/





































































































































































































































































































































































































Текст
J %
W-31
СИСТЕМЫ ФАЗОВОЙ
АВТОПОДСТРОЙКИ
ЧАСТОТЫ
ВХШАХЕИЛВДЯН, А.А.ЛЯХОВКИН
В. В. ШАХГИЛЬДЯН, А. А. ЛЯХОВКИН
СИСТЕМЫ
ФАЗОВОЙ
АВТОПОДСТРОЙКИ
ЧАСТОТЫ
ИЗДАНИЕ 2 е ДОПОЛНЕННОЕ
Scanned & DJVUed
ИЗДАТЕЛЬСТВО «СВЯЗЬ»
МОСКВА 1972
CREWDRIVE
6Ф2
Ш-32
УДК 621.316.726.078
Шахгильдян В. В., Ляховкин А. А.
Щ-32 Системы фазовой автоподстройки частоты. М.,
«Связь», 1972.
Книга посвящена теории, расчету и применениям систем фазовой авто-
подстройки частоты (ФАПЧ), получивших широкое распространение в сов-
ременной радиоэлектронике В ней исследуются линейные и нелинейные
модели таких систем, а также особенности их анализа при детерминиро-
ванных случайных воздействиях. Анализируется работа различных моди-
фикаций сложных систем фазовой автоподстройки частоты. Освещаете»
теория оптимального синтеза систем ФАПЧ Приводятся конкретные при-
меры расчетов их параметров.
Книга предназначена для научных работников, инженеров, аспиран-
тов и студентов старших курсов радиотехнических вузов.
6Ф2
3-4-2
14-72
ОГЛАВЛЕНИЕ
С гр.
Предисловие........................................... '.................. 6
• ГЛАВА 1
ВВЕДЕНИЕ
1.1. Структурная схема и режимы работы системы ФАПЧ................. 15
1.2. Основное уравнение типовой автономной системы ФАПЧ .... 20
1,3. Области применения систем ФАПЧ..........................22
14. Фазовые детекторы...............................................37
1.5. Управляющие элементы............................................62
ГЛАВА 2
АВТОНОМНАЯ СИСТЕМА ФАПЧ ПЕРВОГО ПОРЯДКА
2.1. Решение основного дифференциального уравнения...................75
2.2. Физическая сущность процессов, протекающих в системе .... 80
2.3. Переходные процессы ............................................84
2.4. Влияние формы характеристики фазового детектора на работу системы 87
3
Стр.
'ГЛАВА 3
линейная модель автономной системы фапч
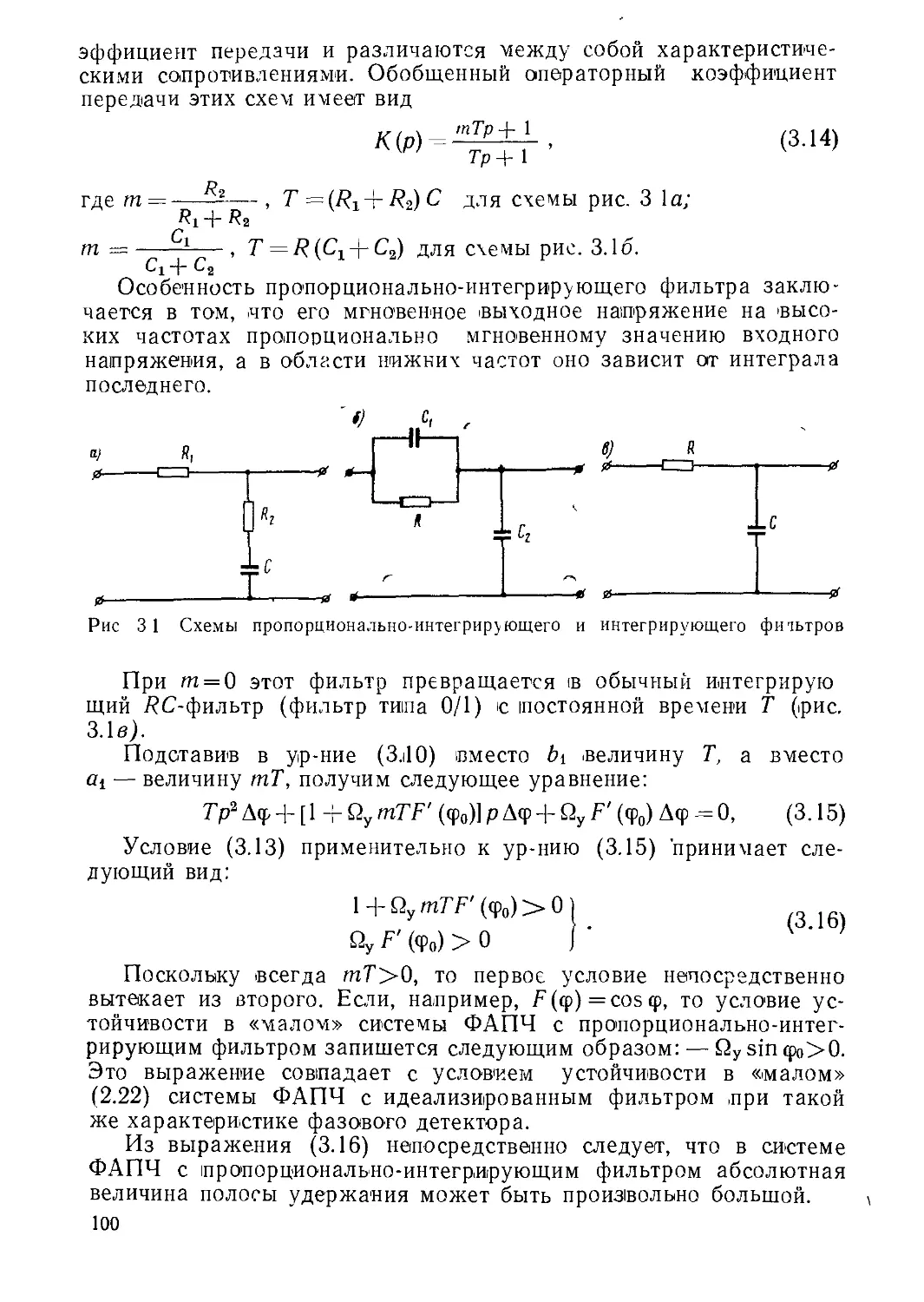
3.1. Устойчивость в «малом» системы ФАПЧ.............................95
3 2. Переходные процессы в линеаризованной системе ФАПЧ .... 105
• г л А в А 4
НЕЛИНЕЙНАЯ АВТОНОМНАЯ СИСТЕМА ФАПЧ
4 1. Общие сведения................................................111
4.2. Об устойчивости нелинейных систем ФАПЧ ... ... ИЗ
4.3. Исследование устойчивости в «целом» систем ФАПЧ вторым методом
Ляпунова............................................................116
4,4. Метод кусочно-линейной аппроксимации характеристик фазового детек-
тора и сшивания фазовых траекторий.............................123
4 5. Метод усреднения 136
4.6. Определение полосы захвата в системе ФАПЧ при помощи электронно-
вычислительных машин................................................147
4.7. Приближенные методы определения полосы захвата, основанные на
различных гипотезах.................................................153
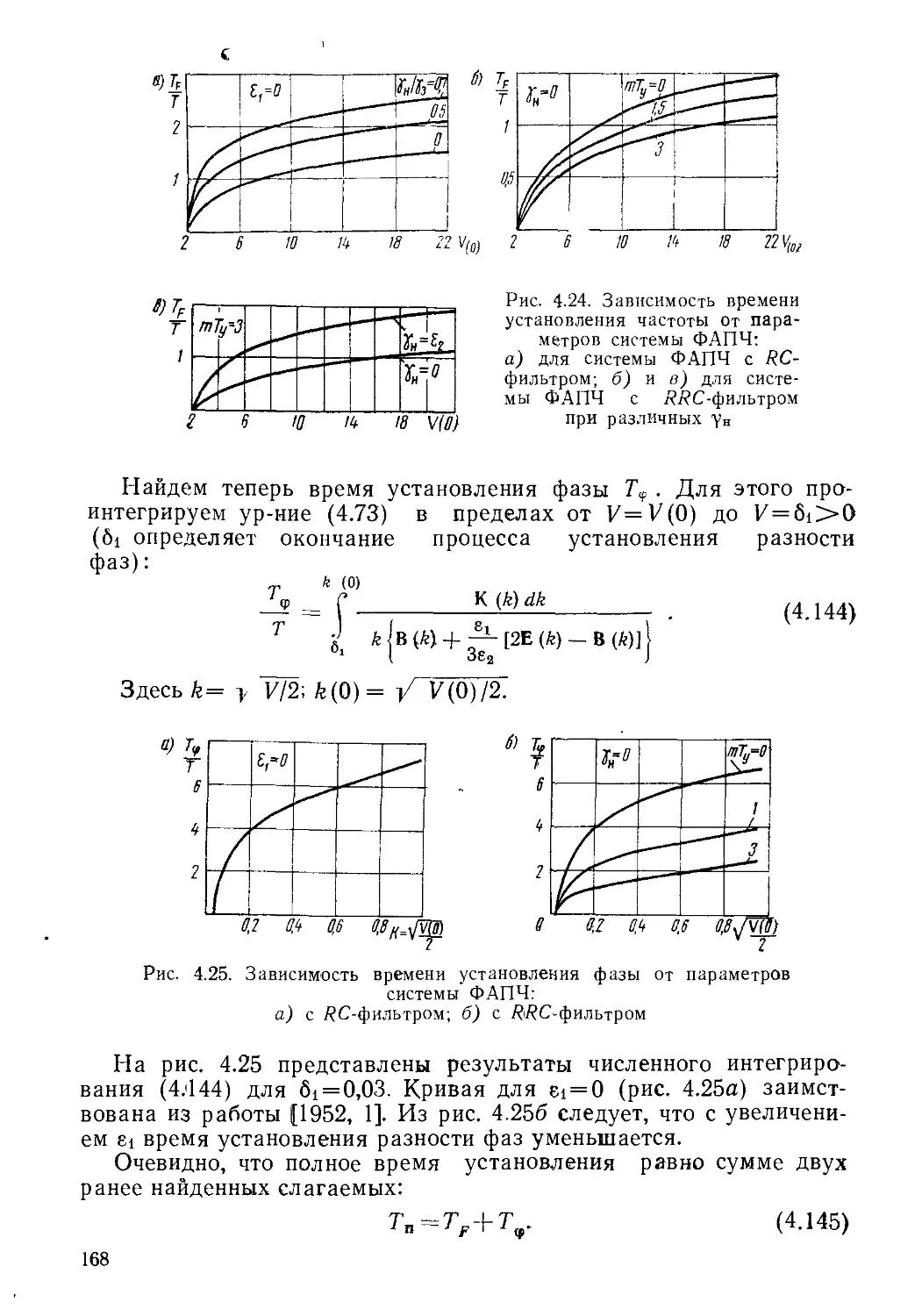
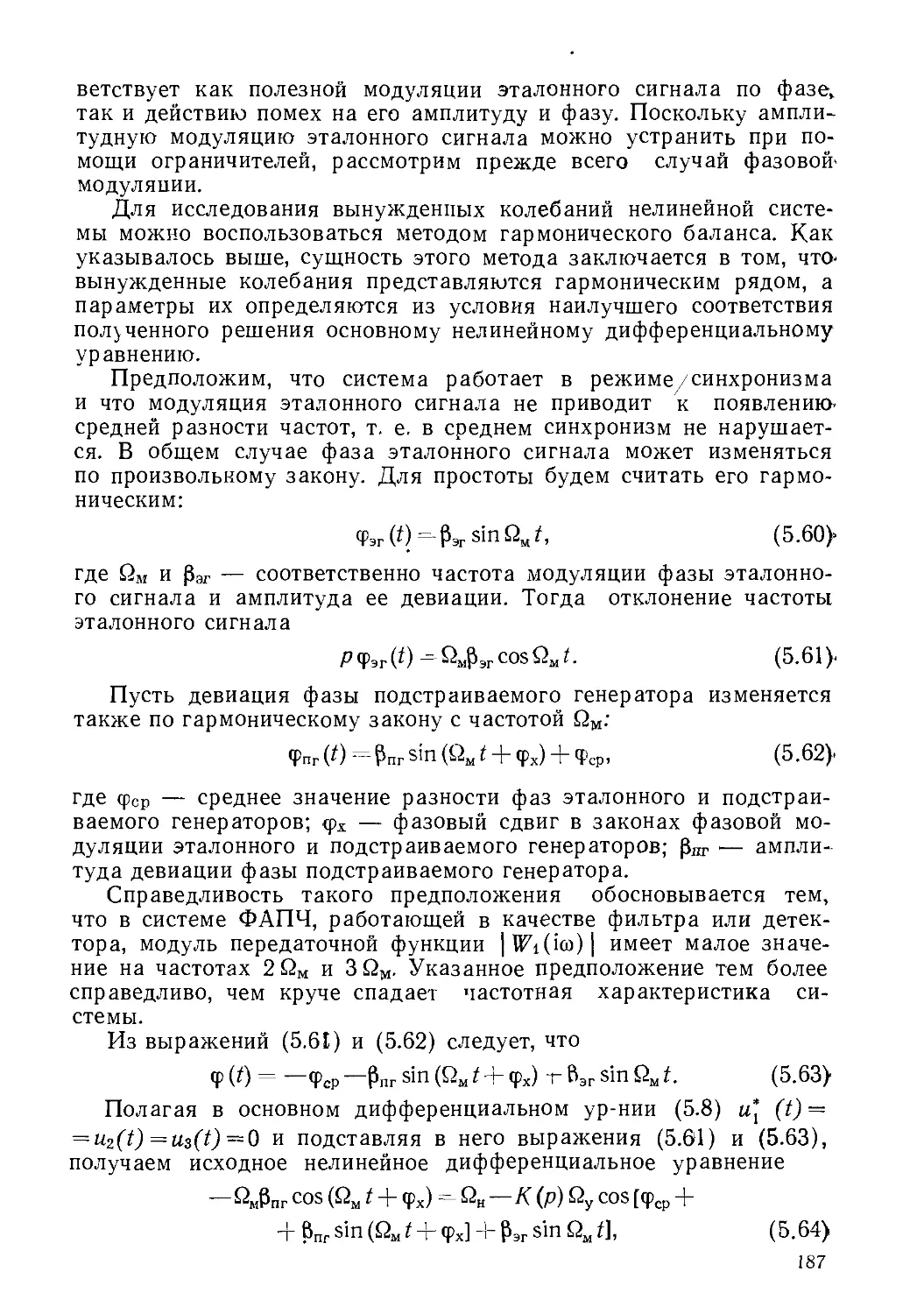
4 8. Переходные процессы.......................................... 166
глава s
ДЕЙСТВИЕ детерминированных возмущении на систему фапч
5.1. Общие сведения................................................ 171
5.2. Реакция системы ФАПЧ на изменение фазы эталонного сигнала . . 175
5.3. Реакция системы ФАПЧ на малые возмущения в цепи управления . . 183
5,4. Действие больших гармонических помех на систему ФАПЧ . . . 186
5 5. Реакция нелинейной системы ФАПЧ на сигналы, манипулированные
по частоте и фазе...................................................196
5.6. Реакция нелинейной системы ФАПЧ на периодические возмущения . . 201
ГЛАВА 6
действие флуктуационных помех на систему фапч
6.1. Общие сведения................................................ 205
6.2. Основное дифференциальное уравнение системы ФАПЧ, находящейся
под действием флуктуационных возмущений.............................206
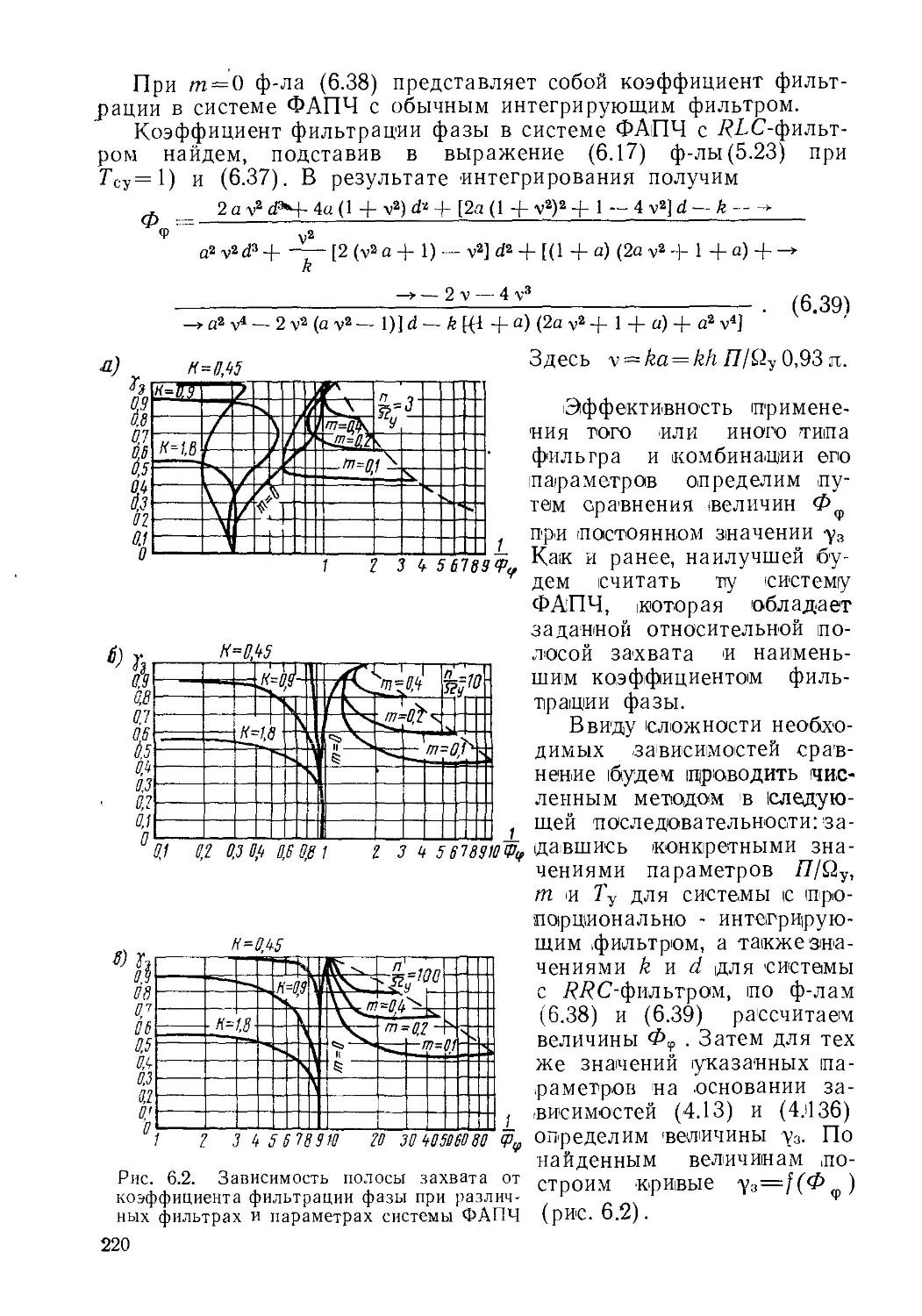
6.3. Действие малых флуктуаций на систему ФАПЧ......................209
6.4. Анализ системы ФАПЧ, находящейся под действием больших широко-
полосных возмущений при помощи аппарата марковских процессов . . 229
6.5 Анализ системы ФАПЧ, находящейся под действием случайных воз-
мущений, методом статистической линеаризации........................268
6.6. Исследование нелинейной системы ФАПЧ, находящейся под действием
случайных возмущений, квазистатическим методом.......................274
ГЛАВА 7
астатическая система фапч
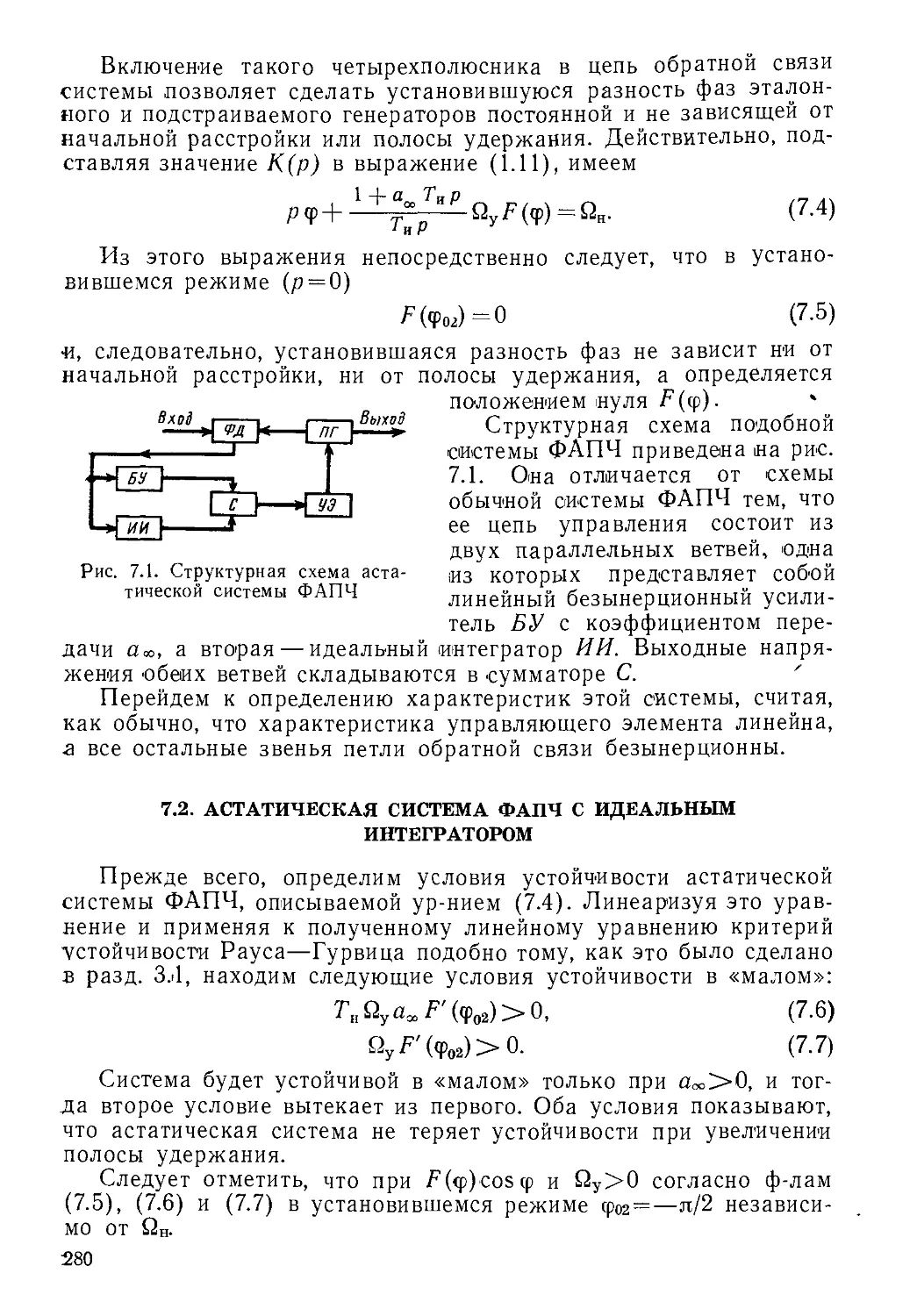
7.1. Общие сведения .... ..............................278
7.2. Астатическая система ФАПЧ с идеальным интегратором .... 280
7.3. Реальные астатические системы ФАПЧ.............................285
ГЛАВА 8
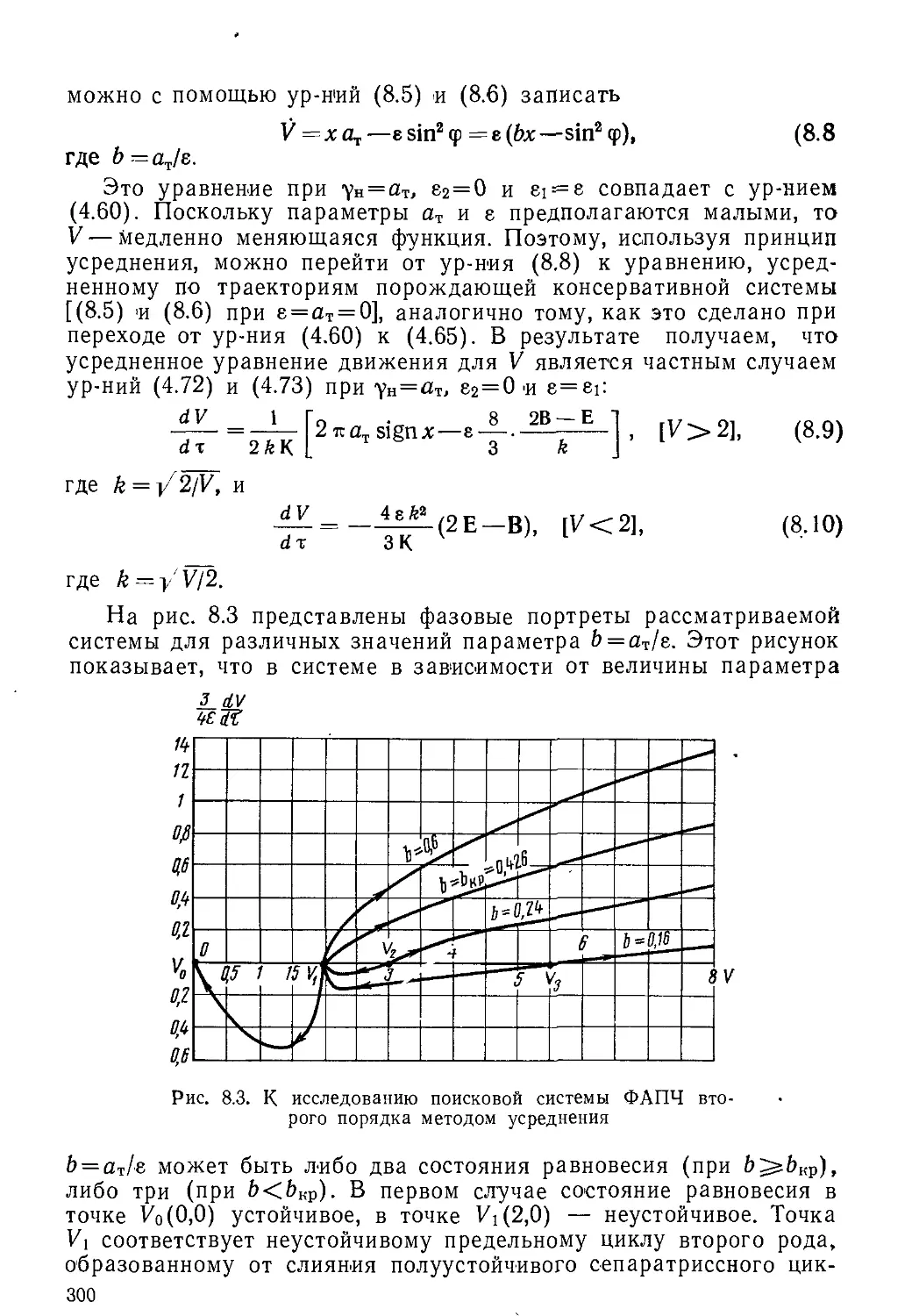
ПОИСКОВАЯ СИСТЕМА ФАПЧ
8.1. Общие сведения............................................... 296
8 2. Поисковая астатическая система ФАПЧ............................299
8.3. Поисковая нестатическая система ФАПЧ...........................303
8.4. Влияние флуктуаций на работу поисковой системы ФАПЧ . . . 305
4
С гр.
ГЛАВА 9
СЛОЖНЫЕ СИСТЕМЫ ФАПЧ
9.1. Общие сведения.............................................308
9.2. Система ФАПЧ с нелинейным фильтром в цегвд управления . . . 308
9.3. Система ФАПЧ с инерционно-нелинейными параметрами . . . . 313
9.4. Система ФАПЧ с дополнительными фазовыми регуляторами . . . 317
9.5. Система частотно-фазовой автоподстройки частоты (ЧФАПЧ) . . 322
9.6. Система ФАПЧ с комбинированным управлением...................... 327
9.7. Система ФАПЧ с разделительным конденсатором в цепи управления . 329
9.8. Система ФАПЧ с инерционной цепью обратной связи.................333
9.9. Взаимосвязанные двухпетлевые системы ФАПЧ........................336
ГЛАВА 10
. СИСТЕМА ИМПУЛЬС НО ФАЗОВОЙ АВТОПОДСТРОИКИ ЧАСТОТЫ
10.1. Общие сведения..................................................339
10.2. Устойчивость системы ИФАПЧ................................345
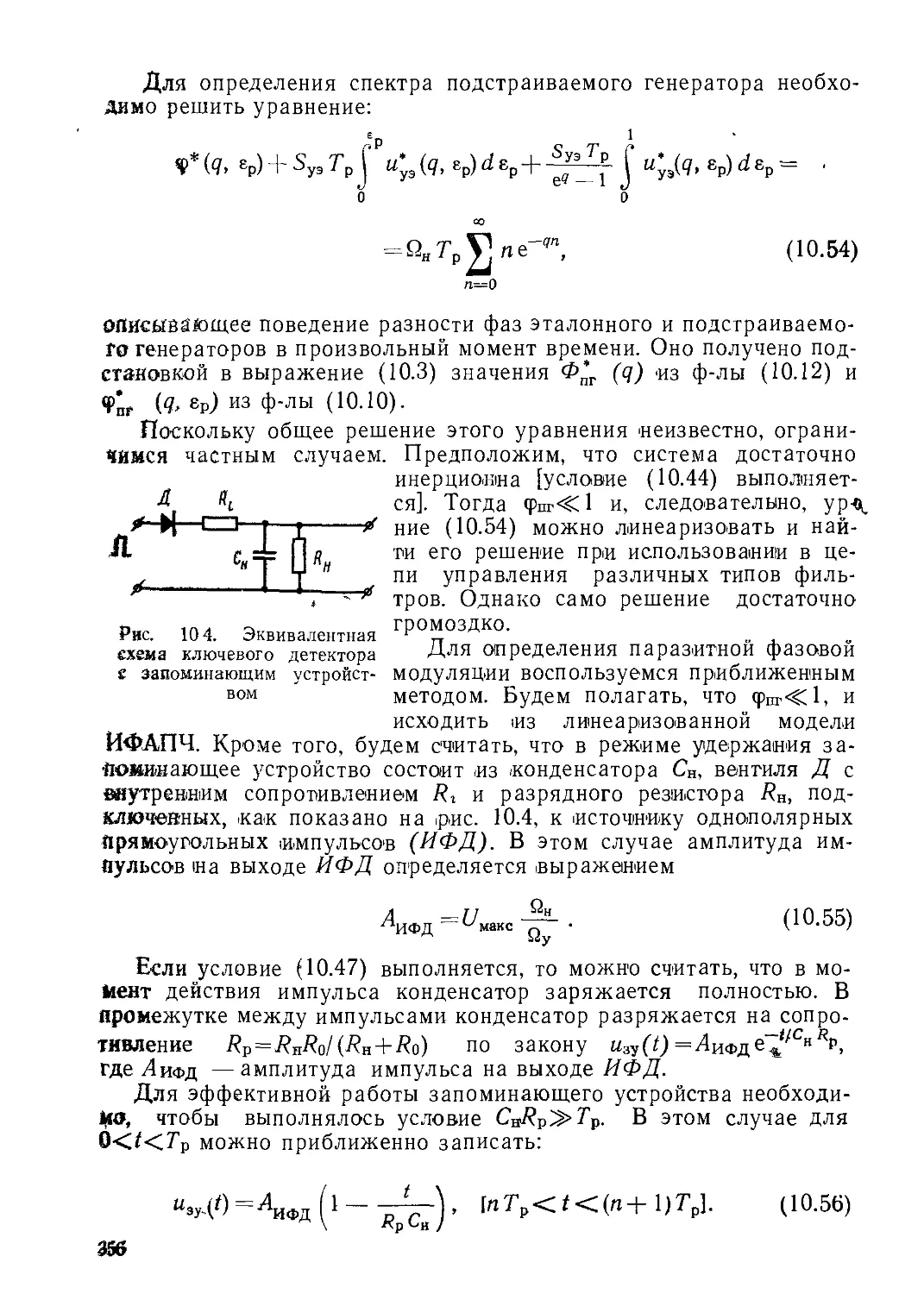
10.3. Импульсно-фазовые детекторы и запоминающие устройства . . . 351
10.4. Побочные колебания на выходе системы ИФАПЧ......................355
10.5. Действие возмущений на систему ИФАПЧ ........................ 357
глава п
НЕКОТОРЫЕ ВОПРОСЫ СИНТЕЗА ОПТИМАЛЬНЫХ СИСТЕМ ФАПЧ
11.1. Постановка задачи.........................................362
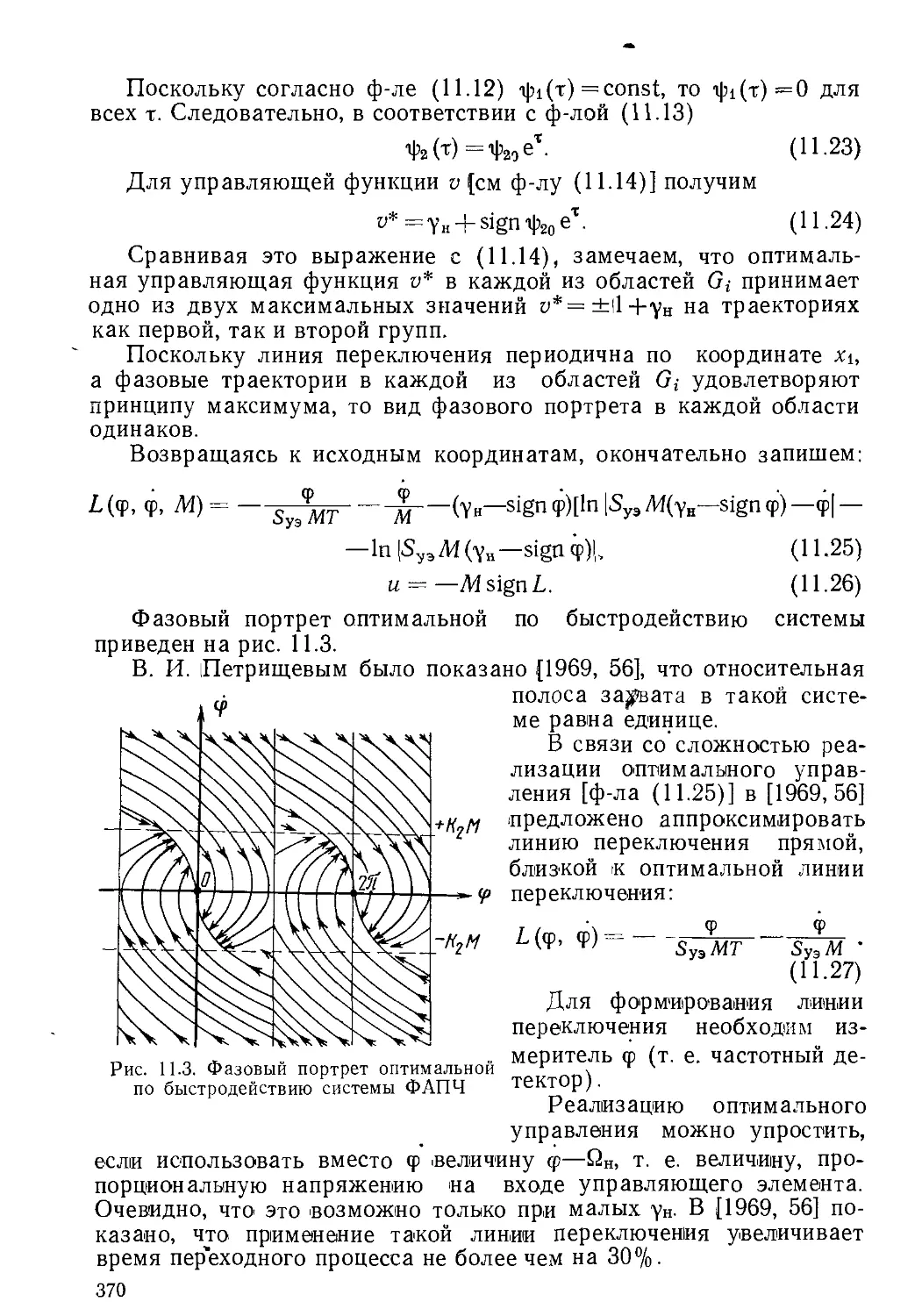
11.2. Синтез системы ФАПЧ, оптимальной по быстродействию . . . 364
11.3. Определение оптимальной передаточной функции линейной модели
системы ФАПЧ на основе критерия минимума среднеквадратичной
ошибки....................................... ..................371
11.4. Синтез оптимальной нелинейной системы ФАПЧ с помощью метода
статистической линеаризации.....................................378
11 5. Вопросы синтеза оптимальных систем ФАПЧ с использованием тео-
рии условных марковских процессов...............................384
ГЛАВА 12
ЭЛЕКТРИЧЕСКИЙ РАСЧЕТ РАЗЛИЧНЫХ СИСТЕМ ФАПЧ
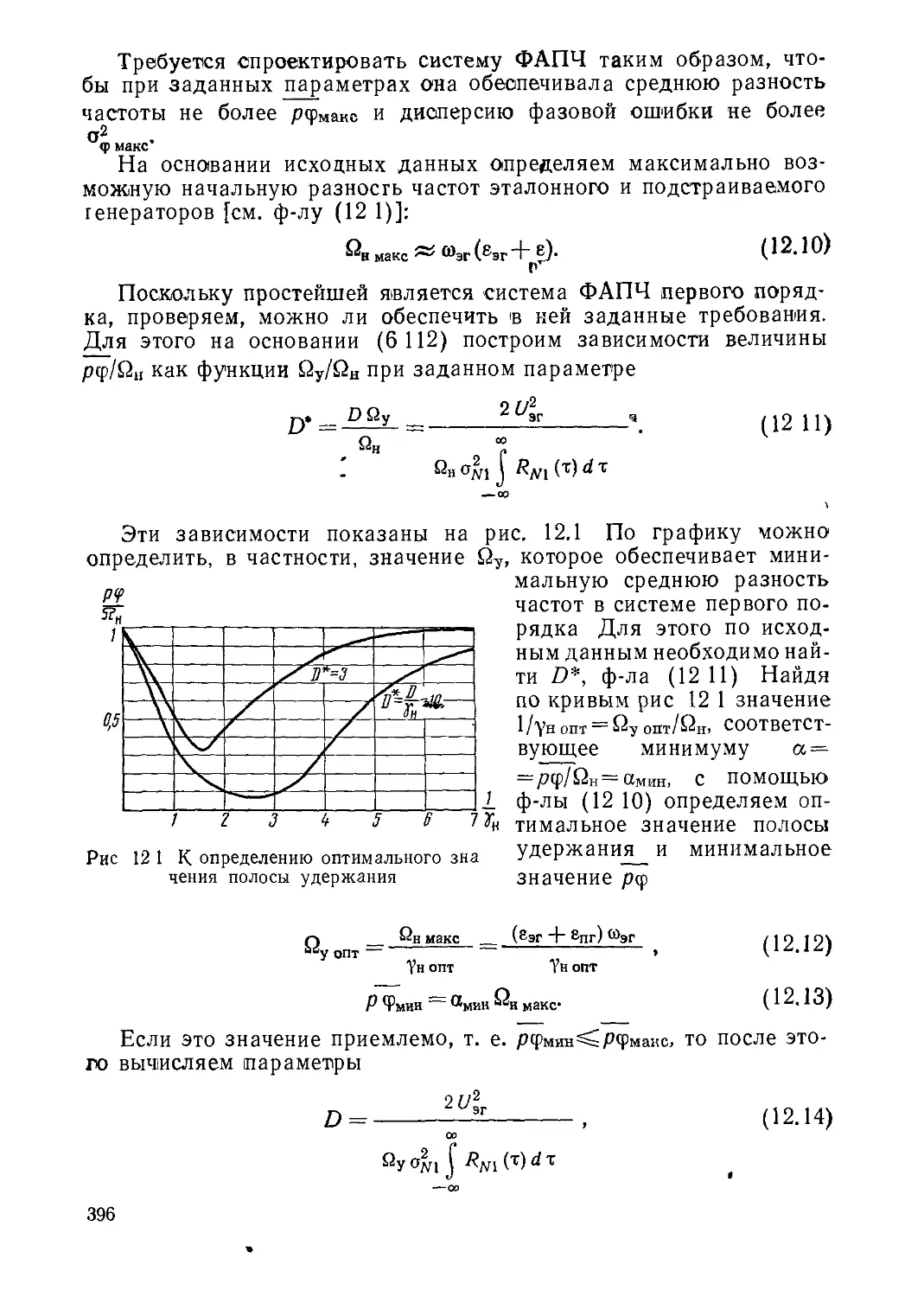
2.1. Задачи, встречающиеся в инженерной практике..............389
2 2. Расчет системы ФАПЧ, выделяющей гармонический сигнал на фоне
детерминированных и флуктуационных помех......................390
2.3. Расчет системы ФАПЧ, выделяющей несущую ФМ сигнала . . 397
12.4. Расчет системы ФАПЧ, работающей в режиме детектирования ФМ
сигнала........................................................400
12.5. Расчет системы ФАПЧ, используемой в качестве частотного моду-
лятора ..........................................................403
12.6. Расчет системы ФАПЧ, используемой в качестве усилителя с малой
фазовой погрешностью.............................................405
12.7. Расчет системы ИФАПЧ............................................408
Приложение 1
Вывод уравнений гармонического баланса неавтономной системы ФАПЧ . 411
Приложение 2
Вычисление интеграла от дробно-рациональной функции...........413
Специальная литература................................................415
Дополнительная литература.............................................445
ПРЕДИСЛОВИЕ
В современной науке и технике большое значение имееют уст-
ройства, в которых автоматически регулируется скорость квазипе-
риодических процессов с целью достижения определенных фазо-
вых соотношений между ними. Примерами могут служить синхро-
низируемые часы, ускорителе элементарных частиц — синхрофазо-
трон, синхронные электрические генераторы и двигатели, устрой-
ства, управляющие ритмом сердечной деятельности.
В радиоэлектронике аналогичные задачи встречаются в телеви-
дении, радиолокации и радионавигации, при использовании коге-
рентных способов приема, в системах стабилизации и кратного пре-
образования частоты при радиотехнических измерениях, связан-
ных с отсчетом разности фаз, в различного рода следящих систе-
мах, при приеме ФМ, ЧМ и однополосных сигналов, в системах
точной магнитной записи и т. д.
Техническое решение указанных задач часто достигается с по-
мощью систем фазовой автоподстройки частоты (ФАПЧ). Эти сис-
темы представляют собой разновидность систем синхронизации.
История возникновения и развития теории систем синхрониза-
ции периодических и квазипериодических процессов восходит к от-
крытию в конце XVIII в. Гюйгенсом явления взаимной синхрони-
зации двух маятниковых часов, связанных общей податливой опо-
рой.
Позднее, в 1878 г., Рэлеем было открыто явление захватывания
(синхронизации) звуковых колебаний органных труб и камерто-
нов.
В 1922 г. Апплтон, рассматривая действие внешней эдс на лам-
повый генератор, обнаружил синхронизацию колебаний последне-
го [1922,1]. Захватыванию посвящены работы Ван-дер-Поля,
А. А. Андронова и А. А. Витта [1930,2].
В 30-х годах появились работы В. Леона и X. Эдгертона [1930,3],
Н. М. Крылова и Н. Н. Боголюбова [1932, 1], Ф. Трикоми [1933, 1],
Ф. Олендорфа, В. Петерса, П. С. Жданова и других, посвященные
захватыванию и переходным процессам в синхронных машинах.
В '1930 г. Б. П. Терентьевым была предложена система фазо-
вой автоподстройки частоты мощного автогенератора [1930,4].
В 1932 г. была опубликована серия статей де Бельсиза, посвя-
щенная синхронному приему. В одной из них [1932,2] была пред-
ложена и описана схема фазовой автоподстройки местного гене-
6
ратора по принимаемому сигналу. Работы де Бельсиза положили
начало теории собственно систем ФАПЧ. В дальнейшем эти во-
просы получили развитие в работах Е. Г. Момота, А. С. Виницко-
го и Р. И. Попова, Д. Г. Таккера и других авторов.
В период с 1930 г. по 1941 г. появились работы К. К. Теодорчи-
ка, С. Э. Хайкина, А. А. Витта, Л. И. Мандельштама, Н. Д. Па-
палекси, А. Д. Гольдштейна, Вудьярда, Н. Н. Баутина, А. В. Бед-
форда и И. Р. Смита, X. Кадена, Е. Г. Момота, С. С. Хухрикова.
Б. Ш. Киселева, А. Д. Князева и других по теории непосредствен-
ной синхронизации, захватыванию и внешнему воздействию на ав-
тогенератор.
К середине 40-х годов сложилось три главных направления
теории синхронизации. г.
— теория непосредственного воздействия внешней силы на ав-
токолебательную систему типа лампового автогенератора или ма-
ятника;
— теория синхронных электрических машин;
— теория систем фазовой автоподстройки частоты.
В послевоенные годы в теории систем синхронизации появи-
лись еще два направления. Одно из них связано с работами по
теории захвата в синхронный режим ускорения элементарных ча-
стиц в синхрофазотронах. Это работы В. Дёлленбаха, Т. Р. Кай-
зера, В. К. Мельникова, Ю. С. Саясова и других. Второе направ-
ление, представленное работами Г. Ю. Джанелидзе, И. И. Блех-
мана, Б. П. Лаврова и А. К- Рундквиста и других, посвящено тео-
рии взаимной синхронизации многих механических объектов.
Различным направлениям теории синхронизации посвящены
труды М. Картрайт и Дж. Литлвуда, Н. Минорского, И. Г. Мал-
кина, Г. В. Аронович, Л. Н. Белюстиной, Н. А. Картвелишвили,
Я. К. Любимцева, В. С. Лауда, Е. А. Андроновой-Леонтович,
Р. Ш алеа, В. Т. Лйорозовского, Д. Хаага, Т. Хаяси и В. В. Каза-
кевича и многих других.
Теория систем фазовой автоподстройки частоты начала особен-
но быстро развиваться с появлением работ В. Н. Горшунова,
В. С Дулицкого, Ю. В. Эльтермана, И. Н. Гельфера, Е. Лабина,
Р. Адлера, Г. В. Кияковского. Позднее значительный вклад в раз-
витие теории систем ФАПЧ внесли труды И. Престона и Д. Тель-
ера, В. Груена, Д. Ричмэна, 3. Желонека, О. Зелинского и Р. Си-
ски, С. И. Евтянова, М. Р. Капланова, В. А. Левина, Ю. Н. Бакае-
ва, М. В. Капранова, Л. Н. Белюстиной, В. М. Сафонова, В. И.
Тихонова, Р Л. Стратоновича, Е. Л. Урмана, Т. Рея, Т. Невядом-
ского, В. Е. Бенеша, 3. Соботки, Н. А. Губарь, Ч. С. Уивера,
Е. А. Барбашина, В. А. Табуевой, К. Б. Челышева, Д. Девеле,
Э. С. Элинсона, С. В. Первачева, Э. Д. Витерби, Ф. М. Гарднера,
В. Линдсея, Р. Д. Бернарда, Н. П. Никитина, В. Д. Шалфеева,
Р. Доносика, Ю. Ф. Игнатова, В. Н. Кулешова и других.
Разрозненность, а отчасти и неполнота сведений по различным
системам ФАПЧ создавали значительные трудности для специа-
7
листов, занимающихся анализом и проектированием таких систем.
В связи с этим несколько лет назад авторы предприняли попытку
систематизировать, обобщить и развить вопросы теории и расчета
систем ФАПЧ («Фазовая автоподстройка частоты». М., «Связь»,
1966). За прошедшее ic момента выхода (указанной книги время в
отечественной и зарубежной технической литературе появилось
много работ по различным аспектам теории и применения систем
ФАПЧ. Заметный прогресс в теории систем ФАПЧ, а также полез-
ные дискуссии авторов со многими читателями дали возможность
устранить замеченные в первой книге опечатки и недочеты, суще-
ственно переработать и дополнить ее содержание.
В предлагаемую вниманию читателя книгу включены новые раз-
делы, касающиеся применения систем ФАПЧ и анализа работы
их различных модификаций (поисковых, частотно-фазовых, с ком-
бинированным управлением, с нелинейными фильтрами и др.), син-
теза оптимальных по быстродействию и статистически оптималь-
ных систем, статистического анализа систем ФАПЧ второго порядка.
По-новому излагается содержание практически всех разделов,
особенно глав, посвященных вопросам устойчивости и динамики ав-
тономных систем ФАПЧ, воздействию детерминированных и слу-
чайных возмущений, фазовым детекторам, астатическим системам.
Основное внимание в книге уделено вопросам теории и расчета
различных модификаций систем фазовой автоподстройки частоты
Существенно пополненная библиография состоит из двух раз-
делов. В первом разделе, посвященном непосредственно системам
ФАПЧ и близким к ним системам, литературные источники приве-
дены в хронологическом порядке. При соответствующей ссылке в
тексте указывается год выхода работы из печати, а затем ее по-
рядковый номер в описке литературы. Во втором разделе библио-
графии даны литературные источники по общим вопросам, затра-
гиваемым в тексте. Ссылки на эти источники в книге даются без
указания года; указываются лишь их порядковые номера
Ввиду обширности библиографии по системам ФАПЧ авторы
отказались от попытки дать полный обзор литературы, ограничив-
шись указанием в историческом аспекте в каждом разделе осново-
полагающих работ. Среди работ, посвященных системам ФАПЧ,
следует выделить вышедшие в последние годы монографии 3. Со-
ботки [1963, 18], Э. Д. Витерби [1966,50], Ф. М. Гарднера [1966,51],
Р. Доносика [1969,58], близкие по тематике к предлагаемой вни-
манию читателя книге. Однако последняя существенно отличает-
ся от них по отбору материала и целям, которые ставили перед
собой авторы.
В настоящей книге рассматриваются как линейные, так и нели-
нейные модели систем ФАПЧ, а также особенности их работы при
детерминированных и случайных воздействиях
Несмотря на увеличение объема книги, авторам не удалось в
полной мере изложить все существенные вопросы. Кратко изложе-
ны в основном разделы, в которых затрагиваются вопросы, не спе-
8
цифичные для системы ФАПЧ или достаточно полно освещенные
в литературе.
Авторы считают приятным долгом выразить благодарность
своим друзьям и коллегам по работе Ю. Ф. Игнатову, В. А. Вла-
сову, В. И. Петрищеву, Ю. И. Савватееву за полезные дискуссии
по многим разделам книги. Авторы глубоко благодарны рецензен-
там доктору техн наук В. А. Левину и доктору техн, наук М. С. Не-
мировскому за их большой труд, критические замечания и советы,
во многом способствовавшие улучшению содержания книги, а также
весьма признательны всем читателям, уже приславшим свои за-
мечания и пожелания, и тем читателям, которые сделают это в
будущем. Отзывы о книге просьба направлять в издательство
«Связь» (Москва-ценгр, Чистопрудный бульвар, 2),
Авторы
Системы фазовой
автоподстройки
частоты
Ваган Ваганович Шахгильдян,
Александр Алексеевич Ляховкин
Редакторы Г Ш Погорельская,
Н К Логинова
Техн редактор К Г. Маркоч
Художник В В Евдокимов
Корректор М X. Механик
Сдано в набор 28/XII 1971 г Подписа-
но в печ 14/III 1972 г Форм бум 60x90/is
28,0 печ л 28,0 усл -п л 28,2 уч -изд л
т 05118 Тираж 7000 экз Зак изд 14064
Цена 1 руб 95 коп
Издательство «Связь», Москва центр,
Чистопрудный бульвар, 2
Типография издательства «Связь» Ко-
митета по печати при Совете Минис, трое
СССР Москва центр, ул Кирова, 40
Зак тип 526
Список основных обозначений
A(t) — косинусоидальная составляющая огибающей входного шума;
Ли — амплитуда импульса;
— коэффициент передачи фильтра нижних частот при (0->-оо;
ат — нормированная скорость поиска;
а — действительная часть комплексного корня характеристического уравнения;
Тр )
«р = — — безразмерный параметр;
Р — амплитуда девиации разности фа^;
Р„ — амплитуда девиации разнолти фаз на частоте n-й гармоники биений;
РпГ; ₽1г—амплитуда девиации фазы подстраиваемого и эталонного генераторов
соответственно;
у = — относительная частота;
“у
Q
Тб =77“— относительная частота биений;
Qy
Йм
Ты = -—относительная частота модуляции;
“у
ун—относительная начальная расстройка;
C(t) — синусоидальная составляющая огибающей входного шума;
Сп— произвольная постоянная;
D и Do — коэффициенты закона распределения разности фаз;
d — затухание AiC-фильтра;
8
Д = —/?СПУ— относительная постоянная времени /?С-фильтра в системе ФАПЧ;
л
До — относительный температурный коэффициент барьерной емкости нелинейного
р-п-перехода;
Ди — длительность импульса;
Дфо — начальное отклонение разности фаз от ее стационарного значения;
ДРШ — шумовая полоса системы;
В(т) —корреляционная функция случайного процесса;
Дф — мгновенное отклонение разности фаз от стационарного значения;
6 — относительный температурный коэффициент диэлектрической проницаемости
р-п-перехода;
6и — скважность импульсов;
E(t) = V ИбО+'^эг]2+С2(/9 — огибающая аддитивной смеси сигнала и шума на
входе системы ФАПЧ;
— огибающая входного шума;
е—относительная нестабильность частоты;
ер — относительное время в промежутке между двумя импульсами;
Еф = — — относительная расстройка;
(1>0
P(q>)—нормированная характеристика фазового детектора;
Ер = —— — частота следования регулирующих импульсов;
ft и Fz — функции-аналоги полосы удержания и начальной расстройки соответ-
ственно;
</А(ф)
F (g>) = —----— крутизна нормированной характеристики фазового детектора;
а <р
G(<p) —поток вероятности величины ф;
Go — область фазового пространства;
1п(х) и Jп(х) — функции Бесселя мнимого и действительного аргументов соответ-
ственно;
I и i — амплитудное и мгновенное значения тока;
Kn(p) — операторный коэффициент передачи для мгновенного отклонения фа-
зы N каскадного усилителя вч;
К(р) — операторный коэффициент передачи фильтра нижних частот в цепи уп-
равления системы ФАПЧ;
Ау — коэффициент усиления усилителя;
Ki и А2 — коэффициенты сноса и диффузии соответственно;
ху—ху = К[х; у}— корреляция случайных величин х и г/;
Йу
k = — — безразмерный параметр RLC- и LC-фильтров;
--о
Ад — коэффициент передачи амплитудного детектора;
kCi и kcz — угловые коэффициенты сепаратрисе на фазовом портрете;
Ло и ki — коэффициенты статистической линеаризации;
Лфд — коэффициент преобразования фазового детектора;
•л — относительный температурный коэффициент контактной разности потенциа-
лов;
X—относительный коэффициент затухания;
М(х—у)2 — математическое ожидание квадрата разности случайных величин х
и у,
т — безразмерный параметр пропорционально-интегрирующего фильтра;
та — коэффициент амплитудной модуляции;
тп(%)—момент n-го порядка закона распределения случайной величины g;
N — число каскадов;
Ni(t) — мгновенное значение аддитивного шумового напряжения на входе си-
стемы ФАПЧ;
n(t)—эквивалентное флуктуационное воздействие;
R
п —-----——коэффициент рассогласования LC-фильтра;
/4
пр — коэффициент передачи редуктора;
3 — относительная величина разряда конденсатора запоминающего устройства
в системе ИФАПЧ;
1
g(i) =[j4fOcos ffoa+CfOsin фоа] ~—случайный процесс на выходе фазового де-
o' эг
тектора линейной модели системы ФАПЧ
при немодулированном эталонном сигнале;
5i(0 =;[A(/)cos(<p—фэг) +С(081п(ф—фэг)]-- —случайный процесс на выходе
Пэг
фазового детектора при фазовой
модуляции эталонного сигнала;
П — интегральная полоса пропускания линейных устройств, предшествующих си-
стеме ФАПЧ (рад!сек);
Пм — интегральная полоса пропускания модулирующей функции (рад/сек);
Ре и Рш— мощности сигнала и шума на входе системы ФАПЧ соответственно;
Рн и Ро — мощность остатка несущей и полная мощность ФМ колебания соот-
ветственно;
1,1
P(t) — вероятность срыва синхронизации;
d
р= ——оператор дифференцирования по времени;
dt
Q — добротность колебательного контура, его элементов;
q = T-pp — оператор дифференцирования по безразмерному времени;
/?(т) — коэффициент корреляции случайного процесса;
р — характеристическое сопротивление контура;
а2 — дисперсия шума на входе системы ФАПЧ;
— дисперсия разности фаз подстраиваемого и эталонного генератора;
Офпг —дисперсия фазы подстраиваемого генератора;
Офэг—дисперсия фазы эталонного генератора, обусловленная полезным сообще-
нием;
2 ,
а/пг—дисперсия частоты подстраиваемого генератора;
Ощ—дисперсия разности частот подстраиваемого и эталонного генератора;
Т — постоянная времени интегрирующего /?С-фильтра;
То — период биений;
7'у = 7'Йу — обобщенная постоянная времени /?С-фильтра в системе ФАПЧ;
Тс = -----—----——собственная постоянная времени системы ФАПЧ;
Йу I F (<р02) |
7'су = Йу-7'с — относительная собственная постоянная времени системы ФАПЧ;
Ts — абсолютное время запаздывания;
То — постоянная времени убывания огибающей решения линейного дифференци-
ального уравнения второго порядка;
Тк—постоянная времени одиночного контура;
Те$ — среднее время до срыва синхронизации;
Тк — время установления частоты;
7’ф — время установления разности фаз <р;
Тп=7'к+7'ф—время установления режима удержания в системе ФАПЧ;
7"и — постоянная времени идеального интегратора;
7"р — период регулирования;
Тп — постоянные коэффициенты;
t — абсолютное текущее время;
t°—температура в градусах Цельсия;
to — произвольная постоянная интегрирования;
5фМ и 5фД — коэффициенты передачи фазового модулятора и фазового детек-
тора соответственно;
S—крутизна характеристики электронной лампы;
Sy3 — крутизна характеристики управляющего элемента;
5ф (со) и S ш (со)—спектральные плотности девиации фазы и частоты резуль-
тирующего сигнала на входе системы ФАПЧ;
8фЭгг(со) —спектральная плотность девиации фазы эталонного сигнала, обуслов-
ленной действием модулирующей функции;
5шпг (w) 11 £<рпг (w) —спектральные плотности девиации частоты и фазы под-
страиваемого генератора, обусловленной действием
шума;
5Шэг (w) — спектральная плотность девиации частоты эталонного сигнала, выз-
ванной полезным сообщением;
St (со) — спектральная плотность функции £(/);
1 1
Sj и —S2 —отношения сигнал/шум по напряжению на входе и выходе систе-
мы ФАПЧ соответственно;
Т = / 1/ —относительное текущее время;
12
Tg = q" у — обобщенный период биений в астатической системе ФАПЧ:
ту = /-Йу — обобщенное время в системе ФАПЧ;
тл>—обобщенная постоянная времени процесса установления величины ф в
идеализированной системе ФАПЧ при А(ф)=созф и малом начальном
возмущении;
тту — постоянная времени установления в идеализированной системе ФАПЧ при
треугольной форме характеристики фазового детектора;
Тпу — постоянная времени установления в идеализированной системе ФАПЧ при
трапециевидной характеристике фазового детектора;
Тг — обобщенное время установления частоты;
Т3
т3р = —- — относительное время запаздывания в системе
‘ Р
Ткорр — время корреляции случайного процесса;
?! корр и т2 корр — время корреляции аддитивного шума
ИФАПЧ;
и производной фазы
эталонного сигнала соответственно;
t
тр = —— — относительное текущее время регулирования в системе ФАПЧ;
7Р
тСр — нормированное среднее время до срыва синхронизма;
Г — кратность преобразования частоты в системе ИФАПЧ;
U — амплитуда синусоидального напряжения;
Ua — амплитуда гармонической помехи;
Уфдмакс — максимальное напряжение на выходе фазового детектора;
u(t) —мгновенное значение напряжения;
Ф1 и Фг — мгновенные фазы напряжений эталонного и подстраиваемого генера-
торов соответственно;
S2
‘-’2
Ф3 = -— — коэффициент фильтрации системы ФАПЧ;
<2>s —коэффициент фильтрации звена фильтр—ограничитель—фильтр;
и —коэффициенты фильтрации фазы и частоты соответственно;
ф — разность фаз подстраиваемого и эталонного генераторов;
фоп — одно из бесчисленных состояний равновесия;
(pot и фо2 — координаты точки неустойчивого и устойчивого равновесия соответ-
ственно;
tpnpfO — приближенное решение уравнения;
фс — произвольная постоянная интегрирования;
фср — среднее значение величины ф;
Фэг(О —фаза эталонного сигнала;
фпг(/)—фаза подстраиваемого генератора;
фз — случайное отклонение разности фаз ф от величины ее математического ожи-
дания;
Фэг л- — фаза результирующего сигнала на входе системы ФАПЧ; -
фи? (о>)—фазовый сдвиг, вносимый четырехполюсником с передаточной функ-
цией W'^iw);
фх — фазовый сдвиг в законах фазовой модуляции эталонного и подстраивае-
мого генератора;
V — функция Ляпунова;
Vn — собственная функция;
v — усеченная функция Ляпунова;
СО
Vw = f t)dt\
13
W'tf'p)— передаточная функция замкнутой системы ФАПЧ для девиации фазы;
W2(p) = TcWl(p)-,
Т.рИМг)
КМ
Wa=-— —коэффициент передачи девиации фазы в нелинейной системе ФАПЧ,
Рэг
Wn(xn, xn-t; Xi)—n-мерная функция распределения случайных величин хп;
W(xn/Xn-lt- х„-2, Xt)—условная функция распределения;
й — разность частот подстраиваемого и эталонного генераторов в замкнутой си-
стеме ФАПЧ;
Йв— верхняя модулирующая частота;
Йвн — среднее значение вносимой расстройки;
Й3— полоса захвата;
йн — начальная разность частот подстраиваемого и эталонного генераторов (в
разомкнутой системе);
Йм — частота модуляции эталонного сигнала;
Йзп — полоса захвата помехи в отсутствие эталонного сигнала,
Йп — разность частот гармонической помехи и эталонного сигнала,
Йу — полоса удержания,
Йуи — полоса удержания в системе ИФАПЧ,
ЙУэ, Йум—максимальные значения расстройки, вносимой электронным и меха-
ническим управляющими элементами соответственно,
Йо — частота собственных колебаний при переходном процессе;
(1)Эг и (и)пг — частота подстраиваемого и эталонного генераторов соответственно,
о)о — резонансная частота контура, фильтра;
Шопг — собственная частота подстраиваемого генератора при разомкнутой петле
ФАПЧ;
фм — максимальное отклонение фазы, вносимое фазовым модулятором.
Глава I. ‘
ВВЕДЕНИЕ
1.1. СТРУКТУРНАЯ СХЕМА И РЕЖИМЫ РАБОТЫ СИСТЕМЫ ФАПЧ
В радиоэлектронике широко распространены две разновидно-
сти систем автоматической подстройки частоты: частотная (ЧАП)
и фазовая (ФАПЧ). Различие этих систем состоит в том, чтовси-
стеме ЧАП сигнал ошибки связан с разностью частот подстраи-
ваемого и эталонного генераторов, а в системе ФАПЧ — с разно-
стью их фаз. Поэтому в системе ФАПЧ в стационарном режиме
Рис 1 1 Структурные схемы
системы ФАПЧ.
а) с учетом возмущений;
б) изолированной от внешних
воздействий
поддерживается остаточная разность фаз, а не частот, как в си-
стеме ЧАП. Указанные особенности ФАПЧ расширяют возможно-
сти ее использования.
Известны различные модификации систем ФАПЧ: однопетлевые
и многопетлевые, с простым и комбинированным управлением
и т. д. Рассмотрим простейшую однопетлевую систему ФАПЧ (рис.
1.1). По своей структуре она представляет собой следящую сис-
тему автоматического регулирования с одним «входом», одним «вы-
ходом» и однопетлевой обратной связью. Объектом регулирования
15
здесь является (подстраиваемый генератор ПГ, причем сигнал уп-
равления воздействует только на частоту (или фазу) его автоко-
лебаний.
На входе системы действует сигнал эталонного генератора в ви-
де периодической или квазипериодической функции (управляющее
воздействие), а с ее выхода снимается сигнал подстраиваемого ге-
нератора. Датчиком рассогласования в системе является фазовый
детектор ФД, выходной сигнал которого представляет собой суще-
ственно нелинейную периодическую однозначную функцию разно-
сти мгновенных фаз сигналов эталонного и подстраиваемого гене-
раторов. Фильтр нижних частот ФНЧ в цепи управления предназ-
начен для коррекции передаточной функции замкнутой системы, а
управляющий элемент УЭ — для изменения под действием элек-
трического сигнала управления реактивности, вносимой в контур
подстраиваемого генератора, а следовательно, и частоты (фазы)
последнего. Входное устройство ВУ представляет собой полосовой
усилитель, необходимый при приеме эталонного сигнала, подвер-
" женного действию аддитивных помех. Четырехполюсник обратной
связи ЧОС обеспечивает однонаправленность всей петли авторегу-
лирования. Он предотвращает проникновение нежелательных воз-
мущений со входа системы через фазовой детектор на ее выход,
минуя фильтр нижних частот.
Основные возмущения, действующие на систему, обозначены на
рис. '1.1 через Bt. Здесь Bt — аддитивная помеха детер-
минированного или случайного характера, налагающаяся на эта-
лонный сигнал; В2 — низкочастотная помеха на выходе фазового
детектора; В3 — модулирующий сигнал при использовании систе-
мы ФАПЧ для стабилизации средней частоты в частотном или
фазовом модуляторе или паразитные сигналы, являющиеся ре-
зультатом пульсации выпрямителя; В4 — дестабилизирующие фак-
торы, обусловливающие нестабильность собственной частоты под-
страиваемого автогенератора. К основным возмущениям относятся
также и изменения параметров эталонного сигнала.
В зависимости от назначения и условий “применения система
ФАПЧ позволяет решать различные задачи. Простейшая из них —
стабилизация частоты (а иногда и фазы) подстраиваемого гене-
ратора. Обычно при этом параметры эталонного сигнала остают-
ся постоянными.
Более сложным является случай, когда параметры эталонного
сигнала непостоянны. При этом система играет роль фильтра, де-
модулятора или следящего усилителя. Она выполняет функции уз-
кополосного фильтра и в том случае, если параметры эталонного
сигнала постоянны, но на ее вход вместе с эталонным сигналом
попадает аддитивная помеха. В таком применении система ФАПЧ
дает исключительно высокие результаты при чрезвычайной про-
стоте конструкции.
Особо следует отметить возможности системы ФАПЧ как не-
линейного фильтра и демодулятора ЧМ и ФМ колебаний. Это обу-
16
словлено тем, чго, по существу, в ней как бы происходит корре-
ляционная обработка принимаемого сигнала.
Система ФАПЧ может работать не только в непрерывном ре-
жиме, но и в импульсном. Эго позволяет успешно использовать ее
для дробно-кратного преобразования частоты.
Рассмотрим принцип действия системы ФАПЧ на примере уп-
рощенной, изолированной от внешних воздействий (автономной)
системы, структурная схема которой представлена на рис. 1.16. Та-
кая система используется для стабилизации частоты автогенерато-
ра по сигналу более стабильного эталонного генератора. Посколь-
ку в ней отсутствуют возмущения, необходимость во входном уси-
лителе и четырехполюснике обратной связи отпадает.
Сигналы частот соЭг и соПг от эталонного ЭГ и подстраиваемого ПГ
генераторов поступают на фазовый детектор ФД, выходное напря-
жение которого определяется разностью фаз напряжений, дейст-
вующих на его входах. Выходное напряжение фазового детектора
через фильтр нижних частот ФНЧ воздействует на управляющий
элемент УЭ, который изменяет частоту подстраиваемого генерато-
ра, приближая ее к частоте эталонного.
В стационарном режиме, -когда частоты соэг и сош- равны, в сис-
теме устанавливается постоянная разность фаз между сигналами
соответствующих генераторов и выходное напряжение фазового де-
тектора постоянно. Это постоянное напряжение подается на вход
управляющего элемента, ибо в противном случае статический режим
будет невозможен. Поэтому <между фазовым детектором и управ-
ляющим элементом включаются устройства, пропускающие по-
стоянный ток. Такими устройствами обычно являются фильтры
нижних частот. Они устраняют из спектра сигнала управления не-
желательные составляющие побочных частот, присутствующие на
выходе фазового детектора, которые, попадая на вход управляю-
щего элемента, вызывают паразитную частотную (фазовую) мо-
дуляцию эталонного генератора.
Система ФАПЧ может работать в различных режимах. Напри-
мер, если частоты ЭГ и ПГ равны и эффект медленных изменений
параметров подстраиваемого генератора, определяющих его часто-
ту, в среднем полностью компенсируется действием ФАПЧ, пос-
ледняя работает в так называемом режиме удержания. С понятием
режима удержания неразрывно связано понятие полосы удержа-
ния, т. е. области начальных расстроек, в которой возможен этот
режим. Ширина полосы удержания определяется разностью гра-
ничных значений частоты генератора ПГ, соответствующих наи-
большему и наименьшему напряжениям на выходе фазового де-
тектора.
Возможен и другой режим работы системы, при котором в сред-
нем разность частот вырабатываемых генераторами сигналов рав-
на нулю, а разность их фаз периодически изменяется. Этот режим,
используемый крайне редко, называется жвазисинхрониз.мом. рбыч-
17
но систему проектируют так, чтобы он не возникал. Поэтому в даль-
нейшем чаще всего будет идти речь только о режиме удержания.
Третий режим работы системы ФАПЧ — режим биений Его
характерной особенностью является непрерывное нарастание в
среднем разности фаз подстраиваемого и эталонного генераторов.
Режим биений всегда наблюдается в тех случаях, когда начальная
расстройка ПГ относительно ЭГ (т. е. расстройка, соответствую-
щая нулю напряжения на выходе фазового детектора) больше по-
лосы удержания. Иногда он может иметь место и при начальной
расстройке, меньшей полосы удержания. В режиме биений среднее
значение частоты ПГ отличается о г частоты эталонного генера-
тора1)- \
Переходное состояние системы, при котором режим биений пе-
реходит с течением времени в режим удержания или квазисинхро-
чизма, называется режимом захвата Под полосой захвата пони-
мают область начальных расстроек, в которой при любых началь-
ных условиях устанавливается режим удержания (или квазисин-
хронизма) Обычно в момент включения частоты подстраиваемого
и эталонного генераторов не совпадают и в системе наблюдается
режим биений. При этом сигнал подстраиваемого генератора мо-
дулируется по частоте напряжением биений.
В зависимости от знака мгновенного напряжения биений раз-
ность частот то повышается, то понижается. В результате длитель-
ности положительной и отрицательной полуволн напряжения бие-
ний оказываются различными и на выходе фазового детектора
образуется постоянная составляющая напряжения. Наличие этой
постоянной составляющей приводит к изменению частоты биений
относительно начальной расстройки Если начальная расстройка
не выходит за пределы полосы захвата, то постоянная составляю-
щая снижает частоту биений до нуля, и возникает режим удержа-
ния. Если же начальная расстройка превышает полосу захвата, то
постоянная составляющая напряжения недостаточна для ее полной
компенсации, и в системе наблюдается устойчивый режим биений.
Подробнее эти явления описаны в гл. 2.
Практически полосы удержания и захвата можно определить
следующим образом. Предположим, что частоты сигналов обоих
генераторов при замкнутой петле автоподстройки равны друг дру-
гу. Медленно перестраивая эталонный генератор (как в сторону
повышения, так и «в сторону понижения частоты) до тех пор, по-
ка система не выйдет из синхронизма, находим полосу удержа-
ния. Полосу захвата можно определить по наступлению синхро-
низма системы при медленном изменении начальной расстройки
от больших значений к малым.
В общем случае полосы удержания и захвата не равны друг
другу (рис. 1.2). На рисунке сплошной линией показано устойчи-
*) Подробнее о режимах см. в гл 4
18
вое изменение средней разности частот (частоты биений) Q1) ге-
нераторов ЭГ и ПГ в замкнутой системе ФАПЧ при изменении
начальной расстройки QH от больших значений к малым. Пунктир-
ной линией показано неустойчивое изменение £2 при изменении
QH от малых значений к большим. Прямая линия на этом рисунке
отображает зависимость й от QH в разомкнутой системе ФАПЧ.
Поскольку кривые, как правило, получаются симметричными, под
Рис 1 2 Зависимость средней разности частот под-
страиваемого и эталонного генераторов от началь-
ной расстройки
полосами удержания и захвата принято понимать половину соот-
ветствующих областей, т. е. Qy и Q3. Соотношение между Qy и
П3 определяется параметрами системы.
Одной из важных характеристик системы ФАПЧ является так-
же время и характер установления в ней того или иного режима,
т. е параметры переходных процессов.
Система ФАПЧ представляет собой разновидность систем с об-
ратной связью, поэтому в ней возможна потеря устойчивости. В за-
висимости от величины флуктуаций, нарушающих равновесие, раз-
личают устойчивость системы в «малом», в «большом» и «целом»
[27] По существу, устойчивость в «малом» определяет возмож-
ность режима удержания, а устойчивость в «большом» — усло-
вия отсутствия режима квазисинхронизма. Выполнение этих усло-
вий, естественно, гарантирует выполнение условий устойчивости
в «малом». Устойчивость в «целом» определяет условие отсутствия
режима биений. Это понятие можно использовать также и для оп-
ределения условий, при которых невозможен ни режим биений,
’) Под Q понимают среднее значение производной разности фаз генераторов
ПГ и ЭГ
19
ни режим квазисинхронизма. Подробно эти вопросы рассмотрены
в гл. 4,
Соотношение между полосой захвата и полосой удержания, ус-
тойчивость системы, ее фильтрующая способность и время установ-
ления режима определяются характеристиками петли автопод-
стройки.
1.2 ОСНОВНОЕ УРАВНЕНИЕ ТИПОВОЙ АВТОНОМНОЙ СИСТЕМЫ ФАПЧ
Несмотря на большое разнообразие условий применения сис-
тем ФАПЧ и требований к ним, а также на схемные различия от-
дельных устройств, содержащих эти системы, основой последних
является типовая непрерывная однопетлевая система ФАПЧ, струк-
турная схема которой показана на рис. 1.16, Это позволяет проана-
лизировать работу таких систем и рассчитать их на основе рас-
смотрения типовой системы.
Составим основное дифференциальное уравнение типовой сис-
темы ФАПЧ. Предположим, что в начальный момент времени на-
пряжение на входе управляющего элемента равно нулю. При этом
начальная расстройка подстраиваемого генератора относительно
эталонного
£2Н = С0эг (Од ПГ 1 (1'0
где соо пг — угловая частота подстраиваемого генератора при ра-
зомкнутой цепи управления.
В момент замыкания цепи управления мгновенная частота под-
страиваемого генератора меняется в результате появления напря-
жения на входе управляющего элемента. Ее новое значение со, в
зависимости от знака мгновенного напряжения на выходе ФНЧ,
будет либо больше, либо меньше соопг. Пусть она станет в этот мо-
мент больше соопг, что не повлияет на общность конечного резуль-
тата) :
со = соо пг4- соуэ. (1.2)
Здесь соуэ — мгновенная расстройка, создаваемая управляю-
щим элементом. Пренебрегая переходными процессами в подстраи-
ваемом генераторе и полагая характеристику управляющего эле-
мента линейной, будем считать, что величина этой расстройки оп-
ределяется выражением:
^уэ = ^уэ^вых, ( 1 -3)
где Sy3 — крутизна характеристики управляющего элемента,
рад!сек-в, «Вых — мгновенное напряжение на выходе ФНЧ (на
входе УЭ).
Напряжение на выходе ФНЧ связано с напряжением на его
входе (выходным напряжением фазового детектора «фд) соотно-
шением
Цуэ = А (р) ИфД, (1-4)
ол 7
где К(р) — коэффициент передачи фильтра в операторной фор-
ме; символ р, как обычно, означает дифференцирование по вре-
мени.
Мгновенное выходное напряжение фазового детектора опреде-
ляется его характеристикой. В дальнейшем будем полагать, что
она имеет периодический характер в функции разности фаз и не бо-
лее одного максимума и одного минимума за период.
Обозначив наибольшее значение модуля напряжения на вы-
ходе фазового детектора через £/фДМакс> получим
^фд = ^фд макс^ (ф) > (1-5}
где Г(ф) — нормированная характеристика фазового детектора,
т. е. отношение мгновенного значения напряжения к наибольшему
по модулю напряжению, ф — мгновенная разность фаз напряже-
ний подстраиваемого и эталонного генераторов.
Подставив ф-лы (1.4) и (4.5) в (1.3), получим
Юуэ = ЗуэЬфД макЛ (р) F (ф). (1.6)
Величина 5Уэ^Фдмакс определяет максимально возможную рас-
стройку, которую можег компенсировать цепь управления, т. е. по-
лосу удержанйя йу. Учитывая это, перепишем выражение (1.6) сле-
дующим образом:
(оуэ=ЦЛ(р)Г(ф). . (1.7}
Подставив ф-лу (1.7) в (1.2), найдем
« = соо пг + Оу К (р) F (ф). (1.8)
Мгновенное значение разнести фаз генераторов связано в об-
щем случае с мгновенным значением разности частот выражением
t
ф=фс+J(co9r—co)dt (1.9)
о
где фс — разность фаз при / = 0.
На основании ф-лы (4.9) выражение для разности частот мож-
но записать в операторной форме:
соэг— со=Рф. - (1.Ю)
С учетом выражений (1.8) и (1.40) имеем
Рф + йу/<(р)Г(ф) =йн. (1.11)
Это уравнение является основным дифференциальным уравне-
нием системы ФАПЧ. Оно показывает, что в любой момент вре-
мени в замкнутой системе ФАПЧ алгебраическая сумма мгновен-
21
ной разности частот р<р и расстройки, вносимой управляющим эле-
ментом, равна постоянной величине (начальной расстройке).
При сложном фильтре нижних частот и нелинейной характери-
стике фазового детектора ур-ние (1.111) превращается в нелинейное
дифференциальное уравнение высокого порядка.
Это уравнение полностью характеризует изменение во време-
ни разности фаз подстраиваемого и эталонного генераторов с мо-
мента их включения. Решение его позволяет определить такие важ-
ные показатели работы системы, как полоса захвата, время и ха-
рактер установления режима, статическая фазовая ошибка.
Точное аналитическое решение основного нелинейного диффе-
ренциального ур-ния (1.11) системы ФАПЧ можно получить только
в том случае, если оно имеет первый порядок [К(р) =4]. Во всех
остальных случаях используют приближенные способы его реше-
ния или анализа. При этом определение полосы захвата или вре-
мени установления становится проблемой даже для систем, описы-
ваемых уравнениями второго и третьего порядков.
Как уже указывалось, ур-ние (il.ll) является основным урав-
нением автономной системы ФАПЧ. На практике же часто встре-
чаются неавтономные системы, параметры которых являются де-
терминированными или случайными функциями времени (напри-
мер, в результате воздействия на них различного рода помех).
Исследование неавтономных систем связано с еще большими труд-
ностями Это объясняет наличие большого количества отечествен-
ных и зарубежных работ, посвященных различным аспектам тео-
рии систем ФАПЧ
1.3. ОБЛАСТИ ПРИМЕНЕНИЯ СИСТЕМ ФАПЧ
Общие сведения
Как уже отмечалось, система ФАПЧ находит самое широкое
применение в различных областях техники: например, для стаби-
лизации частоты мощного генератора по сигналу маломощного
стабильного генератора [1930,4], для создания высокостабильных
возбудителей с дискретным множеством частот [1958,6; 1962,119;
1970,22] и устройств, позволяющих плавно и точно изменять ча-
стоту высокостабильных генераторов [1960,42], в системах выде-
ления несущей для синхронного и корреляционного приема (4959,
2,36; 1956,6; 1960,13; 1967,65], в системах цветного и черно-бе-
лого телевидения [1953,4; 4954,6; 1963,18], для фазовой синхрони-
зации колебаний лазера [1964, 31], для деления и умножения ча-
стоты [1959, 18, 19], для создания фазовых и частотных модуляторов
[1967,34], для стабилизации скорости вращения и синхронизации
электродвигателей [193.9, 2; 1963,22] и т. д. Система ФАПЧ также
широко используется в качестве узкополосного фильтра несущей
в системах ФТ и ОФТ [1965, 40]
Рассмотрим подробнее основные применения систем ФАПЧ.
22
Применение системы ФАПЧ в приемниках
амплитудномодулированных сигналов
Как известно [1932,2; 4941, 1], синхронное детектирование ам-
плитудномодулированных колебаний позволяет значительно повы-
сить помехоустойчивость 'приемника, использовать избирательность
фильтра нижних частот для устранения помех, повысить линей-
ность детектирования. Однако для этого требуется располагать в
Рис. 1.3. Упрощенные структурные схемы синхронного приемника
AM сигналов
а) с остатком несущей, б) с полностью подавленной несущей
приемном тракте напряжением несущей частоты, синфазным с на-
пряжением несущей в передатчике.
Если передатчик излучает несущую или ее остаток, то система
ФАПЧ в приемном тракте может выполнять роль высокоэффектив-
ного узкополосного фильтра и усилителя несущей частоты. Упро-
щенная структурная схема синхронного приемника AM сигналов
показана на рис. 1.3а. Как видно из рисунка, принимаемый сиг-
нал через входное устройство ВУ, смеситель См и усилитель про-
межуточной частоты УПЧ поступает на фазовый детектор ФД, в
котором сравниваются фазы сигнала промежуточной частоты и
сигнала генератора (обычно кварцованного) КГ. Полученный сиг-
23
нал ошибки через фильтр нижних частот ФНЧл и управляющий
элемент УЭ регулирует частоту подстраиваемого первого гетеро-
дина ПГ.
Напряжение низкой частоты образуется на выходе синхронного
детектора СД, в котором сигнал УПЧ детектируется с помощью
напряжения второго гетеродина КД сдвинутого по фазе на 90° от-
носительно напряжения, подаваемого от КГ на ФД, в фазовраща-
теле ФВ, что необходимо для устранения сдвига фаз, вносимого
самой системой ФАПЧ в режиме удержания. С выхода СД сиг-
нал проходит через фильтр нижних частот ФНЧъ обеспечиваю-
щий в данном приемнике дополнительную избирательность, и уси-
литель низкой частоты УНЧ.
Приемник, выполненный по схеме рис. 1.3а, может принимать
обычный двухполосный AM сигнал, AM сигнал с частично подав-
ленной несущей и однополосный сигнал с остатком несущей. При
этом необходимо, чтобы принимаемый сигнал содержал несущую
или ее остаток, что требует дополнительного расхода энергии в
передающем тракте. Известны способы передачи двухполосного AM
сигнала с полностью подавленной несущей, при которых несущая
в приемном тракте восстанавливается только по сигналам боко-
вых полос. В последнем случае схема рис. 1.3а оказывается непри-
годной.
Структурная схема приемника двухполосного AM сигнала с
полностью подавленной несущей, описанная Костасом в [1956,61
приведена на рис. ,1.36. Схема работает следующим образом. Двух-
полосный AM сигнал без несущей через входное устройство ВУ
поступает на два синхронных детектора СД1 и СДг, на которые
подаются напряжения гетеродина ПГ с взаимным сдвигом фаз на
90°. В результате на выходах усилителей низкой частоты УНЧ^. и
УНЧ* выделяются сигналы низких частот, которые после сравне-
ния их фаз в фазовом детекторе ФД образуют сигнал ошибки, уп-
равляющий частотой гетеродина ПГ. Низкочастотная информация,
заложенная в огибающей, выделяется после суммирования сиг-
налов УНЧ1 и УНЧ2 на выходе сумматора С.
Интересно отметить, что эта схема пригодна не только для
приема двухполосных AM сигналов, но и для точного выделения
информации о частоте несущего колебания. При необходимости
сигнал несущей частоты можно снять с выхода генератора ПГ.
Применение системы ФАПЧ в радиотехническом
приемно-измерительном комплексе
В последнее время системы ФАПЧ широко применяются в слож-
ных устройствах, предназначенных для приема ФМ и ЧМ коле-
баний и фазовых радиотехнических измерений. В качестве приме-
ра рассмотрим работу приемного устройства радиотехнического
комплекса «Микролок» [1959,36], позволяющего измерять пара-
24
метры движения искусственного спутника земли и одновременно
принимать от него гелеметрическую информацию.
Устройство состоит из двух приемников (рис. 1.4), один из ко-
торых предназначен для приема телеметрической информации и
измерения допплеровского сдвига частоты, а другой — для опреде-
А Б В Г
Рис. 1.4. Структурная схема приемного устройства «Микролок»
ления направления на излучающий объект. По существу, второй
приемник является составной частью фазового пеленгатора.
Приемник телеметрической информации работает следующим
образом. Телеметрическая информация с борта спутника переда-
ется с помощью модулированного по фазе радиосигнала с несу-
щей частотой 108 Afaz{. Этот сигнал через входной усилитель ВУ3
поступает на смеситель См3 и далее через УПЧ3, настроенный на
промежуточную частоту 5 Мгц, на смеситель Смь. Затем после уси-
ления на частоте 455 кгц в УПЧ^ он подается со сдвигом фазы
25
на 90°, вносимым фазовращателем ФВ, через амплитудный ограни-
читель Огр на фазовый детектор ФДз системы ФАПЧ общего для
обоих приемников первого гетеродина ПГ, работающего на часто-
те 103 Мгц В качестве второго и третьего гетеродинов (также об-
щих) используются кварцевые генераторы АЛ и КГ2, работающие
на частотах 5,455 Мгц и 455 кгц
Сигнал тетеметрической информации снимается с фазового де-
тектора системы ФАПЧ ФД3 (выход В) Колебания допплеровской
частоты снимаются с отдельного смесителя См$, в котором обра-
зуется разность частот подстраиваемого ПГ и кварцованного КГ3,
работающего на частоте 103 Мгц (выход Г) генераторов В прием-
нике предусмотрена общая система АРУ Для получения инфор-
мации об амплитуде сигнала в режиме удержания используется
выходное напряжение специального фазового детектора ФДз (вы-
ход Б)
Полоса удержания системы составляет 10 кгц Для обеспечения
захвата используется специальное устройство .поиска УП, которое,
воздействуя на управляющий элемент УЭ в режиме биения, изме-
няет частоту подстраиваемого генератора по пилообразному за-
кону до тех пор, пока не произойдет захват Устройством поиска
управляет сигнал с выхода одного из фазовых детекторов (ФДз),
который выключается при наступлении захвата Фильтр нижних
частот ФНЧ обеспечивает требуемую шумовую полосу системы
ФАПЧ
Приемник фазового пеленгатора имеет две антенны, сигналы
от которых вычитаются в сумматоре С Образующийся разностный
сигнал после преобразования и усиления детектируется по ам-
плитуде в синхронном детекторе ФД{ На выходе А выделяется
информация о направлении на спутник
В рассмотренном приемном устройстве система ФАПЧ выпол-
няет функции частотного детектора и синхронизатора первого ге-
теродина в синхронном приемнике фазового пеленгатора Приме-
нение системы ФАПЧ в этих приемниках обусловливает их вы-
сокую помехоустойчивость
Систему ФАПЧ можно использовать не только для ЧМ приема,
ьо и для одновременного помехоустойчивого синхронного детек-
тирования сигналов АРУ (1960, 13] Сигнал, пропорциональный амп-
литуде выходного напряжения, при этом образуется так же, как
и сигнал на выходе Б (рис 1 4) Аналогичные функции выполняет
система ФАПЧ и в других допплеровских устройствах (см напри-
мер, [1959, 10])
Применение системы ФАПЧ для получения переменного
напряжения высокостабильной частоты
В современной радиотехнике широко используются интерполя-
ционные методы Перестройки высокочастотных стабильных гене-
раторов Однако схемы, основанные на этих методах, требуют
26
для подавления вредных комбинационных частот применения боль-
шого числа высокочастотных фильтров, что усложняет аппаратуру.
На рис 1 5 приведена структурная схема системы ФАПЧ, ра-
ботающей по вторичным биениям, которая позволяет плавно или
дискретно изменять частоту подстраиваемого генератора, хорошо
подавляет побочные колебания на его выходе и не требует при-
менения высокочастотных фильтров Поскольку эта схема часто
используется как элемент других более сложных систем точного
преобразования частот [1970,22], остановимся на ней несколько
подробнее
В схему, кроме элементов типовой системы ФАПЧ, входят сме-
ситель См и генератор сдвига ГС Колебания частот соПг и соэг под-
страиваемого и эталонного ге-
нераторов поступают на смеси-
тель, на выходе которого обра-
зуются биения с разностной
частотой А(о = (оэг—соПг Напря-
жение разностной частоты по-
дается далее на фазовый де-
тектор. Одновременно на его
вход поступает также напря-
жение частоты Ис В результа-
те на выходе фазового детекто-
ра образуется управляющее
Рис 1 5 Структурная схема системы
ФАПЧ, работающей по вторичным бие-
ниям
напряжение, которое после
фильтрации побочных колеба
ний поступает на управляющий
элемент, создающий корректи
рующую расстройку
Стационарный режим в системе соотйетствует равенству сос =
= | Асо | Он возможен при различных знаках расстройки подстраи-
ваемого генератора Действительно, условие стационарного режи-
ма будет выполнено, если частота подстраиваемого генератора
(0<+> = (0эг + А(0 ИЛИ ft)^’ = СОэг—Асо В обоих случаях | соэг—ft)nr|=Aco,
однако знаки этой разности различны, т е в общем случае часто
та подстраиваемого генератора устанавливается неоднозначно Для
устранения указанного недостатка необходимо, чтобы знак рас
стройки Асо был постоянным Это требование выполняется, если
частота подстраиваемого генератора с учетом ее нестабильности и
диапазона перестройки всегда остается ниже (выше) частоты эта
лонного генератора
Из структурной схемы рис 1 5 следует, что для перестройки
подстраиваемого генератора достаточно менять (плавно или дис-
кретно) частоту сое Пусть, например, сопг>соЭг, а нестабильность
частоты подстраиваемого генератора характеризуется величиной
tnr Требуемый диапазон частот генератора ПГ находится в пре-
делах от сон до Ив Частота генератора сдвига в этом случае дол-
27
жна меняться на величину Л<вс. Верхняя граница 'изменения <вс
определяется допустимым ухудшением стабильности частоты, вы-
ходного напряжения подстраиваемого генератора по сравнению
со стабильностью частоты эталонного^ генератора, как и в обыч-
ном интерполяционном генераторе. При дискретном изменении ча-
стоты выходного сигнала частота <вс получается обычно в ре-
зультате синхронного деления <вЭг и в этом случае ее верхняя гра-
ница может быть произвольной. Нижняя граница изменения ис оп-
ределяется условием фильтрации суммарной частоты (в режиме
синхронизма — второй гармоники <вс/ Для того чтобы при вклю-
чении системы автоматически наступал синхронизм, полоса за-
хвата в ней должна соответствовать условию
““3 2 ' ®пг®пг>
а собственная частота подстраиваемого генератора должна быть
равна средней частоте заданного диапазона частот выходного на-
пряжения, т. е. й)пг= (®н + ®в)/2.
К описанной выше схеме обычно предъявляются следующие
основные требования:
— полоса частот, в которой обеспечивается устойчивая авто-
матическая перестройка подстраиваемого генератора, должна быть
возможно более широкой;
— уровень побочных колебаний в спектре выходного сигнала
должен быть минимальным.
В работе [I960, 12] приведены результаты экспериментальной
проверки такой схемы.
Схему рис. il.5 можно применить для создания в высокочастот-
ном диапазоне дискретной сетки стабильных частот с малым ин-
тервалом между ними, а также в связных коротковолновых пере-
датчиках, работающих по системе ЧТ и ДЧТ. В последнем случае
эталонный сигнал определяет рабочую волну, а частотная девиа-
ция осуществляется изменением частоты генератора сдвига. Этот
же принцип можно использовать для создания генератора качаю-
щейся частоты с высокой стабильностью средней частоты.
В тех случаях, когда требуется стабилизировать высокочастот-
ный генератор при помощи низкочастотного эталонного, послед-
ний обычно используется в качестве генератора сдвига, а напря-
жение эталонного сигнала, подаваемое на смеситель, получается
путем умножения частоты эталонного генератора. Подобные схе-
мы широко используются для стабилизации частоты клистронных
и магнетронных генераторов [1958,6; 1968,55].
В качестве примера рассмотрим систему автоподстройки ча-
стоты клистронного генератора [1958,6], структурная схема кото-
рой показана на рис. 1.6. Сигнал частоты 75 Мгц кварцованного
генератора КГ после умножения ее в 120 раз умножителем У120
образует вместе с сигналом клистронного генератора ПГ на вы-
28
ходе смесителя См напряжение промежуточной частоты, равной
75 Мгц., которое после усиления в УПЧ сравнивается по фазе с
опорным в фазовом детекторе ФД. Полученный сигнал ошибки
через фильтр нижних частот ФНЧ и усилитель постоянного тока
У ПТ регулирует частоту клист-
ронного генератора ПГ. Умножи-
тель У120 построен по многокас-
кадному принципу, а его послед-
ний каскад выполнен на кристал-
лическом диоде. Очевидно, что в
рассматриваемой системе полоса
пропускания УПЧ определяется в
основном нестабильностью часто-
ты клистронного генератора.
В экспериментальном макете сог-
ласно {1958, 6] полоса удержания
составляла 17 Мгц, а полоса зах-
Рис. 16. Структурная схема
ФАПЧ клистронного генератора
вата — 3,7 Мгц. Описанная схема может хорошо подавлять комбина-
ционные частоты, так как фильтрация в ней, по существу, опреде-
ляется полосами пропускания ФНЧ и УПЧ, работающими на низ-
кой промежуточной частоте.
Применение системы ФАПЧ для повышения точности
магнитной записи
В связи с развитием в последнее время специальных видов маг-
нитной записи (запись телевизионных изображений, фототелеграф-
ных сообщений, сигналов телеметрии и телеуправления, сигналов
программного управления и т. п.) резко возросли требования к
точности воспроизведения ранее записанных программ. Точность
воспроизведения зависит как от свойств носителя (неравномерно-
сти отдачи, деформации пленки или проволоки и т. п.), так и от
характеристик аппаратуры записи и воспроизведения, определяе-
мых в основном неравномерностью скорости движения носите-
ля. Наиболее трудно устранить искажения амплитудного и вре-
менного масштабов сигнала.
Искажения амплитудного масштаба вызывают колебания уров-
ня воспроизводимого сигнала. Эффективным методом борьбы с
ними является использование модулированных сигналов, амплиту-
да которых не зависит от мгновенного значения сообщения (при-
меняются как частотная модуляция, так и широтно-импульсная
модуляция) [4].
Искажения временного масштаба приводят к тому, что при за-
писи чисто синусоидального немодулированного сигнала воспро-
изведенный сигнал оказывается модулированным по фазе (ча-
стоте), причем его средняя частота в общем случае отличается от
частоты записываемого сигнала. Медленные изменения средней ча-
стоты воспроизводимого сигнала определяются в основном неста-
29
бильностью средней скорости движения носителя и его растяже-
нием. Быстрые же изменения мгновенной фазы (частоты) этого
сигнала обусловливаются высокочастотной детонацией механизма
протяжки.
Уменьшение искажений временного масштаба представляет со-
бой довольно сложную задачу вследствие высоких требований,
предъявляемых к степени его сохранения в устройствах точной
магнитной записи Эта задача реализуется при использовании фа-
зовой автоподстройки скорости носителя по эталонному сигналу
[1963, 22].
На рис. 1 7 показана структурная схема воспроизводящего лен-
топротяжного механизма, основным элементом которой является
Рис 1 7 Структурная схема устройства, воспроизво-
дящего магнитную запись, с системой ФАПЧ, устра-
няющей искажения временного масштаба
система фазовой автоподстройки частоты Схема работает сле-
дующим образом. Носитель Н при помощи ведущего вала ВВ и
прижимного ролика ПР движется мимо готовок КГБ и ГВ) Во
время записи на отдельную магнитную дорожку записывается ста-
бильный контрольный (часто синусоидальный) сигнал Если при
воспроизведении по каким-либо причинам возникают искажения
временного масштаба, то контрольный сигнал оказывается промо-
дулированным по фазе (частоте) в строгом соответствии с этими
искажениями и поэтому содержит полную информацию о них
Контрольный сигнал воспроизводится контрольной головкой
воспроизведения КГБ и после усиления в блоке У(Д поступает на
один из входов фазового детектора ФД На другой вход последне-
го подается высокостабильный эталонный сигнал от кварцевого
или камертонного генератора ЭГ. В результате на выходе фазового
детектора образуется сигнал ошибки, аргументом которого являет-
ся разность фаз эталонного и контрольного сигналов. Сигнал ошиб-
зо
ки через 'промежуточные устройства ПУ управляет скоростью вра-
щения ведущего двигателя ДВ и, следовательно, скоростью ленто-
протяжки
В состоянии синхронизма система ФАПЧ обеспечивает точное
равенство частот воспроизводимого контрольного сигнала и эталон-
ного генератора. Поэтому если частота последнего в точности рав-
на частоте вспомогательного генератора, использованного при за-
писи контрольного сигнала, то искажения временного масштаба
в среднем отсутствуют. Однако быстрые искажения временного
масштаба невозможно устранить регулировкой числа оборотов
ведущего двигателя в силу его большой инерционности. Для их
уменьшения служит дополнительный канал регулирования, состоя-
щий из усилителя УС2 и электромеханического преобразователя
ЭМП, изменяющего положение головки воспроизведения основно-
ю сигнала относительно носителя [5]. Этот канал не входит в цепь
обратной связи и служит лишь для компенсации паразитной фа-
зовой модуляции воспроизводимого сигнала. Компенсация дости-
гается только при определенном усилении в канале и определен-
ной фазе сигнала ошибки, воздействующего на положение голов-
ки Так, с увеличением скорости движения ленты головка долж-
на смещаться вправо, чго снижает скорость движения носителя от-
носительно щели. Вследствие инерционности дополнительного ка-
нала удается устранять быстрые отклонения скорости лишь до ча-
стот порядка 70 — 100 гц.
Полоса захвата такой системы должна превышать отклонения
частоты контрольного сигнала от частоты генератора ЭГ при ра-
зомкнутой петле ФАПЧ Для увеличения полосы захвата и верх-
ней границы частот колебаний средней скорости носителя, кото-
рые можно скомпенсировать собственно системой ФАПЧ двигате-
ля, последний должен иметь по возможности меньшую электроме-
ханическую постоянную времени.
В видеомагнитофонах система ФАПЧ используется не только
для стабилизации скорости носителя, но и для стабилизации ско-
рости вращения видеоголовок [1963,22].
В качестве ведущего двигателя можно использовать как син-
хронные, так и асинхронные электродвигатели, а также двигатели
постоянного тока.
Промежуточные устройства обычно состоят из управляемого
по частоте генератора и мощного усилителя, обеспечивающего на-
пряжение питания двигателя Если двигатель асинхронный, то уп-
равлять скоростью его вращения можно не только изменением ча-
стоты питающего напряжения, но и регулированием торможения.
Наиболее просто регулируется скорость вращения двигателей по-
стоянного тока (путем изменения величины тока в обмотке ста-
тора либо напряжения на зажимах якоря). Для расширения по-
лосы захвата и повышения устойчивости системы ФАПЧ жела-
тельно, чтобы промежуточные устройства были безынерционными.
31
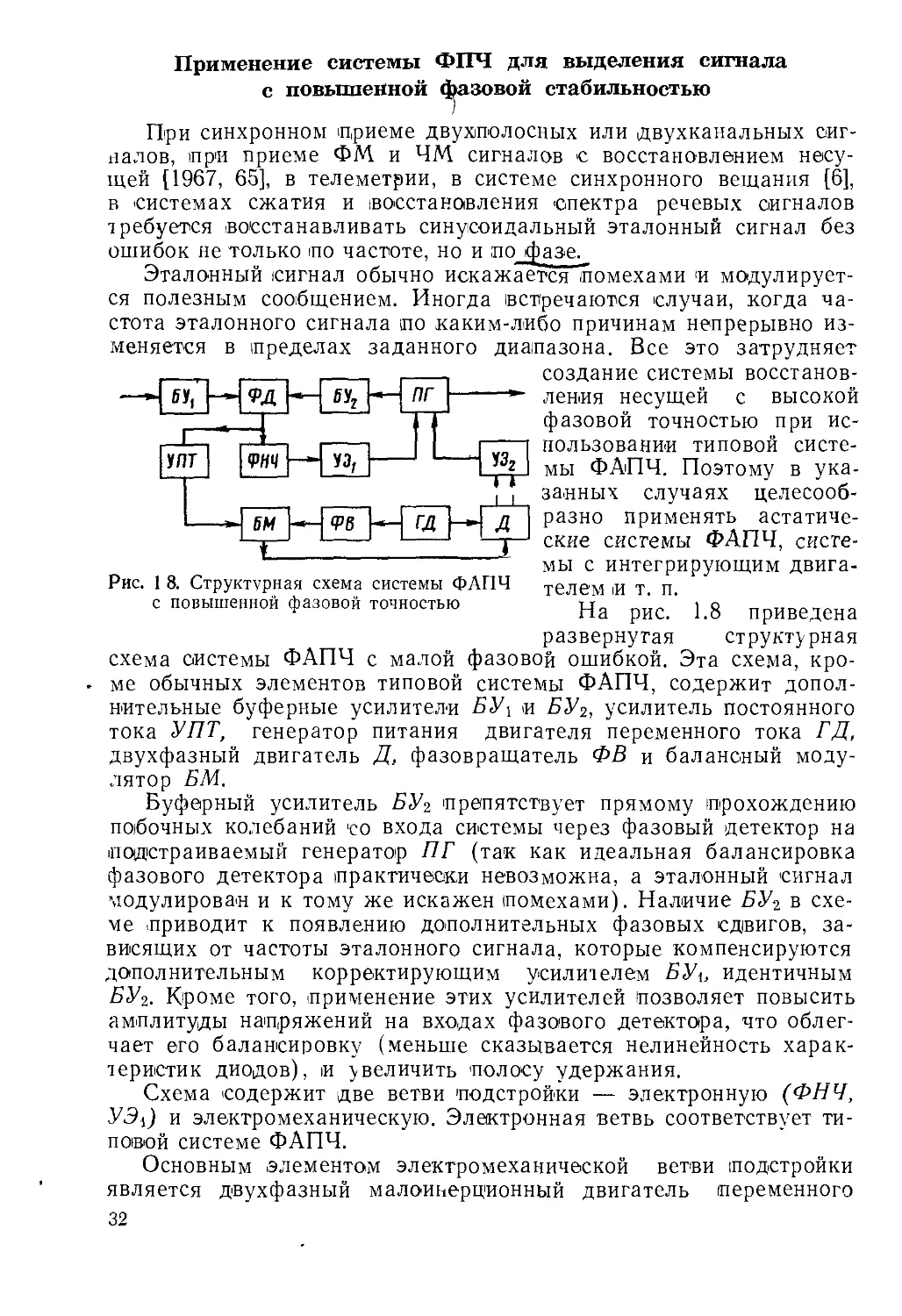
Применение системы ФПЧ для выделения сигнала
с повышенной (разовой стабильностью
При синхронном приеме двухполосных или двухканальных сиг-
налов, при приеме ФМ и ЧМ сигналов с восстановлением несу-
щей [1967, 65], в телеметрии, в системе синхронного вещания [6],
в системах сжатия и восстановления спектра речевых сигналов
требуется восстанавливать синусоидальный эталонный сигнал без
ошибок не только по частоте, но и по фазе.
Эталонный сигнал обычно искажается помехами и модулирует-
ся полезным сообщением. Иногда встречаются случаи, когда ча-
стота эталонного сигнала по каким-либо причинам непрерывно из-
меняется в пределах заданного диапазона. Все это затрудняет
Рис. 1 8. Структурная схема системы ФАПЧ
с повышенной фазовой точностью
создание системы восстанов-
ления несущей с высокой
фазовой точностью при ис-
пользовании типовой систе-
мы ФАПЧ. Поэтому в ука-
занных случаях целесооб-
разно применять астатиче-
ские системы ФАПЧ, систе-
мы с интегрирующим двига-
телем и т. п.
На рис. 1.8 приведена
развернутая структурная
схема системы ФАПЧ с малой фазовой ошибкой. Эта схема, кро-
ме обычных элементов типовой системы ФАПЧ, содержит допол-
нительные буферные усилители БУХ и БУ2, усилитель постоянного
тока УПТ, генератор питания двигателя переменного тока ГД,
двухфазный двигатель Д, фазовращатель ФВ и балансный моду-
лятор БМ.
Буферный усилитель БУ2 препятствует прямому прохождению
побочных колебаний со входа системы через фазовый детектор на
подстраиваемый генератор ПГ (так как идеальная балансировка
фазового детектора практически невозможна, а эталонный сигнал
модулирован и к тому же искажен помехами). Наличие БУ2 в схе-
ме приводит к появлению дополнительных фазовых сдвигов, за-
висящих от частоты эталонного сигнала, которые компенсируются
дополнительным корректирующим усилителем БУ{, идентичным
БУ2. Кроме того, применение этих усилителей позволяет повысить
амплитуды напряжений на входах фазового детектора, что облег-
чает его балансировку (меньше сказывается нелинейность харак-
теристик диодов), и увеличить полосу удержания.
Схема содержит две ветви подстройки — электронную (ФНЧ,
УЭГ) и электромеханическую. Электронная ветвь соответствует ти-
повой системе ФАПЧ.
Основным элементом электромеханической ветви подстройки
является двухфазный малоиьерционный двигатель переменного
32
тока Д. Скорость и направление вращения этого двигателя изме-
няются регулированием амплитуды и фазы напряжения на одной
из его статорных обмоток при неизменных амплитуде и фазе на-
пряжения на другой обмогке
Напряжение с переменной амплитудой и фазой, меняющейся на
180° при прохождении амплитуды через нуль, создается балансным
модулятором БМ, на один вход которого поступает переменное
напряжение от генератора ГД через фазовращатель ФВ, а на дру-
гой — управляющее постоянное напряжение с выхода фазового
детектора через усилитель постоянного тока УПТ. Балансный мо-
дулятор работает таким образом, что амплитуда напряжения на
обмотке управления двигателя является обычно линейной функцией
модуля постоянного напряжения на выходе фазового детектора,
а фаза управляющего напряжения определяется знаком выходно-
го напряжения фазового детектора. Фазовращатель ФВ создает
постоянный фазовый сдвиг между напряжениями на статорных
обмотках, равный 90° и необходимый для получения в двухфаз-
ном двигателе вращающегося магнитного поля. Вал двигателя
связан через замедляющий редуктор с конденсатором контура
подстраиваемого генератора (УЭ2).
Нестабильность среднего значения разности фаз напряжений
эталонного и подстраиваемого генераторов в приведенной схеме
определяется максимально возможной расстройкой подстраивае-
мого генератора относительно эталонного, разностью фазовых
сдвигов, вносимых усилителями и БУ2, нестабильностью нулей
фазового детектора, усилителя постоянного тока и балансного мо-
дулятора, моментом сил сухого трения двигателя (напряжением
трогания) и полосой удержания системы. Нестабильность нуля 'фа-
зового детектора возникает, например, при изменении его рабочей
частоты (частоты эталонного сигнала). Она определяется нерав-
номерностью амплитудно- и фазо-частотных характеристик транс-
форматоров, входящих в состав фазового детектора, температур-
ной и временнбй нестабильностью характеристик выпрямления вен-
тилей и линеаризующих резисторов.
Для повышения стабильности среднего значения указанной раз-
ности фаз необходимо увеличить собственную стабильность ча-
стоты подстраиваемого генератора, усиление в блоке У ПТ и мак-
симальную расстройку, которую способна обеспечить электромеха-
ническая ветвь, а также снизить фазовые сдвиги, вносимые уси-
лителями БУ1 и БУгк и сделать их строго одинаковыми.
Следует отметить, что для повышения устойчивости работы по-
добной схемы очень важно, чтобы ось двигателя механически бы-
ла жестко связана с осью ротора конденсатора. Это означает, что
редуктор должен иметь минимально возможный люфт и не со-
держать пружинящих элементов (пассик, тонкие длинные валы,
пружинные соединения). В противном случае порядок дифферен-
циального уравнения системы повышается (увеличивается запаз-
дывание), а система может стать неустойчивой.
2—526 33
В тех случаях, когда требуется быстродействие, а также при
значительных колебаниях частоты эталонного сигнала, для умень-
шения фазовой ошибки можно использовать комбинированную си-
стему подстройки, предложенную С. И. Евтяновым [1959, 1]. Струк-
турная схема системы представлена на рис. 1.9 [1965,6]. В нее
входят система типовой фазовой автоподстройки и система обыч-
ной частотной автоподстройки, состоящей из частотного дискри-
минатора нулевых биений ЧД (1962, 49], фильтра ФНЧ\, управляю-
щего элемента УЗб и подстраиваемого генератора П1\.
При изменении частоты эталонного сигнала на входе УЭ1 си-
стемы ЧАП появляется управляющее постоянное напряжение, про-
порциональное по величи-
не и одноименное по зна-
ку отклонению частоты
эталонного сигнала от ча-
стоты вспомогательного
подстраиваемого генера-
тора ПД. Если генерато-
ры П1\ и ПГ% идентичны,
то полученное напряже-
ние содержит информа-
цию и о расстройке гене-
ратора ПГ2 относительно
эталонного сигнала, в
связи с чем это напряже-
ние можно использовать
для компенсации началь-
Рис. 1.9. Структурная схема комбинированной
системы ЧАП—ФАПЧ
ной расстройки генерато-
ра ПГ2. Если к тому же характеристики элементов УЭ1 и У32 ли-
нейны и имеют одинаковую крутизну, то для компенсации доста-
точно сложить напряжение, полученное на выходе фильтра ФНЧЬ
с напряжением на выходе фильтра ФНЧ2. Таким образом, систе-
ма ЧАП уменьшает начальную расстройку в системе ФАПЧ, об-
легчая тем самым выполнение системы ФАПЧ с малой фазовой
ошибкой.
Поскольку абсолютной идентичности характеристик элементов
П1\ и П1\, УД и УД получить не удается, компенсация оказы-
вается неполной, но тем не менее схема позволяет значительно (в
несколько раз) снизить начальную расстройку системы ФАПЧ.
Следует заметить, что вместо кольца ЧАП в схеме рис. 1 9 .можно
использовать кольцо ФАПЧ [1967,12].
Применение системы ФАПЧ в синтезаторах частот
Синтезаторами частот называются возбудители, работающие от
одного стабильного эталонного генератора и обеспечивающие боль-
шое число рабочих частот колебаний, когерентных эталонному сиг-
налу. Их выходное напряжение образуется из напряжения эта-
34
лонного сигнала в результате сложного др о б но-к ратного 'Преобра-
зования (синтеза) его частоты.
Основными элементами синтезатора являются делители и ум-
ножители частоты, преобразователи частоты и фильтры.
В качестве делителя или умножителя частоты используется си-
стема импульсно-фазовой автоподстройки частоты (ИФАПЧ), пред-
ставляющая собой разновидность обычной системы ФАПЧ. В от-
личие от последней, на фазовый детектор в этом случае подается
напряжение в виде коротких импульсов. Поскольку в промежутке
Рис. 1.10. Структурные схемы
синтезаторов частот
а) на 1000 рабочих частот;
б) на 4000 рабочих частот
между двумя соседними импульсами система разомкнута, на вы-
ход фазового детектора дополнительно включается запоминающее
устройство.
Применение системы ИФАПЧ позволяет простыми средствами
осуществить умножение или деление частоты высокой кратности
и обеспечить высокую степень фильтрации побочных колебаний.
Существенным преимуществом систем ИФАПЧ является то, что
с их помощью можно создавать преобразователи частоты с пере-
менной кратностью, у которых для изменения коэффициента пре-
образования достаточно изменить настройку всего лишь одного
контура — контура подстраиваемого генератора.
В зависимости от требований, предъявляемых к тому или ино-
му синтезатору, его схема и конкретные значения рабочих частот
могут быть самыми различными. В качестве примера на рис. 1.10а
2*
35
приведена структурная схема синтезатора, который обеспечивает
1000 рабочих частот с интервалом в 1 кгц в диапазоне 44-5 Мгц.
Им управляет сигнал единственного эталонного генератора ЭГ с
кварцевой стабилизацией, работающего на частоте 400 кгц.
Схема работает следующим образом. Напряжение частоты
100 кгц от эталонного генератора ЭГ поступает на импульсно-фазо-
вый умножитель частоты Уио-^о с переменной кратностью умно-
жения 110-4-120 (при такой кратности можно реализовать ум-
ножитель с уровнем побочных колебаний не Выше — 70 дб). В ре-
зультате на выходе образуется сигнал с частотами от 11 до
12 Мг1‘. Далее, из полученного сигнала при помощи цепочки де-
лителей Д2 и Д5 (в 2 и 5 раз) формируется сигнал с частотой, в
100 раз меньшей, и интервалом 1 кгц. Применение дробно-крат-
ного преобразования в результате умножения с последующим де-
лением позволяет сформировать сигнал в диапазоне 1404-420 кгц
с интервалом в 1 кгц при отсутствии в схеме напряжений частоты
1 кгц или ее гармоник. Это очень важно, поскольку основным тре-
бованием к синтезатору является минимум уровня побочных ко-
лебаний.
В схеме применяется не один каскад деления, а цепочка де-
лителей, так как частота делимого сигнала изменяется в значи-
тельных пределах (±5%)- При таком изменении делимой частоты
создание однокаскадного делителя с кратностью деления 100 невоз-
можно, так как в данном случае не выполняется условие постоянст-
ва этой кратности.
Полученная сетка из 10 частот с интервалом в 1 кгц перено-
сится далее в диапазон 14404-1120 кгц при помощи умножителя
У10 (в 10 раз), смесителя См2 и фильтра Ф2.
Сетка частот с интервалом в 10 кгц формируется следующим
образом. Напряжение эталонного генератора подается на делитель
частоты Дю (в 40 раз) и далее на умножитель У59-68 с перемен-
ной кратностью, на выходе которого образуется сигнал в диапа-
зоне 5904-680 кгц с интервалом 10 кгц. При помощи умножителя
У4, смесителя Слц и фильтра Ф1 этот сигнал транспонируется в
диапазон 9904-1080 кгц.
Сигналы с выходов фильтров Ф[ и Ф2 перемножаются в смеси-
теле См3, и фильтром Ф3 выделяется верхняя боковая полоса час-
тот 2,14-2,2 Мгц с интервалом 4 кгц.
Далее, при помощи умножителя У19-28 переменной кратности
формируется сигнал с частотой, дискретно меняющейся через
100 кгц, в диапазоне 1,94-2,8 Мгц. После перемножения этого сиг-
нала с выходным сигналом фильтра Фз в смесителе Слц, фильтром
Ф4 выделяется верхняя боковая полоса частот (44-5 Мгц) с интер-
валом 1 кгц.
В [1966,45] описан синтезатор частот, построенный по другому
принципу Этот синтезатор (рис. 1.106), по существу, представляет
собой систему ФАПЧ, в петлю автоподстройки которой между
подстраиваемым генератором и фазовым детектором включены по-
36
следовательно два делителя частоты. Один из них (Д) имеет по-
стоянную кратность деления М, а другой (ДПКД) — перемен-
ную, равную N. Напряжение с частотой, в MN раз меньшей ча-
стоты ПГ, сравнивается по фазе с опорным напряжением генера-
тора ЭГ, и полученный сигнал управляет частотой генератора ПГ.
В результате на выходе последнего можно получить колебания с
дискретно изменяемой частотой с шагом, равным Mf.№ (f0I — час-
тота эталонного генератора).
Для облегчения условий захвата в системе предусмотрен спе-
циальный блок грубой настройки БГН. Делитель частоты с пере-
менной кратностью в данном устройстве представляет собой слож-
ное цифровое вычислительное устройство. Как указано в [1966,45],
такой синтезатор позволяет получить в диапазоне 195-4-400 Мгц
4000 рабочих частот с шагом по частоте 50 кгц.
Многочисленные модификации синтезаторов частот описаны в
[1970, 22. 7].
1.4. ФАЗОВЫЕ ДЕТЕКТОРЫ
Общие сведения
Практически в системах ФАПЧ, кроме указанных в разд. 1.1
элементов, в качестве промежуточных устройств часто применяют
буферные усилители, усилители постоянного тока, смесители, ча-
стотные дискриминаторы и т. |п. Теория и расчет этих элементов
достаточно полно изложены в литературе [8—44]t поэтому рассмот-
рим только такие специфические устройства системы, как фазовые
детекторы и управляющие элементы.
Анализу работы фазовых детекторов посвящены труды
Л. И. Гутенмахера [1937,2; 1938, 1], Е. Г. Момота {1941, 1], К. Р. Стар-
лея [1944,3], Н. А. Шустера [1951,3], С. П. Иноземцева [1950,4],
Л. И. Фаррена [1946,2], А. А. Шишкина [4951,5], В. И. Житомир-
ского [1952, 2], С. Кришнана и Р. Шидамбарама [1959, 37], В. В. Чер-
нышовой [1955,2], И. А. Попова [1955,7], В. М. Сафонова [1958,9],
В. М. Вяткиной и 3. А. Ивановой [1958, 18], М. В. Капранова
[4959, 7] и др
Как указано в разд. 1.1, фазовым детектором называется уст-
ройство, выходной сигнал которого определяется разностью фаз
колебаний, подаваемых на его входы. Мгновенное выходное нап-
ряжение фазового детектора находится из выражения (4.5).
Для правильного конструирования систем ФАПЧ нужно знать
не только форму характеристики фазового детектора, т. е. зави-
симость выходного напряжения от разности фаз, но и такие его
параметры и свойства, как входное и выходное сопротивления,
степень подавления нежелательных сигналов на выходе, инерцион-
ность, амплитудные характеристики, степень связи между различ-
ными входами, стабильность нуля и т. п.
37
Многочисленные схемы фазовых детекторов можно разделить
на две основные группы — нелинейные векторомерные и парамет-
рические К первой группе относятся детекторы, в которых осу-
ществляются векторное сложение и последующее амплитудное де-
тектирование результирующего сигнала с помощью вентильных
элементов, а ко второй — детекторы, в которых преобразование
разности фаз сигналов в выходное напряжение осуществляется при
помощи линейных цепей с переменными параметрами
Изучение фазовых детекторов удобнее начать со второй груп-
пы, допускающей более простое описание.
Параметрические детекторы
Простейший фазовый детектор параметрического типа можно
выполнить на базе любого устройства, осуществляющего опера
цию линейного перемножения двух сигналов. Пусть один из этих
сигналов есть б^эшФь а другой — (УгэшФг, причем U\ и U-> —
амплитуды сигналов, а Ф1 и Ф2 — их мгновенные фазы. Выходное
напряжение перемножителя
иВЫх--^^С05(Ф1-Ф2) + ^1^С05(Ф1 + Ф2), (1.12)
где ^фД — коэффициент преобразования перемножителя, имеющий
размерность вольт-1.
Поскольку напряжение на выходе фазового детектора должно
определяться разностью фаз подводимых напряжений, то необ-
ходимо исключить второе слагаемое в выражении (1.12). На прак-
тике обычно описываемые этим слагаемым побочные колебания
подавляют при помощи фильтров или путем фазоразностного ме-
тода. В результате имеем:
«ФД = k^UjU2 cos <р, (1.13)
где ф=Ф1—Фг — мгновенная разность фаз.
Из ф-лы (1.13) следует, что Пфдмакс ==-у £фД(7/72, а Г(ф)=созф.
Подавление фильтром колебаний с суммарным аргументом обу-
словливает инерционность фазового детектора.
Таким образом, фазовый детектор, основным элементом кото-
рого является перемножитель, имеет косинусоидальную характе-
ристику. Отличительной особенностью его является минимум па-
разитных сигналов на выходе и линейность амплитудных характе-
ристик по обоим входам. Заметим, что если включить в состав
фазового детектора фазовращатель, вносящий фазовый сдвиг ффв
в какое-либо из входных напряжений, то можно получить фазо-
вый детектор с характеристикой более общего вида:
«Фд = k*JJcos (ф + ффв). (1.14)
38
При >ффВ = 0,5л характеристика фазового детектора оказывается
синусоидальной1;.
Наиболее характерным примером линейной параметрической
цепи, осуществляющей перемножение двух сигналов, является дат-
чик Холла, Фазовые детекторы с датчиками Холла характеризуют-
ся высокой чувствительностью по
напряжению и малым уровнем шу-
мов. Большим преимуществом их
является отсутствие дрейфа нуля и
возможность получения практически
любых входных и выходных сопро-
тивлений при использовании датчи-
ков различных типов. Для подавле-
ния на „выходе такого детектора ко- рис i ц Структурная схема фа-
лебаний с удвоенной частотой при- зового детектора с датчиками
меняют фазоразностный метод. Холла
На рис. 1.11 приведена структур-
ная схема детектора с двумя датчиками Холла ДХ^ и ДХ2, питае-
мыми напряжениями, сдвинутыми по фазе на 90°. Выходные эдс
этих датчиков складываются в сумматоре С. В результате выход-
ное напряжение фазового детектора
ыФд (^) — k^,JJtU2 [cos Ф1 cos Ф2 + sin Фг sin Ф2] = k^UtU2 cos <р.
Принципиальная схема такого детектора приведена в [|15].
Однако фазовые детекторы, выполненные на датчиках Холла,
пока не нашли широкого применения вследствие низкой рабочей
частоты, значительной потребляемой мощности и малого выходно-
го напряжения.
Линейные параметрические фазовые детекторы можно выпол-
нить не только с применением датчиков Холла, но и с использова-
нием фото- и магниторезисторов, электронных ламп с двухсеточ-
ным управлением в режиме малых сигналов и т. п. Наконец, в
низкочастотных механических устройствах линейный перемножи-
тель можно осуществить в виде сопротивления, изменяемого чи-
сто механическим путем в такт с напряжением одного из генера-
торов.
Параметры линейных (или рассматриваемых как линейные)
цепей, используемых в параметрических фазовых детекторах, мо-
гут изменяться не только плавно, но и скачкообразно. В таком
случае параметрические фазовые детекторы называют коммутатор-
ными или ключевыми (рис. 1.12а).
В качестве ключа Кл можно использовать как чисто механиче-
ские прерыватели, так и электронные или транзисторные. Оче-
видно, что частота и фаза коммутации ключа должны совпадать
*) В дальнейшем для упрощения записи будем использовать как косинусо-
идальную, так и синусоидальную характеристики фазового детектора
39
с частотой и фазой одного из входных напряжений фазового де-
тектора.
Для упрощения анализа предположим, что частоты напряже-
ний, подводимых к фазовому детектору, равны или, по крайней
мере, настолько близки друг к другу, что фазовые соотношения
между напряжениями за период вч колебаний можно'считать не-
изменными. Пусть одно из напряжений (назовем его напряжением
сигнала, в отличие от коммутирующего напряжения, которое уп-
равляет работой ключа) uc(t) = (7ccos((Oo^+<pc), а сопротивление
цепи вследствие работы ключа изменяется по закону R(t) =
Рис 1 12 Схемы ключевого фазового детектора
а) с механическим прерывателем, б) с транзисторным пре-
рывателем
= /?,0,9[sign соз(®0^ + фк) + 1], где — сопротивление последова-
тельно соединенных генераторов сигнала и замкнутого ключа.
Напомним, что signx = l, если х>0, и signx =— 1, если х<0.
Таким образом, полагаем, что в течение одного полупериода ключ
замкнут, а в течение второго — разомкнут.
В (14] показано, что если при f=0 напряжение на нагрузке
равно нулю, а постоянная времени заряда конденсатора нагрузки
при замкнутом ключе значительно превышает период сигнала, то
при подаче в момент f=0 на вход детектора сигнала uc(t) его
выходное напряжение, усредненное за период, определяется сле-
дующим приближенным выражением:
ы (1_е-одфд)
ФД n(2Ri + RH) 1
где Uc — амплитуда сигнала uc(t), Тфя = 2 С^гДп/2К{+^н — по-
стоянная времени, определяющая инерционные свойства фазового
детектора, <р='<рс—фк — разность фаз его входных напряжений.
Очевидно, что при t-+oo получаем следующее выражение для
установившегося напряжения на выходе фазового детектора:
2UCRH
Ифд =-----2-=— cos <р,
Фд л (2/?, + R„)
т. е. нормированная характеристика этого детектора косинусои-
дальна.
40
На рис. 1.126 показана одна из возможных практических схем
коммутаторного фазового детектора с транзисторным компенси-
рованным ключом [1965,34]. Как видно из рисунка, транзисторы
ключа работают в обращенном режиме, т е. управляющее нап-
ряжение приложено к их переходам база—коллектор. Другая схема
ключевого фазового детектора описана в гл. 10. В [44, 15] приве-
дены различные варианты схем коммутаторных фазовых детекто-
ров
Векторомерные детекторы
Рассмотрим теперь работу некоторых основных схем векторо-
мерных фазовых детекторов, основываясь на результатах работ
[1946,2; 1955,7; 1958,9; 1959,7] Наибольшее распространение на
практике получили балансные и кольцевые схемы фазовых детек-
Рис. 1 13 Схемы балансного фазового детектора
а) принципиальная, б) эквивалентная
торов, позволяющие значительно уменьшить уровень паразитных
сигналов на выходе.
На рис. 1.13а представлена одна из возможных схем балансного
фазового детектора. Как уже указывалось, высокочастотные сос-
тавляющие выходного напряжения подавляются при помощи филь-
тров. В качестве такого фильтра в простейшем случае исполь-
зуются конденсаторы, шунтирующие нагрузку и не оказывающие
заметного влияния на полезный сигнал, так как обычно частоты
побочных колебаний во много ,раз превышают частотный диапа-
зон полезных составляющих выходного напряжения. Допустим, что
эги конденсаторы полностью устраняют высокочастотные состав-
ляющие, в результате чего напряжение на них за период высо-
кой частоты можно считать постоянным. Кроме того, для упро-
щения анализа схемы предположим, что напряжения, подаваемые
на диоды, достаточно велики В таком случае вольтамперная ха-
рактеристика каждого диода (рис. 1,14) удовлетворительно ап-
проксимируется прямой линией, отсекающей на оси напряжений
41
некоторый отрезо1к и0. Аналитически такая характеристика имеет
вид:
i=0, и < ид
i — R^{ (и~ио), и >u0
(1.15)
где RT — внутреннее сопротивление диода.
Будем считать, что внутренние сопротивления генераторов при-
ложенных напряжений равны нулю и трансформаторы фазового
детектора Tpi и Тр2 идеальные. Как обычно, для балансного де-
Рис. 1.14. Вольтам-
перная характеристи-
ка диода
тектора Rh1 = Rh2-
Схеме фазового детектора рис. 1.13а соот-
ветствует эквивалентная схема рис. 1.136.
Здесь Uс — напряжение сигнала на вторичной
обмотке трансформатора Тр\, UK — напряже-
ние коммутирующего сигнала.
Последовательно с идеальными диодами
включены источники запирающего напряже-
ния ио, равного напряжению отсечки реальных
диодов. Поскольку частоты генераторов пред-
полагаются равными, их действие равносиль-
но включению в каждый контур с диодом од-
ного генератора синусоидальных колебаний.
Если в контуре с диодом Д\ действует на-
пряжение с амплитудой
€7Э1 = | 0,5£7сД- £7К|,
(1-16)
то в контуре с диодом Д2 амплитуда эквивалентного напряжения
€7Э2=| — 0,5С7сН-С7к]. (1.17)
г —
Здесь и — амплитуды напряжений в ’цепях диодов Д\
и Д2 соответственно.
Для нахождения характеристики фазового детектора достаточ-
но знать зависимость постоянной составляющей напряжения на на-
грузке от разности фаз напряжений 1Д и UK. Постоянное напряже-
ние на высходе
«фд=^01-^02, (1.18)
где U0l и U02 — постоянные напряжения на резисторах i/?Hi и Rnz
соответственно.
Величины t70i и U02 определяются равенствами:
Uот—IoiRa, 6^02—7О27?н,
(1-19)
где Уо1 и 7О2 — постоянные составляющие токов, протекающих че-
рез первый и второй диоды соответственно.
Так как напряжение на нагрузке за период высокой частоты
почти постоянно, можно считать, что токи, протекающие через дио-
42
ды Д1 и Д2, имеют вид косинусоидальных импульсов с углами от-
речки 01 и ба, которые определяются из равенств:
I
cos0- = ; cos02 = “° + ^. . (1 20)
Г/Э1 ^Э2
Величины /о1 и /02 находятся следующим -образом [9]:
^02 1 ^э2Уо(0г)» (1-21)
где уо(0) =n~1(sin 0—0 cos'0) — коэффициент разложения косину-
соидального импульса, определяющий постоянную составляющую
последнего.
Подставляя ф-лу (1.19) в (1.18) и учитывая выражения (1.21),
получаем
«фд =^r‘ I^siYo (91)-^э2 Yo (02)1 (1.22)
или
«Фд=ад1Д-^2Кд2, (1.23)
где 7(Д1 у0 lOj), ДД2 Yo (02)— коэффициенты передачи
диодов Д1 и Д2.
Поскольку для балансного фазового детектора О<0<О,5л, для
определения Кщ и Лд2 воспользуемся аппроксимацией [1956, 5]
Yo(0)«-J-(l-cos0), (1.24)
4
Перепишем выражения для коэффициентов передачи диодов с уче-
том ф-л (1.<19)-4-(1.21) и (1.24):
= (Г25)
Подставляя ф-лы (1.25) в (|1.23), получаем выражение для
напряжения на выходе балансного детектора в виде
= ^'26)
Ан -г
Напряжения U3i и иэ2 определяем по векторной диаграмме
рис. 1.15. Согласно теореме о третьей стороне треугольника мож
но записать:
+4 ut+cos
иЭ2=у ^ф4-^с-^ссоз<₽
(1.27)
43
Подставив ф-лы (1.27) в (1.26), 'получим выражение, апреле
ляющее характеристику балансного фазового детектора:
-]/ ^ + -rL'c-^cCOS<p]- (1.28)
Поскольку характеристика фазового детектора является четной
периодической функцией, можно ограничиться рассмотрением ее
на интервале Оч-л/2. Из выра-
жения (1.28) следует, что фор-
ма этой характеристики зави-
сит от соотношения амплитуд
напряжений, подаваемых на
диоды.
На рис. 1.16, заимствован-
ном из (1959,7], приведены нор-
мированные характеристики ба-
лансного фазового детектора
при различных значениях отно-
Рис 1 16 Нормированная характе
ристика балансного фазового
детектора
Рис. 1.15 Векторная диаграм-
ма напряжений в схеме баланс-
ного фазового детектора
этого отношения нормированная характеристика приближается по
форме к косинусоиде. Действительно, если {7с/277к<С1, выражение
(1.28) можно привести к следующему виду:
и
_ и Ян
фд
cos <р.
(1.29)
При [7с/2{/к->1 форма нормированной характеристики фазового
детектора приближается к треугольной (пунктирная линия).
44
Максимальное значение постоянного напряжения на выходе фа-
ювого детектора определяется выражениями
IJ - IJ
'-'фдмакс '-'с D . ,
Ан ~Г ^А I
IJ — IJ II s' 11
'-'фдмакс '-'к , 17 <
Ян+ 47?£
(1.30)
Из этих выражений следует, что максимальное выходное на-
пряжение балансного фазового детектора определяется амплиту-
дой меньшего из двух подаваемых на его входы напряжений.
Анализ ф-лы (1.28) показывает, что при подаче на фазовый де-
тектор существенно отличающихся по амплитуде сигналов измене-
ния амплитуды большего сигнала не влияют на выходное напря-
жение фазового детектора. Такой режим представляет интерес, ес-
ли один из сигналов подвержен паразитной амплитудной модуля-
ции, которую необходимо устранить. Наоборот, если на выходе фа-
зового детектора необходимо выделить сигнал полезной амплитуд-
ной модуляции, его следует значительно уменьшить по сравнению
с коммутирующим напряжением. Для того чтобы характеристика
фазового детектора имела наибольший линейный участок, следует
выбирать режим работы, при котором t7c = 2t7K.
Найдем теперь входные сопротивления балансного фазового де-
тектора для генераторов напряжений сигнала и коммутации. Эти
сопротивления определяются как отношение амплитуды подводи-
мого напряжения к амплитуде первой гармоники тока, протекаю-
щего через генератор, т. е. ZBX=U/I.
Определим сопротивление, нагружающее генератор сигнала. Из
♦ рис 1.136 видно, что ток, отдаваемый генератором сигнала, равен
разности токов, протекающих через диоды Д1 и Д2. Поэтому
4хс=-т^—• (1-31)
' l /г
Здесь /1 и /2 — комплексные амплитуды первых гармоник то-
ков в цепях с диодами Д1 и Д2.
Поскольку считается, что сопротивление конденсатора, шунти-
рующего нагрузку по первой гармонике, равно нулю, ток в общей
ветви совпадает по фазе с эквивалентным напряжением. Величина
его определяется из формул [8]:
| А | = Yi (91)1 , J
|/3|t/a2Yl(02)
Коэффициент Yi(0) можно записать следующим образом:
Yi (9) =—(20—sin 20). (1.33)
2л
45
Воспользуемся вместо выражения (4.33) приближенной зависи-
мостью
Yi (0) =~ (1— cos0).
(1.34)
Выразим теперь cos 9 через величины и0, Ua, и /?п. Для это-
го достаточно в выражения (1.20) подставить ф-лы (1.25), учиты-
вая, ЧТО (7о1=Ад1(АГ, ^О2=ЛД2^Э2.’
COS0 — I______
1 (7э1(Ян + 47?г) ’
„„„ а ___ Rh_________।______ut>4Rt_____
COS U о д _ •
Rh 4Rf 1}э2 (Rh + 4Rf)
(1.35)
Амплитуды токов /i й 12 найдем, подставив ф-лы (1.35) в (4.34)
и воспользовавшись выражениями (1.32):
141
__ 2 (£/э1 — Цо)
Rh + 4R i
141
__ 2 (Цэ2 — ч0)
“ Ян + 4^-
(1.36)
Определим фазовые сдвиги между токами Ц и 72 и напряже-
нием сигнала. Как уже указывалось, эти токи совпадают по фазе
с напряжениями U3i и Ua2, поэтому, чтобы найти искомые фазовые
сдвиги, достаточно найти фазовые сдвиги между Uc и U3l и U32.
Из векторной диаграммы рис. 1.15 следует, что эти углы опреде-
ляются равенствами:
{/„ . 0,5f/c 4- UK cos ср ,,
sina=-—£-sin<p, cosa = ————-------------— , (1.37)
и91 т иЭ1
о 0,5(7с — UK cos ср
Sin Р = —— Sin <Р, COS Р =-----------s---i— .
Подставляя ф-лы (1.36) в (1.31) и учитывая выражения (1.37),
получаем
2 ___________________________2UC (RH + 47?t)______________________
ВХС „Г,,, 0,51/с 4- U„ cos ср 0,5f/c — f/Kcoscp ]
2 (Сэ1 — u0) — + (f/32 — “о) Д Н—*
Оэ! 1/Э2 J
—> + i UK sin ср
Сэ1 4q U52 ---------- Uq I
t/э! иэ% J
(1.38)
Из этого выражения вытекает, что входное сопротивление ба-
лансного фазового детектора — величина комплексная и зависит
не только от его сопротивления нагрузки по постоянному току RH,
но и от соотношения амплитуд и фаз подводимых напряжений.
Следует учитывать, что при непосредственной подаче напряже-
ния с контура подстраиваемого автогенератора на фазовый детек-
тор входное сопротивление последнего может влиять на его часто-
ту и амплитуду.
46
Если и и0^.иЭ2, то с учетом ф-л (1.27) можно записать
2вхс = /?н + 4^, (1.39)
[. е. входное сопротивление — активно и постоянно.
Перейдем к определению сопротивления, нагружающего источ-
ик коммутирующего напряжения. Поскольку ток этого генератора
равен сумме токов IK = Ii + h,
(1.40)
Л + Д
Найдем фазовые углы между напряжением UK и токами Л и
I2, фазы которых совпадают с фазами напряжений U3i и йЭ2 соот-
ветственно.
I Будем считать, что ось отсчета совпадает с направлением UK.
В соответствии с векторной диаграммой рис. 1.15 имеем:
sin ф = ——— sin ф, cos ф = 2-^к cos ,
2^э1 иЭ1 (1.41)
Uc . 2UK — Uc cos <р
Sin Ц =--— Sin ф, cos Ц =------------— .
‘ 2/7 ' ‘ п
^32 и 32
Подставляя ф-лы (1.36) в (1.40) и учитывая выражения (4.41),
получаем \
2 ________________________UK{Ra + 4RC)____________________
2 Г,,, „ , 2Z7K + <7С cos ср 2t/K-t/ccosq>-|
ЩЗ! и0) -j- (1/э2 — и0) >
L С'эг J
Следовательно, и для генератора коммутирующего напряжения
в общем случае фазовый балансный детектор представляет собой
комплексную нагрузку.
При и и0<'Пэ2
ZBXK-^(7?H|47?l). (1.43)
Определим выходное сопротивление балансного детектора. В
балансной схеме, по существу, применяются обычные амплитуд-
ные детекторы. Для того чтобы выходное напряжение этих детек-
торов повторяло собой закон изменения амплитуды подводимого
напряжения, необходимо, чтобы при изменении огибающей они
были мало инерционными. В случае синусоидальной огибающей
(UC<_UK) нелинейные искажения отсутствуют (16], если выполня-
ется условие
|/ 1—0,25m;
2RaCa Й < ------------, (1.44)
та
47
где Q— частота биений (т. е. скорость изменения разности фаз);
При исследовании системы ФАПЧ с балансным фазовым де-
тектором необходимо учитывать вносимые им частотные и фазовые
искажения. Если условие (1.44) выполняется, инерционные свой-
ства балансного фазового детектора можно охарактеризовать (см.
эквивалентную схему рис. 1.17) однозвенным /?С-фильтром ниж-
них частот с постоянной времени
Тбд —О,5СИ7?Э. (1.45^
Здесь ^н-^бд , /?вых бд — выходное сопротивление ба-1
2”н + Авых бд
лансного фазового детектора. 1
Балансный фазовый детектор представляет собой последова-
тельное соединение-двух
нополупериодных выпрямителей, рабо-
тающих на общую нагрузку. Так как
при uo = O выходное
каждого
[1956, 5], выходное сопротивление ба-
лансного
сопротивление
выпрямителя /?вых = 4/?г
фазового детектора
^вых бд 8Д;.
Подставив это значение
(1.45), получим
гр __________ RhRl
бД Сн7?н+4Яг'
Обычно Сн выбирается из
заданной фильтрации несущих частот
(1.46)
ф-лу
(1.47)
условий
В
Рис. 1.17. Эквивалентная
схема для определения
свойств балансного фазово-
го детектора
и их гармоник. При значительном превышении частот сигнала и
коммутирующего напряжения над частотой биений величина Т^я
настолько мала, что ею можно пренебречь.
Из проведенного анализа вытекает, что даже при идеальной
симметрии схемы входные сопротивления для источников сигнала
и коммутирующего напряжения могут быть комплексными.
До сих пор при рассмотрении схемы балансного фазового детек-
тора предполагалось, что каждый из его диодов работает па свою
нагрузку, т. е. что режим работы одного из них совершенно не
зависит от режима работы другого. На практике же встречаются
случаи, когда выходы выпрямителей балансного детектора свя-
заны между.собой, как, например, при несимметричной, общей для
обоих выпрямителей нагрузке, при включении на общий выход фа-
зового детектора вольтметра с конечным внутренним сопротивле-
нием и т. п.
На рис. 1.18 показан один из вариантов схем балансного фа-
зового детектора, работающего на общую нагрузку. Подробный
анализ такой схемы при ио=О, /?Н1 = Дн2 = /?н выполнен в [1959,7].
Приведем основные результаты этого анализа.
48
Выходное напряжение фазового детектора с общей нагрузкой
определяется выражением
«фД = (Дксоз 91 — (792 cos02. (1-48)
Здесь 91 и 92 определяются из уравнений:
р (0 ) = *£ h /1 —^-Y| ,
Р U COS0! R« L /?12 V <V02/J
Уо (%) __ Ri । j
cos 02 RH I
<1. 50)
₽O(02>
Рис. 1.18 Схема балансного фазо-
вого детектора с общей нагрузкой
и его характеристики
В этих формулах Um и Uw, как и ранее, — напряжения, вып-
рямленные диодами Д1 и Д2 соответственно. Перепишем ф-лу
(1.48), введя в нее отношение a=2UK/Uc:
ИфД = -у (7c[cos0i |/ 1 + а2 + 2аcos<р—соз02тЛ 1+а2— 2acos<p].
(1-51)
Так как углы отсечки зависят от выпрямленного, а следова-
тельно, и выходного напряжений, выражение (1.51) определяет за-
висимость выходного напряжения от разности фаз в неявной фор-
ме. Для построения этой зависимости в явной форме зададимся
49
(1.52)
(1.53)
отношением Тщ/Тог. По ф-лам (1 49) и (1.50) найдем значения 0t
п 02 Поскольку очевидно, что
1/э2 1/q2COS0i
1/э1 (701cos02
то, зная 04, 02 и отношение U^IU^, легко найти т = (7э2/(7э1
С помощью выражений (1.27) можно установить, что
1 4- О2 1 — т2
cos <р -------------.
т 2а 1 + т2
Подставляя значения 0i, 02 и cos ср в выражение (1 51), вычис-
ляем выходное напряжение.
На рис. >1.18 по|казаны также семейства характеристик рассмат-
риваемого балансного фазового детектора с общей нагрузкой, по-
строенные указанным способом [1959,7]. Из графиков следует, что
связь между нагрузками выпрямителей в балансном фазовом де-
текторе может существенно исказить форму его характеристики.
При незначительно отличающихся Uc и UK с уменьшением
Riz/Rn—q характеристика фазового детектора приближается к тра-
пецевидной1). С увеличением разницы в амплитудах входных сиг-
налов и параметра q характеристика приближается к косинусоиде.
Очевидно, что увеличение q равносильно ослаблению связи между
выпрямителями. При q-+oo детектор с общей нагрузкой превра-
щается в обычный балансный фазовый детектор
Следует заметить, что приведенные характеристики подобны
характеристикам схемы, состоящей из обычного балансного фазо-
вого детектора и следующего за ним симметричного двусторонне-
го амплитудного ограничителя.
Интересно также отметить, что если в обычной схеме баланс-
ного фазового детектора максимальное выходное напряжение поч-
ти не зависит от амплитуды большего из сигналов, то в детекторе
с общей нагрузкой оно очень слабо зависит не только от большего,
но и от меньшего из входных напряжений.
Кроме рассмотренной, существуют и другие варианты схем ба-
лансного фазового детектора. Так, на рис. 1.19 показана схема ба-
лансного фазового детектора с несимметричным выходом, работаю-
щего на общую нагрузку Эта схема хорошо согласуется с управ-
ляющим элементом, имеющим несимметричный вход и низкое
входное сопротивление.
Из анализа [14, 1959, 31] схемы рис. 4 19 следует, что при
Ri^Rn, в зависимости от соотношения между Uc и UK, максималь-
ное выходное напряжение:
*) Трапецевидные характеристики могут потребоваться в тех случаях, когда
желательно повышать крутизну характеристики фазового детектора, не перегру-
жая управляющий элемент.
50
= 0,319ZVc, f7c«t7K
£7фд = 0,22t7c, 0,5t7c=t7K
£7фд = 0,638t7K, UC>>UK
(1.54)
Сопоставляя эти выражения с (4.30) при Ri<^Rh, можно заме-
тить, что в балансном фазовом детекторе с общей нагрузкой мак-
симальное выходное напряжение получается значительно мень-
шим.
На этом же рисунке приведены характеристики фазового детек-
тора с несимметричным выходом [14]. Как показывает анализ, при
Рис. 1.19 Схема балансного фазового детектора с несимметричным выхо-
дом и его характеристики
значительной разнице между UK и Uc форма характеристик при-
ближается к косинусоиде, а при t7K^0,5 Uc становится трапеце-
видной.
При практическом использовании такой схемы следует учиты-
вать, что входные сопротивления для генераторов сигнала и ком-
мутирующего напряжения оказываются значительно меньшими,
чем для обычной схемы балансного фазового детектора с разде-
ленными нагрузками
Выше всюду предполагалось, что на фазовый детектор подают-
ся сигналы одинаковых частот. В некоторых же случаях возни-
кает необходимость измерения разности начальных фаз колебаний
кратных частот. Оказывается, что с помощью нелинейных векторо-
мерных фазовых детекторов можно получать сигналы, зависящие
от разности начальных фаз колебаний кратных частот. В частности,
для этих целей можно использовать обычный балансный фазовый
детектор с раздельными нагрузками (см. рис. 1.43aJ. Подробный
анализ работы такой схемы при кратных частотах, подаваемых на
нее напряжений, выполнен В. М. Сафоновым [4958, 9].
При анализе автор предполагал, что коммутирующим является
низкочастотное напряжение, а напряжение сигнала имеет более
51
высокую (кратную) частоту. Характеристики диодов аппроксими-
ровались выражениями (1.15) при «о = 0. Предполагалось также,
что емкость нагрузки столь велика, что на нагрузке не выделяется
переменное напряжение частоты коммутирующего сигнала.
На рис. 1.20 а, б [1958, 9] приведены семейства характеристик
балансного фазового детектора,параметрами которых являются от-
ношение амплитуд, кратность частот подводимых напряжений и
разность их фаз. Эти характеристики, в частности, показывают,
Рис. 1.20. Характеристики фазового
микс
детектора кратных частот
что с увеличением отношения сопротивления нагрузки к внутрен-
нему сопротивлению диодов при малых кратностях частот k вы-
ходное напряжение монотонно возрастает.
На рис. 1.20 в показаны зависимости максимального выходного
напряжения от отношения амплитуд подводимых напряжений для
различных кратностей частот и отношений RH/Ri. Из этих зависи-
мостей следует, что при увеличении кратности выходное напряже-
ние существенно уменьшается.
Как показывает анализ, форма характеристики F(<р) фазового
детектора, работающего при кратных частотах, как и обычного
балансного фазового детектора с разделенными нагрузками, занима-
ет промежуточное положение между треугольной и косинусои-
дальной в зависимости от отношения амплитуд подводимых нап-
ряжений. В [1958,9] отмечается, что при больших кратностях (&>•
52
>10) существует такое критическое отношение RH/Ri, при котором
рассматриваемый фазовый детектор неработоспособен, так как его
выходное напряжение независимо от разности начальных фаз под-
водимых напряжений остается равным нулю. Это иллюстрируется
кривыми рис. 1.20г, из которых видно, что при &=40 существует
только одно критическое значение отношения Rn/Ri. При &>1О
критических значений RH/Ri может быть несколько.
Рис. 1.21. Схемы кольцевого
фазового детектора:
а) принципиальная;
б) эквивалентная
В [1958,9] показано, что если низкочастотное напряжение ис-
пользуется в качестве сигнального, т. е. действует на оба вентиля
в противофазе, а коммутирующим является высокочастотное нап-
ряжение, то детектор оказывается неработоспособным при четных
кратностях подаваемых напряжений.
Рассмотрим, как работает колцевой фазовый детектор, прин-
ципиальная и эквивалентная схемы которого приведены на рис.
1.21. Допустим, что диоды в этих схемах такие же, как в схеме
балансного фазового детектора. Постоянное напряжение на выхо-
де кольцевой схемы фазового детектора (рис. 1.216)
Ифд — Кц (^01 ' Л)2 4~ 1оз 04) >
(1.55)
где /01Ч-/04 — постоянные составляющие токов в цепях диодов
—Д4 соответственно.
Величины этих токов определяются следующим образом:
Ли—I ^эг1 Rt Yo(9i)> Лй — Уо(®г)>
Л)8 ~ I ^Э3 I Rl Уо(6з)> Л)4 = | ^э4 | Ri Уо(04)-
(1.56)
53
Здесь U3i—U3i — эквивалентные напряжения на диодах Д1—Дь
определяемые векторными суммами согласно диаграмме, приве-
денной на рис. 1.22:
иэ1=-^(ик+ис) = -иэ3
иэ2-^-(ик^-ис)=-иэ4
(1.57)
Модули этих напряжений определяются равенствами:
Рис, 1.22. Векторная
диаграмма напряже-
ний в схеме кольце-
вого фазового детек-
тора
^31=^33=0,5/ t/2 + t/2 + 2t/Kt/cCOS<p
г_____________________________ .(1.58
t/32 = U3i = 0,5 /1/2 +1/2_ 2^сcos ф
Углы отсечки токов г\—Д можно найти из
следующих выражений:
Рис. 1.23. Эквивалентная
схема кольцевого фазового
детектора для случая 02 =
= 180°
cos94 = cos93 = ——^5_, cos92 =cos94 ——((М. . (1.59)
. ^31 ^32
Подставляя выражения (1.56) в (1.55) и учитывая ф-лы (1.57)
и (9.58), получаем
«Фд = ^-[Цэ1Уо(91)- ^э2Уо(92)1. (1-60)
КI
Поскольку в кольцевой схеме фазового детектора напряжение
на нагрузке для одной пары диодов является запирающим, а для
другой (в отличие от балансной схемы) — отпирающим, углы от-
сечки 9 могут быть больше 90°. Поэтому при анализе такой схемы
нельзя пользоваться принятой ранее простейшей аппроксимацией
54
зависимости у0(9) [ф-ла (1.24)]. Воспользуемся более точной
зависимостью
у0 (9) = —----0,5 cos 9 + cos2 9.
л 2л
(1.61)
Кроме того, сами ур-ния (1.59) справедливы только в том слу-
чае, если 91 <480° и 9г<180°. Если же это условие не выполняет-
ся, то теряется смысл коэффициента разложения. Физически это
означает, что однА пара диодов открыта в течение всего
периода напряжения высокой частоты и ее можно заменить экви-
валентными линейными сопротивлениями, подключенными парал-
лельно 7?н. При линейно ломаной аппроксимации вольтамперной
характеристики диодов каждое из них равно
На рис. 1.23 представлена эквивалентная схема для случая 9г=
= 180° и ип=0, причем диоды Д2 и Д^ заменены их внутренними
сопротивлениями, т. е., по существу, получается двухполупериод-
ный выпрямитель на диодах Д{ и Д3, работающий на нагрузку Rin
из параллельно включенных RK, Rl2, Rit-
Найдем величину выпрямленного напряжения. Для этого, вос-
пользовавшись выражением (4.61), определим прежде всего ко-
эффициент передачи двухполупериодного выпрямителя:
Поскольку Rh^Ri, сопротивление нагрузки двухполупериодно-
го выпрямителя в этом случае RH3^~Rt и К2д=0,22.
По известному коэффициенту передачи работающих диодов
(Д1 и Дз) при условии, что два других диода открыты в течение
всего периода, можно найти напряжение на выходе фазового коль-
цевого детектора
ЦфД = 0,22t731, 92 = 180е. (1.63)
Наличие напряжения U32 в таком режиме приводит лишь к не-
равномерному мгновенному распределению разрядного тока через
открытые диоды Д2 и Д4. Указанный режим сохраняется только в
том случае, если амплитуда напряжения U32 меньше, чем выпрям-
ленное напряжение ЦфД при 9=480°. Это условие можно записать
в следующем виде:
0,22t731 > U32. (1.64)
Поскольку напряжения и U32 равноценны, все'изложенное
выше справедливо и при Ua2>^ai, поэтому выходное напряжение
кольцевой схемы фазового детектора:
55
“фд “l^Yo^-^YoM
С’ =0.22^э1>
<’ =0-22^'
0,22Пэ1 < иэг
0,22U32 Иэ1
0,22t/31 > U3i
0,22t/33>t/3X
(1.65)
Преобразуем выражение (1.60), определяющее характеристику
фазового детектора. Подставив в него ф-лу ('1-61), с учетом выра-
жений (1.59), получим
иФд —
л UsJJsz (1 4* 0,SRiR^ )
(л — 2) (t/31 — ^32)
л (1-й 0,57?^ 1)
(л — 2) (t/31 £/эа)
2 [<7э1</э2 - (Л - 2) u0] (t/31 - -1/32)2 * * * (л - - 2)
[uo — t/эг) (я — 2) 4- £/э)Дэ2 п (1 4~ 7?iO,5/?H 1j ]
Пренебрегая величинами ио и /?, и учитывая условия (1.65), уп-
ростим это выражение:
___________nt/31t/32 Г / 2 (t/31 — t/эг)2 (п ~ 2) J /, 67)
“фД ~ (л - 2) (t/31 - t/32) И + rt4J3lU3i J ’ 1 ' '
Подставляя эту формулу в (1.65) и учитывая (1.58), получаем
окончательное выражение для выходного напряжения кольцевого
фазового детектора, представленного на рис. 1.21а:
л )/" ( + й'с) — 4С/2 U2C cos2 ф
2 (л - 2) (|/ F2 4-t/c4-2t/Kt/c’cosq> - \/ U2K+ U2C - 2£/к£4«*нр)
0,455(1 +^2)
I COS Ср | --------------
(1.68а)
= 0,11 /П2 4+2 + 2UKUC cos ф, ^cos Ф > ’ ;
Б ( 1 (!.б8б)
С '4л.
Чд = °’11 К 2dKdc cos <р , [cos <р — °Л55(1 + та)2
та
(1.68в)
Из ф-л (1.68) 'следует, что при ma = Uc/UK^.O,64 характеристи-
ка фазового детектора определяется выражением (1.68а). В слу-
чае то<0,64 максимальное напряжение на выходе кольцевого фа-
зового детектора
М (я — 2) .
. / . Г>\
Цфд макс
(1.69)
2) \гг?а
Если же та>0,64, то максимальное напряжение на выходе фа-
зового детектора
d<2> =0,1 l^-d + mj.
макс та
(1.70)
Рис. 1,24. Нормиро-
ванная характерис-
тика кольцевого
фазового детектора
Из этих выражений вытекает, что при изменении величины та
от нуля до единицы максимальное напряжение на выходе кольце-
вого фазового детектора (см рис. 1.21а) меняется от 0,22 С/с до
0.319 dc.
Сопоставление этого результата с выражениями (1.30) при
показывает, что кольцевой фазовый детектор рассматри-
ваемого типа имеет меньшее выходное напряжение.
При та<0,3 выражение (1.68а) упрощается:
цФд= Uc (]/ 1 + rrR +2macosep —1Л 1 +m2 — 2macos(f I, (1.71)
2л та \* , ' )
т. е. нормированная характеристика кольцевой
схемы фазового детектора приближается к нор-
мированной характеристике балансной схемы.
Нормированные характеристики кольцевого
фазового детектора, построенные по выраже-
нию (1.68), представлены на рис. 1.24. Из ри-
сунка видно, что с увеличением та крутизна
кривых в области, прилегающей к экстремумам,
уменьшается. Для широкого диапазона значе-
ний та кривые близки по форме к косинусоиде.
Даже при та=1 максимальное расхождение ор-
динат не превышает 8%.
Определим входные сопротивления кольцево-
го фазового детектора. Сопротивление, нагру-
жающее генератор сигнала (см. рис. 1.216),
Z 2(/с
0,5 (4—Л) л-Л-л+4
(1-72)
57
Величины токов Ii^rh определяются равенствами:
Л =^Yi(9iU2 = -^Yi(02)’
Rl Ri (1.73)
/3 = ^-Yi(93)./4=^Yi(04).
Подставив эти выражения в (1.72) с учетом ф-л (1.57) и
(1 58), получим
7 =____________________ (1 74)
ВХС С/эгТ! (Ox) —t>32Yx (е2) ’ ?
Примем, как и ранее, направление вектора Uc (см. рис. 1.22)
за начальное, тогда выражение (4.74) можно записать следую-
щим образом:
__________________________UcRt_________________________
ВХ С Usi Yi (0i) cos « + ^э2 Yi (02) cos р + 1 [t/31 ух (04 sin a— t/92 yr (02) sin^J '
(1-75)
В соответствии с векторной диаграммой рис. 1.22 имеем:
UK . 0,5 (Uc+ UK cos <р)
sin а = —— sin ср, cos а =------—— ---------У—
2£/э1 иЭ1 ’
а : о 0.5 (£/с — t/„cos<p)
Sin Р = —Sincp, COS0 =-------—£----S---— .
2£/э2- 5^32
Подставляя эти формулы в выражение (1.75) и учитывая (1.34),
находим
Z
вх с 2t/c — Uc (cos 0t 4- cos 02) — UK cos <p (cos 9, — cos 02) — i t/K sin <р X
(1-76)
WcRi
—* X (cos 0! — cos 02)
Из последнего выражения следует, что сопротивление, нагру-
жающее генератор сигналов, в общем случае является комплекс-
ным, причем его действительная и мнимая части представляют со-
бой сложные функции приложенных напряжений, сдвига фаз меж-
ду ними, внутренних сопротивлений диодов и сопротивления на-
грузки. Величину этого сопротивления можно вычислить при «о = О,
предварительно определив cos 9i и соэЭгПо ф-лам (1.59) и (4.68)
Однако эти вычисления чрезвычайно громоздки.
Сопротивление ZBXC можно определить гораздо проще, если
та<^1, причем, как следует из ф-л (1.59), cos9i«cos92, cos9i->0.
cos92~>0 Учитывая это, приведем выражение (1.77) к вид\
2вхс = 2Яг. (1.78)
Определим теперь сопротивление, нагружающее генератор ком-
мутирующего напряжения (сопротивление между точками 3—4
рис. 1.21а). Как и ранее, это сопротивление равно отношению на-
58
пряжения, действующего на вторичной обмотке трансформатора
Тр2, к току, приведенному к этой обмотке:
ZBXK =-----------------• (1.79)
Л — 1г — Л 4~ li
Воспользовавшись равенствами (1.73) с учетом (1.57), послед-
нее выражение можно переписать следующим образом:
ZBX К =--------------------- • (1-80)
^э1 У1 (9) 4- ^э2?1 (92)
В данном случае за начальное направление (см. рис. 1.22) удоб-
но принять направление вектора UK Представим ф-лу (1 80) в
виде' '
2 ____________________________________________________________
иЭ1 Vi (9J cos ф + t/32 (02) cos 11 — i (t/3i Yi (9i) sin ф —t/32 Yi (92)X->
-----------(1.81)
-> X sin p]
В соответствии с векторной диаграммой рис. 1.22 имеем:
• , + cos <р
Sin ф =----Sin ф, COS ф = ——--------— ,
2£73i Y у 2t/31
* Ис * Ик ^1 с COS ф i < лл.
sinp = —— sincp, cosp.==—------------— . (1.82)
2l/32 2(732
Подставив ф-лы (4.82) в i('1.81), получим
z =_______________________________________________________________
вх к 2</к — UK (cos 0х 4- cos 02) — Uс cos ф (cos 0г — cos 02) 4—*
—» 4- i Uс (cos0j — cos 9g) sin ф
Величину ZBXK по этой формуле в общем случае следует вы-
числять аналогично ZBXC.
При Ша<^\
ZBXK«2/?t. (1.83)
Из сравнения ф-л (4.83) и (1.78) вытекает, что при та<^\ со-
противления, нагружающие генераторы сигнала и коммутирующего
напряжения, равны.
Особенностью кольцевой схемы фазового детектора является
слабая зависимость (при та<^\) ее входных сопротивлений от
величины /?„ Так, при R,R^>R-t входное сопротивление определяет-
ся только значением Ru тогда как в балансной схеме с разделен-
ными нагрузками входное сопротивление при тех же условиях оп-
ределяется величиной /?н.
Для расчета частотной характеристики кольцевого фазового
детектора рассматриваемого типа найдем его выходное сопротив-
59
,1вние. Поскольку в данной схеме 'Постоянные времени заряда и
разряда нагрузочного конденсатора равны, нелинейные искажения,
обусловленные инерционностью фазового детектора, отсутствуют.
Выходное сопротивление определяется отношением модуля при-
ращения выходного напряжения к приращению постоянной состав-
ляющей тока, отдаваемого детектором в нагрузку:
яВь.х=|4тЧ > о-84)
I Я/0Н I
где /он = Ыфд/^?н-
Возьмем модуль отношения производных du,\i;i]dRn и dh!nldRn.
В результате получим
ЯВЫх = . (1.85)
“Ян Ян
Воспользовавшись зависимостью «фД—f(Rn) (1.66) и положив
«о=О, а та<0,64, последнее выражение представим в следующем
виде:
Ri С]/(1 4-0,5ЯгЯ7‘)2 -М - 1 ~0,5RiR~^
RiR„' ['|/(l + O,57?z/?71f -р 4 - 1 - - ->
2[(1 4- O,5RtR~'y + А - (1 4- 0,5ЯгЯ7‘) + А ]
(1.86)
где А •= 2 (л— 2) (t/31—^эг)2/-^2 ^э//э2-
Из этого выражения следует, что даже в том случае, если ха-
рактеристика фазового детектора описывается одним уравнением
и ио=0, выходное сопротивление кольцевого фазового детектора
находится в сложной зависимости от соотношения напряжений Uc
и Ui-., а также от сдвига фаз между ними.
Если та^0,3, то |ЛМакс|<С7 и выражение (1.86) значительно
упрощается:
^вых
(1.87)
Физически это объясняется тем, что в кольцевой схеме фазово-
го детектора (см. рис. 1.21а) при та^0,3 в любой момент времени
открыты два параллельно включенных диода, соединяющие гене-
ратор сигнала с нагрузкой.
Из сопоставления ф-л (1.87) и (1.46) вытекает, что выходное
сопротивление кольцевого фазового детектора (см. рис. 1.21а) в
16 раз ниже, чем у балансного (см. рис. 1,13а).
60
Постоянная времени кольцевого фазового детектора
<|88>
Кольцевой фазовый детектор можно выполнить также по схе-
ме, показанной на рис. 1.25, отличительной особенностью которой
является симметричность нагрузки [1962,49, 14]. Эту схему мож-
но рассматривать как соединение
двух схем балансных фазовых
детекторов (см. рис. 4.13а), ра-
ботающих на общую нагрузку.
Анализ схемы рис. 1.25 пока-
зывает, что максимальное выход-
ное напряжение ее в два раза
выше, чем в схеме, изображен-
ной на рис. 1.21а. Однако вход-
ное сопротивление этой схемы со
стороны генератора коммутирую-
щего напряжения в четыре раза
ниже, чем в рассмотренной ранее
схеме, а выходное сопротивление
в четыре раза выше.
На рис. 1.26 .представлена одна
Рис. 1.25. Схема кольцевого фазо-
вого детектора с симметричной
нагрузкой
из возможных принципиаль-
ных схем кольцевого фазового детектора, широко используемая
на практике. Она отличается от основной принципиальной схемы
рис. 1.21а наличием вспомогательных элементов. Так, резисторы
Рис. 1.26. Практическая схема кольцевого фазового детектора
включенные последовательно с вентилями Д1Ч-Д4, служат
для выравнивания и идентификации характеристик диодов. Они,
кроме того, являются элементами температурной стабилизации.
Для частот радиодиапазона трансформаторы фазового детекто-
ра выполняются на ферритовых кольцах. При малом числе вит-
61
ков трудно сделать отвод от середины вторичной обмотки транс-
форматора, поэтому резисторы Л5—Rio, предназначенные для точ-
ной балансировки фазового детектора, одновременно использу-
ются и для создания искусственной средней точки Конденсаторы
Ci—С4 служат для выравнивания емкостей схемы.
На частотах овч диапазона трансформаторы выполнить невоз-
можно, однако фазовый детектор можно создать при помощи си-
стем с распределенными параметрами (волноводов). На рис. 1 27
Рис. 1.27 Схема балансного детектора свч
схематически показано устройство овч [балансного фазового де-
тектора, основным элементом которого является двойной волно-
водный тройник [17]. Волна, поступающая на вход Н, создает в
плечах 1 и 2, а следовательно, и на диодах, одинаково удаленных
от центра, два одинаковых по амплитуде и фазе напряжения. Вол-
на, поступающая на вход Е, создает на этих же диодах также
равные по амплитуде напряжения, но противоположные по фазе.
В силу симметрии волна, поступающая на вход Е, не попадает
на вход Н, и наоборот.
Для улучшения частотной характеристики устройства боковые
плечи тройника нагружаются волновым .сопротивлением. Вывод
постоянного напряжения от диодов осуществляется через отверстия
г стенках боковых плечей и проходные конденсаторы Ci и С2.
В [17] приводятся и другие конструкции детекторов свч.
1 5. УПРАВЛЯЮЩИЕ ЭЛЕМЕНТЫ
Действие большинства управляющих элементов основано на
изменении реактивности, вносимой ими в контур подстраиваемого
генератора. К управляющим элементам, применяемым в системах
ФАПЧ, предъявляются следующие требования:
62
— стабильность вносимой ими реактивности,
— малое потребление энергии от подстраиваемого генератора
(высокая добротность вносимой реактивности),
— высокое значение максимальной регулируемой вносимой
расстройки (большой раствор характеристики управления) и ши-
рокие пределы ее относительного изменения,
— малое потребление энергии от источника управляющего сиг-
нала (высокая чувствительность),
— линейность характеристики управления,
— линейность вносимой реактивности, что необходимо для изо-
хронности колебаний подстраиваемого генератора,
— малая инерционность.
На практике часть этих требований может оказаться противо-
речивой
Поскольку управляющие элементы с механическим приводом
(переменные конденсаторы и индуктивности) достаточно просты
и широко известны (1962, 19], в настоящем разделе описаны наи-
более распространенные электронные элементы.
Будем рассматривать управляющий элемент как реактивный
двухполюсник, сопротивление (проводимость) которого изменяет-
ся под действием управляющего сигнала. Практически выполнить
такой двухполюсник можно различными способами.
Большое распространение получили так называемые реактив-
ные лампы, в которых эквивалентным реактивным двухполюсни-
ком служит участок анод—катод (рис. 1.28) Для того чтобы уча-
сток анод — катод лампы
представлял собой реактив- , °______—
ное сопротивление, первая
гармоника ее анодного то-Г щ-
ка должна быть сдвинута
по фазе относительно анод-
ного напряжения на 90°. Так
как анодный ток лампы, в Рис- 1Обобщенная схема реактивной
первую очередь, определяет- лампы
ся сеточным напряжением
(особенно в пентодах), то при подаче на сетку и анод напряжений,
сдвинутых по фазе на 90° (через фазовращатель ФВ), между
анодом и катодом можно получить кажущееся реактивное сопро-
тивление.
Будем считать, что лампа работает в режиме отсечки анодного
тока и сеточно-анодная характеристика ее линейно ломаная. Да-
лее, полагая, что ток, протекающий через электронную лампу
(lai), значительно больше тока, протекающего через фазовраща-
тель /ф, запишем выражение для кажущегося сопротивления ре-
активной лампы [9]:
(1.89)
63
Здесь ф— угол сдвига фаз между напряжением на аноде лам-
пы и первой гармоникой анодного тока /at.
Из этого выражения следует, что при изменении ф можно по-
лучать сопротивления различного характера. Если ф=±л/2, то со-
противление будет чисто реактивным.
Первая гармоника анодного тока связана с напряжением на
сетке лампы следующим выражением [9]:
4i=sY1(0)(t7c-Di7a). (1.90)
где S — крутизна сеточно-анодной характеристики лампы, Uc —
напряжение на сетке, D — проницаемость лампы.
В качестве реактивной лампы обычно применяются пентоды,
у которых О~0 и, следовательно, анодный ток однозначно опре-
деляется сеточным напряжением. Учитывая это и пренебрегая эф-
фектом времени пролета электронов, запишем ф-лу (1.89) в виде
2рл=----------------------------------е!ф. (1.91)
SY1(0)t/c
Это выражение показывает, что при заданных Ua и Uc регу-
лировать полученное реактивное сопротивление, а следовательно,
и частоту автоколебаний можно, меняя либо крутизну характери-
стики S лампы, либо угол отсечки анодного тока 0. Относительное
изменение частоты автогенератора (если оно значительно меньше
единицы), обусловленное подключением реактивной лампы [9]:
— =4-Р25У1(0)р|^фМпФ- (1.92)
соо 2
Здесь Асо — изменение частоты автогенератора, соо — ого соб-
ственная частота, р — коэффициент подключения реактивной лам-
пы к контуру автогенератора, р — характеристическое сопротив-
ление контура, | Кф | — модуль коэффициента передачи фазовра-
щателя.
Из этого выражения следует, что для значительного изменения
частоты автогенератора необходимо увеличить коэффициент под-
ключения реактивной лампы к контуру, крутизну ее характеристи-
ки, модуль коэффициента передачи фазовращателя и характери-
стическое сопротивление контура, а также следует стремиться по-
лучить фазовый сдвиг ф='±л/2.
Формула (1.92) справедлива и в динамике при условии, что
A(oQB«c4 (1.93)
где QB — наибольшее значение частоты модуляции.
Необходимо отметить, что, если ф=/=±л/2, сопротивление реак-
тивной лампы не является чисто реактивным и его можно пред-
64
ставить параллельным (последовательным) соединением реактив-
ного и активного сопротивлений. При 0<ф<л/2 это сопротивле-
ние представляет собой соединение индуктивности и активного по-
ложительного сопротивления. При л/2<ф<л реактивное сопротив-
ление остается индуктивным, а активная составляющая становит-
ся отрицательной (лампа начинает отдавать мощность в контур).
В случае — л/2<ф<0 реактивная составляющая носит емкостный
характер, а активная составляющая при ф =—л/2, как и в преды-
дущем ста чае, меняет знак. Наличие активной составляющей со-
противления приводит к изменению амплитуды автоколебаний. Для
уменьшения паразитной амплитудной модуляции угол тр должен
быть как можно более близким к ±л/2.
Из выражения (1.89) следует, что изменять сопротивление ре-
активной лампы можно любым способом, пригодным для измене-
ния /ат Однако в соответствии с требованиями, предъявляемыми
к управляющим элементам, лучше применять способы, обеспечи-
вающие наименьшее потребление энергии от источника управляю-
щего сигнала.
При работе лампы без токов сетки наиболее экономично ре-
гулировать первую гармонику анодного тока смещением. Как уже
указывалось, здесь возможны два режима работы — с отсечкой и
без отсечки анодного тока. Если фазовращатель выполнен таким
образом, что напряжение на сетке реактивной лампы мало, то
лампа работает без отсечки анодного тока. В этом случае при ре-
гулировании управляющего напряжения yt(0) = const= 1, но кру-
1изча X, а следовательно, и /ai изменяются. При этом нельзя при-
нимать линейно ломаную аппроксимацию характеристики лампы,
поскольку при такой аппроксимации величина 5 остается постоян-
ной и не зависит от напряжения на сетке. Реальные характери-
стики лампы хорошо аппроксимируются степенным полиномом,
т. е.
ia=-«o + ait/c + «i^c + «3^+ • •• (1.94)
В этом случае, как известно, /ai=- Sfp//c(Scp — средняя кру-
тизна характеристики лампы).
Характеристики управления должны быть по возможности ли-
нейными. Эго, в свою очередь, означает, что их средняя крутиз-
на с изменением управляющего сигнала (смещения) должна изме-
няться линейно. Как дифференциальная, так и средняя крутизна
линейно зависят от управляющего напряжения только при квадра-
тичной зависимости анодного тока от сеточного напряжения [8].
Поэтому желательно применять лампу с наиболее ярко выражен-
ным квадратичным участком статической характеристики, а ра-
бочую точк^ выбирать в середине этого участка. Расчет реактив-
ной лампы в отсутствие отсечки анодного тока приведен в [9].
При малых напряжениях на сетке лампы (т. е. при малом
|КФ|) в соответствии с ф-лой (1.92) относительное изменение ча-
стоты автогенератора получается небольшим. Поэтому, если тре-
3—526 й
буется большое отклонение частоты, приходится увеличивать сеточ-
ное напряжение, а следовательно, и коэффициент | |. В случае
больших напряжений на сетке справедлива линейно ломаная ап-
проксимация статической характеристики лампы. Поэтому можно
приближенно считать, что при изменении смещения крутизна ха-
рактеристики лампы постоянна, а меняется лишь угол отсечки и,
следовательно, yi (0).
Поскольку коэффициент yi (0) нелинейно зависит от угла от-
сечки 0 [ф-ла (1.33)], то даже при кусочно-линейной статической
характеристике реактивной лампы зависимость анодного тока, а
следовательно, и частоты от управляющего напряжения является
нелинейной. Характеристика управления имеет близкий к линей-
ному участок при ЗО°<0< 150°.
В работе [9] приводится расчет реактивной лампы, работаю-
щей в режиме больших напряжений на сетке. Увеличение этих на-
пряжений ограничено появлением сеточных токов, которые резко
снижают входное сопротивление лампы и тем самым искажают
характеристику управления.
Эффективность работы реактивной лампы в большой степени
определяется свойствами фазовращателя. Он должен:
— иметь большой коэффициент передачи,
— независимо от частоты обеспечивать фазовый сдвиг, близ-
кий к ±л/2,
— потреблять малую энергию от генератора.
В качестве фазовращателей широко применяются однозвенные
цепи из активного и реактивного сопротивлений (рис. d.29). При
Рис. 1.29. Варианты схем реактивных ламп с простейшими
фазовращателями
использовании таких фазовращателей можно получить фазовый
сдвиг, близкий к +л/2 только при условии |Zi|^>|Z2|- При этом
| Кф | и вносимая расстройка получаются малыми. Кроме того, не-
достатком их является значительная зависимость | Кф| от и.
К достоинствам указанных фазовращателей относятся их про-
стота и независимость фазового сдвига от частоты при | Кф |<С1.
При теоретическом рассмотрении все приведенные на рис. 1.29
варианты схем оказываются равноценными, однако практически
при работе реактивных ламп на высоких частотах приходится счи-
66
таться с влиянием паразитных параметров (ib первую очередь, ем-
костей и времени пролета электронов). Так как ib пентодах про-
ходная емкость мала, на работу фазовращателя в основном влия-
ет входная емкость лампы. В связи с этим наилучшим вариантом
является схема рис. 1.29а, поскольку в ней паразитную входную
емкость можно использовать как часть емкости фазовращателя.
Эта схема оказывается наилучшей также и с точки зрения
влияния времени пролета электронов. При конечном времени про-
лета анодный ток отстает по фазе от анодного напряжения, по-
этому общий сдвиг фаз между Uc и /ai в данной схеме можно
корректировать, уменьшая запаздывание, вносимое фазовращате-
лем. Схемы рис. 1.296 и г принципиально не позволяют этого сде-
лать, так как в этих случаях фазовращатель дает опережение фа-
зы сеточного напряжения относительно анодного, увеличить кото-
рое сверх +л/2 невозможно.
Таким образом, при использовании простейших фазовращате-
лей требования высокого |Кф| и ф=±л/2 оказываются противо-
речивыми. Поэтому, если нужно получить большую девиацию ча-
стоты генератора, прибегают к более сложным схемам. Например,
в цепи обратной связи реактивной лампы применяют усилитель
(рис. 1.30а). В этой схеме выходное сопротивление усилителя, а
Рис. 1.30. Схемы реактивной лампы-
а) с усилителем в цепи обратной связи; б) со сложным фазовращателем
также его выходная емкость (в сумме с паразитными емкостями)
используются в качестве элементов фазовращателя. Поскольку вы-
ходное сопротивление усилителя на пентоде может быть очень
большим, сдвиг фаз в этой схеме получается близким к —h/2.
Входное сопротивление усилителя в цепи фазовращателя также
может быть большим, поэтому здесь осуществима большая доб-
ротность реактивной лампы
Рассмотренная схема успешно применяется на высоких часто-
тах вплоть до 100 Мгц.
Другой способ увеличения отклонения частоты, вносимого ре-
активной лампой, заключается в применении фазовращателя, изо-
браженного на рис. 1.306. Как видно из рисунка, потенциалы сет-
3* 67
kii и катода реактивной лампы при R = l/mC симметричны относи-
тельно напряжения на контуре, и сдвиг фаз при этом равен +л/2.
Величина напряжения между сеткой и катодом равна половине
напряжения на контуре Модуль коэффициента передачи фазовра-
щателя в этой схеме не зависит от частоты Недостатком схемы
является зависимость фазового сдвига от частоты. Кроме того, она
мало пригодна в области высоких частот.
Эффективным способом увеличения отклонения частоты, вно-
симого реактивной лампой, линейности характеристики управле-
ния и стабильности средней частоты, а также снижения паразит-
ной амплитудной модуляции является применение двухтактной ре-
Рис. 1.31. Схема двухтактной реактивной лампы
активной лампы (рис. 1.31). В такой схеме одна из ламп представ-
ляет собой эквивалентную емкость (Jh), а другая — индуктивность
Как видно из рисунка, управляющее напряжение на сетки
ламп подается в противофазе. В этом случае при увеличении ем-
костного сопротивления индуктивное уменьшается и наоборот. Это
•вдвое увеличивает вносимое отклонение частоты.
Поскольку изменения питающих напряжений (и другие причи
ны) действуют на обе лампы синфазно, они не вызывают откло-
нения частоты. Если в этой схеме фазовые сдвиги обеих ламп
отличаются на одну и ту же величину от ±л/2, то активные со-
ставляющие сопротивлений, вносимых лампами в контур автоге-
нератора, равны друг другу. Так как управляющий сигнал прило-
жен к сеткам ламп в противофазе, изменения вносимого активного
сопротивления имеют противоположные знаки и взаимно компен-
сируют друг друга, что снижает паразитную амплитудную моду-
ляцию.
Применение двухтактных реактивных ламп в области высоких
часдот ограничивается трудностью осуществления симметрии обеих
ламп. Различные схемы реактивных ламп подробно описаны в
[18, 13, 19].
В заключение следует отметить, что при использовании реак
тивных ламп в схемах автоподстройки нельзя применять автома-
тическое смещение, так как управляющий сигнал содержит посто-
янную составляющую. По этой же причине напряжение питания
экранирующей сетки и анода должно быть фиксированным (нель-
зя применять гасящие резисторы).
Кроме реактивных ламп, в качестве управляющих элементов
получили распространение так называемые реактивные диоды
(рис. 1.32). Принцип действия
том, что параллельно контуру
подстраиваемого генератора
подключается реактивное со-
противление X через диод, на
который подано также запи-
рающее напряжение t7y. Ток
высокой частоты через диод
зависит от величины этого за-
пирающего напряжения. При
регулировании последнего сред-
няя вносимая в контур ре-
активность меняется в зави-
реактивного диода заключается в
Рис. 1.32. Эквивалентная схема реактив-
ного диода
симости от управляющего напряжения. Если реактивное со-
противление X представляет собой индуктивность, то и вносимое
схемой реактивного диода сопротивление носит индуктивный ха-
рактер, если же X — емкость, то вносимая реактивность носит ем-
костный характер.
Для последнего случая можно получить приближенную зави-
симость эквивалентной емкости и эквивалентного сопротивления,
замещающих схему реактивного диода, от параметров и режима
схемы. Примем для простоты, что характеристика диода соответ-
ствует выражению (1.15) при цо = О. При этом ток в цепи с дио-
дом приближенно имеет вид косинусоидальных импульсов с уг-
лом отсечки 0.
Меняя запирающее напряжение диода, можно изменять угол
отсечки гока, а следовательно, и величины эквивалентных емкости
и сопротивления. Эквивалентные емкость и сопротивление, подклю-
ченные параллельно контуру, определяются выражениями [1962,19]:
. Cx[Y1(0)]*
[Vi(0)]» + w»C^7?2
(1.95)
/ V? (0) \
₽э = 77-40) #,+ ‘ • (1.96)
\ ^C2xRi /
Эти выражения показывают, что с увеличением частоты умень-
шаются вносимая эквивалентная емкость и сопротивление, шунти-
69
рующее контур Поэтому для данной схемы следует выбирать дио-
ды с наименьшим прямым и большим обратным сопротивлениями
Воспользовавшись выражениями (1 34) и (1 96), можно найти
характеристику управления В общем случае она получается не-
линейной Недостатком схемы реактивного диода является резкое
падение добротности вносимой реактивности с ростом частоты и
при увеличении требуемого отклонения последней. Кроме того, за
счет частичного детектирования вч напряжения входное сопро-
тивление этой схемы для управляющего сигнала получается невы-
соким Более подробно схемы и характеристики реактивных дио-
дов описаны в (19]
Для управления частотой автогенератора можно использовать
также полную входную емкость лампового усилителя Как изве-
стно, она определяется выражением (без учета эффекта времени
пролета электронов и паразитных индуктивностей вводов)
свх = Сск + Сас(1 +К). (1.97)
Здесь Сск и Сас — междуэлектродные емкости, К — коэффи-
циент усиления
При регулировании коэффициента усиления любым способом
(например, введением отсечки анодного тока или плавным изме-
нением крутизны характеристики ламп типа «варимю») можно уп-
равлять входной емкостью, а следовательно, и частотой автогене-
ратора
Для того чтобы входное сопротивление было чисто емкост-
ным, необходимо, чтобы анодная нагрузка усилителя была бы чи-
сто активной (величина К должна выражаться действительным
числом). Преимущество этой схемы перед схемой реактивной лам-
пы заключается в отсутствии фазовращателя, потребляющего
энергию высокой частоты. Недостатком же является малое изме-
нение емкости Для увеличения диапазона изменения входной ем-
кости можно включать параллельно участку сетка-анод лампы до-
полнительный конденсатор.
Частотой автогенератора можно управлять не только с помо-
щью входной динамической емкости, но и с помощью статической,
так как последняя зависит от плотности электронного облака, ок-
ружающего катод В [20] приведены графики зависимости вход-
ной статической емкости от постоянных напряжений на электро-
дах лампы Из этих графиков следует, что ее полное изменение по-
лучается весьма небольшим (порядка единиц пикофарад)
В последнее время получили широкое распространение полупро-
водниковые приборы с управляемой емкостью р-н-перехода (вари-
капы) Этот переход при подаче на него как прямого, так и обрат-
ного постоянного смещения можно попользовать как управляемую
емкость
Если на р-п переход подается запирающее напряжение, то речь
идет о барьерной емкости [21], которая связана с образованием
потенциального барьера между областями р и п
70
При отсутствии внешнего напряжения р-н-переход эквивален-
тен конденсатору, поскольку между областями с высокой прово-
димостью (р и п) образуется слой с очень малой проводимостью,
подобный диэлектрику в промежутке между пластинами обычного
конденсатора. Так как толщина этого слоя зависит от величины
приложенного обратного смещения, при изменении запирающего
напряжения можно менять и эквивалентную емкость р-и-перехода
Если подключить такой переход к контуру автогенератора, то
на нем оказывается не только постоянное запирающее напряже-
ние, но и переменное высокочастотное. Для того чтобы переход
оставался в запертом состоянии, амплитуда напряжения высокой
частоты должна быть меньше постоянного смещения При малой
амплитуде этого напряжения можно приближенно считать, что
емкость перехода от нее не зависит и, как показано в [21], в слу-
чае равномерного распределения примесей в зонах р и п и резкого
р-н-перехода выражается как
Сб Сб»У | «з I-F) 2?к) '
(1.98)
Здесь Сбо — барьерная емкость перехода в отсутствие запи-
рающего напряжения, £к — контактная разность потенциалов р-п-
перехода, иа— внешнее запирающее напряжение Обычно при ком-
натной температуре для германиевых р-п-переходов (0,34-
4-0,5) в, а для кремниевых переходов £к« (0,54-0,7) в.
На рис. 1 33 приведена зависимость относительной барьерной
емкости некоторых варикапов от запирающего напряжения [22]
Из рисунка видно, что
крутизна характеристи-
ки управления тем боль-
ше, чем меньше |и3|. Од-
нако снижение |«3| огра-
ничивается условием за-
пирания перехода.
Рис 133 Зависимость относительной барьер-
ной емкости варикапов типа Д901 от запираю-
щего напряжения
^6
Я,
Рис 1 34 Эквивалентная
схема р-п-перехода
Для определения свойств р-н-перехода как элемента контура
рассмотрим его эквивалентную схему (рис. 1.34). Здесь — со-
противление полупроводника, из которого состоят области р и п;
71
Ro — обратное сопротивление р-п-перехода В соответствии с эк-
вивалентной схемой добротность емкости Св определяется выра-
жением
Q
Ro + Ri (1 + Rq 0)2
(1.99)
Из этого выражения следует, что добротность р-п-перехода па-
дает как с уменьшением, так и с увеличением частоты. На частоте
(1. 100)
добротность достигает своего максимального значения
QMaKc=^- МсЯо+Я,).
(1.101)
Таким образом, для расширения рабочей области частот, где
Q^> 1, необходимо выбирать переходы с малым Rj. Наоборот, при
работе на низких частотах необходимы переходы с большим Ro-
Так как барьерная емкость зависит от напряжения, то и доб-
ротность варикапа оказывается зависящей от приложенного к не-
му напряжения. Иногда это может привести к заметному измене-
нию амплитуды колебаний автогенератора.
Одно из основных требований, предъявляемых к управляющим
элементам, — стабильность вносимой ими реактивности. Барьер-
ная емкость р-п-перехода зависит не только от запирающего нап-
ряжения, ио и от температуры. Температурный коэффициент ем-
кости определяется выражением [23]
До —
|£к1*
(1.102)
где Аб=-^~ — относительный температурный коэффициент
Cg di°
g 1, d s o „ , ,
емкости, о =— — —относительный температурный коэффициент
8 dt°
диэлектрической проницаемости материала полупроводника,
— —-—относительный температурный коэффициент контакт-
ен
ной разности потенциалов.
При повышении температуры е увеличивается, а Ек уменьша-
ется, поэтому 6>0, а х<0. Так, для кремния и германия
^2-10~4 —Ц- ,а х=—(Зч-6)10-3 — .
град град
Из ф-лы (1.102) следует, что при таких значениях 6 и я и ма-
лых запирающих напряжениях коэффициент Аб определяется в
основном величиной я. При |п3| ~^>ЕК этот коэффициент опреде-
ляется величиной 6. Поскольку для повышения температур-
72
ной стабильности емкости р-шперехода желательно использовать
режим с большими и3 ('и3>2-ьЗ в).
До сих пор предполагалось, что амплитуда напряжения высо-
кой частоты на р-п-переходе настолько мала, что нелинейные свой-
ства емкости не проявляются. В действительности же это напря-
жение может составлять заметную часть от запирающего напря-
жения и нелинейные свойства емкости перехода по отношению к
источнику вч колебаний необходимо учитывать. Поскольку при
большой амплитуде переменного вч напряжения барьерная емкость
зависит от этого напряжения, вводится понятие средней емкости
р-п-перехода, которая согласно [21] определяется на основании
ф-лы (1.98) выражением
( г т2 г \
! + —~у-+— "+••• • (1.103)
16 и2 256 „4 /
Здесь Сбз — емкость р-п-перехода в отсутствие вч напряжения,
но при заданном значении u3; Um — амплитуда вч напряжения.
Выражение (1.103) показывает, что с повышением Um средняя
барьерная емкость увеличивается. Последнее необходимо учиты-
вать при определении стабильности собственной частоты подстраи-
ваемого генератора. С этой точки зрения желательно иметь такой
режим, при котором Um было бы минимальным.
В качестве управляемой емкости (варикапа) можно использо-
вать не только специальные приборы, но и любые другие р-п-пере-
ходы, например, переход база-коллектор транзистора.
Полупроводниковый р-м-переход может работать как управляе-
мая емкость и в запертом, и в открытом состояниях. В последнем
случае этот переход обладает, кроме того, так называемой диф-
фузионной емкостью [21], которая может на несколько порядков
превышать барьерную и очень резко зависит ст приложенного к
нему напряжения. Однако использование диффузионной емкости
в схемах ФАПЧ затрудняется тем, что, во-первых, она имеет низ-
кую добротность (шунтирована прямым сопротивлением перехо-
да), во-вторых, для ее применения необходимо иметь f7mc0,l—
0,2 в и, в-третьих, в таком режиме для управления этой емкостью
требуется значительно большая мощность, чем в режиме обрат-
ного смещения.
В качестве управляющих элементов можно использовать ка-
тушки индуктивности с сердечниками, выполненными из материа-
лов, магнитная проницаемость которых зависит от магнитного по-
ля (например, с ферритами). Как и при использовании нелинейной
емкости р-м-перехода, где дифференциальная (или средняя) ем-
кость регулировалась изменением положения рабочей точки, в этом
случае изменением постоянной составляющей магнитного потока
можно управлять дифференциальной индуктивностью. Постоянная
составляющая магнитного потока обычно регулируется измене-
нием тока в обмотке подмагничивания.
73
Достоинством такого способа регулировки частоты является
возможность использования его в области высоких частот, что
связано со сравнительно высокой добротностью вносимой реактив-
ности в этом диапазоне, а также возможностью регулирования ча-
стоты мощных колебаний при больших переменных напряжениях
на контуре. К недостаткам относятся низкая чувствительность (тре-
буется повышенная мощность от источника управляющего сигна-
ла) и большая инерционность управляющего элемента, обусловлен-
ная значительной индуктивностью обмотки подмагничивания.
Более подробные сведения о работе нелинейных индуктивно-
стей в качестве управляющих элементов имеются в [1962,19].
Частотой подстраиваемого генератора можно управлять и дру-
гими способами, например, применением варикондов, и так на-
зываемых газовых конденсаторов, а также изменением фазы об-
ратной связи. Эти методы, однако, обладают существенными не-
достатками и мало используются в системах ФАПЧ. Так, варикон-
ды имеют низкую температурную и временную стабильности, га-
зовые конденсаторы вносят значительные потери в контур, а при
изменении фазы обратной связи снижается стабильность автоге-
нератора.
Глава 2
АВТОНОМНАЯ СИСТЕМА ФАПЧ
ПЕРВОГО ПОРЯДКА
2.1. РЕШЕНИЕ ОСНОВНОГО ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ
Общие сведения
Как уже отмечалось, в настоящее время 'нет аналитического ме-
тода, позволяющего получить решение ур-ния (1J11) в общем ви-
де. Начнем его анализ с простейшего случая, когда К(р)=Л. При
этом ур-ние (1.11) имеет первый порядок и описывает систему
ФАПЧ с идеализированным фильтром нижних частот, коэффи-
циент передачи которого в широкой области частот равен еди-
нице:
^+QyF(<p)=QH. (2.1)
Такую систему в дальнейшем будем называть системой перво-
го порядка. Она близка к реальной системе ФАПЧ, у которой по-
лоса пропускания фильтра очень широка.
Изучение автономной системы ФАПЧ первого порядка необхо-
димо как первый шаг анализа более сложных систем высокого по-
рядка, для которых, как правило, не удается найти точные реше-
ния дифференциальных уравнений в общем виде. В ней обнару-
живаются наиболее интересные нелинейные явления, такие, как
захват и удержание, зависимость ее динамики от вида нелинейно-
сти фазового детектора и начальной расстройки и т. д.
Анализ простейшей модели ФАПЧ, базирующийся на точном
решении ее уравнения, представляет большую теоретическую и
практическую ценность. Такая система обладает рядом важных
свойств, благодаря которым она применяется на практике наряду
с более сложными системами высокого порядка.
Повышение порядка системы, вследствие увеличения инерцион-
ности ее звеньев, часто оказывается нежелательным, так как это
снижает устойчивость и увеличивает длительность переходных про-
цессов, а также ухудшает ее свойства как следящей системы, не
75
всегда улучшая помехозащищенность. В некоторых случаях имен-
но система ФАПЧ первого порядка является оптимальной [1964, 1,
1965, 16].
Следует заметить, что ур-ние (2.1) в некоторых предположе-
ниях [24] описывает поведение разности фаз при непосредственной
синхронизации автогенератора синусоидальной внешней эдс.
Уравнение вида (2.1) рассматривалось в работах В. С. Дулиц-
кого и Ю. В. Эльтермана, Р. Адлера [1946, 1], Е. Лабина [1949, 3],
М. Р. Капланова и В. И. Левина [1962, 19], М. В. Капранова
[1957, 2] и ряда других авторов. При этом были получены доста-
точно полные результаты.
На практике, как было показано ранее, характеристика фазо-
вого детектора Е(ф), в основном близка к косинусоидальной (си-
нусоидальной). Кроме того, косинусоидальная кривая является
первым, наиболее грубым приближением для всех периодических
функций, поэтому вначале рассмотрим случай, когда F (<р) = cos <р.
В этом случае ур-ние (2.1) принимает вид:
pq)-|-Qy cos<p=QH. (2.2)
Для отыскания полного решения этого уравнения заменим пе-
ременную х — tg q>/2 [26, 1959, 5]. Тогда ур-ние (2.2) можно пере-
писать следующим образом:
~—ах2+Ь=0, (2.3)
dt
где
а = (Qy + QH)/2, 6 = (Пу-—Пн)/2.
Полученное уравнение представляет собой частный случай урав-
нения Риккати. Согласно [25] решение ур-ния (2.3) зависит от со-
отношения между параметрами а и b и может быть представлено
в виде:
х(/)=х0-6(/-/0), [ц = 0], (2.4)
о
(2-5)
= -----Д7~7Т’ [6 = 0L
1 — хоа (t —10)
х (0 = —& 1g , [аЬ < 0],
У — аЬ — хаа tg К — ab (t — t0)
X (/) == р)— , [ab > 0].
Уab — х0 ath Уab (t — t0)
Здесь хо — значение x(t) при t=t0.
Уравнения (2.4) и (2.5) описывают «негрубую» [26]
ФАПЧ.
В дальнейшем, не снижая общности рассуждений, удобно пред-
положить, что Qy>0. При этом условии ур-ние (2.4) описывает
движение в системе с отрицательной скоростью, т. е. при рф<0.
76
(2.6)
(2.7)
систему
Возвращаясь к основной переменной ф, получаем вместо (2.4)
Ф (/) = 2arc tg |\g -5“— Йу (t — t0)j ± 2п я, [^н = —(2.8)
где ф(0) — значение <p(t) при t—/о=О, п — любое натуральное
число.
Из этого выражения следует, что при /->оо разность фаз стре-
мится к некоторой постоянной величине фо=—л=е2пл.
Аналогично ур-ние (2.5) описывает движение в системе с по-
ложительной скоростью, т. е. при рф>0. При этом
tgm
ф (0 = 2arc tg------------— , [QH = Qyl. (2.9)
1-Яу (/-Qtg^
В этом случае при оо разность фаз стремится к величине
фо = ±2 мл
Поскотьку негрубые системы практически не реализуемы, то
наибольший интерес представляют решения (2.6) и (2.7), когда и
а=£0 и b^=Q. Рассмотрим подробно эти решения.
Режим биений
Режим биений возникает в том случае, если начальная рас-
стройка превышает полосу удержания. Это соответствует неравен-
ству ab<6.
Возвращаясь в ур-нии (2.6) к переменной q(t), находим следую-
щею зависимость:
tg Я ~ («у ~ Ян) tg v (t - t0)
Ф (/) = 2arc tg-2---------------1-------- ± 2n n, (2.10)
<p(0) Q
Я - (Py-J-Ян) tg ~ tg (t t0)
2 £
где Q=--p Q2—Q2.
Из полученного выражения следу-
ет, что при любом значении ф(0) с
возрастанием t модуль разности фаз
непрерывно нарастает. Это означает,
что имеется средняя разность частот
подстраиваемого и эталонного генера-
торов, т. е. захват в системе невозмо-
жен. На рис. 2.1 графически показан
характер зависимости cp(t) при to=O
для этого случая. Выражение (2.10)
определяет функцию ф(7) в виде не-
прерывной непериодической кривой.
Разность фаз нарастает (или убыва-
ности фаз подстраиваемою
и эталонного генераторов
от времени в режиме биении
77
eij в среднем с постоянной скоростью, однако мгновенная ско-
рость не остается постоянной, но колеблется около средней.
Для упрощения выкладок положим в ф-ле (2 10) нулевые на-
чальные условия, т е. ф(0) =0 при to — О, При этом получим
<р(0 ==2arctg^=bl fg-5-t (2.П)
На основании этого равенства нетрудно записать выражение
/ля мгновенной разности частот:
р ф =------------ -----------йн - йу----------- . . - . (2.12)
й2 — й2 й _ й ) 2 ]/ Йд ~ Q2
cos«------------ t -р -^-2----sin2-----------------t
Л 1 —О -О Л
Отсюда следует, что в режиме биений производная разности
фаз является непрерывной однозначной периодической функцией
времени с отличным от нуля средним значением
Интересно найти среднее значение р<р представляющее собой
частоту биений в замкнутой системе. Поскольку р<р, является
четной функцией с периодом Т=2л/КО|—Щ , то
Г/2 Г/2
p'q>=Q=-y рЧ>Л = у-ф(0 | =/Q2^Q2signQH. (2.13)
о о
Рис. 2.2. Зависимость частоты
биений от начальной расстройки
при различных нормированных
характеристиках фазового детек-
тора
та
Из этого выражения вытека-
ет, что в замкнутой системе
ФАПЧ в режиме биений среднее
значение разности частот под-
страиваемого и эталонного гене-
раторов по модулю всегда ниже
начальной расстройки, т. е. всег-
да наблюдается частичное увле-
чение частоты подстраиваемого
генератора. Очевидно, что с уве-
личением начальной расстройки
частота биений асимптотически
приближается к йн; напротив, с
уменьшением QH частота биений
также уменьшается и при QH=
= Qy обращается в нуль, т. е.
происходит захват.
График кривой Q = —Оу
представлен в относительном
масштабе на рис. 2.2 (кривая 2).
Заметим, что изменение знака
начальной расстройки согласно
ф-ле (2.13) в этом режиме приводит к изменению знака частоты
биений. На графике показана одна из нечетно-симметричных поло-
вин кривой.
Режим захвата
Этот режим наблюдается в тех случаях, когда начальная рас-
стройка не превосходит полосы удержания.
Возвращаясь в ур-нии (2.7) к переменной q>(/), получаем сле-
дующую зависимость:
w ГО) /------- V *
tg й= - й* - (йу - йн) th-------(t -10)
Ф (/) = 2arc tg---------------------------------------------- ±
/--2---2 ф (°) ]// Qy ЙН
]/ й2-й2-tg^-(Qy + QH)th---------------
+ 2п п. (2.14) •
Частным случаем этого выражения при ф(0)=л, п = 0 является
известная формула [1946; 1]:
_______f Q2 _______ Q2
Ф(П= -2arctg -l/a^Lcth У (2.15)
Г ййу “J- ЙЬ
которая определяет функцию cp(t) только при рф^О. Из выраже-
ния (^.14) следует, что при /->оо ф(7) стремится к постоянной ве-
личин^
To2 = -2arctgl/-§^H . (2.16)
Т ййу —j— ЙЙН
Таким образом, ф02 есть точка устойчивого равновесия. На са-
мом деле, как следует из ур-ния (2.2), система обладает не един-
ственным состоянием равновесия. Полагая в (2.2) рф=0, находим
условие, которому соответствуют состояния равновесия
coSqi0n=^-. (2.17)
Uy
В частности легко проверить, что значение фог. определенное со-
гласно ф-ле (2.16), удовлетворяет и равенству (2.17).
Из выражения (2.17), как и из выражения (2.13), можно заклю-
чить, что равенство QH=12y соответствует критическому случаю.
При QH>Qy в системе наблюдается режим биений. Если QH<Qy,
при любых начальных условиях происходит захват Таким обра-
зом, в системе ФАПЧ с идеализированным 'фильтром полоса зах-
вата равна полосе удержания. Формально равенство (2.17) спра-*
ведливо для любого значения фОп = 2пл±фо (п = >1, 2, 3, . . .).
В дальнейшем будем рассматривать изменения установившейся
разности фаз в пределах —л<фоп-<л. В этой области возможны
79
только два значения ф0(г, удовлетворяющие соотношению (2 17),
tpoi>O и фог<О, Покажем, что одно из них соответствует состоянию
равновесия, неустойчивому в «малом»
Для исследования устойчивости в «малом» дадим величине фо
бесюнечно малое приращение Дф и определим, что произоидет
в системе с течением времени Если Дф будет уменьшаться, то ре-
жим будем считать устойчивым В противном случае режим неус
тончив. Разность фаз обоих генераторов запишем как
Ф(О=-Фо+Дф(О. (2.18)
Подставляя это значение ф(7) в ур-ние (2 2), получаем
Дф (0 + Qy cos (ф0 ф- Дф) = QH. (2.19)
Разлагая косинус суммы по известной формуле тригонометрии,
находим
— Дф (t) + Qy [cos ф0—cos Дф — sin ф0 sin Дф] -Q,,. (2.20)
dt
Так как при Дф^нО созДфаИ, а 8шДф«Дф и, кроме того,
cos ф0= Qn/Qy, получаем линейное уравнение
—Пу5ШфоДф=О. (2.21)
К этому уравнению применим критерий Рауса—Гурвица [26.
27], согласно которому решение ур-ния (2,21) устойчиво при
QySinфo<O. (2.22)
Отсюда непосредственно следует, что режим является устой-
чивым, если разность фаз имеет отрицательный знак, т е при
фО = фО2.
Отметим, чтсГесли в выражении (2.22) Qy имеет отрицательный
знак, что равносильно изменению знака зависимости частоты под-
страиваемого генератора от разности фаз. то режим 6v.ieT устой-
чивым при положительном значении фо.
Наиболее полно устойчивость положения равновесия характе-
ризуется решением дифференциального уравнения, описывающего
систему ФАПЧ. Это решение дает ответ на вопрос об хстойчиво-
сти системы в целом и проверять устойчивость в «малом > не име-
ет смысла. Так, из ф-лы (2Л4) однозначно следует, какое значение
устойчиво Проведенное на простейшем примере исследование ус-
тойчивости в «малом» нужно только для иллюстрации метода оп-
ределения условий устойчивости этого вида
2.2. ФИЗИЧЕСКАЯ СУЩНОСТЬ ПРОЦЕССОВ, ПРОТЕКАЮЩИХ
В СИСТЕМЕ
Чтобы уяснить физическую сущность процессов, протекающих
в системе ФАПЧ с идеализированным фильтром, дадим качест-
венную оценку возникающих в ней явлений. В дальнейшем это
80
послужит основой для изучения захвата и удержания, переходных
процессов и т. п в более сложных системах.
Впервые ясная физическая интерпретация явлений, происходя-
щих в системе первого порядка, была дана В. С Дулицким
В режиме удержания система ФАПЧ должна следить за раз-
ностью частот эталонного и подстраиваемого генераторов, (поддер-
живая ее равной нулю Предположим, что в первый момент ча-
стоты генераторов равны В этом случае, как следует из ф-лы
(2 17), -установится стационарная разность фаз |±л/2| и следо-
вательно, напряжение на выходе фазового детектора будет равно
н\лю
Изменение частоты эталонного или подстраиваемого генерато-
ра вызовет расхождения их фаз В результате на выходе фазового
детектора появится напряжение такого знака и величины, которые
необходимы для компенсации возникшей расстройки При даль-
нейшем увеличении расстройки это напряжение будет возрастать
Поскольку максимальное значение выходного напряжения фа-
зового детектора ограничено величиной Пфдиачс, наступит момент,
когда расстройка, вносимая управляющим элементом, окажется
недостаточной для полной компенсации расхождения частот ге-
нераторов и синхронизм нарушится Такая картина наблюдается
г системе ФАПЧ только при очень медленном изменении расстрой-
ки между генераторами
При изменении знака расстройки процесс протекает аналогич-
но, но напряжение на выходе фазового детектора изменяет свои
знак.
В режиме биений разность фаз эталонного и подстраиваемого
генераторов непрерывно возрастает, и напряжение на выходе фа-
зового детектора периодически изменяется. Воздействуя на упоав-
ляющий элемент, это напряжение изменяет частоту подстраиваемо
го генератора, а следовательно, и частоту биений, являющихся
разностью частот эталонного и подстраиваемого генераторов В
зависимости от знака мгновенного напряжения на выходе фазо-
вого детектора частота биений или повышается или понижается.
В дальнейшем будем называть мгновенное напряжение на выхо-
де фазового детектора отрицательным, если оно увеличивает раз-
ность частот генераторов, и»наоборот, положительным,ч если оно
сокращает эту разность I 1 Q., SI t -»?
Во время положительной полуволны указанного напряжения
скорость его изменения (т. е. частота) оказывается пониженной, а
во время отрицательной — повышенной. Это приводит к тому, что
длительность положительного полупериода превышает длитель-
ность отрицательного. С уменьшением начальной расстройки ми-
нимальная мгновенная разность частот генераторов становится все
меньше и меньше Длительность положительной полуволны вы-
ходного напряжения фазового детектора все больше превышает
длительность отрицательной полуволны Полный период биений
увеличивается.
81
Найдем форму напряжения биений на выходе фазового детек-
тора при произвольном значении t. Для этого определим из ф-лы
(2.11) cos<p(7), что соответствует нормированному (отнесенному к
максимальному) напряжению на выходе фазового детектора:
Qy + QH cos 1//Л Од — Qy t
cos <p (/) =-------------- —
fiH-|~Qyc°sy/ Qh — Qy t
(2.23)
По этой формуле построено семейство кривых (рис. 2.3), каж-
дая из которых соответствует
определенному значению относи-
тельной начальной расстройки.
Как видно из рисунка, вы-
ходное напряжение фазового
детектора в режиме биений
содержит постоянную состав-
ляющую, причем тем боль-
шую, чем меньше начальная
Рис. 2.3. Формы нормированного напря-
жения на выходе фазового детектора
системы ФАПЧ первого порядка при
различных значениях начальной рас-
стройки
расстройка. Наличие положи-
тельной постоянной составля-
ющей уменьшает среднее зна-
чение разности частот подст-
раиваемого и эталонного гене-
раторов по сравнению с Йн,
т. е. приводит к частичному
увлечению частоты подстраи-
ваемого генератора [ф-ла
(2.13)].
Если Йн приближается к
Йу, длительность положитель-
ной полуволны напряжения на
выходе фазового детектора
стремится к бесконечности, а
длительность отрицательной
полуволны — к величине й
Отношение длительности отри-
цательной полуволны к перио-
ду стремится к нулю.
Если йн^йу, то при любой
фазе включения режим биений
становится апериодическим и
наступает захват. Таким об-
разом, процесс захвата в сис-
теме ФАПЧ определяется из-
менением формы переменного выходного напряжения фазового де-
тектора в результате синхронной модуляции биений по частоте.
Итак, на основании изложенного можно придти к известному
уже положению о том, чго в системе ФАПЧ первого порядка по-
лоса захвата равна полосе удержания.
82
Качественную картину явлений в такой системе удобно иссле-
довать при помощи фазового пространства (т. е. пространства, из-
мерениями которого чаще всего являются искомая величина и ее
производные). Число его измерений определяется, как известно,
порядком дифференциального уравнения, описывающего систему
[26]. Мгновенное динамическое состояние последней отображает-
ся в этом пространстве точкой. С течением времени мгновенное
динамическое состояние системы изменяется, и точка перемещает-
ся в «пространстве, описывая некоторую траекторию. Эта точка на-
зывается изображающей, а траектория — фазовой. Совокупность
всех «фазовых траекторий называется фазовым портретом системы.
Для его построения достаточно иметь дифференциальное уравне-
ние системы.
Применительно к системе ФАПЧ, описываемой ур-нием (2.2),
«разовый портрет содержит одну линию фазовых траекторий. Для
_ его построения ур-ние (2.2) удобнее записать в виде:
= QH—Qy cos q>. (2.24)
Фазовый портрет системы ФАПЧ с 'идеализированным филь-
тром при QH<Qy показан на рис. 2.4. Положение изображающей
точки на фазовой траектории
полностью определяется ее
координатой ф.
Выше было показано, что
точка Л(ф=ф01) на этом ри-
сунке является точкой неус-
тойчивого равновесия, тогда
как точка Б (ф = фог) является
устойчивой. Всякое изменение
начальных условий при неиз-
менных йн и Qy приводит к то-
му, что с течением времени
изображающая точка движет-
ся по фазовой траектории к
точке Б. Следует отметить, что
по мере приближения изобра-
жающей точки к оси абсцисс
скорость ее движения непре-
рывно падает, вплоть до нуля
тационным). По этой причине изображающая точка достигает ус-
тойчивого положения Б только при /~>оо.
Если изображающая точка располагается бесконечно близко
к точке А, то скорость ее удаления от последней близка к нулю
и возрастает только с увеличением расстояния от этой точки. Ес-
ли начальные условия соответствуют расположению изображаю-
щей точки непосредственно в точке А, то скорость ее перемеще-
на
• ач>
Tt
Рис. 2.4. Фазовый портрет системы
ФАПЧ первого порядка
(такое движение называется лими-
ния равна нулю и режим может сохраниться теоретически сколь
угодно долго, несмотря на то, что он является неустойчивым Од-
нако вероятность такого случая бесконечно мала Кроме того, в
реальной системе всегда имеются произвольные флуктуации, ко-
торые выводят изображающую точку на участок с конечной ско-
ростью
2.3 ПЕРЕХОДНЫЕ ПРОЦЕССЫ
В тех случаях, когда отклонения разности фаз эталонного и
подстраиваемого генераторов от <р02 малы, для описания переход-
ного процесса в системе можно воспользоваться уравнением пер-
вого приближения Будем исходить при этом из общего ур-ния
(2 1). Разлагая F(<р) в ряд Тейлора вблизи точки ф=фог и огра-
ничиваясь первыми двумя членами ряда, получаем
F (ср) » F (<р02) + F' (<р02) Дер. (2.25)
Подставляя это выражение в ур-ние (2.1) и учитывая, что
Т(ф|й) =уи, (ун=Йн/йу — относительная начальная расстройка,
имеем
р Д q> + Qy F'. (ф02) Дф = 0. (2.26)
При К(ф)=соэф из ур-ния (2.26) следует (2.21).
Решение ур-ния (2 26) имеет вид
Дф = С ехр [-—F'(ф02) /], (2.27)
где С — произвольная постоянная, определяемая начальными ус-
ловиями
Отсюда следует, что постоянная времени системы определяет-
ся равенством
В частности, при Р(ф)=соэф из ф-лы (2 28) вытекает извест-
ное выражение для Ту [1962, 19]
Поскольку рассматриваемая система является существенно не-
линейной, то процесс установления при малых отклонениях от
положения равновесия далеко не полностью характеризует пере-
ходный процесс при включении этой системы, ибо начальное зна-
чение разности фаз в момент включения может быть произволь-
ным
Так как решение исследуемого ур-ния (2 2) известно, остается
определить при заданной начальной разности фаз время установ-
ления.
Поскольку переходный процесс, строго говоря, длится неогра-
ниченное время, необходимо ввести какой-либо критерий его окон-
чания. Примем в качестве такого критерия прохождение разно-
84
стью фаз определенного значения, отстоящего от положения рав-
новесия на заданную постоянную величину.
Для определения длительности переходного процесса при за-
данных Qy и QH, а также начальном <рн и конечном <рк значениях
разности фаз воспользуемся выражением (2.14). Полагая в этом
выражении £о = О, <ро=<рн и <р(7) = фю получаем следующее
ние для времени движения изображающей точки от <рн к
выраже-
фк-'
(2.29)
где ta — время переходного процесса.
Воспользовавшись выражением функции th через экспоненци-
альные, можно привести ф-лу (2.29) к виду
й?-йн
In
tg^+tgT (tgT
tg^ + tg^2)
\ 2 2/122/
(2.30)
Будем считать, что переходный процесс закончен, если раз-
ность фаз эталонного и подстраиваемого генераторов отклоняется
от своего установившегося значения не более чем на 0,02 рад (в
большинстве случаев это вполне удовлетворяет требованиям к
фазовой точности систем синхронизации).
При принятом критерии
|g Фк _|g <Ро2±0>02 |g Фог 0'02 — tg ^°2 -|- (2 31)
2 2 2 “ 2соз^ 2 “ 1 + Yh
2
Подставляя это значение <рк в выражение (2 30) и учитывая,
что ф01 <фн<фк<Ф02 или фо2<фк<фн<фоь + 2л, получаем
Здесь fni|2— время движения при упщр>0 и унРФ<0 соответ- ф
ственно
85
Для практически встречающихся случаев |ун| <0,9 формула
Для (п 1,2 упрощается:
Ш/1-Я 1g ^-tg-M
----!--1п--------i--i----t-L
Is*-US*5-
(2.32)
Эта формула позволяет определить время переходного про-
цесса при произвольной разности фаз в момент включения. Прак-
тически любая разность фаз в момент включения равновероятна.
Поскольку она случайна, то и время переходного процесса также
случайно.
Представляет интерес определение математического ожидания
времени установления, ибо последнее будет наблюдаться в боль-
шинстве случаев. Среднестатическое время установления при про-
извольной начальной разности фаз в момент включения (при ином
подходе и критерии переходного процесса) было определено
М. К. Чирковым и П. Н. Занадворовым в [31], применительно к
синхронизируемому непосредственно внешним воздействием авто-
генератору.
Считая фн случайной величиной, равномерно распределенной
на отрезке [0; 2л], запишем ее плотность распределения в виде
№(<Рн)=Л> [0<Ф<2л]. (2.33)
Математическое ожидание ta найдем согласно известному пра-
вилу определения моментов закона распределения [28]. Восполь-
зовавшись выражением (2.32), получим
2лЙу — у»
2Л
1п(114/Г=^)рФн +
о
2Л tg - tg
+ [ In----?-------— t/фн
J tg^ + tg^-
(2.34)
Второй интеграл в этом выражении равен нулю, поэтому окон-
чательно имеем
U « —-Д=1п 114 1/1-Y*. (2.35)
В [1966, 46], кроме среднего времени установления, получены
функции распределения и дисперсии этой величины.
Большой интерес представляет также максимальное время ус-
тановления. Теоретически это время при фн=фо1 бесконечно вели-
ко Для практики максимальным можно считать время установле-
86
ния, в течение которого изображающая точка переходит от ф01±0,02
к <ро2—0,02. При этом по аналогии с ф-лой (2.31) имеем
tg *Ь= tg Фо1 * 0,02 « — tg . (2.36)
2 2 2 1 -|- ун
Воспользовавшись этим выражением и ф-лой (2.32), найдем
максимальное время установления по (принятому критерию
tn макс =-In 114 /Г=?2. (2.37>
Qy/l-Y^
Из сопоставления ф-л (2.37) и (2.35) вытекает, что максималь-
ное время установления превышает вдвое его среднее статистиче-
ское значение.
2.4. ВЛИЯНИЕ ФОРМЫ ХАРАКТЕРИСТИКИ ФАЗОВОГО ДЕТЕКТОРА
НА РАБОТУ СИСТЕМЫ
На (практике встречаются случаи, когда характеристика фазо-
вого детектора некосинусоидальна. Выясним влияние формы этой
характеристики на процессы, протекающие в системе ФАПЧ.
Форма характеристики фазового детектора, как было показа-
но в разд. 1.4, зависит от его схемы и режима работы, а также
от формы приложенных напряжений. Так, при подаче на входы
фазового детектора, работающего в режиме линейного перемно-
жения входных сигналов, двух последовательностей прямоуголь-
ных импульсов со скважностью 0,5 его характеристика принимает
треугольную форму. Если скважность одной из последовательно-
стей менее 0,5, то характеристика фазовою детектора принимает
вид симметричной трапеции. Иногда форма эквивалентной харак-
теристики фазового детектора определяется искажениями его сиг-
нала, передаваемого через нелинейные цепи, например, усилитель
или ограничитель.
Заметим, что нормированная характеристика фазового детек-
тора всегда периодична по <р и, кроме того, ее наибольшее и
наименьшее значения ограничены. Поэтому, как уже указывалось,
в системе ФАПЧ первого порядка полоса захвата равна полосе
удержания.
Действительно, при любой (с указанными ограничениями) нор-
мированной характеристике фазового детектора форма фазового
портрета не зависит от начальной расстройки. При изменении по-
следней фазовый портрет перемещается в фазовом пространстве
параллельно самому себе вдоль оси ординат (рис. 2.4).
Переход системы с идеализированным фильтром из режима бие-
ний в режим удержания связан с появлением точек пересечения
фазового портрета с осью абсцисс (d<p/dt=O). Физически это оз-
начает, что захват наступает при равенстве начальной расстрой-
ки мгновенной, вносимой управляющим элементом.
87
Форма нормированной характеристики фазового детектора
влияет, однако, на такие показатели системы ФАПЧ, как время пе-
реходного процесса, диапазон возможной устойчивой разности фаз,
частичное увлечение частоты в режиме биений [1957, 2].
Рассмотрим имеющий место на практике случай, когда харак-
теристика фазового детектора имеет треугольную форму (рис.
2 5а). Почти треугольная характеристика фазового детектора на-
а)
FW
1
Рис. 2 5 Нормированные характе-
ристики фазового детектора:
а) треугольная, б) трапециевид-
ная, в) пилообразная
блюдается, например, при подаче на балансный детектор напря-
жений с равными амплитудами. Эта характеристика, с одной сто-
роны, представляет собой аппроксимацию наиболее часто встре-
чающейся косинусоидальной характеристики, а с другой — поз-
воляет представить нелинейное основное дифференциальное урав-
нение в виде двух линейных уравнений и тем самым упростить
анализ сугубо нелинейных явлений в системе ФАПЧ.
Нормированную характеристику фазового детектора рис. 2.5а
аналитически можно записать следующим образом:
— ф + бГ • [ —Л<><Р=^0]’
Л \ 2 /
Подставив эти выражения в ур-ние (2.1), получим
уравнений
(I L Л \ !
^-йуА(ф-^=йн, [0 сф<л].
(2.38)
систему
(2.39)
88
Решая систему (2.39), находим
ф(0 —
I
(Тн-1)-С2е я J
[ — Л < ф 0],
Ф(/)=Т
9Q
(1-Y-Же^'
(2.40)
(2-41)
Л
[0 < ф < л].
Здесь Ci и С2 — постоянные интегрирования.
Из выражений (2.40) и (2.41) следует, что при ун<1 точка ус-
тойчивого равновесия находится в интервале —л^ф^О, а точка
неустойчивого равновесия — в интервале О^ф^л.
Разность фаз эталонного и подстраиваемого генераторов в точ-
ке устойчивого равновесия определяется из равенства
<Ро2=-у(Ун-1). (2.42)
Равновесие оказывается неустойчивым, если разность фаз
Фо1=-^-(1—Yh)- (2.43)
При помощи системы ур-ний (2.40) и (2.41), задавшись кон-
кретными начальными условиями, можно построить временную за-
висимость мгновенной разности фаз обоих генераторов при любых
начальных условиях. Так как переход из одной области в другую
происходит непрерывно, то следует считать, что значение ф(7), со-
ответствующее концу первого интервала, является начальным ус-
ловием для решения второго уравнения.
Определим постоянную времени переходного процесса анало-
гично тому, как это было сделано при косинусоидальной характе-
ристике фазового детектора. Заметим, что поскольку линейные ур-
ния (2.40) и (2.41) охватывают весь интервал возможных значе-
ний ф, можно найти постоянную времени переходного процесса
для всего диапазона значений ф:
тту=Йугт = ^. (2.44)
Постоянная времени в данном случае не зависит от начальной
расстройки, что объясняется неизменностью модуля крутизны нор-
мированной характеристики фазового детектора.
Определим теперь максимальное время переходного процесса.
Применительно к характеристике типа (2 38) принятый выше кри-
терий существования переходного процесса записывается следую-
щим образом:
Ф02+0,02 <ф(О<Фо1—0,02, (2.45)
Ф01+ 0,02 ф (/) ^ Ф02+ 2к—0,02. (2.46)
89
Вычислим вначале время переходного процесса при рф>0, со-
ответствующее движению изображающей точки, ограниченному ус-
ловием (2.46). При этом необходимо рассмотреть два участка:
«pot + 0,02^ф^л и ф фог + 2л—0,02.
Воспользовавшись ур-нием (2.44) и начальными условиями
<Р = Фо1 + О,О2, / = 0, находим постоянную С1=0,04/л. Аналогич-
но находим из ур-ния (2.40) и начальных условий ф=—л; /=0 по-
стоянную С2=—(Ц-ун).
Время движения на первом и втором участках оказывается
одинаковым ^ni = ^n2= 1п 25л(1ун). Поэтому полное вре-
мя движения при рф>0 и принятом критерии
Up>0) = z~In 25л (i+ун). (2.47)
ййу
Аналогично легко получить время установления гари условии
Рф<0;
U<P<0) = ^1п 25л(1— ун). (2.48)
Время движения изображающей точки согласно ф-ле (2.47)
увеличивается, а согласно ф-ле (2.48) уменьшается при ун>0 с
возрастанием ун потому, что в области рф>0 путь, проходимый изо-
бражающей точкой, при этом увеличивается, а в области рф<0
сокращается. Само же движение имеет экспоненциальный харак-
тер с показателем степени, не зависящим от ун.
Формулы, аналогичные (2.47) и (2.48), приведены ib (1957, 2].
Максимальное время установления
tn макс =^1п 25л (1-у„). (2.49)
асу
Следует отметить, что максимальное время установления в си-
стеме с треугольной симметричной характеристикой слабо зависит
от начальной расстройки.
На рис. 2.6 для сравнения показаны кривые, построенные
по ф-лам (2.37) при различных характеристиках фазового де-
тектора.
Интересно найти среднюю разность частот эталонного и под-
страиваемого генераторов в режиме биений при симметричной
треугольной форме характеристики фазового детектора. Для этого
при |ун|>1 достаточно найти полное время движения изображаю-
щей точки в пределах от —л до л. Заметим, что время пребывания
изображающей точки на участках 04-л и —л4-0 одинаково. Поэто-
му можно, определив один из промежутков времени, удвоить его.
Найденное таким образом время представляет собой не что иное,
как период частоты биений.
•90
Таким образом, на основании равенств (2.40) и (2.41) можно
получить следующее выражение для частоты биений:
=^-sign Yh =—n-Qy-r sign Yh. (2.50>
Тб ln I Yh I + i
I Yh | - 1
где Гб — период биений.
На рис. 2.2 показано графически, как изменяется обобщенная
частота биений уб=П/Йу при изменении обобщенной начальной
расстройки в системе ФАПЧ с характеристикой фазового детекто-
ра треугольной формы (кривая 1).
Формула, аналогичная (2.47), ранее получена в [1957,2].
Приведем теперь другой пример влияния формы характеристи-
ки фазового детектора на время установления и эффект увлечения
частоты. Рассмотрим случай, иногда встречающийся на практике,
когда характеристика фазового детектора имеет вид трапеции (см.
рис. 2.56). Пусть эта характеристика симметрична и периодична с
периодом 2л. Условие ее симметрии; фа=л—фб. Нормированная
характеристика запишется в виде:
Г(Ф) = 1,
[~Фа<фС<Рй1
Г(ф)
2<р — л
2qp« — л
[фй< ф< л — Фа]
Г(Ф) = ~1,
[ + Л—Фа^Ф л4-фа]
(2.51>
F(q)) = _2Lh^=j£±ZL, [-Л+ф^ф^-ф,]
Решая уравнение системы ФАПЧ для стационарного режима
по участкам, как и в случае треугольной формы характеристики,
находим значения устойчивой и неус-
тойчивой разности фаз:
г. - я + Ун(2фа-гс)
Фи--------------
/
__ я 4~ ?н (2фа л)
<Р02---------------
(2.52)
С увеличением крутизны ската тра-
пеции (фа->л/2) уменьшается диапа-
зон, в котором может находиться уста-
новившаяся (остаточная) разность фаз
при изменении Yu- В пределе при
фа->-л/2, устойчивая остаточная раз-
ность фаз стремится также к постоян-
ной величине —л/2.
Перейдем к определению времени
установления в системе ФАПЧ с тра-
пецевидной характеристикой фазового
детектора. Воспользовавшись ур-нием
Рис. 2.6. Зависимость мак-
симального времени уста-
новления от начальной рас-
стройки в системе ФАПЧ
первого порядка при раз-
личных F (ф)
9i
(2.1) и аналитическим выражением характеристики фазового детек-
тора, получим уравнения, определяющие закон изменения разности
фаз во времени:
<р(0 = — Qy(l— у„)(^4 t0), [— фа<ф СфД,
[фа < ф < л—ф0]; (2.53)
Ф (0 = Йу (1 + у„) (t +t0), [Л—фа < ф < л + фа],
22у «+<.)
[—л+фа<ф<—фЛ-
Воспользовавшись критерием (2.45); (2.46) и ур-ниями (2.53),
определим бхмакс- Для этого необходимо просуммировать время
движения изображающей точки, от исходной, определяемой при-
нятым критерием и близкой к фоь до точки л—<ра, затем на уча-
стке ОТ Л—фа ДО Л 4-фа И, Далее, ОТ Л 4-фа до точки, близкой к
Фог, соответствующей окончанию переходного процесса. В резуль-
тате получим следующее выражение:
tn макс =4- <Л-2^)1п 25 (" — 2Ф.) (1 + Yh)+ . (2.54)
ййу йбу - |“£-н|
Первое слагаемое правой части этого выражения описывает
время движения изображающей точки по наклонным участкам
фазового портрета и показывает, что, как и в случае треуголь-
ной формы характеристики фазового детектора, оно слабо зависит
от знака начальной расстройки.
Второе слагаемое представляет собой время движения изобра-
жающей точки по горизонтальному участку фазового портрета.
Выражение (2.54) при фа = 0 превращается в полученную
ранее ф-лу (2.49), а при фа = л/2 дает максимальное время уста-
новления в системе ФАПЧ с прямоугольной характеристикой фазо-
вого детектора /Дер) =sign cos ф (рис. 2.6), совпадающее с анало-
гичным выражением в работе (1957, 2]. Из рис. 2.6 следует, что при
малых значениях ун наибольшее время установления имеет система
ФАПЧ с треугольной формой характеристики фазового детектора,
а наименьшее — система с прямоугольной характеристикой.
Перейдем теперь к определению частоты биений в системе
ФАПЧ с трапециевидной характеристикой фазового детектора. Для
этого прежде всего найдем период биений при |ун| >1- Посколь-
ку система описывается дифференциальным уравнением первого
порядка, т. е. частота однозначно определяется нелинейностью ха-
рактеристики фазового детектора, период биений находится как
92
сумма промежутков времени, за которые изображающая точка
проходит отдельные участки характеристики фазового детектора
(рис. 2.56) в пределах —л<ф=С + л. В связи с этим можно запи-
сать зависимость частоты биений от начальной расстройки в виде:
Q----------------------------------sign ун. (2.55)
2фд 1 Yh I я — 2<р„ | ун I + 1
йу ( Ун— 0 2Qy IYhI — 1
Для системы с прямоугольной формой характеристики фазового
детектора (фа~л/2) это выражение значительно упрощается:
у2 — 1
Q —Qy—5------sign ун- (2.56)
Ун
По этой формуле вычислена зависимость обобщенной частоты
биений ye от обобщенной начальной расстройки (см. рис. 2.2, кри-
вая 3).
На практике часто используется пилообразная разрывная ха-
рактеристика фазового детектора (см. рис. 2.5в), которую можно
записать в виде:
А F(ф) ——----ф, —ф < лп, (2.57)
л
где п = 1, 2, . . . .
При такой характеристике точки равновесия определяются как
Фо1 — + п л> Фог = лУн ± 2л л.
Решая ур-ние (2.1) для пилообразной характеристики с по-
мощью ранее принятого критерия (2.45), (2.46), находим, что
и<р>о)--й;1п5Ол(1+Ун)
Uxo)=^-ln5On(l-yH) ’
“У
откуда следует, что максимальное время установления
Дмакс---1п50л(1 + !ун1).
йьу
Эта зависимость изображена на рис. 2.6.
В системе с пилообразной характеристикой частота биений оп-
ределяется выражением: __
Z-» 2Qy •
------TT“sl£n Ун-
,„Ун+ 1
93
Интересно заметить, что выражение для частоты биений в си-
стеме с пилообразной характеристикой совпадает с аналогичным
выражением для системы с треугольной характеристикой.
Сопоставление всех кривых рис. 2.2 показывает, что наиболь-
ший эффект частичного увлечения частоты достигается при пря-
моугольной форме характеристики фазового детектора, а наи-
меньший — при треугольной.
Из проведенного анализа следует, что система ФАПЧ с идеа-
лизированным фильтром при прямоугольной форме нормирован-
ной характеристики фазового детектора обеспечивает:
— независимость установившейся разности фаз от начальной
расстройки;
— минимальное время установления при [ув|<0,8 (см.
рис 2.6).
В (1969, 56] на основе принципа максимума Понтрягина пока-
зано, что при несколько другом критерии существования переход-
ного процесса система ФАПЧ первого порядка с прямоугольной
формой характеристики фазового детектора обладает максималь-
но возможным быстродействием.
Глава 3
ЛИНЕЙНАЯ МОДЕЛЬ АВТОНОМНОЙ
СИСТЕМЫ ФАПЧ
3.1. УСТОЙЧИВОСТЬ В «МАЛОМ» СИСТЕМЫ ФАПЧ
Общие условия устойчивости
В (предыдущей главе была рассмотрена система ФАПЧ с идеа-
лизированным фильтром, который устраняет лишь высокочастот-
ные составляющие выходного напряжения фазового детектора и не
влияет на его низкочастотные компоненты, (напряжение биений
разностной частоты и его гармоники).
На практике часто встречаются случаи, когда эталонный сиг-
нал модулирован или подвержен действию помех, и в то же время
требуется, чтобы сигнал подстраиваемого генератора был как мо-
жно более монохроматичен. Иногда также требуется, чтобы сис-
тема ФАПЧ пропускала только определенную полосу частот.
Увеличить фильтрующую способность системы можно вклю-
чением перед этой системой или после нее полосовых фильтров,
а также “введением jp цепь управления (между фазовым детекто-
ром и управляющим элементом) фильтра нижних частот. Первые
два метода общеизвестны и достаточно хорошо освещены в лите-
ратуре по вопросам линейной фильтрации, например, в [29, 30].
Практически более удобным является третий метод, ибо он поз-
воляет заменить высокочастотный полосовой фильтр фильтром
нижних частот. Однако включение последнего в цепь управления
существенным образом изменяет характеристики системы ФАПЧ,
например, соотношение между полосами захвата и удержания, вре-
мя переходных процессов, условия устойчивости в «малом» систе-
мы, характер установления разности фаз.
Как уже указывалось, в общем случае нелинейное дифференци-
альное ур-ние (1-Н), описывающее систему ФАПЧ с фильтром,
имеет произвольный порядок. Его решение до настоящего времени
неизвестно. Однако, если ограничиться рассмотрением случая не-
больших отклонений от положения устойчивого равновесия, то
можно использовать уравнения первого приближения. Это дает
95
возможность количественно и качественно исследовать условия
устойчивости системы в «малом», а также время и характер пере-
ходного процесса на основе решения линеаризованного уравнения.
Следует заметить, что линеаризованная модель системы ФАПЧ
ничем не отличается от обычной линейной системы автоматическо-
го регулирования и для ее анализа можно применять все из-
вестные и хорошо разработанные методы исследования линей-
ных систем.
Исследование линейной модели системы ФАПЧ, в частности,
определение условий ее устойчивости в «малом» позволяет найти
максимально допустимую полосу удержания в реальной нелиней-
ной системе ФАПЧ. Эти условия необходимы для нормальной ра-
боты системы и, кроме того, в дальнейшем они будут использова-
ны при нахождении достаточных условий ее устойчивости в «це-
лом» (полосы захвата). В тех случаях, когда нельзя пренебречь
нелинейностью системы (например, при определении полосы за-
хвата), применяются различные приближенные методы анализа,
которые будут рассмотрены ниже.
Найдем условия устойчивости в «малом» системы в режиме
удержания. Как уже отмечалось, этот режим характеризуется стро-
гим соответствием стационарной разности фаз эталонного и под-
страиваемого генераторов начальной расстройке. Однако в сис-
теме ФАПЧ, как и в любой другой реальной системе, постоянно
присутствуют флуктуации различного характера. Поэтому в дейст-
вительности существует не статическое, а динамическое состояние
равновесия в режиме удержания. В состоянии динамического рав-
новесия разность фаз непрерывно колеблется около своего сред-
него значения.
Система будет устойчива, если с течением времени любое до-
статочно малое отклонение от положения равновесия, вызванное
внешней причиной, стремится к нулю, т. е. при условии асимпто-
тической устойчивости в «малом» режима удержания. Для опреде-
ления этих условий примем, что флуктуации разности фаз, вызы-
ваемые внешними причинами, настолько малы, что систему мож-
но считать линейной.
При больших отклонениях разности фаз от положения равно-
весия проявляются нелинейные свойства системы, и она может
выйти из синхронизма. Тем не менее определение условий ее ус-
тойчивости в «малом» очень важно, так как нарушение их приво-
дит к нарушению ее нормальной работы. Эти условия гаранти-
руют отсутствие самовозбуждения по кольцу обратной связи си-
стемы ФАПЧ в случае малых флуктуаций и позволяют определить
ее максимально допустимую полосу удержания при наличии того
или иного типа фильтра нч. Они, по существу, являются необхо-
димыми для выполнения условий устойчивости системы в «боль-
шом» и «целом».
Коэффициент передачи любого пассивного фильтра нч в опера-
торной форме можно представить рациональной дробью:
96
У atpr4 1
^(P)=~V-----------, (3.1)
2 bipl +1
/=i
где аг и — постоянные коэффициенты, характеризующие тип
фильтра; i и / — показатели оператора.
Для фильтра нижних частот m<zn. В дальнейшем для обозна-
чения различных типов фильтров, коэффициент передачи которых
можно представить в виде ф-лы (3.1), воспользуемся классифика-
цией, принятой В. М. Сафоновым [1958, 8]. Согласно этой класси-
фикации тип фильтра определяется отношением высшей степе-
ни оператора р в числителе дроби к его высшей степени в знаме-
нателе.
Так, фильтр, коэффициент передачи которого определяется
ф-лой (3.4), будет обозначаться как фильтр типа т/п. Подставив
выражение (3.1) в основное дифференциальное уравнение систе-
мы ФАПЧ (4.111), получим
т
2 aipi +1
рф + йу_±Д--------А(ф)=Йн. (3.2)
+1
/=1
Положим, что функция F(tp) имеет все производные порядка
до т включительно. Избавимся от знаменателя в левой части вы-
ражения (3.2):
п . пг
2 Ь‘Р,+Х ф+р <р+пу 2 а.р‘F (ф)+QyF (ф)=
/=1 ;=1
=&А+^/_1р;-1пн+ Пн. (3.3)
Учитывая, что йн — величина постоянная (р’йн=0) и, кроме
того, что pF(q>)= — =F/(q>)p<p, ур-ние (3.2) можно пере-
d <р dt
писать следующим образом:
п . т
У bjp'+' <р + р <р [ 1 + Йу ахГ' (<р)] + Йу £ ар1 F (<р) + Йу F (<р) = йн. (3.4)
/=Л Ь=2
В стационарном режиме производные всех порядков от <р рав-
ны нулю, поэтому установившуюся разность фаз находим из ра-
венства:
4-526
(Фо)=Ун
(3.5)
97
Предположим, что в некоторый момент в системе величина ф
отклонилась от фо на Дф, т. е.
Ф=ф0 + Дф. (3.6)
Подставляя это значение ф в ур-ние (3.4) и учитывая, что
^!фо=0, получаем
2 btp,+1 Дф + р Аф [ 1 + ох Пу F' (ф0 + Дф)] +
j=i
+ Пу atPl F (Фо + Аф) Пу F(<p0 +Аф) - П„- (3.7)
1 = 2
Разложим функцию Г(ф) в ряд Тейлора:
F (Фо + Аф) = F (Фо) А^- +
Так как Дф — очень малая величина, можно ограничиться пер-
выми двумя членами ряда:
Т(ф0 + Дф) «Г(фо) гТ'(фо)Лф. (3.8)
При такой аппроксимации нелинейной функции Е(ф) в обла-
сти, охватывающей точку равновесия ф0, Е<,)(фО)=0 для всех £>1.
Если i=il,
Е(1)(фо)=Е'(фо). (3.9)
Подставляя выражение (3 8) в (3.7) и учитывая ф-лы (3.5) и
(3.9), находим
’У bjP,+1 Дф + [ 1 + Ну ахЕ' (фо)] Р Дф +
/=1
+ Ну F’ (фо) £ aiP‘ Аф + Пу F’ (фо) Дф = 0. (3.10)
Г=2
Полученное выражение представляет собой линейное диффе-
ренциальное уравнение. Интересно отметить, что порядок этого
уравнения, определяющего условия устойчивости в «малом» сис-
темы ФАПЧ, на единицу превышает степень знаменателя опе-
раторного коэффициента передачи фильтра нижних частот в цепи
управления.
Для нахождения связи между коэффициентами этого уравне-
ния, определяющей устойчивость в «малом», удобно представить
его в следующем виде:
AmpmДф + Am_j рт-1 Дф + - - + АхрДф + АДф = 0. (3.11)
Здесь символом Ат обозначены постоянные коэффициенты.
Связь их с коэффициентами ур-ния '(3.40) очевидна. При такой
98
форме записи дифференциального уравнения системы для иссле-
дования устойчивости наиболее удобно воспользоваться известным
критерием Рауса—Гурвица [26, 27]. Согласно этому критерию, си-
стема, описываемая линейным дифференциальным уравнением типа
(3.11), устойчива, если действительные части всех корней харак-
теристического уравнения
Атхт + Ат_1 xm-'+ . . .+Ax + 4=0 (3.12)
отрицательнь. Последнее выполняется, если при Ат>0 опреде-
литель
(3.13)
О
и все его диагональные миноры Di=Am^i
А , А „А.
An—1 Ли—3
An Ап—2
о, D3 =
1т—1 2 т—3 т—5
^т Ат_2 Ат_л
О ^т-1 ^т-3
> 0 и т. д.
D2 =
Если коэффициент Ат имеет отрицательный знак, его можно
изменить, умножив ур-ние (3.11) на минус единицу.
Устойчивость в «малом» системы ФАПЧ, описываемой урав-
нением произвольного порядка, можно исследовать и на основании
других критериев устойчивости (Найквиста, Михайлова), которые
достаточно полно освещены в литературе по теории устойчивости
линейных систем, например, в [27] и здесь не приводятся. Критерием
Найквиста и критерием Михайлова удобно пользоваться в тех
случаях, когда неизвестно аналитическое выражение для коэф-
фициента передачи фильтра в цепи управления системы, а име-
ется лишь его частотная характеристика, заданная графически
или таблично, а также в случае высокого порядка дифференциаль-
ного уравнения.
Рассмотрим теперь на конкретных примерах систем ФАПЧ
с наиболее широко применяемыми типами фильтров как опреде-
ляется устойчивость в «малом».
Устойчивость в «малом» системы ФАПЧ
с конкретными типами фильтров
В системе ФАПЧ часто применяется пропорционально-интегри-
рующий фильтр (фильтр типа 11/1), схемы которого представлены
на рис. 3.1 а, б. Обе схемы имеют аналогичный операторный ко-
4* 99
эффициент передачи и различаются между собой характеристиче-
скими сопротивлениями. Обобщенный операторный коэффициент
передачи этих схем имеет вид
(ЗЛ4)
где т = ———, Т = (/?14-/?2)С для схемы рис. 3 1а;
R1 + ₽2
т =----—— , Т = /?(Cx-j-C2) для схемы рис. 3.16.
Ci + С2
Особенность пропорционально-интегрирующего фильтра заклю-
чается в том, что его мгновенное выходное напряжение на высо-
ких частотах пропорционально мгновенному значению входного
напряжения, а в области нижних частот оно зависит от интеграла
последнего.
Рис 3 1 Схемы пропорционально-интегрирующего и интегрирующего фгпьтров
(3.16)
При т = 0 этот фильтр превращается в обычный интегрирую
щий /?С-фильтр (фильтр типа 0/1) с постоянной времени Т (рис.
3.1в).
Подставив в ур-ние (3.40) вместо bi величину Т, а вместо
Ci — величину тТ, получим следующее уравнение:
7>2Дф + [1 -f-Пу mTF'(фо)1рДф + ^у (Фо) Аф=О, (3.15)
Условие (3.13) применительно к ур-нию (3.15) принимает сле-
дующий вид:
1 + Пу тТF' (<р0) > О
Йу Р' (Фо) > О
Поскольку всегда т7’>0, то первое условие непосредственно
вытекает из второго. Если, например, E(q>)=cosq), то условие ус-
тойчивости в «малом» системы ФАПЧ с пропорционально-интег-
рирующим фильтром запишется следующим образом: — Qysinq>o>O.
Это выражение совпадает с условием устойчивости в «малом»
(2.22) системы ФАПЧ с идеализированным фильтром при такой
же характеристике фазового детектора.
Из выражения (3.16) непосредственно следует, что в системе
ФАПЧ с пропорционально-интегрирующим фильтром абсолютная
величина полосы удержания может быть произвольно большой.
100
Рассмотрим теперь условия устойчивости в «малом» системы
ФАПЧ с 7?С7?С и RLC фильтрами (типа 0/2), схемы которых
приведены на рпс. 3.2а, б.
Рис 3 2. Схемы RGRC-, RLC- и
£С-фильтров
Коэффициент передачи таких фильтров в операторной форме
имеет вид:
. (3.17)
где ®0 = 1 / УLC = 1 /У — граничная частота филь-
тра, с! =/?/У'Т7С'=й)о(/?1С'2+^2С'2+^2С1) —затухание фильтра.
В данном случае Ь2 = 1/а20; b1 = d/a0', ах=0.
Подставив эти значения вместо Ьг в ур-ние (3.10), получим
-^рЗДф + —р2Дф + рДф + йуК'(фо)-'~°- (3-18)
ю/ “о
Применив к этом} уравнению условия (3.13), найдем:
(3.19)
d>kF'(Va) I
где k=~ — безразмерный коэффициент, характеризующий со-
<в0
отношение между граничной частотой фильтра и полосой удержа-
ния.
Заметим, что первое условие устойчивости (3.19) совпадает с
одной из ф-л (3.16) и определяет положение точки устойчивого
равновесия на фазовом портрете. Однако для систем, описывае-
мых уравнением, порядок которых выше второго, это условие яв-
ляется необходимым, но недостаточным. Для рассматриваемого
случая, в частности, между затуханием фильтра d, коэффициен-
101
юм k и крутизной нормированной характеристики F'(q>0) фазо-
вого детектора должно выполняться соотношение (3.19). Если
E((p)=cos<p, | F'(<р0) |=СЕ Отсюда вытекает, что при косинусои-
дальной форме характеристики фазового детектора должно вы-
полняться неравенство
dojo>Qy. (3.20)
Определим теперь условия устойчивости в «малом» при ис-
пользовании в цепи управления системы ФАПЧ однозвенного ЕС-
фильтра (фильтр типа 0/3) (рис. 3.2в). Коэффициент передачи та-
кого фильтра в операторной форме имеет вид
КИ =—1-----------Г------1--------• <3'21)
-7Р3 + — р« + —-р+1
И (Bq (Bq П «О
где ю0 =2/]/ЕС, n=R/V L/C — коэффициент рассогласова-
ния, равный отношению сопротивления нагрузки к волновому со-
противлению фильтра.
Из выражения (3.21) следует, что для ЕС-фильтра Ь3 = 2/пы^
&2 = 2/а»0, 61 = 2/«£o0, Я1=0.
Учитывая это, ур-ние >(3.10) можно записать следующим об-
разом:
-2— р4 Дф + — Дф + Дф + р Дф + Йу F' (ф0) Дф = 0. (3.22)
п 6)q (Вд П “о
Применив к этому уравнению, как и ранее, условия Рауса-Гур-
вица, получим
fiyF'(<Po)>O I
knF' (ф0) < 0,5 j
В случае косинусоидальной формы характеристики фазового де-
тектора условия устойчивости 'будут выполнены при любом —л<
<Фо2<О, если
Йу< 0,5—. (3.24)
п
Из рассмотренных примеров видно, что в системах, описывае-
мых уравнениями третьего и четвертого порядков, полосу удер-
жания нельзя выбирать произвольно. Она не должна превышать
некоторого критического значения, определяемого неравенствами
(3.20) и (3.24).
В сложных радиотехнических устройствах часто в цепь обрат-
ной связи системы ФАПЧ включают различные инерционные зве-
нья в виде фильтров, полосовых усилителей и т. п. (например, в
системе ФАПЧ клистрона [1961, 7]). Покажем, что в таких систе-
мах ФАПЧ, как и при использовании фильтров нч второго и вы-
102
включенным между (подстраиваемым
Рис
3.3. Структурная схема системы
ФАПЧ с полосовым усилителем
ше порядков, нельзя выбирать произвольно полосу удержания, не
нарушая при этом условий устойчивости в «малом».
На рис. 3.3 представлена одна из возможных схем ФАПЧ
с полосовым усилителем ПУ, i
генератором ПГ и фазовым
детектором ФД. Для облег-
чения анализа примем, что
полосовой усилитель состо-
ит из N одноконтурных на-
строенных каскадов и, кро-
ме того, что после фазового
детектора включен пропор-
ционально - интегрирующий
фильтр.
Операторный коэффициент
при мгновенном отклонении физы колебаний, проходящих через
этот каскад, выражается следующим образом [32, 33]:
передачи одноконтурного каскада
КЛр)=-~— , (3.25)
1 +ткр
где Тк = 1 /Дю07 — постоянная времени одиночного контура, а
Аюо,7 — его полоса пропускания на уровне 0,7.
Из выражения (3.25) следует, что коэффициент передачи оди-
ночного настроенного контура аналогичен коэффициенту передачи
линейной интегрирующей ЛС-цепи. Так как напряжение на выхо-
де фазового детектора определяется разностью (фаз выходных на-
пряжений полосового усилителя и эталонного генератора, влияние
полосового усилителя на мгновенные отклонения фазы высокоча-
стотных колебаний равносильно влиянию фильтра нижних частот
с коэффициентом передачи
<3'26)
Учитывая, что в рассматриваемой системе ФАПЧ на выходе
фазового детектора включен пропорционально-интегрирующий
фильтр, можно заменить ее системой с эквивалентным фильтром
нижних частот, имеющим коэффициент передачи
(3'27)
Для нахождения коэффициентов Ь} общего уравнения первого
приближения (3.10) необходимо записать знаменатель по убываю-
щим степеням р с ломощьк) биномиальной формулы Ньютона. В
качестве примера рассмотрим случай, когда А=1. Преобразован-
ное выражение для операторного коэффициента передачи эквива-
лентного фильтра в этом случае имеет вид
Кэ1 (Р) =---------------- (3.28)
ТкТр* + (Тк + Т)р+1 v
103
(3.30)
Из выражения (3.28) следует, что а^=-тТ, Ь2 = ТиТ и Ь1 = ТК + Т.
Соответствующее дифференциальное уравнение запишется следую-
щим образом:
ТКТр3 Дф + (Тк + Т) р2 Дф +11 + йу mTF' (ф0)1 р Дф + йу F' (ф0) Дф = 0.
(3.29)
Применяя, как и ранее, критерий Рауса—Гурвица (ЗЛЗ), полу-
чаем условия устойчивости в «малом» системы ФАПЧ с однокон-
турным полосовым усилителем и пропорционально-интегрирующим
фильтром:
Йу F' (Фо) > 0
(Т + Тк) [ 1 + mT йу F' (фо)1—ТТKF (фо) йу > 0
Из второго условия устойчивости можно найти максимально
допустимую полосу удержания в системе.
При большом числе каскадов вычисления условий устойчивости
по критерию Рауса—Гурвица получаются весьма громоздкими. В
этом случае можно воспользоваться приближенным выражением
для коэффициента передачи многокаскадного усилителя с одиноч-
ными настроенными контурами.
Обозначим суммарное время запаздывания, вносимое А-кас-
кадным усилителем, через Т3; тогда T3 = NTK и
—гтг=е~’г'- (М1)
(1 + ТГ'’)
Это выражение справедливо только в том случае, если Т3 не
зависит от N, т. е. если с увеличением числа каскадов общее вре-
мя запаздывания не меняется. Из выражения (3.31) вытекает, что
коэффициент передачи для мгновенных отклонений фазы полосо-
вого усилителя с большим числом каскадов близок к коэффици-
енту передачи неискажающей длиной линии (линии задержки).
Будем считать, что на выходе фазового детектора включен про-
порционально-интегрирующий фильтр. Коэффициент передачи эк-
вивалентного фильтра, аналогичного соединению многокаскадного
усилителя и пропорционально-интегрирующего фильтра, имеет вид
К (р)^е~рГ^ . (3.32)
Эоо W 1 + Тр
Для определения коэффициентов ур-ния (3.10) в этом случае
представим выражение (3.32) в следующей форме, заменив мно-
—рТп
житель е 3 степенным рядом:
[1 _РТз.(РТз)2 _ 1)П(РГ3)П]
К(р) = 1”---------2--1+тР‘------------- • (3’33)
Считая время задержки Т3 малым и ограничиваясь первыми
двумя членами ряда, можно положить at=mTT3, Ьп — Ь^ = Т, а^ =
104
= тТ—Т3. Подставляя значения коэффициентов в ур-ние (3.10),
получаем дифференциальное уравнение, определяющее устойчи-
вость в «малом» рассматриваемой системы:
TfP Дф + [ 1 + Йу {tnT~ Т3) F' (<р0)]р Аф—
—Йу F' (ф0) р2 Дф ТтТ3 + йу F' (ф0) Дф =0- (3.34)
Применяя, как и ранее, критерий (3.13), имеем:
Йу F' (фо) > 0
1 + Йу(лгТ-7\И' (фо)>0
1 — mT3F' (ф0)йу > 0
(3.35)
В случае т = 0 (интегрирующий фильтр) получаем известные
[1960, 4] выражения для условий устойчивости в «малом» системы
ФАПЧ с линией задержки и однозвенным /?С-фильтром в цепи oi6-
ратной связи:
йу F' (ф0) > 0
(3.36)
Итак, видим, что в рассматриваемой системе ФАПЧ нельзя
произвольно выбирать полосу удержания.
Полученные условия устойчивости в «малом» (3.35) соответст-
вуют случаю равномерной амплитудной характеристики коэффи-
циента передачи многокаскадного полосового усилителя для девиа-
ции фазы.
В работе [1962, 6] приведен анализ устойчивости в «малом» та-
кой системы ФАПЧ с учетом влияния амплитудной характерис-
тики коэффициента передачи мгновенного отклонения фазы. Он
показывает, что условия устойчивости в «малом» для этого слу-
чая являются менее жесткими. Поэтому при выполнении условий
(3 35) реальная система с полосовым усилителем будет заведомо
устойчива.
3.2. ПЕРЕХОДНЫЕ ПРОЦЕССЫ В ЛИНЕАРИЗОВАННОЙ
СИСТЕМЕ ФАПЧ
Рассмотрим случай, когда в результате возмущения разность
фаз эталонного и подстраиваемого генераторов остается в преде-
лах линейного участка нормированной характеристики фазового
детектора. При этом поведение системы описывается линейным
дифференциальным уравнением типа (3.11) с постоянными коэф-
фициентами, общее решение которого известно:
Дф(/) = С1ег‘< + С2еГ2<+ • • .Спег»‘ , (3.37)
105
где Ci,..., Сп — произвольные постоянные, определяемые началь-
ными условиями, a ri,..., гп — корни характеристического уравне-
ния
Л/'"+4-1 + • -4 А = 0, (3.38)
соответствующего дифференциальному ур-нию (3.11).
Переходный процесс определяется характером корней ур-ния
(3.38). Описать его аналитически в общем виде трудно, так как
нельзя найти корни алгебраического ур-ния (3.38) произвольной
степени. Однако можно высказать некоторые общие соображения
о характере переходного процесса. Известно, что корни алгебраи-
ческого уравнения могут быть комплексными. Выше было показа-
но (разд. 3.il), что если система ФАПЧ устойчива в «малом», то
действительные части всех корней должны быть отрицательными.
Если при этом их мнимые части равны нулю, то переходный про-
цесс носит апериодический характер и может быть представлен
суммой экспонент. Если же мнимая часть хотя бы одного из кор-
ней не равна нулю, то процесс может быть колебательным. В том
случае, когда мнимые части всех корней отличны от нуля, переход-
ный процесс определяется суммой затухающих синусоид с различ-
ными параметрами.
Установить характер переходного процесса в системах ФАПЧ,
описываемых дифференциальными уравнениями, порядок которых
не превышает пятого, можно при помощи диаграмм Вышнеград-
ского [34]. Однако уже для систем, описываемых уравнениями
четвертого и пятого порядков, эти диаграммы получаются гро-
моздкими и здесь не приводятся. Будем использовать диаграмму
Вышнеградского только для анализа систем третьего порядка.
Рассмотрим переходный процесс в системе, описываемой урав-
нением второго порядка (анализ переходного процесса в системе
первого порядка дан в разд. 2.3). Характеристическое уравнение,
соответствующее дифференциальному уравнению второго порядка
линеаризованной системы ФАПЧ с пропорционально-интегрирую-
щим фильтром (3.15), имеет вид
7г2 + [1 Ч-йу/пТТ'(<р0)]гЧ ПуЕ'((р0) -О,
Корни этого уравнения
1 + Оу tnTF' (<р0) [1 + йу тГГ (<р0)]г
rl,2 ~ 2Т — 4-рг
С учетом условия устойчивости в «малом» (3.16) для случая,
когда
[ 1 4 Йу mTF' (<р0)]2 > 47’ Йу Г (<р0), (3.40)
106
общее решение ур-ния (3.15) представляет собой сумму двух за-
тухающих экспонент:
Д<р(0=С1ег‘< + С2еЧ (3.41)
Постоянные интегрирования Ci и С2 находятся из начальных
условий:
ДФ(О) = Ао(р, Д<р'(О)=Уо. (3.42)
Воспользовавшись этими равенствами, получим:
2Т V.,
г 1 А m , , 1 + Qy ml'F' (<р0) + Доф
[1-|-Qy тТГ (Фо)]а (Фо)
4Д2 т
2Т Го
1 А , 1 + Qy (Фо) + Арф
[1 + Qy тТД'(фо)]2 Qy F' (фо)
47'2 Т
(3.43)
Таким образом, даже для линеаризованной системы ФАПЧ,
описываемой дифференциальным уравнением второго порядка,
процесс установления фазы представляет сложную зависимость
от параметров системы ФАПЧ. Для того чтобы найти время пере-
ходного процесса, нужно решить ур-ние (3.41) (например, чис-
ленными методами). Из этого уравнения следует, что с увеличени-
ем m и уменьшением Т время переходного процесса сокращается.
Если условие (3.40) не выполняется, процесс установления
при малом возмущении носит колебательный характер. Общее ре-
шение ур-ния (3.15) в этом случае имеет вид
l+2ymTF' (фо) t
b4(t)=Ce cos (tV+ 0), (3.45)
где С и 0 — произвольные постоянные, определяемые, как и ра-
нее, начальными условиями, a Q0=]/fiyF'(q)0)/r—[1 )-fiym7’F'(q)0)]2/47’2
— частота собственных колебаний системы при переходном про-
цессе.
При общих начальных условиях (3.42) постоянные С и 0 опре-
деляются следующим образом:
С =----=============== , (3.46)
Г . 1 / Го 1 + Qy F' (Фо) ШТ у
V Q2 'Доф ’ 2Т )
0 = —arctg — (тТ \ . (3.47)
Qo Аф 2Т ) v ’
107
(3.48)
Из выражения (3.45) следует, что характеристика переходного
процесса представляет собой затухающую косинусоиду, огибаю-
щая которой убывает с постоянной времени
т =_______________________________2Т
° 1 + Qy mTF' (ф0)]
Рассмотрим переходный процесс в линеаризованной системе
ФАПЧ, описываемой дифференциальным уравнением третьего по-
рядка. Характеристическое уравнение в общем случае имеет вид
А3г3^Аг2 + Аг+А=0- (3.49)
При выполнении условий устойчивости в «малом» (3.13) это
уравнение может иметь либо три вещественных отрицательных
корня, либо один вещественный и два комплексно-сопряженных с
отрицательной действительной частью. В первом случае процесс
носит апериодический характер и выражается суммой трех экспо-
нент:
А<р (0 — Сх е 11 + С2 е + С3 е 3.
(3.50)
Корни гь г2, rs можно найти из формулы Кардана, а постоян-
ные Ci, С2 и С3, как, и ранее, — из начальных условий.
Во втором случае переходный, процесс определяется суммой эк-
споненты и затухающей косинусоиды:
Рис. 3.4. Характеристики переходных процессов в линейной системе ФАПЧ треть-
его порядка:
а) апериодического; б) колебательного; в) неколебательного
где а — действительная часть комплексных корней.
Характер этого переходного процесса зависит от соотношения
между /у и а. Если ri>a, то имеет место колебательный процесс.
В противном случае, т. е. при ri<a процесс может оказаться неко-
лебательным.
Изложенное иллюстрируется графиками, приведенными на
рис. 3.4.
Для установления связи между параметрами системы ФАПЧ
и характером переходного процесса воспользуемся диаграммой
Вышнеградского {34]. Последняя (рис. 3.5) представляет собой гра-
фическое изображение зависимости характера переходного про-
цесса от некоторых обобщенных параметров А и В. В [34] показано,
108
что эти коэффициенты связаны с коэффициентами ур-ния (3.49)
следующей зависимостью:
А=——^2—; В------. (3.52)
у/
В частности, для ур-ния (3.18) коэффициенты А и В определя-
ются^ равенствами А = d/^ kF' (ф02); В = 1/(//г2 [В' ((рдаОР .Условия
устойчивости в «малом» (3.19) можно выразить через коэффици-
енты А и В следующим образом:
Л>0; В>0; АВ> 1.
Рис. 3.5. Диаграмма Вышнеградского для
системы третьего порядка
Построив на плоскости с координатами А и В (рис. 3.5) ги-
перболу АВ=1, получим границу устойчивости в «малом» систе-
мы, выше которой лежит область устойчивости. Эта область де-
лится на три части.
1. Апериодический переходный процесс. Эта часть области
ограничена кривыми СЕ и CF, которые, как показано в (34],
строятся по уравнению
А2В2—4(А3 + В3)+ 18АВ—27-0.
2. Колебательный переходный процесс. Эта часть области на-
ходится между границей устойчивости и кривыми CF и CD. По-
следняя строится по уравнению 2А3—9АВ + 27 = 0 при А<3.
109
3. Неколебательный переходный процесс. Эта область ограни-
чена кривой DCE.
Диаграмма Вышнеградского позволяет решить две основные
задачи: либо по заданным параметрам системы ФАПЧ найти ха-
рактер переходного процесса, либо, задавшись характером послед-
него, найти область параметров, в которой этот требуемый харак-
тер переходного процесса обеспечивается.
Пусть, например, F'(<рог) — 1, £ = йу ]/LC—8, d=10; тогда на-
ходим, что 4 = 5, В=0,25. Согласно рис. 3.5 переходный процесс
будет колебательным.
Интересно отметить, что при выбранных значениях k и Е'(ср02)
увеличение затухания фильтра d не изменяет характер переходного
процесса. Более того, из приведенной диаграммы следует, что если
^'(фог) ^2,4~3/2 , то в устойчивой в «малом» системе характер пе-
реходного процесса колебательный.
Рассмотрим пример решения второй задачи. Пусть требуется,
чтобы при малых отклонениях от положения равновесия переход-
ный процесс был неколебательным и чтобы время установления
было по возможности малым. Этому условию соответствуют коор-
динаты точки (4=2, В=2,5).
Отсюда следует, что параметры системы ФАПЧ должны удов-
летворять уравнениям:
Щф02)=2,5~3/2; б/= 2-2,5~1/2.
Аналогично можно найти параметры системы ФАПЧ и при дру-
гих требованиях к качеству переходного процесса.
Время переходного процесса в линеаризованной системе
ФАПЧ, описываемой уравнением третьего порядка, следует опре-
делять численным решением ур-ний (3.50) или (3.51), задавшись
каким-либо критерием его окончания. Установление характера и
количественных оценок переходного процесса в системах более
высокого порядка достаточно сложно. Подробно этот вопрос рас-
смотрен в [35].
Глава 4
НЕЛИНЕЙНАЯ АВТОНОМНАЯ
СИСТЕМА ФАПЧ
4.1. ОБЩИЕ СВЕДЕНИЯ
На практике, наряду с простейшей системой ФАПЧ первого
порядка, широко применяются более сложные системы, описывае-
мые дифференциальными уравнениями высокого порядка. Услож-
нение системы в большинстве случаев направлено на улучшение
ее фильтрующих свойств. В некоторых случаях увеличение поряд-
ка дифференциального уравнения связано со сложными преобра-
зованиями сигнала в петле авторегулирования.
При изучении системы высокого порядка весьма желательно
найти точное решение ее уравнения в общем виде и получить, та-
ким образом, всю возможную информацию о ее работе, начиная
с момента включения и до Однако за исключением очевид-
ных решений (состояния равновесия) сделать это не удалось да-
же для системы второго порядка. Поэтому часто приходится до-
вольствоваться приближенными решениями и, даже более того,
определять лишь наиболее важные свойства решений и их зави-
симости от параметров системы. В связи с этим в теории систем
ФАПЧ, являющихся разновидностью нелинейных автономных си-
стем автоматического регулирования, возникают, как обычно, две
проблемы.
Первой и наиболее важной из них является определение усло-
вий устойчивости требуемого режима; второй — определение ка-
чественных и количественных характеристик процесса установле-
ния этого режима. Для строгого и вместе с тем практически при-
годного решения этих проблем не существует готового математи-
ческого аппарата, поэтому большую ценность приобретают при-
ближенные методы исследования.
В настоящей главе основное внимание уделяется проблеме ус-
тойчивости нелинейной автономной системы ФАПЧ, а также рас-
сматривается вопрос о времени установления в ней режима удер-
жания. Сложность задачи об установлении связи между парамет-
рами системы и условиями устойчивости режима удержания
111
обусловлена высоким порядком уравнения системы и периодиче-
ским характером ее нелинейности. Последнее, как уже отмечалось,
создает дополнительные трудности, исключая непосредственное’
применение методов исследования устойчивости, родственных пря-
мому методу А. М. Ляпунова.
Что касается второй проблемы, то ее полное решение еще бо-
лее затруднительно, чем отыскание условий устойчивости. Поэто-
му вначале исследуем качественную сторону физических явлений
в сложной нелинейной автономной системе ФАПЧ. Для изучаемой
системы наиболее характерно явление захвата. Четкая интерпре-
тация этого явления впервые дана В. С. Дулицким и Ю. В. Эль-
терманом. Рассмотрим процессы, сопровождающие захват в систе-
ме ФАПЧ с реальным фильтром. Переход системы из режима бие-
ний в режим захвата связан с неизбежным изменением частоты
биений от ее конечного значения до нуля. Физически всякое от-
клонение частоты биений от среднего значения возможно только
при изменении постоянной составляющей напряжения на входе
управляющего элемента. В связи с этим необходимо выяснить за-
висимость постоянной составляющей вносимой расстройки в ре-
жиме биений от начальной расстройки.
Известно, что любой фильтр нижних частот вносит амплитуд-
ные и фазовые искажения. Рассмотрим в отдельности влияние
каждого из этих факторов на полосу захвата.
Предположим, что в цепь обратной связи системы после фазо-
вого детектора включена идеальная (неискажающая) линия за-
держки. Эта линия не изменяет ни амплитуды, ни формы сигнала,
поступающего с выхода фазового детектора на управляющий эле-
мент, а только вносит постоянный временной сдвиг.
Поскольку период переменного напряжения биений на входе и
выходе линии один и тот же, запаздывание приводит к тому, что
за промежуток времени, в течение которого напряжение на выхо-
де фазового детектора положительно, напряжение на входе уп-
равляющего элемента обязательно будет не только положитель-
ным, но и отрицательным. Это означает, что в течение положи-
тельной полуволны напряжения биений на выходе фазового де-
тектора скорость изменения ее во времени оказывается не только
пониженной (как это имеет место в системе с идеализированным
фильтром нижних частот), но и повышенной. В результате форма
колебаний на выходе фазового детектора изменяется: положи-
тельный полупериод биений меньше растягивается, а отрицатель-
ный меньше сжимается, чем при отсутствии задержки. Такое
изменение выравнивает площади под кривой напряжения биений
и, следовательно, уменьшает постоянную составляющую в режиме
биений. Аналогичным образом на форму биений влияют фазовые
сдвиги, вносимые фильтром.
Рассмотрим влияние амплитудных изменений компонент сиг-
нала, проходящего через фильтр. С понижением напряжения бие-
ний на управляющем элементе девиация частоты биений умень-
112
шается, а следовательно, уменьшается и степень асимметрии по-
ложительной и отрицательной полуволн напряжения на выходе
фазового детектора, что также снижает постоянную составляю-
щую в режиме биений.
Таким образом, как временная задержка, так и завал частот-
ной характеристики фильтра приводят к уменьшению постоянной
составляющей напряжения на входе управляющего элемента, а
следовательно, и к повышению частоты биений при той же началь-
ной расстройке по сравнению с системой ФАПЧ первого по-
рядка. Если в системе ФАПЧ с идеализированным фильтром
вследствие частичного увлечения частота биений при приближении
начальной расстройки к полосе удержания стремилась к нулю, то
в системе с реальным фильтром частота биений стремится к нулю
при начальной расстройке, меньшей полосы удержания.
Поэтому следует выбирать фильтр в цепи обратной связи систе-
мы ФАПЧ с наименьшим фазовым сдвигом при заданной его ам-
плитудно-частотной характеристике. Такому условию удовлетво-
ряют цепи минимально фазового типа, имеющие функциональную
связь между амплитудно-частотной и фазо-частотной характери-
стиками {36]. Эта связь не позволяет произвольно менять парамет-
ры системы ФАПЧ с фильтром нижних частот и усложняет карти-
ну явлений в системе с реальным фильтром.
4.2. ОБ УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ СИСТЕМ ФАПЧ
Изучение явления захвата во многих отношениях связано с
проблемой устойчивости нелинейной модели системы ФАПЧ.
В отличие от устойчивости линейных систем понятие устойчи-
вости нелинейных систем гораздо сложнее. Оно включает в себя
несколько категорий с различными определениями {37]. В настоя-
щей книге рассматривается устойчивость положения равновесия.
При исследовании устойчивости режима удержания в системе
ФАПЧ прежде всего сталкиваются с определением точек равнове-
сия и нахождением условий устойчивости последнего. Естествен-
но, что наличие точек устойчивого равновесия является первым,
необходимым условием существования режима удержания в си-
стеме. В связи с ограниченностью и периодическим характером
нелинейной функции, входящей в дифференциальное уравнение
системы, возможно такое сочетание ее параметров, при котором
точки равновесия либо отсутствуют вовсе, либо имеется бесчис-
ленное дискретное множество этих точек. Поэтому возникает не-
обходимость различать асимптотическую устойчивость какой-либо
определенной точки равновесия и устойчивость по Ляпунову {37].
Во многих практических приложениях ф и <р±2пят (п=1, 2, 3,...)
равноценны. В таких случаях отождествляют значения <р,
различающиеся между собой на ±2 пл; при этом существуют
только две точки равновесия.
113
Нелинейная функция F(q>) обычно является дифференцируемой
в окрестности точек равновесия, поэтому для исследования устой-
чивости равновесия в каждой из них можно воспользоваться
уравнениями первого приближения и найти условия устойчивости
(см. гл. 3) с помощью хорошо разработанных методов теории ли-
нейных систем (методы Найквиста, Михайлова, Рауса—Гурвица).
Существование точек устойчивого равновесия, определенного
по уравнениям первого приближения, является необходимым, но
не достаточным условием нормальной работы системы. Дело в
том, что из уравнений первого приближения непосредственно не
следует величина области начальных возмущений, при которых
это равновесие имеет место. В частности, в некоторых случаях
область допустимых начальных отклонений может быть сколь
угодно малой, что, в свою очередь, ограничивает понятие устойчи-
вости по уравнениям первого приближения. Поскольку реальные
начальные отклонения всегда конечны, то в нелинейных системах
приходится определять область допустимых начальных отклоне-
ний, при которых система устойчива.
В дальнейшем рассматривается в основном асимптотическая
устойчивость систем ФАПЧ. х
Следуя ([27], будем считать, что система устойчива в «малом»,
если выполняются условия устойчивости по уравнениям первого
приближения, причем границы области допустимых начальных от-
клонений не определены. Далее, если известно, что начальные от-
клонения не выходят за пределы некоторой замкнутой конечной
области притяжения точки устойчивого равновесия, речь будет ид-
ти об устойчивости в «большом». Наконец, если областью притяже-
ния точки (любой из дискретного множества) является все фазо-
вое пространство, т. е. если система устойчива при любых началь-
ных отклонениях, то принято считать ее устойчивой в «целом».
Следствием нарушения устойчивости могут быть два различ-
ных явления. В одном случае в системе появляются периодиче-
ские автоколебания разности фаз (самовозбуждение), т. е. систе-
ма начинает работать в режиме квазисинхронизма, в другом раз-
ность фаз в среднем непрерывно непериодически и неограниченно
нарастает с периодическими колебаниями скорости, т. е. возника-
ет режим биений.
Конечная цель исследования асимптотической устойчивости —
определение необходимых и достаточных условий, при которых
невозможны оба указанных режима.
В тех случаях, когда с течением времени независимо от на-
чальных условий в системе устанавливается режим автоколебаний
разности фаз вблизи одного из состояний равновесия (режим ква-
зисинхронизма), будем считать, что система в целом устойчива по
Ляпунову. Если же при этом на начальные условия накладывают-
ся некоторые ограничения, речь будет идти об устойчивости по
Ляпунову в «большом» положения равновесия.
114
Будем полагать, что если какое-либо положение устойчиво по
Ляпунову, то в системе наблюдается захват. Если при этом в си-
стеме возникают автоколебания разности фаз, то можно говорить
о захвате в среднем, т. е. о режиме квазисинхронизма, поскольку
в таком случае среднее значение частоты подстраиваемого гене-
ратора равно частоте эталонного сигнала. Таким образом, полоса
захвата определяется условиями, при которых отсутствует неогра-
ниченное нарастание разности фаз.
В настоящее время для исследования устойчивости в «боль-
шом» и е «целом» систем ФАПЧ применяется несколько методов.
Наиболее общим и строгим является второй метод Ляпунова. Од-
нако он требует в каждом отдельном случае применения специаль-
ных V-функций Ляпунова, что иногда затруднительно.
Заметим, что указанный метод непосредственно, без всяких
упрощений позволяет исследовать устойчивость принятых матема-
тических моделей (дифференциальных уравнений) реальной не-
линейной системы любого порядка. В этом состоит его основное
достоинство. Однако он дает лишь достаточные условия устойчи-
вости системы в «целом», что иногда может привести к излишне
жестким ограничениям на область ее допустимых параметров, в
которой система устойчива, а следовательно, и к недоиспользова-
нию реальных возможностей системы при ее проектировании. Кро-
ме того, построения, необходимые для получения аналитических
условий устойчивости, оказываются часто громоздкими.
Поэтому наряду с методом А. М. Ляпунова на практике ис-
пользуются и другие методы. К ним относятся: метод кусочно-ли-
нейной аппроксимации нелинейных функций и сшивания фазовых
траекторий, метод усреднения, метод гармонического баланса
и др. Возможно также численное решение дифференциальных
уравнений системы с помощью ЭВМ с последующей аппроксима-
цией (или без нее) полученных результатов аналитическими вы-
ражениями.
Все эти методы имеют свои достоинства и недостатки. Как пра-
вило, каждый метод обладает характерной, только ему присущей
особенностью, которая не реализуется при использовании иных
методов. Это, конечно, не исключает существования общих для
группы методов свойств или их частичной эквивалентности. Ука-
занные методы взаимно дополняют друг друга. Их совместное ис-
пользование позволяет наилучшим образом исследовать свойства
сложных реальных нелинейных систем.
Кратко охарактеризуем перечисленные выше методы.
Метод кусочно-линейной аппроксимации характеристики нели-
нейного элемента в сочетании с исследованием топологии фазово-
го пространства дает возможность сравнительно несложно опре-
делять не только условия устойчивости в «большом» и «целом», но
и характер переходного процесса. Однако он эффективен только
для систем, описываемых уравнениями не выше третьего порядка,
115
поскольку ДЛЯ более сложных систем ФАПЧ решение этих урав-
нений затрудняется.
Метод усреднения позволяет находить асимптотические при-
ближения решений нелинейных уравнений и, следовательно, ре-
шать задачи не только об устойчивости и захвате, но и о переход-
ных процессах. Эффективность этого метода связана с возможно-
стью выделения быстрых и медленных движений в системе. Такая
возможность реализуется при определенных ограничениях на па-
раметры системы. Отсюда следует, что применять этот метод не
всегда целесообразно.
Метод гармонического баланса удобен для исследования ста-
ционарных периодических режимов нелинейных инерционных си-
стем. Приближенное определение параметров периодических ре-
жимов позволяет нестрого оценивать условия устойчивости систе-
мы. Характерной особенностью этого метода является возмож-
ность использования его для систем любого порядка, причем вы-
числения производятся согласно известным правилам и оказы-
ваются сравнительно простыми. Эффективность метода гармони-
ческого баланса тем выше, чем ближе точное решение основного
уравнения к гармоническому. Поэтому результаты, полученные с
его помощью, близки к истинным значениям только для достаточ-
но инерционных или почти линейных систем. В других случаях те-
ряется простота применения этого метода.
При малой инерционности существенно нелинейной системы
ФАПЧ метод гармонического баланса неприменим. В этом случае
для исследования устойчивости стационарных режимов можно по-
строить приближенную модель реальной системы ФАПЧ. Достоин-
ство такого приема состоит в общности результатов, поскольку он
не предполагает большой инерционности системы.
Ниже кратко излагается суть указанных методов исследования
устойчивости применительно к системам ФАПЧ и приводятся ре-
зультаты, полученные с их помощью.
4.3. ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ В «ЦЕЛОМ» СИСТЕМ ФАПЧ
ВТОРЫМ МЕТОДОМ ЛЯПУНОВА
Второй метод Ляпунова был разработан для нелинейных си-
стем, имеющих единственное состояние равновесия. Он позволяет
определить условия устойчивости равновесия нелинейной системы
при любых начальных возмущениях, не прибегая к интегрирова-
нию описывающих ее дифференциальных уравнений.
В дальнейшем этот метод был развит и дополнен в работах
И. Г. Малкина, Е. А. Барбашина, Н. Н. Красовского, А. И. Лурье
и др. [37 43].
В системах ФАПЧ возможно бесконечное дискретное множество
состояний равновесия, различающихся по координате ср на 2пп
(п=1, 2, 3, 4,...). Поэтому второй метод Ляпунова непосредствен-
но не может быть применен к исследованию устойчивости систем
116
ФАПЧ. В работах (1960, 2; 1962,-17. 44] этот метод распространен
на системы с бесконечным множеством состояний равновесия.
Прежде чем рассматривать применение видоизмененного мето-
да Ляпунова, напомним вкратце основные положения второго
метода Ляпунова, относящегося к системам с единственным со-
стоянием равновесия. Представим уравнение, описывающее систе-
му ФАПЧ, в следующем виде:
х-,, х3, - хп). (4.1>
at
Здесь Xi (i=\, 2, 3,..., /г) — независимая координата изобра-
жающей точки в фазовом пространстве, имеющем п измерений.
Пусть в системе имеется единственное состояние равновесия,
определяемое условием х-,= х2 = х> = .... = х„ = 0. Если бы можно
было получить решение нелинейного дифференциального уравне-
ния, то исследование устойчивости сводилось бы к нахождению
пределов xit х2,..., хп при
А. М. Ляпунов предложил, не решая основного ур-ния (4.1),
исследовать изменение во времени некоторой специальной функ-
ции V от координат xt. Поведение функции V (хь х2, Хз,,.., хп) во
времени определяется ее полной производной по времени
dV _ dV dxt । dV dx2 । , dV dxn 2).
dt dxt dt dx„_ dt dxn dt
Из этого выражения следует, что dV[dt есть также функция
координат системы, а ее знак определяет направление изменения
функции V (убывание или возрастание во времени). А. М. Ляпу-
нов нашел в общем виде достаточные условия, которым должны
отвечать функции V и dV/dt, для того, чтобы с помощью этих,
функций можно было получить сведения об устойчивости состоя-
ния равновесия системы.
При формулировке этих условий введем следующие определе-
ния. Будем называть функцию знакоопределенной в некоторой об-
ласти, охватывающей точку равновесия, если она сохраняет один
и тот же знак во всех точках этой области, нигде не обращаясь в
нуль, за исключением самой точки равновесия. Если знак функции
во всей области положителен, то она будет называться положи-
тельно-определенной; а если ее знак отрицателен, — отрицатель-
но-определенной. Функцию, которая обращается в нуль не только
в точке равновесия, но и в других точках указанной области, при-
чем сохраняет один и тот же знак при всех ее значениях, отлич-
ных от нуля, будем называть знакопостоянной: постоянно-поло-
жительной или постоянно-отрицательной. Знакоопределенная, од-
нозначная и непрерывная функция всех своих аргументов (хь х2,
Хз,..., хп), явно от времени не зависящая, называется функцией
Ляпунова первого рода.
Ляпунов показал, что если дифференциальное уравнение систе-
мы позволяет найти знакоопределенную, неограниченную по всем
117
координатам непрерывную функцию |/ (xlt хъ,..., хп), производная
которой по времени, вычисленная на основании исходного диффе-
ренциального уравнения, также является знакоопределенной функ-
цией противоположного с V знака, нигде не обращающейся в
нуль, за исключением самой точки равновесия, то состояние равно-
весия асимптотически устойчиво. Более подробно этот вопрос из-
ложен в известных работах [37—43].
Рассмотрим видоизмененный метод Ляпунова, позволяющий ис-
следовать устойчивость системы ФАПЧ с произвольным четырех-
полюсником в цепи управления, описываемой ур-нием (3.4) [I960,
2; 1962, 17]. Предположим, что F(ср) в этом уравнении есть одно-
значная непрерывная и периодическая с периодом 2 л функция,
удовлетворяющая условию ЛицЩица [47] и, кроме того, что в ин-
тервале 0<ф<2л; ур-ние (3.4) имеет только две точки равнове-
сия (рос и фог- Поскольку функция F(ср) периодическая, то cpoi±2£jr
и сро2±2йл; (й = 0, 1.) есть также точки равновесия системы.
Ранее было показано, что в точке cpoi равновесие неустойчиво,
а в точке ср02 устойчиво, т. е. система ФАПЧ имеет бесчисленное
дискретное множество состояний равновесия, причем устойчивые
состояния чередуются с неустойчивыми. Примем за начало отсче-
та точку устойчивого равновесия. Координаты точек равновесия
определяются из равенства F(ср0) =ун. В большинстве случаев все
возможные состояния равновесия, различающиеся на 2 л совер-
шенно равнозначны, поэтому будем считать систему устойчивой,
если устойчиво какое-нибудь очевидное решение ее уравнения.
Отсюда следует, что критерий устойчивости должен обладать
периодичностью по <р. Это условие автоматически выполняется,
если функция Ляпунова удовлетворяет всем обычным требовани-
ям, предъявляемым к ней и, кроме того, является периодической
функцией координаты ср.
Таким образом, если существует непрерывная однозначная по-
ложительно определенная функция, неограниченная по всем коор-
динатам, кроме ср, а по координате <р периодическая с периодом
2 л, такая, что ее производная по времени, взятая на основании ис-
ходного дифференциального уравнения, есть функция постоянно-
отрицательная, причем последняя обращается в нуль только в
точках равновесия, то невозмущенное движение в системе устой-
чиво в «целом» и притом асимптотически. Соответствующие тео-
ремы доказаны в [1962, 17. 44].
Найдем в качестве примера условия устойчивости системы
ФАПЧ с пропорционально-интегрирующим фильтром при помощи
периодических функций Ляпунова [11965, 1], Дифференциальное
уравнение такой системы можно записать в виде совместной си-
стемы дифференциальных уравнений первого порядка. Для этого
перепишем основное уравнение
+ Йу -^"1Гр cos ф = Йн (4.3)
dt у 1 + Тр т ’
в следующей форме:
118 •
^=_mQyf(<p}+Qx, (4.4>
at
7 ££2 — йх—йу (1 — т)^(ф). (4.5>
at
Здесь / (<р) = cos (ср)—ун, а йх— дополнительная координата, опре-
деляемая ур-нием (4.5).
Рассмотрим введенную Ю. Н. Бакаевым и А. А. Гужем перио-
дическую функцию
уИ>Ш(ф)+—дГ »• (4-6>
I 2Qy (1 — mf
о
В {1965, 1] предлагается выбирать Л^(ср) так, чтобы обеспечить-
периодичность функции V по ср. В частности,
A'W-=!1 + A'"' (4.7>
I 1 — Ао, [q>02< <р < <р01 + 2л].
В {1965, 1] показано, что постоянную величину No можно вы-
брать так, чтобы условие периодичности выполнялось. Для этого.*
при малых ун необходимо, чтобы
АО~^УН. (4.8>
Производная функции V, вычисленная на основании системы
ур-ний (4,4) и (4.5), имеет вид:
g2 +тйу(1+Ао)^(ф) + Аой/(Ф)'| . (4.9>
Это выражение можно записать в следующей форме:
~ (----1---[й + Nof (ф)р
dt { йу (1 - т) L ““ 2 0 J
йу (1 — т) /2 (ф) , ]
----yi . > °' w + т йу (1 ± N0}f2 (ф) J . (4.10>
Нетрудно видеть, что производная функции V будет знакоот-
рицательной при условии, что
(1 —/п)Л/2<4т(1 ± Уо), (4.11>
или иначе с учетом малости ун и равенства (4.8)
«12>
Поскольку эта формула выведена при ун<^1, то она справед-
лива только при т<С1.
119
В общем случае построение периодических функций затрудни-
тельно, поэтому в [I960, 2] рекомендуется пользоваться аппаратом
разрывных функций Ляпунова.
В дальнейшем, как обычно, будем подразумевать под координа-
тами фазового пространства величины: <р, dqldt, d\ldt2....dnq>ldtn.
Проведем мысленно через точки неустойчивого равновесия <poi ±
±2йл поверхности ф = const, тогда все пространство окажется раз-
деленным на множество областей, причем в каждой области бу-
дет находиться по одной точке устойчивого равновесия. В силу пе-
риодичности F(ср) все области будут одинаковыми, поэтому рас-
смотрим одну из них — Go. Обозначим границы этой области че-
рез Pi и Р?.
В области Go применим обычный метод Ляпунова, поскольку
внутри нее имеется только одно состояние равновесия. Однако при
движении изображающей точки в фазовом пространстве V-функция
может пересечь границы области, поэтому необходимо, чтобы вы-
полнялись дополнительные условия (I960, 2; 1962, 17]. Пусть диф-
ференциальное уравнение, описывающее систему, позволяет:
— указать знакоопределенную функцию V (Xi, х-i..., хп), не
ограниченную по координатам х2, х3,..„ хп> производная которой по
времени, вычисленная в соответствии с исходным уравнением,
представляет собой знакоопределенную, либо знакопостоянную
функцию противоположного с V-функцией знака. Однако уравне-
ние V=0 не определяет никаких траекторий системы, кроме оче-
видных решений;
— указать знакоопределенную функцию V (х2, хз,..„ хп) одного
знака с V-функцией, причем приращение ее модуля, возникающее
при движении изображающей точки от поверхности Р1(Рг) к по-
верхности Pi(Pi) удовлетворяет неравенству Д|п|<6<0, где 6 —
произвольное число, меньшее нуля.
В этом случае система асимптотически устойчива при любых
начальных условиях. Действительно, произвольная траектория
изображающей точки, начинающаяся на поверхности Pi(Pz), мо-
жет либо вся принадлежать одной области, заключенной между
двумя граничными поверхностями, либо пересечь соседнюю по-
верхность.
При выполнении первого условия все траектории первого типа
с течением времени заканчиваются в точке устойчивого равнове-
сия. Для траекторий второго типа при выполнении второго усло-
вия функция v с переходом из одной области в другую становится
все меньше и меньше, и в конце концов эта траектория превра-
щается в траекторию первого типа, ибо |п|-->0 и обращается в
нуль в какой-либо области.
Если предположить, что траектория второго типа не превра-
щается в траекторию первого типа, то функция v должна либо
потерять свойство знакоопределенности, либо приращение ее мо-
дуля не будет удовлетворять предъявляемому к ней требованию
Д|п| <6<0.
120
Определим теперь условия устойчивости методом разрывных
функций Ляпунова на примере системы ФАПЧ, описываемой
уравнением третьего порядка (I960, 2]. Основное уравнение этой
системы имеет вид
С7^ + а7Т+в^+р^-У«- (4ЛЗ>
d т3 ат2 d т
Здесь С, Л и В — постоянные положительные параметры, т —
относительное время.
К этому виду можно привести, например, основные уравнения
систем ФАПЧ с двузвенным RC- и ДАС-фильтрами.
Уравнение (4.13) эквивалентно следующей системе уравнений
первого порядка:
^Г=У> T- = z’ c^ = F(q)—By—Az+y*.
ах ах ах
Выберем функцию /7(ф)=ф/л при —л<ф<л, повторяющуюся
периодически с периодом 2 л. Поскольку F (ф) разрывна при
|ф|=л, то ур-ние (4.13) следует дополнить условиями скачков
координат. Однако при выбранной системе координат эти скачки
при переходе границы раздела равны нулю.
Изложенными ранее способами можно показать, что состояние
равновесия фо2 = л‘ун асимптотически устойчиво в «малом», если
выполняется условие
пАВ>С. (4.14)
При этом функция -
о
V = + + + (4.15)
л 2 л 2 2
удовлетворяет первому условию. Здесь ф1=кр—фог.
Чтобы проверить, удовлетворяет ли функция V второму усло-
вию, необходимо вычислить приращение функции
(ВС + Ау,* +САуг+^ (4.16)
при изменении координаты ф) на величину 2 л. Это вполне осу-
ществимо, так как при выбранном типе нелинейности характери-
стики фазового детектора решение ур-ния (4.13) известно на всем
участке 0<ф1<2л.
Для определения связи между параметрами системы, при кото-
рых последняя устойчива (A | v | < 6<0), необходимо:
— по известной форме решения определить координаты у и г;
— исключив время в явном виде, выразить у и z в функции
от v;
— давая приращение фЬ равное 2 л, определить приращение
функции V, полагая, что она определяется ур-нием (4.16);
— найти границу области параметров, при которой А|v| <С
<6<0, что определяет область устойчивости системы в «целом».
121
Однако следует отметить, что выполнение указанных операций
•сопряжено со значительными трудностями. Так, даже для систе-
мы. описываемой уравнением второго порядка, выразить аналити-
чески ее координаты через основную переменную в общем случае
невозможно. Величину А | v | тем не менее можно определить пу-
тем численных расчетов либо путем аппроксимации решения
Ф1(Д) в интервале 0<ф1<2 л.
Вообще точное определение величины А | v | не является необ-
ходимым. Достаточно лишь показать выполнение неравенства
Л|и| <6<0, что можно сделать путем оценки величины А| и|.
Часто оказывается успешной аппроксимация <pi(?) аналогич-
ным решением уравнения системы, имеющего порядок, на едини-
цу меньший. При помощи такой аппроксимации в (I960, 2] опреде-
лена зависимость полосы захвата от параметров системы, описы-
ваемой уравнением третьего порядка, аналогичным ур-нию (4.13).
Особенно трудно вычислить или оценить приращение функции и,
когда характеристика фазового детектора имеет косинусоидаль-
ный характер. В этом случае форма решения на участке неизвест-
на. и чтобы найти ее, приходится применять различные искусст-
венные приемы.
В качестве примера определим устойчивость системы ФАПЧ,
описываемой ур-нием (4.13), при F(cp)=cos<p (1965, 5]. Для этого
случая ур-ние (4.13) представим в виде следующей системы:
C^-=—f($)—By—Az, (4.17)
а т ах ах
где f(<p)=cos<p—y„.
Выберем в качестве V-функции Ляпунова функцию вида
oh
J (ф) d ф + Cyf (фг + ф02) 4- СВ-^- + -у (Ау + Сг)2. (4.18)
t/ Z Z
<Р02
Производная по времени от этой функции
у---—У2(Сз1п(ф1 + фо2) +АВ] (4.19)
а т
будет знакоотрицательной при условии, что
АВ>С. (4.20)
Для приближенной оценки приращения функции v вдоль тра-
ектории изображающей точки воспользуемся методом малого па-
раметра. Найдем приближенно значение функции у(ф) из выраже-
ния (4.18), полагая С = 0:
2V-2A^f(<p)dq>. (4.21)
<Р02
122
Это выражение позволяет представить ф-лу (4.19) в виде
г Ф1 л
dV
d т
+ 2V—2Лр(ф)йф
(4.22)
При помощи ур-ний (4.18) и (4.19) можно представить выра-
жение (4.22) в следующей форме:
Таким образом, применяя метод малого параметра, можно ап-
проксимировать уравнение системы третьего порядка уравнением
второго порядка. Условия устойчивости решения (4.23) можно
найти, определив А|ц|. Однако существует более простой путь.
Известно (1962, 17], что при ЛВ»1, Л»В2 и ун<С1 условие устой-
чивости имеет вид
ун< 1,27 ВЛ
(4.24)
В частности, для системы ФАПЧ с /?АС-фильтром это условие
записывается следующим образом:
Применение метода Ляпунова оказывается успешным и для
систем с запаздыванием. Так, в {1962, 5] найдены достаточные ус-
ловия устойчивости системы ФАПЧ с идеальной линией задерж-
ки в цепи обратной связи.
4.4. МЕТОД КУСОЧНО-ЛИНЕЙНОЙ АППРОКСИМАЦИИ ХАРАКТЕРИСТИК
ФАЗОВОГО ДЕТЕКТОРА И СШИВАНИЯ ФАЗОВЫХ ТРАЕКТОРИЙ
Анализ устойчивости и динамики реальных нелинейных систем,
как уже указывалось, представляет значительные, часто непрео-
долимые, трудности. Поэтому иногда строят модель реальной си-
стемы, которая, оставаясь близкой к последней, допускает тем не
менее ее аналитическое исследование.
В частности, общим весьма эффективным приемом является за-
мена нелинейной функции (затрудняющей решение задачи), вхо-
дящей в уравнение системы, близкой к ней функцией, составлен-
ной из отрезков прямых. Этот прием называется кусочно-линей-
ной аппроксимацией.
Как уже указывалось (гл. 2), форма характеристики балансно-
го фазового детектора занимает промежуточное положение меж-
<fty косинусоидой и симметричной «треугольной» кривой. Характе-
ристика кольцевого детектора лишь незначительно отличается от
нее. Следовательно, эту характеристику можно аппроксимировать
двумя отрезками прямых (см. рис 2.5п). Впервые такая аппрок-
123
•симация была предложена В. С. Дулицким, а затем использована
для исследования устойчивости систем второго и третьего поряд-
ков в (1956, 5; 1958, 8]. Она позволяет определить полосу захвата.
Действительно, нелинейное дифференциальное уравнение в
этом случае можно заменить двумя линейными дифференциальны-
ми уравнениями, каждое из которых справедливо для одного оп-
ределенного участка значений ср. Решения указанных уравнений
легко находятся, так как их общая форма известна.
По найденным решениям уравнения на отдельных участках
можно определить поведение системы ФАПЧ при непрерывном из-
менении искомой величины <р(7). Для этого необходимо, задав-
шись произвольными начальными условиями, найти, какому из
двух участков характеристики фазового детектора они соответст-
вуют. Затем, воспользовавшись начальными условиями и извест-
ным решением для этого участка, следует определить условия,
при которых разность фаз достигает границы, разделяющей от-
дельные участки. Эти условия, далее, считаются начальными для
следующего отрезка и т. д. Таким образом, можно построить пол-
ное решение основного нелинейного дифференциального уравне-
ния. Этот прием носит название припасовывания или сшивания
(смыкания) отдельных решений.
Если построить решения для очень большого числа начальных
условий, можно найти критическое значение начальной расстрой-
ки, т. е. полосу захвата. Однако этот процесс чрезвычайно тру-
доемкий, и для определения полосы захвата прибегают к тем
или иным критериям, позволяющим найти ее без построения всего
фазового портрета.
Такой способ определения полосы захвата в большинстве слу-
чаев базируется на результатах качественной теории нелинейных
дифференциальных уравнений, в которой изучаются общие свой-
ства их решений. Применительно к системе ФАПЧ наибольший
интерес в этом аспекте представляют работы Л. Н. Белюстиной,
В. В. Быкова, В. Н. Белых, Н. А. Губарь, М.. В. Капранова,
В. П. Пономаренко, В. М. Сафонова, В. Д. Шалфеева. Все же сле-
дует заметить, что применение указанных критериев также доста-
точно трудоемко. Практически их можно использовать для диффе-
ренциальных уравнений, порядок которых не превышает 2-4-3.
Напомним некоторые определения из теории колебаний, относящиеся к осо-
бым точкам и кривым фазовой плоскости (26, 41], на которой можно изобразить
фазовый портрет системы ФАПЧ, описываемый уравнением второго порядка.
На фазовой плоскости принято различать особые точки, предельные циклы
и сепаратриссы. Особыми на фазовой плоскости называются точки, в которых
наклон фазовых траекторий становится неопределенным. При этом изображаю-
щая точка может стремиться по фазовым траекториям к особой точке, удалять-
ся от нее, находиться в неподвижности в этой точке, либо приближаться к ней
с одной стороны и удаляться с другой.
В первом случае особые точки будут точками устойчивого равновесия, фа-
зовые траектории в районе этих точек образуют либо устойчивый узел (рис. 4.1а),
либо устойчивый фокус (рис. 4.16). Во втором случае фазовые траектории обра-
зуют фигуры, называемые неустойчивым узлом (рис. 4.1в) или неустойчивым фо-
124
Рис. 4.1. Типы фазовых портретов вблизи точек равновесия:
а) устойчивого узла; б) устойчивого фокуса; в) неустойчи-
вого фокуса; д) центра, е) седла
125
кусом (рис. 4.1г). В третьем случае фигура называется центром (рис. 4.1<5). На-
конец, если изображающая точка, с одной стороны, движется по направлению
к особой точке, а с другой,— удаляется от нее, то фигура называется седлом
(рис. 4.1е). Положение равновесия в точке, образующей седло, является полу-
устойчивым. Заметим, что фазовые траектории нигде не пересекаются, за ис-
ключением особых точек.
Предельными циклами называются замкнутые фазовые траектории, к кото-
рым стремятся или от которых удаляются все траектории движения, начинаю-
щиеся внутри областей притяжения или отталкивания особых траекторий, распо-
ложенных вокруг этих предельных циклов.
Предельный цикл, к которому стремятся другие фазовые траектории при
/->оо, называется устойчивым, в противном случае он называется неустойчивым.
Предельный цикл, к которому стремятся фазовые траектории, лежащие по одну
сторону от него, и от которого удаляются фазовые траектории, расположенные
по другую сторону от него, называются полуустойчивыми. Полуустойчивый пре-
дельный цикл возникает в результате непрерывного изменения параметра, опре-
деляющего тип цикла. В частности, значение этого параметра, соответствующее
границе перехода цикла от устойчивого состояния к неустойчивому, называется
бифуркационным.
В тех случаях, когда имеется положение равновесия типа «седло», на фа-
зовом портрете можно выделить две асимптоты At и Л2 (рис. 4.1е), проходящие
через начало координат и, как правило, разделяющие фазовую плоскость на
области устойчивого и неустойчивого равновесия. Такие асимптоты называются
сепаратриссами.
В системах второго порядка с периодической нелинейностью фазовое прост-
ранство представляет собой поверхность кругового цилиндра [26, 42], при этом
ось p<f совпадает с образующей последнего. В дальнейшем будем рассматривать
развертку этой поверхности на плоскость ф, pq>.
В этих системах различают предельные циклы первого и второго рода [26,
42]. Предельные циклы первого рода охватывают положение равновесия на по-
верхности фазового цилиндра. Для них можно найти на поверхности фазового
цилиндра образующую, при разрезании по которой фазовой поверхности пре-
дельный цикл сохраняет свойство замкнутости. Такой предельный цикл путем
непрерывной деформации на фазовом цилиндре можно преобразовать в точку.
Предельными циклами второго рода называются замкнутые интегральные
кривые, охватывающие цилиндр, которые обязательно теряют свойство замкну-
тости при любой развертке цилиндрической поверхности на плоскость.
Предельному циклу первого рода соответствует периодическое изменение
разности фаз (режим квазисинхронизма), тогда как предельному циклу второго
рода соответствует режим биений, сопровождающийся непериодическим неогра-
ниченным нарастанием в среднем разности фаз.
Полоса захвата неразрывно связана с переходом от устойчиво-
го предельного цикла второго рода, соответствующего режиму
биений, к полуустойчивому. Когда цикл станет полуустойчивым,
то, с одной стороны, часть фазовых траекторий будет приближать-
ся к нему, тогда как с другой — фазовые траектории будут уда-
ляться от него. Задача отыскания полосы захвата, таким образом,
сводится к определению условий, при которых предельный цикл
второго рода станет полуустойчивым.
При наличии в системе нескольких предельных циклов второ-
го рода следует найти такое наибольшее значение начальной рас-
стройки, при котором все предельные устойчивые циклы второго
рода отсутствуют. Если заранее известно (или можно определить
каким-либо способом), что в системе имеется только один полуус-
тойчивый цикл и что он образуется в результате слияния двух
фазовых траекторий, выходящих из точек неустойчивого равнове-
126
сия, которые отстоят друг от друга на 2 л, то для определения
полосы захвата достаточно найти условия, при которых эти тра-
ектории сливаются. Такой метод был использован в работах
[1956, 5; 1958, 8] для определения зависимости полосы захвата от
параметров однозвенного и двузвенного интегрирующих фильтров.
Рассмотрим применение этого метода на примере системы
ФАПЧ с однозвенным интегрирующим фильтром [1956, 5]. Коэф-
фициент передачи интегрирующего фильтра имеет следующий вид:
(426>
где Т = RC — постоянная времени фильтра.
Нормированная характеристика фазового детектора при кусоч-
но-линейной аппроксимации определяется выражением (2.38).
Подставляя ф-лы (4.26) и (2.38) в основное ур-ние (1.11), нахо-
дим:
7>2ф + рф + й — (ф+-^Л —QH, [—л<ф<0]
л \ 2 /
7>2ф + рф — Qy — [ф-—)=йн, [0 < ф < л]
я \ 2 /
(4.27)
Для сокращения записи вводятся следующие обозначения:
Тогда выражения (4.27) принимают вид:
Ф -|- 27.ф (ф -——-
л \ 2
= Yh, [ —л<Ф<0]
(4.28)
Точки устойчивого и неустойчивого равновесия определяются
ф-лами (2.42) и (2.43). Исследуем поведение фазовых траекторий
в областях, прилегающих к этим точкам.
Система уравнений, аналогичная (4.28), при К(ф)=этф рас-
сматривалась в [1933, 1; 1959, 4]. В этих работах было показано
что при Yh<1 в такой системе может быть только один предель-
ный цикл второго рода. Это означает, что в системе присутствует
разность частот эталонного и подстраиваемого генераторов, а раз-
ность фаз в среднем непрерывно нарастает.
Полуустойчивый предельный цикл возникает в результате слия-
ния двух сепаратрисе, соответствующих точкам устойчивого и не-
устойчивого равновесия в одной из полуплоскостей фазового про-
странства. При ун>0 слияние происходит в верхней полуплоско-
сти, а при ун<0 — в нижней.
127
В (1969, 52] показано, что математические модели реальных
систем ФАПЧ второго порядка с нелинейными функциями в виде
косинусоиды (синусоиды), симметричного треугольника, прямо-
угольника имеют одинаковую качественную структуру разбиений
фазового пространства и пространства параметров. Поэтому в си-
стеме ФАПЧ с треугольной характеристикой качественная сторо-
на явлений такая же, как и в системе с косинусоидальной характе-
ристикой. Кусочно-линейная аппроксимация обеспечивает не только
совпадение качественных явлений, но и, как будет показано в
дальнейшем, хорошее количественное приближение.
Рассмотрим процесс образования полуустойчивого предельно-
го цикла на фазовом портрете при изменении ун. Если (8/л)Йу7’<;
<1 и |ун| <^11 состояние равновесия при —л<<р<0 характери-
зуется устойчивым узлом, а при (8/л) £2УТ> 1 — устойчивым фо-
кусом. Точка неустойчивого равновесия, лежащая в интервале
0<ф<л является седлом.
Рис. 4.2. Фазовый портрет системы ФАПЧ второго
порядка при ун>Уа
На рис. 4.2а построена часть фазового портрета для случая,
когда (8/л) QyTz> 1 и ун>у3- Здесь устойчивый предельный цикл
образуется из одной ветви сепаратриссы, выходящей из точки не-
устойчивого равновесия cpoi- Областью притяжения кривой являет-
ся вся фазовая плоскость, за исключением ее части, ограниченной
штриховкой. При этом сепаратрисса выходящая из точки tpoi,
идет выше сепаратриссы Сг, входящей в точку <pos=<poi + 2 л. Так
как ун>уз, с течением времени изображающая точка будет стре-
миться к положению устойчивого равновесия не при любых на-
чальных условиях. Состояние равновесия в системе ФАПЧ, имею-
щей этот портрет, возможно только в том случае, если изобража-
ющая точка не выходит за пределы области, ограниченной штри-
ховкой. По мере уменьшения ун фазовый портрет изменяется. При
некотором критическом значении начальной расстройки сепаратрис-
сы Ci и С2 сливаются в верхней полуплоскости и образуют полу-
устойчивый предельный цикл (рис. 4.3а). Эта расстройка соответ-
ствует полосе захвата.
128
При дальнейшем уменьшении уп сепаратрисса С\ проходит ни*
же сепаратриссы С2 и предельный цикл исчезает (рис. 4.4а), а
изображающая точка при любых начальных условиях стремится
к точке устойчивого равновесия.
Рис. 4.3. Фазовый портрет системы ФАПЧ второго порядка при Ун=У»
Рис. 4.4. Фаговый портрет системы ФАПЧ второго порядка при ун<у3
Изменение формы фазового портрета при уменьшении ун дли
случая, когда (8/л)Ну7’<;1 иллюстрируется рис. 4.26, 4.36, 4.46.
Таким образом, для определения полосы захвата достаточно
найти связь между начальной расстройкой и параметрами систе-
мы, при которой сохраняется тип фазового портрета рис. 4.3.
Рассмотрим случай (8/л) QyTc 1, когда точке устойчивого рав-
новесия соответствует устойчивый узел. Покажем, что для 0<
<Ун<1 сохраняется характер фазового портрета рис. 4.46.
Ранее было отмечено, что в системе ФАПЧ с однозвенным
/?С-фильтром полуустойчивый предельный цикл может быть только
один, и образуется он интегральными кривыми, идущими из седла
в седло. Но через точку неустойчивого равновесия типа седла про-
ходят только две фазовые траектории (сепаратриссы) Ci и С2 [26J.
Поэтому, если движение изображающей точки по этим траекториям
направлено к точке устойчивого равновесия, то можно найти усло-
вия существования фазового портрета типа рис. 4.36.
5—526 12»
Для этого рассмотрим две ветви сепаратриссы, выходящей из
точки неустойчивого равновесия (рис. 4.46). Характерной особен-
ностью этого портрета является то, что точки А и Б пересечения
ветвями сепаратрисе линий <р = ±л и <р=0 лежат ближе к оси абс-
цисс, чем точки В и Г пересечения этих же линий осью Oi узла.
Вторая ось С2 узла имеет больший наклон. Поскольку точки ус-
тойчивого и неустойчивого равновесия расположены симметрично
относительно линий <р=±л и ф = 0, условие взаимного расположе-
ния точек А и Б; В и Г равносильно следующему неравенству:
где и /го, — угловые коэффициенты сепаратриссы С\ и оси
Oi узла соответственно.
Для определения коэффициентов kC1 и ko, запишем на осно-
вании системы (4.28) уравнения фазовых траекторий. Вводя обо-
значение
d <р
у = — ,
dt
получаем
± = _2К у--LL + ^ + Yhi [-л<ф<0]
dt л \ 2 /
^- = -2K{/ + A(4>_^UYh> [0 < ф< л]
dt л \ 2 /
(4.30)
(4.31)
Переходя к дифференцированию по ф, находим уравнения ин-
тегральных кривых:
„-^- + 2Xt/ + — (<р4--^Л—ун=0, [ —л<ф<0]
у^- + 2ку--—/ф---—Ун=О. [0<ф<л]
d <р л \ 2 /
(4.32)
Зная, что сепаратриссы и оси представляют собой прямые ли-
нии, Совпадающие с интегральными кривыми [26], найдем их угло-
вые коэффициенты. Для этого достаточно продифференцировать
по ф ур-ния (4.32), учитывая, что dy!dy = const:
kl + 2kk0 + — = 0
u u л
k2c + 2%kc -=0
(4.33)
Здесь
kn=— для — л<ф<0,
d <p
kc =— для 0 < ф < л.
d ф
130.
Из ур-ний (4.32) следует, что ko и kc не зависят от ун, а опре-
деляются исключительно параметром Л;
(4.34)
kr
1.2
Из этих четырех значений выделим угловые коэффициенты, со-
ответствующие сепаратриссе, по которой изображающая точка
удаляется от положения неустойчивого равновесия в седле, и от
оси узла, имеющей наименьший наклон:
5-
(4.35)
feCi = -X+|/V + ^. (4.36)
Из сравнения ф-л (4.35) и (4.36) вытекает, что при (81я)О.уТ<.
<il (или Х2>2/л) |£о, |>1М-
Таким образом, если выполняются условия существования ус-
тойчивой точки типа узла, для всех |ун|<1 сохраняется структу-
ра фазового портрета, изображенного на рис. 4.46. Отсюда сле-
дует, что полоса захвата равна полосе удержания.
При |ун|->1 точки устойчивого и неустойчивого равновесия
сближаются, а при |ун| =1 узел и седло сливаются, образуя слож-
ную, особую точку типа седло—узел (см рис. 4.36). При |yHj>l
нет ни одной точки равновесия, наступает режим биений (см.
рис. 4.26).
Рассмотрим теперь случай, когда (8'л)£2уГ>1. Как уже ука-
зывалось, это условие определяет наличие устойчивой точки типа
фокуса. Для определения полосы захвата нужно найти начальную
расстройку, при которой часть спирали фокуса в области — л<
<Ф<0 пройдет в полуплоскости, соответствующей знаку у1Ь че-
рез точки А и Б пересечения сепаратриссами Ci и С2 (см. рис.
4.3а) прямых <р= ±л и ф = 0 соответственно.
Запишем уравнение спирали фокуса. Для того чтобы перенес-
ти начало координат в точку устойчивого равновесия, заменим пе-
ременные: ф1 = ф—фог. Тогда ур-нпе (4.28), соответствующее
—л<ф<0, примет вид
Ф^г^+Д ф1 -0.
л
(4.37)
Решение этого уравнения
Ф1 (т) = Со е”Хт cos (Йот + Сф),
(4.38)
5!
Кй
где Са и Cf — произвольные постоянные, определяемые началь-
ными условиями, Йо — угловая частота собственных затухающих
колебаний переходного процесса.
Взяв производную от <pt по т и выразив ее через Ф1(т), исклю-
чим время т и получим уравнение интегральных кривых в окрест-
ности фокуса
(Ф1 + ^Фг)2 + Ф? Й-;? -- Со exp (—~ arc tg , (4.39)
где С0=Сфйое2Сч)*'/й" — новая постоянная.
Выразим теперь координаты точек А и Б через начальную рас-
стройку (ун=уа) и угловые коэффициенты kci и kc2, учитывая, что
при ун>0 предельный цикл находится в верхней полуплоскости,
где <pi>0:
<Р1А = -у(’ + Уз). Ф1АЧМтО + ь)
Ф1Б=~(1~Уз)’
z I
Ф1Б = |йс2|^(1 —Уз)
(4.40)
Подставляя сюда значения kct и kc3 из ф-л (4.34), получаем
«PiA- —+ Ф1а=(/^ + 4~Х)4(1 + ^з). (4-41)
Ф1Б = 4<1-^ *Ф1Б = (]/^ + 4 + ^)4<1-Уз). (4-42)
Подставив теперь выражения (4.41) и (4.42) в ур-ние (4.39),
найдем:
Т (1+Уз)[(}Аа + 4-2ЛУ + Й2 =
-51 V № +
= Со exp ~ arc tg —----------, (4.43)
«о u0
42(1-Y3)[(/v + 4-!-2A’)2 + Q2 =
-% у
= Co exp arc tg------. (4.44)
Разделив ур-ние (4.44) на (4.43) и заменив Йо ее значением,
получим
1 _. v + Л.2 ~ Л. — л -f- arc tg -р- j/”I4
--------exp ---------. (4.45)
l+Ъ l/2j ’’ИД5
ta?
На рис. 4.5 представлена зависимость уз={(Т, йу), вычислен-
ная по ф-ле (4.45) [1956, 5]. Пунктирной линией на этом рисунке
показаны результаты численного решения уравнения системы
ФАПЧ с интегрирующим /?С-фильтром для случая /7(<р) =sin<p,
полученные Желонеком и др. [1954, 5].
Интересно отметить, что при замене синусоидальной кривой
линейно ломаной, полоса захвата меняется незначительно. Из вы-
ражения (4.45) следует, что в случае (8/л)ПуГ^>1
Уз
л
1+т
(4.46)
Таким образом, для системы ФАПЧ с /?С-фильтром, описывае-
мой нелинейным дифференциальным уравнением второго поряд-
ка, нахождение полосы захвата сводится к определению условий,
при которых единственный предельный полуустойчивый цикл про-
ходит из седла в седло.
Рис. 4.5. Зависимость полосы захвата от
параметров системы ФАПЧ с 7?С-филь-
' тром
Рис. 4.6. Нормированная несим-
метричная треугольная характери-
стика фазового детектора
Исследование системы ФАПЧ с интегрирующим фильтром и
кусочно-линейной характеристикой фазового детектора возможно
и при других формах последней. Так, в [1958, 12] была найдена за-
висимость полосы захвата в системе ФАПЧ с прямоугольной ха-
рактеристикой. В частности, при Й7Т>>1 формула для полосы
захвата имеет вид:
— 8я
“Г 3Qy Т •
В [1969, 1] исследована зависимость полосы захвата в системе
ФАПЧ с пропорционально-интегрирующим фильтром при тре-
угольной, но не симметричной характеристике фазового детектора
с произвольным коэффициентом асимметрии. Общий вид такой ха-
рактеристики показан на рис. 4.6. Как видно из рисунка, при
у=0 эта характеристика превращается в изученную ранее сим-
133
метричную треугольную. При |v|->l протяженность линейного
участка наибольшая, что оказывается полезным в некоторых прак-
тических случаях.
В [1961, 8] показано, что при v=0 в системе ФАПЧ с пропор-
ционально-интегрирующим фильтром, в зависимости от соотноше-
ния между ее параметрами, образование предельного полуустой-
чивого цикла второго рода возможно двумя различными способа-
ми. В первом случае это происходит так же, как и в системе
ФАПЧ с интегрирующим фильтром, т. е. от слияния ветвей сепа-
Рис. 4.7. Зависимость полосы захвата от параметров си-
стем:
а) при v =—1; б) при v=0; в) при v=-f-l
134
ратрисс двух седел. Во втором случае предельный полуустойчивый
цикл образуется при слиянии устойчивого предельного цикла с
неустойчивым. В (1969, 1] эти результаты распространены на слу-
чай v=0=O. Причем автору с помощью метода точечных преобразо-
ваний удалось найти зависимости полосы захвата от параметров
системы, в том числе и параметра -v. На рис. 4.7 показаны графики
зависимостей относительной полосы захвата у3 от параметров си-
стемы для грех различных значений параметра v (1969, 1].
Пунктирной линией на этих рисунках показана граница облас-
ти параметров, левее которой предельный полуустойчивый цикл
второго рода образуется от слияния сепаратрисе, а правее — от
слияния неустойчивого и устойчивого предельных циклов. Для
случая т^=0, mTQy->oo в [1969, 1] получена следующая зависи-
мость для полосы захвата:
sh 0О ch 0О — 0О
у =--------У----У-----У.
Y sh* е0
(4.47)
Здесь 0о — наименьший корень уравнения (1—m)sh20o=0;-.
Приближенное решение этого уравнения приводит к выраже-
нию
Уз = 1/ 3) т].
(4.48)
На основе последнего выражения в (1969, 1] сделан вывод о
независимости величины у3 от параметра v при ТтЙу->оо. В том
случае, если т=0 (интегрирующий однозвенный фильтр) в
[1969, 1] получено асимптотическое выражение для полосы захва-
та, справедливое для больших постоянных времени
г— г-------- г_______I уТ — v‘
V л |2 4- /1 + v 4- /1 + v (л — arc tg---
/32077
(4.49)
Из этого выражения, в частности, следует, что при изменении
v от —il до 4-1 полоса захвата монотонно возрастает, а отклоне-
ния от ее значения при v=0 на краях указанной области лежат в
пределах ±25% соответственно.
Метод кусочно-линейной аппроксимации дает возможность ис-
следовать динамику и определить полосу захвата в системе ФАПЧ
с более сложными типами фильтров. Так, в (1958, 8] с помощью
треугольной аппроксимации при v=0 была исследована система
ФАПЧ с фильтром нижних частот, общее выражение передаточной
функции которого имеет вид
К(р)=: «гРа4'«1Р + 1. (450)
Ь2рг+Ь1Р + 1
где р— —---------оператор дифференцирования по безразмерно-
2Qy di
2 n 4.
му параметру т= — £2У/.
135
Это выражение охватывает типы фильтров 0/0, 0/1, 1/1,
1/2, 2/2, в зависимости от значений коэффициентов а и Ь.
а)
a.t=jfty(№'tRil:z+
+ R2^2+^3^2^
az=(jf-s?y)z /?/^х
x(RZ+^Ci
Ьг^У^С2
Рис. 4.8. Схемы фильтров второго по-
рядка типов:
а) 0/2; б) 1/2; в) 2/2
Рис. 4.9. Зависимость полосы захвата от
параметров системы ФАПЧ с фильтром
типа 0/2
Примеры возможной реализа-
ции таких фильтров показаны
на рис. 4.8. Фильтр типа 2/2
(рис. 4.8в) хорошо подавляет
помехи на частоте последова-
тельного резонанса цепи LC.
Степень подавления зависит
от сопротивления резистора г.
Она получается наибольшей
для г=0, или иначе &i=0. Та-
кой тип фильтра полезно ис-
пользовать в системе ФАПЧ,
являющейся звеном синтезато-
ра частот, где частота помехи,
подлежащей подавлению, фик-
сирована. На рис. 4.9 показа-
ны зависимости полосы захва-
та от параметров системы
ФАПЧ с фильтрами типа 0/2,
полученные в [1958, 8].
Изучению топологии фазо-
вого пространства системы
ФАПЧ с фильтром, передаточ-
ная функция которого опреде-
ляется ф-лой (4,50), при сим-
метричной треугольной и си-
нусоидальной характеристи-
ках фазового детектора посвя-
щена работа [1967, 28].
Методом кусочно-линейной
аппроксимации можно иссле-
довать системы ФАПЧ и с бо-
лее сложными фильтрами. Од-
нако применение этого мето-
да к системам, описываемым
уравнениями более высокого
порядка, вызывает значитель-
ные трудности при вычислении.
4.5. МЕТОД УСРЕДНЕНИЯ
Метод усреднения, развитый в работах Н. М. Крылова,
Н. Н. Боголюбова и Ю. А. Митропольского, является, как извест-
но, одним из самых сильных, математически обоснованных мето-
дов теории нелинейных колебаний. Этот метод особенно эффекги-
136
вен в тех случаях, когда в системе можно выделить «быстрое»
движение и «медленное», т. е. привести ее дифференциальные
уравнения к стандартной форме, при которой производные каких-
либо координат системы пропорциональны малому параметру [45].
Применительно к системам ФАПЧ метод усреднения впервые
был использован в работах Ю. Н. Бакаева [1952, 1; 1956, 4;
1958, 7]. В дальнейшем с помощью этого метода в работах С. И.
Евтянова и В. К- Снедковой были получены новые интересные
результаты [1968, 10, 11, 14; 1969, 17]. Своеобразная модификация
принципа усреднения была использована Д. Ричмэном [1954, 6, 7].
Покажем возможность определения полосы захвата в системе
ФАПЧ с помощью метода усреднения в форме, использованной
Ю. Н. Бакаевым, С. И. Евтяновым и В. К. Снедковой, на примере
системы ФАПЧ с пропорционально интегрирующим фильтром.
Такую систему можно описать следующими уравнениями:
^=Йх-тЙуЕ(<р), (4.51)
at
7’l£?=QH_Qx_(l_m)QyF((p). (4.52)
di
Вводя относительное время т= К Qy/Tt, вместо системы ур-ний
(4.51), (4.52), получаем:
]/^_тда(ф), (4.53)
= [QH-_Qx_(l_m)QyF(<p)]. (4.54)
а т У/ £2у /
Введем обозначения:
_ i_
=х, гп )' Йу 7 = е2, (ЙУТ) 2 =82
и перепишем ур-ния (4.53) и (4,54) в виде:
^=х—exF(<p), (4.55)
а т
7^ = Ун—е2х—(1—m)F(<p). (4.56)
ах
Если положить ун=е1 = е2=0, то можно прийти к уравнению,
описывающему нелинейную консервативную систему. В дальней-
шем будем рассматривать систему, у которой ун, еь ег не равны
нулю, но достаточно малы, т. е. ун-С 1, rnzQyT<&\, ЙУТ»1. В этом
случае можно применить асимптотические методы теории нелиней-
ных колебаний, в частности, метод усреднения.
137
Для того чтобы выделить быстрые и медленные движения в
системе, рассмотрим полную энергию консервативной системы
У(ф, x)=-^ + (l-m)t/(<p), (4,57)
ч>
где U (<р) -- J F (<р) d <р— безразмерная потенциальная энергия си-
fl
стемы.
Вычислим полную производную по т от V:
^=х^+(1_т)77(ф)1Ф. (4.58)
а т d т d т
Подставляя в это выражение значения производных от х и ф
из ур-ний (4.55) и (4.56), получаем
— =*[Yh — е2х]—(1 —т)е1Е2(ф). (4.59)
d Т
Учитывая предположение о малости ei и e2, что, в свою оче-
редь, требует т<1, пренебрежем в (4.59) величиной т по сравне-
нию с единицей. В этом случае
~~~ Ун*~ е2х2—е1/:'2(ф). (4.60)
d т
Поскольку ун также предполагается малой, то V — медленно
меняющаяся функция, тогда как ур-ния (4.55) и (4.56) описыва-
ют быстрое движение в системе.
Из ф-лы (4.57) находим (учитывая, что т<1)
х ± V 2[V—С7(ф)]. (4.61)
Подставляя это выражение в ур-ние (4.55) и полагая ei«0,
получаем
= + Г 2[У-Щф)]. (4.62)
ат
Если, исходя из малости уш еь e2, проинтегрировать (4.62), счи-
тая V постоянной величиной, можно выразить приближенную за-
висимость ф(т) в явном виде с V в качестве параметра. Подстав-
ляя эту зависимость в ф-лу (4.60) и усредняя это выражение по
явно содержащемуся в нем времени т, можно получить дифферен-
циальное уравнение первого порядка для функции V:
7^ —Ун*— е2х2— е1Р2(ф). (4.63)
а т
Здесь волнистой чертой обозначено усреднение по т, так что
т
z =lim — I zdx.
Т—Т J
0
138
После выполнения операции усреднения ур-ние (4.63) прини-
мает вид:
(4-64)
а т
Исследование решений ур-ния (4.64) позволяет судить об из-
менении энергии в системе ФАПЧ. В частности, точки равновесия
этого уравнения соответствуют постоянству энергии изучаемой си-
стемы и, следовательно, характеризуют ее стационарный режим.
Напомним, что F(cp) — периодическая с периодом 2 л функция,
среднее значение которой равно нулю, поэтому U (<р) также пе-
риодическая функция с тем же периодом.
Методом фазовой плоскости можно показать, что если У<
<max| £/(<р) |, то фазовые траектории ур-ния (4.62) консерватив-
ной системы представляют собой замкнутые кривые и, следова-
тельно, <р(т) — периодическая функция. Если же max | U (<р) | <; V,
то фазовые траектории не замкнуты и <р(т) —функция непериоди-
ческая, хотя для консервативной системы х (т) = d^jdx — функция
также периодическая.
На основании изложенного в ур-нии (4.63) можно осуществ-
лять операцию усреднения за период. Обозначив последний через
Тб, получим
тб
7^=7- f [Yh*—еах2— e1/f2(<p)]dr. (4.65)
dx .)
о
Учитывая, что x = d<p/dr, можно перейти в ур-нии (4.65) от ин-
тегрирования по т к интегрированию по <р:
(4.66)
Здесь
76(V)^-(j)—.........._ ,
J Г2[У-£/(Ф)]
Ф(Ю=Ун51§пх£ dtp —eaf |/ 2[V—t/(<p)] dtp—ex 9(1/),
e(V)=(6-7f2(<p)d-^-.
J Г2[У-£/(<р)]
причем (j) означает операцию интегрирования по траекториям
движения порождающей (консервативной) системы. Появление
знака sign объясняется зависимостью результата усреднения от
выбора траектории, по которой оно осуществляется.
Заметим, что Т^(У), по существу, есть не что иное, как период
биений в консервативной системе.
Наиболее просто интегрирование по траекториям порождаю-
щей системы выполняется при max| t/(<p) | < V. В этом случае ве-
139
личина <р за период изменяется на 2 л, причем траектория изоб-
ражающей точки охватывает фазовый цилиндр и, следовательно,
2Л
Тб(Ю=С—=AL — , (4.67)
J K2[V-t/(<p)]
2Л 2л
ф(V) = 2лун signх—е* f 2[V—U(ф)] dtp—6j ( —ф —
J J /2[V-tZ(<p)]
Если же max| t/(<p) | > V, то пределы интегрирования можно
определить из ур-ния (4.62), полагая d<p/dx—0. Обозначим через
<Р1 и q>2 корни уравнения:
У=Г/(ф). (4.68)
х Тогда, учитывая, что <р изменяется в пределах от <р± до <рг толь-
ко за половину периода порождающей системы, получаем
Ф1
Тб = 2 f d<p--------, (4.69)
J /2[V-t/(<p)J
(4.70)
не охватывает са-
Ф1
В этом случае траектория изображающей точки на фазовом
цилиндре охватывает положение равновесия и
мого цилиндра.
В дальнейшем для конкретности положим Е(ф) =sin<p (пере-
ход к косинусоидальной характеристике осуществляется заменой
0 = <р + л/2), тогда
U (ф) -= 2sina , max | U (ф) | = 2.
(4.71)
При V>2 получим
dV 1 Го- ЗЕ 8 2В-Е
— =------- 2Лу„ signx — во--е,------
dx 2feК L “ k 1 3
V 2/V; К, Е, В — полные эллиптические
У<2 дифференциальное уравнение
(4.72)
k
функции аргумен-
для усредненной
те & =
та k.
Для
энергии принимает вид
— =----— Ге2 4^2B+e1--F(2E —В)] .
dx К L 3 I
Здесь, в отличие от предыдущего случая, /г= |/ V72.
Решение ур-ний (4.72) и (4.73) позволяет судить о полосе за-
хвата, о числе предельных циклов, о времени и характере пере-
140
(4 73)
ходкого процесса. Хотя эти уравнения и первого порядка, однако
они нелинейны и найти все их решения весьма затруднительно.
Для их качественного исследования рассмотрим фазовые портре-
ты системы, описываемой ур-ниями (4.72) и (4.73), для фильтров
вида 0/1 и 1/1, т. е. при ei = 0 и 81=И=0.
На рис. 4.10а показан фазовый портрет системы с ЯС-фильт-
ром вида 0/1 для трех различных значений ун при ei=0, 82 = 0,1
(1968, 10].
Как следует из этого рисунка, при расстройках, превышающих
полосу захвата (например, кривая для ун=0,47), в системе имеет-
ся три стационарных точки. Две из них (0; 0) и (0; 11, 2) являют-
Рис. 4.10. Фазовый портрет системы ФАПЧ:
а) с PC-фильтром типа 0/1; б) с АЦ?С-фильтром типа 1/1
ся устойчивыми и соответствуют: первая — устойчивому состоя-
нию равновесия в системе ФАПЧ, а вторая — устойчивому пре-
дельному циклу второго рода. Третья точка (0; 2) является неус-
тойчивой и соответствует неустойчивому состоянию равновесия в
системе ФАПЧ. В зависимости от начальных условий, налагаемых
на величину V при ун = 0,47, возможно, следовательно, установле-
ние либо режима удержания (К0=0), либо режима биений (Уо=
= 11,2). С уменьшением ун стационарное значение V» уменьшает-
ся: например, при ун = 0,3 Ко=5,5.
При некотором значении начальной расстройки (ун=0,127)
точка устойчивого равновесия сливается с точкой неустойчивого
равновесия (2; 0). В этом случае захват происходит при любых
начальных условиях, так что данная расстройка определяет поло-
су захвата.
Задаваясь различными уш можно вычислить стационарное зна-
чение Ко. соответствующее устойчивому режиму биений и затем по
формуле Тб/Ко) =2kK(k) определить период биений. На рис. 4.11
[1968, 10] показана зависимость уб(уи) =Й/С2У=2л/ТбПу для систе-
мы с фильтром типа 0/1 (кривая ei=0). Захват в соответствии с
этой кривой наступает при ун=0,127. Если после установления ре-
жима синхронизма увеличивать начальную расстройку, система
переходит в режим биений при ун= 1, что соответствует гистере-
зису. в зависимости уб=/(ун). ‘
141
Рассмотрим теперь фазовый портрет системы, описываемой
ур-ниями (4. 72) и (4.73) для системы ФАПЧ с фильтром типа 1/1
(рис. 4.106 (11968, 10]). Из этого рисунка следует, что при больших
расстройках, например, ун=0,6 характер кривой такой же, как и
в системе с фильтром типа 0/1. С уменьшением ун при равных про-
чих условиях характер кривой усложняется. Так, уже при ун=0,47
между полуустойчивой точкой (2, 0) и устойчивой (5; 0) появляет-
ся неустойчивая точка (2,5; 0). При у,,=0,445 неустойчивая и ус-
тойчивая точки сливаются, образуя еще одну полуустойчивую
точку (3,3; 0), которая соответст-
вует полуустойчивому предельному
циклу в системе ФАПЧ.
Рис. 4.11. Зависимость часто-
ты биений от начальной рас-
стройки в системе ФАПЧ с
фильтрами типа 0/1 и 1/1
Рис. 4.12. Зависимость полосы захвата
от параметров системы ФАПЧ с RRC-
фильтром
На рис. 4.11 кривой ei=l показан характер зависимости yg=
_/(ун) для рассматриваемого фильтра. В отличие от системы с
фильтром типа 0/1 захват здесь происходит не при уб = О, а при уд =
=убз>0 (убз=0,23).
Определим теперь зависимость полосы захвата от параметров
системы ФАПЧ. В случае интегрирующего фильтра типа 0/1 (gj =
=0) захват, как уже указывалось, происходит при любых началь-
ных условиях, если единственная устойчивая стационарная точка,
лежащая справа от полуустойчивой точки (2; 0), сливается с ней
(см. рис. 4.10о). Задача отыскания полосы захвата сводится к оп-
ределению значения ун, при котором это имеет место.
Полосу захвата можно определить из условия отсутствия ста-
ционарных точек в области У>2, поскольку при У = 2 всегда су-
ществует стационарная полуустойчивая точка. Приравнивая ну-
лю выражение в квадратных скобках (4.72), получаем условия
существования стационарных точек в области |/>2:
о_ • 8Е . 8 2В— Е
2rtyH sign х -= е2 — + 6j ---. (4.74)
k ok
142
Это уравнение может иметь решение только при yHsignx>0,
поскольку его правая часть положительна, В дальнейшем, полагая
для удобства signx>0, получаем
ун=А|’е2Е + е1-1-(2В-Е)]. (4.74а)
Полоса захвата есть наименьшее значение уи, при котором для
заданных ei и ег и при каком-либо У>2 это уравнение еще спра-
ведливо. Практически для определения у3 необходимо, задавшись
ei и ег, построить правую часть (4.75) как функцию F(V) в обла-
сти V>2. Затем следует найти наименьшее значение уш при ко-
тором на этом поле координат прямая yH=7:’ = const в области
У>2, касается построенной кривой или пересекает ее. Зависимо-
сти у3 от ei и ег показаны на рис. 4.12 пунктирными линиями
(1968, 10]. Сплошными линиями здесь показаны результаты вычис-
ления полосы захвата на аналоговой ЭВМ [1963, 2]. Как видно из
рисунка, совпадение (в области применимости метода усредне-
ния) получается хорошим.
Можно показать, что в случае ei<ge2 наименьшее значение F(V)
соответствует У=2. Поэтому, подставляя У=2 в выражение
(4.74а) и учитывая, что Е(1) = В(1) = & = 1, имеем
• (4-75>
л i_ 3 j л J I L?y
Эта формула была получена впервые в [1958, 7]. При /п=0
она близка к ф-ле (4.46), выведенной методом кусочно-линейной
аппроксимации.
Как показано в [1968, 10], в другом крайнем случае (ei^e^) по-
лоса захвата определяется выражением
,4-76)
При тиС 1 и mTQy^>2 выражение (4.76) практически совпада-
ет с ранее полученными Ричмэном [1954, 6] результатами.
В [1968, 11] изложенная методика была обобщена на системы
более высокого порядка, а в [1969, 17] — на систему с любой пе-
риодической характеристикой фазового детектора. В частности,
для определения полосы захвата системы ФАПЧ с фильтром типа
1/1 при ei<Ce2 было получено следующее выражение;
Уз = /2[ащ-р (Т-1 Q71)] , (4.77)
2л 2л
где а — f F2 (<р) d <р; р = — ( U (<р) d <р.
nJ л .1
о о
Коэффициенты аир для синусоидальной, симметричной тре-
угольной и прямоугольной характеристик составляют ас=1, ₽с=2;
ат= —, Рт= — ; ап = 2, рп = л; соответственно.
143
Рассмотрим теперь возможность применения метода усредне-
ния для отыскания полосы захвата в форме, предложенной Рич-
мэном [1954, 6] для системы ФАПЧ с фильтром типа 1/1. Для этого
обратимся снова к системе ур-ний (4.51), (4.52). Обозначив через
Ti = /nQyf новое безразмерное время, а через xi = ^ixlmQy перепишем
указанную систему в следующей форме:
Ф=Х1—F(<p), (4.78)
х1 = е1Ун— тхх—(1— m)F (<р)], (4.79)
где e^/w’QyT’.
Очевидно, что если е=0, то величина xt постоянна и ур-ния
(4.78) и (4.79) описывают нелинейную систему ФАПЧ первого по-
рядка.
В дальнейшем будем предполагать параметр е¥=0, но доста-
точно малым. Тогда можно считать, что ур-ние (4.79) описывает
медленные, а ур-ние (4.78) — быстрые движения в системе. При-
менив принцип усреднения [45] и положив xt =const, решим ур-ние
(4.78). Подставляя далее полученное решение для <p(xi) в ур-ние
(4.79) и усредняя по явно содержащемуся в нем времени Ti, по-
лучаем
Xi=e[ya—mx!—(1—m)F((p)] =ef(x1). (4.80)
Tt
Напомним, что F(<p) =lim — i Ff<p(T)]dr.
Tl-н» Tj J
0
При вычислении последнего интеграла следует учесть, что ха-
рактер решения <р(Т1) ур-ния (4.78) может быть различным. Так,
при |xi|>l, т. е. в режиме биений <p(ti) — монотонная неограни-
ченная функция, соответствующая движению изображающей то-
ки вокруг фазового цилиндра, такая, что F[(p(n)] — функция пе-
риодическая [см., например, ф-лу (2.20)]. В этом случае вычисле-
ние F(<p) упрощается:
т
Лф) = у ^[ф(Т1)НЧ- (4.81)
о
В случае же | Xi | < 1 решение ур-ния (4.78) стремится к пре-
делу, т. е. к устойчивой точке равновесия ур-ния (4.78).
В качестве примера рассмотрим систему с косинусоидальной
характеристикой F(<p)=cos<p. Для такой нелинейности при |xi| >
£>1 значение F[<p(ri)] легко найти из выражения:
1 4- COS ( 1/ X? — 1 Tj )
cos <p (тх) =------ ’ , (4.82)
Xi 4-cos (J/ xf — iTij
которое следует из ур-ния (4.78) и аналогично (2.23).
144
В том случае, если ]xi] <?1, воспользовавшись общим реше-
нием ур-ния системы первого порядка (2.14), можно показать, что
1 _ £2
cos ф (ту)------£
(4.83)
где
Е,
1
Фо
1 — X-i ]/ 1 — X]
(Т1-То)
1g о I*1---
2 2
а фо и то— произвольные постоянные.
Усредняя (4.82) и (4.83) по ть получаем
созфСгЛ^Хх— у'х^Г, [|xj>
СО5ф(т1)=Х1, [|хх|< 1].
- (Ь — т0)
1],
(4.84)
(4.85)
Подставляя эти выражения в (4.80), находим усредненное
уравнение для координаты Хь
*1 = 8[Уя— Хх + (1 —Щ)]/х2 —1], [,ХХ | > 1],
(4.86)
А =е[Ун—xj, [fxjl< 1]. (4.87)
Полученная система уравнений позволяет исследовать условия
устойчивости. Из нее, в частности, следует, что при |ун|<1 в об-
ласти |Xi|< 1 имеется только одна устойчивая точка равновесия
А (рис. 4.13) с координатами Xi = 0 и х01 = ун- Эта точка соответст-
вует устойчивому равновесию в исходной системе, поскольку, если
подставить xOi в ур-ние (4.78) и положить ф=0, то
^(Фог) =Yh- (4.88)
Из ур-ния (4.86) также следует, что в области Xi>l при ун<
< V 2 т—т2 не существует ни одной точки равновесия; при ун=
= К 2 т—т2 существует одна полуустойчивая точка равновесия
В с координатами (0,1/|/2тп—т2). При ун> У 2m—т2 сущест-
вуют две точки равновесия; одна из них С — неустойчивая с ко-
( Ун — (1 — т) У у2 — (2т — т2)
ординатами 10; --------------------------I, а другая D — устой-
[ Ун У (1 — т) У (2т — т2) \
чивая, с координатами 0;----------------------------- . Следо-
\ 2т — т2 )
вательно, значение
ун=У2т— т21) (4.89)
*) Эта формула близка к выражению (4.12), полученному с помощью перио-
дической функции Ляпунова.
145
является бифуркационным и определяет полосу захвата. Это ил-
люстрируется рис. 4.13, на котором показан фазовый портрет си-
стемы, описываемой ур-ниями (4.86), (4.87) при /п=0,5. Из рисун-
ка видно, что при уГ1гСу3 = 0,865 в системе при любых начальных
условиях устанавливается стационарный устойчивый режим удер-
жания. Если ун>уз> то в зависимости от начальных условий воз-
можен либо режим удержания (точка Аз), либо устойчивый ре-
жим биений (точка D). Точка С соответствует полуустойчивому
режиму биений.
С помощью выражений (4.78) и (4.84) легко найти <р, т. е. час-
тоту биений уб-
Ф=уб--=/^Т (4.90)
На рис. 4.14 в качестве примера показана зависимость уб(ун)
при m=Q, 1 и т=0,5. Пунктирными линиями обозначен участок, со-
ответствующий неустойчивому режиму биений.
Рассмотрим еще одну разновидность метода усреднения для
случая, когда ТЙУ — малая величина. Введем в выражения (4.51)
дифференцирование по обобщенному времени тт = £/Т.’
^=TQy[yx-mF(<p)], (4.91)
d тт
146
=Тн—Ъ—(1 —т)^(ф),
d Т-р
(4.92)
где ух=йх/Пу.
Если допустить, что TQ? достаточно
считать, что ур-ние (4.91) описывает
ур-ние (4.92) — быстрое. Решая снача-
ла ур-ние (4.92) в предположении,
что <р = const, получаем
малая величина, то можно
Yx=Yh—(1 —тИ(ф)> (4-93)
т
где yx = lim— f у(т)с?т.
тт J
о __
Подставляя это значение ух в ур-ние
(4.91) вместо ух, находим, что
медленное движение, а
Рис. 4.14. Зависимость частоты
биений от параметров системы
ФАПЧ с 7?/?С-фильтром при
ffl2Ty3> 1
-^--TQy[yH-F(<p)L (4.94)
Из этого выражения непосредст-
венно следует, что в данном слу-
чае бифуркационным является значение уп=у3=1.
Интересно
отметить, что все три рассмотренных варианта метода усреднения
удачно дополняют друг друга, ибо каждый из них применим в
тех случаях, когда нельзя применить ни один из остальных, в це-
лом же они позволяют охватить почти все пространство парамет-
ров системы.
В (1969, 44] предложено использовать для системы ФАПЧ вто-
рого порядка нелинейное преобразование координат и времени в
исходном дифференциальном уравнении, что упрощает ее иссле-
дование методом усреднения.
4.6. ОПРЕДЕЛЕНИЕ ПОЛОСЫ ЗАХВАТА В СИСТЕМЕ ФАПЧ
ПРИ ПОМОЩИ ЭЛЕКТРОННО-ВЫЧИСЛИТЕЛЬНЫХ МАШИН
Полосу захвата системы ФАПЧ можно определить при помощи
электронно-вычислительной машины (ЭВМ). Для системы ФАПЧ
с произвольным типом фильтра следует воспользоваться общим
методом определения у3. В этом случае необходимо найти условия
отсутствия в фазовом пространстве всех возможных предельных
устойчивых циклов второго рода, не делая никаких предположе-
ний об их топологии.
Последовательность операций при этом должна быть следую-
щей. Прежде всего нужно записать основное дифференциальное
уравнение рассматриваемой системы в форме, аналогичной ур-нию
(3.4). Далее, задавшись начальными условиями, следует наити та-
кое наибольшее значение ун, при котором для любых <р(0), <р(0),
147
<p(0) .... <p<n-1>(0) в системе нет ни одного предельного устойчивого
цикла. Это значит, что все фазовые траектории при t->oo должны
стремиться к точке устойчивого равновесия.
Заметим, однако, что чем выше порядок дифференциального
уравнения, тем большую вычислительную работу должна выпол-
нять машина. Поэтому применение указанного метода наиболее
эффективно для систем ФАПЧ, описываемых уравнениями невы-
сокого порядка. Так, в [1963, 2] этим методом была получена за-
висимость y3 = f(m; Ту) для системы ФАПЧ с пропорционально-
интегрирующим фильтром при треугольной и косинусоидальной
характеристиках фазового детектора (рис. 4Л5). Пунктирными
Рис. 4.15. Зависимость полосы захвата от параметров системы
ФАПЧ с пропорционально-интегрирующим фильтром, получен-
ная при помощи ЭВМ
линиями на рисунке изображено семейство кривых для системы
ФАПЧ с косинусоидальной формой характеристики фазового де-
тектора. Из рисунка следует, что разница в у3 при отмеченных
выше формах характеристики фазового детектора и прочих рав-
ных параметрах невелика (не более 20%).
В некоторых частных случаях, когда имеется предварительная
информация о числе и расположении предельных циклов в систе-
ме, можно значительно сократить число операций, производимых
машиной, а следовательно, и упростить вычисление полосы захва-
та. Один из таких случаев для системы ФАПЧ с /?АС-фильтром!
рассмотрен в [1961, 1].
Процессы, протекающие в системах, описываемых дифференциальными урав-
нениями третьего порядка, изображаются в трехмерном фазовом пространстве.
Границами областей фазового пространства, соответствующих положительному
или отрицательному наклону характеристики фазового детектора, являются по-
верхности (а не линии, как в системе, описываемой уравнением второго поряд-
ка), проходящие через точки ср — 0, ср=л, ср = ±пл.
148
Вблизи точек равновесия справедливо, как известно, дифференциальное
уравнение линейного приближения (3.18), которому соответствует характеристи-
ческое ур-ние (3.49). Если все корни ур-ния (3.49) действительные и отрица-
тельные, точка равновесия оказывается типа устойчивого узла. Если один корень
действителен и отрицателен, а два других — комплексны и имеют отрицатель-
ную действительную часть, то равновесие в особой точке соответствует устой-
чивому фокусу.
В области, охватывающей неустойчивую точку равновесия, корни ур-ния
(3.49) при выполнении условия устойчивости в «малом» могут быть либо все
действительными, причем знак одного из них должен быть противоположен зна-
ку двух других, либо один из них действителен, а два других комплексны, при-
чем их действительная часть должна быть противоположна по знаку веществен-
ному корню.
Первый случай характеризует особую точку типа «седло», второй — особую
точку типа «седло-фокус». Неустойчивая точка сроь следовательно, может быть
либо особой точкой типа «седло», либо типа «седло—фокус». Вид особой точки
определяется крутизной характеристики фазового детектора в этой точке, по-
лосой удержания и затуханием /?1С-фильтра.
На рис. 4.16а дана картина трехмерного фазового пространства для случая
одной особой точки типа устойчивого фокуса, а другой — типа «седло». Посколь-
ку топологии фазового пространства в области устойчивого фокуса и узла, а
также в области седла и седла-фокуса соответственно сходны, можно ограни-
читься изображением фазового пространства, которое получается для особых
точек типа устойчивого фокуса и седла.
Координатами фазового пространства являются для оси х — разность
фаз ср, для оси у — ее первая производная, а для оси z — вторая производная
разности фаз ср.
На рис. 4.16а точка ср01 является точкой неустойчивое о равновесия типа,
«седло», а точка срОг — устойчивого равновесия типа «фокус». Как видно из ри-
сунка, все траектории, попадающие в окрестность точки срОг, стремятся к состоя-
нию равновесия.
Выделим из всей совокупности пространственных кривых одну характерную
кривую, на основании которой можно будет определить полосу захвата Эта
характерная кривая обозначена на рис. 4.16а буквами А, В, С, D
На рис. 4 166 представлены такие характерные кривые, построенные при
различных значениях параметра у’н- Кривая 1 соответствует при d=const и
4 = const начальной расстройке ун>уз, кривая 2 — расстройке ун<Уз, а кри-
вая 3 — расстройке уи = Уз. Рисунок показывает, что при уи = у3 изображающая
точка, двигаясь из точки неустойчивого равенства ср по траектории 3, никогда не
сможет попасть в точку устойчивого равновесия ср^- В системе устанавливается
режим биений. Таким образом, учитывая характер зависимости формы простран-
ственных кривых, исходящих из точки cpoi, от расстройки при заданных пара-
метрах системы ФАПЧ, можно математически сформулировать условие, опреде-
ляющее границу ее устойчивой работы: если начальная расстройка равна поло-
се захвата, траектория, выходящая из точки cpoi, пересекает ось абсцисс в точ-
ке <Ро 1 = 2л+<ро1.
Возможность рассмотрения именно такого типа фазовой траектории при оп-
ределении бифуркационного значения уи подтверждается результатами рабо-
ты [1967, 28].
При расчете на ЭВМ полосы захвата системы ФАПЧ с
/?АС-фильтром были задействованы три интегрирующих блока и
один блок нелинейности. Последний позволяет представить харак-
теристику F(<p)=coscp двенадцатью отрезками прямых. Начальные
условия, соответствующие точке <ро±-
ф(0) =<р (0) = 0; <р(0) =arccosyH, [4=0].
14»
Рис. 4.16. Фазовый портрет системы ФАПЧ третьего порядка:
а) общий вид; б) характерные фазовые кривые
Следует отметить, что, поскольку точка <poi соответствует состо-
янию равновесия, изображающая точка вблизи нее движется чрез-
вычайно медленно. При точном выполнении указанных начальных
условий потребовалось бы бесконечно большое время для того,
чтобы изображающая точка удалилась от этой точки равновесия.
150
Рис. 4.17. Результаты исследования системы ФАПЧ
третьего порядка:
а) интегральные кривые, записанные самописцем; б) и
в) результаты вычисления зависимости полосы захвата
от параметров системы
151
•Однако вследствие флуктуаций точное выполнение начальных ус-
ловий невозможно, и процесс развивается в течение конечного
времени. При этом можно не опасаться серьезных ошибок, так
как флуктуации чрезвычайно малы.
Результаты решения основного нелинейного уравнения для
различных k и d получаются в виде непрерывных кривых, записы-
ваемых самописцем для <р, <р и <р. На рис. 4.17а представлены в
качестве примера решения уравнения при k «0,9 и двух значениях
‘d (d = l и d=3). Для этих решений характерно, что ф стремится к
точке устойчивого равновесия. Кривые 1 и 4 соответствуют рас-
стройке ун<уз- При ун>Уз решение уравнения изображается кри-
вой 7.
Результаты вычисления зависимости y3=f(d, k) представлены
графически на рис. 4.176. Из этого рисунка видно, что с увеличе-
нием d и k полоса захвата монотонно уменьшается.
На рис. 4.17в приведено семейство кривых k=f(d) при у3=
= const.
Отметим, что изложенный критерий определения полосы захва-
та может иногда привести к неверным результатам.
В некоторых системах ФАПЧ предельный цикл может не про-
ходить через точки неустойчивого равновесия, а лежать, например,
значительно выше их. Такой случай характерен для системы
ФАПЧ с пропорционально-интегрирующим фильтром.
В [1970, 12] на основе качественной теории динамических си-
стем численным методом исследована зависимость полосы захва-
Рис. 4 18. Зависимость полосы захвата от параметров системы ФАПЧ с RRC-
фильтром при прямоугольной характеристике фазового детектора
152
та от параметров системы ФАПЧ с /?/?С-фильтром типа 1/1 для
прямоугольной, треугольной и синусоидальной характеристик фа-
зового детектора. Для треугольной и синусоидальной характерис-
тик фазового детектора полученные в [1970, 12] результаты близки
к зависимостям, изображенным на рис. 4.76 и 4.15 соответственно.
Для прямоугольной же характеристики соответствующие кривые-
приведены на рис. 4.18. Заметим, что полоса захвата при прямо-
угольной характеристике фазового детектора получается наи-
большей.
4.7. ПРИБЛИЖЕННЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ ПОЛОСЫ ЗАХВАТА,
ОСНОВАННЫЕ НА РАЗЛИЧНЫХ ГИПОТЕЗАХ
Изложенные ранее строгие и асимптотические методы опреде-
ления условий захвата связаны со значительными вычислительны-
ми трудностями, которые возрастают с увеличением порядка си-
стемы. Поэтому рядом исследователей были предприняты попыт-
ки использовать различные физические гипотезы для построения
нестрогих, но зато простых методов определения полосы захвата
в сложных системах.
Впервые такая задача была поставлена В. С. Дулицким в.
1948 г., когда он предложил использовать для отыскания полосы
захвата метод гармонического баланса. В эти же годы Ю. В. Эль-
терман разработал своеобразную модификацию метода гармони-
ческого баланса, которая значительно упрощала процесс опреде-
ления условий захвата. Позднее Е. Л. Урман [1957, 1], изучая яв-
ление синхронизации в электрических машинах, уравнения кото-
рых близки к уравнению системы ФАПЧ, с помощью метода гар-
монического баланса получил некоторые количественные зависи-
мости, определяющие область параметров, соответствующую ус-
ловию захвата. В дальнейшем метод гармонического баланса был
использован для отыскания полосы захвата системы ФАПЧ в ра-
ботах [1960, Л, 5; 1963, 8; 1965, 26] на базе дополнительных упро-
щающих предположений.
В настоящее время метод гармонического баланса широко ис-
пользуется в теории нелинейных колебаний для приближенного
решения дифференциальных уравнений. Особенно эффективно его
применение к системам, уравнения которых имеют периодические
или почти периодические решения. Остановимся на этом вопросе
подробнее.
Как известно, периодические колебания можно представить в
виде гармонического ряда Фурье. Во многих случаях этот ряд до-
вольно быстро сходится, и поэтому существенную роль в нем иг-
рают лишь несколько первых гармоник. Обычно в приближенном
решении учитывают лишь первых два члена ряда Фурье.
Параметры этого решения определяются из условия, при кото-
ром оно наилучшим образом удовлетворяет основному уравне-
нию. Чем больше членов основного ряда Фурье учитывается в
' 153
приближенном решении, тем выше точность последнего. Однако
определение параметров решения при этом значительно затрудня-
ется, поэтому часто и ограничиваются только первыми двумя чле-
нами ряда Фурье.
Поскольку в установившемся режиме биений частота подстраи-
ваемого генератора меняется периодически, применение метода
гармонического баланса для исследования этого режима и усло-
вий его существования вполне оправдано.
В большинстве случаев в цепь управления системы ФАПЧ
включают фильтры нижних частот с падающей частотной харак-
теристикой, что приближает закон отклонения частоты подстраи-
ваемого генератора к гармоническому. Покажем, что даже в си-
стеме первого порядка при любой не равной нулю частоте биений
отклонение разности фаз от линейного закона определяется быст-
росходящимся рядом Фурье.
На основании выражения (2.23) с учетом (2.13) девиацию час-
тоты синхронизируемого генератора в режиме биений можно за-
писать следующим образом:
Я + COS Q t ,л
соуэ ~= Qy cos ф (t) = Qy . (4.95)
Здесь a = Qy/QH=y~1.
Разлагая выражение (4.95) в ряд Фурье, находим амплитуды
девиации частоты на гармониках «Й:
м = 2(/Г^2- 1? + (рТ^Т2-!)^1 + (Кь=^-1)га+1 (4 96)
УЭ ап~1 К 1 — а2 а"-1 К 1 — а2 ' an+l К 1 — а2
Для того чтобы исследовать зависимость индексов модуляции
на гармониках, т. е. pn = <oy3n/Q от частоты биений, выразим пра-
вую часть равенства (4.96) в функции относительной частоты бие-
ний Y6 = Q/Qy. Разделив обе части выражения (2.10) на Qy, по-
лучим
Yh = /yFF1. (4.97)
Подставив выражение (4.97) в (4.96) и разделив обе части на
nQ, найдем
(У ?б+ 1 — Тб)"
Ря = 2 —----------(4.98)
п
Отсюда следует, что рп достигает максимума при уб->-0:
Р„макс = 11П1₽я=“ • (4-99)
У(Г0 п
Выражение (4.99) показывает, что максимальные значения ин-
дексов модуляции на гармониках основной частоты биений убы-
вают обратно пропорционально номеру гармоники. Промежуточ-
154
ные значения индексов модуляции (уб>0) согласно ф-ле (4.98)»
убывают с возрастанием их номера гораздо быстрее, так что
Р„<2^, (4.100)
где С<1 — постоянный коэффициент.
Поэтому при исследовании режима биений можно в первом
приближении учитывать только первую гармонику точного реше-
ния нелинейного дифференциального уравнения системы.
Поскольку в некоторых случаях, например, в системе с фильт-
ром типа 0/1 частота биений может быть сколь угодно малой, то*
можно ожидать, что гипотеза фильтра [46] не будет выполняться
, и простейшая аппроксимация первого приближения может оказать-
ся слишком грубой. В дальнейшем будем предполагать, что в систе-
ме невозможны предельные циклы первого рода.
Рассмотрим наиболее часто встречающуюся на практике систе-
му ФАПЧ с косинусоидальной характеристикой фазового детектора.
Основное ур-ние (1.11) этой системы можно записать как
p<p = QH—Qy А (р) cos <р. (4.101)
Предположим, что в режиме биений решение этого уравнения
ф(^)=Q^ + фo—PxSinQ/, (4.102)
где Q, как и ранее, —частота биений, ф(1—начальная разность
фаз эталонного и подстраиваемого генераторов, pt — амплитуда
девиации разности фаз.
Подставив ф-лу (4.102) в ур-ние (4.101), получим
Q—QPiCosQ/ =QH—QyК(р)cos(Qtф0—f^sinQ/). (4.103)
Преобразовав косинус в правой части ур-ния (4.103) по фор-
муле косинуса суммы двух углов и воспользовавшись известными
формулами из теории бесселевых функций:
cos (рх sin Q t) = Jo (PJ + 2 J2n (Pi) cos (2n Q /),
n=l
sin (Pi sin Q/) — 2 ^2„+1 (Pi)sin[(2n + 1)Q /],
n=0
найдем
cos (Q t + ф0—рг sin Q f) = [cos Q t cos ф0—sin Q t sin ф0] x
Jo (pi) + 2^J2„(p1)cos(2nQZ)
"1
+ [sin Q t cos ф0 + cos Q t sin ф0] X
х2У /2„+1(Pi)sin[(2n+l)Q/J.
(4.104)
155.
Ограничиваясь в бесконечных суммах двумя первыми слагае-
мыми, преобразуем выражение (4.104):
cos (Q t + ф0—Pi sin Q t) = Ji (pj cos <p0 — [Ju (SJ—J2 (PJJ X
X sin <p0 sin Q t + [Jo (Pi) 4- J2 (P»)l cos <p0 cos Q t —
—Ji (Pi)cos Фо cos 2Q t + Ji (Pi) sin <p0 sin 2Q t +
+ J2 (Pi)cos Фо cos 3Q /—J2 (рг) sin <p0 sin 3Q t. (4.105)
Подставив это выражение в ур-ние (4.103), получим
Q—QPjCosQ/ =Qh—Qy { Л (Pi)cos Фо—I KO Q)| (Pi) —
—Jz (Pi)] sin Фо sin (Q t—%) +1К (i 2Q) | [Jo (PJ + J2 (PJJ cos <p0 x
X cos (Q t —ф2) — | /<(i 2Q) | Ji (pj cos <p0 cos (2Q t —ф22) +
+ | К (i 2Q) \Ji (PJ sin ф0 sin (2Q t —ф22) +1К (i 3Q) | J2 (pt) cos ф0 X
X cos (3Q t — ф32 j — IК (i 3Q) | J2 (Pi) sin ф0 sin (3Q t—ф32) ). (4.106)
Здесь K(iQ), K(i2Q)....— коэффициенты передачи фильтра ниж-
них частот на соответствующих гармониках частоты биений; фя,
ф2я — — фазовые сдвиги, вносимые фильтром на этих же гармо-
никах.
Как уже указывалось, коэффициент передачи фильтра умень-
шается с ростом частоты, поэтому амплитуды высших гармоник
малы. Пренебрегая в полученном выражении всеми гармониками
выше первой, имеем
Q—QPx cos Q t = QH—Qy { Ji (pj cos ф0—| К (i Q) | [Jo (Pi) —
- J2 (Px)l sin ф0 sin (Q t -ф2) + | К (i Q) | [ Jo (PJ + J2 (Pi)] X
X«^0cos(QZ—Ф2)}. (4.107)
Преобразуем левую часть выражения (4.107):
Q—QPx [cos(QZ—ф2) cos трз—sin (QZ—ф2) sinip2] =
= QH — Qy { Ji (PJ cos фо—| К (i Q) | [ J о (Pi) —Jz (Pi)l sin ф0 X
X sin (Q t—ф2) +1К (i Q) | [70 (Pi) + Jz (Pi)] cos ф0 cos (Q t—ф2)}. (4.108)
Из последнего выражения находим
Q—Qy Л (Pi) cos ф0 =QH
QPi cos ф2 = Qy | К (i Q) | [Jo (P0 + J2 (Pi)] cos фо
(4.109)
Qpi sin ф2 = Qy | К (i Q) | [ Jo (Pi) + J2 (Pi)] sin Фо
Эти уравнения впервые были получены В. С. Дулицким. Они
позволяют приближенно определить параметры решения основно-
го уравнения в режиме биений. Аналогичные выражения были со-
ставлены Е. Л. Урманом при использовании метода гармоничес-
кого баланса в форме, предложенной Л. С. Гольдфарбом, для ис-
156
следования устойчивости синхронных машин. В. С. Дулицкий, а
затем и Е. Л. Урман рассмотрели (в рамках указанного метода)
не только условия захвата, но и условия отсутствия предельных
циклов первого рода, положив в первом приближении закон изме-
нения разности фаз генераторов гармоническим.
Поскольку достаточные условия отсутствия предельных циклов
первого рода можно получить с помощью строгих методов А. М.
Ляпунова и В. М. Попова, применение для этой цели метода гар-
монического баланса здесь рассматриваться не будет.
Е. Л. Урман для отыскания полосы захвата предложил решать
уравнения гармонического баланса графоаналитическим способом
на плоскости комплексного переменного. Можно, однако, выпол-
нять построения в плоскости чисто действительных переменных.
С этой целью исключим из ур-ний (4.109) величину <р0. В резуль-
тате получаем систему двух уравнений:
Y6=Yh—Л(Р1)
₽1=1£0Я1[7о(р1)+Л(Р1)]
Тб
cos фо
- — - , (4.110)
1Л> (₽1) + А (₽1)Р %
1
sin*
(4.1П)
С учетом приведенных выражений и известного соотноше-
ния [47]
о
^({М+А(М=~-Ш) (4.112)
Р1
можно записать
Задаваясь типом фильтра и решая совместно ур-ния (4.111) и
(4.113), можно получить зависимость частоты биений от началь-
ной расстройки в замкнутой системе в установившемся режиме
биений. Очевидно, что значение полосы захвата определится на-
чальной расстройкой, при которой система ур-ний (4.111) и
(4.113) теряет решение.
Однако можно показать, что при любом фильтре нижних час-
тот и ун¥=0 действительные положительные решения для yg и 01
всегда существуют. В самом деле, из ур-ния (4.111) вытекает, что
в силу ограниченности функций |2<(iQ) |, Zq(Pi), 7г(Р1) при любом
значении убт^О величина fh конечна. Более того, при уб->°° Pi->0,
а при уб->0 величина Pi не превосходит значения =1,85, вычис-
ленного из уравнения /о(Р[) =-МР* )•
Но конечность Pi означает, что все решения ур-ния (4.113) при
-уну=0 являются действительными, конечными и не равными нулю.
157
расстройки в системе ФАПЧ
с PC-фильтром, построенная
методом гармонического ба-
ланса
Это, в свою очередь, означает, что согласно методу гармоническо-
го баланса в системе при любой величине ун=#0 существует ре-
жим биений. На самом же деле существуют значения ун=т^0, при
которых режим биений невозможен.
Изложенное иллюстрируется рис. 4.19, на котором показана
й от начальной расстройки в системе
ФАПЧ с фильтром типа 0/1, пост-
роенная по ур-ниям (4.114) и
(4.113).
Таким образом, используя толь-
ко метод гармонического баланса,
принципиально невозможно опреде-
лить полосу захвата. Видимо, поэто-
му рядом авторов были предприня-
ты попытки привлечь дополнитель-
ные соображения, позволяющие
обойти указанное затруднение. Так,
еще Е. Л. Урман заметил, что при
Pi> 1 существуют решения уравне-
ний гармонического 'баланса, при
которых мгновенная разность час-
тот рф, вычисленная методом гар-
монического баланса, меняет свой
знак. Предположив, что в слож-
ной системе, как и в системе вто-
разность частот не может менять зна-
ка, Е. Л. Урман предложил считать, что Pi не'может превосхо-
дить единицы и, следовательно, если нет других значений, Pi<l,
при которых гармонический баланс выполняется, полагать, что
происходит захват. Основанием к такому предположению явилось
соображение о том, что при Pi = l в реальной системе вносимая
расстройка оказывается достаточной для захвата, а значит, и
срыва режима биений.
Итак, согласно работе Е. Л. Урмана, возможны два решения
уравнения гармонического баланса на границе захвата: либо с
0i=il, либо с 01< 1.
Первому решению соответствует критерий захвата, принятый в
работах Рея [1960, 5] и Невядомского [1960, 1] и существенно упро-
щает процесс вычисления полосы захвата. Действительно, под-
ставляя значение 01=1 в ур-ния (4.111) н (4.113) и считая, что
при этом ун=уз, получаем:
рого порядка, мгновенная
уб=| K(iQ)| 1/—°-922 - , (4.114)
у 2,2— соз2фа
Уз=Уб
(н
COs4>2
.2[X (i Й)|
(4.115)
158
Исследуя систему ур-ний (4.111) и (4.113) применительно к си-
стемам ФАПЧ с однозвенными RC и /?АС-фильтрами, можно, в
частности, показать, что если существует решение с параметром
₽1=1, то не существует других решений с fli<l. Это позволяет
использовать в данном случае ф-лы (4.L14) и (4.115). Подставляя
в них конкретные функции вместо /*C(iQ) и cos фа, для однозвен-
ного интегрирующего /?С-фильтра имеем
у3 =~~ у' у 0,075 + 0.423Т2 Q2 — 0,273. (4.116)
где Т=RC.
При TQy^l выражение (4.116) упрощается:
Заметим, что выражение аналогично ф-ле (4.75) при т=0.
Для системы ФАПЧ с /?АС-фильтром:
е2 / 1 — е2 V
(1+—2-<₽j - (4-118)
о
Л =-----------212?-------. (4.И9)
* 1,2(1 —е2 )2 + 2,2e2d2
Здесь 8<р =убк, &=Qy/(Oo, ®о= 1/У ЕС.
Решение этих алгебраических уравнений легко находится чис-
ленным методом. На рис. 4.20 приведены результаты расчета у3 по
вы!ражения1М (4.118) и
(4.119) при Е=0,9 в сопо-
ставлении с результата-
ми, полученными при по-
мощи ЭВМ (пунктирная
кривая). Из рисунка вид-
но хорошее совпадение
результатов.
Следует, однако, на-
помнить, что применение
ф-л (4.11-4) и (4.115) в
Рис. 4.20. Зависимость полосы захвата от
величины затухания 7?ЛС-фильтра
общем случае не обосновано. Действительно, существует и второй
случай (например, в системе с /?7?С-фильтром типа 1/1), когда ре-
шения уравнений гармонического баланса исчезают при ₽1<1 (ра-
зумеется, за исключением, согласно работе Е. Л. Урмана, тех ре-
шений, которые имеют параметр 01>1). Условие исчезновения ре-
шений (4.111) и (4.113) для 01<1 определяет полосу захвата, ко-
торую можно найти графоаналитическим или численным способом.
В [1968, 15] метод гармонического баланса использовался для
вычисления полосы захвата с учетом высших гармоник в предпо-
159
лагаемом решении основного дифференциального уравнения си-
стемы.
Таким образом, вычисление полосы захвата в системе ФАПЧ
с помощью метода гармонического баланса возможно только с
привлечением дополнительных соображений. В [1964, 8; 1969, 39]
была предпринята попытка с одной стороны дополнить результа-
ты метода гармонического баланса так, чтобы их можно было ис-
пользовать при любой частоте биений в системе, а с другой —
упростить самый процесс вычисления полосы захвата.
Остановимся на этом вопросе подробнее.
Полагая в ур-нии (4.111) |^(iQ) l/ye’Cl, что справедливо для
достаточно больших ув, получаем
рд ж -|К (i Q) I . (4.120)
Тб
Подставляя это выражение в (4.113), находим, что вносимая
расстройка увн = ун—Уб определяется асимптотическим выраже-
нием
Ybh=~. (4.121)
2Уб
Здесь R = Re/((iQ) = |7<(iQ) |созф2 — действительная часть
комплексного коэффициента передачи фильтра нижних частот, вы-
численная на частоте биений.
Выражение (4.121) хорошо передает зависимость вносимой
расстройки от частоты биений при больших значениях последней
и становится непригодным при малых значениях ув. Однако изве-
стно, что в процессе захвата в реальной системе частота биений
может быть малой, и что при равенстве частоты биений нулю вно-
симая расстройка конечна. Следовательно, в реальной системе за-
висимость вносимой расстройки от частоты биений должна отли-
чаться от зависимости (4.121).
В [1964, 8] была высказана гипотеза о возможности аппрокси-
мировать реальную зависимость вносимой расстройки от частоты
биений при любых значениях последней следующим выражением:
У ?б+ R2'^ Уб
УвН Ун — Уб ------------------
к
(4.122)
Легко показать, что при ув^>1 из ф-лы (4.122) непосредствен-
но следуют асимптотические результаты метода гармонического
баланса, а при уб->0 вносимая расстройка стремится к единице
аналогично тому, как это имеет место в системе первого порядка.
Выражение (4.122) для вносимой расстройки соответствует,
по существу, некоторой модели реальной системы ФАПЧ, описы-
ваемой следующим уравнением:
p<p-bRHycos<p (QH—Q6)R 4-йб. (4.123)
160
При R = 1 это уравнение переходит в уравнение обычной систе-
мы ФАПЧ первого порядка.
Выражение (4.122) связывает начальную расстройку, частоту
биений и характеристику фильтра в устойчивом режиме биений.
При нарушении этого равенства относительная частота биений уб
изменяется в направлении своего нового устойчивого значения.
Захват произойдет в том случае, если частота биений будет непре-
рывно убывать от некоторого конечного значения убз до нуля. Это
означает, что, во-первых, в области 0<уб<убз равенство (4.122)
не должно выполняться, а во-вторых, что его правая часть, т. е.
вносимая расстройка при уменьшении уб должна возрастать
быстрее левей части. В результате получаем критерий захвата
^<-1, [0<уб<убз]. (4.124)
Применяя критерий (4.124) к правой части равенства (4.122),
получаем неравенство для определения полуустойчивого значения
частоты биений на границе захвата:
(R-R2-уб ^/Yl+R'^YefR-Ye-^-). (4.125)
\ « Тб / r \ d Уб1
Если приравнять обе части этого выражения, можно найти кри-
тическое значение частоты биений увкр. Полученное уравнение
может иметь несколько действительных положительных корней.
В таком случае для выполнения критерия захвата в качестве увз
следует из найденных значений убкр выбрать наименьшее. Полоса
захвата определится в результате подстановки этого значения в
ур-ние (4.122).
Можно показать, что при R=/=l согласно ф-ле (4.125) частота
биений увз конечна и не равна нулю. С другой стороны, известно,
что в некоторых системах ФАПЧ (в частности, в системе с фильт-
ром RC) критическая частота биений стремится к нулю. Это —
одно из следствий приближенности рассматриваемой модели ре-
альной системы ФАПЧ. Однако на границе захвата и реальная
система и рассматриваемая модель являются негрубыми [26].
Для негрубых систем характерно значительное изменение пара-
метров решения при небольших изменениях параметров уравне-
ния. Поэтому наличие большой разницы в параметрах решений
(уб) двух систем может соответствовать малому отклонению па-
раметров их уравнений (ун).
Определение увз из ур-ния (4.125) даже для простейших типов
фильтров оказывается сложным. Но если ограничиться нахожде-
нием достаточных условий захвата в принятой выше модели, то
можно значительно упростить все вычисления. Последнее возмож-
но для класса фильтров нч, у которых:
R > 0, -^-<0. (4.126)
4 Тб
6—526
161
При выполнении этих условий в качестве критического вместо
(4.125) можно принять выражение вида
(R — R2) у VI+R2 R Y6- (4.127)
Выполнение этого неравенства и условий (4.126) гарантирует
выполнение неравенства (4.125).
Из выражения (4.127) находим приближенное значение часто-
ты биений при захвате для введенной выше модели системы
ФАПЧ:
<4-128>
Подставляя полученное значение уоз в ф-лу (4.122), имеем
y2 2R - R2. (4.129)
В этом выражении аргументом функции R является величина
Убз, определяемая ф-лой (4.128). Для дальнейшего упрощения вы-
числений нужно заменить аргумент функции R (ув,) большей ве-
личиной, т. е. уз1). Очевидно, что при любом фильтре, для которо-
го справедливо условие (4.126), такая замена приведет только к
снижению вычисляемого значения у3, т. е. к приближенным доста-
точным условиям захвата в рассматриваемой модели.
Таким образом, окончательная формула принимает сравни-
тельно простой вид:
у3 =2R (у3)—R2(y3). (4.130)
Она позволяет легко находить приближенную аналитическую
зависимость относительной полосы захвата системы ФАПЧ с ли-
нейным фильтром нч в цепи управления.
Полученные выражения справедливы для систем ФАПЧ с ко-
синусоидальной формой характеристики фазового детектора. При
иной форме характеристики необходимо сначала определить зави-
симость постоянной составляющей вносимой расстройки от часто-
ты биений, а затем исследовать ее устойчивость аналогично слу-
чаю, рассмотренному выше.
Применим теперь ф-лу (4.130) для определения у3 в системах
ФАПЧ с конкретными типами фильтров. Как уже указывалось,
коэффициент передачи пропорционально-интегрирующего фильтра
определяется выражением (3.14) Его действительная часть имеет
вид
1 + Т2 ?2
где ГУ=7ЙУ.
') Поскольку, как уже указывалось, на границе захвата й!\'н/й!ув->-0, ошибка
в определении у6з мало влияет на у3 (система становится негрубой),
162
Подставив ф-лу (4.131) в (4.130), после преобразований полу-
чим
Y®T4y +[(2т-т2)Гу -2T2]Y4_(2Ty_l)Y2_l =0. (4.132)
Это уравнение можно привести к уравнению третьей степени и
решить в аналитической форме относительно у3. При тАу»1
оно значительно упрощается:
у3 ]/2т—т2 (4.133)
и совпадает с полученной ранее Ричмэном методом усреднения
ф-лой (4.89).
Выражение для полосы захвата в системе ФАПЧ с обычным
интегрирующим фильтром является частным случаем ф-лы (4.132)
при т = 0. Как и в предыдущем случае, при 7У^>1 оно упро-
щается:
y3 = -UL-. (4.134)
/TQy
Эта формула близка к выражениям (4.75) при т = 0 и (4.117).
Рис 4.21. Зависимость полосы захвата от параметров
системы ФАПЧ с пропорционально-интегрирующим
фильтром
На рис. 4.21 сплошными линиями изображены зависимости
Уз = 1СГу) при m = const, построенные по ф-ле (4.132). На этом же
рисунке пунктиром показаны аналогичные кривые, полученные
для F—coscp [1963, 2]. Сопоставление кривых показывает, что
для системы ФАПЧ с пропорционально интегрирующим фильтром
расхождение результатов расчета у3 по ф-ле (4.132) и полученных
на ЭВМ не превышает 7%.
В качестве второго примера рассмотрим зависимость у3 от па-
раметров системы ФАПЧ с ^АС-фильтром второго порядка
6* 163
(рис. 3.2), коэффициент передачи которого определяется выра-
жением (3.|17). Действительную часть последнего можно предста-
вить в следующем виде:
1 — k2 у?
R (у)
(1 — k2 у2) + у2 A2 d2
Подставив ф-лу (4.135) в (4.130), получим
1 - fe2 Тз_______________(1 — £2vg)2
(1 — А2 у*)2 — ^k2d2 [(1 — А2?*)2 — у|/г2б/2]2
(4.135)
(4.136)
При kd^>\ это выражение дает результаты, близкие к (4.25).
Результаты расчета у3 по ф-ле (4.136) при й=0,5 и различных
значениях постоянного параметра d сведены в следующую табли-
цу. В этой же таблице представлены результаты работы [1961, 1],
полученные при помощи ЭВМ, и
ТАБЛИЦА
Зависимость относительной полосы
захвата от параметров системы
А—0,45 (44=0,08)
работы (1958, 8], выполненной
для системы ФАПЧ ic дву-
звенным фильтрам (рис.
4.22), полученные при тре-
у гол ьно й х а р актериотике
Параметры системы Относительная полоса захвата, найденная
d 1 из ф-лы (4.136) В [1958,8] В [1961,1]
1 0,286 0,99 0,98 1
2 0,572 0,92 0,9 0,97
4 1,144 0,76 0,715 0,86
10 2,86 0,525 0,48 0,62
20 5,7 0,382 0,35 0,49
фазового детектора.
Сравнение этих резуль-
татов возможно, поскольку
дифференциальные уравне-
Рис. 4 22 Схема двузвен-
ного интегрирующего
фильтра
ния, описывающие поведение систем ФАПЧ с RLC-фильтром и
двузвенным ДС-фильтром, имеют один порядок и отличаются
только постоянными коэффициентами.
Параметры указанных систем связаны между собой следую-
щими соотношениями [1962, 18]:
у л
(4.137)
/ = -ь /?,С, + /?ХС2) Йу = — kd. (4.138)
л
Если эти равенства выполняются, то обе системы имеют одно и
то же дифференциальное уравнение.
Как видно из таблицы, совпадение результатов вполне прием-
лемо для инженерной практики.
164
Рассмотрим еще один пример вычисления полосы захвата для
системы ФАПЧ с линией задержки вместо фильтра, что соответст-
вует применению многокаскадного вч усилителя в цепи обратной
связи.
Для линии имеем
K(iQ) e'i27X
Действительная часть этого выражения
(4.139)
R(y) cos(Qyy7'.a). (4.140)
Подставив ф-лу (4.140) в (4.130), получим
-2cos (y3Qy 7’3)-cos 2(у3Йу Т3). (4.141)
Результаты расчета у3 по этой формуле представлены на
рис. 4.23 (кривая 1). Для сравнения здесь же пунктирной линией
показана зависимость полосы захвата от обобщенной задержки,
полученная численным интегрированием в [1957, 11], а также ана-
логичная зависимость, постро-
енная методом гармонического
баланса [1960,1] (кривая 2).
Как видно из рисунка, резуль-
таты получаются близкими.
Интересно отметить, что чи-
1
о,в
0,6
Рис. 4.23. Зависимость полосы захвата
от параметров системы ФАПЧ с линией
задержки
стое запаздывание мало влия-
ет на ширину полюсы захвата.
Это объясняется тем, что если
для системы с F(cp)=cos(p при
любом значении 0| ф021 л/2
сти в «малом» (3.36), максимальный сдвиг фаз,
выполняются условия устойчиво-
вносимый ли-
нией задержки на частоте биений, равной полосе удержания,
не может превосходить одного радиана. Вследствие же час-
тичного увлечения частота биений оказывается значительно ни-
же начальной расстройки, при которой происходит захват, и, сле-
довательно, на частоте биений, соответствующей захвату, сдвиг
фаз весьма мал.
Таким образом, приближенная ф-ла (4.130) дает результаты,
хорошо согласующиеся со всеми ранее известными результатами,
относящимися к различным типам четырехполюсников в цепи уп-
равления системы ФАПЧ.
Изложенный метод определения полосы захвата позволяет на-
ходить у3 даже в тех случаях, когда отсутствует аналитическое
выражение для коэффициента передачи фильтра. Для этого до-
статочно, имея лишь экспериментальную зависимость действи-
тельной части последнего от частоты, графически или численно ре-
шить ур-ние (4.130).
Рассмотренные выше приближенные методы определения по-
лосы захвата не являются единственно возможными. Своеобраз-
ий
ные приближенные методы, многие из которых близки, по сущест-
ву, к методу гармонического баланса, предложены в работах
3. Соботки (1963, 18], В. В. Лебедева (1966, 9], М. Брунка [1965,
26], В. К. Снедковой [1969, 63], М. В. Капранова [1963, 6], Бирна
[1962, 8], Голдстейна [1962, 11].
4.8. ПЕРЕХОДНЫЕ ПРОЦЕССЫ
Как было показано ранее, переходный процесс в системе
ФАПЧ первого порядка описывается довольно сложными выра-
жениями. Характер и время этого процесса удавалось найти благо-
даря тому, что для анализа его использовалось нелинейное диф-
ференциальное уравнение первого порядка. Реальная же система
ФАПЧ описывается нелинейным дифференциальным уравнением
произвольного порядка, решение которого в общем виде отсутст-
вует. Поэтому процесс установления в такой системе можно про-
анализировать либо численно, либо приближенно.
Следует заметить, что даже в линейном приближении для си-
стемы, описываемой уравнением высокого порядка, невозможно
определить время установления в аналитической форме, поскольку
решение такого уравнения представляется суммой экспонент и в
каждом отдельном случае приходится пользоваться численным
методом или экспериментальными результатами. Поэтому приме-
нение метода кусочно-линейной аппроксимации оказывается за-
труднительным.
Для некоторых систем ФАПЧ можно воспользоваться приема-
ми приближенного интегрирования нелинейных дифференциаль-
ных уравнений, в частности, методом усреднения.
Последний, как уже указывалось, успешно применяется для
отыскания асимптотических приближений решений нелинейных
дифференциальных уравнений и, следовательно, позволяет уста-
новить характер переходных процессов и найти асимптотические
выражения их длительности. Достоинством этого метода являет-
ся то, что его использование не требует априорных ограничений
на форму переходного процесса.
Рассмотрим наиболее часто применяемую систему ФАПЧ вто-
рого порядка с пропорционально-интегрирующим фильтром, опи-
сываемую системой ур-нии (4.51) и (4.52).
В зависимости от того, какой параметр следует считать ма-
лым, можно использовать различные варианты метода усредне-
ния. Так, если QyT — малая величина, то справедливо ур-ние
(4.94) и, следовательно, характер и длительность переходного про-
цесса такие же, как и в системе первого порядка. Соответствую-
щие формулы приведены в разд. 2.3 и 2.4.
Если т\/ QyTcl и (QyT)““1/2 <С1, то изменение энергии в си-
стеме с течением времени приближенно описывается ур-нием
(4.66). Решая это уравнение (при заданных начальных условиях),
можно найти функцию V(tj, являющуюся одной из характеристик
166
переходного процесса в системе, что позволяет определить из
(4.61) x(t), а с помощью решения (4.55) и ф(7). Иногда доста-
точно знать только процесс установления энергии V(t).
Исследуем процесс установления на примере системы ФАПЧ с
/•(ф) =sin ср. В этом случае изменение V(t) описывается ур-ниями
(4.72) и (4.73).
Ранее было показано, что если начальная расстройка меньше
полосы захвата, статическое равновесие по координатам ф устанав-
ливается при любых начальных условиях. Поскольку этот случай
наиболее интересен для практики, будем предполагать, что на-
чальная расстройка меньше полосы захвата.
Процесс установления, в зависимости от величины У(0), опи-
сывается различными уравнениями, поэтому удобно ввести спе-
циальные обозначения для его стадий. Так, если У>2, то процесс
«описывается ур-нием (4.72), а изображающая точка движется во-
круг фазового цилиндра, охватывая его. Этот процесс будем ус-
ловно считать установлением частоты. При У<2 справедливо
ур-ние (4.73) и траектория изображающей точки не охватывает
цилиндр. Движение совершается лишь вокруг точки устойчивого
(равновесия. Такой процесс будем полагать установлением фазы
(разности фаз).
Вычислим длительность процесса установления частоты TF.
Для этого проинтегрируем ур-ние (4.72) в пределах от V = V(0)
до У=2+6, где б — малая величина, определяющая положение
•системы в момент окончания переходного процесса (б>0). В ре-
зультате получим
K(k)dk
---------------Г- (4.142)
1+6 — &yHsignx— Е(А) — [2В (Те) — Е (А)]
14s2 Зе2 )
Здесь, как и ранее, k=^ 2/V, &(0) = у/~2/У(0).
Из ф-лы (4.142) следует, что результат интегрирования зави-
сит от знака координаты х. Он будет наибольшим в том случае,
если yHsignx>0 из-за отрицательного знака суммы остальных
слагаемых в фигурных скобках. Таким образом, максимальное
время установления частоты определяется выражением:
т k (?;
* F макс_
Т ~~ J
1+6
К (fe) dk
К(fe)dk
( п 81 ) • (4.143)
k — Л I Тн I-- Е (k) - -4- [2В (k) - Е (Л:)]
( 4е2 Зе2 )
Результаты численного интегрирования при 6 = 0,02 представ-
лены на рис. 4.24. Графики показывают, в частности, что при уве-
личении начальной расстройки время установления возрастает.
Кроме того, время установления в системе ФАПЧ с /?/?С-фильт-
ром (ё1У=0) тем меньше, чем больше ei/e2=mQyT.
167
Рис. 4.24. Зависимость времени
установления частоты от пара-
метров системы ФАПЧ:
а) для системы ФАПЧ с RC-
фильтром; б) и в) для систе-
мы ФАПЧ с 7?/?С-фильтром
при различных ун
Найдем теперь время установления фазы . Для этого про-
интегрируем ур-ние (4.73) в пределах от У=У(0) до K=6i>0
(61 определяет окончание процесса установления разности
фаз):
Рис. 4.25. Зависимость времени установления фазы от параметров
системы ФАПЧ:
а) с /?С-фильтром; б) с АУ?С-фильтром
На рис. 4.25 представлены результаты численного интегриро-
вания (4.444) для 61 = 0,03. Кривая для ei = 0 (рис. 4.25а) заимст-
вована из работы (1952, 1]. Из рис. 4.256 следует, что с увеличени-
ем ei время установления разности фаз уменьшается.
Очевидно, что полное время установления равно сумме двух
ранее найденных слагаемых:
Ta^=TF + Tr (4.145)
168
При нахождении Тп в конкретных случаях необходимо знать
начальные условия, т. е. УДО). Функция Vfcp, х) описывается вы-
ражением (4.57). Для определения ее значения при т=0, т. е.
УДО), нужно знать координаты пр и х в этот момент времени. При
F (ср) =sin<p V (0) = х2(0)/2 + 2(1—m) sin2cp (0)/2. На практике чаще
всего значение <р(0) выбирают произвольным, а напряжение на
конденсаторе фильтра равно нулю. Поэтому характерным началь-
ным условием для является Qx(0)=QH или х(0)=унт^TQy.
В качестве начального условия по <р можно взять его значение, со-
ответствующее наибольшему времени переходного процесса, т. е.
<р(0)=л. В результате получаем начальные условия для практи-
ческой оценки времени переходного процесса
v2TOv
УД0)=2(1—m) +
Рассмотрим теперь переходный процесс в системе второго по-
рядка с /?/?С-фильтром при (1954, 6]. В этом случае, как
уже указывалось, в зависимости от начального значения коорди-
наты Xi справедливо одно из ур-ний (4.86) или (4.87). Последние
дают возможность определить характер и длительность процесса
установления координаты xt, а затем с помощью ур-ния (4.78) и
координаты ср.
Учитывая медленность изменения координаты Xi по сравнению
с изменением координаты <р, можно в некоторых случаях ограни-
читься рассмотрением установления только координаты Xi, пола-
гая, что каждому мгновенному значению этой координаты соот-
ветствует установившееся решение ур-ния (4.78) для ф.
По аналогии с предыдущим случаем условно будем считать,
что при |xi| >1 имеет место процесс установления частоты, а при
|xj| <1 — процесс установления фазы.
Определим ТР, полагая, конечно, что начальная расстройка
меньше полосы захвата. Проинтегрируем ур-ние (4.86) в преде-
лах от Xi = Xi(0)>l до х±= 1; в результате получим
Тр 2ун (1 /л) 2 /мун
=-----------------— —- arc tg ------------ -+
(2 — tn) у m (2 — tn) — у„ у 2tn — tn2 — у„
m ун — (2—tri)Y (0) .__1_ ] I (2 — tn) Y2 (0) —- 2m yH Y(0) -f- m3 I .
ТП| 2(1 —Ун)У2(0) I
, tn ] I (2 — m) Y2 (0)—2m yH Y (0) + m3
2(2 —m) П| 2m2(l—yH)
(4.146)
Здесь У(0) =mi[xi(0)— j/ xf (0)—1].
Если, как и ранее, при включении системы оказывается, что
<2(0)=Йн. то, следовательно, хДО) =йх/^гПу=ун/т. Для этого
169
случая на рис. 4.26 приведены результаты вычислений зависимо-
сти времени установления частоты от величины уп/т при различ-
ных значениях т.
Полоса захвата в системе с /?/?С-фильтром при е=1/т27у<С1
определяется выражением (4.89). Из ф-лы (4.146) и приведенных
графиков следует, что при
Yn-^Уз время установления-
частоты неограниченно воз-
растает.
Найдем теперь время ус-
ыновления разности фаз 7?.
Для этого проинтегрируем
ур-ние (4.87) от Х1(0)=11до
Xi(Tv ) = Хог+6, где 6, как и-
Рис 4 26 Зависимость времени установ-
ления от начальной расстройки в систе-
ме ФАПЧ с AJAJC-фильтром при т2Ту^1
в предыдущем случае, —ма-
лая величина, определяю-
щая окончание переходного-
процесса (б>0), а х02=Уп В
результате получим
Zg =/п1п_1._-Тн . (4.147}
Полное время установле-
ния с момента включения
системы, очевидно, опреде-
лится ф-лой (4.145).
В системах ФАПЧ с бо-
лее сложными фильтрами вычисление характеристик переходного-
процесса существенно усложняется. В этих случаях либо можно*
применить метод усреднения [1968, 11], либо численно решить ос-
новное дифференциальное уравнение. Иногда можно пользовать-
ся экспериментальными данными.
Глава 5
ДЕЙСТВИЕ ДЕТЕРМИНИРОВАННЫХ
ВОЗМУЩЕНИЙ НА СИСТЕМУ ФАПЧ
5.1. ОБЩИЕ СВЕДЕНИЯ
В предыдущих главах рассматривались системы ФАПЧ, описы-
ваемые общим ур-нием (1.11). которое не содержит времени в
явном виде (автономные системы). Их автономность была обус-
ловлена тем, что все параметры как эталонного сигнала, так и са-
мой схемы ФАПЧ считались постоянными.
На практике же часто встречаются неавтономные системы
ФАПЧ, т. с. системы, у которых один или несколько параметров
явно зависят от времени. В частности, в результате полезной мо-
дуляции эталонного сигнала или воздействия на него помех па-
раметры этого сигнала могут оказаться непостоянными. Система
может также стать неавтономной вследствие изменения во време-
ни ее внутренних параметров под действием помех или паразит-
ных напряжений, попадающих на вход управляющего элемента,
непосредственно на подстраиваемый генератор и т. д.
Проблема анализа неавтономных систем ФАПЧ в целом слож-
на и многообразна, поэтому в настоящей главе будут исследовать-
ся только те системы, неавтономностъ которых вызывается детер-
минированными причинами.
Ограничимся рассмотрением случаев изменения фазы эталон-
ного сигнала, а также действия возмущений на вход управляю-
щего элемента и на выход фазового детектора (рис. 5.1а). Здесь
через Ut(t), Uz(t), u3(t) обозначены аддитивные помехи и возмуще-
ния, попадающие в различные точки системы ФАПЧ. Практически
аддитивные эталонному сигналу помехи возникают всегда при
приеме последнего от удаленного источника.
Действие аддитивных помех на эталонный сигнал иногда мож-
но свести к действию эквивалентной аддитивной помехи на выхо-
де фазового детектора. Этот же случай соответствует наличию на
выходе фазового детектора паразитных комбинационных коле-
баний.
Непостоянство напряжения на входе управляющего элемента
может иметь место при использовании системы ФАПЧ в качестве
171
фазового или частотного модулятора или при попадании на него
паразитных напряжений, например пульсаций от выпрямителя.
Анализ начнем с составления общего дифференциального
уравнения неавтономной системы ФАПЧ, в которой фаза эталон-
а)
u3(t)
Рис. 5.1. Структурные схемы системы ФАПЧ:
а) обобщенна:!; б) эквивалентная
ного сигнала, а также напряжения на выходе фазового детектора
и на входе управляющего элемента являются независимыми функ-
циями времени. Напряжение эталонного сигнала, модулированно-
го по фазе в соответствии с законом изменения фаг(О', а п0 ампли-
туде — в соответствии с законом изменения U->T(t), в сумме с на-
пряжением помех Ui(t) запишем в виде
иэг (0 -= U3r (0 cos [соэг 14- фэг (г)]+и3 (t). (5.1 >
Здесь (far(t) =0 при t<zO-
Напряжение подстраиваемого генератора можно представить
выражением
цпг (0 -- Unr cos [иэ-г t-+ фэг (0—ф (01, (5-2>
где ф(7) — мгновенная разность фаз эталонного и подстраиваемо-
го генераторов.
Для простоты будем считать, что фазовым детектором служит
идеальный перемножитель. В этом случае можно показать, что
действие аддитивной помехи, накладывающейся на эталонный сиг-
нал, эквивалентно действию некоторой аддитивной же помехи на
выходе фазового детектора. Представим m(t) в виде суммы от-
дельных синусоидальных компонент:
п
«I (0 -= V Ulk cos [(иэг + Qft) 14- ФJ, (5.3>
»=I
где Qh — разность частот эталонного генератора и й-й компонен-
ты, фй — начальная фаза этой компоненты.
Подставив выражение (5.3) в (5.1), найдем выходное напря-
жение фазового детектора с учетом подавления высокочастотных
компонент его нагрузкой:
172
«фд=^^эг(0^пгСО8<р + и;(0- (5-4)
где u*(t) = ^ипг V £/lftcos[QftH ф*+ф (0—фэг (ОЬ
*=1
ЛфД — коэффициент преобразования перемножителя.
Таким образом, выходное напряжение фазового детектора
можно представить суммой двух слагаемых, одно из которых яв-
ляется полезным сигналом, а второе — эквивалентной аддитивной
помехой, приведенной к выходу фазового детектора.
Учитывая, что на вход фильтра нижних частот действует воз-
мущение u2(t), а на вход управляющего элемента, кроме выход-
ного напряжения фильтра нижних частот, — постороннее напря-
жение us(t), запишем
^уэ (0 К (Р) (^фд “Г ^2) V ^3 (0- (5-5)
Мгновенная частота подстраиваемого генератора
®пг = соопг + 5уэ { К (р) р™ ^пАг (О COS ф + U2 (?) + w* (/)j + и3 (о| . (5.6)
Поскольку мгновенная разность частот есть производная
мгновенной разности фаз, можем записать
РФ- “эг—ипг + РФэг(0- (5-7)
Подставив в это выражение ф-лу (5.6), получим основное урав-
нение неавтономной системы ФАПЧ:
Р [ф — Фэг (01 + к (р) йу (0 ' cos ф + Зуз (и* (0 + и? (0) ] +
I (0 J
+ 5уэ«з(0=йн, (5-8)
аде Йу(0=(^д/2)5Уэ^пАг(0.
Структурная схема, соответствующая ур-нию (5.8), приведена
на рис. 5.16.
Если значения U3r и фэг постоянны, а и’ = и2 = «3=0, то ур-ние
(5.8) превращается в ур-ние (1.11), описывающее поведение обыч-
ной автономной системы ФАПЧ.
Уравнение (5.8) является нелинейным дифференциальным
уравнением произвольного порядка с переменными параметрами.
Поскольку решить его даже в случае постоянства параметров не
удается, будем изучать влияние различных помех и модулирован-
ных сигналов на работу системы ФАПЧ при малых возмущениях,
когда ее можно считать линейной. При этом можно ограничиться
рассмотрением системы в режиме удержания.
173
Считая, что система находится в состоянии синхронизма, за-
пишем мгновенную разность фаз эталонного и подстраиваемого
генераторов следующим образом:
ф--фог + А<р(О, (5.9)
где Аф(7) — отклонение мгновенной разности фаз от ее стацио-
нарного значения под действием возмущения.
Найдем прежде всего условия, при которых допустима линеа-
ризация. Нелинейность ур-ния (5.8) определяется одним членом
/г(ф)=созф. Разлагая cos ф в ряд Тейлора вблизи точки устойчи-
вого равновесия и учитывая, что —л<фо2<О, имеем
cos ф = cos ф02 +1 sin фоа j Аф —cos ф02Аф2 —1 sin ф021Аф3. (5.10)
Условие, при котором сумма третьего и четвертого слагаемых
этого выражения всегда остается на порядок меньше второго сла-
гаемого, имеет вид
| Аф | /2,25с1§аф02+Т),6-1,51 cig Фоа! • (5.11)
Поскольку COS ф02 = Ун, то
Аф^ 1/2,25-^ +0,6—1,5 . (5.12)
Это выражение показывает, что девиация разности фаз, при
которой допустима линеаризация, существенно зависит от началь-
ной расстройки. В частности, при [ун| = 1 линеаризация недопус-
тима ни при каких значениях Аф. Физически это объясняется тем,
что при |ун| = 1 система ФАПЧ находится на грани срыва синхро-
низма. В другом крайнем случае, т. е. при ун=0, Аф = 0,775, что
говорит о достаточно широком диапазоне Аф, при котором допус-
тима линеаризация.
При выполнении неравенства (5.12) можно в выражении (5.10)
отбросить все высшие слагаемые как величины малые. Подста-
вив в ур-ние (5.8) выражение (5.10), в правой части которого со-
храняются только два первых слагаемых, получим линейное диф-
ференциальное уравнение
р[Аф—фэг]+К(р)Оу(0 | | F' (ф02) | Аф + (и\ + и2)1 +5уэи3=0 ,
L Sby \t) J
(5.13)
где АДфог) —крутизна характеристики фазового детектора в точ-
ке устойчивого равновесия. В данном случае |/?'(фо2) | — |sin<po2|-
Линейное дифференциальное ур-ние (5.'13) позволяет опреде-
лить реакцию системы ФАПЧ при воздействии на нее различных
возмущений. Для облегчения анализа рассмотрим в отдельности
действие каждого из них.
174
5.2. РЕАКЦИЯ СИСТЕМЫ ФАПЧ НА ИЗМЕНЕНИЕ ФАЗЫ
ЭТАЛОННОГО СИГНАЛА
Эталонный сигнал может оказаться промодулированным как
полезным сигналом, так и внешними помехами. Будем полагать,
что иэг=const и, следовательно, Qy — постоянная величина. Рас-
смотрим реакцию системы на изменение фазы эталонного сигна-
ла. В этом случае в ур-нии (5.13) п”1=ц2=Нз = 0и
р [Аф—фэг] + К (р) Ц, | F' (ф02) | Аф = 0. (5.14)
Это уравнение позволяет найти передаточную функцию систе-
мы ФАПЧ. Под передаточной функцией принято понимать отно-
шение мгновенных отклонений фаз подстраиваемого и эталонного
генераторов Wi=^m(p)/^>3T(p). Передаточная функция имеет боль-
шое значение при линейном анализе систем ФАПЧ, так как она
позволяет оценить свойства системы ФАПЧ как фильтра или как
следящей системы.
Воспользовавшись выражением (5.14), с учетом того, что Аф =
= —фпг + фэг, получим
(р) =-------------------• (5-15)
1 + р/К (р) Йу | F' (фоа) I
Это выражение позволяет проверить выполнение неравенства
(5.12) и найти, таким образом, границы применимости линейного
анализа систем ФАПЧ с конкретными типами фильтров при за-
данном законе отклонения фазы эталонного сигнала. Действитель-
но, учитывая определение функции 1Гц можно записать
Аф - [ 1 - (р)] фэг = —— .. z . (5.16)
1 -|- А (Р) йу | F (ф„2) \/р
Вычислив из этого равенства Аф, можно установить, выполня-
ется ли условие (5.12). Кроме того, выражение (5.16) позволяет
для конкретного типа фильтра и заданного закона изменения
фэг(О определить фпг(7) и в, частности, исследовать переходные
процессы в линеаризованной системе ФАПЧ. В простейшем слу-
чае, когда фэг(Х) меняется по гармоническому закону с частотой • ,
в выражении (5.15) символ р можно заменить на iw, получив
тем самым частотную и фазовую характеристики системы ФАПЧ.
Интересно заметить, что при К(р)=А выражение (5.15) сов-
падает с формулой для передаточной функции интегрирующей
/?С-цепи с постоянной времени Тс= 1/йу|/г/(фо2) |. Эту величину в
дальнейшем будем называть собственной постоянной времени си-
стемы ФАПЧ.
Рассмотрим несколько различных частотных характеристик
систем ФАПЧ с конкретными типами фильтров. В системе первого
порядка К(р) = 1. Поэтому комплексная передаточная функция
девиации фазы такой системы
^i(ico)- . * „ (5.17)
1 1 со / с
175
Частотная характеристика находится из этого выражения как
модуль его правой част^:
, L. (5-18)
]/ l + Y2^
где y = co/Qy — относительная частота, 7'су = 1 /1Z7'(фоа) | — относи-
тельная постоянная времени системы ФАПЧ первого порядка.
Следует отметить, что для Z7(<р) = cos <р частотная характерис-
тика зависит от начальной расстройки, поскольку в этом случае
|Г'(фог) | = 1—Уд- Увеличение начальной расстройки эквива-
лентно увеличению постоянной времени некоторой эквивалентной
7?С-цепи с такой же частотной характеристикой.
Частотная характеристика системы ФАПЧ первого порядка,
построенная при 7'су= 1, показана на рис. 5,2а (кривая, соответст-
вующая Ту = 0).
Если система ФАПЧ имеет пропорционально-интегрирующий
фильтр, коэффициент передачи которого определяется выраже-
нием (3.14), то комплексная передаточная функция системы
(i ш) =--------. (5.19)
(1 - 0)2 ТСТ) +'i (Тс + mT) со
Модуль этого выражения, представляющий собой амплитудно-
частотную характеристику, имеет вид
1 { 1 + у2 [ mW2 - ТуТс, (1 - СП)] }2 + у2 Т2 [1 — тТ2 Т«]2
IWt (i у)| = -— ------------------------------.
' 1 (1 -Y27’y7’cy)2+Y2(7’cy+m7’y)2
(5.20)
В частном случае, при т = 0, выражение (5.20) представляет
собой частотную характеристику системы ФАПЧ с обычным ин-
тегрирующим фильтром. Если m = const, yEy/n^l, m27’y3>7'cy, вы-
ражение (5.20) значительно упрощается:
I ^i(i У) I - г. 1 ... ~ • (5.21)
У 1 + Y2 Т’су/"12
Следовательно, частотная характеристика коэффициента пере-
дачи системы ФАПЧ при указанных условиях аналогична частот-
ной характеристике системы ФАПЧ первого порядка с постоянной
времени, увеличенной в 1/т раз.
На рис. 5.2а приведены частотные характеристики системы
ФАПЧ с пропорционально-интегрирующим фильтром, построенные
по выражению (5,20). При построении кривых величина Ёсу при-
нималась равной единице, так как в этом случае лучше видно
176
влияние фильтра нижних частот, включаемого между фазовым
детектором и управляющим элементом, на передаточную функцию
системы.
Из выражения (5.20) и рис. 5.2а следует, что величину
I Wi(iY) I можно изменять, меняя относительную постоянную вре-
мени Ту или коэффициент пг. Кроме того, из рисунка видно, что
увеличением постоянной времени Ту при т = 0 можно значительно
ФАПЧ:
<г) с /?7?С-фильтром; б) с /?АС-фильтром; в) с
различными типами фильтров при постоянном
значении у»
177
уменьшить I IFtOy) | на заданной частоте. Однако у частотной ха-
рактеристики системы ФАПЧ на частотах, ниже заданной, обра-
зуется подъем. Если система используется в качестве фильтра,
этот подъем весьма нежелателен, так как он может привести к
усилению помех соответствующей частоты. Система же ФАПЧ с
пропорционально-интегрирующим фильтром позволяет при
тТу^Х получить частотную характеристику практически без
подъема, а также значительно уменьшить |VEi(iy)| на заданной
частоте.
Следует отметить, что параметры т и Ту определяют не только
модуль передаточной функции ФАПЧ, но и такой важный показа-
тель ее работы, как полоса захвата (ф-ла (4.132)]. Поэтому при
конструировании системы, работающей как фильтр, необходимо
выбирать ее параметры таким образом, чтобы на заданной часто-
те помехи получить наибольшее отношение | Wi (iy) | /у3.
В качестве второго примера рассмотрим систему ФАПЧ с
АЧ-С-фильтром. Подставив ф-лу (3.17) в выражение (5.15), по-
лучим7
|№i(iy)|--------------!-----------. (5.22>
(l-M7’pyV2) + i7’cy(l-A272)7 '
Взяв модуль этого выражения, найдем частотно-амплитудную
характеристику системы
I ^i(i Y) I =~^(1-Wcy У'2)2 + 7^(1 ~W- (5.23)
Из выражения (5.23) следует, что модуль коэффициента пере-
дачи девиации фазы системы ФАПЧ с АЧС-фильтром зависит от
двух обобщенных параметров фильтра и системы ФАПЧ: k и d.
Увеличение затухания d и коэффициента k приводит к увеличению
завала на верхних частотах и к подъему характеристики на ниж-
них частотах. Изменение k влияет сильнее на завал в области
верхних частот, чем изменение d. Однако увеличивать k можно
только до критического значения, при котором нарушается устой-
чивость системы в «малом» [ф-ла (3.19)]. Семейство кривых, по-
строенных по ф-ле (5.23) при 7’су=1, показано на рис. 5.26.
Стедует отметить, что, как и в системе ФАПЧ с пропорциональ-
но-интегрирующим фильтром, параметры системы и фильтра нуж-
но выбирать с учетом их влияния на полосу захвата.
Поскольку yv и ITi(iy) имеют сложную зависимость от пара-
метров системы и фильтров, то провести анализ в общем виде
трудно. Поэтому укажем методику численного определения опти-
мальной ФАПЧ, ограничившись рассмотрением систем с пропор-
ционально-интегрирующим и 7?ЧС-фильтрами. Проектируя систе-
мы ФАПЧ, работающие в режиме фильтра, необходимо найти оп-
тимальное соотношение параметров, обеспечивающее максимум
отношения | Wi (iy) | /у3, а затем сравнить системы, имеющие опти-
мальные параметры, но отличающиеся типами фильтров.
178
Сравним частотные характеристики систем ФАПЧ с указан-
ными фильтрами при постоянном значении у3. Пусть у3=0,5. Вос-
пользовавшись ф-лами (4.132) и (4.136) для у3, можно найти связь
между параметрами т и Гу для системы ФАПЧ с пропорциональ-
но-интегрирующим фильтром и между параметрами k и d для си-
стемы ФАПЧ с ^АС-фильтром, при которой обеспечивается выб-
ранное значение у3- Полученные области параметров можно ис-
пользовать для построения семейства кривых | ITi(iy) | по ф-лам
(5.20), (5.21) и (5.23). Кривые, построенные указанным способом
при у3 = 0,5, приведены на рис. 5.2s. Из рисунка следует, что одно-
значно решить вопрос о целесообразности применения того или
иного фильтра невозможно.
Выбор типа фильтра зависит от величины у. Можно заметить,
что система ФАПЧ, у которой функция |U7i(iy)| минимальна на
высоких частотах, оказывается неоптимальной при малых значе-
ниях у и наоборот. Так, если у>2, наилучшую фильтрацию обес-
печивает система ФАПЧ с /^АС-фильтром при максимальном зна-
чении параметра k, тогда как для у<1 целесообразно применять
пропорционально-интегрирующий фильтр с большим значением
Ту. В области 1 <Су<С2 все рассмотренные варианты дают при-
мерно одинаковые результаты.
Хотя данный пример относится только к частному случаю у3 =
=0,5, расчет показывает, что полученные выводы справедливы и
для других значений у3. Поскольку численные расчеты слишком
громоздки и не могут охарактеризовать свойства систем ФАПЧ со
всеми возможными типами фильтров, рассмотрим некоторые наи-
более часто встречающиеся случаи.
Если ограничить область возможных значений у3 и у, то можно
пользоваться упрощенными выражениями для определения у3 и
|^i (iy) | через параметры фильтров. Так, при полосе захвата
у3<0,5 для системы ФАПЧ с интегрирующим фильтром ее значе-
ние определяется из выражения (4."134). Если выполняется усло-
вие
TQyy2>l, (5.24)
то выражение (5.20) при т = 0 можно значительно упростить:
I ^i(i Y) I ’ <5-25>
При малых у3 и тп2ТуЗ> 1 величина у3 в системе с RRC-филът-
ром определяется по приближенной формуле, полученной из
(4.133)- ___
у3« У 2т. (5.26)
Если Т|уу23>т2, выражение (5.21) упрощается:
(5-27)
Y * с/
179
Для системы ФАПЧ с ЛДС-фильтром при у3<0,5, kdTcyy^>l и
ky>d выражения (4.136) и (5.23) значительно упрощаются:
~ 1,2
* УМ. ’
I^Oy)!--^4^- (5-29>
А2 у3ТсУ
Сравнивая выражения (5.29) и (5.25), можно заметить, что
система ФАПЧ с /?АС-фильтром при указанных ограничениях
имеет наибольшую крутизну ската частотной характеристики.
Воспользовавшись ф-лами (5.26—5.29), найдем отношение мо-
дулей коэффициентов передачи систем ФАПЧ с пропорционально-
интегрирующим и /?АС-фильтрами при одинаковых полосах за-
хвата:
) IV] (i у) ]RLC _ \‘2.d /5
I (i Y) Irrc ^Y2’
Полученная формула подтверждает сделанный ранее вывод о
нецелесообразности применения пропорционально-интегрирующего
фильтра для подавления высокочастотных помех и, наоборот, о
целесообразности его использования при низкочастотных помехах,
к Расчеты показывают, что при фильтрации высокочастотных
’ помех в цепь управления системы ФАПЧ следует включить фильтр
с большим коэффициентом прямоугольности. При этом имеет мес-
то значительная фильтрация помех и реализуется широкая поло-
са захвата.
До сих пор система ФАПЧ рассматривалась как некоторый уз-
кополосный фильтр, выделяющий несущую частоту и подавляю-
щий модуляцию эталонного сигнала. Однако это не единственное
ее применение. На практике может встретиться случай, когда эта-
лонный сигнал модулирован по фазе некоторым сигналом. При
этом необходимо иметь наименее искаженную частотную характе-
ристику системы.
В общем случае выбор типа четырехполюсника в цепи обрат-
ной связи, корректирующего частотную характеристику системы
в заданной области частот, представляется довольно сложной за-
дачей и зависит как от ширины спектра сигнала, так и от распо-
ложения последнего на шкале частот.
Интересно отметить, что в частном случае, когда спектр полез-
ного сигнала занимает область частот от у = 0 до у=1, система
ФАПЧ первого порядка не является наименее искажающей. Дей-
ствительно, варьируя параметры фильтра, всегда можно получить
наиболее равномерную частотную характеристику системы ФАПЧ
в области нижних частот.
Частотную характеристику системы первого порядка можно
получить из выражения (5.20) при Ту—0 и 7’су=1:
180
В системе ФАПЧ с /?С-фильтром характеристика наиболее-
равномерна при 7^=0,5:
| WT (i у) | = -7 1 , (5.32>
а в системе с /?ЛС-фильтром — при d2=2, k — 1/2 У 2:
| W, (I у) | --=- — .. 1 _• . (5.33>
1 У 1 + 0,015був
Из сравнения ф-л (5.31), (5.32) и (5.33) вытекает, что наи-
большей прямоугольностью и наиболее широкой полосой обладает
характеристика системы ФАПЧ с /?ЛС-фильтром.
Выводы, полученные в настоящем разделе, можно применить
и к системе ФАПЧ, выделяющей несущую частоту из эталонного-
сигнала, модулированного по фазе малой периодической импульс-
ной помехой. В этом случае необходимо выбрать такой фильтр,
который обеспечил бы при заданной полосе захвата эффективное-
подавление основной тактовой частоты и всех ее гармоник.
Рассмотрим теперь реакцию системы ФАПЧ, работающей в-
установившемся режиме удержания, на изменение фазы эталонно-
го сигнала более сложного вида. При этом, полагая начальные ус-
ловия нулевыми, воспользуемся операторным методом. Пусть за-
кон изменения фазы эталонного сигнала задан в виде <рЭг(О- С по-
мощью прямого преобразования Лапласа [48] можно найти изоб-
ражение фэг(р). Тогда изображение для отклонения фазы под-
страиваемого генератора и для разности фаз определятся выра-
жениями:
фпг (Р) = W1 (р) Тэг(Р) = фэг(р). (5-34)*
А (р) 4- / ср
ф(р)-[1~1Г1(р)]фэг(р)=-—Ь^_фэг(р) . (5.35)
А СР) + 7 cP
Зная изображение <рЭг(р) и тип фильтра в системе и используя-
обратное преобразование Лапласа, легко найти закон изменения
<рПг и ф как функций времени.
Рассмотрим реакцию системы ФАПЧ с пропорционально-интег-
рирующим фильтром на различные изменения фазы (частоты)
эталонного сигнала. Прежде всего найдем реакцию системы на
скачок фазы эталонного сигнала или, что то же самое, на беско-
нечно короткий импульс 8(t) частоты эталонного сигнала. Обозна-
чим величину этого скачка через Афэг, тогда изменение фазы эта-
лонного сигнала в функции времени
ФэГ(С)=Афэг-1 (/), (5.36>
где 1 (t) —единичная ступенчатая функция.
Изображение функции (5.36) по Лапласу имеет вид [48]
фэг (р) = А<р„ — . (5.37>
р
181.
Подставляя это выражение и ф-лу (5.14) в (5.34) и (5.35),
имеем соответственно:
... . Г, , (Tai+ V) + ea*i(Ta2+ 1) 1
Српг(О = Афэг [1 +--> --------J .
Ф (0 = -/<P3L^- [(1 + Та,) -(1 + агТ) еа*т].
Т (Я1 — а2)
В этих выражениях
mT + Тс
а, , =----------
112 2ТСТ
(5.38)
(5.39)
(5.40)
тТ+ Тс\2 1
2ТТС /
Из ф-лы (5.38) непосредственно следует, что поскольку дейст-
вительные части ai и аг всегда отрицательны, то при (->оо фПг(()—*
->Лфэг, а ф(7)—>~0. Последний результат является следствием аста-
тизма системы ФАПЧ по отношению к изменениям фазы эталон-
ного сигнала.
Изменение частоты подстраиваемого генератора и разности
частот, очевидно, будет определяться производными по времени от
выражений (5.38) и (5.39). Рассмотрим реакцию системы на ска-
чок частоты эталонного сигнала Aw3r или на линейное во времени
изменение фазы этого сигнала фэг = А«Эг(. Изображение фэг(0 по
Лапласу в этом случае имеет вид
ФэГ(р)=--^. (5.41)
Р2
Подставляя это выражение в ф-лы (5.34) и (5.35), для пропор-
ционально-интегрирующего фильтра имеем:
фпг(t) = - Дт*г J1L+L+ еЧ + Д(0 t—Айэгтс,
(ах — а2) Т L «1 «2 J
(5.42)
1ф (/) ---Г а1т + 1 еО1' + 1 + До)эг Тс. (5.43)
(ai — а2) Т L ах а2 J
Из этих выражений следует, что при (—>-оо устанавливаются
разность фаз, равная Aw3rTc которая не зависит от параметров
фильтра, и нулевая разность частот.
На практике часто закон изменения фэг(0 хорошо аппроксими-
руется степенными полиномами вида
ф^О^СоЛ^ + С^+С/ЧСз/з-Ь • • • (5.44)
Типичным примером в этом отношении является изменение фа-
зы эталонного сигнала, обусловленное эффектом Допплера [49].
Поскольку система рассматривается как линейная, удобно
пользоваться принципом суперпозиции и находить полную реак-
цию системы на воздействие вида (5.44) путем суммирования ее
реакций на каждое слагаемое.
182
По существу, реакция системы на первые два слагаемых была
рассмотрена ранее. Исследуем теперь реакцию системы на третье1
слагаемое ряда (5.44). Это слагаемое определяет линейный во
времени характер изменения частоты эталонного сигнала: фЭг(О =
и, следовательно, фэг(р) =2С2(1/рз)- Воспользовавшись
последним выражением, с помощью ф-л (5.34) и (5.35) для про-
порционально-интегрирующего фильтра находим:
фпг (0 = 2С J -TJ -TJT —Тс + тТ) -
(а/Г+Ре^ (а^+Ре^
+ a|T(Qi_a2)
(5.45}
Ф(О = 2С2 Tct + Tc(T~Tc + mT)
(а27’+ 1)еЙ!/
4 т (“1 — “г)
(fltT + 1) еа)<
of Т (й! — й2)
(5.46}
Из приведенных выражений следует, что с течением времени,
при больших t разность фаз будет неограниченно нарастать и в.
дальнейшем нелинейные свойства системы обязательно про-
явятся.
Совершенно аналогично можно получить реакцию системы на
более сложные законы. Пусть, например, фэг(0 = ДфэГ-е~“г. По таб-
лицам (48] находим фэг(р) =Дфэг/(р + а). Как и ранее, для системы
с /?/?С-(Ьильтром получаем, что
д 1 ( (waiT + 1) еО1<_(ma2T + 1) еп^
Ч'ЭГТГС| (йх — а2) (йх + а) (Oj — а2) (а2 + а)
, (1—)
1 («1 + «1) (а + аг) ) ’
(5.47}
Ф (/) =Дфэг(0— фпг(0- (5.48}
Эти выражения показывают, что для неискаженного воспроиз-
ведения рассматриваемого закона изменения фпг(7) необходимо,
чтобы
min(Rea1; Rea2)>Rea. (5.49}
Установившаяся при этом ошибка равна нулю.
5.3. РЕАКЦИЯ СИСТЕМЫ ФАПЧ НА МАЛЫЕ ВОЗМУЩЕНИЯ
В ЦЕПИ УПРАВЛЕНИЯ
Под возмущениями в цепи управления будем понимать напря-
жения, попадающие непосредственно на управляющий элемент
или на выход фазового детектора [напряжения uz(t)., и1 a^(t) на
183-
рис. 5.1]. Дифференциальное ур-ние (5.13) в этом случае прини-
мает вид
Р Дф+К (р) ЙуГIF' (ф02) ] Дф + 4^-(О 1 + 5уэи3 (0 = 0. (5.50)
L ““У J
Здесь u*(0=u*(0 + u2(0-
Рассмотрим действие напряжений и* (t) и u3(t) в отдельности.
Положим, что u3(t)—O. Тогда
р Дф + К (р) Qy f| F' (ф02) | Дф + и; (о] = о. (5.51)
Для оценки влияния переменного напряжения u* (t), прило-
женного к выходу фазового детектора, на разность фаз эталонно-
го и подстраиваемого генераторов (точнее на фазу подстраивае-
мого генератора, так как фаза эталонного сигнала постоянна)
введем операторный коэффициент передачи W2(p). Этот коэффи-
циент определяется отношением девиации фазы подстраиваемого
генератора, обусловленной действием напряжения u* (t) при зам-
кнутой петле автоподстройки, к девиации частоты этого же гене-
ратора, обусловленной непосредственной подачей напряжения
u* (t) на вход управляющего элемента, при разомкнутой петле
ФАПЧ:
W2(p)=-^P} . (5.52)
5Уэ«2 (р)
Непосредственно из выражения (5.51) можно найти, что
(5‘53>
1 + [тср/к (р)]
Сопоставляя ф-лы (5.53) и (5.15), замечаем, что
^2(Р)=П^1(Р). (5.54)
Это выражение позволяет найти как частотные, так и времен-
ные характеристики системы. Из него, в частности, следует, что
частотные характеристики сигналов, действующих на выходе фа-
зового детектора, отличаются от частотных характеристик функ-
ции W7i(ico) множителем Тс. Таким образом, принципиальные вы-
воды о целесообразности применения того или иного типа фильт-
ра для подавления помех справедливы и для этого случая.
Рассмотрим теперь случай, когда возмущение действует непо-
средственно на вход управляющего элемента. Дифференциальное
ур-ние (5.13) при этом запишется следующим образом:
р Аф + К (р) Йу | F' (<р02) | Аф + Sy3u3 (/) = 0. (5.55)
Для оценки действия переменных напряжений, приложенных
*ко входу управляющего элемента, на частоту подстраиваемого ге-
184
нератора удобно ввести операторный коэффициент W$(p), выра-
жающий отношение мгновенных отклонений частоты подстраивае-
мого генератора при замкнутой и разомкнутой петле автопод-
стройки, а. е.
W3(p) = -p- <Pnr (р)
$уэ«з (Р)
1
(5.56}
(5.57}
(5.58}
Из ур-ния (5.55) имеем
Wa(p)-
1 + [К(р)/ТсР]
Из сравнения выражений (5.56) и (5.15) вытекает, что
Wdp^-^-Wdp).
К (р)
Эти выражения позволяют рассчитать частотную характерис-
тику | W3(iy) | Для переменных напряжений, попадающих на вход
управляющего элемента системы ФАПЧ, при любом типе фильт-
ра. Для примера на рис. 5.3 приведены частотные характеристики
Рис. 5.3. Частотная зависимость функции 1Г3(1у)
для системы ФАПЧ с РЛС-фильтром
185
«системы ФАПЧ с интегрирующим и пропорционально-интегрирую-
щим фильтрами (1958, 2]. Эти характеристики построены при
Т’Су=2/л.
Как показывает анализ и как непосредственно следует из при-
веденных рисунков, включение фильтра нижних частот между фа-
зовым детектором и управляющим элементом вызывает только
подъем частотной характеристики в области нижних частот по
сравнению с частотной характеристикой системы ФАПЧ, не имею-
щей фильтра. Поэтому, если переменное напряжение, непосредст-
венно попадающее на вход управляющего элемента, является по-
мехой, включение фильтра в цепь управления нецелесообразно.
Если же переменное напряжение us(t) представляет собой полез-
ный сигнал и требуется свести к минимуму частотные искажения,
следует применить пропорционально-интегрирующий фильтр с до-
статочно большими постоянными времени. Такой случай соответ-
ствует использованию системы ФАПЧ в качестве фазового (час-
тотного) модулятора, частотная характеристика которого при
тТу~^> 1 имеет вид
(5.59)
Из этого выражения следует, что, уменьшая т, можно расши-
рять диапазон частот, в котором характеристика равномерна.
В (1970, 23] рассмотрена реакция линейной системы ФАПЧ на
возмущения в виде периодической последовательности прямо-
угольных, пилообразных импульсов, вводимых в цепь управления.
5.4. ДЕЙСТВИЕ БОЛЬШИХ ГАРМОНИЧЕСКИХ ПОМЕХ
НА СИСТЕМУ ФАПЧ
До сих пор рассматривалось воздействие на систему ФАПЧ на-
столько малых помех, что нелинейностью характеристики фазово-
го детектора можно было пренебречь. Это давало возможность ли-
неаризовать основное дифференциальное ур-ние (5.8) и тем самым
значительно упростить анализ, сведя его, по существу, к опреде-
лению частотных или временных характеристик, которые полно-
стью определяют свойства линейных систем.
На практике часто встречаются случаи, когда возмущения в
системе ФАПЧ настолько велики, что пренебрегать ее нелинейны-
ми свойствами нельзя. Это привело бы не только к значительным
количественным ошибкам, но и не позволило бы обнаружить но-
вые качественные явления, имеющие место в нелинейной системе.
Так, учет нелинейности характеристики фазового детектора дает
возможность найти зависимость среднего значения установившей-
ся разности фаз от величины внешнего возмущения, а также уточ-
нить амплитуду девиации разности фаз.
Настоящий раздел посвящен анализу поведения системы при
воздействии возмущений на эталонный сигнал. Последнее соот-
186
ветствует как полезной модуляции эталонного сигнала по фазе*
так и действию помех на его амплитуду и фазу. Поскольку ампли-
тудную модуляцию эталонного сигнала можно устранить при по-
мощи ограничителей, рассмотрим прежде всего случай фазовой*
модуляции.
Для исследования вынужденных колебаний нелинейной систе-
мы можно воспользоваться методом гармонического баланса. Как
указывалось выше, сущность этого метода заключается в том, что*
вынужденные колебания представляются гармоническим рядом, а
параметры их определяются из условия наилучшего соответствия
полеченного решения основному нелинейному дифференциальному
уравнению.
Предположим, что система работает в режиме/синхронизма
и что модуляция эталонного сигнала не приводит к появлению-
средней разности частот, т. е. в среднем синхронизм не нарушает-
ся. В общем случае фаза эталонного сигнала может изменяться
по произвольному закону. Для простоты будем считать его гармо-
ническим:
<Par(Q parsinQM/, (5.60)
где йм и рэг — соответственно частота модуляции фазы эталонно-
го сигнала и амплитуда ее девиации. Тогда отклонение частоты
эталонного сигнала
Рфэг(0 " ^ArCOsQj. (5.61).
Пусть девиация фазы подстраиваемого генератора изменяется
также по гармоническому закону с частотой Йм:
фпг (0 = ₽пг sin (йм t + фх) + фср, (5.62)
где фСр — среднее значение разности фаз эталонного и подстраи-
ваемого генераторов; <рх — фазовый сдвиг в законах фазовой мо-
дуляции эталонного и подстраиваемого генераторов; рпг — ампли-
туда девиации фазы подстраиваемого генератора.
Справедливость такого предположения обосновывается тем,
что в системе ФАПЧ, работающей в качестве фильтра или детек-
тора, модуль передаточной функции |JTi(iw) | имеет малое значе-
ние на частотах 2 Йм и 3 Йм. Указанное предположение тем более
справедливо, чем круче спадает частотная характеристика си-
стемы.
Из выражений (5.61) и (5.62) следует, что
ф (0 = —фср —рпг sin (йм t + фх) г Вэг sin йм t. (5.63)
Полагая в основном дифференциальном ур-нии (5.8) u* (t) —
= u2(t)=U3(t)~0 и подставляя в него выражения (5.61) и (5.63),
получаем исходное нелинейное дифференциальное уравнение
—QM0nr cos (Йм t + фх) =- Йн—К (р) Йу cos [фср +
+ Впг sin (Йм t + фх] 4- рэг sin Йм £], (5.64)
187
Это уравнение при некоторых допущениях можно, как показа-
но в приложении 1, свести к системе трех трансцендентных урав-
нений:
Ц COS фср Jq (Р„г) Jq (₽9г) 2Qy COS фср COS фх J± (фпг) J± (Рэг) 0, (5.65)
- —^M₽nrCOS%M=2|K (|Йм)|йу8Шфср Лфпг)Л(Рэг)8Шфх, (5.66)
^мРпг sin ф2м ~ 2 | к (i Нм) I [^у COS фх Jo (Рпг) -Л (Рэг)
—Sin Фср Л(₽)пг/О(рэг)]. (5.67)
Решение этой системы уравнений позволяет определить по из-
вестной величине девиации фазы эталонного сигнала рэг значения
Рпг, фср И фх.
Из ур-ния (5.65) имеем
cos фср =--------------------------------. (5.68)
Jо ( Рпг) 70 (Рэг) + 271 ( Рш ) Jl (рэг) COS <Рх
Из этого выражения следует, что среднее значение разности
«фаз эталонного и подстраиваемого генераторов зависит не только
от величины относительной начальной расстройки, но и от ампли-
туды девиации фазы эталонного сигнала, а следовательно, и от
отношения мощности эталонного сигнала к мощности помехи на
входе системы ФАПЧ. Если ун=0, фср не зависит от рэг и рпг- При
увеличении девиации фазы эталонного сигнала среднее значение
разности фаз обоих генераторов, как видно из ф-лы (5.68), увели-
чивается.
Рассчитаем фильтрующую способность системы ФАПЧ с
учетом нелинейных свойств фазового детектора. Из ф-лы (5.68)
находим
sin фСр =
Тн
1
7о (Рэг) (Рпг) 271 (Рэг) Л (Рп.) cos <рх (
Поскольку при работе системы в режиме синхронизма точка
устойчивого равновесия находится в пределах от Зл/2 до 2 л, перед
радикалом в ф-ле (5.69) необходимо выбрать знак минус.
Из ур-ний (5.66) и (5.67) получаем
[7j (Рш) 7о (Рэг) 70 (Зпг) 71 (Рэг) cos <рх]2
7q (Рпг) 72 (Зэг) (1 cos2 <рх)
(5.70)
V К
Из этого выражения следует, что
COS2 фх [ J2 фпг) J2 фэг) + 72 фпг) J2 фэг) tg2 J _
-27, (рпг) Jo (Рэг) Jo (Рпг) Л (Рэг) cos фх + 7f (рпг) 72 (рэг)-
- 72фпг) 72 фэг) tg2 ф2м = 0. (5.71)
Это уравнение легко решается относительно со5фх. Подставляя
в ур-ние (5.67) значения 5Шфср из (5.69) и совфх из (5.71), можно
найти по известным величинам рэг, ун и Йм значения Рпг, фх и фср.
Величина фх для оценки фильтрующей способности системы
ФАПЧ интереса не представляет.
188
На рис, 5,4а для примера представлены результаты вычисления
зависимости коэффициента передачи девиации фазы FiH=₽nr/₽ar
от относительной частоты помехи yM = QM/Qy (кривые 1 и 3) в си-
стеме ФАПЧ с интегрирующим фильтром. При построении кри-
Рис. 5 4. К расчет-» фильтрую-
щей способности системы
ФАПЧ с /?С-фильтром
вой 1 предполагалось, что рэг=1 рад, ун=0,5, Ту=1. Аналогичная
зависимость получается и при других значениях Ту. Кривая 3 по-
строена при ун=0. Для сравнения на этом же рисунке приведена
характеристика модуля коэффициента передачи линейной модели
системы ФАПЧ | |, полученная по ф-ле (5.20) при т = 0
(кривая 2).
Сопоставляя кривые 1, 2 и 3, можно заметить, что нелиней-
ность характеристики фазового детектора системы ФАПЧ умень-
шает ее коэффициент передачи, причем это уменьшение тем зна-
чительнее, чем больше девиация фазы и чем меньше ум..
На рис. 5.46 показана зависимость коэффициента передачи де-
виации фазы от величины девиации фазы эталонного сигнала при
ум = 1 для y,i = 0 (кривая 1) и ун = 0,5 (кривая 2).
Большой интерес представляет определение зависимости сред-
него значения разности фаз эталонного и подстраиваемого гене-
раторов от амплитуды девиации фазы эталонного генератора и ве-
личины относительной расстройки. Зависимость cos <pCp = f (ун) при
ум=1 и Рэг=1 представлена на рис. 5.5а (кривая /). Здесь же
приведена зависимость cos <pcp=f (уп) в отсутствие фазовой моду-
Рис 5 5 Зависимость косинуса среднего значения разности фаз в си-
стеме ФАПЧ с /?С-фильтрсм от ун и рэг
189
I
ляции эталонного сигнала (кривая 2). Из рисунка видно, что с
увеличением ун величина фср заметно отличается от того значения,
которое получается при линейной аппроксимации характеристики
фазового детектора. В последнем случае фср равно стационарно-
му значению разности фаз.
На рис. 5.56 приведена зависимость среднего значения разно-
сти фаз обоих генераторов от амплитуды девиации фазы эталон-
ного сигнала, вычисленная при ум=1, ун*=0,5. В отсутствие моду-
ляции рэг=0, как и следовало ожидать, созфср = 0,5. Учет нели-
нейных свойств системы ФАПЧ, как видно из рисунка, дает
поправку к значению фСр, заметно увеличивая последнее. Это не-
обходимо учитывать при проектировании различных радиотехни-
ческих устройств с системами ФАПЧ.
Метод гармонического баланса позволяет рассмотреть дейст-
вие на систему ФАПЧ и более сложных возмущений. В частности,
с помощью этого метода В. С. Третьяковым было рассмотрено
влияние суммы гармонических помех на систему ФАПЧ. В (1967,
18] указанный метод использовался для получения приближенно-
го выражения, определяющего полосу захвата в системе ФАПЧ
при высокочастотной модуляции фазы эталонного сигнала:
Уз ~ Л (Рэг) V 2Re[A(iy3)]. (5.72)
Это выражение имеет простое физическое толкование. При вы-
сокочастотной модуляции на вход управляющего элемента посту-
пает напряжение биений, возникающих между несущей эталонно-
го сигнала и сигналом подстраиваемого генератора. Все другие
компоненты подавляются фильтром, и поэтому можно считать, что
ширина полосы захвата зависит только от остатка несущей, ко-
торый определяется множителем /л(раг).
Значительный интерес представляет оценка точности резуль-
татов исследования вынужденных колебаний системы, получен-
ных методом гармонического баланса. Предположим, как и ранее,
что фаза эталонного сигнала меняется по гармоническому закону,
а и* (t) = Uz(t) =us(t) =0. Тогда общее ур-ние (5.8) запишется в виде
р ф + К. (р) Qy cos ф = QH 4- Пмрэг cos QM t. (5.73).
Перепишем это уравнение следующим образом:
D (р) + f (ф)—L (р) Ймрэг cos Йм t = 0. (5.74)
Здесь D(p)=plK.(p), L(p) = 1 /К(р) — операторные полиномы,
f (ф) = ф "Н-
Нетрудно показать, что приближенное выражение (5.63) мож-
но представить с помощью известных тригонометрических формул
в следующем виде:
фпР(0 =фср + Р8ш(Йм/ + фх), (5.75}
190
где tpnpfO — приближенное решение для величины найден-
ное методом гармонического баланса,
Р = J ₽пг + ₽эг _ 2₽пг PnrCOS фх, tg фх =
_____Рэг sin <рх
Рпг 4“ Рэг cos <Рх
Величины Рпг и фх были вычислены ранее по заданному значе-
нию рэг- Поскольку при этом были приняты определенные допу-
щения, решение основного нелинейного ур-ния (5.73), т. е. фпр(О,
было найдено с некоторой погрешностью. Перейдем к непосредст-
венному определению этой погрешности.
Известно (50], что при гармоническом возмущении погрешность
периодического решения уравнения вида (5.74) для несимметрич-
ной нелинейности можно найти из выражения
!ф(/)—Фпр(/)
\ 2"/®м
2л М I С
1+-----— max ) [£(«) —7?пр(ц)Ш<рпР (/)] du
“м ‘Д / J
/ 0
2Л/2М
/ 2л М \ С
1 — М 1 + —— I R(u)\ du
\ сом / J
О
(5.76)
Здесь Л4 = шах|/'(ф) |, Mt = max|df^)/tfrpCp| — пиковое значе-
ние модуля производной среднего значения функции /(ф), R(u) —
ядро интегрального уравнения, к которому может быть сведено
ур-ние (5.74), /?Пр(и) —ядро приближенного интегрального уравне-
ния, которое может быть получено из ур-ния (5.74).
Как следует из выражения (5.76), под погрешностью в данном
случае нужно понимать верхний предел, которого не может пре-
вышать модуль мгновенного значения разности точного и прибли-
женного решений. Для ур-ния (5.74)
,M Qy max | —sin <р | Йу. (5.77)
Функцию смещения /(ф) можно найти обычным способом:
____21с/2м [ I
Йф) = f ЙуС03[фср + ряп(Йм/ + фх)]— QH \dt. (5.78)
6 I J
После интегрирования имеем
Йф) -- -2- [Йу Jo Ф) cos Фер -йн]. (5.79)
"М
Воспользовавшись этим равенством, запишем
Л/^^-ЙуЛф). (5.80)
191
Величины R(u) и Rnp(u), как показано в (50], определяются
выражениями:
п (и} = „V 1 ~ + QM Г ° D"W ] К<0)
D' (rk) 1 - е2л/1'м rk 2л [D' (0) 2 [О' (0)F J 2D' (0) '
k=i
(5.81)
(и) - Re Г_Р2»)-£-0 °м)_1 cos и +
pV ’ л [ D* (i QM) J
। 1 r I D' (0) — D* (i QM) 1 • rv sinQM« /e oo\
4---Im ——— sin QM и------------------. (5.82)
л L J nD'(O)
Здесь D'(p) = dD(p)/dp; гь — корни многочлена D(p), не рав-
ные нулю, />(iQM) = iQMZ)*('iQM).
Выражение (5.76) позволяет оценить ошибку приближенного
решения уравнения вида (5.74) при любом типе фильтра нижних
частот в цепи управления. В качестве примера рассмотрим систе-
му ФАПЧ с интегрирующим 7?С-фильтром. В этом случае ур-ние
(5.74) принимает вид
Тр* ср + р ср + Qy cos ср = QH + QMp3r cos QM t —T Q2 рэг sin QM t. (5,83)
Из ур-ния (5.83) имеем
D(p)=p(\+Tp) (5.84
Отсюда корень многочлена D(p), не равный нулю, ri= — 1/Г.
При помощи выражения (5.84) определяем;
D'(р) = 2Тр-\-£>'(0) = 1 1
Z)" (р) =£)" (0) — 2Т, Z)'(r1)=—1 '
Подставляя эти значения в выражения (5.81) и (5.82), полу-
чаем:
Я («)
Rnp (u) ==
exp ( — и/Т) QM (и — Г)________1_„
1 — exp (2n/QM Г) 2л 2 ‘ ’
QMDcosQM« 1 _ j 1
л(1 + й2Л) " L1 + fi2Mn j
(5.86)
(5.87)
Воспользовавшись этими равенствами, с учетом выражения
(5.75) можно оценить величину интеграла в числителе неравен-
ства (5.76):
' м
J [# (и) —Япр (и)] {QyCOS [фср + р cos (QM t + фх)]—QH} du
2n/SM
<Qy[]cos(?cp + p)—|Yh |] J \R(U)—R^(u)\du. (5.88)
о
192
Знак плюс в аргументе косинуса неравенства (5.85) соответст-
вует положительной начальной расстройке, а знак минус — отри-
цательной.
Интегралы в неравенстве (5.76) в общем случае вычислить
чрезвычайно сложно. При выполнении условия
Ум Ту >4, ’ (5.89)
т. е. если фильтрация в системе достаточно высока, это неравен-
ство значительно упрощается:
7?(Ы)-7?ПР(И)^7?(Ы)« (5.90)
2л 2
С помощью такого приближения можно вычислить величины
интегралов в выражении (5.76):
2Л/2М
f \R(u)\du=^-. (5.91)
0
Подставляя выражения (5.77), (5.80), (5.88) и (5.91) в (5.76).,
находим абсолютную погрешность приближенного решения для си-
стемы ФАПЧ с интегрирующим 7?С-фильтром:
; ф (0—Фпр (01 < -(фср ± ft-1--17111] ЬЛЖ . (5 92)
2ум А, (₽)-"[' + 70ф)]
Можно показать, что числитель этого выражения не превыша-
ет 2л. Поэтому для эффективной оценки погрешности приближен-
ного решения, найденной из выражения (5.92), необходимо, что-
бы она удовлетворяла условию: 2ум70(₽)—го[1 + /0(р)]>2л. В этом
случае величина ошибки не превзойдет 1 рад.
Принятая в качестве эффективной оценки погрешность являет-
ся условной. Если требуется, чтобы эта граница была в N раз
меньше принятой, то приведенное выше неравенство видоизменяет-
ся: 2ум/0(Ю—л[1 +/о(Р)]>2 nN.
Из выражения (5.92) вытекает, что максимальная погрешность
при выполнении условия (5.89) не зависит от относительной по-
стоянной времени интегрирующего фильтра. Это объясняется тем,
что интегрирующий фильтр при выполнении условия (5.89) обла-
дает следующим специфическим свойством: с увеличением его по-
стоянной времени соотношение между первой гармоникой и всеми
остальными не меняется. Кроме того, выражение (5.92) показы-
вает, что погрешность приближенного решения, вычисленного ме-
тодом гармонического баланса, уменьшается с повышением часто-
ты модуляции эталонного сигнала и с уменьшением амплитуды
девиации разности фаз эталонного и подстраиваемого генера-
торов.
Выражение (5.92) позволяет по известным значениям рЭг и вы-
численной величине р определить предел погрешности приближен-
ного решения.
7-526 193
Л
1фХО—фпр(0| < —
Ряс. 5.& Зависимость пог-
решности приближенного
решения уравнения системы
ФАПЧ с 7?С-фильтром от
относительной частоты
внешнего воздействия
Следует заметить, что при выполнении условия (5.89), а также
При ум>2 и рЭг<|1,57 можно с большой точностью считать, что
Тогда р~Рэг и
cos ФСр»—. (5.93)
Jo (гэг?
Подставляя ф-лу (5.93) в выражение (5.92), получаем
cos [arc cos -7-^”— ± Рэг) I — I Ти 1] [1 + 70 (P3r)J
\_______-о (Рэг)__/ !____J__________
2ум ^0 (Рэг) ' л [ 1 + Jo (Рэг]
(5.94)
На рис. 5.6 представлены в качестве примера результаты вы-
числения по ф-ле (5.94) погрешности приближенного решения
уравнения системы ФАПЧ с интегрирующим 7?С-фильтром, как
f ) функции относительной частоты моду-
ляции при ун = 0,5 для нескольких зна-
чений амплитуды девиации фазы эта-
лонного сигнала.
До сих пор рассматривались нели-
нейные явления в системе ФАПЧ, вы-
зываемые гармонической модуляцией
фазы эталонного сигнала. Как уже
указывалось, этот случай соответству-
ет действию аддитивной гармониче-
ской помехи на эталонный сигнал при
наличии ограничения в канале эталон-
ного сигнала. Кроме того, заранее
предполагалось, что система, несмот-
ря на модуляцию фазы эталонного
сигнала, в среднем не выходит из со-
стояния синхронизма.
Большой интерес представляет так-
же и другой случай, когда на эталон-
ный сигнал действует гармоническая
помеха при произвольном отношении
Пи/1/эг, причем ограничение в канале эталонного сигнала отсут-
ствует. Такая помеха может создаваться как внешним источником,
так и внутренним (комбинационные помехи, наводки и т. п.). По-
лагая, что на вход системы ФАПЧ вместе с эталонным гармониче-
ским сигналом (фэг=const) поступает только аддитивная гармони-
ческая помеха с амплитудой l/ц, на основании выражения (5.4)
имеем
ц’(0 ==0,5^ФдДпгД11со5(ПП—ф + ф^фэг). (5.95)
Подставляя значение и* из этого равенства в ур-ние (5.8) и
полагая «2=«3=0, получаем уравнение для системы ФАПЧ с про-
извольным типом фильтра нч:
194
/9<р + K(p)Qy |cos(p + cos(Qt t—Ф + фх + Фэг)] =£2H- (5.96),
L Uar J
Однако получить общее решение этого уравнения невозможно.
Поэтому при изучении действия гармонической помехи на систему
ФАПЧ прибегают к приближенным методам ее анализа, либо к
численному интегрированию и эксперименту. Так, в работе [1963.
7] путем численного интегрирования ур-ния (5.96) для системы с
интегрирующим однозвенным фильтром были получены следую-
щие результаты (при Qt/Qy=У1<уз):
1. Функция рф представляет собой периодическую функцию
времени с периодом, равным периоду биений между частотой по-
Рис. 5.7. Результаты численного решения уравнения
системы ФАПЧ с /?С-фильтром при внешнем гармо-
ническом воздействии для двух значений отношения
сигнал/помеха на входе
мехи и частотой эталонного сигнала. На рис. 5.7 приведены ре-
зультаты численного решения ур-ния (5.96) при (Дг/^и = 0,5 (кри-
вая 2) и Uar/Uu = 2 (кривая /).
2. При U3r/Uu>l частота подстраиваемого генератора в сред-
нем совпадает с частотой эталонного сигнала, что иллюстрируется
кривой 1 на рис. 5.7, поскольку площадь, ограниченная этой кри-
вой и осью абсцисс, за период равна нулю. Действие помехи здесь
сводится к периодическим изменениям мгновенной разности фаз
эталонного и подстраиваемого генераторов относительно некото-
рого среднего значения.
3. При U3r/Uu<ZA частота подстраиваемого генератора равна
частоте помехи. Это иллюстрируется тем, что площадь под кри-
вой 1 на рис. 5.7 не равна нулю.
4. При (7эг/^и=1 частота подстраиваемого генератора равна
среднему арифметическому между частотами эталонного сигнала
и помехи. Если же частота помехи такова, что выполняется не-
равенство Yi>ya, то в системе могут наблюдаться две области на-
7* 195
чальных расстроек, причем в одной из них частота подстраивае-
мого генератора захватывается частотой эталонного сигнала, а в
другой — частотой помехи. Ширина каждой области зависит от
амплитуды соответствующего напряжения.
В [49] рассмотрен случай, когда частота гармонической помехи
йе постоянна и показана целесообразность использования при
этом фильтра типа 1/2.
Некоторые результаты математического моделирования и ка-
чественного исследования воздействия гармонических помех на си-
стему приведены в (1970, 4; 1971, 11].
5.5. РЕАКЦИЯ НЕЛИНЕЙНОЙ СИСТЕМЫ ФАПЧ НА СИГНАЛЫ,
МАНИПУЛИРОВАННЫЕ ПО ЧАСТОТЕ И ФАЗЕ
В некоторых случаях, например, при фильтрации и детектиро-
вании ЧМ колебаний с помощью системы ФАПЧ важно не только
знать реакцию на этот сигнал линейной модели системы, но и учи-
тывать ее нелинейные свойства. Результаты такого анализа весьма
полезны и при изучении работы системы ФАПЧ, подверженной
флуктуациям (1969, 64].
Ввиду больших математических затруднений ограничимся
лишь рассмотрением простейшей модели системы ФАПЧ первого
порядка. Итак, предположим, что на систему первого порядка
действует эталонный частотно-манипулированный сигнал с разно-
сом частот манипуляции Aw. Обозначим время, в течение которого
эталонный сигнал имеет частоту wor, через Tlt а время, в течение
которого его частота равна wor + Aw,— через Tz.
В дальнейшем для упрощения предположим, что при отсутст-
вии возмущений, система устойчива в целом и что за промежуток
времени Л или Т2 переходный процесс в ней успевает закончиться
(гл. 2). Это позволяет в первом приближении считать, что
реакция системы на частотно-манипулированный сигнал опреде-
ляется как последовательность ее реакций на каждое воздействие
в отдельности. Подобная задача для системы первого порядка
рассматривалась в [1969, 64].
Уравнения системы первого порядка в общем случае при им-
пульсной модуляции эталонного сигнала по частоте имеют вид:
р<р-4-А(<р)=ун1> 0</<7’2. (5.97)
p<p + F(<p) =-ун2, 7\<Ч<Т2 + 7\. (5.98)
Здесь дифференцирование ведется по «безразмерному» време-
ни т = Пу^ (р = dldQ.yt), Аун = А(о/йу=ун1—Унг, Aw — отклонение
частоты эталонного сигнала.
Наглядное представление о движении координат системы мож-
но получить при рассмотрении ее фазовых портретов (предпола-
гается, что переключение происходит бесконечно быстро).
196
На рис. 5.8 показаны фазовые портреты системы первого по-
рядка для F(<p)=cos<p и двух случаев |уН1| <?1 и |yHi| >1. Из
приведенных портретов следует, что если |yHi| <1, то по оконча-
нии действия импульса устанавливается исходная устойчивая раз-
ность фаз (рог, т. е. система полностью успевает отработать вход-
ное воздействие. Переходный процесс описывается ф-лой (2.29).
При этом для определения переходного процесса на отрезке Т\
(траектория от а к b на рис. 5.8а) в качестве начальной разности
фаз нужно принять <р02> в качестве начальной расстройки — унь а
в качестве устойчивой точки равновесия — cp*2 = arccos ун1.
Далее, полагаем tn = Ti, а <р& = фь (фь — значение ф в точке Ь).
В результате находим связь между значением Т\ и координатой
точки Ь, т. е. фь-
th
1/1 ~ Уна * 1 — 7н1
' 1 4" Yh2 ^2 1 -j- ун1
(5.98)
197
Определив по этой формуле ерь,, следует принять это значение в
качестве начального для вычисления переходного процесса на уча-
стке Тг- При этом, как и ранее, можно использовать ф-лу (2.29).
Если |уН11 > 1 (рис. 5.86), то в зависимости от степени превы-
шения одной части этого неравенства над другой возможны два
случая: или за время 1\ разность фаз остается меньше величины
фоь и тогда система из состояния, определяемого точкой Ь, перехо-
дит скачком в состояние, определяемое точкой с, и далее — в со-
стояние, определяемое точкой ф02, или за время 7\ разность фаз
превысит величину <pOi и тогда после окончания действия импуль-
са она стремится к величине ф02+2лп (га = 0, 1, 2...), получая, та-
ким образом приращение на 2 пл. При подобном повторении им-
пульсов разность фаз будет получать каждый раз указанное при-
ращение и режим окажется асинхронным.
Найдем условие, при котором за время 7\ разность фаз изме-
нится точно на величину —фог + фо1= |2 фоа| • Для этого воспользу-
емся решением основного уравнения системы ФАПЧ первого по-
рядка для Е(ф)=созф и уН2> 1, т. е. ф-лой (2.10). Полагая в ней
to=O, ф(7о) = фо2, ф(7) =ф(7'1) = фо1, получаем
/ । 1 \ 1 — ^нг . ,
— (Тн1 + 1) . , + Thi — 1
1 + Тн2
(5.99)
С помощью этого выражения, зная 1\, уН2 и Qy, можно найти
критическое значение уН1кр, превышение которого приведет к на-
рушению режима слежения, и в системе при воздействии каждого
импульса фаза б_удет набегать на 2л. Естественно, что при 0<
<t<Ti переходный процесс определяется ур-нием (2.29).
Совершенно аналогично можно получить реакцию системы на
частотно-манипулированный сигнал при иной форме нелинейной
характеристики фазового детектора.
Рассмотрим теперь реакцию системы первого порядка на фа-
зовую манипуляцию эталонного сигнала. Этот случай представ-
ляет интерес при усилении и детектировании сигналов фазовой
телеграфии, а также при использовании системы ФАПЧ в схемах
фазовой манипуляции. Пусть фаза эталонного сигнала меняется
по закону:
фэг(7) =
фэг1=0, 0<7<Т2;
фэг2 = Афэг, Т-.
(5.100)
Уравнение (5.8) системы при К(р) — \ и «2 = и* = из=0 в этом
случае принимает вид:
р(ф—Фэг) + ^(ф)=Ун, • (5.101)
где p = d/dr, x = Qy7.
198
Уравнение (5.101) с учетом (5.100) эквивалентно следующей си-
стеме уравнений:
Рф1 + Г(ф1)=ун, 0<^<Т2; (5.Ю2
РФ1 + ^(Ф1 + Аф1эг) = Тн.\Л<^<г1 + ^2, (5.103
где ф1 = ф—фэг-
Предположим, что ун<1 и что за время Т2 процесс установле-
ния заканчивается согласно принятым ранее определениям, т. е.,
по существу, рассмотрим реакцию системы на отдельный импульс
фазы [1967, 35]. Фазовые портреты, соответствующие ур-ниям
(5.102) и (5.103), для двух характерных частных случаев и F(q>) —
= cos ф приведены на рис. 5.9.
вую манипуляцию эталонного сигнала:
а) для Дсрэг < (cpoi—Фог (; б) для Дсрэг > | <poi—«рог (
Рассмотрим первый случай (рис. 5.9а), когда АфэгСфм—фо2=
= 2 arc cos ун- Пусть при t<zT2 изображающая точка находится в
положении фог- Скачок фазы эталонного сигнала при t = T2 перемес-
199
тит ее в точку а на кривой 2. С течением времени изображающая
точка будет двигаться к состоянию равновесия фр2. Пусть за вре-
мя Т{ эта точка попала в положение Ь. Тогда при возвращении
скачком фазы эталонного сигнала к исходному состоянию изобра-
жающая точка займет положение су, а затем с течением времени
Рис. 5.10. Переходные характеристики си-
стемы ФАПЧ первого порядка
будет стремиться к исход-
ному состоянию фсг. При
этом режим слежения не
нарушится.
Переходный процесс оп-
ределяется ур-нием (2.29),
в котором на участке а—Ь
нужно ПОЛОЖИТЬ фн = ф02—
Дфэг» tn = t> ф/г=ф1(О' Если
t=Ti, то, очевидно, ф!(Т) =
= фб- Далее это значение ну-
жно использовать вместо фн
на участке 0<Д<Т2.
На рис. 5.110 ([1967, 34]
показаны в качестве при-
мера переходные характе-
ристики для ун —0 и ун=0,5 и различных Дфаг. В силу симметрии
фазового портрета кривые нарастания и спада разности фаз при
ун=0 одинаковы.
Во втором случае (рис. 5.96), когда Дфэг>фо1—Фог, за время Л
изображающая точка может не только достичь значения ф01, но и
превысить его (точка Ь). Если это произойдет, то по возвращении
фэг в исходное состояние ф будет стремиться не к точке фоь а к
фог + 2л; фаза скачком изменится на 2 ли синхронизм нарушится.
Найдем условие, при котором за время Т{ q>i(i) достигает зна-
чения ф01 = агссо5ун (фо2 =—arc cos ун). Как и ранее, воспользуем-
ся ур-нием (2.29), положив в нем фн=фог—Дфэг, фл = фо1—Дфэг,
^п=7'1. В результате получим
1/ 1 ~ Тн
1 Ти / Фо1 Лфэг , То 2 Лфэг
Т+Т,11е 2 ~tg---—
, Фо2 Лфэг . Фо1 Лфэг , 1 Тн
tg —— tg —-—+—
(5.104)
2
Из этого выражения можно получить для заданных Tlt Qy и ун
критическое значение величины..Лфэг, превышение которой приве-
дет к изменению разности фаз на 2 л. Так, в частности, при
TiQy^>l и ун = 0 получаем Дфэг£л
При периодической манипуляции фазы (частоты) эталонного
сигнала можно пользоваться полученными выше выводами, если
считать, что период манипуляции значительно превосходит время
установления в системе. Если это условие не выполняется, то рас-
четы существенно усложняются. Некоторые результаты таких рас-
четов приведены в [1967, 34].
200
5.6. РЕАКЦИЯ НЕЛИНЕЙНОЙ СИСТЕМЫ ФАПЧ
НА ПЕРИОДИЧЕСКИЕ ВОЗМУЩЕНИЯ
При частотной или фазовой модуляции эталонного сигнала по
гармоническому закону уравнение системы ФАПЧ первого поряд-
ка при F(<р) =cos<p имеет вид:
pcp + Qy cos ф =fiH + fi3rsin£V. (5.105)
Введя безразмерное время можно записать:
yH ' P sin a—cos ф,. (5.106)
(5.107)
а т
где YM = Q[vi/Qy, p = Q3r/Qy.
В дальнейшем будем полагать параметр ум малым. Тогда
ур-ние (5.107) будет описывать медленное движение в системе, а
ур-ние (5.106) — быстрое. Решения уравнения быстрого движения
при a = const известны [см. ф-лы (2.10) и (2.14)]. Из этих решений
следует, что среднее значение рф вдоль траектории быстрого дви-
жения выражается как:
Y(a) = 0, [| ун + р sin а | < 1]; (5 108)
у (а) = У (у„ + Р sin а)2 — 1 sign (у„ + р sin a), [|Yh + р sin а | > 1 ]. (5.109)
Определим теперь среднее значение величины у за период мед-
ленного движения:
2л
Ycp=7L(‘ N(a)da. (5.110)
2л J
О
Подставляя значение у(а) из выражений (5.108) и (5.409) в
(5.110). можно вычислить уср (Р, ун), разбивая интеграл (5.110)
на соответствующие интегралы по участкам.
Легко показать, что при ун=0, уср=0 независимо от р, так как
в этом случае у(а) — функция нечетная относительно середины
интервала интегрирования. Далее, при р<1 очевидно, что уср = 0,
если |ун| <4—р. Очевидно также, что при |ун| > 1 — р наличие мо-
дуляции приводит к появлению средней разности частот (система
не обеспечивает синхронизма). Если же Р>1, то синхронизм воз-
можен только при ун=0. Вычисление зависимости (5.110) в об-
щем виде достаточно громоздко.
Если воспользоваться аппроксимацией функции у(а) зависи-
мостью
у(а)=0, [| y„ + psina| < IJ
Y(«)=(Yh + Р sin a—l)sign(yH + psma), [| ун Д- sin а | > 1]
то вычисления упрощаются.
, (5.111)
201
Эта аппроксимация позволяет записать среднее значение в
виде: _
YcP=Yh₽[Yo(0i)— Yo(02)L (5.112)
где Yo(6i) и уо(02) — коэффициенты разложения косинусоидально-
го импульса [8]:
Рис. 5.11. Зависимость средней часто-
ты биений от начальной расстройки
в неавтономной системе первого по-
рядка
, cose2 - 1 + 1'’н1 . (5.113)
Р
Характер зависимости уСр(Ун,
(3) (показан на рис. 5.11. Из гра-
фика следует, что среднее значе-
ние частоты биений при ун=/=0
возрастает с ростом (3.
Рассмотрим теперь процессы
в нелинейной системе ФАПЧ вто-
рого порядка с интегрирующим
/?С-фильтром при воздейотвии на
нее периодической последова-
тельности прямоугольных им-
пульсов, подводимых к выходу
фазового детектора (ко входу
фильтра нижних частот). Этот
‘случай соответствует использова-
нию системы ФАПЧ в качестве фазового манипулятора. Уравнения
системы при f’(<p)=sin(p имеют вид:
d <р _
d т
(5.114)
dx , п .
— = ех + ун—{J sign sinz—Sin ф,
d т
(5.115)
dz
d т
(5.116)
Здесь т= / Qy/T-t; е = 1/у^ ТЙУ; ум=Йм/Йу — относительная час-
тота манипуляции; р — максимальное значение внешнего воздей-
ствия.
Введем функцию
]/ = —4-2sin2—.
2 2
(5.117)
С учетом ур-ний (5.114) — (5.116)
— =хун—ех2—pxsignsinz. (5.118)
d т
В дальнейшем полагаем параметры е, р и ум малыми. Тогда
ур-ния (5.114) и (5.115) описывают быстрые движения в системе,
202
а ур-ния (5.116) и (5.118) — медленные. Усредняя по траекториям
быстрого порождающего решения (e=Ya=YM=,P=0> см. разд. 4.5),
имеем
где k = V V/2.
d т 2kK (k)
dz
77 =Ym>
d x
где k=yr2/V.
При 0=0 ур-ния (5 119) и
(5.il20) непосредственно (сле-
дуют из (4.72) и (4.73) три
ei=0.
(5. 119)
a)
е8Е
k
—p sign sin z) sign x
Характер фазовых траекто-
рий при различных соотноше-
ниях параметров системы и
внешнего (воздействия (показан
на рис. 5.112. Нетрудно устано-
вить, что если ун+0<уз |(рис.
5.12а), то независимо от на-
чальных условий в системе при
т->оо устанавливается син-
хронный режим (17=0). Если
же ун— Р>у.з (рис. 5.126), то
при Е(0)>2 в системе обра-
зуется предельный цикл, соот-
ветствующий (режиму биений
«с (переменной частотой бие-
ний». Образование этого цик-
ла для Yw<e показано пунк-
тирными линиями на рис. 5.126.
При Е(0) <2, как и в преды-
дущем случае, возникает ре-
жим синхронизма.
Наиболее интересен случай,
когда ун>Уз, а Ун—Р<¥з- Ха-
рактер фазового
портрета в
этом случае представлен на
рис. 5,il2s. Если в начальный
момент 17(0) <2, то в системе
наблюдается режим синхро-
низма. Если же 17(0) >2, то
Рис. 5.12. Фазовые портреты систе-
мы ФАПЧ второго порядка
в) при ун + Р<уз, б) ун—0>у3;
а) при ун>уа, но ун<0<уа
при отсутствии внешнего воз-
действия в системе устанавливается стационарное значение V>2
(в точке Д). При мгновенном изменении внешнего воздейст-
203
вия изображающая точка переходит в положение В на другуи4
фазовую траекторию, соответствующую значению ун+₽, и далее
движется по этой траектории к точке С. Если ум<$;е, то к момен-
ту изменения знака внешнего воздействия изображающая точка
достигает положения С, а затем переходит в положение D на фа-
зовой траектории, соответствующей значению ун—₽ По окончании
переходного процесса изображающая точка оказывается в поло-
жении равновесия У = 0.
Следовательно, несмотря на то. что в начальный момент не
обеспечивается синхронный режим (ун>уз), он устанавливается в
результате действия внешнего возмущения. Последнее в этом слу-
чае играет роль поискового воздействия, которое изменяет в нуж-
ном направлении топологию фазового портрета и обеспечивает за-
хват.
Если условие не выполняется, то в системе не успевает
установиться стационарное значение энергии и образуется пре-
дельный цикл, как показано на рис. 5.12s пунктирными линиями.
Глава 6.
ДЕЙСТВИЕ ФЛУКТУАЦИОННЫХ ПОМЕХ
НА СИСТЕМУ ФАПЧ
6.1. ОБЩИЕ СВЕДЕНИЯ
На практике наиболее часто встречаются помехи случайногэ
характера, -например, в виде флуктуационного шума, наложенно-
го на эталонный сигнал при приеме его от удаленного источника.
Поскольку помехи случайного характера практически почти иск-
лючительно действуют на эталонный сигнал, этому вопросу будет
уделено основное внимание.
Шумы, проникая в систему ФАПЧ вместе с эталонным сигна-
лом, вызывают паразитную модуляцию подстраиваемого генера-
тора, что не только снижает качество работы радиотехнического
устройства, в котором используется эта система, но может и пол-
ностью вывести его из строя. При большом уровне шумов, как бу-
дет показано ниже, в системе ФАПЧ возникают особые явления,
связанные с ее нелинейностью. К ним относится, например, увели-
чение среднего значения разности фаз эталонного и подстраивае-
мого генераторов, а иногда даже появление средней разности час-
тот, т. е. полное нарушение синхронизма.
Исследование влияния флуктуационных помех на систему
ФАПЧ в общем случае математически представляет собой весьма
сложную задачу, поскольку уравнение, описывающее эту систему,
нелинейно и может иметь произвольный порядок.
При малых помехах, когда допустима линеаризация характе-
ристики фазового детектора в небольшой области, охватывающей
точку устойчивого равновесия, задача решается относительно про-
сто. Если же линеаризация недопустима, прибегают к приближен-
ным методам анализа. В тех случаях, когда заранее известно, что
полоса пропускания системы ФАПЧ значительно меньше, чем по-
лоса пропускания линейных устройств, предшествующих этой си-
стеме, можно использовать аппарат марковских процессов.
Анализ действия флуктуационных помех на систему ФАПЧ
значительно отличается от анализа влияния детерминированных
помех. Так, при гармонической помехе фильтрующая способность
205
системы полностью определяется ее передаточной функцией. Що
известным значениям указанной функции и параметров помехи
можно определить параметры отклонения фазы подстраиваемого
генератора. При случайных помехах отклонения фазы последнего
носят также случайный характер, поэтому в дальнейшем будем
рассматривать статистические характеристики случайных процес-
сов, таких, как функции распределения, дисперсия, среднее значе-
ние, энергетический спектр и т. п.
6.2. ОСНОВНОЕ ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ СИСТЕМЫ ФАПЧ,
НАХОДЯЩЕЙСЯ ПОД ДЕЙСТВИЕМ ФЛУКТУАЦИОННЫХ ВОЗМУЩЕНИИ
Пусть на вход системы поступает сумма квазигармонического
эталонного сигнала и нормального флуктуационного шума Ni(t) с
нулевым средним и симметричной относительно шэг спектральной
плотностью. Тогда входной сигнал можно представить в виде:
“вх(0 =^эг(0С°3[®эг^+(Рэг(01+^1^), (6.1)
где f/эг и <рэг — случайные функции времени, характеризующие за-
коны модуляции амплитуды и фазы эталонного сигнала.
Флуктуационный шум Ni(t), как правило, не зависящий от эта-
лонного сигнала, удобно представить в следующей форме:
(0 = A (f) cos шэг (f) + С (t) sin озэг (t). (6.2)
Здесь A(t)=ENi (t)cos 0, C(7) (Osin 0 — косинусоидаль-
ная и синусоидальная составляющие огибающий ENt(t) входного
шума; 0(0 — его фаза.
При нормальном законе распределения функции Ni(t), A(t) и
С(0 также нормальны и имеют нулевые средние значения и оди-
наковые дисперсии, совпадающие с дисперсией входного шума.
При этом корреляционные функции процессов A(t) и C(t) опре-
деляются для симметричного спектра шума равенством [51]:
Bjv (т) = Вс (т) cos шэгт — ВА (т) cos (оэгт, (6.3)
причем их взаимная корреляционная функция равна нулю.
Сигнал подстраиваемого генератора можно записать как
= t/nrcos (й)эг( + фэг—<р)- Предполагая, что в качестве фазово-
го детектора используется линейный перемножитель и пренебрегая
высокочастотными компонентами, найдем напряжение на его вы-
ходе:
“фд = ~ ^эг (0 ^пг COS <Р + итА (0 COS (ф — <рэг) +
4- ипгс (t) sin (<р — <рэг). (6.4)
Напряжение на входе управляющего элемента
“уэ(0 ^К(р)«фД(0- (6.5)
206
Мгновенная частота подстраиваемого генератора
®пг ®о пг Т ^уэ К (Р) ^фд (0 >
где Шопг — частота подстраиваемого генератора при разомкнутой
цеди управления.
С помощью выражений (5.7), (6.4) и (6.6) запишем основное
дифференциальное уравнение в виде:
р <р + К (р) Йу (0 [ cos <р + cos (<р—<рэг) + ~~~ sin (ср —Фэг)] =
1 L '-'ЭГ \Ч 1>Эг V7 J
-Йн + рфэг. (6.7)
Здесь Qy —— &фд Зуэ Unr Uэг (/).
Исследование этого нелинейного дифференциального уравне-
ния (в общем случае высокого порядка с переменными случайны-
ми коэффициентами и случайными воздействиями), с целью полу-
чения статистических характеристик y(t), представляет собой иск-
лючительно сложную задачу. Для ее решения не существует об-
щих методов, пригодных в любых случаях. Практически все изве-
стные методы исследования основаны на тех или иных частных
упрощающих предположениях о характере внешних воздействий
или о свойствах самой системы.
Так, если интенсивность случайных воздействий настолько ма-
ла, что нелинейные свойства системы практически не проявляют-
ся, то независимо от других свойств воздействий и системы мож-
но воспользоваться методом линеаризации. Этот метод сводится к
замене в малой окрестности невозмущенного состояния нелиней-
ной системы ее линейной моделью, построенной по уравнениям
первого приближения. Линеаризация, как правило, не устраняет
трудности, связанные с непостоянством коэффициентов уравнения.
Если же коэффициенты постоянны (йу = const), то нахождение
корреляционной функции <р, а следовательно, ее энергетического
спектра и дисперсии упрощается. Однако определение даже одно-
мерной плотности вероятности величины <р остается весьма сложной
задачей, за исключением случая нормального закона флуктуаци-
онных воздействий. Исследованию влияния флуктуационных воз-
действий на работу системы ФАПЧ методом линеаризации посвя-
щены работы [1951, 4; 1953, 2, 12; 1954, 6; 1957, 2; 1962, 18;
1964, 14].
Во многих случаях метод линеаризации не применим. Он, в
принципе, не позволяет обнаружить эффекты, связанные с нели-
нейными свойствами системы, а следовательно, и учесть ее специ-
фику.
Другой метод анализа нелинейной модели системы основан на
предположении о большом различии времени корреляции тк воз-
действий и собственной постоянной времени тс системы [24, 52].
Здесь возможны два случая.
Если ТсЗ>Тк, то можно применить апп’арат марковских процес-
207
сов [24] и, в частности, уравнение Фоккера—Планка—Колмогоро-
ва для плотности вероятности координат системы. Такое положе-
ние имеет место, например, при использовании системы ФАПЧ в
качестве узкополосного следящего фильтра. Интересно отметить,
что этот метод позволяет сравнительно просто определять стацио-
нарные плотности распределения вероятностей координат и решать
задачи на достижение координатами заданных границ. В то же
время отыскание спектральных характеристик процесса оказывает-
ся довольно сложным.
Впервые этот метод применительно к задачам, связанным с
синхронизацией ламповых генераторов в условиях помех и анали-
зом систем ФАПЧ, был использован Р. Л. Стратоновичем и
В. И. Тихоновым [24, 1959, 5]. В дальнейшем он применялся для
решения многочисленных задач по определению статистических
характеристик системы ФАПЧ (1960, 3; 1962, 14; 1963, 1, 5, 9; 1965,
3, 7, 8; 1966, 2, 14, 21, 34—36; 1967, 12, 22, 40].
В другом крайнем случае, когда оказывается возмож-
йым квазистатическое рассмотрение системы [24]. Особенностью
квазистатического метода является пренебрежение инерционны-
ми свойствами системы, что позволяет при определении статисти-
ческих характеристик процессов использовать теорию безынерци-
онных нелинейных преобразований случайных процессов. Такой
случай характерен для применения системы ФАПЧ в качестве
быстродействующего следящего устройства. Этот метод был ис-
пользован в [24] для анализа синхронизации лампового генерато-
ра и в [1966, 16] применительно к системе ФАПЧ.
Другой возможный подход к рассматриваемой проблеме осно-
ван на использовании метода статистической линеаризации в раз-
личных его модификациях [53, 54]. Суть метода заключается в за-
мене нелинейный функций в уравнении системы такими линейны-'
ми зависимостями, которые в статистическом смысле эквивалент-
ны линейным. Хотя метод статистической линеаризации и усту-
пает по полноте и точности методу, использующему аппарат мар-
ковских процессов, тем не менее он позволяет приближенно вы-
числить среднее значение и дисперсию искомых координат, что
Часто оказывается достаточным для практики. Этот метод приме-
нительно к системам ФАПЧ был использован в [1963, 3, 21; 1965,
15; 1966, 6, 36].
Из других известных приближенных методов, которые были
Попользованы при анализе систем ФАПЧ, следует отметить метод
функциональных разложений Вольтерра [1964, 6] и метод Винера
[1967, 2]. Эти методы, хотя и позволяют получить решение задачи
в виде последовательных приближений, для систем высокого по-
рядка имеют ограниченное применение, так как требуют громозд-
ких вычислений.
Изучение статистических характеристик системы ФАПЧ нач-
нем с простейшего случая, когда интенсивность воздействия на-
столько мала, что возможно применение метода линеаризации.
208
6.3. ДЕЙСТВИЕ МАЛЫХ ФЛУКТУАЦИЙ НА СИСТЕМУ ФАПЧ
Малыми будем называть такие флуктуации, при которых мож-
но не учитывать нелинейные свойства системы ФАПЧ.
Условия малости флуктуационных и детерминированных воз-
мущений принципиально различны При случайном характере воз-
мущения его мгновенное значение в общем случае может быть
произвольно большим, несмотря на малую мощность возмущений.
Максимально допустимая величина пиковой девиации разности
фаз, при которой еще можно пренебречь нелинейными свойствами
системы ФАПЧ, определяется неравенством (5.12). При случай-
ном характере девиации разности фаз приходится говорить о ве-
роятности, с которой выполняется это неравенство.
Условимся, что нелинейностью характеристики фазового детек-
тора можно пренебречь, если неравенство (5.12) выполняется для
мгновенных значений случайного отклонения разности фаз с ве-
роятностью не менее 0,997. При этом величина дисперсии разности
фаз будет ограничена. Порог ее ограничения определяется в каж-
дом конкретном случае функцией распределения вероятности
мгновенных значений девиации разности фаз. Так, при нормаль-
ном законе распределения система ФАПЧ описывается линейным
уравнением, если среднеквадратическое значение разности фаз <т
удовлетворяет условию-
о < — Г1/ 2’25+0,6----------*’5?н... . (6.8)
В дальнейшем будем предполагать, что условия малости воз-
мущений выполняются и система ФАПЧ с большой точностью
описывается линейным уравнением.
Рассмотрим вначале случай, когда флуктуационному возму-
щению подвержена фаза эталонного сигнала, а его амплитуда по-
стоянна. Это соответствует либо флуктуационной модуляции фазы
этатонного сигнала в отсутствие шума (Ni(t) =0), либо при на-
личии последнего устранению амплитудной модуляции сигнала на
входе системы ФАПЧ каким-либо устройством, например, ограни-
чителем. При этом результирующие колебания на входе системы
можно представить в виде [51]:
+х (0 = Е (0 cos [ыэ+ + (pjr Nt (0 ], (6.9)
где Фэг Nt (0 Фэг (0 + <fNt (0. Е (0 = /[Д(0 + (/эг]2 + т
Отсюда следует, что действие шума приводит к дополнитель-
ной амплитудно-фазовой модуляции сигнала на входе системы
ФАПЧ. Если амплитудная модуляция устраняется, то входной сиг-
209
нал системы остается модулированным только по фазе суммой
фэг и <pNi . Одномерная функция распределения фазы фд, , как по-
казано в [51],
1 — 0,5 s? S, COS ср,, — 0,5 s? sin2 Ф
+2F5TL77^cosMe - (6-10>
Здесь Si=Ugr/(jN — отношение амплитуды эталонного сигнала
к среднеквадратичному напряжению шума, Ffsicos <pw ) — интег-
рал вероятности.
При sicos фд, >3 выражение (6.10) значительно упрощается:
S, COS —0.5 s? sin2 ф
• (6J1>
Для значений фд, >л/2 можно считать, что ^(фд, )~0. В об-
ласти малых значений <р cos <pw =1, a sin Поэтому
- —О,0 8?ф?,
• (6J2>
Следовательно, при высоком соотношении сигнал/шум и нор-
мальном законе изменения фазы эталонного сигнала, одномерное
распределение фазы результирующего сигнала на входе фазового
детектора можно считать нормальным. Параметры этого закона
можно найти по обычным правилам определения статистических
характеристик суммы двух случайных процессов.
Итак, пусть на вход системы воздействует сигнал постоянной
амплитуды, модулированный только по фазе в соответствии с за-
коном изменения 'фдг, (t) [фЭг(0=0]. Полагая для этого случая
Qy(Q = const, A(t) = C(t)=O, из ур-ния (6.7) получаем
pq)4-/<(p)Qycos(p=QH + p(pJVi. (6.13)
Предполагая воздействие малым, так что выполняется условие
(6.8), запишем уравнение первого приближения в виде:
рД (p + ZC^QyF^cpoa) Дф^рср^. (6.14)
Это линейное дифференциальное уравнение можно исследовать
хорошо разработанными и сравнительно простыми методами тео-
рии преобразований случайных процессов в линейных системах
(51, 52]. Однако даже в таком простейшем случае при ненормаль-
ном законе распределения фд, отыскание закона распределения
величин фпг и Ф затруднительно. Тем не менее сравнительно про-
сто удается определить энергетические параметры указанных ве-
личин, что полностью характеризует их при нормальном законе
распределения и является достаточным для многих приложений и
при ненормальном законе распределения фд, .
210
Как следует из ур-ния (6.14), спектры <рпг и <р определяются
соответственно выражениями:
(6-15)
5ф(<о) = |1-Г, (i<< 3,^(0,). (6.16)
Здесь №i(i(o) — передаточная функция, определяемая выра-
жением (5.15), S N — энергетический спектр фазы . С помо-
щью выражений (6.15) и (6.16) легко определить дисперсии ве-
личин <рПг и (р [51, 52]:
со
(6.17)
— со
Фо
,(®)^. (6.18)
Zji J
— со
Вычисление интегралов в ф-лах (6.17) и (6.18) значительно
упрощается, если, как это часто имеет место, подынтегральные
выражения представляют собой дробно-рациональные функции
аргумента ico. При этом интегралы можно выразить через коэффи-
циенты полиномов дробей (см. приложение 2).
В простейшем случае, когда энергетический спектр величины
(Рдг равномерный (S N не зависит от ш), выражение (6.17) мож-
но переписать в виде:
S-~~ (6.19)
— со
Здесь AFUI — шумовая полоса системы (в герцах) для фазы
подстраиваемого генератора.
Понятие шумовой полосы характеризует площадь под кривой
квадрата частотной характеристики и часто оказывается удобным
для практических расчетов. В качестве примера рассмотрим шумо-
вую полосу системы для простейших случаев. Так, если К(р) = 1,
имеем
А = -yf' (фо21- . (6.20)
В случае /?7?С-фильтра
Д f f' <*Роа) 1 + т2 7 Qy F' (фоа) ,g 2м
Из этих выражений следует, что шумовая полоса системы за-
висит от начальной расстройки (фог=—arccosyH). При ун=0
/?/(<Ро2)=11 и шумовая полоса получается наибольшей.
Кроме того, согласно ф-ле (6.21) при т = 0, т. е. в системе с
интегрирующим фильтром, независимо от его постоянной време-
211
ни шумовая полоса такая же, как и в системе первого порядка.
Это объясняется специфической деформацией частотной характе-
ристики системы при введении в нее интегрирующего фильтра.
Оказывается, что подъем частотной характеристики в области
нижних частот компенсирует ее завал в области верхних частот.
Если в системе используется фильтр, содержащий идеальный
интегратор,
(6.22)
Р
то шумовая полоса системы определяется формулой:
Л F,„ £+ £у/' (Фог) . (6.23)
В случае /?ЛС-фильтра с передаточной функцией (3.17) шумо-
вая полоса
Д F.,, --'-AQlUj— . (6.24)
2[d~ kF' (фо2)1
Из этого равенства вытекает что при приближении системы к
границе устойчивости d—шумовая полоса быстро увели-
чивается.
В общем случае, когда система используется в качестве следя-
щего устройства (усилителя), ее свойства характеризуются ошиб-
кой слежения. Поэтому в ее цепи управления необходимо выбирать
такие фильтры, которые при заданной полосе захвата обеспечивают
наименьшую дисперсию фазовой ошибки. Если же система исполь-
зуется для выделения синусоидального сигнала на фоне помех или
из ФМ сигнала (на практике это часто встречается в устройствах
точной синхронизации), то ее свойства как фильтра, определяют-
ся статистическими характеристиками фазы подстраиваемого ге-
нератора.
Рассмотрим подробнее случай, когда на систему ФАПЧ дейст-
вует сигнал, промодулированный по фазе Случайной помехой
Фд, (t). Одномерная функция распределения этой величины опре-
деляется выражением (6.10). Для оценки работы системы как
фильтра необходимо знать энергетический спектр <р (t).
Пусть частотная характеристика линейного устройства, пред-
шествующего системе ФАПЧ, имеет колоколообразную форму. В
этом случае, как показано в (57], энергетический спектр девиации
частоты при предельном ограничении и значительном превышении
мощности несущей над мощностью шума имеет вид-.
S0i(<o) = /M[|jSe (6.25)
где А — коэффициент, зависящий от зь 77 — интегральная поло-
212
са линейного устройства, предшествующего ограничителю и систе-
ме ФАПЧ.
Для процесса, интегрируемого в среднеквадратичном, связь
между спектром (со) девиации частоты и спектром S (to)
девиации фазы определяется соотношением
<6-26>
Воспользовавшись ф-лами (6.25) и (6.26), можно записать
энергетический спектр девиации фазы входного сигнала в виде:
т2
S „ = Ае Пг . (6.27)
<р Л?, д ' '
Таким образом, необходимые для дальнейшего анализа харак-
теристики сигнала на входе системы ФАПЧ найдены.
Поскольку система ФАПЧ для отклонений фазы (частоты) по-
лагается линейной, то, как уже указывалось, при высоком соотно-
шении сигнал/шум (5i>3), когда закон распределения фазы на
входе можно считать нормальным, закон распределения фазы
подстраиваемого генератора также является нормальным. Теперь
остается найти лишь дисперсию фазы подстраиваемого генератора
и ее энергетический спектр.
Для оценки фильтрующей способности системы ФАПЧ при
слабых флуктуационных помехах на входе введем понятия коэф-
фициентов фильтрации фазы и частоты. Это позволит оценивать
свойства собственно систем ФАПЧ независимо от величины дис-
персии фазы (частоты) сигнала на ее входе. Коэффициентом
фильтрации фазы (частоты) будем называть отношение дисперсий
фаз (частот) подстраиваемого генератора и результирующего ко-
лебания на входе системы ФАПЧ.
Поскольку спектральные плотности девиаций фазы и частоты
входного сигнала существенно различаются, а частотные характе-
ристики их коэффициентов передачи одинаковы, то для одной и
той же системы ФАПЧ коэффициент фильтрации фазы отличается
от коэффициента фильтрации частоты.
Рассмотрим случай, когда система ФАПЧ используется как
фильтр частоты. Для определения коэффициента фильтрации ча-
стоты Фи необходимо определить дисперсию частоты подстраи-
ваемого генератора при заданной дисперсии частоты входного сиг-
нала. Дисперсия частоты на выходе системы ФАПЧ
со
=^- (<o)d<o. (6.28)
>пг 2Л J
— со
Отметим, что подынтегральное выражение ф-лы (6.28) пред-
ставляет собой энергетический спектр девиации частоты подстраи-
ваемого генератора. Для его вычисления необходимо подставить.
213.
-в (6.28) ф-лы (5.15) и (6.25) и выполнить интегрирование. Одна-
ко даже для системы ФАПЧ с простейшими типами фильтров вы-
числение такого интеграла исключительно сложно, и результат
нельзя получить в элементарных функциях. Поэтому для его
приближенного определения вместо ф-лы (6,25) примем следую-
щее выражение [1960, 24]-.
/ (О \2
/7* Ь —-
\ 77* /
(6.29)
/г2 +
Здесь b и h — параметры, зависящие от отношения мощности
сигнала к мощности шума на входе системы ФАПЧ, 77* =77/0,93л.
Это выражейие достаточно хорошо передает характер функции
(6.25) в области значений &1П*, определяющей величину диспер-
сии частоты подстраиваемого генератора. Вычисление а2пт с ис-
пользованием ф-лы (6.29) вместо (6.25) приводит к некоторому
завышению результатов. Однако это завышение получается не-
большим, поскольку SmV (со) из выражения (6.29) превышает
SQjv (со) из выражения (6.25) в области ,где оба эти выражения
стремятся к нулю и, кроме того, | ll^i(ico) | также стремится к нулю.
Как следует из [57 и 1960, 24], величина h, определяющая по-
ложение максимума энергетического спектра на шкале частот,
слабо зависит от si, если si>3. В дальнейшем будем полагать
ft=l/i/ л [I960, 24]. Подставляя это значение в выражение (6.29),
а само выражение (6.29) в ф-лу (6.28) и выполняя интегрирова-
ние, можно найти дисперсию и коэффициент фильтрации девиа-
ции частоты в системе ФАПЧ с тем или иным типом фильтра
нижних частот.
Однако нельзя судить о целесообразности применения того
или иного фильтра в петле ФАПЧ по одному только коэффициен-
ту фильтрации, поскольку параметры фильтра, от которых зависит
указанный коэффициент, определяют и полосу захвата системы
(можно считать, что в силу малости случайных возмущений по-
лоса захвата определяется так же, как и при их полном отсутст-
вии). Увеличение фильтрующей способности системы ФАПЧ при-
водит к неизбежному снижению этой полосы. Поэтому следует
искать такую комбинацию параметров фильтра и системы ФАПЧ
в целом, которая обеспечила бы наивысшую фильтрующую спо-
собность при заданной полосе захвата.
Оптимальные значения параметров системы ФАПЧ, как филь-
тра частоты, можно определить аналитически, если выразить зави-
симость полосы захвата от коэффициента фильтрации. Однако
поскольку у3 и Фа даже для систем ФАПЧ с простейшими типами
фильтров являются весьма сложными функциями их параметров,
аналитически решить эту задачу трудно. Поэтому для отыскания
оптимального соотношения параметров будем численно сравни-
214
вать между собой результаты, получаемые при использовании в-
системе ФАПЧ наиболее распространенных типов фильтров.
Пусть в системе ФАПЧ используется пропорционально-интегри-
рующий фильтр. В этом случае, подставляя выражения (5.20) и
(6.29) в ф-лу (6.28) и учитывая ф-лу (П.2) приложения 2, получа-
ем при 7’Су=|1 следующее исходное выражение:
ф — ^пг а2»г3'Гу + ат2(а+2)'Гу + (т +2а) Уу + 1
ma2 (а 4-m)2 Гу 4-[2 am (1 4-а) (а 4-m) 4-а2 (ч>
--------------------------------------------------------. (6.30>
->4- т)2] Ту 4- [2а (1 4- а) (а4- т) 4- m (1 4- а)2ГУ4- (1 4- а)2
о а П
Здесь: a = h---------
Qy 0,93 it
o2fN — дисперсия частоты результирующего
сигнала на входе системы ФАПЧ.
Заметим, что выражение (6.30) при т=0 дает значения коэф-
фициента фильтрации частоты в системе ФАПЧ с обычным однО-
звенным интегрирующим /?С-фильтром. При этом, если Ту^>1 и
а^> 1 формула значительно упрощается:
Ф » ——
® а8 Гу
(6-31)
Выражение (6.30) значительно упрощается и для системы
ФАПЧ с пропорционально-интегрирующим фильтром, если
тТу^> 1:
ф ___
“ (a4-m2)2
(6.32)
Для построения зависимости между относительной полосой за-
хвата и коэффициентом фильтрации частоты воспользуемся выра-
жением (4.132), которое связывает параметры, определяющие ве-
личины Фш и у3. На рис. 6.1 приведены кривые уз=1(Ф№), по-
строенные численным методом с помощью выражений (6.30) и
(4.132) при /1=1/-/^л. Для каждой кривой указано расчетное зна-
чение параметра т, причем семейство кривых каждого рисунка
построено при определенном значении отношения П/Qy.
Интересно заметить, что, как следует из выражения (6.29),
фильтрующая способность системы ФАПЧ с пропорционально-ин-
тегрирующим фильтром при а^1 и тТу^>1 почти не зависит от
Ту. Поэтому выбирать Ту^1/т нецелесообразно, так как это поч-
ти не увеличивает фильтрации, но, как было показано ранее, су-
щественно увеличивает время установления разности фаз.
Ранее была получена (при тТу^>1) упрощенная ф-ла (4.133)
для определения полосы захвата. Исходя из этой формулы и вы-
ражения (6.32), можно найти аналитическую зависимость между
215
' 1 к-ПАЪ XOJxsX x I JL^,n
---^i ’-"Aik \VkX \i fn=u,4 52y
A=«,S?\ k\\x n=g.X
^s.
K = 1,0^
.0 5 ю 15 20 25 30 35 40 10lg
S)
0,1
0 to 15 20 25 30 35 40 Ю1д^.
216
Рис. 6.1. Зависимость полосы захвата от коэффициента фильтрации частоты при
различных фильтрах и параметрах системы ФАПЧ
Уз и Фа в системе с пропорционально-интегрирующим фильтром:
I/O а Р Ф®
У, = I/ 2 ------=
V 1 — 1 ф
' 1 а>
Результаты вычислений по ф-ле (6.33) представлены на
рис. 6.1 пунктирной линией.
Рассмотрим теперь систему ФАПЧ с 7?ДС-фильтром. Подстав-
ляя ф-лы (5.23) (при Тсу=1) и (6.29) в выражение (6.10) и вы-
полняя интегрирование указанным выше методом, получаем сле-
дующую зависимость:
(6.33)
217’
ф _ 2 akdP + (1 + 4g2 d + 2 a3 fe3 — Л
® ” а4 ЛМ3 + а2 k [2 (1 + a3 IP) — cP kP] dP + -»
_> + [(1 + a) (2 a3 *2 + 1 + а) + а6 Л4 — 2 g2 *2 (1 + а3 Л»)] d->
— /г [(1 + a) (2 а3 /г2 J- 1 -j a) J- a« /г4] •
При kd^>\ это выражение значительно упрощается:
С помощью выражений (4.136) и (6.34) на рис. 6.1 построены
кривые у3=/:(Ф(й) для системы ФАПЧ с -^АС-фильтром. Для каж-
дой кривой указано расчетное значение параметра k, а семейство
кривых построено, как и ранее, при определенных значениях от-
ношения П/Qy.
Сравнивая полученные кривые, замечаем, что невозможно од-
нозначно судить о целесообразности применения того или иного
типа фильтра для обеспечения наивысшей фильтрации при задан-
ной величине у3. Это зависит от абсолютных значений у3 и П/Qy.
Общей тенденцией всех кривых является уменьшение фильтрую-
щей способности системы с увеличением полосы захвата, так как
при этом уменьшается инерционность системы.
Наблюдается также уменьшение фильтрующей способности си-
стемы с уменьшением отношения П/Qy. Это объясняется тем, что
весь анализ был проведен для случая, когда отношение мощности
сигнала к мощности шума на входе системы ФАПЧ фиксировано.
При фиксированном же отношении сигнал/шум расширение инте-
гральной полосы линейных устройств, предшествующих системе
ФАПЧ (т. е. увеличение П/Qy), приводит лишь к перераспределе-
нию энергии помех по частотному диапазону. С ростом П/Qy все
большая доля энергии помех приходится на область частот, в ко-
торой коэффициент передачи системы ФАПЧ для девиации часто-
ты резко падает, в результате чего и увеличивается ее фильтрую-
щая способность.
Интересно отметить, что при малых значениях П/Qy (рис. 6.1a)
для некоторых кривых одной и той же величине Ф(Л соответствуют
два различных значения полосы захвата у3. Физически это объяс-
няется тем, что у3 зависит только от параметров фильтра нч в це-
пи обратной связи, в то время как Фа зависит и от вида энергети-
ческого спектра девиации частоты входного сигнала. Поэтому па-
раметры системы ФАПЧ следует выбирать таким образом, чтобы
при заданном Фа величина у3 была наибольшей.
Из рассмотрения кривых, приведенных на рис. 6.1, можно сде-
лать следующие выводы.
0. При не очень больших значениях П/Qy, если m.TQy'^>\, наи-
лучШий результат дает применение пропорционально-интегрирую-
щего фильтра.
218
2. Если /7/Qy=20-4-25, выбор фильтра, как видно из рис. 6.1в,
г и д, зависит от величины -у3.
3. При 100</7/йу< 1000 применять пропорционально-интегри-
рующий фильтр нецелесообразно, если у3 0=0,4. Лучший результат
в этом случае получается при использовании ДАС-фильтра.
4. Если /7/йу>1000 при у3, занимающей практически исполь-
зуемую область (0,1<у3<1), наилучший результат дает примене-
ние ДАС-фильтра.
5. Если допустимо снижение у3 до величины 0,1 и менее, то
можно получить аналитические зависимости у3=[(Фв)) для систе-
мы ФАПЧ с интегрирующим и ДАС-фильтрами. С этой целью вос-
пользуемся выражениями (4.134) и (6.31) для системы ФАПЧ с
интегрирующим фильтром, а также ф-лами (5.28) и (6.35) для си-
стемы с Л-АС-фильтром. В результате приходим к одинаковому для
обеих систем выражению
у3« 1,2 j а3Фш . (6.36>
Эта формула справедлива при шАЙу^>1 и 1 для системы
ФАПЧ с интегрирующим фильтром и при для системы с
/?АС-фильтром.
Значительный интерес представляет случай использования си-
стемы ФАПЧ в качестве фильтра фазы, так как он позволяет не-
посредственно ответить на вопрос о соотношении сигнал/шум на
выходе системы ФАПЧ. Для определения коэффициента фильтра-
ции фазы необходимо знать величину ее дисперсии офпг на выхо-
де системы. Дисперсию можно определить по ф-ле (6.28) ,.заменив-
в ней SmJVi (ш) на 5ф?/1 (ш). Приближенное значение 5фЛГ (<о) вмес-
то точного [ф-ла (6.27)] найдем из выражения (6.29), разделив его
на со2 согласно ф-ле (6.26).
В результате получим
\ n>)= —
/7*
b________
I <в \242
(6.37>
В качестве примера определим коэффициент фильтрации в си-
стемах ФАПЧ с пропорционально-интегрирующим и ^АС-фильт-
рами. Подставив ф-лы (5.20) (при Асу=1) и (6.37) в (6.17) и вы-
полнив интегрирование, получим следующее выражение для коэф-
фициента фильтрации фазы в системе ФАПЧ с пропорционально-
интегрирующим фильтром:
ф Офпг am^(m + 2d)T3y+[a^m^-j-2a(a +т)^]Т2 + ^
ф
°ф Л\ °2 m (m + °) Ту + (а + m) l2am 0 + °) +
—» 4- (4а2 4- 4am m) Ту 1 + 2а
(6.38>
^(а + т) Т2 + [2а (1 + т)+т(1 + а)] (1 + а} Ту + (1 + а)2
2Ш
При m = Q ф-ла (6.38) представляет собой коэффициент фильт-
рации в системе ФАПЧ с обычным интегрирующим фильтром.
Коэффициент фильтрации фазы в системе ФАПЧ с ^АС-фильт-
ром найдем, подставив в выражение (6.17) ф-лы (5.23) при
7'сУ=1) и (6.37). В результате интегрирования получим
2 а у2 4а (1 + v2) & -ф [2а (1 + у2)2 + 1 — 4 у«] d — fe
Ф ~ V2
а2 V2<р +--[2 (v2 а + 1) — v2] d2 + [(1 + а) (2а v2 + 1 + а) + ->
k
-> а2 у4 — 2 у2 (а у2 — 1)] d — Л ((I + а) (2а v2 + 1 + а) + а2 у4]
О'----------—1—1 U ----------------— U.IJJ L
/ 2 3 4 5 6 78 911 20 30 WOW 00 Vv
Рис. 6.2. Зависимость полосы захвата от
коэффициента фильтрации фазы при различ-
ных фильтрах и параметрах системы ФАПЧ
Здесь у = £а = £/г/7/Йу0,93л.
Эффективность примене-
ния того или иного типа
фильтра и комбинации его
параметров определим пу-
тем сравнения величин Фф
при постоянном значении у3
Как и ранее, наилучшей бу-
дем считать ту систему
ФАПЧ, которая обладает
заданной относительной по-
лосой захвата и наимень-
шим коэффициентом филь-
трации фазы.
Ввиду сложности необхо-
димых зависимостей срав-
нение |будем проводить чис-
ленным методом в следую-
щей последовательности: за-
давшись конкретными зна-
чениями параметров /7/йу,
т и 7У для системы с про-
порционально - интегрирую-
щим фильтром, а также зна-
чениями k и d для системы
с 7?7?С-фильтром, по ф-лам
(6.38) и (6.39) рассчитаем
величины Ф<? . Затем для тех
же значений указанных па-
раметров на основании за-
висимостей (4.13) и (4.136)
определим величины у3. По
найденным величинам по-
строим кривые уа=}(Ф )
(рис. 6.2).
220
Из рис. 6.2 следует, что при малом отношении /7/йу зависимость
у3 от Фф неоднозначна. Поэтому, как и в предыдущем случае, здесь
нужно выбирать параметры системы ФАПЧ и фильтра таким об-
разом, чтобы при заданной фильтрации получить наибольшее зна-
чение у3.
Рассмотрение полученных кривых позволяет сделать следую-
щие выводы:
1. В системе ФАПЧ с обычным интегрирующим фильтром уве-
личение обобщенной постоянной времени Ту приводит к одновре-
менному увеличению дисперсии фазы подстраиваемого генератора
и снижению величины у3, что крайне нежелательно. Следовательно,
применение интегрирующего 7?С-фильтра, согласно принятому
критерию, нецелесообразно, поскольку дисперсия фазы подстраи-
ваемого генератора при любом Ту всегда выше, чем в системе
первого порядка (7^=0).
2. Дисперсия фазы подстраиваемого генератора в системе
ФАПЧ с ДАС-фильтром при всевозможных значениях параметров
k и d остается выше, чем в системе ФАПЧ с ДС-фильтром. Следо-
вательно, применение ДСС-фильтра также нецелесообразно.
3. Наилучший результат дает применение пропорционально-
интегрирующего фильтра. Полученное значение дисперсии фазы
подстраиваемого генератора может быть меньшим, чем в системе
первого порядка (Ф <С1).
При фиксированном m для уменьшения Фф следует выбирать
достаточно большое значение Гу. Если тГу^>1, то выражение
(6.38) значительно упрощается:
ф 2а)
ф а(ш-)-а)
Из этого выражения следует, что при большом Ту и заданной ве-
личине а для снижения Ф¥ нужно уменьшать т. При этом полоса
захвата также снижается. Сравнивая выражения (4.133) и (6.40),
замечаем, что с уменьшением т величина у3 снижается значитель-
но медленнее, чем Фф (рис. 6.2, пунктирная линия).
Интересно сравнить систему ФАПЧ со звеном фильтр—ограни-
читель—фильтр (Ф—О—Ф). Оба устройства позволяют решить
•одну и ту же задачу: выделить из смеси сигнала и шума колеба-
ние несущей частоты. Выясним, какое из этих устройств лучше
подавляет шумовую помеху.
Величина Ф , как было указано выше, выражает степень из-
менения дисперсии фазы колебания, прошедшего через систему
ФАПЧ. Известно [51, 57], что при таком отношении мощности сиг-
нала к мощности помехи на выходе линейной системы, предшест-
вующей системе ФАПЧ, если Sj>5, дисперсия фазы выходного
221
колебания линейной системы o2Wi и величина sf связаны следую-
щим соотношением:
(6-4О
si
Зная величину Ф , можно определить дисперсию фазы под-
страиваемого генератора (сигнала на выходе системы ФАПЧ):
о2 . (6Д2)
Ф пг s2 V * '
Выражение (6.42) позволяет найти отношение мощности сиг-
нала к мощности помех на выходе системы ФАПЧ. Под сигналом
будем понимать составляющую выходного напряжения с часто-
той несущей, а под шумом — все побочные колебания, обусловлен-
ные паразитной модуляцией фазы выходного сигнала.
Известно, что фазовая модуляция не изменяет общей мощности
сигнала. Поэтому суммарная мощность несущей и побочных коле-
баний постоянна. Мощность Рн сигнала несущей при фазовой мо-
дуляции нормальным стационарным случайным процессом опре-
деляется выражением [51]:
Ри=Рое , (6.43)
где Pq — полная мощность фазомодулированного колебания.
При помощи этого выражения можно найти отношение сиг-
нал/шум на выходе системы ФАПЧ:
2
2 2е_0Ч>пг
& =--------------
2 — п2
1 — е ч’пг
(6.44)
Здесь s2 — отношение амплитуды несущей ФМ сигнала к сред-
неквадратическому значению шума.
Подставляя о2пг из ф-лы (6.42) в (6.44), получаем
— Ф /S?
2е 1
— Ф /s?
1-е * 1 1
(6.46)
е2
Ь2
В этом выражении величину для s2 >5 можно считать не-
зависящей от Si, поскольку, как уже указывалось, в этом случае
значение h, определяющее форму энергетического спектра фазь>1
входного колебания, почти не зависит от sb
Выражение (6.45) позволяет рассчитать изменение отношения
мощности сигнала к мощности
и шума через систему ФАПЧ:
£=_
si
помех при прохождении сигнала
— Ф /S2
2е ф/1
— Ф / S?
- е ч>/ 1
S?
ф
(6.45)
222
Из этого выражения следует, что коэффициент Ф3 резко зави-
сит от коэффициента Ф . Поэтому при конструировании систем
ФАПЧ снижению величины Фф нужно уделять особое внимание.
Для случая sj>5 иФф<1 выражение (6.46) значительно упро-
щается:
(6.47)
ч>
В качестве примера рассмотрим фильтрующие свойства систе-
мы ФАПЧ с пропорционально-интегрирующим фильтром, посколь-
ку для этой системы значение минимально по сравнению с Ф^
для других систем.
Как следует из выражений (6.40) и (6.47),
Ф — -2“ ('n +_gL . (6.48)
•Р т (2а + т)
Обычно а^т, поэтому
Ф^ — =-------—-----. . (6.49)
т т Оу 0,93 л
Сравним теперь фильтрующие свойства системы ФАПЧ и зве-
на Ф—О—Ф. Будем считать при этом, что первый фильтр звена
Ф—О—Ф точно такой же, как и фильтр, предшествующий систе-
ме ФАПЧ. Кроме того, предположим, что частотная характеристи-
ка узкополосного фильтра, следующего за ограничителем, имеет
форму, близкую к прямоугольной, а его полоса пропускания
может быть сколь угодно узкой.
Потребуем, чтобы полоса пропускания узкополосного фильтра
была равна полосе захвата системы ФАПЧ. Это требование объ-
ясняется тем, что при расстройке, превышающей половину этой
полосы, сигнал на выходе обеих систем пропадает.
На основании [51, 57] можно сделать вывод, что при £^>5 и
точной настройке фильтров на несущую частоту предельный огра-
ничитель звена Ф—О—Ф в первом приближении не изменяет в
пределах рабочей полосы ни формы энергетического спектра, ни
соотношения сигнал/шум. Поэтому коэффициент фильтрации Ф*
звена Ф—О—Ф в этих условиях будет определяться в основном
отношением эффективных шумовых полос обоих фильтров:
(6.50)
Согласно принятому условию
/71--2Q3:=2QyY3. (6.51)
Воспользовавшись предельными соотношениями (4.75), (6.50)
и условием (6.51), получим
223
Из выражений (6.49) и (6.52) находим
Ф5 ___h l''2m — m2
ф* т 0,93 я
Отсюда следует, что при h«0,56 и т<0,077 (т. е. при у3<0,4)
система ФАПЧ обеспечивает лучшую фильтрацию, чем звено
Ф—О—Ф. Однако при этом увеличивается время установления.
До сих пор рассматривалось воздействие на систему эталон-
ного сигнала, модулированного по фазе случайным процессом. На
практике же встречаются и другие случаи. В качестве примера
можно привести задачу о воздействии смеси сигнала и аддитив-
ного шума на входе системы ФАПЧ, фазовый детектор которой
работает в режиме линейного перемножения входного сигнала с
сигналом подстраиваемого генератора. При этом предполагается,
что перед системой ФАПЧ ограничение сигнала по амплитуде от-
сутствует, а амплитуда эталонного сигнала постоянна.
В этом случае, полагая в ур-нии (6.7) Qy=const, а фэг=0, по-
лучаем
р <р + Qy Д' (р) Г cos <р + —-^-cos <р + sin ф] = QH. (6.53)
Считая, как и ранее, воздействие малым так, что выполняется
условие (6.8), запишем уравнение первого приближения:
р А ф + Оу К (р) Я — sin ф02 (1 + cos фо2] А ф -ф
IL \ ^ЭГ / С/ЭГ J
, C(t) - . Д(/)
+ —sin Фо2 -+ —Ы. cos ф02
<>эг '-'эг
(6.54)
Из полученного уравнения следует, что даже при Qy (7,) = const
в рассматриваемом случае система описывается линейным диф-
ференциальным уравнением с переменными параметрами. Анализ
этого уравнения в общем виде весьма затруднителен. Однако при
выполнении условий o2N 1 и Од, /С'|гС 1—у^, которые заве-
домо справедливы при
-^- << 1 —у2 (6.55)
и2 ’ н
^эг
—дисперсия входного шума Ni(t)], вторым и третьим слагае-
мыми в квадратных скобках ур-ния (6.54) можно пренебречь.
В итоге последнее можно заменить приближенным уравнением
рАф + Оу/((р){—5Шф02Аф-Н(0} =°- (6.56)
Здесь § (г) = —— cos ф02 — sin фо2— некоторое флуктуационное
Сэг Сэг
воздействие с нулевым средним значением и корреляционной функ-
цией, равной с точностью до постоянного множителя U~3r корре-
224
ляционной функции процесса N^t), смещенного на нулевую ча-
стоту.
Условие (6.55) не единственное, которое позволяет перейти от
ур-ния (6.53) к (6.56). Действительно, полагая что процесс Ni(t)
имеет значительно более широкий энергетический спектр по срав-
нению с полосой пропускания системы, величину <р(/) можно счи-
тать медленно меняющейся по сравнению с величинами A(t) и
C(t) и, следовательно, не коррелированной с ними. Это позволяет
перейти от ур-ния (6.53) к уравнению
p<p + Qy7((p){cos<p + g1(/)}=QH, (6.57)
где %i(t)—случайное возмущение, которое имеет нулевое среднее
значение и функцию корреляции, совпадающую с точностью до
множителя и2эт с функцией корреляции входного воздействия, сме-
щенного на нулевую частоту. Строгое доказательство этого поло-
жения имеется в [1963, 9]. Интересно, что при этом величина оф
не обязательно должна быть малой.
Линеаризуя ур-ние (6.57), непосредственно получим (6.56).
Уравнение первого приближения (6.56) позволяет по известным
правилам теории преобразования случайных процессов найти ста-
тистические характеристики разности фаз. Дисперсия фазы под-
страиваемого генератора, а следовательно, и дисперсия разности
фаз определяется выражением
J^((o)|U71(i<d 0). (6.58)
-Оо
Здесь 3\(и)—энергетический спектр процесса
Гсу=[/’/(ф02)]-1.
Интересно сравнить по величине дисперсии фазы подстраивае-
мого генератора систему ФАПЧ, на входе которой сигнал имеет
предельное амплитудное ограничение, с системой ФАПЧ, не имею-
щей ограничителя, фазовый детектор которой работает в режиме
линейного перемножения. При сравнении будем предполагать, что
полоса устройств, предшествующих системе ФАПЧ, значительно
шире полосы пропускания самой системы. В этом случае в
ф-ле (6.58)—постоянная величина, определяемая равенством
' С"
Здесь П — интегральная полоса линейных устройств, предше-
ствующих системе ФАПЧ, выраженная в рад)сек.
Подставляя ф-лу (6.59) в (6.58), получаем
’ л Р л F 2 я о?, Д F„,
Ст2 =----ЛДшД Гш------------N,------- (6.60)
фпг [6'Ы2Л=/7 [Г'(Фо2)]2^г/7
8—526
225
где Pc/Pia = L,2r/2o^ = s2/2— отношение мощности сигнала к мощ-
ности шума на входе системы, ДЕШ— шумовая полоса частот.
Для определения дисперсии фазы подстраиваемого генератора
при наличии предельного ограничения воспользуемся выражением
(6.17), полагая в нем 5^ = const:
о2 =S Д рш. (6.61)
Ф пг ф '
При достаточно высоком соотношении sf^>l и равномерной в
вредеiax рабочей полосы частот характеристике линейных вход-
ных устройств энергетический спектр девиации фазы <рэгли сигнала
на выходе ограничителя определяется равенством:
o2Ni 2 л
о ,, —------
* 1 и2эГп
(6.62)
Подставляя это выражение в (6.61), получаем при наличии
ограничения амплитуды
Здесь, как и ранее, П имеет размерность [рад/сек]. z
Сопоставляя выражения (6.63) и (6.60), замечаем, что они раз-
личаются постоянным множителем 7'2v = 1/[/7/(<Ро2)]2= (1—у2)-1,
определяющим крутизну характеристики фазового детектора в
точке устойчивого равновесия.
Интересно отметить, что с увеличением ун дисперсия фазы под-
страиваемого генератора, а следовательно, и разности фаз значи-
тельно возрастает при отсутствии ограничения на входе системы.
Физически это объясняется уменьшением эффективности под-
стройки фазы подстраиваемого генератора по немодулированной
шумом фазе эталонного сигнала.
Если на систему действует сумма модулированного по фазе
случайным процессом эталонного сигнала и шума, а фазовый де-
тектор представляет собой линейный перемножитель, то, поль-
зуясь принципом суперпозиции, легко найти выражение для дис-
персий фазы подстраиваемого генератора и разности фаз эталон-
ного и подстраиваемого генераторов из (6.17), (6.18) и (6.58):
” у-2 00
Z31 J Z31 J
—оо — оо
. (6.64)
“ ^2 00 1
fs r(tD)|l-U71(i<dt0+-^
-Oo -00
Выше Qy рассматривалось как постоянная величина, однако в
прикладных задачах часто встречаются случаи, когда система
ФАПЧ работает в условиях флуктуаций амплитуды эталонного
226
сигнала (а следовательно, и величины Qy), например при воздей-
ствии на систему ФАПЧ с линейным входом AM сигналов, при за-
мираниях в канале передачи эталонного сигнала и т. п. Разумеет-
ся, существуют различные способы ослабления флуктуаций Qy,
тем не менее полное их устранение невозможно. Поэтому интерес-
но выявить влияние совместных флуктуаций Qy и других возмуще-
ний на работу системы ФАПЧ.
Итак, будем предполагать, что на вход фазового детектора, ра-
ботающего в режиме линейного перемножения входного сигнала с
сигналом подстраиваемого генератора, действует аддитивная смесь
флуктуирующего по амплитуде сигнала, модулированного также
и по фазе, и стационарного нормального шума Ni(t) с нулевым
средним значением. В этом случае система описывается ур-нием
(6.7), которое удобно переписать в следующей форме:
р <р + К (р) Qy (t) cos ф + К (р) 1-2 (0 = QH + Р фэг- (6.65)
Здесь ^г(0 = 0,5Хуэ^фд[7пг{А (t) cos <рпг С(Д sin фпг].
Положим, что Ni(t) и фэг(О вызываются разл"ч-',,м!’ пончика-
ми и, следовательно, статистически независимы. Далее будем счи-
тать, что время корреляции шуМа Ni(t) мало по сравнению с
собственной постоянной времени системы, вследствие чего можно
считать его белым. Тогда, как показано в [1963, 9], шум £г(0 пред-
ставляет собой дельта-коррелированный процесс с нулевым сред-
ним, т. е. £2(/)=0, Ь(ОВг(^—x)=K6(t). Здесь чертой обозначена
операция статистического усреднения (А—спектральная плот-
ность процесса g2(/) на нулевой частоте).
Представим выражение для Qy(7) в виде:
йу(0=й;+д(0,
где Qy—среднее значение полосы удержания, Д(£)—флуктуаци-
онная составляющая.
Как и ранее, при анализе будем рассматривать линейную мо-
дель системы. Хотя возможности метода линеаризации ограниче-
ны, тем не менее удается установить некоторые новые качествен-
ные закономерности [58]. Линейная модель системы ФАПЧ с пере-
менными параметрами исследовалась в [1963, 14] в связи с зада-
чей о влиянии белого шума на устойчивость системы ФАПЧ; ряд
уточнений сделан в работе [1969, 32], которая используется при
последующем изложении. Для простоты полагая K(p) = i и линеа-
ризуя ур-ние (6.64) в окрестности равновесного состояния
<Po2 = arccos —, с учетом ф-лы (6.65) получаем
р Д ф + [Q; F' (ф02) + Д (О F' (ф02)] Д ф = -Д (О F (ф02)-£2 (t)+p Фэг- (6-66)
Полученное уравнение исследовалось в [58]. Конкретизируя ре-
зультаты этой работы, положим фэг=1(0—единичная функция,
Д(£)=0, Д(0—Д(/ + т)=х6(т) (x = const), т. е. рассмотрим дейст-
8" 227
вие скачка фазы эталонного сигнала с переменной амплитудой в
сумме с флуктуационным шумом на систему ФАПЧ.
Решая ур-ние (6.66) при нулевых начальных условиях, нахо-
дим:
t
А <р (/) = J [3 (х)—A (х) F (ф02) —£г (x)J exp [Q° (х —
о
— ^(т)/7'(фог)^т dx.
(6.67)
— О^(Фог)] ехР
Используя свойства 6-функции и обозначая через М операцию
статистического усреднения, получаем
It \
exp [—Q’t F' (ф02)] exp — J А (г) Г (ф02) d г +
L о J
t
+ Л4 J[—А(т)А(фОг)—MOJexp[Q’(x—7)F(фог)]Х
.о
Хехр
t
(6.68)
В силу статистической независимости флуктуаций А (г) и g2(^)
имеем
М[Аф] =Л4 exp [—Q° £ А'(фо2)] ехр
— j А (г)/' (фог)с(т
о
(6.69)
Интеграл в показателе второй экспоненты представляет собой
винеровский процесс{51, 52] gB(£) с плотностью распределения
117 (gB, t) = —.... 1 exp
/2 Я7. t \F’ (Фоа)Р
=в
2 х t [F' (<p02)]2
(6.70)
Выполняя в ф-ле (6.69) операцию статистического усреднения
с плотностью (6.70), получаем
Л4 [А ф] = exp {—t F' (ф02) [Q’—0,5 хF' (ф02)]}. (6.71)
Согласно ф-ле (6.71) при Q° >О,5х/?/(фо2) равновесное состоя-
ние системы асимптотически устойчиво в среднем [58]. Однако ес-
ли Q0<0,5xA/^02), то такое состояние оказывается невозможным.
Следовательно, максимальное граничное значение интенсивности
параметрических флуктуаций, обеспечивающее асимптотическую
устойчивость системы в среднем, определяется выражением x = 2Q^
Аналогично исследуется устойчивость равновесного состояния си-
стемы в среднеквадратичном. Опуская громоздкие выкладки, при-
ведем окончательный результат в определении максимальной гра-
228
личной интенсивности параметрических флуктуаций, обеспечиваю-
щих устойчивость системы в среднеквадратичном, а именно
x = Qy. Сопоставление результатов показывает, что условие устой-
чивости системы в среднем и среднеквадратичном не совпадают.
Последнее подтверждает общие положения [58].
Неустойчивость системы в среднем и среднеквадратичном свя-
зана исключительно с параметрическими флуктуациями и не за-
висит от интенсивности аддитивных флуктуаций.
В заключение следует отметить, что эти выводы можно обоб-
щить на многомерные модели систем ФАПЧ [1963, 14]. Некоторые
результаты по исследованию стационарного режима работы ли-
нейной многомерной системы ФАПЧ при мультипликативной
флуктуационной помехе приведены в [1967, 62; 1971, 5].
6.4. АНАЛИЗ СИСТЕМЫ ФАПЧ, НАХОДЯЩЕЙСЯ ПОД ДЕЙСТВИЕМ
БОЛЬШИХ ШИРОКОПОЛОСНЫХ ВОЗМУЩЕНИЙ, ПРИ ПОМОЩИ
АППАРАТА МАРКОВСКИХ ПРОЦЕССОВ
Общие сведения
Как уже указывалось, на практике метод линеаризации часто
оказывается непригодным вследствие большой интенсивности
флуктуационного воздействия. В таких случаях приходится иссле- f
довать непосредственно ур-ние (6.7). Весьма эффективными для
исследования этого уравнения являются методы, основанные на тео-
рии марковских процессов [24, 51, 52]. Они позволяют, в частно-
сти, определить плотность вероятности координат нелинейной си-
стемы.
Приведем краткие сведения из теории марковских процессов [24, 51, 52].
Процессами Маркова, как известно, называются случайные процессы с ограни-
ченным последействием. Марковский случайный процесс в общем случае является
многомерным.
Рассмотрим сначала простейший случай одномерного марковского процесса.
Пусть имеется некоторый случайный процесс x(t) и x2(t2) ... xn(tn)—
его значение в моменты времени t1<t2<. ...tn.
Найдем вероятность появления величины xn(tn) при условии, что в преды-
дущие моменты времени tn-i, tn-ч, <п-з,случайная величина x(t) прини-
мала значения xit х2, ..., хп, т. е. W(xn/xn-i, хп-2, , %i). Если эта условная
вероятность зависит только от самой величины хп и не зависит от всех xn-i,
хп-2, ..., х1г то процесс x(t) называется совершенно случайным и все его зна-
чения в различные моменты времени tlt t2, ..tn статистически независимы.
Если же эта условная вероятность зависит не только от хп, но и от преды-
дущих значений x(t), т. е. хп-з, хп-ч, ..., *i, то имеет место процесс Маркова.
Простым марковским процессом или процессом Маркова первого порядка назы-
вается такой случайный процесс x(t), значение которого в некоторый момент
времени, т. е. xn(tn) зависит лишь от его последнего известного значения
Xn-i(tn-i) и не зависит от всех предыдущих его значений х л-ч(1п-ч),
Xn-sftn-s), ..Xi(ti). Условная плотность вероятности такого процесса зависит
только от хп и xn-i, т. е. W(xn/xn-i; хп-ч, , xi) = W(xn!xn-i)
Простой процесс Маркова полностью определяется двумерной безусловной
плотностью вероятности №ч(Х1, х2) В соответствии с ее определением имеем:
229
Wsfxt, x2)^W1(xl)W(x2/xl). Многомерную плотность вероятности простого мар-
ковского процесса легко найти, зная Wi(xi) и плотность вероятности перехода
№(Хп/хп-1), где п=1, 2, 3...
п
х2, . . .хп) = (xj |"""| W (xi/x._[). (6.72)
Таким образом, одномерная плотность вероятности и плотность вероятности
перехода полностью определяют простой марковский случайный процесс.
Если плотность вероятности перехода зависит только от разности т=/,—ti-i
(1=1, 2, 3...), то процесс Маркова называется стационарным (однородным во
времени). Если, к тому же, при т->оо существует предел W'(x,t/x<_1) = U7i(xt),
то можно считать, что существует стационарная (предельная) плотность вероят-
ности. Это означает, что условная плотность вероятности перехода обращается
в стационарную одномерную плотность вероятности состояния.
Для марковского процесса вводится понятие непрерывности. Непрерывным
называют такой марковский процесс, для которого с убыванием т вероятность
его конечного изменения стремится к нулю, т. е.
lim — f W(xt, ti/x.l,t.i)dxi-^Q, (6.73)
т->0 т J ‘ ‘
|x4-x;_i>6
где 6>0 — произвольно малое число.
Плотность вероятности одномерного марковского процесса удовлетворяет
кинетическому уравнению {24, 51, 52]:
д VI ( — 1)” R дп
— ГН*)-}/ /"-H-IKnWrWl. (6.74)
dt Uk п\ дхп
п==1
„ . Шг (х)
Здесь Кп (х) = lim----.
т->0 т
оо
тп(х) = J [х(/ + т)~ x(f)]n№[x(f + T)/x(O]dx(/ + T).
— со
При выполнении условия (6.73), т. е. при непрерывных марковских процес-
сах, Кп(х) = 0 при /ijs3. В этом случае уравнение упрощается:
д W, (х) д ( ) 1 д2
---K(Wr(x) + — — [K2(xm(x)l. (6.75)
от ox I ) 2 ох2
Это уравнение в частных производных второго порядка параболического
типа называют уравнением Фоккера—Планка. Его строгое математическое обос-
нование было дано А. Н. Колмогоровым (59]. Подробный вывод его имеется
в [24, 51].
Если в начальный момент (/=0) точно известно, что х=х0, то начальное
распределение плотности вероятности — дельтаобразное: 1^10(х)=в(х—х0) и по-
лучаемая из ур-ния (6.75) функция W\(x) совпадает с вероятностью перехода
Ц7(х/хо) Естественно, что функция Wi(x) должна удовлетворять условию нор-
мировки и положительной определенности.
Коэффициент К1(х)" характеризует среднюю скорость изменения координа-
ты х в течение бесконечно малого промежутка времени и поэтому называется
коэффициентом сноса, а коэффициент Кг(х)—дифференциальную дисперсию
процесса и называется коэффициентом диффузии.
Решение уравнения Фоккера—Планка при заданных начальных и граничных
условиях позволяет отыскать Wt как функцию времени и координаты х Для
230
д
стационарной плотности вероятности, т. е. когда Wi(х) = 0, уравнение Фок-
кера—Планка (6.75) переходит в уравнение вида:
d
—-[К2(х)Г1(х)]-2К1(х)Г1(х)= -2G, (6.76)
где G=const называется потоком вероятности [24].
Решение этого уравнения для заданных Ki и К2 известно [24].
Уравнение Фоккера—Планка можно записать и для многомерного марков-
ского процесса. Этот процесс характеризуется совокупностью п случайных функ-
ций, т. е. случайным вектором: r(/) = r(x1('Z), x2(t), ..., xn(t)). Такой процесс
описывается вероятностью перехода P=(xlt х2, .... xn/xI(b х20, , хпо). Через
эту вероятность и начальное распределение выражается многомерное распреде-
ление. Каждый из случайных процессов хь х2, ..., хп называется компонентой
многомерного марковского процесса. Если число п велико, то такой процесс хо-
рошо аппроксимирует любую реальную случайную функцию.
Для многомерного непрерывного марковского процесса уравнение Фоккера—
Планка принимает вид:
d VT д
,, 1п(х1,. . . ,хп) — J I “7 [Kj (Х1,. . . > хп) ш (Х1 >. . . , Хп)] -[-
ut ляш иХ I
п п
......................
1-1 /=1
где
Ki = lim М [хг (t + т) — х( (/)] 1
г-»о
Кц = lim М {[х; (/ + т) — xi (/)] [х7- (/ + т) — х, (/)] т-1 }.
т-»0
Отыскание даже стационарного решения многомерного уравнения Фоккера—
Планка представляет собой весьма сложную задачу.
Обычно при исследовании устройств, подверженных действию
случайных возмущений, приходится изучать дифференциальные
уравнения, в которые входят случайные функции времени. В этом
случае коэффициенты сноса и диффузии вычисляют, исходя из вида
конкретного уравнения. Предположим, что система описывается
дифференциальным уравнением первого порядка:
dx
—~=ПХЛ). (6.77)
dt
Здесь ^=^(t) —стационарное случайное воздействие с нулевым
средним значением.
Если время корреляции этого процесса значительно меньше
времени установления координаты х, то распределение х близко
к распределению одномерного марковского процесса [24, 52]. При
этом коэффициенты сноса и диффузии, определяющие уравнение
Фоккера—Планка для одномерной плотности вероятности,
^(х)=Л4{КхЛ)} + ^Л'(х), (6.78)
231
где
K'W = J^(17- (6-79)
— co
причем
K( df Л_Д1 f[ [x, £(/)] M df[Xl g(/)l 1 x
\ дх ’ x) [L dx dx ]
X [f[x,£(( + T)]-Mf[x,£(( + r)]]} , (6.80)
K2(x) = jK(fJT)dT, (6.81)
причем
К (f,fx) = M {[ f [(x, I f [x, I (()]] X
X [f [x, I (( + r)J-Mf [x.g (Z + r)]]} . (6.82)
При выполнении операции усреднения по ансамблю координа-
та х считается фиксированной постоянной.
Если справедливо условие временной симметрии
д К2 (х)
Если работа устройства описывается системой п уравнений
первого порядка
^=Л(х1,..)хл,^)...и (6.84)
at
где 1=1, 2, . ., п, то при достаточно малом времени корреляции
величин g, по сравнению с временем установления координат плот-
ность вероятности 1Гщ(Х1, х2, .... хп, t) близка к плотности вероят-
ности многомерного марковского процесса, удовлетворяющего
ур-нию (6.77), причем
ЛДх!,..., хп)=М к(х0..., х„, ..., +
, f Idr,
д х //пт
Lv лт J
(6.85)
232
(6.86)
—00
Здесь, как и в одномерном случае, при вычислении среднего
значения функции fi и подынтегральных корреляционных функций
координаты Xi, .., хп следует считать фиксированными.
Система ФАПЧ первого порядка
Воспользуемся полученными соотношениями для анализа воз-
действия широкополосных флуктуационных возмущений на систе-
му ФАПЧ. Анализ начнем с простейшего случая, когда Йу = const,
t7dr = const, K(p) = l [1959, 5]. В этом случае ур-ние (6.7) можно
записать в виде'
~ =QH—Q cos<p + ^^—[Л (Ocos(<p— фэг) +
си ” си LJ ЭГ
+ C(Osin(<p—фэг)], (6.87)-
где n(0 = ~L—^И(Осоз(ф—фэг) + С(О зш(ф—фэг)] — флук-
at U3I
туационное воздействие; 7И{п(0/ф, фэг} = 0,
ф), п(^+т)/ф,фэг} = ст2Я(т) =
й2
= -г- °2N1 (т) + (T); ст2 ст2 —
— дисперсии входного шума Nt и процесса р<рэг соответственно;
/?л-1(т) и /?1(т)—коэффициенты корреляции входного шума, сме-
щенного на нулевую частоту, и процесса р<рэг соответственно.
В дальнейшем будем полагать, что время корреляции тк слу-
чайных воздействий значительно меньше времени установления ту
координаты ф(ту»1/Йу). При этих условиях, как уже указыва-
лось, исходный процесс близок по распределению к марковскому
и для плотности вероятности координаты ф справедливо ур-ние
(6.75).
Коэффициенты сноса и диффузии этого уравнения на основа-
нии ур-ния (6.87) и с помощью ф-л (6.78) — (6.81) определяются
следующим образом:
К1(ф)-Йн—йусоэф, (6.88)
dr--const. (6.89)
В частном случае, когда рфэг=О (эталонный сигнал имеет пос-
тоянную фазу) cti = O.
233
f
Окончательно уравнение Фоккера—-Планка принимает вид:
-^1 (ф) = —/- [йн-Qy cos Ф) (ф)1 + W. (ф). (6.90)
ОТ Оф 2 О ф^
Исследование ур-ния (6.90) начнем со стационарного решения,
когда — IFi'(<p) = const. Его решение в этом случае определяется
формулой:
ф
Ц71(ф)=С1е£)<|ф —Ds!n<₽ f e~Do + Dsln<fd(p. (6.91)
сг
Здесь £>о = 2Йн/Л2, ?О = 2Йу/Л2.
Постоянные Ci и С2 можно определить из условий периодич-
ности:
^1(ф±2^)=Гх(ф)
(6.92)
и нормирования плотности вероятности на каждом периоде
jV (ф) d Ф = 1.
о
(6.93)
Согласно [24], если выполняются условия (6.92) и (6.93), ур-ние
(6.91) можно записать в следующей форме:
„(<р+л) О0— D sin <р ф+2п
Г1(Ф) = ^Ц-----------L f e“D^+Ds'nxdx,
4л2|/г (D)|2 J
ф
где AD(i— функция Бесселя мнимого индекса и мнимого аргу-
мента.
Если начальная расстройка равна нулю, то Д> = 0 и ур-ние
(6.94) упрощается:
(6.94)
о— D sin ф
Um-
(6.95)
На рис. 6.3а по этой формуле построены графики для различ-
ных значений D. Из рисунка и из ф-лы (6.95) следует, что плот-
ность вероятности при нулевой начальной расстройке симметрич-
на относительно значений фо2 = 2лп—л/2 (n = 0, 1, 2...), представ-
ляющих собой стационарную разность фаз эталонного и подстраи-
ваемого генераторов в отсутствие случайных возмущений. Макси-
мум плотности вероятности соответствует устойчивому состоянию
равновесия невозмущенной системы, минимум — неустойчивому.
В случае малых отклонений ф от его устойчивого значения в не-
возмущенной системе фог=—л/2 (если D^> 1), разложив sintp в ряд
234
около точки фог и ограничившись двумя первыми членами разло-
жения, преобразуем ф-лу (6.95) к виду.
Гх(Дф)
2л/0(£>)
(6.96)
При больших шумах (£><1, Do = const) плотность вероятности
близка к равномерной: ^Мф) =Х/2п, {—л<ф<л].
Рис. 6.3. Плотность вероятности <р
при:
а) £)о=0;, D = Var; б) D=3, D0 = Var;
в) D= 10, £>o=Var
Для больших Д можно воспользоваться асимптотическим при-
ближением для Io(D):
IQ(D)^-J=eD. (6.97)
Подставляя ф-лу (6.97) в (6.96), получаем
(Д ф)« — ------е~(Л ф)*/2 D~l , (6.98
235
т. е. закон распределения отклонений разности фаз от стационар-
ного значения становится близким к нормальному с дисперсией
В частном случае р<рЭг = 0, воспользовавшись ф-лой (6.89) и
подставив вместо D его значение, найдем
<Д Йу
о„ =----5—
ф 2U2
ЭГ
(6.99)
Поскольку <2,л1П= J 7?^(т)г/т, а Е/(<р02) =—sin<p02= 1 при ун=0,
то выражение (6.99) совпадает с полученным ранее методом ли-
неаризации выражением (6.60).
Если начальная расстройка не равна нулю, то IFi (<р) следует
определять по ф-ле (6.94). Поскольку интеграл в правой части
этой формулы в общем виде непосредственно не берется, то
1Г1(<р) можно найти либо при помощи численных методов, либо
разлагая подынтегральное выражение в ряд.
Для дальнейших рассуждений удобно ввести вместо <р новую
переменную 0=<р + л/2. Применяя известные из теории бесселевых
функций формулы разложения:
еа cos х = /0 (а) + 2 Л («) cos lx, (6.100)
z=i
е“ ас08 = /0 (а) + 2 2 (—!)' h (a) cos lx, (6.101)
z=i
можно выполнить интегрирование в ф-ле (6.94).
В результате плотность вероятности разности фаз эталонного
и подстраиваемого генераторов представится в виде ряда:
W cPc°sepoU>) < 2 V(~1)г/'(Р) х
1 М Do Ы Dl+l^
X(Docos/0—I sin /0)
(6.102)
где
Л4=4к2е“яО»|/го,(П)|2.
Функции Бесселя с ростом их индекса быстро убывают [60],
поэтому ряд в выражении (6.102) быстро сходится. Впервые пред-
ставление 1Г(0) в виде ряда было дано для ун=0 в [1963, 9], а для
ун¥=0 — в [1965, 8].
На рис. 6.3ц и г в качестве примера представлены семейства
кривых IFi (<р), полученные путем численных расчетов при различ-
236
ных значениях параметров Do и D (24]. Из этих рисунков видно,
что при Йн¥=0 распределение <р становится несимметричным, и,
как следовало ожидать, со средним значением <р, не равным нулю.
Перейдем теперь к вычислению числовых характеристик зако-
на распределения (1965, 8; 1966, 14]. Среднее значение разности
фаз эталонного и подстраиваемого генераторов определяется вы-
ражением
ТС
Ф=
—л
Подставляя в это выражение значение Wi (0) из ф-лы (6.102)
и учитывая ф-лы (6.100) и (6.101), получаем
Ф = ]А№>. + <_=_ц;7 (Р)+
71 D2 + /2 | I 21 ' ‘
М
, yi ( - t)fe+' Zfe2/|__л_
Zj /2 —£2 2 '
k=-l
(4=1)
(6.103)
Из этого выражения следует, что при Ро = О (ун = 0) <р=—л/2.
Дисперсия разности фаз, как обычно,
Ст2= уф^ГДф)^—(ср)2.
—л
(6.104)
Вычисления приводят к следующему результату:
о2 =2к
<р
1 -е-яД» [ /20(Д)
М Do
+ 4D0/0(D)V-^-
4J D2+/2
я2 , 4 VI ( —1)* Д(Д)
з *2w)
<:=!
. 2 У ( — l)Z+ft(Z2 +A2)Zfe(£>)
Zj (/2-^2)
6=1
—(Ф)2. (6.105)
В случае ун=0 (|Z?o = O) это выражение принимает вид (1963, 9]:
g2^ + 4y.(=U^(D)
<₽ 3 Li kU0(D)
k=i
(6.106)
На рис. 6.4 {1965, 8] приведены зависимости статистических
характеристик разности фаз (ф и оф) от параметров системы и
шума.
237
Асимптотические выражения для 1У1(ф) даны в [1965, 8].
До сих пор рассматривалось только стационарное решение
уравнения Фоккера—Планка для одномерного марковского про-
цесса <р(0- На практике же требуется знать не только стационар-
ные характеристики системы, но и анализировать процессы уста-
новления в системе, подверженной действию возмущений, иссле-
Рис 6 4 Зависимость статистических характеристик разности фаз от пара-
метров системы и шума
довать явления перескоков разности фаз (срывов синхронизма),
решать задачи на достижение заданных границ и т. п. Поэтому
обратимся к качественной картине явлений в системе первого по-
рядка, подверженной действию случайных возмущений [24].
Как уже указывалось, если время корреляции случайного воз-
действия значительно меньше времени установления координа-
ты <р, то исходный процесс, описываемый ур-нием (6.87), близок
по распределению к марковскому, описываемому уравнением
= Йн — Йу cos ф + (0, (6.107)
dt
где tii(t) — дельта-коррелированный процесс с параметрами
«1(0=0, n(t)-th (t+x) = Кг6(т); Кг = о2 J R(r}dx.
Удобно рассматривать <р как скорость некоторой материальной
точки. Тогда величина р<р есть не что иное, как ускорение этой
точки и ур-ние (6.107) можно трактовать как уравнение ее дви-
жения в поле регулярных внешних сил, нелинейно зависящих от <р
при наличии случайного возмущения ni(t). При этом разность
Йн—Qycostp будем считать силой, поскольку ей пропорционально
ускорение. Зная зависимость силы от <р, найдем работу этой силы,
т. е
ч>
А = — |(ЙН—Йу созф)с1ф = —йн ф+йу sin ф. (6.108)
о
238
Эту работу можно рассматривать как потенциал некоторой тя-
желой точки, находящейся на наклонной волнистой поверхности,
сечение которой схематически показано на рис. 6.5. Ее характер-
ной особенностью является наличие точек минимального потенциа-
ла (так называемых «ям»). Ямы соответствуют точкам устойчиво-
го равновесия в отсутствие случайного возмущения.
Рис 6 5 Зависимость потенциала тяжелой точки, ле-
жащей на наклонной волнистой поверхности, от ср
Если же на точку действуют случайные силы, то она начинает
хаотически двигаться в окрестности точки фог (яма Я2). При ма-
лых случайных силах точка не выходит за пределы самой ямы,
что соответствует только небольшим флуктуациям разности фаз.
По мере увеличения случайных сил точка начинает выходить за
пределы ямы и попадает в одну из соседних ям (Я\ или Яз), где
<Р = <Ро2±2л. Поскольку потенциал ямы Яз меньше потенциала ямы
Я1, точка из ямы Я2 в среднем перебрасывается чаще в яму Яз,
чем в яму Я\. При перескоке точки из Я2 в Я\ разность фаз умень-
шается на 2л, а из Я2 в Яз — увеличивается на 2л.
Таким образом, в среднем разность фаз эталонного и подстраи-
ваемого генераторов нарастает, что означает наличие средней
разности частот. Разность в числе перескоков, происходящих влево
и вправо, тем больше, чем больше наклон поверхности (чем боль-
ше йн), чем мельче ямы (чем меньше Пу) и чем больше величина
случайного воздействия. Следовательно, при больших флуктуациях
разности фаз, когда линеаризация недопустима, имеет место но-
вое явление: в системе ФАПЧ появляется средняя разность частот
эталонного и подстраиваемого генераторов.
Заметим, что при ПН>ПУ ямы вообще отсутствуют и точка не-
прерывно скатывается по волнистой поверхности вниз, т. е. син-
хронный режим даже в отсутствие случайного воздействия стано-
вится невозможным.
239
Воспользовавшись—ур-нием (6.107), определим величину сред-
ней разности частот рф в системе ФАПЧ первого порядка, нахо-
дящейся под действием случайного возмущения ni(t): pq> —
= йн—Йуcos<p. В результате, учитывая, что rii(t) = O, получаем
РФ = j* (QH—Qycos(p)Vr1(<p)d<p. (6.109)
о
Из ф-л (6.76) и (6.88) имеем
(Йн—Йу cos Ф) Fi (ф) = (ф) Wr (Ф) =
= G+0,5/(2-^M , (6.110)
d <р
Подставляя это выражение в ф-лу (6.109) и учитывая, что в
стационарном состоянии поток G = const, а функция ^(ф) перио-
дична по <р с периодом 2л, находим
р ф = 2 к G.
(6.1И)
Воспользовавшись выражениями (6.76) и (6.94), получим
РФ = АаеяД»(1-е |/ (D)\~2 . (6.112)
ЧЬЯ2 nD« 1 ‘°
Рис 6 6 Зависимость средней разности
частот от начальной расстройки и пара-
метров ш>ма для системы ФАПЧ пер-
вого порядка
По этой формуле на рис. 6.6 построено семейство кривых
у = рф/йу=/(уя, |О). Из рисунка видно, что при действии шума на
систему ФАПЧ переход ее из
режима биений в режим син-
хронизма осуществляется плав-
но, а не скачкообразно, как
при отсутствии случайных воз-
мущений.
Рассмотрим частные пре-
дельные случаи. Если АгЧ1,
то и Do-+O. Поэтому вы-
ражение (6.112) значительно
упрощается: у = ун. Это равен-
siy ство показывает, что влияние
малого эталонного сигнала на
фоне больших шумов не сказы-
вается на частоте подстраивае-
мого генератора и средняя раз-
ность частот обоих генераторов
равна их начальной расстройке.
В другом крайнем случае, когда Аг мало, Ро^> 1- При этом,
если ув<^1, то, воспользовавшись асимптотическими формулами
для I lD (D), получим
у-2 sh к Do е 2 D
(6.НЗ)
240
При ун> 1 в системе невозможен синхронизм, однако ф-ла
(6.112) остается справедливой и из нее можно получить следую-
щую зависимость:
(6И4)
Заметим, что при ун = 0 независимо от величины флуктуаций
разности фаз у=0. Это объясняется отсутствием наклона волни-
стой поверхности, рассмотренной выше. Потенциалы точек поверх-
ности, находящихся «справа» и «слева» от дна ямы, становятся
одинаковыми и, следовательно, перескоки в обе стороны будут
равновероятными.
Определим теперь дисперсию разности частот эталонного и под-
страиваемого генераторов, вызванную случайным возмущением.
Непосредственное определение дисперсии из ф-лы (6.107) невоз-
можно, поскольку в ее правую часть входит дельта-коррелирован-
ный процесс. Поэтому обратимся к исходному ур-нию (6.87). Воз-
водя последнее в квадрат и усредняя полученное выражение,
имеем
(Рф)2 -(Йн—Йу cos?)2 + nf(0 + 2(ЙН—Йу cosф)их(0. (6.115)
Учитывая, что ф(0 — функция, медленная по сравнению с
ni(t), будем раздельно усреднять по быстро и по медленно меняю-
щимся величинам. Усредняя по быстрым величинам, имеем
2 (йн —йу cos ф) Hi (0 — 2 (Йн —йу cos ф)(0 = 0,
поскольку согласно условию tii(t) = O. Кроме того,
_________ q2 ______ ___________ 2
п1 (0 = [А2 (0 cos2 ф + С2 (0 sin2 ф] + of •= Йу —+ of.
ЭГ ____ _____ иЭГ
где, как и ранее, о^ =Л2(0 =С2(0-
В итоге усреднения по быстрым величинам получаем
____________ ___________ „2
(р ф)2 = (Йн— йу COS ф)2 + Йу —+ of. (6.116)
Усредняя это выражение по ф, имеем
___ 2л р2 а2
(7ф)2=Г (Йн-ЙуС08ф)2Ц71(ф)^Ф+-^- + о2. (6.117)
J I;
о эг
Теперь необходимо подставить в подынтегральное выражение
ф-лы (6.117) значение из ф-лы (6.94) и выполнить интегриро-
вание, Однако если воспользоваться равенством (6.110) и усло-
вием стационарности G = const, а также если учесть периодичность
функции №1(ф) с периодом 2л, то вычисление интеграла значи-
тельно упрощается и согласно [1959, 5] получаем
241
„2 2Л
(рф)2 = а?+2кЙн6+-^а2Г1 — 5^ycos<py-W\(<p)d<p. (6.118)
^эг о 45
Переходя в ф-ле (6.102) ог переменной 0 к <р и подставляя
№1(<р) в выражение (6.118), можно, выполнив интегрирование, опре-
делить (р<р)2. При нулевой начальной расстройке (£>о^О) из выра-
жения (6.118) находим
2
У
(РФ)2
г/
2
эг
q2
№
п2 [1 — АМ1+ст2
+ —L /0(D) J 1
(6.119)
Q
Одновременно при этом (р<р) =0 и, следовательно, дисперсия раз-
ности частот равна
°а=(Рф)2~7pq’)2 = -^L^ + -y-[1 — +4 (6.120)
U$r 0
Выше отмечалось, что решение стационарного уравнения Фок-
кера—Планка оказывается в некоторых случаях недостаточным
для практических приложений. Часто требуется найти время дос-
тижения разностью фаз выбранных граничных значений, числа и
вероятности перескоков фазы и т. д. Эти задачи связаны с сущест-
венно нелинейным и нестационарным режимом работы системы.
Для определения указанных характеристик воспользуемся об-
щим ур-нием (6.90). В отсутствие шума разность фаз эталонного
и подстраиваемого генераторов принимает устойчивое значение:
<ро2 = arc cosyH- Случайные возмущения вызывают, во-первых, флук-
туации <р в окрестности <рог и, во-вторых, перескоки разности фаз
на 2лп (п= 1, 2, 3...).
Назовем срывом синхронизма переход координаты <р из окрест-
ности точки «рог в окрестность точки <p-=q>02—2л или <р+=<ро2+2л.
Выберем в качестве начального условия фиксированное значение
координаты
НМф1Л) = в(ф~Фо). (6-121)
Здесь б(-) —дельта-функция.
Реализацию однородного во времени случайного процесса, ни
разу не коснувшуюся границы <р_ или <р+ в течение интервала вре-
мени to до t, будем описывать плотностью вероятности IFi(<p, Г),
удовлетворяющей ур-нию (6.90) с начальными условиями (6.121)
и граничными условиями:
ГДф-, 0 = 1^1 (Ф+Д) = 0. (6.122)
Для каждой реализации время от to до срыва синхронизма, т. е.
время достижения координатой <р одной из границ- <р_ или <р+ слу-
чайно. Определим среднее время Тср, за которое величина <р дос-
тигает одной из этих границ [24]:
242
rcp==J ^W^ffdtdy.
t„ <p_
(6.123)
В [24] показано, что среднее время достижения координатой <р
заданных границ <р_ или <р+ таких, что <р_<<р<<р+ (причем в на-
чальный момент времени <р = <ро), удовлетворяет уравнению:
VЪ(Фо) + К1(Фо) Г^+ 1 = 0, (6.124)
2 dq20 dtP«
с граничными условиями
Лр(ф_» Фо> Ф+) =° ПРИ Фо = Ф_ или фо = ф+. (6.125)
При этом физическому смыслу соответствуют решения, для ко-
торых 7’Ср>0. Коэффициенты и Кг в ф-ле (6.124) для рассмат-
риваемого случая определяются выражениями (6.88) и (6.89).
В результате для нормированного среднего времени тСр=Ну7’Ср
приходим к уравнению:
4-^ + (YH~cos<Po)4^- + 1 =°- (6-126)
D d фо d Фо
Решение этого уравнения при условии (6.125) имеет вид [61]:
tcp = Z) J e-D’^+Dslnp/<C1-J eD^-Dslnxdx\dy, (6.127)
ф_ \ ф_ ’ 7
где
ф+/ ’ у \
Г / — Do у + D sin у С D„ х — D sin х . I ,
е 1 е dx lay
ф \ ф /
Г — о» У + D sin у
j е dy
ф_
Ф+ = Ф02+2л, <Р_=<РО2—2л.
В частном случае, когда <ро = Фо2 = агс соэун, ф-ла (6.127) значи-
тельно упрощается [61]:
^ср = -^^|<п.(^. (6.128)
Если, кроме того, ун=0 (|О0=0), то
тср=2^Д/2(О). (6.129)
При немодулированном эталонном сигнале (рфэг=0), как уже
указывалось, Z>=2t/2r/7/o^i йу2л и в этом случае тср определяется
соотношением сигнал/шум в полосе пропускания системы.
243
На рис. 6.7а показана зависимость 2йуТСр=/(ун) времени до
срыва синхронизации для различных значений D. Из рисунка вид-
но, что с увеличением начальной расстройки тср резко уменьшается.
Рис. 6.7. Зависимость относительного среднего времени до срыва синхронизма:
а) от ун при £>=3; б) от D при ун=0
Зависимость QyTCpпри ун=0, построенная по ф-ле (6.129),
приведена на рис. 6.76.
Зная среднее время достижения координатой <р граничных зна-
чений, можно вычислить среднее число перескоков разности фаз в
единицу времени. В [61] показано, что среднее число перескоков
за границы <р_ и <р+ определяется выражениями:
tf+ =------,
4n2Dp.Do(D)12
р л D<>
N- =----------------- .
4n2D)/.Do(D)|2
(6.130)
(6.131)
Очевидно, что тСр= 1/'(N++N-), а средняя разность частот р<р
определяется как
ПЛ) _ рЗТ Dq _ р- Я Dq
= 2 к (#+—#_) = —------5,
Qy + 2nD|/.Do (D)|2
что совпадает с полученной ранее ф-лой (6.112).
В некоторых случаях (например, в устройствах фазовой теле-
графии) нужно знать среднюю частоту перескоков не только за
уровни <р_ и ф+, но и за уровни <рог—л и фог + л. Приведем без вы-
244
вода соответствующие выражения, полученные для ун=0 в [61]:
N+n = =-----L------. (6.132)
2n2/2(D)
Следует отметить, что если начальное распределение не дельта-
образное, то полученное ранее выражение (6.127) нужно усред-
нить по начальному распределению W'i(rpo):
ф+
тср-- j Tcp(<Po)^i(<Po)d<Po- (6.133)
ф_
Перейдем теперь к определению вероятности срыва синхрониз-
ма [1967, 22]. Эта задача связана с решением нестационарного
уравнения Фоккера—Планка (6.90). При известном значении
1^1 (<р, 0 вероятность P(t) того, что величина <р впервые достигнет
одной из границ <р_ или <р+ в момент времени t (вероятность сры-
ва слежения), определяется выражением
ф+
Р(0 = 1 — J ^(ф, t)d<p. (6.134)
ф_
Представим решение ур-ния (6.90) в виде
^х(ф. 0 = 2Г„е-х«(/-/-,У„(ф), (6.135)
л=0
где Уп(<р)—собственные функции, удовлетворяющие уравнению:
—г- А cos Ф) +ЬХ = °- (6.136)
аф2 аф
с гран-ичными условиями
У„(ф_)=У„(ф+)=0. (6.137)
Коэффициенты Тп определяются из начальных условий
№1(<р, Q=№H(q>). (6.138)
где Ц7н(ф)—произвольное начальное распределение разности фаз
эталонного и подстраиваемого генераторов.
r-> v ч т z 1* Он — Оу COS ф j
Заменой переменной х = Иехр!--------------Лф можно свес-
ти ур-ние (6.136) к дифференциальному уравнению Хилла, реше-
ние которого позволяет, в принципе, найти собственные функции
Vn и собственные значения после чего с учетом выражений
(6.135) и (6.138) можно определить P(t). Однако такой путь яв-
ляется сложным. Для практики важен случай малой вероятности
срыва синхронизма. В этом случае можно найти приближенное
решение задачи.
245
Предположим, что начальное распределение совпадает с одной
из собственных функций, т. е.
Wi (<р, Q =^н(ф) = const Ут(ф), (6.139)
причем выполняется условие нормировки
ф+
У^1(Ф.и^Ф = 1, (6.140)
ч>_
означающее, что в начальный момент времени система работает
в синхронном режиме. В этом случае на основании ф-лы (6.135)
(причем, если тфп, Тп = 0) имеем
ГС\(ф, 0=conste ^(Z~uVm(<p)- (6.141)
Из этого выражения следует, что форма распределения по ф
с течением времени не меняется.
Определим 7-т и Vm. По выражению (6.123) с учетом (6.140)
можно установить, что значение 7.т обратно среднему времени тСр,
в течение которого величина ф достигает одной из границ <р_ или
<р+, т. е. до срыва синхронизма. Функция Ет(ф) удовлетворяет
ур-нию (6.136) с граничными условиями (6.137). При малой ве-
роятности срыва синхронизма, когда
стФ«(т“|'Ро2+т|)2’ (6142)
координата ф пребывает в основном в окрестности точки устойчи-
вого равновесия <ро2- Поэтому за все время наблюдения \t = t—10
плотность вероятности Wi (<p, I) вне границ ф02±л близка к нулю
и, следовательно,
Кп(ф02—= К™ («Роз + = 0. (6.143)
С другой стороны, при выполнении условия (6.142) тср—а
^т-*0 и ур-ние (6.136) переходит в уравнение для определения
стационарной плотности вероятности, которая удовлетворяет гра-
ничным условиям (6.143). Таким образом, зависимость Wi (<p, t)
от <р в этом случае совпадает с ее стационарным значением в ин-
тервале фо2±л и близка к нулю вне его.
Вероятность срыва синхронизма согласно выражению (6.134)
при выполнении условий (6.139), (6.140) и (6.141)
-t-t,
Р(0 = 1—е ’ср ' (6.144)
Этот же результат другим методом получен в [24].
Если выполняется условие (6.142), выражение (6.144), мож-
но заменить приближенным.
= (6.145)
ТСР
Здесь тСр определяется из выражения (6.127).
246
Выше были рассмотрены стационарные характеристики систе-
мы ФАПЧ и задачи, связанные с достижением координатой <р за-
данных границ. Во многих практических применениях систем
ФАПЧ не менее важен анализ процесса установления стационар-
ного режима [1966, 17; 1967, 12].
Для 'исследования процесса установления одномерной плотно-
сти вероятности разности фаз эталонного и подстраиваемого ге-
нераторов обратимся к ур-нию (6.90). Перепишем его в следую-
щей форме, введя одновременно новую координату 0 = <р + л/2:
dWi 1 cPWi , . лчдИ7! । Q1V7 /С «Леч
--- = —-----—(ун—sin 0)---- + cos 0 Wr (6.146)
dr D SO* 50-1 v
Здесь т=йу^ £> = 2йу/Л2.
Вначале рассмотрим случай £)-1 = 0, т. е. когда флуктуацион-
ные возмущения в системе отсутствуют, а начальные условия слу-
чайны. При этом решение может быть найдено точно. В зависи-
мости от величины ун в системе либо будет протекать процесс ус-
тановления стационарной плотности вероятности (ун<1), либо
установление стационарного режима окажется невозможным
(ун>1). Действительно, непосредственно решая ур-ние (6.146)
при Д-^0, имеем [1966, 17]:
(0, т) = —------------------, [ун < 1К (6.147)
2л H^-MsinO — Dacos0] v
Здесь
C=cos0o, A = b(l—cha), &=sin0o=yH,
B = cha—b2, Da=sha, a=rcos0o.
При yH> 1 получаем [62]:
, 2F(%)
Wx (0, r) = — ---1 + , (6.148)
2л yH —sin0 v
где
0
2
ф0=т----, - arc tg--7^-- —-- ,
/й-i /й-i
^(Ч>«) = 7?-[/й.-1 + ।
При решении ур-ния (6.146) было принято, что в начальный
момент разность фаз эталонного и подстраиваемого генераторов
распределена равномерно.
Нетрудно заметить, что если ун<1, а т—>-оо, То Ц7Д0, т) стре-
мится к своему стационарному значению Wi (0, оо)==6(0—0о). Ес-
ли же ун>1, то из (6.148) непосредственно следует, что при t->oo
функция Ц7Д0, т) оказывается периодической по т, т. е. установ-
ление стационарного режима невозможно.
247
Рассмотрим теперь общий случай, когда П-1^=0. Решение
ур-ния (6.146) в дальнейшем будем искать на интервале —л-Рл,
считая, что поскольку координата 9 входит в это уравнение по-
средством периодических функций, то далее оно периодически пов-
торяется. Это, в свою очередь, означает, что отдельным периодам
решения приписывается одинаковый вес.
Поскольку разыскивается периодическое по 9 решение ур-ния
(6.146), то, разлагая его в ряд Фурье, имеем
W], (9, т) = Vo (т) + £ [Vk (г) sin k 9 + rk (т) cos k 9]. (6.149)
А=1
Для простоты ограничимся первыми гармониками этого раз-
ложения, что дает, как будет показано ниже, удовлетворительные
результаты, при 0^1. Таким образом,
1Vi(9, t) = V0(t) +Visin9 + r1cos9. (6.150)
Поскольку в начальный момент фаза распределена равномер-
но на интервале от —л до л, то вполне естественно принять в ка-
честве начального условия для решения ур-ния (6.146) Wi (9, 0) =
= 1/2л. Подставляя ф-лу (6.150) в ур-ние (6.146) и учитывая ус-
ловие нормировки функции IVj (9, т) (решение ищется на интер-
вале от —л до л)
JU71(9,t) = 1, (6.151)
—ТС
получаем систему двух дифференциальных уравнений для опреде-
ления функций Vi(t) и гДт):
1?1+^-^1-унг1 = 0 '
'' + ~/'i + Yh v1 = vo
(6.152)
Функция Vq(t) определяется непосредственно из ф-лы (6.150).
Интегрируя последнюю от —л до л и учитывая условие (6.151),
находим Vo(r) = l/2n.
Разрешая систему (6.152) с учетом нулевых начальных усло-
вий (поскольку начальные условия для точного решения соответ-
ствуют Vo), имеем:
У1(т) =----Пге”т/0(~М^ + со5ун'г') , (6.153)
-----|- е n'D Г-^- sin ун т —---cos Vh т + Yh — Yh
, . D* £> ™ Di 'в т rB p Гн
/• (?) =--------------L----------------------------------------
A _ _1 f__О n\
(6.154)
2«D-'(D-2+^)
248
Подставляя ф-лы (6.153) и (6.154) в (6.150), находим прибли-
женное решение нестационарного ур-ния (6.146)
№х (0, Т) = _*—|-----Ха----Г1 + е~ X/D(D"1 + cos ун т)1 sin 6+
2n 2 Л (Д 2 + у„) L \ Yh /J
+ sinYHT-D^cosYHT + Y2/)-1 — y2]}cos0
-|—---------------------------------— —--------————---- , IO. 100 >
2 л (£T~2 + у2) £)—1
При нулевой начальной расстройке (ун=0) выражение (6.155)
значительно упрощается:
1 1 р— т/г>
ЯШ т) =4-4-0---------------COS0. (6.156)
Стационарное решение ур-ния (6.146) непосредственно можно
получить из ф-лы (6.155):
№. (9, со) =——I----------------1------Р~2 cos 9---. (6.157)
211 2л (D-2 + у2) 2 л ( D~2 +у2 )/)^1
На рис. 6.8 приведены графики №Д9, т), построенные для 0 = 0,7
(рис. 6.8а) и 0=1 (рис. 6.86) по ф-ле (6.157). Характерно,
что процесс установления плотности вероятности является аперио-
дическим. Пунктирные кривые на рисунках соответствуют стацио-
нарной плотности вероятности разности фаз, рассчитанной по ф-ле
(6.95) (0=<р + Л|/2).
Сопоставление зависимостей, рассчитанных по ф-лам (6.157) и
(6.95), показывает, что результаты, полученные при использова-
нии только первых гармоник разложения (6.149), оказываются
удовлетворительными для П<С1. Для больших значений D необхо-
димо учитывать большее число гармоник. Так, если в разложении
(6.149) использовать и первую, и вторую гармоники, то решение
ур-ния (6.146) при ун=0 можно записать в следующей форме:
НК/ Щ - 1 । 2 । е^т(г1 + 4Р-1) ег^(гг4 4Р-1)_д ,
1 ' 2л лОьг, 2л(г,—г2) 2 л (/у— г2) !
+ Г--------5--------1------------5----------(г2 еГ1 т—/1 е'2 т) ] cos 2 0,
L 2 Л Г± Г2 2 Л (fi — Г2) Г1 г2
(6.158)
где
гх = — 2,5£Г1 + У2,25 О'2—0,5, г2=—2.5D-1 —]/2,25£Г2—0,5.
При т->оо из ф-лы (6.158) имеем
№. (9, оо) = ——|-----cos 9 -|--------------!-------cos 2 9.
7 2л лГ»(0,5 + 4D~2) 2л(0,54 4£>2)
Результаты расчета по ф-ле (6.158) для £> = 2 представлены на
рис. 6.8е.
Длительность переходных процессов удобно определять по от-
ношению вероятности нахождения текущей разности фаз в произ-
249
250
Рис. 6.8. К пояснению процесса установления IF^O)
вольном интервале, примыкающем к стационарному значению раз-
ности фаз <р0, к установившемуся значению вероятности (1966, 17]:
(ро+Д
J НМф, T)d<p 1
---------------• (6j59>
J «4(<p, —)d^f
<₽«—л
Выбрав тот или иной интервал разности фаз при заданном кри-
терии, можно определить длительность процесса установления
стационарного режима.
На рис. 6.9 построены зависимости коэффициента L от относи
тельного времени т=йу/, вычислены с помощью выражений (6.156)
(6.157), (6.158). Нетрудно за-
метить, что с уменьшением ко-
эффициента D (увеличения
уровня шума) время переход-
ного процесса при фиксирован-
ном значении интервала Д
уменьшается.
В (1965, 16] дан анализ про-
цесса установления одномер-
ной плотности вероятности раз-
ности фаз в предположении,
что решение'ур-ния (6.146) при
ун=0 может быть представле-
но в виде (6.95). Естественно,
что в этом случае параметр D
является функцией времени.
ФАПЧ с косинусоидальной
Выше была рассмотрена система
или синусоидальной характеристикой. Такая характеристика полу-
чается при синусоидальном входном сигнале и линейном перемно-
жителе в роли фазового детектора. На практике же встречаются
системы ФАПЧ с иной формой нормированной характеристики фа-
зового детектора. При этом в каждом конкретном случае требует-
ся по разному пересчитывать шум, действующий аддитивно с эта-
лонным сигналом, со входа фазового детектора на его выход.
В тех случаях, когда форма нормированной характеристики из-
меняется за счет изменения формы сигналов, подаваемых на фа-
зовый детектор, работающий в режиме линейного перемножения,
такой пересчет осуществляется так же, как и при перемножении
синусоидальных сигналов. Изменение формы сигналов эталонного
и подстраиваемого генераторов при широкополосном аддитивном
шуме приводит в этом случае только к изменению формы норми-
рованной характеристики фазового детектора [1966, 10].
Нетрудно показать, что система ФАПЧ первого порядка с ис-
пользованием в качестве фазового детектора перемножителя при
251
широкополосном шуме и произвольной форме периодических сиг-
налов эталонного и подстраиваемого генераторов описывается
уравнением:
^-=QH-QyF(<p) + n(Z). (6.160)
Здесь F(<p)—периодическая с периодом 2л функция, n(t)—
флуктуационное воздействие, характеризующее как аддитивный
шум N^(t), так и действие случайной модуляции фазы эталонного
сигнала фэг; M{n(t)/q, <рэг}=0 и M{n(t) + <рЭг)=п^(т).
Если время корреляции флуктуационного воздействия значи-
тельно меньше времени установления координаты ф, то исходный
процесс близок к марковскому, описываемому уравнением
4^ = QH-QyF(<p) + n1(0, (6.161)
ат
где
Л4{щ} = °> М {«1 (0 • ni + т)} = К2 8 (т),
К2 = о2 ^R(r)dx.
— оо
Стационарное решение уравнения Фоккера—Планка, соответ-
ствующего ур-нию (6.161), имеет вид:
{ф 1
1ф-С2 Jехр[—Do0 + D/i(0)]|dQ.
—л J
(6.162)
Здесь
ф
D=2Qy/F2, О0 = унО, Я(<р) = jF(<p)<l(p,
о
J (<р)dtp, С2 = [ехр( — 2Dott) — 1] j Jexp[—Поф +
+ ПЯ(ф)Нф.
При Е(ф)=соэф ф-ла (6.162) совпадает с (6.94).
В дальнейшем для простоты будем анализировать систему, по-
лагая начальную расстройку равной нулю (Do=0). Тогда
1Г1(ф)=С1е“пЛ('р),
е- D h (ф)
d ф
(6.163)
На рис. 6.10 представлены графики №\(ф) для трапецевидной
характеристики Е(ф) (см. рис. 2.56) и 0=10. Параметром каждой
кривой является величина фа, связанная с крутизной фронта нор-
552
мированной характеристики фазового детектора. Из графиков
видно, что при ф(1—^л/2 (прямоугольная характеристика) плотность
вероятности сужается. Это снижает вероятность выхода процесса
за заданные границы.
На рис. 6.11 показана зависимость дисперсии закона (6.163)
от параметра D при различных <ра. Для сравнения на этом же ри-
Рис. 6.10. Зависимость плотности ве-
роятности разности фаз от парамет-
ров системы и характеристик шума
Рис. 6.11. Зависимость
дисперсии разности фаз
от параметров системы и
характеристик шума
сунке приведена зависимость дисперсии <р для системы ФАПЧ с
косинусоидальной характеристикой, рассчитанная по ф-ле (6.106).
Сравнение кривых показывает, что при заданном D дисперсия ф
получается наименьшей в случае прямоугольной характеристики
А(ф). Этот же вывод другим путем получен в [1969, 30]. Следова-
тельно, необходимо стремиться так выбирать форму сигналов эта-
лонного и подстраиваемого генераторов, чтобы получить наиболь-
шую крутизну характеристики фазового детектора.
В [1970, 9] определена дисперсия и среднее значение разности
фаз эталонного и подстраиваемого генераторов в системе ФАПЧ
с прямоугольной характеристикой фазового детектора. Соответст-
вующие графики приведены на рис. 6.12.
В [1971, 4] найдена стационарная плотность вероятности систе-
мы ФАПЧ первого порядка с характеристикой вида
где п = 1/5, 1/3, 1,3, 5.
Характеристика F(<p), как обычно, периодична по <р с перио-
дом 2л.
253
Изменяя п, можно менять форму характеристики фазового де-
тектора. Так, при м = 1 получается треугольная характеристика, а
Рис. 6.12. Статистические характеристики разности фаз в си-
стеме ФАПЧ с прямоугольной характеристикой фазового де-
тектора в зависимости от параметров системы и шума
при п—>-0 она приближается к прямоугольной. Соответствующее
выражение для стационарной плотности вероятности имеет вид:
^1(<р)=Сх
[1 + ₽/1(ф)]^1(Ф),
Ц + РШИЧМф),
[---77 ф 0],
[0 < ф < те],
где
ф
Г dx
J Л (*)
о
i = l, 2,...,
ф2(л) Ф1(л)
₽ = —
Л ( — л) ( — л) — /2 (л) ф2 (л)
0 Л
СТ1 = J [1 + ₽Л(ф)] Ч»1 (ф)б/ф-F у [1 -HP (ф)] Ч»2(ф) б/ф,
—Л / 0
фг(ф)=ехр р0<р
ф2(ф)=ехрр0ф
В [1971, 4] показано, что с уменьшением параметра п плотность
распределения при заданных значениях D и Do сужается, что под-
тверждает сделанный ранее вывод о целесообразности применения
фазового детектора с прямоугольной характеристикой для умень-
шения дисперсии фазовой ошибки.
Система ФАПЧ второго порядка
Поскольку на практике система ФАПЧ содержит фильтр в це-
пи управления, для ее описания приходится использовать много-
мерный марковский процесс и соответствующее уравнение Фок-
кера—Планка для плотности вероятности (6.77).
254
(6.164)
Рассмотрим простейший случай системы второго порядка с
пропорционально-интегрирующим фильтром и косинусоидальной
характеристикой фазового детектора. Уравнение (6.77) для этого
случая при фЭг=0 можно записать в виде:
рф + mйуcosф = QH—mn(t) —Я ~ COs
где, как и ранее n(t) = [A (/)cos ф+C(Qsin ф] и M{n(t)n(t+r)} =
Уэг
= о2Р(т).
Введя обозначение йх=йн-------—[соэф + «(/)], ур-ние (6.164)
1 + Тр
можно заменить эквивалентной системой двух дифференциальных
уравнений первого порядка:
Рф + тйуСоэф =йх—mn(f),
7pQx + Qx =QH—(1—т)йуСозф—(1 —
(6.165)
(6.166)
Если время корреляции флуктуационного воздействия гораздо
меньше времени установления координат системы (тКОррС 1/тйу,
Ткорр<^Е), то исходный процесс (<р, йх) близок по распределению к
двумерному марковскому, описываемому уравнениями;
Ф = йх—mQyсоэф—m £(/) =fx[ф, Qx, ni(t)],
ГПК = —QX + QH—(1 —т)йусоэф—(1—m)nx(/) =
=Мф,йх, nx(0L
Здесь
(6.167)
М {пг (/)} = 1, М {пг (t) ni (/ + т)} = К2 6 (/),
Q2
\^)dr.
иэг Я
обозначено дифференцирование по времени t.
перехода от системы (6.165), (6.166) к
К2 = ст2 Jj?(r)dr
Точкой
Смысл
(6.167) заключается в замене реального флуктуационного
ствия n(t), белым шумом %,(t) спектральная плотность которого
равна спектральной плотности реального шума на нулевой ча-
стоте.
Для определения плотности вероятности координат ф и йх вос-
пользуемся ур-нием Фоккера—Планка (6.77), коэффициенты сноса
и диффузии которого определятся выражениями (6.85) и (6.86):
= — т2 К2^------д— (Йх—m Qy cos ф) Г2 +
2 д ф2 д q>
[Йя-Йх-(1-/п)Йу cosT]№2 +
dQ2 Т dQx
, m (1 — m) Кг W'a
2 7 д ф д Йх
системе
воздей-
dW2
dt
2Т
(6.168)
255
Нахождение из этого уравнения даже стационарной плотности
вероятности представляет собой достаточно сложную задачу, ре-
шение которой возможно численными методами. Поэтому рассмот-
рим частные случаи. Так, если ун=0 и т=0, то стационарная
плотность вероятности определяется непосредственно из ур-ния
(6.168) [1960, 3] (заметим, что при этом Йх = ф = рф):
—D sin <р — (<р)2/2 а?
Г2 (ф, ф) = , (6.169)
2 n-|/2nO(j1Z0 (D)
где £=2Йу/К2, а? = ЙУ/О7\
Интегрируя выражение (6.169) по ф в пределах от —сю до сю,
можно получить выведенную ранее формулу для W^i(<p) [ф-ла
(6.95)]. Отсюда следует, что при нулевой начальной расстройке
форма функции распределения разности фаз в системе ФАПЧ
первого порядка и в системе с однозвенным /?С-фильтром одна и
та же. Проинтегрировав же (6.169) по ф в пределах от —л до л,
получим одномерную плотность вероятности производной разности
фаз:
1 — (ф)2/2о2
Гх(Ф)=-=-----е <₽, (6.170)
У 2л д.
ф
т. е. разность частот распределена нормально с нулевым средним
и дисперсией o?<=Qy/Z)7'. Очевидно, что с увеличением Т диспер-
сия разности частот уменьшается. _
Рассмотрим теперь случай, когда m=£Q, но ун<С1, mi/Ty<< 1 <<
<^^7^1970, 17]. Заменой переменных т= । &УТ~Ч и 0 = ф + л/2
ур-ния (6.167) можно привести к виду:
=х—eXsinO—(6.171)
-^=еу —ex—(1—e2X)sinO —(1—еП2) (6.172)
Здесь е = 1 /}/Т йу, X = tn йу Т, х = 7/ йу Г йх/йу,
еу=ун, Я(т)—дельта-коррелированный процесс единичной
интенсивности.
Появление в ур-ниях (6.171) и (6.172) множителя, содержаще-
го дробную степень величины е, объясняется введением нормиро-
ванного времени т и нормированной координаты х. В дальнейшем
параметры 8, еХ и ун полагаем малыми, т. е. ун 1 и
т/7у«1
Уравнения (6.171) и (6.172) с 8=0 описывают поведение нели-
нейной порождающей (консервативной) системы. Введем функцию
V(9, х) =х2/2 + 2 sin2 9/2, представляющую собой (с точностью до
256
членов второго порядка малости) энергию консервативной систе-
мы. Найдем (с указанной точностью) производную по времени
V-функции в силу ур-ний (6.171) и (6.172):
V = —ех2-|-еух—eXsin20—-^-(х-|-е^з1п0)т](т). (6.173)
Рассмотрим совместно ур-ния (6.171), (6.172) и (6.173). Вслед-
ствие малости параметров е, е/. и еу ур-ния (6.171) и (6.172) опи-
сывают быстрые движения в системе, а ур-ние (6.173)—медлен-
ное, ибо скорость изменения V-функции пропорциональна малым
параметрам. Такое разделение движений «по скорости» позволяет
применить метод усреднения, для чего нужно приближенно заме-
нить медленное движение усредненным. Здесь уместно подчерк-
нуть специфический характер правой части уравнения, описываю-
щего медленное движение. Именно «регулярная» и «флуктуацион-
ная» составляющие имеют разный порядок малости (ей у7 е). Та-
кая специфика обеспечивает, во-первых, невырожденность стати-
стической задачи усреднения (в противном случае усредненное
движение вырождается в регулярное) и, во-вторых, близость про-
цесса медленного движения («энергии») к марковскому, локаль-
ные параметры которого (коэффициенты сноса и диффузии) нахо-
дятся путем усреднения локальных параметров медленного движе-
ния по быстрым порождающим движениям, т. е. по решениям
(6.171) и (6.172) при е=0.
Опуская выкладки (которые можно найти в [63]), приведем ко-
нечный результат. Именно, плотность распределения «энергии»
близка к плотности распределения вероятностей, описываемой
уравнением [63]:
(V) = (V)! + в — (№——
D «Э1/2 \t6(V) J dV 1[7б(Ю D.
T (V) = ^/2 (V—2 sin2 0/2 d 0
Тб (У) = jd 0/ ]/2(V—2 sin2 0/2
T(V)=T(V)----sign x ф d 0 + Л 0 (V)
0 (V) = (£ sin2 0 d 0/ /2 (V—2 sin2 0/2
^x(V)} , (6.174)
(6.175)
Здесь исключены составляющие второго порядка малости. Ин-
тегрирование проводится по траектории движения порождающей
(консервативной) системы. Появление signx объясняется зависи-
мостью результатов усреднения от выбора траектории, по которой
это усреднение выполняется. Интегралы (6.175) приводятся к эл-
липтическим:
9—526 257
в области К<2
Т(V) ==8Кв(]/-^|, г5(Ю-4к(]/4)’ 0(Ю-=ту(2Е-В)’
(р9=0;
в области I >2
T(V)=s/4-e(/4)-, Т,(Ю=2/-2-К(У4-1’ 0!И’
У0-"2”.
где Е(«) и К(») —полные эллиптические интегралы первого и
второго рода [60].
Кроме того,
в( К-г) -4к(1/4Н(т Е (’/У] iv <2К
E(Vv)]- i^21-
В частном случае нулевой начальной расстройки ур-ние (6.174)
получено другим способом в [24].
В стационарном режиме $2(0, х)=0. Записывая стационарное
решение ур-ния (6.174) и переходя от координаты V к координа-
там (0, х) по правилам преобразования плотностей распределения
вероятностей (см., например [24, 63]), получаем стационарную
плотность распределения:
V (0. х)
WZ2(0, х) = — ехр —D f -^Х12 dxL
N J Т(Х1) 1
о
л » , у (0, я)
N = С f ехр ] —D f dx
J J J T(X1) 1
—л — w 1 0
(6.176)
(6.177)
d 0 dx.
Согласно ф-ле (6.176) плотность распределения достигает экс-
тремума на тех траекториях невозмущенной системы, для которых
ф(К)=0. Это условие совпадает с условием определения предель-
ных циклов движения в невозмущенной системе (см. разд. 4.5).
В области V <2 уравнение ф(У)=0 допускает для всех
O^Yn^l единственное решение К=0 (и здесь плотность U72(0, х)
достигает максимума). В области К>2, если начальная расстрой-
ка ун=йн/62у не превосходит полосы захвата у3, то решения урав-
нения ф(К)=0 не существует. В этом случае плотность распреде-
ления имеет единственный максимум при V = 0. Далее, если на-
чальная расстройка больше полосы захвата, то в области V>2
уравнение ф(У = 0), как уже указывалось в разд. 4.5, имеет два
решения, причем одно из них соответствует устойчивому предель-
258
ному циклу (плотность распределения достигает максимума), дру-
гое— неустойчивому (плотность распределения достигает мини-
мума). Теперь плотность распределения имеет два максимума.
Таким образом, с изменением начальной расстройки меняется
топология плотности распределения состояния системы. Статисти-
ческие свойства последней вблизи бифуркации претерпевают рез-
кие качественные изменения.
К сожалению, не удается записать плотность распределения
1^2(0, х) в явном виде, так как интегралы (6.176) и (6.177) ни в
элементарных, ни в специальных функциях не выражаются. Од-
нако в частном случае интегрирующего фильтра (Z = 0) и нулевой
расстройки (ун=0) получаем точный результат (6.169).
Представляет интерес количественное исследование плотности
распределения. Прежде всего, используя асимптотические пред-
ставления полных эллиптических интегралов при малых и боль-
ших значениях аргументов, найдем положение экстремумов Фмин
И Фмакс.
Если экстремумы лежат вблизи значения V = 2, то расположе-
ния максимума и минимума определяются соотношениями Умакс =
= цу2/8 .1 + ^ 2, ЕЧИн==2. Если же положения экстремумов соот-
\ з /
ветствуют значениям V^>2, то максимум и минимум плотности
распределения определяются соотношениями: УМакс = А,2/2у2(1 +
+ у 1—2Х/у2)2, VMHH = Х2/2у2 (1—j 1—2^/у2)2при ?.=Н=0 и соотноше-
НИЯМИ Умакс = 2у2, Умин=2 при 2v = 0.
Далее асимптотические представления полных эллиптических
интегралов позволяют качественно исследовать плотность распре-
деления. В области V<z2, если V<C2:
W2(9, х)—-^-ехр[ — D(1 + %)V(0, х)],
или при V ~ 2:
^(9, х)--^ exp 1-0 И ф -~)V(9, х)
В области V'^2, если V~2,
№2 (91 х) =exp {—d[(1 -ф V(0, х)—тгЦ Уl^signx |
(6.178)
или при V^>2:
U72(9, х)=4ехр(-О [v-AlnV-2y(]/-H— signх]}. (6.179)
Здесь использовано условие непрерывности плотности распре-
деления на границе Ф(9, х)=2. Наконец, в практически интерес-
ном случае высокой точности (d->oo, ун<'Уз) справедлива асимпто-
тическая формула:
9* 259
i Di cos 0—№/2а2
- - -- e (6.180)
i. 3t у £ JI I q yX/]_ J
где Dx = (l + X)P, = 1/(1 +K)D. ____
Учитывая, что 9 = <p + 0,5n, x = Qx> T'Qy/Qy, ф-лу (6.180) можно
переписать в следующем ваде:
—D,sin ф—S2/2o2
W2 (Ф, Йх) = т=—----------е Х :
/2л
где ст| = Q/(1 + X)7D.
X
С точностью до нормирующего множителя ф-лы (6.178) и
(6.179) характеризуют отношение максимума плотности распреде-
ления в области У>2 к максимуму плотности распределения в об-
ласти V<2. Можно показать, что при уй^>у3 и D-^oo плотность
распределения концентрируется в области Ё>2, а при уй<уз (и
даже уй~у3) и D-^oo плотность распределения концентрируется в
области V<2. Иными словами, подавляющую часть времени фа-
зовые траектории находятся в окрестности глобального максимума.
Изложенное подтверждается экспериментальными данными
(рис. 6.13). Действительно, при уй/>у3 фазовая ошибка распреде-
лена почти равномерно [плотность ^(О, х) концентрируется в об-
ласти У>2]. Если же ун~уз плотность распределения фазовой
Рис. 6.13. Зависимость плотности распределения фазовой ошибки
от параметров системы и характеристик шума
260
ошибки имеет ярко выраженный максимум (плотность U72(9, х)
концентрируется в области И<2]. Для сравнения здесь приведены
результаты расчета по асимптотической ф-ле (6.180) (пунктирные
кривые). Описание экспериментальной установки, ее структурная
схема и методика проведения эксперимента даны в (1966, 35;
1967, 12].
Общую качественную картину топологии плотности распреде-
ления координат системы поясняют рис. 6.14а (ун>уз) и рис. 6.146
Рис 6.14. Форма двумерной плотности вероятности координат системы при:
а) Ун>уз; б) ун<уз
(ун<уз). В области V<2 плотность распределения представляет
собой четную функцию координаты Qx (или х), а в области V>2
четность нарушается. В случае интегрирующего фильтра (?v=0;
х = 9) нечетность функции W2(0, 9)^= №2(9, —означает появле-
ние средней разности частот (<р = 9).
С ростом отношения у=ун/е степень асимметрии возрастает
[см. ф-лы (6.178) и (6.179)], что приводит, естественно, к увеличе-
нию средней разности частот. Особенно резко такая зависимость
проявляется при начальных расстройках, превосходящих полосу
захвата. Это подтверждается экспериментально (1962, 7; 1967, 12]
и объясняется появлением у плотности распределения И72(9, 9)
двух максимумов. В области начальных расстроек, меньших поло-
сы захвата, зависимость средней разности частот от начальной
расстройки и постоянной времени фильтра сохраняется. С увели-
чением постоянной времени степень асимметрии, а следовательно,
и средняя разность частот возрастают (рис. 6.15) (1967, 12].
В крайних случаях большого (D->0) и малого (Z)->oo) шума
получаются известные (см. разд. 4.5) асимптотические зависи-
мости:
0 1
йу
Th, [D -> 0],
°. [Ти^Тз. D->cc],
я е К (Р^2/Умакс ) г г)
-______ кгн^Уз»
2/УМакс
261
Полученные результаты можно обобщить [1970, 17] и на другие
виды характеристики фазового детектора. В частности, стационар-
ная плотность вероятности координат системы с интегрирующим
фильтром при ун=0 и прямоугольной характеристике
[F(<p) = sign sin<р] выражается как
Рис. 6.15. Зависимость средней разности частот от начальной рас-
стплйки в системе ФАПЧ второго порядка для:
a) !)~3' б) D=2
При пилообразной характеристике фазового детектора
[7’(ф)=ф/л, |q>| <л] и ун = 0 для /?/?С-фильтра
X у
. 2 а2 2 а2
W2 (ф, йх) = ----------7----е Х Ф ’ <
2ла2х аф Ф [л/У 2 а2 )
(6.182)
Здесь
о2=л/.о(1 + А),
Ф \ л j
=йу/р(1 + AW
х \ Л /
Рассмотрим теперь случай, когда в системе используется про-
порционально-интегрирующий фильтр, а параметры выбраны так,
что 1 Cm27'Qy [1966, 14]. Этот случай, по существу, дополняет ра-
нее рассмотренный.
Введя обозначения xt = mQyt, 9 = <р + 0,5л и xi = Qx/mQy, перепи-
шем ур-ние (6.166) и (6.167) в форме:
-AL =X1—sinQ—014(111)^ (6.183)
d тх
262
^е1Л’н—т Xi—(1 —m)sin 9] — (6.184)
d tj
где e = l//n2QyT, oi \mK2iQy, <L = U—
T] — как и ранее, дельта-коррелированный процесс единичной ин-
тенсивности.
В дальнейшем будем полагать параметр е малым. При этом
ур-ние (6.183) будет описывать быстрые движения в системе, а
ур-ние (6.184) — медленные.
Поскольку координата 9(ti) меняется гораздо быстрее, чем Xi(ti)
то можно считать, что каждому значению %i(ti) соответствует ква-
зистационарное распределение разности фаз Wld/Xi). Для его на-
хождения воспользуемся уравнением Фоккера—Планка, соответ-
ствующим стохастическому ур-нию (6.183):
. (6.185)
Здесь, как и ранее, — o2N I RN (r)dr.
u2 1 J 1
ЭГ _oo
Решение этого уравнения при условии периодичности плотно-
сти вероятности и ее нормировки на каждом периоде выражается
ф-лой (6.94) или (6.102). В данном случае D*=xiD, D^ZQylmKz-
Найдем плотность распределения разности фаз:
№1(0)= j№(9/QxHF1(Qx)dQx. (6.186)
—со
Для определения №Д0) необходимо знать плотность распреде-
ления №i(Qx). Представим двумерную плотность вероятности
№2(0, Пх) в виде '[51]:
№2(0, Qx) =№(0/Qx) №х(йх). (6.187)
Полагая в ур-нии (6.168) д№2/с^=0 и интегрируя его по <р в пре-
делах от —л до л, получаем с учетом ур-ния (6.185) и ((6.186)
уравнение для стационарной плотности вероятности [1966, 14]:
Л
d? w (Qx) Г w (Q/fix) d Q +
2 I d Q* J
—л
, m(l-m) d (Йх) C dr(0/fix) dQ
‘ dQr J
л —л
Г
J____d
Т dQ,
QH —
(Qx—т Qy si п 9) W (0/Йх) d 0 —
— jQysin0№(0/Qx)d0 №(Йх)=0.
(6.188)
263
В этом выражении первый интеграл по условию нормировки
плотности вероятности W2(Q/Q,X) равен единице, а второй как
интеграл от производной периодической функции — нулю. Осталь-
ные интегралы определяются выражениями:
Л
ф (Qx) = J (Qx—т Qy cos 0) W (0/Qx) d 9 =
—Л
= QX-^|4(T’ (6-189)
л Dq
л
f Qysin0№2(0/Qx)d0=— [Qx—ф(йх)]. (6.190)
J rn
—л
Подставив эти значения в ур-ние (6.188), получим
Л (Lzzjn)L ^Z1W__L [т QH _Qx+( 1-щ) ф (Qx)1 (Qx) = 0.
2 Т dQ2 т dQx
(6.191а)
Учитывая, что xi = Qx/«2Qy, yH=QH/Qy, это уравнение можно пе-
реписать в следующем виде:
1 (1 — К2 d* (Х1)_________d_
2 Т т йу dX] dx±
[VH — Xj + (1 — m) ф (xx)J ^(ti) = 0. (6.1916)
Аналогичное уравнение для плотности вероятности координа-
ты хь как было показано Ю. Ф. Игнатовым, можно получить и
другим способом. Действительно, на интервалах времени порядка
движение координаты Xi с достаточной точностью описывается
уравнением
dxt
dr.
е ун—тх1—(1—нг)хх
shjrD0
1 n* <£>%
(£>)|2 — Еог2/г(Т1):
(6.192)
полученным путем усреднения локальных параметров ур-ния
(6.184) по траекториям порождающего решения системы (6.183),
(6.184) при е=0. Нетрудно показать, что флуктуационному ур-нию
(6.192) соответствует уравнение Фоккера—Планка (6.1916). Общее
решение этого уравнения имеет вид:
о
Тн тг —(1 — т)г{1--ф(г)] dz, (б193)
еа2
где N—нормировочная постоянная, как обычно, определяемая из
со
условия J IF!i(x)<Zxi = L
--------00
264
Экстремум функции достигается на тех траекториях, для
которых
Ун—mxi—(1—т) 1 —ф(хх)] = 0- (6.194)
В предельном случае, когда О->оо {малый шум), ф(%1) допус-
кает асимптотическое представление (см. разд. 4.5):
Ф1 (-Ч) = х2— 1 , |хх| > 1 J *
В этом случае экстремумы №^(х\) совпадают со стационарны-
ми траекториями невозмущенной системы (см. разд. 4.5). В част-
ности, если ун<уз, то в предельном случае малого шума ур-ние
(6.194) допускает единственное решение xia=yH, определяющее ус-
тойчивое положение равновесия. В этой точке функция W'lf'xi)
максимальна. Если у3<ун, то ур-ние (6.194) в предельном случае
допускает три решения (см. разд. 4.5):
Та + (1 — т) 1/ — (2т — т*)
*1а=Ун, *1бв=--------------;-----------------• (6.196)
1 и, в лт — т2
Состояния Xia и %1б являются устойчивыми стационарными тра-
екториями координат, они определяют состояние равновесия не-
возмущенной системы и ее устойчивый предельный цикл. На этих
траекториях функция W[(x) достигает максимума. В точке xiB, со-
ответствующей неустойчивому предельному циклу, функция
минимальна.
Вычисления по ф-ле (6.193) довольно громоздки. Однако, как
было показано Ю. Ф. Игнатовым, можно воспользоваться тем, что
на интервалах времени порядка е-1 процесс %i(xi) слабо сходится
при е->0 к процессу, описываемому уравнением [64]:
—— =Е
d ту
ун—тх1—(1—т) х1
(6.197)
и, следовательно, выражение для плотности вероятности коорди-
наты xi = Qx/mQy можно записать в следующей форме:
^(XiWC^-Xi). (6.198)
Подставив это выражение в (6.186) и выполнив интегрирова-
ние, получим W7! (9) = 1^(9/х1). Таким образом, определив %i(ti) из
ур-ния (6.197) и воспользовавшись стационарным решением ур-
ния (6.185) вида (6.94) или (6.192), можно определить Wi (9).
При этом параметры этого распределения определятся как
D =2£у , D D. (6.199)
тК,
Таким образом, система ФАПЧ с /?|/?С-фильтром при
m2TQy‘C 1 статистически эквивалентна по координате 9, а следо-
265
вательно, и по координате ср системе первого порядка с соответст-
вующими параметрами D и £>0. Поэтому при нахождении статисти-
ческих характеристик можно использовать полученные ранее вы-
ражения (6.103), (6.105) и (6.112) для среднего значения и дис-
персии разности фаз и средней разности частот соответственно.
Уравнение (6.197) позволяет выяснить лишь влияние шума на
среднее значение координаты Xi. Полученные_результаты можно
уточнить, если учесть, что отклонение Ax = xi—Xj удовлетворяет ли-
нейному флуктуационному уравнению [64]:
- е{—т\х — ^дДЛ-УеОгТ]^), (6.200)
u Tj
д ( sh л £>п , \
где 1--------£_,/ (D)-- (l-m)x1 .
Й*1 \ m£)0 | 1 0 I j
Поскольку отклонение от его среднего значения описывается
линейным уравнением, оно имеет нормальную плотность вероятно-
сти и, следовательно, распределение плотности вероятности Xi вы-
ражается формулой
. _(Д1_Г1)2,2а2
-----е / (6.201)
V 2л ад
Величина од определяется с помощью ур-ния (6.200). Ее ста-
ционарное значение
Ст2 ----------=-----. (6.202)
2 (т + ) 2 т Т (т -j- )
Воспользовавшись очевидным равенством 1Ег(ф, х{) =
= lF(cp/xi) W, (xt), можно записать выражение для двумерной плот-
ности вероятности координат системы
(ф+я) D'- D sm 2С>1 <₽+2л _ 9+n sin 9
иЧф,*!)---------------------------- е do. (6-203)
4 Л2 I Ad%|2 /2Л Од 3
С целью определения нестационарных характеристик системы
ФАПЧ с /?/?С-фильтром при выполнении неравенства е =
= l/in2TQy^l воспользуемся уравнением Фоккера—Планка, соот-
ветствующим ур-нию (6.183), положив, что координата фикси-
рована.
К2 ——1-(9^11----д— (^—sin 6)-Г (0/хх) - ^(9^1) . (6.204)
2 Qy д 02 5 0 д т.
Учитывая, что при е->0 справедливо равенство (6.198), ур-ние
(6.204) можно записать в виде
W----<L(^_sjn0) Г! (0) . (6.205)
2 Qy 5 02 50 v v ’ 5tj v '
266
Переходя к переменным Qx, ф -и получаем
тг д 1 (ф) д /гл гл х нт/ / \ W 1 (ф) /с олд\
——к2—-Ц^-—— (Qx—mQyCOscp)^! <р)-=—. (6.206)
2 д ф2 д ф dt
Это уравнение по структуре совпадает с уравнением Фокке-
ра—Планка для системы первого порядка (6.90), полоса удержа-
ния которой равна mQy, а начальная расстройка — Qx. Связь йх
с параметрами системы и характеристиками шума определяется
ур-нием (6.197). Таким образом, среднее время до срыва синхро-
низма, вероятность срыва и число перескоков ф на ±2л при
e=l/m2TQy<Cl можно найти по ф-лам (6.127), (6.130), (6.131) и
(6.144). При этом параметры Do и D определяются из ф-л (6.199).
В более общем случае, когда е не мало, вычисление найденных
характеристик затруднительно. При малой вероятности срыва син-
хронизма (перескоков) можно воспользоваться методом решения
задачи о прохождении броуновской частицы через высокий потен-
циальный барьер. В (1965, 3; 1967, 40] этим методом получено вы-
ражение для числа перескоков разности фаз на +2л в системах
с RC- и Д£?С-фильтрами. Соответствующие выражения имеют вид:
для ДС-фильтра
N+2n=—^--f]/l + 4QyT/f^-l)expf-2D1 Г=?2-
— унатс cosyH)], (6.207)
; (6.208)
для ДДС-фильтра
"+» = (С 1-'»Ц7’ЦЬ=Ц+4Йу7-, -
*1 «II Ьйу 1
— (1 —тОуТДД — у2) |ехр[ —2D(/'j — у2—yHarccos ун)] . (6.209)
Число же перескоков N ~2л определяется, как и ранее, ф-лой
(6.208). При этом D = 2Oy//<2.
В частном случае, когда т=0, 7 = 0 (система ФАПЧ первого
порядка), полученные выше выражения совпадают с выражениями
(6.130) и (6.131).
Зная N-}-2я,М-2я, можно найти среднее время до срыва синхро-
низации:
_ 1
тср N , „ 4- N „
*+2л । — 2л
(6 210)
Для расчета числа перескоков ф и среднего времени до срыва
синхронизации можно также (в случае малой вероятности срыва)
использовать теорию выбросов случайных процессов [1963, 1;
1963, 5; 1967, 12].
При использовании в системе ФАПЧ более сложных фильтров
исследование статистических характеристик системы аппаратом
267
марковских процессов затрудняется. Сравнительно полное реше-
ние задачи удается найти только при высокой точности работы си-
стемы, когда справедливо гауссово приближение. Отдельные дан-
ные для этого случая приведены в [1963, 9; 1966, 12; 1967, 12;
1967, 42]. Ряд приближенных результатов исследования многомер-
ных систем фазовой автоподстройки частоты получен также в
[1969, 31, 51; 1970, 8].
6.5. АНАЛИЗ СИСТЕМЫ, НАХОДЯЩЕЙСЯ ПОД ДЕЙСТВИЕМ СЛУЧАЙНЫХ
ВОЗМУЩЕНИЙ, МЕТОДОМ СТАТИСТИЧЕСКОЙ ЛИНЕАРИЗАЦИИ
В большинстве практических случаев оказывается достаточным
знать не закон распределения, а лишь некоторые его характери-
стики (первый и второй моменты). Это обусловило разработку
более простых теоретико-вероятностных методов исследования не-
линейных систем, находящихся под воздействием случайных воз-
мущений. Одним из эффективных приближенных методов такого
исследования является метод статистической линеаризации [65].
Впервые этот метод был использован Девеле (случай ун=0) и
Э. С. Элинсоном (ун=#0) [1963, 13, 21].
Сущность метода статистической линеаризации состоит в заме-
не нелинейных функций такими линейными, которые статистичес-
ки равноценны исходным нелинейным. Такая замена дает возмож-
ность перейти от существенно-нелинейных дифференциальных
уравнений к эквивалентным в вероятностном отношении линей-
ным. Задавать условие равноценности можно различными спосо-
бами. Если рассматривать первые два момента распределения, то-
в качестве условия равноценности можно принять равенство этих
моментов при нелинейных и линейных функциях и при заданном
законе распределения аргумента.
Пусть некоторая случайная величина y(t) связана со случай-
ной величиной x(t) нелинейной зависимостью таким образом, что
г/=Е(х). (6.211)
В дальнейшем будем предполагать, что функция F и ее квад-
рат интегрируемы. Заменим функцию F(x) такой линейной зави-
симостью, что среднее значение выходной величины и ее диспер-
сия были равны среднему значению и дисперсии величины у. Пред-
ставим процесс x(t) как сумму его среднего значения, т. е. и
случайного отклонения Дх:
х=тх + Дх. (6.212)
Будем полагать, что приближенное значение у
ynpxkomx + kx Дх. (6.213)
Теперь задача сводится к отысканию статистических коэффи-
циентов передачи k0 и k< нелинейного элемента по среднему зна-
чению тх и случайному отклонению Дх. Эти коэффициенты долж-
ны выбираться так, чтобы выполнялись условия статистической
эквивалентности.
268
Для сохранения среднего значения и дисперсии у при переходе
от у к i/пр коэффициенты k0 и ki должны определяться из выра-
жений: \
со
^о = -— F(tnx +\x)W1(^x)d^x, (6.214)
mx J
—co
(6.215)
где ^(Дх)— одномерная плотность вероятности величины Дх, а
ох — среднеквадратичное отклонение.
Другое определение статистической эквивалентности этих функ-
ций можно получить, если исходить из требования минимума ма-
тематического ожидания квадрата разности между истинной функ-
цией и аппроксимирующей:
М(у—i/np)2 = min, (6.216)
Это условие, как показано в [65], обеспечивает лучшее совпа-
дение корреляционных функций величин у и цПр- Согласно этому
условию коэффициент k0 находится из того же выражения, что и
при первом способе определения эквивалентности функций, а ко-
эффициент k*— из выражения:
— [>(тх + Дх)Дх!^(Дх)ДДх. (6.217)
А -Сй
Заметим, что во многих случаях коэффициенты k> и k*, опре-
деленные из ф-л (6.215) и (6.217), оказываются довольно близки-
ми. Поэтому иногда в качестве коэффициента ki принимают сред-
нее арифметическое между этими его значениями.
Формулы (6.214), (6.215) и (6.217) показывают, что коэффи-
циенты k0 и ki зависят не только от самой нелинейной функции
С(Дх), но и от закона распределения случайной величины Дх.
В тех случаях, когда Дх определяется из нелинейного дифферен-
циального уравнения, найти закон его распределения затруднитель-
но. В таких случаях закон распределения величины Дх аппрокси-
мируют тем или иным способом.
Большинство практически встречающихся законов распределе-
ния можно представить в виде ортонормированного разложения
в ряд, основанный на нормальном законе распределения:
W, (Д х)
(6.218)
269
Здесь //п(Дх) —полином Чебышева—Эрмиту,
со — Д х2/2 У
(Х(Дх) е-... - Х , П=1,2,3. ..
«’• J V 2л ах
— со
Коэффициенты Ьп ряда (6.218) быстро убывают [66] с ростом п,
поэтому для приближенных вычислений можно сохранять только
один-два первых члена этого ряда.
В действительности же, конечно, разность фаз эталонного и
подстраиваемого генераторов, как было показано выше, имеет
распределение, отличное от нормального, которое переходит в нор-
мальное только при ун=0 и при малой дисперсии разности фаз
(£>о = О и О>3). Однако даже в системе первого порядка [К(р) =
= 1] действительный закон распределения разности фаз остается
достаточно близким к нормальному. Отличие в основном состоит
в некоторой асимметрии скатов (см. рис. 6.3) и, как видно из этих
рисунков, получается небольшим и при £>¥=0, но при 03.
Из ф-лы (6.89) следует, что для системы ФАПЧ первого по-
рядка коэффициент Кг при рфэг=0, определяющий величину О,
Q2 Р й2 а?, 2 л
к2 = —J RNi (т) d т = . (6.219)
эг —оо эг
оо
Здесь, как и ранее П = 2п! J Кл,г(т)б/т.
Воспользовавшись ф-лой (6.219), выразим величину D через
соотношение сигнал/шум на входе системы ФАПЧ:
^2 йуО^Л л--у
Здесь s2 = = 2 Рс/Рш.
Отсюда следует, что закон распределения разности фаз в си-
стеме ФАПЧ первого порядка при немодулированном эталонном
сигнале мало отличается от нормального, если
(6.221)
Таким образом, при вычислении коэффициентов статистической
линеаризации будем считать, что закон распределения отклонений
разности фаз эталонного и подстраиваемого генераторов от ее
среднего значения нормальный:
1 — <р2/2а2
--------е s ”. (6.222)
/2л аф
Здесь cps — случайное отклонение разности фаз эталонного и
подстраиваемого генераторов от среднего значения.
270
Подставляя выражение (6.222) в ф-лы (6.214), (6.215) и (6.217)
и выполняя интегрирование при F(tp) = cos ср, имеем:
| 1 —0.5 а2
^0“=-^—е <₽cosmq), (6.223)
Е- — 1/ 0,5(1 —е-2О<₽)—т2А!2(1—е-Оф) , (6.224)
1 ат т ' / ф о \ /
-0,5 а2
k\ = |Sin mv\ е *
(6.225)
Впервые ф-лы (6.223)
и (6.225) были получены
для случая ун=0 в рабо-
те [1963, 13], а для Yn=#
=И=0—в работе [1963, 21].
Для сравнения инте-
ресно вычислить, напри-
мер, коэффициент k0 не
при нормальном законе
распределения cps, а при
Wi (ср§), найденной из
ф-лы (6.95). Подставляя
Рис. 6.16. Сравнение коэффициентов статисти-
ческой линеаризации при различных законах
распределения
ф-лу (6.95) в (6.214), после интегриро-
вания получаем
k*
1 Л (D)
— cos m 1 - .
ф /о (D)
(6.226)
На рис. 6.16 графически представлены зависимости
tn^ka/cos m^=f(D) и m^kj/cos т- = q}(D) для системы ФАПЧ первого
порядка, построенные согласно ф-лам (6.223) и (6.224) при Р>1
(кривая 7) и (6.226) (кривая 2). Этот рисунок наглядно показы-
вает близость коэффициентов k0 и k* при О>1. Такой же вывод
ранее получен в [1963, 21].
Коэффициенты и ki полностью определяют вид эквивалент-
ной линеаризации.
Применительно к системе ФАПЧ нелинейная функция F(x) =
= cosx. Подставляя в ур-ние (6.657) ее приближенное значение из
ф-лы (6.213) и считая рсраг = О, имеем
Рф8 + К(Р)Оу[МФ+М5 + Ы0] -2Н- (6.227)
Напомним, что gi (() = (t)cos cp + C(/)sin ср]. Как и ранее,
предположим, что функции A(t) и C(t) быстрые по сравнению с
с срь(Т). Это позволит считать A(t) и C(t) некоррелированными с
ср«, а следовательно, и с ср и выполнять раздельное_усреднение.
При этом fei(() будет иметь нулевое среднее значение [A (t) = C(t) =
271
= 0] и корреляционную функцию, совпадающую с точностью до
постоянного множителя с корреляционной функцией входного шу-
ма, смещенного на нулевую частоту. /
Для определения установившегося среднего, значения разности
фаз эталонного и подстраиваемого генераторов, т. е. mv и ее дис-
персии ур-ние (6.227) можно разбить на два уравнения [65]:
т^0=ун, ' (6.228)
P<h + K(P)^y[fei<Ps + £i(01 =0- (6.229)
Подставляя в ур-ние (6.228) значение k0 из ф-лы (6.223),
имеем
0,5 а2
cosm(p = yHe ф . (6.230)
Из этого выражения следует, что среднее значение разности
фаз эталонного и подстраиваемого генераторов не определяется
только начальной расстройкой, как это имело место при линей-
ном анализе, а зависит еще и от дисперсии разности фаз, которая
при прочих равных условиях определяется соотношением сиг-
нал/шум на входе системы. С уменьшением отношения Si среднее
значение разности фаз увеличивается.
Влияние шума на остаточную разность фаз можно трактовать
как снижение под действием шумов полосы удержания. Диспер-
сию разности фаз в установившемся режиме находим по извест-
ным правилам:
= J\(®)|№13(ico)|2dco. (6.231)
— QO
Здесь Sj, — спектральная плотность процесса £i(0> ^1э — ком-
плексная эквивалентная передаточная функция системы ФАПЧ,
Тсэ— 1/Йу^Ь
Под W\3 по аналогии с линейной системой ФАПЧ будем пони-
мать отношение девиации фазы подстраиваемого генератора к де-
виации фазы эталонного сигнала. Из ур-ния (6.229)
^э(р)=--^ . (6.232)
1 + р ДэДС (р)
Для простоты будем считать, что спектральная плотность шу-
ма на входе системы ФАПЧ равномерна и симметрична относи-
тельно Мэг в пределах полосы П. Тогда энергетический спектр про-
цесса £1(0 определяется выражением (6.59). Если подставить
<$5, (со) из этого выражения в ф-лу (6.231), то можно при заданном
К(р) найти зависимость дисперсии от параметров системы и шу-
ма. Поскольку W\3(p) зависит от коэффициента kt, который яв-
ляется функцией т<р, а следовательно, и функцией искомой вели-
чины а2, одно ур-ние (6.231) не позволяет вычислить последнюю.
272
Для ее определения необходимо совместно решить ур-ния (6.230)
и (6.231), что в общем виде сделать трудно, и поэтому приходится
прибегать к численным методам
Рассмотрим конкретный пример. Пусть в системе ФАПЧ ис-
пользуется идеализированный фильтр [К(р) = 1]- Подставляя зна-
чения К(р) в ф-лу (6.232), а полученное значение W\3—в ф-лу
(6.231), с учетом выражений (6.59) и (6.230) имеем
9 Л Qy 1
=--------=----
Ф s^Uk, Dk,
(6.233)
Из ф-л (6.224) и (6.225) следует, что k\ зависит от 02 и поэто-
му зависимость о? от s2 является нелинейной, в отличие от ана-
логичной зависимости, полученной из линейной модели системы.
На рис. 6.17 приведены зависимости ©2 от \/\D, полученные при
ун=0 численным методом с помощью выражений (6.224) и (6.233)
(кривая <3), а также (6.225) и (6.233) (кривая 2). Для сравнения
на этом же рисунке представлена
аналогичная зависимость (кри-
вая 7), построенная по ф-ле
(6.106), полученной при помощи
уравнения Фоккера—Планка. Со-
поставление кривых 2 и 3 с точ-
ной зависимостью 1 дает возмож-
ность установить предел приме-
нимости метода статистической
линеаризации, зависящий от тре-
буемой точности. Из этого же
графика видно, что критерий ра-
венства дисперсий при определе-
нии ki (кривая 3) дает более точ-
ный результат. Пунктирной ли-
нией показана зависимость, полу-
ченная Ван-Трисом в [1964, 6]
методом функциональных разло-
жений Вольтерра с учетом пер-
вых трех членов ряда для о?
Эта кривая близка к кривой, по-
лученной методом статистической
функций параметров системы и шу-
ма, найденных различными методами
линеаризации на основании критерия равенства дисперсии.
Метод статистической линеаризации позволяет определить пер-
вые два момента распределения и в том случае, если на вход си-
стемы ФАПЧ действует не аддитивный шум, а фазомодулирован-
ный случайным сообщением эталонный сигнал. Если предполо-
жить, что функция распределения модулирующего сигнала нор-
мальна, а ошибка слежения невелика, то можно считать, что и
разность фаз эталонного и подстраиваемого генераторов имеет
также нормальное распределение. При этом статистические коэф-
273
фициенты k0 и k> определяются теми же ф-лами (6.223), (6.224)
и (6.225), что и в рассмотренном выше случае.
Зная коэффициенты k0 и kit можно найти дисперсию разности
фаз 'из выражения
оо
^фЭг((0)|1-ri3(i<o)Po>. (6.234)
— оо
Здесь S<p3r —спектральная плотность девиации фазы эталонно-
го сигнала, определяемая полезной модуляцией.
Как и при действии флуктуационных шумов на систему ФАПЧ,
для вычисления дисперсии разности фаз в этом случае необходи-
мо подставить в ф-лу (6.234) конкретные выражения для №)э и
S<p3r и выполнить интегрирование, а затем решить полученное
уравнение совместно с выражениями, определяющими k0 и feb Од-
нако в большинстве случаев эти операции аналитически невыпол-
нимы и поэтому приходится прибегать к численному решению
уравнения.
Метод статистической линеаризации позволяет также прибли-
женно оценить область параметров системы и характеристик шу-
ма, при которых обеспечивается синхронный режим ее работы.
Этот режим характеризуется малой средней разностью частот.
В [1965, 12] путем отождествления области синхронной работы
с условием существования решения ур-ния (6.230) удалось опре-
делить критическое значение дисперсии фазовой ошибки на гра-
нице этого режима:
t,u-=2ln-K- <6-235>
При помощи этого выражения можно найти критическое зна-
чение стношения сигнал/шум на входе системы ФАПЧ. Так, для
системы первого порядка с учетом ф-лы (6.233) получаем
-z , jQy-----------------(6.236)
77 У 7п — [ С1 — Тм) — (1 — Тн)1
(Н
Отсюда следует, что с увеличением у„ критическое значение si
увеличивается. При ун—И синхронный режим невозможен.
В [1968, 53] метод статистической линеаризации совместно с ап-
паратом марковских процессов использован для приближенного
нахождения нестационарных характеристик системы ФАПЧ.
6.6. ИССЛЕДОВАНИЕ НЕЛИНЕЙНОЙ СИСТЕМЫ ФАПЧ, НАХОДЯЩЕЙСЯ
ПОД ДЕЙСТВИЕМ СЛУЧАЙНЫХ ВОЗМУЩЕНИЙ, КВАЗИСТАТИЧЕСКИМ
МЕТОДОМ
Как уже указывалось, исследование системы ФАПЧ при по-
мощи аппарата марковских процессов ограничивается требованием
широкополосное™ флуктуационного воздействия. В некоторых
274
случаях имеет место узкополосное воздействие, время корреляции
которого значительно больше времени установления процесса в
системе ФАПЧ. При этом можно использовать другой приближен-
ный метод, называющийся квазистатическим [24].
Особенностью квазистатического метода является предполо-
жение о том, что при каждом значении случайной внешней силы
в исследуемой системе устанавливается соответствующее ему ква-
зистационарное значение искомой величины. Это дает возмож-
ность в основном дифференциальном уравнении считать все ее
производные по времени малыми и пренебрегать ими.
Проведем с помощью этого метода анализ системы ФАПЧ, на-
ходящейся под действием эталонного сигнала с медленно меняю-
щейся фазой. Такой случай соответствует применению системы
ФАПЧ для слежения за фазой эталонного сигнала или в качестве
фазового детектора.
Полагая в ур-нии (6.7) A(t) = C(t) — Q, а также рф = р2ф =
= ... =р’'<р = О, получаем следующее уравнение для разности фаз
эталонного и подстраиваемого генераторов;
cos<p=yH—-^-Рфэг. (6.237)
Заметим, что это уравнение имеет смысл только при
I (6.238)
I “у I
Если условие (6.238) не выполняется, синхронизация в систе-
ме ФАПЧ нарушается и устанавливается режим биений. В этом
случае пренебрегать величинами рф, р2ф, ..., pnq> при анализе не-
допустимо.
Поскольку статистические характеристики рфэг считаются изве-
стными, нетрудно найти ограничения для максимально допустимо-
го мгновенного значения рфэг, при которой условие существования
ур-ния (6.237) выполняется с заданной вероятностью. Предполо-
жим, что закон распределения величины рфэг — нормальный. Тогда,
если принять, что неравенство (6.238) выполняется с вероятностью
0,9, то среднеквадратичное отклонение величины pq> должно удов-
летворять соотношению:
• (6-239)
Из выражения (6.237) вытекает, что при известном законе рас-
пределения .рфэг для отыскания статистических характеристик раз-
ности фаз достаточно применить обычные методы теории безынер-
ционных нелинейных преобразований.
Известно [51], что если имеется некоторое нелинейное одно-
значное и непрерывное безынерционное преобразование случай-
ной величины х: y=<F(x), то для отыскания функции распределе-
275
ния случайной величины у по известной функции распределе-
ния случайного аргумента, т. е. Wi(x), можно воспользоваться
выражением
^1(у) = Т^Т' (6-240>
| dx I
Это выражение справедливо в том случае, если обратное пре'-
образование x=f(y) также однозначное. В данном случае прямое
преобразование имеет вид:
ф -arc cos (ун—-J- рфэг') • (6.241)
\ ««у /
Обратное преобразование выражается равенством (6.237),.
При выполнении условия (6.239) и прямое, и обратное преобра-
зования являются однозначными.
Подставляя в ф-лу (6.240) вместо Wi(x) нормальный закон
распределения величины /лр-,г с нулевым средним значением и вы-
числяя dq/dptp3r из выражения (6.241), а затем заменяя /лрэг в со-
ответствии с равенством (6.237), имеем
— (vH—cos <р)2 22/2q2
W(ф)= ,-?y.|sinjgL е У р(₽эг. (6.242)
Это выражение показывает, что, как и следовало ожидать, при
нормальном законе распределения отклонений частоты эталонно»-
Рис. 6.18 Семейство функций распределения U^i(cp), полученных квазистатиче-
ским методом
го сигнала закон распределения разности фаз ненормальный и не-
симметричный. Распределение гр становится симметричным только
в частном случае при ун = 0.
276
На рис. 6.18 показано семейство кривых IFi (ср), построенное по
выражению (6.242) для нескольких значений ун и ор<рэг . Из этих
рисунков видно, что максимум плотности вероятности получается
примерно при (p = arccosyH.
По известной функции распределения можно при заданных
значениях Ор<рэг и ун найти два первых момента, т. е. среднее зна-
чение разности фаз и ее дисперсию.
Заметим, что, поскольку закон распределения разности фаз не-
симметричен, среднее значение ср зависит от ор<рэг и не совпадает
при модулированном эталонном сигнале со стационарным значе-
нием разности фаз.
Квазистатический метод позволяет исследовать воздействие на
систему не только эталонного сигнала с медленно меняющейся фа-
зой или частотой, но и действие аддитивного эталонному сигналу
узкополосного шума.
Предполагая, что время корреляции случайных функций A(t)
и C(t), входящих в ур-ние (6.7), значительно превышает время
установления координаты <р(7) и что эталонный сигнал не модули-
рован (т. е. рфэг=0), можно пренебречь в этом уравнении всеми
производными . В итоге приходим к уравнению, которое позволяет
определить статистические характеристики ср(7). В частности, при
®н = 0 уравнение для разности фаз аналогично уравнению для фазы
результирующего сигнала, образованного эталонным сигналом и
аддитивным шумом. Статистические характеристики ср для этого
случая приведены в [51].
Физическая интерпретация указанного результата очевидна.
Поскольку инерционность системы ФАПЧ предполагается малой
и начальная расстройка равна нулю, фаза результирующего сиг-
нала передается без искажений через систему ФАПЧ.
Глава 7
АСТАТИЧЕСКАЯ СИСТЕМА ФАПЧ
7.1. ОБЩИЕ СВЕДЕНИЯ
В обычной системе ФАПЧ подстраиваемым генератором управ-
ляет разность фаз между его напряжением и напряжением эта-
лонного сигнала. В режиме удержания устанавливается некото-
рое значение этой разности, определяемое начальной расстройкой
согласно ф-ле (2.14), которую в более общем виде можно запи-
сать следующим образом:
/?(фо2)=-^-. (7.1)
Во многих случаях требуется не только синхронность, но и син-
фазность напряжений эталонного и подстраиваемого сигналов
(например, в системе цветного телевидения, при фазовом разде-
лении каналов в фазометрических системах и т. п.), в связи с чем
точность подстройки, даваемая обычной системой ФАПЧ, оказы-
вается недостаточной.
В обычной системе ФАПЧ оинфазность напряжений эталонного
и подстраиваемого генераторов можно обеспечить только при пос-
тоянной начальной расстройке. Действительно, если начальная
расстройка, полоса удержания, а следовательно, и разность фаз
обоих генераторов постоянны и известны, то всегда найдется та-
кой фазовращатель, с помощью которого можно получить напря-
жение, синфазное с эталонным.
Разность фаз в обычной системе ФАПЧ непостоянна уже в си-
лу собственной нестабильности подстраиваемого генератора. Тем
не менее в самой системе имеются возможности повышения ее
стабильности. Согласно ф-ле (7.1) установившаяся разность фаз
является функцией двух переменных йу и йн и ее малое прира-
щение при изменениях этих переменных
m Sly d Рц S1h d Sly
u Фог = Try ;
d F (<Рог) q2
d<po2 y
(7-2)
278
Из этого выражения следует, что при заданном диапазоне из-
менений величин Qy и QH для стабилизации установившейся раз-
ности фаз необходимо увеличивать полосу удержания и крутизну
нормированной характеристики фазового детектора. Изменение
разности фаз будет наименьшим при трапециевидной характери-
стике фазового детектора, близкой к прямоугольной, и большой
полосе удержания. Однако увеличение крутизны характеристики
фазового детектора и полосы удержания возможно только до оп-
ределенного предела, так как, во-первых, в системе может быть
нарушено условие устойчивости в «малом» режима (см., например,
ф-лы (3.20), (3.24)] и, во-вторых, с увеличением полосы удержа-
ния и крутизны нормированной характеристики фазового детек-
тора уменьшается согласно выражению (5.15) фильтрующая спо-
собность системы ФАПЧ. Поэтому, если заданы жесткие требова-
ния на отклонение установившейся разности фаз от номинального
значения, обычная система ФАПЧ не всегда может их удовлетво-
рить. В таких случаях применяют так называемые астатические
системы, у которых нет ошибки по разности фаз.
В теории автоматического управления принято делить системы
авторегулирования на статические и астатические. В статических
системах при воздействии, стремящемся с течением времени к про-
извольному постоянному значению, ошибка также стремится к
постоянной, зависящей от величины воздействия. В астатических
же системах при таком воздействии ошибка с течением времени
стремится к нулю.
Одна и та же система может быть статической по одному па-
раметру и астатической по другому. Так, обычная система ФАПЧ
является астатической системой подстройки частоты, ибо устано-
вившаяся разность частот эталонного и подстраиваемого генера-
торов в режиме удержания всегда равна нулю. Если же рассмат-
ривать ее как систему автоматической подстройки фазы, то она
является статической, поскольку установившаяся разность фаз
этих генераторов зависит от у,г.
Для того чтобы разность фаз в установившемся режиме не за-
висела от указанных величин, необходимо сделать обычную систе-
му ФАПЧ астатической по отношению к разности фаз при изме-
нении разности частот, полосы удержания и крутизны характери-
стики фазового детектора. Указанный астатизм в системе ФАПЧ
достигается в том случае, если операторный коэффициент пере-
дачи фильтра нижних частот для постоянного напряжения в цепи
управления бесконечно большой, т. е. имеет полюс при р = 0.
В простейшем случае коэффициент передачи этого фильтра
должен определяться выражением
К(р)=о» + —(7.3>
Тир
Здесь Та — постоянная времени идеального интегратора, а*—
коэффициент передачи фильтра при
279
Включение такого четырехполюсника в цепь обратной связи
системы позволяет сделать установившуюся разность фаз эталон-
ного и подстраиваемого генераторов постоянной и не зависящей от
начальной расстройки или полосы удержания. Действительно, под-
ставляя значение К(р) в выражение (1.11), имеем
Рф + 1+тХоИР ^(<P)=QH- (7-4)
1 и Р
Из этого выражения непосредственно следует, что в устано-
вившемся режиме (р = 0)
/Д<Ро2)=О (7.5)
начальной расстройки, ни от
Рис. 7.1. Структурная схема аста-
тической системы ФАПЧ
и, следовательно, установившаяся разность фаз не зависит ни от
полосы удержания, а определяется
положением нуля /’’(ф). *
Структурная схема подобной
системы ФАПЧ приведена на рис.
7.1. Она отличается от схемы
обычной системы ФАПЧ тем, что
ее цепь управления состоит из
двух параллельных ветвей, одна
из которых представляет собой
линейный безынерционный усили-
тель БУ с коэффициентом пере-
дачи а оо, а вторая — идеальный интегратор ИИ. Выходные напря-
жения обеих ветвей складываются в сумматоре С. '
Перейдем к определению характеристик этой системы, считая,
как обычно, что характеристика управляющего элемента линейна,
а все остальные звенья петли обратной связи безынерционны.
7.2. АСТАТИЧЕСКАЯ СИСТЕМА ФАПЧ С ИДЕАЛЬНЫМ
ИНТЕГРАТОРОМ
Прежде всего, определим условия устойчивости астатической
системы ФАПЧ, описываемой ур-нием (7.4). Линеаризуя это урав-
нение и применяя к полученному линейному уравнению критерий
устойчивости Рауса—Гурвица подобно тому, как это было сделано
в разд. 3.4, находим следующие условия устойчивости в «малом»:
ТнйуаооГ(фо2)>0, (7.6)
Йу/7'(<Ро2)>0. (7.7)
Система будет устойчивой в «малом» только при аоо>0, и тог-
да второе условие вытекает из первого. Оба условия показывают,
что астатическая система не теряет устойчивости при увеличении
полосы удержания.
Следует отметить, что при f(<p)cos(p и йу>0 согласно ф-лам
(7.5), (7.6) и (7.7) в установившемся режиме фо2 =—л/2 независи-
мо от йн.
280
Перейдем теперь к определению асимптотической устойчиво-
сти в «целом» астатической системы ФАПЧ. Для этого удобно вос-
пользоваться вторым методом Ляпунова. В разд. 4.3 указывалось,
что непосредственно исследовать этим методом устойчивость
обычной системы ФАПЧ, обладающей бесчисленным множеством
состояний равновесия, невозможно, и поэтому приходится прибе-
гать к периодическим и разрывным функциям Ляпунова.
При исследовании же астатической системы ФАПЧ удобно вос-
пользоваться периодическими функциями Ляпунова, поскольку в.
данном случае их построение не встречает больших затруднений.
В дальнейшем воспользуемся результатами работы [1963, 4]. Бу-
дем считать, что /7(ф)=з1Пф. Тогда ур-ние (7.4) можно предста-
вить в виде системы двух уравнений первого порядка:
^„РФ = — THa«,fiySin<p —'х + Тийн. (7.8)
px = Qysin<p, (7.9)
где х— независимая переменная.
Для удобства перейдем от дифференцирования по t к диффе-
ренцированию по безразмерному времени ту = /йу. В результате
получим:
Рф = — ЯооЫпф — —-(х— ТНЙН), (7.10)
/ и Uy
px=sin<p. (7-11)
В соответствии с [1963, 4] выберем в качестве периодической
по ср функции Ляпунова функцию вида
J/=2sin2 —-|---—у\ (7.12)
2 2ТиЯуУ
где z/ = x—Тийн-
Для определения условий устойчивости в «целом» астатиче-
ской системы необходимо вычислить производную функции V по
времени, считая, что ф и у образуют решение системы ур-ний
(7.10) и (7.11): dV __ дУ d(f । дУ dy (7.13)
d Ту d(p d Ту ду d Ту Из выражения (7.12) имеем: дУ — 51Пф, (7.14)
д ф dV 1 —= У- (7.15)
ду Ти Qy Подставляя эти значения в выражение (7.13) и учитывая ф-лы
(7.10) и (7.11), находим
-- = —Ооо51П2ф.
d Ту
(7Л6)
281
Таким образом, при произвольном значении ср функция V с те-
чением времени убывает, что гарантирует устойчивость в «целом»
системы. Поскольку начальная расстройка не входит в ф-лу (7.16),
система устойчива при любом ее значении. Это явилось следст-
вием применения в цепи управления идеального интегратора, а
также следствием предположения о неограниченной линейности
управляющего элемента.
В действительности же характеристика управляющего элемен-
та может быть линейной только в пределах ограниченного участка.
Рассмотрим, как изменится условие устойчивости системы при
симметричной и ограниченной по максимуму модуля характери-
стике управляющего элемента (характеристика типа насыщения).
Из физических соображений ясно, что, поскольку полоса удержа-
ния в такой системе ограничена, полоса захвата будет также ко-
нечной. Если вновь воспользоваться функциями Ляпунова, можно
показать, что полоса захвата равна полосе удержания и обе они
•определяются максимальной расстройкой, вносимой управляющим
элементом (1963, 4].
Определим с помощью метода усреднения длительность пере-
ходного процесса в астатической системе с идеальным интеграто-
ром [1963, 4]. Запишем ур-ние (7.4) в виде
<р + 8<р cos ф Ч- sing) =0. (7.17)
Здесь е = Goo Qy7'II, причем дифференцирование ведется по от-
носительному времени т = /р Йу/Гц.
Уравнение (7.17) можно представить в виде системы двух диф-
ференциальных уравнений первого порядка:
—е sin ф, (7.18)
d т
= —sin ф. (7.19)
d т
В дальнейшем полагаем параметр е малым.
При е = 0 ур-ния (7.18) и (7.19) описывают работу консерватив-
ной системы ФАПЧ.
Для определения переходного процесса воспользуемся вариан-
том метода усреднения, изложенным в разд. 4.5. При этом будем
изучать процесс установления не самих координат <р и х, а неко-
торой функции от них y=2sin2q>/2 + x2/2. Эта функция характе-
ризует энергию консервативной (е = 0) системы. Ее производная
ло времени имеет вид
dV dV dtp , dV dx . dtp dx /7
= —— J • = Sin ф—— + x----- . (7.20)
dr----------------------------------------------d <p d r dx-dx-dx dx
Подставляя в это выражение производные координат по вре- ,
мени из ур-ний (7.18), (7.19) получаем
= —-esin2<p. (7.21)
d т
282
Это уравнение совпадает с ур-нием (4.60) при ун=е2 = 0,е1 = е„
F(<p) =sin<p.
Поскольку е полагается малым, функция V меняется медлен-
но. Поэтому, используя принцип усреднения, можно перейти ог
ур-ния (7.21) к рассмотрению усредненного по траекториям кон-
сервативной (порождающей) системы уравнения аналогично то-
му, как это сделано при переходе от ур-ния (4.60) к ур-нию (4.65).
В итоге получаем, что усредненное уравнение для V является част-
ным случаем ур-ний (4.72) и (4.73) при 82 = ун = 0, б! = е, т. е.
77 = (2В“Е)’ lv>2L (7-22>
ах 3 к2 л
где k = ]/2/У и
—. = _1^LL(2E— В), [У<2], (7.23)
где k=VV/2.
Как и ранее, при V>2 изображающая точка движется вокруг
фазового цилиндра, охватывая его, и можно говорить о процессе
установления частоты. При К<2 траектория изображающей точки
не охватывает фазовый цилиндр и можно говорить об установле-
нии разности фаз.
Для вычисления времени установления частоты необходимо
проинтегрировать ур-ние (7.22) в пределах от V=V(0) до
К = 2 + 6 (6>0 — малая величина). В результате получим
$со
К (k) dk
k[2B(k)-E(k)]
*(0)
Здесь &(0) = у 2/К(0) —начальное условие.
Результаты приближенных вычислений по ф-ле (7.24) при
6 = 0,02 приведены на рис. 7.2а [1963, 4].
(7.24);
Рис. 7.2 К определению времени установления:
а) разности частот, б) разности фаз
283-
Время установления разности фаз получается в результате 'ин-
тегрирования ур-ния (7.23) в пределах от V=V(0) до V=6i
(61 >0):
К(0)
а оо Йу 7^ = 3
б)
К (k) dk
А [2 Е (А) — В (А)] ’
(7.25)
где £(0)=]/У(0)/2.
На рис. 7.26 показана зависимость, построенная численным ме-
тодом по ф-ле (7.25) при 61 = 0,03.
Рассмотрим теперь помехозащищенность астатической системы
ФАПЧ. Предположим, что помеха на входе системы настолько
мала, что допустима линеаризация основного уравнения. В этом
случае можно воспользоваться понятием передаточной функции,
которая полностью характеризует помехозащищенность системы
ФАПЧ при слабых помехах.
Из выражений (5.15) и (7.3) следует, что
1^(10)) =
1 + > Тя ах со
1 — (d2 Тс Ти i Ти ах ы
(7.26)
Сравнивая ф-лу (5.19) с этим выражением, замечаем, что они
очень близки при тТ^>Тс. Отсюда следует, что при таком усло-
вии все выражения, определяющие помехоустойчивость системы
ФАПЧ с пропорционально-интегрирующим фильтром, применимы
и к астатической системе. При этом, естественно, нужно положить
ТИ=Т, 171 = 0.^.
В случае больших помех в астатической системе, в отличие от
системы с пропорционально-интегрирующим фильтром, установив-
шаяся разность фаз независимо от начальной растройки всегда
равна ±0,5л. Поэтому при сильных помехах вероятность переско-
ков фазы в обе стороны одинакова, и в этой системе нет средней
разности частот эталонного и подстраиваемого генераторов, что
является ее основным преимуществом перед обычными системами
ФАПЧ.
Статистические характеристики астатической системы можно
найти с помощью теории марковских процессов аналогично тому,
как это было сделано в разд. 6.6 для обычной системы. В част-
ности, в [1963, 9] таким путем найдено приближенное выражение
для одномерной плотности вероятности фазовой ошибки при
F((p)=sin(p и воздействии на систему широкополосных флуктуа-
ций. В предположении высокой точности работы системы это вы-
ражение имеет вид:
^(ф)
Da cos ф
(7.27)
2Л/0 (&а)
1
284
где Da=2Qyaoo7'H/K2(l+«» ПуД,), причем К2 определяется ф-лой
(6.89), в которой следует положить, сц = 0, так как рассматрива-
ется случай отсутствия фазовой модуляции эталонного сигнала.
Таким образом, при высокой точности работы системы выра-
жение для плотности вероятности совпадает по форме с ее выраже-
нием для системы первого порядка при нулевой начальной рас-
стройке. Так, при а2хTKQy1 система с идеальным интегратором
эквивалентна системе первого порядка с нулевой начальной рас-
стройкой и полосой удержания, измененной в Яоо раз.
7.3. РЕАЛЬНЫЕ «АСТАТИЧЕСКИЕ» СИСТЕМЫ ФАПЧ
Поскольку идеальный интегратор не может быть практически
реализован, интересно рассмотреть свойства астатической систе-
мы ФАПЧ с реальным интегратором. В качестве реального инте-
гратора часто используется соединение линейного безынерционного
усилителя и обычной интегрирующей (например, RC) цепи. Уси-
литель применяется потому, что интегрирующая цепь дает резуль-
таты, близкие к идеальному интегрированию только при малом
коэффициенте передачи.
Операторный коэффициент передачи реального интегратора
выражается как
= <7.35)
Здесь Ау—коэффициент усиления усилителя.
При включении такого устройства в схему рис. 7.1 вместо иде-
ального интегратора коэффициент передачи всей цепи управления
принимает вид:
«о, Т
1 +-----
К(р) ^ + ^—-К + Ку)-------------- (7-36)
1 + Тр 1 +Тр
Это выражение отличается от коэффициента передачи пропор-
ционально-интегрирующего фильтра [ф-ла (3.14)] лишь постоян-
ным множителем, причем роль параметра m играет величина
Лоо/(Доо + Ку). Поэтому «астатическая» система с реальной инте-
грирующей цепью обладает такими же свойствами, как и система
с пропорционально-интегрирующим фильтром.
В обеих системах статическую ошйбку можно сделать малой,
если выбрать полосу удержания большой. Обычно увеличение по-
лосы удержания приводит к снижению помехоустойчивости. В ука-
занных же системах этого можно избежать, если одновременно с
увеличением полосы удержания уменьшать коэффициент т.
Другим реальным интегратором может служить электродвига-
тель, управляемый по скорости. Если скорость вращения этого
285
двигателя пропорциональна приложенному напряжению, то угол
поворота ротора
t
a—ka^u(x)dx, (7.37)
о
где ka — коэффициент пропорциональности.
Это можно использовать для создания астатической системы
ФАПЧ, если жестко связать ротор мотора с управляющим элемен-
том (например, с конденсатором).
Недостатками электродвигателя, используемого в качестве ин-
тегратора, являются наличие в нем сухого трения, ограниченность
скорости вращения, инерционность. Однако применение его в си-
Рис 7 3 Структурная схема
системы ФАПЧ с интегри-
стеме ФАПЧ 1во многом оправдается
тем, что при 1исчезно®ении эталонного
(сигнала или ,.ри (выключении всей (си-
стемы вносимая с его помощью реак-
ти1вно1сть запоминается на сколь угод-
но долгий срок Поскольку двигатель
меняет вносимую реактивность меха-
ническим способом, управляемый им
реактивный элемент (может быть ста-
бильным и обладать высокой доброт-
рующим электродвигателем НОСТЬЮ.
Система ФАПЧ с электродвигате-
лем, как и система с реальным дезинтегратором, не будет, строго
говоря, астатической из-за наличия сухого трения в двигателе.
Однако статическую фазовую ошибку в ней можно сделать зна-
чительно меньшей, чем в обычной системе.
Структурная схема ФАПЧ с двигателем изображена на рис. 7.3.
Как видно из рисунка, она отличается от схемы обычной системы
ФАПЧ наличием дополнительной электромеханической ветви уп-
равления, включенной между фазовым детектором и подстраивае-
мым генератором и состоящей из усилителя У, электродвигателя
ЭД и управляющего элемента с механическим приводом УЭ2.
Основное дифференциальное уравнение рассматриваемой си-
стемы при косинусоидальной форме характеристики фазового де-
тектора имеет вид
р ср + Пуэ К (р) cos <р Q„ —F.
(7.38)
Здесь F—мгновенное значение расстройки, вносимой элемен-
том УЭ2 Аргументом функции F служит угол поворота ротора
конденсатора рр.
При определении вида функции F необходимо знать характери-
стики всех звеньев электромеханической ветви управления. Будем
предполагать, что электромеханическая ветвь выполнена в виде
соединения электродвигателя редуктора и конденсатора со свобод-
но вращающимся ротором. Зависимость вносимой конденсатором
286
расстройки от угла поворота рр его ротора будем для простоты
считать линейно-ломаной, периодической с периодом 2л функцией
этого угла, так что
F Цм(1 --^-PpSignPrj > [ —(7-39)
Здесь sign рр — знак величины рР, Й1М— максимальное значе-
ние модуля вносимой элементом УЭ2 расстройки.
Считая редуктор, связывающий ось двигателя с осью конден-
сатора, абсолютно жестким, можно переписать ур-ние (7 39) в
виде.
F=QyM^l — a signal , [— л<пра<л],
(7.40)
где Ир—коэффициент передачи редуктора, а — угол поворота ро-
тора двигателя
Для определения зависимости а от выходного напряжения фа-
зового детектора, т е от cos ср, будем считать, что в качестве ин-
тегратора применяется двигатель Феррариса (например, типа ЭМ
или ДИД), движение которого при амплитудном управлении и
постоянном возбуждении с достаточной точностью описывается
дифференциальным уравнением [68]
J р2 а + (7 + SnUf,\pa + Mz sign р а =впи (1-, (7.41)
\ 2 vc / \ 2(/ог?с /
где / и I —приведенные к оси двигателя момент инерции и линей-
ное механическое сопротивление системы двигатель—редуктор—
нагрузка, sn — коэффициент пускового момента, М,— момент сил
сухого трения, для простоты считающийся не зависящим от скоро-
сти, и0 — значение управляющего напряжения, соответствующее
круговому полю статора, и — скорость вращения поля статора,
vc — мгновенное значение управляющего напряжения
Уравнение (741) представляет собой ур-ние моментов на оси
двигателя, причем первый член его левой части есть момент сил
•инерции, второй — момент сил линейного вязкого трения, а тре-
тий—момент сил сухого трения. Правая часть этого уравнения
отображает вращающий момент, пропорциональный приложенно-
му напряжению и скольжению
Полагая, что вспомогательные устройства, включенные между
фазовым детектором и двигателем (балансные модуляторы, уси-
лители), линейны и безынерционны, можно записать
и -=^максСОЗ<р, (7.42)
где 1/макс — максимальное значение управляющего напряжения
Подставляя значение F из ф-лы (7.40) в ур-ние (7.38) и и из
ф-лы (7 42) в ур-ние (7 41), приходим к следующей системе нели-
нейных дифференциальных уравнений, описывающих поведение
287
системы ФАПЧ с интегрирующим двигателем и произвольным
фильтром нижних частот в цепи управления (для — л^пра^л):
р ф + йуэ К (р) cos ф + йум (1-а sign а) = йн, (7.43)
J р2 а + (г + SaU° 'j р а + Mz sign р а =
\ 2t>c I
= snt/MaKCC0S?(l--^с^фР а\ (7.44)
Эти уравнения наглядно иллюстрируют те трудности, с кото-
рыми приходится сталкиваться при анализе рассматриваемой си-
стемы.
Исследование устойчивости системы начнем с установления то-
чек равновесия и определения условий ее устойчивости в «малом».
Найти точки равновесия нетрудно из системы ур-ний (7.43) и
(7.44). Полагая все производные равными нулю и учитывая, что
Л(0) = 1, получаем:
йуэ cos ф0+йум (1-a sign a j = йн, (7.45)
z sign О =созф0, (7.46)
где z = Mz/t7MaKcSn — относительный момент трогания.
Поскольку обычно г<§; 1 (момент трогания гораздо меньше
максимального вращающего момента), на основании выражений
(7.45) и (7.46) можно сделать вывод, что равновесие соблюдается
при
0,5 л—г<фо2<0,5л + г (7.47)
или
—0,5л—и<ф02< — 0,5л-|-г (7.48)
и
а01 = -0—- (Йум + Йуэ cos фо — Йн) (7.49)
2 Tip i2yM
ИЛИ
а°2 = О ~п (йум + Йуэ COS ф0 —Йн). (7.50)
2 Пр J2yM
Неравенства (7.47) и (7.48) показывают, что, в отличие от
обычных систем ФАПЧ, в системе с интегрирующим двигателем
из-за наличия сухого трения в последнем разность фаз' эталонного
и подстраиваемого генераторов в положении равновесия неопре-
деленная в пределах зоны нечувствительности.
Найдем, какое из сочетаний величин ф и а обеспечивает устой-
чивость в «малом». Будем считать, что система должна быть устой-
чивой в «малом» даже при отсутствии сухого трения в двигателе
(Afz = O), поскольку силы сухого трения уничтожаются, например,
288
при механической вибрации устройства. Кроме того, предположим,
что вблизи точек равновесия pa<^ivc.
При указанных условиях величина а из (7.44) выражается с
помощью линейного оператора через cos<p. Подставляя это значе-
ние а в ур-ние (7.43), приходим к упрощенному уравнению:
ар? <р + Ьр2 <р + йуэ (ар2 + Ьр) К (р) cos <р —sign й —Qy“nP cos <р = 0, (7.51)
Л
где а =-----------, (—т:</гра<л),
Uмакс sn
__ 2 ос г 4~ sn t/0 г
t/маке sn 2 Vc Sn Uмакс 2 t/макс
Это уравнение позволяет исследовать поведение системы с ин-
тегрирующим двигателем при произвольном типе четырехполюс-
ника в электронной ветви управления.
Предположим, что в качестве такого четырехполюсника исполь-
зуется пропорционально-интегрирующий фильтр, коэффициент пе-
редачи которого определяется выражением (3.14). Подставляя это
значение К(р) в ур-ние (7.51) и линеаризуя его в окрестности то-
чек равновесия, получаем следующее уравнение первого прибли-
жения для малых отклонений величины <р от фОп:
a4p4A<p + a3p3A<p + a2P2 А ф + ^р А<р + ао = 0, (7.52)
где а^—аТ, а3 = а-\-ЬТ—8т(р0£1уэатТ,
а2 = b — sin <р0 йуэ (а + ЫпТ),
= sin фо (— йуэ 6+ sign a _^-£-Qy“ у
\ л
♦ • 2 Мп £2vm
а0 = sin <р0 sign а0 —.
л
При sincpo<O и signa0=—1 все коэффициенты ур-ния (7.52)
положительны, следовательно, устойчивы значения фоп = фо2<О и
и = (Хоз* Учитывая, что (рог—-- 0,5л, можно записать характеристиче-
ское уравнение для окрестности точки устойчивого равновесия
следующим образом:
р*+ Ь3р3 + b2p2+ btp+ b0 = 0,
(7.53)
где Ь3 —-1---1- йуэ tn Ь«---1- йуэ I ——I-tn
Т а у - аТ У\Т а
^^Йуэ — 2_ПрЙум
1 у аТ л
к 2 QyM Пр
„гр
аТ л
1 0—526
28Э
Поскольку все коэффициенты в ур-нии (7.53) положительны,
то согласно критерию Рауса—Гурвица равновесие устойчиво при
условии
Ь^Ья—Ь2—b3bo>0. (7.54)
Анализ выражения (7.54) показывает, что для повышения ус-
тойчивости в «малом» наиболее рационально увеличивать коэф-
фициент вязкого линейного трения b и снижать коэффициент пере-
дачи редуктора пр. Обе эти меры позволяют повышать устойчи-
вость только за счет увеличения времени установления координат
системы без сужения области устойчивости в «большом» или воз-
растания статической ошибки. Одновременно при этом несколько
сокращается шумовая полоса системы.
В [1966, 47] проведено исследование устойчивости в «малом»
анализируемой системы с учетом сухого трения, а также люфта в
редукторе, соединяющем ось двигателя с осью конденсатора.
Определим полосу захвата рассматриваемой системы. В даль-
нейшем будем полагать, что условия устойчивости в «малом» вы-
полняются. Периодичность функции Г по а нежелательна, посколь-
ку она создает возможность существования режима непрерывного
одностороннего вращения двигателя в отсутствие захвата. Это
сужает область устойчивости в «большом» и сильно затрудняет
отыскание ее границ. Кроме того, длительное вращение двигателя
повышает его износ.
Для предотвращения возможности возникновения указанного
режима достаточно, чтобы характеристика элемента УЭ2 выража-
лась непериодической кривой типа насыщения. Последнее дости-
гается введением ограничителя угла поворота ротора конденсато-
ра с таким расчетом, чтобы знак крутизны характеристики эле-
мента УЭ2 не менялся, оставаясь равным своему устойчивому зна-
чению.
Далее будем расматривать лишь вырожденный, но зато весьма
характерный для практики случай, когда инерционность электрон-
ной ветви управления значительно меньше инерционности механи-
ческой. В этом случае механическую ветвь подстройки можно рас-
сматривать как некоторый изодромный регулятор и считать вно-
симую ею расстройку медленно меняющейся.
Точнее предположим, что всякому положению ротора конден-
сатора подстройки при его движении соответствует установивший-
ся режим в электронной части схемы. Это может быть либо режим
удержания, либо режим биений. Как в режиме удержания, так и
в режиме биений устойчивую в «малом» обычную систему ФАПЧ
можно рассматривать как некоторый симметричный нелинейный
частотный детектор, поскольку среднее значение напряжения на
выходе фазового детектора при йн¥=0 также не равно нулю, а его
знак определяется знаком начальной расстройки и, в режиме бие-
ний, знаком действительной части комплексного коэффициента пе-
редачи фильтра нижних частот на частоте биений.
29Щ
Можно показать, что если в электронной ветви подстройки
включен фильтр не выше первого порядка, то независимо от ре-
жима
sign 5уэ cos <р = sign ун, ^(^55)
где 5Уэ1 — крутизна характеристики элемента УЭ^ соэф =
1 т
= lim — f cos <pdt.
T J
Действительно, для системы ФАПЧ второго порядка предель-
ный цикл, как показано в [44], располагается целиком в одной фа-
зовой полуплоскости, определяемой знаком ун.
Для систем с более сложными фильтрами всегда можно ука-
зать такую область 0<ун<Ункр, в которой выполняется равен-
ство (7,55).
Если условия устойчивости в «малом» выполняются, то в систе-
ме с фильтрами первого порядка имеется тенденция вращения
электродвигателя только в сторону снижения мгновенной остаточ-
ной расстройки обоих генераторов. Если бы сухого трения не была
(z = 0), то двигатель начал бы вращаться при любом значении ча-
стоты биений и захват произошел бы при условии
Уз<Узэ+Уум, [2 = 0], (7.56)
где узэ=^зэ/^уэ—относительная полоса захвата, обеспечиваемая
только электронной ветвью, уум = йум/йуэ — относительная вноси-
мая электромеханической ветвью расстройка.
Сравнительно большая инерционность системы двигатель—ре-
дуктор и сухое трение в ней приводят к тому, что двигатель начи-
нает устойчиво вращаться независимо от частоты биений только
в том случае, если
|cos ф| > z. (7.57)
При определении полосы захвата с учетом сухого трения удоб-
но вначале предполагать, что в момент включения расстройка,
вносимая элементом УЭъ, равна нулю.
На практике чаще встречается случай, когда положение ротора
конденсатора в момент включения неопределенно. В этом случае
из найденной величины у3 нужно вычесть наибольшее значение
расстройки, вносимой электромеханической ветвью в момент вклю-
чения. Среднее значение косинуса разности фаз в режиме биений
при неподвижном роторе электродвигателя согласно ф-ле (4.122)
хорошо аппроксимируется выражением
СОЭф =
/Тб+^-Тб
R
(7.58)
Подставляя ф-лу (7.58) в (7.57), можно найти критическое зна-
чение частоты биений убт, при которой двигатель запускается, из
выражения
У Тбт+Я8 — Тбт
-------£-------
(7.59)
10*
291
Если найденное значение убт удовлетворяет неравенству
/ /?(Тбт) [1 —(Тбт)]
2-Я(Убт)
(7.60)
то частота биений неустойчива даже при неподвижном роторе
электродвигателя и полоса захвата определяется только электрон-
ной ветвью подстройки. Ее приближенное значение
Узэ = >2/?-/?2.
(7-61)
Если же неравенство (7.61) не выполняется, то частота биений
оказывается неустойчивой только при запуске двигателя. Полоса
захвата, являющаяся суммой критического значения частоты бие-
ний и вносимой расстройки, при этом:
Уз=Убт + г, [Убт < Узэ1- Уум—z], (7.62)
Уз = Узэ “Ь Уум> [Убт -> Узэ ' ’ Уум ^]. (7.63)
Равенство (7.62) определяет наибольшую начальную расстрой-
ку, при которой запускается двигатель.
Захват происходит в том случае, если неравенство (7.57) выпол-
няется для О^уб^убт. Полоса захвата не может превысить свое-
го максимально возможного значения, определяемого равенст-
вом (7.63).
На рис. 7.4 показан способ нахождения решений ур-ния
Так, точка А пересечения
кривой 1 с уроинем тро-
гания z соответствует ре-
шению ур-ния (7.59), ког-
да неравенство (7.60) вы-
полняется. Точки Б и В
пересечения -кривыми 2
и 3 уровня трогания со-
ответствуют решению ур-
ния (7.59) для случаев,
когда неравенство (7.60)
не выполняется.
Напомним, что выра-
жения (7.62) и (7.63) от-
носятся к случаю, когда
coscp = z для двух различных случаев.
Рис. 7.4. К определению полосы захвата в
системе ФАПЧ с интегрирующим электро-
двигателем
в момент включения си-
стемы расстройка, вносимая электромеханической ветвью, равна
нулю. Если в этот момент положение управляющего элемента УЭ2
неопределенно, то за -счет вносимой им расстройки частота биений
может оказаться выше критической, ротор двигателя останется
неподвижным и захвата не будет. Поэтому из правой части выра-
жения (7.62) следует вычитать максимально возможную расстрой-
292
ку, вносимую элементом УЭ2 в момент включения. В результате
приходим к следующим равенствам:
v,=v.,-v„. [%, < <7-64>
Т. =V» + Z-TW [ /«V» < v.>+ 2 V„~4 (7.65)
Уз = Ysa-!-Уум’ [Убт УзэТ" 2 Уум z]. (7.66)
Эти выражения позволяют сделать следующие выводы:
1. При большом относительном напряжении трогания и произ-
вольном начальном положении неподвижного ротора конденсатора
подстройки полоса захвата в системе с интегрирующим двигате-
лем меньше, чем полоса захвата, обеспечиваемая только электрон-
ной ветвью подстройки. При этом увеличение максимальной вноси-
мой электромеханической ветвью расстройки приводит к сужению
полосы захвата вплоть до нуля.
2. С уменьшением относительного напряжения трогания полоса
захвата быстро возрастает.
3. При очень малом относительном напряжении трогания уве-
личение максимального вносимого электромеханической ветвью
отклонения частоты приводит к такому же увеличению полосы
захвата.
В качестве примера рассмотрим систему с пропорционально-
интегрирующим фильтром в электронной ветви подстройки при
В этом случае можно считать /?(уб)==т. Подставляя
это значение в равенство (7.59), находим
m(l—22) т ,п
(7.67)
Тогда условие (7.60) принимает вид:
2z угт(1^т) > ту'2 — т. (7.68)
Учитывая, что обычно уум^>1, для рассматриваемой системы
вместо равенства (7.64), (7.65), (7.66) можно записать следующие
приближенные выражения:
у, _ , (7.69)
Т„ + г. [У "i'-y - < 2 г1 .
(7.70)
у3 = р'2т—m2+уум, Г-Т^> угт—т2+2уум—z] . (7.71)
В заключение заметим, что для расширения области устойчи-
вости в «целом» рассмотренной системы следует принимать все
меры, ведущие к ослаблению влияния гистерезиса в электромеха-
293
нической ветви, обусловленного сухим трением. Например, в ре-
жиме биений присутствие на входе двигателя, кроме постоянной
составляющей, также и переменного напряжения управления —
явление положительное, так как оно ослабляет силы сухого тре-
ния. Ослабить влияние сил сухого трения можно, специально под-
водя ко входу двигателя постороннее низкочастотное напряжение
на время переходного процесса. Такой же результат получается
при создании в течение этого промежутка времени механической
вибрации системы двигатель—редуктор.
Наиболее простым и надежным способом расширения области
устойчивости является увеличение усиления в цепи фазовый де-
тектор—двигатель. Снижение запаса устойчивости в «малом» при
этом легко компенсируется уменьшением коэффициента передачи
редуктора.
В. М. Сафоновым предложен электронный интегратор, позволя-
ющий осуществить астатическую систему ФАПЧ [1970, 24]. Струк-
турная схема такой системы показана на рис. 7.5. Она представ-
Рис. 7.5. Структурная схема системы ФАПЧ с
мектронным интегратором
ляет сооои обычную систему ФАПЧ, дополненную специальным
регулятором (обведен пунктиром), который обеспечивает астати-
ческий режим работы системы. Дополнительный регулятор состоит
из двух генераторов ПГ2 и ПГ3, управляемых в противофазе по
частоте сигналом с выхода основного фазового детектора ФД\ и
вспомогательного фазового детектора ФД2.
Очевидно, что напряжение на выходе детектора ФД2, т. е. и2,
связано с напряжением на входе регулятора щ зависимостью
. ц2(/)^=Д2А2
ф(0) Ч" ^н2 Ч" J(5уЭ2 Ч" ^уэз) «х (^)
о
(7.72)
где U2 — максимальное выходное напряжение детектора ФД2, Зуэ2
и 5Уэз — крутизны характеристик управляющих элементов УЭ2 и
УЭ3 соответственно, ЙН2— начальная расстройка генераторов /7Г2
и ПГ3, F2 — нормированная характеристика фазового детектора
ФДг, ф(0) —начальное значение разности фаз.
294
Уравнение системы ФАПЧ, как показано В. М. Сафоновым, при
этом приобретает вид
р ф + Qyl К (р) Fi (ф) + Пу2 F2
ф(0) + ЙН2^+^2вЛ(ф)^ =QH(7.73)
о
Здесь Йгз= ^1(5уэ2+5уэз),ЙУ2 = 5Уэ1^/2> Ui — максимальное выход-
ное напряжение фазового детектора ФД1, Qyi = Sy3iC\, QH— началь-
ная расстройка генераторов ЭГ и ПГ.
Очевидно, что это уравнение можно представить в виде систе-
мы двух уравнений:
р Ф + Йу1 К (р) Fl (ф) + йу2 Л- (х) = QH, (7.74)
рх = fiH2 + fi23 Fx (ф). (7.75)
Для определения условий равновесия положим все производ-
ные равными нулю. При этом:
Оу1Е1(ф0) + Йу2Е2(х0)=Йн, (7.76)
£2^ = —Оаз Fx (ф0). (7.77)
Из последнего уравнения следует, что в состоянии равновесия
величина фо не зависит от начальной расстройки Йн так же, как и
в астатической системе. Она определяется лишь постоянной вели-
чиной Йн2. Отсюда следует, что при изменении частоты эталонного
сигнала относительно частоты подстраиваемого генератора (или
наоборот) в системе в режиме удержания фазовая ошибка сохра-
няется неизменной, т. е. система обладает идеальным астатизмом.
При этом полоса удержания, как показано автором этой системы,
равна Йу2.
В режиме биений система работает как поисковая астатиче-
ская (см. гл. 8), причем от величины Йнг-Йгз* зависит нормирован-
ная скорость поиска, а вид функции Е2 определяет закон поиска.
Если необходимо уменьшить зависимость разности фаз эталон-
ного и подстраиваемого генераторов от Йнг/Йгз, то следует стре-
миться обеспечить стабильность и идентичность генераторов ПГ2
и ПГ3, а также увеличить глубину управления, т. е. Й2з.
Глава 8
ПОИСКОВАЯ СИСТЕМА ФАПЧ
8.1. ОБЩИЕ СВЕДЕНИЯ
В последние годы для смягчения противоречия между расши-
рением полосы захвата и повышением фильтрующей способности
обычной системы ФАПЧ прибегают к принудительному изменению
частоты подстраиваемого генератора, что позволяет обеспечить
условия захвата. Такие системы в дальнейшем будем называть
поисковыми [1969, 57].
Структурная схема одного из вариантов такой системы приве-
дена на рис. 8.1. Если разность частот эталонного и подстраивае-
мого генераторов лежит вне полосы захвата, то индикатор захвата
ИЗ запускает систему поиска
СП, с которой через сумматор
С на управляющий элемент
УЭ поступает сигнал требуе-
мой формы (как правило, ли-
нейно изменяющийся во вре-
мени). При этом частота под-
страиваемого генератора будет
меняться до тех пор, пока раз-
ность частот не окажется в
пределах полосы захвата. После этого в системе ФАПЧ устанав-
ливается режим удержания и система поиска, как правило, от-
ключается.
При линейном и безынерционном управляющем элементе диф-
ференциальное уравнение поисковой системы, по существу, совпа-
дает с дифференциальным уравнением обычной системы ФАПЧ,
работающей под воздействием эталонного сигнала с переменной
частотой. Поэтому, считая для удобства /7(<p)=sincp, это уравне-
ние можно записать в виде:
Р (ф) + К (Р)ЙУ sin Ф=ЙН + /(/). (8.1)
Здесь f(t) —функция, характеризующая закон поиска.
296
г ИЗ -•СП пг
Рис 81 Структурная схема поисковой
системы ФАПЧ
Первые исследования ур-Н'ия (8.1) применительно к поисковым
системам с линейным поиском по частоте выполнены в [1957, 10;
1962, 10; 1963, 9, 17; 1965, 18; 1966, 50; 1969, 57].
Во многих случаях используется астатическая поисковая си-
стема, в которой К(р) =Н(р) + (Тир)~1, где Н(р)—передаточная
функция обычного нч фильтра. Астатическая система позволяет
устранить зависимость установившейся фазовой ошибки от на-
чальной расстройки и, кроме того, при линейном законе поиска
обеспечивает неизменность ошибки во времени.
В дальнейшем для простоты будем считать, что f(t) = at и
К(р) = 1 + 1/Т11р. Тогда ур-ние (8.1) примет вид:
7,иР2ф + йу5Н1ф + йу7,исо8ф -^-=аТи. (8.2)
Вводя новую переменную т=]/ Йу7“'t, можно переписать это
уравнение в следующей форме:
Ф8 ф cos ф-|-sin ф =ат, (8.3)
где е = ;/Лйу Ти, ат = а Ти .
Полученное уравнение при ат = 0 переходит в ур-ние (7.17)
обычной астатической системы.
Качественная сторона явлений в системе, описываемой ур-нием
(8.3), при положении равновесия в ней типа фокуса освещена в
[1966, 50].
Если скорость поиска мала (ат мало), то фазовый портрет си-
стемы имеет вид, изображенный на рис. 8.2а. Его характерной
особенностью является наличие единственного неустойчивого пре-
дельного цикла второго рода NN\, лежащего в верхней полуплос-
кости. При этом выходящая из точки cpoi—2л сепаратрисса Si про-
ходит ниже, чем входящая в точку ф01 сепаратрисса S2. Очевидно,
что захват будет иметь место для всех тех начальных условий, при
которых изображающая точка на фазовой плоскости оказывается
ниже предельного цикла.
При повышении скорости поиска до критической (ат = аткр) не-
устойчивый предельный цикл опускается и касается оси абсцисс,
сливаясь с полуустойчивый предельным циклом, образующимся
от слияния сепаратрисе (рис. 8.26). В этом случае, как и ранее,
захват обеспечивается для начальных условий, лежащих ниже
предельного цикла.
Если скорость поиска превышает критическую, то предельный
цикл исчезает (рис. 8.2ц), а между сепаратриссами образуется
своеобразный «коридор», по которому траектории переходят из
нижней полуплоскости в верхнюю. В этом случае, в отличие от
двух предыдущих, не существует такого значения ф, при котором
захват осуществлялся бы для любого ф. Захват происходит толь-
ко при определенных начальных условиях, когда изображающая
точка лежит в заштрихованной области.
297
Рис. 8.2. Фазовые портреты поисковой системы ФАПЧ второго порядка
В случае дальнейшего увеличения скорости поиска для ат>1
захват становится невозможным (рис. 8.2г).
При изменении направления поиска фазовый портрет повора-
чивается вокруг оси абсцисс на 180°.
Из фазовых портретов, построенных для принятой модели, сле-
дует, что в режиме удержания состояния равновесия системы
устойчивы асимптотически. В реальных системах характеристика
298
управляющего элемента имеет зону насыщения, поэтому состояние
равновесия будет устойчиво на конечном интервале Тм = £2умакс/а,
где Вумаке — максимально возможная расстройка, вносимая уп-
равляющим элементом. Для расширения интервала устойчивости
необходимо при достижении режима удержания снимать поиско-
вое воздействие.
Для получения количественных оценок бифуркационных значе-
ний параметров системы можно воспользоваться одним из мето-
дов, изложенных в гл. 4. В частности, в [1965, 18] методом кусочно-
линейной аппроксимации характеристики F(q>) были найдены усло-
вия образования полуустойчивого предельного цикла, образован-
ного слиянием сепаратрисе, т. е. найдено значение
_ 2 1 — А
°ткр~ я
(8-4)
где
h = ехр
0,5е
у 1—0,25е3
к—2 arc tg
1 Л 1 + 0,25 е3
У 1 — 0,25 е3
При 8<С 1 из ф-лы (8.4) получаем аТкр=ел/8. Очевидно, что если
а<аКр, то еще нет гарантии захвата, поскольку начальные усло-
вия могут оказаться такими, что изображающая точка будет рас-
положена выше предельного цикла (рис. 8.2а). Тем не менее это
условие является достаточным, если, кроме того, предположить,
что в начальный момент ср^О.
Для более полного исследования системы обратимся к методу
усреднения.
8.2. ПОИСКОВАЯ АСТАТИЧЕСКАЯ СИСТЕМА ФАПЧ
Исследование системы ФАПЧ второго порядка
методом усреднения
Уравнение (8.3) удобно переписать в виде системы двух диф-
ференциальных уравнений первого порядка:
—esinq>, (8.5)
dx
—sin (р. (8.6)
d х
В дальнейшем будем полагать параметры е и ат малыми. При
равенстве этих параметров нулю система вырождается в консер-
вативную. Введя функцию
V = ^- + 2sin2-^-, (8.7)
299
можно с помощью ур-ний (8.5) и (8.6) записать
У=хат—esin2(p=e(fct—sin2 ф), (8.8
где b =а^е.
Это уравнение при ун = ат, 82=0 и ei = e совпадает с ур-нием
(4.60). Поскольку параметры ат и е предполагаются малыми, то
V — медленно меняющаяся функция. Поэтому, используя принцип
усреднения, можно перейти от ур-ния (8.8) к уравнению, усред-
ненному по траекториям порождающей консервативной системы
[(8.5) и (8.6) при 8 = ат = 0], аналогично тому, как это сделано при
переходе от ур-ния (4.60) к (4.65). В результате получаем, что
усредненное уравнение движения для V является частным случаем
ур-ний (4.72) и (4.73) при ун=ат, 82=0и e=8i:
2itaTsignx—е-|-., [V>2], (8.9)
где k = у2/V, и
— = _18*1(2Е—В), [У<2], (8.10)
d т 3 К
где k = y V/2.
На рис. 8.3 представлены фазовые портреты рассматриваемой
системы для различных значений параметра Ь = ат/8. Этот рисунок
показывает, что в системе в зависимости от величины параметра
V =_1
dx 2йК
b = aje может быть либо два состояния равновесия (при &^&Кр),
либо три (при &<&Кр). В первом случае состояние равновесия в
точке Vo(O,O) устойчивое, в точке Vi(2,0) — неустойчивое. Точка
V) соответствует неустойчивому предельному циклу второго рода,
образованному от слияния полуустойчивого сепаратриссного цик-
300
ла и неустойчивого цикла второго рода (рис. 8.26). Во втором
случае, т. е. при Ь<Ькр, точка Vo характеризует устойчивое состоя-
ние равновесия, точка Vi— полуустойчивое, а точка Уг (или Vj
и т. д.)—неустойчивое, соответствующее неустойчивому предель-
ному циклу второго рода в исходной системе ФАПЧ (см. рис. 8.2а).
Из приведенного семейства портретов следует, что если в на-
чальный момент при b<bKp V<V^ (или V2, V3 ..., Vn), то в систе-
ме происходит захват. В противном случае функция V, а следова-
тельно, и разность частот непрерывно возрастают.
Для нахождения условий захвата необходимо выразить коор-
динаты точек Vn через параметры системы. Полагая в ур-нии (8.9)
dV/d%=Q, имеем
3 л
4 &
(8.Н)
Зависимость Уп = ((От/е), построенная по этой формуле, пока-
зана на рис. 8.4.
При b>bItp и V<2, как следует из метода усреднения, захват
происходит. Следует, однако, помнить, что значение b не должно
значительно превосходить Ькр, иначе
будут нарушены условия применимо-
сти принципа усреднения в принятой
форме. Величина 6кр определяется ус-
ловием Уп = 2, т. е. \
новесия от параметров
вой системы ФАПЧ
порядка
Рис. 8.4. Зависимость коорди-
наты точки неустойчивого рав-
поиско-
второго
4
3 л
, ат кр
^кр = -Г-
(8.12)
непо-
(8.10)
Полученное выражение при 8<<1
близко к найденному методом полиго-
нальной аппроксимации в (1965, 18]
выражению (8.4).
При Ь^1/е (ат^1) в системе, как
уже указывалось, отсутствуют 'состоя-
ния равновесия и, следовательно, за-
хват невозможен ни при каких на-
чальных условиях.
Время установления режима удержания определяется
средственным численным интегрированием ур-ний (8.9) и
так же, как и в разд. 4.8. Первое из них описывает процесс уста-
новления частоты, второе — разности фаз.
Рассмотрим теперь случай, когда Тф^уА»!. Введем новый па-
раметр r = Qy6, тогда ур-ние (8.3) можно записать в виде системы
двух уравнений первого порядка:
dm
—— ~Х — sin 00,
dt Т’
(8.13)
301
---=(0т—8Н1ф)е. (8-14)
d t
Здесь 8= (QyT^-’C 1.
Уравнение (8.13) описывает быстрое движение в системе, а
ур-ние (8.14)—медленное. Путем усреднения по траекториям
быстрого движения переходим к усредненным уравнениям анало-
гично тому, как это сделано при переходе от ур-ний (4.78) и (4.79)
к (4.86) и (4.87):
— =е(ат—х + [|х|>1], (8.15)
d х
— ^=е(ат—х), [|х)<1]. (8.16)
d т
Соответствующее семейство фазовых портретов показано на
рис. 8.5 для различных значений параметра ат. Рисунок показы-
вает, что при (ат [ < 1 в об-
ласти |х|<1 имеется устой-
чивое положение равнове-
сия |С КООрДИНаТОИ Хо2=0т>
соответствующее положению
равновесия в исходной си-
стеме sinq)02=aT- В области
|х|>1 при | От | < 1 имеется
неустойчивое положение ра-
вновесия, сооответствующее
неустойчивому предельному
циклу в исходной системе с
с координатой Xoi = (1 +
+ а^)/2ат. Очевидно, что при
Рис. 8.5. Фазовый портрет поисковой систе-
мы приТпйу»1 | От I < 1 условие захвата оп-
ределяется выражением
х(0) <xot- Если | ат | >11, то в системе вообще отсутствуют положения
равновесия и захват невозможен ни при каких начальных условиях.
Время установления координаты х определяется прямым инте-
грированием ур-ний (8.15) и (8.16). В частности, интегрируя ур-
ние (8.16) в пределах от х = 1 до хго + б. получаем время установ-
ления фазы:
=1п^:
Т 6
(8.17)
где S>0 — параметр, определяющий окончание переходного про-
цесса.
Таким образом, при ат—>-1—6 время установления сокращается.
302
Исследование системы ФАПЧ высокого порядка
методом гармонического баланса
ЙТКР
Рис. 8 6. Зависимость крити-
ческой скорости поиска от
параметров системы и филь-
тра
На практике встречаются случаи, когда в цепи управления ас-
татической поисковой системы ФАПЧ включен фильтр выше пер-
вого порядка. При этом исследование системы существенно услож-
няется,
Для получения приближенных результатов можно воспользо-
ваться методом гармонического баланса [1969, 38]. Будем считать,
что операторное выражение /передаточ-
ной функции цепи управления имеет вид:
К(р) = Н(р) + 1/Тир. Здесь, как и ранее,
Н(р) — передаточная функция обычного
фильтра нч. Подставляя это выражение
в ур-ние (8.1) и полагая f(t) = at, имеем
рф4-К(р)^уsinф = — =QH . (8.18)
Р
Предположим, что решение /последне-
го уравнения в установившемся режиме
определеятся формулой, совпадающей с
(4.38): ф(7)=фо+й/—PisinQ^. Подстав-
ляя эту формулу в ур-ние (8.18) и отбра-
сывая все высшие гармоники, получаем
систему уравнений гармонического ба-
ланса аналогично тому, как это сделано
в разд. 4.6:
ат =-Л(Р1)зШф0,
(8.19)
уб Pi cos ф = \К (1 Q)| [Jo (рх) + J2 (Pl)] sin фо, (8.20)
уб pi sin ф = \K (i Q)| [ J о (P0—J 2 (pi)] cos ф0. (8.21)
Решив эту систему уравнений, можно найти параметры прибли-
женного периодического решения исходного уравнения.
При критическом значении скорости поиска ат решение систе-
мы уравнений гармонического баланса исчезает. На рис. 8.6 при-
ведена зависимость критической скорости поиска от параметров
системы при Н(р) = 1/(14/Д). Параметром каждой кривой слу-
жит величина 8 = 0,5^ йуТи. При T — Q значение критической ско-
рости поиска совпадает с полученными ранее из выражений (8,4)
и (8.12).
8.3. ПОИСКОВАЯ НЕСТАТИЧЕСКАЯ СИСТЕМА ФАПЧ
В некоторых практических приложениях включение интегра-
тора в цепь управления неудобно. Система ФАПЧ без интеграто-
ра является неастатической. Она имеет ряд особенностей, и ее ис-
следование связано со значительными трудностями.
303
Рассмотрим явления в простейшей поисковой системе ФАПЧ
первого порядка, когда К(р) = \. Уравнение такой системы имеет
вид: '
Рф + Qycos<p (8.22)
Система, описываемая этим уравнением, была исследована в
[1968, 27] с помощью электронной моделирующей установки МН-7.
На рис. 8.7 показана типичная осциллограмма процессов ф(1)
и <р(£). Характерной особенностью этой осциллограммы является
наличие участка замед-
т fit)
Рис. 8.7. Изменение частоты биений и разности
фаз в поисковой системе ФАПЧ
ленного изменения ф дли-
тельностью Atrp. В [1968,
27] введено понятие о
транзитном захвате. Тран-
зитным захватом назы-
вается режим, при кото-
ром производная разно-
сти фаз, приняв нулевое
значение, остается затем
в заданных границах, так
что
Фср— 8<ф<фср + е.
Рис. 8.8. Динамические характеристики по-
исковой системы ФАПЧ
зитного захвата в функции скорости
(8.23)
Здесь фср — значение
разности частот, прибли-
зительно соответствую-
щее середине участка
транзитного захвата.
Ошибка в середине
участка транзитного за-
хвата называется дина-
мической частотной ошиб-
кой fjivm. На рис. 8.8
[1968, 27] приведены за-
висимости относительной
динамической частотной
ошибки и времени тран-
поиока для 8 = 0,25фср. Из
рисунка следует, что с увеличением скорости поиска динамическая
ошибка растет, а время транзитного захва1а падает.
Частотная ошибка во время транзитного захвата меняется от-
носительно слабо, почти линейно возрастая к моменту окончания
транзитного захвата. Если в начале поиска состояние системы
далеко от режима транзитного захвата, то характер изменения
процессов фиф внутри транзитного захвата почти не зависит от
начальных условий. Если считать, тто поиск ведется в направле-
304
нии снижения расстройки, то знак частотной ошибки в режиме
транзитного захвата противоположен знаку начальной расстройки.
В [1969, 57] аналогичным методом исследованы и более слож-
ные поисковые неастатические системы ФАПЧ.
При рассмотрении астатической поисковой системы уже ука-
зывалось на необходимость снятия поискового воздействия по дос-
тижении режима удержания. Совершенно очевидно, что в неаста-
тических системах эта мера тем более необходима. Для ее осуще-
ствления требуется устройство, обнаруживающее состояние систе-
мы, при котором необходимо выключить поисковое воздействие.
Такие устройства называются индикаторами захвата (см. рис. 8.1).
Работа индикатора захвата может базироваться на различных
принципах. Если определять условие захвата по величине q>(t), то
индикатор захвата может работать от выходного сигнала фазово-
го детектора. В этом случае он представляет собой сочетание не-
линейного порогового устройства и накопителя. На практике при-
меняют и другие способы индикации [1969, 57], например, с по-
мощью резонансных устройств, на которые подается сигнал от
подстраиваемого генератора.
8.4. ВЛИЯНИЕ ФЛУКТУАЦИЙ НА РАБОТУ ПОИСКОВОЙ
СИСТЕМЫ ФАПЧ
На практике поисковая система ФАПЧ, как правило, работает
в условиях действия на нее различных возмущений флуктуацион-
ного характера. Общее уравнение системы в том случае, когда
на ее вход вместе с эталонным сигналом попадает флуктуацион-
ный шум, имеет вид:
р Ф + К(р) Оу [sin ф + (/)] = Он + f (/), (8.24)
где ^1(0=77- [A(Ocos<p—C(Z)sinq)] — флуктуационное воздейст-
^ЭГ
вие, пересчитанное на выход фазового детектора, f(t)—детерми-
нированная функция, отображающая поисковое воздействие.
Если в системе наблюдается режим удержания, а разность фаз
эталонного и подстраиваемого генераторов мала, то допустима ли-
неаризация ур-ния (8.24) и, следовательно, можно воспользовать-
ся результатами линейной теории, ранее изложенной для обычной
системы (гл. 6).
Если линеаризация недопустима, то исследование общего ур-
ния (8.24) представляет весьма сложную задачу. В частном случае
астатической системы, линейного поиска и широкополосных флук-
туаций можно воспользоваться теорией марковских процессов,
аналогично тому, как это было сделано для обычной системы
ФАПЧ в разд. 6.6. Так, в работе [1968, 56] получены приближенные
результаты для распределения плотности вероятности фазовой
ошибки при К(р) = 1 + УТ^р. В этой же работе показано, что при
высокой точности действия системы плотность распределения фа-
„ 305
зовой ошибки совпадает по форме с выражением (6.94), прячем
параметры D и Do следует определять как:
2QyT«
К2(14-ТИЙУ) ’
(8.25)
£>о=оТ^О (8.26)
Qy
Здесь Да определяется выражением (6.89), в котором следует
ПрИНЯТЬ 01 = 0.
Рис 8 9 Зависимость вероятности захвата от скорости по-
иска
а) в отсутствие шума, б) при наличии шума
Рис 8 10
захвата от
-----
------^05
— £=0'3
Зависимость вероятности
скорости поиска и коэф-
фициента затухания
Для неастатической системы анализ сильно усложняется даже
при линейном поиске и приходится прибегать к результатам экспе-
риментального исследования, по-
лучаемым путем моделирования
системы. Так, в (1962, 10] приве-
дены результаты моделирования
поисковой системы с пропорцио-
нально-интеприрующим фильт-
ром для rnTfiy^l. При этом ус-
ловии свойства системы ,с RRC-
фильтром, как указывалось в
разд. 7.2, близки к свойствам
астатической системы с переда-
точной функцией цепи управле-
ния вида R(p)= (1+тТр)/Тр.
Это дает возможность при трак-
товке захвата исходить из нар-
тины явлений, характерных для
астатической поисковой системы.
Если задать начальные усло-
вия таким образом, чтобы при
t=Q ф=С0, то, как следует из рис.
8.2п, при (Пт = пТи/^2у)
захват произойдет обязатель-
306
но Если же а>аКр, то захват возможен не при всех начальных
условиях Из рис. 8.2в следует, что захват осуществляется только
в том случае, если изображающая точка пересекает ось абсцисс на
участке АС Вероятность попадания .изображающей точки на этот
участок очевидно есть вероятность захвата. Такое определение
захвата дано в [1965, 18]. Зависимость вероятности захвата от ско-
рости поиска для различных затуханий в системе 8=0,5(7'йу)~/гХ
X (1 + тГйу), полученные в этой работе в предположении, что шум
отсутствует и начальная разность фаз распределена равномерно
на отрезке 0-ь2л, представлена на рис. 8.9. Здесь же показаны
аналогичные зависимости, найденные при наличии шума экспери-
ментальным путем в [1962, 10] для тТйу^>1, 8 = 0,5 и различных
значений параметра Da = 2fiy(l + m7"Qy)/.ЛС2 (1 +т?Т£1у) [К2 — опре-
деляется по ф-ле (6.89) при <Т] = 0], характеризующего уровень
флуктуационного воздействия. Из рисунка видно, что с увеличе-
нием скорости поиска и уровня шума (с уменьшением Da) вероят-
ность захвата падает.
На рис. 8.10 [1962, 10] представлены зависимости вероятности
захвата от скорости поиска при различных параметрах Da и 8. Из
рисунка следует, что большим значениям 8 соответствует более
резкая зависимость вероятности захвата от скорости поиска, если
последняя превышает некоторое критическое значение.
Вопросам оценки вероятности захвата в шумах посвящены ра-
боты [1967, 21; 1968, 20].
Глава 9
СЛОЖНЫЕ СИСТЕМЫ ФАПЧ
9.1. ОБЩИЕ СВЕДЕНИЯ
Как уже указывалось, обычным системам ФАПЧ свойственно
противоречие между расширением полосы захвата и повышением
их фильтрующей способности. Действительно, сужая полосу про-
пускания фильтра в цепи управления и уменьшая полосу удержа-
ния, можно значительно увеличить фильтрующую способность си-
стемы. Однако при этом, как было ранее показано, неизбежно
снижается полоса захвата.
Это противоречие можно отчасти устранить правильным выбо-
ром типа и параметров фильтри и самой системы ФАПЧ в целом.
Полностью его устранить невозможно как в силу ограниченности
максимальной вносимой управляющим элементом расстройки, так
и в силу существования зависимости между амплитудной и фазо-
вой характеристиками фильтров минимально-фазового типа, кото-
рые следует применять в цепи управления системы.
Кроме астатической и поисковой систем, позволяющих смяг-
чить указанное противоречие, получили распространение системы
ФАПЧ с различными дополнительными элементами и устройства-
ми, которые дают возможность также решать ряд разнообразных
практических задач. В дальнейшем эти системы условно будем
называть сложными. К ним относятся комбинированные частотно-
фазовые системы, системы с нелинейными цепями управления, си-
стемы с комбинированным управлением, системы с инерционно-
нелинейными и переменными параметрами и т. п.
Анализу этих сложных систем ФАПЧ и посвящена настоящая
глава.
9.2. СИСТЕМА ФАПЧ С НЕЛИНЕЙНЫМ ФИЛЬТРОМ В ЦЕПИ
УПРАВЛЕНИЯ
Ввести нелинейность в цепь управления (в фильтр нч) с целью
расширения полосы захвата системы при сохранении ее высокой
помехоустойчивости было предложено Ю. В. Эльтерманом и В. С.
308
Дулицким. Позднее различные аспекты теории так-их систем ус-
пешно разрабатывались в работах М. В. Капранова, В. А. Ивано-
ва, Н. Н. Ивановой [1960, 6], Ю. В. Ульяновского [1965, 19], Т. П.
Майковой (1966, 4; 1968, 22]. В. Д. Шалфеева [1969, 65], В. Н. Бе-
лых и В. Д. Шалфеева [1968, 19], М. В. Капранова и Т. И. Наяно-
вой [1967, 31, 32] и других авторов.
Сущность указанного метода расширения полосы захвата со-
стоит в использовании различия уровней переменной составляю-
щей сигналов на выходе фазового детектора в режиме биений и в
режиме удержания при слабой помехе. В этом случае фильтрую-
щую способность системы для слабой помехи можно значительно
увеличить (без снижения полосы захвата), если построить фильтр
таким образом, чтобы при сильном сигнале (в режиме биений) он
имел широкую полосу, а при слабом сигнале (в режиме удержа-
ния) — узкую. Это условие можно реализовать в различных схе-
мах фильтра. В частности, Ю. В. Эльтерманом предложена схема
однозвенного интегрирующего фильтра (рис. 9.1), состоящая из
обычного линейного конденсатора и нелинейного резистора, вольт-
амперная характеристика которого показана на рис. 9.2. Анализ
работы системы ФАПЧ с таким фильтром приведен в [1960, 6].
Нелинейный резистор, как видно из рис. 9.1, состоит из парал-
лельно соединенных линейного резистора и двух включенных на-
Рис. 9.1. Схема нелинейного
??С-фильтра
Рис. 9.2. Вольтамперная ха-
рактеристика нелинейного
элемента
встречу друг другу диодов Д, и Дг с источниками запирающего-
смещения U\ и U2. Регулируя величину запирающего смещения,
можно изменять длину линейного участка вольтамперной харак-
теристики нелинейного сопротивления. Размер этого участка вы-
бирают несколько большим удвоенной амплитуды помехи с тем,
чтобы сопротивление для помехи было высоким (равным 7?). По
мере уменьшения амплитуды помехи можно уменьшать размер
линейного участка, и, следовательно, тем слабее в этом случае
будет проявляться инерционность фильтра при захвате.
Для того чтобы количественно оценить выигрыш, даваемый по-
добным фильтром, необходимо знать модуль передаточной функ-
309
ции и полосу захвата. При расчете фильтрации фазы эталонного
сигнала, вызванной как детерминированной, так и флуктуацион-
ной малой помехой, можно воспользоваться результатами, полу-
ченными для обычного линейного однозвенного /?С-фильтра, счи-
тая, что его постоянная времени определяется сопротивлением ли-
Рис 9 3 Зависимость полосы захвата
•системы ФАПЧ с нелинейным RC-
фильтром от ее параметров
нейного резистора Полосу же
захвата в такой системе нетрудно
определить с помощью рассмот-
ренных ранее приближенных ме-
тодов исследования устойчивости
системы ФАПЧ.
В работе (1960, 6] полоса зах-
вата определялась методом сши-
вания фазовых траекторий при
полигональной аппроксимации
характеристики фазового детек-
тора. На 1рис. 9.3 приведены ре-
зультаты вычисления у3, как
функции безразмерной постоян-
ной времени (8/л) 7Т2У и отноше-
ния Н величины смещения на
диодах к максимальному напря-
жению на ныходе фазового де-
тектора.
Следует заметить, что, как
показано в [1960, 6], при Д-><х>
полоса захвата стремится к ве-
личине уа(оо) = 1—Н Очевидно, что уровень асимптоты получает-
ся тем выше, чем меньшей выбрана величина Н. Последняя опре-
деляется уровнем помех.
Из рисунка видно, что, например, при 77 = 0,1 (амплитуда по-
мехи составляет 10% от максимального напряжения на выходе
фазового детектора) и постоянной времени Д = 100 полоса захвата
снижается не более чем на 10%. В то же время в соответствии с
ф-лой (5.20) фильтрация высокочастотных гармонических помех
получается весьма высокой.
Однако применять подобную схему для повышения фильтрации
слабых гармонических помех нужно с известной осторожностью,
так как при большой постоянной времени частотная характеристи-
ка девиации разности фаз имеет значительный пик в области ниж-
них частот. Поэтому при ее конструировании следует позаботить-
ся о том, чтобы этот пик не совпадал по частоте ни с одной ча-
стотной составляющей помехи.
В [1960, 6] предполагалось, что в момент отпирания диодов пос-
тоянная времени фильтра равна нулю. Анализ с учетом конечности
постоянной времени фильтра проведен в (1970, 26].
Нелинейный интегрирующий фильтр может быть выполнен с
помощью линейного сопротивления и нелинейной емкости. В та-
310
ком фильтре необходимо применять конденсатор, емкость которо-
го уменьшается с увеличением приложенного к нему напряжения.
Подобная зависимость показана на рис. 9.4. Представим эту за-
висимость в виде
(9.1>
Здесь Со — максимальное значение емкости (при ес = 0)г
Ф(вс) — нормированная характеристика нелинейного кон-
денсатора, при которой Ф(0) =
— 1, и Сфдмакс — максимальное
напряжение, вырабатываемое
фазовым детектором.
Дифференциальное урав-
нение системы с нелинейной
емкостью в фильтре можно
представить в виде [1969, 7]:
(9.2) Рис 9 4 Характеристики нелинейного
конденсатора
Т^.ф^н_^ + йх + йур((р)=йн.
ш \ Ь2у /
(9.3)
Здесь T=RCq — максимальная постоянная времени. В дальнейшем
в качестве нелинейной функции Ф(-) примем
(9.4)
Qx
ak Ун - —
Ьйу j
Подставляя ф-лу (9.4) в ур-ния (9.2) и (9.3) и вводя относи-
тельное время т=/йу/П, получаем:
dx
(9.5)
^L = _F(<p) 1-j-у]ай|ун —8x|* +
d x
i
*=i
(9.6)
где 8 = 1/]/ГЦ,, x = j/T;Qy.
31 L
Полагая в дальнейшем параметры е -и ун малыми, можно для
исследования системы (9.5), (9.6) воспользоваться принципом ус-
реднения. С этой целью введем функцию
У=-у + (Ф1)<*4>1.
О
(9.7)
Производная этой функции по времени, вычисленная на осно-
вании ур-ний (9.5) и (9.6), имеет вид:
UV / \
— =*(ун—ех)
а т
1 + ex|ft — F(<p)xJJaft|yH — ex]*. (9.8)
J *=i
При малых ун и е это уравнение описывает медленное движе-
ние в системе, что позволяет усреднить его по траекториям порож-
дающего (-\Р=-е=0) решения, аналогично тому, как это сделано
при переходе от ур-ния (4.60) к (4.65).
Для функции Ф(’) вида (9.4) вычисления в общем случае чрез-
вычайно громоздки. В дальнейшем примем п=1. Тогда усреднен-
ное уравнение для V при 77(<p)=sin<p принимает вид:
dV 1 Го . 8Е . |о 8Е| .
2icyHsignx—е—+ унах 2лун—е— signx —
—0-18 |ун ~ — 4 к е — 1 jsign х |, [V>2], (9.9)
где k =-- У 2/V и
~~ = [е 16 F В—аге ун 16 А2 В sign хф- ate ] ун-16#2 В —
— 16е[(2&2— l)arcsin£—уЛ£2(1—£)]sign х|, [V<2], (9.10)
где k = \'V/2.
Стационарные состояния функции V определяются уравнением
dV/dr=0.
По аналогии с изложенным в разд. 4.5 можно убедиться в том,
что полоса захвата связана с условиями исчезновения в области
V>2 точек равновесия. При этом точка V=2 становится полу-
устойчивой.
Приравнивая выражение в квадратных скобках ур-ния (9.9)
нулю при V=2 и signx=l, находим условие захвата:
у3 = —е+2ахе2. (9.11)
Л
Очевидно, что при a.i = 0 это выражение совпадает с (4.74) для
полосы захвата линейного интегрирующего фильтра (т=0). Таким
образом, наличие монотонно убывающей зависимости емкости кон-
312
денсатора фильтра от приложенного к нему напряжения приводит
к повышению полосы захвата.
Аналогично можно найти полосу захвата и при более сложных
характеристиках конденсатора. В [1968, 19] проведено качествен-
ное исследование и даны
результаты численных рас-
четов на ЭЦВМ для харак-
теристик Ф(-) вида:
ф --------)= 11 [—И<У<Н^
V Ф’“1' (9.12)
а также при
Ф(У)=7-2— • (9.13)
Соответствующие графи-
ки зависимости полосы зах-
вата от параметров системы
приведены на рис. 9.5
[1968, 19]. Эти графики под-
тверждают возможность
увеличения полосы захвата
при введении нелинейной
емкости в фильтр нижних
частот. Более того, из них
следует, что качественный
характер зависимости поло-
сы захвата от параметров
системы сохраняется при пе-
реходе от нелинейности вида
Рис 9 5 Зависимость полосы захвата от
параметров системы ФАПЧ с нелиней-
ным фильтром
.12) к нелинейности вида (9.13).
В [1969, 7] указан метод приближенного определения полосы
захвата при произвольной характеристике фазового детектора,
близкий к методу усреднения. В [1971, 1] рассмотрено влияние шу-
мов на работу системы с нелинейной емкостью. Показано, что при
воздействии больших флуктуаций такая система может оказаться
неэффективной. Для слабых флуктуаций можно воспользоваться
результатами линейной теории обычной системы ФАПЧ. Динамика
системы ФАПЧ с фильтром из нелинейного сопротивления и нели-
нейной емкости рассмотрена в [1969, 9].
9.3. СИСТЕМА ФАПЧ С ИНЕРЦИОННО-НЕЛИНЕЙНЫМИ
ПАРАМЕТРАМИ
На практике часто применяются системы ФАПЧ с инерционно-
нелинейными параметрами. Рассмотрим работу такой системы
[1954, 7]. Ее упрощенная схема представлена на рис. 9 6а Элемен-
313
ты ФД\, УЭ1г ПГ и фильтр ФНЧХ образуют обычную систему
•ФАПЧ. Остальные элементы носят вспомогательный характер и
обеспечивают регулирование коэффициента передачи цепи управ-
txoi
вихов
Рис. 9.6. Структурные схемы системы
ФАПЧ с инерционно-нелинейными
параметрами:
а) общая; б) с катодным повторите-
лем; в) с пропорционально-интегри-
рующим фильтром
ления (между фазовым детектором ФД\ и управляющим элемен-
том УЭ1) в зависимости от величины начальной расстройки.
Для повышения фильтрующей способности системы без сниже-
ния относительной полосы захвата необходимо, чтобы в режиме
удержания коэффициент передачи цепи управления был малым, а
в режиме биений — большим. Это достигается регулированием ко-
эффициента передачи фильтра ФНЧ{.
Регулирующий сигнал образуется на выходе фазового детекто-
ра ФД%, на вход которого через фазовращатель ФВ подается на-
пряжение от подстраиваемого генератора ПГ, сдвинутое по фазе
-относительно входного напряжения ФД\ на 90°. Фильтр ФНЧ2
устраняет переменную составляющую выходного напряжения ФД%
Постоянная составляющая этого напряжения поступает на управ-
ляющий элемент УЭ2, который в зависимости от величины сигнала
на его входе изменяет полосу пропускания фильтра ФНЧ2.
Поскольку напряжения на фазовых детекторах взаимно сдви-
нуты по фазе на 90°, постоянное напряжение на выходе ФД2 мак-
симально по модулю только при нулевой начальной расстройке.
314
При увеличении начальной расстройки независимо от ее знака по-
стоянное напряжение на выходе ФДг уменьшается и коэффициент
передачи цепи управления увеличивается.
В режиме биений постоянная составляющая на выходе ФД2
близка к нулю, и полоса захвата получается большой.
В режиме удержания полоса пропускания фильтра ФНЧХ ока-
зывается узкой, что обеспечивает высокую помехоустойчивость,
всей системы.
На рис. 9.66 и в показаны два варианта рассматриваемой схе-
мы. В первой из них (рис. 9.66) коэффициент передачи цепи уп-
равления изменяют путем регулирования коэффициента передачи
катодного повторителя, выполненного на лампе Лх, через который
часть переменного напряжения с выхода ФД\ поступает непосред-
ственно на вход УЭь Во второй схеме (рис. 9.6в) регулирующий
сигнал, поступающий с выхода фильтра ФНЧ меняет выходное
сопротивление лампы Ль тем самым изменяя коэффициент пере-
дачи пропорционально-интегрирующего фильтра.
Уравнения подобной системы при использовании в ней пропор-
ционально-интегрирующего фильтра ФНЧХ с постоянной времени.
Т, коэффициент m которого зависит от управляющего напряжения
и интегрирующего фильтра ФНЧ2, с постоянной времени Т\, мож-
но по аналогии с (4.78) и (4.79) записать в виде:
Ф=хг—cos гр, (9.14>
= е {ун — (У) — [ 1 — пг (у)Гсоз <р), (9.15>
f/ = ei(—t/ +sirup). (9.16}
Здесь е= l/m2(t/) ГЙу, 1/ = м/^фд2 макс максимальное напряже-
ние на выходе детектора ФДг. Дифференцирование ведется по без-
размерному времени T = m(t/)Qy^.
Полагая в дальнейшем параметры е и ei малыми, воспользуем-
ся принципом усреднения. В результате усреднения по быстрому
движению (9.14) получаем систему уравнений, описывающую дви-
жение медленно меняющихся координат:
*1 = е{Ув~«(^Xj—[1—щ(у)]/х2—1 }, [1<Ы], (9.17}
У^—ЧУ, [1<Ы1, (9-18}
-«i = 8{Yh—Xi}, (И <Ц, (9.19}
f/=e1( — у+ /1— х2), []х11<1]. (9.20}
Практически интересен случай, когда инерционность фильтра
ФНЧ2 велика по сравнению с инерционностью ФНЧХ. Это озна-
чает, что е^е.
315
Применяя к ур-ниям (9.18) и (9.20) процедуру усреднения по
«быстрому» движению {ур-ния (9.17) и (9.19)], получаем уравнение,
описывающее движение самой медленной координаты:
у^—^у, [1<|Х1|], (9.21)
У= — ЧУ + е117 1— [IXj.|<1]. (9.22)
Очевидно, что при т-*оо координата у стремится к величинам:
t/ol = 0, [1<М, (9-23)
IW<U. (9.24)
Для дальнейших рассуждений необходимо ввести конкретную
зависимость параметра пг от у. Очевидно, что для расширения по-
лосы захвата необходимо, чтобы с уменьшением у коэффициент
.т увеличивался. Примем условно следующую упрощенную зависи-
мость:
т(у)=т0<^1, [уг<у], (9.25)
т(у) — 1> [У<Уг1 (9-26)
Здесь у2 — пороговое значение у, при котором переключается
параметр т.
Рассмотрим, как будет происходить захват в системе. Предпо-
ложим, что в начальный момент t/(O)>t/z, т. е. т = т0,
У2т0—т5<ун<1 и *1(0)>1. Тогда, как показано в разд. 4.5, в
системе, описываемой ур-нием (9.17), режим будет стремиться к
стационарному устойчивому состоянию
Yh+(1— m)/ (2 m—m!)
X1 2m — tri*
и в соответствии с ур-нием (9.22) у-+0.
В некоторый момент времени станет справедливым равенство
у = уг и коэффициент пг изменится от т0 до 1. При этом, естествен-
но, в соответствии с,ур-нием (9.17) в области 1< |xi| исчезнут
точки равновесия, Х| будет стремиться к величине ун<1 и прои-
зойдет захват. После этого значение у начнет возрастать в соот-
ветствии с ур-нием (9,22), стремясь к величине ут.
Если t/02< V1—Yh> т0 параметр пг изменяется от 1 до mQ, что
обеспечивает в режиме удержания высокую помехоустойчивость.
Если же уо2> I 1—Yh’ т0 параметр пг не .изменяется и помехоус-
тойчивость системы оказывается низкой. Таким образом, полоса
захвата в системе равна полосе удержания (как и в системе пер-
вого порядка), тем не менее область начальных расстроек, в ко-
торой помехоустойчивость системы повышена, не превышает ве-
личины
YH3C/b=& (9-27)
316
Практически снижению величины yz препятствует наличие в
режиме биений на выходе ФДг небольшой постоянной составляю-
щей, которая в реальных системах всегда имеет место.
Помехоустойчивость рассмотренной системы исследовалась в
[1967, 12]. Основной вывод состоит в том, что система обладает хо-
рошей помехоустойчивостью только при небольшой интенсивности
шума. При увеличении интенсивности шума сверх критической эф-
фективность системы резко падает в связи со снижением постоян-
ной составляющей на выходе ФДг в режиме удержания.
9.4 . СИСТЕМА ФАПЧ С ДОПОЛНИТЕЛЬНЫМИ ФАЗОВЫМИ
РЕГУЛЯТОРАМИ
Частичное разрешение противоречия между требованиями ши-
рокой полосы захвата системы и ее высокой помехоустойчивости
возможно не только за счет расширения полосы захвата при по-
стоянной фильтрующей способности, но и за счет снижения шумо-
вой полосы системы при постоянной полосе захвата. Такое нап-
равление можно реализовать с помощью принципа компенсации
возмущений, предложенного Г. В. Щипановым [69]. Общие вопро-
сы теории подобных систем изложены в [70, 71].
Принцип компенсации позволяет решать различные задачи и
создавать наиболее совершенные системы авторегулирования. Наи-
больший интерес в реальных условиях представляет возможность
независимо выбирать передаточную функцию системы и свойства
петли авторегулирования. Благодаря этому удается в известной
степени разрешить противоречие между устойчивостью и фильтру-
ющей способностью системы.
Сущность указанного способа применительно к системам
ФАПЧ состоит в том, что обычная система дополняется каналом
авторегулирования фазы вы-
ходного сигнала [1966, 37].
Этот канал не оказывает ника-
кого влияния на процессы,
протекающие в кольце ФАПЧ,
но позволяет значительно
улучшить фильтрацию помех
на выходе устройства.
Структурная схема систе-
мы, позволяющей осуществить
указанную идею, показана на
рис. 9.7. Она состоит из схемы
обычной системы ФАПЧ, в ко-
|m |—Г~у~|
| кч |------
Рис. 9.7. Структурная схема системы
ФАПЧ с компенсацией помех
ФД, фильтр ФНЧ, управляющий
торую входят фазовый детектор
элемент УЭ, подстраиваемый генератор ПГ, и дополнительного ка-
нала регулирования фазы выходного напряжения, содержащего
корректирующий четырехполюсник КЧ, усилитель У и фазовый мо-
дулятор ФМ.
317
Выше указывалось, что если система ФАПЧ находится в состоя-
нии синхронизма, а эталонный сигнал модулирован помехой, то
на входе управляющего элемента появляется некоторое перемен-
ное напряжение помехи uya(t). Это напряжение вызывает пара-
зитную модуляцию частоты подстраиваемого генератора. Считая,
что характеристика управляющего элемента линейна, можно най-
ти закон отклонения частоты подстраиваемого генератора:
А «пг (0 = 5уэ «уэ (0- (9.28)
Компенсация действия помех, попадающих на вход управляю-
щего элемента, осуществляется следующим образом. Мгновенное
напряжение подстраиваемого генератора, имеющее девиацию ча-
стоты ДйпгбО/ имеет вид;
«nr(0^nrsin
/
«эг “Ь J А «пг (0 dt ф02
О
(9.29)
Интеграл в выражении (9.29) представляет собой закон откло-
нения фазы колебаний подстраиваемого генератора, вызванного
помехой, являющейся функцией времени. Заменяя в нем подын-
тегральную функцию Д(Опг(0 ее значением из ф-лы (9.28), нахо-
дим, что
t
фпг (0 = 5уэ J «уэ(т) dr. (9.30)
о
Если внести в колебание [ф-ла (9.29)] фазовый сдвиг — <pnrfO>
то тем самым можно скомпенсировать влияние помехи.
Таким образом, для полной компенсации помехи корректирую-
щий четырехполюсник должен выполнять функцию идеального ин-
тегратора. Однако при идеальном интегрировании в дополнитель-
ном канале и линейной неограниченной характеристике фазового
модулятора компенсация действия любого напряжения, в том
числе и полезного постоянного напряжения подстройки, присутст-
вующего на входе управляющего элемента, на фазу и частоту вы-
ходного напряжения будет настолько полной, что даже потеряется
полезный эффект подстройки. При этом частота напряжения вы-
ходного сигнала окажется равной частоте подстраиваемого гене-
ратора при разомкнутой петле ФАПЧ. Поэтому для нормальной
работы устройства необходимо, чтобы в корректирующем четырех-
полюснике осуществлялось интегрирование только для переменной
составляющей напряжения. Практически это достигается включе-
нием на входе усилителя У обычной разделительной цепи.
При помощи усилителя У можно регулировать общий коэффи-
циент усиления в дополнительном канале. Это связано с тем, что
применяемые на практике интеграторы (например /?С-цепь) вы-
полняют функции интегрирования только при малом значении ко-
эффициента передачи.
318
Поскольку в приведенных рассуждениях ограничения на вид
функции Uy3(t) не вводились, рассмотренный метод позволяет
устранить паразитную девиацию частоты (фазы) выходного на-
пряжения .системы ФАПЧ, обусловленную как любыми дискрет-
ными, так и флуктуационными помехами без уменьшения полосы
захвата.
В качестве фазового модулятора в рассмотренной схеме можно
использовать четырехполюсники с сосредоточенными и распреде-
ленными регулируемыми параметрами, через которые следует про-
пустить модулируемое колебание, а также системы ФАПЧ
[1966, 47].
В [1963, 18] списана другая разновидность системы ФАПЧ
дополнительным фазовым модулятором, включенным перед фазо-
вым детектором, и двумя петлями обратной связи (рис. 9.8а). Пе-
редаточная функция такой системы для малых отклонений, пред-
ставляющая собой отношение приращения фазы выходного сигна-
ла к приращению входного, имеет вид:
। . Р тс (1 ~Ь ^Фд^Фм)
К(р)
где 5фМ и 5фД — коэффициенты передачи фазового модулятора и
фазового детектора соответственно.
Это выражение показывает, что наличие дополнительного фа-
зового модулятора приводит к увеличению собственной постоянной
Рис. 9.8. Структурные схемы системы ФАПЧ с дополнительным фазовым моду-
лятором, включенным:
а) перед фазовым детектором; б) в цепи обратной связи
времени кольца ФАПЧ (1+£фД5фМ) раз, а следовательно, и к су-
жению шумовой полосы системы. В [1963, 18] показано, что полоса
захвата в такой системе остается широкой.
Смягчить противоречие между полосой захвата и шумовой по-
лосой системы можно также при помощи системы ФАПЧ с фазо-
вым модулятором, включенным в цепь обратной связи системы
ФАПЧ, предложенной в [1964, 27]. В этой системе (рис. 9.86) сигнал
подстраиваемого генератора перед поступлением на фазовый де-
тектор подвергается дополнительной фазовой модуляции, закон
которой определяется выходным напряжением фазового детектора
и фильтром нижних частот ФНЧ2.
319
Параметры такой системы можно подобрать таким образом,
чтобы, с одной стороны, обеспечить малую инерционность петли
обратной связи и, следовательно, широкую полосу захвата, а с
другой — большую инерционность цепи управления и, следователь-
но, узкую шумовую полосу.
Уравнение системы рис. 9.86 имеет вид [1970, 25]:
-|~P9 + /<1(p)[1 + ^-^4p]f(0)=yh;
Qy L Qy К! (P) J
(9.32)
где 0 — разность фаз сигналов на фазовом детекторе, К\(р) и
Кг(р)—передаточные функции фильтров ФНЧ^ и ФНЧ2, фм=
= t/фд макс• 5фМ—максимальное отклонение фазы, вносимое фазо-
вым модулятором, F(0) —характеристика фазового детектора.
Непосредственно из приведенного уравнения следует, что ди-
намические свойства системы, в частности, полосу захвата, можно
определить так же, как и в обычной системе, имеющей коэффи-
циент передачи:
I Qy Ki (р) J
(9.33)
Поэтому полосу захвата можно вычислить на основании резуль-
татов гл. 4. В частности, если К\(р) =Кд(р) = 1/(1 +Тр), то
К(р)
'Фм
Йу
1 + 7'р
и свойства системы аналогичны свойствам системы с пропорцио-
нально-интегрирующим фильтром. Если фм=7'Пу, то полоса захва-
та равна единице.
Понимая, как обычно, под передаточной функцией системы от-
ношение приращений фаз выходного (ПГ) и входного (ЭГ) сигна-
лов, можно записать ее выражение в виде [1970, 25]:
W, (р) ------------J. (9.34)
. . Р 7~с f 1 F (ф02) Фм Гг (Р)]
Ki (Р)
Из этого выражения вытекает, что передаточная функция в рас-
сматриваемой системе такая же, как в типовой с фильтром, опре-
деляемым выражением
/< (р) =----. (9.35)
\+Г'Ш^К2(Р)
В частности, при К\(р) = К%(р) = 1/(1 + Тр) получаем
W)=p+^n<Po2)r' • [1+ Г •
L l + ^F (Фог) J
Отсюда видно, что в данном случае шумовая полоса в системе
такая же, как и в обычной системе, фильтр которой состоит из
320
делителя напряжения с коэффициентом передачи [1 + фм^/(<ро2)]-1
и интегрирующей цепи с постоянной времени 7’э= Л1—фм-^Чмог)?1.
В частности, при фм=7'£2у (у3=1) получаем выражение для шумо-
вой ПОЛОСЫ1 AFni = QyF (фо2) /2(1 + TQyFr (фо2)]’
Таким образом, выбирая Г£ЗуА' (фО2) > 1, можно значительно
сузить шумовую полосу системы без снижения относительной по-
лосы захвата.
Исследование некоторых
вопросов работы рассмотрен-
ной системы при больших шу-
мах проведено в [1970, 25].
Системы ФАПЧ с дополни-
тельным фазовым регулятором
дают возможность решать и
другие задачи. В частности, в
[1958, 16] описана система
ФАПЧ с дополнительным коль-
цом авторегулирования фазы
Рис. 9.9. Структурная схема системы
ФАПЧ с дополнительным кольцом
авторегулировапия
выходного напряжения, позволяющая значительно уменьшить раз-
ность фаз между входным и «выходным сигналами («рис. 9.9). Каи
видно из рисунка, обычная система ФАПЧ дополняется фазовым
модулятором ФМ, через который проходит на выход сигнал под-
страиваемого генератора. Фазовым модулятором управляет через
фильтр нижних частот ФНЧ2 сигнал ошибки с выхода дополни-
тельного фазового детектора ФД2, на котором сравниваются фазы
входного (эталонного) и выходного сигналов. При достаточно глу-
бокой отрицательной обратной связи в фазовом кольце разность
фаз между входным и выходным сигналами может быть весьма
малой. Таким образом, можно реализовать систему, близкую к
астатической.
При линейной характеристике фазового модулятора система
описывается уравнениями (1958, 16]:
Р (фэг —Фпг) + (Р) Qy F1 (фэг—Фпг) = (9.36)
фвых = фпг-Фм^2 (р) (фэг — Фвых). (9.37)
Здесь КДр) и Кг(р)—операторные передаточные функции
фильтров нижних частот ФНЧ\ и ФНЧ2 соответственно, Fj и F2—
нормированные характеристики фазовых детекторов ФДх и ФД2,
фм—максимальный фазовый сдвиг, вносимый системой ФД2 — мо-
дулятор.
Первое уравнение описывает собственно систему ФАПЧ и мо-
жет решаться независимо от второго. Второе описывает процессы
в кольце дополнительной фазовой автоподстройки. Из него сле-
дует, что в стационарном режиме, когда К2(р) = \, ошибка
фобщ^фэг фвых или фобщ = ф + фмр2(фобщ), следовательно,
Рг(фобщ) = (фобщ ф)/фм.
Выбирая величину фм достаточно большой, можно независимо
от <р обеспечить приближенное равенство Рг(фобщ) «0. При косину-
соидальной характеристике этого детектора разность фаз между
И—526
321
входным и выходным сигналами будет близка к 0,5л В (119'5,8, 16]
рассмотрена работа такой системы и при нелинейной характери-
стике фазового модулятора типа насыщения. Там же приведены
результаты экспериментальной проверки схемы.
9.5 СИСТЕМА ЧАСТОТНО-ФАЗОВОЙ АВТОПОДСТРОЙКИ
ЧАСТОТЫ (ЧФАПЧ)
Рассмотренные в предыдущих разделах способы улучшения ди-
намических свойств системы и повышения ее помехоустойчивости
не являются единственными. Иное направление их улучшения свя-
зано с введением в систему регулирования сигнала, пропорцио-
нального производной ошибки. Применительно к системам
ЧФАПЧ это означает введение воздействия от дополнительного
частотного детектора на подстраиваемый генератор. Сущность
этого метода состоит в том, что частотный детектор измеряет
мгновенную частотную ошибку и вводит такое воздействие на ча-
стоту подстраиваемого генератора, которое при правильном кон-
струировании уменьшает эту ошибку. Очевидно, это облегчает ус-
ловия работы кольца ФАПЧ
Широкую известность такие системы получили после выхода
в свет работы Д Ричмэна [1954, 6, 7]. В дальнейшем различные
модификации подобных систем и аспекты их теории исследова-
лись в [1957, 2, 1958, 3, 5, 1962, 14, 19, 1966, 26, 1967, 23, 1969, 18].
Структурная схема одной из разновидностей системы ЧФАПЧ
показана на рис. 9 10 Частотный детектор в этой схеме может
Рис 9 10 Структурная схема од-
ного из вариантов частотно-фазо-
вой автоподстройки частоты
быть либо обычным, либо нулевых
биений (1962, 19]. В первом случае
через сумматор С и фильтр ФНЧ2
вводится воздействие, пропорцио-
нальное производной фазы (часто-
те) подстраиваемого генератора.
Во втором случае на частотный де-
тектор, кроме сигнала подстраивае-
мого генератора, поступает эталон-
ный сигнал (показано пунктиром),
поэтому выходной сигнал частотно-
го детектора пропорционален про-
изводной разности фаз эталонного
и подстраиваемого генераторов.
При использовании обычного ча-
стотного детектора устраняется возможность проникновения через
него помех со входа системы, но зато сам детектор вносит некото-
рую начальную расстройку вследствие нестабильности собствен-
ной частоты подстраиваемого генератора. Детектор нулевых биений
вносит значительно меньшую нестабильность, но пропускает ука-
занные помехи. При немодулированном эталонном сигнале и от-
сутствии помех обе схемы эквивалентны с точки зрения их анали-
за. Рассмотрим этот случай.
322
Уравнение системы ЧФАПЧ, как показано в [1958, 5], записы-
вается следующим образом:
ptf> + QyK.1(p)F1((p)+QstKa(p)F2(p(p) =ЙН. (9.38)
Здесь К\(р) и Агбр) — операторные коэффициенты передачи
фильтров нижних частот, через которые передаются сигналы фазо-
вого и частотного детекторов соответственно, Й2—максимальное
отклонение частоты, вносимое ветвью частотной подстройки, F\ и
F% — нелинейные нормированные характеристики фазового и ча-
стотного детекторов соответственно, Йн — значение начальной рас-
стройки с учетом действия системы ЧАП.
В простейшем случае положим А2(,р) = 1, Ki(p) = (1 + Тр)~1,
Fz(pq>) =Ь]Й2РФ, тогда уравнение системы принимает вид [1958,5]:
Т d2m , dm , / Qv \ Рн
1 + &! Q2 dt2 dt \1 + &! Q2 / 1 + Ъг Q2
Это уравнение совпадает с уравнением обычной системы ФАПЧ
при использовании в ней интегрирующего фильтра с эквивалентной
постоянной времени, полосой удержания и начальной расстройкой,
уменьшенными в (1+ЦЙ2) раз. Поэтому для расчета полосы зах-
вата, переходных процессов, передаточной функции и т. д. справед-
ливы формулы, полученные для обычной системы ФАПЧ. В част-
ности, полоса захвата при больших значениях 7'ЭквПуЭКВ опреде-
ляется выражением: у3 = 4 (1 + Ц й2)/тг/ТЙу, что свидетельствует
об увеличении полосы захвата
Рассмотрим теперь динамику системы при К\ (р) — Ki(p) —
=4/(1 + Тр). В этом случае ур-ние (9 38) принимает вид:
^L=x, (9.39)-
dx
-^ = Ун—f(8X)—Л(ф)’ (9-40)
d т
Здесь T=^j/ Пу/Г, 8= (TQy) !* , Цех) = ex4-yzF(ex), у2 = Й2/Пу.
В дальнейшем будем полагать f(ex)/x>0 при х=#0 и
lim Цех) =0, а параметры ун и е будем считать малыми. Тогда
л-»0
можно применить принцип усреднения (см- гл. 4). Введем функ-
цию
ч>
1/ = ^- + Jfi(z/)^> (9.41)
о
характеризующую запас энергии в соответствующей порождающей
консервативной системе (8 = ун=У2=0). Производная от V по т в
соответствии с ур-ниями (9 39) и (9 40):
-^-=YhX—xf(ex). (9.42)
d т
1!
323
Поскольку параметры ун, у2 и 8 малы, это уравнение описывает
медленные движения в системе. Усредняя его в предположении
F(<p)=sin<p по траекториям быстрых движений, описываемых ур-
ниями (9.39) и (9.40) при 8 = уи = 0, аналогично переходу от ур-ния
(4.60) к (4.72) и (4.73), имеем:
/ 2л г I г----------------II ]
=—— (2к унsign*—signx f f I 8signx \y 2 (V—2sin2 —j •
d т 2 k К | »J** • \ 2 ] и I
t о ’
[V>2], (9.43)
-^— = —2signx C f Iesignx 1/ 2 (v—2 sin2 —И dtp, [V<2], (9.44)
dt J L I ' \ 2 / IJ
<P.
где cpj 2 = 2 arc sin ]/ V/2.
Отыскание полосы захвата рассматриваемой системы связано
с определением условий, при которых в области У>0 отсутствуют
стационарные точки ур-ния (9.43). Граничные условия при V—2
выражаются как
2Л
Уз =—-— | sign хи 2 8signх| cos-?-П dip. (9.45)
о
Интересно отметить, что полоса захвата в такой системе зави-
сит от знака х, что объясняется асимметрией характеристики f(x)
частотного детектора. Очевидно, что при нечетной характеристике
частотного детектора формула для полосы захвата упрощается:
Уз = — Jf (2 s cos-^-j dip. (9.46)
о
В некоторых случаях характеристику частотного детектора
удобно представить следующим рядом:
f (х) = 2 х2п +^Ьп И sign X.
71=1 7/=1
Подставив это значение в ф-лу (9.45), получим
у, = signх V а2п (2 е)2« (2П-=-^’ + V Ь2п(2 е)2"(—~ *)!! +
W 2/111 2/111
п=1 п= 1
+ 1г ь (2с)2п-1(2”-2)!!
л L (2га— 1)11*
га=1
Это выражение при П2п = 0 близко к соответствующим выраже-
ниям, полученным в [1967, 31] для нечетных характеристик частот-
324
ного детектора методом аппроксимации предельного цикла. В ча-
стном случае, когда, кроме а2п, b2n-\ = b2n=^ при всех п>1, оно
совпадает с результатами работы [196'2, 14].
Очевидно, что при a2n = Q и b2n>Q полоса захвата в системе
ЧФАПЧ больше, чем в системе ФАПЧ (т. е. при a2n = bn = Q).
На рис. 9.11а [1967, 31] показаны зависимости полосы захвата
от параметров системы для двух’характеристик fl(x)=x + b2x2 и
h(x) = b1x + b3x3.
Рис. 9.11. Зависимость полосы
захвата частотно-фазовой системы
автоподстройки частоты от
параметров фильтра;
а) для f(x)=x+bzxz и /(х)=х +
+ ЬзХ3 (пунктирные кривые);
2В х
б) для f2W=
Время установления частоты и фазы в рассматриваемой систе-
ме можно найти путем интегрирования выражений (9.43) и (9.44)
аналогично тому, как это сделано в разд. 4.9.
В [1969, 18] анализировалась система ЧФАПЧ с синусоидаль-
ной характеристикой фазового детектора, одинаковыми интегри-
рующими фильтрами после фазового и частотного детекторов и
характеристикой последнего вида:
F2(x) =---. (9.47)
V 1 + Р2 Х2 ’
325
В результате качественного анализа и численных расчетов на
ЭВМ получены зависимости полосы захвата от параметров си-
стемы, показанные на рис. 9.116 [1969, 18]. Эти зависимости под-
тверждают сделанный ранее вывод о расширении полосы^захвата
в системе ЧФАПЧ по сравнению с полосой захвата системы
ФАПЧ. В [1968, 8] проведено исследование системы ЧФАПЧ
при значительном различии постоянных времени интегрирующих
фильтров. В частном случае малой постоянной времени фильтра,
включенного на выходе фазового детектора, было установлено ра-
венство полосы захвата полосе удержания. В [1968, 16] анализи-
ровалась динамика системы ЧФАПЧ в другом крайнем случае,
когда мала постоянная времени фильтра на выходе частотного
детектора. Такая же система, но с линейным частотным детектором
и нелинейным конденсатором в интегрирующем фильтре, включен-
ном после фазового детектора, рассмотрена в [1968, 7].
Итак, дополнительное регулирование по частотной ошибке уве-
личивает (при правильно выбранных параметрах) полосу захвата
системы.
Для оценки фильтрующей способности системы можно восполь-
зоваться передаточной функцией ее линеаризованной модели
[1957, 2]:
[ 7С+р[1-+ <(0) Qa/CJp)]]-1
W(р) = 1 + 1 2 - 21 J , (9.48)
I К1(р) J
где F2(0) — крутизна характеристики частотного дискриминатора
при нулевой частотной ошибке.
Сравнивая это выражение с передаточной функцией (9.34) си-
стемы ФАПЧ с дополнительным фазовым модулятором в цепи об-
ратной связи, видим, что при соответствующем выборе параметров
они могут быть равными. При этом, если частотный детектор ли-
неен, то и полосы захвата в обеих системах оказываются почти
одинаковыми. Следовательно, в системе ЧФАПЧ при слабых флук-
туациях разрешается противоречие между полосой захвата и
шумовой.
В [1962, 14; 1971, 2] рассмотрена работа системы ЧФАПЧ с оди-
наковыми /?С-фильтрами в частотной и фазовой петлях автопод-
стройкй при больших флуктуационных шумах. Установлено, что
при этом в системе ЧФАПЧ дисперсия частотной ошибки больше,
чем в системе ФАПЧ с такой же полосой захвата. При малых же
флуктуациях система ЧФАПЧ имеет меньшую дисперсию частот-
ной ошибки, чем система ФАПЧ.
Реальные системы ЧФАПЧ могут иметь различные модифика-
ции. На рис. 9.12 показана структурная схема системы ЧФАПЧ,
описанной в [1958,3]. Особенность этой системы состоит в том,
что частотный и фазовый детекторы работают на промежуточной
частоте. Преобразование частоты осуществляется с помощью от-
326
дельного смесителя См. При этом опорный сигнал для фазового
детектора образуется с помощью специального опорного генера-
тора ОГ.
Рис. 9.12 Структурная схема системы ФАПЧ, работающей на
промежуточной частоте
9.6. СИСТЕМА ФАПЧ С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ
Как известно, к системам с комбинированным управлением от-
носятся системы, у которых управляемый объект подвергается воз-
действию не только со стороны детектора ошибки, но и от некото-
рого устройства, измеряющего величину внешнего возмущения.
В частности, таким устройством может быть обычный частотный
детектор, реагирующий на частоту эталонного сигнала. Примене-
ние комбинированного управления расширяет возможности систе-
мы. Особенно эффективен этот метод при переменной частоте эта-
лонного сигнала [1959, 1].
Система с комбинированным управлением (рис. 9.13а) пред-
ставляет собой обычную систему ФАПЧ, дополненную независи-
мым частотным детектором ЧД эталонного сигнала, выходное на-
пряжение которого через фильтр ФНЧ2 и сумматор С подается на
вход управляющего элемента системы ФАПЧ. Если собственная
частота частотного детектора совпадает со средним значением ча-
стоты эталонного сигнала, то при ее изменениях на выходе частот-
ного детектора образуется сигнал, величина и знак которого опре-
деляются расстройкой эталонного сигнала относительно собствен-
ной частоты детектора. Этот сигнал воздействует на частоту под-
страиваемого генератора, заставляя ее изменяться в направлении
изменения частоты эталонного сигнала. В’ результате разность ча-
стот эталонного и подстраиваемого генераторов уменьшается, что
облегчает условия работы системы ФАПЧ.
При определенном выборе параметров система с комбиниро-
ванным управлением позволяет полностью компенсировать изме-
нения частоты эталонного сигнала, т. е. создать систему, близкую
к астатической. Если, кроме того, добиться одинаковой зависимо-
сти собственной частоты частотного детектора и частоты подстраи-
327
ваемого генератора при разомкнутой петле ФАПЧ от различных
факторов, то возможна дополнительная компенсация их действия
на начальную расстройку в кольце ФАПЧ.
Уравнение системы при линейном частотном детекторе имеет
вид:
р ф 4- Qy Ki (р) F (ф) = QH —5уэ К2 (р) Звд (соЭг—сочд), (9.49)
где К\(р) и Kz(p) — операторные коэффициенты передачи фильт-
ров нижних частот на выходе фазового и частотного детекторов
соответственно, Sy3 и 5ЧД — крутизны управляющего элемента и
частотного детектора, соЧд — собственная частота частотного детек-
тора, Йн = (вэг—(Оопг- В стационарном режиме
Qy F (Ф02) = — 5Уэ 5чд (“эг —СОчд)- (9.50)
Очевидно, что условие полной компенсации определяется вы-
ражением:
“эг “опг *^уэ *^ЧД (“эг “чд). (9.51)
Передаточная функция, понимаемая как изображение по Лап-
ласу отношения отклонений фазы подстраиваемого генератора к
отклонению фазы эталонного сигнала,
, , е о т pF Ар)
1+5уэ5чдТе /<1(р)
р тс
\+--
Fi(p)
(9.52)
№\(р)
328
Следовательно, выбирая фильтр ФНЧ достаточно инерционным,
можно сделать передаточную функцию системы близкой к обычной
при сохранении компенсации средней расстройки.
При 5уЭ5Чд=1 и К2(р) = 1 получаем неискажающую систему
[Wt(p) = 1]. В качестве частотного детектора в такой системе мож-
но использовать замкнутую систему частотной (рис. 9.136) или
фазовой (рис. 9.13в) автоподстройки. В первом случае использу-
ется частотный детектор нулевых биений, что позволяет полнее
компенсировать отклонения частоты подстраиваемого генератора.
Во втором случае частотным детектором служит обычная система
ФАПЧ. Выбирая полосу пропускания фильтра ФНЧ^ узкой, а по-
лосу пропускания фильтра ФНЧ^ широкой, можно получить ши-
рокую полосу захвата при сохранении неизменной шумовой поло-
сы в основной системе ФАПЧ.
Передаточную функцию всей системы легко получить из ф-лы
(9.52), заменив в ней величину 5ЧД соответствующей передаточной
функцией эквивалентного частотного детектора.
Система, представленная на рис. 9.13в, является одной из раз-
новидностей более общей двойной системы ФАПЧ, в которой коль-
ца подстройки оказываются взаимозависимыми [1971, 3].
9.7. СИСТЕМА ФАПЧ С РАЗДЕЛИТЕЛЬНЫМ КОНДЕНСАТОРОМ
В ЦЕПИ УПРАВЛЕНИЯ
При использовании системы ФАПЧ для синхронизации мощ-
ных генераторов свч диапазона иногда возникает необходимость
устройство, управляющее частотой, изолировать по постоянному
току от выхода фазового детектора. Такой случай возможен, напри-
мер, при управлении частотой магнетрона изменением его анодного
напряжения. Для развязки цепей по постоянному току последо-
вательно в цепь управления включают конденсатор большой ем-
кости, в результате чего на выходе фазового детектора образуется
дифференцирующая цепь. Такие устройства обычно используются
при моно'Импульсном режиме работы системы ФАПЧ.
Впервые система ФАПЧ с разделительным конденсатором в
цепи управления анализировалась в работах Ф. А. Певзнера
[1964, 21, 22]. В дальнейшем отдельные вопросы теории таких си-
стем изучались в [1967, 25; 1968, 47; 1969, 65; 1970, 30].
Рассмотрим работу простейшей системы ФАПЧ указанного ти-
па, в которой вместо фильтра нижних частот включена дифферен-
цирующая цепь. Уравнение этой системы при косинусоидальной
характеристике фазового детектора принимает вид:
Рф+ ^Тр Qycosqp=QH, (9.53)
где Т—постоянная времени дифференцирующей цепи.
329
Введя безразмерный параметр т=£2у/ и дополнительную коор-
динату х, перейдем от основного уравнения к системе:
—cos ю, (9.54^
dr т
“- к(ун—x + costp), (9.55;
а т
где е=
В дальнейшем положим е<^1, тогда ур-ние (9.54) будет харак-
теризовать быстрое движение в системе, а ур-ние (9.55) —медлен-
ное. Усредняя последнее по траекториям быстрого движения, имеем
(см. разд. 4.5):
^ = еун, [|х|<1], (9.56)
а т
dx
--- — 8
d т
(ун — /х2— 1) ,
[1<|<
(9.57)
Из этих выражений непосредственно следует, что при |х|<1
координата х нарастает с постоянной скоростью, причем согласно
ур-нию (9.54) система находится в режиме квазисинхронизма.
Поэтому для х< 1 и х(0)=ун:
cos ф Ун + е уит = Уи^г + 1) > (9.58)
что близко к результатам, полученным в [1968, 57].
Выбирая постоянную времени Т достаточно большой, можно
при заданном интервале наблюдения снизить фазовую погреш-
ность до требуемого предела.
При |х|>1 координата х стремится к своему стационарному
значению
(9-59>
Подставляя это выражение в ур-ние (9.54) и усредняя его, на-
ходим, что
dw
-aY-=ys=YH-
(9.60)
Отсюда следует, что при |х| >1 в системе устанавливается ре-
жим биений с частотой, равной начальной расстройке, т. е. эффект
подстройки достигается только на конечном интервале времени,
пока | х | < 1.
В более сложных системах, кроме дифференцирующей цепи, в
цепь управления обычно включают фильтр нч, который обеспечи-
вает требуемые свойства системы по отношению к внешним воз-
мущениям.
В [1969, 66] рассмотрена линейная модель и некоторые свой-
ства нелинейной модели системы ФАПЧ с фильтром, коэффициент
передачи которого
К(р) =------. (9.61)
(1 + ЛР)(1 + 7р)
330
В [1969, 65] проанализирована качественная структура фазовых
портретов такой же системы. Некоторые общие соображения об
особенностях работы системы ФАПЧ с разделительным конденса-
тором высказаны в [1968, 57].
Рассмотрим работу системы при наличии в ее цепи управления
каскадного соединения пропорционально-интегрирующего фильтра
и дифференцирующей цепи. Общее уравнение системы в этом слу-
чае принимает вид:
Qy ——1 Тр cos<р = QH. (9.62)
у 1 + р 1 + Тр т v ’
Вводя относительное время т=т957 и дополнительные коор-
динаты х и z, переходим к системе уравнений первого порядка:
-—^-—х—СОЭф, (9.63)
d т
---~ е [уи-f-mz—тх—(1 —/п)со5ф]-|-81 [тсозф-|-ун—тх], (9.64)
d х
=81[шсо5ф-|- ун—тх], (9.65)
d т
здесь е=1/ш2Г0у, ei= l/^TiQy.
В дальнейшем полагаем параметры е и ei малыми (е<С 1,
£1<С1). При этом ур-ние (9.63) описывает быстрое движение в си-
стеме, а ур-ния (9.64) и (9.65)—медленное. Усредняя ур-ния
(9.64) и (9.65) по траекториям быстрого движения, получаем (см.
разд. 4.5):
-j^- = e(yH4-mz—x) + s1yH, [|х|<1], (9.66)
d х
1И<1]. (9-67)
d х
— 8 (ун + mz—х—(1 —га) 1/*2— 1) +Ei (ун—т.ух2 — 1), [|х| > 1],
d т
(9.68)
^=Е1(ун-т/^=О), [|х|>1]. (9.69)
d т
Будем считать, что e<Cei. Тогда, вторично усредняя уравнения
медленного движения (9.67) и (9.69) (теперь z является медлен-
ной координатой по сравнению с х) по траекториям быстрого по-
рождающего движения (9.66) и (9.68) при ei = 0, находим:
=е17н>0, (9.70)
d т L т J
(9.7!)
ГПР - (Ун + ^)4-(1 — /п) Т(?н + /пг)2 — (2/п — /п2)
А 1 W 2т —т2
331
Фазовый портрет, соответствующий системе ур-ний (9.70) и
(9.71), зависит от величины ун. Если ун<(1—т) У т/(2—т), то на
фазовой плоскости рис. 9.14а образуется замкнутая траектория,
что соответствует предельному циклу. При этом в рамках приме-
няемого метода в системе наблюдаются релаксационные колеба-
Рис. 9.14. Фазовый портрет системы ФАПЧ с раздели-
тельным конденсатором в цепи управления
ния. Предположим, что при т = 0 z = 0, тогда в соответствии с
ур-нием (9.70) dz/dT>0 и z нарастает с постоянной скоростью до
величины z2(l—уп)/т. Этот интервал времени согласно ур-ниям
(9.63) и (9.66) соответствует квазисинхронизму в системе.
Непосредственно из ур-ний (9.63) и (9.66) в режиме квазисин-
хронизма (х<1) и при 81 = 0 можем записать: coscp^x и ya+inzx
хх, Следовательно, взяв производную от cos ф, получим
~ . _m JL (sin ф)->.
d т sin <р d т
Подставляя значение dzjdx из (9.67) в это выражение, имеем
dy ~у»
d т Т, йу sin ф
332
ртсюда следует, что производная разности фаз может быть до-
статочно малой при соответствующем выборе величины ун/Лйу.
Райее близкий результат был указан в [1969, 65].
,'По достижении координатой z указанной верхней границы в
соответствии с ур-нием (9.71) производная от z по т скачкообраз-
но изменяется, причем она оказывается отрицательной. Это приво-
дит к дальнейшему уменьшению координаты z вплоть до величи-
ны ()/2/п—т2—уп)/т (рис. 9.14а).
На интервале времени, соответствующем пребыванию коорди-
— т2 — Ун 1 — Ун)
наты z в интервале!----------- ; —^-*-1, в системе согласно ур-ниям
(9.63) и (9.68) наблюдается режим биений. В точке Zi= ( У 2т—т2—
—уи)/т происходит скачок dzfdi, и процесс повторяется. Возмож-
ность релаксационных колебаний в системах с разделительным
конденсатором была отмечена в [1968, 57].
Если же ун>(1—m) Vm/(2—т), то структура фазового порт-
рета для z получается иной (рис. 9.146). В этом случае фазовый
портрет не имеет замкнутых траекторий и в системе невозможны
релаксационные колебания координаты z. При любых начальных
условиях в системе устанавливается стационарное значение коор-
динаты z0, определяемое уравнением: mf2(z0) =у2н + т. При этом,
поскольку z0>(l/2m—т2—в системе в соответствии с ур-
ниями (9.63) и (9.68) наблюдается режим биений.
Очевидно, что для увеличения интервала времени, внутри ко-
торого наблюдается квазисинхронизм, следует выбирать параметр
81 по возможности малым.
Передаточную функцию линейной модели рассмотренной систе-
мы в режиме квазисинхронизма можно определить обычным об-
разом:
W (р) =----------!--------. (9.72)
! , ______Р______
+ Qy К (р) F (<pt)
Здесь <pt—значение <р, соответствующее устойчивому квазиста-
ционарному состоянию равновесия, определяемому ур-нием (9.63)
[F(q\) =cos фх=х]. Очевидно, что в режиме квазисинхронизма кру-
тизна характеристики фазового детектора в точке будет пере-
менной.
9.8. СИСТЕМА ФАПЧ С ИНЕРЦИОННОЙ ЦЕПЬЮ
ОБРАТНОЙ СВЯЗИ
На практике часто между подстраиваемым генератором и фа-
зовым детектором включают инерционные линейные и нелинейные
цепи. Системы ФАПЧ с такими цепями обратной связи встречают-
ся в синтезаторах частот [1970, 22], в приемных устройствах, когда
в цепь обратной связи включается полосовой усилитель (см. рис.
333
3.3), при использовании в цепи обратной связи делителей и умно-
жителей частоты и т. д. Исследование этих систем представляет
собой сложную задачу. Анализу систем ФАПЧ с полосовым уси-
лителем в цепи обратной связи посвящены работы Т. Д. Груера
[1954, 4], В. С. Дулицкого и Ю. В. Эльтемана, 3. Желонека<и
К. Кована [1957, 11], М. В. Капранова [1956, 5], С. И. Евтянова .и
В. К. Исаковой [1962, 6], Ю. Н. Бакаева [1962, 5], В. К- Снедковой
[1967, 33], Л. Н. Белюстиной [1960, 4], В. В. Быкова [1967, 10].
В общем случае можно считать, что между подстраиваемым ге-
нератором и фазовым детектором включен линейный инерционный
четырехполюсник ИЧ (рис. 9.15). Для изучения работы системы
ФАПЧ с такой цепью обратной связи выведем ее основное урав-
нение. Пусть эталонный сигнал определяется выражением:
Цэг (0 эг COS ((Оэг t фэг)’ (9.73)
где шэг и фэг — постоянные частота и начальная фаза эталонного
сигнала.
Сигнал подстраиваемого генератора запишем в виде:
(< \
Ч^Опг t 4“ Д/э (^) 4“ Фопг I ’ (9.74)
0 /
где Qy3—мгновенная расстройка, вносимая управляющим элемен-
том, фопг — начальная фаза сигнала подстраиваемого генератора.
В дальнейшем удобно положить фопг = 0. Считая зависимость
Рис. 9.15. Структурная схема системы ФАПЧ с инерци-
онной цепью обратной связи
частоты подстраиваемого генератора от напряжения на входе уп-
равляющего элемента линейной, можем зайисать:
Йуэ(0=«уЛ(Р)-м<м(0- (9.75)
Для определения сигнала обратной связи на входе фазового
детектора воспользуемся известным асимптотическим разложе-
нием сигнала на выходе линейной цепи при действии на ее входе
ЧМ сигнала [13], ограничившись первым динамическим приближе-
нием:
где
t
uB(f)=A(f)expi coo£-f-уОуЭ(т)^т-|-ф(со)-фх(/) ,
L о
(9.76)
(9.77)
Л(С =£/nr|B(i(D)|.| 1-U-A^ +ia
I at
334
— ргибающая сигнала обратной связи, В (ico)—комплексный ко-
эффициент передачи четырехполюсника обратной связи, <о = <вопг +
+ руэ(0 — текущая частота подстраиваемого генератора,
b — 1 . | 42Ф(ю) /д 7g)
| В (i со) ] d со d со d со2
а = _ 1 1 _ rf*|B(ico)| 1 (9 79)
2 | B(ico)| d со2 2 da* ’ 1
ф(<в)—статическая фазо-частотная характеристика цепи обрат-
ной связи,
d Qy3
x(f)=arctg-------------- (9.80)
dt
— динамическая поправка, учитывающая инерционность вносимо-
го цепью обратной связи сдвига фаз.
Если допустить, что фазовый детектор не реагирует на ампли-
туду подводимого к нему сигнала обратной связи (это достигает-
ся при UaT^A(t) или при наличии ограничителя амплитуды в це-
ци обратной связи), то можно считать, что выходное напряжение
фазового детектора однозначно определяется разностью фаз под-
водимых к нему напряжений:
«Фд(О=^фдмакс/:’(0), (9.81)
где
t
0 = + фэг— [ £2уэ(т) dr—-ф (со)—х (t). (9.82)
6
Уравнения (9.74), (9.75), (9.76), (9.81) и (9.82) позволяют за-
писать исходное дифференциальное уравнение рассматриваемой
системы в ваде:
Р е+ Г1 4-^^-)р]Л(р)ЙуЕ(0) + рх-Йн. (9.83)
d со
Здесь, как и ранее, Qy= [7фДмакс-Sy3—полоса удержания.
Анализ полученного дифференциального уравнения сложен.
Даже при К(р) = \ это уравнение имеет второй порядок и несколь-
ко нелинейных зависимостей. В дальнейшем в целях упрощения
ограничимся квазистационарным приближением, полагая, что ди-
намические искажения сигнала подстраиваемого генератора в це-
пи обратной связи невелики. Это допустимо в том случае, если
/7х»0. Условие малости рх следует непосредственно из ур-ний
(9.78), (9.79). Таким образом, в квазистационарном приближении
ур-ние (9.83) принимает вид:
р0+Г1 + ^^р]/<(р)йуГ(0) = Он.
а (0 |
(9.84)
335
Структура этого уравнения аналогична структуре уравнения
системы ФАПЧ с дополнительным нелинейным фазовым модулято-
ром, включенным в 'Цепь обратной связи (см. рис. 9.86) при тож-
дественных фильтрах ФНЧ1 и ФНЧ2.
В том случае, если фазовая характеристика цепи обратной свя-
зи линейна (Лр/6ш=т = const), то наличие инерционной цепи об-
ратной связи в рамках принятых, допущений эквивалентно включе-
нию в цепь управления вместо фильтра нижних частот линейного
четырехполюсника с эквивалентным оператором передачи:
Лэ(р)=[Ц-тр]Л(р). (9.85)
Таким образом, для исследования такой системы можно ис-
пользовать результаты гл. 4. Очевидно, что ф-ла (9.85) является
частным случаем ф-лы (9.35). Поэтому для рассматриваемой си-
стемы справедливы выводы разд. 9.4. Отсюда следует, что система
с инерционной ветвью обратной связи при т>0 имеет преимуще-
ства перед обычными системами аналогично системе ФАПЧ с до-
полнительным фазовым модулятором. Практически ее можно вы-
полнить, включив в цепь обратной связи режекторный фильтр. Ес-
ли т<0, то динамические свойства системы ухудшаются. Реализа-
ция системы ФАПЧ с инерционной ветвью обратной связи в этом
случае очевидна — это система с полосовым фильтром или УПЧ.
9.9. ВЗАИМОСВЯЗАННЫЕ ДВУХПЕТЛЕВЫЕ СИСТЕМЫ ФАПЧ
В последние годы получили распространение сложные системы
ФАПЧ, позволяющие осуществлять синхронизацию двух автогене-
раторов, работающих на разных частотах, по сложному сигналу
вида:
u3r(t) =/73rcos01(t)cos02(t). (9.86)
Такие системы являются оптимальными устройствами для вы-
деления информации о величинах Ф\ и Ф2 при приеме указанного
сигнала на фоне аддитивного белого шума [82, 83].
Структурная схема системы взаимосвязанных колец ФАПЧ по-
казана на рис. 9.16. Входной сигнал вида (9.86) поступает на два
смесителя См\ и См2, на которые одновременно подаются сигналы
от генераторов П1\ и ПГ2 соответственно. Сигналы разностной ча-
стоты с выхода смесителей подводятся к фазовым детекторам
ФДг и ФД2 систем ФАПЧ соответственно. На эти же детекторы
поступают сигналы от генераторов ПГ\ и ПГ2 через фазовращате-
ли ФВ2 и ФВ1 соответственно. Последние обеспечивают фазовые
сдвиги, равные 90°. Выходные напряжения фазовых детекторов
через фильтры Ki(p) и К2(р) поступают на соответствующие уп-
равляющие элементы УЭ\ и УЭ2 и синхронизируют генераторы
ПГ2 и П1\.
Если допустить, что смесители и фазовые детекторы работают
в режиме линейного перемножения подаваемых сигналов, то мож-
336
но записать основные дифференциальные уравнения изучаемой си-
стемы в виде:
Ф1 = — Оу1К1(р)созф1-8Шфг4-ОН1, (9.87)
<р2 = —Qy2/C1(p)sinq>1-cos(p2-|-QH2. (9.88)
Здесь q>i и ф2—фазовые ошибки сигналов на входах фазовых
детекторов ФДг и ФД2 соответственно, Qyi и Qy2— максимальные
Рис. 9.16. Структурная схема системы двух взаимосвя-
занных колец ФАПЧ
расстройки, вносимые цепями управления колец ФА'ПЧ, QHi и
QH2— начальные расстройки генераторов П1\ и ПГ2 относительно
соответствующих эталонных частот.
Исследование этой системы уравнений в общем виде представ-
ляется весьма сложным в силу нелинейного характера и высокого
порядка уравнений. Поэтому ограничимся простейшим случаем,
когда Ki(p) = Kz(p) — 1. В этом случае систему ур-ний (9.87),
(9.88) можно переписать в виде:
= —cos ф, sin фо -|- уно (9.89)
d т
^-2^ = —s (sin фх cos ф2) -|- ун2- (9.90)
d т
Здесь т— QyiC Y111= в = £^у2/^уь ун2“ Онг/йу! В дальней-
шем полагаем параметры £“й уН2 малыми, тогда ур-ние (9.89) опи-
сывает быстрое движение в системе, а ур-ние (9.90) — медленное.
Усредняя ур-ние (9.90) по траекториям 'быстрого движения, при
е-Ч), уН2-*-0 получаем уравнения усредненного медленного движе-
ния:
=еУн2> [ Yhi > sin2 ф2], (9.91)
^ = —е(с1§ф2|Ат2ф2—у2,)—ун2, [ Vhi <sin2Ф2]- (9-92)
337
Из этой системы уравнений непосредственно следует условие
устойчивости усредненной системы в целом: |yHi| + |Унг| ^1- Это
означает, что начальные расстройки систем должны быть более су-
щественно ограничены, чем в обычной системе ФАПЧ первого по-
рядка.
Фазовый портрет системы, описываемой ур-ниями (9.91) и
(9.92), показан на рис. 9.17 Этот портрет наглядно поясняет физи-
, L
1 £ dt
Рис 9 17 Фазовый портрет системы взаимосвязанных колец ФАПЧ
ческий смысл ур-ний (9.91) и (9.92) и указывает области притяже-
ния точек устойчивого равновесия, а также зависимость движения
в системе от параметра уН2- Задавая какой-либо критерий оконча-
ния переходного процесса, нетрудно найти время последнего.
При наличии фильтров в цепях управления получение условий
устойчивости в целом значительно усложняется. Ряд результатов
исследования устойчивости такой системы приведен в [1971, 3, 5].
Глава 10
СИСТЕМА ИМПУЛЬСНО-ФАЗОВОЙ
АВТОПОДСТРОЙКИ ЧАСТОТЫ
10.1. ОБЩИЕ СВЕДЕНИЯ
В различных отраслях техники, например в радиоавтоматике,
в технике связи и управления, широко применяются системы им-
пульсно-фазовой автоподстройки частоты (ИФАПЧ). Особое зна-
1ение системы ИФАПЧ имеют в устройствах строчной синхрониза-
ции в телевидении, в устройствах диапазонно-кварцевой стабили-
зации частоты (синтезаторах частот) для ее деления и умножения,
при когерентном приеме импульсных радиосигналов, при создании
колебаний с точным фазовым сдвигом, кратным 2л, в устройствах,
формирующих частотноманипулированные сигналы.
Впервые анализ системы ИФАПЧ был проведен В. С. Дулиц-
ким, Ю. В. Эльтерманом и Г. В Денисовым. В дальнейшем теория
работы этих систем успешно развивалась в трудах Г. В. Кияков-
ского [1951, 1], В. Н. Горшунова [1947, 1], Б. П. Терентьева и Ю. В.
Белоцветова [1959, 17—19], Ю. Б. Несвижского [1961, 16; 1964, 28],
Ю. Н. Бакаева [1958, 7], М. Р. Капланова и В. А. Левина [1962, 19],
В. Н Кулешова и А. А. Морозова [1963, 23], М. С. Гаврилюка
[1970, 27].
Система импульсно-фазовой автоподстройки частоты отличает-
ся от обычной системы ФАПЧ тем, что ее кольцо авторегулирова-
ния периодически или квазипериодически размыкается на некото-
рое время, причем размыкание может иметь место на любом уча-
стке кольца. Это создает новые возможности использования систем
ИФАПЧ и одновременно заставляет применять иной подход к их
изучению.
Практически чаще всего импульсный режим работы обеспечи-
вается подачей на фазовый детектор одного (реже двух) напря-
жений в виде последовательности импульсов. Импульсный харак-
тер может носить как эталонный сигнал, так и сигнал подстраи-
ваемого генератора. В первом случае система ИФАПЧ обычно
применяется как умножитель частоты (частота подстраиваемого
генератора выбирается равной частоте какой-либо гармоники эта-
лонной последовательности импульсов), а во втором — как дели-
339
тель (частота эталонного сигнала совпадает с частотой какой-либо
гармоники напряжения подстраиваемого генератора).
На рис. 10 1 приведены структурные схемы соответственно им-
пульсно-фазовых умножителя и делителя частоты. Как видно ив
рисунка, эти схемы отличаются от
а)
I---1 ^зг I--1 I-----1 I------Х^зг
Iзг МЧфу I—Нцфд Н—Iпг I—’
типовой структурной схемы
ФАПЧ наличием формиру-
ющих устройств ФУ, преоб-
разующих синусоидальное
I ФНЧ [•
напряжение в короткие им-
пульсы, импульсно-фазовых
детекторов ИФД вместо фа-
зовых детекторов и допол-
нительных запоминающих
устройств ЗУ, фиксирующих
выходное напряжение ИФД
импульсами.
ИФД
ц в промежутке между двумя
На выхо,де
образуются короткие
импульсы, амплитуда и по-
лярность которых определя-
ются фазовыми соотноше-
ниями входных напряжений,
а на выходе запоминающего
устройства — ступенчатое
напряжение, огибающая ко-
торого в разомкнутой систе-
ме в режиме биений соот-
5)
I зг —I [
|фот |---------------уз |
Рис 101 Структурные схемы импульсно-
фазовых преобразователей частоты
а) \множителя, б) делителя
ветствует характеристике
фазового детектора. Выходное напряжение запоминающего устрой-
ства после фильтрации в фильтре ФНЧ, как и в непрерывной си-
стеме ФАПЧ, управляет частотой подстраиваемого генератора.
В некоторых случаях система может работать в импульсном
режиме и при непрерывных сигналах, подаваемых на фазовый де-
тектор. Такой режим, например, возникает при использовании
ключевого фазового детектора (см. разд. 14). Последнее особен-
но важно учитывать при работе такого детектора на кратных ча-
стотах. В этом случае фазовый детектор объединяет функции фор-
мирующего устройства и импульсно-фазового детектора.
В дальнейшем будем предполагать, что импульсный характер
работы определяется режимом фазового детектора. Практически
удобно рассматривать импульсно-фазовый детектор как линейный
перемножитель.
Разложив последовательность импульсов в ряд Фурье, нетрудно
показать, что в отсутствие ЗУ управляющее постоянное или низ-;
кочастотное напряжение создается только гармоникой импульса,
ближайшей (совпадающей) к частоте синусоидального напряже-
ния, поступающего на ИФД. Поэтому при хорошей фильтрации
побочных колебаний ФНЧ можно, в первом приближении, считать,
340
что рассматриваемая система представляет собой обычную систе-
му ФАПЧ, в которой вместо импульсного сигнала на фазовый
детектор попадает только необходимая гармоника последователь^
ности импульсов.
Достоинством систем ИФАПЧ, как преобразователей частоты,
представленных на рис. 10.1, является простота изменения коэф-
фициента преобразования Y. Для этого достаточно только пере-
строить контур подстраиваемого генератора Очевидно, что систе-
мы ИФАПЧ являются разновидностью систем импульсного авто-
регулирования.
Особенностью систем ИФАПЧ является то, что управляющее
напряжение (ток) на выходе фазового детектора носит импульс-
ный характер. Импульсное напряжение на выходе ИФД характери-
зуется периодом Гр следования импульсов (периодом регулирова-
ния), их длительностью Аи, скважностью би=Ди/Гр и амплиту-
дой Ац
В дальнейшем будем анализировать схему импульсно-фазового
умножителя частоты, однако выводы в целом справедливы и для
схем деления частоты, если, как обычно, относительное изменение
частоты подстраиваемого генератора невелико.
Составим общее основное уравнение системы ИФАПЧ, основы-
ваясь на результатах работ [72] и [1963, 23]. Для простоты пред-
ставим ИФД как соединение обычного фазового детектора с ха-
рактеристикой F(ф) и ключа, пропускающего его выходное напря-
жение только при действии импульса.
Пусть частота одного из синусоидальных напряжений совпа-
дает с частотой подстраиваемого генератора или ее гармоникой, а
второго — с частотой эталонного генератора или ее гармоникой.
При определении выходного напряжения будем считать, что мак-
симальное напряжение на выходе ключа равно амплитуде реаль-
ного синусоидального сигнала, поступающего на ИФД
Для простоты будет считать, что би<С 1, тогда разность фаз на-
пряжения подстраиваемого генератора и необходимой гармоники
эталонного сигнала можно представить функцией дискретного вре-
мени «Гр, отсчитанного от начала процесса регулирования:
<р (nTp) = ФэгГ (пТр)—Фпг (пТр), (10.1)
где n — Q, 1; 2; 3,...
Для составления уравнения системы ИФАПЧ удобно восполь-
зоваться дискретным преобразованием Лапласа [72]:
Г(Р)-У e^f^p). (10.2)
n—Q
Здесь f*(p) — изображение по дискретному преобразованию
Лапласа функции \f(nTv).
341
Применяя это преобразование к ф-ле (10.1) и вводя параметры
Тр=//7'рм q = pTv, имеем
Ф*(<7)=Ф;гГ(<7)-Ф;г(<7). (Ю.З)
Если функция f имеет непрерывный аргумент (эта функция
•описывает процессы в непрерывной части системы), т. е. то
при t — nTv + \t она соответствует так называемой смещенной ре-
шетчатой функции f(nTv, Д/) [72], причем 0<Д^<7'р. Переходя от t
к тр, можно записать: f(nTv + &.t) = [(п + ер), где тр принимает це-
лые значения, равные п, а величина ер = Д//7'р лежит в области
•0<ер<1. Для функции f(n + ep) вводится понятие модифицирован-
оо
лого преобразования Лапласа [72]; f*(q, Ep)=^[(tt> ep)e~9n.
о
Изображение по дискретному преобразованию Лапласа напряже-
ния на выходе ИФД можно записать следующим образом:
«;„(?) =^ФД макс/7* [Ф(П)]< (Ю.4)
где Е*(ф) — изображение нормированной характеристики ИФД.
Суммарную передаточную функцию фильтра нижних частот и
запоминающего устройства обозначим через К(р), т. е.
ВД=Кзу(рИф„ч(Р)=™-.
Ч \Р)
(Ю.5)
где K3v(p) и КФНДр)—передаточные функции запоминающего
устройства и фильтра соответственно, Н(р) и Q(p)—полиномы
числителя и знаменателя оператора К(р)
Тогда напряжение на входе управляющего элемента
% (<7. 8р) =K*(q, Ер) t/фд макс-/7* [ф («)]• (10.6)
Здесь K*'(.q, ер)—отношение изображения по модифицирован-
ному дискретному преобразованию Лапласа реакции системы к
аналогичному изображению воздействия, т. е. импульсная переда-
точная функция, соответствующая обычной передаточной функции
Функция /(*(<?, ер) связана с функцией К(р) выражением [72]:
SpQ _____рЯ О в) О £-
cvo----—----е v р, [0<ep<SH], (10.7)
О ” V
V=1 е’ — е
I
КЧф ep)^cv0
V=1
е? ( е % 6 — 1) % (
—i---------- е
ер~6)
[6н<Ер<1].
(10.8)
Здесь Соо = /С(О) = H(0)/Q(0), Cv0 = Н (qv)/Q'(qv), ^ — корень
полинома Q(q).
342
еР) =
Это выражение справедливо для передаточных функций ампли-
тудномодулированных импульсов с единичной амплитудой при от-
сутствии кратных нулевых значений qv1).
Если в цепи управления, кроме запоминающего устройства и
фильтра с коэффициентом передачи Кфт(р), имеется звено с за-
паздыванием (идеальная линия задержки), то изображение им-
пульсного коэффициента передачи всех трех устройств можно най-
ти по формуле:
е~<?('+1)/<*(<?, 1 4-ер—Дтзр), [0 <ер < Дтзр], Q
е-<"/<*(</, 8р—Дтзр), [Дтзр < ер < 1],
где x-tv=T;JTv — относительное время запаздывания, которое всег-
да можно представить в виде тзр=/ + Дтзр, где / — целое число, а
0<Дтзр< 1.
Зная напряжение на входе управляющего элемента, можно най-
ти отклонение фазы подстраиваемого генератора, вносимое этим'
элементом, с учетом того, что фпг= (\lp)Sriuy9(t) Дискретное пре-
образование по Лапласу величины иуэ связано с изображением ве-
личины фпг зависимостью:
ер 1
Сг(<7. е₽)=ЗД> f «;э(<7, Sp)d8p+ -^уэ7'Г1 Bp)dBp. (ЮНО
о е - 1 о
Поскольку ИФД реагирует только на дискретные значения раз-
ности фаз, для определения ф’г в выражении (10.10) можно поло-
жить первый интеграл равным нулю:
1
<₽;r(<?)=^Zk- [ «;э(<7, еРж- (10-п>
ед — 1 J
о
Дискретное изображение по Лапласу фазы подстраиваемого
генератора
ф;г^) = ф;г1 f пе-^-ф^^). (Ю. 12)
п=0
Здесь Йн — начальная расстройка подстраиваемого генератора
относительно необходимой гармоники (субгармоники), <£,зг1(<7) =
со
==Г(оэгТр У п ё~чп — дискретное изображение по Лапласу фазы гар-
п=0
моники эталонного сигнала.
*) Выражения для K'(q, ер) в иных случаях приведены в [72]
343.
Подставляя выражения (10.11) и (10.12) в (10.3) и учитывая
ф-лу (10.6), имеем
1 со
ф* (</) ц. ^уэу/фдмакс.. J (<7> Ер) d Е₽ р* [ф (п)] ?р п е-Чп _
0 п=0
(10.13)
Это и есть основное уравнение импульсной системы ФАПЧ в
операторной форме. Можно показать, что п-ри Тр-*-0 оно перехо-
дит в обычное ур-ние (1.11) непрерывной системы ФАПЧ.
Введем обозначение
1
№*(<?)=={ К* (<?, ep)dep. (10.14)
б
Тогда на основании теоремы свертывания дискретного преоб-
разования Лапласа запишем:
1Г*(<7)Г*[ф («)]-?£ №(п-/)Е[ф(/)]. (10.15)
1=0
Согласно же теореме сдвига
Ф*(<7)е'?гф(п+1). (10.16)
Применяя эти теоремы к ур-нию (10.13), получаем следующее
нелинейное разностное уравнение:
п
ф(п+1)-ф(п) + ЙуТр^117(п-/)^[ф(/)]=ЙнТр. (10.17)
1=0
Здесь, как обычно, Йу=5}эПфдМакс. Эго уравнение связывает
значения разности фаз напряжения подстраиваемого и гармоники
эталонного генераторов в два смежных момента, разделенных про-
межутком времени, равным интервалу регулирования Тр. Оно поз-
воляет исследовать поведение во времени разности фаз (при воз-
растании п).
Если запоминающее устройство, включенное на выходе фазо-
вого детектора, идеально и безынерционно, то в момент действия
импульса, его коэффициент передачи равен единице, а в промежут-
ке между импульсами значение запоминаемого параметра (в дан-
ном случае амплитуды) сохраняется неизменным. З'У можно за-
менить четырехполюсником с Азу=1, изменив при этом скваж-
ность импульсов на входе ФНЧ. Поскольку такое запоминающее
устройство формирует импульсы со скважностью, равной единице,
то для определения K*(q, ер) достаточно найти Аф(<7, ер) при по-
мощи выражения (10.7), полагая в нем 6И=1.
344
10.2. УСТОЙЧИВОСТЬ СИСТЕМЫ ИФАПЧ
Полученное выше ур-ние (10.17) позволяет определить положе-
ние равновесия системы ИФАПЧ. В положении равновесия при
п-^оо значение разности фаз в два смежных момента времени пос-
тоянно, поэтому ур-ние (10.17) для стационарного режима имеет
вид:
QyF (To)£W=4j)=QH. (10.18)
/=о
Воспользовавшись ф-лой (10.2), запишем
y\W(j)fT4i =W*(q). (10.19)
/=о
В стационарном режиме q — О. Поэтому, заменяя в ур-нии
(10.18) бесконечную сумму ее значением из выражения (10.19) и
учитывая ф-лу (10.14), получаем окончательно
1
QyF((Po)j‘A(0, ep)dep=QH. (10.20)
о
Интеграл в полученном выражении представляет собой относи-
тельную площадь под кривой, отображающей зависимость напря-
жения на выходе последовательного соединения запоминающего-
устройства и фильтра нижних частот от величины ер. Произведе-
ние Йу на этот интеграл представляет собой полосу удержания в.
системе ИФАПЧ. Обозначим его через Йуи, тогда выражение
(10.20) запишется как
^(фо) — - (Ю.21)
12уИ
При Т7(<ро) =‘cos <ро это выражение аналогично по форме равен-
ству (2.17). Если запоминающее устройство идеально, а коэффи-
циент передачи по постоянному току фильтра нижних частот равен
единице, toJK*(0, ep)dep = l и, следовательно, Йуи=Йу.
о
С целью определения условий устойчивости в «малом» системы
запишем на основании ф-лы (10.13) уравнение для малых откло-
нений от фо:
Д Ф* (q) ф йу Тр W* (<?) F' (Фо) Д ф* = 0. (10.22)
Функцию W*(q) всегда можно представить в виде: W*(q) —
=А (е«)/В(е«), где А(е9) и В(е9) —полиномы от е9.
Уравнение (10.22) перепишем следующим образом:
( е" — 1) В ( е’)Д<р* + Йу ТрА [eq)F' (Фо)Дф* = 0. (10.23)
345
Если полиномы А и В известны, то ур-ние (10,22) всегда мож-
но представить в следующей форме:
^eA<? + aft_1e(A~1)<?+ . • , + ах е" + а0 = 0. (10.24)
Это уравнение является аналогом характеристического уравне-
ния относительно переменной q.
В работе [72] показано, что система импульсного регулирования
устойчива, если Ьй>0 и все определители Аг, получаемые из мат-
рицы
Ьь , Ь. Д). ,-Ь. _
Ьь b. „Ьь .ь. „
я я—2 k—4 k—6 • *
о ьь . ь. д. .
A-1 Л._3 *-5 • • (10.25)
0 bk bk_2bk^ . . .
0 0 bk_{ bk_3 . . .
отчеркиванием п строк и п столбцов снизу и справа, также больше
нул?. Коэффициенты bh матрицы (10.25) связаны с коэффициента-
k
ми йк ур-ния (10.24) следующей зависимостью: bk = \ av, а для
V
всех остальных Ь'.
V=1
+(-ir1(„i1)C1 v)+(-i)"ft)]«v. (10.26)
где(„)=——----------биномиальные коэффициенты.
Раскрыв эти условия, получим [72]:
k = \, ах + ао>0, ах—ао>0; (10.27)
k = 2, а2 + ах + ао>0, а2 — ао>0, а2—ах + ао>0; (10.28)
k =3, а3-|- a2 + fli+ao>0, а3—а2-\-аг—aQ>^,
al + a-j + OaCZo—-а3а2> 0. (10.29)
Определим условия устойчивости систем ИФАПЧ с конкретны-
ми типами фильтров. Будем считать, что запоминающее устрой-
ство, включенное на выходе ИФД, идеально и безынерционно. Оно
обеспечивает наименьшее значение уровня побочных колебаний
в спектре сигнала подстраиваемого генератора, ибо в стационар-
ном состоянии напряжение на его выходе постоянно. Кроме того,
в дальнейшем будем полагать, что А(<р) =cos <р.
346
Найдем сначала условия устойчивости в системе ИФАПЧ, ког-
да фильтр отсутствует [А(р) = 1]. В этом случае W* (д) = 1 и, ур-
ние (10.24) принимает вид:
( е’ — 1)—Йу Тр sin фо = 0- (10.30)
Очевидно, что при этом k= 1, а0 = — (1 + Йу7'р.з1Пфо), di = 1. Вос-
пользовавшись условиями (10.27), получим
—QyTpsin ф0> 0
Йу<---------
7pSin<p0
(10.31}
Согласно первому условию устойчивости крутизна нормирован-
ной характеристики ИФД должна быть положительной, т. е.
—л<фо2<О. Второе условие накладывает ограничение на макси-
мально допустимую величину полосы удержания системы. Соглас-
но- этому условию система ИФАПЧ первого порядка оказывается
устойчивой не при любых значениях Йу, что отличает ее от обыч-
ной системы ФАПЧ первого порядка.
Рассмотрим систему ИФАПЧ с пропорционально-интегрирую-
щим фильтром, коэффициент передачи которого определяется вы-
ражением (3.14). Полагая p = q!Tp в К(р) и обозначая ар=7'Р/7',
получаем
/<(<?) = -ар+т?- . (10.32)
«р + 4
Передаточная функция K(q) имеет один полюс qi ——ар, для
которого Coi=(ap—тар)/(—ар). По ф-ле (Ю.7) находим /(*(<?,«р),
полагая би=1 (на выходе ИФД включено идеальное запоминаю-
щее устройство). В итоге получаем
К*(7, ер) = 1 + (m-1) —--------— е-“р ер .
еч - е-“р
(10.33)
Воспользовавшись ф-лами (10.14) и (10.33), находим
W* (?) = ! + [ 1 —е~“р]. (10.34)
ар ( еч — е “р)
Подставляя это выражение в ур-ние (10.22), получаем следую-
щее характеристическое уравнение;
’ аре2’-е’ {аре-“р + ар+ Ур [ар + (m-1) (1 -е^р)] +
. +аре-“р + Ур[аре~“р + (т+1) (1 - е"“р)]} = 0. (10.35)
Здесь Ур = йр7'р sin фд.
В соответствии с ур-нием (10.35) имеем:
а3 = ар, ах = —{ар(е-“р+ 1) + Ур [ар + (пг— 1) (1— е~“р)]},
а0 = ар е~“р + Ур [ ар е-ар + (пг — 1) (1 — е~“р) ].
347
Воспользовавшись неравенствами (10.28), получим условия ус-
тойчивости в «малом» системы ИФАПЧ с пропорционально-'инте-
грирующим фильтром:
— TpQysin(po>0
—Тр Йу sin Фо [(1 —«) (1 —е-“р) —ар е-“р] < ар (1 —е-“р)
—ТрЙу sin фо [ар (1 + е~“р) —2 (1 — tn) (1 —е-“р) ] < 2ар (1 + е-“р)
(10.36)
Первое условие (10.36), как обычно, выполняется при периоди-
ческой характеристике фазового детектора и определяет собой
лишь устойчивое значение фо- Последние два условия в (10.36) ог-
раничивают предельно допустимое значение полосы удержания в
Рис 10 2 Диаграмма устойчивости в малой системе ИФАПЧ
а) с. пропорционально-интегрирующим фильтром, б) с линией задержки
системе ИФАПЧ при прочих заданных величинах. Все эти условия
совпадают с результатами, полученными в [1959, 18] при би= 1 ча-
стотным методом.
На рис. 10.2а сплошными линиями показаны границы устойчи-
вости рассмотренной системы ИФАПЧ [1959, 18]. Пунктирной ли-
нией нанесены кривые, построенные по ф-лам (10.36), ограничи-
вающие сверху относительную полосу удержания.
348
Анализ условий устойчивости показывает, что при малых зна-
чениях Т, т. е. при ар3>1, с увеличением m устойчивость системы
понижается. С другой стороны, в области часто используемых зна-
чений (10-4-30)7^ отмечается максимум допустимого значения
относительной полосы удержания Ур при изменении коэффициен-
та m Если т=^=0, устойчивость максимальная при ар=0.
В случае аР<С 1 последние два условия устойчивости (10.36)
значительно упрощаются:
—Qy7’psin<p0 <2, [tn -=0]
m
—Ц,7-ряпФо«г >^l_] . (10.37)
ар — m L 1 — m J
/~\ rr> • ^.2 Г tfl "I
7 p sin (pe -C , ap “<. —
m [ 1 — m J
Следует отметить, что при m = 0 (интегрирующий фильтр) пер-
вое условие устойчивости (10.37) совпадает со вторым условием
(10.31) для системы ФАПЧ с К(р) = 1.
Чдсто в цепи управления системы ИФАПЧ применяют сложные
многозвенные фильтры нижних частот. При этом вычисление усло-
вий устойчивости становится чрезвычайно громоздким. Однако
этот фильтр можно приближенно рассматривать как линию за-
держки. Вычислим условия устойчивости ИФАПЧ с идеальной ли-
нией задержки Ограничимся для простоты случаем, когда запаз-
дывание не превышает интервала регулирования.
Полагая в ф-ле (10.9) /=0, имеем:
А*(<7, ер)=е ", [0 <ер< А тзр],
Лз(<7, ер) = 1, [Дтзр<ер<1].
Воспользовавшись этими выражениями, найдем
№*(</)= А тзр е~’ + 1 — А тзр.
(10.38)
(10.39)
(10.40)
При этом, если Т7(<р) = cos <р, ур-ние (10.24) принимает вид
е2<? — е? [1 ф- Оу 7фрп фо (1 —А тзр)]—Оу Тр sin ф0 А тзр - 0. (10.41)
Применяя неравенства (10.28), получаем следующие условия
устойчивости в «малом» системы ИФАПЧ с идеальным запазды-
ванием:
—Оу7прзтф0> 0
—ОуТфзшфоС—J-
А Т3р
—Qy Трsinф0(0,5—Атзр) < 1
(10.42)
Два последних условия налагают при прочих заданных величи-
нах ограничения на ширину полосы удержания. Можно заметить,
что при Дтзр<0,25 определяющим является последнее условие, а
при Атзр>0,25 — предшествующее ему.
349
На рис. 10.26 показана область устойчивости в «малом», огра-
ниченная сверху сплошной линией (1964, 28].
При исследовании устойчивости конкретных систем ИФАПЧ
предполагалось, что запоминающее устройство идеально1)- Это
позволило упростить вычисления, поскольку при определении
К*(<7, ер) можно было пользоваться только выражением (10.7).
В отсутствие запоминающего устройства не только, как уже
указывалось, увеличится уровень побочных колебаний в спектре
подстраиваемого генератора, но и уменьшится полоса удержания,
а следовательно, и полоса захвата. Действительно, как было по-
казано выше, при наличии идеального запоминающего устройства
полоса удержания импульсной системы определяется, как и в
обычной ФАПЧ, лишь произведением максимального выходного
напряжения фазового детектора на крутизну характеристики уп-
равляющего элемента.
Для определения /(*(<?, ер) в отсутствие запоминающего устрой-
ства приходится пользоваться выражениями (10.7) и (10.8). Мож-
но показать, что полоса удержания при этом прямо пропорциональ-
на скважности импульса. Скважность должна быть тем меньше,
чем больше коэффициент преобразования (умножения). Поэтому
получить большую полосу удержания без запоминающего устрой-
ства затруднительно.
Полученное выше линеаризованное ур-ние (10.22) позволяет
определить не только условия устойчивости в «малом» системы
ИФАПЧ, но и характер переходных процессов при малых возму-
щениях состояния равновесия [72]. В работе [1951, 1] рассмотрена
зависимость характера переходных процессов в системе ИФАПЧ с
идеальным запоминающим устройством и пропорционально-инте-
грирующим фильтром в цепи обратной связи. Процесс установле-
ния в такой системе при малых отклонениях разности фаз от поло-
жения равновесия будет апериодическим, если выполняются усло-
вия:
•) Предположение об идеальности запоминающего устройства вполне обосно-
вано, поскольку при конструировании реальных систем ИФАПЧ применение уст-
ройства, близкого к идеальному, если не обязательно, то весьма желательно.
350
Анализ этих выражений показывает, что при практически ис-
пользуемых значениях ар<0,1 область апериодического характера
переходного процесса в случае т=£0 определяется в основном
двумя первыми условиями. Если т=0, область апериодичности
переходного процесса определяется последним выражением и прак-
тически отсутствует. Подробное исследование уравнения линеари-
зованной системы ИФАПЧ проведено в [1970, 27].
Для полной характеристики устойчивости системы ИФАПЧ,
как и для обычной системы ФАПЧ, кроме условий устойчивости в
«малом», необходимо знать условия устойчивости режима удержа-
ния при любой величине возмущений состояния равновесия.
Для определения полосы захвата необходимо проанализировать
основное нелинейно-разностное ур-ние (10.17). Поскольку решение
этого уравнения в аналитической форме получить не удается, то,
как и в случае обычной непрерывной системы ФАПЧ, прибегают
к приближенным методам анализа.
Однако для практических целей можно воспользоваться иными
соображениями. Как с точки зрения фильтрации побочных колеба-
ний в спектре подстраиваемого генератора, так и с точки зрения
сохранения кратности преобразования (устранения перескоков ко-
эффициента преобразования вследствие произвольного изменения
начальных условий), система ИФАПЧ обычно выполняется инер-
ционной. При этом справедливо условие
«>• (Ю-«)
где <7 чмаьс = Д,макс Гр—максимальный по модулю корень характе-
ристического ур-ния (10.24).
Это условие приближенно характеризует медленность переход-
ных процессов по сравнению с периодом регулирования.
Следует отметить, что условие (10.44) выполняется даже в си-
стеме ФАПЧ при Кфнч = 1/если | QyTv sin <р02 ] 1. Уменьшением
можно добиться выполнения этого неравенства при любом Гр,
поскольку I sin ф021 1.
При выполнении условия (10.44), как показано в [72], свойства
системы с импульсным регулированием приближаются к свойствам
этой же системы при непрерывном регулировании. Это позволяет
для определения полосы захвата и времени установления пользо-
ваться теми же формулами, что и для системы ФАПЧ с непрерыв-
ным регулированием. Указанный ~в®ирос применительно к системе
ИФАПЧ с пропорционально-интегрирующим фильтром освещен в
[1970, 27].
10.3. ИМПУЛЬСНО-ФАЗОВЫЕ ДЕТЕКТОРЫ И ЗАПОМИНАЮЩИЕ
УСТРОЙСТВА
Теоретически в системе ИФАПЧ в качестве ИФД могут исполь-
зоваться все схемы обычных фазовых детекторов двух синусоидаль-
ных сигналов. Однако работа этих систем будет эффективной толь-
351
ко в том случае, если они дополнены запоминающим устройством,
действие которого не зависит от величины и характера выходного
сопротивления фазового детектора.
Простейшим запоминающим устройством может служить обык-
новенный конденсатор, который включается непосредственно на
выходе фазового детектора. Для того чтобы такое запоминающее
устройство было близко к идеальному, постоянная времени заряда
должна быть меньше длительности фронта импульса, а постоянная
времени разряда — значительно превышать период следования им-
пульсов. Это означает, что выходное сопротивление фазового де-
тектора в момент действия импульса должно быть как можно
меньше, а при отсутствии импульса — как можно больше. Сопро-
тивление нагрузки запоминающего конденсатора как по постоян-
ному, так и по переменному току должно быть большим. .
Указанные условия могут выполняться не во всех схемах фа-
зовых детекторов. Так, выходное сопротивление в схеме кольцевого
фазового детектора всегда остается низким независимо от соотно-
шения подаваемых на него напряжений. Поэтому схему кольцево-
го детектора нежелательно использовать в системах ИФАПЧ.
В схеме балансного фазового детектора (см. рис. 1.13a) такой
режим работы возможен. При этом для выполнения первых двух
условий необходимо применять диоды с большим отношением об-
ратного сопротивления к прямому (иногда вакуумные), обеспечи-
вать большое сопротивление нагрузки и, что особенно важно, вы-
бирать импульсное напряжение, значительно превышающее ампли-
Рис. 10.3. Схема ключевого импульсно-фазового де-
тектора
гуду синусоиды. Последнее гарантирует надежное запирание дио-
дов в промежутке между импульсами и, следовательно, сохранение
заряда конденсатора памяти.
Существенный недостаток балансной схемы заключается в том,
что на каждом конденсаторе нагрузки выделяется большое напря-
жение, запирающее диоды. Поэтому даже небольшой разбаланс
схемы приводит к смещению нуля фазового детектора.
От этого недостатка свободна схема так называемого ключевого
фазового детектора (рис. 10.3). При достаточно большом импульс-
ном напряжении она работает следующим образом. При подаче на
352
вход схемы импульса все четыре диода отпираются и источник си-
нусоидального напряжения на время действия импульса оказы-
вается подключенным к запоминающему конденсатору нагрузки
Св. По окончании действия импульса диоды запираются падения-
ми напряжений на накопительных конденсаторах запирающих це-
почек RiCi.
Таким образом, система работает как ключ, замыкающий цепь
лишь на время действия импульса. В этой схеме запирающее на-
пряжение образуется не на запоминающем конденсаторе нагрузки,
а на отдельных конденсаторах.
При разбалансе диодов на нагрузку попадает лишь разность
падений напряжения импульса на прямых сопротивлениях диодов,
а не на сопротивлениях нагрузки, как это имеет место в -баланс-
ной схеме. Поскольку прямые сопротивления диодов обычно не-
велики, то и смещение нуля в данной схеме при изменении харак-
теристик диодов получается малым.
Для того чтобы конденсатор не разряжался в промежутке меж-
ду импульсами, запирающее напряжение (сумма напряжений на
конденсаторах СД должно превосходить удвоенное значение ам-
плитуды синусоидального напряжения U. Емкости конденсаторов
Ci следует выбирать из условия:
ад»7Д (10.45)
Если импульс близок по форме к прямоугольному, а его на-
пряжение на вторичной обмотке трансформатора достаточно вели-
ко, то, пренебрегая падением напряжения на прямых сопротивле-
ниях диодов, можно определить из условия:
Здесь Ди — длительность импульса, /и—требуемая величина
импульса тока.
Величину /п можно найти из следующих соображений. В мо-
мент действия импульса (предполагается, что амплитуда импуль-
са превосходит удвоенную амплитуду синусоиды U) в схеме рис,
10.3а мгновенный ток, протекающий через конденсатор Сн, вызы-
вает перераспределение токов, протекающих через диоды Д\ггД^
Для того чтобы в момент действия импульса все диоды были от-
перты, ток, протекающий через них от источника импульсного яа-
пряжения, должен в 2-4-3 раза превышать ток ic, протекающий че-
рез эти же диоды от источника синусоидального сигнала.
Для определения максимального значения тока гс потребуем,
чтобы конденсатор Св заряжался до 0,9 от установившегося значе-
ния напряжения за время не более длительности импульса. Пола-
гая приближенно характеристику диодов линейно ломаной, можно
записать
(Явых + Я,)Сн^0,4Дг (10.47)
12—526 35}
, Здесь /?вых — импульсное выходное сопротивление источника си-
нусоидального сигнала, представляющее собой отношение прира-
щения напряжения к приращению тока за время Ди, Яг — прямое
сопротивление диодов.
Емкость Сн нетрудно определить из условия сохранения заряда
В промежутке между импульсами. Так, если задаться допустимым
разрядом конденсатора на 3, то емкость конденсатора должна
быть
С Тр
(10.48)
Здесь /?0 — обратное сопротивление запертого диода.
Подставляя неравенство (10.48) в (10.47), находим наибольшее
Допустимое значение сопротивления, через которое заряжается
конденсатор Сн:
Rw+Ri=W
Rh Rq Ди д '
Тр (Ri. + Ro)
(10.49)
Зная эту величину, определим пиковое значение тока от источ-
ника синусоидального сигнала:
. 2,5£/Tp(RH4-j?0)
макс опа-1
Rh Ro Ди
(10.50)
Учитывая, что /и^ (24-3)/макс, на основании ф-л (10.50)’и
(10.46) имеем
D да------MhRoB-------- . (Ю.51)
(10 -ч- 15)f/(R„ + /?0)
Как видно из этих выражений, пульсации напряжения на запо-
минающем конденсаторе и величины требуемых токов от источни-
ков импульсного и синусоидального сигналов можно значительно
Снизить при увеличении сопротивления нагрузки. С этой целью
часто применяют катодный повторитель, включаемый после запо-
минающего конденсатора.
Степень подавления побочных колебаний системы ИФАПЧ в
режиме удержания определяется напряжением пульсаций на кон-
денсаторе Сн и затуханием, которое вносит фильтр нижних частот,
включаемый после катодного повторителя, на частоте следования
импульсов и ее гармониках. Для обеспечения хорошей фильтрации
побочных колебаний, что особенно важно при умножении частоты,
необходим катодный повторитель и хороший фильтр нижних
частот с пиками затухания на частоте следования импульсов и ее
гармониках. В делителях частоты требование хорошей фильтрации
легко выполняется, поскольку частота следования импульсов рав-
354
на частоте подстраиваемого генератора, и побочные колебания яв-
ляются лишь гармониками выходной частоты. Поскольку условие
(10.44) обычно всегда выполняется, расчет фильтрации ведется,,
как и для непрерывной системы ФАПЧ.
До сих пор предполагалось, что длительность импульса, дейст-
вующего на ИФД, значительно меньше длительности периода си-
нусоидального сигнала. В импульсно-фазовых умножителях часто-
ты высокой кратности, работающих в высокочастотном диапазоне,
это условие трудно выполнимо.
Если запоминающее устройство отсутствует, то при увеличении
длительности импульса постоянная составляющая выходного на-
пряжения фазового детектора вследствие щелевого эффекта зна-
чительно снижается. Согласно работе [1962, 19] при прямоугольном
импульсе низкочастотная составляющая напряжения на выходе
ИФД
Ди сопг
sin----
(7ифд = U —------------cos ср. (10.52)
Т р wnr
Анализ этого выражения показывает, что наименьшая длитель-
ность, при которой обеспечивается максимальное значение постоян-
ной составляющей выходного напряжения фазового детектора
АИОпТ = у£. (10.53)
Поэтому при тех же процентных отклонениях длительности импуль-
са, имеющих место на практике, изменение постоянной составляю-
щей получается наименьшим.
Если же в системе имеется запоминающее устройство, то при
прямоугольной форме импульса и Ди^Тр постоянная составляю-
щая на выходе этого устройства даже при относительно большой
длительности импульса почти не зависит от Ди.
10.4. ПОБОЧНЫЕ КОЛЕБАНИЯ НА ВЫХОДЕ СИСТЕМЫ ИФАПЧ
Ранее указывалось, что при идеальном запоминающем устрой-
стве и постоянной начальной расстройке в режиме удержания
напряжение на входе управляющего элемента строго постоянно,
поэтому спектр подстраиваемого генератора монохроматичен.
Практически все применяемые устройства запоминания невде-
альны, поэтому в режиме удержания напряжение на входе управ-
ляющего элемента является пульсирующим с частотой Fp=sl/Tp.
Это приводит к паразитной модуляции фазы подстраиваемого ге-
нератора, т. е. к обогащению его спектра. Знание уровня этой
паразитной фазовой модуляции чрезвычайно важно на практике.
12* 355
Для определения спектра подстраиваемого генератора необхо-
димо решить уравнение:
Ф*(<7> ер) + ЗуэТр С и’э(д, ep)dep+-^^ f и;э(д, ep)dep = .
L/ 1 t)
о о
со
^аТр^п^п, (10.54)
и—0
описывающее поведение разности фаз эталонного и подстраиваемо-
го генераторов в произвольный момент времени. Оно получено под-
становкой в выражение (10.3) значения Ф*г (q) из ф-лы (10.12) и
Фпг (?, ер) из ф-лы (10.10).
Поскольку общее решение этого уравнения неизвестно, ограни-
чимся частным случаем. Предположим, что система достаточно
инерционна [условие (10.44) выполняет-
Л Я) ся]. Тогда фпг<^1 и, следовательно, урд.
—с—1—t—Т------4 ние (10.54) можно линеаризовать и най-
Л С т Нй ™ его Решен'ие при использовании в це-
,______" 1 Т я пи управления различных типов филь-
тров. Однако само решение достаточно
Рис. 10 4. Эквивалентная ГР°МОЗДКО. „
схема ключевого детектора Для определения паразитной фазовой
с запоминающим устройст- модуляции воспользуемся приближенным
вом методом. Будем полагать, что срш<С 1, и
исходить из линеаризованной модели
ИФАПЧ. Кроме того, будем считать, что в режиме удержания за-
йоминающее устройство состоит из конденсатора Сн, вентиля Д с
««утренним сопротивлением и разрядного резистора Rs, под-
ключенных, как показано на ,рис. 10.4, к источнику однополярных
Прямоугольных импульсов (ИФД). В этом случае амплитуда им-
пульсов на выходе ИФД определяется выражением
4фД=^макс^-. (Ю.55)
Если условие (10.47) выполняется, то можно считать, что в мо-
мент действия импульса конденсатор заряжается полностью. В
промежутке между импульсами конденсатор разряжается на сопро-
тивление Rv=RsRol (Rr + Ro) по закону u3y(t) =ЛИфд е~//СнЯп,
где Дифд —амплитуда импульса на выходе ИФД.
Для эффективной работы запоминающего устройства необходи-
мо, чтобы выполнялось условие СнДр^Тр. В этом случае для
0</<7’р можно приближенно записать:
1Ы')=А1ФД (1 - ’ 1пТр<К(п±1)Тр]. (10.56)
356
Таким образом, на конденсаторе запоминающего устройства
создаются импульсы пилообразной формы с амплитудой
А изу = 4 _А_. (10.57)
зу ИФД RPCH V ’
Для определения закона изменения и величины девиации фа-
зы подстраиваемого генератора необходимо найти реакцию фильт-
ра и управляющего элемента совместно с генератором ПГ (идеаль-
ным интегратором) на воздействие (10.56). Однако практически
удобнее воспользоваться спектральными представлениями. Для
этого необходимо разложить выражение (10.56) в ряд Фурье, а
затем помножить его на коэффициент передачи по переменному то-
ку линейной части системы.
Разложение переменной составляющей выражения (10.56) в
ряд Фурье имеет вид:
/М — 4 2 Тр I sin Qp t sin 2QP t sin 3 I
9УЮ “ Ифд ---------2—+ 3
В соответствии с этим выражением амплитуда девиации фазы
подстраиваемого генератора на n-й гармонике частоты
импульсов QP:
дифд ^уэ Г2р | /<фНч (п Qp)|
л Rp Гц п»
Из последнего выражения вытекает, что даже в
системе ФАПЧ [при Хфич (nQp) = 1] амплитуда девиации фазы
подстраиваемого генератора падает обратно пропорционально
квадрату номера гармоники. Поэтому для практических расчетов
можно учитывать только первую гармонику. В результате, с учетом
ф-лы (10.55), имеем
~ Гр | Л~фнч (®р)|
Рпг~ nRpCH
Это выражение показывает, что для уменьшения <Рпг следует
располагать максимум затухания фильтра на частоте Qp.
Таким образом, побочные колебания в спектре подстраиваемо-
го генератора определяются его синусоидальной фазовой моду-
ляцией с индексом Рпг. Уровень побочных колебаний легко опре-
делить при помощи функций Бесселя.
10.5. ДЕЙСТВИЯ ВОЗМУЩЕНИЙ НА СИСТЕМУ ИФАПЧ
(10.58)
следования
(10.59)
простейшей
Рпг(п) =
(10.60)
Если возмущения, действующие на систему, очень малы и ее
нелинейные свойства не проявляются, то, как и для непрерывной
системы, можно ограничиться рассмотрением ее линейной модели.
При этом к импульсной линейной системе ФАПЧ применимы
принципы и понятия теории линейных систем.
357
Принцип суперпозиции, как обычно, позволяет исследовать
реакцию на каждое отдельно взятое возмущение независимо от
действия других возмущений и суммировать отклики при одновре-
менном воздействии нескольких возмущений.
Для импульсных линейных систем введены понятия импульс-
ной передаточной функции, импульсного комплексного коэффици-
ента передачи, импульсного энергетического спектра и т. д., ана-
логичные соответствующим понятиям для обычных линейных си-
стем. Эти понятия позволяют пользоваться в теории линейных им-
пульсных систем методами, аналогичными методам теории непре-
рывных систем [72].
Применительно к системе ИФАПЧ импульсной передаточной
функцией Wi(q, ер) назовем отношение изображений по модифи-
цированному дискретному преобразованию Лапласа [72] отклоне-
ния фазы подстраиваемого генератора к аналогичному изображе-
нию отклонения фазы эталонного сигнала.
Структурная схема рассматриваемой линейной модели ИФАПЧ
показана на рис. 10.5. На вход системы поступает эталонный
сигнал, начальная фаза которого подвержена возмущению <рэг(/),
представляемому изображением <p*r (q, ер). Как и ранее, будем
предполагать, что импульсный элемент и запоминающее устройст-
во формируются прямоугольные импульсы со скважностью 6„= 1 и
Рис. 10.5. Структурная схема системы ИФАП.Ч, подверженной действию слу-
чайных возмущений
амплитудой, определяемой значением разности фаз в тактовые мо-
менты, отстоящие один от другого на постоянную величину Тр.
При этих условиях передаточную функцию замкнутой системы
можно представить в виде [72]:
(9. ер) =------Z------- (1 °-61)
1 + аЛ1 (?, 0)
где а = Пу?р А'(ф02)>
8р)—j КфНЧ(9> 8р+ е<7_1 ) ^ФНЧ^’ ер)^8Р’
о о
причем Кфнч(Ф ер) определяется по ф-ле (10.7) при би=1-
358
Зная изображение фэг(7), т- е- ф*г ег/ легк0 находим изо-
бражение <р*г (q, &р):
Фпг(<7- sp) =
oK*(q, Ер)
1 + aK*(q, 0)
Фэг SP)’
(10.62)
Поскольку импульсно-фазовый детектор в рассматриваемой
модели реагирует только на дискретные значения разности фаз,
можно в последнем сомножителе полагать ер=0, т. е. <р‘г (q, ер) =
= ф*(<7> 0). -
В частном случае для системы ИФАПЧ с пропорционально-
интегрирующим фильтром
ч 1 / —1)( е “р еР— 1)
К*(q, ep)=ep + (m—1)^----------——-----
ар(е'' —е ₽)
+ _1_Г1 + (1_е-~р
е?+! L «Р(е?-е-“р)
(10.63)
Подставив это выражение в (10.62), легко найти передаточную
функцию всей замкнутой системы.
Для того чтобы получить фпгГО, можно воспользоваться таб-
лицами обратного модифицированного дискретного преобразова-
ния Лапласа [72].
Если фаза эталонного сигнала модулирована, кроме регуляр-
ной составляющей, еще и случайной, то для нахождения отклика
системы на возмущения в силу ее линейности можно искать от-
клик системы на случайную составляющую отдельно. Предполо-
жим, что фаза эталонного сигнала подвергается стационарным
нормальным случайным флуктуациям, причем ее функция авто-
корреляции имеет вид
А(т)=оэг^(п, ЕД (10.64)
Здесь <э2эг— дисперсия, Д(-)—коэффициент автокорреляции
фазы эталонного сигнала, п — интервал между дискретными зна-
чениями времени, кратными периоду регулирования (целая часть
числа тр=//7'р).
Известно, что спектральная плотность такого процесса опреде-
ляется выражением [72]:
ОО
— 1 V п
Здэг(<А 8)=стэг 2 ^(п, ер)е , (10.65)
И=—X
где и = со7'р — безразмерная частота.
Дисперсия фазы подстраиваемого генератора
л 1
=П5дэг (и> е) 1 Wi (i v’е)|2 dvds- (10-66)
о о
359
>
В этом выражении №i(iu, е) представляет собой комплексную
передаточную функцию замкнутой системы, которая получается
путем прямой замены q на iu в выражении (10.61).
Если спектральная плотность 5ДЭГ равномерна, то ее можно
вынести за знаки интегрирования в (10.66) и тогда
о2пг = 5дэг ДЕдш=-5дэг j ^W^iv^dtdv, (10.67)
о о
где АЕдш — шумовая полоса дискретной замкнутой системы
ИФАПЧ.
Конкретные выражения для ДАдш даже для систем ИФАПЧ с
простейшими фильтрами довольно громоздки. В частности, как
показано в (1970, 27], шумовая полоса системы ИФАПЧ с пропор-
ционально-интегрирующим фильтром
а2 (2 р2 р4 + а рД Г 8 р2 — + р| р| + 16р — ( — е”а 1 +
д р _ ______________[_ а 3________________а \ а____/ __
дш~' 8{ае-“ + ргр4[Р1(2-ч)-->
-» + Pi Ps (2 pj — 8р ~ j j
-» — 2 а Р1 р2]} ~Г
(4 — а р2) — р2 р
4 а2 | “~ + (р Р2 + е “)2 + Р2(рР2+е “) —-у-
+___________________________________L
S(ae “ + р2 р4)
(10.68)
где а-ТР!Т, p=(m — 1)/а, рх = 1 + е~“, f>2 = 1 — е-“, р3 = 1—е~2“
Р4= 1 +ар, р5=2 р—1, Т и m — параметры фильтп i
Из этого выражения, как показано в (1970, 27], следует, что
при /и = 0 шумовая полоса практически, не зависит от постоянной
времени фильтра. При больших значениях а шумовая полоса, а
следовательно, и фильтрация помех мало зависят от параметров
фильтра. Для всех а, меньших некоторой критической величины,
существует оптимальное значение пг, при котором шумовая поло-
са оказывается наименьшей. С уменьшением а оптимальное зна-
чение m уменьшается. Одновременно и минимальное значение шу-
мовой полосы также уменьшается. С увеличением коэффициента а
шумовая полоса расширяется. При ct<C 1 выражение (10.68) пе-
реходит в аналогичное выражение шумовой полосы непрерывной
системы (6.21).
Аналогичным образом можно определить реакцию системы на
возмущения, приложенные в других точках кольца авторегулиро-
вания. Так, при действии внешнего возмущения ер) (рис.
10.5) на входе импульсного элемента
Ф;г(7. М =£*(<?, ер) —^..-е-р) - ^(t/,%). (10.69)
1 + аК1 (<?, 8Р) а
360
Если импульсно-фазовый детектор можно представить в виде
перемножителя с дополнительным ключом, то действие широко-
полосной помехи Ni(t), аддитивной эталонному сигналу, можно
свести к действию возмущения ^(t) на выходе перемножителя. При
этом, как и в случае непрерывной системы ФАПЧ, спектральная
плотность широкополосной эквивалентной помехи определяется вы-
ражением (6.58). Дисперсия фазы подстраиваемого генератора на-
ходится из выражения:
Чпг и29Гп
где — дисперсия аддитивного входному сигналу шума Ni(t),
П — интегральная полоса этого шума, UBT — амплитуда эталон-
ного сигнала, подаваемого на перемножитель, ДЕдщ — шумовая
полоса дискретной замкнутой системы, определяемая выражением
(10.67).
Для исследования действия больших флуктуаций на работу
системы ИФАПЧ, когда нельзя пренебречь ее нелинейными свой-
ствами, можно прибегнуть к известным для непрерывных систем
приближенным методам. В частности, в (1970, 27], методом стати-
стической линеаризации проанализирована система ИФАПЧ вто-
рого порядка.
»
Глава 11.
НЕКОТОРЫЕ ВОПРОСЫ СИНТЕЗА
ОПТИМАЛЬНЫХ СИСТЕМ ФАПЧ
11.1. ПОСТАНОВКА ЗАДАЧИ
При проектировании систем ФАПЧ обычно задают требова-
ния к ним и условия их применения. Необходимо так выбрать
схему и параметры системы, чтобы она наилучшим образом удов-
летворяла поставленным требованиям. Такая задача носит назва-
ние синтеза оптимальной системы.
Иногда встречаются случаи, когда схема ФАПЧ уже выбрана
по каким-либо соображениям и требуется лишь найти ее парамет-
ры, при которых характеристики системы будут наилучшими. Та-
кая задача носит название выбора параметров.
Синтез отличается от анализа тем, чте? для его выполнения нет
твердо установленных правил. Кроме того, при синтезе приходит-
ся иметь дело с функциями многих независимых и зависимых
переменных, причем связь между этими переменными часто не
удается выразить в аналитической форме. Поэтому задачи синте-
за во много раз сложнее задач анализа.
В настоящей главе изучаются отдельные вопросы синтеза оп-
тимальных систем или выбора их оптимальных параметров. Раз-
личные аспекты синтеза оптимальных систем ФАПЧ рассматрива-
лись в работах многих авторов [1955, 3; 1963, 3; 1964, 1; 1966, 8;
29, 48; 1967, 12; 1969, 30, 56].
Поскольку система ФАПЧ находит применение в различных об-
ластях радиотехники, радиосвязи и радиоэлектроники, то и требо-
вания, предъявляемые к ней, чрезвычайно разнообразны. Более
того, они часто оказываются противоречивыми (например, требо-
вания высокой помехоустойчивости и широкой полосы захвата).
Большое разнообразие требований к системе ФАПЧ и частичная
их противоречивость создают исключительные, почти непреодоли-
мые трудности при поиске оптимальной системы ФАПЧ. Однако
в большинстве случаев требуется, чтобы система была оптималь-
ной по одному-двум параметрам при произвольных прочих пока-
зателях ее'работы. Это позволяет дополнительно улучшить основ-
362
ные характеристики системы за счет ухудшения некоторых срав-
нительно малоценных показателей.
Рассмотрим наиболее характерные случаи. Так, на практике
часто приходится создавать систему ФАПЧ, обладающую макси-
мальной полосой захвата и минимальным временем установле-
ния. Поскольку эти требования не являются противоречивыми, оп-
тимальной в данном случае будет система первого порядка, имею-
щая наименьшую инерционность и у„=1. Для реализации наимень-
шего времени установления необходимо обеспечить наибольшее
значение полосы удержания. При этом, как указывалось в гл. 2,
для определенного критерия окончания переходного процесса си-
стема должна иметь прямоугольную характеристику фазового
детектора.
Однако иногда реализация системы первого порядка оказы-
вается невозможной (например, в силу инерционности управляю-
щего элемента). В таких случаях возникает задача синтеза кор-
ректирующих устройств в цепи управления системы, обеспечиваю-
щих ее максимальное быстродействие. При этом можно восполь-
зоваться принципом максимума Л.С. Понтрягина [73, 74], примене-
ние которого для данной задачи развито в [1969, 56], или прибегнуть
к методам теории систем с переменной структурой (1969, 56].
Второй, не менее часто встречающейся, задачей является про-
ектирование системы ФАПЧ как высокоэффективного узкополос-
ного фильтра, выделяющего немодулированный гармонический
сигнал из аддитивной смеси его со случайным флуктуационным
процессом. К системе ФАПЧ в таком случае обычно предъявляют-
ся требования широкой полосы захвата, малой дисперсии фазы
подстраиваемого генератора, а также малого математического
ожидания (среднего значения) отклонения разности фаз сигналов
эталонного и подстраиваемого генераторов от 0,5л.
Как следует из гл. 7, поставленным требованиям хорошо удов-
летворяет астатическая система ФАПЧ, поскольку полоса захвата
в ней ограничивается только возможностями управляющего эле-
мента, так что у3= 1; среднее значение разности фаз в такой си-
стеме всегда постоянно и равно (0,5л) и, наконец, правильно вы-
бирая ее параметры, можно сделать дисперсию фазы подстраивае-
мого генератора достаточно малой.
Следует отметить, что в астатических системах одновременное
выполнение указанных требований достигается за счет увеличения
времени установления режима.
Третьей характерной задачей при проектировании ФАПЧ явля-
ется создание системы, наилучшим образом следящей за фазой
(частотой) эталонного ФА! и ЧМ сигнала в отсутствие шумов и
помех. Оптимальной в данном случае будет система ФАПЧ, обла-
дающая минимальной дисперсией разности фаз (частот) сигна-
лов эталонного и подстраиваемого генераторов. Ее реализацией
является система ФАПЧ первого порядка с большой полосой
удержания и линейной рабочей частью характеристики фазового
363
>
детектора. Задача создания подобной системы встречается при
использовании ее в качестве неискажающего усилителя ЧМ и ФМ
колебаний. Значительно сложнее создать систему ФАПЧ, опти-
мальным образом выделяющую полезный ЧМ или ФМ сигнал из
аддитивной смеси его со случайным флуктуационным шумом. Не-
обходимость в этом часто возникает на практике при использовании
систем ФАПЧ в качестве частотных или фазовых дискримина-
торов.
В теории оптимальной нелинейной фильтрации было показано,
что структура системы ФАПЧ с линейным перемножителем в ка-
честве фазового детектора в гауссовом приближении является оп-
тимальной в смысле максимума апостериорной плотности вероят-
ности для выделения (приема) на фоне нормального белого шума
сигналов с фазовой (частотной) модуляцией [1964, 1, 26; 1965, 1,
16]. При этом изменение статистических характеристик моду-
лирующей функции не требует изменения структуры системы
ФАПЧ, а лишь ведет к изменению фильтра нижних частот в цепи
управления {1966, 13].
Если предположить структуру системы заданной, величину
ошибки настолько малой, что нелинейностью характеристики фа-
зового детектора можно пренебречь, а распределение помехи и
подлежащего выделению параметра нормальным, то для опреде-
ления структуры цепи управления можно применить теорию опти-
мальной линейной фильтрации [51, 52, 75, 76], с помощью которой
в [1955, 3; 1966, 8; 1967, 12] найдены структуры фильтров при
различных критериях оптимальности и законах модуляции.
11.2. СИНТЕЗ СИСТЕМЫ ФАПЧ, ОПТИМАЛЬНОЙ
ПО БЫСТРОДЕЙСТВИЮ
В ряде случаев быстродействие системы ФАПЧ является опре-
деляющим фактором ее работы. Задача о быстродействии стано-
вится особенно актуальной для систем ФАПЧ, в кольце регулиро-
вания которых содержатся инерционные элементы. Примерами мо-
гут служить система ФАПЧ, в которой управляющий элемент вы-
полнен в виде ферритового элемента с катушкой подмагничивания,
система ФАПЧ, где в качестве подстраиваемого генератора ис-
пользуется электродвигатель, управляемый по скорости, и т. п.
Вопросы быстродействия затрагивались в предыдущих разде-
лах при изучении работы конкретных систем ФАПЧ. В более об-
щей постановке задачи предполагается, что часть структуры зада-
на и требуется найти такие корректирующие звенья, которые
обеспечат быстродействие системы.
Отдельные задачи, связанные с повышением быстродействия,
рассматривались в [1965, 24; 1966, 29, 36]. Систематическому изу-
чению этого вопроса посвящена работа В. И. Петрищева [1969, 56].
364
Рассмотрим задачу о синтезе оптимальной по быстродействию
системы ФАПЧ, управляемый генератор которой обладает инер-
ционностью [1969, 56].
Рис. 11.1. Структурные схемы
системы ФАПЧ, применяемые
при выборе оптимального уп-
равления:
а) упрощенная; б) развернутая
Будем рассматривать систему ФАПЧ как состоящую из объек-
та управления ОУ и управляющего устройства УУ (рис. 11.1а).
К объекту управления отнесем, кроме подстраиваемого генерато-
ра, управляющий элемент и фильтр нижних частот (если таковой
имеется).
Задача оптимального по быстродействию управления состоит
в минимизации времени движения системы из одного состояния,
в котором она находилась в момент времени t0, в другое, которое
наступает в момент /ц т. е. в минимизации разности ti—to, кото-
рую можно представить функционалом
б
J = ^dt. (11.1а)
^0
Это достигается соответствующим выбором управляющей функ-
ции u(t), которая воздействует на объект управления. Управляю-
щая функция формируется на основе информации о сигналах
эталонного и подстраиваемого генераторов. Поскольку синтези-
руется система ФАПЧ, то управляющее устройство должно ис-
пользовать информацию о разности фаз указанных генераторов.
Это означает, что в состав управляющего устройства должен вхо-
дить фазовый детектор, имеющий периодическую ограниченную
характеристику F(<p) =F(<p + 2 л). Поэтому управляющая функция
должна быть ограниченной по модулю, т. е.
|«(0|<М. (Н.16)
где М — постоянная величина.
При этом развернутая структурная схема системы приобрета-
ет вид, показанный на рис. 11.16, где К.(р) объединяет как пере-
даточную функцию фильтра, так и передаточную функцию управ-
365
/
Ляющего элемента. Подстраиваемый генерат'ор отображен /бло-
ком Syg/p. I
В дальнейшем будем полагать К(р) = (1 + 7'р)-1. Сигнал, под-
лежащий отработке, представляет собой скачок фазы и частоты
эталонного сигнала в момент to'.
ФэГ(О=ФэГо + (<Р1 + ЯнО1(^о). (П-2)
Здесь <рэг о — начальная фаза эталонного сигнала, фь йн — ве-
личины скачков фазы и частоты эталонного сигнала соответствен-
но, 1 (/—10) —единичная функция.
Для принятого К(р) уравнения объекта управления можно за-
писать так:
йфпг=5 (113)
d/2 dt у
Вводя координату ф = фэг—фпг — обычную фазовую ошибку и
Замену переменной х1 = ф(5у:)Л1Г)-1, r=tfT, ун=^н/5уэЛ1 < 1,
и=ун—и/М, перепишем ур-ние (11.3) в виде
^=*2- (П-4)
d т
^=-xz + v, (11.5)
dr
где —1+ун^гС1 + ун.
Задача теперь сводится к отысканию оптимального управления
как функции координат системы, т. е. v = v(xi, х2). В силу перио-
дичности F (ф) имеем х-
v(F(X1), x2)^v[F(Xl + 2^(Sy3MT)-1), х2]. (11.6)
Следовательно, ур-ние (11.3) определяет бесконечное счетное
множество состояний равновесия, в котором чередуются устойчи-
вые и неустойчивые по первому приближению состояния. Уточняя
задачу нахождения оптимальной по быстродействию системы
ФАПЧ, будем полагать, что в момент t = t0 изображающая точка
находится в произвольной точке плоскости х2 системы ур-ний
(1'1-4), (11.5).
Требуется так определить функцию и, чтобы изображающая
точка системы попала в какое-либо устойчивое состояние равно-
весия за минимальное время. В связи с этой особенностью разобь-
ем все фазовое пространство системы (11.4) и (11.5) прямыми,
проходящими через точки неустойчивого равновесия (х* ) и па-
раллельными оси х2, на периодически повторяющиеся области
х2) таким образом, чтобы внутри каждой области было
только одно устойчивое состояние равновесия.
Уравнения граничных прямых имеют вид:
g(xt-Г >)"--< 211,1 «=0,1,2... (11.7)
v ’ 1 — Sy3 МТ v 7
366
Поскольку области периодически повторяются, вначале рас-
смотрим одну из них Go. Пусть границами этой области будут
прямые gi(xi) и g2(xi). Все траектории, заполняющие область Go,
можно разбить на две группы:
— траектории, целиком лежащие внутри области Go и не ка-
сающиеся границ,
— траектории, касающиеся границ или пересекающие гра-
ницы.
Для построения оптимальных траекторий первой группы спра-
ведлив принцип максимума Л. С. Понтрягина [73]. Существование
траекторий второй группы объясняется ограниченностью управле-
ния [см. ф-лу (11.16)].
Поскольку в данном случае непринципиально, в какой из об-
ластей изображающая точка попадает в состояние равновесия, не-
обходимо найти оптимальную траекторию перевода изображаю-
щей точки из начального состояния х0 б Go на границу области Go,
а затем попытаться найти траекторию, которая, начинаясь на гра-
нице, являющейся общей для областей Go и соседней с ней Gi, за-
кончилась бы в области IG1. Если этого сделать не удается, про-
цесс следует повторить для следующей зоны G2 и т. д. до тех пор,
пока не будет найдена зона, в которой осуществима траектория
первой группы.
При отыскании оптимальной траектории второй группы для
перевода изображающей точки на границу области наряду с
принципом максимума следует использовать условие трансвер-
сальности [74].
Таким образом, можно построить весь фазовый портрет опти-
мальной системы для любой заданной области координаты х и
тем самым определить оптимальное управление.
Перейдем к построению траекторий оптимального управления.
Следуя [1969, 56], составим для траекторий первой группы функ-
цию
Я=ф1(т)х2 + ф2(т)1»—ф2х2. (11.8)
Вспомогательные функции 1|д и ф2 определяются уравнениями;
-£*!- =---— =0, (11.9)
d х d
= (11.10)
d х дх2
Согласно принципу максимума Л. С. Понтрягина оптимальное
управление v* определяется из условия:
Я(ф1, ф2, ^1,^2, у) =тах/7(ф1, ф2х2, ц). (11.11)
367
Максимизация Н по v при учете ограничений на v дает и* =
^Ys+Sign фг(т) • Решение системы ур-ний (11.9) и (11.10) можно
записать в виде:
Фх = ф10 - const, (11.12)
^(x)-=i|5i0 + (i|52()—i|510)eT. ’ (11.13)
Следовательно,
у* Yh + sign+0ho—Фы)ет]. (П-14)
Из этого выражения следует, что при любых заданных фю и ф2о
функция v* меняет знак не более одного раза.
Для построения линии переключения, т е. линии в фазовом
пространстве системы, при достижении которой изображающей
точкой управляющая функция меняет свой знак, исключим из си-
стемы ур-ний (11.4) и (П.5) величину т. После интегрирования
полученного уравнения имеем:
xi = xio + (%2о—х^)-— о* 1п I ——— I. (11.15)
I v *20 I
Это уравнение фактически описывает два семейства фазовых
Траекторий, определяемых двумя значениями v*:
Ь -х10 + (х20 -х2) + (1 + ун) 1п 1 , р* = 1 + ун], (11.16)
1 + Тн - *20
Ч = + (%20 — х2) + (— 1 + Ун) In I -1 + Yu~*2 I, [у* = _ 1 Vh] .
I — 1 + Ун — *20 I
(11.17)
На рис. 11.2 приведены оба семейства траекторий для 0<ун<
Как уже указывалось, для траекторий первой группы опти-
Рис 112 Семейство фазовых траекторий
Мальный процесс состоит из двух интервалов (одно переключение
©*). Из. рисунка следует, что изображающая точка может по-
пасть в- состояние равновесия %i=X2=0, двигаясь по траекториям
КО и КА. Это означает, что линия переключения должна быть
368
сформирована из полутраекторий КО и KiOi. На полутраектории
КО имеем и* = 1+ун и х2<0, а на KiOt v* = — 1+ун, х2>0. Объеди-
няя эти условия, можно записать для любой траектории
V* =Ун— Signx2- (11.18)
Подставляя это выражение в (11.15) и полагая ради простоты
Хю = Х2о = 0, получаем уравнение для линии переключения:
L(xlt х2) =—Xj—х2—(ун—signx2)ln I 1--------—----1=0. (11.19)
I Ун — sign x2 |
Определим теперь значения управляющей функции выше и ни-
же линии переключения. Очевидно, что линия переключения ле-
жит во II и IV квадрантах, причем для всех точек, выше линии
переключения L(xt, x2)<ZO, и наоборот. Поскольку, как уже ука-
зывалось, переключение для рассматриваемых внутренних траек-
торий происходит только один раз, то для окончательного выясне-
ния вида управления необходимо установить, каким оно должно
быть выше и ниже линии переключения. Для этого нужно рас-
смотреть какое-либо частное оптимальное движение в системе. Из
ф-лы (11.18) следует, что при движении изображающей точки по
линии переключения (которая совпадает с одной из оптимальных
траекторий) вид управляющей функции определяется знаком ко-
ординаты х2.
В частном случае при %i = 0 для всех %2>0, т. е. выше линии
переключения управление v* —— 1 + ун, следовательно, ниже линии
переключения и* = 1+ун. Поскольку L(X{, х2) также меняет свой
знак на линии переключения, то оптимальное управление
v* = sign Ь(хг, х2). (11.20)
Так как практически наблюдается не сама координата а пе-
риодическая функция от нее F(xt), Xt же входит в L(xb х2) линей-
но. для формирования оптимального управления достаточно, что-
бы в пределах выделенной зоны dFldx} = \. Наибольшая возмож-
ная ширина зоны 2 л—0, поэтому линейный участок F(xt) должен
быть таким же. В результате приходим к пилообразной характе-
ристике фазового детектора.
Рассмотрим теперь построение оптимального управления вто-
рой группы. Как уже указывалось, для траекторий этой группы
наряду с принципом максимума необходимо использовать усло-
вие трансверсальности, имеющее вид [74]:
ф(т1)-П=0. (11.21)
Здесь ф (я) — значение вектора вспомогательной переменной
в момент Ti пересечения оптимальной траекторией граничной пря-
мой gt(xi), т) — единичный вектор, лежащий на граничной прямой.
Раскрывая ф-лу (11.21) для данного случая, имеем
+ 0. (11.22)
369
Поскольку согласно ф-ле (П-12) фДт) =const, то ф1(т)=0 для
всех т. Следовательно, в соответствии с ф-лой (11.13)
Фг(т) =ф2аеТ- (11.23)
Для управляющей функции v {см ф-лу (11.14)] получим
v* =YH + sigmp20eT. (11.24)
Сравнивая это выражение с (11.14), замечаем, что оптималь-
ная управляющая функция v* в каждой из областей G,- принимает
одно из двух максимальных значений у*=±11+ун на траекториях
как первой, так и второй групп.
Поскольку линия переключения периодична по координате Xi,
а фазовые траектории в каждой из областей G,- удовлетворяют
принципу максимума, то вид фазового портрета в каждой области
одинаков.
Возвращаясь к исходным координатам, окончательно запишем:
£(Ф, Ф, Л4) = —Sy*MT — -------(ун—sign ф)[1п |Sy3M(YH—sign^)—<p| —
—In |Sy3M(yH—signal,, (11.25)
и ——AlsignL. (11.26)
Фазовый портрет оптимальной по быстродействию системы
приведен на рис. 11.3.
В. И. Петрищевым было показано {1969, 56], что относительная
Рис. 11.3. Фазовый портрет оптимальной
по быстродействию системы ФАПЧ
полоса заката в такой систе-
ме равна единице.
В связи со сложностью реа-
лизации оптимального управ-
ления [ф-ла (11.25)] в [1969,56]
предложено аппроксимировать
линию переключения прямой,
близкой к оптимальной линии
переключения:
^(ф’ Sy^MT ~S^M •
(11.27)
Для формирования линии
переключения необходим из-
меритель <р (т. е. частотный де-
тектор) .
Реализацию оптимального
управления можно упростить,
если использовать вместо Ф величину <р—Пн, т. е. величину, про-
порциональную напряжению на входе управляющего элемента.
Очевидно, что это возможно только при малых ун. В [1969, 56] по-
казано, что применение такой линии переключения увеличивает
время переходного процесса не более чем на 30%.
370
Структура простейшей быстродействующей системы показана
на рис. 11.4. Коэффициенты cci и аг выбирают таким образом, что-
бы обеспечить близость аппроксимирующей линии переключения к
оптимальной в окрестности начала координат [77].
Рис 11.4 Структурная схема простейшей быстродействующей системы
ФАПЧ
В частном случае, когда 7 = 0 (система первого порядка) непо-
средственно из ф-л (11.25) и (11.26) следует, что система, опти-
мальная по быстродействию, реализуется в виде системы ФАПЧ
первого порядка с прямоугольной характеристикой фазового де-
тектора.
Развитие вопросов синтеза быстродействующих систем ФАПЧ
дано в [1969, 56].
11.3. ОПРЕДЕЛЕНИЕ ОПТИМАЛЬНОЙ ПЕРЕДАТОЧНОЙ ФУНКЦИИ
ЛИНЕЙНОЙ МОДЕЛИ СИСТЕМЫ ФАПЧ НА ОСНОВЕ КРИТЕРИЯ
МИНИМУМА СРЕДНЕКВАДРАТИЧНОЙ ОШИБКИ
Системы ФАПЧ часто используются для приема сигналов с фа-
зовой и частотной модуляцией, поскольку, как уже указывалось,
они являются оптимальными устройствами для такого применения
[1964, 1]. В реальных условиях прием сопровождается флуктуа-
ционным шумом. В связи с этим возникает задача так выбрать
параметры системы, чтобы дисперсия ошибки принимаемого сигна-
ла была минимальной. В общем случае указанная задача весьма
сложна. Однако практически наиболее интересен случай, когда
выполняется условие высокой точности работы системы (диспер-
сия ошибки мала). При этом допустимо использовать линейную
модель системы. Тогда поставленная задача сводится к отысканию
оптимальной передаточной функции фильтра, обеспечивающей ми-
нимум дисперсии ошибки слежения за нужным параметром. Для
решения этой задачи можно использовать результаты теории оп-
тимальной линейной фильтрации. В дальнейшем будем считать,
что на вход системы действует сигнал, модулированный по фазе
(частоте) нормальным стационарным процессом, в сумме со ста-
ционарным нормальным шумом. Предполагается, что сигнал и
371
шум статистически независимы, а фазовый детектор, как и ранее,
выполнен в виде перемножителя. Тогда дисперсия разности фаз
а2 определится полученным выше выражением (6.64).
В том случае, если задан спектр не девиации фазы эталонного
сигнала, а его частоты, можно найти требуемую величину из со-
отношения:
5йэг(ш) =ю2 5фэг(ю). (11,28)
Выражение для дисперсии фазовой ошибки по структуре ана-
логично выражению для дисперсии ошибки воспроизведения сиг-
нала, имеющего спектральную плотность S<p3r (со) линейным филь-
тром с коэффициентом передачи IFi(ico) на фоне шума, имеющего
спектр T'cySj (со). Поэтому для отыскания оптимальной передаточ-
ной функции, минимизирующей ст2, можно воспользоваться из-
вестными из теории оптимальной фильтрации формулами [30, 51,
52]. Так, если не учитывать условий физической осуществимости,
то оптимальную передаточную функцию можно найти из выраже-
ния [30, 56]:
•Sm (СО)
опт (1 со) =------. (11,29)
V $Фэг(со) + Т2су$6(со)
Таким образом, эта передаточная функция не должна вносить
фазовых сдвигов и в то же время должна иметь коэффициент пе-
редачи, зависящий от частоты. Хотя она и неосуществима, тем не
менее представляет большой интерес, так как позволяет достаточ-
но просто оценить теоретический предел снижения о2 .
Подставляя ф-лу (11.29) в (6.64), получаем
2 1 f (со)
о2 =— ----------------------------dto.
%ШН 2л l + SV3r(co)/Te2yS6(co)
(11.30)
Это выражение определяет предел, к которому следует стре-
миться при проектировании физически реализуемой передаточной
функции.
Если предъявить к системе требование физической реализуемо-
сти, то ее импульсная реакция g(t) должна удовлетворять усло-
вию:
g(0=g(0. t>0]
g(t) = O, t<0|
(11.31)
Если, далее, предположить, что спектральные плотности
Sipar (со) и (со) представляют собой дробно-рациональные
функции частоты, то оптимальная передаточная функция системы
определится выражением [56]:
^юпт(1со) = Si(ico) [s1(!licoj] • (11.32)
372
Здесь |Si(ico) |2 = 5<рэГ(со) + Г cySj(co) = Si(ico)Si(—ico). Опера-
ция [ ]+ означает, что в разложении выражения, заключенного в
скобки, на простейшие дроби используется то слагаемое, которое
имеет полюсы в верхней полуплоскости.
Дисперсия разности фаз при оптимальной физически реализуе-
мой передаточной функции принимает вид [56]:
00
< [{Чг(ю)-1^опта(0)|2[5Фэг(«)) + Т2у5 («)]}</«. (11.33)
—со
Интересно сравнить выражение (11.32) с (11.29), которое со-
ответствует физически нереализуемой системе. Выражение (11.29)
можно представить в виде:
!VZ ,• х 1 5<РЭГ(“)
И'юптО®)- S1(ico) s1(-ico) '
Сравнивая это выражение с (11.32), видим, что в физически
реализуемой передаточной функции учитывается только часть вы-
ражения Дрэг (co)/Si(—ico), соответствующая частотной характе-
ристике физически осуществимой линейной системы.
Заметим, что если фаза эталонного сигнала и помеха имеют
нормальное распределение, то в соответствии с [51, 52] наименьшее
значение дисперсии разности фаз всегда достигается только с ли-
нейным фильтром в цепи управления.
Рассмотрим примеры вычисления ИД опт (ico). Предположим,
что спектр эквивалентной помехи (со) определяется выражени-
ем (6.59) и что спектр девиации фазы эталонного сигнала имеет
вид:
д
(со)=^-. (11.34)
фэг' ' Щ2 ' '
Такой спектр соответствует модуляции фазы эталонного сиг-
нала винеровским случайным процессом. Примером могут слу-
жить естественные флуктуации фазы автогенератора [24].
Обозначим постоянный спектр помехи через
2 л о?,,
Т2 S (со) = Т2 - .. = С2. (11.35)
су 5 С / су f/2 гт ' '
ЭГ
Складывая спектры, получаем
|Sx(ico)|2 = -°-+Mf2M2 =-(/Л°дт^-ТД)°~;МС)' • (1L36)
Отсюда следует, что:
S1(icD) = //1° + iMC , (11.37)
Sx(—1Ш)= /Л27М^С • (11.38)
373
Разделив (11.34) на (11.38) и разбив результат на два слагае-
мых, найдем
5Фэг И Г4 + УА0С (i i,39)
Si ( — i СО) 1Ш /до—icoC
Первое слагаемое имеет полюс со = 0 и соответствует физически
реальной системе. Разделив это слагаемое на (11.37), получим
„Г (!«)------g--------. (11.40)
1+тг‘
Сравнивая это выражение с (5.17), замечаем, что оно соответ-
ствует передаточной функции системы ФАПЧ первого порядка с
собственной постоянной времени Тс = С/ V Ао. Поскольку парамет-
ры С и Ао зависят от параметров модулирующей функции и шума,
то при их изменении Тс и, следовательно, полоса удержания си-
стемы должны меняться.
Для получения оценки фазы эталонного сигнала необходимо
сигнал со входа управляющего элемента пропустить через интег-
ратор (интегрирующую цепь).
В том случае, если система ФАПЧ оптимальным образом долж-
на следить не за фазой эталонного сигнала, а за его частотой, оп-’
тимальной следует считать систему, у которой минимальна дис-
персия разности частот обоих генераторов. Задача определения
оптимальной передаточной функции для этого случая аналогична1
задаче, рассмотренной выше. Действительно, дисперсия разности
частот определяется выражением
00 Т2 х
(Х/Ф) |l~W71(i<rf® + ~^L f(o25 (£0)^(1 <d<o.
—co —
(11-41)
Сравнивая это выражение с ф-лой (6.64), замечаем, что их раз-
личие обусловлено только иной формой энергетического спектра
помех и, следовательно, W7iOnr(ico) можно определить по ф-лам
(11.29) и (1132), в которых вместо (со)^су и S^Hco) нужно
подставлять величину Sj(co)7eyco2 и 5ИЭГ (со) соответственно. По-
рядок же расчета остается прежним.
Если система ФАПЧ используется в качестве частотного де-
тектора, то полезный сигнал снимается непосредственно со входа
управляющего элемента. Казалось бы, что в этом случае опти-
мальной следует считать такую передаточную функцию системы
ФАПЧ, при которой дисперсия разности частот обоих генерато-
ров минимальна. Однако это далеко не так. Минимум дисперсии
разности частот еще не означает минимума дисперсии разности
фаз. Поэтому возникает опасность нарушения линейности режима
374
работы системы ФАПЧ, что может привести к недопустимым ис-
кажениям принимаемого сигнала.
Следовательно, нужно выбирать передаточную функцию замк-
нутой системы ФАПЧ из условия минимума дисперсии разности
фаз. При этом передаточная функция самой системы ФАПЧ не
будет оптимальной для случая приема ЧМ. сигнала, и сигнал, сни-
маемый со входа управляющего элемента, следует пропустить че-
рез корректирующий четырехполюсник так, чтобы результирую-
щая передаточная функция всего устройства была оптимальной.
Ранее при выводе оптимальной передаточной функции счита-
лось, что функция, модулирующая по частоте или фазе эталонный
сигнал, является стационарным случайным процессом. На прак-
тике часто встречаются случаи, особенно при измерениях коорди-
нат тел, летящих по законам баллистики, когда характер модули-
рующего процесса известен с точностью до некоторых постоянных
параметров, значение который в соответствии с начальными усло-
виями является случайным. В связи с этим возникает задача оп-
ределения такой передаточной функции системы, которая обеспе-
чила бы минимум случайной флуктуационной ошибки, вызываемой
действием шума, при заданном уровне ошибки, обусловленной пе-
реходным процессом для заданного воздействия.
Как и ранее, флуктуационную ошибку запишем в виде
т2 ”
°Фл: -9~
—00
Качество переходного процесса характеризуется
квадрата ошибки
(11.42)
интегралом
Фд = /фд(^) dt,
о
(11.43)
где фд — динамическая ошибка переходного процесса.
Используя равенство Парсеваля, можно записать:
Ф2=^Ф2д(0Л=~ J|l-W\(i<S>)d(D, (11.44)
О -00
где 5д(со) = |фэг(7?) |2, <f(p) — преобразование Лапласа функции
фэг (7), в котором величина р заменена на ico.
Задача отыскания функции ITi(ico), обеспечивающей минимум
° ? при заданной величине фд , эквивалентна задаче отыскания пе-
редаточной функции системы, минимизирующей полную ошибку
(56]. Полная ошибка
, р Т2 ?
J |1-Il71(ico)|2^(co)dco + lT (11.45)
— СО —со
375
Здесь Л. — так называемый неопределенный множитель Ла-
транжа, определяемый в соответствии с заданным требованием
близости реального переходного процесса к желаемому.
Сравнивая (11.45) и (6.64), видим, что для нахождения
№ionT(ico) можно воспользоваться приведенными выше выраже-
ниями (11.29) и (11.32), заменяя в них (со) на АА$д(со).
Очевидно, что, поскольку величина ф2 должна быть конечной,
то в установившемся состоянии динамическая ошибка должна
быть равна нулю.
Рассмотрим примеры вычисления оптимальных передаточных
функций. Пусть в момент t = Q фаза эталонного сигнала претерпе-
вает скачок Афэг. Тогда изображение его по Лапласу <рЭг(р) =
= Афэг 1/р. При этом 5д(о) = (Афэг)2/со2, что аналогично ф-ле
(11.34). Оптимальная передаточная функция для данного случая
•определяется ф-лой (11.40), в которую вместо Ло следует подста-
вить (Афэг)2АА Установившаяся ошибка при этом будет равна ну-
лю, а флуктуационная при равномерной спектральной плотности
(со)=С27^2 найдется из выражения:
,, С С d со С А <рэг %
f л 2л ,1 С2 СО2 2
““ 1 +Р (А фэг)2
Здесь С определяется выражением (П.35).
Пусть теперь при / = 0 частота эталонного сигнала скачком из-1
меняется на величину Аэг, что соответствует линейному нараста-
нию фазы эталонного сигнала. Изображение фазы по Лапласу
принимает вид:
Афэг(р)=Аэг-у и 5д(со)-=^. (11.46)
р2 со4
Для вычисления оптимальной передаточной функции найдем
[^(ico)!2 = Х25д(со) + С2 ^С2 а4 + м'‘ . (11.47)
Здесь а4=А?г к2/С2.
Разлагая выражение (1147) на комплексно сопряженные со-
множители, получаем
' (11.48)
S1(-i<a)-Ct‘'-1^,y“[+,(-|")* . (11.49)
Подставляя 725д (со) вместо Sv3r (со), а также ф-лы (11.48) и
(11.49) в (11.32), имеем
W (i со) =_________A3^(i со)2__г_______________________I
10ПТ „ С [а2 j/^a i со+(1 ш)2] [(ico)2 [а2—У 2 a i со -f- (i со)2] J
376
Выполняя операцию [ ]+, окончательно получаем
nv г. \ a2+V2aico ...
и7! опт (1 со) =-. (11.51 >
а2 + V 2 a i со + (i со)2
Сравнивая это выражение с (5.15) замечаем, что оптимальная
передаточная функция в системе ФАПЧ достигается при нали-
чии в цепи управления низкочастотного фильтра с коэффициентом’
передачи вида К(р)={а2+ У2ар]Тс/р. Отсюда следует, что опти-
мальное слежение за скачком частоты в условиях широкополосных
помех осуществляется в астатической системе. Очевидно, в такой
системе установившаяся динамическая ошибка равна нулю. Флук-
туационная ошибка при этом
О2л--=0,5 /С7\ДэгМгХгТ\| *+} 2С).
Аналогично вычисляются оптимальные передаточные функции’
системы ФАПЧ при других законах изменения фазы эталонного
сигнала [49].
В качестве критерия оптимальности системы иногда принима-
ют минимум флуктуационной ошибки при заданной величине
обобщенной интегральной оценки качества переходного процес-
са, вызванного регулярной составляющей воздействия. Интеграль-
ная оценка качества переходного процесса, предложенная А. А.
Фельдбаумом в [78], имеет вид:
j - j {|фд(Oi2 4- Yi К1’ ^i2 + Y2 |ф(д ’ (Oj2 + - + Yn—i) Ф^1’ «} dt.
о
(11.52>
Здесь — весовые коэффициенты, (pg2* _ п.я произ-
водная по времени динамической фазовой ошибки.
В [1966, 8] показано, что согласно изложенному критерию пе-
редаточная функция оптимальной системы второго порядка, следя-
щей за скачком частоты эталонного сигнала, реализуется в систе-
ме ФАПЧ с пропорционально-интегрирующим фильтром, парамет-
ры которого определяются выражениями:
Т=-^-, mT = ^2Boq-B20Tc)^- .
ТсВ2о й2о
Здесь Во = А.2Д 1Г/Л2А эг Y2 + с2, А — множитель Лагранжа, q =
= |/1+yiB20/2.
Множитель Лагранжа, как уже указывалось, вычисляется в
соответствии с заданным требованием близости реального пере-
ходного процесса желаемому.
В [1966, 8] для конкретного вида переходного процесса были
определены основные параметры и характеристики оптимальной
системы ФАПЧ.
377“
До сих пор при синтезе оптимальных передаточных функций
системы предполагалось, что время наблюдения за смесью сигна-
ла и помехи не ограничено. На практике могут встретиться случаи,
когда требуется найти оптимальные передаточные функции систе-
мы, обеспечивающие минимум флуктуационной ошибки при задан-
ной длительности переходного процесса и заданных требованиях
к динамической точности. В общей постановке такая задача реша-
лась в {79]. Применительно к системе ФАПЧ конкретные результа-
ты были получены В. Н. Кулешовым в [1966, 48].
11.4. СИНТЕЗ ОПТИМАЛЬНОЙ НЕЛИНЕЙНОЙ СИСТЕМЫ ФАПЧ
С ПОМОЩЬЮ МЕТОДА СТАТИСТИЧЕСКОЙ ЛИНЕАРИЗАЦИИ
Ранее при синтезе оптимальной системы ФАПЧ предполагалось,
что выполняется условие высокой точности ее работы. Это дава-
ло возможность использовать линейную модель системы.
На практике три снижении уровня полезного сигнала часто
нельзя пренебрегать нелинейными свойствами системы. Отыска-
ние оптимальных параметров при этом, даже в простейшем слу-
чае, когда критерием оптимальности служит ^минимум среднего
квадрата ошибки, представляет собой исключительно сложную
задачу.
Одним из эффективных методов исследования, позволяющих
приближенно решить поставленную задачу, является метод ста-
тистической линеаризации. Поскольку этот метод позволяет за-
менить нелинейный элемент некоторым эквивалентным в статисти-
ческом смысле линейным элементом, то при синтезе оптимальной
нелинейной системы по минимуму среднеквадратичной ошибки
можно пользоваться теми же методами, что и цри синтезе опти-
мальной линейной системы.
Использование метода статистической линеаризации для син-
теза оптимальной нелинейной системы ФАПЧ показано (в [1963, 3],
[1965, 15].
Будем полагать, что на вход системы действует сигнал, моду-
лированный по фазе (частоте) стационарным нормальным про-
цессом, в сумме с нормальным стационарным шумом. Задача за-
ключается в отыскании параметров системы ФАПЧ, обеспечиваю-
щих минимум дисперсии фазовой ошибки.
Воспользовавшись введенными в разд. 6.6 понятиями эквива-
лентных передаточных функций нелинейной системы ФАПЧ, мо-
жно найти дисперсию разности фаз генераторов при действии на
вход системы ФАПЧ ФМ сигнала и аддитивного шума.
Складывая выражения (6.231) и (6.234), имеем
. " Т2 р
I J ^«l V -I
— 00 —«
(11.53)
378
где Тсуэ—4/А.
Сравнивая это выражение с ф-лой (6.64), замечаем, что по
форме они одинаковы .Существенное различие между ними со-
стоит в том, что в выражении (111.53) функции 1Г1Э(ко) и Тсуэ за-
висят от <т| и от среднего значения разности фаз т-.
Оптимальная передаточная функция системы ФАПЧ, при ко-
торой <т| в выражении [6.64], аналогичном (11.53), минимальна,
уже найдена [ф-лы (11.29) и (44.32)]. Выше было показано (см.
разд. 6.7), что при учете нелинейности система ФАПЧ эквива-
лентна некоторой линейной системе ФАПЧ, которая вместо соб-
ственной постоянной времени Тс имеет постоянною времени Тсэ =
=4/Qy&i, зависящую от о| . Поэтому для получения оптимальной
передаточной функции в ф-лах (11.29) и (11.32) необходимо за-
менить 7с на 7СЭ.
Зная оптимальную передаточную функцию и энергетические
спектры модулирующего сигнала и помех, можно определить по
выражениям (11.30) и (11.33) минимальную дисперсию разности
фаз, по которой затем можно найти и пц [ф-ла (6.230)].
Пусть, например, спектр модулирующего сигнала равномерен
в полосе частот 0</</в. Полагая, что спектр шума равномерен
в полосе, значительно более широкой, можно, подставив в выра-
жение (4130) вместо Тс величину Тсэ и проинтегрировав его,
найти дисперсию разности фаз в оптимальной нелинейной систе-
ме ФАПЧ:
Scp3r (и) 2 А
(J2 — ------------—------------------
’’мин |1 4- (co)/Sg (со) т2сэ
(11.54)
Нетрудно заметить, что при (со) = const, 5тЭГ(со)2/в =
= ог2эг. Мощность полезного сигнала на выходе фазового детек-
тора 7,свых = ц2эг 5|д (5фД — крутизна характеристики фазового
детектора), а мощность шума на выходе детектора при Sj (со) =
=const Ал Bbix=Sj (со) Тсэ 2/в5фд . Воспользовавшись этими ра-
венствами, перепишем выражение (41.54) в следующем виде:
(11.55
Причем (Р с/Р ш_)вых — О(рэг /S £ (со)Т'суэ 2/в
Воспользовавшись ф-лой (6.59), запишем отношение сиг-
нал/шум на входе системы
При этом мощность сигнала Pc=U29r/2.
379
Отношение сигнал/шум на выходе системы
( Рс \ СТФэг^Л
>Ш / ВЫХ \ All /Вх
(11.57)
где QB = 2n./B.
Подставляя ф-лу (11.57) в (11.55),получаем
‘Рмин
(11.58)
Это выражение вместе с (6.224) или (6.225) позволяет опреде-
лить зависимость ОфМИН=Л(Дс/Дш)вх, /7/Пв] при заданных <тфЭг и
Ун
В случае очень большой и очень малой дисперсии вычисление
°ГфминМ0ЖН0 значительно упростить. Если офМИ8С1, то из выра-
жений (6.224) и (6.225), учитывая ф-лы (6 223) и (6.230), имеем.
При £i-J/r0,5—
Для этих двух случаев <тфМИн вычисляется по более простым фор-
мулам:
<т2 «рМ
фмин \ Рс /вх
о?, ~
^МИН ‘Рэг
___&В__
(I-Yh)"
(11.59Х
(11.60)
На рис. 11 5 в качестве примера показаны зависимости о^мия=
=Я(Рс/Рш) вх, /7/Пв] при у = 0 [при этом в соответствии с (6.30)
тф&о=0] и нескольких значениях <тф , построенные по ф-лам
(6 224) и (11.58). По этим кривым и ф-ле (11.51) построены за-
висимости (/’с//’ш)вых=Дога) , (Рс/Рт)т>х> Д/Йв], приведенные на
**эг
рис. 11.6. Кривые показывают, что при некотором (зависящем от
(Р ) значении (Рс/Рш)ъх и ат >1 линейная зависимость
(Рс/Рш)вых=:1(Ре1Рш)вх нарушается. Это означает наличие поро-
та помехоустойчивости системы ФАПЧ, который нельзя было об-
наружить при линейном анализе.
Далее с помощью выражения (11.32) нужно было бы вычис-
лить физически реализуемую передаточную функцию оптималь-
ной системы ФАПЧ и найти дисперсию разности фаз в послед-
ней с учетом ее нелинейности. Однако эти вычисления весьма
громоздки
Покажем, что дисперсия разности фаз в простейшей системе
ФАПЧ первого порядка с соответствующим образом выбранной
полосой удержания, мало отличается от дисперсии в системе с
380
нелинейной системе ФАПЧ от параметров системы и шума
Рис. 11.6 Зависимость порога помехоустойчивости системы
ФАПЧ от параметров эталонного сигнала и шума
оптимальной, но физически не реализуемой передаточной функ-
цией Эквивалентная передаточная функция нелинейной системы
ФАПЧ первого порядка имеет вид-
U719(i<o) = -—
(11.61)
Подставляя это выражение в ф-лу (1153) и учитывая, что
Sr)r(oj) = const и S\ (<jj) =const, получаем
oft Г1— aretg—--------------'-AMVi 1 (11.62)
Ф <₽эг[ /в S^y 4/в \РС /вых]
Заменяя в этом выражении (Ро/Ап/вых на (Рс/Рш/вх при по-
мощи выражения (14 57), получаем
1— ^-^arctg-^------1-----fo-..
/ь Йу 2кгП а \ Рс /Вх
*эг
О 2 =(j2
Ф Фэг
(11.63)
Найдем теперь такое значение Qy, при котором дисперсия
0% минимальна Аналитическое определение этого значения в об-
щем случае затруднительно, поскольку статистический коэффи-
циент ki представляет собой сложную зависимость от а£. Если
же Оф<С11, то ^i = j/ 1—и полоса удержания, соответствую-
щая минимальной величине , определяется выражением
QyonT = 1,37^1/ J--------------, (11.64)
Г Гш вх
а минимальная дисперсия разности фаз
О 51 / Р \ 13/^ 1 7н)2 2л /в о?, / п \
О2 = 1/ ------------. (11.65)
^МИН 1 Ун \ А /вх ' 77 \ Рщ /вх
В другом крайнем случае при А(Рс/Рш)вх /7/Пв<С1 вели-
чина Qy опт -^0 Однако уже при
QyonT«0,15fB^ <?ф (11.66)
дисперсию разности фаз с высокой степенью точности можно оп-
ределить из ф-лы ((11.60). Для промежуточных значений (Р0/Рш)вх
оптимальная величина Qy находится путем численного расчета из
ф-л (1163) и (6 224). Результаты расчета Оуопт при ун=0 и раз-
личных значениях (77/QB) (Рс/Рщ/вх и сг<рэг приведены на рис 1'1.7.
С помощью кривых этого рисунка и ф-л (11.57) и ('11.63) можно
найти зависимости:
382
Расчеты показывают, что система ФАПЧ без фильтра с опти-
мальной полосой удержания дает возможность при заданном
(Рс/Рш)вх получить (Рс/Рш)вых всего на 1-4-2 дб меньше, чем в
системе ФАПЧ с оптимальной физически не реализуемой переда-
Рис 117 Зависимость оптимальной относительной полосы
удержания от параметров эталонного сигнала и шума
точной функцией. Поэтому'для определения порога эффективной
работы системы первого порядка можно пользоваться графиком
рис. 11.6.
Таким образом, система ФАПЧ первого порядка с полосой
удержания, регулируемой в зависимости от отношения (Рс1Рш)вх>
обеспечивает прием фазомодулированного сигнала в присутствии
шумов примерно с такими же качественными показателями, как
и система ФАПЧ с оптимальной физически не реализуемой пере-
даточной функцией, параметры которой зависят от (Рс/Рш)ты
На необходимость регулировки усиления в кольце автоподстрой-
ки указано в [1966,3]. Заметим, что с уменьшением отношения
(Рс/Рш)вх для получения минимума сг^, приходится уменьшать
£2у, что приводит к снижению полосы захвата и увеличению сред-
него значения разности фаз эталонного и подстраиваемого гене-
раторов. Во избежание этого следует применять не систему
ФАПЧ первого порядка, а систему с пропорционально интегри-
рующим фильтром при /п2Гу^4, которая, как показано выше, по-
383
зволяет получить такую же дисперсию разности фаз, что и сис-
тема первого порядка с полосой удержания mQy В этом случае
можно не только обеспечить оптимальный прием ФМ сигнала,
но и сделать полосу захвата большой, а статическую ошибку —
малой
11.5. ВОПРОСЫ СИНТЕЗА ОПТИМАЛЬНЫХ СИСТЕМ ФАПЧ
С ИСПОЛЬЗОВАНИЕМ ТЕОРИИ УСЛОВНЫХ МАРКОВСКИХ ПРОЦЕССОВ
На практике часто встречается случай, когда структура сис-
темы ФАПЧ частично задана и требуется так определить ее ос-
тальную линейную или нелинейную часть, чтобы достичь наи-
лучших в заданном смысле результатов. Решения таких задач
оказывается весьма эффективным с привлечением теории опти-
мального управления, базирующейся на теории условных марков-
ских процессов, развитой Р. Л. Стратоновичем [80]. Теория оп-
тимального управления детерминированных систем уже использо-
валась при синтезе оптимальных по быстродействию систем
ФАПЧ.
Синтез оптимальных элементов нелинейных систем при нали-
чии помех представляет собой более сложную задачу. Решение
этой задачи применительно к системам ФАПЧ дано в [1969, 16,
30] Ниже излагаются некоторые результаты этих работ.
Одной из важных задач синтеза элементов системы ФАПЧ
является определение вида функции F(q>) (характеристики фазо-
вого детектора), при которой среднеквадратичная ошибка мини-
мальна. Частично этот вопрос за-
трагивался в разд. 6.4, посвя-
щенном статистическому анализу
систем ФАПЧ первого порядка.
При сравнении дисперсии в си-
стемах ФАПЧ с конкретными ха-
рактеристиками фазового детек-
тора оказалось, что наилучшие
Рис 118 К определению оптималь свойства имеет система с прямо-
ного управления угольной характеристикой. Одна-
ко остается неясным, является ли
она оптимальной. Поэтому имеет смысл уточнить этот вопрос с
помощью теории оптимального управления.
Систему ФАПЧ первого порядка представим в виде объекта
управления ОУ (подстраиваемый генератор) и управляющего
устройства УУ (фазовый детектор) (рис. 118). Задающим воз-
действием SaT(t) является сигнал эталонного генератора На
вход объекта управления одновременно с сигналом управления
u(t) действует широкополосный флуктуационный процесс ти-
па белого шума g(Z)[A4g = 0, Л4{^(/)^(/+т)} =N8(t)]. Пред-
полагается, что управление ограничено |ы| ^1 и периодично по
Ф с периодом 2л.
384
Уравнение, определяющее фазовую ошибку (управляемый про-
цесс и наблюдаемый процесс), можно записать в виде
4^ = -«(<₽) + В (0. (11.67)
а т
где т= Qyt-
Задача заключается в нахождении функции ы(<р), минимизи-
рующей интегральную квадратичную ошибку (риск R), опреде-
ляемую выражением:
{г i
jV(r)dT. (11.68)
о J
Для решения этой задачи вначале вводится условный риск
S(x, т). Нужно выбрать значение и, минимизирующее этот риск
[80].
т
S(x, т) = min М И ф2 (Тх) d тх/ф (т) = х
|U<1| J
(11.6ЭГ
Здесь х — значение ф(т) в момент т.
Качество рассматриваемой системы будет описываться функ-
цией S(x, т), уравнение для которой имеет вид [80]:
dS . f 2 dS . 1 d2 S
---=min lxi—и-----1--------
дх I dx D dx2
(U.70)
здесь D = 2)N.
Непосредственно из этого уравнения следует, что
«опт = Sign 4^-- <'П-Я)
При этом ур-ние (11.74) принимает вид:
5S . ( 2 dS . / d.S \ . I d2S )
—'— = —minx2---------sign ---- +---------. (11.72)
dx ( dx \ dx ) d dx2 j v
Стационарный режим работы характеризуется средними поте-
рями в единицу времени [80]
(7-г)—» Т — Х
Полагая существование равенства (11.73), а также
5°(х) —lim [S(x, т)~у(Т—т)1,
(Г—Т)-»оо
'в стационарном режиме вместо (1170) имеем [80]:
1 d2S° dS° . 2 к а dS‘> п
----------------Н х = у в области у , где ----> 0,
D dx* dx r ZJ+ dx
1 d2S° . dS° . 2 A VT dS°
--------P------F x = у в области у , где-----< 0.
D dx2 dx r dx
(11.73)
предела
(11.73а)
(11.74)
(11.75)
13—526
38Б
При этом на общей границе Г областей S+ и должно вы-
полняться условие S°ldx=Q при х=хг Граница этих областей
есть линия переключения.
Решая ур-ния (1174) и (1175), можно определить S°(x), а
также найти выражение для линии переключения Г и средние по
терн в единицу времени у. Так как управление периодично по
ф, а следовательно, и по х с периодом 2л, то справедливо до-
полнительное краевое условие dSajdx=Q при х=±л Таким об
разом, используя это граничное условие, можно получить уравне-
ние относительно хг и у В итоге имеем [1969, 30]
1 — е
Следовательно, оптимальное управление в стационарном ре-
жиме
M°nT=sign<p, 1ф|О- (11.77)
Оптимальной среди всех характеристик данного класса явля-
ется прямоугольная
Рассмотрим другой пример определения оптимальной системы
(1969, 30]. Пусть управляемый процесс, как и ранее, описывается
ур-нием (1167) При этом %(t) можно интерпретировать как соб-
ственные флуктуации эталонного генератора Но теперь будем
полагать, что он не доступен наблюдению. Вместо него наблю-
дается процесс у(х), описываемый уравнением:
^=51пф+Ш (П.78)
а т
где Afgi = O, + =М6(т) (gj — аддитивный эталонному
сигналу шум, пересчитанный на выход фазового детектора), что
соответствует наблюдению сигнала на выходе фазового детекто-
ра при F(q>) =sin ср
Качество управления в этом случае будет оцениваться риском
С т ।
7?=A4 ^-J[<p2(t) + m2(t)]c1t . (11.79)
1 о 1
Задача заключается в определении ц(<р), минимизирующего
R. Поиск оптимального управления при несовпадении наблюдае-
мого и управляемого процессов разбивается на две задачи
— формирование достаточных координат и решение уравнения
оптимальной нелинейной фильтрации при фиксированном управ-
лении;
— определение оптимального управления как функции доста-
точных координат.
386
Применительно к ур-ниям (1167) и ((11.78) апостериорную
плотность распределения <р при марковском характере <р и у я
фиксированном управлении можно записать в виде [52, 80]:
(И.80)
д т д <р 2 д <р2
Здесь f= (1/Л\) ^t/sin<p—^-sin2<p^ — логарифм функционала
правдоподобия в конце интервала наблюдения, MF — математи-
ческое ожидание F.
Определение из ф-лы (11.80) представляет собой сложную
задачу Однако если аппроксимировать апостериорную плотность
вероятности гауссовой кривой (гауссово приближение), то реше-
ние ее существенно упрощается, поскольку гауссово распределе-
ние характеризуется двумя параметрами (средним значением
<р0 и дисперсией о2 ) Эти два параметра являются достаточными
координатами для W. Уравнения для этих параметров можнв
представить как [80]:
2
dx
^- + -^-=2V. (11.82)
dr N±
Эти уравнения позволяют сформировать оценочное значение
координаты ср и определить точность оценки. Если ограничиться
стационарным режимом работы фильтрующего блока, то
(11.83)
Замена о2 на существенно упрощает конструкцию блока
фильтрации Если теперь ввести условный риск
{т
-j- JlT2 (ti) + и2 (Ti)]
т
(11.84)
то уравнение для S(x, т) с использованием (111.81) и заменой
о2 « можно записать [1969, 30] следующим образом:
dS
д г
= гг
(Х2 + О2
\ 1 0ф 1 ;
dS . N &S}
dx 2 dx? J
(11.85)
Отсюда следует, что оптимальное управление
_ dS
“опт
dx
(11.86)
13*
38Г
В стационарном режиме ур-ние (1185) можно переписать в
виде
_и )_v. (11.87)
2 3x2 2 \ дх / 2 0<р' V V '
где S0 и у определяются ф-лами (11.73) и (11 73а) Решение это-
го уравнения позволяет найти функцию S0, а следовательно, и
оптимальное управление Аппроксимируя решение полиномом
второго порядка вида:
S°(x) =а0 + а1х + -^-а2х2, (11.88)
подставляя это выражение в ур-ние (1187) и приравнивая коэф-
фициенты при соответствующих степенях, получаем а0 = с, ai = 0,
«2= 1, с — произвольная постоянная
Используя выражения (1187) и (11.88), находим
*мОпт=*. Т=“(°оф+Л7)- (11.89)
Таким образом, оптимальное управление есть линейная функ-
ция х.
Воспользовавшись теперь ур-ниями (11.67), (11.78) и (1181),
найдем:
4^ = -m + Ut). (11.90)
d т
= _„ + Л[!3}п(р+^(т)]. (11.91)
а т
2
Здесь ОуТ =----5—-, т] = —.
°0ф + °0ф
1 -4-
N1
Таким образом, оптимальная цепь управления системы ФАПЧ
реализуется в виде интегрирующей цепи с постоянной времени
Т и усилителя с коэффициентом передачи ту В [1969, 16, 30] рас-
смотрены более сложные примеры синтеза оптимальных систем.
Глава 12
ЭЛЕКТРИЧЕСКИЙ РАСЧЕТ
РАЗЛИЧНЫХ СИСТЕМ ФАПЧ
121. ЗАДАЧИ, ВСТРЕЧАЮЩИЕСЯ В ИНЖЕНЕРНОЙ ПРАКТИКЕ
Цель настоящей главы — показать, как можно практически
использовать материал, изложенный в предыдущих главах, как
выделить основные моменты, определяющие проектирование сис-
темы и требования к ее элементам. Подход к проектированию
и расчет конкретной системы ФАПЧ зависят от назначения и ус-
ловий применения последней. Поскольку охватить все многооб-
разие конкретных условий невозможно, ограничимся рассмотре-
нием только наиболее характерных случаев
Приступая к проектированию системы ФАПЧ, необходимо,
прежде всего, составить перечень требований к ней. После этого
нужно определить, какие требования являются главными для со-
ставления структурной схемы устройства. Так, если система
ФАПЧ используется в качестве узкополосного фильтра, выделяю-
щего немодулированные колебания на фоне флуктуационных по-
мех, то главным будет требование малой паразитной модуля-
ции фазы подстраиваемого генератора. В этом случае можно при-
менять обычную систему ФАПЧ с пропорционально-интегрирую-
щим фильтром.
Если дополнительно к системе предъявляется требование ма-
лой средней установившейся разности фаз, целесообразно ис-
пользовать астатическую систему ФАПЧ. Система ФАПЧ с ин-
тегрирующим двигателем может оказаться целесообразной при
замираниях эталонного сигнала
В случае использования ФАПЧ, как детектора ФМ или ЧМ
сигналов, главными будут требования помехозащищенности сис-
темы и линейности характеристики фазового детектора
При использовании системы ФАПЧ в качестве фазового или
частотного модулятора на первое место выдвигаются требования
линейности модуляционной характеристики и минимума частот-
ных искажений.
Если система ФАПЧ применяется для умножения или деле-
ния частоты, основными являются требования стабильности ко
эффициента деления или умножения и малого уровня побочных
389
колебаний. В этом случае целесообразно применить схемы им-
пульсно-фазовой автоподстройки
При расчете системы ФАПЧ обычно задаются стабильность
источников питания, диапазон изменения» физических величин, ха-
рактеризующих условия применения системы (температура, влаж-
ность, давление, вибрация и т. п.), параметры эталонного сигна-
ла (частота, амплитуда, закон модуляции и т. д.), ограничения
на параметры ошибки (среднее значение, дисперсию), парамет-
ры выходного сигнала (частота, амплитуда, допустимый уровень
паразитной модуляции фазы или частоты и т. п.). Вместо первого
и второго условий часто задается значение собственной нестабиль-
ности частоты подстраиваемого и эталонного генераторов
Рассмотрим несколько примеров расчета.
12.2. РАСЧЕТ СИСТЕМЫ ФАПЧ, ВЫДЕЛЯЮЩЕЙ ГАРМОНИЧЕСКИЙ
СИГНАЛ НА ФОНЕ ДЕТЕРМИНИРОВАННЫХ И ФЛУКТУАЦИОННЫХ
ПОМЕХ
Расчет на основе линейной модели системы
Исходные данные-
1. Частота эталонного сигнала—иэг.
2. Нестабильность его частоты —8ЭГ= ±А<вЭг/<Вэг
3. Нестабильность частоты подстраиваемого генератора —
zt Ёцг
4 Амплитуда эталонного сигнала— U№.
5. Аддитивная помеха представляет собой сумму гармоническо-
го сигнала с амплитудой Un и частотой <вп и нормального случай-
ного шума со спектральной интенсивностью, близкой к колоколь-
ной кривой, и дисперсией a2N . Интегральная полоса пропускания
линейных устройств, предшествующих системе ФАПЧ, — П Пред-
полагается, что в режиме удержания справедлива линейная модель
системы.
Требуется выбрать схему и параметры системы ФАПЧ таким
образом, чтобы девиация фазы подстраиваемого генератора, обус-
ловленная действием детерминированной помехи, не превышала
величины Рпг, а среднеквадратичная девиация фазы этого генера-
тора, обусловленная шумом, не превышала величины опг-
Исходя из заданных условий, можно сразу определить полосу
захвата Она должна быть больше максимально возможной раз-
ности частот эталонного и подстраиваемого генераторов Учитывая,
что ЙнЛоэг<1, полагаем
6^3 <йэг (Г'эг Сцг) Он vaKc (12 1)
Для того чтобы определить, на сколько именно поло,са захвата
должна превосходить максимально возможную начальную рас-
стройку, необходимо учесть наличие дискретной помехи Система
390
должна быть спроектирована так, чтобы не было ложного захва-
та на частоте помехи При этом подстраиваемый генератор не дол-
жен захватываться помехой даже в отсутствие эталонного сигнала
Для этого должно выполняться неравенство
ЙЗП<Я|- о)эгепг (12.2)
Здесь Й-ц — полоса захвата, определяемая помехой в отсутст
вие эталонного сигнала, Пп = (0п—«эг— разность частот эталонного
сигнала и помехи
Из неравенств (12.1) и (12 2) нетрудно определить область
значений П3 Если считать, что П3 и П5 пропорциональны амплиту-
де входного сигнала, то эта область
«эг(еэг + епг) < П, < «эгепг)- (12.3)
Если же система ФАПЧ работает в режиме ограничения вход-
ного сигнала, то П3 = Пзп и тогда неравенство (12 3) запишется
следующим образом:
«,Г (®ЭГ ®пг) <'- ^3 Рп| «ЭГ ^ПГ- ( 12.4)
Полосу удержания выберем по возможности наибольшей для
получения наименьшего значения уп, что обеспечивает минималь-
ные значения средней разности частот [ф-ла (6112)] и среднего
отклонения разности фаз от 0,5 л [ф-ла (2.17)] Предел увеличения
Пу ограничивается параметрами управляющего элемента и воз-
можностью повышения характеристического сопротивления конту-
ра автогенератора Это сопротивление не может быть слишком
большим по условиям стабильности частоты подстраиваемого гене-
ратора Разумеется, после выбора типа фильтра следует проверить
выполнение условий устойчивости системы в «малом»
Зная П3, Пу, Пн и Пп, можно найти и относительные величины
Тн, Уз и уп = Пп/Пу Будем условно считать дискретную помеху вы-
сокочастотной, если уп>2 и низкочастотной, если уп<1-
Далее определим, какая помеха преобладает—флуктуационная
или гармоническая Для этого запишем отношение их мощностей
на входе системы ФАПЧ:
Рщ \ _2^,
Рс /вх 6/2
Если эта величина больше единицы, то преобладает помеха
случайного характера, и наоборот.
Предположим, что 2а^ (помеха гармоническая) и что
система ФАПЧ работает в режиме без ограничения входного сиг-
нала Тогда, как показано в гл 5, гармоническую помеху, дейст-
вующую на входе системы (считая фазовый детектор линейным
391
перемножителем), можно свести к внутренней помехе, действую-
щей на выходе фазового детектора.
Если система ФАПЧ используется в качестве узкополосного
фильтра, то обычно по заданию Pnr^il 41 можно считать, что она
работает в линейном режиме, ибо рЭг-О, а амплитуда девиации
разности фаз равна амплитуде девиации фазы подстраиваемого
генератора, т. е. р = Рпг- Это дает возможность считать эквивалент-
ную помеху, приложенную к выходу фазового детектора, также
гармонической. Принятые допущения и ограничения позволяют при
расчете Рпг воспользоваться понятием передаточной функции для
внутренней помехи И72(1ш) = TcU/^io).
Поскольку известно уп, можно в соответствии с рекомендация-
ми гл. 5 выбрать тот или иной тип фильтра, при котором фильтра-
ция будет наибольшей. Так, если уп< 1, то следует применить про-
порционально-интегрирующий фильтр, если же уп>2, то более ра-
циональным оказывается использование ДЕС-фильтра.
При выбранном т.ипе фильтра найдем модуль передаточной
функции U72(iw) на частоте Пп. Согласно определению [см. ф-лу
(5.52)]
l^2(iQn)l=—(12.6)
5уэ i/j
Здесь согласно (5.4) U* =k^U-aU-arl‘2, — амплитуда эквивалент-
ной внутренней помехи, действующей на выходе фазового детек-
тора.
Подставляя значение U*. в ф-лу (12 6) и учитывая, что Qy=
= йфд^ш<^эг5уэ/2, получаем
(12.7)
с/д Му
Это значение | W21 является максимально допустимым при за-
данной величине рпг Зная |U7i(ifin)|, находим согласно (5.54)
| И72(1£!п) | =ТС| WT(iQ) |, поскольку Тс= (Qy|sin ф021 )-1 уже извест-
но (фо2 = агссозун).
Далее, по ф-ле (5.20) в случае пропорционально-интегрирую-
шего фильтра или (5 23) при ДЕС-фильтре находим связь между
параметрами этих фильтров, обеспечивающую заданную фильтра-
цию Одним из параметров можно задаваться произвольно (одна-
ко при этом следует учитывать условие устойчивости в «малом»).
При выбранных параметрах фильтра по графикам рис 4 15
или рис 4.176 находим у3. Обозначим это значение у3 через у* .
Если полученное таким способом значение у* окажется больше,
ием значение у3, определенное ранее из соображений необходимой
полосы захвата и максимально возможной полосы удержания, то,
изменяя параметры фильтра (например, уменьшая m .или увели-
чивая d в Д£С-фильтре), можно обеспечить заданную величину y.t
при повышенной, по сравнению с требуемой, фильтрации гармо-
392
нической помехи. В случае у* <у3 обеспечить заданную 'степень
фильтрации в обычной системе ФАПЧ весьма затруднительно и
следует воспользоваться одним из методов повышения фильтрую-
щей способности последней, изложенных ib гл. 9.
Если расчет показал, что можно реализовать требуемую сте-
пень подавления гармонической помехи, то остается проверить, не
превосходит ли при этом дисперсия фазы подстраиваемого генера-
тора допустимой величины Такую проверку можно выполнить при
помощи ф-лы (6 17) или более простым способом, используя кри-
вые фильтрации, приведенные на рис. 6.2.
Поскольку предполагается, что реальную помеху, действующую
на входе фазового детектора, можно заменить эквивалентной на его
выходе, то согласно выражениям (6.58) спектральная плотность эк-
вивалентной шумовой девиации фазы эталонного сигнала
<12.8)
где (со) — спектральная плотность процесса g.
Поскольку 5фЭГ отличается от постоянным множителем, то
и дисперсия эквивалентной шумовой девиации фазы эталонного
сигнала будет отличаться от дисперсии процесса а следова-
тельно, и от дисперсии шума на входе системы ФАПЧ только по-
стоянным множителем Поэтому для обеспечения допустимой дис-
персии фазы подстраиваемого генератора ОфПГДОП должно выпол-
няться условие:
о2 U2
th °<рпгдоп 1'эг__ /] О Q\
Величина Ф в этой формуле определяется по известным зна-
чениям ун и параметров т или k, а также по отношению П/Йу (см.
гл 6)
Поскольку в данном случае 2а ZN <£ Uz, неравенство (12.9) обыч-
но выполняется. В тех же случаях, когда оно не выполняется, сле-
дует изменить выбранные параметры фильтра таким образом, что-
бы достичь компромиссного решения в отношении фильтрации дис-
кретной и флуктуационной составляющей помехи. Если это не уда-
ется, нужно использовать какой-либо метод повышения помехо-
устойчивости. Например, при постоянной величине Qn пропорцио-
нально-интегрирующий фильтр, обеспечивающий хорошую филь-
трацию флуктуационной помехи, следует дополнить узкополосным
режекторным или заградительным фильтром на заданную частоту.
Рассмотрим теперь случай, когда 2а^>[/2 (флуктуационная
помеха преобладает). В соответствии с рекомендациями гл. 6 сле-
дует выбрать пропорционально-интегрирующий фильтр с mTy^l.
Из ф-лы (12.9) находим максимально допустимое значение ко-
эффициента фильтрации Ффмакс. Затем по графику рис. 6.2 опре-
393
деляем наибольшее возможное значение у», соответствующее по-
лученному Ффмакс. Одновременно находим значение коэффициента
т. Если у * оказывается больше, чем у3, то, уменьшая т, можно
достичь большей степени фильтрации при заданном значении у3.
Если же у*<у3, то это означает, что в обычной системе ФАПЧ
выполнить заданные требования невозможно. Далее, по графи-
кам рис. 4.21 находим величину Ту, а значит, и Т = ТУ/ЙУ. В зак-
лючение расчета по ф-лам (5.21) и (12.7) следует проверить сте-
пень подавления гармонической помехи.
В том случае, если 2oN1~f7n (мощность гармонической помехи
близка к мощности флуктуационной), также целесообразно ис-
пользовать пропорционально-интегрирующий фильтр, поскольку
подавление флуктуационной помехи при этом получается значи-
тельно более глубоким, в то время как подавление дискретной по-
мехи мало зависит от типа фильтра.
Порядок расчета остается прежним.
Пример расчета.
Дано: /эг=1 Мгц-, еэг=1 -10“5; 47эг= 1 в; (7П = 2 в, /п=1,01 Мгц\ oNi = 0,l в;
/7/2л = 20 кгц\ епг=10~3.
Требуется обеспечить рПг^0,01 и офпг^0,02
1. Определяем область возможных значений Fs по ф-ле (12.3)
1 кгц < F3 < 4,5 кгц.
Выбираем Fs = 2 кгц
2. Предположим, что в качестве управляющего элемента использована ре-
активная лампа. На этих частотах при помощи такого управляющего элемента
легко получить отклонение частоты-±5%. Поэтому будем считать Ру = 50 кгц.
Крутизну характеристики управления положим равной 20 кгц/в.
При выбранном значении Fy у3=0,04 и уп = 0,2. Таким образом, в данном
случае имеет место низкочастотная iармоническая помеха.
3. Поскольку 2<Jni близко к (7^ и, кроме того, помеха низкочастотная, вы-
бираем пропорционально-интегрирующий фильтр с т2
4. Согласно ф-ле (12.7) определяем максимально допустимое значение мо-
дуля функции:
IW' j (i йп)| = 0 28-50-103• 2 = 1 ’6 Ю сек-
5. Определяем постоянную времени Тс системы ФАПЧ, учитывая, что при
ун = 0,04 величина |sin <р02| « 1:
6. Находим |!Fi(iQn)|:
|^1(iQn)l=|l₽'2(ifin)|-~ = 0’510_2 •
' с
7. По ф-ле (5.21) находим величину т, учитывая, что для данного случая
Тсу= 1/]sin <pozI « 1:
394
m — 1^1 А ^п)| Уп ~ I л—3
8. Для определения у3 воспользуемся предельной ф-лой (4.65) или (4.79):
у* = У 2т— тг =0,045.
*
Поскольку значение у 3 оказалось почти равным у3, принимаем его.
9. Находим теперь среднеквадратичную девиацию фазы подстраиваемого
генератора, вызванную шумом. Воспользовавшись выражениями (6.19), (6.59)
и (6 21), при т2 Гу5>1 получим
пг «0,87-10-2 .
Так как это значение меньше допустимого, можно считать, что тип фильтра
и его параметры выбраны правильно.
10. Теперь остается определить постоянную времени Т фильтра. Из графи-
ков рис. 4.21 находим, что для выбранных значений т и у3 при условии тТу"У\
минимальное значение Гу«*5103. Тогда
Т = — = 1,6-10—2 сек.
Йу
Затем по рассчитанным значениям Тит определяем сопротивления и ем-
кость фильтра, причем одну из этих величин необходимо задать произвольно.
При расчете предполагалось, что по отношению ко входным сигналам фа-
зовый детектор линеен. Это возможно только в том случае, если амплитуда
напряжения подстраиваемого генератора, поступающего на фазовый детектор,
превышает входной сигнал не менее чем в 3—5 раз. Тогда выходное напряжение
фазового детектора не зависит от амплитуды напряжения подстраиваемого ге-
нератора.
В рассмотренном случае целесообразно применить балансный фазовый де-
тектор, так как он имеет высокое входное сопротивление и большой коэффи-
циент передачи по постоянному току.
Формулы для расчета фазового детектора приведены в гл. 1. Остается до-
бавить, что поскольку эталонный сигнал искажен помехой, то для устранения
прямого проникновения помехи через фазовый детектор в подстраиваемый ге-
нератор напряжение последнего следует подавать на фазовый детектор через
безынерционный буферный усилитель.
Расчет нелинейной системы
Исходныеданные: 1
1. Частота эталонного сигнала — юЭг.
2. Нестабильность его частоты — 8ЭГ= ±Дюэг/юЭг.
3. Нестабильность частоты подстраиваемого генератора ±епг.
4. Амплитуда эталонного сигнала — [7ЭГ.
5. Аддитивная помеха представляет собой широкополосный слу-
чайный нормальный стационарный процесс с функцией корреляции
<j2n Rmb). Детерминированная помеха отсутствует.
Рассматривается нелинейный режим работы с учетом возмож-
ных перескоков разности фаз (см. гл. 6).
395
Требуется спроектировать систему ФАПЧ таким образом, что-
бы при заданных параметрах она обеспечивала среднюю разность
частоты не более р<рМакс и дисперсию фазовой ошибки не более
а2
Ф макс
На основании исходных данных определяем максимально воз-
можную начальную разность частот эталонного и подстраиваемого
генераторов [см. ф-лу (12 1)]:
^н макс ®эг (6эг + е)- (12.10)
г
Поскольку простейшей является система ФАПЧ первого поряд-
ка, проверяем, можно ли обеспечить в ней заданные требования.
Для этого на основании (6 112) построим зависимости величины
pyl&u как функции Йу/Йн при заданном параметре
jyt D Йу 2 U3r,
Йн
. йн J Rtfi (т) d т
— 00
(12 11)
Рис 12 1 К определению оптимального зна
чения полосы удержания
Эти зависимости показаны на рис. 12.1 По графику можно
определить, в частности, значение Йу, которое обеспечивает мини-
мальную среднюю разность
частот в системе первого по-
рядка Для этого по исход-
ным данным необходимо най-
ти D*, ф-ла (12 11) Найдя
по кривым рис 12 1 значение
1/ун опт = Йуопт/Йн, соответст-
вующее минимуму а =
— Йн ~ Имин, С ПОМОЩЬЮ
1 ф-лы (12 10) определяем оп-
тимальное значение полосы
удержания и минимальное
значение рср
I ______ йн макс .____ (гэг + епг) ®эг
'у опт
Ун опт Ун опт
(12.12)
(12.13)
Р Тмин «мин ^н макс-
Если это значение приемлемо, т. е. рфмин^/Дрмакс, то после это-
го вычисляем параметры
D ---------------------------, (12.14)
00
Йу aNl J d т ,
‘—00
396
D0-^=Dya. (12.15)
С помощью этих параметров^ по ф-лам (6 103) и (6 105) или
по графикам рис. 6 4 находим <р и oj Проверяем, удовлетворяет
ли при этом о 2 неравенству оф2<о,р„акс Если это неравенство
имеет место, то выбранная схема системы ФАПЧ и ее параметры
удовлетворяют поставленным условиям.
Естч же окажется, что р<рМин>р<рмакс или что те
следует применить астатическую систему, поскольку в ней /?ф = 0,
а о 2 может быть сделана малой Это, однако, связано с услож-
нением системы
Пример расчета
СО
Дано f3r = 2 Мгц, езг=1 10 5, 1Дг=1 в, J 7?»1(т)Дт= 10-4 сек, еИг=10_‘;
— со
Ол-^0,4 в
Требуется обеспечить р<рМакс=150 гц, ОфМакс^0’®
1 По ф ле (12 10) определяем
ян макс = 2 кгц 2 л
2 По ф ле (12 11) получаем
±_Z —— a 1V
6,28 2 10» 10~4
3 По кривым рис 12 1 находим, что минимальное значение а~0,075 соответ-
ствует оптимальному значению уИопт~0,4 или ПуОпт~2л5 кгц Поскольку
это значение удовлетворяет заданным требованиям, согласно ф лам (124)
(12 5) имеем
2 1
D =---------------------т— » 4, О. = •»„ О = 1,6
6,28 5 10» о,16 10-4 ° г
о
По графикам рис 6 4 определяем оф = 0,36
Поскольку это значение меньше заданного, можно выбрать систему первого
порядка
12.3. РАСЧЕТ СИСТЕМЫ ФАПЧ, ВЫДЕЛЯЮЩЕЙ
НЕСУЩУЮ ФМ СИГНАЛА
Исходные данные
1 Частота эталонного сигнала юЭг, его амплитуда Uar, неста-
бильность частоты еог
2 Эталонный сигнал модулирован по фазе случайным процес-
сом с нормальным законом распределения мгновенных значений и
имеет колокольную спектральную плотность девиации фазы, при-
чем среднеквадратичное значение отклонения фазы есть офЭг.
3 Нестабильность частоты подстраиваемого генератора ецГ
397
4 . Интегральная полоса, соответствующая колокольной спект-
ральной плотности модулирующей функции, — Пм
Требуется выбрать схему и параметры системы ФАПЧ таким
образом, чтобы среднеквадратичное отклонение фазы подстраи-
ваемого генератора не (превышало офПГ радиан, а среднее значение
отклонения разности фаз от величины 0,5л было не более Д<ро ра-
диан.
Определяем область возможных значений у3- Поскольку эталон-
ный сигнал модулирован только флуктуационной помехой и нет
опасности захвата частоты подстраиваемого генератора какой-ли-
бо гармонической составляющей, за исключением несущей часто-
ты, имеем
Ин макс ®эг (®эг Н- ®пг) Н3. (12.16)
Полосу удержания выбираем максимально возможной по кон-
структивным или иным соображениям. Эта величина, во всяком
случае, должна быть не менее чем
Q __ &)ЭГ (бэг ~Ь 8пг) 02 17)
у |sin A <р0| |sin Л <р0|
Поскольку обычно о<р nr^COip ог, среднеквадратичное отклонение
разности фаз от ее среднего значения определяется величиной о<рЭг
и, следовательно, можно при помощи ф-лы (6.1) определить, ли-
неен ли режим работы системы. Для этого в ф-лу (6.1) вместо ун
нужно подставить ее максимальное значение унмакс=<оэг(еэг+8пг)/Йу.
Предположим, что проверка показала линейность режима. Тог-
да для анализа можно воспользоваться понятиями передаточной
функции и коэффициента фильтрации Фф При этом дисперсия
фазы подстраиваемого генератора в общем случае определяется
выражением (6.17).
В соответствии с рекомендациями гл. 6 выбираем пропорцио-
нально-интегрирующий фильтр, обеспечивающий наилучшую филь-
трацию при заданном значении ун- При этом целесообразно также
выбрать
По заданному коэффициенту фильтрации Ф = о 2 пг/оф эг <и ко-
эффициенту широкополосное™ /7М/ЙУ находим значение парамет-
ра т по ф-ле (6.40), считая, что т2Ту^1 и h = n~i/z '
т = —а
2 V 4 *
(12.18)
/7М ,
здесь а= ——п.
Qy
При больших значениях /7М/ЙУ, когда а^> 1, можно вместо ф-лы
<12.18) пользоваться более простым выражением:
т^0,5аФф. (12.19)
398
Зная т, определяем у* по ф-ле (4.133). Если у‘>у3, то можно
повысить фильтрацию, уменьшив т до такого значения, при кото-
ром у* = у3. В случае у* <у3 необходимо увеличивать Qy и одно-
временно уменьшать т до тех лор, шока не будут получены прием-
лемые результаты. Если по каким-либо причинам не удается уве-
личить Qy, то следует .применить более сложную схему (например,
систему с поиском или с интегрирующим двигателем или прибег-
нуть к другим методам повышения помехоустойчивости, рассмот-
ренным в гл. 9).
При выборе величины Т из условия т7’у3>1 следует помнить,
что чрезмерно большие значения Т нерациональны, так как прв
этом Ф не уменьшается, но время установления растет. Ориен-
тировочно следует выбирать т27у»5.
Рассмотрим теперь порядок расчета системы в нелинейном ре-
жиме. Последовательность расчета до выбора типа фильтра ос-
тается неизменной. В дальнейшем удобно воспользоваться резуль-
татами метода статистической линеаризации. Поскольку этот ме-
тод позволяет заменить реальную нелинейную систему некоторой
эквивалентной ей линейной системой, тип фильтра можно выби-
рать так же, как и в линейной модели ФАПЧ. Выбираем, как и
ранее, пропорционально-интегрирующий фильтр при т27'у^>1.
Будем полагать, что Z7M}§>Qy. Это дает возможность считать
спектральную плотность девиации фазы эталонного сигнала
5фЭГ (м) /Пм приблизительно постоянной, что облегчает ра-
счет.
Определяем дисперсию разности фаз по выражению (6.234).
Поскольку при Хорошей фильтрации 11^1Э(1(о) | <С 1, приближенно
можно считать, что оф «о .
Зная о2 и ун, можно по выражению (6.230) определить сред-
нее значение разности фаз. Если при этом окажется, что оно от-
личается от 0,5п больше, чем на А<ро, следует снижать величину
Ун, увеличивая Qy.
Для того чтобы определить параметр т, исходя из заданной
фильтрации, необходимо предварительно найти статистический ко-
эффициент ki из ф-л (6.224) или (6.225).
Поскольку передаточная функция системы ФАПЧ с пропор-
ционально-интегрирующим фильтром при тТу^>\ совпадает с пе-
редаточной функцией системы ФАПЧ первого порядка с полосой
удержания Q^ =m, для вычисления о2 пг можно воспользоваться
ф-лой (6.231), заменив в ней S^T23 на 5фЭГ и подставив №1э из
выражения (5.21), считая, что Tcy=\/tnkt В результате получим
при т2Ту'^\:
o2nr = 0,5mS(p3r(ffl)Qy^, (12.20)
По заданным а2пг ; 5фЭГ((о) и известным из предварительного
расчета Qy и ki находим параметр т.
39S
По полученному значению т и ф-ле (4.133) находим у* . Как и
ранее, если у* >у3, то можно, уменьшив т, получить лучшую
фильтрацию. Если же окажется, что у*<у3, то придется увеличи-
вать полосу удержания.
Пример расчета.
Лм
Пусть fsr=70 Мгц, еэг=0, Эг=1 рад, епг=10-3;-^-=10 Мгц
Требуется обеспечить офПг^0,02 рад и Дсро^О,1 рад
1. Согласно выражению (12.16), находим минимально допустимое значение
Г*: Г* > 70 • 10е-10-3=70 кгц
2. Полагая, что в системе в качестве управляющего элемента использована
уеактивиая лампа, выберем полосу удержания порядка 3 Мгц и проверим, удов-
летворяет ли она условию (12 17)-
70 10е 10-3
Гу = 3 Мгц >------Q-j---= 0,7 Мгц.
3 Проверяем условие линейности режима по ф-ле (6.1) при
Тн = Тн макс — 2,33 10
2
з
(2,33 10-2)2 . „ „ _ 2,33 IO'2
------ д-0,6 — 1,5— ----- -
(2,33 10 ) / 1 _ (2,33 Ю~2)2
Поэтому режим работы будет нелинейным.
4 По выражению (6 230) находим среднее значение разности фаз
cosm9 =2,33 10—2 е1^2 = 3,8410—2 .
Отсюда Д<ро = 3,84-10~2 рад Поскольку эта
выбранное значение полосы удержания можно
аейшего расчета
5. Находим в соответствии с выражением
затем из ф-лы (12 20) определяем т, учитывая,
пг о
т= wfer=4’410-3 •
величина меньше заданной, то
считать приемлемым для даль
(6.225) коэффициент Ai = 0,6, а
что эг (со) =2яа2 ЭГ//7М:
6. Определяем ys:
у* = Vim — тг — 9,4 10 2.
Поскольку у3’>у3, можно либо принять эти данные расчета, либо несколько
уменьшить т, увеличив тем самым фильтрующую способность системы
12.4 . РАСЧЕТ СИСТЕМЫ ФАПЧ, РАБОТАЮЩЕЙ В РЕЖИМЕ
ДЕТЕКТИРОВАНИЯ ФМ СИГНАЛА
Исходные данные: ,
1. Частота эталонного сигнала соэг, его амплитуда Uar, неста-
бильность частоты еэг, нестабильность частоты подстраиваемого ге-
иератора вщ-.
400
2. Эталонный сигнал модулирован сообщением, спектральная
плотность мощности 5фЭг(<а) которого равномерна в пределах по-
лосы 04-fB, а закон распределения близок к нормальному. Сред-
неквадратичная девиация его фазы — оф эг.
3. Интегральная полоса входного линейного устройства, пред-
шествующего системе ФАПЧ, — П.
4 На вход линейного устройства вместе с эталонным сигна-
лом действует нормальный аддитивный флуктуационный шум с
равномерной спектральной плотностью.
Отношение мощности сигнала к мощности шума на входе си-
стемы ФАПЧ (Рс/Рщ)Вх.
Требуется выбрать схему и параметры системы ФАПЧ таким
образом, чтобы дисперсия разности фаз подстраиваемого и эта-
лонного генераторов не превышала величины оф.
Прежде всего, необходимо установить, выполнимо ли требова-
ние к офпри заданных (Рс/Т,ш)вх и офЭГ- С этой целью, предпола-
гая режим работы линейным или воспользовавшись методом ста-
тистической линеаризации, по ф-ле (11.32) находим оптимальную
передаточную функцию системы, обеспечивающую минимум сред-
неквадратичной ошибки. При сложных выражениях спектральной
плотности сигнала и помех эта операция может быть затрудни-
тельной. В данном случае, как показано в разд. 11.4, результаты,
близкие к оптимальным, достигаются в системе ФАПЧ с пропор-
ционально-интегрирующим фильтром при правильном выборе па-
раметров последнего.
Рассчитаем параметры системы. Находим по ф-ле (12.16) наи-
большее возможное значение начальной расстройки Qн макс
Как и ранее, выбираем по возможности большее значение Qy,
после чего определяем величину ун макс = йн макс/йу.
Далее, при помощи выражений (11.64) и (11.66) или, миними-
зируя по Qy выражение (11.63), численным способом с учетом ф-лы
(6 224) находим оптимальное значение ЙУ0пт Затем по ф-ле
(11.63) находим о2фМН - Если при этом окажется, что офМИН>оф
то система ФАПЧ, удовлетворяющая поставленным требованиям,
нереализуема. Если же офМ11Н<оф, можно продолжать расчет
В системе ФАПЧ с пропорционально-интегртрующим фильтром
и т2^»!, как показано в гл. 11, йуОпт = /«Йу. Зная величины Йу
и Qy опт, определяем коэффициент т:
т=йуопт (12.21)
Йу
После этого по ф-ле (4.133) определяем у*, и если у* > уНмакс>
при выбранном значении Qy обеспечивается требуемая степень
фильтрации и выполняются условия захвата. Если у* <уНмакс, то
необходимо увеличить полосу удержания и повторить расчет.
401
После того, как будут найдены требуемые значения т и Qy,
можно до ф-ле (ilil.57) определить отношение мощности сигнала к
мощности помех на входе управляющего элемента. Поскольку со
входа управляющего элемента снимается сигнал, пропорциональ-
ный производной фазе подстраиваемого генератора, для выделе-
ния сообщения необходимо пропустить этот сигнал через интегри-
рующую цепь.
Теперь определяем частотную характеристику детектора по вы-
ражению (5.21).
В заключение заметим, что для снижения нелинейных искаже-
ний, возникающих при детектировании, необходимо выбирать та-
кой режим работы фазового детектора, при котором его нормиро-
ванная характеристика имела бы наибольший линейный участок.
Пример расчета.
Дано- /=70 Мгц, eSr = 0, еПг=10-3, fB=15-103 гц, <гфЭГ=5 рад, П/2п =
=0,5 Мгц, (Рс/Рш)вх=2.
Требуется обеспечить аф ^0,2 рад и определить частотную характеристику
системы как фазового детектора.
1 По ф-ле (12 16) находим Fn MaKC = farenr = 70-Ю3 гц
2 Выбираем полосу удержания (см. предыдущий пример)' Fy=3-10®.
3 Определяем ув макс~Тн макс/7"у = 233 10 2.
При такой величине у« макс вместо ф-л (11.64), (11.66) можно воспользо-
ваться графиками рис.115—117. Выбираем пропорционально-интегрирующий
фильтр при т27у^>1. Из графика рис. 117 по известным значениям
П, (Рс/Рш)ъх, f„ и аф эг находим
Йу опт m f-y = 6,28 210 IO3 рад/сек.
4 Определяем коэффициент т='(.‘Р, Опт/йу = 7-10-2.
5 . Находим у* = V 2т—т2 = 0,375.
6 . Поскольку уэ^>ун макс, для облегчения выполнения системы уменьшим
Йу Положим Ду=0,7 Мгц, тогда ун маьс = 0,1, т. е. уНмакс<С1, следовательно,
последней можно пренебречь при определении Qv опт', полученное ранее из гра-
фика рис. 11.7 значение йу Опт остается неизменным.
7 . Определяем новое значение коэффициента т.
210-Юз
т =----------— 0,3.
0,7 Юз
8 Проверяем условие захвата в системе:
у* = V 0,6—0,09 = 0,71.
Сравнивая это значение с новым значением уп макс, замечаем, что условия
захвата обеспечены с запасом.
9 . По известным величинам (Ре/Рш)в*, П, fn и афЭГ при помощи графика
рис. 11.5 определяем аф мин=0,173 рад, что меньше заданного, т. е. требование к
системе по <т удовлетворено.
10 По графикам рис. 11.6 определяем (/’с//’ш)вых =7,95.
11 . Из ф-лы (5.21) находим частотную характеристику системы, полагая
7с у = 1 (Ун ~ 0):
IFj (i у)! = - л 1 = .
' Р| /1 + П У2
402
12.5. РАСЧЕТ СИСТЕМЫ ФАПЧ, ИСПОЛЬЗУЕМОЙ В КАЧЕСТВЕ
ЧАСТОТНОГО МОДУЛЯТОРА '
Исходные данные:
Частота эталонного сигнала far, нестабильность эталонной ча-
стоты еэг, нестабильность частоты подстраиваемого генератора епг-
Требуется спроектировать частотный модулятор, обеспечиваю-
щий максимальное частотное отклонение Дымакс/ при этом коэф-
фициент гармоник не должен превышать величины kT, а частот-
ная характеристика системы должна быть близка к горизонталь-
ной прямой с искажениями A4= |JF3(iQ) |/ !F3(iQCp) | на низшей
и высшей FB модулирующих частотах соответственно. Здесь
]1^3(1ЙСр)| — модуль передаточной функции на средней модули-
рующей частоте.
Частотная модуляция сигнала подстраиваемого генератора в
системе ФАПЧ может осуществляться подачей модулирующего на-
пряжения на вход управляющего элемента. Поскольку в таком ре-
жиме эталонный сигнал не модулирован, а фаза подстраиваемого
генератора может меняться в процессе модуляции на ±<рпг, рад,
разность фаз обоих генераторов также меняется на ±српь рад.
Следовательно, для того чтобы в системе не было срывов син-
хронизма и среднее значение разности фаз не зависело от ампли-
туды модулирующего сигнала, разность фаз не должна выходить
за пределы линейного участка характеристики фазового детек-
тора. Поэтому желательно выбирать этот участок характеристики
наибольшим.
Принципиально возможно построить фазовый детектор, протя-
женность линейного участка характеристики которого близка к 2л.
Однако практическое выполнение такого детектора затруднительно.
Значительно легче осуществить фазовый детектор с линейным уча-
стком характеристики протяженностью л (симметричная треуголь-
ная характеристика).
Идеальная линейность достигается при подаче на балансный
фазовый детектор двух напряжений в виде идеально прямоуголь-
ных импульсов со скважностью 0,5. В этом случае обеспечивает-
ся наименьшее смещение средней разности фаз при модуляции.
Иногда формирование прямоугольных импульсов оказывается
затруднительным (особенно на высоких частотах). В таких случаях
следует использовать режим одинаковых синусоидальных напря-
жений, подаваемых на фазовый балансный детектор. При этом
форма характеристики последнего наиболее близка к симметрич-
ной треугольной.
Из рекомендаций гл. 5 следует, что наилучшей частотной харак-
теристикой [ф-ла (5.59)] обладает система ФАПЧ с пропорцио-
нально-интегрирующим фильтром.
Определяем й3 по выражению (12.16).
403
Затем выбираем по возможности большее значение полосы
удержания, исходя из наименьшего^ значения уш обеспечивающе-
го расположение рабочей точки в середине линейного участка ха-
рактеристики фазового детектора. Для этого величина уНМакс дол-
жна быть значительно меньше единицы и, следовательно, <р02~
~—л/2. При треугольной симметричной характеристике фазового
детектора 7’су = 2/л.
По заданным частотным искажениям на нижних частотах Л4Н и
выражению (5.59) находим коэффициент т, при котором частот-
ные искажения не превышают допустимых:
m =!£?!/! —м2 . (12.22)
Мн
Поскольку из ф-лы (5.59) следует, что частотные искажения
при увеличении модулирующей частоты отсутствуют, полагаем
Мв = 0.
Далее ио известному значению т определяем относительную
полосу захвата у*. При этом можно воспользоваться ф-лой (4.133),
несмотря на то, что характеристика фазового детектора ближе к
треугольной кривой, чем к синусоидальной. Если у* >уНмакс, то
можно удовлетвориться полученными значениями Qy и т. В про-
тивном случае следует увеличить Qy, оставив неизменным произ-
ведение mQy.
Для нахождения нелинейных искажений представим систему
ФАПЧ как систему с нелинейностью в цепи отрицательной обрат-
ной связи. Нелинейные искажения в такой системе определяются
как нелинейностью характеристики управляющего элемента, так
и искажениями, вносимыми Дёпью обратной связи. Поскольку ча-
стотные искажения определяются напряжением обратной связи,
то, если выполняются условия их малости, можно считать, что не-
линейные искажения определяются только нелинейностью управ-
ляющего элемента. Расчет нелинейных искажений в этом случае
такой же, как при проектировании реактивных ламп.
Требуемое напряжение на входе управляющего элемента для
обеспечения заданного значения Аймаке.’
п = -А_Д«акс_ (12.23)
2 макс о х '
^уэ
Остается добавить, что в таком частотном модуляторе макси-
мальный индекс модуляции при малых значениях унмакс не дол-
жен превосходить 0,5л, поскольку в противном случае возможны
перескоки фазы. Это условие ограничивает область применения
подобного частотного модулятора.
Если сообщение имеет значительную мощность низкочастотной
части спектра, то на входе системы следует включить дифферен-
цирующую цепь и перейти таким образом от ЧМ к ФМ.
В том случае, если необходимо определить время установления
при включении, можно воспользоваться ф-лами (4.143) и (4.144)
или (4.146) и (4.147).
4С4
Пример расчета.
Дано- /Эг=40 Мгц; епг=0,5- 10“3, еэг=0, <рпгмакс = 1,5 рад, Г,, =300 гц,Мя=?
^0,5, Fb=3,5 кгц, Ms=0,7.
Требуется рассчитать фазорый модулятор для коммерческой радиотелефон-
ной связи.
1. Определяем по ф-ле (12.16) F3- F3>Fa макс=40-103 гц
2. В качестве управляющего элемента на этих частотах целесообразно ис-
пользовать управляемую нелинейную барьерную емкость р-п-перехода. При этом
легко получить отклонение частоты порядка ±(34-5)%. Выбираем полосу удер-
жания Fy = 2 Мгц.
3. Находим ун макс= 1 • Ю-2. При таком значении ув макс можно считать
Фо2=—0,5л.
4. Применим балансный фазовый детектор с равными напряжениями, тогда
Тсу=2/л.
5. По выражению (12.22) находим т= 1,7-10~4.
6. Определяем по ф-ле (4.133) у3 = У 2т—т2= 1,84-10~2. Поскольку у3>
>Ун макс, то условия захвата выполняются.
7 Для получения фазовой модуляции подстраиваемого генератора на входе
следует включить дифференцирующую цепь RC. Постоянн' ю времени этой цепи
находим по заданным допустимым искажениям на верхней модулирующей ча-
стоте:
/1 — М%
'Р _ г в
Ов Mjj
= 4,55-10—5 сек.
8. Коэффициент передачи дифференцирующей цепи в области рабочих ча-
стот определяется выражением:
|К(1®)| =
icoT
1 + icoT
«соТ.
Крутизна характеристики выбранного выше управляющего элемента состав-
ляет 0,5 Мгц)в. Поэтому крутизна характеристики фазового модулятора
5уэ рад
5фм = |К (1 со)| = SysТ = 22,7 *—•.
СО в
9. Для того чтобы значение српг не превышало заданной величины 0,5л,.
входное напряжение системы не должно превышать
1,57 о
бвх макс 22 7 —7-10 в.
12.6. РАСЧЕТ СИСТЕМЫ ФАПЧ, ИСПОЛЬЗУЕМОЙ В КАЧЕСТВЕ
УСИЛИТЕЛЯ с малой фазовой погрешностью
Исходные данные:
Частота эталонного сигнала медленно изменяется в пределах
от /эгм до /эгв- Нестабильность частоты подстраиваемого генера-
тора бпг-
Требуется спроектировать систему ФАПЧ, обеспечивающую
лри заданном изменении частоты эталонного сигнала фазовую
ошибку не более Дсро-
Для выбора структурной схемы ФАПЧ прежде всего определим
требуемую ширину полосы удержания в обычной системе ФАПЧ,
исходя из заданного диапазона изменения эталонной частоты и
405
«собственной нестабильности частоты подстраиваемого генератора,
полагая F(<p) = cos qy
р _ Рц макс __ 0-5 (/эгв — /эгн) + 0.5 (/эгв + /эгн) Snr ц2 24)
у |sin Д ф0| ]sin Д ф0|
возможно получить такое значение полосы удержания при
электронного управляющего элемента, то следует приме-
Если
помощи
нить обычную систему ФАПЧ первого порядка. Если же реализа-
ция этой полосы удержания при помощи одного электронного уп-
равляющего элемента невозможна, то следует применить астатиче-
скую систему ФАПЧ и, в частности, систему с интегрирующим
электродвигателем (см. гл. 7)
Предположим, что по конструктивным соображениям выполне-
ние условия (12 24) невозможно. Выбираем систему ФАПЧ перво-
го порядка с интегрирующим двигателем и определяем минималь-
но необходимое значение расстройки, вносимой электромеханиче-
ской ветвью подстройки:
2 Ау„ =(/эгв—/эгаШ/эгв +/эгн) Епг—^уэ 2 Дп Л ф0|. ( 12.25)
Здесь Fy3 — наибольшее возможное по конструктивным сооб-
ражениям значение максимальной расстройки, вносимой электрон-
ной ветвью.
Далее выбираем тип двигателя из условий на габариты, вес,
потребляемую мощность или, если требуется быстродействие, дви-
гатель с наименьшей постоянной времени и большой скоростью
вращения. При выбранном типе двигателя известны: электромеха-
ническая постоянная времени 7'Эм = /5р/5п; тангенс угла наклона
(крутизна) регулировочной характеристики электродвигателя Sp;
крутизна моментной характеристики (коэффициент пускового мо-
мента) Sn; напряжение трогания t7T=zt/o; максимально допустимое
напряжение на входе двигателя иыакс.
Определяем максимальное напряжение на входе двигателя, ис-
ходя из заданной величины Лцо Из ф-лы (7.46), учитывая, что
Mz=U^Sn, имеем (Лцо+Д):
ит ~ ит
Isin Д ф0| ~ Дф0
(12.26)
Если эта величина окажется больше допустимой, то следует
ввести ограничитель в цепь усиления напряжения, питающего дви-
гатель
Зная величины UMaKC, Тэм и Sn, находим коэффициенты а и b
[ф-лы (7.51)], учитывая, что обычно r = SnISp^>SnUol2Uc:
а=—, (12.27)
Uмакс ‘Sp
ь
б^макс Sp
(12.28)
-406
Затем 'из условия (7.54) определяем коэффициент редукции,
обеспечивающей устойчивость системы в «малом»:
6 Йуэ (6 4“ fl Пуэ) Л
лрмакс<~ о 3 ' • (12.29}
2а Ь2 ум
Чем меньше этот коэффициент, тем больше коэффициенты А и
В в ф-ле (3 52) и тем ближе переходный процесс к апериодическо-
му. Характер 'процесса можно определить при помощи диаграм-
мы Вышнеградского (см. рис. 3.5). Если по каким-либо причинам
уменьшить пр невозможно, то следует либо применить тахогенера-
тор, увеличивающий эффективное затухание [1962,19], либо вве-
сти ограничитель на угол поворота ротора конденсатора, осущест-
вляющего перестройку.
Далее, но выражениям (7.64), (7.65), (7.66), определяем полосу
“ следует
захвата в системе. Если окажется, что уэ<Унмакс, то
уменьшить z, например, увеличив 1/Макс-
Пример расчета.
Дано /агн = 0,б5 Мгц, /:Эгв = 0,75 Мгц, еп1 = 10~3 Требуется получить
Афо±0,03.
1 Определяем согласно (12 24) необходимую полосх удержания в обычной
системе ФАПЧ
0,5 105
Fy >----------
+ 0,5 10« 1,4 10-3
0,03
= 1,70 10е гц
Следовательно, обычная система ФАПЧ неприменима
2 Выбрав максимальную расстройку, вносимую электронной ветвью, поряд
ка ПуЭ = 2л,-2-104 рад/сек (что легко достижимо с управляющим элементом в
виде реактивной лампы), по ф ле (12 25) определяем
2FyM> 101,4 103— 2 2 104 0,03 = 100,2 Ю3 кгц
Принимаем с запасом для дальнейшего расчета FyM = 9 104 гц
3 Выбираем, для примера, двухфазный малоинерционный электродвигатель,
переменного тока с полым ротором типа ДИД-0,5ТА, широко применяемый в ав-
томатике [81], данные электродвигателя
— частота питающего напряжения — 400 гц,
— напряжение на обмотке возбуждения — 36 в,
— напряжение на обмотке управления при параллельном соединении по-
ловин — 10 в,
— ток обмотки возбуждения — 0,15 а,
— ток обмотки управления — 0,11 а,
— крутизна моментной характеристики—0,22 Г см/в,
— электромеханическая постоянная времени — 0,08 сек,
Г см
— момент инерции ротора — 4,4----сек2,
рад
— напряжение трогания — 0,5 в,
— скорость Вращения на холостом ходу — 13 500 об/мин,
— скорость вращения при нагрузке (Мн=3 Г-см) —7500 об/мин,
— максимально допустимое на короткое время напряжение на обмотке уп-
равления — 36 в
4 Определяем Пмакс по ф-ле (12 26)
UT 0,5
б'макс = л „ — п то в'
Д (Pq и> иЗ
407-
Поскольку (7макс<36 в, ограничение не нужно. Для снижения статической
ошибки примем (7макс = 36 в
5 Определяем коэффициенты а и Ъ по ф-лам (12.27) и (12.28), учитывая,
что 5р=5ПГЭм//:
а = ——— =----------------0,565 10-4 сек,
Рмакс Sp 7/макс
Т-'макс ‘Sp Рмакс Дэм
6 Определяем коэффициент редукции по ф-ле (12.29): пр<0,3. Обычно
nP<Sl по условиям повышения момента на оси конденсатора и стабильности по-
ложения ротора конденсатора при механических толчках. Поэтому при любом
пр<^1 система оказывается устойчивой в «малом» с большим запасом.
Выбираем стандартный редуктор с замедлением, так что пр«0,01.
7 . Для определения характера установления <р по диаграмме Вышнеград-
ского находим из ф-лы (3.52) коэффициенты А и В для данного случая
= 31,4,
Ь Нуэ
з Г О2 я
1 / “ум"Р
|/ ° Я«
Согласно диаграмме рис. 3.5 процесс будет колебательным, поэтому вводим
ограничитель на угол поворота ротора
8 . Определяем уэ по ф-ле (7-71) при т=1, поскольку б'макс/2Ь'т>1+2уум—
‘—(Ут/Рмакс
Уз — 1 + Уум — 5,5.
Видим, что уэ>ун макс= (2Fya)-1[(f3rB—?эгн) + бпг^эгв+^эгн)], следователь-
но, условие захвата выполняется.
12 7. РАСЧЕТ СИСТЕМЫ ИФАПЧ
Исходные данные:
Частота эталонного сигнала /эг, ее нестабильность 8ЭГ, кратность
ее преобразования Y=/nr/i/эг, нестабильность частоты подстраивае-
мого генератора 8пп максимально допустимая девиация фазы под-
страиваемого генератора фпгмакс.
Требуется 'спроектировать систему импульсно-фазовой автопод-
стройки частоты, обеспечивающую заданную кратность преобразо-
вания и уровень паразитной девиации фазы подстраиваемого ге-
нератора, не превышающий заданной величины.
Расчет начинаем с выбора схемы ИФАПЧ. Если Y>1, необхо-
димо выбрать схему умножителя (см. рис. 10.1а), при Y<1, — схе-
му делителя (см. рис. '10.16).
Определяем максимально возможную расстройку подстраивае-
мого генератора относительно требуемой гармоники для умножи-
теля и субгармоники для делителя частоты:
408
Рц макс—fnr (еэг4~ епг)- (12.30}
Проверяем, может ли быть реализован режим надежного де-
ления или умножения частоты с заданной кратностью преобразо-
вания и допустимой нестабильностью обоих генераторов. Если
/?нмакс<—, (12.31>
то система будет работать надежно. В противном случае нет га-
рантии, что при произвольных начальных условиях кратность пре-
образования будет сохраняться. Это объясняется тем, что при не-
выполнении условия (12.31) подстраиваемый генератор в момент
включения может оказаться настроенным ближе к соседней гар-
монике (субгармонике), чем к заданной, и в таком случае веро-
ятность захвата при неправильной кратности будет больше, чем
вероятность захвата при заданном Y.
Далее, выбираем полосу захвата, исходя из условия
^нмакс<^з<—— • (12.32}
п МаКС о Q гр X '
Zip
Длительность импульса следует выбирать с таким расчетом,,
чтобы выполнялось условие (>10.53). Отклонение ее в любую сто-
рону от указанного значения нежелательно. При уменьшении дли-
тельности импульса и отсутствии запоминающего устройства сни-
жается 'постоянная составляющая напряжения на выходе фазо-
вого детектора. При наличии запоминающего устройства сниже-
ние длительности импульса также нежелательно, поскольку оно
вызывает необходимость повышения требований на безынерцион-
ность запоминающего устройства. Увеличение длительности им-
пульса независимо от наличия или отсутствия запоминающего
устройства приводит к снижению стабильности постоянной состав-
ляющей при изменениях Ди.
Если проектируется умножитель частоты с переменной кратно-
стью, то’при выборе длительности импульса в ф-лу (10.53) следует
подставлять вместо Y наибольшие значения этой величины.
На практике не всегда удается получить импульс, близкий по
форме к прямоугольному. При иной форме импульса его парамет-
ры следует выбирать с таким расчетом, чтобы полезные гармони-
ки имели наибольшее значение и наивысшую фазовую и амплитуд-
'ную стабильность.
' Полосу удержания необходимо выбирать максимально воз-
можной. Ее предел ограничивается снижением собственной ста-
бильности подстраиваемого генератора и возможностями управ-
ляющего элемента. Увеличение полосы удержания позволяет сни-
зить среднее значение разности фаз, а также повысить фильтрацию
(уменьшить коэффициент передачи фильтра нижних частот).
Рассчитаем ИФД и ЗУ. Выберем тип диодов (Ri и До изве-
стны).
409
Определив оптимальную длительность импульса до ф-ле
(10.53), из выражения (10.47) найдем Сш положив 7?Вых = 0, если
синусоидальный сигнал подается на фазовый детектор с колеба-
тельного контура (конденсатора). В иных случаях следует пред-
варительно определить величину /?ВЫх.
Далее, по ф-ле (10.51 определим сопротивления запирающих
цепей. Для этого найдем U=Qy/Sy9 и выберем Ди=(Зч-4)1/.
Затем по ф-ле (10.45) найдем величину С).
Выбираем в качестве пробного варианта пропорционально-ин-
тегрирующий фильтр при т27'у^1 и по известной величине уэ на-
ходим требуемое значение параметра т (ф-ла (4.75)]. Далее про-
веряем условие устойчивости системы в «малом» по ф-лам (10.36).
Если устойчивость обеспечена, остается проверить по ф-ле (10.60),
не превосходит ли рПг допустимого значения.
Если степень фильтрации недостаточна, необходимо улучшить
запоминающее устройство или применить более сложный фильтр,
например, дополнив пропорционально-интегрирующий фильтр ре-
жекторным звеном, настроенным на частоту Qp. При изменении
фильтра следует заново проверить условия устойчивости в «ма-
лом» и в «целом», а также условия устойчивости кратности деле-
ния.
Фильтрация побочных колебаний для делителей частоты в боль-
шинстве случаев не рассчитывается.
Пример расчета.
Рассчитать умножитель частоты с переменной кратностью умножения сог-
ласно следующим данным: (Эг=100 кгц, еЭг = 1-10~6, Т=10-Ь100, еПг=1-10-3,
Рпг м а кс = 0,001.
1. Выбираем структурную схему умножителя типа рис. 10.1п.
2. Определяем Римане, взяв в ф-ле (12.10) вместо (Пг ее наибольшее зна-
чение:
макс = /пг макс (8эг + епг) ~ Ю4 г4.
3. Проверяем устойчивость работы умножителя по условию (12.31);
макс = 104 гЦ < 2.10—® СеК'
Следовательно, кратность умножения будет устойчивой.
4. Выбираем полосу захвата, исходя из условия (12.32); равную 2,5-104 гц.
5. Определяем длительность импульса из условия (10.53), полагая г=100:
П ОШ лу ......
* J макс *
Импульс такой длительности можно сформировать без больших затруднений
ври помощи блокинг-генератора.
6. Выбираем в качестве управляющего элемента нелинейную барьерную ем-
кость р-п-перехода.
Для того чтобы при изменении кратности преобразования Y крутизна ха-
рактеристики управляющего элемента изменялась прямо пропорционально этой
кратности, т. е. чтобы относительная полоса удержания оставалась постоянной,
необходимо перестраивать генератор, изменяя индуктивность его контура.
410
На заданных частотах при помощи емкости р-п-Лерехода можно получить,
полосу удержания порядка 1% от рабочей частоты. Так, при Т=100 Гу=100 кгц.
При этом крутизна характеристики управляющего элемента имеет порядок
400 кгц]в.
7. Рассчитаем импульсно-фазовый детектор.
Выбираем кремниевые диоды типа Д-104Б со следующими данными:
/?,~500 ом, ,5 Мом, 17обр макс=75 в.
Определяем емкость запоминающего конденсатора по ф-ле (10.47), полагая,,
что /?вых=0, а Дн-*00:
_______ . Ди опт ... .
Сн < 0.4 —-— —- 40 пф.
Принимаем Сн=40 пф.
Находим необходимую амплитуду напряжения источника синусоидального
сигнала U= ЙУД$Уэ= 2,5 в.
Выбираем амплитуду импульсного напряжения из расчета Аи = 3; Аи=7,5 в
По ф-ле (10.51) определяем сопротивление одного из резисторов запирающей
цепи, найдя предварительно из ф-лы (10.48) 3 = 3,73-10~2 и положив Дн»До’.
= Ли До-~ = 84 ком
1 10 Г'
Определяем емкость конденсатора запирающей цепи по условию (10.45).
« 100 « 12-10~9 пф.
Rt
8. Выбираем пропорционально-интегрирующий фильтр с т2Ту^>1. Опреде-
ляем величину т по ф-ле (4.133):
m= 1 — /1 — у9 « 0,03.
9. Проверяем условие устойчивости системы с таким фильтром по прибли-
женной ф-ле (10.37), учитывая, что тГуЗ>1 и, следовательно, ар<т/(1—т)<1.
Для данного случая —sin ф02=Т/^1—1 и условие (10.37) принимает вид.
2 2
ТРЙУ< —, т. е. 2 л-10~5-105 <-------.
р у т 0,03
Поскольку условие устойчивости в «малом» выполняется, остается опреде-
лить по ф-ле (10.60) Рпг, полагая, что после запоминающего устройства включен
катодный повторитель или УПТ на полевом транзисторе с изолированным затво-
ром и Дн-»-°о:
2^н7рЩ 2-104-10—10-0,03 .
РПГ =--------s---=--------------•— = 2-10~4 .
ЯоСн 7,5-10в-0,4-10—1°
Поскольку рпг< Рпг маьс, расчет можно считать законченным.
ПРИЛОЖЕНИЕ t
ВЫВОД УРАВНЕНИЙ ГАРМОНИЧЕСКОГО БАЛАНСА
НЕ АВТОНОМНОЙ СИСТЕМЫ ФАПЧ
Перепишем ф-лу (5.64) в виде:
— Йм рпг cos (Йм t + <рх) = Йн — К (р) Йу cos (Рэг sin Йм t —
— Рпг sin (Йм t + фх) + фср]. (П1.1 >
411
Преобразовав косинус в правой части этою выражения по формулам коси-
яуса двух углов и воспользовавшись известными формулами из теории бесселе-
вых функций: ।
00
COS (₽sinx) Jo (Р) + 2 V (Р) cos пх, (П1.2)
/1—1
00
sin (Р sin х) = 2 У J2n+1 (Р) sin (2п-|-1) х, (П1.3)
п=0
получим
cos [рэг sin Йм t — рпг sin (Йм t + фх) — фср] =
С 00
= < COS фср Jо (Рпг) + 2 J 2Я (Рпг) cos 2п (Йм / + фх)
I L п=1
00
— sin фср- 2 J2П_|_] (Рпг) s>n (2п + 1) (Йм t 4- фх X
п=0
• I < Г
X Jo (Рэг) + 2^^ J 2/1 (Рэг) COS 2п QM t I + (Sin фср I J0(pnr) ~h 2 У J(Рпг) X
n=l J I L n=-l
Xcos2n (QM /+ фх) + соырср-2 J2„+1 (Pm) sin (2n + 1) Ймn X
n=o J
00
X2 An-pi (Рэг) sin (2n -|- 1) Йм t,
n=o
(П1.4)
Если модуляция фазы эталонного сигнала вызывается аддитивной помехой
Ui(t) = Un cos'[(ci)3r+H1)/-|-cpi], то можно показать, что при Uu<U3r (это соот-
ношение почти всегда выполняется на практике) девиация фазы эталонного сиг-
нала, а следовательно, и девиация фазы синхронизируемого генератора не пре-
восходит величины 0,5л [1964, 3]. Но если рэг<1,57 и рпг< 1,57, то величины
Л(Рэг) и Л(Рпг) малы по сравнению с 70(Рэг) и 70(Рпг) соответственно, а
/з(Рэг) и Уз(Рпг)—по сравнению с Л(Рэг) и Л(Рпг). Поэтому в бесконечных
суммах выражения (П1.4) можно ограничиться только первыми членами:
cos [фср + Рпг sin (Йм t + фх) — Рэг sin Йм /] =
= [cos фср /о (Рпг) — sin фСр- 2 Ji (Рпг) sin (Йм t + фх) Jo (Рэг) +
4" [sin Фср •/о (Pni) cos фср ’ 2 Ji (Рпг) я'п (Йм t -|" фх)[ 2 (рэг) sin Йм t. (П1.5)
Подставив это выражение в ур-ние (П1.1), получим
— Ом Рпг COS (йм t -[- фх) = Йн — Йу {СОЗ фср Jо (Рпг) Iо (Рэг) — |/ГО йм)( X
Xsin фср 2 Ji (Рпг) Jo (Рэг) sin (Йм < 4- Фх — Фа м) +
4~ 2 |К (i Оц)1 sin фср Jо (Рпг) •/г (Рэг) sin (Йм t Фа м) 4“
4- 2 cos фср Jг (Рпг) А (Рэг) cos фх 2 |/( (i 2 Йм)| cos фсрХ
X А (Рпг) /1 (Рэг) cos (2 Йм t 4- фх фц м)|. (П1.6)
412
Здесь A(ifiM) и Л(12ЙМ)—коэффициент передачи фильтра нижних частот
на частотах Йм и 2ЙМ; фам и ф22 м—фазовые сдвиги, вносимые фильтром на
указанных частотах.
Поскольку обычно коэффициент передачи фильтра нижних частот на часто-
тах 2ЙМ и ЗЙМ мал по сравнению с его значениями на частоте Йм, слагаемыми
частоты 2ЙМ в выражении (П1.6) можно пренебречь. Тогда
Йм Рпг (C°S Йм + фх) — Йн Йу {cos фср Jо (Рэг) *^G (Рпг)
— к (i йн)| 2 sin фср Л (Рпг) Jо (Psi) sin (Йм t + фх — Фа м) +
+ 2 |Л (i Йм)| sin фср Jо (Рпг) Iг (Рэг) sin (Йм t + фа м) -ф-
Н~ 2 cos фср Jг (Рпг) Jг (Рэ1) cos фх. (П1.7)
Преобразовав обе части этого равенства, получим
— Йм Рпг [cos (Йм t + фх — фа м) cos фа м + sin (йм t + фх — ф2 а м) sin фа м] =
= Йн Йу COS фср Jо (Рпг) J0 (Рэг) 2 Йу COS фср j 1 (Рпг) А (Рэг) COS фх ф-
+ 2 Йу |К (i Йм)| sin фср Jг (Рпг) 1 (Рэг) sin (Йм I + фх Фа м) —
2 Йу | К (i Й„)| sin фср J0 (Рпг) Jг (Рэг) [sin (Йм t + фх Фа м) cos фх
— СО5(Йм/+фх —фам)5Шфх]. (П1.8)
Из выражения (П1.8) получаем систему трех трансцендентных уравнений:
Йн Йу COS фср А (Рпг) Jо (Рэг) 2 Йу COS фср /1 (Рпг) А (Рэг) cos фх == 0, (П1.9)
Йм Рпг cos фа м = 2 |Л (i Йм)| [Йу sin фСр J0 (Рпг) А (Рэг) sin фх], (П1,10)
— Йм рпг sin фа м = 2 [ К (i Й„)| [Йу cos фх Jo (Рпг) А (Рэг)
sin фср Ji (Рпг) Jо"(Рэг) I • (П1.11)
ПРИЛОЖЕНИЕ 2
ВЫЧИСЛЕНИЕ ИНТЕГРАЛА ОТ ДРОБНО-РАЦИОНАЛЬНОЙ ФУНКЦИИ
Пусть имеем интеграл вида
. If g«(i<o) .
2л J hn (i и) hn (i co)
—00
где gn (i cd) = b0 (i w)2"-1 + (i w)2n~1 + ... b„_b
hn (i cd) = a0 (i cd)" + (i cd)"-1 ... an,
(П2.1)
причем корни многочлена /t„(iw) лежат в левой полуплоскости.
413
Используя теорему Коши о вычетах (из теории функций комплексного пере-
менного) можно, как показано в [55], свести Jn к выражению.
(-1)п+\Дч
2а0 D
(П2.2)
где
dn die • . dm
dii d22 • . din
d,! = ; dif — a2i_if
dni dn2 • dnn
причем ds=0 при и<х<0, а Вп — определитель, полученный из £>» заменой
первого столбца величинами Ьо, bt, ..bn-i-
Конкретные выражения для нескольких первых членов, этого выражения
имеют вид:
Л = -А
2а0 Й1
h , а<А
— Ьа 4--------
г_______________
J2 о „ >
2 а0 ах
. «О 01^2
— а2 bQ + а0 —
уз =______________________^2—s
3 2 я0 (а0а3 — а1а^)
(П2.3>
(П2.4)
(П2.5)
&о ( а1 а4 + аг «з) — аа аз bi + аа Ь? + а3 — вх
ji=-------------------------------------------«*----------------
2 а0 (оо аз + ai а4 — «г а2 а3)
(П2.6)
Выражения Jn для гг>4 приведены в [56].
Специальная литература
1922—1931 гг.
1. Applton Е. V. The Automatic Synchronization of Triode Oscillators.—
«Proc. Cambridge Phil. Soc.», vol. 21, part. Ill, 1922, p. 231—248.
2. Андронов А. А., Витт А. А. К математической теории захватывания.
«ЖПФ», 1. 7, вып. 4, 1930 или Собрание трудов А. А. Андронова. М., Изд-во
АН СССР, 1956.
3. Lyon W. V. and Edgerton Н. Е. Transient Torque-Angle Charakteristics
of Synchronous Machines.—«Transaktions of the American 1ЕЕ», vol. 49,
1930, n2, p. 689.
4. Терентьев Б. П. Способ стабилизации частоты генератора. Заявочное сви-
детельство № 62595 от 26/1II 1930.
1932 г.
1. Крылов Н. М., Боголюбов Н. Н. О колебаниях синхронных машин.
Харьков—Киев, Энергоиздат.
2. De BeUescizeHLLa Reseption Synchrone. — «Onde electr», vol. 11, June,
p. 230—2'40.
3. Теодор чи к К. Ф., Хайкин С. Э. Акустическое захватывание. М.,
«ЖТФ», т. 2, вып. 1.
1933 г.
1. Tri comi F. Integratione di unequatione differentiale presentatasi in elec-
rotechnica. — «Annali della Roma Schuola Normale Superiore de Pisa Scienza
Physiche e Matematiche», vol. 30, p. 4.
1934 r.
1. Гольдштейн Л. Д. О сложном воздействии на автоколебательную систе-
му. Научно-технический сборник Ленинградского института связи., 4, вып. 15.
1935 г.
1. С. Travis. Automatic frequency control. — «Proc. IRE», vol. 23, October,
p. 1125—1141.
1937 r.
1. Крылов H. M., Боголюбов H. H. Введение в нелинейную механику.
Киев, изд-во АН УССР.
2. Гутенмахер Л. И. Электронно-ламповые векторомеры.— «Автоматика и
телемеханика», .№ .6.
1938 г.
1. Гутенмахер Л. И. Детекторные векторометры. — «Электричество», № 7.
1939 г.
1. J. G. С h a f f е. The application of negative feedback to frequency modulation
systems. — «Proc. IRE», vol. 27, May, p. 317—331.
2. H. К a den. «Е1. Nachr. Tech.», 16.
1940 r.
1. Виницкий А. С., Попов P. И. Генератор с автоматической подстройкой.
Авторское свид. Кл. 21а 802, № 63879. Опубл. 31 авг. 1944 г. с приоритетом
от сект. 1940 г.
415
2. Г и с к e r D. G. A carrier frequency synchronization. — «Post Office Elect.
Eng. J.», vol. 23, July.
3. Bedford A. V., Smith I. P. A precision television synchronizing signal
genci ator. — «RCA Review», July.
4. Мом о т E. Г. Фазовая селекция в ^радиосвязи.— «Электросвязь», № 9 и
№ 11.
1941 г.
1. Мом от Е. Г. Проблемы и техника синхронного приема. Л.-М. Госэнергоиз-
дат (М., «Связьиздат», 1961).
2. В у а г d S„ Eccles W. Н. The Locked-in Oscillator. — «Wireless Eng.»,
vol. 18, January, p. 2—6.
3. Хухриков С. С. К анализу ЧМ колебаний по методу ВуДиярда.—«ИЭСТ»,
№ 4.
1943 г.
1. Tucker D. G. The Synchronization of Oscillators. — «Electronic Engineering»,
vol. 16, June, № 6, p. 26—30.
2. Wendt K. R. and FredendallG. L, Automatic Frequecy and Phase
control of Synchronization _ in Television Reseivers. — «Proc. IRE», vol. 31,
January, p. 7—15.
1944 r.
1. Beers G. L. A frequency dividing locked-in oscillator frequency — modulation
receiver. — «PIRE», vol, 32, December.
2, Carnahan C. W., Cal mu s H. P. Synchronized oscillators as frequency —
modulation receiver limiters. — «Electronics», vol. 17, August, p. 108—112.
3. S t u r 1 e у К. R. Phase discriminator. — «Wireless Engineei», Febroary,
p. 72—78.
1945 r.
1. Tucker D. G. Forced oscillations in oscillator cirquits. — «Jour. 1ЕЕ»
(London), vol. 92, September, p. 226—234.
1946 r.
1. Adler R. A Study of Locking Phenomena in Oscillators. — «PIRE», vol. 34,
p. 330—340.
2. Farren L. I. Phase Detectors. — «Wireless Eng.», vol. 23, p. 330—340.
1947 r.
1. Горшунов В. H. Исследование области устойчивой работы синхрогенера-
тора.— «Радиотехника», т. 2, № 1.
2. Н u n t о n R. D. Synchronization of oscillators. — «PIRE», vol. 35, December,
p. 1415—1423.
1948 r.
1. Buchsbaum U. H. Automatic Frequency Control. — «Radio News», vol. 39,
n3, p. 68—69.
1949 r.
1. Dishington R. Hi Diode Phase Discriminators.— «PIRE», 'vol. 37, De-
sember, p. 1401—1404.
2. Shlesinger K. Lock Oscillator for Television Synchronisation. — «Elec-
tronics», vol. 222, January, p. 112—117.
3. Labin E. Theorie de la sinchronization par controle de la phase. — «Philips
Research Report», n4, p. 291—315.
4. A m e r 1 о L. Determinazione delle condizione di stability per gli integrale
di un’equazione interessante 1’electrotecnica. — «Annali di Matematica Рига ed
Applicata», vol. 4, n30, p. 75.
416
5. J u s t e r F. Commande automatique de frequence et de phase pour re'cepteur
de te'levsion. — «Toute la Radio», vol. 16, nl35, p. 168—160.
6. Gardner L. E. Circuits for Horizontal AFC.—«Radio—Electronics»,
vol. 20, nlO.
7. С 1 a г к E. L. Automatic Frequency Phase Control of Television Sweep
Circuits. —«PIRE», vol. 37, n5, p. 497—500.
1950 r.
1. Cornell J. A. A signal tube AFC circuit for television deflection systems.—
«Radio and Television News», January, p. 58—60.
2. Stephenson J. G. Combined search and automatic frequency control of
mechanicalli tuned oscillators.— «PIRE», November, p. 1314—1317.
3. Recent developments in color synchronization in the RCA color television
system. — «RCA Labs. Report, Princeton», N.J. Feb.
4. Иноземцев С. П. Детекторные векторомерные устройства и их расчет.—
«Электричество», № 10.
1951 г.
1. Кияковский Г. В. О работе схем синхронизации телевизионных прием-
ников.— «Радиотехника», т. 6, № 6.
2. Ельшик М. И. О фазовых траекториях движения маятника.— «УМН»,
вып. 4.
3. Shuster N. A. A phase sensistiv detector circut having high balance sta-
bility.— «Reiv. Sci. Instr.», vol. 22, n4, p. 254—255.
4. G e о r g e T. S. Analysis of synchronizing systems for dot interlaced color
television. — «PIRE», vol. 39, Feb., n2, p. 124—131.
5. Шишкин А. А. Исследование схемы фазобалансного моста. МЭИ, канди-
датская диссертация.
1952 г.
1. Бакаев Ю. Н. Приближенное интегрирование уравнения маятника.—
«ПММ», т. 16, вып. 6, стр. 723—728.
2. Житомирский В. И. Линейная теория кольцевого фазового детектора.—
«Радиотехника», т. 7, № 5.
3. Тихонов В. И., Амиантов И. Н.— «Воздействие флуктуаций на фазо-
вый детектор.— «Радиотехника», т. 7, № 2.
4. Howitt G. Evaluating AFC System for Television Receivers —«Electronics»,
vol. 25, nil.
5. Leed. Automatic Frequency Control by Electromechanical Analogue. — «PIRE»,
vol. 40, n2.
6. Dishing ton R. H. Phase Discriminators. — «PIRE», vol. 37, p. 1401.
7. Richman D. Frame Synchronization for Color Television. — «Electronics»,
vol. 25, Oct., p. 146—152.
8. Stephenson W. L. Automatic Frequency and Phase Control of Television
Line Time Base for Negative Modulation Transmissions. — «Mullard Technical
Communications», vol. 1, May.
9. Tucker D. G. The Synchrodine and Coherent Detectors. — «Wireless fingr.»,
vol. 29, p. 184.
1953 r.
1. Бакаев Ю. H. Процесс установления фазы колебаний лампового генера-
тора, включаемого под воздействием эдс.— «Труды ВВИА им. Н. Е. Жуков-
ского», вып. 466.
2. Р г е s t о п J. W. and Т u 11 i е г J. С. The lock-in performance of an AFC
circuit. — «PIRE», vol. 41, n2, p. 349—251.
3. Richman D. Theory of sinchronization applied to NTSC color television. —
«IRE Conv. Record», part 4, March 23.
4. Richman D. APC color sync, for NTSC color television. — «IRE Conv.
Record», part 4, March 23.
14—526 417
5. H a у s W. D. On the equation tor a damped pendulum under constunt
torque. — «Zeitschift fur Angewandte Matematic und Phisik», В—4, n5.
6. В о о t о n R. С. The analisis of nonlinear control systems with random
inputs. — «Proc. Symposium on Nonlinear Circuits Analisys. Politechnic
Institut of Brooklin», April, p. 369—391.
7. Bohm C. Nouvi criteri di exsistenza di solutione periodiche di una nota
equazione differentiale nonlineare. — «Annali di Mathematica Рига ed Appli-
cata», Ser. 4, vol. 35.
8. Statemen M. J. Cross-correlation applied to automatic frequency control.—
«Convention Record of IRE», p. 91—95.
9. В 1 a d e 1 J. V. Controlled frequency osc. with frequency memory. — «Journal
of Scientific Instrumets», vol. 30, September, p. 299—301.
10. D о 1 a n d G. D. Теория сервомеханизмов, применяемая для расчета схем
АПЧ. — «Tele-Tch», п.5, р. 95—97, р. ,1|49i—,li55.
11. Lehan F. W. and Parks R. J. Optimum demodulation. — «IRE Nat. conv.
Record», part. 8, p. 101—103.
12. G r u e n W. J. Theory of AFC sinchronization. — «PIRE», vol. 41, n8,
p. 1043—1048.
1954 r.
1. Манаев E. И. Об одновременном детектировании сигнала и помехи ам-
плитудным и фазовым детекторами, работающими в режиме линейного бе-
зынерционного детектирования — «Радиотехника», т. 9, № 3.
2. Хоулов Р. В. К синхронизации автоколебаний на обертонах.— «Вестник
МГУ», т. 51, № 8.
3. Белюстина Л. Н. Об устойчивости режима работы явнополюсного син-
хронного двигателя.— «Изв. АН СССР», ОТН, № 10, стр. 131—140.
4. Gruen W. J. Test generator for horizontal scanning AFC system. — «IRE
Trans, on Broadcast and Television receivers», vol. BTR—1, p. 36—43.
5. J el о nek Z., Celinskj O., Sy ski R. Pulling effect in synchronized sys-
tems. — «Р1ЕЕ», part 4, Fe6roary.
6. Richman D. Color-carrier reference phase sinchronization accuracy in NTSC
color television. — «PIRE», vol. 42', nl, p. 106—133.
7. Richman D. The D. C. Quadricorrelator: a Two Mode Sinchronization
Systems. — «PIRE». vol. 42, nl, p. 288—299.
8. О r d u n g R. F., Gibson J. E., Shinn B. J. Closed—loop automatic
phase control. — «Trans. AIEE, Communication and Electr», n9, p. 375—381.
1955 r.
1. Белюстина Л. H. Об одном уравнении из теории электрических машин.
Сб. «Памяти академика А. А. Андронова». М., Изд-во АН СССР.
2. Чернышова В. В, Исследование работы фазового детектора. МАИ, кан-
дидатская диссертация.
3. Jaffe R., Re ch tin E. Design and performance of phase—locked circuits
capable of near optimum performance over a wiide range of input signals
and noise levels. — «IRE Trans, on Information Theory», vol. IT-1, March,
p. 66—76.
4. Peter M., Strandberg M. W. Phase stabilization of microwave oscilla-
tor.— «PIRE», vol. 43, July, p. 869—873.
5. Sobotka Z. Oscillator RC synchronisovany automatickym ovladanim fase.—
«Sdelovaci technika», cis. 8, str. 239—241.
6. White E. L. C. The Pull-in Range of an APC Loop. Report No RK/94,
November 1955, Electronic Musical instruments Research Laboratories, Hayes,
Middlesex, England.
7. Попов И. А. Теория кольцевого детектора при работе на активную нагруз-
ку, зашунтированную емкостью.— «Автоматика и телемеханика», № 1.
1956 г.
1. Тихонов В. И., Амиантов И. Н. Воздействие медленных флуктуаций
на автогенератор.— «Радиотехника и электроника», т. 1, № 4.
418 *
2. Казаков И. Е. Приближенный вероятностный анализ точности нелинейных
систем.— «Автоматика и телемеханика», № 5.
3. Бакаев Ю. Н., Кузнецов П. И. Метод усреднения и его применение
к некоторым нелинейным задачам радиотехники.— «Радиотехника», т. 11,
№ 10.
4. Бакаев Ю. Н., Кузнецов П. И. К определению области устойчивой ра-
боты инерционной системы телевизионной синхронизации.— «Радиотехника»,
т. 11, № 11.
5. Капранов М. В. Полоса захвата при фазовой автоподстройке частоты.—
«Радиотехника», т. 11, № 12.
6 Costas J. Р. Synchronous communications — «PIRE», vol. 44, December,
p. 1713—1718.
7. V i c t о r W. K. The evaluation of phase—stable oscillators for coherent
communication systems. — «JPL External Publication», n337, May 8.
8. Strandberg M. W. Phase stabilization of microwave oscillators. — «PIRE»,
vol. 44, n5, p. 696.
9. Ingham W. E. The design of an APC synchronizing loop. E.M.I. Res. Labs.,
Ltd., Hayes Middlesex, Eng., Rept. Nr RW/8, April.
10. G i g e r A. Ein Grenzproblem einer technisch wichtigen nichtlinearen Diffe-
rentialgleichung. — «Zeitschrift fur Angewandte Matematik und Physik»,
vol. VII, n2, p. 121—129.
1957 r.
1. Урман E. Л. Применение принципа гармонического баланса для исследо-
вания условий синхронизации машин.— «Вестник электропромышленности»,
№ 4.
2. К а п р а н о в М. В. Фазовая автоподстройка частоты. МЭИ, кандидатская
диссертация.
3. Т и х о н о р В. И. Влияние собственных флуктуаций на работу автогенера-
тора.— «Вестник МГУ», № 2.
4. Бортникер Ю. В. Устойчивость фазовой автоподстройки частоты с уче-
том эффекта запаздывания.— «Труды ВКАС им. Буденного», № 59.
5. В оо ton R. С., Goldstein М. Н. Расчет и оптимизация синхронных де-
модуляторов.— «IRE Wescon. Conv. Rec.», vol. I, vol. Ill, part. 2.
6. L u t z H. Die Bewertung der Giitte der Horizontalsynchronisierung von
Fernsehenempfangern.—«Arch, der electrischen Ubertragung». Heft 11, No-
vember, p. 461—470.
7. Margolis S. C. The responce of a phase—locked loop to a sinusoidal plus
noise. — «IRE Trans, on Inf. Theory», vol. IT—3, June.
S. Taeger W. Die Phasensynchronisierung in Fernsehenempfanger. «Funk-
shau». nl5, p. 447—448.
9. S a u t e 1 s A. N. Transistorized Phase Discriminators. — «Trans, of the Ame-
rican Institute of El. Engrs.» pt. I, Communication and Electronics March,
vol. 76, p. 19—26.
10. Leek R. Phase—lock AFC loop tracking signals of changing frequency.—
«Electronic and Radio Engineer», vol. 34, N4, p. 114, N5, p. 117.
11. Jelonek Z., Cowan C. Synchronized systems with time dely in the
loop. — «Р1ЕЕ», pt. C, September.
12. Leek R. Phase-lock APC loops. — «Electronic and Radio Engenier»’ № 4,
p. 141—146 and № 5, May, № 5, p. 177—183.
13. Rechtin E. Design of phase-lock oscillator circuits. — «JPL Section Rep.»,
N8, 566, Febr. 7.
14. Gilchriest С. E. The Application of phase-locked loop discriminators for
the threshold improvement and error reduction in PM/FM telemetry. — «IPI
External Publication», N364, January.
15. Winkler G. Progress in phase-lock techniques. — «Proc, of the 11th
Annual Sympos. on Frequecy Control», U.S. Signal Corps, Fort Monmouth,
N.J., May, p. 335—336.
14*
419
1958 г.
1. Акопян И. Г., СтратоновичР. Л. Установление синхронной фазы в
автогенераторе при наличии флуктуационных помех. — «НДВШ». Сер. физ-мат.
наук, № 1.
2. Капранов М. В. Фильтрация помех при фазовой автоподстройке часто-
ты.— «НДВШ». «Радиотехника и электроника», № 1.
3. Тюфякин Л. С. Способ автоматической подстройки частоты.— «НДВШ».
«Радиотехника и электроника», № 1.
4. Белюстина Л. Н. О разбиении на траектории цилиндрической фазовой
поверхности.— «Изв. вузов». «Радиофизика», т. 1, № 2, стр. 118—130,
5. Капранов М. В. О полосе захвата при ЧФАП.— «НДВШ». «Радиотехни-
ка и электроника», № 2.
6. Бернштейн И. Л., Сибиряков В. Л. Фазовая автоподстройка часто-
ты генераторов сантиметрового диапазона.— «Радиотехника и электроника»,
т. 3, № 2.
7. Бакаев Ю. Н. Исследование инерционной системы телевизионной синхро-
низации.— «Радиотехника и электроника», т. 3, № 2.
8. Сафонов В. М. Фазовая автоподстройка частоты с фильтрами второго
порядка. «НДВШ». «Радиотехника и электроника», № 4.
9. Сафонов В. М. Анализ фазового детектора при кратных частотах. — «Тру-
ды МЭИ», вып. XXXI. «Радиотехника», ГЭИ.
10. Белкин А. П. Влияние системы автоматической подстройки частоты на ча-
стотную характеристику приемника ЧМ сигналов.— «Труды МЭИ», вып. XXXI.
«Радиотехника», ГЭИ.
И. Самойло К. А. Скачки фазы под действием импульсных помех при деле-
нии частоты.— «Труды МЭИ», вып. XXXI. «Радиотехника», ГЭИ.
12. Капранов М. В. Полоса захвата автоподстройки частоты с прямоуголь-
ной характеристикой фазового детектора. — «НДВШ». «Радиотехника и элект-
роника № 4.
13. Беркман Р. Я. Фазовый детектор на кратные частоты. — «Автоматика и
телемеханика», т. XIX, № 4.
14. Р а е в с к и й С. Я., X о х л о в Р. В. О синхронизации автогенератора сину-
соидальной силой при наличии флуктуационных помех. — «Радиотехника и
электроника», т. 3, № 4.
15. С т р а т о н о в и ч Р. Л. Синхронизация автогенератора при наличии по-
мех. — «Радиотехника и электроника», т. 3, № 4.
J 16. Капранов М. В. Автоподстройка фазы синхронизированного автогене-
ратора. — «НДВШ». «Радиотехника и электроника», № 4, стр. 129—137.
17. Артым А. Д. Применение фазовой автоподстройки частоты. — «Радиотех-
ника», т. 13, № 8.
18. Вяткина В. М., Иванова 3. А. Фазовый дискриминатор. — «Радио-
техника», т. 13, № 10, стр. 39—44.
19. Richter Н. L., S a m s е п W. F., Stevens R. Mikrolock: A Minimum
Weight Radio Instrumentation Systems for Satellite. «Jet Propulsion», vol. 28,
pt. 1, August, № 8, p. 532—540.
20. Niewi adorn ski T. Niektore zagadnienia zwiazane z automatyczna kon-
trola fazy w generatorach lampowych. «Archiwum Elektrotechniki», tom VII,
cis 2, str. Й31—245.
21. Gilchriest С. E. Application of the phase-losked loop to telemetry as a
discriminator or tracking filter.—«IRE Trans», vol. TRC—4, nl, p. 20—35.
22. N i e 1 s e n C. L. Principles and applications of the phaselock detection in
phase coherent systems.—'«Jet Propulsion», vol. 28, pt. 1, August, p. 541—547.
23. L eh an F. W., Parks R. J. Optimum demodulation. — «IRE Nat. Conv.
Rec.», pt. 8.
v
24. Carniol B., Novak J. Zpetovazebni vztahy fazove synchronisace v linearni
oblasti. — «Slaboproudy Obzor», cis 7, str. 446—452.
25. H о w 1 e 11 D. J., В u d u 1 s L. Noise immunie synchronizing circuits for
television time base circuits. — «PIRE», Australia, L. vol. 19, N 14, November,
p. 680—689.
420
26. G i 1 c h r i e s t С. E. Design and operation handbook for phase-locked loop
discriminator. — «JPL Publication», N127, May 30.
27. M c. Rae D. D. Phase-locked demodulation in telemetry receivers. — «Proc.
1958 Nat. Symp. on Telem». Miami Beach, September.
28. Rey T. J. Automatic phase control: theory and design. «NEREM Meeting in
Boston», Mass, November 19.
1959 r.
1. E в т я н о в С. И., Исакова В. К. Фазовая автоиодстройка частоты с ос-
лабленной нестабильностью фазы. — «НДВШ». «Радиотехника и электро-
ника», № 1, стр. 134—140.
12. Принципы детектирования с использованием методов фазовой синхронизации
в фазово-когерентных схемах. — «Зарубежная радиоэлектроника», № 2.
3. Сафонов В. М„ Исакова В. К. Система автоподстройки частоты с фа-
зочувствительной индуктивностью. М., Изд. филиала ВИНИТИ. Тема № 36, М.
4. Б ел гости на Л. Н. Исследование нелинейной системы фазовой автопод-
стройки частоты. — «Изв. вузов». «Радиофизика», т. 2, № 2, стр. 277—291.
5. Т и х о н о в В. И. Влияние шумов на работу схемы фазовой автоподстройки
частоты. — «Автоматика и телемеханика», т. XIX, № 9, стр. 1188—1196.
6. Белюстина Л. Н. Определение качественной структуры грубой динамичес-
кой системы путем приближенного построения особых траекторий. — «Изв.
вузов». «Радиофизика», т. 2, № 4, стр. 638—653.
7. Капранов М. В. Фазовый детектор с общей нагрузкой. — «НДВШ». Ра-
диотехника и электроника», № 2, стр. 267—278.
8. Б а к а е в Ю. Н. Некоторые вопросы нелинейных фазовых систем. — «Тру-
ды ВВИА им. Н. Е. Жуковского», вып. 800.
9. Артюшенко В И. Анализ переходных процессов фазовой автоподстрой-
ки частоты. — «Сб. трудов РАУ им. Ленинского комсомола», вып. 76.
10. Gardner F. М. Doplock used phase-locked filter. — «Electronic Industries»,
vol. 18, NI0, p. 96—99.
II. Me. Aleer H. T. A new look at the phase-locked oscillators. — «PIRE»,
vol. 47, June, p. 1137—1143.
12. Preston G. W. Basic theory of locked oscillators in tracking FM signals.—
«IRE Trans, on Spase Electronics and Telemetry», vol. SET-5, N 1, March,
p. 30—33.
13. Vitebi A. J. Acquisition and tracking behavior of phase-locked loops.—
«Jet Propulsion Laboratory, California Institute of Technology, Pasadena,
California. External publication», N673, Ch.S, July, 14.
14. Weaver Ch. S. A new approach to the linear design and analisis of phase-
locked loops. — «IRE Trans, on Spase Electronics and Telemetry», vol. SET-5,
December, N4, p. 166—178.
1'5 . Viterbi A. J. The effect of sinusoidal interference of phase-locked loops.—
«JPL Section Rep», N8—583, December 16.
16. Sobotka Z. Synthesa korekeniho obvdu pro automatickou fazovou synchro-
nisaci. — «Slaboproudy obzor», cis 9, N20, str. 648—555.
17. Белоцветов Ю. В., Терентьев Б. П. О возможности деления часто-
ты в дробное число раз. — «НДВШ». «Радиотехника и электроника», № 2.
18. Терентьев Б. П., Белоцветов Ю. В. Схема деления частоты с по-
мощью импульсно-фазового детектора. — «Электросвязь», № 6.
19. Белоцветов Ю. В., Терентьев Б. П. Анализ схем кратного преобра-
зования частоты с импульсно-фазовым детектором. — «Электросвязь», № 9.
20. Vlach J. Die Synthese einer Schaltung filr Schwinggradsynchronisation. —
«Hochfrequenz technik und Elektroakustic». Band 68, Heft 3, September, N3,
p. 86—93.
21 Акопян И. Г. Экспериментальное исследование влияния флуктуационных
помех на процессы синхронизации. — «Изв. вузов». «Радиофизика», т. II,
№ 3.
22 Уткин Г. М. Синхронизация, деление и умножение частоты с повышенной
стабильностью фазы. — «НДВШ». «Радиотехника и электроника», № 1.
421
23. Акопян И. Г. Исследование влияния флуктуационных помех на процессы
синхронизации ламповых генераторов. МГУ, кандидатская диссертация.
24. Барбаши и Е. А., Та буев а В. А. Об условиях существования предель-
ных циклов. — «ПММ», № 5.
25. Б а р б а ш и и Е А., Та бу ев а В. А. О колебаниях маятника при нали-
чии сухого трения. — «Изв. вузов». «Математика», № 5.
26 В аси л d ев А. М. Применение теории Броуновского движения к исследо-
ванию импульсных радиотехнических следящих устройств. — «НДВШ». «Ра-
диотехника и электроника», ч. I, № 1, стр. 16—25, ч. II, № 2, стр. 3—13.
27. С h о a t е R. L. Analisis of a phase-mudulation communication system. —
«JPL Progress Report», PR—30—21, October 8.
28. К r e i n d 1 e r E. The theory of synchronization of oscillator with application
to DOPLOC tracking filter. Technical Report 5 T-l/147, Scool of Engine,
ering, Columbia University. — «New York», 27, NY, August.
29. Sobotka Z. Dvoijne systemy automaticke fazove synchronisace. — «Sdelovaci
technika», cis. 11.
30. С a r n i о 1 B., Mack Z. Fazova synchronisace radkoveho kmitoctu Vyzkumna
zprava, cis. 25/123/59. Vyzkumny ustav pro sdelovaci techniku A. S. Popova,
Praha (1959, prosinec).
31. Krishnan S. A diode phase detector. — «Electronics and Radio Enginee-
ring», Feb., N2, p. 45—50.
32. Fraser W., Scheme! R. E. The Modulator as a Phase Detector. — «Elec-
tronic Engineering», vol. 31, N376, p. 345—346.
33. S am pson W. F., R u e g g F. A. Phase-lock in space communicatins. —
«Proc. Nat. 'Symp. Space Electr. and Telem», paper 1—3, September.
34. R u n g a n R. А. Факторы, определяющие выбор вида фильтра в фазово-
когерентных дискриминаторах. — «IRE Proc. Nat. Symp. on Spase Electr. and
Telemetry», vol. IX, N9.
35. E d w a r d s K. A., G о 1 u b j a t n i k о v O., Brady D. J. Transistor phase-
locked oscillators. — «Communications and Electronics», January, №40,
p. ГО43—1951.
36, Радиотехническая система «Mikrolock» для измерения параметров орбит
спутников земли. — «Зарубежная радиоэлектроника», № 9.
37, Krishnan S,, Chidambaram R. Balanced Push-Pull Phase Detector
«Electronic and Raguo Engeneer», August.
1960 r.
1. Niewiadomski T, Zakrez Chwytania Synchronizacji w ukladah genera-
torow lampowych z automatyczna kontrola fazy. — «Archiwum Elektrotechiki».
T. IX, ZESZYT 1 Kwartalnik.
2. Бакаев Ю. H. Построение рабочих зон систем автоматического регулиро-
вания фазы. — «Изв. АН СССР ОТН». «Энергетика и автоматика», № 2,
стр. 132—136.
3. Тихонов В. И. Работа фазовой автоподстройки частоты при наличии шу-
мов. — «Автоматика и телемеханика», № 3, стр. 301—309.
4. Белюстина Л. Н. О возбуждении автоколебаний в нелинейной системе
фазовой автоподстройки частоты с запаздыванием. — «Изв. вузов». «Радио-
физика», т. 3, № 5.
5. Rey Т. J. Automatic phase control: theory and design.—«PIRE», vol. 48,
October, p. 17601—1771.
6. Капранов M. В., Иванов В. А., Иванова H. И. Фазовая авто-
подстройка частоты с нелинейным фильтром. — «Радиотехника и электро-
ника», т. 5, № И, стр. 1774—1785.
7. Weaver С. S. Increasing the dinamic tracking range of phase-locked loop.—
«<PIRE», vol. 48, N5, p. 952—953.
8. Viterbi A. J. An aquisition and tracking behavior of phase-locked loops. —
«Proc, of the Symp. on Active Netvorks and Feedback Systems.» Z (Micro-
wave Research Institute Sympos Series), vol. X, p. 583—619. April, 1960.
Politechic Institute of Brooklyn, New York.
422
9. West lake P. R. Digital phase control techiques.— «IRE Trans, on Commu-
nications Systems», vol. Cs-8, N8, p. 237—246.
10. Martin B. D. Threshold improvement in FM subcarrier systems. — «IRE
Trans, on Space Electronics and Telemetry», vol. SET-6, March, Nl, p. 25—33.
11. Robinson E. M. Acquisition capabilities of phase-locked oscillators in the
presens of noise. G. E. Co, Syracuse 4, TIS, N, R60, DSD 11, September.
12. Терентьев Б. П., Шахгильдян В. В. Получение высокостабильной
меняющейся частоты с помощью фазовой автоподстройки. — «Электро-
связь», № 11.
13. Mori to М., Ito S. Hihgh sensistivity receiving system for frequecy modu-
lated wave. — «IRE Internal. Conv. Rec. pt. 5, March., p. 21—24.
14. Pullen K. A. The dinamic characteristics of phase-lock receivers. — «Report
Nr 1093, Ballistic Research Labs. Aberdeen Proving Ground, Maryland, January.
15. d e Bey G. Tracking in space by DOPLOC. — «Trans, IRE», MIL-4, April—
July, p. 332—334.
16. Pedersen В. О. Фазовое детектирование на кратных частотах. — «IRE
Trans, on Instrumentation», vol. I—9, December, N3, p. 349—335.
17. Fuji mn r a Y., Mii N. Automatic frequecy control with reactance transis-
tors. — «Electronics», N40, p. 97—99.
18. Chidambaram R., Krishnan S. R. The Single—Ended Diode—Phase—
Sensistive Detector. — «Electronics Engineering», vol. 32, March, N385,
p. 158—160.
19. Thirup G. The application of phase-locking techniques to the design of
apparatus for measuring complex transfer function. — «Journal Brit. IRE»
Vol. 48, May, p. 387—396.
20. St and berg M. W. P. Noise spectrum of phase-locked oscillators. — «PIRE»,
vol. 48, ,N6, p. 1168—1169.
21. Good E. F. Фазочувствительное детектирование в присутствии шумов боль-
шой амплитуды. — «Electronic Engineering», vol. 32, March, N385.
?22 . Шустер об ич A. H. К вопросу о приближенном решении уравнения фазы
колебаний лампового генератора, находящегося под действием внешней
эдс. — «Радиотехника и электроника», т. 5, № 5.
23. Белянин Ю. Ф. Способ фазовой АПЧ. Авт. свид. Кл. Н026, 21а, 8102,
№ 155181, заявлено 21.06, 1960.
24. Каганов В. И. Переходные процессы в некоторых системах автомати-
ческой подстройки частоты и контуров. МЭИС, кандидатская диссертация.
1961 г.
1. Ш ахгильдян В. В. Полоса захвата в системе фазовой автоподстройки
частоты с iRLC-фильтром. — «Электросвязь», Ns 9, стр. 22—31.
2. Шахгильдян В. В. Фильтрация флуктуационных помех системой фазо-
вой автоподстройки частоты с различными вариантами фильтров. — «Ра-
диотехника», т. 16, Ns 10, стр. 28—37.
3. Шахгильдян В. В. Система фазовой автоподстройки частоты с LC-филь-
тром третьего порядка. «Труды учебных институтов связи», вып. 7,
стр. 27—41.
4. Шахгильдян В. В. Фильтрация флуктуационных помех системой фазо-
вой автоподстройки частоты с LC-фильтром третьего порядка. — «Труды
учебных институтов связи», вып. 8, стр. 29—39.
5. Weaver Ch. S. Thresholds and Tracking Ranges in Phase-Locked Loops. —
«Trans. IRE», vol. SET-7, N3, p. 60—70.
6. Rue A. K., Lux P. A. Transient Analisis of Phase-Locked Loop Discrimi-
nator. — «Trans. IRE», vol. SET-7, December, N4, p. 105—111.
7. Биргер Л. А. Устойчивость схемы фазовой автоподстройки частоты клист-
рона. — «Радиотехника», т. 16, Ns 3.
8. Губарь Н. А. Исследование одной кусочно-линейной динамической систе-
мы с тремя параметрами. — «ПМП», Ns 6.
9. Van Trees Н. L. A Threshold Theory for Phase-Locked Loops. — «Technical
Report N246, Lincoln Lab., Mass. Inst, of Techn.». August, 22.
423
10. Lawhorn R., Weaver C. S. The Linearized Transfer Function of a Phase-
Locked Loop Containing an IF Amplifier. — «PIRE», vol. 49, Nowember, p. 1704.
11. Gold stain A. J., Byrn C. J. Pull-in Frequency of the Phase-Controlled
Oscillators. — «PIRE», vol. 49, July, 1209.
12. Breese M., Colbert R., Rubin W. Phase-Locked Loops for Electroni-
cally Scanned Antenna Arrays. — «IRE Trans.», vol. SET-7, № 4, December,
p. 95—100.
13. Sobotka Z. Nelinearni charakteristiky automaticke fazove synchronisace.—
«Zpravodai VUST», cis. 1, str. il—28.
14. Биргер Л. А. Частотная манипуляция клистрона в схеме ФАП. — «Ра-
диотехника», т. 16, № 12, стр. 44—48.
15 Шполянский В. А., Тюфяки и Л. С., Казаков П. П. Фазовая
автоподстройка частоты с запаздыванием. — «Радиотехника и электрони-
ка», т. 6, № 9, стр. 1468—1481.
16. Н е с в и ж с к и й Ю. Б. Импульсно-фазовая автоподстройка частоты с умно-
жителем частоты в цепи обратной связи. — «Труды учебных институтов
связи», вып. 7, стр. 49—26.
17. Белюстина Л. Н. Применение качественных методов к исследованиям
нелинейных систем второго порядка. — «Труды Всесоюзной межвузовской
конференции по теории и методам расчета нелинейных электрических цепей».
Ташкент, стр. 13.
18. Шахгильдян В. В. Анализ систем фазовой автоподстройки частоты. «Сб.
аннотации к докладам. Научная сессия НТОРиЭ им. А. С. Попова».
19. G assman G. G. Neu Phase und Frequenz—Vergbeichschaltungen. — «AEU»,
Band 15, Heft 8, 3591—376 (August).
20. S c a 11 e h u г у G. S. P. A simple phase detector. — «Electronic Engineering»,
December, p. 803—805.
21. Bruch W. Horizontal Synchronisierung in Fernsheenepfangern mit erweiter-
tem Fangbereich. — «Telefuken — Zeitung», 34, p. 102—113.
22. Develet J. A. Fundamental sensistivity limitation for second-order phase-
lock loops. — «Spce Tech. Lab. Loc Ageles, Calif. STL Publication», June,
N8616—0002—N U—00.
23. C h a n Ch. R. Picewise linear analysis of phase-locked loop discriminator. —
«Trans. IRE», SET-7, p. 105—111.
24. S p i 1 k e r J. J., Mo gill D. T. The delay-lock discriminator-an optimum
tracking devce.—«PIRE», vol. 49, Semtember, p. 1403—1416.
25. Spilker J. J. Threshold comparison of phase-lock, frequency lock and FM
discriminators of maximum likelihood types. Paper 14/2 presented of WESCON
San Franc! cisco.
26. Sobotka Z. Filtrace sumu a pasmo aktivni synchronisace v systemech
automaticke fdzove synchronisace. — «Elektrotechnicky casopis SAV», rocnikXII,
cis. 6, str. 355—374.
27. Baghdady E. J. Techique for lowering the noise threshold of conventional
frequency, phase and envelope demodulators. — «IRE Trans», VC5-9, N3.
1962 r.
1. Шахгильдян В. В. Фильтрация дискретных помех системой фазовой ав-
топодстройки с iRLC-фильтром. — «Электросвязь», № I, стр. 34—39.
2. Bernard R. D. Variation Techniques Applied to Capture in Phase-Controlled
Oscillators.—«The Bell System Telhnical Journal», vol. XLI, January, Nl,
p. 227—256.
3. Шустерович A. H. О приближенном решении дифференциального урав-
нения схемы фазовой автоподстройки частоты. — «Радиотехника и электро-
ника», т. 7, № 5.
4. Первачев С. В. Исследование режима захвата следящего автоселекто-
ра. — «Радиотехника», т. 17, № 2, стр. 51—55.
5. Бакаев Ю. Н. Исследование устойчивости систем синхронизации с за-
паздыванием. — «Изв. АН СССР ОТН». «Энергетика и автоматика», № 6,
128—132.
424
6. Евтянов С. И., Исакова В. К. Фазовая автоподстройка частоты с за-
паздыванием. — «Радиотехника», т. 17, № 7, 26—33.
J7. Тихонов В. И., Ж у р а в л е в А. Г. О работе устройств синхронизации
при больших шумах. — «Радиотехника», т. 17, № 9, 40—48.
8. Byrne С. J. Properties and Design of the Phase-Controlled Oscillator with
a Cawtooth Comparator. — «The BSTJ», vol. XLI, March, N2, p. 559—602.
9. C h a п C. R. Piecewise Linear Analysis of Phase-Locked Loops, — «IRE
Trans», vol. SET-8, Nl, March, p, 8—13.
10. Frazier J. P., Page J. Phase-Lock Loop Frequency Asquisition Study.—
«IRE Trans», vol. SET-8, September, N3, p. 210—227.
11. Goldstein J. A. Analysis of the Phase-Controlled Loop with Sawtooth
Comparator. — «BSTJ», vol. XLI, March, N2, p. 603—635.
12. Shilling D. L., Sehwartz M. The Response of an Automatic Phase
Control System fo FM Signals and Noise. — «IRE Intern. Conv, Record»,
March, pt 8, p. Ill—122,
13. Бакаев Ю. H. Об одном возможном способе улучшения динамических
свойств систем автоматического регулирования, — «Изв, АН СССР, ОТН»,
«Энергетика и автоматика», № 6, стр, 144—145.
14. Бакаев Ю, Н. Исследование динамических и статистических свойств фа-
зовой системы автоматической подстройки частоты при квадратичном и
комбинированном затухании, — «Автоматика и телемеханика», т, XXIII,
№ 9, стр. 1|179—1185.
15. W е a v е г С. S, Design a Phase-Locked Loop as a Doppler Tracker.—
«PIRE», vol. 50, September,
16. Butler T, W., Aupern E, M. Применение генераторов с фазовой авто-
подстройкой частоты в быстродействующих системах переключения частоты.—
, «Electronics», Ns 43.
/17 . Бакаев Ю, Н. (Прикладная тёория фазовой синхронизации. ВВИА им.
Н. Е. Жуковского, докторская диссертация,
18. Ш а х г и л ь д я и В. В. Анализ систем фазовой автоподстройки частоты.
МЭНС, кандидатская диссертация.
19. Капланов М. Р., Левин В, А, Автоматическая подстройка частоты.
М.-Л., Госэнергоиздат.
20. Тихонов В. И. Работа автоподстройки частоты при наличии шумов, —
«Электросвязь», Ns 9.
2L Деве ле Д, Э. Когерентная телефонная связь с частотным разделением ка-
налов и ЧМ несущей. — «ТИРИ», Ns 9.
22, V а 1 d о г f Н., Schroder J. Automatishe Fangbereicherweiterung einer
Frequezsynchronisationschaltung mit Hilfe eine Suchoszillators. — «Frequenz»,
16, 511—515.
23. Benes V. E. Ultimateli periodic solutions to a nonlinear integrodifferential
equotion. — «BSTJ», vol. XLI, January, NL
24. P о о 1 R. H. A comparison of a second order and thidr order phase-lock loop
receivers.—«Collins Radio Co. Cedar Rapids Mich. RQ. pt 1», N CRR-2.
25. D о n о c i k R. Theorie fazove regulace frevence. — «Vyzkumna zprava.
Vyzkumny ustav pro sdelovaci techniku A. S. Popova», Praha 20. 6. 1962.
26. O’ S u 11 i v a п M. R. Tracking systems employing the delay-lock discrimina-
tors.— «IRE Trans.», vol. SET-8, p. 1—7.
27. G a s s m a n n G. G. Phasen und Frequenz-Vergleichschaltungen fur Fernse-
her.—«Radio Mentor», N12, p. 1027—>1037.
28. Robinson E. M., Tan lock. A PLL of extended tracking capability. Nat.
Winter Convent, on Militarry Electronics. Febroary 7—9, Los Angeles.
29. Sobotka Z. Dvojne systemy automaticke fazove synchronizace v televishich
prijimacich. — «Zpravodaj Vilst» (Vyzkumny ustav pro sdelovaci technice
A. S. Popova, Praha), cis. 4, str. 1—34.
30. S о b о t k a Z. Mereni zakladnich parametru automaticke fazove synchroni-
sace.— «Zprovadaj VUST» (1962, brezen), cis. 1. (Vyzkumny ustav pro
sdelovaci techniku A. S. Popova, Praha).
31. Runyan R. A. Demodulators to data processing. — «Proc. Nat. Telem.
Conf.», p. 9—3.
425
32. M a 11 i h g L. R. Phase-stable oscillators for space communication, including
the relationship between the phase noise, the spectrum the short-term sta-
bility and the Q of the oscillator. — «PIRE», vol. 50, July, p. 1656—1664
33. W о о d m a n R. F. A phase-locked filter for Minitrack system IV ASA
(Goddard Space Flight Center), Technical Note D-1419, September.
34. Booton R. C. Demodulation of wideband frequency molulation utilizing
phase-lock technique. — «Proc. 1962 Nat. Telem. Conf.», Paper №4—6, May.
35. Schwartz L. S. Phase-lock for aerospace communications receivers.—
«Space Astronoutics», Febroary, p. 71—75.
36. К о c s i c L. L. Phase-lock demodulators. — «National Electronics Conf.»,
October.
37. S t r a u c h R. C Phase-locking millimeters saurces for frequency control. —
«Fequency Prototipe Essue», p. 16—18.
38. Chodima G. E. Passive satellite trecking radar employing a 50% duty
cycle and a phase-lock receiver. — «Proc. 1962, National Symp. and Space
Electronics and Telem.», October.
1963 r.
1. Тихонов В. И., Челышев К. Б. Статистическая динамика фазовой ав-
топодстройки частоты. — «Радиотехника и электроника», т. 8, № 2,
стр. 331—334.
2. Первачев С. В. О полосе захвата системы фазовой автоподстройки час-
тоты. — «Радиотехника и электроника», т. 8, № 2, стр. 334—337.
3. Д е в е л е Д. Э. Пороговый критерий при синхронной демодуляции. —
«ТИИЭР», т. 51, Ns 2, стр. 380—387.
,4. Бакаев Ю. Н. Устойчивость и динамические свойства астатической систе-
мы фазовой автоподстройки. — «Радиотехника и электроника», т. VIII,
Ns 3, стр. 513—516.
5. Челышев К. Б. Воздействие шума на фазовую автоподстройку частоты. —
«Автоматика и телемеханика», т. XXIV, Ns 7, стр- 942—949.
6. Капранов М. В. Метод вычисления полосы захвата при фазовой авто-
подстройке частоты. — «Электросвязь», Ns 8, стр. 14—22.
7. Ж у р а в л е в А. Г. Работа системы фазовой автоподстройки частоты при
гармонических помехах. — «Радиотехника», т. 18, Ns 9, стр. 38—46.
8. Ш ахгильдян В. В. Нахождение полосы захвата в системе фазовой
автоподстройки частоты. — «Труды учебных институтов связи», вып. 4,
стр. 77—84.
\/9. Viterbi A. J. Phase-locked loop dinamics in the presens of noise by
Fokker-Plank techniques. — «Р1ЕЕЕ», vol. 51, Desember, 1737—1753.
10. Leypold D., Schucht P. Umsetzer hoher Frequenzkonstanz fur den
Kurzwellenbereich. — «Frequenz» Band 17, Nl, p. 5—12.
11. Берштейн П. В. фильтрация белых шумов в приемниках точных час-
тот. — «Электросвязь», Ns 5, стр. 15—23.
112. Бакаев Ю. Н. Влияние запаздывания на условия синхронизации систем
' автоматического регулирования фазы. — «Изв. АН СССР ОТН». «Энергети-
ка и автоматика», Ns 1.
13. Develet J. A. An analytic approximation of phase-locked receiver thresh-
hold. — «Trans. IEEE», vol. SET-9, March, Nl, p. 9—11.
14. Van-Trees H. L. A lower bound of stability in phase-locked loops.—
«Information and Control», vol 6, September, N3, p. 195—2il2.
15. Nelson W. L. Phase-lock loop design for coherent angle-error detection
in the Telstar satellite tracking system. — «BS1J», vol. 42, September, N5,
p. 1941—1976.
16. Golomb W., Davey J. R., Reed I. S., Van Trees H L., Stif-
fler J. J. Synchronization. — «IEEE Trans, on Communication System», vol.
CS-11, Desember, p. 481—491.
17. Shilling D. L. The response of an automatic phase control system to a FM
signal in the presence of gaussian noise. — «IEEE Int. Conv. Rec.», part 8,
March, p. 242—246. See also: «Proc. IEEE», vol. 51, N10, October, p. 1737—1753
426
18. S о b о t к a Z. Automatika fazova synchiouisace. Praha, Nakladatelstvi Ceskolo-
venske Akademic Ved.
19. Viterbi A. J. Phase-lock loop systems. — «New York — San Francisko —
Toronto — London», Me. Graw-Hiee Book Co., p. 123.
20. Шахгильдян В. В. Метод фильтрации внешних дискретных помех си-
стемой фазовой автоподстройки частоты. — «Электросвязь», № 5, 9—14.
21. Эл и неон Э. С. Некоторые вопросы теории и проектирования систем фа-
зовой синхронизации в радиоприемных устройствах. ЛИЭС, кандидатская
диссертация.
22. Лазарев В. И., П а р х о м е и к о В. И. Магнитная запись телевизионных
изображений. М., Гостехиздат.
j 23. Ку л е ш о в В. Н., Морозов А. А. Исследование импульсной системы фа-
зовой автоподстройки частоты. — «Радиотехника и электроника», т. VIII,
Ns 8, стр. 1334—1344.
24. Шахгильдян В. В., Ляховкин А. А. Некоторые вопросы теории ра-
боты системы фазовой автоподстройки частоты. «Сб. аннотаций к докладам.
Научная сессия НТОРиЭ им. А. С. Попова».
25. Бе л гостии а Л. Н., Л е о н т о в и ч-А н д р о н о в а Е. А. Теория бифурка-
ций динамических систем второго порядка и ее применение к исследова-
нию нелинейных задач теории колебаний. Киев, «Труды международного
симпозиума по нелинейным колебаниям», т. 2, стр. 7—28.
26. Benjaminson A. Phase-locked klystrons simulate doppler radar. — «Elec-
tronics», April 19, p. 44—46.
127. Viterbi A. J. Phase-locked loop dinamics in the presens of noise by
J Fokkr — Plank techniques. — «Proc. 7th Regional IEEE Conf.», April 1963;
also Technikal Report N 32—427, JPL, March 29.
28. Develet J. A. The influence of time delay on second order phase-lock
acquistion range. — «Int. Tlefnet. Conf.», London, p. 432'—437.
29. Valter A., Jonson. Analisis of the false-lock problem associated with the
phase-lock loop. — «Report TDR-269 (4250—45)—1 Aerospase Corporation»,
October 2, NSA Accession No 64—43776.
30. Burnett E. E. A Ku-Band phase-locked system. — «Proc., Nat Winter Conf,
on Military Electronics.
31. Benjaminson A. Phase-locking microwave oscillators to improve stabi-
lity. — «Microwave Journal», January, p. 88—92.
32. C a s s о n W. H., Hall С. C. New phase-tracking demodulator will not lock
on sidbands. — «Electronics», Febroary 8, p. 52—55.
1964 r.
1. Кульман H. К., Стратонович P. Л. Фазовая автоподстройка часто-
ты и оптимальное измерение параметров узкополосного сигнала с непостоян-
ной частотой в шуме. — «Радиотехника и электроника», т. 9, № 1, стр. 67—
78.
2. Песков Р. А. Приближенное определение периодических движений в системе
фазовой автоподстройки частоты. — «Изв. вузов». «Радиофизика», т. 7, Ns 1,
стр. 160—465.
3. Шахгильдян В. В. Фильтрация дискретных помех в нелинейной системе
фазовой автоподстройки частоты. — «Радиотехника», т. 19, № 3, стр. 42—47.
4. Т и х о и о в В. И. Влияние флуктуаций на точность работы устройств син-
хронизации. — «УФН», т. 33, вып 4.
5. Шахгильдян В. В., Ляховкин А. А. Фильтрация монохроматическо-
го сигнала системой фазовой автоподстройки частоты. — «Электросвязь»,
№ 4, стр. 11 —18.
6. V а п Т г е е s Н-. L. Functional technicques for the analisis of the nonlinear
behavior of phase-locked loops. — «Р1ЕЕЕ», vol. 52, N8, p. 894—911.
7. Шахгильдян В. В. Точность нахождения периодических решений в си-
стеме фазовой автоподстрсйки частоты. — «Труды учебных институтов свя-
зи», вып. 21, 65—71.
8. Ляховкин А. А., Шахгильдян В. В. О полосе захвата в инерционной
427
системе фазовой автоподстройки частоты. — «Радиотехника», т. 19, № 9,
32—40
9. Viterbi A. J., Chan С. R. Optimum coherent phase and frequency demo-
dulaton of a class of modulating spectrum. — «IEEE Trans, on Spase Elect,
and Telemetry», vol. SET-10, September, N3, p. 96—101.
10. Williams W. J. Selection of phase sensistive detectors for spase radar.—
«IEEE Trans.», vol. ANE-11, N4.
11. Powell Noble R. Демодуляция ЧМ сигналов с помощью системы сле-
жения с фазовой обратной связью. — Rec. Intern. Space El. Symp; Las Vegas,
1964, N4.
12. S h i 11 n g D. L., В i 11 i g J. On the threshold extension capability of the PLL
and FDMFB. — «Р1ЕЕЕ», vol. 52, May, p. 621—622.
13. Bagdady E. J. Theoretical comparison of exponent demodulation by phase-
lock and frequency-compressiv feedback techniques. — «IEEE Intern. Conv.
Record», pt. 6, p. 402—421.
14. Берштейн И. Л. Флуктуации частоты генератора при применении схем
автоматической стабилизации частоты. «Изв. вузов». «Радиофизика», т. 7,
№ 2, стр. 328.
15. S t i f f 1 e r J. J. Phase-locked loop synchronization with nonsinusoidal syg-
nals. — «JPL, Pasadena, Calif., Space Programa Summary), 37—38, vol. IV,
August, p. 227—2132.
16. Frenkel G. Oscillator stability and the second order phase-locked loop —
«IEEE Trans.», vol. SET-10, N2, p. 65—69.
17. Gupta S. C. Transient analysis of phase-locked loop optimized for a fre-
quency ramp input. — «IEEE Trans.», vol. SET-10, June, N2, p. 79 —84.
18. Sanneman R. W., Rowbottam J. R. Unlock characteristic of the
optimum typell phase-locked loop.— «IEEE Trans.», vol. ANE-14, March,
p. 15—24.
19. Lindsey W. C. Investigation of second order phase-locked loops by Fokker-
Plank methods. — «JPL Space Programs Summary», Pasadena, Calif., vol. 14,
N37—30, Desember 31, p. 262—268.
20. Holtzman J. M., Rue A. K. Regions of asymptotic stabiliti for phase-
locked loops. — «IEEE Trans.», VI, SET-10, March, Nl, p. 45—46.
21. Певзнер Ф. A. O'системе ФАП с разделительным конденсатором в петле
обратной связи — «Изв. вузов». «Радиотехника», т. 7, № 1, стр. 103—105.
22. Певзнер Ф. А. Некоторые особенности работы системы ФАП с фильтром
верхних частот. — «Труды по радиотехнике, электротехнике и энергетике»,
т. 20, вып. 2. Г.П.И. Горький.
23. Певзнер Ф. А. Управление частотой генератора с помощью схемы ФАП,
имеющей в петле обратной связи разделительный конденсатор. — «Изв. ву-
зов». «Радиотехника», т. 7, № 5.
24. Белюстина Л. Н. О бифуркациях в одной нелинейной системе ФАПЧ.
Самарканд. Всесоюзный симпозиум по качественной теории дифференциаль-
ных уравнений и ее применению. Тезисы докладов.
25. Ш а х г и л ь д я и В. В. Воздействие на систему фазовой автоподстройки
частоты сложных сигналов. — «Научная сессия НТОРиЭ им. А. С. Попова».
«Тезисы докладов», М., «Советское радио».
26. Кульман Н. К. Оптимальный прием сигналов с непостоянной частотой и
амплитудой на фоне шумов. — «Радиотехника и электроника», т. 9, № 9.
27. Сизов В. П. Устройство фазовой автоподстройки частоты. «Авторское сви-
детельство Ns 163217, кл. 21а, 290z» — «Бюллетень изобретений и товарных
знаков», Ns 12, стр. 33.
28. Н е с в и ж с к и й Ю. Б. Локальные процессы в системе импульсно-фазовой
автоподстройки частоты с запаздыванием. — «Труды учебных институтов
связи», вып. 19.
29. G a s s m а п G. G. Kombinierte Hachlauf and Mitnachmessynchronisation von
Sinusoczillatoren. — «Arch. Elektr. Ubertragung», 18, № 2, 87—94.
29a. Stiffler J. J. Phage locked Synchronization with Sinusoidal Signals —
«JPL, Space Progr. Summary», vol. IV, N 37—27, June 20, p. 208—212.
428
30. Shilling D. L., Billig J. On the Threshold Extension Capability of the
PLL and FDMFB.— «Proc. IEEE», vol. 52, May, p. 621—622.
31. Enloe- L. H., Rodda J. L. Laser Phase-Locked Loop. — «Proc. IEEE»,
vol. 53, Febroary, p. 165.
32. L i n d s e у W. C. Threshold Characteristics in Phase-Loked Frequency Disc-
riminators. — «JPL, Space Progr. Summary», vol. IV, August 31, N37—28,
p. 2'23—226.
33. Benjaminson A. Phase-Looked Mierowave Oseillator System with 0,1 cps.
Stability. — «Microwave Journal», December, p. 65—69.
34. Nishimura T. Desing of Phase-Locked Loop Systems with Correlater
Noise Input. — «J.P.L. Space Progr. Summ», vol. IV, April 30, № 37—26,
p. 234—240.
35. В a 1 о d i s M. Laboratory Comparison of Tan-Lock and Phase-Lock. —
«National Telemetry Conference», Paper 5—4.
36. S t r a t e m e у r H. P. A Low-Noise Phase-Locked Oscillator Multiplier.—
«Internal. Proc. Simp, en Defenitions Measurement of Short-Term Frequency
Stability», Part III, p. 121—136, Goddard Space Flight Center Greenbelt Md,
December.
37. G u p t a S. C. Transient Analysis of a Phase-Locked Loop Optimised for a
Frequency Ramp Input. — «IEEE Trans.», vol. SET-10, N2.
38. В о о t о n R. С. Детектирование широкополосного ЧМ сигнала детектором
с фазовой синхронизацией. — «NASA Tech. Note», 1964, N.D—(1620, iv. 12.
39. Frenkel G. Oscillator Stability and the Second. Order Phase-Locked Loop. —
«IEEE Trans.», ANE, N4.
40. Williams W. J. Selection of Phase Sensistive Detectiors for Space Radar.—
«IEEE Trans.», ANE, N4.
41. Jankovie T. Примерный расчет фильтра низкочастотной системы ФАП.—
«Electrotechnica», Ns 1 ^Югославия)
42. L е w Wasyl. Phase Synchronization Systems. — «Electronic Design», N12.
43 Harte Philip. Метод фазовой синхронизации и его применение Для кос-
мической связи. — «Raumfahr forschung», N2.
1965 г.
1. Бакаев Ю. Н ., Г у ж А. А. Оптимальный прием сигналов частотной моду-
ляции в условиях эффекта Допплера. — «Радиотехника и электроника»,
т. 10, Ns 1, стр. 175—196.
2. S. G. Gupta, S о 1 е m R. J. Optimum filters for second and Third-order
Phase-Locked Loops by an Error function criterion. — «IEEE Trans.», vol.
SET-11, N2.
3. H и к и т и н H. П. Срыв слежения в схеме фазовой автоподстройки часто-
ты. — «Автоматика и телемеханика», т. 26, Ns 4, стр. 669—675.
4. R е у Т. J. Futher on the Phase-Locked Loop in the Presence of Noise. —
«Р1ЕЕЕ», vol. 53, May, N5, p. 494—495.
5. Бакаев Ю. H. Синхронизирующие свойства фазовой автоматической под-
стройки частоты третьего порядка. — «Радиотехника и электроника», т. 10,
Ns 6, стр. 1083—1087.
6. Игнатов Ю. Ф. Комбинированная система частотно-фазовой автоподстрой-
ки частоты. — «Труды учебных институтов связи», вып. 25, стр. 53—60.
7. Перваче в С. В. Срыв слежения во временном автоселекторе. — «Радио-
техника и электроника», т. 10, Ns 8, стр. 1435—1444.
8. Тихонов В. И., Шахтарин Б. И. Статистические характеристики фа-
зовой автоподстройки частоты — «Автоматика и телемеханика», т. 26, Ns 9,
стр. 1563—1572.
9. Шахгильдян В. В. Определение полосы захвата системы фазовой авто-
подстройки частоты при фазовомодулированном эталонном сигнале. — «Ра-
диотехника и электроника», т. 10, Ns 10, стр. 1753—1758.
10. Бакаев Ю. Н. О применимости критериев устойчивости, полученных ме-
тодом усреднения, к исследованию фазовой системы автоподстройки с про-
порционально-интегрирующим фильтром. — «Радиотехника и электроника»,
т. 10, Ns 10, стр. 1919.
429
11. Гайгеров Б. А. Выбор параметров пропорционально-интегрирующего
фильтра фазовой автоподстройки частоты. — «Радиотехника и электрони-
ка», г. 10, № 12, стр. 2234—2236.
12. Ш а х г и л ь д я и В. В., Игнатов Ю. Ф. Определение области синхронной
работы системы фазовой автоподстройки частоты. — «Электросвязь», № 10,
стр. 33—37.
13. Шахгильдян В. В., Ляховкин А. А. О выборе типа низкочастотного
фильтра в цепи фазовой автоподстройки частоты, минимизирующего дис-
персию частоты синхронизируемого генератора. — «Радиотехника», т. 20,
Ns 6, стр. 28—34.
14. Alexander Р. HI., Kai г a S. М. Unlock Characteristics of a Phase-Locked
Loop. — «Proceedings of the IEEE», vol. 53, August, N8, p. 1138.
15. Шахгильдян В. В. Воздействие фазовомодулированного эталонного сиг-
нала и шума на систему фазовой автоподстройки частоты. — «Электро-
связь», № 6, стр. 19—30.
16 Тихонов В. И. Нелинейная фильтрация и квазиоптимальный характер
фазовой автоподстройки частоты. — «Изв. АН СССР». «Техническая кибер-
нетика», 2.
17. Meer S. A. Aclass of Wiener Filters useful in PLL Applications. — «Р1ЕЕЕ»,
vol. 53, December, N12, p. 2124.
18. Никитин H. П. О вероятности захвата сигнала системой ФАП, работаю-
щей в режиме поиска по частоте. — «Изв. вузов». «Радиотехника», т. 8, № 6,
стр. 696—703.
19. У л ь я и о в с к и й Ю. В. Метод и техника экспериментального исследования
помехоустойчивости системы ФАПЧ. — «Изв. вузов». «Радиотехника», № 1.
20. Ж у р а в л е в А. Г., Алексеевский И. Г., Р е в я к и-н В. В. Работа
системы фазовой автоподстройки частоты при модулированных сигналах и
наличии помех. — «Электросвязь», № 2, стр. 15—23,
21. V а п Trees Н. L. A Comparison of Optimum Angle Modulation Systems
and Rate—Distortion Bounds. — «Trans. lE'EE», vol. 12, December, N12,
p. 2123—2124.
22. N i s h i m u r a T. The mean-squared Deviation of a Phase—Locked Loop
Having a Triangular S—curve. — «JPL Space Programs Summary», vol. IV,
Febryary 28, N37^31, p. 311—315.
23. C a r a s s a F., Ongaro P., Rocca F. Optimum and nearly—optimum
performance of Phase—Lock demodulators.—«Alfa frequenza», vol. 34, N2,
p. 121—130.
24. Kazuyuki, Hiroshige. A simpl Techniques for Impoving the Pull-in
Capability of Phase—Lock Loops. — «IEEE Trans», vol. SET-11, March, Nl,
p. 40—46.
25. Charles F. S. A. Second—Order Phase—Locked Loop study. — «М. S. thesis
Syracuse University», Syracuse, N. Y. November.
26. В r u n k M. Der Fangbereich von Nachlaufsynchronisatios shaltungen mit
sinusformiger Charakteristik des Phasendiskriminators. «Archiv der Electrichen
Ubertragung». — Band 19, Dezember, HEFT-12, 649—663.
27. White A D. Frequency Stabilization of Gas Lasers. — «Proc. IEEE»,
vol. QE-1, N28, November.
28. Shilling D. L., Abrams B. S., Berkoff M. — Phase—Locked Loop
Threshold. «Proceedings IEEE», vol. 53, October, p. 1673.
29. Филимонов Ю. M. К задаче об оптимальном управлении математичес-
ким маятником. — «Дифференциальные уравнения», т. 1, № 8, стр. 1007—
1015.
30. М о г s h у t z G. S. Miniaturized RC filters using Phase—Locked Loop. —
«Bell Syst. Tech. Journal», vol. 44, May—June, 823—870.
31. Несвижский Ю. Б. Импульсно-фазовая АПЧ с фиксацией. — «Радиотех--
ника», т. 20, № 9.
32. Н е с в и ж с ки й Ю. Б. Вынужденные колебания в системе ФАПЧ. — «Ра-
диотехника», т. 20, Ns 7.
33. Шахгильдян В. В. Воздействие флуктуационных помех на систему фазо-
вой автоподстройки контура. — «Труды учебных институтов связи», вып. 27.
430
34. Д р о з д о в В. Н. Работа ключевого фазового дискриминатора при прямо-
угольной характеристике фазового детектора. — «Изв. вузов». «Приборо-
_ строение», № 1, стр. 74.
35. Ш а х г и л ь д я и В. В. Определение областей устойчивой работы системы
ФАПЧ. «Сб. аннотаций к докладам. Научная сессия НТОРиЭ им. А. С. По-
пова».
3G. Бенджаминсон. Синхронизируемый по фазе генератор свч со стабиль-
ностью 0,1 гц. — «Зарубежная радиоэлектроника», № 5.
37. Taucworthe R. С. New Calculation of Phase—Locked Loop Perfor-
mance. — «JPL Space Programs Summary», vol. 4, Febroary, N37—31,
p. 292—300.
38. Viterbi A. J. Futher on the Prase—Locked Loop in Presence of Noise.—
«Р1ЕЕЕ», vol. 53, May, N5.
39. Цзян ь-Ц з ю н ь, Чжао. Определение полосы захвата в системе ФАПЧ с
учетом нелинейной характеристики. — «Дяньцы сюаба». «Acta Electron, si-
шса», Ns 3 (Р. Ж. «Радиотехника», 1966, № 3.)
40. Петрович Н. Т. Передача дискретной информации в каналах с фазовой
манипуляцией. М., «Советское радио».
1966 г.
1. Шахтарин Б. И. Об асимптотическом значении полосы захвата системы
фазовой автоподстройки частоты. — «Радиотехника и электроника», т. XI,
9, стр. 1696—1698.
2. Обрезков Г. В., ПервачевС. В. Срыв слежения в системе с астатиз-
мом второго порядка. — «Автоматика и телемеханика», № 3, стр. 48—55.
3. Т и х о и о в В. И. Основные статистические характеристики канала синхро-
низации. — «Электросвязь», № 4, стр. 32—41.
4. М а й к о в а Т. Т. Полоса захвата ФАПЧ с нелинейным интегрирующим
фильтром. — «Труды учебных институтов связи», вып. 31.
5. Шахтарин Б. И., Щепкин Ю. Н. Экспериментальное исследование
воздействия флуктуационных помех на систему фазовой автоподстройки час-
тоты. — «Электросвязь», № 9, стр. 18—23.
6. Шахтарин Б. И. О фильтрующей способности системы фазовой автопод-
стройки частоты. — «Электросвязь», № 4, стр. 25—31.
7. Шахгильдян В. В. Определение вероятности срыва синхронизации в си-
стеме фазовой автоподстройки частоты. — «Радиотехника и электроника»,
т. XI, № 10, стр. 1746—1752.
8. Э л и и с о и Э. С., Л а р и о и о в А. С. Синтез оптимальной системы фазовой
синхронизации при наличии помех по методу обобщенного интегрального
критерия. — «Радиотехника и электроника», т. XI, № 5, стр. 803—811.
9 Лебедев В. В. Полоса вхождения в синхронизм ФАП при различных ви-
дах характеристики фазового детектора». — «Электросвязь», Ns 7, стр.
34—42.
10. Ш а х г и л ь д я и В. В. Влияние формы характеристики фазового детектора
на статистические свойства системы фазовой автоподстройки частоты. —
«Труды учебных институтов связи», вып. 30, стр. 81—86.
11. Шахгильдян В. В. Оптимальный прием фазовомодулированного сигнала
в шумах. — «Труды учебных институтов связи», вып. 32, стр. 41—46..
12. Ш а х г и л ь д я и В. В. Исследование статистических свойств'системы фазо-
вой автоподстройки частоты с произвольным четырехполюсником в цепи об-
ратной связи. — «Радиотехника и электроника», т. XI, № 9, стр. 1547—
1553.
13 Игнатов Ю. Ф. Фазовая автоподстройка и оптимальный прием сигналов
частотной модуляции. — «Радиотехника и электроника», т. XI, Ns 10, стр.
4866—1868.
14. Ш а х г и л ь д я и В. В., Игнатов Ю. Ф. Влияние шума на точность ра-
боты системы фазовой автоподстройки частоты. — «Электросвязь», Ns 3,
стр. 42—49.
15. БеловЛ. А., Благовещенский М. В. Иванов В. А., К а п р 4-
новМ. В., Уткин Г. М., Хрюнов А. В. Совместные фазовая автопод-
431
стройка частоты и синхронизация. — «Радиотехника и электроника», т. XI,
№ 12, стр. 2135—2141.
16. Ш а х г и л ь д я и В. В. Влияние узкополосных флуктуаций на работу систе-
мы фазовой автоподстройки частоты. — «Автоматика и телемеханика»,
№ 12, стр. 131—135.
17. Акопян И. Г. Об установлении синхронного режима в ламповом автоге-
нераторе при наличии помех». — «Радиотехника и электроника», т. XI, № 1,
стр. 32—41.
18. О s Ь о г п е Е F. Statistical Measunnents ol Phase-Locked Receivers. —
«IEEE Trans, on Aerospace and Electronic Systems», vol. AES-2, N2, March,
198—200. -
19. Smith В. M. Phase-Locked Loop Threshold. — «Proceidings of the IEEE»,
vol. 54, May, N5, p. 810—811. Also: The Phase-Locked Loop Mith Filter:
Frequency of Slipping Cycles. — «Р1ЕЕЕ», v. 54, N2, p. 296—297.
20. L i n g s e у W. C., Charles F. J. A Model Distribution for the Phase-Error
in Second-Order Phase-Locked Loops. — «IEEE Trans. Communication Techno-
logy», v. 14, October, N5, p. '662—664.
21. Charles F. J., Lindsey W. C. Some Analytical and Experimental Phase-
Locked Loop Results for Low Signal to Noice. — Ratios. «IEEE», v. 54, N9,
p. 1152—1166.
22. Meer S. Ahmed. Analysis of Phase-Locked Loop Acquisition: A Quasi Sta-
tionary Approach. — «IEEE. International Convention Record», part. 7,
p. 85—106.
23. Bernard M., Smith. A Semi—Empirical Approach, to the PLL Thres-
hodd. — «IEEE Trans. Aerospace and Electronie Systems», N2, p. 463—468.
24. L i n d s e у W. C. Phase-Shift-Keyed Signal Detection with Noisy Reference
Signals. — «IEEE. Trans, on AES», vol. AES-2, July, N4, p. 393—401.
25. Система для расширения диапазона регулировки генераторов, синхронизи-
рованных по фазе. Пат. США, № 3241. 084, Кл. 331—111, 1966.
26. Белю стин а Л. Н., Шалфеев В. Д. О динамике нелинейной системы
частотно-фазовой автоподстройки. «XXII Всесоюзная научная сессия
НТОРиЭ им. А. С. Попова. Секция радиоприемных устройств». М., «Совет-
ское радио», стр. 36—44.
27. Рым ши и В. П. Помехоустойчивость приема ФТ с системой ФАП в опор-
ном тракте приемника. — «Труды учебных институтов связи», вып. 30,
стр. 53—61.
28. S р 1 i 11 F. G. Design and analysis of a linear phase-locked loop of wide
dvnamic range. — «IEEE. Trans. Commun Techn.», vol. Com. 44, August,
p.’ 437—440.
29. Sanneman R. W., Gupta S. C. Optimum strategies for minimun time
frequency transitions in Phase-Locked Loops. — «IEEE. Trans, on AES»,
vol. AES-2, September, p. 570—581.
30. Игнатов Ю. Ф. О точности фазовой автоподстройки частоты при случай-
ных возмущениях. «XXII Всесоюзная научная сессия НТОРиЭ им. А. С. По-
пова. Секция радиоприемных устройств». М., «Советское радио», стр. 44—48.
31. Biswas В. М. Phase following behavieur of an automatic phase control
circuit with respect to a signal in presence of random noise. — «Jndian
J. Phys», vol. 40, p. 648—668.
32. П.теки и В Я. Исследование следящей системы измерения частоты Доп-
плера при наличии флуктуаций частоты перестраиваемого гетеродина. —
«Радиотехника», т. 21, № 8, стр. 74—76.
33. Sydnor R., Caldwell J J., Pose В. E. Frequency Stability Requirments
for Space Communications and Tracking Systems. — «Р1ЕЕЕ», N2, p. 231—236.
34. Ш a x г и л ь д я и В. В. Исследование статистических свойств инерционной
системы фазовой синхронизации. «XXII Всесоюзная научная сессия НТОРиЭ
им. А. С. Попова. Секция теории и техники передачи дискретных сигналов».
М., «Советское радио», стр. 7—13.
35. Петрищев В И., Шахгильдян В. В., Игнатов Ю. Ф. Экспери-
ментальное исследование статистических свойств системы фазовой автопод-
432
стройки частоты. «XXII Всесоюзная научная сессия НТОРиЭ им. А. С. По-
пова. Секция теории и техники передачи дискретных сигналов». М., «Совет-
ское радио», стр. 13—48.
36. Шахгильдян В. В., Л я х о г к и и А. А. Фазовая автоподстройка час-
тоты, М., «Связь».
37. Ш а х г и л ь д я и В. В., Ляховкин А. А. Устройство для фильтрации
синусоидальных сигналов. Авторское свидетельство СССР № 182 770 кл.
21а и 8/02. Опубликовано 9/VI 1966 г., бюллетень № 12.
38. Ш а л ф е е в В. Ф. О системе ФАПЧ с разделительным конденсатором.
«XXII Всесоюзная научная сессия НТОРиЭ им. А. С. Попова. Секция радио-
приемных устройств». М., «Советское радио».
39. Шалфеев В. Ф. Устойчивость астатической системы частотно-фазовой АПЧ.
В сб. «Второй метод Ляпунова и его применение в энергетике», ч. I. Ново-
сибирск.
40. Риджуэй Р. И. Метод расчета порога демодулятора с фазовой автопод-
стройкой. — «Труды института по электротехнике и радиоэлектронике», т. 54,
№ 12.
41. В i s w a s В. N., D a 11 a G. Locking phenomena in injection sinchrcnised pulled
Oscilators. — «Jndian J. Phys.», vol. 40, N5, p. 244—257.
42. A c a m p о r a A., Newton А. Использование вычитания фазы для расшире-
ния диапазона синхронно-фазового детектора. — «RCA. Rev.», vol. 27, N4,
р. 577—599.
43. V а с h е 1 а. Применение фазовой плоскости для определения области захва-
тывания системы ФАПЧ. — «Abhande Deutsch Akad. wiss.» Berlin, kl. Math.
Phys, und Techn.», N2.
44. Ongaro D., Rocca F. Сверхвысокочастотный детектор с фазовой синхро-
низацией. — «Alta frequenza», v. 35, N8, p. 645—655.
45. Б л a x о в и ц Л. Ф. Новый тип синтезатора на частоты до 500 Мгц. —
«Электроника», т. 39. № 9. М., «Мир».
46 С е м е и к о А. И. Исследование динамики системы фазовой автоподстройки
частоты с применением метода гармонического баланса. Киев, КИГА, кан-
дидатская диссертация.
47. Ляховкин А. А. Некоторые вопросы теории фазовой автоподстройки час-
тоты. М. МЭИС, кандидатская диссертация.
48. Кулешов В. Н. Синтез следящих систем АПЧ М., МЭИ, кандидатская
диссертация.
49. J е 1 о п ek Z. J., Khan u А. Н. Synchronired oscillatory systems with nonu-
niform gain in the feedback loop. — «Proc. 1ЕЕ», Nil, 1769—1774.
50. Viterbi A. J. Principles of Coherent Communication. — «Mg. Craw Hill
Company», N.J.
51. G a r d n e r F. M. Phaselock Techniques. — «Wiley», N.J.
1967 r.
1. Лободинский Ю. Г. О применении теории нелинейной фильтрации гаус-
совых процессов к синтезу фильтра сигнала с изменяющейся частотой. —
«Радиотехника и электроника», т. XII, № 1, стр. 117—,120.
2. Я и о в с к и й Г. Г. Применение метода Винера к анализу систем ФАПЧ. —
«Материалы юбилейной НТК ЛЭНС», вып. 1, стр. 75—80.
3. С и з о в В. П. Система фазовой автоподстройки частоты с фазовращателем
в цепи обратной связи. — «Радиотехника», т. 22, № 1, стр. 32—36.
4. Лободинский Ю. Г. Оптимальный прием ЧМ. — «Радиотехника и элек-
троника», т. XII, № 1.
5. Д а р о в а П. И., Пугач А. Б. Фазовая автоподстройка частоты в измери-
тельной аппаратуре дискретных сигналов. — «Труды ЦНИИС К. Ф.», вып. 2.
Телеграфия.
6 Зачепицкач Л. П. Оценка влияния системы фазовой автоподстройки на
качество оптимальной обработки сигналов при наличии фазовых искаже-
ний.— «Изв. вузов». «Радиотехника», т. X, вып. 2, стр. 224—231.
7 Охтяркин Е. Г. О параметрах системы автоматической регулировки уси-
433
ления в ЧМ приемнике с помехозащищенным синхронно-фазовым детекто-
ром. «Сб. трудов Гос. НИИР», вып. 2 (42).
8. Шалфеев В. Д. Об астатической системе частотно-фазовой автоподстрой-
ки.— «Изв. вузов». «Радиофизика», т. X, вып 3, стр. 449—451.
9. Тихонов В И. Квазиоптимальный характер частотной автоподстройки
частоты. — «Изв. вузов». «Радиоэлектроника», т. X, № 3.
10. Быков В. В. Устойчивость системы ФАП с пропорциоиально-интегрирую-
щим фильтром и запаздыванием. — «Изв. вузов». «Радиофизика», т. X, № 3,
стр. 447.
11. Шалфеев В. Д. Об астатической системе частотно-фазовой автоподстрой-
ки. — «Изв. вузов». «Радиофизика», т. X, № 3, стр. 149—451.
12. Шахгильдян В. В. Некоторые вопросы теории и расчета непрерывных
систем фазовой автоподстройки частоты. МЭИС, докторская диссертация.
13. Заорски Р. В. Ввод системы ФАПЧ в область захвата в случае входных
сигналов с квадратичной фазой. — «ТИИЭР», т. 55, № 3.
14. Пушкин В. М. Исследование дискретной ФАПЧ в схеме создания опор-
ного колебания в приемнике данных с многократной ОФМ — «Материалы
НТК, ЛЭИС» вып. 4, стр. 133—134.
15. Клайн, Мур. Идеи и методы расчета при разработке цепей фазовой син-
хронизации. — «Зарубежная радиоэлектроника», № 4.
16. Сизов В. П., Капранов М. В. Об оптимальной схеме фазовой авто-
подстройки частоты. — «Радиотехника и электроника», т. ХП, № 4,
стр. 714-717.
17. Охтярккн Е. Г., Логинов В. В. Подавление амплитудной модуляции
в синхронно-фазовом детекторе с обратной связью по частоте. «Сб. трудов
Гос. НИИР», вып. 4 (49).
18. Ш а х г и л ь д я и В. В. Определение полосы захвата инерционной системы
фазовой автоподстройки частоты при действии флуктуационных помех. —
«Радиотехника», т. 22, № 2, стр. 9—'15.
19. Шахгильдян В. В. Анализ переходных процессов в системе фазовой син-
хронизации при действии флуктуационных помех на эталонный сигнал. «Те-
зисы докладов на Всесоюзном симпозиуме по прикладной математике и ки-
бернетике. Горький.
20. И г и ато в Ю. Ф. К задаче моделирования в теории оптимальной нелиней-
ной фильтрации. — «Радиотехника и электроника», т. ХП, № 5, стр. 914—
918.
21. Никитин Н П. О вероятности захвата сигнала системой ФАП при ли-
нейном поиске по частоте в присутствии флуктуационной помехи. — «Изв.
вузов». «Радиотехника», т. X, № 6, стр. 595—598.
22. Ш а х г и л ь д я н В. В., Игнатов Ю. Ф. Срыв синхронизации в системе
фазовой автоподстройки частоты. — «Электросвязь», № 6, стр. 17—22.
23 Белюстина Л. Н., Шалфеев В. Д. О качественном исследовании
нелинейной системы ЧФАП. «Тезисы докладов на Всесоюзном симпозиуме
по прикладной математике и кибернетике». Горький.
24. Б а р б а ш и и Е. А., Т а б у е в а В. А. О знакоопределенных периодичес-
ких решениях одного дифференциального уравнения. «Тезисы докл. на Все-
союзном симпозиуме по прикладной математике и кибернетике». Горький.
25. Шалфеев В. Д. К теории нелинейной системы ФАПЧ с разделительным
конденсатором. Ташкент, «III симпозиум по теории и методике расчета не-
линейных систем и цепей».
26. Ш а х г и л ь д я и В. В. Об одной самонастраивающейся схеме фазовой ав-
топодстройки частоты. — «Труды НТК проф. преп. состава МЭЙС».
27. Петрищев В. И. Повышение эффективности работы системы фазовой
автоподстройки частоты. — «Труды НТК проф. преп. состава МЭИС».
28. Б е л ю с т и и а Л. Н., Б ы к о в В. В. О бифуркационных и некоторых ка-
чественных характеристиках трехмерной системы фазовой автоподстройки
частоты с фильтром 2-го порядка. «Тезисы докладов на Всесоюзном симпо-
зиуме по прикладной математике и кибернетике». Горький.
29. Белюстина Л. Н., Чеснокова Р. А. О динамике синхронной маши-
434
ны с асинхронной характеристикой. «Тезисы докладов на Всесоюзном сим-
позиуме по прикладной математике и кибернетике». Горький.
30. С и з о в В. П. Анализ фазовой автоподстройки частоты в стационарном ре-
жиме. «Доклады НТК по итогам научно-исследовательских работ МЭИ за
1966—1967 гг. Секция радиотехническая. Подсекция теории колебаний»,
стр. 9—И 6.
31. Капранов М. В., Наянов а Т. И. Полоса захвата системы фазовой
автоподстройки частоты с нелинейным затуханием. «Доклады НТК МЭИ за
1966—1967 гг. Секция радиотехническая, подсекция теории колебаний»,
стр. 17—25.
32. Капранов М. В., Н а я н о в а Т. И. О вычислении полосы захвата фа-
зовой автоподстройки частоты с нелинейным фильтром порогового типа.
«Доклады НТК МЭИ за 1966—1967 гг. Секция радиотехническая, подсекция
теории колебаний», стр. 26—39.
33. Снедкова В. К. О полосе захвата фазовой автоподстройки частоты с
усилителем высокой частоты. «Доклады НТК МЭИ за 1966—1967 гг. Секция
радиотехническая, подсекция теории колебаний», стр. 40—45.
34. Кап рано? М. В., Рихтер С. Г. Фазовая автоподстройка частоты в ре-
жиме манипуляции фазы. «Доклады НТК МЭИ за 1966—1967 гг. Секция ра-
диотехническая, подсекция теории колебаний», стр. 46—58.
35 Капранов М. В., Рихтер С. Г. Высокоскоростной режим манипулято-
ра фазы с системой ФАП. «Доклады НТК МЭИ за 1966—1967 гг. Секция
радиотехническая, подсекция теории колебаний», стр. 59—68.
36. Кулешов В. Н., Удалов Н. Н. Об одном способе оптимальной нели-
нейной фильтрации ЧМ сигнала. «Доклады НТК МЭИ за 1966—1967 гг.
Секция радиотехническая, подсекция теории колебаний», стр. 69—79.
37. Ф у т о р и ы й Ю. П. О неустойчивости работы непрямого синтезатора час-
тоты (с кольцом ФАП). «Доклады НТК МЭИ за 4966—1967 гг. Секция ра-
диотехническая, подсекция теории колебаний», стр. 80—87.
38. Б е с п а л о в Е. С„ Кулешов В. Н. Синтез цепи фильтрации и коррекции
в ЧМ приемнике с обратной связью по частоте. «Доклады НТК МЭИ за
1966—1967 п. Секция радиотехническая, подсекция теории колебаний»,
стр. 10—1'12
39. Гаврилюк Л. Н. О согласовании фазового дискриминатора на диодах с
усилителем. — «Радиотехника», т. 22, № 10.
40. Ш а х т а р и и Б. И. Статистическая динамика системы фазовой автопод-
стройки при наличии пропорционально-интегрирующего фильтра. — «Автома-
тика и телемеханика», № 10, стр. 82.
41. Постников В. А. Об отношении сигнал/шум на выходе синхронного и
коммутационного детекторов. — «Радиотехника», т. 21, № 12.
42. Tausworth R. С. Cycle slipping phas-locked loops. — «IEEE Trans Com-
munication Technology», vol. COM-15, June, N3, p. 417—421.
43. M e 1 v i 1 T. С. Оптимизация демодулятора с фазовой аэтоподстройкой ча-
стоты при одноканальной речевой связи. —«The Microwave Journ», vol. 10,
N7, p. 43—47.
44. T a u s w о r t h R. C. A method for calculating phase-locked loop performance
near threshold —«IEEE Trans. Communication Technology», vol. Com-15,
August, p. 502—506.
45. Ridgway R 1., Carter 1. E. More Comments on Phase Locked Loop
Threshold. — «Proc. IEEE», vol. 55, N8, August, p. 1531—1533.
46. И т о Ю. Я., Йосихито Уэно. Схема приемника с обратной связью в
фазовом детекторе. Японск. пат. кл. 98Е6, № 8892. Заявл. 18.03.63. Опубл. 11.05.66.
47. Stiffler J. J. К вопросу о выборе формы сигнала в системе с фазовой
автоподстройкой. —«1ЕЕ Internal. Conf. Commun. Digest.» — Minneapolis
Minn. 1967, Authors synopsis papers, New York, 139.
48. Anderson D. E , L u h J. J. S. Анализ свойств системы фазовой автопод-
стройки высокого порядка с учетом воздействия белого шума. — «1ЕЕ
Internal. Conf. Commun. Digest». Minneapolis, Minn, 1967, Authors sinopsis
papers, New York.
435
49. Lindsey W. C., Tausworth R. C. A survey of phase-locked loop theory
of 1EE ICC 67. — «1ЕЕ Interhat. Conf. Commun. Digest.» Minneapolis. Minn.
1967. Authors Synopsis papers, New. York, p. 139.
50. M a у e r R. Расчет схемы фазочувствителыгого детектора. Arch, techn.
Messen», № 377, 135—140.
51. Biswas B. N., Datta G. Tunable Compound Phase-Locked Demodula-
tor. — «Р1ЕЕЕ», vol. 56, Nil, November, p. 2044—2045.
52. Б a p б а ш и н E. А. Классификация траекторий динамической системы с
цилиндрическим фазовым пространством. — «Дифференциальные уравнения»,
№ 12.
53. Shilling D. L. Comments on «Phase-Locked Loop Threshold. — «Р1ЕЕЕ»,
vol. 55, Nl, January, p. 82—83.
54. Zakheim J. Усовершенствование системы с фазовой блокировкой.—
«Inter, electroniguc», 111, N2, p. 10—14.
55. Keblawi F. S. Unlock Behavior of the Second-Order Phase-Locked Loop
With and Without Interfering Carriere. — «RCA Rev.», N 2, p. 277—296.
56. Schilling D. L., Smirlock M. Jntermodulation Distortion of a Phase
Locked Loop Demodulation. — «IEEE Trans. Comm. Thechn», vol. COM-15,
April, N 2.
57. Г у n т а С. К. О функции передачи системы ФАПЧ. — «ТИИРЭ», т. 55, № 4,
стр. 114—<115.
58. Rowbotham J. R„ Sanneman R. W. Random Caracteristics of Type 11
Phase-Loched Loop. — «IEEE Trans, on Aerospace and Electronic Systems»,
vol. AES-3, N 4, July, p. 604—612.
59. A 1 e x a n d e r J. W. Непосредственное определение коэффициента захватыва-
ния в генераторах с фазовой автоподстройкой частоты. «Internal. J. Elect-
ron», № 4.
60. Ш е ф т е л м е и. Переходная характеристика линейного фазового детектора
при малом отношении сигнал/шум на его входе. — «Труды ин-та инженеров
по электротехнике и радиоэлектронике», т. 55, № 5.
61. Lewis Р. Н1., Weigarten W. Е. A comparison of Second, Third and
Fourth order Phase-Locked Loops. — «IEEE», vol. AES-3, № 4, Julv,
p. 720—727.
62. D e Couvreur G. A., Ludwig D. Optimum Waveform for the Shortest
Acguisition Time in Type II Phase-Lock Loops. — «IEEE», vol. AES-3, № 4,
July, p. 731.
63. С у т я г и и E. Б. Воздействие мультипликативной флуктуационной помехи
на систему ФАПЧ. — «Радиотехника», т. 22, № 10, стр. 45—49.
64. S h a f t Р. D., D о г f R. С. Reduction of communication signal acguisition
time through nonlinear design. «Proc. Nat. Electron Couf. Chicage III, 1967,
vol. 23, Chicago III, p. 588—592.
65. Кантор Л. Я. «Методы повышения помехозащищенности приема ЧМ сиг-
налов». М., «Связь».
1968 г.
1. Gupta S. С., Bagless J. W, Hummels D. R. Threshold Jnvestigation
of Phase-Locked Diserimanator. — «JEE, Trans», vol. AES-4 Number 6,
November, p. 855—863.
2. ЭлинсонЭ. С., БолабовкоЭ. С. К расчету основных параметров си-
стемы синхронной демодуляции ЧМ сигналов. — «Радиотехника», т. 23,
№ 6, стр. 28—32.
3. Никитин Н. П., Чардынцев В. А. О вероятности многократных пе-
рескоков фазы в схеме фазовой автоподстройки частоты. Помехозащищен-
ность и надежность радиомеханических устройств и систем автоматического
управления. — «Труды УПИ им. С. М. Кирова», сб. 68, стр. 36—44. Сверд-
ловск.
4. К о з л о в В М., Е д в а б и ы й В. М. К вопросу проектирования частотной
декады с ФАПЧ в качестве фильтра. Научные труда Омского института
инж. ж/д транспорта. Вып. 59, стр. 119—126.
436
5. Т е р н и к о в а Н. П. К исследованию одного дифференциального уравнения
фазовой автоподстройки частоты». — «Труды Горьковского ин-та пнж. вод-
ного хранспорта», вып. 94, стр. 73—80.
6. Шах ги л ьдян В. В. Обнаружение сигнала с блуждающей фазой и непо-
стоянной частотой. — «Труды учебных институтов связи», вып. 41.
7. Белых В. Н., Шалфеев В. Д. Частотно-фазовая автоподстронка час-
тоты с нелинейным фильтром в фазовой цепи управления. — «Изв. вузов».
«Радиофизика», т. 11, № 111, стр. 1756—1759.
8. Пономаренко В. П., Шалфеев В Д. Нелинейная система частотно-
фазовой автоподстройки с широкой полосой захвата. — «Изв. вузов». «Ра-
диофизика», т. 11, № 11, стр. 1694—1999.
9. Ш а х т а р и и Б. И. Влияние характеристики фазового детектора на стати-
стические характеристики системы ФАПЧ — «Автоматика и телемеханика»,
№ 9, стр. 53—61.
10. Евтянов С. И., С и ед ко в а В. В. Определение полосы захвата фазо-
вой автоподстройки частоты асимптотическим методом. — «Электросвязь»,
№ 9, стр. 22—28.
И. Евтянов С. И., Снедкова В. В. Исследование ФАП с фильтрами вы-
сокого порядка асимптотическим методом. — «Радиотехника», т. 23, № 9,
стр. 48—53.
12. Капранов М. В. Асимптотические значения полосы захвата при фазовой
автоподстройке частоты. — «Изв. вузов». «Радиофизика», т. XI, № 7, стр.
1028—1041.
13. Шахтарин Б. И. Об одном предельном случае в теории фазовой автопод-
стройки частоты с фазовым детектором, характеристика которого зависит от
параметра. — «Радиотехника и электроника», т. 13, № 4, стр. 732—734.
14. Евтянов С. И. Об исследовании фазовой автоподстройки частоты асимп-
тотическим методом. — «Радиотехника», т. 23. № 4, стр. 105—106.
15. Сизов В. П. Об эффективности метода гармонического баланса при ис-
следовании стационарных режимов фазовой автоподстройки частоты. —
«Изв. вузов». «Радиофизика», т. 11, № 11, стр. 1700—1709.
16. Б ел юстин а Л. Н., Шалфеев В. Д. К теории нелинейной системы час-
тотно-фазовой автоподстройки частоты. — «Изв. вузов» «Радиофизика»,
т. XI, № 3, стр. 383—397.
17. Шахтарин Б. И. О нарушении синхронизма в системе фазовой автопод-
стройки частоты. — «Радиотехника и электроника», т. XIII, № 4, стр. 737—
741.
18. Шахтарин Б. И. Анализ асимптотических значений статистических ха-
рактеристик системы ФАПЧ. — «Радиотехника и электроника», т. XIII, № 2,
стр. 247—258.
19. Белых В. Н., Шалфеев В. Д. Исследование динамики системы фазо-
вой автоподстройки с нелинейной емкостью в фильтре нижних частот. —
«Изв. вузов». «Радиофизика», т. XI, № 3. стр. 407—418.
20. Н и к и т и и Н. П. Помехоустойчивость схемы ФАП, следящей за сигналом
с быстрой линейной частотной модуляцией. Помехоустойчивость и надеж-
ность радиотехнических устройств и систем автоматического управления. —
«Труды УПИ им. С. М. Кирова», сб. 158, стр. 31—35. Свердловск.
21. Шахтарин Б. И. Об одной лемме в теории фазовой автоподстройки час-
тоты — «Радиотехника и электроника», т. XIII, № 9, стр. 1704—1706.
22. Майкова Т. П. Об одном подходе к исследованию систем фазовой авто-
подстройки частоты (ФАПЧ) с произвольным нелинейным четырехполюсни-
ком.— «Труды МЭНС», вып. 1. М., «Связь», стр. 177—182.
23. П е т р и щ е в В. И. К экспериментальному исследованию статистической
динамики системы ФАПЧ. — «Труды МЭИС», вып. 1. М., «Связь», стр. 182—
185
24. Ш а х г и л ь д я н В. В. Эффективность работы системы фазовой автопод-
стройки частоты с ограничителем на входе. «Труды МЭИС», вып. 1, М„
«Связь», стр. 194—197.
25. Ш а х г и л ь д я н В. В., Петрищев В. И. «Статистическая динамика си-
437
стемы ФАПЧ с нелинейной цепью управления. — «Труды МЭИС», вып. 1,
М., «Связь», стр. 197—'203.
26. Шахтарин Б. И. О системе фазовой автоподстройки частоты с фильтра-
ми второго порядка. — «Радиотехника и электроника», т. XIII, Xs 9, стр.
1701 — 1704.
27. В л а с о в В. Л. Математическое моделирование поисковой системы фазо-
вой автоподстройки частоты «(ФАПЧ)». — «Труды учебных институтов свя-
зи». Вып. 40.
28. Шахгильдян В. В. Обнаружение непрерывного сигнала в космических
радиолиниях. — «Тезисы докладов I НТК по космической радиосвязи», М.,
«Советское радио».
29. U h г а п J о h п J. «Cycle Slipping Effects on the Output Signal of a Phase-
Locked Demodulator». — «Р1ЕЕЕ», v. 56, N 1, January, p. 80—81.
30. Gupta S. G. On Optimum Digital Phase-Locked Loops. — IEEE Trans on
Commun. Technol.», vol. com-16, Nomber 2, April, p. 340—344.
31. Hess D. T. Cycle Slipping in a First-Order-Phase Locked Loop. — «IEEE,
Trans on Commun. Technol.», vol. com-16, April, N 2, p. 225—260.
32. W о о d b u г у J. R. Phase-Locked Loop Pull-in Range. — «IEEE Trans on
Comm. Techn.», vol. com-16, February, N 1, p. 184—186.
33. S t i f f 1 e r J. J. On the selection of signals for Phase-Locked Loop. — «IEEE,
Trans on Comm Techn.», vol. com-16, April, N 2.
34. Leonhard R., Fleischmann. Pull-in Range of Phase-Lock Loop
Circuits with Arbitrary Feedback Filter. — «The Radio and Electronic Enge-
neer», vol. 36, August, N 2.
35. Частотные детекторы на основе ФАПЧ. «Internal. I. Electron», т. 23, Xs 6,
573—586.
36. U n k a u f M. G., Schulman R. J. «Experimental signal/noise — ratio com-
parison of the second-order phase-locked loop and the second order frequ-
ency — locked loop».
37. S m i t h В. M. «Electron Letters», N 26, p. 585—586. Some experimental
results cdhcerning cycle-slipping a plase-controlled loop. — «IREE», Austral
29, N 8, p. 294—299.
38. Didday R. L„ L i n d s e у W. C. Subcarrier Tracking Methods and Commu-
nication System Design. — «IEEE Trans, on Comm Technol», vol. com-16,
August, N 4, p. 541—550.
39. Osborne P., Schilling D. L. Threshold Performance of Phase-Locked
Loop Demodulators. — «IEEE Internal Cont. Communs, Philadelphia», vol. 4,
Hew York, N 4, 466—470.
40. Gupta S. C., Bayless J. W., Hummels R. R. Threshold Investigation
of Phase-Locked Discriminators. — «IEEE Trans», vol. AES-4, Number 6,
November, p. 859—862.
41. Игнатов Ю. Ф. Статистический анализ системы фазовой автоподстройки
частоты третьего порядка. — «Радиотехника и электроника», т. XIII, № 10,
стр. 1879^1881.
42. И г н а т о в Ю. ф. Статистический анализ точности фазовой автоподстрой-
ки частоты. — «Радиотехника», т. 23, № 2, стр. 36—44.
43. И г н а т о в Ю. ф., Шахгильдян В. В. Квазиоптимальное обнаружение
ЧМ сигналов. — «Труды учебных институтов связи», вып. 40, стр. 26—33.
44. В л а с о в В. А. К расчету переходных характеристик поисковой системы
ФАПЧ первого порядка. — «Труды МЭИС», вып. 1. М., «Связь», стр. 166—171.
45. Игнатов Ю. Ф. «К статистической теории нелинейных регулируемых сис-
тем. Задача точности». — «Труды МЭИС», вып. 1. М., «Связь», стр. 171 —176.
46. D е Couvrier, L u d w i g D. A. General Solution for the Shortest Acquisi-
tion Time in Type II Phase-Lock Loop. — «IEEE», vol. AES-4, Number 4,
July, p. 639—640.
47. Шалфеев В. Д. Исследование динамики системы фазовой автоподстройки
частоты с разделительным конденсатором в цепи управления. — «Изв. ву-
зов». «Радиофизика», XI, № 3, стр. 397—418.
48 Pastirnack G., W h а 1 i п R. L. Analysis and synthesis of a digital Phase-
438
Locked Loop for FM demodulation. — «Bell Syst. Techn. J.», vol 47, December,
p. 2207—2238.
49. Афанасьев H. А., Дорофеев В. M. Помехоустойчивость системы
ограничитель — ФАПЧ. «Тезисы докладов I НТК по космической связи». М„
«Советское радио».
50. Обрезков В. Г. Вероятность достижения границы в нелинейных системах
авторегулирования. — «Изв. АН СССР». «Техническая кибернетика», № 3.
51. Грачев Ю. А., Григор аш Д. Н„ Беляев В. Л. О некоторых осо-
бенностях систем ФАП с делителями частоты. — «Изв. вузов». «Радиоэлект-
роника», № 3.
52. Афанасьев Ю. А. Работа ФАПЧ с ограничителем при сильных шумах.—
«Труды НИИР», № 1.
53. Разевиг В Д., Обрезков В. Г Срыв слежения в нелинейных систе-
мах, работающих в нестационарном режиме. «Автоматика и телемеханика»,
№ 10.
54. В о z z о п Е., Mendol U. Comparison between the ossillating limited and
the first order plase-locked loop. — «Р1ЕЕ», v. 56, N 11, p. 2094.
55. V о u g h a n J., Rodney M. «The ingection-locked voltage tunable magnet-
ron.— «Microwave J», vol. 11, N 10.
56. Шахгильдян В. В., Власов В. А. Работа поисковой системы ФАПЧ
в шумах. — Сб. докладов конференции «Применение средств технической
кибернетики в энергетике и промышленности». Куйбышев.
57. С и з о в Е. Н. Стационарные режимы фазовой автоподстройки частоты. —
«Электросвязь», № 1, стр. 63—67.
1969 г.
1. Сафонов В. М. О влиянии формы пилообразной характеристики фазового
детектора на полосу захвата ФАП. — «Радиотехника», т. 24, стр. 76—80.
2. РзаеваГ. И., Кулешов В. Н., КенгерлинскийЮ С. О точности
реализации оптимальных параметров фазовой автоподстройки частоты. —
«Радиотехника и электроника», т. XIV. № 12, стр. 2263—2265.
3. Скрябин Б. Н. Качественное исследование одного уравнения теории фа-
зовой автоподстройки частоты. — «ПММ», т. 33, вып. 2, стр. 340—344.
4. Protonarios N. Pull-In Perfomance of a Piecewise Linear Phase-Locked
Loop. — «IEEE Trans, on Aerospace and Electron Systems», vol. AES-5, N 3,
May, p. 376—386.
5. Ш a x т a p и и Б. И., Шишкин В. И. О применении метода Гольдфарба
к исследованию одной нелинейной системы. — «Автоматика и телемехани-
ка», № 9.
6. Капранов М. В. О влиянии формы характеристики фазового детектора на
асимптотическую полосу захвата фазовой автоподстройки частоты. — «Ра-
диотехника и электроника», т. XIV, № 5, стр. 824—828.
7. К а п р а и о в М. В. Асимптотический способ вычисления полосы захвата
фазовой автоподстройки частоты второго порядка с фильтром, содержащим
нелинейную емкость. — «Электросвязь», № 5, стр. 30—40.
8. Lindgren A. G., Pinkos R. F., Berube R. Н. Noise dynamics of the
Phase-Locked Loop with signal clipping. — «IEEE Trans Aerospace and Elec-
tronic System», vol. AES-5, January, N il, p. 66—76.
9. Белых В. H., Шалфеев В. Д. Исследование динамики системы ФАП
с нелинейным фильтром. — «Радиотехника и электроника», т. XIV, № 11,
стр. 1167—1977.
10. Сапфиров С. Н., Сморгонский В. П., Белозеров Ю. С., Ут-
ки и Ю. С., Першин В. П. Метод расчета переходного процесса в систе-
ме фазовой автоподстройки частоты с фильтром нижних частот в цепи уп-
равления. — «Радиотехника и электроника», XIV, № 9, стр. 1597—4602.
11. КапраноьМ. В., Рихтер С. Г. Экспериментальное исследование си-
стемы ФАПЧ в режиме манипуляции фазы. — «Радиотехника», т. 24, № 11,
стр. 98—100
12. Майкова Т. П. К вопросу о полосе захвата системы ФАПЧ с нелинейным
интегрирующим фильтром. — «Электросвязь», № 8, стр. 27—32.
439'
13. Шахтарин Б. И. Исследование кусочно-линейной системы ФАП — «Ра-
диотехника и электроника», т. XIV, № 8, стр. 1415—1424
14. Шахтарин Б. И. Об одном методе В. С. Дулицкого в теории ФАПЧ. —
«Радиотехника», т. 24, № 7, стр. 62—65.
15. Сизов В. П. Об асимптотической полосе захвата в системе фазовой авто-
подстройки частоты с пропорционально-интегрирующим фильтром.— «Радио-
техника», т. 24, № 8, стр. 62—64.
16. Игнатов Ю. Ф. О разладке синхронизации.— «Радиотехника и электрони-
ка, т. XIV, № 7, стр. 1332—1334.
17. Евтянов С. И., Снедкова В. К. О зависимости полосы захвата ФАП
от характеристики фазового детектора при пропорционально-интегрирующем
фильтре.— «Радиотехника», т. 24, № 4, стр. 91—92.
18. Ш а л ф е е в В. Д. К исследованию нелинейной системы частотно-фазовой
автоподстройки частоты с однозвенным интегрирующим фильтром в фазовой
и частотной цепях. — «Изв. вузов». «Радиофизика», т. XII, вып. 7, стр.
1057—1051.
19. Шахтарин Б. И., Шишкин В. И. Об одной оценке полосы захвата в
системе ФАПЧ. — «Радиотехника», т. 24. № 12, стр. 70—72.
20. Обрезков Г. В. Срыв слежения в системе с нелинейным фильтром. —
«Доклады НТК по итогам работ за 1968—1969 гг. Секция радиотехники.
Подсекция статистич, радиотехники». Изд. МЭИ, стр. 91—96.
21. Игнатов Ю. Ф., Шахгильдян В. В. Статистический анализ фазовой
автоподстройки частоты методом усреднения. «XXV Всесоюзная сессия
НТОРиЭ им. А. С. Попова». М., «Советское радио», стр. 36—37.
22. Петрищев В. И. Применение принципа максимума Л. С. Понтрягина для
синтеза оптимальной по быстродействию системы фазовой синхронизации.
XXV Всесоюзная сессия НТОРиЭ им. А. С. Попова». М., «Советское радио»,
стр. 37.
23. Сморгонский В. П., Сапфиров С. Г., Белозеров Ю. С., Ут-
кин Ю. С., Першин А. П. Некоторые вопросы теории фазовой автопод-
стройки частоты (ФАПЧ). «XXV Всесоюзная сессия НТОРиЭ им. А. С. По-
пова». М., «Советское радио», стр. 37— 38.
24. R i t е г S. Ап Optimum phase Reference Detector for Fully Modulated phase-
shift Keyed signals. — «IEEE Trans on AES», vol. AES-5, Nil, p. 627—631.
125. Белов Л. А., Рихтер С. Г., Кочемасов В. H. О длительности пере-
* ходных процессов в системах ФАПЧ. «Доклады НТК по итогам научно-ис-
следовательских работ за 1968—1969 гг. Секция радиотехническая. Подсекция
теории колебаний». Изд. МЭИ, стр. 3—9.
\J2 6. Кулешов В. Н., Удалов Н. Н. Исследование затягивания переходных
процессов в нелинейной системе ФАПЧ. «Доклады НТК по итогам научно-
исследовательских работ за 1968—1969 гг. Секция радиотехническая. Под-
секция теории колебаний». Изд. МЭИ, стр. 17—22.
27. К а и р а и о в М. В., Р’и х т е р С. Г. Квазистатический режим коммутации в
многоканальной системе фазовой автоподстройки частоты. «Доклады НТК
по итогам научно-исследовательских работ за 1968—1969 гг. Секция радио-
техническая. Подсекция теории колебаний». Изд. МЭИ, стр. 23—28.
28. Н о в и к о в а Е. П., Снедкова В. К. Влияние расстройки усилителя вы-
сокой частоты на полосу захвата системы ФАП. «Доклады НТК по итогам
научно-исследовательских работ за 1968—1969 гг. Секция радиотехническая.
Подсекция теории колебаний». Изд. МЭИ, стр. 29—34.
29. С и з о в В. П. Исследование условий синхронизации в системе ФАП с пря-
моугольной характеристикой фазового детектора «Доклады НТК по итогам
научно-исследовательских работ за 1968—1969 гг. Секция радиотехническая.
Подсекция теории колебаний». Изд. МЭИ, стр. 35.
30. Игнатов Ю. Ф. Применение теории оптимального управления к синтезу
системы фазовой автоподстройки частоты.— «Труды МЭИС». М., «Связь»,
стр. 145—J49.
31. Игнатов Ю. Ф. О негауссовом решении статистической задачи точности
440
фазовой системы автоподстройки частоты.— «Труды МЭИС». М„ «Связь»
стр. 149-152.
32. Игнатов Ю. Ф„ Шахгильдян‘В. В. Параметрические флуктуации в.
системах фазовой автоподстройки частоты. — «Труды МЭИС». М., «Связь»,
стр. 152—154.
33. Майкова Т. П. Определение полосы захвата системы ФЛПЧ с нелинейным
фильтром при фазовомодулированном эталонном сигнале. — «Труды
МЭИС». М., «Связь», стр. 154—157.
34. М а й к о в а Т. П. К вопросу о выборе оптимальных параметров системы
ФАПЧ с нелинейным фильтром при фазовомодулированном эталонном сиг-
нале. — «Труды МЭИС». М., «Связь», стр. 158—<161.
35. П е т р и щ е в В. И. «Синтез оптимальной по быстродействию системы фазо-
вой автоподстройки частоты». — «Труды МЭИС». М., «Связь», стр. 161—
165.
36. П е т р и щ е в В. И. Повышение быстродействия системы фазовой автопод-
стройки частоты. — «Труды МЭИС». М., «Связь», стр. 165—‘168.
37. Сафонов В. М. О применении сложных фильтров в системе ФАП. —
«Труды МЭИС». М., «Связь», стр. 168—170.
38. Ш а х г и л ь д я и В. В., Власов В. А. Исследование поисковой астатичес-
кой системы ФАПЧ. — «Труды МЭИС». М., «Связь», стр. 170—174.
39. Шахгильдян В. В., Л я х о в к и и А. А. Об исследовании асинхронного
режима работы системы ФАПЧ. — «Труды МЭИС». М., «Связь, стр. 175—
177.
40. Jacques Willims J. Acquisition conditions for phase-lock loops. —
«Jnternat. J. Electron», vol. 26, N 2, p. 137—144.
41. Lay land James W. On Optimal Signal for Phase-Locked Loops.—
«IEEE Trans, on Commun. Technology», vol., com-17, N 5, p. 526. \
42. Lindsey W. C. Phase density distribution of phase-locked loop in cascad. —
«IEEE Trans, on Com. Tech.», vol. 17, N 4.
43. Lindsey W. C. Nonlinear analysis of generalized tracking system. — «Proc,
of the 1ЕЁЕ», vol. 57, N 10, 1705—4722.
44. С а м о й л о К. А., Федосова T. С. О полосе захвата системы фазовой
автоподстройки частоты. — «Труды МИРЭА». «Радиотехника», т. III, вып. 40,
стр. 30—39.
45. Федосова Т. С. Устойчивость системы фазовой автоподстройки частоты
с делителем частоты. — «Труды МИРЭА». «Радиотехника», т. III, стр. 40—
49.
46. О б у х о в Н. В., Д а д я и Э. Г. Анализ импульсно-фазовой автоподстройки
частоты с астатизмом второго порядка. — «Труды МАИ», вып. 268,
стр. 63—75.
47. М о л о т о в Е. П., К о ч е ш и е в В. В., К и й А. Л., П о и о м а р е в Ю. А.
Система ФАПЧ с многоступенчатой схемой поиска. — «Труды МАИ», вып.
268, стр. 87—4101.
48. С и л а-Н о в и ц к н й С. Ю. Статистический анализ системы фазовой авто-
подстройки частоты. — «Труды МАИ», вып. 268, стр. 76—86.
49. С у х а р е в А. Д., Ж о д з и ш с к и й М. И., Суслов Н. В., Курба-
т о в А. В., А и ц и б о р Н. М. Получение стабильной плавно перестраивае-
мой с помощью системы фазовой автоподстройки частоты со смесителем и
фазовым детектором в виде каскада совпадения, — «Труды МАИ»,
вып. 268, стр. 39—62.
50. Ж о д з и ш с к и й М. И., С у х а р е в А. Д. Получение стабильной дискрет-
но-перестраиваемой частоты с помощью систем фазовой автоподстройки час-
тоты с делителем в петле обратной связи. — «Труды МАИ», вып. 268,
стр. 5—38.
51. Ш а х г и л ь д я и В. В. Исследование статистических свойств многомерных
систем фазовой синхронизации. — «Труды учебных институтов связи», вып. 47.
52. Баутин Н. Н. Об аппроксимации и грубости пространства параметров ди-
намической системы. — «ПММ», т. 32, вып. 6.
53. Беляков А. С. О расчете переходного процесса в системе фазовой авто-
подстройки частоты. В сб. «Устройства электропитания малой мощности».
М., «Энергия», т. I.
441
54. Ермилов Э. А. О системе ФАП кратных частот. — «Труды Горьковского
политехнического ин-та», т. 25, № 3, стр. 13—17.
55. У р я д о в А. Л. Метод повышения быстродействия систем ФАПЧ — «Тру-
ды Горьковского политехнического института», вып. 25, № 3.
56. Петрищев В. И. Вопросы повышения эффективности работы систем фа-
зовой автоподстройки частоты. МЭИС. кандидатская диссертация.
57. В л а с о в В. А. Исследование поисковых систем ФАПЧ. МЭИС, кандидат-
ская диссертация.
58. D о п о с i k R. Theory of Phase-Controlled Oscillations, Prague. — «Acade-
mia», p. 295.
59. Clarke J. M. A. O. Pulse .Interference Effekts in a Phase-Lock Loop. —
«IEEE Electromagnetic compatibility Sumposium Record», N.j, 17/VI—19/VI
1969, p. 207—214.
60. В eld win G. L., И о w a r d W. G. Широкополосная система фазовой авто-
подстройки частоты с компенсацией гармоник.—«Proc, of the IEEE», vol. 57,
N 8, p. 1464—1465.
61. Eisenberg B. R. Аппроксимация частоты вхождения в синхронизм для
линейных цепей ФАП высокого порядка и нелинейных цепей. — «1ЕЕЕ
Trans. Aerospace and Electronics sistems», N 5.
62. Каганов В. И. Системы автоматического регулирования в радиопередат-
чиках. М., «Энергия».
63. Снедкова В. К. Исследование фазовой автоподстройки частоты с фильт-
рами верхних и нижних частот. МЭИ, кандидатская диссертация.
61. Жуков В. П., Иванова Н. Н. Отслеживание схемой ФАП перескоков
фазы случайного сигнала. «Доклады НТК по итогам научно-исследователь-
ских работ за 1968—1969 гг. Секция радиотехническая. Подсекция общей ра-
диотехники». Изд. МЭИ.
65. Шалфеев В. Д. Исследование некоторых нелинейных систем фазовой ав-
топодстройки частоты. ГГУ, кандидатская диссертация.
66. Певзнер Ф. А. О выборе постоянной времени фильтра верхних частот
в системе фазовой автоподстройки частоты. В сб. «Радиоэлектроника в на-
родном хозяйстве». Куйбышев, стр. 95—99.
1970 г.
1. Сизов В. П. Анализ стационарных режимов ФАП при кусочно-линейной
характеристике фазового детектора. — «Радиотехника и электроника», т. XV,
№ 3, стр. 481—487.
2. Ш а х т а р и н Б. И. О связи двух статистических характеристик фазовой
автоподстройки частоты. — «Радиотехника и электроника», т. XV, № 3,
стр. 488—494.
3, Шишкин В. И., Шахтарин Б. И. О захвате сигнала системой ФАПЧ
при поиске по частоте. — «Радиотехника», т. 25, № 1, стр. 74—79.
4. Цибулько А. Е. Исследование системы ФАПЧ методом математического
моделирования. — «Радиотехника», т. 25, № 3, стр. 55—61.
5. Шахгильдян В. В. Статистическая динамика системы фазовой автопод-
стройки частоты. — «Радиотехника», т. 25, № 5, стр. 66—70.
6. Евтянов С. И., Снедкова В. К. О полосе захвата ФАП и характе-
ристике ФД. — «Радиотехника», т. 25, № 5, стр. 71—75.
7. Чечурин В. Л. Полоса захвата в системе фазовой автоподстройки час-
тоты. — «Радиотехника», т. 25, № 5, стр. 98—100.
8. Игнатов Ю. Ф. Применение принципа усреднения к статистическому ана-
лизу фазовой автоподстройки частоты. — «Радиотехника и электроника»,
т. XV, № 1, стр. 185—189.
9. Рахимов Б. Э. Влияние шумов на работу системы ФАП с прямоугольной
характеристикой фазового детектора. «Ученые записки», вып. 105, серия «Ра-
диофизическая». Горький, ГГУ, стр. 33—38;
10. Никитин Н. П. Относительно фильтрации внешних помех схемой фазовой
автоподстройки частоты. — «Изв. вузов». «Радиоэлектроника», № 6.
•442
11. Гребне., Камензинд. Частотно-избирательные интегральные схемы,
использующие системы фазовой автоподстройки частоты. — «Зарубежная
радиоэлектроника», № 7.
12. Бе л юстин а Л. Н., Быков В. В., Киве л ев а К. Г., Шалфе-
ев В. Д. О величине полосы захвата системы ФАП с пропорционально-ин-
тегрирующим фильтром. — «Изв. вузов». «Радиофизика», № 4.
13. Семенко А. И. Переходной процесс в системе фазовой автоподстройки с
пропорционально-интегрирующим фильтром. — «Изв. вузов». «Радиоэлект-
роника», № 5.
14. Свириденко В. А. Анализ системы ФАПЧ при воздействии амплитудно-
модулированных сигнала и нормального шума. — «Труды МЭИС», вып. 1.
М., «Связь», стр. 61—65.
15. Петрищев В. И. Синтез оптимальной по быстродействию системы ФАПЧ
l-ro порядка при наличии помех. — «Труды МЭИС», вып. 1. М., «Связь»,
стр. 95—98.
16. Савватеев Ю. И. Устойчивость стохастических систем фазовой автопод-
стройки частоты в «малом». — «Труды МЭИС», вып. 1. М., «Связь», стр.
99—104.
17. Шахгильдян В. В., Игнатов Ю. Ф. Исследование влияния шума на
работу фазовой автоподстройки частоты, — «Труды МЭИС», вып. 1, М.,
«Связь», стр. 104—108.
18. Шахтарин Б. И. Оценка границ устойчивости системы автоматического
управления фазой колебаний генератора. — «Автоматика и телемеханика»,
№ 9, стр. 159—162.
19. Кал нин А. А. Воздействие шумов на систему ФАПЧ с усилителем проме-
жуточной частоты. — «Радиотехника», № 9, стр. 48—54.
20. Т и х о н о в В. И. Нелинейная оптимальная фильтрация и 'квазикогерентный
прием сигналов. — «Изв. вузов». «Радиоэлектроника», № 2.
21. Разевиг В. Д. Определение вероятности достижения границ 2-мерным
марковским процессом. — «Изв. вузов». «Радиофизика», № 2.
22. Левин В. А. Стабилизация дискретного множества частот. М., «Энергия».
23. Ч у п р а к о в Б. А. Некоторые вопросы применения системы фазовой авто-
подстройки с делителем частоты в кольце обратной связи в задачах радио-
измерительной техники. Горьковский политех, ин-т, кандидатская диссертация.
24 Сафонов В. М. Устройство для автоматического поддержания синфазно-
сти электрических колебаний двух независимых генераторов. Авт. свиде-
тельство № 283316, кл. 21а4, 8/02.
25. Сизов В. П. Фазовая автоподстройка частоты с модулятором в цепи обрат-
ной связи. МЭИ, кандидатская диссертация.
26. М а й к о в а Т. П. Анализ систем фазовой автоподстройки частоты с нели-
нейными фильтрами. МЭИС, кандидатская диссертация.
27. Г а в р и л ю к М. С. Исследование импульсно-фазовой автоподстройкч час-
тоты. ОЭИС, кандидатская диссертация.
28. Н и к и т и н Н. П. Относительно фильтрации внутренних помех схемой фа-
зовой автоподстройки частоты. — «Изв. вузов». «Радиоэлектроника», т. XIII,
№ 6, стр. 764—766.
29. Фомин А. Ф., Урядников Ю. Ф. Пороговые свойства синхронно-фазо-
вого демодулятора. — «Радиотехника», № 11, стр. 57—61.
30. Шалфеев В. Д. Система ФАП с разделительной емкостью. — «Радиотех-
ника», № 10, стр. 63—65.
31. ГаврилюкМ. С., Кулешов В. И. О фильтрации помех в линейной
модели импульсно-фазовой системы ФАП с интегрирующим фильтром. —
«Радиотехника», № 10, 1970, стр. 98—100.
32. Савватеев Ю. И. К вопросу об устойчивости системы фазовой автопод-
стройки частоты относительно малых флуктуаций параметров. — «Труды
учебных институтов связи», вып. 48, стр. 151—157.
33. Б е л ы х В. Н., Белых Т. Г. Исследование астатической системы ФАП в
режиме непрерывного поиска по частоте. — «Изв. вузов». «Радиофизика»,
т. XIII, № 11, стр. 1677—1683.
443
1971 г.
1. Шахгильдян В. В. Статистические свойства системы фазовой синхрони-
зации второго порядка с нелинейной емкостью в фильтре. — «Труды учеб-
ных институтов связи», вып. 54.
2. Шахгильдян В. В. Влияние флуктуационных помех на точность работы
системы фазовой синхронизации с нелинейным затуханием. — «Труды учеб-
ных институтов связи», вып. 53.
3. Шахгильдян В. В., Савватеев Ю. И. К исследованию устойчивости
двухпетлевых систем фазовой синхронизации. — «Изв. вузов». «Радиофизи-
ка», т. XIV, № 7, стр. 1035—1042.
4. Рахимов Б. Э. О влиянии формы характеристики ФД на работу системы
ФАП при действии помех. — «Изв. вузов». «Радиофизика», т. XIV, № 3,
стр. 476—479.
5. Савватеев Ю. И. Анализ работы двухпетлевых систем фазовой синхро-
низации МЭИС, кандидатская диссертация.
\/ 6. Бакаев Ю. Н. Критерии синхронизации системы фазовой автоподстройки
с нелинейным фильтром. — «Изв. вузов». «Радиофизика», т. XIV, № 3,
стр. 479—481.
7. Петрищев В. И. Синтез оптимальной по быстродействию ФАП. — «Ра-
диотехника», т. 26, № 2.
8. Шахгильдян В. В, Игнатов Ю. Ф. Исследование влияния шума на
работу ФАПЧ методом усреднения. — «Радиотехника», т. 26, № 1, стр. 44.
9. Корни юв И. П., Рихтер С. Г. Система фазовой автоподстройки час-
тоты — усилитель мощности фазовоманипулированных сигналов. — «Электро-
связь», № 2, стр. 53.
10. Gray М. Tausworthe Frequency-Counted Measurements and Phase-Locking
to Noise Oscilators. — «IEEE Trans Com. Technology», vol. com-19, N 1,
p. 21—30
11. Бел Юстин а Л. И., Белых В. II. Режимы работы системы фазовой
автоподстройки при действии аддитивной гармонической помехи, близкой к
эталонному сигналу. XXVI Всесоюзная сессия НТОРиЭ им. А. С. Попова.
М., «Советское радио».
12. Ш а х т а р и н Б. И. О статистических характеристиках нелинейных систем
одного класса. — «Автоматика и телемеханика», № 6, стр. 55—64.
13. Шахтарин Б. И. О сравнении двух стохастических моделей фазовой ав-
топодстройки частоты. — «Радиотехника», т. 26, № 1, стр. 57.
14. Д е м ь я н ч е н к о А. Г. Система ФАПЧ с делителем частоты. — «Электро-
связь», № 2, стр. 60.
15. Шахтарин Б. И., Шишкин В. И. Исследование цифровой модели си-
стемы автоматического управления фазой колебания генератора. — «Радио-
техника и электроника», т. XVI, № 3, стр. 436—440.
16. Grebene А. В. The monolithic phase-locked loop a versatile building block.—
«IEEE spectrum», vol. 8, March, N 3, p. 22—05.
17. Пономаренко В. П. Динамика совместной системы ФАПЧ и слежения
за задержкой. — «Изв. вузов». «Радиофизика», т. XIV, № 7, стр. 1043—1065.
18. Федосова Т. С. Расчет переходных процессов в системе фазовой авто-
подстройки частоты. — «Изв. вузов». «Радиоэлектроника», т. XIV, № 8.
19. Г е л ь б ш т е й и Л. С., Козлов А. И. Об экспериментальном исследова-
нии системы ФАПЧ. — «Радиотехника», т. 26, № 10, стр. 92—93.
20. Ч у р к и н Е. И. — К анализу модифицированной системы ФАПЧ. — «Радио-
техника», т. 26, № 10, стр. 82—84.
21. Шахтарин Б. И. О критериях устойчивости при приближенном исследо-
вании систем с периодическими характеристиками. — «Радиотехника и электро-
ника», т. XVI, № 10, стр. 1828—1839.
22. Пономаренко В. П. К теории систем синхронизации с перекрестными
связями. — «Изв. вузов». «Радиофизика», т. XIV, № 11, стр. 1728—1740.
23. Белых В. Н. Об уравнениях систем ФАПЧ с нелинейной цепью управле-
йия. — «Изв. вузов». «Радиофизика», т. XIV, № 11, стр. 1749—1758.
24. Белых В. И. Об оценках областей устойчивости систем ФАП с нелинейной
-444
цепью управления. — «Изв. вузов». «Радиофизика», т. XIV, № 11, стр. 1759—
25. М о h а г i г Р. S., S а г m а К. A Acquisition time of second ordei phase—locked
loop. — «Int. J. Electron.», vol. 30, No 6, pp. 511—518.
26. Li ndsey W. C., Simon M. K- The Effect of Loop Stress on the Performance
of Phase—Coherent Communication Systems. — «IEEE Trans, on Comm.
Techn.», Vol. Com., No 5, Oktober.
Дополнительная литература
1. Ляпунов A. M. Общая задача об устойчивости движения. М.-Л., «Гостех-
издат», 1950.
2. Айзерман М. А., Гантмахер Ф. Р. «Абсолютная устойчивость регу-
лируемых систем». Изд. АН СССР, 1963.
3. Чет ае в Н. Г. Устойчивость движения. М., «Наука», 1965.
4. Г ит л иц М. В. О динамическом диапазоне канала магнитной записи. —
«Радиотехника», т. 17, № 4, 1962.
5. Иоффе А. Ф. Применение магнитной записи. М., Госэнергоиздат, 1959.
6. Пирогов А. А. Синхронизация сообщений. МЭИС. Докторская диссерта-
ция, 1963 г.
7. Ч и с т я к о в Н. И. Синтезаторы частот. М., «Связь», 1970.
8. Евтянов С. И. Радиопередающие устройства. М., «Связьиздат», 1950.
9. Радиопередающие устройства. Под ред. Б. П. Терентьева. М., Связьиздат,
1962.
10. Боде Г. В. Теория цепей и проектирования усилителей с обратной связью.
М„ ИЛ, 1948.
И. Риз к ин А. А. Основы теории усилительных схем. М., «Советское радио»,
1958 г.
12. Асеев Б. П. Фазовые соотношения в радиотехнике. М., Связьиздат.
13. К а р т ь я н у Г. Частотная модуляция. Изд. 2-е доп. Бухарест, Меридиемс,
1964.
14. Кривицкий Б. X. Автоматические системы радиотехнических устройств.
М.-Л., Госэнергоиздат, 1962.
15. Богомолов В. И. Устройства с датчиками Холла и датчиками магнито-
сопротивления. Ленинград, ГЭИ, 1961.
16. Г уткин Л. С. и др Радиоприемные устройства, ч. I, М., «Советское ра-
дио», 1961.
17. Бычков С. И. и др. Стабилизация частоты генераторов свч. М., «Совет-
ское радио», 1962.
18. Гонор овский И. С. Частотная модуляция и ее применение. М., «Связь-
издат», 1948.
19. Ар ты м А. Д. Теория и методы частотной модуляции. М., Госэнергоиздат,
1961.
20. Бергельсон И. Г. и др. Приемно-усилительные лампы повышенной на-
дежности. М., «Советское радио», 1962.
21. Берман Л. С. Нелинейная полупроводниковая емкость. М., Физматгиз,
1963.
22. Справочник по полупроводниковым диодам и транзисторам под ред.
Н. Н. Горюнова. М., «Энергия», 1964.
23. С а мч> й л е н к о В. И. Работа полупроводниковых диодов при больших на-
пряжениях. М., Оборонгиз, 1959.
24. Стратонович Р. Л. Избранные вопросы теории флуктуаций в радиотех-
нике. М., «Советское радио», 1961.
25. Камке Э. Справочник по обыкновенным дифференциальным уравнениям.
М., «Наука», 1965.
26. А н д р о н о в А. А., В и т т А. А., X а й к и н С. Э. Теория колебаний. М.,
Физматгиз, 1959.
27. Айзерман М. А. Теория автоматического регулирования. М., «Наука»,
1966.
445
28. Первозванский А. А. Случайные процессы в нелинейных автоматичес-
ких системах». М., Физматгиз, 1962.
29. Г уткия Л. С. Теория оптимальных методов радиоприема при флуктуа-
ционных помехах. М„ Госэнергоиздат. 1961.
30. Зубаков В. Д., Вайнштейн Л. А. Выделение сигналов на фоне слу-
чайных помех. М., «Советское радио», 1959.
31. 3 а н а д в о р о в М. К., Чирков П. Н. О воздействии на автогенератор
радиоимпульса большой амплитуды. — «Изв. вузов». «Радиофизика», т. II.,
№ 3, Й959.
32. Евтянов С. И. Переходные процессы в приемно-усилительных схемах. М.,
Связьиздат, 1947.
33. Горелик Г. С., Елкин Г. А. О преобразовании флуктуаций амплитуды
и фазы автоколебаний резонансными системами. — «Радиотехника и электро-
ника», т. II, 1957, № 1.
34. Попов Е. П. Автоматическое регулирование. М., Физматгиз, 1959.
35. Техническая кибернетика. Теория автоматического регулирования. Книга 1,
гл. XI. М., «Машиностроение», 1967.
36. Харкевич А. А. Нелинейные и параметрические явления в радиотехнике
М., Гостехиздат, 1956.
37. М а л к и н И. Г. Теория устойчивости движения. М.-Л., ГИТТЛ, 1952.
38. Моисеев Н. Н. Асимптотические методы нелинейной механики. М., «Нау-
ка», 1969.
39. Красовский Н. Н. Некоторые задачи теории устойчивости движения. М.,
Физматгиз, 1959.
40. Каннингхэм В. Введение в теорию нелинейных систем. М.-Л., Госэнер-
гоиздат, 1962.
41. Б а б а к о в И. М. Теория колебаний. М., Гостехиздат, 1958.
42. Б а р б а ш и н Е. А. Введение в теорию устойчивости. М., «Наука», 1967.
43. Лурье А. И. Некоторые нелинейные задачи теории автоматического регу-
лирования. М., Гостехиздат, 1951.
44. Б а р б а ш и н Е. А., Т а б у е в а В. А. Динамические системы с цилиндричес-
ким фазовым пространством. М., «Наука», 1969.
45. Боголюбов Н. Н., Митропольский Ю. А. Асимптотические мето-
ды в теории нелинейных колебаний. М., ГИФМЛ, 1963.
46. Попов Е. П., Пальтов И. П. Приближенные методы исследования не-
линейных автоматических систем. М., Физматгиз, 1960.
47. Б р о н ш т е й н И. Н., С е м е н д я е в К. Н. Справочник по математике, М.,
ГИТТЛ, 1957.
48. К о р н Г., Корн Т. Справочник по математике. М., «Наука», 1968.
49 Тузов Г. И. Выделение и обработка информации в допплеровских систе-
мах. М., «Советское радио», 1967.
50. Гарбер Е. Оценка погрешности метода гармонического баланса. — «Авто-
матика и телемеханика», 1963, № 4.
51. Левин Б. Р. Теоретические основы статистической радиотехники». М, «Со-
ветское радио», 1966 г., ч. I и II, 1968.
52. Тихонов В. И. Статистическая радиотехника. М., «Советское радио», 1966.
53. В о о t о n R. С. The analysis of nonlinear control systems with random
inputs. — «Proc. Sympos. Nonlinear Circuits Analysis», vol. 2, 4953.
54. К а з а к о в И. Е. Приближенный метод статистического исследования. —
«Труды ВВИА», вып. 394, 1954.
55. Лен ин г Дж. X., Бэттин Р. Т. Случайные процессы в задачах автома-
тического регулирования. М., ИЛ, 1958.
56. Пу гаев В. С. Теория случайных функций и ее применение в задачах авто-
матического управления. М., Физматгиз, 1960.
57. Миддлтон Д. Введение в статистическую теорию связи. М., «Советское
радио», т. I; II.
58. Т и х о н о в В. И. Воздействие флуктуаций на простейшие параметрические
системы. — «Автоматика и телемеханика», т. XIX, 1958, № 8.
59. Колмогоров А. Н. Стационарные последовательности в гильбертовом
пространстве. — «Бюллетень МГУ», т. 2, 1941, № 6.
446
60. Янке Е., Эм де Ф., Лёш Ф. Специальные функции. М., «Наука», 1968.
61. Тихонов В. И. Выбросы случайных процессов. М., «Наука», 1970.
62. Степанов В. В. Курс дифференциальных уравнений, М., ГИФМЛ, 1958.
63. Хасьминский Р. 3. О работе консервативной системы при воздействии
малого трения и малого случайного шума. — «ПММ», т. 28, № 5, 1964.
64. Г и х м а н И. И., Скороход А. В. Стохастические дифференциальные
уравнения. Киев, «Наукова думка», 1968.
65. К а з а к о в И. Е., Д о с т у п о в Б. Г. Статистическая динамика нелинейных
автоматических систем М., Физматгиз, 1962.
66. Крамер Г. Математические методы статистики, М., ИЛ, 1948.
67. Г р а д ш т е й н И. С., Р ы ж и к И. М. Таблицы интегралов сумм, рядов и
произведений. М., Физматгиз, 1962.
68. Ч е ч е т Ю. С. Электрические микромашины автоматических устройств. М.,
«Госэнергоиздат», 1965.
69. Щ и п а н о в Г. В. Теория и методы проектирования регуляторов. — «Авто-
матика и телемеханика», 1939, № 3.
70. П е т р о в Б. Н., У л а н о в Г. М. Вопросы теории комбинированного управ-
ления. Сб. «Научно-технические проблемы автоматизации электроприводов».
Изд. АН СССР, 1957.
71. Уланов Г. М. Регулирование по возмущению. М., Госэнергоиздат, 1960.
72. Цыпкин Я. 3. Теория линейных импульсных систем. М., Физматгиз, 1963.
73. П о н т р я г и н Л. С., Болтянский В. Г., Г а м к р е л и д з е Р. В.,
Мищенко Е. Ф. Математическая теория оптимальных процессов. М., Физ-
матгиз, 1961.
74. Лейтман Дж. Введение в теорию оптимального управления. М., «Наука»,
1968.
75. Wiener N. Extrapolation, Interpolation and Smoothin of Time series with
Engineering Applications — «John Wiley and Sons.», Inc., New York, 1949.
76. Колмогоров A. H. Интерполирование и экстраполирование стационарных
случайных последовательностей «Изв АН СССР, сер. математ.», т. 5, 1941,
№ 1.
77 Ф л ю г г е-Л о т ц И., Титус Г. Оптимальное и квазиоптимальное управле-
ние системами третьего и четвертого порядка. «Тр. II конгресса ИФАК. Опти-
мальные системы. Статистические методы». М., «Наука», 1965.
78. Фальдбаум А. А. Основы теории оптимальных автоматических систем.
М., «Наука», 1966.
79. Солодовников В. В. Статистическая динамика линейных систем авто-
матического управления. М., ГИМФЛ, 1960.
80. Стратонович Р. Л. Условные марковские процессы и их применение к
теории оптимального управления. «Изд. МГУ», 4966.
81. Панасенко В. Д. Элементы автоматических устройств и вычислительной
техники. М., Оборонгиз, 1962.
82 Алексеев А. И., Шереметьев А. Т., Тузов Г. И., Глазов В. И.
Теория и применение псевдослучайных сигналов. М., «Наука», 1969.
83. Дет ин о в А. Н. Оптимальный прием фазовоманипулированных сигналов с
непостоянной частотой в шуме. — «Радиотехника и электроника», т. XIII,
№ 3, 1968.