/
































































































































































































Автор: Зубов Л.М. Еремеев В.А.
Теги: общая механика механика твердых и жидких тел механика математика механика деформируемых тел
ISBN: 978-5-02-034102-9
Год: 2008



Текст
В.А. ЕРЕМЕЕВ
Л. М. ЗУБОВ
МЕХАНИКА
УПРУГИХ
ОБОЛОЧЕК
НАУКА
УДК 531
ББК 22.21
Е70
Рецензенты
доктор физико-математических наук В И. ЕРОФЕЕВ,
доктор физико-математических наук Ю.Ф. МИГАЛЬ
Еремеев В.А., Зубов Л;М.
Механика упругих оболочек / В.А. Еремеев, Л.М. Зубов ; отв. ред.
В.А. Бабешко ; Юж. НЦ РАН. - М. : Наука, 2008. - 280 с. - ISBN
978-5-02-034102-9.
Изложены общая нелинейная теория микрополярных оболочек (оболочка
рассматривается как материальная поверхность Коссера, образованная частицами,
обладающими шестью степенями свободы)- На основе принципов и представлений
современной механики сплошной среды сформулированы уравнения движения и определяющие
соотношения упругих и неупругих оболочек при больших деформациях. Построена
математическая теория групп поверхностной анизотропии оболочек. Установлены
вариационные принципы нелинейной динамики и статики упругих микрополярных
оболочек. Разработана теория дислокаций и дисклинаций в оболочках типа Коссера.
Представлена термодинамическая теория фазовых превращений, развита теория
разрывных решений и волн ускорения в оболочках. Найдены универсальные решения
нелинейной статики упругих оболочек. Решены нелинейные задачи Сен-Венана о кручении и
изгибе призматических и спиральных микрополярных оболочек Сформулированы
определяющие неравенства. Обсуждаются приложения теории микрополярных оболочек к
задачам наномеханикн н биомеханики.
Для студентов, аспирантов и специалистов в области механики деформируемого
твердого тела и прикладной математики.
Темплан 2007-1-140
ISBN 978-5-02-034102-9 © Южный научный центр РАН, 2008
© Еремеев В.А., Зубов Л.М., 2008
© Редакционно-издательское
оформление. Издательство "Наука", 2008
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
В книге используется трехзначная нумерация формул: номер
главы, номер параграфа и номер формулы. Для рисунков и таблиц
принята двухзначная нумерация: номер главы и номер рисунка
(таблицы). Также приняты следующие общие соглашения.
1. Векторы «абраны полужирным курсивом или прямым шрифтом
(греческий алфавит), например А.
2. Тензоры набраны полужирным прямым шрифтом ( А).
3. Функционалы набраны рукописным шрифтом (^).
4. Греческие индексы, как обычно, принимают значения 1 и 2,
латинские - произвольные.
Основные буквенные и символьные обозначения:
л - обратный тензор дисторсии;
^ - потенциал внешних нагрузок;
Ь, В - тензоры кривизны микроструктуры;
Ьк (к. = 1,2,..., М) - векторы Бюргерса;
D, G - тензоры усилий и моментов типа.Пиолы;
Do - частное решение силового уравнения
равновесия;
dk, Dk (к = 1,2, 3) - ортонормированные тройки векторов
ориентации частиц;
ds, dS - элементы длины дуг кривых на О и I;
div, Div - операторы дивергенции на о и Е;
е, Е - дискриминантные тензоры на поверхностях о и
^ -функционал потенциальной энергии оболочки;
%1=%,%2,%ъ>--- -функционалы, исиользуемые в вариационных
принципах стационарности Лагранжа, Ху-Васид-
зу, первом принципе Тонти, Кастильяно, Рейс-
снера, втором принципе Тонти, Гамильтона-
Остроградского и др.;
ег, е9, е„ ея, еф, ez - векторные базисы, соответствующие
цилиндрическим системам координат;
Ег, Еф, Ев, ER, Еф, - векторные базисы, соответствующие
сферические ким системам координат;
&та - символ Леви-Чивиты;
f,€ - поверхностные силовая и моментная нагрузки;
F - тензор дисторсии;
grad, Grad — операторы градиента на О и X;
Н - тензор макроповорота;
I - единичный, тензор в трехмерном пространстве;
i*i, /3. *з ~ декартов векторный базис;
3
К - массовая плотность кинетической энергии;
К - мера изгибной деформации;
L - тензор изгибной деформации;
La = ra • L; !£у - виртуальная скорость движения линии у на с в
направлении нормали v,
Lin„ - группа тензоров X : п • X = 0;
п, N - векторы единичной нормали к о и Е;
о = I - w ® л - проектор на о-;
0 = 1-Лг@Лг - проектор на Ъ;
Р[, Рг - тензоры усилий и моментов типа Кирхгофа;
Pjj, Ujj - компоненты тензоров Р;, Р2;
qi, q2 - произвольные гауссовы координаты на О;
Q - ортогональный тензор;
Qo = In ® п -1 - тензор поворота вокруг вектора п на 180°;
г — радиус-вектор точек оболочки в начальном
состоянии (отсчетной конфигурации);
R - радиус-вектор точек оболочки в актуальной
конфигурации;
га, т$ - основной и взаимный базисы на а;
Ra, R^ - основной и взаимный базисы на X;
г, (р, х3 = г и - цилиндрические лагранжевы и эйлеровы коорди-
Rt Ф, Z наты;
г, ф, 9 и R, Ф, 0 -сферические лагранжевы и эйлеровы
координаты;
s, S - длины дуг кривых, лежащих на о и X;
Sym„ - группа принадлежащих поверхности о:
симметричных тензоров;
Orth Orth Orth* ~~ группа ортогональных тензоров и ее подгруппы;
Т, М — тензоры усилий и моментов типа Коши;
tr - оператор взятия следа тензора;
^ф STjtO" - касательная плоскость к о;
и - вектор перемещений, или вектор малого
добавочного перемещения;
U — скорость движения сингулярной кривой;
Unim„ - двумерная унимодулярная группа;
у - линейная скорость частиц оболочки;
V - удельная дополнительная энергия оболочки;
Т - функционал дополнительной энергии для
оболочки с непрерывно распределенными
дислокациями;
°У' - функционал дополнительной энергии для
многосвязной оболочки;
°У" -функционал дополнительной энергии для
оболочки с дискретным набором дислокаций;
w - малое возмущение фазовой линии у,
4
W - удельная потенциальная энергр дочка
оболочки; ,т.е.
х\, х2, х3и - декартовы лагранжевы и эйле & "У1И
XI,X2,X3 #ja
х, у, г - декартовы лагранжевы координа. \
х,Х - радиус-векторы точек трехмерного
счетной и актуальной конфигурациях;
Y - мера деформации;
И - тензор метрической деформации;
а. - вектор плотности дислокаций;
а' - вектор плотности дислокаций для
сосредоточенных дислокаций;
р - суммарный вектор Бюргерса набора дислокаций;
5 - символ вариации;
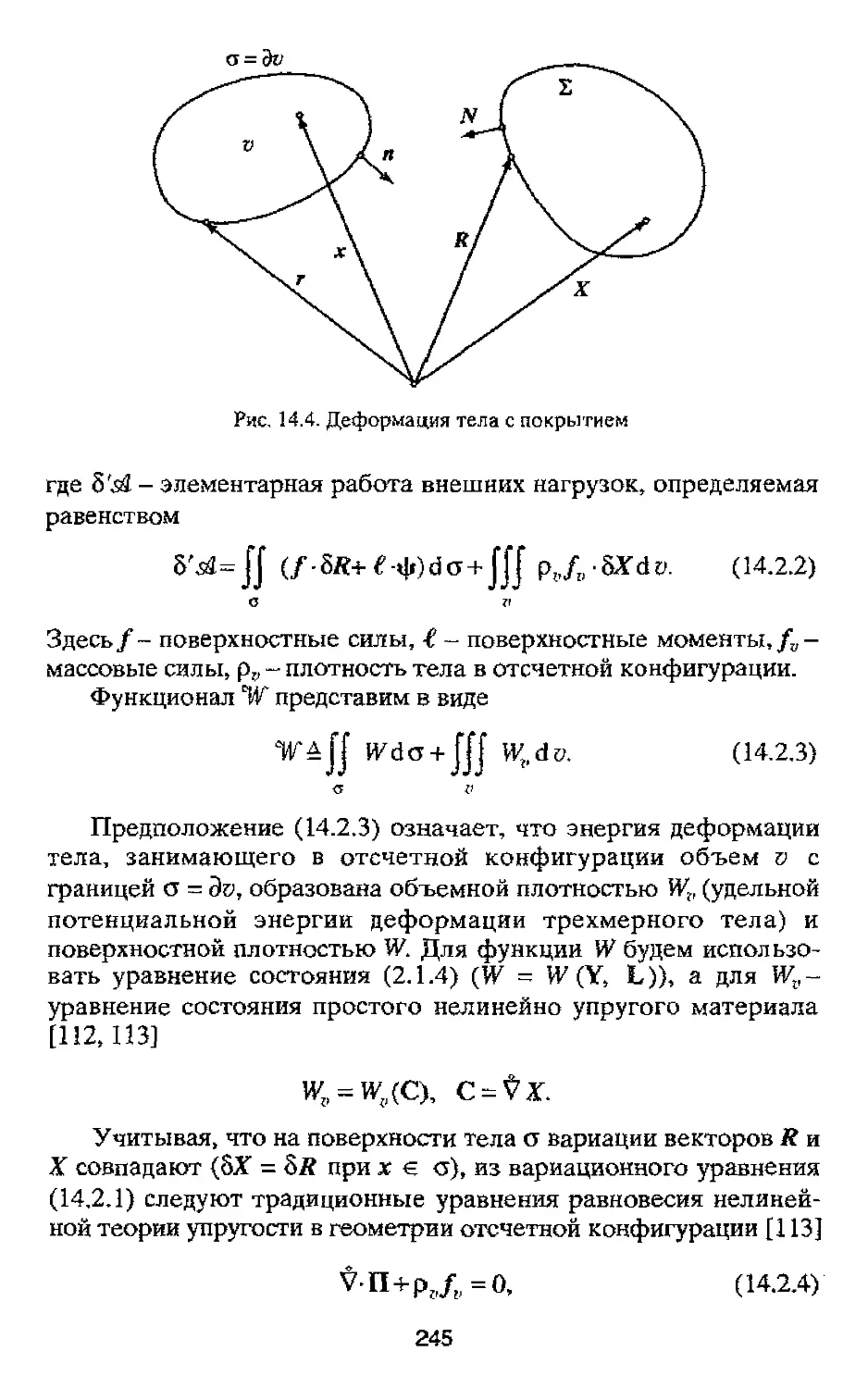
5'^ - элементарная работа внешних сил;
6{г) -дельта-функция;
sP к - символ Кронекера;
°<х» итл
ф - вектор функций напряжений;
<р, у - линейные плотности краевых силовой и момент-
ной нагрузок;
у - прообраз границы раздела фаз на а;
ук(к ~ 1, 2,..., М) - контуры отверстий на а;
Гк{к = I, 2,..., М) - произвольные контуры, охватывающие ук;
|х - тензор энергии-импульса (Зшелби) в оболочке;
v - вектор нормали к кривой на а, касательный к о-;
V - вектор нормали к кривой на Е, касательный к 2;
р - плотность оболочки в отсчетной конфигурации;
р, h - заданные на краю оболочки радиус-вектор точек
тела и поворот;
р©;, р©2 -тензоры инерции;
а, Б - поверхности оболочки в отсчетной и актуальной
конфигурациях;
1 ~ касательный вектор к кривой, лежащей на о;
й> = (й; и щ = - контур оболочки;
= 0Оз исо4
Ш; - часть контура, на которой заданы перемещения;
©2 - часть контура, на которой заданы усилия;
щ - часть контура, иа которой заданы повороты;
й>4 - часть контура, на которой заданы моменты;
о* - вектор малого добавочного микроповорота или
угловая скорость;
ф - виртуальный вектор микроповорота;
9 - линейное натяжение на кривой у,
\ } - скачок соответствующей величины при
пересечении сингулярной кривой;
- операция скалярного умножения;
5
- операция косого (векторного) умножения;
- операция полного умножения (свертывания)
тензоров;
- операция тензорного умножения;
- групповая операция;
- векторный инвариант тензора второго ранга;
- трехмерный кабла-оператор в отсчетной
конфигурации;
- линейный тензор деформаций;
- тензор скоростей деформаций;
- линейный тензор изгибных деформаций;
- тензор скоростей изгибных деформаций (кроме
гл. 6).
ВВЕДЕНИЕ
Оболочкой в механике и технике называется материальное
тело, масса которого сосредоточена вблизи некоторой
поверхности. Плоская пластина - частный случай оболочки.
Тонкостенные конструкции в форме оболочек широко распространены в
природе и технике. Оболочка - это, например, внешнее
покрытие летательного или космического аппарата, корпус подводной
лодки, велосипедная камера, воздушный шарик, дирижабль и
другие надувные конструкции, клеточная мембрана,
железобетонная строительная конструкция, труба, шланг, артерия живого
организма, парашют, парус, нанотрубка, фуллерен и т.д. Теория
оболочек - один из наиболее актуальных разделов механики
деформируемого твердого тела. Поведение оболочек как
реальных объектов отличается большой сложностью и
разнообразием.
Хотя тело оболочки занимает некоторую область в
трехмерном пространстве, краевые и начально-краевые задачи,
используемые для описания равновесия или движения оболочки,
являются двумерными (по пространственным переменным). За
независимые переменные в системе разрешающих уравнений
принимаются гауссовы координаты той поверхности, вблизи
которой распределена масса оболочки, и время, а координата,
отсчитываемая по толщине оболочки, исключается из
рассмотрения. Это означает, в частности, что в случае равновесия
оболочки определение ее напряженно-деформированного
состояния сводится к задаче отыскания функций, определенных на
двумерном многообразии.
Построение двумерных моделей оболочек осуществляется
разными способами. Один из них состоит в приближенной
замене исходной трехмерной (по пространственным переменным)
задачи для тонкостенного тела на двумерную. Переход от
трехмерной задачи к двумерной выполняется либо путем принятия
гипотез о виде зависимости поля перемещений и напряжений от
толщинной координаты (например, классических гипотез
Кирхгофа-Лява), либо на основе асимптотического метода,
использующего наличие в трехмерной задаче малого
параметра - относительной толщины оболочки. Для упругих
оболочек метод гипотез можно трактовать как вариационный
метод Канторовича-Ритца.
7
Другой способ вывода моделей оболочек, получивший
название прямого подхода, заключается в том, что оболочка с
самого начала рассматривается как материальная поверхность,
т.е. двумерный материальный континуум, наделенный
определенной структурой и определенными свойствами. Уравнения
движения или равновесия материальной поверхности
формулируются на основе фундаментальных принципов и законов
механики. При прямом подходе понятия и представления трехмерной
сплошной среды не привлекаются.
Исторически теории оболочек предшествовала теория
изгиба плоских пластинок, разработанная Кирхгофом. Хотя
уравнение изгиба пластинки, называемое уравнением Софи Жермен,
было известно еще в начале 19-го столетия, заслуга Кирхгофа
состояла в том, что он впервые сформулировал правильные
граничные условия на краю пластинки. Кроме того, Кирхгоф
вывел двумерную теорию изгиба тонкой пластинки из
трехмерной теории упругости, приняв физически ясные гипотезы о
распределении перемещений и напряжений по толщине пластинки,
получившие его имя. Линейная теория пластинок Кирхгофа
впоследствии была хорошо обоснована разными способами с
позиций трехмерной теории упругости в предположении малости
относительной толщины, а также однородности и изотропности
материала.
Гипотезы Кирхгофа были обобщены Лявом на случай
кривых пластинок, что привело к созданию линейной теории
упругих оболочек, которая со временем была усовершенствована
рядом ученых. В теории Кирхгофа-Лява состояние оболочки
полностью определяется полем перемещений срединной
поверхности. Общий порядок системы уравнений равновесия оболочек
Кирхгофа-Лява равен восьми. Это значит, что на краю оболочки
должны быть поставлены четыре граничных условия. В
частности, если участок края свободен от закреплений, то на нем
следует задать вектор распределенной по контуру силовой
нагрузки и распределение внешнего изгибающего момента,
вектор которого направлен по касательной к граничной кривой
деформированной оболочки. Распределение крутящего момента
по краю оболочки в теории Кирхгофа-Лява не может быть
учтено в полной мере, что считается недостатком этой теории.
Теория оболочек типа Кирхгофа-Лява имеет не только
линейный вариант, пригодный при малых деформациях и
поворотах, но и вполне корректный нелинейный вариант,
справедливый при произвольно больших деформациях, поворотах и
перемещениях. Модель оболочки Кирхгофа-Лява может быть
8
выведена на основе прямого подхода, при котором оболочка
трактуется как двумерный материальный континуум, т.е.
материальная поверхность с определенными свойствами. Если
говорить об упругих оболочках, то модель Кирхгофа-Лява
можно определить как материальную поверхность, для которой
удельная потенциальная энергия деформации в данной точке
зависит от движения поверхности посредством коэффициентов
первой и второй квадратичных форм, т.е. посредством величин,
характеризующих изменение метрики и кривизны поверхности в
этой точке. Благодаря такому свойству теория оболочек типа
Кирхгофа-Лява тесно связана с классической
дифференциальной геометрией поверхностей, в частности с теорией изгибаний,
и поэтому отличается красотой и наглядностью. Внутренние
воздействия в оболочке Кирхгофа-Лява описываются
двумерными симметричными тензорами усилий и моментов.
Взаимодействие частей двумерного континуума осуществляется силами
и моментами, распределенными по кривой, разделяющей эти
части. При этом проекция вектора распределенного момента на
направление нормали к деформированной поверхности равна
нулю в каждой точке оболочки типа Кирхгофа-Лява.
Перерезывающие усилия, т.е. составляющие внутренних усилии в
направлении нормали к деформированной поверхности, в данной
модели не совершают работы при любых движениях оболочки,
т.е. играют роль реакций связи.
Хотя модель оболочки типа Кирхгофа-Лява обладает рядом
достоинств, ее точные нелинейные соотношения и разрешающие
уравнения весьма сложны и громоздки. По этой причине в
литературе имеется необозримое количество приближенных и
упрощенных вариантов теории оболочек, в которых отбрасываются
те или иные члены в разрешающих уравнениях. Указанные
упрощения, как правило, не имеют надежного обоснования и
четко очерченной области применимости. Можно ожидать, что с
развитием численных методов и совершенствованием средств
вычислительной техники значение упрощенных теорий будет
уменьшаться, а роль точной теории будет возрастать.
Гипотеза Кирхгофа для упругой пластинки означает
отсутствие поперечных сдвигов при ее изгибе. Учет поперечных сдвигов
привел к созданию линейной теории изгиба пластинок, которая
называется теорией Рейсснера и является более точным
приближением к трехмерной теории упругости по сравнению с теорией
Кирхгофа. Преимущество теории Рейсснера перед теорией
Кирхгофа проявляется для пластинок средней толщины, в
динамических задачах, а также в случаях, когда материал пластинки
9
анизотропен и обладает малой жесткостью на сдвиг. Теория типа
Рейсснера, учитывающая поперечные сдвиги, существует и для
оболочек (в геометрически линейном варианте). Общий порядок
системы дифференциальных уравнений статики оболочек типа
Рейсснера равен десяти. В соответствии с этим число граничных
условий равно пяти. Если край оболочки не закреплен от
поворотов, то одно из этих условий заключается в задании
распределенного крутящего момента.
Напряженно-деформированное состояние оболочки типа
Рейсснера определяется не только полем перемещений
срединной поверхности, но и еще двумя функциями гауссовых
координат на этой поверхности, которые интерпретируются как углы
поворотов сечений оболочки. Понятие углов поворота
существует я в теории Кирхгофа-Лява, но там поле поворотов
выражается через поле перемещений поверхности. В модели
Рейсснера два угла поворота кинематически независимы от
леремещений, что и создает поперечные сдвиги, однако третий
угол поворота (вокруг нормали к поверхности) выражается
через перемещения срединной поверхности. Таким образом, если
рассматривать оболочку Рейсснера как материальную
поверхность, то каждая частица этого двумерного континуума
имеет пять степеней свободы (три перемещения и два поворота),
в то время как в теории Кирхгофа-Лява- только три степени
свободы.
Контактные воздействия на кривой, разделяющей две части
материальной поверхности, в теории Рейсснера сводятся к
распределенной по этой кривой силе и распределенному
моменту, вектор которого не имеет составляющей по нормали к
поверхности. Оболочка Рейсснера, как и оболочка Кирхгофа-
Лява, не способна воспринимать распределенную по поверхности
или по ее краю моментную нагрузку, вектор которой направлен
по нормали к поверхности (речь идет о геометрически линейной
теории, т.е. о случае малых деформаций и поворотов).
Перерезывающие усилия в модели Рейсснера совершают работу на
поперечных сдвигах, связываются с ними определяющими
соотношениями, т.е. играют роль, равноправную с
тангенциальными усилиями и изгибающими и крутящими моментами в
оболочке.
Следует отметить, что теория оболочек типа Рейсснера, в
отличие от теории Кирхгофа-Лява, не имеет логически
последовательного и корректного нелинейного варианта, пригодного
при произвольно больших перемещениях, поворотах и
деформациях.
10
Оболочки типа Коссера, рассматриваемые в настоящей
книге, являются двумерным аналогом сплошной среды с момент-
ными напряжениями и вращательным взаимодействием частиц
(т.е. континуума Коссера). Каждая частица материальной
поверхности в модели Коссера имеет шесть степеней свободы
абсолютно твердого тела, причем все три вращательные степени
свободы кинематически независимы от поля перемещений
поверхности. Модель оболочки Коссера обладает большей
общностью по сравнению с моделями Кирхгофа-Лява и Рейс-
снера и может быть сформулирована без каких-либо
ограничений на величину перемещений, поворотов и деформаций.
Взаимодействие частей двумерного континуума Коссера
осуществляется силами и моментами, распределенными по линии раздела.
При этом вектор распределенного внутреннего момента, в
отличие от теории оболочек Кирхгофа-Лява и Рейсснера, может
иметь любое направление. Достоинством теории оболочек
Коссера по сравнению с более сложными моделями оболочек
является то, что внутренние воздействия целиком состоят из сил
и моментов и не содержат сверхстатических величин, например,
распределенных силовых диполей. Общий порядок системы
дифференциальных уравнений статики оболочек типа Коссера
равен двенадцати, что требует постановки шести граничных
условий на краю поверхности. На участке края, свободном от
закреплений, задается распределение силовой нагрузки и
моментной нагрузки. Оболочка Коссера способна воспринимать
моментную нагрузку произвольного направления,
распределенную как по поверхности, так и по граничному контуру. Модель
Коссера позволяет без труда формулировать граничные условия
на том участке границы, который жестко связан с абсолютно
твердым телом, испытывающим конечные перемещения и
конечные повороты.
Существенное отличие теории оболочек типа Коссера от
теорий типа Кирхгофа-Лява и Рейсснера заключается в том, что
она не может быть выведена из трехмерной теории упругости,
если упругая среда является простым материалом, в котором
отсутствуют моментные напряжения, а тензор напряжений
Коши симметричен. В то же время модель оболочки типа
Коссера можно получить путем перехода от трехмерной задачи к
двумерной, если трехмерную среду считать континуумом
Коссера, т.е. материальным телом с моментными напряжениями
и вращательными степенями свободы частиц. Континуум
Коссера, основы теорий которого изложены в [9, 29, 39, 47, 58, 70,
114, 116, 122, 127, 150-154, 162, 184, 196, 197, 200-202, 209, 219,
1.1
223, 247, 250, 286, 297], часто называют микрополярной средой.
По этой причине оболочки типа Коссера в дальнейшем будут
называться также микрополярными оболочками.
В данной работе развивается прямой подход к построению
механики микрополярных оболочек (оболочек типа Коссера).
Нисколько не умаляя достоинств широко используемых и
хорошо известных по большому числу публикаций различных
подходов к построению механики оболочек на основе
уравнений пространственной теории упругости, следует отметить, что
у прямого подхода имеется ряд преимуществ. В первую очередь
это связано с получением уравнений состояния при конечных
деформациях для оболочек. Дело в том, что технология
изготовления оболочек многих типов существенно влияет на
механические свойства материала оболочки так, что они изменяются
по сравнению со свойствами трехмерной среды. Например, это
происходит в результате изменения свойств обработанного
поверхностного слоя, который в большой степени определяет
свойства оболочки в целом. Следует также заметить, что
уравнения состояния при больших деформациях многих
полимерных и резиноподобных материалов известны, по
экспериментам на тонких пластинках или пленках, а не на
трехмерных образцах. Для наноразмерных оболочек
существенно проявляются масштабный фактор (т.е. когда механические
свойства, например модуль Юнга, зависят от размеров), влияние
поверхностного натяжения. Кроме того, существует целый
ряд примеров систем, таких как, например, биологические
мембраны, свободно подвешенные пленки смектиков, тонкие
полимерные пленки, трехмерных аналогов которых просто не
существует. В этой связи вполне естественно построение
двумерных уравнений состояния оболочек непосредственно из
соответствующих экспериментов, а не путем, например,
проведения достаточно трудоемкой в случае конечных
деформаций процедуры осреднения по толщине уравнений состояния
трехмерных тел, тем более, что таковые часто бывают
неизвестны.
Отметим еще, что теория оболочек типа Коссера может
использоваться для моделирования инженерных конструкций,
которые издалека выглядят как оболочки, но имеют сложное
строение, например, содержат внутренние перегородки,
подкрепления, многослойность и т.п.
Первая глава монографии является вводной и содержит
необходимые в дальнейшем сведения из тензорного исчисления.
Использованы прямые тензорные обозначения, которые позво-
12
лили избежать громоздких обозначений, обычно присущих
уравнениям механики оболочек.
Далее, во второй главе в рамках прямого подхода изложены
основные положения теории упругих оболочек типа Коссера.
Оболочка рассматривается как материальная поверхность,
образованная частицами, обладающими шестью степенями
свободы абсолютно твердого тела - вектором перемещений и
собственно ортогональным тензором микровращения. Основные
уравнения и краевые условия статики упругих оболочек типа Коссера
выведены при помощи принципов локального действия,
материальной индифферентности и виртуальной работы.
Сформулированы основные типы краевых условий.
Получены деформационные и дисторсионные граничные условия.
Решены задачи определения перемещений по заданным полям
меры деформации и поворотов, а также нахождения
перемещений и поворотов по известным полям меры деформации и
тензора изгибной деформации. Сформулированы
соответствующие условия совместности. Обсуждаются краевые задачи
статики, основанные на введении функций напряжений. Вкратце
рассмотрена связь двумерных уравнений статики оболочек
Коссера с условиями равновесия трехмерного микрополярного тела.
В литературе [98, 99, 169, 170, 195, 245, 246,267-270, 274, 282]
оболочками Коссера также называются модели оболочек, в
которых поверхность оболочки наделяется одним или
несколькими векторами - директорами. Кинематика и уравнения
движения таких оболочек Коссера (оснащенных поверхностей),
вообще говоря, существенно отличаются от использованных в
данной работе. Эти различия анализируются в заключительном
параграфе второй главы.
В третьей главе предложены вариационные постановки
задач равновесия микрополярных оболочек. Сформулированы
вариационные принципы стационарности типа Лагранжа, Кас-
тильяно, Рейсснера, Ху-Васидзу, а также первый и второй
вариационные принципы Тонти, принцип динамики Гамильтона-
Остроградского. Здесь же получены уравнения динамики
микрополярных оболочек.
Построение определяющих соотношений оболочек с
памятью содержится в четвертой главе. В ней же сформулированы
модели оболочек при наличии связей,
В пятой главе изложена термодинамика оболочек. Здесь
использован подход [61, 296], в рамках которого в каждой точке
поверхности оболочки вводятся два температурных поля, для
которых постулируются уравнения сохранения энергии. Второе
13
начало термодинамики постулируется в форме двух неравенств
типа Клаузиуса-Дюгема. На их основе получены приведенные
диссипативные неравенства. Формулируются уравнения
состояния термоупругих оболочек. Приведен упрощенный вариант
термодинамики оболочек, аналогичный [240]. Для этого
варианта в каждой точке поверхности оболочки задается одна
температура, перепад температур по толщине оболочки не
учитывается.
Следующая глава содержит построение теории групп
симметрии уравнений состояния упругих оболочек. Здесь дано новое
определение локальной группы материальной симметрии
оболочки, основанное на требовании инвариантности уравнений
состояния оболочки (плотности потенциальной энергии
оболочки) при некоторых преобразованиях отсчетной конфигурации.
Группа симметрии образована четверками тензоров,
определяющих эти преобразования. Данное определение позволило ввести
представления уравнений состояния оболочек для некоторых
типов анизотропии.
В седьмой главе развит полуобратный метод решения задач
статики микрополярных оболочек. В частности, для нелинейно
упругих оболочек типа Коссера найдены семейства конечных
деформаций, на которых исходная двумерная краевая задача
статики сводится к краевой задаче для системы обыкновенных
дифференциальных уравнений. Эти семейства представляют
собой точные решения нелинейных уравнений равновесия и
относятся к оболочкам, имеющим форму винтовой поверхности.
Построенные решения описывают, в частности, большие
деформации растяжения, кручения и пространственного изгиба
естественно закрученных призматических оболочек, а также трубок,
ось которых является винтовой линией.
Далее, изучен ряд универсальных деформаций
(универсальных решений) для микрополярных оболочек, точно
удовлетворяющих уравнениям равновесия при любых уравнениях
состояния ортотропных или изотропных оболочек. Эти решения
аналогичны универсальным деформациям, известным в статике
несжимаемых нелинейно упругих тел.
В девятой главе рассмотрены задачи статики для
многосвязных оболочек, оболочек с конечным набором и
непрерывным распределением дислокаций. При помощи вариационного
принципа дополнительной энергии (Кастильяно) выполнен
переход от оболочки с конечным набором дислокаций к оболочкам с
заданной плотностью дислокаций. Установлена статико-геомет-
рическая аналогия и сформулированы двойственные краевые
14
задачи для оболочки без дислокаций, нагруженной
поверхностными силами и моментами, и для оболочки с непрерывным
распределением дислокаций, свободной от силовой
поверхностной нагрузки. Наряду с теорией дислокаций в случае
конечных деформаций в этой же главе построена линейная теория
дислокаций и дисклинаций в микрополярных оболочках.
Сформулированы дополнительные неравенства в теории
оболочек, аналогичные неравенству Колемана-Нолла и условию
сильной эллиптичности в нелинейной теории упругости [142].
Одиннадцатая глава посвящена исследованию разрывных
решений задач статики и динамики оболочек Коссера. Получено
условие существования слабых разрывных решений уравнений
движения - волн ускорения, для которых нарушение
непрерывности на некоторых сингулярных кривых происходит у вторых
производных полей перемещений и микроповоротов.
Установлен аналог теоремы Френеля-Адамара-Дюгема о
существовании акустических осей и вещественности акустических чисел для
упругих микрополярных оболочек. Показано, что условие
существования волны ускорения, как и в случае простых
материалов, не обладающих моментными напряжениями,
эквивалентно требованию сильной эллиптичности уравнений
равновесия.
В двенадцатой главе рассмотрены задачи равновесия
оболочек, материал которых претерпевает фазовые
превращения мартенситного типа. С пом:ощью вариационного принципа
стационарности потенциальной энергии получены условия
термодинамического равновесия. Получено выражение тензора
энергии-импульса (Эшелби) для микрополярных оболочек и
сформулировано кинетическое уравнение, описывающее
движение фазовой линии в случае малых отклонений от
термодинамического равновесия. Выведенные краевые условия на
границе раздела фаз обобщены на случай учета линейного
натяжения.
Тринадцатая глава отведена применению статического
подхода Эйлера к задачам устойчивости микрополярных оболочек.
Здесь получены линеаризованные краевые задачи статики
оболочек Коссера.
В последней главе обсуждаются некоторые приложения
теории микрополярных оболочек к моделированию
механического поведения клеточных и липидных мембран.
Сформулированы уравнения состояния микрополярных оболочек,
материал которых представляет собой двумерную упругую
несжимаемую жидкость, обладающую свойствами ориентационной
15
упругости, подобно жидкокристаллическим средам - нематикам
и смектикам. Дана постановка задачи о так называемых телах с
покрытием - трехмерных телах, поверхность которых обладает
упругой энергией. Также рассмотрены некоторые задачи,
возникающие в наномеханике.
Составление обзора литературы по механике оболочек,
насчитывающей десятки тысяч источников, не входило в цели
этой книги. Тем не менее отметим некоторые труды по механике
оболочек, в значительной степени повлиявшие на интерес
авторов к теории оболочек [17, 23-26, 30, 31, 39, 61, 94, 99, 123,
124, 129, 138, 139, 147, 148, 151, 182, 228, 245, 267]. Обратим
внимание на библиографические статьи [249, 256], посвященные
механике пластин и оболочек, а также на соответствующий
раздел в книге [237], где предпринята попытка собрать
известные работы в этой области, начиная с работы Эйлера
1767 г. и заканчивая некоторыми публикациями за 1998 г.
В работах [179-182, 227-229, 233, 258], восходящих к идеям
[263], развивается вариант нелинейной механики оболочек, в
котором деформация оболочки также описывается собственно
ортогональным тензором поворота и радиус-вектором
положения базовой поверхности оболочки. В частности, в рамках этих
исследований развиты численные методы конечных элементов,
адаптированные к такого класса нелинейным задачам статики и
динамики оболочек и которые могут быть использованы в
теории оболочек Коссера.
Также выделим книги и статьи, непосредственно связанные с
развитием механики микрополярных тел и оболочек [4, 6-8, 35,
115, 118, 120, 121, 132-134, 159, 187, 246, 248, 275, 276].
Содержание данной книги основано преимущественно на
исследованиях авторов, опубликованных ранее в различных
периодических изданиях [41, 42, 49, 71-74, 77, 189-192, 259, 299,
300] и которые на разных этапах поддерживались грантами
РФФИ (№№ 04-01-00431, 05-01-00638 и др.), Конкурсного центра
фундаментального естествознания при СПбГУ, J6zef Mianowski
fund (Польша) и Фонда поддержки отечественной науки.
Глава 1
ЭЛЕМЕНТЫ ТЕНЗОРНОГО ИСЧИСЛЕНИЯ
В краткой форме сообщаются необходимые в дальнейшем
сведения о тензорном анализе в бескоординатной форме. Более
подробно прямое (бескоординатное) тензорное исчисление
изложено в [59, 79].
1.1. Евклидовы тензоры
Рассмотрим евклидово векторное пространство (5„
размерности п над полем вещественных чисел. Евклидово векторное
пространство представляет собой линейное пространство, в
котором определена операция скалярного произведения
векторов. Скалярное произведение векторов а, Ъ из %п обозначается
точкой: а ■ Ь. Здесь и далее векторы будем выделять наклонным
полужирным шрифтом. Пусть ek (k = 1, 2, ..., п)~ некоторый
базис в пространстве (§„. Тогда любой вектор разлагается
единственным образом по векторам базиса:
а = акек. (1.1.1)
Здесь и в дальнейшем применяется соглашение о
суммировании от 1 до п по повторяющимся индексам, расположенным
на разной высоте. Скалярное произведение двух векторов
выражается через их компоненты с помощью положительно
определенной матрицы метрических коэффициентов
ab = gsiasbk.
Наряду с базисом еь который назовем основным, рассмотрим
базис es, определенный уравнениями
[О, s^k,
*'-«*=s; ±\ , (1.1.2)
[1, 5 = к.
Здесь 8£ - символ Кронекера. Единственное решение уравнений
(1.1.2) имеет вид
e* = g™em, (1.1.3)
17
где gsm- матрица, обратная матрице g^,: gsmgmk - bsk. Базис es
называется взаимным по отношению к базису ек. Векторы
основного базиса выражаются через векторы взаимного формулами,
аналогичными (1.13):
em = gmlek. (1.1.4)
В евклидовом пространстве @„ существует базис it,
удовлетворяющий соотношению ik ■ is = 5Ь. Такой базис называется
ортонормированным и образует совокупность п взаимно
ортогональных единичных векторов. Очевидно, что базис, взаимный
к ортонормированному, совпадает с ним самим. Поэтому при
использовании ортонормированного базиса условимся все
индексы писать на одном (нижнем) уровне, при этом соглашение о
суммировании по повторяющемуся индексу остается в силе,
например, а = а^к.
С помощью неособой матрицы А^ можно перейти от
основного базиса ек к другому основному базису ет> по формуле
«*=4Л- (1-1-5)
Матрицу обратного преобразования обозначим А™ , так что
ек = Afem„ A(Akm, = 5^, А*т.А? = 5*. (1.1.6)
Преобразование базисов, взаимных к ек и ет-, осуществляется
также с помощью матриц А^, и А" :
**' = A,V, е' = А'я*т'. (1.1.7)
В основе прямого (бескоординатного) тензорного исчисления
лежит понятие тензорного произведения линейных пространств.
Строгое определение и описание конструкции тензорного
произведения содержится в [59, 79]. Здесь мы ограничимся
перечислением основных свойств тензорного произведения.
Тензорное произведение двух евклидовых векторных пространств @т и
(£„ обозначается @ffl ® (5„ и представляет собой линейное
пространство, порождаемое тензорными (диадными) произведениями
вектора из (£т на вектор из (£„. Тензорное произведение векторов
(диада) в <= <ё т я р е (Sn обозначается а ®р и обладает
следующими свойствами:
(ш + $Ь)®р = а(а®р) + $(Ь®р),
a®(cxp + $q) = a(a®p) + $(a®q).
18
Здесь а, Ъ е &т> Р> Я G ®я> а> Р - произвольные вещественные
числа. Как видно из (1.1.8), тензорное произведение обладает
обычными свойствами относительно сложения и умножения на
число, но некоммутативно.
Аналогичными свойствами, а также ассоциативностью
обладает тензорное произведение трех и более векторных
пространств @т® ©„ ® ... ® <£„ порождаемое элементами вида
а ®р®... ®х.
Пусть ек - базис в пространстве (£,„, /; - базис в пространстве
©„,..., А,- базис в пространстве (Sr. Размерность пространства
@,„ ® (£я ® ... ® @г равна произведению размерности
перемножаемых векторных пространств, а его базис составляют
элементы вида ек ®/ ® ... ® hj (к = 1, 2,..., m, j = 1, 2,..., «, j" = 1, 2,..., г).
Элементы пространства Жр> являющегося тензорным
произведением р идентичных евклидовых тензорных пространств @„,
называются евклидовыми тензорами ранга р. Далее тензоры
второго, а также более высокого ранга будем выделять прямым
полужирным шрифтом.
В соответствии с этим определением вектор «е ®„ можно
назвать тензором первого ранга, скаляр (число) а - тензором
нулевого ранга.
Базисом в Жр может служить совокупность элементов вида
ек®ек.®ек-® ..., где еь ек; е^... - произвольные базисы в (£р.
Такой базис называется сложным полибазисом. Наиболее часто
используется так называемый простой полибазис в Жр, который
строится на основе некоторого основного базиса в (§р и
взаимного к нему. Так, для пространства Ж2 тензоров второго
ранга возможны четыре простых полибазиса: ек ® es, ек ® es,
ек ® е5У ек ® es. Любой тензор второго ранга Т можно представить
в виде следующих разложений:
T = tskes ®ek =tskes ®ek=t5kes <8>е* =*/е* ®es. (1.1.9)
Числа t^ называются ковариантными компонентами тензора,
?к - контравариантными, tsk и tk - смешанными компонентами.
Аналогично определяются компоненты евклидовых тензоров
любого ранга.
Не следует отождествлять тензор с его компонентами.
Тензор есть инвариантный объект, не связанный с выбором базиса,
в то время как его компоненты зависят от выбора базиса.
Например, для тензора третьего ранга имеем
Ч? = 4>™ет ® еК ® es = ¥*q'-'ek, ®et,®eq'. (1.1.10)
19
Из (1.1.6), (1.1.7) получаем формулу преобразования
компонент тензора при изменении базиса
ч,*;'=а»<^"л (i-i.il)
Тензоры вида а®Ь®с®... ®х называются разложимыми.
Очевидно, что любой тензор есть линейная комбинация
разложимых тензоров.
1.2. Действия с тензорами
1. Так как пространство тензоров ранга р является линейным
пространством, в нем определены действия сложения и
умножения на число. Если тензор представлен своими компонентами в
некотором базисе, то умножение его на число сводится к
умножению на это число всех компонент тензора. При сложении
двух тензоров одного ранга, представленных в одном и том же
базисе, соответствующие компоненты складываются. Таким
образом, если тензоры представлены своими компонентами в
одном и том же базисе, то линейной комбинации тензоров
соответствует такая же линейная комбинация их компонент.
Например,
ссХ + рТ = {аХ"'1" + рГ"-)ет ® е„ ® ....
2. Тензорное умножение тензоров из Жр на тензоры из Жг
Результатом является тензор ранга р + q:
VX е Хр, VY е %,, X® Ye Жр+Ч,
X = Xm-Sem ®... ® es, Y = l*"'et ® ... ® е„
X®Y ±Х™ 5У*- !ет® ... ®es®ek®...®e,.
Тензорное произведение произвольного числа тензоров
обладает свойством ассоциативности.
3. Перестановкой TSj называется линейная функция Тц. Жр ->
—> 2^, определяемая сначала на разложимых тензорах и
состоящая во взаимной перестановке векторов, стоящих на i-м и _/-м
местах:
(в, ® ... ®й,® ... ®aj® ... ®afiJ =
= (Д, ® ... ®а}® ... ®dj® ... ®йг).
На произвольные тензоры операция перестановки
распространяется по линейности. Для тензора второго ранга возможна
20
только одна перестановка - транспонирование тензора,
которое будем обозначать так:
(я ® bf = Ь ® а, X = Хтпет ® е„
ХТ = Хтяеп®е„, = Хлтет®е„. (1.2.1)
Видно, что для Хе J2 матрицы компонент тензоров X и Хг в
простом полибазисе являются транспонированными.
4. Свертыванием tr тензора называется линейная функция
(*..т)
tr :5£ —>Ж0_2 (р>2), определенная на разложимых тензорах
(*..о р р
формулой
tr(al®...®ai®...®ai®...®a,) =
= (а,--ву)в,®...®вЬ| ®а,+, ®...®й;_,®0;+! ®...®дг
и состоящая в скалярном перемножении вектора, занимающего
1-е место, на вектор, занимающий j-e место. По линейности
операция свертывания распространяется на произвольные
тензоры. Свертывание уменьшает ранг тензора на две единицы.
Свертывание тензора второго ранга обозначается просто tr, а
скаляр tr X (X е Ж2) называется следом тензора X:
trX = Хтпет -е» = Xmng™ = Х™8тп = Х£ = Х"я. (1.2.2)
Заметим, что след тензора вообще говоря не совпадает со следом
матрицы его компонент.
5. Простым умножением тензора X ранга р на тензор Y
ранга q называется операция, состоящая в свертывании tr
<p.p+i>
тензора X <8> Y и обозначаемая X ■ Y
X Y 4 tr (X®Y).
(p,p+i>
Другими словами, простое умножение сводится к скалярному
перемножению последних векторов в разложении тензора X на
первые векторы в разложении тензора Y:
XY = (Xm-s'en!®..,®e:i®e!)(Yklpek®el®...®ep) =
= Хт~*кУк1^ет®...®е,®е!®...®ер.
Ранг тензора X * Y равен р + q - 2. В частности, для тензоров
второго ранга имеем
X-Y = AiAyV"®e,e £2.
21
6. Косое умножение. Это действие имеет смысл только для
тензоров, построенных на основе трехмерного векторного
пространства (?3- Как известно, в @3 определено векторное про-
изведение векторов a xb. Косое умножение XxY, где X е Жр,
Y б Ж^, приводит к тензору ранга р + q - 1 и состоит в векторном
перемножении последних векторов в разложении тензора X на
первые векторы в разложении тензора Y:
Хх Y = (ХЩ- л,ет ®...®es ®el)x(YkI"pek ®е, ®...®e ) =
= X"'-s!Yk'-t,em®...®es®(etxek)®e!®...®e
р'
1. Полное умножение. Пусть X е Жр, Y е Жч, причем
р > q. Полное умножение - операция, приводящая к тензору
ранга р— q и состоящая в последовательности свертываний
tr , tr ,..., tr тензора X®Y. Эту операцию будем
обозначать знаком О:
X© \ = (Х! jmn-'ei®...®es®et) О (Ук1_рек ®el ® ...®ер) =
%,„..,*■ ®-®V (1-2-3)
_ yi.jmn.
Если X и Y - тензоры одинакового ранга, toXOY = Y0X,
причем X О X > О, аХ0Х=О тогда и только тогда, когда X ~ 0.
Следовательно, операция полного умножения тензоров в
пространстве Жр имеет свойства скалярного произведения. Таким
образом, пространство Жр можно рассматривать как векторное
евклидово пространство размерности пР.
Для тензоров второго ранга верны соотношения
X0Y = tr(X-YJ) = Y0X = XrOYr.
1.3. Теорема о линейной функции
Пусть X <= Ж р, Ye Ж q, L е Жр+Ф тогда соотношение
Y = L © X задает линейную функцию %: Жр -» %q. Справедливо и
обратное утверждение:
Теорема о линейной функции. Всякая линейная функция
€: Жр —» Жф отображающая тензоры ранга р в тензоры ранга q,
может быть представлена единственным образом с помощью
полного умножения некоторого тензора ранга р + q: €(X) =
= L0X.
Опуская детали доказательства, укажем только метод
построения тензора L. Пусть WM, FN - основной и взаимный
22
базисы в %^М, N = 1, 2,..., пр). Тогда L единственным образом
определяется формулой
L^F*)®**. (1.3.1)
В частном случае линейного преобразования векторного
пространства @л в себя имеем у = £{х) = Ljr,Le %2.
Таким образом, пространство тензоров второго ранга можно
рассматривать как пространство линейных операторов,
преобразующих векторы в векторы. Аналогично, пространство 5Г3
есть пространство линейных операторов, переводящих векторы
в тензоры второго ранга, и т.д.
Рассмотрим в линейном векторном пространстве %п
наиболее простую линейную функцию - тождественное
преобразование
€(х) Ах V* € <£„.
Реализующий это преобразование тензор называется
единичным и обозначается I. Единичный тензор имеет следующие
эквивалентные представления:
I = ek®ek = ek®ek = gk!ek ®е,= gm#m ®еп = ik ® ik.
Рассмотрим тождественное преобразование пространства &2
€(Х) ах VX е £2.
Реализующий это преобразование тензор 41 является
тензором четвертого ранга и может рассматриваться как единичный
оператор в (£ 2. Тензор 41 имеет следующие эквивалентные
представления:
4I = (I®if2-' = ek®I®ek = it ®im ®im ®гк.
1.4. Тензоры второго ранга
Наиболее широкое применение в механике сплошной среды
амеют тензоры второго ранга. Как уже указывалось в § 1.3,
тензор второго ранга есть линейный оператор, действующий в
пространстве ёппо правилу
& = Р а = лРг. (1.4.1)
Тензор второго ранга Р называется симметричным, если Р =
= Р , и антисимметричным, если Р = —Р .
23
В трехмерном пространстве антисимметричный тензор А
имеет только три независимые компоненты и может быть
представлен через вектор а по формуле
A = lxa = axl, a = --5 ©А. (1.4.2)
2
Здесь 8 ^ -1x1 = bhn„ik®im ®in - Ьискриминантный
тензор {тензор Леви-Чивита). Его компоненты в
ортонормированием базисе б^п, называемые символами Леви-Чивита,
равны нулю, если среди индексов k, m, n имеются хотя бы два
одинаковых, равны числу е, если индексы образуют четную
перестановку чисел 1, 2, 3, и равны -е, если индексы образуют
нечетную перестановку, е = 1, если векторный базис ik имеет
правую ориентацию, £ = -1 - в противоположном случае. Для ко-
вариантных и контравариантных компонент тензора 8 в
произвольном косоугольном базисе ек справедливы соотношения
Л^Л,,, A^ = -Lsw g= \gik\. (1.4.3)
При простом умножении двух тензоров второго ранга снова
получается тензор второго ранга. Поэтому множество тензоров
второго ранга замкнуто не только относительно линейных
операций, но и относительно простого умножения. Результат
простого умножения тензоров второго ранга в дальнейшем
будем называть произведением этих тензоров.
При использовании смешанных компонент тензора в
фиксированном простом полибазисе имеет место соответствие между
алгеброй тензоров второго ранга и алгеброй матриц в том
смысле, что линейной комбинации тензоров соответствует та же
линейная комбинация матриц смешанных компонент, а
произведению тензоров соответствует произведение матриц. При замене
базиса по формулам (1.1.5), (1-1.7) матрица смешанных
компонент заменяется подобной матрицей. Благодаря такому
соответствию многие понятия и факты из теории матриц
соответствующим образом переносятся на тензоры второго ранга.
Кроме того, ясно, что для тензоров второго ранга
справедливы все понятия и теоремы, известные в теории линейных
операторов в конечномерных пространствах.
Детерминантом тензора второго ранга называется
определитель матрицы его смешанных компонент
detX^lVI = |Х-| = г!Хы| = -|*ы!- (1-4.4)
8
24
Это определение корректно, так как величины |X™ \ и\Х™\
не зависят от выбора базиса. Тензор X называется неособым,
если det X ф 0, Для неособого тензора существует единственный
обратный Х~!, удовлетворяющий соотношению
Х-Х^1=Х-'-Х = 1. (1.4.5)
Целая степень Хт тензора X вводится как т-кратное
произведение тензора самого на себя. Тензор (Х"!)" = X""
называется отрицательной степенью тензора X.
Линейное преобразование q : (£н —ь- (£,„ сохраняющее
скалярное произведение векторов, называется автоморфизмом
евклидова пространства. @„:
q{a) q(b)=ab Vo, Ъ е <£„. (1.4.6)
Как и любое линейное преобразование, автоморфизм
реализуется с помощью тензора второго ранга Q. Этот тензор
называется ортогональным. Из (1.4.6) следует, что он удовлетворяет
соотношению
Q QT=QT Q = I. (1.4.7)
Из (1.4.7) получаем, что det Q = ±1. Ортогональные тензоры
с положительным детерминантом называются собственно
ортогональными, а с отрицательным несобственно
ортогональными. Ортогональное преобразование не меняет длин
векторов и углов между ними, поэтому собственно
ортогональный тензор в трехмерном евклидовом пространстве задает
конечный поворот абсолютно твердого тела вокруг
неподвижной точки. Несобственно ортогональный тензор осуществляет
преобразование, состоящее из жесткого поворота и отражения.
Совокупность ортогональных тензоров образует группу,
обозначаемую 0{Ъ) или Orth, в которой операцией умножения
служит простое умножение тензоров. Эта группа называется
полной ортогональной группой.
Ортогональный тензор переводит ортонормированный базис
векторов в другой ортонормированный базис:
Если базисы ik,js заданы, то тензор Q находится из уравнения
(1.4.8) в виде
Q = j3®is- (1-4.9)
Если в формуле (L4.8) тензор Q несобственно
ортогональный, то базисы j* и ik имеют разноименную ориентацию.
25
Единичный вектор е, удовлетворяющий уравнению
Х-е=Хе, (1.4.10)
называется собственным вектором, или главной осью тензора
X. Те значения X, при которых существует решение уравнения
(1.4.10), называются собственными, или главными значениями
тензора X.
Они являются корнями характеристического уравнения,
которое в трехмерном пространстве записывается так:
-7?+I1tf-l2\ + I3=Q, (1.4.11)
/, ±trX, /2 * -(tr2X-trX2), /3* = detX.
Коэффициенты уравнения (1.4.11) называются
соответственно первым, вторым и третьим (главными) инвариантами тензора
второго ранга X.
Для симметричного тензора главные значения вещественны,
а соответствующие им собственные единичные векторы -
ортогональны и образуют базис. В ортонормированием базисе
собственных векторов симметричный тензор, действующий в
трехмерном пространстве, представляется следующим образом:
X = \lei®el+X2e2®e7+Xiei®e3. (1.4.12)
Представление вида (1.4.12) называется спектральным
разложением тензора второго ранга. Для несимметричного тензора
может не существовать вещественных собственных чисел и
соответствующих им вещественных собственных векторов, а
спектральное разложение, вообще говоря, не имеет места.
Для любого тензора второго ранга справедлива:
Теорема Кэлн-Гамильтона. Тензор удовлетворяет своему
характеристическому уравнению.
В трехмерном пространстве это тождество записывается
следующим образом:
-X3 + /jX2-/2X + /3l = 0. (1.4.13)
С помощью (1.4.13) любую целую (а для неособого тензора -
и любую целую отрицательную) степень тензора можно
выразить в виде трехчлена a,J + я5Х + агХ2, коэффициенты которого
в0, аи а2 будут полиномами от главных инвариантов тензора X.
Тензор X1, определенный для п = 3 формулой
X1 4 Х2-/,Х + /21, (1.4.14)
называется присоединенным к X. Для неособого тензора верно
26
равенство X1 = X"1 det X. Матрица смешанных компонент
тензора X1 совпадает с транспонированной матрицей
алгебраических дополнений матрицы смешанных компонент тензора X.
Симметричный тензор X называется неотрицательным,
если
а X а>0 Va,
и положительно определенным, если
а - X ■ а > 0 Va Ф 0.
Собственные значения неотрицательного (положительно
определенного) тензора неотрицательны (положительны).
Неотрицательным (положительно определенным)
квадратным корнем из неотрицательного (положительно
определенного) симметричного тензора X € %2 называется тензор X1'2,
определенный формулой
Здесь Хк- собственные значения тензора X, ек-
соответствующие им собственные векторы, а квадратные корни берутся
в арифметическом смысле. Аналогично (1.4.15) можно
определить любую степень тензора X.
Справедлива следующая теорема:
Теорема о полярном разложении. Любой неособый тензор
второго ранга X е Ж2 можно единственным образом
представить в виде
X = S Q = Q S*, (1.4.16)
где S, S - симметричные положительно определенные
тензоры, a Q -ортогональный тензор.
Эти тензоры определяются формулами
S = (X-Xr)"2, S*=(Xr-X)"2, Q = S! X. (1.4.17)
Заметим, что теорема о полярном разложении имеет смысл и
для особого тензора Р. В этом случае также верны разложения
(1.4,16), тензоры S и S* являются неотрицательными и
определяются единственным образом по формулам (1.4.17), а
ортогональный тензор Q определяется не единственным образом.
Обозначив орты главных осей тензоров S и S
соответственно екп е*к, имеем
S = X<fe®*„ S' = £ ^X»v (L4.18)
27
Ортогональный тензор Q переводит главные оси тензора S в
главные оси тензора S : es - Q = +es.
Теорема о полярном разложений часто используется в
нелинейной теории упругости [ИЗ, 142] для определения чистой
деформации среды, не связанной с поворотами.
1.5. Псевдотензоры
В трехмерном пространстве примером несобственно
ортогонального тензора служит тензор -I. Соответствующее линейное
преобразование меняет направление всех векторов на
противоположные и называется инверсией. В @3 любое несобственно
ортогональное преобразование можно представить в виде
суперпозиции некоторого собственно ортогонального и инверсии.
В связи с преобразованием инверсии в @3 следует сделать
следующее замечание. Векторное произведение двух векторов а х b
не является в полном смысле вектором, так как не меняет знака
при инверсии пространства. Такие векторы называются
псевдовекторами или аксиальными векторами, в то время как
векторы, меняющие знак при инверсии пространства,
называются истинными (абсолютными) или полярными векторами.
Аналогично псевдовекторам можно ввести и псевдоскаляры и
псевдотензоры.
Дадим математическую формулировку отличия
псевдотензоров от истинных тензоров. Она состоит в различном
преобразовании компонент тензора при преобразовании векторного
базиса. Пусть матрица Ачр. описывает преобразование от одного
векторного базиса к другому (1.1.5):
ет- = А"еп.
Если определитель матрицы | АЪ \ меньше нуля, то новый базис
имеет противоположную старому ориентацию, если j Д^ j > 0, то
одноименную. Преобразование компонент произвольного
тензора или псевдотензора ^ = х¥П"г 'em®en®...®et =Ч"в'"'"''еГЙ.®
®еп.®...®е1, определяется формулой
^"■^[^л;,!)]^:^;,...^-'"''', (1.5.1)
0 для истинных или полярных тензоров,
1 для псевдотензоров или аксиальных тензоров.
где
е
28
Примером псевдоскаляра служит смешанное произведение
полярных векторов а • (Ьх с), псевдовектором является
векторное произведение полярных векторов axb, псевдотензором
второго ранга - тензор I х «, где а - полярный вектор.
Псевдотензором третьего ранга является тензор Леви-Чивиты
§ = -I х I. Естественно, что псевдовектором (псевдотензором)
является произведение псевдоскаляра на истинный вектор (тензор).
При неизменной ориентации пространства, т.е. при
использовании только одноименных (например, правых) векторных
базисов, различие между истинными тензорами и псевдотензорами
пропадает. Хотя для многих вопросов механики сплошной среды
различие между тензорами и псевдотензорами не является
существенным и обычно между ними не делается различий, тем
ие менее в некоторых ситуациях это различие играет
существенную роль, например, при рассмотрении симметрии тензорных
функции [60]. Это различие используется в современной физике,
например, в теории электромагнетизма.
В механике оболочек это различие может оказаться весьма
существенным. Например, псевдотензорами являются тензоры
изгибных деформаций, моментов, псевдовекторами - векторы
микроповорота, угловой скорости, в то время как тензоры
метрической деформации и усилий являются истинными, как и
вектор линейной скорости. Истинными скалярами являются такие
объекты, как внутренняя энергия, плотность, энтропия и др.
Более подробно тензорный аналпз аксиальных и полярных
объектов обсуждается в книге [59].
Следует заметить, что поскольку оболочка может
рассматриваться как материальная поверхность, наделенная
определенными физическими свойствами и вектором нормали я, для
теории оболочек существенным оказывается аналогичное
разделению между тензорами и псевдотензорами различие тензорных
объектов при преобразовании зеркального отражения
относительно касательной плоскости к оболочке (описываемого
несобственно ортогональным тензором 1-2я ® н).
1.6. Внутренняя и внешняя симметрия тензоров
Свойство некоторого тензора не изменяться в результате
действия какой-либо перестановки называется свойством
внутренней симметрии тензора. Например, таким свойством
обладают симметричный тензор второго ранга ТТ = Т, Те Ж2, или
тензор Леви-Чивиты: 8 = (8Г" )Г|-3.
29
Внешней симметрией тензора называется его свойство не
изменяться при некоторых автоморфизмах в (£л. Вначале
ограничимся рассмотрением истинных или абсолютных тензоров.
В пространстве тензоров Жр можно ввести преобразование
sfe>c(X): Жр —> Хр по следующему правилу:
^vQ(X)^X,J'{erQ)®{eJ-Q)®...®(e!-Q) (J g {)
4X = X»-'ei®eJ®...®eleXp,
где Q - ортогональный тензор. Это преобразование сохраняет
скалярное произведение в пространстве Жр:
s£vQ(X)Qs£vQ(Y)=XOY VX, Ye£p (1.6.2)
и поэтому называется автоморфизмом в Хр. Автоморфизм
(1.6.1) порождается соответствующим автоморфизмом
векторного пространства @„.
Согласно (1.6.1) действие автоморфизма на скаляр*, вектор лг
и тензор второго ранга X соответственно можно записать таким
образом:
3&vQ(x) = x, &vQ(x) = x-Q, s&vQ(X) = Qr-X-Q. (1.6.3)
Группой внешней симметрии тензора X е Хр называется
совокупность ортогональных тензоров Q, для которых sfoe(X) = X.
Таким образом, свойством внешней симметрии тензора
называется свойство не меняться при некоторых ортогональных
преобразованиях.
Примеры.
1) Группа внешней симметрии вектора состоит из поворотов
вокруг этого вектора и отражений относительно плоскостей,
проходящих через этот вектор.
2) Учитывая геометрическую интерпретацию симметричного
тензора второго ранга как поверхности второго порядка, можно
показать, что группа внешней симметрии симметричного
тензора второго ранга совпадает с группой совмещений трехосного
эллипсоида.
Тензор ранга р называется изотропным, если группа его
внешней симметрии совпадает с полной ортогональной группой,
т.е. для любого ортогонального тензора Q выполняется
равенство sJ^e(X) = X.
Из этого определения и (1.6.1) непосредственно следует, что
изотропный тензор имеет одни и те же компоненты в любом
ортонормированном базисе.
30
Изотропными тензорами являются тензоры 1,1®1,1®1®1
и т.д.
Любая перестановка изотропного тензора также является
изотропным тензором.
Можно доказать следующее утверждение.
Любой изотропный тензор четного ранга 2к представляет
собой линейную комбинацию перестановок тензора
1©1®...®1.
А: раз
Никакой тензор нечетного ранга не может быть изотропным,
так как он меняет знак при инверсии пространства
Таким образом, изотропным тензором второго ранга
являются тензоры вида oel, а е IR, а изотропными тензорами
четвертого ранга - линейные комбинации вида eel ® I+p(I ® I)2? +
+ y4I V серией*.
Тензор ранга р называется гиротропным, если группа его
внешней симметрии содержит в себе собственно ортогональную
группу, т.е. для любого собственно ортогонального тензора Q
выполняется равенство sfee(X) = X.
Примером гиротропного тензора является тензор Леви-
Чивиты 8.
Гиротропный тензор имеет одни и те же компоненты во всех
ортонормированных базисах одноименной ориентации.
Очевидно, что если тензор четного ранга является
гиротропным, то он будет и изотропным.
В случае рассмотрения не только истинных тензоров и
полярных векторов, но и псевдотензоров и аксиальных векторов,
ситуация с внешней симметрией усложняется. Например,
рассмотрим псевдовектор с- векторное произведение полярных
векторов: с = ах.Ь. Если воспользоваться определением
автоморфизма (1.6.1), то можно убедиться, что тогда $&vQ(c} оказывается
равным (detQ)Qr - (я х Ь) = (detQ)c • Q, в то время как для
полярного вектора su.v^a) = a • Q. Псевдотензор третьего ранга -1x1
не изменится при любом преобразовании вида (1.6.1), т.е.
согласно данному выше определению он является изотропным. Таким
образом, существуют изотропные псевдотензоры нечетного
ранга. Также существуют и гиротропные в смысле данного выше
определения (но не изотропные!) псевдотензоры четного ранга.
Определение автоморфизма (1.6.1) и определение внешней
симметрии тензора могут быть расширены на случай аксиальных
31
объектов, если ввести автоморфизм s& v'q согласно следующему
правилу:
st v'Q{X) ± (det Q)E Г'-1 (v Q) ® (в> • Q) ®... <8 (е, Q) (1.6.4)
VX = X'i-'e, ®е}®...®е,еЖр>
где е = 1 для полярных величин и е = -1 для аксиальных.
Для полярных объектов выбор преобразования si v'Q при
определении группы внешней симметрии равносилен выбору s&Vq,
но для аксиальных объектов приводит, вообще говоря, к разным
результатам.
1.7. Тензорные функции
Тензорной функцией 5 тензорных аргументов называется
отображение, ставящее в соответствие каждой совокупности
тензоров различного ранга рк из некоторого множества тензор
ранга Y:
¥=ЛХ;>Х2,...Л);Х,е^, УеЖ,. (1.7.1)
Рассмотрим частный случай тензорной функции/: %р —» 3£?
одного аргумента
Y = ДХ); X е Жр, Y е Жг (1.7.2)
Записав компонентные представления тензоров X и Y в
фиксированном базисе
X = Хт-'ет ®...®e„Y= Y'~«ei ® ... ® ед,
из (1.7.2) видим, что тензорной функции/можно поставить в
соответствие nq скалярнозначных функций от п? скалярных
аргументов:
Yi..Q =fi~9(V •<) (1.7.3)
При другом выборе базиса ет в @я вид компонентных
функций/'1 будет, вообще говоря, другим. Очевидно, что такое
компонентное представление возможно и для тензорной функции
общего вида (1.7.1).
Тензорная функция называется изотропной, если для
любого ортогонального тензора Q выполняется соотношение
^q(Y) =/l^Q(X,),.... afefctX,)]. (1.7.4)
32
Если (1.7.4) выполняется только для любых собственно
ортогональных тензоров, то функция называется гиротропной.
Для функции/: Ж2 —> £2 условие изотропности (1.7.4) можно
переписать так:
ЯСГ-Х-О) = СГЛХ)-0. (1.7.5)
Изотропная тензорная функция имеет одинаковые
компонентные представления во всех ортонормированных базисах, т.е.
вид компонентных функций/1-* не зависит от выбора орто-
нормированного базиса в @„.
Все рассмотренные в § 1.2 действия с тензорами кроме
косого умножения задают изотропные функции от тензоров.
Данные выше определения изотропной функции в случае
необходимости рассмотрения аксиальных объектов - векторов и
тензоров следует видоизменить, использовав автоморфизм,
определенный формулой s&v'Q (I.6.4), и условие изотропности
функции принимает вид
^(Y) = /[^Q(X,), ..., sH(Ys)].
Например, в случае функции/: 5Е2 —> Ж2, имеющей в качестве
аргумента и значения псевдотензоры, условие изотропности
(1.7.5) записывается так:
Mdet Q)Qr ■ X ■ Q) = (det Q)QT.дХ) ■ Q.
Рассмотрим тензорную функцию
Y = L О X, X € Ж„, Y е %Т L e Xp+q. (1.7.6)
Если Y рассматривать как функцию двух тензоров L и X, то
эта функция изотропна. Если же (.1.7.6) рассматривается как
функция только одного аргумента X, a L считается
параметрическим тензором, то эта функция будет, вообще говоря,
неизотропной. Она будет изотропной только в случае, когда L -
изотропный тензор.
Скалярнозначная изотропная функция одного тензора
называется инвариантом этого тензора, а скалярнозначная
изотропная функция нескольких тензоров называется совместным
инвариантом этих тензоров.
Известно, что в трехмерном пространстве любой инвариант
симметричного тензора второго ранга есть функция его
собственных значений или, что эквивалентно, функция его главных
инвариантов /:, /2» ^з- Любой инвариант вектора есть функция его
длины.
'ЕреивелВ.А.
33
Сведения о полных системах совместных инвариантов
произвольного числа векторов и тензоров второго ранга содержатся в
[281].
Общее представление изотропной функции, аргумент и
значение которой суть симметричные тензоры второго ранга, в
трехмерном пространстве имеет вид
У^фоГ + ^Х + фгХ2, (1.7 7)
где (р0, ф[, ф2 - функции главных инвариантов тензора X. Как
видно из (1.7.7), тензоры X и Y соосны, т.е. имеют совпадающие
собственные векторы.
Рассмотрим тензорную функцию/(X), отображающую
тензоры ранга р в тензоры ранга q. Если для любого тензора В е Хр
существует такой тензор /,х(Х) ранга p + q, что выполняется
соотношение
/,хОВ = ^-ДХ + аВ)
Эа
а=0
^ДХ + аВЬДХ), (L?>8)
а->0 а
то этот тензор fixQQ называется производной тензорной
функции по тензору X. В компонентном представлении в
фиксированном простом полибазисе, образованном на основе базиса ек в
@„ и взаимного к нему, правая часть (1.7.8) примет вид
Эа' \=0 дХ""
По определению полного умножения (1.2.3) и в силу
произвольности тензора В из (1.7.8) получим
fM^) = ~^et®...®es®e'n...e'. (1.7.9)
Таким образом, компоненты производной fix представляют
собой совокупность частных производных компонентных
функций по компонентам тензорного аргумента.
От (1.7.8) можно перейти к обычным дифференциальным
обозначениям, если обозначить тензор В через dX и назвать его
дифференциалом независимой тензорной переменной, а правую
часть (1.7.8) назвать дифференциалом функции df.
df=£x0dX, (1.7.10)
или в компонентном представлении
Ml
dX
?ifk "S
(!/■*-*= .St dX"~'.
34
При вычислении производной по тензорному аргументу
часто можно пользоваться представлением (1.7.9), однако во
многих случаях удобнее применять бескоординатное
определение (1.7.8).
Из (1.7.8) нетрудно установить, что производная изотропной
тензорной функции есть также изотропная тензорная функция.
Отсюда, в частности, следует, что производная любого
инварианта симметричного тензора X второго ранга есть
симметричный тензор, соосный с X. Кроме того, главные значения
производной от инварианта симметричного тензора суть частные
производные этой функции по главным значениям тензорного
аргумента.
Приведем еще формулы дифференцирования главных
инвариантов тензора X второго ранга:
/1Д = I, /2,х = ItrX-Xr, /3,х = (ХУ. (1.7.11)
1.8. Тензорные поля
В евклидовом точечном пространстве положение точки
можно задать радиус-вектором R = Xkik, где Хк - декартовы
координаты, ik - орты координатных линий.
Тензорным полем Ф(Д) называется отображение, ставящее в
соответствие каждой точке из некоторой области точечного
евклидова пространства тензор Ф произвольного ранга. Тензор
Ч* можно считать либо функцией радиус-вектора R, либо
функцией декартовых координат Хд.
Если существует такой тензор Grad Ф, что для любого
вектора а выполняется соотношение
,д d
а - Grad Ф=—Ф( R -И ш)
da
(1.8.1)
a=0
то тензор Grad Ф называется градиентом тензорного поля в
точке R. Очевидно, что ранг тензора Grad Ф на единицу больше
ранга тензора Ф (Grad : Жп —» Жп+.{). С математической точки
зрения, введенный таким образомярадиент тензорного поля
представляет собой производную по Гато [141].
Если тензорное поле рассматривается как функция
декартовых координат, то соотношение (1.8.1) запишется следующим
образом:
аЛк - (Grad Ф) А А щХ& + си,)
da
ЭФ
= а.
= «А-'.
ЭФ
a=o oXs a=s dXs
35
В силу произвольности вектора а получаем выражение для
градиента тензорного поля через частные производные в
декартовой системе координат
Grad* = iJl®|^ = ^kLiJ®i)1,®„.<&v (1.8 2)
dXs dXs
Обозначив вектор а через d/J, можно записать (1.8.1) в
дифференциальных обозначениях:
d^ = dtf Grad*. (1.8.3)
Дифференциал (линейная часть приращения) тензора при
смещении из данной точки в соседнюю (бесконечно мало
удаленную) равен скалярному произведению вектора смещения dR
на градиент этого тензора в данной точке.
Непрерывно дифференцируемые функции декартовых
координат Qs(Xb Х2> Х-з) (s = 1, 2, 3) называются криволинейными
координатами в трехмерном точечном евклидовом простран-
3<2*
стве, если якобиан
дХк
отличен от нуля во всех точках, за
исключением некоторых особых.
Определим векторный базис формулой
„Ь^^-Ф
R**GmdQs = ^~ik. (1.8.4)
дХк
Найдем базис, взаимный к R1, т.е. удовлетворяющий
соотношению Д1-Лп1=5д. Решение последнего уравнения ищем в
видеRm = Amkik. Учитывая (1.8.4), получим —~Ат =Ц.
vXm
Отсюда следует, что матрица Amt обратная к матрице Якоби
ш
и представляет собой матрицу частных производных об-
ЭХк
ратных функций Xk{Q}, Q2, Q?]:
ЭХ,
Из (1.8.5) имеем
Л^—г- (1.84)
*m=|^(;=J^_. (1.8.6)
36 Эб
36
Векторные базисы Rm и Rk называются естественными
базисами, соответствующими данным криволинейным
координатам. Из (1.8.6) следует, что вектор Rm направлен в каждой
точке по касательной к координатной линии, вдоль которой
изменяется координата Q".
В отличие от естественного базиса декартовых координат ik
векторные базисы Rm и Rk - переменные, они меняются при
переходе от одной точки пространства к другой. Для вычисления
градиентов тензорных полей необходимо знание производных
базисных векторов по координатам. Так как —-у есть вектор, то
его можно разложить по базису Rm:
|^-=г;д, с = пи- (1-8.7)
Величины Г^ называются символами Кристоффеля
второго рода. Они могут быть выражены через метрические
коэффициенты G^ = Rk ■ Rm, G"1* = Rk ■ Rm и их производные:
Выражения производных векторов взаимного базиса имеют
вид
= -Г* Rs. (1.8.9)
При замене координат по формулам Qm = Qm {Ql ,Q2,Qb)
естественные векторные базисы преобразуются по формулам
(1.8.5Н 1.8.7), при этом А* =^-.
Рассмотрим представление градиента тензорного поля в
криволинейных координатах. Согласно (1.8.2), (1.8.4) имеем
дО" ЭФ" ЭФ
Grad*=''«lw=*"e3ff- (!'8Л0)
Таким образом, оператор градиента Grad можно
рассматривать как символический вектор (часто обозначаемый как
набла-оператор V) в криволинейных координатах
Grad = i\ -^- = Я*-^-. (1.8.11)
37
При вычислении производных по координатам от тензора
Ф= 4>m~JRm ®...®R, следует помнить, что от координат зависят
не только компоненты 4/'и■■■', но и векторы Rm,..., R,. В частности,
для векторного поля a{R) с помощью (1.8.7) получим
Gmda±Rs®-^~(amRni) = Vsa'nRs®Rm, (1.8.12)
Знак Vj называется символом ковариантной производной.
Для тензорного поля второго ранга аналогично имеем
Grad Ф = V Ч"*Я' ®Rs®Rk, Vr¥J* 4 Xi__ + г* 4«* + Г* 4"".
(1.8.13)
Кроме градиента тензорного поля часто используются
дивергенция тензора
Div Ф = tr (Grad^) = Я* ■ —т (Div: £„ ^ £„_,) (1.8.14)
и ротор тензора
Rot4^K*x-^- (Rot :£„->£„). (1.8.15).
Для любого дважды дифференцируемого тензорного поля Ф
произвольного ранга справедливы тождества
Rot(Grad Ф) = О, Div(Rot Ф) = 0. (1,8.16)
Пусть в некоторой области пространства, занимающей
объем V и ограниченной кусочно-гладкой замкнутой
поверхностью X, задано непрерывно дифференцируемое тензорное
поле Ф любого ранга. Тогда справедлива формула Гаусса-Остро-
градского
jjjGrad4*dV = jj N®4?dZ. (1.8.17)
v z
Здесь N - единичный вектор внешней нормали к поверхности £.
38
Из (1.8.17), в частности, следуют формулы
[|JDiv^dV-J|iV-*dE, jjJRot^d^-Jjtfx^dZ. (1.8.18)
V 2 V 2
Для непрерывно дифференцируемого вблизи
кусочно-гладкой поверхности 2, опирающейся на замкнутый контур Г,
тензорного поля Ф произвольного ранга справедлива формула
Стокса
|JjV • (Rot *)dS = ^d Я-Ф, (1.8.19)
Z Г
причем направление обхода контура Г выбирается таким
образом, чтобы у наблюдателя, направленного по нормали N и
движущегося по контуру, поверхность X оставалась слева.
1.9. Элементы теории поверхностей
В теории оболочек широко используются формулы из
геометрии поверхностей, необходимые из которых приводятся в
этом параграфе.
Поверхность Z в трехмерном пространстве может быть
задана уравнением в параметрической форме
R=R(q\q*), (1.9.1)
где R - радиус-вектор поверхности, а параметры ql, q2
называются гауссовыми координатами на поверхности. Поверхность
предполагается кусочно-гладкой, причем требуемая степень
гладкости будет ясна из контекста и, как правило, специально
оговариваться не будет.
В некоторых случаях удобным оказывается описание
поверхности в неявной форме, т.е. при помощи уравнения
ОД У, 2? = О, (1.9.2)
гдеХ, Y, Z- декартовы координаты (или любые другие
пространственные криволинейные координаты).
Геометрическое место точек, для которых значение одной из
координат зафиксировано, образует кривую на поверхности,
называемую координатной линией.
Предполагается выполненным условие
dR_ dR
dq,Xdq2
39
dR
Векторы Ra - —-- {a = 1,2) являются касательными к коор-
dq
динатным линиям и образуют базис в плоскости, касающейся
поверхности в данной точке. Заметим, что в общем случае векторы
Ra не являются ортогональными и единичными.
Линейное пространство векторов, касательных к
поверхности £ в некоторой точке R, будем обозначать так: 3^(7?) или
Зц, если положение точки несущественно.
При переходе от одних гауссовых координат к другим <?
базисные векторы преобразуются по формулам
Числа Gap = Cpa = Ra • R^ называются коэффициентами
первой квадратичной формы. Через них выражается длина
бесконечно малого элемента кривой на поверхности:
dS2±dR.dR = Gt#dq*dqt.
Единичный вектор нормали к поверхности задается
соотношением
или в случае использования уравнения (1.9.2) так:
ЛГ = - Grad Ф. (1.9.4)
iGradOl
Векторы /?(, Jt2 и N образуют базис в трехмерном евклидовом
пространстве, изменяющийся при переходе от одной точки
поверхности к другой. Векторный базис на поверхности, взаимный
к Ra, находится из уравнений
Лр-Ла=8£, R*-N = 0. (1.9.5)
Аналогично (1.1.3) получим
ДР = G«$R^ G^G^ = b*t R* g» = ^ (1 9 6)
Формулу (1.9.3) можно записать иначе:
N = -^RlxR2, С±СиСп-(%г. (1.9.7)
40
Пусть в каждой точке поверхности Е определен тензор Ф
произвольного ранга (Ф е &р). Тензор Ф назовем
принадлежащим поверхности, если для любой перестановки Гу выполняется
соотношение
ЛГ.фг'-'=0. (1.9.8)
В частности, в случае тензора второго ранга (1.9.8) означает,
что имеет место представление Ф = ¥a$RaR$= Ч?а$Н^р
Принадлежащий поверхности тензор является элементом тензорного
произведения нескольких экземпляров векторного пространства
3ЕСФе31®...®31).
Тензор второго ранга
O^I~N®N = GatRa®Rp=GapRa®Rp=Ra®Ra (1.9.9)
называется первым фундаментальным тензором поверхности
£. Он является единичным тензором в плоскости, касательной к
поверхности (Оа = йО = а Va e Sj). Кроме того, тензор О
является оператором проектирования (проектором) на
касательную плоскость, т.е. О-а е SIt Va e @3.
Дифференцируя по координатам равенство N- N= 1, видим,
что вектор —— принадлежит поверхности и может быть пред-
dq
ставлен в виде
jf=-K*&. (1.9.10)
С другой стороны, дифференцируя равенство Ra • N = 0,
получим
"■£="-аЙГ"---5Г**-*-- (,А,,)
Числа Я^р называются коэффициентами второй
квадратичной формы поверхности, а тензор второго ранга
К 4 ^Д" ® Др = JT*J^ ® Др = tf£j^ ® Др, (1.9.12)
Г* = <?*<?*Кф, Kg = СЩК^
называется вторым фундаментальным тензором поверхности
или тензором кривизны. Он характеризует кривизну
поверхности в данной точке.
Тензоры О и К симметричны и принадлежат поверхности Е.
41
Если тензор второго ранга Ф принадлежит поверхности, то
детерминант (третий инвариант) Ф, рассматриваемого как
трехмерный тензор, равен нулю. Поэтому детерминантом тензора,
принадлежащего поверхности, будем называть его второй
инвариант. Эта терминология оправдывается тем, что последний
равен определителю матрицы смешанных компонент тензора Ф
в векторном базисе на поверхности:
Ф = ^Да®Йр=Ч'^®Да> (1.9.13)
det* = JlP^j=|4'|j = -(tr2lJ'-tr1J'2),
(гФ = 10Ф = О0Ф.
Под тензором Ф~!, обратным к тензору второго ранга Ф,
принадлежащему поверхности, будем понимать тензор второго
ранга, также принадлежащий поверхности и удовлетворяющий
соотношению Ф~' -Ф = Ф_£ . гр- = 0. Матрицы смешанных
компонент тензоров Ф~! и Ф взаимно обратны.
Формула Гамильтона-Кэли для принадлежащих поверхности
тензоров второго ранга имеет вид
Ф2 - Ф1гФ +■ ОсЫФ = 0. (1.9.14)
Дифференциальный оператор
Grad^ Д"-^ (1.9.15)
dq
называется поверхностным оператором градиента (часто
вместо обозначения Gradj; используется набла-оператор V) на
поверхности, а тензор Grad£Ф - градиентом тензорного поля Ф,
заданного на поверхности. Здесь Ф - тензор произвольного
ранга в трехмерном евклидовом пространстве. Далее, начиная со
второй главы, мы будем, опуская индекс, использовать
стандартные обозначения для поверхностного оператора градиента
V = Gradz = Grad, понимая под ним двумерный
дифференциальный оператор (1.9.15). С помощью поверхностного
оператора градиента записывается линейная часть приращения
тензорного поля Ф при смещении из одной точки поверхности в
соседнюю:
dФ = d^г-GradIФ. (1.9.16)
На основании (1.9.11), (1.9.15) второму фундаментальному
тензору поверхности можно дать следующее бескоординатное
представление [68]:
K=-Gradj;iV. (1.9.17)
42
Как и любой симметричный тензор, тензор К имеет
вещественные собственные значения Къ Къ называемые главными
кривизнами поверхности в данной точке. Спектральное разложение
тензора кривизны К записывается в виде
К = K^t ®et + К2е2 ® ег,
где €\, е2- единичные ортогональные векторы, принадлежащие
поверхности. Кривые на поверхности, касательные к которым в
каждой точке направлены по главным осям еа тензора К в этой
точке, называются линиями кривизны. Первым и вторым
инвариантами тензора кривизны будут соответственно удвоенная
средняя кривизна 2Н и гауссова кривизна К поверхности:
H±-txK = -(Kl+K2)t K^detK = KiK2. (1.9.18)
Принадлежащий поверхности антисимметричный тензор
второго ранга Е, определяемый соотношением
E±-OxN = -NxO=N-& = S-N, (1.9.19)
называется дискриминантным тензором поверхности. Здесь 5 -
тензор Леви-Чивиты. Из (1.9.19) получим
Е = £«РД(1®Яр=£фй°®йР, (1.9.20)
Еи = Еп=Е22 = Е22 = 0,
£!2=_£2l=^> Ei2=-E2i = -jp.
Имеют место тождества
£ир£ет-5^-5^, Е2=-0. (1.9.21)
Тензор Леви-Чивиты выражается через дискриминантный
тензор поверхности следующим образом:
b = E®N + N®E-(N®Ef12. (1.9.22)
Учитывая, что тензор Леви-Чивиты постоянный, а тензор
GradzAf симметричен, из предпоследнего равенства в (1.9.19)
получим тождество
Divj Е = DivL(iV -Ь) = -(Gradz JV) О 8 = 0. (1.9.23)
43
1.10. Тензорный анализ на поверхности
Рассмотрим дважды дифференцируемое тензорное поле
"Ф(й) = Ф(<?!, дг), определенное на поверхности I. Аналогично
(1.9.15) введем определения операторов дивергенции Divj; и
ротора Rots на поверхности £:
Dnx^ = Ra-~'9, Rou^/Tx-^-^ УФ. (1.10.1)
dqa г dq"
Определения дифференциальных операторов в
бескоординатной форме обсуждались в [57, 66,234, 239].
Следует заметить, что на результат дифференцирования
тензорных полей, определенных на поверхности, существенно
влияет кривизна поверхности. В частности, для поверхностных
дифференциальных операторов (1.10.1) справедливы тождества,
аналогичные (1.8.16):
RotzCGradjW) = -N х К х GradE*, (1.10.2)
а»'
Divz(Rotz^) = /fa-K- Nx~[. (1.10.3)
Используя непосредственно проверяемое тождество
N-Rotz4f = ~Divz(Nx4t) = Divz(E-qr) УФ (1.10.4)
и умножив (1.10.2) слева на вектор N, придем к важному
тождеству
Div2(E ■ Gradz40 = 0. (1.10.5)
При вычислении градиента тензорного поля на поверхности
наряду с формулами дифференцирования вектора нормали
(1.9.10) нужны выражения производных векторов базиса по
координатам. Они имеют вид
^-Г^+К^, ^Г = -Г£Я? + К$Н. (1.10.6)
Символы Кристоффеля Т^а на поверхности выражаются
через коэффициенты первой квадратичной формы формулами,
повторяющими (1.8.8), с той разницей, что индексы пробегают
значения 1, 2.
Рассмотрим векторное поле a(qK q2). Разложим вектор а на
составляющую по нормали к поверхности и составляющую,
принадлежащую поверхности:
a = a]}+aLN, ai]=a-0 = aaR{X=aaRa> aL = a-N.
44
Для градиента и дивергенции векторного поля согласно
(1.8.8), (1Л 0.6) получим
Gradso = (Grad^,) О - ajt + (Grad^ + К - ан) ® N, (1.10.7)
Divja = Divzen - 2а LH.
Принадлежащий поверхности тензор (Grad^u^ - О имеет
следующее представление;
(Grad^,,) ■ О = VaaPRa®R$= Vaa$R"® R$, (1 Л0.8)
где Va - символ ковариантной производной на поверхности:
v*aP=i7+r<^Y' v«ae=^~r°w (U0-9)
Приведем еще представление вектора Div^, где Ч* -
принадлежащий поверхности тензор второго ранга:
DivzW = УаФ«^ +Мг (Ф ■ К), (1.10.10)
Для теории оболочек важное значение имеет теорема о
дивергенции на поверхности, являющаяся аналогом теоремы
Гаусса-Остроградского (1.8.18). Для ее вывода воспользуемся
формулой Стокса (1.8.19).
Предварительно отметим, что тензор произвольного ранга
можно представить в виде следующего разложения:
4r = Nxtyi+N Ф2. (1.10.11)
В самом деле, имея в виду тождество
0=-Nx(NxO),
можно написать
^ = l-4r = (0+N®N)-^f = -Nx(NxO-4r)+N®N-^t (1.10.12)
откуда
Ф,=-ЛГхО Ф = -ЛГхФ = Е Ф, 4r2=N-V. (1.10.12)
Применим к тензору М*] формулу Стокса
jj NRot^td-L = j t-^idS, (1.10ЛЗ)
где t - единичный вектор касательной к контуру £2 (рис. 1.1).
45
а
N
Рис. 1.1. Поверхность Е и
определенные на ней векторы для формулы
Стокса на поверхности
Далее имеем
2^~ ~~- * +ЛГх^-¥, ] = ,/V-Rotz¥,.
dZ J
Здесь Z - координата,
отсчитываемая по нормали к
поверхности. Таким образом, хотя в
исходной форме теоремы
Стокса (1.8.19) фигурирует
тензорное поле, заданное в
трехмерной области, левая часть
равенства (1,10.13) не зависит
от способа продолжения поля,
определенного на поверхности, в трехмерную окрестность этой
поверхности. Приходим к формуле Стокса, применимой для
тензорного поля, определенного только на поверхности:
JJ tf-RotE*,dZ = £<-*idS. (1.10.14)
г а
В соответствии с требуемым в формуле Стокса
направлением обхода контура верно равенство
N-VXJV, (1.10.15)
где V - единичная нормаль к контуру £2, лежащая в касательной
к поверхности плоскости (V ■ JV = 0) и направленная в сторону,
внешнюю по отношению к поверхности (рис. 1.1).
Сославшись на (1.10.4) и тождество
(VxN)- ¥, = V-(tfx*,),
вместо (1.10.14) получим
JT Divr(^x*,)dS = | V-(JVx*,)dS. (1.10.16)
Далее на основании (1.9.17), (1.9.18) имеем
Vi\z(N®4F2) = (Di\zN)92 =-2H4f2. (1.10.17)
Из (1.10.П), (1.10.16) и (1.10.17) получаем искомую формулу,
справедливую для произвольного непрерывно
дифференцируемого тензорного поля Ф;
jj (Divz* + 2fflV-4<)d£ = | V-WdS. (1.10.18)
46
В частности, если поверхность Е замкнута (£2 = 0) или
тензорное поле М* обращается в нуль на контуре Q,, то имеем
Д DivE*dZ = -JJ 2/WV-*dI.
Из (1.10.18) можно получить более общую формулу.
Положим Ф" = О ® Ф и заметим, что
DivzO = 2HN.
Тогда будем иметь
Jj (Gradj.<& + 2№V®<&)d5; = ! Г®Ф65. (1.10Л9)
Из (1 ЛОЛ9) следует формула, аналогичная второй формуле
из (1.8Л8):
JJ (Kott4f+2Hff^4T)dI. = j VXWdS. (1.10.20)
I ft
Наконец, положив в (1.10.20) "Ф = ,/У®Ф, придем к
интегральной формуле
К(й1(ЛГ®Ф)<!Е = ^ Г®Ф<15. (1.10.21)
п
Заметим, что, так как площадь элементарного
параллелограмма, построенного на векторах R^qK ^2^Ч2, равна [ Rt х /^ |х
xd^'d^2 =4G&qx dq2, элемент площади поверхности dX,
присутствующий в предыдущих интегральных формулах,
выражается формулой
d£ = VGd?!d?2. (1.10.22)
1.11. Тензорный анализ
в окрестности поверхности
В предыдущих параграфах были даны элементы тензорного
анализа в трехмерном пространстве и на поверхности. Для
теории оболочек интерес представляет также анализ тензорных
полей, определенных в трехмерной окрестности некоторой
базовой поверхности.
47
Рис. 1.2. Геометрия в окрестности
поверхности
Радиус-вектор X точки в
векторном пространстве (@з в
окрестности гладкой
поверхности Е можно представить в
виде (рис. 1.2)
X = R + ZN, (1.1I.1)
где Z- координата,
отсчитываемая по нормали к
поверхности. Это означает, что в
некоторой трехмерной
окрестности поверхности можно
ввести криволинейные
координаты Q} = q\ Q2 = q\ аъ = г
Базисные векторы даются
формулами
dq
(1.11.2)
Векторы взаимного базиса вычисляются по формулам
Х** = (0-2КУ*-Я*, ХЭ=М (1.11.3)
В (1.11.3) использовано определение тензора, обратного к
тензору, принадлежащему поверхности.
Градиент дифференцируемого тензорного поля 4*0?'> Яг-> 2)
вычисляется по формуле
Grad^ = \Ха
V bqa ЪХ)
= (О - ZK)4 ■ Grad^ + N ® ~.
dZ
(1.11.4)
Более подробно формулы тензорного анализа в окрестности
поверхности представлены в [68], где они использованы для
вывода уравнений нелинейной теории оболочек на основе
пространственной теории упругости. Далее в книге в основном будет
использован прямой подход к построению теории оболочек, не
требующий применения этих формул.
Глава 2
ОСНОВНЫЕ СООТНОШЕНИЯ ТЕОРИИ УПРУГИХ
МИКРОПОЛЯРНЫХ ОБОЛОЧЕК
2.1. Вывод уравнений равновесия
и краевых условий для улругих оболочек
из принципа виртуальных работ
Упругая оболочка типа Коссера является двумерным
аналогом континуума Коссера, т.е. представляет собой
материальную поверхность, каждая частица которой имеет шесть степеней
свободы абсолютно твердого тела. Выведем основные уравнения
нелинейной теории оболочек типа Коссера, следуя методу,
примененному ранее [78, 297] для построения математической
модели трехмерной среды Коссера при больших деформациях.
Пусть с - поверхность оболочки в отсчетной конфигурации, т.е.
в недеформированном состоянии, отнесенная к гауссовым
координатам qa (а = 1, 2), и r(ql, q2) — радиус-вектор частицы на О.
Поверхность Ъ оболочки после деформации также отнесена к
координатам qa, а положение частицы на L описывается радиус-
вектором R(qK q2) (рис. 2.1). Ориентация частиц оболочки
характеризуется полем поворотов Н(<?!, q2), где Н - собственно
ортогональный тензор. Тензорное поле Н кинематически независимо
от поля перемещений оболочки u=R~r, Если ввести три орто-
нормированных вектора^ (к = 1,2,3), описывающих ориентацию
частиц оболочки в отсчетной конфигурации, и аналогичный
триэдр Dk, задающий ориентацию частиц оболочки в текущей
конфигурации, то тогда тензор поворота Н может быть
определен формулой Н = dk ® Dk.
Таким образом, деформация оболочки типа Коссера
определяется векторным и тензорным полями:
R = R{<f), H = H(^). (2.1.1)
Следуя принципу локального действия [113, 142]!, удельную
(на единицу площади поверхности о) потенциальную энергию
Подробнее формулировки принципа локального действия (локальности),
а также используемого ниже принципа материальной индифферентности см.
в гл. 4
49
Рис. 2.1. Кинематика микрополярной оболочки
деформации упругой оболочки примем в виде
W = W(R, grad R, H, grad H), (2 Л .2
ЭФ
6q
Здесь Гр и га - основной и взаимный векторные базисы на по
верхности с, п - единичная нормаль к о, grad - оператор гра
диента на о\ "9 - произвольное дифференцируемое тензорно
поле, определенное на 0. Согласно принципу материальной ш
дифферентности [142] плотность упругой энергии W инва
риантна относительно жестких движений. Инвариантность i
относительно трансляций приводит к независимости W в (2.1.1
от аргумента R. Требование инвариантности относительно вра
щений системы отсчета приводит к условию
W [(grad R) Q, H Q, (grad Н) ■ Q] = W (grad R, H, grad Н) (2.1J
для любого ортогонального тензора Q. Полагая в (2.1.3) Q = Нт
учитывая, что Н • Нт = I, получим
W= W [(gradtf) ■ Hr, (gradH) • Н7] . (2.L
Легко проверить, что представление (2.1.4) не только нео
ходимо, но и достаточно для выполнения условия (2.1.3) при ли
бых Q = QT. Из ортогональности тензора Н вытекает свойсп
антисимметричности тензоров (ЭН/Зда) ■ Н7". Поэтому тенз(
50
третьего ранга (gradH) • Нт можно представить при помощи
тензора (точнее, псевдотензора) второго ранга L
(gradH) -IF=-L xl, (2.1.5)
(2.1.6)
2
ЭН Нт
где Тх означает векторный инвариант тензора второго ранга Т,
который определяется соотношением
Тх = {T»"Rm ® Д„)* = T™Rm х R„.
Здесь Rm- некоторый векторный базис. Из (2.1.4) и (2.1.6)
вытекает, что удельная энергия упругой оболочки типа Коссера
зависит от деформации окрестности частицы посредством двух
тензоров: меры метрической деформации Y и тензора изгибной
деформации L:
W=W(Y,b), Y = (gradtf)-IF. (2.1.7)
В дальнейшем изложении будут применяться некоторые
общие представления собственно ортогонального тензора. Для
их вывода воспользуемся теоремой Эйлера-Шаля, - согласно
которой любое перемещение абсолютно твердого тела с
неподвижной точкой можно осуществить с помощью одного поворота
вокруг оси, проходящей через эту точку. Обозначим через % угол
поворота, а через е- единичный вектор, задающий ось поворота.
Пусть 1ц i-i - неподвижные орты в плоскости, ортогональной
вектору е, a i{, V7 - орты, связанные с телом. Тогда собственно
ортогональный тензор Н, соответствующий повороту тела,
очевидно запишется в виде
Н = 1!®("|' + (2 ®i'2+e®e,
i[ - ц cos % 4- i2 sin %, i^ = -i, sin % + i2 cos %,
ИЛИ
H = (I -e ® e)cos% + e®e-ex \sm%. (2.1.8)
Выражение (2.1.8) можно преобразовать к виду, не
содержащему тригонометрических функций, если применить
известные формулы тригонометрии
l-tg2y/2 . 2tgY/2
cos% = —-^—> smY = Щ
l + tg2x/2' A l + tg2%/2
и ввести вектор 6 = 2еЩ%12. Это приводит к следующему
представлению собственно ортогонального тензора через произ-
51
вольный вектор:
н=—^[(4-e2)i+26®e-4ixe], e2=ee. (2.i.9j
(4+е2)
В кинематике абсолютно твердого тела вектор 9 называется
вектором конечного поворота Родрига [110]. В контексте
теории оболочек типа Коссера мы будем называть его вектором
микропоеорота. По любому заданному собственно
ортогональному тензору Н вектор в находится из (2.1.9) единственным
способом:
в = 2(1 + trH) 1НХ. (2.1.10)
Таким образом, выражение (2.1.9)- общее представление
собственно ортогонального тензора в том смысле, что когда 6 в
правой части (2.1.9) пробегает множество всех трехмерных
векторов, левая часть Н пробегает множество всех собственно
ортогональных тензоров.
На основании (2.1.9) прямым вычислением проверяется дру.
гая форма представления тензора микроповорота через векто;:
микроповорота:
1ixeYfi+-ixel =
2 ) \ 2
=fi+-ixe) -fi--ixe\ (2.1.11)
Обращение представления (2.1.11) имеет вид
1хв = 2(1-Н)-(1 + Н)-=. (2.1.121
Заменив в (2.1.8) cos^ и sin^ их разложениями по степеням)
и учтя формулы
(«х I)2,n = (~l)»-i(e ® е-1), т= 0,2,...,
(е х I)2"*' = (-])»(* х I), m = 0,1,...,
получим представление собственно ортогонального тензора i
виде экспоненты антисимметричного тензора
H = £ -^(хгх1Г=ехр(Хех1). (2.1. И
Выразим тензор изгибной деформации L через поле микро
поворотов. Для этого введем векторы La =г„- L (а = 1, 2), дл
52
которых в силу (2.1.6) верно равенство
На основании (2.1.10) имеем
Э6 4 + 82ЛЭНх ЭН1
- 2 . ,г -Btr-
9<f 16 ^ Э^ 3<f J
(2.1.14)
(2.1.15)
При помощи (2.1.9), (2.1.14) находим
L„xH = (4 + e2)-ir(4-92)LaxI + 2Ltlxe®e-4e®LC( + 4ieLa],
tr
ЭН
8
ЭН.
Bqa 4 + е2
2
6ia,
(2.1.16)
(4La-eez,a+2exza).
а?" 4+е2
Подставляя (2.1.16) в (2.1.15), получим
!^=i(4i+e®e+2ixe)-La.
(2.1.17)
Умножим равенство (2.1.17) слева на тензор I — 1x81:
Гг1*9}^—^ (2ЛЛ8)
Из (2.1.18) следует
4 Э8 fr lr A
г= „—_. I+-Ix8L
* 4+e2dqa \ 2 /
откуда приходим к искомой формуле
L = ra®L =
-4+^§ГаС1в
Н1хв)
(2.1.19)
Для вывода уравнений равновесия и краевых условий упругих
оболочек воспользуемся принципом виртуальных работ
5Jj Wda = b's&,
(2.1.20)
53
где 5'stl - элементарная работа внешних нагрузок, Ь - симво
вариации. На основании (2.1.7) имеем
SW = PtG8Y + P2G6L, (2.1.21
dw _ avv
3Y ' 2 " ЭЬ *
5Y = (gradStf) • № + (gradfi) • 5НГ.
Р= =
(2.1.23
(2.1.23
Из ортогональности тензора Н вытекает антисимметрии
ность тензора Н7 • 6Н, который можно записать в виде
Нг5Н=^хф. (2.1.а
Вектор ф будем называть вектором виртуального noeopi
та. Так как НГ-5Н = £>5 ® Й£>г, из (2.1.24) следует, что S/>j:
= ф х Ds. Последнее равенство означает, что ф представляет а
бой вектор малого поворота ортонормированного триэдра £
жестко связанного с частицей континуума Коссера. Через вари;
цию вектора микроповорота 56 вектор ф выражается следуй
щим образом:
V 4+вЧ 2 )
(2.12!
Формулу (2.1.25) можно получить из (2.1.9), (2.1.10) тем ж
способом, который был применен при выводе формулы (2.1.19)
Из (2.1.23), (2.1.24) получим
8Y = (gradStf) • Нг- (gradtf) • (Н х ф)г (2.I.2E
Для вычисления вариации тензора изгибной деформации ва
пользуемся определением (2.1.6), откуда и из (2.1.24) имеем
2
ж #.*.„?).
(2.1.21
2
.2a-B.r+f.w«r,
= -/•"
2
1Ннг-(н^)нг+1г(Н
В силу легко проверяемого тождества
54
выражение (2.1.27) приводится к виду
Эф
8L = --rei
2
H-Ix-^-НЧ = (2.1.28)
1 <
2 ч
bq«l U dq* dq"
Итак,
5L = gradi{( • Hr. (2.1.29)
Из (2.1.21), (2.1.26), (2.1.29) и теоремы о дивергенции на
поверхности о* (1.10.18) получаем
SjJ Wdo = | v-(D-8R + G»ds-
-Jf (divD)-8Rd<j-JJ [divG+((gradR)r-D)x]-ifido, (2.1.30)
a
D = P, H, G = P2 H. (2.1.31)
Здесь CO - граничный контур поверхности a, v - единичный
вектор нормали к кривой со (уп = 0), ds - элемент длины дуги на со.
Разобьем границу оболочки на две непересекающиеся части
двумя способами: со = щ и 0>2 и <й = щ и со4- Предположим, что
на <fli задан вектор перемещений, т.е. bR = 0, а на ш3 задан
поворот края, т.е. ф = 0. На (Oj вариация 5/t произвольна, а на со4
векторная функция ф($) может принимать произвольные
значения. Соотношение (2,1.30) диктует форму выражения
элементарной работы внешних сил
S'jA= JJ (f-5R + €-y)do +
+ \ ф-5К& + J y-gyds. (2.1.32)
Чтобы выяснить механический смысл векторов /, (, ф и у,
рассмотрим элементарную работу сил, приложенных к
абсолютно твердому телу. Пусть г - радиус-вектор произвольной точки
тела в исходном положении, г0 - радвус-вектор некоторой
фиксированной точки (полюса). Положение точек твердого тела после
перемещения определяется формулой
й(г) = (г-г0).Но + Ло. (2.1.33)
55
где Н0- собственно ортогональный тензор, (Rq-г^- bcktqj
перемещения полюса. Виртуальные перемещения абсолютщ
твердого тела согласно (2.1.33) задаются выражением
&й = (г -г0) ■ 5Н0 + 6Я„ = SR0 + ф0 х (Я - До).
где ф0 - вектор виртуального поворота абсолютно твердо^
тела. Предположим, что силы, действующие на тело
распределены по его объему V с некоторой плотностью К(г)
Тогда элементарная работа этих сил с учетом (2.1.34) запишете
в виде
5's£0 = JJJ /И5^ + ф0х(К-Д0)]аУ=^-5^+Жфо,
v (2.1.35
9?=JJJ КйУ, Л = }jj (R-Ro)xKdV.
V V
Согласно (2.1.35) главный вектор сил 3£ совершает работу н
возможном перемещении полюса, а главный момент М - на вир
туальном повороте. Поскольку каждая частица поверхност
Коссера является абсолютно твердым телом, отсюда следуй
что в выражении (2.1.32) векторы/ и <р представляют соба
плотности внешних сил, распределенных соответственно по по
верхности оболочки и по кривой ©2, а векторы € ну - плотности
внешних моментов, распределенных соответственно по повери
ности а и по кривой <й4-
Из вариационного уравнения (2.1.20), выражения (2.1.32}
указанных выше граничных условий на ш, и (&$ вытекает я
становка краевой задачи о равновесии нелинейно упругой о&
лочки типа Коссера:
divD+/=0, (2.1J
div G + [(grad R)T ■ D]* + € = 0, (2.1.31
<о, : J? = pCr), (2.1.3!
ад2: v • D = <p(5), (2.1.J
a»3:H = h(f), h-hr=I, (21.4
<a4:v-G-y(s). (2.1.4
Здесь p(s), h(s}~ заданные функции. В (2.1.36)—(2.1.41) подр-
зумевается, что тензоры D и G выражены через меры дефо|
56
мацйй Y и L при помощи определяющих соотношений (2.1.31), а
тензоры Y и L выражаются через R и Н по формулам (2.1.6),
(2 1.7). Тензоры D и G аналогичны тензору напряжений Пиолы в
трехмерной теории упругости [113] и называются
соответственно тензором усилий и тензором моментов типа Пиолы.
Тензор усилий Pi и тензор моментов Р2 в (2.1.22) аналогичны
тензору напряжений Кирхгофа. Из (2.1.6), (2.1.7), (2,1.22)
вытекает, что указанные тензоры усилий и моментов оболочки
Типа Коссера обладают свойством
п D = n G = n P,=n -Р2 = 0. (2.1.42)
Пусть Ra - радиус-вектор некоторой точки поверхности 2.
Легко проверить справедливость тождества
div[D х (R - R0)] = (div D) х (й - R0) - [(grad R)T ■ D]x. (2.1.43)
Учитывая (2.1.43), проинтегрируем уравнения (2.1.36) и
(2.1.37) по произвольной области а* с а. Применив теорему о
дивергенции на поверхности, получим
jvD6s+jjfda = 0, (2.1.44)
j[v-G + (R~R<i)x(vD)\ds + jj[e+(R-RQ)xf]6a = Q. (2.1.45)
Соотношения (2.1.44) и (2.1.45) выражают собой
соответственно баланс сил и баланс моментов, действующих на
произвольную часть оболочки. Это означает, что вектор v - D есть
линейная плотность контактной силы, действующей на выделенную
часть оболочки а* со стороны оставшейся части, а вектор v ■ G -
линейная плотность контактного момента. Если, в частности,
контур ш* совпадает с границей оболочки (В, то согласно (2.1.39)
и (2.1.41) указанные векторы представляют собой интенсивности
силовой и моментной внешних контурных нагрузок.
Чтобы ввести тензоры усилий и моментов, аналогичные
тензору напряжений Коши в трехмерной механике континуума,
обратимся к геометрии поверхности деформированной оболочки
2. Вектор единичной нормали к поверхности 2 обозначим через
N, а векторы основного и взаимного базисов, порожденных
координатами q\ ф, обозначим Яа, R$, Тогда оператор градиента
на 2 будет иметь вид*
Э
Grad = Я"
Э?а
См. замечание об обозначениях Grad и Gradj на с. 42.
57
Пусть v - вектор единичной нормали к некоторой мате
риальной кривой на поверхности а, причем v - п = 0. После д&
формации оболочки эта кривая будет лежать на поверхности £
Рассмотрим нормаль V к материальной кривой на Z, также
лежащую в касательной плоскости к £ (V • N = 0). Единичные
векторы касательных к кривой на а и ее образе на Е обозначив
соответственно ти(. Для любого дифференцируемого поля ty
справедливы соотношения
ЭФ ЭФ
-—= T-grad^, —~ = *-Grad*. (2.1.46
да dS
где S - длина дуги кривой на 2. На основании (2.1.46) имеем
■ г, од , _ oR , „ ,
tdS = —-dS = — ds^T-Fds,
д$ ds
л (2.1.47
F = grad/? = ra®ffa.
Тензор F в дальнейшем будем называть тензором дисторск
оболочки. При помощи (2.1.47) установим связь между вектора
ми v и V. Справедливы формулы
V = txN = E-t, у = тхд=е-т,
(2.1.41
Е 4 -Nxl = E^Ra®RV, e = -nxl = va®rp.
Здесь е и Е -дискриминантные тензоры на поверхностях <у и
соответственно.
Согласно (1.9.20) компоненты тензоров Е и е имеют следуя
щие значения:
еи = егт. — "» *12 ~ — ег\ ~ yS'
ГДе gap и ^р - коэффициенты первой квадратичной формы на
и X. Из (2.1.48) следует
Е = Л-е-аг, a = Rn ®ra = Gradr. (2.1.4
58
Здесь а — обратный тензор дисторсии оболочки, связанный с
тензором дисторсии соотношениями
F а = о = 1-и®л, a F = 0 =l-N®N.
Из (2.1.47)42.1.50) вытекает формула преобразования
нормали к кривой при деформации поверхности
VdS = Javds. (2.1.51)
Тензоры усилий и моментов типа Коши Т и М определим
соотношениями, которые должны выполняться для любой
кривой на поверхности оболочки, проходящей через данную точку
VJdS = vT>ds, V-UdS = v-Gds. (2.1.52)
Из (2.1.51) и (2.1.52) следуют формулы
Т = J-*W ■ D, М = J^Fr G, (2l 53)
D = /ar T, G = Ja? M.
Перейдем в уравнениях баланса сил и моментов (2.1.44) и
(2.1-45) к интегрированию по контуру и площади на
деформированной поверхности Е, используя (2.1.52) и вытекающую из
(1.10.22) формулу преобразования элемента площади dS = J do
|v-TdS + Jj.T!/dX = 0, (2.1.54)
Q' I'
l[v.M^(if-JRo)x(P-T)]d5 + |Jy-l[€+(R-JR0)x/]dZ = 0.(2.1.55)
Здесь £2* - замкнутый контур, ограничивающий область L\
Преобразуя контурные интегралы в (2.1.54) и (2.1.55) по теореме
о дивергенции на поверхности Е и пользуясь произвольностью
области £*, придем к уравнениям равновесия для тензоров усилий
и моментов типа Коши, которые записываются в геометрии
деформированной оболочки:
DivTW-!/=0, Div M + ТХ + J~4 = 0,
ЭФ (2Л-56>
Div4r = Ra - — .
Сформулированные здесь основные уравнения нелинейной
теории оболочек Коссера впервые были получены П.А.
Жилиным [58] способом, отличным от изложенного выше.
Следует заметить, что уравнения равновесия (2.1.36) и
определяющие соотношения (2.1.7), (2.1.22), (2.1.31) могут быть по-
59
лучены как в рамках прямого подхода к построению нелинейщ
теории оболочек, примененного выше, так и в результате вывод
двумерных уравнений движения на основе процедур4
интегрирования трехмерных уравнений баланса {228, 231].
последнем случае величины Я, Н интерпретируются как среди?
взвешенные, а меры деформации Y и L получаются как эне}
гетически сопряженные к тензорам усилий и моментов. В обоа
подходах математическая структура уравнений движения и со
стояния одинакова и совпадает со структурой двумерного коя
тинуума Коссера (микрополярной двумерной среды).
Отметим, что в литературе под оболочками Коссера таюк
понимается модель оболочек, в которой поверхность оболочк
наделяется одним или несколькими векторами - директорам
[98, 99, 245, 267] {оснащенные поверхности). В рамках этог
подхода кинематика и уравнения равновесия, вообще говоря, <j,
личаются от используемых здесь соотношений (2.1.7) и (2.1.36
(2.1.37). Более подробно эти различия рассмотрены в § 2.8.
2.2. Геометрический смысл мер
и тензоров деформаций
Для того чтобы пояснить геометрический смысл введеннь
выше мер и тензоров деформаций, рассмотрим бесконечно м
лые приращения величин, обусловленные смещением в близку
точку пространства.
Тензор дисторсии F-grad/f связывает бесконечно мала
приращения радиус-вектора частиц оболочки в отсчетной и а
туальной конфигурациях (рис. 2.2):
dff=dr-F. (2.2,
Аналогично, для обратного тензора дисторсии а выполняем
соотношение
dR • а = dr. (2.2.
Рассмотрим далее приращения директоров Dk в актуальна
конфигурации. Поскольку Dk единичны, вектор dD* будет орд
гонален к Dk. Отсюда следует представление
dDk=B'xDt, Bt = ~DixdDl. (2.2.
Соотношение (2.2.3) позволяет ввести тензор В формулой
B' = dR В. (2.2
60
Рис. 2.2. Деформация оболочки
Отсюда следует, что
B = —~(GtadDt)xDt.
(2.2.5)
Тензор В можно назвать тензором кривизны
микроструктуры актуальной конфигурации, поскольку он описывает
изменение триэдра директоров Dk в этой конфигурации.
Рассматривая приращения директоров dk в отсчетной
конфигурации, аналогично можно ввести тензор кривизны
микроструктуры b отсчетной конфигурации
udk=b'xdk,b' = -dkxddk,b' = dr-b,b = --($Ta.ddl:)xdk. (2.2.6)
Тензоры В и b описывают локальное изменение директоров в
актуальной и отсчетной конфигурациях соответственно.
Найдем приращение тензора микроповоротов Н.
Выполняются соотношения
dH = d(4* ® Dk) = (ddk) ®Dk + dk®dDk =
= dbxdk®Dk-dk®DkxdB = drbxH-HxHT-dR=
= dr-bxH-H.(dr-F-BxI). (2.2.7)
61
Используя (2.2.3)-(2.2.6) из (2.2.7), получим формулу
(dH)-Hr=dr- (b-F-B-IF)xI. (2.2.8,
Учитывая, что по определению градиента выполняется р&
венство dH = dr ■ grad H, из (2.2.8) вытекает формула для гра
диента тензора микроповорота
gradH = (b-F-B-H7)xH. (2.2.9
Сравнивая (2.2.9) с (2.1.5), видим, что L = F ■ В • Нг - Ь.
При деформации частицы микрополярного континуума ис
пытывают не только трансляционные перемещения, но и по
вороты, которые, в отличие от простого нелинейно упругоц
тела, вообще говоря, не связаны с тензором макроповорота в
полярного разложения градиента деформации. Ориентация час
тиц в пространстве задается при помощи тензора микроповорот;
Н. Это означает, что направление элементарного волокна &
после деформации будет совпадать с направлением dr ■ В
Найдем разность d/J - dr • Н. Получим
dfi-drH=dr-(F-H). (2.2.10
Меры и тензоры деформаций естественно связать с нормам
рассматриваемых приращений. Используя евклидову норму, га
лучим
ltd» - dr ■ НИ2 = dr ■ (F ■ Нт~ I) • (Н • Fr-1) ■ dr, (2.2.11
IldHIl2 = 2dr ■ (F ■ В • W- b) ■ (H ■ BT ■ Fr- b7) ■ dr. (2.2.12
Формула (2.2.11) следует из (2.2.10), a (2.2.12) получается в
(2.2.8) с учетом равенств II dH II = II (dH) ■ HrII, || W \\= л/2 J| w % еск
W = I х w. Видно, что в (2.2.11) естественно появляется введения
ранее формулой (2.1.7) мера метрической деформации У = F ■ Н
Соотношения (2.2.11) и (2.2.12) позволяют естествен^
ввести следующие тензоры и меры деформаций типа Коти
Грина
И = Р-№-о, L = F-B-tF-b, (22]]
Y = F Нг, К = F В W.
Здесь И - тензор метрической деформации оболочки тип
Коши-Грина, К-мера изгибной деформации типа Коши-Гриш-
При отсутствии деформаций (т.е. при R = г, H = I)H = L=f
Y = о, К = b.
Обратим внимание на то, что ранее, в § 1.9 буква К обозначала втор
фундаментальный тензор поверхности Z. Авторы надеются, что это обей
тельство не приведет к недоразумению.
62
Через Y также выражается изменение длины элементарного
волокна:
1!<Ш2 - IIdr! I2 = dr ■ (Y ■ V- о) ■ dr. (2.2.14)
Отметим, что соотношение (2.2.14) вместе с равенством
F = Y H (2.2.15)
позволяет считать Y аналогом правого тензора растяжения в
нелинейной теории упругости простых материалов, однако здесь
уравнение (2.2.15) не является полярным разложением тензора
дисторсии F и Y - несимметричный тензор.
Соотношения (2.2.11), (2.2.12) можно записать в другом виде:
IIdX -dr • НИ2 = d« ■ (О - я ■ Н) • (О -Ж ■ ш1) • dR, (2.2.16)
HdHN2 = 2dK-(B-a-b-H)- &Т-НТ Ът■ a7)-dR. (2.2.17)
уравнения (2.2.16), (2.2.17) позволяют ввести меры и тензоры
деформаций типа Альманзи
и = 0-а Н, l = B-a b Н, у = аН, л = аЬН. (2.2.18)
В результате рассмотренных выше геометрических
рассуждений формулами (2.2.13), (2.2,18) для континуума Коссера
естественным образом были введены первая мера деформаций U
и тензоры деформаций И, и, вторая мера деформаций у, первая
и вторая меры изгибных деформаций К, л, тензоры изгибных
деформаций L, 1.
Заметим, что введенные таким образом на основе
геометрических рассуждений или на основе дополнительных
рассуждений с использованием принципа материальной
индифферентности, как в предыдущем параграфе, меры и тензоры
деформаций для оболочек могут быть определены и по-другому,
например, как энергетически сопряженные к соответствующим
тензорам усилий и моментов,
2.3. Уравнения совместности деформаций
Рассмотрим задачу определения поля перемещений оболочки
или, что эквивалентно, определения положений частиц R{q\ q2)
деформированной поверхности Е по заданным полям меры
деформации Y и тензора поворота Н, которые предполагаются
непрерывно дифференцируемыми и однозначными функциями в
области ст. Согласно (2.1.7) при указанных условиях тензор
дисторсии F = Y - Н будет заданной функцией координат ql, q2, и
63
задача сводится к нахождению векторного поля R{ql, q1) из
уравнения
gradS=F, (2.3.1)
Необходимое и достаточное условие разрешимости уравне-
ния (2.3.1) состоит в выполнении векторного равенства
div(e-F) = 0, e = -1хя, (2.3.2)
которое будем называть уравнением совместности для тензора
дисторсии. Здесь е - дискриминантаый тензор на поверхности о,
При выполнении условия (2.3.2) в односвязной области а вектор.
ное поле R находится с точностью до постоянного аддитивного
вектора. Случай многосвязной области будет рассмотрен в гл. 9.
Обратимся к более сложной задаче определения полей пе
ремещений и поворотов оболочки по заданным полям тензоро;
деформации Y и L. Сначала найдем поле поворотов Н(<?!, q2) npi
помощи системы уравнений, вытекающих из определения (2.1.6)
тензора изгибной деформации L:
|*L = -LaxH, MvL. (2.3.3
dq
Исключая из системы уравнений (2.3.3) неизвестный орто
тональный тензор Н, придем к следующим условиям раз
решимости:
3L 31»
^f-^ = L«Xh <«.P = 1.2). (2.3.4
Заметим, что уравнения (2.3.4) как условия существованв
поля поворотов упругой оболочки в несколько другом контекст
были получены ранее в [149] и независимо в [254] (см. такж
обзор [255]).
Уравнения (2.3.4) можно записать в бескоординатной форме
div(e • L) +1А • и = О, (2.3.S
1/= -(LaxIp)®(raxr?) = L2-LtrL + -(tr2L-trL2)I.
Уравнение совместности (2.3.2) для тензора дисторсии обо
лочки можно преобразовать в уравнение относительно тензор»
Y и L. Для этого достаточно подставить в (2.3.2) вместо F пра
изведение Y-H и воспользоваться соотношением (2.1.6). J
результате получим
div(e-Y)-f-(Yr-e.L)y = 0. (2.3/
64
Два векторных уравнения (2.3.5) и (2.3.6) относительно Y и L
эквивалентны шести скалярным соотношениям и называются
уравнениями совместности деформаций теории оболочек типа
Коссера. Основываясь на теореме Картана [95], можно доказать,
что условия (2.3.5) и (2.3.6) необходимы и достаточны для
существованИЯ в односвязной области о~ однозначных полей
перемещений и поворотов поверхности £ при заданных в
некоторой точке области о значениях вектора R и собственно
ортогонального тензора Н. В отличие от линейной теории
оболочек, выражение полей поворотов и перемещений оболочки
через заданные поля мер деформации Y и I не может быть
представлено в квадратурах, т.е. при помощи обычных
криволинейных интегралов по поверхности О, а требует использования
криволинейных мультипликативных интегралов [297].
2.4. Дисторсионные и деформационные
граничные условия
Краевые условия (2.1.38) на части границы оболочки <at
можно преобразовать к виду, не содержащему перемещений.
Дифференцируя (2.1.38) по s и учитывая (2.3.1), получим
cd,:t-F = ^, (2.4.1)
где т - единичный вектор касательной к граничному контуру
оболочки. Поскольку условия (2.4.1) накладывают ограничения
на краевые значения тензора дисторсии, их можно назвать
дисторсионными граничными условиями. По заданным на о^
значениям т - F функция R(s) определяется с точностью до
аддитивной векторной постоянной, которая соответствует
поступательному движению оболочки. Поэтому краевые условия (2.1.38)
и (2.4.1), вообще говоря, не эквивалентны. Они будут
эквивалентны в случае связного участка (йх, так как добавление
поступательного перемещения не влияет на напряженное
состояние оболочки.
Краевые условия (2.1.40) на части границы со3, где задан
тензор поворота, можно заменить условиями на значение тензора
изгйбной деформации L. В самом деле из определения (2,1,6)
непосредственно получаем
1 Еремеев В.А.
65
Обратный переход от (2.4.2) к (2.1.40) осуществляется путе}
решения обыкновенного дифференциального уравнения относу
тельно краевого значения тензора поворота Щ$)
^ = -tW-L^xH(s). (2.4.3
as
На связном участке со3 решение тензорного уравнения (2.4,]
определено с точностью до произвольного постоянного co6ci
венно ортогонального множителя Но. который соответствуе
повороту всей оболочки как абсолютно твердого тела.
Предположим теперь, что связные участки границы обо
лочки юг и (й3 совпадают, т.е. на W] = ю3 заданы положещ
частиц оболочки после деформации и их ориентации. Легв
видеть, что следствием условий (2.1.38) и (2.1.40) буду
деформационные краевые условия, накладывающие ограничена
на краевые значения мер деформации Y и L и состоящие а
(2.4.2) и соотношений
T-Y = ^-hr. (2.4.4
as
Справедливо и обратное утверждение: граничные услова
(2.1.38) и (2.1.40) на связном участке границы o>i = да3 восст;
навлнваются по деформационным граничным условиям (2 4.2J
(2.4.4) с точностью до движения абсолютно твердого тела. По
следнее можно отбросить как не влияющее на напряженно
состояние оболочки. Следовательно, если участок гранищ
со, - ©з связный, то геометрические граничные условия (2.1.38)
(2.1.40) эквивалентны деформационным краевым условия!
(2.4.2), (2.4.4).
Вопрос о деформационных граничных условиях в нелине?
ной теории оболочек типа Лява освещен в [26, 94, 125, 149, 255].
2.5. Функции напряжений и различные
постановки граничных задач
равновесия упругих оболочек
Внешние поверхностные нагрузки/и £ в уравнениях (2.1.36
(2.1.37), а также контурные нагрузки <р и у в (2.1.39), (2.1 41) в
обязательно являются заданными функциями координат gl, q
Они могут заданным образом зависеть от деформации оболочи
т.е., например,:значение/в данной точке поверхности зависит а
значений Я, Н и их производных в этой же точке. Такие нагрузи
66
называются конфигурационно зависимыми. Если же J{ql, q2) -
заданная функция, то распределенная сила называется мертвой.
В этом случае уравнению равновесия сил (2.1.36) можно
тождественно удовлетворить при помощи подстановки
D = e-grad<f> + D0, (2.5.1)
где Do" некоторое частное решение, Ф- дважды
дифференцируемый вектор, называемый вектором функций
напряжений. Выражение (2.5.1) является общим решением уравнения
(2.1-36), так как вектор Ф определяется по лгобо'му заданному в
односвязной области тензорному полю D(<?J, q2) с точностью до
аддитивной векторной постоянной.
При формулировке краевых задач о равновесии оболочки
возможны различные варианты выбора основных неизвестных
функций. Наиболее естественно принять в качестве основных
неизвестных функции йиН, т.е. поля перемещений и поворотов
оболочки. Этот способ позволяет в полной мере учесть
возможную зависимость внешних нагрузок от деформации
конструкции. Для составления системы разрешающих уравнений
достаточно подставить в уравнения равновесия (2.1.36), (2.1.37)
определяющие соотношения (2.1.31), в которых меры
деформации Y, L выражены через R и Н по формулам (2.1.6), (2.1.7).
Точно так же формулируются в терминах R, Н краевые условия
(2.1.39), (2.1.41).
При определенных допущениях о поведении внешних
нагрузок краевую задачу о равновесии оболочки можно
сформулировать полностью в терминах мер деформации Y и L. Для
этого преобразуем уравнения равновесия (2.1.36), (2.1.37) и
граничные условия (2.1.39), (2.1.41), умножив каждое из них на Нги
учтя соотношения (2.1.6), (2.1.7), (2.1.31). В результате получим
divP!-(Pir.L)x+/*=0, (2.5.2)
divP2 - (Р2Г • L + Р,г ■ Y)x+ €' = О, (2.5.3)
OVI-P,^ ш4:Ц-Р2=у\ (2.5.4)
/*=/-Нг, €^€-Нг,
(2.5.5)
<р =<р-Н, у =у Н .
Предположим, что векторы/*, €*, <р\ 7* - заданные функции
координат. Согласно (2.5.5) физически это означает, что
нагрузки носят следящий характер. Тогда в силу (2.1.31) уравнения
67
(2.5.2), (2.5.3) не содержат никаких неизвестных, кроме Y, 1,
Присоединив к ним уравнения совместности деформаций (2.3,5)
(2.3.6), получим полную систему уравнений относительно Y, i
Геометрические граничные условия в случае щ = (В? замени!
эквивалентными им деформационными условиями (2.4.2), (2.4,4)
а граничные условия (2.5.4) на ю2 = со4 при помощи (2.1.31'
запишем в терминах тензоров Y, L. Описанная постановка з$
дачи равновесия в терминах метрических и изгибных дефор
маций удобна, в частности, для многосвязных оболочек, в ко
торых поля перемещений и поворотов могут быть многознач
ными [69], в то время как тензорные поля Y и L однозначны.
Если определяющие соотношения (2.1.31) можно однозначш
обратить, т.е. выразить меры деформации Y и L через усилия Р
и моменты Р2, то получаем постановку задачи равновесщ
оболочки в усилиях и моментах.
Сравнивая теорию оболочек с трехмерной теорией упругосц
[112], видим, что задача о равновесии оболочки с неизвестный
R, Н аналогична задаче теории упругости в перемещениях^;
постановка задачи для оболочки в усилиях и моментах ана
логична задаче теории упругости в напряжениях. Между этим
двумя постановками в теории оболочек существуют про
межуточные варианты выбора неизвестных функций. Например
можно исключить из системы уравнений вектор положения Я
приняв за основные неизвестные тензоры Y и Н или, чтс
эквивалентно, тензоры F и Н. В этом случае вместо уравнена
F = grad R следует использовать уравнение совместности дл
дисторсии (2.3.2), а геометрические граничные условия (2.1.38
заменить дисторсионными условиями (2.4.1). При наличии)
оболочке непрерывно распределенных дислокаций целесо
образно выбрать в качестве основных неизвестных векто[
функций напряжений Ф и тензор поворота Н (см. разд. 9).
2.6. Геометрически линейная теория
микрополярных оболочек
В случае малых деформаций уравнения теории оболоча,
существенно упрощаются. В этом геометрически линейно)
случае нет необходимости различать эйлерово и лагранжея-
описания, поверхности о* и Е различаются бесконечно мало
операторы grad и Grad можно не различать, также нет не
обходимости рассматривать различные типы тензоров усилий!
моментов. Введем бесконечно малые вектор перемещений и \
68
вектор поворота -8 так, что выполняются соотношения
R=r + u, H = I-Ix». (2.6.1)
В (2.6.1) последняя формула следует непосредственно из
представления собственно ортогонального тензора через вектор
конечного поворота (2.1.9) при 161 < 1.
Мера метрической деформации Y и тензор изгибной
деформации L с точностью до линейных слагаемых могут быть
выражены через линейные тензоры деформаций и изгибных
деформаций € и к:
Y = I + e, L = k, €=gradu + oxd, ic = gradd. (2.6.2)
Тензоры е и к ранее использовались в линейной теории
оболочек типа Коссера [296, 297].
В силу (2.6.2) в линейной теории оболочек введенные выше
тензоры усилий D, Р:, Т не отличаются друг от друга. Точно так
же не различаются между собой тензоры моментов G, Р2, М. В
дальнейшем тензоры усилий и моментов в контексте линейной
теории оболочек будем обозначать соответственно Т и М.
Уравнения состояния упругих оболочек могут быть
представлены через функцию удельной энергии деформации W =
= W(e, к):
dW <}W
Т=" М=|~. (2.6.3)
Уравнения равновесия линейной теории имеют вид
divT-f-/=0, div M + ТХ + € = 0, (2.6.4)
а краевые условия преобразуются следующим образом:
ю, : и = Ио(5), (2.6.5)
<о2 : v ■ Т = <р(5), (2.6.6)
m3:d=<W). <2-6л>
со4 : v ■ М = y(s). (2.6.8)
Здесь h0(s) и -d0(s) - заданные функции длины дуги,
определяющие соответственно перемещения и повороты на части
контура оболочки.
Примером уравнения состояния в случае малых деформаций
служит квадратичная форма
2W = ay tr2€||+a2tr€^ +щ tr(e||-ej[) + a4n-€Г-е-п4-
+ Э, tr2 к|: +р2 to к} +р3 »(ки -К|[) + р4п-кг -к-п, (2.6.9)
описывающая физически линейную изотропную оболочку, щ и
69
$к- упругие постоянные (к = 1, 2, 3, 4), ец-е-о, Кц-к-о
Согласно (2.6.3) для уравнений (2.6.9) тензоры усилий и mq.
ментов определяются формулами
T = a,otrej, + a2e,[+a36j[+a4€-»®n, (2.6Л0)
М = pjO tr ки + j52k[ + р3к„ + р\,к • п ® п. (2.6.11)
Линейные уравнения состояния (2.6.10), (2.6.11) вместе (
(2.6.4) и (2.6.5)-(2.6.8) образуют линейную краевую задачу от
носительно полей перемещений и поворотов, описывающун
равновесие микрополярной оболочки в случае бесконечно ма
лых деформаций.
Нелинейные уравнения состояния упругих и неупругщ
микрополярных оболочек при конечных деформациях стану!
предметом изучения в следующих главах (см. главы 4, 5, 6, 10).
2.7. Связь с трехмерными уравнениями
равновесия
Хотя в этой книге развивается прямой подход к построен!»
теории оболочек, в данном параграфе уделим некоторое меси
связи полученных уравнений равновесия оболочек с условиям
равновесия оболочки как трехмерного микрополярного нелв
нейно упругого тела. Выведем условия равновесия оболочек ка
следствие уравнений нелинейной теории упругости. Рассмотри
трехмерное тело, один из размеров которого много меныи
остальных, так называемое тело-оболочку (рис. 2.3).
Пусть в отсчетной конфигурации тело занимает область о,
ее граница Эг> представляет собой объединение боково
поверхности ох, верхней а+ и нижней поверхностей о
Эо = 01 ио+ vjo_. Отнесем все силы и моменты, действующ
на тело-оболочку к геометрии" недеформированного состояш
Обозначим массовую силу через/;„ поверхностные силы, дейс
вующие на о±, через t±, а поверхностные силы, действующие
боковую поверхность, через /v. Массовые и поверхностные а
менты обозначим соответственно через с;„с±, cv. Тогда главнь
вектор сил, действующих на тело-оболочку, дается равенством
9= JJJp,/r d v + JJ/+ d a +j\t_ d a +jj*v d a, (2.7
где р„ - плотность тела-оболочки в отсчетной конфигурации.
70
<*±
o_
Рис. 2.3. Оболочка как трехмерное тело
Введем в области v некоторую достаточно гладкую
поверхность о*. Тогда положение частиц тела до и после деформации
может быть представлено при помощи формул вида (1.11.1).
Главный момент сил, действующих на тело-оболочку,
представим в виде
(2.7.2)
где радиус-вектор точек тела-оболочки X в деформированном
состоянии связан с радиус-вектором R поверхности Z - АГ(а)
формулой (1.11.1).
Выражения для главного вектора сил и главного момента
(2.7.1), (2.7.2) сохраняются, если рассмотреть произвольную
часть и* тела-оболочки, которая сама представляет собой тело-
оболочку той же толщины, т.е. такую, что Зо* -a^uo+ua*,
где a+ - v г\о±. Соответствующий главный вектор сил и
главный момент обозначим через З5* и Л* соответственно.
Поверхностную плотность оболочки в отсчетной
конфигурации определим с помощью интегрального соотношения
JJpdc4jJJp,dP, (2.7.3)
4 *
О V
выполнения которого потребуем для любой области v* рас.
сматриваемого вида. Здесь и далее О -и ост.
Определим плотность поверхностной силовой нагрузки,
действующей на поверхность о% формулой
JJ/do^JjJp^dp+JJ^do + JJ^da Vp\ (2.7.4)
Аналогично часть главного момента в (2.7.2) можно замени^
при помощи введения поверхностного момента Z, определяемого
как/при помощи интегрального тождества
Jj(€+*X/)d0^jJjPu(C!,+*X/!,)d£> +
+ JJ(c++*x/+)do+JJ(c_ + J!rxOda v^- (2-7-5)
4 *
Нагрузку, действующую на боковой поверхности a]_t такж
представим в виде векторов усилий dv и моментов gv, дейст
вующих на границе о>* поверхности aV
Jrfvds^J|rvda, J($v+«xrfv)ds = jJ(cv + *x*v)dc Vw*. (2.74
Введение при помощи интегральных равенств (2.7.4)-(2.7.(j
поверхностных и контурных нагрузок позволяет представив
главный вектор сил и главный момент, действующие на про
извольную часть тела-оболочки, в виде
&* = jjfda+ jtfvds, M'= (2.7.1
A t
= jj(€+Rxf)d<J+ j(gv + Rxd4)ds.
О* Си*
Можно показать, что векторы усилий dv и моментов gv яШ
ются линейными функциями нормали v и связаны с тензорам
усилий D и моментов G при помощи формул
dv = v D, gv = v-G. (2.7.8
72
Таким образом, условия равновесия произвольной части тела
оболочки, заключающиеся в равенстве нулю векторов W и Ж*, с
помощью (2.7.7), (2.7.8) приводятся к интегральным
соотношениям
JJ/do+jV-Dd* = 0,
°* w* (2.7.9)
JJ(€+Kx/)da+J(v-G + «x(p-D))<b = 0 Va*, ю+ =3a\
которые при До = 0 совпадают с соотношениями (2.1.44), (2Л .45),
полученными ранее в рамках прямого подхода при помощи
принципа виртуальных работ.
Следовательно, уравнения равновесия микрополярных
оболочек (2.1.36), (2.1.37) являются точным следствием условий
равновесия трехмерного микрополярного тела-оболочки, не
требующим никаких дополнительных гипотез о виде напряженного
состояния трехмерного тела. Естественно, что при переходе от
трехмерного тела к двумерной поверхности часть информации о
напряженном состоянии теряется безвозвратно, поскольку
тензоры усилий и моментов представляют собой лишь
интегральные характеристики напряженного состояния.
2.8.0 механике оснащенных поверхностей
Как отмечалось выше, наряду с рассматриваемыми в данной
книге оболочками типа Коссера в литературе известны и другие
неклассические модели, также называемые оболочками типа
Коссера [98, 99, 245, 267]. Во избежание путаницы будем
называть такие оболочки оболочками типа Нагхди или
оснащенными поверхностями. Чтобы проанализировать отличия
этой модели от рассматриваемой теории микрополярных
оболочек, в данном параграфе приведем основные соотношения
упругих оболочек типа Нагхди,
Оболочка типа Нагхди представляет собой материальную
поверхность, на которой задано поле директора - вектора,
описывающего изменение ориентации и длины материальных
волокон оболочки, рассматриваемой как трехмерное тело.
В актуальной конфигурации поле директора обозначим через I.
В отсчетной конфигурации поле директора обозначим как /„
(ряс. 2,4). Предполагается, что векторы / и L не являются
касательными к поверхности оболочки, т.е. I • N^Ouh • и ^ 0. Таким
73
Рис. 2.4. Кинематика оболочки (оснащенной поверхности) в модели Нагхди
образом, деформация оболочки типа Нагхди описывается двумя
векторными полями - радиус-вектором и директором:
R = R(qKqL\ l = l(ql,q*). (2.8.1)
В общем случае директор / не является единичным и нор
мальным к поверхности X вектором. Таким образом, число
степеней свободы у оболочки типа Нагхди оказывается равныл
шести, как и в случае микрополярных оболочек. Налагая
дополнительные ограничения на вид I, можно получить частные
случаи механики оболочек, в том числе и теорию оболочек типа
Кирхгофа-Лява, связав директор с нормалью: I = N.
Предположение, что директор не является единичным, но параллелей
нормали (/ IIN), позволяет учесть поперечное обжатие оболочки,
Более подробный анализ следующих из общей модели типа
Нагхди вариантов теории оболочек содержится в [267].
Для упругой оболочки типа Нагхди удельная потенциальна?
эиергия деформации Появляется функцией R, /и их градиентов:
W=W(«,F,/,grad/). (2.8.21
Как и в случае микрополярных оболочек, используя принцш
материальной индифферентности, получим, что функция W н<
зависит от Л и должна удовлетворять уравнению
ЩР-QJ-Q, (grad t) - Q] = W(F, /, grad t) (2.8.J
для любого ортогонального тензора Q. Рассмотрим полярно
разложение тензора дисторсии F [68]. Учитывая, что F- особы
тензор, рассмотрим полярное разложение неособого- тензор
F + п ® N. Имеем
F + n®N=(U + n®n)-A,
74
где U - принадлежащий поверхности (двумерный) положительно
определенный симметричный тензор, определяемый формулой
у = {F ■ F7), а А - ортогональный тензор поворота поверхности,
причем « ■ А = N. Окончательно имеем формулу [68]
Полагая в (2.8.3) Q = Аг, получим удовлетворяющее
принципу материальной индифферентности уравнение состояния
упругой оболочки типа Нагхди
W = W(V, I ■ A?, (grad 0 • А7). (2.8.4)
Уравнения равновесия для оснащенной поверхности получим
вариационным методом из уравнения
8jjwdo-5'st=0. (2.8.5)
о
Для упрощения выкладок используем при вычислении
вариации потенциальной энергии деформации W зависимость (2.8.2).
Тогда получим, что
ol
где
ЪйШ UUJW_ (2.8.7)
dF dgradl к }
-тензоры усилий и моментов типа Пиопы.
Используя (2.8.6), (2.8,7) и теорему о дивергенции на
поверхности а (1.10.18), получаем
b\jWdo = jv(D-bR + G-8l)ds-
-jJ(divD)-5tfdo--|J
divG--—
dl
Ы da. (2.8.8)
Согласно вариационному уравнению (2.8.5) формула (2.8.8)
определяет возможный вид элементарной работы внешних
нагрузок 5'sl, действующих на оболочку типа Нагхди, а именно,
имеем представление
5'^JJ(/*Stf + £-SJ)da+ J <p-8Rds+ly-Slds. (2.8.9)
75
В (2.8.9) /, €,<р и -у -заданные функции.
Из вариационного уравнения (2.8.5) с учетом (2.8.9) вытекает
постановка краевой задачи о равновесии нелинейно упруго!
оболочки типа Нагхди в геометрии отсчетной конфигурации:
divD+/ = 0, (2.8.I0)
divG-^— + ^ = 0, (2.8.11)
ol
<в,:Л = р(*), (2.8.12)
m2:v-D = 9(s), (2.8.13)
ю3:/=/°(^), (2.8.14)
&4:vG = y(s). (2.8.15)
Здесь p(s), P(s) - заданные функции, участвующие в
кинематических краевых условиях (2.8.12) и (2.8.14). Как и раньше,
функция p(s) задает положение части (ot края оболочки j
пространстве, в то время как lQ(s) задает директор на (й,.
Проводя аналогичные § 2.1 рассуждения об элементарной
работе сил, действующих на абсолютно твердое тело, можно
убедиться, что функции/ и<рв выражении (2.8.9) и уравнения!
(2.8.10), (2.8.13) описывают распределенную по поверхности
оболочки и части со2 ее края силовую нагрузку. Однако, несмотря на
одинаковую структуру элементарных работ для микрополярной
оболочки (2.1.32) и для оснащенной поверхности (2,8.9), механи
ческий смысл функций (, у и €,7 различен. Действительно,
задание директора / не фиксирует ориентацию абсолютно твер
дого тела в пространстве, так как при этом допускаются любые
повороты вокруг вектора I, Это означает, что в элементарно!
работе внешних сил, действующих на оболочку типа Нагхдо
(2.8.9), не могут быть учтены крутящие моменты вокруг оси
направляющим вектором /, так как такие моменты не могут
производить работу на поворотах вокруг I, С другой стороны
рассмотрим такие вариации директора /, при которых изменяете
только его длина, т.е. 5/ = (о/) • II. Очевидно, что им не соот
ветствует никакое вращение частиц оболочки, а следовательно
и никакие силовые или момектные нагрузки. Такие вариацй
описывают деформации (микродеформации) частиц, образую
щих оболочку, а соответствующие им силовые характеристика
представляют гипернапряжения {силовой диполь). Это значит
что в уравнениях (2.8.11) и (2.8.15) компоненты векторньи
76
функций I и у имеют разную природу. Представим их в виде
суммы слагаемых, параллельных и перпендикулярных
директору: € = €-ll + (xl и у-у-И+yxL Тогда первые
слагаемые представляют собой силовые диполи, действующие по
направлению /, а вторые - моментную нагрузку, не содержащую
моменты с осью /,
Таким образом, в рамках модели оболочки типа Нагхди
оболочку можно рассматривать как материальную поверхность,
образованную деформируемыми частицами, воспринимающими
силовую нагрузку и часть моментной, а также некоторые
гипернапряжения. В то время как микрополярную оболочку
можно образно представлять себе как поверхность,
образованную недеформируемыми микрочастицами с формой
произвольного эллипсоида, взаимодействующими между собой при
помощи сил и моментов, оболочку типа Нагхди можно образно
представить как поверхность, образованную микрочастицами в
форме стержней, изменяющих в процессе деформирования
поверхности свою длину, но нечувствительных к поворотам
вокруг своей оси. Это различие означает, что в общем случае ни
одна из моделей оболочек типа Коссера и типа Нагхди не
следует друг из друга. Вместе с тем модель типа Коссера
представляется логически более завершенной, поскольку при своем
описании не требует введения нагрузок, отличных от сил и
моментов.
Глава 3
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
Указанные выше постановки статических задач допускают
вариационные формулировки. Рассмотрим некоторые
вариационные принципы теории оболочек, которые формулируются
по аналогии с вариационными теоремами трехмерной упругой
среды Коссера [70], а также выведем уравнения движения
микрополярных оболочек из принципа Гамильтона.
3.1. Принцип Лагранжа и критерий
консервативности внешних нагрузок
Ранее, в § 2.1 уравнения равновесия оболочки были
получены из вариационного уравнения (2.1.20). Правая часть &А
уравнения (2.1.20) представляет собой элементарную работу
внешних нагрузок и в общем случае не является вариацией
какого-либо функционала. Если такой функционал существует,
то нагрузка называется консервативной. Используя [ 18], можно
показать, что необходимое и достаточное условие
консервативности нагрузки, действующей на оболочку, имеет вид
&[Ш, 5в, 57f, 5'0] = ЩЬ'К, 5'0, 5Д, 56] V 5R, 50, 5'Я, 5'0, (3.1 Л)
где вариации 5Д, 60, 5'Д, 5'8 подчинены условиям
ю, : BR = 5'й = 0, щ : 50 = 5'в = 0.
В (3.1.1) билинейный функционал 3* определяется следую*
щим образом:
&№,№,§%№]= (ЗЛ.2)
= Jj 5'/-5ff+—-—54 .ri + -Ixe]-60 + 5'e-Li-Soldo*
j 5'<p-5Rds+| —-—8vfi+-ixeYse+5'e-L2-se]<k
+
Si>2
78
где
L,4-
2
b2 -
2+-e-eL
2
exi+—-—в®|€+^€хе!1
4+e-e v 2 ■ J.
4 f 1 \
4 + 9-9 \ 2 J
ЭЛ dgradS 39 dgrad9
J ЭД ЭgradЯ
дЭ/
© grad 8'Я + $f- - 8'6 + —^— © grad 8'в.
39 d grad 9
Аналогично (3.1.3) записываются выражения 5€, 5<р, 67 и S'€,
8'ф, 5'7-
При выполнении условия (3.1.2) элементарная работа
внешних нагрузок будет вариацией некоторого функционала
ЩК, 9], называемого потенциалом внешних сил и моментов.
Более того, условие (3.1.2) есть необходимое и достаточное
условие консервативности внешних нагрузок. Здесь и далее в
качестве аргументов функционала указываются варьируемые
функции. Вместо вектора конечного поворота в можно
использовать тензор поворота Н.
Рассмотрим пример приложения полученного критерия
консервативности. Предположим, что силовая нагрузка является
мертвой, т.е. не зависящей от перемещений и поворотов, а
моментная нагрузка распределена по поверхности оболочки и
отсутствует на ее краю, т.е. bf = Ь<р = 8у = 0. Тогда функционал SF
принимает вид
9Ч5*,5е,5'Л,6'в] = JJ —i-^js'^I + IlxeJ-Se-
€xl +—-—9®К+-€хе|
4+9-6 К 2 )
--5'9
2
■SOVda.
Отсюда видно, что критерий (3.1.2) не выполняется при
Ы = 0. Это означает, что мертвая моментная нагрузка не
является консервативной. Не будет консервативным и следящий
момент, вектор которого поворачивается вместе с частицей, т.е.
когда о€ = ф х €, где ф- вектор виртуального поворота (2.1.25).
79
В то же время условию консервативности, очевидно,
удовлетворяет моментная нагрузка, для которой 3^ = 1/2ф xf и которую
можно назвать полуследящим распределенным моментом. Ана-
логичные утверждения справедливы и для моментной нагрузки,
распределенной по части края оболочки со4. В случае
трехмерных микрополярных сред аналогичные результаты о
консервативности получены в [47, 70]. Ряд других примеров
консервативного и неконсервативного поведения моментной
нагрузки содержится в [63].
Предположим, что внешние силы, действующие на оболочку,
консервативны, т.е. элементарная работа внешних нагрузок
(2.1.32) представляет собой вариацию некоторого функционала
su.[R,H]. В этом случае вариационное уравнение (2.1 20)
превращается в вариационный принцип стационарности типа Лаг-
ранжа. Рассмотрим функционал %y{R, Н], определенный на
множестве дважды дифференцируемых полей смещений и
поворотов поверхности а, удовлетворяющих граничным условиям
(2.1.38) и (2.1.40) на со, и со3:
«,[Д,Щ = Л Wda-rf[K,H]. (3.1.4)
о
При помощи (2.1.31), (2.1.30) легко проверить, что условие
стационарности функционала %у эквивалентно уравнениям
равновесия (2.1.36), (2.1.37) и краевым условиям (2.1.39) и (2.1.41)
на ©2 и со4.
3.2. Принцип типа Ху-Васидзу
В этом принципе стационарности главными граничными
условиями являются условия (2.1.40) на ю3, задающие краевые
значения тензора поворота Н. При вычислении вариации
функционала независимо варьируются векторное поле R и тензорные
поля Н, У, L, D, Р2, а сам функционал имеет вид
%2[R,H,Y,L,D,P2} =
= JJ [w(Y>L)-D°(Y-H-grad*b (3 2.1)
■Р20 L-ira®|i5-Hr] [do-J m-D-(Jt-p)d£-s![l?,m
80
Уравнениями Эйлера вариационной задачи о стационарности
функционала %2 служат уравнения равновесия (2.1.36) и (2.1.37) в
усилиях и моментах, определяющие соотношения (2.1.31) и
геометрические соотношения (2.1.6)2, (2Л.7)2. Естественными
краевыми условиями являются ограничения (2.1.38), (2.1.39) и (2.1.41).
3.3. Первый принцип типа Тонти
Предположим, что силовая нагрузка/, распределенная по
поверхности а, а также силовая нагрузка <р, распределенная по
части границы оболочки щ, являются мертвыми, т.е. векторы/и
<р - заданные функции координат q\ q2. Выразим тензор усилий
D через вектор функций напряжений по формуле (2.5.1) и
подставим в граничные условия на о>2 (2.1.39):
d<E>
— = <p(s)-v-D0.
as
Поскольку добавление произвольной постоянной к вектору
функций напряжений не влияет на напряженное состояние
оболочки, в случае связной кривой ш2 последнее равенство
эквивалентно заданию на со2 функции напряжений
фЦ2=е(5). (3.3.1)
Далее предположим, что моментная нагрузка консервативна,
и ее потенциал зависит только от поля поворотов:
ffi-tydo+$fytyds = bsA[H[. (3.3.2)
Функционал первого принципа типа Тонти имеет вид
«з1У,Н,Ф] = Д I(e-grad<I> + Do)0(Y-H)-
-W(Y,L(H))]da+ f Ф-^ds+sltH]. (3.3.3)
J as
К сравнению допускаются дифференцируемые тензорные
поля Y, дважды дифференцируемые функции напряжений Ф,
удовлетворяющие условиям (3.3.1), и дважды
дифференцируемые собственно ортогональные тензорные поля Н,
подчиняющиеся условиям (2.1.40) на со3. Через L(H) обозначено
выражение (2.1.6)2.
81
Уравнения Эйлера вариационной задачи о стационарное?
функционала (3,3.3) состоят из уравнений совместности для дис
торсии (2.3.2), уравнения баланса моментов (2.1.37) и опреде
ляющих соотношений в форме
e-grad<fr + D0= —-H.
Естественные краевые условия представляют собой дистор
сионные условия (2.4.1) на Щ и динамические моментны,
условия (2.1.41) на со4-
3.4. Принцип типа Кастильяно
Введем в рассмотрение удельную дополнительную энергш
оболочки V как функцию от тензора усилий Р, и тензора т
ментов Р3, связанную с удельной потенциальной энергией дефор
мации W преобразованием Лежандра:
V(P, ,P2) = P,OY + P20L-^ (3.4,1
По свойству преобразования Лежандра имеем
Y.»l. b.Z-. (ЗА!
ЭР,' ЭР,
В (3.4.1), (3.4.2) предполагается, что меры деформации вырг
жены через тензоры Р[ и Р2, т.е. существует однозначное обр;
щение определяющих соотношений
P,=X,(Y,L), P2 = K2(Y,L).
Имея в виду соотношение Pi = D • Нг, удельную дополю
тельную энергию V будем считать функцией тензоров D, Н, Р
что в силу (3.4.2) приводит к выражению
~JoSP2. (3.4.1
SV=Y0(8D-H7 + D-oH7) +
Удовлетворяя уравнениям равновесия (2.1.36) при помоо:
представления (2.5.1) тензора D через вектор функций напр!
жений Ф и предполагая, что для элементарной работы момея
ной нагрузки справедливо соотношение (3.3.2), запишем выр:
жение функционала дополнительной энергии оболочки
^4[Ф,Н,Р2] = Л[Н(е-Егас1Ф + О0)Н7",Р2)-
P20L(H)]dC + Гф-^ая-йЦН]. (3.4;
а»!
82
В функционале %^ варьируется векторное поле функций
напряжений Ф, подчиненное условиям (3.3.1), поле собственно
ортогонального тензора Н, удовлетворяющего условиям (2.1.40),
й тензорное поле моментов Р2. Допустимые функции Ф, Н
предполагаются дважды дифференцируемыми, а функция Р2 -
дифференцируемой.
При помощи (3.4.3) доказывается, что условие
стационарности функционала (3.4.4) эквивалентно условиям
совместности (2.3.1), уравнениям баланса моментов (2.1.37), второму из
соотношений (3.4,2), дисторсионным краевым условиям (2.4.1) на
щ, и условиям (2.1.41) на а>4.
3.5. Принцип типа Рейсснера
Функционал имеет вид
«S[«,H,D,P2] = JJ [D0gradtf+P2QL(H)-
о
-V(D-HTtF2)]do-<u[R,H]~ Jm-D-(tf-p)ds. (3.5.1)
to.
Единственным ограничением, не считая требований-
гладкости, накладываемым на варьируемые функции, if, H, D, Р2,
является краевое условие (2,1,40) на щ. Остальные краевые
условия (2,1.38), (2.1.39), (2.1.41) будут естественными, т.е.
вытекают из требования стационарности функционала (3.5.1).
Уравнения Эйлера вариационной задачи 5^5 = 0 состоят из уравнений
равновесия (2,1.36), (2.1.37) и определяющих соотношений
оболочки в форме
grad R = =- • Н, L(H) = -—.
6 3(D-Hr) ЭР2
3.6. Второй принцип типа Тонти
Этот принцип в определенном смысле аналогичен принципу
Ху-Васидзу и заключается в стационарности функционала
^№H,F,D,P2] = ||[V(D-H7",P2)~P2OL(H)-FO(D-e.
о
*ЕгааФ-О0)]аа + ^[Н]+ |Ф'|^ё5+ |т-Г-(Ф-8(5))(Ь. (3.6.1)
83
Здесь предполагается справедливым соотношение (3.3.2)
Главные условия- ограничения (2.1.56) на (В5. Естественным^
краевыми условиями являются дисторсионные условия (2.4.1) на
(й|, условия (3.2.1) на щ и моментные условия (2,1.41) на &><
Уравнения Эйлера состоят из уравнений совместности (2.3 2},
уравнения равновесия моментов (2.1.37), выражения (2.5.1)
тензора усилий Пиолы через функции напряжений и
определяющих соотношений в форме
цр>» f= 3Vh.
ЭР2 3(DHr)
3.7. Принцип Гамильтона и уравнения
динамики оболочек
Как известно из теоретической механики, кинетическая
энергия абсолютно твердого тела задается следующей квадра
тичной формой [110]:
-\Mv0 -v0 + 2M(vq xta0)Rc + w0-©°-to0]. (3.7.11
2
Здесь М- масса тела, vu- скорость полюса О, ft>0~ углова?
скорость, Rc~ радиус-вектор, соединяющий полюс О с центром
инерции С, ©° - тензор инерции тела относительно точки О.
В соответствии с (3.7.1) кинетическую энергию оболочм
типа Коссера следует постулировать в виде
3£ = jjptf(»,«0dc, (3.7.2s
о
K{v, &>) = —»- г> + ю ■ ©, -v + —to ■ ®2 ■ <a,
где v = R, <a = — ШТ ■ H) - линейная и угловая скорости частивд
оболочки, (■) = d(0№, p - поверхностная плотность оболочю
в отсчетной конфигурации, рК - поверхностная плотность кипе
тической энергии, p0j, р©2 -тензоры инерции (©£ = ®гУ Е™
ственно, предполагается, что кинетическая энергия положи
тельна, что налагает определенные ограничения на вид тензорй
инерции.
84
Для вывода уравнений динамики оболочек воспользуемся
принципом Гамилътона-Остроградского. Этот вариационный
принцип динамики заключается в стационарности функционала
действия
и
«7rH,H] = J(3£-«,)dr (3.7.3)
на таких движениях оболочки, которые принимают в моменты
времени :0, tx заданные значения и удовлетворяют
кинематическим граничным условиям.
Выразим вариацию угловой скорости at через производную
по времени от виртуального поворота ф. Имеют место формулы
Нт Н = -1хш, (3.7.4)
H^-oH^-Ix»)/. (3.7.5)
Варьируя уравнение (3.7,4) и дифференцируя (3.7.5) по
времени, после некоторых преобразований придем к искомой
формуле
5ю = ф + ф х to. (3.7.6)
Тензоры ©| и ©2 по своему физическому смыслу обладают
свойством
©,=нг ©; н, ©2 = нг ©°2 н,
(3.7.7)
©;=©2=о, 5©;=§©2=о.
Вычислим вариацию кинетической энергии оболочки.
Используя (3.7.4) и (3.7.7), найдем вариации тензоров ©: и ©2
8©, = ф х ©, - ©, х ф,
(3.7.8)
502 = ф х ©2 - ©2 х ф.
На основании (2.1,6), (3.7.8) имеем формулы
b(^vv\ = v-(SR)\ (3.7.9)
5(w-©,-»)-(©! •»)-ф + <о-01-(5Я)'+(w©i хг>)-ф, (3.7.10)
5[-<о-©2ы] = ь>-©2.ф. (3.7.11)
85
Используя формулы (2.1.21), (3.7.9)—(3.7.11), в которых все
вариации выражены через 5Л,ф и (5/?)', ф, из принципа Га-
мильтона-Остроградского выводим уравнения движения обо
лочек
divD + /= (>*:„ (3.7.I2)
div G + [F7 - D]x + i = р{кг + v x ©^ ■ w],
K.= = t?+©, -to, Ky = —- = ©. •» + ©, a>.
Здесь рЛГ, и р.К2 + р/? х ATt— плотности количества движения и мо
мента количества движения.
Для замыкания задачи динамики микрополярных оболоче;
уравнения движения (3.7.12) и краевые условия (2.1.38)-(2.I.4lj
следует дополнить начальными условиями
где Д\ z>°, Н°, (д>° - известные функции (начальные данные).
Уравнениями Эйлера для функционала (3.7.3) служат соотно
шения динамики (3.7.12), а естественные краевые условия даютс
формулами (2.1.39), (2.1.41).
Уравнения нелинейной динамики оболочек (3.7.12) рано
другим способом были получены в [58] и приведены таю»
в [228].
3.8. Вариационный принцип
для нелинейных собственных колебаний
Вариационный принцип Гамильтона-Остроградского може
быть преобразован на случай нелинейных собственных кож
баний, т.е. периодически изменяющихся во времени с некоторо
частотой Q движений микрополярной оболочки при отсутства
внешних сил и моментов. Естественно, что здесь, как и во все
выше сформулированных вариационных принципах, за кадре*
рассмотрения остается вопрос о существовании таких движенй
Построим вариационный принцип для определения собственны
частот и форм колебаний микрополярной оболочки.
86
В случае существования собственные колебания будут
стационарной точкой функционала
гс/П
«8[Д,Н]= J(3C-«,)df (3.8.1)
на таких движениях оболочки, которые удовлетворяют
однородным кинематическим граничным условиям и условию
периодичности по времени:
R(r, -ж/Q) = R(r, я/Q), Щг, -п/О) = Щг, я/Q).
Сделаем замену переменных £2* = т. Тогда функционал (3.8.1)
преобразуется к виду
«8[*.Н]= J(3£-«,)dx (3.8.2)
-л
на множестве 2я-периодических функций R(r, т), Щг, т):
Д(г, -к) = Й(г, ж), Н(г,-я) = Н(г, я). (3.8.3)
3.9, Вариационные принципы
в случае малых деформаций
Рассмотрим вариационную постановку задач механики
оболочек в случае малых деформаций. Примем, что поверхностная и
краевая нагрузка является мертвой, т.е. не зависит от
перемещений и поворотов. Тогда вариационный принцип типа Ла-
гранжа (3.1.4) в случае малых деформаций преобразуется к виду
«,[«,a] = JJW(€,K)da-,s4[ii,d], (3.9.1)
о
где потенциал внешних нагрузок ,э![ы,г>] определяется
равенством
лЛГи.^]4 JJ(/-ii+«-&)do + J<p«ds + J-fdds.
Рассматривая функционал (3.9.1) на множестве дважды
дифференцируемых полей перемещений и поворотов поверхности О,
удовлетворяющих граничным условиям (2.6.5) и (2.6.7) на «: и С0з>
легко проверить, что условие его стационарности эквивалентно
уравнениям равновесия (2.6.4) и краевым условиям (2.6.6) и
(2.6.8) на ©2 в ю4- Отметим, что в этом случае при стандартных
87
предположениях о положительной определенности функций
W(€, к) в случае малых деформаций вариационный принцип
стационарности Лагранжа является минимальным вариационны^
принципом - равновесное решение доставляет минимум
функционалу (3.9.1).
Аналогично вариационному принципу типа Лагранжа не
составляет большого труда записать и остальные вариационные
принципы для оболочек в случае малых деформаций,
рассмотренных в предыдущих параграфах. Это потребует в основное
лишь изменения обозначений.
Вариационный принцип типа Кастильяно для малых
деформаций будет сформулирован в § 9.7 для оболочек, содер
жащих изолированные или непрерывно распределенные де-
фекты.
3.10. Вариационный принцип Ролея
В случае геометрически линейной теории микрополярньи
оболочек вариационный принцип для собственных колебаний
может быть сформулирован иначе, чем в § 3.8. В этом случае
плотность кинетической энергии оболочки определяется
формулой
и является однородной функцией второй степени относительно
скоростей v = а, <а - Ф, т.е.
K(Qv, Qo») = Q2K(v, ш)
при Q > 0. Предположим, что W(e, к) является выпуклой функ
цией. Отметим, что в случае физически линейной оболочм
с уравнением состояния вида (2.6.9) это предположение верно
если W(et к) является положительно определенной квадратично*
формой.
Тогда вариационная задача (3.8.2), (3.8.3) на перемещения
и поворотах, удовлетворяющих кинематическим краевым уело
виям (2.6.5) и (2.6.7) на щ и щ, эквивалентна принципу стацш
нарности для функционала
«9Е«.Ф = { /Jw(e, K>d<JdT> (злш
-1С О
88
определенного на дважды дифференцируемых полях
перемещений » и поворотов ©, удовлетворяющих однородным
граничным условиям
«;:н = 0, щ:Ъ = 0, (3.10.2)
условиям периодичности
и(г,-я) = и(г, ж), д(г, -к) = д(г, к) (3.10.3)
и ограничению
dadi = A2, (3.10.4)
I НтЛ}
-к о у
где .Д - некоторая постоянная.
Доказательство эквивалентности задач (3.10.1)-(3.10.4) и
(3.8.2), (3.8.3) полностью повторяет рассуждения [15] для случая
трехмерных уравнений теории упругости. Отметим, что здесь
допускается нелинейная зависимость W(e, к), отличная от
квадратичной, т.е. возможно рассматривать собственные
колебания физически нелинейных оболочек. Величина А соответствует
амплитуде собственных колебаний.
В случае физически и геометрически линейной теории
оболочек вариационную постановку (3.10.1)-(3.10.4) можно еще
упростить. В силу линейности собственные колебания имеют
вид, пропорциональный е'"* {и - uV"', -d = д°е'"г К и функционал
(3.10.1) может быть проинтегрирован по времени. В этом случае
имеет место вариационный принцип Рэлея: формы собственных
колебаний оболочки являются стационарными точками
функционала потенциальной энергии
«9[«",d"] = J'Jw(«",it")do, (3.10.5)
о
где
€° = grada° +oxd°, K°=gradd°
на множестве функций, удовлетворяющих условиям (3.10.2) и
ограничению
JJpJf(«",d")do = I. (3.10.6)
о
В формулах (3.10.5), (3.10.6) функции ы°,д° представляют
собой не перемещения и малые повороты, а амплитуды
колебаний этих величин.
89
Вариационный принцип Рэлея эквивалентен принципу
стационарности для отношения Рэлея {частного Рэлея):
JjV(e\ к')da
9Цд',д']= Л -, (3.10.7)
определенного на кинематически допустимых функциях и", -&'
При этом первая (минимальная) собственная частота оболочк1
соответствует минимальному значению функционала ЯП. Следу!
классическому подходу [107], отношение Рэлея (3.10.7) позволяв]
оценить не только первую собственную частоту, но и еле
дующие, рассматривая Як на множестве функций, в определен
ном смысле ортогональных первым найденным модам собствен
ных колебаний.
Глава 4
ОПРЕДЕЛЯЮЩИЕ СООТНОШЕНИЯ ОБОЛОЧЕК
ТИПА КОССЕРА
Уравнения движения (3.7.12) являются общими уравнениями
баланса, выражающими баланс импульса и момента импульса
для произвольной части оболочки. Для их решения необходимо
знать зависимости тензоров усилий Т и моментов М от
деформации оболочки, которые устанавливаются при помощи
определяющих соотношений. Естественно, что уравнения
состояния зависят от конкретного материала и устанавливаются на
основе экспериментальных данных. В § 2.1 были
сформулированы уравнения состояния для упругих оболочек типа Коссера.
В этой главе мы рассмотрим более общий случай определяющих
соотношений, учитывающих зависимость тензоров усилий и
моментов от предыстории деформаций.
Отметим, что в рамках чисто механической теории микро-
полярной среды помимо определяющих соотношений для Т и М
могут быть также рассмотрены так называемые кинематические
уравнения состояния, определяющие плотности импульса и
момента импульса.
4.1. Аксиомы определяющих соотношений
В данном параграфе сформулируем аксиомы определяющих
соотношений для микрополярных оболочек, ограничившись
рамками чисто механической теории (без учета влияния
температуры и введения внутренней энергии, энтропии и т.д.).
Аксиомы определяющих соотношений представляют собой
требования, налагаемые на форму любых определяющих
соотношений. В трехмерном случае эти аксиомы изучались в книгах [142,
278,287,288].
Принцип детерминизма. Тензор усилий и тензор моментов
в данной точке оболочки определяются предысторией
движения оболочки.
Принцип локальности. Тензор усилий и тензор моментов
в данной точке оболочки полностью определяются движением
«е всей оболочки, а лишь движением сколь угодно малой
окрестности данной точки.
91
Отметим, что в отличие от принципа детерминизма (аксиомы
причинности), выполнение которого не вызывает сомнений
(уравнение состояния не может "предсказывать" будущее),
принцип локальности зависит от наших представлений об уравнениях
состояния и, вообще говоря, может не выполняться для
некоторых материалов. Модели нелокальных сред, в том числе
и микрополярной, рассмотрены в [186, 198]. Принцип
локальности был использован для упругих оболочек в § 2.1.
Для введения следующего принципа нам потребуется
определение индифферентных величин. Согласно (2.1.1) движение
оболочки задается полями радиус-вектора положения частиц
оболочки R и тензора микроповорота Н. Рассмотрим два
движения оболочки:
R = R(qa,t), H = H(«za,0 И R = R~(qa,t), ll = H*(qa,t). (4.1.1)
Эти два движения называются эквивалентными, если они
связаны соотношениями
Я* = я(0 + (К-3,)-0<4 H* = H-Q(r), (4.1.2)
где Q(f) - произвольный ортогональный тензор, e(J) -
произвольный вектор, R0 - постоянный вектор, задающий
фиксированную точку пространства.
Так как в (4.1.2) вектор a(t) и тензор Q(t) одинаковы для всех
частиц, хотя и могут зависеть от времени, эквивалентные
движения отличаются друг от друга движением материального
тела как абсолютно твердого. Поэтому эквивалентные движения
можно трактовать как одно и то же движение оболочки, но
рассматриваемое с точки зрения разных систем отсчета. Случай,
когда Q(0 - несобственно ортогональный тензор, соответствует
повороту системы отсчета и изменению ее ориентации
(например, при переходе от правого векторного базиса к левому).
Из (4,1.2) следует, что градиенты деформации в
эквивалентных движениях связаны соотношением
F*=F-Q(0- (4.1.3)
Пусть в каждой частице оболочки определены скаляр ф и
тензор Т произвольного ранга. Скаляр называется
индифферентным (употребляются также термины: независимый от
системы отсчета, объективный, нейтральный), если для
любых двух эквивалентных движений выполняется соотношение
<р*=ф. (4.1.4)
92
Тензор Т называется индифферентным, если для любых двух
эквивалентных движений выполняется равенство
T = dvQ(J). (4.1.5)
Используя понятие индифферентной величины, можно
сформулировать следующий постулат.
Принцип материальной индифферентности. Определяющие
соотношения должны быть такими, чтобы задаваемые ими
тензор усилий и тензор моментов типа Коши были
индифферентными величинами.
Этот принцип (аксиома объективности) выражает
интуитивно понятный принцип независимости свойств материала,
заключающихся в определяющих соотношениях для тензоров
усилий и моментов, от изменения системы отсчета наблюдателя.
Вместе с тем строгое определение этого принципа, для
трехмерных тел сформулированного достаточно давно [288],
вызывает дискуссии и по настоящее время (см., например, [241]).
Отметим, что принцип материальной индифферентности уже
был использован ранее в § 2.1 при выводе уравнений состояния
упругих оболочек. А именно, согласно (2,1.3) удельная
потенциальная энергия деформации W является индифферентным
скаляром, так как удовлетворяет соотношению вида (4.1.4).
Выведенное на основе принципа материальной
индифферентности уравнение состояния упругих оболочек (2.1.7) очевидно
влечет выполнение (4.1.5) для тензоров усилий Т и моментов М
типа Коши.
Выполнение принципов локальности и детерминизма для
упругих оболочек является очевидным.
4.2. Относительные меры деформаций
В механике простых материалов [5, 142, 288] используется
относительное описание, при котором в качестве отсчетной
выбирается текущая конфигурация в момент времени t. Для
микрополярных тел относительное описание рассматривалось в
[200, 202, 219]. Это означает, что момент наблюдения t выбран
как начало отсчета, а прошлая и будущая деформация тела
измеряется по отношению к выбранному моменту времени.
Введем понятие относительной дисторсии
F,(T)±R"(t)®Ra(T)^a(t)F(x), (4.2.1)
93
при определении которого текущая конфигурация в момент
времени t рассматривается в качестве отсчетной, а
конфигурация, соответствующая моменту времени х, играет роль текущей.
Аналогичным образом для микрополярной двумерной среды
введем понятие относительного тензора микроповорота
НДх) 4 Dk{t) ® Dk{%) = HT(i) - Н(1). (4.2.2)
Из (4,2.1), (4.2,2) видно, что относительные тензоры дистор-
сии и микроповорота при т = г оказываются единичными: Ff(() =
= О,Д,(0=1.
Также введем относительные меры и тензоры деформации
ВДАад.Н^(г), K,<t)^L,(t) + B(0,
L,(x)xl4_[GradH,(T)]Hj"(t).
Напомним, что мера изгибнои деформации К = L(r) + b была
введена ранее формулами (2.2.13).
Естественно, что при % = t актуальная и отсчетная
конфигурации совпадают и относительные деформации среды
отсутствуют: Yr(0 = О, K,(r) = B(0, L,(r) = 0.
Для предыстории относительных тензоров (4.2.3)
воспользуемся обозначениями
F» A F,(r - 5), Н;<5) £ Н, {t - s) и т.д.
Из (4.2.3) вытекают формулы
Y'(s) = Y(0-H(r)-Y;(5)-Hr(0,
K'U) = Y(r) ■ Н(/)- К;(5) ■ Н7(0, (4.2.4)
y;co)=o, к;со)=всо, Цсо)=о,
k;w=l»+b<o.
4.3. Тензоры скоростей деформации
и изгибнои деформации
Вычислим производные по времени от меры деформации Y
и тензора изгибнои деформации L, С учетом равенства
dH „
■—- -Нх<*>
dr
94
можно провести следующие выкладки:
«.i(F.H').*.H'+F.^.
dr df d/ d/
= (grad&)-H7+F-(wxHT) = F-GradtJ-Hr + F'(Ixw)-Hr =
= F-e-Hr,
где e = Grad г? + I x w.
Тензор £ = Gradr>+I Xto называется тензором скоростей
деформации микрополярной оболочки.
Нетрудно убедиться, что е является индифферентным
тензором. Если оболочка движется как абсолютно твердое тело, то
Е = 0. Таким образом, г характеризует скорость изменения
чистой деформации.
Заметим, что введенный несимметричный тензор скоростей
деформации в микрополярной оболочке е отличается от
используемого в механике оболочек Кирхгофа-Лява [68] тензора
скоростей деформаций, равного —((Grad v)• О + О• (Grad г>)Г)•
Продифференцируем по времени тензор изгибной
деформации L. Операция ()х является линейной и перестановочной
с операцией взятия производной по времени. Отметим, что
нахождение производной по времени от L с точностью до
обозначений повторяет вычисление вариации L (см. формулы
(2.1.27)-(2.1.29)). Имеет место следующая последовательность
выкладок:
d/ 2
dqa{dt)' + dqa' dt
2
Э(Нхь>)
2
M
ж
xo>
(toxHr)
dq
С учетом свойства смешанного произведения (а х Ъ) • с -
= а - ф х с) можно доказать, что
ЭН
хад
.Н^|^-(о>хНг).
dq
95
Продолжая выкладки, получим
dL I tt
Г W ИХ „
dt 2 { dqa
Гнх^).Нг
2 I dqa ,
Для продолжения выкладок нам потребуется следующее
утверждение. Для любого симметричного тензора второго
ранга X и любого собственно ортогонального тензора Q
справедливо соотношение
(Q-X-Q^Q-X*. (4.3.1)
В силу линейности (4.3.1) относительно тензора X
достаточно доказать его для диадного тензора X: Х = а®Ь. Тогда
имеем
(Q-a®b-QX = (Qa)x(bQT) =
= (Q-a)x(Q-b) = Q-(axb) = Q-Xx.
С учетом утверждения 4.3 производной от L можно придать
вид
dt 2 ( dqa)x dqa
= ra
dq
-■Hr = gjadw-H7'=F-x-H7'.
Тензор x = Gradw называется тензором скоростей изгибной
деформации.
Как и е, тензор х является индифферентным тензором.
Если деформация представляет собой движение абсолютно
жесткого тела, то х = О. Тем самым, тензор изгибной
деформации характеризует скорость изгибных деформаций
микрополярной оболочки.
Таким образом, получены формулы, определяющие скорости
деформация и изгибной деформации в оболочке типа Коссера:
е = а] — Y -H^Grado + Ixoo,
(4.3.2)
х = а - —L • Н = Grad ю.
U
96
4.4. Скорости деформации
более высокого порядка
Введем тензоры скоростей деформации более высокого
порядка. Вычислим п-с производные по времени от Y и L.
Заметим, что первые производные от Y и L имеют вид F ■ X - Нг,
где X - индифферентный тензор. Можно проверить, что
выполняется формула
™(F-XHr) = F-f— + Grad»-X + Xxw)Hr,
d/ K& J
причем выражение — + Grad v ■ X + X х ta также представляет
собой индифферентный тензор.
Таким образом, n-е производные Y и L можно представить
б виде
£!X = F-An.Hr, ^ = F Ви Нг.
dr" d?n
de
Например, A0 = I, Aj = e, A2 = — + Grad v • e + e x o> и т.д.
dr
Тензоры
d"Y rt"I
A,=a._.H, 4....— H <4A1,
называются тензорами скоростей деформации и изгибной
деформации типа Ривлина-Эриксена.
Вместо определения (4.4.1) для вычисления тензоров
скоростей типа Ривлина-Эриксена часто удобнее пользоваться
рекуррентными соотношениями
An + != — An+(Gradz>)-A„+A„ x*o, А0 = 1, А,=е,
dt
Вя + 1=^-Ви+СОгж1о)-Вя+Вих«, В0 = В, В,=х.
df
В случае простых материалов с памятью тензоры скоростей
деформации Ривлина-Эриксена широко используются при
записи уравнений состояния дифференциального типа, в
частности неньютоновских жидкостей.
Если предыстории Y/(s) и L'(s) являются бесконечно
дифференцируемыми, то, разлагая их в ряды Тейлора в окрест-
4 Еремеев В.A Q_
ности момента наблюдения {s = 0), можно получить формальные
разложения
Таким образом, предыстории Y/(.s) и U,(s), по крайней мере
формально, могут быть вычислены по тензорам скоростей
деформаций и изгибных деформаций, измеренных в момент
наблюдения t. В частности, если движение тела таково, что
тензоры А„ и В„ обращаются в нуль начиная с некоторого номера,
то вся предыстория деформации полностью определяется
конечным числом тензоров скоростей.
4.5. Уравнения состояния микрополярных
оболочек с памятью
Учитывая принцип локального действия, определяющие
соотношения оболочки Коссера с памятью в случае конечных
деформаций следует принять в виде
Т(0 = ^[F'O), H!(s), grad H'(s)], (4.5.1)
M(f) = s£2[Fr(s), H'(s), grad tf(s)J,
F'(s) = F(f - s), H'(s) = H(r - s), F(() = grad R(t), (s > 0).
В (4.5.1) suit ^2 - операторы отклика, зависящие от
предыстории градиента деформации Fr(s), тензора микроповорота H'(s)
и его градиента.
Требование инвариантности определяющих соотношений
(4.5.1) относительно трансляций системы отсчета наблюдателя
выполняется автоматически, а требование инвариантности
относительно вращений будет выполнено в том и только том случае,
если операторы su.t,d-2 удовлетворяют условию
&* №) ■ QU, НЪ) ■ Qb\ grad K(s) - Q'(s)] =
= <f(О • &a [F'(s), H'(s), grad ВД] ■ <K0 (a = 1, 2) (4.5.2)
для любого собственно ортогонального тензора Q'(s). Положив в
(4.5.2) Q'{s) = Н'г(5), получим
Т(0 = Нт(0 ■ % [Y'{S\ V(S)] ■ H(t), (4 5 3)
М(0 = Нг(0 - $b [Y'(s), L'(5)l ■ Н(0-
98
Здесь Y'(s) - предыстория первой меры деформации, L'(s) -
предыстория тензора изгибной деформации.
Легко видеть, что представления (4.5.3) не только
необходимы, но и достаточны для материальной независимости от
системы отсчета.
Операторы 2S[, SS2 в определяющих соотношениях (4.5.3),
вообще говоря, зависят от некоторых постоянных (т.е. не
меняющихся в процессе деформации) тензоров, определяемых
выбором отсчетной конфигурации материального тела. К таким
тензорам, в частности, относите» тензор кривизны начального
состояния Ь. Поэтому, учитывая (2.2.13), определяющие
соотношения (4.5.3) можно представить в следующей форме:-
Т(г) = Нт(0 • %[Y(s), K'(5)] • Н(0, 5
М(г) = Нг« • Э2 [Y'(s), К'Ш ■ H(t).
В случае упругого материала тензоры ТиМне зависят от
прошлой предыстории деформации и определяющие
соотношения (4.5.4) принимают вид
Т(0 = Нг(г) - f,[Y(l), К(*)] ■ H(J), 5
M(0 = HT(r).f2[Y(r),K(r)]-H(f),
где fi, f2 - тензорные функции.
С использованием законов термодинамики уравнения
состояния (4.5.5) упругого континуума Коссера могут быть
представлены при помощи удельной потенциальной энергии
деформации W(Y, K% совпадающей с удельной свободной энергией
в изотермическом процессе и удельной внутренней энергией
в адиабатическом процессе, следующим образом [297]:
Т = у-1рг.^.ц M = y-!Fr~-H, (4.5.6)
BY ЭК
Нетрудно видеть, что формулы (4.5.6) фактически
совпадают с полученными ранее соотношениями (2.1.53).
В дальнейшем будем рассматривать класс изотропных
оболочек, для которых тензорные операторы отклика 9)!( Э2 в
(4.5.4) являются изотропными, т.е. удовлетворяют соотношениям
(Я = det Q)
% ГО • V<*) ■ Qr, m ■ K'U) • Q7] = Q - 2>, [Y'(5), Kr(s)] - QT, 5
иЭ2 IQ - Y(s) ■ Q7, r,Q ■ Kr(5) • Q7] = Q ■ % [V(s), K'(s)] ■ QT
99
для любого ортогонального тензора Q. Согласно (2.2.13), (4.5.4),
(4.5.7) тензоры Т(г) и M(f) не меняются при заменах:
F'(s) -► Q • ¥'(s\ H'(5)^Q-Hr(5) VQ=Qr (4.5.8)
Это означает, что изотропные оболочки нечувствительны
к любым изменениям отсчетной конфигурации, описываемым
ортогональными преобразованиями.
Определение изотропной оболочки, как и других типов
анизотропии, может быть дано строго при помощи понятия
локальной группы симметрии материала, основанного на
инвариантности уравнений состояния по отношению к некоторым
изменениям отсчетной конфигурации, или, другими словами,
невозможности определения некоторых изменений отсчетной
конфигурации путем экспериментов (своего рода
"нечувствительности" по отношению к таким преобразованиям отсчетного
состояния). Для простых материалов определение локальной
группы симметрии вместе с классификацией уравнений
состояния содержится в [113, 142, 278, 287, 288]. Для полярной
трехмерной среды определение локальной группы симметрии
предложено в [202], а для микрополярных оболочек более подробно
локальная группа материальной симметрии оболочек будет
рассмотрена в гл. 6. Отметим только, что определение
изотропной оболочки (4.5.7) дано с учетом того, что М и К -
псевдотензоры, которые меняют знак при инверсии пространства {79].
С использованием относительных мер деформации и их
предыстории, определенных формулами (4.2.1)^(4.2.4), можно
сформулировать утверждение об общем виде уравнений
состояния оболочек с памятью.
Определяющие соотношения любой изотропной оболочки
типа Коссера с памятью могут быть представлены в форме
т(о=^[у(о, y;cs), к;<4 (459)
м(о=#2[у(о, вд, к;с*>],
где SF [, З'г - изотропные операторы.
Действительно, на основании (4.2.4) определяющее
соотношение (4.5.4) для тензора напряжений можно представить в виде
Т(г) = Нт(г) - <Э, [Y(0. H(0 ■ Y» • Hr(0, H(0 • KJ(5) ■ Нг(г)] ■ Н(0.
(4.5.10)
Положим в (4.5.8) Q = НТ(Г). Тогда тензор Y(f) согласно
(2.2.13) заменится тензором Нг • F, а тензор H(f) заменится еди-
100
ничным тензором I. С учетом равенства у • Н ■ F = О это на
основании (4.5.10) дает
т(о=^[у(о, y/(5), k;cs)].
Аналогично преобразуется определяющее соотношение для
тензора моментных напряжений М(г), что приводит к
выражениям (4.5.9). Изотропность операторов &и 3^ вытекает из
свойства изотропности операторов 5&5, %2-
Соотношения (4.5,9) содержат в себе модель вязкоупругой
микрополярной оболочки дифференциального типа. Учитывая
формальные разложения (4.4.2) предыстории меры деформации
Y,'(s) и тензора изгибной деформации Y,'(s), уравнения
состояния оболочки дифференциального типа сложности (т, п)
запишем следующим образом:
T = f,(y,B,A!...Am,BI...B„), (4.5.11)
M = f2(y,B,AI...AfflJBt-Bn),
где f t, f2 - изотропные функции.
Частным случаем (4.5.11) является модель вязкоупругой
оболочки дифференциального типа сложности (1, 1), уравнения
состояния которой имеют вид
T = f,(y,B,e, «), M = f2(y,B,e, x).
4.6. Модели микрополярных оболочек
с внутренними связями
В механике сплошной среды широкое применение находят
модели материалов с внутренними связями [113, 142]. Под
внутренними связями в нелинейной теории упругости понимаются
ограничения в виде равенств, накладываемые на возможные
деформации сплошной среды, точнее, на градиент деформации,
который теперь уже не является произвольным неособым
тензором. В частности, большое распространение получила модель
несжимаемого тела [113], в которой любая часть тела не меняет
своего объема в процессе деформации. Предположение о
несжимаемости, во многих случаях существенно облегчающее
решение краевых задач, является хорошим приближением для
сред, сопротивляющихся сдвиговым деформациям значительно
слабее, чем изменению объема. Оно широко используется для
описания поведения резиноподобных и высокоэластичных
материалов.
101
Для оболочек в некоторых случаях также целесообразно
использовать модели с внутренними связями. Например,
оболочку, армированную достаточно жесткими на растяжение (по
сравнению со связующим материалом) нитями, можно считать
нерастяжимой в направлении нитей.
Так как определяющими параметрами для оболочки
являются тензоры F, Н и grad H, уравнение связи следует принять в виде
/(F,H,gradH) = 0, (4.6.1)
где/- некоторая скалярнозначная функция.
Связь, накладываемая на возможные деформации оболочки,
есть внутреннее свойство материала, поэтому она не должна
зависеть от выбора наблюдателя. Методом, использованным
выше, при выводе определяющих соотношения в форме (2.1.7),
легко показать, что уравнение связи (4.6.1) удовлетворяет
принципу материальной индифферентности тогда и только тогда,
когда оно сводится к виду
/(Y,L) = 0. (4.6.2)
Приведем некоторые примеры связей.
1. Нерастяжимая в заданном направлении оболочка.
Уравнение связи имеет вид
d0F FTd0~l=O, (4.6.3)
где d0 _ единичный вектор, касательный к поверхности оболочки
в ее отсчетной конфигурации. Уравнение (4.6.3) означает, что
материальные волокна, расположенные вдоль вектора d0, не
меняют своей длины при деформации оболочки. В общем случае
вектор d0 может зависеть от координат на поверхности. Связь
(4.6.3) аналогична условию нерастяжимости в заданном
направлении трехмерных тел [113] и может быть использована для
описания оболочек, армированных жесткими волокнами или
нитями,
2. Оболочка, для которой площадь любой части
поверхности не меняется при деформации. Уравнение связи имеет вид
J - 1 = 0, (4.6.4)
где J определяется формулой (2.1.50).
3. Нерастяжимая во всех направлениях оболочка.
Уравнение связи имеет вид (4.6.3), где теперь rf0 - любой единичный
вектор. Для нерастяжимой оболочки метрика при деформации
не меняется, т.е. допустимыми являются деформации, связанные
с микроповоротами частиц оболочки.
102
Наряду с (4.6.3), (4.6.4) в [68] для оболочек типа Кирхгофа-
Лява были сформулированы и другие ограничения: сохранение
средней кривизны
Я-#0 = 0,
где Н и Я0- средние кривизны поверхностей £ и о,
определяемые формулами вида (1.9.18), а также условие
неизгибаемости оболочки в заданном направлении. Для микрополярных
оболочек эти два ограничения не могут быть выполнены,
поскольку при их формулировке используются уравнения связей,
содержащие вторые производные от радиус-вектора Я, т.е. не
укладывающиеся в форму (4.6.1).
Для оболочек со связями определяющие соотношения (4.5.3)
нуждаются в модификации. При наличии связей уже нельзя
считать, что тензоры усилий и моментов в данной частице
поверхности оболочки полностью определяются заданием
предыстории тензоров Y и L в этой частице. В самом деле,
рассмотрим, например, плоскую пластинку, нерастяжимую во всех
направлениях и нагруженную силами, расположенными в
плоскости пластинки. Возникающий при этом в пластинке тензор
усилий в зависимости от приложенных сил может принимать
произвольные значения, в то время как деформация отсутствует
в силу условия нерастяжимости.
Сначала рассмотрим упругие оболочки с внутренними
связями. В § 2,1 уравнения состояния (2.1.22) для тензоров усилий
и моментов получены на основе анализа вариационного
уравнения (2.1.20). Рассмотрим здесь этот вопрос более подробно.
Преобразуя правую часть уравнения
5|JwdCT = JJ(/-SR + €-^)do+ J<p-8/tds+ Jv^ds
ас <i>i (04
с учетом уравнений равновесия (2.1.36), (2.1.37) и краевых
условий (2Л.38)-{2.1.41), получим равенство
J]"(&W- Р, О 8Y-P20 5L)dCT = O. (4.6.5)
о
В силу уравнения связи (4.6.2) тензоры SV и 5L теперь не
могут принимать любые значения, и поэтому представления
(2.1,22) несправедливы. Чтобы учесть наложенную связь,
воспользуемся методом множителей Лагранжа. Проварьируем
уравнение связи (4.6.2), умножим его на неопределенный множитель
X, проинтегрируем по поверхности а и сложим полученное
уравнение с (4.6.5). Стандартные рассуждения метода множи-
103
телей Лагранжа приводят к таким определяющим соотношениям
упругой оболочки с внутренней связью:
8Y dY 2 3L 3L
Pi =^7 + ^-^7. ^2=^г + ^~- (4-6-6)
Из (4.6.6) получим
-ii?r 3!УИ . .-!г,г Э/
3Y 3Y
M = /"!Fr- — •H + Xy-1FT--^-H. (4.6.7)
Слагаемые с множителем X в (4,6.6), (4.6.7) представляют
собой составляющие тензоров усилий и моментов, не
определяемые деформацией окрестности рассматриваемой точки
поверхности. Их следует трактовать как реакцию связи,
задаваемой уравнением (4.6.2). Эти составляющие не вносят вклада
в мощность внутренних сил оболочки, т.е. не совершают работы
на движениях оболочки, совместимых со связями. Последнее
утверждение становится очевидным, если учесть, что уравнение
связи (4.6.2) эквивалентно следующему:
Легко проверяется также обратное утверждение: если
тензоры усилий и моментов не вносят вклада в мощность
внутренних сил на движениях, совместимых со связями, то они
имеют вид вторых слагаемых в (4.6.6), (4.6.7).
Представления (4.6.7) естественным путем обобщаются на
оболочки с памятью. Именно, примем, что в оболочке с памятью
при наличии внутренних связей тензоры усилий и моментов
в точке поверхности оболочки определяются предысторией
деформации сколь угодно малой окрестности этой точки лишь
с точностью до слагаемых, не совершающих работы на
движениях оболочки, совместимых со связями. Таким образом,
общее определяющее соотношение для оболочки, подчиненной
связи (4.6.2), имеет вид
Т(0 = XJ'lFT(t) ■ Л ■ Н(0 + Ят (г) ■ «8, [Y'(*>. L'(s)] • Н(0,
(4.6.8)
М(0 = X7-'Fr(0 ■ ~ • ЩО + Нг(/) ■ <§3 [Y'(s), U(sj\ ■ Н(0,
104
где операторы %\, *ё2~ операторы, определенные на предысто-
риях мер деформации, удовлетворяющих соотношению (4.6.2).
При наличии нескольких связей, задаваемых уравнениями
f. = 0 (( = 1, 2,..., и), первые слагаемые в (4.6.8) будут иметь
соответственно вид
£ V"'Fr«" Ц • Н(0, I V-'Fr(f) • |- • Н(0-
i = l j =!
При постановке краевых и начально-краевых задач для
оболочек со связями множители Xj будут неизвестными функциями
координат и времени. Этот избыток неизвестных
компенсируется дополнительными уравнениями - уравнениями связей.
Пользуясь формулами (4.6.8), составим общее представление
определяющих соотношений для оболочек со связями,
заданными уравнениями (4.6.3), (4.6.4).
1. Нерастяжимая в заданном направлении оболочка:
Т(0 = IXJ-'d®d + HT(t)-<e. \Y'(s), U(s)]■ H(0,
(4.6.9)
M(0 = Hr(r)-<82[Y,(*).L,(j)]-H(0-
Здесь d = dQ * F - принадлежащий поверхности Z вектор.
2. Оболочка, сохраняющая площадь поверхности:
Т(0 = - рО + Нг(г) - <S, \Y\s\ L' (s}\ - Н(0,
1 J (4.6.10)
м(о=нг(о. <§ 2 [\\S), u(s)} ■ н(о.
Здесь р - двумерный аналог функции давления в теории
упругости несжимаемых тел.
3. Нерастяжимая во всех направлениях оболочка. Так как
вектор d0 произвольный, в этом случае, по существу, наложена
не одна, а бесконечное количество связей. Видно, что в этом
случае F • Fr= Y * YT = О и J = 1. Тензор усилий остается
полностью неопределенным, в то время как тензор моментов вполне
определяется деформацией:
Т(0 = Т0(0, М(0 = Нт(0 • <§ 2 [Y(s), V (s)} ■ H(f).
Здесь Т0 - произвольный тензор второго ранга, принадлежащий
поверхности I (N • Т0 = Т0 ■ N = 0).
В рамках теории оснащенных поверхностей различные связи
рассмотрены в [267].
105
4.7. Двумерный псевдоконтинуум Коссера
В механике микрополярных сред получила распространение
модель псевдоконтинуума Коссера или среды со стесненным
вращением [55, 122, 150, 151, 223, 250, 286]. В рамках этой модели
тензор микроповорота отождествляется с тензором
макроповорота, получающимся из полярного разложения градиента
деформации. Рассмотрим двумерный аналог псевдоконтинуума
Коссера. В этом случае тензор микроповорота Н совпадает
с тензором макроповорота А из полярного разложения тензора
дисторсии (6.4.2) F = U • А:
Н>А. (4.7.1)
Уравнение (4.7,1) является примером тензорной связи,
накладываемой на деформации оболочки. Сравнивая формулы
F = Y-HnF=U-Af получим, что Y = U. Таким образом, тензор
Y оказывается симметричным. Это условие можно записать в
виде векторного уравнения
Yx = 0, (4.7.2)
которое в случае трехмерного псевдоконтинуума Коссера
использовалось в [47, 78, 297]. Уравнение (4.7.2) может быть также
записано в индифферентной форме Нг ■ Yx = 0.
Используя развитый в предыдущем параграфе подход метода
множителей Лагранжа, можно показать, что связь (4.7.2) не
влияет на тензор моментов М, а тензор усилий типа Коши Т
определяется равенством
T-J^F7"—-H-XxH, (4.7.3)
где X - векторный множитель Лагранжа, не зависящий от
деформаций оболочки.
В случае геометрически линейной теории оболочек
линеаризованная связь (4.7.2) с учетом (2.6.2) может быть записана
с помощью линейного вектора поворота Ъ:
•d = rot« (zt-roto)n. (4.7.4)
Глава 5
ТЕРМОДИНАМИКА МИКРОПОЛЯРНЫХ
ОБОЛОЧЕК
В данной главе теория микрополярных оболочек обобщается
в направлении учета температурных эффектов. Построение
термодинамики оболочек требует введения дополнительных
термодинамических параметров - температуры, энтропии и т.п.
Перенесение этих понятий из механики трехмерного континуума
[103, ИЗ, 128, 135, 142, 278, 287] в двумерную теорию оболочек
наталкивается на определенные сложности. Например,
уравнение баланса энергии оболочки, рассматриваемой как трехмерное
тело, учитывает энергию движений частиц оболочки, которые
не влияют на движение оболочки как двумерной поверхности.
Это означает, что в двумерном уравнении баланса энергии
оболочки могут присутствовать источники энергии, не
связанные с работой тензоров усилий и моментов и требующие
дополнительного уравнения состояния.
Кроме того, для трехмерного тела-оболочки естественно
задание на поверхности разных значений температуры. В
двумерной модели это приводит к необходимости рассмотрения
нескольких температурных полей, определенных в одной и той
же точке поверхности оболочки. Для каждого из этих
температурных полей требуется как минимум формулировка своего
уравнения теплопроводности, не говоря уже об уравнении
баланса энтропии. В этой связи кажется уместным отметить
аналогию между оболочкой, каждая частица которой обладает
несколькими температурами,, и теорией смесей [164, 165, 174], где
также возможна ситуация, когда в одной и той же точке
пространства могут быть заданы разные значения температуры,
приписываемые разным компонентам смеси.
Построению термодинамики оболочек в рамках прямого
подхода посвящены работы [61, 207, 208, 240, 296]. К ним
примыкает [171], где наряду с температурой введен дополнительный
параметр состояния - пористость и построена модель пористых
термоупругих оболочек типа Нагхди. Переход от трехмерных
уравнений к двумерным проводился в [228, 231, 279, 280].
Отметим, что в упомянутых работах использованы различные
наборы полей, определенных на поверхности оболочки и отвечаю-
107
щих за температуру (две температуры, приписываемые
поверхностям оболочки, в [61, 296], осредненное по толщине поле
температуры и осредненная производная температуры по тол-
щинной координате использовались в [171, 228, 279, 280], три
температурных поля в [231, 240]). Естественно, что различаются
и предложенные в этих работах формулировки первого и
второго начал термодинамики оболочек. В данной книге выбран
подход [61, 296], который представляется более логически
обоснованным и обладающим достаточной общностью.
Следуя [61, 296], будем считать, что на поверхности оболочки
в каждой точке заданы два температурных поля Т+ и Т_ как
функции гауссовых координат. Поля Т+ и Т_ можно трактовать
как температуры разных сторон поверхности оболочки, которые
будем также отмечать индексами "+" и "-".
5.1. Уравнение баланса энергии
в теории оболочек
Закон сохранения энергии может быть сформулирован
следующим образом.
Первое начало термодинамики. Скорость изменения полной
энергии произвольной части оболочки равна сумме мощности
приложенных к ней внешних сил и притока энергии
немеханического происхождения (тепла):
— (ЗС + S) = d + £. (5.1.1)
&t
Здесь % - кинетическая энергия части оболочки, определяемая
равенствами (3.7.2), внутренняя энергия % определяется
аналогично % при помощи введения поверхностной плотности
внутренней энергии ре:
« = JJpedo. (5.1.2)
с*
В (5.1.1) si - мощность внешних сил и моментов,
определяемая соотношением
st = jj(f>v+e-w)da+ J(<p-»ds-s-7-t">)ds. (5.1.3)
а' о/
Векторы/, t, tp, у имеют тот же механический смысл, что и в
(2.1.32), и представляют собой силы и моменты, распределенные
по поверхности о* и ее контуру со*.
108
Величина & описывает приток энергии, не связанный с
работой внешних нагрузок. Здесь этот приток будем связывать
только с переносом тепла за счет поступления через поверхность
и контур оболочки:
& = #p(?(!+<r+<7+)do-- jqvds. (5.1.4)
Здесь поля q* и q~ задают приток тепла, поступающий через
соответствующую сторону поверхности оболочки, pqa -
представляет собой источник тепла внутри оболочки, a qv ~ тепло,
переносимое через ее контур. При помощи (5.1.1) доказывается,
что поток тепла qv через контур оболочки выражается через
вектор потока тепла q формулой
qv = v q,
где q - принадлежащий поверхности о~ вектор.
Используя уравнения движения оболочки (3.7.12), закон
сохранения энергии (5.1.1) можно преобразовать к виду
о*
= H^O^+P2Q^-divq + p(q^q^q-)ya. (5.1.5)
о
В силу произвольности области о* из (5.1.5) сразу же следует
уравнение баланса энергии в дифференциальной форме
р^ = Р, ©-^ + Р2 O^-div*+ р(яв + q+ +q~). (5.1.6)
at at at
Как уже отмечалось во введении к этой главе, для двух
температурных полей Г+ и Т_ следует сформулировать
независимые уравнения переноса энергии. Для этого разделим все
величины, входящие в уравнение (5.1.6), кроме тензоров Y и L,
на две составляющие, которые будем трактовать как величины,
отнесенные к соответствующей стороне оболочки:
е 4 е+ + е-, Р, = Р,+ + Pf, Р2 = Р2+ + Р2,
q = q+ + q~, qa=q++q;
(5.1.7)
109
С учетом этого разделения уравнение (5.1.6) может быть
записано в виде двух соотношений:
dt * * (5.1.8)
Здесь введены в рассмотрение новые величины £?*, причем
Q~ + Q+ = 0. С их помощью описывается обмен теплом между
сторонами "+" и "-" оболочки в единицу времени. Представления
(5.1.8) окажутся удобными при формулировке приведенных
неравенств диссипации энергии.
Отметим, что уравнения (5.1.8) по своей структуре
аналогичны парциальным уравнениям баланса энергии в теории смесей
[164], т.е. законам сохранения энергии, записанным для каждой
компоненты. При этом (5.1.6) аналогично закону сохранения для
смеси в целом, а разбиение (5.1.7) соответствует определению
парциальных величин в случае, если плотности компонент
одинаковы.
5.2. Второе начало термодинамики
формулировка второго закона термодинамики для
оболочек может быть также записана в форме двух неравенств,
аналогичных неравенству Клаузиуса-Дюгема в термомеханике
сплошной среды. Они имеют вид [61,296]
а <; v ' ш
о <; ч 'to
где pri+ и pi}- - поверхностные плотности энтропии,
приписываемые соответствующим сторонам поверхности оболочки,
q^j~v-q±. В (5.2.1) через Т"1! обозначена температура
окружающей среды, примыкающей к поверхности оболочки со стороны,
помеченной знаком "-", а Т"' - температура окружающей среды
со стороны "+". Аналогично (5.1.7) поверхностную плотность
энтропии оболочки представим в виде суммы
r^Tf+rf. (5.2.2)
110
Интегральные неравенства (5.2.1) после стандартных
преобразований приводят к соотношениям в дифференциальной
форме
/ _+
^ + - *1 + + (5.2.3)
— div? + gjadj^.^-
Локальные формы закона сохранения энергии (5.1.8) и
второго начала термодинамики (5.2.3) должны выполняться для
любых процессов деформирования и любых уравнений
состояния микрополярных оболочек.
5.3. Приведенные неравенства
диссипации
Преобразуем неравенства (5.2.3) с помощью (5Л.8), удалив из
(5.2.3) слагаемые вида —div^*. Введя в рассмотрение поверх-
±
ностные плотности свободной энергии
после преобразований получим приведенные неравенства
диссипации
К d/ dr J T+
1 dr df T? T_
( _dT_ dy") 1 ._ _ D_^dY (53Л)
„_^,dL _Гл'-7 л Т.-Т „
+ P,0—+(>q ~ ,„ " +pQ + ~ >0.
dr 7_'л 7+
Несмотря на громоздкость, эти неравенства более удобны
для анализа определяющих соотношений.
Следует отметить, что принятый подход к построению
термодинамики оболочек требует формулировки достаточно боль-
111
шого количества определяющих соотношений, а именно для
набора T(f*, "ПД q*, Р*, Р|, q\ Q = Q* = -Q-. Перечисленные
величины, вообще говоря, являются функционалами или
операторами, зависящими от предыстории тензоров Y и L, температур
7V и 71 и их градиентов gradTV и grad 71, и должны быть
совместимы с неравенствами (5.3.1) при любых значениях
аргументов.
5.4. Термоупругие оболочки
Рассмотрим случай термоупругих оболочек, для которых
перечисленные выше величины являются скалярными,
векторными или тензорными функциями следующих параметров
состояния:
Y, L, 71, 7+, gradTl, gradr+,
например, у* = iff^Y, L, 71, Т+, gradTl, gradTl). Тогда приведенные
неравенства диссипации для термоупругих оболочек принимают
вид
-Р
П+ +
3y+W+ ду+dT_
дТ. dt дТ dt
, d7+ Эу+ J d71
grad—--p-— grad +
3grad7+ & dt 3grad7: 6 dr
-—gradr+V+P9+i^^+PG+^p^0,
-p n~ +
3y'W_ Эу~ dT+
дТ 1 dr дТ dt
-р
Зу"
3grad71
•grad—; p
Эу"
dr
3grad7+
+ FT-p
3^
~3Y~
_\
^dY (__ a^-
■grad—^-s-
dt
-—gradr_-g-+pg- "^ ~+p6~-±^-:^0■
"^"!2
P.-PS. P2=P~. (5-4-2)
Поскольку последние неравенства должны выполняться для
любых термодинамических процессов, множители при
производных по времени должны обращаться в нуль. Отсюда имеем
соотношения, связывающие между собой тензоры усилий и
моментов, энтропии и свободные энергии:
дТ± ЭГ, дТ+ dgradr+ dgradT. (5.4.1)
Pf=P~£> Р?=Р^7' V^V^V. L, Г, T+).
С учетом (5.1.7) и (5.2,2) из (5.4,1) следуют соотношения для
суммарных усилий и моментов
№ р=р^
причем поверхностная плотность свободной энергии цг должна
удовлетворять равенству
Сравнивая формулы (5.4.2) и (2.1.22), легко видеть, что
введенная ранее удельная плотность энергии деформации W
совпадает с величиной рцг в изотермическом процессе. Также можно
показать, что роль W в адиабатическом процессе играет ре.
Таким образом, все результаты, касающиеся зависимости W от
тензорных аргументов Y и L, непосредственно переносятся на
функции свободной энергии и внутренней энергии. Отметим, что
для термоупругих оболочек нет необходимости строить
уравнения состояния для тензоров усилий и моментов,
приписываемых разным сторонам оболочки, а также для соответствующих
плотностей свободных энергий. Достаточно построить
уравнения состояния для полной свободной энергии \|/.
В качестве примера здесь ограничимся уравнением состояния
в случае малых деформаций и малых отклонений температуры
от некоторого постоянного значения Г0:
2ру = a,tr2€|, +a2tre|| + щи(ц -е[) + (5.4.3)
+ а4«-€Г ■€-/!+j3itr2K|j +p2trK|2+p3tr(K|j'K|[) +
+ р4пкГ'К-и4- 2а+1гси(Г+ -T0)+2ajr^(T_ -T0) +
+ 2р+1гк!|(Т+-Г0) + 2р_1гк||(Г_-Г0) +
-н5+(7;-Г0)2+5_(Г-Г0)2,
113
которое является обобщением модели (2.6.9) физически
линейной изотропной оболочки на случай термоупругости. Здесь о^,
р±> Ь±~ дополнительные параметры, связанные с
температурными эффектами. Для уравнений (5.4.3) тензоры усилий и
моментов, плотности энтропии определяются формулами
T = alotret|+a2e|[+a36|1+a4€-«®n+a+(7;-7J))o + a_(71-?J))o,
М = р|оик| + ргк|г + ЭэК|1+Р«л-«®я + Р+С7'+-Г0)о + р_(71-7'0)о,
-ргр = а±1Г€ц +fJ±tnc|, + 5±(Г± - Г0).
В гл. 6 предложены уравнения состояния при конечных
деформациях (см., например, (6.9.1) или (6.9.4)), которые нетрудно
модифицировать с учетом влияния температуры, используя
(5.4.3).
Диссипативные неравенства (5.3.1) для термоупругих
оболочек сводятся к паре неравенств, содержащих только потоки
тепла и температуры:
-jrmdT+-q+ +pq+-^r^ + pQ+^r^>0, (5.4.4)
-— grad T_ q~ + pq~ -т„ ~ + pQ~ ^j-^ > 0.
Уравнения баланса энергии (5.1.8) также значительно
упрощаются и имеют вид
pr+^- = -div*++p(j2++*++*«). (5.4.5)
at
pT_—±- = -d\vq +p(Q~ + q + g<l).
at
Простейшим случаем уравнений состояния для входящих в
(5.4.4) и (5.4.5) величин служат соотношения [61]
r^-^-gradr,, qt=ctOT'-T±), Q = Q+ = -Q~ =с0(Г_-Г+).
Здесь с* - принадлежащие поверхности а тензоры
теплопроводности, которые должны быть неотрицательно определенными,
неотрицательные постоянные с* описывают теплообмен разных
сторон поверхности оболочки с окружающей средой, а са-
неотрицательный коэффициент теплопроводности в нормальном
к поверхности направлении, описывающий обмен теплом между
сторонами поверхности оболочки.
114
5,5. Упрощенная термодинамика:
одна температура
Достаточная общность описанного здесь подхода к
термодинамике оболочек своей обратной стороной имеет
необходимость формулировки значительного количества определяющих
соотношений, дополнительных по сравнению с термодинамикой
трехмерного континуума Коссера, что заметно усложняет эспе-
риментальное подтверждение этой теории. Некоторые
упрощения могут быть достигнуты за счет дополнительных гипотез.
Дополнительные уравнения состояния связаны с наличием двух
температурных полей, приписываемых каждой точке
поверхности оболочки и позволяющих учесть перепад температуры по
толщине оболочки. Если перепадом температур по толщине
оболочки можно пренебречь, то представляется вполне
оправданным рассмотреть упрощенный вариант термодинамики, в
котором в каждой точке оболочки задана одна температура
Т~ Г_ = Г+. Поле Т в этом случае описывает некоторую
осредненную по толщине температуру оболочки. При этом нет
необходимости использовать разделение (5.1.7) и вполне
достаточно использовать одно уравнение сохранения энергии (5.1.6) и
одно неравенство типа Клаузиуса-Дюгема. Сохраняя для
предельных значений температур окружающей среды обозначения
Т1*' и Т**', второе начало термодинамики примем в виде
At
о а
Именно такая форма второго закона термодинамики
использована, например, в [240]. Нетрудно видеть, что (5.5.1)
получается как сумма неравенств (5.2.1) при Т_-Т±= Т.
Соответствующая (5.5.1) локальная форма неравенства Клаузиуса-
Дюгема имеет вид
dT| ^ ( а. д_ а„} 1 ,. 1
dt [Т** Гя TJ
div? + -rg-grad7\ (5.5.2)
Преобразуя (5.1.6) и (5.5.2), получим приведенное неравенство
диссипации
( йТ <Ьц\ 1 ._ Dr,dY or.dL
~rir+17J-7gradr'9-Pi0ir-p^^ +
+ P4-^r~+M+L^r-^- (5-5.3)
115
В рамках упрощенного подхода количество определяющих
соотношений существенно сокращается: необходимо задать
зависимости \|/>Т|, д, Р1? Р2 от предыстории тензоров Y и L,
температуры Т и ее градиента gradT. При этом в качестве
аргументов по-прежнему могут присутствовать две внешние
температуры Tf и Т+т.
Рассмотрим случай термоупругих оболочек. Проводя
стандартные рассуждения, получим, что из (5.5.3) следуют уравнения,
связывающие тензоры усилий и моментов и энтропию со
свободной энергией:
P'-pdY' Р2~РЭГ Л~ ЪГ agradr"0' {5'5Л)
и неравенство диссипации редуцируется к чисто тепловому
неравенству
1 ._ _Г"-Г + Т?-Т
-&adT-q+pq r„ +pg -^
-_gjadr-«+p9--=^jj- + p^-±—->0. (5.5.5)
Аналогичное (5.4.3) уравнение состояния при малых
деформациях дается формулой
2р\|/ = otjtr2Gj| + cc2tr еЦ + oc3tr(€|j -€][) + и4и ■ ег ■ б ■ и +
+Pitr2K„ +P2trKif +p3trCKii -К|[) + Р4и-кг -ки +
+2а01ге]{Т-Т0) + 2%Щ[(Т-Т0) + Ь0(Т-Т0)2, (5.5.6)
где осо, f}0, S0= const.
Простейшие уравнения состояния для q, q+ и q~,
удовлетворяющие (5.5.5), можно записать в виде
q = -tgrad7, q± = ^(Tf - T), (5.5.7)
где с > 0 - коэффициент теплопроводности оболочки в
тангенциальном направлении, с* > 0 - коэффициенты, описывающие
теплообмен с окружающей средой согласно правилу Ньютона
(поток тепла через поверхность пропорционален разности
температур).
Уравнение теплопроводности в случае термоупругих
оболочек имеет вид
pT^ = -divq + i>(q^+q++q-). (5.5.8)
at
Нетрудно видеть, что рассмотренная в этом параграфе
упрощенная термодинамика оболочек является частным случаем
описанного выше подхода.
116
Несмотря на отмеченные недостатка упрощенного подхода,
связанного с пренебрежением перепадом температуры по
толщине, что, например, приводит к невозможности описать изгиб
пластинки при неравномерном по толщине нагреве, его
достоинством является относительная большая простота. В частности,
здесь нет необходимости рассматривать уравнения состояния,
приписываемые каждой из сторон поверхности оболочки, как
нет и обменного тепла Q. По сравнению с трехмерной средой
здесь дополнительными определяющими соотношениями
являются зависимости для q+ и <j_, описывающие обмен теплом
оболочки с окружающей средой. Они, вообще говоря, могут
иметь более сложный вид, чем (5.5.7).
Выбор той или иной термодинамической модели оболочки
Коссера должен определяться конкретной задачей.
Глава 6
ТЕОРИЯ МАТЕРИАЛЬНОЙ СИММЕТРИИ
Понятие симметрии материала играет важную роль в
механике сплошной среды и определяется при помощи введения
локальной группы материальной симметрии. В рамках
механики простых материалов определение локальной группы
материальной симметрии приведено во многих монографиях по
нелинейной теории упругости и механике сплошной среды (см.,
например, [113, 142, 278, 288]). Локальная группа материальной
симметрии простого нелинейно упругого материала является
подгруппой полной унимодулярной группы, т.е. образована
тензорами, модуль определителя которых равен единице. В
основу определения группы симметрии положено свойство
инвариантности уравнений состояния нелинейно упругого тела
при некоторых преобразованиях отсчетной конфигурации.
Например, изотропное тело определяется как материал, для
которого любые повороты и отражения отсчетной
конфигурации невозможно определить механическим экспериментом,
т.е. уравнение состояния нечувствительно к таким
преобразованиям. Для изотропного тела группа симметрии совпадает с
полной ортогональной группой, содержащей все ортогональные
тензоры. Жидкость определяется как материал, уравнение
состояния которого не зависит от выбора отсчетной
конфигурации с сохранением плотности, для жидкости группа
симметрии является максимально возможной и совпадает с полной
унимодулярной группой.
На случай трехмерной микрополярной среды определение
группы симметрии обобщено в [202]. Здесь группа симметрии
представляет собой множество триплетов (троек тензоров).
Авторы [202] ограничились только определением, не развивая
детально теорию групп симметрии подобно [142, 288]. Кроме
того, в [202] не была учтена разная природа входящих в
уравнения состояния тензоров. Дело в том, что одни аргументы
уравнений состояния микрополярной среды являются истинными
(полярными) тензорами, в то время как другие - аксиальными
(псевдотензорами). Напомним, что основное различие между
аксиальными и полярными объектами состоит в том, что они по-
разному преобразуются при инверсии пространства (см. § 1.5).
118
Различие между полярными и аксиальными объектами -
обычное дело в теории тензорного исчисления, теории
электромагнетизма. В теории микрополярной среды псевдовекторами
оказываются векторы объемных и поверхностных внешних
моментов, вектор угловой скорости, а псевдотензорами - меры и
тензоры изгибной деформации, тензор моментов. В [44] такое
различие учтено и показано, что оно может оказаться
существенным. Упоминая о теории симметрии в микрополярных средах,
следует также упомянуть [200, 291, 293], где, в частности,
получены представления тензоров упругостей.
В механике оболочек, как и в случае трехмерных
материалов, формулировка ограничений на уравнения состояния при
конечных деформациях, вытекающих из свойств симметрии
материала, также занимает существенное место. Такие
ограничения, в частности, необходимы, чтобы существенно понизить
число материальных постоянных, подлежащих определению в
ходе эксперимента. Так, в общем случае анизотропии
квадратичная форма, использованная в [228] для представления упругой
энергии оболочки, содержит более ста упругих модулей. Это
делает практически неосуществимым их определение из
эксперимента. Кроме того, симметрии уравнений состояния могут
быть использованы в получении решений нелинейной теории
оболочек полуобратным методом.
В силу сложности и разнообразия различных моделей
оболочек, понятие группы симметрии для них рассматривалось
в значительно большем числе работ.
Теория материальной симметрии для упругих мембран была
развита в [213] и обобщена на случай термоупругости в [240].
Фактически в [213, 240] результаты трехмерной нелинейной
теории упругости были перенесены на двумерный случай без
принципиальных изменений.
Существенные усложнения в структуре уравнений состояния
двумерной среды (оболочки), состоящие в появлении нескольких
аргументов - тех или иных мер метрической и изгибной
деформации, повлекли усложнения и в структуре группы симметрии.
Существование различных моделей в теории оболочек также
влечет за собой необходимость введения разных определений
группы симметрии. Исследования групп симметрии и симметрии
уравнений состояния оболочек в рамках модели оболочек типа
Нагхди начаты в [176, 193, 194]. В частности, в [194] предложена
процедура получения группы симметрии оболочки на основе
группы симметрии трехмерного материала, из которого сделана
оболочка. Для уравнений состояния упругих двуслойных мемб-
119
ран группа симметрии введена в [289], где также получены
соответствующие представления для скалярно-, векторно- и тензор-
нозначных изотропных функций энергии деформации
мембраны. Наиболее обширное по охвату типов уравнений состояния
исследование симметрии выполнено в [242, 243), где
рассмотрены уравнения состояния простых материальных поверхностей
(мембран), материальных поверхностей с уравнением состояния
второго порядка, а также поверхностей Коссера (оболочек типа
Нагхди), на которых задано кинематически независимое от
перемещений векторное поле директора. Элементами введенной
в [242, 243] группы симметрии являются тройки (триплеты)
соответствующих преобразований. Симметрия уравнений
состояния оснащенных полем директора поверхностей как тройка
соответствующих линейных преобразований рассматривалась в
[157,158], где построены возможные инварианты, т.е. величины,
не изменяющиеся на преобразованиях, образующих группу
симметрии. Понятие группы симметрии для поверхностей,
оснащенных директором, использовалось также в [183].
Локальная группа материальной симметрии для оболочек
типа Кирхгофа-Лява, уравнения состояния которых в
определенной степени являются частным случаем теории второго
порядка, обсуждалась в [282,283].
Введение локальной группы симметрии как подгруппы
общей ортогональной группы для уравнений состояния
оболочек, кинематика которых описывается собственно
ортогональным тензором микроповорота и полем перемещений,
обсуждалось в [58], а также в [3, 61, 160, 161]. В этих работах рассмотрен
случай только твердых оболочек и основное внимание уделено
симметриям тензоров упругостей. Группа симметрии
рассматривалась как подгруппа полной ортогональной группы.
Для оболочек Коссера построение локальной группы
материальной симметрии проведено в [49], где учтена
зависимость энергии деформации от тензора кривизны поверхности
оболочки в начальной конфигурации и локальная группа
материальной симметрии образована четверками тензоров,
описывающих деформацию отсчетного состояния оболочки. В [191]
авторы отказались от учета зависимости энергии деформации от
тензора кривизны поверхности оболочки в начальной
конфигурации, но учли различия между истинными тензорами и
псевдотензорами. Определенная в [191] группа симметрии образована
триплетами тензоров, как в [202, 242,243].
В связи с теорией симметрии для стержней упомянем также
[161,230].
120
При развитии теории симметрии нужно подчеркнуть, что
теория инвариантов для таких преобразований, которые
описываются при помощи четверок или троек тензоров, далеко
не так хорошо развита, как в случае инвариантов подгрупп
полной ортогональной группы, используемых в нелинейной
механике трехмерных тел (см., например, [281]). Кроме того, как
отмечалось в [60, 61], такая теория инвариантов должна еще
учитывать разную природу аргументов тензорных функций (т.е.
разницу между псевдотензорами и истинными тензорами).
С физической точки зрения сложность построения группы
симметрии для оболочки обусловлена тем, что локальная группа
материальной симметрии оболочки должна зависеть:
1) от симметрии материала,
2) от геометрических свойств поверхности о,
3) от строения оболочки как трехмерного тела.
Действительно, например, с физической точки зрения
изотропная оболочка вовсе не то же самое, что оболочка,
изготовленная из изотропного материала. Тем более это касается
оболочек более сложной структуры. Другими словами,
наследования свойств симметрии от трехмерного тела для двумерных
уравнений состояния, вообще говоря, не происходит. К тому же
сами свойства материала оболочки могут претерпевать
изменения в процессе ее изготовления, или его трехмерных аналогов
может просто не быть, как, например, в случае нанопленок.
Далее, на основе [49, 191] предложено определение группы
симметрии для оболочек типа Коссера и получены некоторые
представления уравнений состояния для частных случаев
симметрии.
6.1. Изменение отсчетной конфигурации
Как и в случае трехмерных тел [142, 278, 287], положим в
основу определения группы симметрии оболочек свойство
инвариантности уравнений состояния по отношению к некоторым
преобразованиям отсчетной конфигурации. С физической точки
зрения это означает, что уравнения состояния нечувствительны
к таким изменениям отсчетной конфигурации и их невозможно
обнаружить экспериментально.
Рассмотрим другую отсчетную конфигурацию,
описываемую поверхностью а* (рис. 6.1). Радиус-вектор частиц
поверхности а* обозначим через г* = r*(ql, q2), а их ориентацию будем
описывать собственно ортогональным тензором Ъ = Ъ(д\д2)
121
Рис. 6.1. Изменение отсчетной конфигурации
(h*~dk®d*k). Вначале рассмотрим одноименную ориентацию
триэдров dk и d*k, т.е. будем считать, что триэдры dk и Dk оба
правые или оба левые, так что det h = 1. Введем градиент
деформации Р = gradr* для отображения С —» о*. Нетрудно
видеть, что Р удовлетворяет соотношениям
л • Р = Р ■ »* = О,
п* - вектор нормали к ст*.
Текущее состояние оболочки, которому отвечает
поверхность X, может описываться с использованием как отсчетной
конфигурации с, так и с*.
Далее все величины, относящиеся к описанию деформации
оболочки с помощью отсчетной конфигурации а*, будем
обозначать верхним индексом "*". Нетрудно установить, что
an
тензоры дисторсии F, F* = r*a ®—- и тензоры микроповорота
bq
Н, Н* =dk ®Dt связаны формулами
F = P-F\ H = h H*. (6.1.1)
Отсюда непосредственно следует формула для связи мер
деформации Y и Y*
122
Y = P-Y*-hT. (6.1.2)
Аналогично Y и Y* связаны меры изгибной деформации К и К":
К=Р К* hr. (6.1.3)
Это соотношение непосредственно следует из формул
(2.2,13) и того факта, что тензор кривизны микроструктуры
актуальной конфигурации В, определенный формулой (2.2.5), не
зависит от выбора отсчетной конфигурации. Тензор кривизны
микроструктуры отсчетной конфигурации Ь естественно зависит
от ее изменения. Используя равенство d"k- dk- h, определим
тензор кривизны микроструктуры в отсчетной конфигурации
оболочки, соответствующей поверхности <?, формулой
b*A_I(grad<<)xrf; ^grad*Ar-_9_j (6Л.4)
где г*а - взаимный базис на а*.
Можно показать, что bub' связаны более сложным
соотношением
b = P b* hr-P \ hr,
2 [W I
(6.1.5)
Из уравнения (6.1.5) видно, что в отличие от (6.1.2), формула
перехода между b и b содержит дополнительное слагаемое -
тензор А., описывающий изгибные деформации,
сопровождающие преобразование а —» а*.
Тензор изгибной деформации L , отсчитываемый от
конфигурации о*, определяется формулой
2
и связан с L соотношением
L = P L* hr+P \ hr (6.1.6)
Рассмотрим теперь такое преобразование отсчетной
конфигурации, при котором триэдры dk и d*k имеют разноименную
ориентацию. Это значит, что deth = -1. Вспомним, что тензоры
В, Ь, К, L являются псевдотензорами (в их определении
123
использовано векторное произведение) и при преобразованиях,
сопровождающихся инверсией пространства, меняют знак. С
учетом этого для произвольных ортогональных тензоров h
формулы (6.1.3), (6.1.5) и (6.1.6) принимают вид
К = (det h)P К* hr, L = (deth)P ■ V ■ hr + Л,
(6.1.7)
b = (deth)Pb*b/-A, A=(deth)P X hr.
Помимо рассмотренных мер деформации потенциальная
энергия деформации W вообще говоря зависит от других
параметров, характеризующих отсчетную конфигурацию
оболочки. Такими параметрами могут быть метрический тензор
о=1-п®« и тензор кривизны k = -gradn.
Изучим изменение этих величин и вектора нормали я,
связанное с заменой отсчетной конфигурации о —> о*.
Рассмотрим полярное разложение неособого тензора Р + п ® и*.
Оно дается формулой [68]
P + n®n* = (U + n®rt)-R, (6.1.8)
где R - собственно ортогональный тензор, U - двумерный
симметричный положительно определенный тензор,
принадлежащий поверхности а, т.е. удовлетворяющий соотношениям
и-я = л-и = 0. (6.1.9)
Тензор U вычисляется по формуле U = VР • Рг.
Из полярного разложения (6.1.8) непосредственно следует
соотношение, связывающее векторы нормали
п* = п R, (6.1.10)
а также "полярное разложение" особого тензора Р
Р = U R.
Таким образом, связь метрических тензоров о и о* дается
формулой
o* = RT о R. (6.1.11)
В случае преобразований общего вида тензоры кривизны
поверхностей о и а* не связаны никакими соотношениями,
использующими градиент деформации Р, т.е. являются
независимыми. Это следует из того, что кривизна поверхности
определяется вторыми производными от радиус-вектора [68]:
k = grad gradr- n.
124
Введем симметричный и принадлежащий поверхности а
тензор х формулой
« = к-Р к' Рг
Тогда
к = Рк'Рт + х. (6 1.12)
Тензор х обращается в нуль, если преобразование о ^ о*
сводится к повороту поверхности с (г * = г • Q, Q~l = Q).
Действительно, тогда тензоры кривизны связаны соотношением
видак=Р-к* Рг.
Выберем на поверхности а произвольную точку г°. Далее
ограничимся такими преобразованиями отсчетной конфигурации
а —> а\ при которых нормаль к оболочке в точке г° не
изменяется, т.е. выполнено уравнение
п\г°) = п(г°) или я(г°) = п{г°) - R(r°), (6.1.13)
и r° e a, r° e о*.
Другими словами, рассматриваются все возможные от-
счетные конфигурации оболочки, которые имеют общую
касательную плоскость в точке г° (рис. 6.2).
Тогда о* = о. Нетрудно также видеть, что в этом случае
тензор Р(г°) оказывается принадлежащим поверхности а:
в(г°) • Р(г°) = Р(г°) ■ п(г°) = 0.
Рис. 6.2. Отсчетные конфигурации, имеющие общую касательную плоскость
125
Действительно, первое из этих равенств выполняется по
определению поверхностного градиента, а второе следует из формул
Pn = U-Rn = 0, которые вытекают из (6.1.9) и (6.1.13).
Выберем в качестве аргументов потенциальной энергии
деформации оболочки W меры метрической и нзгибиоя
деформации Y и К, кроме того, будем учитывать, что W зависит от
параметров b и к, характеризующих отсчетную конфигурацию:
W = W(Y, К; Ь, к).
С учетом принятых ограничений на вид макроповоротов
зависимость от параметра п указывать не будем.
Плотность потенциальной энергии деформации W в
рассматриваемой точке г° является функцией меры деформации Y\
тензора изгибной деформации К и параметров к и b : W =
= W*(Y\K*;b\k*).
Вообще говоря, эта зависимость может отличаться от
W(Y, К; Ь, к). Тем не менее, поскольку функции W и W*
описывают энергию деформации произвольной части оболочки X',
они связаны интегральными соотношениями
JJy(F)WdE = J|vVda= JjVdc*.
из которых сразу следует, что
W(Y, К; b, k) = J(P)W*(Y\ К*; Ь*, к*), (6.1.14)
где
J(P)U U[tr2(P-Pr)-tr(P-Pr)2]. (6.1.15)
С учетом формул (6.1.2), (6.1.7), (6.1.12) соотношение (6.1.14)
можно записать в виде
J(P)W*(P Y hr, (deth)P К hr;
(deth)P b hr- Л, Р к P7 + «) = W(Y, K; b, k). (6.1.16)
6.2. Локальная группа материальной симметрии
Прежде чем давать формальное определение группы
симметрии для оболочки типа Коссера, рассмотрим несколько
соображений физического характера, которые должны учитываться
при определении инвариантных преобразований отсчетной
конфигурации. Примем следующую гипотезу.
126
Гипотеза 1. Инвариантные преобразования отсчетной
конфигурации должны сохранять площадь элементарной
площадки оболочки.
Действительно, трудно представить, чтобы уравнения
состояния не "почувствовали" изменения площади оболочки, в
противном случае такими преобразованиями, не изменяя энергии,
можно было бы уменьшить ее плошадь почти до нуля. В этом
смысле условие сохранения площади элементарного участка
оболочки полностью аналогично требованию унимодулярности
преобразований, составляющих группу симметрии простого
трехмерного материала [142].
Условие постоянства площади элементарного участка на
поверхности оболочки при преобразовании отсчетной
конфигурации может быть записано как
У(Р) = 1,
где У(Р) определен формулой (6.1.15).
Соотношение (6.1.16) является локальным, т.е. выполняется
в отдельно взятой точке г° поверхности с. Следует заметить, что
величины Р, h, Л, х в этом случае оказываются независимыми.
Таким образом, изменение уравнений состояния оболочки из-за
изменения отсчетной конфигурации согласно (6.1.16)
определяется четверкой тензоров Р, h, Л, ж, причем несимметричный
тензор Р принадлежит поверхности о, несимметричный
псевдотензор А удовлетворяет соотношению я * Л = 0, h -
ортогональный тензор, ж - симметричный, принадлежащий
поверхности о тензор. Далее зависимость соответствующих величин от
выбранной точки г° указывать не будем.
Предположение, что уравнение состояния оболочки
нечувствительно к замене отсчетной конфигурации а на а*, означает,
что функции W и W просто совпадают, т.е. должно выполняться
уравнение
W(Y, К; Ь, к) = щу\ К*; Ь*, к+).
Опуская индекс "*", окончательно получим
W(P - Y • hT, (det h)P K bT;
(deth)P b hT- Л, P k P^+ к) = W(Y, K; b, k). (6.2.1)
В данной работе не рассматривается свойство симметрии
уравнений состояния оболочки по отношению к заменам вида
п ^± —и, которое позволяет отделить оболочки симметричного
по толщине строения от несимметричного. Преобразования
отсчетной конфигурации ограничены отображениями, сохраняю-
127
щими ориентацию нормали, что позволяет избежать
рассмотрения «-ориентированных тензоров [3].
Далее будем использовать обозначения:
Orth = {Q : Q"1 = Q7} - группа всех ортогональных тензоров;
Orth+ = {Q : Q е Orth, detQ = 1}- группа собственно
ортогональных тензоров;
Orth^ = {Q:QeOrth+, n-Q = n\ - группа вращений вокруг
единичного вектора я;
Unim„ = {Р:и-Р=Рл=0, 7(Р) = 1} - двумерный аналог
унимодулярной группы;
Linn = {A:«-А = 0};
Sym„ = {х : х = хг, и - х = 0).
Здесь Unim„ - группа относительно умножения, a Lin„ и
Sym„ - группы относительно сложения.
С учетом сделанных выше замечаний и обозначений
соотношение (6.2.1) позволяет дать
Определение. Локальной группой симметрии<ёа оболочки
типа Коссера назовем множество упорядоченных четверок
тензоров
X = (Р <= Unim„, h € Orth, Л е Lin,,, it e Symn),
таких что выполняется уравнение
MY, К; Ь, к) = W(P • Y ■ hr, (det h)P К Ьг; (det h)P - b ■ hr -
- Л.Р-к-Р'Чх)
для любых тензоров У, К, b и к из области определения
функции W. Множество Ща является группой относительно
операции "°":
(Pi,h,,Ai,Xj)° (Р2, h2, Лг, щ) =
= (Р, Р2, Ь,-Ь2> A^Cdeth^Pj-Aj-hf, х,+Р, -х^7).
Докажем корректность определения, т.е. проверим, что
описанное им множество действительно образует группу.
Нетрудно проверить, что если Х( = (PIs hj, А:, х:) е %а и Х2 =
= (Р2, h2, А2, щ) е <§„, то и Х| ° Х2 е %0. Действительно, так как
Xj е % и Х2 е %, то
W(Y, К; Ь, к) =
= W(PrY-hl (deth^P.-K-hr;
(deth^P^b-hf-Ap P1-k-P1T"+x,) =
= W(P2 Y h2r, (deth2)P2 -K-h[;
(detb2)P2-b-hJ-A2, P2-k-P27+x2).
128
С учетом последних соотношений имеем
W(PrP2-Y-h[-h[, det(h|.h2)P1-P2-K-hJ,-hJ";
det(hl-h2)Pl-P2'bh^-hf-Al-det(hl-h2)PrA2-h[,
Р!-Р2-к.р2г.Р1г+х!+Р!.х2-Р1г) =
= W(Pl-(f2-\-hl)-h1, (dethi)Pi.((deth2)P2-K-h[)-bf;
(dethj)P, -((deth2)P2 b h^ - A2)-hf -A,,
P, -(P2 -к-Р^-иг,)-^7 +ч,)= W(P2 - Y h[, (deth2)P2 -K-h£;
(deth2)P2-b-h£-A2, P2-k-P2r+x2) =
= W(Y, K; b, k),
что и доказывает принадлежность Х: ° Х2 группе симметрии <$ст.
В Чкс единичным элементом является
II = (о,1,0,0),
где 0 - нулевой тензор. Очевидно, что [ принадлежит группе
симметрии.
Обратным к элементу X е <5„ служит элемент Х~!,
вычисляемый по правилу
X-! = (P,h,A,x)-l =
= (Р"!, hT, -(det h)P"' A h, -Р"1 • х • Р"г).
Здесь под Р-1 понимается тензор, обратный к двумерному
тензору Р: Р"1 ■ Р = Р ■ Р~! = о, и использовано обозначение Р~т =
= (р-1)г=(Р7')-!.
Действительно,
X о Х"! = (Р, h, А, ж) о (Р, h, А, у)-1 =
= (Р Р !, h hr, A- (det h)2P F1 A h hr, x -
-P P"1 ■ x P"T P7) = (o, 1,0,0).
Можно показать, что обратный элемент X~l принадлежит
группе симметрии, если Хе ^0. Таким образом, проверка
корректности определения завершена.
Эта групповая операция аналогична, но не совпадает с
введенными ранее в [202, 242] для трехмерных микрополярных тел
и оболочек типа Нагхди.
Имеют место также следующие тождества:
(о, I, А„ х,) ° (о, I, Л2, щ) ~ (о, I, А[ + А2, щ + «г).
(Р„ h!t 0, 0)» (Р2, h2, 0, 0) = (Р, ■ Р2, h, ■ h2, 0, 0).
5 Еремеев В А.
129
Естественно, что локальная группа симметрии оболочки <£<,
зависит не только от точки на поверхности, но и от выбора
отсчетной конфигурации. Рассмотрим, как связаны группы
симметрии оболочек для разных отсчетных конфигураций. Пусть ах
иа2- две отсчетные конфигурации оболочки, имеющие общую
касательную плоскость в точке, где рассматривается группа
симметрии, и пусть % и Ъ2 - соответствующие им локальные
группы симметрии оболочки. Обозначим величины,
определяемые с помощью конфигураций Oi и а2 при помощи индексов 1, 2
соответственно. Пусть Р и h - градиент деформации и тензор
поворота, сопровождающие деформацию С| —> Са, Р~1 и Ьг -
градиент деформации и тензор поворота, сопровождающие
обратную деформацию а2 —> о^, а ж описывает изменение кривизны
поверхностей.
Согласно (6.1.2), (6.1.7), (6.1.12) и (6.2.1) меры метрической
деформации Y[ Y2, изгибной деформации К:, К2, тензоры
кривизны микроструктуры Ь5 и Ь2, тензоры кривизны к(, к2 и
энергии Wlt W2 связаны сотношениями
Y, = Р Y2 hr, К] = (deth)P К2 hr,
bj = (det h)P• bj - hT- А, к, = P ■ k2 • Pr+ x,
A = (deth)P-X-hr, x = iree>f^-hrj,
W,(Y„ К,; Ъ„ к,) = J(P)Wj(Y2, K2; b2, k2).
Отсюда сразу следует, что
J(P)W2(Y2!X2;b2,k2) =
= Wt(P- Y2 ■hr,(deth)P. K2 ■ hr; (det h )P • b2 hr-A,P k2 -Pr + x)
и
JCP"1)W!(Y1,K!;b!,k!) =
= W2(Vri Y, h, (det h)Fl K: h; (det h)P4 ■ (bL + A) - h,
p-'tki-xi-P7).
Пусть A = (Pi, hi, A[, Xi) e Щ i, тогда в силу этих зависимостей
выполняется следующая последовательность соотношений:
J(V)W2(y2, К2; Ь2, к2) = W1(Y„ К,; b„ к,) =
= W1(P;-Yi-hf,(deth1)P,-Krhf;
(deth^-b^hf-A,, РгкгР1Г+х,) =
= 7CP)W2[p-'.Pl-Yl-hf.h,
(deth)(deth,)P-' Р, K, h[ h;
130
(deth)P~!'((deth1)Pl-b,-hf-Ai+A),h>
P ! ■ (P, ■ k, ■ P,r -je+x,) ■ P ! ] = /(PJWJP-1 ■ P, ■ P -:Y2 ■ h7" ■ hf • h,
(deth,)P-i-Pi.p.K2-hr-h[-h;
(deth1)P"i.prP-b2-hr'hf-h^(deth)Cdethl)P"l-PrA-hf'h +
+(deth)P"i-(A-A1)-h,
Р"|-Р1-Р-к2-Рг-Р|г-Р~г + р-1-(к!-«)-Р"7,+Р"1-Р|-х-Р~г]-
Это означает, что В = (Р2, h2, A,, x2) е %l, где
Р2 = Р"1 Р, Р, h2 = hr-h,-h,
A2=(deth)(deth1)P"'.p|.A-h|'-h-Cdeth)P4-CA-Al)-h.
х2=Р"! ■Сх,-х)-Р"7" +Р"1 Р, .«.р^р-г.
Нетрудно проверить, что В = IP-1 ° A ° IP, где Р = (Р, h, А, и).
Таким образом, локальные группы симметрии оболочек
связаны соотношением вида
<32 = Р-!°<Й,°1Р. (6.2.2)
Уравнение (6.2.2) обобщает известное правило Нолла [142,
278, 288], связывающее группы симметрии простых материалов в
разных отсчетных конфигурациях, иа случай микрополярных
оболочек.
В дальнейшем нам потребуются некоторые вспомогательные
сведения о представлении скалярных функций одного
тензорного аргумента.
6.3. Представления поверхностно изотропных
и гиротропных функций одного аргумента
Для поверхностно гиротропных функций одного тензорного
аргумента существует представление, которое дает
Теорема 1. Пусть скалярнозначная функция f: Lin„ —> Ш
является поверхностно гиротропной, т.е. выполняется
соотношение
/(X)=/(Q-X-Qr) VXeLin„, VQeOrth:,
тогда f является функцией пяти независимых инвариантов
131
/(X) =Л/*(Х»,
Л(Х) = 1гХ, ;2(X) = trXj, j3(X) = trX|rX,[,
д(Х) = п.Х7.Х.п, )5(Х) = «-Хг-Х2и,
где Хц = X ■ о.
Доказательство.
Представим X в виде Х = Х + х®п,Х1[ = Х-о>х = \-п(п-х =
0), а Хц- в виде суммы симметричного и антисимметричного
тензоров Х„= XJ+Xf, Xf = Xf, Xj=~Xfr.
Пусть еа (а = 1,2), п ■ еа = 0 - произвольный ортонормиро-
ванный базис. Тогда Щ = Xs^ea®e^(X^ =Xps0), Xjf =
= X"(ei®e2~e2®ei).
Таким образом, функцию / можно представить как
зависимость от симметричного двумерного тензора Xjj, вектора х и
скаляраХ":
/ = /x(Xj( х, Ха).
Из определения поверхностно гиротропной функции следует,
что /х- изотропная функция своих аргументов, т.е. функция с
группой симметрии SO (2), и, тем самым, является функцией
инвариантов [281] ХЦ и х: trX|, й"Х|2, х Х,| х, хх, а также Х°.
С учетом формул trXjj = trX, x ■ Xjj ■ х =х - X • х, trXjj2 = trX2 +
+2Х"2 = йгХц -Х|[ - 2Ха2 функцию/можно считать функцией
следующих инвариантов:
trX, trX2, trX,|-Xj[, xXx, xx,
что и завершает доказательство теоремы.
Из доказательства теоремы видно, что вместо Хц в
выражениях для инвариантов можно было бы использовать и X.
Определенные выше инварианты, кроме jj, являются
четными функциями X и поэтому не меняют знак при инверсии
пространства, даже если X - псевдотензор и знак меняет. Таким
образом, для поверхностно изотропной функции имеем
представление
Теорема 2. Пусть скалярнозначная функция/: Ыпя —> R
является поверхностно изотропной, т.е. выполняется
соотношение
f(X) = f(sAv'Q(X)) VXGLin„, VQeOrthn,
132
тогда/является функцией пяти независимых инвариантов
/СХ)=Л/,(Х»,
причем/- четная функция ji, если X — псевдотензор.
Из теорем непосредственно вытекают представления для
линейной и квадратичной функций одного аргумента.
Следствие 1. Поверхностно гиротропная линейная функция
/: Lin„ —> U. дается формулой
ДХ) = Оой-Х.
Представление линейной изотропной функции зависит от
того, является ли ее аргумент истинным тензором или
псевдотензором. Для истинного тензора представление дается
следствием 1, а для псевдотензора линейной функцией может быть
только нулевая. Действительно, изотропная функция является
гиротропной и выполняется следствие 1, но в силу теоремы 2 она
должна быть четной функцией trX, что возможно только если
/= 0. Для квадратичной функции нет разницы между свойствами
гиротропности и изотропности.
Следствие 2. Поверхностно изотропная или гиротропная
квадратичная форма/: Lin„ —> (R дается формулой
2/(X) = a,tr2X + a2trXjf+ a3trXrX|[+a4n'Xr-X-n.
Случай функций нескольких аргументов является более
сложным и здесь не рассматривается.
6.4. Уравнения состояния и локальная группа
симметрии оболочки
Структура локальной группы симметрии, налагая
определенные ограничения на вид уравнения состояния, позволяет в
некоторых случаях существенно упростить его вид. Далее будут
рассмотрены некоторые упрощения уравнений состояния,
вытекающие из структуры группы симметрии. Заметим, что локальная
группа симметрии позволяет судить о свойствах уравнений
состояния в выбранной точке поверхности оболочки. Поэтому,
например, утверждение, что группа симметрии соответствует
твердой или жидкой мембране, относится к данной точке. В
другой точке оболочки группа симметрии, вообще говоря, другая.
Далее выводы на основе группы симметрии о физической
природе оболочки следует понимать локально, с учетом сделанного
замечания.
133
Пусть группа симметрии оболочки в некоторой отсчетной
конфигурации состоит всего на двух элементов: Ща - {(о, ± I, О,
0)}. Из определения сразу же следует, что доказывается четной
функцией по отношению к аргументам К и Ь:
ЩУ, К; Ь, k) = W(Y, -К; -Ь, к). (6.4.1)
Из (6.4.1) следует, что функция энергии Атакой оболочки не
может содержать линейных по К слагаемых, например c^trR
(осо = const). Однако линейные по К слагаемые могут быть, если в
них использован тензор кривизны микроструктуры Ь, например,
вида
Если элементы локальной группы симметрии образованы
четверками тензоров с произвольными тензорами Л е Linn, то
удельная энергия такой оболочки не зависит от тензора Ь.
Действительно, пусть X = (g, I, Л е Lin„, 0) е Ща. Тогда
W(Y, К; b, k) = MY, К; b -Л, к) VA е Lin„,
откуда сразу следует, что
W= W(Y, К; к).
Аналогично доказывается, что если группа симметрии
некоторой оболочки образована четверками тензоров с
произвольными х, то это приводит к независимости этой энергии оболочки
от кривизны поверхности в начальной конфигурации:
W=W(Y,K;b).
Таким образом, группа симметрии вида
% = {(Р, h V X е Lm„, V я е SymJ}
соответствует уравнению состояния оболочки
W=W(Y,K),
которое не зависит от "скрытых" параметров состояния -
тензоров кривизны микроструктуры b и кривизны поверхности к.
Приведенные примеры показывают, что свойства группы
симметрии во многом определяет вид уравнений состояния
оболочек.
Отметим, что предполагаемый вид уравнения состояния
оболочки типа Коссера приводит к группам симметрии того или
иного типа. Другими словами, само определение группы
материальной симметрии зависит от того, какие тензорные величины
принимаются в качестве аргументов функции удельной энергии
оболочки. В [49] рассмотрены уравнения состояния вида W-
= W(Y, L; k), для которых тип группы симметрии аналогичен
134
построенному здесь, в [191] использованы уравнения состояния
W = Ж(И, L; Ь) и структура группы уже оказалась другой,
образованной тройками преобразований. Поскольку тензоры И
и Y, К и L преобразуются по-разному, и групповая операция
также будет определяться по-разному. Использованное в данной
книге уравнение состояния W = W(Y, К; b, k) является наиболее
общим для упругих микрополярных оболочек. Отметим, что
в частных случаях (например, твердых оболочек) эти
определения дают одинаковые результаты.
Рассмотрим некоторые частные случаи уравнений состояния.
Пусть потенциальная энергия деформации дается формулой
W= W(Y) и зависит только от меры деформации оболочки.
Такую оболочку можно назвать мембраной Коссера. Тензор
моментов Коши в мембране Коссера равен нулю (М = 0), тензор
усилий, вообще говоря, несимметричен (Т Ф Тг). Моментное
уравнение равновесия является нетривиальным и служит для
определения поля ориентации Н. Задание краевых условий для Н
или вектора моментов невозможно.
Если группа симметрии мембраны Коссера такова, что
(o,Q,0,0)e <SC VQe Orth,
то уравнения состояния описывают обычную мембрану,
потенциальная энергия деформации которой дается формулой W =
= W{XJ) (U = л/F ■ ¥т) и, таким образом, зависит только от
метрической деформации поверхности. Действительно, положим в
соотношении
W(Y) = W(P Y hT)
P = о, h = A ■ Нг, где А - собственно ортогональный тензор из
полярного разложения
F + n®N=(\J + n®n) -A,
аналогичного (6.1.8). Тогда получим, что
F = U • А (6.4.2)
и
W(Y) = Що - Y - Н • А7) = W(U).
Тензор усилий симметричен (Г = Тг), и моментное уравнение
равновесия выполняется тождественно при отсутствии
поверхностных моментов. Группы симметрии и представления
уравнений состояния для мембран рассматривались в [213,289].
Дальнейшая групповая классификация уравнений состояния мембран
135
определяется группой, содержащей допустимые тензоры Р,
Приведем здесь следующие результаты [213, 289]:
1. *ёа = {(Ре Unim„, h e Orth, A e Lin„, x e SymJ}: жидкая
мембрана, W = W(det U).
2.<gCT={(P = o-Q,h = Q,Ae Lin„,xe Sym„)} VQe &„eOrth:
твердая мембрана.
3.^=((P=oQ,h = Q,Ae Linn, x e Sym„)} VQ e Orth:
изотропная мембрана, W = W(trU, detU).
Естественно, что для мембран Коссера существуют и
промежуточные варианты устройства локальной группы симметрии.
Например, если \={(Ре Unim„, he Э,„,Ле Lin„, х е SymJ},
% с Orth, % *■ Orth, to
W = WfdetU, R), R = о • A ■ Hr,
т.е. энергия деформации помимо det U зависит от относительных
поворотов.
6.5. Изотропные оболочки
Практически важным случаем являются изотропные
оболочки. В случае трехмерных тел условие изотропии
материала с физической точки зрения связывается с независимостью
свойств материала от направления, а математическая
формулировка этого свойства состоит в том, что группа симметрии
изотропного нелинейно упругого тела содержит полную
ортогональную группу тензоров. Оболочку будем считать
изотропной, если элементы ее группы симметрии также содержат
все ортогональные преобразования.
Определение. Оболочка называется изотропной, если в
некоторой отсчетной конфигурации, называемой
неискаженной, ее группа симметрии Щ0 содержит элементы вида
(Р = о Q о, Q,0,0) VQe Orth.
Преобразования отсчетной конфигурации, описывающие
изотропную оболочку, описывают ее произвольные повороты и
преобразование инверсии пространства.
Для изотропной упругой оболочки должно выполняться
соотношение
W(Y, К; Ь, к) = Що ■ Q • Y • Qr, (det Q> Q К Qr;
(detQ> Q b О/, о Q к QT)
для любого ортогонального тензора Q.
136
6.6, Уравнения состояния
жидких оболочек Коссера
Дадим определение жидкой оболочки Коссера, положив в
основу аналогично случаю трехмерных тел свойство
независимости уравнений состояния от выбора локальной отсчетной
конфигурации с сохранением площади. Таким образом, для жидкой
оболочки Коссера должно выполняться уравнение
MY,K;b,k)= (6.6.1)
= W(P ■ Y • hr, (deth)P К hr; (deth)P b hr- A, P k P7* к),
VP g Unim,,, Vh e Orth, VA e Linn, Vit e Sym,,.
Из произвольности А и х сразу же следует, что уравнения
состояния не могут зависеть от b и к:
W = W(Y, К).
Используя полярное представление (6.4.2), положим в (6.6.1)
Р= U"!detU, h = А ■ Нг (напомним, что V - двумерный
(принадлежащий поверхности о) симметричный тензор, А е Orth* -
тензор макроповорота). Тогда с учетом (2.2.13) получим
соотношение
W(Y, К) = W((det U)o, (det U)o • A ■ В • A7).
Это уравнение состояния можно переписать в виде
W(Y, К) = W* (det U, А В А7),
введя новую функцию W*, зависящую от скалярного аргумента
det U и тензорного. При преобразовании отсчетной
конфигурации о —> Cf* тензор поворота А преобразуется по формуле А =
R-A*, где ReOrth*- ортогональный тензор из полярного
разложения (6.1.8) градиента деформации Р. Это значит, что
функция W* должна быть поверхностно гиротропной, т.е. должно
выполняться тождество
W (det U, А • В • А7) = W* (det U, Q ■ А ■ В ■ А7" - Q7)
VQe Orth*.
Полагая Q = А7* и учитывая, что det U - У, окончательно
получим уравнения состояния упругой жидкой микрополярной
оболочки
W=W{J,B), (6.6.2)
137
причем W*(7, В) - четная функция В. Это свойство следует из
(6.4.1).
Нетрудно видеть, что это уравнение состояния вообще не
зависит от выбора отсчетной конфигурации, если при изменении
отсчетной конфигурации сохраняется площадь. Для (6,6.2)
соотношение (6.6.1) выполняется для любого п, т.е. (6.6.1) верно для
любой двумерной унимодулярной группы Unim„ и любой группы
по сложению двумерных симметричных тензоров Sym„. Таким
образом, уравнение состояния жидкой оболочки Коссера
соответствует максимально возможной группе симметрии, т.е. группе
симметрии, образованной всеми возможными элементами, ее
порождающими. Очевидно, что жидкая оболочка является
изотропной.
Из принципа материальной индифферентности следует, что
W*(J, В) = W*(J, Q В <У) VQ e Ortlf. (6.6.3)
Учитывая, что N - В = 0, где N - нормаль к £, для W* можно
использовать результат теоремы 1 из § 6.3, заменив в
определении инвариантов^ и j5 вектор в на N.
Найдем выражения тензоров усилий и моментов для
оболочки с функцией энергии W= W*(J, В). Далее знак V будем
опускать. Имеют место выражения
dW = — 0dF + —- 0dB =
dJ dF ЭВ
dJ dF'
Hr
ЭВ
0dY +
B'.^-O-
Br
Q(dHr
dW
ЭВ
,>
RT 0dK +
эв " эв
С другой стороны, поскольку dK = dL,
dW = P, 0dY + P20dK.
Отсюда фазу следуют соотношения
Н).
р,=
- — Н -а • ——
dJ dF ЭВ
эв
и, кроме того,
в^-о-^-в'"
эв эв
^■Вг-Н'
= 0.
138
С учетом формулы FT = JO получим выражения для
тензоров усилий и моментов типа Коига
Т = -рО-М Br, M = J"lO-~, p = -~. (6.6.4)
ЭВ ш
Определяющие соотношения (6.6.4) описывают
материальную поверхность, энергия которой нечувствительна к
произвольным деформациям, сохраняющим площадь единичного элемента
поверхности, но чувствительна к изменению ориентации частиц
оболочки.
Сравнив полученные уравнения состояния (6.6.4) с
определяющими соотношениями упругой микрополярной жидкости [48,
76], нетрудно заметить полное сходство этих соотношений с
точностью до обозначений. Это позволяет считать уравнения
состояния (6.6.4) двумерным аналогом микрополярной жидкости.
В этой же связи отметим работу [199], посвященную построению
моделей жидких кристаллов на основе континуума Коссера.
Интерес к корректному построению моделей жидкой
оболочки Коссера связан с возможным использованием уравнений
состояния для моделирования тонких пленок, материал которых
демонстрирует эффекты ориентационной упругости, подобные
вязкоупругим микрополярным жидкостям и жидким кристаллам.
Подобные уравнения состояния присущи, например, пленкам
низкосимметричных смектиков [97].
6.7. Уравнения состояния
твердых оболочек Коссера
Рассмотрим группы симметрии твердых оболочек Коссера.
При рассмотрении предыдущих типов уравнений состояния
локальную группу симметрии образовывали четверки независимых
преобразований. Для твердых трехмерных тел группа симметрии
образуется при помощи ортогональных преобразований,
описывающих повороты отсчетной конфигурации. В случае твердых
оболочек трудно представить, чтобы уравнения состояния
оказались нечувствительными к независимым вращениям поверхности
вокруг нормали к ней и поворотам частиц. Также трудно
допустить инвариантность по отношению к произвольным
изменениям кривизны оболочки в начальной конфигурации. Для
твердых оболочек представляется физически оправданной еще одна
гипотеза, дополнительная к первой:
139
Гипотеза 2. Группа симметрии твердых оболочек
образуется преобразованиями отсчетной конфигурации, образованными
одинаковыми макро- и микроповоротами частиц оболочки.
Принятие этой гипотезы позволяет дать
Определение. Группа симметрии твердой оболочки Коссера
в некоторой конфигурации, называемой неискаженной, дается
соотношением
% = {(Р = о • Q, Q, 0,0) VQ е &н с OrthJ.
Группа <ё5 фактически определяется подгруппой &„
ортогональной группы Orth„. Нетрудно видеть, что для V, К, b e Linn и
Q e Orth„ выполняются равенства о - Q • У = Q Y, о - Q ■ К =
= Q-K,o-Q-b=Q-b, о - Q- k - Qr ■ о = Q ■ k ■ QT, упрощающие
запись преобразования уравнений состояния. Здесь требование
инвариантности уравнения состояния сводится к определению
подгруппы 2.,, полной ортогональной группы, т.е. таких Q е 2,„ с
Orth,,, что
W(Y, К; b, k) = W(Q ■ Y ■ О/, (det QJQ К О/;
(det Q)Q - b О/, Q к О/).
6.8. Некоторые группы симметрии
твердых микрополярных оболочек
Рассмотрим уравнения состояния упругих оболочек типа
Коссера для некоторых частных случаев анизотропии.
Наиболее узкий класс составляют изотропные оболочки,
материал которых нечувствителен к повороту элемента
оболочки на любой угол вокруг нормали и инверсии пространства.
Определение. Твердую оболочку будем называть
изотропной, если существует такая отсчетная конфигурация,
называемая неискаженной, что удельная энергия оболочки
удовлетворяет соотношению
W(Q У О/, (det Q)Q К О/, (det Q)Q b Qr, Q k • Q7) =
= W(Y, K; b, k) VQ e Orthn. (6.8.1)
Определение. Оболочку будем называть хемитропной
(гиротропной), если существует такая отсчетная
конфигурация, называемая неискаженной, что удельная энергия
оболочки удовлетворяет соотношению
W(Q У О/, Q К О/; Q b Qr, Q k Q7) =
= W(Y,K;b,k) VQeOrth*. (6.8.2)
140
Определение. Твердую оболочку Коссера будем называть
ортотропной, если удельная энергия W для некоторой
отсчетной конфигурации (неискаженной) удовлетворяет
соотношению
WCQo-Y-Qj. Qo-K-Q0r; Qo b Q£, Q0-k.Q£)=W(Y,K;b,k),
Q0 = 2n ® n -I, (6.8.3)
где Q0 - ортогональный тензор, осуществляющий поворот на
180° вокруг нормали к поверхности оболочки.
При таком преобразований принадлежащие поверхности
тензоры не изменяются. Полиномиальными инвариантами
тензора X е Lin„ являются компоненты Ху = X - о и JtiX), j5(X).
Уравнение состояния ортотропной оболочки можно представить
в виде
W=W(Y[l,Kll,Y-n,K-n;bl[,b-n,k)>
где функция W является четной функцией своих векторных
аргументов:
W(-,-,x,y;-,z,-)= W(-,-,-x, -у; -,-z,-).
Следует заметить, что данные выше определения уравнений
состояния ортотропной и изотропной оболочек (6.8.3), (6.8.1)
отличаются от определения ортотропного и изотропного
материалов в пространственной теории упругости [113] тем, что здесь
рассматриваются более узкие группы симметрии, включающие в
себя только повороты вокруг нормали к оболочке. Так,
например, условие изотропии трехмерной микрополярной среды
совпадает с (6.8.1), если пренебречь зависимостью от к, но при
этом Q оказывается произвольным ортогональным тензором.
Таким образом, соотношения (6.8.1), (6.8.3) оказываются менее
ограничительными, что, вообще говоря, приводит к
необходимости введения большего числа материальных постоянных.
Например, уравнение состояния изотропного физически
линейного трехмерного континуума Коссера включает только шесть
упругих постоянных, а, как будет показано ниже, определяющие
соотношения для изотропной физически линейной оболочки -
восемь. Вместе с тем данные определения вполне согласуются с
физическими представлениями о свойстве поверхностной
анизотропии.
В дальнейшем анализе ограничимся представлением
функции энергии W в виде квадратичной формы тензоров Y, К
(точнее, И и L), т.е. моделью физически линейного материала.
141
6.9. Уравнения состояния оболочек
для физически линейного материала
В данном разделе рассмотрим уравнения состояния удельной
потенциальной энергии деформации как функции тензоров
метрической и изгибной деформаций
W= W(H,L;b,k),
причем ограничимся в этом представлении не более чем
квадратичными по И и L членами.
Нетрудно видеть, что из сформулированного выше
определения группы симметрии для твердых оболочек следует, что
должно выполняться равенство
ЩИ, U Ь, k) = W(Q И QT, (det Q)Q L QT;
(detQ)Q b QT,Q к Q7)
для тензоров Q e Orth„, порождающих группу симметрии.
Положим Q = -I, отсюда сразу следует, что W - четная функция
аргументов L и Ь.
Примером уравнения состояния, удовлетворяющего (6.8.1),
является модель физически линейной изотропной оболочки,
удельная энергия которой задается посредством квадратичной
формы
2№r = aitr3HI[+a2trH[]+a3tr(H1|-Hj[) + a4«-Hr-H-is!+ (6.9.1)
+р> 2Ц +pVr Ц +p3tr(L(1 Ц) + р> -I/ -L л,
Отсутствие в выражении квадратичной формы (6.9.1) членов,
билинейных относительно Y и L, объясняется тем, что мера
изгибной деформации L является псевдотензором и меняет знак
при инверсии пространства.
Заметим, что в уравнение состояния входят восемь
параметров аь р\ (k= 1, 2, 3, 4), которые, вообще говоря, могут
зависеть от тензора кривизны к.
Функции энергии (6.9.1) соответствуют следующие
определяющие соотношения:
Р[ =а]ои-Ий+а2И|[+ес3||И|!+а4И''г®я> (6.9.2)
Р2 =p|OtrL||+|52LJ|+P3L|,-|-|34Ь'И®л.
142
В [182, 257] использована модель оболочки с уравнением
состояния
2W = C[vtr 2Иц + (1 - v)tr Иг И[] + сцС(1 - v)n: Иг • И • и +
+Avtr2L!! + (l-v)trL]|-L^J + ctr£>(l-v)H-L7'-L-«,
которое является частным случаем (6.9.1) (здесь С, D, as, a„ v -
независимые материальные постоянные).
Аналогичным образом можно определить и другие типы
анизотропных твердых оболочек. Вначале ограничимся случаем
зависимости энергии только от тензоров деформации: У/(!Л, L).
Для сокращения выкладок рассмотрим квадратичную форму
одного тензорного аргумента ДХ), Хе Lin,,. Использовав
представления X = X., + х ® п, Х(, = X - о, лг = X • и, Хм = Ха$еа ® е$,
х = хаеа, получим
/~ Сцр^Х^^ + Z)a(iTXapJcT +Ea^xaXp -CullXn +2СШ2Х,,Х12 +
+2Cli2lX'iiX2l +2Cll22XllXl2 +
+ С|2]2л12+2С]22,Х|2Х21 "*"2С|222Л|2Л2г +
+ *--212!^21 +2C2l22A2lA22 +С2222л22 +
+ D2UX2lxl + D2i2X2lx2 +• D22[X22xl + D222X22x2 +
где CapF, Da^, Ea$-материальные постоянные. Всего
независимых постоянных в этом представлении 21.
В случае ортотропной квадратичной функции ДХ) свойство
четности относительно вектора х приводит к тому, что D^ = 0 и
остается 13 постоянных. Функция/имеет вид
/ ~ Са^Е^ф^уЕ + ^ap-^a^p = QI!!^П * ^Ц (I2Xt, Л!2 +
+ 2Cil2iXnX2i -н2СП22лилг2 +
+ С1212л!2 +2С1221л!2А21 +2С1222Х12Х22 +
"*"^'212iJ^2i ~*"'^2!22^2! ^22 "*" ^2222^22 "*" ^li^i "*" ^[г^!^ "*" *^'22Х2 '
Рассмотрим случай кубической симметрии. Это означает, что
группа 2.„ порождается поворотами на 90°, т.е. тензорами вида
к
Q = (I - в ® «)cos % +и ® и - в хIsin%, X = ОД —, гс.
Л/
143
Тогда должны выполняться следующие соотношения:
j('*il,Xl2,X2i,.tp.t2) = j(-X-22<~Х2р_ X-ll<x2>~~X\) =
~-Д^И'^|2> "21» 22 > — -^I'- Х-2' = J(."22»~"2j, —Aj2,Ajj,—X2,Jfi J,
При таких симметриях квадратичная форма сводится к
/ = 2СИ.),(ХП +л"22) + 2С1212(л,2 + Х21) +
+ 2Etl(xf+xi)
и содержит только 4 независимые постоянные. Нетрудно видеть,
что для квадратичной функции кубическая симметрия
эквивалентна требованию изотропности.
Анализ представлений функции двух тензорных аргументов
И, L может быть проведен аналогично. В общем случае
квадратичная форма И, L, представляющая энергию оболочки,
содержит 78 материальных постоянных и здесь не приводится в силу
громоздкости. Учитывая, что ЩТ1, L) = W(H, - L), она не может
содержать перекрестные члены по И, L, и число независимых
постоянных сводится к 42. Таким образом, квадратичная форма
от И, L распадается на две квадратичные формы от каждого
аргумента
WCH,L)=/,<H)+/2(L). (6.9.3)
Используя (6.9.3) и полученные выше представления
квадратичной функции одного тензорного аргумента, нетрудно
построить представления удельной потенциальной энергии
деформации оболочки для некоторых типов анизотропии. Введя
обозначения Иар = еа ■ И„ ■ £р,Иа = еа • И ■ и и аналогичные для £ар и
La, приведем квадратичную форму для общего случая
анизотропии
гДе C^.Z^.Ej.Cj^.Z^.tfJ - материальные постоянные.
Всего независимых постоянных в этом представлении 42.
Ортотропная физически линейная оболочка имеет энергию с
26 постоянными, которая представляет собой сумму
квадратичных форм
* = С^ИЛ+*%№>+<&. V*+Е*М ■
144
Кубическая симметрия дает только 8 независимых
материальных постоянных. Энергия дается формулой
1У = 2С1^1(И?1+И|1)+2С1ЯШ(И1\+И51) +
+ 2С!£22!И!2И2! + 2^(И!2+И^)+2С^!(/12|+4) +
+2C[2i2(Lj2 ~f"^2i)"f"2C!22!L12Z2i +2Eli(Ll + Lj).
Нетрудно убедиться, что приведенная выше квадратичная
форма лишь обозначениями отличается от уравнения состояния
физически линейной изотропной оболочки (6.9.1).
Анализ квадратичных функций И, L, зависящих и от b и к,
более сложен из-за большего числа материальных постоянных.
Кроме того, без принятия дополнительных гипотез о характере
зависимости энергии W от тензоров b и к такие уравнения
состояния будут чрезвычайно громоздкими.
Приведем пример квадратичной зависимости от И, L для
изотропной оболочки с явной зависимостью от кривизны
оболочки в начальной конфигурации:
2W(H,L;k)=a,tr2H(j + OjtrЩ+ЩНЩ ■ Щ)+ а4и ■ И7" ■ И•« +
+ astr2(k-H) + a6wHr-k-Y-n + pltr2L(|+p2trLjj+ (6.9.4)
+p\!tr(L|rL]|) + p>-l/ -L-n+ji5tr2(k-L) + p>-Lr k L л,
где a; = a,(tr k, tr k2), ft = p\(tr k, tr k2) (i = 1,..., 6).
Рассмотрим теперь зависимости вида W(H, L; b).
Ограничимся представлением W(H, L; b), содержащим не более чем
квадратичные члены от тензоров метрической и изгибной
деформации, и предположим, что зависимость от b проявляется
только через зависимость коэффицентов при И и L. Тогда W
имеет вид
+яау^иу+£*риаир+c^Lap^ + о^ЦфЦ +£а>Л +
+ С*ИЛ + zftn^t, + />£ 4#иу + Е™Иа[^.
Здесь наряду с линейными слагаемыми содержатся также
смешанные произведения, билинейные по И и L. Это связано с
тем, что здесь коэффициенты являются функциями
псевдотензора b и могут менять знак при инверсии пространства.
145
Линейные слагаемые в (6.9.5) описывают существование в
оболочке начальных усилий и моментов, которые определяются
формулами
Р^ —
1 аи
И=0,Ь=№ olj
И=0,Ь=0
Подобные начальные усилия и моменты могут быть связаны
с несовершенствами конструкции оболочек при изготовлении,
наличием дефектов типа дислокаций и другими причинами.
Используя свойство четности W(H, L; Ь) = ^(И,-L; -Ь), из
представления (6.9.5) можно получить, что часть коэффициентов
являются нечетными функциями Ь (а именно: ^p>#*,C,fiL,
Da/ft* Daft >Еф >' остальные - четными.
Следуя [191], в (6.9.5) можно ограничиться зависимостями
коэффициентов от b в виде разложений в ряды Тейлора не выше
второй степени, т.е., например, использовать соотношения вида
<4,(Ь) =(0) С^ +(,) С^(Ь) +<2) С^(Ь),
г№ <0> C<J* не зависит т ь- 0) ^(Ь) и а) С^(Ь) - линейная и
квадратичная функции Ь, для которых можно использовать
представления § 6.3.
Для общего случая анизотропии количество материальных
постоянных остается чрезвычайно большим и может быть
сокращено в случае более симметричных уравнений состояния. В
[191] предложено аналогичное (6.9.4) уравнение состояния в
случае изотропной оболочки при учете явной зависимости W от
Ь. Учитывая, что b является тензором более общего вида, чем к,
это представление содержит большее число слагаемых по
сравнению с (6.9.4). Если же говорить об уравнении состояния
общего вида W(H, L; Ь, к), то оно будет чрезвычайно громоздким
даже в случае изотропной оболочки.
Следует отметить, что построение уравнений состояния
функций нескольких, вообще говоря, несимметричных тензоров
в виде разложений по степеням тензоров деформаций
наталкивается на определенные сложности теоретического характера.
Дело в том, что число независимых полиномиальных
инвариантов от нескольких тензоров может быть больше числа их
компонент [281] и такие общие представления будут содержать
чрезмерно много материальных постоянных.
Некоторые группы симметрии и соответствующие им
уравнения состояния оболочек представлены в табл. 6.1.
146
Таблица 6.1
Элементы группы
симметрии % = {(Р, h, Л, х)}
VPe Unimn
(\fn), Vh € Orth
VA £ Lin„, Vxe Sym,,
P = о Q, h - Q,
Q e an с Orthn
Л = 0, х = 0
P = о Q, h = Q,
Qga„4{l,-I,2e®B-I}
Л = 0, * = 0
P = o Q,h = Q,
V Q e Orth„
Л = 0, x. = 0
Тип ура&нения
состояния
Жидкая оболочка
Коссера
Твердая оболочка
Ортотропная
оболочка
Изотропная
оболочка
Уравнение состояния
W=W(J,B) =
= W(J,-B)=W(IRT-BR)
VR e Orth
W=W(Y,K;b,k) =
= W(Q Y Q/,
(detQJQK-Q7";
(detQ)Qb-Q/),
QkQ7)VQea„
VV=W(Y, K;b, k) =
= W(Q ■ Y Qt,
(detQ)Q К Q^;
tdetQ)Qb,ar,
Q-k-Qr)VQe&n
W=Vf(Y, K;b, k) =
= W(Q Y Qr,
(det<£Q-K Q7";
(detQ)Qb ОЛ
Q k Qr)
VQ e Orth,,
6.10. О локальной группе материальной
симметрии для неупругих оболочек
Выше было дано определение локальной группы
материальной симметрии для упругих оболочек, основанное на
инвариантности уравнения состояния для поверхностной плотности
потенциальной энергии деформации W при преобразованиях от-
счетной конфигурации, порожденных группой симметрии. Не
составляет большого труда перенести его на случай оболочек с
памятью. Используя уравнения состояния (4.5.4), дадим
Определение. Локальной группой симметрии Щ^ оболочки
Коссера с памятью назовем множество упорядоченных
четверок тензоров
X = (Р е Unimn) h e Orth, Л е Lin,„ у. е 8угая),
147
таких, что выполняются уравнения
О, [Р • Y'(s) ■ hr, (det h)P • Kr(s) - hr;
(det h)P b hr- A, P к W + «] =
= h-01[Y'(5)^,(s);h4-hr,
■Qz [P • Y'(s) ■ h7", (det h)P • K'($) ■ hT;
(deth)P-b.hr-A,P-k-P7'+»t] =
= (det h)h ■ 02 №)№); b, k] ■ hr
для любых предыстории Y'(s), K'(s) и любых тензоров Ъ uk из
области определения функции W.
Нетрудно убедиться, что в частном случае изотропной
оболочки это определение приводит к соотношениям (4.5.7).
Для оболочек, уравнения состояния которых зависят от
температуры, определение группы симметрии имеет особенности.
Для сокращения выкладок ограничимся случаем термоупругих
оболочек и анализом свободной энергии. Как отмечалось выше,
в группу симметрии входят несобственно ортогональные
преобразования, соответствующие преобразованию инверсии, или
зеркальным отражениям относительно некоторых плоскостей.
Поскольку разным сторонам поверхности термоупругой
оболочки приписываются разные температуры Г+ и Т_, они должны
меняться местами при таких преобразованиях. Это означает, что
должно выполняться соотношение
V(Y, К; Ь, к; Т+, Т_) = у(У, -К; -Ь, к; Г_, Г+).
Так, например, модель физически линейной термоупругой
оболочки дается формулой
2ру = а,аг2Ий + a2trЩ +a3tr(Иц • И|[)+a4« и'г И п +
+P,tr 2L„ + p*2tr Ц + (J3tr (L|j ■ Ц) + fi 4л ■ I/ - L ■ n +
+2a0tr И„(Г+ - T0) + 2a0tr И„(7: ~ Г0 +
+2p> L„(T+ - Г ) + 50[(7; - T0)2 - (71 - T0f).
Для упрощенного варианта термодинамики оболочек с одной
температурой таких условий нет. В общем случае термовязкоуп-
ругих оболочек локальная группа материальной симметрии
образуется множеством тензоров, оставляющих неизменным
каждое уравнение состояния (для тензоров усилий и моментов,
свободной энергии, энтропии, вектора потока тепла и т.д.).
Глава 7
НЕЛИНЕЙНАЯ ТЕОРИЯ ИЗГИБА
И КРУЧЕНИЯ
В этой главе дано применение полуобратного метода в
нелинейной статике упругих оболочек. Под полуобратным
методом мы понимаем приемы построения таких частных
решений, для которых исходная система уравнений сводится к
уравнениям с меньшим числом независимых переменных. Для
упругих оболочек типа Коссера определенного геометрического
строения находим семейства конечных деформаций, на которых
исходная двумерная краевая задача сводится к краевой задаче
для системы обыкновенных дифференциальных уравнений. Эти
семейства представляют собой точные решения нелинейных
уравнений равновесия и описывают большие деформации
растяжения, кручения и изгиба цилиндрических, тороидальных,
естественно закрученных и винтовых оболочек.
7.1. Чистый и пространственный изгиб
цилиндрических (призматических) оболочек
Предположим, что оболочка в отсчетной конфигурации
представляет собой цилиндрическую поверхность с с
образующими, параллельными оси х1% Поперечное сечение поверхности
о плоскостью х2хъ - произвольная замкнутая или незамкнутая
кусочно-гладкая кривая, не имеющая точек самопересечения
(рис. 7.1). Эта кривая задается функциями x2(s) и x3(s), где s-
параметр длины дуги кривой. За гауссовы координаты
поверхности а примем qx = x]t q2 = s. Обозначая штрихом производную
по переменной s, имеем
г - *,#"] +x2(s)i2 + Xj(s)£j, (7.1.1)
/j ~~ *i j #2 -— Д^!^ "•" JC'it'i-,
-'" -xfTxT'
Здесь it, i2, *"з - постоянный ортонормированный базис,
соответствующий декартовым координатам xt, х2, х$.
149
Рис. 7.1. Примеры цилиндрических (призматических) оболочек
Представим радиус-вектор точки деформированной
поверхности L в виде
R = X,i, + X2i2 + X3i3
и рассмотрим следующее семейство деформаций
цилиндрической оболочки:
Х} = y(»sin (ал; + X(s)), X2 = a(s) + €xt,
X3 = y(s) cos (axi + Ms)), (7.1.2)
я/ = const,
HO, *;) = #„„(*)/„, <S>e„, m, и = 1,2,3, (7-1.3)
e, = r( cos (axs + X(s)) - *3 sin (at) + A.{»), e2 = t2, (7.1.4)
ej = ij sin (ax; + Hs)) +13 cos (a*; + A,(s)).
Здесь H„,„ - элементы собственно ортогональной матрицы.
Условиям Hmff-Ink = 8Ш1 и detC^nn) = 1 можно удовлетворить,
выразив функции Нт11 через три функции 8t(s) (к = 1, 2, 3) по
формулам
Итп=(4 + в2у1[(4-д2)8тл +28 А +45(ЛПА1> (7-1-5)
где 5,л„* - символ Леви-Чивиты.
150
Легко видеть, что прямолинейные образующие цилиндра s =
= const после деформации (7.1.2) превращаются в винтовые
линии, а сама цилиндрическая поверхность а переходит в винтовую
поверхность L, ось которой направлена вдоль вектора i2-
Важным частным случаем деформации (7.1.2) является
чистый изгиб цилиндрической оболочки. При чистом изгибе Х($) =
= 0, £ = 0, а тензор микроповорота задается более простым по
сравнению с (7.1.3), (7.1.4) выражением
Н = (jj ® е2 + i3 ® «3) cos co(s) + (t2 ® еъ -
-i3 ® e3) sin co(s) + ij ®ех. (7.1.6)
При чистом изгибе прямые линии s = const в отсчетной
конфигурации превращаются в дуги окружностей, лежащих в
плоскостях, параллельных плоскости х{хъ, а цилиндрическая
поверхность недеформированнои оболочки становится сектором
поверхности вращения с осью, параллельной вектору i2.
Векторы основного базиса на поверхности Е согласно (7.1.2)
определяются формулами
R{ = дЦ^у, + ih, &г = №№>i + «'№ + У'&Ъ. (7.1.7)
Из (7.1.4) вытекают следующие формулы
дифференцирования векторов ортонормированного базиса ек(к= 1,2, 3):
Т± = -«э. •Н~1 = 0. Т^ = *»1. (7-1-8)
os ds ds
На основании (2.1.6), (2.1.7), (7.1.1), (7.1.3), (7.1.4), (7.1.7),
(7.1.8) заключаем, что тензоры деформаций и изгибных
деформаций будут иметь вид
Y = Y„{s)i„ ® /n, L = l^(s)im ® i„, (7.1.9)
т.е. тензорные поля Y и L не зависят от координаты х{. При
чистом изгибе в силу (7.1.6) в дополнение к (7.1.9) справедливы
соотношения
Гц = Yl2 = Yl3 = Г31 = О, Lu = L>2 = Lj3 = Ьгг = Цг = 0. (7.1.10)
Цилиндрическую оболочку будем называть однородной по
координате х1з если удельная энергия W не зависит явно от xt,
хотя может зависеть от координаты $;
W=mY{xt,s),Uxus);s]. (7.1.11)
151
Из определяющих соотношений (2.1.22) и (7.1.9) следует, что
в случае оболочки, однородной по координате л':, тензоры
усилий и моментов типа Кирхгофа не зависят от координаты хи
т.е. имеют представления
Р. -P%(s)im®i„, Р2 = Р%\&„ ®К- (7-1.12)
Далее предположим, что призматическая оболочка
нагружена только по торцам, т.е. по криволинейным кромкам Х\ = аи
Х[ = аг. Тогда / = € = 0 и согласно (7.1.9), (7.1.12) уравнения
равновесия в форме (2.5.2), (2.5.3) не будут содержать
переменной л;, и станут обыкновенными дифференциальными
уравнениями. Граничные условия (2.5.4) на прямолинейных кромках s =
— s\,s~ s2 при <р = у = 0 также не содержат переменной xt. Таким
образом, подстановка (7.1.2)-(7.1.4) приводит исходную
двумерную задачу о равновесии оболочки к нелинейной краевой задаче
для системы шести обыкновенных дифференциальных
уравнений с шестью неизвестными функциямиy(s), a($), Ms), 9*(s) (k=\,
2, 3). Постоянные а и € считаются заданными.
Если имеет место чистый изгиб, то для изотропной и
однородной по координате Xi цилиндрической оболочки на
основании (7.1.10) доказываются равенства
рО) _ p(D _ р(0 - р(0 _ л
Г\2 ~ г2\ - Г1Ъ ~ г3! ^и'
р(2) _ р(2) _ р(2) _ р(2) _ р(2) _ п
г11 "~ г22 "~ Г33 — Г23 ~ г32 —и*
а ненулевые компоненты тензоров Р: и Р2 в базисе ik зависят
только от координаты s. Можно проверить, что в силу (7.1.13)
три из шести уравнений равновесия, записанных в скалярной
форме, а также три из шести граничных условий на каждой из
кромок s = 5;, s = s2 удовлетворяются тождественно.
Следовательно, задача чистого изгиба призматической оболочки
приводится к решению системы трех обыкновенных
дифференциальных уравнений с неизвестными y(s), a(s), 0)(s).
Можно показать, что система усилий и моментов,
действующих в произвольном сечении оболочки лс: = const при
деформации вида (7.1.12), (7.1.13), статически эквивалентна
сосредоточенной силе F2, направленной вдоль орта i2, и сосредоточенному
изгибающему моменту М2, вектор которого также параллелен
вектору i2. После решения краевой задачи для системы
обыкновенных дифференциальных уравнений сила F2 и момент М2
станут известными функциями параметров а и €. Это означает,
что за счет подбора постоянных а и i краевым условиям на
торцах оболочки можно удовлетворить в интегральном смысле
152
Сен-Венана при условии, что внешние сила и момент, заданные
на концах х\ - ait Х\ = а2, действуют в направлении оси х2.
Если оболочка испытывает чистый изгиб, то доказывается,
что главный вектор сил, действующих в сечении оболочки х{ =
= const, равен нулю, т.е. F2 = 0. Следовательно, реализаций
деформации (7.1.2), (7.1.6) при i = 0, XiJ) = 0 требует приложения к
торцам цилиндра только изгибающего момента М2.
7.2. Растяжение и кручение
цилиндрической оболочки
Заменим декартовы координаты х:, *2, х?, на круговые
цилиндрические координаты г, ф, z по формулам
х{ = г cos ф, x2 = r sin ф, хъ = 2
и рассмотрим призматическую (цилиндрическую) оболочку,
образующие которой параллельны оси г. Кривую в поперечном
сечении поверхности а плоскостью z = const будем задавать
функцией г = г(ф). Положим д1 = z, q2 = ф в качестве гауссовых
координат на о~. Тогда будем иметь
dr
г, =аъ> г2 = г\ +т2, г'=—, (7.2.1)
<3ф
я, =tj cos ф + »2 яшф, а2 = -*': sin ф + 1*2со5ф, й3 = i3.
Обозначим через R, Ф, Z цилиндрические координаты точки
деформированной поверхности £, так что
Ху=Ксо$Ф, X2 = Rs.in<&, X3=Z
Рассмотрим следующее семейство деформаций
цилиндрической оболочки:
R = Л(ф), Ф = ф + \fz + о(ф), 2 = ш + аф + №(ф), (7.2.2)
\|f, О, а = const,
Н(ф, z) = Яип(ф)ят ® Ал fan = 1, 2, 3), (7.2.3)
Aj = i, cosO + i2 sinO, A2 = -*[ sin Ф + % cos Ф, A3 = (3.
Элементы собственно ортогональной матрицы //ти(ф) в
(7.2.3) выраж;аются по формулам (7.1.5) через три функции 6*(ф).
Формулы (7.2.2), (7.2.3) описывают кручение оболочки с
углом закручивания \|/, продольное растяжение-сжатие с
относительным удлинением а- 1 и продольный сдвиг. Поперечное
сечение оболочки z = const испытывает депланацию,
описываемую функцией и>(ф), а также деформацию в своей плоскости,
153
описываемую функциями /?(ф) и о(ф). Когда цилиндрическая
оболочка деформируется в соответствии с (7.2.2), (7.2.3),
прямолинейные образующие цилиндрической поверхности
превращаются в винтовые линии.
Если поперечное сечение оболочки есть замкнутая кривая,
функции /?(ф), с(ф) и w((p) должны быть 2тс-периодическими, а
величина 2ка равна длине вектора Бюргерса винтовой
дислокации. Если сечение оболочки - незамкнутая кривая, то
постоянную а следует положить равной нулю.
Векторный базис на поверхности £ согласно (7.2.2)
выражается соотношениями
R: = y#42 + аЛ3, R2 = R'Ai + Л(1 + v')A2 + (а + w')A3. (7.2.5)
Из (7.2.1), (7.2.4), (7.2.5) следует, что тензоры Y и L при
деформации цилиндрической оболочки вида (7.2.2), (7.2.3) будут
иметь представление
Y = Утя(фт ®amL = ^(Ф) ат ® ап. (7.2.6)
Если оболочка однородна по координате z = q\ то из (7.2.6)
вытекает, что компоненты тензоров усилий и моментов типа
Кирхгофа Р[ и Р2 не зависят от переменной z:
р= = ^ЛфК, ®*я, р2 = ОфК ®<v
Теперь нетрудно проверить, что уравнения равновесия
(2.5.2), (2.5.3) вместе с краевыми условиями (2.5.4) на кромках
ф = const при отсутствии внешних нагрузок на этих кромках и на
поверхности оболочки составляют краевую задачу для системы
шести обыкновенных дифференциальных уравнений с
неизвестными функциями #(<р), и(ф), и/(ф), 91 (ф), 82(ф), 93(ф).
Краевым условиям на торцах оболочки z - zx и z = z2 можно
удовлетворить за счет постоянных а и \|/ в интегральном смысле
Сен-Венана, если система внешних сил и моментов,
приложенных к одному из торцов, имеет главный вектор и главный
момент, направленные вдоль орта ^.
7.3. Изгиб, сдвиг и кручение
сектора оболочки вращения
Предположим, что оболочка в отсчетной конфигурации
имеет поверхность а в форме поверхности вращения или сектора
поверхности вращения (рис. 7.2). Уравнение меридиана в
цилиндрических координатах г, ф, z запишем в виде г = r{z). Гауссовы
154
координаты на а выберем следующим
образом: ql = z, q2= ф. Базисные векторы в
отсчетной конфигурации оболочки,
следовательно, будут
г, = г'(г)я, + а3, г2 = r(z)cfc. (7.3.1)
Рассмотрим следующее семейство
деформаций оболочки, задаваемое при
помощи эйлеровых цилиндрических координат R,
<D,Z:
R = R(z), Ф = Jftp + p(z), Z=€q> + T(z),
(7.3.2)
К, i - const,
*t
H(z, ф) = Hpt(z)ap ®A,(p,t=\,2, 3),
(7.3.3)
Рис. 7.2. Пример
оболочки вращения
где величины Hp,(z) выражаются через три
функции 9m(z) (т = 1, 2, 3) по формуле (7.1.5).
Отметим некоторые частные случаи деформации (7.3.2),
(7.3.3).
1. К= 1, £"= 0. Кручение и осесимметричная деформация
оболочки вращения.
2. К = -1, € = 0. Кручение и осесимметричная деформация
вывернутой наизнанку оболочки вращения.
3. К> 0, £ = 0. Кручение и осесимметричная деформация
оболочки вращения с дисклинацией.
Осесимметричная деформация оболочки вращения без
кручения, но с учетом дисклинаций отвечает следующему частному
случаю представления (7.3.2), (7.3.3):
R = R{z), Ф = Щ, Z = y(z),
Н = (а, ® Ai + а3 ® А3) cos 9(z) +
+ (а3®А[-й! ®A3)sine(z) + e2 ®^2-
(7.3.4)
Из (7.3.2) находим базисные векторы на деформированной
поверхности X
Й! = Д'А| + Др'А2 + /Аз, Я2 = £КА2 + e*3. (7.3.5)
В силу (7.3.1Н7.3.3), (7.3.5) имеем
Y = Yp!(z)ap®a„ L = L^z)^ О а, (7.3.6)
155
Оболочку вращения типа Коссера будем называть
однородной по координате ф, если ее удельная энергия W,
рассматриваемая как функция компонент тензоров Y и L в базисе в„ а2, а3,
не зависит явно от координаты ф:
Из определяющих соотношений (2.1.22) оболочки,
однородной по координате ф, и (7.3.6) вытекает, что компоненты
тензоров усилий Р[ и моментов Р2 в базисе ат (т = 1, 2, 3) не зависят
от координаты (р. Если компоненты поверхностных силовой и
моментной нагрузок в базисе Ат(т = 1, 2, 3), так же как нагрузок,
распределенных по краям z = const, не зависят от переменной ф,
то исходная двумерная краевая задача приводится к краевой
задаче для системы обыкновенных дифференциальных
уравнений.
Если изотропная оболочка вращения находится под
действием осесимметричной нагрузки, то кручение отсутствует, и в
силу (7.3.4) часть уравнений равновесия удовлетворяется
тождественно, а задача сводится к решению трех обыкновенных
дифференциальных уравнений с неизвестными R{z), y(z), 9(г).
7.4. Выпрямление и кручение
сектора оболочки вращения
В отличие от разд. 7.3, теперь поверхность вращения о,
соответствующую отсчетной конфигурации оболочки, будем
задавать при помощи уравнения меридиана г = r(s), z = z(s), где г,
г - цилиндрические координаты, 5 - параметр длины дуги
меридиана (рис. 7.3). Гауссовы координаты на а выберем
следующим образом: ql = s, q2 = ф, где ср - третья цилиндрическая
координата. Такой способ описания геометрии поверхности удобен,
например, для тороидальной оболочки.
Наряду с (7.3.2), (7.3.3) существует другое двупараметри-
ческое семейство деформаций сектора оболочки вращения, для
которого двумерная задача приводится к одномерной. Этот класс
деформаций определяется соотношениями
X; = u(s) sin Г|ф + v(s) cos т)ф, Х2 = хф + w(s), (7.4Л)
Х3 = u(s) cos Г|ф - v{s) sin Т|ф, х, Г| = const,
B(s,q>) = H^s)ap®ht, (7.4.2)
fti =t"i cos т^ф-^ sinr|9, k2 = t2, A3 = it sin Г|ф + i3 cos Т1ф.
156
Рис. 7.3. Пример тороидальной оболочки вращения
При деформации вида (7.4.1), (7.4.2) дуги окружностей
5 = const переходят в отрезки винтовых линий, ось которых
параллельна орту i2. На основании (7.4.1) имеем
Г\ = r'ax + z'ah г2 = гаъ
Rt = v'hy + w'h2 + и'къ, й2 = т|ыЛ1 +xh2-r\vhj.
Рассуждения, аналогичные приведенным в предыдущих
разделах данной главы, показывают, что подстановка (7.4.1), (7.4.2)
обеспечивает сведение двумерной задачи о равновесии оболочки
к системе обыкновенных дифференциальных уравнений.
Если в (7.4.1) положить Г| = О, w(s) = 0, а вместо (7.4.2) взять
выражение
Н = (uj ® ii + а3 ® i3) cos <x(s) + (а3 ® it - а, ® i3) sin a(s) + a2® i2,
то получим задачу о выпрямлении (разгибании) сектора
оболочки вращения в цилиндрическую поверхность. В этом случае
остаются только три неизвестные функции: ы(х), v(s), a(s).
7.5. Кручение и растяжение естественно
закрученной цилиндрической оболочки
Предположим, что в отсчетной конфигурации оболочка
имеет форму винтовой поверхности, которая образована
винтовым движением вдоль оси л:3 плоской кривой jc, = Т| ,(£), х2 ~ Пг(£)
(рис. 7.4, а). Введя гауссовы координаты q] = x3, q2 = £, уравнение
поверхности а запишем в виде (vj/0 = const)
157
r(q1,q2) = nl(^)ei+T]2(^)e2 +
+ x3b, (7.5.1)
ex = i] cos ^0X3 + (2 sin ^0*3,
e2 = -11 sin \|%*3 + i2 cos \P0X3.
Оболочку с поверхностью,
заданной уравнением (7.5Л),
будем называть естественно
закрученной цилиндрической
оболочкой. При Yo = 0 она
превращается в цилиндрическую
оболочку произвольного
поперечного сечения. На основании
(7.5.1) имеем
и = «,(^)е, +n2(%)e2+ni(l)iv
Рассмотрим следующее семейство деформаций естественно
закрученной оболочки:
Xt = Vi(£)cosyx3 -v2(b,)s\n^x3, (7.5.3)
Х2 - О, (^)sinЧ$ХЪ + E>2(£)cosV-*3>
^3 = vz (%)+ Щ > T' V = const,
Щх,А) = НтЛ)ет®Еп, (7.5.4)
£i = (, cosу^з +12 sin щъ,
£2 - -i, sin Mfx3 + j2cos щ5, Е3-е3- /3,
Здесь предполагается, что элементы ортогональной матрицы
Ят„(^) выражены через три функции 9S(4) по формулам (7.1.5).
При помощи (7,5.2)-(7.5.4) нетрудно показать, что тензорные
меры деформации оболочки будут иметь вид
Y = Уь&Ъ ®ех, L = LL&)ek ® «,. (7.5.5)
Естественно закрученную призматическую оболочку будем
называть однородной по координате х3, если удельная энергия
деформации W, рассматриваемая как функция компонент тен-
158
Рис. 7.4 Естественно закрученная (а)
и винтовая (б) оболочки
зоров Y и L в ортонормированном базисе ек, не зависит явно от
координаты л3:
W=W(Yb,Lb-£>.
Предполагая, что составляющие поверхностных нагрузок
f • етЛ* ■ ет и составляющие нагрузок ф* • ет, "f ■ ет, действующих
на краях оболочки % - ^ и % = t,2, не зависят от х3, и повторяя
рассуждения предыдущего раздела, убеждаемся в том, что
равновесное состояние естественно закрученной оболочки,
однородной по координате д:3, определяется путем решения нелинейной
краевой задачи для системы обыкновенных дифференциальных
уравнений с неизвестными vt(^), 8/£).
7.6. Пространственный изгиб
естественно закрученной
цилиндрической оболочки
Предположим, что ось винтовой поверхности ст, отвечающей
положению упругой оболочки в недеформированном состоянии,
параллельна вектору i{. Тогда уравнение поверхности о будет
иметь вид
г = x,i, +Л2Й)^2 +n3&gj, (7.6.1)
g2 ^ijCostyoJt; + i3 sin у^Ху,
gъ - -i2 sin у0xx + tj cos \|/0JC;.
Полагая qi = x1,q2 = £, из (7.6.1) получим
П = i"i - W№ + Wlzft. г2 = П'2ё2 + Лз£з*
И =«[(^1, + fl2(Z,)g2 +П3(5)*э-
Зададим деформацию оболочки Коссера следующим
образом:
Xl=ul(^)co^(Hxi-u2(^,)sin(axlt (7.6.2)
Х2 -Mjt^sinawj +M2(^)cosayC[,
Х3 - и3(£) + vjtt, со, v = const,
Н脧) = #М11й)ги®/я, (7.6.3)
#: = i,, /[ = (, cos сошг, -f- r3 sin uK[,
h - ~h s'n oari + h cosoitj, /3 = i3.
159
Из (7.6.2), (7.6.3) видно, что поверхность деформированной
оболочки £ представляет собой винтовую поверхность с осью,
параллельной вектору i3.
Дальнейшие рассуждения, связанные с получением
одномерной краевой задачи относительно функций щ(£), &s(£),
аналогичны рассуждениям, приведенным выше.
7.7. Растяжение, кручение и изгиб
винтовых оболочек
Пусть кривая, расположенная в плоскости, проходящей через
ось вращения л:3, задана уравнением х3 = C,(t), r- pit), где г-
расстояние от оси вращения. Рассмотрим винтовую поверхность,
образованную винтовым движением данной кривой вдоль оси хъ.
Уравнение этой поверхности имеет вид
r = P(0/i+(C<f)+/o«P)b. ОЛЛ)
/; = ij cosф + i2 sin ф, l0 = const,
где ф - полярный угол в системе круговых цилиндрических
координат (г, ф, х3). Упругую оболочку с поверхностью о,
заданной уравнением (7.7.1), будем называть винтовой оболочкой
(рис. 7.4, 6). При 1о= 0 она становится сектором оболочки
вращения. Введя гауссовы координаты ql = t, q2 = ф, из (7.7.1)
получим (штрих означает производную по t)
', = РУ, + CV г2 = р/2 + l0i3, (7.7.2)
/2 = ~h s*n <P+h cos Ф'
* = «I W/i + Г12 СОЛ + «3 W*3 •
Учитывая, что деформированное состояние оболочки Коссе-
ра описывается ие только полем перемещений точек
поверхности а, но и полем поворотов, рассмотрим следующее двупара-
метрическое семейство деформаций винтовой оболочки, при
котором деформированная поверхность Е остается винтовой
поверхностью с осью, параллельной вектору i3:
Xi =a(0cosx«p-P(0sin^, (7.7,3)
Х2 = a(/)sin x<f> + fS(0cos хф,
X3 = y(t) + Хф, X, x = const,
H(f,q>) = Hm{f)fM ® Fn (m,n = 1,2,3), (7.7.4)
160
/<j = i, cosKCp + i2 sin хф,
F2 = -ij sin иср +12 совхф, F3=f3 = iV
Здесь Hmn{t) - элементы собственно ортогональной матрицы,
которые выражаются по формулам (7.1.5) через три функция
е*(0-
Исходя из (2.1.7), (2.1.20), (7.7.3), (7.7.4), можно видеть, что
тензорные меры деформации Y и L имеют следующее
представление:
Y = 4(f)/, ® /f, L = МОЛ ®/,- (7-7-5)
Таким образом, при деформации винтовой оболочки вида
(7.7.3), (7.7.4) компоненты тензоров Y и L в ортонормированном
базисе fi не зависят от координаты ф.
Винтовую оболочку будем называть однородной по
координате ф, если удельная потенциальная энергия деформации W,
рассматриваемая как функция компонент тензоров Y и L в
базисе fk, не зависит явно от координаты ф, но может явно
зависеть от г.
W=W(Yh,Lks;t). (7.7.6)
Из (7.7.5), (7.7.6) и определяющих соотношений (2.1.31)
вытекает, что для винтовых оболочек Коссера, однородных по
координате ф, величины ^1)=/S-P]-/* и Р™ = fm" Р2 ' /» бУДУт
функциями только одной переменной г. Предполагая, что
коэффициенты разложения векторов поверхностных нагрузок/* и (.*
по базису fk не зависят от координаты ф, видим, что более
удобные для использования в данном случае уравнения
равновесия (2.5.2), (2.5.3) на деформациях (7.7.3), (7.7.4) превращаются
в систему шести обыкновенных дифференциальных уравнений с
неизвестными а((), p\f), y((), 6t(f).
Если кривая х3 = С(0> г = р(г), движением которой образована
винтовая поверхность, незамкнута, то на краях оболочки t = t\ и
t= г-2 должны выполняться граничные условия (2.5.4), Можно
проверить, что если величины <р* ■ fk и 7* */* не зависят от ф, то
для оболочки, однородной по координате ф, при деформации
вида (7.7.3), (7.7.4) граничные условия (2.5.4) не будут содержать
переменной ф. Таким образом, равновесное состояние оболочки
определяется путем решения краевой задачи для системы
обыкновенных дифференциальных уравнений.
Если внешние нагрузки, распределенные по поверхности
оболочки и по краям t = ti,t=t2, отсутствуют, то можно доказать,
что реализация деформации вида (7.7.3), (7.7.4) требует прило-
6 Еремеев В.А.
161
жения к торцам винтовой оболочки системы сил и моментов,
статически эквивалентных сосредоточенной силе S и сосредото-
ченному моменту М, действующим в точке оси х3, т.е. оси
винтовой оболочки, и направленным вдоль этой оси. После ре~
шения указанной выше краевой задачи для системы
обыкновенных дифференциальных уравнений продольная сила S и
крутящий момент М становятся известными функциями
параметров к и X. Обращение функций 5(х, А,) и М(н, X) позволяет
определить параметры х и % по заданным значениям продольной
силы и крутящего момента.
Глава 8
УНИВЕРСАЛЬНЫЕ ДЕФОРМАЦИИ
В этом разделе будут построены некоторые примеры
универсальных деформаций для оболочек. Под универсальными
деформациями (или универсальными решениями), как и в трехмерной
нелинейной теории упругости [113, 142], понимаются решения,
точно удовлетворяющие уравнениям равновесия для любого
материала из определенного класса, например, для всех
изотропных оболочек. Универсальным деформациям может
соответствовать довольно ограниченный класс поверхностных нагрузок.
Что же касается сил и моментов, распределенных по краю
оболочки, то они определяются по найденному решению.
Естественно, что при этом нет речи о решении наперед заданной
краевой задачи - универсальная деформация диктует вид допустимых
краевых нагрузок. Следует заметить, что в отличие от
трехмерных тел нетривиальные универсальные решения в оболочках
могут быть найдены для более общих классов уравнений
состояния.
Ценность универсальных деформаций заключается в том,
что их можно использовать для экспериментального построения
определяющих соотношений оболочки.
При построении явных точных решений,, являющихся
универсальными деформациями для оболочек Коссера, вместо
(2.1.36), (2.1.37) будем использовать преобразованную форму
уравнений равновесия (2.5.2), (2,5.3).
8.1. Кручение, изгиб, растяжение и сдвиг
цилиндрической панели
Обозначим через г, ф, г круговые цилиндрические
координаты точки поверхности а, а через R, Ф, Z- круговые
цилиндрические координаты точки деформированной
поверхности Ё. Пусть поверхность а представляет собой круговую
цилиндрическую панель радиуса г0, а параметры ср, z приняты за
гауссовы координаты на поверхностях о , £ (рис. 8.1).
Рассмотрим следующий класс деформаций цилиндрической панели:
163
Рис. 8.1. Деформация цилиндрической панели
R=R0, Ф = иф + чГ7, Z = az + a(p, (8.1.1)
/^,,x,\|/,a,a = const.
Формулы (8.1.1) описывают кручение, изгиб, растяжение и
сдвиг цилиндрической панели. При этом деформированная
поверхность 2 становится частью кругового цилиндра радиуса К0.
Поскольку частица оболочки типа Коссера имеет степени
свободы абсолютно твердого тела, соотношения (8.1.1) необходимо
дополнить заданием тензорного поля ориентации (поворота)
частиц поверхности 2. Собственно ортогональный тензор Н
будем разыскивать в виде
Н(ф, г) = er ® eR + (et ®ez+e^® еф)со$х0 + (8-1 -2)
+(*»®«z-*r®OsinXo. Xo = const,
er = i, cos<p+i2 sin (p, e^ = -*, sin <f> +■ i2 cos <j>,
eR=it cos Ф + i2 sin Ф, еф = -it sin Ф+i2 cos Ф,
Здесь i[, i2, I3 - орты декартовых координат Xj=rcos<p,
х2 = rsintp, jc3 = z. Тензор дисторсии оболочки и тензорные меры
деформации, соответствующие выражениям (8.1.1), (8.1.2),
вычисляются при помощи (2.1.6) и (2.1.7):
F = gradR = ^ev®e<>+-e9®ez + 4fRoe2®e0+ae!®ez,(&.l3)
164
Y = —(esinXo + х/$,сокхо)«ф ®*<> (flCosXo +
го Ъ
+ xRqsinXo)*9 ®*i +(asinx0 + y^,cosXoK ®*„ +
+(acosx0 - v«o sin x0)e: ® «,,
L = ^e, ®еф + *° «f ®eT +VsmXoer ®«» +
+Vcos3Co^®^-
Так как в данном случае и = е„ из (8.1.3) вытекает, что при
деформации вида (8.1.1), (8.1.2) тензоры Y и L обладают
свойством
n-Y = Y-n = B-L = L-* = 0. (8.1.4)
Далее будем рассматривать случай ортотропной оболочки.
Из определяющих соотношений (2.1.31) и свойства ортотропии
оболочки (6.8.3) следует, что
PeCQo-Y-Q5,Qo-L-Qj) = Q0-Ptt(Y,L)-Qf(a = l,2). (8.1.5)
Легко проверить, что из (8.1.4) вытекают равенства
Q0 Y Ql = Y, Q0 L Ql = L. (8.1.6)
На основании (8.1.5), (8.1.6) можно заключить, что
Pe-Qo=Qo-Pe(a = U),
откуда, используя (2.1.42), получаем
Pa-n=0(a = l,2). (8.1.7)
Соотношения (2.1.42), (8.1.7) означают, что тензоры усилий и
моментов имеют представление
Pi = V<P ®€<f + V» ®С= + V* ®«» +Р:& ®е:> (8-1-8)
Р2 = Пwef ® ^ + П^ ®ег + П^е, ®eip+ Il:!e: ® е,.
Круговую цилиндрическую оболочку будем называть
однородной, если удельная энергия W, рассматриваемая как функция
компонент тензоров Y и L в базисе е^, es e» не зависит явно от
координат ф, z. В силу (8.1.3) для однородной оболочки
компоненты тензоров Р[ и Рг в (8.1.8) будут постоянными величинами.
Учитывая выражение набла-оператора на поверхности
кругового цилиндра
. 1 Э д
гй * Эф Ъг
165
и используя (8.1.8), получим
Р
divP,=—^-eT, divP2
го
Вследствие (8.1.4), (8.1.8) входящие в уравнения равновесия
(2.5.2), (2.5.3) векторы (P,r-L)x и (Р2Г • L + Р,г • Y)x имеют
направление вектора ег Предположим, что оболочка нагружена по
поверхности 2 равномерно распределенным давлением^,
действующим по нормали к 2, и равномерно распределенным
моментом, вектор которого направлен также по нормали к 2. Так как
вектор нормали к 2 в рассматриваемой задаче совпадает с ей, на
основании (8.1.2) можно заключить, что векторы/", V в
уравнениях равновесия (2.5.2), (2.5.3) имеют постоянную длину и
направлены вдоль ет . Таким образом, уравнения равновесия
однородной ортотропной круговой цилиндрической оболочки на
деформациях (8.1.1), (8.1.2) сводятся к двум алгебраическим
соотношениям, позволяющим определить постоянные й0> Хо- При
этом внешнее нормальное давление и интенсивность моментной
нормальной нагрузки, а также постоянные г0, -к, а., а, \|/
считаются заданными. Равномерно распределенные по кромкам
цилиндрической панели ср = const, z = const силы и моменты,
которые необходимо приложить для реализации деформации
(8.1.1), (8.1.2), находятся с помощью определяющих соотношений
оболочки.
Деформации (8,1.1), (8.1.2) можно назвать универсальными
деформациями (или универсальными решениями) в классе
однородных ортотропных оболочек Коссера, так как на этих
деформациях тождественно удовлетворяются уравнения
равновесия любых оболочек из указанного класса в случае, когда
внешняя поверхностная нагрузка сводится к равномерному
нормальному давлению и равномерно распределенному
нормальному моменту (которые, в частности, могут равняться нулю).
8.2. Изгиб, кручение, растяжение и сдвиг
плоской пластинки
Другим семейством универсальных деформаций для
ортотропных однородных оболочек является изгиб, кручение,
растяжение и сдвиг плоского листа (рис. 8.2),
Этот вид деформации задается соотношениями
/?=j%, ф = жу+уг, Z = ay+az, (8.2.1)
П.
w
в,.
(8.1.9)
166
Рис. 8.2. Деформация плоской панели
Н = i, ®ед +(i2 ®еф + es®ez)co$x0 + (i2®ez ~ez ®^)sin%0,
ij = i2 x er.
Здесь у, z- декартовы координаты, отсчитываемые в плоскости
листа, представляющего собой недеформированную
конфигурацию оболочки, 1*2, ех— орты этих координат. Доказательство
универсальности семейства деформаций (8.2.1) приводится
аналогично предыдущему.
8.3. Выпрямление, растяжение и сдвиг
цилиндрической панели
Еще одно семейство универсальных деформаций для орто-
тропных однородных оболочек представляет собой выпрямление
(разгибание) цилиндрической панели в плоскую пластинку,
которая затем испытывает однородную деформацию растяжения
и сдвига. Данное семейство описывается соотношениями
Х-Х0, y = st<p + iyz, Z-аф-ЪШ, (8.3Л)
H = er®i1+(e!fl®i2+e:®ez)co$x0+(elf®ez-e2®i2)$mxQ.
Здесь X, У, Z - декартовы координаты точки поверхности £
деформированной оболочки, Х0, х, \|/, а, а, Хо~ постоянные
величины. Аналогично изложенному выше доказывается, что на
семействе деформаций (8.3.1) тождественно удовлетворяются
уравнения равновесия любых ортотропных однородных
оболочек при отсутствии поверхностной нагрузки.
167
8.4. Выворачивание сферического купола
Теперь рассмотрим задачу о выворачивании сферического
купола или полной сферы (рис. 8.3), Отсчетная конфигурация
оболочки в этом случае представляет собой сферический
сегмент радиуса г0, который, в частности, может быть и замкнутой
поверхностью, т.е. замкнутой сферой. Выворачивание наизнанку
полной сферы можно осуществить, например, путем разрезания
сферы на две половины, выворачивания каждой половины и
последующего их склеивания по краям. Положение точки
поверхности <т в пространстве будем задавать сферическими
координатами г, ф, 9, связанными с декартовыми координатами
соотношениями
jr, = rcos(pcos9, x2 - /-sin(pcos9, Xj^rsinQ.
Обозначим через R, Ф, 0 сферические координаты точки
оболочки в деформированном состоянии и зададим деформацию
выворачивания сферического купола формулами
# = J^=const, Ф = (р, 0 = -& (8.4.1)
За гауссовы координаты на о" примем
географическую долготу з1 = Ч> (0<ф<2я) и географическую широту
Тензор поворота зададим в виде
Н = £ф®£ф-Яе®£0-Я,®£л, (8.4.2)
Ег =(!, со8ф + 128тф)со8б + /38тв, (8.4.3)
Е = -I*! sin ф +12 cos ф,
Ев - -(i, со8ф + (2 sin9)sin9+i3 cos9,
ER = (/] cosO+i2 sin Ф) cos в +i3 sin в,
Рис. 8.3. Выворачивание сферического купола
168
Еф = -/, sin Ф + i2 cos Ф,
EQ = -(/, cos Ф +12 sin Ф) sin в+i3 cos в.
Используя (8,4.1)-(8.4.3), вычислим тензор дисторсии и меры
деформации оболочки
¥ = ^(Ещ®Еф-Ев®Ев), (8.4.4)
У = ^(Еф®Еф + Ее®Ее),
го
Ь = -(£9®Еф-Яф®£9).
'о
При помощи (6.8.1) и (8.4.4) можно показать, что в задаче о
выворачивании однородной изотропной сферической оболочки
справедливо представление
Р! = Р0(£,®Еф+Вв®£в), (8.4.5)
V2=nQ(EB®E9-Ev®EB).
где Pq и П0 - постоянные.
Учитывая представление оператора градиента на
поверхности сферы
grad = ——-i?-— + — £е —
r0cos9 v Э(р г0 Э9
и выражения (8.4.5), видим, что при отсутствии поверхностных
нагрузок уравнение равновесия (2.5.2) приводится к виду
Р0 = 0, (8.4.6)
а моментное уравнение равновесия (2.5.3) удовлетворяется
тождественно. Соотношение (8.4.6) служит для определения
неизвестного радиуса вывернутой сферической оболочки. Согласно
(8.4.5) сохранение сферической формы вывернутого купола
требует приложения по его краю 6 = const равномерно
распределенного изгибающего момента.
Изложенные рассуждения показывают, что деформация
(8.4.1), (8.4.2), описывающая выворачивание сферы, является
универсальным решением уравнений равновесия в классе
однородных изотропных оболочек.
Приведенные выше универсальные деформации не
исчерпывают всех возможных их классов. Например, универсальной в
169
классе однородных оболочек является аффинная деформация
плоской панели, сопровождаемая постоянным полем поворота;
универсальной для изотропных оболочек также является
центрально симметричная деформация сферы.
Следует заметить, что в отличие от трехмерной теории
упругости, где нетривиальные универсальные деформации
существуют только для несжимаемых материалов, здесь на
уравнения состояния оболочки не накладываются дополнительные
связи.
Глава 9
ДИСЛОКАЦИИ И ДИСКЛИНАЦИИ
В УПРУГИХ ОБОЛОЧКАХ
Этот раздел посвящен теории оболочек, содержащих
дислокации и дисклинации. Результаты предлагаемой теории могут
быть полезны при анализе многосвязных тонкостенных
конструкций, в биомеханике и биохимии клеточных мембран, при
математическом моделировании двумерных кристаллов, тонких
пленок, тонкостенных тел из сверхпластических материалов.
Развиваемые в теории дислокаций методы полезны при
исследовании внутренних напряжений, возникающих в
тонкостенных элементах конструкций из-за неточности изготовления.
Отметим здесь также наномеханические приложения
рассматриваемой теории. В настоящее время накоплены
значительные сведения экспериментального характера о таких нано-
материалах, как нанопленки, нанотрубки, фуллерены. Нано-
объекты демонстрируют аномальные свойства, весьма
привлекательные для приложений в электронике, фотонике, акусто-
электронике, для создания микро- и наноэлектромеханических
устройств (MEMS, NEMS), и вместе с тем не связанные, вообще
говоря, со свойствами макроскопических образцов, даже если
таковые и можно получить [34, 38, 100, 105, 106, 136, 175, 214,
284]. Свойства наноматериалов в существенной степени зависят
от наличия в них дефектов типа дислокаций и дисклинации.
Различные линейные дефекты наблюдаются в наноструктурах
на основе углерода, например, фуллерены можно рассматривать
как оболочку, содержащую определенное количество
дисклинации [38, 106] (рис. 9.1). Здесь выделен один из пяти
пятиугольников в структуре С60, которые и отвечают за появление
дисклинации. Наряду с пятиугольниками в гексагональных
дефектных решетках наблюдаются и семиугольники.
Пятиугольник, окруженный шестиугольниками, соответствует
положительной дисклинации, а семиугольник- отрицательной [175].
Более сложный дефект представлен на рис. 9.2, на котором
наряду с идеальной гексагональной структурой (рис. 9.2, я)
показана структура, состоящая из двух семиугольников и двух
пятиугольников (диполь Стоуна-Уэльса) (рис. 9.2, б), которая
соответствует нескольким дисклинациям.
171
Материал данной главы основан на работах [49, 69, 71, 77,
297-299]. Отметим также исследования линейных дефектов в
рамках теории оболочек типа Кирхгофа-Лява, которые
проводились в [84, 297]. Деформация мембраны с клиновой дискли-
нацией изучена в [96], Теория дислокаций и дисклинаций в
пластинах типа Кармана построена в [75].
9.1. Определение поля перемещений
по заданным полям деформаций и поворотов
Предположим, что поверхность С, соответствующая отсчет-
ной конфигурации оболочек, многосвязна и гомеоморфна кругу
с круговыми отверстиями. В отличие от предыдущих разделов
через ш будем обозначать не всю границу оболочки, а
только замкнутый внешний контур. Контуры отверстий будем
обозначать ук(к = 1,2,...,М) (рис. 9.3). Отверстия свободны от
172
Рис. 9.3. Многосвязная оболочка
нагрузки, т.е. на ук выполняются условия
v-D = 0, (9.1.1)
v-G = 0. (9.1.2)
Как и ранее, контур <й разбивается на две непересекающиеся
части двумя способами: ш = ш, исо2 и to = Ct)jWQ)4. Каждая из
кривых (Л/, (к = 1,2, 3,4) предполагается связной, и на них
выполняются краевые условия (2Л.38)—(2.1.41),
Рассмотрим задачу нахождения перемещений оболочки при
заданных тензорных полях Y(<?!, q2) и Н(#!, q2), что эквивалентно
определению положения /f(<?', q2) точек деформированной
поверхности S, в случае многосвязной оболочки. Заданные
функции Y и Н будем считать непрерывно дифференцируемыми
и однозначными в области о*. Тогда тензор дисторсии оболочки
F = Y-H (9.1.3)
также будет однозначной функцией на а. Уравнение для
определения вектора R имеет вид (2.3.1). Необходимое и
достаточное условие разрешимости уравнения (2,3.1) заключается в
выполнении условий совместности (2.3.2). Решение уравнения
(2.3.1) имеет вид
г
R = R0 + jdr>F(r'), До=Д(г0). (9.1.4)
В многосвязной области а поле перемещений u(r) = R(r) - г,
определяемое формулой (9.1.4), вообще говоря, может обладать
неоднозначностью, состоящей в том, что при обходе замкнутого
контура Гъ охватывающего одно из отверстий, вектор ы полу-
173
чает приращение
[и+ ~и_]\Гк =Ьк, Ък = const = wdr-F(r).
(9.1.5)
Вектор bk, называемый вектором Бюргерса, не зависит
выбора контура Гк при условии, что контур охватывает толь°Т
одно &-е отверстие. Неоднозначность поля перемещений в обп.
лочке вида (9.1.5) означает наличие в ней трансляционны
изолированных дислокаций.
Заметим, что если отказаться от требования однозначности
тензора поворота Н в многосвязной области о, а считать
однозначными тензорные поля деформации Y и изгибной
деформации L, то неоднозначность перемещений будет иметь
более сложный по сравнению с (9.1.5) характер, связанный с
наличием дисклинаций [69). Принятое здесь допущение об
однозначности поворотов исключает существование дисклинаций.
9.2. Постановка задачи о равновесии оболочки
с дислокациями
Краевую задачу о равновесии многосвязной оболочки с
заданными характеристиками дислокаций bk можно
сформулировать как задачу определения тензорных полей F и Н из
уравнений равновесия (2.1.36), (2.1.37) и уравнений совместности
(2.3.2). При этом grad/f в (2.1.37) заменяется на F, тензор усилий
D и тензор моментов G определяются соотношениями (2.1.31), в
которых мера деформации Y выражена через F и И согласно
(9.1.3), а тензор изгибной деформации L выражен через тензор
поворота Н при помощи второго соотношения (2.1.6). Поскольку
указанная система уравнений не содержит перемещений
оболочки в качестве неизвестных функций, вектор R следует
исключить из краевого условия (2.1.38). Это можно сделать,
продифференцировав (2.1.38) по переменной s, что приводит с
учетом (2.3.2) к дисторсионным краевым условиям (2.4.1).
Таким образом, краевые условия для системы уравнений
относительно тензоров F и Н состоят из ограничений (9.1.1),
(9.1.2), (2.1.39)—(2.1,41), (2.4.1). Кроме того, в формулировку
краевой задачи входят интегральные соотношения (9.1.5), в
которых &..- заданные постоянные.
Вместо тензоров F, Н в качестве основных неизвестных
функций можно использовать тензоры D и Н, выразив дис-
174
иЮ f через тензор усилий D, тензор поворота Н, а также
изводные тензора Н. Это можно сделать следующим
"fi зом. Согласно (2.1.31) тензор усилий Р, - функция меры
м
формаций Y и тензора изгибной деформации L. Предполагая
Я позначную обратимость этой функции относительно Y,
Цразим тензор Y через Р, и L:
Y = X0P„L). (9.2.1)
На основании (2.1.31), (9.1.3), (9.2.1) получим
F = \(D Нг, L)- Н. (9.2.2)
Поскольку согласно (2.1.6) тензор L выражается через
тензор поворота Н и его производные, формула (9.2.2) дает
представление дисторсии через усилия типа Пиолы и повороты.
Согласно (9.2.1), при отсутствии распределенной силовой
нагрузки, т.е. при/=0 уравнение равновесия (2.1.36) можно
тождественно удовлетворить при помощи вектора функций
напряжений Ф:
D = е • grad Ф. (9.2.3)
Уравнение (9.2.3) - частный случай представления (2.5.1) при
D0 = 0. Из (9.2.3) вытекает, что для любой кривой на а
(1Ф
справедливо соотношение = v-D. Поэтому приращение
ds
функции Ф при обходе любого замкнутого контура равно
главному вектору сил, приложенных к этому контуру. Это
означает, что если контуры отверстий многосвязной оболочки
свободны от нагрузки, то вектор Ф - однозначная функция в
области о.
Подставив (9.2.3) в (9.2.2), получим представление дисторсии
через вектор функций напряжений и тензор поворота.
Краевые условия (2.1.39) на части (fy с учетом (9.2.3) примут
аФ
вид = <р, что после интегрирования дает
ds
<t>l2 = \<p(s)ds+C0,
где С0- произвольная постоянная. Поскольку в силу (9.2.3)
добавление постоянного вектора к функции Ф не влияет на
напряженное состояние оболочки, в случае связной кривой а^
постоянную С0 можно зафиксировать произвольным образом.
Следовательно, на со2 будут заданы значения функции
напряжений, т.е. граничные условия (3.3.1).
175
Краевые условия (9.1.1) на контурах отверстий аналогичным
образом приводятся к виду
Ф\п = Ск =const(Jfc = l,2,...,Jtf). (9.2.4)
Постоянные векторы Ск, определяющие значения вектора
функций напряжений на контурах отверстий у*, остаются
неизвестными.
Система уравнений, описывающая равновесие оболочки и
содержащая в качестве неизвестных функций вектор Ф и тензор
Н, состоит из уравнений совместности (2.3.2) и уравнений
баланса моментов (2.1.37), в которых тензор дисторсии F = grad R
предполагается выраженным через вектор функций напряжений
при помощи (9.2.2), (9.2.3). Краевые условия на внешнем контуре
оболочки (О состоят из дисторсионных условий (2.4.1) на (йи
ограничения (3.3.1) на со2 и условий (2.1.40), (2.1.41). На контурах
отверстий Yk должны выполняться условия (9.1.2) и (9.2.4),
Уравнениями для определения неизвестных постоянных Ск
служат интегральные соотношения (9.1.5), в которых в качестве
контуров Гк можно взять контуры отверстий у^.
9.3. Вариационная формулировка задачи
о равновесии многосвязной оболочки
с дислокациями
Сформулированная в предыдущем пункте краевая задача о
равновесии многосвязной оболочки с изолированными
дислокациями допускает вариационную постановку, основанную на
принципе дополнительной энергии (принципе типа Кастильяно
(3.4.4)).
Далее предположим, что элементарная работа моментной
нагрузки, распределенной по поверхности оболочки а и по части
границы и4, представляет собой вариацию функционала,
зависящего только от поля поворотов, т.е. выполнено соотношение
(3.3.2).
Учитывая представление (9.2.3) тензора D через вектор
функций напряжений, запишем выражение функционала
дополнительной энергии оболочки
У'[Ф.Н.Рг,С1...См]= (9.3.1)
=Л[^(Ф,н,р2)-р2оцн)]аа+54[Н]+|ф-^^+2^-с,.
176
В (9.3.1) выражение функционала У отличается от ранее
использованного (3.4.4) зависимостью от постоянных Ск. В нем
варьируются вектор функций напряжений Ф, подчиненный
условиям (3.3.1), (9.2,4), собственно ортогональный тензор Н,
удовлетворяющий условиям (2.1.40), тензор моментов Р2, а
также постоянные Ch Допустимые функции Ф, Н
предполагаются дважды непрерывно дифференцируемыми, а функция
Р2 - непрерывно Дифференцируемой. Используя (3.3,2), (3.4.3), а
также соотношение (2.1.29)
5L(H) = (grad*).Hn
вычислим вариацию функционала (9.3.1)
6V' = jJ{-grad-(e-F-S^ + (grad-(e-F)]-8*+ (9.3.2)
о
-Н^Ф)^е-Р)х-ф + (~-ь)оЗРг-
-grad'(P2 ■ Н- i{() + [grad-(P2 * Н)]-ф+ €■ ty}dc +
После применения к (9.3.2) теоремы о дивергенции на
поверхности и при учете ограничений 5Ф = 0 на щ, ф = 0 на ад3,
5Ф = SCt на ук условие стационарности функционала примет вид
Д [grad.(e-F)]-SO + [~-Ll
ЭР2
0 8Р2+ (9.3.3)
+ [gmd-(P2H) + (FT -еёгайФ)х+ ?]■$ \dv +
Ш| 004
М М (
-£|уР2-Нф + £ bk-jdr-F
1V Ук
5Ск=0.
Из (9.3.3) вытекает, что условие стационарности
функционала (9.3.1) эквивалентно условиям совместности (2,3.2),
уравнениям баланса моментов (2.1,37), соотношению
177
ЭР2'
дисторсионным краевым условиям на оог, краевым условиям
(9.1.2) на контурах отверстий, условиям (2.1.41) на части со4
внешней границы оболочки, а также интегральным
соотношениям (9.1.5).
9.4. Переход к непрерывному распределению
дислокаций в оболочке
Если число дислокаций на ограниченном участке оболочки
весьма велико, то целесообразно перейти к математической
модели дислокаций, непрерывно распределенных по поверхности
оболочки. Это можно сделать при помощи установленного выше
вариационного принципа.
Будем неограниченно уменьшать диаметры отверстий таким
образом, чтобы каждый контур ук стягивался в точку, имеющую
радиус rk. Так как функция Ф имеет одинаковые значения для
всех точек контура ук, в пределе постоянные Ск совпадут со
значениями функции Ф в точках гк и функционал (9.3.1) будет
иметь выражение
У"[Ф,Н,Рг1 = ||[У(Ф,Н,Р2)-Р20Ь(Н)]ёо-+ (9.4.1)
(и; а
М
а' = %Ьк&(г-гк). (9.4.2)
*=i
Здесь 5 (г-г*)- дельта-функция двух переменных,
сосредоточенная в точке гк.
От функционала (9.4.1), соответствующего дискретному
набору сосредоточенных трансляционных дефектов, легко
перейти к случаю непрерывно распределенных дислокаций,
заменив в (9.4.1) обобщенную функцию а' на обычную а и назвав
последнюю плотностью дислокаций. Физический смысл
плотности дислокаций а согласно (9.4.2) заключается в том, что
суммарный вектор Бюргерса набора дислокаций, содержащихся
178
в произвольной подобласти о* С а, выражается формулой
p = JJada
с*
Таким образом, вектор плотности дислокаций а есть
результирующий вектор Бюргерса всех дислокаций, содержащихся в
единичной площадке поверхности оболочки.
Функционал дополнительной энергии для случая дислокаций,
непрерывно распределенных по односвязной поверхности
оболочки а, принимает вид
У[Ф,Н,Р2] = || [У(Ф.Н,Р2)- (9.43)
о
-Р20Ь(Н) + <*.фЫа+й1[Н]+ f Ф-^ds.
J ds
Из стационарности функционала (9.4.3) вытекают уравнения
баланса моментов (2.1.37), в которых gradR заменен на F, и
соотношения
div(e - Н) + a = 0, (9.4.4)
которые можно назвать уравнениями несовместности.
Естественными краевыми условиями для функционала (9.4.3)
служат дисторсионные условия (2.4.1) и условия (2.1.41),
а главными граничными условиями являются ограничения
(2.1.40) и (3.3.1).
При заданной плотности дислокаций а соотношения (2.1.37)
и (9.4.4) образуют полную систему уравнений равновесия
оболочки с неизвестными Ф и Н.
Заметим, что традиционный подход к нелинейной теории
непрерывно распределенных дислокаций заключается в том, что
плотность дислокаций определенным образом выражается через
пластическую дисторсию [20, 104], Это требует разложения
деформации на упругую и пластическую составляющие, которое в
области больших деформаций может быть выполнено
неоднозначно, т.е. разными способами. Кроме того, пластическая дис-
торсия в общем случае не исключается из системы уравнений,
что существенно усложняет математическую формулировку
нелинейной модели среды с непрерывно распределенными
дефектами. Предложенный выше вариационный подход к нелинейной
теории двумерных сред с непрерывно распределенными
дислокациями свободен от указанных выше недостатков, так как не
179
требует разложения конечной деформации на упругую и
пластическую составляющие.
9.5. Двойственные краевые задачи
микрополярных оболочек
Между уравнениями равновесия усилий (2.1.36) и
уравнениями несовместности (9.4.4) существует очевидная аналогия.
Введя обозначение F* = е ■ F, видим, что уравнения (2.1.36) и
(9.4.4) переходят друг в друга при заменах D?±F\ /?i«. Эта
аналогия, отмеченная ранее в [67] в частном случае а =/ = О,
существенно связана с учетом геометрической нелинейности и
отличается от статико-геометрической аналогии в линейной
теории оболочек [30, 71, 84, 124]. В последней имеются
соответствия между усилиями и изгибными деформациями, между
моментами и метрическими деформациями, а также между
плотностью дислокаций и распределенной моментной нагрузкой.
Далее заметим, что выражение (9.2.3) тензора усилий Пиолы
в случае/= 0 аналогично согласно (2.3.1) выражению тензора F
через радиус-вектор R при а = 0, кинематические краевые
условия (2.1.38) идентичны условиям (3.3.1), а силовые граничные
условия (2.1.39) идентичны дисторсионным условиям (2.4.1).
Указанная статико-геометрическая аналогия влечет
существование двойственных краевых задач для нелинейно
упругих оболочек, т.е. таких двух задач, которые математически
эквивалентны, но различаются по физической постановке, так
как описывают различные физические ситуации. Системы
уравнений и краевых условий двойственных задач запишем в два
столбца.
divD +/=0, divF* + a = 0, (9.5.1)
divG + [(gradff) • D]x + € = 0,
G=-F(F* IF,L).H,
F* = e gradK,
2 W i
divG + [(gradO)7" ■ F ]K+ € = 0,
(9.5.2)
FV3,(D ■ HF, L) ■ H, (9.5.3)
G=-l!(D.IF,L)-H, (9.5.4)
D = e grad<&, (9.5.5)
L = IrP®fM.HTV (9.5.6)
180
щ: R = (i(s), щ: Ф = х(Д (9.5.7)
ш3: v-D = tp(s), co2: v -F* =ф), (9.5.8)
fi>3: H=h(s), G>3: H = h(s), (9.5.9)
<fl4: v-G=7(s), ш4: v-G = y(s). (9.5.10)
Первая задача (левый столбец) описывает равновесие
оболочки, не содержащей дислокаций и нагруженной
распределенными по а силами /и моментами £. Основными неизвестными
являются радиус-вектор R, задающий положение точек
поверхности оболочки после деформации, и ортогональный тензор Н.
Система уравнений состоит из уравнений равновесия сил (9.5.1)!,
уравнений баланса моментов (9.5.2);, определяющих соотно»
шений (9.5.3)(, (9.5.4);, которые представлены в форме
зависимости тензоров усилий и моментов от мер деформации, а также
геометрических соотношений (9.5.5)и (9.5.6);. Краевые условия
(9.5.7)]-(9.5.10)1 состоят в задании перемещений на части
границы ш!? поворотов на 0%, силовой распределенной нагрузки на
со2 и моментной нагрузки на со4-
Вторая задача (правый столбец) описывает равновесие
оболочки, содержащей непрерывно распределенные дислокации с
заданной плотностью а и нагруженной распределенными по а
моментами с плотностью £. Силовая поверхностная нагрузка
отсутствует (f = 0). Основными неизвестными во второй задаче
являются вектор функций напряжений Ф и тензор поворота Н.
Система уравнений состоит из уравнений несовместности (9.5.1)2,
уравнений баланса моментов (9.5.2)2, определяющих
соотношений (9.5.3)2, (9.5.4)2, выражения (9.5.5)2 тензора усилий Пиолы
через вектор функций напряжений и представления (9.5.6)2
тензора изгибной деформации через тензор поворота.
Определяющие соотношения в данном случае задаются посредством
зависимости меры деформации Y = е - Y от тензора усилий Р] и
тензора изгибной деформации L и зависимости тензора
моментов Р2 от тех же аргументов. В качестве граничных условий на
№[ задается вектор функций напряжений, что эквивалентно
заданию распределенной по ю: силовой нагрузки. На о>г
поставлены дисторсионные краевые условия, эквивалентные заданию
перемещений. Краевые условия на Oj и со4 такие же, как и в
первой задаче.
Предполагается, что указанные краевые задачи
сформулированы в безразмерном виде, т.е. все величины, входящие в
(9.5.1)2-(9.5.10)2, безразмерны. Величины/, ot, t считаются
заданными функциями координат ql, q1 на поверхности о", а ве-
181
личины р, <р, h, 7> Х> Л - заданными функциями длины дуги на
контуре (О.
Из (9.5.1)2-(9.5.10)2 непосредственно видно, что если
выполняются равенства
f(qi, q2) = a(ql, q2), p(s) = \(s), ip(s) = n(s)t
а функции Л и "Г совпадают соответственно с функциями ^i и \,
то первая и вторая краевые задачи математически не
отличаются одна от другой, хотя соответствуют совершенно
различным физическим ситуациям. Таким образом, данные
краевые задачи математически эквивалентны, если
определяющие соотношения оболочки в первой и второй задачах имеют
«соответственно вид
P^JCT.L), P2=4(Y*,L), (9.5.11)
У*=Л(РЪЬ), P2=-T(P,,L). (9-5Л2>
Согласно (9.5.11), (9.5.12) упругие свойства материала
оболочек, отвечающих двойственным, т.е. математически
эквивалентным задачам, вообще говоря, различны.
9.6. Линейная теория дислокаций
и дисклинаций в микрополярных оболочках
Построение теории изолированных и непрерывно
распределенных дефектов в случае геометрически линейной теории
оболочек значительно упрощается, в этом случае возможно
рассмотрение не только дислокаций,-но и дисклинаций.
'Система уравнений, описывающих малые деформации
упругой оболочки типа Коссера, состоит из уравнений равновесия в
усилиях л моментах (2.6.4), уравнений состояния (2.6.3) и
геометрических соотношений (2.6.2).
Здесь допускается, что зависимости (2.6.3) усилий и моментов
от деформаций и изгибных деформаций могут быть
нелинейными, т,е. материал оболочки может обладать физической
нелинейностью.
Исключив вектор смещений и вектор поворотов из
соотношений (2.6.2), придем к уравнениям совместности деформаций
div(e ■ к) = 0, div(e ■ е) + (е • к)х = 0. (9.6.1)
При выводе (9.6.1) использовано тождество (1.10.5),
справедливое для любого дважды дифференцируемого тензорного
поля, определенного на а.
182
Рассмотрим задачу определения полей перемещений и
поворотов оболочки при заданных непрерывно
дифференцируемых на о тензорных полях деформаций € и к.
На основании (2.6.2) имеем
г
a=s0+J dr-к, ao = d(r0), (9.6.2)
da=dre+dxdr. (9.6.3)
Подставив (9.6.2) в (9.6.3) и интегрируя, получим выражение
для и в виде двукратного интеграла. Меняя порядок
интегрирования, можно двукратный интеграл свести к однократному и
найти следующее представление для поля перемещений
оболочки:
г
и=и0 + аох(г-г0) + | dr'[e' + K'x(r~r')}, (9.6.4)
'о
«о = и(г0), е' = е(г'), к' = к(г').
Штрихом в (9.6.4) отмечена переменная интегрирования.
Легко видеть, что необходимые и достаточные условия
независимости интегралов в (9.6.2), (9.6.4) от пути интегрирования в
односвязной области о~ совпадают с уравнениями совместности
деформаций (9.6.1). Предположим теперь, что поверхность а
многосвязна и гомеоморфна кругу с круговыми отверстиями (см.
рис. 9.3), а функции €(/■) и к(г) однозначны в этой многосвязной
области. Рассмотрим замкнутый контур Гк, охватывающий одно
из отверстий. Полагая в (9.6.2), (9.6.4) г = г„, найдем приращение
векторов Ь ни при обходе этого- контура:
tf+-0_=fc, «t-K_-^^txr0, (9.6.5)
qk&j dr-к, bk&j dr-(e-KXr). (9.6.6)
Векторы Ьк и qi„ называемые соответственно вектором Бюр-
герса и вектором Франка, не зависят от выбора замкнутого
контура Гк при условии, что контур охватывает только к-е
отверстие. Если неограниченно уменьшать диаметры отверстий,
то получим оболочку с дискретным набором дислокаций Воль-
терра, или изолированных дефектов, каждый из которых
представляет собой комбинацию трансляционной дислокации и диск-
линации и характеризуется двумя векторными параметрами-
вектором Бюргерса и вектором Франка. При этом оси дефектов
183
следует представлять себе как прямые, пересекающие
поверхность с? и ортогональные к ней, т.е. имеющие направление
нормали и в точке расположения дефекта.
Перейдем от дискретного набора дислокаций Вольтерра к
непрерывному распределению дислокаций и дисклинаций в
оболочке, следуя методу, применявшемуся в [21, 104, 251] для
трехмерной упругой среды. При помощи (1.9) найдем суммарный
вектор Франка для системы дефектов, расположенных на
некотором участке ст0 поверхности ст:
Q^b^=^L jdrK- (9-6-7>
В силу известных свойств криволинейных интегралов и
однозначности тензорного поля к сумму интегралов в (9.6Л)
можно заменить одним интегралом по замкнутому контуру Г0,
охватывающему все дефекты в области с0:
£=| dr-к. (9.6.8)
Го
Предположим теперь, что дефекты распределены
непрерывно по поверхности О, и будем считать, что для
результирующего вектора Франка всех дефектов, содержащихся в
области о*0, ограниченной контуром Г0, сохраняется формула
(9.6.8). При непрерывном распределении дефектов тензорное
поле х можно считать непрерывным и дифференцируемым в а0,
что позволяет преобразовать контурный интеграл в (9.6.8) в
интеграл по поверхности а0. Кроме того, надо иметь в виду, что
при переходе к непрерывному распределению дефектов
происходит качественное изменение физического смысла тензоров
деформаций, в частности тензора изгибной деформации к. В
континуальной теории дислокаций [20, 21, 104] составляющая
деформации, обусловленная наличием распределенных
дефектов, называется необратимой или пластической и обозначается
кр. Таким образом, суммарный вектор Франка дефектов,
распределенных по участку оболочки <70, представляется формулой
б = JJ n ■ rot кр d a = JJ div(e ■ кр )d а. (9.6.9)
"о сто
Поскольку участок а0 можно взять произвольным, формула
(9.6.9) дает основания назвать подынтегральное выражение
плотностью дисклинаций §:
e = div(e-Kp). (9.6.10)
184
Заметим, что в отличие от трехмерной среды [21] плотность
дисклинаций в оболочках является не тензорной, а векторной
величиной.
Сравнивая (9.6.1) и (9.6.10), видим, что при ? Ф 0 тензор кр не
удовлетворяет уравнениям совместности. Это означает, что не
существует векторного поля $р такого, что
graddp = кр.
Чтобы ввести понятие плотности дислокации в оболочке,
рассмотрим сначала случай, когда дисклинаций отсутствуют, т.е.
плотность дисклинаций ? равна нулю. Тогда п ■ rot кр = 0 и
существует вектор д, для которого grad<dp = кр. Следовательно,
существует пластическая дисторсия, определяемая согласно
(2.6.2) соотношением
(gradn), = €p-oxap. (9.6.I1)
Если векторы Франка для каждого из изолированных
дефектов, расположенных на участке О0, равны нулю, то вектор
Бюргерса дефекта определяется более простой по сравнению с
(9.6.6) формулой
Ък - Ф dr-(gradu)= <Ь dr-(e-oxd),
г* rt
а суммарный вектор Бюргерса всех дефектов, расположенных в
области Оо, выражается как
рд^^=£ j dr-(e-oxd)=<f dr (€-oxd). (9.6Л2)
Переходя к непрерывному распределению трансляционных
дислокаций, преобразуем контурный интеграл в (9.6.12) в
поверхностный, а дисторсию будем считать аналогично
предыдущему пластической дисторсией. Это приводит с учетом (9.6.11) к
выражению для результирующего вектора Бюргерса
£ = JJado\ a^div(e-€p-exdp). (9.6.13)
Оо
Используя непосредственно проверяемое тождество
div(e х "Ф) = ~(е • grad*)*,
где Ф - дифференцируемое на а векторное поле, исключим из
выражения (9.6.13) вектор -др:
aidivfee ) + (е'К.)х. (9.6.14)
185
На основании (9.6.13) векторную величину а следует назвать
плотностью трансляционных дислокаций. Выражение (9.6.14)
примем в качестве определения плотности дислокаций оболочки
также и в общем случае, т.е. тогда, когда плотность дисклинаций
в*0.
Теперь вычислим, используя определения плотностей
дислокаций и дисклинаций (9.6.14) и (9.6.10), результирующий
вектор Бюргерса для системы непрерывно распределенных
дефектов, отказавшись от упрощающего предположения об
отсутствии дисклинаций. На основании общей формулы (9.6.6)
имеем
Э=| dr-(€p-Kpxr) = IT div(e-ep-e'iepxr)da. (9.6.15)
Преобразуем, используя (9.6.10), второе слагаемое в
подынтегральном выражении (9.6.15):
div(e ■ кр х г) = 5 х г - (е - кр)х.
Отсюда с учетом (9.6.14) получаем
p = Jj (a + rxs)da. (9.6.16)
an
Формула (9.6Л6) показывает, что при непрерывном
распределении дефектов общего вида результирующий вектор
Бюргерса определяется не только плотностью дислокаций, но и
плотностью дисклинаций. Аналогичное утверждение
справедливо в трехмерной континуальной теории дисклинаций [21].
Отметим, что отличие континуальной теории дислокаций и
дисклинаций в оболочках от соответствующей трехмерной
теории [21] состоит не только в том, что плотности а и ?
являются векторными, а не тензорными величинами, но и в том,
что в теории оболочек векторные поля аи?не обязаны
удовлетворять никаким дифёреренциальным уравнениям.
Для формулировки краевой задачи о равновесии оболочки с
заданными плотностями дислокаций и дисклинаций надо учесть,
что в геометрически линейной теории полная деформация е, так
же как и полная изгибная деформация к, складывается из двух
составляющих - упругой и пластической:
е = ef +- ър, к = ке+ Кр. (9.6.17)
Упругие деформации ее, ке являются параметрами состояния
оболочки и связаны с внутренними усилиями а и моментами ц
определяющими соотношениями вида (2.6.3).
1S6
Полные деформации е и к удовлетворяют уравнениям
совместности (9.6.1). Отсюда и из (9.6.10), (9.6.14), (9.6.17) получаем
уравнения для упругих деформаций
div(e • ке) + ч ~ 0, div(e ■ с) + (е ■ к)х + а = 0. (9.6.18)
Если выразить при помощи определяющих соотношений
(2.6.3) тензоры усилий и моментов через упругие деформации и
подставить в уравнения равновесия (2.6.4), то они вместе с
уравнениями (9.6.18) составят полную систему уравнений для
определения тензорных полей е.е и ке при заданных внешних
нагрузках/, t и заданных плотностях дислокаций и дисклинаций
аир.
Уравнения (9.6.18), которые можно назвать уравнениями
несовместности деформаций^ с точностью до обозначений
повторяют уравнения равновесия (2.6.4) в усилиях и моментах.
Очевидно, что системы уравнений (2.6.4) и (9.6.18) переходят
одна в другую при следующих заменах:
Tt>eK, Mt^ee, /^p, *t>«. (9.6.19)
Идентичность уравнений равновесия в усилиях и моментах
при отсутствии распределенных по а нагрузок уравнениям
совместности (неразрывности) хорошо известна в теории оболочек
и составляет содержание статико-геометрической аналогии
[30J. Здесь указанная аналогия обобщена на случай наличия
поверхностной нагрузки, причем интенсивности силовой нагрузки/
в этой аналогии соответствует плотность дисклинаций р, а
интенсивности моментной распределенной нагрузки t
соответствует плотность дислокаций «.
9.7. Вариационный метод построения
геометрически линейной теории оболочек
с распределенными дефектами
К полученной выше системе уравнений равновесия
оболочки с непрерывно распределенными дефектами можно прийти
другим путем, используя вариационный принцип дополнительной
энергии и не вводя в рассмотрение пластических деформаций.
Рассмотрим многосвязную упругую оболочку, поверхность
которой а ограничена простым замкнутым внешним контуром
со и простыми замкнутыми внутренними контурами уА. Систему
уравнений, описывающих напряженно-деформированное
состояние оболочки, можно записать как систему относительно
187
тензоров усилий Т и моментов М. Для этого необходимо
обратить определяющие соотношения (2.6.3), т.е. выразить
тензоры деформаций € и к через тензоры Т и М. После этого
уравнения совместности (9.6.1) будут содержать в качестве
неизвестных функций тензоры усилий и моментов и вместе с
уравнениями равновесия (2.6.4) образуют полную систему
разрешающих уравнений упругой оболочки в случае малых
деформаций. К этим уравнениям, помимо граничных условий на
(О и ук, следует присоединить интегральные соотношения (9.6.6),
выражающие заданные векторы Бюргерса и Франка
изолированных дефектов через поле усилий и моментов в оболочке. При
этом в качестве контуров Г* в (9.6.6) можно взять контуры
отверстий Y*-
Предполагая однозначную разрешимость уравнений
состояния (2.6.3) относительно тензоров € и к, введем в рассмотрение
удельную дополнительную энергию оболочки V как функцию
тензоров усилий Т я моментов М, связанную с удельной
потенциальной энергией деформации W преобразованием Ле-
жандра:
V(T,M) = TOe + M0K^W.
По свойству преобразования Яежандра имеем
dV bv га-г i\
€ = —-, к = -—. (9.7.1)
ЭТ ЭМ
Для упрощения записи будем предполагать, что оболочка
свободна от внешних нагрузок, распределенных по поверхности
ст, а также от краевых нагрузок, распределенных по контурам
со и % {к = 1, 2,..., п). Пользуясь статико-геометрической
аналогией, легко заметать, что уравнениям равновесия (2.6.4) при
/ = € = 0 можно тождественно удовлетворить, положив
Т = е ■ grad<S>, М = е (grad1!* + охФ). (9.7.2)
Векторно-значные функции ФиФ будем называть
функциями напряжений. Далее положим Ш2 = ©4- Краевые условия на
свободной от нагрузки границе оболочки
согласно (9.7.2) формулируются через функции напряжений
следующим образом:
<*>2>TV ~1 = 0, %~ + тхФ = 0. (9.7.3)
ds as
188
Решая уравнения (9.7.3), получим
а>2: Ф = Ф0, Ф = Ф0 + Ф0хг, (9.7.4)
ук: Ф=Ф*, ¥ = Ф|+Ф*х(г-1>).
Здесь Ф0, Ф0 и Фк, "Ф4 (А: = 1,...,«)- векторные постоянные,
гк~ радиус-вектор некоторой точки внутри области,
ограниченной контуром yj. Поскольку согласно (9.7.2) добавление к
функциям напряжений ФиФ соответственно выражений вида а
и Ь + а х г, где а, Ъ - постоянные векторы, не влияет на тензоры
усилий и моментов, без ограничения общности можно положить
ф0 = "ф0 = 0. Постоянные Ф*, Ч?к на контурах отверстий остаются
неизвестными.
При использовании общего решения (9.7.2) уравнений
статики оболочки разрешающая система уравнений сводится к
уравнениям совместности деформаций (9.6.1), записанным через
функций напряжений. Краевые условия имеют вид (9.7.4) при
Фо = ^о = 0. Интегральные соотношения (9.6.6) при заданных
значениях bh qk служат уравнениями для определения
неизвестных постоянных фк, "Фк (к = 1,2,..., я). Докажем, что
указанная краевая задача эквивалентна вариационному принципу
6Т[Ф(г), Ф(г), Ф„.., Ф„, "Ф, Ф„] = 0, (9.7.5)
где
В функционале Т варьируются дважды непрерывно
дифференцируемые функции напряжений, удовлетворяющие краевым
условиям (9.7.4), а также постоянные Фк, ч> к (к = 1,2,..., н).
Согласно (9.7,1), (9.7.2) вариация функционала V имеет вид
8Т = jj [еОСе • grad 5Ф) + к©(е - grad 6Ф + е х 5Ф)] d a +
а
к=\
После интегрирования по частям и учета краевых условий
(9.7.4) при
Фо = ^о = 0
выражение (9.7.6) преобразуется как
5Т = JJ [(<fiv(e-e)+(e-K)x)-^ + (div(e-K))-S*]da+ (9.7.7)
189
Jt=l
К+ЧкХгк~ I T-[€-KX(r-rj)]dj
"Ik
ЬФк +
*=1 I Y*
5Ф,
Из выражения (9.7Л) следует, что условие стационарности
функционала Т эквивалентно уравнениям совместности (9.6.1) и
интегральным соотношениям (9.6.6).
Будем теперь неограниченно уменьшать диаметры отверстий
таким образом, чтобы каждый контур у* стягивался в точку,
имеющую радиус-вектор rh Тогда согласно (9.7.4) постоянные
Ф*, Ф* совпадут соответственно со значениями функций ФиФв
точке тк и функционал (9.7.5) будет иметь вид
= jj Vda+ f[ (а'-Ф+?'-Ф)(1а,
где
Ft 71
Здесь 5(r - г*) - дельта-функция двух переменных,
сосредоточенная в точке гк. От функционала (9.7.8), соответствующего
дискретному набору сосредоточенных дефектов, легко перейти к
случаю непрерывно распределенных дислокаций и дисклинаций.
Для этого достаточно заменить в (9.7.5) обобщенные функции а'
и ?' на обычные а и 5, назвав последние соответственно
плотностью дислокаций и плотностью дисклинаций. Функционал
дополнительной энергии для случая непрерывно распределенных
дислокаций и дисклинаций примет вид
У[Ф(г),Ф(г)] = Д Vdo + Jj (а-Ф+в-Ф)<1с. (9.7.9)
а о
Нетрудно убедиться в том, что требование стационарности
функционала (9.7.9) при условиях
ф = О, Ф = О
на контуре со влечет уравнения несовместности (9.6.18),
записанные через функции напряжений.
190
9.8. Принцип двойственности
в геометрически линейной
теории оболочек
Рассмотрим подробнее краевую задачу о равновесии
оболочки с заданными плотностями непрерывно распределенных
дислокаций и дисклинаций. Чтобы сформулировать граничные
условия на краю оболочки, сначала обратимся к задаче
равновесия при отсутствии распределенных дефектов, т.е. при а = ? =
= 0. В этом случае упругие деформации будут совместными и
существуют упругое перемещение и и упругий поворот О. Одним
из распространенных типов краевых условий в теории оболочек
являются кинематические условия, при которых на некоторой
части со, = щ границы со задаются перемещения и поворот
u = u0(s), d = ft0(s), (9.8.I)
где u0(s), b0{s) - известные функции текущей длины дуги
граничного контура. На основании (2.6.2) из (9.6.1) получим на со,
т.кА, Т.е = ^ + Тхд0. (9.8.2)
as as
Условия (9.8.2) накладывают ограничения на граничные
значения тензора деформаций и тензора изгибных деформаций и
называются деформационными. Впервые деформационные
граничные условия были сформулированы в [148] в рамках
линейной теории оболочек типа Лява. Деформационные условия
(9.8.2), вообще говоря, не эквивалентны кинематическим
условиям (9.8.1). Однако, если участок границы Ш] связный, то, как
легко видеть, кинематические условия восстанавливаются по
деформационным с точностью до движения абсолютно твердого
тела. Поскольку добавление жесткого движения не влияет на
напряженное состояние оболочки, в случае связной части Сй(
граничного контура со краевые условия (9.8.1) и (9.8.2) можно
считать эквивалентными. Для оболочки с непрерывно
распределенными дефектами упругие перемещения и повороты не
существуют, поэтому кинематические граничные условия не
имеют смысла. Однако деформационные условия можно
применять и в случае несовместных деформаций. Таким образом,
будем считать, что на связном участке со, границы области ст
поставлены деформационные условия
т-е = £(а), тк=ч(5), (9.8.3)
где £(-0> ч(5) ~ заданные функции. Очевидно, что условия (9.8.3)
191
при помощи (9.7.1), (9.7.2) можно сформулировать в терминах
функций напряжений Ф, Ф.
Другой распространенный тип граничных условий в теории
оболочек состоит в задании на контуре внешних нагрузок -
силовой и моментной:
v-T = <p(s), v-M = y{s) на со2 = со4. (9.8.4)
Будем полагать, что часть границы т2 также связна и
дополняет кривую а)[ до полной границы со. Тогда из (9.7.2) можно
видеть, что с точностью до слагаемых вида (9.7.4), не влияющих
на значения тензоров усилий и моментов, условия (9.8.4)
эквивалентны условиям на контурные значения функций напряжений
Ф = Ф0(Д ч>=ч>0(5), (9-8.5)
где Ф0(^), Ф"о(*) ~ заданные функции.
Краевая задача о равновесии оболочки с заданными
плотностями дислокаций и дисклинаций при отсутствии
распределенных по поверхности о* нагрузок состоит из уравнений
несовместности деформаций, определяющих соотношений,
выражающих тензоры деформации через тензоры усилий и
моментов, выражений усилий и моментов через функции напряжений и
граничных условий (9.8.3), (9.8.5). Рассмотрим параллельно
задачу статики для оболочки при заданных поверхностных нагрузках
/, € и при отсутствии распределенных дефектов, с
кинематическими краевыми условиями на Cui и с заданными контурными
нагрузками на щ (т.е. краевую задачу (2.6.4)-(2,6.8) при ш: = со3,
о>2 = о>4)- Уравнения последней задачи состоят из уравнений
равновесия в усилиях и моментах (2.6.4), определяющих
соотношений (2.6.3), выражающих усилия и моменты через
деформации, и соотношений (2.6.2), выражающих тензоры деформаций
через перемещения и повороты. Будем считать, что все
уравнения и краевые условия приведены к безразмерному виду, т.е.
представляют собой соотношения между безразмерными
величинами. Введя обозначения
е*Ае-е, к*Де-к,
выпишем полные системы уравнений и краевых условий
указанных двух задач в два столбца. Правый столбец
соответствует первой задаче, а левый - второй.
divT +/= 0, divK* + ? = 0, (9.8.6)
divM + Tx +€=0, dive*+ <+<* = 0, (9.8.7)
Т = Л(к*, е *), к* = ^(Т, М), (9.S.8)
192
М =Ч(к*, е *), е* = -\<Т, М), (9.8.9)
к* = е ■ gradd, T = е gгadФ, (9.8.10)
е* = е (gradK + oxd), М = е ■ (grad* + о х Ф), (9.8.11)
ш,: и = и0(Д А = ЭД, ю:: "Ф = Ф0(5), Ф = Ф0(*), (9.8.12)
<о2: v ■ Т = <p(s), v ■ М = 7(4 С02: v к* = i\(s), v e* = £(s).
(9.8.13)
Две упругие оболочки с одинаковой поверхностью о назовем
сопряженными, если функции Л" и *1 в определяющих
соотношениях (9.8.8), (9.8.9) первой оболочки совпадают
соответственно с функциями ^1 и "h в определяющих соотношениях второй
оболочки. Таким образом, две упругие оболочки будут взаимно
сопряженными, если тензоры к* и €* в одной оболочке
выражаются через тензоры усилий и моментов точно так же, как
тензоры усилий и моментов в другой оболочке выражаются через
тензоры к* и е*. Согласно (9.8.8), (9.8.9) сопряженные оболочки
имеют, вообще говоря, различные физические свойства, т.е.
изготовлены из разных материалов.
Из (9.8.6)-(9.8.13) вытекает следующий принцип
двойственности теории оболочек.
Краевая задача о равновесии упругой оболочки с заданными
плотностями дислокаций и дисклинаций при отсутствии
поверхностных нагрузок, деформационными граничными
условиями на части границы (О; и с заданными на другой части
границы ау^ функциями напряжений математически
эквивалентна краевой задаче о равновесии сопряженной оболочки с
заданнными поверхностными нагрузками при отсутствии
дислокаций и дисклинаций, с заданными на щ контурными
нагрузками и кинематическими граничными условиями на Шг-
Сформулированный принцип двойственности, который
можно распространить и на другие типы граничных условий,
обобщает известные [109, 145, 146] результаты о
математической эквивалентности некоторых частных задач теории
оболочек.
7 Еремеев В.А.
Глава 10
ДОПОЛНИТЕЛЬНЫЕ НЕРАВЕНСТВА
В ТЕОРИИ ОБОЛОЧЕК
В нелинейной террии упругости широко известны так
называемые дополнительные неравенства. К их числу
относятся усл&вие сильной эллиптичности и его слабая форма -
неравенство Адамара, неравенства Колемана—Нолла, Бейкера-
Эриксена и целый ряд других [113, 142, 287, 288]. Каждое из этих
неравенств играет свою роль в теории определяющих
соотношений. Дополнительные неравенства отражают физически
интуитивные представления о поведении материалов, например,
естественно предположить, что растягивающие напряжения
вызывают растяжение стержня. С математической точки зрения
эти неравенства описывают те или иные свойства уравнений
нелинейной теории упругости, например, выпуклость энергии
деформации или эллиптичность уравнений равновесия
(гиперболичность уравнений движения). Следует отметить, что
дополнительные неравенства выражают приписываемые материалу
свойства и могут оказаться чересчур ограничительными, т.е.
могут нарушаться при некоторых деформациях. Например,
требование сильной эллиптичйости нелинейно упругого
материала означаетиевозможность существования негладких
решений, которые могут иметь место при достаточно больших
деформациях.
В данной главе, в основном следуя результатам работы [192],
для теории оболочек формулируются аналоги некоторых
дополнительных'неравенств трехмерной нелинейной теории
упругости, а именно неравенство Колемана-Нолла, условие сильной
эллиптичности, неравенство Адамара, и установлена связь между
ними.
10.1. Геометрически линейная теория
Наиболее просто с дополнительными неравенствами, как и в
случае линейной трехмерной террии упругости, дело обстоит в
линейной, теории оболочек. Здесь естественно постулировать
условие положительной определенности удельной энергии де-
194
формации W(e, к), которая является квадратичной формой
линейных тензоров деформаций и изгибных деформаций и, в
частности, для изотропной оболочки имеет вид (2.6.9).
Положительная определенность квадратичной формы (2.6.9) на любых
значениях тензоров с и к эквивалентна серии неравенств:
2оС[ + ссз + а3 > 0, аз + а3 > 0, а3 - а2 > 0, а4> О,
(10.1.1)
2p1.+ pi + p3>0, Рг + Рз>0, Рз-р2>0, %>0.
Неравенство
W(e,K)>0 Ve, к*0
и следующие из него в изотропном случае неравенства для
упругих постоянных (10.1.1) являются простейшим примером
дополнительных неравенств в теории оболочек. Их нарушение
повлекло бы целый ряд патологий, например, неединственность
решений линейной теории оболочек (а следовательно, и их
несуществование при некоторых нагрузках), невозможность
распространения волн по некоторым направлениям, что
неестественно с физической точки зрения.
В случае конечных деформаций положительная
определенность удельной энергии деформации W(Y,-L), вообще говоря,
не гарантирует выполнение ожидаемых, свойств уравнений
состояния, и требуются другие дополнительные неравенства.
10.2. Неравенство Колемана-Нолла
Предположим, что известно некоторое состояние равновесия
упругой оболочки, обусловленное действием заданных нагрузок
и называемое в дальнейшем начальным или основным. Это
состояние характеризуется полями R(qa) и H(qa). Наряду с
основным напряженным состоянием рассмотрим возмущенное
положение равновесия оболочки, мало отличающееся от
основного. Линейные части приращений различных величин,
характеризующие возмущенное состояние равновесия, будем
обозначать точкой сверху, например
А
D =—D[grad(« + w,H-THxe,grad(H-THxd))]|Tit0.
(10.2.1)
Здесь и - вектор добавочного перемещения, О - линейный
вектор добавочного поворота, характеризующий малый по-
195
ворот, отсчитываемый от начального деформированного
состояния. Справедливы формулы
R =u, H=-HxQ, Y' = F-e-HT, L:=F к-Н7", (10.2.2)
e = Gradu + Ixd, K = Gradd, (10.2.3)
где е и к - тензоры деформаций и изгибных деформаций,
аналогичные используемым в линейной теории оболочек (см. § 2.6).
В целях упрощения формул в'дальнейшем будем считать, что
отсчетная конфигурация оболочки, которая может быть
выбрана произвольно, совпадает с ее начальным (основным)
напряженно-деформированным состоянием. Это означает, что в
основном состоянии F = Y = I - л ® и, Н = I, L = 0. При
указанном выборе отсчетной конфигурации на основании (2.1.37),
(2.1.53), (10.2.1НЮ.2.3) получим
3Y3Y Э¥ЭЬ
G = -HJIL 0e + 3JL- ©K _ м x O.
3L3Y 3L3L
Предположим, что моментная нагрузка в основном и
возмущенном состоянии равна нулю: / = 7 = 0. а силовая нагрузка -
мертвая. Тогда потенциальная энергия оболочки выражается
формулой
Tl = jjWdis-jjf-(R-r)da-jip-{R-r)ds.
Вычислим приращение энергии в возмущенном положении
равновесия по сравнению с энергией в основном состоянии,
ограничиваясь членами не выше второго порядка малости:
„ „ Л11П 1 гГ^П)
Сославшись на определяющие соотношения упругой
оболочки (2.1.37) и формулы (Ю.2.2), (10.2.3), имеем
— = ff[tr(Dr-grad«) + tr(Dr-Fxd) + tr(G^graci^)Ida-
-JJ/ada- JVttds. (10.2.5)
196
Продифференцируем (10.2.5) по параметру х, используя
(10.2.2) и учитывая, что в качестве отсчетной конфигурации
оболочки выбрано основное состояние. Тогда получим
d2n
dT
= jJ[tr(DrGrada) + tr(D'rxd) +
+tr(Tr (Gradu)xO> + tr(G'r gradd)]dX.
Из равновесности основного напряженно-деформированного
состояния в силу (2.1.36) и (2.1.38) вытекает, что первая вариация
dll
, а вторая вариация на основании
(10.2.3) и (10.2.4) может быть представлена в виде
энергии равна нулю
dx
d2n
dx2
= 2^wd~L, w^w' + w", (10.2.6)
w = -€0-~—-Oe+eO-——Ок + -к0—~-~ Ok,
2 8Y5Y dY3L 2 3L3L (1027)
tv"-tr(dxT^€)--tr(^xTrxd) + -tr(dxMr.K).
Величина w представляет собой плотность энергии малых
деформаций предварительно напряженной оболочки. Согласно
(10,2.6), (10.2.7) эта удельная энергия разбивается на две
составляющие: энергию чистой деформации w' и энергию поворотов
w". Коэффициенты квадратичной формы w" выражаются через
тензоры усилий и моментов в основном состоянии и не зависят
от свойств материала оболочки. Если основное состояние
оболочки является естественным (Т = М = 0), то w = w\ и плотность
энергии будет квадратичной формой тензоров е и к.
Аналогичное разложение удельной энергии деформации
предварительно напряженного трехмерного микрополярного тела
получено в [47].
Известное в теории простых упругих материалов
неравенство Колемана-Нолла в дифференциальной форме {GCN-усло-
вие) состоит в требовании положительности удельной энергии
при любой отличной от нуля малой чистой деформации
относительно произвольной отсчетной конфигурации [142]. Никаких
ограничений на значения энергии при деформациях,
сопровождающихся поворотами, не накладывается.
1Э7
^-j-WCY + tcL + tk)
di
Учитывая разложение удельной энергии (10.2.6), видим, что
аналогом неравенства Колемана-Нолла для упругих оболочек
типа Коссера является требование
w'(c,k)>0 Ve*0, кфО. (10.2.8)
Используя (10.2.7), неравенство (10.2.8) можно записать в
эквивалентной форме
>0 Ve*0, к*0. (10.2.9)
-[=0
Условие (10.2.9) обладает свойством материальной
индифферентности и может служить определяющим неравенством для
упругих оболочек.
10.3. Условие сильной эллиптичности
и неравенство Адамара
Другим широко известным дополнительным неравенством в
нелинейной теории упругости является условие сильной
эллиптичности и его слабая формулировка - неравенство Адамара.
Выполнение условий эллиптичности уравнений равновесия
нелинейной теории упругости (требования сильной
эллиптичности, ординарной эллиптичности, неравенства Адамара и
других) играет большую роль в задачах устойчивости упругих.
трехмерных тел, распространения волн в
предварительно-напряженных средах, при исследовании разрывных решений
нелинейной теории упругости, теории фазовых превращений в упругих
телах при больших деформациях. Исследованию свойств
эллиптичности и разработке эффективных методов проверки
эллиптичности уравнений равновесия большое внимание уделено в
работах [33, 40, 80-83, 111, 113, 178, 217, 220-222, 265, 295]. Из
общей теории эллиптических систем уравнений в частных
производных [1, 22, 37] известно* что вместе с условием
дополнительности (условием Шапиро-Лопатинского, коэрцитивности,
или накрывания), налагаемым на краевые условия, проверка
условия эллиптичности является составляющей частью
исследования эллиптичности краевой задачи. Эллиптичность краевой
задачи позволяет сделать вывод о фредгольмовости оператора,
порождаемого линеаризованной краевой задачей теории
упругости, и судить о регулярности ее решений. Кроме того, в ряде
задач со свободными (неизвестными) границами надлежащим
образом обобщенное условие дополнительности вместе со
198
свойством эллиптичности уравнений в объеме тела позволяет
сделать вывод о гладкости свободной границы [101, 144], что
важно, например, при анализе регулярности фазовой границы.
Фредгольмовость оператора линеаризованной теории упругости
(в частности, наличие конечномерного ядра и коядра) важна для
использования теории ветвления решений нелинейных
уравнений [19], обеспечивая, например, конечное число мод
выпучивания, соответствующих критической нагрузке.
В этом параграфе, используя результаты теории систем
нелинейных уравнений в частных производных [1, 22, 37],
сформулируем условие сильной эллиптичности уравнений равновесия
теории оболочек (2.1.36). Для этого рассмотрим
линеаризованные уравнения равновесия. Не ограничивая общности,
рассмотрим мертвое нагружение. В этом случае линеаризованные
уравнения равновесия в лагранжевом описании даются
соотношениями
divD~ = 0, divG"-f-[FT-D-+(gradH)T-Dk=0, (10.3.1)
где G" определяется формулой, аналогичной (10.2.1). Уравнения
(10.3.1) представляют собой линейную систему уравнений в
частных производных второго порядка относительно и и О.
Сохраняя в (Ю.3.1) дифференциальные операторы второго
порядка, получим выражения
divH
divJ
d2W
3YBY
' d2W
0((grada)-Hr) + ^-0((gradd)-Hr)
3L3Y
©((gradiO'H7")-
3YdL
d2W
dLdh
0((gradd)-Hr)
H
H
которые позволят сформулировать условие сильной
эллиптичности уравнений равновесия (2.1.36). Используя формальную
процедуру [1, 22, 37], заменим оператор grad на единичный
вектор v, лежащий в касательной плоскости к поверхности
оболочки а, а векторные поля и и О - на векторы а и Ь. Таким
образом, в каждой точке поверхности оболочки получим
алгебраические выражения вида
ГГ -,2,
d£W т д W т
Н
0(v®a-HT) + -^rO(v®b-HT)
3L3Y
3L3L
H
199
Умножая скапярно первое из них на вектор л, а второе - на
вектор Ь и складывая их, получим условие сильной
эллиптичности в форме
t)2W t)2W
O(v®a-Hr)+^-0(v®4-H7)
+v-
3Y3Y
3L3Y
3Y3L
d2W
0(v®a-HT) + -^-0(v®b-4T)
m-a +
щь>о
3L3L
Окончательно это неравенство можно записать в виде
(v®a-RT)Q^-0(v®a-HT)+
aYoY
+ 2(v ® а • Нг )0^- 0(v ® Ь - UT) +
ЭУЭЬ
32W
+(v®&-Hr)©^-©(v®6-Hr)>0 Va,J>*0.
0L0L
В более компактной форме это неравенство можно записать,
используя матричные обозначения:
£-A(v)-£>0 Vve^a, v*0, VgelR6, £*0, (10.3.2)
где g = (c',&')eR6, a' = a-Hr, £' = &НГ, а матрица A(v)
определяется соотношением
(v)4
32W
м
d2w
{v}
3Y3Y 3Y9L
Й2^ , , 32W
.3L3Y 3L3L'
Здесь введена следующая операция для произвольного
тензора четвертого ранга К и вектора v: K{v} = £Иим v* vmi, ® iB.
Неравенство (10.3.2) представляет собой условие
сильной эллиптичности уравнений равновесия (2.1.36) упругих
оболочек. Слабая форма неравенства (10.3.2), т.е. условие
§A(v)-£j>0, является аналогом неравенства Адамара для
оболочек.
Как и в трехмерном случае, условие сильной эллиптичности
уравнений равновесия микрополярных оболочек служит до-
200
полнительным неравенством, налагаемым на уравнения
состояния (2.1.7). Нарушение условия (10.3.2) означает возможность
существования негладких решений уравнений равновесия
микрополярных оболочек (2.1.36). С физической точки зрения
примером таких негладких решений может служить образование
изломов или складок на поверхности оболочка или появление
линий раздела фаз для оболочек, материал которых
претерпевает фазовые переходы,
В механике оболочек широко используются уравнения
состояния частного вида
W(Y,L)^Wl(Y) + W2(L), (10.3.3)
например, форму (10.3.3) имеют определяющие соотношения
(6.9.1).
Тогда условие (10.3.2) оказывается эквивалентным двум
более простым неравенствам:
ЭУЭУ1 ' dhdh
VveS^a, v*0, Va,beU\ a,b*0.
В качестве примера рассмотрим условия выполнения (10.3.2)
для уравнений состояния (6.9.1). Можно показать, что здесь
d2W d2W
тензоры второго ранга t~v~{v} и ■-■ {у} даются формулами
д2Щ
"L
{v} = a3o + (a: + a2 )v ® v + a4n ® n,
3Y9Y
(10.3.4)
d2W
gj^-{v} = p3o + Cpl+P2)y®v+p4n®n,
и неравенство (10.3.2) оказывается выполненным при следующих
условиях:
a3>0, а,+а2+а3 >0, а4>0,
(10.3.5)
Р3>0, р!+Р2+Р3>0, р4>0.
Эти неравенства аналогичны ограничениям, полученным для
физическв лвнейной трехмерной микрополярной среды [47].
Неравенства (10.3.5) также обеспечивают сильную
эллиптичность уравнений равновесия (2.6.4) линейной теории в случае
изотропной оболочки и являются более слабыми по сравнению с
условием положительной определенности (10.1.1).
201
Условие сильной эллиптичности также может быть записано
в виде
,2
^-TW(\ + Tv®a,,L + xv®b')
dT
>0 Vv,a',b'*0. (10.3.6)
т=0
Сравнение условия сильной эллиптичности в форме (10.3.6) и
условия типа Колемана-Нолла (10.2.9) показывает, что первое
следует из второго. Это существенно отличает теорию упругих
оболочек Коссера от теории простых упругих материалов. В
обычной теории упругости, как известно [142], требование
сальной эллиптичности и неравенство Колемана-Нолла
являются несравнимыми условиями: ни одно из них не влечет другое.
Заметим, что для физически линейного материала (6.9.1)
условие сильной эллиптичности влечет и неравенство Колемана-
Нолла. В общем случае уравнений состояния это не так.
Отметим также, что формулировка условия сильной
эллиптичности для уравнений состояния оболочек со связями будет,
вообще говоря, отличаться от приведенной выше, поскольку в
уравнениях равновесия максимальный порядок
дифференциальных операторов, соответствующих некоторым неизвестным
функциям (например, двумерному давлению), может оказаться
ниже второго. В этом случае определение свойства
эллиптичности должно опираться на определение в смысле Даглиса-
Ниренберга.
Глава 11
РАЗРЫВНЫЕ РЕШЕНИЯ
Б предыдущих главах рассматривались достаточно гладкие
решения нелинейной теории оболочек. Вместе с тем интерес
представляет также случай кусочно-гладких решений, гладкость
которых нарушается на некоторых кривых. С физической точки
зрения нарушение гладкости решений уравнений движения или
равновесия может быть связано с появлением ударных волн,
фазовых переходов, изломов на поверхности оболочки. Эта
глава посвящена выводу соотношений совместности на границах
нарушения непрерывности решений теории оболочек. В
механике сплошных сред аналогичные исследования проводились в
значительном числе работ, среди которых отметим [135, 142,
232, 235, 278]. В случае нелинейной теории оболочек одно из
наиболее полных исследований негладких решений дано в
монографии [231].
11.1. Уравнения баланса
на поверхности разрыва
Целью данного параграфа является установление различных
зависимостей между предельными значениями различных полей
на поверхности нарушения непрерывности поля или его
некоторых производных. Напомним некоторые необходимые
сведения из механики сплошной среды [142, 287]. Обозначим
рассматриваемое тензорное, векторное или скалярное поле
через Ф, а сингулярную поверхность, на которой нарушается
его непрерывность, - через С(г). Предельные значения поля Ф на
C(t) будем отмечать индексами "+" или "-", а скачок Ф на С(г) -
двойными квадратными скобками: [ф] = Ф+ - Ф". Также
предположим, что рассматриваемое поле Ф дифференцируемо
нужное число раз и его производные также имеют предельные
значения на С(г). Поверхность C(t) называется сингулярной
поверхностью п-го порядка по отношению к рассматриваемому
полю Ф, если разрыв претерпевают п-е производные Ф, в то
время как производные меньшего порядка существуют и
непрерывны в некоторой окрестности, содержащей С(Г). Сингулярные
203
поверхности порядков 0 и 1
называются сильными, а остальные - слабыми.
Значения скачков производных Ф,
вообще говоря, не могут быть
произвольными, между ними существуют
зависимости, продиктованные
наличием тех или иных требований
гладкости Ф или наличием уравнений
баланса для поля Ф в области,
содержащей сингулярную поверхность.
Для предельных значений Ф+ и?"
выполняется лемма Адамара [142]:
d^+=f-grad^+ds, ёФ =t -grad*~ds, (11.1.1)
где t - единичный вектор касательной к кривой /, лежащей на С,
s - длина дуги кривой / (рис. 11.1).
Из леммы Адамара непосредственно вытекает соотношение
совместности, связывающее скачки поля Ф и его градиента:
^-i = f-[grad^]. (11.1.2)
ds
Уравнение (11.1.2) называется кинематическим уравнением
совместности для поля Ф. Если Ф непрерывно, т.е. [Ф[ = 0, то
из (11.1.2) имеем
f-[grad*] = 0. (11.1.3)
Таким образом, для непрерывного и кусочно непрерывно
дифференцируемого поля Ф выполняется [142].
Теорема Максвелла. Скачок градиента непрерывного поля
нормален к сингулярной кривой:
|^Ф] = #®ф. (11.1.4)
Определенное в (П. 1.4) поле ф называется амплитудой
скачка. Здесь N - единичный вектор нормали к С. Если Ф б %р,
то и ф е %р.
Отметим, что формулировки леммы Адамара и теоремы
Максвелла верны для пространства любой размерности, а
использованный в (11.1.1)-(11Л.4) оператор градиента включает
в себя не только пространственные, но и временные
производные. Таким образом, эти результаты могут быть непосред-
Рис. 11.1. Сингулярная
поверхность
204
ственно перенесены на случай оболочек, т.е. поверхности,
вложенной в трехмерное пространство, с движущейся по ней кривой.
Рассмотрим такое движение оболочки, при котором
возможны нарушения непрерывности кинематических и
динамических величин на некоторой гладкой кривой y(t) а а, которую
будем называть сингулярной. При этом предполагается
существование односторонних пределов этих величин и их некоторых
производных на у. Эти предельные значения могут быть
разными в зависимости от того, с какой стороны от у происходит
вычисление предела (рис. 11.2). Для оболочки сингулярная
поверхность C(t) лежит на а и образована кривой у в разные
моменты времени. Если записать уравнение сингулярной кривой
в параметрическом виде: г = x(s, t) (s - длина дуги), то
поверхность C(t) образована точками (x(s, £), 1). Скорость
движения сингулярной кривой определяется формулой [228]
U = v ■ Эх/Зг, v - вектор нормали к у, лежащий в касательной
плоскости Э^а к а, т - единичный касательный вектор к у
Рассмотрим кусочно непрерывно дифференцируемое поле Ф
на с, непрерывное в окрестности у(г), но с возможным
нарушением непрерывности у производных. Тогда выполняется
аналог теоремы Максвелла
[grad*| = v®»k {**¥.] =-Uty. (П.1.5)
of
Из соотношений (11.1.5) следует кинематическое условие
совместности для непрерывного поля Ф на поверхности
\~ ] = -Uv-\g,rad4f). (11.1.6)
Для оболочки естественно считать поле радиус-вектора R
непрерывным, нарушение его непрерывности означает разрывы
сплошности оболочки. Тогда применение формул (11.1.5),
Рис. 11.2. Сингулярная линия на поверхности оболочки
205
(11Л .6) для поля Я и его производных F sv дает
[F] = v®a, \v\ = ~Ua и [»] = -tfi>-[Fj. (11.1.7)
Аналогично, для непрерывного поля тензора микроповорота
Н следуют уравнения баланса на у
[gradHJ = v®h, [?~-] = -Ub и |^} = -t/v[gradH]. (И.1.8)
at dt
С учетом формул (2.1.5) и (3.7.4) из (11.1.8) следует равенство
[ых1] = -(Л>-[ЬНх1],
откуда окончательно получим кинематическое условие
совместности для скачков скорости микровращения и тензора изгибной
деформации
[<о] = ЧЛ> [LJH. (11.1.9)
Для выполнения кинематических уравнений совместности
(11.1.7) и (11.1.9) требуются только непрерывность и кусочная
дифференцируемость полей R и Н. Вместе с тем для оболочек
существуют также уравнения, баланса импульса и момента
импульса, которые а случае наличия сингулярной поверхности
дополнительно к кинематическим приводят к динамическим
условиям совместности. Для получения этих условий
рассмотрим в общем виде уравнение баланса, выражающее тот или иной
закон сохранения для оболочки, В интегральной форме такой
закон сохранения для произвольной тензорной величины Ф
может быть представлен следующим образом:
—ДрФс1ст = Jv Ods+Jj0do\ (H.1.10)
" * * * 4
В (11.1.10) о~* - произвольная часть поверхности ст, ад*- ее
граница. Контурный интеграл в (11.1.10) описывает скорость
изменения величины "Ф за счет притока через контур оболочки,
а второе слагаемое - за счет производства на поверхности о~.
Другими словами, Ф представляет собой поток, а © - источник
величины Ф\
При условии непрерывной дифференцируемости "Ф и Ф на с
из (11.1.10) с использованием теоремы Гаусса-Остроградского
(1.10.18) следует закон сохранения в дифференциальной форме
р~Ф = &\Ф + 2Н0п-Ф + ®, (11.1.11)
df
где Я0 - средняя кривизна поверхности ст.
206
Если непрерывная дифференцируемость ФиФ нарушается
на некоторой сингулярной линии ус а\ то с учетом формулы
-^-[[рФ<10=[[р™Ф(1с+(фЕ']<Ь (НЛ.12)
atJ~ JJt at J
<j a Y
и теоремы Гаусса-Остроградскего из (11.1.10) получим
динамическое условие баланса на сингулярной линии у
-I/[*l = v[*l- (11.I.13)
При этом в области гладкости полей Ф и Ф выполняется
дифференциальное уравнение (11.1.11).
Применим теперь полученные результаты к интегральным
законам сохранения импульса и. момента импульса. Они имеют
вид
JvDds + JJ/do-^-JJpA-ida, (П.1.14)
j[vG + (R-R<))x(vD)}us + jj[€+(R-R<))xf}da =
* *
= -^-\\p[K2+{R-R<))xKi]oo. (H.1.15)
at JJt
a
С учетом (Н.1.13) из уравнений (11.1.14), (11.1.15)
получаются динамические условия совместности
гфЬ-рФч), v[G] = -pU[K2l (11.1.16)
которые выражают баланс сил и моментов на движущейся
сингулярной кривой.
В случае равновесия уравнения (11.1.14), (11.1.15) сводятся к
ранее полученным интегральным соотношениям (2.1.44), (2.1,45),
из которых следуют формулы
v-[D] = 0, v [G] = 0,; (11.1.17)
11.2. Волны ускорения
в микрополярных оболочках
Исследование нелинейных волн в твердых телах, в том числе
и ударных, - весьма сложная задача, аналитическое решение
которой удается провести в весьма редких случаях. Одним из
таких случаев являются волны ускорения или волны слабого
207
разрыва, которые представляют собой разрывные решения
уравнений движения, для которых происходит нарушение
непрерывности вторых производных полей перемещений, а
также других рассматриваемых полей, на некоторых
сингулярных поверхностях [103, 142, 287]. Для микрополярных сред
исследование волн ускорения проводилось в [42, 43, 236], а для
микрополярных оболочек - в [42,49, 189,192].
По определению, волна ускорения представляет собой
движущуюся сингулярную кривую, на которой терпят разрывы
вторые производные (по пространственным координатам и по
времени) от радиус-вектора положения R и тензора
микроповорота Н, в то время как сами величины и их первые
производные непрерывны {волна слабого разрыва или сингулярная
кривая второго порядка). Далее рассмотрим возможность
существования волн ускорения, т.е. определим условия, при
которых возможно движение сингулярной кривой второго
порядка {U Ф 0).
Из определения сингулярной поверхности второго порядка
вытекает, что
|Fj = 0, [gradH] = 0, [v] = 0, [о»] = 0, (I1.2.1)
откуда сразу следуют соотношения для скачков мер деформации
и векторных величин Къ К2
[Y| = 0, [Lj = 0, [tf,j = 0, [*э] = 0. (11.2.2)
С помощью уравнений состояния (2,1,31) из (11.2.2) следуют
условия отсутствия скачков у тензоров усилий и моментов на
слабой сингулярной кривой
[Dj = 0, [Gj = 0,
и с использованием теоремы Максвелла последние соотношения
дают уравнения, связывающие скачки дивергенции тензоров
усилий и моментов и их производных по времени
U[divD] = -v.|^l */[divG] = -v.[^|. (11.2.3)
at at
Из уравнений движения (3.7.12) вытекают соотношения
[divD] = pf^4, [divG] = o№l. (11.2.4)
at at
Исключая аз (11.2.3) и (I I.2.4) скачки дивергенции тензоров
усилий и моментов, получим уравнения
208
(11.2.6)
Дифференцируя уравнения состояния (2.1.31), получим
dD d2W „dY „ d2W „dL „ dW dH
= QJ H + — tv H + - • " >
dr 3Y3Y dr 3Y3L d/ 3Y df
dG h2W „dY _ d2W _dL „ 3W dH
= 0 H + - О H + - .
dr 3L9Y dr 9L5L dr 3L dt
Отсюда, используя выражения для К\ и К2, соотношения
(11.2.5) можно записать в виде
_.±S.0|£l).H-,.**s|!!bl.H.
3L3Y l df ' 3L3L l dr
Вычисление скачков скоростей, мер деформации дает
[iIj = [gradHHr, i^] = [grad<o]Hr. (11.2.7)
dr df
Применение теоремы Максвелла к непрерывным на у полям
линейной и угловой скоростей позволяет определить структуру
скачков ускорений и градиентов скоростей:
[ —-\ = ~Ua, [gradi/] = v®«,
df
|^.| = _£/&, fgrada>] = v<S>&, (11.2.8)
df
где а, Ъ - векторные амплитуды скачка ускорения.
Таким образом, из (11.2.7), (11.2.8) следует, что
df dr
209
и соотношения (1 L2.6) можно представить в виде
= р V V Н7+ (Н • €>г ■ Н7") ■ (Ь ■ Нт)],
t)2W t}2W
oLox 0L0L
= p^2[(H-01-H7)-(a-H7') + CH©3-Hr).(6-H7")]
или с использованием матричных обозначений как
d2W , , d2W .
3Y9Y 3Y3L
и!
B2W . . d2W t х
dL3Y ЭЬЭЬ
L*'J
= pf/:
I
H 0 H
J иг
н ©, нг н-в,-нг
а'
Ь'
где а'=а-Нт, Ь' = ЬНТ и использовано введенное ранее в
(10.3.2) обозначение G{v} s G^v^J, ® i„.
Это соотношение можно записать более компактно в
матричном виде
A(v)-g = pt/2IB-£ £=<W)eR6, (11.2.9)
где А и В - матрицы с тензорными элементами. А определена в
условии сильной эллиптичности (10.3.2), а В дается равенством
I
Н & Н
Т xjT
не,нг н ©, нт
Таким образом, условие распространения волны ускорения
совпадает с условием наличия решений у обобщенной задачи на
собственные значения (11.2.9).
Из положительности кинетической энергии K(v,i>>) следует
положительная определенность матрицы В. Для упругих
оболочек наличие функции потенциальной энергии W влечет за
собой только симметрию матрицы A(v). В нелинейной механике
210
простых материалов [113, 142] известна теорема Френеля-
Адамара-Дюгема о существовании акустических осей и
вещественных акустических чисел. Ее аналог в теории микрополярных
оболочек дается утверждением
Теорема. Квадраты скоростей распространения
сингулярных кривых второго порядка (волн ускорения) в
микрополярных упругих оболочках являются вещественными для
произвольных направлений движения, задаваемых вектором v.
Доказательство теоремы проведено выше.
Условие положительной определенности A(v), необходимое
для существования волны ускорения в какой-то точке
поверхности оболочки (т.е. положительности собственных значений
U1), дается неравенством (10.3.2) и совпадает с условием сильной
эллиптичности уравнений равновесия микрополярных оболочек
(2.1.36), (2.1.37) в той же точке. Таким образом, верна теорема,
аналогичная случаю трехмерной теории упругости простых
материалов и микрополярных сред:
Теорема. Условие существования волны ускорения в
микрополярных оболочках (10.3.2) эквивалентно условию сильной
эллиптичности уравнения равновесия.
Приведем пример решения задачи (П.2.9) для физически
линейной оболочки. Предположим, что тензор инерции ©j равен
нулю, а тензор инерции ©3 шаровой (©2 =fl)> гдеу- мера
вращательной инерции частиц оболочки. При выполнении неравенств
(10.3.5) решения уравнения (11.2.9) даются формулами
t/,=J—, ё,=(т,0), и2= р—2-—К €2 = (v;o),
v р Ч р
^з= Р, £3=(«,0), £/4= R, €,=«Кт), (11.2.10)
- \h±MK
у5 = Г - fc = <o.-"), U6 = J—> *б = (0.я).
V РУ V Р/
Решения (11.2.10) описывают поперечную и продольную
волны ускорения и ускорения микровращения. Можно показать,
что полученные скорости волн ускорения (11.2.10) совпадают с
предельными значениями фазовых скоростей плоских
гармонических волн, распространяющихся в линейно упругой
микрополярной пластинке, при стремлении частоты волны к
бесконечности. В отличие от микрополярной среды [43, 127, 250] для
оболочки все скорости волны оказываются разными.
211
Наряду с отмеченными выше совпадениями со случаем
пространственной нелинейной теории упругости следует отметить
существенные отличия от случая простых материалов [113, 142],
которые не сводятся к увеличению размерности векторного
пространства для обобщенной задачи на собственные значения
(11.2.9).
Выполнение условия сильной эллиптичности вообще говоря
не гарантирует устойчивости в малом даже прямоугольной
однородно закрепленной пластинки, защемленной по всему
краю, в то время как аналогичное условие эллиптичности
гарантирует устойчивость однородного напряженно
деформированного состояния равновесия нелинейно упругого трехмерного
тела, закрепленного по всей границе [ИЗ].
Далее, для простых материалов аналог A(v) называется
акустическим тензором, поскольку его собственные числа
пропорциональны квадратам скоростей распространения малых
плоских гармонических волн в однородно напряженной среде.
Можно показать, что в нашем случае уравнение (11.2.9) не
совпадает с уравнением распространения бесконечно малых
плоских гармонических волн даже в однородно напряженной
микрополярной пластине. Тем не менее, если рассмотреть
коротковолновые решения линеаризованных уравнений
движения (3.7.12), т.е. решения, пропорциональные ехр(г - k)exp(kt)
при Iftl —> », 1A.I —> ™, \k]fX= const, то соотношение (П.2.9)
может быть получено как предельный случай,
С учетом этого замечания тензор A(v) также можно назвать
акустическим тензором в теории оболочек, а его собственные
числа - акустическими.
Анализ существования слабых разрывов и их связь с
условием сильной эллиптичности в случае трехмерных
микрополярных сред был проведен в [43], а обобщение на случай
термоупругих микрополярных сред - в [45].
11.3. Слабые разрывы решений
уравнений равновесия
Ранее, в § 10.3 отмечалось, что нарушение эллиптичности
уравнений равновесия может приводить к появлению разрывов у
решений. Рассмотрим этот вопрос более подробно. Здесь будем
рассматривать сингулярные кривые второго порядка, не
зависящие от времени. Предположим, что на поверхности оболочки о"
существует кривая у» на которой возможен разрыв у вторых
212
производных радиус-вектора R или тензора микроповорота Н.
Наличие такого слабого разрыва может означать, например, что
кривизна поверхности L, которая определяется вторыми
производными R, имеет разрыв, т.е. в процессе деформации на
оболочке ПОЯВЛЯЮТСЯ ИЗЛОМЫ.
Из уравнений равновесия следуют соотношения
fdivDJ = 0, |divGj = 0,
которые, повторяя выкладки из предыдущего параграфа, можно
свести к виду
М
d2w
ЭУЭУ
3L3Y
м
{V}
3Y3L
а2 ук
3L9L
М
V
= 0
или, в компактной форме, записать как
(П.3.1)
Условие существования нетривиальных решений уравнения
(11.3.1), означающее появление слабых разрывов, состоит в
обращении в нуль определителя матрицы A(v).
Если выполняется соотношение
(11.3.2)
в виде
(11.3.3)
detA(v)*0,
то такие разрывы невозможны.
Для уравнения состояния в форме (10,3.3), т.е.
W~ W;(Y) + W2(L), условие (11.3.2) распадается на два:
?i2W ?2W
**3ravw*a Hol""'0-
В качестве примера рассмотрим условия выполнения (11.3.2)
для уравнений состояния физически линейной оболочки (6.9.1).
Используя формулы (10.3.4), можно показать, что выполнение
условий (11.3.3) сводится к неравенствам
а3*0, а,+а2 -ьа3^0, а4*0, $3ф0, £,+р2+р3*0, Р4^0.
Условие (11.3.2) является условием эллиптичности
(эллиптичности в смысле Петровского) системы уравнений
равновесия теории оболочек и совпадает с соответствующим
абстрактным определением в теории систем уравнений в частных
производных [1, 22, 37]. Условие (11.3.2) также называется условием
ординарной эллиптичности. Видно, что (11.3.2) является более
слабым, чем условие сильной эллиптичности (10.3.2).
Глава 12
РАВНОВЕСИЕ ДВУХФАЗНЫХ ОБОЛОЧЕК
В процессе изготовления или эксплуатации материал
оболочки может претерпевать структурные или фазовые
превращения. Например, такого рода изменения могут происходить
в тонкостенных конструкциях из полимерных материалов,
сплавов с памятью формы. Широкий спектр фазовых превращений
наблюдается в биологических мембранах или свободно
подвешенных пленках смектических жидких кристаллов. В данной
главе ограничимся рассмотрением фронтальных фазовых
превращений (т.е. фазовых переходов с четко выраженной границей
раздела фаз), вызванных изменением
напряженно-деформированного состояния в условиях постоянного однородного поля
температуры. Процесс деформирования будем считать
изотермическим или адиабатическим. Примеры такого рода фазовых
переходов мартенситного типа описаны, например, в [16, 108],
а также в справочнике [ИМ 14], где рассмотрены примеры
конструкций, использующих этот эффект. В частности, практически
важным примером использования тонкостенных конструкций
являются моно- и поликристаллические пленки из сплавов типа
NiTi (NiMnGa, NiTiCu, NiAl и др.), обладающих
эффектом памяти формы. Такие пленки по своей эффективности
оказываются одними из лучших элементов для использования в
микроэлектромеханических устройствах (MEMS) (см., например,
[167]), таких, как, например, миниатюрные насосы. Описанию
деформирования мартенситных пленок посвящены работы [166,
218, 277], где, в частности, в результате специальной процедуры
перехода от трехмерного слоя к поверхности построена модель
оснащенной мембраны, т.е. оболочки, не имеющей изгибной
жесткости, уравнения состояния которой тем не менее зависят не
только от перемещений и их производных, но и от
кинематически независимого от них поля директора. Исследованию
условий равновесия фаз в рамках теории оболочек посвящены
работы [41, 188, 190, 259], на которых и основано содержание данной
главы.
Далее будем считать, что фазовый переход происходит по
всей толщине оболочки одновременно. Это предположение
позволяет ввести линию на поверхности оболочки, разделяющую
214
фазы материала, которые различаются своими свойствами.
Основанием для такой гипотезы служат довольно
многочисленные экспериментальные исследования деформирования тонких
пластинок и трубок из сплавов с памятью формы, например [205,
252, 253, 285] . Другой случай расположения фаз в тонких
пленках, когда поверхность, разделяющая фазы, параллельна
поверхности пленки, рассмотрен в [266].
12.1. Условия термодинамического равновесия
оболочек Коссера
Для двухфазной оболочки поверхность о состоит из двух
частей с, и о+ (рис. 12.1), разделенных гладкой линией у. Заранее
неизвестный контур 7 представляет собой прообраз границы
раздела фаз, которая в актуальной конфигурации является
кривой Г, Контур у подлежит определению совместно с
деформацией (2.1.1). Отметим, что у является частным случаем
сингулярной кривой, на которой могут нарушаться условия
непрерывности некоторых рассматриваемых величин.
Условия термодинамического равновесия оболочки, находя^
щейся в изотермическом процессе, могут быть получены на
основе вариационного принципа Гиббса [28], который в случае
изотермического или адиабатичнского процесса сводится к
принципу стационарности потенциальной энергии деформации
на кинематически допустимых
полях перемещений и
микроповоротов, при условии
возможности независимого
изменения границы раздела фаз.
Вариационные методы в
механике сплошных сред при учете
фазовых превращений
развивались в [15, 32, 46, 53, 54, 126,
168, 210, 211, 238, 264]. В
частности, с их помощью были
сформулированы [46] условия
равновесия фаз для упругих
сред С микроструктурой, в TOM Рис. 12.1. Двухфазная оболочка
На сайте одного из авторов [205, 285] http://www-mech.ust.hk/~meqpsun/ также
представлены видеофайлы, демонстрирующие экспериментально
наблюдаемые фазовые превращения в деформируемых тонких трубках и пластинках, из
материалов с памятью формы.
215
числе и для трехмерной среды Коссера. Вариационный метод
использовался [172] для изучения фазового равновесия в
клеточных мембранах.
Не ограничивая общности, предположим, что внешние
нагрузки отсутствуют, а на всем крае оболочки заданы смещения и
повороты (© = щ = щ). Тогда функционал потенциальной
энергии оболочки имеет вид
%i=%sjjwda. (12.1.1)
о
Для вычисления вариации (12.1.1) воспользуемся методом
[107]. Рассмотрим функционал (12.1.1) на гладком однопарамет-
рическом семействе деформаций:
R = R(q*,z)t H = H(?a,T), (12.1.2)
которое удовлетворяет граничным условиям при всех X. Здесь х -
некоторый малый времениподобный параметр. При 1 = 0
деформация (12.1.2) совпадает с (2.1.1). Будем считать, что
поверхность оболочки в отсчетной конфигурации и линия раздела
фаз также зависят от V.
а = а(т), у=у(х\
так что линия у(т) лежит на 0(1). Другими словами, изучим
изменение функционала энергии в случае переменной отсчетной
конфигурации. С физической точки зрения изменение отсчетной
конфигурации связано здесь с не зависящим от поля деформаций
и поворотов смещением линии раздела у(т) на поверхности о,
происходящим в результате фазового перехода. Это означает,
что поверхности о и о~(х) отличаются друг от друга только
разбиением на части (занятые разными фазами материала) при
помощи линий у и у(х) соответственно.
Пусть г = r\cf, %) - произвольный диффеоморфизм,
отображающий о~ в 0(т), такой что ТОО =r*(Y> т)- Такое отображение
всегда существует при достаточно малых г, причем его носитель
может лежать в малой окрестности линии Y- Тогда
ад= JJ W(Y(T),L(T))do-(T), (12.L3)
где Y(t), L(-c) - мера деформации и тензор изгибной
деформации, соответствующие семейству (12.1.2). Введем обозначения
дЩда,х) ^^\(дЩда,х) дГ]
t=o' 2{ Эх д т=о
« = -
Зт
216
„=д/^^
Эх
(12.1.4)
т=0
В (12.1.4) и, ф, w - векторы малых добавочных перемещений
и микроповоротов, а также малого возмущения отсчетной
конфигурации о.
Вариация % представляет собой дифференциал Гато и может
быть вычислена по формуле
Перейдя в (12.1.3) к интегрированию по О и использовав
формулы дифференцирования элемента площади поверхности,
получим
5« = Jjj—+JVdivwJda. (12.1.5)
Здесь и далее обозначение х = 0 будем опускать. Применив
формулу (1.10.18) ко второму слагаемому в (12.L5) и учтя,
что вектор w лежит в касательной плоскости к а (н ■и' = 0>
так как w - инфинитезимальный вектор скорости линии у,
скользящей по неподвижной поверхности с), выведем формулу
Ъ% = IJ |— - в> ■ grad w\ do + j v ■ | ftHJds,
a 1
где v - вектор нормали к у, лежащий в касательной плоскости
к а и направленный иза+ в о_ (рис. 12.1). Здесь и далее двойными
квадратными скобками будем обозначать скачок
соответствующей величины на у, например \Щ = W+ - W_, а индексы "+"
и "-" будем использовать для обозначения величин, относящихся
к разным фазам, там, где это существенно. Обозначим
выражение v - w через ££т Величина i£T представляет собой виртуальную
скорость движения линии у в направлении нормали v и только
обозначением отличается от использованной в предыдущей
главе скорости движения V сингулярной кривой.
Используя приведенные в § 4.3 формулы, получим
^ = (gradH)-Hr+(Fx4*).Hr, -^ = (grad4*)-Hr. (12.1.6)
Эх Эх
При вычислении полной производной по х следует учесть,
что от х зависят и независимые переменные. Тогда с учетом
217
(2.1.4) и (12.1.6) можно показать, что
и - grad W = —— О -:— + —- О ^— =
dx BY Эх BL Эт
-DOgrad« + G0gradt}t-[Fr-D]x-i{(.
Таким образом,
&% - Jj{D0 gradtt +G О gradi|i-[Fr D]x • ^}do + |sey[W]|ds
о Tf
(12.1.7)
в вариация энергии не зависит от произвола в выборе
диффеоморфизма г*, соотношение (12.1.7) включает в себя только
скорость движения линии у. Отметим, что (12.1.7) является частным
случаем формулы (11.1.12).
Применяя к (12.1.7) формулу (1.10.18) и учитывая
соотношения (2.1.42), получим
S« = SSf0 +5SPY, (12.1.8)
-о% = jj {(div D) н + [(div G) + (Fr D]x ■ ф} da,
Щ = ^{vflD-B + D-iM + 2Y|[Wl}ds.
Tf
Таким образом, требование стационарности
S<g = 0
распадается на два независимых уравнения: 5£f0 = 0 и 6£^7 = 0.
Выполнение первого из них влечет уравнения равновесия (2.1.2)
в каждой из фаз. Анализ обращения в нуль контурного
интеграла ЬЭ'у = 0 требует дополнительных предположений о
характере поведения вариаций и и ф в окрестности у, следующих из
свойств гладкости функций R и Н. Вектор R необходимым
образом является непрерывным всюду на ст, иначе оболочка потеряет
свою сплошность. Отсюда следует формула, связывающая
скачки вектора добавочных перемещений и градиента
деформации, аналогичная (11.1.7):
|М + £ту-М = 0. (12.1.9)
Как и в случае трехмерных микрополярных тел [46], будем
различать микрокогерентные фазовые превращения, когда
тензор микровращения Н непрерывен, и фазовые превращения
218
с микропроскальзыванием, когда его непрерывность на границе
раздела фаз нарушается. Для микрокогерентных фазовых
переходов можно получать соотношение для скачков, аналогичное
(11.1.9):
№ + ZTv-[L-H] = 0. (ШЛО)
Для фазовых переходов с микропроскальзыванием вариации ф±
независимы и последнее соотношение места не имеет.
Используя (12.1.9), (12.1.10), уравнение 55^ = 0 можно
преобразовать к виду
${v-lD]-K_+v.[Gj-*_-2Tv-[|il-v}dj = 0, (12.1.11)
т
где fJi = Wo -D ■ F - G ■ Hr • Lr- тензор энергии-импульса
(тензор Эшелби) для микрокогерентных фазовых переходов в
оболочке. Для трехмерных тел тензор Эшелби описывает изменение
энергии тела при движении в нем сингулярности [155, 203, 204]
(трещины, дислокации, границы фазового перехода). Тензор \i
можно также представить в виде
3Y 3L
Поскольку входящие в (12.1.11) функции и_, ф„ и $£у
произвольны, из (12.1.11) следуют условия термодинамического
равновесия микрокогерентных фазовых переходов
v-lp]| = 0, p-[G] = 0, v-[fi]-v = 0. (I2.1.12)
Первые два соотношения в (12.1.12) совпадают с (11.1.17) и
выражают условия баланса сил и моментов на равновесной
сингулярной кривой у, а последнее уравнение в (12.1.12) является
дополнительным термодинамическим условием, необходимым
для определения положения прообраза фазовой границы у.
Можно показать, что для фазовых переходов с
микропроскальзыванием второе уравнение в (12. LI2) следует заменить на
vG±=0. (12.1.13)
Отметим, что условия термодинамического равновесия фаз
(12.1.12) и (12.1.13) для оболочек Коссера аналогичны условиям
равновесия трехмерных двухфазных тел Коссера [46]. Для
оболочек условия фазового равновесия (12.1.12), (12.1.13) другим
способом получены в [190]. Для геометрически линейной теории
оболочек условия равновесия фаз в перемещениях и поворотах, а
также в терминах функций напряжений сформулированы в [49].
219
12.2. Кинетическое уравнение
Полученные результаты позволяют определить скорость
изменения потенциальной энергии оболочки Коссера на
равновесных полях деформаций, вызванную движением по оболочке
линии скачкообразного изменения свойств у безотносительно
к природе явления, вызывающего это движение. Так, имеет
место соотношение
«|#„vM-vdj. (12.2.1)
Y
В терминах линейной термодинамики необратимых
процессов [36] выражение v • Ц|л1 - v представляет собой
термодинамическую силу (или конфигурационную силу [210, 211]),
двойственную скорости 5£Т Соотношение (12.2.1) позволяет корректно
постулировать кинетическое уравнение для описания движения
линии у в оболочке при малых отклонениях от термодинамического
равновесия
#y=-Qv-W-v, (12.2.2)
где С0 - положительный кинетический коэффициент.
Уравнения (12.2.1), (12.2.2) описывают изменение энергии на
движении дефекта в оболочке Коссера.
Как и в случае трехмерных тел [210]-[212], уравнение (12.2.2)
может быть обобщено с учетом дополнительных факторов
(например, энергии линии у), действующих на движущуюся
границу.
12.3. Условия термодинамического равновесия
фаз при учете энергии границы раздела фаз
и сосредоточенных на ней сил
В теории фазовых превращений важное значение имеют
поверхностные эффекты, связанные с учетом поверхностной
энергии. В частности, именно поверхностное натяжение связывается
с критическим размером зародыша новой фазы [10, 28, 225]. Для
рассматриваемых в данной книге двумерных структур аналогом
поверхностного натяжения (поверхностной энергии) служит
линейное натяжение - энергия, приписываемая линии,
разделяющей фазы материала. Концепция линейного натяжения помимо
фазовых превращений широко используется в теории поверх-
220
ностных явлений [143, 156, 244, 272, 273]. Кроме того, понятие
линейного натяжения как энергии ядра дислокации используется
в теории дефектов [216]. Различные постановки задач механики
взаимодействующих между собой трехмерных, двумерных и
одномерных тел рассматривались в монографии [130]. При этом
в [130] рассматривались уравнения состояния сред в общей
постановке при учете моментных напряжений. Механика
материальных поверхностей, содержащих материальные линии,
наделенные дополнительными характеристиками, рассматривалась
также в работах [163, 177, 290].
В качестве модели фазовой границы воспользуемся линией
Коссера, т.е. материальной кривой, состоящей из частиц,
положение которых задается радиус-вектором, а ориентация в
пространстве - ортогональным тензором микроповорота [184].
Таким образом, положение кривой Г в пространстве будем
задавать радиус-вектором у, а ориентацию частиц- ортогональным
тензором HY:
y=y(s\ Hy=HY(s), (12.3.1)
где s - параметр длины дуги на у.
Удельную (отнесенную к единице длины кривой в отсчетной
конфигурации) потенциальную энергию деформации линии Г
зададим в виде
H/=wT(/,HrH;), (■>'£-!. (12.з.2)
us
Применяя к (12.3.2) принцип материальной
индифферентности, можно показать, что энергия Wy является функцией
векторных мер деформации Yy=y'-¥Ly и изгибной деформации
Wy = Wy(Yy,L,). (12.3.3)
Отметим, что кинематические соотношения (12.3.1) и
уравнения состояния (12.3.3) используются в неклассических теориях
упругих стержней [39,62,92, 182].
Функционал потенциальной энергии оболочки преобразуется
к виду
% = jjW6a+%r-M1t %yujwyds, (12.3.4)
221
где s^- потенциал сосредоточенных на у сил/у и моментов €у,
такой что выполняется соотношение
§s&y = j(frtt + ty-tyy)ds.
У
Здесь *\ty - вектор виртуального поворота частиц на у,
определенный аналогичным (2.1.24) равенством
Если рассмотреть оболочку с границей раздела фаз как
трехмерное тело, то сосредоточенные на у силы /7 и €у можно
трактовать как главные векторы сил и моментов, действующие
на некоторую малую цилиндрическую область, окружающую
поверхность раздела фаз тела-оболочки.
Как и ранее, для получения условий равновесия фаз
воспользуемся вариационным принципом 5"8 = 0. Для этого применим
формулу варьирования криволинейного интеграла с переменной
областью интегрирования [130, 177]
jwyds = jbWyds + jkg£yWyds. (12.3.5)
ТУТ
dT
В (12.3.5) к„4 п - геодезическая кривизна кривой у,
s ds
т - единичный вектор касательной к у.
Используя (12.3.5) и соотношения
Щ =^-Ъ¥у +^Г'5Ьч =dby + S% -(y'xdy^, (12.3.6)
где d и g- векторы усилий и моментов типа Пиолы,
действующие на кривой у, вариацию SS можно представить в виде суммы
(12.1.8). При этом первое слагаемое Уа не изменяется, а второе
принимает вид
v у
-jtf'-fy + ig'+y'xdytyjds-jif^u + t^^ds. (12.3.8)
222
Как и ранее, рассмотрим два типа фазовых превращений:
микрокогерентные и с микропроскальзыванием. Для
микрокогерентных фазовых переходов на кривой у должны выполняться
соотношения
R=y = R+, H_=Hr=H+. (12.3.9)
Для фазовых переходов с микропроскальзыванием
выполняется только первая группа равенств в (12.3.9).
Можно показать, что для микрокогерентных фазовых
переходов условия баланса на кривой у принимают вид
m-(v-D)WT -v}-{v-GHRT 'U -v} = kgWv (12.3.10)
rf' + [v-D]| + /T=0, g' + fxd+lv-Gl + ey=0. (12.3.11)
Здесь угловыми скобками обозначено среднее значение
соответствующей величины при пересечении у, например
(W)U-(W+ + W_).
Уравнение (12,3.10) представляет собой условие
термодинамического равновесия фаз оболочки. Соотношения (12.3.11)
представляют собой уравнения равновесия кривой у и с
точностью до обозначений совпадают с [130], а также с уравнениями
равновесия стержней [39, 62, 182[. Уравнения (12.3.11) также
были получены в [224) на основе аналогичного § 2.7 перехода от
трехмерных уравнений равновесия для тонкостенных тел,
имеющих разветвления или самопересечения, к двумерным краевым
задачам, при этом область разветвления или пересечения
заменялась материальной кривой.
Для фазовых переходов с микропроскальзыванием
уравнения баланса на кривой у принимают вид
M-(v.D)iFT-vl = kKWv *-G±=0,
(12.3.12)
<T+[v-Dl + /y=0, g'+y'xd + f^O.
Уравнения (12.3.10) и (12.3.12) обобщают условия
термодинамического равновесия (12.1.12), (12.1.13) на случай учета энергии
границы раздела фаз, а также действия на ней сосредоточенных
сил и моментов.
223
12.4. Постоянное линейное натяжение
Рассмотрим частный случай, для которого плотность энергии
границы раздела фаз, отнесенная к единице длины кривой Г в
актуальной конфигурации, постоянна. Тогда
%y=®jdS=&j\y'\ds, (12.4.I)
г у
а, следовательно, Wy ~W^y'-у''. Здесь ^ - постоянный
коэффициент линейного натяжения.
Для уравнения состояния (12.4.1) одномерные определяющие
соотношения (12.3.10) и (12.3.12) существенно упрощаются.
Действительно, используя (12.3.7), из уравнения (12.4.1) получим
d = -JL~y't g = Q. (12.4.2)
VJ' -У
Из (12.4.2) следует, что dxy' = 0. Если предположить, что
сосредоточенные на у моменты отсутствуют €у=0, то третье
уравнение в (12.3.10) сводится к соотношению
а четвертое из уравнений (12.3.12) удовлетворяется
тождественно.
Поскольку -J——у' является единичным касательным
вектором к кривой Г, то, используя формулы Френе, получим
где к- главная кривизна Г, а £ - вектор главной нормали к Г.
Таким образом, при дополнительном предположении об
отсутствии сосредоточенных на у сил/т = 0 второе уравнение (12.3.10)
или третье в (12.3.12) сводятся к соотношениям
9NfcI/|£+i[v-D]| = 0. (12.4.3)
Используя (2.1.52), уравнение (12.4.3) можно записать в
геометрии актуальной конфигурации, так что на
термодинамически равновесной границе раздела фаз Г должно выполняться
равенство
У*£ + |[1>-Т1 = 0. (12.4.4)
224
Соотношения (12.4.3) и (12.4.4) представляют собой
одномерные аналоги уравнения Лапласа в теорий капиллярности
[143, 273], которое определяет угол контакта двух капиллярных
поверхностей.
12.5. Осесимметричная деформация
двухфазной пластинки
с круговым отверстием
В качестве простого примера рассмотрим плоскую осе-
симметричную деформацию двухфазной пластинки с круговым
отверстием. На бесконечности пластинка предполагается
закрепленной, а на краю отверстия радиуса а в отсчетной
конфигурации задано радиальное перемещение u(a)=R(a)er-aer =
- -и*ег, где и = const (рис. 12.2). Предположим, что в процессе
деформации пластинка испытывает фазовое превращение и
фазовая граница Г представляет собой окружность радиуса В, а ее
прообраз у - окружность радиуса Ъ.
Рассмотрим деформацию пластинки вида
R = R(r)er + ze^ H = L (12.5.1)
Здесь и далее г, (р, z - цилиндрические лагранжевы координаты,
еп €у, е, - связанный с ними базис, R{r) - неизвестная функция.
Примем для плотностей энергии пластинки простой вид
W± = CtHOH + D±LOh + ^±,
(12.5.2)
С±>0, Z)±>0, A±= const.
Рис. 12.2. Двухфазная пластина с отверстием
8 Еремеев В.А. 225
Это уравнение состояния означает, что фазы материала, из
которого сделана оболочка, различаются лишь упругими моду-
лями С*, D& и энергией недефюрмированного состояния Д±. При
этом не учитывается собственная деформация фазового
перехода. Обычно плотность энергии деформации задается с
точностью до константы, которая не влияет на
напряженно-деформированное состояние оболочки, но здесь в условия
термодинамического равновесия входит разность энергий фаз. Поэтому эти
константы уже нельзя выбирать произвольно. Величина
Д+ - Д_ представляет собой разность энергий фаз при нулевых
деформациях. Не ограничивая общности, далее положим Д_ = О,
тогда Д+ описывает энергетический барьер, который нужно
преодолеть для образования новой фазы "+". Далее положим
Д+ = С+Д Ф 0, где Д - безразмерный параметр. Линейное
натяжение будем считать постоянным с коэффициентом Э5.
Для деформации (12.5.1) и уравнений состояния (12.4.2) и
(12.5.2) имеем
D± = D?er ®er + D^ ® V G± = 0,
£f = 2CV, D£=2Ct-, u(r)=R(r)-r.
r
Таким образом, изгибные деформации отсутствуют (L = 0),
как и моментные напряжения М = 0, и состояние пластинки
является безмоментным.
Решая уравнения равновесия, получим
i \ ± л_ «1*
и+(г) = и0 г +—,
г
где «о и «f - постоянные интегрирования.
Используя краевые условия
u+(a)--u*t u+(b) = -u_(b) и и_{г)—»0 для г—>«,
* +
получим, что н^=0, и* = и* + Ь2и$ и Uq -г-. Постоянная
а а
интегрирования «^ находится из преобразованного уравнения
(12.3.12):
[v DI = [#(*)- D;{b)]er = f <?г,
b
226
а неизвестный радиус Ь окружности у- первого уравнения
(123.10) или (12.3.12), которые в данном случае совпадают:
С
<2Ф)+
ul(b)
-С"
и?{Ь) +
и2_{Ь)^
+ Д-
--[/>;<*)+/>;(*)][<(*> - uL№ =
&в
(12.5.3)
Двухфазное решение существует, если только и > u^t где
Ип-й-
с = -Ц->0, £ = -?-.
Полученное решение позволяет описать деформацию
двухфазной пластинки следующим образом. Начальное состояние
пластинки является однофазным и состоящим из фазы "-". Оно
остается однофазным и при 0 < и" < Ид. При достаточной
деформации, соответствующей значению и* = «д, на границе
отверстия возникает новая фаза "+", модуль упругости которой
меньше, т.е. возникает более "мягкая" фаза по сравнению с
первоначальной. При дальнейшем увеличении параметра
деформирования (к* > «о) радиус границы раздела фаз возрастает
(рис. 12.3). Значение Ъ зависит от отношения материальных
постоянных с, а также от SF и Д.
Отметим^ято линейное натяжение оказывает значительное
влияние на положение фазовой границы % если значение Э5
Рис. 12.3. Зависимость радиуса границы раздела фаз Ъ от параметра
деформации и
227
достаточно велико. Если SF < 1, то в пределе 3F —> 0 получаем
решение [190], полученное при отсутствии линейного натяжения.
Из теории фазовых превращений в трехмерных упругих телах
[32, 117, 119] известно, что сколь угодно малое поверхностное
натяжение может существенно влиять на образование новой
фазы, если кривизна межфазной границы достаточно велика. В
рассмотренном здесь примере зародыш новой фазы представляет
собой тонкое кольцо и кривизна межфазной границы не так
велика, чтобы существенно повлиять на процесс зародышеобра-
зования.
После определения постоянных интегрирования величина %
представляет собой функцию параметров х = Ь/а и и=и 1а и
дается соотношением
\—%{х,й) = —^ \ {2й2(х2+сх2+с-\) + 2и!рх +
2ка2С+ сх2+х2-с + 11
+ -[2А(с + 1)х4 + 4^(с + 1)jc3 - (4Лс + IP2 )x2 +
4
+ 4~®(1~с)х+2Ас-2А + !р2)}. (12.5.4)
Это соотношение позволяет убедиться, что уравнение (12.5.3)
эквивалентно условию стационарности —— = 0. Можно показать,
ах
что при и > ы0 существует только одно решение для Ь,
Зависимость полной энергии, определенной в этой задаче уравнением
(12.5.4), от Ъ представлена на рис. 12.4, где показано
существование только одного минимума при и > щ.
0 ь
Рис. 12.4. Зависимость полной энергии от радиуса Ь для разных значений и
228
О и*1ф=о и*^=! и*
Рис. 12.5. Зависимости полной энергии для двухфазного решения &2 и ДЛЯ
однофазного % х
Решение, соответствующее сосуществованию двух фаз,
является энергетически более выгодным по сравнению с
однофазным. Вычисляя полную энергию %2 двухфазного решения, а
также энергию пластинки %lt не претерпевшей фазовый переход,
можно проверить, что полная энергия двухфазной пластинки
всегда меньше (рис. 12.5).
Таким образом, приведенный пример иллюстрирует
возможность определения равновесного положения фазовой границы в
зависимости от параметров нагружения в случае неоднородного
напряженно-деформированного состояния оболочек на основе
предложенной модели.
Глава 13
ТЕОРИЯ УСТОЙЧИВОСТИ
Важным элементом нелинейной теории оболочек является
теория устойчивости. Начиная со второй половины XIX в.
исследования устойчивости пластин и оболочек, вызванные
в первую очередь практическими задачами инженерного дела,
привели к появлению десятков тысяч публикаций по
неустойчивости тонкостенных элементов конструкций. В настоящее
время развиты различные подходы к исследованию выпучивания
пластинок и оболочек (статический и динамический критерии,
метод начальных несовершенств и др.). Отметим здесь и ставшие
классическими, и новые монографии [17, 23-25, 31, 102, 129, 138,
139, 162, 292], в большой степени отражающие состояние теории
устойчивости пластин и оболочек.
В данной главе излагается статический подход Эйлера к
теории устойчивости упругих оболочек, состоящий в анализе
существования нетривиальных решений линеаризованной в.
окрестности исследуемого состояния равновесия краевой задачи
статики микрополярной оболочки и определении тех параметров
нагружения, при которых такие нетривиальные решения
существуют.
13.1. Линеаризованные краевые задачи
для микрополярных оболочек
Предположим, что известно некоторое состояние
равновесия оболочки, обусловленное действием заданных нагрузок и
называемое в дальнейшем начальным или основным. Это
состояние характеризуется векторными полями R(r) и в(г) (или
тензорным полем Н(г)). Наряду с начальным деформированным
состоянием рассмотрим положение равновесия тела, мало
отличающееся от него. Используем обозначения (10.2.1), (10.2.2) из
§ 10.2- линейные части приращений различных величин,
характеризующих возмущенное состояние равновесия, будем
обозначать точкой вверху. Линеаризация краевой задачи (2.1.36)-
(2.1.41) дает систему уравнений и краевых условий относительно
вектора добавочного перемещения н и линейного вектора
добавочного поворота О:
230
divD"+/* = (>, (13.1.1)
divG* + [F7 D* + (gradw)r -DJ, + Г=0, (13.1.2)
со,:и=0, (13.1.3)
©2: v-D' =<p-(s), (13.1.4)
(03: d=0, (13.1.5)
a>4:vD' =y{s), (13.1.6)
где
D* = ~D[grad(* + tK,H-THxd,grad(H-xHxd))]l0,
dt '
G*-—G[grad(/t+tH,H-xHxd,grad(H-THxd))]L=0.
dx
Тензоры D" и G* являются линейными функциями
тензоров €, 0= I x d и к. Эти функции находятся путем линеаризации
определяющих соотношений (2.1.31) с привлечением ^юрмул
(10.2.2), (10.2.3), которые для удобства использования приведем
ниже:
R'=u, Н=-Нхв, Y* = F-e-HTt L*=F-k-Ht,
€ = Gradtt + Ix-&, K = Gradd,
d=^-yfe*--rxe
4 + вЧ 2
Введя тензоры
1\=JIFTD\ П1=Г1¥Т G\ (13.1.7)
линеаризованные уравнения равновесия (13.1.1), (13.1.2) и
граничные условия (13.1.3)-( 13.1.6) можно записать в геометрии
начального деформированного состояния
DivI^+y-!/* = 0, (13.1.8)
DivI^-s-tgradHfT^ + H^+y-5 Г=0, (13.1.9)
£Vh=0, (ШЛО)
£22:У-Ц =<pE(s), (13.1. И)
Q3:* = 0, (13.1.12)
Q4:V-ni=y^s), (13.1.13)
231
где Qk- части границы поверхности 2, соответствующие (Ок
(к = 1, 2, 3, 4) при отображении R = R(r) (Qk = #(©*}), функции
<Pi(s) и ух($) определяются из соотношений
tpz(s)6S=ip'(s)ds, yz(s)dS = y,(s)ds.
Векторы f, £', tp\ 7*><Psn Уг~ линейные функции
кинематических величин н, ft, €, к.
Наряду с истинным полем перемещений и и поворотов -Э
возмущенного состояния равновесия (т.е. векторов и и О,
удовлетворяющих краевой задаче (13.1.8)-(13.1.13)) будем
рассматривать кинематически возможные поля S« и ЬЬ, под
которыми будем понимать дважды дифференцируемые функции
координат, удовлетворяющие соответственно граничным уело-
виям (13.1.10) и (13.1.12). Умножим скалярно уравнение (13.1.8)
на вектор 5а, а уравнение (13Л.9)- на вектор 5-д, сложим и
проинтегрируем по области 2, занимаемой оболочкой в
начальном состоянии. После преобразования получим равенство
JJ m©Se + n,08K-[Tr-(e-ft)]OSO]dZ= (13.1.14)
= jj (/•■5H+r-5d)da+ jV-5uds + o+J7'-odds.
Можно показать, что вариационное уравнение (13.1.14)
принимает вид
5JJ wdE = £(u,a,OH,Sd), (13.1.15)
i
£(*i,d,oH,Sd)4Jj (f.su+~(€xQ)-sti+e §Л<т+
+ j ф' • 5и d 5 + Г
й>2 ^4
-(7Хд) 50+7* ■&&
где функция w была введена ранее формулами (10.2.7) и
представляет собой плотность энергии малых деформаций
предварительно напряженной оболочки.
Необходимое и достаточное условие того, чтобы правая
часть (13.1.15) была вариацией некоторого квадратичного
функционала, состоит в выполнении для любых и, Ь, 5и, 80,
удовлетворяющих кинематическим граничным условиям, равенства
£(н,д,5и,о0) = Ж(8и,50,и,д). (13.1.16)
232
Можно показать, что условие (13.1.16) эквивалентно
введенному ранее условию (3.1.1) консервативности нагрузок,
действующих на оболочку.
При консервативных внешних нагрузках, как известно [17],
исследовать устойчивость основного состояния равновесия
можно статическим методом Эйлера, состоящим в определении
тех значений параметров нагружения, при которых существуют
нетривиальные решения линейной однородной краевой задачи
(13.1.1И13.1.6) или задачи (13Л.8Н13Л.13).
Повторяя рассуждения § 10.2, можно показать, что из
равновесности основного состояния вытекает, что первая вариация
энергии 5П равна нулю, а вторая вариация имеет вид
S3n = JJ wdE. (13.I.17)
Состояние равновесия упругого тела будем называть
устойчивым, если в этом состоянии вторая вариация потенциальной
энергии тела строго положительна. Из этого определения
вытекает, что положение равновесия будет неустойчивым, если
существует нетривиальное решение а0, д0 линеаризованной
задачи (13.1.1)413.1.6) (или задачи (13.1.8)-(13.1.13)). В самом
деле, вторая вариация обращается в нуль на решении щ, 90.
Из данного выше определения устойчивости равновесия
следует, что ненапряженное состояние оболочки будет
устойчивым, если выполнено неравенство Колемана-Нолла (10.2.8).
Действительно, для ненапряженного состояния w = w\ а функция
w' согласно (10.2,8) должна быть положительна для любых
ненулевых значений аргументов. Таким образом, неравенство
Колемана-Нолла оказывается достаточным условием
устойчивости ненапряженного состояния оболочки.
13.2. Вариационные принципы для
предварительно напряженных оболочек
Если рассматривать добавочные нагрузки Д €' и <р", 7* как
дополнительные малые силы и моменты, действующие на
оболочку, то системы уравнений (13.1.1)-(13.1.6) и (13.1.8)-(13.1.13)
описывают малые деформации предварительно напряженных
оболочек. Для этих систем также можно дать некоторые
вариационные постановки, аналогичные сформулированным в гл. 3.
Предположим, что моментная нагрузка в основном
состоянии равна нулю: t = 7 = 0, а силовая нагрузка- мертвая. В
233
возмущенном состоянии действуют малые добавочные нагрузки,
для обозначения которых будем использовать прежние
обозначения /\ €', <р*, 7'- Тогда вариационное уравнение (13.1.15)
соответствует вариационному принципу типа Лагранжа для
предварительно-напряженной оболочки
8$„=0, (13.2.1)
где функционал потенциальной энергии малых деформаций
оболочки
«„[«,d] = jj Jwda-jj (/*■«+е*-»)do-
- j <f>'uds- J y-Sds (13.2.2)
определен на дважды дифференцируемых полях функций и а Ь,
удовлетворяющих (13.1.3) и (13.1,5).
Нетрудно видеть, что выражение (13.2.2) по своей структуре
аналогично формуле для функционала потенциальной энергии в
случае геометрически линейной теории оболочек (3.9.1). Вместе
с тем здесь w зависит не только от тензоров €, к, как в линейном
случае, но и от добавочных поворотов О.
Условие стационарности (13.2.1) эквивалентно уравнениям
равновесия (13.1.1), (13.1.2) и статическим краевым условиям
(13.1.4), (13.1.6).
Уравнения движения предварительно напряженной оболочки
в геометрии отсчетной конфигурации имеют вид
лк
divD4-/*=p^-, (13.2.3)
of
divG-+[(gradH)r-D-i-Fr-D-]x+€-=p^,
ot
где
K{ =v + ®l■<*>, K2 = ©j D-Ь®, -«>, v-—, со-——.
dt at
Нетрудно проверить, что уравнения динамики
предварительно напряженной оболочки (13.2.3) следуют из принципа
Гамильтона-Остроградского, который заключается в
стационарности функционала действия вида
и
«12[н,д] = | (3£-«„)dr (13.2.4)
'о
234
на таких движениях оболочки, которые принимают в моменты
времени t0, t} заданные значения и удовлетворяют
кинематическим граничным условиям. В (13.2.4) кинетическая энергия
оболочки Ж определяется, как и в § 3.7.
В случае малых собственных колебаний предварительно
напряженной оболочки также выполняется аналогичный
(3.10.5), (3.10.6) принцип типа Рэлея.
Глава 14
НЕКОТОРЫЕ ПРИЛОЖЕНИЯ ТЕОРИИ
МИКРОПОЛЯРНЫХ ОБОЛОЧЕК
14,1, Микрополярные оболочки
ш математические модели
клеточных мембран
Одним из примеров тел, к описанию механического
поведения которых приложима теория микрополярных оболочек,
являются биологические (клеточные) мембраны и их
искусственные аналоги. Клеточные мембраны играют определяющую
роль в жизнедеятельности клетки, реализуя, в частности,
функции синтеза, защиты, преобразования механической, химической
и других типов энергии. Искусственные мембраны, аналогичные
по строению природным, активно используются в современной
медицине и фармакологии. Достаточно упомянуть липосомы -
сферические капсулы микроскопических размеров, содержащие
внутри себя лекарственные препараты и облегчающие их
проникновение внутрь организма.
Наряду с химическими и биологическими процессами
исследование механического поведения клеточных мембран под
действием внешних нагрузок является одной из задач биофизики
мембран. Исследование процессов деформирования биомембран
наталкивается на значительные трудности, связанные как с
геометрией изучаемых объектов - толщина биологических мембран
имеет порядок десятка нанометров, так и со сложностью
протекающих в них процессов, сложностью внутренней структуры.
14.1.1. Основные сведения о механических
свойствах клеточных и липидных мембран
Общепринятая в настоящее время [27, 93, 294] жидкостно-
мозаичная модель трактует биологическую мембрану как
неоднородный по толщине бислой, образованный молекулами
липидое, находящийся, как правило, в жидком состоянии, с
внедренными в него белками. Характерная бислойная структура
клеточной мембраны представлена на рис. 14.1.
236
Рис. 14.1. Строение клеточной мембраны
Здесь однотипные компоненты изображают молекулы липи-
дов, а более крупные - белки. В некоторых случаях белки могут
покрывать поверхность клеточной мембраны, образуя
относительно жесткий белковый слой (скелет мембраны). Толщина
бислоя определяется длиной молекул липидов и, как правило,
равна порядка 8-10 нм.
Молекулы липидов (в основном фосфолипидов),
участвующие в образовании бислоя, представлены широкими
классами соединений. Схематическое изображение молекулы
одного из таких соединений - фосфатидилхолина показано на
рис. 14.2 [27].
Молекулы липидов являются полярными, в них имеются
гидрофильная полярная область (головка- на рис. 14.2 обведена
окружностью) и гидрофобная часть, образованная двумя
углеводородными (жирнокислотными) цепями. С механической
точки зрения полярная область является достаточно жесткой и
практически недеформируемой, в то время как углеводородные
цепи достаточно гибкие и при физиологических условиях могут
занимать различное положение. Характерная особенность
клеточных фосфолипидов состоит в возможности образовывать
бислой, который является термодинамически выгодной
структурой при определенной концентрации молекул липида в
растворе. Отметим также, что, как показано на рис. 14.2,
углеводородные цепи (хвосты молекулы) не обязательно направлены
по нормали к поверхности бислоя. Кроме того, молекула не
обладает осевой симметрией по причине наличия двух хвостов.
Распределение плотности по толщине бислоя неоднородно -
плотность поверхностной части, образованной полярными
головками (на рис. 14.2 отделена штриховыми горизонтальными
линиями), выше плотности внутренней части. Средняя плотность
237
Рис. 14,2, Строение молекулы фосфатидилхолина и других липидов
бислоя при физиологических температурах соответствует
плотности растительного масла. Плотность мембранных белков
больше плотности бислоя в полтора-два раза.
Поскольку толщина бислоя фактически определяется
удвоенной длиной молекул липидов и толщиной мембранных
белков, она практически не изменяется при его деформировании,
исключая случаи, связанные с фазовыми превращениями.
Отметим еще достаточную легкость сдвиговых деформаций
жидкого бислоя при одновременно значительно большем
сопротивлении изменению площади оболочки, что делает возможным
использование внутренних связей - условия сохранения площади
любого участка поверхности. Это - характерное свойство как
клеточных, так и полученных из липидных растворов мембран.
В [91] отмечено, что упругий модуль, отвечающий за однородное
изменение площади (аналогичный объемному модулю в
линейной теории упругости), превосходит модуль сдвига на 4-5
порядков. Это свойство полностью аналогично свойству
несжимаемости (сохранения объема) резиноподобных тел. Формулировка
условия сохранения площади произвольного участка оболочки
дана в [68] и записывается при помощи соотношения (4.6.4).
Ламмелярная (бислойная) структура, образующаяся в
растворах липидов в воде при исследуемых значениях температуры и
концентрации [93], [27], позволяет отнести растворы липидов к
жидкокристаллическим средам, а именно наиболее близкими
оказываются смектики С [56,97, 260] или "экзотические" жидкие
кристаллы (например, двухосные нематики [226]). Вместе с тем
из-за отсутствия осевой симметрии у образующих бислой
молекул возможно проявление эффектов ориентационной упругости,
238
связанной с согласованием поворотов молекул вокруг оси,
направленной вдоль углеводородных цепей. Соответствующие
таким поворотам степени свободы отсутствуют в имеющихся
гидромеханических теориях смектиков С. В этой связи
представляется возможным использовать для описания поведения
бислоя модели упругих и вязкоупругих микрополярных
оболочек, в которых существуют дополнительные степени свободы по
сравнению со смектиками.
Взаимодействие белков с липндным бислоем достаточно
сложно. Оно играет важную роль в жизнедеятельности клетки,
обеспечивая ее разнообразные функции. В частности,
по-видимому, именно эти взаимодействия обеспечивают активный
транспорт вещества в мембранах, т.е. перенос вещества в
направлении против градиента химического потенциала.
Следуя 127], представим здесь их возможные типы (рис. 14.3).
Отметим, например, случаи, когда мембранный белок вызывает
изменение фазового состояния в своей окрестности (первый
фрагмент рис. 14.3). Здесь в окрестности трансмембранного
белка наблюдается изменение фазового состояния липидного
бислоя - переход его в твердое (гелевое) состояние. Второй и
третий фрагменты рис. 14.3 показывают искажение ориентации
молекул липидов в обоих слоях или только в одном слое
липидного матрикса. При этом обычные деформации липидного
бислоя могут и отсутствовать. В последних двух из
представленных на рис. 14.3 случаях наблюдается также искажение
геометрии бислоя.
Учет упругой энергии взаимодействия белков и бислоя
может оказаться важным при рассмотрении переноса вещества
сквозь мембрану, поскольку учет эффектов ориентационной
упругости приводит к появлению дополнительных слагаемых в
электрохимическом потенциале мембраны.
Мембранные белки и молекулы липидов обладают
значительной подвижностью в тангенциальном направлении. В ряде
экспериментов, описанных в [27], определены скорости и
времена диффузии белков и липидов. Кроме того, липиды обладают
подвижностью и в поперечном направлении бислоя, т.е. могут
переходить с одной поверхности мембраны на другую (флип-
флоп переход).
Таким образом, с точки зрения механики сплошной среды
клеточная мембрана может быть представлена как
материальная поверхность - оболочка, уравнения состояния которой
соответствуют двумерной несжимаемой жидкости, обладающей
свойствами ориентационной упругости, в частности сопротив-
239
лением изгибу, связанному с
изменением ориентации частиц
оболочки. С большой степенью
точности оболочку можно
считать поверхностно изотропной.
Поверхность мембраны
содержит относительно жесткие
белковые включения, существенно
влияющие на ее структуру.
Сложная внутренняя структура
диктует необходимость
построения в рамках прямого подхода
моделей упругих и вязкоупругих
микрополярных оболочек,
учитывающих микроструктуру
материала.
Классические модели
оболочек типа Кирхгофа-Лява,
использованные в [91], не являются
достаточными, поскольку не
обладают возможностями
описывать вращательное
взаимодействие частиц и, в частности, ориен-
тационные эффекты, подобные
приведенным на рис. 14.3.
В биофизике клеточных
мембран используется модель
[215], где поверхностная
плотность свободной энергии
представляет собой квадратичную
изотропную функцию тензора
кривизны оболочки в текущей
конфигурации
Рис. 14.3. Взаимодействие белков и
бислоя (по [27})
2W = vl(Hz-hQ)2+v2Kl
(14.1.1)
где Нх - средняя кривизна поверхности 2, Къ - гауссова кривизна,
й0- начальная кривизна оболочки (так называемая [27]
спонтанная кривизна), V,, v2- материальные постоянные. В
частности, модель (14.1.1) использована в [172] для определения
условий термодинамического равновесия фаз, для описания
процессов адгезии [173] и целого ряда других проблем биофизики
клеточных мембран. По существу уравнение (14.1.1)
соответствует специальному случаю оболочки типа Кирхгофа-Лява,
240
и также не учитывает бислойный характер мембраны и ориен-
тационные эффекты, не связанные с изменением кривизны
поверхности мембраны.
Более удовлетворительными представляются теории,
использующие модели жидких кристаллов смектического типа
[97]. Как отмечалось выше, присущих модели смектика степеней
свободы может оказаться недостаточно для описания изменений
ориентации частиц. Таким образом, представляется полезным
использовать развитую в этой книге теорию упругих и вязко-
упругих оболочек типа Коссера при конечных деформациях для
моделирования деформирования биологических мембран.
14.1.2. Уравнения состояния жидких упругих
микрополярных оболочек
Используя результаты глав 4, 6, выведем определяющие
соотношения для упругих микрополярных оболочек,
учитывающие особенности механического поведения клеточных мембран.
Резюмируя отмеченные выше механические свойства,
сформулируем основные гипотезы, которые будут положены в
основу построения механической модели находящейся в равновесии
биологической мембраны на основе теории микрополярных
оболочек;
-уравнения состояния должны представлять поверхностно
изотропный материал, т.е. удовлетворять соотношениям вида
(6.8.1);
- должно выполняться свойство сохранения площади
произвольного участка оболочки;
- оболочка должна представлять собой двумерную жидкость.
Условие сохранения площади любой области на оболочке
сформулировано выше и дается уравнением (4.6.4), которое
накладывает ограничения на возможные деформации оболочки
и аналогично условию несжимаемости в пространственной
теории упругости [113]. Уравнения состояния оболочки со
связью (4,6.4) для тензора усилий Т изменяются и записываются
следующим образом [68]:
Т=-рО + ТЕ. (14.1.2)
В (14.1.2) р- неизвестная функция, не зависящая от
деформации, своего рода двумерное давление, Т£ - часть тензора
усилий, определяемая по потенциальной энергии деформации
формулами (2.1.31), (2.1.53). Дополнительным уравнением для
241
определения р служит связь (4.6.4). Тензор моментов
определяется как и раньше.
Чтобы удовлетворить третьей гипотезе в рамках теории
упругих микрополярных оболочек, потребуем, чтобы уравнения
состояния жидкой оболочки были нечувствительны к любым
изменениям отсчетной конфигурации, сохраняющим площадь
произвольного участка поверхности, т.е. подчиненным уравнению
(4.6.4), и не изменяющим ориентации частиц оболочки. Тем
самым приходим к уравнениям состояния жидкой оболочки Коссе-
ра, полученным в разд. 6, со связью (4.6.4), т.е. вида W= W(B).
Примером такой функции может служит квадратичная
зависимость
2W = v, tr2 В(( + v2 trB2 + v3 tr(B(| -B[) + v4N Вт В N, (14.1.3)
В„=В О, vk = const (£=1,2,3,4).
Приведенные здесь уравнения состояния не учитывают
бислойную природу биомембран, а также их вязкоупругие и
пластические свойства. С учетом представлений гл. 4 уравнения
состояния упругих оболочек (14.1.2) легко обобщаются на
случай вязкоупругих материалов. Развитие же теории вязко-
упругопластических двухслойных микрополярных пластин и
оболочек лежит за рамками данной книги. Отметим только, что
построение уравнений состояния бислойных оболочек возможно
путем введения двойного набора направляющих ортов D%, D£,
которые описывают изменение ориентации частиц, образующих
каждый из слоев. Таким образом, двухслойная оболочка может
рассматриваться как своеобразная микрополярная бинарная
смесь, т.е. двумерный континуум, к каждой точке которого
существуют частицы двух сортов, имеющие общий радиус-
вектор R, но разные директоры. Также, рассматривая
мембранные белки как абсолютно твердые, в рамках теории смесей
можно сформулировать уравнения вязкоупругих микрополярных
двухслойных оболочек с непрерывно распределенными
включениями применительно к моделированию клеточных мембран.
14.1.3. Двухфазное состояние равновесия
в микрополярной пластине с включением
В качестве примера рассмотрим задачу о фазовом переходе в
окрестности изогнутой структуры в круглой жидкой
микрополярной пластине радиуса R,, вызванной включением,
аналогичной изображенной на первых двух фрагментах рис. 14.3. Радиус
242
включения а заранее неизвестен. Плотность потенциальной
энергии деформации примем в виде одноконстантного
приближения
W_=-tr(B-Br), v-const,
которое получается как частный случай (14.1.3) при V[ = v3 = 0,
v3 = v4 = v. Это - уравнение состояния аналогично одноконстант-
ному приближению в теории жидких кристаллов [56, 137].
Введем также постоянную линейную плотность энергии
линии раздела фаз 3% а фазовое включение будем считать
абсолютно жестким с плотностью энергии W+. Тогда функционал
энергии оболочки можно записать в виде
<g = jj lV_do + J 9^d5+|j W+dc. (14.1.4)
Здесь фаза "-" относится к микрополярной оболочке, а фаза
"+" - к включению. Рассмотрим следующую деформацию
оболочки, описываемую векторами Dk:
Di = eR, D2 ~ е<ъ, Оъ = i3 = ЛГ,
где eR, еф, ez = t3 - базисные орты, соответствующие
цилиндрическим эйлеровым координатам R, Ф, Z.
Для нее тензор В дается формулой
B = -elb®N.
R
ф
Можно показать, что в рассматриваемом случае уравнений
состояния уравнения равновесия пластины совпадают с плоской
задачей статики упругой микрополярной жидкости,
исследованной в [48].
Вычисляя функционал энергии, получим
% = itv In Q- + 1п9а + ш2 W^.
а
Нетрудно показать, что термодинамически равновесный и
энергетически выгодный (доставляющий минимум функционалу
(14.1.4)) радиус включения определяется формулой
2W+ +4{2W+
2WL
243
В случае SF = 0 (т.е. при отсутствии энергии линии раздела
фаз) это решение совпадает с найденным ранее [48] решением о
фазовом включении цилиндрической формы в упругой
микрополярной жидкости.
14.2. Механика тел с покрытиями
В данном параграфе рассмотрим некоторые модели упругого
тела, поверхность которого наделяется дополнительными
свойствами, т.е. модель так называемых тел с покрытиями. Как
отмечалось в гл. 12, поверхностные явления могут играть
значительную роль в механике многофазных сред, в трибологии,
а также в наномеханике (см., например, [34]). Поскольку
предположение о постоянстве коэффициента поверхностного
натяжения часто оказывается недостаточным, вполне естественна
идея использовать двумерные уравнения состояния оболочек или
мембран для моделирования поверхностного слоя тела. Кроме
того, интерес представляют задачи механики тел, на поверхности
которых нанесено покрытие, например, нанопленка, или
произведена та или иная обработка поверхности, изменяющая ее
свойства. Не претендуя на обзор результатов в данной области
механики и физики, отметим в этой связи только монографию
[130], статьи [240, 261,283], где рассматривались связанные
задачи при конечных деформациях, а также работу [271], в которой
для внутренних границ раздела в теле предлагалась модель
оснащенной поверхности.
В данном параграфе для моделирования поверхностной
энергии будем использовать уравнения состояния
микрополярных оболочек, выведенные в гл. 2. Для обозначения положения
точек, лежащих на поверхности тела в отсчетной конфигурации,
будем использовать радиус-вектор г, для поверхности тела £ в
актуальной конфигурации - радиус-вектор R. Положение
внутренних точек тела в отсчетной и актуальной конфигурациях
будем обозначать соответственно при помощи радиус-векторов х
и X (рис. 14.4). Для поверхностных операторов градиента и
дивергенции сохраним прежние обозначения grad и div, а
пространственный оператор градиента в метрике отсчетной
конфигурации обозначим через V, Для получения уравнений равновесия
нелинейно упругого тела с поверхностью, наделенной
поверхностной энергией, воспользуемся принципом виртуальных работ
SW^S'su, (14.2.1)
244
Рис. 14.4. Деформация тела с покрытием
где 8'sH - элементарная работа внешних нагрузок, определяемая
равенством
о'^Я (/-5/t-H^»da + JJJ pJv-SXdv. (14.2.2)
Здесь/- поверхностные силы, ( - поверхностные моменты,/„-
массовые силы, р^ - плотность тела в отсчетной конфигурации.
Функционал "W представим в виде
"ИГлЦ Wda + Jfj Wpdv. (14.2.3)
Предположение (14.2.3) означает, что энергия деформации
тела, занимающего в отсчетной конфигурации объем v с
границей ст = dv, образована объемной плотностью Wt, (удельной
потенциальной энергии деформации трехмерного тела) и
поверхностной плотностью W. Для функции W будем
использовать уравнение состояния (2.1.4) (W = W (Y, L)), а для Wv~
уравнение состояния простого нелинейно упругого материала
[112.ИЗ]
wv = wv(0, с = Рх.
Учитывая, что на поверхности тела а вариации векторов R и
X совпадают (6Х = &R при х € а), из вариационного уравнения
(14,2.1) следуют традиционные уравнения равновесия
нелинейной теории упругости в геометрии отсчетной конфигурации [113]
^•П + рг,/г,=0, (14.2.4)
245
где П4 V- -тензор напряжений Пиолы, а также модифициро-
dC
ванные уравнения равновесия микрополярной оболочки
divD + Z-и-П^О, (14.2.5)
divG + [(gradif)r-D]1(+€=0. (14.2.6)
Уравнения (14.2,5), (14.2.6) отличаются от (2.1.36), (2Л .37)
тем, что в (14.2.5) появилось слагаемое п - П 10, описывающее
силовое воздействие на покрытие со стороны тела. Соотношения
(14.2.5) и (14.2.6) являются естественными краевыми условиями
для уравнений равновесия (14.2.4),
Здесь предполагалось, что вся поверхность тела является
покрытием, т.е. обладает поверхностной энергией. Если только
часть тела является покрытием, то на ней выполняются (14.2.5),
(14.2.6), а на оставшейся части задаются стандартные краевые
условия нелинейной теории упругости. При этом на контуре,
ограничивающем покрытие, возможно задание граничных
условий вида (2.1.38М2.1.41).
Используя результаты гл. 3 и вариационные принципы
нелинейной теории упругости [64, 65], можно дать вариационные
; постановки задач механики упругих тел с покрытием. В
частности, используя соответствующим образом модифицированный
принцип Гамильтона-Остроградского, уравнения (14.2.4)-( 14.2.6)
могут быть обобщены на случай динамики. Опуская
промежуточные выкладки, приведем уравнения динамики упругого тела с
покрытием в геометрии отсчетной конфигурации:
♦■П + р^рД (14.2.7)
divD + /-n-ni0=pA:i,
di v G + [Fr • D]x+ e= p(k2 + v x ®] ■ to),
где Ki и К2 даются формулами (3-7.12). Аналогично (14.2.7) могут
быть записаны уравнения движения в эйлеровом описании, а
также для сочетания линейной теории упругости и линейной
теории микрополярных оболочек. Отметим, что уравнения
(14.2.7) являются частным случаем балансовых уравнений [130].
Отметим некоторые особенности предложенной модели тела
с покрытием и потенциальные возможности ее применения.
Нетрудно видеть, что в рамках этой модели, описываемой
уравнениями (14.2.4)414.2.6) или (14.2.7), возможно задание на
поверхности тела распределенных моментов €, причем не только
246
изгибающих, но и крутящих, которые в салу связанности
уравнений (14.2.5), (14.2.6), вообще говоря, оказывают влияние
на напряженно-деформированное состояние внутри тела. Кроме
моделирования поверхностных эффектов в твердых телах, это
обстоятельство позволяет также строить на основе
предложенных уравнений модели составных тел, образованных
структурами разной размерности.
Учитывая, что для модели оболочек типа Коссера возможно
изменение ориентации частиц, не связанное с макроповоротами
среды, предложенная модель может учесть ориентационные
перестройки микроструктуры материала в приповерхностном
слое. Уравнения состояния жидких оболочек типа Коссера,
введенные в гл. 6, в сочетании с предложенными уравнениями
для тел с покрытиями могут оказаться полезными в методах
диагностики, основанных на нанесении тонких пленок жидких
кристаллов на поверхность тела [140]. Итого, предложенная
модель представляется полезной для некоторых задач нано-
механики, таких как описание процессов образования и
деформирования нанопленок на подложке.
14.3, Малые собственные колебания оболочки
с распределенными по поверхности
нанообъектами
В данном параграфе в связи с одной задачей наномеханики
рассмотрим собственные колебания составной оболочки,
образованной пластиной с закрепленными на ее поверхности
цилиндрическими оболочками. В настоящее время хорошо известно,
что нанообъекты демонстрируют аномальные свойства, весьма
привлекательные для приложений и вместе с тем не связанные,
вообще говоря, со свойствами макроскопических образцов, даже
если таковые и можно получить [34, 214, 284]. Поэтому одной из
ключевых проблем наномеханики является определение
механических и физических характеристик нанообъектов. Один
из наиболее эффективных методов определения упругих
модулей, в частности изгибной жесткости, используемых в
механике макрооб-ъектов, основан на измерении собственных частот
исследуемого объекта.
В [50, 51] предложен метод определения собственных частот
некоторых наноструктур (нанотрубок и нанокристаллов),
основанный на измерении собственных частот "большой системы",
состоящей из высокоориентированного массива (решетки) оди-
247
наковых нанотрубок или нанокристаллов, выращенных на
подложке и расположенных перпендикулярно по отношению к
подложке. Поскольку размеры нанообъектов в массиве, как
правило, примерно одинаковы, это позволило использовать
макроскопические размеры такого массива для изучения свойств
нанообъектов путем определения первых собственных частот
системы, состоящей из решетки нанотрубок или нанокристаллов
и подложки. В [50, 51] показано, что по найденному спектру
"большой системы" (решетка-подложка) я спектру подложки
можно определить собственные частоты одного нанообъекта.
Идея метода [50, 51] экспериментального определения
собственных частот нанообъектов заключается в следующем. Спектр
собственных частот системы решетка нанотрубок или
нанокристаллов - подложка делится на две части. Одна часть спектра
системы представляет собой спектр собственных частот
нанообъектов. При колебаниях нанообъектов с этими частотами
подложка остается практически неподвижной. Другая часть
спектра системы представляет собой спектр собственных частот,
близких к собственным частотам подложки без нанообъектов.
При этих частотах амплитуда колебаний нанообъектов
оказывается существенно меньше амплитуды колебаний подложки.
Все перечисленные выше свойства системы решетка нанотрубок
или нанокристаллов - подложка выявлены в результате
теоретического исследования, проверенного в работах [50, 51]. На
основании теоретически полученных фактов можно предложить
методику проведения экспериментов по определению
собственных частот нанообъектов в двух модификациях.
Модификация 1. Измерить собственные частоты системы
решетка нанотрубок или нанокристаллов- подложка. Измерить
собственные частоты точно такой же подложки без
нанообъектов. Сравнить два полученных спектра. Частоты в спектре
системы, близкие к частотам подложки без нанообъектов, не
представляют интереса. Частоты в спектре системы, которым не
находится соответствия среди частот в спектре подложки,
представляют собой частоты нанообъектов.
Модификация 2. Измерить резонансные частоты системы,
зафиксировав излучение нанообъектов (это можно сделать,
поскольку нанообъекты представляют собой пьезоэлектрики).
Одновременно измерить амплитуду колебаний подложки (это
можно сделать, поскольку подложка представляет собой
макрообъект). Резонансные частоты, при которых амплитуда
колебаний подложки равна нулю, являются собственными частотами
нанообъектов.
248
В случае перпендикулярно расположенных нанотрубок
метод [50, 51] позволяет оценить собственные частоты,
соответствующие первым изгибным собственным модам нанотрубки. По
этим частотам можно определить стержневую изгибную
жесткость нанотрубки. Для определения изгибной жесткости нано-
пленки, из которой изготовлена нанотрубка, необходимо знать
собственные частоты лежащих нанотрубок. В работах [131, 206,
262] развиты методы получения различных нанообъектов из
многослойных полупроводниковых нанопленок (GaAs, InAs, GeSi
и др.), в том числе и нанотрубок, расположенных горизонтально
на подложке. Эффективные физические свойства таких пленок
существенно зависят от их строения и остаточных напряжений.
Полупроводниковые нанопленки и изготовленные из них
наноструктуры представляют большой интерес для электроники.
Дизайн таких наноструктур невозможен без учета действующих
в них механических напряжений, в значительной степени
определяющих долговечность и прочность наноконструкций.
Полупроводниковые нанопленки и изготовленные из них
наноструктуры представляют большой интерес для электроники.
Следуя [52], далее метод определения собственных частот
нанообъектов [50, 51] обобщен на случай нанотрубок,
закрепленных параллельно подложке. Показано, что из спектра
"большой системы", состоящей из подложки и нанотрубок, возможно
выделение нескольких первых собственных частот,
соответствующих изгибным колебаниям одной нанотрубки, что позволяет
оценить их изгибную жесткость. Проведено конечно-элементное
моделирование нанотрубок из арсенида галлия.
14.3.1. Аналитическое исследование
модельной задачи
Рассмотрим модель, состоящую из горизонтально
расположенной пластины, моделирующей подложку, и N лежащих на
ней цилиндрических оболочек, моделирующих нанообъекты
(рис. 14.5). Пластина занимает область 0 < х < L, 0 < z < /,
толщина пластины Н. Все оболочки имеют одинаковые размеры
(длину /, радиус R и толщину И) и расположены на одинаковом
расстоянии a = U(N + 1) друг от друга, так что их оси направлены
вдоль оси z. Предполагается, что оболочки жестко прикреплены
к пластине.
Чтобы получить обозримые аналитические формулы для
собственных частот упругой конструкции, изображенной на
249
Рис. 14.5. Система параллельных друг другу нанотрубок, лежащих на подложке
рис. 14.5, следует сделать дополнительные упрощающие
предположения. Система уравнений геометрически линейной
микрополярной теории оболочек § 2.6 может быть упрощена как: в
[3, 58, 61], если предположить, что вектор />3 совпадает с
нормалью N к поверхности оболочки, а также принять некоторые
гипотезы о виде напряженно-деформированного состояния
оболочки. Тогда уравнения движения оболочек сводятся к
соотношениям [3,58,61]
divT + / = pw, divM + Tx+^ = 0,
T-o + -(M-k)e=4A-€, Mr = 4C--x,
€ = |((grad«)o+o-(gradH)r), (14.3.1)
x= (gradd)-o-}-—((grad«)-e)b,
d = -nx(grad(i)n.
Здесь 4А, 4С - тензоры жесткости оболочки.
Уравнения (14.3.1) применимы для описания колебаний как
цилиндрических оболочек, так и пластинки, на которой они
закреплены.
Изгибные колебания цилиндрической оболочки. При
описании кинематики оболочки будем использовать цилиндрическую
систему координат г, ф, z, где г s R. Известно, что тензор
жесткости оболочки на растяжение и сдвиг в касательной плоскости 4А
пропорционален толщине оболочки h, а тензор жесткости на
изгиб и кручение 4С пропорционален h3. Поэтому в случае hIR < 1,
hIL ^ 1 рассматриваемую оболочку можно считать нерастя-
250
жимой. Таким образом, тензор е будем считать равным нулю:
6=0. (14.3.2)
При этом 4А —» «, соответствующее соотношение упругости
теряет смысл, а тензор усилий в касательной плоскости Т - о
определяется с учетом уравнения совместности деформаций:
A(tr(T-o))-(l + v)div(div(T.o)) = 0,
где у - коэффициент Пуассона. Тензор жесткости на изгиб и
кручение 4С имеет вид
XC = D
1 + v I —v
е®е + -—~(а2®а2 + а4®а4)
Здесь О- изгибная жесткость оболочки, а7 = elf®e<9-e7: ®ег,
a4 = eip®eI+e:®elf.
Представим вектор перемещений и вектор поворотов в виде
разложения по базису цилиндрической системы координат:
Очевидно, что при отсутствии деформации растяжения-сдвига
все величины, характеризующие напряженно-деформированное
состояние оболочки, зависят только от полярного угла ф. Кроме
того, следствием (14,3.2) являются кинематические соотношения
£+*=<* ц-о. ..-о. *.-i(N-^}(i«j)
Выберем в качестве основной переменной перемещение по
нормали к поверхности оболочки «,. Легко показать, что при
отсутствии деформации растяжения-сдвига задача о свободных
колебаниях оболочки сводится к решению дифференциального
уравнения
2 { Л \
D dT [ d
i
+ 1
( d
2
И,+ —т—1
й,=0. (14.3.4)
р/?4 dip2 [dtp2 ' '} "r ' [d<p2 'j
Решения уравнения (14.3.4) имеют следующую структуру:
з (14.3.5)
иг(Ф) = X lAi S'm&j<?) + Bj cos(l^)],
251
где Ар Bj - произвольные постоянные, Х} - корни
характеристического уравнения
tf-23L4+(l-flz)A?-n2=0, Q = o>j£-R2.
Здесь Q - безразмерная собственная частота, для определения
которой требуется формулировка граничных условий.
Согласно формуле (14.3.5) функция £/г(ф) содержит 6
постоянных интегрирования. Эти константы определяются из
граничных условий, которые представляют собой условия
периодичности
н„(0,0 = и,(21С0. и,(0,г)=ы,(21С.О, ^(0,0 = ^(2^0(14.3.6)
и условия сопряжения оболочки с подложкой, которые будут
сформулированы ниже.
Изгибные колебания пластины. Уравнения движения
пластины выглядят так:
divT + £/„5(* -па) = pit',
я=1
N
divM + Тх + £ €„ 8(jc -па)-0,
"=l (14.3.7)
N
п=1
где/„, €„ - сила и момент, действующие на пластину со стороны
цилиндрической оболочки с номером л, S(x)~ дельта-функция
Дирака. Они вычисляются по формулам
/* = vT<n)U €«4vMWU <143-8>
Считая пластину иерастяжимой и пренебрегая деформацией
поперечного сдвига, приведем уравнения движения (14.3.7),
(14.3.8) к виду
СДДш + рли/ =
где w - поперечный прогиб (перемещение в направлении оси у),
С - изгибная жесткость пластины, а р„ - ее поверхностная
плотность. Для того чтобы система уравнений стала замкнутой,
дополним ее кинематическими условиями сопряжения оболочек с
пластиной
252
,(«)
tp=0
—L_. "П. =о, #И . =-|и
lj=rta' Ф
1|{1=0
1р=0
Эх
(14.3.10)
*=ял
и граничными условиями для пластины, имеющими смысл
свободного края на сторонах z = 0,1:
d2w
dz2
= 0,
Э2
w
dz2
= 0,
d2w
k=i
3z3
= 0,
Э3
w
Ъгъ
= 0 (14.3.11)
:=l
и жесткой заделки х = 0, L:
w\
--a «U-a £
и>
-0. (14.3.12)
x=L
Поскольку рассматриваются свободные колебания системы,
решение уравнения (14.3.9) будем искать в виде
w(x,z,r)= W(x,z)ek
(14.3.13)
Подставляя в уравнение (14.3.9) выражение для поперечного
прогиба (14.3.13) и выражения для сил и моментов
7ln)j =2Крю2У, X „ МИ =ДУ(М-1)в'-),
полученные в результате интегрирования уравнений движения
оболочек, приходим к уравнению
CAAW - t>na>2W =
n г
-EI
л=! j=l
2 Ярю2
Л{я)8(х-пв) +
V^2 ;BJn)64x-na)
(14.3Д4)
Следует отметить, что любые деформации пластины,
зависящие от координаты z, неизбежно вызовут деформации
растяжения-сжатия лежащих на ней оболочек. Эти колебания
оболочек не представляют интереса для целей данной работы,
поскольку нас интересуют наинизшие собственные частоты.
Поэтому ниже будут рассматриваться движения, при которых все
величины, характеризующие напряженно-деформированное
состояние пластины, зависят только от координаты х. Такие дви-
253
жения допускаются дифференциальным уравнением (14.3.14) и
краевыми условиями (14.3.11). Заметим, что при выполнении
условия / <§ L несколько первых собственных частот колебаний
пластины связаны именно с деформациями, зависящими только
от координаты х. Итак, вместо уравнения (14.3.14) будем
рассматривать более простое уравнение
,1V
CW? -pjsfW =
N 3
-II
л = 1 >=!
2/?роГ
А)*Щх-па)+
V ' } В("Щх-па)
(14.3.15)
Дальнейшее продвижение невозможно без определения
констант Л|и), 5]"\ где и принимает значения от 1 до jV. Согласно
уравнениям (14.3.3), (14.3.5), (14.3.6), (14.3.10), системы
уравнений для определения указанных констант имеют вид
з
£ [Д)п) мп(2*Л,) - Bf(\ - cos(2kXj ))] = О,
j=\
( I J (j=no*
(14.3.16)
j=i
Ху-Л*"» = 0, £ ^[^n>cos(2nX,bB<nVm(2rcX;)] = 0,
M J
J=l j
J
£ А,7[д)п)(1 - сов(2яХ;)) + B<n) sin(2rcX;)] = 0,
;=!
R*—i 1 1 * Ь=и
Поскольку предполагается, что все цилиндрические оболочки
одинаковы, определители всех JV систем (14.3.16) одинаковы.
Отличие заключается в правых частях систем, куда входят
перемещения и производные от перемещений в разных
точках пластины. Далее рассмотрим две взаимоисключающие
ситуации.
254
1. Определитель систем (14.3.16) равен нулю. В этом случае
састемы уравнений (14.3.16) будут иметь решения только'тогда,
когда их правые части обращаются в нуль:
WU=0' ^'U,=fc (W.3.17)
Поскольку размеры оболочек, моделирующих нанообъекты,
существенно меньше размеров пластины, моделирующей
подложку, а количество оболочек достаточно велико, можно считать,
что оболочки непрерывно распределены по поверхности
пластины. Тогда дискретные условия (14.3.17) заменятся
непрерывными условиями
W(z) = 0, W'(x) = 0. (14.3.18)
Выполнение (14,3.18) фактически означает, что пластина
остается неподвижной. Частоты колебаний, найденные из условия
равенства нулю определителя систем (14.3.16), соответствуют
колебаниям цилиндрических оболочек, лежащих на жестком
основании.
Таким образом, из спектра системы выделяется спектр
собственных частот колебаний нанообъектов. При этих частотах
подложка остается неподвижной,
2. Определитель систем (14.3.16) отличен от нуля. В этом
случае системы (14.3.16) имеют единственные решения,
структура которых такова, что все константы Л|я>, £]п) представляют
собой линейные комбинации величин W\ = , W^'j _ , Нетрудно
показать, что
3 2Л(п)
'"' ' ' (14.3.19)
С учетом (14.3.19) уравнение (14.3.15) переписывается в виде
CWxry-p„<B2W =
N
= ~2 [p®a(Gi^w + G2R2W;)b(x~ na) +
■D^W + ^W^b'ix-na)]. (14.3.20)
255
л=1
Если цилиндрических оболочек достаточно много, можно
считать, что оболочки непрерывно распределены по поверхности
пластины. Осреднив правую часть уравнения (14.3.20), упростим
математическую постановку задачи, сведя ее к уравнению
W'v -Л£-(СЖ + G4RW;r) - (й2 Bs. х
х CLR2 К 3 х } С
wS-(GtW-i-G2RW;)
LP«
= 0. (14.3.21)
Если слагаемые, связанные с наличием цилиндрических
оболочек, будут малыми, собственные частоты системы будут близки
к собственным частотам пластины без оболочек. Оценим
порядок слагаемых, вносимых оболочками:
.g3w;~n(AYf A? w>\ -^-g<w;'~n(AY к w*,
3 * KHJ \RJ x CLR 4 x \H) R *
NRp „ „, ., h R „. NR2p _ „., ,Jf /?Y.., ,,, , ~„4
-G,W~N W, -G2W'~N— — W. (14.3.22)
Оценки (14.3.22) показывают, что малость динамических
слагаемых, связанных с наличием оболочек, определяется
исключительно малостью размеров оболочек в сравнении с размерами
пластины. Для того чтобы были малы определяемые
оболочками силовые факторы, необходимо, чтобы толщина
оболочек была много меньше толщины пластины, а линейные
размеры пластины и оболочек различались бы не столь
существенно. Фактически определяющей является малость величины
ш
Отметим два существенных отличия поведения системы с
горизонтально расположенными нанотрубками от поведения
аналогичной системы с вертикально ориентированными
нанотрубками [50]. В случае вертикально ориентированных нано-
трубок [50] уравнение, аналогичное (14.3.21), содержит только
четные производные по пространственным координатам, и
кроме того, при колебаниях с частотами, близкими к
собственным частотам колебаний подложки, амплитуды колебаний нано-
объектов оказываются существенно меньше амплитуды
колебаний подложки. В случае горизонтально расположенных нано-
трубок это не так. С физической точки зрения это связано с тем,
что в отличие от [50], где распределенные вертикально ориен-
256
тированные нанотрубки не оказывали влияние на эффективную
изгибную жесткость пластины, здесь прикрепленные
горизонтально нанотрубки изменяют эффективную жесткость
пластины. Тем самым, с точки зрения эффективных свойств пластина с
горизонтальными нанотрубками оказывается анизотропной и
неоднородной.
14.3.2. Численный анализ собственных колебаний
Без сделанных выше допущений о характере
деформированного состояния получить аналитические результаты о
спектре колебаний "большой системы" вряд ли удастся. Исследуем
систему, состоящую из некоторого числа нанотрубок, лежащих
параллельно друг другу на подложке в рамках трехмерной
теории при помощи метода конечных элементов. Поскольку
рассматриваемые материалы (GaAs, InAs, GeSi и др.) обладают
пьезоэлектрическими свойствами [2, 185], в целом такая система
представляет собой составное пьезоэлектрическое тело.
Для модального анализа трехмерной системы, состоящей из
пластины и лежащих на ней параллельно друг другу нанотрубок,
использован конечно-элементный пакет ANSYS.
Был проведен ряд вычислительных экспериментов для
разного числа нанотрубок (от I до 10) и разной геометрии системы
(отношений толщин подложки и нанопленки, радиуса
нанотрубки к длине подложки и др.). Также были проведены расчеты
при разных условиях закрепления подложки. Все части системы
моделировались как трехмерные анизотропные линейно-упругие
тела. Для трубок использованы конечные элементы,
соответствующие пьезоупругому материалу. Для расчетов свойства
материалов взяты из [2, 185]. Рассматривались используемые в
практике материалы подложки и нанотрубок [206, 262]. Расчеты
показали, что вне зависимости от характера закрепления
подложки качественное поведение спектра "большой системы" одно
и то же, т.е. возможно подобрать параметры задачи так, чтобы
из общего спектра можно было выделить собственные частоты
нанотрубок и подложки, что является численным
подтверждением результатов теоретического анализа, приведенного выше.
Приведем результаты для свободной подложки с тремя
нанотрубками. В качестве подложки рассматривался кристалл
сапфира, а для нанотрубок были использованы физические
характеристики арсенида галлия. Геометрические параметры
нанотрубок взяты аналогично [206, 262].
9 Еремеев В.А.
257
Рис. 14.6. Собственные моды, локализованные в нанотрубках
Рис. 14.7. Собственные моды, соответствующие первой изгибной моде
подложки
Некоторые собственные моды колебаний представлены на
рис. 14.6-14.9, а распределение собственных частот по их
порядку - на рис. 14.10. Квадратиками на рис. 14.10 отмечены
моды, при которых наблюдаются существенные движения
подложки, круглыми маркерами - собственные частоты, при
которых подложка практически неподвижна, а колеблются нано-
трубки. При выбранных значениях параметров задачи в рассмот-
258
Рис. 14.8. Пример высокочастотной собственной моды: колебания подложки
нанотрубок
Рис. 14.9. Пример собственной моды, локализованной водной нанотрубке
ренном диапазоне находятся только три моды собственных
колебаний подложки. Рис. 14.6 соответствует собственным
колебаниям, локализованным в нанотрубках. Собственные частоты
показанных колебаний соответствуют первой собственной
частоте нанотрубки, закрепленной по части боковой' 'поверхности.
259
.
J
p- -*--#--*" "*"
г
J-
,*'■ -
В.
л -V
1 3 5 7 9 И 13 15 17 19 21 23 25 27
Рис. 14.10. Распределение собственных частот "большой системы" в
зависимости от их номера п. Квадратами выделены собственные частоты,
соответствующие колебаниям подложки
На рис. 14.10 эти частоты соответствуют нескольким первым
точкам на графике. Видно, что при этих колебаниях подложка
практически неподвижна, а нанотрубки испытывают колебания,
при которых их поперечное сечение становится овалом. Таким
образом, эти первые частоты позволяют оценить изгибную
жесткость пленки, образующей нанотрубку.
На рис. 14.7 показаны собственные колебания при частоте,
соответствующей первой изгибной моде колебаний подложки.
В отличие от результатов [50, 51], где при таких модах
вертикально закрепленные нанообъекты двигались практически как
абсолютно жесткие тела, здесь эта мода колебаний также
сопровождается деформацией нанотрубок. С учетом характера
закрепления нанотрубок и их меньшей жесткости это вполне
естественно.
Следующие моды собственных колебаний соответствуют
более сложному характеру движений. На рис. 14.8 показана
мода, для которой подложка совершает колебания согласно
третьей собственной частоте, вместе с тем форма колебаний
нанотрубок уже соответствует высокочастотным колебаниям одной
нанотрубки. Эта мода соответствует последней точке на
рис. 14.10. Поскольку распределенные нанотрубки влияют не
только на массу системы в целом, но и на ее эффективную
жесткость, для таких мод колебаний, как на рис. 14,8,
изменяются не только формы колебаний, но и значения собственных
частот "большой системы" отличаются от собственных частот
260
как одной подложки, так и одной нанотрубки. Для первых же
частот численное совпадение значений собственных частот
"большой системы" с соответствующими парциальными
собственными частотами подложки и одной нанотрубки вполне
удовлетворительное.
Численный анализ показывает также наличие собственных
колебаний, практически локализованных в одной нанотрубке
(рис. 14.9). Заметим, что такие колебания менее интересны с
точки зрения детектирования таких колебаний
экспериментально. Ббльший интерес представляют локализованные моды
колебаний, при которых колеблются все или большая часть
нанотрубок, особенно в случае измерения возникающих в
окрестности системы электрических полей- от системы
колеблющихся нанотрубок напряженность поля больше. С этой точки
зрения, чем больше имеется на подложке нанотрубок, тем
эффективнее предлагаемый метод.
Как и в случае [50, 51], удалось подобрать геометрические
параметры "большой системы" так, чтобы было возможно
разделить спектр на собственные частоты, порожденные
собственными колебаниями нанотрубок, и собственные частоты
подложки. Следует отметить, что в отличие от случая
вертикального массива нанокристаллов, рассмотренного ранее, здесь
перемешивание собственных частот подложки и нанотрубок
происходит в большей степени. Возможность выделения из спектра
первых нескольких собственных частот нанотрубки в большей
степени зависит как от геометрии системы, так и от ее
механических характеристик. Следовательно, для данной задачи
проведение компьютерного моделирования в значительной степени
позволяет оптимизировать процесс постановки натурного
эксперимента.
Конечно-элементные расчеты системы решетка
нанотрубок - подложка на основе трехмерной теории подтвердили
выводы, сделанные выше на основе анализа уравнений движения
оболочек, о возможности выделения собственных частот одной
нанотрубки. Проведенный здесь теоретический и численный
анализ позволяет заключить, что детектировать собственные
колебания "большой системы", состоящей из лежащих пьезо-
активных нанотрубок, представляется вполне возможным на
основе предложенных модификаций.
Предложенный выше метод при удачном соотношении
геометрических и физических характеристик "большой системы"
позволяет с высокой точностью экспериментально определить
первые собственные частоты одной нанотрубки по спектру
261
системы решетка-подложка и одной подложки,
соответствующие изгибным колебаниям нанопленки, образующей нано-
трубку.
Метод особенна эффективен в случае, когда первые
собственные частоты нанообъектов сравнимы с первыми
собственными частотами подложки (как в рассмотренном здесь примере).
Главным ограничением предложенного метода является
частотный диапазон измерительных приборов. Если собственные
частоты нанообъектов слишком высоки, зафиксировать их не
удастся. Вместе с тем существует возможность создания из таких
нанообъектов, как полупроводниковые нанопленки, структур,
жесткость которых будет меньше, так что собственные частоты
таких структур окажутся в области действия измерительных
приборов.
В связи с развитием методов исследования упругих модулей
наноструктур отметим работы [85]-[90].
ЛИТЕРАТУРА
1. Агранович И.С, Вишик М.И. Эллиптические задачи с параметром
и параболические задачи общего вида // УМН. 1964. Т. 19, № 3
С. 53-161.
2. Акустические кристаллы: Справочник / Сост. А.А. Блистанов и др.;
Под. ред. М.П. Шаскольской. М,: Наука, 1982. 632 с.
3. Альтенбах X., Жилин П.А. Общая теория упругих простых
оболочек // Успехи механики (Advances in Mechanics). 1988, Т. II, №4.
С. 107-148.
4. Амбарцумян С.А. Микрополярная теория оболочек и пластин.
Ереван: Изд-во НАН Армении, 1999. 214 с.
5. Астарита Дж., Маруччи Дж. Основы гидромеханики
неньютоновских жидкостей. М.: Мир, 1978. 311 с.
6. Атоян А.А., Саркисян СО. Изучение свободных колебаний
микрополярных упругих тонких пластин // Докл. НАН Армении. 2004.
Т. 104, №2. С. 18-33.
7. Атоян А,А., Саркисян СО. Задача динамики тонкой пластинки на
основе несимметричной теории упругости // Изв. НАН Армении.
2004. Т. 57, № 4. С. 287-294.
8. Атоян А.А., Саркисян СО. Динамическая теория микрополярных
упругих тонких пластин // Экол. вестн. НЦ ЧЭС. 2004. N° 1. С. 18-
29.
9. Аэро Э.Л., Кувшинский Е.В. Основные уравнения теории упругости
сред с вращательным взаимодействием частиц // ФТТ. I960. Т. 2,
№ 7. С. 1399-1409.
10. Базаров И.П. Термодинамика. М.: Высщ. шк„ 1983. 344 с.
11. Беляев СП., Волков А.Е. и др. Материалы с эффектом памяти
формы: Справ, изд. / Под ред, В.А. Лихачева. СПб.: НИИХ СПбГУ,
1997. Т. 1.424 с.
12. Беляев СП., Волков А.Е. и др. Материалы с эффектом памяти
формы: Справ, изд. / Под ред. В.А. Лихачева. СПб.: НИИХ СПбГУ,
1998. Т. 2. 374 с.
13. Беляев СП., Волков А.Е. и др. Материалы с эффектом памяти
формы: Справ, изд. / Под ред. В.А. Лихачева. СПб.: НИИХ СПбГУ,
1998. Т. 3.474 с.
14. Беляев СП., Волков А.Е. и др. Материалы с эффектом памяти
формы: Справ, изд. / Под ред, В.А. Лихачева. СПб.: НИИХ СПбГУ,
1998. Т. 4. 268 с.
\Ь.ШерЬичевскийВ.Л. Вариационные принципы механики сплошной
среды. М.: Наука, 1983.448 с.
16. Бойко B.C., Гарбер P.M.., Косевич A.M. Обратимая пластичность
кристаллов. М.: Наука, 1991. 280 с.
263
17. Болотин В.В. Неконсервативные задачи теории упругой
устойчивости. М.: Наука, 1961. 340 с.
18. Вайнберг ММ. Вариационные методы исследования нелинейных
операторов. М.: Гостехиздат, 1956. 344 с.
19. Вайнберг М.М., Треногий В. А. Теория ветвления решений
нелинейных уравнений. М.: Наука, 1969.527 с.
20. Вакуленко А. А. Связь микро- и макросвойств в упругопластических
средах // Итоги науки и техники. Механика деформируемого
твердого тела. М.: ВИНИТИ, 1991. Т. 22. С. 3-54.
21. Вит Р.де. Континуальная теория дислокаций. М.: Мир, 1977. 208 с.
22. Волевич Л.Р. Разрешимость краевых задач для общих
эллиптических систем // Мат. сб. 1965. Т. 68, вып. 3. С. 373-416.
23. Вольмир А.С. Устойчивость деформируемых систем. М.: Наука,
1967.984 с.
24. Вольмир А.С. Нелинейная динамика пластинок и оболочек. М.:
Наука, 1972. 432 с.
25. Ворован И. И. Математические проблемы нелинейной теории
пологих оболочек. М.: Наука, 1989. 376 с.
26. Галимов К.З. Основы нелинейной теории тонких оболочек. Казань:
Изд-во Казан, гос. ун-та, 1975. 326 с.
27. Теннис Р. Биомембраны: Молекулярная структура и функции. М.:
Мир, 1997. 624 с.
28. Гиббс Дж.В. Термодинамика: Стат. механика. М.: Наука, 1982.
584 с.
29. Грекова Е.Ф., Жилин П.А. Уравнения нелинейных упругих
полярных сред // Изв. вузов. Сев.-Кавк. регион. Естеств. науки.
2000. Слецвып. Нелинейные пробл. механики сплошных сред.
С. 24-46.
30. Гольденвейзер А.Л. Теория упругих тонких оболочек. М.: Наука,
1976.512 с.
31. Григолюк Э,И., Кабанов В.В. Устойчивость оболочек. М.: Наука,
1978. 359 с.
32. Гринфельд М.А. Методы механики сплошных сред в теории
фазовых превращений. М.: Наука, 1990. 312 с.
33. Гурвич Е.А. Условие Адамара в нелинейной теории упругости //
Изв. АН СССР. МТТ. 1979. № I. С. 45-51.
34. Гуткин М.Ю., Овидько И.А. Дефекты и механизмы пластичности в
наноструктурных и некристаллических материалах. СПб.: Янус,
2003. 194 с.
35. Дудников В.А., Назаров С.А. Асимптотически точные уравнения
тонких пластин на основе теории Коссера // Докл. АН СССР. 1982.
Т. 262, № 2. С. 306-309.
36. Дъярмати И. Неравновесная термодинамика: Теория поля и
вариационные принципы. М.: Мир, 1974. 304 с.
37. Егоров Ю.В., Шубин М.А. Линейные дифференциальные уравнения
с частными производными. Основы классической теории // Итоги
науки и техники. Соврем, проблемы математики. Фундаменталь-
264
ные направления. Т. 30. Дифференциальные уравнения с частными
производными-1. ВИНИТИ, 1987. С. 1-262.
38. Елецкий А.В., Смирнов Б.М. Фуллерены и структуры углерода //
УФН. 1995. Т. 165, № 9. С. 977-1009.
39. Елисеев В.В. Механика упругих тел. СПб.: СПбГТУ, 1999. 341 с.
40. Еремеев В.А. Об эллиптичности краевых задач нелинейной теории
упругости // Изв. РАН. МТТ. 2000. № 3. С. 67-72.
41. Еремеев В.А. Фазовые превращения в оболочках Коссера // Изв.
вузов. Сев.-Кавк. регион. Естеств. науки. 2001. Спецвып. Мат.
моделирование. С. 64—67.
42. Еремеев В,А. О распространении волн слабого разрыва в средах с
микроструктурой // Экол. вестн. НЦ ЧЭС. Мат. моделирование,
вычисл. механика и геофизика. 2004. С. 37-46.
43. Еремеев В.А. Волны ускорения в упругих микрополярных средах //
Докл. РАН. 2005. Т. 401, № 5. С. 623-625.
44. Еремеев В. А. О локальной группе материальной симметрии в
механике микрополярных сред // Мат. моделирование систем и
процессов. 2006. № 14. С. 62-73.
45. Еремеев В.А. Волны ускорения в термоупругой микрополярной
среде // Нелинейный мир. 2008. Т. 6, № 5-6. С. 343-347.
46. Еремеев В. А., Зубов Л. М. Условия фазового равновесия в
нелинейно-упругих средах с микроструктурой // Докл. РАН. 1992. Т. 326,
№6. С. 968-971.
47. Еремеев В.А., ЗубовЛ.М. Об устойчивости упругих тел с момент-
ными напряжениями // Изв. РАН. МТТ. 1994. № 3. С. 181-190.
48. Еремеев В.А., ЗубовЛ.М. Теория упругих и вязкоупругих
микрополярных жидкостей // ПММ. 1999. Т. 63, вып. 5. С. 801-815.
49. Еремеев В.А., ЗубовЛ.М. Общая нелинейная теория упругих
микрополярных оболочек // Изв. вузов. Сев.-Кавк. регион. Естеств,
науки. 2003. Спецвып. Нелинейные пробл. механики сплошных
сред. С. 124-169.
50. Еремеев В.А., Иванова Е.А., Морозов Н.Ф., Соловьев А.И. Об
определении собственных частот нанообъектов // Докл. РАН. 2006.
Т. 406, № 6. С. 756-759.
51. Еремеев В.А., Иванова Е.А., Морозов Н.Ф., Соловьев А.Н. Об
одном методе определения собственных частот упорядоченной
системы нанообъектов // ЖТФ. 2007. Т. 77, вып. 1. С. 3-8.
52. Еремеев В.А., Иванова Е.А., Морозов И.Ф., Строчков СЕ. О
собственных колебаниях систем нанотрубок // Тр. 10-й Междунар.
конф. "Современные проблемы МСС", Ростов-на-Дону, 5-
9.12.2006. Ростов н/Д: Изд-во ООО "ЦВВР", 2006. Т. 1. С. 109-114.
53. Еремеев В.А., Фрейдин А.Б., ШариповаЛ.Л. О неединственности и
устойчивости в задачах равновесия упругих двухфазных тел //Докл.
РАН. 2003. Т. 391, № 2. С. 189-193.
54. Еремеев В.А., Фрейдин А.В., ШариповаЛ.Л. Об устойчивости
равновесия двухфазных упругих тел // ПММ. 2007- Т. 71, вып. 1.
С. 66-92.
265
55. Ерофеев В.И. Волновые процессы в твердых телах с
микроструктурой. М.: МГУ, 1999. 328 с.
56. Жен П.де. Физика жидких кристаллов. М.: Мир, 1982. 304 с.
57. Жилин П.А. Механика деформируемых оснащенных поверхностей
// Тр. IX Всесоюз. конф. по теории оболочек и пластин. Л.:
Судостроение, 1975. С. 48-54.
58. Жилин П.А. Основные уравнения неклассической теории упругих
оболочек // Тр. Ленингр. политехи, ин-та. 1982. № 386. С. 29^6.
59. Жилин П.А, Векторы и тензоры второго ранга в трехмерном
пространстве. СПб.: Нестор, 2001.275 с.
60. Жилин П.А. Модифицированная теория симметрии тензоров и
тензорных инвариантов // Изв. вузов. Сев.-Кавк. регион. Естеств.
науки. 2003. Спецвып. Нелинейные пробл. механики сплошных
сред. С. 176-195.
61. Жилин П.А. Прикладная механика. Основы теории оболочек: Учеб.
пособие. СПб.: Изд-во Политехи, ун-та, 2006. 167 с.
62. Жилин П.А. Актуальные проблемы механики. СПб.: Изд-во
ИПМаш РАН. 2006. Т. 1. 306 с.
63. Зеленина А. А., Зубов Л. М. Критерий потенциальности сил,
действующих на абсолютно твердое тело // Изв. РАН. МТТ. 2000, № 3.
С. 188-190.
64. Зубов Л.М. Вариационные принципы нелинейной теории упругости
// ПММ. 1971. Т. 35, вып. 3. С. 406-410.
65. Зубов Л.М. Вариационные принципы нелинейной теории
упругости. Случай наложения малой деформации на конечную // Там
же. Вып. 5. С 848-852.
66. Зубов Л.М. Кинематика деформирующейся поверхности и ее
приложения к механике оболочек // Изв. Сев.-Кавк. науч. центра ВШ.
Естеств. науки. 1973. № 4. С. 26-29.
67. Зубов Л.М. Статико-геометрическая аналогия и вариационные
принципы в нелинейной безмоментной теории оболочек // Тр. 12-й
Всесоюз. конф. по теории оболочек и пластин. Ереван: Изд-во
Ереван, ун-та, 1980. Т. 2. С. 171-176.
68. Зубов Л.М. Методы нелинейной теории упругости в теории
оболочек. Ростов н/Д: Изд-во РГУ, 1982. 144 с.
69. Зубов Л.М. Нелинейная теория изолированных дислокаций и дис-
клинаций в упругих оболочках // Изв. АН СССР. МТТ. 1989. № 4.
С. 139-145.
Ю.Зубов Л.М. Вариационные принципы и инвариантные интегралы
для нелинейно-упругих тел с моментными напряжениями // Там же.
1990. № 6. С. 10-16.
71. Зубов Л.М. Непрерывно распределенные дислокации и дискли-
наций в упругих оболочках // Изв. РАН. МТТ. 1996. № 6. С. 102-
110.
72. Зубов Л.М. Общие решения нелинейной статики упругих оболочек
// Докл. РАН. 2002. Т. 382, № I. С. 58-61.
266
1Ъ.ЗубовЛ.М. О теории равновесия нелинейно упругих оболочек //
Изв. вузов. Сев.-Кавк. регион. Естеств. науки. 2001. Спецвып. Мат.
моделирование, С. 85-89.
74. Зубов Л. М, О больших деформациях изгиба и кручения упругих
оболочек, имеющих форму винтовой поверхности // Пробл.
механической деформации твердого тела: Межвуз. сб. к 70-летию
Н.Ф. Морозова. СПб: Изд-во СПбГУ, 2002. С. 130-136.
75. Зубов Л.М, Уравнения Кармана для упругой пластинки с
дислокациями и дисклинациями // Докл. РАН. 2007. Т. 412, № 3.
76. Зубов Л.М., Еремеев В.А. Уравнения вязкоупругой микрополярной
жидкости//Там же. 1996. Т. 351, №4, С. 472^175.
77. Зубов Л.М., Еремеев В. А. Механика упругих микрополярных
оболочек // Дальневост. мат. журн. 2003. Т. 4, N° 2. С. 182-225.
78. Зубов Л.М., Карякин М.И. Дислокации и дисклинации в нелинейно-
упругих телах с моментными напряжениями // ПМТФ, 1990. № 3.
С. 160-167.
79. Зубов Л.М., Карякин М.И. Тензорное исчисление: Основы теории.
М.: Вуз. кн., 2006. 120 с.
80. Зубов Л.М., РудевА.И. Эффективный способ проверки условия
Адамара для нелинейно-упругой сжимаемой среды // ПММ. 1992.
Т. 56, вып. 2. С. 296-305.
81. Зубов Л. М„ РудевА.И. О признаках выполнимости условия
Адамара для высокоэластичных материалов // Изв. РАН. МТТ.
1994. №6. С. 21-31.
82. Зубов Л.М., РудевА.И. Об условиях существования продольных
волн в анизотропной нелинейно-упругой среде //Докл. РАН. 1994.
Т. 334, №2. С. 156-158.
83. Зубов Л.М., Рудев А.И. О необходимых и достаточных признаках
эллиптичности уравнений равновесия нелинейно-упругой среды //
ПММ. 1995. Т. 59, вып. 1. С. 209-223.
84. Зубов Л.М., Филиппова Л, М. Теория оболочек с непрерывно
распределенными дислокациями // Докл. РАН. 1995. Т. 344, .№ 5.
С. 619-622.
85. Иванова Е.А., Индейцев Д.А., Морозов Н.Ф. К вопросу об
определении параметров жесткости нанообъектов // ЖТФ, 2006. Т. 76,
вып. 10. С. 74-80.
86. Иванова Е.А., Индейцев Д.А., Морозов Н.Ф. Об определении
параметров жесткости нанообъектов // Докл. РАН. 2006. Т. 410, №6.
С. 754-758.
87. Иванова Е.А., Кривцов A.M., Морозов Н.Ф. Особенности расчета
изгибной жесткости нанокристаллов // Там же. 2002. Т. 385, .№ 4.
С. 494-496.
88. Иванова Е. А., Кривцов A.M., Морозов И.Ф., Фирсова А.Д. Учет
моментного взаимодействия при расчете изгибной жесткости
наноструктур //Там же. 2003. Т. 391, Яа 6. С. 764-768.
267
89. Иванова Е.А., Морозов Н.Ф. Об одном подходе к
экспериментальному определению изгибной жесткости нанооболочек // Там
же. 2005. Т. 400, № 4. С. 475^79.
90. Иванова Е.А., Морозов Н.Ф., Семенов Б.Н., Фирсова АД. Об
определении упругих модулей наноструктур; теоретические расчеты и
методика экспериментов // Изв. РАН. МТТ. 2005. № 4, С. 75-85.
91. Ивенс И., Скейлак Р. Механика и термодинамика биологических
мембран. М.: Мир, 1982. 304 с.
92. Илюхин А. А. Пространственные задачи нелинейной теории упругих
стержней. Киев: Наук, думка, 1979. 216 с.
93. Кагава Ясуо. Биомембраны. М: Высш. шк., 1985. 303 с.
94. Кабриц С.А., Михайловский Е.И., Товстик П.Е. и др. Общая
нелинейная теория упругих оболочек. СПб.: СПбГУ, 2002. 388 с.
95. Картан Э, Риманова геометрия в ортогональном репере. М.: Изд-
во МГУ, 1960. 308 с.
96. Корякин М.И. Равновесие и устойчивость нелинейно-упругой
пластинки с клиновой дисклинацией // ПМТФ. 1992. № 3. С. 157-
163.
97. Кац Е.И., Лебедев В.В. Динамика жидких кристаллов, М.: Наука,
1988.144 с.
98. Каюк Я. Ф., Жуковский А.П. К теории пластин и оболочек на
основе концепции поверхностей Коссера // Прикл. механика. 1981.
Т. 17, №10. С. 80-85.
99. Каюк Я.Ф. Геометрически нелинейные задачи теории пластин и
оболочек. Киев: Наук, думка, 1987. 208 с.
100. Керл Р.Ф. Истоки открытия фуллеренов: Эксперимент и гипотеза
// УФН. 1998. Т. 168, № 3. С. 331-342.
101. Киндерлерер Д., Стампакья Г. Введение в вариационные
неравенства и их приложения. М.: Мир, 1983. 256 с.
102. Колпак Е.П. Устойчивость безмоментных оболочек при больших
деформациях. СПб.: СПбГУ, 2000. 248 с.
103. Кондауров В.И., Фортов В.Е. Основы термомеханики
конденсированной среды. М.: Изд-во МФТИ, 2002. 336 с.
104. Кренер Э. Общая континуальная теория дислокаций и
собственных напряжений. М.: Мир, 1965. 103 с.
105. Кривцов A.M., Морозов Н.Ф. Аномалии механических
характеристик наноразмерных объектов // Докл. РАН. 2001. Т. 381, № 3.
С.345-347.
106. Крото Г. Симметрия, космос, звезды и С60 // УФН. 1998. Т. 168,
№ 3. С. 343-358.
107. Курант Р., Гильберт Д. Методы математической физики, М.; Л.:
ГТТИ, 1933. Т. 1.525 с.
108. Лихачев В.А., Кузьмин С.Л., Каменцева З.П. Эффект памяти
формы. Л.: ЛГУ, 1987. 216 с.
109. Лурье А.И. О статико-геометрической аналогии в теории
оболочек // Проблемы механики сплошных сред. М.: Изд-во АН СССР,
1961. С. 233-240.
268
110. Лурье А.И. Аналитическая механика. М.: Наука, 1961. 824 с.
111. Лурье А,И, Критерий эллиптичности уравнений равновесия
нелинейной теории упругости // Изв. АН СССР. МТТ. 1979 № 2
С. 23-34.
112. Лурье А.И. Теория упругости. М.: Наука, 1970. 939 с.
113. Лурье А.И. Нелинейная теория упругости. М.: Наука, 1980. 512 с.
114. Миндлин Р.Д., Тирстен Г.Ф. Эффекты моментных
напряжений в линейной теории упругости // Механика. 1964. №4/86
С. 80-114.
115. Мовсисян Л. А. К моментной теории упругости для тонких пластин
// Докл. НАН Армении. 1999. Т. 99, № 2. С. 148-152.
116. Морозов Н.Ф. Математические вопросы теории трещин. М.:
Наука, 1984.256 с.
117. Морозов И.Ф., Назыров И.Р., ФрейдинА.Б. Одномерная задача о
фазовом превращении упругого шара // Докл. РАН. 1996. Т. 346,
№2. С. 188-191.
118. Мутафян М.Н., Саркисян СО. Асимптотические решения
краевых задач тонкого прямоугольника по несимметричной теории
упругости // Изв. НАН Армении. 2004. Т. 57, № 1. С 41-58.
119. Назыров И.Р., Фрейдин А.Б. Фазовые превращения при
деформировании твердых тел в модельной задаче об упругом шаре // Изв.
РАН. МТТ. 1998. № 5. С. 52-71.
120. Никогосян Г.С., Саркисян СО. Упругие тонкие оболочки по
несимметричной теории упругости со стесненным вращением //
Докл. НАН Армении. 2005. Т. 105, №2. С. 132-139.
121. Никогосян Г.С, Саркисян СО. Об асимптотической теории
микрополярных упругих тонких оболочек // Изв. НАН Армении,
2005.Т. 58,Хэ1.С. 15-37,
122. Новицкий В. Теория упругости. М.: Мир, 1975. 872 с.
123. Новожилов В.В. Теория тонких оболочек. Л.: Судостроение, 1962.
430 с.
124. Новожилов В.В., Черных К.Ф., Михайловский Е.И. Линейная
теория оболочек. Л.: Политехника, 1991.656 с.
125. Новожилов В.В., Шамина В.А. О кинематических граничных
условиях в задачах нелинейной теории упругости // Изв. АН СССР.
МТТ. 1975. № 5. С. 63-74.
126. Осмоловский ВТ. Вариационная задача о фазовых переходах в
механике сплошной среды. СПб.: СПбГУ, 2000. 262 с.
127. Пальмов В.А. Основные уравнения теории несимметричной
упругости// ПММ. 1964. Т. 28, вып. 3. С. 401-408.
128. Пальмов В.А. Колебания упругопластических тел. М.: Наука,
1979.328 с.
129. Погорелое А.В. Геометрическая теория устойчивости оболочек.
М.: Наука, 1966.296 с.
130. Подстригай Я.С, Повстенко Ю.З. Введение в механику
поверхностных явлений в деформируемых твердых телах. Киев: Наук.
думка, 1985. 200 с.
269
131. Принц В.Я., Голод СВ. Упругие нанооболочки на основе
кремниевых пленок; формирование, свойства и практическое применение
// ПМТФ. 2006. № 6. С. 114-128.
132. Саркисян СО. Асимптотическая теория и вариационное
уравнение плоской задачи упругой тонкой пластинки по моментной
теории упругости // Докл. НАН Армении. 1999. Т. 99, № 2. С. 138-
147.
133. Саркисян СО. Асимптотическая теория и вариационное
уравнение задачи изгиба упругой тонкой пластинки по моментной теории
упругости // Там же. № 3. С. 216-225.
134. Саркисян СО. Микрополярная теория тонких стержней, пластин и
оболочек // Изв. НАН Армении. 2005. Т. 58, № 2. С. 84-94.
135. Седов Л.И. Механика сплошной среды: В 2 т. М.: Наука, 1983. Т. 1.
528 с.
136. Смолли Р.Е. Открывая фуллерены // УФН. 1998. № 3. С. 323-
330.
137. Сонин А.С. Введение в физику жидких кристаллов. М.: Наука,
1987. 320 с.
138. Тимошенко СП. Устойчивость упругих систем. М.; Л.: ОГИЗ
ГИТТЛ, 1946. 532 с.
139. Товстик П.Е. Устойчивость тонких оболочек: Асимптотические
методы. М.: Наука, 1995. 320 с.
140. Томилин М.Г. Взаимодействие жидких кристаллов с
поверхностью. СПб.: Политехника, 2001. 325 с.
141. Треногий В.А. Функциональный анализ. М.: Наука, 496 с.
142. Трусделл К. Первоначальный курс рациональной механики
сплошной среды. М.: Мир, 1975. 592 с. (Tmesdell С. A first course in
rational continuum mechanics. N. Y.: Acad. Press, 1977.)
143. Финн Р. Равновесные капиллярные поверхности: Мат. теория. М.:
Мир, 1989. 312 с.
144. Фридман А. Вариационные принципы и задачи со свободными
границами. М.; Наука, 1990. 536 с.
145. Чернина B.C. Некоторые математически эквивалентные задачи
статики оболочек вращения // Изв. АН СССР. МТТ. 1973. N° 3.
С. 120-128.
146. Черных К.Ф. Сопряженные задачи теории тонких оболочек //
Проблемы механики сплошных сред. М.: Изд-во АН СССР, 1961.
С. 499-503.
147. Черных К.Ф. Линейная теория оболочек. Л.: ЛГУ, 1962. Ч. 1. 274 с.
148. Черных К.Ф. Линейная теория оболочек. Л.: ЛГУ, 1964. Ч. 2.
396 с.
149. Черных К.Ф., Шамина В.А. Некоторые вопросы нелинейной
классической теории тонких стержней и оболочек // Тр. IX Всесоюз.
конф. по теории оболочек и пластин. Л.: Судостроение, 1975.
С. 99-103.
150. Шкутин Л.И. Нелинейные модели деформируемых моментных
сред // ПМТФ. 1980. № 6. С. 111-117.
270
151. Шкутин Л.И. Механика деформаций гибких тел. Н.: Наука 1988
127 с.
152. ШкутинЛ.И. Обобщенные модели типа Коссера для анализа
конечных деформаций тонких тел // ПМТФ. 1996. Т. 37 № 3
С. 120-132.
153. Эринген А.К. Теория микрополярной упругости // Разрушение. М.:
Мир, 1975. Т. 2. С. 646-751.
154. Эринген А.К. Теория микрополярных жидкостей // Механика, М.:
Мир, 1969. №4. С 79-93.
155. Эшелби Дж. Континуальная теория дислокаций. М.: ИЛ, 1963,
247 с.
156. Adamson A.W., GastA.P. Physical chemistry of surfaces. N.Y. etc.: John
Wiley and Sons, 1997. 784 p.
157. Adeleke S.A. On symmetry of shells //J. Elast. 1983. Vol. 13. P. 111-119.
158. Adeleke S.A. On possible symmetry of shells // The breadth and depth of
continuum mechanics: A collection of papers dedicated to J.L. Ericksen
on his 60th birthday / Ed. by CM. Dafermos. В.: Springer-Verlag, 1986.
P. 745-757.
159- Aganovie I., Tambata J., Tutek Zv. Derivation and justification of the
models of rods and plates from linearized three-dimensional micropolar
elasticity //J. Elast. 2006. Vol. 84. P. 131-152.
160. Altenbach H„ Zhilin P.A. The theory of simple elastic shells // Theories of
Plates and Shells: Critical Review and New Applications / Ed. by
R. Kienzler et al. В.: Springer-Verlag, 2004. P. 1-12.
161. Altenbach #., Naumenko K., Zhilin P.A. A direct approach to the
formulation of constitutive equations for rods and shells // Shell Structures:
Theory and Applications / Ed. by W. Pietraszkiewicz, C. Szymczak. L.
etc.: Taylor and Francis, 2005. P. 87-90.
162. Antman S.S. Nonlinear problems of elasticity. B. etc.: Springer-Verlag,
1995. 751 p.
163. Atai A.A., Steigmann D.J. Coupled deformations of elastic curves and
surfaces // Intern. J. Solids and Struct. 1998. Vol. 35, N 16. P. 1915-1952.
164. Atkin R.J., Grain R.E. Continuum theories of mixtures: Basic theory and
historical development//Quart. J. Mech. and Appl. Math, 1976. Vol. 29,
N 2. P. 209-244.
165. Atkin R.J., Grain R.E, Continuum theories of mixtures: applications // J.
Inst. Math, and Appl. 1976. Vol. 17, N 2. P. 153-207.
166. Bhattacharya K.t James R.D. A theory of thin films of martensitic
materials with applications to microactuators // J. Mech. Phys. Solids.
1999. Vol. 36. P. 531-576.
167. Bhattacharya K., James R.D. The material is the machine // Science.
2005. Vol. 307. P. 53-54.
168. Bhattacharya K., Kohn R.V. Elastic energy minimization and the
recoverable strains of polycrystalline shape-memory materials // Arch. Ration,
Mech. and Anal. 1997. Vol. 139. P. 99-180.
169- Birsan M. The solution of Saint-Venant's problem in the theory of
Cosserat shells III. Elast. 2004. Vol. 74. P. 185-214.
271
170. Birsan M. Minimum energy characterizations for the solution of Saint-Ve-
nant's problem in the theory of shells // Ibid. 2005. Vol. 81. P. 179-204.
171. Birsan M. On a thermodynamical theory of porous Cosserat elastic
shells // J. Therm. Stresses. 2006. Vol. 291. P. 879-901.
172. Boulbitch A. A. Equations of heterophase equilibrium of a biomembrane //
Arch. Appl. Mech. 1999. Vol. 69. P. 83-93.
173. Boulbitch A.A. Enforced unbinding of biomembranes whose mutual
adhesion is mediated by a specific interaction // Europ. Biophys. J. 2003.
Vol. 31. P. 637--642.
174. Bowen R.M. Toward a thermodynamics and mechanics of mixtures //
Arch. Ration. Mech. and Anal. 1967. Vol. 24, N 5. P. 370-403.
175. Carbon Nanolubes // Topics Appl. Phys. 2001. Vol. 80. 425 p.
176. Carrol M.M., Naghdi P.M. The influence of the reference geometry on the
response of elastic shells // Arch. Ration. Mech. and Anal. 1972. Vol. 48.
P. 302-318.
177. Cermelli P.M., Gurtin E., Shvartsman MM. A note on the thermo-
mechanics of curvature flows in IR3 and on surfaces in /K3 // Meccanica.
1998. Vol. 33. P. 587-599.
178. Chen Y.-C. On strong ellipticity and the Legendre-Hadamard condition //
Arch. Ration. Mech. and Anal. 1991. Vol. 113. P. 165-175.
179. Chroscielewski J. Rodzina elementdw skonczonych klasy C° w nieli-
niowej szescioparametrowej teorii powfok // Zesz. nauk. Gdan. 1996.
Vol. 53, N 540. P. 1-291.
180. Chroscielewski J., Makowski J., Stumpf H. Finite element analysis of
smooth, folded and multi-shell structures // Comput. Methods Appl.
Mech. Eng. 1997. Vol. 141. P. \-A6.
181. Chroscielewski J., Makowski J., Pietraszkiewicz W. Non-linear dynamics
of flexible shell structures // Сотр. Assisted Mech. Eng. Sci. 2002.
Vol. 9. P. 341-357.
182. Chroscielewski J., Makowski J., Pietraszkiewicz W. Statics and dynamics
of multifold shells. Non-linear theory and finite element method
(in Polish). W-wa: Wydawnictwo IPPT PAN, 2004. 612 p.
183. Cohen H., Wang C.-C. A mathematical analysis of the simplest direct
models for rods and shells // Arc. Ration. Mech. and Anal. 1989.
Vol. 108, N LP. 35-81.
184. Cosserat E., Cosserat F. Theorie des corps deformables. P., 1909.
vi+226 p.
185. Dargys A., Kundrotas J. Handbook of physical properties of Ge, Si, GaAs
and InP. Vilnius: Sci. and Encycl. Pub!., 1994. 264 p.
186. Edelen D.G.B. Nonlocal field theories // Continuum Physics / Ed. by
A.C. Eringen. N.Y.: Acad. Press, 1976. Vol. 4. P. 76-204.
187. Erbay H.A. An asymptotic theory of thin micropolar plates // Intern. J.
Eng. Sci. 2000. Vol. 38. P. 1497-1516.
188. Eremeyev V.A. Phase transformations in elastic shells with microstructiire
and applications to the biomembranes theory // Ext. Abstr. 7th Conf.
"Shell Structures Theory and Appl.", Gdansk-Jurata (Poland),
9-11Л 0.2002. Gdansk: Gdansk Univ. Techn., 2002. P. 79-80.
272
189. Eremeyev V.A. Nonlinear micropolar shells: theory and applications//
Shell Structures: Theory and Applications / Ed. by W. Pietraszkiewicz,
C. Szymczak. L. etc.: Taylor and Francis, 2005. P. 11-18,
190. Eremeyev V.A., Pietraszkiewicz W. The nonlinear theory of elastic shells
with phase transitions // J. Elast. 2004. Vol. 74. P. 67-86.
191. Eremeyev V.A., Pietraszkiewicz W. Local symmetry group in the general
theory of elastic shells // Ibid. 2006. Vol. 85, N 2. P. 125-152.
192. Eremeyev V.A., Zubov L.M. On constitutive inequalities in nonlinear
theory of elastic shells //ZAMM. 2007. Vol. 87, N 2. P. 94-101.
193. Ericksen J.L. Symmetry transformations for thin elastic shells // Arch.
Ration. Mech. and Anal. 1972. Vol. 47. P. 1-14.
194. Ericksen J.L. Apparent symmetry of certain thin elastic shells // J.
Mec"anique. 1973. Vol. 12, N 1. P. 12-18.
195. Ericksen J.L., Truesdell C. Exact theory of stress and strain in rods and
shells // Arch. Ration. Mech. and Anal. 1957. Vol. I. P. 295-323.
196. Eringen A.C. Theory of micropolar fluids // J. Math, and Mech 1966,
Vol. 16, N I. P. 1-18.
197. Eringen A.C. Linear theory of micropolar viscoelasticity // Intern. J. Eng.
Sci. 1967. Vol. 5, N 2. P. 191-204.
198. Eringen A.C. Nonlocal polar field theories // Continuum Physics / Ed. by
A.C. Eringen. N.Y.: Acad. Press, 1976. Vol. 4. P. 205-268.
199. Eringen A.C. A unified continuum theory of liquid crystals // ARI. 1997.
Vol. 50. P. 73-84.
200. Eringen A.C. Microcontinuum field theories. I. Foundations and solids. B.
etc.: Springer-Vertag, 1999. 325 p.
201. Eringen A. C. Microcontinuum field theories. II, Fluent media. B. etc.:
Springer-Verlag, 2001. 325 p.
202. Eringen A.C, Kafadar C.B. Polar field theories // Continuum Physics /
Ed. by A.C. Eringen. N.Y.: Acad. Press, 1976. Vol. 4. P. 1-75.
203. Eshelby J.D. The force on an elastic singularity // Philos. Trans. Roy. Soc.
London A. 1951. Vol. 244, N 877. P. 87-112.
204. Eshelby J.D. The elastic energy-momentum tensor // J. Elast. 1975.
Vol. 5, N 4. P. 321-335.
205. Feng P., Sun Q.-P. Experimental investigation on macroscopic domain
formation and evolution in polycrystalline NiTi microtubing under
mechanical force//J. Mech. and Phys. Solids. 2006. Vol. 54. P. 1568-1603.
206. Colod S. V., Prinz V. Ya., Mashanov V.I., Gutakovski A.K. Fabrication of
conducting GeSi/Si micro- and nanotubes and helical microcoils //
Semiconductor Sci. and Technol. 2001. Vol. 16. P. 181-185.
207. Green A.E., Naghdi P.M. Non-isothermal theory of rods, plates and
shells // Intern. J. Solids and Struct. 1970. Vol. 6. P. 209-244.
208. Green A.E., Naghdi P.M. On thermal effects in the theory of shells // Proc.
Roy. Soc. London. A. 1979. Vol. 365. P. 161-190.
209. Grekova E„ Zhilin P. Basic equations of Kelvin's medium and analogy
with ferromagnets // J. Elast. 2001. Vol. 64. P. 29-70.
210. Gurtin M.E. Thermomechanics of evolving phase boundaries in the plane.
Oxford: Clarendon-Press, 1993. xi+149 p.
273
211. Curtin M.E. Configurational Forces as Basic Concepts of Continuum
Physics. B. etc.: Springer-Verlag, 2000. xiv+249 p.
212. Gurtin M.E., Jabbour M.E. Interface evolution in three dimensions with
curvature-dependent energy and surface diffusion: Interface-controlled
evolution, phase transitions, epitaxial growth of elastic films // Arch.
Ration. Mech. and Anal. 2002. Vol. 163. P. 171-208.
213. Gurtin M.E., Murdoch A.I. A continuum theory of elastic material
surfaces//Ibid. 1975. Vol. 57. P. 291-323.
214. Handbook of nanoscience, engineering, and technology/ Ed. by
W.A. Goddard et al. Boca Raton: CRC Press, 2003. 824 p.
215. Hetfrich W. Elastic properties of lipid bilayers: Theory and possible
experiments // Ztschr. Naturforsch. 1973. Bd. 28. S. 693-703.
216. Hirth J.P., Lothe J. Theory of dislocations. N.Y.: McGraw-Hill, 1968.
7S0 p.
217. James R.D. Phase transformations and non-elliptic free energy
functions// New Perspectives in Thermodynamics/ Ed. by J. Serrin. В.:
Springer-Verlag, 1986. P. 223-239.
218. James R.D., Rizzoni R. Pressurized shape memory thin films // J. Elast.
2000. Vol. 59. P. 399-436.
219. Kafadar СВ., Eringen A.C. Micropolar media // Intern. J. Eng. Sci. 1971.
Vol. 9. P. 271-305.
220. Knowles J.K., Sternberg E. On the ellipticity of the equation of nonlinear
elastostatics for a special material // J. Elast. 1975. Vol. 5, N 3/4. P. 341-
361.
221. Knowles J.K., Sternberg E. On the failure of ellipticity of the equation for
finite elastostatics plane strain// Arch. Ration. Mech. and Anal. 1977.
Vol. 63, N4. P. 321-341.
222. Knowles J.K, Sternberg E. On the failure of ellipticity and the emergence
of discontinuous deformation gradients in plane finite elastostatics // J.
Elast. 1980. Vol. 10, N 3. P. 255-293.
223. Koiter W.T. Couple-stresses in the theory of elasticity. Pt I-II // Proc.
Kon. ned. Akad. Wetensch. B. 1964. Vol. 67, N 1. P. \7-M.
224. Konopinska V., Pietraszkiewicz W. Exact resultant equilibrium conditions
in the non-linear theory of branched and self-intersecting shells // Intern,
J. Solids and Struct. 2007. Vol. 44. P. 352-369.
225. Leo P.H., Sekerka R.F. The effect of surface stress on cristal-melt
and cristal-cristal equilibrium// Acta met. 1989. Vol. 37, N 12. P. 3119-
3138.
226. Leslie P.M., Laverty J.С Continuum theory for biaxial nematic liquid
crystals // Nonlinear elasticity and theoretical mechanics. In honour of
A.E. Green / Ed. by P.M. Naghdi et al. Oxford, etc.: Oxford Univ. Press,
1994. P. 79-89.
227.LibaiA., Simmonds J.G. Nonlinear elastic shell theory// Adv. Appl.
Mech. 1983. Vol. 23. P. 271-371.
228. Libai A., Simmonds J.G. The nonlinear theory of elastic shells. 2nd ed.
Cambridge: Cambridge Univ. Press. 1998. 560p.
274
229. Lubowiecka I., Chroscielewski J. On dynamics of flexible branched shell
structures undergoing large overall motion using finite elements // Comp
and Struct. 2002. Vol. SO. P. 891-898.
230. Luo C, O'Reilly O.M. On the material symmetry of elastic rods // J. Elast.
2000. Vol. 60. P. 35-56.
231. Makowski J., Pietraszkiewicz W. Thermomechanics of shells with singular
curves. Gdansk: Zesz. Nauk. N 528/1487/2002, 2002. 100 p.
232. Makowski J., Pietraszkiewicz W., Stumpf H. Jump conditions in
the nonlinear theory of thin irregular shells// J. Elast. 1999. Vol. 54,
P. 1-26.
233. Makowski J„ Stumpf H. Buckling equations for elastic shells with
rotational degres of freedom undergoing finite strain deformation//
Intern. J. Solids and Struct. 1990. Vol. 26. P. 353-368.
234. Man C.S., Cohen H. A coordinate-free approach to the kinematics of
membranes//J. Elast. 1986. Vol. 16. P. 97-104.
235. Maugin G.A. Material inhomogeneities in elasticity. L. etc.: Chapman
Hall, 1993. 276 p.
236. Maugin G.A. Acceleration waves in simple and linear viscoelastic
micropolar materials// Intern. J. Etig. Sci. 1974. Vol. 12. P. 143-157.
237. Mechanika sprezystych pfyt i powfok / Ed. by Cz. Wozniak. W-wa: PWN,
2001.767 р.
238. Mielke A., Theil F., Levitas V.I. A variational formulation of
rate-independent phase transformations using an extremum principle// Arch.
Ration. Mech. and Anal. 2002. Vol. 162. P. 137-177.
239. Murdoch A.I. A coordinate free approach to surface kinematics//
Glasgow Math. J. 1990. Vol. 32. P. 299-307.
240. Murdoch A.I. A thermodynamical theory of elastic material interfaces //
Quart. J. Mech. and Appl. Math. 1976. Vol. 29, pt 3. P. 245-214.
241. Murdoch A.I. On criticism of the nature of objectivity in classical
continuum physics// Continuum Mech. Thermodyn. 2005. Vol. 17.
P. 135-148.
242. Murdoch A.I., Cohen H. Symmetry considerations for material surfaces //
Arch. Ration. Mech. and Anal. 1979. Vol. 72, N 1. P. 61-98.
243. Murdoch A.I., Cohen H. Symmetry considerations for material surfaces:
Addendum // Ibid. 1981. Vol. 76, N 4. P. 393^00.
244. Midler P., Saul A. Elastic effects on surface physics// Surface Sci.
Reports. 2004. Vol. 54. P. 157-258.
245. Naghdi P.M. The theory of plates and shells / Handbuch der Physik / Ed.
by S. Flugge. В., 1972. Vol. 6a/2. P. 425-640.
246. NeffP. A geometrically exact Cosserat shell-model including size effects,
avoiding degeneracy in the thin shell limit. Pt I: Formal dimensional
reduction for elastic plates and existence of minimizers for positive
Cosserat couple modulus // Continuum Mech. Thermodyn. 2004. Vol. 16.
P. 577-628.
247. Nikitin E.N., ZubovLM. Conservation laws and conjugate solutions in the
elasticity of simple materials and materials with couple stress // J. Elast.
1998. Vol. 51. P. 1-22.
275
248. Nikogosyan G.S., Sargsyan S.O. Micropolar theory of elastic thin shells//
Proc. XXXII Summer School APM'2004. S.-Petersburg, 2004. P. 325-
331.
249. Noor A.K. Bibliography of monograps and surveys on shells// Appl.
Mech. Revs. 1990. Vol. 43. P. 223-234.
250. Nowacki W. Theory of asymmetric elasticity. Oxford, etc.: Pergamon-
Press, 1986. 383 p.
251. Nye J.F. Some geometrical relations in dislocated crystals // Acta met.
1953. Vol.1, N2. P. 153-162.
252. Pieczyska E.A., Tobushi #., Gadaj S.P., Nowacki W.K. Superelastic
deformation behaviors based on phase transformation bands in TiNi shape
memory alloy // Mater. Trans. 2006. Vol. 47, N 3. P. 670-676.
253. Pieczyska E.A., Gadaj S. P., Nowacki W.K., Tobushi К
Phase-transformation fronts evolution for stress- and strains-controlled tension tests in
TiNi shape memory alloy // Exp. Mech. 2006. Vol. 46. P. 531-542.
254. Pietraszkiewicz W. Finite rotations and langrangian description in the
nonlinear theory of shells. W-wa: PWN, 1979. 103 p.
255. Pietraszkiewicz W. Geometrically nonlinear theories of thin elastic
shells // Adv. Mech. 1989. Vol. 12, N I. P. 51-130.
256. Pietraszkiewicz W. Addendum to: Bibliography of monograps and
surveys on shells // Appl. Mech. Revs. 1992. Vol. 45. P. 249-250.
257. Pietraszkiewicz W. Teorie nieliniowe powiok// Mechanika sprezystych
ptyt i powlok / Ed. by Cz. Wozniak. W-wa: PWN, 2001. P. 424-497.
258. Pietraszkiewicz W., Chroscielewski J.. Makowski J. On dynamically and
kinematically exact theory of shells // Shell Structures; Theory and
Applications / Ed. by W. Pietraszkiewicz, C. Szymczak. L. etc.: Taylor
and Francis, 2005. P. 163-167.
259. Pietraszkiewicz W., Eremeyev V.A., Konopmska V. Extended non-linear
relations of elastic shells undergoing phase transitions// ZAMM. 2007.
Vol. 87, N 2.
260. Pleiner H„ Brand H.R. Nonlinear hydrodynamics of strongly
deformed smectic С and C* liquid crystals // Physica A. 1999. Vol. 265.
P. 62-77.
261. Podio-Guidugli P., Caffarelli G.V. Surface interaction potentials in
elasticity // Arch. Ration. Mech. and Anal. 1990. Vol. 109. P. 343-383.
262. Print V.Ya. A new concept in fabricating building blocks for nano-
electronics and nanomechanics devices// Microelectron. Eng. 2003.
Vol. 69, N 2/4. P. 466-475.
263. Reissner E. Linear and non-linear theory of shells // Thin Shell
Structures / Ed. by Y.C. Fung, E.E. Sechler. Prentice Hall, 1974. P. 29-
44.
264. Romano A. Thermodynamics of phase transitions in classical field theory.
Singapore etc.: World Sci. PubL, 255 p. (Ser. Adv, Math. Appl. Sci.;
Vol. 13).
265. Rosakis P. Ellipticity and deformation with discontinuous gradients in
finite elastostatics// Arch. Ration. Mech. and Anal. 1990. V. 109, N 1.
P. 1-37.
276
266. Roytburd A., Slutsker 3. Coherent phase equilibria in a bending film//
Acta mater. 2002. Vol. 50. P. 1809-1824.
267. Rubin M.B. Cosserat Theories: Shells, Rods and Points. Dordrecht- KIu-
wer Acad. Publ., 2000. 480 p.
268. Rubin M.B. Restrictions on linear constitutive equations for a rigid heat
conducting Cosserat shell // Intern. J. Solids and Struct. 2004 Vol 41
P. 7009-7033.
269. Rubin M.B. Numerical solution of axisymmetric nonlinear elastic
problems including shells using the theory of a Cosserat point // Comput
Mech. 2005. Vol. 36. P. 266-288.
270. Rubin M.B. Heat conduction between confocal elliptical surfaces using the
theory of a Cosserat shell // Intern. J. Solids and Struct. 2006. Vol 43
P. 295-306.
271. Rubin M.B., Benveniste Y. A Cosserat shell model for interphases
in elastic media// J. Mech. and Phys. Solids. 2004. Vol. 52. P. 1023-
1052.
272. Rusanov A.I. Classification of line tension // Colloids and Surfaces A:
Physicochem. and Eng. Aspects. 1999. Vol. 156, N 1/3. P. 315-322.
273. Rusanov A.l. Surface thermodynamics revisited // Surface Sci. Reports.
2005. Vol. 58. P. 111-239.
274. Sansour C, Bernadczhyk H. The Cosserat surface as a shell model, theory
and finite element formulation // Comput. Methods. Appl. Mech. Engrg.
1995. Vol. 120. P. 1-32.
275. Sargsyan S.H. On some interior and boundary effects in thin plates based
on the asymmetric theory of elasticity // Theories of Plates and Shells:
Critical Review and New Applications/ Ed. by R. Kienzler et al. В.:
Springer-Vedag, 2004. P. 201-210.
276. Sargsyan S.H., Vardanyan S.A. The theory of thermoelastic bending of
micropolar thin plates // Proc. 6th Intern. Congr. Thermal Stresses, may
26-29, 2005. Vienna, 2005. Vol. 1. P. 135-138.
277. Shu Y.C. Heterogeneous thin films of martensitic materials // Arch.
Ration. Mech. and Anal. 2000. Vol. 153. P. 39-90.
278. Silhavy M. The mechanics and thermodynamics of continuous media. B.
etc.: Springer-Verlag, 1997. 505 p.
279. Simmonds 3.G. The thermodynamical theory of shells: Descent from
3-dimensions without thickness expansions // Flexible shells, theory and
applications // Ed. by E.K. Axelrad, F.A. Emmerlinf. В.: Springer-Verlag,
1984. P. 1-11.
280. Simmonds J.G. A simple nonlinear thermodynamic theory of arbitrary
elastic beams//J. Elast. 2005. Vol. 81. P. 51-62.
281. Spencer A.J.M. Theory of Invariants// Continuum Physics. N.Y.: Acad.
Press, 1971. Vol. 1. P. 292-307.
282. Steigmann D.J. Elements of the theory of elastic surfaces// Nonlinear
Elasticity: Theory and Applications/ Ed. by LB. Fu, R.W. Ogden.
Cambridge: Cambridge Univ. Press, 2001. P. 268-304.
283. Steigmann D.J., Ogden R.W. Elastic surface-substrate interaction// Proc.
Roy. Soc. London. A. 1999. Vol. 455. P. 437-474.
277
284. Springer Handbook of Nanotechnology / Ed. by B. Bhushan. B. etc.:
Springer-Verlag, 2004. XXXVI+1222 p.
285. Sun Q.-P., Li Z.-Q. Phase transformation in superelastic NiTi polycrysta-
Iline microtubes under tension and torsion - from localization to
homogeneous deformation // Intern. J. Solids and Struct. 2002. Vol. 39.
P. 3797-3809.
286. Toupin R.A. Theories of elasticity with couple-stress// Arch. Ration.
Mech. and Anal. 1964. Vol. 17, N 2. P. 85-112.
287. Tmesdell С Rational Thermodynamics. N.Y etc : Springer-Verlag, 1984
579 p.
288. Tmesdell C, Noll W. The nonlinear field theories of mechanics // Hand-
buch der Physik/ Ed. by S. Flugge. В.: Springer-Verlag, 1965. Vol 3/3
P. 1-602.
289. Wang C.-C. On the response functions of isotropic elastic shells // Arch.
Ration. Mech. and Anal. 1973. Vol 50 P. 81-98.
290. Wang L. Thermodynamics of moving Gibbs dividing surfaces // Phys.
Rev. E. 1997. Vol. 55. P. 1732-1738
291. Warren W.E., Byskov E. Three-fold symmetry restrictions on
two-dimensional micropolar materials// Europ. J. Mech. A. Solids 2002. Vol. 21.
P. 779-792.
292. Wempner G., Demosthenes G.T. Mechanics of solids and shells. Theories
and approximations. Boca Raton etc.. CRC PRESS, 2003. 521 p.
293. Xiao H. On symmetries and anisotropics of classical and micropolar linear
elasticities: A new method based upon a complex vector basis and some
systematic results // J. Elast. 1998. Vol. 49. P. 129-162.
294. Yeagle P.L. The structure of biological membranes. Boca Raton: CRC
Press, 1991. 1227 p.
295. Zee L., Sternberg E. Ordinary and strong ellipticity in the equilibrium
theory of incompressible hyperelastic solids // Arch. Ration. Mech. and
Analysis. 1983. Vol. 83, N I. P. 53-90.
296. Zhilin P.A. Mechanics of deforma'ble directed/surfaces // Intern. JE. Solids
and Struct. 1976. Vol. 12. P. 635-648.
297. Zubov LM. Nonlinear theory of dislocations and disclinations in elastic
bodies. B. etc.: Springer-Verlag, 1997. 205 p.
298. Zubov LM, Duality principle of elastic shells theory // Proc. 15th IMACS
World Congress. В., 1997. Vol. 3. P. 527-532.
299. Zubov LM. Nonlinear theory of isolated and continuosly distributed
dislocations in elastic shells // Arch. Civ. Eng. 1999.45, N 2. P. 385-396.
300. Zubov LM. Semi-inverse solutions in nonlinear theory of elastic shells //
Arch. mech. 2001. Vol. 53, N 4/5. P. 599-610.
предметный указатель
А
автоморфизм, 32, 30
автоморфизм евклидова
пространства, 25
аксиальные объекты, 28
аксиомы определяющих
соотношений, 93
акустический тензор, 2i2
амплитуда скачка, 204
антисимметричный тензор, 23
Б
биологические мембраны, 236
В
вариационный принцип Лагранжа,
80,87
вариационный принцип Рзлея, 88
вектор микроповорота, 52
вектор Бюргерса, 174, 183
вектор Бюргерса, результирующий,
179
вектор виртуального поворота, 54
зектор конечного поворота Родрига,
52
вектор потока тепла, 109
вектор Франка, 183
вектор функций напряжений, 67
векторный инвариант тензора, 51
векторное произведение, 22
взаимный базис, !8
взаимно сопряженные оболочки,
193
винтовая оболочка, 160
внешняя симметрия тензора, 30
внутренние связи, 101
внутренняя симметрия тензора, 29
волна слабого разрыва, 213
волна ускорения, 207
второй фундаментальный тензор
поверхности, 41
вязкоупругая микрополярная
оболочка дифференциального типа,
101
Г
гауссова кривизна, 43
гауссовы координаты, 39
гиротропная функция, 33
гиротропный тензор, 31
градиент тензорного поля, 35
Д
двойственные краевые задачи, 180
деформационные граничные
условия, 19!
деформационные краевые условия,
66
диада, 18
дивергенция тензора, 38
динамические условия
совместимости, 206
директор, 73
дискриминантный тензор, 24
дискриминантный тензор
поверхности, 43
дисторсионные граничные условия,
65
дополнительные (определяющие)
неравенства, 194
Е
евклидово векторное пространство,
17
евклидовый тензор ранга р, 19
единичный тензор, 23
естественный базис, 37
естественно закрученная
цилиндрическая оболочка, 158
Ж
жидкая оболочка Коссера, 137
жидкостно-мозаичная модель, 236
И
изотропная функция, 32
изотропная оболочка, 100, 136
изотропный тензор, 30
279
индифферентный тензор (скаляр,
вектор), 93
инвариант, 33
инверсия, 28
К
квадратный корень тензора, 27
кинематические уравнения
состояния, 91
кинематическое уравнение
совместности, 204
кинематическое условие
совместности на поверхности, 205
кинетическое уравнение, 220
конфигурационная сила, 220
ковариантная производная, 38
ковариантная производная на
поверхности, 45
консервативная нагрузка, 78
косое умножение, 22
краевая задача в усилиях и моментах,
68
криволинейные координаты, 36
коэффициенты первой квадратичной
формы, 40
Л
лемма Адамара, 204
линейный тензор деформаций, 69
линейный тензор изгибных
деформаций, 69
линейное натяжение, 220
пинии кривизны, 43
линия Коссера, 221
липиды,23б
локальная группа материальной
симметрии, 118
М
матрица метрических
коэффициентов, 17
мера изгибной деформации, 63
мера метрической деформации, 51
меры и тензоры деформаций типа
Альманзи, 63
микрокогерентные фазовые
превращения, 2! 8
Н
начало термодинамики, первое, Ю8
начало термодинамики, второе, 110
неискаженная конфигурация, 136
неотрицательный тензор, 27
неравенство Адамара, 198
неравенство Колемана-Нолла, 195
О
оболочка типа Нагхди, 73
обратный тензор дисторсии
оболочки, 59
одноконстантное приближение, 243
определяющие соотношения, 1
ортогональный тензор, 27
ортотропная оболочка, 141
оснащенная поверхность, 73
основной базис, 17
относительная дисторсия, 93
относительные меры и тензоры
деформации, 94
относительный тензор
микроповорота, 94
относительное описание, 93
отношение Рэлея, 90
П
перестановка, 20
первый фундаментальный тензор
поверхности, 41
плотностьдисклинаций,184
плотность дислокаций, 178
плотность трансляционных
дислокаций, 186
полное умножение, 22
положительно определенный тензор,
27
полуобратный метод, 149
полуследящий момент, 80
потенциал внешних сил и моментов,
79
поверхностный оператор градиента,
42
правило Нолла, 131
преобразование Лежандра, 188
принцип Гамильтона-Остроградско-
го, 84, 234
принцип Рэлея, 88
принцип детерминизма, 91
принцип двойственности, 180,191
принцип локальности, 91
принцип материальной
индифферентности, 92
принцип типа Ху-Васидзу, 80
280
принцип типа Кастильяно, 82
принцип типа Рейсснера, 83
принцип типаТонти, первый, 81
принцип типаТонти, второй, 83
принцип виртуальных работ, 53,244
присоединенный тензор, 26
приведенные неравенства
диссипации, 113,114
простое умножение, 21
простой полибазис, 19
псевдоконтинуум Коссера, 106
псевдотензор, 28
псевдовектор, 28
Р
разложимый тензор, 20
ротор тензора, 38
С
свертывание тензора tr , 21
(*,s)
симметричный тензор, 23
символы Кристоффеля на
поверхности, 44
символы Кристоффеля второго рода,
37
символы Леви-Чивита, 24
сингулярная кривая, 205
скалярное произведение, 17
скорость движения сингулярной
кривой, 205
слабые разрывы уравнений
равновесия, 212
след тензора, 21
сложный полибазис, 19
собственные (главные) значения, 26
собственный вектор, 26
совместный инвариант, 33
спектральное разложение, 26
средняя кривизна, 43
статико-геометрическая аналогия,
180
Т
твердая оболочка, 139
тела с покрытиями, 244
тензор второго ранга, 23
тензор дисторсии оболочки, 58
тензор изгибной деформации, 51
тензор кривизны микроструктуры
актуальной конфигурации, 61
тензор Леви-Чивита, 24
тензор метрической деформации,
62
тензор моментов типа Пиолы, 57
тензор скоростей Деформации, 95
тензор скоростей изгибной
деформации, 96
тензор усилий типа Пиолы, 57
тензор, принадлежащий
поверхности, 41
тензор энергии-импульса, 219
тензор Эшелби, 219
тензоры и меры деформаций типа
Коши-Грина, 62
тензоры скоростей деформации и
изгибной деформации типа Рив-
лина-Эриксена, 97
тензоры усилий и моментов типа
Кирхгофа, 57
тензоры усилий и моментов типа
Коши, 59
тензорное поле, 35
тензорное произведение, 18
тензорное умножение, 20
теорема Кэли-Гамильтона, 26
теорема Максвелла, 204
теорема Максвелла на поверхности,
205
теорема о дивергенции на
поверхности, 45
теорема о линейной функции, 22
теорема о полярном разложении, 27
теорема Френеля-Адамара-Дюгема,
2U
теорема Эйлера-Шаля, 51
теория устойчивости, 230
термодинамическая сила, 220
термоупругие оболочки, Ц2
У
удельная дополнительная энергия
оболочки, 82
удельная потенциальная энергия
деформации, 50
универсальные деформации, 163
уравнение совместности для тензора
дисторсии, 64
уравнения движения, 86
уравнения несовместности, 179, 187
уравнения совместности
деформаций, 65
281
условие консервативности нагрузки,
78
условие сильной эллиптичности, 198
условие эллиптичности или
ординарной эллиптичности, 2!3
Ф
фазовые превращения с
микропроскальзыванием, 218
физически линейная изотропная
оболочка, 142
физически линейный материал,
142
формула Гаусса-Остроградского, 38
формула Стокса, 39
формула Стокса на поверхности, 47
функции напряжений, бб
функционал действия, 85
функционал дополнительной энер
гии, 176,178
функция напряжений, 188
X
хемитропная оболочка, 140
Ч
чистый изгиб, 149
Э
эквивалентное движение, 92
элементарная работа внешних нагру
зок, 55, 245
G
GCN-условие, 597
Оглавление
Основные обозначения 3
Введение 7
Глава 1. Элементы тензорного исчисления 17
1.1. Евклидовы тензоры 17
1.2. Действия с тензорами 20
1.3. Теорема о линейной функции 22
1.4. Тензоры второго ранга 23
1.5. Псевдотензоры 28
1.6. Внутренняя и внешняя симметрия тензоров 29
1.7. Тензорные функции 32
1.8. Тензорные поля 35
1.9- Элементы теории поверхностей 39
1.10. Тензорный анализ на поверхности 44
1.11. Тензорный анализ в окрестности поверхности 47
Глава 2. Основные соотношения теории упругих микрополярных
оболочек 49
2.1. Вывод уравнений раановесия и краевых условий для упругих
оболочек из принципа виртуальных работ 49
2.2. Геометрический смысл мер и тензоров деформаций 60
2.3. Уравнения совместности деформаций 63
2.4. Дисторсионные и деформационные граничные условия 65
2.5. Функции напряжений и различные постановки граничных
задач равновесия упругих оболочек 66
2.6. Геометрически линейная теория микрополярных оболочек .. 68
2.7. Связь с трехмерными уравнениями равновесия 70
2.8. О механике оснащенных поверхностей 73
Глава 3. Вариационные принципы 78
3.1. Принцип Лагранжа и критерий консервативности внешних
нагрузок 78
3.2. Принцип типа Ху-Васидзу 80
3.3. Первый принцип типа Тонти 81
3.4. Принцип типа Кастильяно 82
3.5. Принциптипа Рейсснера 83
3.6. Второй принцип типа Тонти 83
3.7. Принцип Гамильтона и уравнения динамики оболочек 84
3.8. Вариационный принцип для нелинейных собственных
колебаний 86
283
3.9. Вариационные принципы в случае малых деформаций 87
3.10. Вариационный принцип Рэлея 88
Глава 4. Определяющие соотношения оболочек типа Коссера .... 91
4.1. Аксиомы определяющих соотношений 91
4.2. Относительные меры деформаций 93
4.3. Тензоры скоростей деформации и изгибной деформации 94
4.4. Скорости деформации более высокого порядка 97
4.5. Уравнения состояния микрополярных оболочек с памятью ... 98
4.6. Модели микрополярных оболочек с внутренними связями 101
4.7. Двумерный псевдоконтинуум Коссера 106
Глава 5. Термодинамика микрополярных оболочек 107
5.1. Уравнение баланса энергии в теории оболочек 108
5.2. Второе начало термодинамики 110
5.3. Приведенные неравенства диссипации 111
5.4. Термоупругие оболочки 112
5.5. Упрощенная термодинамика: одна температура 115
Глава 6. Теория материальной симметрии 118
6.1. Изменение отсчетной конфигурации 121
6.2. Локальная группа материальной симметрии 126
6.3. Представления поверхностно изотропных и гиротропных
функций одного аргумента 131
6.4. Уравнения состояния и локальная группа симметрии
оболочки 133
6.5. Изотропные оболочки 136
6.6. Уравнения состояния жидких оболочек Коссера 137
6.7. Уравнения состояния твердых оболочек Коссера 139
6.8. Некоторые группы симметрии твердых микрополярных
оболочек 140
6.9. Уравнения состояния оболочек для физически линейного
материала 142
6.10. О локальной группе материальной симметрии для неупругих
оболочек 147
Глава 7, Нелинейная теория изгиба и кручения 149
7.1. Чистый и пространственный изгиб цилиндрических
(призматических) оболочек 149
7.2. Растяжение и кручение цилиндрической оболочки 153
7.3. Изгиб, сдвиг и кручение сектора оболочки вращения 154
7.4. Выпрямление и кручение сектора оболочки вращения 156
7.5. Кручение и растяжение естественно закрученной
цилиндрической оболочки 157
7.6. Пространственный изгиб естественно закрученной
цилиндрической оболочки 159
7.7. Растяжение, кручение и изгиб винтовых оболочек 160
284
Глава 8. Универсальные деформации 163
8.1. Кручение, изгиб, растяжение и сдвиг цилиндрической
панели 163
8.2. Изгиб, кручение, растяжение и сдвиг плоской пластинки 166
8.3. Выпрямление, растяжение и сдвиг цилиндрической панели ... 167
8.4. Выворачивание сферического купола 158
Глава 9. Дислокации н дисклинацни в упругих оболочках 171
9.1. Определение поля перемещений по заданным полям
деформаций и поворотов 172
9.2. Постановка задачи о равновесии оболочки с дислокациями ... 174
9.3. Вариационная формулировка задачи о равновесии
многосвязной оболочки с дислокациями 176
9.4. Переход к непрерывному распределению дислокаций в
оболочке 178
9.5. Двойственные краевые задачи микрополярных оболочек 180
9.6. Линейная теория дислокаций и дисклинаций в микрополярных
оболочках 182
9.7. Вариационный метод построения геометрически линейной
теории оболочек с распределенными дефектами 187
9.8. Принцип двойственности в геометрически линейной теории
оболочек 191
Глава 10. Дополнительные неравенства в теории оболочек 194
10.1. Геометрически линейная теория 194
10.2. Неравенство Колемана-Нолла 195
10.3. Условие сильной эллиптичности и неравенство Адамара 198
Глава 11. Разрывные решения 203
П.1. Уравнения баланса на поверхности разрыва 203
11.2. Волны ускорения в микрополярных оболочках 207
11.3. Слабые разрывы решений уравнений равновесия 212
Глава 12. Равновесие двухфазных оболочек 214
12.1. Условия термодинамического равновесия оболочек Коссера 215
12.2. Кинетическое уравнение 220
12.3. Условия термодинамического равновесия фаз при учете
энергии границы раздела фаз и сосредоточенных на ней
сил 220
12.4. Постоянное линейное натяжение 224
12.5. Осесимметричная деформация двухфазной пластинки с
круговым отверстием 225
Глава 13. Теория устойчивости 230
13.1. Линеаризованные краевые задачи для микрополярных
оболочек 230
13.2. Вариационные принципы для предварительно напряженных
оболочек 233
285
Глава 14. Некоторые приложения теории микрополярных
оболочек 236:
14.1. Микрополярные оболочки и математические модели
клеточных мембран 236
14.2. Механика тел с покрытиями 244
14.3. Малые собственные колебания оболочки с
распределенными по поверхности нанообъектами 247
Литература 263
Предметный указатель 279
Научное издание
Еремеев Виктор Анатольевич
Зубов Леонид Михайлович
МЕХАНИКА
УПРУГИХ ОБОЛОЧЕК
Утверждено к печати
Ученым советом
Южного научного центра РАИ
Зав. редакцией М.В, Грачева
Редактор Л. В. Филиппова
Художник Ю.Н. Духовская
Художественный редактор В.Ю. Яковлев
Технический редактор О.В. Аредова
Корректоры И.П. Барабаш, Р. В. Молоканова
Подписано к печати 17.O7.20OS
Формат 60 х 90!/is. Гарнитура Тайме
Печать офсетная
Усл.печ.л. !8,0. Усл.кр.-отт. 18,5. Уч.-изд.л. 17,1
Тип. зак. 558
Издательство "Наука"
117997, Москва, Профсоюзная ул., 90
E-mail: sectet@naukaran.ru
w ww.na ukaran .ш
Отпечатано с готовых диапозитивов
в ГУП "Типография "Наука"
199034, Санкт-Петербург, 9 линия, 12
АДРЕСА КНИГОТОРГОВЫХ ПРЕДПРИЯТИЙ
ТОРГОВОЙ ФИРМЫ "АКАДЕМКНИГА" РАН
Магазины "Книга-почтой"
121099 Москва, Шубинский пер., 6; (код 495) 241-02-52 Сайт: www.LitRAS.ni
E-mail: info@LitRAS.ru
197110 Саикт-Петербург, ул. Петрозаводская, 7 "В"; (код 812) 235-40-64
ak@akbook.ru
Магазины "Академкнига" с указанием букинистических отделов
н "Книга-почтой"
690002 Владивосток, Океанский проспект, 140 ("Книга-почтой");
(код 4232) 45-27-91 antoli@mail.ru
620151 Екатеринбург, ул. Мамина-Сибиряка, 137 ("Книга-почтой");
(код 343) 350-10-03 Kniga@sky.ru
664033 Иркутск, ул. Лермонтова, 289 ("Книга-почтой"); (код 3952) 42-96-20
akmi@irlan.ru
660049 Красноярск, ул. Сурикова, 45; (код 3912) 27-03-90 akademkniga@bk.ru
220012 Минск, просп. Независимости, 72; (код 10375-17) 292-00-52, 292-46-52,
292-50-43 www.akademkniga.by
117312 Москва, ул. Вавилова, 55/7; (код 495) 124-55-00
(Бук. отдел (код 495) 125-30-38)
117192 Москва, Мичуринский проспект, 32; (код 495) 932-74-79
127051 Москва, Цветной бульвар, 21,строение 2;(код495) 621-55-96
(Бук. отдел)
i I7997 Москва, ул.Профсоюзная,90; (код 495)334-72-98
105062 Москва, Б. Спасоглинищевский пер., 8 строение 4; (код 495) 624-72-19
(Бук. отдел)
630091 Новосибирск, Красный проспект, 51; (код 383)221-15-60
akademkniga@mai1.ru
630090 Новосибирск, Морской проспект, 22 ("Книга-почтой");
(код 383) 330-09-22 akdmn2@mail.nsk.ru
142290 Пущино Московской обл., МКР "В", 1 ("Книга-почтой");
(код 49677) 3-38-80
191104 Санкт-Петербург, Литейный проспект, 57; (код 812) 272-36-65
ak@akbook.ru (Бук. отдел)
199034 Санкт-Петербург, Васильевский остров, 9-я линия, 16;
(код 812) 323-34-62 (Бук. отдел)
634050 Томск, Набережная р. У шайки, 58;
(код 3822) 51-60-36 akademkniga@mail.tomsknet.ru
450059 Уфа, ул. Р. Зорге, 10 ("Книга-почтой"); (код 3472)23-47-62,
23-47-74 UfaAkademkniga@mail.ru
450025 Уфа, ул. Коммунистическая, 49; (код 3472) 72-91-85 (Бук. отдел)
Коммерческий отдел, Академкнига, г. Москва
Телефон для оптовых покупателей: (код 495) 241-03-09
Сайт: www.LitRAS.ru
E-mail: info@LitRAS.ra
Склад, телефон (код 499) 795-12-87
Факс (код 495) 241-02-77
В.А. ЕРЕМЕЕВ
Л. М. ЗУБОВ
МЕХАНИКА
УПРУГИХ
ОБОЛОЧЕК
НАУКА