/






























































































































































































Автор: де Вит Р.
Теги: механика деформируемых тел упругость деформация физика математика механика прикладная математика теория дисклинаций
Год: 1977




Текст
МЕХАНИКА
НОВОЕ В ЗАРУБЕЖНОЙ НАУНЕ
ИЗДАТЕЛЬСТВО "М И Р" МОСКВА
МЕХАНИКА
НОВОЕ В ЗАРУБЕЖНОЙ НАУКЕ
РЕДАКТОРЫ серии: А.Ю.ИШЛИНСНИЙ, Г. Г. ЧЕРНЫЙ
9
Р. ДЕ ВИТ
КОНТИНУАЛЬНАЯ
ТЕОРИЯ
ДИСНЛИНАИИЙ
Перевод с английского
Под редакцией
А. А. ВАКУЛЕНКО
Издательство «Мир» Москва 1977
УДК 539.3
В последнее время все большее внимание специалистов^
привлекают работы по математической теории дисклинаций/
Дисклинации — важный элемент различных механических струк-
тур (таких, как биологические объекты, жидкие кристаллы, зер-
нистые материалы и т. п.), и их изучение имеет фундаменталь-
ное значение в развитии современной теории твердого тела.
Книга содержит переводы статей Р. де Вита, известного
специалиста в данной области; статьи написаны достаточно
подробно, и ясность изложения делает книгу доступной широ-
кому кругу исследователей.
Книга заинтересует специалистов по прикладной матема-
тике и механике материалов и может служить учебным посо-
бием для студентов и аспирантов университетов и технических
вузов.
Редакция литературы по математическим наукам
„ 20304—041
Д 041(01)—77 41 77
(g) Перевод на русский язык, «Мир», 1977
ОТ РЕДАКТОРА ПЕРЕВОДА
Обычно моделью кристалла с дислокациями служит сплош-
ное упругое тело с такими дислокациями Вольтерра, каждая
из которых вполне определяется заданием линии и одинако-
вого для всех ее точек вектора скачка перемещения (вектора
^Бюргерса). С недавних пор стало ясно, что имеет смысл рас-
сматривать также дислокации Вольтерра общего вида, т. е.
(Дислокации, при образовании которых с помощью разрезов
по поверхностям задается не только взаимная трансляция, но
и взаимный поворот берегов разреза. При выполнении извест-
ного условия поле напряжения и в этом случае непрерывно
’продолжается через поверхность разреза, так что имеет зна-
чение лишь контур этой поверхности (линия дислокации), но
в дополнение к линии дислокации теперь нужно задать пару
векторов. Это соответствует четвертому, пятому и шестому
типам известного подразделения дислокаций Вольтерра на
шесть типов. Дислокации этих типов и принято сейчас на-
зывать дисклинациями. Можно показать (см. гл. II настоя-
щей книги), что «стенка дислокаций», образующая обычную
малоугловую границу в кристалле, эквивалентна подходящей
цисклинации. В ряде случаев и большеугловую границу об-
разует система «обычных» дислокаций, эквивалентная одной
щсклинации. В органических же кристаллах дисклинации
/асто являются вообще одним из основных элементов надмо-
шкулярной структуры [1].
Настоящая книга содержит перевод четырех статей
Р. де Вита, известного специалиста в области континуальных
теорий тел с микродефектами (ранее был опубликован рус-
ский перевод его обзора континуальной'теории дислокаций,
вошедший в книгу [2]). Статьи объединены общим замыслом
и посвящены систематическому изложению основ континуаль-
ной теории дисклинаций (в настоящем издании каждой статье
соответствует глава книги). Изложение отличается большой
простотой и ясностью и начинается с напоминания классиче-
ских условий совместности и континуальной теории «обыч-
ных» дислокаций. Более того, последним уделено столько
места, что книгу можно было бы назвать «Континуальной тео-
рией дислокаций и дисклинаций». Это тем более существенно,
что на русском языке имеется лишь немного обстоятельных
6
От редактора перевода
работ по континуальной теории дислокаций, причем все они
появились уже более десяти лет тому назад [2, 3, 4]. Дискли-
нациям же в отечественной литературе посвящена всего одна
обзорная работа, а именно уже упоминавшаяся книга [1], ос-
новное место в которой занимают совсем другие вопросы.
Подчеркну, что статьи Р. де Вита написаны с большой за-
ботой о читателе. Так, при изложении всех, вопросов, по ко-
торым пока имеются разногласия, наряду со своей точкой
зрения автор излагает и другие подходы. Большое внимание
уделяется различным статико-геометрическим аналогиям
(дуализмам статики и геометрии на языке автора), которые
иллюстрируются многочисленными и хорошо подобранными
таблицами и мастерски используются для прояснения струк-
туры определяющих соотношений. И даже повторения, неиз-
бежные при объединении отдельно публиковавшихся статей,
в большинстве случаев можно считать оправданными. Напри-
мер, многое из изложенного в первой статье (гл. I книги)
затрагивается и во второй, но в то время как в первой исполь-
зуется прямая (бескоординатная) запись тензоров и тензор-
ных соотношений, во второй они излагаются в другой форме,
обладающей своими достоинствами. Все это и большая ак-
туальность проблемы позволяют надеяться, что предлагаемый
вниманию перевод работ Р. де Вита окажется полезным
широкому кругу специалистов, занимающихся исследова-
ниями деформации и прочности твердых тел. Перевод выпол-
нен Р. А. Арутюняном, А. И. Кузнецовым и Р. Ю. Хайровым.
А. А. Вакуленко
СПИСОК ЛИТЕРАТУРЫ
1. Лихачев В. А., Хайров Р. Ю., Введение в теорию дисклинаций, Изд-во
Ленинградского ун-та, 1975.
2. Эшелби Д., Континуальная теория дислокаций, ИЛ, М., 1963.
3. Кунин И. А., Теория дислокаций (дополнение к книге Я. Схоутена
«Тензорный анализ для физиков», «Наука», М., 1965).
4. Крёнер Е., Общая теория дислокаций и собственных напряжений,
«Мир», М., 1965.
Глава I
ЛИНЕЙНАЯ СТАТИЧЕСКАЯ ТЕОРИЯ
ДИСКЛИНАЦИЙ О
В этой главе дается сжатый обзор классической теории упругости
и теории упругого тела с внутренними источниками напряжения* 2). Пока-
зано, как теория дислокаций получается из классической теории упру-
гости. Аналогичным образом из теории дислокаций получается теория
дисклинаций. Тензоры плотности дислокаций и дисклинаций определяются
через пластическую деформацию. Полная деформация удовлетворяет
классическому условию совместности. Используя эти понятия, находим
основные геометрические законы — соотношения, связывающие упругую
деформацию с распределением дефектов. Тензор Ная оказывается по-
лезным эквивалентом плотности дислокаций. Теорема Вейнгартена приво-
дит к обобщению понятия о векторе Бюргерса и введению аналогичным
путем вектора поворота для дисклинаций. Наконец, рассматриваются дуа-
лизм между геометрией теории дисклинаций и статикой моментных на-
пряжений, а также связь теории дисклинаций с винтовым исчислением.
1. ВВЕДЕНИЕ
Причиной написания этой работы был особый в последнее
время рост интереса к дисклинациям, см., например: Набарро
[1] — в этой работе обсуждаются некоторые кристаллографи-
ческие аспекты дисклинаций, и Антони с сотрудниками [2],
которые наблюдали такие дефекты. Обычно этот тип дефек-
тов не рассматривался и до выхода работы Шефера не было
затрагивающей их теории. Однако Шефер представляет свои
результаты как результаты,на базе винтового анализа .[4]. Бо-
лее того, он применяет последний к континууму Коссера и
лишь затем к дисклинациям, которые обсуждаются как част-
ный случай этой общей теории. Как признает сам Шефер,
этот подход оказался бесполезным для теоретиков: «Вопрос
о том, как или когда плотность дисклинаций обращается в
*) de Wit R., Linear theory of static disclinations, in «Fundamental
aspects of dislocation», ed. by J. A. Simmons, R. de Wit, R. Bullough, Nat.
Bur. Stand. (US), Spec. Publ. 317, voE I, 1970, p. 651—673.
2) В оригинале: теория совместной упругости и теория несовместной
упругости (compatible and incompatible elasticity theory). В отечественной
литературе, однако, эти термины не приняты и -потому вместо них мы,
как правило, используем указанные. Тем более, что и автор вместо «тео-
рия совместной упругости» часто употребляет термин «классическая тео-
рия упругости». А термин «теория упругого тела с внутренними источни-
ками напряжений», будучи синонимом термина «теория несовместной
упругости», используется в отечественных работах и потому звучит более
привычно. — Прим. ред.
8 ' Гл. I. Линейная статическая теория дисклинаций
нуль, остается не ясным в теории дислокаций» [5]. В настоя-
щей работе теория дисклинаций строится более простым и
прямым путем.
Теория дисклинаций может быть выведена из континуаль-
ной теории дислокаций подобно тому, как Крёнер получил
последнюю из классической теории упругости [6]. В действи-
тельности таким путем получается некоторая комбинация кон-
тинуальных теории дисклинаций и теории дислокаций. В том
же смысле теория Крёнера является комбинацией классиче-
ской теории упругости и теории с несовместной упругостью
(с внутренними источниками напряжений), т. е. в, ней интег-
рируемы повороты, но неинтегрируемы смещения. Переход
к теории дисклинаций является переходом к теории, в кото-
рой неинтегрируемы и повороты. При этом большинство урав-
нений теории дислокаций обобщаются и переходят в уравне-
ния теории дисклинаций.
Общий подход аналогичен подходу Крёнера. Поле пласти-
ческой деформации произвольно и определяет распределение
дефектов в тел(е. Для тела, испытывающего упругопластиче-
скую деформацию без разрушения, полная деформация удов-
летворяет классическим условиям совместности. Используя
указанные понятия, находим основные геометрические за-
коны, т. е. соотношения, связывающие упругую деформацию
с распределением дефектов.
В разд. 2 дается обзор классических условий совместно-
сти, в разд. 3 — теорема Вейнгартена для многосвязного тела,
в разд. 4 рассматривается теория упругого тела с внутрен-
ними источниками напряжений без учета их природы.
В разд. 5 излагается классическая континуальная теория
дислокаций, в разд. 6 —теория дисклинаций, а в разд. 7 по-
казывается, как теорема Вейнгартена приводит к определе-
нию вектора Бюргерса и вектора поворота для дисклинаций;
разд. 8 посвящен дуализму геометрии и статики континуаль-
ной теории дефектов и, в частности, дуализму между дискли-
нациями и моментными напряжениями. В разд. 9 показана
связь с новым «винтовым анализом» Шефера.
2. ОБЗОР ТЕОРИИ СОВМЕСТНОСТИ
Когда сплошное тело подвергается деформации, последняя
удовлетворяет классическим условиям совместности. Эти ус-
ловия являются следствием того факта, что в каждой точке
тела может быть определен вектор перемещения и1); таким
J) Автор всюду в этой главе векторы и тензоры более высокой ва-
лентности обозначает одинаково — полужирными латинскими и греческими
буквами. Из контекста обычно бывает ясно, о тензоре какой валентности
2. Обзор теории совместности
9
образом, эти условия суть условия интегрируемости. В этом
разделе будут найдены условия совместности для всех ос-
новных полей: дисторсии 0, деформации е, поворота со и из-
гиба-кручения х1)- Мы увидим также, что все эти условия
совместности подразумевают существование поля перемеще-
ния.
а) Дисторсия определяется соотношением
0 — grad и =Vu. (2.1)
Вследствие этого соотношения поле 0 должно удовлетворять
условию
curl0 = VX₽ = O, (2.2)
которое является условием совместности для 0. Обратно, в
соответствии с теорией потенциала [7, стр. 20] выполнение
(2.2) обеспечивает существование решения и уравнения (2.1),
определенного с точностью до постоянного слагаемого tto.
б) Деформация определяется как симметричная часть 0:
е = def и =s 7г (Vu + uV), ~ (2.3)
а тензор поворота — как антисимметричная часть 0:
о = 7г (Vti — uV), (2.4)
так что
0 = е+<о. (2.5)
Вместо антисимметричного тензора <о можно использовать
вектор, определяемый так:
(2.6)
(см. приложение). Соответствующим эквивалентом определе-
ния (2.4) служит соотношение
© = y2VXu, (2.7)
которое легко проверить, подставляя (2.4) в (2.6). В силу оп-
ределений (2.3) и (2.7), ей® удовлетворяют соотношениям
inc е = V X е X V = 0, (2.8)
\7.® = о, (2.9)
которые являются условиями совместности для ей®.
идет речь. Антисимметричный тензор и соответствующий ему аксиальный
вектор обозначаются одной буквой, но с добавлением стрелки над сим-
волом вектора (см., например, соотношения (2.6) и (2.7)). — Прим. ред.
!) Ради компактности используется диадная (прямая) символика
(см., например, [7], часть I, или [23*], [24*], [25*] приложения II. В). Все
соотношения нетрудно перевести на язык индексных обозначений.
10
Гл. I. Линейная статическая теория дисклинаций
Эти условия вытекают также из (2.2). Действительно, с
помощью (2.5), (2.6) и (А.6) из (2.2) имеем
VXe + V- ®S —®V = 0, (2.10)
где 6 — единичный тензор. След левой части (2.10) с точ-
ностью до множителя равен V*®, и поэтому из (2.10) выте-
кает (2.9). Подставляя (2.9) в (2.10), получаем
VXe-®V = 0. (2.11а)
Удобства ради приведем равносильное соотношение
— eXV —V® = 0. (2.116)
С помощью операций VX ( ) (или ( ) XV) и взятия следа
теперь нетрудно получить условия (2.8) и (2.9). С учетом пре-
дыдущего видно также, что (2.11) вполне эквивалентно (2.10),
а потому и (2.2).
Теперь мы хотим рассмотреть обратную задачу и выяс-
нить, что вытекает из условий совместности (2.8) и (2.9). Как
мы видели, эти условия необходимы для существования поля
перемещения, но будут ли они и достаточными условиями?
Ниже будет показано, что положительного ответа на этот во-
прос дать нельзя (даже в случае односвязного тела).
Начнем с условия (2.8). В соответствии с теорией потен-
циала [8, стр. 88], при выполнении этого условия'существует
решение и уравнения (2.3), определенное с точностью до
жесткого перемещения u0 + ©о X г. Более того, поскольку мы
не считаем сейчас, что удовлетворяется (2.2), это решение мо-
жет не представлять поля перемещения с указанной точ-
ностью. Согласно (2.3) и (2.5), имеем только
₽=72(Vu + uV) + ®. (2.12)
Это соотношение эквивалентно (2.1) лишь тогда, когда поле и,
кроме (2.3), удовлетворяет также (2.4) или (2.7). Поэтому
(2.8) является менее ограничительным условием, чем (2.2).
Используя (2.3), условию (2.2) можно придать форму условия
(2.11а), а именно
(72VXu-®)V = 0. (2.13)
Решение этого уравнения и решение (2.7) отличаются на по-
стоянное слагаемое ©о- В результате теперь и действительно
представляет собой перемещение, определенное с точностью
до жесткого смещения, через которое, следовательно, в силу
2. Обзор теории совместности 11
(2.1), 3 определяется с точностью до постоянного слагаемого
Оф. Таким образом, представляя полное перемещение в виде
и'+Uo + ©оXг, получаем с указанным произволом (2.1), а
значит и решение вопроса, поставленного выше под рубри-
кой (а).
С другой стороны, на основании же теории потенциала
[9, стр. 104] выполнение условия (2.9) обеспечивает существо-
вание решения и уравнения (2.7), определенного с точностью
до слагаемого вида V<p. Однако снова это и может и не быть z
вектором перемещения. Справедливо только соотношение
p = e + 72(Vu-uV), (2.14)
которое эквивалентно (2.1) лишь тогда, когда наряду с (2.7)
поле и удовлетворяет и (2.3). Еще раз обратимся к условию
(2.11а); тогда с помощью (2.7) имеем
VX(e-V2uV) = 0. (2.15)
В силу этого соотношения, е определяется через и с точностью
до слагаемого вида VV<p. В результате теперь и представляет
собой поле перемещения, определенное с точностью до сла-
гаемого вида V<p> и в соответствии с (2.1) дает дисторсию р
с точностью до слагаемого вида Wcp. Представляя полное пе-
ремещение в виде u + V<p, вновь получаем ответ на вопрос,
поставленный под рубрикой (а).
Таким образом, можно отметить, что условия (2.8) и (2.9)
сами по себе не обеспечивают существования поля перемеще-
ния и1). При обсуждении условий совместности в классиче-
ской теории упругости это обычно остается в стороне из-за
неявно предполагаемого выполнения нужных соотношений.
в) Тензор изгиба-кручения определяется соотношением 2)
x = V<o. (2.16)
1) Проиллюстрируем это примером из теории несовместности: при
распределении краевых дислокаций с постоянной плотностью поле переме-
щения не.существует, ибо не выполняется условие (2.2) (см. (5.6)), в то
время как е (=0) и поворот о (=г*К при К = const и tr К = 0)
удовлетворяют условиям (2.8) и (2.9).
2) Термин «изгиб-кручение» впервые вводится и используется в
этой работе. Диагональные компоненты тензора и описывают кручение,
педиагональные—изгиб. Миндлин и Тирстен [10] называют этот тензор
тензором кривизны-кручения, а Койтер [11] — тензором кручения-из-
гиба. Упругую часть тензора х часто называют кривизной решетки. Но-
вый термин позволяет избавиться от возможной путаницы между кривиз-
ной Римана — Кристофеля и кручением Картана, которые используются
в неримановой формулировке теории.
12 Гл. 1. Линейная статическая теория дисклинаций
Из этого определения вытекает первое условие совместности
для х:
VXx = 0. (2.17)
у
Второе условие совместности для х вытекает из (2.16) и
(2.116):
x = -eXV. ,(2.18)
Отметим, что (2.18) вместе с (2.17) влекут за собой (2.8).
Вследствие (2.17), кроме того, существует решение <о уравне-
ния (2.16), определенное с точностью до постоянного слагае-
мого ®о. А при наложении дополнительного условия (2.18)
получаем (2.116). Отсюда вытекает, что существование такого
поля в>, удовлетворяющего кроме (2.16) и условию (2.18),
обеспечивает существование решения и уравнений (2.3) и
(2.7), определенного с точностью до постоянной трансляции
Uq. При этом с помощью (2.1) 0 определяется с точностью до
постоянного поворота <во- Представляя поворот в виде
о + «о и перемещение в виде u + Uo + ®о X г, мы еще раз
получаем ответ на вопрос, поставленный в пункте (а).
Третье условие совместности для х вытекает непосред- .
ственно из соотношения (2.18), в силу которого след тензора
х должен быть равен нулю:
trx = 0. (2.19)
Отметим, что соотношение (2.19) вместе с (2.17) влечет за
собой (2.9).
До сих пор мы рассматривали лишь вопросы существова-
ния полей о и и в случае совместной деформации односвяз-
ного тела‘. Но в действительности теперь нетрудно дать и фак-
тическое выражение этих полей. Положим, что поля х и е из-
вестны и удовлетворяют условиям (2.17) — (2.19). Тогда для
определения они необходимо знать лишь их значения в ка-
кой-либо одной точке г0. Действительно,
или
г
®(г) = о (г0) + j d&,
Го
® (г) = ®0 + J dr' • х (г7)
Го
(2.20)
2. Обзор теории совместности
13
И
u(r) = tio+ dr' ’₽(r') = Uo+ rfr'• (е'+ <»') = <
Ге Го
— и0 + • е' + ©' X dr') =
г&
- = Uo+$ {dr'-e' —d(® Xfr —r'B + da'Х(г —Н},
Го
ИЛИ
u(r) = UO + ©о X (Г — Го) + J dr' • (е' + v! X (г — г')). (2.21)
г«
Этими соотношениями определяются однозначные поля при
условии, что линейные интегралы не зависят от пути или (что
то же самое) обращаются в нуль при интегрировании до лю-
бому замкнутому контуру С в объеме тела. Это очевидно из
теоремы Стокса и условий (2.17) — (2.19):
ф dr' • х'= $ dS' • V' X х' = 0.
С 3
(2.22)
§ dr' • (е' + х X (г - г')) = J dS' • V' X (е' + «' X (г - г')) =
С 3
= J dS' • (V' Хе' - (V' х х') X (Г - г') + х'6 - х') = 0. (2.23)
з
Легко проверить, что определяемые соотношениями (2.20)
и (2.21) поля удовлетворяют (2.1), (2.3) и (2.4) или (2.7)
(2.9), (2.11) и (2.16).
В классической теории упругости для деформации одно-
связного тела справедливы все соотношения этого раздела.
В следующем разделе показано, как следует изменить эти
результаты в случае многосвязного тела. Затем будет пока-
зано, что для упругого тела с дефектами условия совместно-
сти, вообще говоря, нарушаются. Однако при упругопласти-
ческой деформации без разрушения полная деформация од-
носвязногб тела остается еще совместной и удовлетворяет
всем соотношениям настоящего раздела.
и
Гл. I. Линейная статическая теория дисклинаций
3. МНОГОСВЯЗНЫЕ ТЕЛА И ТЕОРЕМА ВЕЙНГАРТЕНА
Рассмотрение многосвязных тел ограничим .рамками этого
раздела. Многосвязное тело - будем называть совместным,
когда для него выполняются условия совместности.
Каков теперь смысл этих условий для полей поворота и
перемещения, даваемых соотношениями (2.20) и (2.21)? Оче-
видно, что в случае многосвязного тела однозначность полей
не вытекает при помощи теоремы Стокса из (2.22) и (2.23),
Рис. 1.
ибо в этом случае не всякий замкнутый контур С можно пу-
тем непрерывной деформации стянуть в точку без выхода за
пределы тела.
Рассмотрим поля ® и и в этом случае. Пусть Со — замкну-
тый контур в теле, начинающийся и оканчивающийся в точке
Го (рис. 1). Если Со не стягивается в точку указанным обра-
зом, то значения мнив одной и той же точке до и после об-
хода контура могут не совпадать. Полагая г = г0 в соотноше-
ниях (2.20) и (2.21), определяем эти изменения полей таю
[<в] = ф dr' • н', (3.1)
Со
[u] = § dr'. [е' + х'.Х (Го - г')]• (3.2)
Со
3. Многосвязные тела и теорема Вейнгартена 15
Эти соотношения можно переписать в виде
Й=й, (3.3)
[u] = b+QXr0; (3.4)
->
где Я и b — постоянные векторы, определяемые соотноше-
ниями
£ = dr' *', (3.5)
С
b = §dr>(e' -х'ХИ, (3.6)
с
в которых С — любой контур, эквивалентный контуру Со (т. е.
совмещаемый с Со в результате непрерывного деформирова-
ния без выхода из области, занимаемой телом).
Доказательство. В случае С = Со результат очевиден.
В противном случае найдется поверхность в теле, ограничен-
ная контурами С и Со (рис. 1), к которой применима теорема
Стокса. При этом, как нетрудно видеть с помощью (2.17)—
(2Л9), „
О(С) = Й(С0), Ь(С) = Ь(С„).
В случае односвязного тела любой контур С может быть стя-
нут в точку допустимым образом (т. е. путем непрерывного
изменения без выхода из области, занимаемой телом), и по-
этому Q = b = О и [©] = [и] = О, как уже было показано
в разд. 2. В случае многосвязного тела для контура С, окру-
жающего полость и потому не стягиваемого в точку, векторы
й и b могут быть и ненулевыми, принимая одно и то же зна-
чение для всех взаимостягиваемых (эквивалентных) конту-
ров. В этом случае шип еще можно рассматривать как функ-
ции, но они будут многозначными функциями (положения
точки в теле).
Соотношения (3.3) и (3.4) выражают теорему Вейнгар-
тена: когда для многосвязного тела удовлетворяются
классические условия совместности, вектор поворота и
вектор перемещения при обходе контура, не стягиваемого
в точку, изменяются на величину, которую можно опреде-
лить в предположении недеформируемости тела.
Дополнительное обсуждение теоремы Вейнгартена имеется
в работах Набарро [1] и Кесселя [12]. Эта теорема может по-
служить отправной точкой для построения теории тела с ди-
скретным распределением дефектов, таким, что по удалении
16
Гл, I. Линейная статическая теория дисклинаций
дефектов из тела оно превращается в многосвязное, но со-
вместное тело. В дальнейшем этот подход рассматриваться не
будет. В следующих разделах развивается систематический
анализ случаев, когда дефекты распределены непрерывно в
односвязном теле.
4. ОБЗОР ТЕОРИИ С ВНУТРЕННИМИ ИСТОЧНИКАМИ
НАПРЯЖЕНИЯ
Когда тело испытывает произвольную пластическую де-
формацию, последняя не удовлетворяет условиям совместно^
сти. При заданной пластической деформации ер тензор несо-
вместности определяется соотношением
4 = -VXe₽XV, (4.1)
Так как для совместной пластической деформации q = 0, тен-
зор 1] характеризует отклонение от совместности. Основной
вывод из этого уравнения и состоит в том, что произвольная
пластическая деформация влечет несовместность. Непосред-
ственно из (4.1) вытекает условие непрерывности
V-4 = 0. (4.2)
Уравнение (4.1) не пригодно для решения задачи из-за того,
что тензор ер не является параметром состояния тела, т. е.
величиной, которая вполне определена для каждого состоя-
ния тела. Но упругая деформация
е = ег —ер (4.3)
есть параметр состояния. Здесь ег обозначает тензор полной
деформации1). Последняя должна удовлетворять соотноше-
нию вида (2.8): 1псег = 0, из которого, а также из (4.1),
(4.3) получаем основной геометрический закон — уравнение
для поля ц:
VXeXV = nj. (4.4)
С геометрической точки зрения это уравнение выражает тот
факт, что при наличии в теле дефектов, распределение ко-
торых задано полем q, упругая деформация е обеспечивает
непрерывность тела. В результате уравнение (4.4) заключает
в себе математическую формулировку утверждения, что не-
совместность является источником упругой деформации.
*) Отмечая индексом Т полную (total), а индексом Р— пластическую
(plastic) деформацию, упругую деформацию нужно было бы отмечать ин-
дексом £, но для простоты в обозначении упругих составляющих (дистор-
сии, деформации, поворота и т. д.) этот индекс будем опускать.
5. Обзор теории дислокаций 17
Основная задача линейной статической континуальной тео-
рии дефектов заключается в решении уравнения (4.4) совме-
стно с уравнением равновесия и законом связи напряжения
и деформации. Эта задача уже была исследована Крекером
[6]. Однако его исследование не полностью выявляет природу
дефектов, вызывающих несовместность ц.
б. ОБЗОР ТЕОРИИ ДИСЛОКАЦИЙ
Если вместе с пластической деформацией ер задан пла-
стический поворот ®р, то дефекты можно рассматривать как
дислокации. То же самое имеет место при задании произволь-
ного поля пластической дисторсии:
рр = ер + ®р, (5.1)
где ер и ©р— симметричная и антисимметричная части тен-
зора рр.
Существуют две формулировки теории дислокаций, а
именно через тензор плотности дислокаций а или через тензор
кривизны К.
а) Плотность дислокаций определяется соотношением
as-VX₽p. (5.2)
Это определение подсказывают соотношения типа (2.1) и
(2.2). Поскольку в случае совместной пластической деформа-
ции а = 0, тензор а является мерой несовместности. Действи-
тельно, из (4.1) и (5.2) видно, что
4 = (aXV)5, (5.3)
где индексом S обозначена симметричная часть выражения
в скобках. Смысл (5.2) состоит в том, что задание произволь-
ной пластической дисторсии означает задание некоторого рас-
пределения дислокаций. Условие непрерывности вытекает не-
посредственно из (5.2):
V-a = 0. (5.4)
Это значит, что дислокации не оканчиваются внутри тела.
Упругая дисторсия определяется соотношением
р = рт_рр. (5е5)
Для полной дисторсии справедливо соотношение вида (2.2):
V X ₽г = 0, из которого, а также из (5.5) и (5.2) вытекает
основной геометрический закон для поля а:
VX₽ = a. (5.6)
18 Гл. I. Линейная статическая теория дисклинаций
Геометрическое значение этого уравнения заключается в том,
что при наличии распределения дислокаций а упругая дистор-
сия р обеспечивает непрерывность тела. Следовательно, урав-
нение (5.6) означает, что дислокации являются источником
упругой дисторсии.
б) Кривизна1) определяется соотношением
K = -epXV — V®p. (5.7)
Это определение подсказывается соотношением (2.116). По-
скольку в случае совместной пластической деформации К = О,
тензор К является мерой несовместности. Действительно, из
(4.1) и (5.7) видно, что
4 = VXK. (5.8)
Уравнение (5.7) означает, что произвольные пластические де-
формация и поворот приводят к образованию кривизны. Но
поскольку деформация и поворот определяют дисторсию (см.
уравнение (5.1)), кривизна К должна быть связана с тензо-
ром а. Чтобы показать это, получим из (5.7) соотношения
*
для транспонированного тензора К и следа тензора К:
K=VXep-®pV, (5.9а)
trK=-V-®p. (5.96)
Тогда, используя (5.1) и (А.6), соотношение (5.2) можно запи-
сать в следующем виде:
a = -VXep-V-®₽&'+®pV. (5.10а)
а след определяется соотношением
tra = — 2V • ®₽. (5.106)
Сравнивая (5.9) и (5.10), получаем следующие соотношения
для а и К:
a = (trK)5 —К. (5.11а)
K=72(tra)5-a. (5.116)
Упругий поворот определяется соотношением
® = в»г —©р, (5.12)
*) Термин «кривизна» был предложен Крёнером [13]. Этот тензор из-
вестен как тензор Ная. Отметим, что тензор кривизны, который является
величиной, характеризующей (внутренние) источники напряжения, не сле-
дует смешивать с тензором изгиба-кручения.
6. Теория дисклинаций
19
а из (4.3) и (5.12), соотношения вида (2.116) для полной де-
формации ег и из (5.7) вытекает основной геометрический за-
кон, или уравнение поля для К:
eXV + V® = K. (5.13)
Геометрическое значение и интерпретация этого уравнения
такие же, что и для уравнения (5.6). В самом деле, (5.13)
эквивалентно (5.6). Это можно показать, используя соотно-
шение
р = е + ®, (5.14)
а также (5.5), соотношение вида (2.5) для рг и соотношения
(5.1),'(4.3) и (5.12). С другой стороны, используя (А.6), вы-
ражение (5.6) можно переписать в следующем виде:
VXe + (V-®)6-®V = a. (5.15)
А с учетом (5.11) видно, что соотношение (5.15) эквивалентно
(5-13).
В этом разделе мы введем также тензор пластического из-
гиба-кручения
x₽ = V©₽. (5.16)
Определяя тензор упругого изгиба-кручения соотношением
х = — пр (5.17)
и используя (5.12), (5.16) и соотношение вида. (2.16) для
®т, получаем
x = V®. (5.18)
В итоге уравнения (5.7), (5.9), (5.10), (5.13) и (5.15) можно
выразить через тензор изгиба-кручения. Отметим, что из
(5.6) следует неопределенность упругого смещения, т. е. фор-
ма dr-p может и не быть интегрируемой, даже при вполне
определенном поле <в.
6. ТЕОРИЯ ДИСКЛИНАЦИЙ
Поскольку упругий поворот, рассматривавшийся в разд. 5,
представляет собой перемещение без деформации, он не яв-
ляется параметром состояния; более естественно к числу па-
раметров состояния отнести изменение угла поворота (изме-
нение при переходе от точки к точке тела). Поэтому есть
все основания считать тензор упругого изгиба-кручения х
20
Гл. I. Линейная статическая теория дисклинаций
параметром состояния, как и тензор упругой деформации е.
Упругий поворот при этом остается неопределенным, подобно
тому как обстояло дело с упругим перемещением в разд. 5.
Таким образом, распределение дефектов в теле полностью
задается с заданием тензора пластического изгиба-круче-
ния нр и тензора пластической деформации ер, пластический
же поворот <вр при этом может оставаться неопределенным.
Далее мы увидим также, что в этом случае результаты
разд. 2, касающиеся полной деформации, и результаты
разд. 4 сохраняют силу, в то время как результаты разд. 5
нуждаются в изменении.
При переходе от классической теории упругости к теории
упругого тела с дислокациями выражение (2.2) подсказывает
определение (5.2). Аналогично, при переходе от теории дис-
локаций к теории дисклинаций соотношение (2.17) подсказы-
вает следующее определение плотности дисклинаций:
Gbs-VXx₽. (6.1)
Когда тело содержит только дислокации, из (5.16) следует,
что "0=0, так что 0 есть мера отклонения распределения
дефектов от распределения чисто дислокационного типа. Глав-
ный же вывод из (6.1) состоит в том, что задание произволь-
ного поля пластического изгиба-кручения означает задание
распределения дисклинаций. Непосредственно из (6.1) сле-
дует также условие непрерывности для 0s
V«0 = O. (6.2)
Это условие означает, что дисклинации не оканчиваются
внутри тела.
Подчеркнем, что при задании произвольных ер и хр за-
дается и некоторое распределение дислокаций. Как и в
разд. 5, это распределение может быть описано с помощью
тензора плотности а или тензора кривизны К. Однако опреде-
ления этих величин, данные в разд. 5, теперь неприменимы.
Подставляя (5.16) в (5.10а) и (5.7), получаем соотношения,
дающие основания определить их теперь такг
а = - VX ер-(trxp)d + «p (6.3)
K=_epXV-x₽. (6.4)
Из этих определений следует, что при обращении плотности
дисклинаций в нуль результаты настоящего раздела будут .
совпадать с результатами разд. 5; так, например, как видно
из изложенного в разд. 2, п. в, при 0 = 0 выражение (6.1)
эквивалентно выражению (5.16). Мы видим, что а и К по-
6. Теория дисклинаций
21
прежнему связаны соотношениями (5.11):
« = (tr к) 6 - К, (6.5а)
K = 1/2(tra)6 —«. _ (6.56)
В случае совместной пластической деформации a = К = О,
т. е. а и К все еще являются мерой несовместности. Действи-
тельно, из (6.3), (6.4), (6.1) и (4.1) следует, что и дислокации,
и дисклинации дают вклад в несовместность:
4 = («XV-0)5= (6.6)
= VXK-0. (6.7)
Главный вывод из соотношений (6.3) и (6.4) заключается в
том, что с произвольными полями пластических деформаций
и изгиба-кручения связаны поля дислокаций и кривизны.
Условие непрерывности для а вытекает из (6.3), (6.1) и
(А.7):
V-a+ 20 = 0. (6.8)
Из этого уравнения видно, что дислокации могут оканчиваться
только на дисклинациях, плотность которых 0 является асим-
метричным тензором. Однако Антони имеет иную точку зре-
ния относительно соотношения (6.8). (См. обсуждение в ма-
териалах конференции по фундаментальным аспектам теории
дислокаций.) Подставляя выражение (6.5а) в (6.8), получаем
условие непрерывности для К:
V(trK)-K-V+2t = 0. (6.9)
Выясним теперь, в какой мере соотношения (6.6) и (6.7) со-
гласуются с требованием симметрии тензора t), вытекающим
из (4.1), и с условием (4.2). Симметрия тензора т] (см. (6.6))
очевидна, а из (6.2), (6.8) и (А.8) следует, что выполняется
и условие непрерывности:
2V.i) = V.aXV- V-0- 0-V =
= V-«XV —2VX^ =
= (V • a + 20) X V = 0.
Соотношение (6.7) вытекает также непосредственно из (6.2),
асимметрия — из (А.7) и (6.9):
2ч = (УХК)-20 =
= к- V-V(trK)-20 = 0.
22 Гл. I. Линейная статическая теория дисклинаций
Из (5.17), (6.1) и (2.17) для хг получаем основной геометри-
ческий закон (уравнение поля) для 0:
vx«=e, (ело)
а из (4.3), (5.17), (2.18) и (2.19) для полной деформации,
учитывая также (6.3) и (6.4), — основные геометрические за-
коны для а и К:
VXe + (tr х)6 —н = «, (6.11)
eXV + « = K. (6.12)
При выполнении условия (5.18) тензор .0 на основании (6.10)
обращается в нуль, (6.11) сводится к (5.15), а (6.12)—к
(5.13). Геометрическое значение уравнений (6.10), (6.11),
(6.12) заключается в том, что при наличии распределений
дисклинаций и дислокаций, заданных полями 0 и а или К,
упругая деформация и изгиб-кручение обеспечивают непре-
рывность тела. Следовательно, из этих уравнений вытекает,
что дисклинации и дислокации являются источниками упругой
деформации и изгиба-кручения. Отметим, что при наличии
дисклинаций дислокации не являются источником упругой
дисторсии. Более того, в этом случае последняя и не сущест-
вует (не определена).
7. ВЕКТОР ПОВОРОТА И ВЕКТОР БЮРГЕРСА
В случае односвязного тела с дефектами теорема Вейн-
гартена, рассматривавшаяся в разд. 3, подсказывает опреде-
ления следующих величин:
£=§dr-x, (7.1)
С
b = ф dr • (е — х X г), (7.2)
с
где С — замкнутый контур, называемый контуром Бюргерса.
Используя соотношения (6.10) и (6.11) и теорему Стокса для
произвольной поверхности S внутри тела, ограниченной кон-
туром С, эти величины можно связать с 0 и а, а именно
JdS- vx«=$ dS-0, (7.3)
s s
b == J dS • {V x e - (V x x) X Г + (tr x) & - x) =
s
= JdS.{a-0Xr). (7.4)
s
8. Связь с теорией моментных напряжений
23
Из (7.3) и (7.4) видно, что Q является общим вектором
поворота дисклинаций, пересекающих поверхность S, а b—
общим вектором Бюргерса и дислокаций, и дисклинаций,
пересекающих поверхность 3. Известно, что диагональные и
недиагональные компоненты тензора а соответствуют винто-
вым и краевым компонентам дислокаций. Из уравнения (7.3)
видно, что диагональные компоненты тензора 0 соответствуют
клиновым компонентам дйсклинаций. На уже упоминавшейся
конференции по фундаментальным аспектам теории дислока-
ций было предложено назвать недиагональные компоненты
тензора 0 компонентами кручения дисклинаций1).
Пусть теперь 3 является замкнутой поверхностью, огра-
ничивающей объем V. Тогда, применяя теорему о диверген-
ции (т. е. теорему Остроградского. — Прим, ред.) и учиты-
вая соотношения (6.2) и (6.8), получаем
Й= JdVV-0 = O,
v
b= JdVV-(«-0Xr) =
v
= JdV {V • « - (V - 0) X r + 20} = 0.
v
Итак, уравнения непрерывности для 0 и а соответствуют тео-
ремам сохранения для Q и Ь.
8. СВЯЗЬ С ТЕОРИЕЙ МОМЕНТНЫХ НАПРЯЖЕНИЙ
Дуализм геометрии и статики в теории дефектов был от-
мечен Кондо [14]. В отсутствие объемных сил тензор напря-
жения а удовлетворяет уравнению равновесия
V.ff = 0. (8.1)
Поэтому, используя теорию потенциала, можно найти для
симметричного тензора о такой тензор <р (называемый тензо-
ром функций напряжения Бельтрами), что
o = VXq>XV. (8.2)
Очевидно, что уравнения (8.1) и (8.2) двойственны
1) Набарро [1] называет их винтовой и краевой дисклинацияхми со-
ответственно.
24
Гл. I. Линейная статическая теория дисклинаций
уравнениям (4.2) и (4.4). Связь между геометрией и статикой
обеспечивается законом Гука классической теории упругости:
<з=с : е. (8.3)
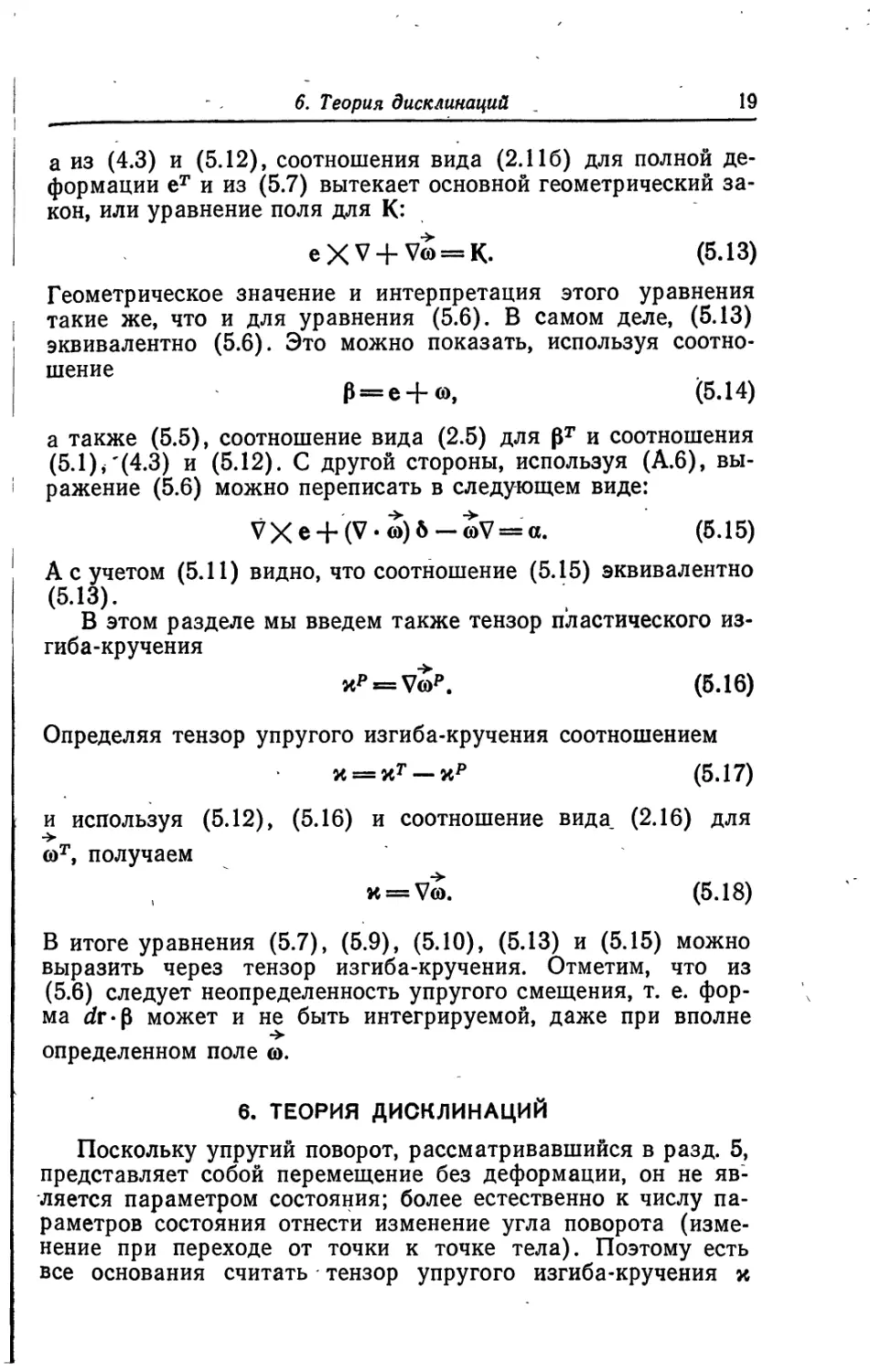
Результаты этого соответствия представлены в табл. 1.
Таблица 1
Геометрия
ч
е
V-n==0
VXeXV = 4
Статика
(Т
Ф
v• <т = О
= vxwxv
Связь между геометрией и статикой
а — с : е
Иной, причем более детальный, дуализм существует между
геометрией теории дисклинаций и статикой моментной теории
упругости!). В этой теории, в дополнение к (8.1), имеется еще
уравнение равновесия для тензора моментных напряжений
р, которое при отсутствии массовых моментных внешних сил
имеет вид
V.g+2a = 0. ' (8.4)
Теперь тензор о уже не обязательно является симметричным.
Из уравнений (8.1) и (8.4) аналогичным образом, используя
теорию потенциала, мы заключаем, что существуют два тен-
зора F и G, такие, что \
a=VXF, (8.5)
g = VXG + (trF)6-F. (8.6)
Тензоры F и G называются тензорами функций напряжения
Гюнтера [15]. Уравнения (8.1), (8.4) — (8.6) двойственны урав-
нениям (6.2), (6.8); (6.10) и (6.11). Этот дуализм подсказы-
вает следующую связь между геометрией теории дисклинаций
9 Простое изложение моментной теории содержится в статье Минд-
лина и Тирстена [10].
8. Связь с теорией моментных напряжений
25
и статикой теории моментных напряжений:
<r = d:x + c:e, (8.7)
g = a:« + &:e. (8.8)
Результаты показаны в табл. 2.
Таблица 2
Дуализм геометрии теории дисклинаций и статики
теории моментных напряжений
Геометрия
Статика
О
а
х
е
v-o = o
V-« + 2(T=0
vx« = o
*
VXe + (trx)$ - х = а
or
F
G
V -or = 0
V • H + 2a = 0
or = vXF
H = VXG + (trF)d - F
Связь между геометрией и статикой
a = d: х + с: е
= а : х + b £е
Определяющие уравнения (8.7) и (8.8) являются более
общими, чем соответствующие уравнения моментной теории
Миндлина и Тирстена [10], в которой выполняются условия
совместности. Это следует из того факта, что моментная тео-
рия с несовместностью не содержит в себе ограничения, что
trx равно нулю, как это видно из (6.11) или (6.12). Однако
рассматриваемые уравнения в свою очередь являются част-
ным случаем уравнений континуума Коссера (см. [16]), по-
скольку тензор е симметричен. Теория дисклинаций представ-
ляет собой теорию Коссера со связями и несовместностью по
терминологии Кесселя, или теорию псевдоконтинуума Кос-
сера с несовместностью по Шеферу [5], или же, согласно Эрин-
гену [17], «промежуточный» вариант моментной теории с не-
совместностью. Все это наводит на мысль, что настоящая тео-
рия может быть распространена на теорию Коссера с несов-
местностью путем превращения х и е в тензоры, характери-
зующие деформацию в теории Коссера.
26
Гл. 1. Линейная статическая теория дисклинаций
Крёнер [18] рассмотрел дуализм с несколько иной точки
зрения. Вместо тензоров функций напряжения Гюнтера он ис-
пользует функции напряжения
ф = '/2(1гц)6 — И, (8.9)
Z = GS, (8.10)
двойственные тензорам Кие. Тогда, исключая F, уравнения
(8.5) и (8.6) можно также переписать в виде
<* = -VXxXV + VXt, (8.11)
ц = (1гф)& —ф; (8.12)
последние двойственны уравнениям (6.7) вместе с (4.4) и
(6.5а) г Однако этот дуализм приводит к иным определяющим
уравнениям:
ff = d:K + c:e, (8.13)
ц—а: К + Ъ: е, (8.14)
которым Крёнер и отдает предпочтение. Эти результаты пред-
ставлены в табл. 3.
Таблица 3
Дуализм геометрии теории дисклинаций и
статики моментной теории согласно Крёнеру
— Геометрия Статика
0 а К е 0 = — VXeXV + VX* « = (trK)6 - К от Н % от = - v+xxv + VXt * Ц = (tn|))O — ф
Связь между геометрией и статикой
a = d: К + с: е
= а: К -f- Ь: е
Из этих дуализмов видно, как понимание геометрии де-
фектов позволяет глубоко проникнуть в статику механики
континуума. Так, например, Кондо [14] свел изучение многих
физических явлении, таких, как пластическое течение, к изу-
9. Связь с, винтовым исчислением
27
чению геометрии в пространстве Шефера. Дуализмы объяс-
няют также и новую терминологию, например дуальные дис-
локации моментных напряжений.
9. СВЯЗЬ С ВИНТОВЫМ ИСЧИСЛЕНИЕМ
Отметим, что b есть величина, не инвариантная относи-
тельно переноса начала координат. Если выбрано новое на-
чало координат О', положение которого определяется векто-
ром Гс относительно начала О старой системы, то новый ра-
диус-вектор г' связан со старым радиусом-вектором г равен-
ством
г' = г-гс. (9.1)
Тогда, используя (7.1) и (7.2), лйбо (7.3) и (7.4), получаем
Q'=Q, (9.2)
b' = b + 6xrc; (9.3)
Пара конечных векторов, преобразующихся указанным обра-
зом, называется винтом, а винтовая алгебра была развита
Мизесом [19] более сорока лет назад для описания движения
твердых тел.
Недавно Шефер' [4, 3] сделал эту алгебру винтовым ана-
лизом, распространив (с учетом (9.2) и (9.3)) понятие V-one-
ратора, действующего на бесконечно малый винт (V, W), сле-
дующим образом:
V\_/W у
w ) = I vW + v -х ь z <9,4)
Этими соотношениями определяется градиент винта. Путем
введения знака точки или креста определяется также дивер-
генция и вихрь:
W + Vx&
/V\ = pxv'
vxkw7 — \vxw + v£6
(9.5a)
(9.56)
Эти соотношения переносятся также на винтовые тензоры
более высокого ранга. Такой подход был использован Кессе-
лем [20] для получения определенных результатов в теории
28
Гл. I. Линейная статическая теория дисклинаций.
континуума Коссера. Что касается этой работы, то очевидно,
что такой формализм позволяет упростить запись многих пар
уравнений, а именно
(6.1,3)
(6.2,8)
(6.10,11)
(8.1,4)
(8.5,6)
(8.5,8)
Далее интересно отметить, что эти уравнения, кроме (8.5,6),
совпадают по форме с соответствующими уравнениями клас-
сической континуальной теории дислокаций Крёнера [6], т. е.
с уравнениями (5.2), (5.4), (5.6), (8.1) и (8.3). Этот результат
был отмечен Шефером,-применявшим 'нериманову формули-
ровку теории. В применяемой здесь формулировке классиче-
ской теории.дислокаций тензор а становится эквивалентным
картанову кручению, в трехмерном пространстве с параллель-
ным переносом. Шефер [3] обобщил эту концепцию на теорию
дисклинаций, приняв, что (0, а) эквивалентно винту карта-
нова кручения в шестимерном винтовом пространстве с па-
раллельным переносом1).
. 10. РЕЗЮМЕ И ОБСУЖДЕНИЕ
Был дан краткий обзор теорий дислокаций с совместностью
и несовместностью. Затем было показано, что теория дискли-
наций является логическим шагом в развитии континуальной
теории дефектов. При этом было обнаружено, что многие
уравнения теории дислокаций обобщаются в виде пар уравне-
*) При другой неримановой формулировке теории дисклинаций при-
нимается, что а и 0 эквивалентны картанову кручению и кривизне Ри-
мана — Кристоффеля в трехмерном пространстве. Тогда при ненулевом 0
параллельный перенос невозможен.
1 ' . . -' .
i. x ' 11. Приложение 29
ний теории дисклинаций. Выяснено, что кривизна К может
быть в равной мере использована для описания, как и плот-
ность дислокаций а, в том случае, когда имеются дисклина-
ции. Теорема Вейнгартена играет наводящую роль для обоб-
щения понятия вектора Бюргерса b и введения аналогичного
вектора вращения Q для дисклинаций. Был отмечен дуализм
геометрии дисклинаций и статики, теории моментных напря-
жений, который может играть полезную руководящую роль
в дальнейшем исследовании. Была также отмечена связь
с винтовым исчислением, что может служить другим направ-
лением последующих исследований.
Следующий шаг в развитии теории дефектов мог бы со-
стоять в введении континуального аналога точечных дефек-
тов. Последние могут быть представлены либо в виде «де-
формации без напряжения» ег (см. Эшелби [21]), либо в
форме плотности петель дислокаций у [22]. Было бы инте-
ресно посмотреть, как при этом обобщаются результаты тео-
рии-дислокаций. Например, можно ожидать, по крайней мере
на первый взгляд, что уравнения (6.6) и (6.7) (в линейной
формулировке теории) должны принять вид
4 = (VXvXV + aX V-0)s= -VXerXV + VX«-0.
11. ПРИЛОЖЕНИЕ
Используя декартовы компоненты, выведем для тензо-
ров три тождества, -которые применялись в этой главе (де-
тали вывода см. в книге .Надо [7]). Поворот и вихрь тензора т
определяются следующим образом:
<*) = ei/feT«7afe, (АЛ)
V X * = a^akd/tkiai. (A.2)
Здесь — тензор Леви-Чивиты, гц — орты декартова базиса
и применяется правило суммирования Эйнштейна. Ассоцииро-
ванный вектор поворота определяется так:
;=w, <А-3)
или, в индексных обозначениях,
Tjj (А.4)
Отсюда следует, что антисимметричная часть гц равна
< = (А*5)
30
Гл. 1. Линейная статическая теория дисклинаций
Теперь выводим первое тождество:"
V X = & = (bifijtn ^infill) bidftnfi’l ~
= а4д/Т/аг — ajd/Т/а/ = (V • т) 6 — tV. (A.6)
Здесь 6 = ajat — единичный тензор.
Второе тождество имеет вид
(V X т) = d^kl^m =
= djTk^k — dfTkka, == т • V — V (tr т). (А.7)
. И наконец, третье тождество
2V X т = 2a{eljkdiTk = af е^е^т/п, ==
= (Snfym — ^Infill) &ldjxlm — — bidftji —
= t-V-V-t. (A.8)
СПИСОК ЛИТЕРАТУРЫ
I. Nabarro F. R. N., Theory of crystal dislocations, Clarendon Press, Ox-
ford, 1967.
2. Anthony К.» Essmann U., Seeger A., Trauble H., in «Mechanics of
generalized continua (Proc. IUTAM Symposium, Freudenstadt-Stuttgart,
1967), E. Kroner, ed„ Springer-Verlag, Berlin, 1968, p.-355.
, 3. Schaefer H., ZAMM, 47, 319 (1967); in «Mechanics oL generalized con-
tinua» (Proc. 4UTAM Symposium, Freudenstadt-Stuttgart, 1967),
E. Kroner, ed., Springer-Verlag, 1968, p. 57.
4. Schaefer H., Bull. Acad. Pol. Sci., 15, 63, 69 (1967).
5. Schaefer H., ZAMM, 47, 485 (1967).
6. Kroner E., Erg. Angew. Math., 5, 1 (1958).
7. Nadeau- G., Introduction to elasticity, Holt. Rinehart and Winston, New
York, 1964.
_8. Fung Y. C., Foundations of solid mechanics, Prentice-Hall, Englewood
x Cliffs, N. J., 1965.
9. Phillips H. B., Vector analysis, Wiley, New York, 1963.
10. Mindlin R. D., Tiersten H. F., Arch. Rat. Meeh. Anal., 11, 415 (1962);
русский перевод: Мйндлин P. Д., Тирстен Г. Ф., Эффекты момент-
ных напряжений в теории упругости, сб. Механика, № 4 (88), 80—
114 (1964).
И. Koiter W. Т., Proc. Коп. Ned. Akad. Wetensch., В67, 17 (1964).
12. Kessel S., Abh. d. Brschw. Wiss. Ges., 17, 51 (1965).
13. Kroner F. in «Mechanics of generalized continua» (Proc. IUTAM Sym-
posium, Freudenstadt-Stuttgart, 1967), E. Kroner, ed., Springer-Verlag, "
Berlin, 1968, p. 330.
14. Kondo K., in «Mechanics of generalized continua» (Proc. IUTAM Sym-
posium, Freudenstadt-Stuttgart, 1967), EJ Kroner, ed., Springer-Verlag,
Berlin, 1968, p. 200.
15. Gunther W., Abh. d. Brschw. Wiss. Ges., 10, 195 (1958).
16. Kessel S., Abh. d. Brschw. Wiss. Ges., 16, 1 (1964).
17. Eringen A. C., in «Mechanics of generalized continua» (Proc. IUTAM
Symposium, Freudenstdat-Stuttgart, 967), E. Kroner, ed., Springer-Ver-
lag, Berlin, 1968, p. 18.
Список литературы
31
18. Kroner Е., Appl. Meeh. Rev., 15, 599 (1962); Jnt. J. Engng. Set., 1,
261 (1963); Mat. Sei. Res., 1, 281 (1963).
19. von Mises R., ZAMM, 4, 155, 193 (1924).
20. Kessel S., ZAMM, 47, 329 (1967); in «Mechanics of generalized con-
tinua» (Proc. ШТАМ Symposium, Freudenstadt-Stuttgart, 1967), E. Kro-
ner, ed., Springer-Ver lag, -Berlin, 1968, p. 114.
21. Eshelby J. D., Progr. Sol. Meeh., 2, 89 (1961).
22. Kroupa F., Czech. J. Phys., B12, 191 (1962).
23*. Кочин H. E., Векторное исчисление и начала тензорного исчисления,
7-е изд., АН СССР, М., 1951.
24*. Седов Л. И., Введение в механику сплошных сред, Физматгиз, М.,
1962.
25*. Трусделл К., Первоначальный курс механики сплошных сред, «Мир»,
М., 1975.
26*. Эшелби Дж., Континуальная теория дислокаций, ИЛ, М., 1963.
Глава II
НЕПРЕРЫВНО РАСПРЕДЕЛЕННЫЕ
И ИЗОЛИРОВАННЫЕ ДИСКЛИНАЦИИ
В АНИЗОТРОПНОМ УПРУГОМ ТЕЛЕ1)
В этой главе излагается теория стационарных дисклинаций в одно-
родном линейно-упругом бесконечном теле. Введение дисклинаций в тео-
рию дислокаций производится тремя различными способами: исходя из
непрерывных распределений, изолированных дефектов и непрерывных рас-
пределений бесконечно малых петель. Это приводит к трем независимым
определениям дисклинаций, связанным друг с другом единственным обра-
зом. Эта взаимосвязь поясняет подход Антони и Муры, теория которых
кажется на первый взгляд отличной от развиваемой здесь. Введенные
Мурой «пластическая дисторсия» и «пластический поворот» могут быть
отождествлены с плотностями петель дислокаций и дисклинаций соответ-
ственно. Упругие деформация и кручение-изгиб представлены в виде'
определенных интегралов через плотности^ дефектов; показано, что они
являются параметрами состояния. Рассматриваемая теория переходит в
классическую теорию дислокаций, если отсутствуют дисклинации. Для
каждой изолированной дисклинации можно найти «дислокационную мо-
дель» в виде стенки дислокаций, которая дает в точности такие же упру-
гие деформации и напряжения.
1. ВВЕДЕНИЕ
Здесь будет изложена общая теория стационарных дискли-
наций в однородном линейно-упругом бесконечном теле.
Обзор многих геометрических аспектов изолированных
дисклинаций был уже дан в работах Набарро [1] и Антони
[2]. В работах автора [3] и Антони [2] рассматривалась также
геометрия континуальных дисклинаций (т. е. непрерывно рас-
пределенных дисклинаций). Автор дает несколько иную, чем
Антони, интерпретацию тензора плотности дислокаций и урав-
нения неразрывности для дислокаций в том случае, когда есть
дисклинации. Это различие возникает вследствие того, что оп-
ределения непрерывно распределенных и изолированных де-
фектов вводятся по существу независимо друг от друга, и мы
надеемся, что эта проблема будет разрешена в настоящей
работе. В работе Антони, кроме того, рассмотрена статиче-
ская задача для клиновой дисклинации в изотропной среде
с моментными напряжениями и дана геометрически нелиней-
ная формулировка теории распределенных дисклинаций.
*) de Wit R., Theory of disclinations: II. Continuous and discrete discli- '
nations in anisotropic elesticity. Journal of Research, of the National Bu-
reau of Standards, 77A, No. 1, 49—100 (1973).
1. Введение
33
Развитие излагаемой здесь теории принадлежит во многом
Муре [4]. Он развил анизотропную теорию изолированных
дисклинаций и дал ее обобщение на случай непрерывных
распределений. Мура не проводит границы между геомет-
рией и статикой. Он вводит понятия «пластической дисторсии»
Р* и «пластического поворота» <р*, которые, как отмечалось
ранее [3], не могут быть определены, когда имеются дискли-
нации. Однако эти понятия могут быть включены в общую
теорию путем небольшого изменения их интерпретации: их ло-
гично рассматривать как тензоры плотности дисклинацион-
ных петель. Тогда эти величины, имеющие ясное определение
для изолированных дефектов, сохраняют свой физический
смысл при обобщении теории на случай непрерывных распре-
делений. В этом смысле теория дислокационных петель Кроу-
пы [5] и обобщается на дисклинации.
Мура также вводит, «упругую дисторсию» в том случае,
когда имеются дисклинации. Физический смысл этой величи-
ны еще нуждается в оценке, поскольку оказывается, что она
не является параметром состояния в противоположность всем
ранее введенным упругим полям. По определению параметр
состояния есть непрерывно изменяющаяся величина, которая
(в принципе) может быть измерена в макроскопическом опыте
без знания предшествовавших состояний тела. Если для дис-
локаций упругая дисторсия есть параметр состояния, то для
дисклинаций мы обнаруживаем, что подходящими парамет-
рами состояния являются пластическая деформация и кру-
чение-изгиб. Все результаты статьи Муры [4] объединяются
в настоящей работе.
Имеется несколько способов, при помощи которых можно
подразделить изложение теории дисклинаций для целей этой
главы. Чтобы сделать ясной логическую структуру главы, рас-
смотрим сначала эти способы, следуя намеченному плану из-
ложения.
1.1. Сопоставление дислокаций и дисклинаций
Мы можем сопоставить эти два типа дефектов. Обсудим
сначала еще раз известные результаты для дислокаций с тем,
чтобы отметить то новое, что появляется при наличии дискли-
наций. С этой точки зрения то, что в литературе называют
«теорией дисклинаций», фактически представляет собой ком-
бинированную теорию дисклинаций и дислокаций1)- Поэтому
в этой работе мы будем использовать термин дефект для обо-
!) Может показаться, что использование этого термина исключает
возможность рассмотрения точечных дефектов. Однако в этой теории они
могут быть представлены как плотности петель изолированных дефектов.
Это будет проиллюстрировано на примере в гл. III.
2 Зак. 201
34 Гл. II. Дисклинации в анизотропном упругом теле
значения комбинации дисклинаций и дислокаций. По этой
терминологии, следовательно, здесь рассматриваются непре-
рывно распределенные и изолированные «дефекты» в анизо-
тропной теории упругости.
«Теория дефектов» есть обобщение теории дислокаций и
сводится' к последней, если дисклинации отсутствуют. Хотя
возможна «чистая теория дислокаций», но невозможна «тео-
рия дисклинаций» без дислокаций. Тем не менее мы остав-
ляем слово «дисклинация» в названии работы, чтобы подчер-
кнуть то новое, что появляется с введением дисклинации.
1.2. Сопоставление непрерывно распределенных дефектов,
изолированных дефектов и распределений
петель дефектов
Дефекты можно определить следующими тремя сущест-
венно различными способами.
Во-первых, геометрическая теория непрерывно распреде-
ленных дефектов может быть сформулирована как следствие
нарушения классических условий совместности (гл. 1). С этой
точки зрения тело с непрерывно распределенными дефектами
можно назвать также телом с несовместностью, в то время
как тело, свободное от дефектов, можно назвать телом с сов-
местностью.
Во-вторых, теорема Вейнгартена [3, 6] может служить от-
правной точкой для теории изолированных дефектов. Эта тео-
рема позволяет ввести две характерные константы, связанные
с изолированным дефектом: общий вектор Бюргерса, пере-
ходящий в классический вектор Бюргерса для изолированной
дислокации, и характеристический вектор поворота для изо-
лированной дисклинации! Подобно вектору Бюргерса для дис-
локаций, характеристический вектор поворота играет столь
же важную роль для дисклинаций. Поэтому мы решили на-
звать этот вектор вектором Франка, поскольку именно Франк
ввел в употребление термин «дисклинация»1).
’) Здесь уместно дать историческую справку. После того, как Вейн-
гартен [6] опубликовал свою теорему, Вольтерра применил ее к изолиро-
ванным дефектам, которые он назвал «дисторсиями». Этот термин вна-
чале представлялся весьма удачным для обозначения комбинаций дисло-
каций и дисклинаций. Крёнер [8] назвал их «дисторсиями Вольтерра», но
впоследствии использовал термин «дисторсия» для общепринятого сейчас
обозначения градиента перемещения. Между тем Ляв [9] решил назвать
эти дефекты «дислокациями». Этот термин привился, но поскольку транс-
ляционного типа дефекты играли в пластичности более важную роль, это
наименование постепенно стало ассоциироваться с дефектами именно
этого типа. Тогда появилась необходимость проводить различие между
трансляционными и поворотными дислокациями, или, согласно терми-
нологии Вольтерра, между дислокациями первого, второго и третьего
1. Введение
35
В-третьих, теория формулируется в терминах плотностей
непрерывно распределенных бесконечно малых петель дефек-
тов. Этот подход можно рассматривать как наиболее простой,
поскольку в общем случае распределение плотности петель
может быть задано произвольным образом. Кроме того, лю-
бой заданный дефект может быть построен при помощи не-
которого распределения петель.
При установлении взаимосвязи между этими тремя спосо-
бами возникают затруднения. Для дислокаций существует
прямая связь между плотностью дислокаций, вектором Бюр-
герса и плотностью петель дислокаций. Когда вводятся дис-
клинации, между тензором плотности дисклинаций, вектором
Франка и плотностью петель- дисклинаций аналогичной связи
не имеется. Оказалось, однако, что не существует единствен-
ной связи между дислокациями, определяемыми тремя ука-
занными способами, если не смешивать понятий дислокации
и дисклинации. Это и является в основном источником раз-
личия нашего подхода с подходом Антони ’(непрерывные рас-
пределения и изолированные дефекты) и с подходом Муры
(линии и петли).
1.3. Сопоставление геометрии и статики
Эти понятия всегда служат синонимами кинематики и ди-
намики, различие между ними проводится в конкретных раз-
делах науки.
Соотношения, получаемые при геометрическом подходе,
являются просто следствием из свойств евклидова простран-
ства и не зависят от свойств тела. Поэтому при таком под-
ходе различие между упругим и пластическим остается неоп-
ределенным и приобретает физический смысл лишь при вве-
дении статики. Тем не менее результаты, следующие из
типов и между дислокациями четвертого, пятого и .шестого типов/ По-
этому для последних Франк [10] ввел наименование «дисинклинации»,
заменив его впоследствии на «дисклинации». Сейчас термины «дислока-
ция» и «дисклинация» стали общепринятыми в литературе, но поскольку
подходящего термина для обозначения их комбинаций введено не было,
мы назвали эти комбинации просто «дефектами». Дополнительные сведе-
ния см. у Набарро [3, стр. 17—20]. Сделаем также дополнительное замеча-
ние относительно обозначений. В излагаемой линейной теории поворот,
как обычно, представлен вектором, причем последовательные повороты
коммутативны в соответствии с обычным правилом сложения векторов.
Когда же теория обобщается на нелинейный случай, повороты могут быть
конечными и могут стать некоммутативными. В этом случае повороты по-
прежнему можно представлять векторами (называемыми иногда версо-
рами), но они подчиняются более сложному правилу сложения (см.
разд. 5.1.).
2*
36
Гл, II, Дисклинации в анизотропном упругом теле
геометрии, пригодны для линейно-упругого однородного тела,
конечного или бесконечного.
После введения статики геометрические величины связы-
ваются со свойствами тела. Мы ограничимся рассмотрением
линейно-упругого (следующего закону Гука) однородного
тела. Некоторые результаты, получаемые здесь, зависят,
кроме того, от граничных условий. К этим результатам отно-
сится вывод о том, что в бесконечонм теле перемещения и
деформации убывают на бесконечности быстрее, чем г"*1 и г~2
соответственно.
1.4. Схема главы
В разд. 2 мы даем общее решение задачи о теле с пласти-
ческой деформацией, рассматриваемой независимо от конк-
ретной природы обусловливающих ее дефектов. Эта задача
является обобщением «трансформационной задачи» Эшелби
[11]. Полученный результат служит основой всех последую-
щих приложений к статическим задачам. При выводе
ставятся общие граничные условия и определяется соответ-
ствующий тензор Грина. Мы покажем, как может быть обоб-
щен метод Эшелби. И наконец будет показано, что совмест-
ная пластическая деформация не вызывает напряжений.
В разд. 3 содержится обзор классической теории дислока-
ций как основы для дальнейших рассмотрений.
В разд. 4 вводятся поля, описывающие непрерывные рас-
пределения дефектов. Этот случай в общих чертах уже
рассматривался в гл. I, и соответствующие уравнения обозна-
чаются через (1.1), (1.2) и т. д. В этом разделе рассматри-
вается также тензор источников напряжения (введенный Сим-
монсом и Баллафом [12]), который используется для нахож-
дения упругой деформации и для того, чтобы показать, что
она является параметром состояния.
В разд. 5 исследуется изолированный дефект. Для обос-
нования определений используется теорема Вейнгартена. За-
тем последовательно находятся пластическая деформация и
изгиб-кручение, которые выражаются через тензоры Муры
Р* и <р*. Оказывается, что тензор плотности дислокаций зави-
сит от вектора Франка, как это видно, например, в упомя-
нутом выше случае. Выведены соответствующие статические
соотношения.
В разд. 6 дана формулировка задачи в терминах непре-
рывного распределения бесконечно малых петель дефектов.
Здесь р* и <р*, введенные для дискретных дефектов, отождеств-
ляются с тензорами плотности дислокационных и дисклина-
ционных петель. В результате они имеют смысл и в обобще-
1. Введение
37
нии Муры на случай непрерывных распределений. В качестве
другого примера взаимосвязи дефектов мы покажем, что дис-
локационная плотность зависит от плотности дисклинацион-
ных петель.
В разд. 7 мы выводим некоторые результаты для изоли-
рованного диполя и показываем их связь с результатами для
дислокационного диполя.
В разд. 8 показано, что в отсутствие дисклинаций основ-
ные результаты разд. 4—6 сводятся к результатам разд. 3./
В разд. 9 детальнее рассматривается 0*, введенное для .
петли изолированного дефекта. Показано, что без <р* такое 0*
описывает ограниченную компенсированную стенку дислока-
ций, т. е. постоянную плотность дислокаций на поверхности,
опирающейся на линию некоторой дислокации. Это было на-
звано «дислокационной моделью» дискретного дефекта. Выве-
дены поля напряжений для этого случая.
В разд. 10 рассматривается тензор <р* для изолированной
петли. Показано, что без 0* такое <р* описывает дисклина-
ционную петлю, т .е. поверхность с постоянной плотностью
дислокаций, опирающуюся на контур петли изолированной
дисклинации. Упругие поля этого дефекта обращаются в нуль.
В приложении к этой главе мы приводим специальные обо-
значения для дельта-функций на кривых и поверхностях. Эти
обозначения очень удобны и упрощают исследование изоли-
рованных дефектов.
На протяжении всей главы мы видим, что многие понятия
теории дислокаций естественным образом обобщаются и пе-
реходят в соответствующие понятия теории дефектов. Напри-
мер, дислокации сопоставляется дефект, состоящий из дискли-
наций и дислокаций; вместо вектора Бюргерса появляется ве-
личина, состоящая из вектора Франка и полного вектора
Таблица 4
Определение величин, характеризующих дефекты
Величина Дислокация Название компоненты
Дисклинация диагональная недиагональная
Тензор плотности в случае непрерывного распреде- ления дефектов Тензор плотности в случае непрерывного распреде- ления бесконечно малых петель дефектов а 0 V или Р * £ или <р * Винтовая Клиновая Призматическая Кручения Краевая Кручения Скольжения Клиновая
38
Гл. II. Дисклинации в анизотропном упругом теле
Бюргерса. Мы считаем полезным ввести новое понятие «ба-
зисных полей», образуемых полями деформации и изгиба-
кручения. При этом дисторсия, фигурирующая в теории дис-
локаций, перейдет в базисное поле теории дефектов. Исполь-
зованная терминология сведена в табл. 4 и 5.
Изложенное в этой главе относится в основном к решению
граничных задач. Понятия о силах взаимодействия дефектов
и их энергии важны, но внесли бы дополнительные усложне-
ния, и потому мы ими займемся позднее. Мы не будем рас-
сматривать пока и приложений к конкретным задачам. Они
будут рассмотрены в работах [25, 26].
2. ОБЩЕЕ РЕШЕНИЕ ЗАДАЧИ О РАВНОВЕСИИ ТЕЛА
С ПЛАСТИЧЕСКОЙ ДЕФОРМАЦИЕЙ
2.1. Постановка задачи
В этом разделе мы даем формальное решение следующей
задачи, которую можно поставить без конкретизации при-
роды дефектов: в однородном анизотропном теле бесконеч-
ных размеров задано поле пластической деформации ef{, тре-
буется найти поле полного перемещения точек тела.
Эта задача является обобщением задачи Эшелби о вклю-
чении [11] на случай анизотропной среды и неоднородной де-
формации включения, свободной от напряжений. Отметим, что
понятие «деформации, свободной от напряжений», идентично
понятию пластической деформации.
Перефразируя эту задачу, можно сделать ее почти иден-
тичной одной из основных задач классической теории упру-
гости. Используя это обстоятельство, мы получим решение
обеих задач одновременно.
Уравнение равновесия имеет вид •)
+ = /,/=1,2,3, (2.1)
где ft — плотность объемных сил. Здесь и всюду далее исполь-
зуется условие суммирования Эйнштейна, а запятая указы-
вает на соответствующее дифференцирование: ев доц/дх{.
Напряжения связаны с упругой деформацией вы по закону
Гука:
°ц = СцмСы, (2.2)
Для простоты используются декартовы координаты.
2. Общее решение задачи о равновесии тела
39
где Сцм — упругие постоянные. Поскольку и ем симмет-
ричны, то отсюда следует, что1)
Ciiki = Ciiki = Cmk. (2.3)
Полная деформация eTkl определяется2) соотношением
еы^и(1, k)» (2-4)
В общем случае полная деформация не является полностью
упругой, и часть ее является свободной от напряжений, оста-
точной (пластической) деформацией, так что
eki= eki “Ь ekr (2.5)
Приведенные соотношения удобно объединить:
CilklUIt ki^~ fj~ ^ifklekl, i- (2-6)
Это система дифференциальных уравнений в частных произ-
водных относительно uf, которую нам нужно решить при за-
данных fj и е£г
2.2. Определение и использование тензора Грина
Для интегрирования уравнения (2.6) целесообразно ввести
тензор Грина Gjn(г), который представляет собой перемеще-
ние по направлению Xj в точке г, вызываемое действием в на-
чале координат единичной сосредоточенной силы по направ-
лению хп. Тензор Gjn удовлетворяет уравнению
CwGM,zfe(r) + 6/nS(r) = 0 - (2.7)
и граничному условию, в соответствии с которым Gjn обра-
щается в нуль на бесконечности3). Здесь 8in символ Кроне-
кера, а 6 (г)—трехмерная дельта-функция Дирака. Опреде-
ление последней приведено в приложении Б, где также пока-
зано, что она есть однородная функция степени (—3) по г.
Отсюда и из (2.7) с учетом граничных условий вытекает, что
Gjn (г) —однородная функция степени (—1) по г, т. е. GJn(r)
изменяется как г-1.
Теперь можно получить общее решение уравнений (2.6) че-
рез тензор Грина. Вводя относительный радиус-вектор
R = r —г', (2.8)
9 Если существует упругий потенциал, мы дополнительно имеем
условие симметрии Ciju = Оыц, однако оно нам не потребуется.
2) Мы определяем симметричную часть тензора Тц так: Т(о) =
= 'МТ ц + Т ji).
3) Если Cijki = Ckiij, мы также имеем соотношение симметрии
Gjn == Gnjt но в настоящей работе оно нам не потребуется.
40 Г л. II. Дисклинации в анизотропном упругом теле
имеем с учетом (Б.З) и (2.7)
«!(«•)= $ V(R)«f(r')rfV'= - $ CwGln ik^)ur{r')dV't (2.9)
где интегрирование производится по всему пространству. Для-
любого тензора T’(R), который является функцией только R,
из (2.8) следует, что
T((R)=-T(,(R)S-^<. (2.10)
Поэтому мы можем записать (2.9) так1):
^(r) = -JciM/G/„>i,ftz(R)«nHdr. (2.11)
Используя теорему о дивергенции и выражение (АЛ) из при-
ложения А, это соотношение можно представить в виде
+ ф (К) “I. <г') - $ c4siG(. (R) -I (И dV'.
(2.12)
где поверхностные интегралыf берутся по границе достаточно
большой области. Эта процедура обычно называется интегри-
рованием по частям. Полученные соотношения справедливы,
разумеется, когда интегралы сходятся.
Теперь мы введем следующее граничное условие для пе-
ремещения: и] (г)->0 при г->оо. Тогда k(r) будет стре-
миться к нулю при г—> оо быстрее, чем г”1. Следовательно,
подынтегральные выражения поверхностных интегралов в
(2.12) при г'->оо сходятся к нулю быстрее, чем (г')~2> и по-
этому эти интегралы обращаются в нуль. С помощью таких
же соображений видно, кроме того, что объемные интегралы
в (2.9), (2.11) и (2.12) сходятся. В результате с учетом (2.6)
получаем следующее соотношение:
! w = $ Gln (R) [f/ (И - СиА г (И] dV'. (2.13)
2.3. Решение задачи классической теории упругости
. В классической теории упругости отсутствует пластиче-
ская деформация: е£ = 0, и поэтому (2.13) сводится к соот-
ношению
u'W^Gi^fiWdV'. z (2.14)
’) В (2.11) правило суммирования Эйнштейна применяется как для
штрихованных, так и нештрихованных индексов.
2. Общее решение задачи о равновесии тела
41
Это хорошо известное классическое решение почти очевидно,
если вспомнить смысл тензора Грина. Принимая во внимание
(2.6) и граничное условие для «[, необходимо наложить сле-
дующее условие: заданное поле объемных сил ДДг) должно
стремиться к нулю при г->-оо быстрее, чем г-2. Тогда подын-
тегральное выражение интеграла (2.14) будет стремиться
к нулю при г'->оо быстрее так что интеграл конечен.
2,4. Рэшение задачи о равновесии тела
с пластической деформацией
В настоящей задаче задано поле пластической деформа-
ции в теле, в то время как объемных внешних сил нет, т. е.
fj = 0, и поэтому, интегрируя по частям и используя (2.10),
из (2.13) получим
< (Г)=- J C,rt,G„ (R) <£.,, (И dV -
(2-15)
Здесь снова принято, что при интегрировании по частям по-
верхностный интеграл обращается в нуль. Для этого доста-
точно, чтобы заданная пластическая деформация (г) при
г->оо приближалась к нулю быстрее, чем г-1. С учетом (2.6)
видно, что это требование согласуется с граничным условием
для Более того, подынтегральное выражение интеграла
(2.15) будет стремиться к нулю при г'->оо быстрее, чем
(г')-3, так что интеграл конечен.
Уравнение (2.15) справедливо для любых дефектов, соот-
ветствующих заданной пластической деформации. Оно слу-
жит основой всех последующих рассмотрений статических за-
дач, в которых pj и должны удовлетворять аналогичным
граничным условиям. Подобный результат для временной за-
висимости пластической деформации был получен в работе
Муры [13]. Приведенный вывод подчеркивает, что для полу-
чения решения в случае тела бесконечных размеров необхо-
димо знать пластическую деформацию (а не пластическую
дисторсию), и для нее должно ставиться граничное условие,
которое должно быть удовлетворено, как и граничное условие
для перемещения.
В дальнейшем под рубрикой «Геометрия» приводятся ре-
зультаты без учета поведения полей на бесконечности, а под
рубрикой «Статика» результаты подчиняются сформулирован-
ным здесь граничным условиям.
42 - Гл. II. Дисклинации в анизотропном, упругом теле
2.5. Метод Эшелби
Для преодоления математических трудностей в физиче-
ской науке часто используются разные ухищрения. В ходе
развития математической теории дислокаций примечательную
роль сыграли приемы, разработанные Эшелби. Мы хотим по-
казать, как с помощью одного из таких приемов можно полу-
чить уравнение (2.15).
Эшелби вычисляет перемещения в задаче о включении
с заданной несовместностью при помощи последовательно
вводимых воображаемого разреза, деформации и склейки [11J.
Это делается таким образом, что несовместность включения
оказывается возможным заменить фиктивными Объемными
силами. Затем он удаляет эти силы и находит результирую-
щее перемещение из классического выражения.
Для обобщения этого подхода на наш случай необходимо
представить себе некоторое, непрерывное распределение этих
операций разреза, деформации и склейки. Как и в задаче
Эшелби, не важно, осуществимы или нет эти операции в дей-
ствительности. Используя пластическую деформацию е?*,
вводим фиктивную объемную силу в виде
fI= i>' (2* 16)
Тогда из (2.13) следует, что перемещение обращается в
нуль. Затем устраняем эту объемную силу, вводя равную ей
по величине, но противоположную по направлению объемную
силу — fj = — Cilk[eh i>. Учитывая вновь введенную силу в
(2.14), получаем соотношение для перемещения
которое совпадает с (2.15). Итак, суть метода Эшелби заклю-
чается в том, что дефект, описываемый пластической дефор-
мацией e£lt можно заменить фиктивной объемной силой
V'
2.6. Совместная пластическая деформация
Пусть пластическая деформация выводится из пластиче-
ского перемещения
рр =ир
eki — иц, ky
(2.17)
3. Обзор теории дислокаций
43
В этом случае будем называть совместной пластической
деформацией. Из соотношения (2.15) при этом имеем
= $ V (R) «₽ (г') dV' =ирп (г), (2.18)
где второе равенство получается путем интегрирования по ча-
стям, а третье — из выражения (2.7). Отсюда следует, что в
случае совместной пластической деформации упругое переме-
щение обращается в нуль:
(2-19)
Следовательно, в этом случае все упругие поля обращаются
в нуль.
3. ОБЗОР ТЕОРИИ ДИСЛОКАЦИЙ
3.1. Непрерывное распределение дислокаций
3.1.1. Геометрия
Если вместе с пластической деформацией задан пла-
стический поворот то дефекты можно отождествить с дис-
локациями. В этом случае пластическая дисторсия (1.5.1) !):
к-^+w; (з-о
является произвольной функцией координат.' Здесь e^iq —
символ Леви-Чивиты, — симметричная часть тензора
ем = Р(М)» (3*2)
а второй член в (3.1)—антисимметричная часть т. е.
(3-3)
Плотность дислокаций определяется соотношением (1.5.2):
pl tn1 ' z
которое эквивалентно равенству
epmkaplS PmZ, k PftZ. m’ (3.5)
*) Напомним, что (1.5.1) означает уравнение (5.1J главы 1.
1
44 Гл. II. Дисклинации в анизотропном упругом теле
Уравнение непрерывности (1.5.4) для дислокаций
«р1,р = 0 (3.6)
непосредственно следует из (3.4). Уравнение (3.6) означает,
что дислокации не могут оканчиваться внутри тела.
Рис. 2. Геометрия изолированного дефекта с линией L.
S—поверхность дефекта, А.-—контур Бюргерса, а—поверхность Бюр-
герса. Поверхности S и а—произвольные криволинейные поверх-
ности, опирающиеся на кривые L и К соответственно; г^°— точка
пересечения кривой L с поверхностью а, г^—точка пересечения
кривой К с поверхностью S. Положительные направления обхода
кривых указаны стрелками.
Введем в рассмотрение контур Бюргерса — произвольную
замкнутую кривую X внутри тела (рис. 2). Вектор Бюргерса
для кривой А определяется как контурный интеграл
bt^~^pkldLk- И
к
Это соотношение можно интерпретировать следующим обра-
зом. Представим себе, что в первоначально идеальном кри-
сталле путем введения в него дислокаций создана некоторая
пластическая деформация. Некоторое число дислокаций про-
3. Обзор теории дислокаций
45
ходит внутри %, вызывая относительное смещение решетки
в точках кривой, равное — ^tdLk. Суммируя эти смещения,
мы получаем результирующий вектор Бюргерса всех дисло-
каций, пронизывающих поверхность а, ограниченную конту-
ром %. Из (3.4), применяя теорему Стокса (А.2), имеем
bi=^apidSp. (3.8)
о
Это соотношение показывает, что компонента aPi тензора
плотности дислокаций равна потоку в направлении xi всех
векторов Бюргерса дислокаций, пересекающих единичную
площадку, нормальную к направлению хр.
Существование пластической дисторсии подразумевает су-
ществование упругой дисторсии (см. (1.2.1) и (1.5.5)):
рГ = итп m = Р™ + PL- (3.9)
Это соотношение имеет место только в том случае, когда от-
сутствуют дисклинации, так как существование пластической
дисторсии подразумевает отсутствие дисклинаций. При по-
мощи (3.9) из определений (3.4) и (3.7) следует, что
Gpmkfykl, m e ®р1> (3.10)
^kldLk^bu (3.11)
Л
Эти уравнения называются основными геометрическими зако-
нами, или полевыми уравнениями для и
В числе других величин, которые нам будут полезны в
дальнейшем, отметим пластический изгиб-кручение (см.
(1.5.16)):
= (3-12)
[последнее равенство следует из (3.3)], упругую деформацию
етп = Р(шп) (3.13)
и упругий изгиб-кручение (см. 1.5.18)):
^st — СО/, 3 = Уг^тпРтп, з- (3.14)
3.1.2. Статика
С учетом (3.2) и (2.3) выражение (2.15) для перемеще-
ния можно записать в виде
(г) = - J ClSklQin-t (R) (ИdV'. (3.15)
Здесь пластическая дисторсия (г) должна удовлетворять
условию, что она стремится к нулю при г->оо быстрее, чем
46 Гл. II. Дисклинации в анизотропном упругом теле
г-1. Из (3.15) находим полную дисторсию
< .() = - $ С „Л (R) И, (г') dV' =
— 5 Kw (rW'=
= $ С„А.,, (Ю [%.%, (И - Г <r')] dV' -
= S , (Ю %, (И dV + HL « (3.16)
Первое из этих равенств получается просто дифференциро-
ванием под знаком интеграла, в котором от г зависит лишь
тензор Грина, второе — интегрированием по частям, третье
следует из (3.5), четвертое получается интегрированием по
частям с использованием (2.7) и (Б.З). Из (3.9) находим уп-
ругую дисторсию
Pmn (г)= ^pmkCilkfifn, i (R)ap/(r')dr. (3.17)
Это часть формулы Муры — Виллиса [12, 13, 15], принадле-
жащая Муре. Часть, принадлежащая Виллису, получается,
если при выводе учесть (2.14). Из (3.4) и наложенного выше
условия на следует, что apZ(r) стремится к нулю при
г->оо быстрее, чем г-2. Однако для существования самого
х интеграла в (3.17) требуется лишь, чтобы тензор ар;(г) обра-
щался в нуль на бесконечности быстрее, чем г-1.
Отметим, что плотность aPi является параметром состоя-
ния, поскольку она может быть измерена в данном состоянии
тела (например, методом электронной микроскопии или рент-
геновским методом). Поэтому из (3.17) следует, что и упру-
гая дисторсия Ра; есть параметр состояния, поскольку она пол-
ностью определяется плотностью дислокаций aPi. С другой
стороны, например, пластическая дисторсия 0£z не может
быть параметром состояния, так как ее-нельзя измерить без
знания предшествовавших состояний тела.
3.2. Изолированная дислокация
3.2.1. Геометрия
Линия дислокации L определяется как граница поверхно-
сти S, материал ниже которой пластически сдвинут по отно-
шению к материалу выше на величину, определяемую по-
стоянным вектором Бюргерса bi (рис. 2).
3. Обзор теории дислокаций
47
Следовательно, для разности между смещениями мате-
риала ниже и выше поверхности S имеем
[«/(г)] = bt. (3.18)
Наша задача заключается в том, чтобы найти соответствую-
щую пластическую дисторсию. Прямой путь решения этой за-
дачи состоит в следующем. Сначала положим, что поверх-
ность S замкнута и ограничивает объем V, Согласно (Б.7),
соотношение
MT(r)=±d(V)Z>z (3.19)
определяет поле, равное bi внутри области V и нулю вне ее,
т. е. имеющее скачок (3.18) при переходе через S. С учетом
(3.9) этому полю соответствует дисторсия
(0=«I Дг)=б, k (Ю Ь{« - ък (S) ь[г - (3.20)
где мы воспользовались также теоремой о дивергенции (Б.24);
здесь 5 — граница области V. Мы видим, что дисторсия сосре-
доточена на поверхности S. Поскольку эта деформация пред-
ставляет собой жесткую трансляцию части тела, упругой
дисторсии нет — дисторсия (3.20) является полностью пласти-
ческой. Теперь мы положим, что это выражение справедливо
и в случае незамкнутой поверхности 3, т. е. что и в этом слу-
чае
₽£/(r) = ~Ms)6r ' (3-21)
Вектор Бюргерса в случае непрерывно распределенных
дислокаций был определен соотношением (3.7). Покажем, что
это определение согласуется с определением вектора &/, при-
веденным выше. Если Л— произвольный замкнутый контур,
охватывающий линию дислокации L и имеющий ориентацию
(положительное направление обхода), согласующуюся с
ориентацией на L, то положительное направление на % совпа-
дает и с положительным направлением нормали к поверхно-
сти S в точке пересечения rs\ С учетом этого из (3.21) и
(Б. 15) получим соотношение
dLk = ^bk(S)bidLk = bi. (3.22)
А - Л
Используя (3.4) и теорему Стокса (Б.26), находим теперь
тензор плотности дислокаций
(0 == щ (S) bi = &р (L) bi, (3.23)
где L — замкнутый контур, служащий границей поверхности
S, т. е. линия дислокации. Вектор 6P(L) есть дельта-функция
48 Гл. II. Дисклинации в анизотропном упругом теле
Дирака на L; он касателен к линии L в каждой ее точке. Изо-
лированная дислокация называется винтовой или краевой,
если вектор Бюргерса соответственно параллелен или перпен-
дикулярен линии дислокации. С учетом этого из уравнения
(3.23) следует, что диагональные и недиагональные компо-
ненты тензора aPi представляют соответственно винтовую и
краевую компоненты плотности дислокаций (см. табл. 4).
Кроме того, из уравнения (3.23) видно, как осуществляется
переход от непрерывного распределения дислокаций к случаю
изолированной дислокации. Отметим, что и в последнем слу-
чае, согласно (Б.28), выполняется условие (3.6):
р (г)= р (^) ~ 0» (3.24)
В качестве перекрестной проверки покажем также, что, в силу
(3.23), выполняется (3.8) (см. рис. 2):
J api dSp = J бр (L) bt dSp = bt, (3.25)
а а
где использовано еще раз соотношение (Б. 15). Выражение
(3.25) справедливо и в случае нескольких дислокаций и по-
тому может быть использовано при переходе от изолирован-
ных дислокаций к случаю непрерывного распределения дисло-
каций. В случае нескольких дислокаций средняя плотность
их aPi представляет собой ^-компоненту суммы векторов
Бюргерса всех дислокаций, пересекающих единичную пло-
щадку, нормальную к хр-направленикУ. Для иной интерпрета-
ции тензора плотности aPi рассмотрим следующий результат:
J ар1 (г) dV = J бр (L) bt dV = bt\ бр (L) б (V) d V = '
v
~bt\b(y)dLp = bt J dLp. (3.26)
L L(V)
Здесь первое равенство вытекает из.уравнения (3.23), вто-
рое— из (Б.7), третье — из (Б.11) и четвертое — из (Б.7),
где L(V) —часть контура кривой L, заключенная в объеме
V. Из этого соотношения видно, что средняя плотность дисло-
каций aPi представляет собой сумму произведений Хгкомпо-
ненты вектора Бюргерса дислокации на длину проекции на
направление хр для всех дислокаций, содержащихся в еди-
ничном объеме. Эквивалентность двух вышеприведенных ин-
терпретаций средней плотности дислокаций может быть
также показана методом количественной стереологии [16].
3. Обзор теории дислокаций
49
Отметим здесь, что существует и другой вид плотности
дислокаций, широко используемый главным образом экспе-
риментаторами. Это есть полная длина дислокаций на еди-
ницу объема, обозначаемая обычно через р:
Jp(r)dV= J dL.
V L(V)
(3.27)
Легко показать, что
р(г) = /Д(£), (3.28)
где tp — единичная касательная к линии дислокации. Тогда
соотношение между двумя различными плотностями дислока-
ций имеет вид
pb2==tpaplbh (3.29)
где мы использовали уравнение (3.23).
3.2.2. Статика
Подставляя (3.21) в (3.15) и используя (Б.12), находим
выражение для перемещения в случае изолированной дисло-
кации:
иТп (г) = S Ci}klGintt (R) б, (S') bt dV' =
v
= J CiikiGin, i (R) bi dSk- (3.30)
s
Это уравнение позволяет дать оценку асимптотики переме-
щения на больших расстояниях от бесконечно малой дисло-
кационной петли. Эта асимптотика непосредственно совпа-
ла дет с асимптотикой подынтегрального выражения. По-
скольку тензор Грина Gjn(r) пропорционален г-1, мы видим,
что итп (г) при г—>ообудет пропорционально г-2. ’Но так
как деформация emn(r) определяется производной от пере-
мещения, она при г—>оо будет пропорциональна г-3. Эти ре-
зультаты представлены в табл. 6. Более точные вычисления
асимптотического поведения перемещения в случае малой
петли могут быть получены путем разложения тензора Грина
под интегралом (3.30) в ряд Тейлора по г' (учитывая не-
сколько первых членов разложения) и интегрирования по по-
верхности S. Применяя этот результат в случае изотропного
тела, находим соотношения, полученные ранее Кроупой [17].
Более детальное обсуждение этого вопроса будет опублико-
вано в работе [26].
50 Гл. II. Дисклинации в анизотропном упругом теле
Теперь из (3.30) находим полную дисторсию в виде
m (г) = CiiklGin, im (R) bi dS^ =
s
— <§> epmkCukiGin, i (R) bi dL'p + CtjkiG/n, ik (R) bi dS'm =
L S
= $ ^kCitkiGm t (R) b, dL' + p₽ (r). (3.31)
j pm к tj/ы ]n, i.4 ' i p 1 rtnn ' ' ' r
L
Первое из этих равенств получается просто дифференцирова-
нием под знаком интеграла, второе — из теоремы Стокса
(А.4) и третье — из соотношений (2.7), (Б.5) и (3.21). Тогда
из (3.9) получим соотношение для упругой дисторсии:
р (г) = & е .CUUG. . (R) b, dL' (3.32)
rтп' 7 j ртя ijRl in, i ' '' I р ' 7
L
Это соотношение можно также получить непосредственно из
выражений (3.17), (3.23) и (Б.11). Подобный результат уже
был получен в работе Муры [13] в случае движущейся дисло-
кации. 1
Мы видим, что параметр состояния $тп можно записать
в виде линейного интеграла по линии изолированной дисло-
кации, т. е. через интеграл по тем областям тела, где локали-
зован дефект. Если дефект является параметром состояния,
то необходимым и достаточным условием для того, чтобы и
его поля являлись параметрами состояния, является условие,
что эти поля можно представить в виде интеграла по дефек-
ту. В случае линейного дефекта это означает, что параметр
состояния должен быть линейным интегралом по линии де-
фекта.
Уравнёние (3.32) также позволяет нам дать оценку
асимптотического поведения дисторсии и, следовательно, де-
формации на больших расстояниях от прямолинейной дисло-
кации. Как видно из (3.32), асимптотики их такие же, как и
для тензора Грина, т. е. Pmn(r) и eWn(r) при г->оо пропор-
циональны г-1. Поскольку перемещение и7п является инте-
гралом дисторсии, оно при г->оо пропорционально In г. Этот
хорошо известный результат также приведен в табл. 6.
3.3. Непрерывные распределения
бесконечно малых петель дислокаций
В разд. 3.1 плотность дислокаций и вектор Бюргерса оп-
ределялись по заданной пластической дисторсии соотноше-
ниями (3.4) и (3.7). Следствием этих определений является
4. Обзор теории дислокаций
51
уравнение (3.8), связывающее вектор Бюргерса с плотностью
дислокаций. Это уравнение можно использовать для опреде-
ления плотности дислокаций по заданному вектору Бюргерса.
Удобнее всего представить уравнение (3.8) в дифференци-
альной форме. Тогда в случае непрерывно распределенных
дислокаций тензор плотности определяется соотношением
(3.33)
Как отмечалось выше, в случае изолированных дислокаций
выражение (3.33) представляет собой среднюю плотность ди-
слокаций, где Д&г есть /-компонента результирующей векто-
ров Бюргерса всех дислокаций, пересекающих элемент по-
верхности Д5р, перпендикулярный направлению хр в данной
точке.
Подобным же образом Кроупа [5] ввел тензор плотности
петель дислокаций, определив его так: ум представляет поток
в направлении хг составляющей дислокаций (или вектора
Бюргерса) на направлении хк. В случае непрерывно распре-
деленных петель тензор плотности ум является функцией ко-
ординат и определяется соотношением
(334)
а в случае изолированных петель выражение (3.34) пред-
ставляет собой среднюю плотность петель дислокаций, где
теперь — /-компонента результирующей векторов Бюр-
герса всех петель, пересекаемых отрезком линии AL^ парал-
лельным направлению Xk в данной точке.
Чтобы связать плотность петель дислокаций и пластиче-
скую дисторсию, представим соотношение (3.34) в виде ин-
теграла
bi = ^ykidLk (3.35)
К'
и сравним его с определением (3.7). Подынтегральные выра-
жения могут отличаться только производной по Хь,. Поэтому
можно записать следующее соотношение:
%—т„ + »Ь> (3.36)
где — произвольное векторное поле. Это соотношение оп-
ределяет пластическую дисторсию в случае непрерывно рас-
пределенных петель дислокаций и позволяет найти из харак-
теристик петли все соотношения, выведенные в разд. 3.1.
52 Гл. II. Дисклинации в анизотропном упругом теле
Например, (3.4) сводится к уравнению
= GpmkNkl, mi (3.37)
которое является фундаментальным соотношением между
плотностью петель дислокаций и плотностью соответствую-
щих дислокаций. Поскольку пластическое перемещение не
приводит к образованию упругих полей (см. разд. 2.6), мож-
но положить = 0 и для вычисления полей непрерывно
распределенных петель дислокаций использовать соотноше-
ние
(3-38)
идентичное выражению Кроупы. Следовательно, мы можем
отождествить пластическую дисторсию с плотностью петель
дислокаций с точностью до знака.
Теперь мы можем дать интерпретацию уравнения (3.21)
в терминах бесконечно малых петель. Чтобы построить линию
изолированной дислокации L, распределим бесконечно малые
петли дислокаций мощностью bi с постоянной плотностью по
некоторой поверхности S, ограниченной линией L. Этот метод
может быть также использован при определении изолирован-
ной дислокации, рассмотренной в разд. 3.2. Поэтому в случае
дислокационной петли конечных размеров плотность петель
определяется соотношением
у«(г) = дЛ(«)&ь (3.39)
где S — поверхность, натянутая на линию дислокации. Век-
тор 6a(S)— дельта-функция Дирака на поверхности S; он
всегда нормален к S. В зависимости от того, перпендикуля-
рен или параллелен вектор Бюргерса поверхности S, мы имеем
призматическую петлю или петлю скольжения. Поэтому из
уравнения (3.39) следует, что диагональные и недиагональ-
ные компоненты тензора представляют призматические ком-
поненты и компоненты скольжения плотности петель дисло-
каций (см. табл. 4). Из уравнения (3.39) также видно, как
можно перейти от непрерывно распределенных бесконечно
малых петель дислокаций к случаю петель конечных разме-
ров.Используя (Б. 15), видим, что уравнение (3.39) удовлетво-
ряет (3.35). Последнее справедливо и в случае нескольких
петель конечных размеров и поэтому может быть использо-
вано при переходе от петель конечных размеров к случаю
непрерывно распределенных петель. В случае нескольких
дислокационных петель конечных размеров средняя плотность
петель дислокаций ум представляет собой хгкомпо.ненту сум-
мы векторов Бюргерса всех петель, пронизываемых прямой
3. Обзор теории дислокаций
53
по направлению Для иной интерпретации тензора ум рас-
смотрим следующий результат:
$ Nki (г) dV = $ (S) bldV = bl\dk (S) 6 (V) dV =
V V V
= bt J 6 (7) dSk = bt J dSk. (3.40)
V S(V)
Первое из этих равенств вытекает из уравнения (3.39), вто-
рое— из (Б.7), третье — из (Б.12) и четвертое — из (Б.7),
где S(1Z)—часть поверхности S, заключенная в объеме V.
Из этого выражения видно, что средняя плотность петель ди-
слокаций ум также представляет собой сумму произведений
xz-компоненты вектора Бюргерса петли на площадь ее проек-
ции на нормальную к Хь плоскость для всех петель дислока-
ций, содержащихся в единичном объеме. Эквивалентность
двух вышеприведенных интерпретаций средней плотности пе-
тель дислокаций может быть также показана методом коли-
чественной стереологии [16].
3.4. Дислокационный диполь
Поля дислокационного диполя, т. е. пары близких дисло-
каций с протйвоположно направленными векторами Бюр-
герса, исследовались ранее в работе Кроупы [18]. В этом раз-
деле мы хотим представить некоторые общие результаты для
дефекта такого типа.
3.4.1. Общее определение диполя
Следуя рассуждениям Кроупы, дадим сначала общее оп-
ределение диполя любого дефекта. Такой диполь состоит из
двух частей: одна получается перемещением базисного де-
фекта на небольшое расстояние, другая представляет собой
базисный дефект противоположного знака в первоначаль-
ном положении. Для математической формулировки этого
представления допустим, что исходный дефект задан в виде
функции координат с помощью функции источника S(r).
Например, этой функцией может быть тензор из разд. 2
или тензор aPi из разд. 3.1. Если этот дефект жестко смещен
на расстояние |, то функция источника нового дефекта при-
обретает вид S(r — §). Следовательно, для диполя функция
источника определяется соотношением
S°(r) = S(r-g)-S(r). (3.41)
Этот результат справедлив в случае конечного диполя.
54
Гл. II. Дисклинации в анизотропном упругом теле
В случае изолированного дефекта, сосредоточенного в
точке, на линии или на поверхности, обычно имеют дело
с бесконечно малым диполем. Последний имеет место при ус-
ловии, что когда § стремится к нулю, мощность исходного де-
фекта стремится к бесконечности так, что поле диполя при
этом остается конечным. При достаточно малом значении |,
используя разложение в ряд Тейлора, соотношение (3.41)
можно переписать в виде
$°(г) = -|Дг(г)- (3.42)
Мы видим, что это определение имеет знак,-противополож-
ный знаку в определении Кроупы, что соответствует принци-
пам электродинамики. Теперь покажем, что подобное соот-
ношение выполняется для полей дефекта и его диполя.-Пусть
..поле исходного дефекта определяется общим выражением
f(r)=jG(R)S(r') dV',
(3.43)
где G(R)—некоторое ядро интегрирования. Такую форму,
например, имеют выражения (2.15) и (3.17). Соответствую-
щее поле диполя имеет вид
fD (г) = J G (R) SD (г') dV' = - Ь J G (R) S, r (г') dV' =
= - Gt е (R) 5 (г') dV' = - У, t (г). (3.44)
Второе из этих равенств получается с помощью (3.42),
третье — интегрированием по частям, а четвертое—из (3.43).
Уравнения (3.42) и (3.44) являются фундаментальными
соотношениями, связывающими функции исходного дефекта и
функции соответствующего ему диполя. Исходный дефект яв-
ляется произвольным. Например, им может быть сам диполь;
в этом случае мы получаем диполь диполя или квадруполь.
Таким способом определяются все мультиполи высоких по-
рядков.
3.4.2. Случай изолированного дислокационного диполя
Применим результаты разд. 3.4.1 к случаю изолированной
дислокации (рис. 3). Базисным уравнением для плотности
дислокаций может служить уравнение (3.23). С учетом этого
и уравнения (3.42) плотность дислокационного диполя опре-
деляется соотношением
aoZ (г) = m (Г) = ““ m (^) (3.45)
pl ' ' pl, tn ' ' р, m ' 7 '
3. Обзор теории дислокаций
55
Используя это выражение, можно уточнить смысл бесконечно
малого смещения устремляем и &г~>оо так, чтобы
произведение bfem оставалось постоянным.
Используя (3.31) и (3.21), из уравнения (3.44) находим
поле перемещения в случае дислокационного диполя:
Ы«(Г)----КХ,т(Г) =
----ф ^С11иО„,, (R) b,lm dl't + (S) »„lm. (3.46)
L
Интересно отметить, что последнее слагаемое в уравнении
(3.46) можно обратить в нуль, выбирая поверхность S вдоль
§ так, чтобы dS'm = 0, т. е. чтобы S была бесконечно малой
полоской, соединяющей базисную дислокацию с ее смещен-
ным прообразом. Из уравнения (3.46) как следствие выте-
кает, что перемещение дислокационного диполя является
параметром состояния.
Из уравнения (3.46) можно вывести и другие статистиче-
ские величины, например дисторсию Р£п. Аналогичное выра-
жение для дисторсии можно получить, подставляя (3.45)
в (3.17).
Уравнение (3.46) позволяет также дать оценку асимпто-
тического поведения перемещения на больших расстояниях
от прямолинейного дислокационного диполя. Из сравнения
(3.46) с (3.32) видно, что асимптотика такая же, как и в слу-
чае дисторсии от прямолинейной дислокации, т. е. при
г —> со перемещение пропорционально с1, Следовательно,
56
Гл. II. Дисклинации в анизотропном упругом теле
деформация при г->оо будет пропорциональна г~2. Эти ре-
зультаты также приведены в табл. 6. Отметим из таблицы
следующий факт: дислокационный диполь можно рассмат-
ривать как дефект со свойствами, промежуточными между
свойствами дислокационных линии и петли.
Иногда узкая вытянутая дислокационная петля рассмат-
ривается как диполь. С точки зрения нашего определения
диполя такое рассмотрение невозможно, поскольку две ком-
поненты диполя должны разделяться. Тем не менее две
параллельные бесконечные прямолинейные дислокации с про-
тивоположно направленными векторами Бюргерса не проти-
воречат нашему определению диполя. Такой диполь аналоги-
чен растянутой петле. Таким образом, дислокационный ди-
поль можно рассматривать как частный случай петли. ,
4. НЕПРЕРЫВНОЕ РАСПРЕДЕЛЕНИЕ ДЕФЕКТОВ
Как было отмечено в разд. 1.1, комбинации дислокаций и
дисклинаций мы будем называть дефектами (см. табл. 5).
Таблица 5
Обобщение теории дислокаций ня теорию дефектов ,
Величины Теория дислокаций Теория дефектов
Тензоры ' плотности дефектов Плотность дислокаций а Плотность дислокаций а Плотность дисклинаций 0
Базисные пластичес- кие поля Пластическая дисторсия Рр Пластическая деформа- ция ер Пластический изгиб-кру- чение хр
Характеристические векторы Вектор Бюргерса Ь Полный вектор Бюргер- са В Вектор Франка Q
Базисные упругие поля Упругая дисторсия 0 Упругая деформация е Упругий изгиб-круче- ние X
Разрывы Разрыв перемещения [и] Разрыв перемещения [и] Разрыв поворота [<в]
Тензоры плотности петель Плотность петель дис- локаций V (₽Р) Плотность петель дисло- каций V (Р *) Плотность петель дис- клинаций $ (ф*)
4. Непрерывное распределение дефектов --------------57
4.1. Геометрия
Рассмотрим бесконечное тело, в котором пластическая де-
формация e?t и пластический изгиб-кручение х^ заданы не-
зависимо как функции точки пространства. Назовем для удоб-
ства эти две функции базисными пластическими полями.
Тогда мы можем получить как дисклинации, так и дислока-
ции. Плотности дислокаций и дисклинаций определяются со-
отношениями (1.6-3) и (1.6.1):
apZ ~ “ epmk (fkl, m “Ь (4-0
®pq ~ epmkKkq, m ' (^p ~ ““ %nZXZp, n)* (^.2)
Из (4.1) и (4.2) сразу следуют уравнения неразрывности
(см. (1.6.8) и (1.6.2)):
®р1, р + ^ipqQpq — 0, (4.3)
9р,.р = 0. (4.4)
Первое из этих уравнений означает, что дислокации могут
оканчиваться только на дисклинациях и, наоборот, если
тензор плотности дисклинаций несимметричен, то дисклина-
ции должны испускать дислокации. Второе уравнение пока-
зывает, что дисклинации не могут оканчиваться внутри тела.
Вводя контур Бюргерса X, определим теперь характери-
стические векторы: общий вектор Бюргерса Вг и характери-
стический вектор поворота который мы условились
в разд. 1.2 называть вектором Франка:
— “* Ф “ eiqrKkqKr) (4.5)
А.
’ . о.—$<<«•.• («)
А.
Эти соотношения можно интерпретировать следующим обра-
зом. Представим себе, что в первоначально идеальном кри-
ёталле путем введения в него . дефектов создана некоторая
пластическая деформация. Определенное число линий дефек-
тов проходит внутри контура %. Каждая дисклинация, прохо-
дящая внутри X, вызывает в решетке на кривой относитель^
ный поворот — х£ dLk. Суммирование их по контуру Л дает
результирующий вектор Франка всех дисклинаций, пронизы-
вающих поверхность о, ограниченную контуром Л. Легко ви-
деть, что (4.5) совпадает с‘ (3.7) в том случае, когда xfg за-
58 Гл. II. Дисклинации в анизотропном упругом теле
дается равенством (3.12). В этом можно убедиться путем ин-
тегрирования по частям, учитывая, что внеинтегральный член
обращается в нуль, и используя (3.1) или (3.2). Поэтому
определение (4.5) есть просто обобщение определения (3.7).
Вектор Bi представляет собой результирующий вектор Бюр-
герса всех дефектов (дислокаций и дисклинаций), проходя-
щих внутри контура X и пронизывающих поверхность а. Сле-
дует подчеркнуть, что Bi не представляет собой сумму отно-
сительных перемещений вдоль контура X. Последняя вели-
чина не является инвариантом для кривой X, а зависит от
точки начала интегрирования. К определению (4.5) непосред-
ственно подводит теорема Вейнгартена (разд. 5.1). Применяя
теорему Стокса (А.2) и используя (4.1) и (4.2), из соотно-
шений (4.5), (4.6), (1.7.4) и (1.7.3) находим
5 epmk m ei4mXkq eiqrKkq, mXr) ^$р ~
a
~ (apZ Glqr®pq%r) dSp9 (4.7)
a
m dSn == ^ dSD. (4.8)
ч J ptnH Rq, m t) j уч v \ /
a a
Соотношение (4.7) показывает, что плотность- дисклинаций
QPq также дает вклад в величину общего вектора Бюргерса
в дополнение к плотности дислокаций aPi. Соотношение (4.8)
показывает, что компонента 0рд плотности дисклинаций равна
потоку дисклинаций (т. е. вектора Франка) в направлении
xq, пересекающему единичную площадку, нормальную на-
правлению хр.
Для дальнейших приложений полезно переписать уравне-
ния (4.1) и (4.2) в эквивалентной форме:
GpmlPpl &~ml, k &kl, т 4" SpmkXlp ^klmx ’ (4.9)
epmk®pq ~ %mq. k ~ Kkq. m (6qnfiqp = %np, I ~ XZp, re)'
Тензор несовместности определяется равенствами (см. (1.4.1)
и (1.6.6)):
“4pq ~ ^pmk^qnl^kl, тп О
= п 4" ®р?)(р?)’ (4-12)
Выражение (4.12) следует из (4.1) и (4.2). Из (4.11) непо-
средственно получается уравнение неразрывности для тен-
зора несовместности (1.4.2):
Лрд. р == 3- (4.13)
4. Непрерывное распределение дефектов
59
При наличии дисклинаций мы больше уже не можем утвер-
ждать, что полная дисторсия равняется сумме упругой и
пластической частей (см. (3.9)) просто потому, что пласти-
ческая дисторсия р£п не определена. Ибо, если бы р£п суще-
ствовала, пластический изгиб-кручение равнялся бы гра-
диенту от пластического поворота (см. (3.12)) и, следова-
тельно, плотность дисклинаций (4.1) обращалась бы в нуль1).
Вместо этого, поскольку задаются пластическая деформация
e£z и пластический изгиб-кручение мы постулируем
существование упругой деформации ем и упругого изгиба-
кручения %л7, которые мы будем называть базисными упру-
гими полями. Так, согласно (1.2.3), (1.4.3), (1.2.16) и (1.5.17),
имеем
С S С m) = emn + emn, (4’14)
’Cs< = <Bb='/2e/mX.mS = XS/ + ^- (4-15)
Поскольку из (4.14) и (4.15) следует, что
6 . (6 * Вkl m + 6klaHma) = 6nmkUl km ~ (4.16)
pmR \ Hl, tn 1 nig mq/ pmR i, Rm 1 f
то соотношения (4.14) и (4.15) позволяют с учетом (4.1),
(4.2), (1.6.11) и (1.6.10) вывести следующие основные гео-
метрические законы, или полевые уравнения для и 0рд:
^pmk m “I" ^klq^mq) = ^pb (4.17)
Gpmk'X'kq. m = ^pq* (4.18)
Геометрический смысл этих уравнений состоит в том, что де-
фекты (дислокации и дисклинации) выполняют роль источ-
ников базисных упругих полей (упругой деформации и упру-
гого изгиба-кручения). Из (4.14) и (4.15) следует, что
ehl GlqrHkqXr= W[Z, r]Xr\ k9
и значит эти соотношения вместе с (4.5), (4.6), (1.7.2) и
(1.7.1) позволяют получить основные геометрические законы
!) Эта ситуация аналогична той, которая имеет место в «чистой»
теории дислокаций. Там полное перемещение не равно сумме упругой и
пластической частей, так как если бы пластическое перемещение wf суще-
ствовало, то пластическая дисторсия была бы его градиентом: — uf k.
В этом случае плотность дислокаций (3.4) равнялась бы нулю.
60
Гл. IL Дисклинации в анизотропном упругом теле
для Bi и
'Ф (fikl ^Iqr^kq^r) — В/, (4.20)
к
ф ^kq — Q^.
к
(4.21) у
Эти уравнения можно рассматривать как интегральную фор-
му полевых уравнений (4.17) и (4.18). Наконец, из (4.14),
(4.11) и (1.4.4) следует основной геометрический закон, или
полевое уравнение для несовместности
^pmk^qnl^klt mn === ^pq* (4.22)
Это уравнение показывает, что несовместность можно рас-
сматривать как плотность источников для упругой деформа-
ции.
4.2. Статика
Здесь будет дано обобщение результатов гл. I, в которой
рассматривалась лишь геометрия непрерывно распределен-
ных дефектов, краткий обзор которой был дан в разд. 4.1.
Основным результатом/ который мы получим, является но-
вое выражение для упругой деформации через плотности де-
фектов (см. (4.29)). Будет найден также упругий изгиб-
кручение.
Из (2.15) находим полную дисторсию:
- J < (R) [%А (И -</.»- (И - (И] =
- j <(«)[%,(')-ЧЛИ]dV + e”m.(г). (4.23)
Здесь второе равенство получается интегрированием по ча-
стям, третье следует из (4.9) и (2.3), четвертое получается
интегрированием по частям с учетом (2.7) и (Б.З). Видно, ;
что для сходимости интегралов нужно лишь, чтобы ар/(г) и
xfp (г) убывали при г—>оо быстрее, чем г-1. Исходя из вы-
ражения (4.23), определим базисные упругие поля и пока-
жем, что они являются параметрами состояния.
4. Непрерывное распределение дефектов
61
По выражению (4.14) находим упругую деформацию1):
етп = S GpmtPiikfiin, i W [%Z (И “ rfp (ГЭ] (4.24)
Чтобы показать, что етп есть параметр состояния, восполь-
зуемся введенным Симонсом и Баллафом [12] понятием тен-
зора источников несовместности. В отличие от Симонса и
Баллафа, которые получили несколько выражений этого теН’
зора исходя из общего его определения, мы введем этот тен-
зор непосредственно в следующем виде:
Imnpq W = (4л) J 6pmk6qslCijkiGjnt i's'(r ) R dV(mn)* (4.25)
Из этого определения видно, что Imnpq(r), как и Gjn(r), есть
однородная функция степени —1, так что обе эти функции
изменяются, как г-1. Используя тождество
^Pq dps bpi
Gpmlfiqsl ^mq dms dml (4.26)
^kq dks dkl
и равенство (2.7), соотношение (4.25) можно записать в сле-
дующем виде:
Imnpq О*)== (4л) ^mq^npi Г
- (Ct/Pq - citkfipq) J Gln, ы (r') R-ldV' +
+ {ClImq - Cilkk6mq) ( Oin, {y (r') R~1 dV'\ . (4.27)
Это выражение, за исключением последнего слагаемого, со-
гласуется с выражением, которое Симонс и Баллаф назы-
вают формулой Эшелби—Эддингтона. Теперь нетрудно ви-
деть, что тензор источников несовместности удовлетворяет
следующему соотношению:
Gqsllmnpq, s (г) = (4л) j Gpmk \Pi]klGjnt i's' (г )
CijnsGjn, (Г7)] Rt s dV(mn) =
= (4л) Gpmk [CilklGjn, i' (f )/?,$$
GqksGjn, i's' (r ) R, l ] dV(mn) =s
== 6pmk [CIjklGjn, if (Г ) 6 (/?)
- S*rt6 (г') (4л/?)й!] dV'(mn) =
:= \^pmkGijklGjn, i (r)](mn). (4.28)
J) См. прим. 2 на стр. 39.
62 Гл. II. Дисклинации в анизотропном упругом теле
Второе из этих равенств получается интегрированием по ча-
стям, третье — из равенства R~ss = — 4л6 (R) и уравнения (2.7).
При помощи соотношения (4.28) слагаемое в (4.24), содер-
жащее xzpp, можно представить в виде
S w»»,.. да «г, мdv' “ 5 да <». . м dv=
если выполнить интегрирование по частям и воспользоваться
равенством (4.2). Заметим, что получающиеся при интегри-
ровании по частям поверхностные интегралы исчезают, вслед-
ствие отмеченного выше асимптотического поведения вели-
чин Imnpq и Поэтому для упругой деформации (4.24) по-
лучаем выражение
&тп (1*) == ^ртьСijkiGjn* z(R)ttpz(r )dV(mn) /mnptf(R) ®qp (ff)dV\
(4.29)
Это выражение и представляет собой искомый результат.
Отсюда следует, что упругая деформация есть параметр со-
стояния, поскольку она полностью определяется плотностями
дефектов aPi и 0др.
Тензор источников несовместности Imnpq первоначально
был введен Симонсом и Баллафом для решения так называе-
мой задачи о несовместности, т. е. для вычисления упругой
деформации етп по заданному полю несовместности Y]Pg. По-
кажем здесь, как может быть решена эта задача. Используя
(2.7), из (4.28) имеем
Gprlfiqsllmnpq, rs (f) = \Pijkfi im W &kmP ijrfi fn, ir W](mn) =
= \Qi]kfijn, im О*) “I" (r)](/nrt)* (4.30)
Отсюда получаем
emn (Г) = “ J CijklGjn, im W ekl (И ^(mn) втп W =
= $ (R) + «..V (R)] К (И w- (r) -
= mnpq (R) T)p<7 (f') dV'. (4.31)
Первое из этих равенств следует из (4.14) и (2.15), второе —
из (4.30), третье получается интегрированием по частям, чет-
вертое^-из (4.11),
4. Непрерывное распределение дефектов
63
Выведем далее выражение для упругого изгиба-кручения.
Найдем сначала производную полной дисторсии (4.23):
< ч (R> М - Ч <И] W + е~т, , (г).
(4-32)
Интегрированием по частям член, содержащий rfp, можно
преобразовать так:
- С,„ „(R)xf,(Иdl"-
- - s W., А.. (К) Ч.(И dV' -
— 5 epmk9llkfijn, I W [6?sZ0<7p (Г ) ~ Hsp, l' (Г )] dV' =
5 epmkGqslCl/kfiln, i (R) ®qp (Г ) dV' + epmnXsp (f)’
Здесь второе выражение следует из (4.10), третье получается
интегрированием по частям с использованием (2.7). Следо-
вательно,
< ms (Г) 5 Gpmk^ilkfiln, Is (R) apl (Г ) dV' +
+ Ь»ЛМ/..Ж^' +
+ ^,s(r) + %X₽(«-). (4.33)
Учитывая (4.15), окончательно находим
%st fa") = */2 ^imn^pmlfiiiklGjn, is (R) ®pZ 0" ) dV +
4” */2 ^tmn^pmk^qsfiijkfijn, I (R) ) dV . (4.34)
Это выражение показывает, что xst также является парамет-
ром состояния.
Таким'образом, в этом разделе результаты теории дисло-
каций (см. разд. 3.1.2) обобщены на случай более общей тео-
рии дефектов. Основной результат (3.17) заменен соотноше-
ниями (4.29) и (4.34). Отметим, что при таком обобщении
понятиям, величинам и уравнениям в теории дислокаций со-
ответствуют пары понятий, величин и уравнений в теории
дефектов. Некоторые из этих понятий представлены в'табл. 5.
' 64 Гл, II. Дисклинации в анизотропном упругом теле
5. ИЗОЛИРОВАННЫЕ ДЕФЕКТЫ
5.1. Теорема Вейнгартена
Отправной точкой для определения изолированного де-
фекта служит теорема Вейнгартена (см. разд. 3
гл. I):
В многосвязном теле при обходе по нестягиваемому в точ-
ку контуру перемещение и угол поворота изменяются на
величины, соответствующие жесткому перемещению, в том и
только том случае, когда во всем теле выполнены условия
совместности деформаций классической теории упругости.
В явном виде изменения этих величин представляются вы-
ражениями (см. (1.3.4) и (1.3.3)):
[U/] = Bi ^lqr^qXri (5.1)
Iю J (5.2)
Постоянные Bi и выражаются через контурные интегралы
(1.3.6) и (1.3.5), которые в координатной форме записи имеют
вид
В( = (^) (вы ^Iqr^kq^r) dLfa (5.3)
К
: &q=§Xk4dLk. (5.4)
К
Здесь X — упомянутый выше нестягиваемый контур. То, что
Bi и ,Йд являются константами/ легко показать, используя
теорему Стокса и уравнения совместности, т. е. уравнения
(4.17) и (4.18) при арг=0 и 0рд=О. Отметим, кстати, что со-
отношения (4.20) и (4.21) находятся в соответствии с опре-
делениями (5.3) и (5.4) !).
5.2. Геометрия
{ Изолированный дефект с линией L определяется как гра-
ница поверхности S, ниже которой материал необратимо сме-
9 Для обобщения настоящей, теории на нелинейный случай следует
сначала убедиться в справедливости теоремы Вейнгартена в этом случае.
Тогда при конечных поворотах вместо (5.1) мы имели бы соотношение
[«,] = + (elqrQgxr + ~ ЧЯЦ (1 + >AQ2)-
Здесь вектор Франка, или версор, имеет направление оси поворота и ве-
личину, равную 2tg (ф/2), где <р — угол поворота. Правило сложения по-
воротов (1) и (2) (второй поворот следует за первым) принимает вид
е,=(а<‘> + а® - Л’Ч2)) 0 -
5. Изолированные дефекты
65
щен относительно материала над поверхностью S на вели-
чину, представляющую собой жесткое перемещение (рис. 2).
Следовательно, разность между перемещениями непосред-
ственно ниже и выше поверхности S равна
+ (5.5)
Здесь bi — вектор жесткого- трансляционного перемещения,
к нему добавляется перемещение вследствие поворота на по-
стоянный угол вокруг оси, проходящий через точку хР.
Постоянный вектор bt мы будем называть вектором Бюргерса
изолированной дислокации, которую содержит в себе дефект.
Этот вектор следует отличать от общего вектора Бюргерса,
определенного равенством (4.5). Постоянный вектор ото-
ждествим с вектором Франка (4.6). Соотношение (5.5) озна-
.чает, что при переходе через S испытывает скачок и вектор
поворота, а именно
. (5-6)
Представим себе, что материал в трубке, внутри которой
расположена линия L (рис. 2), удален из тела. Тогда мы по-
лучаем двусвязноё тело, и по теореме Вейнгартена скачок пе-
ремещения при переходе через 5 представляет собой жесткое
перемещение. Следовательно, двусвязное тело есть тело с
совместностью, т. е. базисные упругие поля удовлетворяют
уравнениям совместности, даже на поверхности S. Поэтому
соотношения (5.5) и (5.6) должны также следовать из ра-
венств (5.1)—(5.4). Реальное (с несовместностью) односвяз-
ное тело получится, если поперечные сечения трубки устре-
мить к нулю. Тогда равенства (5.3) и (5.4) становятся иден-
тичными равенствам (4.20) и (4.21), а последние, согласно
уравнениям совместности для полной деформации, эквива-
лентны (4.5) и (4.6).
Наша задача состоит сейчас в том, чтобы, основываясь на
соотношениях (5.5) и (5.6), дать определения базисных пла-
стических полей, т. е. пластической деформации и пластиче-
ского изгиба-кручения. Мы укажем прямой метод получения'
этих величин, а затем проверим при помощи (5.1), (5.2)‘ и
(4.5), (4.6), что найденные значения являются точными. Пред-
положим сначала, что поверхность S замкнута и ограничи-
вает объем V. Тогда,’в силу (Б.7), перемещение
«Г (г) = б (V) {bt + (xr - х»)} (5.7)
совпадает внутри V с перемещением, стоящим в правой части
(5.5), и равно пулй вне V. Поэтому оно обладает нужным
3 Зак. 201
66
Гл. 11. Дисклинации в анизотропном упругом теле
скачком на поверхности S. Объем V с поверхностью S можно
рассматривать как зерно, смещенное относительно окружаю-
щего материала на величину жесткого перемещения (5.5).
Мы будем считать, что перемещение (5.7) произошло в
результате пластической деформации на поверхности S и уп-
ругой трансляции и поворота в объеме V. Для определения |
базисных пластических полей найдем сначала базисные пол- .
ные прля, т. е. полную деформацию и полный изгиб-круче-'
ние. В общем случае их можно разложить на упругую и пла-
стическую части (см. (4.14) и (4.15)). Но, поскольку упругое
перемещение здесь является жестким, базисные упругие поля
равны нулю и пластические поля совпадают с полными. Ис- j
пользуя теорему о дивергенции (Б.24), из (3.9) и (5.7) на- |
ходим
(г)=«. ь сю р;+ sA (*, -*»)}+мю =
--«1(5){», + ЧЯ(\-^)} + «(Ю <5-8) ,
Отсюда получаем J
«W’-MWVA-1!))» <5-9> '
Ч(г) = -'/А,Д(5){», + е,аЯ(^-^)} + 8(',>й,- (510) i
I
Очевидно, что (5.10) представляет собой поворот, совпадаю-
щий с поворотом (5.6) внутри V и равный нулю вне V. По- |
этому этот поворот обладает требуемым скачком на поверх- |
ности S. Далее, снова используя теорему о дивергенции, из I
(4.15) находим изгиб-кручение |
Р» (S) р, +", Д («, - ® ~ \ СТ й,. j
(5.11)
Мы видим, что базисные полные поля сосредоточены на по-
верхности S. Как отмечено выше, поскольку перемещение
есть лишь жесткое смещение части тела, базисные упругие 1
поля отсутствуют, и поэтому все поля являются пластиче- V
скими. Следующий шаг заключается в предположении, что |
соотношения (5.9) и (5.11) сохраняются в том же самом виде
и для незамкнутой поверхности S петли дефекта. Чтобы сфор-
мулировать окончательные результаты, удобно ввести «пла- I
стическую дисторсию» и «пластический поворот», определе- ;
ния которых были даны Мурой [4]: |
K<W = -5.CTP, + s,«Afr-<)). (5-12) (
<p;,(r)=-6«(s>Q«- <5ЛЗ> i
5. Изолированные дефекты
67
Интерпретация этих величин как плотностей петель дислока-
ций и петель дисклинаций будет дана в разд. 6. А пока они
будут выполнять роль вспомогательных величин при вычисле-
ниях. Напишем.следующие равенства:
<5.14)
W.<.«+4’- (<='/,%₽;.,>+О <5-15>
Рассмотрим эти соотношения. Уравнения (5.14) и (5.15)
вместе с (5.12) и (5.13) дают значения базисных пластиче-
ских полей для изолированного дефекта, на линию которого
L натянута поверхность S. Из (5.14) и (5.15) вытекает также
следующий полезный в дальнейшем результат:
е? 4-efcZxp =Bt ф* . (5.16)
kl, m 1 klqtnq ^klt tn 1 klq™ tnq
Теперь, как было отмечено выше, убедимся в справедливости
равенств (5.14) и (5.15). Интегрируя по частям и учитывая
(5.12), (5.13) и (Б.15), из (4.5) находим
= ~ Ф (fyfeZ) — P[rZl, kXr ~ eiqr^kqXr} =
Л.
= ~ § (PfeZ — eiqr<PkqXr) ~
Л
= $ М$) {bt - dLk — bj — etqrQ^. (5.17)
Очевидно, что это есть соотношение, связывающее общий век-
тор Бюргерса и вектор Бюргерса дислокации. Далее из (5.15),
(5.13) и (Б.15) имеем
— ф Hkq dLh = § ^kq ~ § bk (S) £2? dLk = Q?. (5.18)
Это соотношение, в соответствии с (4.6), отождествляет
с вектором Франка. Если подставить эти результаты в (5.1)
и (5.2), то получим (5.5) и (5.6), что нам и требовалось.
При помощи (4.1) и (5.16) находим теперь плотность дис-
локаций
®pl W 6pmk (P&Z, tn “Ь ^klq^tnq)
= %mk [\ m (S) {bt + ЧА (*r - *?)} +
+ h (S) elqrQ qt>rm + ekl4t>m (S) QJ =
= 6p (£) {bt + elqrQq (xr - x?)}. ' (5.19)
Первое из этих равенств следует из (5.16), второе — из (5.12)
и (5.13), третье равенство получается при помощи теоремы
3*
68 Гл. П. Дисклинации в анизотропном упругом теле
Стокса (Б.26)Используя (5.15), (5.13) и (Б.26), из (4.2)
находим плотность дисклинаций
%, V - - «„Л. „=А, о,=а, (ц о,. (5.20)
Соотношения (5.19) и (5.20) дают значения плотностей де-
фектов для изолированных дефектов. Из соотношения (5.19)
видно, что, помимо вектора Бюргерса дислокации Ьь вектор
Франка Qg также дает вклад в величину плотности дислока-
ций. Вектор 6p(L)—дельта-функция на кривой £; он всегда,
направлен по касательной к L. Изолированная дисклинация
называется клиновой дисклинацией или дисклинацией круче-
ния в зависимости от того, параллелен или перпендикулярен
линии L вектор Франка. Поэтому, как видно из равенства
(6.20), диагональные и недиагональные компоненты тензора
Орд представляют собой соответственно клиновые компоненты
и компоненты кручения плотности дисклинаций (см. табл. 4).
Уравнения (5.19) и (5.20) показывают, как можно перейти от
непрерывно распределенных дефектов к случаю изолирован-
ных дефектов.
Изолированный дефект, характеризуемый вектором Бюр-
герса дислокации bi и вектором Франка Qg, быд определен
в этом разделе независимо от тензоров плотности дефектов
aPi и Орд, которые определены равенствами (4.1) и (4.2) в
разд. 4.1. Возникает вопрос: имеется ли единственная связь
между этими определениями? Если имеются только дислока-
ции, то существует прямая связь между вектором Бюргерса
и плотностью дислокаций в случае непрерывного распределе-
ния, данная равенством (3.8), или связь между плотностью
дислокаций для изолированного дефекта и его вектором Бюр-
герса, данная равенством (3.23). Если, кроме того, вводятся
дисклинации, то существует аналогичная прямая связь в
виде равенства (4.8) между вектором Франка и плотностью
дисклинаций для* непрерывного их распределения или связь
в виде равенства (5.20)—в случае изолированной дискли-
нации.
Однако, как было отмечено, общий вектор Бюргерса (см.
(4.7)) теперь содержит слагаемое, зависящее от плотности
дисклинаций, а в случае изолированного дефекта в выраже-
ние плотности дислокаций (5.19) входит член, зависящий от
вектора Франка. Это означает, что определения термина
«дислокации» не являются идентичными в обоих подходах.
Поэтому, как видно из упомянутых соотношений, при пере-
ходе от одной формулировки к другой происходит некоторая
путаница. Антони [2] обошел это затруднение, приняв петлю
изолированной дисклинации в качестве истинного определе-
5. Изолированные дефекты
69
ния дисклинации. Тогда - наш тензор плотности дислокаций
(5.19) частично описывает изолированную дисклинацию. По-
этому Антони разлагает на две части: истинную компо-
ненту, соответствующую линии дислокации с вектором Бюр-
герса Ьц и компоненту, отвечающую линии дисклинации с век-
тором Франка Qg. Таким образом, различие в подходах
Антони и нашего сводится просто к различию в точках зрения.
Мы предпочитаем сохранить нашу точку зрения в связи
с различными определениями «дислокации», потому что дей-
ствительно трудно, как можно видеть из равенства (5.19),
отождествить линию дислокации с линией изолированного
дефекта. Например, допустим, что мы изменяем, положение
оси поворота и вектор Бюргерса дислокации следующим об-
разом:
x°' = x°r + gr, (5.21)
= + (5-22)
Тогда плотность aPi в (5.19) остается неизменной. Следова-
тельно, вектор Бюргерса дислокации bi определяется не од-
нозначно, а зависит от положения оси. С другой стороны, об-
щий вектор Бюргерса Bt в (5.17) не изменяется при преобра-
зовании (5.21) и (5.22), и поэтому именно эта величина являет-
ся инвариантной для петли изолированного дефекта. Это слу-
жит еще одним соображением в пользу введения вектора В/.
Смысл равенства (5.19) можно истолковать еще следую-
щим образом. Рассмотрим бесконечно малый объем dV
с центром в некоторой точке на L. Величина скачка на S
дается равенством (5.5). Поворотную часть перемещения (5.5)
можно считать приближенно постоянной внутри объема dV,
ввиду малости последнего, иными словами мы не можем
отличить, чем вызван скачок перемещения — поворотом или
трансляцией, даже если известно локальное значение скачка
поворота. Тогда плотность дислокаций представляет собой ло-
кальное тензорное поле. Поэтому в соответствии с (5.19) тен-
зор плотности дислокаций можно получить путем замены Ьг
в (3.23) скачком .(5.5). Значит, плотность дислокаций (5.19)
в любой точке на линии L является в точности такой, какую
можно ожидать от локального необратимого перемещения в
этой точке или от вычисления по малому контуру Бюргерса
вокруг линии L в этой точке. Этот момент будет пояснен бо-
лее детально на примерах в гл. IV.
С первого взгляда на (5.21) и (5.22) кажется, что можно
исключить изолированную дислокацию из (5.19), выбирая
так, чтобы bi — 0, но это возможно только тогда, когда
вектор bi нормален вектору Qg. Однако из (5.19) можно еде-
70
Гл. II. Дисклинации в анизотропном упругом теле
лать следующее важное заключение. Ось изолированной
дисклинации можно при помощи трансляции сместить из точ-
ки в точку х®', добавляя к этой линии изолированную дис-
локацию с вектором Бюргерса, нормальным вектору Франка
и равным
= (5.23)
Иными словами, как видно из (5.19), можно сдвинуть ось пу-
тем добавления к плотности дислокации члена
= <5-24)
Предыдущие рассуждения предполагают, что дислокация
может оканчиваться или начинаться с линии дисклинации.
Рис. 4. Линии дефектов, соединяющиеся в узлах.
Рассмотрим три кривые L, L' и L", пересекающиеся в двух
узлах (рис. 4). Представим себе, что эти кривые являются
линиями изолированного дефекта, описываемого следующими
выражениями:
«„()=m ft+ -«?))+
+ «, №') ft, + ft - <)} + «, (L"> ft - ft). Р-25)
ер,(г) = б,(1 + Г)йа. (5.26)
Имеется несколько способов рассмотрения этого дефекта.
Первый способ состоит в том, что линия дефекта считается
описываемой равенствами (5.19), (5.20) вдоль кривых L и L',
причем к нему вдоль L' и L" добавлена линия дислокации
с вектором Бюргерса (5.23). Второй состоит в том, что L"
рассматривается как линия дислокации, опирающаяся в двух
точках на линию дефекта вдоль L и L'. Как следствие в этом
случае ось длд L проходит через точку х°г и через точку к?*
5. Изолированные дефекты
71
~-----------------------------------------------------5—
для L'. Третий способ заключается в рассмотрении двух пе-
тель дефекта с одинаковым вектором Франка: одна петля
состоит из линий L' и L" с осью поворота в точке х^', другая
проходит по L и по L" в отрицательном направлении и имеет
ось поворота, проходящую, через х°. Вдоль общей линии Ln
повороты взаимно уничтожаются, и остается лишь линия дис-
локации. Теперь видно, каким образом дефект, описываемый
соотношениями (5.25) и (5.26), можно представить в виде
комбинации двух более простых дефектов. Из изложенного
видно также, каким образом линия изолированной дислока-
ции может окончиться на линии изолированной дисклинации.
Частный случай такой геометрии уже рассматривался в ра-
боте [19]. Детальный математический анализ этого частного
примера будет дан в гл. IV.
Заметим, что плотности (5.19) и (5.20) удовлетворяют
уравнениям неразрывности (4.3) и (4.4), .которые с учетом
(Б.28) принимают вид
CpZ, р + Glpq^pq ~ &р (£) elqrQftrp 4“ Glpq^p Ш = (5-27)
ep?,p = 6p.o(L)Q? = 0. (5.28)
Аналогично легко показать, что плотности (5.25) и (5.26)
также удовлетворяют уравнениям неразрывности; это под-
тверждает утверждение, сделанное в работе [19].
В качестве перекрестной проверки покажем еще, что (5.19)
и (5.20) дают результаты, согласующиеся с (4.7) и (4.8). Ис-
пользуя (Б.15), получаем
В/ = $ бр (L) {bt - G!qr^} dSp = bt — elqT^r, (5.29)
0
J eP9 dSp = J Sp (L) dSp = (5.30)
0 0
что находится в согласии с (5.17) и (5Д8). Эти соотношения
в равной мере пригодны для большого числа дефектов, и по-
этому их можно использовать как способ, при помощи кото-
рого можно перейти от изолированных линий к непрерывному
распределению дефектов. Однако более удобными для этой
цели являются следующие соотношения:
$ %, rfS, = $ (О {», + =
0 0
= = № (5.31)
®pq dSp== [©J. (5.32)
0
72
Г л. II. Дисклинации д йнизйтрйПНбм упррёом тс Лё
Здесь первое равенство следует из (5.19), второе— из (Б.16),
причем через xrLo обозначена точка пересечения кривой L с по-
верхностью о (рис. 2); третье равенство следует из (5.5) и
последнее—из (5.6). Таким образом, для большого числа ли-
ний дефектов средняя плотность дислокаций aPi представляет
собой Xz-компоненту суммы скачков векторов перемещения,
а средняя плотность дисклинаций Bpq является .^-компонен-
той суммы векторов скачка поворота (векторов Франка) для
всех линий дефекта, которые пересекают единичную пло-
щадку, перпендикулярную направлению хр.
б.З. Статика
В этом разделе вычисляются базисные упругие поля, т. е.
упругая деформация и упругий изгиб-кручение, для изоли-
рованного дефекта.
Подставляя (5.14) и (5.12) в (2.15) и используя (Б.12),
находим перемещение
“т.« = s m (У) + V, ft - о) <IV'=
= $ , (R) ft + «А ft - *!)} (5.33)
s
Это выражение для полного перемещения, вызванного конеч-
ной петлей изолированного дефекта. Оно позволяет оценить
асимптотику перемещения на больших расстояниях от малой
петли дисклинации (&/ = 0). Поскольку тензор Грина Gjn(r)
убывает, как г-1, очевидно, что и? (г) в общем случае будет
убывать, как г-2 при г-> оо. Однако в некоторых частных слу-
чаях, например в случае симметричной петли дисклинации
с центром, лежащим на ее оси поворота, порядок убывания
интеграла увеличивается на единицу благодаря симметрии.
Поэтому конечная симметричная петля дисклинации дает ано-
мальное асимптотическое поведение, а именно перемещение
убывает, как г~3 при г->оо. Поскольку деформация emn(r)
получается из перемещения дифференцированием, то она убы-
вает, как г-4 при г-> оо. Эти результаты приведены в табл. 6.
В случае бесконечно малых симметричных петель дискли-
наций итп и emtl равны нулю. Более точную оценку асимпто-
тики перемещения от малой, но конечной петли дисклинации
можно также получить из уравнения (5.33), если разложить
тензор Грина в ряд Тейлора по г', оставить в разложении не:
сколько членов и выполнить интегрирование по поверхности
5. Детали вычислений выполнены в работе [26], где также
Асимптотики перемещения ит и деформации е
на больших расстояниях от дефектов некоторых типов
Таблица 6
Дислокация Дисклинации
е аТ е
Линия In г Г-1 (3.32) г In г In г (5.37)
Диполь г-» (3.46) Г“2 In г (7.6) г"1
Петля г-2 (3.30) Г-3 Общий случай: г“2 (5.33)
I Симметричный случай: г"3 (5.33) Г-*
’Числа в скобках—номера уравнений» из которых следует оценка.
«В случае симметричной петли дисклинации в °*
74 Гл. II. Дисклинации в анизотропном упругом теле
показано, что для случая изотропии результаты совпадают
С результатами Ли и Гилмана [20].
Найдем теперь полную дисторсию из (5.33):
«I. W = $ (R) {6,+е,Л « - хЭ} dS' -
S
= § % Л «А.. .(«){<’. + - x?)J dL'p +
L
+ § CijkiGjn, i (R) 6jffrQ?Srm dS'k +
s
+ S c«a. (w {<-,+(<-«?»<»;=
s
=Ф bAfii... «> № + е,Л « -«?)}dL', +
“1“ J epmkPiikfiin, I + (5.34)
s
Здесь второе равенство следует из теоремы Стокса (А.4),
третье — из (2.7), (Б.5) и (5.12). Если мы теперь величину
назовем «упругой дисторсией», то эта ве-
личина не будет параметром состояния, поскольку последний
интеграл в (5.34) не может быть представлен в виде контур-
ного интеграла. Чтобы убедиться в этом, достаточно лишь по-
казать, что подынтегральное выражение этого слагаемого
имеет не равную нулю дивергенцию. Используя (2.7), имеем
\GpmkCilkfiin, i (г)], I = GpmkCilkfijn, И (г) = ^pmrfi (г)^=0. (5.35)
Сравнивая последний интеграл в (5.34) с интегралом (3.30),
обнаруживаем их большое сходство. Как известно, скачок
перемещения (3.30) на поверхности S имеет величину
= что согласуется с равенством (3.18). Отсюда мы
заключаем, что второй интеграл в (5.34) дает скачок полной
дисторсии $ттп на поверхности S: [₽£п] — ертп&р, что соответ-
ствует скачку поворота [со£] = xlzepmn [Pm„] — ®рв согласии >
с равенством (5.6). При более раннем подходе, применяв-
шемся в теории дислокаций, поверхность S не рассматрива-
лась, и поле перемещения от линии изолированной дислока-
ции описывалось многозначной функцией с периодом, равным
вектору Бюргерса. Уравнение (5.34) показывает, что с этой
точки зрения поле поворота (или дисторсии) линии изолиро-
ванной дисклинации является многозначной функцией с пе-
риодом, равным вектору Франка.
5. Изолированные дефекты
. 75
Упругая деформация определяется из (4.14), (5.14) и
(5.34) в следующем виде:
w=ф < да ft+а « ,™>+
L
+ U hC.fbJGt .(R)Q dS' v (5.36)
1 J pmk ijkl jn, i \ p I (mn)*
S
Дивергенция подынтегральной функции во втором интеграле
равняется нулю, и поэтому, используя (4.28) и теорему Сток-
са, этот интеграл можно представить в виде
Gqsllmnpq, s (R) dSi = I mnpq (R) ^p dLq*
S L
Следовательно,
emn (Г) = Ф %ml£ijkl9jn, i W {^Z + ^Iqr^q (Xr Xr)} ^p (mn)
L
(R)QpdL'p. (5.37)
Разумеется, этот результат можно получить также прямо из
(4.29), (5.19), (5.20) и (Б.11). Равенство (5.37) и представ-
ляет собой искомое соотношение. Оно показывает, что упру-
гую деформацию можно выразить через контурные интег-
ралы по линии дефекта, и поэтому упругая деформация яв-
ляется параметром состояния.
Уравнение (5.37) позволяет также оценить асимптотику
поведения деформации на больших расстояниях от прямой
линии дисклинации. Второй интеграл является главным чле-
ном. Тензор источников несовместности Imnpq (г) убывает, как
г-1. Тогда получаемая интегрированием упругая деформация
Cmniy) ведет себя, как In г при г—>оо. Поскольку перемеще-
ние получается интегрированием деформации, оно ведет себя,
как г In г при г->оо. Эти результаты также приведены
в табл. 6.
Введем далее соотношение для упругого изгиба-круче-
ния. Сначала найдем производную от полной дисторсии
(5.34):
“,г... (г) - ф A.(R) ft +е> А « - О) +
L
+ 5 ePmkCtlklGin. is (*) dSi + Vnn. S (*)• (5.38)
s
76
Гл. //. Дисклинации в анизотропном упругом теле
Второе слагаемое при помощи теоремы Стокса преобразуется
к виду
Ф GpmkGqslCijklGln, i (R) dLq -]- GptnkGljklGjn, it (R) dS$,
L S
Второе слагаемое в этом выражении при помощи (2.7), (Б.5)
и (5.13) приводится к виду
— № A 6(R)Q dS' = — е б (S) Q =е ф* (г).
Jjpmfc fen ' р s pmn s' ' p pmnVsp'*'*
S
Следовательно, (5.38) записывается так:
< „.()= Ф ‘tMC„uOln_ „ (R) {4, + %Q, (<-<)} dL'p +
L
+ $ < «П dL', + K,„.,«+(r)- (5-39)
L
Из (4.15) и (5.15) теперь получаем
Xs< (Г) = >/2 $ ^mn%mkCwGin,is(R) {bt + « -x?)} dL'p +
L
“1“ /2 ф GftnnGp’nkGqslGijkiGjn i <№pdL'q. (5.40)
L
Эту формулу можно также получить непосредственно, под-
ставляя (5.19), (5.20) в (4.34). Из (5.40) следует, что nst яв-
ляется параметром состояния.
Таким образом, результаты разд. 3.2.2 для изолированной
дислокации обобщены здесь на более общий случай изолиро-
ванного дефекта. Основной результат разд. 3.2.2 — уравне-
ние (3.32)—заменяется здесь уравнениями (5.37) и (5.40).
Кроме того, видно, что упругой дисторсии в теории дислока-
ций соответствуют базисные упругие поля в теории дефектов.
6. НЕПРЕРЫВНЫЕ РАСПРЕДЕЛЕНИЯ
БЕСКОНЕЧНО МАЛЫХ ПЕТЕЛЬ ДЕФЕКТОВ
В разд. 4.1 плотности дефектов и их характеристические
векторы определялись через базисные пластические поля
(поля деформации и изгиба-кручения) соотношениями (4.1),
(4.2), (4.5) и (4.6). Исключением из этих определений базис-
ных пластических полей получаются соотношения (4.7) и
(4.8), связывающие характеристические векторы дефектов с
их плотностями. Эти соотношения позволяют дать другое
6. Непрерывные распределения бесконечно малых петель 77
определение дефектов — определение через характеристиче-
ские векторы, когда последние заданы подходящим образом.
Удобнее всего представить эти соотношения в дифференциаль-
ной форме. Определим сначала плотность дисклинаций. В слу-
чае непрерывно распределенных дефектов тензор плотности
дисклинаций определяется соотношением
<61>
В случае изолированных дефектов выражение (6.1) представ-
ляет собой среднюю плотность дисклинаций, где ДЙд есть
^-компонента результирующих векторов Франка всех дискли-
наций, пересекающих элемент поверхности ДЗР, перпендику-
лярный направлению хр в заданной точке. Учитывая уравне-
ние (4.7), следует изменить определение (3.33) плотности дис-
локаций aPi. Для неоднородного непрерывного распределе-
ния дефектов определим их плотности соотношением
ар/ elqr®pqXr s &Sp * (®*2)
В случае изолированных дефектов это соотношение дает нам
среднюю плотность дислокаций, где АВ/ есть /-компонента ре-
зультирующей полных векторов Бюргерса всех дефектов (дис-
локаций и дисклинаций), пронизывающих элемент поверхно-
сти Д5Р, нормальный направлению хр в заданной точке.
Используя (5.31), удобнее всего записать уравнение (6.2)
в виде
где
Д [щ] = ДВ/ + Дй7хг (6.4)
согласно (5.1). В случае изолированных дефектов Д[иг] пред-
ставляет собой /-компоненту результирующей скачков пере-
мещения всех линий дефектов, пересекающих элемент поверх-
ности Д5Р, перпендикулярный направлению хр в заданной
точке. Соотношение (6.3) такое же, что и в случае плотности
дислокаций, определяемых локальной пластической деформа-
цией, независимо от того, вызвана ли эта деформация изоли-
рованными дислокациями или дисклинациями. Соотношение
(3.33) можно также представить в виде (6.3) с учетом (3.18).
Теперь рассмотрим непрерывно распределенные бесконеч-
но малые произвольно ориентированные в пространстве петли
дефектов. Следуя Кроупе [5], введем тензор плотности петель
дисклинаций. Мы можем определить его следующим образом:
t>kq представляет собой поток в направлении Xk составляющей
78
Гл. II. Дисклинации в анизотропном упругом теле
дисклинаций (или вектора Франка) на направлении xq. В слу-
чае непрерывно' и неоднородно распределенных петель тен-
зор плотности Zkq является функцией координат и опреде-
ляется соотношением
(6.6)
В случае изолированных петель это выражение представляет
собой среднюю плотность петель дисклинаций, где теперь
AQg— (/-компонента результирующей векторов Франка всех
петель, пересекаемых отрезком линии ALa, параллельным на-
правлению Xk в заданной точке. Теперь также следует из-
менить определение (3.34) плотности петель дислокаций.
В случае непрерывно распределенных петель дефектов плот-
ность определяется соотношением
В случае изолированных нетель это соотношение дает нам
среднюю плотность петель дислокаций, где теперь A [uz] есть
/-компонента суммы скачков перемещения для всех петель,
пересекаемых отрезком линии Д£а, ориентированным в на-
правлении Xk в заданной точке. Используя (6.4), мы также
имеем другое определение:
АВ/ Дйя
^kl е/*г'Д£ГХг’ (6‘7)
где для изолированных петель ДВг является /-компонентой
результирующей полных векторов Бюргерса всех петель де-
фектов, пронизываемых отрезком линии Д£а, ориентирован-
ным в направлении Xk в заданной точке.
Чтобы вывести соотношение между плотностями петель
дефектов и базисными пластическими полями, подставим сна-
чала выражения 1(6.5) и (6.7) в (6.8):
У kl GiqjZfeqXr = • (6.8)
Соотношения (6.8) и (6.5) легко представить в виде интегра-
лов
&1 = ф (YfcZ ^Iqr^kq^r) dLfo (6.9)
К
Qq=\ZkqdLk. (6.10)
6. Непрерывные распределения бесконечно малых петель
79
Сравнивая эти соотношения с определениями (4.5) и (4.6),
видим, что подынтегральные выражения могут отличаться
только производной по хд. Поэтому мы можем записать сле-
дующие соотношения:
«£, = -t„+<"£,- (6.11)
еМ ^Iqr^kc^r ~ Yj./ 4" Glqr^>kqXr + (Uf €lqraqXr\ ft» (6.12)
где и ир — произвольные векторные поля, а тензор ept —
симметричен. Как мы покажем дальше, последнее условие
даст соотношение, связывающее эти поля.
Подставляя (6.11) в (6.12), получаем
ekl ~ ~ Vkl ““ eklq^ + k* (6« 13)
Тогда из условия симметрии тензора e%t получим
°>q = “ '^klq (Yft/ - «Г, ft)» (6-14)
а соотношения (6.13) и (6.11) сведутся к виду
eki ~ ~~ ^(ki) “Ь u(it fe)> (6-13)
Kmq = %mq 'l^hlq^kl, tn 4“ 'l^klqtf, km* (6.16)
Эти соотношения определяют базисные пластические поля для
непрерывно распределенных петель дефектов. Используя эти
выражения, можно получить все соотношения, выведенные
в разд. 4, через характеристики распределения петель. На-
пример, из (4.1) и (4.2) имеем
ССр/ = Gpmk (YfeZ, m 4“ ^klqZmq)^ (6.17)
®pq = Gpmk&kq, m* (6.18)
Это фундаментальные соотношения между плотностями пе-
тель дефектов и плотностями соответствующих дефектов. Из
выражения (6.17) видно, что плотность дислокаций опреде-
ляется плотностями петель дислокаций и дисклинаций.
Поскольку пластическое перемещение upt в (6.15) и (6.16)
не приводит к образовнию упругих полей (см. разд. 2.6),
можно без потери общности положить = 0 и для вычисле-
ния полей непрерывно распределенных бесконечно малых пе-
тель дефектов использовать соотношения
^ = -Y№0. (6.19)
%mq =~^mq~ m- (6.20)
80
Гл. //. Дисклинации в анизотропном упругом теле
Более того, из (2.15) и (6.19) видно, что полное переме-
щение определяется только плотностью петель дислокаций.
Следовательно, плотность петель дисклинаций Zmq не влияет
на упругие деформацию и напряжение, как указывалось
в разд. 5.3. Отметим также, что все выше приведенные резуль-
таты сводятся к результатам разд. 3.3., когда плотность пе-
тель дисклинаций обращается в нуль (Zmq = 0).
Мура [4] обобщил понятия «пластической дисторсии» и
«пластического поворота», введенные для изолированной пет-
ли (разд..5.2), на случай непрерывно распределенных петель.
Поясним этот подход. Сравнивая выражения (5.14) и (5.15)
с (6.19) и (6.20), получаем следующие равенства:
0(fc/) = (6.21)
^mq + '^klqfikl, m = ““ ^mq ~ eklq4kl, m‘ (6.22)
Из этих уравнений можно определить пластические величины
Муры:
$kl = -~4kl~~ eklq^qy (6.23)
= + <6-24)
где со* — произвольное векторное поле. Соотношения (6.23)
и (6.24) определяют пластические величины Муры для не-
прерывно распределенных петель дефектов. Подставляя вы-
ражения (6.21) и (6.22) в (6.19) и (6.20), получаем базисные
пластические поля, выраженные через величины Муры:
= (6.25)
Ир == ф* 4- 1/2€к, 6!. . (6.26)
mq ™mq 1 klq^kl,m*
Эти соотношения по форме совпадают с выражениями (5.14)
и (5.15), но справедливы и в случае непрерывно распределен-
ных петель. Подставляя (6.25) и (6.26) в выражения (4.1) и
(4.2), находим выражения для плотностей дефектов:
apl ~ ~ epmk (PpZ. m “Ь ек1ч^шр)> (6.27)
= (6.28)
совпадающие с (5.19) и (5.20) (см. разд. 5.2). Вектор со* не
входит в определения базисных пластических полей и плот-
ностей дефектов и, следовательно, не влияет на упругие поля,
а входит только в антисимметричную часть — опреде-
ния (6.23) для PjZ. Мура [30] назвал дислокации, определяе-
мые антисимметричной частью пластической дисторсии, неак,-.
6. Непрерывные распределения бесконечно малых петель
81
тивными дислокациями, поскольку, как видно из (2.15), эта
часть дисторсии не входит в определение полного перемеще-
ния и, следовательно, не приводит к образованию упругих
полей. В общем случае антисимметричная часть пластической
дисторсии даст конечную плотность дислокаций (см. (3.4)).
Однако эти плотности дефектов обращаются в нуль в уравне-
ниях (6.27) и (6.28) за счет слагаемого <в* m из (6.24). Следо-
вательно, мы можем без потери общности положить ©*=0
для вычисления упругих полей по заданному распределению
кы и
Kt — 4kl> (6.29)
. (б.зо)
Отсюда следует, что «пластическая дисторсия» и «пластиче-
ский поворот» Муры (введенные в разд. 5 для изолирован-
ного дефекта) могут быть интерпретированы как плотности
петель дислокаций и дисклинаций с точностью до знака.
А это устраняет наши расхождения с Мурой. Выражения
(6.25) и (6.26) являются основными соотношениями, связы-
вающими подход Муры с нашим. Например, из (4.5) и (4.6)
характеристические векторы находятся в виде
-----ф eklq^kqXr) dLk, (6.31)
Q4 = -§<KadLk> <6-32)
к
что соответствует (6.9) и (6.10).
Теперь мы можем также дать интерпретацию соотношений
(5.12) и (6.13) в терминах бесконечно малых петель. Чтобы
построить изолированный дефект с линией L, распределим
сначала бесконечно малые петли дисклинаций (общей) мощ-
ностью с постоянной плотностью по некоторой поверхности
S, ограниченной контуром L. Это распределение дает только
взаимный поворот сторон поверхности S, причем такой, что
результирующая ось поворота и напряжения остаются неоп-
ределенными. Вернее, каждая бесконечно малая петля имеет
свою ось поворота, так что результирующая ось как бы не-
прерывно распределена по поверхности S. К этому распре-
делению затем добавим распределение бесконечно малых
петель по S, состоящее из двух частей. Одна содержит дисло-
кационный вектор Бюргерса и представляет собой равномер-
ное распределение дислокационные петель, эквивалентное
82
Г л. II, Дисклинации в анизотропном упругом теле
изолированной дислокации с вектором Бюргерса Другая
часть содержит вектор Франка и переносит ось каждой
петли дисклинации в точку xQr. Очевидно, что это сопровож-
дается увеличением мощности петель дислокаций на величину,
пропорциональную расстоянию от выбранной оси. Сочетание
. этой линейно изменяющейся плотности петель дислокаций с
постоянной плотностью петель дисклинаций, упоминавшихся
выше, дает изолированную дисклинацию. Упругая деформа-
ция в этом случае вполне определяется распределением- пе-
тель дислокаций.
Итак, можно утверждать, что в случае петли конечных
размеров плотности петель дефектов определяются соотно-
шениями
У и (г) = ». (5) {», + в, А (*, - О), (6.33)
£»»(r) = MS)O,. (в.34)
Вектор 6а(S)—дельта-функция Дирака на поверхности S;
он всегда нормален поверхности S. В зависимости от того,
как направлен вектор Франка к поверхности S, перпендику-
лярно или параллельно, мы имеем дисклинационную петлю
кручения или клина. С учетом этого из выражения (6.34)
видно, что диагональные и недиагональные компоненты тен-
зора плотности петель дисклинаций представляют собой
соответственно компоненты кручения и клина. Из уравнений
(6.33) и (6.34) также видно, как можно перейти от непрерывно
распределенных бесконечно малых петель дефектов к случаю
петель конечных размеров. С учетом (Б.15) и (5.17) видно,
что плотности петель дефектов (6.33) и (6.34) удовлетворяют
соотношениям (6.9) и (6.10), которые справедливы и для не-
скольких петель конечных размеров и поэтому могут быть
использованы для перехода от петель конечных размеров к
случаю непрерывно распределенных петель. В случае несколь-
ких петель конечных размеров средние плотности петель дис-
v локаций ум и дисклинаций Zkg представляют собой сумму
^-компонент векторов скачка перемещения и хд-компонент
векторов Франка всех петель, поверхности которых пересе-
каются единичным вектором в направлении xk.
В этом разделе тензоры плотности бесконечно малых пе-
тель дефектов и ум были определены независимо от опре-
делений плотности дефектов в разд. 4.1 и плотности изолиро-
ванных дефектов в разд. 5.1. Какова же связь между этими
определениями?
Рассмотрим сначала связь между непрерывно распреде-
ленными дефектами и плотностью их петель. Прямая связь
7. Изолированный диполь
S3
такого типа существует только в случае дислокаций (уравне-
ние (3.37)). При введении дисклинаций возникает аналогич-
ная связь между плотностью петель дисклинаций и тензором
плотности дисклинаций (уравнение (6.18)). Однако плотность
дислокаций теперь содержит слагаемое с плотностью петель
дисклинаций (уравнение (6.17)). Это означает, что два выше-
приведенных определения дислокаций не тождественны и при
переходе от одной формулировки к другой возникает неко-
торая путаница.
Теперь рассмотрим связь между изолированным дефектом
и непрерывно распределенными петлями дефекта. И опять,
при наличии одних только дислокаций, существует прямая
связь между плотностью петель дислокаций и вектором Бюр-
герса (уравнение (3.39)) или вектором Бюргерса и плотностью
петель дислокаций (уравнение (3.35)). При введении дискли-
наций появляется аналогичная связь между плотностью пе-
тель дисклинаций и вектором Франка (уравнение (6.34)) или
вектором Франка и плотностью петель дисклинаций (уравне-
ние (6.10)). Однако теперь в случае изолированного дефекта
плотность дислокационных петель содержит слагаемое с век-
тором Франка (уравнение (6.33)) или общий вектор Бюргерса
содержит слагаемое с плотностью петель дисклинаций (урав-
нение (6.9)). Поэтому в обоих подходах определения дисло-
каций не тождественны, и, как видно из выше приведенных
соотношений, при переходе от одной формулировки к другой
возникает некоторая путаница.
Таким образом, существуют по крайней мере три независи-
мых способа определения дислокаций через дефекты: через
непрерывно распределенные дефекты, изолированные дефекты
или непрерывно распределенные бесконечно малые петли де-
фекта. При наличии одних только дислокаций эти определе-
ния эквивалентны, а при введении дисклинаций они суще-
ственно отличаются.
7. ИЗОЛИРОВАННЫЙ ДИПОЛЬ
7.1. Основные соотношения для двухосного диполя
Обобщая определение Кроупы [18] дислокационного ди-
поля, определим изолированный диполь как пару близких
изолированных дефектов с противоположными характеристи-
ческими векторами. Назовем такой диполь двухосным, по-
скольку он имеет две оси поворота. В этом разделе будут вы-
ведены некоторые соотношения, аналогичные соотношениям
Для дислокационного диполя в разд. 3.4.2. Используя выра-
жение (3.42), находим связь между плотностями дефектов для
Двухосного диполя и основными плотностями дислокаций aPi
84
Гл. II. Дисклинации в анизотропном упругом теле
и дисклинаций QPg: I
ао(г) = _?а (Г) (7.1) 1
0D (r) = -g епя m(r). (7.2) I
С учетом (5.19) и (5.20) эти соотношения для изолированного I
диполя переписываются так: |
“й « = - V „ (Ц {4, + е„О, (х-»•)} ?„ - 5, (£) , (7.3)
Смысл вектора состоит в следующем: при gm->0 векторы Н
bi-*- оо и Qg—>оо таким образом, что bfem и остаются J
постоянными. ;
Используя выражения (5.34) и (5.12), из (3.44) находим .
поле перемещения 1
»?W—«,.« = - Р-5) J
—$ ,<«{»,+чя « - *?» - -I
L
~~ S epmtPiikfiin, I W dS't “Ь
S
+ «»(S){51+%A(^-^)}k- P-6) f
В этом выражении интеграл по поверхности S можно об- I
ратить в нуль, выбирая поверхность S вблизи линии L так, •:
чтобы она была параллельна вектору g, т. е. чтобы вдоль L 1
выполнялось равенство ^mdS'm = Q. Тем не менее из-за нали- |
чия поверхностного интеграла перемещение (7<6) не является г
параметром состояния в отличие от случая дислокационного
диполя. , j
В случае необходимости из выражений (7.1) — (7.6) можно
получить все другие соответствующие величины для изоли- |
рованного двухосного диполя. I
Уравнение (7.6) позволяет дать оценку асимптотики пере- <
мещения на больших расстояниях от прямолинейного двух- J
осного диполя. Легко видеть, что при г-*-со перемещение
ведет себя, как In г. Следовательно, деформация при r->oo i
убывает, как г-1. Эти результаты также приведены в табл. 6.
7.2. Влияние положения оси на одноосный диполь ;
Диполь, рассматривавшийся в разд. 7.1, был получен из
исходного изолированного дефекта (определенного в разд. 5) v
перемещением этой линии вместе с осью поворота на беско- I
J
7. Изолированный диполь
85
нечно малое расстояние § и последующим вычитанием исход-
ного дефекта в его первоначальной позиции.
В этом разделе мы должны прежде всего исследовать
влияние переноса оси при фиксированном положении линии
дефекта. С этой целью рассмотрим следующий дефект, со-
стоящий из двух частей: первая получается из исходного де-
фекта перемещением его оси на бесконечно малое расстояние
вторая представляет собой исходный дефект противопо-
ложного знака в его первоначальной позиции. Плотности по-
лучаемого таким образом дефекта даются выражениями
«НЛ/Ч. (7.7>
= (7.8)
С учетом (5.19) и (5.20) эти соотношения можно представить
в следующем виде:
«рЛг) = -6р(^)%йД. (7-9)
0^(г) = О. (7.10)
Тогда перемещение записываем так:
(7.11)
= — J № €lqr®q%r ^'k =
S
= - ( enmkCukiGln i (R) OX dS' (7.12)
J pmh ijfol jn, I v I ' <
S
Здесь второе равенство следует из (5.33), а третье полу-
чается перестановкой индексов с учетом условий симметрии
(2.3).
Сравнивая (7.9) и (7.12) с (3.23) и (3.30), видим, что эти
уравнения представляют собой плотность дислокаций и пе-
ремещение для изолированной дислокации' с вектором Бюр-
герса
-bt----eiqrQqlr, (7.13)
что и следовало ожидать, поскольку, как видно из (5.5), пе-
ренос оси на расстояние эквивалентен относительному сме-
щению сторон поверхности S на расстояние bi, определяемое
выражением (7.13). Этот вывод служит дополнительным по-
яснением сделанного в разд. 5.2 утверждения о том, что ось
поворота для изолированного дефекта можно перемещать пу-
тем добавления дислокации к этому дефекту (ср. (5.23)).
86
Гл. II. Дисклинации в анизотропном упругом теле
Рассмотрим далее эффект переноса одной только линии
дефекта при фиксированной оси поворота. Дефект такого
типа назовем одноосным диполем, поскольку он обладает
лишь одной осью поворота. Этот дефект может быть исполь-
зован в качестве еще одного возможного определения изоли-
рованного диполя. Он составлен из следующих двух частей:
первая получается перемещением исходного изолированного
дефекта на бесконечно малое расстояние § при фиксирован-
ной оси поворота, вторая представляет собой исходный дефект
противоположного знака в его первоначальной позиции. Ре-
зультирующие поля представляют собой просто разность по-
лей из разд. 7.1 и вышеприведенных полей настоящего раз-
дела. Таким образом, плотность дислокаций и поле переме-
щения для одноосного диполя равны:
Ир/ (г) = Орг (г) - (г) = (7.14)
= - бр, m ~ *?)} (7.15)
Un(T)=Un(r)~Un(r)= (7-16)
= - $ . («) « - О! <7-17»
L
в то время как плотность дисклинаций для диполей обоих
типов остается той же:
е^=е?9. (7.18)
Отметим, что перемещение одноосного диполя является па-
раметром состояния.
Особый интерес представляет частный случай уравнения
(7.17), когда в качестве базисного дефекта рассматривается
линия клиновой дисклинации, совпадающая с осью поворота.
В этом случае bi = 0. Вектор Франка клиновой дисклинации
параллелен линии дисклинации: О || dL'. Точка г' лежит на
линии дисклинации, а г° — на оси поворота. Поскольку линия
дисклинации совпадает с осью поворота, разность (г'— г°)
также параллельна линии дисклинации: (г' — г°) || dL'. Таким
образом, £2 || (г' — г°) и, следовательно, Giqr&q (х'г — = 0.
Тогда и выражение (7.17) обращается в нуль. Поэтому
«о = Это означает, что диполь из таких клиновых дискли-
наций с вектором Франка эквивалентен дислокации с век-
тором Бюргерса bi, определяемым уравнением (7.13). Эта
дислокация является краевой дислокацией, поскольку
b X Q|| dL'. Эшелби [21] использовал этот подход для про-
стого определения упругих полей краевой дислокации по из-
вестному полю клиновой дисклинации.
8. Приложение к дислокациям
87
Из уравнения (7.17) видно, что асимптотика перемещения
на больших расстояниях от прямолинейного одноосного ди-
поля такая же, как и для двухосного диполя. Из табл. 6 видно,
что существует явное отличие асимптотик дисклинационных
диполя и петли от асимптотик иных дефектов, т. е. нет такого
дефекта дисклинационного типа, перемещение которого было
бы пропорционально г-1.
8. ПРИЛОЖЕНИЕ К ДИСЛОКАЦИЯМ
Цель этого раздела состоит в том, чтобы проверить внут-
реннюю согласованность результатов для дислокаций и для
дефектов более общего типа. Здесь не содержится нового ма-
териала, а ставится лишь задача показать, что результата
разд. 3 вытекают из результатов разд. 4—6 в том случае,
когда дисклинации отсутствуют, т. е. когда пластическая де-
формация тела полностью описывается пластической дистор-
сией z
8.1. Непрерывное распределение дислркаций
8.1.1. Геометрия
Пластическая деформация и пластический поворот опреде-
ляются выражениями (см. (3.2), (3.3)):
ekl~$?kVp (8-0
(8-2)
так что, согласно (3.1),
; ' ^+в.1Х=К<- (8-з)
Пластический изгиб-кручение равен (см. (3.12)):
. (8Л)
Следовательно, согласно (3.4), из (4.1) получаем
ot ,== — е . “1” в.. )=® .В?. • (8.5)
pl pmk V kl, m 1 klq qt mJ pmk^kl. m
Из (4.2), как и следовало ожидать, имеем
0Р9=-%Х^=°- м
Вектор Бюргерса определяется из (4.5):
Bi = ~ Ф (е« “ VPq, kxr) dLk = -§ (eki + V>P) dL'k =
А A
— (8-7)
К •'
88 Гл. 11. Дисклинации в анизотропном упругом теле
Здесь первое равенство следует из (8.4), второе получается
интегрированием по частям, причем внеинтегральный член об-
ращается в нуль на замкнутом контуре X, третье равенство
следует из (8.3). Этот результат согласуется с формулой (3.7).
Кроме того, видно, что равенство (4.7) при выполнении (8.6)
переходит в равенство (3.8). Из (4.6) и (8.4) находим, что
вектор Франка имеет, как и следовало ожидать, значение,
равное
__ Qq —— kdLk = 0. (8.8)
л
Это также согласуется с результатом подстановки (8.6) в
(4.8).
Аналогично легко показать, что равенства (4.17) и (4.20)
переходят в (3.10) и (3.11), в то время как величины (4.18)
и (4.21) обращаются в нуль.
8.1.2. Статика
С учетом (8.4) член в выражении (4.23), содержащий
принимает вид
— J еРмсцА и «) < (И Ж'= Ю-
Первое из этих равенств получается интегрированием по час-
тям, второе следует из (2.7). Поэтому для полной дисторсии
(4.23) мы получаем выражение
< „ (г) = J А.,«) %. <и dv'.+
+ Сп(0 + е Х(г). (8.9) •
согласующееся с (3.16) и (3.1). Из (4.14) находим упругую
деформацию
emn (f) = $ epmkPilkfiln. i (ЭД apl (Г ) (8-10)
Это соотношение можно получить также подстановкой (8.6)
в (4.29). Соотношение (8.10) согласуется с равенствами
(3.13) и (3.17).
Определим далее изгиб-кручение. Из (8.9) и (8.4) находим
+ C..w+e„Xf(r)- I8-»)
8. Приложение к дислокациям
89
Следовательно, из (4.15) получаем
Х.ДГ) = Т 5 : «) <г')dV’- (8Л2>
Это соотношение можно получить также подстановкой (8.6)
в (4.34). Соотношение (8.12) согласуется с равенствами (3.14)
и (3.17).
8.2. Изолированная дислокация
- 8.2.1. Геометрия
Если дефект не содержит дисклинацию, то, как показы-
вает (8.8), Qg = 0. В этом случае (5.5) сводится к (3.18), и
(5.6) принимает вид
К(г)]=0, (8.13)
тогда как (5.7) сводится к (3.19), а (5.8)—к (3.20).
Далее обнаруживается, что (5.12) и (5.13) принимают вид
= (8.14)
Ф1,(Г) = О. (8.15)
Из этих равенств с учетом (3.21) имеем
' • (8.16)
что и следовало ожидать, поскольку, как видно из (6.29) и
(3.38), каждая из двух величин (8.16) представляет собой
плотность петель дислокаций. Уравнение (8.15) показывает,
что плотность петель дисклинаций равняется нулю. С учетом
(8.14) и (8.15) уравнения (5.14) и (5.15) принимают следую-
щий вид:
4 « = - '/> р, (S) », + s, (S) ь,]. (8.17)
Очевидно, что уравнение (8.17) согласуется с (3.2) и (3.21),
а уравнение (8.18) — с (3.12) и (3.21).
Из (5.17) получаем равенство
Bi = bh (8.19)
показывающее, что полный вектор Бюргерса сводится к век-
тору Бюргерса дислокации. Из (4.1), (8.17) и (8.18) имеем
ср/ (г) •= €pmfe6fe, m (S) bi = бр (L) bi. (8.20)
Этот результат можно также получить прямо из (5.19); он
находится в согласии с равенством (3.23). Далее, из (4.2)
90
Гл. 11. Дисклинации в анизотропном упругом теле
и (8.18) или прямо из (5.20) находим
брд (г) = ^li^pmk^lqr^r. km (^) ^1 = 0, (8.21)
как и ожидалось, в соответствии с (8.6).
8.2.2. Статика
Ввиду того что Qg = 0, равенство (5.33) сводится к (3.30),
а равенство (5.34) с учетом (8.16) переходит в (3.31). Упру-
гая деформация равна
етп (0 = ^pmkCijkfi/n, I (R) bi dLp (тпу (8.22)
L
Этот результат можно получить двумя путями: либо из (5.37),
либо из (4.29) с учетом (8.20) и (8.21). Соотношение (8.22)
находится в согласии с (3.13) и (3.32).
Далее определяем из (5.40) упругий изгиб-кручение
(г) = */2 GimtfipmkCilkfijn, is (Ю bl (ILp. (8.23) '
L
Это соотношение можно также получить из (4.34), (8.20),
(8.21), что находится в согласии с (3.14) и (3.32).
Таким образом, в этом разделе показано, что более общая
теория дефектов, включающая в их число и дисклинации,
полностью сводится к хорошо известной теории дислокаций
в том частном случае, когда дисклинации отсутствуют.
9. ДИСЛОКАЦИОННАЯ МОДЕЛЬ ДЕФЕКТА
Ли и Гилман [20] рассматривали конечную петлю дискли-
нации как некоторое непрерывное распределение дислокаций
и назвали это распределение дислокационной моделью дис-
клинации. Мура [22] использовал тот же подход, приписывая
его Эшелби. Он рассмотрел также тот случай, когда клино-
вая дисклинации заменяется полубесконечной стенкой крае-
вых дислокаций. Здесь ставится задача провести четкое раз-
личие между этими подходами.
Начнем с замечания, сделанного в разд. 6, что только лишь
плотность дислокационных петель, или соответствующая ей
«пластическая дисторсия» $*kt, дает вклад в величину упругой
деформации. Для линии дефекта величина $*kl определяется
выражением (5.12). Поэтому упругая деформация, получае-
мая из этого выражения, не зависит от того, как задается
9. Дислокационная модель дефекта
91
плотность петель дисклинаций или «пластический поворот»
Муры (р^. Если мы положим
<4=0, (9.1)
то получим распределение петель дислокаций по поверхгости
S, которое дает в точности такую же упругую деформацию,
что и дефект в разд. 5. Отвечающее этому случаю распреде-
ление дислокаций мы назовем дислокационной моделью де-
фекта. Отметим, что эта дислокационная модель представ-
ляет собой дефект, явно отличающийся.от дефекта, которому
он соответствует. В частности, мы получаем дислокационную
модель, полагая
Pf/ = PZp (9.2)
где
К. (г) = - \ (s) {6, + *,„0, (ж, ~ X?)), (9.3)
a bi и' — константы. Тогда можно воспользоваться мето-
дами разд. 3.1 и получить любое из остальных нужных нам
соотношений. Кроме того, с учетом (9.1) соотношения
(5.14) — (5.16) принимают вид
4=p;fen. 0.4)
^ = 1/2бйгД/1т, (9.5)
ekl "Ь eklqKmq ~ PfcZ, m* (9.6)
Исходя из этих соотношений, мы также можем воспользо-
ваться методами разд. 4 и получить любой из остальных нуж-
ных нам результатов.
9.1. Геометрия
Из уравнений (3.4) и (9.2) или из (4.1) и (9.6) находим
плотность дислокаций
®pl fa*) ^pmk^kl, tn
=‘„А.»(3) {*, + (*, - О} + А (3) -
= б, (Ц {», + e,srSie (хг - *?)} + б, (S) О, - б„А (S) (9.7)
Здесь второе равенство следует из (9.3), третье — из теоремы
Стокса (Б.’26) и формулы (А.З). Теперь мы видим, что дисло-
кационная модель представляет собой распределение дисло-
каций, состоящее из следующих двух частей. Первая часть
есть дислокация, проходящая по L и совпадающая с дислока-
92 Гл, II, Дисклинации в анизотропном упругом теле
цией, содержащейся в дефекте (см. (5.19)); вторая часть пред-
ставляет собой равномерное распределение дислокаций по
поверхности S. Иными словами, дислокационная модель пред-
ставляет собой стенку дислокаций, лежащую на поверхно-
сти S и ограниченную линией дислокации на ее границе L.
Как и следовало ожидать, плотность дисклинаций, согласно
(4.2) и (9.5), обращается в нуль:
0„ = — е i/2 е В* =0. (9.8)
pq ptnR ' lqr*rlt Rtn > 7
Очевидно, что уравнение неразрывности (3.6) или (4.3) также
удовлетворяется:
<„. р« = р Q, <5 -*?)} + ML> '<„4 +
+.S,,,(S)O,-e,.,(S)Ql=t>. (9.9)
Здесь при вычислении использованы формулы (Б.27) и (Б.28).
Учитывая (9.4) и (9.5); находим далее из (4.5) полный
вектор Бюргерса:
= — ф (P(ftZ) — P[rZ1> ftxr) dLk = — <§> PfeZ dLk —
к к
- $ (S) {», + (.«, -»»)}«,-», + в,Л (X? - xj).
к
(9.10)
Здесь второе равенство получается интегрированием по ча-
стям, третье следует из (9.3), четвертое — из (Б. 15) и (Б. 16);
^‘обозначает точку пересечения контура % с поверхностью
S (рис. 2).
9.2. Статика
Подставляя (9.3), (9.4) в (2.15), получаем выражение для
перемещения
< (г)=5с,„а. , да» {»,+чл « - х!» ^'г, (Эл»
3
совпадающее с выражением (5.33). Таким образом, дислока-
ционная модель даёт в точности такое же перемещение, что
и соответствующий ей дефект. Следовательно, выражение
(5.34) получается точно таким же путем:
< „ fr) = Ф W«. А». 1 (R) V>. + е,.Я - х?)} dl'„ +
L
+ ,(R)OP<JS;+C(r)- (9;12)
Р. Дислокационная модель дефекта
93
Поэтому упругая дисторсия (3.9) с учетом (9.7) имеет сле-
дующее значение:
Pmn (г) = ф GpmkCiikfiin, i (R) {Pl 4" ^Iqr^q (%r *?)} dL'p 4~
L
+ J 6pmkCklmtfijn, i (tyQpdS'i. (9.13)
s
Это соотношение можно получить также из (3.17) и (9.7). Из
обсуждения, проведенного в разд. 3.12, следует, что эта упру-
гая дисторсия является параметром состояния для дислока-
ционной модели, однако, как обсуждалось в разд. 5.3, для
линии дефекта упругая дисторсия не есть параметр состоя-
ния. Это соображение позволяет придать физический смысл
«упругой дисторсии» Муры в случае изолированной дискли-
нации. Далее находим
6тП (г) = § 6pmk^ilkfiin. t W {b[ + eiqr®q ~ •*>)} (mn) +
L
~ +5 ^pmk^nkfijn, i (R) Qp dSi ^тпу (9.14)
s
Это соотношение следует также из (4.14), (9.4) и (9.12) или
из (4.29) и (9.7), (9.8). Мы видим, что выражение (9.14)
идентично (5.36). Таким образом, упругая деформация и,
следовательно, напряжение для дислокационной модели сов-
падают, как отмечалось ранее, с упругой деформацией и на-
пряжением для соответствующей линии дефекта.
Найдем теперь изгиб-кручение. Из (9.12) имеем
“I... (г) - Ф «) О', + « - *?)}dL, +
L
+ $ '„АЛ(R) a, + К,... (г). (9.15)
а из (4.15) и (9.5) находим
^st (г) = ЗГ Ф GtmnSpmkCijklGjn, is (R) fyl 4” ^Iqr^q Xr)} dLp -f-
L
4" ~2 Gtmn6pmk&jnt Zs(R)^p dSp» , (9.16)
S
Это соотношение можно получить также из (3.14) и (9.13)
или же из (4.34) и (9.7), (9.8).
Из вышеизложенного видно, что существует весьма большое
сходство между дислокационной моделью и соответствующим
94
Гл. II. Дисклинации в анизотропном упругом теле
ей дефектом. Поэтому важно тщательно проводить различие
между ними. Например, для линии дефекта плотности опре-
деляются равенствами £5.19), (5.20), тогда как для дислока-
ционной модели — равенствами (9.7), (9.8). Поэтому мы ви-
дим, что при переходе от дефекта к модели взамен плотности
дисклинаций (5.20) задается постоянная по поверхности плот-
ность дислокаций, содержащаяся в выражении (9.7). Как
было отмечено, оба дефекта дают одну и ту же упругую де-
формацию; ее явные выражения можно получить подстанов-
кой упомянутых выше плотностей в (4.29). При этом упругая
деформация для дефекта определяется равенством (5.37), а
для дислокационной модели — равенством (9.14). Мы видим,
что второй член в (5.37) представляет собой вклад в величину
упругой деформации, который дает плотность дисклинаций;
он равен второму члену в (9.14), представляющему вклад от
постоянной на поверхности плотности дислокаций. Некоторые
частные случаи дислокационной модели мы рассмотрим в
гл. IV.
Ли и Гилман вычисляют также силу, действующую на ли-
нию дисклинации, считая ее равной силе, действующей на со-
ответствующую дислокационную модель. Поскольку в настоя-
щей работе силы не рассматриваются, мы отсылаем читателя
к работе [23], в которой дается формальное доказательство
этого интересного результата.
10. КОМПЕНСИРОВАННАЯ ДИСКЛИНАЦИЯ
Рассмотрим теперь задачу, дополняющую содержание
разд. 9. Допустим, что плотность петель дислокаций равняет-
ся нулю, а плотность петель дисклинаций определяется ра-
венством (5.13), т. е.
PXz = O, (10.1)
<P;jr ) = -6ft(S)Q(7, (10.2)
где Qg — постоянный вектор. Этими соотношениями как раз
и описывается равномерное распределение петель дисклина-
ций по поверхности S. Поскольку распределения петель дис-
локаций нет, "этому дефекту соответствует нулевая упругая
деформация. Из (5.14)— (5.16) находйм пластические вели-
чины:
еР=0, (10.3)
С=С- о°-4)
Далее можно воспользоваться методами разд. 4 и получить
любое нужное нам соотношение.
10. Компенсированная дисклинация 95
10.1. Геометрия
Используя теорему Стокса (Б.26), из (4.1) и (4.2) нахо-
дим плотность дислокаций и плотность дисклинаций:
ар1 (г) — epmkeklq^m (S) = f>pl^>k С$) (S) йр, (10.5)
®pq (г) = epm$k, m ("$) ^q = &p (^) Of (10.6)
Поэтому дефект в этом случае представляет собой стенку
дислокаций, лежащую на поверхности S и ограниченную ли-
нией дисклинации на границе L поверхности S. Дефект со-
стоит из той же самой линии дисклинации, что и в разд. 5
(см. (5.20)), и из распределения дислокаций на S, которое
является в точности таким, какое нужно для того, чтобы уп-
ругая деформация равнялась нулю. Поэтому мы будем на-
зывать такой дефект компенсированной дисклинацией. Заме-
тим, что, складывая (10.5) и (9.7), получаем (5.19) и что
(10.6) совпадает с (5.19). Разумеется, этого и следовало
ожидать, потому что задача разд. 5 представляет собой су-
перпозицию задач разд. 9 и 10. Используя (Б.27) и (Б.28),
проверяем, что плотности aPi и 0pg удовлетворяют уравне-
ниям неразрывности (4.3) и. (4.4):
dpi, р (0 + elpq^pq (Г) = Sfe, I (S) &k — fy, р G$) ^р +
4-elp(?Sp(£)Q? = 0, (10.7)
eP9,p(r) = 6p.p(L)Q. = 0. (10.8)
Учитывая (Б. 16), находим далее из (4.5) и (10.2) —(10.4) пол-
ный вектор Бюргерса:
В.=- <‘0.9)
Л
Здесь — точка пересечения кривой % и поверхности S
(рис. 2). Отметим, что сложение уравнений (10.9) и (9.10)
дает уравнение (5.17). Используя (Б.15), из (4.6) опреде-
ляем вектор Франка:
^§KppqdLk = §dk(S)CiqdLk = Qq. (10.10)
Л к
Это равенство отождествляет постоянный вектор Qg с векто-
ром Франка. Те же самые результаты можно получить из
(4.7), (4.8) и (10.5), (10.6).
96 Гл. //. Дисклинации в аНизйЪропнои упругом Фелб
10.2. Статика
Подставляя (10.3) в (2.15), находим перемещение
< = 0. (10.11)
Следовательно, из (4.14) и (10.3) имеем
еи»0. (10.12)
Таким образом, упругая деформация, а следовательно, и на-
пряжение отсутствуют, как обсуждалось ранее. Из (4.15),
(10.11), (10.4) и (10.2) определяется упругий изгиб-кручение:
<10ЛЗ)
Желая добиться полной согласованности, покажем, что это
соотношение можно также получить другим способом. Под-
ставив (10.5) и (10.6) в (4.34), находим
(г) — — Уг eimnepmkCiikfijn, is (R) dS'i -f-
s
“Ь 'А ф ^tmn^pmk^qslCiikiGjn, i (K)QPdL'q. (10.14)
L
Используя теорему Стокса. (A.2), (2.7) и (Б.5), это равенство
можно записать в виде
К st (О = V2 GtmrfipmkGijklGjn, it (R) &p dS's~
S
~ V2 6fmn6pmk$kii$ (R) dSs ~ 6$ (S) Q/, (10.15)
s
согласующемся c (10.13). Заметим, что, как и следовало ожи-
дать, сложение (10.14) и (9.16) дает равенство (5.40).
Резюмируя, отметим, что добавление компенсированной
дисклинации к дислокационной модели дает дефект.
11. ВЫВОДЫ
Эту главу мы начали с рассмотрения общего решения за-
дачи о пластической деформации, которая представляет собой
обобщение трансформационной задачи Эшелби и по существу
эквивалентна задаче Муры о пластической дисторсии. Эта за-
дача служит основой для определения всех статических по-
лей, вызванных дефектами. Затем был дан обзор теории дис-
локаций, включая непрерывное распределение, изолирован-
ную линию, непрерывное распределение бесконечно малых
петель, введенное Кроупой, а также диполь. Этот вводный
11. Выводы
97
материал служит отправной точкой для построения общей
теории дефектов, т. е. комбинаций дисклинаций и дислока-
ций. С другой стороны, он служит основой для сравнения,
поскольку общая теория дефектов сводится к теории дислока-
ций в том случае, когда дисклинации отсутствуют.
Дано определение непрерывного распределения дефектов.
Наводящую роль при введении этого определения играет на-
рушение условий совместности деформаций. Затем был вве-
ден вектор Франка, который . является характеристическим
вектором дисклинаций, аналогичным вектору Бюргерса для
дислокаций. Были получены интегральные выражения для
основных упругих полей (упругой деформации и упругого
кручения-изгиба) через плотности дефектов. Эти выражения
показывают, что упомянутые выше поля являются парамет-
рами состояния. Ядра в интегралах выражаются через тензор
Грина и тензор источников несовместности — тензор типа
Грина, введенный Симонсом и Баллафом.
Наводящую роль при определении дефекта играет теорема
Вейнгартена. Новой величиной, введенной здесь, является ось
поворота, которой нет в случае непрерывного распределения.
После вычисления основных пластических полей (пластиче-
ской деформации и пластического изгиба-кручения) резуль-
таты для дефекта могут быть получены путем специализации
соответствующих результатов для случая непрерывного рас-
пределения дефектов. Показано, что вычисления упрощаются,
если воспользоваться двумя новыми величинами — «пластиче-
ской дисторсией» и «пластическим поворотом», введенными
Мурой. В последующем эти величины отождествлены с плот-
ностями петель дислокаций и дисклинаций соответственно.
Показано, что ось дисклинации можно параллельно сместить
в новое положение, добавляя к дисклинации дислокацию.
Базисные упругие поля представлены в виде контурных инте-
гралов, что еще раз подтверждает природу этих величин как
параметров состояния.
Непрерывное распределение бесконечно малых петель де-
фекта определяется путем обобщения Кроупы определения
петель дислокации. Путем вычисления базисных пластических
полей через плотности петель показано наличие полной кор-
реляции с непрерывным распределением дефектов. Тогда
весьма просто осуществляется упомянутое выше отождеств-
ление пластических величин, введенных Мурой, что позволяет
выяснить различие нашего подхода с подходом Муры.
Показано, что три независимых определения дефектов —
через непрерывные распределения, изолированные линии и
бесконечно малые петли — не приводят к единому понятию
дцсклинации. Вернее, дисклинация, определенная одним
4 Зак. 201
98
Гл. II. Дисклинации в анизотропном упругом теле
способом, содержит в себе часть дислокаций от поля дислока-
ций, получаемого при использовании двух других способов.
В результате получается некоторая путаница при переходе от
одной формулировки к другой, однако различие между ними
может быть установлено единственным образом. Так, напри*
mqp, различие между подходом Антони и нашим возникает
из-за смешения непрерывных распределений дефектов с изо-
лированными дефектами. В качестве другого примера рассмат-
ривается интерпретация линии дефекта в терминах непре-
рывного распределения петель дефекта, что делает ясным от-
личие нашего подхода от подхода Муры.
Диполь определяется как обобщение дислокационного ди-
поля, введенного Кроупой. При этом обнаруживается, что
имеется большое сходство между дисклинационными дипо-
лями и дислокациями.
Далее показано, что общая теория дефектов сводится к
обычной теории дислокаций, если дисклинации отсутствуют.
Разъяснено введенное Ли и Гилманом понятие дислока-
ционной модели дефекта. Показано, что эта модель представ-
ляет собой распределение дислокационных петель, совпадаю-
щее с соответствующим распределением для изолированного
дефекта, без какого-либо распределения петель дисклинаций.
Такая модель в терминологии Муры соответствует «пластиче-
ской дисторсии» без «пластического поворота». Показано, что
эта дислокационная модель представляет собой стенку дисло-
каций, ограниченную линией дислокации, лежащей на линии
дефекта. Дислокационная модель дает те же значения полного
перемещения, упругой деформации и напряжения, что и со-
ответствующий дефект. «Упругая дисторсия» для дислока-
ционной модели совпадает с «упругой дисторсией» Муры для
дефекта. Ввиду большого сходства дислокационной модели с
соответствующим ей дефектом необходимо четко различать
эти два понятия.
Глава заканчивается рассмотрением «компенсированной
дисклинации», которая представляет собой равномерное рас-
пределение петель дисклинации по поверхности. Этот дефект
создается, по терминологии Муры, «пластическим поворотом»
без «пластической дисторсии». Показано, что такой дефект
представляет собой стенку дислокаций, которая оканчивается
на линии дисклинации и не создает полей перемещения, де-
формации и напряжения.
Добавление компенсированной дисклинации к дислока-
ционной модели дает дефект.
В приложении Б приведена специальная символика, при-
меняемая в работе Кунина [27]. Эта символика очень полезна
12. Приложение А
99
при изложении изолированных дефектов там, где появляются
обобщенные функции типа 6-функции Дирака.
Таким'образом, в этой главе изложена общая теория не-
подвижных дефектов в линейно упругом однородном беско-
нечном теле. В последующих главах эта теория будет дета-
лизирована для случая изотропии и затем будет применена
к прямолинейным дисклинациям и дисклинационным петлям.
Основным недостатком настоящего исследования является
использование линейной теории. Это означает, что в реаль-
ном твердом теле поля вблизи изолированных дефектов су-
щественно отличаются от полей, которые дают полученные
формулы, однако по мере удаления от дефекта отличие этих
полей от реальных становится незначительным. Это обстоя-
тельство будет более подробно проиллюстрировано на част-
ных примерах в последующем. Однако без предположения
о линейности мы наверняка не смогли бы продвинуться в тео-
рии так далеко, как мы это сделали. Отмеченная выше не-
точность является платой за весьма полное аналитическое
изложение теории.
С точностью др указанных ограничений изложенная тео-
рия является полностью самосогласованной. Помимо той цен-
ности, которую она имеет сама по себе, теория может быть
использована в качестве отправной точки для обобщения на
различные случаи, например динамика, нелинейные эффекты,
моментные напряжения, случай ограниченного тела или неод-
нородности.
12. ПРИЛОЖЕНИЕ А
ТЕОРЕМА О ДИВЕРГЕНЦИИ И ТЕОРЕМА СТОКСА
Ранг (или, как иногда говорят, порядок) тензора есть чис-
ло, совпадающее с числом' индексов у компонент тензора.
В последующем через Т обозначается тензор любого ранга,
причем индексы не указываются. Теорема о дивергенции фор-
мулируется следующим образом:
^TtidV = ^T dSi. (A.l)
v s
Здесь интегралы берутся по объему V и ограничивающей его
замкнутой поверхности S.
Теорема Стокса имеет две формулировки. Первая, форму-
лировка такова:
\etlkT' jdSl = ^TdLh. (А.2)
s i.
100
Гл. II. Дисклинации в анизотропном упругом теле
Здесь Gijk — символ Леви-Чивиты. Используя тождество
^i/k^klm== ЬцЬ/m (А.З)
получаем вторую формулировку
ф ekim^ dLk = (Тt m dS[ Т, i dSm). (A.4)
l s
Здесь интегрирование производится по произвольной поверх-
ности S и замкнутой кривой L, ограничивающей поверх-
ность S. Ориентации поверхности S и кривой L согласованы
по правилу правого винта.
13. ПРИЛОЖЕНИЕ Б
ДЕЛЬТА-ФУНКЦИИ, СВЯЗАННЫЕ С КРИВЫМИ
И ПОВЕРХНОСТЯМИ
В этом приложении кратко излагается символика, приме-
няемая в работе Кунина [27]. Пусть ф(х)—бесконечно диф-
ференцируемая конечная функция от х, называемая основной
функцией. Определим b-функцию Дирака следующим обра-
зом:
ь ГО при х' < а,
6 (х — х') ф (х) dx = j ф (х') при а<х'<Ь, (Б.1)
а I 0 при b < х',
где а и b — произвольные постоянные числа. Поскольку
6(х)—обобщенная функция, интегралы в этом и последую-
щих уравнениях не существуют в том смысле, в каком они
понимаются в классическом анализе; их следует рассматри-
вать как символическое обозначение. Эта символика подробно
изложена в книге Гельфанда и Шилова [28]. Рассмотрим сле-
дующие интегралы, имея в виду, что затем все дальнейшие
результаты выводятся из определения (Б.1).
Трехмерная 6-функция Дирака 6 (г) определяется равен-
ством
6 (г - г') = 6 (Х1 — х[) 6 (х2 — х2) 6 (х3 — Хз). (Б.2)
Пусть ф(г)—бесконечно дифференцируемая конечная функ-
ция радиуса-вектора г. Тогда из (Б.1) и (Б.2) следует, что
г , ( Ф (?'), если г' е V,
\5(г-г')ф(r)dV = l \ (Б 31
J (. О, если г ф V. ,о'
Здесь dV = dxidxzdxs, V — произвольный объем.
13. Приложение Б
101
Дельта-функции Дирака для кривой L, поверхности S и
объема V определяются равенствами
\d(r-r')dL'h (Б.4)
L
i>i (S) s J d (г - r') dS'i, (Б.5)
s
J S(r-r')dr. (Б.6)
v
Мы видим, что 6i(L) и 6,(S), кроме того что они являются
6-функциями, являются также векторами, параллельными
кривой L и нормальными к поверхности S соответственно.
Из (Б.З) видно, что
( 1, если ге У,
> = { О, если Г0И. М
Теперь получаем следующие соотношения:
J б, (L) Ф (г) dV = J ф (г) dLt, (Б.8)
L
J 6t. (S) ф (г) dV = J ф (г) dSi, (Б.9)
s
J б (Ю Ф (г) dV = J ф (г) dV, (Б.10)
v
в которых интегрирование в левых частях производится пр
всему пространству, а в правых частях — по кривой L, по-
верхности S и объему V соответственно. Для доказательства
первого из этих соотношений подставим (Б.4) в левую часть.
Изменяя порядок интегрирования и используя (Б.З), получаем
J J б (г - г') dLfo (г) dV = $ J 6 (г - г') ф (г) dV dL'i = \<s> (г') dL'i.
L L L
Доказательство соотношений (Б.9) и (Б.10) проводятся ана-
логичным путем. Изменяя обозначения переменных, пере-
пишем (Б.8) — (Б.10) следующим образом:
(бДГ)ф(г-г')^'= 5ф(г-г')^, (Б.11)
L
$М5')<Р(г-г'МГ= $T(r-r')dS£, (Б. 12)
S
$6 (И ф (г - г') dV' = J ф (г - г') dV'. (Б. 13)
V
102 Гл. II. Дисклинации в анизотропном упругом теле
Если кривая L пересекает один раз поверхность S, то
J Р 1ъпь
(Б.14)
Здесь ti — единичный вектор касательной к кривой L, nj —
единичный вектор нормали к поверхности S, вычисленный
в точке пересечения гья. Для доказательства этого соотноше-
ния заметим, что в величину интеграла (Б.14) дает вклад
лишь точка rLS. Поэтому кривую L можно заменить каса-
тельной к L в точке rLS, а поверхность S — касательной пло-
скостью к S в той же точке. Сначала вычислим интеграл
(Б.14) в том частном случае, когда rij — (001), т. е. когда
S совпадает с плоскостью %i, х2. Тогда при /=1, 2 интег-
ралы обращаются в нуль, как и должно быть в соответствии
с формулой (Б.14). При / = 3 с учетом (Б.2) и (Б.1) имеем
СО СО ,
$ $ S (х* — x'i) 6 (хг — х'2) б (х3 — Хз) dL'i dxi dx2 —
— оо —оо £
ОО
= б(х3—Хз)-|^-рбГхз=щ-.
— ОО
Здесь был использован тот факт, что для прямой линии
dL'i = dx3 и что для положительных значений t3 перемен-
ная Хз имеет интервал (— оо, со) и для отрицательных зна-
чений t3 — интервал (оо,—оо). Полученный результат также
согласуется с формулой (Б.14) для рассматриваемого част-
ного случая. Таким образом, равенство (Б.14) справедливо
в некоторой специальной системе координат. Благодаря тен-
зорному анализу это равенство поэтому справедливо в неко-
торой общёй системе координат. Частную форму равенства
(Б.14) ,:можно получить также при помощи метода, приме-
няемого в приложении II к работе [29]. Из равенств (Б.4),
(Б.5) и (Б.14) следует
$6, (L)dSi= ^f)t(S]dLl==
S L
1, если L пересекает S
в положительном на-
правлении,
0, е’сли L не пересекает S, (Б. 15)
—1, если L пересекает S
в отрицательном на-
правлении.
-он
13. Приложение Б
103
Нетрудно обобщить этот результат следующим образом:
^ML)T(r)dS,= S ' ф(г£5), если L пересекает 5 в положительном на-
= 6г (S) ф (г) dLt = L правлении, 0, если L не пересекает S, (Б. 16) — <р(г£5), если L пересекает S в отрицательном на- правлении.
Производная 6-функции определяется в соответствии
с классическим анализом перенесением знака дифференциро-
вания на основную функцию:
J 6,1 (г - г') ср (г) dV s J 6 (г - г') ф, , (г) dV. (Б.17)
V V •
Приведем формулы для производных 6-функций (Б.4) —(Б.6):
6,-,/(L)=p./(r-r,)dM> L (Б.18)
bi,I(.S)=\dl(r-r')dS', s (Б.19)
V Из этих соотношений следует, что (Б.20)
' J 6/,/(Мф(г)^ = — ^(ft}(r)dLi, L (Б.21)
$6/t/(S)V(r)d7 = - 5ф,/(г)^, s (Б.22)
$б./(Юф(г)^ = - $Ф,/(г)</7. V Докажем, например, равенство (Б.21). Подставляя левую часть равенства (Б.21) и используя (Б.17) (Б.23) (Б.18) в и (Б.З),
имеем
J J 6,1 (г - г') dLl ф (г) dV = J J 6, t (г - г') ф (г) dVdLi =
L I
= — s (r — г') Ф, / (r) dV dLl — — jjcp r(r')dL't.
Равенства (Б.22) и (Б.23) доказываются аналогично, '. z ..
104 Гл. 11. Дисклинации в анизотропном упругом 'Геле
Для 6-функций также выполняется теорема о дивергенции
и выражается в следующем виде:
б. /(Ю = - 6.(5), (Б.24)
где S— замкнутая поверхность, ограничивающая объем V. До-
казательство теоремы сводится к проверке соотношений
$6,ЛЮф(г)^ = -5ф(<(г)^ = -§ф(г)^=.
V S
= -$М5)ф(гМЮ
v
tip И выводе которых использованы равейства (Б.23), (А.1) и
(Б.9). Поскольку функция ф(г) произвольная, отсюда следует-
равенство (Б.24). Из этого равенства вытекает, что для за-
мкнутой поверхности S
eHk^k.i(S) = O. (Б.25)
Кроме того, для 6-функций также выполняется теорема
Стокса. Она может быть записана в одной из следующих двух
форм:
ei/A./(S) = -6JL), (Б.26)
6«m6ft(L)-6m,z(S)-6z.m(S), (Б.27)
где замкнутая кривая L есть граница поверхности S. Дока-
зательство теоремы сводится к проверке соотношений
$ 6i/fe6,-. у (S) ф (г) dV = — J е;Мф, у (г) dS{ = — § ф (г) dLk =
• 3 L
= — § Ы^) Ф(г)dV,
вытекающих из равенств (Б.22), (А.2) и (Б.8). Поскольку
функция ф(г) произвольна, отсюда следует равенство (Б.26).
Равенство (Б.27) непосредственно вытекает из (Б.26). Из
,(Б.26) следует, что для замкнутой кривой
6А,ИЮ = 0. (Б.28)
Однородная функция степени Л определяется равенством
f(kx) = kKf{x), (Б.29)
в котором k — произвольное положительное число. Покажем,
что 6 (г) есть однородная функция степени —3 относительно
Список литературы
переменной г. Из (Б.З) имеем
б (г) ф (г) dV — ф (0). •
105
(Б.ЗО)
Заменяя переменную интегрирования и учитывая (Б.З), по-
лучаем
J б (Лг) ф (г) dV = k~3 J б (г) ф (fc-1r) dV = k~3<p (0). (Б.31)
Поэтому, так как функция ф(г) произвольна, то
6(fcr) = fe-36(r),
(Б.32)
что и требовалось доказать.
СПИСОК ЛИТЕРАТУРЫ
1. Nabarro F. R. Н., Theory of crystal dislocations, Oxford, 1967.
2. Anthony K. H„ Arch. Ration. Meeh, and Analysis, 39, 43 (1970).
3. de Wit R., in «Fundamental aspects of dislocation theory», ed. by
J. A. Simmons, R. de Wit, R. Bullough, Nat. Bur. Stand. (J. S.), Spec.
Publ., 317, vol. 1, 1970, p. 651; русский перевод см. гл. I этой книги.
4. Mura Т., Arch. Meeh. Sios., 24, 449 (1972).
5. Kroupa F, Czech. J. Phys., B12, 191 (1962).
6. Weingarten G., Atti Accad. naz. Lincei Rc. [5], 10, 57 (1901).
7. Volterra V., Annals Scient. Ec. norm, sup., Paris [3], 24, 400 (1907).
8. Kroner E., Ergeb. angew. Math., 5, 1 (1958).
9. Ляв А., Математическая теория упругости, ОНТИ, М. — Л., 1935.
10. Frank F. С., Disc. Faraday Soc., 25, 19 (1958).
11. Eshelby J. D., Progress in Solid Mechanics, vol. II, 1961, p. 87.
12. Simmons J. A., Bullough R., in «Fundamental aspects of dislocation
theory», eds. by J. A. Simmons, R. de Wit, R. Bullough, Nat Bur. Stand.
(U. S.), Spec. Publ. 317, vol. 1, 1970, p. 89.
13. Mura T., Philos. Mag., 8, 843 (1963).
14. de Wit R., Acta Met., 13, 1210 (1965); Bilby B. A., Bullough R., Smith E.,
Proc. Roy. Soc., A231, 263 (1955).
15. Willis J. R., Int. J. Engng. Sci., 5, 171 (1967).
16. Underwood E. E., Quantitative stereology, Addison-Wesley Reading,
Mass., 1970; см. уравнения (6.40) и (6.44).
17. Kroupa F., in «Theory of crystal defects», ed. by B. Gruber, Academic
Press, N. Y., 1966, p. 275.
18. Kroupa F., Czech. J. Phys., В15, 896 (1965).
19. de Wit R., J. Appl. Phys., 42, 3304 (1971).
20. Li J. С. M., Gilman J. J., J. Appl. Phys., 41, 4248 (1970).
21. Eshelby J. D., Brit. J. Appl. Phys., 17, 1131 (1966).
22. Mura T., The relation between disclinations and dislocations, Europhy-
sics Conference on Disclinations, Aussois (n. c. savoie), France, June
2i_______23 1972.
23. Das E. S. P., Marcinkowski M. J., Armstrong R. W., de Wit R., Philos.
Mag., 27, 369 (1973).
24. de Wit R., Theory of disclinations. III. Continuous and discrete disclina-
tions in isotropic elasticity, J. Res. Nat. Bur. Stand., 77A, No. 3 (1973);
русский перевод см. гл. Ill этой ^нири.
106 . Гл. II. Дисклинации в анизотропном упругом теле
25. de Wit R., Theory of disclinations. IV. Straight disclinations, J. Res.
Nat. Bur. Stand., 77A, No. 5, 1973; русский перевод см. гл. IV этой
книги.
26. de Wit R., Continuous distribution of disclination loops, Phys. Stat.
Sol. (a), 18, 669—681 (1973).,
27. Кунин И. А., ПМТФ, 6, 76 (1965).
28. Гельфанд И. M., Шилов Г. Е., Обобщенные функции и действия над
ними, т. I, Физматгиз, М., 1959..
29. de Wit R., Phys. Stat. Sol., 20, 567 (1967).,
30. Mura T., in «Mechanics of generalized continua», ed. by E. Kroner,
Springer-Verlag, Berlin, 1968, p. 269,
- Глава III
НЕПРЕРЫВНО РАСПРЕДЕЛЕННЫЕ
И ИЗОЛИРОВАННЫЕ ДИСКЛИНАЦИИ
В ИЗОТРОПНОМ УПРУГОМ ТЕЛЕ1)
В этой главе развивается общая теория неподвижных дисклинаций
в бесконечном линейно-упругом однородном изотропном теле. Показано,
что эта теория является частным случаем анизотропной теории. Получены
решения в интегральной форме для полного перемещения, упругой де-
формации, изгиба-кручения и напряжения. Рассмотрены как непрерывно
распределенные, так и изолированные дефекты.
1. ВВЕДЕНИЕ
В предыдущей главе была развита общая теория непо-.
движных дисклинаций в бесконечном линейно-упругом одно-
родном анизотропном теле. Данная глава посвящена прило-
жению этих результатов к случаю изотропного упругого тела.
Рассмотрение изотропного случая диктуется следующими
тремя соображениями. Во-первых, во многих приложениях
общей теории допущение об изотропии позволяет получать
решения в аналитической форме, поэтому всегда удобно иметь
формулы для изотропного,материала. Во-вторых, облегчается
сравнениё данных результатов с имеющимися в литературе,
многие из которых были получены при заранее принятом
предположении об изотропии. В-третьих, в тех случаях, когда
имеется ясная связь между изотропной и анизотропной тео-
риями, возможно применение изотропных методов к анизот-
ропным задачам. Такой подход зачастую оказывался успеш-
ным, к тому же по изотропной теории имеется гораздо больше
литературы, чем по анизотропной.
Основной целью данной главы является развитие изотроп-
ной теории ab initio. Постараемся также показать ее связь
с анизотропной теорией в тех случаях, где эта связь прояв-
ляется наиболее наглядно. В разд. 2 этой главы будут даны
изотропные выражения для некоторых основных величин и со-
отношений, таких, как упругие константы, тензор Грина и
тензор источника несовместности.
*) de Wit R., Theory of disclinations: III. Continuous and discrete
disclinations in isotropic elasticity, Journal of Research of the National Bu-
reau of Standards, 77A, No. 3, 359—368 (1973).
© National Bureau of Standards, Department of Commerce, Washington,
D. C., USA, 1973. ~ -
© Перевод на русский язык, «Мир», 1977
108 Гл. III. Дисклинации в изотропном упругом теле
В разд. 3 будет дан обзор теории упругости с внутрен-
ними источниками напряжения без конкретизации природы
дефектов. Вначале дадим решение задачи о пластической де-
формации; полученное здесь решение в интегральной форме
для полного смещения будет далее полезным во всей теории
дефектов. Этот результат проиллюстрируем на простейшей мо-
дели точечного дефекта Эшелби. Затем решим задачу о не-
совместности и получим выражение для упругой деформации
как параметра состояния в виде интеграла от тензора несов-
местности.
В разд. 4 дается обзор классической теории дислокаций.
В разд. 5 развивается теория непрерывно распределенных
дефектов. Здесь получены решения в интегральной форме для
базисных упругих полей (деформации, изгиба-кручения.) и
поля напряжения. Выражения для этих параметров состояния
записываются через плотности дефектов, т. е. плотности дис-
локаций и дисклинаций.
. Раздел 6 посвящен приложению к изолированному де-
фекту. Полное смещение выражается поверхностным интег-
ралом, а базисные упругие поля и поле напряжения — кри-
волинейными интегралами.
2. ИЗОТРОПИЯ
Для изотропного материала число упругих постоянных
Сцм сокращается до двух независимых постоянных. Запишем
их через модуль упругости при сдвиге G и коэффициент Пуас-
сона V. [3]:
Cilki = ZG (bufiji + (2-1)
где — символ Кронекера, a (tj) обозначает, что выражение
в скобках симметризовано *) по i и /. Для простоты будем
пользоваться декартовой системой координат.
В изотропном случае тензор Грина можно записать в яв-
ном виде [3]:
Gin (r) = . qq ~ 2 (1 — V) Г’/п) ’ (2.2)
где г — радиус-вектор, а запятой обозначено дифференцирова-
ние. Комбинация CijhiGjn.i встречалась всюду в гл. II. Ис-
пользуя (2.1), (2.2), приведем ее к следующему виду:
GtlklGln, I (О = g^- kqq “Ь ^knr, Iqq ~
j _v r, kin “I” | _v ^klr, nqq') • (2.3)
*) См. прим. 2 на стр. 39. — Прим. ped.
3. Обзор теории несовместности
109
Другая величина, которая также часто встречалась в гл. II,—
это тензор источника несовместности, определенный форму-
лой (II. 4.25) 9
I mnpq (г) = "4л" j GpmkGqslCiiklGjnt i's' (Г7) R dV(mn)9 (2.4)
где ePmk — символ Леви-Чивиты, R— длина (модуль) вектора
R = r — г'. В изотропном случае с учетом (2.3) эта формула
приводится к следующему виду:
7mnpq (г) == 32л2 GpmkGqsl [f>lnr, i'i'k's’ 4“
здесь мы воспользовались антисимметрией eqsi. Принимая во
внимание, что
J г' dV' = 2 J (r'RT1 dV'= - 4nr, (2.6)
и интегрируя по частям, выражение (2.5) можно записать в
следующем виде:
Imnpq (г) = 3^" epmkeqsl [^lnr, ks 4“ j _ v &klr, ns) (mn)> • (2.7)
И, наконец, используя формулу (II. 4.26), получаем
Imnpq O’) = g^- kk ^nufipqf, kk 4“ &mnr, pq
6npr mq 4- । _ (Sp</, mn bmqr, nP)] . (2.8)
1 v i J\mn)
Далее будет показано, что все результаты гл. II можно
свести к случаю изотропии, если воспользоваться получен-
ными здесь формулами. Здесь принято правило Эйнштейна
суммирования по повторяющимся индексам. Это правило рас-
пространяется как на индексы со штрихами, так и без штри-
хов; см., например, (2.4).
3. ОБЗОР ТЕОРИИ НЕСОВМЕСТНОСТИ
В этом разделе дадим формальное решение двух задач:
задачи о теле с заданной пластической деформацией и задачи
о несовместности. Эти задачи могут быть решены без конкре-
тизации природы дефектов.
J) (II. 4.25) обозначает: формула (4.25) гл. II..— Прим, иерев^
110 Гл. III. Дисклинации в изотропном упругом теле
3.1. Задача о пластической деформации
Рассмотрим однородное бесконечное изотропное тело, в ко-
тором задана пластическая деформация как функция точки
пространства. Будем искать результирующее смещением? по
всему телу.
Для решения задачи воспользуемся методом, аналогичным
приведенному в разд. II. 2. Уравнение равновесия для напря-
жения <jij (см. (II. 2.1)) имеет вид
<Ъм = 0. (3.1)
Принимая во внимание (2.1), закон Гука для изотропного
материала (II. 2.2) можно записать'в виде
° И = 2G (ец + j б/7е), (3.2)
где е — относительное изменение объема, или след тензора
упругой деформации, ец, т. е. е = ец. Полная деформация,
определенная через полное смещение'(II. 2.4), состоит из уп-
ругой и пластической частей (см. (II. 2.5)):
s иу, о = ец "Ь ец* (3-3)
Соотношения (3.1) — (3.3) удобно объединить в одно выра-
жение (см. (II. 2.6)):
“Г.я + т^4« = 2^/+|^Г.- (зч)
Это соотношение представляет собой систему дифференциаль-
ных уравнений в частных производных для и? при заданных
значениях ^..Наиболее прямой метод ее решения состоит
в сведении этой системы к бигармоническому уравнению.
Вначале продифференцируем (3.4) по xit в результате полу-
чим
1 — 2v “I ill= eti. И + 1 — 2v etu • ' $.5)
Далее, взяв оператор Лапласа от обеих частей (3.4), получим
«Т ньъ + -г-Ц- «/ = , 2\ ер(3.6)
I, jjkk * 1 — 2v /> и» 1 1 — 2v » 1н ' '
Объединив (3.5), (3.6), имеем
«Т = 2ер ,kk — - А- ер {.ь + ер. (3.7)
*» 7/кк IJ, JkR 1 -V JR, IjR 1 1 — V » •// х '
3. Обзор теории несовместности
111
Для интегрирования этого уравнения воспользуемся следую-
щим соотношением:
(8л) 1 г, nkk + б (г) = О,
(3.8)
где б (г)—трехмерная дельта-функция Дирака, определен-
ная в приложении Б гл. II. Интересный метод получения
этого соотношения заключается в подстановке (2.3) в (II. 2.7).
Тогда (3.8) будет представлять собой изотропный эквивалент
уравнения для функции Грина.
Теперь решение нашей задачи можно легко записать
в виде
«[(r)-J»(R)«r(r9tfr=
=-<r')£,r=
= -Ё- j * И (г'> - тЁт ,-,•».(•') +
= Ё- S И I’.rt <г'> ~ЛЛ (И +
+ т=? (3.9)
где интегрирования выполняются по всему объему. Здесь пер-
вое равенство вытекает из свойства дельта-функции (II. Б.З),
второе равенство следует из (3.8), третье равенство получено
интегрированием по частям, четвертое следует из (3.7) и пя-
тое получено также интегрированием по частям. При интег-
рировании по частям поверхностные интегралы будут равны
нулю на бесконечности, если выполняются следующие усло-
вия: 1) граничное условие для полного перемещения: иТ (г)-»0
при г—>оо, 2) условие для заданной пластической деформа-
ции: efj (г) стремится к нулю быстрее, чем г-1, при г->оо.
В силу последнего условия интеграл (3.9) является конеч-
ным. Легко показать, что (3.9) можно получить также под-
становкой (2.3) в (II.2.15), что указывает на соответствие
между изотропной и анизотропной теориями. В том случае,
когда деформация постоянна внутри ограниченной обла-
сти пространства и равна нулю вне этой области, тогда (3.9)
Сводится к соотношению, полученному- Эшелби [4]. Из (3.9)
112
Гл. III. Дисклинации в изотропном упругом теле
легко получить выражение для полной дисторсии:
РГ/(г) = И/, Дг) =
= - sH [2₽. <г') -т^Л «.А<г')+
+ -f4v я.оыНИ]*»''- (зло)
Уравнения, полученные в этом разделе, будут в дальнейшем
основополагающими при рассмотрении полей более конкрет-
ных дефектов.
Эшелби указал, что поле дефекта может быть смоделиро-
вано некоторой фиктивной объемной силой. В изотропном слу-
чае выражение для этой силы получается подстановкой (2.1)
в (II. 2.16). Таким образом, дефект, описываемый с помощью
е^, моделируется следующей фиктивной объемной силой:
-f, = -2G(er,, + T^5?eJ’,). (3.11)
3.2, Приложение; точечный дефект
, Полезно рассмотреть одно простое приложение соотноше-
ний (3.9) и (3.11). Эшелби [5] считает центр расширения про-
стейшей упругой моделью точечного дефекта. В нашей форму-
лировке эта величина задается следующим выражением:
^(г) = 1/3ДУбг/б(г), ' - (3.12)
где ДУ—постоянная величина, представляющая пластическое
изменение объема. Тогда из (3.9) находим
ы[(г) = сх,./г3, (3.13)
где с — «сопротивление» точечного дефекта:
Из (3.11) следует, что точечный дефект может быть смодели-
рован следующей фиктивной объемной силой:
2 -Л = -ДУ Кб.Дг), (3.15).
где К—объемный модуль:
К__ I "Ь v 2(? . «ч
Л —Т=27-з“- <3-16)
Эти результаты согласуются с выводами Эшелби, который
детально разработал данную проблему.
3. Обзор теории несовместности
ИЗ
Согласно формуле (II. 3.34) разд. II. 3.3, пластическая
дисторсия pf/ эквивалентна плотности уИ дислокационной
петли. Поэтому уравнение (3.12) показывает, что точечный
дефект может быть представлен системой трех равных изоли-
рованных призматических взаимно перпендикулярных петель.
А это является примером, показывающим, что точечный де-
фект можно представить плотностью изолированных дефект-
ных петель.
Более того, из (3.15) следует, что точечный дефект может
быть также смоделирован системой трех равных фиктивных
изолированных двойных взаимно перпендикулярных сил.
3.3. Задача о несовместности
Пусть задан тензор несовместности как функция точ-
ки пространства. Требуется определить результирующую
упругую деформацию по всему телу.
Будем решать эту задачу, используя понятие пластической
деформации. Если поле пластической деформации eff задано,
то с помощью' (II. 4.11) определен и симметричный тензор не-
совместности:
^U = eikieimneintkm9 (3.17)
который удовлетворяет условию непрерывности (см. (II. 4.13))
_ П//и = 0. (3.18)
С использованием (II. 4.26) выражение (3.17) запишется в
виде
ТЪ, = — ЪЪ ---еРЦ 4“ th “Ь ik + ll --------м)* (3.19)
*ij i], кк 9 ij 1 j к9 lk 1 tk9 jk 1 ij \ • ll kl9 kl* ' ,
Из этого соотношения следуют два результата:
т1 = е,Рп е?1. и* . (3.20)
Л,/ = е?} kk ik + /k. (3.21)
Решение нашей задачи получается теперь в следующем виде:
eil (г) ~ — 8л S IX И (еМ. i'k' “1“ ^к, i'k') ~ 1 _ v %, Hekl. k'l' +
+И'-?,(<)=
= — ал S IX. и ~~ М* + eii. >'«' + еР, <'/') +
+ * и (ч - »Ггг) + dv’ - ‘1< (г) ~
= - Ц». M4U (И + - i,lR. и) Ч (Г')] tv’. (3.22)
114
Гл. HI. Дисклинации в изотропном упругом теле
' Первое равенство в этой формуле следует из соотношений
(3.3), (3.10) с помощью интегрирований по частям, второе
равенство — из (3.20), (3.21) и третье равенство получается
после нескольких интегрирований по частям, использования
(3.8) и сокращений. Легко показать, что соотношение (3.22)
следует также из (II. 4.31), если сюда подставить (2.8) и ис-
пользовать (3.18). Будет также показано, что члены в (2.8),
содержащие г,р и г,д, не вносят вклад в интеграл. А это ука-
зывает на то, что точная форма (2.8) является в некоторой
степени неопределенной.
Ясно, что упругая деформация ei7- является параметром
состояния, так как она полностью определяется через инте-
грал от тензора несовместности т],-,-, который характеризует
распределение дефекта и поэтому является также параметром
состояния. Под параметром состояния понимаем величину,
которая может быть измерена экспериментально без каких-
либо знаний о предыдущих состояниях тела.
4. ОБЗОР ДИСЛОКАЦИОННОЙ ТЕОРИИ
4.1. Непрерывно распределенные дислокации
Дадим формальное решение следующей задачи-: пусть за-
дана пластическая дисторсия или плотность дислокации
ай Как функция точки пространства. Требуется определить
результирующую упругую дисторсию Pfj.
Для решения поставленной задачи воспользуемся реше-
нием для смещения, найденным ранее в разд. 3.1. Здесь так-
же будут получены выражения для деформации, изменения
объема, напряжения и поворота. Плотность дислокации опре-
деляется формулой (см. (II. 3.4)):
<Ип — ~ 6шРГп. k (4.1)
и удовлетворяет условию непрерывности (см. (II. 3.6)):
ain,i = 0- (4.2)
Вместо плотности дислокаций удобно иногда пользоваться
кривизной (см. (1.5.116)):
Kik — 'Мма — вы- (4.3)
Полная дисторсия определяется через полное смещение, и,
если ограничиться рассмотрением только дислокаций, она
будет состоять из упругой и пластической частей (см.
(П. 3.9)):
Ро S Uh i = pi/ + Pf/. (4.4)
4. Обзор дислокационной теории
115
Как только -упругая дисторсия определена, упругая деформа-
ция и поворот легко определяются из (II. 3.13), (II. 3.14):
= Р(*/>» (4.5)
=у 6i/fePi/- (4.6)
Для решения задачи воспользуемся тем, что пластическая
деформация, представляет собой симметричную часть пласта’
ческой дисторсии (см. (II. 3.2)):
ец = Pw), (4.7)
и поэтому полное смещение определется через пластическую
дисторсию из (3.9):
«Т (г) = — 8^-$ [#, n&ik (г') + R, jkk^i (г') —
- R> (И + (r')] dV'‘ <4-8>
Используя (4.4), можно легко выразить упругую дисторсию
через пластическую дисторсию. Тем самым первая часть на*
шей задачи будет решена. Для решения второй части задачи
следует выразить упругую дисторсию через плотность дисло-
кации:
Р// (г) = — [fl. ZnnPn. i’ + R, knnfikj, г —
~ t=V l' + T=7 R’ "«РЯ dv' ~ ₽« W =
= [/?, Inn (^iik^kl — Pfz, /') + R, knn (,eiklali — Pw. fc') —
— 1 2.’ ikl($ikm&ml — Pfz, fe') +
+ 1 R. inn (^ilmO-ml — Pzz, Z')] dv' — pf/ (r) =
= 8rt S Zn"e*/*aft* (r) "Ь R> *«neZ*ZaZ/ (r)
“ ।____v R, ikl ^ikma’ml (^ ) H j_v R, inn^Unflml (** )] . (4.9)
Первое равенство в этой формуле следует из (4.4), (4.8) с
применением интегрирований по частям, второе равенство —
из (4.1) и третье получено после интегрирований по частям,
использования (3.8) и некоторых сокращений. Этот результат
можно получить также непосредственно подстановкой (2.3)
в (II.3.17).
116
Гл. Ill, Дисклинации в изотропном упругом теле
Выражение (4.9) запишется в более удобной форме, если
использовать следующие тождества:
+ eilmfykPml> (4.10)
R, l6ikm я meikl — R, ieklm ~ R. keilm- (4.11)
Используя эти тождества, находим
Pi/ (f) = 5 |X (H +
+ R,knneikfljl (И — R, kntfiklnfiifl-ml (H +
+ ~_L~ (R< nkekim — R, ikmeiki) a-mi Ю] dV\ (4.12)
Последний член в этом выражении сокращается после инте-
грирования по частям и использования (4.2). В результате
получаем
Pi/ W == lnrfi{IkP’kl О’ ) “I” R, knn^ikl^/l (Г ) +
+ (-ПГ? - btiR, knn) (г')] dvf. (4.13)
Таким образом, получено выражение для упругой дисторсии,
соответствующей заданному дислокационному распределению
агп. Она является параметром состояния. Используя (4.1),
можно выразить также упругую дисторсию через пластиче-
скую дисторсию, что и явится решением поставленной вна-
чале задачи.
Упругую деформацию определим из (4.5) и (4.13):
еЦ (г) = J Р?, knn О* )(//) +
+ (r=T-Wten)e«mami(r')]dV'. (4.14)
Из этого соотношения выразим величину относительного из,
менения объема
е(г) = - $ R.kn^Mnflmi (г') dv', (4.15)
а используя (3.2), получим напряжение
сц (г) = $ |Х (Gikla]l (ГЭ)«/) + -
+ 7X7 (R. И* ~ ^ilR. knn) (г')] dV'. (4.16)
4. Обзор дислокационной теории 117
Поворот определяется из (4.6) и (4.13):
©ft (г) = "g^ [/?, inntyit (г ) '/г^, knna (г ) 4~
+ 'hR.lnnalk(r')]dV'. (4.17)
Последний член в этом выражении исчезает после интегриро-
вания по частям и использования (4.2). Окончательно имеем
©ft (г) $ [Я. (И - 72Я, ft»na(r')I dV' = (4.18)
= -^\*.inMr')dV', (4.19)
где последнее равенство следует из (4.3).
Таким образом, в этом разделе были получены явные ин-
тегральные выражения наиболее важных упругих полей (ди-
сторсии, деформации, относительного изменения-объема, на-
пряжения и поворота) для непрерывно распределенных дисло-
каций в бесконечном изотропном теле.
4.2. Изолированная дислокация
Пластическая дисторсия для изолированной дислокации
с вектором Бюргерса bj вдоль- кривой L выражается форму-
лой (см. (II. 3.21)):
pr/(r) = -Sf(S)6/, (4.20)
где 6»(S) — дельта-функция Дирака на поверхности S с гра-
ницей L. Эта функция определена в приложении П.Б. Поэто-
му, учитывая (П.Б.9), получаем выражение для смещения
(4.8) в следующем виде:
«Г (г) = i $ [R.iikbk dS'i + R, dS'i -
- R. ijbbk dS', + /?, tJlbk dsf|. (4.21)
Эту формулу можно получить также непосредственной под-
становкой (2.3) в (II. 3.30), как это сделано в работе [3]. Тот
же самый результат получен Кроупой (6, 7].
Плотность изолированной дислокации в этом случае имеет
вид (см. (II. 3.23)):- "
аг/(г) = б/(Ь)&/, (4.22)
где 6{(Л) — дельта-функция Дирака, заданная на замкнутой
кривой L. Поэтому, используя (II. Б.8), находим упругую
118
Гл. III. Дисклинации в изотропном упругом теле
дисторсию (4.13):
Pi/ (г) = [#, intfiijk dL'k + /?, knneiki dL'i +
L
+ (<T^-f>i^.knn')eklmdL'„]. (4.23)
Аналогичным образом находится и упругая деформация из
(4.14) или из (4.23):
еЦ (г) ~ 8^7 Ф knn. (eikldLj)^i^ 4" _ v ЬцЦг knn) eklm dL'mJ .
L (4.24)
Это выражение согласуется с формулой, полученной в работе
[3]. Относительное изменение объема можно найти из (4.15)
или (4.24):
е (г) = - -yEv ф Я. knneMm dL'm, (4.25)
L
а напряжение — из (4.16);
° и W = -IT [я. ft- dL^n +
L
“В I _ v (Я, Ilk 1%, knn) eklm dLmj. (4.26)
Формула (4.26), обычно называемая формулой Пича и Кё'
лера, согласуется с работой [3]. Наконец, из (4.18) получаем
поворот
^k(r) = -^^[R,lnndL'k-^R,knndL^. (4.27)
L -
В этом разделе были получены явные выражения, записанные
через криволинейные интегралы по замкнутому контуру, наи-
более важных упругих полей для изолированной дислокации
в бесконечном упругом изотропном теле. Большинство из этих
формул обсуждалось ранее в литературе и с успехом исполь*
зовалось в приложениях дислокационной теории.
5. НЕПРЕРЫВНО РАСПРЕДЕЛЕННЫЕ ДЕФЕКТЫ
Как и в гл. II, будем далее называть комбинации дисло-
каций и дисклинаций дефектами, а деформацию и изгиб-
кручение— базисными полями. Дальнейшее обсуждение ба-
зисных полных, упругих и пластических полей приводится
в работе [9].
5. Непрерывно распределенные дефекты
119
В этом разделе будет дано формальное решение следую-
щей задачи: известны базисные пластические поля и nfi
или плотности дефектов оцп и 0,-3- как функции точки про-
странства. Найти базисные упругие поля вц и
Для решения этой задачи воспользуемся снова решением,
найденным в разд. 3.1. Дополнительно найдем также выраже-
ние для напряжения. Если базисные пластические поля из-
вестны, плотности дефектов определяются соотношениями
(см. (II.4.1), (П.4.2)):
ain ~ ~ eikl (e/Pn. k "b e/iX/)’ (5’1)
®i/ s ~~ eiklKlf, k> (5-2)
которые удовлетворяют условиям непрерывности (см. (II. 4.3),
(П.4.4)):
Oin. I + eutfin — о, (5.3)
0г/.г = О. (5.4)
Условия (5.3), (5.4) объединим в одно соотношение:
®ifeZ®mZ, tnk 4” 0it, 1 = 0. (5.5)
Тензор несовместности (3.17) выразится соотношением (см.
(II.4.12)):
1lz/= (®/тпа«л, m + (5.6)
Вместо плотности дислокаций агп удобно иногда пользой
ваться кривизной, которую определим, как и ранее (см.
(1.6.56)):
Кik~ 72^ki^—вы. (5.7)
Для плотности дисклинации 0,3- имеем следующее соотно-
шение:
®Z/ ~ ~~ eiklHll, k + ^aGklmX?m, k =
= ~ eikl fyjl. k ~ Kkl, j)> (5.8)
где второе равенство следует из тождества (4.10) заменой в
нем а на х. Базисные полные’поля определяются через полное
смещение и состоят из упругой и пластической частей (см.
(II.4.14), (II.4.15)):
eTii^ull,i^eii + ePip М
xz/ z ==xz/ + xz/> (5.10)
Где полный поворот определяется выражением
(5.11)
120
Гл. III. Дисклинации в изотропном упругом теле
Для полноты дадим также выражения для характеристиче-
ских векторов, т. е. полного вектора Бюргерса Вп и вектора
Франка Qj (см. (II.4.5) — (II. 4.8)):
&п s ~ Ф (С —‘ 5 (ain — eimn®l!Xm) dSt • (5-12)
A, a
й; == — ф %P dLt J ef/ dSt, (5.13)
A, a
где % — контур Бюргерса, а а — поверхность Бюргерса, огра-
ниченная контуром Л.
Для решения задачи воспользуемся выражением (3.10)
для дисторсии. Применяя интегрирование по частям и замену
немых индексов, получаем
“Л Лг) = - к ИХ -Л. : (И + Л «„Л. <- (И -
—пНл м +т4тЛ А (Н] dV. (5.14)
Базисные упругие поля легко выражаются через базисные
пластические поля при помощи (5.9) — (5.11). В результате
первая часть поставленной задачи решена. Далее выразим
основные соотношения через плотности дефектов. Из .(5.14)
следует
ЫЛ Аг)= 8л $ IX Inn {eUk (akl ~ xffe) — eil, I' + eijiyP} +
4" Л knn {ez*z (az/— x/z) — eif, k' ~ eiikxP} ~
1 _ v Ikl {eikm (flml Hlm) tfl, k' "Ь 6ШХ₽} 4*
4- т^— R ieitm (amt ~ XD - epu Z'fl dV' =
• 1 — v »ч ibtn \ mi im/ ti, i ) j
= 8л S X Inn^Uk (.akl ~ rfk) 4~ R, knnGihlail ~
1 V
j__y R' Ikl^ikm^ml 4“- ।_v R, Inn^ttnflml “
R, nn^lkirfl, k’ 4" 1 — v- /Z6ZfemXfm, k'
—r~~ R dV' + ept, (r) =
1 —- у \ inn Um imj 1 if v '
** "8n 5 X inneilk (akl~ Xzk) R, knn6iklall ~
•=- R) kn,neklm^qaml 4“
5. Непрерывно распределенные дефекты
121
+ ! J. v (R, ijkeklm — R, lkm?ikl) V-ml 4~ R, nn (®tl^/6) —
-T^R.H (0n - M)] <*' + «=
5 IX Inn? ilk (?kl (r ) ~ XU (^ "b R, knneiklall (Г ) "b
+ ( 1 _!v ~ f>ilR, knn) eklmaml (ГЭ + R, ntfiil (H +
+ G^-M.nn)w] + er/(r). (5.15)
Первое равенство в (5.15) следует из (5.1), второе равенство
получено в результате интегрирований по частям, использо-
вания (3.8) и некоторых сокращений, третье следует из (4.10),
(4.11), (5.8), применения интегрирований по частям и сокра-
щений, четвертое равенство получено после интегрирований
по частям и использования (5.9).
С учетом (5.9) упругую деформацию находим из (5.15):
Сц (0 8л 5 X’ fcnn (** )\i/)
+ R. Лл (г') + - btlR, ПЛ) о (г')] dV'. (5.16)
Эта формула дает выражение упругой деформации, соответ-
ствующей заданному распределению дефектов atn и вц. Тот
же самый результат можно получить, подставляя (2.3) и
(2.8) в (II. 4.29) и используя (5.4), (5.5). В дальнейшем будет
показано, что члены в (2.8), содержащие гЛ, не дают вклада
в интеграл. Ясно, что является функцией состояния, так
как она выражается через плотности дефекта. Соотношения
(5.1), (5.2) позволяют также выразить упругую деформацию
через базисные пластические поля. Поэтому (5.16) решает
наполовину поставленную вначале задачу. Заметим, что
когда плотность дислокации исчезает, т. е. = 0, то (5.16),
как и следовало ожидать, переходит в (4.14).' Имеется дру-
гая форма записи (5.16), которая получается после несколь-
ких интегрирований по частям:
ег/ (г) = J [/?. „„ (efe/ma/z, v (г') + 0г/ +
+ ~ ^lR-+ 0 <П)] dV'. (5.17)
122 Гл. III. Дисклинации в извтролном уЛругом теле
С учетом (5.6) эта форма записи согласуется с (3.2) и пока-
зывает альтернативный путь вывода (5.16). Из (5.16) нахо-
дим относительное изменение объема
K^WmamZ(r,) + /?,n„e(r')l dV', (5.18)
и, учитывая (3.2), получаем напряжение
О*) knn (^ikl^jl О* ))({/) "Ь
4 1 __у (^» ijk W. knn) ^klnflml (Г ) 4“
+ R, n&in (H + -nrv (R, И - 6i/R. nA) 0 (r')] dV'. (5.19)
Чтобы найти упругий изгиб-кручение, сначала выразим
полный поворот из (5.11) и (5.15): 1
® й = 8л 5 [X Inn (akl — Hffe) Т R. knn& +
+ у R-inn^jk + R, nn6//ft0z/] dV' —
= - Ж J R. [*,» (И+«Г» (И] ж, (6.20)
где второе равенство получено из (5.7) интегрированием по
частям с использованием (5.3). Наконец, найдем упругий из-
гиб-кручение
КИ (г) =— 8^ [Я klnn.R'kj "Ь R. knrirfzj, Z'l dV' ~ W =
“ ~s- j [R. «Л+R. (=«<в« - Ч.»-)]dv’ - х» Ю=
= -5 [R. шЛм (Н + R. ».пбшО„ (!')] (5.21)
Первое равенство в этой формуле следует из (5.10), (5.20) и
интегрирования по частям, второе следует из (5.2), а третье
получается путем интегрирования по частям, использования
(3.8) и сокращения. Эта величина упругого изгиба-круче-
ния соответствует заданным распределениям дефектов ain и
Oij. Тот же самый результат можно получить, если подставить
(2.3) в (II. 3.34) и использовать (5.3) и (5.5). Видно, что эта
величина также является функцией состояния. Она выра-
жается также через базисные пластические поля с помощью
(5.1), (5.2). Таким образом, выражения (5.21) и (5.16) яв-
ляются решением первоначально поставленной задачи. Когда
плотность дисклинации исчезает, т. е. = 0, тогда (5.21)
6. Изолированный дефект
123
представляет собой, как и следовало ожидать, производную
от (4.18). у
В этом разделе были получены в-явной форме интеграль-
ные выражения базисных упругих полей и поля напряжения
для непрерывного распределения дефектов в бесконечном изо-
тропном теле. Показано, что, когда плотность дисклинации
равна нулю, т. е. 0$, = 0, эти результаты сводятся к анало-
гичным результатам для дислокаций, полученным в разд. 4.1
этой главы. Благодаря предположению об изотропии получен-
ные выше интегралы выражаются через относительный ра-
диус-вектор R и его производные. Поэтому эти интегралы
могут быть непосредственно вычислены для заданного рас-
пределения дефектов. В следующем разделе покажем, как
можно пользоваться этими результатами в приложении к изо-
лированному дефекту. z
6. ИЗОЛИРОВАННЫЙ ДЕФЕКТ
Для изолированного дефекта вдоль кривой L базисные
пластические поля определяются соотношениями (см. (II. 5.14),
(II. 5.15)):
еГп = (6.1)
«Г/= V2<W™, * + <₽*/’ (6.2)
где плотности дефектных петель определяются формулами
(см. (II.5.12), (11.5.13)):
’ ----», (3) {Ь. -1- e,mnQ, (х, - х"„)}, (6.3)
Ф), (г)--5,(3) О,. (6.4)
Здесь Ьп и Qj — характеристические векторы, т. е. вектор
Бюргерса дислокации и вектор Франка, х°т — точка, через
которую проходит ось дисклинации, 6i(S) — дельта-функция
Дирака на поверхности S с границей L. Плотности дефекта
задаются соотношениями (см. (II.5.19), (II.5.20)):
' <6-5)
6„(г)-б,(ЦЙ,. (6.6)
где 6f(L) — дельта-функция Дирака по замкнутой кривой L.
Кривизна задается с помощью (5.7) и (6.5):
(г) “ 'Ъ 6, л (L) {6, + Д - xj)} -
124 Гл. JЛ. Дисклинации в изотропном упругом теле
Полный вектор Бюргерса выражается соотношением (см.
(II. 5.17)):
Вп — Ьп~ е/тгР^т, (6.8)
а скачок смещения вдоль поверхности S — соотношениями
(см. (П.5.1) и (II. 5.5)):
[«„] = В„ + е. = bn + e. Q. (х_ — ). (6.9)
Полное смещение определится теперь из (3.9), (6.1) и (6.3):
«Г Ю-ёН ("* + ft - *5)} ft. /М А + R. „Д. -
--n7VR.»“is< + T=VR.<«,is'‘]’ <6Л0>
где было, использовано (П.Б.9). Если дисклинация исчезает,
то Qm==0, и это уравнение переходит в (4.21). Упругую
деформацию находим из (5.16) и (6.5), (6.6):
s w - ж f [ft+% А ft - 4» ft.ft« +
+- Vt.»„) s. а} + К.. А <«•;)<,„ +
+(т^-мг...)о.<Щ.]. <6.ii)
где было использовано (II. Б. 8). Снова при Qm=.O это вы-
ражение переходит в (4.24).
Относительное изменение объема и напряжение выра-
жаются соответственно формулами
«И — i f [ft + % А ft - 4)) R. +
+ (6.12)
’</«=i Ф [ft + S А ft - 4» {R.... ft« dLi)m +
+-n^(R , i}k knn) ^ktm dLm} 4~ nn (Qy
+ т=7 ч ~ dL'A • <6-13>
И наконец, упругий изгиб-кручение получаем из (5.21) и
(6.6), (6.7);
w - i f [ft+% A ft - 4» X
X ft. лц - 4.R - R^Mat UK (6.14)
8. Список литературы
125
В этом разделе были получены решения в явном виде, за-
писанные через интегралы по замкнутому контуру, для базис-
ных упругих полей и поля напряжения в случае изолирован-
ного дефекта в бесконечном упругом теле. Показано, что при
исчезновении дисклинации, = 0, полученные здесь резуль-
таты совпадают с аналогичными результатами для изолиро-
ванной дислокации. Все интегралы, приведенные выше, выра-
жаются через радиусы-векторы. Поэтому если геометрия изо-
лированного дефекта известна, то эти интегралы могут быть
непосредственно вычислены. Таким образом, как и в случае
дислокационных линий, полученные выше выражения будут
удобны для-практических приложений дисклинаций.
7. ВЫВОДЫ
Результаты, полученные ранее для анизотропной дисклина-
ционной теории, детализированы в этой главе на случай
изотропии. Изотропная теория была также развита незави-
симо, и было показано, что она является частным случаем
анизотропной теории.
Дан краткий обзор теории несовместности, которая яв-
ляется основой для дальнейших приложений к дефектам. Сде-
лан также обзор дислокационной теории, являющейся осно-
вой для сопоставления в теории дефектов.
В случае непрерывно распределенных дефектов получены
выражения для параметров состояния: базисных упругих по-
лей и поля напряжения. Эти формулы выражаются через
плотности дефектов, плотности дислокаций и дисклинаций,
которые в свою очередь могут быть определены через базис-
ные пластические поля. Далее эти результаты применяются
к петле изолированного дефекта. Полученные здесь формулы
выражаются через характеристические векторы, полный век-
тор Бюргерса и вектор Франка и даны в виде криволинейных
интегралов вдоль линии дефекта. Показано, что в случае
отсутствия дисклинаций эти результаты переходят в анало-
гичные результаты теории дислокаций.
Результаты для изолированного дефекта даны в форме,
удобной для приложений к конкретным дефектам с заданной
геометрией.
СПИСОК ЛИТЕРАТУРЫ
1. de Wit R., in «Fundamental aspects of dislocation theory», Nat Bur.
Stand. (U. S.), Spec. Publ. 317, vols. 1 and 2, 1970, p. 651; русский пере-
вод см. гл. I этой книги.
2. de Wit R., J. Res. Nat. Bur. Stand. (U. S.), 77A (Phys, and Chem.)»
No. 1, 49—100, (1973); русский перевод см. гл. II этой книги.
126 Гл. III. Дисклинации в изотропном упругом теле
3. de Wit R., Sol. State Phys., 10, 269 (1960).
4. Eshelby J. D., Progr. Solid Meeh., 11, 89 (1961).
5. Eshelby J. D., Sol. State Phys., 3, 79 (1956).
6. Kroupa F., Czech. J. Phys., B12, 191 (1962).
7. Kroupa F., in «Theory of crystal defects», ed. B. Gruber, Academic Press,
N. Y.., 1966, p. 275.
8. de ,Wit R., Theory of disclinations. 4V. Straight Disclinations; русский
перевод см. гл. IV этой книги.
9. de Wit R., Continuous distribution of disclination loops, Phys. Stat. Sol.,
(a), 18, 669—681 (1973); о результатах этой статьи см. добавление к
настоящей книге.
Глава IV
ПРЯМОЛИНЕЙНЫЕ ДИСКЛИНАЦИИ')
Развитая ранее общая Теория дисклинаций применяется к случаю
прямолинейной дисклинации. Вначале найдены геометрические поля, на-
пример плотности петель дефектов, соответствующие новым понятиям
Муры «пластической дисторсии» и «пластического поворота», базисные
пластические поля (деформация и изгиб-кручение), плотности дефекта
(дислокации и дисклинации), характеристические, векторы (Бюргерса и
Франка) и несовместность. Затем найдены статические поля для изотроп-
ного случая: поля перемещения > и полной дисторсии, базисные упругие
поля и поле напряжения. Показано, что при добавлении дислокации к ди-
склинации ось дисклинаци перемещается. Все эти результаты для прямо-
линейной дисклинации удовлетворяют общим уравнениям теории. Допол-
нительно рассматриваются еще следующие вопросы:
1. Конечный и бесконечно малый прямолинейный дисклинационный
диполь, который может быть двухосным и одноосным и имеет сходство
с прямолинейной дислокацией.
2. Дислокационные модели прямолинейной дисклинации и конечного
дисклинационного диполя. Эти модели представляют собой ограниченные
дислокационные стенки (изогнутые и закрученные).
3. Компенсированная дисклинация и изогнутая дислокационная стенка.
4. В заключение приведен конкретный аналитический пример дисло-
кации, оканчивающейся на дисклинации.
1. ВВЕДЕНИЕ
В предыдущих главах была развита общая теория непод-
вижных дисклинаций в анизотропном или изотропном теле.
В настоящей главе рассматривается приложение некоторых
из этих результатов к прямолинейным дисклинациям.
В 1907 г. Вольтерра [4] вычислил упругие поля от прямо-
линейных дислокаций и дисклинаций с полым ядром, прохо-
дящим по оси длинного изотропного цилиндра. Он назвал эти
дефекты «дисторсиями». Позднее Ляв [5] ввел термин «дисло-
кации». Это название укоренилось, однако его смысл сузился
до трансляционных дислокаций из-за важности этого типа
дефекта в пластической деформации. Поэтому для описания
дислокации поворота Франк [6] ввел новое название дисин-
клинация, которое было позднее заменено термином «дискли-
9 de Wit R., Theory of disclinatoins: IV. Straigt disclinations, Journal
of Research of the National Bureau of Standards, 77A, No. 5, 607—658
(1973).
© National Bureau of Standards, Department of Commerce, Washingtoiit
D. C., USA, 1973
© Перевод.на русский язык, «Мир», 1977
128 Гл. IV. Прямолинейные дискЛинйциа
нация». Словом «дисторсия» стали называть градиент пере-
мещения, в этом смысле термин «дисторсия» употребляется и
в настоящей работе, т. е. чтобы избежать путаницы, мы не
приписываем этому слову смысл; данный Вольтерра, как ком-
бинации дислокаций и дисклинаций. Все же было бы полезно
для этой комбинации иметь название, и поэтому для ее обо-
значения мы приняли термин дефект. Выражение «прямо-
линейный дефект» употребляется здесь согласно этой терми-
нологии. Принятая терминология не исключает также слово
«точечный дефект», так как точечные дефекты могут рассма-
триваться как комбинации изолированных дислокационных^
петель (см. гл. III).
Следует также подчеркнуть, что стало обычным употреб-
лять термин «теория дисклинаций», имея в виду в действи-
тельности «теорию дефектов» (т. е. теорию дислокаций и дис-
клинаций). Мы пользуемся термином «теория, дисклинаций»
лишь для того, чтобы подчеркнуть, что. новые результаты
в теории дефектов были получены введением дисклинаций.
Боле того, имеются по крайней мере три независимых спо-
соба определения обоих типов дефекта, а именно в терминах:
1) непрерывного распределения, 2) изолированного дефекта,
3) бесконечно малой петли, которые приводят к существенно
разным описаниям дисклинации. Это означает, например,,что
изолированная дисклинация содержит и некоторое поле плот-
ности дислокаций или поле плотности петель дислокаций.
В этой главе устанавливается природа этих величин для пря-
молинейных дисклинаций.
В разд. 2 напоминается, что еще Вольтерра сгруппировал
характерные члены в выражении для поля перемещения в слу-
чае прямолинейных дефектов. Путем видоизменения этих фор-
мул можно добиться выполнения условий равновесия.
В разд. 3 дан обзор теорий прямолинейных дислокаций и
показан способ приложения общей теории к частному случаю.
Этот раздел является основой при дальнейшем изложении.
В разд. 4 рассматривается приложение общих результатов
гл. II к частному случаю прямолинейных дисклинаций. Най-
дены плотности дефектов, которые являются «пластической
дисторсией» и «пластическим поворотом», введенными Мурой.
.Затем определяются базисные пластические поля, из которых
следуют все остальные соотношения. Находятся плотности
дефекта и показывается, что они удовлетворяют необходи-
мым общим соотношениям. Рассматриваются векторы Бюр-
герса и Франка, и в заключение этого раздела даются соот-
ношения для тензора несовместности.
В разд. 5 исследуется статика прямолинейных дисклина-
ций в изотропном теле. Исходя из заданного перемещения,
2. Уравнения Вольтерра
129
получены базисные упругие поля и показано, что они удовлет-
воряют уравнениям поля с плотностями дефекта. Затем на-
ходится поле напряжения и показывается, что оно удовлетво-
ряет условию равновесия.
В разд. 6 показано, каким образом следует видоизменять
соотношения для полей при перемещении оси дисклинации из
начального положения. Этот случай соответствует добавлению
дислокации к дисклинации.
Разд. 7 посвящен бесконечно малому прямолинейному ди-
склинационному диполю. .
В разд. 8 приведена дислокационная модель прямолиней-
ной дисклинации. Показано, что она представляет собой огра-
ниченную дислокационную стенку (в общем случае изогнутую
и закрученную). Она имеет те же самые поля перемещения
упругой деформации и напряжения, как и соответствующая
линия дисклинации. В терминах такой дислокационной мо-
дели мы получаем более точную интерпретацию новых поня-
тий, введенных Мурой.
В разд. 9 рассматривается конечный прямолинейный ди-
склинационный диполь. Показано, что такой диполь сводится
к бесконечно малому диполю, рассмотренному в разд. 7, когда
ширина диполя стремится к нулю.
В разд. 10 получены результаты для прямолинейной ком-
пенсированной дисклинации путем использования двух раз-
личных поверхностей дефекта.
В разд. 11 результаты разд. 10 применяются к изогнутой
дислокационной стенке, образованной двумя полубесконеч-
ными стенками, пересекающимися под углом 90°.
В разд. 12 приведен конкретный аналитический пример
дислокации, оканчивающейся на дисклинации.
Всюду в этой главе предполагается, что -тело имеет беско-
нечные размеры. Геометрические результаты действительны
и для анизотропного случая, однако полученные нами выра-
жения для статических полей относятся только к изотропному
челу.
2. УРАВНЕНИЯ ВОЛЬТЕРРА
Теорема Вейнгартена [1, 2] утверждает: при обходе нестя-
гиваемого в точку контура в многосвязном теле перемещение
и поворот изменяются на величину, представляющую собой
жесткое перемещение тела тогда и только тогда, когда по
всему телу выполняются условия совместности классической
теории упругости
Эта теорема привела Вольтерра к введению дефектов, ко-
торые он назвал «дисторсиями». Впоследствии их также назы-
вали общими дислокациями Вейнгартена — Вольтерра. Затем
5 Зак. 20J
130
Гл. IV. Прямолинейные дисклинации
Вольтерра перешел к вычислению свойств таких прямолиней-
ных дефектов, лежащих вдоль оси z. Вначале он выделил
члены в выражениях для полей перемещения, которые харак-
теризуют эти дефекты. Набарро [7] считал эти уравнения на-
столько важными для дисклинационной теории, что привел их
полностью в своей книге (уравнение (2.20)):
2лы* = (bx — dzxz + dxy у) arc tg {уlx) +
+ 7а (— by — dvzz — adxy x) In (x2 + y2),
2nuy = (by — dxyx + dyz z) arc tg (y/x) +
+ 7a — dzxz — adxy y) In (x2 + y2),
2nuz = (bz — dyzy + dzx x) arc tg (yjx) +
+ 7г (dyzx + dzx y) In (x2 + t/2),
где a — упругая постоянная. При этом тело находится в рав-
новесии без воздействия каких-либо объемных сил, за исклю-
чением сил, действующих вдоль оси z. Будет показано, что
члены с коэффициентами b представляют собой возможные
перемещения для дислокаций, а члены с коэффициентами
d — возможные перемещения для дисклинаций.
Эти уравнения нужно видоизменить, чтобы получить рав-
новесие без воздействия каких-либо объемных сил, в том чис-
ле и по оси z. Этого можно достичь различными способами.
Один из них заключается в вычислении объемной силы из
уравнения (2.1) при помощи обычных уравнений теории упру-
гости. Затем показывается? что она сингулярна вдоль оси z.
И наконец, для получения желаемого результата находится
выражение для поля перемещения, вызываемого равной по
величине, но противоположной по направлению вдоль оси z
силой, и найденное выражение добавляется к уравнению
(2.1). Здесь мы не приводим всех этих - вычислений. Другой
способ заключается в использовании общих соотношений
гл. III. Хотя прямолинейные дефекты не удовлетворяют необ-
ходимым граничным условиям, использованным в гл. III, все
же можно найти точную функциональную зависимость этих
полей исходя из этих выражений. Эти вычисления приводятся
в приложении В.
Как только «правдами и неправдами» найдено множество,
функций перемещения, легко установить, что они являются
решениями; для этого нужно показать, что условия равнове-
сия удовлетворены повсюду, в том числе и в сингулярных
точках, и что они содержат характеристические члены Воль-
терра (2.1). Условия равновесия проверяются просто путем
вычисления напряжения и показывается, что оно удовлетво-
ряет уравнениям равновесия.
3. Обзор теории прямолинейных дислокаций
131
Задача, поставленная в этой главе, может быть также
сформулирована в виде следующего общего вопроса. Дано
перемещение в виде эмпирической функции координат, соот-
ветствующей экспериментальным данным; какова должна
быть система дефектов, приводящая к такому перемещению?
Чтобы ответить на этот вопрос, нужно установить способ раз-
деления результирующего поля на упругую и пластическую,
части. Для изолированного дефекта это легко сделать, так
как в качестве базисных пластических полей больше всего
подходят те члены, которые имеют сингулярность на поверх-
ности частного вида, как будет показано для дислокаций в
разд. 3.2 и дисклинаций в разд. 5. Однако, производя разде-
ление результирующего поля другим способом, можно также
найти различные системы дефектов, которые вызовут то же
самое перемещение. Такой способ будет рассмотрен в разд. 8
для «дислокационной модели» прямолинейной дисклинации.
3. ОБЗОР ТЕОРИИ ПРЯМОЛИНЕЙНЫХ ДИСЛОКАЦИЙ
3.1. Геометрия
Пластическая дисторсия, вызванная постоянным переме-
щением по поверхности S, и плотность дислокаций для соот-
ветствующей изолированной дислокации, имеющей линией
контур L поверхности S, задаются соотношениями (см.
(П. 3.21) и (II. 3.23) 9):
(3.1)
apZ(r) = 6p(L)6z, (3.2)
где L — замкнутая граница поверхности S, 6^(5) и бр(А) —
дельта-функции Дирака на поверхности S и кривой L соответ-
ственно, определенные в приложении А соотношениями
(А. 11), (А. 12), и bi—постоянная, представляющая собой век-
тор Бюргерса изолированной дислокации. В этой главе мы
рассмотрим частный случай, когда L — прямая линия, aS —
полубесконечная плоскость, ограниченная прямой L. В част-
ности, пусть L параллельна оси Хз, a S является частью пло-
скости Х1Х3 с отрицательными xz. Для удовлетворения правила
правой руки направим нормаль к плоскости S в отрицатель-
ном направлении оси х2, как показано на рис. 5. Тогда не-
равные нулю компоненты в (3.1) и (3.2) в соответствии с
(А.15), (А.16) запишутся в виде
= (з-з)
а3/ = bfi (xt) б (х2). (3.4)
9 II. 3.2. означает раздел 3.2 гл. II, а (II. 3.21) — уравнение (3.21)
гл. II.
5*
132
Гл. IV. Прямолинейные дисклинации
Пластическая дисторсия сингулярна на плоскости 3, а плот-
ность дислокаций сосредоточена на оси х3. На рис. 6—8 про-
иллюстрированы три различных случая, соответствующих
I = 1, 2, 3. Плоскость 3 на рис. 6 и 8 является также плоско*
стью скольжения, так как она содержит вектор Бюргерса.
Рис. 5. Геометрия изолированного прямолинейного
дефекта в декартовой системе координат Xj, х3, х3.
Линия дефекта L проходит по оси Хз, а поверхность де-
фекта S представляет собой полуплоскость с отри-
цательными значениями Х\. Нормаль к плоскости $ на-
правлена в сторону отрицательных значений х2. В каче-
стве контура Бюргерса X, который обходит линию L, и
поверхности Бюргерса о, которая пронизывается линией L,
выбран круг радиуса а с центром в начале координат,
расположенный на плоскости XiX2.
Эти результаты непротиворечивы, так как они удовлетво*
ряют данному ранее определению (см. (1.5.2) и (II. 3.4)):
apl ~ epmk@kl, т» (3.5)
которое получено при помощи (А.6). Видно также, что (3.4)
удовлетворяет условию неразрывности (см. (1.5.4), (II. 3.24))*
°рЛр = 0. (3.6)
Выберем в качестве контура Бюргерса К круг радиуса а с
центром в начале координат, расположенный в плоскости
XiX2 (рис. 5). Тогда из (3.3) и (А.23) в соответствий с
(II. 3.22) получим
- § dLk = - § btH (- х,) d (х2) dL2 = bt, (3.7)
A К
3. Обзор теории прямолинейных дислокаций
133
Рис. 8. Винтовая дислокация
с плотностью а33«Z>3d (а^) д (х2).
где bi — вектор Бюргерса. Из (3.4) и (А.22) при помощи
(II. 3.25) также получаем
ар/ dSp = bfi (xi) б (х2) dS3 = 6/. (3.8)
о а
Таким образом, в этом разделе получены частные формы
пластической дисторсии и плотности дислокации (3.3) и (3.4)
для прямолинейной дислокации, сосредоточенной на оси х3.
134
Гл. IV. Прямолинейные дисклинации
Эти уравнения полностью согласуются со всеми общими гео-; |
метрическими результатами. *
В заключение этого раздела дадим выражение для тен- i
зора несовместности. В общем случае он определяется в виде ;
(см. (1.5.3)):
"Чрд= (e<7«Z®pZ. n)(pq)' (3.9)
В нашем случае с учетом (3.4) остаются следующие не рав- .
ные нулю компоненты этого тензора: ' /
111з= — ’AM (*i) 6' (х2), (3.1 Оа)
Игз= 1 /г^з^7 (^1) б (хг)> (3.1 Об)
Пзз = М (%i) 6' (х2) — b2t)' (х,) б (х2). (3.10в) ?
Отметим, что эти компоненты удовлетворяют условию нераз-
рывности (см. (1.4.2)): j
Пм.р = 0. (3.11)
r> i
Результаты этого раздела применимы как для изотропного, i
так и для анизотропного тела бесконечных размеров. ;||
3.2. Отатика дислокаций в изотропном тело |1
В этом разделе мы находим статические поля для прямо- |
линейной дислокации в изотропном теле бесконечных разме- 3
ров. Перемещение задается соотношениями (см. приложе-* I
ние В): Л]
и? = [ъГ + 4л (1 v) р2 ] + 4я (1 - v) D1 — 2v)ln Р + 7г]. I
(3.12а) j
«Г =---л b '---Г Г(1 — 2v) In Р + —Г j + &2 Гтг-л г1> f
2 4я(1—v) L' ' r р2 J 2 L 2я 4я(1—v)p2J 9
(3.126) |
где v — коэффициент Пуассона. Эти выражения хорошо из-
вестны для дислокации с вектором Бюргерса bh которая про-
ходит по оси хз. Мы использовали декартову систему коор- |
динат Xj, х2, Хз (см. рис. 9). Цилиндрические координаты р |
и <р определены в приложении Б и показаны на рис. 9. Если |
ограничивать угол ф интервалом (—л, л), то перемещение 1
будет разрывным на полубесконечной плоскости S, как пока- |
зано на рис. 9, которая тогда становится первоначальной пло- f
скостью необратимого перемещения из разд. 3.1. Заметим, что |
3. Обзор теории прямолинейных дислокаций
135
в (3.12) перемещения обозначены как полные. В литературе
эти выражения обычно рассматриваются как соотношения для
упругого перемещения, которое считается многозначным от-
носительно угла ф. Однако в рамках данной теории было бы
неправильно считать (3.12) упругим перемещением, ибо, если
перемещение обусловливается только упругой деформацией,
то дислокаций в теле заведомо нет (см. разд. 1.2, 1.5, а также
*2
(f>=-jr/Z
Рис. 9. Связь между декартовыми координа-
тами Xi и *2 и цилиндрическими р и <р.
Интервал изменения угла ф равен (—л, л); ф принимает
Значения, показанные на осях, и имеет скачок 2л при
переходе через отрицательное направление оси JCi.
' примечание 1 в гл. II на стр. 59). Но если задано полное
перемещение, дислокации все же еще не определены. Из
(3.5) следует, что для их определения нужно знать, как раз-
ложить полную дисторсию на упругую и пластическую ча-
сти. Интуитивно ясно, что в данном случае неразумно разла-
гать перемещение на упругую и пластическую части, потому
что угол ср не может быть разложен на непрерывную и раз-
рывную части. В общем случае можно отметить,^ что если
величина полного поля прямолинейного дефекта содержит
угол <р, то неразумно разделять эту величину на упругую и
пластическую части. Эта идея будет использована также в
разд. 5. Выражения (3.12) дают логарифмическую зависи-
мостью для перемещения на расстояниях, далеких от дислока-
ционной линии, в соответствии с табл. 6 (см. гл. II).
Полная дисторсия определяется через полное перемещение
и состоит из упругой и пластической частей (см. (1.2.1),
136
Гл. IV. Прямолинейные дисклинации
(1.3.9)):
— uTi, k ^ki “Ь PC/-
(3.13)
При дифференцировании перемещения (3.12) члены, содержа-
щие ф, дадут выражения, сингулярные на плоскости S, согла-
сно (Б.4). Эти выражения в точности соответствуют пластиче-
ской дисторсии (3.3), найденной в предыдущем разделе. Та-
кое очевидное совпадение связано, конечно, с особым выбором
плоскости S и области изменения ф. Эти члены появляются
только из-за того, что угол ф был выбран разрывным, а не
многозначным. С другой стороны, если нам заранее ничего не
известно о пластической дисторсии, то можно приписать к
ней сингулярные члены. Интуитивно эти члены представляют
поверхность, вдоль которой имело место пластическое пере-
мещение, как обсуждалось в разд. 3.1. Таким образом, исполь-
зуя (Б.З) — (Б.7), находим упругую дисторсию прямолинейной
дислокации:
4мп^[<‘-2’)-г+2>] +
+ -2’)-? +2 >]• (3.146)
031 = 0, (3.14в)
_ Г(з_2*)4-2-^],~ (з.14г)
4jt (1 — v) Lv 7 р2 р4 J ’ 4 г
Ъ t Г Хп х * Хл "1
₽22= - -Т-77-2-Г 1 “ 2V -T — 2 -М +
М22 (J _ v) / р2 р4 J 1
+WW<i~2^+2¥1 <з14*>
Рж=0, (3.14е)
!>..= —5©-. <3'14ж>
Ь—(ЗЛ4э)
0зз = О. (3.14и)
3. Обзор теории прямолинейных дислокаций
137
В отличие от пластической дисторсии (3.3), упругая дистор-
сия состоит из функций, которые непрерывны везде, за исклю-
чением оси %з, что и следовало ожидать для упругого поля.
Чтобы проверить непротиворечивость наших результатов,
можно легко показать, что упругая дисторсия и плотность
дислокаций (3.4) удовлетворяют уравнению поля (см. (1.5.6),
(II. 3.10)):
$pmkQkl, ^pl (3.15)
с учетом (Б.8) — (Б.10). Этим результатом подтверждается,
что (3.14) представляет собой упругую дисторсию изолиро-
ванной дислокации, проходящей по оси х3.
Далее покажем, что условие равновесия выполняется по-
всюду. Сначала находим упругую деформацию, которая в
общем случае задается соотношением (см. (II. 3.13)):
eM — $(kVp (3.16)
Отсюда и из (3.14) получаем следующие выражения для
упругой деформации в случае прямолинейной дислокации:
еп-----
4я (1 - v) 2v) р2 + 2
+ [(1 " 2^)^ -2 ^1], (3.17а)
= ~ 4 Г1‘ J(l-2v)4-2-^fil +
22 4зт (1 — v) I? р2 р4 J
+ tt<rb)-[<1 -2’)^+2 ^]. <3-17б)
^зз = 0> (3.17в)
о bl Г *1 о *1*2 1 й2 Г *2 а *1*21
12 4л (1— v) L р2 р4 J 4л; (1 — v) L р2 р4 j *
(3.17г)
(3-17Д)
«з. —(3.17е)
Изменение объема е = равно
1 2v
в = — 2я(1 _ V) р2 (Мг — V1). (3.17ж)
На больших расстояниях от линии дислокации упругая дефор-
мация изменяется обратно пропорционально расстоянию,
138
Гл. IV. Прямолинейные дисклинации
в соответствии с табл. II. 6. Обобщенный закон Гука для изо-
тропного тела имеет вид (см. (III. 3.2)):
= 2G (е« + “ТГ2(Г ) • (3.18)
Следовательно, поле напряжения для прямолинейной дисло-
кации представляется в виде
__ ^1 Г Х2 I П -XlX21 t @&2 Г *1 п Х1Х2 ~1
11 “ 2л (1 -v) Lp2 “t-Z р4 J Ф 2л (1 - V) L р2 р4 J’
(3.19а)
_ ___ Ul/1 I *2 п Л1Л2 । ии2 I 1 t О 1 2 I
°22 2л(1—v)L-p2 р4 J f 2л(1 -v) Lp2 *‘Z р4 J’
(3.196)
<ЗЛ9в>
Г Xj XjXg I Gb2
2л(1—v) Lp2 p4 J 2n(l—v)
<*23 —
Gb3xi
2лр2
*2 n XlX2l
P2 ' P4 J’
(3.19r)
(3.19д)
(У31 —
__ Gb3X2
2лр2 ’
(3.19e)
Эти выражения также хорошо известны в литературе. И на-
конец, уравнение равновесия имеет вид (см. (II. 2.1)):
ft — — Qki.k, (3.20)
где fi — объемная сила на единицу объема. Из (3.19) и
(Б.8) — (Б.10) находим, что условие
. Ь = 0 (3.21)
выполняется всюду, в том числе и на оси х3, где (3.19) имеет
особенность. Таким образом, приведенные выше поля остают-
ся в равновесии, включая и ось х3, без воздействия объемных
сил. Перемещение (3.12) содержит характерные члены Воль-
терра для дислокации. Поэтому, согласно разд. 2, можно сде-
лать вывод, что (3.12) точно представляет собой перемещение
в случае дислокации.
В заключение этого раздела приведем выражения для
упругого поворота от дислокации, которые в общем случае
имеют вид (см. (III. 4.6)):
(3.22)
4. Геометрия прямолинейных дисклинаций
139
или с учетом (3.14) в нашем частном случае:
_ЬзХ1 1 4яр2 ’ (3.23а)
.. -Л*2 2 4яр2 ’ ' (3.236)
.. Mt 3 2лр2 Ь2х2 2лр2 * (3.23в)
В этом разделе мы привели хорошо известные выражения
для перемещения и упругих полей в случае прямолинейной
дислокации в бесконечном изотропном теле.
4. ГЕОМЕТРИЯ ПРЯМОЛИНЕЙНЫХ ДИСКЛИНАЦИЙ
В этом разделе мы применяем общие геометрические ре-
зультаты разд. II. 5.2 к случаю прямолинейной дисклинации.
В случае изолированного дефекта, сосредоточенного на линии
L и образованного пластическим перемещением на поверхно-
сти 5, плотности петель дислокаций и дисклинаций задаются
в общем виде соотношениями (см. (II. 5.12) и (II. 5.13)):
+ (4-1)
'!>;„« =-M'SIQ,. . (4.2)
где bi — вектор Бюргерса дислокации, — вектор Франка,
х?— точка, через которую проходит ось дисклинации, и
6й(5) — дельта-функция Дирака на поверхности S, определен-
ная в приложении А выражением (А. 12). Величины (4.1) и
(4.2) были введены Мурой [9] и названы «пластической ди-
сторсией» и «пластическим поворотом». В случае прямолиней-
ной дисклинации, проходящей по оси х3, в качестве поверх-
ности S выбираем полубесконечную плоскость х{х3 с отрица-
тельными Xi и нормалью, совпадающей с отрицательным на-
правлением оси хз (см. рис. 5), и полагаем bt = 0. Далее, для
простоты полагаем, что ось поворота проходит через начало
координат, так что хРг = 0. Влияние смещения оси дисклина-
ции будет рассмотрено в разд. 6. Тогда, в соответствии с
(А.16), в выражениях (4.1) и (4.2) остаются только следую-
щие компоненты:
= (4-3)
(4-4)
140
Гл. IV. Прямолинейнее дисклинации
Для удобства, используя (А.8), выпишем эти компоненты пол*
ностью:
<4-3а)
₽;2=(йл- W(-(4.зб)
р*3=-О2х1Я(-х1)б(х2), (4.3в)
(p^GVK-x^x,), (4.4а)
Ф^ = Й2Я(-х1)б(х2), • (4.46)
<р*3 = Q3H (- xt) б (х2). (4.4в)
В общем случае базисные пластические поля (пластические
деформация и изгиб-кручение) определяются соотношениями
(см. II. 5.14) и (II. 5.15)):
С = ₽«> (4-5)
XL,= '/^ufiu. « + <4'6)
В нашем частном случае из (4.3) легко находим не равные
нулю компоненты пластической деформации:
е₽2 = '/2Й2х3Я(-х1)б(х2), (4.7а)
е22= (^3Х1 ®1*з) ( *1) (Х2)» (4-7б)
<з =---------------------------------(4-7в)
а с учетом (4.6) и (А. 6) из (4.3) и (4.4)—не равные нулю
компоненты пластического изгиба-кручения:
(4.8а)
х2Р = - ‘/^Я (- х,) б' (х2) + Й,Я (- х,) б (х2), (4.86)
х£ = 0, (4.8в)
xf2 = °, (4.8г)
к2Р=О2Я(-х1)б(х2), (4.8д)
xf2 = 0, (4.8е)
«Гз = 1/2®2хз6 (xi) 6 (хг)> (4.8ж)
= - '/ДхзЯ (- х,) б' (х2) + Й3Я (- xt) б (х2), (4.8з)
%₽-----,/2й2Я(-х1)б(х2). (4.8и)
Плотности петель дефектов (4.3) и (4.4) и базисные пласти-
ческие поля сингулярны на плоскости S (рис. 5). На этой
4. Геометрия прямолинейных дисклинаций
141
плоскости имело место дискретное пластическое перемещение,
которое привело к образованию линии дисклинации на оси Хз.
Общие выражения для плотностей дислокаций^и дисклина-
ций задаются соотношениями (см. (II. 5.19) и (II. 5.20)):
«Р/ (г) = бр W {bt + elqrQ4(xr -х°)}, (4.9)
0w(r) = 6p(L)Q„ (4.10)
где t>P(L) — дельта-функция Дирака на кривой L, определен-
ная (А.-11). В нашем случае, когда &z = xJJ = O, с учетом
(А.15) имеем следующие не равные нулю компоненты плот-
ностей дефектов:
«3/ — elqr^q^rb (-^1) 6 (^г)>
939 = Q?d-(x1)S(x2).
(4.Н)
(4.12)
Далее, используя выражение (А.8), выпишем для удобства
эти результаты полностью:
с&31 —‘ (*1) te)> (4.11a)
(Х32 = Q1X3S (Xj) 6 (х2), (4.116}
«33 = 0» (4.11b)
03i = QiS (Xi) S (x2). (4.12a)
032== ^2^ (^1) te)> (4.126)
033 = ^3^ (*i) 6 (x2). ’ (4.12b)
Плотности дефектов сосредоточены на оси хз. На рис. 10—12
представлены три типа дисклинаций, соответствующие q =
= 1, 2, 3. На рис. 10, 11 представлены дисклинации кручения
с перпендикулярными линиями дисклинации векторами Фран-
ка Qi и Й2> а на рис. 12 — клиновая дисклинация с параллель-
ным линии дисклинации вектором Франка йз. Из (4.12)
видно, что дисклинации кручения соответствуют недиагональ-
ные компоненты плотности дисклинаций, а клиновой дискли-
нации— диагональная компонента (см. табл. 4). Отметим
также, что изолированная прямолинейная дисклинация кру-
чения содержит некоторое поле плотности дислокаций, опре-
деляемое выражениями (4.11а), (4.116). Смысл этих выраже-
ний можно интерпретировать так. Рассмотрим тонкий слой
материала, проходящий через точку х3 и параллельный пло-
скости Х1Х2. Локально около оси Хз скачок перемещения ди-
склинации нельзя отличить от скачка перемещения дислока-
ции, даже при наличии скачка поворота. Деформация и ска-
чок перемещения для дисклинации, изображенной на рис. 10,
около точки на оси х3 подобны деформации и скачку переме-
Рис. 10. Дисклинации кручения с век-
тором Франка Qj и с плотностями
дефекта а32 = — QiX3d (xj) д (х2) и
©31 = Qjd (Xi) d (x2).
Рис. И. Дисклинации кручения с
вектором Франка Q2 и с плотнос-
тями дефекта a3j « Q2x3d (xj d (x2)
и 032 == Q2d (x0 6 (x2).
Рис. 12. Клиновая дисклинация с век-
тором Франка S23 и с плотностью
6зз = &з$ (*vi)d(x2).
4. Геометрия прямолинейных дисклинаций
143
щения дислокации, изображенной на рис. 11, с плотностью,
определенной (4.116). Поэтому с этой точки зрения вполне
оправданно рассматривать изолированную дисклинацию как
состоящую из плотностей дислокаций и дисклинаций. Это
частная иллюстрация общего утверждения, уже сделанного
нами в гл. II. Отметим, что плотность дислокаций заключает в
себе линию дислокации с изменяющимся вектором Бюргерса.
Однако Антони (10] рассматривает величину, определяе-
мую (4.11), не как плотность дислокаций, а как интеграль-
ную часть плотности дисклинаций. Преимущество этого под-
хода в том, что дисклинации однозначно определяется либо
через непрерывно распределенные дефекты, либо через изо-
лированный дефект. Тем не менее этот подход становится
громоздким для описания ограничивающей дислокации, кото-
рая будет рассмотрена в разд. 12. Антони также исследовал
несколько частных случаев прямолинейных дисклинаций. По-
лученные им уравнения (27), (28) и (30) для клиновой ди-
склинации соответствуют нашим уравнениям (4.12в) и
(4.11 в). В разд. 6 мы сравним его результаты для дисклина-
ции кручения с* нашими.
Теперь с учетом (А.6) и (А.8) можно непосредственно
проверить, что выражения (4.7) и (4.8) для базисных пла-
стических полей и выражения (4.11) и (4-12) для плотностей
дефектов удовлетворяют общим определениям (см. (1.6.3),
(1.6.1), (II.4.1) и (II.4.2)):
a , s — в .(еГ, 4- %р Y (4.13)
pl pmk\kl,m *. klq mq)>
0„„ ae — 6 .x? .. (4.14)
pq otnR Rq, tn \ 7
Более того, с учетом (А.6) и (А.8) легко проверить, что общие
соотношения (II. 6.27) и (II. 6.28) между плотностями петель
(4.3) и (4.4) и плотностями дефектов (4.11) и (4.12) имеют
вид
apl = epmk (PfcZ, tn + Gklq^mq\ (4.15)
<4Л6)
Мы также видим, что плотности дефектов (4.11) и (4.12)
удовлетворяют общим условиям неразрывности (см. (1.6.8),
(1.6.2), (II. 5.27) и (II. 5.28)):
ар/, р “F е/р^0рр = 0> (4.17)
0р9,Р = О. (4.18)
Далее мы находим полный вектор Бюргерса, который в общем
случае определяется через базисные пластические поля
144
Гл. IV. Прямолинейные дисклинации
соотношениями (см. (II. 4.5)):
Bz = — — 6/?гн^г) dLk, (4.19)
к
где Л — контур Бюргерса (рис. 5). В нашем частном случае,
используя (А.8) и (А.9), из (4.7) и (4.8) получаем, что
Bz = 0. (4.20)
Общее выражение для полного вектора Бюргерса изолиро-
ванного дефекта имеет вид (см. (II. 5.17)):
и с учетом нашего предположения, что bt = x^ — 0, оно сво-
дится к выражению (4.20). Полный вектор Бюргерса Bt дает
скачок перемещения в начале координат, который обращается
в нуль согласно рис. 10—12. В общем случае полный вектор
Бюргерса можно выразить также через плотности петель де-
фектов (II. 6.31) или плотности дефектов (II. 4.7):
<4-22>
А,
= (apZ ^Iqr^pq^r) dSp) (4.23)
а -
где о — поверхность Бюргерса (рис. 5). Используя (4.3),
(4.4) и (4.11), (4.12), легко показать, что эти уравнения сво-
дятся к уравнению вида (4.20). Выберем в качестве контура
Бюргерса X круг радиуса а, расположенный на плоскости
Х1Х2, с центром в начале координат (рис. 5). Тогда с учетом
(4.8) и (А.19) — (A.2I) имеем
-§tfkqdLk=Qq (4.24)
Л
в соответствии с (II. 5.18); это подтверждает, что Qq есть век-
тор Франка. С учетом (4.4) и (А.23) мы также имеем
- § ,dLk = - § QqH (- х,) 5 (х2) dL2 = Qq (4.25)
К к
в соответствии с (II.6.32), а согласно (4.12) и (А.22),—
J 0р? dSp = J Qfl6 (х.) б (х2) dS3 = Й (4.26)
а а _
5. Статика прямолинейных дисклинаций в изотропном теле 145
в сответствии с (II. 5.30). В общем виде.скачок перемещения
на поверхности S определяется соотношениями (см. (II.5.1),
(II. 5.5)):
[ut (г)] = В{ + etqrQqxr = (4.27)
=W«(W (4-28)
В нашем частном случае, когда Ь1 — х^~ 0, или с учетом
(4.20) это соотношение сводится к виду.
[м|(г)]=е/?гЙвхг. (4.29)
Этот скачок перемещения соответствует скачкам, изображен-
ным на рис. 10—12. Итак, в этом разделе мы нашли выраже-
ния для плотностей петель дефектов (4.3) и (4.4), базисных
пластических полей (4.7) и (4.8) и плотностей дефектов (4.11)
и (4.12) для прямолинейной дисклинации, проходящей по оси
Хз. Эти уравнения полностью согласуются со всеми общими
геометрическими результатами гл. II.
В заключение этого раздела приведем выражения для
тензора несовместности. В общем виде он задается соотно-
шением (см. (1.6.6), (II. 4.12)):
Лр<;== п ~Ь (₽<?)• (4.30)
В нашем случае, используя (А.9), из (4.11) и (4.12) находим
не равные нулю компоненты тензора несовместности
Ли = — ^16 (Xj) 6 (аг2)э (4.31а)
1)23 = — О2б (х,) б (х2), (4.31 б)
Т|зз = Q1X36' (xj б (х2) + ОгХзб (Х1) б' (х2) — Q36 (х() б (хг). (4.31в)
Отметим, что эти результаты удовлетворяют условию нераз-
рывности (см. (1.4.2) и (II. 4.13)):
Лрр, р = 0. (4.32)
Результаты, полученные в этом разделе, применимы как к
изотропному, так и анизотропному телу бесконечных раз-
меров.
б. СТАТИКА ПРЯМОЛИНЕЙНЫХ ДИСКЛИНАЦИЙ
В ИЗОТРОПНОМ ТЕЛЕ
В этом разделе мы найдем упругие статические поля пря-
молинейной дисклинации для бесконечного изотропного тела.
Если выражения Вольтерра (2.1) изменить так, чтобы выпол-
нялось равновесие всюду в теле, то перемещение имеет вид
I
146
Гл. IV. Прямолинейные дисклинации
(см. приложение В):
<=-1^[о-<М1пр + 4] +
+ + 4n(i*-v)p2] ~~ Q3 [itoT ~~ 4«(1 -v) Xl (ln Р - О].
(5.1а)
[Ф х<х9 1 £29Xq Г ~ _ х?1
Ил ~ 4л(1 -v)pj — 4л (f- v) Ь1—lnp + ^J +
+ Ч^+ТХ7Г^<|П<>-»] <51б>
+ f-W
где v — коэффициент Пуассона. Мы использовали декартову
систему координат xj, х2, х3 (см. рис. 5) и цилиндрическую
систему координат р и <р (см. приложение Б и рис. 9). Выра-
жения (5.1) описывают поле перемещения для прямолиней-
ной дисклинации, сосредоточенной на оси х3, с вектором
Франка Ограничивая угол <р интервалом (—л, art), нахо-
дим, что полубесконечная плоскость S превращается в поверх-
ность пластического перемещения, рассмотренную в разд. 4.
Перемещение (5.1) ведет себя асимптотически, как plnp, в
соответствии с табл. 6.
В общем случае полная дисторсия определяется через
перемещения соотношением (см. (1.2.1), (II. 3.9)):
(5-2)
При дифференцировании перемещения (5.1) будем считать,
что трехмерное пространство состоит из двумерной плоскости
XiX2 и независимой одномерной линии х3. Для xf и х2 исполь-
зуем результаты из приложения Б. для обобщенных произвол- ?
ных. Поскольку х3 входит в выражение (5.1) только линейно,
классические и обобщенные производные по х3 совпадают.
Поэтому, используя (Б.З) — (Б.7), для полной дисторсии на- J
ходим
вт й1хз Г(1 2гл *1 2 1
Ри 4л(1—v) I?1 ’ р2 2 р4 J . J
а2Х3 Г/1 О-A *2 | о Х1*21 ।
~ 4Л (1 - V)" И1 ~ 2v)~F + 2 ~1 + |
+ -S7r'brLIJ-2'4’"f- + ^J <5А> 1
5. Статика прямолинейных дисклинаций в изотропном теле 147
К.— 4^[<'-2’)-> + 2^] +
. +[<’ - у -2 +
+ a.xjl (- «,) в М - О, [а + to||^)p,], (5.36)
S2i Г".. \« t *21 । л Г Ф XtXn ”1
Psi= ~ 4я (1 —v) P “ 2v) ln P + -7 ] + 2» *" 4л (1 -v) p2 J ’
(5.3b)
ОI Xo Г . л ' \ *9 л ^1^9!
РТ!=4ДпЫ<3-2'’>-?-2-?£]-
Q2x3 Г/1 _ 2v^ — 4- 2 *1XH 4- О Г J₽___*1*2 1
~4n(l-v)LU zv'p2+z p4 J + “3L2n 4я(1 — v) p2 J ’
(5.3г)
Q1X0 Г л \ *1 1 л ^1^2*1
$22 = ~ 4Л (1 —V) I/1 ~~ p2’ P4 -1
- QiX3H (- x.) 6 (x2) - [(1 - 2v) £ - 2 ф] +
+ 4n(f—~v)~[(1 “2v)lnP + тИ + (-*1)6<5-3Д)
₽32 = — Й1 [‘гя’ ~ 4л (1 - v) p2 ] “ 4я(1 -v) [^ — 2v)ln p + 7?]’
(5.3e)
?13= 4n (1 — v) bl — 2v) 'np + —
[Ф *1*9 1 &9 Г. ч X? 1
2л 4л (1 - v) p2 J ~ 4л (1 - v) P — 2v) In P + —
— QiXlH (— X,) 6 (x2), (5.3з)
₽зГз = 0- (5-Зи)
Отметим, что в выражениях для полной дисторсии есть чле-
ны, сингулярные на поверхности S и полностью совпадающие
с плотностью петель дислокаций р^, определяемой (4.3). Этот
результат совпадает с общим уравнением (II. 5.34). Поэтому
148
Гл. IV. Прямолинейные дисклинации
мы можем рассматривать эти члены как пластическую дистор-
сию P£z и, следовательно, из (3.13) получить упругую ди-
сторсию. Такова точка зрения Муры [9]. Следствия этого под-
хода будут исследованы в разд. 8. Строго говоря, мы сво-
бодны в выборе способа разложения полной дисторсии «а
упругую и пластическую части. Отметим, что в выражениях
(5.3) для полной дисторсии содержатся члены с углом <р, в
отличие от случая дислокаций. Поскольку <р терпит разрыв на
поверхности S, его нельзя разложить на часть, непрерывную
по всей области тела, кроме оси х3, и часть, локализованную
на поверхности S. Поэтому полную дисторсию нельзя разло-
жить на упругую часть, которая непрерывна везде, кроме оси
Хз, и на пластическую часть, локализованную на поверхности
пластического перемещения S. Однако будет показано, что
в выражениях для базисных полных полей нет членов с углом
<р, и поэтому интуитивно легко найти способ разложения этих
полей на упругую и пластическую части.
Сначала рассмотрим полную деформацию, представляю-
щую собой симметричную часть полной дисторсии и состоя-
щую из упругой и пластической частей (см. (II. 4.14))1
eki ~ 0<м)= eki "Ь ekf (5.4)
Подставляя (5.3) в это выражение, находим, что сингуляр-
ные на поверхности S члены соответствуют пластической де-
формации е£;, определяемой (4.7). Поэтому для упругой де-
формации в случае прямолинейной дисклинации находим
Й.Х3 Г/. „ . X, п XlXol
еп = — 4я(1 _v) [(1 — 2v)-- —2 J —
_ -2v)4 + 2 -^1 +
4л (1 — v) L4 7 p2 1 p4 J 1
+ [(1 - 2’>ln •>-+ 4] (5-5a)
Qlx3 ГZi О.Л X1 t n xlx21
622 “ 4Я (1 — V) U1 2V) p2 + 2 p« J
л \ Л *1
L<‘
+ to-o’-v) [d~2-)lnp+4]' <5-56>
£зз — 0, (5.5b)
5. Статика прямолинейных дисклинаций в изотропном теле
149
Q1*3 Г *2 о *1*2 1 ,
#12 4л(1 — V) L Р2 Р4 J "Г
I й2*3 Г *1 о *1*2 "I ^3*1*2 - V
ф 4л (1 - v) L р2 z р4 J 4л (1 - V) р2 ’
О1Х1Х9 Q9 Г Xi 1
б23 = 4л (1 _ V) р2 ~ 4л (1 - V) [0 “ 2v)ln Р + J • (5.5д)
e3i = - 4л (1 _ V) [о — 2v),п р + 77J + 4л (1 _ V) р2 • (5.5е)
Изменение объема е — e^h равно
‘— 2,(7^- |Цд+ад + 12(1 - 2,)1пр -1].
(5.5ж)
В выражение упругой деформации входят функции, которые
непрерывны повсюду, кроме оси Хз, что естественно для упру-
гих полей. Эти выражения приводят также к логарифмиче-
ской зависимости упругой деформации от координат на боль-
ших расстояниях от линии дисклинации в соответствии с
табл. 6.
Чтобы найти полный изгиб-кручение, найдем сначала
полный поворот, определяемый в общем случае соотношением
(см. III. 5.11)) 5
•{“'М* . (ЗД
или, с учетом (5.3), в нашем частном случае:
Wiff(-«i)«W, (5.7а)
' Waff(-*,)«W+-^-. (5.7»)
В этих выражениях содержится также угол ф, что препят-
ствует разложению полного поворота на упругую и пластиче-
скую части. Полный изгиб-кручение в общем случае опреде-
ляется через полный поворот и может быть разложен на
упругую и пластическую части (см. (II. 4.15)):
= + <5>8)
Дифференцируя функции (5.7), находим, что сингулярные
на поверхности S члены соответствуют компонентам пласти-
ческого изгиба-кручения определяемым соотношением
150
Гл. IV. Прямолинейные дисклинации
(4.8). Поэтому, используя (А.6), (Б.З), (Б.4) и (Ь.8), для
упругого изгиба-кручения получаем
%11 ~ 2лр2 ’ ^21 2лр2 ’ Х31 = 0, Q2X2 Х12 — 2лр2 ’ ’ Й2*1 %22~ 2лр2 ’ %32 = 0, QjXjXnXo QnXq Г 1 х« "1 Q0X9 %. L 1„= 2Р;+»ад] (5.9а) (5.96) (5.9в) (5.9г) (б.9д) (5.9е) (5.9ж)
OiXq Г 1 Хл . Ч"1 QnXiXnXn Q0х। 5423 — 2л [р2 2 +я5(р)] + лр4 ' 2лр2 * QjX2 Q2X1 ^33 2лр2 2лр2 (5.9з) (5.9и)
Упругий изгиб-кручение, как и упругая деформация, не
содержит угла ср и является непрерывной функцией повсюду,
кроме оси Хз. Если нам ничего не известно заранее о базисных
пластических полях (4.7) и (4.8), то мы могли бы задать их
через базисные полные поля, сингулярные на поверхности S,
поскольку эти поверхностные сингулярности интуитивно по-
казывают, где имеет место пластическое перемещение/Таким
способом мы могли бы получить и базисные упругие поля
(5.5) и (5.9) исходя из выражения для перемещения (5.1),
как обсуждалось в конце разд. 2.
Для проверки непротиворечивости наших результатов, ис-
пользуя (Б.8) — (Б. 12), можно показать, что базисные упругие
поля (5.5) и (5.9) и плотности дефектов (4.11) и (4.12) удов-
летворяют уравнениям поля (см. (1.6.3), (1.6.1), (II. 4.17) и
(II. 4.18)):
Gpmk (pkl, т “Ь ^klq^mq) === ^>рЬ (5.10)
^pmk^kq. т ~ ®pq9 (5.11)
Эти результаты подтверждают, что (5.5) и (5.9) представ-
ляют собой выражения для базисных упругих полей в случае
изолированной дисклинации, сосредоточенной на оси х3. Бо-
лее того, с учетом (Б.8) — (Б. 12) можно проверить, что упру-
5. Статика прямолинейных дисклинаций в изотропном теле
151
гая деформация (5.5) и тензор несовместности (4.31) удов-
летворяют уравнению поля (см. (II. 4.22)):
' ^pmk^qnl^kl, mn== (5.12)
Далее покажем, что условия равновесия выполняются
всюду. Сначала из закона Гука (3.18) и упругой деформации
(5.5) находим выражения для напряжения
GQjX3 I X] Q *1*2 1 ^О2х3 Г х2 । о
2n(l-v)lp2 Р4 J 2л (1v) L р2 ’
GQg Г х2 v 1
+ 2TT1-V) LlnP +7? +T=27j’
GQ2X3 Гх1 *1*2 1 GQ2X3 Г Х2 q
2n(l-v) р4 J 2л(1 - v) Lp2‘"“2
! GQ3 ( х2 f v "j
2л (1 — v) L ° Р + Р2 1 — 2v J ’
а» — „(1С_"’)Р. (ОЛ + ад + [2v Ш р +
оп =
°22---
GQtXq Г х9 ХлХр ”1
’«=s<r=^l/-2v1J +
GQ2x3 Г х2 х^-1 ___ GQ3x1x2
’ 2л (1 — v) L р2 р4 J 2л (1 — v) р2 ’
GQiXiX2 GQ2 |”z _ ч, *i 1
<У23 = о’ zi Г~2 Ъ Л ~2~""Г (1 — 2v) In р + — L
25 2л (1 — v) р2 2л (1 — v) Lv r р2 J
GQi Г X? "I GQpXiXp
G31 = — 2л (1 - v) U1 ~ 2v) 1° p + J + 2Я (1 _ v) p2 •
Подставляя эти результаты в уравнения равновесия
учетом (Б.5) — (Б.10) находим, Что
Л=0
.2
.2
*1*2
Р4
-2 .1
1 - 2v J ’
(5.12в)
(5.12г)
(5.12д)
(5.12е)
(3.20), с
(5.13)
во всей рассматриваемой области, включая и ось х3, так что
приведенные выше поля находятся в равновесии без участия
объемных сил. Выражение (5.1) для перемещения содержит
характерные члены Вольтерра (2.1) для дисклинации. По-
этому, как обсуждалось в разд. 2, мы можем заключить, что
(5.1) представляет собой точное выражение для перемещения
в случае прямолинейной дисклинации.
В этом разделе мы получили статические поля, т. е. поля
перемещения, полной дисторсии, базисные упругие поля (де-
формации и изгиба-кручения) и поле напряжения для пря-
молинейной дисклинации для бесконечного изотропного тела.
152
Гл. IV. Прямолинейные дисклинации
6. ДИСКЛИНАЦИЯ СО СМЕЩЕННОЙ ОСЬЮ ПОВОРОТА
Можно получить более общие результаты, если отказаться
от принятого в разд. 4.5 ограничения, что ось дисклинации
проходит через начало координат. Оно было использовано
для получения явных формул из общих выражений гл. II.
В этом разделе будут рассматриваться только те соотноше-
ния, которые нужны для решения вопроса о перемещении оси
дисклинации. С помощью этих соотношений будет показано,
что эффект смещения оси дисклинаций эквивалентен добав-
лению дислокации к дисклинации, о чем уже упоминалось
в гл. П.
6.1. Геометрия
Общее выражение для плотности дислокаций изолирован-
ного дефекта дается соотношением (4.9). Рассмотрим случай
изолированной дисклинации, сосредоточенной на оси х3, с
осью поворота, проходящей через точку х^. Тогда, полагая
bi = 0 и используя (А. 15), вместо (4.11) имеем следующие не
равные нулю компоненты плотности дислокаций:
«з/=еЛ (5 - О6 (х06 (*2)- (6- О
С другой стороны, плотность дисклинаций изолированной
дисклинации со сдвинутой из начала координат осью пово-
рота остается той же, что ив (4.12). Выписывая (6.1) пол-
ностью, имеем
аз1= [^2 (хз *з) + ^3*2] $ (х1) $ (^г)» (6* 1а)
а32 ~ [ ^3*1 (Х3 4)] $ (*1) а (Х2)> (6* 1 б)
«33 = l?“ Q1X2 + Q2X1] 6 (Xl) 6 (*2)> , (6Лв)
где мы использовали (А.8). Конечно, при х£ = 0 эти резуль-
таты сводятся к (4.11). В рассматриваемом случае из (4.21)
при bi = 0 находим, что полный вектор Бюргерса уже не ра-
вен нулю:
= . (6-2)
Итак, из (4.27) и (4.28) получаем, что скачок перемещения
на поверхности S в нашем частном случае имеет вид
А (Жг-»Э. (б.з>
или, если записать подробно:
[wi (г)] — ^2 (хз хз) ^з (х2 ““ хг)’ (6.3а)
[^2 (г)] ~ ^з (*i (*з ^)> (6.36)
(г)]= (х2 *з) ^2 (Х1 *?)• (6.Зв)
6. Дисклинация со смещенной осью поворота 153
Полный вектор Бюргерса (6.2) есть скачок перемещения в
начале координат. Антони [10] рассмотрел дисклинацию кру-
чения мощностью Qi с осью поворота, проходящей через
точку x£ = x2(Z), х° = 0. Чтобы получить этот случай, поло-
жим Й2 == £2з = 0 в уравнениях (6.3а) — (б.Зв). Тогда из урав-
нений (4.12), (6.1) и (6.3) остаются следующие не равные
нулю компоненты:
031 = Qjd (xj) б (х2), (6-4)
U32 — й]Хзд (Х[) б (Х2), (6,5а)
взз = — 0^2 (Z) б (Xj) б (х2), (6.56)
1«2] = — Q,x3 (Ро), (6.6а)
[«3] = QI(x2(P0)-x2(Z)), (6.66)
где мы положили х2 = Х2(Ро), х3 = х3(Ро). Эти уравнения
соответствуют уравнениям Антони (31), (33) и (34). Следо-
вательно, наши результаты полностью соответствуют резуль-
татам Антони.
Сравнивая. (6.1) с (4.11), видим, что при добавлении плот-
ности дислокаций
a3l = ~ eiqr^qXl (*1) & (*2) (6.7)
к линии дисклинации, рассмотренной в разд. 4, ось дисклина-
ции сместилась из начала координат в точку х^, что согла-
суется с (II. 5.24). С учетом (3.4) это соответствует добавле-
нию линии дислокации с вектором Бюргерса
к линии дисклинации, что соответствует (II. 5.23). Запишем
выражение (6.8) подробно:
+ (6.8а)
б2 = -П3х? + О1х», (6.86)
&3=-Q1xO4-Q2x?. (6.8b)
Таким образом, ось дисклинации смещается из начала коор-
динат в точку х^ простым добавлением дислокации с векто-
ром Бюргерса (6.8) к этой дисклинации.
6.2. Статика
Поля прямолинейной изолированной дисклинации, сосре-
доточенной на оси х3, со смещенной в точку х° осью поворота
можно получить сложением полей дислокаций из разд. 3.2
154
Гл. IV. Прямолинейные дисклинации
из
их
z
4n(l-v) I?
+ Q2 (X3
. ^3 (X1
4л (1
— Q3 (x2 — x°)
с вектором Бюргерса (6.8) и полей дисклинаций
Например, подставляя (6.8) в (3.12) и добавляя
получаем выражения для перемещения
х21
2v)lnp + -rrJ +
Г -I
ФК + -4М1---;>р.]+ '
£[(1 _2v)lnp + -i|]-
XiX2 1 n 1 - 2v
4я(1— v) p2 J 34n(l—v) *’
(5.1),
ul = - Q. (x. - 4H Л - „ nX'X\ 21 -
2 1\ 3 з/|_2л 4л (1— v)p2J
Qo ^Xq — *q) Г _ X? 1
--4Ч------Г- (1 -2v npH—r| +
4л (1 — v) L' ' r 1 p2 J 1
_ y0\ Г_Ф_____X1X2 1 |
ЛМ12я 4n(l-v)p2V
„ . , ,*il Л 1 — 2v
r 2v) In p + J - Q3 -4jt (1_v) X2,
। йз(х2 *г) Г/.
"Г 4л (1- v) I?
7 п Г(Х2"Х2)ф 1 — 2v 1
I a 7"j г” Xi (If! О 01
3 1 L 2л 4л (1 — V) 1 v r 'J
~ l—2v „ 1
«^i^T^Clnp-Dj-
разд. 5.
к
(6.9а)
(6.96)
(6.9в)
Это перемещение соответствует случаю прямолинейной ди- 1
склинации, сосредоточенной на оси Хз, со смещенной в точку
х® осью поворота. Другие поля можно вычислить таким же .
способом или вывести из (6.9) методом, использовавшимся J
в разд. 5.
7. БЕСКОНЕЧНО МАЛЫЙ ДИПОЛЬ ДИСКЛИНАЦИЙ
В этом разделе мы применим общие выражения разд. 7
гл. II к случаю линейного дисклинационного диполя. Двухос-
ный диполь получается перемещением исходной прямолиней-
ной дисклинации целиком на бесконечно малое расстояние
gm. Одноосный диполь получается смещением только линии
дисклинации при фиксированной оси поворота. В обоих слу-
чаях отрицательная исходная дисклинация расположена сле-
ва от оси х3.
7. Бесконечно малый диполь дисклинаций
155
7.1. Двухосный диполь
В общем случае плотности дефектов двухосного диполя
определяются соотношениями (см. (II.7.1) и (II.7.2)):
Р-0
в?,= -ЕЛ.-«. Р-2)
где aPi и Gpq — плотности дефектов, соответствующие базис-
ным дефектам. В случае изолированного прямолинейного
двухосного диполя дисклинаций плотности базисных дефек-
тов даются выражениями (4.11) и (4.12). Поэтому для диполя
в соотношениях (7.1) и (7.2) имеем следующие не равные
нулю компоненты:
= - ь Л W.» „ (р) + (р)]. Р-З)
e»=-ox,s „(р). р-4)
где 6 (р) — двумерная дельта-функция Дирака, определяемая
выражением (Б.9). Эти результаты также можно найти из
(II. 7.3), (П.7.4) и (А. 15). В этих выражениях пред-
ставляет собой мощность диполя. Выписывая (7.3) и (7.4)
полностью, мы получаем
а31 = ^2 [*3^ 01) Ог) “Ь 01) Ог) +
+ 13б(х1)б(х2)], (7.3а)
a^ = Q1[x3|]S (Xj) б(х2) 4* x3|2®(-^i) б Ог) 4“ ?з^ 01) Ог)!» (7-36)
03°. = - Ц ЕМ' 0«) б (х2) + в2б (х,) д' (х2)], (7.4а)
6f2 = - Й2 [1,6' (х,) д (х2) + ^б (х,) д' (х2)], (7.46)
03D3 = - Q3 ЕМ' 01) 6 О2) + 01) б' (*2)]р (7.4в)
где мы использовали (А.8) и (А.9).
В общем случае поле перемещения двухосного диполя за-
дается соотношением (см. (II. 7.5)):
Р-5)
где итп — перемещение для соответствующего базисного де-
фекта. В нашем случае дисторсия для базисной прямолиней-
ной дисклинации задается соотношением (5.3), и поэтому
156
Гл. IV. Прямолинейные дисклинации
перемещение диполя равно
„р_ Qi^i*3
“1 4П (1 _ V)
*1*2
Р4
*1 » *1*2
Р2 Р4
4л(1—v) I?
(Ojg2 + Q2^) x3 Г
4л(1—v) I?1 Z
[(1_2v)lnp + ^
X^X2 1 I
P4 J +
*2 n *1*2 1
-r — 2-V- +
P2 p4 J ~
4л (1 — v)
х2
2v)-r - 2
D__ а1^1*з
м2 — 4л(1—v)
I й2^2*3 Г/t _ О-Л
4л (1 — v) L( '
। (а1?з + аг11) *з f/t f
"* 4л (1- v) LU *
й2^з~йзВг _«
4л (1 — v) I?1
Ofc Г v2 1
*1*2
Р4
te('-v)p-]- <7'И>
iiD =-------
И3 4л (1
.2
—^Ц.Г(1-2у)1п(
4л (1 — v) Lx 7 1
-«i,i,-QA)[^-te(i^)p,]. <7-6b>
где мы из (5.3) отбросили члены, сосредоточенные на поверх-*
ности S. Мы считаем, что перемещение не является парамет-
ром состояния, поскольку выражение для него содержит
угол ф. На больших расстояниях от линии диполя перемеще-
ние логарифмически зависит от расстояния в соответствии с
табл. 6.
7.2. Одноосный диполь
Чтобы получить соотношения ДЛЯ ОДНООСНОГО ДИПОЛЯ ДИ-4
склинаций, рассмотрим сначала результат смещения оси ба^
зисной дисклинации на бесконечно малое расстояние при
фиксированной дисклинации. Плотность дислокации для та-
7. Бесконечно малый диполь дисклинаций 157
кого дефекта определяется соотношением (см. (II. 7.7)):
«ИЛМ <7-7)
а плотность дисклинаций обращается в нуль (брр — 0). В слу-
чае прямолинейных дисклинаций из (6.1) находим, что не
равные нулю компоненты плотности дислокаций (7.7) равны
4 = -%W(p) (7.8)
в соответствии с (II. 7.9) и (А. 15). Поле перемещения в слу-
чае такого дефекта равно (см. (II.7.11)):
p-в)
и в случае прямолинейных дисклинаций с учетом (6.9) при-
нимает вид
= — (Q^ — Q3Q[JL 4- 4jt(J р2 ] —
- °4мГЛ)‘ [<' ~^)!пр+>]. (7.10а)
-(<м,-а,ы[£- 4„(1TV)P.]. <7-10б>
—(о1Е!-ол,)£. (7.10b)
Сравнивая (7.8) и (7.10) с (3.4) и (3.12), видим, что приве-
денные выше выражения представляют собой плотность ди-
слокаций и поле перемещения для изолированной прямоли-
нейной дислокации с вектором Бюргерса
— ^Iqr^q^r । (7.11)
в соответствии с (II.7.13).
Теперь найдем соотношения для изолированного прямоли-
нейного одноосного дисклинационного диполя. В общем слу-
чае они определяются разностью между результатами
разд. 7.1 и приведенными выше результатами. Например,
плотность дислокаций находится из разности (см. (II. 7.14)):
apt = api—api- (7-12)
Следовательно, из (7.3) и (7.8) находим следующие не рав-
ные нулю компоненты плотности дислокаций (7.12):
a3l = ~ eiqr^qXr%rr£, т (₽) (7; 1.3)
158 , Гл. IV. Прямолинейные дисклинации |
в соответствии с (II. 7.15) и (А.15). Записывая это выражение j
подробно, получаем а
а31 = (xi) & (хг) "Ь (Х1) & (Х2)] 1
-£М2б(*1)б(х2), (7.13а)
а32 = (Xl) (Хг) “Ь (Х1) ® (Х2)] 4" 1
+ Q3M(*1)4*2)> (7.136) |
азз = (Q& - ад 6 (*0 S (*2), (7.1 Зв) j
где мы использовали (А.8) и (А.9). Плотность дисклинаций
одноосного диполя такая же, как и в случае двухосного ди-
поля (бр<7 — т. е. определяется соотношением (7.4). Поле j
перемещения одноосного диполя определяется соотношением
(см. (II. 7.16)):
«„==«»-“»• (7Л4)
Используя (7.6) и (7.10), в нашем частном случае получаем
, а1Е1*з Г(1 2 ч xi 2 *1*И_
“1 4л (1— v) I?1 р2 р4 J
~t^[<3-2^-2v4 +
+ [<> - 2’)> + 2 4^] • <7-15а) 1
“5 - - L<3 - 2 тН J +
+ 4^г[<‘-2^-24^] +
- +(^Г-Т,[<1-2^+2^]'
“з‘=1^[(>-2’)'"р + 4] +
+ 4л (1 -v) Ь1 — 2v)ln Р + — 4л (| р. • |
(7.15в) I
Отметим; что эти .выражения уже не содержат угол <р, и по* 1
этому является параметром состояния. Асимптотическая I
зависимость перемещения на больших расстояниях от Ди-1
8. Дислокационная модели прямолинейной дисклинации
159
поля такая же, как и в случае двухосного диполя, и пока-
зана в табл. 6.
Более того, перемещение для одноосного диполя не со-
держит вклада от клиновой дисклинации, т. е. Оз не входит
в (7.15). Поэтому мы можем заключить, что поле перемеще-
ния краевой дислокации можно получить из поля двухосного
диполя клиновых дисклинаций. В частности, полагая
q1 = q2==0, (7.16)
для (7.11) находим
= (7.17а)
62 = -йз11. (7.176)
Подставляя эти результаты в (7.6а) и (7.66), находим (3.12а)
и (3.126). Этот метод получения поля перемещения для крав'
вой дислокации был впервые указан Эшелби в работе [11].
8. ДИСЛОКАЦИОННАЯ МОДЕЛЬ ПРЯМОЛИНЕЙНОЙ
ДИСКЛИНАЦИИ
8.1. Геометрия
'Дислокационная модель изолированного дефекта вдоль
кривой L рассматривалась в разд. 9 гл. II. Эта модель была
получена исключением плотности петель дисклинаций (см.
из соответствующей поверхности дефекта 5 с контуром L.
Проиллюстрируем это для нашего случая и найдем дислока-
ционную модель прямолинейной дисклинации. Поверхность S
можно выбрать многими способами, но мы рассмотрим ту
поверхность, которая была использована в предыдущих раз-
делах и показана на рис. 5.
Плотность петель дислокаций определяется по-прежнему
соотношением (4.3) и совпадает с пластической дисторсией
(П.9.2). Поэтому не равные нулю компоненты этой плотно-
сти равны
В = Ий = W (- *1) 6 (8-2)
или, в подробной записи
Р21 = Р21 = ^зя (~ *0 6 (х2), (8.2а)
Р2₽2 = Р*22 - (Q3*1 - <Vs) Н (- %,) 6 (х2), (8.26)
р2з = Ри = -й2хЛ(-^1)б(х3). (8.2в)
160
Гл. IV. Прямолинейные дйсклинации
Плотность дислокаций для дислокационной модели в общем
виде задается соотношением (см. (II. 9.7)):
«Р/ (г) = 6Р (L) {bt + elqrQq (xr - х?)} + dz (S) Qp - 6pZ6ft (S) (8.3)
и в нашем случае, когда &z = xJ! = O, имеет компоненты
an = Q2H (— Xi) S (х2), (8.4а)
02! = О, (8.46)
а31 = Q2x3S (xi) 6 te), (8.4в)
012 = — (— х,) S (х2), (8.4г)
022 = 0, (8.4д)
а32 = — QiX3d (xi) S (х2) — £l3H (— X!) д (Хг), (8.4е)
«1з = 0, (8.4ж)
а2з = 0, (8.4з)
а33 = £22Я(—Xi)S(x2). (8.4и)
Здесь при вычислении использованы выражения (А.15),
(А. 16) и (А.8). Дислокационная модель состоит из двух ча-
стей: первая часть равна плотности дислокации вдоль кривой
L, совпадающей с плотностью дислокаций, соответствующей
дисклинации (4.11), а вторая часть представляет.собой плот-
ность, равномерно распределенную по поверхности S и опре-
деляемую выражениями, в которые входит функция Хеви-
сайда. На рис. 13—15 показаны три различных типа дислока-
ционных моделей для Qi, Й2, й3. Хотя соотношение (8.4) от-
носится к случало равномерного распределения дислокаций,
-которое довольно трудно изобразить на рисунке, мы все же
показали дискретное распределение, являющееся хорошей
аппроксимацией равномерного распределения, и в то же вре-
мя довольно наглядное. Эти рисунки представляют дислока-
ционные модели прямолинейных дисклинаций, изображенных
на рис. 10—12. На рис. 13 и 15 представлена ограниченная
стенка наклона, а на рис. 14 — ограниченная стенка кручения.
Плотность дисклинаций в обоих случаях, разумеется, равна
нулю:
0м = 0. (8.5)
Для проверки непротиворечивости полученных результатов
легко показать, что (8.2) и (8.4) удовлетворяют определению
(3.5). Легко также проверить, что соотношения (8.4) удовлет-
воряют условию неразрывности (3.6), что согласуется с
(II. 9.9).
*3
Рис. 13. Дислокационная модель дисклинации кру-
чения, показанной на рис. 10.
Стенка наклона на поверхности S (рис. 5), ограниченная
осью Хз, представлена множеством параллельных крае-
вых дислокаций. Стрелки указывают направление век-
тора Бюргерса, а короткие линии, присоединенные к ним»—
ориентацию дополнительных полуплоскостей. Этот дефект
описывается плотностями дислокаций (-хх) б (х2)
и а32= - 81X36 (Xi) б (х2).
^2
Рис. 14. Дислокационная модель дисклинации кру-
чения, изображенной на рис. 11.
Стенка наклона на поверхности S, ограниченная осью х3,
представлена в виде пересекающейся сетки винтовых
дислокаций. Векторы Бюргерса показаны стрелками, а ко-
роткие линии, присоединенные к ним, дают ориентацию до-
полнительных полуплоскостей краевых дислокаций. Этот
дефект описывается плотностям# дислокаций a,t=au —
- Q2H (-хд б (х2) и а31=82хаб (xi) б (х2)..
6 Зак, 201
162
Гл. IV. Прямолинейные дисклинации
В заключение этого раздела рассмотрим выражения для
тензора несовместности. Подставляя (8.4) в (3.9), находим
следующие не равные нулю компоненты тензора несовмест-
ности:
П13 = — (*i) 6 (х2), (8.6а)
т]23 = — 2,6 (xi) S (х2), (8.66)
т)зз = QiX3S' (хО S (х2) + йгХ36 (xj S' (х2) — Q36 (хх) д (х2). (8.6в)
Эти выражения идентичны соотношениям для тензора несов-
местности соответствующей дисклинации (4.31). Поскольку
хг
Рис. 15. Дислокационная модель клиновой диск-
линации, изображенной на рис. 12.
Стенка наклона на поверхности S, ограниченная осью Хз,
представлена множеством параллельных краевых дисло-
каций. Векторы Бюргерса показаны стрелками, а корот-
кие линии, присоединенные к ним, дают ориентацию допол-
нительных полуплоскостей. Этот дефект описывается плот-
ностью дислокаций аз2=- Й3Я (-Xi) б (х2).
несовместность является источником упругой деформации
(см. (II. 4.22) и (II. 4.31)), то дислокационная модель опре-
деляется той же самой упругой деформацией, что. и соответ*
ствующая изолированная дисклинация.
8.2. Статика
Согласно (II.9.11) и (II.9.12), полное перемещение и ди*
сторсия для дислокационной модели и соответствующей ди-
склинации идентичны и определяются соотношениями (5.1) и
(5.3).
Чтобы определить упругие поля, необходимо знать, как
разложить полные поля. Разница между изолированной ди-
8. Дислокационная модель прямолинейной дисклинации
163
склинацией и ее дислокационной моделью обнаруживается
при разложении полных полей различными способами. Для
изолированной дисклинации было отмечено, что полная ди-
сторсия не может быть разложена на упругую и пластиче-
скую части. В частности, в разд. 5 было указано, что выра-
жения (5.3) для прямолинейной дисклинации не могут быть
разложены на упругую и пластическую части из-за того, что
они содержат угол ср. В случае дислокационной модели отка-
жемся от этой точки зрения-и будем считать, что полная
дисторсия может быть разложена на упругую и пластическую
части. Этот подход приводит нас к новым понятиям «пласти-
ческой дисторсии» и «упругой дисторсии», введенным Мурой.
В частности, покажем, что в случае прямолинейной дисклина-
ции соотношения (5.3) могут быть разложены. Логично
отнести к пластической части те члены в выражении плотно-
сти, которые сосредоточены на поверхности S. Эти члены соот-
ветствуют в точности (8.2) или плотности дислокационной
петли разд. 4. Упругую дисторсию находим из (3.13), (5.3)
и (8.2):
. jft-y [(1 - 2v)4 + 2 Ф-1 +
4я (1 — v) Lx ’ р2 р4 J * 1
+ 4„U*-v)-[<1-2V>lnP + ?]' <8‘7а>
QqXq Г . х^Хл "1
+ Л /Т - г I (3 — 2v) —4- — 2 -V —
4л (1 — v) I? Р2 Р4 J
— Q3+ л-йХ1Х2\ 21, (8-76)
J L 2л 1 4л (1 — v) р2 J ’ v '
О Г 1*2 1
+ a4l£ <8-7в>
р12 = __Г (3 _ 2v) - 2 ^ф-1 -
ги 4л (1 — v) I? ' р2 р4 J
Гп о..\ *1 । о *1*2! ।
“ 4л(1—v) U1 “ + 2 ~J +
+ q3L^ .1 (8.7г)
1 3|_2л 4л (1— v)p2J v
6»
164
Гл. IV. Прямолинейные дисклинации
+ 4MT=^[(1-2v) '"р + тй- <8-ЗД
о __ 0 Г ф______Х1^2__1
Р32 112я 4л (1 — v) р2 J
~ 4п (1 — v) [(I — 2v) In р + j, (8.7е)
Р'>—tairh)-[(* -2” I"»+$ -
<8-^)
Рзз = Й1 + 4„ (| р2 ] —
- taTT^rt'1 - 2v) In Р +-^-]. (8.73)
₽з« = 0. (8.7и)
Эти выражения представляют собой упругую дисторсию для
«дислокационной модели» прямолинейной дисклинации. Они
также являются «упругой дисторсией» Муры для прямолиней-
ной дисклинации. Отметим, что эти выражения все еще
содержат угол ср. Непротиворечивость этих соотношений вы-
текает из того, что (8.7) и (8.4) удовлетворяют уравнению
поля (3.15). Теперь из выражений для упругой дисторсии
можно найти другие упругие поля дислокационной модели.
Подставляя (8.7) в (3.16), получаем выражение для упру-
гой деформации, идентичное (5.5). Поэтому упругая деформа-
ция и напряжение дислокационной модели и соответствующей
изолированной дисклинации идентичны, что было отмечено в
разд. 9 гл. II.
Из (3.22) и (8.7) находим выражения для упругого по-
ворота
, О1Ф
(di — о .
1 2л *
йгФ
<* = -2Г’
Q{x2x3 Q2xtx3 . Озф
2лр2 2лр2 2л
(8.8а)
(8.86)
(8.8в)
9: Конечный дисклинационный диполь
165
В общем случае упругий изгиб-кручение задается соотноше-
нием (см. (II. 3.14)):
Xkq = <i>q.k- (8.9)
В нашем случае компоненты изгиб а-кручения имеют вид
(8.10а)
__ Q1
глр5’’
«31 = 0,
__ Ql*2
И'2 — 2яр2 ’
^2 = - + Q2# (-XOW,
х32 = 0,
__ Q1* 1*2*3
%13 яр4
(8.106)
(8.10в)
(8.10г)
(8.10д)
(8.10е)
__ Qj*2 &2*1
Изз 2лр2 2лр2 ’
-2 !+„»(,»]-»
р)]+^^-+
-^- + Й3Я(-х1)6(х2)>
(8. Юж)
(8. Юз)
(8.10и)
где мы использовали (Б.З), (Б.4) и (Б.2). Упругий изгиб-
кручение для дислокационной модели состоит из суммы упру-*
гого изгиба-кручения соответствующей дисклинации (5.9)
и плотности дисклинационной петли или «пластического по-
ворота» Муры (4.4). Непротиворечивость этих соотношений
видна из того, что (8.10) и (8.5) с учетом (Б.8), (Б.11) и
(Б. 12) удовлетворяют уравнению поля (5.11).
Таким образом, новые понятия Муры интерпретируются
просто с помощью дислокационной модели. «Пластическая
и упругая дисторсии» Муры для дисклинации являются пла-
стической и упругой дисторсиями соответствующей дислока-
ционной модели. «Пластический поворот» Муры определяется
полным изгибом-кручением без упругой части для дислока-
ционной модели соответствующей дисклинации.
9. КОНЕЧНЫЙ ДИСКЛИНАЦИОННЫЙ ДИПОЛЬ
Результаты для конечного диполя получаются из суммы
полей положительной и отрицательной базисных дисклина-
ций, удаленных друг от друга на конечное расстояние.
166
Гл. IV. Прямолинейные дисклинации
Предположим, что положительная дисклинация проходит че-
рез точку (L, 0, 0), отрицательная — через (—L, 0, 0) и обе
параллельны оси х3.
9.1. Двухосный диполь -
а. Геометрия
Используя данный выше метод, найдем плотности дефек-
тов для конечного прямолинейного двухосного дисклинацион-
ного диполя, исходя из плотностей дефектов (4.11) и (4.12)
базисной изолированной линии дислокации. Не равные нулю
компоненты плотности имеют вид
аз1 — ®2*з (xi ' & (xi "Ь ^)] ® (*2)’ (9.1а)
аз2 = ~ Qix3 [б (xi — Ь) - д (х, + £)] б (х2), (9.16)
= Qq [б (х, — L) — б (х, 4- L)] S (x2). (9.2)
Интересно также найти дислокационную модель такого
дефекта, поскольку она имеет такие же полное перемещение,
полную дисторсию, упругую деформацию и напряжение.
Плотности дефектов дислокационной модели конечного двух-
осного дисклинационного диполя можно найти из базисных
плотностей дефектов дислокационной модели изолированной
прямолинейной дисклинации, определяемых соотношениями
(8.4) и (8.5). Используя тот же метод, находим
an = - q2 [я (*i - Ь) - Я (х, 4- £)] б (х2), (9.3а)
а°=0, (9.36)
а° = [б (х, -1) - б (х, 4- £)] б (х2), (9.Зв)
а?2 = Q, [Я (х, - £) - Н (х2 4- L)] б (х2), (9.3г)
a2D2 = 0, (9.3д)
«f2 = “ ЙЛ [б (*i - А) - б (х, 4- £)] б (х2) 4-
4- йз [Я (х, - L) - Н (х, 4- £)] б (х2), (9.3е)
а^ = 0, (9.3ж)
af3 = 0, (9.3з)
а° = - Q2 [Я (х, - L) - Я (Xj 4- £)] б (х2), (9.3и)
6°=0. (9.4)
Рис. 16. Дислокационная модель конечного ди-
поля дисклинаций кручения (одноосного и двух-
осного), соответствующая рис. 10 и 13.
Плотности дислокаций равны
<Ч2=Й1 » (Ж2+ Ч] 8 (*!)•
a^=-2jX3 [в (*!-*)-8 (Х1 + 1)1 8 (*г)-
Рис. 17. Дислокационная модель конечного диполя
дисклинаций кручения, соответствующая рис. 11
и 14.
Плотности дислокаций двухосного диполя равны
«П“«?3=-а2 F (хг~Ч~н (*i + L)1 8 (*2),
[в (*,-Ь)]-в +1)] «(*2).
Для одноосного диполя нужно добавить плотность
дислокаций
V18 (*1-L) + 8 (*1 +д)1 8 (хг)’
помеченных двумя векторами Бюргерса в точках L и
168
Гл. IV. Прямолинейные дисклинации
Дислокационная модель состоит из двух частей: плотности
дислокаций соответствующего дефекта (9.1) и постоянной
плотности, распределенной по полоске поверхности между
(—£,0,0) и (L, 0, 0). Этот случай показан на рис. 16—18.
Рис. 18. Дислокационная модель конечного ди-
поля клиновых дисклинаций, соответствующая
рис. 12 и 15.
Плотность дислокаций двухосного диполя равна
aD=a3[H(Xi-L)-H(xl+L)]6(x2).
Для одноосного диполя нужно добавить плотность дис-
локаций
аз2=а3д [в (х,-L)+ в (х, + L)] а (Х2),
помеченных двумя векторами Бюргерса в точках L и —L.
Дислокационная модель двухосного диполя клиновых дискли-
наций (рис. 18) была рассмотрена Ли [12] и названа «дисло-
кационной стенкой».
б. Статика
Поля конечного прямолинейного двухосного дисклинаци-
онного диполя можно получить из полей соответствующих
базисных дефектов, т. е. прямолинейных дисклинаций (опре-
деленных в разд. 5), уже применявшимся выше способом.
Проиллюстрируем это на двух примерах. Найдем сначала
из (5.1) полное перемещение для двухосного дисклинацион-
9. Конечный дисклинационный диполь
169
ного диполя:
«?=
3*з [1 (1 _ 2v) ln _
4я(1—v)L2 (xj + £)2 + (х( — £)2+х2
х2 1 £2пХо г ,
/ ”7 м2 , 2 J + “ТГ I Ф (*1 — L> Хг) — ф (%! + L, х2) +
L) Х2 J 2Л |_
। Х2 ( Х[ L Х\ “I™ L
2 (1 — v) ( (Xj — L)2 + х| (Xj + £)2 + х2
— 17 [*2 <Ф ~ L’ Х^ — Ф <Х1 + L> ~
}]-
1 — 2v J 1 , (х!-£)24-х2
2(1 —v) l2*lln (x, + £)2+x2
—i L In ((xt - £)2 + x2) ((x, + £)2 + x2) + 2L }],
(9.5a)
«f = — -^г[ф (*i — L> x2) — Ф (xi + L, x2) —
____%2 ( *1 — L______X\ + L 'I “I _
2(1 —V) ( (X!-L)2+x| (xf + £)24-x| Jj
_ Q2*3 Г-L m _ 2v) ln (xi~£)2+x| (X, - L)2 _
4л (1— v)L2 (Xi + L)2+xl (Xj — £)2+xf
- гхф^-Гх2!+^Г*1 {<p (x‘ ~£* X2> ~ ф
— у{ф(Х1 —ь, X2) +ф(х1 + £, x2)} +
1 — 2v 1 (X| — L)2 + x| 1
----------X2 — In —-------т------5- I,
2(1 —v) 2 2 (Xl + L)2 + x2i
[*2 {ф (xi — L, x2) - ф (x, + L, x2)J -
1 — 2v ( 1 (X[ — £)2 + x|
-----------5 —X. In -*-!-£-----£ —
2(1 —v) I 2 (x, + £)2 + x2
-1L In ((x, - L)2 + xf) ((x, + L)2 + xf) + 2L}]_
— ‘Й'[Х^Ф(Х1 — L' x2) —ф(х!4-£, Хг)} — -
— £ {ф (xj — £, x2) + Ф (xi + £, x2)} +
l-2v т (х.-^ + х2!
+ 2 (1 - v) 2 2- (x1 + £)2 + xp ’
(9.56)
(9.5b)
где ф(хь x2) определяется соотношением (Б.2). Далее, пола-
гая Й1 = Q2 = 0, из (5.12) находим поле напряжения для
170
Гл. IV. Прямолинейные дисклинации
-------------------------------
двухосного диполя клиновых дисклинаций
са» Г1 !„(*-1)2+*М
11 2я(1 —v)L2 (x{ + L)2 + x2
х| х| 1
(х1 — £)2 4- х$ (xj + L)2 + х| J ’ (9.6а)
= OQ3 П (х,-£)2 + х2
22 2л (1 — v) [.2 (Xj + L)2 + x2
(х. — Л)2_____(xi+L)2 1 ,Q .
(x,-L)2+x2 (Xj + L)2 + x2 J ’ b J
GQoV = 2 In 2л (1 — v) (*1 ^)2 + Х2 (Xi + Lf+xj ’ - (9.6в)
GQ3X2 г Xi — L (9.6г)
°12 2л (1 — v) L (*1-^?+*2 (Xj + L^+x2 J’
&23 = 0, (9.6д)
031 = 0. (9.6е)
Эти напряжения совпадают с напряжениями для конечной
дислокационной стенки на больших расстояниях от нее, полу-
ченными Ли [12], за исключением поворота плоскости XjX2 на
90°.
И. наконец, чтобы сравнить конечный диполь с бесконечно
малым, устремим две базисные дисклинации друг к другу.
Когда в (9.5) £->0, перемещение для конечного диполя бу-
дет стремиться к соотношениям
2WiX3 Г х^ _ xix|1 2LQ2x3 Г х^_ ,
М1 4n(l-v) I?1 ’ р2 р4 J ф4л (1-v) I31 2 } р2 +
фЯ _ 2£О3 Г _ х| ]
1 р4 J 4л (1-— v) L? ' г 1 р2 J 4 1
2lrQnXn Г Хп XiXn 1
тмгМтР-2v)^-2-iAl +
। 2£Q2x3 Гм ола *1 I о *1Х21
+' 4л (1 -"Г L(1 ~ 2у) 7* + 2 — J ~
— 2LQ3ГJL- . z.— x j, (9.76)
3 L 2л 4л(1 —v)p2J ' '
te't-v)- [<‘ - 2v> '">’+?] +
+ 2L4£~4»<rW (9-7В)
9. Конечный дисклинационный диполь
171
Эти результаты согласуются с перемещениями (7.6) для бес-
конечно малого диполя, если положить gr = (2L, 0, 0). Этого
и следовало ожидать, поскольку такой диполь построен для
случая конечного смещения базисной дисклинации по оси
Хь Далее, полагая в (9.6) £->0, находим, что напряжения
для конечного диполя клиновых дисклинаций выражаются
приближенно в следующем виде:
Л 21G&O Г Xi Л Xi*?!
_________I ____L___ О__1 2 I
ан 2л (1 - v) L р2^ р4 J*
D 2LGQ3 ГХ1 1
2л (1 -v) L р2 р4 J’
_______2LGQ3V л xi
Q33"^ 2л (1 - v) р2 ’
2Z/GQq F Хп XiXn"!
°12 2л(1 — v) L p2 p4 J’
(9.8a)
(9.86)
(9.8b)
(9.8г)
Эти результаты соответствовали бы напряжениям для беско-
нечно малого двухосного диполя клиновых дисклинаций, ко-
торые мы не вычисляли в разд. 7.
Тем не менее мы там отметили, что поля такого диполя
совпадают с полями краевой дислокации. Подставляя най-
денное выше смещение = (2L, 0,0) в (7.17), находим
бг = (0,—2LQ3, 0). При таком значении вектора Бюргерса
выражение (9.8) совпадает с (3.19).
9.2. Одноосный диполь
Для получения конечного прямолинейного одноосного ди-
поля дисклинаций сместим ось каждой базисной дисклинации,
рассмотренной в разд. 9.1, к оси Хз. Изложим схему получения
результатов для этого случая. В общем случае ось изолиро-
ванной дисклинации перемещается из точки хРГ в точку х^'
добавлением изолированной дислокации, дислокационная
плотность которой задается соотношением (см. (II. 5.24)):
.(9.9)
В нашем случае xJT — 0, поскольку мы перемещаем ось в на-
чало координат. Для положительной дисклинации, проходя-
щей через (А, 0,0), и отрицательной дисклинации, проходя-
щей через (—L, 0, 0), параллельных оси Хз, находим следую*
Щие не равные нулю компоненты бР(£):
б3 (£) = б (х, — £) б (х2) в точке х°г = (L, 0, 0), (9.10а)
б3 (£) = S (х, + L) б (х2) в точке х« = (- L, 0, 0), (9.106)
172 Гл. IV. Прямолинейные дисклинации
используя (А. 15). Следовательно, получаем не равные нулю
компоненты плотности добавляемых дислокаций (9.9):
4 = Q3L [б (х, - L) + б (х, 4- L)] б (х2), (9.11а)
4 = - Q2L [б (Х| - L) + б (х, + L)] б (х2). (9.116)
.Теперь плотность дислокаций находим- из соотношения
“pl^Vpl + rfl- <9-10 * 12)
Обратим внимание на разницу в знаках между этим соотно-
шением и (7.12). Соотношение (9.12) дает плотность дислока-
ций для конечного одноосного дисклинационного диполя, если
a£z задается соотношением (9.1), а также плотность соответ-
ствующей дислокационной модели, если a£z задается соотно-
шением (9.3). Плотность дисклинаций одноосного диполя
совпадает с плотностью двухосного диполя, т. е. определяется
соотношениями (9.2) или (9.4). Добавляемые дислокации,
определяемые выражением (9.11), также представлены на
рисунках 17—18.
Статические поля одноосного диполя находятся просто
сложением полей дислокаций (9.11) и полей двухосного ди*
поля из разд. 9.1. Вычисления эти просты, и мы оставляем
их читателю.
10. КОМПЕНСИРОВАННАЯ ДИСКЛИНАЦИЯ
Как было отмечено в разд. 10, компенсированная дискли-
нация получается в случае, если на поверхности дефекта S,
натянутой на линию дисклинации L, положить плотность дис-
локационных петель равной нулю:
₽«=о. (10.1)
Проиллюстрируем это на примере прямолинейной дисклина-
ции. Поверхность S, разумеется, можно выбрать многими спо-
собами. Мы остановим свой выбор на двух: первый уже ис-
пользовался ранее и показан на рис. 5, при втором способе
в качестве S берется бесконечная полуплоскость х2хз, отве-
чающая положительным значениям х2.
Из (10.1) и (4.5) следует, что пластическая деформация
также равняется нулю (см. II. 10.3):
е₽=0. (10.2)
Если поверхность S выбрана, как показано на рис. 5, то
плотность петель дисклинадии, как и ранее, дается выраже*
10. Компенсированная дисклинация
173
нием (4.4) и совпадает с упругим изгибом-кручением4 (см.
(II. 10.4)). Таким образом, единственными ненулевыми ком-
понентами являются компоненты
Ч - Ф2«=(- *1)6 &)• (10-3)
Плотности дефекта для компенсированной дисклинации в об-
щем случае определяются равенствами (см. (II. 10.5)):
aPi (г) = 6pZ6fc (S) Qk - 6Z (S) Qp, (10.4)
. 9p,(r) = 6p(L)Q?. (10.5)
В нашем случае отличны от нуля лишь следующие компо-
ненты:
ап = — Q2H (— Xi) б (х2), (10.6a)
а12 = QiH (— х() б (х2), (10.66)
а32 = £13Н (— Xi) б (х2), (Ю.бв)
а33 = — Й2Я (— х{) б (х2), (10.6г)
6з<7 = ^<76 (Xj) б (Х2). (Ю.7)
При выводе этих выражений были использованы формулы
(А. 15) и (А. 16). Компенсированная дисклинация состоит из
базисной дисклинации L, которая описывается равенствами
(4.12), и из равномерного по S распределения дислокаций
(8.4), противоположного по знаку распределению дислокаций
в дислокационной модели. Это распределение дислокаций, как
мы видели, представляет собой стенку поворота. Компонен-
там «12 и «32 соответствуют стенки наклона, а компонентам
ац и азз — стенка кручения.
Для полной согласованности можно убедиться в том, что
выражения (10.1) — (10.3) и (10.6), (10.7) удовлетворяют как
определениям (4.13), (4.14), так и соотношениям (4.15) и
(4.16). Легко также проверить, что величины (10.6), (10.7)
удовлетворяют условиям неразрывности (4.17) и (4.18), что
согласуется с уравнениями (II. 10.7) и (II. 10.8).
Тензор несовместности получается подстановкой (10.6),
(10.7) в (4.30). Находим, что
ПР9 = 0. (10.8)
В общем случае мы знаем, что для компенсированной дискли-
нации полное перемещение и упругая деформация равны
нулю:
«£ = 0, (10.9)
eki = Q. (10.10)
174
Гл. IV. Прямолинейные дисклинации
Последнее из этих равенств согласуется с (10.8), так как не-
совместность является источником упругой деформации. По-
скольку упругая деформация равна нулю’, из закона Гука сле-
дует, что равно нулю и напряжение. Единственным ненулевым
упругим полем является упругий изгиб-кручение. Его вели-
чина в общем случае определяется равенством (см.
(II. 10.13)):
=-%£,. (10.11)
кд кд х '
В нашем случае, согласно (10.3), единственными ненулевыми
компонентами являются компоненты
= — &дН (— Xi) б (Х2)« (10.12)
Заметим, что если сложить поля компенсированной дискли-
нации с соответствующими полями дислокационной модели,
рассматривавшейся в разд. 8, то мы получим поля дисклина-
ций, которые рассматривались в разд. 4 и 5. Для общего слу-
чая это обстоятельство уже отмечалось в разд. II. 10. Так,
например, символически можно записать: (10.1) +(8.2) =
= (4.3), (10.3) + (8.1) = (4.4), (10.6)+ (8.4) = (4.11),
(10.7) + (8.5)= (4.12), (10.8) + (8.6) = (4.31), (10.12) +
'+ (8.10) = (5.9).
Исследуем теперь второй выбор поверхности S, а именно
когда S есть бесконечная полуплоскость х2х3, отвечающая по-
ложительным значениям х2, с нормалью, направленной в сто-
рону отрицательных значений хь Эту геометрию можно полу-
чить путем поворота плоскости S на рис. 5 на угол 90° по
часовой стрелке. Тогда, вместо (А.16), единственная ненуле-
вая компонента 6P(S) есть
61(3) = -б(х1)Я(х2). (10.13)
Следовательно, вместо (10.3) имеем следующие не равные
нулю компоненты плотностей пластического изгиба-кручения
и петель дисклинации:
Далее, из (10.4) следует, что теперь вместо (10.6) отличны
от нуля лишь следующие компоненты плотности дислокаций:
а21 — Q26 (хО Н (х2), (10.15а)
a31 = Q3d(x1)H(x2), (10.156)
022 — — 6^6 (X]) Н (хг), (10.15в)
а33 = -Й1д(х1)Я(х2). (10.15г)
11. Двугранная дислокационная стенка
175
Наконец, упругий изгиб-кручение в соответствии с (10.11)
и (10.14) также изменяется. Все остальные соотношения
остаются неизменными независимо от выбора поверхности S.
11. ДВУГРАННАЯ ДИСЛОКАЦИОННАЯ СТЕНКА
В разд. 10 найдены поля для компенсированной дисклина-
ции при двух различных выборах поверхности дефекта S.
Если вычислить разность полей, отвечающих этим двум вы-
борам поверхности 5, то все поля обращаются в нуль, за
Рис. 19. Двугранная дислокационная стенка с по-
воротом Qi и плотностями дислокаций
<*12=—Q1H (“"Xj) 6 (Хз), <Хг2=®33 ' (Xi) Н (Хз).
исключением пластического и упругого изгиба-кручения, плот-
ности дисклинационных петель и плотности дислокаций. Ком-
поненты последней, как следует из (10.6) и (10.15), имеют
вид
(Хц — Xj) (^2), (11.1а)
(Х21= Й26 (%i) Н (Х2), (11.16)
(Х31 = Q3S (%i) Н (х2), (11.1В)
(Xj2 == (““ Xj) д (Х2), (11.1г)
(Х22 — (xj) Н (^2), (П.1д)
<*32 = — Q3H (— Х[) 6 (Х2), (11.1е)
(*13 = 0, (11.1ж)
«23 == 0, (11.13)
«33 = — (Xi) Н (х2) + Q2# (— Xi) 6 (х2). (11.1и)
I
Рис. 20. Двугранная дислокационная стенка с по-
воротом Q2 и плотностью дислокаций «ц = а33 =*
= &2Н (—*i) $ (*2), «21 — Q26 (*i) Н (х2).
Рис. 21. Двугранная дислокационная стенка с по-
воротом Q3 и плотностями дислокаций
«31 в &з^ (*i) Н {x2)t «32 =» — (*i) б.(х2)«.
12. Пример ограничивающей дислокации
177
Какого рода дефекты определяют эти соотношения? Они опре-
деляют две полубесконсчные дислокационные стенки, пере-
секающиеся вдоль оси х3; иными словами — двугранную ди-
слокационную стенку1). Она не создает дальнодействующих
напряжений и упругих деформаций. Три такие различные
стенки показаны на рис. 19—21, на которых для наглядности
показано равномерное распределение дислокаций в виде ди-
скретного распределения. Рисунки 19, 20 изображают случаи,
рассматривавшиеся Шобером и Балуффи (см. рис. 6 и 7
в работе [13]).
12. ПРИМЕР ОГРАНИЧИВАЮЩЕЙ ДИСЛОКАЦИИ
В недавно вышедшей работе [14] дан конкретный пример
краевой дислокации, оканчивающейся на ступеньке клиновой
дисклинации. Было отмечено, что этот пример является ил-
люстрацией уравнения неразрывности (4.17). В этом разделе
мы детально рассмотрим его геометрию и затем покажем, что
в этом случае уравнение неразрывности выполняется.
Ранее уже были введены общие выражения для дислока-
ции, оканчивающейся на дисклинации. Плотности дефекта -
определяются равенствами (см. (II. 5.25) и (II. 5.26))}
<•„ «=(i) {», +А (*, - +
+», (П {»,+«. А (*, -<)}+»„ (£") А« - О. <12- о
e„(r)-6,(i + na,. (12.2)
Здесь L и L' — линии дисклинации, L" — соединяющая их
линия дислокации. '
Рассмотрим частный случай, показанный на рис. 22.
Положим bt = ^ = 0, и пусть £23 и > 0 — единственные
отличные от нуля компоненты и х/}. Кроме того, выберем
в качестве L прямую, параллёльную положительной оси х3
и проходящую через точку (0, х%, 0), в качестве L' — отрица-
тельную ось х3 и небольшой отрезок положительной оси х2
от начала координат до точки и в качестве L" — осталь-
ную часть положительной оси х2 выше точки х®. Тогда един-
ственными отличными от нуля компонентами 6-функций в (12.1)
и (12.2) являются следующие:
б3(£) = б(х1)б(х2-х»)Я(х3), (12.3а)
62(Г) = б(х,)Я(х2)Я(4-х2)б(х3), (12.36)
63 (£') = б (Xi) б (х2) Н (- х3), (12.3в)
б2 (£") = б (х,) Н (х2 - х») б (х3). (12.3г)
9 В оригинале: bent dislocation wall — изогнутая дислокационная
стенка. — Прим, перев.
7 Зак3 201
178
Гл. IV. Прямолинейные дисклинации -
вающаяся на ступеньке клиновой дис-
клинации.
Поэтому, используя (А.8), из (12.1) и (12.2) получаем сле-
дующие отличные от нуля компоненты:
С&21 — (Xj) Н (х<^ Н (xJJ Х2) (Хз)
(Х1) (х2 Х%) & (Хз)> (12.4)
023 = Й3 6 (xt) Н (х2) Н (х° - 6 (х3), (12.5а)
0зз = Q3* (*i) 6 (*2 - х°) Н (х3) + Q3S (х,) 6 (х2) И (- х3). (12.56)
Эти соотношения задают клиновую дисклинацию, имеющую
вблизи начала координат ступеньку, от которой отходит крае-
вая дислокация. Конкретно дисклинация состоит из следую-
щих частей: из прямолинейной клиновой дисклинации, срсре*
доточенной , на отрицательной оси х3 до начала координат
(второе слагаемое в (12.56)); из малой ступеньки дисклина-»
ции кручения, сосредоточенной на оси х2 от начала коорди-
нат до точки х£ (см. (12.5а)), и из прямолинейной клиновой
дисклинации, параллельной положительной оси х3 и исходя-»
щей из точки х§ на оси х2 (первое слагаемое в (12.56))..Ди-»
слокация состоит из двух частей. Первое слагаемое в (12.4)
13. Выводы
179
описывает дислокацию, мощность которой линейно возра-
стает при перемещении по оси Хг от начала координат до
точки х°; это слагаемое можно рассматривать как интеграль-
ную часть элемента дисклинации кручения. Вторая часть ди-
слокации описывается вторым слагаемым в (12.4) и представ-
ляет собой краевую дислокацию, сосредоточенную на поло-
жительной оси х2 и начинающуюся в точке х°. Эта краевая
дислокация, как видно из (12.4), имеет вектор Бюргерса
6Z = -Q34 (12.6)
Отметим, что появление ограничивающей дислокации яв-
ляется результатом смещения дисклинации вместе с ее осью
из положения L' в положение L.
Покажем теперь, что величины (12.4), (12.5) удовлетво-
ряют уравнениям неразрывности (4.17) и (4.18):
«р/, р 4* elpq^pq — 0» (12.7)
брр. р = 0. (12.8)
Необходимо лишь рассмотреть случай I = 1 для уравнений
(12.7) и q = 3 для уравнений (12.8). Во всех остальных слу-
чаях эти уравнения удовлетворяются тождественно. С учетом
(А.6), (А.7) и условия х^>0 уравнение (12.7) сводится к
следующему:
a2i ,2 4~ б23 = Q36 (х() Н (х2) Н (х!| х2) б (х3) 4“
4* й3х2б (х,) Н (х2) б (х£ х2) б (х3) Н3х®б (х() б (х2 х§) 6 (х3) +
+ й3б (xz) Н (х2) Н (4 - х2) б (х3) = 0.
Аналогичным образом, уравнение (12.8) принимает вид
®23,2 "Ь б33>2 = ^3^ (х1) & (хг) Н (-^ xi) & (хз)
йЗб С*т) (^2) ® (Х2 Х?) (Хз) 4“
4“ ^35 (х.) б (х2 х2) б (х3) Q36 (х,) б (х2) б (х3) = 0.
Таким образом, путем детального анализа показано, что ди-
слокация может оканчиваться на дисклинации и что этот факт
согласуется с уравнениями неразрывности.
13. ВЫВОДЫ
В этой главе рассмотрено применение результатов общей
теории к частному случаю прямолинейных дисклинаций. Вна«
чале для введения в предмет напоминается содержание
7*
180
Гл. IV. Прямолинейные дисклинации
работы Вольтерра и дается обзор теории прямолинейной дис-
локации.
Рассмотрена геометрия прямолинейных дисклинаций. Най-
дены плотности петель дефекта, совпадающие с введенными
Мурой «пластической дисторсией» и «пластическим поворо-
том». Эти величины сосредоточены на поверхности дефекта,
которая является бесконечной полуплоскостью, ограниченной
линией дисклинации. Затем базисные пластические поля (пла-
стические деформация и изгиб-кручение) выражены через
введенные Мурой величины. Базисные пластические поля
также сосредоточены на поверхности дефекта. Определены
плотности дефектов (дислокаций и дисклинаций); эти плот-
ности сингулярны на линии дисклинации. Отмечено, что для
изолированной дисклинации существует конечная плотность
дислокаций, и этой величине дана интуитивно разумная ин-
терпретация.
Наши результаты полностью согласуются с результатами
Антони. Проверена непротиворечивость полученных частных
результатов путем доказательства, что эти результаты удов-
летворяют всем необходимым общим уравнениям: определе-
ниям плотностей дефекта через базисные пластические поля,
соотношениям между петлями дефекта и плотностями и урав-
нениям неразрывности. Поясняется смысл полного вектора
Бюргерса как скачка перемещения в начале координат: при
нашем специальном выборе геометрических характеристик
полный вектор Бюргерса равен нулю, в то время как условие
на скачок перемещения дает интуитивно ясный результат, как
это видно из иллюстраций. Найден тензор несовместности и
показано, что он удовлетворяет своему условию неразрыв-
ности.
Далее определяются изотропные статические поля для
прямолинейных дисклинаций в изотропном случае. Выписаны
выражения перемещений для прямолинейной дисклинации.
Эти выражения вначале нами просто постулируются. Путем
дифференцирования определяется полная дисторсия. По най-
денной полной дисторсии вычисляются базисные полные поля
(деформация и изгиб-кручение). Они содержат члены двух
типов: сингулярные на поверхности дефекта члены, точно
соответствующие основным пластическим полям, найденным
независимо ранее, и члены, непрерывные вне сингулярной ли-
нии дисклинации. Это приводит к естественному разделению
базисных полей на упругую и пластическую части. При по-
мощи такого способа находим упругую деформацию и упру-
гий изгиб-кручение для прямолинейной дисклинации. По-
казано, что эти величины удовлетворяют полевым уравне-
13. Выводы
181
ниям, содержащим плотности дефекта. Напряжения опреде-
ляются из закона Гука. Они удовлетворяют уравнениям рав-
новесия, включая и сингулярную линию дефекта; тем самым
подтверждается, что первоначальные выражения для переме-
щения являются точными.
Затем показывается, как изменяются поля, если ось ди-
склинации сместить из первоначального ее положения. Плот-
ность дислокаций и полный вектор Бюргерса изменяются, а
плотность дисклинаций и вектор Франка остаются прежними.
Результат можно сформулировать так: ось можно сместить,
добавляя дислокацию к дисклинации. Этот результат облег-
чает отыскание статических полей дисклинаций, имеющих
новую ось. Поля для дисклинации с новой осью получаются
добавлением полей дислокаций к соответствующим полям
дисклинаций с осью, проходящей через начало коорди-
нат.
Выведены соотношения для бесконечно малого .дисклина-
ционного диполя как в случае двухосного, так и одноосного
диполя. Найдены плотности дефекта и перемещения для ди-
полей обоих типов и указана связь между ними. Отмечено,
что перемещение прямолинейного одноосного диполя не содер-
жит клиновой компоненты. Поэтому статические поля для пря:
молинейного двухосного диполя клиновой дисклинации совпа-
дают с полями для прямолинейной краевой дислокации, что
согласуется с результатом Эшелби.
Найдена дислокационная модель прямолинейной дискли-
нации в виде ограниченной дислокационной стенки (наклона
и кручения). Показано, что дислокационная модель и соотв^
ствующая ей дисклинация дают одинаковые тензор несовме-
стности, перемещение, полную дрсторсцю, упругую .деформа:
цию и напряжение. Полная дисторсия содержит сцнгулярные'
на поверхности дефекта члены, в точности соответствующий
цлотности дислокационных петель, которая (была вычислена
независимо раньше. Если отождествить эти члены с пласти-
ческой дисторсйей, как это сделал. Мура', то, и получается
дйслокациорная модель. При помощи этого Способа упруга#
«дисторсия» Муры для изолированной" дисклинации мржет
бьггь,^интерпретирована как упругая дисторсия для соответ-
ствующей дислокационной модели. Наконец, * .введенный-
Мурой «пластический поворот» интерпретируется- как. раз5
ность изгиба-кручения для дисклинации и ее дислокационной-
модели.;- , *. - - л-
Далее определяются .цлоднрс-'РЦ. дефектов для конечного
дис,1^инаци|6ни®га.дипрдй<'Д®^г^ТО]!?^::Д₽фе^ва} также (можно,
построить дислокационную мбдель.^Н&иДе^о .^перемещение
для двухосного диполя. Оно стремится к величине перемещения
182
Гл. IV. Прямолинейные дисклинации
для бесконечно малого диполя, когда ширина диполя стре-
мится к нулю. Показано, что напряжения для двухосного
диполя клиновой дисклинации соответствуют напряжениям,
которые были вычислены Ли для конечной дислокационной
стенки.
Вычислены плотности дефекта для компенсированной ди-
склинации при двух различных выборах поверхностей де-
фекта. При помощи этих результатов построена двугранная
дислокационная стенка, рассматривавшаяся Шобером и Ба-
луффи. Такого рода дефекты не вызывают перемещения,
упругой деформации и напряжения.
В заключение путем детальных аналитических вычислений
показано, как изолированная краевая дислокация может
оканчиваться на ступеньке изолированной клиновой дисклина-
ции. Ступенькой является малый отрезок линии дисклинации
кручения, который содержит конечную величину плотности
дислокаций. Показано, что аналитические выражения плотно-
стей удовлетворяют уравнениям неразрывности.
В приложении А показано, как встречающиеся в общей
теории б-функции Дирака для кривой и поверхности приме-
няются к улучаю прямой линии и бесконечной полуплоскости.
Знание формул частного вида существенно для приложения
общей теории к частным случаям с простой геометрией. Вы-
числены также некоторые полезные интегралы для контуров
Бюргерса.
В приложении Б показано, как вычисляются обобщенные
производные цилиндрических координат. Дано точное опре-
деление полярного угла ф через декартовы координаты хь х2;
для угла выбран интервал (—л, л). Производные угла рас-
сматриваются как обобщенные производные и содержат
б-функцию. Точно так же производные однородной функции
степени —1 или меньшей являются обобщенными функциями.
Аппарат обобщенных функций удобен тем, что он позволяет
выполнять все обычные операции над полями, в том числе и
на сингулярных линиях и поверхностях, оставаясь в рамках
обычной теории поля, традиционно применяемой лишь к не-
прерывным и гладким функциям. Это существенно упрощает
вычисления в случае изолированных дефектов, поскольку мы
получаем возможность применять математический аппарат
прямо к сингулярностям, взамен интуитивных понятий, как
это делается при классическом подходе.
В приложении В показано, каким образом, используя об-
щие результаты гл. III для случая изотропии, можно получить
функциональные выражения для статических полей в случае
прямолинейных дефектов.
14. Приложение А
183
14. ПРИЛОЖЕНИЕ А
ВЫЧИСЛЕНИЕ б-ФУНКЦИЙ НА ПРЯМОЙ ЛИНИИ
И НА БЕСКОНЕЧНОЙ ПОЛУПЛОСКОСТИ
Дельта-функция Дирака 6(х) определяется (см. (II. Б.1))
следующим образом:
ь
S (х — х') <р (х') dx' =4
а
О, если х < а,
Ф (х), если а < х < Ь,
О, если b < х.
(АЛ)
Это определение иллюстрируется следующими частными слу-
чаями:
Js(x-x')dx'=l, (А.2)
~Х
Js(x-x')dx' = ZZ(x), (А.З)
. о
о
Jd(x-x')dx' = ZZ(-x). (А.4)
z —X
Здесь Н(х)—функция Хевисайда:
( 0, если х < О,
Н(х)=\ . п ’ (А.5)
' ' ( 1, если 0 < х. '
Производные функции Хевисайда легко находятся из (А.З):
X
/Г(х) = ^^===б(х-х')1 + ^S(x-x')dx' =
х^х g
— д (х — х') 1Х,_Х — $ S (х — х') dx' —
О
= д(х-х%,_х- [6(Х-х')£:>б(х). (А.6)
Из (А.1) очевидно, что
S (х — х') ф (х') = S (х — хЭ ф (х). (А.7)
Частным случаем этого соотношения является следующее: .
(х — х') 6 (х — х') = 0. (А.8)
184
Гл. IV. Прямолинейные дисклинации
Дифференцируя, получаем
(х — х/) б' (х — х') = — б (х — х7). (А.9)
Трехмерная 6-функция Дирака 6 (г) определяется так:
6 (г — г') э б (Xj — х') б (х2 — х£) б (х3 — х'). (АЛО)
Дельта-функция Дирака для кривой L и поверхности 5 опре-
деляеются равенствами
bi(L)= $6(r-r')dZ4, (АЛ1)
L
6Z(S)= ^б(г-г')^. (АЛ 2)
s
Вычислим эти величины для частного случая, когда L — пря- .
мая, совпадающая с осью Хз, a S — бесконечная полуплоскость
XiX2 при Xi < 0 с нормалью, параллельной отрицательной оси
х2 (рис. 5). Тогда для L и для S имеем соответственно
dL'i = (0, 0, </£') = (0, 0, dx'), г' = (0, 0, х£), (АЛ3)'
dS' = (0, dS'2, 0) = (0, - dx{ dx'3, 0), г' = (х{, 0, х£). (А Л 4)
Единственные ненулевые компоненты функций бг(£) и 6,(S)
равны
со
ML) = $ 6(х1)б(х2)б(хз-хз)йхз = 6(х1)б(х2)- (АЛ5)
—со
б2 (3) — б (х1 х^ б (х2) б (х3 — xQ dx{ dx3 ==
в-Я(-х1)б(х2). (А Л 6)
Здесь при вычислениях использованы равенства (А.2) и
(А.4). Заметим, что с учетом (А.6) эти величины удовлетво«
ряют теореме Стокса (см. (П.Б.26)):
Мм ($)=»-МО- (А.17)
Этого следовало ожидать, так как L — граница полуплоско-
сти 3. Рассмотрим далее некоторые интегралы по кривой X,
охватывающей L. Пусть X — окружность радиуса а в плоско-
сти XiX2 с центром в начале координат (рис. 5). Тогда на X
х2 + х2=±а2ф ' (АЛ8)
15. Приложение Б
185
Вычислим три типичных интеграла по замкнутому контуру X,
содержащие обобщенные функции. Первым из них является
следующий:
$ f (*1) 6 (*2) dLt == (xt) 6 (х2) х2 (а2 - x2)-‘AdL2 = 0. (А. 19)
к Л
Здесь при замене переменной интегрирования использовано
уравнение (А. 18), а также соотношение (А.8). Вторым инте-
гралом является интеграл
а
(х,) dL, - $ f ([<? - 4]'‘) d (х2) dx, +
К "—а
—а
+ J f(-[o2-x2]*/’)d(x2)dx2 = f(a)-f(-fl). (А.20)
п
Здесь при вычислении использованы (А. 18) и (А.1). Третий
интеграл
^f(x1)6'(x2)d£2 = — ^f'(xi)6(x^dLi=0
Л К
вычисляется интегрированием по частям с использованием
(А. 19). В заключение для полной согласованности покажем,
что компоненты (А. 15), (А. 16) удовлетворяют соотношениям
(П.Б.15). Пусть а — круг, ограниченный контуром % (рис. 5).
Тогда для компоненты (А. 15), используя (А.1), получаем
J S3 (L)dS3 = J J S (xj 6 (x2) dxi dx2=l. (A.22)
a
Далее, используя (А.20) и (А.5), для компоненты (А. 16) на-
ходим
ф S2 (S) dL2 = - ф Я(-х1)6(х2)dL2 = -Н(-а) + Н(а) = 1. (А.23)
Л» я»
Таким образом, эти результаты согласуются с соотношениями
(П.Б.15).
16. ПРИЛОЖЕНИЕ Б
ОБОБЩЕННЫЕ ПРОИЗВОДНЫЕ ЦИЛИНДРИЧЕСКИХ
КООРДИНАТ
Выражения, которые дифференцировались в этой главе,
содержат цилиндрические координаты р и <р. Геометрическая
<;вязь этих координат с декартовыми координатами Xi и х%
186 Гл. IV. Прямолинейные дисклинации
показана на рис. 9. Функциональное соотношение для р имеет
вид
р(Х1,х2)=(^+4),/’- (Б.1)
Для ф обычно берется выражение arc tg(x2/%i). Однако это
приводит к некоторой неясности по следующим двум причин
нам: 1) в качестве арктангенса обычно берется его главное
значение, заключенное в интервале (—л/2, л/2), в особенно-
сти в формулах для интегралов; 2) угол ф обычно рассматри-
вается как многозначная функция; такой подход находится
в противоречии с предположением об однозначности функций,
которые вводятся в общей теории дефектов.
Исходя из этих соображений, мы примем для ф интервал
(—л, л), так что функция ф однозначно определена всюду, но
на отрицательной оси Xi имеет разрыв величиной 2л, как это
показано на рис. 9. Этот выбор удобен для вычислений, вы-
полняемых в этой главе, поскольку разрыв имеет место на
бесконечной полуплоскости S (рис. 5). Поэтому ф задается
выражением
Ф (xb х2) = arc tg (Х2/Х1) + лЯ (— хО [Н (х2) — Н(— х2)], Q5.2)
в котором под арктагенсом понимается его главное значение,
а Н — функция Хевисайда (А. 5). Определенная таким обра-
зом функция ф принимает значения, указанные на рис. 9.
Чтобы сохранить необходимую однозначность при диффе-
ренцировании разрывной функции ф, следует ввести обобщен-
ную производную. Разрыв приводит тогда к обобщенной функ-
ции, т. е. 6-функции Дирака. За деталями вычисления обоб-
щенных производных мы отсылаем читателя к § 2 гл. 1 книги
Гельфанда и Шилова [8]. Результат имеет следующий вид:
Ф.1 = —х2/р2, (Б.З)
Ф, 2 = Х1/р2 4- 2лЯ (— Х|) S (х2). (Б.4)
Эти результаты можно было бы предвидеть, исходя из интуи-
тивных соображений. Формулы (Б.З), (Б.4) содержат обыч-
ные производные арктангенса с добавлением члена с б-функ-
цией на отрицательной оси Х\. Появление этого члена связано
с разрывом функции ф.
В отличие от этого производные от р и In р совпадают с
производными в классическом смысле:
(In р),, = Х1/р2, (Б.5)
(In р), 2 = х2/р2. (Б.6)
Другой функцией, обобщенные производные которой совпа*
дают с обычными, ярляется функция х^хр/р2. Ее производные
16. Приложение S
187
равны
zwjY =_2 + + р> ]_ 2 (Б7)
х Р /♦ у Р Р
Выпишем их полностью:
Приведенные выше производные (Б.5) — (Б.7) локально инте-
грируемы во всей плоскости XiX2, включая сингулярную точку
начала координат. Это и является причиной, по которой обоб-
щенные функции совпадают с обычными.
Однако следующие производные функции хахр/р2 возра-
стают, как р-2, и не будут уже локально интегрируемы вблизи
начала координат, потому что порядок особенности равен раз-
мерности пространства (т. е. двум). Для сохранения одно-
значности опять необходимо ввести обобщенные производные.
Мы снова отсылаем читателя к книге Гельфанда и Шилова [8]
(см. § 3 гл. III), где подробно приводится процедура вычис-
ления обобщенных производных этого типа. Результаты со-
держат однородные функции степени —2 (такие, как р-2),
которые следует рассматривать как обобщенные функции.
Один из результатов имеет вид
(£).Г^-2^+"8-’б(Л (Б8)
где 6(р)— двумерная 6-функция Дирака:
6(р) = 6(х1)б(х2). (Б.9)
Приведем равенства (Б.8) полностью:
(й.,=^-2^+"5<Л
Другим результатом является следующий:
( ХаХ$Ху\ ХоХрХуХ6 . + Xadg5Xv + 6apXpXv
-------------------------
р® ' р4 ~
Ч- (барб^ -f- 6^абрб + брубав) ® (Р)» (Б.10)
188
Гл. IV. Прямолинейные дисклинации
или, в подробной записи:
Следующие обобщенные производные вычисляются аналогич-
ным образом и представляют собой однородные обобщенные
функции степени —3. Нам понадобятся производные:
(?)..----(Б.П)
/ \ хахрх^ 4"
\ Р4 /,а~~ Р® Р4
-tM-v(p) + (р) + W.p(p)1- (БЛ2)
Последнее равенство в полной записи имеет вид
16. Приложение В
189
16. ПРИЛОЖЕНИЕ В
ВЫВОД СТАТИЧЕСКИХ ПОЛЕЙ ДЛЯ ПРЯМОЛИНЕЙНОГО
ДЕФЕКТА ИЗ ОБЩЕЙ ТЕОРИИ
В гл. III выведены общие выражения статических полей
в бесконечном изотропном теле. Было показано, что для схо-
димости интегралов необходимо, чтобы пластическая дефор-
мация eff(r) при г->оо стремилась к нулю быстрее, чем г-1.
Это условие не выполняется для прямолинейных дефектов,
как это видно из (3.3) и (4.7). Однако по-прежнему возможно
получить функциональные выражения статических полей из
общих формул, если игнорировать бесконечные члены, появ-
ляющиеся при интегрированиях. Корректность полученных
статических полей может быть затем проверена подстанов-
кой их в уравнения общей теории, как было сделано в этой
главе.
Будем исходить из следующих общих выражений. Пере-
мещения для дислокации имеют вид (см. (III. 4.21)):
« —s S к «А <»;+«, -
S
- (bj>
и выражения для упругой дисторсии (см. III. 4.2.3):
₽</ «[*. -Л»iL* + R. dL'l +
L
+ <в-2>
Для дислокации с осью, проходящей через начало координат,
перемещение выражается в виде (см. (III. 6.10)):
(г) = '{to’ ekmn^mx'n [#, Ilk ilfilk ~
s
<в-3>
упругая деформация (см. (III. 6.11)) в виде
е</ (f) = § [6/р<7йрх^ { К, knn (eikt dL't\in +
L
+ (-Йт- №. □ e«. } + «.." (G/ "Эи. +
+ (т^7-М, <вл)
190
Гл. IV. Прямолинейные дисклинации
а упругий изгиб-кручение (см. (III. 6.14)) в виде
к11 № = § [% klnn. ~ У . Ппп dL'k } —
,<в-5)
Здесь обозначено
R = (XtXt)\ (В.6)
Х^х^-х;. (В.7)
Выражения (В.1) — (В.5) представляют собой контурные и
поверхностные интегралы. В случае геометрии частного вида,
показанной на рис. 5, для линии L имеем
dL' = (0, 0, d£3) = (0, 0, dx'), г' = (0, 0, х^. (В.8)
Следовательно, с учетом (Б.1)
' /? = (р2 + Х|)Ч (В.9)
р = (х2 + х2)^. (В. 10)
Для поверхности S имеем
dS' = (0, dS', 0) = (0, - dx\ dx'y 0), г' = (Sv 0, V3). (В. 11)
Следовательно,
7? = (X2 + x2 + *(p. (В. 12)
Рассмотрим сначала контурные интегралы. Все необходимые
результаты в общем случае могут быть получены дифферен-
цированием основных интегралов ^2?d£jH ^x^d£'. Из
(В.8) следует, что единственными ненулевыми компонентами
этих интегралов являются интегралы RdL'3 и ^x£#d£3. Эти
интегралы расходятся, поскольку они берутся по бесконечной
прямой. Вычислим сначала интеграл для конечного проме-
жутка:
$ /?dx'3= J/?dX3=[|p2In(X3 + /?) + |x3/?]t =
~L+X, -t L
=p2 in + £ (p2 + l2)]’7’ . (в. 13)
Необходимый нам интеграл получается при £->оо, но тогда
члены в (В. 13), содержащие £, также будут стремиться к
16. Приложение В
191
бесконечности. Однако при последующем дифференцировании
эти члены можно рассматривать как константы. Поэтому они
не влияют на поля и на практике их можно отбросить. Таким
образом, для необходимого нам интеграла получаем соотно-
шение
\RdL'3-+q, (В. 14)
L
в котором введено обозначение
q= — р21пр. (В. 15)
Этот прием может быть также оправдан следующим образом.
Производные достаточно высокого порядка интеграла (В. 13)
при L -> оо стремятся к конечным функциям от р. Дифферен-
цирование функции (В. 15) дает те же самые функции. Далее
в выражения (В.1) — (В.5) входят лишь производные инте-
гралов типа R dLt. Поэтому мы можем прямо использовать
формулы (В. 14) и (В. 15). Точно таким же путем находим
выражение для другого интеграла. Сначала вычисляем инте-
грал для конечного промежутка
L
J x'3Rdxf3 = \(x3-X3)RdX3 =
= [^x3p2\n(X3+~R) + ^x3X3R-^L_L. (B.16)
Следовательно, как и для интеграла (В.13), имеем
^x'3Rdx3-+x3q. (ВЛ 7)
L
Рассмотрим теперь поверхностные интегралы. В общем слу-
чае все необходимые результаты получаются из выражений
интегралов и ^X;/?dS'. Из (В.П) следует, что от-
личны от нуля лишь интегралы R dS'2, ^x{/?dS' и ^x^AJdS'.
Вычисление первого может быть выполнено следующим образом^
l о о
\RdS'2->- J ^Rdx'ldx3-^ $(X2 + x|)ln(X2 + x|)‘/’dx;->
S -L -L -L
Z L
^$(Х2 + х|)1п(Х? + х*)^Х,=
Ч(т*?+М|пИ+^),'’-т*=агс,е<-
_(1хз+|ед)£. (В.IS)
*r‘
192
Гл. IV. Прямолинейные дисклинации
Здесь первый результат получается с учетом геометрии поверх-
ности S (рис. 5), второй — интегрированием по которое
выполняется, как и выше, но R определяется равенством
(В. 12), вместо (В.9), третий результат получается заменой
переменной интегрирования. Таким образом, для интеграла
получаем соотношение
\RdS'2-+g, (В.19)
з
где введена функция
g = — (7з*? + In р + 2/зФ + + 2/з*гФ (в-2°)
Вычисление следующего интеграла выполняется так:-
J ^R dS'2 -> J х{ (X* + In (X* + xiyi‘ dx^ ->
5 —L
X,) (X* + xl) In (X| 4- x|)V. dxr (B.21)
X,
Отсюда получаем
\x[RdS'2-+h, (B.22)
s
где введена функция —
h^xlg+ */4p<lnp + 7Iexf - 7^|. (B.23)
Последний из интегралов вычисляется так:
l о
— (В.24)
s —L -L
Функции </, g и h зависят только от Xi и Хг- Нам понадобятся
следующие производные от q:
Q, 11— 2 In р 1 2 р2 » (B.25a)
„ _ 9 Х1*2 ?,12— р2 » (В.256)
х2 <7,22 ~ 2 In р 1 2 -^2~, (В.25в)
<7,аа= —4(1пр+ 1), (В.25г)
Xl XiXq
9.ш = -2р] 4*/, (В.25д)
16. Приложение В
193
9 <7.112=-2-^-+4-^-, (В.25е) 9 X, х,х9 ?.122=-2-^-+4-^-, (В.25ж) л х9 х?х9 ^,222 = -2-f--4-^, (В.25з) Р г <?,.«« =-4^-, (В.25И) <7.2аа=-4-^, (В.25к) q. Паа = - 4 (4- - 2 4- + 1x6 (Р)) • (В-25л) 9.12аа = 8-^-, (В,25М) Р q.22aa= 4 ( 2 2 2 +л6(р)). (В.25н) \ р р <
Здесь греческие индексы принимают значения только 1 и 2.
Формулы (В.25л) — (В.25н) вытекают из (Б.8). Остальными
производными, которые нам понадобятся, являются следую-
щие: g.ii2 = -2-^-, (B.26a) р g, 122 = - 2 (1П р +1 + , (В.266) g.222 = 4<p + 2-^-, : (В.26в) g. 1аа = — 4 (1П р + 1), (В.26г) ^,2аа = 4ф, (В.26д) ^,122 = “ 2xj 1п р + 4х2<р —(В.27а) h, 222 = Gx2 In р + 4х!ф 4- 6х2 + j Хг, (В.27б) Л,1аа= —4х11пр4-4х2ф—*1, (В.27в) Л,2аа = 4х21пр+4х1ф + 6х2— уХ2. (В.27г)
Теперь перемещение (ВЛ) для дислокации записывается в
виде
8я [^> 2аа^1
|lv «.,«4 <В'28)
194
Гл. IV. Прямолинейные дисклинации
С учетом (В.26) компоненты перемещения равны:
Ul = ~ ‘8л [1 — V 8. 112 ~~ 8. 2<ш] ~
8л" [ 1 — v 122 1 — v 8, 1<х<х] ’ (В.29а)
т_ bt г 1 1 62 Г 1 2 — v 1
Ы2 8л 11 — V 122 8, laaj 8лЦ —V^’222 1 — v^’2tt0J’
(B.296)
= (В.2ЭД
что совпадает с выражениями (3.12) с точностью до несу-
щественных констант. Формула (В.2) для упругой дисторсии
дислокации принимает вид
Раз ~ Kvv 4“ 6хХ ( j __ v xw)j » (В.30а)
Раз ~ еаз?. (В*306)
0з/ = 0, (В.ЗОв)
Здесь еар — двумерный символ Леви-Чивиты: ен = е22 = 0,
б12 = — е21 = 1. Упругая дисторсия (В.ЗО) с учетом (В.25)
имеет следующие не равные нулю компоненты, совпадающие
с (3.14):
_ Ь\ Г q, 112 1 . Ь2 Г <7, ill 1 /ПО1 \
Ри —' 8лГ LT="v — 2VVJ + "8?г LT=V ~~ ’ VVJ ’ (B-3lа)
о 61 Г <7,122 1 I 62 Г <7.112 1
021----8л Ll-v +^!vvj +17L1-V ?.2vvJ. (В.316)
₽12 = 8Л [k=V “ lvv] + "87 [т=^7 + 2vv] > (В.з 1 в)
₽22 = 8л [t^v ~ q'2VV] + "8л [t^v “ q’lvv] ’ <В-31г)
Рв = Я. 2vv> (В.31д)
₽23----Я3’31®)
Выражение (В.З) для поля перемещения дисклинации прини-
мает вид
«Г=^-[Л.2<ш6й —T^h^+ -j4rA.^] + |re«-A2aa +
4 8л~~ k aYY^*2 4“ хзё, 2YY^a 1 — v (^3§), x*2a 4"
4- । у (хзё\ iYY^a?] • (B.32)
16. Приложение В
195
С учетом (В.26) и (В.27) компоненты перемещения имеют
значения
и1 ~ 8л3 [ 1— V S'122 1 - V ё’ *vv]
Q2X3 г 1 „ „ 1 Оз Г I
8л Ll-V^112 £«2VyJ
122
___Q1X3 Г 1 2 v ”1
И2 — “8л" LT=V ^’222 ~ T=V 8‘ 2wJ —
О2Хз Г 1 „ „ 1 Q3 Г 1 .
8л L 1 - V 8‘ 122 8‘ IwJ 8л L 1 — V Л>222
т___ Q] Г 1 v *1 й2 Г 1
W3— "8НЧ“П=7? ^22 — 7—7 8> YYJ "8л"
1 _ v 1аа] •
(В.ЗЗа)
2-v , 1
—jtzv п< 2““J *
(В.ЗЗб)
£,12+Л,2аа].
(В.ЗЗв)
совпадающие с (5.1) с точностью до несущественных линей-
ных членов. Упругая деформация (В.4) для дисклинации за-
писывается в виде
еа₽ — 8л" [^VX3^ 1 _ v yvv) 4~ (д _ v ®ар?. vv] .
(В.34a)
е“3= ₽р “ 1 _ V ^3^’ ар] ’ (В.346)
взз' — 0. (В.34в)
С учетом (В.25) компоненты (В.34) по отдельности имеют
следующие значения, совпадающие с (5.5) с точностью до
некоторых несущественных линейных членов:
__ О1Х3 р <7, ш ~| ^2*3 [" qt 112 1 f
е" = 8л" LT^V “ 1VVJ 8л~ |_Т^7 ~ ^2VVJ +
йз Г <7, п "I
+ 8л “ ^VVJ’
Q1X3 Р У, 122 "J ^2*3 Р q, 222 "J j
е22= s^rLi^v-^ ivvJ 8лг1т=т ~ ^2vvJ +
О3 р qt 22 ”1
+ ~8л LT^V “ WJ •
633 = о,
&1*3 х qt И2 Й2Хз ^,122 f Йз ^,12
^12 8л 1 - v 8л 1 - Vх• 8л 1 — v ’
й] qt 12 О2 р q, 22 *1
е23= — 8л 1 - V “‘8л’ 1т=7 — VVJ ’
Qi р q, 11 1 &2 q, 12
ез1 ’ 8п [1 — v VVJ 8л 1 — v ’
(В.35а)
(В.356)
(В.35в)
(В.35г)
(В.35д)
(В.35е)
196
Гл. IV. Прямолинейные дисклинации
Упругий изгиб-кручение (В.5) для дисклинации принимает
вид
H<w = ~8neafi(l>V,'v’ (В.Зба)
Xa3==="8nT <»0vv + ^36ap?,pvv]» (В.366)
«з7 = 0. (В.Збв)
С учетом (B.25) компоненты (B.36) по отдельности следующие значения, совпадающие с (5Ж9): имеют
Qi (В.37а)
Qi %21 — (В.376)
«31 = 0, (В.37в)
^2 Х,2 *8л” ^,2VV’ (В.37г)
£2 2 И22— <7, (В.37д)
Х32 = 0, (В.37е)
Й1Х3 I Q2X3 1 ^3 «13 8я Ч. 12VVT* 8я <7,nvv-t- 8я </.2VV, (В.37ж)
(В.37з)
«23 8я Ч. 22VV 1 8я Ч, 12VV 8jl 4.1VV1
£2] 1 ^9 1 11 /7 - Л /7 (В.37и)
%33 8л + 8я Ч, ivv
СПИСОК ЛИТЕРАТУРЫ
1. de Wit R., in «Fundamental aspects of dislocation theory», ed. by
J. A. Simmons, R. de Wit, R. Bullough, Nat. Bur. Stand. (U. S.) Spec.
Publ. 317, vol. 1, 1970, p. 651; русский перевод см. гл. I этой книги.
2. de Wit R., J. Res. Nat. Bur. Stand. (U.S.), 77A, No. 1, 49 (1973); рус-
ский перевод см. гл. II этой книги.
3. de Wit R., Л Res. Nat. Bur. Stand. (U. S.), 77A, No. 3, 359 (1973);
русский перевод см. гл. Ill этой книги.
4. Volterra V., Annals, scient. Ec. norm, sup., Paris [3], 24, 400 (1907).
5. Ляв А., Математическая теория упругости, ОНТИ, М. — Л., 1935.
6. Frank F. С., Disc. Faraday Soc., 25, 19 (1958).
7. Nabarro F. R. N., Theory of crystal dislocations, Clarendon Press, Ox-
ford, 1967.
8. Гельфанд И. M., Шилов Г. Е., Обобщенные функции и действия над
ними, т. I, Физматгиз, М.., 1959.
9. Mura Т., Arch. Meeh. Stos., 24, 449 (1972).
10. Anthony К. H., Arch. Rat. Meeh. Anal., 39, 43 (1970). .
11. Eshelby J. D., Brit. J. Appl. Phys., 17, 1131 (1966).
12. Li J. C. M„ Acta Met., 8, 563 (1960).
13. Schober T., Baluffi R. W., Phys. Stat. Sol. (b), 44, 115 (1971).
14. de Wit R., Л Appl. Phys., 42, 3304 (1971).
Дополнение
О ПАРАМЕТРАХ СОСТОЯНИЯ И
НЕОБРАТИМОЙ ДЕФОРМАЦИИ
СРЕДЫ С ДИСКЛИНАЦИЯМИ
А. А. Вакуленко
Серия статей Р. де Вита, перевод которых содержит настоящая кни-
га, представляет собой хорошее введение в континуальную теорию дисло-
каций и дисклинаций. Но это действительно введение, в котором многие
вопросы этой теории даже не упоминаются. Ниже мы вкратце охаракте-
ризуем важнейшие из вопрсов, не затронутые в книге. Этому посвящен
§ 4. В §§ 1 и 2 проводится подготовительная работа, а также рассматри-
ваются работы де Вита, не вошедшие в настоящий сборник, в § 3 рас-
сматриваются некоторые вопросы термодинамики тела с непрерывным
распределением дисклинаций.
§ 1. Кроме статей, вошедших в настоящий сборник,
Р. де Вит опубликовал еще две большие статьи по контину-
альной теории дисклинаций [1, 2]. Статья [1] посвящена связи
изолированных дисклинаций и непрерывных их распределе-
ний, статья [2] — непрерывным распределениям дисклинацион-
ных петель. Обе статьи начинаются с обзора континуальных
теорий дислокаций и дисклинаций, аналогичного обзорам
этих теорий в гл. I (разд. 5, 6) и II (разд. 3, 4) настоящей
книги. И вообще, почти все, о чем идет речь в [1, 2], излагается
(и притом, как правило, подробнее) и в настоящей книге.
Однако вследствие, вероятно, именно большей сжатости изло-
жения в [1, 2] в этих работах отчетливее проявляются осо-
бенности подхода де Вита. Эти особенности состоят в сле^
дующем.
Роль основного играет случай непрерывного распределен
ния дефектов — все основные определения и постулаты вво*
дятся в применении к этому случаю, а случай тела с изолиро-
ванными дислокациями и дисклинациями получается как оп*
, ределенного рода предельный частный случай.
Базисными полями служат поля тензора деформации и
тензора изгиба-кручения — через пластические составляющие
этих полей определяются тензоры плотности дислокаций и
дисклинаций, векторы Бюргерса и Франка, плотности петель
и т. д.
Тщательно различаются поля, являющиеся параметрами
состояния тела (в термодинамическом смысле) и не являю-
щиеся таковыми.
Надо заметить, что в первые годы развития контитинуаль-
ной теории дислокаций в качестве основной модели тела в ней
© «Мир», 1977
198
Дополнение
почти исключительно использовалось упругое сплошное тело
с изолированными дислокациями. В частности, рассматривая
такую модель, Най ввел в 1953 г. понятие тензора плотности
дислокаций [3]. Модель реального моно- или поликристалла
в виде сплошного упругого тела с дефектами, допускающими
индивидуализацию, часто используется и в современных ис-
следованиях. Однако во многих случаях имеет смысл сделать
еще один шаг и перейти к модели, в которой сглажена не
только кристаллическая решетка, но и дефектная структура,
т. е. распределение дефектов описывается гладкими полями.
Для построения такой, в полном смысле континуальной,
теории упругого тела с дислокациями существенное значение
имели исследования Ная, Кондо, Эшелби. Но особенно значи-
тельную роль сыграли работы Крёнера. В соответствии с од-*
ним из основных предположений развитой им теории иссле*
дуемое тело в любом возможном состоянии представляет
собой гладкое многообразие. Выбрав одно из состояний
за начальное, любому возможному состоянию сопоставляют
тензор дисторсии — такой двухвалентный тензор. 0Г, что для
касательных векторов dr0, dr, представляющих одну и ту же
пару близких точек многообразия в начальном и рассматри-
ваемом его состояниях, du = dr-fiT, где du = dr — drQ; для
состояний, в которых тело вложено в евклидово пространство,
рт = Vu. Еще одно основное предположение теории Крёнера
состоит в том, что в каждом состоянии поле рг единственным
образом разбивается на упругую и пластическую части, так
что при малой деформации рг = р + рр, причем все эти
поля непрерывны и достаточно много раз дифференцируемы.
Вектор Бюргерса и тензор плотности дислокаций опреде*
ляются соотношениями
& = - a = -VXPp (1.1)
(*)
(X — любой простой и гладкий замкнутый контур в теле). На
основе этих предположений удается развить достаточно да-
леко идущую теорию [4,5]. С другой стороны, с очевидными
оговорками определения (1.1) имеют смысл и в случае тела
с изолированными дислокациями, причем в применении к
этому случаю согласуются с известными определениями. Так,
преобразуя интеграл в (1.1) по формуле Стокса и используя
затем второе из соотношений (1.1), видим, что поток поля а
через любую поверхность дает вектор Бюргерса дислокаций,
пронизывающих эту поверхность, в соответствии с определен
нием Ная.
Дополнение.' О параметрах состояния и необратимой деформации 199
Р. де Вит первым отчетливо показал, что для тела с дис-
клинациями определения (1.1) нуждаются в изменении, и
предложил естественное обобщение теории Крёнера. Основу
составляет предположение, что не дисторсия, а тензор дефор-
мации и тензор изгиба-кручения всегда разбиваются на упру-
гую и пластическую части:
8г = е-|-8р, хг = х4“Ир. (1.2)
Это предположение заведомо является более общим предпо
ложением, чем соответствующее предположение Крёнера: для
того, чтобы было рг = Р + ₽р, необходимо, чтобы были спра-
ведливы разложения (1.2) и, кроме этого, чтобы была инте-
грируемой форма dr-zp.
Соответственно, в роли базисных теперь выступают поля
&р и хр— через эти поля определяются характеристические
векторы:
Ьл=- J drK • {вр + нр X (Г — rj), Q = — Jdrx-x₽ (1.3)
W (ft
и тензоры плотности дислокаций и дисклинаций:
«= —VX8₽ 4-хр —(trxp)S, G = —VX»P (1.4)
(х*— тензор, алгебраически сопряженный тензору х, 6 — еди-
ничный тензор). Вектор Й, определяемый согласно (1.3),
де Вит называет вектором Франка; для изолированной дис-
клинации этот вектор характеризует взаимный поворот бере-
гов разреза: b(r) = [u(r)] = bo4- й X (r — ro)- Преобразуя
интеграл О в (1.3) с помощью теоремы Стокса и используя
(1.4), нетрудно видеть, что 0 — такой двухвалентный тензор,
поток поля которого через любую поверхность в теле с изо-
лированным^ дефектами равен сумме векторов Франка дис-
клинаций, пронизывающих эту поверхность. Поток же поля а,
вообще говоря, по-прежнему дает суммарный вектор Бюр-
герса (дислокаций и дисклинаций, пронизывающих поверх-
ность). Подчеркнем, однако, что, как и в теории Крёнера,
в качестве основного у де Вита выступает случай непрерыв-
ного распределения дефектов в теле, когда все фигурирующие
в (1.3) и (1.4) поля являются гладкими полями. Если при
этом форма dr-xp интегрируема, т. е. xp = Vop, то, согласно
(1.3), й = О для любого замкнутого контура X; согласно (1.4),
всюду в теле 0 = 0, а остальные два из соотношений (1.3) и
(1.4) сводятся в точности к соотношениям (1.1). Это пока-
зано в разд. 3 работы [2] (см. также разд. 6 главы I настоя-
щей книги). В последних разделах работы [2] рассматри-
200
Дополнение
ваются непрерывные распределения петель дислокаций и
дисклинаций, а также связь с теорией Муры.
§ 2. В отличие от а и 0 — тензоров плотности дислокаций
и дисклинаций, характерное свойство которых выражают по-
токи через поверхности, характерное свойство тензора плот-
ности петель дислокаций у и тензора плотности петель дис-
клинаций g выражают «линейные интегралы», а именно для
любого гладкого замкнутого контура X
В= Jdrv(V-iXrA), (2.1)
(Л) (Л)
где В — b — Q X г — так называемый полный вектор Бюр*
герса. Когда дисклинации отсутствуют, тогда § s 0 и В s= b,
так что первое соотношение принимает вид
b=JdrA-v, (2.2)
соответствующий определению тензора у в работе Кроупы
[6]. Согласно (2.2), у — двухвалентный тензор, линейный ин-
теграл поля которого по любому пути X внутри тела с изоли-
рованными дислокациями равен сумме векторов Бюргерса
всех петель, пронизываемых линией X. Подобным образом
истолковываются и соотношения' (2.1). Из сравнения (2.1)
и (1.3) получается, что с точностью до несущественных ела*
гаемых [2] (см. также разд. 6 гл. II)
e₽ = -|(y + v), x₽ = -g-lv(y-y):e, (2.3)
где е—тензор Леви-Чивиты, а двоеточие обозначает двух-
кратное свертывание.
Существенно, что любую изолированную дислокацию или
дисклинацию можно получить суперпозицией бесконечно ма-
лых петель дислокаций и дисклинаций. Вследствие этого
задание плотностей петель должно всегда означать задание
плотностей и самих дефектов, т. е. полей а и 0. Это полу-
чается и формальным образом. Действительно, в силу (2.3)
И (1.4),
« = VXV-i + (tr|)6, 0 = VX§, (2.4)
откуда следует, что задание полей у, § влечет за собой зада*
ние и полей а, 0. С очевидной оговоркой справедливо и обрат*
рое, т. е. задание а, 0 влечет за собой задание и у, |.
Дополнение, О параметрах состояния и необратимой деформации 201
§ 3. Таким образом, есть основания считать, что в число
независимых параметров состояния упругопластического тела
поля а и 0 не должны входить одновременно с полями у и
Вопрос о параметрах состояния возникает при термодинами-
ческом анализе и потому является одним из основных вопро-
сов континуальной теории дефектов.
Уделяется внимание этому вопросу и в работах де Вита.
Так, неоднократно подчеркивается, что параметры состояния
системы — это такие (и только такие) поля и величины из
числа характеризующих систему, которые в каждый момент ее
существования могут быть (по меньшей мере в принципе)
измерены без знания того, что происходило с системой ранее.
Тензоры плотности дислокаций и дисклинаций и тензоры
плотности петель заведомо обладают таким свойством, т. е.
являются параметрами состояния. В [1] показано, что поля
е и -х вполне определяются через а и 0 и потому тоже пред-
ставляют собой параметры состояния. Но этим и завершается
рассмотрение вопроса; сами термодинамические соотношения
де Вит не рассматривает. Вместе с тем здесь обнаружи-
ваются интересные факты.
Напомним прежде всего, что в континуальной теории де-
фектов последние представляются сингулярностями или не-
прерывными распределениями в упругом сплошном теле, как
правило, обычного типа — сплошной среде, внутренние силы
в которой характеризуются предельным близкодействием
(можно сказать, что части тела взаимодействуют друг с дру-
гом только по разделяющим их поверхностям). Вследствие
этого свойства классической сплошной среды, 1) внутренняя
энергия и энтропия любой ограниченной'И измеримой ее части
представляются интегралами от соответствующих плотностей:
Ev = ер dv, Sv = sp dv (3.1)
(v) (о)
(р — плотность вещества), 2) плотности е и s в каждой точке
тела суть функции параметров состояния в этой точке (а не
в некоторой ее окрестности). С помощью (3.1) уравнения ба-
ланса энергии и энтропии для произвольного подобъема v
известным образом сводятся к локальным уравнениям:
de “ И deL „ ds 1
P"d7 = <T ~t V‘q’ ~fV’q> ,(3.2)
где oiJ и — компоненты тензора напряжения и тензора де*
формации, Т — абсолютная температура, q — вектор потока
тепла (так что —V-q = —divq — количество тепла, которое
в единицу времени получает единица элементарного объема).
Первое из соотношений (3.2) заключает в себе также еще
SOS
Дополнение
одно предположение о внутренних силах, в соответствии с
которым эти силы вполне характеризуются полем одного
двухвалентного тензора. В рамках условия, обеспечивающего
справедливость соотношений (3.1), взаимодействие частей
тела может быть более сложным — таким, что действие на
любой мысленно выделенный подобъем остальной части тела
описывается не одним, а несколькими векторными полями на
поверхности подобъема. При этом наряду с тензором напря-
жения о появляется тензор «моментных» напряжений ц (а
также, вообще говоря, тензоры моментных напряжений более
высокого порядка). В результате мощность внешних сил бу-
дет содержать дополнительные члены,, и первое соотношение
(3.2) примет вид
de и deu । a d*n
где |ii-f — компоненты тензора моментных напряжений, —
компоненты тензора изгиба-кручения.
Удобно ввести в рассмотрение плотность свободной энер->
гии, определяемую соотношением f = e — Ts. При этом из
(3.3) имеем
df .. d&ii , .. dxL dT m •
P ~dt ~G ~dT + ~dt S~dT~Tri' <3,4)
где
<3-S>
— скаляр, характеризующий диссипацию (в соответствии с
(3.2) всегда г] 0, причем на основании второго начала тер-
модинамики т] = 0 тогда и только тогда, когда процесс яв-
ляется обратимым). Как и плотности е и s, f есть функция со-
стояния в точке. В соответствии со сказанным ранее состоя-
ние любого объема тела вполне определяется заданием полей
8, х, у, § и поля температуры в этом объеме. Действительно,
заданием полей у и как уже отмечалось (см. (2.3) и (2.4)),
определяются и поля а, 0, т. е. полностью определяется рас-*
пределение дислокаций и дисклинаций в теле. Заданием же
полей е и х вполне определяется упругая деформация тела,
так что остается только задать поле температуры.
Таким образом, для каждой точки функция f есть функция
значений тензоров 8, х, у, | и температуры в этой точке. По*
этому
~dj df d&if df d%4 df dytj
dt de.i dt dn^ dt dy^ dt ‘
dlu dt + dT dt * (3*6)
Дополнение. О параметрах состояния и необратимой деформации 203
Выделим мысленно достаточно*малый материальный объем с
центром в данной точке. Вырезав такой объем из тела, его
можно разгрузить, т. е. перевести в ненапряженное состояние.
Как и в теории пластичности (см., например, [7]), в контину-
альной теории дефектов предполагается, что статическая раз-
грузка достаточно малого объема является обратимым про-
цессом. Это условие подразумевается, например, в разложе-
ниях (1.2) полей деформации и изгиба-кручения на упру-
гую и остаточную части. Рассмотрим разгрузку элемен-
тарного объема. Тогда dzp!dt = 0, и, следовательно, dzTldt =
= dbjdt. В процессе разгрузки остаются также неизменными
распределения дефектов, так что dyfdt = d^/dt = 0. Учиты-
вая, кроме того, что для обратимого процесса т] = 0, из (3.4)
и (3.6) в этом случае имеем
df df d%t
? д&ц dt + Р dt
дт dt
i) de{l _i_ „О dK4 —<>dT
dt dt S~dF ’
независимости переменных dziddt,
= о
а отсюда, вследствие
d%ijldt, dTfdt, имеем
a° = p7^7*~ = s==~^r- <3-7)
Так как разгрузка осуществима из любого состояния элемен-
тарного объема (иначе не всегда были бы справедливы раз-
ложения (1.2)), для любого возможного состояния справед-
ливы и соотношения (3.7).
Учитывая все это, допустим теперь, что части тела взаимо-
действуют друг с другом в соответствии с принципом напря-
жений Коши, т. е. что никаких моментных напряжений нет.
Кроме того, по условию, ц = 0 (p.ij = 0) для любой точки
тела и .любого его состояния. Но на основании (3.7) тогда
всегда будет и df/chtu = 0, т. е. функция f = f (е, х, у, Г) от
тензора х не зависит. Однако в силу (1.2) и (1.4) VXx=0
и невероятно, чтобы поле, столь существенно связанное с рас-
пределением дисклинаций в теле, не оказывало бы влияния
на его свободную энергию. Поэтому остается признать, что
в теле с непрерывным распределением дисклинаций наряду
с обычными обязательно должны иметь место и моментные
йапряжения. Изложенное в первой главе настоящей книги
показывает, что и де Вит считаем, что в теле с дисклинациями
должны быть моментные напряжения. Но это мнение он под-
крепляет только дуализмами геометрии и статики (точнее
тем, что при наличии моментных напряжений эти дуализмы
выглядят полнее).
204
Дополнение
§ 4. При изучении настоящей книги не может не броситься
в глаза также то, что всюду, где речь идет об определении
напряжений в теле, пластические поля считаются фиксиро-
ванными и задача ставится как задача об упругом теле. Это
характерно не только для работ де Вита, но и для других^
известных к настоящему времени исследований в этой об-
ласти.
Ясно, что в общем случае изменение состояния тела свя-
зано с изменением не только упругих полей, но и распределе-
ния дефектов. Поскольку смещения последних в теле всегда
сопровождаются диссипацией, такое изменение состояния
представляет собой необратимый процесс. Для того, чтобы
можно было рассматривать необратимые процессы, к соотно-
шениям, вытекающим из (3.7) по конкретизации функции f,
нужно присоединить подходящие соотношения для пластиче-
ских составляющих деформации и изгиба-кручения.
Заметим, что при любой допустимой конкретизации функ*
ции f = f(e, х, у, %, Т) первые соотношения (3.7) должны да-
вать 12 соотношений, разрешимых относительно 8^ и
(в сущности, это является одним из условий, определяющих
допустимые f). Так, с учетом малости упругой деформации
можно положить, что
f = Ef/%8ftl + ^4№ + A%(7’-To) + fo, (4.1) .
где Eiiu, Н')ы, №, f0, вообще говоря, — некоторые функции
тензоров у и При этом отмеченное требование разрешимо-
сти (3.7) относительно и хг-3- равносильно очевидному усло-
вию невырожденности тензоров Е, Н и h. Подставляя (4.1)
в (3.7), получаем соотношения, из которых следуют
ъц — + BijkiPkl + ai} (Т — То),
кц = CukiO111 +
Подчеркнем, что тензоры е и g представляют упругую часть
деформации и изгиба-кручения. Для того, "чтобы система
определяющих соотношений была полной, нужно, чтобы с на-
пряжениями и температурой были бы связаны и поля ер, х?.
Вследствие необратимости процессов, в' кбторйх изменяются
8Р и хр, эти. связи, могут отражатьЛвлияние..«11стории>>^т.,
тецзоры 8Р и хр в каждый., данный- момент времени могут
весьма сложным образом зависеть от напряжений о, ц и тем-
цературы в предшествующие моменты..
/ Пусть / — время . или^. аналогичный.. скалярный параметр;
гтусть при /=.0 тёлб,.находится в ^екссррром* заданном равно*'
веером ср,стоянии, й пусть (о) ь?(Д) <Г‘‘(г) функции р'о, 3HaiJ Ч
чениями соответственно <г(т), р(т), Т(т) при 0 t ДЛ?£ f
Дополнение. О параметрах состояния и необратимой деформации 205
какой-либо фиксированной точки тела. В соответствии с от-
меченным каждая из компонент тензоров ер и ир представ-
ляет собой функционал, аргументами которого,служат (о)ь
(р,)ь (7% так что
8p(/) = F((o)t, (H)f> (Г),), н₽(0 = Ф((<т)ь (ц)#, (T)f). (4.3)
Когда поля 8р и хр известны, с помощью (2.3) и условий на
границе тела определяются поля у, описывающие распре-
деление дефектов в теле. Ясно, что в каждой данной точке
тела тензоры у и § должны быть функциями тех же аргумен-
тов, что и фигурирующие в (4.3):
у(/) = Г((<т)й (,*),, (Г)/), g(/) = 3((o)<, (Н)/, (Г)0. (4.4)
Обратно, если для каждого f>0 и каждой точки тела из-
вестны у и то, в силу (2.3), вполне определены и поля
ер, хр.
Таким образом, задача сводится к детализации двух групп
функций: 1) функций (4.2), описывающих упругие свойства
материала, 2) функций (4.4), описывающих эволюцию полей
дислокаций и дисклинаций под действием полей напряжений
и температуры. Первая из этих задач сравнительно проста
и хорошо изучена. Она усложняется только тогда, когда тен-
зоры Е,-Н, h, компоненты которых фигурируют в (4.1) и (4.2)
и которые, как отмечалось, в общем случае есть функции
тензоров у и |, действительно заметно зависят от последних.
Известно, однако, что влияние дефектов на постоянные упру-
гости начинает заметно сказываться лишь при больших плот-
ностях дефектов — существенно больших, чем достигаемые
при малой деформации.
Вторая задача представляет собой сложную проблему.
Для того, чтобы прояснить существо этой проблемы, вообра-
зим сначала заданной модель кристалла с дефектами в виде
упругого сплошного тела с системой изолированных дислока-
ций и дисклинаций. Подчеркнем, что поля плотности дислока-
ций и дисклинаций и плотности петель у и § определяются и
в этом случае, но будут сингулярными полями. Так, у и § —
обобщенные функции с тензорными значениями, сосредото-
ченные на поверхностях в теле, края которых служат линия-
ми дислокаций и дисклинаций (см. [1, 2] и разд. 3—5 гл. II
настоящей книги). Почти для каждой точки каждой из этих
линий найдется окрестность, пересекающаяся с линией только
одной дислокации или дисклинации. Для такого малого объ-
ема нетрудно сформулировать критическое условие и связать
характеристики движения соответствующего (попадающего в
объем) участка линии дислокации с напряжениями в объеме
[8]. Но для построения модели тела с непрерывными полями
206
Дополнение
дефектов с ситуацией в таких малых объемах исходной мо-
дели надо связать средние по объемам, содержащим много
дефектов. Вследствие взаимодействия последних, это труд-
ная задача. Заметные результаты в этом направлении начали
появляться лишь в самое последнее время [9].
Отметим также работы [10, 11], посвященные выяснению
роли дисклинаций при пластическом деформировании метал-
лов. Для преодоления трудностей, возникающих при изучении
тела с большим числом взаимодействующих дефектов, имеет
значение разработка различных приближенных методов.
В работах [10, 11] на основе экспериментальных данных пока-
зывается, что с развитием пластической деформации метал-
лического тела важную роль в ансамбле дислокаций начи-
нают играть такие коллективные моды, которые эквивалентны
системам дисклинаций. С этим связана фрагментация кри-
сталла на блоки, разделенные малоугловыми границами, а
также, по-видимому, дальнодействующая часть собственных
напряжений в теле.
СПИСОК ЛИТЕРАТУРЫ
1. de Wit R., The relation between continuous and discrete disclinations,
Arch. Meeh. Stos., 24, 3, 499—510 (1972).
2. de Wit R., Continuous distribution of disclination loops, Physica Stat
Sol., (a) 18, 669—681 (1973).
3. Nye J. F., Some geometrical relations in dislocated crystals, Acta Me-
- tallurgica, 1,453—162 (1953).
4. Kroner E., Kontinuumstheorie der Versetzungen und Eigenspannungen,
Ergeb. angew. Math., 5, 1—179 (1958).
5. Крёнер E., Общая континуальная теория дислокаций и собственных-
напряжений, «Мир», М„ 1965.
. 6. Kroupa F., Continuous distribution of dislocation loops, Czech. J. Phys.,
B12, 191—202 (1962).
- 7. Качанов Л. M., Основы теории пластичности, «Наука», 1969.
8. Вакуленко А. А., О связи микро- и макромоделей упругопластического
тела, Исследования по упругости и пластичности, сб. 10, ЛГУ, 1974,
стр. 3—37.
9. Динамика дислокаций, сб. статей, «Наукова думка», Киев, 1975.
10. Лихачев В. А., Рыбин В. В., Дисклинационная структура деформиро-
ванных кристаллов, Вестник ЛГУ, № 1, 1976, стр. 90—96.
11. Лихачев В. А., Рыбин В. В., Дисклинации в идеально фрагментирован-
ном кристалле, Физ. те. тела, 18, № 1, 163—168 (1976).
ОГЛАВЛЕНИЕ
От редактора перевода..........................................'...5
Глава J. .Линейная статическая теория дисклинаций ........ 7
'1/Введение . . ’ .............................................7
‘2.’Обзор теории совместности..................................8
3. Многосвязные тела и теорема Вейнгартена.14
4. Обзор теории с внутренними источниками напряжения ... 16
5. Обзор теории дислокаций . .17
6. Теория дисклинаций .......................................19
7. Вектор поворота и вектор Бюргерса ........................22
8. Связь с теорией моментных напряжений......................23
9. Связь с винтовым исчислением............................. 27
10. Резюме и обсуждение ......................................28
11. Приложение.............................................. 29
Список литературы............................................ 30
Глава II. Непрерывно распределенные и изолированные дисклинации в
анизотропном упругом теле........................................32
1. Введение . ............................................
2. Общее решение задачи о равновесии тела с пластической де-
формацией . .......................... ...............
3. Обзор теории дислокаций................................
4. Непрерывное распределение дефектов.......................
5. Изолированные дефекты................................*
6. Непрерывные распределения бесконечно малых петель дефектов
7. Изолированный диполь...................................
8. Приложение к дислокациям...............................
9. Дислокационная модель дефекта..........................
10. Компенсированная дисклинация...........................
11. Выводы.................................................
12. Приложение А. Теорема о дивергенции и теорема Стокса . .
13. Приложение Б. Дельта-функции, связанные с кривыми и по-
верхностями . .............................................
Список литературы .........................................
32
38
43
56
64
76
83
87
90
94
96
99
Глава III. Непрерывно распределенные и изолированные дисклинации
в изотропном упругом теле.........................................Ю7
1. Введение ,............................................. 107
2. Изотропия................................................108
3. Обзор теории несовместности..............................109
4. Обзор дислокационной теории........................... . 114
5. Непрерывно распределенные дефекты........................118
$08
Оглавление
6. Изолированный дефект................................ .123
7. Выводы................................................125
Список литературы........................................125
Глава IV. Прямолинейные дисклинации ..........................127
1. Введение . ............................................127
2. Уравнения Вольтерра.............,......................129
3. Обзор теории прямолинейных дислокаций..................131
4. Статика прямолинейных дисклинаций в изотропном теле . .139
5. Статика прямолинейных дисклинаций в изотропном теле . . .145
6. Дисклинация со смещенной осью поворота.................152
7. Бесконечно малый диполь дисклинаций ...................154
8. Дислокационная модель прямолинейной дисклинации . . .159
9. Конечный дисклинационный диполь........................165
10. Компенсированная дисклинация ............ 172
11. Двугранная дислокационная стенка......................175
12. Пример ограничивающей дислокации......................177
13. Выводы . . ......................................... 179
14. Приложение А. Вычисление 6-функций на прямой линии и на
бесконечной полуплоскости.................................183
15. Приложение Б. Обобщенные производные цилиндрических ко-
ординат ..................................................185
16. Приложение В. Вывод статических полей для прямолинейного
дефекта из общей теории.....................................189
Список литературы ......................................... 196
Дополнение. О параметрах состояния и необратимой деформации среды
с дисклинациями...............................................197
Список литературы . . . . .................................206
ИБ № 175
Р. Де. Вит
КОНТИНУАЛЬНАЯ .ТЕОРИЯ ДИСКЛИНАЦИЙ
Редактор П. Я. Корсоюцкая
Художник А. В. Шипов
Художественный редактор В. И. Шаповалов
Технический редактор И. М. Кренделева
Корректоров.-С. Соколов . > '
Сдано в набор 17.06.76. Подписано к печати 15.11.76. Бумага тип. № 2 60XQOVie'»6,50
бум. л. 13,00 печ. л. 12,12 уч.-изд. л. Изд. № 1/8640. Цена 1 р. 21 к. Зак. 201.
Издательство«Мир>, Москва, 1-й Рижский пер., 2 * -
Ордена Трудового Красного Знамени Ленинградская типография № 2 имени Евгении
Соколовой СоЮзполиграфпрома при Государственном комитете Совета Министров СССР
по4делам издательств, полиграфии и книжной торговли, 198052, Ленинград,' Л-52,
Измайловский проспект, 29ж
НОВОЕ В ЗАРУБЕЖНОЙ НАУНЕ
к.