/


































































































































































































































Автор: Левин В.А. Малиновский В.Н. Романов С.К.
Теги: электротехника электроника
ISBN: 5-256-00339-9
Год: 1989




Текст
В. А. Левин
В. Н. Малиновский
С. К. Романов
СИНТЕЗАТОРЫ
ЧАСТОТ
С СИСТЕМОЙ
ИМПУПЬСКО-
ШАЗОВПЙ
АОТОПОДСТРОЙКИ
Scanned & DJVUed
OCREWDRIVEIX
Москва
«Радио и связь»
1989
УДК 621.396.662
Левин В. А., Малиновский В. Н., Романов С. К. Синтезаторы частот с сис
темой импульсно-фазовой автоподстройки. — М,- Радио и связь. 1989. — 232 с.
ил. — ISBN 5-256-00339-9.
Излагаются как оригинальные, так и известные результаты исследованн!
функционирования синтезаторов частот (СЧ) с импульсно-фазовой автопод
стройкой частоты (ИФАПЧ). Приводятся основные термины и определения
поясняются физические процессы, проводится обзор структурных схем, клас
сифицируются методы расширения полосы захвата и повышения быстродействия
Изучаются основные узлы: импульсные фазовые и частотно-фазовые детекторы
цифровые делители частоты.
Исследуются особенности работы делителей частоты с фиксированными I
переменными коэффициентами деления, перестройка частоты автогенераторот
варикапами. Строятся цифровые модели основных узлов СЧ и алгоритмы моде
лирования синтезаторов в целом. Методом фазовой плоскости анализируются-
бесфильтровые СЧ с ИФАПЧ, обладающие предельно высоким быстродействием.
Исследуются динамические характеристики ИФАПЧ с фильтром нижних частот,
находятся условия устойчивости «в малом», синтезируются линеаризованные-
системы ИФАПЧ с импульсно-фазовым детектором «выборка — запоминание».
Оценивается влияние нелинейности характеристики управляемого генератора и
начального отклонения частоты колебаний от установившегося значения на дли-
тельность переходных процессов в ИФАПЧ. Прослеживаются пути образования
детерминированных побочных составляющих в спектре выходного сигнала СЧ
с ИФАПЧ. Описываются помехи, обусловленные применением делителей с дроб-
ным коэффициентом деления, и определяется закон преобразования шумов в
системе ИФАПЧ. Устанавливается связь процессов дискретизации по времени
с уровнем фазовых шумов. Описывается ряд технических решений, направлен-
ных на повышение быстродействия СЧ. Прикладное значение проведенных ис-
следований подтверждается разработкой инженерных методик расчета и раз-
личными схемотехническими решениями. Приведенные таблицы, графики и но-
мограммы повышают эффективность проектирования СЧ с ИФАПЧ. В прило-
жениях дается описание программ для расчета основных характеристик СЧ с
ИФАПЧ.
Для научных работников, специализирующихся в области радиосвязи,
радионавигационной и радиоизмерительной техники; может быть полезна аспи-
рантам и студентам старших курсов радиотехнических специальностей.
Табл 52. Ил. 137. Библиогр. 131 назв.
Рецензенты: д-р техн, наук, проф. В. В. Шахгильдян, канд. техн, наук
А.В. Рыжков
Редакция литературы по информатике и вычислительной технике
Л
2303040500-174
040(01)-89
122-89
ISBN 5-256-00339-9.
© Левин В. А., Малиновский В
Романов С. К.
ОГЛАВЛЕНИЕ
Условные обозначения ................................................. 5
Предисловие........................................................... 6
Глава 1. Основные понятия............................................. 8
1.1. Физические процессы в синтезаторах частот с ИФАПЧ ... 8
1.2. Классификация синтезаторов частот с ИФАПЧ. Структурные
схемы..........................................................13
Глава 2. Узлы синтезаторов частот с системой ИФАПЧ .... 21
2.1. Импульсно-фазовые детекторы..............................21
2.2. Импульсные частотно-фазовые детекторы....................28
2.3. Управляемые генераторы...................................40
2.4. Цифровые делители частоты................................47
Глава 3. Математическое описание работы синтезаторов частот с систе-
мой ИФАПЧ...................................................59
3.1. Постановка задачи и краткие сведения о методах анализа . . 59
3.2. Эквивалентные схемы для построения математических моделей
синтезаторов частот ............................................. 65
3.3. Математические модели на основе «естественного» пространства
состояний.....................................................67
3.4. Математические модели на основе разложения передаточной
функции ФНЧ на элементарные дроби.............................78
3.5. Методы построения упрощенных математических моделей . . 85
3.6. Частотные методы анализа синтезаторов с ИФАПЧ .... 89
Г л а в а 4. Цифровое моделирование синтезаторов частот с ИФАПЧ 94
4.1. Эквивалентная структурная схема СЧ для цифрового моделиро-
вания ............................................................94
4.2. Модели цифровых узлов синтезаторов.......................96
4.3. Модели аналоговых узлов синтезатора.....................103
4.4. Построение алгоритмов моделирования синтезаторов с ИФАПЧ 106
Глава 5. Динамические характеристики бесфильтровых синтезаторов
частот с ИФАПЧ........................................................ИЗ
5.1. Устойчивость и переходные процессы в СЧ с линеаризованной
системой ИФАПЧ....................................................ИЗ
5.2. Анализ системы ИФАПЧ на фазовой плоскости...................115
5.3. Полоса захвата системы ИФАПЧ с ИФД «в-з»....................118
5.4. Полоса захвата системы ИФАПЧ с ИЧФД «в-з» .... 125
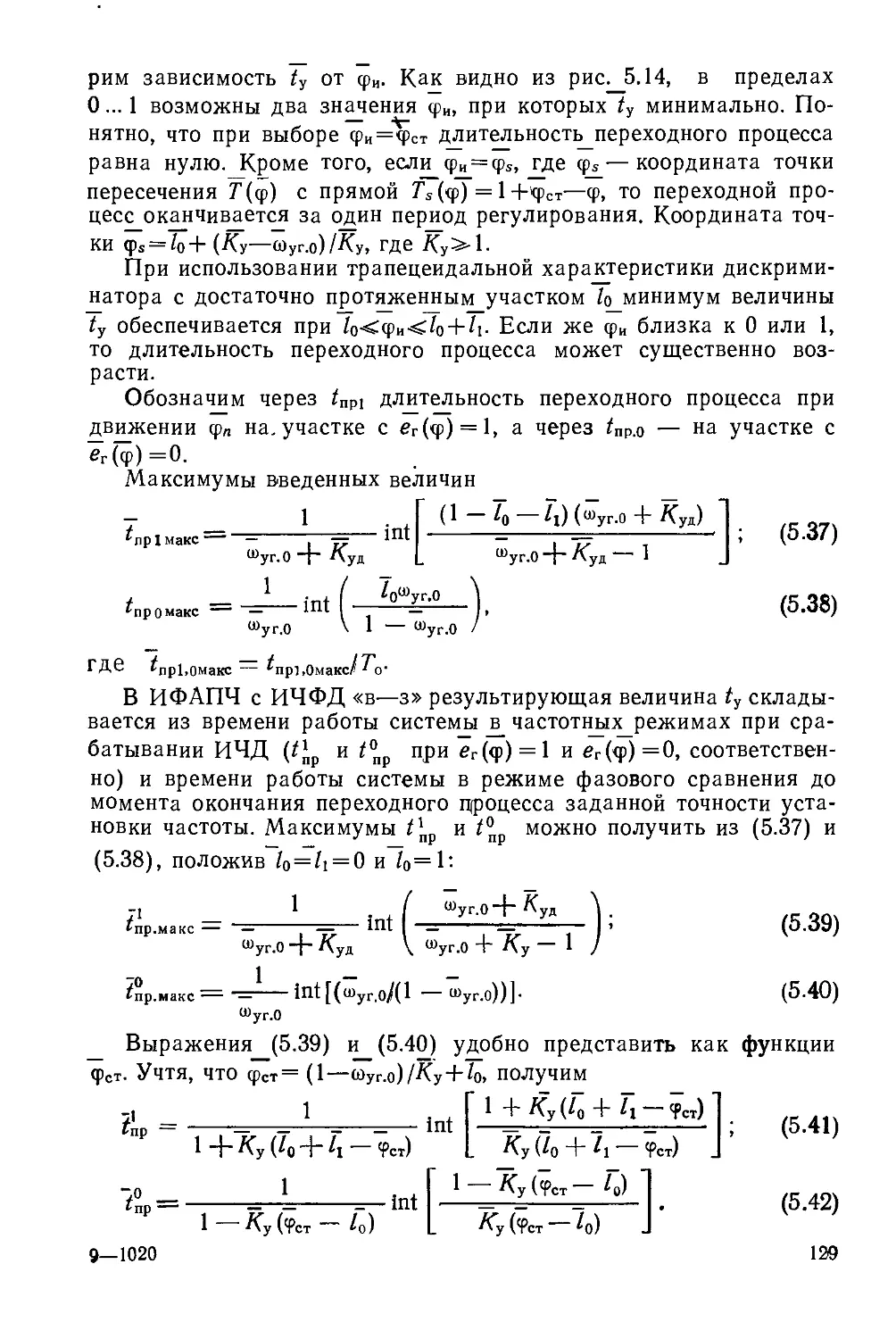
5.5. Длительность переходных процессов...........................128
Глава 6. Динамические характеристики системы ИФАПЧ с ФНЧ 130
6.1. Устойчивость «в малом» системы ИФАПЧ........................130
6.2. Синтез линеаризованных систем ИФАПЧ с применением ампли-
тудно-фазовых характеристик .................................... 135
3
6.3. Устойчивость «в целом» системы ИФАПЧ с ФНЧ .... 139
6.4. Переходные процессы в системе ИФАПЧ...........................145
Глава 7. Методы повышения быстродействия синтезаторов частот 156
7.1. Синтезаторы с дробно-рациональной аппроксимацией значений
выходных частот...................................................156
7.2. Синтезаторы с предварительной установкой частоты и оптималь-
ным управлением...................................................161
7.3. Применение систем автоматического поиска частоты .... 169
7.4. Синтезаторы с изменяемыми характеристиками канала управле-
ния ..............................................................175
Глава 8. Спектральные характеристики выходных колебаний синтезато-
ров частот с системой ИФАПЧ...........................................177
8.1. Побочные составляющие.........................................177
8.2. Преобразование шумов системой ИФАПЧ...........................184
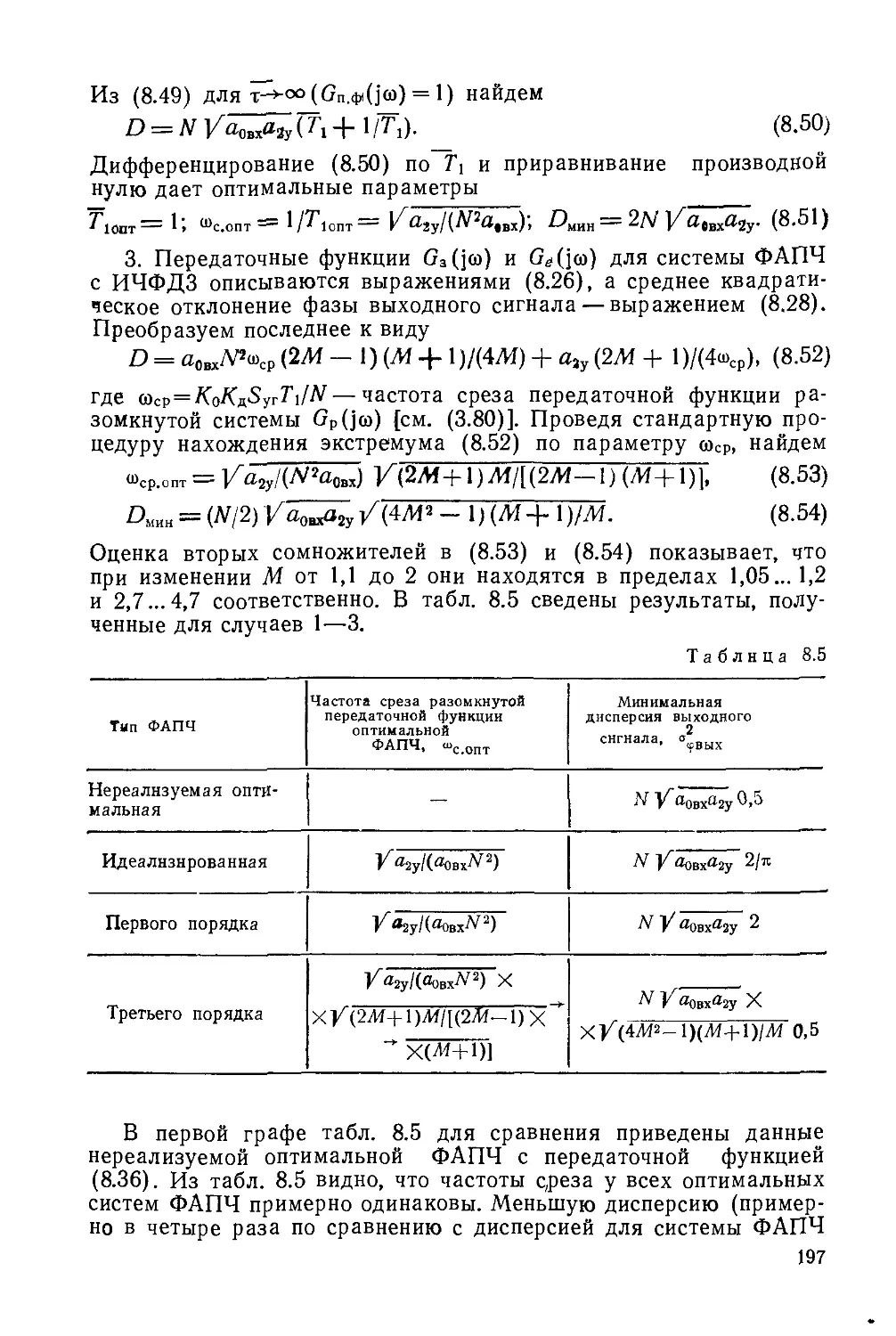
8.3. Оптимизация систем ИФАПЧ по шумовым характеристикам . . 191
8.4. Влияние фликкерных шумов на набег фазы........................199
Глава 9. Расчет и проектирование синтезаторов с ИФАПЧ 203
9.1. Расчет синтезаторов с ИЧФД....................................203
9.2. Схемы основных узлов синтезаторов.............................214
Приложение. Комплекс программ расчета СЧ с ИФАПЧ.......................222
Список литературы................................*.....................226
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
еВых(Х) —выходной сигнал СЧ
Ел — максимальное значение выходного сигнала дис-
криминатора
ел(Р) — выходной сигнал дискриминатора
e0(t) — сигнал на выходе ДФКД
eor(t) —выходной сигнал ОГ
ec(i) — сигнал на выходе ДПКД
eyr(t) — выходной сигнал УГ
вупр(А) — управляющий сигнал
вф(7) —напряжение на выходе ФНЧ
fyr, Шуг — частота выходного колебания УГ *
f0 — частота следования импульсов ДФКД
fc — частота следования импульсов ДПКД
fcp — частота среза системы
fT — тактовая частота
fyr.H — номинальное рабочее значение частоты УГ
/Уго — начальная частота УГ
fyr.cT — частота УГ в стационарном режиме **
G$(s) — передаточная функция ФНЧ
КУ — нормированный коэффициент усиления ИФАПЧ
Кул — нормированная полоса удержания
М, Км — показатели колебательности линеаризованной
системы ИФАПЧ по входу и выходу соответст-
венно
N, Nn, No — коэффициент деления ДПКД
P(t) — порог срабатывания РЭ
7?д — коэффициент деления ДФКД
Syr — крутизна характеристики УГ
«д.п — уровень дискретных побочных составляющих вы-
ходного сигнала СЧ
у3 — относительная полоса захвата
Д/з — полоса захвата
Д/м — девиация частоты
Afyr.H — скачок частоты
AfyA — полоса удержания
Д/е — точность установки частоты
Д/ — шаг дискретизации
е — относительная точность установки частоты
♦ Здесь и далее обозначения частоты сигнала символами t или о> (круго-
вая частота) равнозначны.
** Здесь и далее символ «ст» используется для обозначения сигнала в ста-
ционарном режиме.
5
ПРЕДИСЛОВИЕ
Синтезаторы частот (СЧ), или, как их называют в более развер-
нутом виде, системы синтеза (формирования) дискретного мно-
жества частот, получили ныне столь широкое распространение в
самых разнообразных видах аппаратуры, что-правомерно говорить
о выделении их в самостоятельный класс радиотехнических уст-
ройств. Поток публикаций, посвященный различным аспектам ис-
следований и проектирования СЧ, не только не иссякает, но и,
наоборот, имеет устойчивую тенденцию к быстрому росту. Харак-
терно, что такая ситуация существует, несмотря на то, что появле-
ние первых разработок синтезаторов (тогда они назывались систе-
мами диапазонно-кварцевой стабилизации частоты) относится еще
к 30-м и 40-м годам.
В настоящее время выявились следующие основные методы
построения СЧ: косвенный на базе систем импульсно-фазовой ав-
топодстройки частоты (ИФАПЧ), прямой с использованием филь-
трующих элементов на поверхностно-акустических волнах, цифро-
вой на основе вычислительных процедур. Каждый метод имеет
свои особенности, достоинства и недостатки. Не останавливаясь
подробно на сопоставлении названных методов построения СЧ
(подобные вопросы являются предметом обсуждения в [1—5]),
отметим, что СЧ с ИФАПЧ относятся к числу чрезвычайно дина-
мично развивающихся систем формирования дискретного множе-
ства частот. Решающую роль при этом играют такие важнейшие
преимущества СЧ с ИФАПЧ, как возможность реализации высо-
кокачественных спектральных и приемлемых динамических харак-
теристик при хороших габаритных, энергетических и других пока-
зателях. Подчеркнем также, что синтезаторы с ИФАПЧ не имеют
каких-либо принципиальных ограничений с точки зрения выбора
частотного диапазона выходного сигнала. Практически может
использоваться любой участок частотной оси: от единиц и десят-
ков герц до гигагерц.
В предлагаемой вниманию читателей книге предпринята по-
пытка систематизированного и всестороннего изложения извест-
ных и оригинальных результатов, касающихся различных аспектов
6
<34 с ИФАПЧ. Сюда относятся разработка методов математичес-
кого и цифрового моделирования, исследование повышения быст-
родействия и улучшения спектральной чистоты колебаний, созда-
ваемых СЧ, анализ наиболее важных и сложных узлов синтезато-
ра и др. Все эти вопросы не только взаимосвязаны, но и находятся
в диалектическом противоречии. В книге большое место уделяет-
ся поискам компромиссных решений, а также разработке СЧ в
тех случаях, когда один или группа параметров имеют приоритет-
ное значение.
При ознакомлении с материалом следует иметь в виду, что
СЧ с ИФАПЧ является разновидностью систем автоматического
регулирования с периодической нелинейностью. Это обстоятельст-
во исключает проектирование СЧ с ИФАПЧ, основанное на интуи-
тивно^экспёриментальном подходе, и требует привлечения доста-
точно тонкого математического аппарата и применения ЭВМ.
Весьма важна задача выявления прикладного характера получен-
ных результатов и их физическая интерпретация. Заключительная
глава полностью посвящена описанию методов инженерных рас-
четов и разработки СЧ с ИФАПЧ.
Известно, что наиболее правильным с точки зрения усвоения
методов анализа является изложение материала в соответствии с
принципом «от простого к сложному». Однако из-за ограниченного
объема книги читателю придется изучать более углубленно ту
или иную проблему самостоятельно, пользуясь приводимой лите-
ратурой.
Книга написана коллективом авторов: В. А. Левиным и
В. Н. Малиновским — гл. 1, 4, 5, 7, 9; В. А. Левиным и С. К- Рома-
новым — гл. 2, 3, 6, 8; С. К. Романовым, В. Н. Малиновским —
приложение.
Авторы выражают благодарность Н. Н. Калаянову, Н. И. Зуе-
ву, Н. М. Корецкому и В. В. Саутину за помощь, оказанную при
подготовке отдельных разделов книги к изданию.
ГЛАВА 1
ОСНОВНЫЕ понятия
1.1. ФИЗИЧЕСКИЕ ПРОЦЕССЫ В СИНТЕЗАТОРАХ ЧАСТОТ
С ИФАПЧ
Вначале несколько слов о терминологии. В"предлагаемой внима-
нию читателей книге изучаются синтезаторы частот (СЧ), пост-
роенные на основе системы импульсно-фазовой автоподстройки
частоты (ИФАПЧ). Для краткости подобные устройства будут
именоваться СЧ с ИФАПЧ или просто СЧ. Рассмотренный класс
синтезаторов часто неточно именуют цифровыми (ЦСЧ), имея в
виду прежде всего широкое использование в них элементов и уз-
лов вычислительной техники.
Функционирование СЧ основывается на работе системы авто-
подстройки, но при всей условности различий их не следует отож-
дествлять. Говоря о СЧ, будем подразумевать устройство, создаю-
щее дискретное множество частот в заданном диапазоне с требуе-
мой стабильностью и шагом (интервалом), а также качеством вы-
ходного сигнала. Собственно же ИФАПЧ представляет собой
импульсную систему автоматического регулирования с периоди-
ческой нелинейностью [6—8], что предопределяет весьма сложные
физические процессы, протекающие й ней. В СЧ из-за наличия
ИФАПЧ возникает противоречивая связь между динамическими и
спектральными характеристиками. Проблема разрешения этих
противоречий является самой сложной. Система автоподстройки
определяет быстродействие СЧ, т. е. длительность переходных
процессов установления стационарного или установившегося режи-
ма (режима синхронизма). Кроме того, в СЧ возникают такие
характерные режимы, как удержание и захват, а также взаимо-
связь между динамическими характеристиками и видом периоди-
ческой нелинейности. Если по ходу изложения речь идет о непре-
рывной системе фазовой автоподстройки частоты, то она без до-
полнительных пояснений называется ФАПЧ.
На рис. 1.1 приведена структурная схема наиболее простого'
синтезатора с ИФАПЧ, который имеет лишь одно кольцо (контур)
8
fv(t)
Рис. 1.1. Структурная схема синтезатора с ИФАПЧ
регулирования и поэтому носит название однокольцевого. По-
скольку рис. 1.1 является лишь иллюстрацией к описанию физи-
ческих процессов в ИФАПЧ, на схеме не изображены каскады
формирования импульсов для делителей частоты, частотно-преоб-
разовательные каскады, часто включаемые в тракт обратной свя-
зи (ТОС), и т. п. На выходе СЧ стоит буферный каскад (БК),
снижающий влияние нагрузки синтезатора на генератор, управляе-
мый по частоте (УГ). Он изображен для того, чтобы показать, что-
выходной сигнал СЧ еВыХ(0 может отличаться по уровню от еуг(/)
и иметь частоту fyr, определяемую УГ. Если БК отсутствуют, то
еуг(/) не отличается по форме от еВых(0 и представляет собой
квазигармонические или импульсные колебания. Напряжение
еуг(0 одновременно подается на вход ТОС, в котором включен
делитель частоты с переменным коэффициентом деления (ДПКД).
Частота fyr с помощью управляющего элемента (УЭ) (обычно-
варикапа), входящего в колебательный контур УГ и не показан-
ного на рис. 1.1, может изменяться в зависимости от управляющего
сигнала еупр(/). При отсутствии БК между фильтром нижних час-
тот (ФНЧ) и УГ eynP(Os<?<b(O, где вф(0 — напряжение на выходе
ФНЧ. С учетом воздействия дестабилизирующих факторов преде-
лы перестройки [уг должны несколько превышать диапазон выход-
ных частот синтезатора. Отметим, что в общем случае, если между
ФНЧ и УГ устанавливается БК, то еупр(/) отличается от вф(1).
Зависимость fyr=,»|>yr(eynp) в установившемся режиме называется
статической характеристикой управления или сокращенно харак-
теристикой управления УГ. При анализе ИФАПЧ используют по-
нятия крутизны характеристики управления Syr=dif>yr(eynp) /deynP.
Если функция 4>yr(eynP) нелинейна, то Syr зависит от еупР.
С помощью ДПКД частота fyr понижается в коэффициент де-
ления N раз. Сигнал на выходе делителя ес(/) представляет собой
последовательность импульсов с частотой следования fc=fVr/N.
Как и во всякой системе регулирования, для образования сигнала
ошибки ед(/) в ИФАПЧ имеется датчик рассогласования, назы-
ваемый обычно дискриминатором (Д). В качестве дискриминатора
в ИФАПЧ используется импульсно-фазовый детектор (ИФД) или
импульсный частотно-фазовый детектор (ИЧФД). Колебания
ec(t) поступают на так называемый сигнальный вход Д. На опор-
9-
ный вход дискриминатора подается импульсная последователь-
ность е0 (0 с частотой следования f0, формирующаяся на выходе
делителя частоты с фиксированным коэффициентом деления
(ДФКД). На вход ДФКД воздействует синусоидальный сигнал
еог(0 от опорного генератора (ОГ) (на рис. 1.1 не показан) с
частотой for. Частота fo = for//?A (где 7?д — коэффициент деления
ДФКД) называется частотой сравнения. Поскольку на вход Д
поступают две импульсные последовательности ес(/) и e0(t), то,
строго говоря, нельзя говорить об измерении разности фаз между
ними, поскольку речь идет не о гармонических сигналах. Физичес-
кий смысл имеет лишь разность времени хе подачи на вход Д тех
или иных импульсных сигналов. Однако, учитывая квазипериоди-
ческий характер ес(/)> при малых отклонениях fyr от стационар-
ного значения fyr.CT вводят понятие разности фаз <ре между импуль-
сами разных последовательностей, причем фе = 2лте/7’о, где То =
= 1/fo. Фактически речь может идти о разности фаз первых гар-
моник сигналов е0(/) и ес(0- В дискриминаторе происходит выде-
ление информации о фазовом (временном) рассогласовании фе
между импульсами последовательностей е0^) и ес(0 и преобра-
зование ее в выходной сигнал ед(/) (напряжение или ток). Опре-
деление статической фазовой характеристики (или сокращенно
фазовой характеристики) дискриминатора производится в стацио-
нарном режиме при равенстве частот f0 = fc. При этом усреднением
вд(/) во времени на интервале То находится постоянная составля-
ющая сигнала на выходе дискриминатора ед.п = ед.п(ф<>). Фазовая
характеристика ед.п(фе) нелинейна и при монотонном изменении
фе во времени носит периодический характер.
Работа дискриминатора типа ИЧФД описывается статической
частотной характеристикой ед.п = ед.п(Д^. Последняя также отно-
сится к стационарному режиму работы Д и представляет собой
зависимость усредненной за интервал 7’yCp=l/|fo—fc| постоянной
составляющей ед.п от разности частот (f0—fc).
Выходной сигнал дискриминатора ед(/) поступает на вход
сглаживающего звена — ФНЧ. Сигнал вф(/) с выхода фильтра
используется непосредственно в качестве воздействия еуПр(0,
управляющего частотой fyr. От амплитудно-частотной и фазочас-
тотной характеристик ФНЧ зависят важнейшие характеристики
СЧ — динамические (устойчивость и быстродействие) и спектраль-
ные. Последовательно включенные Д и ФНЧ образуют канал уп-
равления (КУ) системы ИФАПЧ. Информацию о разности фаз
входных импульсных последовательностей e0(t) и ec(t) можно
получить с помощью какого-либо параметра выходного сигнала
ед(/), зависящего от фе. В разных типах Д этот параметр разли-
чен: уровень напряжения ед(/), ширина импульсов выходного по-
тока и др. Постоянная (в стационарном режиме) или медленноме-
няющаяся (в переходном режиме) составляющие этого времен-
нбго процесса выделяются в ФНЧ, не входящем в дискриминатор.
В первом приближении работа схемы на рис. 1.1 происходит
следующим образом. Допустим, что система ИФАПЧ находится в
10
стационарном режиме, когда /Уг.ст=/уг.н, где fyr.H — номинальная
рабочая частота (одна из дискретного множества). Если при этом
коэффициент деления ДПКД равен N, то fyr.«=foN=foTN/K)i.
В рассмотренном режиме синхронизма fc = fo и сигнал управления
eynp(/)=const значение еупр.Ст должно быть таким, чтобы ском-
пенсировать возникшее под воздействием дестабилизирующих фак-
торов частотное рассогласование. Очевидно, что еупр.Ст= (/Уг.н—
—W/Syr (Syr = const, где fyr.o— частота /уг при нулевом управ-
ляющем напряжении, т. е. начальная частота колебаний УГ).
Если требуется изменить частоту настройки УГ, то достаточно
перейти к новому коэффициенту деления N. Минимальная дис-
кретность в перестройке fyr, т. е. шаг сетки частот Fm, определяет-
ся частотой сравнения f0. При использовании в СЧ делителей с
дробно-переменным коэффициентом деления (ДДПКД) [5] спра-
ведливо равенство Лп^о/Ю», где i — число декад дробности.
Уточним понятия режимов функционирования ИФАПЧ. Упомя-
нутый стационарный режим, при котором частоты f0 = fc, соответст-
вует рабочему режиму работы СЧ. Однако он не является единст-
венно возможным. Во-первых, даже в стационарном режиме воз-
можны изменения частоты fyr под действием дестабилизирующих
факторов. Если они, однако, настолько медленны, что систему
ИФАПЧ можно все время считать находящейся в синхронизме, то
говорят, что имеет место режим синхронизма (удержания). Соот-
ветственно вводится в рассмотрение полоса удержания Д/уд —
область отклонений (расстроек) частоты /уг от своего номинально-
го значения, при которых не нарушается имевший место стацио-
нарный режим. Во-вторых, существует режим захвата, при котором
в системе ИФАПЧ происходят переходные процессы от ее началь-
ного асинхронного состояния к установившемуся. Полоса захвата
Д/з — это область отклонений частоты fyT от своего номинального
значения, внутри которой стационарный режим наступает всегда,
т. е. при любых начальных условиях. В-третьих, в ИФАПЧ может
возникать так называемый режим биений, при котором частота
fyr непрерывно изменяется во времени. Этот режим в синтезаторах
частот является вредным.
Пусть низший и высший уровни управляющего напряжения
обозначены через еупР.н и еупр.в соответственно. Тогда по определе-
нию Д/Уд='фУг (еупр.в) фУг (еупр.н). При Syr = const Д^уД = Зуг (еупр.в—
£УпР.н) .
Что касается полосы захвата, то ее определение в общем слу-
чае значительно сложнее, так как оно должно основываться на
анализе переходных процессов в нелинейной импульсной системе
ИФАПЧ (см. гл. 5, 6). Задача упрощается только в случае систе-
мы ИФАПЧ первого порядка, для анализа которой разработаны
специальные графические методы исследования (см. гл. 5).
Из физических соображений ясно, что стационарный режим мо-
жет быть реализован на практике только в том случае, если
ИФАПЧ устойчива «в малом», т. е. обладает сходимостью к поло-
жению равновесия при достаточно малых возмущениях. Предпола-
11
гается, что в процессе компенсации последних фазовое рассогла-
сование не выходит за пределы линейного участка фазовой ха-
рактеристики дискриминатора. При оценке устойчивости «в ма-
лом» используются различные методы, разработанные для дис-
кретных систем автоматического регулирования [9, 10]. Все они
основаны на линеаризации ИФАПЧ в окрестности точки равнове-
сия и на математическом описании системы линейным разностным
уравнением [7]. Исходя из физических соображений, можно утверж-
дать, что устойчивый «в малом» стационарный режим может при
определенных условиях не наступить. Такое положение будет
иметь место, если система автоподстройки окажется неустойчивой
«в целом». По существу, полоса захвата является ничем иным,
как областью начальных расстроек fyT, внутри которой ИФАПЧ
устойчива «в целом». В связи с изложенным можно говорить о не-
обходимости выполнения условий устойчивости «в целом» для эф-
фективной работы ИФАПЧ, а следовательно, и СЧ.
При изменении коэффициента деления N, включении СЧ, скач-
кообразном изменении fyr возникает режим захвата и в системе
ИФАПЧ протекают переходные процессы. В зависимости от па-
раметров ИФАПЧ они носят колебательный или апериодический
характер. Основной параметр этих процессов — длительность
(время) /у, являющаяся мерой быстродействия СЧ. Величина ty
определяется как промежуток времени между моментом начала
возмущения /н и моментом tK, после которого отклонение fyr от
/^уг.ст (фе от фе ст) не превышает заданной величины ДД(Д<ре),
называемой точностью установления частоты (фазы). (Пример ко-
лебательного процесса (процесса установления) при переключении
СЧ с частоты fH на частоту fK приведен на рис. 4.9.) Если переход-
ной процесс возникает при переключении коэффициента деления
ДПКД с Aj на N2, справедливо равенство Afyr.H=fo(M2—Ni). При
малоинерционном ФНЧ или при его отсутствии ty существенно
зависит от частоты сравнения f0 и при ее увеличении уменьшается.
Наряду с основным параметром, характеризующим быстродей-
ствие СЧ, существует другая группа параметров синтезатора,
имеющих первостепенное значение. В первую очередь это спек-
тральные характеристики выходного сигнала СЧ еВЫх(0- Для их
оценки рассматривается стационарный (точнее, квазистационар-
ный) режим синхронизма ИФАПЧ, находящейся под воздействи-
ем детерминированных и случайных возмущений (см. гл. 8). Отме-
тим, что особенностью СЧ с ИФАПЧ, отличающей его от СЧ с
ФАПЧ, является наличие побочных составляющих в частотном
спектре еВЫх(0, обусловленных дискретным характером процесса
регулирования. Интенсивность указанных составляющих сущест-
венно зависит от типа дискриминатора (см. гл. 2).
1.2. КЛАССИФИКАЦИЯ СИНТЕЗАТОРОВ ЧАСТОТ С ИФАПЧ.
СТРУКТУРНЫЕ СХЕМЫ
Синтезаторы частот, как правило, не являются функционально са-
мостоятельными устройствами. Они входят в состав приемной,
передающей, измерительной и другой аппаратуры и используются
для гетеродинирования колебаний, возбуждения усилителей мощ-
ности, а также в качестве датчика эталонных частот и т. д. Техни-
ческие характеристики СЧ, важнейшие из которых приведены в
[1, 5, 11], оказывают решающее влияние на методы их построения.
Различие требований к синтезаторам, входящим в состав той
или иной радиоаппаратуры, а также непрерывное совершенство-
вание схемотехники и элементной базы привели к созданию мно-
гочисленных структур СЧ с ИФАПЧ. Наиболее простым является
однокольцевой синтезатор, структурная схема которого приведена
на рис. 1.1. К основным достоинствам таких СЧ относятся: просто-
та формирования дискретного множества частот; отсутствие поло-
совых фильтров, смесителей и формирователей опорных частот,
колебания которых являются дополнительным источником образо-
вания побочных составляющих в спектре выходного сигнала СЧ.
Следует подчеркнуть, что указанные характеристики реализу-
ются при хороших габаритно-массовых показателях, малом энерго-
потреблении, высокой надежности и технологичности. Однако, на-
ряду с несомненными достоинствами, однокольцевым СЧ свойст-
венны недостатки. Во-первых, трудно обеспечить высокое
быстродействие при синтезе частот с малым шагом Fm. Во-вторых,
устранить противоречия между требованием по фильтрации внут-
ренних и внешних помех, подавлением внешних помех и быстро-
действию и т. д.
Ниже в основном изучаются базовые однокольцевые структуры
СЧ, поскольку при этом удается выявить основные особенности
рассматриваемого класса СЧ. Для анализа многокольцевых
ИФАПЧ используются те же методы исследования.
Рис. 1.2. Классификация методов расширения полосы захвата
13
Рис. 1.3. Синтезатор с предварительной установкой УГ
Известно большое число методов улучшения характеристик од-
нокольцевых синтезаторов. Классифицируем их по ряду признаков.
Начнем с методов расширения полосы захвата при сохранении
высокой фильтрующей способности ИФАПЧ в установившемся
режиме (рис. 1.2). Эти методы можно разбить на две группы:
основанные на принудительном уменьшении начальной расстройки
УГ до значения, при котором ИФАПЧ входит в режим синхрониз-
ма [5]; основанные на расширении полосы захвата вследствие не-
посредственного изменения характеристик канала управления
кольца ИФАПЧ в режиме захвата [4, 12].
Простейшим методом, относящимся к первой группе, является
предварительная установка fyr вблизи требуемого номинального
значения (рис. 1.3). Для этого в схему вводится цифроаналоговый
преобразователь (ЦАП) и дешифратор (ДШ). Весь диапазон пе-
рестройки УГ делится на ряд поддиапазонов. Предварительная
установка fyr производится подачей на второй вход сумматора
напряжений (См) напряжения еупр2 с выхода ЦАП. Точная уста-
новка fyr, т. е. режим синхронизма, осуществляется затем системой
ИФАПЧ. Минимальное число поддиапазонов определяется из не-
обходимости обеспечения надежного захвата а пределах каждого
поддиапазона. При необходимости использования ФНЧ с большей
инерционностью должна быть повышена точность предварительной
установки fyr, так как Af3 при этом резко сужается. Однако в
реальных условиях вследствие ряда дестабилизирующих факто-
ров собственные отклонения частоты могут быть значительными^
что снижает эффективность рассмотренного метода. Развитием
Рис. 1.4. Синтезатор с устройством поиска
14
последнего является введение системы поиска частоты. При этом
установка fyv производится автоматическим выбором управляюще-
го напряжения г?упР2, при котором в системе ИФАПЧ происходит
захват. Для определения момента вхождения системы ИФАПЧ в
указанный режим в схему вводится датчик частотного рассогласо-
вания (ДЧР) (рис. 1.4). Штриховыми линиями обозначены другие
возможные варианты подключения ДЧР. Для формирования закона
изменения еуп₽2 включается устройство формирования кода (УФК).
В простейшем случае в качестве УФК может быть использован
реверсивный счетчик, изменяющий код управления ЦАП, а следо-
вательно, и еупр2 по линейному закону с некоторой тактовой час-
тотой Д [7]. Максимальное время поиска в этом случае £п.макс =
= 2nlf-r, где п — разрядность ЦАП.
Отметим, что подачу еупР2 (на рис. 1.3 и 1.4) можно осуществить
на вход ФНЧ. Для этого сумматор напряжений должен быть вклю-
чен между используемым в качестве дискриминатора ИФД и
фильтром. В этом случае ФНЧ производит дополнительную фильт-
рацию еупр2, что благоприятно сказывается на спектральных ха-
рактеристиках синтезатора. Существуют более эффективные ал-
горитмы поиска с точки зрения повышения- быстродействия СЧ
(см. гл. 7).
Эффективным средством расширения полосы захвата являет-
ся использование ИЧФД. Это позволяет при минимальных аппа-
ратурных затратах обеспечить широкодиапазонную перестройку
fyr при сохранении высокого качества выходного сигнала в уста-
новившемся режиме. Отличие ИЧФД от обычного ИФД заключа-
ется в том, что в нем имеются два режима сравнения: по фазе и
по частоте. Первый — является основным и при этом ИЧФД дей-
ствует аналогично ИФД. В частотном режиме работы периодич-
ность характеристики дискриминатора, свойственная ИФД, устра-
няется и информация, которая выдается ИЧФД, служит только
для индикации наличия частотного рассогласования между вход-
ными сигналами e0(t) и ec(t) и его знака. Критерием смены ре-
жима работы ИЧФД, как правило, является нарушение очеред-
ности поступления входных импульсов дискриминатора (см. гл. 2).
Одним из методов второй группы является включение в КУ
нелинейного фильтра нижних частот (НФ). Простейшим вариан-
том является интегрирующий 7?С-фильтр (рис. 1.5). Как известно,.
Рис. 1.5. Простейший нелинейный Рис. 1.6. Простейший коммутируемый
фильтр фильтр
15
Рис. 1.7. Синтезатор с изменяемым коэффициентом усиления в цепи управ-
ления УГ
его свойства определяются постоянной времени T = RC. В данном
случае последнюю можно изменять в процессе работы ИФАПЧ в
зависимости от уровня сигнала, поступающего на вход фильтра.
В режиме захвата переменное напряжение с выхода ИФД откры-
вает диоды VD1 и VD2, при этом закорачивается R, что приводит
к уменьшению инерционности фильтра и, следовательно, к рас-
ширению Д/з. Естественно, что уровень переменного напряжения
на входе НФ в режиме захвата должен быть достаточным для
надежного открытия диодов. В стационарном режиме ИФАПЧ
переменное напряжение на входе фильтра мало, диоды закрыты
и фильтр эффективно ослабляет входные помехи, так как инер-
ционность НФ в этом случае велика. Заметим, что применение
НФ в качестве единственного звена фильтрации допустимо лишь
тогда, когда в режиме синхронизма сигнал на выходе ИФД имеет
относительно малые пульсации. В противном случае НФ может
быть использован как дополнительный фильтр к основному ФНЧ.
Примером нелинейного коммутируемого фильтра (КФ) может
служить интегрирующее звено, в котором параллельно резистору
R включен ключ Кл (рис. 1.6). Команда на замыкание последнего
подается при переключении выходных частот синтезатора и удер-
живается до достижения системой ИФАПЧ стационарного состоя-
ния. Основной задачей, решаемой при использовании КФ, является
борьба с коммутационной помехой, образующейся на выходе
фильтра.
Расширить полосу захвата ИФАПЧ можно, изменив коэффи-
циент усиления системы. На рис. 1.7 приведена структурная схема
синтезатора, в которой для достижения этого эффекта в цепь
управления УГ введен регулируемый усилитель (РУ). Такой же
усилитель может быть введен между выходом дискриминатора и
входом ФНЧ с целью изменения коэффициента передачи детекто-
ра в переходном режиме. Управление коэффициентом усиления
РУ может быть осуществлено теми же способами, что и в НФ
и КФ.
С рассмотренной задачей ослабления в СЧ противоречий меж-
ду степенью фильтрации помех и расширением полосы захвата
тесно связана проблема повышения быстродействия. Последняя
может решаться методами двух классов [13]: повышением часто-
ты сравнения f0 (класс I) и использованием различных техничес-
ких решений при заданной fo (класс II) (рис. 1.8).
16
Рис. 1.8. Классификация методов повышения быстродействия синтезаторов с
ИФАПЧ
Методы класса I. Реализуются при включении ДДПКД вместо
ДПКД. Применение ДДПКД существенно повышает f0 при за-
данном шаге Fm. Однако говорить об улучшении динамических
характеристик синтезатора можно лишь в том случае, если приня-
ты меры по снижению так называемых «помех дробности» [14].
Частоты последних отстоят от [уг на величину, кратную Fm<f0.
Другим способом повышения быстродействия в рамках мето-
дов класса I является использование алгоритмов аппроксимации
номинальных значений [уг.н. В этом случае вместо ДФКД вводит-
ся ДПКД2 с коэффициентом деления (рис. 1.9). Тогда спра-
ведливо равенство
/Уг.н=/огт. у (to
Рис. 1.9. Синтезатор с аппроксимацией значений выходных частот
2—1020 17
Идея алгоритма заключается в подборе таких У и 7?д, при
которых fyr.H, определяемая из (1.1), была бы достаточно близка
к требуемой. Величины У и /?д (при заданной /ъ?) должны быть
существенно меньше коэффициентов деления ДФКД и ДПКД в
обычном синтезаторе без аппроксимации (см. рис. 1.1) для полу-
чения заданного шага Рш- Подбор подходящих У и Л?д может быть
осуществлен по какому-либо алгоритму, например широко исполь-
зуемому для этой цели алгоритму цепных дробей [15]. Управление
ДПКД1 и ДПКД2 может производиться от вычислительного уст-
ройства, определяющего У-и /?д при поступлении команды на из-
менение fyr.H, либо с помощью постоянного запоминающего устрой-
ства (ПЗУ), хранящего в своей памяти заранее записанные коды
N и /?д. В первом случае ко времени ty установления частоты не-
обходимо добавить длительность вычисления значений N и Рл.
Использование алгоритмов аппроксимации позволяет сущест-
венно повысить быстродействие СЧ, однако приводит к непостоян-
ству Fm, что накладывает известные ограничения на область при-
"менения таких синтезаторов. Кроме того, реализующая алгоритм
система ИФАПЧ работает с изменяющейся в широких пределах
частотой сравнения fo, что затрудняет оптимизацию параметров
цепи регулирования. Анализ работы синтезаторов с аппроксима-
цией значений выходных частот приведен в гл. 7.
Для получения малого значения при высокой частоте f0 ши-
роко применяются различные способы трансформации шага сетки
частот. Наиболее простым из них является использование допол-
нительного делителя частоты на п на выходе СЧ (рис. 1.10). Вы-
ходная частота /вых отличается здесь от /уг в п раз, т. е.
ЛЫх=/уг/« = лу0/«. (1.2>
Из (1.2) следует, что Fm=fo/n, т. е. частота сравнения в п раз
превосходит шаг сетки. Недостатком рассмотренного решения яв-
ляется понижение выходной частоты и сужения в п раз диапазо-
на СЧ.
Более сложным, но распространенным способом трансформа-
ции Fm в рамках метода класса I является построение синтезато-
ров на основе многокольцевой ИФАПЧ [4, 5]. Рассмотрим в каче-
стве примера две схемы, приведенные в [13]. Для схемы на рис. 1.11
выходная частота синтезатора определяется соотношением
/уг 2 = Л — A/'i/oi -Р 02’ О-З)’
Рис. 1.10. Синтезатор с делителем частоты на выходе УГ
18
Рис. 1.11. Двухкольцевой синтезатор с ИФАПЧ
где fob fo2 — частоты сравнения первого и второго колец ИФАПЧ;
f3—частота подставки, вырабатываемая датчиком опорных час-
тот (ДОЧ).
Из (1.3) следует, что, изменив AG и N2 на единицу, можно по-
лучить перестройку fyr на величину Fm = fo2—foi. Частоты fol и fO2
могут быть на несколько порядков выше Рш. При правильном
выборе частотного режима смесителей (См) комбинационные
составляющие на их выходах фильтруются кольцом ИФАПЧ.
На рис. 1.12 приведена схема трехкольцевого синтезатора.
Трансформация шага сетки частот происходит здесь за счет деле-
ния частоты второго синтезатора /УГ2 и использования ее в качест-
ве опорной в выходном кольце ИФАПЧ. Вспомогательный синте-
затор СЧ1 необходим для расширения диапазона перестройки
синтезатора. Выходная частота определяется соотношением fyr=
= fyri + fyr2/Af. Отсюда следует, что шаг сетки частот на выходе
СЧ в М. раз меньше шага (частоты сравнения) СЧ2. Выбирая бла-
гоприятный режим смесителя, сложный полосовой фильтр на его
выходе можно заменить достаточно широкополосным ФНЧ, не
ухудшающим динамику выходного кольца синтезатора.
Методы класса II (см. рис. 1.11).
Уменьшение начальной частотной ошибки может быть достигнуто
введением быстрого поиска, а также путем предварительной уста-
новки частоты fyr, близкой к своему номинальному значению.
Примеры реализации указанных способов приведены выше (см.
Рис. 1.12. Трехкольцевой синтезатор с ИФАПЧ
2*
19
рис. 1.6, 1.7). В качестве устройства поиска используются быстро-
действующие системы импульсно-частотной автоподстройки (см.
гл. 7) и бесфильтровые кольца ИФАПЧ. Для осуществления быст-
рого поиска применяются также специальные типы ИЧФД (см.
гл. 7). Эффективность различных схем определяется точностью
установки частоты по окончании поиска и длительностью послед-
него. Наиболее перспективными в этом отношении являются ал-
горитмы, основанные на половинном делении (дихотомии, бисек-
ции) [15] и методе секущих [16, 17]. Описание указанных процедур
поиска и оценка их эффективности приведены в гл. 7.
Для улучшения быстродействия СЧ с предварительной уста-
новкой и поиском могут быть использованы принципы оптималь-
ного управления [18, 19]. Объектом управления в этом случае
являются последовательно соединенные ФНЧ и УГ. Теоретические
аспекты использования методов оптимального управления в коль-
це ИФАПЧ изложены в гл. 7.
Методы повышения быстродействия следующей группы в рам-
ках класса II основаны на изменении характеристик КУ кольца
ИФАПЧ. Здесь задача может быть решена с помощью ИФД с
особой нелинейной формой фазовой характеристики на участке
от —2л до 2л (см. гл. 2, 7). Использование дискриминатора тако-
го типа возможно только в системе ИФАПЧ с астатизмом по фазе.
Напомним, что у подобных систем в режиме синхронизма разность
фаз входных импульсов дискриминатора <ре равна нулю.
Последняя группа методов повышения быстродействия, относя-
щаяся к классу II, основана на создании определенных фазовых
соотношений при замыкании ИФАПЧ [20]. Известно, что на дина-
мику системы существенно влияет начальная разность фаз фйн
импульсных сигналов e0(t) и ec(t), поступающих на вход дискри-
минатора. Это связано с тем, что при произвольной фен выходной
сигнал дискриминатора en(t) может значительно увеличить час-
тотную ошибку УГ, что приводит к увеличению длительности
установления частоты. Особенно это характерно для систем с
ИЧФД. Управление фен может осуществляться путем блокировки
входов установки (переводом в нулевое состояние) и изменения
коэффициентов деления ДПКД и ДФКД. Отметим, что наиболее
широкие возможности указанных методов реализуются в системах
ИФАПЧ с астатизмом по фазе, т. е. при фе = 0.
Многие из рассмотренных в этом параграфе методов расшире-
ния полосы захвата и повышения быстродействия СЧ детализиру-
ются в процесе последующих исследований. Однако и сейчас на
основании достаточно эскизных их описаний можно сделать вывод
о разнообразии технических решений, направленных на улучшение
параметров СЧ с ИФАПЧ.
ГЛABA 2
УЗЛЫ СИНТЕЗАТОРОВ ЧАСТОТ
С СИСТЕМОЙ ИФАПЧ
2.1. ИМПУЛЬСНО-ФАЗОВЫЕ ДЕТЕКТОРЫ
Импульсно-фазовые детекторы (ИФД) предназначены для преоб-
разования разности фаз <ре (времен те) поступления импульсов с
ДПКД ec(t) и ДФКД е0(0 в управляющее напряжение (ток)
ед(0- Для корректного анализа ИФД необходимо разработать
математическую модель (ММ), из которой находят:
а) ед.п(фе) или ед.п(те) —статическую фазовую характеристику
как зависимость постоянной составляющей ед.п(0 от <ре или те;
б) Кд=с/ед.п/с/фе — статический коэффициент передачи ИФД;
в) ед(ксоо) —уровень помех на выходе ИФД как функцию
частоты входных импульсов ИФД со0 = 2л/о^к= 1, 2,....
Рассмотрим наиболее применяемые в синтезаторах ИФД.
Импульсно-фазовый детектор на ^S-триггере. Простейшим яв-
ляется ИФД с пилообразной статической характеристикой на
/?5-триггере [21]. На рис. 2.1 приведены эпюры напряжений, пояс-
няющие его работу. Импульсные сигналы e0(t), следующие с
опорной частотой сравнения f0=l/7’0, поступают на вход S триг-
гера и переводят его выход Q в состояние «лог. 1», а сигналы с
выхода ДПКД ec(t) с частотой fyr/У, поступающие на вход R,—
в состоянии «лог. О». Если частоты сравниваемых по фазе сигна-
лов равны, то при изменении разности времен поступления им-
пульсных сигналов хе на входы R и S от 0 до То или соответствен-
но разности фаз ц>е от 0 до 2л постоянная составляющая ед(/)
будет меняться от 0 до Ед. Для ММ ИФД на /?5-триггере можно
записать
М0 = £д 2+ U1, (2.1)
где 1(/) —ступенчатая функция; i = mt(xn/T0) +1, int{‘} —целая
часть числа.
Рис. 2.1. Эпюры напряжений, пояс-
няющие работу ИФД
Рис. 2.2. Временные диаграммы, поя-
сняющие работу ИФД по схеме ис-
ключающее ИЛИ
21
В режиме синхронизма системы ИФАПЧ, когда Тп=Т0, 1=1,
сигнал ед(/) (2.1) представляет собой периодическую функцию,
которую можно разложить в ряд Фурье
вд.ст (0 = Е^е „/То + (2EJv) jr sin (kme „/To) cos (fa»ot)/k, (2.2)
fe=i
где Тест — установившееся значение разности времен поступления
импульсов на R и S. Из (2.2)>
ед.п(?е) = £д?еЖ (2.3)
К* = ЕД12^. ' (2.4)
На управляющий элемент генератора наряду с постоянной сос-
тавляющей поступают гармоники с частотой опорного сигнала,
которые необходимо ослаблять с помощью ФНЧ. Наиболее ин-
тенсивна первая гармоника, а ее максимальный уровень при
Те СТ = То/2, соответствует ед.макс(<Оо) = 2£д/л.
Импульсно-фазовый детектор по схеме исключающее ИЛИ [21].
Логика работы ИФД приведена в табл. 2.1.
С использованием данных табл. 2.1 на рис. 2.2 приведены вре-
менные диаграммы, поясняющие работу этого ИФД. Предполага-
ется, что e0(t) и ес(0 имеют вид меандра. В соответствии с
рис. 2.2 сигнал на выходе ИФД
оо
ед (0 = Ед [1(1 - TJ2 4- - tn) - 1 (t - 6„- tn) 4-
n=0
4 1 (i 4 Тл+i — ^n+i) — 1 {t— ln+i)]. (2.5)
В режиме синхронизма системы ИФАПЧ, когда Тп = Т0, 9П =
= Т0/2 аналогично предыдущему случаю сигнал ед(1) (2.5) можно
разложить в ряд Фурье
со
ед.ст(0 = 2Едте „/То 4(2Дд/тс) 2 sin (2Ame ст/Т0)cos(2A<»o/f)/A
Л=1
для 0 < % „ < То/2;
ед ст (() = 2Ел (те ст — То/2) 4 (2Ед/тг) sin [2Аэт (те „ —
*=1
— Го/2)] cos(2b>o/)/A для То/2 < те ст <Т0.
Из (2.6)
<?д,п (ч>е) = E^J’k для 0 < % < к;
«д’.п (ч>г) = Ед (©е — тг)/тг для к < <рг < 2тг.
Выражения (2.7) позволяют определить
д- _ ( Ел/к для 0<<реО;
Д I—Ед/к для ir<<pe<:2ir.
(2.6)
(2.7)
22
Зависимость (2.7) имеет треуголь-i
ную форму. Если ес(0 и e0(t) отли-,
чаются от меандра, эта зависимость!
имеет вид трапеции. Из (2.6) следует,!
что в управляющем сигнале ел(1) от- ,
сутствуют нечетные гармоники часто- \
ТЫ (Do-
Импульсно-фазовый детектор типа
«выборка—запоминание». В рассмот-
ренных выше типах ИФД наряду с
Таблица 2.1
% <^д «с М/яд
0 0 1
0 1 0
1 0 1
1 1 0
полезной составляющей
на выходе имеются весьма интенсивные помехи с частотами, рав-
ными и кратными частотам опорного сигнала. Для их ослабления
в цепи ИФД—УГ используют ФНЧ, к которому предъявляются
высокие требования по подавлению в полосе задерживания. Рас-
сматриваемый ИФД «выборка—запоминание» (ИФД «в—з») [21]
обладает более «чистым» сигналом на выходе.
На выходе этого ИФД побочные продукты с частотой опорного
сигнала и ее гармоник могут быть ослаблены на НО дБ относи-
тельно побочных продуктов на выходе ИФД на 7?5-триггере.
Структурная схема ИФД «в—з» представлена на рис. 2.3. На
этом рисунке приняты обозначения: ГПН — генератор периоди-
ческого напряжения; Кл1, Кл2— электронные ключи различного
типа, замыкаемые и размыкаемые импульсами выборки; С1 —
конденсатор, на котором формируется периодическое напряжение
еС1(0; С2 — конденсатор, запоминающий напряжение (заряд) на
время между двумя соседними импульсами выборки; R — сопро-
тивление открытого ключа Кл2; БК — буферный каскад с коэффи-
циентом передачи по напряжению, близким к единице, т. е.
есг(0~ед(0- Генератор пилообразного напряжения может за-
пускаться либо импульсами e0(t), либо ec(t). Аналогично импуль-
сы выборки формируются либо из импульсов е0 (0, либо из ес(0-
Ключ Кл2 и БК должны обеспечивать большую инерционность
разряда конденсатора С2 на время между двумя соседними им-
пульсами выборки. Сопротивление ключа Кл2 в открытом состоя-
нии должно быть мало. Характер периодического напряжения
еС1(/) определяет вид характеристики ИФД — пилообразная, тре-
угольная, трапецеидальная и т. д. Детектор работает следующим
образом. При подаче на ключи импульсов выборки ключ Кл1 раз-
мыкается, а ключ Кл2 замыкается. Напряжение с конденсатора
С1, соответствующее временному сдвигу импульсов, запускающих
ГПН, относительно импульсов выборки подается на конденсатор
С2 и заряжает его. По окончании импульса выборки это напряже-
Рис. 2.3. Структурная схема ИФД «в-з»
23
ние запоминается на кон-
денсаторе С2 на интервале
времени между импульсами
выборки. В случае пилооб-
разной формы напряжения,
формируемого ГПН, на рис.
2.4 показаны эпюры, пояс-
няющие работу этого ИФД.
Найдем математическую
модель ИФД «в—з», струк-
турная схема которого при-
ведена на рис. 2.3. Предпо-
ложим, что входной ток БК
равен нулю. В момент
(соответствует переднему
фронту импульса выбор-
ки) Кл1 размыкается, а
ключ Кл2 замыкается на
Рис. 2.4. Временные диаграммы, поясняю-
щие работу ИФД «в—з»
время ти, напряжение на С1 соответствует'-’eci(tn) = ввх[п], напря-
жение на С2 тогда ec2<tn) = ввых[«— 1]. В цепи C1RC2 после ^з^ы-
кания ключа Кл1 имеет место следующее соотношение для~на-
пряжений: (1/С2) j idt+Ri+ (1/С1) J’ idt=O, где I — ток переза-
ряда конденсаторов С1 и С2. Обозначим (1/С2) f idt=eC2, тогда
последнее соотношение примет вид deCzldt+ (1/7’и)еС2=0, где
ГИ = 7?С1С2/(С1 + С2).
Решение этого дифференциального уравнения имеет вид
еС2 (О — Ао + Аг exp (— t/TJ, (2.8)
где До и Ai — постоянные коэффициенты, которые определяются
начальными условиями: при /=0 eC2—eSbiX{n—1]=Д0+Д1, при
/=оо ес2 = {С2 евых[п—1] +С1 евх[п]}/(С1 +С2) =А0. Из этих выра-
жений НаХОДИМ Л0=={евхИ+&£вых[П—1]}/(1+6), Д1= (—еВх[п]+
+ евых[п—1])/(1 +Ь), где Ь~С2/С1. Подставив в (2.8) Ао и Ль
найдем eC2(t) = {евх{п]+Ьевых[п— + — {eBX[n] — евых[п]}Х
Хехр(—1/Ти)/(А + Ь).
Обозначив [1—ехр(—ти/Ги)]/(1 +Ь) =dB, запишем окончательно
ММ ИФД «в—з» в виде линейного разностного уравнения
^С2 Ю — ^вых [и] — ^вх|Д] Ч- ^вых ПО ^и)- (2*9)
Уравнение (2.9) совпадает с соответствующим выражением в [22]
если в dB положить R = 0.
Если в (2.9) С21С1-А\ то имеет место случай безынер-
ционного ИФД:
^вых [«] = £вх [«]. ев,.,х [«I = £л/Д>- (2.Ю)
Для этого варианта ИФД математическая модель запишется в
виде
= = 2T„[l(Z-~Z„)-l(Z-Zn+i)]. (2.11)
л=0 .
24
Из (2.11) получим передаточную функцию безынерционного ИФД
«в—з»:
Go (s) = ел ($) = (Е/2*) [1 — exp (— sTn)]/s,
где s — оператор дифференцирования. Заменив s на j<o, получим-
ел (»/?е О) = (^’д7’п/2к) ехр (—W«/2) I Sin (шТп1'2) | /(шТл/2).
В режиме синхронизма из (2.11) найдем ед.Ст = (Ел/Т0)т;е. Из
последнего выражения определим статическую характеристику
ед.п (сре) — ^д'Ре/2^ и /(д = EjJQ'K.
Таким образом, статическая характеристика и коэффициент’
передачи безынерционного ИФД «в—з» совпадают с аналогичны-
ми характеристиками ИФД на 7?5-триггере (2.3, 2.4). Используя
аппарат /-преобразований [9] из (2.9), получаем передаточную-
функцию инерционного ИФД «в—з» бд(г) =ед(г)/фе(.г) =
= Едс?иг/{2л[г—(1—dH)]}. Из последнего выражения видно, что
статические характеристики инерционного ИФД «в—з» совпада-
ют со статическими характеристиками безынерционного ИФД.
Рассмотрим, как образуются помехи с частотой сравнения и ее гармоник в
составе выходного сигнала ИФД «в—з»:
1. Проникновение сигнала пилообразной формы на выход ИФД во время
действия импульса выборки при отсутствии ключа Кл1.
2. Проникновение периодического сигнала вщ(0> образуемого на конденса-
торе С1, через закрытый ключ Кл2 на выход ИФД.
3. Разряд запоминающего конденсатора С2 «паразитным» током утечки в
промежуток времени между импульсами выборки.
4. Проникновение импульсов выборки через «паразитные» конденсаторы и
резисторы ключа Кл2 на выход ИФД.
Оценим уровень помех на выходе ИФД, обусловленный каждой из названных
причин, считая что он мал по сравнению с сигналом ед(/) и ти<СР0.
Исследуем первую причину подробно, а в отношении остальных ограничим-
ся краткими указаниями. Обратимся к схеме, изображенной на рис. 2.5. На этом
рисунке 13 — ток заряда. Обозначив напряжение на С2 есч,= (1/02) J ic^dt, полу-
чим из рис. 2.5 дифференциальное уравнение
de^dt + еаТи = eBJ{RC2) + i3tf(RC\ С2), (2.12>
где Ти=RC1C2I(Cl + С2), ввх — напряжение на конденсаторе С1, соответствую-
щее переднему фронту импульса выборки. Уравнение (2.12) справедливо при
0</<т„ (принято /л=0). Известно, что решение линейного дифференциального
уравнения y'+p(x)y—Q(x) записывается в виде #=ехр[— j‘p(x)dx][j‘ Q(x)X
Хехр( Jp(x)dx)dx+B], где В — постоянная интегрирования.
Рис. 2.5. К расчету помех на выхо-
де ИФД
0—77
ea(t)
Рис. 2.6. К учету «паразитных» эле-
ментов ключа
2Д.
Поэтому (2.12) имеет решение
еа (0 = 7>ВХ/(ЯС2) 4 В ехр (- ЦТК) + [i3/(RC\С2)] Т* ЩТ„ - 1).
(2.13)
"Уравнение (2.13) описывает как переходной, так и стационарный режим в ИФД.
Тогда, учитывая, что прй синхронизме напряжение есг(0 в дискретные моменты
времени, соответствующие переднему и заднему фронтам импульсов выборки,
равны между собой, можно положить есг(О) =ес2(ти). Применив это условие к
(2.13), можно найти величину В. В результате после промежуточных преобра-
зований
ес2 (О = евхГи/(/?С2) - IJ^RCA С2) + г3Гл/[7?С1С2 (1 -
- ехр (- ти/ Ги)] + (i3TJRC 1С2) {t - ?и [ 1 - ехр (- </Ти)] / [ 1 -
— ехр (—ти/Ти)]}. (2.14)
Уравнение (2.14) может быть использовано для определения уровня «паразит-
ных» сигналов на выходе ИФД. Для этого рассмотрим режим синхронизма
ИФАПЧ, при котором функцию есг(0 можно считать периодической с периодом
То. При решении данной задачи интерес представляй- только четвертый член
(2.14), зависящий внутри интервала 0...ти от текущего времени t. Представим
указанный член в виде совокупности трех функций:
треугольной ST (/)=/;
экспоненциальной 5э(0=ти ехр(—//Ти)/[1—ехр (—ти/Та)];
прямоугольной Sn(/)={( —Ти/[1—ехр(—Ти/Ги)]}{1 (0—1 (^—Ти)}.
Сумма этих функций, умноженная на i3T3IRClC2, равна четвертому члену в
(2.14): 0</<ти и нулю при ти</<7’0. Разложим эти функции в ряд Фурье.
Лапомним, что для периодической функции S(t) справедлива комплексная фор-
ма этого ряда
5(^)-(1/2) 2 Лйехр(/Аш0<), где Ak ехр (—]?*),
Л» — со
-То/2
^л = (2/Т0) J s(() ехр(— yokt)dt. .
т0/2
Тогда комплексные коэффициенты разложения в ряд Фурье треугольной перио-
.дической функции можно записать в виде
Лт.к = [2/(7^) ]Х
X У( cos А<воти+ #<ooT„sin Ашоти— l)2+(b>oTHcos Ашотн—sinA<B0TH)2x
X ехр (jcpT.K), фт.к = arctg [£<%% cos Ашоти —
— sin Амоти]/[ cos #шоти + kwoxu sin — 1].
В реальном ИФД, как правило, интересно знать уровни Ац первой гармо-
ники частоты сравнения. При этом условии, а также с учетом Th/To-CI получа-
ется <рц~0 и справедливо равенство Ат1=2т2/Т0. Коэффициенты разложения
в ряд Фурье экспоненциальной функции
Л9К = 2ти У[1—ехр(—T11/7'11)cosA(i>oT11]2+[exp(— T„/TH)sin /ЧЛиРХ
26
X exp (ШУ 1 / Ги2 + (Аш0)2 То (1 - ехр (- ти/Ги))],
<рэ = arctg [(ехр — ти/Ги) sin Ам>оти]/[ 1 — ехр (— ти/Ти) cos Ашотн] —
— arctg Ашот:и.
В рассматриваемом случае Аэ) = (2/70)^иТи.
Коэффициент разложения в ряд Фурье прямоугольной функции запишем в
форме Лп1= (2/Т0)т2/[1—ехр(—Ти/Ги)]. Таким образом, амплитуда первой гар-
монической составляющей «паразитного» сигнала на выходе ИФД при отсутст-
вии ключа Кл1
£д|.1 = г’зТ'и (Ад 4~ A»i + Л1)/ (RC1C2).
Подставив полученные выражения для коэффициентов разложения в ряд, по-
лучим
ед1.1 = [2Z3t„T„/(7'0Z?C1C2)][t„-|-7'„ —ти/(1 — ехр(—Тн/Гн))]. (2.15)
Для реально используемых ИФД, когда можно положить Ти->-7?С2(С/>С2),
ехр(—Th/ThJ-^O, т. е. 7?С2<Сти, последнее выражение упрощается:
ед1.1 = 2г3тиТи/(7'оС1). (2.16)
Использовав (2.15), (2.16), можно рассчитать уровень «паразитного» сигна-
ла на выходе ИФД «в—з», обусловленного проникновением сигнала пилообраз-
ной формы на конденсатор С2 во время действия импульса выборки. Если этот
уровень оказывается неприемлемым при проектировании ИФД, то можно при-
менить «стробирование» напряжения на конденсаторе С1 на время действия
импульса выборки с помощью ключа Кл1, как показано на рис. 2.3.
Для определения уровня помех, обусловленных проникновением периодичес-
кого сигнала eci(t) на выход ИФД через закрытый ключ Кл1, представим
последний в виде параллельно соединенных «паразитных» элементов и Са
(см. рис. 2.6). Функцию ещ(0 можно разложить в ряд Фурье, считая ее в пер-
вом приближении пилообразной с размахом Ед, и найти амплитуду первой
гармоники ес1.1=Дд/л. Затем следует воспользоваться передаточной функцией
для схемы на рис. 2.6 и определить est2—амплитуду первой гармоники сигна-
ла, возникающего вследствие второй причины проникновения «паразитной» по-
мехи на выход ИФД. В результате ед1 2= (Ед/л) | (1 +/co0t?nCn)/(l +/со0ЯпС2) |.
Переходя к рассмотрению третьего фактора, влияющего на помеху в выход-
ном сигнале ИФД, отметим, что разряд запоминающего конденсатора С2 посто-
янным током утечки Тут при условии Ти-СГо создает на С2 пилообразное на-
пряжение с размахом емкв—1утТ0/С2. Последнее можно разложить в ряд
Фурье и найти амплитуду первой гармоники еД1 з=/уТ7’0/(С2л).
Амплитуда первой гармоники импульсов выборки, проникающих через ем-
кость Cni на выход ИФД, может быть рассчитана по формуле, полученной с
помощью (2.2). В результате еД1.4=2евСП1 sin (лти/Т0)/(лС2), где ев— ампли-
туда импульса выборки.
Использовав полученные выше выражения, можно оценить суммарный уро-
вень еЯ1. Е помех, вызванных различными причинами, на выходе ИФД «в—з».
Для приближенной оценки можно воспользоваться принципом аддитивности и
сложить найденные выше амплитуды первых гармонических составляющих. Тогда
€Д1. J = еДЬ1 + ед1 2 + еД1 з+еД1 4.
27
Однако следует оговориться, что при таком подходе не учитываются воз-
можные фазовые сдвиги между отдельными слагаемыми, которые в случае ре-
альных процессов могут привести к уменьшению уровня помех по сравнению с
уровнем, определенным по последней формуле. Как видно из изложенного, для
улучшения спектральных характеристик ИФД необходимо уменьшать «паразит-
ные» параметры элементов схемы, токи утечки, а также производить «стробиро-
вание» периодического сигнала на конденсаторе С1 с помощью ключа Кл1.
2.2. ИМПУЛЬСНЫЕ ЧАСТОТНО-ФАЗОВЫЕ ДЕТЕКТОРЫ
Комбинированный импульсный частотно-фазовый детектор. При-
менение импульсных частотно-фазовых детекторов (ИЧФД) в СЧ
позволяет получить широкодиапазонную перестройку управляемо-
го генератора без ложных настроек и значительно упростить реа-
лизацию всего синтезатора частот. Схемы ИЧФД и их математи-
ческие модели исследованы в [23—31].
Рассмотрим ряд ИЧФД. Начнем с комбинированного, называе-
мого ниже КИЧФД. Он представляет собой комбинацию импульс-
ного частотного детектора (ИЧД) и ИФД типа «выборка—запоми-
нание» или на основе 7?5-триггера. Логику работы КИЧФД, струк-
турная схема которого условно показана на рис. 2.7, можно понять
из рис. 2.8.
Анализ работы КИЧФД в цепи ИФАПЧ при наличии переход-
ных процессов показал, что существует семь различных режимов
его работы, которые определяют типы процессов СЧ (см. рис. 2.8):
I—переход к нулевому уровню на выходе происходит, когда
уровень сигнала на выходе пропорционален тга;
II — сигнал на выходе пропорционален временному рассогласо-
ванию тп;
III—уровень сигнала на выходе изменяется от максимального
Ед к пропорциональному временному рассогласованию тп;
IV — уровень сигнала на выходе равен максимуму Ед;
V — уровень сигнала на выходе изменяется от пропорциональ-
ного временному рассогласованию т„ до нулевого;
VI — уровень сигнала на выходе равен нулю;
VII — уровень сигнала на выходе меняется от нулевого к про-
порциональному временному рассогласованию хп.
Таким образом, в соответствии с вышеприведенной классифи-
кацией существуют четыре переходных и три стационарных режи-
ма работы КИЧФД. В «стационарных» режимах КИЧФД может
находиться бесконечно долго. Например, если частота сигнала
ес(0 всегда больше частоты сигнала eo(t), то КИЧФД находится
в режиме IV. Режим II КИЧФД характеризует в основном работу
системы ИФАПЧ в режиме, близком к синхронизму.
Импульсный частотный детектор определяет, по какому входу
(/ или 2) поступают подряд два или больше импульса, и произ-
водит смену режимов работы КИЧФД.
На рис. 2.9 приведен в виде графа порядок смены режимов
работы КИЧФД в СЧ. Дополнительными круговыми стрелками
обозначены «стационарные» режимы VI, II и IV.
28
Рис. 2.7. Структурная схема комби-
нированного импульсного частотно-
фазового детектора
Рис. 2.8. Диаграммы, поясняющие
работу — КИЧФД с «выборкой-запо-
минанием» и ^S-триггером
Рис. 2.9. Граф, поясняющий работу
КИЧФД в системе ИФАПЧ
Рис. 2.10. Структурная схема ИЧФД
«В—3»
29
Более детальная структурная схема КИЧФД, представляющая
собой комбинацию ИЧД и ИФД «в—з» с пилообразной характе-
ристикой, которую в дальнейшем обозначим ИЧФД «в—з», пока-
зана на рис. 2.10.
Рассмотрим вначале режим II. При этом на выходах 3 и 4 ИЧД имеются
постоянные сигналы с уровнем «лог 1», и оба логических элемента И-НЕ нахо-
дятся в положении И. Импульсы e0(t) проходят по цепям 5, 6 и 7 на вход
ГПН и запускают его,- Моменты, соответствующие «сбросу» до нулевого уровня
еГпн(0> определяются поступлением импульсов e0(t). Напряжеие ес (t) пода-
ется на вход 2 ИЧД и одновременно управляет по линии 8 ключом (Дл) и
запоминающим устройством (ЗУ). При.поступлении импульсов ес (0 Кл откры-
вается, напряжение с выхода ГПН, уровень которого определяется разностью
фаз между e0(t) и ес(0, подается на ЗУ и запоминается до прихода следую-
щего импульса ec(t). Таким образом, ИЧФД «в—з» в режиме II работает так,
же, как и обычный ИФД «в—з».
Рассмотрим далее переходной процесс, когда на вход 1 ИЧД поступили
подряд два импульса е0(/) (режим I). В этом случае на выходе 4 ИЧД появ-
ляется сигнал с постоянным уровнем «лог 0», переводящий логический элемент
В в положение «НЕ». В результате импульсы е0 (£),*'' осуществляющие «сброс»
еГпН(0, на выход ГПН не поступают и еГпн(0 достигает максимального значе-
ния £д. При этом на выходе ИЧФД «в—з» образуется сигнал с постоянным
уровнем ед. в_3(£) =£д и ИЧФД «в—з» переходит в режим IV. Под действием
указанного сигнала частота и фаза УГ в замкнутой системе ИФАПЧ изменяют-
ся до тех пор, пока два импульса подряд появятся на входе 2 ИЧД (режим III).
Ситуация, возникшая после того как два импульса подряд были зафиксированы
на входе / в режиме I, приводит к тому, что на обоих выходах ИЧД вновь
появляются сигналы с постоянными уровнями «лог 1», переводящие ИЧФД
«в—з» в режим ИФД «в—з» (режим II).
Если при переходном процессе в ИФАПЧ два импульса подряд поступили
на вход 2 ИЧД, то на его выводе 3 появляется сигнал «лог 0». Этот сигнал,
переводит элемент А в состояние «НЕ», что препятствует поступлению е0 (/) по
линии 6 на ГПН. Логический элемент В переводится в состояние «И», при кото-
ром ГПН в отсутствие импульсов ео(0 не работает, т. е. сигнал егпн(1), а сле-
довательно и ед.в-з(0> становится равным нулю (режим V). При постоянном
во времени сигнале ед.в-3 (0=0 (режим VI) частота и фаза УГ изменяются до
тех лор, пока два импульса подряд не появятся на входе J ИЧД (режим VII).
При этом на обоих выходах ИЧД возникнут сигналы «лог 1», что приведет к
восстановлению в элементе А состояния «И» и переходу ИЧФД «в—з» в режим
ИФД «в—з» (режим II).
На рис. 2.11 представлена упрощенная структурная схема
КИЧФД, выполненная на основе комбинации ИЧД с ^S-триггером
(см. § 2.1). Работа такого КИЧФД в целом аналогична ИЧФД
«в—з», за исключением режима II, когда едКз(/) представляет
собой широтно-модулированный импульсный сигнал, проходящий
с 7?5-триггера через две схемы И-НЕ. Временные диаграммы для
сигнала представлены на рис. 2.8.
На рис. 2.12 приведены статические фазовые и частотные ха-
рактеристики вд.п(Д<о), где Дщ— отклонение частоты ec(t) от <о0-
30
Рис. 2 11. Структурная схема
КИЧФД с PS-триггером
Рис. 2.12. Статистические фазовая
(а) и частотная (б) характеристики
кичфд
Для обоих типов КИЧФД штриховой линией изображена стати-
ческая фазовая характеристика ИФД «в—з» или с 7?3-триггером.
Статическая частотная характеристика КИЧФД приведена на
рис. 2.126. Таким образом, в области частотных рассогласований
КИЧФД ведет себя как частотный дискриминатор релейного типа.
Необходимо отметить, что статические характеристики КИЧД не
отражают всего многообразия процессов и носят скорее иллюстра-
тивный характер. Заметим, что коэффициент передачи КИФД
определяется только в режиме II и совпадает с Кд ИФД «в—з»
или ИФД на КЗ-триггере (см. § 2.1).
Поскольку в режиме синхронизма КИЧФД работает как ИФД,
то для расчета помех на его выходе можно воспользоваться ре-
зультатами § 2.1.
Найдем математические модели КИЧФД. Для упрощения зада-
чи будем считать, что ИЧФД «в—з» в режиме ИФД безынерцио-
нен. Будем считать также, что при /=0 на входе КИЧФД появля-
ется первым импульс с ДФКД. Введем целочисленную функцию L,
характеризующую очередность появления импульсов вс(/) сДПКД
и в0(/) с ДФКД. Она принимает значения 0, 1,2,... в соответствии
с выражением L = int(/n+i)—int(/n), где tn=tn]To, tn+i = tn+1/T0 —
нормированные моменты прихода re-го и (ге + 1)-го импульсов с
ДПКД соответственно. Значение Л=0 характеризует поступление
подряд двух и более импульсов вс(0; К=1 указывает на наличие
очередности поступления входных импульсов дискриминатора и
А>2 характеризует поступление на входы КИЧФД двух и более
импульсов во (0- Кроме того, введем функцию состояния КИЧФД
Fn, которая условно принимает одно из трех значений в зависи-
мости от режима работы КИЧФД:
a) Fn=0 (режим II), при этом на интервале от tn до tn+i спра-
ведливо Вд.в—з (/) = Вд (К) 1 (^ tn) ~1“ £д (К—1) 1 (К /) ~ £д.в—з (^л—Ь tn) т
где Вд(/Л) =Вд.в_3 (/) для / = 6г + е(е>0, lime=0), вд rs(0 =£дХ
X1 (/—7’о+тп—tn) X1 (/—К)—£ДХ 1 (/—Тп—tn);
б) Fn= + 1 (режим IV) при Вд.в-з(0 = ед Rs(t) =ЕЛ;
в) Fn =—1 (режим VI) при Вд.в~з(0 =ед rs(0 =0.
31
•С учетом этих функций и рис. 2.8 представим математические мо-
дели КИЧФД в виде табл. 2.2.
Таблица 2.2
Функции и сигналы Режим
I II III IV V VI VII
L 2 1 0 1 0 1 1
Еп 0 0 -1 1 0 —1 —1
1 0 0 1 —1 —1 0
ед.в—3 ^Д.В—3 1» ^л) ^Д.В ——1’ ^л) Ед Ед {tn—1» ^л) 0 0
exRS №)1ЕЛ 1(^—То + + хл—U 1(^ — ^о + + хл~^л)— -tn) 1 1 0 4t-tn~ 27'о-г Е п t„)
Импульсный частотно-фазовый детектор с тремя состояниями.
Логику работы ИЧФД с тремя состояниями, называемого в даль-
нейшем ИЧФДЗ, удобно рассмотреть на варианте исполнения [25].
Структурная схема его приведена на рис. 2.13, на которой приня-
ты следующие обозначения: П, Т2 — О-триггеры, Кл1, Кл2 —
ключи, коммутирующие токи Ел, —Ел от генераторов тока ГТ1 и
ГТ2 в цепь НЧ. Варианты принципиальных схем ИЧФДЗ при-
ведены в [25—27, 32].
Опишем физические процессы в ИЧФДЗ. Логическая схема ИЛИ-HE фор-
мирует импульс установки «лог 1» D-триггеров при поступлении на оба ее вхо-
да сигнала «лог 0». Импульс установки подается на входы S D-триггеров и по-
ложительным фронтом устанавливает Т1 и Т2 в состояние «лог 1». В этом
состоянии каждый из триггеров находится до тех пор, пока на его вход С не
поступит импульс «лог 1», который передним положительным фронтом перебро-
сит его в то состояние, в котором находится его вход D, т. е. в состояние
Рис. 2.13. Структурная схема ИЧФДЗ
32
е°Щ f^fe f,-fc fa-fc frf fi>fe
.Tn n П„ П n n.,0 11 n,.П П II J П I ,
*an n n „Л n Л П Л П e n n 0,0 II П/
V"tl I IJ I I J I I „П П П..П П П,'
л/n, n 1-1 i—1 1—1 r-t i—i ? ?2 S’ t>t2 t] tl, ts t6 t/b t] tl, tg tg t
*№ nnjl ПП,1 I 1,1 I 1,1 I I
44 t3 4 ts ts trt2 tj t„ tg ts t
a) 6) S) г) a)
Рис. 2.14. Диаграммы, поясняющие логику работы ИЧФДЗ: а—для fo<fo,
б—г—для f0=fc; д—для f0>fc
«лог О». Каждый из триггеров остается в состоянии «лог 0» независимо от чис-
ла импульсов, поступивших на вход С, до тех пор, пока не поступит импульс
«лог 1» на вход S.
Отметим, что терминологически для P-триггера его состояние определяют
типом сигнала на выходах Q — «лог 0», на выходе Q — «лог 1»; в состоянии
«лог 1» — на выходе Q сигнал «лог 1», на выходе Q —«лог 0». Каждый из клю-
чей Кл1 и Кл2 замыкается при состоянии «лог 0» соответствующего триггера
и размыкается при состоянии «лог I». На рис. 2.14 иллюстрируется ряд вариан-
тов работы ИЧФДЗ. На рис. 2.14,6—г входные сигналы e0(t) и ес(О имеют
равные частоты f0=fc. На рис. 2.14,г сигнал ес(О отстает по фазе от сигнала
ео(0> на рис. 2.14,6 — опережает, на рис. 2.14,в ео(0 и ес(О—синфазны.
Остановимся на рис. 2.14,г. Предположим, что триггер Т1 находится в
состоянии «лог 0», а Т2— в состоянии «лог 1». В момент /1 на вход С триггера
Т1 поступает сигнал e0(t), который не может изменить его состояние, так как
триггер находился в состоянии «лог О». С выхода Q триггера Т1 сигнал «лог 1»
(на рис. 2.14 обозначен Q/T1) подается на Кл1, подключая тем самым генера-
тор тока ГТ1 (-т-Дц) на выход ИЧФДЗ. С другого выхода — Q триггера Т1
сигнал «лог 0» поступает на вход 1 схемы ИЛИ-HE. Ключ Кл2 разомкнут, так
как на выходе Q имеется сигнал «лог 0». Такое состояние ИЧФДЗ будет до
момента t2, когда на вход С триггера Т2 поступит импульс ec(t), перебрасывая
передним фронтом триггер Т2 в состояние «лог 0». При этом с выхода Q тригге-
ра Т2 сигнал «лог 0» поступает на вход 2 схемы ИЛИ-HE. При одновременной
подаче на оба входа схемы ИЛИ-HE двух сигналов «лог 0» она формирует сиг-
нал «лог 1», поступающий на входы SD-тригтеров и устанавливающий их в
состояние «лог 1». При установке триггеров Tl, Т2 в состояние «лог 1» на схему
ИЛИ-HE подается сигнал «лог 1» и, следовательно, на входы S Д-триггеров —
сигнал «лог О». В результате оба триггера в интервале /2 — h на своих выходах
Q имеют сигналы «лог 0», что соответствует разомкнутым ключам Кл1 и Кл2.
Таким образом, в интервале /2...оба генератора тока ГТ1 и ГТ2 от выхода
ИЧФДЗ отключены. При t=t3 сигнал ео(0 перебрасывает триггер Т1 в состоя-
ние «лог 0» и, следовательно, замыкает Кл1, подавая одновременно на вход 1
схемы ИЛИ-HE сигнал «лог О». В момент Д сигнал ео(0 перебрасывает триггер
Т2 в состояние «лог 0». При этом на вход 2 схемы ИЛИ-HE с триггера 7Т
также поступает сигнал «лог 0» и схема ИЛИ-HE вновь устанавливает тригге-
ры Т1 и Т2 в состояние «лог 1». В свою очередь, сигнал «лог 0» с выхода Q
3—1020 33
триггера Т1 размыкает Кл1. Состояния триггеров и логической схемы ИЛИ-НЕ
на интервалах ... и 6 — аналогичны. Таким образом, на интервалах Л ...
/3... к ... t» и т. д. с выхода Q триггера Т1 на ключ Кл1 поступает сигнал
«лог 1». Ключ замыкается и к выходу ИЧФДЗ подключается генератор заряд-
ного тока ГТ1, сигнал которого Еа.
Рассмотрим рис. 2.14,в. Импульсы ес(/) и e0(t) поступают одновременно в-
моменты /1, t2, /3 и т. д. на входы С триггеров Г1 и Т2, перебрасывая их в
состояние «лог 0», при котором замыкаются ключи Кл1 и Кл2. Однако в то же
время уровни «лог 0» поступают на схему ИЛИ-HE, которая вырабатывает сиг-
нал «лог 1», устанавливающий с небольшой задержкой триггеры Т1 и Т2 вновь
в состояние «лог 1». Тем самым оба ключа размыкаются, на входах 1 и 2
схемы ИЛИ-HE уровни «лог 0» переходят в уровни «лог 1», т. е. с входов S
триггеров Т1 и Т2 сигналы «лог Ь снимаются. В результате рассмотренного
цикла триггеры 7Т и Т2 перебрасываются входными сигналами в состояние
«лог 0» на очень короткое время, в течение которого ключи Кл1 и Кл2
замкнуты.
На рис. 2.14,6 показан случай, когда ec(t) опережает e0(t) и импульсный
сигнал «лог 1» (ключ Кл2 замыкается). В результате на ФНЧ подаются им-
пульсы разрядного тока — Ед от ГТ2. Рис. 2.14,а и д иллюстрирует случаи, когда
/о//с = 1,1 и /0//е = 0,9 соответственно. *
Из этих рисунков видно, что импульсный сигнал с выхода
триггеров подключает тот генератор тока, который компенсирует
разность частот сигналов e0(t) и ес(/). Рассмотренные примеры
работы ИЧФДЗ показывают, что с точки зрения выходного тока
детектор может находиться в одном из следующих трех состояний:
1. ел(1)=Ея, когда к выходу подключается ГТ1.
2. ед(/) =—£д, когда к выходу подключается ГТ2.
3. ед(/)=0, когда к выходу не подключается ни ГТ1, ни ГТ2.
Отметим, что во всех случаях ед(/) воздействует на входные
цепи ФНЧ, включаемого в системы ИФАПЧ между ИЧФДЗ и УГ
(см. рис. 1.1). Заметим также, что четвертое состояние ИЧФДЗ,
соответствующее случаю, когда оба ключа Кл1 и Кл2 замкнуты
(рис. 2.14,в), не выделено. Объясняется это тем, что в реальных
устройствах ИЧФДЗ никогда не появляются условия точной син-
фазности сигналов e0(t) и ec(t).
В [26, 33] описан вариант ИЧФДЗ, при котором ключи Кл1 и
Кл2 подключают к выходу не генераторы тока, а генераторы на-
пряжения. Назовем такой тип дискриминатора ИЧФДЗН. Возмож-
ны варианты подключения к активному ФНЧ ИЧФДЗ, минуя клю-
чи Кл1 и Кл2.
Анализ работы ИЧФД на рис. 2.13 показал, что в детекторе-
возможны пять различных режимов работы, обусловленных пятьк>
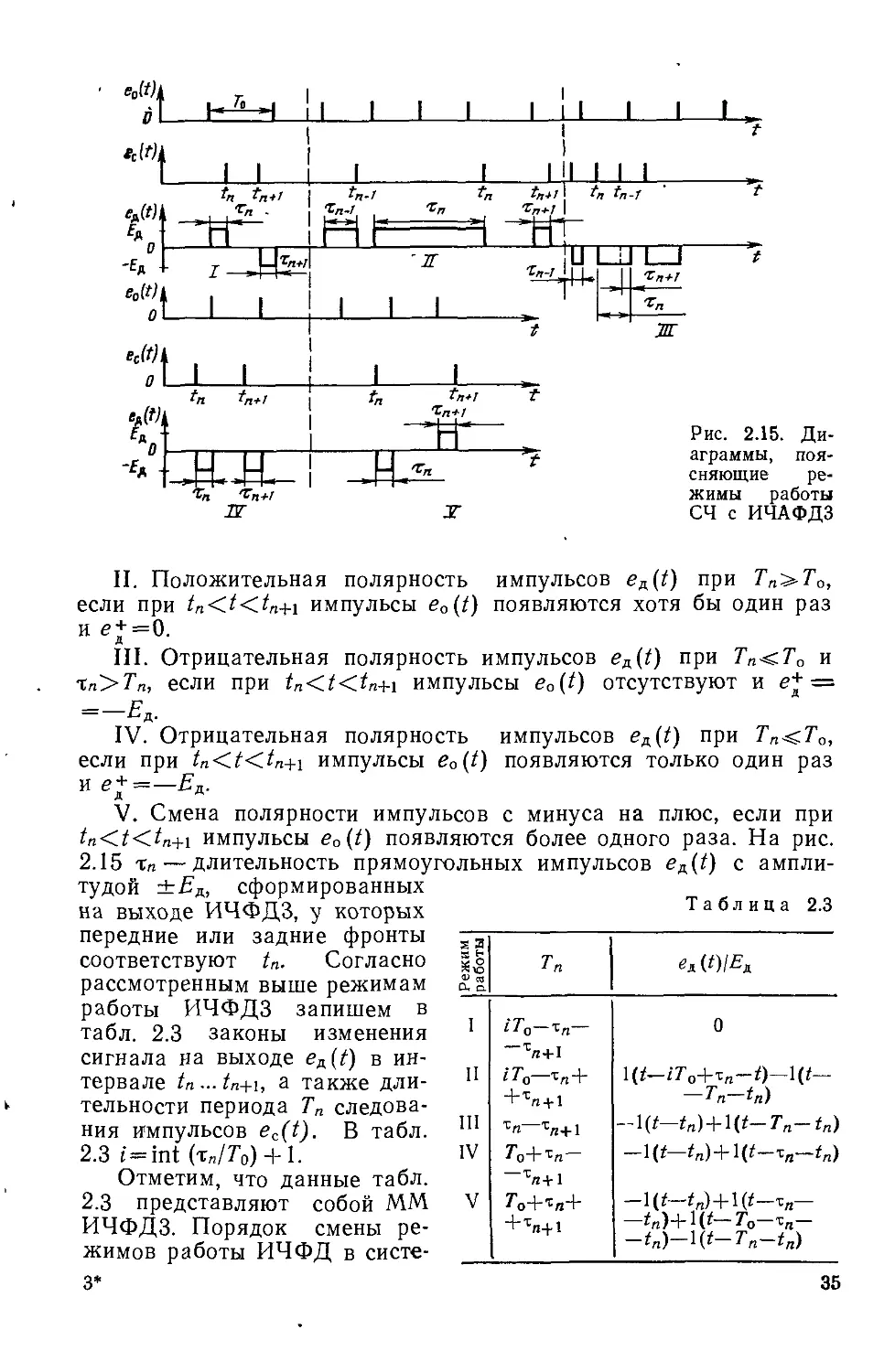
типами движений в СЧ, показанных на рис. 2.15:
I. Смена полярности импульсов ед(/) с плюса на минус, если
при tn<t<tn+i импульсы ec(t) отсутствуют и е* =0
6-0. г>0>
£д(^>+е)].
34
Рис. 2.15. Ди-
аграммы, поя-
сняющие ре-
жимы работы
СЧ с ИЧАФДЗ
t
t
t
II. Положительная полярность импульсов ед(/) при 7’„>7’О,
если при /„</</„+1 импульсы e0(t) появляются хотя бы один раз
и е +=0.
д
III. Отрицательная полярность импульсов ед(/) при Тп<.Т0 и
tn>Tn, если при tn<t<tn+i импульсы ео(0 отсутствуют и е+ =
IV. Отрицательная полярность импульсов ед(/) при Тп<.Т0,
если при tn<t<tn+\ импульсы e0(t) появляются только один раз
и е + =— Ец.
д
V. Смена полярности импульсов с минуса на плюс, если при
tn<i<tn+i импульсы e0(t) появляются более одного раза. На рис.
2.15 Тп — длительность прямоугольных импульсов ед(/) с ампли-
тудой ±ЕЛ, сформированных
на выходе ИЧФДЗ, у которых Таблица 2.3
передние или задние фронты
соответствуют tn. Согласно
рассмотренным выше режимам
работы ИЧФДЗ запишем в
табл. 2.3 законы изменения
сигнала на выходе ед(7) в ин-
тервале tn...tn+\, а также дли-
тельности периода Тп следова-
ния импульсов ec(t). В табл.
2.3 i=int (ч!п/Т0) + 1.
Отметим, что данные табл.
2.3 представляют собой ММ
ИЧФДЗ. Порядок смены ре-
жимов работы ИЧФД в систе-
[Режим | [работы 1 Тп ед (0/£д
I z —хп 0
II 1Т0—Т„ + +тп+1 1(/_/7'0Ч-х„—0—1(<— Тп tn)
III хл+1
IV ^'о4'хгг — хл+1 -4t-tn) + 4t-^n-tn)
V То + 'сл + + ХП+1 T n tn)
3*
35
Рис. 2.16. Граф смены режимов рабо-
ты в ИЧФДЗ
£д
Рис. 2.17. Статическая фазова^
характеристика ИЧФДЗ
ме ИФАПЧ в виде графа показан на рис. 2.16. Круговые стрелки
около движений III, IV и II указывают возможность долговремен-
ного существования. В отличие от указанных движения I и V —
переходные.
Детектор ИЧФДЗ обладает свойствами различать как фазовые,
так и частотные рассогласования сигналов e0(t) и ec(t). На рис.
2.17 приведена его статическая фазовая характеристика, т. е. за-
висимость постоянной составляющей тока ед.п на выходе от раз-
ности фаз <ре указанных сигналов. Из статической фазовой харак-
теристики на рис. 2.17 легко найти коэффициент передачи ИЧФД
Ки = Ец12л. При этом естественно предполагается, что f0=fc- При
fo^fc на выходе ИЧФД появляются импульсы ед(() определенной
полярности. Зависимость постоянной составляющей тока елл1Ел
от fo/fc, т. е. статическая частотная характеристика детектора, в
безразмерном виде представлена данными табл. 2.4 [26]. Рас-
Табл и ц а 2.4
/о//с 1 2 3 4 5 k
е д 0,5 0,75 0,833 0,875 0,9 1-/с/(2/0)
смотрим некоторые модификации ИЧФД с тремя состояниями.
На рис. 2.18 приведена структурная схема ИЧФДЗ на четырех
Рис 2 18 Структурная схема ИЧФД на четырех D-триггерах
36
Рис. 2.19. Диаграммы на- пряжений в ИЧФДЗД J 1 I I 1 1 1 1 U а) *
О-триггерах [29]. Назо- вем этот детектор ИЧФДЗД. На рис. 2.19,а—в показаны ди- аграммы входных и выходных сигналов ИЧФДЗ и на рис. 2.19,а — выходного сигнала ИЧФДЗД. Как видно из рис. 2.19, /L—1 1 LLL- I 1 I k8n(t) 7 J и 1 1 U 1 ‘l 11—11—17 г)
при значительных частотных рассогласованиях между f0 и /с (в
два и более раз) длительность регулирующих сигналов на выходе
ИЧФДЗД большая и поэтому скорость настройки СЧ с ИЧФДЗД
выше. В режиме синхронизма и при малых частотных расстройках
между fo и fc дополнительные Д-триггеры не срабатывают и ре-
жимы работы ИЧФДЗД и ИЧФДЗ не отличаются. При f0=fc ста-
тическая фазовая характеристика ИЧФДЗД совпадает с характе-
ристикой, изображенной на рис. 2.17. При fo^fc статическая час-
тотная характеристика в безразмерном виде приведена в
табл. 2.5 [26].
Рассмотрим еще одну модификацию ИЧФДЗ, приведенную на
рис. 2.20. У этого детектора (назовем его ИЧФДЗМ) статическая
фазовая характеристика линейна вблизи точки <р = 0 и скачкооб-
разно изменяется, т. е. имеет релейную форму, при превышении
tpe на некоторую величину 0. Функция ед.п(фе) нечетная и удов-
летворяет следующим условиям:
е _ /£'д%/2~ Для | < 9;
[£д для 0 < | <ре | <2я.
Протяженность линейного участка характеристики 0 задается
длительностью импульсов на выходе формирователей импульсов
ФИ. Рассмотренные модификации ИЧФДЗД и ИЧФДЗМ могут
обеспечить в некоторых случаях повышенное быстродействие СЧ
[27] (подробнее см. гл. 7).
Если приведенное выше качественное описание процессов в
ИЧФДЗ основывалось на определенных идеализациях характе-
ристик детекторов, то при оценке уровня помех с частотой срав-
нения на его выходе необходимо учитывать реальные параметры
звеньев. Прежде чем переходить к рассмотрению вопроса об уров-
нях указанных помех, отметим,
что для их ослабления в режиме
синхронизма во всех случаях же-
лательно уменьшать длитель-
ность регулирующих импульсов
tn до нуля. Это приводит к не-
обходимости обеспечения в коль-
Таблица 2.5
folfc “1 2 3 k
0,5 | 1 1 1
37
Рис. 2.20. Структурная схема ИЧФДЗ с формировате-
лями импульсов
це ИФАПЧ астатизма по фазе, соответственно операторный коэф-
фициент передачи ФНЧ в цепи ИЧФДЗ — управляемый генератор
должен иметь полюс при s = 0. На практике приближение к такой
ситуации достигается включением в состав ФНЧ интегрирующей
емкости либо интегратора на операционном усилителе. Однако фи-
зическая невозможность достижения полного астатизма по фазе
и неидеальность элементов ИЧФДЗ приводит к тому, что в сос-
таве выходного сигнала e^t) появляются импульсы с часто-
той ®0.
Выделим основные причины образований рассматриваемых «паразитных»
сигналов.
1. Ключи Кл1 и Кл2, входящие в состав детектора, обладают в разомкнутом
состоянии некоторой конечной проводимостью. Активная проводимость ФНЧ
по постоянному току, приведенная к выходу ИЧФДЗ, также может отличаться
от нуля. В результате в выходном сигнале ИЧФД ед(/) в режиме синхронизма
будет присутствовать постоянная составляющая тока /ут (ток утечки). Для
компенсации /ут система ИФАПЧ вырабатывает регулирующие импульсы тока
ДЛИТелЬНОСТЬЮ Тр=/ут^’о/£'д.
2. В выходном сигнале детектора всегда присутствуют «паразитные» им-
пульсы тока длительностью тПар, наличие которых связано с задержкой установ-
ки D-триггера (рис. 2.13). С учетом тПар общая длительность регулирующих
импульсов будет увеличена до тр п=/утГо/£,д+тПар.
3. Токи, создаваемые ГТ1 и ГТ2 (см. рис. 2.16), не равны по абсолютным
значениям, т. е. Е* =£Е~, где £* и Е~ реальные значения ГТ1 и ГТ2 соот-
ветственно.
4. Регулирующие и «паразитные» импульсы тока за счет неидентичности
характеристик каналов прохождения их к точке суммирования «а» (см. рис. 2.13)
сдвигаются по времени на ДтПар.
На рис. 2.21 приведены диаграммы сигналов ИЧФДЗ, построенные с учетом
указанных факторов, влияющих на уровень помех. В режиме синхронизма сум-|
марное количество перенесенного заряда за период То на выходе ИЧФДЗ долж-j
38
JVJVVnTf
Рис. 2.21. Диаграммы напряжений в ИЧФДЗ, поясняющие образование «пара-
зитных» сигналов
но быть равно нулю (иначе частота УГ за счет интегрирующего звена ФНЧ бу-
дет постоянно смещаться). Исходя из этого, запишем
+ (2.17)
Для определения дискретных составляющих помех на выходе ИЧФДЗ раз-
ложим функцию ea(t), изображенную на рис. 2.21, в ряд Фурье. После про-
межуточных преобразований получим
ао
(£) = (ak cos 2wkt + bk sin 2nkt),
fe=t
где
a* — (E* + 7yT) [sin 2r.k(tnap Atnap) — sin 2'гс&Дтпар]/тс£ —
— (E* — /ут) sin (2л^тр.п)/л^, (2.18)
bh = (E~ + /ут) [cos 2к/гДтпар — cos 2r.k (трп -f- Дтпар)]/тс+
+ (Et — 7yT) (cos 2irtp.n — V)/nk, (2.19)
— //T'o? Tp-n — трп/7"o» Tnap= ^nap/Toi А^пар — ^тпар/ To.
Ограничимся определением на основании (2.18) и (2.19) первой гармоники Л
ВЫХОДНОГО ТОКа, УЧТЯ, ЧТО Тр.п, Тпар И ДТпар'СЕ
а. Найдем зависимость It от /ут, для чего положим тПар, ДтПар = 0. На ос-
новании (2.17) имеем Е* Тр.а=1ут, тогда
' • /1а = 2 (£д+ - /утУЧр.п 2/ут. _ (2.20)
, б. Если положить в (2.18) и (2.19) /ут = 0, трп=тпар=т, g+ = £- —
» найдем зависимость Ц от тр.п и Дт^ар:
/1б = 4тс£’д'гД'спар. (2.21)
39
в. Зависимость Ц от степени неравенства токов ГТ найдем, допустив в (2 18)
и (2 19) /Ут, Дтпар = 0, а также п=ЕдТпар, и, обозначив E+fE~ — 1,
Цв =. 2«*Е^ (71 - 1). (2.22)
Выражения (2.20) — (2.22) позволяют оценить паразитный сигнал первой'
гармоники выходного сигнала ИЧФДЗ в установившемся режиме. i
2.3. УПРАВЛЯЕМЫЕ ГЕНЕРАТОРЫ
Управляемые по частоте автогенераторы (УГ) с точки зрения
функционирования их в системе ИФАПЧ являются, по существуй
преобразователями управляющего напряжения или тока в перио-'
дический сигнал с частотой fyr. Наибольшее распространение »
СЧ находят УГ, создающие сигналы синусоидальной и прямоуголь-
ной формы. ‘
Автогенераторы состоят из двух частей: активной — лампы*
биполярных и полевых транзисторов, туннельных и лавиннопро-
летных диодов и т. п. и пассивной — резонатора, задающего /Уг-
В резонатор входят элементы, с помощью которых практически
безынерционно можно изменять fyT,— варикапы или ферриты.
В УГ мультивибраторного типа, генерирующих сигналы прямо-
угольной формы [34, 35], частотой повторения импульсов fyT управ-
ляют при изменении уровня тока, заряжающего конденсатор.
Отметим, что мультивибраторы обладают линейной статической
характеристикой управления при перестройке больше октавы и
могут работать до частот порядка 30 МГц. Однако они имеют
повышенный уровень ПОЧ и ПОФ и в высококачественных СЧ
не используются. В диапазоне высоких (ВЧ) и очень высоких час-
тот (ОВЧ) применяются, как правило, УГ, в которых в качеС'Ве
активного элемента используются биполярные и полевые транзис-
торы, а резонатор на сосредоточенных или распределенных IС-
элементах перестраивается с помощью варикапов. Примеры элек-
трических схем УГ приведены на рис. 2.22. Напряжение e-,T(l)
является входным сигналом БК СЧ (см. рис. 1.1), и поэтому к
нему предъявляются весьма жесткие требования. В частности,
необходимо обеспечить минимальные уровни спектральной пл< т-
ности среднего квадрата ПОЧ Sf(a>) и спектральной плотности
среднего квадрата ПОФ 5- (со) в заданной полосе частот, а также
реализовать требуемый коэффициент перекрытия диапазона ра-
диочастот.
Рассмотрим сначала некоторые вопросы, связанные с пере-
стройкой LC-резонатора УГ с помощью варикапов. Как известно
[36], варикап — это диод, у которого емкость закрытого р-п пе-
рехода меняется в зависимости от подаваемого на него напряже-
ния. На рис. 2.22 варикап обозначен VD. На рис. 2.23,а, б приве-
дены соответственно полная и’ упрощенная эквивалентные схемы
варикапа [36]. На этих схемах приняты следующие обозначения:
Сб — барьерная емкость р-п перехода; Ав — индуктивность выч
водов; Го — сопротивление контактов и кристалла; gn — активная
40
Рис. 2.22. Схема управляемого гене-
ратора на биполярном транзисторе
Рис. 2.23. Полная (а) и упрощенная
(б) эквивалентные схемы варикапа
составляющая проводимости р-п перехода, гп = го+ l/{gn[l +
+ (»тв)2]}, Св = Сб[1 + 1/(ютв)]/[1— (ю/юо.в)2], ® — рабочая частота,
rB = C6/gn, ®о.в= 1/У^вСб. Емкость Сб, зависящую от напряжения
управления еупр, запишем в виде Сб = Свн [(Ен+<рк)/(^упР+<рк)]".
где СвН — емкость р-п перехода, измеренная при еУпр=Дн, <рк —
контактная разность потенциалов, п— показатель, зависящий от
закона распределения примесей в полупроводнике, Ен — начальное*
напряжение. Для варикапов, у которых Сб>2 пФ и g’ndO-8 См
в частотном диапазоне ®уг/2л> 10 МГц, выражения для Св и гп
можно упростить: Св=Сб/(1—£вСб®2), гп = Го- Для частот ®угСсо0.в
Св = С6 = Свн (£н + Тк)"/(вупр + П)п- (2.23>
В табл. 2.6 приведены параметры некоторых типов варикапов
[36]. Кроме введенных ранее обозначений в табл. 2.6 L\ — погон-
ная индуктивность выводов варикапа. Тогда для длины выводов
I справедливо равенство LB = IL\.
Варикап может различным образом включаться в схему LC-
резонатора, однако большинство схем колебательных контуров-
можно представить в виде схемы рис. 2.24. Здесь частота /уг может
варьироваться как за счет изменения емкости варикапа Св, таю
и за счет перестройки конденсаторов Со и С1 или одного из них.
Таблица 26
Параметры варикапов 2В110, 2В117, 2В124
Тип варикапа Свн £н=4В п ч>й- в гп, Ом нГ/мм
2В110 А 15,19 0,48 0,6 0,56 1,2
2В110 Б 17,02 0,48 0,6 0,71 1,2
2В110 В 21,52 0,48 0,6 0,65 1,2
2В110 Е 22,45 0,48 0,6 0,81 1,2
2В117 А 24,70 0,98 0,8 0,55 1,2
2В117 Б 25,91 0,98 0,8 0,54 1,2
2В124 А 24,42 1 0,8 0,83 1,0
Рис. 2.24. Схема колебательно-
го контура УГ
4р
Будем считать, что частота колебаний УГ <0уГ==2л/уг совпадает с
частотой настройки колебательного контура, изображенного на
рис. 2.24. Это предположение-справедливо, если не учитывать
инерционность активной части УГ.
Перейдем к определению статической характеристики управления УГ. До-
полнительно к принятым обозначениям для текущих значений параметров будем
отличать их начальные величины дополнительными индексами «Н». Введем так-
же понятия коэффициентов перестройки: Ке уПр= (еУиР+<рк)/(£'н+<Рк)»1;
Хс в “ Свн/Св Г, Ксо~СОЙ1СО> 1; Кс1 = С1н/С1>1, Кск= Скв/Сх>1; ХщУг =
__1_
=ыуг/п)уг.н^-1. Здесь ыУг= (ГкСк) ь>Уг.н = (ГкСкн) Ск=С0+С1Св/(С1+Св),
Гкн = Грн-|-С1В Свн/(С|Н-|-Свн) , ^СщУГ = Скн/СК.
Используя приведенные формулы и обозначения
ао,н — б?о.н/Скн <1уг’ 11 н — СВН/С1Н > О,
яюлучаем
Свн/Скн == (1 — а0.н) (1 + 11н), " (2.24)
Ск/Скн = ао.н//Сс.о + (1 - а0.н) (1 4- Т1Н)/(КСВ + Ън/Сс1) = 1/№ш УГ,
Кш уг = {(/Сев + Tih/Cci) /Сс.о/[( 1 — ао.н) (1 11н) /Сс.О +
+ *о.н(Ксв+ ъЛс1)]Р • (2.25)
^Принимая во внимание (2.23), можно показать, что
Ксв=^упр. (2.26)
ГС учетом (2.26) и (2.25) л
1
„ _ (К*упр Tih/Cci) /Сс.о 2 (2 97)
(1—«О.н)(1 +Т1н)А'с.о + «О.н(/С"упр + '(1н/Сс1)
'Выражения (2.25) н (2.27) представляют собой разные формы записи стати-
ческой характеристики управления УГ в безразмерном виде. Из (2.27) следует,
•что прн еуПр=£'н
________________(1+71нКс1)Кс.О
. (1 —а0н)(1 + Т1н)/Сс.О-|-ао.н (1 -1- TihACci)
(2.28)
' Формула (2.25) может быть также использована для определения различных
•функций, располагающихся в ее правой части (Ксв, «он, Уш и др.), позволяю-
щих рассчитывать элементы колебательного контура прн той нлн иной сово-
купности заданных величин.
Важным параметром УГ, влияющим на многие важные характеристики
ИФАПЧ (коэффициент усиления, устойчивости н др.), является дифференциаль-
ная (локальная) крутизна Syr статической характеристики управления УГ,
определяемая в точке нз равенства Syr=rfcoyr/rf£ynp.
-42
Найдем величину Syr как
Syr = (dwyr/dCK) (dCJdC^dCJdeynp) = 5Ш yr. CKS CK.CB*SCB. 6y*
Используя введенные выше обозначения, можно показать, что
Sw уг.ск = шуг.нК® yr/(2CKH), Sck.cb = Л2^пр/(/С"уПр + 'IihA’ci)2,
$свеу= СвнЛ/[(гупр + ?к) A"y*p].
С учетом этих равенств н (2.24)
~ у _ Цуг-нГС (1 - «0,н) (1 + Пи) К3Ш уД?упр
yr(W- 2&-НЖЧ + Ш2
Принимая во внимание (2.27), запишем (2.29) в ином виде:
Syr (еупр) = шуг.нга (1 - а0.н) (I + Пн) Кпеу1прК10/{2 (£н + <Рк) X
X Кт уг [( 1 —«О.и) (1 4- Пн) КсЛ + “О.н (А'Лупр +
При (?упр = Ен
„ ._ _ шуг.нИ(1 «о.н) (1 + Пн) А® 1Г (£„)
уг( н) ЖЪШ+Ш •
Для Syr (еуПр) относительное изменение крутизны
„ ___ Ayr (Ан)
Asyr~ S (е )
Oyr vcynp/
(2.29)
(2.30)
^уг^нИ^упр + ТьЛс,)2
(1+ЪнЛс>)2К3шуД"у‘р
Для облегчения трактовки полученных результатов остановимся на част-
ных случаях.
1. Колебательный контур настраивается только емкостью Со (рис. 2.24), т. е.
Kci= 1. Примем также, что Ксо>1, Кеупр = 1, (еуПр = £'в), аон>0, У1Н>0. Тогда
1
на основании (2.28) и (2.30) запишем КшУг(£в) ={Кс о/[(1—аов)Ксо+оов]} 2
Sa, уг(£в) =<Вуг в/г(1—<Хов)^шуг (•Ев)/[2(£,в + фк) (1+У1в)].
2. Колебательный контур УГ перестраивается только емкостью Ci, т. е.
Ксо=1. Примем также Kci> 1, Кеупр = 1, аОв>0, Yib>0. Тогда
1
Кт уг (£„) = {( 1 + Т1нКс1)/[(1 - «0,н) (1 + Пн) + «0.Н (1 + Т1н/Сс1)]} 2 •
Syr (£н) = ШУГ.Н« (1 — Оо.н) (1 + Т1н)/{2 (Е„ + <рк) Кт уг (£«) X
X [(1 — «о.н) (1 + Пн) + “0 н(1 + TlH^cl)]2}.
Если емкость Со отсутствует (Со=0), то очевидно Ксо=1> но следует до-
полнительно учитывать, что аов=0. В этом варианте приведенные формулы мо-
гут быть упрощены:
Кт уг (£•„) = [(1 + Т1нКс1)/( 1 + Пн)]~,
уг (£н) — ШуГ.нИ/{2 (Ен + <рк) (1 Т1Н) Кт уг (£•„)}.
3. Перестройка осуществляется только емкостью варикапа, т. е. Ксо=1.
Лс1 = 1, Ke упр> 1, аОв>0, Yib>0. В этом случае
1
^уг = {(^упр + 'Г1„)/[(1 — а0.н)(1+Пн) + «О.н {Кпе упр + Т1н)]}2,
43
Syr = шуг.н« (1 - ао.н) (1 + 11») «1 угК"~1пр1[2 (Еи + Тк) X
Х(^упр + Т1н)2].
Syr (£») = шуг.н« (1 — ао.н)/[2 (Е„ + <Рк) (1 + Т1н)]»
К,уг = (К^упр + Ън)2/[( 1 + ЪнЖ уЛ-’р].
а) а0.н = О (Со = 0), т1н>0 и ^Уг = [(К"упр+11н)/(1 + Ън)]’2'/
Syr (%пр) — ШуГ.Н^Л" упр/[2 (Ен + <рк) U 4" Т1н) уг],
Syr (Еа) = шуг.н«/[2 (Ен + Тк) (1 + Т1Н)]. Ks уг = кт уг/^’р.
б)«о.нZ>0, — 0 (Ci= оо); КюуГ — {/С"упр/[(1 ао.н) +аонА'"упр]}2 »
Syr(^ynp) = ШуГ.вИ (1 аОн) /С® уг/[2 + ?к) К" упр].
5уг (Ен) = шуг.н« (1 - а01|)/[2 (fH + <рк)], Ks yr = Kne^Kt уг-
Из последнего равенства п(еупр) =lg (K„yrKs уг)/1£ Ке упр—1- Зависимость
я(еуПр) позволяет при известном значении <рк и измеренных величинах Ктуг,
Ks уг и еуПр экспериментально определить связь между показателем степени
характеристики варикапа и напряжением смещения. При этом важно, что нет.
необходимости Знать величину а0 н.
а) яо.н = Т1н — 0, С\ — со):
Кшуг = А’е2упр, Syr(eynp) = <Oyr.H«^"/2~pV[2 (£в 4~ <рк)]>
Syr (Ен) = шуг.в«/ [2 (£н + Тк)], Ks уг = К’-"'2.
Рассмотрим вопросы, связанные с выбором режимов УГ по
постоянному и переменному токам. Общая теория транзисторного
автогенератора развита в [37, 38]. Допустим, что имеется емкост-
ная трехточечная схема (рис. 2.25), и используем результаты, по-
лученные в [39]. На рис. 2.25 приняты следующие обозначения:
L, Cl, С2 — элементы колебательного контура УГ (емкость вари-
капа условно включена в СЗ), г — резистор, отображающий поте-
ри в колебательном контуре, Цк, ha — первые гармоники тока
JL Т I О^пит П/?7 Лб ЦЛк *-AP С _ С , у В12 П BlL IL1 ^~С2 I I 1 ‘-'ВЛ О"2 е,, [Г* СЗ = z —Z. С/ £др Рис. 2.25. Емкостная трехточечная схема УГ Рис. 2.26. Эквивалентная схема за- мещения цепи базы по переменному току сз QZzk'? е'-г\ L os'
44
коллектора и базы соответственно, ец, ei.2— первые гармоники
напряжений на конденсаторах Cl, С2 соответственно, Rl, R2, R4 —
резисторы, обеспечивающие надлежащий режим УГ по постоян-
ному току. Если разорвать в УГ обратную связь (например по
цепи коллектора), а ток /[к создать от постороннего источника, то
на резонансной частоте контура <вуг эквивалентная схема заме-
щения в цепи базы (клеммы а—б) по переменному току может
быть изображена в виде, приведенном на рис. 2.26. Под резонанс-
ной частотой контура понимается <Byr=iyLC, где С определяется
из равенства 1/С= 1/CI + 1/С2+1/СЗ. На рис. 2.26 обозначено
R = 1/(гС1С2о>2г )—управляющее сопротивление УГ на частоте
<оуг. Величина R может быть также определена по одному из сле-
дующих соотношений. R — RK3R=pQC2/(ClC2), где RK3 =
= (a>yTL)2p2lr, p=\LIC, К=С\/С2— коэффициент обратной связи,
Q — добротность контура, p=eu/eiL=C/Cl, e\L—напряжение пер-
вой гармоники на индуктивности L.
С учетом рис. 2.25 и 2.26 УГ с разомкнутой обратной связью
в цепи коллектора может быть сведен к усилителю с общей базой,
изображенному на рис. 2.27. На этом рисунке приняты следующие
обозначения: E0=Enw-IR2/(R1+Я2), p = 7iK/7i6 — коэффициент уси-
ления безынерционного транзистора по току, 2?г=^3+^4 +
+кб + ^1/?2/(2?1 +7?2)]/р, Гб — сопротивление базы транзистора. Вы-
сокочастотное напряжение на конденсаторе С2р в дальнейшем
учитывать не будем. Ток коллектора в схеме рис. 2.27 представля-
ет собой косинусоидальные импульсы с отсечкой:
. / \ __ (0,85 (Лк7?/7?')( cost— cos 6) при cos т> cos 6; ,о q
{ А (2.01)
( 0 при cos т < cos 6,
где R ' —Ra + rb/fi+RK/fi; т=юуг^— нормированное время; 0 =
= arccos(—Ecm/Iik7?) —эквивалентный угол отсечки;
Есм = Eq —’ Л) (Rr — RT) 4“ In (X/s/?r)/X; (2.32)
Io—постоянная составляющая тока эмиттера; Wk^KoTIg— тем-
пературный потенциал; Ко—-постоянная Больцмана; Т — абсо-
лютная температура; g— заряд электрона, Is— тепловой ток
эмиттера, определяющий ток эмиттера гэ при данном напряжении
на переходе эмиттер—база Еэ6 в соответствии с формулой
<э = Лехр (Еэ6/Х).
Разлагая /к(т) в ряд Фурье,
находим первую гармонику кол-
лекторного тока и, учитывая, что
в режиме генерации должен вы-
полняться баланс амплитуд, по-
лучаем
0,85/1^(6)//?; = Л к, (2.33)
Рис. 2.27. Эквивалентная схема УГ
45
где Yi (0) = (20—sin 20)/2л — коэффициент разложения косинусо-
идального импульса с отсечкой для первой гармоники. Равенство1
(2.33) запишем в виде 0,85 (RIR’r )yi(>0) = 1. С помощью (2.31) и
(2.32) найдем первую гармонику и постоянную составляющую то-
ка коллектора. После преобразований получим
Л О,85[£о4-1п(Х/Х)А1ъ(6)
1К R’r [0,85 (b — 1) f0 (6) — cos 6]
7п.к = Лк1о(0)/Ъ(0).
где b = R,/R'; уо(0) = (sin 0—0cos0)n. Первую гармонику напря-
жения на конденсаторе С2 найдем как eiz. = 7iK2?(l—K/fJ)- Напря-
жения на других элементах УГ можно определить достаточно"
просто.
Рассмотрим некоторые вопросы, связанные с спектральными
характеристиками колебаний УГ. Эти вопросы, играющие сущест-
венную роль не только в системах синтеза частот, явились пред-
метом исследований многих авторов [40—43] и поэтому рассматри-
ваются ниже кратко.
Естественные и технические шумы активной и пассивной частей
УГ «размывают» спектральную линию автоколебаний, которые
вследствие этого не могут считаться моногармоническими. В ре-
зультате для квазигармонического сигнала автогенератора спра-
ведлива запись eyr(Z) =Em(t) cos {соуг/ + ср(/)}, где Em(t) —отража-
ет флуктуационные изменения амплитуды колебаний <р(/) —ПОФ.
Энергетический спектр колебаний eyr(Z) при отстройках от соуг на
±coyr/2Q в основном формируется за счет ПОФ [4, 40]. Типичная
спектральная плотность фазовых флуктуаций (ю) [рад2/Гц]
показана на рис. 2.28 [44]. Кривая (со) условно разделена на
несколько участков, каждый из которых соответствует определен-
ному виду флуктуационных возмущений: 1 — характеризует слу-
чайные отклонения частоты (закон 1/<о4); 2— частотно-модулиро-
ванный фликкер-шум (1/со3); 3 — частотно-модулированный белый
шум (1/со2); 4 — фликкер-шум (1/со); 5 — белый шум (со0).
Для определения ST (со) в одноконтурном УГ используется мо-
дель, принятая в [44] (см. рис. 2.29). На этом рисунке S?yc(u>)
обозначает спектральную плотность фазовых шумов усилителя
Рис. 2.28. Спектральная плотность
фазы УГ
46
Рис. 2 29 Модель УГ для расчета!
фазовых флуктуаций
(активной части УГ), TQ = 2Q/(oyr — эквивалентную постоянную*
времени нагруженного контура (пассивной части УГ). Из рис. 2.29
можно найти
1 2 г Ш2
SJ0)) = Sipyc(«)) + •
(2.34>
Представив фазовые шумы усилителя с учетом фликкер-шума в
виде ST yc(f) =ajf+ao из (2.34), получим
Sv (/) = (/yr//)2«-i/(/4Q2) + (/yr//)2«o/(4Q2) + а-г/f + a0, (2.35>
где fyT=a>yT/2n. Таким образом, зная параметры усилите-
ля a~i, До [40, 45] и параметры контура fyr, Q, можно используя
(2.35), определить спектральную плотность фазовых шумов УГ.
2.4. ЦИФРОВЫЕ ДЕЛИТЕЛИ ЧАСТОТЫ
Делители частоты в СЧ служат для приведения частот колебаний
опорного соог и управляемого юуг автогенераторов к рабочей часто-
те ио дискриминатора (см. рис. 1.1). Во многих вариантах построе-
ния синтезаторов а>0 задает шаг сетки частот Гш.
Ниже рассматриваются так называемые цифровые делители
частоты, построенные на элементах цифровой логики и управляе-
мые внешним воздействием, поступающим на соответствующий
вход. Подобные устройства получили наиболее широкое распрост-
ранение в СЧ. С точки зрения возможности оперативного измене-
ния коэффициента деления в процессе работы они могут быть
разделены на два вида: с фиксированным (ДФКД) и переменным
(ДПКД) коэффициентами деления. Важнейшую классификацию
ДФКД проведем по характеру выходного колебания (функцио-
нальной характеристике) и по структуре [46]. В первом случае
отличительными критериями являются длительности импульсов
выходной последовательности и возможность изменения располо-
жения их на временной оси (сдвига «фазы» импульсов) в про-
цессе работы делителя. В зависимости от особенностей примене-
ния ДФКД сигналы на его выходе представляют собой последова-
тельность коротких импульсов длительностью rg, соизмеримой с
2л/со0г, или меандр. Такое подразделение имеет, разумеется, смысл
при обычно выполняемом неравенстве Т п~^>2л/<ла1. Например, если
ДФКД нагружен непосредственно на ИФД типа Д5-триггера, то
желательно, чтобы rg не превышала 2л/юОг. При использовании
ИФД типа исключающее ИЛИ на его вход обычно подается ко-
лебание типа меандр (см. § 2.1) [47]. Отличия в rg могут сказать-
ся и на структуре ДФКД. Так, при тг==2л/<»ог сигнал можно сни-
мать с дешифратора, идентифицирующего состояние, условно при-
нятое за конечное (финишное). Для получения меандра при лю-
4Т
бых целых коэффициентах деления Дд ДФКД наиболее простым
решением является последовательное объединение двух делите-
лей: первого с коэффициентом деления Д1 = Дд/2 и второго с коэф-
фициентом деления Д2=2. Что касается расположения выходных
импульсов на временной оси, то обычно в процессе работы СЧ
оно сохраняется неизменным, что позволяет говорить о периоди-
ческом характере выходного сигнала. При пассивном цифровом
синтезе [46] используют ДФКД, в которых сдвиг фазы осущест-
вляется по внешним командам.
Структуры ДФКД классифицируются по типу счетчика им-
пульсов (СИ) и числу номинальных делителей в ДФКД. В свою
очередь, СИ делятся на двоичные весовые (взвешенные) и двоич-
ные циклические. Применение весовых СИ в ДФКД не всегда ра-
ционально. Так, при Дд>20 это приводит к неоправданному уве-
личению аппаратурных затрат. При Дд>20 обычно применяют СИ,
работающие по циклическому коду, и поэтому такого рода дели-
тели условно можно назвать циклическими.
Подчеркнем, что для работы ДФКД очень важными являются
такие характеристики, как длительность и вид переходных про*
цессов, уровень паразитной фазовой модуляции выходного сиг-
нала, собственные шумы и т. д. С точки зрения этих показателей
следует отдать предпочтение ДФКД, построенным на СИ с «па-
раллельно-сквозным переносом» информации между каскадами
делителя. Номинальным делителем будем называть такое устрой-
ство, структура и-постоянные связи которого позволяют получить
только одно значение коэффициента деления Дн. Если в ДФКД
применен один номинальный делитель, что это устройство может
быть отнесено к однономинальным. Применение последних неиз-
бежно, например, в случаях, когда — простое число. Чаще,
однако, возникает задача деления частоты на сложные числа
(разлагаемые на множители), когда применение однономинальных
ДФКД не оправдано. Имеется в виду ухудшение динамических
параметров, конструктивно-технологических характеристик и воз-
можности включения унифицированных узлов широкого примене-
ния. В такой ситуации используются многономинальные ДФКД,
построение которых осуществляется согласно следующему алго-
ритму:
1. Требуемый коэффициент Дд разлагается на простые множи-
тели.
2. Выбираются однономинальные ДФКД со значениями Дн, со-
ответствующими простым числам, входящим в разложение по п. 1.
3. Принимается одна из следующих структур: а) однономи-
нальные делители соединяются последовательно; б) входы всех
однономинальных делителей объединяются и подключаются к ис-
точнику сигнала с частотой (оог. Сигналы делителей подаются на
соответствующие входы логического элемента И, т. е. подвергают-
ся логическому умножению. Выходной сигнал снимается с выхода
указанного элемента И.
48
4. Если разложение коэффициента деления /?д содержит только
одинаковые простые множители (например 2?д= 125= 5*5>5), то
многономинальный ДФКД может быть реализован по последова-
тельной схеме в соответствии с п. За). При получении в процессе
разложения по п. 1 разных простых множителей (например,
RH= 105=3-5-7) ДФКД выполняется либо в виде последователь-
ного соединения однономинальных делителей (п. За), либо с
эбъединением их входов (и. 36). На практике могут использовать-
ся смешанные схемы многономинальных ДФКД. Такое положение
возникает, если разложение Ra по п. 1 содержит одновременно
как разные, так и одинаковые простые числа (например, 2?д = 75=
= 5-5-3).
Благодаря быстрому развитию техники цифрового деления и
повышению степени интеграции микросхем делителей можно пе-
реходить на комбинированные схемы. В последних имеются как
однономинальные делители, например с 2?н=10 (К533ИЕ6) или с
2?н=16 (К533ИЕ7), так и маломощные в смысле потребления
энергии от источников питания устройства с переменным к коэф-
фициентом деления (564ИЕ15) [48].
Наибольшую трудность в проектировании и соответственно ос-
новной интерес для рассмотрения представляют ДПКД. Послед-
ние являются пересчетными устройствами с целочисленным коэф-
фициентом деления N, задаваемых цифровым кодом, и их можно
разделить на группы по следующим классифицированным крите-
риям: дискретность деления, вид управляющего кода (функцио-
нальной характеристике), структура схемы опознавания. В зави-
симости от параметров СЧ N может изменяться с дискретностью
Рис. 2.30. Структурная схема ДПКД
со схемой управления и записи
Рис. 2.31. К пояснению работы
ДПКД; а — режим вычитания ТС;
б — режим сложения ТС
49
К СУЗ
Рис. 2.32. Структурная схема ТС (W=2n)
(шагом), равной единице, либо с более мелкой — дробной дис-
кретностью. В соответствии'с этим рассматривают целочисленные
и дробные ДПКД и ДДПКД соответственно. Вид управляющего-
кода во многом определяется характеристиками системы управле-
ния СЧ. Так, при ручной установке рабочей частоты предпочтение
отдается декадным счетчикам импульсов. Это объясняется удоб-
ствами, создаваемыми для оператора широко распространенной
десятичной системой счисления. При автоматической перестройке
более рационально использовать двоичные СИ, позволяющие уп-
ростить аппаратурную реализацию СЧ [5, 46, 47, 49].
Б)
Рнс. 2.33. Диаграммы, поясняющие работу ТС: а—режим сложения; б—режим
вычитания
50
В ДПКД чаще всего используются опознавание одного, заранее
выбранного состояния тракта счета (ТС) и запись заданного чис-
ла N, лежащего в пределах Ммин... А/'макс- В этом случае ДПКД
можно представить в виде структурной схемы'(рис. 2.30), состоя-
щей из трех основных узлов: ТС, схемы опознавания (СО) и схе-
мы управления и записи (СУЗ) [5, 46, 49, 50]. Для получения за-
данного коэффициента деления устройство ТС должно обладать
определенным числом устойчивых состояний, которйе определяют v
его емкость N0=2", где п—число триггеров Уо>^макС. В ТС можно
использовать принцип сложения или вычитания. В первом вариан-
те текущее состояние ТС с приходом каждого выходного импульса
увеличивается на единицу, а при работе на вычитание уменьшает-
ся на единицу. Изменение во времени состояний ТС, работающего
на вычитание, можно представить в виде линейноспадающей
(рис. 2.31,а), а на сложение — линейнонарастающей пилообразных
характеристик (рис. 2.31,6). Для установки счетчика ТС в любое
нужное состояние от Умии до Умакс каждый из его триггеров
(Т-типа, £)-типа, УК-типа и др.) должен иметь два установочных
входа S и R: при подаче на вход S «лог 1» на выходе должно
устанавливаться состояние Q=l, а при подаче «лог 1» на вход
R— состояние Q—0 (рис. 2.32). Кроме того, каждый триггер дол-
жен иметь тактовый вход С. Работа ТС на сложение и вычитание
с учетом весовых коэффициентов триггеров показана на рис. 2.33,а
и рис. 2.33,6 соответственно.
Выбор опознаваемого состояния — одна из основных задач при
проектировании ДПКД. Для ее решения необходимо знать гра-
ничные значения коэффициентов деления ЛГМИИ, Кмакс и входной
цифровой код В. В большинстве случаев код В не совпадает с
кодом для N, и поэтому рациональный выбор опознаваемого сос-
тояния может значительно упростить устройство формирования
управляющего кода. Если с помощью СО опознавать некоторое
состояние А в ТС и осуществлять его установку в состояние В,
то при работе ТС на сложение справедливы следующие зависи-
мости (см. рис. 2.31,6):
/V = Д — В, если Д>В,| „ зб>
N = No — (В — А) = 2п — (В — А), если Д<В.) ( '
При работе ТС на вычитание (рис. 2.31,а) справедливы зависи-
мости
№В-Д. если В < А,1
Nz=N0 — (A — B), еслиД>В./ v 1
Из (2.36) и (2.37) видно, что при К=4=В всегда можно найти
такое значение А, при котором для требуемой величины N можно
получить необходимое В. Например, требуемые коэффициенты де-
ления ДПКД, работающего на вычитание, Умии = 1999, Кмакс =
= 2998, а входной код В меняется от 0 до 999. Выберем ЛА,=212=
= 4096 согласно условию К0>Л^макс. Из (2.37) найдем Д=у0—
—N+B. Подставляя в эту зависимость Вмин=0, ЛГМИИ=1999, нахо-
4* 51
дим А = 2097. Проверка (2.37) для йМакс = 999 дает ММакс = 4096—
— (2097—999) =2998, что соответствует требуемому значению. Та-
ким образом, при заданных N и входных кодах управления схема
опознавания должна быть настроена на дешифрацию состояния
ТС, равную 2097. Таким же образом работает широко используе-
мая в ДПКД микросхема 564ИЕ15. Если выполняется равенство
N = B, опознаваемое состояние в 564ИЕ15 равно нулю.
Для изучения процессов установления (сброса) в ТС в конце
каждого цикла состояния, определяемого В, необходимо рассмот-
реть принцип построения СУЗ. Чтобы установить триггеры ТС в
состояние Q(=0 или Q, = l (i= 1, 2,..., п), на установочные входы
S или R (см. рис. 2.32) должны поступить логические единицы
(или логический нуль).
Один из вариантов схемы СУЗ на логических элементах
2ИЛИ-НЕ и D-триггере показан на рис. 2.34. В данном случае
СУЗ имеет в два раза больше выходов, чем триггеров в счетчике
ТС, и столько входов В, р, сколько состояний сброса В должно
быть обеспечено. При подаче на какой-либо из входов В1р логи-
ческой единицы или логического нуля на выходах элементов
2ИЛИ-НЕ (см. рис. 2.34) появляются соответствующие сигналы.
В случае отсутствия подобных схем СУЗ временные диаграммы
работы ДПКД на вычитание имели бы вид, показанный на рис.
2.35,6. Если B = N, то в качестве опознаваемого состояния выби-
рается Д=0. Тогда при достижении в ТС нулевого состояния на
выходе СО появляется сигнал еВЫх.со, воздействующий на тригге-
ры ТС (см. рис. 2.35,а) (их состояния показаны штриховыми ли-
ниями). Первый триггер, перешедший в состояние, отличное от
того, в котором он был во время опознавания, вызовет пропадание
сигнала еВЫх.со. Длительность импульса еВЫх.Со зависит от задерж-
ки сигнала опознавания в СО, ТС и с учетом ряда дестабилизиру-
ющих факторов может колебаться в широких пределах. При этом
не исключено, что указанный импульс не сможет установить (сбро-
сить) часть триггеров ТС в нужное состояние, а это приведет к
ошибке в работе ДПКД. Для исключения этого эффекта, необхо-
димо подать на входы R и S триггеров ТС такой импульс, который
бы надежно устанавливал их в нужное состояние.
На рис. 2.35,6 — приведены временные диаграммы для ДПКД
СУЗ на рис. 2.34. Для получения нужного значения N в схеме
ввх суз
_П_ 0/п СО —|—
----------О Г
въх с
Рис 2.34. Структурная схема СУЗ
52
Рис. 2.35. Диаграммы, поясняющие работу СО: а—при отсутствии СУЗ; б—при
наличии СУЗ
СУЗ необходимо опознавать не состояние 0, а состояние 2. В этом
случае выходной сигнал евх.суз со схемы опознавания поступает на
вход £Ш-триггера, который изменяет его значение при переходе ТС
из состояния 2 в состояние 1 по переднему фронту входного им-
пульса ДПКД ^вх.с (см. рис. 2.35,6). Сигнал Qcy3 удерживается
в состоянии единицы на время, равное периоду сигнала евх.с. При
действии сигнала QCyB на выходах СУЗ появляются сигналы уста-
новки триггеров ТС в те состояния, которые задаются кодом В
(см. рис. 2.35,6, В, В—1, В—2, ...). В этом состоянии ТС находится
в течение двух периодов сигнала евх.с: в первом за счет блокиров-
ки ТС импульсом Qcy3, а во втором — за счет блокировки положи-
тельного фронта импульса евх.с. По окончании блокировки начи-
нается новый цикл счета ДПКД. Следовательно, для реализации
ДПКД с СУЗ на рис. 2.34 необходимо при расчете опознаваемого
состояния учитывать блокировку ТС на два периода входной им-
пульсной последовательности. Иными словами, при работе ТС на
53
сложение необходимо из А вычитать число 2, а при работе на вы-
читание складывать А с числом 2.
В рассмотренной схеме ДПКД (рис. 2.30) высшая входная
частота fyr должна быть меньше максимально допустимой рабочей
частоты триггеров ТС и О-триггера в СУЗ. В СВЧ синтезаторах
во многих случаях приходится повышать fyr до частот выше
10... 500 МГц. Однако при этом в ТС должны включаться тригге-
ры, работающие на этих частотах при всех дестабилизирующих
факторах. Подобная ситуация приводит к усложнению ДПКД и
неизбежному увеличению потребляемой от источников питания
мощности.
Более целесообразен следующий путь. Сигнал УГ в начале пос-
тупает на высокочастотный предварительный делитель (ПД) с
фиксированным коэффициентом деления Р, а затем с выхода ПД
сигнал с частотой fyr/P подается непосредственно на ДПКД. Вы-
ходная частота ПД должна быть оптимальной с точки зрения
работы ДПКД. Для уменьшения входной частоты собственно
ДПКД при заданном диапазоне fyr используют структуру дели-
теля, изображенную на рис. 2.36. Составными частями такого де-
лителя являются ПД, имеющие два целых коэффициента деления
УПд = Г> и УПд=Г+1; ДПКД1 с коэффициентом деления Ln —
программируемый счетчик, управляющий значением УПд. Общий
коэффициент деления ДПКД при Упд = Г определится так:
М = /уг//с = Р^. (2.38)
При изменении на единицу N изменяется на Р. Для работы СЧ
целесообразнее сделать так, чтобы N можно было менять в опре-
54
деленных пределах, равных любому целому числу, а не только
кратному Р. Рассмотрим этот вопрос подробнее.
Запишем (2.38) в виде Ni=N/P. При делении У на Р с учетом
того, что N и Р целые положительные числа и P<N, можно
записать
N/P— R^ Ь/Рг, ' (2.39)
где Pi, L — целые положительные числа, причем 0<L<P и
/?!>£. Подставив (2.39) в (2.38), получим
N-PRt + L. (2.40)
После простых преобразований имеем
Af = (/?1-L)P + £(P+l). (2.41)
Из изложенного следует, что величина L изменяется от £мии = 0
до ЕМакс = Р—1. Поскольку разность должна быть положительна,
необходимо выполнение неравенства Р1МиН>Емакс. Для того чтобы
реализовать структурно выражение (2.41), схема (см. рис. 2.36)
должна работать следующим образом. Одновременно с появлени-
ем выходного импульса ec(f) коэффициент деления УПд устанавли-
вается с помощью СУЗ равным Р+1. Деление на Р+1 будет про-
исходить на выходе ПД только L периодов колебаний, так как
через интервал времени, равный L(P+l)/fyr, схема Ln переведет
ПД в режим работы с Л/'ПД = Р. Весь цикл функционирования
ДПКД периодически повторяется, и это позволяет наглядно объяс-
нить то обстоятельство, что в схеме на рис. 2.36 нельзя получить
некоторые значения N. Поясним сказанное. Пусть требуется опре-
делить значения NMKK и УМакс, обозначающие в рассматриваемом
ДПКД границы диапазона коэффициентов деления. Тогда в соот-
ношение Р1 мии>Рмакс необходимо ПОДСТЭВИТЬ Рмакс = Р—1. ТаКИМ
образом, условие для Pi имеет вид
Pi>P-l. (2.42)
Так как Р1мии>Р—1, то из (2.42) следует, что неравенство
JRi>L выполняется для всех значений L и соответственно для
£мИи = 0. Подставив £мии и Р1МИн в (2.40), получим
Nu^ = P(P~i). (2.43)
Если В (2.42) подставить Рмакс и Рмакс, то
М.акс -тмакс+ 1)- 1- (2.44)
Известен ряд микросхем (например, 193ИЕ1, SP8690, SP8716,
-SP8792 и т. д.), для которых Р=10, Р+1 = 11; Р=128, Р+1 = 129;
Р=100, Р+1 = 101 и т. д. Из (2.43) видно, что при использовании
микросхемы с Р=100, УмиИ = 9900. В ряде случаев Умии в схеме
ДПКД (рис. 2.36) может превышать требуемое значение N
для СЧ.
С целью снижения Умии используют принцип разделения ПД
на п каскадов управляемых предделителей (ПД,-) (i= 1, 2,..., л)
(см. рис. 2.37) [51]. Для реализации такой схемы необходимо пре-
дусмотреть л схем управления L,-. Поясним некоторые аспекты
55
работы рассматриваемого ДПКД. Предположим, что управляемые
делители ПД, с коэффициентами деления от Pi до Pn-i работают
только с коэффициентами деления на Pt (i=l,...,n—1), а ПДП в
в двух режимах — деления на Рп и Рп+1. В этом случае мини-
мальный коэффициент деления ДПКД можно найти из (2.43):
Л^мин п = Р{р2 Pn-i[Pn(Pn—1)]. Аналогично если все ПД, кроме
ПДЛ_1, работают только в режимах деления на Plt а ПДП_] — в
двух режимах деления на Рп-\ и Рп-1 +1, то имеем КмИН, n-i =
= PiP2... Pn-2Pn[Pti-i (Рп~г~- 1)]. Составив подобные выражения
для NM ии, гг—2, •••> Л^минь нетрудно убедиться, что каждое из значе-
ний КмИИ1 одинаково зависит от произведения Pt=P (постоян-
но для данной схемы). Поскольку каждый из делителей ПД,-
управляется отдельным программируемым счетчиком Li, L2, ...,
Ln, то их коэффициенты деления взаимно независимы. Наиболи
шее из значений Ммии в схеме на рис. 2.37 определяется максималь-|
ным Р,: I
М,нн - (supP, — 1) fl рь
(2.45)
где sup Pt — максимальное значение Pt из множества Pt. Разделив
правые части (2.43) и (2.45), можно оценить выигрыш в умень
шении КМИи, который дает схема на рис. 2.37 по сравнению сс
схемой на рис. 2.36:
KB = P(P-1)/ (supP, - 1)ПР,
(2.46)
Найдем Кв при одинаковом коэффициенте деления одного ПД и п
ПД, т. е. при выполнении условия Р= П Pi. Тогда из (2.46)
Ав= П Pf-1) /(suPPz- 1).
(2.47|
Если Р^Р^Р^Р», то из (2.47) Кв= (Р"—1)/(Р—1). Макси*'
мальный коэффициент деления ДПКД на рис. 2.37 определяется
по формуле
Аймаке = М маке П Pi Р‘~' (Р' ~
До недавнего времени описанные структуры ДПКД не нахо-
дили широкого практического применения. Разработка микросхем
быстродействующих делителей частоты с коэффициентом деления
Р=10, Р+1 = 11 (КР193ИЕ2, КР193ИЕЗ) позволила эффективно>
использовать данные структуры и повысить максимальную рабо-
чую частоту ДПКД до 200 ...500 МГц.
Применение в ДПКД микросхем быстродействующих ПД име-
ет свои особенности. Для того чтобы получить одинаковые быст-
56
Рис 2 38 Функциональная
схема предварительного де-
лителя частоты
КР193ИЕЗ
б* 9N
родействия ДПКД и ПД необходимо выполнение следующих усло-
вий. Во-первых, нужно применять программируемые счетчики с
максимальной рабочей частотой, в МПд раз меньшей максимальной
частоты входного сигнала. Во-вторых, при формировании сигнала
управления ПД следует обеспечить требуемое время задержки
относительно входного сигнала ДПКД, определяемое структурой
предварительного делителя [52]. Структура предварительных де-
лителей КР193ИЕ2 и КР1ЭЗИЕЗ (рис. 2.38) такова, что если сиг-
нал управления, переключающий с 10 на 11 или с 11 на 10,
начнет формироваться от первого входного счетного импульса и
закончит формироваться к девятому импульсу, то в следующем
такте работы ПД будет устойчивое деление соответственно на 10 и
на 11. Диаграммы напряжений на счетном входе, выходе и входе уп-
равления микросхемы КР193ИЕЗ приведены на рис. 2.39. Задержки
распространения сигнала показаны условно. Делитель будет устой-
чиво работать на любой частоте рабочего диапазона, если сумма
времени задержки п в предварительном делителе и времени за-
держки Т2 формирования сигнала управления меньше девяти пе-
риодов входного сигнала (9ТВХ). При ti+t2 = 97’bx наблюдается
неустойчивость в работе ДПКД. Если ti+t2>97’bx, то ДПКД вновь
работает устойчиво, но использовать такой режим работы не сле-
дует, так как техническими условиями не гарантируется минималь-
ное время задержки микросхемы. При использовании микросхем
КР193ИЕ2, КР193ИЕЗ формирование сигнала управления следует
начинать от положительных фронтов импульсов с выходов 2 и 6
или от отрицательных фронтов с инверсного выхода 4. Макси-
*вх
ют„
012395678907 23956789 10
ппппппппппппппппппппппп
! I I I
о
^вых
t
н
„п T5i
А
t
t
Рис 2 39. Диаграммы рабо-
ты делителя КР193ИЕЗ
57
Рис. 2.40. Структурная схема ДДПКД
Рис. 2.41. Структурная схема на-
копительного сумматора
мальная рабочая частота ДПКД при этом /макс=9/(т1+т2). Заме-
тим, что в последнем равенстве не учтено пренебрежимо малое
время задержки логических микросхем ПД, необходимое на обра-
ботку сигнала управления.
Рассмотренная структурная схема ДПКД„на рис. 2,36 позволя-
ет просто решить вопрос получения дробного коэффициента де-
ления (принципы формирования такого коэффициента деления
подробно представлены в [5]), Особенностью этого ДПКД являет-
ся появление в его схеме формирователя дробности (ФДр) и сум-
матора 3341 (см, рис. 2.40). Схема ФДр состоит из счетчика им-
пульсов выходной .частоты fc ДПКД, емкость которого зависит от
числа разрядов дробности. Известен вариант ДДПКД, в котором
распределение импульсов дробности осуществляется с помощью
схемы накопительного сумматора [53]. Вариант схемы такого
сумматора показан на рис. 2.41 [54]. На сумматор SM2 подается
код дробности Вдр и код с выхода регистра RG. На тактовый вход
С регистра RG поступают импульсы с выхода ДПКД. Выход пе-
реноса Rn сумматора подключен к схеме управления L «младши-
ми» разрядами ДПКД через ЗЛИ. В последнем производится сло-
жение кода SM1 с кодом «младших» разрядов. С приходом каж-
дого выходного импульса ДПКД в SM2 накапливается код дроб-
ности до его переполнения. Импульс переполнения присутствует
на входе схемы управления «младшими» разрядами ДПКД весь
цикл его работы, В новом цикле схема управления L «младшими»
разрядами ДПКД формирует сигнал управления ПД, который на
единицу больше, чем это определено кодом «младших» разрядов.
Таким образом, средний коэффициент деления АГ всего ДДПКД
будет содержать дробную часть, соответствующую коду Вдр. Пос-
ледовательное соединение двух и более таких накопительных сум-
маторов позволяет увеличить число разрядов дробности ДДПКД.
ГЛАВА 3
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
РАБОТЫ СИНТЕЗАТОРОВ ЧАСТОТ
С СИСТЕМОЙ ИФАПЧ
3.1. ПОСТАНОВКА ЗАДАЧИ И КРАТКИЕ СВЕДЕНИЯ
О МЕТОДАХ АНАЛИЗА
Синтезатор частот с ИФАПЧ представляет собой сложное нели-
нейное дискретное устройство автоматического регулирования,
Ряд его звеньев (УГ, ФНЧ) образует непрерывную, а ряд
(ДФКД, ДПКД, Д) — импульсную части системы (см. рис.
1.1). Фундаментальные свойства СЧ определяются в первую оче-
редь нелинейностью импульсной части, обусловленной видом ха-
рактеристики дискриминатора и непериодическим квантованием
во времени в переходном режиме. Управляемому генератору так-
же свойственна нелинейная зависимость частоты колебаний от
управляющего сигнала (напряжения или тока).
При исследовании СЧ весьма продуктивным является метод,
основанный на создании ММ реальных устройств. Математическое
моделирование в сочетании с применением ЭВМ резко интенсифи-
цирует разработки новых типов аппаратуры и систем. Любая ММ
должна опираться на описание работы реального объекта и его
элементов, т. е. адекватно учитывать происходящие в них физи-
ческие процессы. С другой стороны, полученные математические
уравнения не должны быть настолько сложными, чтобы их интер-
претация оказалась практически невозможной. Отсюда вытекает
приближенность создаваемых моделей, но при этом, разумеется,
большие количественные и особенно качественные ошибки недо-
пустимы. При анализе СЧ с помощью ММ также следует вводить
ограничения на характер процессов в импульсной и непрерывной
частях, зависящие от конкретных вариантов построения ИФАПЧ.
Отметим, что применение импульсных ММ ИФАПЧ [7, 55, 60]
с постоянным периодом квантования не позволяет исследовать
переходной режим СЧ при больших отклонениях координат сис-
темы от положения равновесия. Однако, если эти отклонения
достаточно малы, указанные модели могут быть использованы
для анализа и синтеза СЧ.
Наиболее точные и универсальные ММ СЧ (во временной об-
ласти) разработаны на основе представления звеньев УГ и
ДПКД в виде частотно-импульсного модулятора второго рода
(ЧИМ2) с привлечением метода пространства состояний. Такой
подход использовался авторами работ [21, 28, 56—59] и др.
Поясним подробнее схему ЧИМ2. В зависимости от характера
связи между модулирующей функцией e(t) и модулируемым па-
раметром т]л различают модуляцию первого и второго родов [61,
62]. При импульсной модуляции первого рода значение т]„ опреде-
59
Рис. 3.1. Блок схема частотно-им-
пульсного модулятора
При импульсной модуляции
ляется величиной e(t) в момен-
ты срабатывания импульсного
элемента на входе модулятора:
r]n = f(en), где en = f(tn) и т]п =
= f(en)—модулирующая функция
и модулируемый параметр соот-
ветственно в дискретные момен-
ты t = tn (п = 0, 1, 2, 3, ...).
sToporo рода т]п определяется не-
которым функционалом от модулирующей функции на заданном
интервале времени, который, как правило, совпадает с периодом
квантования i]n=F{e(t^tn-, fn+i)}.
Для СЧ будем считать, что ДПКД — это счетчик числа пере-
сечений синусоидальным сигналом управляемого генератора
еуг(1) некоторого порогового напряжения. Тогда УГ и ДПКД мо-
жно представить в виде ЧИМ2, изображенного на рис. 3.1 [61].
Схема ЧИМ2 состоит из времязадающего фильтра (ВЗФ) с пе-
редаточной функцией 1/s, релейного элемента (РЭ) с порогом
срабатывания 2nNn, где Nn=N (tn) — коэффициент деления
ДПКД, специального импульсного устройства (ИУ), формирую-
щего элемента (ФЭ). На рис. 3.1 частота и фаза колебаний УГ
обозначены <пуг(7) и <рУг(О, a ec(t) соответствуют сигналу на вы-
ходе ДПКД; ИУ генерирует б-импульс всякий раз, когда срабаты-
вает РЭ, а ФЭ создает прямоугольные импульсы. Модулирующим
воздействием на ВЗФ является соуг(/). Сброс РЭ (линия 1) под-
готавливает к работе ВЗФ, устанавливая на его выходе к началу
каждого последующего интервала нулевые начальные условия.
В рассматриваемом случае в качестве ВЗФ используется иде-
альный интегратор (И); такие устройства согласно [61] называют-
ся интегральными ЧИМ2. Для ММ СЧ возможен вариант ЧИМ2
на рис. 3.1, в котором отсутствует сброс ВЗФ (интегратора) в
нуль. При этом порог РЭ после его срабатывания в моменты tn уве-
личивается скачком на 2nNn+i, а перед первым срабатыванием РЭ
он устанавливается равным 2лМь
Период между двумя импульсами ec(t) можно определить из
функционального соотношения
Тп
Tn=tn+i — tn; f <oyr(. + U ЦТn-,)d-- = 2r.Nn, (3.1)
о
где tn — момент появления л-го импульса с ДПКД. Предполагает-
ся, что в общем случае коэффициент деления ДПКД может ме-
няться в моменты tn.
Остановимся кратко на методах пространства состояний при разработке
ММ СЧ. Для фильтрации помех в цепи обратной связи ИФАПЧ используются
различного вида ФНЧ. Если не оговорено специально, то ФНЧ, как правило,
можно отнести к линейным стационарным динамическим цепям, описываемым
дифференциальными уравнениями
60
ame^ (t) + + ••• + (t) + a^t) =
= рое^)+Р1е^ (f)+ ... +A-></-i,(0 + P/</)(0, (3.2)
где ед(/) и вф(/)—сигналы на входе и выходе ФНЧ соответственно (см.
рис. 1.1); ат и pi — постоянные коэффициенты; т=0... 3, ... — порядок уравне-
ния; 1=0... 3 — число, определяющее порядок входного воздействия; е(™>(0 =
=dmеф (/))dtm, е(О (/) =dze4 (/)/d/z. Очевидно, что если заданы т начальных
условий и входное воздействие, то выходная функция и ее (т—1) производных
определяется однозначно.
Совокупность переменных вф(/), е^(/).. е ф”~2,(0 и е^~(/) можно
трактовать как состояние ФНЧ в «естественном» пространстве в момент t. При
этом уравнение (3.2) удобно представить в матричной стандартной форме [63],
если обозначить его правую часть u(t), а также принять, что
*i(0 = МО, ..., xm(f) =
Тогда из (3.2)
хт (О = е1фт> (0 = - (а0/ат) Х1 (t) - (at/am) х2 (t) —
— ... —(am^i/am)xm(t) + (l/am)u(t);
Х(0 = AX(0 + BU(0’l
Y(f) = CX(£) + DU(£)J
где X(/) = ||xi(/), x2(/), ..., xm(/)||r — вектор состояния ФНЧ (T — знак транспо-
нирования);
0 1 0 0 • 0 0
0 0 1 0 • 0 0
0 0 0 1 0 0
0 0 0 0 • • 0 1
—ajam —a^am —am_x]a
— сопровождающая матрица; В, С — матрицы; в (3.3) В = ||0, 0..1/ат||г — век-
тор-столбец размера т, С=||1,0................................0||— матрица-строка размера m; Y (0 =
= ||вф (/), 0.О||г — выходной вектор управляемых переменных; U (/) — входной
вектор управления, в (3.3) и(/)—скаляр; D — матрица, в (3.3) D =0.
Рассмотрим способ получения уравнений в пространстве состояния ФНЧ
путем разложения его передаточной функции G®(s), соответствующей диффе-
ренциальному уравнению (3.2), на элементарные дроби;
I т
Оф ($) = еф (з)/ед (s) = ^рр'Ч ais‘- (3.4)
1=0 1=0
Обозначим через Х(((=1,2....т) полюсы функции G$(s). Очевидно, что Ач—
это корни характеристического уравнения, составленного для (3.2). Если 1<т,
«т=1 и полюсы A.J простые, то (3.4) можно разложить на элементарные дроби:
т
Оф($) — d0 -ф- cjts — kz), (3.5)
i=l
где C/=iim (s—A()G$(s), d0=lin^(s).
5-*oc
61
Введем переменные состояния, для которых преобразование по Лапласу
имеет вид [64]
xi(s) = eJL(s)/(s -кг).
Применив к X;(s) обратное преобразование Лапласа (при нулевых начальных
условиях), получим Xi(t) —kiXi(t) + ед(/), используя (3.5), найдем вф(/) =
т
CjX-,(t). Перейдем к векторным обозначениям:
<=1
Х(0-АХ«) + Вед(^), У 36)
еф(0 = СХ(0 + ^д(0. I - .
где X(/)=||xi(0> х2(/), •••> xm(0Hr> A=diag||k1; k2, II — диагональная мат-
рица.
Случай, когда (3.4) имеет кратные полюсы, исследован в [64].
Остановимся еще на одном важном способе получения уравнений состояния
в канонической форме, который позволяет значительно упростить решение урав-
нений на ЭВМ. Рассмотрим дифференциальное уравнение состояния ФНЧ:
X(f) = AX(f) + bzz(f), - (3.7)
где b-вектор-столбец размера т\ u(t)—скаляр; А — матрица коэффициентов
размера mXm; Х(/)—m-мерный вектор-столбец. Пусть собственные значения
Х(((=1,2..т) матрицы А различны. Введем линейное преобразование
X(f) = LZ(f). (3.8)
С помощью (3.8) уравнение (3.7) можно привести к каноническому виду
Z(zf) = Sz(O + l«W-
(3.9>
В (3.8) и (3.9) приняты следующие обозначения: L —матрица, которая может
быть выражена через собственные значения как матрица Вандермонда
1 1
ki k2
Хт-1 ут-Х
L =
1 ••• 1
К К,
I т
к2 ... к2
i т
к"1-1 • • • к"1-1
I т
S = L-1AL = diag II kj, к2....km II ; (3.10)
L~1—матрица, обратная L; 1=L—!Ь. Выражение S=L—!AL называется
преобразованием подобия. Матрицы А и S подобны: они имеют одинаковые
собственные значения и их характеристические уравнения совпадают.
Из приведенного следует, что применив метод переменных состояния, можно
понизить порядок линейного дифференциального уравнения, сведя его к вектор-
ному дифференциальному уравнению первого порядка (3.3) или (3.6). Решение
последних на интервале времени от /0 до t
X(f) = ф(< - f0)X(f0) + /Ф (t - т)Ви(т)dx, (3.11)
где Ф(/—/0)=ехр[А(/—/0)]—переходная или фундаментальная матрица.
Х(/о)—вектор состояния при /=/0.
62
Матрица Ф(/) вычисляется различными способами. В частности, известны
аналитические процедуры, основанные на нахождении интерполяционного по-
линома Лангранжа—Сильвестра и теоремы Гамильтона—Кэлли [64]. В [61]
приведены формулы для определения элементов переходной матрицы Фгк по
таблицам обратного преобразования Лапласа:
Фгк (0 = £-1 {s-fe-i [1 - Ak (s)\lAm (s)], г < k-
ФгЬ (Z) = L-' {s'-*-1 Ak (s)!Am (s)}, г > k.
(3.12>
k
Здесь L~l— оператор обратного преобразования Лапласа, As(s) = X^ajs1;
i=o
k<m, a; — коэффициенты характеристического полинома передаточной функции
Оф(х). Необходимо отметить, что аналитическое определение Ф(/) отличается
сложностью и трудностью, резко возрастающими с повышением размера матри-
цы А. При использовании ЭВМ наиболее эффективны численные методы нахож-
дения Ф(1). Они, как правило, сводятся к установлению такого пространства
состояния, в котором матрица А — диагональна. Соответственно если собствен-
ные значения матрицы А различны, то матрица имеет вид
exp RJf — Zo)]
О
Ф(^-^о) =
О
О О
exp[A2(f — Zo)] О
О exp [Xm (Z — Zo)]
(3.13>
Выше были рассмотрены два способа определения пространства состояния,
в котором матрица А имеет диагональный вид: разложение передаточной функ-
ции Оф(х) на элементарные дроби и канонические преобразования. В первом
случае можно воспользоваться программой PRFEXP [65], написанной на языке
Фортран IV. Входными параметрами программы PRFEXP являются полиномы
числителя и знаменателя бф(х), которые задаются своими корнями либо коэф-
фициентами. Полином знаменателя может иметь кратные действительные кор-
ни с кратностью не выше девяти, причем комплексные корни должны быть прос-
тыми. Выходные параметры PRFEXP: матрица коэффициентов числителей дро-
бей разложения и матрица корней знаменателя передаточной функции G®(s).
При каноническом преобразовании А к S согласно (3.10) в качестве преобра-
зующей можно использовать матрицу L, составленную из собственных векторов
матрицы А [63]. Последние определяются из соотношения Ag=A§, где А—
собственное значение матрицы А. Тогда g= ||gi, g2..... gmll, где gi, g2. —
собственные векторы, соответствующие различным собственным значениям Ai,
А2... Am-
Для нахождения собственных значений и векторов можно использовать-
программы из пакета EISPAK [66], Записанных на языке Фортран IV или
программы EIGEN, COMEIG [67] на языке АЛГОЛ-60. В [68] приведен вари-
ант программы COMEIG на языке ФОРТРАН IV.
Возникает вопрос, на каком интервале времени определять
уравнение (3.11), т. е. чему равны t и /о? Дать однозначного от-
вета не представляется возможным, поскольку имеется по край-
ней мере два варианта: 1) to=nTQ, где То — период следования
65
опорного сигнала, t=i(n +1) Ту, 2) to = tn, t=tn+\. Отметим с учетом
(3.1), определяющего закон интегрального ЧИМ2, что удобнее
использовать интервал времени от tn до /л+ь Тогда (3.11) примет
вид ’ '
'л + 1
X(Zf„+1) = 0(Zf„+1-f„)X(f„)+ j Ф(^+1-т)ВЫ(т)сГт. (3.14)
t
п
Выражение (3.14) является рекуррентным разностным уравнением
и при исследовании на ЭВМ позволяет экономить оперативную
память машины.
Таким образом, рассмотренные методы позволяют записать ма-
тематическую модель синтезатора частот с ИФАПЧ в виде систе-
мы нелинейных разностных уравнений
61+1
X(2f„±i) = Ф(<„+1 - QX(U+ J Ф(^-1-т)В«(г)</г, (3.15а)
п
Тп
J Мт + ^)-1(Л.-^ = 2^л, и (3.156)
О
где и(т) =F(s)eA(/), F(s) — линейный дифференциальный оператор
/для (3.4) F(s)=^Pjs!\e^t)=fA[(n-i)T0,(n-i+l)T0...... (п+1)Х
Х(п—1-\-\)Т0, ..., (п+1)То, tn-j> tn-/4-1]. fn — некоторая функция
ют моментов появления импульсов опорного сигнала и импульсов
С ДПКД; 6г 6г+1, 1 = 0... П, ] = 0...П’у Tn~tn+\—tn~ СОуг(^) =
=,фуг[еф(/)] — нелинейная зависимость частоты управляемого ге-
нератора от сигнала с выхода ФНЧ; вф(/) = ||ci, сг, ст||Х(У),
X (/) = Ф X (tn) + j Ф (t-x) Bu (т)dt.
п
Используя разложение функции <вуг(t) в ряд Тейлора по сте-
пеням вф(/)„ имеем: юуг(/) =Wyro+Syre$(O+ ^уГеф(0+•••• где
Syr и 5уГ — постоянные коэффициенты (Syr — крутизна статичес-
кой характеристики УГ); <вуго—значение <вуг при еф(/)=0. Часто
оказывается достаточным ограничиться линейной или квадратич-
ной зависимостями
o>yr(f) = о>уГ.о + 5угеф (f), (3.16а)
o,yr (t) = о>уг.0 + Syi еф (t) + 5;ге2ф- (t). (3.166)
•Система уравнений (3.15) позволяет определять длительность пе-
реходных процессов СЧ, разрабатывать систему ИФАПЧ с опре-
деленном запасом устойчивости и т. д.
«4
3.2. ЭКВИВАЛЕНТНЫЕ СХЕМЫ ДЛЯ ПОСТРОЕНИЯ
МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ СИНТЕЗАТОРОВ ЧАСТОТ
Используя материал § 3.1 и рис. 3.1, изобразим эквивалентную
структурную схему однокольцевого СЧ в виде, приведенном на
рис. 3.2. На этом рисунке <р(-) обозначает функциональный пре-
образователь напряжения на выходе ФНЧ в частоту УГ, т. е.
(Йуг (t) =<Руг [^Ф (/) ]•
Рассмотрим структурные схемы при использовании различных
пространств состояния ФНЧ. На рис. 3.3 показана такая схема
для состояния ФНЧ «в естественном» пространстве в соответствии
с (3.3). Характеристика УГ считается линейной [см. (3.16а)].
К достоинствам структурной схемы на рис. 3.3 следует отнести
простоту построения и возможность измерения напряжения и его
производных на выходе модели ФНЧ [62]. Существенно также то,
что в выбранном пространстве состояния матрицу А в (3.3) можно
отнести к нижней матрице Хессенберга, что позволяет при машин-
ном исследовании СЧ воспользоваться рядом разработанных про-
грамм и алгоритмов [67]. Недостатком структурной схемы на рис.
3.3 является необходимость вычислять «скачки» вектора состояния
ФНЧ при скачкообразном изменении ед(/). Это объясняется нали-
чием в структурной схеме на рис. 3.3 идеальных дифференциа-
торов.
На рис. 3.4 показана структурная схема СЧ при использовании
пространства состояния ФНЧ, полученного в результате разложе-
ния его передаточной функции бф(х) на элементарные дроби сог-
ласно (3.7). Характеристика УГ считается параболической (см.
3.166). Величина а!0=Ит Оф(х). К достоинствам структурной схе-
5-00
мы на рис. 3.4 следует отнести отсутствие скачков вектора состоя-
ния при скачкообразном изменении ед(/). Недостатком является
трудность вычисления коэффициентов ci, с2, ..., ст для т>2.
На рис. 3.5 приведен вариант структурной схемы СЧ при раз-
ложении бф(х) на элементарные дроби в случае, когда один из
полюсов передаточной функции Хо=0. Характеристика УГ счита-
ется линейной [см. (3.16а)]. Отличие схемы на рис. 3.5 от приведен-
ной на рис. 3.4 заключается в следующем. Во-первых, усилитель-
ное звено с коэффициентом Syr и интегрирующее звено И вынесено
из ЧИМ2 и отнесено к ФНЧ. Этим объясняется появление на рис.
3.5 интегратора для (вуго и увеличение размерности вектора X на
единицу. Во-вторых, порог релейного элемента РЭ меняется по за-
Рис. 3.2. Эквивалентная структурная схема СЧ
5—1020
65
Рис. 3.3. Эквивалентная структурная схема СЧ с «естественным» пространством
состояния ФНЧ
Рис. 3.4. Структурная схема СЧ для
случая разложения <?ф(5) на эле-
ментарные дроби
Рис. 3.5. Вариант структурной схемы
СЧ для Хо=О и линейной аппрокси-
мации характеристики УГ
п
кону Рс = 2л^ ;Vt, i=0, 1,...,п, где Nt— значение коэффициента
1-0
деления ДПКД в момент t-t прихода i-ro импульса с ДПКД.
Вариант вынесения усилительного и интегрирующего звеньев
из ЧИМ2 можно реализовать и в структурной схеме на рис. 3.3.
В этих случаях уравнение (3.156) для определения Тп будет иметь
вид
п п
+ (3.17)
1=0 1=0
66
3.3. МАТЕМАТИЧЕСКИЕ МОДЕЛИ НА ОСНОВЕ
«ЕСТЕСТВЕННОГО» ПРОСТРАНСТВА СОСТОЯНИЙ
Решение матрично-векторного уравнения (3.3) в виде (3.11) пред-
полагает, что функция и(т) не содержит импульсов типа б-функ-
ции и ее производных (б-импульсов). Однако формирование моде-
лей ИФД и ИЧФД (см. § 2.1) с использованием единичной функ-
ции допускает появление в правой части (3.2) б-импульсов поряд-
ка I—1. Поэтому и вектор состояния Х.(7) в «естественном»
пространстве является обобщенной векторной функцией, содер-
жащей б-импульсы. Это вызывает определенные трудности в
создании ММ СЧ в «естественном» пространстве и предполагает
привлечение методики обобщенных функций, разработанных для
задачи теории электрических цепей, например в [69]. Нам, в част-
ности, потребуются правила дифференцирования обобщенных
функций, которые мы используем на следующем примере.
Запишем сигнал детектора ед(/) в общем виде
ea(Z) = /2(f)-l(f„-f) + /(f)-l(f-f„), (3.18)
где tn — момент, в который происходит скачок ед(/), f-(t), f(t)—некоторые
непрерывные функции.
Положив в (3.18) f-(t), f(t) некоторыми постоянными значениями или ну-
лями, можно получить ряд рассмотренных в § 2.1 ММ ИФД и ИЧФД.
Положив в (3.18) f-(t), f(t) непрерывными функциями, подставив (3.18)
в (3.3) и использовав правила дифференцирования обобщенных функций, полу-
чим
и {0 = (i) • 1 (t„ - t) + ^Pjf^ (/). 1 (/ - tn) +
/=0 /=0
+ -tn), (3.19)
/=1 a=0
где f(/](/), Г(/)—/-я производная от f(t); ба (/) — а-производная от
б-функции; фигурные скобки в u{t} показывают, что u{t} — обобщенная функция.
Максимальное значение а согласно (3.19) равно I—1 и поэтому вектор состоя-
ния может содержать б-импульсы порядка I—2 [69].
Решение уравнения (3.3) для вектора Х(/) ищем в виде:
X {Z} = Х_ (f) • 1 (t„ - t) + X (t) • 1 (t - t„) + 2 - ^)> (3-2°)
a=0
где X{/} — обобщенная вектор-функция, X_(/), X(Z) — непрерывные векторные
функции, определяющие состояние ФНЧ до и после момента tn. Функция
Х_(/) считается заданной, а расчету подлежат вектор-функция Х(/) и постоян-
ные вектора Ха. Продифференцируем Х{/} как обобщенную функцию:
X {Z} = Х_ (t) • 1 (f „ - t) + X (t) -1 (tn - 0 + AX (tn) 8 (t - tn) +
+ 2Xa8(«+O(f-Q, (3.21)
<x=0
где Д X(/„)=X(/„)-X_(/„).
5* 67
Подставляя (3.21), (3.20) и (3.19) в (3.3) и сопоставляя коэффициенты
б-импульсов одинаковых порядков в левой и правой частях (3.3), получаем
рекуррентные соотношения
Xz_2=a [/(U-/-OB;
Xz-3 = AXz_2+ V
да
Xz-4 = AXz-з + 2 Pj О B.
7=1-2
Xz - AX2+ (tn) - /0-*) (f„)J B;
;=3
x0 = AX, + 2pH/(/-2’ (U - (U] B; „
;=2
AX = AX0 + B.
I=l
(3.22)
Следующий этап вычислений реализуется согласно алгоритму (3.11) на
интервале t>tn, в пределах которого внешнее воздействие и(т) непрерывно.
Поэтому запишем
t
X(f) = 0(z- zf„)[X_(Z„) + AXO+
t
(3.23)
Для ступенчатых сигналов ед(1) производные (/) = 0 при и вы-
ражение для ДХ(/„) значительно упрощается:
АХ (Z„) = 2 А/-1^ [/ (Q - /_ (Q] В. (3.24)
/=1
В этом случае надобность в расчете векторов Ха зачастую отпадает. С учетом
(3.24) выражение (3.23) запишется в виде
Х(0= Ф(*-их_(и+Ф(*-и
/=1
t
- /_ (t„)] В + pQf (tn) J Ф (f - т) В • 1 (т - tn) dt.
п
Использовав условие коммутативности матриц Ф(/) и А, представим (3.24) в
форме
68
t
X (/) = Ф (t - tn) X_ (t„) + pQf (tn) j Ф (t - т) В • 1 (T - tn) dx +
n
+[/ (^) - f- (tn)] 2
1=1
где (/—tn) —j-я производная от Ф(/—1„).
(3.25)
Использовав соотношение (3.25), получим математические мо-
дели СЧ в «естественном» пространстве для различных типов дис-
криминаторов. Для ИФД «в—з» и ИЧФД «в—з» напряжение на
входе ФНЧ и интервале от tn до tn+\ запишется в виде
(t) = (z?n_i) • 1 {tn — t) + ед (tn) • 1 (t — tn) = en-i 1 (t n — f) +
+ en-Ui-tn), (3.26)
где en-i, en определяются в зависимости от вида движения в соот-
ветствии с табл. 2.2. Учитывая (3.26) и полагая в (3.25) t=tn+l,
имеем
4+1
X_(Ui) = 0(4+i-yX_(U4-poe„ J Ф(<-т)В.1(т-(л)Х
п
+ - ^)Р^- (3.27)
/-1
С помощью (3.26), (3.25), (3.16а), (3.166) и рис. 3.3 запишем со-
отношение для определения tn+x'-
С [Ф (f — tn) Х_ (tn) + poen J Ф (t - OB-1 (x - tn) ^4-
n
+ (en — £n-l) 2
1=1
Фб-’)(^-0)руВ] -1 (tn+l-t)dt+<»y.r0Tn=2iWn ,
(3.28)
где C= ||1,0,0..0|| — матрица-строка размера m. Таким образом,
(3.28), (3.27) совместно с данными табл. 2.2, поясняющие функ-
ционирование ИЧФД «в—з» и разностным уравнением для
ИЧФД «в—з» типа (2.10), представляют собой ММ СЧ с исполь-
зованием естественного пространства для Х(/) и «разностного»
пространства для еп.
Для матрицы А невысокого порядка т<3 элементы матрицы Ф(/—tn) удоб-
но определять из (3.12). Применим для этого случая правила определения изоб-
ражений по Лапласу при дифференцировании и интегрировании оригиналов.
Тогда уравнения (3.27), (3.28) после некоторых преобразований и нормирования
координат и параметров можно свести к виду
О =v(ra)X_(ra) + У(га),
(3.29а)
69
Х_(га + 1)= Ф(га)Х_(га) + Ь(га), (3.296)
где чп (n) = l|vo(7’n), Vi(Tn), Ук(Тп), ..., vm_i(7\I)|| - матрица-строка, vK(/) =
= 7’oZ-->{s-‘-2[l—A*(s)/A„(s)]}, 7=tlT0,fn=TnlT0, T„=~tn+l—Tn, L-> — обратное
преобразование Лапласа, s=s7’0 —нормированный оператор дифференцирования,
(S) “ alsi> Cli — CltT0 , am = 1,
i=0
Afe(s) = X_(«)= II x_(7„), 72’(7„), .... II T
1=0
вектор-столбец нормированных координат (состояния), х^ (/) =
=Syr 7'о+1х^ (t)/(2nN), N = Nn—ANn — наибольший целый постоянный коэф-
фициент деления ДПКД при общем переменном коэффициенте деления Nn",
[ёд(п) — ед(л—l)]F(Tn) + ед(л—+ Т0(йуго1 „/(2nN) — 1 — &N(n);
ея(п) =ея(/п)/£'д, £д — размах напряжения на выходе ИФД «в—з» или ИЧФД
«в—з», &N(n) =ANn/N, v
FW(t) = E.S^TlL-^ (Г)}/^), (3.30)
(s) = T 2 Pjs1/ j? s', pj =
F\l) (7) = E,SyrTrl+2L-i {s‘-*p0/Am (?)}/(2кЛ0; (3.31)
Ф(л) —нормированная матрица перехода с элементами
*rk(i)=Tr~khrkCt), (3.32)
hrk (7) = TOL-1 {s-r-^ [ 1 - Ak (s)/Am (s)]}, k^r-
krk (7) = - 7U-1 (s)/Am (s)}, k < r,
Ь(п) = \\ [ёд («) - ёд (n - 1)] F» ГГп) 4- ея (n - 1)F(iU (7„),
..., [ёд(«) — e^n- 1)]^)(Тл) + 7д (n- 1)/Г’Гл)11 T
вектор-столбец размера m. Приведем пример нахождения элементов системы
уравнений (3.29) для СЧ с ИФД «в—з». Допустим, что передаточная функция
ФНЧ имеет вид
Оф ($) = (1 /т2 + T\S/T2)/{1/T2 + s). (3.33)
Подобный ФНЧ (рис. 3.6) в литературе называется пропорционально-интегриру-
ющим фильтром (ПИФ). Из рис. 3.6 найдем Т1=/?фС1ф; Т2—/?ф(С1ф+С2ф).
В рассматриваемом случае Ф(п) =фоо(Т„), фоо(Тп)/Т0 = ехр(—Tn/Ti), где
= Т21Т0-,
,(t)/T0=T2[\ - ехр(-Тл/7^];____________________
Р_{Тп)/Т0 = {(Л - А) [1 - ехр (- Тп/ Г2)1 +ТП} ЛЦ
Л = Т\!Т0, Куя = E,SyrT0/(2^N)-
70
FO) (Tn)/To = - Т2) exp (- Тп/ Г2)/Г2+_1}
(Тп)/Т0 = {7„ - [ 1 - ехр (-Тл/Т2)] Т2} /Суд;
М” (Л) = {1 - ехр (- Тп1Т2)} Кул-,
%_(/) =Syr7’oX-(/)/(2nW) — нормированное напряжение на выходе ПИФ.
В результате получим систему из двух разностных уравнений
72 [1 - ехр (- 7„/Т2)] х_ (tn) 4- {^д («) -7Д (п - 1)] (7, - Г2)} X
X ЛУ1 {[ 1 - ехр (-TjT2)] + Тп} +~е, (п - 1) {Тп - [ 1 -
- ехр (— 7\/Т2) ] Т2} Куд + Тошут 0Tnl(^N) - 1 - ДАТ («) = О,
(3.34а)
х_(7„+1) = ехр (— TniT2)'x_(tn) + [7д(п) —7д(п — 1)] X
X Луя(Л - Т2) [ехр (- Тп/Т2)/Т2 + 1 ] + 7Д (п - 1) Кул[I -
- ехр (- Тп/Т2)]. (3.346)
Уравнение (3.34а) при заданных ед(«), ед(я—1), соуг.о, ДУ{«) и x-(tn) служит
для расчета Тп- Как видно, относительно Тп оно является трансцендентным и
для решения необходимо применять различные итерационные процедуры. Най-
денное Тп подставляется в (3.346) и определяется x_(/„+t). На следующем
этапе устанавливается новое значение ед(«+1) с учетом таблиц функциониро-
вания ИФД или ИЧФД, а также периодичности и инерционности ИФД. Далее
процесс вычислений повторяется.
Рассмотрим ММ СЧ с ИЧФДЗ. Подобный дискриминатор ха-
рактеризуется большим числом скачков сигналов на интервале от
tn до /п+1, нежели ИЧФД «в—з». По этой причине ограничимся
подробным анализом ММ для одного из типов движений СЧ (со-
гласно табл. 2.3), например II. Весь интервал от tn до /л+1 разо-
бьем на три подынтервала:
1) от tn до (tn + iTo—тп)-, где/л =lim(/n + e), (/л + 1Т0—тл)~=
0<е-*0
= lim (/п + /Уо—Тп—а);
0<е—О
2) от (tn+iT0—тп)+ до (tn + iTa—Тп+тп+i)";
3) ОТ (tn + iTo—Тп + Тп+1)- ДО (tn + iTo—Тп—Тп+1)+.
Использовав (3.23), запишем вектор состояния ФНЧ на подын-
тервале 1; Х(/)=Ф(/—tn) Х(^+)на подынтервале 2:
X(t) = Ф (t - /То+ т„ - in} [Ф (ITо - т„ - tn)X (Ц) +
+ b\(tn+tTo-xn)]+p0E, J Ф а - т)в-1 (т - 1ТО+хп-
*п+‘Т0-'п
— tn)dz. (3.35)
71.
Приняв во внимание групповое свойство переходной матрицы
Ф(/—/2) Ф(^2—^з)=Ф(^—^з), а также соотношение Ф*^/—/0) ==
=А<-1ф(^—10), уравнение (3.35) с учетом (3.24) запишем как
х (о=ф а - /„) х (/+) + е, 2 ф''-1» a ~ ito + тл _ +
/=|
+ ^0^1 Г ф(^ — т)В.1 (т — iT0 + т„ - tn)dt. (3.36)
'л+'Л^л /Л
На подынтервале 3
х (Ч+1) = Ф('«* -'.)Х ('.+) + Е, 2^~П'.+
/=1
+ тл~и^В + ^д J Ф(^+1-т)В-1 (т — ГГ0 + т„-
'л^о^л
v (3.37)
/=i
С помощью (3.36) получим соотношение для определения tn+i'.
SyT j 1с[Ф (t-иХ(/+) + р0£д Ф (/— т) В-1 (т —
t i + IT —т
л л^мо л
- 1Т0 + Т„- tn) dT + Ea^ Ф</-1) (t - IT 0 + Т„- tn)PjB• 1 (t -
- ITO + тл - /„)]} • 1 (t + . ,-!)* + “yr.o Tn = 9kN„. (3.38)
Уравнения (3.37) и (3.38) представляют собой ММ СЧ для движе-
ния типа II. Подобным образом можно найти ММ СЧ с ИЧФДЗ
и для других типов движения: I, III, IV и V. После преобразова-
ний получим для движения типа I на интервале от t+ до
Х(<;+1) = Ф(и-/л)Х(^),
'л-Н
Syr J С [Ф (t - tn) X (/+)] • 1 (/л+1 - tn) dt + («уг.оГл = 2^п,
(3.39)
для движения типа III на интервале от t~ до t~+x
X(t~+ J = Ф (tn+l - tn)X (t~) - E,2 - tn) -
;=i
'л-Н
- ФО-О (0)] p7B - p0E^ J Ф (/„+1 — т) В • 1 (T — tn) dx,
72
с [ф (/—/„)х (/-) - е. 2 ф^> а - ырг* и ~tn)B-
/=1
t
-РоЕ^ Ф(^-т)В.1(т-и^1
n
• 1 (^л+i — t)dt-\- «вуго^л — 2itV„r
(3.40>
Для движения типа IV на интервале от 1~ до t~+l
х = Ф {tn+x - t„) X (t~) - 2 [ФО-n (tn+l - tn) -
л+1
— фО—'> (tn+1 -tn — /„)} pfi-p^ J Ф (Z„+l — т) В [1 (t — tn) —
n
_ 1 (т — — £„)] dx,
Syr
*n+l | I
J С [Ф (t - in) X (t~) - Л 2 в’"-01 V - +
t I 7=1
+ E я 2 Ф(/-° (t - - tn) tn)pp -
/-I
t
- pQE^ Ф (t - т) В [ 1 (т - tn) - 1 (T - T„ - ^)]]} • ](£„+1 - t) dt -b
n
+ ^уг0Гп = 2^п, (3.41 >
Для движения типа V на интервале от t~ до t++1
X (*л++1) = Ф (^+i - in) X (^) - Е, 2 [Ф""1» (tn+l ~ in) ~
j=y
(n+l
— ф(У~1Ц^п+1-тп-t^p^B-poE,, J ф(/л+1_х)В[1(т —/„)—
п
-Ц'-'п- U] + Ел 2 [Ф1/-П (in+l - То + Т„ - /л) -
/=1
*л+1
_ф(/-1)(О)]^В + ро^ у ф (tn+l - т) В. 1 (т -То + г„ —
'л+^л
— Q
fn + i
Syr J (С[ф(/-
п
tn}X(t~)-E, ^i-^t-t^BA (/-/„) +
/=i
73=
+ Ек 2 (/ - Ъ. - tn) • 1 Ч - \ - tn)pfl - Р0Е, j Ф (t - г)Х
/=1
ХВ[1(г-/л)-1(т-тл-/л)] + ^2ф(/“1)^-То + ^-
/=1
t
- - ^0 + - ^) + Ро£д J ф {I - т) В-1 (т -
<п+ Го~ хп
- То + тл - tn) ffc]} 1 - (£„+i -1) dt + («уг.о7'л = 2^п. (3.42)
Пять видов интервалов от tn до /я+i выбраны с учетом графов дви-
жений (см. рис. 2.19).
Построение ММ для СЧ с ИЧФДЗ при матрице А невысокого
порядка основывается на том, что элементы матрицы Ф(/—tn)
можно найти из (3.12). В этом случае уравнения (3.38) — (3.42)
приводятся к виду (3.29) с той, однако, разницей, что векторы Хл
и Х(п+1) будут определяться в соответствии с принятыми выше
интервалами времени. Скалярная величина ‘'V(n) и вектор Ь(п)
определяются из соотношений_[30] 7(п)=<р(7’л, тл,^гл+1) + Го(оугоХ
ХТп/(2hN)—{1+AN(п)], где_тл=тл/7’0; Ь(п)_== Цф*1 * * * *)(Тп, тл, тл+ь ....
ф("’)(7’л, тл, тл+1) Пт, ч>(Тп, тл, Тя+1), ф^ЦТ., тя, Тя+1) — некоторая
функция и ее производные (см. табл. 3.1). В табл. 3.1 функция
F(-) и ее l-е производные Лг> определяются из (3.30).
Приведем пример ММ для СЧ с ИЧФДЗ и ФНЧ с передаточной функцией
<?ф(«) = ЗД + Ш(1 + w (3.43)
Передаточную функцию такого вида имеют последовательно соединенные актив-
ные ПИФ и интегрирующий фильтр (рис. 3.7). В частности, найдем Т1 = С1ф/?2Ф,
Ко— 1/(С1ф/?,ф), Т2=С2ф/?зф, Pq= 1/(С|ф/?1фСзф/?зф), Р1=^2ф/(^?1фСзф/?зф), (<7i =
= 1/(С2ф/?зф. Из (3.29) получим
Фоо (0 = 1 (0. Ф01 W = [ 1 — ехр (—Ф10 (7) = О,
Фи (7) = ехр (— tax) VO (7) = 7, (/) = [— 1 4- axt -f-exp(—7ai)]/ai,
Таблица 3.1
Тип
движе-
ния
I
II
III
IV
V
О
F<O(t„+,)-F(^(0)
FW (0) - (тл)
F{l^n-\)-F(l4Tn)
F<!)(Tn-<)-№(tn) +
+ -F(<> (t„+i)-FW (0)
С/*,
Рис. 3.6. Пропорционально-ин-
тегрирующий фильтр
74
Рис. 3.7. Активный пропорционально-
интегрирующий фильтр с интегриру-
ющим звеном
F (t) = Ку {(IM — PilPo) [1 — tax - ехр (- tax)]lax + /2/2},
Ft1» (7) = Ау{7+(а/7о — l/«i) [ 1 — exp (— ta])|},
F<2> M = Ку [1 - (1 -pA) exp (—Taj},
где Ку = E^Ko 7^/(2tCV).
Использовав табл. 3.1, определим ММ, например, для движения типа II:
О = Тпх(п)+[Тпах + ехр (- Тпах) - 1] х«> (га)/а? +
+ Ку{^+1/2 — (1/й! ~ рх/р0)[^п+\ах + ехр(—тл+1а1) — 1 ]/ах} -j-
+ То(Вуг07л/(2кДГ)-[1 + ДД/(«)],
X (ti + 1) — X (га) + [1 — ехр (— Тпах)] х(О (п)/ах +
+ Яу{7„+1 + Тр,/Ро~ 1/01) [1 — ехр(-7л+1й1)]},
х<’> («4- 1) = ехр (— Т„ах) х<М (га)4~ Му(1 — Fi0i/Fo)[1 —
— ехр (— т^+104)].
Аналогично можно найти ММ для других типов движения в СЧ.
Перейдем к рассмотрению ММ СЧ в «естественном» простран-
стве с применением канонических преобразований. При этом пе-
реходную матрицу линейной части СЧ можно представить в виде
Ф (* ~ tn) - « II ехр [X (/ — М] || 0, ' (3.44)
где « = ||аг*Ц J1-1—квадратная матрица m-го порядка, составлен-
ная из правых собственных векторов матрицы А: ||ехр[Х(/—/л)]|| =
= diag|| exp[Xi(/—ML ехр[Х2(/— ML •••> ехр [Xm(Z—Mill; Xi, Х2, ....
Xm— собственные значения матрицы А (предполагаем, что все они
различны); 0 = Il₽r*ll o'"1— квадратная матрица m-го порядка,
составленная из левых собственных векторов матрицы А. С ис-
пользованием (3.44) решение (3.27) для ступенчатых сигналов
запишется в виде
X (О = а ехр [X (t — Q] £х_ (tn) + paf (tn) J a exp [X (t — /„)] X
n
(tn) - /_ (/„)] diag 11 X(—1 exp [X^- ML
7=1
ц-1 ехр[Х2(/-M], ..., Xj^exp [xm(/ — Q]II0fA (3.45)
В (3.45) применена операция дифференцирования матрицы
75
Ф({—tn). Для упрощения выкладок предположим, что матрица-
столбец В = ||0, 0,..., 1 ||г, т. е. ат=1. Это уменьшает общности ре-
зультатов, так как конкретную величину ат можно учесть в коэф-
фициентах at и pt. Перейдем от матричной записи (3.45) к скаляр-
ной по аналогии с [68]:
*1 (t) = cik ехр А* (t ~ *„)] + Pof (tn) L* {exp[X* (t — Q] —
Л=0 Л=0
. m-l I
-l}A* + [/(U~/-O2 Тмехр [X4(^-U]2^4_1> <3-46>
A=0 /=1
m—1
где clk = (^л)» lik = i •
/=0
Для определения периода Tn требуется вычислить интеграл
Jx0(T)ak Учтя (3.46), получим
t m—1
J х0 (т) dx = 2 COk {ехр [ХА (t — Q] — 1 }/xA 4-
*n
m—1
+ Pof (tn) 2 Тол fl exP M - U] -MA* V - in)K} + [/ (tn) -
ЬО
m—1
(3.47)
С помощью (3.46), (3.47) и рис. 3.3 найдем ММ для СЧ с ИЧФД
«в—з» в виде
т—1__ __ ________
2 сол[ехр(ХлТл)— 1]Ал + ^д(«)^о Тол[ехр(\Гл) — 1 ]/Х| —
А=0 AsO
__ _ _ т~ 1 _ _________ __
- ТпГ\к} + [ел (п) - ел(п - 1)] Тол{{[ехр(Х^Т^) - 1]/XJ Х
ь=о
I
х + Tn^T0!^N) = 1 + ДМ («),
(3.48а)
*,(«+ 1)= 2 <j*exp (ХлТл)4-ед(га) 2 Tz*^o[exp (ХлГл) — 1]/Ха4-
*=0 *=0
+ [ед(га) —ед(га —1)]^ Т/лехр (^hTn)
л=о /=1
г = 0, 1, ..., т—1. . (3.486)
В (3.48) кроме нормировки координат и входных сигналов, как и
76
в (3.29), используются нормированные коэффициенты
_ т—1 ___ _ __ __ __
cik = (4)» Ъл=<ЧлР* m-i FASyr/(2it^, alk, k
J=0
элементы матриц, составленных из правых и левых собственных
векторов и собственных значений матрицы А. Последняя получена
из нормированных коэффициентов а(-.
На основании (3.37) — (3.42), а также (3.46), (3.47) определим
ММ СЧ с ИЧФДЗ в следующем виде:
т—1 __ _ ______ ______ ___ __ _
2 [ехр(ХАl]Aft+Q(T„, тп+1) + 7>у1,оТл/(2*Л9 =
*-и
= 1 + ДА(га), (3-49а)
/И —1_ _ _ —.
+ 1) = ст exp(V\) + Р-ДЧ- ^л+1). i = °, I.-» т~ U
Л-0
(3.496)
где Q(Tn, тп, Тл+1), щ(Тп, тл, Тл+i) находятся из табл. 3.2. В табл.
3.2 используются функции
6(0 = Toft l^o I ехР ~ + [ехр (Xft7) - 1] Р/Ч-2!’
°i & = 2 [ехр ~ +ехр (чо 2 ^ч-1
Л=0 1=1
Таблица 3.2
Тнп движения <2(ГЯ, тл, тл+1) '1(Гл-хл хп+1>
I 0 0
II 6(4+1) - е(0) (тл+1) — ° (°)
III 6(О)-6(ТЛ) (0)-оД7;)
IV 6(Тл-тл)-б(Тл) <’/(7’л-’л)-<’/(7’л)
V б(Тл-гл)-е(тл) + °1(Гп-'п)-°1Сгп) +
+ 6(тл+1)-6(О) + 0 (тл+1) — а (0)
При наличии в бф($) одного полюса в начале координат комплекс-
ной плоскости одно из собственных значений матрицы А равно
нулю. Для определенности положим Хо—0. Тогда уравнения (3.49)
запишутся в виде
__ _ т—1 _ _ __ _ _ _
сооГп + соЛ ехр (Xft7\) — 1]/Х4 + Q (Тп, тл, тл+1)-(-
Л=1
+ 7>уг.оТл/(2*А) = 1 4- Z7V (п), (3.50а)
77
xi (n + 1) — ^оЧ" 2 exp (Xft Гл)(?„, тл» Tn+i),
*=i
i = 0, 1, ..., m — 1.
(3.506)
В табл. 3.2
__ _ m—1 _
e(0 = Tooliw + pJl + 2 ?0ft MexplM) - l +
г А=1
+ [ exp [Xft0 - 1] 2м*-2
/=1
_ m—1 _ _ _
°z(0 = Ъо(Р</+а)4- 2 Tift PoIexp(M)—l]7^ +
ft-i
+ exp (Xk0 2Л/Ч-1 •
7=i v
На основе выражения (3.50) на языке ПЛ/1 разработана прог-
рамма IFAPH [30] для определения длительностей переходных
процессов в СЧ, обусловленных скачкообразным изменением коэф-
фициента деления ДПКД.
3.4. МАТЕМАТИЧЕСКИЕ МОДЕЛИ НА ОСНОВЕ
РАЗЛОЖЕНИЯ ПЕРЕДАТОЧНОЙ ФУНКЦИИ ФНЧ
НА ЭЛЕМЕНТАРНЫЕ ДРОБИ
Получение и исследование ММ СЧ на основе разложения бф($)
на элементарные дроби рассмотрено в [58, 70, 72] и др. Определим
ММ СЧ для наиболее общего случая, изображенного на рис. 3.4,
использовав параболическую аппроксимацию характеристики УГ
[см. (3.166)]. Вектор состояния и e$(t) задаются векторно-матрич-
ным дифференциальным уравнением (3.7). Решение (3.7) для
вектора состояния на интервале от tn до tn+\ имеет вид (3.14), в
котором Ф(0 =diag||exp(XiO> ехр(Х20. ехр (W) II- Предполага-
ем, что все X, различны. Функция и(т)=ел(1)—напряжение или
ток на выходе дискриминатора, определяемые типом и режимом
еп -
е -
еп -
t
Рнс. 3.8. Эпюры сигнала на выходе
дискриминатора
его работы. Анализ различных ди-
скриминаторов показал, что сиг-
нал ед(0 может иметь наиболее
общую форму, представленную на
рис. 3.8. Здесь ед(/) соответству-
ет сигналу на выходе ИЧФДЗ при
движении типа V. Положив
длительность импульсов тп или
Гп+1 равными нулю или Тп
можно получить другие четыре
78
типа движения в ИЧФДЗ и семь типов движения ИЧФД «в—з»
(см. § 2.2). Например, если тп = 0 и xn+i~Tn, то получается сигнал
ед(£), соответствующий дискриминатору типа «выборка—запоми-
нание».
Решение векторно-матричного дифференциального уравнения
(3.7) для вектора состояния X(t) с учетом рис. 3.8 имеет вид
Х(/л+1) = Ф(Тл)Х(/л)+Vn, (3.51)
где
Тп
V„ - J Ф (Г„— т) Вед (т) dx = еп || {ехр^^+О + ехр [Ч (Тп — т„)|—
О
— ехр (Ч^л) —1}/Ч> ...» {ехр (Хттл+|)-|-ехр [\п(7'л — ’„)] —
- ехр(Ч,7\)- 1}/Хот || т _
вектор-столбец размера tn. Уравнение для определения периода
Тп из (3.156) с учетом (3.7) и (3.51) запишем
Тп
2*КП = j шуг (Т + tn) -ЦТп- Т) (3.52)
О
где
<1)уг (/) = <1)уг.о 4- SyrC [Ф (О X (tn) + у Ф (t — т) Вед (т) dx\ +
о
+ 5уг
С[Ф(/)Х(и+ уФ(/-0Вед(тИт]
2
+ Sy?dQe^ (t) +
+ S'yTd*e*(t).
Проведя интегрирование (3.52) с учетом вида ед(т) на рис. 3.8,
получаем
f(Syr, Clt xlt еп, тп, тл41, Тп, Ч, <1)уг.о) = 2toV„, (3,53)
(функция /”(•) приведена в [72]).
По выражениям (3.51), (3.53) для ИЧФДЗ разработана на
языке ПЛ/1 программа IFAPH2 (см. приложение). Эта програм-
ма позволяет анализировать влияние нелинейности характеристи-
ки УГ на длительность переходных процессов в СЧ. Для случая
ИЧФД «в—з»
II [ехр(ЧГл) — 1]/Ч> [ехр(Х2Т„)—1]/Х2,
[exp(XmT„)- 1]/Хт || г. (3.54)
Уравнение для определения периода имеет вид
m
m
Syr 2 [ехр (ЧТ„) - 1 ]/Ч + ед (U 2 <U[ ехр (X.TJ - 1 ]/\ -
-Tn]/^ + eMd0Tn
m" m2
+s;r 2 2 CiXiCjXj 1 exp [ Tn +~
i=i j=i
79
~ 1 ]/(^z + ty 4- (О 2 cixJCl HexP (^ + M — 1 ]/(\+^/)4-
z=i/=i
+ [1 - exp (1,7»/X( + ед2 (tn) 2 2 C‘CJ Hexp ]Г„ (X, + Xy)] -
- 1Ж+М+ U - exp (XzT„)]a/+ [1 - exp (Х,Гл)]/Ху+ TJ -
— 2ел(1п)(10 2^-хД! — exp (\Tn)]/Xj 4~ e2a (tn)d2Tn + (tn) X
7=1
X dQ^Cl [[1 - exp (Х7Ж + Л1А/1+ <»yr0Tn = 2kN„. (3.55)
i=i
По выражениям (3.51) и (3.55) при Syr =0 для ИЧФД «в—з» на
языке ПЛ/1 разработана программа IFAPH3 (см. приложение).
Эта программа позволяет исследовать длительности переходных
процессов в СЧ с ИЧФД «в—з». Уравнения (3.51) и (3.53) — (3.55)
с учетом последовательностей смены режимов работы ИЧФДЗ и
ИЧФД «в—з» определяют динамические процессы в СЧ при боль-
ших отклонениях вектора состояния и периода Тп от стационарных
положений.
Как видно из (3.53) и (3.55), учет нелинейности характеристики
управления УГ приводит к весьма громоздким формулам для
определения Тп. Практически полученные уравнения можно ана-
лизировать только с помощью ЭВМ. Существенного упрощения
можно добиться, если допустить, что отклонения вектора состоя-
ния и периода Тп от стационарного положения достаточно малы.
Тогда из (3.51) и (3.53) для N = Nn и do=O в стационарном поло-
жении тп=тп+1 = Хг = 0, i> 1, ТЛ = Т&. Значение xi=XiCT Для стацио-
нарного положения определится из квадратного уравнения
х? сА/ч/М + М + (“у-о - ЛЧ)/(Лйоо) = 0, (3.56)
где а>о=2л/Т0. Положим тл=тл/ТоС1,тл+1<С1 и введем обозначения
ДХ]Л— (Мл Xj ст)/(^л То), ДХ/Л — Х1п1(в^Г^ (AXjn <§( X] ст/(^лТ'о),
Ьх1п « 1).
Z+1
Тогда из (3.51) и (3.53) получим систему линейных разностных
уравнений, описывающих динамику СЧ для движений типа V:
ТЛ+1 -- тл Ку
m
дх1п +2Дхм^ [ехр (\Т0) - 1 ]/Xz —
1-2
m
1 + ^Jexp^To)— 1 ]/Xz
1—2
(3.57)
дХ1,п+1 = Axln-f-Tn+| — т„;
Дх/, л+1 = Дх/л exp (X^o) -Нл+i — exp (\T0)‘>
SO
для движения типа II:
{п
Дх1л+ 2 Дх^сЛехР А*7’») — ЧА/
i=2
Axi, л+i — Axjn ~Ь ^л+ь
Axz, л+i = Дх/л-Нл+1;
для движения типа IV:
т
1 + 2^[ехр(Х70)- 1]7XZ
1=2
ДХ|.л+1 = Дх„ — тл,
Ах/, л+i — (Ах(Л тл) ехр А/Т'о)»
где Ку = Syrtj^ 7^/(2itV).
(3.58)
(3.59)
Если задать начальный вектор состояния Дх(0 и то, то с помощью
уравнений (3.57) — (3.59) можно рассчитать переходные процессы
при малых отклонениях от стационарного положения. С помощью
уравнений (3.57) — (3.59) можно также провести анализ устойчи-
вости стационарного режима СЧ. Для этого необходимо в (3.59)
изменить знаки перед тп, Тп+i на противоположные (т. е. минус
на плюс, и наоборот), ввести расширенный (за счет тп) вектор сос-
тояния хрп=||тл, Ахщ, ..., Ахтл11г, записать в соответствии с (3.59)
разностное матричное уравнение
Хр л+1----ФрХрл,
где Фр =
/л 1
1 -Яу 1 + 2 е/ [exp(W - 1J/XA -Ку
т
(3.60)
— Кус2[ехр (Х2Г0)—1]/Х2
ехр^т;) 0 0
ехр(ХтТ0) 0 0
• • • — КуСт [ехр (ХтТо) — 1 ]/Хт
0
0
ехр (ХтТ0)
6—1020
81
провести анализ собственных значений матрицы ФР) и если ока-
жется, что хотя бы одно удовлетворяет условию [73] |Х/|>1, то
стационарный режим СЧ неустойчив. Аналогично из (3.51) и
(3.54) найдем уравнения, описывающие динамику СЧ в ИЧФД
«в—з» при малых отклонениях вектора состояния от стационар-
ного положения Х(ст=—вд.ст/Xz, где ед.ст—напряжения на выходе
ИЧФД «в—з» в стационарном режиме (режиме синхронизма).
Оно определяется из решения квадратного уравнения 5уге2>ст/(2кЛ^)+
+ Зугел. ст / (2лД) + (соуго—N&o)/ (Л\оо) =0- Примем обозначения
Дх£л = х/л—X/ст и £д (^п) = ^д.ст4-^г.стАтп, где б?г.ст — производная от
периодического сигнала ИЧФД, из которого производится выбор-
ка в режиме синхронизма, Атп — временное отклонение импульсов
с ДПКД относительно момента выборки в режиме синхронизма.
При выполнении условий Дхгп<О< ст и Дтп<^70 имеем
Дх/, л+1 = Дхгп ехр (\tT0) + ёг.ст [ехр (\Т0) — 1] Дтп/\,
Дтп+1 — Дт„
1 - (SyrT0/2^) ;?г.ст 2 ct [[ехр (Х^) - 1]/\ +
/=1
+ Т0]/хД - (SyrT0/2^) 2 c^Xl [ехр(Х/Т0) - 1]/ХР
J i=i
(3.61)
Системе разностных уравнений (3.61) соответствует матрица
ФР-
Q 7* m
2*У X;
~ бг.ст [ехр (XjTo) — l]Xj
с т г
уг. °Ч (ех,го _ и
2кАл!
0
ег.Ст[ехр (XmT0) — 1]Хт
Q Т С
° yr' о^/п , X т , .
---------(е m ° — 1)
ехр (Х]Т0)
о
ехр (XmT0)
Приведем пример получения разностных уравнений для локальных процес-
сов в СЧ с ИФД «в—з» и ФНЧ типа ПИФ с передаточной функцией (3.33).
Запишем ее в виде
(7ф(х) = Т1/Т2 + (1/72-Т1/Т22)/(1/Т2 + 4 (3.62)
В (3.62) согласно (3.5) Xi=—1/Г2> С\=Л[Тг—Ti/T2. Подставив Xi и ct в (3.61),
найдем систему разностных уравнений
Дт„+| =Дтп {1—5угег.ст^/(2к//) — [5угвг.ст7’о/(2-гсЛ0] [ехр (—То/Т2)—
82
— 1 ] та (i ~ Л/Л)}+дхи^Л^М [ехр (—Л/Л) -1] х
х(1—Л/Л),
ДХ1. л+1 = — ^пвг.стТ2 [ехр (— TJT2) — 1 ] + Дх1п [5угЛ/(2^)] X
X [ехр (- Л/Л) — 1 ] (1 — Л/Л)- (3.63)
Матрица Фр, соответствующая системе (3.63), позволяет найти характеристичес-
кое или «вековое» уравнение по его корням (собственным значениям Фр) оце-
нить устойчивость СЧ в стационарном состоянии;
SvrT2 . SyrTo . -^s. / ТА
— 0
е^Т2 (е 1
«г Т
*-*уг2 о
(е
2^
Т\
Т2
(3.64)
Решив определитель (3.64), придем к результату
м + ЧЛУ - ку (1 - d) (Та - Л) - (1 + А?)] +
+ а?(1-/<у) + Ку(72-Л)(1-^) = 0, (3.65)
где Ky=SyTT^'er,ct/(2лМ), d=exp (—TJTy). Характеристическое уравнение
(3.65) позволяет найти параметры СЧ, обеспечивающие его устойчивость в ма-
лом (подробнее см. § 6.3).
Рассмотрим вариант разработки ММ СЧ для структурной схе-
мы на рис. 3.5. В этом случае передаточную функцию непрерывной
m—l
части СЧ представим в виде SyrG$(s)/s = £//($—
/=i
—Ху). Тогда уравнение состояния СЧ можно записать
Х-АХ + ВМО, (3.66)
где X — вектор
О
О
О
1
О
О
состояния размера т+1
О 0 ... О
О О ... о
Xi 0 ... о
Л
0 0 0 0
— квадратная матрица размера т+1, В=||0, 1,..., 1||г — столбец
размера т +1.
6* 83
Решение (3.66) на интервале Тп для сигнала eA(t), изображен-
ного на рис. 3.9, имеет вид (3.51), в котором следует принять
1 t 0 0 0
0 1 0 0 0
Ф(0 = 0 0 ехр (ХА) 0 0
0 0 0 0 ехр (Хт_А)
(переходная матрица размера (m+1) X (m+1)),
V/i = еп II (тл+1 4~ тл)/2 т„+| тл;
{ехр (XjT„+1) — 1 -exp^TJfl - ехр(—XjTJDAi, ...;
{exp(Xm—iX„+i) 1 exp(Xm—iT’JH exp ( Хт_]Тп)]}/Хт_| ц
(3.67)
(столбец размера m+1).
Для различных типов движения в СЧ с ИЧФДЗ матрица V„
показана в табл. 3.3. Для СЧ с ИЧФД «в—з» матрица-столбец
имеет вид *
V„ = еа (tn) || Т2/2, Т„, [ехр (\Тп) - 1 J/Xt.[ехр (Xm_1T„) -
— l]Am-l||T.
Таблица 3.3
Тип
движения
д
I
II
III
IV
|| 0, 0.О ||г
Нтл+1/2’ т"+'> [ехр (XjTn+i) — IJ/Xi. [exp(Xm_jX
Хтп+1)-1]/Хт_1 IF
Н -Т2/2, -Тп, -exp^TJ-lJ/X,......_[exp(Xm_IT„)-
- 1]/Xm_i IF
II —+ ~ехр(Х1Тл)[ехр(-Х1т„)—1]/Хъ ...
..., (ХотГ„) [exp (- Хт_,т„) - 1]/Xm_1 [12-
Уравнение для определения Tn найдем, проведя следующие
выкладки: из (3.17) следует
С [X (/л+1) - X О 4- «)уг.07\ = 2^; (3.68)
подставив (3.51) в (3.68), получим С{Ф (Тл) Х(/л) + Vn—Х(/л)}+
+ ®yr.oFn=2n:Nn; обозначив ЕЛ=Ф(ТЛ) —I, где I — единичная мат-
рица, имеем окончательно
С [FnX (tn) + V„] + o>yr.0Tn = 2kN„. (3.69)
Таким образом, система уравнений (3.51) и (3.69) представля-
ют собой ММ СЧ для случая, изображенного на рис. 3.5.
84
3.5. МЕТОДЫ ПОСТРОЕНИЯ УПРОЩЕННЫХ
МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
При рассмотрении в предыдущих двух параграфах ММ СЧ учиты-
вался ряд нелинейностей как элементов ИФАПЧ, так и системы в
целом. По этой причине полученные ММ можно назвать «точны-
ми». Для их анализа приходится прибегать к сложным математи-
ческим процедурам, в частности к решению трансцендентных урав-
нений (3.29а), (3.49а), (3.53) и (3.68) при определении периода
следования импульсов на выходе ДПКД. Задачу можно значи-
тельно упростить, если предположить, что переходные процессы
в СЧ протекают достаточно «медленно». Условие медленности за-
пишем в виде
+ (3.70)
где А7'п = А7'л/7'о, АТп<СТл-1 и ХгмАТл<С1, Х/м —максимальное соб-
ственное значение матрицы А. Выражение (3.70) не эквивалентно
неравенству
(Гп-То)/То^1, (3.71)
так как допускает режимы, связанные с большими изменениями
периода (частоты) выходного сигнала СЧ. Более жесткое условие
(3.71) предполагает квантование по времени в системе ИФАПЧ
с постоянным периодом, что справедливо лишь при «малых» от-
клонениях частоты выходного сигнала от стационарного значения,
и сводит модель СЧ к амплитудно-импульсной системе ФАПЧ.
Если при условии «медленности» пренебречь и импульсным харак-
тером процессов, то ММ СЧ сводятся к широко известным моде-
лям непрерывных систем ФАПЧ.
Применим (3.70) для определения Тп (3.69). Для этого введем
функцию
f (Тп) = С [F„X (/„) + V„] + «)уг.оТ„ - 2кУ„. (3.72)
Тогда можно записать приближенное уравнение f(Tn-i) +
+ ЦГ*—Tn-t)f' (Tn-t) 4- (Тп—Tn-t)2f"(Tn-i)/2=0. Если использовать
только первую производную для определения Тп, то получим фор-
мулу Ньютона для этой задачи Тл = 7'„_1—f(Tn-\) If' (Тп-\). Под-
ставив в последнее выражение (3.72), найдем
Тп = Tn-i - {С [ F (Тл_,) X (/„) + V (Тп^)] +
+ a)y,..0Tn_i -2^„}/{С [F' (T„_i) X (/„) + V' (П-i)] + а)уг.о}, (3.73)
где F(T„_]), V'(Tn_i)—производные От матриц F и V по Тп в
точке Тп_х. Учет второй производной в разложении f(Tn) позволяет
записать
тп = Тп_} - {С [F (T„_i) X (/„)+V (П^О] + Шуг.отп^ -
- 2*Hn}/{C [F' (T„_1) X (/„) + V' (Тл_,)J 4- (Вуг.е} + 8, (3.73а)
где е = - {С [F (?„_!) X (*„) 4- V (Т»-,)] + <»утЛТп^ - 2*АЦ2 X
X {С [F"(Т„_!) X (/„) + V" (Гл_г)]}/{С [F' (Т„_0 X (tn) +
+ У'(/„_.)]+ ^yr.0}?>2,
85
матрицы F'(Tn -i) и F"(T„_i) имеют вид
0 1 0 0
0 0 0 0
F'(?„-!) = 0 0 Х1ех‘Гл-1 0
0 0 0 • • •
0 0 0 0
0 0 0 0
F"(T„_i) = 0 0 х|ех*Гл-1 0
0 0 0 ... X2 m—Iе
Для ИЧФД «в—з» матрицы-столбцы V приведены в табл. 3.4,
а для ИЧФДЗ —- в табл. 3.5. Отметим, что для движения типа I
=0, V,(7'„_1) =0, V"(7'n_I) =0. С использованием выраже-
ний (3.73) на языке ПЛ/1 разработана программа IFAPH1 для оп-
та б л и ц а 3.4
V (Tn-i)je (tn)
V'(Tn^/e(tn)
V"(Tn^)/e(tn)
|| rtiA Т’п-ь [exp^-O-lJ/X,, ...
..., [exp (Xm_i ?„_!)— у7,
|| Tn-i, 1, exp(X1T„_i), ..., exp(Xm_iT„_i)||r
|| 1, 0, exp ........Xm_iexp(Xm_1T„_1)||T
ределения длительностей переходных процессов в СЧ при скачко-
образном изменении коэффициента деления ДПКД (см. приложе-
ние). Блок-схема алгоритма IFAPH1 соответствует графу смены
типов движения в СЧ с ИЧФДЗ, приведенном на рис. 3.9. Над
стрелками показаны условия смены типов движения. Следует отме-
тить, что из-за более простого алгоритма расчеты по программе
IFAPH1 требуют меньших затрат машинного времени по сравне-
нию с расчетами по программе IFAPH2.
Оценим возможность применения условия (3.71) для получения упрощенных
ММ. СЧ с ИЧФДЗ. В этом случае обозначим
Т„ = ТО + 8ТП, (3.74)
где 67„<g7o.
Рис. 3.9. Граф смеиы ти-
пов движения в СЧ с
ИЧФДЗ
86
Таблица 3.5
Тип движения Уравнение
II V (Tn_!) = || (?„_! - 1Т0 + т„)«/2, Г„_> -1 То + т„, [ехр [Xj (Tn—i — 1Т0 -|- тп)] — 1 ]/Х,, [ехр [Xm_i (Тп—\ -zTo + xjj-ij/x^ir V' (Tn_0 = || Уд—1 - ГТ0 + Т„, 1, ехр [Xj (?„_!- iT0 + T„)J, ехр [xm_!(?;_!—Z7;-Hn)] цг N" (Tn^) = || 1, 0, Xj exp [Xj (Т„_!-/То + z„)l, .... xm_f exp [Xm_! (T„_! - iT0 + T„)] |f
III V(Tn_0= || -T^/2, — Tn-i, [1 -ехр(Х1Тл_1)]Д1, .... [1 — exp(Xm_i7'n_i)]/Xm_1 |f V'(/’„-i) = || — r„_i, -1, -exp^TVO, — exp (Х^_1ГП_1)[Г V" (Tn_!) = || - 1, 0, — Xj exp (Xj Tn-t), — Xm_1exp(Xm_iTn_i)||r
IV V (Tn-i) = [[ — Tn-i^n -|-/2, тп, exp (X, [I — exp(—XjT„)]/Xj, — exp(Xm_1r„_i)[l - - exp(—Xm_iT„)]/Xm_i I)7, ¥'(?„_,)= ||—т„, 0, — ехр(Х1Г„_1)[1 — exp(—XjtJ], — exp(Xm_j rn_i)[l — exp(— Xm_iT„)] |f V" (?„_!) = II 0, 0, - Xj exp (Xj r„_j) [1 - exp (- XjT„)l, X^-jexpfXjJ’jj-On ~ехр(-Хл)| |f
V V (rn_j) = || [(?„_! - Го - тя)2 + t2]/2 - Tn-^n, Tn-l - To, {explX-JTV-j — To — ?„)] - 1 — exp(XiTn_1)[l — — exp(— Xj-cJD/Xj, {exp[Xm(Tn_i — To — t„)] — 1 — — exp (XmT„_!) [1 — exp (- Xm_1T„)]/Xm_1 ||r V' (T„_0 = [1 Tn-i -To- 2t„, 1, exp [Xj (?„_!- Г0—т„)]- — ехр(Х]Гп_,) |1 — exp (—XjT^)], .... exp [Xm_j (Tn-i—To~ — t„)] - exp (Xm^iT„_i)[l —exp(-Xm_iT„)] ||r V" (T„_i) = [I 1, 0, exp [a, (Tn-i ~T0- t„)] - —X, exp (Xj y„_i) [1—exp (—XjTn)],. •, Xm_! exp [Xm_j (Tn-i — — To — ?„)] — Xm_ j exp (Хт_1Гп_>) [ 1 — exp (— Xm_r„)] |f
87
Применив условия (3.74) и (3.71) для определения Тп в СЧ на рис. 3.5, по-
лучим
Тп = То - с [F (То) АХ (tn) + V„ (То)] Т0/(2к^ + ГОДУ (n)/N, (3.75)
где ДХ — малые отклонения вектора состояния от стационарного значения. Ко-
ординаты вектора состояния в стационарном режиме определяются следующими
выражениями: Х|ст(п+1)—Х|ст (и) =7’оХ2ст, ^-2ст:= (2лЛ^—свуго^о)/(Соо^о),
=0(т—l>i>2), a F (Го) = Ф(7’0)—I, V п(То)/еп определяются из табл. 3.6.
Таблица 3.6-
Тип движения
Функция
II
IV
V
О
V„(T0)/e„
— ТОХП
- 'л
— ехр^Го)^
— Totn
о
[1— ехр (Х^)]
п
—ехр(Хт_1Т0)т„
Тя[1— ехр (Хт_1Т0)]
Отклонение вектора состояний от стационарного положения определится
как
ДХ (Q = Ф (То) ДХ (t„) + V„ (То). (3.76)
Уравнения (3.75), (3.76) и значение вектора V„ позволяют представить ММ
СЧ рис. 3.5 в виде амплитудио-импульсиой системы автоматического регулиро-
вания (рис. 3.10). Аналогично для ММ СЧ с ИЧФД «в—з», применив (3.71),
(3.74) к (3.29а), получим
'п + 7о
Т„ = Т0 + Т0Д^-(Т05уг/2к) С Деф(0^, (3.77)
tJ
п
где Де$(/)—отклонение напряжения на выходе ФНЧ от стационарного значе-
ния еф.ст=ед.стРо/йо. При выводе (3.77) учтено, что напряжение на выходе
ИЧФД «в—з» в стационарном положении e«cr=—(соУго—Mj)o)do/Po-$yr. Урав-
нение (3.296) для малых отклонений вектора состояния от стационарного поло-
жения становится линейным разностным уравнением. Совместно (3.77) это-
обстоятельство позволяет представить ММ СЧ с ИЧФД «в—з» также в виде
Рнс. 3.10. Амплитудно-импульсная ММ СЧ с ИЧФДЗ
88
Рис. 3.11. Амплитудно-импульсная ММ СЧ с ИЧФД «в—з»
амплитудно-импульсной системы автоматического регулирования (рис. 3.11). На
рис. 3.11 через У обозначен безынерционный усилитель с передаточной функцией
ег ст. Подчеркнем, что на рис. 3.11, в отличие от рис. 3.10, имеется экстраполя-
тор нулевого порядка с передаточной функцией G0(s) = [l—ехр (—Tos)]/s.
Экстраполятором в схеме на рис. 3.10 является интегрирующее звено в составе
ФНЧ.
3.6. ЧАСТОТНЫЕ МЕТОДЫ АНАЛИЗА СИНТЕЗАТОРОВ
С ИФАПЧ
При использовании частотных методов, как правило, предполага-
ется, что динамика СЧ описывается линейными дифференциальны-
ми и разностными уравнениями [2,8] и др. Это предположение
справедливо при малых отклонениях вектора состояния СЧ от
стационарного положения. Таким образом, анализу частотными
методами подлежат амплитудно-импульсные ММ СЧ, показанные
на рис. 3.10 и 3.11, а также непрерывные ММ СЧ. Последние могут
быть получены из моделей на рис. 3.10 и 3.11 при исключении эле-
ментов дискретизации. В литературе, однако, большее распростра-
нение получили модели, приведенные на рис. 3.12, и 3.13, отлича-
ющиеся тем, что на устройство сравнения подаются фазовые, а не
временные воздействия (см. рис. 3.10 и 3.11). На рис. 3.12 и 3.13-
приняты обозначения Д’д.и, G0(s)—коэффициенты передачи дис-
Рис. 3.12. Амплитудно-импульсная ММ СЧ при анализе частотными
методами
Рис. 3 13. Непрерывная ММ СЧ при анализе частотными мето-
дами
8<>
жриминатора и экстраполятора, Кл.в = КцТо для ИЧФДЗ, Ад.и =
—Кд. для ИЧФД «в—з», Ад— статический коэффициент передачи
дискриминатора (см. § 2.1 и § 2.2), <рвх, <рВых— фазы входного и
выходного сигналов, <ру — некоторое внешнее воздействие, сумми-
руемое с сигналом управляемого генератора, <ре — сигнал фазовой
ошибки, фд — шумы и регулярные помехи, генерируемые дискрими-
натором. В воздействие <рвх могут входить шумы цифровых ДПКД,
• оо
.ДФКД, сигналы дробности-2л А^(17о)/^, фазовой модуляции
1=0
импульсов ДФКД и т. д. В воздействие <ру— шумы УГ, внешние
акустические шумы, приложенные к УГ, и т. д.
Введем вначале некоторые соотношения для непрерывной ММ.
•СЧ (системы ФАПЧ):
о As) = <PBb.x(s)/<FBx(s) = [Ад5уг0ф (s)/s]/[l + Ад5угСф(х)/(ЛА$)] (3.78)
— передаточная функция замкнутой системы ФАПЧ,
GB (5) = ?вых (S)l<fy (s) = 1 /[ 1 + /Сд5уг0ф(s)/(A7s)] (3.79)
— передаточная функция по возмущению, Ge(s) =tp<?(s)/<pBx(s) =
= GB(s) — передаточная функция по ошибке,
Gp(s) = K,Sy^(s)/(Ns) (3.80)
— передаточная функция разомкнутой системы ФАПЧ.
Частотные методы анализа СЧ основаны на использовании пе-
редаточных функций (3.78) — (3.80) для определения реакции син-
тезатора на гармонические воздействия <рВх(0 и <ру(/) в устано-
вившемся режиме. Допустим, что срвх(О =фвх ™ ехр [j (а^+ф)] =
=<Рвх m ехр (jo/), где фвх m — амплитуда гармонического воздейст-
вия, о и ф — круговая частота и начальная фаза воздействия,
<Рвх m = фвх m ехр (]ф) —комплексная амплитуда воздействия. Тогда,
использовав (3.78), получим <Рвыхт = бз(](о)<рвхт. Аналогично
•фвых m = GB (j(o)фу
Частотные передаточные функции часто представляют в виде
G3 (jw) = | G3 (j<0) ] ехр [j arg G3 (j<o)] = U3 (w) + j V3(<»),
Ge (» = I O“) I exp [j arg Qe (j<»)] = Ue («>) -f- j Ve («>),
Gp (» = I Gp (jco) | exp [j arg'Gp (jo>)] = (Jp (w) + j Vp (<»),
где |G(ja) |—модуль передаточной функции, argG(ja)—аргу-
мент G(ja) или фаза, Й(а), Г(а)—действительная и мнимая
части G(ja).
При изменении частоты а в пределах —оо... -|-оо на комплекс-
ной плоскости с координатами U(а) и Г(®) частотная передаточ-
ная функция описывается кривой, которую называют амплитудно-
фазовой характеристикой СЧ (АФХ). По АФХ можно судить об
устойчивости и качестве СЧ. Отметим, что существуют общие ме-
тоды формирования АФХ, обеспечивающие эти характеристики в
заданном виде в системах автоматического регулирования [74],
частным случаем которых является ИФАПЧ. Например, употреб-
90
ляются такие частотные показатели качества переходного процес-
са, как запасы устойчивости по амплитуде и фазе, а также пока-
затель колебательности, который позволяет судить и о запасе
устойчивости. Дадим определение запаса устойчивости по ампли-
туде АЛ как расстояние между точкой (—1, jO) и ближайшей к
ней точкой пересечения АФХ с отрицательной полуосью абсцисс.
Тогда запас устойчивости по фазе ц=180°—|ф(<оср) |, где ысР—
частота среза, определяемая из соотношения | Gp(jcocp| = 1. В [74]
рекомендуется выбирать ДА >0,6 и ц=30... 60°.
Более удобно определять запас устойчивости по показателям
колебательности М и 7?м, которые для астатических систем
М = макс [ G3 (jw) | /N, (3.81)
RM = макс | Ge (jo>) | . (3.82)
Рекомендованные значения M= 1,1 ...1,7 и 7?м=1,2... 2 [62]. При
Rm — М обеспечиваются всегда одинаковые запасы устойчивости по
фазе. Величина RM определяет запас устойчивости по амплитуде
в области высоких частот (<d>(dcp), а М — в области низких час-
тот (со<(осР). В виду того что в большинстве случаев потеря запа-
са устойчивости по амплитуде происходит именно в области высо-
ких частот из-за пренебрежения малыми инерционностями в
ФНЧ, процессами дискретизации по времени, запаздыванием сиг-
налов в ИФЧ и т. д., использование критерия 7?м оказывается бо-
лее предпочтительным. Формулы для определения требуемых
АФХ с использованием RM и М приведены в [62, 73].
Рассмотрим применение частотных методов для определения
флуктуационных характеристик СЧ. Допустим, что известны спект-
ральные ПЛОТНОСТИ шумов <Рвх—5<?ВХ ((£>) И фу—S <р у ((о) . ТОГДЭ
спектральная плотность фвых [73]
S-Р вых (<*>) — S-р вх (<*>) I G3 (jw) I 2 + S?y (cd) I GB (]<«) I 2. (3.83)
При этом предполагается, что (рвх и <ру не коррелированы. Функция
5ср вых ((d), если она интегрируема, позволяет рассчитать дисперсию
+<»
вых = <1 /2к) f SV в«х (ш)dw, (3.84)
—СО
среднеквадратическое отклонение фазы в полосе частот от ин до
6фвь.х(Шн. ®в) = (1М) рч>вых(®)^®, (3.85)
шн
средний квадрат набега фазы выходного сигнала за время т
00
А^выхС1) = (1/к) р(1 — cos агО^выхМ^со. (3.86)
о
Перейдем к краткому рассмотрению амплитудно-импульсной
ММ СЧ (см. рис. 3.12). Ее особенностью является наличие им-
91
пульсного элемента (ИЭ), преобразующего непрерывный сигнал
на его входе в 6-импульсы, существующие в момент п.Т0 с весами
е(пТ). Наличие ИЭ приводит к необходимости рассматривать
вместо непрерывных функций y(t), как в предыдущем случае,
дискретные (решетчатые) функции y(t) t=nr0- Для решетчатых
функций, определенных при м>0, разработан аппарат z-преобра-
00
зований z {у (п)} = F(z) = "^у(п)г-п, где z = exp(s7’0).
Имеются подробные таблицы z-преобразований различных
функций (75]. Аналогично (3.78) —(3.80) можно с использованием
z-преобразований ввести передаточные функции
G3(z) = <рвых (z)/<pBX (z) = [K^SyrZ {G0(s) Оф(х)/х}]/[1 + Aa.H5yrX
XZ{G0(s)Gt(s)/(№)}], (3.87)
Ов(г) = <рвых(г)/<ру(г) = l/[l+Kx.HSyrZ{Go(s)G0(S)/(A/S)}], (3.88)
G£(z)=<t>Xz)/<t>BX(z) = GB(2). (3.89)
Если в (3.87) — (3.89) положить z=exp (joj7e.), то передаточные
функции станут зависимыми от jco, т. е. будут периодическими с
периодом со0. Это делает их применение не очень удобным. Поэто-
му часто используются передаточные функции на основе w-преоб-
разования
№-(z-l)/(z+l). (3.90)
Сделав подстановку в (3.90) z=exp (jcoT0), получим w=[exp (jcoT0)—
—1]/[ехр (jcoT0) + l]=j tg(coT0/2) =jX, где Z,=tg(coTo/2)—относитель-
ная псевдочастота. Рассматривают также абсолютную псевдочас-
тоту Z= (2/To)tg((oT0/2) =2Z/?’o. При малых частотах (соТ0<
<2)Z = co.
Из (3.90) имеем z= (l + w)/(l—w). Использовав это равенст-
во, можно из (3.87) —(3.89) найти G3(jZ), GB(jZ) и Ge(jZ). Приве-
дем ряд формул, связывающих Gp(jZ) с известной функцией
GP(s) [73]. Пусть
/П I Г л
П (! + V)exp(-Ts) \sr {[(\+TiS)
-*=' JIL
G₽(s)=*y
(3.91)
где Ky — общий коэффициент усиления, г — степень астатизма.
Допустим, что все постоянные т*(ть ...,тт) больше То/2 и все
постоянные Tt разделены: 1) Ть ..., Tg больше То/2; 2) Tg+i, Тп
меньше То/2. Предположим, что условие соср7’о<2 выполняется.
Рассмотрим два случая построения ММ СЧ на рис. 3.12.
I. Экстраполятор отсутствует:
а) на частотах вблизи со = 2/7’0| Gp(jw) | ~ 1/со
Gp(jX) = 1(/Су/Т0)(1 — jX7’0/2) (1 + ]Ч) ft (1 + J4)
( *=i
(1+рл)!,
Zssl
(jHl +
(3.92)
92
где t8 = То/2 - Tod (d~* — 1)/(1 — d), d exp (- 70/T0/Tg+1),
£ — (T + x0))Tо, t0 = Tg+2 4- ... Tn, T9 = (To/2) ctg[To/(2Tg+1)];
б) на частотах вблизи co = 2/7’0| Gp(j®) | — I/®2
Gp (jk) zz | (КУ/ТО) (1 - j ).T0/2) (1 + j 1лэ) П (1 +
I Л-1
+ j Ы
(РгПо + т
i=i
где тэ = To (1 — 2e)/2, e zz (т -f- t0)/To,
(3.93)
To — Tg+l + — +^n-
II. Экстраполятор имеет нулевой порядок:
а) на частотах вблизи со = 2/Т0 = | Gp(j®) | ~ 1/®
m
/Гу (1 - Ж/2) [1 + jX(То/2 + Л)] П (1 +
*=i
+ Р-та)
(jw + радп (i+w)
i=\
(3.94)
п
Пе П= 2
б) на частотах вблизи и = 2/Т01 Gp (j®) | ~ I/®2
Gp (j А) = к (1 - j ХТ0)/2( (1 - j kTs) П (1 + j Ч)| / !(J ХУ X
g )
хП (1 +РЛ) •
(3.95)
пока-
Выражения (3.92) — (3.95) позволяют, использовав понятие
зателей колебательности М и Яы, разработать СЧ с заданным АФХ
и запасом устойчивости. В частности, выражение (3.94) приводит
к формулам для определения параметров АФХ [62]:
m g
Хср(Д4 — 1)/Л4,
Л=1 /=1
п
70/2+ 2 Л«1АсР)Л1/(Л4+ 1),
*=£+!
где Хср = ®ср — частота среза,
m g
fe=l
(3.96)
Хср/?м/(7?м — 1 )»
TJ2 + V Г, < (1Лср)(«м — 0/Л.
<=«•+1
(3.97)
93
Для определения спектральной плотности фазы выходного сигна-
ла в ММ СЧ на рис. 3.12 приведем выражение, заимствованное
из [76]:
вых (®) — s\ вх (w) | Од и и’ш) I 2N2 4- Swy (ад) | 1 -Од.н (jco) | 2
+ 5;у | Од.н(й I 2. (3.98)
/п=+оо
где О* вх — вх (ш + 2кт) —дискретная спектральная плот-
00
ность фвх(О> и = соТо — относительная частота,
Од.н (jco)= [Syr/C.„G0 (jco) Оф (jco)/jco]/[ 14-5уЛд.и2{О0 (s) Оф (s)/(MS)}],
_ т—+оо ______
z = ехр (jcoT0), S*y (со) = 2 Stoy (со 4~ 2«и).
т=—оо
/п#=0
Выражение (3.98) с использованием (3.84) — (3.86) позволяет
найти дисперсию, среднеквадратическое отклонение фазы в поло-
се частот, средний квадрат набега фазы за время т.
ГЛАВА 4
ЦИФРОВОЕ МОДЕЛИРОВАНИЕ
СИНТЕЗАТОРОВ ЧАСТОТ С ИФАПЧ
4.1. ЭКВИВАЛЕНТНАЯ СТРУКТУРНАЯ СХЕМА СЧ
ДЛЯ ЦИФРОВОГО МОДЕЛИРОВАНИЯ
Разработанные в гл. 3 ММ СЧ, несмотря на общность методов
их построения, предназначались для анализа процессов, происхо-
дящих в конкретных структурах ИФАПЧ с определенными типами
дискриминаторов. На практике нередко возникает необходимость,
оперативного исследования новых структур СЧ с тем, чтобы прог-
нозировать их характеристики и судить о целесообразных облас-
тях применения. Создание ММ для этих целей связано каждый раз
с необходимостью решения весьма сложных (в математическом от-
ношении) и трудоемких задач.
Ниже рассматривается метод численного анализа системы
МФ АПЧ — цифровое моделирование на ЭВМ, позволяющее про-
водить на этой основе изучение СЧ без составления ММ.
Принципы цифрового моделирования радиотехнических систем-
изложены в [77]. Построение цифровых моделей (ЦМ) основыва-
ется на функциональном принципе моделирования, согласно кото-
рому модель считается эквивалентной оригиналу, если она с доста-
точной точностью воспроизводит его основные функции. Несущест-
венные с информационной точки зрения подробности, связанные,,
например, с конкретной элементной базой оригинала, при цифро-
94
вом моделировании опускаются. Аналогичный подход использо-
вался в гл. 3 при построении ММ СЧ.
В соответствии с общими принципами цифрового моделирова-
ния, процессы, протекающие в СЧ (дискретные и непрерывные)г
можно с определенной точностью заменить дискретными во време-
ни процессами tk~k\t, где А/— выбранный шаг дискретизации вре-
мени, k~0, 1, 2,.... Цифровое моделирование СЧ проводится в два
этапа. На первом создается ЦМ всех звеньев системы ИФАПЧ по-
заданным передаточным функциям и нелинейным характеристи-
кам. Цифровыми моделями при этом являются алгоритмы, позво-
ляющие преобразовать на ЭВМ с допустимой погрешностью дис-
кретные реализации входных сигналов в дискретные реализации
выходных сигналов звеньев ИФАПЧ. На втором этапе в соответ-
ствии со структурой ИФАПЧ составляется общая ЦМ СЧ, реали-
зуемая в виде программы на каком-либо алгоритмическом языке.
Методы цифрового моделирования служат основой для создания
систем автоматизированного исследования и проектирования СЧ.
Построим эквивалентную структурную схему СЧ. Для этого
представим УГ и ДПКД в виде ЧИМ2, как это было сделано в
гл. 3. Положим для общности, что частота сигнала ОГ не являет-
ся постоянной. Эквивалентную схему ОГ и ДФКД представим так-
же в виде ЧИМ2. Эквивалентная структурная схема СЧ для циф-
рового моделирования приведена на рис. 4.1. Элементы ЧИМ2,
образованного из УГ и ДПКД, объединены в блок А1, а элемен-
ты ЧИМ2, образованного из ОГ и ДФКД, — в блок А2. Переда-
точная функция линейного инерционного звена СЧ (ФНЧЭ) имеет
вид
ОфЭ ($) = 5угСф ($)/$. (4.1>
Введение в состав ФНЧЭ интегратора повышает точность моде-
лирования СЧ, так как на входе ФНЧЭ действует сигнал с выхода
дискриминатора, который имеет, как правило, кусочно-постоянную
форму и допускает точную аппроксимацию ступенчатой функцией.
При раздельном моделировании ФНЧ и интегратора нужно было
бы учитывать сложную форму сигнала вф(/) на входе интеграто-
ра, при которой представление вф(/) в виде ступенчатой функции
дает соответствующую погрешность. Кроме того, при использова-
нии разностных методов моделирования линейных инерционных
звеньев, речь о которых пойдет ниже, введение в ФНЧ интеграто-
ра позволяет исключить появление алгоритмов типа евых(/й) =
Рнс. 4.1. Эквивалентная схема синтезатора частот с ИФАПЧ для цифрового-
моделирования
95
= f[eBx(/fe)l, что существенно упрощает процесс моделирования
(в нашем случае алгоритмы будут иметь вид eBbIX(/fe) =Я>вХ(/*_])].
Поясним работу схемы на рис. 4.1. Запишем уравнение для пол-
ной фазы сигнала У Г относительно входа РЭ1:
?уг (tk) = <рф (ik) + <ру г.о (**), (4.2)
где <рф(/й) и фуГ.о(4) —составляющие полной фазы, возникающие
за счет частоты соф(4) =5угеф(/*) и начальной частоты соуг.о(/л).
При <pyr(/fe) где Pc(tk) —порог срабатывания РЭ1, на
выходе РЭ1 возникает сигнал в виде дискретного 6-импульса [6],
а порог Рс (tk) увеличивается на 2лАгп, где Nn — коэффициент де-
ления ДПКД после появления п-го импульса на его выходе. По-
рог определяется как Pc(tk) = 2л При неизменном коэффи-
л=о
циенте деления ДПКД Nn=N = constРс(^) = 2jtJV(n-h1).
Полная фаза сигнала опорного генератора <рог(/й) поступает
на вход РЭ2. При <рОг (^*) >Р0(^), где P0(t*)—порог срабатыва-
ния РЭ2, на выходе релейного элемента появляется дискретный
3-импульс и Ро (tk) увеличивается на 2л7?д, где 7?д — коэффициент
деления ДФКД. Порог P0(tk) определяется как Ро(^) =
= 2л7?д (м0 + 1), где rto = O. 1.2,... — номер импульса на выходе
ДФКД.
Процесс изменения Рс(4) и появления на выходе РЭ1 сигнала
ec(Jk) показан на рис. 4.2. Для P0(jk) и е0(^) этот процесс имеет
аналогичный вид.
Определим цифровые модели отдельных звеньев ИФАПЧ, а за-
тем ЦМ СЧ в целом. При этом условно выделим из эквивалентной
•схемы синтезатора цифровые и аналоговые звенья.
Рис. 4.2. Процесс изменения порога
Pc(tk) н выходного сигнала е0(/*)
РЭ1
«6
4.2. МОДЕЛИ ЦИФРОВЫХ
УЗЛОВ СИНТЕЗАТОРОВ
При срабатывании релейных эле-
ментов РЭ1 и РЭ2 (см. рис. 4.1)
на их выходах появляются дис-
кретные 6-импульсы. Обозначим
через V(tk) и Q(4) сигналы на
выходах РЭ1 и РЭ2. Равенства
V(/fe) = l и Q(/fe) = l означают,
что релейные элементы сработа-
ли и указанные сигналы имеют-
ся на их выходах. Если они не
сработали, то К(/Ц=0 и Q(/*) =
= 0. Тогда алгоритм работы РЭ1
следующий:
если Туг(£) > Л(^), то V(tk+y) = 1, Pc(tk+i) =
— Р? i^k) 4~ АРСЛ, 3)
если ?yr(?ft)<A(^)> то V (7ft+I) = 0, Рс(7*+,)=
= А#*).
где ®рг(^) - ?yr(Fft)/2^, Pc(4)=Pc(Q/2^, ^Pc„—N„/Nt tk—tkIT0,
N — номинальный коэффициент деления ДПКД.
Аналогично определяется алгоритм работы РЭ2:
если ?or (Fft) > Ро (7Й), то Q(7ft+1) = 1, P0(7ft+i) = 1
P<Atk) I (4.4)
если ?or(7ft)<Po(4), то Q(7ft+1) = 0, P0(4+i) =
= P<№).
где <por (tk) — срог (^)/2itRa, Po (tk) — Po (fJ/ZitRn.
Отметим, что алгоритмы (4.3) и (4.4) моделируют работу ти-
повых схем делителей частоты. Однако в ряде технических прило-
жений используются схемы делителей с установкой по внешней
команде в нулевое состояние {78]. Подобные устройства находят
применение в специальных схемах быстродействующих СЧ (см.
гл. 7). Для таких делителей алгоритм работы следующий:
если L(iь) = 1, то 7С(бы-i) = ?Уг(7ft),
если L (tk) — 0, то Pc(7ft+i) = А(4),
если ?yr(7ft)>Pc(7ft), то l/(7fe+i)= 1, _х
Рс (^Л+1) = />с (U + ЬРсп>
если ?уг(Г*)<Рс(4). то V^fe+i) = 0,
Pc(7ft+I) = Pc(7ft),
где L(tk) —функция, принимающая значение единицы в моменты
«обнуления» ДПКД. В остальное время L(tk)~Q. Методы форми-
рования L(tk) зависят от конкретной реализации схемы установки
делителя в нулевое состояние. Программная реализация (под-
программа REL) алгоритма (4.5) приведена ниже (здесь и далее
использован язык программирования ПЛ/1), в которой Р — по-
рог РЭ; F — входной сигнал; DP — приращение порога; I — выход-
ной сигнал; L — команда обнуления):
REL PROC;
IF L=1 THEN P=E:
IF F>=P THEN 1=1; ELSE 1=Я;
IF 1=1 THEN P=P+DPj
RETURN;
END REL.;
7—1020
97
Перейдем к определению цифровых моделей дискриминаторов,
получивших наиболее широкое распространение при построении
СЧ. Будем при этом считать, что дискриминаторы представляют
безынерционные устройства, а все имеющиеся в реальных схемах
инерционности — аналоговые узлы системы ИФАПЧ. В этом слу-
чае дискриминатор можно представить логическим устройством,
алгоритм работы которого удобно описывать с помощью таблиц
переходов состояний.
1. ИФД «в—з» (см. § 2.1). Анализ работы ИФД «в—з» поз-
воляет определить его цифровую модель в виде таблицы перехо-
дов, в которой функции V(ik) и Q(tk) являются для дискримина-
тора входными воздействиями и E(tk+{) = ед(4+1)/£д— сигналом
на выходе. Полученная ЦМ приведена в табл. 4.1.
Таблица 41
Цифровая модель ИЧД «в—з»
V(tk) 1 0 0 1
Q(h) 0 1 0 1
E(tk+{) Er(tk+\) Дг 0») EAh) £r(0)
В табл. 4.1 £г(^*) =er(/ft) / максег(/*), 7fe = /* + int(/ft). Начало
отсчета /0 дискретного времени tk должно при моделировании СЧ
совпадать с появлением сигнала на выходе РЭ2.
2. ИЧФД «в—з» (см. § 2.2). Представим дискриминатор в ви-
де двух звеньев: ИЧД и ИФД «в—з», описываемых отдельными
таблицами состояний. Для определения цифровой модели ИЧД
введем P(ik)—функцию выходного состояния ИЧД, G(tk)—
функцию, характеризующую внутреннее состояние ИЧД. Функция
P(tk) в зависимости от режима работы ИЧД (см. § 2.2) принима-
ет одно из следующих трех значений:
P(tk) = 1 — режим работы при ед(6г) =Ец-,
P(tk) =— 1 — режим работы при ед(4) =0;
Р(^л)=0 — режим работы при ед(/*) — er(tk).
Функция G(tk) может иметь два значения:
G(/fe) = l при V (Тк) = 1;
G(tk)=~ 1 при Q(Tfc)=0.
При V(tk)~O и Q(tk)~O значение G(tk) остается неизменным.
Смысл введения функции G(tk) заключается в необходимости оп-
ределения состояний входных сигналов ИЧД, при которых нару-
шается очередность их поступления.
98
С использованием функций P(tk) и G(tk) цифровую модель
ИЧД представим в виде табл. 4.2.
Таблица 4.2
В табл. 4.2_функции И(/л), Q(^), P(tk-\~} и G(/*-i) являются
входными; G(ife), P(tk)—выходными. Прочерк здесь и далее
означает, что значение этой функции является несущественным
при определении выходных переменных.
Таблица состояний, отражающая работу ИФД «в—з», при-На-
личии ИЧД должна быть расширена для учета функции P(tk).
Для этого случая ЦМ ИФД «в—з» представлена табл. 4.3.
Подпрограмма DETWZ, реализующая цифровую модель ИЧФД
«в—з» или ИФД «в—з», приведена ниже.
Переменные подпрограммы имеют следующий смысл: PR —
признак типа дискриминатора (PR = 0 — ИФД «в—з», PR^O—
DETWZ:PROC:
IF PR=0 THEN GOTO M;
IF V=0 & 0=0 THEN GOTO Ml;
IF V=0 & 0=1 h P1=0 & Gl = l THEN DO; P=0; G=-l; END;
IF V=1 & 0=0 & P1=0 t, Gl=—1 THEN DO; P=0; G=l; END;
IF V=0 & 0=1 & P1=0 & Gl=—1 THEN DO; P=l; 6=-l; END;
IF V=1 & 0=0 & P1=0 t, Gl = l THEN DO; P=-l; G=l; END;
IF V=0 & 0=1 & Pl=l THEN DO; P=1 ; G=-l; END;
IF V=1 & 0=0 & Pl=-1 THEN DO; P=-l; G=l; END;
IF V=1 & 0=0 & Pl = l t, Gl=—1 THEN DO; P=l; G=l; END;
IF V=0 & 0=1 & Pl=-1 8< Gl = l THEN DO; P=-l; G=-l; END;
IF V=1 0=0 & Pl = l & Gl = l THEN DO; P=0; G=l; END;
IF V=0 & 0=1 & Pl=-1 8< Gl=-1 THEN DO; P=0; G=-l; END;
IF V=1 8< 0=1 THEN DO; P=0; G=-l; END;
M;
IF V=0 THEN GOTO Ml;
TD=T-FLOOR<T>;
IF (Р1Л=1 & P=0> ' <P1=0 & P=-l> THEN DO; IF TD<F0 THEN E=0;
IF TD>F0 & TD<(E0+F1> TXEH E=(TD-F0J/Fl;
IF TD>=(F0+F1) THEN EN=1; END; IF Pl=-1 8< P=-l THEN E=0;
IF P=1 THEN E=l;
IF Pl=l & P=0 THEN E=l;
Ml:
P1=P;
IF V~=0 ! 0Л=И THEN 61=6;
RETURN;
END DETWZ;
7*
99
Таблица 4.3
Цифровая модель ИФД «в—з» с учетом ИЧД
V(tk) 1 1 1 1 1 0 0 1
QCtk) 0 0 0 0 0 1 0 1
m_i) 0 —1 — 1 — — —
p(tk) 0 —1 —1 1 0 — — —
E (4+i) (4+1) £r (4+i) 0 1 1 £r (£) £r (Tk) 0
ИЧФД «в—з»); V, Q — соответственно сигнальный и опорный вхо-
ды; Т —текущее время; Р, Pl, G, G1—функции P(tk), Р(4-1),
G(tk), G(4-i) соответственно; Е — выходной сигнал; F0, F1 —
параметры фазовой характеристики ИФД «в—з» трапецеидальной
формы То, соответственно (см. гл. 5 рис. 5.6).
3. ИЧФДЗ (см. § 2.2). На основе анализа работы дискримина-
тора можно составить таблицу переходов состояний (табл. 4.4),
являющуюся его цифровой моделью.
Таблица 44
Цифровая модель ИЧФДЗ
V(tk) 1 1 1 1 0 0 0 1
Q (tk) 0 0 0 0 1 1 0 1
E (tk) 0 1 —1 1 1 —1 — —
E (4+1) —1 0 —1 0 1 0 E (tk) 0
Выходной сигнал дискриминатора E(tk+i) полностью опреде-
ляется входными сигналами V(tk) Q(4) и выходным сигналом
Е (tk) в предыдущий момент.
Всего возможны восемь комбинаций значений V(ik), Q(ik) и
E(ik). Последняя комбинация V (4) = 1 и Q (4) = 1 в реальных схе-
мах дискриминаторов точно не определена. В цифровой модели
эта ситуация доопределяется нулевым значением сигнала E(tk+i).
4. ИЧФДЗД (см. § 2.2). Работа дополнительных £)-триггеров
в дискриминаторе можно отразить таблицей^ переходов состояний
(табл. 4.5), в которой введены функции £>+(4) и отражаю-
щие сигналы на выходах верхнего и нижнего дополнительных
£)-триггеров соответственно. Функции £>+(4) и D~(ik) принимают
два значения: 1 — если на выходе триггера имеется сигнал «Лог 1»;
О — если сигнал «Лог О».
Цифровую модель ИЧФДЗД можно представить совокупностью
табл. 4.4 и табл. 4.5. Выходной сигнал ИЧФДЗД ED(ik+\) опреде-
ляется как £d(4+i) — sign(£ (4+i) +D+(tk+i)—D (4+i)].
100
Таблица 4.5
Цифровая модель дополнительных D-триггеров ИЧФДЗД
V(ik) 0 0 1 1 0 1
Q(tk) 1 1 0 0 0 1
E(tk) 1 0 —1 0 — —
D^k^ 1 0 D+(tk) D+li*) D¥(tk) 0
D (zft+i) D~ (ik) D~(tk) 1 0 D-(tk) 0
Полученная ЦМ ИЧФДЗД может быть использована и для
моделирования ИЧФДЗДГ (см. гл. 7). В этом случае в качестве
ЦМ служат табл. 4.4 и 4.5, но выходной сигнал дискриминатора
Eoo(ik+{) определяется соотношением EDG(ik+l) =Е (tk+l) +
+ §[£)+(/fe+1)— D~ (Д-н)1, где ^ = /Доп//д, /доп —ток дополнительных
генераторов тока.
5. ИЧФДЗМ (см. § 2.2). Выходной сигнал ИЧФДЗМ зависит
от разности фаз входных сигналов дискриминатора. Поэтому для
построения ЦМ необходимо определить алгоритм, позволяющий
вычислять указанную разность фаз. Цифровую модель блока вы-
числения нормированной разности фаз F(tk) =<р(/*)/2л представим
в виде табл. 4.6.
Таблица 4.6
Цифровая модель блока вычисления разности фаз входных импульсов ИЧФДЗМ
E (tk) 0 ±1 +1 0
Efk-i) 0 0 ±1 ±1
(/fc + 1) 0 tk tn Gfe—i)
E(tk+J E(~k) 0 0 ± [tk—tH (^fe)]
В табл. 4.6 параметр /Н(М введен для определения момента
начала измерения разности фаз. Знак функции £(/*), Eft^) и
F(tk) берется либо « + », либо «—».
Далее следует определить выходной сигнал дискриминатора
£м(6ж) по алгоритму:
если F(/ft+i)>9, то £M(/ft+i) = sign [F(/fc+i)];
если F(/ft+i)<0, то ^(/*+1) = F(7ft+i),
где 0 = 0/2л— нормированная протяженность линейного участка
фазовой характеристики ИЧФДЗМ.
101
Совокупность алгоритмов, приведенных в табл. 4.4 и 4.6, а так-
же (4.6), составляет ЦМ дискриминатора рассматриваемого типа.
Подпрограмма DET3, реализующая цифровую модель ИЧФДЗ и
его модификации (ИЧФДЗД, ИЧФДЗДГ, ИЧФДЗМ), приведена
ниже.
DET3-.P0C:
IF V=0 S- 0=0 THEN DO; EN=NE1; GOTO M: END;
IF V=1 & 0=0 b EN1=0 THEN DO: EN=-1; ! =0: END;
IF V=1 b 0=0 b EN1=1 THEN EN=0;
IF V-l & 0=0 & EN1=-1 THEN DO; EN=-1; L=l; END;
IF V=0 b 0=1 b EN1=0 THEN DO; EN=1; H=0; END;
IF V=0 8< 0=1 & EN1 = 1 THEN DO; EN=1; H=l: END:
IF V=0 ?< 0=1 b EN1=~1 THEN EN=0; '
IF V=1 b 0=1 1HEN DO; EN,H,L=0: END;
M:
IF MOD=0 THEN SEN=EN;
IF MOD=1 THEN SEN=SIGN(EN+H-L);
IF M0D=2 THEN=EN+NU*(H-L> ;
IF M0D=3 THEN GOTO Ml; ELSE GOTO М2;
GOTO М2:
Ml:
IE EN=0 b EN1=0 THEN TT=0;
IF EN‘=0 b EN1=0 THEN DO: TT=T; F=0; END;
IF (EN*EN1)>0 THEN F=0;
IF EN=0 b EN1=1 THEN F=T-TT;
IF EN=0 b EN1=-1 THEN F=-(T-TT>;
F1=ABS(F>;
IF F1>=TET THEN SEN=SIGN(F>;
IF FKTET THEN SEN=EN;
М2:’
RETURN:
END DET3:
Переменные в подпрограмме имеют следующий смысл: MOD —
признак модификации дискриминатора (MOD = 0 для ИЧФДЗ,
MOD=1 для ИЧФДЗД, M0D = 2 для ИЧФДЗДГ, M0D = 3 для
ИЧФДЗМ); V, Q — входные сигналы; Т — текущее время; SEN —
выходной сигнал; EN, Н, L — функции £'(4), D+(tk) iiD-(tk) со-
ответственно; NU — параметр g; ТЕТ — параметр 0; F — текущая
разность фаз входных сигналов.
По разработанной методике могут быть получены ЦМ других
типов дискриминаторов, применяемых в синтезаторах с ИФАПЧ.
Одним из элементов, характерных для реальных систем ИФАПЧ, является
звено задержки. При соизмеримости его постоянной времени с периодом регу-
лирования То оно может оказывать существенное влияние на динамические
процессы, протекающие в системе. Для учета этого обстоятельства при построе-
нии ЦМ СЧ необходимо вводить звенья задержки. Реализация последних может
быть осуществлена при перенесении значений задерживаемого сигнала /7(Д) из
одного участка в некоторой выделенной области памяти ЭВМ в другой. Алго-
ритм, обеспечивающий задержку сигнала F(tk) на п шагов дискретного времени
Д/, можно записать следующим образом:
А(/г)=А(/г-1); А (п - 1) = А (п — 2); .... А (1) = Л (0);
A(0) = F(7fe); FM = A(n), ' (4.7)
103
где АД?*) — задержанный сигнал /7(/*); А (п) — вспомогательные функции для
повторной записи значений задерживаемого сигнала.
Программно звено задержки может быть реализовано в виде подпрограммы
BEL:
DEL:PROC?
DO f- =0 TO D-1 :
A <D—К > -A (D-I -1 > :
END;
A<0)-IN;
OUT=A(D):
RETURN;
END:
Переменные подпрограммы имеют следующий смысл: А—одномерный мас-
сив; IN, OUT — входной и выходной сигналы; D — задержка (число шагов
дискретного времени Д/).
Таким образом, мы получили ЦМ основных цифровых узлов
•СЧ. Разумеется, каждый цифровой узел СЧ можно разделить, в
свою очередь, на более мелкие части и представить ЦМ узла, сос-
тоящую из цифровых моделей отдельных компонентов. Например,
модель ИЧФДЗ можно представить из моделей £)-триггеров, ло-
гических элементов «И-НЕ», токовых ключей и т. п. Однако это
•существенно усложнит ЦМ синтезатора в целом, но заметно не
изменит результаты моделирования. Построение сложных детали-
зированных цифровых моделей СЧ целесообразно при анализе
работоспособности последних в отдельности.
4.3. МОДЕЛИ АНАЛОГОВЫХ УЗЛОВ СИНТЕЗАТОРА
В эквивалентной схеме СЧ, изображенной на рис. 4.1, к аналого-
вым узлам отнесли ФНЧЭ и интеграторы И1 и И2. Существует ряд
.методов цифрового моделирования таких элементов [77],. Основны-
ми требованиями здесь является минимальный объем вычислений
на ЭВМ и простота подготовительной работы. Среди указанных
методов следует выделить разностные, использование которых не
требует большого объема оперативной памяти ЭВМ.
Сущность разностных методов состоит в замене процессов в
непрерывных линейных системах процессами в эквивалентных им-
пульсных линейных системах, поведение которых можно описать
рекуррентными соотношениями. Математическим аппаратом при
этом служит /-преобразование.
В синтезаторах, как правило, сигнал на выходе дискриминато-
ра, воздействующий на фильтр, имеет кусочно-постоянную фор-
му. На входах интеграторов И1 и И2 сигналы, как правило, также
постоянны (Dor(0—const, ыуго(/) = const. Учтя это, применим для
моделирования ФНЧЭ и интеграторов метод Цыпкина-Гольден-
берга [77, 79], который для такого класса входных сигналов явля-
ется точным.
103
Рис. 4.3. Импульсный эквивалент
ФНЧэ.о
Указанный метод основан на ступенчатой аппроксимации вход-
ного сигнала с помощью интерполирующего фильтра с передаточ-
ной функцией
О0($) = [1-ехр(-$ДЭД/$. (4.8)
Импульсный эквивалент ФНЧэ.о показан на рис. 4.3. Сигнал
ед(/) с выхода дискриминатора, проходя через ключ с периодом
коммутации Д/, преобразуется в решетчатую функцию ед(4), по-
ступающую на вход звена ФНЧЭ с передаточной функцией
G3.0(s) = G0(s) бф.э(з). Выходным сигналом ФНЧЭ.О является ре-
шетчатая ФУНКЦИЯ фф (tk) .
Для получения рекуррентного алгоритма, описывающего дина-
мику ФНЧэ.о, возьмем /-преобразование:
Оэ0(z) =Z {Оэ0 (X)} 2 VjZ-ll 2
/=0
(4.9)
где а,, Р/ — постоянные коэффициенты, полученные одним из из-
вестных способов*; а0=1, ро = О (Ро=0 из-за наличия астатического
звена в ФНЧЭ).
Далее из (4.9) найдем рекуррентное уравнение, связывающее
входные и выходные сигналы ФНЧЭ:
?ф (^л) = Р1ед (^Л-1) + ?2ед (tk-2) + ••• 4“ Ра (tk-a) а1фф (tk—1)
— а2?ф (^Л-2) — ... — «х<Рф (tk-x)- (4.10}
Аналогично получим уравнения для И1 и И2:
Туг.о(^й) — Д^уг.О (tk—l)4"<pyr.O (tk—1)‘, ®or (^k) — &twor (tk—l) + <por(^J_l).
Уточним выражение (4.10) для использования при моделировании СЧ с
ИЧФДЗ с ФНЧ второго порядка с передаточной функцией (3.43).
/-преобразование Ga0 в этом случае имеет вид
Оэ.о(г) = Ло5угД/2{г2[Дт-Дтс2(1 -- <Л) + 0,5]+г[Дт[2т2(1-<4)-
_ 1 _ dд] + 0,5 (1 — t/д)] + Дт [Од — т2 (1 - t/д)] — 0,5а?д}/[г3 —
— (2 t/д) z2 -|~ (1 4- 2а?д) z — t/д],
где а?д = ехр(— Ы/Т2); = ъ2 = Т2/М; Дт = — т2.
Соответствующее Gao(z) разностное уравнение в нормированных входных
и выходных сигналах имеет вид
104
?ф (^л) = (2 + du) <Рф (tk-1) — (1 + 2</д) <рф (tk-2) 4- ^д<Рф (tft-з) +
4- {Дт [ 1 - Т2 (1 - аГд)] + 0,5} ~ел (7^) + Ки {Дт [2т2 (1 — <4) -
- 1 - <41 + 0,5 (1 - </д)} ёд (4-г) + АГд {Дт [дГд - Т2 (1 - <4)] -
— 0,5<+д} ед (77—з), (4.11>
где Кд = K0Syr^A^/2n^ = КУД?2.
При использовании в СЧ с ИЧФД «в—з» пропорционально-интегрирующего
фильтра с передаточной функцией (3.33) получим Z-преобразование
„ . 5угД^{г[1 4-Дт(1 — <4)] —Дт(1 — </д) —</д}
Сгэ о (-S’) —---------------------------------------- •
z2 - z (1 + <4) + du
Разностное уравнение имеет вид
<рф(4) — (1 4' du) срф (tk-1) — ^дфф (tk—2) + Кд {[ 1 + А^ (1 — t/д)] X
Хёд(7*-1)-[Дт(1 -<4) + <4]7д(7*_2)}; (4.12>
где Ки = SyrEubtlZvN = КуМ.
Отметим, что если в структурной схеме на рис. 4.1 интегратор-
не объединен с ФНЧ, то при использовании в качестве фильтра
ПИФ разностное уравнение импульсного эквивалента фильтра
еф(Л) = аиеф (4-i) + (t^Tjj) ея (ik) — (1 — du — Tj/t2) ёд (7ft-i).
В этом уравнении выходное напряжение e^(tk) в момент tk
зависит от ед(4). Это приводит к необходимости определения
ед(4) численным или, если это возможно, аналитическими спосо-
бами, что является недостатком разностного метода моделирова-
ния линейных инерционных звеньев. Возможный вариант устране-
ния указанного недостатка состоит в искусственном введении в
тракт ФНЧ звена задержки на один таг дискретного времени.
Рассмотрим метод моделирования [79], основанный на исполь-
зовании векторно-матричного уравнения (3.296), определяющего-
явную зависимость выходного сигнала динамического звена от
времени. Метод позволяет в процессе моделирования легко изме-
нить шаг дискретизации, что существенно сокращает затраты ма-
шинного времени при сохранении высокой точности моделирова-
ния.
Как и ранее, введем ФНЧЭ с передаточной функцией (4.1).
Уравнение для определения выходного сигнала ФНЧЭ запишем
в виде
X (t) = Ф70 X (0) + В (7), (4.13>
где Х(/)=[фФ(/)], <р^> (/), <р^т>(/) —вектор-столбец нормирован-
ных координат ФНЧЭ, которыми являются фаза выходного колеба-
ния УГ и ее производные без учета составляющей фазы за счет
частоты^ (0уг.о(7): _ В(0 =йд(/)—7д(0)]Л1>(7)-(-^(O)/7)1’(Г), ...,
1едЮ—ед(0)]Г(т+1)(/)+вд(0)Г'1т+1>(/)} — вектор-столбец, опре-
ют
деляющий изменение координат выходного сигнала ФНЧЭ под
действием сигнала ед(/); Ф(/)—переходная матрица ФНЧЭ.
Функции и F^~> (t), а также Ф(/) находятся из соотно-
шений (3.30), (3.31) и (3.32), полученных в гл. 3, с учетом вида
передаточной функции ФНЧЭ.
При использовании ФНЧ с передаточной функцией (3.43) в СЧ с ИЧФДЗ
получим
?Ф (о - (0)+4° (°/Н- (°) - П(1 - ^)] +
+ Ау [ёд ("о -~ел (0)] [Т2 (Ч\ — Т2 (t/T2 + dt-l) + 72/2] +
+ Куе, (0) Tl (1 - dt + ^I2TI -t/TJ-
№ = И1’ “Hi2’ С1 ~ + «у 1*д ~ ёд(°)] к"4-} (4-14)
+ (Л - т2) (1 - dty] + к;е, (0)Т2 (?/т2 -1 + dty,
СО =~^ (0) dt + Ку [7Д (?) - ёд (0)] [ 1 + (^-72)^/7’214-
4-/<Л(0)(1-^),
где dt = ехр (- 7/f2); Ку = K0SyrEJ^N.
Соотношения (4.13) для ФНЧ с передаточной функцией (3.33) в СЧ с ИЧФД
«в—з» имеют вид
?ф ('О = ?Ф (0) 4- (0) Т2 (1 - dt) + ку [е; (/) - ёд (0)] [7+
+ (Л - Т2) (1 - dt)} 4-Куед (0)Т2(Г/Т2 - 1 + d,);
_ _ - . _ _ _ _ (4Л5)
(0 = <ff (0) dt 4- Ку [ед (0 — ед (0)] 11 + (7\ -V2) dt/T2] +
+ Куед(0)(1 - dt),
где Ку = 5угЕдТ0/2тг^.
Для моделей интеграторов И1 и И2
фуг.0 (0 — фуг.О (0) + “yr.oF, <рог (0 — <рОг (0)4- (»ОгЛ
4.4. ПОСТРОЕНИЕ АЛГОРИТМОВ МОДЕЛИРОВАНИЯ
СИНТЕЗАТОРОВ С ИФАПЧ
После нахождения алгоритмов, отражающих работу отдельных
звеньев, может быть построен алгоритм, моделирующий протекаю-
щие в СЧ процессы в целом. Наиболее просто такой алгоритм оп-
ределяется при моделировании с постоянным шагом дискретизации
времени (рис. 4.4). Однако ЦМ СЧ при высокой точности получе-
ния результатов требует больших затрат машинного времени. Сле-
довательно, использование подобной ЦМ СЧ целесообразно толь-'
ко в тех случаях, когда должно быть произведено определение
106
координат ИФАПЧ в промежут-
ках между моментами срабаты-
вания релейных элементов (т. е.
между моментами появления им-
пульсов с ДПКД и ДФКД). Та-
кая ситуация возникает, напри-
мер, при анализе спектральных
характеристик выходного сигнала
синтезатора или при построении
ЦЛА СЧ с учетом нелинейности
характеристики управления УГ и
зависимостей соог и иУг.о от вре-
мени. Кроме того, постоянный шаг
дискретизации необходим для мо-
делирования СЧ с ИЧФДЗ при
учете зависимости токов /+, 1~
от напряжения на входе ФНЧ
бф.вх(^). Заметим, что схема на
рис. 4.1 не содержит информацию
о вф(/), еф.вх(0 (для случая ис-
пользования ИЧФДЗ) и (0уГ(0,
необходимую для построения ЦМ
таких систем. Следовательно, эта
схема должна быть дополнена
специальными звеньями, что и
сделано на рис. 4.5.
В ИЧФДЗ для учета неиде-
альности генераторов тока ЦМ
дискриминатора следует допол-
нить цифровой Моделью блокарис 44 Блок-схема алгоритма циф-
нелинейности, задающего зависи-ровой модели синтезатора частот с
мость изменения токов /+ И /-постоянным шагом дискретизации
г> д д времени
от вф.вх(г). о ряде случаев эта за-
висимость может быть достаточно
Рис. 4.5. Расчетная схема синтезатора частот для цифрового моделирования с
учетом нелинейности характеристики управления УГ и зависимости токов Z*
и 1~ в ИЧФДЗ от еф в ДО
107
Рис. 4.6. Зависимость и Iд от
вф ВХ
Рис. 4.7. Вариант построения ФНЧ
точно аппроксимирована графиками, показанными на рис. 4.6.
Точки на оси абсцисс, соответствующие напряжениям е+вх и е~вх
разделяют области постоянства токов /+ и 1~ от областей их
линейного изменения. Напряжение Еп определяет максимальное
значение еф.вхЦ,), при котором /+ =0. Практически Еп соответст-
вует напряжению питания ИЧФДЗ. В результате ЦМ ИЧФДЗ и
его модификаций дополняется блоком нелинейности, алгоритм
работы которого отражен в табл. 4.7.
Таблица 4.7
Цифровая модель блока нелинейности ИЧФДЗ
1 1 —1 —1 1 -1 0
£ф.вх ^^ф.вх F* ' ^ф.вх ^^ф.вх ^^ф.ВХ >1 <0 —
(Л + 1) 1 £ф.вх ^ф.вх —1 Е\, вх (^) 0 0 0
1-£ф.вх р- ^ф.вх
В табл. 4.7 Ен(^) =ен(Д)/Ед— нормированный выходной сиг-
нал ИЧФДЗ с учетом нелинейности токов дискриминатора;
ЕФ.вх(Гк) =еФ.вхО£п; Е+Вх = е+вх/Ев; Е~вх = е~вх/Еп.Подпрограм-
ма BLN, реализующая ЦМ блока нелинейности, приведена ниже.
blnzproc:
IF EN=l & EG<=EFP THEN SEN=ls
IF EN=1 & EG>EFP THEN SEN=1-(EG-EFP)/<l-EFP);
IF EN=-1 & EG>=EFM THEN SEN=-1;
IF EN=-1 b EG<EFM THEN SEN=-EG/EFM;
IF <EH=l & EG>1) 1 <EN=-1 & EG<0) EN=0 I HEN SEN=0;
RETURN;
END BLN;
Переменные подпрограммы имеют следующие значения: Е для
£(/?); EF для £ф.вх(М; EFP для F + BX; EFM для Е~вх;ЕН для
E„(Tk).
108
Разумеется, возможно построение алгоритма работы блока не-
линейности, отражающего более сложный характер изменения
токов генераторов от вф.вх(/).
Следует подчеркнуть, что учет зависимости токов ИЧФДЗ от
£ф.вх(/) позволяет с достаточной точностью использовать рассмот-
ренную модель дискриминатора для анализа СЧ с ИЧФДЗ и ге-
нераторами напряжения ИЧФДЗН (см. § 2.2). При этом сущест-
венно упрощается цифровая модель ФНЧ, поскольку его переда-
точная функция остается неизменной при размыкании и замыкании
ключей дискриминатора. Зависимости токов /+ (вф.вх) и 1~ (вф.вх)
для моделирования СЧ с ИЧФДЗ с генераторами напряжения при-
ведены на рис. 4.6 штриховыми линиями. В цифровой модели бло-
ка нелинейности в этом случае £JBX=0 и £ф ВХ=1.
Итак, особенностью моделирования процессов в СЧ с учетом
неидеальности токов дискриминатора является необходимость оп-
ределения напряжения вф.вх(/), от которого зависят эти токи. При
использовании ФНЧ, показанных на рис. 9,1,а, б, напряжения на
входе вф.вх(/) отпадает. Однако в общем случае вф.вх(0^еФ(0> и
поэтому при построении ЦМ СЧ должен быть введен алгоритм
определения вф.вх(<).
Например, для ФНЧ, показанного на рис. 4.7, напряжения
£ф.вх(/) и вф(/) различны. Легко определить, что передаточная
функция звена ФНЧВХ имеет вид:
f-f I , бф.вх (s) Ко (1 4- T\s) (1 + T2s)
ea(s) 5(14-7»
где Ko=l/(C14-C2); 7»2?1C1; Г2 = Я2С2; 7» (/?!4-7?2)ClC2/(Cl4-
4-C2); eA(s) —изображение токового выходного сигнала ИЧФДЗ.
При этом передаточная функция фильтра
С?ф(«) — 2<о(1 + 7'iS)/s(l -|-7».
(4.16)
(4.17)
Выражения (4.16) и (4.17) совпадают только при 2?2 = 0.
Цифровое моделирование с постоянным шагом дискретизации
времени позволяет легко учесть практически все особенности функ-
ционирования реальных схем СЧ, однако, как уже отмечалось, по-
вышение точности моделирования ведет к увеличению затрат ма-
шинного времени. Если съема информации и изменения выходного
сигнала дискриминатора в промежутках между срабатываниями
релейных элементов не происходит, то эффективность цифрового
моделирования может быть существенно повышена за счет введе-
ния переменного шага дискретизации.
При моделировании линейных динамических звеньев на основе
векторно-матричного уравнения (4.13) ЦМ СЧ с переменным ша-
гом дискретизации времени может быть реализована в виде алго-
ритма, изображенного на рис. 4.8. На этом рисунке дополнительно
введены блоки вычисления временного интервала (/н, /в) сраба-
тывания релейных элементов на п-м цикле итераций и вычисления
моментов их срабатывания /’ (временные параметры /н, /в и t*
109
Рис. 4.8. Блок-схема алгоритма цифровой модели СЧ с переменным шагом дис-
кретизации времени
110
отсчитываются от t*n_x — предыдущего момента срабатывания
РЭ1 и РЭ2. Вычисление интервала (/«, /в) организовано по мето-
ду дихотомий. Определение t'n при срабатывании РЭ1 производит-
ся из решения уравнения <рф(/* ) +<рУг.о(^ )—Рс=0 на интервале
(/„, /в) численным методом. Вычисление t*n при срабатывании РЭ2
осуществляется в соответствии с выражением t*n =Pq—<j>or(^_i)-
В соответствии с блок-схемой на рис. 4.8 разработана програм-
ма SINTM для расчета времени установления частоты и построе-
ния переходных процессов в СЧ с ИЧФДЗ с тремя его модифика-
циями и ФНЧ второго порядка с передаточной функцией (3.43).
Необходимые сведения по использованию программы SINTM при-
ведены в приложении.
Рассмотрим далее вопрос о получении в процессе моделирова-
ния информации о таких параметрах, как ®уг(0, <рУг(О, еФ(0 и
ед(1). Во время переходного и установившегося режимов работы
ИФАПЧ она может выводиться непосредственно. Сложнее дело
обстоит с выделением информации о времени установления часто-
ты, областей устойчивости, спектральных характеристиках выход-
ного сигнала синтезатора и ряда других. Эти параметры необхо-
димо рассчитывать, так как в случае цифровой модели они отсут-
ствуют.
При определении ty исходят из заданной точности установки
частоты Дсое и находят моменты А/ вхождения текущего значения
соуг(^) в «трубку» сот(^) =®ст±Дсог (рис. 4.9). В качестве ty
принимают время от начала переходного процесса до момента
после которого соУг(^) из «трубки» до окончания времени мо-
делирования не выходит. Алгоритм работы блока измерения ty
можно записать так:
если Ди (Zfe_i) Да)8, Ди (th) < Да)8, то ty^-th,
где А(о(Д) = |(0уг(6-)— 1 |, СОУг(^) =«>Уг(^)/®ст, А(О = = А(0 е /(Ост.
При моделировании с переменным шагом дискретизации време-
ни, когда информация о частоте ®уг(Д) может быть выведена
только в моменты срабатывания релейных элементов, вычисление
ty производят следующим образом. Находят отдельно ty по значе-
ниям (оУг(tk) в моменты срабатывания РЭ1 (Iyi) и РЭ2 (1уг), а за-
тем выбирают максимальное. Тогда /У = макс{/У1, /у2}.
Широко используется определение ty по времени установления
периода следования импульсов с ДПДК- Для этого в процессе
моделирования вычисляются значения этого периода Тп и Tn-i,
а затем используют алгоритм: если 11/Тп—11 >A®S , 11/Тп—11 <
<Acos, то 1У=Д. Заметим, что значение ty, получаемое таким
способом, будет несколько меньше, чем в предыдущих случаях, так
как здесь не учитываются выбросы соуг(О в промежутках между
импульсами с ДПКД.
Аналогично может быть получена величина ty по заданным точ-
ности установления фазы выходных колебаний СЧ, уровню ослаб-
111
Рис. 4.9. К определению времени установ-
ления частоты в ty процессе цифрового
моделирования
эксперимент может быть прекращен,
ления дискретных составля-
ющих помехи с частотой
сравнения в спектре выход-
ного сигнала и т. п.
Условием окончания вы-
числительного эксперимента
(условие «Останова») при
определении ty может слу-
жить ограничение текущего
времени tk некоторой посто-
янной величиной i*k, превос-
ходящей ty для самых
инерционных параметров
ИФАПЧ. Вычислительный
если отклонение координат
переходного процесса будет соответствовать ty. Второй вариант
завершения моделирования эффективнее с точки зрения затрат
машинного времени.
Спектральные характеристики выходного сигнала синтезатора
в установившемся режиме при учете помех, создаваемых, напри-
мер, ДДПКД, можно определить разложением сигнала <рф(/Д в
ряд Фурье. Для этого в программной реализации ЦМ СЧ необ-
ходимо использовать процедуру спектрального анализа (быстрое
преобразование Фурье [80]). При этом ЦМ СЧ должна быть по-
строена с постоянным шагом дискретизации времени.
Области устойчивости «в целом» и «в малом» находятся путем
многократного вычислительного эксперимента при различных на-
чальных условиях и параметрах ИФАПЧ. Естественно, что выбор
последних сопровождается предварительными качественными ис-
следованиями, в результате которых число вариантов вычислений
существенно сокращается.
Сравнение результатов расчета переходных процессов для ря-
да структур СЧ методом цифрового моделирования и с помощью
ММ, разработанных в гл. 3, показало их эквивалентность с точки
зрения точности описания процессов, протекающих в реальных
системах ИФАПЧ.
Выше были рассмотрены примеры построения ЦМ одноколь-
цевых СЧ. Однако область применения цифрового моделирования
не ограничивается простыми структурами синтезаторов и может
быть расширена и на моделирование сложных структур: много-
кольцевых, с различными устройствами поиска частот, со сложны-
ми алгоритмами работы ДПКД и ДФКД и т. п. Разработка ЦМ
таких сложных структур СЧ не имеет принципиальных особеннос-
тей и ввиду ограниченного объема книги здесь не приводится.
112
ГЛАВА 5
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
БЕСФИЛЬТРОВЫХ СИНТЕЗАТОРОВ
ЧАСТОТ С ИФАПЧ
5.1. УСТОЙЧИВОСТЬ И ПЕРЕХОДНЫЕ ПРОЦЕССЫ В СЧ
С ЛИНЕАРИЗОВАННОЙ СИСТЕМОЙ ИФАПЧ
В ряде случаев при использовании в системе автоподстройки СЧ
дискриминаторов типа ИФД «в—з» или ИЧФД «в—з» (см. § 2.1,
2.2) благодаря хорошим фильтрующим свойствам последних уда-
ется получить приемлемые спектральные характеристики выход-
ного сигнала синтезатора без применения ФНЧ. Отсутствие инер-
ционного фильтра позволяет, в свою очередь, реализовать предель-
ное быстродействие СЧ. Сказанное обусловливает значительный
интерес специалистов к подобным системам.
Анализ устойчивости и переходных процессов в СЧ, основанных
на бесфильтровых ИФАПЧ, проведем сначала для случая, когда
отклонения от стационарных значений малы. При этом периодич-
ность статической фазовой характеристики дискриминатора мож-
но не учитывать. Для такой линеаризованной системы из соотно-
шений (3.63), справедливых для ИФД «в—з» и ПИФ, положив
постоянные времени фильтра 7\ = Т2=0, получим
Дт“+1-Дт;(1-Ау) = 0. _ (5.1)
Напомним, что в (5.1) Атл— нормированное отклонение раз-
ности фаз входных импульсов дискриминатора от стационарного
значения в момент tn=nT0; /Су=5уГег.ст7 ^/2лА—нормированный
коэффициент усиления ИФАПЧ в режиме синхронизма.
Выражение (5.1) является линейным однородным разностным
уравнением первого порядка, которое полностью характеризуется
параметром Ку. Очевидно, что в установившемся состоянии
Атл+1 = Атл=0.
Применив к (5.1) условие устойчивости «в малом» (см. табл.
6.1), найдем пределы изменения Ку, в которых ИФАПЧ устойчива:
0<К’ус2. Решением (5.1) является
Дт„ = Д7н(1-Ку)«, _ (5.2)
где Дтн — начальное отклонение координаты Атп.
Характерной особенностью бесфильтровой ИФАПЧ является
возможность достижения установившегося состояния за один ин-
тервал регулирования. Действительно, из (5.2) следует, что при
Ку=1 процесс сходится при п=1 независимо от Атн. Эта особен-
ность является весьма важной, поскольку, выбрав /Су~1, можно
добиться предельного быстродействия СЧ. При Ку#=1 процесс
установления Дтп имеет при Ку<1 знакопостоянный характер, а
8—1020
ИЗ
Рис. 5.1. Зависимости Дт„(п) в бесфильтровых ИФАПЧ при различных
Ку: а)0<Ку<1; 6)1<КУ<2; в)Ку=1; г)Ку>2; й)К;<0;
е)Ку=2; яс)Ку=0
при Ку> 1—знакопеременный. На рис. 5.1 показаны зависимости
Атл от п при различных Ку, иллюстрирующие характер переходных
процессов. На рис. 5.1 случаи а—в соответствуют устойчивым сис-
темам; г, д — неустойчивым; е, ж — нейтральным.
Найдем число интервалов регулирования пг, необходимых для
достижения абсолютного отклонения Дтл, меньшего Ат«, где
Дт8 — малая величина, характеризующая точность установления
Атл. Для этого преобразуем (5.2) к виду
Д7„/Д7Н = (1 - /<у)». (5.3)
Прологарифмировав правую и левую части (5.3), получим
п = In | Дтл/Д7н | /1п | 1 — Ку | . (5.4)
Подставив в (5.4) вместо Атл значение Атв и учтя, что п —
целое число, найдем
иг = int (In | Дх,/Дтн ! /1п | 1 — Ky | ) + 1. (5.5)
Так как Ats <С1 и Атн<С1, то можно записать Ат./Атн~
~А/уг.» /А^уг.н^в, где А/уг.« и Afyr.H— требуемое и начальное от-
клонения fyr от частоты в стационарном режиме fyr.CT. При этом
формула (5.5) позволяет определить число интервалов регулиро-
114
вания п г для достижения Af>r пе
значения Afyr 6. Время установ-
ления по частоте или фазе 75
определяется умножением п._
на То. _
Значение Ку при работе СЧ в so
диапазоне частот значительно из-
меняется, что связано с измене-
нием коэффициента деления 25
ДПКД и нелинейностью крутиз-
ны характеристики управления
Зуг. Выражение (5.5) позволяет
оценить влияние вариации этих о
величин на время переходного -
процесса Рис. 5-2- Зависимость ле от ду
На рис. 5.2 приведены зависи-
мости ns от Ку при е = const, по-
лученные из (5.5). Они показывают, что в достаточно широких
пределах изменения Ку относительно оптимального Ку=1 (поряд-
ка ±20%) составляет 5... 7 периодов регулирования То при
е= 10-2... 10-4. Для уменьшения пе до 2...3 То точность реализа-
ции Ку, равного единице, должна быть не хуже 1 %, что трудно
выполнимо.
5.2. АНАЛИЗ СИСТЕМЫ ИФАПЧ НА ФАЗОВОЙ ПЛОСКОСТИ
Уравнение нелинейной бесфильтровой системы ИФАПЧ, учитыва-
ющее частотно-импульсную модуляцию второго рода, получим из
(3.34), положив постоянные ФНЧ 71i = T2=0. Примем также, что
N не зависит от tn, т. е. KN (п) =0. Тогда
\ (Тп)ТпКуЛ + ТоТ„шуг.0/2^-1 = 0. (5.6)
Нелинейное разностное уравнение (5.6) связывает длительность
га-го периода Тп с моментом tn появления га-го импульса на выходе
ДПКД. Для tn+i имеем tn+i = /n + Tn:
Преобразуем (5.6):
Тп = 1/[ Шуг.о + А^уд^д (Ub (5.7)
где соуг.о = соуг.оТо/2л;У—нормированная к частоте соуг.ет началь-
ная частота УГ.
В уравнении (5.7) ед(6>) определяется уровнем сигнала на вы-
ходе генератора периодического напряжения в момент tn eR(tn) =
= вр (tn) .
Вследствие периодичности функции er(tn) справедливо равен-
ство вг(^л) =er(Atn), где &tn = tn—int (tn) —нормированный времен-
ной сдвиг между импульсами ДПКД и ДФКД.
8* 115
Величину Д/л можно трактовать и как нормированную раз-
ность фаз между входными импульсами дискриминатора cpn=<pn/2n
С учетом сказанного
Тп = 1 / К г о + Кудёг (<?„)]. (5.8)
Уравнение (5.8) будем исследовать на фазовой плоскости с
осями координат Т, ср, на которых откладываются значения Тп и
(рп [81]. В отличие от традиционной фазовой плоскости здесь на
оси ординат откладывается период, а не частота, что существенно
упрощает построение траекторий движения и их анализ.
Для построения траекторий движения нанесем на фазовой
плоскости кривую Г(<р), полученную из уравнения (5.8) посредст-
вом замены Тп и срл на Г(<р) и ф соответственно, и прямые =
= i, где 1=1,2..m (т=1п1[макс Г(<р)]+ 1).
Последовательности {Гл} и {<p«} находятся в следующем поряд-
ке (рис. 5.3):
1. Задается начальное значение при п=0, равное гри, и на-
ходится Г(фн), определяющее начальное значение периода Гн.
2. Из точки с координатами Гн, фн под углом 135° к оси ср про-
водится прямая до пересечения с линией 7\(<p). Координата точки
пересечения по оси <р соответствует значению фЬ
Для нахождения последующих координат системы ИФАПЧ
указанные операции повторяются.
Значения <р в режиме синхронизма определяются координата-
ми ср; ст точек пересечения функций Г (ср) и £Д<р). Как правило,
Рис. 5.3. Построение траектории дви-
жения на фазовой плоскости
116
Рис. 5.4. Фазовая плоскость для ана-
лиза ИФАПЧ с ИЧФД «В—3»
Рис. 5.5. Примеры построения траекторий движения в ИФАПЧ с ИЧФД «в—з>:
а—для ег(ср), б—для ег(ф) = 1
систему рассчитывают таким образом, чтобы захват осуществлял-
ся на частоте сравнения с координатой cpiCT. Однако возможны ре-
жимы работы ИФАПЧ, при которых захват происходит на субгар-
мониках частоты сравнения с координатами ср2ст, Фзст и т. д.
Рассмотрим построение фазовых траекторий движения в систе-
ме ИФАПЧ с ИЧФД «в—з». Для учета работы ИЧД построим
дополнительные линии переключения состояния (рис. 5.4):
То(?) = 1 — <р,
Т1 (<р) = 2 — у.
(5.9)
Прямые, задаваемые (5.9), разделяют фазовую плоскость на
три области, обозначенные цифрами. При попадании изображаю-
щей точки фазовой траектории в области 1 и 3 происходит смена
состояния ИЧД, при движении изображающей точки в области 2
состояние ИЧД остается неизменным.
Изобразим на рис. 5.4 функцию Т(ср), соответствующую сраба-
тываниям ИЧД. Она описывается уравнениями
T°f (<р)= Г/Шуг.О,
Т1} (<р)= 1/(шуг.о+ Ауд).
(5.10)
Горизонтальные прямые (5.10) характеризуют период Тп в ус-
тановившихся частотных режимах работы дискриминатора при
ег(<р)=О и ег(ср) = 1 соответственно. Примеры построения траекто-
рий движений на фазовой плоскости приведены на рис. 5.5 для
ег(<р)=О (рис. 5.5,а) и ег(ср) = 1 (рис. 5.5,6).
117
_ На рис. 5.5,а начальная изображающая точка с координатами
(Л,, фн) располагается в области 1 срабатывания ИЧД с ег(ф) =
= 0. Следующая изображающая точка (Т\, cpi) находится на ли-
нии Т'(ф), так как в соответствии с логикой работы ИЧФД «в—з»
(см. рис. 2.8) срабатывания ИЧД в точке (Тп, фн) еще не проис-
ходит. В точке (Ti, cpi) ИЧД срабатывает и изображающие точки
располагаются на прямой (<р). В частотном режиме работы
система остается до тех пор, пока изображающая точка не достиг-
нет заштрихованного участка области 3, после чего ИЧД отклю-
чается и далее система работает в фазовом режиме.
На рис. 5.5,6 начальная изображающая точка (Тя, фн) распо-
лагается в области 3. В соответствии с логикой работы ИЧФД
«в—з» (см. рис. 2.8) срабатывание ИЧД происходит в точке (Тн,
Фн). Последующие изображающие точки находятся на прямой
Tlj (ср). После достижения изображающей точки заштрихованного
участка области 1 система ИФАПЧ переключается в фазовой ре-
жим работы. v
Координаты ф* после выключения ИФД при ег(ф)=0 ограни-
чены пределами 0<ф*<фл, где фЛ=(1—а)уг.о)/к>уг.о- Координаты
<рл после выключения ИЧД при ег(ф) = 1 имеют пределы ф/С
^фл <фл, ГДе ф/,= (2 СОуг.О Куд) / (сОуг.оЧ" Кугд) J ф/i= 1 / ((йуг.оН-Куг)
Таким образом, фазовая плоскость позволяет графоаналитиче-
ским методом проводить исследование динамических характерис-
тик бесфильтровых систем ИФАПЧ с ИФД «в—з» и ИЧФД «в—з».
5.3. ПОЛОСА ЗАХВАТА СИСТЕМЫ ИФАПЧ С ИФД «В—3»
Использовав метод представления траекторий движения коор-
динат на фазовой плоскости, определим полосу захвата ИФАПЧ
и ИФД «в—з». Анализ проведем на примере системы с трапецеи-
дальной фазовой характеристикой дискриминатора. Функция er(f),
соответствующая этому типу характеристики дискриминатора, при-
ведена на рис. 5.6. Величины 10 и li являются параметрами харак-
теристики.
Выражение для Т(ф) имеет вид
7’(<Р) =
1/шуг.о,
1 /[шуг.о + Ку Ср — /о)].
1/(шуг.О + Ку1\},
0< <р < 10;
4» <р 4» 4>’
4 + 4 ? -С 1 •
где Ку—Kyfljli', Iq—l0/To; Ii-^JaITо.
Найдем координату фл в режиме синхронизма системы
118
Рис. 5.6. Функция er(t) для трапе-
цеидальной характеристики ИФД
Рис. б.'Л Траектория движения ПЦ
при ег(фст)-*1
ИФАПЧ. Для этого, положив Т (ср) = 1, получим <pi СТ-------------фст---
= Асоуг.о/ЛуЧДо, где АсоУг.о= 1—«уг.о — нормированное начальное
отклонение частоты колебаний УГ.
Заметим, что для обеспечения устойчивости «в малом» срст
должно располагаться на участках функции ег(ср) с положитель-
ным наклоном. Следовательно, должно выполняться условие
ЛГУ Ао)уГ>оу/|. (5.11)
Определим относительную полосу захвата как [81]
Тз = 2ег (фст.мнн, макс) 1> (5.12)
где фст.мнн, макс — минимально или максимально возможные значе-
ния фст, при которых ИФАПЧ входит в стационарный режим. В
идеальном случае, когда этот режим достигается при 0<ег(фст)<1,
уз = ± 1.
Для определения полосы захвата необходимо найти области
изменения срст, для которых при любых срн отсутствуют устойчивые
периодические или квазипериодические движения в системе авто-
подстройки. Однако более удобно эту задачу сформировать иначе:
найти области изменения срст, в которых возможны устойчивые
периодические или квазипериодические движения; после этого
исключить эти области из всей возможной области изменения фст
и получить полосу захвата.
119
При расположении срст вблизи верхней границы линейно воз-
растающего участка характеристики дискриминатора, т. е. при
£г(ч>ст)->1, возможен предельный цикл (ПЦ), показанный на
рис. 5.7. Координаты ПЦ и являются корнями системы
уравнений
< Fi = <р.2 — I -f-1/[ | Wyr.o | + Ку (<р°— Л>)1» ,5
- о 1, . — । I -о ' ’ '
< р2= 1/ I “уг.О | + <Р1 —
где v = int (1/1 соуг.о |); 1=1, 2,v>i. Величина соуг.о взята по моду-
лю, поскольку формально возможны отрицательные значения час-
тоты фуг.о. Такая ситуация может иметь место в системах ИФАПЧ,
использующих смесители для понижения частоты УГ в тракте
ДПКД.
Решив (5.13), получим
То _ I юуг.о I 0)уг,о[ | »Лг,0 | (у + 0 П | v 1 .
1 [ I шуг.О I (у 4“ 0 — 1 ] Ку | 0)уг.О |
„о — 7 _l । муг-° I ~ юуг-°I I юуг-° I (v।]
2-0 [ >уг.о| (У + 0-1]^у
Найдем КУ, при которых возможен ПЦ, показанный на рис. 5.7.
Как видно из рис. 5.7, для существования предельного цикла не-
обходимо выполнение условия Осер® </о, откуда следует, что зна-
чения Ку должны находиться внутри области, ограниченной сле-
дующими соотношениями:
дГ < I юуг,0 | { | Ц’уг.О | юуг.О [ | о)уг,0 | (у ~Ь I) 1]} . (5 14)
[1 — I (Uyr.o I (у + /0)] [ | Wyr.O | (у + Ц— 1]
> 1 юуг.О I { I 4>yr.O | о)уг,0 | I Ц>уг.О | (у 4~ i) 1]} (g jg)
У (1—'I шуг.о | у) 1 | шуг.о | (У-f-i)—1]
Установим теперь ограничение на величину Ку, исходя из
обеспечения устойчивости ПЦ при малых отклонениях координаты
фл от точек <р? и <f>2. Обозначим n-е нормированное отклонение ко-
ординаты через Атл. Изменение Дтл с увеличением п подчиняется
разностному уравнению первого порядка
Дтл+| =Дтл[1 ± dT ($)№]. (5.16)
На основании (5.16) условие устойчивости ПЦ «в малом» запи-
шется как
Ку < 2<ОуГ.о/[1 — I “уг.о | (у + ОГ- (5-17)
Совокупность соотношений (5.14), (5.15), (5.17) и (5.11) опре-
деляет области параметров системы ИФАПЧ, при которых ПЦ
существуют. Рассмотрим этот вопрос более подробно. Из (5.14)
и (5.15) следует, что при Zo = O их правые части совпадают, так
120
как Ку ограничен с дву-х сторон одной и той же величиной. Следо-
вательно, при Zo=O ПЦ невозможны. Кроме того, численный ана-
лиз (5.14) и (5.15) показывает, что при t<2 их выполнение в об-
ласти изменения Ку от 0 до 2 невозможно.
Условия (5.17) и (5.11) налагают ограничение на максималь-
ное значение i=lMaKc, при котором ПЦ может существовать. Чис-
ленный анализ показывает, что iMaKc = 2. Для того чтобы_ИФАПЧ
была устойчива «в малом», необходимо выполнение Ку<2, и
поэтому из (5.11) следует, что ПЦ могут существовать только при
11 >0,25.
Помимо ПЦ в рассматриваемой системе автоподстройки при
£г(фст)->1 может существовать еще один тип движения координат,
показанный на рис. 5.8. Изменение срл в этом случае не является
строго периодическим. Назовем такой тип движения квазиперио-
дическим циклом (КЦ). Определим области параметров системы,
при которых возможны КЦ. Обозначим: фг — координата точки
пересечения Т(ср) с прямой T'i * * *(cp)=i—<р; <pj —координата точки
пересечения Г(ф) с траекторией КЦ, выходящей из точки cp = Zoi
ср/ —координата точки пересечения прямой Д(ф)=г с траектори-
ей КЦ, выходящей из точки ф = 0 (после пересечения с Т (ср)). Ве-
личины срг, ср/ и ср/ согласно рис. 5.8 определяются следующим
образом:
~i____ZCy(l -р /о) шуг.о
2^
[Ку (Z 4- Zo) - Ц>Уг,о]2
cpz = Z0 —-р 1/1 “Уг.о|;
Z^y г.0
К,
(5.18>
-I _ I муг.О |1 ~ | Шуг.О | (? + Ц
С^уг.О I шуг.О I Ky[l | 0)уг.О | (v -р Zp)] | Wyr.O I
Для существования КЦ должны выполняться условия
> cpj и cp/^Z0, из которых следует, что область допустимых зна-
чений коэффициента усиления системы ограничена пределами
<-• Ц>уг.О (v ~4~ Z Zo) Ц>уг.о/ I (|)уг.О I 1 . (5 19)
v (у i — /0) — (2v i — Zo)/ | Wyr.o I + l/“yr.o
> wyr.o[l + юуг.о/ I wyr.O | — CI)yr,Q (vZ -p ZQ)] go
[ 1 — | (Uyr.o I (v -f- Zo) ] [ I Wyr.O I (v + Z-f-^o) — 1 ]
Из численного анализа соотношений (5.19) и (5.20) следует,
что КЦ, как и ПЦ, могут существовать только при Z0>0, v>i и
1макс= 2.
121
Рис. 5.8. Траектория движения КЦ
при ег(фст)-*1
Рассмотрим процессы в ИФАПЧ, когда вг(фСт)->0, т. е. <рСт
располагается вблизи границы линейно возрастающего участка
характеристики на рис. 5.6. Траектория движения изображающей
точки по возможному в этом случае ПЦ показана на рис. 5.9. Для
определения стационарных координат цикла составим систему
уравнений
^=^ + 7(^-1
+ -1
ф/ = Ф/-х + Л-i + Т (Ф/-1) — 1
ф 1 = фг + т (фг) — 1
“О “7 0 > /70\ 1
ср£ = Ф1 + Т (ф1) — 1
<Р1=<Рг +^(Тг)— 1
^ = ^? + 7(т?)
где ср/ —координаты точек ПЦ, расположенные на участке ха-
рактеристики от70+/1 до 1; <р° —на участке от 10 до l0+h; п = 1,
2,..., g; g — число точек с координатами ср°, определяющее тип
122
ПЦ; / = 1,2....m; m=int[(l—1\—/о) (шуг.о+ЛуМЛЛуЛ—Дшуг.о)] —
число точек с координатами яр/. _
Устойчивость «в малом» ПЦ при вг(фст)->0 определится с по-
мощью разностного уравнения в отклонениях Атл относительно
координат цикла, которое, как следует из рис. 5.9, имеет вид
д7л+1 = Д7„ П [ 1 4- dT (?»)/</?]. (5.22)
7] = 1
Анализ (5.22) показывает,_что для устойчивых ИФАПЧ модуль
каждого сомножителя при Дтл не превосходит единицы, т. е. урав-
нение (5.22) устойчиво. Таким образом, ограничения по устойчи-
вости ПЦ рассматриваемого вида не существуют.
Определим параметры ИФАПЧ, при которых ПЦ имеют место.
Из рис. 5.8 следует, что разрушение ПЦ происходит при выполне-
нии условий: <р с — 1, ?° = /о+Л и <рх = ср’г, где <рг находится из
(5.18) при 1=1. Система уравнений (5.21) совместно с этими ус-
ловиями позволяет определить область параметров ИФАПЧ, при
которых возможны периодические режимы работы системы авто-
подстройки.
В общем случае определить области параметров ИФАПЧ, при которых су-
ществуют ПЦ, не представляется возможным, поэтому рассмотрим конкретные
типы циклов для некоторых
Наиболее простой случай соответствует циклу с § = 1 и 1о=0, при этом
(5.21) сводится к виду
ф! = <Рс — 1 + 1 /(“уГ.0 + Ку<?с) , | (5 23)
<??= <Р? + 1/(шуг.О + KyTl). I
Если из системы нелинейных алгебраических уравнений (5.23) исключить
координату <р0 то ее можно привести к кубическому уравнению. Решение
последнего по формуле Кордана [81]:
+- V17 - -г +8) ~ • (5-24)
Таким образом, координаты ПЦ при § = 1 могут быть определены аналити-
чески с помощью (5.24).
Подставив в (5.23) <р° =1, получим уравнение, связывающее между собой
параметры системы, при которых ПЦ разрушаются:
/Су — [(1 + 2<оуг.о — 2е>уГ.о)/е>уг.о] Ку -f- <Оуг.о — 2и)уг.о = 0. (5.25)
Решение (5.25) дает зависимость К? от шуг 0 на границе существования
г70 I ~Ь 2о)уг,о — 2<ВуГ,о .
^у о~ "г
ZWyr.O
123
+ ]/[ (I+2«у+йи, -;гд + 2-тг 1 (5.26)
* L 4(оуг.о
Минимальное значение К? при котором возможен ПЦ с §=1, найдем из
(5.26), положив <1)уг.о=1. В результате Ку.мин =0 +Кб) /2= 1,62.
Использовав (5.21), можно установить области изменения Ку,
при которых существуют ПЦ £=2, g = 3 и т. д. Приведем резуль-
таты численного анализа: если £=2, то ПЦ существуют при 1,14<
<КУ<1,62; если £ = 3, то — при 1,02<Ку<1,14 и т. и. [83]. Теоре-
тически § не ограничено, ^эднако, как видно из приведенных дан-
ных, область изменения Ку с ростом £ быстро уменьшается. При
е=4 эта область становится пренебрежимо малой (1^Ку<1,02).
Аналогичные результаты можно получить при Zo=^0.
Следует заметить, что если ег(фСт)->-0, то ПЦ существуют не
при любых значениях 10. Для этого необходимо (см. рис. 5.9), что-
бы линия Т'(ср) пересекалась с прямой Т° (ср) = 1—<р. Приравняв
Т(<р) к Т° (<р), получим координаты точек пересечения:
—* Ку— шуг.О + Ку10
I 1 / (Ку юуг,0 Kyltf ______ 1 юуг,0 _>5 27]
“ * 4КУ Ку °'
Для существования <р* и подкоренное выражение в (5.27)
должно быть неотрицательным, из чего следует
/о < (“уг.о + Ку - 2 У Ку )/Ку. (5.28)
Полагая в (5.28) Ку = 2 и шуг.о = 1, имеем ^о<_(3—]/8) /2 — 0,086.
Таким образом, для существования ПЦ при Вг(срст)-Д) необходи-
мым условием является OcZocO,O86.
На основе проведенного анализа определим полосу захвата
системы ИФАПЧ с ИФД «в—з». Рисунок 5.10 иллюстрирует связь
между полосой захвата системы ИФАПЧ и различными парамет-
рами фазовой характеристики дискриминатора. Заштрихованные
области соответствуют возможному существованию предельных
циклов. Из анализа рис. 5.10,а б следует, что при Zo = O верхняя
граница у3 совпадает с верхней границей полосы удержания. При
Z0>0 захват «сверху» осуществляется не при любых значениях
параметров (рис. 5.10,в, г). Область у3 «прорезана» областями
существования ПЦ, наибольшую долю которых составляют КЦ
при А(ОуГ.о<1 с v = 2. Величина v не ограничена, однако, и с ее_
ростом площадь КЦ резко уменьшается. При возрастании 10
(рис. 5.10,г) область существования ПЦ увеличивает'ся и переме-
124
Рис 5.10. Зависимость полосы захвата бесфильтровой системы ИФАПЧ от Ку:
а—при ео=0, et=l; б—при ео=0, е[=0,2; в—при ео=0,02, ei=0,8; г—при ео~
=0,3,^ = 0,7
щается в сторону больших Ку. При данных значениях 1о и 1\ име-
ются и области существования ПЦ, площадь которых с увеличе-
нием v также резко уменьшается. Для АшУг.о>1 на рис. 5.10,г по-
казаны области ПЦ, область КЦ в этом случае чрезвычайно мала
(не показана). Заштрихованная часть области у3 ограничена кри-
вой y3 = l/KyZi—1, полученной из условия, при котором линия пе-
реключения У(<р) не заходит за прямую Т2(ср)=2, что гарантиру-
ет отсутствие КЦ и ПЦ. Заметим, что при /о^О,О86 нижняя гра-
ница у3 (рис. 5.10,г) совпадает с нижней границей полосы удер-
жания. Приближенное значение уз_ «снизу» можно найти из
условия отсутствия пересечения Т(ср) и Г0(ср):
„ >1_____2 Г 2 4- 2МУ - V
13 К/ 2
- )/ 2 + 2\~ ^у7° ~ V1 -~W + V + 2КУ - 1 . (5.29)
В соответствии с (5.29) на рис. 5.10,а—в приведены штриховые
линии, приближенно определяющие полосу захвата у3 «снизу».
5.4. ПОЛОСА ЗАХВАТА СИСТЕМЫ ИФАПЧ С ИЧФД «В—3»
Как отмечалось в § 5.1, СЧ с ИФД «в—з» в ряде случаев строятся
по бесфильтровой схеме, что позволяет реализовать предельное
быстродействие синтезатора. Однако недостатком такого СЧ яв-
вляется возможность возникновения устойчивых ПЦ, что уменьша-
ет полосу захвата. Проведем анализ устойчивости «в целом» СЧ
и ИЧФД «в—з» и оценим эффективность применения ИЧД для
расширения полосы захвата.
125
Как и ранее, допустим, что статическая фазовая характеристи-
ка дискриминатора имеет трапецеидальную форму и для определе-
ния полосы захвата воспользуемся фазовой плоскостью.
Определим условия срабатывания ИЧД. Из рис. 5.5 видно, что
они выполняются в том случае, если Т(ср) пересекает прямые пе-
реключения состояния ИЧД Г0 (ср) или Г1 (ср), т. е. при
йуг.о > 1 - (2 -|- 2Ку + /ЭД/2 +
+ /(2 + 2КуГ0)2/4 — К2 (1 — Z"o)2 + КуТй + 2Ку-\, (5.30)
или
“уг.о -С 0,5. (5.31)
На рис. 5.11 изображена плоскость у3> Ку с построенными на
ней согласно (5.30) и (5.31) кривыми, при которых происходит
срабатывание ИЧД. Кривые 1—4 построены_для Zo = O- Штриховая
линия соответствует /о = О,О5 и /1 = 0,4. При ег (ср) = 1 ИЧД не сра-
батывает, если /1<0,25.
Отметим также, что при Ку<2 области возможного включения
ИЧД не пересекаются. Поэтому в СЧ не возникает переходных
процессов, при которых происходит срабатывание ИЧД как при
(ср) =0, так и при ег (ср) = 1.
Перейдем к определению полосы захвата системы ИФАПЧ с
ИЧФД «в—з» и рассмотрим случай ег(фСт)—И.
Рис. 5.12. Возможные ПЦ в системе ИФАПЧ с
ИЧФД «в—з» при ег(фст)->-1 (Пф)—линии пере-
ключения)
Рис. 5.11. Области сраба-
тывания^ ИЧД (кривая
1—для e_i=l, кривая 2—
—для б£=0,8; кривая
3—для _7i=0,6, кривая
4—для ei = 0,4)
126
На рис. 5.12 показаны возможные ПЦ, с наличием которых
связано уменьшение полосы захвата. На этом рисунке приведены
два типа_ПЦ: с координатами сро, при которых циклы лежат ниже
прямой Ti(q)=i, где i = 2, 3, ..., и с координатами ср^ при которых
циклы лежат выше указанной прямой. Разностное уравнение в от-
клонениях относительно срг для ПЦ этих типов имеет вид
Дтп+1= ± Дт„[ [ dT | + 1]. (5.32)
Здесь знак « + » соответствует ПЦ на участке ветви Т((р) с
положительным, а знак «—»— с отрицательным наклонами. Из
(5.32) ^следует, что циклы, у которых точка срг расположена на
ветви T(tp) с положительным наклоном, неустойчивы. Кроме того,
если ПЦ располагается выше прямой T(cp)=i, то |d71((p° )/dcp| >
>Kyi2, т. е. левая часть всегда больше двух (Ку>1). По этой
причине ПЦ, показанный на рис. 5.12, также неустойчив.
Таким образом, возможным устойчивым циклом является цикл,
на рис. 5.12, имеющий координату ср2 расположенную на участке
Т(<р) с отрицательным наклоном. Координаты этого цикла ср?
и ср ° связаны следующей системой уравнений:
<Р2 == 1 + 2/((Оуг.О 4~ КуЛ) — 1 >
<Р1 = <Р° -f- 1 /1 OJyr.0 4~ Ку (Т2 — Zo)l — Z.
Решением (5.33) являются координаты "tp? и <р°. Для того
чтобы рассмотренные ПЦ были устойчивы, необходимо выполне-
ние следующих условий,- | dT^/dy | 2, <р° >0.
Отсюда
[2 — (г + 1) КуГх\+ КуЛ /2
“уг.О —------—--------
(1+ l)VKy +V2
0)Уг.о KyZj 2 0)уг.о i I 1 > О
[(Z + 1) (Шуг.о 4“ Kyly) 2] Ку О)уг.0 -f- Kyi, Ку
(5.35)
Выражения (5.34) и (5.35) позволяют определить параметры
системы, при которых возможно существование ПЦ. Численный
анализ (5.34) и (5.35) показывает, что ПЦ могут иметь место при
1=2 и /о+6^0,99. На рис. 5.13 приведены области параметров
Шуг.о и Ку, построенные по (5.34) и_(5.35), при которых возможны
ПЦ для ряда значений 10, если Zo+Zi = l.
Таким образом, полоса захвата «сверху» в СЧ с ИЧФД «в—з»
в общем случае меньше полосы удержания. Однако_ условие
Zo+Zi^ 0,99 практически не выполняется (спад сигнала ег(ср) от 1
до 0 происходит за конечное время), поэтому можно считать, что
127
(5.33)
Рис. 5.13. Области ПЦ в системе
ИФАПЧ с ИЧФД «в—з» при ег(фст)
-И
Рис. 5.14. Расположение точек ф01 и
Ф«
наличие ИЧД расширяет полосу захвата «сверху» до полосы удер-
жания.
Отметим, что время спада сигнала ег(ср) должно быть мини-
мальным, так как -на падающем участке фазовой характеристики
ИФД «в—з» в ИФАПЧ возможно существование КЦ. Подробный
анализ этого вопроса приведен в [82].
Определим полосу захвата при ег(фст)->-0, для чего исследуем
возможность существования периодических процессов. Последние
могут иметь место только при повторных срабатываниях ИЧД,
если er(q>) =0, т. е. при выполнении условия срЛ>фг (см. рис. 5.5,а).
С учетом того, что <рл= (1—(оУг.о)/©уг.о и (5.18) при i=l, это усло-
вие можно записать в виде
(1 0)yr.o)/0)yr.O [(/fl О Ку »уг.о1Жу
- V[(То + 1) ^у -^уг.о]7<’ - (1 - »уг.о + Ку/"о)/Ку (5.36)
Численный анализ соотношения (5.36) показывает, что оно
невыполнимо и, следовательно, повторных срабатываний ИЧД не
происходит. Поскольку выбираемое значение Ау всегда меньше
двух, то после выключения ИЧД в системе ИФАПЧ наступает синх-
ронизм. Таким образом, при ег(срст)->-0 применение ИЧД расши-
ряет полосу захвата до полосы удержания.
5.5. ДЛИТЕЛЬНОСТЬ ПЕРЕХОДНЫХ ПРОЦЕССОВ
Воспользуемся фазовой плоскостью для определения времени уста-
новления частоты /у в бесфильтровой нелинейной системе ИФАПЧ.
Обозначим через срн начальное значение координаты <рл и рассмот-
128
рим зависимость ty от сри. Как видно из рис. 5.14, в пределах
О... 1 возможны два значения <ри, при которых ty минимально. По-
нятно, что при выборе ч>и=<Рст длительность переходного процесса
равна нулю. Кроме того, если <ри = <р^, где cps — координата точки
пересечения Т'(ср) с прямой Ts (<р) = 1 +<рСт—ср, то переходной про-
цесс оканчивается за один период регулирования. Координата точ-
ки <ps = Zo+(Ку—соуг.о)/Ку, где КУ>1.
При использовании трапецеидальной характеристики дискрими-
натора с достаточно протяженным участком 1о минимум величины
/у обеспечивается при /о<Фи</о + А- Если же сри близка к 0 или 1,
то длительность переходного процесса может существенно воз-
расти.
Обозначим через Znpi длительность переходного процесса при
движении срл на. участке с ег(<р) = 1, а через /Пр.о — на участке с
ег(ср)=О.
Максимумы введенных величин
- 1 (1— А) ----А) (“УГ.О + Куд)
* пр 1 макс — —= j = mt =
о)уг.О + Куд L “уг.о + Куд------- I
f — ___int ( ^уг-°
‘'промакс — — 1111 I 1 — /»
шуг.О \ 1 — ^уг.О /
(5.37)
(5.38)
Где ^прЬомакс — ^npi,Омаке/Т))-
В ИФАПЧ с ИЧФД «в—з» результирующая величина ty склады-
вается из времени работы системы в частотных режимах при сра-
батывании ИЧД (/*р и /°р при ег(<р) = 1 и ег(<р) =0, соответствен-
но) и времени работы системы в режиме фазового сравнения до
момента окончания переходного процесса заданной точности уста-
новки частоты. Максимумы Рпр и /°р можно получить из (5.37) и
(5.38), положив Z0 = 7i = 0 и /0=1;
- I 1 ( “уг.оН-Куд
^пр.макс — — — int I — —=г -
шуг.О + Луд \ шуг.О + Л у — 1
^пр.макс — ”= Int [(шуг,о/(1 шуг.о))]*
шуг.О
(5.39)
(5.40)
Выражения (5.39) и (5.40) удобно представить как функции
фст. Учтя, ЧТО фст= (1—<Оуг.о)/Ку + /о, ПОЛуЧИМ
_ ____________1__________ 1 + Ку (/р + /1 — <Рст)
~ 14-Ку (То 4-4 — Уст) n L Ку (70 + Л - ?„)
1 1 ’ Ку(сРст /р)
=-------=—=--------=— int ------=—=-----=------- .
1 Ку ('Рст /о) _ Ку (<Рст А))
9—1020
(5.41)
(5.42)
129
Рис. 5.15.-Зависимость^ Д. от па-
раметров фст, фя и Ду в нели-
нейной _бесфнльтровой _ИФАПЧ:
а—при фн=0,5; б—при фст=0,5;
в—при фот=0,5
Из (5.41), (5.42) следует, что при распбложении срст вблизи
границ линейно нарастающего _участка фазовой характеристики
дискриминатора значения и 1°р могут существенно возрастать.
Это обстоятельство необходимо учитывать при проектировании СЧ.
В заключение коротко о зависимости времени переходного про-
цесса в режиме сравнения фаз от параметров срст, фи и (см. рис.
5.15,а—в). Расчет производился по уравнению (5.8) для 1о—0,
/1 = 1 и е=10-2. Расчетные точки соединены между собой условно.
Для нахождения времени установления частоты ty в СЧ с ИЧФД
«в—з» необходимо просуммировать время переходного процесса
при срабатывании ИЧД и время переходного процесса в фазовом
режиме работы.
ГЛАВА 6
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
СИСТЕМЫ ИФАПЧ С ФНЧ
6.1. УСТОЙЧИВОСТЬ В «МАЛОМ» СИСТЕМЫ ИФАПЧ
Как указывалось в § 1.1, динамические характеристики определя-
ются устойчивостью ИФАПЧ, параметрами переходного процесса
в этой системе.
Понятие устойчивости «в малом» связывается со способностью
системы возвращаться в стационарный режим (синхронизм) при
малых отклонениях координат. Указанное понятие, таким образом,
применимо к любой реальной структуре ИФАПЧ, если справедли-
ва ее линеаризованная модель, и является, по существу, одним из
130
условий, необходимых для нормальной работы синтезатора. Ва-
риации координат обусловлены помехами флуктуационного и де-
терминированного характера, воздействующими на различные
звенья ИФАПЧ. Считается, что система автоматического регули-
рования устойчива «в малом», если можно констатировать лишь
факт наличия области устойчивости, причем границы последней не
определены [84]. При рассмотрении процессов «в малом» ИФАПЧ
с ФНЧ описывается матричным линейным разностным уравнением
(3.60), решение которого можно записать в виде
ХРЛ = Ф"Хр0, (6-1)
где ХРо — расширенный вектор начальных состояний. Условие
устойчивости «в малом»:
Нт Хрл = 0. (6.2)
П-*
Предельное соотношение (6.2) характеризует также асимптотичес-
кую устойчивость стационарного состояния по Ляпунову. Если
ИшХрп = оо, то система считается неустойчивой, а если ИшХрл =
И-»-ос П-*оо
= const, то она находится в граничном режиме.
Приведем алгебраические условия устойчивости «в малом» сис-
темы ИФАПЧ, описываемой уравнением (3.60). Преобразуем
матрицу Фр к каноническому виду (см. (3.10))
0p = Ldiag[|X1, Х2, ..., Хт+1 || L-1, (6.3)
где diag ||Х1, Хг, —, Xm+i ||—диагональная матрица, составленная
из собственных значений Фр (предполагаем, что все X/, i= 1, 2,...,
т+1, различны); L — матрица, составленная из собственных век-
торов, соответствующих собственным значениям Xi, Х2, —, Xm+i;
L-1 — обратная к L матрица.
Использовав (6.3), представим решение:
Хрп = L diag |1 Х?, Х«, .... Х^+1 || L-1Xp0. (6.4)
Из (6.4) следует, что для выполнения условий (6.2) необходимо
и достаточно, чтобы выполнялись неравенства
|XJ<1. (6.5)
Собственные значения матрицы Фр можно определить из решения
характеристического уравнения
| Фр - XI | = 0, (6.6а)
где I — единичная матрица.
Запишем (6.6а):
a0Xm+1 + at/.m + ... + ат+1 = 0, (6.66)
где а0, cti, ..., am+i — некоторые постоянные коэффициенты, зави-
сящие от коэффициента усиления ИФАПЧ и параметров ФНЧ.
Уравнение (6.66) можно также получить, приравняв знаменатель
передаточной функции замкнутой системы (3.87) нулю и заменив
z на X.
9* 131
Таким образом, для обеспечения устойчивости ИФАПЧ «в ма-
лом» необходимо и достаточно, чтобы все корни (6.66) (полюсы
передаточной функции замкнутой системы) согласно (6.5) были
расположены на комплексной плоскости внутри окружности еди-
ничного радиуса с центром в начале координат.
Известно, что для анализа устойчивости «в малом» непрерыв-
ных систем автоматического регулирования развит целый ряд
фундаментальных критериев: Рауса—Гурвица (алгебраический),
Найквиста, Михайлова и др.-[6]. Все они, разумеется, в модифици-
рованном виде могут быть применены и для импульсных систем,
к которым относится ИФАПЧ. Рассмотрим более подробно про-
цедуры анализа устойчивости ИФАПЧ с помощью критерия Рау-
са—Гурвица. В этом случае производят ^-преобразования, про-
ведя подстановку Х,= (®z+ —1). Тогда неравенство (6.5)
приобретет вид
RE (w,)<0.
Приведем заимствованные из [85] (см. табл. *6.1) результаты ана-
лиза устойчивости импульсных систем регулирования с различны-
ми порядками характеристического уравнения (6.66). Из табл. 6.1
Таблица 6.1
Условия устойчивости системы ИФАПЧ
Порядок ФНЧ Условие устойчивости Порядок ФНЧ Условие устойчивости
0 1 Л Л в1 в4 + 1 О о в в 2 ао 4" ai 4~ а2 4" аз > 0 3 (ао—аз)4~а1—«2>0 3(а04-«з)~а1—а2>0 «0—al + a2““a3>0 ao—аз4" aia3 aoa2^0
1 ао+а1 + а2> 0 “О”al + a2>0 “0 — а2>°
видно, что условия устойчивости имеют вид неравенств, ограни-
чивающих значения коэффициентов характеристического полино-
ма (6.66). При повышении порядка ФНЧ резко возрастает слож-
ность этих условий. На практике алгебраический критерий устой-
чивости системы ИФАПЧ применяют при т<2.
Определим условия устойчивости для системы автоподстройки с различными
дискриминаторами и типами ФНЧ. Рассмотрим вначале ИФАПЧ с дискриминато-
ром ИФД «в—з» и ФНЧ типа ПИФ с передаточной функцией (3.33). Предпо-
лагаем, что ИФД «в—з» «безынерционен», т. е. его математическая модель опи-
сывается выражением (2.11). Для этого случая в § 3.4 получено характеристи-
ческое уравнение (3.65). Применим к нему условия устойчивости из табл. 6.1
для т=1. В данном случае а0=1, ai = Ay—Ау(1— d) (Т2—Т\)— (1— d), а2 =
=d(l—Ку) + Ау(Т2—7\)(1—d). В результате получим
132
Ky(l-d)>0;
Ky < 1 /[0,5 - (T2 -Т,)(1 - d)/(l + </)];
Ky<\/[T2-Ti-d/(l-d)].
(6-7)
Поскольку rf<l, первое неравенство в (6.7) накладывает ограничение на знак
Ку, а второе и третье—на предельное значение нормированного коэффициента
усиления Ку системы. Отметим, что условия (6.7) совпадают с результатами,
приведенными в [7] для ИФАПЧ с косинусоидальной характеристикой дискри-
минатора, постоянным периодом регулирования и без ДПКД в цепи обратной
связи.
Найдем условия устойчивости ИФАПЧ с инерционным ИФД «в—з», матема-
тическая модель которого описывается уравнением (2 9). Предположим, что
ФНЧ является многозвенной LC-структурой. Математические процедуры в этом
случае становятся весьма громоздкими, но их можно значительно упростить,
если заменить фильтр идеальной линией задержки с передаточной функцией
03(г)=---
Н
6ф(5) = ехр(—ST3), (6.8)
где т3 — время задержки (запаздывания).
Для получения характеристического уравнения воспользуемся аппаратом
передаточных функций, допустив, что т3<7’0, где То — период колебаний опор-
ного сигнала. Тогда, использовав выражение для бд(г), полученного из ММ
ИФД «в—з» (2.9), запишем передаточную функцию (387) замкнутой системы:
Кд^уГ^И^ „(1 ехр ( sT0)
г-_(1 _^И) Z(- V.......... еХР<~ ^з)
A\SyrdHz J 1 — ехр (— s То)
ДГ[г_(1_4)] Z[
(6-9)
Опустив промежуточные z-преобразования, проведенные согласно [10], запишем
(6.9) в виде
NKyda [(1 — т3) z + т3]
03 (?) =---------=---------------------- J-----------_ _ , (6.10)
г2 H-Z [К^и (I - T3) + d„ - 2] + 1 - 4 + Kyd^3
где Ку = Ед5у7'0/(2«К), т3 = т3/Т0.
Из (6.10) найдем характеристическое уравнение
X2 + X [КУ4 (1 - Г3) + dK - 2] + 1 - dK + Kyd'z3 = 0.
Применив к этому выражению условия устойчивости согласно табл. 6.1, для
m= 1 получим следующие неравенства [86]:
KydK > 0,
Ку<2(2 —<7И)/[<7И(1-2т3)],
(6.Н)
‘3*
Ку
Как и в (6.7), первое неравенство в (6.11) накладывает ограничения на знак
нормированного коэффициента усиления, а второе и третье — на значение коэф-
133
фициента усиления (в данном случае в зависимости от параметров ИФД и ФНЧ).
Из (6.11) видно, что возрастание инерционности ИФД «в—з», т. е. уменьшение
dB, приводит к увеличению области допустимых Ку. Максимальное значение Ку
соответствует запаздыванию т3=^и/4. При этом Ky = 4/dH.
Перейдем к определению условий устойчивости «в малом» ИФАПЧ с
ИЧФДЗ и ФНЧ второго порядка с передаточной функцией (3.43). Расширенную
матрицу Фр в (3.60) можно представить в виде
-ку Ky^-r^id-i)
1 о
(6-12)
о
d
где Ky=SyrK0EJ20l(2^N), 7\=Т\1Т0, Т2=Т2/ То, rf=exp (-То/Т2).
Подставив (6,12) в (6.6а) и опустив промежуточные выкладки, запишем харак-
теристическое уравнение
X3 + {„2-CU.^y[l+(f1-T2)(l-rf)]}^ +
+ {l + 2rf-Ky [d+ (Л-Г2)(1 -d)]}X-d = 0. (6.13)
Применив к уравнению (6.13) условия устойчивости табл. 6.1 для /п=2, по-
лучим
Ку (!—</)> 0, (6.14а)
Ку[1 +d + 2(7\-T2)(l-d)]>0, (6.146)
(l-d)(4-Ky»0, (6.14в)
4(1 +rf)-Ky[l +rf + 2(T1-T2)(l-rf)]>0, (6.14г)
Ку(Л~Л)(1-</2)>0. (6.14д)
Поскольку d<l, то (6.14а) задает положительный знак Ку. При выполнении
(6.14д) соотношение (6.146) выполняется всегда. Анализируя систему неравенств
(6.14а)—(6.14д), с учетом сказанного приходим к результату
Ку>0; ^>7,; Ку<4; Ку <4 (1+d)/[l+ 2 (Л-Т2) (!-</)]. (6.15)
Приведенные примеры определения областей устойчивости
ИФАПЧ с различными дискриминаторами и типами фильтров
(при т<2) свидетельствуют о достаточной простоте анализа.
Для исследования устойчивости ИФАПЧ с ФНЧ, имеющими
порядок т>2, можно использовать критерий, основанный на по-
строении годографа функции, связанного с коэффициентами ха-
рактеристического уравнения (6.66) следующим образом:
А(г) = аог^+> + z = ехр ОД,) и 0 <о)Т0<л,
(это аналог критерия устойчивости Михайлова для систем непре-
рывного регулирования). Возможен также подход, использующий
частотные характеристики разомкнутой ИФАПЧ, аналогично тому,
как это делается при анализе устойчивости с помощью критерия
Найквиста. Подробнее с указанными методами определения устой-
чивости импульсных систем автоматического регулирования мож-
но познакомиться в [9].
134
6.2. СИНТЕЗ ЛИНЕАРИЗОВАННЫХ СИСТЕМ ИФАПЧ
С ПРИМЕНЕНИЕМ АМПЛИТУДНО-ФАЗОВЫХ
ХАРАКТЕРИСТИК
Устойчивость «в малом» является необходимым, но не достаточ-
ным условием применимости ИФАПЧ в СЧ. При реализации СЧ
необходимо обеспечить определенные запасы устойчивости, т. е.
найти критерии, устанавливающие, насколько далеко от границы
устойчивости находится линеаризованная система автоподстройки.
Наибольшую опасность с рассматриваемой точки зрения пред-
ставляет затухающий колебательный процесс установления ста-
ционарного режима.
В этой ситуации при отсутствии должного запаса устойчивости
наиболее вероятен переход к самовозбуждению ИФАПЧ. Оценка
удаленности системы от границы колебательной устойчивости про-
водится различными способами. Используются, например, поня-
тие колебательности (отношение мнимой части корня характерис-
тического уравнения к вещественной), запасы устойчивости по фа-
зе и амплитуде, перерегулирование, показатель колебательности
и др. [10].
При расчете ИФАПЧ частотными методами удобно использо-
вать показатели колебательности М и /?м, введенные в § 3.6 [см.
(3.81) и (3.82)]. Как показано в [10], необходимым и достаточным
условием того, чтобы в устойчивой системе показатель колеба-
тельности М был не больше заданного, является нахождение ам-
плитудно-фазовой характеристики (АФХ) разомкнутой системы
вне запретной области на комплексной плоскости с осями коорди-
нат l/=ImGp(jco) и G=ReGp(jco). Эта запретная область пред-
ставляет собой окружность с радиусом г=М/(М2—1) со смещен-
ным влево относительно начала координат на с=М2/(М2—1),
центром.
При использовании показателя колебательности /?м запретной
областью для АФХ Gp(jco) является окужность с радиусом г=
= 1//?м и центром, расположенным в точке (—l,j0). Допустимые
показатели колебательности системы определяются величинами
/?м или М, соответствующими окружностям наименьшего радиуса,
с которыми соприкасаются АФХ. В системах, находящихся на гра-
нице колебательной устойчивости, выполняются равенства /?м =
=М = <х>, а при значительном демпфировании равенства RM=M= 1.
Использование запретных областей позволило [10] получить ряд
простых выражений для синтеза параметров как непрерывных,
так и импульсных систем автоматического регулирования, обла-
дающих заданным показателем колебательности. Если системы
описываются характеристическим уравнением невысокого порядка,
выражения для показателей колебательности можно найти непо-
средственно из АФХ замкнутой системы G3(jco). Условимся под
синтезом ИФАПЧ по АФХ понимать определение параметров,
обеспечивающих требуемый запас устойчивости по М или /?м при
заданной структуре системы (дискриминаторе, ФНЧ и т. и.).
135
(6.18)
Рассмотрим ряд примеров, имеющих практическое значение при проектиро-
вании СЧ. Для ИФАПЧ первого порядка (с безынерционным ИФД «в—з> и
без ФНЧ) из (3.87) найдем передаточную функцию
/<ЛУГ2{[ 1 - ехр (- sT0)]/s2}
з(г) 1+Кд5уг7{[1-exp(-sT0)]/s2}/7V ‘ >
Использовав таблицы z-преобразований, из (6.16) получим 03 (z)=NKyl(z+Ky —
—1), где /<у=/<д.$уГ7’0/?7. Учтя, что z=exp(/o)7’0) из последнего равенства
! Оз(j<*>) I = <<2(!-^)(l-coso)ro) + ^. (6.17)
Запишем выражение для производной
d | 03(» | / ch> = — NKy(\ — Ky)stnvT0X
x/[2(l-tfy)cosu7’o + 7<2]3.
Отсюда следует, что в интервале частот О<со7’0<я производная отрицатель-
ная при Ау<1, тождественно равна нулю при Ау=1 и положительна при Ау>1.
Производная всегда равна нулю в точках с абсциссами 0 и я. Поэтому при
Ау>1 в точке с абсциссой я |G3(/co) | имеет место максимум и с учетом (3.81)
и (6.17)
I О3(рт/То)|/ЛГ=М=Уу/(2-Ку), если ^>1,
М — 1, если Ку < !•
Из (6.18) видно, что на границе колебательной устойчивости Ау=2 (см. § 5.1)
М = оо.
Рассмотрим далее ИФАПЧ с безынерционным ИФД «<в—з» и ФНЧ с пере-
даточной функцией
0ф($) = 1/(Ц-Т2$). (6.19)
Вначале не будем принимать во внимание эффекты дискретизации в ИФД по
времени, т. е. будем считать систему непрерывной. В этом случае см. (3.80)
Gp ($) = 7<д5уг/[( 1 + T2s) sN], (6.20)
G3 (х) = /<д5уг/[ Г2х2 + х -j- /W/VL (6-21)
Ge(s) = х (1 + T2s)l(T2s2 + s-^K^Syr/N), (6.22)
где G3 (s) и Ge (s) — соответственно передаточные функции замкнутой системы
от входа к выходу (3.78) и по ошибке (3.79).
Из (6.21), (6.22), заменив s=ja>, можно непосредственно определить макси-
мумы модулей |G3(jco) | и |Ge(jco) | с помощью стандартной процедуры взятия
производной по частоте и приравнивания ее нулю. Определив эти максимумы
и приравняв их соответственно NM и Ям см. (3.81) и (3.82), получим выраже-
ния
К^угТ21К^(М2 + М Vw-Wl, (6.23)
K.SyrT2IN< (R2 - 1)/[2Я2 (1 - /(/^-w2)]- (6-24>
Из (6.22) следует, что СЧ с таким ФНЧ всегда устойчив [корни знаменателя
(6.22) находятся в левой полуплоскости], однако показателй колебательности
136
растут [см. (6.23) и (6.24)] с увеличением произведения коэффициента усиле-
ния на постоянную времени фильтра Тг.
Учтем эффект дискретизации по времени в ИФД «в—з». В этом случае, ис-
пользовав (3.95), найдем
Qp (jX) = (Кд5уг/Л0 (1 - jXT0/2)/[jX (1 + JXT2)]. (6.25}
Сравнив (6.20) и (6.25), замечаем, что в числителе выражения (6.25) по-
явился неминимально-фазовый член (1—jXT0/2), который в области частот
среза системы дает дополнительный фазовый сдвиг. В [10] предлагается учи-
тывать его следующей коррекцией (6.23):
KzSyr(T2+TJ2)IN^(M*+МУМ^1)/2, ЛТ<1,3. (6.26)
На основании (6.24)
/<flSyr(7’2 + T0/2)/yV<(/?2- 1)/[^2(1 -]/(^-1)/О- (6-27>
Таким образом, квантование по времени в ИФД можно учесть эквивалентным
увеличением постоянной времени ФНЧ.
Рассмотрим ИФАПЧ с безынерционным ИФД «в—з» и ФНЧ типа ПИФ с
передаточной функцией (3-33). В случае разомкнутой системы [см. (3.95)]
Gp (jX) = Кд5уг (1 - ]ХТ0/2) (1 + jX7'1)/[ JX (1 + JXT2) tf]. (6.28)
Использовав (3.96) и (3.97), получим выражения для синтеза ИФАПЧ по пока-
зателям колебательности М и 7?м:
J2/T?</<y(/H-l)/(^^J (б29>
7\/(2Т2)<М/[Ку(М +!)];(
^/Tl^KyRKl(Rv -1). (б 30>
ЛД2Т2)<(£м- !)/(КуЯм),
где Т2 = Т2/ТО, 7\=Л/:Го, Ky = K,SyrT0!N.
Перейдем к синтезу ИФАПЧ с инерционным ИФД «в—з» и сложным
AC-ФНЧ, передаточная функция которого соответствует выражению (6.8). Для
разомкнутой системы можно записать
Ор(г) = ^5угТо[(!-^)г + т3]/^(г-1)[г-(!-(/„)]}. (6.31}
Используя ^-преобразование, из (6.31) получаем
_Кд$уг (1 - j'^o/2) [ 1 + (0,5 - Т3) jXT0]
₽(J) jX[l +jXTo(l/rfH-0,5)]N
(6.32}
Если в области частоты среза ИФАПЧ передаточная функция (6.32) ведет себя
как — l/(jX)2 (это зависит как от коэффициента усиления, так и от постоянных
t/и и тз, т. е. требуется предварительный анализ Gp(jX)), то по аналогии с (6.26)
и (6.27) запишем следующие выражения:
К^угТ0 (l/du - 0,5 4- T-3)/W < (Ж2 + М Ум^\)/2,
K.SyTT0 (1 /d- 0,5 + t3)/N < (R* -1)/ [22?2 ([ _ 1 )//?*)].
Если же в этой области указанная функция может быть аппроксимирована за-
висимостью ~1/]Х, то при синтезе можно воспользоваться понятием запаса
(6.33)
137
устойчивости по фазе (см. § 3.6). Частота среза определится из выражения
<Вср«Хср=Ку/7’0> где Ky = KxSylT,JN, а фаза коэффициента передачи (6.32) при
Z=Xcp как
ф (Хср) = тс/2 + arctg (Ку/2) Н- arctg [ Ку (1 ]dK - 0,5)] -
— arctg (0,5 — т3) = и — р. (6.34)
Из (6.34), заменив значение arctg на аргумент, получим приближенное соотно-
шение
< (л — 2|i) </я/(2 — + 2т3й(и). (6.35)
Соотношение (6.35) накладывает ограничения на параметры системы, обеспечи-
вающей заданный запас устойчивости по фазе.
Проведем синтез в более сложном случае, когда система включает в себя
ИЧФДЗ и ФНЧ с передаточной функцией (3.43). Передаточную функцию не-
прерывной части ИФАПЧ (рис. 3.13) на основании (3.87) можно записать в виде
Op ($) = K.SyrK0To (1 + TlS)/[Ns* (1 + Г2$)]. (6.36)
Разложим (6.36) на элементарные дроби:
Gp ($) = (KzSyrK0To/N) [(Л - T2)/s + l/s»+Т2 (Г2 - Тх)/( 1 + Г2$)].
С помощью таблиц 2-преобразований определим импульсную передаточную
функцию разомкнутой системы:
г . х Кд5у№о2[г-й? + (Г1-Т2)(1-й()(г-1)]
и0 (z) =---------------j-j-.---—, (6.37)
₽v ’ (V(z —- l)2(z — rf) v '
где d=exp(—То/Т2).
Применив ^-преобразование (3.90) к (6.37), после несложных выкладок получим
K.SyrK0To (1 + jXT0/2) (1 - jXГо/2) (1 + jXx,)
GP(W =
(6.38)
(jX)2 (1j’Xt2) Л7
где T8=To(l+d)/[2(l-d)l.
(1 +d)/[2(l—d)] для различных T2/To приведены в табл. 6.2. Из табл. 6.2 следу-
ет, что если Ta/T’oS-l (при точности порядка 10 %), можно записать
= Ъ = Т2.
Значения
(6.39)
Таблица 6.2
7-2/7-0 0,5 1 2 5
<l+d)[2(l-d) 0,656 1,082 2,041 5,015
На рис. 6.1 изображены амплитудно-и фазочастотная характеристики ра-
зомкнутой ИФАПЧ, построенные на основании (6.38). Для такого вида харак-
теристик в [10, 87] получены условия синтеза:
> Vm (М - 1 )Абаз. ъ < Ум (м -1)/[х6аз (М +1)],
> М + 1ЖАбаз> Ъ < (ЯМ-1)/(*6аз/(7?^ПЖ).
где Лбаз — базовая частота (см. рис. 6.1).
(6.40а)
138
Жд|сР(1л)|<р
Рис. 6.1. Логарифмические амплитуд -
но- и фазочастотные характеристи-
ки в области частот среза системы
ФАПЧ
Рис. 6.2. Зависимость относительной
полосы захвата от параметров сис-
темы ФАПЧ
В рассматриваемом случае соотношения (6.40а) запишутся как
Л -т2 >(! +J)/[(1 1)1,
Лу^4(1—1)/[(1 4-4/)(1-+-Л4)]2,
Л-Т2>(1 + d)/[l-d)(£M-l)],
^<4(1 -rf)4/?M-l)2/[(l +^)2/?м(7?м+ 1),.
где 7'1=Л/7’о, Т2=Т2]ТО, Ky=KlsSyrKaT^IN.Tl'pti справедливости равенств (6.39)
выражения (6.406) упрощаются:
1),
KzSyrKolV < м(м - 1)/[G44 + 1) Л]2,
Л/Л>(^ + 1)/(/?м-1).
КД5УЛО/ЛГ< (/?м - 1 )2/[Т^ч (Ru + 1)].
(6.40в)
Условия (6.40в) справедливы и для ИФАПЧ с ИЧФДЗ и ФНЧ типа (3.43) при
пренебрежении процессом дискретизации по времени в дискриминаторе. Таким
образом, здесь уточнен вопрос о корректности замены дискретной системы на
непрерывную с точки зрения обеспечения примерно одинаковых запасов устой-
чивости.
Приведенные выше примеры определения соотношений для синтеза устойчи-
вых ИФАПЧ с применением показателей колебательности показывают целесо-
образность использования последних для расчетов СЧ. Эти соотношения доволь-
но просты даже в случаях применения ФНЧ высокого порядка. Важен и тот
факт, что синтез ИФАПЧ ведется с позиции исследования частотных характе-
ристик, широко используемых в инженерной практике. Более сложные методики
синтеза ИФАПЧ разработаны в [2,88].
6.3. УСТОЙЧИВОСТЬ «В ЦЕЛОМ» СИСТЕМЫ ИФАПЧ С ФНЧ
Устойчивость «в малом» системы автоподстройки даже при нали-
чии запаса устойчивости не может гарантировать возвращение
координат ИФАПЧ к стационарному положению при реальных
«больших» возмущениях, возникающих в СЧ. Подобные возмуще-
ния имеют место в основном в двух режимах; при включениях
СЧ и при переключениях его выходных частот при изменении
139
коэффициента деления ДПКД. В связи с этим кроме сходимости
«в малом» в ИФАПЧ должны выполняться условия устойчивости
«в целом» [8,84], при соблюдении которых система цриходит в
стационарный режим при любых начальных положениях отобра-
жающей точки в фазовом пространстве состояний. По существу,
исследования в данном случае сводятся к определению полосы
захвата ИФАПЧ, ибо можно показать, что если начальные рас-
стройки УГ лежат внутри этой полосы, то система будет устойчи-
вой «в целом», и наоборот.
Для выяснения условий'устойчивости ИФАПЧ «в целом» ли-
нейные приближения не могут быть использованы и должна быть
проанализирована система нелинейных разностных уравнений
(3.15) с учетом алгоритмов функционирования дискриминаторов
(2.1), (2.5), (2.11), табл. 2.1, табл. 2.2 и т. д. Поскольку решение
этих уравнений в аналитической форме получить не удается, их
исследуют с помощью ЭВМ либо приближенными методами ана-
лиза. Результаты изучения ИФАПЧ с ИЧФД и различными ФНЧ,
проведенные в [23, 29, 33, 71, 89], позволяют утверждать, что вве-
дение импульсного ЧД приводит к устойчивости системы «в це-
лом», если она обладает устойчивостью «в малом».
При использовании в СЧ ИФД типа PS-триггер, а также ис-
ключающего ИЛИ с высоким уровнем переменной составляющей
на выходе или ДДПКД возникает необходимость во включении
достаточно инерционного ФНЧ. Это объясняется трудностями по-
лучения в таких ИФАПЧ высококачественных спектральных ха-
рактеристик сигнала на выходе СЧ.
Условие инерционности ИФАПЧ можно записать в виде
(6.41)
Неравенство (6.41) характеризует медленность переходных про-
цессов по сравнению с периодом То. При выполнении (6.41) устой-
чивость «в целом» можно исследовать методами, развитыми для
непрерывных систем ФАПЧ и основанными на определении поло-
сы захвата [8]. Относительная полоса захвата (при линейной ста-
тической характеристике управления УГ) определяется соотноше-
нием
Ъ = макс { | ед.ст — EJ2 | / (£д/2)}, (6.42)
где ед.ст — постоянная составляющая выходного напряжения ИФД
в режиме синхронизма, Ел— максимальное напряжение ИФД (см.
рис. 2.1, 2.2). Напряжение |ед.ст—£д/21 компенсирует расстройку
частоты УГ относительно частоты, соответствующей £д/2— сред-
нему напряжению ИФД. Из (6.42) следует, что у3 может меняться
от нуля до единицы и определяется максимумом |ед.ст—£д/21,
при котором наступает режим синхронизма.
На рис. 6.2 приведена зависимость у3 от обобщенного парамет-
ра —4£,д5уг7’2/(лА) [8] для ФАПЧ с треугольной характеристикой
ИФД (2.7) и передаточной функцией интегрирующего ФНЧ (6.19)
при линейной характеристике управления УГ. Из рисунка видно,
140
что полоса захвата уменьшается с ростом коэффициента усиления
системы и постоянной времени ФНЧ. Такой вид зависимостей у3
типичен для систем ФАПЧ с любыми характеристиками ИФД и
типами ФНЧ.
При использовании в СЧ ИФД типа «выборка—запоминание»
условие инерционности (6.41), как правило, не выполняется и тре-
буется учитывать влияние квантования выходного сигнала дискри-
минатора во времени на устойчивость «в целом». Возможен сле-
дующий подход к решению этой задачи. Предположим, что в пе-
реходном режиме изменение периода регулирования на двух со-
седних интервалах много меньше периода опорного сигнала, т. е.
Гп-Т0«Т0. (6.43)
При выполнении (6.43) можно считать, что нелинейная система
ИФАПЧ имеет постоянный период прерывания, равный То, и ее
схема изображена на рис. 6.3. На этом рисунке приняты обозначе-
ния: фог(0 — фаза опорного сигнала; q)yr(i) —фаза управляемого
генератора; Лд(г) — передаточная функция, учитывающая инер-
ционность ИФД; EnF((p)/2 — передаточная функция нелинейного
преобразователя разности фаз сре в напряжение; Ел — размах пе-
риодического сигнала, из которого производится выборка; F(q>) —
нормированная периодическая функция с размахом от —1 до
+ 1. Система ИФАПЧ на рис. 6.3 с постоянным периодом прерыва-
ния То для F(q>)=sin<p и различных типов ФНЧ исследовалась
на устойчивость «в целом» методом инвариантных конусов в [90].
В [91] определены условия устойчивости «в целом» для системы
ИФАПЧ с ПИФ и функцией F(q>) (прямоугольной или пилообраз-
ной). В [92] указанные условия найдены для ИФАПЧ с ИФД,
имеющим пилообразную, треугольную и трапецеидальную форму,
и ФНЧ типа ПИФ. Анализ проводился с помощью моделирования
системы на аналоговой вычислительной машине.
Рассмотрим более подробно процедуры определения полосы
захвата в системе на рис. 6.3, развитые в [93] для ИФД «в—з»,
имеющего пилообразную характеристику. Описываемый подход
основан на методологии, разработанной в [94] для непрерывных
систем ФАПЧ с пилообразной характеристикой фазового детек-
тора. Ее основные положения могут быть сформулированы следу-
ющим образом:
1. Анализируется асинхронный режим, при котором в системе
ФАПЧ возникают биения и непрерывно возрастает, периоди-
Рис. 6.3, Функциональная схема системы ИФАПЧ с ИФД «в—з» и постоянным
периодом квантования во времени
141
Рис. 6 4. Нормированное напряжение
на выходе ИФД «в—з» в режиме
биений
Рис. 6 5. Линейная ММ системы
ИФАПЧ, находящаяся под воздей-
ствием последовательности единичных
ступенчатых сигналов
чески отклоняясь от линейного закона изменения. Задача сводит-
ся к исследованию сигнала ошибки в линейной системе ФАПЧ при
воздействии на ее вход последовательности единичных ступенча-
тых функций с интервалом, равным периоду биений Тб, зависяще-
му от относительной начальной расстройки ун = 2(с1)уг.о—
—'А/’сОо) / (5уг£д).
2. В качестве критерия захвата используется условие невоз-
можности существования асинхронного режима, которое соответ-
ствует минимуму функциональной зависимости ун = Е(Тб). Таким
образом, у3 = мин77(7’б).
Для системы ИФАПЧ полосу захвата определим, как и для
системы ФАПЧ, следующим образом:
Ъ = мин F(vT0), (6.44)
где vT0 = T(,, v — некоторое число из натурального ряда. Для на-
хождения зависимости ya = F(yT0) рассмотрим рис. 6.4 и 6.5. На
рис. 6.4 показано изменяющееся нормированное напряжение на
выходе ИФД «в—з» в асинхронном режиме биений на интервале
времени от (/—1)уТ0 до ]'vT0, где / — некоторое число из нату-
рального ряда. Причем
Ун 2 ((Дуг о ЛЮ/(5уЛд) — 2ед ст/
В соответствии с положением 1 линейная система ИФАПЧ в асин-
хронном режиме находится под воздействием последовательности
единичных ступенчатых сигналов S 1 (/ — »Tai), т. е. в этом ре-
i—0 /-ТОО
жиме сигналы ед(0 в схеме на рис. 6.5 и 6.3 одинаковы. На
рис. 6.5 ел обозначает сигнал ошибки дискретной линейной сис-
142
темы ИФАПЧ в некоторый момент пТ0. Из рис. 6.4 и 6.5 можно
найти
2ед(«7'0)/Вд = ул = Тн —2ел, (6.45)
т. е. задача сводится к определению gn. Для линейной системы
ИФАПЧ найдем с помощью аппарата z-преобразований:
е (2) =z(y 1 — *Toi) I Ge (2),
J
где g(z) —z-преобразование en.
Последовательность входных ступенчатых функций имеет z-
преобразование:
7=0
z(z~’> —1)
(6.46)
(z-l)(z-’-l)
Использовав (6.46) и теоремы об определении функции оригинала
по ее z-преобразованию [10], запишем
g (z-'l — 1)Ог(2)2л
S?- (2-’-1)(2-1) ’
где Res — интегральный вычет в особой точке zi, g — число осо-
бых точек для g(z). Будем рассматривать сигнал ошибки на ин-
тервале от (/—ijvTo до jvTo при /->сю. Обозначив в (6.47)
п= (j—\)vTo + k, где k = 0, 1, 2,..., v, получим
s zft(l-z^)(/e(2)
ev/6 — Res .____ .—j-т .
/ - » zi ' 1 z ) (2 *'
Представим Ge(z)/(z—1) в виде
Ge (2) _ Ааг“ 4- A-iz*-1 4- ... + A, = A (z)
z-1 ^ + Bx_,z^+... + B0 B(z) ’
где Aa, Bx — постоянные коэффициенты. Разложив последнее вы-
ражение на элементарные дроби в предположении, что
B(z)—zi простые, получим [10]
А (2) * Afo) 1________
= z~zi
Используя (6.48) и (6.49), находим
1=1
Так как согласно рис. 6.4 для n = jvTo Уп=1, k=v, то с
(6.44) и (6.45) окончательное выражение для расчетов
захвата
(647)
(6.48)
корни
(6.49)
(6.50)
учетом
полосы
7з
ин Л %) zt№ (zi) (1 — *<)]•
’ j=i
(6.51)
143
Аналогично можно получить и выражение для полосы захвата в
случаях кратных корней отношения Ge(z)/(z—1) [93].
Приведем примеры расчетов полосы захвата для системы
ИФАПЧ с пилообразной характеристикой ИФД «в—з» и некото-
рыми типами ФНЧ.
1. Система ИФАПЧ с безынерционным ИФД «в—з» и ФНЧ
типа ПИФ. Можно показать, что передаточная функция по ошибке
Ge (z) =----=— _----_ —~ —=----------=—=------>
z^z[Ky-Ky (Тг-7\) (1 (1 -d) (Т2-Л)+
(6.52)
+d(l-Ky) ’
где Ку = 5угЕдГо/(2л^), Т2 = Т2/ГО, fi = Ti/To, d=exp (—1/Т2).
Обозначив в знаменателе (6.52) коэффициент при z через 2g, а
свободный член — через Q2, получим для случаев комплексных
корней характеристического уравнения выражение для полосы
захвата
2 S’[sin(v + 1)<р — (tZ/20) sin ^<p] - S2’sln?
= 1 + мин-----------------------T --------------------, (6.53)
1 Sq” — 22’ cos
где ® = arctg (]/ 2g — ?2 )/ — t
Результаты расчетов y3 на ЭВМ по формуле (6.53) для некото-
рых значений параметров системы Т\1Т2 и v>5 приведены на
рис. 6.6. Из рисунка видно, что полоса захвата уменьшается с
увеличением Ку, Т2. На рис. 6.6 крестиками показаны результаты,
полученные в [92] и пересчитанные к параметру Т2= 1,5, штрихо-
вая линия соответствует данным [91] для Т2 = 1,5.
Таким образом, расчеты, проведенные по выражению (6.53),
весьма близки к результатам моделирования на ЭВМ [92]. Что
касается значений у3 в [91, 92], то их можно рассматривать как
оценки полос захвата снизу.
Рис. 6.6. Зависимость полосы захва-
та системы ИФАПЧ с ПИФ от
Ку, Т2 при Т\/Т2=0
Рис. 6.7. Зависимость полосы захва-
та системы ИФАПЧ с инерционным
ИФД «в—з» и ФНЧ в_виде линии за-
держки от Ку, dn при т3=0,5
144
2. Система ИФАПЧ с инерционным ИФД «в—з» и ФНЧ, кото-
рый можно представить в виде идеальной линии задержки с пере-
даточной функцией (6.8). В этом случае справедливо разностное
уравнение (2.9). Можно показать, что передаточная функция по
ошибке имеет вид
Ое (г) =
(z—l)(z—14-d„)
г2 + 2 [Лу^и (1 — тз) + da — 2] -|- 1 — dx -J- Kydui3
(6.54)
Применив к (6.54) те же обозначения, что и при анализе (6.52),
получим формулу
2
73 = 1 мин--------
v sin <р
[sin (v -f- 1) © — (1 — du) sin v<p/20]—sin ©
1 -f- a2v — 22^cosv<p
(6.55)
Результаты расчетов y3 на ЭВМ по (6.55) для некоторых пара-
метров ИФАПЧ и т3 = 0,5 приведены на рис. 6.7. Из рисунка вид-
но, что полоса захвата рассматриваемой системы монотонно
уменьшается с ростом Ку и увеличением инерционности ИФД
(уменьшение dH)-
Итак, рассмотрены два приема, способствующие определению
условий устойчивости «в целом» ИФАПЧ. Первый основан на све-
дении системы к модели непрерывной ФАПЧ, второй — на пред-
ставлении системы моделью с постоянным периодом квантования
во времени. Что же касается ИФАПЧ, описываемой уравнением
(3.15) для ИФД «в—з», то выявление условий устойчивости «в
целом» является весьма сложной задачей, решение которой в
известных авторам работах не найдено. В [57] приведены экспери-
ментальные данные по определению полосы захвата в ИФАПЧ
с ИФД «в—з» и ФНЧ интегрирующего типа. Отмечена асимметрия
полосы захвата в положительной и отрицательной областях час-
тотных расстроек, которая увеличивается с повышением коэффи-
циента усиления ИФАПЧ и уменьшением нормированной постоян-
ной времени Т2-
6.4. ПЕРЕХОДНЫЕ ПРОЦЕССЫ В СИСТЕМЕ ИФАПЧ
Переходные процессы в ИФАПЧ обусловлены, как правило, режи-
мами включения СЧ либо переключения выходных частот при из-
менении коэффициента деления ДПКД. Основным показателем
переходного процесса в СЧ является его длительность ty, опреде-
ляемая параметрами ИФАПЧ. Величина ty находится как время,
по истечении которого некоторая координата системы х,(0 при-
ближается к установившемуся значению х(- ст с заданной точностью
Дхд
| хД/) — xizx | < Дхе. (6.56)
t>ty
Значение ty отсчитывается либо с момента включения СЧ, либо
с момента окончания набора частотного кода, подаваемого на
10—1020 145
ДПКД. В качестве координаты xi(t) выбирается, как правило,
частота иуг(/) или фаза колебаний УГ Фуг(0-
В некоторых случаях при проектировании СЧ оговаривается
допустимое перерегулирование напряжения ед(0 на выходе дис-
криминатора, определяемое как
ал= макс | ед(0 — ед.ст I /1 ед.ст I- (6.57>
Это связано с необходимостью устранения нелинейных искажений
цепи дискриминатор—управляемый генератор.
Переходные процессы, связанные с включением СЧ или изме-
нением коэффициента деления ДПКД, в общем случае необходи-
мо анализировать с помощью системы нелинейных разностных
уравнений (3.15), описывающих работу ИФАПЧ, с учетом алго-
ритмов работы дискриминаторов. При включении СЧ аналиэ
ИФАПЧ сложен, так как требует задания ненулевых начальных
условий по всей совокупности состояний. Это трудно реализовать,
поскольку такие условия зависят не только от выбранных вариан-
тов состояний, но и от конкретной реализации СЧ. Во втором слу-
чае ситуация с заданием начальных условий состояний проще —
их всегда легко вычислить. Но и здесь учет нелинейностей ИФАПЧ
при исследовании переходного процесса приводит к трудоемким
расчетам, которые проводятся, как правило, с применением ЭВМ.
Расчет переходных процессов можно значительно упростить, если
реальные параметры системы автоподстройки позволят ввести ряд
ограничений.
Вначале допустим, что ИФАПЧ можно представить в виде не-
прерывной системы ФАПЧ [см. (6.41)], УГ имеет линейную ха-
рактеристику управления и ФД работает в линейном режиме.
Последнее означает, что рассматриваются весьма ограниченные
фазовые рассогласования в переходном процессе. Допустим, что
отклонение частоты колебаний УГ иуг(0 происходит за счет скач-
кообразного изменения коэффициента деления ДПКД от У1 до
N2. Подобная ситуация эквивалентна появлению начальной час-
тотной расстройки УГ A<oyr.H= (Л^2—М1)ио — частота опорного сиг-
нала на входе дискриминатора.
Для расчетов воспользуемся рис. 6.8, который получен простым
преобразованием схемы на рис. 3.14. Из рис. 6.8 и (3.79) следует,
что
Дшуг (х) = Д<оуг.„Ое (х)/х, (6.58)
где Аиуг—преобразованная по Лапласу Диуг(^). Если удастся из
(6.58) найти оригинал Аиуг(^), то, использовав (6.56), можно оп-
Рис. 6.8. Непрерывная модель ИФАПЧ при анализе переходных
процессов
146
ределить длительность переходного процесса. В частности, разло-
жим Ge(s)ls на элементарные дроби, тогда
Дшуг (/) = Дшуг.н {Bi е-а,( 4* В2 e_“»f -|- + Ci e~i*r sin (k^ 0j) 4~
-|- C2 e-^ sin (X2t -f- 62) "I- •••}’ (6.59)
где Bi, B2.... Ci, C2..... en, a2... yi, y2..... Xi, •••> 61, 62, - — не-
которые постоянные. Пренебрежем в (6.59) членами, имеющими
большую скорость затухания:
= —— 1п (6.60а)
а/мнн А(Ое
ИЛИ
/у = —— 1П-ШуГ-Н£‘ , (6.606)
Т(МНИ Дб)е
где а, мни — минимальное значение среди дискретного множества
а», у» мин — минимальное значение среди дискретного множества у,.
Рассмотрим цример. Найдем длительность переходного про-
цесса в ИФАПЧ с ИЧФДЗ и ФНЧ с передаточной функцией (3.43)
при скачке коэффициента деления ДПКД. Передаточная функция
разомкнутой системы имеет вид (6.36), а нормированная переда-
точная функция замкнутой системы
о3(?)М = (^5+1Ж?+?+^?4-1), _ (6.61)
Г де — <0обЛ. == ^об^2» шоб —' Кц ^уг Ко/N 2 , 5 — £/^об*
Так как Ge(s) = l—G3(s)/N2, то из (6.58) найдем
Дч)уг(х) === Д<°Уг.н/(<о06х) Д<°уг.нСз (^/(^об^^и)’ (6.62)
Использовав таблицы обратного преобразования Лапласа [75], оп-
ределим функцию-оригинал по изображению (6.62) в предположе-
нии, что два корня в G3(s) — комплексные, а один — действитель-
ный [такая ситуация имеет место при синтезе ФАПЧ по показате-
лю колебательности М в соответствии с (6.40в)]. В этом случае
Д<оуг(7) = (Д<оуг.н/ш0б)[Вехр(— at) — Сехр(— yi!)sln(k/ + 6)], (6.63)
где t=<nof>t; В, а, С, у, X и 6 определяются из табл. 6.3.
Таблица 6.3
Значения В, а, С, у, X и 0 в зависимости от М
м a 1 к В С 9
1,1 0,333 2,999 3,163 0,117 1,531 0,817
1,3 0,645 1,519 1,844 0,471 1,805 0,952
1,5 0,898 0,994 1,492 0,799 1,937 1,191
1,7 1,048 0,713 1,361 0,761 1,793 1,381
10*
147
При синтезе системы ФАПЧ по показателю колебательности
Дм значения В, а. С, X и 0 определяются из табл. 6.4. Из (6.63) и
Таблица 6.4
Значения В, у, С, g, X и 0 в зависимости от /?м_________________
а I к В С 9
1,1 13,752 0,723 0,763 0,117 1,531 0,817
1.3 4,29 0,737 0,895 0,471 1,805 0,952
1.5 2,489 0,692 1,038 0,799 1,937 1,191
1.7 1,874 0,593 1,192 0,761 1,793 1,381
1,8 1,720 0,543 1,156 0,687 1,702 1,4379
2,0 1,535 0,457 1,178 0,551 1,553 1,3948
2.2 1,429 0,392 1,181 0,453 1,454 1,5331
(6.60) для а<у находим /у=(1/а) In[|Аиуг.н|В/(иОбА®. )]/<о0б Для
а>у ^у= (1/у) 1п[|Д©уг.н|С/((ОобАй)е )]/а>Об. Использовав [10], мож-
но определить максимальный скачок по частоте, который вызовет
отклонение разности фаз фе меньше 2л: ДиУг.н/Л^2<®об2л/0,55.
Это соотношение справедливо для 1<Л4< 1,7.
Рассмотрим переходные процессы в ИФАПЧ, связанные со
скачкообразным изменением закона дробности в ДДПКД. Извест-
но [14, 53], что при использовании ДДПКД в дискриминаторе
сравниваются частоты, равные f0 = fnFn,, где Гш — шаг сетки частот
СЧ, т — некоторые числа (при десятичной системе набора частот
в СЧ т—10,1000,...). За период усреднения Tc=l/Fm ДДПКД
осуществляет т циклов счета, в каждом из которых коэффициент
пересчета Nn принимает определенное целое значение. При этом
дробность коэффициента деления определяется из соотношения
т
N = (1/т) ^'п = М) + ОМ) X, где No — наибольшее целое дроб-
Л=1
ного числа N, х — целое число от 0 до т—1 в зависимости от за-
данной частоты синтезатора.
Для получения одного и того же значения х возможны разные
алгоритмы изменения N„ на интервале усреднения. В табл. 6.5
Таблица 6.5
Алгоритм дробного деления_______________
X Номер цикла
0 1 > 2 3 4 5 6 7 8 9
0 № No No No No No No No No No
1 № No No No No No No No No No+1
2 № No No No No+1 No No No No No+1
3 № No No No+1 No No No+1 No No No+1
4 Ло No A^o+ 1 No No+1 No No No+1 No No+1
5 № No+1 No No+1 No No+1 No No+1 No No+1
6 Vo+1 No+1 No No+1 No No+1 Vo+1 No No+1 No
7 Vo+1 N0+l M)+1 No No+1 No+1 No No+1 No+1 No
8 Vo+1 No+1 Vn+1 No No+1 No+1 No+1 No+1 No+1 No
9 ЛГо+1 No+1 Л/о+1 No+1 No+1 No+1 No+1 No+1 No+1 No
148
Рис. 6.9. К определению длительностей переходного процесса в ИФАПЧ с
ДДПКД
приведен пример алгоритма квазиоптималъной реализации дроб-
ного коэффициента деления [95] Nn для т=10. Из рис. 3.10 и 3.11
следует, что фвх на рис. 6.8 э случае применения ДДПКД опреде-
ляется соотношением
п
(=0
В (6.64) можно выделить линейно нарастающую фазовую состав-
ляющую
фвх.л = 2тглМ (t)/(N0Tom).
Тогда
(6.64)
(6.65)
п
'Рвх-'Рвх.л = (2rc//V0) 2 АУ(£Т0) -Хб! (<)/(?» •
i=0 1
На рис. 6.9 для т~10, х=3 в соответствии с данными
изображены графические зависимости J? AN(iTo),
1-0
п
ДАДгТо)—0,3t/To (кривые /—3 соответственно). Сигнал фвх.л
1=0
представляет «полезную» фазовую составляющую, обеспечиваю-
щую в конечном итоге перестройку частоты колебаний УГ, а раз-
ность (фвх—Фвх.л) — «помеховую» составляющую, которую необхо-
димо подавить в ФНЧ. Из (6.65) и рис. 6.8 найдем изображение
по Лапласу
V (х) t= (х) S^N^ms* [1 + ДдОф (х) Syr/(Nox)] =
= 2kxG3 (s)l(TomN0s). (6.67)
Из (6.67), воспользовавшись теоремой об определении установив-
шегося значения функции оригинала по ее изображению, запишем
<иуг.ст — 2tzX/( Тот). (6.68)
В соответствии с (6.56) нас интересует модуль разности между
a>yr(t) и соуг.ст» который обозначен Диу(/). Тогда с помощью (6.67)
и (6.68) имеем
A<oyr (х) = (— 2~х/тТ0) Ge(s)/s.
(6.66)
i=0
табл. 6.5
0,3fi/To,
(6.69)
149
Уравнения (6.58) и (6.69) аналогичны по виду и отличаются толь-
ко постоянным множителем перед Ge(s)/s. Таким образом, все
рекомендации по определению длительностей переходного процес-
са, сформулированные выше, справедливы и в данном случае.
При учете дискретизации по времени в дискриминаторе для
расчета длительностей переходного процесса в пределах справед-
ливости (6.43) можно воспользоваться линейной импульсной мо-
делью на рис. 6.10. Естественно, предполагается, что разность фаз
находится в пределах линейности участка статической фазовой
характеристики ИФД. Из рис. 6.10 с помощью правила преобразо-
вания линейных схем найдем выражение для ^-преобразования от
отклонения частоты колебаний УГ:
Дшуг(г)=Дшуг.н
zOe (z)
z~ 1
1 _ _ZL z {Кди5угО0 (s) Оф (6.70)
z — 1
где Z{x} обозначает z-преобразование x. Если Ge(z) не имеет
кратных корней, то оригинал изображения (6.70) по аналогии с
(6.59) можно представить в виде
Д<Оуг(яГо)==Дшу1..и{В1а{, + В2я2 + ••• + СП1 + 0j)+
+ ОгЧз sin (к2я -ф- 92) -ф- ...},
(6.71)
где В\, В%, ..., Сь С2, ..., си, а2, уь у2. ta. •••• 6ь Ог, •••— не-
которые постоянные. Пренебрегая в (6.71) членами, имеющими
большую скорость затухания, длительность переходного процесса
находим из формулы
ty пеТ0 = То inf {Ig [ Д<оЕ/(Д<оуг,НВ;)]/lg а;макс}, (6.72а)
или
ty ~ пгТо ~ То int {1g [Д<оЕ/(Д<Оуг.нСг)]/lg 7/макс}> (6.726)
где а, макс, у» макс — максимальные значения из^множества а, и у(-
соответственно.
Выражения для расчета переходного процесса, аналогичные
(6.71), можно получить из (6.1), если найти переходную матрицу
Ф” способами, изложенными в [96]. Расширенный вектор состоя-
ния для ИФАПЧ с ИЧФДЗ определится из выражения Хро =
= 1Ю,АХ1.о, 0.... 0|Е, где AxI.o=A®yr.II/(5yrCI7o2 <?„). Для ИФАПЧ с
ИЧФД «в—з» справедлива формула
Хро — II Дто, Дх1() ..., Дхда0 ||г,
где Д-о = 0, Дх/0 = — (М — Л^)/(5уД;).
Рис. 6.10. Импульсная модель ИФАПЧ для анализа переходных процессов
150
Однако с помощью ЭВМ величину Д можно определить непос-
редственно из матричного разностного уравнения (6.1). В процес-
се решения, сравнивая Nxn с ДфЕ (при ИЧФДЗ) или N&tn с
Д<рЕ (при ИЧФД «в—з»), находят пЕ<р, когда выполняются усло-
вия |Мгп|<Д<рЕ или |Л^Дтп|<Д<рЕ соответственно. При этом
п>пЕ1р. Тогда длительность переходного процесса установления
фазы колебаний УГ с точностью Дфе:^У1? = пе?То.
Аналогично, найдя пЕШ, когда выполняется условие | А2<°ОХ
Х(-гл+1— тл) J < ДшЕ, для п > п1ш можно определить длительность
переходного процесса установления частоты колебаний УГ tym —
Применение системы нелинейных разностных уравнений (3.15)
для установления длительностей переходных процессов покажем
на ряде примеров. Предположим, что система ИФАПЧ описывает-
ся уравнениями (3.34) и включает bi себя ИЧФД «в—з» и ФНЧ
типа ПИФ. Допустим далее, что характеристика ИФД — пило-
образная, характеристика УГ — линейная и ДУЛ = О. Длительность
переходных процессов в ИФАПЧ рассчитывалась путем решения
системы уравнения (3.34) на ЭВМ. Алгоритм работы ИЧФД
«в—з» программировался в соотношении с табл. 2.2. Нормирован-
ные скачки частоты УГ задавались соотношением Дсоуг.н= (ек—
—ек)/Ку, где ек — установившееся нормированное напряжение
ИЧФД при N=N2, ен — установившееся нормированное напряже-
ние ИЧФД при N=Ni. Справедливы равенства:
— (Л\шо шуг.о)/(^УгАд), ^V.'==- (А^2шо шуг.о)/(5уг£д).
Точность установки частоты ДсоЕ задавалась в соответствии со
скачком частоты Асоуг.н как ДсоЕ = Дсоуг.не, где е=10-2, 10~3, 10“4.
На рис. 6.11 для параметров Т2=2,5; Т1/7’2=0,5; 7Д = 0,8 показан
фазовый портрет системы ИФАПЧ в переходном режиме при скач-
ках частоты из начального синхронного (ен = 0,25) в конечное (ек =
Рис. 6.11. Фазовый портрет системы
ИФАПЧ в переходном режиме (I—
IV—типы движений, см. табл. 2.2)
Рис. 6.12. Зависимость длительностей
переходных процессов установления
частоты
151
= 0,75) состояние и обратно. Из рисунка ясно виден переходный про-
цесс со всеми типами движений в соответствии с табл. 2.2. На
рис. 6.12 показана зависимость длительности переходного процесса
установления ЧаСТОТЫ/у.макс= ^у.макс(ек, бн, Л<Ог ) =/у.макс/То от £к-
Время /у.макс определялось как максимальное значение /у(ек, ек,
До>£) при ен = 0,1 (1+п), где п = 0,1,...,8. Величины: Ку = 0,4;
^i/^2 = 0,l; е= 10~3. На рисунке видна особенность динамики
ИФАПЧ с ИЧФД «в—з», состоящая в том, что при значениях ек,
близких к нулю или единице, /у.Макс резко возрастает. К такому
результату привело увеличение времени работы ИЧФД «в—з» в
режимах IV и VI [97] (см. рис. 6.11). Для сравнения штриховыми
линиями на рис. 6.12 показана зависимость /у.МаКс от ек в. области
полос захвата ИФАПЧ при отсутствии импульсного частотного
дискриминатора. Были также найдены параметры ИФАПЧ, при
которых длительность переходного процесса минимальна. Коэф-
фициент Ку определялся в областях, соответствующих равным
корням характеристического уравнения (3.65), когда выполняется
условие
^у.опт = [(Т2 - т J (1 - d) +11 (1 - 4/)/[(г2 - Л) (1 - d) - I р -
- / {[(П-Л) (1 -d)4-l ]2 (1 -d)2-(l-d)2}/[(T2-Л) (1 _</)_ 1 р- *
В табл. 6.6 приведены результаты расчетов времени установления
частоты /ую=/уш/7’о при изменении Ку в а раз относительно Ку.от
для Т’1/Т’2 = 0,1; е=10~4, ек = 0,5; ен = 0,6. Анализ табл. 6.6, рис. 6.12
Значения ty для различных Т2 и а
Таблица 6.6
Л а
0,2 0,4 0,6 0,8 1.0 1,2 1 1,4 1 1,8 | 2,2 2,6 3,0 3.5 4,0 4,5
0.5 134 63 38 26 16 14 15 15 16 17 19 22 25 28
0,25 270 127 79 53 36 30 30 30 28 30 32 33 32 34
2,5 461 257 161 104 72 60 59 30 54 57 53 36 53 56
5 940 442 298 197 142 121 120 102 107 113 106 110 105 109
и других результатов, полученных при моделировании уравнения
(3.43), показывает, что минимальное время переходного процесса
в режимах, когда не происходит работа ИЧФД «в—з» в зонах
VI и IV, достигается при Ку~ (1, 2,..., 3) Ку.от. Если скачки час-
тоты таковы, что имеет место работа ИЧФД «в—з» в зонах IV и
VI, то длительность переходного процесса установления частоты
резко увеличивается. Тем не менее рассматриваемая ИФАПЧ
152
всегда приходит в состояние синхронизма, что означает равенство-
полое захвата и удержания.
Исследуем переходные процессы в ИФАПЧ с ИЧФДЗ и ФНЧ с
передаточной функцией (3.43). Предположим, что характеристика
управления УГ линейна и переходный процесс обусловлен скачко-
образным изменением коэффициента деления ДПКД от Vi до N2.
Считаем также, что система устойчива «в малом» с запасом, оп-
ределяемым показателем колебательности М согласно (6.406). На
ЭВМ моделировалась система уравнений (3.49), в которой &Nn =
= 0; N=N2; соуг.оГо/(2лМ) = Ai/Мг-
1
-1/Л
т2
о о
о -1/Т2
т =
Л
о
-Т2
1
Л>=1/Т2, ~Pi=T\IT\, хг(У = 0_(^ = 0, 1, ..../п-1).
Варьировались параметры Ni/N2, Т2 и М. В рассматриваемом ре-
жиме частота следования импульсов с выхода ДПКД скачкообраз-
но уменьшается или увеличивается, что приводит к изменению
длительности управляющих импульсов %п. Процесс движения тл
к установившемуся значению при четырехкратных изменениях N
для 72== 0,1 и Л4=1,5 показан на рис. 6.13. Из анализа рисунка
следует, что большую часть времени ИФАПЧ находится в режи-
мах II и IV (при М2 = 4М и Ni = 4N2 соответственно). Режим ра-
боты III имеет место только на начальном этапе переходного про-
цесса, когда отклонение соуг(/) от частоты синхронизма велико.
На рис. 6.14 для Ni/N2=Q,5; Т2 = 0,5 показано изменение тп в пе-
реходном процессе в зависимости от показателя колебательности
системы, как видно при малых М функция т(п) носит апериоди-
ческий характер, а при больших М— колебательный. Из рисунка
следует, что при некоторых значениях М процессы установления в.
Рис. 6.13. Переходный процесс в
ИФАПЧ с ИЧФДЗ при четырехкрат-
ном изменении коэффициента деле-
ния ДПКД
Рис. 6.14. Переходные процессы по
фазе в ИФАПЧ с ИЧФДЗ в зависи-
мости от показателя колебательнос-
ти М
1531
ИФАПЧ происходят с наибольшей скоростью. В табл. 6.7—6.9
приведены результаты расчетов на ЭВМ времени установления
частоты ty m = tyu> /То как функции М и Т2. Точность установления
частоты задавалась в соответствии с относительным скачком час-
тоты (Mi—М2)/М2 как ДсоЕ=е(М1—М2/М2), где е=10-2; 10-4. Из
табл. 6.6—6.9 следует, что длительность переходного процесса воз-
растает с ростом Т2 и (Nt—N2)/N2, увеличением точности и умень-
шением М. Если требуется спроектировать СЧ с быстродействием
/у<в <1070, то необходимо выбирать М= 1,7... 1,5, 72<0,5.
Таблица 6.7
Значения tya для различных М, Т2, е при (Nt—TV2)/?V2=±O,1
т, м
1,1 1.3 I 1.5 1,7 1,1 1.3 1,5 1.7
е=10~ 2 Е — 10~4
0,1 24 И 8 8 68 24 10 10
0,5 32 15 9 И 89 32 17 18
1 32 25 13 19 146 53 34 33
2 96 46 22 37 275 99 64 64
5 235 312 54 91 674 243 157 156
10 726 304 186 192 1602 565 318 361
Таблица 6.8
Значения /у со ДЛЯ различных М, Т2, е при ( АГ,—JV2)^=—0,5
м
г, 1,1 1.3 1 1,5 1,7 1.1 1.3 1,5 1,7
е=10" -2 е = 10-*
0,1 24 11 7 9 67 27 16 13
0,5 32 15 8 10 89 32 17 17
1 54 25 13 20 148 53 27 34
2 137 61 35 36 315 114 62 70
5 741 274 191 149 1181 409 257 231
10 2986 1071 706 529 3814 1329 838 693
Таблица 6.9
Значения /уш для различных М, Т2, е при (Nt— JV2)/iV2=l
м
т, 1,1 1,3 1,5 1,7 1,1 1 1,3 1 1,5 1.7
е = 10 -2 £ = 10~4
0,1 24 И 8 9 67 24 12 12
0,5 36 17 9 10 92 33 17 17
1 73 32 21 22 168 60 36 35
2 277 91 57 54 416 145 85 81
5 1438 513 338 250 1849 643 404 333
10 5939 2057 1303 959 6674 22900 1436 1118
154
Рис. 6 15. Переходные процессы ус-
тановки частоты в ИФАПЧ с
ИЧДЗ для 7’2=0,5:
---------As=l, а>уГ0/(А2<0о) =0,9;
•------ As=2, Ц*уго/(Л?2(ио1 =0,9;
—X—Х“~ As=l, COyro/(jV2o)0 j = 1,1;
— • —As —0,5, соуго/(Аусоо) ~ 1,1
Рис. 6.16. Переходные процессы ус-
тановки частоты в ИФАПЧ с
ИЧФДЗ для Т2=5:
-------As—1, а)уго/(А2<Оо) =0,9;
------ As=2, <Оуго/(А2(Оо) = 0,9;
—X—X—As=l, (Оуго/Агйо) = 1,1;
— • -— • —As=0,5, <Оуго/(А2<0о) = 1,1
В [71] изучено влияние эффекта усложнения ФНЧ на длитель-
ность переходного процесса в ИФАПЧ с ИЧФДЗ. При этом требо-
вания по подавлению помех с частотой сравнения <во в составе
выходного сигнала и обеспечению показателей колебательности
М поддерживались одинаковыми в системах со сложным фильт-
ром и фильтром с передаточной функцией (3.43). Оказалось, что
за счет введения в ФНЧ дополнительных интегрирующих звеньев
или Т-образного мостикового фильтра можно уменьшить /уш.
Этот результат получен с помощью программы IFAPH1 (см. при-
ложение).
Влияние нелинейности характеристики управления УГ на дли-
тельность переходных процессов в ИФАПЧ рассмотрим на при-
мере применения ИЧФДЗ и ФНЧ с передаточной функцией (3.43).
Исследования проводились с помощью программы IFAPH2 [72],
написанной на языке ПЛ/1 (см. приложение). Использовались
выражения (3.51), (3.53) и табл. 2.3 функционирования ИЧФДЗ.
Некоторые результаты расчетов переходных процессов при пере-
ключении частоты колебаний УГ с юуГ1 =Лйво на ыуГ2=А'2<Во приве-
дены на рис. 6.15, 6.16 и табл. 6.10. На рисунках показаны пере-
ходные процессы перестройки частоты в ИФАПЧ с показателем
колебательности М= 1,5, рассчитанным для частоты wyr2 и крутиз-
ны Syr = Syr2. Параметром, задающим нелинейность характеристи-
ки управления УГ, считалось отношение крутизн /G = Syrl/Syr2 на
155
Таблица 6.10
Значения G" Для различных coyr o/Mcoo,Ks,72 и е
шУг.0^зшо г
10-2 io-3 ю-4 10-2 io-3 io-4
0,9 1 п 9 ри 7’2=0, •15 5 19 54 при 7’2=5 110 155
2 12 17 21 77 108 115
1,1 0,5 12 16 21 76 130 173
1 9 15 19 54 110 155
частотах coyri и соуГ2. Длительности переходного процесса £у<в>
•приведенные в табл. 6.10, определялись при точности Дсое =
=е(М—N2)I'N2- Для сравнения на рис. 6.15, 6.16 и в табл. 6.10
приведены данные для линейной характеристики УГ, т. е. Ks = l.
Результаты исследований переходных процессов в ИФАПЧ по-
казывают, что нелинейность характеристики управления УГ не-
обходимо учитывать в первую очередь при использованиии ФНЧ
с большими постоянными времени.
ГЛАВА 7
МЕТОДЫ ПОВЫШЕНИЯ
БЫСТРОДЕЙСТВИЯ СИНТЕЗАТОРОВ
ЧАСТОТ
7.1. СИНТЕЗАТОРЫ С ДРОБНО-РАЦИОНАЛЬНОЙ
АППРОКСИМАЦИЕЙ ЗНАЧЕНИЙ ВЫХОДНЫХ ЧАСТОТ
Актуальность проблемы повышения быстродействия СЧ с ИФАПЧ
обусловила появление многих технических предложений, в той или
иной степени решающих эту задачу. Анализ наиболее характерных
отличительных признаков указанных предложений позволил про-
вести их классификацию (см. рис. 1.11). Естественно, что каждая
разновидность СЧ имеет свои достоинства и недостатки, и поэтому
целесообразность использования той или иной диктуется в первую-
очередь конкретными требованиями, предъявляемыми к радио-
I устройству в целом. Выделить какой-либо один метод повышения
быстродействия всех видов СЧ нельзя. В конечном счете только
сам разработчик, будучи осведомленным о различных способах
построения и параметрах СЧ, может произвести обоснованный вы-
156
бор оптимальной структуры с учетом условий производства и
эксплуатации аппаратуры.
Исследовать динамические характеристики всех или хотя бы
большинства быстродействующих СЧ и дать на этом основании
рекомендации по выбору параметров системы автоподстройки
здесь не представляется возможным и целесообразным. Весьма
важным является то обстоятельство, что анализ динамических
свойств различных модификаций СЧ не имеет существенной спе-
цифики и может быть проведен на основании базового одноколь-
цевого синтезатора. Например, СЧ с ДДПКД можно изучать с
помощью однокольцевого СЧ, в котором необходимо учитывать
помехи дробности. Конечно, при определении интенсивности по-
следних необходимо принимать во внимание эффективность их
компенсации и способы построения ДДПКД. Аналогичный подход
справедлив для многокольцевого СЧ, когда достаточно провести
анализ только наиболее инерционной петли ИФАПЧ, задающей в
основном длительность переходных процессов всего СЧ. Перечень
подобных примеров можно без труда продолжить.
Учитывая сказанное, в настоящей главе рассматриваются те
типы СЧ и методы улучшения их быстродействия, которые требу-
ют проведения дополнительных исследований. Начнем с синтеза-
торов, построенных по принципу аппроксимации значений выход-
ных частот [5, 15, 98, 99], относящихся к классу I (см. рис. 1.8).
Анализ работы аппроксимирующего СЧ (АСЧ), упрощенная
структурная схема и описание принципа работы которого приве-
дены в § 1.2 (рис. 1.9), позволяет выделить следующие основные
факторы:
высокая частота сравнения, на которой работает дискримина-
тор, при малом шаге, т. е. интервале между соседними значения-
ми выходной частоты;
значительное изменение частоты сравнения при работе синте-
затора в диапазоне частот;
неравномерность шага перестройки;
зависимость степени заполнения диапазона выходных частот
АСЧ при заданной точности установки частоты от максимально
допустимого коэффициента деления частоты опорного генератора.
Для исследования динамических процессов наиболее сущест-
венным является второй из названных факторов, поскольку изме-
нение частоты сравнения в больших пределах заметно влияет как
на устойчивость, так и на длительность переходных процессов в
ИФАПЧ. Рассмотрим этот вопрос подробнее, учтя, что в АСЧ в
качестве дискриминатора наиболее целесообразно использовать
ИЧФДЗ. Последний, в отличие от ИЧФД «в—з», способен рабо-
тать в широкой области частот сравнения.
Обозначим через [ном некоторую среднюю частоту сравнения,
назвав ее номинальной, а через )А— текущую частоту. Тогда
/а=^ном, где £ — некоторое положительное число.
157
Найдем связь между параметрами ИФАПЧ на частотах срав-
нения [ном и /а. При использовании ФНЧ с передаточной функцией
(3.43) справедливы равенства
^уа_=^уЛ, Т1А = Т^ Г2А = Т& (7.1)
где Аул — коэффициент усиления кольца регулирования; Т\А,
Т2А— постоянные времени ФНЧ; 7СУ, 7\, Т2 — те же параметры на
номинальной частоте £ом.
С учетом (7.1) условия устойчивости «в малом» (6.14д) и
(6.14г) примут вид
Т1-7>0, ' (7.2а)
~Ку < 4? (1 + d^)l [ 1 + + 2? (Л - Т2) (1 - <Г'е)]. (7.26)
На рис. 7.1 изображены области изменения параметров Ку и
Т2, соответствующие неравенствам (7.2а) и (7.26) при £=0,5 и
фиксированных 7\, определяющие устойчивость «в малом» АСЧ.
Границы указанных областей заштрихованы. Из сравнения рис. 7.1
и рис. 6.2, построенному для £=1, следует, что с уменьшением £
области устойчивости также уменьшаются. Минимальная величи-
на £ = £мин при расчете АСЧ по заданному показателю колебатель-
ности М может быть получена из (7.26) при подстановке Ку и 7\,
взятых из выражений (6.406). В результате получим неравенство
______________ 1 4- ^мин_______________________
(1 + (1 +rf) _ 1 j + 2^мин (1 + d) (1 - d,z’mhh ) "
--------(£22^)44-------- 0 (7 3)
решение которого относительно Т2 дает граничное значение £мин.гр.
Результаты численного решения (7.3) приведены на рис. 7.2. Из
158
этого рисунка следует, что заметное ограничение £Мин.гр наблюда-
ется лишь при Т2<1.
Для Т2>1 неравенство (7.3) можно решить аналитически.
Учитывая, что в этом случае d^l—1/Т2 и с?1/6мнн — l/7’2gMHHr
,2 ЗЛ42 + 5М + 2 . = .
'Хин* 2* 4(Ж4-1)2 мин 2“Г
откуда
т ЗМ2 + 5М + 2
'мин' 2 п , ,, I 1 \ о
М(М—1)
8 (М + 1)2
У(ЗЛ12 + 5М + 2)2/2(7И+ I)2 —Л4(М —1)/2
2(М+ 1)
(7.3а)
Оценим влияние изменения частоты сравнения на величину М.
Выражение для определения показателя колебательности АСЧ
МА имеет вид [99]
ЛТА = макс --X
X 1/ —----------------------------------1, (7.4)
г (/су/? - «>1)2 _ 4 (/<ул/^ - «IB2) J '
где ®А = X/tfHOM, А = (1 + d^)/[2 (1 - №)] -М (Г, - Т2),
В = (1 +^^)Д2(1 -d'/E)].
На рис. 7.3 показаны зависимости МА от g при фиксированных
Т2 и М = 1,5, полученные из (7.4) путем расчета на ЭВМ с исполь-
зованием программы FMIN [100]. Эти кривые позволяют в конечном
счете найти области допустимых изменений fA для обеспечения
заданного показателя колебательности системы ИФАПЧ.
Перейдем к определению влияния изменения частоты сравне-
ния на время ty установления частоты в АСЧ. Результаты расчета
нормированной величины ty, проведенного с помощью цифрового
моделирования СЧ, сведены в
табл. 7.1.
При расчете принято, что ска-
чок частоты составляет Дсоуг.н =
= 0,1.
Из анализа табл. 7.1 следует,
что при £<1 длительность пере-
ходных процессов по сравнению
с длительностью при д=1 возра-
стает. Увеличение частоты сравне-
ния |а(^>1) приводит к некото-
рому повышению быстродействия
синтезатора. Таким образом, рас-
чет параметров АСЧ целесооб-
разно проводить для минималь-
159
Таблица 7.1
Бремя установления частоты в АСЧ
•
Е 10-2 | ю~4 Ю-2 ю~4 10~2 io—4 10-2 | 10~4
м= =|Д м- = 1,5 м- =Ы м = 1.5
при Т = =0,5 при Г=2,0
0,5 42 94 18 32 124 278 58 128
1 32 89 9 19 96 275 23 63
2 22 82 9 - 21 66 255 26 66
5 9 70 6 20 30 219 22 62
ной частоты сравнения, на которой возможна работа синтезатора.
При этом можно гарантировать, что время установления частоты
/у при работе АСЧ в диапазоне частот будет не хуже расчетного.
Для иллюстрации дадим количественную оценку возможного изменения
/а в АСЧ, работающем в диапазоне 50... 70 МГц с шагом Рш~1 кГц при
for=100 МГц [98]. Результаты приведены в табл. 7.2, в которой N и — коэф-
фициенты деления ДПКД1 и ДПКД2 соответственно (см. рис. 1.12).
Таблица 7.2
Результаты расчета для АСЧ, работающего в диапазоне частот 50...70 МГц
f , МГц 1 вых’ 4 Ошибка аппрок- симации, Гц IV /д, КГц
55,355 6,0 831 460 120,3
55,356 2,5 1559 863 64,1
55,357 —142 560 310 178,5
55,358 —0,9 2081 1152 48,0
61,247 —2,3 2085 1277 47,9
61,248 0 3125 1914 32,0
Данные таблицы показывают, что для указанных частота }л изменяет-
ся более чем в 5 раз. Однако в практических схемах максимальное изменение
частоты fA может быть ограничен двукратным ее изменением. Для этого N н
7?д должны определяться соотношениями
Д) = 2lnt йогА’макс1^р>ДГр> — 2lnt ^ой’У?Л.макс^д.р'^д
где М , 7?д р и Ммакс, 7?д макс — расчетные и максимально допустимые коэф-
фициенты деления делителей соответственно.
Расчет Мр и р производится согласно алгоритму Евклида [5].
160
7.2. СИНТЕЗАТОРЫ С ПРЕДВАРИТЕЛЬНОЙ УСТАНОВКОЙ
ЧАСТОТЫ И ОПТИМАЛЬНЫМ УПРАВЛЕНИЕМ
Эффективным методом повышения быстродействия СЧ является
предварительная установка частоты УГ. Она может быть осущест-
влена двумя способами: подачей специально сформированного до-
полнительного управляющего напряжения, суммируемого с основ-
ным управляющим сигналом на выходе ФНЧ; непосредственной
установкой уровня выходного сигнала ФНЧ, близкого к ожидаемо-
му в режиме синхронизма, при подаче на вход фильтра управляю-
щих воздействий (напряжения или тока).
При втором способе отсутствуют устройства формирования до-
полнительного управляющего сигнала, являющегося к тому же
источником шумов. Поэтому с точки зрения технической реализа-
ции и спектральных характеристик он предпочтительнее. Однако
указанный способ уступает первому по скорости предварительной
установки частоты, так как для изменения уровня сигнала на вы-
ходе ФНЧ требуется определенное время, возрастающее с увели-
чением инерционности фильтра. Решение задачи снижения дли-
тельности процесса предварительной установки достигнуто на ос-
нове использования методов теории оптимального управления
[18, 104]. Рассмотрим более подробно этот вопрос на примере СЧ
с ИЧФДЗ.
Итак, пусть требуется изменить частоту выходного сигнала
синтезатора от начальной сон до конечной (ок. Этим частотам в
режиме синхронизма соответствуют следующие сигналы ФНЧ:
- /М__2кЛ/н шуг.О
С'ф.н \ ь) — ~~ “Т— — “
Tosyr syr
С (0 = 0,
(7.5)
^'>(0 = 0,
еф.к(0=|^ - I
T0Syr Syr I
С (0=0,
(7-6)
4".71)(O=o,
где индексы «н» и «к» относятся к частотам сон иkok соответственно,
п — порядок ФНЧ.
Разность фаз сигналов на входе ИЧФДЗ в каждом из стацио-
нарных состояний равна нулю. При поступлении команды о смене
выходной частоты синтезатора с сон на <ок ИФАПЧ изменяет вы-
ходной сигнал ФНЧ, переводя последний из начального состояния
(7.5) в конечное (7.6) за время ty, определяемое длительностью
переходных процессов в системе. Задача состоит в том, чтобы
добиться минимального ty при параметрах ФНЧ, отвечающих
заданным требованиям к спектральным характеристикам СЧ.
11—1020 161
В теории оптимального управления это задача о максимальном
быстродействии [105]. Согласно этой теории управляющее воздей-
ствие E*(t), имеющее максимальное значение Е макС) ИЩуТ В КЛас-
се кусочно-постоянных функций на интервале где t*n —
момент окончания управления. В соответствии с теоремой об п
переключениях для перевода ФНЧ из состояния (7.5) в (7.6) не-
обходимо и достаточно иметь п интервалов EKZKC, причем знаки на
интервалах должны чередоваться (п—1) раз: на первом интерва-
ле положительный, если вф.к(0—вф.н(0>0, и отрицательный, если
вф.к(^)—еф.н(^)<0.
На рис. 7.4 изображена функция E*(t) для вф.к(/)— еф.н(0 >0
и четном числе п. Импульсцую последовательность на рис. 7.4
можно записать в виде
Е* Щ = ЕЛ
Введем переменную V (0^еф(0—еФ.н(0 и перепишем
(7.6):
vH(0 = 0,
W) = o,
(7.5) и
(7.8)
1/(П-1)(0 = 0,
* О*^уГ
ик”ю=о,
Ик"-^) = 0.
Состояние ФНЧ (7.8) можно принять за нулевое и функцию
оптимального управления определить, получив (7.9) суммирова-
нием реакций ФНЧ на управляющее воздействие E*(t) по всем
координатам.
Будем считать, что передаточную функцию ФНЧ можно пред-
ставить следующим образом;
л с
^^=(1+^)2^,
i=i 1
(7.Ю)
Рис. 7.4. Управляющее воздей-
ствие £♦(/) на входе ФНЧ
162
где Ti — постоянная времени форсирующего звена ФНЧ; с, — пос-
тоянные коэффициенты; X,- — вещественные неположительные по-
люсы передаточной функции, М = 0; i=l,2,п.
С учетом (7.10) изображение реакции ФНЧ на воздействие с
уровнем Ец имеет вид
Еа + "ct "
f_1 * f—
где yzz (s) = (1 + Tis)/[s(s — k;)].
Перейдя к оригиналу V>(0 и учтя, что 7q=0, найдем
V(t) = (Л + 0 - Ел 2 Cl Ц - (т\ + ехр (kit)
О L *•/ \ i '
(7.П)
где />0.
Просуммировав V(t) в соответствии с (7.7) и учтя (7.9), запи-
шем первое уравнение функции оптимального управления:
п / 1 \ Л—I
Ел2 Cl Л + г]А1 + Е^п + 2£-д 2 (-1)” Сг {fn - Е) =
1=1 ' * ' v=l
= 2к (/VK - NH)/T05yr,
(7.12)
л—1
где Л; = ехр (X.Q4-(—1)"-j-2 2 (— О” ехР Iх/ ~ *’)]•
V=1
Аналогичным образом можно получить остальные уравнения
функции оптимального управления:
" / 1 \
2^г! л+т-Мг = о
(=2 ' 1
(7.13)
где i=2, 3, ..., п.
Относительно А, соотношения (7.13) образуют однородную
систему уравнений, детерминант которой отличен от нуля. Следо-
вательно, А-=0.
Таким образом, функция оптимального управления принимает
вид
2к (NK - NH)
«; + 2 2 (1>’ «-<•)= TS Ee
7 О’-?уГ£-'ДЬ*1
п— 1
ехр (V:) + 2 2 НГ ехр 1Х2- М] + (~ 1)" = 0
v=l
(7-14)
ехр (Х„^) + 2 2 (-1)’ ехр [к„ (Гя - <,)] + (-1)» = 0
v=t J
11
163
Решение (7.14) определяет моменты времени, при которых дол-
жна происходить смена знака управляющего воздействия для до-
стижения максимального быстродействия при переводе ФНЧ из
начального состояния (7.8) в конечное (7.9).
Рассмотрим случай использования в СЧ фильтра с передаточной функцией
(3.43). Система (7.13) преобразуется к системе двух уравнений с неизвестными
и t*2-.
2t 2к(/Ук-д/н)
1 2 ToSyrEaK0 '
( t* \ / г -tx\
ехр — I — 2 ехр-------------=— 4-1=0
\ * 2 / X 1 2 /
Отсюда получим решение
ч = Т2 In {1 /[1 - J/ 1-ехр(- 3/Т2)]};
F; == 2Т2In {1/[1 — /1 — ехр (— B/T2)j}- 8,
где 8 = | Д/уг.в | /^, Д/уг.н = (^-^)/Ч, "
4^^1/То, F- = ^/To> Т7 = Т2/ГО, /<7 = /<0£д5угГ2/2к.¥к.
Величина t*2 определяет искомое время предварительной установки частоты
<оуг при оптимальном управлении (без учета времени работы вычислителя для
расчета й, <2)- Для опенки этого времени в табл. 7.3 приведены расчетные зна-
чения для ряда параметров системы ИФАПЧ. В табл. 7.3 в числителе и знаме-
Таблица 73
Значения t*2 и в СЧ с ИЧФДЗ и ФНЧ второго порядка при расчете по
показателю колебательности М
Т, Дшуг.н
0,1 0.5 1 1 0,1 1 0,5 1
при Л4= 1,1 при 44=1,5
0,5 2,4/89 9,3/89 17,9/92 0,9/17 2,5/17 4,3/17
1 8,1/146 24,4/148 48,3/168 2,1/34 6,3/34 11,1/36
2 19,4/275 86,3/321 170/416 6,1/62 20,1/64 37,5/85
5 109/674 511/1198 1016/1849 28/157 112/262 217/404
нагеле даны значения t2 и /у соответственно. Принято, что переходный процесс
в случае определения ty оканчивается при достижении относительной точности
установки частоты е=10-4. Расчет ty производится с помощью цифрового моде-
лирования (программа SINTM см. приложение).
Из анализа табл. 7.3 следует, что рассматриваемый способ наиболее эффек-
тивен при малых значениях Т2. При увеличении Т2 эффективность перестройки
164
Рис. 7.5. Зависимость /2 от Ау/Куо
при Лыуги=0,1 (кривая 1 для Л1 =
= 1,1, 7'2=3; кривая 2 для M^l.5,
Т2~5; кривая 3 для Л4=1,5, 7'2=3)
Рис. 7.6. Функциональная схема СЧ
с предварительной установкой час-
тоты УГ
снижается. Для устранения этого недостатка целесообразно в процессе управле-
ния состоянием ФНЧ повышать коэффициент усиления Лу относительно расчет-
ного значения Ку о, увеличив Ея ИЧФДЗ и перерассчитав при этом значения
и Полезность такого решения можно оценить по графикам на рис. 7.5.
Отклонение реальных параметров ИФАПЧ от расчетных, ис-
пользуемых при определении приводит к снижению точ-
ности предварительной установки частоты. Наиболее нестабиль-
ным параметром ИФАПЧ является Ку, зависящий от Syr и £д.
Введем параметр т], характеризующий отклонение Ку от Ку.о,
и примем, что Ку=Ку.о(1 + т|)- Тогда с учетом (7.12) после окон-
чания режима предварительной перестройки нормированное оста-
точное отклонение частоты колебаний УГ от юк—А(оОСт
Д<1)0Ст = (“к - “к)/“к = (7.15)
где со * —частота УГ в момент окончания управления.
Из (7.15) следует^что если, например, изменить Ку относитель-
но Ку.о на 10 %, то Асоост будет составлять одну десятую началь-
ного скачка частоты.
Техническая реализация рассматриваемого способа повышения
быстродействия предложена в [103]. Упрощенная функциональная
схема устройства приведена на рис. 7.6. Принцип действия СЧ за-
ключается в следующем. При изменении кода выходной частоты
синтезатора устройство управления (УУ), в состав которого вхо-
165
дят вычислитель для расчета E*{t) и ряд формирующих устройств,
блокирует с помощью сигнала вбл работу цифровой части (ЦЧ)
ИЧФДЗ и подает на вторые входы логических схем ИЛИ сигналы
управления еу1 и еу2. Под действием последних на входе ФНЧ
создается оптимальное управляющее воздействие E*(t), пред-
ставляющее последовательность импульсов тока с чередующейся
полярностью. По окончании процесса перестройки синхронно с
сигналом е0, имеющим частоту f0, на установочный вход ДПКД
поступает сигнал на его «обнуление» еОбН. Этим достигается не-
обходимая для режима синхронизации ИФАПЧ установка нуле-
вой разности фаз входных сигналов ИЧФДЗ. Затем блокировка
дискриминатора снимается и кольцо ИФАПЧ замыкается. Такто-
вый сигнал с частотой fT используется для получения еу1 еу2.
Образовать управляющее воздействие E*(t) при изменении
уровня выходного напряжения ФНЧ можно и без введения в СЧ
специальных устройств формирования eyi и еу2. Для этого пере-
ключение коэффициента деления ДПКД от М, АГК производят не
сразу, а через ряд промежуточных значений N„ рассчитанных спе-
циальным образом [101, 102, 104]. Допустим, что имеется СЧ с
ИЧФДЗ и ФНЧ, описываемым передаточной функцией (7.10).
Изменив по некоторой программе Nj, можно получить последова-
тельность импульсов E*(t), цриведенную на рис. 7.7. В отличие от
последовательности на рис. 7.5 она имеет нулевые участки сигна-
ла, что связано с логикой работы ИЧФДЗ (смена полярности сиг-
нала едИ) происходит всегда после того, как он станет равным
нулю). В соответствии с рис. 7.7
п
Е* (t) = £д [1 - 9ь) - 1 (t - 62,)], (7.16)
V=1
где еь = /Г0, 02v — +Кл,, К, = (— 1)'|+1 sign (А^к — /VH).
С учетом (7.16) и (7.12) получим первое уравнение функции оп-
тимального управления:
л п п ! 1 \
2 ci Л + — ^хр [X, (Г„ - 8Ь)] -
ч=1 ч=1 /=2 ‘ '
-То О Тв 2Та JT0 470 (п-1)Т„ пТв (п+1)Тв i
ii iz is in-i in in+i i
________П П " II
-Д*4]’ll 7 '
Рис. 7.7. Управляющее воздействие на входе ФНЧ, сформированное програм-
мным переключением коэффициента деления ДПКД
166
- exp [k; (Z* - e2,)]} 2r (NK - NJ/S^Te,
где t'„ = nT0 + F*ntn, F*n — Fn при NK—NH>0 и n нечет-
ных, а также при NK—NH<0 и n четных; в остальных случаях
г; =о.
Взяв (п—1)-ю производную от V(t) [см. (7.11)] и использовав
(7.16), найдем остальные уравнения функции оптимального управ-
ления:
2 и (л + -^)^=о
v)xrljS^’°
i=2 Х ‘ '
(7.17)
где Вг = (ехр 1Х‘ — 61 v)] — ехр [лz (t*n - б2,)]}.
I
Уравнения (7.17) образуют однородную систему (п—1) линей-
ных алгебраических уравнений относительно В;, детерминант ко-
торой отличен от нуля. Следовательно, В( = 0.
Таким образом, функция оптимального управления принимает
вид
« 2k(Nk + ?Vh)
' BasyrToC1
vex t
П
2<еХР[ХЖ-М-ехр[М^-М} = 0 р (7.18)
V=1
2 {ехр [а„ (Гп - М - ехр [Х„ (Г„ - 02,)]} = О
’=i )
Решение (7.18) определяет длительность импульсов tv состав-
ляющих E*(t). Зная тъ легко определить моменты появления им-
пульсов ДПКД К, формирующих совместно с импульсами ДФКД
воздействие E*(t)—=vTo+F^.
Использовав результаты [101], приведем закон программного
изменения коэффициента деления ДПКД Nj для формирования
£*(0 =
ЛГН(ТО + FFj~F ;__1t;_i)/7’0-|-—£з»+£ъ) +
4=1
E S j n
+m - ti - +ад —2 2
v=l i=2
— (Tj + 1/X,) [exp (X^lv)—exp (\T2,)—exp (X,fe,) + exp (X^4s)]/XJ, (7.19)
где = (У — '>) To-\- Fpj, tii —(J — — 1) To Fly/-.!, t^ — (J —
vj 7*0 | FjXj • — (J v 1) 7*0 -p Fj—F
>0 j = 1, 2.....n + 1, Xj = 0 при у = n+ 1.
167
В (7.19) коэффициент деления N„+i введен для установления
нулевых фазовых соотношений между импульсами ДПКД и
ДФКД после окончания управления. Отметим, что смена коэффи-
циентов деления ДПКД согласно (7.19) производится в моменты
появления очередного импульса с ДПКД. С установкой коэффи-
циента деления Nn+i процесс перестройки заканчивается. Время
перестройки определяется порядком ФНЧ п: t*n =пТо.
Конкретизируем соотношения (7.18) и (7.19) на примере использования ФНЧ
с передаточной функцией (3.43). В этом случае (7.18) преобразуется к виду
— Х2 -_8, _ _ I (7.20)
ехр(—1/Г2)-ехр[—(1 — Tt)/72—ехр(-т2/Т2)+1=0, NK>NH.j
Т2 — 8, 'x
exp [—(1 Ч-^г)/^]—eXP [—(1 +Ti+x2)/^2]—heXP (—^г/Т’г)—1=0.
Л'к < Mr
(7.21)
Системы уравнений (7.20) и (7.21) имеют следующие решения:
для NB>NB v
14 = Т21п(1/х,)8, т2 = T2ln(l/Xj);
для NK<NB
7=Т21п(1/х2) + 8, 7 = 721п(1 -х2),
где
xt = (1 + d)/2 + V (1 +d)2/4-d/a; (7.22)
х2 = (1 + d) a/2d — /(1 -d)2a2/4d2—а/d; (7.23)
а = exp (8/7^). *
Из (7.22) и (7.23) определим области допустимых значений S в зависи-
мости от Г2> при которых возможно управление:
8^ 1 — 2Т2[1п2— 1п(1 — d)] для МК>МН, (7.24)
8> —{1-27И1П2 —1п(1 Н-d)]} для МК<ЛГН. (7.25)
Условие (7.25) выполняется всегда, но, поскольку максимальное значение
управляющего импульса ИЧФДЗ не превышает периода опорного сигнала, для
NK<NB получим
U 1 — T2ln(14-d—d2). (7.26)
Из (7.19) получим Nj. Для NK>NB
Nt = (1 + xj NH + KyNK [^/2 + (Л - 72) 7- T2 (7\ - T2) (1 - xja)],
M2=(l --4 — Ч>) M, + MM< hi — 7 “ +
+ T2 (Л - T2) (1 - xj/a - ad/(x? + d/xj],
= (1 + t2) + KyNK Ki — — ^/2 •-
168
- (7\ - Т2) Ъ + Л + Т2 (7\ - Т2) (ф, - 1) d]xt]
и для NK<NB:
М = (1-7)4,
4 = 0 + ч +’г) 4 + 44 КЛ — ^j) 4 — ч) +
+ (7-^)/2- (1 +7)ч],
4 = (1-^)4-
Рассмотренные способы предварительной установки частоты с
применением методов оптимального управления обладают доста-
точно высокой эффективностью. Однако их практическая реали-
зация сопряжена с необходимостью проведения сложных вычисли-
тельных операций даже при использовании ФНЧ второго порядка.
С целью упрощения расчетных процедур имеет смысл понижать
порядок ФНЧ до первого на время процесса перестройки. Исполь-
зование ФНЧ с передаточной функцией (3.43), две возможные
реализации которого показаны на рис. 9.1, позволяет легко осу-
ществить работу по описываемому алгоритму. Для этого достаточ-
но резистор R замкнуть с помощью специально введенного ключа,
что обеспечивает получение передаточной функции ФНЧ в виде
Сф(5) = ^/5. (7.27)
С учетом (7.27) из (7.14) получим
“I = ДшУг.и/М- (7.28)
Выражение (7.28) является достаточно простым с точки зре-
ния построения вычислительного процесса.
При осуществлении программного управления ДПКД, как сле-
дует из (7.18), п = Лсоуг.нКу. Промежуточное значение коэффициен-
тов деления найдем из (7.19):
для NK>NH
4 = 4 (1 + ч) + 44^/2, 4 = 4 (1 - 7)1
для NK<NH
4 = NH (1 N2 = ,VK (1 4- 7) + ^2.
По окончании перестройки инерционность ФНЧ должна авто-
матически восстанавливаться для того, чтобы в установившемся
режиме СЧ имел требуемые спектральные характеристики.
7.3. ПРИМЕНЕНИЕ СИСТЕМ АВТОМАТИЧЕСКОГО ПОИСКА
ЧАСТОТЫ
Добиться повышения быстродействия СЧ можно с помощью сис-
темы автоматического поиска (АП) частоты, используемой для
уменьшения начального частотного рассогласования. Время поиска
частоты tn должно быть, разумеется, значительно меньше дли-
тельности процессов установления в кольце ИФАПЧ. Среди доста-
точно большого числа систем АП [5, 15, 17] следует выделить уст-
169
ройство, алгоритм работы которого основан на методе дихотомий
(половинного деления, биссекций) [106]. Такое устройство имеет
достаточно высокое быстродействие при относительно простой
схемной реализации. Время задается выражением /п=Тит1о§2^
где К—число состояний цифроаналогового преобразователя
(ЦАП); Тит— период итерационного цикла. При жестких требо-
ваниях к точности частотного поиска величина К должна быть
достаточно большой, что приводит к увеличению tn. Подробно
анализ работы АП, построенного на основе принципа дихотомий,
приведен в [5].
В [17] предложена система АП, в которой применяется линей-
ное интерполирование (метод секущих). Эта система обладает
более высокой скоростью поиска, чем при использовании половин-
ного деления. Для поиска методом секущих необходимо на каждом
цикле итерации проводить следующие операции:
I. Начальный цикл счета
1. Измерить величину начального отклонения частоты УГ
Асоуг.н от частоты синхронизма СОуг.ст • А'СОуг.ст — ГОуг.н ОЭуг.ст.
2. Определить приращение выходного напряжения ЦАП Аен,
необходимое для компенсации Дсоуг.н, исходя из некоторого на-
чального расчетного значения крутизны Syr.H характеристики
управления УГ: А^н = Асоуг.н/5Уг.н.
3. Вычислить значение управляющего кода ЦАП K\=KS+
+ лАен, где г] = 27£,оп (Еоп— опорное напряжение, — начальное
значение кода, i — разрядность ЦАП).
II. Основной цикл счета
1. Измерить величину Дшуг „ = шуг я — шуг.ст, где п — порядко-
вый номер итерационного цикла, п=1, 2,..., М.
2. Произвести коррекцию расчетного значения крутизны ха-
рактеристики управления УГ: Syrп = Syr.„_i +^Дшуг n/^en-i.
3. Определить Ьеп = Дшуг n/Syr я.
4. Вычислить /Сл+| =/<„ + 7)Деп.
Далее цикл II повторяется до тех пор, пока не выполнится ус-
ловие | Дшугя | < Дше, где Дше —требуемая точность поиска.
Графическая иллюстрация процесса поиска, осуществляемого
в соответствии с приведенным алгоритмом при АсоУг.н<0, показа-
Рис. 7.8. К процессу поиска методом секущих
170
на на рис. 7.8. Цифрами на рисунке отмечена последовательность
итерационных циклов.
Для теоретического анализа времени поиска методом секущих
будем считать, что зависимость частоты УГ от управляющего на-
пряжения соуг(^упр) задана аналитически. Тогда в соответствии
с пп. 1—4 основного цикла счета II получим следующую систему
разностных уравнений:
^п — I -&Шугп№угп,
^“уг, л + ! = ^шугп “уг (^П+1) “уГ (^л)>
*^уГ, П+1 =: (Дшуг, П+1 ^“уГп)/(^П + 1 еп)>
(7.29)
где е=еупр — напряжение на выходе ЦАП.
Система (7.29) позволяет исследовать быстродействие АП в
зависимости от вида функции <оУг(еУпр) и начального частотного
отклонения.
При реализации рассматриваемого алгоритма поиска расчет-
ные значения еп могут принимать отрицательные значения или
значения, превышающие допустимые для используемого управля-
ющего элемента УГ.
Для устранения этих явлений в алгоритм поиска следует ввес-
ти ограничение на величину еп:
^чин ^п ^макс> (7.30)
где вмин, емакс — допустимые нижнее и верхнее граничные значе-
ния еп соответственно.
Для выполнения (7.30) величина К.п также должна быть огра-
ничена:
^мин Кп /Смаке’
где /(мин = п^мин; /См акс — Т]^макс-
Анализ быстродействия системы АП методом секущих приведем на кон-
кретном примере для параболической зависимости <оуг (еуПр). к которой близки
характеристики реальных УГ. Для определенности положим
“уг (еУпр) = 2к[36 4- 2,8 (еупр - 2) -0,038 (еупр - 2)2]. (7.31)
Использовав (7.29) и (7.31), оценим время поиска tn. При расчете примем
следующие условия: еМин = 2В, еМакс=25В; начальные значения управляющего
напряжения на выходе ЦАП ен = 3 В, 11,5 В; начальные скачки частоты
ДДгн—±40,4 МГц, +20,2 МГц.
Результаты определения частотных отклонений ДДг п после очередного цик-
ла итерации приведены в табл. 7.4. Данные табл. 7.4 позволяют оценить ско-
рость уменьшения частотного отклонения ДДГ в процессе поиска и найти вели-
чину Д=и7’ит, где п — номер итерации, при которой достигается требуемая
точность поиска.
С использованием данных табл. 7.4 оценим быстродействие поиска метода
секущих и дихотомий. Для этого сравним число итерационных циклов, требую-
щихся для установки частоты УГ с заданной точностью ДД обоих методов
(табл. 7.5).
В табл. 7.5 Ns и Nd — число итерационных цикло® системы АП методом
секущих и дихотомий соответственно. Из анализа табл. 7.5 следует, что при
171
Таблица 7.4
Значения Д/угл после завершения п-го цикла итерации
«н- В дГуг.л, МГц п
1 1 2 3 4 5
3 —40,4 —0,88 —0,35 —0,86-10-2 —0,88-10-* —0,23-10—7
24 40,4 2,11 —0,30 0,99-10-2 0,45-10-* —0.23-10-5
3 —20,2 3,44 0,48 —0,16-10-1 0,66-10-* 0,89-10-8
24 20,2 4,93 —1,66 0,76-10-1 0,11-10-2 0,72-10-»
11,5 —20,2 —3,09 —0,83 —0,63-10-' -0,15-10-2 —0,29-10-5
11,5 20,2 —2,97 0,59 0,88-10-2 —0,27-10-* 0,12-10-»
Таблица 7.5
Сравнение быстродействия поиска
методом секущих и дихотомий
кГц 100 10 1 0,1 0,01
Na 3 4 5 5 6
Nd 9 12 16 19 22
точных значений приращений Дел и Д5уг л
поиске по методу секущих требу-
емая точность установки частоты до-
стигается за меньшее (в 3—4 раза)
число итерационных циклов по
сравнению с поиском, основанным
на методе дихотомий.
Погрешность вычислений при ре-
ализации аЛгоритма секущих влияет
на скорость поиска. Для рассмотре-
ния этого вопроса при расчете ча-
стотных отклонений Д/уг л в каждом
цикле итерации введем относитель-
ные ошибки вычислений т]е (для
Дел) и T]s (для 5угл). Тогда вместо
будем иметь
+^);
Д5угЛ=Д5Ул(1 + ’IS),
где Де„ и Д5угл - приращения еп и 5уГ л с учетом ошибок вычислений.
Результаты расчета Д/уг л для приведенного выше примера отражены в
табл. 7.6 и 7.7.
Таблица 7.6
Значение Д£угл после завершения n-го цикла итерации с учетом т]е
’Je п
1 1 2 3 4 5
0,1 0,95 —0,29 0,24-10-2 0,60-10-5 -0,13-10-’
0,1 —2,81 0,92 0,14-10—1 0,60-10-* 0,40-10-»
0 4,93 —1,66 0,76-10-1 0,11-10-2 -0,72-10-»
—0,1 6,81 —2,41 0,11 0,32-10-2 —0,44-10-»
—0,2 8,60 —3,21 0,27 0,72-10-2 —0,17-10-*
В табл. 7.6, 7.7 приведены результаты расчета сходимости ДДг, взятые для
наихудшего случая, который имеет место при ен=24В и Д/у|Л —20,2 МГц.
172
Таблица 7.7
Значение Д1 угп после завершения п-го цикла итерации с учетом 7]$
п
’IS 1 1 2 3 4 5
0,1 4,93 —0,50 —0,64-10-* —O.ll-lO-1 -0,18-10-2
0,1 4,93 —1,02 —50-Ю-1 —0,48-10-2 -0,44-10-3
0 4,93 —1,66 0,76-10-1 0,11-10-2 0,72-10-6
—0,1 4,93 —2,44 0,39 —0,34 0,40-10-2
—0,2 4,93 —3,43 1,02 —0,22 0,57-10-’
Из анализа табл. 7.6 и 7.7 следует:
1. Ошибка определения Дел в зависимости от начальных условий может как
повышать, так и уменьшать скорость сходимости процесса поиска.
2. Ошибка определения Д5уг л в общем случае ухудшает быстродействие
поиска. Характер сходимости Д/уг л приближенно может быть выражен соотно-
шением Д/угл^т]” ^fsrn, которое справедливо при п>3. В случае т]з = 0,5 ско-
рости сходимости поиска по методам секущих и дихотомий примерно совпадают.
Отметим, что к недостаткам метода секущих можно отнести
более сложный алгоритм вычислений, чем при использовании ме-
тода дихотомий.
Быстродействующая система АП может быть построена на
основе системы предварительной установки частоты, рассмотрен-
ной в § 7.2. Для этого необходимо до замыкания кольца ИФАПЧ
произвести измерение реальных характеристик сигнала УГ (теку-
щей частоты и ее производных), организовать коррекцию расчет-
ных параметров кольца по результатам измерений и произвести
процесс перестройки повторно до получения требуемой точности.
В общем случае даже при использовании ФНЧ второго порядка
решение указанной задачи чрезвычайо сложно, поскольку кроме
громоздких вычислений имеются немалые трудности измерения
характеристик сигнала УГ. В этой связи представляется целесо-
образным рассмотрение частного случая задачи, когда порядок
ФНЧ понижается до первого с помощью специального ключа (см.
§ 7-2).
Алгоритм функционирования АП сводится к следующему.
1. Исходя из расчетного начального значения коэффициента
усиления ИФАПЧ Ау.н и начального частотного отклонения
7:2. Измеряется образовавшееся после начального воздействия
(см. 7.28) /1ц=Асоуг.н/Т^у.н*
2. Измеряется образовавшееся после начального воздействия
отклонение Acoyri частоты колебаний УГ. Считая, что наличие
Ай>уг вызывается отклонением коэффициента усиления ИФАПЧ от
расчетного, по Acoyri определяется уточненное значение указанно-
го коэффициента: ^yl = ^y.н(l—Дсоущ/Асоуг.н) -
173
Далее процесс поиска продолжается: вычисляется длитель-
ность нового управляющего воздействия Лл, измеряется частотное
отклонение Асоуг2 и вычисляется новое скорректированное значе-
ние /Су2. Процесс продолжается до тех пор, пока отклонение Аа>Уг я
не уменьшится до требуемого.
В общем случае процесс итерационного изменения параметров
Куп и t\ п можно описать системой уравнений
^шугп/^ул> ‘ (у 32)
Ку. л+l = Куп (1 Дшуг, Л + 1/ДШугп)-
Исключив в (7.32) параметр Куп, получим
il л+1 = ^1Л^ШУ1', л+1/(Дшугл — Дшуг, л + l). (7.33)
Соотношение (7.33) показывает, что рассмотренный алгоритм
поиска соответствует вычислительному методу секущих. О быстро-
действии поиска в данном случае можно судить по результатам,
приведенным в табл. 7.4. *
Опишем еще одну быстродействующую систему АП, основан-
ную на специальном «частотном» режиме работы кольца ИФАПЧ
с ИЧФДЗ [108]. Суть такого режима заключается в том, что в
каждый раз в момент окончания регулирующего импульса дискри-
минатора должно происходить «обнуление» трактов ДПКД и
ДФКД. В результате на выходе дискриминатора появляется сиг-
нал ед(7), пропорциональный не фазовому, а частотному рассо-
гласованию между входными сигналами ec(t) и eo(t). Строго го-
воря, ед(1) зависит от отклонений периодов АГ сигналов ec(t) и
e0(t), однако при малых АТ имеет место соотношение Д/7Д>~
~А7/70. На время частотного режима следует понизить порядок
ФНЧ, замкнув резистор фильтра R ключом.
Проведем анализ указанного режима работы. Для четырех ос-
новных случаев временного соотношения eQ(t) и eo(t) (рис. 7.9,а—
г) можно получить нелинейные разностные уравнения:
1_(1„Г)^/ 1—и—; п+1)К’ -- „
случаи 1: -----------------------1—------------Ку^п =
1 —1 — t/i+i
ec!tlL I I I I L I I
A
А+7
а)
t
6)
T. -1 I I____L
A А+/
T I i II
u n
6)
П
t
t
tn А+/ t
I ! I T
t
Рис. 7.9. Временные соотношения (случаи I—4) ес и е0 в СЧ с ИЧФДЗ в
частотном режиме работы (а—г)
174
случай, 2: ----------—-------
1 + хл _ _ _
1 (1 -1“ Тл + 1) Ку Ку^л + 1/2 ~ —
----------------= Н Лу^Л = “г
1 + хл+1
сличай 3: -1 - < __ 1-(1+^;)ВД+1/2 _^у-=о,
1 — хп 1 4" Хл+1
4: 2-(l.+S)^-^/2. _
1 +
_ 1-(1-2»+1Иу +^у- =0,
1 — 1л+1
где /C/ = coyI..o7'0/2jtV.
Для всех типов движений линейное разностное уравнение име-
ет вид
т"л+1 + (^-1); = 0. _ (7.34)
Из (7.34) видно, что при /(у = 1 можно получить установление
требуемого значения соуг за один период регулирования.
В реальных системах выполнить ХУ = 1 практически удается
лишь с некоторой точностью, поэтому время поиска t„ будет опре-
деляться несколькими периодами регулирования (см. § 5.1).
Система ИФАПЧ с ИЧФДЗ обладает наибольшим быстро-
действием при выборе показателя колебательности М~1,5 (см.
§ 6.4). При этом из (6.406) получим требуемое значение коэффи-
циента усиления
Яу^0,12/Т2. (7.35)
Из (7.35) следует, что в частотном режиме работы для обеспе-
чения максимального быстродействия значение Ку должно быть
увеличено в ц раз, причем ц = Т2/0,12.
В рассмотренных системах АП предельно достижимая точность
установления частоты колебаний УГ существенно зависит от обес-
печения степени синхронизации «обнуления» трактов ДПКД и
ДФКД. Так, если этот процесс производится с точностью до пери-
ода входной частоты ДПКД, то можно показать, что максималь-
ная ошибка перестройки соуг ограничена частотой сравнения.
Для повышения эффективности поиска необходимо найти тех-
ническое решение, позволяющее провести «обнуление» трактов
ДПКД и ДФКД с более высокой степенью синхронности.
7.4. СИНТЕЗАТОРЫ С ИЗМЕНЯЕМЫМИ
характеристиками канала управления
Выбор тех или иных параметров ИФАПЧ определяет динами-
ческие и спектральные характеристики синтезатора. Причем в
175
Рис. 7.10. Время установления
частоты в СЧ с ИЧФДЗ и его
модификациями (ИЧФДЗ—кривые
7; ИЧФДЗД — кривые 2:
ИЧФДЗД Г — кривые 3;
ИЧФДЗМ — кривая 4) при М~
= 1,5 и е=Ю-’
переходном режиме работы
спектральные характеристики вы-
ходных колебаний СЧ не регла-
ментируются. Подобная ситуация
дает основание использовать раз-
личные манипуляции указанных
параметров в течение переходно-
го процесса в ИФНПЧ с целью
повышения быстродействия СЧ.
Проведем анализ эффективности
некоторых вариантов подобного
метода на примере ИФАПЧ с
ИЧФДЗ (см. рис. 2.1) и ФНЧ
второго порядка, описываемого
передаточной функцией (3.43).
Уменьшить постоянные време-
ни ФНЧ Тх и Т2 наиболее целесо-
образно соответствующим изме-
нением номинала сопротивления
резистора R (см. рис. 9.1), по-
скольку в этом случае будут
практически отсутствовать ком-
мутационные помехи. Однако результаты расчетов, приведенные в
§ 9.1, показывают, что быстродействие СЧ при этом улучшается
незначительно, а при оптимальном выборе параметров ИФАПЧ
(т. е. при М= 1,5) оно вообще остается без изменения. Исключе-
ние составляет случай малого показателя колебательности. Так,
при М—1,1 возможный выигрыш составляет примерно 1,7 раза.
Увеличение коэффициента усиления Ау относительно расчет-
ного за счет увеличения токов ГТ в дискриминаторе также не яв-
ляется эффективным средством с рассматриваемой точки зре-
ния [127].
Для того чтобы сохранить в ИФАПЧ оптимальное значение М,
наиболее целесообразно осуществлять в переходном режиме одно-
временное уменьшение Л и Т2 в ФНЧ и увеличение Ау. Действи-
тельно, например при 7,2>1, как следует из (6.40в), показатель
колебательности определяется отношением М~ (Ti + T2)/(Ti—Т2),
которое от номинала сопротивления резистора R не зависит. Од-
нако коэффициент усиления /<у, как следует из (6.40в), обратно
пропорционален Т2 и, следовательно, должен быть соответствен-
но увеличен. Из данных табл. 6.7 следует, что зависимость време-
ни установления частоты ty от Т2 можно считать приблизительно
линейной. Поэтому одновременное изменение Т2 и Ку позволит во
столько же раз повысить быстродействие СЧ, во сколько раз уда-
стся снизить постоянную времени Т2.
Вариация параметров ИФАПЧ, в частности Ку, может быть
достигнута применением специальных модификаций схемы
ИЧФДЗ. К ним относятся схемы ИЧФДЗД, ИЧФДЗДГ и
176
ИЧФДЗМ, принцип работы которых изложен в § 2.2, а цифровые
модели приведены в § 4.2. В синтезаторах с такими дискриминато-
рами коэффициент передачи последних Кд не остается постоян-
ным, а зависит от разности фаз <рп для ИЧФДЗМ или от отноше-
ния частот сигналов ec(t) и eQ(t) для ИЧФДЗД и ИЧФДЗГ.
Результаты расчета ty в СЧ с ИЧФДЗ и его модификациями, по-
лученные с помощью цифрового моделирования (программа
SINTM, приложение 4), приведены на рис. 7.10. Из анализа ри-
сунка следует, что использование модификаций схем ИЧФДЗ
позволяет повысить быстродействие СЧ, однако существенный вы-
игрыш возможен только при достаточно инерционных ФНЧ.
ГЛАВА 8
СПЕКТРАЛЬНЫЕ ХАРАКТЕРИСТИКИ
ВЫХОДНЫХ КОЛЕБАНИЙ
СИНТЕЗАТОРОВ ЧАСТОТ С СИСТЕМОЙ
ИФАПЧ
8.1. ПОБОЧНЫЕ СОСТАВЛЯЮЩИЕ
При анализе СЧ в предшествующих главах рассматривался авто-
номный режим работы, т. е. не учитывалось воздействие внешней
среды на параметры синтезатора. Кроме того, допускалось, что
какими-либо вредными внутренними воздействиями на звенья СЧ
можно пренебречь. В этих условиях сигнал еВЫх(0 на выходе СЧ
по окончании переходных процессов мог считаться гармоническим.
Очевидно, что реальная ситуация отлична от принятой идеализа-
ции. В действительности, внешние и внутренние помехи оказыва-
ют непосредственное воздействие на качество (спектральные ха-
рактеристики) еВых(0, которое жестко регламентировано в совре-
менных системах синтеза частоты [109]. Как указывалось в гл. 1,
речь идет как о шумах, искажающих моночастотность сигнала
еВых (0, так и о появлении в спектре последнего побочных (регу-
лярных, детерминированных) составляющих.
В настоящей главе рассматривается влияние помех на работу
СЧ в установившемся режиме. При этом если не учитывать ва-
риации амплитуды сигнала, то выражение для еВЫх(^) в общем
виде может быть записано
^вых^) = £'тСО8(шВЫх.ср^ + <р (0 + <Ро), (8.1)
где t — текущее время; Ет — амплитуда колебаний; СОаых.ср-
средняя частота; <р(0—мгновенная фаза колебаний; <ро — на-
чальная фаза колебаний. Отличие (8.1) от гармонического закона
объясняется наличием шумов в спектре колебаний УГ, шумов и
детерминированных гармонических помех в цепях его питания и
со стороны источника управляющего воздействия. Определенную
12—1020 177
роль играют шумы усилителей, включенных между УГ и нагруз-
кой СЧ. В составе еВЫх (t) могут появляться также побочные ком-
поненты из-за «паразитной» связи УГ с импульсными делителями
частоты. Этот вид помех трудно поддается расчету, так как опре-
деляется конкретной реализацией структурной схемы СЧ и era
конструкцией.
Рассмотрим подробнее составляющие, обусловленные гармони-
ческими помехами в составе управляющего сигнала Указан-
ные помехи, образующиеся в дискриминаторе Д из импульсных
последовательностей от ДПКД и ДФКД, фильтруются ФНЧ, а
затем воздействуют на УГ, создавая паразитное отклонение час-
тоты (фазы) (ПОЧ или ПОФ) сигнала еуг(0 от частоты (фазы)
идеального (гармонического) колебания. Причины образования
детерминированных гармонических помех на выходе Д следую-
щие:
а. Неидеальность преобразования разности фаз (времен) вход-
ных последовательностей импульсов в управляющий сигнал, при-
водящая к возникновению на выходе Д помех с частотой сравне-
ния и ее гармоник (см. § 2.1). „
б. Наличие периодической модуляции фронтов входных им-
пульсных последовательностей. Подобный процесс может возник-
нуть,-например, в тракте опорного канала многокольцевых систем
ИФАПЧ, когда на Д воздействует сигнал внутреннего СЧ, имею-
щего ПОФ. На выходе ДПКД детерминированная паразитная
модуляция фронтов импульсов может появиться при использова-
нии смесителя в цепи У Г — ДПКД, предназначенного для пониже-
ния с помощью частотной опорной «подставки» Дпод рабочей час-
тоты на входе ДПКД- При этом возможны две причины возник-
новения указанной модуляции: вследствие ПОФ сигнала на входе
смесителя с частотами, не кратными со0, и тогда, когда сама час-
тота /под не кратна частоте ®о [61]. В последнем случае паразит-
ная модуляция импульсов на выходе ДПКД обусловлена образо-
ванием на его входе комбинационных составляющих с частотами
вида fK= igfyr+p/noA, где g и р — целые числа, принимающие
Значения 0, 1, 2,...;
в. Существование детерминированной модуляции фронтов им-
пульсных последовательностей на входах Д из-за применения
дробных ДПКД в цепях ОГ—Д и УГ—Д. Этот вид помех имеет
особое значение, поскольку включение ДДПКД широко исполь-
зуется на практике.
Запишем детерминированную помеху на входе УГ:
*Ч.п (0 = Дд.п cos (шп£), (8.2)
где Ел,„, соп — соответственно амплитуда и частота детерминиро-
ванной помехи. Возмущение вида (8.2) создает на выходе СЧ па-
разитную фазовую МОДУЛЯЦИЮ фВых.п = (£д.п5уг/®п) sin (сопО =
= <рг.м sin (>сопО> где <pt.M = Дд.пЗуг/соп — индекс паразитной фазовой
модуляции.
178
Тогда сигнал (8.1) на выходе СЧ может быть записан в виде
^вых W = Ет cos [Швых.ср/ + ?гм sin (<»„/) + <РО]. (8.3а)
Для малых фгм, что всегда имеет место в СЧ, перепишем (8.3а):
^вых (0 Ет COS (“вых.ср^ + <Ро) + COS («вых.ср/ + “п* + <?о)/2 ~
— Em'tr.,, cos (<*>вых.ср^ — + ?о)/2. (8.36)
Относительный уровень детерминированной дискретной побочной
составляющей в спектре е8ых(0> обусловленной помехой (8.2), и
выпаженный в децибелах, из (8.36) можно определить как
= 201g [Ед.п5уг/(2шп)] = 201g (?r.M/2). (8.4)
Из (8.4) видно, что при заданной величине Syr уровень побочной
составляющей определяется амплитудой и частотой помехи на
входе УГ.
Перейдем к оценке уровня и частоты помехи на выходе СЧ.
Рассмотрим помехи на выходе Д, обусловленные неидеальностью
преобразования разности фаз последовательностей импульсов на
его входе в управляющее напряжение. Дак следует из материала
§2.1, частоты этих помех равны <<r)n = £coo, где k= 1,2,3...... На
рис. 8.1 штриховой линией выделен Д. Через ед.п обозначена де-
терминированная помеха на его выходе, а через <рВх.п—детерми-
нированная помеха, приведенная к его входу. Примем
<рвх.п = <Ртд COS (шдЧ, (8*5)
где фт д, сод — соответственно амплитуда и частота помехи. Закон
паразитной фазовой модуляции (ПФМ) сигналов на входе ДФКД
(звено 1/Дд) фпr, а на входе ДПКД (звено 1/jV), обусловленный
сигналом частотной подставки, фп.п. Тогда с учетом каждой из
помех Фтд_Фтп/?//? и ®тд = — с?,лп.п/У, где в числителях фигури-
руют индексы соответствующих ПФМ. При этом условно принято,
что частоты помех ОГ и сигнала «подставки» не изменяются при
прохождении через цифровые делители частот, а претерпевают
трансформацию только в Д.
Амплитуду (индекс) и частоту помехи (8.5) обусловленную
неидеальностью смесителя, определим из следующих соображе-
ний. Из-за комбинационной помехи сигнал на входе ДПКД имеет
паразитную фазовую модуляцию [55]
фвх.дпкд = (еЯ1к/^Я1)81п(шб/), (8.6)
где етк и ет — амплитуды напряжений комбинационной сок и про-
12*
Рис. 8.1. К определению регулярных помех в системе ИФАПЧ
179
межуточной сопр частот соответственно; <об=<оПр—сок. Соотношение
(8.6) имеет место для всегда выполняющегося в СЧ соотношения
етк1ет Из сопоставления (8.6) и (8.5) найдем, что амплитуда
и частота помехи для рассматриваемого случая определяются как
<ртд = — етк1(ет1\[), сод=соб. Знак минус отражает тот факт, что
источник рассматриваемой помехи находится в цепи отрицатель-
ной обратной связи по фазе ИФАПЧ.
Для нахождения помех, обусловленных применением ДДПКД
в СЧ, воспользуемся соотношением (6.66) и некоторыми результа-
тами работ {14, 95]. Как отмечалось в § 6.4, в составе <рвх содер-
жится как полезная (линейно нарастающая) составляющая, соз-
даваемая перестройкой частоты УГ, так и помеховая, которая
согласно (6.66)
Твх.п.д
п
= (2«/ЛГ0) 2 - М7»] t1
7=0
(87)
Разложив (8.7) в ряд Фурье на интервале t=l/FUI (здесь Fm шаг
сетки частот), найдем амплитуду помех с частотами KFm на
входе Д: > v
Л,= [Шт)]/<Й»; ‘ '' (8.8)
— т—1 /и—1
где ак= 2 1лcos(2m/s/m), ₽к=2 ’f„sln(2«n*//n),
п=0 п=0
п
7П _ 2 ^А/(/То) — xtiim, k — номер составляющей.
/=0
Уровень помех зависит не только от ее номера, величины х, но и
от алгоритма реализации ДДПКД. Известен рад алгоритмов дроб-
ностей [14, 53, 95]. Наиболее широко на практике используется
алгоритм, формируемый с помощью импульсных «накопителей».
В таких устройствах коэффициент деления ДПКД увеличивается
на единицу в момент, когда происходит переполнение накопителя,
емкость которого определяется т. Содержимое накопителя уве-
Таблица 81
Зависимость нормированного уровня
гармоник от величины х (накопитель с
емкостью т-10)
X
1;9 I 2;8 | 3;7 | 4;6 > 5
1 6,16 —2,20
2 0,58 6,60 —3,60 2,42 —
3 —2,2 — 6,16 — —
4 —3,60 2,42 0,58 6,6 —
5 —4,04 —4,04 — 9,94
180 <^э
личивается с каждым выход-
ным импульсом ДДПКД на х.
В частности, для т=10 с по-
мощью накопителя реализует-
ся квазиоптимальный алгоритм
дробности, приведенный в табл.
6.5. Для такого алгоритма в
табл. 8.1 даны результаты рас-
четов по (8 8) нормализован-
ного уровня гармоник 201g
(AKN0) в децибелах. В табл. 8.2
приведены результаты расче-
тов нормированного уровня
гармоник для алгоритма реали-.
Таблица 8.2
Зависимость нормированного уровня гармоник от величин х и k
(накопитель с емкостью т-100)
*
X I 2 3 4 5
1 6,02 0,01 —3,51 —6,00 —7,92
2 6,03 — 0,02 —
3 —22,73 —22,89 6,02 —22,57 —23,03
4 — — — 6,04 —
5 — — 6,06
6 —16,87 —16,55 —
7 —23,82 —16,62 —21,99 —21,77 —17,18
8 — —11,98 —
9 —14,63 —20,13 —22,73 —23,88 —23,93
10 1 <- —
11 —12,95 —18,62 —21,54 —23,17 —23,93
12 — — — —10,53 —
13 —20,44 —23,97 —22,39 —11,95 —17,18
14 — —10,6 — —15,75 —
15 — — — —9,05
16 — — — —8,70 —
17 —24,00 —9,49 —23,68 —15,36 —23,03
18 — —14,10 — — 17,86 —
19 —19,78 —23,76 —23,29 —17,69 —7,92
20 — —— —
21 —19,03 —23,40 —23,82 —20,74 —7,92
22 — — 12,60 — —17,15 —
23 —16,01 —21,29 —23,51 —24,02 —23,03
24 — — — — 5,65 —
25 __ —— —— ——
26 — —17,95 — — 5,93 —
27 —23,29 —21,29 — 14,63 —24,02 — 17,18
28 — — — — 9,73 —
29 —22,39 —23,40 —10,81 —20,74 —23,93
30 - —— —— —— ——
31 —21,99 —23,76 —16,02 — 17,69 —23,93
32 — — — — 3,32 —
33 — 3,51 — 9,49 —12,95 —15,36 —17,18
34 — — 3,47 — — 9,34 —
35 — — — — 3,20
36 — — —11,84 —
3’ —21,54 —23,97 —19,03 —11,95 —23,03
38 —17,74 — —11,67 —
39 —23,68 — 18,62 —20,44 —23,17 — 7,92
40 — — — — —
41 —23,51 —20,12 —18,17 —23,88 — 7,92
42 —17,38 — —14,72 —
43 —10,81 —16,62 —19,79 —21,77 —23,03
44 — —11,13 —
45 — — — 9,95
46 —15,27 —18,00 —
47 —18,77 —22,89 —24,03 —22,37 —17,18
48 — 0,09 —
49 —24,03 — 0,01 —24,00 — 6,00 —23,93
50 '
181
зации дробности с накопителем, имеющим емкость т=100. Про-
черки в таблицах означают отсутствие гармоник в составе увх.пд.
В табл. 8.2 приведены уровни гармоник для х=1...5О. Для
100—х они будут такими же, как и для х. Как правило, наиболее
опасна для СЧ первая гармоника (при k=l, х=1 или х =9 для
т— 10, х=1 или 99 для т= 100), так как она имеет наименьшую
частоту и наиболее резко выражена в разложении увых.п- В 114]
предложены алгоритмы работы ДПКД, использовав которые
можно подавить помехи с частотами, равными не только Кш, но и
2КШ, ЗКШ.
Далее уточним требования к передаточной функции ФНЧ
Сф(з), исходя из требования к выходному сигналу. Будем считать,
что уровни гармонических помех на входе и выходе дискримина-
тора известны. Для расчетов используем соотношение, заимство-
ванное из [9]:
t ч ч Кд.и5угОо(5)Оф(5)/5
<РВ“Х.П (S) = ?вх.п (г) 1 + SyrZ{Go(s)04>(s)/s}/7V ’
(8-9)
где <рВых.п($) —изображение <рВЫх.п(0 на выходе СЧ (см. рис. 8,1).
Обратим внимание, что (8.9) отличается от (3.78) тем, что пре-
образованный по Лапласу выходной сигнал определяется здесь
через z-преобразованный входной сигнал.
Приведем соотношения, связывающие преобразованные по
Лапласу функции и их z-преобразования [9]:
?вх.п (.2) = (1/Т0) 2 ®ВХ.П (s 4- j Zw0),
/?=—оо
Z{G0(s) G$(s)/s}=(l/T0) 0о(5+^шо)СМ5+Мшо)/(54-Р%)-
k= — *э
(8.10)
Заменив в (8.10) s на jcoA, получим, что при наличии во вход-
ном сигнале Д гармонического компонента с частотой сод в выход-
ном колебании СЧ появляются составляющие с комбинационными
частотами сок, равными со0±сод, 2со0±сод. сок=^«))д. Уровень
этих составляющих на выходе СЧ можно определить с учетом
(8.9) из выражения
?вых.п (14) ={?Я1д(1/7’о)Кд.и5уГС0(]а>к)Сф(]а>к)/(/шА)}/{1 4~
+ [Кд.И5уг/(ЛТ0) 2 °о(1шд + )*®о)Оф6<,,д+)*®о)/0и)д4-)А®о)
*=— -
(8.11)
Помехи с частотами ык можно условно разделить на две группы:
wK<Wcp и сок>ыср, где (оср — частота среза системы ИФАПЧ. По-
мехи первой группы проходят на выход системы ИФАПЧ с коэф-
фициентом передачи
?ВЫХ.п(1®к) Кд-иЗД, (]®к) Оф (jMK)/(ja)KT0)
Т+Кд-иЗД (] ШК) Оф (j ®K)/(j «лту ~ ( ’
182
Пусть система ИФАПЧ синтезирована по показателю колеба-
тельности М на частоте (ок = (Омакс, где соМакс — частота, на которой
коэффициент передачи замкнутой системы ИФАПЧ равен NM.
При этом, как следует из (3.81), уровень помехи на выходе СЧ
увеличится в NM раз. Из (8.12) вытекает правило: комбинацион-
ные помехи, имеющие частоту, которая меньше частоты среза сис-
темы ИФАПЧ, необходимо ослаблять в месте их возникновения
согласно требованиям ослабления на выходе. Действительно, для
ряда помех (см. рис. 8.1) справедливы равенства
’РпТ? == (^?д/Л0> “д.ггРп.п = аД.п, ?вх.дпкд == яд.п>
где ад.п — требуемое ослабление в разах уровня помех на выхо-
де СЧ.
Таким образом, требования по подавлению первой группы по-
мех не могут быть выполнены за счет изменения G<j>(s).
Для второй группы помех ситуация более сложная, так как
уровень побочных продуктов на выходе СЧ необходимо определять
с использованием соотношения (8.11). Поскольку z(G0(s)X
XG<j>(s)/s) —периодическая функция с периодом ы = со0, то можно
утверждать, что |<рвых.п (}(ок)/фт д| имеет подъемы не только на
(Омаке, но И на частотах, близких К (0о±(0макс, 2(0о —(Омаке и т. д. Не
будем принимать во внимание подъемы на частотах, близких к
£(0о ±(Омаке, что позволяет считать знаменатель в (8.11) мало от-
личающимся от единицы. Тогда требования к Сф (s) с точки зре-
ния ослабления помех на частотах (ок в составе фВых.п определя-
ются как
Оф Ок) = (Тоад.п)<Ок)/[/<д.и5уГ?тдО0 (>к)]. (8.13)
Приведем пример использования выражения (8.13) и рассмотрим систему
ИФАПЧ с ИЧФДЗ и ДДПКД. Алгоритм дробности соответствует табл. 6.5, т. е.
т = 10. Параметры х=1, k — 1. Определим параметры ФНЧ с передаточной функ-
цией
Оф(^) = /<0(1+7,1х)/[х(1+Т2х)],
обеспечивающей ослабление помехи дробности с частотой 0,1<во на заданную
величину ад п. Система ИФАПЧ синтезирована с применением показателя ко-
лебательности М по выражениям (6.40в). После несложных преобразований
имеем
ад.п = 2Л4/[ш27р/И+ 1)]. (8.14)
При выводе (8.14) учитывалось, что на частотах сок согласно табл. 8.1
(И-Т^сиД/П+ТУсок) ~Т1/Т2 и д»2/А/0. Учитывая, что <uK = 0,l<uo, из (8.14)
получаем условие для определения постоянной времени ФНЧ
т2 = [ 1 /(2кДш)] Г2А4/[ад.п(ЛЦ- 1)] . (8.15)
Таким образом, (8.15) совместно с (6.40в) задают требования как к пара-
метрам ФНЧ, так и к системе ИФАПЧ в целом, обеспечивающие одновременно
необходимую степень устойчивости и ослабления помехи на выходе СЧ. Естест-
венно, эти параметры определяют и быстродействие СЧ при смене рабочих частот
(т. е. при скачках коэффициента деления ДПКД А) (см. § 6.4).
183
Для расчета подавления помех <рВых.п, обусловленных возму-
щениями на выходе дискриминатора с частотами Лсо0, приведем
следующие соображения. Из рис. 8.1 следует, что изображение
закона ПФМ на выходе СЧ для этого вида помех можно записать
так:
’Рвых.п (s) = еп.л (s) (Оф (х) Syr/x — Z {г?п.д (х) Оф (х) Syr/(xW)} X
X {Кд.и5угО0 (х) Оф (х)/х}/[ 1 + ZG.HSyrZ {О0 (х) Оф (s)l(sN)}]. (8.16)
Второй член в (8.16) обусловлен действием обратной связи в сис-
теме автоподстройки. В составе передаточной функции разомкну-
той ИФАПЧ содержится коэффициент передачи хотя бы одного
интегрирующего звена, и поэтому при замене х = ]Лсо0 второй член
в (8.16) обращается в нуль. Иными словами, при частотах помех,
равных частотам гармоник опорного сигнала, ИФАПЧ ведет себя
как разомкнутая система. Соответственно из (8.16)
<?вых.п (]ш0Л) — вп.л (]^®о) Оф (j 5уг/(]Л(00). (8.17)
Приведем пример использования соотношения (8.17). Пусть имеется
ИФАПЧ с ИЧФДЗ и ФНЧ имеет передаточную характеристику (3.43).
На выходе ИЧФДЗ в установившемся режиме действует сигнал еп д — импуль-
сы тока с амплитудой Ея и длительностью т, обусловленные утечками (см.
§ 2.2). Допустим, что система ИФАПЧ синтезирована с применением М по вы-
ражениям (6.40в). Тогда, раскладывая еп д в ряд Фурье, имеем
/€п.д(0=^д
“ sin (kxz/T0)
т/Т0 + 2,/Т0 cos (Ы1Т0)
Обычно в СЧ т/70<С1, и поэтому из (8.18) для не очень больших k
вп.ц (t) — Е&
t/T0 + (2т/Т0) COS (k 2к1/Т0)
*=1
(8.18)
(8.19)
С помощью (8.19), (8.17) и (6.40в) после несложных выкладок получим
<8'20)
При выводе (8.20) учитывалось, что Кд и = £д7’0/(2я) (см. § 2.2 и 3.6). Таким
образом, соотношение (8.20) совместно с (6.40в) позволяет синтезировать сис-
тему ИФАПЧ с требуемым запасом устойчивости и ослаблением помех на вы-
ходе.
8.2. ПРЕОБРАЗОВАНИЕ ШУМОВ СИСТЕМОЙ ИФАПЧ
На рис. 8.2 показана достаточно общая схема ИФАПЧ с элемен-
тами, которые являются и источниками фазовых шумов <р [45].
Для того чтобы полнее отразить возможные модификации пост-
роения схем СЧ с ИФАПЧ (см. гл. 1), изображены смесительный
каскад и умножитель (делитель) частоты с коэффициентом k.
Вход последнего может быть соединен с выходом опорного гене-
ратора (ОГ) либо подключен к отдельному СЧ. Поскольку все
184
Рис. 8 2. Блок-схема системы ИФАПЧ с источниками аддитивного
шума
шумы, создаваемые элементами СЧ на рис. 8.2, малы по сравне-
нию с полезными сигналами, они считаются аддитивными и при-
меняется правило их суммирования на соответствующих входах
или выходах. Естественно, предполагается некоррелированность
(независимость) шумов, возникающих в различных источниках.
Рассмотрим непрерывную математическую модель (ММ) СЧ,
соответствующую применению в синтезаторе системы ФАПЧ. Из
рис. 8.2 найдем преобразованные по Лапласу выходные фазовые
шумы
<Рвых (5) = [<Ро (s)/Rb + <Рд.ф ($) — ?С (s)/N 4- <РУМ (s)/N +
+ <Рп (5) — Фд.п (s) + <рд (х)/кд 4- <рф (5)/Кд] [ 5угКд0ф ($)/$]/[ 1 4-
4- 5угКд0ф Ж] + <Ру (*)/[ 1 + 5угКа0ф (S)W1- (8.21)
Использовав (3.78) и (3.79), запишем (8.21) в виде
Твых (s) — [<ро ($)//?д ~Ь <?д.ф (S) <?д.п (S) 4“ Тум ($)/А^ Тс 4-
4- Тп (S) kN + <рд (Х)/Кд 4- <рф (5)/Кд] G3 (s) 4- <ру (S) Ge (s). (8.22)
Формулы (8.22) и (3.83) позволяют найти выражение для спект-
ральной плотности:
^ВЫх(«) = {^о(ф)/Дд + 5срд.ф (ф) + (®) 4* [5тум (®) + 5?с (ш)]/А24~
+5ТП (ф) А2/№+[5?д (ф)4-^ф (ш)]/К2| | G3 (]ш) |2+SW (ш) | Ge(/ф) |2.(8.23)
Зависимости (8.23) и (3.84) — (3.86) дают возможность определить
дисперсию, среднеквадратическое паразитное отклонение фазы в
заданной полосе частот и средний квадрат набега фазы выходно-
го сигнала за время т. Естественно, предполагается, что соответ-
ствующие интегралы в (3.84) — (3.86) сходятся. Проблема сходи-
мости интегралов, в особенности при вычислении дисперсии и
среднего квадрата набега фазы, возникающая при учете фликкер-
шумов элементов СЧ, обсуждается ниже.
Для вычисления среднеквадратического паразитного отклоне-
ния частоты (ПОЧ) Д/ в заданном интервале частот FH...FB ис-
пользуем соотношение S<„(®)=5tp (ф) ф2, где 5ш(ш)—спектральная
плотность среднего квадрата ПОЧ. Тогда
185
/ 2"FB
V(FH, Л>) = (1/2^1/ f S?sraW^, (8.24)
P 2^h .
где StpBWX(w) определяется (8.23).
Спектральные плотности шумов элементов СЧ в зависимоети
от частоты можно представить в следующем виде:
для цифровых делителей, дискриминаторов, усилителей, умно-
жителей, смесителей, активных ФНЧ: Sv (со) =ao+ai/co;
для опорных и управляемых автогенераторов: Sv (со) =ао+
+ ai/co+а2/со2 + а3/со4.
Постоянные коэффициенты ао, ац а2, аз можно найти с помо-
щью [38, 45, ПО, 111] и др.
Предположим, что для приближенной оценки 5ТВых(<о) спра-
ведливы следующие соотношения;
при <0 < Шср I G3(ja>) |2^№, | Ge(ja>) |2~0; 1 5
при <о > <оср | 03 (]<*>) |2 ~ 0, | Ое (]ш) |2 1. J
Из (8.25) и (8.23) следует, что шумы, приведенные ко входу сис-
темы ФАПЧ, увеличиваются в полосе пропускания кольца в У
раз. Собственные же шумы УГ ослабляются только в этой полосе.
Для более точного определения передаточных функций внутри и
вне полосы пропускания необходимо учитывать тип ФНЧ.
Приведем пример. Пусть в системе ФАПЧ имеется ФНЧ с пе-
редаточной функцией Сф(х) = 1/(1+ T2s). Для такой системы в
соответствии с (6.21) и (6.22) при со<(оср|Ое(]и) |2~ 1/со2, а при
Gj>tocp| С?з(jai) ]2~ 1/со4. Отсюда следует, что интегралы для вы-
числения дисперсии фазовых шумов выходного сигнала будут схо-
диться только в случае учета в шуме, приведенном ко входу, сос-
тавляющей ао (белые шумы), а в шуме УГ —доставляющей а2/со2
(винеровские шумы). Все другие составляющие приводят к рас-
хождению соответствующего интеграла.
Приведем более сложный цример, когда удается получить вы-
ражение для дисперсии при заданных спектрах шумов, приведен-
ных ко входу и выходу системы. Пусть Sv Вх(«) =аоВх и y(w) =
= а2у/(о2. Подобный вид имеют спектральные плотности шумов,
наблюдаемые у усилителей и генераторов при учете «естествен-
ных» (тепловых и дробовых) шумов. Допустим, что используется
ФНЧ с передаточной функцией (3.43). Тогда в соответствии с
(3.78) и (3.79)
О3(» = + 1) N/3H(jm), Ge (»= [г;(]ш)з + (М2]/ЗЯ(», (8.26)
где J-ш = = Л VKo^SyjN, ъ = т2 ГКоКдЗуг/А,
ЗН (» = т2 (Н3 4- (»2 + Tij“ + 1.
С учетом (8.26), (8.23) и (3.83)
S^bl*(w) = a0BXN2 | xjw+l |2/ | 3H(]m) |2 + a2y I ^2(j®)3 +
+(j«)2|2/[3//(»|2W.A.(j^W]- ' (8.27)
186
Подставив (8.27) в (3.84), после громоздких преобразований най-
дем дисперсию фазы выходного сигнала:
»’вых = °овх Шда (^ + 1 )/[2 6 -72)] +
+ «2У + 1 )/{VK0^Syr/N [2 6 -72)]}.
Если система ФАПЧ синтезирована по показателю колебатель-
ности М с помощью выражения (6.40в), то последняя формула
упрощается:
а’вых = №аОвх(2Л4 - 1)(М + 1 )/[4УлЦМ^Т)] +
+ а2у(2М + I)(М — 1 )/[4 VK^Syv/N /Л1(7И-1)'].
При вычислении ПОФ в заданной полосе частот в- (3.85) обыч-
но не удается найти интегралы в замкнутом виде. По этой причи-
не интегрирование проводится с использованием ЭВМ либо при-
ближенно на базе упрощенных выражений для передаточных функ-
ций (8.25). Покажем приближенный способ вычисления средне-
квадратического отклонения фазы в полосе частот от ын до сов.
В соответствии с (3.83) и (3.85)
б’вых (“и, “в) = (VO J [^вх (Ш) I G3 (ja>) [2 + (ш) I Ge (jo>)|2] rfo>, (8.28)
ш
и
где
•StfBx (®) — ^Овх + й1вх/ш + й2вх/®24- ^Звх/*"3' (8.29а)
5.РУ (ш) = сОу 4-а1у/ш -f- 4-гг2у/ш3. (8.296)
С учетом (8.25) при расчетах по (8.28) могут встретиться три
случая: соср<«>н, wH<wcp<wB, ыср>ыв. Соответственно (8.28) при-
мет вид
е?2вых1 = (% - %) aiy (<V®») 4- «Яу (V“>„ - W 4“
+ «Syf1/®»-1/Шв)/2]/’Г- 61ВЫХ2 = [«0Вх^2(®ср-®н) + а1вх^21п(щСр/®И)4-
4- «2вх№ (1/“н — 1 /«’ср) + a3BXN3 (l/u>2 — 1 /о>2р)/2 + аОу (<ВВ — 0>ср) 4-
4-гг1у1п(шв/шср) + а3у (1/шср — 1/®в) + «ЗуСМ^ср — 1/шв)/21/’'*
• 92выхЗ = 1аовх (®в — шн) 4- а.вх 1П (шв/шн) + °2ВХ (1/®н — 1/®в) 4“
4- ^Звх(1/®н — I/^b)2]/^-
Аналогичные выражения при указанном подходе можно получить
и для ПОЧ в заданном интервале частот.
Перейдем к оценке влияния шумов отдельных звеньев синтеза-
тора на выходной сигнал СЧ с учетом дискретизации по времени,
обусловленной функционированием ИФАПЧ с ДПКД. Как отме-
чено в § 3.5 и § 3.6, при малых отклонениях координат системы
от стационарного положения справедливы амплитудно-импульсные
ММ СЧ (см. рис. 3.12). Очевидно, что такие модели могут быть
использованы и при анализе прохождения шумов относительно
малых уровней через ИФАПЧ.
187
Особенностью рассматриваемой задачи анализа является то,
что импульсная модуляция осуществляется в дискриминаторе (см.
рис. 3.12) и необходимо в конечном счете знать спектр непрерыв-
ного сигнала на выходе СЧ. Это обусловлено тем, что качествен-
ные параметры синтезатора оцениваются по уровню спектральных
составляющих указанного сигнала. Такой подход разрабатывался
в [76, 112, 113] и др. В частности, как указывалось в § 3.6, в [76]
получено выражение (3.98) для расчета спектра шумов на выходе,
если известны спектральные, плотности S<pBX(w) и <ST у(со) (см.
рис. 3.12). Формула (3.98) справедлива в предположении, что
непрерывные процессы <рвх и <ру стационарны. В [41] показано, что
флуктуации, имеющие спектральные плотности вида S (со)
®»1/о»т> у>1, нестационарны. Как следует из (8.29), в выражении
для S?Bx и S?y только первый член (белый шум) может соот-
ветствовать стационарному случайному процессу. Поэтому при ис-
пользовании (3.98) для практических расчетов необходимо сле-
дить за корректностью полученных результатов.
Приведем примеры использования (3.98) для расчета спектральной плот-
ности шумов выходного сигнала СЧ. Рассмотрим И&АПЧ с ДПКД и ИФД
«в—з» без ФНЧ. Считаем ИФД «в—з» безынерционным. Непрерывные спектры
описываются выражением S?BX(<л)=«0вх и S?y (со) = а2у/<в2, т. е. учитываются
естественные шумы каскадов СЧ. Дискретная спектральная плотность входного
процесса
т=+оо
<$‘Вх(ш) = 2 U 2тс/п), <в = <в/ш0.
т——«
Непосредственная подстановка в это выражение а0 вх приводит к неверным ре-
зультатам. Правильный подход заключается в применении концепции «дискрет-
ного белого шума» [И4]. При этом спектральная плотность дискретного бело-
го шума (прошедшего импульсный элемент Д)
S;Bx(^) = «oBx/7’0. (8-30)
С целью нахождения S*y(<o) для функции а2у/ш2 проведем следующие выклад-
ки. По определению дискретные спектральные плотности
гг2у 1 / 1 1 у
УуМ у (ш /ИШО)2 °2у \ j(B —j<u }
msz —©о
Заменив в последней формуле jco на s и использовав таблицы ^-преобразований,
получим окончательно
\‘у (ш) = д2уТ0/[2(1 - coso>T0)]. (8.31)
Из (8.31) следует, что S?y(w) обращается в бесконечность на частотах тша.
Подставив (8.30) и (8.31) в (3.98), после преобразований запишем
4(1 —cos<uTo)2 ^№«оВх
^вых^)- 1+(1__Ку)2_2(1 - tfy)COSO>To (шТ0Г +
«2у ( &Ку-Ж-2КУ (4-Ку) cos шТо+2Кусо82шТо |
+ ш8 |>+ ji + (i-Ку)2-2(1- Ку) собш 7'оК?2 И8’ а)
188
Рис. 8 3. Зависимости F} (со) (сплош-
ные линии) и F2(w) (штриховые ли-
нии) от со
Рис. 8.4. Зависимости _____ Fi(co)/co8
(сплошные линии) и F2(a>)l'a2 (штри-
ховые линии) от со
где Ку=Ад5уГ7’0/М При Т’о-’-О система ИФАПЧ сводится к непрерывной, для
которой на основании (8 32а)
5твых(ш) ао»хК^г/(ш2 + К252г/ЛГ2) + + (8.326)
Как видно из сравнения (8 32а) и (8.326), учет процессов дискретизации
в ИФАПЧ при расчетах спектральных плотностей шумов на выходе приводит
к достаточно громоздким выражениям. На рис. 8.3 для оценки влияния процес-
са дискретизации во времени изображены функции
Ft (ш) = 1 + [/Су - 2/Су -2/Су (4 - /Су) cos о>+2/Су cos 2ш]/{[ 1+(1 -Ку)2-
— 2(1 — /Су) COS ш] 0)2}, F2(0)) = <l)2/(u>2 4- /Су),
где а=шТ0.
На рис. 8.4 представлены нормированные функции Г1(со)/со2 и F2(a)/bF.
Из рис. 8.3. видно, что кривые F2(a) монотонно стремятся к единице, а кривые
F2(w) имеют максимумы, первый из которых при Ку = 1 примерно равен 2,45.
Таким образом, при некоторых условиях может происходить усиление шумов
УГ. Из рис. 8.4 следует принципиальный вывод о том, что на всех частотах
и в области <о->-О в системе ИФАПЧ с ИЧФД «в—з» при учете процесса дис-
кретизации наблюдается увеличение уровня спектральных составляющих шума.
Оценку этого эффекта при <о->-0 можно получить из предельного выражения
litn (со)/®2 = F2(<u)/w2 -|- /Су/12.
0<СО-»0 0<ш-*в
Сделаем интегральную оценку влияния процесса дискретизации на увели-
чение уровня шумов на выходе СЧ. Для этого проинтегрируем численно на
ЭВМ Г1(со)/со2 и F2(a>)/ti>2 в полосе частот о от 0 до 4л (при дальнейшем воз-
растании со функция Ft (а) мало отличается от Г2(<о)). Результаты расчетов
приведены в табл. 8.3.
Из табл. 8.3 следует, что в простейшей ИФАПЧ с ростом коэффициента
усиления наблюдается уменьшение дисперсии шумов на выходе (при учете
189
Таблица 8.3
0,5 0,7 0,9 1,1 1,3 1,5 1,7 2
4п ~ J (<o)/<o2dto 3,93 3,07 2,66 2,45 2,4 2,54 3,1 ОО
0 4« J (<о)/<оМ<о 3,05 2,16 1,66 1,35 1,13 0,97 0,84 к/4
0
только шумов УГ), причем минимум достигается при /Су~1,2... 1,3. Дальнейшее
увеличение Ку приводит к резкому увеличению дисперсии; при Ау->-2 она стре-
мится к бесконечности [система становится неустойчивой «в малом» (см. §5.1)].
При ^у<0,5 учет дискретизации не дает существенных уточнений в расчетах.
Приведем пример более сложного случая. Рассмотрим ИФАПЧ с ДПКД,
ИЧФДЗ и ФНЧ, имеющим передаточную функцию (3.43). Система синтезирова-
на с помощью коэффициента М согласно выражениям (6.406). Входные шумо-
вые воздействия иа систему ИФАПЧ аналогичны предыдущим. Использовав
(3.98), (8.30), (8.31) и (8.37), получим
S?BUX (ш) = а^МКу + 1 )/(Тр + 1)] X
х I (Z— l)2(z — d)/[^(z)(ju>)2] I2 + a2yF3 (ш)/ш2, (8.33)
где Ку == KbK0SyrT2o/N, d = exp (- To/T2), W (z) = (z—I)2 (z - d) +
+ KyZ [z - d + (7\ - T2) (1 — d) (z — 1)],
F3 (<u) = 1 — 2Ky Re
(z-l)2(z_-d)(T1jo> + 1)
^(z) (>)2(7>+ 1)
<u2
T2u>* 1
T2u>2 -J- 1
2 ___
2(1 — cos u>),
Re{-} — действительная часть комплексного числа. Для оценки влияния дискре-
тизации во времени на уровень спектральной плотности шумов рассмотрены
две функции (рис. 8.5) Гз(ш) и Г4(ш)= ^(l + TjCo2)/!»)4 (l-J-wT^) -|- А2(1 -|- <о2Х
z — d
"W
190
валентной передаточной функции на воздействие a21l<s>2 в системе ИФАПЧ [см.
(8.33)], Л(<о) = |Ge(/w) |2 [см. (3.79)] —квадрат модуля нормированной передаточ-
ной функции ФАПЧ по ошибке. Зависимости F3(со) и Л(<о) построены для 72=0,5
и Л4=1,5. На том же рисунке изображены относительные зависимости F3 (со)/со2
и /^(оО/ш2. Из рис. 8.5 видно, что кривые Аз (со) и ^(со) мало отличаются.
Интегральную оценку влияния процесса дискретизации в ИФАПЧ на уровень
выходных шумов СЧ можно произвести с помощью табл. 8.4, в которой приве-
Таблица 8.4
t, M
1,1 1 1,5 2 1,1 1 1,5 2
:TC _ _ _ | [F3 dco 4r. C [^4
0,5 2,74 3,02 3,44 2,8 3,0 3,32
1 4,90 5,37 6,05 4,97 5,39 6,04
i 9,51 10,48 11,80 9,63 10,51 11,81
5 23,43 25,95 29,35 23,86 26,14 29,41
4тс
дены результаты численного интегрирования выражений F3(a>)la2da> к
о
J F4(<o)/<o2d(o для различных Т2 и Л4.
Из анализа данных табл. 8.4 можно сделать следующий вывод?
учет влияния процессов дискретизации во времени в ИФАПЧ с
ФНЧ на интегральный уровень выходных фазовых шумов СЧ
приводит к весьма малым уточнениям, но сопровождается столь
громоздкими вычислениями, что вряд ли может быть рекомендо-
ван для инженерных расчетов.
8.3. ОПТИМИЗАЦИЯ СИСТЕМ ИФАПЧ ПО ШУМОВЫМ
ХАРАКТЕРИСТИКАМ
Под оптимизацией системы ИФАПЧ будем понимать нахождение
такой ее структуры, при которой выходной сигнал СЧ имеет ми-
нимальные интегральные шумовые характеристики: дисперсию
’овых (3-84), среднеквадратическое отклонение фазы в полосе
е^вых (“н> ®в) (3.85), средний квадрат набега фазы Д2вых (т)
(3.86) и среднее квадратическое значение ПОЧ в полосе частот
Af(FH, FB) (8.24). При решении задачи оптимизации будем исхо-
дить из того, что спектральные плотности фазовых флуктуаций,
приведенных ко входу 5<рВх (со) и выходу 5<рУ (со) системы
ИФАПЧ, известны, т. е. выражение (8.23) может быть записано в
виде
•$,»>« (ш) = (ш) | G3 (Jw) р + S,y (ш) | Ge (Jw) p. (8.34)
191
Рассмотрим непрерывную ММ СЧ. Такой подход возможен
вследствие отмеченных в конце § 8.2 несущественных уточнений
интегральных шумовых характеристик при учете процесса дискре-
тизации во времени.
Проблема оптимизации системы ФАПЧ может быть рассмот-
рена в двух аспектах.
1. Нахождение передаточной функции замкнутой системы
G3(j(n) и передаточной функции по ошибке Ge(jco) (названные
функции связаны равенством Ge(jco) = 1—AG3(j<B)), при которых
обеспечивается минимум указанных интегральных характеристик.
Такой подход может быть назван оптимальным синтезом по за-
данному (выбранному) показателю качества системы.
2. Определение таких параметров р2, Рт передаточной
функции G3(pi, р2, рт, jco), при которых обеспечивается мини-
мум некоторой интегральной шумовой характеристики выходного
сигнала СЧ. В этом случае решается задача оптимального пара-
метрического синтеза по заданному критерию (показателю) каче-
ства системы.
Рассмотрим первый аспект оптимизации. С учетом (8.34),
(3.84) — (3.86) и (8.24) запишем *
4-00
Л)=(1/2л) J 5срвых(‘«) I Оп.ф (М |2du> =
—со
=(1/2к) "j {5,вх (ш) № | 0з.д(» |2 1 Оп.ф (]ш) р +
— Ос
+ S.fy (<«) | 1 — 0з.д (Н |2 | Gn ф (» |2} du>, (8.35а)
Рассмотрим четыре случая:
:1)£> = %2ВЫк ПРИ Gn4(ja>)=l; л (8.356)
2)£) = 62вых при | Оп.ф(» |2 = [1 (ш — (вн) — Ц®1— <ов)]; (8.35в)
3) D = Д2ВЫХ (х) при I Оп.ф (jo>) I2 = I 1 — ехр (— j<ox) |2; (8.35г)
4) Z) = Д2/(FH, FB) при I Опф(Н |2 =2тса>2 [ 1(<о— <%)— 1(<В—<ов)];
Оз.д (р>) = G3 (jo>)/A. (8.35д)
Задача состоит в определении такого оптимального значения
G3.A(jco) (обозначим его О0пт(]со)), при котором обеспечивается
минимум D, равный DMm. Естественно, значения G0nr(jco) будут
разными для каждого из случаев 1)—4). Запись (8.35) позволяет
представить ФАПЧ и воздействующие на нее шумы в виде, изоб-
раженном на рис. 8.6. На этом рисунке штриховой линией выде-
лена эквивалентная система (между точками а—б) с передаточ-
ной функцией G3.A(jco).
На основании рис. 8.6 и соотношения (8.35) можно сделать вы-
вод, что задачи минимизации шумов <рвых в СЧ и оптимальной ли-
нейной фильтрации [115, 116 и др.] совпадают. Сказанное спра-
ведливо, если принять, что <ру (полезный сигнал) — стационарный
192
Рис. 8.6. Преобразованная модель ИФАПЧ с источниками шума
нормальный процесс, а <рвх— стационарный нормальный шум, т. е.
в точке в необходимо воспроизвести с минимальной среднеквадра-
тической ошибкой шумы <ру (s) бп.ф (s). Такой подход, основываю-
щийся на теории оптимальной линейной фильтрации, позволяет
найти оптимальную передаточную функцию системы ФАПЧ, ми-
нимизирующую дисперсию шумов на ее выходе [117, 118].
Базируясь на [74, 155], приведем без вывода выражения, поз-
воляющие найти оптимальную передаточную функцию G0nT(jco).
Для физически нереализуемой системы
□опт (W = S¥y (0>)/[S¥y (со) + S,BX (со)№]. (8.36)
Напомним, что физически нереализуемой системой называется
такая, у которой отклик на единичную б-функцию, приложенную
в момент t=6, не равен нулю при КО. Для физически реализуе-
мой системы, у которой в этих же условиях отклик равен нулю
при КО, имеем
Оопт (ja>) = f +f Sipy (<U> । °п;ф (]’ш) |2 (8.37a)
ОПТ V / 2гор (j(o) J ф (— J<о) • \ /
где ф(]'со) и ф(—jco) находятся из процесса «факторизации», т. е.
№5срВХ (со) | Оп.ф (ja>) |2 -f- Svy (со) | Оп.ф (jco) |2 — ф (jco) ф (— ]о>).
Передаточную функцию GonT (jco) записывают чаще всего в ви-
де, используемом для расчетов:
Оопт (jco) = —— ГS'y (ш) 1 °п-ф (]ц>) I2 1 , (8.376)
Ф(]“)1 Ф(-Н J+
где оператор [-]+ означает процедуру разложения на элементар-
ные дроби функции, заключенной в квадратные скобки, и после-
дующего отбрасывания дробей, полюсы которых лежат в правой
полуплоскости. Рассмотрим примеры использования (8.37) для
синтеза оптимальной системы ФАПЧ. Пусть Sip.BX(co) = aw*f
5ТУ (со) =а2у/со2, | бп.ф (jco) |2= 1. В этом случае
+ а2у/ш2 = {/ сг2у (1 ]ш V aomN2la2y)l(]u>)} {/сЦ (1 —
— J°> Va^N2jd2y )/(— jco)} = ф (jco) ф (— jco).
Подставив \|>(jco) и ф(—jco) из последнего выражения в (8.376),
найдем
Оопт (Jco) = 1/(1 + jco КаовхЛ^/агу)• (8.38)
13—1020 193
Передаточной функции вида (8.38) соответствует ФАПЧ без ФНЧ
с безынерционным ИФД, коэффициент передачи которого /<д =
= У Й2у/«0вх/5уг.
Частота среза разомкнутой оптимальной системы соср =
=У«2у/ (№йовх) и соответствует точке пересечения кривых спект-
ральных плотностей Stpsx (°*) № и 5иу (<«).
Пусть в предыдущем примере S^y = а4у/со4. Тогда
№аовх + «чу/°*4 = «чу [(]°*)4 Т"2 + 1 ]/[(№(— ]°*)21 =
= I К^~у[Г(]ш)2+]/2Т jco+l] j ( Г^Гу [Г (-]ш)2+К27 >+1 ] ) =
I (j0*)2 JI (—j0*)2 J
= Ф (]°*) Ф (~ J°*)> (8.39)
где Т = /Л/2аовх/а4у.
В правой части (8.39) через 'p(jco) и ф(—jco) обозначены выра-
жения, стоящие в первой и второй фигурных скобках соответствен-
но. Подставив ip(jco) и ф(—jco) в (8.376) и произведя описанную
выше процедуру разложения, окончательно получим
GonT(jo>) = (l+ |/2Т jo>)/[T(H2 + /2Г jco +4]. (8.40)
Оптимальной передаточной функции (8.40) соответствует сис-
тема ФАПЧ с передаточной функцией разомкнутой системы
Gp(jco) = (1 +]/2Tjco)/ [T(jco)2]. Последняя может быть реализована
включением после ИФД ФНЧ с передаточной функцией Оф (jco) =
= ^(l + Tijco)/jco, гдеТ1=|Л2JV]AzCBX/a4y > Ло= М^Довх/^у /Сд5уг).
Из приведенного выражения для Gp(jco) найдем, что частота
среза разомкнутой системы соср = j/"2/|/№<20вх/а4у .Она примерно
соответствует точке пересечения огибающих спектров №аОвх и
&4у/СО4.
В [118] приведены выражения для оптимальных функций при
различных аппроксимациях (“), S..y (ш) и Сп.ф(]со) = 1.
Рассмотрим задачу нахождения оптимальной передаточной
функции по (8.376) для минимизации среднего квадрата набега
фазы (для этого случая Оп.ф(]со) = 1—ехр(—jco?)). Зададим 51рВх =
«'obxj *^tpy == «'Sy/0*2, Тогда
А^Чвх|1 - ехр (- jure) I2 -I- (а2у/°*2) I 1— ехр (— ]шт) |2 =
/а2у [1 — ехр(—j<iK)](Tju) Д-1) 1
jX
х | Г^[1-ехМ)т)1|1-7>)| | ф(>)ф(_м,
где Т=уЛ/’2а0.вХ/а2у. Подставив ф(]‘со) и ф(—jco) из последнего вы-
ражения в (8.376), получим
__________jg>_________Г 1 — ехр — jco-c
(14-Tja>)(l—ехр — jure) ju>(l—Tjo))
GonT (j0*)
(8.41)
194
Выражение в квадратных скобках (8.41) представим в виде сум-
мы трех составляющих
(1 — ехр — jm)/[j<o(l — Tj<u)] = (l — ехр — jo>T)/j<u4-
+ ехр (- ]а>т)/(]ш - 1/Т) + 1/(]ш - 1/Т). (8.42)
В (8.42) нас интересует только первый и второй члены, причем
во втором необходимо выделить физически реализуемую часть.
Для этого заменим в нем jco на s и найдем оригинал
1 +1»
w j - i/W*-
—J oo
Полученный интеграл решается с помощью теории вычетов
при интегрировании по правой полуплоскости для (t—т) <0 и
т>0. В результате f(t) = ехр{(7—х)/Т]. Физически реализуемую
часть f(H для можно найти, определив изображение кусочно-
экспоненциальной функции
Лэ (/) = {ехр [(/ - т)/Т]} [1 (0 - 1 (/ - т)].
Используем преобразование Лапласа:
ОО
Л, (s) = J/кз (И = (е-« - е-т/г)/( 1/Т - s). (8.43)
о
^опт (]ш) -
Заменив s на jco и объединив правую часть (8.43) с первым чле-
ном в (8.42), из (8.41) получим
1 ____j<i>T______ехр [—tjco]— ехр [— 't/Т] ’
1 -]- Tju> |_ 1 — ехр [— ]<вт]
1 -7>
(8.44)
Из соотношения (8.44) видно, что с помощью системы ФАПЧ в
классе дробно-рациональных передаточных функций невозможно
реализовать б0пт(]со). Ряд трудностей возникает также при по-
пытке найти оптимальные передаточные функции, использовав
(8.376), при учете в спектральных плотностях входного и выход-
ного сигналов членов вида ai/co и а3/со3. При этом для случая 1)
((8.356) при бп.ф(]со) = 1) задача
отыскания б0пт(]со) по критерию
минимума дисперсии фазы выход-
ного сигнала не имеет смысла,
так как интеграл в (8.35) расхо-
дится из-за нестационарности фвх-
Для случаев 2) и 4) очевидно, что
оптимальная передаточная функ-
ция существует, поскольку сигна-
лы на выходах полосовых фильт-
ров с передаточными функциями
бп.ф(]со) стационарны. В этих
случаях при решении задачи
оптимизации можно аппрок-
13*
Рис. 8.7. Спектральные плотности
5фвх(со)№, 5фу(<о_) и передаточные
функции <?а(/'ш)2/Л^, Oe(ja)2
195
симировать 5твх(со), 3<рУ (со) и Gnp (jco) дробно-рациональными
функциями. Необходимо только следить, чтобы порядок числителя
Gonr(jco) был бы на единицу меньше порядка знаменателя. В про-
тивном случае нельзя реализовать б0пт(]со) с помощью ФАПЧ.
Вопросы построения оптимальных автоматических систем при на-
личии заданного типа «регулятора» (в нашем случае УГ с пере-
даточной функцией Syr/jco) обсуждаются в [119].
Перейдем к рассмотрению второго подхода к решению задачи
минимизации шумов на выходе СЧ — параметрической оптимиза-
ции системы ФАПЧ. На рис. 8.7 показаны функции SfBX(oi)N3 и
5¥У(и>), а также зависимости |G3(jico)|/№ и |Ge(jco) |, постро-
енные по упрощенным выражениям (8.25). Пусть функции SfBX (w) N2
и Svy (со) пересекаются в некоторой точке с абсциссой coi, при-
чем на частотах cn><coi 3?у (ш) 5тВХ(и>) №, а на частотах co>coi
соответственно Sipy((o)<;SipBX («>)№. Тогда, как следует из рисун-
ка, минимальное значение интегральных шумов (заштрихованная
область) обеспечивается при равенстве частоты <вСр (в данном
случае она соответствует переходу к бесконечному затуханию)
частоте соь Подобный подход рассмотрен в [120].
Оценим возможности параметрической оптимизации системы
ФАПЧ при З^вх (со)=ао.вх, 3ТУ (со)=а2у/со2 и Gn.<b (jco) = 1 для ря-
да случаев.
1. Передаточные функции G^(jco) и Ge(jco) описываются выра-
жениями (8.25) (идеализированная ФАПЧ). Тогда из (8.35)
D = («Овх^ср^2 + «2у/шср)Л • (8,45)
Дифференцируя (8.45) по <вср и приравнивая производную нулю,
найдем оптимальную частоту среза <вс.опт = Уа2у/(ЛГ2«о.вх). Этот ре-
зультат согласуется с рис. 8.7. Подставив <вс.опт в (8.43), получим
Омин = 2W ]/" а0вха2у/к. (8.46)
2. Передаточные функции G3,A(jco) и Ge(jco) для ИФАПЧ с
ИФД «в—з» без ФНЧ (непрерывная ФАПЧ первого порядка) име-
ют вид
<Л.д(>)=1/(1 Ое(]‘») = Т1]ш/(1+Г1]ш), (8.47)
где T\ = NI(KASyr).
Положим для общности результатов Сп.ф(]со) = 1—ехр(—jcox).
Тогда (8.35) запишем в виде
4 ~ шт [ аОвх№ a2v ]
£)т = — С sin2 — ж- + г-, Ууг2- d*. (8.48)
it J 2 114- «о2/ f 1 4 <лГ 4
о ' 1 1 i ’
Используя табличный интеграл [121]
Z sin2 dx it
J X2 + ₽2 dX = ЧГ Ц ~ е~2а^
и нормировку Tj =Т1/]/'«овхЛ/2/а2у , a^W/a^, из (8.48)
получаем
Dx = /VVa^?(l + T?)(l— exp —т/7\)7\. • (8.49)
196
Из (8.49) для т->о°(Сп.фО) = 1) найдем
D = N (Л + 1 /Л). (8.5°)
Дифференцирование (8.50) по Л и приравнивание производной
нулю дает оптимальные параметры
7'1опт=1’> шс.опт= 1/^1 опт— Р^2у/(^2^,вх)> -Омин = 2/V jZtZjBxtZgy (8.51)
3. Передаточные функции G3 (jco) и G^(jco) для системы ФАПЧ
с ИЧФДЗ описываются выражениями (8.26), а среднее квадрати-
ческое отклонение фазы выходного сигнала — выражением (8.28).
Преобразуем последнее к виду
D = аОвхМшср (2М - 1) (М 4- 1 )/(4М) + aSy (2М + 1 )/(4шср), (8.52)
где <вср = ^о^д5уг7'1/Л^ — частота среза передаточной функции ра-
зомкнутой системы Gp(jco) [см. (3.80)]. Проведя стандартную про-
цедуру нахождения экстремума (8.52) по параметру соСр, найдем
Шср.спт = /а2у/(№«0вх) Г(2Л1+1)Л1/[(2Л4-1)(/И+1)], (8.53)
£>мин = (ВД /(4Л12-1)(М+1)/Л1. (8.54)
Оценка вторых сомножителей в (8.53) и (8.54) показывает, что
при изменении М от 1,1 до 2 они находятся в пределах 1,05... 1,2
и 2,7...4,7 соответственно. В табл. 8.5 сведены результаты, полу-
ченные для случаев 1—3.
Таблица 8.5
Тип ФАПЧ Частота среза разомкнутой передаточной функции оптимальной ФАПЧ, шс.опт Минимальная дисперсия выходного 2 сигнала, ^вых
Нереализуемая опти- мальная — ЛГ у/*Оовх^зу
Идеализированная V ^2у/(^ВХ^2) Уаовх^у 2/тс
Первого порядка /в2у/(«овх№) N ^ОВХ^Зу 2
Третьего порядка /а2У/(аовх№) X ХУ(2М+1)М/[(2М-1) X Х(Л4+1)1 N ‘Яовх^зу X Х/(4Л42_ 1)(М+1)/М 0,5
В первой графе табл. 8.5 для сравнения приведены данные
нереализуемой оптимальной ФАПЧ с передаточной функцией
(8.36). Из табл. 8.5 видно, что частоты с,реза у всех оптимальных
систем ФАПЧ примерно одинаковы. Меньшую дисперсию (пример-
но в четыре раза по сравнению с дисперсией для системы ФАПЧ
197
первого и третьего порядка) можно было бы получить в нереали-
зуемой системе ФАПЧ.
Рассмотрим проблемы параметрической оптимизации при опре-
делении среднего квадрата набега фазы выходного сигнала СЧ
за время т при вх (со) =а0.вХ, S?y (со) =а2у/ы2, Сп.ф(]’со)|1—
—ехр—jcor |. Допустим, что синтезатор построен на основе непре-
рывной ФАПЧ без ФНЧ. Для определения оптимальной частоты
среза сос.опт системы обратимся к выражению (8.49). Применение
стандартной процедуры отыскания экстремума функции в данном
случае не приводит к желаемому результату, так как математи-
ческие преобразования приводят к трансцендентному уравнению
относительно соср. Поэтому воспользуемся численным методом
определения минимума функции D- (Л, т) (подпрограмма FMIN
{100]). В итоге получим оптимальную нормированную частоту сре-
за СОс.опт = 1/Л.О И МИНИМуМ фуНКЦИИ F т опт“ (сОс.опт 4" 1/сОс.опт) X
X (1—ехр—тсос.опт), дающие минимум Dx [см. (8.49)]. Результаты
расчетов приведены в табл. 8.6. Видно, что при изменении т от 0,1
Таблица 8.6
- соС.ОПТ F г X ОПТ - соС.ОПТ опг
0,1 0,025 0,099 0,9 0,226 0,856
0,2 0,050 0,199 1,0 0,225 0,940
0,3 0,075 0,298 1,1 0,281 1,020
0,4 0,100 0,398 2,1 0,556 1,622
0,5 0,125 0,492 3,1 0,789 1,878
0,6 0,151 0,586 4,1 0,913 1,960
0,7 0,176 0,679 6,1 0,985 1,995
0,8 0,202 0,768 8,1 0,997 1,999
до 8,1 сос.опт для системы ФАПЧ первого порядка изменяется в
пределах единицы. Величина F- Опт при малых т меняется про-
порционально т (аналогично и сос.0пт), а затем при увеличении т
асимптотически приближается к двум.
Найдем оптимальную частоту среза системы ФАПЧ первого
порядка, минимизирующую среднеквадратическое значение ПОФ
на выходе СЧ в полосе частот от сон до сов. Примем, что вх(со) =
= d0B*, Svy (со) =а2у/а2. Подставив (8.47) в (8.35) с учетом того,
что | бп.ф (jco) | = 1 (со—сон) — 1 (со—сов), после интегрирования полу-
чим (
0’вых (%. ‘“в) = ЛГ/«0-вх«2у (1/шср 4" шср) (arctg U)B/(Bcp — arctg (0н/(0Ср)/к,
(8.55)
где coep = 1/Л = Уар.вх^/пгу/Т t — нормированная частота среза
ФАПЧ, сов = совуао.вхМ2/а2у, сон=^нУао.вхА2/а2у. Для определения ми-
нимума (8.55) при вариации соср воспользуемся подпрограммой
FMIN. Некоторые результаты вычислений приведены в табл. 8.7,
198
Таблица 8.7
СО В
“и 1 1,5 2 1 5 10 1 1,5 1 2 1 5 10
шс опт р 1 СО опт
0,1 99,99 99,99 2,14 1,099 0,999 0,9 1,4 1,837 2,532 2,74
0,2 99,99 99,99 1,837 1,000 0,909 0,8 1,3 1,71 2,352 2,538
0,5 99,99 2,602 1,000 0,5436 0,467 0,5 0,99 1,287 1,7131 1,837
0,75 99,99] 0,379 0,0135 0,1 0,01 0,25 0,665 0,833 1,133 1,233
1 99,99 0,0104 0,011 0,01 0,01 0 0,353 0,5 0,80 0,9
в которой приняты следующие обозначения; <вс.опт — нормирован-
ная оптимальная частота; Рш0!П:— значение функции Fm при
СОср= СОс.опт, где Fm =(1/<Вср-(Оср) (arctg СОв/(Вср) — arctg (сон/соср)-
__ Поиск минимума Fu, осуществлялся в диапазоне изменений
(Вер 0,01... 100. Из табл. 8.7 следует, что в некоторых случаях экс-
тремум достигается на границах области возможных значений
йс.опт- При больших разностях между <вв и сон (например, <вв=10,
(вн = 0,1) частота <вс.опт близка к единице. Последние два примера
определения оптимальной частоты среза ФАПЧ показывают, что
правило, согласно которому она должна находиться вблизи точки
пересечения функций, описывающих спектральные плотности
5-f вх ]о>) Л-'2 и Stpy («) (см. рис. 8.7), не всегда применимо.
Приведенный материал в основном базировался на определе-
нии оптимального значения только одного параметра ФАПЧ —
частоты среза. Многопараметрическая оптимизация сложнее и осу-
ществляется, как правило, с привлечением численных методов
[122, 123].
8.4. ВЛИЯНИЕ ФЛИККЕРНЫХ ШУМОВ НА НАБЕГ ФАЗЫ
Рассмотрим подробнее вопрос определения среднего квадрата набега фазы вы-
ходного сигнала СЧ при учете фликкер-шумов. Он особенно актуален при раз-
работке «узкополосных» колец ФАПЧ в СЧ, когда основная доля шумов в
-$<рВХ (“) приходится на член а,пх/ы и в S.fy (со) на член а3у/«3. Подоб-
ные СЧ могут использоваться в системах радиосвязи с фазовой телеграфией,
когда накладываются весьма жесткие ограничения на величину среднего квадра-
та набега фазы за время посылки т [124]. В начале рассмотрим модель ФАПЧ,
близкую к идеализированной [см, (8.25)], но отличающуюся тем, что |G3(/co) |2
и |Ge(/co) |2 описываются следующими выражениями:
ш < ъшсР, I G3 О) I2 = №;
(0>7в(вср, I G3 (ju>) |2 = 0;
ш < 7ушсР, I Ge (Jw) | = 0;
ш > 7ушсР, | Ge (jw) [ = 1,
где -fB и -fy — некоторые постоянные коэффициенты, причем ув> 1, уу<1.
(8.56)
199
Сказанное иллюстрирует рис. 8.8. Н,а рисунке сплошными линиями показаны
реальные передаточные функции Ge(/<o) и G3(/<o)/jV, а штриховыми — идеализи-
рованные, В этом случае выражение (8.35) имеет вид
.о / , 4 V • , U)'c №«1вх , . 4 р . шт а3у
д!Ных(т)=— Sln2----------------------— du-\---------I sin2------------^-с/ш =
fBb,x K x 2 ш ~ -п J 2 ш3
Ту“ср
4 У] (ъшс₽') Ч- a3yJ2 (Ту^ср^)/(ly^cp)2]/71» (8.57)
где (7в“Срт) = 1п ('Пв<°ср'1:)— G1 (7в“срт); у=1,781— постоянная Эйлера; См —
интегральный косинус;
г , . . 9 7у°)срт Ту°)срт . ('(уШСр'-)2 .
Л>(7ушсР7) = sm2 —£--------]----£— sin (тушсрт)--------------Gi (7уа>срт).
Для расчетов по (8,57) в табл. 8.8 и 8,9 приведены /1 и Л соответственно.
Выражение (8,57) трудно для анализа, и поэтому рассмотрим два случая:
1. Параметры кольца ФАПЧ и время т таковы, что шсрт<С1. Тогда допусти-
мо удержать в разложении в ряд [125] Gi(x) = 1пух—х2/(2-2!) +х4/(4-4!) +...
первые два члена. Кроме того, произведем замену sin(x)«x. В итоге
Д2ВЫХ (т) = а1^2 (Т»‘всР'')2/’с+ «зу [3t2 — 2т2 In (77уШсрт)]/к. (8.58)
Таблица 8,9
Таблица 8.8
Ъшсрт со т) п ‘в ср ' Т со х ’у ср Л(1у“ср-0 Ту“ср7 Ally “ср*)
0,05 0,000625 0,1 0,0161 3,6 0,528
0,1 0,0025 0,2 0,0507 4 0,441
0,2 0,01 0,5 0,203 4,6 0,355
0,5 0,062 0,75 0,347 5 0,336
1,0 0,24 1 0,528 5,6 0,362
2,0 0,85 1,4 0,652 6 0,407
л 1,62 1,8 0,75 7 0,547
2л 2,44 2 0,771 8 0,6124
4л 3,1 2,2 0,776 9 0,568
20 3,57 2,8 0,709 10 0,472
50 4,49 3 0,669 20 0,341
100 5,18
Продифференцируем (8.58) по шср и найдем оптимальное значение шср.опт, ми-
нимизирующее Д2ВЫХ (т), т. е. <0ср,опт=/a3yl(aiBzN*)iv>. При этом
200
AfpMHH (t) = 4т2ЙЗу {1—0,5 In [пу тЛйзу/(а1вх^2)т:/Тв]}/’с-
2. <оСрт5>1. Используем асимптотическое разложение Gi(x) в ряд [137]:
Gi(x) =» (sinx/x)(l — 2!/х2 + 4!/х4 — ...) —
— (cosx/x) (1/х — 3!/х3 + 5!/х5 — ...).
В результате из (8.57) получим
Д2ВЬ1Х (т) = !4й1вЛ’21п (iw) + 8озу/(72®2р)]/к. (8.59)
Определив минимум (8.59) при вариациях (Вер, найдем
^ср.опт == /а3у/(а1 вх №)/”Гу,
Д’Мин (х) = «1вх№ [2 + 4 In (Ив VОзуКа1ю№) т/ту)]/^.
Из (8.58) и (8.59) видно, что при малых <оср т с ростом т Д2 мин нарастает
быстрее, чем при <оСрТ> 1. Оптимальная частота (оср ФАПЧ при малых
(Осрт меньше, нежели при больших <оСрТ.
Оценим влияние на полученные результаты составляющей вида а2у/(о2 в-
спектре S^y (cd) . Для этого найдем отношение, характеризующее долю шумов,
определяемую членом cz2y/<D2, по сравнению с составляющей, определяемой чле-
ном «зу/а3 в д2вых
Г 4 шт
£= — «2у j sin2 —
7у“ср
1
(В2
(/(В
Г 4
/ ~й3у\
“ (ВТ 1
Х J sin2-2-^rrf(B
7 (о
1у ср
— Ту^ср/з (Ту(,)СрТ)/(В2у>
(8.60)
где e>ay=a3y/a2y — частота, соответствующая пересечению составляющих спектра
взу/«з и a2y/“2;
Zj (Ту®срт) == [ 1 COS (уу(Всрт) -f- 7у®срТ Si (7y(BCpT)]/[sin2 ('[(ВсрХ/2)
4~ (Ту(Всрт/2) sin ('[у(вСрт] ('(y®cpi:)2 GI (1ущсрт)/2];
S1 — интегральный синус.
Значения J3 (7У“срт) приведены в табл. 8.10. Из табл. 8.10 и (8.60) видно,
что при малых ТуО’.рТ доля шумов от a2y/w2 при том же отношении Ту®ср/®ау
Таблица 8.10
7уЫсрт 0,1 0,2 0,5 1,0 2,0 3,0 4,0 5,0 6,0 7,0 8,0 10 15
Л (Ту“срт) 114,8 33,6 6,6 1,73 0,84 1,26 2,48 3,5 2,66 1,73 1,43 2,33 1,72
возрастает. В предельных случая соотношение (8.60) можно упростить и пред-
ставить в виде 3=2-fywcp/w2y при 7v“cpx>l, ₽=2/{7у(йсрш2у[Зт2/4—т21п(77у(йсрт)/
2]} при 7у<*>СрТ<^1.
Сравним полученные для идеализированной ФАПЧ результаты (8.57) со
значением функции Д2 вых(т) для более сложной системы. Рассмотрим ФАПЧ
20J
третьего порядка, имеющую передаточные функции C?3(jco) и Ge(j<o) (8.26) с
ИЧФДЗ. Используя (8.35) и (8.26), получаем
Д*вых (т) = а1вх№ (Л + а/5)/[4 (к)5], (8.61)
где
Л ~ J {Ку [1 4- (2«Т,и)2] sin2 (2лшт/2)}/[3 (ш) ш] dw;
® = (2rc)4a3y/(®2(V2aJBX);
Л = J {[1 +(2яТ'г®)2! sin2 (2л<и т/2)} ш/3 (и) Ди;
Ку = К0Кд5уг7’2/М
Л = Т^Т0, 7 = М/Мо, о)0 = 2^/Т0, ~= z/T0, Т2 = Г2/Го,
3 (®) = ®4 [1 + (2гс72«)2] 4- /су [1 + (2к7>)2)/(2тг)*-
- 2Кущ2 [ 1 4- (2™р7\тг]1(2ф.
Нормировка (8.61) приведена для вычислений интегралов на ЭВМ, так как
аналитическое их решение неизвестно. Синтез параметров ФАПЧ проводился
с применением показателя колебательности М [см. (6.40в)]. В результате полу-
чены соотношения Т?=МД(М—1) 2люСр], 7“М/[(М+1)2л^р], Ky=2nZ2cp х
X (Л1 1)/Л1, где<оСр ='<i>Cpla>0 = 5угГ1/(^0)— нормированная частота среза
разомкнутой системы ФАПЧ.
Рис. 8.9. Зависимости Л (а) и Z4(5) от т
202
Некоторые результаты численно-
го интегрирования Л и Л для 1,5
приведены на рис. 8.9, а, б. На тех
же рисунках точками показаны дан-
ные расчета Л и /г, входящих в
упрощенную формулу (8.57) для иде-
ализированной ФАПЧ. При построе-
нии было произведено соответству-
ющее масштабирование для <ос₽ =
=0,05. Коэффициенты уу и ув при-
нимались 0,37 и 2,17 соответственно.
Из рисунков видно, что расчеты по
приближенным и точным зависимо-
стям дают удовлетворительную для
практики точность. По результатам
обработки (которая здесь не приво-
дится) данных для Ц и /5 для при-
ближенных расчетов по (8.57) при
М=1,1 можно рекомендовать: <оор=
=“ср“о> Ту=0,37, ув —1,85; при Л4=
=2: Ту=0,36, ув=2,55.
На рис. 8.10 приведена рассчи-
танная на ЭВМ зависимость Z6=Z4+
+ о75 [см. (8.61)] от т при М=1,5,
минимизированная при вариаци-
ях (оср. Параметр а задавался 10;
Рис. 8.10. Зависимости /6 и <ос.опт
от т
1; 0,1. На этом же рисунке приведена зависимость <ос опт от г, минимизирую-
щая /6. Оптимальная частота среза кольца ФАПЧ в областях <оо.оптТЗ>1 и
Wc.oniTCl определяется законом ]/а, а отношение оптимальных частот среза
для областей <Ос.оптТС1 и <оСовтТЗ>1 примерно равно ув/уУ) что согласуется
с соотношениями для (Ос.опт, полученными из (8.57).
ГЛАВА 9
РАСЧЕТ И ПРОЕКТИРОВАНИЕ
СИНТЕЗАТОРОВ С ИФАПЧ
9.1. РАСЧЕТ СИНТЕЗАТОРОВ С ИЧФД
На базе материала предшествующих глав можно определять па-
раметры кольца ИФАПЧ, необходимые для построения синтеза-
тора. Тем не менее целесообразно обобщить проведенные иссле-
дования с целью создания удобных для инженерного проектиро-
вания методик расчета.
Ряд рекомендаций по созданию СЧ с требуемыми динамичес-
кими и спектральными характеристиками изложен в [1, 2, 4, 5].
Уделим основное внимание рассмотрению СЧ с ИЧФДЗ и ИЧФД
203
<в—з». Наибольшие трудности, как правило, вызывает использо-
вание в качестве дискриминатора ИЧФДЗ, так как для таких сис-
тем ИФАПЧ эмпирические и интуитивные методы разработки не
приводят к решению поставленных задач. В то же время в лите-
ратуре отсутствует последовательное изложение процедур расче-
та СЧ с указанными типами дискриминаторов.
Исходные данные для расчета СЧ с ИЧФДЗ следующие: диа-
пазон выходных частот; шаг перестройки (частота сравнения);
время установления частоты; уровень ослабления помех в спектре
выходного сигнала; частота среза систем ИФАПЧ и т. д. В зави-
симости от конкретных требований к СЧ расчет может идти не-
сколькими путями.
Пусть наиболее важным параметром является время установ-
ления частоты ty. В этом случае для синтеза по заданному пока-
зателю колебательности ФНЧ второго порядка с передаточной
функцией (3.43) (см. гл. 3,6) величина М выбирается из условия
достижения максимального быстродействия, т. е. Л4=1,5. Далее
определяется максимально возможный скачок частоты
Д/уг=(/в-Л)/Д,
где /в, /н — соответственно верхняя и нижняя частоты рабочего
диапазона или поддиапазона УГ, если весь диапазон перекрыва-
ется несколькими генераторами.
По данным табл. 6.7—6.9, в которых для различных Т2 = Т2/ТО,
заданных показателе колебательности системы ИФАПЧ М и от-
носительной точности установки частоты е | А/ г /!Д/уг.н приведено
рассчитанное по программе IFAPH1 (см. приложение) норми-
рованное время_установления ty = tyIT0, находим величину Т2, при
выборе которой ty не превышает требуемого значения.
Отметим, что расчет ty производится при переключении син-
тезатора с частоты /н на /в из соображения обеспечения заданного
Рис. 9.1. Варианты схемной реали-
вации ФНЧ второго порядка в СЧ с
ИЧФДЗ
Рис. 9.2. Область допустимых зна-
чений для обеспечения устойчи-
вости «в малом» ИФАПЧ с ИЧФДЗ
204
ty при любых значениях частот внутри диапазона (поддиапазона)
УГ [127]. _
По выбранным М и Т’2 находим нормированные параметры эле-
ментов ФНЧ, которые с учетом (6.406) определяются по форму-
лам:
для варианта на рис. 9.1,а
С1 = А2Т2 (М + 1 )2/{4Л4 \h 1)]},
С2 = Л3(7И+ 1)а/{4/И (Л4 — 1) [А4- 7^(/И — 1)]},
R = 4М [А + Т2 (7И — 1)]2/[А3 (/И + I)2];
для варианта на рис. 9.1,6
С1 =АТ2(Л4 4-1),/4Л4,
С2 = А2(Л4 + 1)2/[47И (Л4 — 1)],
(9.1а)
(9.16)
R = 4Л4/[ А (М + 1)2],
где А=[1+ехр (—1/7^)]/[1—ехр(-1/72)].
По нормированным устанавливаем истинные параметры эле-
ментов ФНЧ:
С1=С1Кнор, С2 = С2Кнор, Я = ЯТо/Кяор,
Т,а блица 9.1а
Параметры элементов ФНЧ (рис. 9.1,а), рассчитанные по показателю
колебательности М
Параметр т, м
0.2 0,4 0,6 0,8 1,0 1,5 2,0 3,0
С1 0,20 0,46 0,85 1,38 2,07 4,46 7,80 17,4
СЧ 10,1 13,5 20,7 31,0 44,9 92,5 159 350 1,1
~R 1,02 0,91 0,74 0,60 0,51 0,35 0,27 0,18
Cl 0,19 0,44 0,80 1,30 1,93 4,15 7,25 16,1
С2 3,30 4,30 6,50 9,70 14,0 28,7 49,3 108 1,3
R 1,07 1,01 0,85 0,70 0,59 0,42 0,32 0,21
Cl 0,19 0,42 0,76 1,23 1,83 3,92 6,89 15,2
С2 1,90 2,50 3,70 5.50 7,90 16,2 27,9 61,2 1,5
R 1,14 1,11 0,95 0,80 0,67 0,48 0,36 0,21
Cl 0,19 0,41 0,73 1,18 1,75 3,74 6,52 14,5
С2 1,40 1,70 2,60 3,80 5,4 11,1 19,0 41,7 1,7
1,19 1,21 1,05 0,89 0,76 0,60 0,41 0,28
205
Таблица 9 16
Параметры элементов ФНЧ (рис. 9.1,6), рассчитанные по показателю
колебательности М
Параметр т, м
0,1 0,4 0,6 0,8 1,0 1,5 2,0 3,0
С1 0,20 0,47 0,88 1,45 2,17 4,68 8,18 18,2
СЧ 10,3 13,9 21,5 32,6 46,9 97,0 167 368 1,1
R 0,98 0,85 0,68 0,55 0,46 0,32 0,24 0,16
С1 0,21 0,48 0,89 1,47 2,20 4,75 8,31 18,5
СЧ 3,50 4,70 7,30 и.о 15,9 32,8 56,5 124 1,3
R 0,97 0,83 0,67 0,55 0,45 0,32 0,24 0,16
С1 0,21 0,49 0,92 1,50 2,25 4,86 8,51 18,9
СЧ 2,10 2,90 4,50 6,80 9,8 20,2 34,7 76,4 1,5
R 0,95 0,81 0,65 0,53 0,44 0,31 0,24 0,16
С1 0,22 0,51 0,94 1,55 2,32 5,00 8,75 19,5
СЧ 1,60 2,10 3,30 5,0 7,2 14,8 25,5 56,2 1,7
R 0,92 0,79 0,64 0,52 0,43 0,30 0,23 0,15
где /СноР= Л’у/Л’о=5Уг7д7’2 /2xNB, NB — коэффициент деления
ДПКД, соответствующий fB.
Размерности получаемых емкостей и сопротивления, а также
величин, входящих в коэффициент КНор, следующие: СЦФ], С2[Ф],
R [Ом], 5уг [рад/с-В], /д [А], Го [с].
Необходимо отметить, что при синтезе по показателю колеба-
тельности М для малых Т2 система ИФАПЧ становится весьма
критической к предельному изменению коэффициента усиления от-
носительно расчетного Ку. Для обеспечения устойчивости «в ма-
лом» отношение Ку/К”° =т]х должно находиться в области, огра-
ниченной кривыми на рис. 9.2, полученными с помощью соотноше-
ния (6.15).
Для удобства расчета СЧ формулы (9.1а) и (9.16) протабули-
рованы (см. табл. 9.1а, 9.16). _
При выполнении условия Т2> 1 выражения для расчета пара-
метров элементов ФНЧ упрощаются:
для варианта на рис. 9.1,а
С1 =
С2 = 2Т2(М + I)/[Af(Af- 1)],
R = M/2T2,
206
(9.2а)
для варианта на рис. 9.1,6
Cl =7l(M-Hl)2/2M,
СЧ = Т1 (М + 1 )2/[Л4 (М - 1)],
R = 2/И/[Т2 (М 4 I)2].
(9.26)
Следует иметь в виду, что при выборе параметров ИЧФДЗ не-
обходимо, чтобы был определенный запас по управляющему на-
пряжению еупр на входе УГ. Напряжение еупр должно превышать-
напряжение перестройки УГ в рабочем диапазоне частот для ис-
ключения ограничения тока 7Д в генераторах тока дискриминато-
ра, что ведет к затягиванию переходных процессов. Учитывая, что
перерегулирование при Л4=1,5 составляет приблизительно 40 %
от скачка частоты (см. гл. 6), необходим запас по напряжению,
управления в 1,8—2 раза. ।
После определения параметров элементов ФНЧ необходимо
рассчитать уровень побочных составляющих в спектре выходного
сигнала СЧ, возникающих за счет помехи сигнала сравнения. Он
определяется по формуле [126]
«д.п = KyNii /(1 + 4«27’?)/( 1 + 4 л2 Tl) М"
или при Т’2>1 по формуле
ад.п = М1Л4/[4^(Л4+ 1)],
(9-3)
где й = й//д — нормированная амплитуда первой гармоники им-
пульсной помехи сигнала сравнения.
При неизвестной i\ значение ад.п определяется эксперименталь-
но. Если при выбранном Т2 полученное значение ад.п не удовлет-
воряет заданной норме, то необходимо принять меры по уменьше-
нию й: минимизировать «перекос» токов заряда и разряда гене-
раторов тока дискриминатора; снизить токи утечки за счет исполь-
зования более качественных конденсаторов в ФНЧ и ключей ге-
нераторов тока; применить более быстродействующие элементы
цифровой части дискриминатора и т. п. Если при этом ад.п не со-
ответствует требуемому значению, то следует ввести дополнитель-
ный фильтр. При этом Т2 необходимо уменьшить на задержку
Тз=Тз/7’о, вносимую дополнительным фильтром. С учетом установ-
ки последнего расчет Cl, С2 и R производится по следующим
формулам [126]:
для варианта на рис. 9.1,а
Cl = КЛОПТ2& (М + 1 )2/{4Л4 [Л9 + {Т2 +73) (М - 1)]},
СЧ = Cl М + (Л-Нз) (м - 1)]/[Т2(Л4 — I)] — 1},
R= [Аэ + (Т2 + t3) (М - 1 )]/[С2 (М - 1)],
207
для варианта на рис. 9.16
с 1 = [КдопЗД (М + 1)2 ]/{4Л4 [Аэ + Т3 (М - 1)]},
С2 = СI [А3 4-73 (М - 1 )]/Т2 (М - 1),
R = [А,4-Т3 (М - 1 )]/С2 (М - 1),
где Кдоп — коэффициент передачи по постоянному току дополни-
тельного фильтра; Аэ={1+ехр[—1 (Т’г+ т3)]}/{1—ехр [—1/(Т’г+тз)]}-
Приведем методику расчета, в которой основным требованием
является обеспечение требуемого ослабления дискретных помех с
частотой сравнения в спектре выходных колебаний синтезатора.
Допустим, что известна й для конкретной схемы дискриминатора.
Тогда для определения Т2, при которой ад.п удовлетворяет задан-
ным нормам, можно воспользоваться формулой (при Т’2>1)
Т2 = / МЖп(М + 1)/2к. (9.4)
Далее по найденному Т2 и заданному М определяются пара-
метры элементов ФНЧ. Если й заранее неизвестно, то расчет про-
водят в два этапа. Сначала при произвольно выбранной Т2 (на-
пример, при 7’2=1) определяются параметры элемента ФНЧ, и
при этом экспериментально находится ад.п (например, ад.п = 0,01
или —40 дБ). Если ослабление ад.п недостаточно (например, тре-
буется —60 дБ), то, как следует из (9.4), величину Т2 необходимо
увеличить в 3,2 раза. После этого производится окончательный
расчет параметров ФНЧ.
Если в системе ИФАПЧ требуется обеспечить заданную часто-
ту; среза юср, то при расчете ФНЧ
2 7^ = Л4/[в>ср7'0(Л4 4-1)]. (9.5)
Формула (9.5) справедлива при Т2> 1 (см. гл. 6).
Иногда частотный диапазон СЧ перекрывается несколькими УГ. Тогда
при жестких требованиях к быстродействию синтезатора следует принять меры
к увеличению скорости переключения поддиапазонов УГ. Кроме того, необхо-
димо исключить возможность пропуска импульса ДПКД в процессе переключе-
ния поддиапазонов, так как это приводит к затягиванию переходного процесса
за счет частотных свойств ИЧФДЗ. Сказанное поясним на следующем примере.
Допустим, что весь диапазон СЧ 80 ... 120 МГц перекрывается двумя УГ с
поддиапазонами 80... 100 МГц и 100 ... 120 МГц. Запас по частоте на границах
поддиапазонов равен 5 МГц. Очевидно, что при изменении выходной частоты,
например с 90... до 120 МГц, происходит переключение поддиапазонов. Если
при этом имеется пропуск импульса ДПКД, то дискриминатор будет работать
в режиме заряда (см. гл. 2) в течение времени, максимум которого /макс =
=(120/5) 7'о=24 7'о. Только по истечении этого времени система ИФАПЧ перей-
дет к регулированию <оуг.
Приведем весьма полезную с практической точки зрения но-
мограмму для расчета времени установления частоты в СЧ с
208
Рис 9 3 Номограммы для расчета относительного времени установления часто-
ты (в СЧ с ИЧФДЗ и ФНЧ второго порядка) по М (а) и по /у. (б)
ФНЧ второго порядка при малых скачках частоты. Она получена
на основании выражений (633) и показана на рис. 9.3. Пусть,
например, заданы Л4=1,5 и Т2 = 2. Тогда для определения /у про-
ведем следующие прямые: из точки 1,5 на оси М проводим верти-
кальную линию до пересечения с кривой, зааднной точности, на-
пример е—10~3; из точки пересечения — горизонтальную линию
до пересечения с прямой, заданной постоянной времени ФНЧ
Т2 — 2; из точки пересечения — вертикальную линию до пересече-
ния с осью /у. Последняя точка пересечения дает искомое время
установления частоты; /у~40.
При проектировании СЧ расчетные параметры элементов ФНЧ
приходится выбирать из дискретного ряда номиналов сопротив-
лений и емкостей. Закономерен вопрос, с какой точностью следует
производить этот выбор. Рассмотрим влияние отклонения пара-
метров элементов ФНЧ от расчетных на М, адп и ty [127].
Обозначим r]R, 1)с1, т]с2 коэффициенты, определяющие отклоне-
ния параметров элементов R, С1 и С2 от расчетных, т. е. R — t]RR0,
С1 = г]с1С10, С2—г)с2С2°. В этом случае постоянные времени Т2
и коэффициент усиления /Су определятся для двух вариантов ФНЧ
следующими соотношениями:
для варианта на рис. 9.1,а
7\ = tWGc2 Г?,
Гг= 2 (Г? - Т>) + Т]С1 Г’],
Ку = К°7?/[г(С2 (7 ? - 72°) + ;
для варианта на рис. 9.1,6
Л = ^Ь)С1т20 -Нс2 (7? -Ж
ф __ 'гО
2 = 2,
14—1020
(9.6а)
(9.66)
209
Для оценки влияния отклонения параметров элементов ФНЧ
на показатель колебательности М необходимо в (6.76) учесть со-
отношения (9.6а) или (9.66). Результаты расчета М в зависимости
от nr, t]ci и лег для ФНЧ на рис. 9,1,а приведены на рис. 9.4. Кри-
вые получены при изменении одного из параметров элементов
фильтра (остальные соответствуют расчетным значениям). Как
видно из рис. 9.4, с увеличением т]с2 и уменьшением r]ci показатель
колебательности падает. Отклонение r]R от единицы как в сторону
увеличения, так и в сторону уменьшения приводит к возрастанию
М. Для ФНЧ на рис. 9.1,6 зависимости М от r]Ci и т]С2 имеют
аналогичный вид.
Результаты расчета ty при отклонении параметров элементов
ФНЧ приведены на рис. 9.5. Кривые показаны для ФНЧ на
рис. 9.1,а при изменении одного из параметров его элементов. Из
рис. 9.5 следует, что при Л4 = 1,5 имеет место оптимум по быстро-
действию, однако он выражен нерезко, что позволяет производить
подбор параметров конденсаторов и резистора с точностью
10...20% от расчетных. Аналогичный вид имеют зависимости ty
от Лс] и лег для ФНЧ на рис. 9.1,а.
Определим величину ад,п в зависимости от отклонения пара-
метров элементов ФНЧ от расчетных. Подставив в (9.3) 7\, Т2 и
Ку, взятые из (9.6а) и (9.66) для двух вариантов ФНЧ при Т’2> 1,
получим
«д.п = “".n/’ICl
для варианта на рис. 9.1,а,
Рис. 9.4. Зависимость М от отклоне-
ния параметров Ня(--------------)>
T]ci(-----), Г]С2(-------) элемен-
тов ФНЧ на рис. 9.1,а от расчетных
при 7'2=0,5
Рис. 9.5. Зависимость ty от отклоне-
ния параметров Т)р(—), T)ci(------),
т]с2(-------) элементов ФНЧ от
расчетных при Tt=2, е=10~3,
Д1уг.н = 0,1
210
ад.п = а°.п [(М - 1)/т)С2 + 2т)С1]/(7И + 1)
для варианта на рис. 9.1,6.
Из этих соотношений следует, что величина ад.п в основном
зависит от С1 и поэтому для улучшения подавления побочных
составляющих следует увеличивать емкость указанного конденса-
тора. Однако при этом необходимо учитывать возможное воз-
растание /у (рис. 9.5) и повышение колебательности системы
(рис. 9.4).
Приведем пример расчета синтезатора с ИЧФДЗ. Параметры СЧ: диапазон
частот 100... НО МГц, шаг перестройки 10 кГц; время установления частоты с
точностью ±1 кГц 5 мс; ослабление побочных составляющих с частотой сигна-
ла сравнения —60 дБ. Для обеспечения максимального быстродействия выберем
показатель колебательности Л1=1,5. Рассчитаем величину Т2 с точки зрения
выполнения требований по ослаблению помехи данного типа. Положим, что
амплитуда первой гармоники ИЧФДЗ й равна 25-10'9 А, а выбранный ток ге-
нераторов тока /д = 5-10~3 А, тогда по формуле (9.4)
7, = К1100 • 5 -Ю"6 -1,5/К)-3 -2,5 /2^1.
Учтя, что точность установления частоты относительно скачка частоты
е—1-10-4, а максимум относительного скачка частоты составляет примерно
±0,1, найдем по табл. 6.7 время установления /у = 34. Следовательно, абсолют-
ное время установления /у=^у7’0 = 3,4 мс. Таким образом, требования к СЧ по
быстродействию выполняются с некоторым запасом.
Найдем параметры элемента ФНЧ на рис. 9.1,а. Из табл. 9.2а при Т2=1
И М—1,5 следует, что С1 = 1,83; С.2=7,92; R = 0,672.
Пусть крутизна характеристики управления 5уГ=2л-5 МГц/B. Тогда
Киор=2-10~8. Абсолютные значения параметров элементов ФНЧ: С1~37 000пФ;
62=0,16 мкФ; R—3.4 кОм.
В рассмотренном примере требования к быстродействию и ослаблению помех
удовлетворяются без каких-либо специальных технических приемов. Если воз-
никает необходимость, то следует использовать сложный фильтр и принять
меры к снижению их в дискриминаторе.
Перейдем к расчету СЧ с ИФД «в—з» и ИЧФД «в—з». Различ-
ные аспекты проектирования синтезаторов с ИФД «в—з» нашли
достаточно полное отражение в технической литературе [2, 4, 5,
55, 128]. Тем не менее для полноты изложения уделим некоторое
внимание этому вопросу. Как отмечалось в гл. 2, системы с ИФД
«в—з» и ИЧФД «в—з» при малых отклонениях координат от по-
ложения синхронизма эквивалентны. Поэтому анализ устойчивости
СЧ с этими дискриминаторами «в малом» одинаков. Приведем
ряд соотношений для расчета ИФАПЧ с ПИФ (рис. 9.1,в) при вы-
боре параметров системы по заданному показателю колебатель-
ности М. Возможны три варианта расчета, когда кроме М зада-
ются постоянная времени ФНЧ Т2, отношение постоянных време-
ни т — Тх1Т2 или коэффициент усиления системы Ку. Из (6.29)
получим: для заданных М а~Тч
211
Ку = 4Т27И (М - 1 )/(7И + 1 )2,1 (9 7
т = (Л1+1)/[2Т2(М-1)], )
для заданных Мит
Ку = 2М/[т(М+1)], (9?б)
Т2=(м + i)/[2m(M- 1)],J
для заданных М и Ку
т = 2М/[Ку(М+1)], (97в)
7'2 = /Су (Л14-1)2/[47И (7И ~ 1)].
Поскольку из условия реализуемости ФНЧ /п<1, то с помощью
(9.7а) и (9.7в) найдем соотношения, ограничивающие выбор па-
раметровТ2 и”Ку:
Т2>(Ж + 1)/2(Ж-1), (9.8а)
Ку>2М/(М+1). (9.86)
Следует отметить, что расчет параметров ИФАПЧ по (9.7) по-
казывает, что необходимый коэффициент усиления Ку получается
достаточно большой (до единицы и более). Поэтому при проекти-
ровании СЧ, построенного по однокольцевой схеме без использо-
вания смесителя в тракте УГ—ДПКД, для реализации больших
Ку должны быть применены ИФД с трапецеидальной фазовой ха-
рактеристикой.
В соответствии с (9.7а) — (9.7в) получим формулы для расчета
элементов ПИФ:
= [(2 Г2 — 1)(7И - 1) - 2] Т0/2С(М - 1)Д (9 9а)
R2 = (M+\)TO/2C(M- I); j
й1=(7И+1)(1-7п)Т0/2С/п(/4-1), | б
R2 = (M + 1) 7’0/2С(7И —- I); /
Rl = (M+l)[Ky(M+l)-~2M]7'0/4CM(M-~l), ] (9 9в)
£2-=(/И+1)/2С(Ж~ 1). /
Расчет ИФАПЧ по заданному М обеспечивает устойчивость
системы «в малом». Если такой расчет по каким-либо причинам
не может быть использован, то необходимо обеспечить в системе
устойчивость «в малом» выбором параметров Ку, Т2 и т. Условия
устойчивости «в малом» приведены в § 6.1.
Для оценки быстродействия СЧ с ИФД «в—з» в табл. 9.2 при-
ведены результаты расчета ty в системе с пилообразной характе-
ристикой дискриминатора. Расчеты проводились по программе
IFAPH2 (см. приложение) для параметров кольца автоподстрой-
ки, определенных по формулам (9.76) при относительном скачке
частоты Дсоуг.н = 0,1 и ег.ст=0,5 (периодичность характеристики
дискриминатора в этом случае не проявляется).
212
Таблица 9.2.
Относительное время установления частоты ty в СЧ с ИФД «в—з» и ПИФ
% т
0,1 0,2 0,3 0,4 0,1 0,2 0,3 0,4 0,2 0,3 0,4
1,3 1,5 1,7 1,9 2,1 2,3 2,5 2,7 2,9 г ==10-2 12 12 12 12 8 8 8 8 6 6 6 6 4 4 5 5 5 3 4 4 5 4 3 4 6 4 3 4 6 5 3 4 7 5 5 4 е—10~3 19 19 19 19 11 12 12 13 7 8 9 9 6 6 7 7 7 6 5 6 7 6 4 5 8 6 5 5 9 7 5 5 9 8 6 6 г = 10—4 26 26 26 27 15 16 16 17 9 If 12 12 7 6 9 10 8 7 6 8 9 7 6 6 10 8 5 8 11 9 7 7 12 10 8 7
Из табл. 9.2 следует, что при данной методике расчета величи-
на ty от пг практически не зависит. Минимальное значение fy
достигается при М— 1,7... 2,7. Нахождение /у при выборе парамет-
ров ИФАПЧ по формулам (9.7а) и (9.6в) показало, что зависи-
мость ty от Т2 или от Ку практически отсутствует.
Расчет ослабления помех с частотой сигнала сравнения в спект-
ре выходного сигнала СЧ производится по формуле ад.п = КуА«1Х
X 1 + 4kWT2 /2 /1 + 4к2 Т1 или при 7’2/п>0,5 по формуле
ад.п = /СуА«1/п/2, где Ui — нормированное напряжение первой гар-
моники помехи сигнала сравнения.
При использовании интегрирующего ФНЧ (/п = 0) и 7’2>0,5
определение ад.п производится по формуле ад.п = КуАм1/4л7’2. При
расчете кольца по формулам (9.7) для 7’2/п>0,5 aA.n — NMuil (М +
+1).
Особенности динамики СЧ с ИЧФД «в—з» рассмотрены в
гл. 5 и 6. Напомним, что в таких синтезаторах возможно сущест-
венное увеличение ty, если ег.сТ близко к границе линейно возрас-
тающего участка фазовой характеристики ИФД. Это происходит
за счет срабатывания ИЧД и зависимости его работы от началь-
ных фазовых соотношений сигналов ДПКД и ДФКД- Результаты
определения ty в СЧ с ИЧФД «в—з» для пилообразной характе-
ристики ИФД и ряда параметров ИФАПЧ приведены в табл. 9.3
и 9.4. Кроме ty, в указанных таблицах даны_значения времени
работы системы ИФАПЧ в частотном режиме tf.
Зависимость /у от ег.ст представлена в табл. 9.5, из которой сле-
дует, что при <?г.ст~>0 или ег.ст->1 величина резко возрастает вслед-
ствие увеличения времени работы ИФАПЧ в частотном режиме.
213
Таблица 9.3.
Относительное время установления (у в СЧ с ИЧФД «в—з»
при бг ст = 0,05 и бг н = 0,5
Т, m S ‘у Г/
е=10~2 е=1о-3 е=10—4
0,2 19 28 37 0
0,1 0,5 8 9 14 0
1,0 21 27 32 16
0,5 1,5 23 30 36 14
0,2 20 29 38 0
0,3 0,5 7 9 13 0
1,0 20 23 28 15
1,5 19 24 30 13
0,2 21 25 „ 39 0
0,1 0,5 40 53 61 27
1,0 21 35 49 8
2,0 1,5 31 49 65 13
0,2 19 27 37 0
0,3 0,5 36 44 52 24
1,0 33 41 50 25
1,5 18 26 33 9
Приведенные в табл. 9.3—9.5 сведения позволяют оценить
быстродействие СЧ с ИЧФД «в—з». Однако привести полные дан-
ные для расчета ty в таких синтезаторах не представляется воз-
можным, так как имеется много вариантов фазовых характерис-
тик ИФД: пилообразная, трапецеидальная с различным наклоном
линейно возрастающего участка и т. д. Кроме того, параметры
ИФАПЧ и расположение рабочих точек в состоянии синхронизма
также широко варьируются. По этой причине рекомендуется ис-
пользовать программу расчета /у в синтезаторе с ИЧФД «в—з»
общего вида (программа IFAPH2), которая приведена в прило,-
жении 2.
9.2. СХЕМЫ ОСНОВНЫХ УЗЛОВ СИНТЕЗАТОРОВ
Приведем схемы ряда узлов синтезаторов и краткое описание их
работы.
На рис. 9.6 показана схема ИЧФДЗ с индикатором контроля
синхронизма (D2) и ФНЧ второго порядка на рис. 9.1,а (СЮ,
С12, Д11) [129]. Дискриминатор состоит из двух частей: цифровой
и аналоговой. Первая, собранная на двух P-триггерах (£>2?1,
214
Таблица 9.4.
Относительное время установления ty в СЧ с ИЧФД «в—з»
при ег ст = 0,95 и ег.н = 0,5
Т, т *у 'у 9
е=10-2 е=ю-3 е=ю-4
0,2 19 28 37 0
о,1 0,5 8 12 13 0
1,0 20 25 30 12
0,5 1,5 23 32 37 15
0,2 19 28 37 0
0,3 0,5 8 9 13 0
1,0 18 21 26 11
1,5 20 26 30 14
0,2 21 31 39 0
0,1 0,5 26 39 48 14
1,0 41 55 66 25
2,0 1,5 32 50 66 15
0,2 20 27 38 0
0,3 0,5 22 30 37 9
1,0 32 38 47 21
1,5 20 27 34 10
Таблица 9 5.
Зависимость относительного времени установления /у от расположения рабочей
точки при Лу = 0,5, Та=2, т = 0, егн = 0,5
*г,ст *У Tf
е=10 6=10-3 6=1 о-4
0,01 142 156 169 137
0,02 87 96 109 76
0,03 63 76 89 51
0,97 40 53 67 28
0,98 53 66 76 42
0,99 91 105 118 86
DD2) и схеме И-НЕ (DD3), вырабатывает последовательность
импульсов на выходах (прямые выходы D-триггеров). Длитель-
ность импульсов зависит от фазового рассогласования входных
сигналов. Если импульсный сигнал, поступающий на счетный вход
первого D-триггера (DD1.1), опережает по фазе сигнал, поступаю-
щий на счетный вход второго D-триггера (DD1.2), то на прямом
215
Рис 9 6 Схема ИЧФДЗ и использованием ТТЛ микросхем
выходе £)£)1.1 появляются импульсы, длительность которых про-
порциональна разности фаз входных сигналов. При этом на пря-
мом выходе DD1.2 имеют место короткие импульсы с длитель-
ностью, определяемой задержкой срабатывания триггера схемы
И-НЕ (DD3) и постоянной времени 7?С-цепи (7?4, С8). Введение
последней необходимо для обеспечения надежной работы дискри-
минатора (устранения так называемой «мертвой зоны», или «зоны
нечувствителньости», при работе ИФАПЧ в режиме синхронизма).
Если сигнал на входе PD1.1 отстает по фазе of сигнала на входе
DD1.2, то имеет место обратная ситуация.
При нулевом фазовом рассогласовании входных сигналов (или
близком к нулю), что характерно для режима синхронизма, на вы-
Рис 9 7 Схема ИЧФДЗ с использованием КМОП-микросхем
216
ходах обоих D-триггеров имеются короткие импульсы. Генераторы
тока заряда (УП, УТ’2) и разряда (VT3) управляются импульса-
ми с цифровой части дискриминатора. Токовый сигнал с выхода
дискриминатора подается на ФНЧ, в котором формируется сиг-
нал управления УГ.
На микросхеме DD2 построен индикатор синхронизма, выра-
батывающий «лог 1» при наличии фазового рассогласования вход-
ных сигналов и «лог 0» — при отсутствии рассогласования фаз.
Дискриминатор работает в широком диапазоне частот сравне-
ния (до нескольких мегагерц) и изменения управляющего напря-
жения (от 4 до 20 В).
Вариант схемы ИЧФДЗ, используемый в синтезаторе радио-
станции «Маяк» [130], работает на более низкой частоте сравне-
ния: до 10...25 кГц (рис. 9.7). Цифровая часть дискриминатора
выполнена на D-триггерах DD1.1, DD1.2 и элементах И-НЕ
DD2.1, DD2.2. Индикатор контроля синхронизма собран на эле-
ментах DD2.3 и DD2.4. Импульсы с длительностью, пропорцио-
нальной разности фаз входных сигналов, присутствуют на инверс-
ных выходах D-триггеров. Управление генератором тока заряда
(V71) осуществляется с прямого выхода DD1.1. В этом случае
большую часть времени (при малой разности фаз входных сиг-
налов) на транзисторе присутствует низкий потенциал и диод
VD2 заперт. При нулевом сигнале на прямом выходе DD1.1 ток
заряда питает вход ФНЧ второго порядка на рис. 9.1,а (СЗ, С5,
R7) с дополнительным интегрирующим звеном (/?8, С6). Управ-
ление генератором тока разряда (УТ’2) осуществляется от инверс-
ного выхода DD1.2. В режиме синхронизма на выходе индикатора
присутствует сигнал с уровнем «лог 1». В приведенной схеме ука-
занный индикатор рассчитан на работу дискриминатора на часто-
те сравнения 2,5 кГц.
Вариант схемы ИЧФДЗ с цифровой частью, построенной на
двух D-триггерах, приведен на рис. 9.8. Отличием схемы от пре-
дыдущих является отсутствие в цифровой части специальной це-
пи установки триггеров в исходное состояние [131]. При поступле-
Рис. 9.8. Схема ИЧФДЗ без специальной цепи установки триггеров в исходное
состояние
217
нии сигнала на счетный вход первого триггера (Z)Z)1.1) на его пря-
мом выходе появляется сигнал «лог 1» и одновременно с этим
входной сигнал устанавливает DD1.2 в нулевое состояние. На вхо-
де D второго триггера при этом присутствует сигнал «лог 0». При
поступлении сигнала на счетный вход DD\J2 на его выходе оста-
ется сигнал «лог 0», a DZH.1 устанавливается в нулевое состоя-
ние. Если импульсный сигнал, поступающий на счетный вход
7)7)1.2, опережает по фазе сигнал, поступающий на счетный вход
DiDl.l, то ситуация становится обратной.
Генераторы тока выполнены на ключах DD2A и DD2.2. Ток
задается резисторами 7?1 и R2.
Рассмотренный упрощенный вариант генераторов тока обла-
дает тем недостатком, что при изменении напряжения управле-
ния УГ соответственно изменяются токи заряда и разряда. Поэто-
му этот вариант целесообразно применять в случае небольшого
диапазона управляющего напряжения.
Применяемые схемы ИФД «в—з» в настоящее время хорошо
известны и приведены в ряде монографий по синтезаторам [2, 4,
5, 7]. Остановимся поэтому лишь на примерах схем ИЧД, входя-
щих в состав ИЧФД «в—з».
На рис. 9.9 приведена схема на микросхемах серии 561. Схема
ИЧД содержит /?3-триггер (7)7)1.1, DD1.2), который фиксирует
временную разность между фронтами приходящих на его входы
импульсов с частотами f0 и fc. Сигналы, сформированные на выхо-
де ЛЗ-триггера, поступают на информационные входы DD2A,
DD2.2. При соблюдении очередности входных сигналов на выхо-
дах DD2A и DD2.2 будет постоянно присутствовать сигнал «лог О».
При нарушении очередности входных импульсов (например,
fo>fc) возникает последовательность состояний fc, f0, fo, fc. Тогда
при поступлении второго импульса сигнала e0(t) и до момента
прихода импульса ec(t) на выходе DD2.1 будет напряжение
«лог 1». При переключении DD2A в состояние «лог 1» на выходе
DD3A фиксируется сигнал с уровнем «лог О». В этом случае на
выходе ИЧД постоянно присутствует указанный сигнал, вследст-
218
вие чего сброса выходного сигнала ГПН ИФД «в—з» не проис-
ходит и на выходе дискриминатора ед(/) = максед(/). Рассматри-
ваемое состояние ИЧФД «в—з» будет сохраняться до тех пор,
пока не возникнет последовательность состояний f0, fc, fc, fo.
В этом случае импульс, прошедший на выход DD2.2, установит
DD3.1 по входу R в состояние «лог 1». Сигнал e0(t) через инвер-
торы DDi.3 и DD\A проходит на выход ИЧД, что соответствует
режиму измерения разности фаз. При /0, /с, /с, f0 на выходе ИЧД
будет присутствовать сигнал «лог 1», что соответствует режиму
работы ИЧФД «В‘—з» с ед(/) =мин<?д(£). Обратная ситуация /с,
to, fo, fc переводит ИЧФД «в—з» в режим измерения разности
фаз.
Необходимо отметить, что длительность входных импульсов
ИЧД должна быть минимальной, так как она определяет «зону
нечувствительности» ИЧД (минимальную разность фаз, которую
ИЧД способен измерить). Существование указанной зоны в ИЧД
приводит при проектировании СЧ к необходимости увеличения
полосы удержания Л/Уд по сравнению с диапазоном частот синте-
затора. Нетрудно показать, что должно выполняться условие
fH(l—2т/7’о) <Д/уД</в(1 + 2т/7’о), где т — длительность входных
сигналов ИЧД.
На рис. 9.10 приведена схема ДПКД радиостанции «Маяк»,
работающего в диапазоне выходных частот 135,3... 174 МГц.
Составными частями ДПКД является высокочастотный предвари-
тельный делитель на 10 (DDI), высокочастотный предваритель-
ный делитель на 10/11 (DD2), программируемый счетчик (DD4),
низкочастотный ДПКД (DD5). Частота входного сигнала пони-
жается с помощью DD1 в 10 раз. Далее сигнал поступает на де-
литель DD2, который в зависимости от сигнала управления на
входах DD\ и D2 работает в режиме деления на 10 или 11. С вы-
хода DD2 импульсная последовательность через схему блокировки
Рис. 9.10. ДПКД радиостанции «Маяк»
219
(DD3) подается на счетный вход программируемого счетчика
DD4 и через инвертор DD3.1 на счетный вход низкочастотного
ДПКД (Z)Z)5). Последний представляет собой тракт счета, способ-
ный находиться в состояниях от 9999 до 0. При достижении нуле-
вого состояния DD3 формирует на выходе сигнал положительной
полярности с длительностью т, равной периоду входного сигнала.
С помощью счетчика DD4 происходит управление делителем DD2.
Указанный счетчик вырабатывает управляющее воздействие поло-
жительной полярности с длительностью, изменяющейся от 0 до 9
периодов сигнала, поступающего на счетный вход (в зависимости
от кода, установленного на информационных входах DD\—DD4).
Поясним работу ДПКД в целом. Будем считать, что DD4 нахо-
дится в нулевом состоянии («лог 0» на выходе), а на выходе DD3
сформирован выходной импульс. При появлении сигнала на вы-
ходе DD5 происходит запись кода, установленного на информа-
ционных входах DDi—DD4, а также запись кода коэффициента
деления DD5. Эта операция производится с помощью пе-
ревода DD5 из нулевого состояния в состояние, соответствующее
установленному коду ДПКД. При этом на выходе DD4 появляет-
ся сигнал «лог I», который через DD3A переводит DD2 в режим
деления на 11, а также разрешает прохождение выходных импуль-
сов с DD2 через DD3.3 на счетный вход DD4. По окончании цикла
счета на выходе DD4 появляется сигнал «лог 0», который блоки-
рует поступление тактовых импульсов на его счетный вход и пе-
реводит DD2 в режим деления на 10. При достижении нулевого
состояния DD5 на его выходе формируется следующий импульс,
который определяет момент окончания предыдущего цикла счета
и начало нового. Далее весь цикл счета повторяется. Изменение
коэффициента деления ДПКД возможно в пределах от 40000 до
79 990 с шагом дискретности 10.
Для уменьшения времени установления частоты синтезатора
при переключении режимов работы радиостанции с приема на
передачу и обратно на вход Кь триггера DD5 подается сигнал
установки низкочастотного ДПКД в нулевое состояние. Управле-
ние DD5 осуществляется параллельным двоично-десятичным кодом
по тринадцати входам установки. Потребляемая ДПКД мощность
по цепи +5 В составляет 180 мВт, по цепи 4-10 В 50 мВт.
Рассмотрим схему УГ на примере радиостанции «Маяк»
(рис. 9.11). Здесь имеются два УГ: УГ1 собран на полевом тран-
зисторе VT\, УГ2 на транзисторе VT3. Схемы емкостных трехто-
чек обоих генераторов идентичны. Транзисторы включены по схе-
ме с общим затвором. Колебательные контура УГ1 составляют
LA, VD\, С4, С7 и С8, УГ2 — L2, VD2, С6, С9 и СЮ. Колебания
УГ1 используются для гетеродинирования в приемнике (ПРМ), а
колебания УГ2 — для возбуждения каскадов усиления мощности
в передатчике (ПРД). Модуляционное напряжение емод(|') пода-
ется на варикап VD2. Управляющее напряжение от системы
ИФАПЧ поступает на варикапы VD1 (в УГ1) и VD2 (в УГ2).
220
Рис 9.11. Схема УГ радиостанции «Маяк»
Включение генераторов в режимы ПРМ и ПРД осуществляется
подачей «лог 1» на вход транзисторных ключей РЛсили VTA со-
ответственно. Сигналы УГ1 и УГ2 через апериодический буферный
усилитель (1/Г5) подаются на оконечные усилители, собранные
на транзисторах VT6 и VT7. Основное назначение усилителей —
обеспечение необходимого уровня выходного сигнала синтезатора
(еВых1) и сигнала на входе ДПКД (евыхг), а также ослабление
влияния импульсных помех от ДПКД на работу синтезатора и
нагрузки на работу кольца автоподстройки.
Рабочий диапазон УГ в режиме ПРМ 135,3... 163,3 МГц, в ре-
жиме ПРД 146... 174 МГц. Весь диапазон перестройки разбит на
14 поддиапазонов по 2 МГц. Начальная установка частоты УГ в
каждом поддиапазоне осуществляется подстройкой индуктивно-
стей 1Л, L2. Схема на рис. 9.11 имеет следующие технические
характеристики: уровень напряжения на выходе еВЫх1 в режиме
ПРД — не менее 0,5 В, в режиме ПРМ — не менее 0,4 В; уровень
модулирующего напряжения 300... 900 мВ; крутизна характерис-
тики управления УГ 0,8 МГц/B; управляющее напряжение — в
пределах 4...7 В. Для уменьшения времени установления частоты
СЧ при переключениях режимов ПРМ—ПРД перестройка УГ1 и
УГ2 сопряжена. Устройство выполнено в виде функционального
законченного блока в латунном экране, залитом пенопластом.
В настоящей главе приведен ряд примеров конкретных вариан-
тов расчета, а также даны некоторые рекомендации по проекти-
рованию СЧ с системой ИФАПЧ. Разумеется, на практике круг
221
задач, с которым сталкиваются исследователь и разработчик ап-
паратуры, оказывается значительно шире. В этих случаях резуль-
таты теоретического анализа, содержащиеся в предшествующих
разделах книги, должны оказаться полезными.
ПРИЛОЖЕНИЕ
КОМПЛЕКС ПРОГРАММ РАСЧЕТА СЧ С ИФАПЧ
Программа
1FAPH1
Программа IFAPH1 реализует алгоритм расчета переходных процессов
в системе ИФАПЧ с ИЧФДЗ без учета нелинейности характеристики управ-
ления УГ. Эта программа написана на языке ПЛ/1 в соответствии с выраже-
нием (3.51), в котором матрица Ф(/) имеет вид
1 t 0 0 ... 0
0 1 0 0 ... 0
ф(0 = 0 0 ехр(М) 0 ... 0
0 0 0 0 ... ехр Q.mt)
где Л, — корни передаточной функции Syr Оф(д)/д, Тп — период, определяемый
из соотношения (3.73а), —вектор из табл. 3.3. Так как в системе ИФАПЧ
с ИЧФДЗ возможны пять типов движений, то и программа IFAPH1 содержит
пять характерных фрагментов. Переход от одного типа движения к другому
соответствует графу на рис. 3.9. Для типа движения II проверяется условие
т,1+1<0: если оно истинно, то происходит переход к типу движения I и далее
к IV. Для типа движения IV проверяются два неравенства: 1) хп>Тп, если оно
истинно, то происходит переход к типу движения III и далее к типу движения
IV; 2) Tn+i<0, если оно истинно, то происходит переход к типу движения II;
если оба неравенства ие выполняются, то проводятся расчеты по формулам,
соответствующим типу движения IV. "*
Входные параметры процедуры IFAPH1 следующие; N — порядок харак-
теристического полинома передаточной функции ФНЧ, умноженной на Syr/s;
Al =Е,д5УгАо7'о/(2лА)—нормированный коэффициент усиления, где Ко — коэф-
фициент, определяемый из условия нормировки коэффициентов С, С(1)=с,/Ко,
С(1) =Соо/Ао= 1; WU = <Byr о/(А<Во)—нормированная начальная частота УГ;
S — массив размерности А, составленный из нормированных корней характе-
ристического полинома SyrG(j(s)/s, 5(/)=Х,Г0, М ==7.2=0, С — массив размер-
ности N, составленный из нормированных коэффициентов С(1).
В качестве выходной информации IFAPH1 на печать выдаются СК — числе
со знаком минус, определяющее, сколько раз в системе ИФАПЧ имел место тит
движения III, и со знаком плюс, определяющее, сколько раз два импульса опор-
ного сигнала появлялось в периоде импульсов с ДПКД при типе движения II
ТР — интервал времени от начала движения до момента, пока отклонение нор-
мированной частоты УГРи=1—1 /pN = 1—Г0/Гп ие войдет в область, где Е3=
= 0,0111—WU|; ТР1 — интервал времени от начала движения, при которой
FU входит в область, где Е5 = 0,001|1—WU]; ТР2 — интервал времени от на
чала движения, при котором FU входит в область, где Е6=0,0001 [1—WU]
Т — интервал времени от начала движения, при котором отклонение координат
системы от установившихся значений, определяемых как TN=9, Е (2) = 1—WU
222 х
fe(I)=0(I>2), не достигнет области, где Е7 = 0,00007 |1—WU|. При этом пре-
кращается счет по программе IFAPH1.
Для проверки точности вычисления периода Тп по (3.73а) на печать выво-
дится значение максимальной ошибки ENl = e/T0 и значения интервала времени,
когда эта ошибка возникает. При |е|/7'о>0,1 счет прекращается и выдается
сообщение «погрешность вычисления велика».
ПРОГРАММА IFAPH2
Программа IFAPH2 реализует алгоритм расчета длительностей переходных
процессов в системе ИФАПЧ с ДПКД и ИЧФДЗ. Она написана на языке
ПЛ/1 в соответствии с выражениями (3.51) и (3 53). Так как в системе воз-
можны пять типов движения, то и IFAPH2 содержит пять характерных фраг-
ментов.
Переход из одной области в другую проводится в соответствии с графом на
рис 2.16 и определением текущего периода следования импульсов с ДПКД.
Если этот период не определяется системой уравнений, присущей данному типу
движения, то происходит переход к другому типу движения.
Период следования импульсов ДПКД в программе IFAPH2 определяется с
помощью двух подпрограмм:
1. Подпрограммы Р1 вычисления периода.
2. Подпрограммы ZEROIN.
Подпрограмма PI — это запись уравнения (3.53) на языке ПЛ/1, а
ZEROIN — подпрограмма определения корня трансцендентного уравнения на
языке ПЛ/1, взятая из [100] и модернизированная применительно к решаемой
задаче.
Входные параметры процедуры IFAPH2 следующие: N — порядок характе-
ристического полинома передаточной функции ФНЧ: A==EaSyvK/jT|/(2лА) —
нормированный коэффициент усиления, где Ко — постоянный коэффициент, оп-
ределяемый из условий нормировки коэффициентов с,—С(/)=с,/Ко, С(1) =
|=С1/К0=1; WH = <Byr о/(А<Во)—нормированная начальная частота УГ;
DELTAS = Syri/Syi.2 — отношение крутизны управления УГ в начале и конце
переходного процесса; S — массив размерности А нормированных корней ха-
рактеристического полинома передаточной функции ФНЧ; S(I)=X,7'0; С — мас-
сив размерности А, составленный из нормированных коэффициентов С(1) =
|=с,/К0, C(l) = l; PR—коэффициент, принимающий два значения: PR=1—•
режим работы программы IFAPH2, когда переходные процессы рассчитываются
всегда по выражениям (3.51) и (3.53), PR=0—режим работы программы
JFAPH2, при котором расчеты по (3.51) и (3.53) ведутся до момента, пока
ртклонения нормированных координат системы ИФАПЧ от установившихся зна-
!ений не войдут в А+1-мерный куб с гранями, равными 0,01.
Далее расчеты переходных процессов ведутся по линейным разностным
равнениям (3.59).
Нормированные состояния в программе соответствуют массивам Е1(1),
:(1) и TN. Нормировка состояний системы проведена по следующим соотноше-
иям: Е(1)=х,/(£дТ0) и ТИ=тл/Г0.
В качестве выходной информации, получаемой программой IFAPH2, явля-
ется: СК—число со знаком минус, определяющее, сколько раз в системе
ЙФАПЧ имел место тип движения III, и со знаком плюс, определяющее, сколь-
ко раз два импульса опорного сигнала появлялось в периоде импульсов с ДПКД
223
при типе движения II; ТР — интервал от начала движения до момента, пока
отклонение нормированной частоты УГ FU= 1—Го/Л, не войдет в область, где
Е3 = 0,0111—WH]; ТР1 — интервал от начала движения до момента, пока FU
войдет в область, где Е5=0,001|1—WH|; ТР2— интервал времени, при котором
FU входит в область, где Е6=0,000111—WH|.
Вычисления по программе IFAPH2 происходят до тех пор, пока отклонения
состояний системы от установившегося значения, определяемого как TN = 0,
Е(1) =2(1—WH)/(DELTAS+1), E(I) = 0(I=2,3....N) не достигнут значения
Е7 = 0,0000711—WH|.
В качестве выходной информации на печать выдаются значения N, Al, WH,
DELTAS и массивы S и С.
Отметим, что в представленном варианте программы IFAPH2 используют-
ся нулевые начальные условия по состояниям тл и х,. Учет ненулевых началь-
ных условий можно легко провести за счет введения дополнительных парамет-
ро в программу IFAPH2 и оператора CALL вызывающей программы.
Заметим, что в IFAPH2 параметр WN равен нулю. Если его менять по со-
ответствующему закону, то можно с помощью программы IFAPH2 исследовать
системы ИФАПЧ с дробными ДПКД.
ПРОГРАММА IFAPH 3
Программа IFAPH3 реализует алгоритм расчета длительностей переходных
процессов в системе ИФАПЧ с ДПКД и ИЧФД «в —з» без учета нелинейности
характеристики управления УГ Эта программа написана на языке ПЛ/1 соглас-
но выражениям (3.51) и (3.55) с учетом, что S'yr = 0.
Программа IFAPH3 содержит три подпрограммы:
1. Подпрограмму Р1 для вычисления периода, написанную в соответствии
с выражением (3.55).
2. Подпрограмму ZEROIN для вычисления совместно с подпрограммой Р1
корня трансцендентного уравнения
3. Подпрограмму U для вычисления уровня выходного сигнала ИФД
«в—з», имеющего трапецеидальную форму.
Входные параметры программы IFAPH3 следующие. N — порядок характе-
ристического полинома передаточной функций ФНЧ; А1 =Ед5Уг7'0/(2лА) —
нормированный коэффициент усиления; WH = <Byr о/(Мв0) — нормированная на-
чальная частота УГ; DO=d0 — член в разложении передаточной функции ФНЧ
на элементарные дроби (см. 3.5); PR—параметр, принимающий два значения:
PR=0 — режим импульсного частотного детектирования исключается и расчет
ведется для ИФД «в—з», PR=1—расчет ведется для ИЧФД «в—з»; F0 — па-
раметр, принимающий значения от нуля до единицы, характеризующий длитель-
ность начального участка трапеции; F01 — параметр, принимающий значение
от нуля до 1—F0 и характеризующий в трапеции длительность участка с поло-
жительным наклоном; KL — параметр, характеризующий начальное состояние
импульсного частотного детектора и принимающий три значения: KL = 0— со-
ответствует типу движения II (см. табл. 2.2), KL=—1 — соответствует типу
движения VI, KL=1 — соответствует типу движения IV; S — массив размернос-
ти N нормированных корней характеристического полинома передаточной функ-
ции ФНЧ,<8(1) =Л,Г0; С—массив размерности А, составленный из нормирован-
ных коэффициентов С(1)=с,Г0; Е — массив размерности N, составленный из
224
нормированных значений начальных состояний ла, нормировка проведена по
следующему выражению: Е(1)=х1/Ед.
В качестве выходной информации, получаемой программой IFAPH3 и вы-
даваемой на печать, являются: UN=ea(n)/Es—нормированное напряжение на
выходе ИЧФД «в—з»; PNl = Tn/T0 — нормированный период импульсов с ДПКД;
ТР — нормированный к То интервал от начала движения до момента, пока от-
клонение нормированной частоты УГ FU=1—1/PN=1—Т0/Тп не войдет в об-
ласть, где ЕЗ=0,0111—WH-A1-E(1)S(1) |; ТР1 — интервал от начала движения,
при котором FU войдет в область, где Е5=0,00111—WH-A1-E(1)S(I) (; ТР2 —
интервал от начала движения, при котором FU войдет в область, где Е6=
= 0,0000111—WH-A1 -Е(1) • S(l) |.
Счет по программе IFAPH3 происходит до тех пор, пока отклонения коор-
динат системы ИФАПЧ от установившихся значений, определяемых как
FU=0, Е(1)= — (1—WH)/S(I), не достигнут значения Е7 = .000007|1—WHX
ХЕ(1)-S(l) [.
В качестве выходной информации на печать выдаются значения A, Al, WH,
S и С.
ПРОГРАММА SINTM
Программа S1NTM реализует цифровую модель ИФАПЧ с переменным
шагом дискретизации времени и предназначена для расчета времени уста-
новления частоты в СЧ с ИЧФДЗ, ИЧФДЗД, ИЧФДЗДГ и ИЧФДЗМ с ФНЧ
второго порядка при расчете системы по М, RK и произвольным 1\, Т2 и Ку.
Входными параметрами являются:
М — значение показателя колебательности М или /?1Ч;
Т2 — нормированная к То постоянная времени ФНЧ Т2;
W— нормированный скачок частоты Д/н=(/к—fa) If к, где fB, fr.— начальное
и конечное значения выходных частот СЧ соответственно;
Т1—нормированная к То постоянная времени ФНЧ Т\ (задается при про-
извольном выборе параметров ИФАПЧ);
ТЕТ — нормированная к То задержка звена задержки ИЧФДЗМ;
NU — нормированный к 1Я ток дополнительных генераторов тока ИЧФДЗДГ;
PR — параметр, принимающий значения: 0—при расчете по М; 1 — при
расчете по 7?м; 2—-при произвольных Гь Т2 и Ку;
N — число отсчетов длительностей выходных импульсов дискриминатора
выводимых на печать;
KU — нормированный коэффициент усиления Ку (задается при произволь-
ном выборе параметров ИФАПЧ);
ТМ — значение нормированного к То времени ограничения на вычислитель-
ный эксперимент;
MOD — параметр, принимающий значения: 0 — при использовании
ИЧФДЗ; 1—при использовании ИЧФДЗД; 2 — при использовании ИЧФДЗДГ;
3 — при использовании ИЧФДЗМ;
EF — относительная точность установки частоты ty=Af, /Л/н, где AfB —
точность установки частоты.
15—1020
225
В качестве выходной информации, получаемой программой SINTM и выда-
ваемой на печать, являются параметры ИФАПЧ Т\, Тг и Ку; N — число отсчетов
длительности выходных импульсов дискриминатора и нормированное к То время
установления частоты TU.
СПИСОК ЛИТЕРАТУРЫ
1. Левин В. А. Стабилизация дискретного множества частот. — М.: Энергия,
1970. —328 с.
2. Зарецкий М. М., Мовшович М.Е. Синтезаторы частоты с кольцом фазовой
автоподстройки. — Л.: Энергия, 1974. — 256 с.
3. Галин А. С. Диапазонно-кварцевая стабилизация СВЧ.—М: Связь,
1976. —255 с.
4. Манасевич В. Синтезаторы частот. Теория и проектирование: Пер с англ.
/Под ред. А. С. Галина. — М.: Связь, 1979. — 384 с.
5. Шапиро Д. Н., Пайн А. А. Основы теории синтеза частот.—М.: Радио и
связь, 1981. — 264 с.
6, Капланов М. Р., Левин В. А. Автоматическая подстройка частоты. — М.
— Л.: Госэнергоиздат, 1962. — 320 с.
7. Системы фазовой автоподстройки с элементами дискретизации / В. В. Шах-
гильдян, А. А. Ляховкин и др.; Под ред. В. В. Шахгильдяна. — М.: Связь,
1979, —224 с.
8. Шахгильдян В. В., Ляховкин А. А. Системы фазовой автоподстройки час-
тоты.— М.: Связь, 1972. — 448 с.
9. Цыпкин Я. 3. Основы теории автоматических систем. — М : Наука, 1977.
— 560 с.
10. Бесекерский В. А. Цифровые автоматические системы. — М.: Наука, 1976.
— 576 с.
11. ГОСТ—12252—77. Радиостанции с угловой модуляцией сухопутной под-
вижной службы. Типы. Основные параметры. Технические требования. Ме-
тоды измерений.
12. Курочкина Т. И. Стабилизация частоты с нелинейным управлением//Ма-
териалы межотраслевых научно-технических конференций, совещания, се-
минаров и выставок. Стабилизация частоты. — М.: ВИМИ, 1978.
С. 171—179.
13. Шахгильдян В. В., Пестряков А. В., Кабанов А. И. Общие принципы по-
строения быстродействующих синтезаторов частот на основе системы фазо-
вой синхронизации.— Электросвязь, 1983. — № 10. — С. 36—42.
14. Гуревич И. Н. Подавление помехи с частотой, кратной шагу сетки, в син-
тезаторах частоты//Техника средств связи. Сер. ТРС.— 1979.— Вып. 6.
— С. 30—41.
15. Нисневич Д. Г, Вычислительные алгоритмы синтеза частот//Техника
средств связи. Сер. ТРС.— 1981. — Вып. 3. — С. 46—52.
16. Малиновский В, Н, Алгоритмы частотного поиска для цифровых синтеза-
торов частоты//Техника средств связи. Сер. ТРС.— 1983. — Вып. 7. — С.
83—90.
17. А, с. 1054907 (СССР). Устройство для автоматической подстройки часто-
ты / В. Н. Малиновский, С. К- Романов. — Опубл. 1983, Бюл. № 42,
226
18. Малиновский В. Н., Романов С. К. Применение метода оптимального уп-
равления в задаче повышения быстродействия переключения частот синте-
затора с кольцом ИФАПЧ//Техника средств связи. Сер. ТРС.— 1980.
— Вып. 7. — С. 78—85.
19. Левин В. А., Малиновский В. Н., Саутин В. В. Оптимальное управление
частотой цифрового синтезатора с коррекцией расчетных параметров
//Техника средств связи. Сер. ТРС.— 1985. — Вып. 7. — С. 60 — 66.
20. А. с. 995336 (СССР). Двухпетельное устройство импульсно-фазовой авто-
подстройки частоты/А. В. Пестряков, М. Ю. Соловьев, Н. Н. Филимонов,
В. В. Шахгнльдян. — Опубл 1983. — Бюл. № 5.
21. Довженко С. Т. Математическое описание системы ФАПЧ с учетом время-
импульсной модуляции//Автоматика и вычислительная техника (Минск)).
-- 1979 — № 9, —С. 27—36.
22. Von Horst Behlen. Ubertragungseigenschaften eines Abtastphasendiskrimi-
nators mit Zwischen Speichrung. — Frequenz, 1970, Bd. 24, N 5.—S. 131 —
139.
23. Москвин Ю. Ф., Озеров В. В., Лаптенков Г. Г. Система автоподстройки
частоты с цифровым частотно-фазовым детектором // Техника средств связи.
Сер. ТРС.— 1977, —Вып. 9. — С. 36—42.
24. Алехин Ю. Н. Фазовые детекторы с непериодической характеристикой
//Техника средств связи. Сер. РИТ.— 1978.— Вып 1. — С.72—76.
25. Sharpe С. А. А 3-State phase detector car improve your next PLL design. —
EDN, 1976, № 20.— P. 55—59.
26. Sharpe C. A. Speed up PLL’s in digital Synthesiezer. — Electronic Design.—
1977.—Vol. 25, N 24. — P. 124—127.
27. Балтарагис И. Г. Б. Оптимизация по быстродействию частотно-фазовых
детекторов для цифровых синтезаторов частот // Техника средств связи.
— Сер. Рит. — 1982. — Вып. 4. — С. 92—101.
28. Саликов Л. М., Кудрявцев С. А., Киселев Б. М. К исследованию цифро-
вых синтезаторов частот//Радиотехника и электроника.— 1975. — Т. XX,
№ 4. — С. 762—768.
29. Малиновский В. Н., Романов С. К. Динамические процессы в цифровом
синтезаторе частоты с импульсным частотно-фазовым детектором//Электро-
связь. — 1983. — № 6. — С. 50—54.
30. Романов С. К., Малиновский В. Н. Математические модели цифровых син-
тезаторов частоты//Техника средств связи. Сер. ТРС.— 1981. — Вып. 7.
— С. 72—85.
31. Dikmann Р. Digitale Frequenz und Phasenvergleiche schaltung fur nach-
gesteurte Oszillatoren. — Internatiale Elektronische Rundschau.— 1970.—
N 9,—S. 231—232.
32. Rohde Ulrich L. Digital PLL Frequency Synthesizers. — New-York: Prentice-
Hall, 1983.—494 p.
33. Gardner I. M. Charge-pump phase-lock loops.— IEEE Trans.— 1980.—
Vol. COM-28, N 11, —P. 1849—1859.
34. Морган Д. Микроваттная схема ФАПЧ расширяет возможность разработ-
чика // Электроника. — 1982. — № 20, — С. 74—75.
35. Гребен А. Б. Проектирование аналоговых интегральных схем: Пер. с англ.
— М.: Энергия, 1970. — 256 с.
36. Савченко М. П., Карлинская Т. А. Параметры эквивалентной схемы и ап-
проксимация характеристик УКВ варикапов//Радиотехника. — 1985.—
— № 11, —С. 24—27.
37. Челноков О. А. Транзиторные генераторы синусоидальных колебаний. — М.;
Сов. радио, 1975. — 272 с.
38. Шитиков Г. Т. Стабильные автогенераторы метровых и дециметровых
волн. — М.: Радио и связь, 1983. — 256 с.
39. Грибов Э. Б. Нелинейные явления в приемно-передающем тракте аппара-
туры связи на транзисторах. — М.: Связь, 1971. — 243 с.
40. Жалуд В., Кулешов В. Н. Шумы в полупроводниковых устройствах. — М.:
Сов. радио, 1977. — 416 с.
41. Малахов А. Н. Флуктуации в автоколебательных системах. — М.: Наука,
1967,-600 С.
15'
227
42. Кулешов В. Н., Савченко М. П. Неизохронность автогенератора со встречно-
последовательно соединенными варикапами//Радиотехника.— 1986. — №9.
— С. 38—40.
43. Лучинин А. С. Разработка малошумящих автогенераторов на биполярных
транзисторах//Изв. Вуз. СССР. Радиоэлектроника. — 1987. — Т. 30, № 3.
— С. 3—4.
44. Scherer D. Today’s Lesson—Learn About Low—Noise Design//Microwa-
ves. — 1979. — Vol. 18, N 4. — P. 116—122.
45. Kroupa V. F. Noise Properties of PLL Systems//IEEE Trans.— 1982.—
Vol. COM-30, N 10.—P. 2244—2252.
46. Нисневич Д. Г., Левин В. А., Гусев В. Л. Классификация цифровых уст-
ройств, используемых в технике синтеза частот//Электросвязь,— 1978.
— № 3. — С. 66—72.
47. Левин В. А., Нисневич Д. Г. Некоторые вопросы построения цифровых
синтезаторов частот // Электросвязь^ — 1976. — № 4, — С. 73—79.
48. Ланцов А. Л., Зворыкин Л. М., Осипов И. Ф. Цифровые устройства на
комплементарных МДП интегральных микросхемах. — М.: Радио и связь,
1983. —266 с.
49. Нисневич Д. Г., Левин В. А. Анализ структурных схем делителей частоты
с переменным коэффициентом деления // Вопросы радиоэлектроники. — Сер.
ТРС. — 1972. — Вып. 1. — С. 80—88.
50. Лейнов Д. Г., Качалуба В. С., Рыжков А. В. Цифровые делители на логи-
ческих элементах. — М.: Энергия, 1975.— 128 с.
51. А. с. 839063 (СССР). Способ деления частоты предварительным управ-
ляемым делителем и устройство для его осуществления / В. С. Суслов,
Н. И. Зуев. — Опубл. 1981, Бюл. № 22.
52. Шишов С. Я. Быстродействующий делитель частоты с переменным коэффи-
циентом деления//Техника средств связи. Сер. ТРС.— 1981. — Вып. 9.
— С. 83—88.
53. Варфоломеев Г. Ф. Спектр помех дробности в системе фазовой АПЧ с
дробным делителем частоты//Техника средств связи. Сер. ТРС.— 1978.
— Вып. 10. —С. 66—71.
54. Шишов С. Я., Станков В. С., Сухотин С. С. Прямые цифровые синтезаторы
частот для аппаратуры связи//Техника средств связи. — Сер. ТРС. — 1983.
—Вып. 9. —С. 66—71.
55. Губернаторов О. Н., Соколов Ю. И. Цифровые синтезаторы радотехниче-
ских систем. — М.: Энергия, 1973. — 175 с. ,
56. Романов С. К. К расчету идеализированной системы импульсно-фазовой
автоподстройки частоты с делителем в цепи обратной связи // Вопросы
ридоэлектроники. Сер. ТРС — 1970. — Вып. 4. — С. 85—93.
57. Романов С. К. К исследованию системы импульсно-фазовой автоподстрой-
ки частоты со счетчиковым делителем частоты в цепи обратной связи
//Вопросы радиоэлектроники. Сер. ТРС. — 1974. — Вып. 4. — С. 112—118.
58. Саликов Л. М. Расчет процессов в синтезаторах частоты с делителем в
цепи обратной связи//Изв. Вуз. СССР. Радиоэлектроника.— 1975. — Т.
XVIII, №5, —С. 118—120.
59. Горюнов В. Н. К теории систем импульсно-фазовой автоподстройки часто-
ты (ИФАПЧ)//Изв. Вуз. СССР. Приборостроение. — 1974, №10. — С.
102—107.
60. Макаров А. К. Исследование динамики импульсной системы фазовой авто-
подстройки частоты//Изв. Вуз. СССР. Радиофизика. — 1972. — №10. — С.
1538—1546.
61. Кунцевич В. М„ Чеховой Ю. Н. Нелинейные системы управления с частот-
но-и широтно-импульсной модуляцией. — Киев.: Техника, 1970. — 339 с.
52. Дискретные нелинейные системы. Под ред. Ю. И. Топчеева.—М.: Маши-
ностроение, 1970. — 312с.
63. Директор С., Рорер Р. Введение в теорию систем: Пер. с англ. — М.: Мир,
1974.— 464 с.
64. Чаки Ф. Современная теория управления: Пер. с англ. — М-: Мир, 1975.
— 544 с.
228
65. Мелса Дж., Джонс Ст. К. Программы В Помощь изучающим теорию ли-
нейных систем управления. Пер. с англ. — М.: Машиностроение, 1981.
— 200 с.
66. Райс Д. Ж. Матричные вычисления и математическое обеспечение: Пер. с
англ.—М.: Мир, 1984. — 264 с.
67. Уилкинсон, Райнш. Справочник алгоритмов на языке Алгол. Линейная
алгебра: Пер. с англ. — М.: Машиностроение, 1976. — 390 с.
68 Проектирование следующих систем с помощью ЭВМ / Под ред. В. С. Мед-
ведева. — М.: Машиностроение, 1979. — 367 с.
69. Розенфельд А. С. Скачки и дельта-импульсы вектора состояния линейных
электрических цепей//Изв. Вуз. СССР. Радиоэлектроника.— 1978. — Т. XXI,
№ 11, —С. 67—73.
70 Довженко С. Т., Мицкевич А. Д. Об одном подходе к анализу синтезато-
ров частоты с время-импульсной модуляцией // Материлы межотраслевых
научно-технических конференций, совещаний, семинаров и выставок. Стаби-
лизация частоты. — М.: ВИМИ, 1978, с. 17—24.
71. Романов С. К. Определение времени переключения частоты в цифровом
синтезаторе с импульсным частотно-фазовым детектором с тремя состоя-
ниями//Техника средств связи. Сер. ТРС.— 1983. — Вып. 7.— С. 74—82.
72. Романов С. К. Математическая модель системы ИФАПЧ со счетчиковым
делителем в цепи обратной связи и нелинейным управителем частоты // Тех-
ника средств связи. Тер. ТРС.— 1985.— Вып. 7. — С. 67—76.
73. Бесекерский В. А. Динамический синтез систем автоматического регулиро-
вания.— М.: Наука, 1970. — 578с.
74. Радиоавтоматика / Бесекерский В. А., Елисеев А. А., Небылов Л. В. и др.;
Под ред. В. А. Бесекерского. — М.: Высшая школа, 1985. — 271 с.
75. Макаров И. М., Менский Б. М. Таблица обратных преобразований Лапла-
са и обратных z-преобразований: Дробно-рациональные преобразования.
— М.: Высшая школа, 1978 — 274 с.
76. Пестряков А. В. Расчет спектральных характеристик синтезаторов частот,
использующих дискретные кольца ФАПЧ//Электросвязь.— 1985, № 3.—
С 51—55.
77 Быков В. В. Цифровое моделирование в статистической радиотехнике.
— М.: Сов. радио, 1971. — 328 с.
78 А. с. 1077057 (СССР). Цифровой синтезатор частот./И. П. Усачев, С. К.
Романов, В. Н. Малиновский. — Опубл. 1984, Бюл. №8.
79. Малиновский В. Н., Романов С. К. Моделирование на ЭВМ синтезаторов
частоты с кольцом импульсно-фазовой автоподстройки // Электросвязь.
— 1983, №4, —С. 52—58.
80. Каппелини В., Константинидис А. Дж., Эмилиани П. Цифровые фильтры и
их применение. Пер. с англ.—М.: Энергоатомиздат, 1983. — 360 с.
81. Романов С. К. К исследованию периодических процессов в системе им-
пульсно-фазовой и автоподстройки частоты со счетчиковым делителем
частоты в цепи обратной связи // Техника средств связи. Сер. ТРС. — 1976.
—Вып. 4,—С. 97—103.
82. Малиновский В. Н. Полоса захвата цифрового синтезатора частоты с ком-
бинированным частотно-фазовым детектором // Техника средств связи. Сер.
ТРС. — 1982. — Вып. 4. — С. 119—128.
83. Малиновский В. Н. Полоса захвата синтезатора частоты с кольцом
ИФАПЧ первого порядка // Радиотехника. — 1982. — Т. 37, № 9. — С. 42—44.
84. Теория автоматического управления. 4.1. Теория линейных систем автома-
тического управления / Под ред. Л. А. Воронова. — М.: Высшая школа,
1986, —367 С.
85. Видаль П. Нелинейные импульсные системы: Пер. с франц.—М: Энергия,
1974, —356 с.
86. Романов С. К. К анализу системы импульсно-фазовой автоподстройки час-
тоты (ИФАПЧ) с запоминанием и запаздыванием//Вопросы радиоэлектро-
ники. — Сер. ТРС. — 1971. — Вып. 7. — С. 89—98.
87. Основы автоматического регулирования и управления. Под ред. Пономаре-
ва В. М. и Литвинова А. П. — М.: Высшая школа, 1974. — 439 с.
229
88. Артым А. Д„ Трифонов С. В. Частотные методы анализа и синтеза систем
ФАП. — М.: Связь, 1976. — 159 с. t
89. Oberst I. F. Generalized Phase Comparators for Improved Phase Looked Loop!
Aquesition//IEEE Trans. — 1971. — Vol. COM-19, N 6. — P. 1142—1148.}
90. Корякин Ю. А., Леонов Г. А. Определение полосы захвата в системах1
импульсно-фазовой автоподстройки частоты//Радиотехника.— 1977. — Т.1
32, № 6 — С. 65—72. !
91. Корякин Ю. А., Леонов Г. А., Лисс А. Р. Частотный критерий устойчивос-
ти дискретных систем автоматического управления фазой генератора // Ав-!
матика и телемеханика.— 1978. — №12 —С. 64—69. }
92. Макаров А. К. Анализ цифровых синтезаторов частоты: Дис.... канд. техн.!
наук.—М.: 1975.
93. Романов С. К. Определение полосы захвата в системе импульсно-фазовой'
автоподстройки частоты с пилообразной характеристикой фазового детек-'
тора//Техника средств связи. Сер. ТРС. — 1979. — Вып. 4. — С. 90—95.
94. Павлов Б. А. Применение метода импульсно-частотных характеристик в
теории фазовой автоподстройки // Вопросы радиоэлектроники. Сер. ТРС.
— 1972. — Вып. 2. — С. 146—159.
95. Гуревич И. Н., Никитин Ю. А. Определение требований к фильтру нижних
частот при различных реализациях делителя с дробно-переменным коэффи-
циентом деления//Техника средств связи. Сер. ТРС.— 1977. — Вып. 6.— С.
122—129
96. Иванов В. А., Ющенко А. С. Теория дискретны^ систем автоматического
управления. — М : Наука, 1983. — 336 с.
97. Малиновский В. Н., Романов С. К. Определение длительности переходных-
процессов в системе импульсно-фазовой автоподстройки частоты с частотно-
фазовым детектором//Техника средств связи. Сер. ТРС.— 1979. — Вып. 7.
—С. 95—102.
98 Бодряков В. В., Сенюшкин Б. П., Соколов М. Л. и др. Синтезатор с дроб-
но-рациональной аппроксимацией произвольных значений частоты//Мате-
риалы межотраслевых научно-технических конференций, совещаний, семи-
наров и выставок. Стабилизация частоты. — М.: ВИМИ, 1978, с. 12—16.
99 Романов С. К., Малиновский В. Н., Тихомиров Н. М. О влиянии изменения
таковой частоты на характеристики цифровых синтезаторов частот, пост-
роенных с использованием алгоритмов в аппроксимации // Техника средств
связи. Сер. ТРС. — 1981. — Вып. 7. — С 86—95.
100. Форсайт Дж. Малькольм М., Моулер Е. Машинные Методы математических
вычислений.— М.: Мир, 1980. — 280 с.
101. Малиновский В. Н. Об увеличении быстродействия синтезаторов частоты
путем управления коэффициентом деления ДПКД//Техника средств связи.
— Сер. ТРС. — 1981. — Вып. 7. — С. 96—109.
102. Романов С. К. Об управлении частотой генератора в системе импульсно-
фазовой автоподстройки частоты со счетчиковым делителем частоты в це-
пи обратной связи//Техника средств связи. Сер. ТРС.— 1976. — Вып. 4.
— С. 89—96.
103. А. с. 1109914 (СССР). Цифровой синтезатор частоты. В. Н. Малиновский,
С. К. Романов. — Опубл. 1984. — Бюл. №31.
104. А. с. 987817 (СССР). Цифровой синтезатор частоты/С. К. Романов,
В. Н. Малиновский. — Опубл. 1983, Бюл. № 1.
105. Ройтенберг Я. Н. Автоматическое управление: Учебное пособие М.: Наука,
1978, —552 с.
106. А. с. 657575 (СССР). Устройство для автоматической подстройки частот
/Д. Г. Нисневич, Р. С. Нисневич.— Опубл. 1979, Бюл. № 14.
107. Крылов В. И. и др. Вычислительные методы.—М.: Наука, 1976. — 303 с.
— 1 т.
108. Малиновский В. Н., Саутин В. В. Повышение быстродействия синтезатора
с ИЧФД с тремя состояниями//Техника средств связи, Сер ТРС.— 1986.
— Вып. 7. —С. 83—91.
109 ОСТ4.208.012.—77.1979. Аппаратура синтеза частот для радиосвязи. Терми-
ны и определения.
230
ПО. Калмыкова О. Л., Кулешов В. Н., Демьянченко А. Г., Хуртин Е. А. Радио-
передающие устройства, умножители частоты с кольцами АПЧ. — МЭИ,
1980. 70 с.
111. Алехин Ю. Н., Кириллов М. И., Сингосин С. А. Фазовые детекторы цифро-
вых синтезаторов частоты//Материалы межотраслевых научно-технических
конференций, совещаний и выставок. Стабилизация частоты. М.: ВИМИ,
1980. —С. 70—74.
112. Романов С. К. О влиянии шумов опорного сигнала на спектр колебаний
управляемого генератора в системе импульсно-фазовой автоподстройки с
делителем частоты в цепи обратной связи // Вопросы радиоэлектроники.
Сер. ТРС.—1971. —Вып. 7.—С. 79. —84.
113. Калмыкова О. Л., Кулешов В. Н. О расчете спектра флуктуаций фазы
подстраиваемого генератора в импульсной системе ФАП//Материалы
межотраслевых научно-технических конференций, совещаний, семинаров и
выставок. Стабилизация частоты. М.: ВИМИ, 1980. С. 115—116.
114. Николаев Ю. А., Петухов В. П., Феклисов Г. Н., Чемоданов Б. К. Дина-
мика цифровых следящих систем.—М.: Энергия, 1970. — 496 с.
115. Первачев С. В., Валдев А. А., Чиликин В. М. Статическая динамика радио-
технических следящих систем. — М.: Сов. радио, 1973. — 488 с.
116. Линдсей В. Системы синхронизации в связи с управлением: Пер. с англ.
/Под ред. Ю. Н. Бакаева и М. В. Капранова.—М.: Сов. радио, 1978.
— 600 с.
117. Гаврилюк Я. Д. Оптимизация системы фазовой автоподстройки частоты
//Вопросы радиоэлектроники. Сер. Общетехяическая.— 1976. — Вып. 11.
— С. 97—106.
118. Алехин Ю. Н., Альтшуллер Г. М., Кириллов М. Н. Об оптимальной струк-
туре систем автоматической подстройки частоты синтезаторов частот
//Техника средств связи. Сер. Радиоизмерительная техника.— 1984.
— Вып. 1. — С. 10—14.
119. Абдулаев И. Д., Петров Ю. П. Теория и методы проектирования оптималь-
ных регуляторов. — Л.: Энергоатомиздат, 1985. — 240 с.
120. Алехин Ю. Н., Карякин В. П., Прокофьев В. С. Фильтрующие свойства
системы фазовой автоподстройки частоты ЖИГ генератора//Электросвязь.
— 1982. —№ 11, —С. 51—54.
121. Градштейн Н. С., Рыжик Н. М. Таблицы интегралов, сумм, рядов и произ-
ведений.— М.: Наука, 1971.— 1108 с.
122. Реклейтис Г., Рейвиндран А., Регсдел К. Оптимизация в технике. В 2-х кн.,
кн. I: Пер. с англ. — М.: Мир, 1986. — 349 с.
123. Болнокин В. Е., Чинаев П. И. Анализ и синтез систем автоматического уп-
равления на ЭВМ. Алгоритмы и программы. — М. Радио и связь, 1986.
— 248 с.
124. Доленчук В. М. К вопросу о допустимой нестабильности фазы выходного
колебания синтезатора частоты радиоприемника и возбудителя передатчи-
ка//Техника средств связи. Сер. ТРС.— 1979. — Вып. 10.— С. 47—51.
125. Янке Е., Эмде Ф., Леш Ф. Специальные функции (формулы, графики, таб-
лицы).—М.: Наука, 1968.— 344 с.
126. Романов С. К., Малиновский В. Н., Корнюшин И. Н. Расчет цифровых
синтезаторов частоты с широтно-импульсным частотно-фазовым детектором
//Техника средств связи. Сер. ТРС.— 1980.— Вып. 7. — С. 86—95.
127. Малиновский В. Н. Влияние изменения параметров системы ИФАПЧ с
широтно-импульсным частотно-фазовым детектором на ее динамические
характеристики//Техника средств связи. Сер. ТРС.— 1982. — Вып. 7.—
С. 60—67.
128. Губернаторов О. Н. Время установления колебаний в цифровых синтезато-
рах частот // Электросвязь. — 1979. — № 8, — С. 50—53.
129. И. л. № 80—0009, сер. ИЛТ9-12-23. Импульсно-фазовый детектор (ИФД),
М. ВИМИ, 1979.
130. Системы подвижной радиосвязи/И. М. Пышкин, И. И. Дежурный, Талы-
зин В. Н. и др.; Под ред. И. М. Пышкина, — М.: Радио и связь, 1986.
— 328 с.
131. А. с. 985929 (СССР). Импульсный частотно-фазовый детектор / В. П. Гуд-
зюк, С. А. Наронов, А. Г. Сорочан. — Опубл. Бюл. 1982, Бюл. №48.
. 231
Научное издание
Левин Виктор Аронович, Малиновский Владимир Николаевич,
Романов Станислав Константинович
СИНТЕЗАТОРЫ ЧАСТОТ С СИСТЕМОЙ ИМПУЛЬСНО-ФАЗОВОЙ АВТОПОДСТРОПКИ
Заведующая редакцией Г. И Козырева, редактор С. Н. Удалова, художественный
редактор А. С. Проценко, переплет художника Н, А. П а ш у р о, технический редак-
тор А. Н. Золотарева
Корректор И. Г. Зыкова
НБ № 1617
Сдано в набор 25.01.89 Подписано в печать 25.09.89
Т. 13674 Формат 60X90 1/16 Бумага типогр. № 2 Гарнитура «Литературная»
Печать высокая Усл. печ. л. 14,5 Усл кр.-отт. 14,75
Уч.-изд л. 15,99 Тираж 8600 экз. Изд. №22116
Зак. № 1020 Цена 1 р. 80 к.
Издательство «Радио и связь». 101000 Москва, Почтамт, а/я 693
Типография издательства «Радио и связь», 101000 Москва, Почтамт, а/я 693