/










































































































































































































































































































































Текст
Точные методы
исследования
нелинейных систем
автоматического управления
Scan - AAW,
DjVu - Dmitry7
нелинейные системы
автоматического
управления
Под общей редакцией
члена-корреспондента АН СССР
Е. П. ПОПОВА
I
ИЗДАТЕЛЬСТВО «МАШИНО
Точные методы
исследования
нелинейных систем
автоматического управления
Под редакцией
доктора технических наук
профессора Р. А. НЕЛЕП И НА
СТРОЕНИЕ» • МОСКВА ■ 1971
УДК 621—501.14
АВТОРЫ КНИГИ
В. М. Кунцевич, д-р техн. наук, профессор
A. М. Летов, чл.-корр. АН СССР
Б. Н. Наумов, д-р техн. наук, профессор
Р. А. Нелепин, д-р техн. наук, профессор
Б. Н. Петров, академик
B. Я. Платов, канд. техн. наук
Е. П. Попов, чл.-корр. АН СССР
Г. С. Поспелов, чл.-корр. АН СССР
Е. Н. Розенвассер, д-р техн. наук, профессор
Б. М. Шамриков, канд. техн. наук
В. М. Шеленков, инженер
Р. М. Юсупов, д-р техн. наук
3-3-13
Б3№28—1969 —№6
ОГЛАВЛЕНИЕ
Предисловие
Глава I. Точные аналитические методы в теории нелинейных систем
автоматического управления (Е. П. Попов, Р. А. Нелепин)
1. Качественные методы теории нелинейных дифференциальных
уравнений (11). 2. Методы фазовой плоскости и фазового
пространства (13). 3. Методы расчленения сложной системы на более
простые (15). 4. Другие методы (17)
Глава II. Метод сечений пространства параметров (Р. А. Нелепин) .
1. Математические модели (21). 2. Вскрывающие сечения в
пространстве параметров (25). 3. Построение сечений в пространстве
Сп (30). 4. Построение сечений в пространстве Cn-i (33). 5.
Построение сечений в пространстве Cq(q < n) и других пространствах (36).
6. Построение сечений для неавтономной системы с несколькими
нелинейностями (43). 7. Распространение результатов, получаемых
в сечениях, в окрестность сечений. Продолжение в окрестность
сечений областей устойчивости (44). 8. Продолжение в окрестность
сечений областей автоколебаний (47). 9 Оценка близости качества
переходных процессов в сечении и в малой окрестности
сечения (52)
Глава III. Системы второго порядка с типовыми нелинейностями
(Р. А. Нелепин)
1. Математические модели (56). 2. Общая система уравнений при
g2 = 0 (59). 3. Общая система уравнений при С2 = оо (68). 4.
Общая система уравнений при g2 ф 0, С2 Ф °° (75). 5. Рассмотрение
частных случаев (79). 6. Структура пространства параметров (90).
7. Примеры (105)
Глава IV. Исследование и расчет нелинейных систем методом сечений
(Р. А. Нелепин)
1. Определение периодических движений и сепаратрисных
поверхностей. Исследование в сечениях многомерных фазовых
пространств в целом (111). 2. Исследование пространств параметров.
Построение в плоскостях сечений точных границ областей
устойчивости и автоколебаний (120). 3. Анализ механизмов влияния нели-
нейностей (124). 4. Синтез нелинейных законов управления (125)
Глава V. Расчет абсолютной устойчивости процессов и состояний
равновесия в нелинейных системах на основе частотных методов
1(Б. Я. Наумов)
1. Основные понятия и определения (135). 2. Частотный критерий
абсолютной устойчивости состояния равновесия в нелинейных
системах (критерий В. М. Попова) (142). 3. Частотный критерий
абсолютной устойчивости процессов в нелинейных системах (144).
4. Различные формулировки критерия абсолютной устойчивости
процессов (147). 5. Анализ абсолютной устойчивости процессов
(153). 6. Синтез корректирующих устройств нелинейных систем,
обеспечивающих абсолютную устойчивость процессов (154). 7 Раз-
личные формулировки критерия абсолютной устойчивости
состояния равновесия (критерия В. М. Попова) (159). 8. Кривые Попова
для некоторых типовых линейных частей системы (165). 9. Анализ
абсолютной устойчивости состояния равновесия (168). 10. Синтез
корректирующих устройств, обеспечивающих абсолютную
устойчивость состояния равновесия (171).
Глава VI. Расчет устойчивости нелинейных систем при допустимых
отклонениях на основе метода сечений и прямого метода Ляпунова
(Б. Н. Петров, Б. М. Шамриков) . . . . . . . . .174
1. Постановка задачи и основы ее решения (175). 2. Построение
вскрывающих сечений (176). 3. Определение периодических
режимов (178). 4. Оценка величины области притяжения (181)
Глава VII. Проблема качества нелинейных систем (А. М. Летав) . .188
1. Математическая модель объекта управления (188). 2. Основные
требования, предъявляемые к системе управления (189). 3.
Математическая формулировка 7_кРитеРиев (191). 4. Проблема
качества (193). 5. Оценка времени затухания ('193). 6. Теорема
В. В. Немыцкого (199)
Глава VIII. Исследование релейных систем с помощью уравнений в
конечных разностях (Г. С. Поспелов, В. М. Шеленков) . 203
1. Математические модели (204). 2. Уравнения автономной
системы (205). 3. Периодические режимы релейной системы (208)
4. Устойчивость периодических режимов релейной системы (209).
5. Реакция релейной системы на медленно меняющиеся
воздействия (211). 6. Следящая система с переменной структурой (215).
7. Уравнения автономной системы с переменной структурой (216).
8. Периодические режимы системы с переменной структурой (218).
9. Реакция системы на медленно меняющиеся воздействия (220).
10. Система со скачкообразно меняющимися параметрами (225).
Глава IX. Исследование нелинейных импульсных систем прямым
методом Ляпунова (В. М. Кунцевич) ......... 233
1. Математическая модель ЧИМ-системы (234). 2. Анализ
устойчивости многомерной ЧИМ-системы прямым методом Ляпунова
(236). 3. Условия устойчивости статических многомерных ЧИМ-
систем (238). 4. Условия устойчивости астатических многомерных
ЧИМ-систем (244). 5. Обобщение на системы с двойной
модуляцией (247)
Глава X. Исследование нелинейных систем с помощью подвижной
фазовой плоскости (В. Я. Платов) 252
1. Математическая модель (254). 2. Переходные процессы при
сильно изменяющемся управляющем сигнале (260) 3. Сильно
изменяющийся сигнал вида g(t) =a(t), a = const (262). 4.
Переходные процессы при слабо изменяющемся управляющем сигнале.
Управляющий сигнал вида g(t) = at, a = const (267). 5. Области
устойчивости системы при линейно изменяющемся управляющем
сигнале (271)
Глава XI. Применение теории чувствительности к нелинейным системам
управления (Е. Н. Розенвассер, Р. М. Юсупов) 275
1. Основные положения (275). 2. Применение метода функций
чувствительности к задаче устойчивости разрывных систем (287).
3. Применение функций чувствительности для анализа точности
нелинейных систем (298)
Литература 307
Предметный указатель 322
«Единство природы обнаруживается в
«поразительной аналогичности»
дифференциальных уравнений, относящихся
к разным областям явлений».
В. И. Ленин
Предисловие
Современные методы исследования нелинейных
систем автоматического управления разделяются на
два класса: точные и приближенные. Точные методы
применяются для анализа нелинейных систем
управления, когда приближенные методы приводят
исследования к неверным результатам или являются
слишком грубыми. Кроме того они получили
широкое распространение при теоретических
обоснованиях различных способов синтеза систем управления.
Если добавить, что существуют многочисленные
виды нелинейных систем управления,
проектирование которых производится с помощью точных
методов, то значение этих методов трудно переоценить.
Точные методы исследования нелинейных систем
управления получили значительное развитие
благодаря работам отечественных ученых А. М.
Ляпунова, А. А. Андронова, Н. Г. Четаева, Н. Н. Красов-
ского и других. Эти методы широко применяются
при исследовании устойчивости нелинейных систем
управления различных видов (непрерывных,
релейных, импульсных и т. п.). В последнее время метод
7
Ляпунова получил обобщение (в форме векторных функций
Ляпунова) и стал применяться для исследования многомерных
систем автоматического управления.
Большое распространение получили методы исследования
нелинейных систем, основанные на рассмотрении фазовой
плоскости и фазового пространства. С помощью этих методов были
объяснены механизмы мягкого и жесткого возбуждения и
устойчивости автоколебаний, получен ряд важных результатов в
теории бифуркаций.
Трудности исследования многомерных фазовых пространств
нелинейных систем можно преодолеть методом сечений
пространства параметров. Этот метод позволяет получать точные
аналитические решения. Он находит практическое применение как в
задачах анализа нелинейных систем, так и в задачах синтеза
нелинейных законов управления. Метод сечений пространства
параметров совместно с прямым методом Ляпунова позволяет строить
области устойчивости нелинейных систем при допустимых
отклонениях.
В книге рассматриваются частотные методы исследования
абсолютной устойчивости, использующие критерий устойчивости
В. М. Попова. Дальнейшее развитие этого метода позволило
исследовать устойчивость вынужденных колебаний и качество
переходных процессов.
Для исследования релейных систем автоматического
управления рассмотрено применение метода, основанного на уравнениях
в конечных разностях. Приводятся методы анализа нелинейных
систем, использующие теорию чувствительности, показатели
качества переходных процессов и др.
Различные методы, изложенные в книге, позволяют получать
точные или приближенные, но достаточно строгие результаты
исследования нелинейных систем. Будем надеяться, что эта
книга даст представление читателю о современном развитии точных
методов и поможет ему при расчетах и проектировании
конкретных нелинейных систем автоматического управления.
Е. Попов
Р. Нелепин
Точные
аналитические методы
в теории
нелинейных систем
автоматического
управления
Методы исследования нелинейных систем можно
разделить на две большие группы: аналитические
методы и неаналитические. К аналитическим
методам следует отнести те, которые позволяют
находить и выражать решения задач аналитически,
т. е. посредством формул. К неаналитическим
методам можно отнести численные, графические, а
также машинные методы, в основе которых лежит
применение цифровых или аналоговых
вычислительных машин.
Достоинством аналитических методов является
представление решения в общем виде,
охватывающем различные частные случаи и потому удобном
для выполнения анализа влияния различных
факторов на характер решения задачи. В отличие от
этого неаналитические методы дают окончательные
результаты лишь для конкретных исходных данных
и при изменении последних требуют каждый раз
нового применения.
Аналитические методы целесообразно
применять в теоретических исследованиях или для
предварительного анализа решаемых практических
9
Глава 1
задач. Неаналитические методы целесообразны при решении
конкретных задач с численно заданными исходными данными, а
также в тех случаях, когда аналитические методы не могут быть
применены ввиду сложности задачи. Практически машинные
методы являются основными методами проектирования сложных
автоматических систем, но они наиболее эффективны, когда
предваряются аналитическими методами.
Аналитические методы исследования нелинейных систем, в
свою очередь, можно разделить на точные и приближенные
(неаналитические методы в строгом смысле слова принципиально
всегда являются приближенными).
Под точными аналитическими методами будем понимать
методы, результаты применения которых, будучи выражены в виде
обозримых формул, представляют собой точные характеристики
изучаемых математических моделей.
К приближенным аналитическим методам следует отнести
методы, которые позволяют получать количественные
характеристики математических моделей лишь приближенно, а в связи
с этим не строго судить о их поведении и с качественной точки
-зрения (например, не строго ответить на вопрос о наличии при
данных условиях периодического режима в том смысле, что при
более тщательном анализе вывод приближенного метода может
и не подтвердиться).
Достоинствами приближенных аналитических методов в
сравнении с точными являются их универсальность и простота
применения.
По указанным причинам они являются основными
аналитическими методами, применяемыми при исследовании и
проектировании нелинейных систем. Однако их недостатком является
невозможность во многих случаях предсказать или оценить
величину получаемой погрешности, причем возникающая ошибка иногда
может носить качественный характер. Другим недостатком
приближенных методов является то, что они оказываются
неприменимыми для решения некоторых сложных вопросов динамики
нелинейных систем.
Достоинство точных и строгих аналитических методов
заключается в безусловной верности и точности получаемого общего
решения задачи. Недостатком этих методов, особенно связанных
с получением количественных характеристик, является их
сложность и громоздкость, а также, в большинстве случаев,
возможность применения лишь к определенному сравнительно узкому
кругу задач. Впрочем, простым и весьма универсальным
строгим методом суждения об устойчивости в малом нелинейной
системы является метод первого приближения Ляпунова,
который, однако, не решает вопроса об устойчивости при больших
отклонениях и в этом смысле имеет чисто качественный
характер.
10
По изложенным соображениям точные и приближенные
аналитические методы развиваются независимо и имеют свои
области применения.
1. Качественные методы теории нелинейных
дифференциальных уравнений
Невозможность определения общих решений нелинейных
дифференциальных уравнений, кроме нескольких простых
случаев (уравнения Бернулли, Риккати, уравнения, приводящие к
эллиптическим интегралам и др.), обусловила развитие
специальных методов.
Важную группу таких методов составляют качественные
методы А. М. Ляпунова [94] и А. Пуанкаре [297] и другие методы
качественной теории дифференциальных уравнений. Эти методы,
не будучи точными количественными методами, являются
строгими и в связи с этим в прикладных задачах могут выполнять
примерно те же функции, что и точные аналитические методы.
Теоретический фундамент линеаризованной теории
автоматического регулирования представляют теоремы Ляпунова об
устойчивости по первому приближению. Благодаря этим
теоремам проблема устойчивости нелинейной системы в малом
(гарантирующей физическую осуществимость исследуемого
движения или состояния равновесия) обычно сводится к задаче об
устойчивости линеаризованной системы и потому
алгоритмизируется.
Метод первого приближения в вопросах устойчивости получил
развитие в ряде работ советских и зарубежных ученых.
Обоснованию допустимости линеаризации в различных случаях при
решении вопросов устойчивости посвящены работы [4, 106] и др.,
рассмотрению критических по Ляпунову случаев, когда
линеаризация недопустима,— работы [69, 96, 161]. В монографии [103]
рассмотрен метод построения границ области устойчивости
линеаризованной системы, в монографии [25] исследуется характер
границ этой области.
Однако в теории автоматического управления
интересуются устойчивостью не только в малом, но и в большом (при
конечных отклонениях) или в целом (при любых отклонениях).
В этих, значительно более сложных, случаях задача об
устойчивости нелинейных систем не поддается алгоритмизации.
Исследовать математически строго устойчивость в большом
и в целом нелинейных систем со многими степенями свободы
позволяет прямой метод Ляпунова [94], развитию и применению
которого посвящены монографии [6, 22, 28, 54, 62, 78, 89, 91, 97,
146, 177, 218, 314] и другие работы.
Одной из первых работ, посвященных прямому методу
Ляпунова, была монография Н. Г. Четаева [177]. В ней теоремы
11
этого метода доказываются с различными дополнениями и
изменениями. Проблема существования функций Ляпунова
рассматривалась И. Г. Малкиным [97], В. И. Зубовым [62], Н. Н. Кра-
совским [78]. В работе [23] рассматривается применение метода
функций Ляпунова к задаче об асимптотической устойчивости в.
целом, в работе [160] — к задаче об устойчивости по отношению
к части переменных. В работе [44] изучается устойчивость при
постоянно действующих возмущениях. Устойчивости случайных
процессов с распределенными параметрами посвящена
работа [162]. В работах [78, 155] прямой метод Ляпунова
распространяется на системы с запаздыванием, а в работах [83, 84, 178] —
на нелинейные импульсные системы. Вопросы построения
функций Ляпунова для различных случаев рассматриваются в
работах [63, 78, 97, 259, 323] и др. В последнее время для
исследования многомерных систем получили применение векторные
функции Ляпунова.
В теории автоматического регулирования прямой метод
Ляпунова получил широкое применение после выхода в свет работы
А. И. Лурье и В. Н. Постникова [93], результаты которой
обобщены в работе [91].
Различные аспекты применения прямого метода Ляпунова к
нелинейным системам автоматического регулирования и
управления рассматриваются в монографиях [6, 28, 89, 218, 314], в
работах [126, 163, 166, 170, 180—182, 211, 215—217, 241, 259—264, 293,
309, 313, 323, 331] и др.
В связи с работой [2] возникла проблема определения
условий, при которых задача об абсолютной устойчивости системы
с одной нелинейной функцией сводится к так называемой
обобщенной задаче Гурвица. Решение этой проблемы для систем
второго порядка рассмотрено в работах [57, 78] и др., для систем
третьего порядка — в работах [146, 189] и др., для систем
четвертого порядка — в работе [200] и др. Один класс систем /г-го
порядка, для которого данная проблема имеет положительное
решение, устанавливается в работе [6].
Следует отметить, что прямой метод Ляпунова не
предназначен для отыскания точных количественных характеристик, в
частности точных границ областей устойчивости в пространстве
параметров и точных границ областей притяжения в фазовом
пространстве исследуемых на устойчивость невозмущенных
движений. Задача построения с помощью данного метода точной
границы области абсолютной устойчивости нелинейных систем
автоматического регулирования наталкивается на серьезные
трудности, связанные с отысканием подходящей функции
Ляпунова. Кроме того, при исследовании этим методом систем
высокого порядка возникают обычные затруднения, вынуждающие в
конкретных задачах от аналитического исследования переходить
к численным расчетам.
12
Вместе с тем, прямой метод Ляпунова является наиболее уни-
Берсальным методом исследования устойчивости нелинейных
систем в большом. Он заключает в себе нелокальный подход к
анализу фазового пространства, что отмечалось еще Н. Г. Че-
таевым. В связи с этим в работе [134] поставлена задача
качественного исследования в целом фазового пространства
нелинейной системы п-то порядка с помощью функций Ляпунова. Но на
пути решения этой проблемы предстоит еще большая работа.
Классическая качественная теория систем нелинейных
дифференциальных уравнений второго порядка, предложенная А.
Пуанкаре [297] и развитая далее в работах [14, 15, 57, 188, 193, 210,
272, 273, 274] и др., послужила основанием для развития
аналитических методов исследования систем автоматического
регулирования и управления, описываемых дифференциальными
уравнениями второго порядка (методов фазовой плоскости).
Из числа работ общего характера, в которых
рассматривается динамическое поведение нелинейных систем высокого
порядка, следует упомянуть монографии [195, 135, 270], а также
работы [133, 213, 278, 319].
Однако необходимо отметить, что если качественная теория
нелинейных дифференциальных уравнений достаточно полно
развита для систем второго порядка (п = 2), то в случае п ^ 3
она имеет еще ряд принципиально важных нерешенных
вопросов. Сложность методов этой теории в приложении к
нелинейным системам п-то порядка и невозможность, в большинстве
случаев, получения с их помощью точных количественных
результатов ограничивают их применение в прикладных задачах и
расчетах.
2. Методы фазовой плоскости и фазового пространства
Среди точных методов исследования нелинейных систем
автоматического управления большое место занимают методы,
непосредственно основанные на рассмотрении фазовой плоскости
или фазового пространства; остановимся на них отдельно.
В теории автоматического регулирования методы фазовой
плоскости берут свое начало от классической работы М. Г. Лео-
те [271]. Леоте использует фазовую плоскость для исследования
системы непрямого регулирования с сухим трением. Он
устанавливает, что на фазовой плоскости геометрическим образом
периодического движения в нелинейной системе автоматического
регулирования служит предельный цикл, к которому
асимптотически приближаются изнутри и снаружи интегральные кривые.
Методы изучения нелинейных систем автоматического
регулирования и управления с помощью фазовой плоскости и
фазового пространства получили всестороннее развитие и примене-
13
ние. Среди этих методов особо следует отметить метод точечных
отображений Пуанкаре — Брауера — Биркгофа [192, 297],
получивший существенное развитие в работах А. А. Андронова и его
сотрудников [8, 14, 16, 105].
Метод точечных отображений представил собой строгий
аппарат для решения ряда принципиальных вопросов теории
колебаний, в частности для нахождения предельных циклов
Пуанкаре в фазовых пространствах нелинейных динамических систем
и объяснения механизмов мягкого и жесткого возбуждения и
устойчивости автоколебаний [8, 14, 16], для получения ряда ре-
зультатов в теории бифуркаций [15, 86, 107—109] и т. п.
Изучение фазовых портретов нелинейных систем с помощью
метода точечных отображений позволило решить ряд задач
теории автоматического регулирования, важных в прикладном
отношении. С помощью этого метода было выяснено влияние
сухого трения на динамику систем стабилизации [10—13, 16, 17,
65, 67, ПО, 112—116, 118—120]. В работах [33, 71, 104] и др.
метод точечных отображений позволил получить ряд конкретных
результатов по динамике релейных систем. В работах [46, 137,
142] этот метод применен для анализа динамики нелинейных
сервомеханизмов. В монографии [128] он использован для
полного изучения фазовых пространств и пространств параметров
систем с одной степенью свободы и типовыми нелинейностями.
Аналитические методы, связанные с изучением фазового
пространства, в том числе метод точечных отображений, наиболее
эффективны, если задача исследуется на фазовой плоскости или
на многолистной фазовой поверхности [64, 143].
Методы фазовой плоскости позволили эффективно изучать
оптимальные [282, 234, 289], самонастраивающиеся [117, 81],
цифровые [165] и другие автоматические системы [56, 141, 174.
197, 255, 284]. В работе [237] эти методы применяются для
объяснения физического и математического механизмов
возникновения неустойчивости в системах автоматического управления.
В работах Т. Хаяси [224—230] методы фазовой плоскости
применяются для исследования вынужденных колебаний в
нелинейных системах.
Метод точечных отображений позволил успешно рассмотреть
ряд конкретных задач, в которых фазовое пространство имеет
три измерения и более [8, 9, 16, 17, 26, 27, 75, 104, 167, 319]. Но
если при /г = 2 метод точечных отображений позволяет исследовать
фазовую картину движения в большом и в целом, в частности
на основе применения диаграмм Кенигса — Ламерея, то при
п^З в общем случае нет регулярных методов отыскания
неподвижных точек точечного отображения, соответствующих
периодическим движениям. Если при п = 2 возможно изучение
всей совокупности фазовых траекторий, то при большом п
приходится прибегать к локальному рассмотрению фазового про-
14
странства, линеаризуя функции соответствия и исследуя малые
окрестности неподвижных точек преобразования [105, 192].
Даже при п = 3 вычислительные трудности аналитического
исследования методом точечных отображений кусочно-линейной
системы, если преследуется цель рассмотрения ее фазового
пространства в большом и в целом, могут быть столь серьезны, что-
потребуется развивать специальный, специфический для данной
задачи математический аппарат [17]. Существенную помощь при
решении такого рода задач может оказать теория бифуркаций
[15, 86], получившая развитие для систем со многими степенями
свободы в работах [107—109] и др.
Практически трудности исследования многомерных фазовых
пространств нелинейных систем могут быть преодолены с
помощью численных вычислений [24], однако при этом метод
исследования уже перестает быть аналитическим (а
следовательно и точным в строгом смысле этого слова).
Ряд методов, связанных с изучением фазовых траекторий
нелинейных систем высокого порядка (в частности, методы,
применяемые в работах [249—253]), заведомо основан на численных
расчетах и потому к аналитическим методам не относится.
В заключение можно отметить, что аналитические точные
методы, основанные на изучении поведения нелинейных систем
непосредственно в фазовом пространстве, оказываются
эффективными в прикладных задачах, если рассматриваются
некоторые классы систем второго порядка (в первую очередь —
кусочно-линейные автономные системы), но эти методы сталкиваются
с весьма серьезными трудностями при повышении порядка
системы.
3. Методы расчленения сложной системы
на более простые
Трудности, испытываемые при применении точных
аналитических методов к исследованию нелинейных систем высокого
порядка, позволяют преодолевать методы, основанные на
расчленении сложной системы на более простые.
Еще в классической механике для интегрирования уравнений
движения механической системы с п степенями свободы был
предложен метод разделения переменных уравнения
Гамильтона — Якоби, осуществляемый путем удачного подбора координат
и позволяющий в частных, но практически важных случаях
найти полный интеграл этого уравнения.
В теории линейных дифференциальных уравнений
установлены условия, налагаемые на коэффициенты линейного
дифференциального уравнения /г-го порядка, при которых оно
приводится к ряду уравнений первого порядка, последовательно инте-
15
грируемых в квадратурах [287]. В работах [1, 49, 50, 172] изучение
линейной системы п-то порядка с переменными (медленно
меняющимися) коэффициентами осуществляется путем ее
приближенного (асимптотического) расщепления на ряд независимых
систем более низких порядков. В работах [183, 303, 311, 312]
к ряду независимых систем низких порядков сводятся некоторые
нелинейные системы частного вида.
В работах [121, 122] предложен метод сечений пространства
параметров, суть которого состоит в том, что нелинейная
автоматическая система высокого порядка изучается в условиях
специально выбираемых сечений пространства ее коэффициентов
(вскрывающих сечений). Для этих сечений исходная система
неособым линейным преобразованием переменных преобразуется
в такую систему, исследование которой сводится к
последовательному изучению ряда подсистем низких порядков. По'сле
этого найденные результаты переносятся на исходную систему,
сохраняющую в условиях рассматриваемых сечений свой
порядок и размерность своего фазового пространства равными п.
Таким путем результаты анализа точными методами систем
низких порядков обобщаются на типовые классы нелинейных
автоматических систем /г-го порядка [121—125]. Рассмотрена
проблема распространения результатов, получаемых по сечениям,
на окрестности сечений [128, 130].
В работах [32, 127, 128, 130] метод сечений пространства
параметров применяется для синтеза нелинейных законов
управления. В работах [126, 128, 129] этот метод применяется к задаче
об абсолютной устойчивости нелинейных регулируемых систем.
В работе [19] он используется для исследования нелинейных
систем с запаздыванием. Приложение метода сечений к решению
практической задачи исследования и расчета конкретной
автоматической системы рассмотрено в работе [131]. Различные
аспекты применения метода сечений рассмотрены в монографии
[128]. Метод сечений пространства параметров снимает
трудности, связанные с высокой размерностью, возникающие при
применении точных аналитических методов к кусочно-линейным
и другим нелинейным системам высоких порядков. Благодаря
этому он позволяет точно исследовать многомерные фазовые
пространства и выполнять разбиение бифуркационными кривыми
плоскостей изучаемых сечений. Ограниченность данного метода
состоит в том, что он позволяет исследовать исходную систему
не при любых, а лишь при вполне определенных значениях
параметров (коэффициентов). Однако точные решения,
получаемые методом сечений, служат эталонами, на которые можно
ориентироваться при использовании в пространствах между
сечениями приближенных методов. Кроме того, эти точные
решения дополняют результаты приближенных исследований
данными, которые приближенными методами не могут быть получены
16
ввиду их грубости. В некоторых задачах сечения удается
построить так, что анализ их дает достаточное представление о
структуре пространства параметров.
4. Другие методы
Большую группу точных методов исследования нелинейных
систем составляют методы, основанные на рассмотрении
протекания процессов во времени. В частности, в теории
автоматического регулирования они берут свое начало от классического
исследования Р. Прелля [304]. Это — метод припасовывания,
примененный Л. Ф. Лекарню [269] для решения задачи Вышне-
градского, и другие, родственные ему, методы. В более поздние
годы эти методы получили развитие для определения
периодических режимов в кусочно-линейных системах /г-го порядка.
В работах [30, 36, 91, 176] для точного определения
периодических режимов в релейных системах применялся как метод
припасовывания, так и метод представления искомых
периодических функций в виде полных рядов Фурье. В работах М. А. Ай-
зермана, Ф. Р. Гантмахера [3] и др. [48, 72, 157] те же методы
применяются для определения периодических режимов в более
сложном случае, когда система /г-го порядка имеет
кусочно-линейную характеристику. Эти результаты обобщены в
монографии [31]. В работе [53] точно определяются автоколебательные
режимы в системах экстремального регулирования.
Метод припасовывания сыграл большую роль в исследовании
нелинейных систем автоматического регулирования и до сих пор
остается необходимым при исследовании кусочно-линейных и
других кусочно-интегрируемых систем. Однако, подчеркивая
большое принципиальное значение рассматриваемых методов,
отметим также их ограниченность и те серьезные затруднения, с
которыми приходится сталкиваться при их применении. Во-первых,
эти методы основаны на локальном подходе к анализу фазового
пространства, ибо исследуется только одно конкретное
движение, в данном случае — периодическое, устойчивость которого в
большом остается невыясненной. Во-вторых, эти методы не
приспособлены для отыскания всех возможных периодических
движений в системе, ибо тип искомого движения первоначально
задается, а затем проверяется возможность его существования.
В-трекъих, эти методы в приложении к кусочно-линейным и
другим, более сложным, нежели релейные, системам, оказываются
чересчур громоздкими, так что получаемые результаты с трудом
могут быть подвергнуты анализу, а это является конечной
целью аналитического исследования. В ходе применения
названных методов к кусочно-линейным системам получаются так
называемые уравнения периодов, решения которых и определяют
периодическое движение. Но уравнения периодов, будучи слож-
2 Заказ 33 17
ными трансцендентными уравнениями, вообще не могут быть
решены в общем виде и не требуют приближенного численного
решения.
В последние годы широкое применение при рассмотрении
задачи об абсолютной устойчивости нелинейных систем
автоматического регулирования получил частотный метод В. М. Попова
[148, 299—302].
В работах [101, 182] частотный метод обобщается на случай,
когда рассматривается не устойчивость состояния равновесия, а
устойчивость процессов, в частности устойчивость вынужденных
колебаний. В работе [175] этот метод применяется для решения
задачи об абсолютной устойчивости нелинейных систем с
запаздыванием, а в работах [34, 182] — для систем с неоднозначными
нелинейными характеристиками, в частности с характеристикой
люфта. В работе [102] частотный метод применяется для
исследования качества нелинейных систем.
Применительно к решению задачи об абсолютной
устойчивости систем автоматического регулирования частотный метод
В. М. Попова представляет достаточно удобный математический
аппарат. Удобство в приложении этого метода объясняется тем,
что трудности аналитических вычислений в нем обходятся
благодаря общности формулировки критерия устойчивости,
заключающейся в использовании понятия частотной характеристики.
В связи с этим при решении практических задач этим методом
обычно необходимы численные расчеты по определению
частотной характеристики, т. е. фактически метод не является
полностью аналитическим.
Как показали работы [181, 240] и др., метод В. М. Попова
имеет глубокую связь с прямым методом Ляпунова. Прямой
метод Ляпунова и частотный метод В. М. Попова позволяют
получать достаточные условия абсолютной устойчивости, вопрос о
близости которых к достаточным и необходимым в общем случае
остается не решенным [6, 95, 129]. Позволяя строго ответить на
вопрос о том, устойчив ли в целом данный установившийся
режим нелинейной системы, метод В. М. Попова в общем случае
не дает возможности точно определить границы области
устойчивости, т. е. является не столько точным, сколько строгим
качественным методом.
Однако в последние годы удалось получить достаточные
условия абсолютной устойчивости систем автоматического
регулирования, близкие к достаточным и необходимым (а в частных
случаях — совпадающие с ними).
Специфическую группу точных аналитических методов
исследования нелинейных систем составляют методы, основанные на
изучении поведения системы не во временной области, а в
какой-либо другой, переход к которой осуществляется путем
применения интегральных преобразований. Так, преобразования
18
Лапласа и Хевисайда, эффективно применяемые к линейным
системам и переводящие дифференциальную задачу во
временной области в алгебраическую задачу в некоторой комплексной
области, могут быть использованы и в случае нелинейной
(например кусочно-линейной) системы. Однако более целесообразно
для исследования нелинейных систем применять другие
преобразования. Примером может служить преобразование Кош и —
Тейлора, удачно примененное в работе [265] для анализа одного
класса нелинейных систем. Методы данной группы нуждаются в
дальнейшем развитии.
Можно указать еще ряд методов [80, 329], позволяющих так
или иначе преодолевать трудности интегрирования нелинейных
уравнений и находить аналитически те или иные характеристики
решений или сами решения. В данном обзоре не представляется
возможным остановиться на специальных методах,
предназначенных для исследования оптимальных, самонастраивающихся
и некоторых других классов систем управления.
Ж Ш Ш
2*
Глава II
Метод сечений
пространства
параметров
Сложность и трудоемкость точных
аналитических методов исследования нелинейных систем
известны. В этой области случай системы /г-го
порядка сильно отличается от случаев п = 1 или (когда
система автономна) п = 2. В настоящее время
существует возможность исследовать фазовые
картины движения систем низких порядков нелокально и
в целом. Методы исследования нелинейных систем
/г-го порядка обычно основаны на локальном
подходе к рассмотрению фазового пространства. Но и
при таком подходе точные методы в применении к
нелинейным (в частности, кусочно-линейным)
системам /г-го порядка являются обычно слишком
громоздкими и поэтому вынуждают на
определенном этапе исследования отказываться от
аналитического рассмотрения и переходить к численным
расчетам.
Стремлением в определенной степени преодолеть
эти трудности и приобрести возможность
исследовать нелинейные автоматические системы /г-го
порядка до конца аналитически, точно и столь же
полно, как это делается в случае систем низких
порядков с помощью фазовой плоскости, и вызвана разработка
излагаемого в данной главе метода — метода сечений
пространства параметров.
Основная идея метода состоит в следующем. В пространстве
параметров (коэффициентов) системы п-то порядка, имеющей
линейную часть и отдельные нелинейности, строится ряд сечений
(гиперплоскостей). Показывается, что эти сечения можно
выбрать определенным образом. А именно, при значениях
параметров, принадлежащих рассматриваемым сечениям, исходная
система неособым линейным преобразованием переменных
может быть приведена к ряду уравнений низкого (первого и
второго) порядка, связанных между собой так, что они могут
интегрироваться последовательно, одно за другим, если некоторые
из них рассматривать как неоднородные. Тем самым сложная
задача исследования исходной нелинейной системы п-то порядка
в условиях рассматриваемых сечений сводится в основном к
значительно более простой и хорошо изученной задаче
исследования систем первого и второго порядков с теми же нелинейно-
стями. Благодаря этому названный метод позволяет простыми
средствами получать такую информацию о поведении системы
п-то порядка, которую не удается получить другими методами.
А именно, для значений параметров, принадлежащих
рассматриваемым сечениям, предоставляется возможность аналитически
и точно исследовать многомерные фазовые пространства
нелинейных систем, с построением сепаратрисных поверхностей,
предельных циклов и т. д. Далее, в каждом из рассматриваемых
сечений можно зесьма подробно наблюдать структуру
пространства параметров (коэффициентов) системы, в смысле
соответствия точек этого пространства топологически определенному
типу фазовой картины движения.
Предполагается, что между рассматриваемыми сечениями
система исследуется другими (приближенными) методами. Однако
результаты, получаемые по сечениям, в большинстве случаев
в силу свойств непрерывности удается распространить на малые
окрестности сечений. Метод применим не всегда, однако он
оказывается полезным при решении задач анализа и синтеза для
важных классов нелинейных автоматических систем, в частности
для систем, рассматривающихся в монографиях [91, 89, 314]
и др,
1. Математические модели
Пусть непрерывная автоматическая система описывается
уравнениями
п п
Не =2 СкаГ\а + ЬЛо), /С = 1, . . . , Г/; 0=^0^, (ИЛ)
а=1 / = 1
21
где г|к, сг—независимые переменные;
дка, Ьк, ск (/с, а = 1,..., /г) —вещественные коэффициенты;
/(а)—некоторая нелинейная функция.
Наряду с исходными уравнениями вида (II. 1) будем
рассматривать уравнения в канонической форме.
Воспользуемся каноническим преобразованием [91]
где
р=х; #Лр) = 2*АЛр). (П-3)
1 /=1
ар
DiK(p) —алгебраическое дополнение элемента
определителя D(p), стоящего на пересечении строки i и
столбца К]
%i — корни алгебраического уравнения
D(p) =det[a*a —6мхР] = 0, (II. 4)
6Ka— символ Кронекера.
Преобразование (II.2) приводит систему (II.1) к канониче-
кому виду
п
x^XtXt + fio), *--=!, ..., п; а==2тл» (п-5)
*=i
где
Y,-=-^2^K(^), * = 1, ..-,"• (П.6)
к—1
Системы (II.1) и (П.5) будут взаимозаменяемыми в
процессе исследования, если преобразование (П.2) является
обратимым, т. е. неособым (имеет невырожденную матрицу).
Пусть Л = [ака] — квадратная п X п матрица; В— столбец,
составленный из чисел Ьк (к = 1, ..., п).
Преобразование (П.2) от системы (II.1) к системе (П.5) бу-
дет неособым тогда и только тогда, если [122, 128]:
1) уравнение (II.4) имеет только простые корни;
2) векторы
Я, ЛВ, А2В, ..., Ап~1В (П.7)
линейно независимы.
В случае, когда выполняется второе из только что
названных условий, система (II.I) называется полностью управляемой
22
[68]. Если хотя бы одно из этих условий не выполнено,
канонические уравнения (II.3) и преобразование (П.2) должны быть
заменены другими [128]. Ради простоты выкладок далее будем
рассматривать систему (II.1) только при выполнении названных
условий.
Аналогично разностные уравнения дискретной
автоматической системы вида
Ца [П + 1] = 2 аарГЦз [П] + baf{0 [п]) , а = 1, . . . , Щ\
р=1
<* [П] = 2 Ск^к Ы
\ (И. 8)
/с=1
с помощью преобразования
п
ъм=-2£^"Ь *='-
приводятся к канонической форме
Х1[п+1] = Ь£Х1[п] + ?(о[п]), i=l,
т
/с=1
m
m:
(И. 9)
(11.10)
Величины Яг, ук в этих уравнениях определяются из
выражений (II.4), (П.6).
Частными случаями системы уравнений (П.1) будет ряд
других систем, рассматривающихся в работах [89, 91], в том числе
так называемая система «непрямого» регулирования. В
частности, если
(0, 1=1, . . ., п—1; / = 1, . . ., i} i' + 2,
I 1, t = l, ..., л—1; / = *+1;
10п\ = —#п-ж > / = 1, . .., л;
6, = 0, t=l, . . .,п— 1; 6rt= —6; ^ =£,_!, t= 1,
то, обозначая
(Л_1) dK~U
1\l = % Ч\к = Ч\ =•
(11.11)
dt
к—I
, л- 2,3,
вместо уравнений (II.1) имеем
л(я) + ащ^-^ + . . . + a n-i Ц + ад = - bf(a);
а = ^оЛ +^1Л+ • • • +V-m'
(я-1)
(11.12)
(11.13)
23
Система (11.13) приводится к канонической форме (П.5) с
помощью преобразования
п
—ь
л
(s).
/г
/=1
D'(*,)
D'(K)
(
(11.14)
■х s= 1, . . ., n — 1,
где обозначено
D(p) =(-l)nD(p) =pn + alPn-1 + ...+an.
Выражения (II 6) для коэффициентов у{ в данном случае
принимают вид
7/-— Ь i{%l) , t = 1 л, (11.15)
где
Д(Я,) =е0 + еЛ+ • • • +вя-ДГ1 • (П. 16)
Матрица преобразования (11.14) будет невырожденной, если
числа %i различны и Ь Ф 0.
В качестве обобщения системы (II. 1) рассмотрим
неавтономную систему с т нелинейными элементами и запаздываниями
под знаками нелинейных функций
а=1 /=1
Я= 1, . . ., П\
п
где fc(/), с^> т-,— вещественные постоянные;
fj(a}) — нелинейные функции;
F(t) —заданная функция времени.
С помощью преобразования [124, 128]
\ (И. 17)
К=\
D' {К
а = 1, .
(11.18)
систему (11.17) приведем к каноническому виду
т
хк=кхк+2 4Л( W М'-*/)]+4'n+1)( W('),
я= 1, . . ., п;
а/-2 Л. ' =
1,
т.
i=i
(11.19)
24
Здесь обозначено:
m-fl n
/=i
0=1
N?(b,)= 2 baDaK(h), i, к=1,...,п; j - 1, . . ., m + 1; (II. 21)
Ct=l
/г
■^~^,W,J=l n; /=l,...,/n; (11.22)
Y</> =
/C=l
4'(K)=w(K)mK)r, » = i.
m-
1,
(11.23)
а остальные обозначения совпадают с принятыми выше; в
частности, %i—корни уравнения (П.4), составленного из
коэффициентов апа системы (11.17). Номер р (он может быть разным
для разных к) в выражениях (11.19) и (11.23) выбирается так,
чтобы Я/з (Як) Ф 0. Преобразование (11.18) будет неособым
тогда и только тогда, если:
1) корни Хг- (I = 1,...,/г) различны;
2) векторы
2£('\ А2Ви\ Л22Я(/), ...,Ап~-1ЪВи)
линейно независимы. Здесь обозначено:
— m+i
26</>
т+\
(11.24)
2Яи' =
2 MP
/=i
m+1
2 *?
(11.25)
Оба условия неособенности преобразования (11.18) далее
полагаем выполненными.
При / = 1, tj = F(t) = 0 из формул (11.18) —(11.25) получим
соответствующие выражения для системы (II. 1) с одним нели-
неййым элементом.
2. Вскрывающие сечения в пространстве параметров
Обратимся к рассмотрению системы (II.1). Будем считать
коэффициенты ака, Ьк, ск (или часть из них) параметрами и
рассмотрим в пространстве параметров некоторые сечения, оп-
25
ределяемые соотношениями между коэффициентами. Пусть эти
соотношения выбраны так, что / корней уравнения (II.4)
совпадают с I ^ п — 1 корнями уравнения
A(p)=^cKNK(P)-0. (II.26)
/С=1
Если / = п— 1, то в уравнениях (II.5), (П.6) п — 1 величин
Уг обращаются в нуль, и каноническая система принимает вид
^ = М/ + Д*М=1, ...,/г; а = 7Л, ("-27)
т. е. для о получаем уравнение первого порядка
* = Ко + Ув№ (П .28)
с разделяющимися переменными. Определив из выражения
(11.28) сг(/), уравнения (11.27) для хг при i Ф s можно
рассматривать как линейные неоднородные первого порядка. Из этих
уравнений имеем
t
хкУ) = хк{0)еЧ + еЧ^[о(те-х**(и. (11.29)
О
Заметим, что для определения характера функций xK(t) нет
нужды вычислять ст(0> достаточно определить характер
функции o(t) (см. гл. IV). Будем рассматривать только такие
соотношения между коэффициентами системы, определяющие
изучаемые сечения пространства параметров, для которых
каноническое преобразование (П.2) остается неособым. В силу
неособого преобразования (П.2) результаты рассмотрения
канонической системы переносятся на исходную.
Если 1 = п — 2, то в уравнениях (П.5), (П.6) п — 2
величины у* обращаются в нуль; тогда o(t) согласно уравнениям (II.5)
определяется из независимой системы второго порядка
xs-=Xsxs + f(a)\ xr = Xrxr + f(a)\ o = ysxs + yrxn (II.30)
а переменные хг при i ф s, i Ф г, как и выше,— из линейных
неоднородных уравнений первого порядка.
При 1 = п — 3 в канонической системе (П.5) только три из
величин у г отличны от нуля, a (t) будет определяться из системы
третьего порядка, и т. д.
Сечение пространства параметров, для которого переменная
а, стоящая под знаком нелинейной функции, определяется из
уравнения /с-го порядка, будем называть сечением /с-го рода
(к = 1, 2, 3,...). Сечение 1-го рода, для которого ys ф О,
обозначим G(f , а сечение 2-го рода, для которого ys ф О и уг ф 0,
обозначим Gif'r).
26
Пример II. 1. Пусть исходная система имеет вид [91]
ri + 2n^ + co2n= —Л/g; 6 = /(а);|
* = /оП + /1'П — ГЪ> J
(11.31)
где п, со2, N — заданные положительные постоянные;
/о, /ь г — параметры (г>0).
Приведя систему (11.31) к виду (П.1), воспользуемся преобразованием
(11.2), после чего получим каноническую систему
3
* = М]+/(<*); x2 = 'klx2-\-f(G)\ x3 = f(o); o = ^ylxl,
где %i + %2 = —2/г; ЯД2 = со2;
„ /o + ^i/i 1Г jp + kiji N .
Рассмотрим случай, когда п2 — со2 > 0, \%i\ > \X2\, а нелинейная функция
удовлетворяет условиям
/(0) = 0, 0<LLjL<co при ст^О.
о
В полупространстве г, /0, /i (г > 0) можно построить три сечения 2-го
рода, сечение G\ ' будет описываться уравнением /о+ A,2/i = 0, сечение G(2 • —
уравнением /0 4- A,j/i = 0, наконец, сечение G2 ' —уравнением /0 -f ~~г г = 0.
В условиях этих сечений каноническое преобразование остается неособым,
о(t) определяется из уравнений 2-го порядка, a Xi(t) — из неоднородных
уравнений 1-го порядка. Результаты рассмотрения этих уравнений с точки
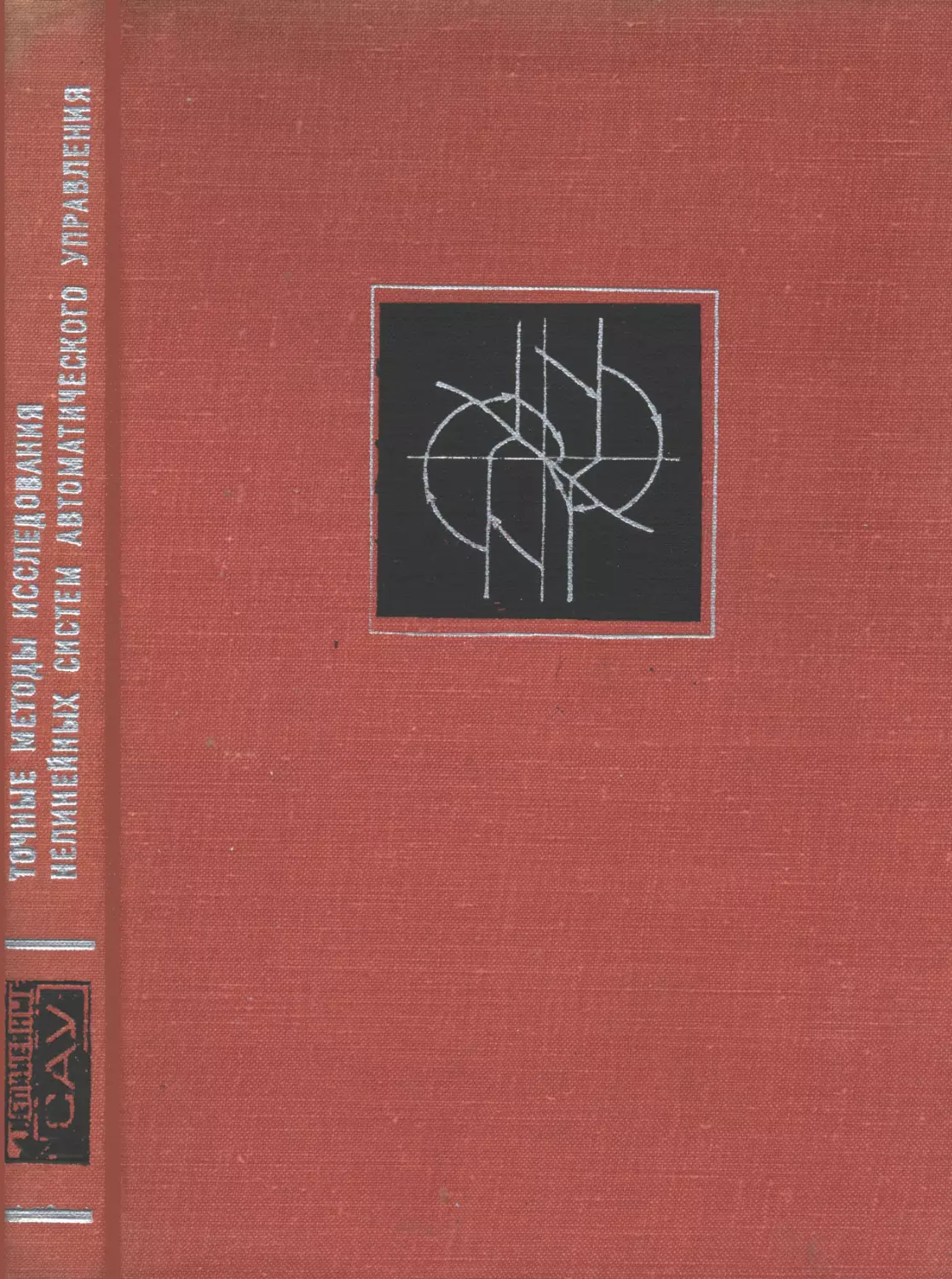
зрения устойчивости нулевого решения системы представлены на рис. II.1.
Полуплоскость G2 ' ' пересекает полуплоскости G^1, ' и G2 '3* , причем линии
пересечений лежат на границе области абсолютной устойчивости; те точки
сечений G2 ' * и G2 ' *, для которых /о + — г > О, принадлежат области
абсолютной устойчивости (горизонтальная штриховка на рисунке). В свою очередь,
сечение G2 ' * рассекается вдоль прямой L плоскостью 2nr -f Nj\ = 0 ня две
части. Та часть полуплоскости G21,2\ которая на рис. II 1 лежит вправо от
прямой L и для которой 2nr -f Nj{ > 0, служит границей области абсолютной
устойчивости; последняя на рис. II.1 лежит вверх от сечения G(2'2).
Таким образом, при исследовании устойчивости системы (11.31) изучение
рассматриваемых сечений позволило: 1) определить часть точной границы
области fабсолютной устойчивости; 2) построить плоскости, заведомо лежащие
внутри области абсолютной устойчивости. Полученная граница области
устойчивости целиком согласуется с данными работы [95], из которой следует, что
абсолютная устойчивость сохраняется не только в малой окрестности сечений,
но и на большом расстоянии от них. Аналогично может быть рассмотрена
область автоколебаний и др.
В рассмотренной задаче анализ уравнений 1 и 2-го порядков позволил
судить о динамических свойствах нелинейной системы 3-го порядка. Способ
исследования не усложняется, если порядок системы будет произвольно
большим.
27
Итак, в результате применения обсуждаемого метода могут
быть получены наглядные диаграммы разбиения плоскостей
изучаемых сечений на области, соответствующие топологически
определенным типам фазовой картины движения. В соответствии
с той ролью, которую играют рассматриваемые сечения при
изучении структуры пространства параметров, а также для отличия
их от других возможных сечений, будем называть эти сечения
вскрывающими (или апериентными).
Рис. II.1. Рассечение области абсолютной устойчивости системы третьего
порядка сечениями второго рода
Для существования сечений 1-го рода в любом пространстве
параметров системы (II. 1) необходимо, чтобы степень т
полинома А(р) была п— 1, а для существования сечений 2-го рода
необходимо т < п — 2. Условие т = п — 1 иначе запишется
£сА^О, (11.32)
а условие т = п— 2
Х^аХЧ&а^-МаО^О, (11.33)
а=1 /=1
где штрих означает пропуск слагаемого при i = а. В важном
частном случае системы (II.1) —в случае системы «непрямого»
регулирования [91] условие (11.32) выполнено, если гфЪ (г —
коэффициент жесткой обратной связи). Достаточные и
необходимые условия существования вскрывающих сечений для
системы (11.1) приводятся в работе [128]. Для пространств
параметров, представляющих основной интерес в приложениях,
соответствующие сечения будут построены в следующих параграфах.
Условие существования вскрывающих сечений в выбранном
пространстве параметров — это условие применимости в данной
28
задаче обсуждаемого метода. Но желательно построить в
рассматриваемом пространстве как можно больше различных
сечений. Различными сечениями данного к-то рода будем называть
такие, которые не сливаются с другими сечениями того же рода
и не содержатся в этих других сечениях.
Позволяет ли примененный способ построения вскрывающи\
сечений путем приравнивания нулей полиномов D(p) и А(р)
получить все различные сечения? Нельзя ли при тех же
условиях получить сечения к-то рода для системы (II. 1), отличные
от получаемых указанным способом, воспользовавшись другой
формой канонических уравнений, например так называемой
второй формой [89]? На эти вопросы отрицательный ответ дает
следующая теорема [122, 128]: сечения пространства параметров
полностью управляемой системы (П.1) с различными
собственными значениями матрицы А, для которых аргумент нелинейной
функции описывается независимым уравнением к-то порядка и
которые получаются путем приравнивания п—к нулей
полиномов D(p) и Д(/?), единственны.
Чтобы яснее представить смысл обсуждаемых сечений,
рассмотрим их с разных точек зрения.
С точки зрения теории структурных схем [139] эти сечения
выглядят следующим образом. На вход суммирующего
устройства, заданного последним уравнением системы (П.1), поступают
сигналы r\i (i = 1,...,/г). Эти сигналы можно разложить на
канонические составляющие Xj (/ = 1,...,/г); тогда, в условиях
сечения к-то рода (к = 1, 2, 3), канонические составляющие,
принадлежащие различным сигналам r\i, при их сложении в
суммирующем устройстве взаимно сокращаются, за
исключением к канонических составляющих. Суммирующее устройство
превращается, таким образом, в точный фильтр, пропускающий
лишь определенные канонические составляющие. Этих
составляющих достаточно, чтобы управляющий сигнал а, подаваемый
на вход объекта, возбуждал в нем колебания на всех его
собственных частотах, и тогда на вход суммирующего
устройства будут непрерывно поступать все канонические
составляющие.
С точки зрения теории автономного регулирования объектов
с несколькими регулируемыми величинами [40] можно сказать,
что ^ условиях рассматриваемых сечений к-то рода переменная
а, вводящая в уравнения (П.1) нелинейно, описывается
автономной, независимой системой уравнений к-то порядка, но
переменные г]* (i = 1,..., п) изменяются неавтономно, во взаимосвязи,
так что порядок исходной системы (П.1) остается равным п.
Однако, поскольку переменные г)* (ь = 1,...,/г) входят в
уравнения (П.1) линейно, линейная часть системы обычным путем
может быть преобразована к каноническому виду, при котором
ее матрица диагональна.
29
Чтобы пояснить значение рассматриваемых сечений
пространств параметров с позиций метода точечных отображений
[105], обратимся к простейшему случаю, когда функция /(а)
кусочно-линейна, и рассмотрим систему (П.1) в условиях сечения
1-го рода. В данном случае будем иметь f(a) = k3o + h3 при
сг/< cr<G/4-i; /=1, . ..,9» гДе £/> fy» Gh аЖ— вещественные
постоянные. Следовательно, система (11.27) запишется
xs = (K + kjys)x8 + hf9
i/ = M* + A/ + fyYs*s(')
i= 1, . . ., s—1, s+ 1, . . ., /г; >
Как видим, смысл рассматриваемого сечения 1-го рода для
кусочно-линейной системы вида (ИЛ) состоит в том, что в
условиях этого сечения все «плоскости переключения» в координатах
Х{ (i = I, ...,n) ориентируются ортогонально оси xs. Поэтому
уравнение (11.31) для xs позволит найти время %3 пробега
изображающей точки от одной плоскости переключения до другой
как постоянную величину, не зависящую от начального
положения этой точки на исходной плоскости переключения. В связи
с этим в интегралах уравнений (11.31) для %\ при i = 1,..., 5 — 1,
5+1, ...,п (рассматриваемых как неоднородные уравнения с уже
найденной функцией xs(t)) после подстановки t = x3 выражения
exp (XiXj), cos (ImXiXj) и т. п. будут постоянными
коэффициентами, не зависящими от начальных условий, так что названные
интегралы дадут линейное точечное отображение одной
плоскости переключения в другую. Соответствующие упрощения
претерпевают уравнения точечных отображений и в условиях
сечений 2-го рода.
3. Построение сечений в пространстве Сп
Рассмотрим случай, когда в уравнениях (ИЛ) коэффициенты
aia, bi заданы, а коэффициенты с\ служат параметрами и
образуют /г-мерное евклидово пространство Сп. В этом случае
условие совпадения I = п— к корней уравнений (II.4) и (11.26)
запишется в виде системы / линейных однородных
алгебраических уравнений вида
£с,.ад/) = о (И.35)
с п неизвестными с\. Система (11.35) будет иметь ранг /, так как
строки матрицы ее коэффициентов пропорциональны .столбцам
30
при —<^<-^±i-. (II.34)
7s 7s
коэффициентов канонического преобразования (П.2). Система
(11.35) имеет отличные от нуля вещественные решения
относительно параметров сг, когда каноническое преобразование
остается неособым.
Справедлива следующая теорема [122, 128].
Пусть числа ai0h b\ (i, a= 1,...,/г) таковы, что уравнение
(11.4) имеет только простые корни и векторы (П.7) линейно
независимы. Тогда в пространстве Сп существуют сечения 2-го
рода, а сечения 1 и 3-го рода существуют, если при указанных
условиях среди корней уравнения (II.4) есть хоть один
вещественный. При этом сечение /с-го рода (к = 1, 2, 3) представляет
собой линейное подпространство размерности к пространства Сп,
определяемое системой п — к уравнений вида (11.35).
Решения системы вида (11.35) можно записать в удобной
симметричной форме, если учесть, что общее решение
однородной системы п — к линейных алгебраических уравнений с п
неизвестными и рангом матрицы коэффициентов п — к совпадает
с решением неоднородной системы п линейных алгебраических
уравнений с п неизвестными и рангом матрицы коэффициентов пу
если эта последняя система содержит в себе указанную
однородную систему, а в остальных ее уравнениях свободными членами
служат произвольные постоянные. Решение названной
неоднородной системы, определяемое по формулам Крамера и
содержащее к произвольных постоянных, содержит в себе все решения
однородной системы. Доказательство этого утверждения
приведено в работе [128].
В соответствии с изложенным, уравнения сечения 3-го рода
в пространстве Сп можно записать в виде
л
£ ctNt (Xj) =■ 6,А + Mr + «/Л, / = 1, ..., /г, (И. 36)
i=\
где 6jq (q = 5, г, р) — символ Кронекера; As, Ar, Av —
произвольные постоянные, причем As и Аг полагаем комплексными
сопряженными, если Xs и Хг — комплексные и, значит,
сопряженные. Для сечений 2-го рода в уравнениях (11.36) Av = 0, а для
сечений 1-го рода Ar = Av = 0. Определитель матрицы
коэффициентов системы (11.36) пропорционален определителю матрицы
неособого преобразования (П.2). Поэтому ранг матрицы
коэффициентов системы (11.36) равен /г, т. е. эта система совместна
независимо от выбора чисел А{.
Выбирая по-разному числа Яг-, для которых уг Ф 0, можно
построить различные сечения /с-го рода. Число различных
сечений /с-го рода (к -■= 1, 2, 3) в пространстве Сп системы (II.1)
устанавливается следующей теоремой [122, 128].
Пусть уравнение (П.4) имеет п простых корней, из них 5
вещественных и q комплексных, и пусть векторы (Н.7) линейно
31
независимы. Тогда в пространстве Сп число различных сечений
1-го рода равно
N^s, (II.37)
число различных сечений 2-го рода
N2 = 0,5[s(s-l)+q]% (II.38)
наконец, число различных сечений 3-го рода
N3=^-[(s-l){s-2)+3q]9 (11.39)
причем каждое сечение /с-го рода представляет собой линейное
подпространство размерности к пространства Сп.
Например, при п = s = 3 в трехмерном пространстве С\, с2,
съ имеем три сечения 2-го рода в виде трех плоскостей,
проходящих через начало координат, и три сечения 1-го рода в виде
трех прямых, образующихся при пересечении названных
плоскостей.
Рассмотрим подробнее сечения 1 и 2-го рода, являющиеся
основными. Будем говорить, что сечение Gfyr> соответствует
комплексным корням, если Xs и Хт комплексны, и что оно
соответствует вещественным корням, если Xs и Хг вещественны.
Будем говорить также, что сечение меньшей размерности
содержится в сечении большей размерности, если все точки первого
являются точками второго.
Любые два сечения /с-го рода имеют в пространстве Сп
нулевое пересечение, т. е. пересечение в начале координат с* = О
(I = 1,..., п) /г-мерного пространства параметров Сп. Вопрос о
ненулевых пересечениях сечений 2-го рода в пространстве Сп
системы (II. 1) рассматривает следующая теорема [122, 128].
Пусть уравнение (П.4) имеет п простых корней, из них 5
вещественных, и векторы (П.7) линейно независимы. Тогда в
пространстве Сп:
1) сечения 2-го рода, соответствующие комплексным корням,
не образуют пересечений, отличных от нулевого;
2) при 5 < 3 сечения 2-го рода также не имеют пересечений,
отличных от нулевого;
3) при 5^3 сечения 2-го рода, соответствующие
вещественным корням, образуют пересечения размерности 1, являющиеся
сечениями 1-го рода; при этом каждое сечение G^r\
соответствующее вещественным корням Xs и Яг, содержит в себе два
различных пересечения размерности 1, G[s)nG[r\ а всего в
пространстве Сп образуется 5 различных пересечений
размерности 1, каждое из которых может быть рассматриваемо как
результат пересечения а сечений 2-го рода (соответствующих
вещественным корням), где а — любое из целых чисел 2,..., 5 — 1.
32
В силу этой теоремы при s^3b пространстве Сп системы
(ИЛ) все сечения 1-го рода содержатся в сечениях 2-го рода, не
представляя самостоятельных геометрических образов. Но этот
факт имеет место и при 5 = 2, о чем говорит следующая теорема
[122, 128]: если уравнение (П.4) среди п простых корней имеет 5
вещественных и векторы (П.7) линейно независимы, то в
пространстве Сп при 5 ■= 1 сечение 1-го рода не содержится ни в
одном из сечений 2-го рода, а при s ^ 2 каждое сечение 1-го
рода G(js) содержится в сечении 2-го рода G(2s'r) соответствующем
вещественным корням.
Однако и при 5^2 рассмотрение сечений 1-го рода
параллельно с сечениями 2-го рода представляет интерес, так как для
них задача сводится к изучению уравнений только первого
порядка, в связи с чем можно получить дополнительную
информацию о поведении исходной системы.
4. Построение сечений в пространстве Сп _i
Пусть теперь в уравнениях (ПЛ) заданы коэффициенты ака,
Ьк и один из коэффициентов ск, а остальные п — 1 величин ск
являются параметрами. Не нарушая общности, будем считать
фиксированным коэффициент сп.
Пространство Сп-\ параметров си с2,..., cn-i можно
рассматривать как (п—1)-мерное евклидово пространство,
порожденное (п— 1)-мерными векторами, координатами которых в
некотором ортонормальном базисе служат вещественные числа ск.
Если величина сп задана равной нулю, то пространство Сп-\
можно рассматривать еще как подпространство размерности
п — 1 евклидова пространства Сп. При указанном условии (т. е.
при сп = 0) пространство Сп-\ будем обозначать С°п_{.
Напишем матрицу с п строками:
Ni(Xi); ВДО; ...; Nn-i(bi)'
LAMV); N2(KY, ...; Nn^(Xn)
(11.40)
Минор порядка п—1 матрицы (11.40) обозначим Ма, если
он является определителем матрицы, получаемой из выражения
(11.40) вычеркиванием строки а, состоящей из элементов Np (^а),
где р = 1, ..., п— 1. Будем говорить, что минор Ма
соответствует корню Я а (а = 1,..., п) уравнения (П.4).
Вопрос о существовании сечений 1 и 2-го рода в
пространстве C°_t системы (ПЛ) решает следующая теорема.
Пусть числа ака, Ьп (/с, а = 1, ..., п) таковы, что уравнение
(11.4) имеет только простые корни и векторы (II.7) линейно
независимы. Тогда в пространстве С°п_х существуют сечения
3 Заказ 33 33
2-го рода в виде подпространств размерности 1 или 2, а сечение
1-го рода G(p существует и представляет собой
подпространство размерности 1, если при указанных условиях среди корней
уравнения (П.4) имеется вещественный корень Хг, для которого
минор Мг = 0.
Доказательство этой теоремы имеется в работе [128].
Разумеется, здесь, как и всюду, идет речь только о таких сечениях,
для которых преобразование (II. 1) является неособым.
В случае простых корней Яа (а = 1,..., п) все сечения 2-го
рода в пространстве С°п_{ системы (II. 1) могут быть описаны
однородными системами вида
2<*ВДа) = °. а= 1, ..., г—1, г+1, .... р—I, p+I, ...,/i
P=i
(11.41)
с матрицей ранга п — 2 (для сечений размерности 1) или п — 3
(для сечений размерности 2), а все сечения 1-го рода — теми
системами вида
2CP*W=0' cc^l, ...,r-l, r+l, ...,n, (II.42)
которые, при вещественном Яг, имеют матрицу с рангом п — 2.
Если для какого-то вещественного V ранг матрицы системы
(11.42) равен п—1, то соответствующее сечение G{pB
пространстве С%_{ не существует.
Будем говорить, что два сечения одинаковой размерности
сливаются, если все их точки являются общими. Полагая корни
Хг и Яр любой парой комплексных или любыми вещественными
корнями уравнения (П.4), можно образовать всего N2 систем
вида (11.41), где число N2 определено формулой (11.38). Однако
не всегда все эти системы будут описывать различные сечения
2-го рода в пространстве С°_2, так как некоторые сечения 2-го
рода размерности 1 могут сливаться, превращаясь при этом в
сечение 1-го рода. Число различных сечений 1 и 2-го рода в
пространстве С%_{ системы (II. 1) определяется следующей
теоремой [121, 128].
Пусть уравнение (П.4) имеет п простых корней, из них 5
вещественных, и пусть векторы (И.7) линейно независимы. Тогда
в пространстве C°_j число различных сечений 2-го рода равно
N2=N2—N[(s—N[), (11.43)
34
где N2 есть число различных сечений 2-го рода в пространстве
Сп, определяемое по выражению (11.38), a N[ —число
различных сечений 1-го рода в пространстве C°n_v причем
0<iVi <s при s<n; ) (II 44)
О^Л/j^s—1 при s = n. J
Из этой теоремы следует, что число различных сечений 2-го
рода N'2 в пространстве С®_{ полностью управляемой системы
(II.1) в случае простых корней Яа(а= 1,..., п) максимально и
равно числу N2, определяемому по выражению (11.38), тогда и
только тогда, когда А^' = 0 или N[ = 5. Здесь речь идет о
максимальном числе Л^2 при различных значениях заданных
коэффициентов aa/5v Ьа. Но при фиксированных значениях заданных
коэффициентов аар, Ьа число iV2', разумеется, всегда представляет
собой максимальное число различных сечений 2-го рода в
пространстве с°_г
В силу уравнений (11.41), (11.42) все рассматриваемые
сечения имеют в пространстве С^_1 нулевое пересечение, т. е.
пересечение в начале координат са = О (а = 1,..., п— 1) (п— 1)-мер-
ного пространства параметров са. Вопрос о ненулевых
пересечениях сечений 2-го рода в пространстве С0п_{ рассматривает
следующая теорема [121, 128].
Пусть уравнение (Н.4) имеет п простых корней, из них 5
вещественных, и векторы (П.7) линейно независимы. Пусть также
в пространстве CQn__x имеется N[ сечений 1-го рода. Тогда в этом
пространстве:
1) сечения 2-го рода, соответствующие комплексным корням,
не сливаются и не образуют пересечений, отличных от нулевого;
2) при 5 < 3 либо 5 ^ 3 и N[ = 0 сечения 2-го рода также не
сливаются и не образуют пересечений, отличных от нулевого;
3) при s ^3 и N {Ф 0 каждое сечение 1-го рода представляет
линию пересечения N{ — 1 сечений 2-го рода размерности 2 и
линию слияния 5 — N [ сечений 2-го рода размерности 1;
последние при слиянии исчезают, превращаясь в сечение 1-го рода.
Согласно сформулированной теореме при 5^3 и N\^2 в
пространстве С®_1 каждое сечение 1-го рода содержится в
сечениях 2-го рода. Но этот факт имеет место и при 5 = 2 (если
N[ ^ 2), о чем говорит следующая теорема [128]: пусть в
пространстве CJJ_j полностью управляемой системы (II.1), уравнение
(II.4) которой имеет только простые корни, существуют сечения
1-го рода; тогда в этом пространстве при N [ = 1 сечение 1-го
рода не содержится ни в одном из сечений 2-го рода, а при N'2 ^ 2
3* 35
каждое сечение 1-го рода содержится в определенных сечениях
2-го рода, соответствующих вещественным корням.
Предположим теперь, что в системе (II. 1) величина сп
отлична от нуля, но фиксирована. В этом случае пространство Сп-\
можно рассматривать как гиперплоскость сп = const
размерности п—1 в пространстве Сп. При указанном условии (т. е. при
сп = const) пространство Сп-\ будем обозначать С *__2 .
Разумеется, пространства С%__х и С*п_{ изоморфны.
Существование сечений 2-го рода в пространстве С*__{
системы (II.1) утверждает следующая теорема.
Если уравнение (П.4) имеет п простых корней, из них 5
вещественных, векторы (II.7) линейно независимы и 5 ф 1, то в
пространстве С*п__х системы (П.1) существуют сечения 2-го рода
в виде гиперплоскостей размерности 1. В случае s = 1, в виде
исключения, сечений 2-го рода в пространстве С*_2 может
не быть вовсе.
Доказательство теоремы имеется в работе [128].
Сечение 2-го рода в пространстве С*п__1 описывается
системой неоднородных уравнений
п—\
%с№(К) =—CnNn(K), a=l, ...,г— 1, г+1, ...,
р-1, р+ 1 /г (И.45)
с матрицей ранга п — 2, где с*п —заданное значение
коэффициента Сп-
Решения совместных систем вида (11.45), существование
которых при 5 Ф 1 гарантируется, обращают в нуль выражения
(П.6) для уа при а ф г и аф р.
5. Построение сечений в пространстве Cq(q <C п)
и других пространствах
Допустим теперь, что в уравнениях (П.1) из числа п величин
Ci заданы значения п — q величин, а остальные q являются
параметрами, образующими ^-мерное пространство Сд. В случае,
когда п — q заданных величин d равны нулю, пространство Cq
будем обозначать С°. Пространство С0 будет ^-мерным
подпространством линейного пространства Сп. В случае, когда в числе
п — q заданных величин Ci есть отличные от нуля, пространство
Cq будем обозначать С*. Пространство С* может быть
рассматриваемо как гиперплоскость размерности q пространства Сп.
Если значения коэффициентов а^, Ь\ также заданы, то
сечения /с-го рода (к = 1, 2, 3) в пространстве Cq будут существо-
36
вать не всегда, а лишь при выполнении определенных условий.
Если же коэффициенты a*j, Ь\ (или достаточно большая часть
этих коэффициентов), в свою очередь, заданы буквенно и не
фиксированы, то сечения /с-го рода можно построить, налагая
условия на часть коэффициентов ац, bi (в виде п — q равенств),
что равносильно рассмотрению совокупности пространства Cq
и пространства некоторых коэффициентов а^-, bi.
Приведем четыре способа построения сечений пространств
параметров в рассматриваемых случаях. Разумеется, все эти
способы дают одинаковые результаты.
Первый способ. Построение сечений с помощью формул
Крамера. Этот способ основан на том, что сечения
пространства Cq могут быть получены как пересечение соответствующих
сечений пространства Сп с гиперплоскостью С* или с
подпространством С°. Поэтому в данном случае полагаем, что все п
величины d являются неизвестными, и находим по формулам
Крамера из неоднородных систем вида (11.36) значения этих
величин, принадлежащие рассматриваемым сечениям в пространстве
Сп, как линейные формы произвольных постоянных Аг\ затем
п — q из числа п найденных выражений для с\ приравниваем
заданным значениям С{ = с* (в частности, С\ = 0).
Таким путем получим п — q равенств, связывающих
коэффициенты dij, bi и к постоянных Ai(k= 1, 2, 3). Если эти п — q
равенств можно выполнить только за счет выбора коэффи-
ентов aij, bi, то q величин Ci(i = 1,..., q) в условиях сечения /с-го
рода (к = 1, 2, 3) определятся в ^-мерном пространстве Cq с
точностью до /с произвольных постоянных Ai. Если же для
выполнения названных п — q равенств придется наложить условия
на часть постоянных Ai, то величины a(i= 1,..., q) для данного
сечения /с-го рода (/с = 2 или /с = 3) определятся с точностью до
m < /с произвольных постоянных, и тогда сечение /с-го рода
представит собой в <7_меРН0М пространстве m-мерную
плоскость.
Во всех случаях для существования рассматриваемых
сечений названные п—q равенств должны быть выполнены так,
чтобы: а) преобразование (П.2) оставалось неособым; б)
выполнялись заданные значения для части коэффициентов ац, bi (если
таковые имеются).
Второй способ. Построение сечений на основе
использования метода Гаусса. Этот способ отличается от предыдущего
только тем, что в данном случае для решения систем уравнений,
определяющих'сечения /с-го рода (к = 1, 2, 3), вместо формул
Крамера используется метод Гаусса решения систем линейных
алгебраических уравнений. Этот способ практически при
большом п экономичнее предыдущего, связанного с раскрытием
определителей порядка п.
37
. Рассмотрим сначала вместо системы вида (11.36) более
общую систему, в которой все постоянные Аг Ф 0.
]Г bLaca = Ah i=l,
(11.46)
а=1
здесь обозначено bi0L = Na(ki).
Будем полагать, что определитель det [йг-а], составленный из
коэффициентов при неизвестных системы (11.46)), отличен от
нуля, для чего должны выполняться условия неособенности
преобразования (II.2), Используя метод Гаусса, приведем систему
(11.46) к виду
С2 + т\ъСъ + .
,(2)
п/(2).
+ m^+...+m(24^rt-44);
Cq-\- ... tTlqn Cn — Clq '., I
^n — ип • )
(11.47)
Здесь коэффициенты т(?р и dfj) определяются рекуррентными
формулами
.(2/-1).
/-1
*w ')=ьа—2 п^ "т]
(2/с-1)^(2/с)
■к] »
/с=1
/-1
т£Л = -
'/а
2 «I?
/с=1
(2«-1) (2к)
т/са
п
(2/-1)
Л/-2МГЧ2я>
d?fi = 2=!
"л
= /, /+1, ...,«;
а = /+1, / + 2, . . ., п;
/=1, 2,
., п,
\ (И-48)
в которых пУ~~1 —некоторые вспомогательные коэффициенты, а
верхние индексы означают порядок выполнения операций.
Формулы (11.48) определяют процесс вычислений при
п(2/-1) ф q (у = i ^ я^ Если при каком-то шаге это неравенство
нарушается, можно йоменять местами члены в уравнениях так,
чтобы данное условие выполнялось, и тогда формулы (11.48)
заменятся другими, получаемыми в процессе вычислений.
38
Пусть требуется построить сечения пространства С°, когда
п — д величин С{ = 0; не нарушая общности,
сь = 0 при i = q-\-l, . . ., п.
можем положить
(11.49)
В таком случае для совместности системы (11.47) требуется
выполнение п— q равенств
4-2/)==0, / = (/+!,
П,
(11.50)
которые должны быть удовлетворены, при сохранении
неравенства det[6;a] Ф 0 в условиях сечения /с-го рода, т. е. когда
только к из числа п величин А{ отличны от нуля (к = 1, 2, 3). При
условиях (П.49), (11.50) последние п—q уравнений системы
(11.47) исчезают, и остается система q уравнений с q
неизвестными и рангом матрицы q, которая определит, при должном
выборе числа отличных от нуля произвольных постоянных А{,
соответствующее сечение в пространстве С°.
Пусть требуется построить сечение G[s). Для этого сечения
Л, = 0, i=l.
s-1, s+1,
(11.51)
где полагаем 5 ^ q.
Условия (11.51) нужно подставить в выражения (11.47) и
(11.50). Тогда, учитывая формулы (11.48), получим
d}2/) = 0. /=1, ..., s-1; 4:
-(2s) .
п,
(2s—1)
dfj)-
K=S
/ = s+l, s + 2, ...,/г.
| (И. 52)
J
В частности, если s = q (при вещественном Xq), т. е. если
Л8 ф 0 для последнего из не исчезающих при условиях (П.49)
и (11.50) уравнений (11.47), то тогда для выполнения равенств
(11.50) в виде соотношений (11.52) необходимо и достаточно
выполнения равенств
п
(2s-1)
= 0, j = s+ 1, s + 2, . .., n\ s = q,
(11.53)
котбрые не противоречат условию det[bi(X] Ф 0. Удовлетворив
п — q равенствам (11.53) за счет выбора п2 + п коэффициентов
aih b{ (или части этих коэффициентов), для определения
сечения G[s) в пространстве С° получим из уравнений (11.47) систему
q уравнений относительно неизвестных с{ (i = 1,..., q), которая
будет совместна и определит сечение G[s>b виде подпространства
размерности 1 пространства С°.
39
Фиксируя число q и полагая 5 любым из тех чисел /= 1,...,
q—1, для которых корень Яг вещественный, по формулам
(11.47) — (11.52) получим в пространстве С° другие сечения 1-го
рода G\l\ соответствующие корням Хи содержащимся в первых
q— 1 уравнениях системы (11.46). Для того чтобы образовать в
данном случае (при сд+{ = cq+2 = ... = сп = 0) сечения 1-го рода,
соответствующие вещественным Х% при i > q, запишем уравнения
системы (11.46) в обратном порядке — последнее поставим на
первое место и т. д. Затем, пользуясь методом Гаусса, приведем
матрицу этой системы к верхней (правой) треугольной. Тогда,
поступая, как и выше, и полагая cq+\ = cq+2 = ... = сп = 0,
отбросим тем самым уравнения, соответствующие корням %и Яг,.-.,
Яд—1, и сможем построить сечения G(fJ при i > q.
Аналогично, полагая, что в уравнениях (11.47) и (11.50) две
соответствующие величины Лг- отличны от нуля, получим в
пространстве C°q сечения 2-го рода.
Третий способ. Построение сечений на основе теоремы
Кронекера — Капелли. Условием существования вскрывающих
сечений в пространстве С° будет совместность систем уравнений
с q неизвестными са (а = 1,..., q), получаемых из систем вида
(11.36) при условии ср = 0 (р = q + 1,..., п), т. е. систем вида
q<n
2 CaNa (Я,-) = 6< А + 6, А + М*. *'=! «. (" • 54>
а=1
где для сечений 2-го рода Av = 0, а для сечений 1-го рода Аг =
= AV = 0.
Для совместности системы (11.54), в силу теоремы
Кронекера— Капелли, необходимо и достаточно, чтобы ранг матрицы
В = [Na(Xi)] (а = 1,..., q\ i = 1,..., п) был равен рангу
расширенной матрицы, получаемой от добавления к В столбца свободных
членов. Условие совпадения рангов названных матриц и будет
условием существования рассматриваемых сечений в
пространстве С0; оно может быть выполнено за счет выбора
коэффициентов dij, bi, и тогда из системы (11.54) величины са (а = 1,...,<7)
для данного сечения /с-го рода определяются с точностью до к
произвольных постоянных (к = 1, 2, 3). Условие совпадения
рангов названных матриц может быть выполнено также (для сечений
2 и 3-го рода) за счет выбора части отличных от нуля свободных
членов уравнений (11.54); в таком случае не все эти свободные
члены будут произвольными постоянными, и значения са (а =
= 1,..., q) для данного сечения /с-го рода (к = 2, 3)
определяются с точностью до m < к (например, т= 1) произвольных
постоянных.
40
В случае пространства С* следует аналогичным образом
рассмотреть систему п уравнений с q неизвестными Ci (i = 1,..., q),
получаемую подстановкой в систему вида (11.54) заданных
значений d = c*(i = q + 1,..., п).
Четвертый способ. Построение сечений с помощью
систем уравнений, не содержащих корней характеристического
уравнения. Этот способ позволяет определять рассматриваемые
сечения уравнениями, не содержащими всех корней А,г- уравнения
(II.4), и поэтому удобен, когда эти корни не могут быть
найдены.
Разлагая полиномы D(p) и А(р) по степеням р, имеем
D (р) - (~р)п+ S, (-p)n-{ + ...+Sn,
Ь(р) --#„(-/>)"-' +Я, (-р)п~2+ . . . + Яя_ь
где Si, Hi — известные функции коэффициентов а^, Ьг-, с\.
Для сечения 1-го рода G[s) равенство
cD(p) = (^-p)A(p), (H.56)
в котором с — вещественная произвольная постоянная, должно
быть тождественным относительно р. Приравнивая
коэффициенты при одинаковых степенях р в правой и левой частях
равенства (11.56), с учетом (11.55) имеем уравнения сечения G(2s) в виде
с=Н0\ cS^Ht + KHi-u i = l, ...,/i—l; cSn=XsHn-i. (11.57)
В частности, если рассматривается пространство Сп
параметров с\, <?2, ..., сп при К{ Ф 0 (i = 1, ..., п), то решение системы
(11.57) может быть представлено в простом виде:
cK = cDKi(K8)9 к=1, ...,л, (И.58)
где индекс р выбирается среди чисел 1,..., п произвольно, но так,
чтобы N& (Xs) ф 0.
Данный способ построения сечений наиболее удобен, когда
исходные уравнения имеют вид системы (11.13). В этом случае
коэффициенты полиномов (11.55) выразятся через
коэффициенты исходных уравнений так:
S.= (—iyah £ = 1 /7; Я/=(— 1)ж&?п-/-1, * = 0, ...,п—1.
(11.59)
Имея в виду уравнения (11.57) и их коэффициенты,
задаваемые выражениями (11.59), сечение б^для системы (11.13)
определим зависимостями
£?„_*_ 1 = а„еп-х + Ксп-к, к = 1, . .., я, (II.60)
где при к = п следует положить e_i = 0.
41
(11.55)
Аналогично из сравнения коэффициентов полиномов D(p) и
А(р) получаются уравнения для сечений 2 и 3-го рода. Условия
совместности получаемых таким путем систем уравнений
относительно выбранных неизвестных (параметров) при условии
неособенности канонического преобразования и представляют
собой достаточные и необходимые условия существования сечений
к-то рода в любом пространстве параметров систем вида (П.1),
выраженные непосредственно через коэффициенты исходной
системы [128].
Следующие два примера иллюстрируют построение сечений
в крайне вырожденных случаях, когда большая часть
коэффициентов ct в исходных уравнениях равна нулю.
Пример II.2. Пусть в уравнениях (II.1) из числа п величин сг только одна,
сг, отлична от нуля. Тогда система (11.46) примет вид
crNr(Kl) = Alt /=1,..., п. (11.61)
Определим сечение 1-го рода G\r' . Оно будет описываться системой,
получаемой из системы (11.61) при Лг = 0 для 1фг, т. е. системой
^г(Х/) = 0. *=!..... r-l.r+l п;|
crNr(Xr) = An \
причем требуется, чтобы Хг было вещественным. Из системы (11.62) сг
определится как произвольная постоянная, если выполняется п—q условий (здесь
4=1):
Nr(%i) = 0, /=1,..., г—1, г+ 1 п (11.63)
при Nr(lr)¥=0.
Для выполнения условия (11.63) достаточно положить
аг/ = 0, /=1,...,г—1, г+1,..., п. (11.64)
Действительно, имея в виду соотношения (11.64), из выражений (П.З)
найдем
Nr(p) = brDrr(p). (II.65)
Но разлагая определитель D(p) по элементам строки г с учетом
выражений (11.64) получим
D(p) = (arr-p)Drr(p). (II.66)
При учете, что все корни уравнения (II.4) простые, из соотношения (11.66)
следует, что Хг = агг есть вещественный корень уравнения (П.4), не
удовлетворяющий уравнению
Drr(p) = 0, (II.67)
и что все остальные п— 1 корней уравнения (П.4) являются корнями
уравнения (11.67). Поэтому, с учетом соотношения (11.65), приходим к условиям
(11.63). Последние не противоречат условиям неособенности преобразования
(II.2), так как выполняются, когда все корни Яг- (i = 1,..., п) простые и,
согласно выражениям (11.64), не зависят от выбора чисел Ь\ (i = 1, ..., п).
Пример II.3. Пусть исходной является система (11.13) при ег = О
для i = 1, ..., п — 2 и требуется построить сечение 1-го рода. Из рекуррентной
42
формулы (11.60) при к = п получаем
h
К
при к = п — 1 находим
е0 = ап_{еп_{
ео=—г-еп_1\ (П.68)
(11.69)
Из той же формулы при к = п—2, п—3, ..., 2 в силу ег- =0 (i = 1, ..., п—2)
определяем
ак = 0, к = 2,..., п — 2. (11.70)
Наконец, при к = 1 из формулы (11.60) находим а{ = —Ks. С учетом этого
равенства из соотношений (11.68) и (11.69) имеем
ап = а1ап_{. (II. 71)
В результате сечение G^p определено уравнениями (11.69) — (11.71).
6. Построение сечений для неавтономной системы
с несколькими нелинейностями
Все сказанное выше о вскрывающих сечениях пространств
параметров системы (II. 1) справедливо и для систем (II.8),
(11.13). Рассмотрим систему (11.17).
Пусть в уравнениях (11.17) величины сФ(1 = 1,..., п\\ = 1,...,т)
являются параметрами, а коэффициенты аки b{J}— заданные числа.
Пространство Ср будем трактовать как n-мерное евклидово
пространство; пространство пХ т параметров сФ составляется
из т пространств C^(j= I,..., m). Рассмотрим т систем
линейных уравнений вида
^)HK(Kl)=A\1) (i = l,...,n);'
к = 1
(11.72)
2^т)ад(-)=4т) (* = i, ...,п),
каждая из которых имеет п неизвестных ср (к = 1,..., /г).
Поскольку преобразование (11.18) неособое, системы (11.71)
совместны независимо от выбора чисел АФ Пусть
А(Р = 0 для i = l, ...,s-l, s+l, ..., г—1, г+1, ..., /г, (11.73)
a A(J} и Ар вещественные (если Xs и Хг вещественны) или
комплексные сопряженные (для ^s и Хг комплексных сопряженных),
в остальном произвольные постоянные. При условиях (11.73)
43
системы (11.72) определяют значения с<р, принадлежащие в со-
вокупности пространств С^сечению 2-го рода G^-r\ для
которого в уравнениях (11.19) у(/)= 0 при / =£ s, ьфг, и только
У^ФО, у\!]ф 0 (/= 1,..., т). Поэтому в условиях сечения G(2s'r>
переменные gj определяются из независимой системы 2-го
порядка
т \
/=1 | V * r
l = s, П Oj = Vs)xs + yi,!)xn /=1, ...,m, J
а после определения Oi(t), x8(t), xr(t) остальные п — 2
уравнения (11.19) для переменных хк при кФ s, кф г можно
проинтегрировать как линейные неоднородные 1-го порядка. Пусть, как
и ранее, уравнение (П.4) имеет 5 вещественных и q комплексных
корней. Выбирая по-разному Xs и Яг, построим 0,5[s(s—1) + q]
различных сечений G{*>r\ каждое из которых будет 2т-мерным
вещественным пространством.
Полагая в системах (11.72) только одну из величин A\j)
отличной от нуля, построим 5 различных сечений 1-го рода Gfy
каждое из которых будет m-мерным вещественным
пространством.
Нетрудно соответствующим образом перенести на систему
(11.17) и все остальные результаты, полученные выше для
системы (ИЛ). В работе [128] выполняется построение
вскрывающих сечений и для других классов нелинейных систем
автоматического управления.
7. Распространение результатов, получаемых в сечениях,
в окрестность сечений.
Продолжение в окрестность сечений областей устойчивости
В практических задачах соотношения между параметрами,
представляющие уравнения сечений, могут быть выполнены
лишь с некоторым округлением, но не абсолютно точно.
Покажем поэтому, что области определенного динамического
поведения системы, обнаруживаемые во вскрывающих сечениях,
могут быть продолжены в их достаточно малые окрестности.
Обратимся сначала к вопросу о продолжении в окрестность
вскрывающих сечений области устойчивости состояния
равновесия по Ляпунову.
Рассмотрим систему (ИЛ), приведенную неособым
преобразованием (П.2) к каноническому виду (П.5). Коэффициенты
flKa, bn будем считать некоторыми фиксированными числами, а
коэффициенты ск(я=1,..., п)—параметрами, эквивалентными
44
параметрам yi(i = 1,..., п) канонической системы. Пусть функция
f(o) = f(I>ViXi) определена и непрерывна вместе со своими
производными до второго порядка на некотором открытом
множестве R пространства переменных у^ X{(i = 1, ..., /г), и пусть /(0) =
= 0. Точка Xi = 0(i= 1,..., п) будет изображать состояние
равновесия.
Линеаризуем каноническую систему в окрестности состояния
равновесия, удерживая -в представлении f(o) по формуле
Тейлора с остаточным членом второй степени только линейное
слагаемое. Получим
: = ^КХ
«+i^^
1, ...,/!,
(11.75)
где
до
вычисляется в точке а = 0.
Состояние равновесия системы (II. 1) будет устойчивым по
Ляпунову, если все корни уравнения
i . df df
до до
до
Уп
df
до
Yi;
до
т2;
df г 1
до
-0 (11.76)
имеют отрицательные вещественные части.
В случае уг Ф 0 корни уравнения (11.76) обозначим X*(i =
= 1,...,/г).
В качестве вскрывающего сечения, не нарушая общности,
рассмотрим сечение G(2'2). В сечении G(2*'2), т. е. при yi = 0 для
i = 3,..., /г, корни уравнения (11.76) обозначим А,-. Нетрудно
видеть, что в сечении G(2]'2) имеем А,/ = Яг (/ = 3,..., /г), где Аг-—
корни уравнения (П.4).
Рассмотрим 8-окрестность сечения G(2I,2), для которой yi = е*
(/= 3,..., /г), где |ег-| ^ е, е — достаточно малое положительное
число, a yi и Y2 — те же, что и в сечении G(2l*2K Ввиду
непрерывной зависимости собственных чисел матрицы от ее элементов
корни А* в е-окрестности сечения G(2»2> будут сколь угодно мало
отличаться от корней А'- в самом сечении G(22'2).
Допустим, что ReAa < 0 при I = 3,..., /г; тогда в сечении G2*'2)
область устойчивости определится неравенствами ReA[ < 0,
ReAo < 0, т. е. неравенствами
?4+^2<0, Al'A2>0.
45
При учете выражения (11.76) эти неравенства преобразуются
к виду
до до
KK+-j-(yi\ + y,K)>o.
до
(11.77)
Неравенства (11.77) определяют область устойчивости в
плоскости Yi, Y2-
Корни, которые лежали в левой (или в правой)
полуплоскости корней в сечении G^'2), останутся также в левой
(соответственно, в правой) полуплоскости корней и в достаточно малой
окрестности сечения. Поэтому в окрестности сечения область
устойчивости (в пространстве переменных vi,..., уп) определяется
неравенствами ReA,* < 0, ReX* < 0> т. е.
^1 + Я;<0, Я1а2>0. (И. 78)
При учете выражения
А,* = А,-+ 6t.(Yi, . . ., уп)
неравенства (11.78) запишутся в виде
К + \ + ^Ъ+-£-Уш + йЛУи .-.,7я)+в2(71, ...Ля)<0,
до до
М"» + "Г" (71^2 + ?2^l) + 6iA,2 + Xi62+6i62 > 0.
до
(11.79)
При непрерывном стремлении yi(i = 3,..., п) к нулю числа 6i
и 62 также непрерывно стремятся к нулю. Поэтому и согласно
неравенствам (11.77), (11.79) граница области устойчивости
состояния равновесия в малом, проходящая в плоскости сечения
G(2l'2)пространства vi,..., yn в виде некоторых прямых,
обязательно имеет непрерывное продолжение в виде поверхностей по
крайней мере в малой окрестности сечения.
Таким образом, если в плоскости вскрывающего сечения
построена область устойчивости состояния равновесия по
Ляпунову, эта область может быть продолжена в малую окрестность
сечения и, следовательно, превращена в n-мерную область п-
мерного пространства параметров.
В силу теоремы о непрерывной зависимости собственных
значений матрицы от ее коэффициентов [136] из выражения (11.76)
вытекает оценка
п—\
46
р = 1, .
df
до
17,
Чк=3
(11.80)
h
да
i=l, .
?
of
da
rz; a =
5
3,
l*a|).
. . ., ft.
где /W = max
Данная оценка позволяет область устойчивости, построенную
в сечении G(2l>2\ продолжить не только в малую окрестность
сечения, но и на конечное расстояние от него.
Предположим теперь, что среди корней Xi (i = 3,..., п)
имеется корень с равной нулю вещественной частью, например Хп = 0.
Тогда та часть сечения G{21>2\ для которой Re^'^crO, ReA^s^O,
будет принадлежать границе области устойчивости; анализ
поведения системы в этих сечениях в рассматриваемом случае
производится, как обычно, в критических по Ляпунову случаях.
Наконец, если имеется корень %q, для которого ReXq > 0 (q —
одно из чисел 3,..., /г), то сечение G(2lt2} лежит в области
неустойчивости.
Аналогичным способом решается задача продолжения в
малую окрестность сечений области абсолютной устойчивости
состояния равновесия, с заменой характеристического уравнения
системы уравнений первого приближения другой системой
алгебраических уравнений — разрешающими уравнениями Лурье
[6, 91]. От характера корней этих разрешающих уравнений
зависит абсолютная устойчивость, но корни непрерывно зависят от
коэффициентов и, следовательно, от у*. Анализ одного класса
случаев показал, что область абсолютной устойчивости,
построенная (любым методом) во вскрывающем сечении, имеет
непрерывное продолжение в малой окрестности сечения [126, 128]. Как
и при рассмотрении устойчивости в малом, отдельные сечения
могут частично принадлежать границе области абсолютной
устойчивости (сечение G(2!'2) примера П.1).
8. Продолжение в окрестность сечений
областей автоколебаний
Рассмотрим опять систему (П.1). Коэффициенты ака, Ьк по-
прежнему будем считать фиксированными числами, а
коэффициенты С{ (i = 1,..., п)—параметрами, причем вместо
пространства параметров Ci будем рассматривать эквивалентное ему
пространство параметров у* {i = 1,.-» п), полагая, что система (II.1)
неособым преобразованием переменных (II.2) приведена к виду
(II.5). Пусть функции
представляющие правые части уравнений канонической системы
(II.5), определены и непрерывны вместе со своими частными
47
дХк дХк д*Хк д2Хк
производными—-, —— , —, —на некотором открытом
ду[ дхь d2xi дхрдхд
множестве R пространства переменных у^ Х\ (г = 1,..., п). Тогда
для всякой заданной системы начальных условий х°. (I = 1,..., п)
существует единственное решение
Xi(t)=4>i(t—t0, хи ..., Хп, 7ь • • ., ?Л), t = l, . . ., л, (И. 81)
такое, что #г-(0) = х°г Функции (11.81) определены и непрерывны
на некотором открытом множестве R пространства переменных
х°,...,*° Yi»-. Yn-
Предположим, что для некоторой области Q пространства
Yi,..., уп среди движений системы существует изолированное
асимптотически орбитно устойчивое периодическое движение
периода т, изображаемое в пространстве #i,..., xn замкнутой
траекторией T(Q cz #,Гс: R). Проведем в пространстве #i,..., xn
плоскость S размерности п— 1
п
2<7/*/ + <7»-i=0, (11.82)
пересекающую в точке Л4* траекторию Г, а в малой окрестности
М* — все соседние с Г траектории [20]. Если М — достаточно
близкая к М* точка плоскости S, то фазовая траектория,
выходящая из М, пересечет через некоторое время плоскость S в
точке М. Преобразование МвМ, осуществляемое фазовыми
траекториями системы, есть преобразование Г, М* — неподвижная
точка этого преобразования [105].
Определим характеристический полином преобразования Т.
Пусть х* , Х{, х. (i = 1,..., п)—координаты, соответственно,
точек ЛР, М, М, a i\ — время, через которое траектория,
выходящая из М, пересечет S в М. Согласно выражениям (11.81),
(11.82) уравнения преобразования Т будут
(11.83)
*/с = фЛ(*1,*1, • • -, *п, 7ъ • • ., 7п), К=1, • • ., П\
X Ч1*1 + Яп-1 = 0.
Введем обозначения:
Xi = x] + A*t-; xt = x] + Ллу, ^ = т + Ат,
где xz., Xi, t\ — значения переменных, близкие к их значениям для
точки М* и удовлетворяющие уравнениям (11.83).
48
Так как функции Хк в рассматриваемой области имеют
непрерывные частные производные по Хг до второго порядка, то и
Ф/с будут иметь частные производные по начальным условиям
х9. до второго порядка. Поэтому воспользуемся формулой
Тейлора с остаточным членом второй степени и, отбросив остаточные
члены, получим линеаризованное в окрестности М*
преобразование Т:
Д*,
-о
dt
Дт +
/=1
Axh к=1,
п\
2 li^ti
/=1
1 (11.84)
Подставляя в выражения (11.84) значение Ахк = zAxKl
получим п + 1 однородных алгебраических уравнений относительно
неизвестных Дя*. Дт:
гАхк
dt
1=1
dxt
Axh /с = 1,
., п;
2 <7/*А*/ = 0.
/=i
(11.85)
Отсюда характеристическое уравнение преобразования Т
М*. 7ь ..., Y/i)^
dq>n
дхг
Я&
— г:
дхп
dt
дхп
-«(
дф/г
а;
о
= 0. (11.86)
Поскольку периодическое движение Г по предположению
асимптотически орбитно устойчиво, неподвижная точка М*
преобразования Т асимптотически устойчива; следовательно, в
области Q все корни Zi характеристического уравнения (11.86)
лежат в плоскости корней внутри единичного круга. Границами
области Q существования и устойчивости периодического движения
в пространстве параметров 7ь—, Уп будут служить поверхности
/V-н, N-\ и Л^ф с уравнениями
ArU.Vi, ...,?п)=0; Дг(-
Аг(Л 7l, ..., 7*)=-0
1, 7ь ...,7я)=0;
(11.87)
и, возможно, поверхности TV со и Л^со [107].
4 Заказ 33
49
Теперь предположим, что некоторая область QG
существования и устойчивости периодического режима Г построена во
вскрывающем сечении /с-го рода G{K '"'K\ и покажем, что в таком
случае эта область может быть распространена и на достаточно
малую окрестность данного сечения. Границы области QG =
= Q Г) G(k к) в пространстве у\,..., ук в силу системы (11.87)
описываются уравнениями
Дг(1, 7ь ...,7„ 0, ...,0)=0; )
М-1, 7ь ...,7Я, 0 0)=0; (11.88)
Дг(Л7ь ...,7„0, ...,0)=0. )
Обозначим Qe малую окрестность области QG с уравнениями
границы
ЛгО, 7i. •■•, Ую **+ь ..., вя)=0; |
АИ-1, 7ь ..., ук, еЛ+1, ..., e„)=0; (11.89)
МЛ 7ь • -., 7л:, Вк+1, ..., 8П) -0. J
В уравнениях (11.89) имеем |'уг| = |е*| ^ г (i = к + 1,..., /г),
где s — достаточно малое положительное число. При сделанных
предположениях о функции Xi(i= 1,..., п) частные производные
d<pi/dxK9 дцц/dt, т. е. коэффициенты уравнений (11.83) непрерывно
зависят от yi(i= 1,—> п) в рассматриваемой области
пространства параметров [147]. Но корни уравнений (11.86) непрерывно
зависят от его коэффициентов и, следовательно, от yi. Поэтому
граница области Q, описываемая в (jo.■••»*) поверхностями вида
(11.88) размерности к—1, будет иметь непрерывное
продолжение в s-окрестности сечения G{^—'K) в виде поверхностей вида
(11.89) размерности п— 1. В итоге область автоколебаний,
определенная первоначально во вскрывающем сечении п-мерного
пространства у\,..., уп как часть /с-мерной плоскости,
превращается в пространстве yi,-, Уп в некоторую область размерности п.
Так же, как и в случае областей устойчивости, области
автоколебаний можно продолжить на конечные расстояния от
вскрывающих сечений, если воспользоваться существующими
оценками изменения величины корней алгебраических уравнений от
изменения коэффициентов этих уравнений. Раскладывая
определитель (11.86) в строку по степеням z, получим
2л + а,(71, ...,Уп)2Г~1 + ...+Сп-1(Уи .... Yn)2 = 0. (И.90)
При Yk+i = -.-=7я = 0» в сечении С{к{' " '' к\ имеем
2я + ^1(71, ...,?*, 0, ...,0)2^4...+
+ ^-i(7i, ..., у„ 0, .... 0)2^0. (11.91)
50
Коэффициенты уравнений (11.90), (11.91) будут
непрерывными функциями параметров у{. Пусть уравнение (11.90) имеет
корни (j,*,..., jx*, а уравнение (11.91)—корни ja/,..., \x'n. Тогда
справедлива оценка [136]
\)Li-M<2ny Уо,(уъ ...,7п)-М?ь ...,7„ 0, ...,0)|6я-\
1=1, ...,*, (11.92)
где
б < 2тах
.MVi .... V„)f\ |flv(?b .... 7Л, 0, ...,0)|v J
Пусть мы находимся в некоторой точке внутри области Qg,
которой соответствуют некоторые значения yi(i = 1,..., /с). Для
этой точки известны корни \х! (i = 1,..., /г) уравнения (11.91), и
пусть j,i'— ближайший к окружности единичного радиуса
корень этого уравнения. Тогда значения yi(i = к + 1,..., п),
определяемые неравенством
\iq +2n
УМТъ •-., У к, Ук+и ...,7я) —
— МТь . .., 7л:, 0, ..., 0)1 б'
1-1-
>1,
(11.93)
будут принадлежать области Q8.
Результаты, полученные выше для случая непрерывных и
достаточно гладких нелинейных функций, могут быть обобщены и
на случай кусочно-непрерывных нелинейных функций. Последний
случай будет отличаться лишь тем, что могут появиться
дополнительные бифуркационные поверхности [105]. Вскрывающие
сечения по-прежнему будут либо пересекаться с
бифуркационными поверхностями, либо, в отдельных случаях, принадлежать
этим поверхностям. При пересечении бифуркационных
поверхностей вскрывающим сечением области устойчивости,
автоколебаний и т. д., построенные в сечении, вместе с их границами могут
быть продолжены за пределы сечения. При слиянии сечения с
бифуркационной поверхностью мы получим определенную
информацию о расположении искомой бифуркационной
поверхности в пространстве коэффициентов.
В следующем примере рассматривается продолжение
области автоколебаний за пределы вскрывающих сечений в системе
с разрывной нелинейной характеристикой.
4* 51
Пример 11.4. Рассмотрим систему, приведенную к каноническому виду
x1=—2x1 + f (а); х2 = — х2 + / (а); х3 = f (а);
3 ( /о при а > 0;
о-=^7Л» /(а) = {0 при а = 0;
•'-1 -f0 при а< 0.
/=1
I
(11.94)
Построим в пространстве декартовых координат yi (i = 1, 2, 3) сечения
2-го рода и рассмотрим V и VIII квадранты этого пространства. Здесь между
плоскостями
Yi + Y2 + Ys = 0,
7з = 0
(11.95)
(11.96)
(1,3)
располагается область существования и устойчивости периодического движения
(рис. 11.2). Плоскость, представленная уравнением (11.95), служит поверхностью
jVco [107]. Часть плоскости,
представленной уравнением
(11.96), лежащая в VIII
квадранте между
полупрямыми Y2 = 0, Yi + 2y = 0
(Y2<0), и часть этой
плоскости, лежащая в V
квадранте, служат поверхностью
N ж [107]. Часть плоскости
(11.96), лежащая в VIII
квадранте между
полупрямыми Yi + 2у2 = 0, Yi +
+ Y2 = 0 (Y2 < 0),
принадлежит области существования
и устойчивости
периодического режима. Эти
результаты получены из анализа
трехмерной системы [128].
Однако в части,
относящейся к сечениям, эти же
результаты получаются
методом сечений пространства
параметров.
В данном примере сечения G\ * \ G(2 • * с точки зрения их
взаиморасположения с бифуркационными поверхностями не отличаются от других, случайно
проведенных, сечений; области автоколебаний, построенные в этих сечениях,
продолжаются и за пределы сечений. Сечение G\ ' , ввиду наличия нулевого
корня Я3 = 0, частично принадлежит бифуркационной поверхности.
Автоколебания
Рис. II.2. Рассечение области автоколебаний
релейной системы третьего порядка
сечениями второго рода
9. Оценка близости качества переходных процессов в сечении
и в малой окрестности сечения
Пусть правые части уравнений канонической системы
i/ = M/+q2v/*/V *' = 1' •••'я (П-97)
/=1
52
в некоторой компактной области G пространства переменных
Х\,..., хп определены, непрерывны и удовлетворяют условиям
Липшица
В условиях вскрывающего сечения G^> — >K) система (11.97)
запишется
*/ = М/ + /(2 ?/*/), i=l,
., /г.
(11.98)
Допустим, что в сечении G^ /с> определены переходные
процессы Xi(t). Рассмотрим s-окрестность сечения, для которой
Уг = 8г- (i = к + 1,..., /г), |бг| < 8, 8 — достаточно малое
положительное число, a yi(i = 1, ...,/с) —те же, что и для G^1—-•**;
имеем
2 «л
<|е*
:|(/2 — /С) =6.
В ограниченной замкнутой области G величина |#гтах|
ограничена, поэтому за счет выбора |eimax| величина б может быть
сделана сколь угодно малой. В таком случае из непрерывности
f(a) следует
/ 2>*/+ 2 *л -/(27Л
V = l i=K+\ J
\i = l
<в(в),
где 9(6) -^Опри 6->-0.
Так как величины правых частей системы (11.98) и системы
xi^ylxi + fl^yIxi+ 2 *i*X *'=!, -••,л (П.99)
\/ = 1 /=/с+1 /
отличаются меньше, чем на 0(6), то для разницы решений этих
систем, удовлетворяющих одним и тем же начальным условиям,
справедлива оценка [135]
|^.(0-^(0l<2n(^-gee"L((-f»». (ii.ioo)
Соответствующим выбором чисел уг = е* величина 6 в
выражении (11.100) может быть сделана сколь угодно малой, и тогда
решения Xi(t) системы (11.99) и Xi(t) системы (11.98) на
конечном интервале времени будут сколь угодно близки.
53
Но в технических системах практически всегда приходится
иметь дело с конечными интервалами времени.
Итак, если при рассматриваемых условиях мы выбрали
параметры системы, принадлежащие вскрывающему сечению,
исходя из надлежащего качества переходного процесса, а затем
при реализации системы удовлетворили уравнениям сечения не
абсолютно точно, а с некоторым округлением, то качество
переходных процессов, рассматриваемых на конечном интервале
времени, от этого практически не изменится.
■ SB
Глава 111
Системы
второго порядка
с типовыми
нелинейностями
В предыдущей главе было показано, что
исследование нелинейных систем /г-го порядка,
описывающих типовые автоматические системы, на
специальных сечениях пространств параметров
(коэффициентов) может быть сведено к
рассмотрению ряда уравнений низких порядков. В
большинстве практических случаев возникает
необходимость исследовать системы второго порядка
вида (11.30). В данной главе рассматриваются
системы второго порядка (а также некоторые
вырожденные системы третьего порядка) в
предположении, что нелинейная функция описывает одну из
типовых нелинейностей, присущих автоматическим
системам, либо комплекс таких нелинейностей.
Исследование выполнено точно и аналитически
методом точечных отображений.
Малый объем главы не позволяет изложить
методику исследования рассматриваемых в ней задач,
поэтому приводится лишь сводка основных
результатов. Большинство доказательств имеется в ранее
опубликованных работах [110—115, 118—120, 128],
однако некоторые результаты публикуются впервые.
55
Разумеется, изучение точными методами системы второго
порядка с типовыми нелинейностями не только служит целям
метода сечений пространства параметров, но имеет
самостоятельное значение, так как рассматриваемая система охватывает
математические модели различных автоматических устройств,
сервомеханизмов и т. п.
1. Математические модели
Рассмотрим систему вида
х= dlP + d2 z; (III.l)
P2+glP+g2
(kx—kC1 — kxesign pz
при ргфО и 0<z<£(C2 —Сг);
kxJrkC1 — kxe sign pz
z = | при pz =£0 и — k{C2—C1)<z<0; (Ш 2)
j при Iz—kx + kC^^kxe и 0<z<£(C2 — C±)
\ nYi6o\z—kx—kC1\^kxz и k(C2~C1)<z<0;
&(C2—Cx)signz при |#|>C2+x8;
0 при UKCt—хг, если С^^^е,
где х, z— зависимые переменные; du d2i g\, £2, k, Cu C2, xe —
вещественные коэффициенты, из которых k, Сь С2,
хг—положительны, р == rf/df.
Уравнения (III.2) описывают нелинейную характеристику,
представляющую сочетание типовых нелинейностей 1 (мертвая
зона, насыщение, гистерезисная петля люфта) и изображенную
на рис. III.1, а. Если один или два из числа коэффициентов Сь
С2, хг обращаются в нуль, получаются более простые
математические модели. В частности, при хе = 0 уравнения (III.2)
принимают вид
kx—kCx при Сх<^х<^Съ\
kx + kCx при — С2<*<—Су, 3
k (С2—Сг) sign х при | х | ^> С2;
z =
0 при^КСх
и описывают характеристику, показанную на рис. III.1,6.
1 Системы с релейными характеристиками рассматриваются в гл. VIII.
56
F £
у-
Г^
G F
Ei
/
/
—7
/
H
A
I
—/
A
z
0
at
— c2-
л
В С
I / /
f Г /
/
—?—
-// j
c( '
-Ax£
7^7
Ai x
X£ h*—
z
k
Ы,
С 2
f
l£
^
x
I
c2
-1
/o
cz
X
Z
1
I 1
l\ x
4je
M)
Рис. III.l. Типовые нелинейные характеристики
При С~х= О уравнения (III.2) приводятся к виду
z =
kx—kC1—kxesignpz при р^0и0<2;
kx-\-kC1—^Xesignpz при pz=^=0 и z<^0;
, | при \z—kx + kCx | <Ckxe hO^z
I либо |z — kx—kC1\^kxe hz<0;
i^ 0 при \x\ < Cx—x8, если С1 > x&
(III. 4)
и описывают характеристику, представленную на рис. III.1, е.
57
z =
(III. 5)
на
При С\ = 0 уравнения (III.2) запишутся в виде
kx— kx& sign pz
при pz^-0 и —kC2^z^kC2;
const при | z—kx | < kx& и —kC2 ^ z < &C2;
&C2 sign x при | x | > C2 + хг
и будут описывать характеристику, изображенную
рис. III.1, г.
Если в уравнениях (II 1.2) одновременно С~1=0 и хг = О,
то получим уравнения
| kx—kC1 при x^-CV,
z= ux + uCi при x<^—Су, (III.6)
1 0 при | х К Сь
описывающие характеристику на рис. III.1, д.
Если в выражении (III.2) хг = Сх = О, то уравнения
\ kx при | х К С2;
\ kC2 sign x при \х\^>С2
описывают характеристику с насыщением (рис. III.1, в).
Наконец, если С{ = СТ = 0, то уравнения (III.2)
принимают вид
kx—kxe sign pz при pz=£0;
const при \z—kx\^kx&
(Ш.7)
z = <
(III. 8)
и описывают нелинейность типа люфта (рис. III.1, ж).
Заметим, что при хгФ0 система (III. 1), (III.2)
представляет собой систему третьего порядка, фазовые траектории
которой изображаются в трехмерном пространстве либо на беско-
нечнолистной фазовой поверхности.
Сопоставим систему (III.1), (III.2) с системой (11.30). Из
системы (11.30) получим уравнение вида
o-(Xr + Xs)o+XrXse=-(Xsb + ysXr)f(e) + (yr + ys)r(o), (III.9)
где /'(а)^_Ю__№_**.
dt
да dt
Уравнение (11.9) в случае разрывной характеристики f(a)
дополняется условием скачков переменной da/dt [128]. Если
ввести обозначения
о = х; /(<x) = z; K + K=—Bi> КК = 8*>
то уравнение (III.9) переходит в уравнение (III.l).
58
(ШЛО)
2. Общая система уравнений при g2 = О
Случай I [112]. Рассмотрим систему уравнений (III.1),
(III.2) при выполнении условий
£2 = 0, ft>0, d2>0, gl + d1k>0. (Ш. 11)
Этот случай имеет важное практическое значение,
остановимся на нем подробнее.
Введем обозначения
X = g1 + d1k\ Y = d2k. (III. 12)
Пусть ри р2 — корни алгебраического уравнения
p2 + Xp+Y = 0, (III. 13)
в том числе pi)2 = а ± /р (если X2 < 4Y), р\ = Ръ = ос (если
А"2 = 47), /?! = а, р2 = аь причем а > ои (если X2 > 4У).
Определим функции ^(У), F^V) следующими выражениями.
1. При X2<4F
F = Va\+(V— l)2
exp
l , Аг
arctg ——
Лг s V-\
В
F^GiBln^-V^+Vl+AUxp^-j-avdgA,).
2. При X2 = 4Y
F = (V_l)exp(-TLr
F^-G^B In— И+е.
(III. 14)
5—V
3. При X2>4F
(III. 15)
F=(V —l)exp
Л =
A . V—l
In
Л-1
V—Л
1_0(Я1„_г__У)+Мр(_^.1„и).
(III. 16)
Здесь обозначено:
A-
аг
B =
d2&
a
gi«
G = -^->0;
(III. 17)
V — некоторый параметр, монотонно убывающий при возраста-
dx
нии х0; *о — значение х > 0 при = 0. В рассматриваемом
dt
случае Ах > 0, А > 1, В > 0, V > 0.
59
Определим также неявные функции F[(V), F(V)
следующими уравнениями.
F[ + V + В In B~V' = — 2DE.
B + F[
1. При X2<4F
Va\+(F'+1)' exp (-L arctg -^A-
(III. 18)
= 1/Л?+(У — ly
exp
1 , Лх
arctg —
Ax s V' — l
2. При X2 = 4Y
(f'+l) exp
= (V—l)exp
1
f' + l ' rV V' — l
3. При X2>4Y
-2EGD. (III. 19)
—2EGD. (III. 20)
(F'+l) exp
= (V —l)exp
Л—1
In-
F'
-1
In
F' + l
V' — l
V'—A
—2EGD.
(III.21)
В уравнениях (III.18) — (111.21) введены обозначения:
2\ d—I
D =
(l+A\)B
при Х2<4К:
В-1 при Х2 = 4У
Б-1 А при Х2>4Г
(III. 22)
У7 — некоторый параметр, монотонно возрастающий при
возрастании Xq.
Справедлива следующая теорема.
Пусть дана система уравнений (III.1), (III.2) и
соблюдаются условия (III.11). Тогда пространство существенных
параметров (критериев подобия) А (или А\)9 В, G, Е разбивается на
две области качественно различного динамического поведения
системы: область устойчивости в целом 1 состояний равновесия
и область жесткого режима автоколебаний. Точная граница
между этими областями (которой соответствуют полуустойчивые
предельные циклы) определяется в пространстве названных
параметров двумя поверхностями. Одна из этих поверхностей
1 Под устойчивостью в целом здесь понимается случай, в котором областью
притяжения состояний равновесия служит все фазовое пространство.
60
(поверхность /) с образующей, параллельной оси Е,
описывается системой
V dV Jv=vs \ dV Jv=v3
0<Е<Е° = — (в\п— V3
2D V V-Vs
(III. 23)
Вторая поверхность (поверхность /) определена в области
Е > Е° и описывается системой
FAV^FiVJ; (<£-) >/af
Ч
dV Jv=v2 \ dV Jv=v2
3_
2D V B — V2
1 'в\п—1 V.
(III. 24)
Области устойчивости в целом соответствуют значения А >
> Л°, Ах > Л<\ G > G0, где Л°, Л°, G0 —решения системы
(III.23), и значения £ > £00, где Е00 — решение системы (111.24).
Доказательство этой теоремы имеется в работах [112, 128].
Области устойчивости в целом и автоколебаний, построенные
для некоторых значений параметров согласно выражениям
(III.23), (III.24), показаны на рис. III.2, где штриховка нанесена
с той стороны граничных кривых, которая обращена в сторону
области устойчивости. Вычисленные граничные значения
параметров приведены в табл. III.1 (для поверхностей /) и в
табл. III.2 (для поверхностей /).
Внутри области жесткого режима автоколебаний состояния
равновесия системы будут устойчивы, если х0 < хпн, где
хпн = хг + С1 + —Щ- , (III.25)
Б In
B-V2
а параметр V2 определяется из первых двух выражений (III.24).
Вычисленные значения V2 для ряда значений параметров
приведены в работе [128].
При Хо > хпн в системе устанавливается устойчивый
периодический режим. «Амплитуда» устойчивого предельного цикла
хпу (наибольшее значение х за цикл колебаний) определяется
следующими выражениями.
1. При Хпу>Хе + С2
х^(В1п7^Г
-VlVc,-^)—Хв-Сх,
(III. 26)
61
где V[ — решение уравнения
(Fi)v'=v:
(F')v'=v:.
2. При хпу^хв + С.
Хпу ~~ Х£ I ^ 1"
2gi*8
а\ Bin-
В
В — Уг
-Vi
где Vi — решение системы
dV /v=vx \ dV )v=vx
(HI. 27)
(III. 28)
(III. 29)
Случай xny ^ xe + C2 имеет место при V\ ^ Vmin < V2, а
случай xny ^ xB + C2 —при ]/mln < Уь где Vmln — решение
относительно V уравнения (III.18) при F[ = 0.
A=1,0(Aj=0J
A = 5~,0
5-10
Z-10
S-10
Z-10
62
77M*\ 100
177,5
*)
Рис. III.2. Области устойчивости и автоколебаний системы (III.I), (III.2)
в случае I:
а — при G = 0,2; X2 < 4У; б — при G = 0,2; X2 > 4Y; е - при G = 1,0;
*2 <4у; г _ при G = 1,0; X2 > 4У
Таблица III.1
Граничные между областями устойчивости в целом
и жесткого режима автоколебаний значения параметров системы
(Ш.1), (III.2) при g2 = 0, gY > 0, d2 > 0, gi + dxk > 0
(координаты поверхностей /)
см
о'
II
о
II
о
см
II
л1
1 в
Е
Л
В
Е
Л
В
Е
В
Е
Л
В
Е
Л
В
Е
л,
В
Е
Л
В
Е
А
В
Е
0,000
7,207
24,574
1,100
7,567
24,623
15,000
52,974
89,329
0,000
15,110
21,744
1,100
15,111
21,875
15,000
100,935
78,942
0,000
24,589
21,509
1,000
25,811
21,563
15,000
180,084
77,733
0,100
7,210
24,352
1,500
8,981
25,448
25,000
84,819
137,547
1,100
15,156
21,418
1,500
18,870
22,622
25,000
177,508
121,382
0,500
25,090
17,861
1,500
30,645
22,291
25,000
288,113
119,464
0,500
7,344
20,363
2,500
12,420
29,245
50,000
163,379
255,528
0,500
15,428
18,089
2,500
26,070
25,954
50,000
341,791
225,273
1,000
26,319
12,193
2,500
42,366
25,583
50,000
554,747
221,740
1,000
7,679
13,830
5,000
20,746
40,925
75,000
242,332
374,849
1,000
16,168
12,330 |
5,000
43,506
36,254
75,000
506,880
330,453
1,500
27,936
8,376
5,000
70,689
35,722
75,000
822,728
325,107
1,500
8,112
9,411
7,500
28,835
52,825
100,000
320,242
491,136
1,500 1
17,161
8,456 1
7,500
60,428
46,729
100,000
666,766
432,940
2,500
31,562
4,671
7,500
98,173
46,091
100,000
1086,394
1 425,970
2,500
9,075
5,158
10,000
36,974
65,184
200,000
632,856
959,345
2,500
19,346
4,702
10,000
77,451
57,624
200,000
1323,513
845,488
5,000
40,789
2,038
10,000
125,765
56,738
200,000
2148,615
833,602
Таблица 111.2
Граничные между областями устойчивости в целом |
и жесткого режима автоколебаний значения параметров системы
(Ш.1), (Ш.2) при g-2 = (),#!> 0, d2 > 0, £4 + dxk > 0
(координаты поверхностей J)
см
о'
II
сч
в
Е
Л,
в
Е
Л
В
Е
1,00
7,68
13,83
2,50
9,07
5,16
1,00
7,21
24,57
1,00
10,00
57.91
2,50
10,00
11,47
1,00
10,00
125,76
1,00
25,00
617,58
2,50
25,00
160,25
1,00
25,00
1258,70
1,00
50,00
2794,25
2,50
50,00
750,00
1,00
50,00
5636,СО
1,00
100,00
11822,50
2,50
100,00
3219,10
1,00
100,00
23741,50
1,00
200,00
48582,50
2,50
200,00
13316,41
1,00
200,00
97356,50
63
Продолжение табл. II 1.2
CS|
о
II
о
II
о
CSI
II
А
8
Е 1
А 1
Е 1
А 1
в
Е 1
А 1
В
Е |
Л1
Е
В
Е
А
В
Е
А
В
Е
А
В
Е
А
В
Е
1 Л1
8
Е
В
Е
1 л
В
Е
1 л
В
Е
А
В
Е
—
—
—
—
1,00
10,00
—
—
—
—
—
—
—
—
—
—
—
—
—
—
1,00
16,17
12,33 |
—
1,00
15,11
21,74
—
—
—
—
—
—
—
—
2,50
12,42
29,24 1
5,00 1
20,75
40,92 1
10,00 1
36,97
65,18 |
—
1,00
25,00
77,19 |
5,00
24,86
2,03
1,00
25,00
162,05
5,00
43,51
36,25
—
—
1,00
26,32
1 12,19
—
1 1,00
24,59
1 21,51
—
—
2,50
15,00
94,13 |
5,00 1
50,00
901,80 1
10,00 1
50,00
307,15 1
25,00
84,82
137,55 1
1,00
50,00
409,05
5,00
50,00
26,60
1,00
50,00
831,60
5,00
50,00
89,80
10,00
77,45
57,62
—
1 1,00
50,00
| 128,30
5,00
40,79
1 2,04
1 1,00
50,00
1 265,25
1 5,00
70,69
35,72
—
2,50
20,00
230,87 |
5,00
100,00
4302,50 1
10,00 1
100,00
1882,00 1
25,00
100,00
403,76 |
1,00
100,00
1809,00
5,00
100,00
130,40
1,00
100,00
3662,00
5,00
100,00
604,80
10,00
100,00
212,30
25,00
177,51
121,38
1 1,00
100,00
| 625,78
1 5,00
100,00
1 42,47
1 1,00
100,00
1 1267,25
1 5,00
100,00
171,65
1 10,00
125,76
56,74
2,50
30,00
649,03
5,00
200,00
18581,40
10,00
200,00
8759,55
25,00
200,00
2867,66
1,00
200,00
7622,75
5,00
200,00
576,63
1,00
200,00
15297,00
5,00
200,00
2816,00
10,00
200,00
1255,40
25,00
200,00
| 277,72
1 1,00
200,00
| 2712,00
1 5,00
200,00
1 197,63
1 1,00
200,00
| 5455,50
1 5,00
200,00
945,00
1 10,00
200,00
375,00
64
Формулы для точного определения периода автоколебаний
имеются в работе [128]. В частности, при хпу < х8 + С2, X2 > 4У
период автоколебаний определяется выражением
Т =
1 п
2
2х0
In Л
Vx—1
Б х.
пу
-хг—Сх
V,
1.В(А-1)
(Уг-А)ехр
Ул—А
■In
Л-1
In
Vi-1
(Vi-^exp
1
In
Vx-1
2Сг
сек.
A—l "" Vi-Л/ " В Хпу-хе-Сг1
Следующая теорема определяет условия монотонности
переходного процесса.
Пусть дана система уравнений (III.1), (III.2) и выполнены
условия (111.11). Тогда для того чтобы переходный про-
dx
цесс x(t) при начальных условиях х(0) Ф О, — =0 был моно-
dt
тонным, необходимо и достаточно выполнения следующих
неравенств:
1) при X2<4Y
Va\ + (B— 1)2<2
GE ехр —
2) при X2 = 4Y
arctg
Аг
В-\
В<1+2—G£exp-
1
в— 1
3) при X2 > 47
В<Л + 2—G£exp
1
-1
In
в—\
В —А
С л у ч а й II [112]. Пусть выполняются условия
£2 = £i = 0, d2>0, ^>0.
(III. 30)
(III. 31)
(III. 32)
(III. 33)
В таком случае справедлива следующая теорема.
Система уравнений (III. 1), (III.2) при условиях (III.33)
представляет автоколебательную систему. Если Е =
= Х'г (С2 — Ci)~l < £*, где £* — решение уравнения
(L')Ei-e. = L, (Ш. 34)
то «амплитуда» автоколебаний хп (наибольшее значение х за
цикл колебаний) определяется выражением
хп = С1+ *8(1 + £*} <С2 + х£. (Ш.35)
5 Заказ 33 65
Если Е = £*, то
Наконец, если Е > Е*
хп = С х -\- хе
-С2 + хе.
и2па2(С2-Сг)
2d*k
> С2 + X*
где ип — решение уравнения
\Ei)u=un~ (LJu^u^
а — вещественная часть корней уравнения (III.13).
Выражения Lu L[ имеют следующий вид.
1. При d\k < 4d2
U = 1/л?+(^+1)2ехр f-Urctg-^-
1; = /л?+[^2+4£(1 + л?)-1]2
X
х ехр
1
arctg—-= ■-.. ,
А 1/^2 + 4£(1+Л2)-1 J J
2. При d\k = Ad2
l
Li=(M+l)exp ,
w+ 1
Li'-(]/i?+4£ —l)exp
1
V«2 + 4£_l
3. При d\k>U2
L1={u+ l)exp ( — 1
V A—\
u + A
и + 1
Li = (l/aa + 4£ — l)exp( — lr
V'u2 + 4AE— 1
(HI. 36)
(III. 37)
(III. 38)
(III. 39)
(III. 40)
(III.41)
Выражения для L и Z/ получаются из формул (III.39) —
(111.41), если в них положить и = 0, £ = Е\. Здесь и, £i —
некоторые положительные параметры.
Решения уравнений (III.34), (111.38) для ряда значений
параметров имеются в работе [128].
Случай III [114]. Предположим, что выполняются условия
£2 = 0,. gx > 0, d2 > 0, gl + dxk < 0. (Ill. 42)
Тогда* динамическое поведение рассматриваемой системы
определяется следующей'теоремой.
-66
Пусть дана система уравнений (ШЛ), (III.2) и
выполняются условия (111.42). Тогда пространство параметров А\ (или
Л), В, G, Е системы разбивается на две области: область
устойчивости в целом состояний равновесия и область жесткого
режима автоколебаний. Точная граница области устойчивости в
целом определяется системой уравнений
(д\р1\\ __(д\*'\ \ . |
\ a|V| /m=i^'i. \d\v\ J\v'\=v'\.' (И1.43)
(| Fi \)\v'\=\v\9 = (IP' I)\v\=\v'\» '
где \F[ | > \F'\ при \V'\ Ф \У\Ъ\ величины \F[ \ = — F[ >0
и l^l = —Ff > 0 определены выражениями (III.18) — (111.21).
Доказательство этой теоремы приведено в работе [128}.
Отметим, что в данном случае А\ < О, Л < 1, В < О, V =
= —\V\ <0, V' = —\V'\ <0.
Случай IV [114]. Допустим, что удовлетворяются условия
ft = 0, &<0, d2>0, g1 + d1k>0. (III.44)
Тогда справедлива следующая теорема.
Пусть дана система уравнений (III.1), (III.2) и выполнены
условия (111.44). Тогда пространство параметров А (или Ах),
В, G, Е системы разбивается на две области: 1) область
абсолютной неустойчивости состояний равновесия х\ 2) область, для
которой в фазовом пространстве существует сепаратрисная
поверхность; если начальные отклонения от состояния равновесия
не достигают этой поверхности, в системе возникают
автоколебания (мягкий режим), в противном случае изображающая
точка уходит в бесконечность. Поверхность, разделяющая в
пространстве параметров А (или А\), В, G, Е две указанные
области, определяется системой уравнений
(-£■>_;-(■£>-,;: WW;- CV-,;. (Ш.«>
где F\ < F' при V Ф Уъ\ выражения F[ и F' определяются по
формулам (III.18) — (111.21).
Доказательство теоремы имеется в работе [128]. В данном
случае А\ > О, А > 1, В < 0; для перехода из области
абсолютной неустойчивости в область автоколебаний, ограниченных
неустойчивостью «в большом», здесь целесообразно уменьшать
величины Е и G.
1 В области абсолютной неустойчивости состояний равновесия элементами
притяжения для всех точек фазового пространства служат бесконечно далекие
точки.
5* 67
Случай V [114]: £2 = 0, g, < О.
1. Пусть:выполняются условия
ft = 0, ft < 0, d2 > О, gl + d±k < 0. (Ill. 46)
Тогда состояния равновесия системы (III.1), (III.2)
абсолютно неустойчивы. При Х2*< 4У имеются колебания,
«амплитуда» которых неограничено нарастает; при X2 ^ 4У функция
x(t) имеет не колебательный характер.
2. При условиях
ft = 0, ft<0, d2<0, ^>0 (dJt + g^O) (HI.47)
состояния равновесия системы (III.l), (III.2) также абсолютно
неустойчивы, причем процессы имеют неколебательный характер.
Случай VI. Пусть, наконец, выполняются условия
ft = 0, ft>0, da<0, ^<0 (ft + ^^O). (III.48)
В таком случае фазовая картина движения в общем
аналогична той, которая имеет место в случае V.2. Однако фазовые
траектории, соответствующие отрезкам ЕЕ\ и АА{ нелинейной
характеристики (см. рис. III.1, а), приводят к состояниям
равновесия (так как ft > 0), т. е. при некоторых ограниченных
начальных отклонениях переходные процессы сходятся к
состояниям равновесия.
3. Общай система уравнений при С2 = ос
Случай VII: g, + d{k > 0, g2 + d2k > 0, gx > 0, g2 > 0,
C\ < хв, .С2,±е °°-
1. Рассмотрим систему уравнений (III.l), (III.2) при
условиях [128]
g^+d,k > Q, g2 + d2k > 0, gl > 0, g2 > 0, g2{ > 4g2; j (Ш 49)
C1 < xe, C2 = oc. J
Обозначим, как и ранее, через рь р2, в том числе р\,2 =
= а ± £р, либо р\ = а, р2 = он (а ^ ai) корни уравнения
p2 + Xp + F = 0, (III. 50)
причем в данном случае
X = gl + dlk\ Y = g2 + d2k. (III.51)
Далее, обозначим через Яь Х2, в том числе Xi,2 = \х ± /v, либо
h\ = \i, fa = M*i(m< ^ Ma) корни уравнения
^2 + ft^ + ft = 0. (HI. 52)
.68
Определим функции Г(У£>1 ), Ti(Vd, ) следующими
выражениями:
1) для функции Г (Уд,)
Г + 1 1 + G
V£ + l 1-G
1 — G
С J Г+1 VE + C
С —1 V Г + С VE+l ,
[Ф1(^1)-1]=Ф,(У£, VDl),
(III. 53)
(III. 54)
где
<J>i(VoI) = (l-Vi)1)exp
C-Vi
D,
1 C(l-yDi)J
Vnfl-1
Ф2(^, VDl)= ^B+1 x
X exp
Л ln /VoJi-A_ VEB+l
A —I nyvDiB—l VEB + A
(III. 55)
(дляХ2>4К); (III. 56)
02(V£, VDl) =
X
X exp
1 arctc A1B(VB + VDi)
A s(vDib_i)(K£b + i)-^J
(УДВ-1)Ч^
(V£B+l)2+^
(дляХ2>4Г); (III. 57)
VE — некоторый положительный параметр;
2) для функции Г; (Уг., )
{№i(Vd,)-1]-41}-
G+l
Фз(Р1),
(III. 58)
где
Ф8-(Г1) = (Г1В+1)ехр
1 ^(Гф + 1)
А—\ VXB+A J
(для X2 > 47);
Ш1.59)
Фз(Гх) =
Л|+(1 + Г1В)2
aJVi
exp ( -— X
X
arctg 4iEi* ^ (дляХ2<4У).
А2.+1 + \\В
(III. 60)
69
Здесь применены обозначения1
Л =
В =
«i .
а
ацхТ
4-
Р
С=-^; G = -
v—1
vDl >o
НИИ Xq.
при Х2 > 47,
(Р' + а2)^)-1 при X2<4Y,
параметр, монотонно убывающий при
возрастали.61)
В рассматриваемом случае А\ > О,
В>0.
А > 1, G< 1, С> 1,
£0
.7,0
1,0,
G=ffi
А=$0
Q=0,2
20 25 30. Ji" 40 £
7,0
£,0
3,0
1,0
л=що\
6=0,2
T^4c=^;
40 4f £0 SS В
5)
Рис. III.3. Области устойчивости и автоколебаний системы (III.I),
(III.2) в случае VII:
а — при А = 5,0; б — при А = 10,0
Имеет место следующая теорема, доказанная в работе [128].
Пусть дана система уравнений (III.1), (III.2) и соблюдаются
условия (111.49). Тогда пространство параметров А\ (или Л), В,
С, G системы разбивается на две области: область устойчивости
в целом состояний равновесия и область жесткого режима
автоколебаний. Точная граница между указанными областями
определяется системой уравнений
TAVk) =nv'Dt); (^rV^:= (rX_^- (Ш.62)
dVr
УОГЧОх
dV
Dx
VDrVDx'
Области устойчивости в целом и автоколебаний, построенные
согласно условиям этой теоремы для некоторых значений
параметров, показаны на рис. III.3; из рассмотрения кривых следует,
что для подавления автоколебаний следует увеличивать А и G,
уменьшать В и С. Вычисленные по уравнениям (Ш.62)
граничные значения параметров приведены в табл. III.3.
70
1 Все обозначения данного параграфа сохраняют силу и при g2 = 0.
Таблица III.3
Граничные между областями устойчивости и жесткого режима
автоколебаний значения параметров системы (III.1), (III.2)
при gl'+dlk>09 g2 + d2k>0, g{ >0, g-2>0, g2l—4g2 >0,
Ci< Хг, С2 = ©о.
G = 0,1
А
В
С
1,1;
13,3;
1,1;
1,1;
8,0;
5,0;
1,1
7,2
10,0
5,0;
34,8;
1,1;
5,0;
22,4;
5,0;
5,0
19,9
10,0
10,0;
64,0;
1,1;
10,0;
40,4;
5,0;
10,0
35,8
10,0
А
В
С
1,1; 1,1; 1,1
15,7; 9,6; -8,4
1,1; 5,0; 10,0
G = 0,2
5,0; 5,0; 5,0
42,4; 26,3; 23,5
1,1; 5,0; 10,0
10,0; 10,0; 10,0
76,0; 47,0; 41,5
1,1; 5,0; 10,0
А
В
С
1,1; 1Л; 1,1
22,4; 13,1; 11,4
1,1; 5,0; 10,0
G = 0,5
5,0; 5,0; 5,0
61,8; 35,8; 32,1
1,1; 5Д 10,0
10,0; 10,0; 10,0
109,8; 66,1; 56,9
1,1; 5,0; 10,0
А
В
С
1,1; 1,1; 1,1
25,6; 15,4; 12,7
1,1; 5,0; 10,0
G = 0,7
5,0; 5,0; 5,0
69,6; 42,4; 35,0
1,1; 5,0; 10,0
10,0; 10,0; 10,0
124,0; 75,0; 63,0
1,1; 5,0; 10,0
А
В
С
1,1; 1,1; 1,1
27,8; 16,1; 13,1
1Л; 5,0; 10,0
G = 0,9
5,0; 5,0; 5,0
71,1; 44,6; 37,0
1,1; 5,0; 10,0
10,0; 10,0; 10,0
134,0; 80,0; 67,2
1,1; 5,0; 10,0
Внутри области жесткого режима автоколебаний в
рассматриваемом случае переходные процессы сходятся к
состояниям равновесия, если х0 < хпн, где
+ 2*8
с c-vDi
—— In —
c-i -c(\-v')
(l~VDl)e K Dj -1
0+
dJk \-i
Величина V'D определяется из системы
dTi_
dVDl JvDi=vDt
>
dT
(III. 63)
(III. 64)
dVDt /rDrvDt
dx
а величина x0 — как и ранее, значение х(0) > 0 при —— = 0.
at
71
«Амплитуда» хпу автоколебательного режима (наибольшее
значение х за цикл колебаний) вычисляется по формуле(II 1.63),
в которую вместо V'D следует подставить V"D . Величина V'D
определяется из системы вида (II 1.64), но с противоположным
знаком неравенства. Период автоколебаний вычисляется по
следующим формулам:
7 = 2
1) при X2 > 4Г
^(y"Di-C)(c + VEi)(VE+\)
1
1Ы-Ы c(v"Di-\)(\ + vEi)(vE + c)
(V"DB~l)(VEB+A)A(VEB + l) '
In
Г = 2
kil-И "' (V"DB-A)(.VEB + 1)(VEB + A) J
2) при Х2 < AY
i ln {v"d-c){c + ve){Ve+\)
I Ma. 1 — 1 M-1 C(V"D-\)(\+VE)(VE + C)
Аг{УЕВ + У"0В)
+ —arctg —
P V
DyE^ + v"DB-vEB-
-0+л?)
A arctg
■Ve*
(III. 65)
(III. 66)
Величины Ve, Vex b формулах (111.65), (111.66)
определяются следующим образом: VE — по уравнению (III.54) при
подстановке в него значения VD — V"D ; VЕ —как решение
относительно Г уравнения (III.53) при подстановке в него значения Vet
найденного указанным выше способом.
2. Пусть теперь соблюдаются условия 1
gl + d,k > 0, g2 + d2k > 0, gl > 0, g2 > 0, g? < 4g2; J (Ш ^ 67>
Этот случай отличается от рассмотренного выше лишь тем,,
что здесь уравнение (III.52) имеет комплексные корни.
Пространство параметров А1 (или Л), В, С, G по-прежнему
разбивается на две области: область устойчивости в целом состояний
равновесия и область жесткого режима автоколебаний, граница
между которыми определяется системой (II 1.62). При этом
В рассмотрении случаев VII.2 и VIII принимал участие Ю. И. Малянов.
72
функции T(VDi), TiiVoi) определяются следующими
выражениями:
1) для функции Г(^)
1 с?+(ГН-1)« i + G .
In— fin-
2 "" С?+(К£+1)2 !~G
^ -^=7- arctg
(г-к£)сх
Ci с?+(Г+1)(1/£+1)
1-G
[®*(VDl)-l] = $>2(VE, FDl),
(III. 68)
(III. 69)
где
Ф*(^) =
Ci+d-^,)
i + с?
X
X exp f -±- arctg ^b— ) (для VDl < 1 + C?); (111.70)
Ф*(^,)
c?+(i-M2
т 2
1+2?
X
X exp
^^ I — + arctg
CiVDl
4-!-ci
(для VDl>l+Ci);
(III.71)
02(VE, VDl) определено формулами (111.56), (III.57) с
учетом выражения (111.73) для В;
VE — положительный параметр;
2) для функции Fi(VDt)
{[<ti{VDi)-l]-l + l} _1_ = ф8(Г1), (III.72)
где Фз(Г1) определено формулами (III.59), (111.60) с учетом
выражения (III.73) для Б.
В формулах (II 1.68) — (III.72) применены обозначения
£ = v_>0 в=Ыг^2 + А~1 при Х>4У,
* ' i(a2 + p2)(x((x2 + v2)-la-lnpHX2<4F1
(III. 73)
а остальные обозначения — те же, что и выше.
73
Случаи X2 = 4:Y и g2 = Ag2 получаются как граничные из
случаев Х2^4Г, g2^ 4g"2.
С луч а й VIII. Рассмотрим теперь систему (III.1), (Ш.2) при
условиях
gi+dxk<0, g2 + d2k>0,g1>0, g2>0, Сг<хв, C8 = oo. (III.74)
Если выполняются условия (III.74), то в фазовом
пространстве системы уравнений (III.1), (III.2) существует сепаратрис-
ная поверхность, ограничивающая область притяжения состояний
равновесия. Если начальные отклонения не достигают этой
поверхности, процессы сходятся к состоянию равновесия, в
противном случае изображающая точка уходит в бесконечность.
Состояние равновесия устойчиво, если х0 <хпн, где хпп — величина,
определяемая при g\ > 4g*2 по формуле (111.63), а при g2 < 4g*2 —
по следующей формуле:
Хпн^\2хе + ^-(С1 + хе) +
+ 2хе[фН^1)-1]-1}(1+-^-)~'. (Ш - 75)
Здесь, как и в формуле (II 1.63), величина V'D определяется
из системы (111.64), а выражение ф*(VD ) определено
формулами (III.70), (III.71). Функции T(VDt ), T{(VD ) определяют-
■ся выражениями (111.53) — (II 1.60) (для g2 > 4g2) либо
(III.68) — (III.72) (для g2 <4g-2), причем в данном случае
В < 0, Ах < 0, А < 1 (но по-прежнему С > 1, Сх > 0, 0 < G < 1,
VE — некоторый положительный параметр).
Таким образом, рассмотрены представляющие основной
практический интерес случаи системы(II 1.1), (III.2), когда С~! =
— 0 и С\ < хг. В частности, если при условиях Cjl= 0 и С\ <
< хе выполняется одна из следующих систем неравенств:
g1+d1*<0,
gl + dtk<0,
gl + d1k>0.
gl+dlk>0,
gl + d1k>0,
gl + d1k<0,
§1 + й,к<0,
g1 + d1*<0>
g2 + d2k<0,
g2 + d2k<0,
g2 + d2k<0,
g2 + d2k<0,
g2 + d2k<0,
g2 + d2k<0,
g2 + d2k>0,
~g2 + d2k>0,
Si<0,
gr>0,
Sx<0,
£г>0,
8г<0,
g,<0,
Si<0,
gl<0,
£2<0;
g*<0;
£2<0;
g* < 0;
ft>0;
£2>0;
£2>0;
ft<0,
то состояния равновесия системы абсолютно неустойчивы.
74
Обратимся к случаю, когда при Cjl = 0 выполняется условие
С\ > хг; при этом стабильность системы в областях,
представляющих практический интерес, улучшается.
Случай IX. Предположим, что выполнены условия
ft + d,k > О, ft + d2k > 0, (ft + djzf > |
> 4 (ft + d,k), ft >0, ft > 0, g\ > 4^2, (III. 76)
Ci >x&, C^l=0. J
Тогда справедлива следующая теорема [128]: при условиях
(111.76) состояния равновесия системы (III.I), (III.2)
устойчивы в целом.
4. Общая система уравнений при g2 ф 0, С2 ф оо
С луч ай X [128]. Рассмотрим систему уравнений (III.1),
(III.2) при условиях
g1 + d1k>0, ft + d2£>0, ft>0,
£2>0, g*>4g2, Сх<хг,
Введем параметр Е, определяемый выражением
Е = _ 2Х°
dJt
d*k
(III. 77)
(III. 78)
Й
С,
Рассмотрим в пространстве параметров А (или Л1), В, С, G,
Е определяемую уравнениями (111.62) поверхность с
образующей, параллельной оси Е. Обозначим /' ту часть этой
поверхности, которая принадлежит области, ограниченной неравенствами
0<Е<Е0 = (1—К£,)ехр
In-
C-Y"
1, (III.79)
где V'Dt
С-l C(l-V"Di)
решение системы уравнений (III.62).
Рассмотрим также в пространстве А (или А\), В, С, G, Е
поверхность /', определяемую выражениями
dVDl JvDi
>
*VD, JVDt
E*=(l-Vb,)exp
c—vr
c-i с (i-v'Di)
— 1.
(III. 80)
Имеет место следующая теорема.
Пусть дана система (III.1), (III.2) при условиях (111.77).
75
Тогда пространство параметров Л (или AX),B,C,G,E этой
системы разбивается на две области: область устойчивости в
целом состояний равновесия и область жесткого режима
автоколебаний. Точная граница между этими областями в
пространстве названных параметров состоит из двух поверхностей:
поверхности Г с уравнениями (111.62), (111.74) и поверхности Г с
уравнениями (III.80). Точки, для которых Е > Е*, принадлежат
области устойчивости.
Доказательство теоремы имеется в работе [128]. Области
устойчивости в целом и автоколебаний, построенные для неко-
G = 0,1
6 = 0,1
G = 0,2
Рис. III.4. Области
устойчивости и автоколебаний
системы (III.1), (III.2)
в случае X:
- при А = 5,0; С = 5,0;
- при А = 10,0; С = 5,0;
при А = 10,0; С = 10,0
торых значений параметров согласно условиям этой теоремы,
показаны на рис. II 1.4. Вычисленные граничные значения
параметров приведены в табл. 111.4, где первый столбец чисел В, Е
относится к координатам поверхности /', остальные столбцы — к
координатам поверхности /'.
Для подавления автоколебаний в данном случае следует
увеличивать А и G и уменьшать В. Влияние параметров Е и С на
устойчивость несколько сложнее. В частности, параметр Е в
некоторой области на границу области устойчивости не влияет,
а в некоторой области за счет увеличения Е можно подавить
в системе автоколебания и перейти к устойчивости.
76
Таблица III A
Граничные между областями устойчивости в целом
и жесткого режима автоколебаний значения параметров системы (III.1), (III.2)
при gx + dYk > 0, g-2 + d2k > 0, gx > ,0, g2 > 0,
о
II
о
CN
о"
II
О
А= 1,1 |
С = 5,0 1
Л = 5,0 1
С = 5,0 1
Л = 10,0
С = 5,0 1
Л= 1,1
С = 10,0
Л = 5,0
С= 10,0
Л= 10,0
С = 10,0
А= 1,1
С = 5,0
Л = 5,0
С = 5,0
Л = 10,0
С = 5,0
Л = 1,1
С= 10,0
Л = 5,0
С = 10,0
Л = 10,0
С = 10,0
£
Е
В
Е
Я
Е
В
Е
Я
Е
Б
Е
В
Е
Б
Е
1 В
Е
Б
Е
В
Е
Б
1 Е
8,050
0,154
22,400
0,180
35,800
0,090 |
7,250
0,112
19,900
0,112
35,800
0,090
9,600
0,105
26,300
0,112
1 47,000
1 0,105
1 8,450
1 0,070
23,500
0,070
41,500
0,070
8\ > 4#-2'
8,200
0,191 |
23,000
0,234
41,000
0,234 1
7,400
0,147
20,000
0,130
36,000
0,114
10,000
0,167
30,000
0,241
1 50,000
0,176
8,660
1 0,090
24,000
0,092
42,000
1 0,090
Сх<хг
8,300 1
0,208
23,500 1
0,273
42,000
0,273
7,450
0,159
20,200
0,142
36,500
0,142
12,000
0,259
35,000
0,320
60,000
0,273
1 9,000
0,103
26,000
0,130
45,000
0,126
8,500 1
0,234
24,000 1
0,311
43,000
0,311
7,470
0,163
20,500
0,157
37,000
0,163
14,000
0,311
40,000
0,359
70,000
0,334
1 10,000
0,138
28,000
0,152
1 47,000
0,140
9,000
0,311
24,500
0,346
44,000
0,346
7,500
0,167
20,600
0,163
37,200
0,169
I 15,000
1 0,334
44,300
0,337
80,000
0,373
10,700
0,163
29,500
0,163
50,000
0,154
Параметры автоколебательного режима вычисляются
следующим образом. Определим величину Vc2 уравнением
(1-1/с2)ехр
С —1
1п-=-
c-vr
CQ-VC)
-1=Е,
(III.81)
а величину V"D —как и выше, системой вида (III.64), но с
противоположным знаком неравенства. Если V с <. V ^ , то
величина хпу (максимальное значение х за цикл колебаний)
вычисляется, как указывалось при рассмотрении случая VII, по
формулам (III.63), (III.64). При этом для вычисления периода
периодического режима можно пользоваться формулами
77
(111.65), (111.66). Если же V'с > V^, то величина хпу
определяется выражением
Хпу —
е. 1
dok
X ехр
— А'о
C-Vr
d2k
g2
с,
0-Vb)x
c-i c(i-v*D)
здесь V*D — решение уравнения
длк
g2
(С.-Сг); (Ш. 82)
Г[(Уо) = Г'(УУ). (III. 83)
Функции r{(VD) и T^Vd) определяются следующими
выражениями:
1) для функции ri(Vc)
(1+Е)(^+1)ехр
С , VP+C
ln-
L c-i c(w + i)
= (l-VD)exp
l + E 2
In-
C-Vr
E G+l
[ C-l C(1-VB) J
Ф4(Гь Ы
(III. 84)
(III. 85)
Ф4(Гь VP)= '
г,'в +1
VpB + l
X
X exp
A i VFB + l Г,В + 1
Л — 1
Г.В + 1 VpB + Л
(дляХ2>4У); (III. 86)
Ф4(Гь VF):
\V{B + if + A\
x exp
(^s + i)2 + ^f
AlB(VF-Tl)
X
arctg —
At (г,'В + 1)(У^В + 1) + Л?
(для Х2<4Г); (III.87)
Vf — некоторый положительный параметр;
2) для функции Г'(Ус)
Г' + 1 1 + G
V£ 4-1 1 -G У С —1
1-G
С ,п/ Г' + l "в + С
Г'+С ^я+1
(III. 88)
(III. 89)
где Q>2(VE, VD) определено формулами (111.56), (111.57),
VE — положительный параметр.
78
Период автоколебаний при ус > y"D определяется по-
формуле
Т = 2 (tCD + tDE + tEB, + tElF + to), (Ш • 90)
где
tcD~=
ln-
c-vr
1Л* I — I Xxl C(l-VD)
tDE =
I ft I
I Pi I
A + VEB
1-VdB
arctg
l + VEB
Л-У0В
(дляХ2>4К);
<yDB-l)(.VEB + \)-Aj
(для Х2<4У);
te,F:
1
in
I *, 1-1*11
Г'В + 1
C + T' VE+l
1 + Г'
vE + c
I ft I
I Pi I
A + VpB
A + V'B \ + VFB
A1B(T'-VP)
(для Х2>4Г);
— arctg — „
p s (Г'В + 1) (У,,В+1)+А?
(для X2<4F);
tpG = -
1
*i|-|Xi|
m/'e."*-1-'
vF+c
В выражения для/Cd, tDE,tEE„ tEtF , £fg следует
подставить значения Уя, Г7, Vjp и VD = V q, при которых
удовлетворяется равенство (111.83).
Случай XI. Пусть удовлетворены неравенства
g1 + d1k>09 g2 + d2k>0, (g. + d.kry
>4(й + ад, &>0, £2>0, g?>4£2,
С»! ^> Хе .
(III. 91)
Справедлива теорема [128]: состояния равновесия системы
(III.1), (III.2) при условиях (111.91) устойчивы в целом.
^аким образом, рассмотрены некоторые основные области
пространства коэффициентов полной системы (III. 1)„ (III.2).
5. Рассмотрение частных случаев
В данном параграфе рассматривается система уравнений
(III.1); (III.2) при обращении нескольких коэффициентов
уравнений в нуль. Эти случаи не требуют самостоятельного анализа,
79
соответствующие результаты для них могут быть получены из
анализа общих случаев. Исследование частных случаев
представляет интерес по следующим причинам.
Во-первых, условия обращения в нуль некоторых
коэффициентов могут соответствовать бифуркационным (граничным)
поверхностям в пространстве коэффициентов, а определение
таких поверхностей — конечная цель анализа системы.
Во-вторых, в практических приложениях сопоставление
динамических свойств системы для случаев когда некоторый
коэффициент равен нулю и когда он отличен от нуля, целесообразно при
анализе влияния на динамику физического фактора,
учитываемого этим коэффициентом.
Случай XII. Пусть выполняются условия: g2= C^1 = 0.
Нелинейная характеристика системы представлена на рис.
III.1, в пописывается частным случаем уравнений (III.2) при
С~х = 0 — уравнениями (Ш.4).
Этот случай был рассмотрен в работе [119]. Результаты для
этого случая могут быть получены также из результатов § 3
(случаи I—VI).
1. Пусть g2 = C~l = 0, £i >0, d2>0, g{ + dlk>0. Тогда
пространство существенных параметров А (или А\), В, G
системы (III.1), (III.2) разбивается на область устойчивости в целом
состояний равновесия и область жесткого режима автоколебаний.
Точная граница между названными областями соответствует
полуустойчивым предельным циклам и описывается системой из
первых двух уравнений (III.23).
Сформулированное утверждение сразу следует из теоремы,
приведенной при рассмотрении случая I, если в результат этой
теоремы подставить значение С2 = оо, т. е. Е = 0. Оно может
быть получено также из результатов анализа случаев X и XI,
если в них перейти к пределу при g2-+0, C2->oo, либо из
результатов анализа случаев VII и IX при g2^-0 [128].
Граничные между областью устойчивости в целом и
жесткого режима автоколебаний значения параметров А (или А\), В
и G могут быть взяты по табл. III. 1, где следует считать
Е = 0.
В области жесткого режима автоколебаний процессы будут
сходиться к состоянию равновесия, если х0 < хпн, где х0 —
значение х(0) > 0 при dx/dt = 0; хпп — величина, определяемая по
уравнению (III.25), в которое следует подставить значение
параметра V2, найденное из первых двух выражений (III.24).
«Амплитуда» автоколебаний хпу (максимальное отклонение х
за цикл колебаний) определяется по формулам (III.28),
(111.29).
Условия монотонности переходных процессов в данном
случае имеют следующий вид:
80
1) приХ2<4У
1^4? + (V-l)2exp( l_arctg-^r)<2D ^ ; (III. 92)
2) приХ2>4У
При этом параметр V связан с начальным условием х(0) =
= х0 (при = 0 для t = 0 ] выражением
(x0~C1-xe)=^(B\n-^—-V)~{. (III.94)
|а| \ В — V )
2. Пусть g2 = g"i = 0, rf2 > 0, d\ > 0(C2 = оо). Тогда
вследствие теоремы, приведенной при рассмотрении случая II, система
уравнений (III.1), (III.2) является автоколебательной
(мягкий режим). «Амплитуда» предельного цикла хпу определяется
по формулам (III.34), (III.35), как указывалось при анализе
случая П.
3. Пусть g2 = 0, gx> 0, d2 > 0, gx + dxk < 0(С2 = оо). Тогда
состояния равновесия системы уравнений (III.1), (III.2) будут
иметь в фазовом пространстве область притяжения, вне
которой процессы уходят в бесконечность (128].
4. Пусть g2 = С-1 = 0, gx< 0, d2 > 0, gx + dxk > 0. Тогда
рассмотренная система является автоколебательной (мягкий
режим). Параметры автоколебательного режима определяются из
условия пересечения кривых F(V) и FX(V), заданных
выражениями (III.14) — (III. 16), причем в данном случае В < 0.
5. Пусть при g2 = C~l = 0 выполняется одна из системы
неравенств
g1<0,d%>0, g1 + d1k<0;
gi<0, d2<0, ^>0 (g. + d.k^O);
при этом состояния равновесия системы (III.1) и (III.2),
абсолютно неустойчивы.
6. Пусть g2 = C^l=0t gx>09 d2<0, dl<0(gl + dxk^0).
Тогда, как и в случае VI, система неустойчива в большом, но
траектории, соответствующие отрезкам ААХ и ЕЕХ нелинейной
характеристики (см. рис. III.1), вливаются в отрезок покоя.
Случай XIII: g2 = Сх = 0. Нелинейная характеристика
системы изображена на рис. III.1, г и описывается уравнениями
(III.5). Эта задача была рассмотрена автором в работе [НО].
1. Пусть g2 = Сх = 0, gx > 0, d2 > 0, gi + dxk > 0. В этом
случае граница области устойчивости в целом состояний
равновесия получается из условия прохождения вырожденного предель-
6 Заказ 33 &1
ного цикла через концы отрезка покоя и определяется в
плоскости Л (или Ai), В уравнением
Fi = F,
(III. 95)
где величины Fx и F получаются из формул (III.14) — (III.16)
при G = О, V = В. При переходе за границу .области
устойчивости в системе
возникают автоколебания
(мягкий режим). Области
устойчивости и
автоколебаний в плоскости
названных параметров
изображены на рис.
III.5, а граничные
значения параметров при-
ведены в табл. III.5.
Области,
изображенные на рис. III.5,
представляют собой
сечение пятимерного
пространства
существенных параметров
системы уравнений (III.1) и
_ (II 1.2) плоскостью G =
= C~l = 0. Особенностью в данном случае является то
обстоятельство, что участки насыщения нелинейной характеристики
(см. рис. III.1), в отличие от общего случая, рассмотренного
выше, не оказывают влияния на устойчивость системы, т. е.
параметр Е не оказывает влияния на границы области
устойчивости.
«Амплитуда» автоколебаний может быть вычислена следую-
Таблица III.5
Граничные между областями устойчивости в целом и мягкого режима
автоколебаний значения параметров системы (III. 1), (Ш.2)
при g2 => d = 0
Рис. III.5. Области устойчивости и
автоколебаний системы (III.1), (III.2)
в случае XIII. 1
В
Аг
В
А
В
А
В
А
В,
0,Ю
4,59
25,00
13,19
1,00
4,59
15,00
33,63
150,00
,305,83.
0,50
4,47
50,00
18,21
1,10
4,82
20,00
. 44,10
175,00
.355,95
1,00
4,87
75,00
22,11
1,50
5,71
25,00
54,31
200,00
406,10
1,50
5,12
100,00
25,42
3,00
9,01
50,00
, 104,98
250,00
506,21
2,И
5,44
500,00
56,05
4,00
11,15
75,00
155,23
500,00
1007,00
5,00
6,89
750,00
68,85
5,00
13,25
100,00
205,40
750,00
1507,50
10,00
8,90
1000,00
79,75
10,00
23,65
125,00
255,73
1000,00
2007,50
82
щим образом. Обозначим, как и выше, VmXn значение У7,
являющееся решением уравнения (III.18) при F[ = 0. Обозначим У*
решение уравнения
F1{V)=F{V), (Ш-96)
составляемого в силу выражений (III.14) — (III.16) при G = 0.
Если Fmin < У* < В, то «амплитуда» хпу < С2 + хе
устойчивого предельного цикла (максимальное значение х за цикл
колебаний) определяется по формуле
Хпу = хе (1+ f \ (Ш.97)
где У* — решение уравнения (111.96), а величина D
определяется формулами (111.22).
Если же F* ^ ymin, то хпу > С2 + хе, причем хпу
определяется по уравнениям (III.26), (111.27) при учете Сх = 0.
Достаточные и необходимые условия монотонностей
переходного процесса в данном случае имеют вид
В<1 при X2 = 4F, £<Л при Х2-4К
и получаются из выражений (III.30) — (III.32) при учете G = 0.
2. Если g2 = Сх = gx = 0, d2 > 0, rfi > 0, то остаются в силе
результаты анализа случая II, нужно только везде подставить
Gx = 0. Система является автоколебательной (мягкий режим).
3. Пусть g2 = Сх = 0, gx > 0, d2> 0, gx + dxk < 0. При этом
все движения в системе заканчиваются устойчивым
периодическим движением, представляющим автоколебательный процесс.
4. Пусть теперь g2=Cx=0f £i < 0, d2 > 0, gi + dxk > 0.
При Сх > 0 рассматриваемой области значений коэффициентов
соответствует случай IV. Установленный при анализе случая IV
характер динамического поведения системы при обращении
коэффициента Сх в нуль не меняется. Если УтХп < Vo, то в
фазовом пространстве системы имеется устойчивый предельный цикл
с «амплитудой» хпу < С2 + хг и, снаружи его, сепаратрисная
поверхность, проектирующаяся на многолистную фазовую
поверхность как неустойчивый предельный цикл. Если же Vo <
< Vmm, то °ба предельных цикла (устойчивый внутри
неустойчивого) цмеют «амплитуды» хп > С2 + х&, либо они сливаются
в один полуустойчивый (на который наматываются изнутри и
с которого сматываются снаружи фазовые траектории)., либо,
наконец, система абсолютно неустойчива.
Здесь Утш—как и выше, решение уравнения (IH.18)
относительно, V при F[ = 0; V0 — решение, относительно V одного
из уравнений (III.19) — (111.21) при F' = 0 и G> 0.
5* 83
5. Если g2 = С\ = О, а также соблюдаются условия g\ < О,
^2 > 0, g{ + dxk < 0, либо условия g"i > 0, d2 < 0, tfi < 0 (gi +
+ dj&^ 0), либо, наконец, условия g\ < 0, d2 < 0» ^i > 0> (gi +
+ di&^ 0), то состояния равновесия системы (III.1), (III.2)
абсолютно неустойчивы.
Случай XIV. Пусть g2 = хв = 0. Тогда нелинейная
характеристика (см. рис. III.1, б) становится однозначной, бесконеч-
нолистная фазовая поверхность превращается в обычную
фазовую плоскость. В связи с этим анализ данного случая
выполняется весьма просто. Так, при gi > 0, d2> 0, g{ + dxk > 0 из
i dx
фазового портрета в плоскости х, у = непосредственно вид-
dt
но, что состояния равновесия системы устойчивы в целом.
Случай XV. Пусть d\ = g2 = 0. Этот случай был изучен
ранее в работе [12]. Сейчас в результаты исследования,
рассмотренные в § 4, нужно подставить dx = 0. Тогда D = 2 и по
выражениям (III.22) имеем
(0,5(1+Л?) дляХ2<4У;
В = \ 0,5 дляХ2 = 4У;
1 0,5Л дляХ2>4У.
Следовательно, один из существенных параметров может
быть непосредственно выражен через другой; четырехмерное
пространство параметров А (или Л1), В, G, Е становится
трехмерным.
Пусть g\ > 0 и d2 > 0. Тогда семейство кривых
(соответствующих определенным фиксированным значениям G),
образующееся в трехмерном пространстве А (или А{), В, Е при
пересечении поверхности 6 = 0,5(1 + А\) с поверхностями / и / (см.
случай I), будет представлять в данном случае границу между
областями устойчивости в целом и жесткого режима
автоколебаний. Иначе эти области могут быть построены следующим
образом.
Обозначим: d = —-— в случае d\ — 0. Тогда в правой коорди-
й
натной системе h= (ось аппликат), G (ось ординат), d (ось
2 Е
абсцисс) область жесткого режима автоколебаний системы
будет заключена в пространстве между плоскостью G = 0
(которой соответствует мягкий режим автоколебаний) и двумя
поверхностями (которым соответствуют полуустойчивые
предельные циклы): цилиндрической поверхностью с образующей,
параллельной оси /i, и поверхностью, проходящей через ось d.
Ца. рис. III.6 показана часть этой области, ограниченная
произвольными плоскостями d = 10, h = 4. Вне этой области система
устойчива в целом.
84
Граничные между областью устойчивости в целом и жесткого
режима автоколебаний значения параметров, вычисленные для
этого случая согласно выражениям (111.23), (III.24), приведены
в табл. III.6.
Пространство параметров, показанное на рис. III.6, является
сечением четырехмерного пространства параметров А (или А\),
В, G, Е случая I поверхностью dx = 0.
Диаграмма, показанная на рис. III.6, совпадает с
диаграммой, построенной в работе [12]. Данное обстоятельство является
Автоколебания
(мягкий, режим)
Автоколебания
(жесткий режим)
Устойчивость
в целом
Рис. Ш.6. Области устойчивости и автоколебаний
системы (III.1), (III.2) в случае XV
следствием того, что уравнения системы с винтом изменяемого
шага, рассмотренные в работе [12], после некоторых
преобразований могут быть приведены к частному виду уравнений (III.1),
(III.2) при d\ = g2 = 0, в соответствии с чем результаты работы
[12] вытекают из результатов, полученных для случая I.
Случай XVI. Пусть dx = С{ = Cjl = 0. В данном случае
нелинейная характеристика имеет вид, показанный на
рис. III.1, ж, и описывается уравнениями (III.8). Если С\ = 0, то
G = 0, а если С2 = оо, то Е = 0.
При d\ = 0 корни уравнений (III.50) и (III.52) связаны
равенством
Pl+P2 = ^l+4
85
Таблица 111.6
Граничные между областями устойчивости в целом и жесткого режима
автоколебаний значения параметров системы (Ш.1), (HI.2)
при йг = g2 = 0, gt > 0, d2 > О
II
о
о
11
о
см
II
о
со
II
О
II
О
11
О
со*
II
d
£°
d I
£0
d
£°
d 1
£°
d 1
£° |
d
£°
d 1
£0 |
d
d
£°
d
£"
d
£o
d
£o
d
£o
d
d
£o
d
£o
d
£o
1 d
\ £o
d
£o
100 ,
2204-10""1
1000
2410
50-103
1242-102
100
3200-10~2
1000 , 1
3762-10_1
50-103
1980-10
100
9940-10~3
1000
1328-10"1
50-103
7200
100
4190-10~3
1000 o
6650-10~2
50-103
3724
100
1918-10~"3
1000
3919-10~2
50-103
2272
100
0
1000
254Ы0*-2
50-103
| 1528
100
0
200
4596-10-l
1500
3643
100-103
2487.102
200
6910-10-2
1500 , 1
5706-КГ1 |
100.103
3960-10
200
2294-10~2
1500 t
2028-10"-1
100-103
1440-10
200
107Ы0-2
1500
1024-lO"1
100-103
7485
200
5776.10-3
1500
6090-10^2
1100-103
4572
200
3363-Ю-"3
1500
3987-10~2
100.103
3080
200
2010- lO-^3
300
6988-10~l
2000
4872
150-103
3731-102
300
1068-Ю-1
2000
7658-10-1
150-103
5950-10
300
3630-10-2
2000
2733-10~l
150-103
2170-10
300
1739-10~2
2000
1386-lO"1
150-103
1120-10
300
9754-10~3
2000
8282-10~2
150-103
6878
300
5977-10-3
2000
5453-lO"2
150-103
4635
300
3853-10~3
400 ,
9434-10-l
2500
6101
200-103
4974-102
400
1448-lO"1
2500
9614-10-1
200-103
7940-10
400 o
4983- lO"2
2500
3441-10-1
200-103
2900-10
400
2424-10-2
2500
1750-lO"1
200-103
1500-10
400
1383-10~2
2500 t
1048-10"1
200-103
9186
400
8644-10~3
2500
6922.10-2
200-103
| 6197
400 o
5712-10—3
500
11870-10-1
3000
7340
250-103
6222-102
500
1831-10-1
3000
11570-КГ1
250-103
9930-10
500 n
6349-10—2
3000 t
415Ы0-1
250-103
3620-10
500 o
3116-10—2
3000
2115-10-1
250-103
1880-10
500
1797-10—2
3000
1270-10—x
250.103
1150-10
500 n
1138-10—2
3000
8408-10~2
250-103
1 7755
500 o
7618-10—3
86
Продолжение табл. II 1.6
6,0 I
II
II
о
00
II
О
стГ
II
О
о
о
1
о
d \
d
d
Е«
d
d
d
d
Ео
d
Ео
d
Ео
d
Ео
d
Е°
d
Ео
d
Ео
d
Е°
1000 1
1755-10-2 |
50-103
1097
100
0
1000
1272-10-2
50-103
8230-Ю-1
100
0
1000
9490-Ю-3
50-103
6410- Ю-1
100
0
1000
7240-10—3
50-103
| 5120-Ю-1
100
1 о
1000
5620-Ю-3
50-103
420
1500
278Ы0-2 |
100-103
2213
200
1177-Ю-"3
1500
2032.10^2
100-103
1666
200
0
1500
1536-Ю-2
100-103
1299
200 -
0
1500 о
1187-10-2
100-103
| 1038
200
0
1500
9410-Ю-3
100-103
850
2000
3814-Ю-2 |
150-103
3335
300
2548-Ю-3
2000
2808-10-2
150-103
2512
300
1702-10-3
2000
2132-10-2
150-103
1958
300
1089-10~3
2000
| 1662-Ю-2
150-103
1 1567
300
| 610-10-3
2000
1326-10-2
150-103
| 1285
2500
4874-10-2
200-1О3
4462
400
3912-Ю-3
2500
3595-10-2
200-103
3353
400
2738-10~3
2500
2740-10-2
200-103
2623
400
1942-Ю-3
2500
2142-10-2
200-103
| 2098
400
1367-Ю-3
2500
1724-10-2
200-1О3
1719
3000
5933-10-2
250-103
5580
500
5348-Ю-3
3000
4380-10-2
250-1О3
4206
500
3830-10~3
3000 0
3354-10-2
250-103
3279
500
2810-10—3
3000 о
2632-10-2
250-1О3
2630
500 о
2035-Ю-3
3000 о
2109-10-2
250-Ю3
2156
Учитывая последнее равенство, из выражений (II 1.61)
получим
А+В = ±+1 дЛя Х2>47,
в с
2В
1
1 для Х2<4У.
(III. 98)
1+Л2 С
Уравнения (III.98) позволяют исключить один из трех
параметров А (или А\), В, С. В результате вместо пяти существенных
параметров Л (или А\), B,C,GhE в данном случае остаются два.
87
Пусть, например, gi > О, g2 > 0, g2 + d2k > О. Тогда
вследствие теоремы, приведенной при рассмотрении случая VII,
плоскость существенных параметров разбивается на область
жесткого режима автоколебаний и область устойчивости в целом
состояния равновесия; граница между этими областями определяется
уравнениями (III.62) при учете равенств (111.98) и равенства
G = 0. Получаемая таким путем граница устойчивости
совпадает с границей, полученной Андроновым, Баутиным и Гореликом
в работе [13] *.
Плоскость параметров для данного случая можно
рассматривать как сечение пространства параметров Л (или Ль) В, С, G
случая VII плоскостью G = 0 и поверхностью, описываемой
соотношениями (111.98).
Случай XVII. Пусть g2 = С\ = Cjl= 0. Этот случай
является дальнейшим упрощением случая XIII за счет отсутствия
участков насыщения у нелинейной характеристики (ввиду С2 = сю).
1. Пусть ^2 = ^ = ^=0, £i>0, d2>0, gl + dxk>0.
В этой области параметров при Cf1 > 0, как указывалось при
рассмотрении случая XIII, участки насыщения не влияют на
границу области устойчивости. Поэтому и в рассматриваемом
случае граница между областью устойчивости в целом и мягкого
режима автоколебаний в плоскости параметров Л (или Л]), В
будет определяться уравнением (III.95) (см. рис. III.5 и
табл. III.5). «Амплитуда» автоколебаний определяется по
формулам (111.96), (III.97), как указано выше, причем в данном
случае имеем хпу < хе + С2 = оо. Достаточные и необходимые
условия монотонности переходных процессов даны в
рассматриваемом случае формулами (III.92) — (III.94), в которых теперь
следует положить С\ = 0. При этом, когда X2 < 4У, монотонный
процесс отсутствует, ибо неравенство (III.92) иначе можно
записать
и тогда для С\ = 0 имеем
v<i±A/=i,
т. е. при А\ >0 в области вещественных чисел не существует
такого У, которое удовлетворяло бы критерию монотонности.
Динамическая задача, соответствующая данному случаю,
была рассмотрена Андроновым и Баутиным в работе [11].
Непосредственное сравнение показываем, что граница между обла-
* Следует иметь в виду, что обозначения параметров Л, В в работе [13]
и в данной работе различны.
88
стью устойчивости и областью мягкого режима автоколебаний,
представленная на рис. III.5 и в табл. III.5, совпадаете
аналогичной границей, приведенной на рис. 1 работы [11].
2. Пусть g2 = Сх = С-1 = О, gi > О, d2 >0, gi + dxk < 0.
Тогда состояния равновесия системы абсолютно неустойчивы.
3. Если g2 = Ci = C~l= 0, gx < 0, d2 > 0, gY + dxk > 0, то
система является автоколебательной (мягкий режим).
Система остается автоколебательной (мягкий режим) и в
случае g2 = g"i = С\ = С^1 =0, ^2 > 0, di > 0, причем в этом
случае для вычисления «амплитуды» автоколебаний справедливы
формулы (III.34), (III.35) с учетом равенства С\ = 0.
4. Наконец, при g{ < 0, d2> 0, g{ + d{k < 0, либо gx > 0,
d2 < 0, di < 0, либо g"i < 0, d2 < 0, di > 0 в случае XVII система
абсолютно неустойчива.
Случай XVIII. Пусть d\ = g2 = C\ = 0. Тогда остается в
силе анализ случая XIII, но накладывается дополнительное условие
d\ = 0. При этом D = 2 и ввиду соотношений (III.22) один из
параметров А(А\), В может быть выражен через другой.
Граница устойчивости, представленная для случая XIII кривой в
плоскости двух параметров А (или А\) и В, теперь будет
представлена точкой на числовой оси одного существенного параметра.
Пусть g\ > 0, d2 > 0. Тогда при X2 ^ 4У переходные
процессы монотонны, состояния равновесия устойчивы. Если же X2 <
<4У, то в силу соотношений (III.22) при D = 2 имеем В =
= 0,5(1 + А*). Подставляя это значение В в уравнение (111.95),
записанное для случая Х2<4У, получим условие устойчивости
в виде
А УЩ^Л< 3,3435,
gi
или
d = ^-< 3,0447 ^3,04. (Ш99)
При обращении последнего неравенства в равенство
вырожденный устойчивый предельный цикл проходит через концы
отрезка покоя, а при изменении знака неравенства на обратный
возникают автоколебания (мягкий режим).
К случаю XVIII при g\ > 0, d2 > 0 и дополнительном
условии С2 = оо сводится динамическая задача, рассмотренная
Андроновым и Баутиным в работе [10]. Так как при этом (см.
случай XIII) участки насыщения нелинейной характеристики не
влияют на границу области устойчивости равновесия, то
дополнительное условие С2 = оо не меняет критерия устойчивости
(III.99); этот критерий совпадает с полученным в работе [10].
89
Случай XIX. Пусть g2 = хе = С «г1 = 0. Нелинейная
характеристика имеет вид рис. III.1, д. Нетрудно установить, что в
области g\ > 0, d2> 0, gi + d\k > 0 состояния равновесия системы
устойчивы в целом; в области g\ < 0, d2> 0, gi + d\k > 0
система автоколебательная (мягкий режим). Если g\ > 0, d2 > 0,
g"i + d\k < 0, либо g\ >0, d2 < 0, ^i < 0, то на фазовой
поверхности имеется некоторая область притяжения отрезка покоя, за
пределами которой изображающая точка уходит в
бесконечность. При условиях g"i < 0, d2 < 0, d\ > 0 (g\ + d{k ^ 0) и
g"i < 0, §2 > 0, g\ + dxk < 0 состояния равновесия абсолютно
неустойчивы.
Случай XX. Пусть g2 = хе= С\ = 0. Нелинейная
характеристика системы описывается уравнениями (Ш.7) и показана
на рис. III.1, е. Анализ этого случая [111] не встречает
затруднений. В области g"i > 0, d2 > 0, gi + dxk > 0 состояние
равновесия устойчиво в целом; в области g\ > 0, rf2 > 0, g\ + di& < 0
система автоколебательная (мягкий режим). При условиях g\ <
<0, d2 > 0, g\ + di& > 0 на фазовой плоскости имеется
неустойчивый предельный цикл, разделяющий область притяжения
точки покоя и область притяжения бесконечно далеких точек
фазовой плоскости. В областях (gi < 0, d2 > 0, gi + dxk < 0), (g\ >
> 0, d2 < 0, dx < 0) и (gi < 0, d2 < 0, d\ > 0) состояние
равновесия абсолютно неустойчиво.
6. Структура пространства параметров
Области, соответствующие качественно различным решениям
системы уравнений (III. 1) и (III.2), определены в пространстве
независимых существенных параметров А (или А\), В, С, G, Е
(для g2 Ф 0) либо А (или Аг), В, G, Е (для g"2 = 0). Эти
параметры, выражения которых через исходные коэффициенты
приведены выше, являются критериями подобия рассматриваемой
динамической задачи. Они безразмерны, независимо от того,
являются ли коэффициенты и переменные в исходных
уравнениях размерными или безразмерными. Число этих параметров
нельзя сократить, не упрощая исходных уравнений. В частных
случаях, когда один, два или три коэффициента в уравнениях
(III.1) и (II 1.2) обращаются в нуль, число существенных
параметров уменьшается, так как некоторая часть параметров либо
обращается в нуль или в бесконечность, либо выражается через
другие параметры. Так, при g2 = 0, g\> 0 согласно
выражениям (111.52), (III.61) имеем С = оо, при С\ = 0 имеем G =
= ——= 0. В случае g2 ф 0, хг = 0 получаем G = оо, Е = 0, а в
случае g2ф 0, С2 = оо получаем Е = 0. Далее, при g2 = хе = 0,
90
имеем G = оо и Е = -^—^- = О, а при g2 = 0 и С2 = оо имеем
с2—ьх
Е = 0 и т. д. Поэтому в соответствующих частных случаях
пространство параметров упрощается и становится трехмерным (см.
случаи XII, XV), двумерным (случаи XIII, XVII) или
одномерным (случай XVIII). При этом результаты для частных
случаев непосредственно получаются из результатов для более общих
случаев.
Разбиение пространства названных параметров на области,
соответствующие топологически различным фазовым картинам
движения, в различных случаях (случаи I—XX) приведено
выше. При этом получены точные аналитические выражения для
поверхностей, ограничивающих те или иные области (области
устойчивости состояний равновесия, области автоколебаний и
т. д.). Дополнительно для областей устойчивости определены
условия монотонности переходных процессов, а для областей
существования периодических режимов — точные формулы для
определения амплитуд и периодов этих режимов.
Заметим, что результаты, выраженные через параметры А
(или А{), В, С, G, Е (или Е), легко можно пересчитать и
выразить через другие параметры, эквивалентные указанным. Так,
при £2=7^0, g* > 4g2 параметры А (А\), В, С, G, Е можно
заменить эквивалентными параметрами а, Ь, с, G, £,
воспользовавшись соотношениями:
I) для X2 < 4У
2 „ С ,. t С
а = -
1+Л?
В
С + 1
1; Ь-
Я2С
— 1
С— -7=г-
(С+1)2
£=•
(С + 1)2 ^ 1+А{
вч:
0+л?)
+ 1-G
Л + 1
А
с = -
В
2) для Хг > 4Г
,Л—1; *=-^-(
С+1 (С + 1)2\
с „ вч:
: £ =
' вч:
А
(С+1)2
Здесь обозначено
А(2Е
—1
■1 — G)
(III. 100)
dji
dok
Si
Si
si
(III. 101)
Рассмотрим подробнее случай g2 = 0, который наиболее
часто встречается в задачах автоматического управления. При
91
этом различные области, построенные в пространстве
параметров А (или А\), В, G, £, целесообразно пересчитать на
соответствующие им области в пространстве параметров
а =
dik
r-fe№-te)^gl<0),G,£,
(III. 102)
наиболее удобных для практических приложений.
Соответствующие формулы пересчета в случае g\> 0 имеют вид:
1) для X2 < 4У
2В
а = -
d = -
1+А*
Б2
•1;
2В
1
-А\
1+Л?
1;
Л+1
2) для X2 > 4У
Б2 Л +1
В— 1; d-
В+1
(III. 103)
(III. 104)
Область Q,
Для удобства рассмотрения структуры пространства a, d
(или d'), G, £ разобьем его на несколько областей (рис. III.7):
область Qi при а > — 1, а + d > 0;
область Qu при а < —1, а + d > 0;
область Qm при а < —1, а + d' > 0;
область Qiv при а + d < 0, а < 0;
область Qv при а + d' < 0, а < 0;
область Qvi при а + d' > 0, а > —I.
Можно это записать и иначе:
области Qi соответствуют gx > 0,
> 0, dxk + gx > 0;
области Qu соответствуют gi > 0,
d2 > 0, di£ + gi < 0;
области Qm соответствуют g\ < 0,
d2 > 0, dxk + g\> 0;
области Qiv соответствуют g\ > 0,
C0,rfK0 (gi + difc^0);
области Qv соответствуют gx < 0,
rf2 > 0, dx > 0 (dxk + gi^0);
области Qvi соответствуют gx < 0, d2 > 0, di& + g"i < 0.
Динамическое поведение системы, представленной
уравнениями (III.l), (III.2) при g2 = 0 в указанных выше областях
значений существенных параметров a, d, d' видно из
рис. III.8, а — ж [128].
92
^2
Рис. III.7. Разбиение плоскости
параметров a, d, d' на вспомо-^2
гательные области
С1Ф0;Г2±оо;х£Ф0 (G>0,£>0) С7ФО;С2=°°;х£*0(в>0,£=0) CfO; 2*оо;х£Ф0(6=0,£>0)
а) 5) в)
С1=0-,С2=оо;ХеФ0@=0,Е=0) C7*0;C2=oo;x£=0(G=°°,£=0) C7=0}C2*°°;Xe=0
д) е)
Обозначения:
устойчивость 8 целом;
устойчивость в целом или автоко*
ле5ания (жесткий режим);
устойчивость при ограниченных
отклонениях, неустои чивость „ в
большом ";
автоколебания (жесткий режим);
автоколе5ания(мягкий режим) ;
автоколебания (мягкий режим)
при ограниченных отклонениях
и неустойчивости в „большом";
\ j | автоколебания (мягкий режим) при ограниченных откло-
' \ ' нениях и неустойчивость в „большом"либо
абсолютная неустойчивость ;
Y//1 абсолютная неустойчивость
Рис. III.8. Диаграммы разбиения пространства параметров системы (III.1),
(III.2) на области, соответствующие различным типам движения,
в случае £2 = 0
93
В областях Qi, Qn, Qui, показанных на рис. III.8, а,
поведение системы определяется дополнительным заданием
параметров G и £, как указывается ниже. Диаграммы
рис. III.8, б — д получаются из диаграммы рис. III.8, а при
сечении областей пространства a, d, G, Е плоскостями G = О, Е =
= 0 и G = сю. На рис. III.8, ж для сравнения показана плоскость
параметров a, d, d/ соответствующей линейной системы.
Рис. II 1.9. Области устойчивости в целом и жесткого режима автоколебаний
при g2 = 0 в пространстве a, d, G, Е
В области Qi пространства a, d, E, G система является либо
устойчивой в целом, либо автоколебательной (жесткий режим
при С\ > 0, мягкий режим при С\ = 0). Граничная поверхность
между областями устойчивости в целом и жесткого режима
автоколебаний определяется решениями систем (111.23), (III.24),
как указывалось выше, с учетом формул (III.103), (III.104).
При фиксированных значениях G > 0 область жесткого
режима автоколебаний W будет ограничена двумя плоскостями
(£ = 0, а = —1) и двумя поверхностями: цилиндрической
поверхностью R с образующими, Параллельными оси Еу и
поверхностью 5, ординаты которой E° = f(a, d) для а>0. моно-
,94
тонно возрастают с увеличением d (при а = const) и с
уменьшением а (при d = const). При увеличении параметра G область
W сжимается; при этом поверхность R передвигается (при
фиксированных а) в сторону больших значений d, а поверхность S
опускается (при а = const > 0, d = const) в сторону меньших
значений Е. Следы поверхностей R на плоскости Е = О для всех
G сходятся в точке а = —1, d = 1.
Рис. ШЛО. Области устойчивости в целом и жесткого режима автоколебаний
при g2 = 0 в пространстве a, d, G, Е
Ряд областей W показан на диаграммах (рис. III.9 — 111.11),
где они ограничены произвольно выбранными плоскостями а =
= const, d = const, E = const. Вне области W в области Qi
система устойчива в целом.
Вычисленные значения координат поверхностей S и R в
широких интервалах значений параметров приведены в табл. III.7
и III.8.
П|ри G = 0 (т. е. С\ = 0) поверхность S исчезает, сливаясь с
поверхностью R, продолжающейся до значений Е = оо._ Так как
поверхность R параллельна оси Е, то параметр Е перестает
влиять на границу области устойчивости. Вместо плоскости R можно
рассматривать лишь ее след на плоскости G = 0 (рис. III.8, в),
который пересекает ось d в точке d = 3,04.- Часть плоскости
G = 0, лежащая между этим следом и прямой а =., — 1,
соответствует мягкому режиму автоколебаний.
•95
При а = О (т. е. d\ = О) границей между областями
устойчивости в целом и жесткого режима автоколебаний служат (при
фиксированных значениях G) следы поверхностей 5 на
плоскости а = 0. Иначе в этом случае области устойчивости и
автоколебаний могут быть построены в трехмерном пространстве rf, G, Е
(см. рис. III.6).
При Е = 0 (т. е. С2 = оо) границей между областями
устойчивости в целом и жесткого режима автоколебаний служат
Рис. III. 11. Области устойчивости в целом и жесткого режима автоколебаний
при g2 = 0 в пространстве a, d, G, Е
(при фиксированных значениях G) следы поверхностей R на
плоскости Е = 0, ряд которых изображен на рис. III.12—III. 14;
если точка лежит на диаграмме при данном G правее и ниже
соответствующей кривой, то состояния равновесия системы
устойчивы в целом; если точка лежит на этой диаграмме при
данном G левее и выше соответствующей кривой, то система при
С2 = оо, т. е. Е = 0, является автоколебательной (жесткий
режим). Линия (а— I)2 = Ad соответствует кратным корням
уравнения (III. 13). Иначе при Е = 0 подобласти устойчивости в
целом 1а и жесткого режима автоколебаний /б могут быть пост-
96
Таблица III.7
Координаты поверхностей R
о
II
<3
С<1
о"
II
о
7
С*)
о
II
о
со
1!
а
d
Е
а
d
Е
а
d
Е
а
d
Е
а
d
Е
а
d
Е 1
а
d
Е
а
d
Е
а
d
Е
а
d
Е
а
d
Е
а
d
i E
» а
t d
'Е
а
d
Е
а
d
1 Е
0,00
3,04
оо
14,90
20,21
со
306,85
316,58
со
1,05
9,86
5,16
13,97
39,80
25,45
165,65
368,21
255,53
0,91
22,85
2,03
29,36
200,48
21,88
183,61
1076,75
121,38
0,15
33,39
0,95
48,28
557,38
21,56
298,63
3021,73
119,46
0,61
64,54
1 0,97
1 69,55
1124,95
1 22,20
I 781,14
10978,86
1 221,41
1,00
4,44
со
25,02
30,92
оо
356,93
366,87
со
3,99
16,26
9,41
16,34
45,31
29,24
244,55
538,44
374,85
4,34
47,29
4,70
30,45
206,94
22,62
347,63
1988,79
225,27
2,14
61,85
2,04
50,08
576,02
22,29
564,84
5590,04
221,70
1 3,35
119,83
1 2,05
1 80,91
1288,39
1 25,51
1 1147,80
15989,20
1 322,27
2,15
5,90
со
55,48
63,50
со
407,13
417,45
со
6,68
22,80
13,83
23,90
62,18
40,92
322,44
703,10
491,14
9,56
81,06
8,46
35,50
236,36
25,95
512,62
2913,08
330,45
7,71
129,69
4,63
58,31
659,64
25,58
832,67
8192,41
325,11
1 Н,04
251,54
1 4,66
115,99
1785,01
| 35,48
1 1515,20
21020,80
1 424,32
3,87
6,98
со |
106,05 1
114,24
со |
507,22 1
517,73
со |
10,75
32,40
20,36 |
31,68 '
79,19
52,82
635,02
1367,51
959,44 1
15,17
115,53
12,33
51,21
327,35
36,25
675,46
3810,39
432,94
16,19
223,93
8,38
83,83
915,54
| 35,72
1096,26
10706,27
1 425,97
1 22,75
435,40
1 8,33
1 152,86
2304,74
1 45,97
1 2981,20
41046,80
1 828,63
6,47
10,98
со 1
156,26
164,90
со
1008,01
1020,08
оо
13,28
38,19
24,35
39,67
97,04
65,18
947,11
2029,61
1426,16
25,68
166,74
18,09
66,48
420,39
47,73
1329,13
7429,30
845,49
25,32
321,03
12,19
110,26
1174,80
46,09
2158,36
20925,00
833,60
35,38
626,57
12,19
189,98
2824,42
56,53
4442,80
60950,20
1232,20
8,18 1
12,89
со
206,45 1
215,44
оо
1507,96
1520,10
со
13,42
38,53
24,57
55,51
113,6
89,33
1259,45
2692,62
1893,63
29,01
198,43
21,42
84,20
515,67
57,62
1982,13
11041,10
1257,70
39,14
464,46
17,86
137,34
1444,35
56,74
3215,88
31051,12
1235,31
54,43
905,81
17,78
264,18
3855,92
| 77,23
5907,60
80937,40
1636,50
11,01
16,05
оо
256,74
266,31
со
2008,51
2022,55
со
13,45
38,61
24,62
87,21
200,56
137,55
1570,97
3351,50
2358,59
29,22
199,09
21,74
117,33
703,09
78,94
2634,86
14648,06
1668,88
47,73
551,95
21,32
119,10
1970,93
77,73
4277,69
41261,31
1643,62
i 66,99
1088,60
[ 21,49
412,44
5909,06
| 118,72
7364,50
100703,50
2035,00
7 Заказ 33
97
Продолжение табл. II 1.7
о
II
о
II
о
со"
II
о
II
о
00~
II
а
d
Е |
а
d
Е |
а
d
Е 1
а
d
Е |
а
d
Е 1
а
d
Е [
а
d
Е
а
d
Е
а
d
Е
а
d
Е
а
d
Е
а
d
\ Е
а
d
Е
а
d
Е
а
1 Е
1,06
105,66
0,97 |
88,88 1
1850,02
22,13 1
995,99
18112,01
220,61 1
1,51 1
157,23
0,98 1
108,41
2764,29
22,19 |
1207,80
26882,20
319,30 1
1,95
218,13
0,97
123,10
3727,10
21,41
483,02
13242,98
77,20
0,01
160,03
1 0,43
1 141,63
4932,67
| 21,30
866,96
26994,04
| 119,20
0,14
205,07
1 0,43
1 160,85
6373,35
| 21,52
1 978,34
3449Г,66
| 117,34
4,56
196,56
2,05 |
103,45 1
2122,75
25,42 |
1466,10 1
26481,90
323,40 1
5,76 1
291,25
2,05 1
125,99 1
3165,01
25,48 |
1778,80
39353,20
320,60 1
6,97
405,68
2,04
123,27
3728,63
21,44
751,96
20215,04
117,94
2,39
288,04
0,97
148,06
5184,14
| 22,37
1 1642,60
50289,40
| 222,20
1 2,85
371,52
1 0,98
166,57
6617,13
1 22,17
1849,00
63941,00
| 218,60
14,37
413,59
4,66 |
148,32
2948,28
35,54 |
1932,20 1
34705,80
423,75 1
17,70 1
616,08
4,67 |
181,79
4409,01
35,62 1
2344,90
51604,10
419,80
21,06
860,71
4,70
128,25
3881,05
22,40
1420,10
37398,90
218,00
8,15
535,85
2,04
170,30
5818,50
| 25,40
1 2410,90
73128,10
1 322,53
1 9,43
697,76
1 2,09
1 193,22
7505,18
Г 25,36
1 2723,40
93657,60
I 319,40
29,30
716,79
8,34 1
195,31 1
3805,39
46,07 |
3795,60 1
67559,40
824,25 1
35,84 1
1067,10
8,34 |
237,65 1
5674,85
46,06 1
4602,5
100307,50
822,50
42,24
1476,90
8,25
148,48
4411,52
25,44
2097,30
55078,70
1 322,87
24,37
1142,40
1 4,70
1 244,87
8151,13
1 35,54
1 3179,60
95988,40
| 422,50
1 27,99
1495,30
1 4,82
1 275,61
10351,39
| 34,98
1' 3590,2С
122829,8С
| > 418,5С
45,44
1032,80
12,19|
242, Зб|
4652,34
56,28|
5667,00|
100720,00
1231,70|
55,52
1542,00
12,24
234,76
6934,34
56,25|
6880,10
149917,90
1228,20
65,40
2139,20
12,16
212,71
6130,49
35,53
2762,90
72121,10
| 422,50
48,83
1968,70
I 8,30
1 323,76
10625,24
| 46,67
1 6253,50
187401,50
| 823,00
1 55,29
2519,80
1 8,26
1 364,26
13495,74
1 46,12
)| 7059,9С
)239750,1С
)| 825,75
69,65
1490,20
17,74|
336,90|
6352,60
76,97)
7532,20|
133632,80
1633,80|
85,ю|
2231,30
17,86|
411,02
9535,48
77,77|
9148,40
199089,60
1630,00
100,47
3117,20
17,92
279,58
7893,22
45,98
5418,20
139961,80
1 818,00
75,39
2842,80
1 12,15
399,03
12825,97
| 56,00
1 9319,20
278330,80
| 1223,30
1 85,41
3647,90
1 12,16
1 450,21
16375,'7S
1 55,55
)| 10521,ОС
)356079,ОС
)| 1226,7С
85,58
1788,40
21,35
525,55
9728,45
118,22
9398,60
166599,40
2038,00
104,59
2676,31
21,56
639,38
14526,62
118,34
11410,00
247970,00
2031,00
122,03
3700,10
21,32
347,51
9690,49
56,40
8104,30
209442,70
1 1223,80
1 115,64
4135,90
| 17,87
1 553,88
17485,12
| 76,за
1 12447,00
373003,00
| 1636,20
130,78
5296,20
1 17,82
1 626,52
22445,48
1 76,37
1 14003,00
)473822,00
)| 1627,50
98
Продолжение табл. III.8
о
о>~
II
о
о
II
а
d
Е \
а
d
Е
а
d
Е
а
d
Е
а
d
Е
а
d
\ Е
0,28
254,98
0,43|
176,76
7722,70
20,95
1091,30
43032,70
118,40
0,41
310,67
0,43
198,63
9764,80
21,74
1212,00
53200,00
120,00
3,29
461,30
0,98|
187,50
8340,50
22,40
2058,80
79420,20
216,00
3,72
559,38
0,99
205,09
9987,91
22,13
2265,80
96516,20
215,50
10,62
867,03
2,08
215,82
9378,18
25,34
3034,10
116589,90
322,00
11,80
1054,00
2,07
239,03
11518,97
25,66
3352,20
142660,80
323,47
31,01
1825,70
4,70
307,45
12906,55
34,92
3997,00
152693,00
421,50
33,92
2176,90
4,63
341,19
15921,81
35,73
4421,20
187278,80
423,50
61,93
3155,60
8,32
405,54
16751,46
45,40
7870,50
298854,50
821,50
68,43
3848,80
8,31
446,95
20384,05
44,98
8701,90
366154,10
826,00
95,20
4531,90
12,09
503,86
20560,14
56,05
11739,00
444628,00
1220,00
106,11
5629,90
12,42
554,62
24959,48
55,60
145,17
6531,40
17,50
702,21
28270,79
77,47
15589,00
588986,00
1615,00
160,46
7985,90
17,56
773,35
34358,65
76,97
12967,00 17214,00
543043,00 719986,00
1223,30 1621,20
роены в трехмерном пространстве a, d, G. В этом пространстве
границей между названными областями будет служить
поверхность Г, часть которой изображена на рис. III. 15. Подобласти
устойчивости в целом 1а принадлежат точки, для которых d <
< d° (при а = а0 = const, G = G° = const), где a0, d°, G° —
координаты поверхности Т. При G = 0 и Е = 0 (т. е. С\ = 0 и С2 = оо)
подобласть /б вырождается в область мягкого режима
автоколебаний (см. рис. Ш.8, г), а при G = оо и Е = 0 (т. е. хе = 0)
исчезает совсем за счет слияния с плоскостью а = —1 (см.
рис. III.8, д).
В области Qn пространства a, d, G, Е при £>0и G > 0
граница между областями устойчивости в целом и жесткого режима
автоколебаний определяется уравнениями (III.43) с учетом
формул (III.103), (III.104). В сечении этой области плоскостью Е =
= 0 при 0 < G ^ сю (что соответствует случаю С2 = оо, хе ^ 0)
имеем устойчивость состояний равновесия при ограниченных
отклонениях, неустойчивость в большом (см. рис. III.8, б, д). В
сечении указанной области плоскостью G = 0 (т. е. С\ = 0) при
Е > 0 имеем автоколебания (мягкий режим)—см. рис. III.8, в.
Таким образом, в области Qn при Е = 0 система неустойчива
при больших отклонениях от состояния равновесия, а при G = 0
неустойчива при ограниченных отклонениях; в соответствии с
этим в пересечении плоскостей Е = 0 G = 0 в области Qn
имеем абсолютную неустойчивость состояния равновесия (см.
рис. III.8, г).
7* 99
Таблица III.8
Координаты поверхностей S
о"
II
о
о
II
а = 0
а = 5
а=10
а = 15
а =25
а = 50
а= 100
а = 200
а = 300
а = 400
а = 500
а = 2,5-103
а = 5.103
а = 10-103
а = 15-Ю3
а = 0
а= 5
а= 10
а= 15
а = 25
4
£ 1
d
£
d
Е
d
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
d
Е
d
100
220
100
209
100
197
100
184
100
155
500
1070
500
937
500
589
1000
1601
1000
1218
1000
50-Ю3
118-103
50103
И МО3
50-Ю3
9Ы03
50-103
83-103
100
32
100
27
100
19
100
100
200
460
200
448
200
437
200
421
200
397 1
1000
2296
1000
2174
1000
1904
1500
2881
1500
2584
1500
2256
100-103
242-103
100-103
236.103
100-103
223-1О3
100.103
| 209-103
200
69
200
64
200
59
200
53
200
1 38
300
699
300
689
300
679
300
665
300
640
1500
3527
1500
3407
1500
3151
2000
4131
2000
3853
2000
3562
150-Ю3
367.103
150-Ю3
361-103
150-Ю3
348-103
150-Ю3
| 334-Ю3
300
107
300
102
300
97
300
92
300
| 80
400
943
400
931
400
922
400
910
400
886
2000
4762
2000
4644
2000
4409
2500
5378
2500
5104
2500
4828
200-1О3
| 492-103
200-103
| 485-103
200-1О3
472-103
200.103
| 460-103
400
145
400
| 140
400
| 136
400
| 131
400
| 120
500
1187
500
1176
500
1165
500
1154
500
1131
2500
5995
2500
5883
2500
5637
3000
6612
3000
6352
3000
6084
250-1О3
616-103
250-1О3
610-Ю3
250-1О3
597-1О3
250-103
585-103
500
183
500
179
500
| 174
500
| 169
500
| 159
100
Продолжение табл. II 1.8
о
1!
о
ем
II
а = 50
а= 100
а = 200
а =300
а = 400
а = 500
a = 2,5-103
а = 5-103
а = 10-103
а -= 15-103
а = 0
а = 5
а= 10
а = 25
а = 50
а =100
а = 200
£ = 2,5-Ю3
а = 5-103
а = 10-103
| а = 15-103
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
1 d
Е
d
Е
d
Е
d
\ Е
d
\ Е
d
1 Е
1 d
1 Е
500
130 1
500
1000
1000
1000
1000
50-103
173-102
50-103
145-102
50-Ю3
50-Ю3
100
10
100
4
100
100
1000
| 98
1000
1000
50-Ю3
| 55-102
50-103
| 28.102
50-Ю3
1 50-Ю3
1000
330 |
1000
271 1
1500 1
343 1
1500
1500
1500
100-103
3/3-102
100-103
348-1О2
100 -103
290-1О2
100-103
214-102
200
23
200
19
200
15
200
1500
| 171
1500
130
1500
100-103
128-102
100-103
110-102
1 100-103
| 56-102
1 100-103
1500
525
1500
474
2000
560
2000
403
2000
2000
150•103
572-102
150-Ю3
548-102
150-Ю3
495. Ю2
150-Ю3
435-Ю2
300
36
300
33
300
29
300
2000
242
2000
206
2000
150-Ю3
20Ы02
150-Ю3
184-Ю2
1 150-Ю3
| 145-Ю2
1 150-Ю3
| 84-Ю2
2000
721 |
2000
672
2500
761
2500
634
2500
455
2500
200-Ю3
772-Ю2
200-Ю3
747-Ю2
200-Ю3
696-Ю2
200-Ю3
64Ы02
400
50
400
47
400
43
400
30
2500
1 313
2500
1 279
2500
190
200-203
274-Ю2
200-Ю3
| 258-Ю2
1 200-Ю3
| 221-Ю2
1 200. Ю3
| 178-Ю2
2500
918
2500
869
3000
959
3000
845
3000
704
3000
500
250-1О3
970-1О2
250-Ю3
946-Ю2
250-Ю3
897-Ю2
250-1О8
844-Ю2
500
63
500
60
500
57
500
46
3000
385
3000
352
3000
269
250-Ю3
347-Ю2
250-Ю3
ЗЗЫО2
1 250-Ю3
1 296-Ю2
1 250-Ю3
| 256-Ю2
101
Продолжение 111.8
о
со"
II
о
II
ю"
II
а = 0
а = 5
д=10
а = 25
а = 50
а = 200
а = 2,5.103
а = 5-103
а= 10-103
а= 15-103
а = 0
а=5
а = 10
а = 50
а = 2,5.103
а = 5-103
а = 10-Ю3
а = 0
а = 5
а = 50
4
£
rf
£
d
Е
d
Е
d
Е
d 1
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
100 1
4 I
100
100
100
1000 1
37 1
1000
50.10s '
23.102
50-103
50-Ю3
50-103
100
2
100
100
1000
50-103
10-102
50-103
50-103
100
100
1000
200
11
200
8
200
200
1500
77
1500
100-103
62-102
100.103
47-102
100-103
100-103
200
6
200
200
1500
38
100-103
36-102
100103
21-102
100103
200
3
200
1500
14
300
17
300
15
300
11
300
2000
114
2000
150-103
10-102
150-103
87-102
150-103
50-102
150-103
300
10
300
7
300
2000
62
150-103
59-102
150-103
47-102
150-103
300
6
300
3
2000
36
400
24
400
22
400
19
400
2500
147
2500
200-103
138-102
200-103
125-102
200-103
95-102
200-103
400
14
400
12
400
9
2500
85
200-103
82-102
200-103
71-102
200-103
| 43-102
400
9
1 400
7
1 2500
52
500
31
500
29
500
26
500
14
3000
188
300
59
250-103
176-102
250-103
164-102
250-103
135 -102
250-103
100.102
500
18
500
16
500
13
3000
107
250-103
106-102
250-103
i 95-102
250-103
| 70-102
500
11
1 500
9
1 3000
67
102
Продолжение табл. II 1.8
о
in
II
о
со
II
II
О
о
оо~
II
О
о
II
О
о~
II
О
а-2,5-103
а = 5-103
а — О
а = 5
а = 50
a=2,5-103
а = 5-103
а = 0
а = 50
а=2,5-103
а = 0
а = 50
а = 2,5.103
а = 0
а = 50
а = 2,5-103
а = 0
а = 50
а = 2,5-103
d 1
£ 1
d 1
£ 1
d 1
£ 1
<* 1
Е \
d 1
Е 1
^
F
^ 1
Е
d
£ 1
d
Е
d
Е
d
Е
d
Е
d
Е
d
Е
1 d
Е
1 d
Е
1 d
Е
1 d
Е
1 d
Е
50-103 1
50-Ю3 1
100 1
100 1
1000 1
50-103
50-103 1
1000
13 1
1000
50-Ю3
1000
9
1000
50-Ю3
1000
7
1000
50-103
1 1000
6
1 1000
1 50-Ю3
100-103 1
22-102 |
100-Ю3 1
200 1
2 1
200 1
1500 1
100-103
14-102 |
100-103
1500
20
1500
100-103
lO-lO2
1500
15
1500
100-103
б-Ю2
1500
12
1500
100-103
4-102
1500
9
1 1500
1 100-Ю3
150-103 1
38-102 |
150-103 1
28-Ю2 1
300
4 1
300
2000 1
21 |
150-103
26-102 1
150-103
16-102
2000
28
2000
150-103
19-102
2000
21
2000
150-Ю3
14-Ю2
2000
17
1 2000
1 150-Ю3
10-Ю2
1 2000
13
1 2000
1 150-103
8-Ю2
200-Ю3 1
54-Ю2 |
200-Ю3 1
44-Ю2 1
400 1
6 1
400 1
4 I
2500 1
33 |
200-Ю3
37-Ю2 |
200-1О3
29-Ю2
2500
36
2500
22
200-Ю3
27-Ю2
2500
27
2500
13
200-Ю3
20-Ю2
1 2500
21
1 2500
1 200-133
16-Ю2
2500
17
2500
1 200-103
12-Ю2
250-1О3
70-Ю2
250-1О3
60-Ю2
500
8
500
6
3000
44
250-1О3
49-Ю2
250-103
41-Ю2
3000
44
3000
30
250-Ю3
| 36-Ю2
3000
33
3000
20
1 250. Ю3
27-Ю2
3000
26
3000
13
1 250-Ю3
2Ы02
1 3000
21
1 3000
8
1 250-103
17-Ю2
103
Q=709 8 7 6 5 4
4-70'
3-10z
2-101
1
III
III
mil
11
1
I/
h
к
ii
и
li
1,
//
—-*\^_
7
1'
^
/
/
/
/
Л-
/
f
3
/2
1 >
/7
' /
/
1J2=4d
' 0,1
£=0
d
zoo-w3
150-103
100-103
so-w3
у
it
i
w/
G
1)2=bd
I
1
1
Wi
///
///
= 10 9 S T 6
III
II
V/
V
/ /
i
i /
у
/,
' 5
/
1 /
/
4
/1
3\
A
1\
A
0,1
G=0 I
i
20
5103 10-10 y
Рис. III.12. Области устойчивости Рис. III.13. Области устойчивости
в целом и жесткого режима автоколе- в целом и жесткого режима
автоколебаний при g2 = О, С2 = оо баний при g2 = 0, С2 =- оа
G=W 98 7 6 S 4 3
110е
I
I
1
1
у/м
///
///'
У
У
V
1/
17
//
4d/
1
0,2
G=0
100
100
300
wo
Рис. 111.14. Области устойчивости в целом и жесткого режима
автоколебаний при g2 = 0, С2 = оо
104
Устойчивость
А втоколедания в целом
-ь^ г
В области Qui пространства а, д!', G, £ граница между
областью автоколебаний при ограниченных отклонениях и
неустойчивости в большом и областью абсолютной неустойчивости
определяется уравнениями (111.45), с учетом формул (III. 103),
(III.104). В сечении этой области плоскостью £ = 0 (т. е. Съ =
= оо) независимо от значения G имеем автоколебания (мягкий
режим) —см. рис. III.8, б, г, д. В сечении указанной области
плоскостью G = 0 (т. е. С\ = 0) при Е > 0 имеем автоколебания
(мягкий режим) при
ограниченных отклонениях от
состояния равновесия и расхо- „ . 0
v К, Устойчивость у
димость процессов в беско- s целом
нечность при больших
начальных отклонениях (см.
рис. III.8, в).
В области Qiv устойчи- w
вость состояний равновесия 9
в некоторой области
фазового пространства возможна
лишь при G > 0, в
противном случае состояния
равновесия абсолютно
неустойчивы. В областях Qy, Qvi
состояния равновесия
абсолютно неустойчивы.
Как видим, влияние
учитываемых нелинейностей на
динамику системы столь
существенно, что за счет их
устойчивая линейная
система может быть сделана
абсолютно неустойчивой (в
области Qui) и, наоборот, неустойчивая линейная система может
быть сделана устойчивой в целом (в области Qn, см. рис. II 1.8,
ж и 111.8, а).
юность Т
Рис. III. 15. Области устойчивости в
целом и автоколебаний при g2 = 0, С2 = °°
в пространстве a, d, G
7. Примеры
Пример II 1.1. Рассмотрим систему непрямого регулирования с
гидравлическим усилителем струйного типа при учете сухого трения в чувствительном,
усилительном и исполнительном элементах. Принципиальная схема этой
системы, широко применяемой в судовых энергетических установках для
регулирования давлений, уровней жидкости и расходов различных сред, изображена
на рис. III.16. Чувствительным элементом здесь обычно служит сильфон (или
мембрана), усилительным элементом — струйное усилительное реле с
отражательной заслонкой (или со струйной трубкой), исполнительным элементом —
поршневой сервомотор с двусторонним подводом рабочей жидкости; регулятор
имеет жесткую обратную связь силового типа [128].
105
При увеличении регулируемого давления (ф) весовой рычаг 1 регулятора
поворачивается по часовой стрелке, и отражательная заслонка 2 отклоняется
влево, ввиду чего увеличивается давление в правой полости сервомотора,
который прикрывает регулирующий орган
и одновременно через пружину обратной
связи возвращает весовой рычаг в
прежнее положение.
Уравнения движения системы
могут быть записаны для безразмерных
переменных в следующем виде [128].
Уравнение объекта регулирования
(например, емкости с паром под
давлением или резервуара, частично
заполненного жидкостью)
(Твр + в)ф = |х—/?(*), (III.105)
где Та — постоянная времени объекта в
сек;
6 — коэффициент
самовыравнивания;
Ф — регулируемая величина;
\i — регулирующее воздействие
(координата сервомотора);
/ d
F(t) — нагрузка на объект р= ——
\ at
Уравнения измерительно-усилительного органа при учете кулонова трения
в чувствительном элементе и в опорах и сочленениях рычажной системы
данного органа
8
m+"r~sign/Ni + <p + fin = 0 при рц=£0;
Рис. III.16. Схема системы
непрямого регулирования с
гидравлическим усилителем струйного типа
у\ = const при | у\\ + ф + &\л | < •
(III. 106)
-где г] — координата чувствительного элемента, совпадающая (в относительных
величинах) в данной схеме с координатой усилительного элемента;
у — коэффициент неравномерности измерителя;
б — коэффициент обратной связи;
е/2 — коэффициент нечувствительности измерительно-усилительного органа.
Уравнения сервомотора при учете мертвой зоны (как следствия кулонова
трения в сервомоторе и регулирующем органе) и нелинейности насыщения
Tsp\i + С* = Y[ ПрИ С* < Г| < С*х; ^
TSPV> — с* = г| при — с*х<г|<: — с*;
р\л = 0 при |т||<с*; \ (III. 107)
/7[X = -
- sign ri при |*n|>c*lf
где Ts — постоянная времени сервомотора в сек;
с* — половина ширины мертвой зоны сервомотора;
сг— значение отклонения |г]|, при котором скорость сервомотора
достигает наибольшей величины.
Записанные уравнения учитывают все основные нелинейности
рассматриваемой системы и, в частности, кулоново трение во всех звеньях регулирующего
устройства.
106
Вводя переменные х = ф + 6jx, z = p\i и объединяя нелинейные звенья
в одно эквивалентное нелинейное звено, а также полагая при свободных
колебаниях F(t) = 0, приведем записанную выше систему уравнений к виду (III.1),
(III.2) при g2 = 0, а именно
1 + 69 + 67>
(TaP + Q)
z, z = f(x} z, sign pz),
(III. 108)
причем нелинейная характеристика будет описываться полными уравнениями
(III.2), т. е. будет иметь вид, показанный на рис. III.1, а.
Сравнивая коэффициенты уравнения (III.1), уравнений (II 1.2) и (III. 108)
и используя формулу (III. 102), получим следующие выражения существенных
параметров (критериев подобия) рассматриваемой динамической задачи через
исходные коэффициенты:
&' :
увт8
d-
yQ*Ts
(для 0 > 0);
G =
увч5
ус*
8/2 '
а (для G < 0);
8/2
Е==
у(с*±—с*)
(III. 109)
причем коэффициенты Та, Ts, у, с *, с j и 8 положительны по физическому
смыслу, а коэффициенты б и 0 могут быть больше нуля, равны нулю или меньше
нуля.
Области устойчивости, автоколебаний и т. п. рассматриваемой системы
в пространстве параметров (III.109) представлены на диаграммах,
изображенных на рис. III.8—III.14. Результаты,
изложенные в § 2 и 6, позволяют точно
рассчитывать конструктивные параметры
данной системы из условий устойчивости
в большом состояний равновесия, а
также из условий монотонности
переходных процессов, определять, в случае
надобности, амплитуды и периоды
автоколебательных режимов, позволяют
проанализировать влияние на динамику
системы тех или иных физических
факторов и конструктивных параметров,
определяющих величину коэффициентов
уравнений движения [128].
Одновременный учет в этой задаче
нескольких нелинейностей позволяет
получить^ результаты, которые нельзя
получить при учете этих нелинейностей в
отдельности (в частности, устанавливается
характер зависимости границы области
устойчивости в пространстве параметров от величин сил сухого трения в
измерительно-усилительном устройстве и сервомоторе, обнаруживается, что за
счет настройки нелинейности насыщения можно автоколебательную систему
превратить в устойчивую в целом и т. п.).
Пример III.2. Рассмотрим классическую схему системы непрямого
регулирования с золотником и жесткой (рычажной) обратной связью при учете
важнейших нелинейностей.
107
Подвод
масла
Рис. III.17. Схема системы
непрямого регулирования с отсечным
золотником
Эта широко известная система (рис. II 1.17) может быть описана
следующими уравнениями:
уравнением объекта регулирования
(7> + e)cp = |i-F(0f
(ШЛЮ)
где обозначения те же, что и в предыдущем примере;
уравнением чувствительного элемента при учете кулонова трения в
золотнике
vn + ф = ■+■
7П + Ф=-
(УЦ + Ф) <
для ро < 0;
для ро > 0;
для ро = 0}
(ШЛИ)
где г] — координата чувствительного элемента;
у — коэффициент неравномерности чувствительного элемента;
8
— коэффициент нечувствительности;
уравнением золотника
а = 11 — jfyi,
(ШЛ12)
где о — смещение золотника;
(1 — координата сервомотора;
|3 — коэффициент жесткой обратной связи (обычно (3 = 1);
уравнением сервомотора при учете мертвой зоны и нелинейности насыщения
Tsp\i-\-c = o при а<г|<с1;
Tsp\x—c = o при — сх<;а< — с\
РИ- =
■ sign о при | о | > сх;
р|л = 0 при |а|<с.
(ШЛ13)
Здесь мертвая зона шириной 2с есть следствие перекрышей в окнах
золотника, а также кулонова трения в сервомоторе и регулирующем органе,
а нелинейность насыщения (р\х = const при |cr|^Ci) возникает, если
максимальный ход золотника больше длины его окон, если ограничена мощность
средств, питающих автоматику рабочей жидкостью, и т. п.
Подставляя значение г\ = о + |3ji из уравнения золотника в уравнение
чувствительного элемента, получим
8
уо + — sign ро + ф -f YpM- = 0 при ро Ф 0;
8
1Та + Ф + 7Р^1<— при ра=0.
Если теперь обозначить
к системе примера III.1.
108
б, то рассматриваемая система сведется
В данном случае существенные параметры (III. 102) определяются
выражениями
— -^- - -^- (для 6 > 0);
ers
yd*Ts
df
Е-
а (для 6<0); G- —
4&TS
8/2
v(ci-
8/2
(III.114)
причем коэффициенты Та, Ts, у, с, сх и е положительны по физическому
смыслу.
Области в пространстве параметров (III.114), соответствующие качественно
различному динамическому поведению системы (ШЛЮ) — (III.ИЗ),
рассмотрены выше, в параграфе 6. Приведенные там результаты позволяют, в
частности, оценить максимально допустимую величину сухого трения в золотнике,
при которой нарушаются условия устойчивости и возникают автоколебания.
Глава IV
Исследование
и расчет
нелинейных систем
методом сечений
Динамическое поведение нелинейной системы
при заданных значениях параметров
(коэффициентов) полностью определяется разбиением фазового
пространства на траектории. Установление
структуры разбиения фазового пространства на
траектории является первой основной проблемой
исследования нелинейных динамических систем. Для
систем п-то порядка это разбиение в оснорном
определяется сепаратрисными поверхностями, которые
служат элементами притяжения либо отталкивания
для окрестных фазовых траекторий. Однако
регулярные методы построения сепаратрисных
поверхностей в общем случае отсутствуют. Но для
значений коэффициентов, принадлежащих вскрывающим
сечениям (см. гл. II), можно полностью
рассмотреть структуру разбиения на траектории я-мерного
фазового пространства, с аналитическим
определением сепаратрисных поверхностей и других
элементов этого пространства.
Динамическое поведение класса нелинейных
систем одинаковой структуры для совокупности
значений параметров (коэффициентов) полностью опре-
110
деляется разбиением пространства этих параметров на области»,
для которых разбиение на траектории фазового пространства
однотипно. Определение бифуркационных поверхностей,
служащих границами названных областей, является второй основной
проблемой исследования нелинейных автоматических систем.
Для систем п-то порядка возможны лишь отдельные частные
решения этой проблемы. Метод сечений пространства параметров,
позволяет построить бифуркационные кривые в плоскостях
вскрывающих сечений. Эти кривые будут пересечениями
бифуркационных поверхностей с плоскостями сечений и, таким
образом, дадут представление об искомых бифуркационных
поверхностях.
В данной главе, на основе результатов двух предыдущих
глав, рассмотрены д-мерные фазовые пространства нелинейных,
систем, изучаемые в условиях вскрывающих сечений
пространств параметров. Приведена методика разбиения плоскостей
вскрывающих сечений бифуркационными кривыми. Получаемые
таким путем результаты могут быть использованы, в частности,,
для анализа влияния нелинейностей в сервомеханизмах на
динамику нелинейных автоматических систем п-то порядка, а
также для синтеза нелинейных корректирующих устройств.
1. Определение периодических движений и сепаратрисных
поверхностей.
Исследование в сечениях многомерных фазовых
пространств в целом
Рассмотрим систему [см. уравнения (11.1)3
п п
п к=2 а™^а+b*f w; а=2Ci4h ^v •1 *'
<х=1 /=1
динамическое поведение которой характеризуется разбиением на
траектории фазового пространства Z переменных t]i,..., цп.
Неособое преобразование (П.2) приводит эту систему к
канонической форме (II.5). В условиях вскрывающего сечения 2-го рода
Gfyr) (см. гл. II) каноническая система (II.5) запишется в виде
Xi = hiXi + f(o), *'=1, .-., s— 1, .s+1, ..., j
r-1, r+l ..., n; (IV.2))
К = Кхь + f fa); xr = K*r + f(<*); a = ysxs + yrxr. I
Будем рассматривать д-мерное фазовое пространство
системы (IV. 1) при условии, что ее коэффициенты принадлежат
сечениям G(2,r), построенным в гл. П.
Определение периодических движений. В условиях
вскрывающих сечений G(2s'r) последние три уравнения (IV.2)
образуют независимую систему второго порядка, которая может быть
111
рассмотрена на фазовой плоскости xs, хг обычными методами.
Пусть такое исследование выполнено и установлено, что при
данных значениях параметров система
x8 = Kxs + f(a)\ |
xr--=Xrxr + f(o); (IV. 3)
имеет периодическое решение (либо несколько периодических
решений). Это означает, что на плоскости переменных xs, xr
имеется предельный цикл — устойчивый или неустойчивый (либо
несколько предельных циклов).
При названных условиях рассмотрим фазовое пространство
X системы (IV.2). Заметим, что комплексные величины х\ в
системе (1\Л2) всегда попарно сопряженные: если xq = xq + jxq+\,
Toxq+i=xq—jxq+i, где xq hjc^i вещественны; каждой паре
канонических уравнений с комплексными сопряженными xq,
xq+l эквивалентна система двух уравнений с вещественными
переменными xq, Xq+\. Поэтому под фазовым пространством X
будем понимать евклидово пространство вещественных
переменных #i,..., xq, Xq+i ...,xn, причем волнистую черту над буквами
xq, ~xq+i всюду, кроме специальных случаев, будем опускать.
Если функция /(а) в интервалах а* ^ а ^ ау*+1 описывается
различными аналитическими зависимостями, то линиям
переключения, в плоскости а, а описываемым уравнениями
в = в], /=1,2, ...,/, (IV.4)
•будут соответствовать плоскости переключения в пространстве
X, описываемые уравнениями
Xsxs + Xrxr = o*h /-1,2, ...,/, (IV.5)
ортогональные плоскости xs, xr и параллельные координатным
осям Xi(i ф 5, 1Ф г) пространства X.
Пусть Ту — замкнутая фазовая траектория, изображающая
в плоскости xs, xr устойчивое периодическое движение, Гн —
замкнутая фазовая траектория, изображающая в плоскости xs, xr
неустойчивое периодическое движение (здесь под устойчивостью
периодического движения имеется в виду асимптотическая ор-
битная устойчивость). Рассмотрим одну из них, например Ту.
Факт сходимости xs(t) и xr(t) при ^->+оо к Г^ не зависит от
Х{ при 1Ф г. Поэтому в пространстве X существует
цилиндрическая поверхность Sy с образующей, параллельной осям Xi(i =
= 1, ..., 5 — 1, 5 + 1,..., г— 1, г + 1,..., п) и ортогональной осям
xs, xT пространства Х\ в окрестности этой поверхности по обесто-
112
роны от нее все интегральные кривые в пространстве X
располагаются таким образом, что координаты xs, хг при t->- +oo
асимптотически приближаются к значениям этих координат на
поверхности Sy. Пересечением (п—1)-мерной поверхности Sy с
плоскостью xs, xr является замкнутая кривая Ту. Аналогично,
если на плоскости xs, xr существует неустойчивый предельный
цикл Гп, то в пространстве X существует цилиндрическая
поверхность SH с образующей, параллельной осям Х{(1Фб, i ф г)
и ортогональной плоскости xs, xr, такая, что пересечением SH
с плоскостью xs, xr служит траектория Тн- Все интегральные
кривые системы (IV.2) вблизи поверхности SH по обе стороны от
нее располагаются таким образом, что при t-^+oo координаты
xs, xr этих интегральных кривых удаляются от поверхности SH.
Таким образом, поверхности Sy и SH являются сепаратрисны-
ми поверхностями. Первая из них порождается устойчивым, а
вторая — неустойчивым предельным циклом, т. е. кривыми 1\/ и Гп
на плоскости xs, xr. Характер интегральных кривых относительно
остальных координат Х{(1фз, 1фг) и, следовательно,
характер этих кривых в целом в окрестности поверхностей Sy, SH
определяется знаками вещественных частей корней %i (i ф в,1Ф r),
При этом возможны следующие случаи.
Первый случай. Пусть
Re^<0, i=l, ..., 5—1, s+l, ..., г— 1, г+1, ..., п. (IV.6)
Интегралы первых (п — 2)-х уравнений (IV.2) запишутся в
виде выражения (11.29) или, иначе,
^(0=^(0)eV+eV[O(Q_O(0)], i=£s, 1фг, (IV.7)
где
Ф (0 — Ф (0) = Г / [a(t) ] e~xif dt. (IV. 8)
о
Для комплексных hq, Хд+\ = X* функции xq(t), xq+\(t) в
выражении (IV.7) удобно считать комплекснозначными
функциями вещественного переменного t (эквивалентными в указанном
выше смысле координатам xq, xq+i пространства X).
Для интегральных кривых, расположенных на Sy либо на
SH, функции xs(t) и xr(t), а следовательно, и функции o{t) и
Яа(0] — периодические; поэтому и согласно выражениям (IV.7),
(IV.8) при условии (IV.6) функции Xi(t) будут асимптотически
стремиться к периодическим при t->- + 00, а фазовые траектории,
расположенные на Sy (соответственно на SH), будут
асимптотически приближаться к некоторой замкнутой траектории Ту
(соответственно к Г„). Ортогональной проекцией траектории Г^ на
8 Заказ 33 ИЗ
плоскость xs, хг будет служить замкнутая кривая Г^, а
проекцией траектории Тп— кривая Гн. Траектории, начинающиеся в
окрестности Sy, согласно условиям (IV.6) и в силу устойчивости
периодического движения Ту, будут асимптотически стремиться к
Ту, при этом функции Xi(t) (ьфз, ьфг) при ^->-+оо будут
стремиться к периодическим функциям.
Траектории, расположенные в окрестности Sw, будут при t-*~
->+оо удаляться от SH (так как Тн — неустойчивый
предельный цикл и, следовательно, xs(t) и xr(t) при ^->+оо удаляются
от Sn).
Рис. IV. 1. Интегральные кривые в пространстве X:
а — сепаратрисная поверхность 5^и устойчивый предельный цикл Г„, порожденные
при условии (IV.6) устойчивым предельным циклом Г„ системы (IV.3); б —
сепаратрисная поверхность SH и условно устойчивый предельный цикл Г н, порожденные при
условии (IV.6) неустойчивым циклом Тн системы (IV.3); в — трубка замкнутых
траекторий, порожденная предельным циклом системы (IV.3) при %q = О
Таким образом, при выполнении условия (IV.6) к
траектории Ту асимптотически приближаются все фазовые траектории,
расположенные на Sy и в ее окрестности (см. рис. IV. 1, а, где
штрих-пунктирными линиями показаны проекции траекторий
на плоскость xs, xr, проведенную в пространстве X).
К замкнутой траектории Тн при условии (IV.6)
приближаются лишь траектории, расположенные на SH, для которых
начальные условия таковы, что xs и хг принадлежат Тн\ все остальные
траектории, начинающиеся в окрестности SH (в том числе на
плоскости xs, xr), удаляются от SH (см. рис. IV. 1,6, где штрих-
пунктирными линиями показаны проекции траекторий на
плоскость х#, хг).
Периодическое движение Гн в пространстве X при условии
(IV.6) можцо назвать условно, устойчивым (устойчивым на по^
114
верхности SHcz X). Если на фазовой плоскости возможны толь-
ко четыре типа изолированных замкнутых интегральных кривых,,
соответствующих неустойчивым предельным циклам,
устойчивым предельным циклам и, наконец, полуустойчивым циклам
двух типов (к одному из них траектории снаружи
асимптотически приближаются, а изнутри от него удаляются; к другомуг
наоборот, изнутри асимптотически приближаются, а снаружи от
него удаляются), то в д-мерном фазовом пространстве
возможно существование большого числа различных типов условно
устойчивых периодических движений, в окрестности которых
интегральные кривые размещаются так, что асимптотически
приближаются к ним в направлении одних координатных осей
пространства X и удаляются — в направлении других. Лишь
один тип периодического движения в пространстве X, к
которому асимптотически приближаются все окрестные траектории,
будет устойчивым.
Второй случай. Среди корней %i (i ф s, i ф г) есть
корни с положительной вещественной частью.
Пусть ReA,p> 0. В таком случае в силу выражения (IV.7)
функция xp(t) неограниченно возрастает по модулю при t->- + 00.
Поэтому периодическое движение Ту, изображаемое устойчивым
предельным циклом в плоскости xs, хг системы (IV.3), в
пространстве X системы (IV.2) не порождает устойчивого
периодического движения.
Третий случай. Среди корней %i (* =т^= s, i ф г) имеются
корни, вещественные части которых равны нулю.
Пусть kq = 0. В таком случае решение уравнения (IV.2) при
i = q будет
xg(t)=xq(0)+[f[a(t)]dt. (IV.9)
о
Имея в виду выражение (IV.9), нетрудно установить, что если
o(t) —периодическая функция, то и xq(t) будет периодической
функцией. Аналогичный результат получим, если Xq—чисто
мнимый корень и исключен случай резонанса [63].
Если имеется один нулевой корень Xq = 0, то периодическое
движение, изображаемое на плоскости xs, xr замкнутой
траекторией Ту либо Гн, в пространстве X порождает трубку, сплошь
состоящую из замкнутых траекторий (рис. III. 1, в). Периодиче-'
ское движение Ту либо Тн не является более изолированным.
В зависимости от устойчивости исходного периодического
движения в плоскости xs, л:г и в зависимости от знаков вещественных
частей остальных корней Я* (i ф s, i ф г, i Ф q) возможны
различные случаи, когда указанная трубка замкнутых кривых будет
представлять устойчивые, условно устойчивые или абсолютно
неустойчивые периодические движения. . . ,
8* 115
Если имеется только один корень Xi с равной нулю
вещественной частью, то указанная трубка замкнутых кривых будет
образовывать поверхность St размерности 2 внутри (п—1)-
мерной сепаратрисной поверхности Sy либо Sn (SrczSy либо
ST cz Sh) ; в частности, если п = 3, то St = Sy либо
ST = SH. Если имеются два корня Хг с равной нулю
вещественной частью, то поверхность 5г, состоящая из замкнутых
траекторий в пространстве X, будет иметь размерность 3, и т. д.
Таким образом, изолированный устойчивый предельный цикл
Ту на плоскости xs, хг становится изолированным устойчивым
предельным циклом Ту в пространстве X тогда и только тогда,
когда выполняются условия (IV.6). В случае обращения
вещественных частей m корней %i (i Ф s, i ф г) в нуль на
поверхности Sy в пространстве X может возникнуть область замкнутых
интегральных кривых размерности m + 1. В случае же, если
вещественные части одного или нескольких корней ?ц (i ф s, i ф г)
становятся положительными, устойчивого периодического
движения в пространстве X не существует.
При выполнении условий (IV.6) замкнутая траектория Ту
(или Г„) лежит в пространстве X на цилиндрической
поверхности Sy (или Sn), ортогональной плоскости xs, xr; для траектории
Ту (или Ги) все функции Xi(t) (i = 1,..., п) —периодические.
Возможен другой случай, когда замкнутая траектория Г лежит
в некоторой плоскости пространства X, ортогональной осям xs и
хг\ тогда функции x8(t) и xr(t) будут для Г не периодическими,
т. е. указанное периодическое движение Г системы (IV.2) не
может быть найдено из анализа системы (IV.3). Но такие
периодические движения легко определяются из анализа уравнений
(IV.2) при i ф s, i ф г. Пусть %q = ш, %q±\ = —ш — чисто
мнимые корни, а(/)->0 при t-^+oo. Тогда согласно выражениям
(IV.7), (IV.8) функции xq(t) и xq+i(t) при t-»- + оо стремятся
к периодическим, при выполнении остальных условий (IV.6)
изображающим в пространстве X изолированное устойчивое
периодическое движение.
Итак, в пространстве X системы (IV.2) определены все
возможные замкнутые траектории, представляющие периодические
движения; преобразование (11.2) позволяет пересчитать эти
траектории на эквивалентные им замкнутые траектории в
пространстве Z переменных гц, ...,rjn исходной системы (IV.1). При
этом замкнутые траектории, в общем случае, перестанут лежать
в плоскостях, параллельных каким-либо осям координат, так
что вдоль этих траекторий все функции r\i(t) (i = 1,..., я)
оказываются периодическими.
Таким образом, все возможные периодические движения си-
116
стем (IV. 1) в условиях сечений 2-го рода G^r) делятся на два
типа: 1) движения, порождаемые периодическими движениями
системы уравнений второго порядка вида (IV3); 2) движения,
порождаемые чисто мнимыми корнями Xi в канонических
уравнениях для переменных Xi, не «захватываемых» сечениями G{J>r)
(т. е. при i Ф s,i Ф г).
Построение сепаратрисных поверхностей. В фазовом
пространстве X системы (IV.2) можно построить следующие сепа-
ратрисные поверхности, порождаемые особыми траекториями
фазовой плоскости системы (IV.3).
Во-первых, сепаратрисные поверхности Sy и SH размерности
п—1, порождаемые устойчивыми и неустойчивыми
предельными циклами системы (IV.3), рассмотренные выше.
Во-вторых, сепаратрисные поверхности Sc и Son размерности
п— 1, порождаемые сепаратрисами и отрезками покоя
плоскости xs, xr. Факт сходимости (или расходимости) при /-^+оо
координат xs, хт к их значениям на Sc и Son не зависит от %\
(i ф s, i ф г), поэтому поверхности Sc и Son будут
цилиндрическими поверхностями с образующими, ортогональными
плоскости xs, xr и параллельными координатным осям Xi (i ф s, i ф г)
евклидова пространства X. Разбиение поверхностей Sc, Son на
траектории и рассмотрение поведения траекторий в их
окрестности осуществляется так же, как это было сделано выше для
поверхностей Sy, Sn.
Названные выше сепаратрисные поверхности имеют
образующие, параллельные осям Х\ (i ф г, i Ф s) пространства Х\
поэтому их уравнения в пространстве X не зависят от координат
Xi (i ф s, i ф г) и совпадают с уравнениями порождающих их
особых фазовых траекторий на плоскости xs, xr системы (IV.3),
имея вид
S(x5, xr)=0. (IV. 10)
Кроме того, в пространстве X существуют сепаратрисные
поверхности, параллельные осям xs, xr, так что их уравнения не
зависят от значений координат xs и хт и поэтому эти
сепаратрисные поверхности не могут быть найдены из анализа системы
(IV.3). Но все они легко определяются из рассмотрения
уравнений (IV.2) при i Ф s, i ф г. Пусть Xq ф О и вещественно
(q ф s, цфг), а(/)->0 при /->оо. Тогда плоскость xq = О
размерности п—1 будет сепаратрисной поверхностью фазового
пространства Х\ ввиду выражений (IV.7), (IV.8) с обеих сторон
от этой плоскости все траектории либо асимптотически к ней
приближаются (если Хд<0), либо от нее удаляются (если
Xq > 0). Аналогичным образом в пространстве X можно
построить сепаратрисные поверхности (плоскости) более низких
размерностей, принадлежащие отдельным подпространствам
пространства X.
117
Итак, в фазовом пространстве X системы (IV.2) определены
все сепаратрисные поверхности. Преобразование (II.2)
позволяет пересчитать эти поверхности на эквивалентные им
поверхности в фазовом пространстве Z исходной системы. Запишем
преобразование (П.2) в виде
Z = KX,
тцеХ и Z — я-мерные векторы-столбцы. Отсюда
где
х = к~1
Кц К21
d d
А12 А22
d d
_K_in Kin
z,
Knl~
d
КП2
d
Knn
(IV. 11)
к
Kis — алгебраическое дополнение элемента строки i,
столбца 5 определителя det/C матрицы К, d = det /С- Согласно
выражению (IV.11) уравнения сепаратрисных поверхностей (IV. 10)
в пространстве Z будут иметь вид
Kir
d
t\i
/=1
0.
(IV. 12)
При переходе от пространства X к исходному пространству Z
сепаратрисные поверхности (IV.10) деформируются и перестают
быть параллельными каким-либо координатным осям. Сепара-
трисная плоскость xq = 0 остается плоскостью, проходящей
через начало координат, и в пространстве Z.
су>2>
Пример IV.1. Пусть для системы (IV.1) имеем п = 3. Рассмотрим сечение
при Я3 < 0 и предположим, что система
Xi = kiXi + / (а); /=1,2; а = Yi*i + y2x2
(IV. 13)
является автоколебательной (жесткий режим). Тогда на фазовой плоскости Х\,
х2 имеется два предельных цикла — неустойчивый внутри устойчивого, которые
порождают в пространстве X сепаратрисные поверхности SH и Sy и
расположенные на них предельные циклы Гн и Ту, Пересчитав указанные элементы
пространства X на пространство Z, получим в пространстве Z сепаратрисную
поверхность с уравнением вида (IV. 12) и, вне ее, устойчивый предельный цикл
Ту (рис. IV.2). Траектории, начинающиеся в области, ограниченной
поверхностью SH, будут стремиться к состоянию равновесия, а начинающиеся вне этой
области — к устойчивому предельному циклу. Характер интегральных кривых
пространства Z определяется, как указывалось выше, их расположением
относительно сепаратрисных поверхностей Sy и SH.
118
Исследование в сечениях фазовых пространств в целом.
Таким образом, в д-мерном фазовом пространстве системы (IV. 1)
в условиях сечения G(2s»r) определяются все сепаратрисные
поверхности и периодические движения, а также характер
интегральных кривых между этими элементами, если только известен
характер интегральных кривых системы второго порядка вида
(IV.3). Иначе говоря, если известно разбиение на траектории
фазовой плоскости д:5, хг системы (IV.3), то известно разбиение
на траектории д-мерного фазового пространства X системы
{IV. 1) в целом, рассматриваемой в условиях сечения G(2s'r).
Согласно изложенному выше, структура пространства Z полностью
определяется фазовым
портретом системы (IV.3) и
характером корней Xi(i ф 5,
/ ф г) канонических
уравнений для переменных #г-, не
«захватываемых» сечением
G<|.r> . В случае Re?w < О
(i Ф s, i Ф г) динамическое
поведение системы (IV.I) в
условиях сечения G2s,r)
аналогично динамическому
поведению системы (IV.3):
устойчивому состоянию
равновесия системы (IV.3)
соответствует устойчивое состояние
равновесия системы (IV.1);
изолированному устойчивому предельному циклу на плоскости
xs, xr соответствует изолированный устойчивый предельный цикл
в пространстве Z переменных т]ь ...,rjn; жесткому режиму
автоколебаний соответствует жесткий режим автоколебаний,
и т. д.
В случаях, когда нелинейная функция z = f(x, z, pz)
представляет типовые для автоматических систем нелинейности и их
совокупности, т. е. описывается одним из выражений (III.2) —
(III.8), фазовые картины движения системы вида
Рис. IV.2. Сепаратрисная поверхность
SH и устойчивый предельный цикл
d* + d> -z; z=f(x,z,pz) (p= d
p2+glp-
dt
(IV. 14)
детально изучены на многолистных фазовых поверхностях в
работе [128], с точным аналитическим определением всех
основных элементов; в частности, формулы, позволяющие в указанных
случаях вычислять точные значения «амплитуд» и периодов
периодических движений, приведены в гл. III.
Но фазовые переменные х, dx/dt системы (IV. 14) согласно
119
выражениям (ШЛО) эквивалентны фазовым переменным о,
do/dl системы
a—(%s+Kr)a + XrK5a=—(%8yr + ysXr)z+(yr + y&)z;
z = f(a, z, г). (IV. 15)
В свою очередь, фазовые переменные системы (IV.15)
связаны с фазовыми переменными xs, xr системы (IV.3)
выражениями
о—Xsg— (ys + yr)f(o) , )
xs =-
_g — %so— (yr + 7s)/(g)
(IV. 16)
УгК—угК
Следовательно, в случаях, когда в системе (IV.3) нелинейная
функция /(a) s=: /(а, г, г) описывается одним из уравнений вида
(III.2) — (III.8), фазовые картины движения этой системы
изучены аналитически и точно. Поэтому для случаев, когда
нелинейная функция f(o) представляет одну из типовых нелинейно-
стей либо совокупность таких нелинейностей, фазовое
пространство системы (IV.2) и, следовательно, системы (IV. 1) в условиях
вскрывающих сечений также оказывается полностью
определенным, с точными значениями координат сепаратрисных
поверхностей и точными значениями «амплитуд» (величин отклонений
координат т)1, ..., Цп) и периодов периодических режимов.
Аналогично тому, как это сделано для системы вида (IV. 1) ^
результаты исследования фазовой картины движения систем
вида (IV.3) или (III.1), (III.2) обобщаются и на другие классы
нелинейных систем п-то порядка, описывающих типовые
автоматические системы. Результаты рассмотрения /г-мерных
фазовых пространств, полученные в условиях вскрывающих сечений.,
согласно изложенному в §§ 7—9 гл. II могут быть
распространены и на окрестности сечений.
2. Исследование пространств параметров.
Построение в плоскостях сечений точных границ
областей устойчивости и автоколебаний
Если известны бифуркационные поверхности в пространстве
параметров системы второго порядка вида (IV.3), то их легко»
пересчитать на соответствующие бифуркационные кривые в
плоскостях вскрывающих сечений систем п -го порядка.
Пусть исходной служит система (IV.1); допустим, что ака»
Ьк — заданные числа, ск (я = 1,..., я) —параметры,
образующие д-мерное пространство Сп. Построим в пространстве Сп
сечения второго рода G^'r)(cM. § 3 гл. II). В условиях этих
120
сечений система (IV. 1) неособым преобразованием (П.1)
приводится к виду (IV.2) и п — 2 из числа п параметров сп могут
быть выражены через два, например через cq и cv. Поэтому три
последних уравнения (IV.2) можно записать в виде
*s = Ms+ /(<*); xr = %rxr + f{o); \ (IV.17)
Так как коэффициенты aKai при построении сечений в
пространстве Сп были заданными числами, то и величины Xs, Xr в
уравнениях (IV. 17) будут заданными числами; величины ys и^г в
уравнениях (IV. 17) будут линейными функциями от параметров
ср, cq, определяемыми согласно выражениям (П.6) и уравнениям
сечений вида (11.35). Иначе, величины ys и уг можно считать
параметрами, эквивалентными параметрам ср, cq.
Предположим, что в плоскости параметров ср, cq системы
(IV. 17) построены бифуркационные кривые (в частности,
границы области устойчивости состояния равновесия в целом,
границы областей автоколебаний мягкого и жесткого режима
и т. п.). Тогда, согласно изложенному в предыдущем параграфе,
при выполнении условия (IV.6) эти бифуркационные кривые
будут справедливы и для системы п-то порядка вида (IV.2), а
следовательно, в силу неособого преобразования (П.2), и для
исходной системы (IV. 1), рассматриваемой в плоскости сечения
G(*>r). Построив N2 = 0,5[s(s— 1) + д] различных сечений
2-го рода в пространстве параметров Сп системы (IV.1), где
5 — число вещественных, д — число комплексных корней
уравнения (П.4), в каждом из этих сечений определим
бифуркационные кривые.
При невыполнении условия Re?w<0 (i=l,..., s—1, s +
+ 1,...,/'—1, r+ 1,..., n) перенесение результатов исследования
системы вида (IV. 17) на систему (IV.2), с соответствующими
коррективами, также нетрудно осуществить (см. предыдущий
параграф).
Для системы (IV. 14), где z = f(x, z, pz) —нелинейная
функция, представляющая типовые нелинейности и описываемая од-
ной из систем уравнений (II.2) — (П.8), все бифуркационные
поверхности определены аналитически и точно. В гл. III эти по-
верхцости построены в пространстве существенных параметров
А (или Лi), В, С (или Ci), G, Е, способ определения которых
через коэффициенты системы (IV. 14) был приведен. Рассмотрим
методику пересчета бифуркационных поверхностей, построенных
для системы (IV. 14) с типовыми нелинейностями в пространстве
названных параметров на бифуркационные кривые в плоскости
вскрывающего сечения G(2s>r) системы (IV. 1) с теми же
нелинейностями.
121
Прежде всего, граничные поверхности в пространстве
параметров Л, В, С, G, Е целесообразно пересчитать на эквивалентные
им граничные поверхности в пространстве параметров
dxk л 1 dik
а-
8\
ё\
8\
Сг
Е=-
-Сг *
(IV. 18)
как указывалось в § 6 гл. III.
Сравнивая коэффициенты систем (IV. 14) и (IV. 15), имеем
^1=-у8+Уп d. = YA + YsV> gi=-(K + KY> g* = KK- (IV-19)
При рассмотрении вскрывающих сечений Gi?>r) в
пространстве Сп системы (IV.1) величины Xs и Хг в выражениях (IV.19)
будут фиксированными числами, a ys и у,, либо d\ и rf2 —
параметрами.
Определим из уравнений сечения G(2s'r) вида (11.36)
значения параметров ск, принадлежащие сечению, по формулам
А
с* = -
/с=1,
л,
(IV. 20)
тде
Д =
^(>0; N2(KY,
Nn(K)
Nn(h)
(IV.21)
(IV. 22)
AjK (j = s, r) — алгебраическое дополнение элемента строки /,
столбца к определителя Д;
As, Ar — произвольные постоянные (вещественные, если
Xs и Хг вещественны, и комплексные
сопряженные, если Xs и Хг — комплексные сопряженные).
Выражения для NK(X{) определены формулами (П.З). Но
согласно выражениям (II.6) для -уг имеем
D'(Xt)
Поэтому произвольные постоянные As, Ar в формулах (IV.22)
можно заменить произвольными постоянными ys, уг, и тогда
значения параметров ск, принадлежащие сечению G(|'r\ будут
cK = A-ll-D'(%s)y£,K-D'(Xr)vArKl к=1, ...,п. (IV.23)
122
Предположим теперь, что выполнены условия (IV.6), и
определим в плоскости сечения GSf'r) бифуркационные значения
параметров ск. Из выражений (IV. 19) имеем
_ d^s-hdj . _ dxXr + dz (IV.24)
Из выражений (IV. 18) определим бифуркационные значения
параметров du d2:
d1 = ^±-\ da=-^-. (IV.25)
С учетом формул (IV.24), (IV.25) из выражений (IV.23)
получаем бифуркационные значения параметров ск:
cK = bTlgJCx [bSKD'(Xs)(Xs-Xrrl(aXs + bgl) +
+ ^KD'(Xr)(Xr-Xsrl(alr + bgl)l jc= 1 л. (IV.26)
Значения ск, определяемые по формуле (IV.26), описывают
бифуркационную кривую в пространстве Сп, лежащую в
плоскости сечения G^*r\ В формулу (IV.26) следует подставить
бифуркационные значения параметров а, Ь, известные на
основании результатов гл. II. Параметры с, G, Е в условиях
рассматриваемого сечения G^r) остаются произвольными. Результаты
вычислений по формуле (IV.26) можно представить в плоскости
каких-либо двух параметров ср, cq.
Таким образом выполним разбиение бифуркационными
кривыми всех сечений G^*r) пространства Сп. При п = 3 все
плоскости сечений с нанесенными на них бифуркационными кривыми
можно построить графически в аксонометрической проекции;
при п > 3 плоскость каждого сечения можно изобразить на
отдельном чертеже.
Аналогично задача построения бифуркационных кривых в
плоскостях вскрывающих сечений решается в других случаях.
Эти бифуркационные кривые являются пересечениями искомых
бифуркационных поверхностей с плоскостями сечений и,
следовательно, дают представление о бифуркационных поверхностях
рассматриваемого пространства параметров. Результаты §§7—9
гл. II позволяют распространять области, получаемые в
сечениях, на окрестности сечений. На этом исследование
пространства параметров рассматриваемым методом заканчивается; оно
может быть дополнено рассмотрением областей между
сечениями с помощью приближенных методов или методов электронного
моделирования.
123
3. Анализ механизмов влияния нелинейностей
Изучение предельных переходов в фазовом пространстве и
в пространстве параметров при появлении или исчезновении
отдельных нелинейностей, составляющих совокупную нелинейную
характеристику системы (III.1), (III.2), позволило объяснить
механизмы влияния этих нелинейностей на динамическое поведение
системы [128].
Обобщение результатов исследования системы (III.1), (III.2)
на системы п-го порядка вида (IV. 1) с помощью метода сечений
пространства параметров позволяет не только выполнять
расчеты по сечениям, но объяснить механизмы влияния нелинейностей
и на динамическое поведение системы п-го порядка (IV.1).
Рассмотрим, например, механизм влияния нелинейности
насыщения на границы области устойчивости состояний равновесия
в целом системы (IV.1), в которой нелинейная функция z = /(a)
заменена нелинейной функцией z = f(o, z, pz), описываемой
уравнениями вида (III.2). Для этого рассмотрим систему (IV. 1) в
условиях сечения 2-го рода G(2s>r) при значениях параметров
системы (IV. 15), соответствующих случаю X (см. § 4 гл. III) и
случаю VII (§ 3 гл. III).
Предположим, что выполнены условия (IV.6). Тогда в
отсутствие нелинейности насыщения (С2 = оо) граница области
устойчивости в целом состояний равновесия системы (IV. 1) с
названной нелинейной функцией определяется в сечении G(2s'r)
уравнениями (111.62), (III.100), (IV.26).
При переходе по сечению за эту границу в фазовом
пространстве системы (VI. 1) возникают сепаратрисная поверхность SH,
охватывающая начало координат, и устойчивый предельный
цикл Ту. Если начальные условия таковы, что изображающая
точка лежит с той стороны от SH, которая примыкает к началу
координат, то движение сходится к состоянию равновесия; если
же точка лежит вне SH, то движение сходится к Ту. Введение
нелинейности насыщения (С2 ф оо) меняет фазовые траектории
при отклонениях, больших некоторой величины, улучшая в
данном случае их сходимость в сторону начала координат.
Параметр С2 может быть столь большим, что улучшение траектории
будет происходить лишь при отклонениях, лежащих за
пределами расположения SH и Ту. Тогда нелинейность насыщения не
будет влиять на границу области устойчивости в целом, и
последняя будет определяться по-прежнему уравнениями (III.62),
(III.100), (IV.26) из условия взаимного сближения и слияния
SH и Ту при изменении параметров системы, отличных
от С2.
124
Уменьшением С2 можно добиться улучшения траекторий в
области между 5пиГу; тогда поверхность SH не изменится, а
замкнутый цикл Ту будет стягиваться к SH. В итоге произойдет
слияние Ту с SH только за счет уменьшения С2. Соответствующая
граница области устойчивости определяется уравнениями
(III.80), (III.100), (IV.26). Таким образом, введением
нелинейности насыщения можно добиться расширения области
устойчивости системы (IV. 1) с нелинейной функцией рассматриваемого
вида.
Аналогично объясняются механизмы влияния других
типичных нелинейностей (см. рис. III.1, а — ж) на динамическое
поведение типовых автоматических систем. Понимание этих
механизмов позволяет осуществлять синтез корректирующих
нелинейностей.
4. Синтез нелинейных законов управления
Проблема применения нелинейных законов управления в
автоматике имеет несколько аспектов [150]. Один из вопросов этой
проблемы состоит в следующем: в автоматической системе
(обычно — в сервомеханизме) имеются определенные
нелинейности, и для компенсации их вредного влияния, а также для
улучшения динамических свойств системы требуется ввести в
закон управления специальные нелинейности. Решению этого
вопроса для частных случаев посвящен ряд работ. В данном
параграфе рассмотрим способ решения названного вопроса на
основе применения точных аналитических методов
применительно к автоматической системе п-то порядка.
Пусть требуется осуществить синтез нелинейного закона
управления для исходной системы вида
АШ=-ЪЪ pt = №, о==Ъ(р)ц-гЪ (IV.27)
где
А(р) = рп~~1 + alPn-2 + ...+ art_!;
Ь(р)=ео + е[р+ ...+е'п-2рп-2 (р=—\
rj, g, £ — зависимые переменные; аг-, е'., Ь, г' — вещественные
коэффициенты.
Структурная схема системы (IV.27) показана на рис. IV.3, а.
Заметим, что если подставить значение g из первого
уравнения (IV.27) в последнее, после чего обозначить
e't+-l—an-i-i=eh 1 = 0, ...,п — 2;
о
г'
125
(IV. 28)
то система (IV.27) может быть представлена в виде системы
уравнений (11.13), где в данном случае ап = 0. Следовательно,,
система (IV.27), как и система (11.13), является частным
случаем системы (II.1), поэтому для нее справедливы все выводы
о существовании вскрывающих сечений в пространстве
параметров, сделанные в гл. II.
Введем в закон управления корректирующие нелинейности,
для чего включим в схему следующие нелинейные элементы
^^ i г^ттп _ гтп |
] \
i
/ \J{ Ч \ Р 1
i
1 «/ 1 ..-
А (п) L
й\Р) Г
1—ъ—1
П 2>7(~р) Г"
, 7
7
я;
\ г^У
На 2 I
НЭ3
\
—ч
/,
С?
1
/7(7;
/ДО
f
—J Л '»*
1
Н)
1
Di(P)
V
'(
5)
Рис. IV.3. Структурная схема:
а — исходной системы; б — системы с нелинейной коррекцией
(рис. IV.3, б): нелинейный элемент НЭ\ — в цепь местной
обратной связи, элемент НЭ2 — в цепь главной обратной связи,
элемент НЭ3 — для преобразования управляющего сигнала в целом.»
Тогда уравнения системы примут вид
°=f,№, S(/>)T|]-fi(<*, rt)l
где /i, /2, /з — пока что неизвестные нелинейные функции.
Воспользуемся каноническим преобразованием
г л—1
ti= —Ь
(IV. 29)
ъ
"-1 лн
'л—*5Ь=?
JmU D,
Р
(h)
лп-\
1 =
п — 2;
(IV. 30)
126
где
D[(K) =
dD1(p)
dp
P=l:
Преобразование (IV.30) является частным случаем
преобразования (ИЛ); оно будет неособым, если 6^0 и корни %i (i =
= 1, ..., п— 1) уравнения D\(p) = 0 простые и отличны от нуля..
Это преобразование приводит систему (IV.27) к виду
п
xn = f(a)\ a= 2?Л,
п— 1;
г=1
где
yt=—b-
А(%д
*=1,
1;
Уп--
(IV.31>
-г', (IV.32)
VMM "»-!
Систему (IV.29) преобразование (IV.30) приводит к виду
xK = KxK + f(o), *=1, ..., п — 1; xn = f(o)\
\f*[a> 2ъх*+УпХп ~ма>г'Хп)
(IV.Щ
где
уп = —I
ип-\
а уг (i = 1,..., я—1) —те же, что и в уравнениях (IV.31).
Рассмотрим в д-мерном пространстве Сп параметров е'. (I =■
= 0, ..., п — 2), гг вскрывающее сечение, определяемое
уравнениями
^о + ^/ + а?+...+^-2ЯГ2-б,Л, *-1, ...,л-1, (IV.34)
где biS — символ Кронекера; As — вещественная произвольная-
постоянная (%s — вещественно). Согласно § 3 гл. II сечение,,
описываемое уравнениями (IV.34), обозначим G^n)' .
Определитель матрицы /?, составленной из коэффициентов при
неизвестных системы (IV.34), будет определителем Вандермонда
detS= П (*/-*/)>
1</<*<л —1
который отличен от нуля, если все Xt (i = 1, ...„я— 1) различны.
Поэтому, система (IV.34), совместна и при А& Ф- 0 определяет
т
отличные от нуля решения. Согласно уравнениям (IV.34)
сечение G(2s>/2) в пространстве Сп есть плоскость размерности 2,
проходящая через ось г'. Если уравнение D\(p) = 0 имеет 5
вещественных корней, то, выбирая в уравнениях (IV.34)
по-разному A,s, в пространстве Сп построим 5 различных сечений G£-n\
Для системы (IV.27) в условиях сечения G^n) переменная а
согласно выражениям (IV.31), (IV.32), (IV.34) определяется
из системы
*s = Vs + f Уа); xn=f(o); о = ysxs + упх1Ъ (I V. 35)
а после определения o(t) остальные переменные Xi согласно
формулам (IV.31) находим из линейных неоднородных
уравнений 1-го порядка. Для системы (IV.29) в условиях сечения
<j(s,/z) согласно выражениям (IV.32) — (IV. 34) переменная о
определяется из системы
*s = Vs+ /(<*); xn = f(o) I (iv.36)
<* = 1з1!Л<!, VsXs + ynXn)—fi(0, r'xn)], J
а переменные x\ (i=£s), как и ранее,— из неоднородных
уравнений 1-го порядка. Динамическое поведение системы (IV.29)
в условиях сечения G^n) при Re/w < 0 (i ф s, i ф п)
определяется, как установлено в § 1, поведением системы (IV.36),
поэтому осуществим выбор характеристик корректирующих нели-
нейностей при исследовании этой последней системы. Таким
путем задача синтеза корректирующих нелинейностей для системы
л-го порядка сводится в основном к аналогичной задаче для
системы второго порядка, которая может быть эффективно
решена с помощью фазовой плоскости.
Подчеркнем, что уравнения (IV.34) определяют вскрывающее
сечение G£,/z) и для системы (IV.27), и для системы (IV.29),
при одинаковых значениях коэффициентов обеих систем. Это
обстоятельство позволяет, сопоставляя результаты рассмотрения
обеих систем, непосредственно наблюдать эффект введения
нелинейностей в закон управления.
Рассмотрим подробно конкретный пример, поясняющий
изложенную методику.
Пример IV.2. Пусть уравнения нелинейной автоматической системы
третьего порядка имеют вид
T!+3ri + 2T]=-g; 6 = /,(v); v = /a(a);
a = etf\ + e[x\ — r'b.
Предположим, что нелинейная характеристика сервомотора f\{v) имеет
мертвую зону (рис. IV.4, а), а нелинейная характеристика усилителя f2(o)
задана в виде гистерезисной петли элемента с сухим трением или люфтом
128
(IV. 37)
(рис. IV.4, б). Характеристика, показанная на рис. IV.4, а, описывается
уравнениями
(IV. 38)
5 = &i (v—Cxk2 sign v) при | v | > C±k2; I
| = 0 при |v|<CA, I
а характеристика /2(0*), изображенная на рис. IV.4, б, описывается уравнениями
v = k2o—k2xss\gnv при v Ф 0; I
= const при | V — k2o | < k2x£. J
(IV. 39)
(IV.40)
Рис. IV.4. Нелинейные характеристики системы
(IV.37)
Объединяя нелинейности fi(v) и /2(0") в одну, им эквивалентную, получим
Ё = ЫЫа)) = /(а).
При учете последнего выражения систему (IV.37) можно записать так:
^■ + 3n + 2n=-E; t = f{o);
т. е. она будет представлять собой частный случай системы (IV.27). С помощью
преобразования (IV.30) система (IV.40) приводится к каноническому виду
(IV.31). Чтобы написать каноническую систему, определим корни уравнения
5i(p) = p2 + 3p + 2 = 0.
Найдем
Я,1=—2; Ь2=—1. (IV.41)
Для определения выражений коэффициентов у* вычислим D{ (Яг) (i = 1, 2).
При э^гом получим
~, dDUp)
Dl(p)= А = 2р + 3; D1(^1)=-l;
dp
(IV.42)
Di(M=L
Согласно найденным значениям (IV.41), (IV.42) и с учетом равенств
b = I, cin-i = 2, п = 3 выражения (IV.32) примут вид
1 , , 1
Vi=—7~eo + *P V2 = ^o — е\> Уз=—Гео-
9 Заказ 33
(IV. 43)
129
Каноническая система (IV.31) с учетом равенств (IV.41) при п = 3 будет
иметь вид
x1=—2x1 + f(o); x2=—x2 + f(o);
3
/=i
(IV. 44)
Для сокращения выкладок допустим, что коэффициенты уравнений
нелинейных характеристик fi(v) и /г (а) имеют значения
fc1 = 2; /г2 = 5; Cj=0,2; *8 = 0,1. (IV.45)
При этом условии система (IV.37) среди своих коэффициентов будет иметь
только три заданных коэффициента е0, е{ и г\ которые будем считать
параметрами. Допустим, что эти параметры положительны.
Построим в пространстве параметров е^, е[ , г' сечения 2-го рода G(?*^
при 5 = 1 и 5 = 2. Уравнения этих сечений имеют вид (IV.34)..Система (IV.34)
эквивалентна однородной системе, получаемой из системы (IV.34)
отбрасыванием уравнения, содержащего А8. Поэтому при s = 2, т. е. для сечения Gif' '
систему (IV.34) с учетом (IV.41) можно записать в виде одного уравнения
е'0—2е[ = 0. (IV.46)
При 5 = 1, т. е. для сечения G$ , аналогично получим уравнение
е'0 — е{ = 0. (IV. 47)
Уравнения (IV.46), (IV.47) определяют сечения G(2 \ G^1' * в
пространстве е0, ех, г' в виде плоскостей,проходящих через ось г'. Ввиду сделанного
предположения о том, что параметры е0, ех , т' положительны, рассмотрим
названные сечения лишь в первом квадранте пространства этих параметров.
В условиях рассматриваемых сечений согласно уравнениям (IV.46), (IV.47)
один из параметров выражается через другой, так что исходная система
зависит уже не от трех, а только от двух независимых параметров.
С учетом выражений (IV.43) и (IV.46) для сечения G^2'3^ каноническая
система (IV.44) принимает вид
(IV. 48)
хх = — 2хг + f (а); х2 = — х2 + f (а);
*з = / (<*); o = e[x2 — (el+r')x3.
Аналогично, для сечения G(2*' * канонические уравнения (IV.44) можно
записать в виде
*i = — 2*i + / (а); х2 = — х2 + f (а);
x9 = f(o); a = — e'\xi--(— e'\+r' )*s-
(IV. 49)
Три уравнения системы (IV.48) — уравнения для х2, xz и о — образуют
независимую систему второго порядка, из которой можно определить o(t).
Характер изменения во времени переменной о передается и Х\ согласно первому
уравнению (IV.48), имеющему при %\ < О затухающую с течением времени соб-
130
ственную составляющую своего общего решения. Результат исследования
канонической системы (IV.48) при выполнении условия (IV.46) с помощью
неособого преобразования вида (IV.30) перенесем на исходную систему (IV.37).
Таким образом, для значений параметров, принадлежащих сечению G22,3)
исследование исходной системы третьего порядка (IV.37) в основном сводится
к исследованию системы второго порядка; последняя в данном случае
эквивалентна системе вида (III.1), (III.2) при g2 = 0.
Для значений параметров, принадлежащих сечению G*21,3\ исследование
системы (IV.37) также в основном сводится к исследованию системы второго
порядка указанного вида, но уже с другими значениями коэффициентов. Для
сечения G2 ' ' система второго порядка, определяющая решение o(t), в
рассматриваемом случае составляется из первого, третьего и четвертого уравнений
(IV.49).
£0 60
а) 5)
Рис. IV.5. Области устойчивости в целом и автоколебаний:
б
^(1.3)
а — в сечении G% \
^,(2,3)
в сечении G2
Но указанная система второго порядка с интересующей нас нелинейностью
при буквенных значениях всех ее коэффициентов рассмотрена в § 5 гл. III
(случай XII), где в пространстве ее параметров определены аналитически
бифуркационные поверхности. Координаты бифуркационной поверхности,
служащей границей между областью устойчивости состояния равновесия в целом
и областью жесткого режима автоколебаний, вычислены также численно в
широких интервалах значений существенных параметров (см. рис. III. 12—
рис. III.15, а также соответствующие таблицы). Поэтому остается лишь
воспользоваться названными результатами, подставив в выражения существенных
параметров новые обозначения и соответствующие численные значения
некоторых коэффициентов, аналогично тому, как это делалось в § 2 данной главы.
Выполнив эту несложную процедуру, получим бифуркационные кривые в плос-
G<2'-3), G<22'3'
пространства е0, е^ , г' системы (IV.37).
костях сечении
Так как в данном случае пространство параметров трехмерно, сечения
G(2'3\< G22,3) с нанесенными на них бифуркационными кривыми можно
построить в аксонометрической проекции. Каждое сечение можно изобразить
также на отдельном чертеже, в координатах г', е0 либо г', е{ (такое
представление будет изображением проекций сечений на координатные плоскости).
Сечения G2 \ G2 '3^ в координатах г', ех с нанесенными на них
границами области устойчивости состояний равновесия в целом изображены на
рис. IV.5, где заштрихованные области соответствуют жесткому режиму
автоколебаний.
9* 131
Для расширения области абсолютной устойчивости системы применим
нелинейную коррекцию. Чтобы подавить в данном случае автоколебания, нужно
изменить ход фазовых траекторий при больших отклонениях [128]. Наиболее
просто это можно достигнуть, подвергнув нелинейному преобразованию весь
управляющий сигнал путем применения элемента с характеристикой типа
насыщения. В таком случае исходные уравнения рассматриваемой системы вместо
записи в виде (IV.37) примут вид
Л+Зт1 + 2т1=-£; £ = Mv); v = /2(a);
o = fs(y)\ y = ^-\re[t\ — r,l.
(IV.50)
Ыз(У)
Корректирующая нелинейность f3(y) описывается уравнениями
о = у при \у\<С2 + х ; }
„ \ (IV.51)
сг = (С2 + хе) sign у при | у | > Со + х&\
и изображена на рис. IV.6. Уравнениям (IV.50)
соответствует структурная схема, показанная на
рис. IV.7. Эта схема представляет собой пример
рассмотренной ранее схемы (см. рис. IV.3, б),
когда из трех указанных выше нелинейных
корректирующих элементов применяется только один ЯЭ3.
Объединяя все нелинейности системы (IV.50)
в одну, получим
Рис. IV.6.
Корректирующая нелинейность
l = fiihlfs(y)} = F{y).
Система (IV.50) при учете выражения (IV.52) принимает вид
rj + Зп + 2т] = — 6; i = F(y); \
(IV. 52)
(IV.53)
Но система (IV.53) отличается от системы (IV.40) только нели-нейной
характеристикой (замена обозначения а на у несущественна).- Поэтому в
пространстве параметров eQ, e{ , г' системы (IV.53) построим точно такие же
сечения 2-го рода G^ ' , G2 ' , как и для системы (IV.37). При построении
этих сечений анализ системы (IV.53) сводится к анализу системы второго
порядка, отличной от рассмотренных выше только нелинейной характеристикой:
вместо характеристики f(a) вида рис. III. 1, в теперь будет характеристика F(y)
вида рис. III.1 а. Эта система эквивалентна системе (III.1), (III.2) при g2 = О,
рассмотренной в § 2 гл. III (см. случай I). Структура пространства параметров
такой системы рассмотрена также в § 6 гл. III. Результаты анализа названной
системы низкого порядка в условиях рассматриваемых сечений 2-го рода G^2' *
G^2 непосредственно переносятся на систему (IV.53), т. е. на исходную
систему (IV.50). Используя табл. III.8 либо соответствующие ей диаграммы,
выбираем численное значение коэффициента С2 уравнений (IV.5F) из условия
расширения области устойчивости в целом системы (IV.53) по сравнению с
системой (IV.37):
С2 = 0,205. (IV.54)
При значениях коэффициентов (IV.45), (IV.54) область устойчивости
состояний равновесия в целом системы (IV.53) в плоскостях сечений G2 ,3) и
G(2 '3) имеет вид, показанный на рис. IV.8. Для сравнения здесь же пунктиром
132
показана старая граница области устойчивости в целом, которая была до
введения корректирующей нелинейности fs(y).
Аналогично решаются вопросы синтеза корректирующих нелинейностей из
условия улучшения качества переходных процессов.
re^WH+H^
if
Pz+3p+Z
е'0 +е'7р
Рис. IV.7. Структурная схема системы с нелинейной
коррекцией
Рис. IV.8. Расширение области устойчивости в целом за счет введения
нелинейной коррекции:
Jl>3) * „(2,3)
а — в сечении G2 ; о — в сечении G£
В заключение сделаем два замечания. Во-первых, если бы все
коэффициенты исходной системы были заданы буквенно, то примененную выше методику
ее рассмотрения, очевидно, можно было бы полностью сохранить. Во-вторых,
если бы порядок исходной системы был задан произвольным числом п, то эта
методика также не усложнилась бы. В последнем случае можно было бы
построить такие же наглядные диаграммы, которые изображены на рис. IV.8.
Используя вскрывающие сечения, можно осуществлять
синтез нелинейных корректирующих устройств для нелинейных
систем высокого порядка аналитически и точными методами, имея
дело с исследованием систем не выше второго порядка, т. е. в
конечном счете применяя результаты, полученные с помощью
фазовой плоскости.
Расчет абсолютной
устойчивости
процессов
и состояний
равновесия
в нелинейных
системах на основе
частотных методов
Одной из основных проблем, возникающих при
исследовании динамики нелинейных
автоматическим систем, является проблема устойчивости.
Строгая теория устойчивости движения динамических
систем, описываемых обыкновенными
дифференциальными уравнениями, была создана выдающимся
русским ученым А. М. Ляпуновым в его работе
«Общая задача об устойчивости движения».
Наибольшее значение для исследования устойчивости
нелинейных систем имеет прямой метод Ляпунова,
основанный на использовании некоторой функции,
называемой функцией Ляпунова.
Теория Ляпунова была впоследствии
существенно развита в работах многих советских и
зарубежных авторов (см. гл. I).
Существует большое число понятий
устойчивости. Известно, например, понятие технической или
практической устойчивости (устойчивости на
конечном интервале времени), устойчивости по Лангран-
жу, гиперустойчивости, эвентуальной устойчивости
и т. д. Однако наиболее плодотворным
применительно к нелинейным системам автоматического уп-
Глава
равления оказалось понятие асимптотической устойчивости по
Ляпуидву, лежащее в основе понятия абсолютной
устойчивости [93].
Понятие абсолютной устойчивости и предложенный метод ее
исследования имели большое значение для развития теории
нелинейных систем на основе второго метода Ляпунова.
Это направление сразу же после опубликования работы [93]
привлекло к себе внимание многих специалистов по теории
автоматического управления в СССР и за рубежом
оригинальностью постановки задачи об устойчивости и методом ее решения.
В 1959 г. румынский ученый В. М. Попов [299—302] показал,
что для исследования абсолютной устойчивости положения
равновесия нелинейных систем могут быть использованы частотные
представления. Доказанный им критерий получил название
критерия Попова. Работы [299—302] имели большее значение и
послужили началом серии работ во многих странах. Р. Калманом
[240] была установлена связь между вторым методом Ляпунова
и критерием Попова. Критерий Попова был обобщен на условно
устойчивые системы и на нелинейные импульсные системы.
Метод также был распространен на системы с неединственным
положением равновесия [43], с запаздыванием [175] и применен для
исследования абсолютной устойчивости процессов в нелинейных
системах [101, 102, 182].
1. Основные понятия и определения
Рассмотрим подробнее понятие устойчивости нелинейных
систем. Допустим, что нелинейную систему, содержащую один
нелинейный элемент с характеристикой
y = F(x) (V.1)
и линейную часть (устойчивую, неустойчивую, нейтральную),
характеризуемую передаточной функцией
W(s) == ^№т^+... + 1) ^ (Ve2)
на которую действует внешнее воздействие f(t), можно
представить в виде, изображенном на рис. V.I.
Для того чтобы в дальнейшем иметь дело с системами,
имеющими устойчивую линейную часть, охватывая одновременно
случаи систем, в которых линейная часть неустойчива и
нейтралка, проделаем некоторое эквивалентное преобразование
(рис. V.2, V.3). Для этого охватим линейную часть системы
жесткой отрицательной обратной связью с коэффициентом обратной
связи г > 0 таким образом, чтобы эквивалентная передаточная
функция
Wn(s)= W(s) (V.3)
nW l + rW(s) v '
соответствовала устойчивой линейной части.
135
Можно показать, что для того, чтобы проведенное
преобразование было эквивалентным, необходимо параллельно нели-
f(t) r\x(t)
y-F(x)
W(s)
jj^e
НЭ
y(t)
Линейная
часть
системы
щ
Рис. V.l. Структурная схема нелинейной системы
UrW(s)
fo(t)
7
UrW(s)\
itf).
T
i
, F(x)
— r г
*o f~^-
*v
i
Г 1
i
J~
\
W(s)
-Ar —
\
г It)
f i
'
Рис. V.2. Пояснение эквивалентного преобразования нелинейной системы
ft Ю
О
x(t)
Fn(xx)
УН)
W„(s)
z(t)
Рис. V.3. Схема нелинейной системы после эквивалентного
преобразования
нейному элементу включить элемент с коэффициентом г > О,
причем так, чтобы
F(x)=Fa(x)+rx, (V.4)
где Fn(x)—нелинейная характеристика преобразованной
системы.
136
Кроме того, надо провести эквивалентное преобразование
действующего на систему воздействия f{t):
Fn(s) =L{Ut)} = F{s) . (V.5)
Если
fn(t)=fn(t)+ft(t),
TO
f°(s)=L{f°(0) = rf^-; (V.6)
Kis)= 1{Ш=Г^-; (V.7)
F0(s)=L{f0(t)}; (V.8)
fH(s)=L{fM(0}, (V.9)
где F(s)=L{f(t)}.
Нелинейная система, структурная схема которой после
эквивалентного преобразования приведена на рис. V.3,
характеризуется следующим уравнением, записанным относительно
изображений по Лапласу:
X(s)=Fn(s)-Wn(s)L{Fn(x, х)}. (V.10)
Уравнению (V.10) соответствует нелинейное интегральное
уравнение, которое может быть легко получено в результате
перехода в уравнении (V.10) от изображений к оригиналам:
х{1)=Ш—§ wn(t-X)Fn(x, x)dK (V. 11)
о
где wn(t) = L-l[Wn(s)} — импульсная характеристика
линейной части системы.
Уравнение (V. 11) полностью характеризует динамические
свойства нелинейной системы, структурная схема которой
приведена на рис. V.1 и V.3.
Действующие на нелинейные системы внешние воздействия
fn(t) можно разделить на следующие две основные группы.
Ограниченное внешнее воздействие /°(0—такое, которое
представляет собой функцию вещественного переменного t,
принимающую определенные значения для всякого t ^ 0, причем
абсолютные значения ее при t ^ О остаются всегда меньше
некоторого конечного положительного числа М °f,
\fn(t)\<M°f.
Отметим, что аналогичным понятием пользовался А. М.
Ляпунов [94].
137
Исчезающее внешнее воздействие f%{t) представляет собой
ограниченную функцию вещественного переменного t, имеющую
определенные значения для всякого t ^ 0 и, кроме того,
оо
\\fHn(t)\dt<MHf, (V.12)
о
hmfHn(t)=0. (V.13)
Предположим, что после проведенного выше эквивалентного
преобразования линейная часть системы, характеризуемая
передаточной функцией Wn(s), устойчива. В этом случае внешнее
воздействие f^(t), являющееся результатом ненулевых
начальных условий, будет удовлетворять условиям (V.12) и (V.13) и,
следовательно, будет исчезающим.
Как было показано выше, динамика преобразованной
системы с одним нелинейным элементом (рис. V.1) будет полностью
описываться следующим нелинейным интегральным уравнением:
t
x(t) = fn(t) +fn(t) - J wn(t-X)Fn(x, x) d-k. (V. 14)
0
Обычно первое требование, которое предъявляется к любой
системе автоматического управления,— это требование
устойчивости при учете действующих на систему воздействий, т. е. в
данном случае — при учете воздействий /°(0 и /*(£)•
Воспользуемся формулировкой понятия устойчивости, аналогичной той,
которая принята Я. 3. Цыпкиным для релейных систем и которая
более удобна для дальнейшего изложения по сравнению с
общепринятой.
Нелинейная система автоматического управления устойчива,
если при любом сколь угодно малом е > 0 существует такое
положительное число г|(е) > 0, что для всех исчезающих внешних
воздействий f"{t), удовлетворяющих условию
sup | f2(f)|<т|,
отклонение
sup | l(t)\ = sup | x(t) —x°(t)\ < 6
при любом / ^ 0, где x°(t) —вынужденное или установившееся
движение 1.
1 Определение понятия вынужденного или установившегося движения в
нелинейных системах высокого порядка является довольно тонким и сложным.
Требуется, строго говоря, доказывать существование вынужденных движений
и их вид, ибо в нелинейных системах высокого порядка они могут быть почти
установившимися (непериодическими), периодическими и почти периодическими
(последние определяются так называемыми функциями по Бору). Поэтому,
говоря далее о вынужденных движениях, будем предполагать сам факт
существования вынужденных движений установленным.
138
Сформулированное выше понятие устойчивости можно
заменить более сильным, если потребовать, чтобы с течением
времени отклонение в нелинейной системе стремилось к нулю:
lim 6(0=0. (V.15)
При этом
НтШ=0. (V.16)
Системы автоматического управления, удовлетворяющие
условиям (V.15) и (V.16), называются асимптотически
устойчивыми. Если
lim£(*) = ±oc,
то системы, удовлетворяющие этому условию, называются
неустойчивыми.
Следует различать асимптотическую устойчивость положения
равновесия и асимптотическую устойчивость процессов и, в
частности, вынужденных движений.
В том случае, когда на нелинейную систему действует
только исчезающее внешнее воздействие f^{t), установившееся
движение x°(t) удовлетворяет условию
x°(t) =MX = const
либо
*°(*)=0.
В этом случае говорят об асимптотической устойчивости
положения равновесия. Заметим, что в том случае, когда
устойчивая нелинейная система имеет нелинейную характеристику с
зоной нечувствительности, в качестве установившегося значения
(положения равновесия) x°(t) = Мх может быть одно из
бесчисленных значений, принадлежащих зоне нечувствительности
(отрезку устойчивости), т. е. система может иметь бесконечное
число положений равновесия.
Сформулированное выше понятие асимптотической
устойчивости положения равновесия и процессов несправедливо для
систем, имеющих нелинейные характеристики с зоной
нечувствительности. Его необходимо определить иначе; в этом случае
следует считать положение равновесия устойчивым, если:
\im\x(t)—x°(f)\ = 0,
t->oo
где x°(t) = Мх— любое значение, принадлежащее зоне
нечувствительности (отрезку устойчивости) (рис. V.4):
— x0<M;c<-f х0.
139
Когда на нелинейную систему действуют исчезающее и
ограниченное внешние воздействия f£(0 и /°(0> следует говорить об
асимптотической устойчивости процессов и, в частности,
вынужденных движений.
В соответствии с данным выше определением это означает,
что если процессы в исследуемой нелинейной системе
асимптотически устойчивы,— вынужденное движение x°(t), вызванное
ограниченным внешним воздействием /°(0> существует и
ограничено и, кроме того, отклонение l(t) от вынужденного движе-
y=F(x)
ния x°(t) с течением времени
Отрезок
устойчивости j
О
Ко
Рис. V.4. Нелинейная
характеристика с зоной нечувствительности
стремится к нулю.
Если условия асимптотической
устойчивости выполняются лишь
при малых отклонениях от
положения равновесия или
вынужденного движения, то в этом
случае говорят, что система
асимптотически устойчива в малом.
Для большинства
практических случаев этого бывает
недостаточно и поэтому важным
является обеспечение
асимптотической устойчивости в некоторой
области, т. е. при достаточно
большом отклонении от положения равновесия (вынужденного
движения). Принято также говорить, что нелинейная система
асимптотически устойчива в целом, если условия
асимптотической устойчивости положения равновесия (процессов)
выполняются при любом исчезающем внешнем воздействии (при
любых начальных условиях).
Заметим, что, обеспечив для линейных систем
асимптотическую устойчивость в малом, мы тем самым обеспечиваем
асимптотическую устойчивость в целом.
Для нелинейных систем может иметь место асимптотическая
устойчивость в малом, но условия асимптотической устойчивости
в большом или в целом могут не выполняться. В этом одна из
особенностей нелинейных систем.
Возможны два пути решения задачи об устойчивости.
Первый путь связан с нахождением решения интегрального
(дифференциального) уравнения, характеризующего динамику
исследуемой системы. Однако этот путь является практически
неприемлемым, так как решить интегральные уравнения для
нелинейных систем можно лишь в некоторых частных случаях.
Трудности, связанные с невозможностью получить решения
в большинстве практических случаев для систем выше второго
порядка, привели к разработке методов нахождения
достаточно
ных условий устойчивости нелинейных систем без нахождения
решения уравнений.
Разработке подобного рода методов также способствовал
тот факт, что часто бывает трудно говорить о точном
определении нелинейной характеристики, поскольку в процессе самого
действия системы автоматического управления она может
подвергнуться заметным искажениям, например, в зависимости от
действия приложенной к регулирующему органу нагрузки,
колебания уровня энергии, подводимой к исполнительному органу от
внешнего источника, и т. п.
В этих случаях, довольно часто встречающихся на практике,
можно задать лишь главные, характерные свойства нелинейной
характеристики и найти достаточные условия асимптотической
устойчивости в большом или в целом для систем
автоматического управления с такими характеристиками.
А. М. Летовым [89] для этого случая введено понятие
функций (нелинейных характеристик) класса А. Рассматриваемый
класс функций охватывает характеристики многих
исполнительных органов, используемых в современной технике.
Нелинейные характеристики, описываемые функциями,
принадлежащими классу А, обладают следующими свойствами:
xF(x) > 0 при х ^0,
F(0)=0,
F(x) —непрерывная функция,
Г F(x)dx= ± оо.
о
Как следует из приведенных выше свойств, график функции
может иметь достаточно произвольную форму. Нелинейная
характеристика F(x) задается графически или аналитически.
Используя такой подход, можно выделить класс таких нелинейных
функций F(x), когда характеристика нелинейного элемента
лежит внутри сектора, ограниченного прямыми гх и kx (рис. V.5),
т. е.
X
Если функция F(x) лежит внутри сектора, ограниченного
прямыми гх и kx, и выполняются условия принадлежности этой
функции к классу А, то асимптотическую устойчивость в целом
системы с функцией F(x) будем называть абсолютной
устойчивостью. В частности, могут быть случаи, когда г = 0 (рис. V.6),
либо г = 0 и k = оо (рис. V.7).
141
(V.17)
g=F(x) Axy
Рис. V.5. Нелинейная характеристика,
лежащая внутри сектора,
ограниченного прямыми у = kx, у = гх
Рис. V.6. Нелинейная характеристика,
расположенная внутри сектора,
ограниченного прямой у = kx и осью
абсцисс
y=F(x)
Рис. V.7. Нелинейная
характеристика, расположенная в
первом и третьем квадрантах
Во всем дальнейшем изложении
будут рассматриваться, в основном,
достаточные частотные критерии
абсолютной устойчивости положения
равновесия и процессов в
нелинейных системах автоматического
управления, в основе которых лежат
работы А. И. Лурье и В. Н.
Постникова [93], В. М. Попова [14S,
299—302] и др.
Основное внимание будет
уделено практическим методам анализа
абсолютной устойчивости
положения равновесия и процессов в
нелинейных системах.
2. Частотный критерий абсолютной устойчивости
состояния равновесия в нелинейных системах
(критерий В. М. Попова)
Рассмотрим нелинейную систему автоматического
управления, структурная схема которой, полученная в результате
эквивалентного преобразования, приведена на рис. V.3.
Как уже отмечалось выше, линейная часть преобразованной
системы должна быть устойчива, тогда как линейная часть
исходной системы (при г = 0) с передаточной функцией W(s)
может быть неустойчивой, нейтральной либо условно устойчи-
142
вой. Получение устойчивой линейной части системы достигается
за счет введения отрицательной обратной связи с
коэффициентом г > О (см. рис. V.3).
В связи с тем, что нас интересует абсолютная устойчивость
состояния равновесия, полагаем, что f°n{t) = 0, /*(0
удовлетворяет условиям (V.12) и (V.13), а линейный элемент
характеризуется непрерывной функцией Fn(x), удовлетворяющей
условиям
^я(0)=0; >
Fn(x)xy>0 при х т^О;
§ Fn(x)dx=±oe; \ (V.18)
о
X
Передаточная функция Wn(s) и нелинейная характеристика
Fn(x) преобразованной системы связаны с W(s) и F(x)
следующими соотношениями:
пУ } l+rW(s)
Fn = F(x)—rx.
Критерий абсолютной устойчивости В. М. Попова для
преобразованной системы, приведенной на рис. V.3, формулируется
следующим образом.
Для того чтобы состояние равновесия нелинейной системы
автоматического управления (см. рис. V.3), состоящей из
нелинейного элемента с характеристикой Fn(x), удовлетворяющей
условиям (V.18), и устойчивой линейной части с передаточной
функцией ! Wn(s), было абсолютно устойчивым, достаточно,
чтобы при k > 0 существовало такое действительное число q
(положительное либо отрицательное), при котором для всех со > 0
выполняется неравенство
Re(l +m)Wn(j<o) + -i- > 0, (V • 19)
к
где
№„(/со) = [Wn(s)U,a = £/я(ю) +/V»
— частотная характеристика преобразованной линейной части
системы.
1 Линейная часть исходной системы может быть при этом условно
устойчивой, нейтральной либо неустойчивой.
143
В случае г = О при устойчивой или нейтральной линейной
части исходной системы и непрерывной нелинейной
характеристике F (х), удовлетворяющей условиям, аналогичным (V.18),
неравенство (V.19) приобретает вид
Re(l +/<7<o)№(/G>) + -f > °> (V-2°)
к
где W(jcx)) —частотная характеристика исходной линейной
части системы.
3. Частотный критерий абсолютной устойчивости процессов
в нелинейных системах
Рассмотрим нелинейную систему автоматического
управления, структурная схема которой, полученная в результате
эквивалентного преобразования, приведена на рис. V.8.
Линейная часть
преобразованной системы,
характеризуемая
передаточной функцией Wn(s),
должна быть устойчивой,
тогда как линейная часть
исходной нелинейной
системы может быть
неустойчивой, нейтральной,
либо условно устойчивой.
На входе рассматриваемой системы действует ограниченное
внешнее воздействие /°(/), удовлетворяющее условиям (V.12)
и (V.13), а нелинейный элемент описывается непрерывной
функцией Fn(x), удовлетворяющей условиям (V.18).
Динамика рассматриваемой нелинейной системы полностью
характеризуется нелинейным интегральным уравнением
t
fn(t)^(t)
\
\
F„
y(t)
^-
w„(s)
z(t) _
1
[
Рис. V.8. Структурная схема нелинейной
системы
*(') =Ш - \ wn(t-X)Fn(x, x)d\
(V.21)
где wn(t) = L-l{Wn(s)} —импульсная характеристика преобра
зованной устойчивой линейной части системы;
W(s) .
w \ + rW(s)
Fn(x) = F{x)—rx;
t
U (0 = /° (f) - г j w (t - X) fl (K) dX;
(V.22)
(V.23)
(V.24)
f°n(t) —ограниченное внешнее воздействие.
144
Следуя приведенному выше определению абсолютной
устойчивости, надо доказать, что вынужденное движение x°(t),
удовлетворяющее нелинейному интегральному уравнению
x°(t) =fn(t) -]wn{t-X)Fn[x*(k)]dK (V.25)
существует и ограничено. Кроме того, отклонение от процесса
l{t), вызванное любым исчезающим внешним воздействием
/*(0 (начальными условиями), приложенным в момент t = О,
будет асимптотически устойчивым.
Нетрудно получить нелинейное интегральное уравнение,
характеризующее изменение отклонения £>(t).
Вследствие действия исчезающего внешнего воздействия
fHn(t) в момент / = О
t
x{t) +l(t) = fn(t) +K(t)-\wn(t-X)Fn{x{X) +5(Я)}<й.
6
(V.26)
Вычитая уравнение (V.26) из уравнения (V.25), получим
искомое нелинейное интегральное уравнение для отклонения
1(f) =-fn{t)-\wn{t-K)4[l{K); X]dK (V.27)
6
чту, м=ч«1т+ш-Рп{х) (v.28)
где
т
%[№$
^-
Wn(s)
\
\
— нестационарная нелинейная характеристика.
Нетрудно получить из выражения (V.28) тождество Ч^О, t] ==
= 0. Структурная схема нелинейной системы, динамика которой
описывается интеграль- н. .
ным уравнением (V.27), *п '
приведена на рис. V.9.
Она отличается от
структурной схемы,
приведенной 'гна рис. V.8, тем, что
нелинейный элемент со
стационарной
характеристикой заменен
нелинейным элементом с нестационарной характеристикой Wn(x, t).
Здесь не будем приводить доказательство критерия
абсолютной устойчивости процессов, а дадим лишь его
формулировку. Доказательство имеется в работах [182, 101].
Ю Заказ 33 145
Рис. V.9. Структурная схема нелинейной
системы с нестационарной характеристикой
Достаточный частотный критерий абсолютной устойчивости
процессов в нелинейной системе, структурная схема которой
приведена на рис. V.9, формулируется следующим образом.
Для того чтобы процессы
4*[i№l
Рис. V.10. Нестационарная нелинейная
характеристика
в нелинейной системе (рис.
V.9) были абсолютно
устойчивыми, достаточно, чтобы
при заданном г > 0
преобразованная линейная часть,
характеризуемая
передаточной функцией Wn(s), была
устойчивой, а частотная ха-
3F
Рис. V.11. Производная
нелинейной характеристики, лежащая
внутри полосы (г, k)
рактеристика преобразованной линейной части системы №(/ю)
удовлетворяла для всех со ^ 0 условию
1
Re№„(/co)
>0:
(V.29)
при этом нестационарная линейная характеристика W[l(t)\ t]
для любого t должна удовлетворять условию
6(0
(V.30)
т. е. принадлежать сектору (г, k) (рис. V.10).
Если вместо ^[^(t); t] в неравенство (V.30) подставить
соответствующее выражение для F(x), то получим
дх
(V.31)
Таким образом, для обеспечения достаточного условия
абсолютной устойчивости процессов необходимо выполнение
неравенства (V.29), а производная нелинейной характеристики ——
дх
146
должна принадлежать полосе (г, k) (рис. V.11). Кроме того,
характеристика F(x) должна удовлетворять условиям
F(x) х > 0 при х =f= 0;
F{x)dx=~- ± ос,
о
(V.32)
В заключение отметим, что условия абсолютной
устойчивости процессов в нелинейных непрерывных системах более жестки
по сравнению с условиями абсолютной устойчивости состояния
равновесия, так как они накладывают дополнительные
ограничения на производную от нелинейной функции и соответствуют
частному случаю условия В. М. Попова при q = 0.
4. Различные формулировки критерия абсолютной
устойчивости процессов
В случае устойчивой линейной части исходной системы
можно положить г = 0, тогда вместо неравенства (V.29) получим
ReW7(/o))+— >0, (V.33)
k
или
Refe№(/co) + l>0.
Геометрически последнее условие означает, что на плоскости
амплитудно-фазовой характеристики разомкнутой
линеаризованной системы, получаемой из исходной нелинейной системы
заменой нелинейного элемента линейным усилителем с
коэффициентом усиления k, частотная характеристика kW(jco) для всех
со ^ 0 должна быть расположена правее прямой kU(co) = —1
(рис. V.12).
Для формулировки частотного критерия абсолютной
устойчивости процессов при гфО преобразуем неравенство (V.29),
введя параметр А = k/r > 0:
Re_kW(M_ +_i_r>'0, (v.34)
где
kW (/со) = W (со) + jkV (со). (V ,Щ
Найдем в плоскости kU, kV геометрическое место
точеку"соответствующее А = const,- получаемое при замене в выражении
(V.34) знака неравенства на равенство. Подставляя
соотношение (V.35) в левую часть выражения (V.34)., находя веществен-
10* 147
ную часть и приравнивая ее нулю, получим уравнение искомого
геометрического места
kU{a)+±{A + l)
2+kV((u) = —(A— l)2. (V.36)
4
Нетрудно показать, что последнее выражение представляет
собой уравнение семейства окружностей, проходящих через
точку— 1; /О, имеющих радиус R = —— и расположенных
левее прямой kU(co) = —1 (рис. V.13). Каждой окружности будет
Пл. kW(joj)
Рис. V.12. Частотная характеристика
линеаризованной системы
Рис. V.13. К пояснению критерия
абсолютной устойчивости процессов
соответствовать свое значение Л = —, которое будет всегда
больше или равно единице.
Неравенство (V.29) будет выполняться вне Л-окружностей,
что легко установить, полагая kU = kV = 0 при k > 0, г > 0.
Условие абсолютной устойчивости процессов будет выполнено при
г Ф 0, если частотная характеристика kW(jco) находится вне
соответствующей Л-окружности (рис. V.13).
Таким образом, каждой окружности соответствует свое
значение Л, которое может меняться от единицы до бесконечности.
Если Л = 1, то Л-окружность переходит в окружность с
нулевым радиусом, с центром в точке —1; /0, и достаточное условие
абсолютной устойчивости нелинейной системы становится
необходимым и достаточным условием асимптотической устойчивости
некоторой линейной системы (при k = г). При Л = оо
окружность переходит в окружность бесконечного радиуса; из
выражения (V.29), после раскрытия неопределенности, получим
условие (V.34).
Дадим формулировку частотного критерия абсолютной
устойчивости процессов в нелинейных системах для того случая,
когда г Ф 0. Процессы в системе автоматического управления
148
с одним нелинейным элементом будут абсолютно устойчивы
тогда, когда производная от характеристики нелинейного эле-
dF{x) . ,ч
мента—-—принадлежит полосе (г, я), а частотная
характерная
стика разомкнутой системы kW'(/со), удовлетворяя частотному
критерию Найквиста, не пересекает соответствующей Л-окруж-
ности, где А = k/r.
Очевидно, что при выполнении частотного критерия
абсолютной устойчивости процессов будут устойчивыми не только рас-
Пл kW(ju)
Рис. V.14. Частотная
характеристика устойчивой линейной части
нелинейной системы, в которой
процессы неустойчивы
Пл. kW(ju)
OJ^oo Щъ/j
Рис. V.15. Частотная
характеристика нейтральной линейной
части нелинейной системы, в
которой процессы неустойчивы
сматриваемые процессы, но также и положения равновесия
системы.
В последнее время в работе [198] был обобщен
сформулированный выше критерий путем вывода достаточных условий, при
выполнении которых процессы в рассматриваемой нелинейной
системе будут неустойчивы.
Этот критерий может быть сформулирован так. Процессы в
нелинейной системе (рис. V.3) будут неустойчивы, если при
заданном г > О частотная характеристика разомкнутой системы
kW(j(u) охватывает соответствующую Л-окружность, где Л =
= k/r. При этом производная от характеристики нелинейного
элемента должна принадлежать полосе (г, к).
На рис. V.14 и V.15 приведены частотные характеристики
разомкнутой системы, соответствующие случаям, когда
процессы в замкнутой нелинейной системе неустойчивы.
Нетрудно также сформулировать частотный критерий
абсолютной устойчивости процессов в нелинейных системах на языке
логарифмических частотных характеристик.
Семейство Л-окружностей (рис. V.13) отображается на
плоскость логарифмической частотной характеристики разомкнутой
линеаризованной системы с декартовой системой координат
149
LM,d5\
L(co) = Q[<p(©)], ф(со) [где L(co) = 20 \g\kW(ju) |
—логарифмическая амплитудно-частотная характеристика,
ф(со)—логарифмическая фазово-частотная
характеристика] в граничные
кривые [101] (рис. V.16), каждой из
которых соответствует свое зна-
k
чение А ■■= — > 0. В этом случае
г
достаточные условия абсолютной
устойчивости процессов можно
сформулировать следующим
образом. Процессы в системе
автоматического управления с одним
нелинейным элементом будут
абсолютно устойчивы, когда
производная от характеристики нели-
dF(x)
-90 Градусы нейного элемента—— принадле-
-Z70
дх
Рис. V.16. Семейство граничных жит полосе (г, k), а логарифмиче-
кривых на плоскости L, ср ская частотная характеристика
разомкнутой системы £(со) —
= Q[<p(<j))], удовлетворяя частотному критерию Найквиста, не
пересекает соответствующей граничной Л-кривой.
Рис. V.17. Вид частотной характеристики
L = Q[(p] нелинейной системы, в которой
процессы неустойчивы
Рис. V.18. К определению пара-
k
метра А = —
На рис. V.17 изображена частотная характеристика
разомкнутой системы для случая, когда замкнутая нелинейная система
будет неустойчива.
Отметим, что граничные Л-кривые, изображенные на
рис. V.16 и V.17, совпадают с так называемыми номограммами
150
Никольса, которые используются для определения вещественной
частотной характеристики замкнутой линейной системы по
логарифмической частотной характеристике разомкнутой системы.
В этом случае каждой номограмме Никольса соответствует
свое максимальное значение вещественной частотной
характеристики Вт линеаризованной системы.
Нетрудно показать, что значения вещественных частотных
характеристик Вт связаны с соответствующими значениями
А = k/r следующим соотношением (рис. V.18):
Та часть номограммы Никольса, которая соответствует
граничным кривым, изображенным на рис. V.16, соответствует
положительным значениям Вт в диапазоне от единицы до
бесконечности. При Вт, равном бесконечности, номограмма Никольса
вырождается в точку с координатами 0, —я.
Таким образом, по максимуму вещественной частотной
характеристики замкнутой линеаризованной системы, получаемой
в результате замены нелинейной характеристики линейной с
коэффициентом усиления k, можно судить об абсолютной
устойчивости процессов в нелинейной системе автоматического
управления, т. е., зная Sm, по кривой А = А(Вт) (рис. V.18) легко
определить соответствующее значение А = k/r.
Необходимые для суждения об абсолютной устойчивости
процессов свойства можно также легко определить из кривой
D-разбиения [103] по коэффициенту усиления разомкнутой
линеаризованной системы k = kkA4. Сформулируем некоторые из
таких свойств, которые могут оказаться полезными, если
построена кривая £)-разбиения по коэффициенту усиления
линеаризованной системы k = kk^.
Свойство I. Процессы в нелинейной системе автоматического
управления будут абсолютно устойчивы при расположении
в полосе (г, k), если окружность радиуса Д =_1_с центром
дх 2
на положительной части действительной оси, проходящая через
начало координат плоскости кривой D-разбиения по
коэффициенту усиления, расположена в области устойчивости и нигде
не пересекается с названной кривой £)-разбиения (рис. V.19).
Известно, что значение б(о)г) = , но так как в данном
ab
случае ас < ab, то 5(сог-) < 1, что и доказывает свойство I.
Свойство II. Максимальное (предельное) значение
коэффициента knv полосы (0, knp), при котором будут выполняться
достаточные условия абсолютной устойчивости процессов в
нелинейной системе (рис. V.20), может быть определено из условия
151
касания окружности радиуса R = —^-(с центром на
положительной части действительности оси) и кривой D-разбиения по
коэффициенту усиления разомкнутой системы. Это предельное
значение k = knp равно 2R, где R — радиус окружности.
I У «7/77 Л
\Ь ш=ш1
Рис. V.19. К определению устойчивости нелинейной
системы по кривой D-разбиения
Свойство III. Значения г и k полосы (г, k), где процессы в
нелинейной системе автоматического управления будут
абсолютно устойчивы, могут быть определены, если провести окружность
Ъ
\jJmk _ радиуса R =— с центром
/1л./с 2
А ,* на положительной части
действительной оси (рис. V.20)
и определить величину
максимума вещественной
частотной характеристики
замкнутой линеаризованной
системы Вт.
По максимуму
вещественной частотной
характеристики Вт, легко
определяемому из кривой /)-разбиения по коэффициенту усиления,
можно определить значения
и=шт
Рис. V.20. К определению устойчивости
по кривой £)-разбиения
л=^=-
_1
1-1 Вт I
+ 1
где k = оа.
152
А '
5. Анализ абсолютной устойчивости процессов
Под задачей анализа абсолютной устойчивости процессов в
нелинейных системах будем понимать возможность
установления факта выполнения частотного критерия абсолютной
устойчивости процессов при заданной структуре и параметрах
исследуемой системы, определение значений k и г, а в тех случаях,
когда это необходимо, построение границы области абсолютной
устойчивости k = k (r), где k = kkA4.
Таким образом, задача анализа абсолютной устойчивости
процессов состоит в проверке выполнения частотного критерия
при заданной структуре и параметрах системы.
Рис. V.21. К определению устойчивости по кривой
D-разбиения
Если известна частотная характеристика линейной части
системы №(/со), то нетрудно определить значения k и г, т. е.
ширину полосы (У, k), которой должна принадлежать производная
от характеристики нелинейного элемента. Для этой цели удобно
использовать сетку Л— окружностей (см. рис. V.13). Задаваясь
значениями k и изображая на этой сетке частотную
характеристику разомкнутой линеаризованной системы &W(/co), из
условия касания kW(j®) соответствующей Л-окружности
определяем параметр А = к/г. Зная значения k и А = k/r, нетрудно
определить соответствующее значение г.
Таким образом, если это необходимо, можно получить и
зависимость k = k(r).
Для нахождения соответствующих значений k и г или
определения зависимости k = k(r) в случае использования
логарифмических частотных характеристик вместо семейства Л-ок-
ружностей необходимо иметь их отображение (семейство
граничных кривых) в декартовой логарифмической системе
координат на плоскости L(co) = 20lg\kW(j(o) | и ср(со) (рис. V.16).
153
В этом случае для нахождения зависимости k = k(r)
необходимо:
1) построить логарифмические амплитудно-и фазо-частотные
характеристики линейной части системы для ~k = 1 = kkw, где
kw — коэффициент усиления линейной части системы;
2) перенести их на плоскость L, ф и определить индексы
Л-кривых, касательных к логарифмическим частотным
характеристикам при разных значениях k\
3) зная__Л, найти значения г, соответствующие различным
значениям k.
В тех случаях, когда имеется кривая D-разбиения по
коэффициенту усиления разомкнутой линеаризованной системы Ъ,
можно воспользоваться сформулированными выше свойствами
для определения зависимости k = k(r) непосредственно по
кривой D-разбиения.
6. Синтез корректирующих устройств нелинейных систем,
обеспечивающих абсолютную устойчивость процессов
В ряде случаев может оказаться, что при заданных
параметрах системы и требуемом значении коэффициента усиления k
условия абсолютной устойчивости процессов не выполняются.
Тогда логарифмическая частотная характеристика L(co) =
= Q[cp(co)] может пересекаться с соответствующей граничной
Л-кривой (рис. V.23).
В этом случае, естественно, возникает задача —
синтезировать корректирующее устройство, при наличии которого условия
абсолютной устойчивости выполняются.
Для этого можно использовать различные типы линейных
корректирующих устройств. Рассмотрим методику синтеза на
примере последовательного корректирующего устройства, но
перед этим покажем, как найти желаемую логарифмическую
частотную характеристику линейной части системы, при наличии
которой выполняется достаточный частотный критерий
абсолютной устойчивости процессов.
Желаемая логарифмическая частотная характеристика. Как
уже было отмечено, в том случае, когда частотный критерий
абсолютной устойчивости процессов не выполняется,
логарифмическая частотная характеристика линейной части системы,
пересекается с соответствующими граничными кривыми (рис. V.23)
в точкахо*^, cos*» ю*^, coL^, • • •> ®*Аг ^л.,... Здесь индексы у
со* указывают значения индексов соответствующих граничных
Л-кривых, с которыми пересекается частотная характеристика.
В связи с тем, что в рассматриваемом случае
С02оо ~ <U2At ^ . . . ~ С02Л.,
154
Рис. V.22. Определение предельного значения
коэффициента knp
Рис. V.23. Пояснение основной идеи синтеза
корректирующих устройств в нелинейных системах
155
в дальнейшем у со*2 писать индексы граничных кривых не будем.
Из рис. V.23 следует: если ввести в систему корректирующее
устройство, деформирующее частотную характеристику линейной
части системы, то достаточный частотный критерий абсолютной
устойчивости процессов будет выполняться.
Назовем идеальной желаемой логарифмической частотной
характеристикой, при наличии которой выполняются
достаточные условия абсолютной устойчивости процессов при А = Aiy
логарифмическую
характеристику, заштрихованную на рис. V.24r
и будем ее в дальнейшем
обозначать Ьжи((0) = Q[q)acu(GE>)].
LMU(u)) = L(w)
\Цы),д5
Рис. V.24. К синтезу последователь- Рис. V.25. К синтезу последовательно-
ного корректирующего устройства го корректирующего устройства
Задавшись значениями ср в диапазоне сом/ —со2, можно на
плоскости логарифмической амплитудно-частотной
характеристики линейной части системы изобразить характеристику
^жи(со), которая на рис. V.24 заштрихована.
В этом случае
Lm (со) ф L (со); уЖ1Х (со) = Ф (со).
Далее можно задаваться значениями L в том же диапазоне
со*л. —cog и на плоскостях L(cd) и ф(со) получить
характеристики 1жи(со) и фжи(со). Однако нетрудно видеть (рис. V.25), что в
этом случае
Ь*»Нв £(<*>); срлт(со)=£ Ф(со).
156
Таким образом, возможен некоторый произвол при
получении желаемых логарифмических частотных характеристик
Ьжи(со) и (ржи(со). Как будет видно из дальнейшего, удобнее
пользоваться первым способом, при котором фЖи(со) = ср(со)
(см. рис. V.24).
Синтез последовательных корректирующих устройств.
Предположим, что мы хотим обеспечить выполнение достаточного
частотного критерия абсолютной устойчивости процессов при
WM(s) = WK(s)W(s)
I 1
*Л
т
F(x)
1
—-т-
1
1
L
W(s)
■^
WK(s)
*
1 ^ '
1
1
J \
W
'
Рис. V.26. Структурная схема нелинейной системы
с последовательным линейным корректирующим
устройством
ЧОО Ш300 Ш100 Ь)2 (jj^oo ^2 Ь)
Рис. V.27. Логарифмическая амплитудно-частотная
характеристика последовательного корректирующего
устройства
помощи введения последовательного корректирующего
устройства (рис. V.26). В этом случае необходимо найти такую
передаточную функцию последовательного корректирующего
устройства WK(s), чтобы частотная характеристика W(j(o)WK(j(o) не
пересекалась с соответствующей граничной кривой. Для этого
надо ввести корректирующее устройство с частотной
характеристикой WK(j®), деформирующее логарифмическую амплитудно-
частотную характеристику. Тогда нетрудно определить
желаемую идеальную логарифмическую амплитудно-частотную
характеристику корректирующего устройства, которую необходимо
ввести, чтобы обеспечить выполнение частотного критерия
абсолютной устойчивости процессов (рис. V.27):
В этом случае
ф/си((о)=0.
157
Как известно из линейной теории, невозможно найти такое
физически реализуемое корректирующее устройство, у которого
логарифмические амплитудно-частотные характеристики
меняются, а фазо-частотные не меняются. Поэтому целесообразно
аппроксимировать идеальную желаемую логарифмическую
амплитудно-частотную характеристику Ьжи{(о) физически
реализуемой. Ввиду того, что мы синтезируем последовательное
корректирующее устройство, его логарифмическую
амплитудно-частотную характеристику можно определить так:
Аппроксимируя характеристику Ькр((о) ломаными,
имеющими наклон нуль или ±Кь дб/дек, где Кь — целое число,
получим аппроксимирующую логарифмическую
амплитудно-частотную характеристику. Это дает возможность написать
передаточную функцию корректирующего устройства. В данном случае,
при А = оо,
(7\s+l)(72s+l)
где
Т±
w к\ъ
1
w2oo '
(T3s+1) (T4s+1)
т = ! • т —
2 «Зоо ' 3
1
Wloo
Схема корректирующего устройства, соответствующего
передаточной функции WK(s), приведена на рис. V.28. При синтезе
Gi
*1
последовательных
корректирующих устройств удобна
пользоваться таблицей, в
которой приведены
асимптотические логарифмические
частотные характеристики и
соответствующие им
передаточные функции.
Пользоваться для
синтеза идеальной желаемой
логарифмической фазо-частот-
ной характеристикой
неудобно, так как в этом
случае значительно
сложнее находить передаточную
функцию, соответствующую фжр(оо).
В заключение синтеза последовательного корректирующего
устройства, построив желаемую логарифмическую частотную
характеристику скорректированной линейной части системы в
158
X
Рис. V.28. Схема последовательного
корректирующего устройства
декартовой системе координат, необходимо убедиться, что
условия абсолютной устойчивости процессов выполняются и кривая
^жр(со) = Q[qvp(со)] не пересекает соответствующей граничной
кривой. Обычно условие абсолютной устойчивости систем с
физически реализуемым корректирующим устройством, как
правило, выполняется, причем даже с некоторым запасом по
коэффициенту усиления разомкнутой системы.
7. Различные формулировки критерия абсолютной
устойчивости состояния равновесия (критерия В. М. Попова)
Частотный критерий абсолютной устойчивости положения
равновесия В. М. Попова для нелинейных систем
автоматического управления с одной однозначной нелинейной
характеристикой, принадлежащей классу А, был сформулирован в § 2
настоящей главы.
Условию (V.19) можно дать простую геометрическую
трактовку, которая оказывается очень удобной при практическом
использовании критерия абсолютной устойчивости для нелинейных
систем, получаемых в результате эквивалентного
преобразования (см. § 1) *.
Введем следующие обозначения:
0(ю)=оэ1/(ю); 1 (V 37)
*(©)=£/(©), J
где V(co) = Im[W(/co)], f/(co) = Re[W(/co)] — мнимая и
действительная части частотной характеристики линейной части
исходной системы W(/co), a Vn(co) = Im[Wn(/o))]; Un(co) =
= Re[Wn(/co)] — мнимая и действительная части частотной
характеристики линейной части преобразованной системы Wn(j(o)-
С учетом введенных обозначений условие абсолютной
устойчивости положения равновесия можно записать так:
^И-со^(со)+4->° (V-38)
к
для всех со^О.
Действительная £/п(со) и мнимая Vn(co) части связаны с
л: (со) и у (со) следующими соотношениями; имеем
^аю)=^И+^(ш)=тт_, (V.39)
или
WnU*)= U + iV - </(1+гУ)+*» + /? t (V.40)
1+rU+jrV (l + rLOa+(rV)a
* Приводимая ниже геометрическая трактовка критерия абсолютной
устойчивости положения равновесия В. М. Попова была предложена А. Р.
Бергеном и М. А. Шапиро.
159
откуда получим
ц _ Е/(1+гУ)+гУ2 ,
П (1+г£/)2+(гУ)2'
V
V,
п (1+г£/)2+(гУ)а*
Подставляя найденные выражения для Un и Vn в
неравенство (V.38), найдем
^+*/)+гУ2 «£ +^>0 (V.41)
(1 + rU)2 + {rVf (1 + rVf + (гУ)2 6 ;
для всех со > 0, или, умножая левую часть последнего
неравенства на положительную величину (1 + 2f/)2 + (rV)2, после
преобразований будем иметь
r(r + k)U2+(k + 2r)U + r{r + k)V—k®qV+l>0 (V.42)
для всех со > 0.
Используя последнее неравенство и переходя к координатам
л: (со) и у (со) 9 можно показать, что при обеспечении условия
(V.42) модифицированная характеристика линейной части
системы W*(co) с координатами х и у лежит вне параболы,
уравнение которой
^ + _к±Ь_х kJ—y + ! =0. (V.43)
Условие абсолютной устойчивости положения равновесия
(V.43) может быть записано так:
«* ' М - kq -у+—^ >0 (V.44)
r(r + k) r(r + k) " r(r + k)
для всех со > 0.
Сформулируем достаточный критерий абсолютной
устойчивости положения равновесия. Система автоматического управления
с нелинейной характеристикой F(x), лежащей внутри сектора
[г, г + k], и с линейной частью, описываемой частотной
характеристикой W(j(u), будет иметь абсолютно устойчивое состояние
равновесия, если видоизмененная характеристика устойчивой
линейной части системы W*(co) для всех со > 0 лежит вне параболы
(V.43) (рис. V.29). При этом линейная часть преобразованной
системы с передаточной функцией Wn{j(u) должна быть
устойчива. Линейная часть исходной системы с передаточной функцией
W(s) может быть нейтральна, неустойчива либо условно
устойчива.
Нетрудно показать, что при г-^0 уравнение параболы
вырождается на плоскости модифицированной характеристики в
уравнение прямой
x-qy + ±. = 0, (V.45)
k
160
проходящей через точку ( , 0 )и имеющей угловой
коэффициент — (рис. V.30). Эту прямую принято называть прямой
Ц
Попова.
При г ^ О критерий абсолютной устойчивости состояния
равновесия В. М. Попова для нелинейных систем с устойчивой
либо нейтральной линейной частью, имеющих одну
нелинейную характеристику F(x), принадлежащую классу А,
заключается в том, чтобы модифицированная характеристика линей-
Рис. V.29. Кривая Попова для нелиней- Рис. V.30. Вид парабол и их вы-
ной системы с условно устойчивой линей- рождения в прямую Попова при
ной частью изменении значения
коэффициента г
ной части системы находилась при всех со > 0 правее прямой
Попова (рис. V.31).
Если в выражении (V.44) положить г = О, левую часть
неравенства умножить на k и вместо модифицированной
характеристики W*(®) рассматривать &№*(со), то прямая Попова
будет проходить через точку (—1, 0).
Для выполнения достаточного условия абсолютной
устойчивости состояния равновесия нелинейной системы
модифицированная характеристика kW*(w) должна находиться правее
прямой, проходящей через точку (—1, 0) и имеющей наклон —
q
(pHcji V.32 и V.33). Из сказанного становится ясным смысл
коэффициента q, который может быть как положительным, так и
отрицательным [6].
Условие абсолютной устойчивости (V.44) в случае г = 0
и k->- оо принимает вид
Re(l+/?©)№(/©)> 0 (V.46)
для всех со > 0.
11 Заказ 33
161
При выполнении этого неравенства положение равновесия
будет абсолютно устойчивым для любых однозначных
непрерывных нелинейных характеристик F(x), расположенных в
первом и третьем квадрантах, т. е. неравенство (V.46) дает ответ
Рис. V.31. Вид модифицированной Рис. V.32. Вид модифицированной
частотной характеристики W*(co) частотной характеристики kWv(со) в
в нелинейной системе с абсолютно нелинейной системе с абсолютно ус-
устойчивым положением равновесия тойчивым положением равновесия
при q > 0 при q >-0
Рис. V.33. Вид характеристики Рис. V.34. К определению кпрт&х
kWq0 (/со, q0)
на постановку задачи об абсолютной устойчивости,
сформулированную в работе [93].
В связи с тем, что критерий В. М. Попова допускает выбор
действительного числа q (положительного либо отрицательного),
1б2
то его следует выбирать таким, чтобы условие устойчивости
выполнялось при максимально возможном значении
коэффициента k.
Определить это максимальное значение k можно, например,
построив семейство амплитудно-фазовых характеристик
^„04 <7о) = (1 +WW/<*>)', (V.47)
ИЛИ
при различных значениях q = g0. Если воспользоваться
обозначениями, введенными в начале параграфа, неравенство (V.46)
можно записать в виде
Re№,0(/co, 4o)+4->°>
/г
ИЛИ
Re^0(/co; ?0) + 1 > О (V.49)
при со > 0.
Дадим следующую формулировку критерия В. М. Попова:
для того чтобы состояние равновесия нелинейной системы
автоматического управления с одним нелинейным элементом с
характеристикой у = F(x), расположенной внутри сектора,
ограниченного лучами kx и ох, было абсолютно устойчивым,
достаточно, чтобы существовало такое действительное число q
(положительное либо отрицательное), при котором для всех со > 0
частотная характеристика kWqo(j(u\ qo) была бы расположена
правее вертикальной прямой, проходящей через точку —1; /0
(рис. V.33).
В тех случаях, когда требуется определить максимальное
значение k, при котором выполняется достаточное условие
абсолютной устойчивости (V.49), необходимо построить семейство
характеристик kWQo (/со; qo) при разных значениях q = q0. Тогда
каждому значению q = qQ будет соответствовать свое
максимальное значение k, определяемое из условия, касания
характеристики kW до (/со; q0) с вертикальной прямой, проходящей через
точку —1; /0.
Построив кривую k = f(l/q) (рис. V.34), нетрудно
определить искомое максимально возможное значение k = &max и
соответствующее ему значение q = qom-
Заметим, что численное" значение qom, соответствующее, маю
симально возможному значению km, нас практически не интерсен
сует, так как согласно критерию Попова нам.важно лишь ^зиать,
что это значение qom — действительное.
Для построения семейства характеристик kW^0 (/to; qo)
можно построить частотную характеристику линейно^ части системы,
И* 163
а затем каждый из ее векторов для со = со умножить на
V \-\-qlan и повернуть против часовой стрелки на угол,
равный arctg ^осог. Если же обозначить Q0 = q^i и заранее
построить кривые V 1 +Qo и arctg Q0 (либо записать их в виде
таблицы), то это может несколько упростить нахождение
характеристики kW g0 (/со; #о) при различных q0.
Следует отметить, что приведенная форма использования
критерия В. М. Попова несколько неудобна, ибо она требует в
ряде случаев больших затрат труда для построения семейства
характеристик kWQo (/со; qo).
Можно также сформулировать критерий В. М. Попова и на
основе логарифмических частотных характеристик. Для этого
представим выражение для WЯо (/со; q0) в виде
^.(М'7о)=1^.0©;?о)|в/ф".
Тогда после логарифмирования получим
L„0(co; ft) =20 lg|№,0 | = 201g £ + 20 lg| Щ/со)| + 20 lgj/l+^co2;
«M®; Qo) = ФИ + arctg90со,
где
W(j®)=\W{j(*)\ejM(»).
Как следует из полученных выражений, логарифмическая
амплитудно-частотная характеристика LqQ отличается от
обычной логарифмической амплитудно-частотной характеристики
линейной части системы слагаемым 20 lg V 1 + ^0со2, а
фазовая (pq —слагаемым arctg д^со.
Сформулируем критерий В. М. Попова на основе
логарифмической частотной характеристики в декартовой системе
координат.
Как было показано выше, прямая на плоскости амплитудно-
фазовой характеристики, параллельная мнимой оси и проходящая
через точку (—1; /0), отображается на плоскость L, ср в так
называемую граничную кривую (рис. V.35), проходящую через
точку —я, 0. асимптотами которой являются прямые —я/2:
+ я/2. Теперь критерий В. М. Попова для нелинейных систем
автоматического управления с однозначными характеристиками
F(x), принадлежащими сектору [0, k], можно сформулировать
так: состояние равновесия нелинейной системы будет
абсолютно устойчивым тогда, когда существует такое
положительное число q (положительное либо отрицательное), при
котором для всех со > 0 логарифмическая частотная
характеристика линейной части системы L^^co'-, q0) и ф^ (со', qo) находится
вне граничной кривой (рис. V.35).
164
Для определения максимального значения k = &max
необходимо построить семейство логарифмических амплитудно- и
фазо-частотных характеристик Lqo (<p; qQ) и ф7о (<о', до) при
Рис. V.35. К синтезу последовательных корректирующих
устройств в нелинейных системах с абсолютно
устойчивым состоянием равновесия
разных значениях q = q0, затем логарифмическую частотную
характеристику в декартовой системе координат Lqo = Q[q>q0 ]•
По кривой k = f(l/q) нетрудно определить максимальное
значение k = &max и соответствующее ему значение q = <7o-
8. Кривые Попова для некоторых типовых
линейных частей системы
В ряде случаев для упрощения построения кривых Попова
представляет интерес выяснить, какой они имеют вид для
некоторых типовых линейных частей системы.
В табл. V.1 приведены кривые Найквиста для некоторых
типовых линейных частей системы и соответствующие им кривые
Попова, построенные К. Фуджии и К. Шоджи.
Если передаточную функцию линейной части системы
представить в виде алгебраической суммы элементарных
передаточных функций, то знание кривых Попова для них может
упростить построение кривой Попова в более сложном случае.
165
Таблица VJ
Кривые Попова
для некоторых типовых
линейных частей системы
Передаточная
функция
к
s
к
к
Ts + 1
e-sr
к
$(Ts + 1)
Вид^ кривой
Найквиста
0
\
С0 = оо
0
0
i 00= оо
а/=оо к
<^J°*°
+С
X
кТ,Тг
—Jo
)
>—
Z/
Вид кривой.
Попова
0
к
~т\
\У
\ х 1
0\ 1
Ъ-к
с
1 X
П
У к х \
7С0 = ОО
м
ч
\~У °\
? /\
i
i
\
со
(
=0
УМ 1
\+1 х
Г"
X
166
Продолжение таил.
1^-
T,+h
к^
to
Ikt-
/
/
А
,(
'—~d
У
к х
О
' /
у Наклон
^.T1T2-*'T1T3i-T2T3
«о
кГгГг
-к(Т,+Тг)
•К
к*
I ^
Наклон
Ъ-Tz
TiT2
«=Г£Г!1_ (
/
0
f
I <N
+
наклон
zr
CJn
/f
//
/ /
/ {
/ [
У /
/
/
/
0
A X
/*L)=0
167
В этом случае для нахождения кривой Попова можно
воспользоваться графическим способом. Поясним это на конкретном
примере.
Пример V.I. Допустим, что линейная часть системы характеризуется
передаточной функцией
Щ5)= °^£±J .
s(s+l)(0,5s+l)
Представим выражение W(s) в виде суммы элементарных передаточных
функций
W (s) = W1 (s)—W2 (s) + W3 (s), (V. 50)
где
»
s
W, (s) =
W2(s) = -
W3(s) = -
1,8
s + 1 ;
0,4
0,5s+l
Из этой суммы нетрудно получить выражение для кривой Попова
W* (со) = W\ (со) - W*2 (со) + W\ И'
где Wx (со), W2 (со), W3 (со) —уравнения кривых Попова, соответствующие
элементарным передаточным функциям Wi(s), W2{s), Ws(s).
Из выражения (V.50) следует, что кривая Попова, соответствующая
линейной части системы с W(s)t представляет собой алгебраическую сумму
кривых Wx (со), W2 (со) и W3 (со), вид которых нам известен (см. табл. V.1). Строя
каждую из элементарных кривых и складывая их, например, геометрически,
нетрудно найти искомую кривую Попова для линейной части разомкнутой
системы.
9. Анализ абсолютной устойчивости состояния равновесия
Под задачей анализа абсолютной устойчивости будем
понимать установление факта выполнения критерия В. М. Попова
при заданной структуре и параметрах исследуемой нелинейной
системы и определение максимального значения k = knp, при
котором условия устойчивости выполняются.
Критерий В. М. Попова позволяет решить задачу анализа
абсолютной устойчивости положения равновесия нелинейных
систем автоматического управления с одним нелинейным
элементом, характеризуемым непрерывной однозначной нелинейной
характеристикой у = F(x).
Использование модифицированной частотной
характеристики W*((&) позволяет в большинстве случаев довольно легко
определять максимально возможное, будем далее говорить — пре-
168
дельное значение коэффициента усиления разомкнутой
линеаризованной системы k = knv\
где k — угловой коэффициент наклона луча сектора;
kw — коэффициент усиления линейной_части системы.
В этом случае для определения k = knv неравенство (V.33)
следует заменить равенством и потребовать его выполнения для
всех со ^ 0, тогда получим
Re^pV (/<*>) +1 = 0,
где W(jco) = knpW(j(£>)—частотная характеристика линейной
части системы;
W(jco) —нормированная частотная характеристика линейной
части системы.
Геометрически это означает, что найдено такое предельное
значение knv, при котором модифицированная частотная
характеристика ЯР* (со) касается прямой Попова и при всех других
Рис. V.36. Модернизированная частот- Рис. V.37. Модернизированная
частотная характеристики при q > 0 ная характеристика при q < 0
со > 0, за исключением точки (точек) касания, находится правее
этой прямой.
Если модифицированная частотная характеристика имеет
гладкий характер (рис. V.36 и V.37), то она касается прямой
Попова в одной точке а. Прямая Попова является касательной
169
к модифицированной частотной характеристике, проходящей
через точку с координатами (—1, 0). Поэтому в этих случаях как
при q > 0 (рис. V.36), так и при q < 0 (рис. V.37) предельное
значение_коэффициента усиления разомкнутой линеаризованной
системы knv может быть определено на основе анализа
характеристического уравнения замкнутой линеаризованной системы,
получаемой в результате замены нелинейного элемента y = F(x)
линейным у = kx:
При этом для исследования абсолютной устойчивости
положения равновесия и, в частности, для определения knp можно
воспользоваться лю-
кУ(ш)
j= Пл. kW*(cj)
Рис. V.38. Модернизированная частотная
характеристика
бым из критериев
устойчивости линейных
систем.
Если же
модифицированная частотная
характеристика имеет две
точки касания с
прямой Попова (рис. V.38),
то тогда значение knv,
определяемое на осно-
и=0 кХ(и>) ве критерия В. М.
Попова, будет меньше
значения knVJl для
линеаризованной
системы.
В этом случае
нельзя пользоваться
линеаризованной системой и
необходимо knv
определять при помощи
критерия В. М.
Попова. Для этого надо, задаваясь различными
значениями q0, определить значения Hnv, при которых частотные
характеристики kWQo (/со; <7о) касаются вертикальной прямой, про^
ходящей через точку (—1, /0), построить кривую knv = /О/?) и
выбрать максимальное значение &npmax. Для нахождения
кривой knV = f(l/g), а затем &npmax удобно воспользоваться
логарифмическими частотными характеристиками. Как было
показано, значение k = knp определяется из условия касания
логарифмической частотной характеристики с граничной кривой.
170
10. Синтез, корректирующих устройств, обеспечивающих
абсолютную устойчивость состояния равновесия
пртр х
кррХ
1=Пх)
Рассмотрим задачу синтеза корректирующих устройств,
обеспечивающих выполнение критерия абсолютной устойчивости
положения равновесия при требуемом значении k = kTV и
заданных параметрах системы.
Критерий В. М. Попова в том виде, как он был
сформулирован в его работах, не позволяет решить названную задачу
синтеза.
Однако метод логарифмических частотных характеристик,
изложенный в предыдущем разделе, можно использовать не
только для анализа, но
также и для синтеза
корректирующих устройств,
обеспечивающих
абсолютную устойчивость
состояния равновесия при
требуемом значении k = kTp.
Допустим, что,
используя метод
логарифмических частотных
характеристик, мы определили
максимальное значение
knv max и знаем
соответствующее ему
значение Fornax- __
Предположим, что найденное значение knv меньше
некоторого требуемого значения kTP, т. е. при найденном значении
нелинейная характеристика выходит за пределы сектора,
определяемого осью абсцисс и прямой у = kx (рис. V.39).
Для того чтобы нелинейная характеристика у = F(x) не
выходила за пределы сектора, ограниченного осью абсцисс и
прямой у = kxy необходимо обеспечить выполнение критерия
В. М. Попова при k = knprp (рис. V.39). ПриЪПртр
логарифмическая частотная характеристика, построенная в декартовой
системе координат Lqo = Q[<pqo] при q = qQ, пересекает граничную
кривую в точках со*, и со2* (рис. V.35), поэтому требуется
синтезировать такое корректирующее устройство, чтобы при данном
q = q0 кривая LQo = Q[qqJ не пересекала бы граничную кривую.
В идеальном случае введенное корректирующее устройство
должно так деформировать характеристику LqQ = Q[<pqo],
чтобы она совпала с характеристикой, заштрихованной на
рис. V.35. После построения логарифмической характеристики
Lq0 = Q[q>q0] при q = q0 и k = knVTV методика синтеза, например,
171
Рис. V.39. Нелинейная характеристика
последовательного корректирующего устройства сводится к
следующему.
1. Задаваясь значениями ЬЯо в диапазоне Lqo (coi) —Lq9 (co2)
либо q>ft(coi)—ф^^г), строим желаемую логарифмическую
фазо-частотную характеристику 4>жид(®) [в этом случае
Z§L§KnpTp
*hoM
l-Muq0M
L*uq0M ори
<PMuq0W=4>qeM
CJ
1Ш1
CO
<P/Kuq0(bJ) при
LMaqoM=LqoM
Рис. V.40. Синтез последовательного
корректирующего устройства в нелинейной системе с абсолютно
устойчивым состоянием равновесия
^u^W-^oNl либо желаемую логарифмическую
амплитудно-частотную характеристику L^ (ю) [в этом случае
Фясц^Сю) =ф<70(со)], которые представляют собой отображение
заштрихованной кривой на рис. V.35 на плоскости характеристик
ib и (pqo (рис. V.40). Практически для синтеза удобнее
использовать желаемую логарифмическую характеристику Ьжа (со),
когда Фдо^И =Ф<70(со).
172
2. Строим физически реализуемую асимптотическую
амплитудно-частотную характеристику LPQo (рис. V.40).
3. Используя соотношение
M®)=£p*oN— М®)>
строим искомую асимптотическую логарифмическую
амплитудно-частотную характеристику последовательного
корректирующего устройства (рис. V.40).
4. Строим физически реализуемую логарифмическую фазо-
частотную характеристику системы с найденным
корректирующим устройством при q = qQ, соответствующую Lpqo (со), а затем
Lpq0 (со) = Q[ypq0 (со)], и убеждаемся, что при ранее выбранном
Q = Qo условие абсолютной устойчивости положения равновесия
выполняется.
5. По найденной асимптотической логарифмической
амплитудно-частотной характеристике находим соответствующую ей
передаточную функцию корректирующего устройства.
Таким образом может быть найдено последовательное
корректирующее устройство, при котором выполняются достаточные
условия абсолютной устойчивости положения равновесия
исследуемой нелинейной системы при k = knprp и q = q0.
Найденное значение knprp, вообще говоря, может быть
меньше максимального.
Если из каких-либо соображений требуется найти
максимальное значение knp max для исследуемой нелинейной системы
с корректирующим устройством, то для этого надо, задаваясь
несколькими_значениями q = qo вблизи значения дотах,
построить кривую k = f(l/q) так, как это было указано выше, и
определить максимальное значение кривой knpmaiX, которое может
быть только больше кпртр.
■ ■ ■
Глава VI
Расчет устойчивости
нелинейных систем
при допустимых
отклонениях
на основе метода
сечений и прямого
метода Ляпунова
Задача об устойчивости регулируемого
положения равновесия чаще всего решается
линеаризацией уравнений движения в окрестности равновесного
состояния. При этом об устойчивости исходной
нелинейной системы «в малом» судят по
устойчивости линеаризованной системы. Математическим
обоснованием такого приема служат известные
теоремы Ляпунова об устойчивости по уравнениям
первого приближения.
Однако такой подход к решению задачи
гарантирует устойчивость «в малом», но не может гаран-
тирозать устойчивость системы при конечных
отклонениях от равновесного состояния. На практике
же отклонения координат регулируемых систем от
равновесного состояния являются достаточно
большими. В этом случае, как правило,
рассматривается абсолютная устойчивость [6]. Требование
абсолютной устойчивости предполагает, что исследуемое
состояние равновесия устойчиво при любых, в том
числе неограниченно больших по модулю,
отклонениях, т. е. устойчиво в целом.
На практике отклонения координат систем мо-
174
гут быть большими по модулю, но они никогда не превосходят
некоторых максимальных значений. Требование устойчивости
при больших, но ограниченных по модулю отклонениях не столь
жестко, как требование устойчивости в целом. Поэтому области
абсолютной устойчивости или устойчивости в целом могут
оказаться менее широкими, нежели области устойчивости при
ограниченных по модулю отклонениях, а в связи с этим критерии
абсолютной устойчивости — излишне жесткими.
В некоторых практически важных случаях система .
автоматического управления с точки зрения устойчивости в целом
заведомо структурно неустойчива, но она может быть устойчивой
при больших, но ограниченных по модулю отклонениях. В таких
случаях критерии абсолютной устойчивости или устойчивости в
целом становятся совсем неприменимыми.
Из сказанного ясно, что требованиям практики наиболее
отвечают не условия устойчивости в малом и не условия
абсолютной устойчивости, а условия устойчивости при больших, но
ограниченных по модулю отклонениях. Между тем, рассмотрению
таких случаев для систем д-го порядка посвящены лишь
некоторые работы [51, 61, 128, 173].
В данной главе рассматривается метод построения областей
устойчивости нелинейных систем автоматического управления
при больших, но ограниченных по модулю отклонениях (или,
иначе, при допустимых отклонениях). Для ясности изложение
ведется применительно к конкретному примеру системы третьего
порядка, но аналогичные выкладки могут быть выполнены и для
систем п-то порядка.
1. Постановка задачи и основы ее решения
Сформулируем задачу об устойчивости для нелинейных
систем управления при больших, но ограниченных по модулю
отклонениях.
Пусть имеется динамическая система, у которой единственное
состояние равновесия асимптотически устойчиво «в малом»,
т. е. в фазовом пространстве существует область притяжения G
этого положения равновесия. Пусть также в фазовом
пространстве системы задана некоторая область допустимых
отклонений L, представляющая собой совокупность значений
обобщенных »координат, которые допускаются в переходных режимах
конструктивными особенностями системы. Необходимо в
пространстве параметров регулятора D выделить некоторую
область Z)*, обладающую тем свойством* что для значений
параметров из этой области в фазовом пространстве область
притяжения включает в себя область допустимых отклонений:
LdG. (VI.1)
При выполнении соотношения (VI. 1) движения в
рассматриваемой системе асимптотически устойчивы при любых допусти-
175
мых начальных отклонениях. Таким образом, задача
исследования устойчивости при конечных отклонениях от состояния
равновесия фактически сводится к проблеме отыскания границ
области притяжения или к эффективной оценке величины этой
области.
Рассматриваемый ниже способ решения сформулированной
задачи основан на методе сечений [122, 123, 128] и прямом методе
Ляпунова. При построении функции Ляпунова используется
информация о конфигурации области асимптотической
устойчивости, получаемая методом сечений пространства параметров.
Метод сечений позволяет точно найти сепаратрисные
поверхности в фазовом пространстве для значений параметров,
принадлежащих так называемым вскрывающим сечениям
второго рода. При этом оказывается, что если вскрывающее
сечение проходит через область устойчивости системы «в малом»
в пространстве параметров, то в фазовом пространстве область
притяжения ограничивается цилиндрической сепаратрисной
гиперповерхностью, порожденной неустойчивым предельным
циклом, ближайшим к состоянию равновесия. Точные границы
области асимптотической устойчивости, определенные методом
сечений пространства параметров, могут служить своего рода
эталоном при оценке эффективности той или иной функции
Ляпунова. Предлагается строить функцию Ляпунова, учитывающую
ориентацию неустойчивого предельного цикла в фазовом
пространстве, который приближенно может быть определен, с
помощью метода гармонической линеаризации. Такой подход к
решению задачи объясняется стремлением максимально
использовать имеющуюся информацию о структуре фазового
пространства системы для получения достаточных условий устойчивости
«в большом» (но не в целом), наиболее близких к необходимым.
Кроме того, этот путь позволяет формально сохранить процедуру
оценки величины области притяжения с помощью метода
функций Ляпунова для значений параметров, отстоящих от
вскрывающих сечений на некоторое конечное расстояние.
2. Построение вскрывающих сечений
Рассмотрим систему уравнений, которую можно
интерпретировать как упрощенную математическую модель системы
угловой стабилизации осесимметричного аэродинамически
неустойчивого летательного аппарата:
И-= /(<*);
f(a) К \*\<В ! (VI.2)
\Ssigna, | су | >В;
а = d^ + d2i|)—r\i,
176
где а|) — угол рыскания объекта;
\х — координата исполнительного органа;
В — уровень насыщения скоростной характеристики
рулевого привода;
«1 < 0, аъ > О — постоянные коэффициенты, характеризующие
соответственно степень аэродинамической
неустойчивости объекта и эффективность
управляющих органов;
{du d2, r) = d^D — параметры регулятора.
Пусть область допустимых отклонений L задается системой
неравенств
IФ К сг\
Н\<с%\
| \х | < с3. )
(VI.3)
Область устойчивости системы «в малом» D в соответствии
с критерием Гурвица определяется соотношениями
c1 + a3d1>0\ )
air + cA>0; (VI. 4)
d1r—d2>0. J
Как известно, система уравнений (VI.2) с помощью
линейного неособенного преобразования координат может быть
приведена к канонической форме
= М/+ /(<*)> *=1,2;
Хз = №)',
■2>*/
/=i
(VI. 5)
где
К = — К- У—Сг>0\ )
Yi =
Ya =
2tf
а3
-(dA + da);
2%\
{d1X2+d2);
Y8= — (Т1 + Т2 + Г).
(VI.6)
Рассмотрим в пространстве параметров регулятора
вскрывающие сечения второго рода, которые получаются из формул
(VI.6) путем поочередного приравнивания нулю коэффициентов
12 Заказ 33 177
Yj. При этом связь между параметрами в указанных сечениях
задается соотношениями:
а) в сечении G(22'3)(yi - 0) : &х = ^- ;
б) в сечении G(2!•3) (у2 = 0) : dx= — ;
А/2
в) в сечении G(2! '2) (7з = 0) : ^2 =
г.
а3
Рис. VI. 1. Вскрывающие сечения
пространства параметров dh d2, r системы
(VI.2)
Вскрывающие сечения приведены на рис. VI.1.
Учитывая соотношения
(VI.4), легко установить,
что через область
устойчивости системы «в малом»
проходит единственное
вскрывающее сечение вто-
£ рого рода, а именно, G^»3*.
Для значений параметров,
принадлежащих этому
сечению, из системы уравнений
(VI.5) выделяется
независимая подсистема второго
порядка, которая может быть
исследована точно,
например, методом точечных
преобразований. Для
дальнейшего нам понадобятся
данные о периодических решениях системы (VI.5), которые
наиболее просто могут быть получены с помощью метода
гармонической линеаризации нелинейностей.
3. Определение периодических режимов
В соответствии с методом гармонической линеаризации
выражение для координаты о ищется в виде
a(*)=i4asinoirf. (VI. 7)
Передаточная функция линейной части системы,
разомкнутой на входе нелинейного элемента, имеет вид
__ Ф2 + (уД2 -1- уДО р — у3ХД2
Р(Р-К)(Р-Ь>2)
Запишем характеристическое уравнение замкнутой
гармонически линеаризованной системы
W(p)a(Aa) +1 = 0, (VI.9)
178
W(p)
(VI. 8)
где а(А0)—коэффициент гармонической линеаризации
нелинейного звена типа «насыщение», определяемый
выражением
в^)=т(-в|п^-+т/,-(^-)')- <V1-
10)
Полагая в уравнении (VI.9) р = /со и решая полученную
систему уравнений относительно Лди со с учетом соотношения
АВ
а(А^ ~ ~лА~(А° ^ В)' П0ЛУЧИМ
А0
АВ АаЫуз + г)
co^-i/— К^У\
(VI. И)
Диаграмма гармонического баланса системы приведена на
рис. VI.2, откуда следует, что частотная характеристика линей-
Рис. VI.2. Диаграмма
гармонического баланса
Рис. VI.3. Кривые предельного
цикла системы:
/ — по методу точечных
преобразований; 2 — по методу
гармонической линеаризации
ной части системы при всех d^D имеет единственную точку
пересечения с годографом обратного коэффициента
гармонической линеаризации, т. е. система (VI.5) имеет единственное
периодическое решение. На основании приближенных критериев
устойчивости периодических режимов можно сделать
заключение, что указанный предельный цикл неустойчив.
В дальнейшем нас будут интересовать проекции найденного
предельного цикла на некоторые плоскости. Так, для значений
параметров регулятора, принадлежащих вскрывающему сече-
12* J79
ник> G^''3) , представляет интерес проекция неустойчивого
предельного цикла на фазовую плоскость переменных Х\ и х3, так
как она определяет величину области притяжения положения
равновесия в фазовом пространстве. При этом решения для фа-
з'овых координат %\ и х3, определенные методом гармонической
линеаризации, всегда можно представить в виде
х1 (t) = AL sin ((dt + ф);
X3(t) = A3COS(ut,
(VI.12)
где
Л
_ 4Б
_ 4Б
K%1
г
V
У
г
г
7з
Ф = arctg
/-*-
(VI.13)
Для иллюстрации погрешности метода гармонической
линеаризации на рис. VI.3 нанесены кривые предельного цикла,
построенные этим методом и методом точечных преобразований
для d<=G^'3) , откуда следует, что метод гармонической
линеаризации для рассматриваемой системы дает удовлетворительное
совпадение с точным методом.
Уравнение (VI.12) представляет собой параметрическое
задание уравнения эллипса. Исключая параметр t и производя
ортогональное преобразование координат
х-, = Si cos г) — S3sin ri; /-__%_ ~ = *з
Л1 ' Хз " A3
x3 = £x sin г] + £3cos ту,
приведем уравнение эллипса к главным осям:
(VI. 14)
где
с\ = 1 + sin ф >- 0; )
с3= 1 —sintp>- 0;
v — cos2 ф;
(VI. 15)
(VI. 16)
Соотношение (VI. 15) приближенно (с точностью до
погрешностей метода гармонической линеаризации) задает границу се-
180
чения области притяжения плоскостью х2 = О и может служить
основой для построения достаточно конструктивной функции,
Ляпунова.
4. Оценка величины области притяжения
Рассмотрим вначале процедуру построения функции
Ляпунова, когда параметры регулятора принадлежат вскрывающему
сечению G{0U3). Построим определенно-положительную
квадратичную форму от фазовых переменных
У = Ус,& (VI. 17)
где ^2 = *2, a gi и Н3 связаны с Х\ и х3 с помощью соотношений
(VI. 14). Коэффициенты с\ и сз этой формы определяются через
параметры периодического решения по формулам (VI.16),
коэффициент с2 ^ 0 является неопределенным. Далее необходимо
установить, что построенная таким образом функция V при
С2 ->0 является функцией Ляпунова. Для этого покажем, что
полная производная по времени от этой функции в силу системы
уравнений движения в зоне линейности является отрицательно-
определенной функцией фазовых координат. В зоне линейности
полная производная по времени от функции V имеет вид
v = -li-
(h+r)-(K
/
+ Ш\ (К + г)
г)\/
Тз
— Vi J
Тз
-7i
+ 2bE,(^ + r)
+ 2с2Ы2. (VI. 18)
Для доказательства определенной отрицательности функции
V достаточно показать, что квадратичная форма, заключенная в
фигурные скобки, является определенно положительной.
Составим определитель
(VI 19)
^ = (K
(VI 20)
181
на основании критерия Сильвестра заключаем, что V является
определенно-отрицательной функцией фазовых координат, т. е.
функция V при ^2-^0 есть функция Ляпунова. Вне зоны
линейности уравнение V = 0 определяет некоторую поверхность
F(llt%A3)='-0.
(VI. 21)
Функция Ляпунова (VI. 17) задает в фазовом пространстве
поверхность эллипсоида
Ф(?1, Е2, У =2 US?-V = 0. (VI.22)
i = \
Эллипсоид устойчивости, определенный из условия касания
этих поверхностей, будем называть оптимальным. Для точки
касания справедлива следующая система уравнений:
дФ*/д^г _ дФ*/д%2
dF*/dti dF*/d%2
дФ*/д& .
dF*/dl9 '
(VI. 23)
где знак ( * ) означает, что частные производные берутся в точке
касания. Система уравнений (VI.23) при tfeG^1,3) может быть
записана в развернутом виде:
<i£'
1S1
С2?2
Ciki6i+M3"
ciii
схВ
V2 \ Л
,(2%2t*2 + B)
^3^3
(VI. 24)
~с{кхЪ{ 4-^i?3'
сз^Лз +^i^i +
с3В
V2 U
и Аз
2
'1 + — ~3+ТПХ'
с2еи^2+в)+йе;
2c/(6)'-v=o.
(VI. 25)
+
(VI. 26)
(VI. 27)
1=1
182
Полученная система алгебраических квадратных уравнений
позволяет найти координаты точек касания и определить
величины
з
^ = 2^(Ел)2, (VI. 28)
i=i
причем оптимальному эллипсоиду устойчивости соответствует
наименьшая из них.
Можно показать, что система уравнений (VI.24) — (VI.27)
имеет решения только при с2 -*0. При этом уравнение (VI.24)
удовлетворяется тождественно при любых значениях g*.
Учитывая соотношения (VI.13), непосредственной проверкой
убеждаемся, что система уравнений (VI.25) — (VI.26) имеет два
решения:
11=Гз = Г=—^-l/-^-; (VI.29)
Й = -б=Г = -^l/^. (vi.30)
причем оптимальному эллипсоиду устойчивости соответствует
величина
V\ = 2{ty = ^-—-L- (VI.31)
16 ( —71)
Теперь можно указать значения параметров,
соответствующих максимально возможной области притяжения. При г->(—у\)
имеем
lim | xj^lim Д | хх\
/■->(—Vi) /•-»■(—Vi) ^ii (VI 32)
lim |*8| = НтЛ3|*8| = <х>,
'•-»(—Yi) г->(—Vi)
т. е. область асимптотической устойчивости, определенная с
помощью функции Ляпунова вида (VI. 17), стремится к части
фазового пространства, заключенной между плоскостями \х\\ =
=—г и совпадает с точным предельным значением этой
Обладь
сти. Действительно, при г-> (—71) коэффициент ^з-^0, и
движения в системе определяются первыми уравнениями системы
(VI.5), откуда и следует указанное утверждение.
На рис. VI.4 для некоторых значений параметров регулятора
rfeG(21,3) приведены сечения области притяжения плоскостью
х2 = 0, определенные точным методам, методом гармонической
линеаризации и прямым методом Ляпунова, откуда следует, что
183
функция вида (VI. 17) является конструктивной, т. е. определяет
достаточные условия устойчивости «в большом», весьма близкие
к необходимым.
Рассмотрим теперь случай, когда параметры регулятора от-
стоят от вскрывающего
сечения G(2,3) на конечное, но
малое расстояние. При этом
Vj^O все коэффициенты yj
системы уравнений (VI.5) отлич-
j ны от нуля. Линейным
ортогональным преобразованием
координат
з
(VI. 33)
эта система уравнений
всегда может быть приведена
к виду
з
^=2 «*/*/+
Нб\=в
Р.ис. VI.4. Сечения области притяжения
положения равновесия системы (VI.5)
в фазовом пространстве плоскостью
х2 = 0:
/ — по методу гармонической линеаризации;
2 — но методу точечных преобразований; 3 —
по методу Ляпунова {V — V*)
/=1
+ /Я//(<Г),
1=1,2,3;
(У = РА + Рй»
(VI. 34)
где аргумент нелинейной
функции зависит только от
двух переменных z\ и г3.
Коэффициенты щк, rrij, pi, рз
выражаются через параметры преобразования а,ц следующим
образом:
i = \
3
3
3
/, /c=l, 2,3;
/=1,2,3;
(VI. 35)
184
Величины ciij должны удовлетворять следующей системе
уравнении:
Jy з
i = \
3
Vi = Pi
7з Рз
1, K=/
0, *=£/
2 <№=«/«=! ;• ,v,: (ic, /=i,2, з);
I (VI.36)
Эта система содержит число неизвестных, на единицу
превышающее число уравнений, т. е. преобразование (VI.33) не яв-
Лг=7, г=4;
d2 = 3, n^-Z
у*
0,08
0,06
0,04
0,01
0 0,1 0,1 с2
Рис. VI.5. График зависимости
1/* = V*(c2)
/
1
\ 1
1
/
у
ляется однозначным. Для
доопределения системы уравнений
(VI. 36) необходимо считать
один из параметров ац = а*
Рис. VI.6. Кривые сечения
области притяжения
положения равновесия системы
(VI.34) в фазовом
пространстве плоскостью 22 = 0:
/ — по методу гармонического
баланса; 2 — по прямому
методу Ляпунова
U
свободным. Определенную свободу, существующую при выборе
этого параметра, можно использовать для расширения области
асимптотической устойчивости, доставляемой функцией
Ляпунова вида (VI.17).
Далее можно показать, что если параметры регулятора
близко отстоят от вскрывающего сечения G^U2>) , то соответствующим
выбором параметра а], можно обеспечить малость по
абсолютной величине коэффициентов (щ (i =#=/), причем значения
185
\aa\ {i Ф /) равномерно стремятся к нулю при приближении
параметров регулятора к вскрывающему сечению. В частности,
данным свойством обладает преобразование, сохраняющее след
пересечения плоскости угх\ + 7з*з = 0 с плоскостью х2 = 0. При
этом коэффициенты (щ определяются выражениями
алл =
Vi
У1
Kvf + viy 2 т?
v? + v^
• 0>1 =
—T1V2
|Л?+т§/2т?
"-9Я G*9
£'ia — &ч\ — '
■Vi7s
v?+vi
7з
ТгУз
Кт?+т|\/2^
/=1
К-
Vi+Vs
Л~Г
V^
/=1
Y?
Ky?+y23|/J>?
V1+V3
^ 9.9
/
Т? + Тз
v'st?
(VI. 37)
В основе преобразования (VI.33), приводящего систему к
виду (VI.34), лежит геометрическое соображение о «вытя-
нутости» области притяжения вдоль зоны линейности
системы.
Теперь аналогично тому, как это проделывалось выше,
методом гармонической линеаризации можно найти проекцию
неустойчивого цикла на плоскость переменных z\ и гъ и построить
функцию Ляпунова в виде выражения (VI. 17), где \ч = %2, a gi
и £3 связаны с Z\ и z3 соотношениями, которые получаются из
выражений (VIJ4) заменой х\ и хъ на z\ и гъ соответственно.
Коэффициенты с\ и сз определяются по формулам (VI. 16),
коэффициент с2 ^ 0 является неопределенным. Отыскание
максимальной области притяжения в данном случае может быть
проведено путем объединения оптимальных эллипсоидов устой-
186
чивости, определенных из решения уравнений (VI.23) для
различных значений коэффициента с2 и параметра ац
Gmax = f/G/. (VI. 38)
На рис. VI.5 для некоторых значений параметров регулятора,
не принадлежащих вскрывающему сечению G(21,3), приведен
график зависимости V* = V*(c2), а на рис. VI.6 — сечения
области асимптотической устойчивости, рассчитанные методом
гармонической линеаризации и методом функций Ляпунова. При этом
параметры преобразования (VI.33) определялись из
соотношений (VI.37).
Сравнение величины области притяжения с областью
допустимых отклонений (VI.3) позволяет определить такие значения
параметров регулятора, для которых в фазовом пространстве
выполняется соотношение (VI.1).
Рассмотренная методика оценки величины области
асимптотической устойчивости с помощью метода сечений пространства
параметров и прямого метода Ляпунова естественным образом
может быть распространена на системы выше третьего порядка.
■ ■ ■
Глава VII
Проблема качества
нелинейных
систем
В процессе проектирования систем
автоматического управления выбирается такая ее структура
и параметры, чтобы динамические процессы в
системе удовлетворяли вполне определенным
показателям качества. К числу основных показателей
качества принято относить следующие: время протекания
переходного процесса (или время затухания),
максимум перерегулирования, гладкость процесса и его
автономность. Иногда применяются и другие
критерии качества, число которых может быть достаточно
большим.
1. Математическая модель объекта управления
Наиболее простыми объектами теории
автоматического управления являются те, математические
модели которых могут быть адекватно
представлены обыкновенными дифференциальными
уравнениями вида
* = /(*, я,*), (VII. 1)
где х {хи ..., хп} — вектор состояния объекта;
и {ti\,..., ur} —вектор управления;
t—время, определенное в интервале т = [t0, T] или
[/о, оо].
Уравнение (VII. 1) есть точная (или достаточно точная)
математическая запись физических (или же каких-либо иных)
законов, которым объект подчинен. Следовательно, х, и —
векторы с вещественными компонентами.
Пусть *V — область действия этих законов, т. е. совокупность
всех л:, #, при которых уравнение (VII. 1) имеет смысл. Это
может быть все открытое пространство или его замкнутая часть,
характеризуемая неравенствами
*(х, Q>0, (VII.2)
R{x,u,f)>0, t£%. (VII.3)
Неравенства являются векторными (или скалярными),
однако такими, что все еще остается свобода выбора функции и и
движения изображающей точки М(х, и) в пространстве X.
Относительно *, R обычно предполагают, что они
дифференцируемы нужное число раз, а матрица имеет в области N
максимальный ранг, равный измерению вектора R .
Выберем некоторый класс функций U (например, кусочно-
непрерывных) и будем говорить,, что управление и является
допустимым, если и е U и, при данном л:, принимает численные
значения в области N. Тогда любое решение уравнения (VII.1)
будет также допустимым, если при данном и е U оно будет
лежать в области N.
Чтобы быть уверенным в существовании такого решения,
будем предполагать, что векторная функция f(x,u, t) при любом
и е U удовлетворяет всюду в области N условиям теоремы
Кош и о существовании решений. Кроме того, будем,
предполагать, что система, описываемая уравнением (VII.1), полностью
управляема.
2. Основные требования, предъявляемые
к системе управления
Ц процессе проектирования системы управления объектом,
отвечающим уравнению (VII.1), предъявляется ряд требований,
касающихся обеспечения желаемых динамических свойств
объекта. Одним из основных требований этого является получение
состояния объекта, которое характеризуется заданной функцией
jc*(t), и в частном случае лг* может быть постоянной
величиной.
Выбор функции x*(t) произволен, иногда эта функция
может служить экстремалью для некоторого наперед заданного
189
функционала. Разумеется, х *(t) должна быть допустимой и
отвечать допустимому управлению и *(t) так, чтобы х *(£), и *(/)
были бы совместны с уравнением (VII.1).
Но проектировщик отчетливо понимает, что состояние x*(t)
никогда не может быть реализовано, даже при точном
воспроизведении управления #* (t). Отклонения у = х —х* появляюъ
ся вследствие многих причин; одна из них — невозможность
устранить эти отклонения в начальный момент t0. Поэтому
возникает необходимость иметь дополнительное отклонение v
органа управления, которое формируется как известная функция
вектора у, некоторого векторного параметра р {pi,..., рт} и,
может быть, времени t.
Формирование осуществляется следующим образом.
Положив
х = л:* + у\
(VII. 4)
оставим уравнение для вектора у. В общем случае оно имеет
вид
y = A*y + m*v + <f(y,v,t)+if(t); (VII.5)
здесь
*-['-!-(£)'• —(-£-)"- <™-6»
матрицы, вычисленные на движении х*у и*,
Ф — нелинейная функция v,y,t, полученная в результате
разложения функций / в целый, сходящийся по у, v ряд;
ф — некоторая функция времени, появляющаяся в результате
действия ранее неучтенных сил.
Одна из причин появления \|) (t)—неточная реализация
движения л;*, #*; другая — неполный учет действующих сил при
составлении уравнения (VII.1).
Уравнение (VII.5) описывает возмущенное движение объекта
управления или, иными словами, переходный процесс. Будем
говорить, что объект (VII.5) наблюдаем по координатам у и —, У а
(а ^ п), если существует набор технических средств,
позволяющих измерять компоненты У\,...,уа вектора у в любой момент
времени t. Совокупность наблюдаемых координат z/i,..., у ^N
назовем полем регулирования размерности а и обозначим
буквой У а .
Конструктор всегда стремится выбрать поле Уа минимальной
размерности. Рассмотрим множество М всех допустимых
управлений
v^=v{y19... , !/а,дО, (VII.7)
определенных над полем Уа.
190
Операцию замещения v в уравнении (VII.5) функцией
(VII.7) назовем замыканием, а построенную таким образом
систему (VII.5), (VII.7) —замкнутой.
Будем говорить, что любая допустимая функция (VII.7),
определенная над полем Уа, принадлежит совокупности законов
обратной связи (или законов регулирования), если операция
замыкания системы (VII.5) делает невозмущенное движение
у = 0 (VII.8)
(в случае ty(t) = 0) асимптотически устойчивым по Ляпунову.
Требование асимптотической устойчивости замкнутой системы
относительно состояния (VI 1.8) является наиболее
фундаментальным. Оно обеспечивается не только должной композицией
поля Уа- выбором функции V из множества М, но также и
выбором параметра р. Пусть L — область значений векторного
параметра р, при которых асимптотическая устойчивость системы,
замкнутой выбранной функцией (VII.7), гарантируется.
Однако проектировщик никогда не может удовлетвориться
построением лишь области L. Его следующее требование
сводится к обеспечению некоторых, наиболее существенных
характеристик динамики затухания переходного процесса, характеризуемой
некоторой серией ^-критериев, оценивающих его затухание.
Критерии затухания всегда имеют частный характер и их
содержание существенно связано со спецификой объекта
управления. Особенно наглядно эта специфика выражена в случае, в
котором объект управления (VII.5) является атомным
реактором. Для такого реактора существенно, чтобы движение у (t)
затухло бы почти до нуля не позднее чем за 4—5 сек, а
максимальные отклонения у (t) никогда не достигали бы границы
области N. Важность этих критериев вытекает из того, что в
случае не соблюдения хотя бы одного из них реактор
превращается в атомную бомбу. Отсюда вытекает практическое
значение такого выбора параметра р gL в функции (VII.7), при
котором переходный процесс в замкнутой системе (VII.5), (VII.7)
не только гасился бы до нуля, но характер этого гашения
удовлетворял бы серии у-критериев, выбранных проектировщиком.
В этом и заключается проблема качества регулирования.
3. Математическая формулировка у-критериев
Допустим, что о|) (t) = 0.
Критерий времени затухания t*. Пусть /?, 8 — два заданных
положительных числа, таких, что R много больше 8. Построим
две сферические поверхности
\\y(f)\\ = R; (VH.9)
||.У(**)|1 = е, (VII. 10)
принадлежащие N.
191
Очевидно, для любого р eL существует такое t*(R, г,р)%
при котором изображающая точка М(у), начав свое движение
на сфере (VII.9), непременно попадет на сферу (VII.10) и будет
оставаться внутри ее при любом t > t*. Величину t* назовем
временем затухания переходного процесса.
Пусть Т — заданное число.
Критерием времени затуханий называется условие
**(#,е,/>К7\ (VII. II)
Критерий перерегулирования. Пусть Q — заданное
положительное число, a F(y) —функция, принимающая только
положительные значения, а также значение, равное нулю при у = 0.
Примерами таких функций являются\\у\\, ^aK\yKlan ^ 0 и др.
к
Величину
o(R, р) - sup F^-Q , a > 0 (VII. 12)
t Q
назовем перерегулированием.
Очевидно, если а существует, то оно положительно; если же
а ^ 0, то будем говорить, что перерегулирования нет. * Пусть
а* — заданное положительное число.
Критерием перерегулирования назовем неравенство
<y(R,p)<e*. (VII. 13)
Критерий гладкости. Пусть 8 — заданное положительное
число. Будем говорить, что переходный процессу (ty to, у0),
\\у0\\ = R обладает, с точностью до 8, первой степенью
гладкости, если соблюдается неравенство *
|ji(^oJo)IKe. (VII. 14)
Неравенство (VII.14) назовем критерием гладкости первой
степени переходного процесса. Аналогично могут быть
определены критерии гладкости любой степени.
Критерий автономности регулирования. Систему,
представленную уравнениями (VII.5), (VII.7), назовем автономной с
точностью до е > 0 по группе координат у\, ...,#£, р < п, если
значение параметра р eL таково, что любое решение #i,...,*/p,
возникающее на сфере, описываемой уравнением (VII.9),
удовлетворяет условию
2i£ (t, /о, 0...., 0, №+1(0),...,упф))<г\ (VII.15)
/е=1
* Здесь ||.у|| — евклидова норма вектора у, т. е. \\у\\ = I / у. у\ где уг —
координаты вектора у. Прим. редактора.
192
При 8 = 0 система (VII.5), (VII.7) будет автономна по
группе координат #i,..., #/з, р < п, если значение параметра р <=L
таково, что любое решение у\,..., #р, возникающее на сфере
(VII.9), зависит лишь от начальных значений #i(0),...,t/p (0) и
не зависит от начальных значений остальных координат.
4. Проблема качества
Допустим, что задан объект регулирования уравнением
(VII.5) и закон управления (VII.7), в котором параметр р eL,
а также задана серия у"кРитеРиев качества переходного
процесса.
Проблема качества заключается в построении подобласти
1У eL, такой, что при любом p^Ly вся серия ^-критериев
качества переходного процесса удовлетворяется. В такой
формулировке задача крайне сложна. Очевидно, она во многом может
быть упрощена, если построение подобласти Lv производить,
опираясь на принцип пересечения. Последнее означает
следующее.
Допустим, что мы умеем решать проблему качества для
каждого отдельно взятого критерия серии у и строить подобласть
U^L параметра р, на который данный критерий соблюдается.
При этом условии область Lr, если она существует, будет
определяться как пересечение всех областей вида U.
Разумеется, для каждого объекта (VII.5) существует
минимальное поле Yd , на котором гарантируется асимптотическая
устойчивость замкнутой системы (VII.5), (VII.7).
Отсюда, однако, не следует, что на этом же поле можно
получить и решение проблемы качества, даже если качество
характеризуется одним каким-либо критерием.
5. Оценка времени затухания
Итак, допустим, что установлен некоторый закон обратной
связи (VII.7), в котором остается свобода выбора параметра р.
Замыкание системы (VII.5) дает исходные уравнения задачи
Ук=^акаУа + Ши ••• >Ут Р, t), К= I,. . ., П. (VII. 16)
а
* *
Здесь коэффициенты ап а содержат параметры рь . . . , рт и
в общем случае известным образом зависят от t. По условию
система (VII. 16) асимптотически устойчива относительно
решения (VII.8). Это означает, что корни Яа характеристического
уравнения
detf^a —^1 = 0 (VII. 17)
имеют отрицательные вещественные части.
13 Заказ 33
193
Предположим относительно функций fK, что:
1) МО, А 0^0;
2) существует такая сферическая окрестность ||у|| = 7?* с
такими постоянными числами L^*\ что всюду при Из>И*ч#*
соблюдаются условия
1МЛА0К^Г||у||;1 т 18)
Теперь рассмотрим все движения системы (VII.16),
начинающиеся на сфере (VII.9). Чтобы оценить время затухания
движений, введем новые переменные /?, z , определяемые по
формулам
^2 = 1|у||2;) (VII.19)
y, = Rz. J
Геометрический смысл преобразования состоит в том, что
компоненты вектора z суть направляющие косинусы радиуса-
вектора изображающей точки, тогда как R— его длина.
Уравнения для новых переменных имеют вид
£=_ш# + ф(#, г, p,t)\ (VII.20)
(VII.21)
(VII. 22)
2«= У. I G/ca + 0ка I 0>+ — l|Za+ ,#v х" *' '/ г' ~' , К -= 1, . . . , П.
(VII. 23)
Уравнения (VII.20) и (VII.23) имеют первый интеграл
||*||2=1. (VII. 24)
Он очевиден не только из-за геометрического смысла г, но
также может быть получен и по самим уравнениям. Теперь
перейдем к оценке времени затухания.
Первоначально допустим, что система линейна. Уравнение
(VII.20) дает
R = R(0)e b . (VII.25)
Отсюда следует, что проблема качества, в случае
использования лишь одного критерия, сводится к изучению тех значений
194
w= —
a 3
®(R,z,PJ)=^zJk(R,z,pJ
ЬКа + Ъка(м+ y)
fK(R, z, p, t)
Za+ -
квадратичной формы (VII.21), которые она принимает на по-^
верхности (VII.24).
Поскольку система асимптотически устойчива,
коэффициенты формы непременно удовлетворяют критерию Сильвестра
Ьгк + Ьк1
bye + Ьк1
,~ьк
>0, t£x, к=1,...,п. (VII.26)
Область L устойчивости системы определяется пересечением
неравенств (VII.26) по параметрам/?ь ...,/?т.
В области L всюду форма w принимает лишь положительные
значения, поэтому время затухания t* есть первый
положительный корень уравнения
wdt= — lnf —Л
(VII. 27)
Интересующая нас оценка может быть получена из анализа
уравнения (VII.27).
Пусть р фиксировано. Рассмотрим уравнение
и \ km. + Ьп1
— Оц — К • • • >
bm + bn
— b„„—X
= 0.
(VII. 28)
Пусть корни этого уравнения будут
0 < K(tiXK(t)< • • • < KV)- (VII.29)
Следовательно, переменная R убывает не быстрее, чем
функция
t
R(0)e ° ,
и не медленее, чем функция
- \*i№
R(0)e Ь
Отсюда находим более простое соотношение для любых
линейных асимптотически устойчивых систем.
Рассмотрим первоначально стационарные системы. Для этого
случая все корни (VII.29) постоянны и проблема качества
разрешается соотношением
К(Р)>—7ln(f)2> (VIL3°)
13* 195
вытекающим из выражений (VII.11), (VII.27). Отсюда следует
заключение: линейная стационарная система будет иметь
наилучшее качество в смысле критерия (VII.11) для такого
значения параметра р eL, для которого корень Xi(p) уравнения
(VII.28) принимает наибольшее значение.
Уравнение (VII.27) дает также и другой ответ на вопрос о
наилучшем качестве. Именно, линейная стационарная система
будет иметь наилучшее качество в смысле критерия (VI 1.11) для
такого значения параметра р е L, для которого все корни
уравнения (VII.28) одинаковы. В этом случае уравнение разрешается
точно и дает
К(р) = ---=К(р) = Чр).
У линейных нестационарных систем неравенство
t
^l1(p,t)dt>-\n^J (VII.31)
О
может быть эффективно использовано с помощью
вычислительных машин.
Неравенство (VII.31) может быть упрощено, если
воспользоваться теоремой о среднем для оценки интеграла, стоящего в
его левой части. Пусть Х*(р) —среднее значение функции
Xi(p, t). Тогда
ь*(р)>~1п(т)*> (VIL32)
т. е. качество линейной нестационарной системы является
наилучшим в смысле критерия (VII.11) для значения параметра
р е L, для которого среднее значение Л* (/?) наименьшего корня
h(P, t) уравнения (VII.28) является наибольшим.
Неравенство (VII.31) может быть изучено с помощью
вычислительных машин. При этом надлежит решить уравнение
(VII.28) и определить X\(t) как функцию времени. Нанесение
на график функции J X\(t)dt позволяет легко определить момент
о
t* как координату точки пересечения этого графика с прямой
—1п( —) . Заметим, что когда непосредственное применение
уравнения (VII.28) в случае стационарных линейных систем
затруднительно, желательно использовать канонические
переменные
£. = 2С^<" *=1,....,л. (vii.33)
196,
Пусть \xs — корни характеристического уравнения
detlo.0 —цввр]-0. (VII. 34)
Если коэффициенты C(as) выбрать как решения уравнений
lsCf = 2 С$аар, s, р = 1, .. . , п, (VII. 35)
то новые переменные определятся с помощью уравнений
£s = h
S*Si
S=l,
(VII. 36)
Поскольку исходная система асимптотически устойчива,
Re ixs < 0.
Допустим для определенности, что все JlIs — вещественны.
Для оценки качества системы (VII.36) или, что то же самое,
исходной системы, составим уравнение (VII.28). Тогда имеем
АО,..., 0
-IV
0,
о,
■Итг
= 0.
(VII. 37)
Следовательно, корни уравнения (VI 1.28) отличаются от
корней полинома Гурвица исходной системы только знаком.
Если же среди корней полинома Гурвица будет пара
|х1=—а + ф, \х2=—а —ф, а>0
комплексных сопряженных, то в уравнении (VII.37) вместо
—jlii, —jjl2 следует поставить а. В обоих случаях проблема
качества регулирования в смысле критерия (VII.II) будет
оцениваться наименьшей степенью устойчивости по полиному
Гурвица [149].
Отсюда следует заключение: с любой наперед заданной
степенью точности наилучшее качество регулирования для линейной
стационарной системы обеспечивается таким выбором параметра
peL, для которого все вещественные корни полинома Гурвица
одинаковы, все комплексные корни имеют одинаковую
вещественную часть, равную по величине вещественному кратному
корню. Доказательство этого утверждения легко может быть
получено построением канонической системы и в случае кратных
корней.
Для нелинейных систем уравнение (VII.20) дает
т =
г т
t \wds
R(0)+ f Фе° dx
i '
— fa*/*
e °
(VII. 38)
197
Отсюда находим
[ wdt t [ wds
Re0 <fl(0)+j-I^LRe° dx.
(VII. 39)
Пусть
t
\wdt
u = Re'° , 0=-Ш_, c-#(0)>0.
Тогда из неравенства
и < с + f *як#
вытекает следующее выражение:
t
lvdt
u^ce0 ,
которое называется неравенством Беллмана [29]. Его
применение к нашему случаю дает
/?(*)< Я(0)е ° (VII.40)
Из определения функции Ф [см. формулу (VI 1.22)] вытекает
оценка
|ф|<12*лнг-/1<нл<кя (vii.4i)
к
На основании последней можно сделать следующее
заключение: исходная нелинейная система будет иметь наилучшее
качество для того значения параметра /?eL, для которого
разность %\(р) — к максимальна.
Применим полученный результат к регулируемой системе
вида (П.1), т. е. к системе
т1л = 2^аЛа + 6ж/И. к=1>
п\
а=1
п
!2сл<'
i=i
(VII. 42)
где f(o) — нелинейная функция класса А' [89];
Д0)=0, o/(o)>0,(-|_^=o>/*, (-|-)<Я; (VII.43)
вещественные постоянные.
198
Свойства (VII.43) позволяют утверждать, что в некоторой
области значений |cr| ^ а* функция /(а) расположена в секторе
(Но, ho). Выделим в этой функции линейную часть ho и
положим /(g) = ho + ф(сг).
Пусть pi < р2 < ... < рп — вещественные корни уравнения
det[# + p£] = 0, (VII. 44)
где Е — единичная матрица;
А = [aKa\i —квадратная матрица,
B = A+h
К, ...,ся]. (VII.45)
С помощью линейного неособого преобразования (см. гл. II)
приведем рассматриваемую систему уравнений к канонической
форме вида (II.5), т. е.
** = ЬЛ+ /(<*)> к=\, ... ,п;
:27Л'
(VII.46)
о =
где
Допустим, что существует область L параметров системы, в
•которой все рк положительны. К уравнению (VII.46) применима
оценка (VII.41). Для этой оценки, вводя переменные zK, по
формулам вида (VI 1.19) в которые вместо ук следует подставить
хк, из системы уравнений (VII.46) определим
w = Y>P«z*> Pi<P2< ••• <Рд- (VII.47)
к
Для числа к имеем формулу
*=(#-W ng^, (VI1-48)
Следовательно, наименьшее время затухания переходного
процесса получается для такой точки области L, для которой
величина pi — к максимальна.
6. Теорема В. В. Немыцкого
Теорема В. В. Немыцкого [133] позволяет в ряде случаев
решить проблему качества, характеризуемую критерием
перерегулирования.
199
Пусть заданы уравнения (VII. 16), в которых р ^L. Будем
говорить, что эти уравнения удовлетворяют «основным
условиям», если:
1) корни Яг характеристического уравнения
\a^-K8a[i\ = 0 (VII. 49)
таковы, что Re Яг ^ —Ь2\ Ь2 > 0, i = 1,..., п;
2) найдется такая постоянная CR, что в шаре \\у\\ ^R
нелинейные функции удовлетворяют неравенствам
|/-(^^р)|<СЛ||у||; (VII. 50)
3) функции fa(y, pt) таковы, что для любого р ^L
существуют решения уравнений (VII.16), проходящие через любую
точку шара || у\\ ^ /?**, определенные при любых t, при которых
НУ (*, л, р) || < R**, если || уо!1 ^ Я**.
Теорема имеет следующую формулировку. Если система
(VII. 16) удовлетворяет основным условиям и для всех у, для
которых || у\\ ^ R постоянная
С« < -^=- в— emax = J^p -^- , (VII .51)
п2 У т \ п2 || А ||
где т — число отличных от нуля функций /а, || А || =- - / ^ V а\^у
то все интегральные кривые системы (VII. 16), выходящие из
точек шара ||^||<8m7i^**, будут 0+-кривыми (т. е. ||.у||-*0, при
t ->■ оо), находящимися при t ^ 0 в шаре \\ у\\ ^ #**. Здесь Ь2—
постоянная, выбираемая согласно первому основному условию.
Теорема В. В. Немыцкого не отвечает на вопрос, имеет ли
система (VII. 16) при данном р перерегулирование. Однако,
если такое перерегулирование существует и условие (VII.51)
соблюдается, то при F(y) = \\y\\2 согласно неравенству (VII.13)
величина перерегулирования должна удовлетворять следующему
критерию:
sup m-R = *"-4а*" ff* (VII_52>
°тах ч
Следовательно, параметр р eL следует выбирать таким
образом, чтобы выполнялось неравенство
^L^r'>-U-. (vii. 5з>
я2 IIЛ || / 1+а
200
Данная оценка может быть значительно улучшена, если
система (VII.16) приведена к треугольной форме
</i = Mi + M2 + . . . +blnyn + f1(y, f)\
У* = КУ2 + • • • + bmyn + /а(У. *)'»
(VII. 54)
Уп= КУп + fniyJ).
В этом случае теорема В. В. Немыцкого формулируется так.
Если система (VII. 16) имеет треугольную форму, удовлетворяет
основным условиям и для всех у, для которых || у\\ ^ R,
постоянная Ск удовлетворяет неравенству
C^^minle^1-^; -£=), (VII. 55)
( тах пут пут)
где т — число отличных от нуля функций /а,
1*11
В\\=1/^^Ь2фу (VII. 56)
то все интегральные кривые системы (VII. 16), выходящие из
точки шара || у\\ ^ min'(sm7x; 1)^?** будут 0+-кривыми (т. е.
|| у II ->0 при £->- + 00), находящимися при /^0 в шаре
радиуса R.
Данная формулировка теоремы В. В. Немыцкого может быть
использована для оценки перерегулирования согласно
неравенству (VII.52); только в этом случае величину етах следует
определять по формуле (VII.56). Вторая формулировка теоремы
теряет свой смысл при \\В\\ = 0, т. е. когда уравнение (VIL16)
приведено к канонической форме
yK = KyK + fK(yJ), (VII.57)
Тогда имеет место теорема о монотонном затухании
переходного процесса: если уравнения (VII. 16) имеют каноническую
форму (VII.57), удовлетворяют основным условиям и для всех
ь2
у, для которых || у II ^7?**, постоянная CR** < —=-, где т —
у т
числи функций fK, отличных от нуля, то все интегральные кривые
системы, выходящие из точек шара \\у\\ ^i?**, будут монотон
ными 0+-кривыми (т. е. \\у\\ ->0 при t->- +00), находящимися в
шаре ||у II ^/?** для любых t ^ 0. Например, для системы
(VI 1.46) Cr = (Я — К) -I / 2^*»m = п-> и условие монотонности
переходного процесса имеет вид (Я— К) л/ п2дУ1^^ •
V к
201
Наконец, рассмотрим случай, когда уравнение (VII.16)
линейно. В этом случае имеет место теорема: пусть задана
линейная система с постоянными коэффициентами
Ук = X йкаУ«> /с- 1, ... , п\
тогда все траектории, выходящие в начальный момент из шара
радиуса ( , ) R**f будут оставаться в шаре ра-
* У \п Vn-l\\A\\ J у у н F
диуса #** при любом t ^ 0 и || у || ->- 0 при t ->- оо.
Следовательно, требуемое перерегулирование в системе
может возникнуть, если параметр р таков, что
'^<f » , V41, (VII.58)
1+<т ^Д nVn—l || Л ||
/I-
22<&- (VI1-59)
3
Существуют оценки и двух других критериев качества
нелинейных систем управления: гладкости и автономности. Однако
из-за большого объема математических выкладок их приводить
не будем.
Глава VIII
Исследование
релейных систем
с помощью
уравнений
в конечных
разностях
В настоящее время в различных областях
техники широко применяются релейные системы
автоматического управления. Это обусловлено целым
рядом их преимуществ, к числу которых относятся
высокие точностные характеристики, относительно
малые габариты и вес, высокая надежность за счет
применения современных бесконтактных релейных
элементов, имеющих практически неограниченный
срок службы. Релейным системам, как правило,
свойственны автоколебания, амплитуда и период
которых должны быть по возможности малыми.
Требуемые значения амплитуды и частоты
обеспечиваются обычно одним из следующих способов:
введением дополнительных корректирующих
устройств, охватывающих релейный элемент, или
источника внешних высокочастотных колебаний.
В последнем случае в системе устанавливается
режим вынужденных высокочастотных колебаний.
Воспроизводящие свойства релейных систем с
высокочастотными колебаниями или
автоколебаниями по отношению к медленно меняющимся входным
сигналам близки к свойствам непрерывных линей-
203
ных систем. На выходе релейной системы имеет место
непрерывный медленно меняющийся сигнал с наложенной
высокочастотной составляющей, имеющей малую амплитуду. В дальнейшем
под реакцией на медленно меняющиеся воздействия будет
пониматься значение медленно меняющейся составляющей
выходного сигнала или более точно—огибающая выходных
колебаний. Следует отметить, что в современных следящих системах
с переменной структурой, обладающих высоким порядком аста-
тизма и работающих в скользщем режиме, на выходе
наблюдаются явления того же характера, что и при воздействии медленно
меняющихся сигналов. Несомненно, большой интерес
представляет исследование скользящих режимов с конечной частотой
и амплитудой с целью получения огибающих.
1. Математические модели
Рассматриваемые релейные системы содержат один релейный
элемент, находящийся в управляющей части или в
исполнительном тракте, и линейную часть. Линейная часть описывается
системой линейных дифференциальных уравнений,
характеризующих состояние системы в промежутках между переключениями
релейного элемента. Некоторая релейная функция z = /(e)
определяет функциональную связь между входом е и выходом z
релейного элемента.
На рис. VIII. 1 представлены возможные виды релейных
характеристик.
Исследуемые релейные системы можно разделить на две
группы: системы с неизменяющейся линейной частью, поведение
которых описывается дифференциальными уравнениями с
разрывными правыми частями; системы, у которых в момент
переключения параметры линейной части изменяются скачком.
Последнее обстоятельство существенно усложняет анализ. В
настоящей главе будет исследовано состояние релейной системы
в малой окрестности периодического режима.
Для описания функционирования релейных систем
применяются нелинейные уравнения в конечных разностях, а для
исследования асимптотических решений этих уравнений и суждения
об устойчивости предварительно следует рассмотреть
периодические режимы. Предполагается, что медленно меняющиеся
воздействия g(t) не «уводят далеко» систему от периодического
режима. Такая предпосылка позволяет оценить воспроизводящие
свойства системы по отношению к g(t) на основании уравнений
первого приближения. Последние получаются в результате
обычной линеаризации исходных нелинейных разностных уравнений.
Прежде чем оценивать влияние сигнала g(t), составим
разностные уравнения для автономной системы \g(t) = 0| с
релейным элементом, имеющим характеристику типа Ь (рис. VIII. 1).
204
При симметричных характеристиках релейных элементов
уравнения автономных систем имеют более простой вид, чем при
несимметричных. Случай несимметричных релейных характеристик
подробно рассмотрен в работе [152].
с1 с2
I
,
'
I
\z
0 £
а)
2
'
I
I
I
£
С2 Cf
-с
2
0
с
Ю
Z
0
L
€
£
I
-С
'
z
0
\
6)
Z
£
S
0
С
3) е)
Рис. VIII.1. Релейные характеристики:
а — идеальная релейная характеристика; б — релейная характеристика с мертвой
зоной; в — релейная характеристика с зоной неоднозначности; г — релейная
характеристика с зонами неоднозначности и мертвой зоной; д — Z-образная
характеристика со смещением; е — Z-образная характеристика без смещения
2. Уравнения автономной системы
Нелинейные уравнения в конечных разностях представляют
собой рекуррентные соотношения, позволяющие по заданным
начальным условиям не только определить все моменты
переключений, но и значения координат в эти моменты. Добавив к
ним решения линейных дифференциальных уравнений между
моментами переключений, можно полностью описать релейную
систему. Выходной сигнал релейного элемента z представляет
собой последовательность знакопеременных прямоугольных
импульсов. Совместим начало /г-го импульса длительности 0П с
моментом п-то переключения. На рис. VIII.2 показан характер
изменения выходного сигнала релейной системы я, выходной
координаты релейного элемента z и i-й компоненты выходного
сигнала при отсутствии медленно меняющегося воздействия g(t)
и внешних линеаризующих колебаний.
Пусть передаточная функция линейной части W(s) содержит
только простые полюсы, тогда
с,
(VIII. 1)
205
Соответственно выходной сигнал линейной части можно
представить как сумму элементарных составляющих
*(*)=£ Л')-
(VIII. 2)
Положим, что переключение реле происходит в моменты
достижения сигналом ошибки е(0 =—x(t) пороговых значений
+ С или — С (рис. VIII.2).
1
N,
О/
7
о п+1
•1
1 М I
t
xMft)
0
I
i
'
i
I ч
1
ъ
7
Рис. VIII.2. Колебания в системе с релейным элементом,
имеющим характеристику, показанную на рис. VIII. 1, в
Запишем в векторной форме уравнения системы между двумя
соседними переключениями
X = Ax±zmCe, (VIII. 3)
где X — матрица-столбец с компонентами х^ (i --= 1, 2, ...,/с);
А и С — диагональные матрицы с компонентами аг* и С\,
е — единичная матрица-столбец.
206
В уравнении (VIII.3) знак плюс соответствует
положительным, а минус — отрицательным импульсам на выходе релейнога
элемента. Задавая начальные условия и принимая без
нарушения общности zm = 1, найдем решение уравнения (VIII.3):
x = M(t)x0±N(t)Ce, (VIII.4)
где М (t) = [еа**] — диагональная матрица к X к с
элементами eai ;
N (0 = [М (t) — Е]А~1 — диагональная матрица к X к с
элементами (eai —1)/ах-;
Е — единичная матрица к X к.
Обозначим х (0) = —хп и х(Вп) = xn+i- Используя
уравнение (VIII.4), определим вектор
хп+х = —M(Qn)xn + [M(Qn)—E] A~lCe. (VIII.5)
Принятое обозначение х (0) = —хп учитывает
противоположность знаков хп и хп+и поэтому разностное уравнение-
(VIII.5) справедливо как для положительного, так и для
отрицательного импульса выходного сигнала релейного элемента.
Текущее значение вектора х (t) между соседними переключениями
будет равно
x(t)=M{t)[A-lCe—xn]—A-lCe, (VIII. 6),
o</<e„.
Для определения продолжительности п-то импульса 0П
необходимо записать условия переключения с n-го импульса на
(п + 1)-й. Переключение с п-то положительного импульса на
(п+1)-й отрицательный произойдет в момент, когда сигнал,
ошибки достигнет значения— С (см. рис. VIII.2):
e(f) = —*(*) = —erx{t), (VIII. 7)
Иначе, условие переключения имеет вид
е**(еп)=С (VIII. 8}
где е — транспонированная матрица е или вектор-строка,
состоящая из к одинаковых компонент, равных единице..
Используя уравнение (VIII.6) с учетом (VIII.8), получим
уравнение для определения 0П
е*{-Мфп)хп+ШЮ-Е]А-1Се)=С. (VIII. 9)
Уравнения (VIII.5) и (VIII.9) составляют искомую систему-
нелинейных разностных уравнений автономной системы. Они
написаны для случая всех простых корней a* (t = 1, 2,..., /с),
отличных от нуля. При наличии нулевого корня соответствующие
компоненты векторов и элементов матриц получаются' путем
предельного перехода, когда один из щ->-0..
20?
Уравнения (VIII.6) и (VIII.9) дают возможность по
произвольно заданным начальным условиямх0 = ||лго°|| (i = 1, 2,..., /с)*
вычислить последовательно все значения хп(п= 1, 2,..., оо) и
0п (л = 0; 1, 2,..., оо). Для нахождения значений 0П приходится
каждый раз решать трансцендентное уравнение (VIII.9), причем
решение должно удовлетворять условию переключения в
нужную сторону. Это означает, что производная сигнала ошибки
е(/) =—eTx(t) в момент переключения должна иметь вполне
определенный знак; например, при переключении с
положительного импульса на отрицательный она должна иметь знак минус.
Таким образом, получим
x(Qn)=e*x(QJ>0 (VIII. 10)
или после дифференцирования уравнения (VIII.6) с учетом того,
что М (t) = AM (t), найдем
ет{АМфп)1А~1Се—хп]}>0. (VIII. 11)
Необходимо отметить, что в качестве решения
трансцендентного уравнения (VIII.9) следует брать наименьший из корней,
удовлетворяющий условию (VIII. 11).
3. Периодические режимы релейной системы
Предположим, что существует автоколебательный режим с
периодом 20 и со значениями переменных в момент
переключения, равными лгр(0). Это означает, что неустановившиеся
колебания с промежутками между переключениями 0П и со
значениями переменных в моменты переключения хп ихп+\ сходятся к
«своим значениям в автоколебательном режиме:
НтЭл = Э; \imxn= lim^n+i =^хр(в).
Заменяя в уравнениях (VIII.5), (VIII.9) и в неравенстве
(VIII. 11) 0п а 0, ал:?г+1 и хп налгр('0), получим новые уравнения
и соответствующие условия для установившегося режима:
xp(Q) =--Мф)[А-1Се—хр{В)]—А~хСе, (VIII. 12)
или
хрф) = Т{В)А~1Се\ (VIII. 13)
ет{Т(В)А~1Се} = С; (VIII. 14)
eT{[E+T(Q)] Се} > 0, (VIII. 15)
п -ft
где Т (0) —диагональная матрица к X к с компонентами th-1-.
* В отличие от JCf (0) через .^обозначены начальные значения
последовательности величин х^ (п = 0, 1, 2, ..., оо).
208
Матрицы М (9) и Т (9) связаны следующими
соотношениями:
Е + Т (9) = 2 М (9) [М (0) + ЕГХ; (VIII. 16)
E + T(Q)=M(Q)[E— Г(9)]; (VIII. 17)
£ — 7(9) =2[ЛГ(9) +ЯГ1. (VIII. 18)
Уравнение (VIII. 14) называется уравнением периодов. Все
его вещественные положительные корни 9ь 92,..., Qi могут
соответствовать автоколебаниям с периодами 29ь 292...
Существовать же могут автоколебания только с такими периодами 29т
(т = 1, 2,..., I), при которых удовлетворяются как условие
(VIII. 15), так и условия устойчивости, о которых будет сказано
ниже.
Обозначим компоненты вектора лгр (0) =7 (9) А-1 Се через
С; ,1 а,6
Pi = —— in —— и соответственно
а;
e'*„(e)=2ft=p(e)- (viii.19)
Величина P(Q) представляет собой значение выходной
координаты xp(t) =eTxp(t) релейной системы в момент
переключения в установившемся режиме.
Левая часть неравенства (VIII.15) представляет собой
производную xp(t) при ^ = 9. Обозначим через qi компоненту
вектора *р(9), при этом
1+th-^-
Q(e)=2fc = *r{-*p(e)}-
(VIII. 20)
Как будет показано в дальнейшем, значение производной
выходного сигнала Q в момент переключения играет
существенную роль в уравнениях первого приближения.
4. Устойчивость периодических режимов
релейной системы
Для суждения об устойчивости необходимо из исходных
нелинейных разностных уравнений получить уравнения для малых
отклонений от исследуемого периодического режима.
14 Заказ 33 209
Введем малые отклонения от исследуемого периодического
режима
Дея = тп, Ллгш АлГп+1.
Тогда
Хп+\ =ЛГр(е)+ДлГп+Г,
Подставим последние выражения в уравнения (VIII.5) и
(VIII.9), нелинейные функции в этих уравнениях представим
в виде первых приближений их рядов и, исключая тождества,
относящиеся к периодическому режиму, получим следующие
уравнения для малых отклонений:
Axn+l = -Мф)Ахп + хр{Щтп; (VIII.21)
ет{[Е + Т(в)]Се}тп—eT{M{Q)Axn}=0. (VIII.22)
В уравнении (VIII.22) выражение первого слагаемого,
заключенное в фигурных скобках, представляет собой вектор лгр(0),
компоненты которого равны дг-. Следовательно, все первое
слагаемое представляет собой произведение Qxn. Учитывая это
обстоятельство, уравнение (VIII.22) можно записать в виде
тп = ^еТ{Мф)Ахп}. (VIII.23)
Исключая тп из уравнений (VIII.21) и (VIII.22), получим
разностное уравнение первого приближения
Ахп+х = -М{ЩАхп + ±{еЧМ{Ъ)Ахп]}хр{Ъ), (VIII.24)
или
Д^л+i = -Щ*)Ь*п + {вГЬхп}хрф)9 (VIII.25)
Q.
где gT — вектор-строка с компонентами gi =—-(i=l, 2,..., к).
Второе слагаемое в правой части уравнения (VIII.25)
представляет собой скалярное произведение двух векторов,
умноженное на третий вектор. Оно определяет специальное линейное
преобразование над одним из векторов, входящих в скалярное
произведение, которое носит название диады.
Считая, что система координат ортонормирована, перепишем
векторное разностное уравнение (VIII.25) в следующем виде:
Axn+i=BAxn, (VIII. 26)
где B=(xp(Q)Xg)-M(Q).
210
Последнее выражение означает, что
. ВАхп = < gAxn > хр (0), (VIII. 27)
где < > —знак скалярного произведения.
Коэффициенты матрицы В имеют вид
*«-(-?—0 **•
Устойчивость исследуемого периодического решения зависит
от собственных чисел матрицы
(В—гЕ)
или корней характеристического уравнения
Д*(г)=0,
где
Ьц — г Ь12 ... Ь1К
Ab(z)
Ь21 Ь21 —Z • • • 62/С
^Kl ^K2 ^/C/C ^
(VIII. 28)
(VIII. 29)
(VIII. 30)
Периодический режим устойчив, если все корни
характеристического уравнения (VIII.29) лежат внутри круга единичного
радиуса плоскости г.
5. Реакция релейной системы на медленно
меняющиеся воздействия
Предположим, что на вход релейной системы подается
медленно меняющееся воздействие g(t), максимальная частота
которого много меньше частоты автоколебаний. Переключение
реле будет происходить теперь под действием сигнала ошибки
s(0=S'(0—X(t)y a Движение системы станет возмущенным.
Исходя из условия малости ошибки реальной релейной системы,
можно считать, что отличие параметров автоколебаний от их
невоздоущенных значений весьма мало. Это дает основание для
оценки воспроизводящих свойств по отношению к g(t) по
уравнениям первого приближения. Для составления исходных
нелинейных уравнений используем кусочно-линейную
аппроксимацию входного сигнала. На каждом n-м промежутке
длительности 20п входной сигнал аппроксимируется линейной функцией
gn + knt (0</<26„),
где gn и kn — функции номера п (рис. VIII.3).
14* 211
arctgkn
Рис. VIII.3. Кусочно-линейная аппроксимация
входного сигнала
Рис. VIII.4. Возмущенные автоколебания
212
В дальнейшем будет также применяться более грубая,
ступенчатая аппроксимация (kn = 0). В качестве меры нарушения
симметрии колебаний (рис. VIII.4, а — г) примем коэффициент
In-
а(<р)_о(Ф)
п п
29^
(VIII. 31)
где 6лФ)—длительность положительного этапа (z(t) >0);
®{п}— длительность отрицательного этапа (z(t) < 0).
Отметим, что
20
zmtn= fz(t)dt, (VIII. 32)
о
и для невозмущенного автоколебательного режима £п = 0.
Дадим всем переменным на положительном этапе индекс ф, а на
отрицательном — г|). Тогда, совмещая начало отсчета с началом
каждого этапа, примем следующие обозначения:
ДГф(и)-— хп, x<p{vn ) = v,n = дГф(U); I сVIII 33)
•Я/Н-1 — -^ф(9д ) . j
Переключение внутри промежутка произойдет в момент,
когда ошибка 8Ф(0 достигнет значения (—С). Переключение в
конце промежутка имеет место при еФ (t) = С.
Используя решение (VIII.4) и обозначения (VIII.33),
запишем для двух этапов систему уравнений в конечных разностях
K = M(W)xn + [M(B%)-E]A-lCe\ (VIII. 34)
gn + W№)-er[M(Q{fixn + [M№
(VIII. 35)
xn+i -= MiWWn-lM^-E] A"xCe\ (VIII.36)
ёп + кп2Ъп~ет\М{№)Ъп-[М{^ (VIII.37)
Введем малые отклонения от автоколебательного режима:
х„ = -хр(В)+Ахп; Ъп = хр(Щ+АЪп; )
Xn+i = —xp(Q)+&xn+i; 6п = е + т„;
tn = 0 + Mn; 6<ф) = е + т^; е<ф) = 6 + т<ф);
2т„ = т<*Чт<ф); тГ = тп + 6А|п; I
(VIII. 38)
^п-
(ф)_ (ф)
%п тп
29
213
В результате линеаризации получим систему линейных
уравнений в конечных разностях
Мп = М(ЩАхп + хр(Щ%Т\
т(ф).
in
у [£„ + £„ (6)-
■<Г{М(Ъ)Ах„}];
Ахп+1=Мф)АЪп — хр(в)тфп;
».
Q
■{gn + kn2Q-e-[M(Q)Mn]}.
(VIII. 39)
Отметим, что в связи с медленностью изменения g(t) всегда
Q» \kn\, поэтому при выводе уравнений (VIII.39)
произведениями xln\ knи2%nkn пренебрегаем, как малыми второго порядка.
Исключая из уравнений (VIII.39) переменные %^\ %% и АЪп,
получим окончательно
Алгп+1 —B2Axn = (E—B)Lgn + [2QE—QB]Lkn, (VIII. 40)
где/?— матрица, встречавшаяся ранее в уравнении (VIII.26);
L = ±-xp(Q).
При ступенчатой аппроксимации входного сигнала (kn = 0)
уравнение (VIII.40) имеет несколько иной вид:
Длгл-И— В2кхп= (Е—B)Lgn.
После г-преобразования уравнения (VIII.41)
начальных условиях получим
х* [г] = (zE-B2)-1 (E—B)LG* [г],
где
при
(VIII. 41)
нулевых
(VIII. 42)
/1=0
оо
0*И = 2^(2еп)2~"-
я=0
Переходные процессы в системе определяются корнями
характеристического уравнения
Afl.(z) = 0, (VIII. 43)
где Дб2 (z)—определитель матрицы (zE—В2).
Для оценки реакции релейной системы на входной сигнал
g(t) необходимо найти элементарные передаточные функции
^И = ^М.. (VIII. 44)
С* И
214
Элементарные передаточные функции вычисляются по
формуле
л(0 г21
^/M = -S, (VIII. 45)
АЛИ
где Д^>
определитель, полученный из Лв* заменой 1-го
столбца столбцом (Е—BL) при ступенчатой аппроксимации
входного сигнала.
Передаточная функция относительно любого из
интересующих нас выходов системы может быть получена в виде
линейной комбинации элементарных передаточных функций.
Очень часто передающие свойства дискретной системы
удобнее оценивать не по дискретной передаточной функции, а по
передаточной функции для огибающей. Огибающая является
решением некоторого дифференциального уравнения и совпадает
с истинным значением выходной величины только в дискретных
точках 0, 20, 40, ..., n2Q. Уравнение огибающей находится с
учетом связи между корнями характеристического уравнения
дискретной системы и корнями характеристического уравнения
огибающей.
6. Следящая система
с переменной структурой
Описанная выше методика может быть применена для
анализа систем с переменной структурой, содержащих неидеальные
релейные элементы. Будем, как и ранее, рассматривать
реакцию на медленно меняющееся воздействие g(t). На рис. VIII.5
9(Ъ) £
1
i
1
' ■* L
■ГаП
f(£,£,x)
ки
^\.
1
>Л
J *
1
Tss
<Р(е,ё
х)х
J*
К1
Tas+1
X
Рис. VII 1.5. Структурная схема системы с переменной
структурой
показана структурная схема системы, линейная часть которой
описывается следующими дифференциальными уравнениями:
объекта регулирования
Tax + x^k^\ (VIII. 46)
исполнительного элемента
Ts\i = t;
(VIII. 47)
215
сравнивающего элемента
b = g{t)—x.
Нелинейное звено "^(е, в, х) формирует логическую функцию
закона регулирования
£ = &8e-f-iM8, s, х)х,
где
(VIII. 48)
функцию
(VIII. 49)
Y(e,e,i)- I
7\ при
—7\ при
fye + Туе > С, i > 0;
kjs + Tfe<—C, x<0]
kfi + Tp>—C9 *<0;
kp + Tp<C,x>0.
(VIII. 50)
В соответствии с законом регулирования (VIII.49) и
логической функцией (VIII.50) на рис. VIII.6 показана развернутая
Ш0
Н /г>
к j k(+>*
Tjs
Ш=-
z
С
А
I
T,s
*■
TSS
J*
*i
TaS+1
Рис. VIII.6. Развернутая структурная схема
структурная схема системы. Для оценки воспроизводящих
свойств по отношению к g(t) рассмотрим предварительно
движение автономной системы [g(t) = 0].
7. Уравнения автономной системы
с переменной структурой
Анализ выражения для логической функции W показывает,
что необходимо последовательно описать четыре этапа
движения системы. При этом на первом и третьем этапах оно
подчиняется одному дифференциальному уравнению, а на втором и
216
четвертом — другому. Учитывая, что при отсутствии входного
сигнала s(t) =—x(t) и s(t) =—x(t), запишем выражение для
закона управления на первом этапе
l=—k*x—Txx (VIII. 51)
и соответствующее дифференциальное уравнение движения
ТаТ8х + {Ts + T&) х + kxk&x = 0. (VIII. 52)
Совместим начало первого этапа с моментом п-го
переключения. Тогда начальные условия х(0) = хп и х(0) = хп связаны
уравнением линии переключения
k}xn + TjXn = C. (VIII. 53)
Выберем параметры системы таким образом, чтобы на
первом этапе корни характеристического уравнения были
действительными, а на втором — комплексными сопряженными с
положительными вещественными частями.
Решение уравнения (VIII.52) с учетом начальных условий и
соотношения (VIII.53) имеет вид
x(f) — (a2Tf + kj)xn — C pglt _]_ (aiTj + kj)xn — C ^^ (VIII. 54)
Tj(a2 — щ) Tji^ — ao)
Момент окончания первого этапа определяется переходом
через нуль x(t). Иначе говоря, имеет место следующее условие
переключения:
x(W)=0, (VIII. 55)
или в развернутой форме
Tiai , [(a2Ti + kj)xn-C]ea^) +
+ —-^—Г Wj + k^-Qe^^O. (VIII.56)
(ax — a2) If
Отсюда получим уравнение для определения длительности
первого этапа
In
Э(1)- —
(aiTj + kj)xn — C
(a2Tj + kj)xn~C
сс2
(VIII. 57)
ах — а2
Начало второго этапа характеризуется скачкообразным
изменением знака при Тх в законе управления (VIII.51). Движение
системы на втором этапе описывается новым
дифференциальным уравнением
ТаТ8х + (Т8 — Т&) х + kxkex = 0 (VIII. 58)
с начальными условиями х(0) = ^(ЭлО и х(0) =0.
217
Решение уравнения (VIII.58) в промежутке между
переключениями при данных начальных условиях запишется таким
образом:
we(1))
x{t) = ——]Ло2 + $2е^ cos(co/ + Фг), (VIII. 59)
где
Фх — arccos
у ©а + ра
Второй этап закончится в тот момент, когда сигнал на входе
релейного элемента (рис. VIII.6) достигнет порогового
значения С.
Условие переключения принимает вид
k Jim y^i + piepe»' COs(co0^> +
со
д./0П)\ п6(2)
+ Ф0— Т, V n } У<& + фе n sincoGf = — С. (VIII.60)
со
Составим систему нелинейных разностных уравнений,
позволяющую по заданным начальным условиям последовательно
определить моменты переключения и значения всех переменных в
рассматриваемые моменты. Для этого добавим к уравнениям
(VIII.57) и (VIII.60) еще два уравнения в конечных разностях
х (*2Tj + kj)xn-c ^ , for/+ */)*»-с c««eff^ (VHI.61)
Т/(а2 —ах) ' ^/(а! —а2)
Хп+\
_L«_!./G)2 + p2e n cos(©ei2) + 9i), (VIII.62)
где хп - х (Q{n ); xn+i = x(Q{n >).
Уравнения (VIII.57), (VIII.60), (VIII.61) и (VIII.62)
описывают поведение системы на первых двух этапах движения.
Следует отметить, что при отсутствии входного воздействия и
симметрии релейной характеристики третий этап будет полностью
идентичен первому, а четвертый — второму.
8. Периодические режимы системы
с переменной структурой
Допустим, что существует автоколебательный режим с
периодом 20 и со значениями выходной координаты в моменты
переключения, равными Р\ и Р2. Следовательно, неустановившиеся
колебания с промежутками между переключениями внутри пе-
218
риода Э^и 6£2;и с переменными в моменты переключения хп и
хп+\ сходятся к своим значениям в автоколебательном режиме:
lim Q™ = 6^, lim 6f - 62; lim xn = Px;
/г-^co n-+oo n-*--x)
\\m\xn\ = lim | xn+11 = P2.
rt->CO rt-»CO
Заменяя_в уравнениях (VIII.57), (VIII.60), (VIII.62) 0«!на
0Ь 0^'на 62, хп на Ри \хп\ и \xn+i\ на Pi, получим систему
уравнений для определения параметров установившегося режима:
(aiTj + kj)P2-C
(a2Tj + kj)P2—C
«2
«1
-а2
kj -^- V®2 + р2е№ cos(co02 + ф1) Ш- /со2 + р2
Pf
Хер 2sin(u02-=—С;
(а,Т] + к])Ра-с са,е. (сц77 + */)Р»-С ^.е,.
P. "-=
Т/(ах — а2)
-^- l/co2 + p2e002cos((o02 + 91).
(VIII. 63)
(VIII. 64)
(VIII. 65)
(VIII. 66)
Для суждения о устойчивости периодических режимов
запишем уравнения в малых отклонениях от исследуемого
периодического режима.
Введем малые отклонения A0«u, A0j,2), A*n+i. Д*п> Ах„; тогда
eJ?>=e1 + Aei1); e^ = e2 + Ae<f>;
a:„ = Pi + A^; хп = Р2 + кхп;
Xn+l = —Р2 + кхп+\.
Подставим последние выражения в исходные нелинейные
уравнения (VIII.57), (VIII.60) —(VIII.62), нелинейные функции
представим членами до 1-й степени их разложений в степенные
ряды и исключим тождества, относящиеся к периодическому
режиму. В результате получим систему уравнений первого
приближения.
ле<1}
дх„
Ах„
dh
д№
п J п
е<2>=<
Л0<2) = -
dh
dh
e<1>=e,
А0),1'— I (VIII. 67)
L дхп
Ахп;
219
Лх„ =
Ax„+i =
+
dh
дхп
' &h
. дхп
dh
ae'2>
)(2),
=e2
kxn +
A*n+
A6<2) +
dh
dh
e<J>=e,
Aej,!);
(1)
^> J 8^=8,
№' +
dxn
x=P
Axrn
где /ь /2, /3, /4 — соответствующие нелинейные функции в
исходных разностных уравнениях.
Исключая из системы (VIII.67) переменные Ах*п, ЛЭ^ и A6^2),
приходим к линейному разностному уравнению
Axn+i=kAxn. (VIII. 68)
Для того чтобы исследуемое периодическое решение было
устойчиво, должно выполняться условие \k\ < 1.
9- Реакция системы на медленно
меняющиеся воздействия
Принимая во внимание сказанное ранее относительно
медленно меняющегося входного воздействия и считая, что оно не
«уводит далеко» систему от периодического режима, будем
оценивать реакцию на действие g(t) на основе решений разностных
уравнений первого приближения.
Поскольку автоколебания потеряли симметрию, необходимо
рассматривать все четыре этапа движения. В промежутке между
первым и вторым переключениями движение системы
описывается дифференциальным уравнением с правой частью
TaTsx+ (T8+T1k1)'x + k1keX = k1kBg(t)- (VIII.69)
Для составления исходных уравнений используем линейную
аппроксимацию входного сигнала. Входной сигнал
представляется линейной функцией knt.
Решение уравнения (VIII.69) при заданных начальных
условиях х(0) = хп, х(0) = хп будет несколько отличаться от
решения (VIII.54) за счет того, что коэффициенты учитывают
воздействие, а также добавится частное решение, соответствующее
правой части:
k^faTj + kfiXn Jra2Tjkn(Ts + kiT,) -С
x(t) = * . eaJ +
+ knt
Kkx
kzkx jajj + kj) xn + a.Tjkn (Ts + kjTj) - С
VJi7V(a2—a0
<?OL2t
(VIII. 70)
220
Условие окончания первого этапа остается прежним, однако
выражение для длительности первого этапа п в явном виде
найти не удается. В этом случае получим
. kekx (a2Tj + kj) xn + a2Tjkn (Ts + к{Гг) - С
х{тг) = ах г^-/ : Ь
+ ос2
/^1Г/(а2 —al)
Mi {aiTj + kj) xn + aiTjkn (Ts + kxT$ - С
kek1Tj(a2 — a1)
e*** + kn = 0. (VIII. 7 1)
Ha втором этапе движения система подчиняется дифферен
циальному уравнению вида
TaT'sx + {Ts — ТА) * + Kfa = Kk*K (тх +1). (VIII. 72)
Начальными условиями для второго этапа по координате и
производной служат их значения в конце первого этапа х(0) =
= *(ti), х(0) = 0. Решение уравнения (VIII.72) с учетом
начальных условий выглядит таким образом:
x(t) = *(Tl)~A22 е^ sin (со/ + ф2) + knt + A22, (VIII. 73)
sin cp2
где
Л9о
kik^-iTs-kiTdkn
kXke
cp2 = arctg —
#n#J &o
W«Ti" Cs-Vil^-^WMe
-P
(VIII. 74)
Момент окончания второго этапа соответствует равенству
входной координаты релейного элемента пороговому значению
С. Запишем условие переключения
*/ &(') -*(т2)]+Гу 1ёГ(Л -х(х2)] = С,
или в развернутом виде
fon^i'
X(%l) Лг &* sin (ют2 + ф2) + knx, - Д22
sin ф2
+ Tj А»-*Ы е^ [рsin(coT2 + ф2) +
sin ф2
+ (DCOS((BT2 + <Pa)]=C.
(VIII. 75)
+
(VIII. 76)
На третьем этапе движение определяется дифференциальным
уравнением
TaTsx + (Ts + ^7\) x + k,kzx = hhkn (%1 + r2 + t). (VIII. 77)
Начальными условиями служат х(0) = л:(тг), x(0) = xfa).
221
Решение уравнения (VIII.77) записывается по аналогии с
анализом первого этапа в виде
Г (7\ + ГА)/г„
(сс277 + kj) [х (т2) - kn (тх + т2) ] + а2Т,- ' - 1-^г-
x(f) = .
kiK
+ с
7,/(«2-а1)
+
{ajTf + kj) \х(т2) -kn(тх + т2)] + ajj
+
л-с
Tj(a2 — аг)
+ knt- V* + ™k* +MT. + TJ
(VIII. 78)
В конце третьего этапа я(тз) = 0, т. е.
(сс2Т/ + kj)[х(т2) -kn(Ti + т.)] + сс2Г/ Г iTs+^f&l)kn 1 + С
(а^/ + &/) [* fa) - kn (х1 + та) + а1Г/
X
X а^*^ + •
(^s + TA)^
kxke
Tj(a2 — a±)
X
Ха2еа^-|_^л = о. (VIII. 79)
Ha последнем, четвертом этапе движение системы
описывается дифференциальным уравнением
TaTsx + (Ts - ВД x+kM = £ А£* fa+T2 + т3 + О (VIII. 80)
с начальными условиями х(0) = я(тз), *(0) = 0.
По аналогии с выражениями для второго этапа запишем
решение уравнения (VIII.80) в виде
x(t) = х{Хз) ~Л*2 sinH + ф,) +knt + A^ (VIII.81)
sin ф2
где
А
42
ф = arcctg
^1 Vn fa + T2 + T3) - (Ts - TykX) kg
knk1k&
МЛ fa + T2 + t8) — Ts — ГА) £л —л: (т3) /г^
Условие переключения в конце четвертого этапа имеет вид
*/ \К Ы +*, + г8) - *(Тз)~Л*г ^sin(o«4 + ф2) ~aJ +
L sincp2 J
+ T:\ А**~х{Тз) e^(psin(©T4+9«)+ocos((i>T4 + 92))l = —С.
|_ sin ф2 J
(VIII. 82)
222
Значение выходной координаты в момент окончания
процесса может быть получено из уравнения
х(т4) =хп+1 = *№>-*" +kn^ + A^ (VIII. 83)
sincp2
Таким образом, в результате анализа этапов движения
можно составить систему нелинейных разностных уравнений
(VIII.71), (VIII.76), (VIII.79), (VIII.82), (VIII.83),
позволяющих последовательно определить длительность всех этапов и
значения выходной координаты в момент переключения.
При ступенчатой аппроксимации входного воздействия
исходная система нелинейных уравнений имеет более простой вид,
а именно:
а2 (од Tf + kf) (хп—gn) — С )
_ ai ^т^+ ku (Xn—gn)—C i . (VIII 84)
ах —а2
*(Tl)"g* VaP + pefr*[kj sin (сот2 + Фа) +
+ Tj ]/со2 + (З2 sin(coT2)] - С, (VIII. 85)
где
ср2= —arcsin
yV + p2 '
ga (aiTi + ki)[x(x2)—gn] + C
ai (atTj + kfilxW—gnl + C
ах—а2
(VIII. 86)
x{%z)~gn y^ + fe^* [kjsin(сот4 + ф2) + Tj V^ + № X
Xsin(0T2)]-— C; (VIII. 87)
xn+i = grt~^(T3) V ri4j2e^ sin (cdt4 + cp2) + ga. (VIII.88)
CO
Следует отметить, что при ступенчатой аппроксимации
входного сигнала удается в явном виде записать выражения для
длительности первого и третьего этапов.
Д.дя оценки устойчивости и нахождения огибающей
колебаний к(а выходе системы составим уравнения в малых
отклонениях от исследованного ранее периодического режима. После
разложения нелинейных функций в уравнениях (VIII.84) — (VIII.88)
в ряды и исключения тождеств, относящихся к установившемуся
режиму, получим систему линейных разностных уравнений вида
Ат1 = А АЯй + пг1- А^; (VIII.89)
дхп dgn
223
дт2
Ат9
dhAx„
дхп
dgn
&gn-
дхг
■A%x
Ats =
dh Axn
df:
dxn
df
dx,
4 Ат4=-
dgn
дП
дх,
дх2
Agn-
Ахп-
I
* Дт,-
df.
At,
дт3
At,
dt2
-At,
(VIII. 90)
(VIII. 91)
дтг
Атх +
(VIII. 92)
Ax,
n+l
dh
dr.
Ax,
dh
~Agn-
dgn
Atj
dh
dx±
Ax„,
dx2
At2 +
(VIII. 93)
дт3 дл;^
где /ь /2, /3, /4, /5 — нелинейные функции в уравнениях
(VIII.84) — (VIII.88).
Частные производные взяты при условии, что
соответствующие переменные имеют значения установившегося режима.
Исключая из последней системы уравнений промежуточные
переменные Ать At2, Ат3 и Ат4, приходим к линейному
уравнению в конечных разностях
где
Axn+l—FAxn = NAgn,
bgn = g[ 2Q]-g[(n-l)2B].
Применим к уравнению (VIII.94) ^-преобразование
гх*(г) -zx(0) —Fx^z) = AG(z).
Тогда
x*(z)
AG (z) , zx (0)
(VIII. 94)
(VIII. 95)
(VIII. 96)
(VIII. 97)
С помощью обратного дискретного преобразования Лапласа
можно по данному изображению в каждом конкретном случае
найти оригинал
(VIII. 98)
—1
Ax[n2Q] = L7l{x*(z)}.
Последнее выражение дает возможность вычислить значения
Ах в дискретные моменты времени.
Таким образом, проведенный анализ позволяет сделать
вывод о применимости изложенной ранее методики к системам с
переменной структурой. Заметим, что повышение порядка
линейной части приводит к существенным трудностям, связанным с
возрастанием числа переключений.
224
Частным случаем систем с переменной структурой являются
системы со скачкообразно меняющимися параметрами.
Следующий параграф посвящен такого рода системам.
10. Система со скачкообразно меняющимися параметрами
Рассмотрим замкнутую систему с нелинейным элементом, у
которого связь между выходом и входом определяется релейной
характеристикой, показанной на рис. VIII.1,5. Отметим, что в
данном случае на вход релейного элемента подается производная
от выходной координаты линейной части x(t). Колебания
выходной величины линейной части системы описываются
дифференциальным уравнением второго порядка с разрывной правой частью
х + 2{к'+ а§* = I ° ПрИ Х < С; (VIII. 99)
| 0о при х > С.
Будем искать уравнение верхней огибающей колебаний
координаты х в процессе выхода системы на установившийся режим,
предполагая, что затухание мало. Как и раньше, необходимо
рассмотреть два движения, подчиняющиеся двум различным
дифференциальным уравнениям, и «припасовать» начальные
условия нового движения к конечному состоянию, являющемуся
результатом движения на предыдущем этапе.
Совместим начало отсчета с моментом п-то переключения и
запишем решение линейного дифференциального уравнения
х + 2$х + щх = 0 (VIII. 100)
между моментами переключения
х (t) = ег& (Сг cos at + С2 sin arf). (VIII .101)
С учетом начальных условий х(0) = хп и х(0) = С решение
примет следующий вид:
x(t)=erv(xn cos(d;+ C + P*" sinoA (VIII. 102)
Переключение произойдет в тот момент, когда входная
координата релейного элемента x(t) достигнет пороговой величины
С. Отсюда условие переключения
или
*(еи)=с, (Viii. юз)
е ,8ед {[_®хп sinco6rt + (С + $хп)cos ©0Л] —
-Р(*п
cos ©б,. А !—2- sin ©9,
ш
= С. (VIII. 104)
15 Заказ 33 225
Значение х в момент первого переключения определяется
нелинейным разностным уравнением
хп = е~^п ( Хп cos ©0„ + C + {k* sin ©0 Д (VIII. 105)
На втором этапе движение системы подчиняется новому
дифференциальному уравнению с правой частью
х-\-2$х-\-(й\х=-(й\.
(VIII. 106)
Начальными условиями по координате х и ее производной х
будут соответствующие значения этих переменных в момент
окончания первого этапа. С учетом этого решение
дифференциального уравнения (VIII.
x(t) = l+e~
X sin ©0„ I — 1
06) будет иметь вид
е '" п (хп cos 06
X
со
cos со/ +
С В , р —ее
—+ — e ^п х
со со со
sin ©Л. (VIII. 107)
X fxncoscoQn-] ' ^Хп sincuO^ I
Окончание второго этапа соответствует моменту, когда x(t)
снова достигнет порогового значения С. Отсюда следует
условие переключения
x(Qn+l)=C
или
е -**»» {_!£___£_ е-"п(хп cos©0„ +
С+$хп
{
sin ©0,
со
*2
„нзе„
©б " ( хл cos ©0„ +
C + ^sin©9n) + ©)sin©9n+'i +Сб"р9я+1 cos©0„+1 =C. (VIII. 108)
Составим нелинейное разностное уравнение для определения
значения выходной координаты линейной части х в момент
второго переключения:
Хп+Л = 1 + g-^e+i | Г <Г^ ^я cos ©0„
С + Р*я
X
X sin ©0„ ) — 1 cos ©6д_и -\ sin ©0rt . 1 + — X
/J со со
X е~^п [ хп cos©0„Н ±_Р^_ sjn00^ \ s;n0ert+i —
^ CO /
— i-.sin(o6n+1]. (VIII. 109)
226
Последнее уравнение совместно с уравнениями (VIII.104) и
(VIII. 108) образует искомую систему нелинейных разностных
уравнений, позволяющую по заданным начальным условиям
вычислить последовательно все значения Эп, >0n+i и хп+\.
Предположим, что существует автоколебательный режим с
периодом колебаний 20 = 0i + 02 и со значением выходной
координаты х в момент переключения, равным Р. Это означает,
что неустановившиеся колебания с промежутками между
переключениями 0П и 0п+1 и со значениями переменных в моменты
переключения хп и хп+\ сходятся к автоколебаниям.
Иными словами,
Нтв;1 = 1
я-»оо
Нт 0/1+1 =92:
\imxn
п-+оо
НгПХд+1 =Р.
Заменяя в уравнениях (VIII.104), (VIII.108) и (VIII.109)
значения 0п на -0i; 0n+i на 02; хп, хп+\ на Р, получим уравнения для
определения параметров установившегося режима:
С + $хп
Р=1+ег&*
e-^i I xn cos ©0! -
• sin 002 ) —
Р ^
1 cos со02 -\ sin со02 + — е—№* (хп cos 00t
J со о> V
+ С + ^Хп этюЭЛ sinco02 £- sinco02]; (VIII. 110)
со / со )
е-(зе2 (_cg_—PL g-.ee, / Хп cos ^e + c + tj** х
{ СО СО \ СО-
X sin соОЛ + ^ сое-№ ( xh cos 00 + С + Р** X
/со V со
X sin соЭ1+со| sin со02 + Се~№*> cos ;oo02 - С; (VIII .111)
e-p°i
-Р
-cwnsin(o01 + -— **Xn cosw©!
хп cos00x Н L^- sin 00x
= С. (VIII. 112)
Значения сигнала x(t) между моментами переключения
определяются выражениями (VIII.102) и (VIII.107) при
соответствующей замене.
Очевидно, значения выходной координаты" х в моменты
переключения и в промежутках между ними являются функциями
0i и 02. Последние же определяются путем решения
соответствующих трансцендентных уравнений (VIII.1Н) и (VIII. 112),
причем каждое из этих уравнений может иметь несколько решений.
Устойчивым решениям будут соответствовать автоколебательные
режимы в системе.
15* 227
Для исследования устойчивости необходимо линеаризовать
исходные нелинейные разностные уравнения или составить
линейные уравнения в конечных разностях для малых отклонений
от исследуемого периодического режима.
Введем малые отклонения Л0П = тп, A0n+i = тп+ь Ахп = уп,
AXn+i = f/n+i от исследуемого периодического решения.
Представив нелинейные функции в уравнениях (VIII.104), (VIII.108),
(VIII.109) в виде первых двух членов их разложений в
степенные ряды и исключив тождества, относящиеся к
установившемуся режиму, получим следующую систему линейных разностных
уравнений:
Уп = Ахп; (VIII. 113)
уп = Вхп + Стп+1; (VIII. 114)
yn+l = Dxn+Exn+l + Fya, (VIII. 115)
где
А=-
Ж]
dfi I
в =
en=e«
df,
дхп
С ---
39,
>n+l
»n+l
=e2
df, 1
D
£ =
a/»
ae
'л+i
*n+l
=e2
F =
ffs "I
здесь fi, /2, /з — соответствующие нелинейные функции в
уравнениях (VIII.104), (VIII.108) и (VIII.109).
Исключая из уравнений (VIII.113), (VIII.114) и (VIII.115)
переменные хп и тп+ь получим
y^.\=kynt (VIII. 116)
где
й = -
АС
Исследуемое периодическое решение устойчиво и ему
соответствует автоколебательный режим, если выполняется условие
|Л|<1.
В результате решения линейного разностного уравнения
(VIII.116) с помощью дискретного преобразования Лапласа
можно получить значения приращений выходной координаты в
моменты переключения, а затем и уравнение для верхней
огибающей колебаний на выходе линейной части системы.
228
Применяя дискретное преобразование Лапласа к уравнению
(VIII.116), имеем
гу*(г)-гу*{0)=ку*(г), (VIII. 117)
т. е.
У(0)г
»*(*)
Определим оригинал
у[п2Щ=-у{0)№.
Отсюда следует выражение для верхней огибающей
Рассмотрим в заключение конкретный пример.
(VIII. 118)
(VIII. 119)
(VIII. 120)
Пример VII 1.1. Ламповый генератор с колебательным контуром в цепи
анода и индуктивной обратной связью имеет схему, показанную на рис. VIII.7.
Пренебрегая сеточными токами и анодной реакцией, в соответствии с
принятыми на рисунке обозначениями, запишем на основании законов Кирхгофа
дифференциальные уравнения для колебаний в
ламповом генераторе
la
Ri + L-
di
dt
i = ia + C
\-uc = Q;
duc
~dT'
(VIII. 121)
(VIII. 122)
Иначе, после исключения ис
„ dH _ di
Здесь ia = ia(ug) —анодный ток,
являющийся при сделанных допущениях функцией
только напряжения на сетке лампы
4 =
di
-ми-
Рис. VIII.7. Схема лампового
генератора
Для ламп с большой крутизной характеристики ia = ia(ug) можно с
достаточной степенью точности аппроксимировать эту характеристику
идеализированной характеристикой типа е (см. рис. VIII. 1)
( 0 при иё < 0;
а \ 1а при ug > 0.
Имея в виду достаточно малое затухание контура и достаточно сильную
обратную связь, запишем уравнение для тока в колебательном контуре в
следующем виде.
2 I 0 при х< 0;
х -f 2(5* + со0л: = {
| cog при х >0,
где
i р 1 п R
(VIII. 123)
In
LC
229
Уравнение (VIII.123) имеет разрывную правую часть, что соответствует
скачкообразному изменению анодного тока при переходе х через нуль.
Рассмотрим движение системы на первом этапе, подчиняющееся
дифференциальному уравнению
x + 2$x + (dIx = 0.
(VIII. 124)
Отсчитывая время от момента переключения, найдем решение уравнения
(VII 1.124) в промежутке между двумя переключениями
х (t) = е~^ (Сх cos со/ + C2 sin со/).
С учетом начальных условий х(0) = хп, х(0) ---О
х (/) = e~~v ( хп cos со/ + — sin со/ ).
(VIII.125)
(VIII. 126)
Момент окончания первого этапа связан с переходом х через нуль.
Соответственно, условие переключения с паузы на импульс имеет вид
i(6„) = 0,
Р2
-е г"/г [ -— + со J xn sin co6rt--^ 0.
(VIII. 127)
(VIII. 128)
-Рвя
Р2
Учитывая, что е * пфО и —-|-со=£0, получим выражение для 0?г:
со
е„ = -
(VIII. 129)
В момент первого переключения значение координаты х в связи с
постоянством величины 0П определяется линейным разностным уравнением
хп = е~~^пхп (cos со0„ И- — sin соЗ„ Y (VIII. 130)
На втором этапе движение системы описывается дифференциальным
уравнением с правой частью
х + 2$х + coqa; = сод.
(VIII. 131)
Запишем решение уравнения (VIII.131) в промежутке между первым и
вторым переключениями, принимая в качестве начальных условий л:(0) = хп\
л-(0) = 0:
е VVflxn ( cos со0л + — sin со0п ) — 1
±
со
е v"nxn ( cosco0rt + sin coB^ ) —1
cos со/ +
sin ©Д- (VIII. 132)
Условие переключения, как и прежде, запишется в виде
i(en+1) = 0.
230
или с учетом выражения (VIII.129)
e-pe«+i
_i£L ., _J*. i»l
шпе <° +(* + ?-е <° + —
со в :
sina>9n+1=0. (VIII. 133)
Принимая во внимание, что е ' "^ Ф О и выражение в квадратных
скобках также не равно нулю, цайдем
ея_и=—. (viii. 134)
п^1 со
п
Введем обозначения 6n = 6n+i = и составим линейное разностное
со
уравнение, определяющее значение выходной координаты в момент второго
переключения:
хп+1 - х„Г2** = 1 + в-Р0. (VIII. 135)
Полученное разностное уравнение легко решается с помощью дискретного
преобразования Лапласа:
Aeq
Лс. (?) - е"х (0) -*, (?) e-W = , (VIII. 136)
е"—1
где
Отсюда
xAq)= d£! +^0)£L. (VIII.137)
Найдем оригинал
*М = 1±£-^(1 -^pe») + *(0)e-2pe«. (VIII.138)
Соотношение (VII1.138) представляет собой переходную функцию,
позволяющую найти значение выходной координаты в дискретные моменты времени.
Запишем выражение для верхней огибающей колебаний выходной величины:
х = 6~* \\(1 _вН») + *(0)*--*7. (VIII.139)
Аналогичным образом можно найти и нижнюю огибающую колебаний
на выходе системы
_p-P9(i 4- е~~№)
Хог^= y+w (l-e-~V) + x(0)e-V. (VIII.140)
В установившемся режиме амплитуда автоколебаний для безразмерной ве-
х6-хн \-е-№
личины х равна полуразности , где хв— — получается из соот-
2 1_е-2Рв
_е~ре(1_е-ре)
ношения (VIII.138) при п-»-оо, а хн = —— — из
соответствующего выражения при определении нижней огибающей.
231
Итак, амплитуда автоколебаний равна
1 1+^в J ре
^=T7Z^"=Tctht- (VIIIUI)
или для тока в колебательном контуре
-4cth-7J^_
2 а 2 /со2 —ра
Iycm = — /e cth о 1/^Г-оЯГ • (VI11 •142)
На этом можно закончить рассмотрение примера со скачкообразным
изменением параметра.
Глава I/V
Исследование
нелинейных
импульсных систем
прямым методом
Ляпунова
В последнее время значительно возрос интерес
к импульсным системам управления с
частотно-импульсной модуляцией (ЧИМ). Это объясняется
главным образом тем, что по простоте технической
реализации ЧИМ-системы почти не уступают ре-
лейно-импульсным системам, но значительно
превосходят их по своим динамическим свойствам.
Известны две основные разновидности ЧИМ-си-
стем управления: первого рода [83], т. е. такие
системы, в которых частота следования импульсов
является некоторой функцией дискретных значений
координат системы (математическое описание для
таких систем было получено в виде нелинейных
разностных уравнений [82, 178]) и второго рода, т. е.
такие системы, в которых частота следования
импульсов зависит от некоторого функционала
ошибки, определенного на интервале между
импульсами. Математическое описание этих систем не
может быть получено в виде нелинейного разностного
уравнения, а сводится к некоторой системе
нелинейных интегро-дифференциальных уравнений (см.
например, [292]).
233
В связи с тем, что ЧИМ-системы являются существенно
нелинейными динамическими системами, то основным и
единственным методом исследования устойчивости их в настоящее время
является прямой метод Ляпунова. Применительно к
исследованию одномерных ЧИМ-систем первого и второго рода такой
подход был использован в работах [83, 84, 291].
Выполненные до настоящего времени исследования касались
исключительно одномерных систем управления.
В этой главе результаты, полученные ранее в работах [83,
84], обобщаются на случай многомерных ЧИМ-систем первого
рода. Рассмотрим простейщую многомерную систему с
линейной непрерывной частью и с идеальными частотно-импульсными
модуляторами .первого рода. Для упрощения изложения
подробно рассмотрим лишь двухмерную систему.
1. Математическая модель ЧИМ-системы
Структурная схема рассматриваемой системы приведена на
рис. IX. 1. Оба модулятора преобразуют входные сигналы вг-(0
(i =1,2) в частотно-модулированную последовательность б-им-
пульсов z* (/).
Уравнение нелинейных элементов #Зг-, управляющих
работой импульсных элементов, запишем в виде
гМ = \*&еМ ПРИ 1**1 ><*) (ix.1)
I 0 при 18/Кс,; )
(cj = const, i = 1, 2).
Интервал Тп между моментами появления б-импульсов,
равный
7Я = *„+!-*„, (IX. 2)
принимается в виде некоторой четной положительной
дифференцируемой и ограниченной функции, не возрастающей в области
Si(tn) >0,
г„-ле1(дл(а ах.з)
Кроме того, примем, что
limf [eb е2]--Д,
е4-*0
82->0
где А — сколь угодно малая положительная величина.
Для многомерной линейной непрерывной части (МЛНЧ),
включающей в себя как собственно объект управления, так и
исполнительные устройства, примем Р-каноническую структуру,
показанную на рис. IX. 1.
234
Рис. IX. 1. Структурная схема двумерной ЧИМ-системы.
МЧИМ — многомерный частотно-импульсный модулятор, НЭ\, НЭ2, F —
нелинейные элементы, ИЭи МЭ2 — идеальные импульсные элементы
Тогда уравнения суммирующих звеньев запишутся в виде
*i = gt-xt, (IX. 4)
где
2
<i = >] ХЦ-
/=1
(IX. 5)
Пусть далее передаточные функции отдельных звеньев
МЛНЧ имеют вид
Wu(s)-
ПЧ т.,
^ht,Jf-
(IX.6)
^ ГЛ.:—К
/С=0
(lLj < тц\ ат = hij0 = 1; i, j = 1, 2).
На основании приведенных выше соотношений и результатов,
полученных в работе [83], уравнения динамики ЧИМ-системы
запишутся в виде матричных разностных уравнений
„А;,'7
Хи(п+ 1) -- е^1п[Хц{п) + В1Г2М%
(IX. 7)
235
где Xij(n)= \x$(n)\™if —вектор-столбец фазовых координат
системы;
xfl(n)^ lim xtf(tn-e);
0<е-)-0
(IX. 8)
еАи-тп
переходная матрица;
Ац — сопровождающая матрица характеристического полинома
МЛНЧ
*и =
О 1 0 ... О
О 0 1 ... О
о о
о
о
о
1
-а_ -om.,.-i —<>m -ат
(IX.9)
"41 "41
bij(t) = L~l[Wij(s) —импульсная переходная функция системы;
*«=И?(0)1о,г1; z/(n)=zi(/n)
В дальнейшем будут анализироваться свободные колебания
системы, поэтому в уравнениях (IX.4) положим gi(t) =s 0.
2. Анализ устойчивости многомерной ЧИМ-системы
прямым методом Ляпунова
Движение системы (см. рис. IX. 1) будем рассматривать в
фазовом пространстве £)т, под которым понимается т-мерное
евклидово пространство с координатами x^Ji'(n) , где /, / = 1, 2;
r{j = 0, 1,..., mij — 1; т= ^ т*г
Исследование устойчивости свободных колебаний системы
(см. рис. IX. 1) будет основано на использовании дискретного
аналога теоремы Ла-Салля [314], которая имеет следующую
формулировку.
Пусть vn = v( Xn) —непрерывная скалярная функция,
однозначно и положительно определенная в Dm, причем уп->оо при
||ДГ«||->-оо. Допустим, что разность функции vn неположительна
вдоль любой фазовой траектории автономной импульсной
системы
Хп+1=Х(Хп). (IX. 10)
Обозначим через 0 множество всех тех точек пространства
Dm, в которых Дуп = 0, а через М — максимальное
инвариантное множество, содержащееся в 0. Тогда все решения системы
(IX.10) неограниченно приближаются к М при я->- оо.
236
Если множество М состоит только из положений равновесия,
имеет место полная устойчивость множества положений
равновесия. Если множество М состоит только из начала координат,
имеет место полная устойчивость (асимптотическая
устойчивость в целом).
Доказательство теоремы имеется в работах [83, 84].
Для исследования устойчивости множества положений
равновесия рассматриваемой системы выберем функцию Ляпунова
в виде простейшей эрмитовой квадратичной формы
где
VtW^xmA'ijAtfXttn)*;
Aij — квадратная матрица, для которой
1 1... 1 1
Л*! =
СГ1 от1 СГ1
ч/i
*7/2
ijm
'// -J
(IX. 11)
(IX. 12)
(IX. 13)
1цг(г = 1, 2, ..., та)—собственные значения матрицы Ац, т. е.
корни уравнений
Аа(8) = 0, i,j= 1,2; (IX. 14)
А«
— матрица, эрмитово-сопряженная с Лг>
В дальнейшем ограничимся рассмотрением только таких
ЧИМ-систем, передаточные функции отдельных элементов
МЛНЧ которых не имеют кратных полюсов. Так как матрицы
Л-.1 являются матрицами Вандермонда, определители которых
отличны от нуля, если корни %^г не кратные, то, следовательно,
матрицы Л*., A*j существуют и являются эрмитовыми
матрицами с положительными спектрами, т. е. функции (IX.12)
являются положительно определенными.
Цринимая во внимание, что для матриц Л и А имеют место
следующие соотношения (см. например, [41]):
лЛ-1
„АЛЛ" Ч ,
ЛЛЛ"1 =C = diag[c/];
ect = diag [e l}; (Л*)-1 Д^Л* = С = diag [cj,
* Символ Т означает операцию транспонирования.
237
из уравнений (IX.7) и (IX.11) получим, что первая разность
функции Ляпунова равна
Avn = J \-XJi(ti)Qii{n)Xli{n) + z2i{n)qij{n) +
+ 2zl(n)Xli(n)Nlj(n)Bli}9 (IX. 15)
где
Яи(п) = лЪ [Eu-D*f(n)Du(n)] A„; (IX. 16)
Nu(n) = Re [л;,5„(п)Dtl{n) Л,7]; (IX. 17)
qu(n) = ^АцЪц(п)Оц(п)АиВи; (IX. 18)
Z)//(n)=diag[di/r(/i)]; dlJr(n) = eh*Tn; (к= 1, 2,. .., m,y) (IX.19)
£ ij — единичная матрица m^ X ягг>
Определение условий устойчивости, т. е. условий, при
которых удовлетворяются требования приведенной выше теоремы,
выполним отдельно для статических и астатических ЧИМ-си-
стем.
3. Условия устойчивости статических многомерных ЧИМ-систем
В соответствии с теоремой Ла-Салля для полной
устойчивости статических многомерных ЧИМ-систем требуется, чтобы
Avn было неположительным во всем пространстве Dm. Для
определения условий, при соблюдении которых это имеет место,
выделим в Dm две области: область Qi, ограниченную двумя
параллельными и симметричными относительно начала координат
гиперплоскостями переключения Р\+ и. Pi-, уравнения которых
на основании соотношений (IX.l), (IX.4) и (IX.5) запишем в
виде
riiW + *22(") + Ci = 0, (IX. 20)
и область Q2, ограниченную гиперплоскостями переключения Р2+
и Р2-, заданных уравнениями
%(«) + ^) + са = 0. (IX.21)
Расстояния ppi+, рр2+ плоскостей переключения от начала
координат соответственно равны
Ря.+ = у^; (IX-22)
>р*+=7=- <1Х-23)
238
Согласно уравнениям (IX.4) и (IX.5) Z\(n) =0в области Qi
(включая и ее границы) и, соответственно, 22(ft) =0 в области
Q2 (рис. IX.2). Поэтому в области Q = Q\ r^Q2 выражение
а) 5)
Рис. IX.2. Проекции линий пересечения гиперплоскостей переключения Р\+
и Pi_:
а — с плоскостью Хп(п)0хп(п); б — с плоскостью #12(^)0*22 (я)
(IX.15) для Avn приобретает вид эрмитовой квадратичной
формы:
^п-= ~ 2 ^WQ//(rt)Ar/7(Ai), (IX.24)
которая является отрицательно определенной в том и только в
том случае, когда
Re(V)<0; U=1,2; г= 1, 2,. . ., m/y, (IX.25)
т. е. если все звенья МЛНЧ устойчивы.
Очевидно, устойчивость звеньев МЛНЧ является
необходимым условием полной устойчивости, и поэтому принимаем, что
неравенства (IX.25) выполняются.
В общем случае функция Avn в области Qc = Dm — Q
является знакопеременной. Поэтому определим условця, при
соблюдении которых Avn будет отрицательно определенной в Qc.
Область Qc удобно разделить, в свою очередь, на подобласти,
границы которых показаны на рис. IX.3.
Ввиду четности функции Avn достаточно ее проанализировать
только в одной из четырех областей Qfj_+ например, в Q+c+ так
как для остальных областей будут получены аналогичные
результаты. Это справедливо также и для областей Qc+0 и Й^+#
А поскольку выражения функции Avn в областях Q°^0 и Qg±
239
являются частными случаями выражений функции Avn для
областей Q + + , то; следовательно, достаточно провести
исследование функции Avn только в области й^_+, внутри которой
Хп(п) + х12{п)>с» (IX. 26)
x*(") + Xn(")>cv (IX.27)
Из уравнений (IX.1), (IX.4) и (IX.15) следует, что в области
Q^, функция Avn имеет вид
2
,= £ \-XmQti(n)Xu(n)~
-2ХЦп)Ми(п)Ви + ди(п)}.
Приравнивая это выражение нулю, получим
2 {-^Г/(л)О//(«)^//(л)-2ДГГ/('2)ЛГ//(/1)Д// + (///(л)}=0. (IX.29)
(IX. 28)
Можно показать, что при выполнении условий (IX.23)
уравнение (IX.29) описывает в D71
Р2- х7
in) Pz+
Sti
^/W/V/W/V^^^
at
sL
c-0+
tzz'0)\
'Z Я
0
<„„„„„„„„„Ь(„„„„)ч„„„)\„„„„„„„„„„„.
-с,
2U
Ci
QjXgtn)
&,
ti-
Рис. 1Х.З. Области перемены знаков
управляющих сигналов Zi(ri)
замкнутую ограниченную
гиперповерхность, охватывающую
начало координат, причем
внутри этой гиперповерхности
Avn < 0.
Проведем в Dm две
гиперплоскости R\+ и i?i_,
касательные к гиперплоскости Avn =
= 0 и параллельные
соответственно гиперплоскостям
переключения Р1+ и Р\- (см.
рис. IX.2, а).
Уравнение гиперплоскости,
касательной в точке А к
поверхности Avn = 0, имеет вид
2 ro/,-1
2 J т,|/г(Л)4?(/1)-
/• /= 1 г=0
где
Ч//гИ) ='
dkvn
дх$(п)
x(tf(n)=xff{A)
2 "»//-!
v,(A)= 2 2^>(л)^/)(л)'
^(Л) = 0,
(IX. 30)
(IX.31)
(IX. 32)
240
xff (A)—координаты вектора Х(А), проведенного в точку
касания.
Из уравнений (IX.20) и (IX.30) следует, что условия
параллельности плоскостей i?i+ и Р\+ имеют вид
т|//г(Л) = 0, /, /=1,2; г=1,2 ти-1; (IX.33)
Л./оИ) = 0, /=1,2 (IX. 34)
и
Цпо(А)-у\120(А) = 0. (IX. 35)
Аналогично условия параллельности плоскости i?2+,
касательной к поверхности Avn = 0 в точке В, и плоскости переключения
Р2+ получим в виде следующей системы уравнений:
т|//г(Я) = 0, i,/=l,2; г=1,2 m/7-l; (IX.36)
ти,о(В) = 0, /=1,2; (IX.37)
WS)-r]2ioCB) = 0. (IX.38)
Система уравнений (IX.33) — (IX.35) образует систему
(т—1) уравнений, позволяющих выразить (т—1) искомых
переменных Хцг{А) через одну из них, а эта последняя может
быть определена после подстановки найденных (т—1)
значений х{[) (А) в выражение (IX.26) поверхности Avn = 0.
Аналогичным путем определяются координаты х\0 (В) вектора Х(В).
Покажем, что системы уравнений (IX.33) и соответственно
(IX.36) линейны относительно х\г) (Л) и х(0 (В) (при г=^=0).
Действительно, принимая во внимание, что
дХТ(п)={8{г^, 82г+1._; 8m>r+l)> г=1, 2 т-\ (IX.39)
дх^г)(п)
(где 8pq — символ Кронекера), уравнения (IX.33) и (IX.36)
можно записать в следующем виде:
(Qt,(n))l90Xu(A) = -(NtJ(n))lt0Bir, (IX.40)
(Q,/H1 0XtJ(B) = -(#„(*)), f 0ВФ (IX.41)
где (А)ц\ (A)i 0 и а(Л)0 у —подматрицы матрицы Л, у которых
вычеркнуты соответственно i-строка и /-столбец или только
/-столбец или /-строка.
Выражения (IX.40), (IX.41) представляют собой
неоднородные системы из (rtiij— 1) уравнений в каждой, линейные
относительно xtfi(A) и х$(В) при г Ф 0.
16 Заказ 33 241
Как уже отмечалось в работе [83], det (Qij(n)) i,i Ф 0 и
поэтому системы (IX.40) и (IX.41) имеют единственные
решения:
x<f)(A) = x[x<f)(A)}, t, /=1,2; r= 1, 2,. . ., m,7-l; (IX.42)
4>(Л) = х[4)(В)], t,/=l,2; r=l,2,..., /n,,— l. (IX.43)
Определим теперь значения Xij(A) и Xij(B).
Из выражений (IX.3), (IX.4) и (IX.16) — (IX.19) можно
установить, что элементы матриц Qij(n), Nij(n) и Оц(п)
являются функциями периода Тп = Л^гД^)]- Поэтому имеют место
следующие соотношения:
дЯц(п) ^ dQgjn) ^ t.)/=1>2. (IX.44)
дхп(п) dxi2(n)
^ТТ- = ^ТТ- ^=1.2! **1' g=\,2. (IX.45)
d*gi(/z) • dxg2{n)
Очевидно, аналогичные соотношения справедливы и для
соответствующих производных от матриц Nij(n) и скаляров
qij(n).
Принимая во внимание соотношения (IX.44), (IX.45) и
(IX.39), уравнение (IX.35) запишем в следующем виде:
L\l! {Qu(n)Xu(n) + Nn(n)Bn} | Xii{n)=Xii{A)-
-L\ll {Q^)X1M + N1MB12}\Xi2{n)=Xi2{A) = 0i (IX.46)
где ЦУ = (1, 0, 0,..., 0) —строка из Шц элементов, у которой
все элементы, кроме первого, равны нулю.
Повторяя аналогичные рассуждения, вместо уравнения
(IX.38) получим, соответственно,
til {Q21(n)X21(n) + N21(n)B21} | X2iin)=X2i{B)-
-L^Q^)*22(/z)+A^ (IX.47)
Выражения для коэффициентов y\2jo(A) и r\ijo{B) хотя и
могут быть на основании соотношений (IX.31), (IX.26) и (IX.44),
(IX.45) записаны в общем виде, но получающиеся при этом
выражения весьма громоздки и неудобны для непосредственного
использования и поэтому здесь не приводятся. При решении же
конкретных задач значения y\\jo(n) легче получить,
дифференцируя непосредственно уравнение Avn = 0, не прибегая к
использованию выражений для y\ijo(n), представленных в общем виде.
Итак, для определения искомых значений Хц(А) имеются
уравнения (IX.34), (IX.46) и уравнение (IX.42). Решения
системы уравнений (IX.34) и (IX.46) относительно, например,
координаты Хц(А) обозначим так:
xu(A) = fu[xu(A),Tn]. (IX. 48)
242
Тогда после подстановки выражений (IX.42) и (IX.48) в
уравнение (IX.29) получим следующее уравнение
относительно Хц(А):
x\l(A) + l1(Tn)x11(A) + UTn) = Oy (IX.49)
где 1\{Тп) и 12(Тп) —некоторые трансцендентные функции Тп.
Поскольку, как уже указывалось выше, поверхность (IX.26)
ограничена и охватывает начало координат, то трансцендентное
уравнение (IX.49) всегда имеет два вещественных корня
противоположных знаков. Обозначим положительный вещественный
корень этого уравнения, разрешенного относительно координаты
хи{А), не входящей под знак трансцендентных функций,
следующим образом:
хп(А) = а11(Тп); (IX. 50)
далее, результат подстановки значения Хц(А) в выражение
(IX.48) обозначим
xu(A)~au{TJ, ij =1,2. (IX.51)
Очевидно, аналогичным образом могут быть определены и
значения Xij(B) также в виде некоторых функций периода
повторения Тп.
По аналогии с выражением (IX.51) запишем сразу же, что
xu(B) = h,{Tn), U=l,2. (IX.52)
Тогда на основании уравнений (IX.30) — (IX.34), (IX.36),
(IX.37) и (IX.51), (IX.52) найдем, что искомые расстояния,pjn+
и рД2+ определяются из решения следующих уравнений:
М") + *1.(я)-аи(Гя) -а*(Гй) = 0; (IX. 53)
*.i('0 + *22(/0-M^)-a22(rj = 0. (IX.54)
Далее, в соответствии с выражениями (IX.22) и (IX.23), для
выполнения неравенства Avn < 0 во всей области ^5_+
необходимо, чтобы гиперповерхность (IX.26) не имела общих точек с
гиперплоскостями Р1+ и Р2+- Последнее имеет место только при
выполнении неравенств
Р^1+<РР1+; (IX. 55)
Р*2+<Рр2+- (1Х-56)
С вычислительной точки зрения вместо решения системы
уравнений (IX.53), (IX.54) и последующей проверки системы
неравенств (IX.55), (IX.56) предпочтительнее потребовать
выполнения следующих неравенств:
агЛТп) + а12(Тп)< хп(п) + х12(п); (IX.57)
ЫТп) + ^(Тп)< х21(п) + х22(п) (IX.58)
16* 243
при
Ci < Xnin) + х12{п)< ос;
являющихся по существу лишь другой формой записи
достаточных условий устойчивости (IX.55), (IX.56).
4. Условия устойчивости астатических
многомерных ЧИМ-систем
Рассмотрим теперь тот простейший критический случай,
когда каждая из передаточных функций Wij(s) имеет один
нулевой корень, т. е. примем
V = 0; hjr ^ ° при г > 0 (i, /=1,2). (IX. 59)
Множество М положений равновесия такой астатической
системы представляет собой замкнутую область (М £ й), внутри
которой
2
2 **/(")
/=1
<С/; х\?{п) = 0; (/,/=1,2; г=1,2 тц-\). (IX.60)
Это множество М устойчиво в целом, если существует такая
функция vn, удовлетворяющая теореме из § 3 этой главы, что
Avn = 0 при Х(п)£М "(IX.61)
Avn<0 при X(n)GDm—M. (IX.62)
Функцию v>n выберем в виде положительно определенной эр
митовой квадратичной формы (IX.11), (IX.12). Тогда из
выражений (IX.59), (IX.13) и (IX.16) установим, что' все элементы
(кроме первого) первого столбца матриц Ац и первый элемент
диагональных матриц Е ц — Оц (п) Оц(п) равны нулю. По-
этому для астатической системы вместо уравнения (IX. 15)
получим
244
+ 2zl(n)Xl,(n)Nu(n) + г] (n)qu(n)l (IX. 63)
где
(«//(«)),., =Ю.,1 (Ец-Dii{n)Dl((n))ltl(Att)ltl. (IX.64)
В области Q выражение (IX.63) приобретает вид эрмитовой
квадратичной формы
*"«=- £ (^wVi^wii.i^/Wti.o- (IX-65)
Поскольку в области Q исследуемая система является
разомкнутой системой, то это означает, что необходимым условием
устойчивости в целом является нейтральность ее МЛНЧ, т. е.
необходимо
при Kifl = 0 иметь Ке(Ч>}>0 (*>/=-1,2; г = 2,3,...,
ти-\\ (IX.66)
а это эквивалентно следующим соотношениям:
К7г(л)|<1 npHdz/1(/i) = l. (IX. 67)
В дальнейшем будем считать, что неравенства (IX.66)
выполняются.
Рассмотрим теперь функцию Avn в области Qi+, Из
выражений (IX.63), (IX.26) и (IX.27) для X{п) €&с++ получим
-2Xti(n)Nu(n)Bu + qu(n)}.
Последнее выражение в общем случае знакопеременно в йс,+>
поэтому определим условия, при которых оно отрицательно в
Приравнивая данное выражение нулю, получим
2 ((4W)o,i№/H)i,i№/K,o +
i, /=1
+ 2Xl,(n)Nu(n)Bu} = 2 Яц(п). (IX.68)
Нетрудно показать [83], что в Q^_+ функция Avn
положительна внутри гиперповерхности (IX.68) и отрицательна вне ее.
Поэтому At;n < 0 во всей области только в том случае, когда
гиперповерхность, заданная уравнением (IX.68), не имеет общих
точек с гиперплоскостями переключения Р1+ и Рг+-
245
Для определения условий, при соблюдении которых это
имеет место, построим две гиперплоскости /?1+ и /?2+, касательные к
гиперповерхности Ди-П = 0 и параллельные соответственно
гиперплоскостям переключения Р\+ и Р2+, и определим расстояние
их от начала координат.
Поскольку уравнения (IX.30) — (IX.32) плоскостей Я\+ и
R2+ и условия параллельности (IX.33) — (IX.38) их плоскостям
Pi+ и Р2+ остаются неизменными, то перейдем непосредственно
к определению координат точек касания X (А) и X (В).
Из выражений (IX.68), (IX.31) и (IX.33) следует, что для
астатической ЧИМ-системы вместо системы уравнений (IX.40)
и (IX.41) будем соответственно иметь
Ш")\,. (**/И)),. о = -М/СО),, 0ВФ i, /-1,2; (IX. 69)
{Q{,{n)ul{Xti{A))li0=-{Nu{n)lt0Blh i, /= 1, 2. (IX.70)
Как уже отмечалось выше, (Qij(n))\,\ — неособые матрицы,
поэтому системы уравнений (IX.69) и (IX.70) имеют
единственные решения:
(АГиИ))1>0=-(д//(л))Г/ДЛГ//(/1))1>0в//, /,/=1,2; (IX.71)
№/(B))lfo = -(Q//W)r/i(^//W)li0^/. »,/ = 1,2. (IX.72)
Далее, принимая во внимание отличия выражения (IX.68)
от аналогичного выражения (IX.29), уравнение (IX.46)
.перепишем в виде
L\4 {Nn(n)Bn} | Xiiin)=XiiiA)-L\4 [Nu(n)Blt) | XiM=Xn{A) = 0. (IX.73)
соответственно, уравнение (IX.38) окончательно запишем в
следующем виде:
LW{N*(n)Ba} \XtlW=^tl<Pi~L^{Nn(n)BK} \x„{ny=Xn(B>==0. (IX.74)
Решение системы уравнений (IX.34) и (IX.69), (IX.73)
относительно, например, координаты X22(A) обозначим так:
xu(A) = fmu[Xn(A),Tn]. (IX.75)
После подстановки в уравнение (IX.68) значений xifi (A)
(г > 0) из соотношений (IX.71) и выражений (IX.75) получил?
уравнение относительно х%2(А):
хп(А) + 1*(Тп) = 0, (IX. 76)
где 1*(Тп) —некоторая трансцендентная функция Тп.
Поскольку поверхность (IX.68) ограничена и всегда
охватывает начало координат, то трансцендентное уравнение (IX.76)
имеет положительный вещественный корень, который обозначим
хю(А)=а;2(Тя). (IX. 77)
246
Введем следующее обозначение
Xii(A)=-al.(Tn). (IX.78)
Соответственно, результат определения составляющих
вектора X (В) запишем в виде
%(В) = р;/(Гй). (IX.79)
Тогда, повторяя полностью все рассуждения, которые были
использованы в § 3 при выводе неравенств (IX.55), (IX.56),
можно утверждать, что функция Av>n отрицательна во всей
области й^_+ (т. е. достаточные условия асимптотической
устойчивости выполняются) только в том случае, если гиперповерхность
(IX.68) не имеет общих точек с гиперплоскостями переключения
Л+ и Рг+, что имеет место только тогда, когда выполняются
следующие неравенства:
«11 (Тп) + *'12{Тп)< хп(п) + х1%(п)\ (К• 80)
F2i<TJ + &2(Tn)<xAn) + xn(n) (IX.81)
при
С1<*11(я) + *121Я)<оо;
C2<*2l(")+*22(tt) <OC.
Пример, иллюстрирующий изложенную методику
исследования устойчивости, приведен ниже в § 5.
5. Обобщение на системы с двойной модуляцией
Предложенный способ анализа двумерной ЧИМ-системы без
существенных затруднений обобщается на случай системы
произвольной размерности jm. При этом, естественно, достаточные
условия устойчивости получаются уже в виде системы \х
неравенств, аналогичных неравенствам (IX.55), (IX.56) или (IX.80),
(IX.81).
Далее нетрудно показать, что изложенная методика легко
распространяется и на случай систем с двойной импульсной
модуляцией (ДИМ), т. е. с модуляцией импульсов как по
частоте (ЧИМ), так и по длительности (ШИМ), а также и на все те
импульсные системы, которые могут рассматриваться как их
частные случаи, в том числе частотно-импульсные системы с
KOHef4HOH длительностью импульсов и широтно-импульсные
системы.
Уравнения динамики линейной части системы, на вход
которой поступает последовательность импульсов, модулированных
не только по знаку и частоте, но также и по длительности, были
получены в работе [84] и имеют вид
Хи(п + 1) = АГ* [Хи{п) + Ви(п)ъ(п)Ъ
247
где
В„{п) = е W)G„{n);
Оц(п) = \gij [т,(п)]; g„ [т,(п)];.. .; gffir1) [тг(/г)]] ;
gll(n) = L-l[±-Wll(s)];
%i(n) = fi[si(n)] — длительность управляющего импульса в i'-м
канале (закон ШИМ).
Нетрудно показать, что для получения условий устойчивости
такой системы достаточно в соответствующие выражения вместо
вектора Вц подставить вектор Вц(п).
Естественно, что проверку выполнения полученных
неравенств необходимо проводить только для той области изменения
фазовых переменных системы Хц(п), внутри которой
О ^ %i{n) ^ (Т*)шах.
Рассмотрим теперь конкретный пример.
Пример IX.1. Пусть в схеме (см. рис. IX.1) будет
Wi!(s) = -
hb
*«
где
Тогда
ац2 = 0; %ijY = 0; Кц2 = — a,-/i < 0.
Г1 0 1
Dn(n)=\
h[J2
; йф(п) = еХЧ*Т»\
hi,
Ьц (0 = I"1 [W,/ (s)] = —У- О2' -1);
V;2
Закон модуляции примем в виде
Tn = F(*ii(n)V-
*f/J
е
(IX.82)
(IX.83)
-6. (IX.84)
со + /t | еп (л) + e12 (л) I + /21 821 (/i) + 822 (/i)
Подставляя выражения (1Х.83) в уравнения (IX.16) —(IX.17), получим
QuXn) = -
Nu{n) =
1
hj2
a2
Klj2
0
0
0 l-42(n)
-A,;/, 1+42 И J
Л/;
ад(«)=-г-(1+42(Л))-
\2
Ki]2
(IX .85)
248
Подстановка этих выражений в уравнение (IX.68) дает
2 2
(,/=1 " 1,1=1
— 2
У][1+42(«)] гт-^7(")+ У!^" [1+4-2H =°- <1Х-86>
Подставляя, далее, выражения (1Х.85) в формулу (IX.71), получим
(Хи(А))и0 = хи(А) = —^ f i. (IX.87)
Из уравнений (IX.73), (IX.83) и (IX.85) следует, что должно иметь место
следующее соотношение
tin hl2
Хц-2 Ai22
Совместное решение уравнений (IX.32), (IX.34) и (IX.68) даст
(IX.88)
-jr+%[Xii(nlTn]^k^' (IX-89)
г *
/г29 дТ
-— + %[хи(п), т„]—f- = 0, (IX.90)
Л222 C*22 v4
где
2
*[*,./(л), Гя] = >J-^ ^ ll- d*f2(n). (IX.91)
/,/=1
Так как dTn/dx2i(n) = dTn/dx22(n), то из уравнений (IX.89) и (IX.90)
следует, что должно иметь место следующее равенство:
^21 ^22
(IX. 92)
^212 ^222
Для упрощения последующих выкладок удобно обозначить
V, = -^-; (IX.93)
Лц2
U*
Ъ = ^~- (IX.94)
А-222
Получение окончательных расчетных соотношений, определяющих
достаточные условия устойчивости, существенно упрощается при отказе от требования
сохранения устойчивости в целом, т. е. во всем неограниченном фазовом
пространстве Dm и при переходе к получению условий устойчивости в
ограниченной части Dm. Для этого достаточно в выражении (IX.84) положить 6 = 0.
При этом, как следует из выражения (IX. 16) [см. также соотношения (IX.24)
и (IX.65)], при |я*(я)| ->~ 00 матрица Qij(n) вырождается. Однако при любых
конечных |л;г(п)| < оо матрица Qa(n) остается неособой.
249
При б = 0 из выражения (IX.84) получим ]
дТп -9/,
дхц (п) [со + /i {хг х (я) + х12 (л)) + /2 (*21 (п) + х22 (я)]2
■(1=1,2). (IX. 95)
Тогда, принимая во внимание выражения (IX.88) и (IX.93) — (IX.95), после
совместного решения с уравнениями (IX.86) и (IX.87) и с уравнениями (IX.86),
(IX.89), (IX.95) найдем
2
7i (*и О4) + *12 (Л)) + 72 (*2i (Л) + х22 (А)) =
И*-}
/, /=1
-d*(n)
(IX.96)
[со + 1г (хп (Л)+х12 (Л)+/2 (JC2i И) + x22(AW =
49/2
72
2
2-
[1-42Н]2 '
(IX. 97)
Беря арифметическое значение корня из уравнения (IX.96) и разрешая его
совместно с уравнением (IX.97) относительно интересующей нас суммы
хц(А) + х12(А) [см. выражения (IX.78) и (IX.80)], получим2
1 I. vi ? l+dU^
ап(Тп) + а12(Тп) =
-y2d) — y2
49/2
72
Ухк — Учк
2
\\~d2ij2(n)
l-dfj2(n)
(IX. 98)
Для определения искомых координат хц(В) запишем систему уравнений,
полностью аналогичную системе (IX.96), (IX.97), отличающуюся лишь тем, что
в правую часть уравнения (IX.97) вместо величины 12/у2 вводим 1\/у\. Решение
этой системы относительно суммы х2\(В) и х22(В) (при условии, что d Ф 0)
дает
2
1 VI о l + dli2(n)
Vll(Tn) + &2(Tn)=- --W \ 7? f—
7А-7Л ^^ l-dff2(n)
i, f=l
-7lC0 + 7l
щ vi
~JL7'-t
A//42 W
Л /=i
[i-42(«)]J
/2 v0
(IX. 99)
1 Напомним, что исследование ведется в области &j_+' где Яц(м) +
+ х12(п) > сх и *2i(tt) + л;22(п) > с2.
2 Принимается, что определитель d = y\l2—угЛ системы, линейной
относительно координат Х\{А) и х2(А), не равен нулю.
250
Подставляя полученные выражения (IX.98) и (IX.99) соответственно в
неравенства (IX.80) и (IX.81), необходимо проверить выполнение этих неравенств
при заданных численных значениях параметров.
Приняв, что Xlj2 = —0,2 Цсек, 9 = 35 сек, со = 2, h*n = 0,0125, h*22 = 0,0025,
м = с\ = 1, h = 5, с2 = 0,5, и ограничиваясь, например, требованием сохранения
устойчивости в области, где
ci < Uu (л) + xi2 (л) I < 10q и с2 < I х21 (п) + л;22 (п) | < 10с2,
непосредственной проверкой неравенств (IX.80) и (IX.81) убеждаемся в их
справедливости.
■ ■ В
Глава X
Исследование
нелинейных систем
с помощью
подвижной
фазовой плоскости
Применение метода фазовой плоскости для
расчета нелинейных систем второго порядка дает
ощутимый выигрыш по сравнению с другими
методами [46, 128]. В своей обычной форме этот метод
позволяет определить лишь свободное движение
системы, вызванное изменением начального
состояния. При наличии возмущающего воздействия или
управляющего сигнала типа единичного скачка
путем преобразования зависимой переменной удается
свести анализ процессов к рассмотрению
опять-таки свободного движения при изменении
начального состояния. Однако в некоторых задачах
требуется рассматривать реакцию системы на
внешние воздействия как функции времени. Для этого
необходимо исследовать неавтономную систему.
При исследовании движений неавтономных систем
с учетом возмущающих или управляющих
воздействий с помощью фазового пространства возможно
использовать различные подходы.
Во-первых, можно считать время t как еще одну
фазовую координату; тогда исследование
неавтономной системы сводится к исследованию автоном-
252
ной [105]. Следует при этом иметь в виду, что размерность
фазового пространства повышается на единицу и метод фазовой
плоскости для исследования систем второго порядка становится
уже неприменимым, нужно рассматривать фазовое
пространство.
Во-вторых, можно представить вынужденные колебания
зависимостью
x(t) = u(t) sin t + v(t) cos t,
где x — координата исследуемой неавтономной нелинейной
системы второго порядка, подверженной синусоидальному
внешнему воздействию;
u(t), v(t) —переменные амплитуды.
Подставив записанное выражение для х в уравнение
исследуемой системы, приравняем коэффициенты при членах,
содержащих sin t и cos t в обеих частях уравнения, в результате чего
получим уже автономную систему из двух нелинейных
уравнений первого порядка относительно и и v. Изучение последней
системы с помощью фазовой плоскости позволяет рассматривать
вынужденные колебания и процессы их установления [225];
однако такой подход основан на приближенном
исследовании.
В-третьих, рассмотрение процессов в системах второго
порядка при учете некоторых типов внешних воздействий возможно
осуществить точными методами на фазовой плоскости, если
основываться на следующем. Воздействие типа скачка можно
представить как мгновенное смещение начального положения
изображающей точки на фазовой плоскости, что эквивалентно
смещению соответствующих линий переключения относительно
начала координат. Если при этом управляющее воздействие
изменяется с течением времени, то уже нельзя просто переместить
линии переключения относительно начала координат до начала
движения системы. Но в этом случае можно считать, что
управляющий сигнал приводит к непрерывному изменению положения
соответствующих линий переключения во времени.
В указанном смысле будем говорить о подвижной фазовой
плоскости.
Такого рода подход к исследованию применен, в частности, в
работе С. Минагава (1961 г.) при рассмотрении релейной
системы второго порядка, подверженной синусоидальному входному
сигналу. В этой работе на фазовой плоскости рассматриваются
два движения: движение изображающей точки по эллипсу и
движение эллипса по фазовой плоскости.
Данная глава посвящается применению и развитию третьего
из указанных подходов к исследованию неавтономных систем
второго порядка с помощью фазовой плоскости. При этом будут
рассмотрены реакции системы на несинусоидальные сигналы.
253
1. Математическая модель
Остановимся на изучении влияния управляющего сигнала
вида
g=g(t) (x.i)
(где g(t) —заданная негармоническая функция времени) на
поведение системы, структурная схема которой представлена на
рис. Х.1. Здесь обозначено:
Г —гс при ог>С3;
z3(a)= 0 при —С3<о<С3\
1 гс при а<;—С3;
z3x[cr(0] = z8[cr(/-T)];
(Х.2)
#ь #2, о — зависимые переменные;
т — запаздывание, причем т = ti
при включении исполнительных
органов (z\ ф О, г2 ф 0) и т = Т2 при
их выключении (zx = z2 = 0).
Из приведенной структурной
схемы нетрудно получить уравнения
фазовых траекторий
*1-*1о = 2*зт(а) (*i-*ia)>(X.3)
Рис. Х.1. Структурная схема
системы
где #20 и Хю — начальные значения
фазовых координат.
Сделаем следующие замечания. Динамика систем
рассматриваемого класса во многом определяется типом нелинейностей
z\(x\) и 2г(*2). Так, можно установить, что представление Z\{x\)
в качестве характеристик релейных элементов делает систему
устойчивой х при сколь угодно больших начальных отклонениях
фазовых координат. Наоборот, представление £2(^2) в качестве
характеристик релейных элементов вызывает появление в
системе неустойчивого предельного цикла, определяющего
совокупность максимальных начальных отклонений фазовых координат,
при которых система остается устойчивой.
При достаточно больших зонах нечувствительности по
координате Х\ в системах данного класса реализуются в основном
два типа автоколебаний, которые условно можно назвать
автоколебаниями первого и второго рода. Автоколебания первого
1 Под устойчивостью будем понимать устойчивость системы по начальным
условиям.
254
рода — симметричные, охватывающие зону нечувствительности
системы по координате х\\ автоколебания второго рода —
несимметричные, односторонние, не охватывающие зону
нечувствительности по координате х\.
Представим нелинейные функции Z\(x{) и г2(х2) в виде
{ Z,
*i(*i)
при хг > Съ
О
при
-С1<х1<С1\
Zir ПрИ *!< — <?!,
22{Х2)
^2С
при
>С2 + Х2г> РХ2>0>
(Х.4)
либо х2 > С2—х2ъ, рх2 < 0;
0 при —С2 + х2ъ<х2<С2 + х2& рх2>0,
либо —С2—х2г<х2<С2 — х2&, рх2<0;
-г2С при х2< —С2 + х28, рх2>0,
либо х2< —С2—х28, рл;2<;0,
где | ^1С—^2С ] > С3, p = d/dt.
Нетрудно получить уравнения линий переключения (рис. Х.2)
1) Lx
2) L2
2) Lz
4) U
5) Ц
6)L6
7) L7
8) Ls
9) L9
10) L10
#1 #2X1 — ^1*>
xx x2%2 = Cj -| — т2,
#1 #2X1 = ^ 1 + ~ X2 >
Л ! -^2X1 ~ ^ 1 >
#1 #2X1 ~ ^l o~ X2
X1 -^2Xl ~ ^1 I~" X2
#2 ~ ^2 Г ^28*»
#2 ~ ^2 #28 ^1X2>
X2~-= ^2 #28'
#2 = ^2 ~T #28 ' ^C^2*
(X.5)
В исследуемой системе характер движения изображающей
точки различен для различных интервалов начальных условий.
Задавая последние как значения фазовой скорости при нахо-
255
ждении изображающей точки на линии переключения L5,
нетрудно установить три таких интервала.
Так, при 0 < х2о < С2 + х2г (рис. Х.2) в области от L5 до L1
фазовые траектории представляют прямые, параллельные оси
Рис. Х.2. Автоколебания:
а — первого рода; 6 — второго рода
абсцисс; потом движение осуществляется по параболе до
попадания изображающей точки на линию переключения L2. В
указанном интервале начальных условий система неустойчива, что
легко устанавливается при анализе точечного отображения
полупрямой L5 в симметричную ей относительно начала координат
полупрямую L2.
256
Если начальное положение фазовых координат соответствует
второму интервалу начальных условий С2 + х2г < *2о < *2а, где
Х2А = ~гсЪ + V [К-*2г + zc(^-^)}2 + 4*cCi + #А (Х-6)
характеризует начальное значение фазовой скорости, при
котором фазовая траектория попадает в точку пересечения линий
переключения L8 и Lb то изображающая точка при своем
движении от линии переключения L5 попадает на линию
переключения L8.
Наконец, в третьем интервале начальных условий х2л <
< х20 < оо, когда фазовые траектории минуют линию
переключения L8, в системе имеется неустойчивый предельный цикл,
определяемый как точка пересечения функций точечного
отображения полупрямой L5 в полупрямую L2\
F1(v) = x?—2zc%2v\
F2{u) = u2 + 2zcx1u—4:ZcC1 — 2z2crl
где х20 = и — координата произвольной точки на полупрямой L5,
х2[ = —v — координата соответствующей ей точки на
полупрямой L2.
Взаимное расположение приведенных выше функций
точечного отображения позволяет установить координаты
неустойчивого предельного цикла
Х2Пр ~ Unp — Vtip — ~ ~ '
т1 ~ГТ2
F2(u) = F1(v) = [ ■ .
Для реализации автоколебаний первого рода необходимо,
чтобы одновременно выполнялись условия
гсхш + y[\C2~x2Q-zcx2\ + zc^Y-z^ > С2 + х2е; (X. 7а)
*<* + У(СЖ + x2&-Yzdi1f-zlx\ < х2л; (X.76)
C2-x2s-zcr2>0. (х-7в)
Физический смысл выражений (Х.7а) и (Х.76) сводится к
тому, что изображающая точка при своем движении как из
первого, так и из третьего интервалов начальных условий попадает
на линию переключения L8 (или L10). Тогда условие (Х.7в)
определяет положение линий переключения L8 и L10 на фазовой
плоскости.
При изменении знака неравенства в условии (Х.7в) и
удовлетворений условий (Х.7а), (Х.76) в системе возникнут автоко-
17 Заказ 33 257
лебания второго рода. Оба типа автоколебаний представлены на
рис. Х.2.
Параметры автоколебаний первого рода определяются по
формулам:
а) амплитуда автоколебаний по координате Х\
^a = C1+1J-{[C2-^e + Zc(t1-T2)]2-Z2T2j. (Х.8а)
б) амплитуда автоколебаний по координате Х2
Ча = *сТ2 + 1/[С2-^е + ^с(Т1-Т2)]2-4Т1' (Х ' 8б)
в) период
{ С1 — Чг — гС%ь \ У Со—x2s—гст2
+ A|/^,-x2e + zc(T1-T1)j2-4x?j. (Х.8в)
Соответственно, для автоколебаний второго рода имеем
+ 2z2T1x, + 2zc(tl + x,) J/ [zc(T1 + x1)-C, + x2ej»-4x?} ; (Х.8д)
2гС*1 , _,_
*Ja+ = ZCT2 + / (ZCT2 — C2 + *2E)2 + 2ZCT1 (ZCT2—C2 + *2e) '• (X •8e)
A'2a_ = 2CT2 — С2-Ь*2е; (Х.8Ж)
r=зк+т2) + _ ~u; -, + (t!+т,) у i +._"T... +
-^^ + (t1 + t2)1/h—-i^L
+ А{1/[гсК + ^)-С2 + х28]2-г2т1-С2 + х2Л. (Х.8з)
zc
Поскольку автоколебания второго рода несимметричны, в
выражениях (Х.8г) — (Х.8з) представлены максимальные
значения координат х\ и х% при отклонениях в одну и в другую
стороны.
Из приведенных выражений следует, что расширением зоны
нечувствительности по координате Х\ можно значительно увели-
258
чить период автоколебаний первого рода, в то время как период
автоколебаний второго рода не зависит от этой величины.
Таковы исходные предпосылки для дальнейших рассуждений.
Итак, пусть на систему, представленную на структурной
схеме (рис. Х.1) и описываемую уравнениями (Х.2) — (Х.4),
воздействует управляющий сигнал g(t). Это эквивалентно, как
указывалось выше, непрерывному перемещению линий переключения
L\ — L6 вдоль оси Х\ фазовой плоскости хи х2 со скоростью,
равной ' . Таким образом, в каждый момент времени после
начала отработки управляющего воздействия положение линий
переключения L\—L6 определяется уравнениями (Х.5), к
правым частям которых следует добавить член g(t), где t—время,
прошедшее после начала задания управляющего сигнала.
При достаточно больших зонах нечувствительности С{ по
координате Х\ продолжительность движения изображающей точки
вдоль линий переключения L8 и L10 (см. рис. Х.2) значительно
превышает длительность движения на остальных участках.
Вследствие этого существенное значение приобретает соотноше-
dg(t)
ние между скоростью изменения управляющего сигнала
dt
и фазовой скоростью х2 = С2— х2е— zc%2- Действительно, если
Ш<\с2-х2г-гсх2\у 0<t<oc, (X.9)
то в процессе движения изображающей точки вдоль указанных
линий переключения очередное переключение управляющей
функции z3(o) произойдет, когда изображающая точка догонит
уходящую от нее линию переключения Х\ = Сх (или,
соответственно, Х\ = —Сх).
Если же
Ш>\С,-х2г-г(я,\, 0</<оо, (Х.10)
то изображающая точка догнать линию переключения не может,
поскольку линии переключения движутся быстрее
изображающей точки. В этом случае приходится говорить уже о том, что
изображающую точку догоняет линия переключения Х\ = —С\
(или, соответственно, Х\ = С\).
Как будет показано ниже, характер переходного процесса во
многом определяется соотношениями (Х.9) и (Х.10).
Управляющий сигнал при удовлетворении условия (Х.9) будем называть
слабо изменяющимся управляющим сигналом, а при
удовлетворении условия (Х.10)—сильно изменяющимся управляющим
сигналом.
17* 259
2. Переходные процессы при сильно изменяющемся
управляющем сигнале
Пусть в некоторый момент времени при нахождении
изображающей точки на линии переключения L8 движущаяся линия
Х\ =—С1 догнала изображающую точку. Для простоты отсчет
времени начнем с-этого момента. В течение последующего
отрезка времени t = %{ исполнительные органы с координатами Z\ и
г2 остаются выключенными; до их включения разность
координат линии Х\ = —h\ и изображающей точки составит
^x1~^g=(C2-x2&-zcT2)x1~g(t)\t=Xi<0. (X.U)
Исполнительйы'е органы после своего включения остаются
включенными до тех пор, пока изображающая точка не догонит
линию Х\ =—Ci и еще пройдет время t = %2. Время их
включения обозначим t2 = ti + Т2, причем tx можно определить из
соотношения
^-t2i+(Ct-x26-zcxt)ti = g(%=t-(Ci-x2e-zcxt)xl. (X.12)
За время равное t2, фазовая скорость увеличится до значения
*22 = С2 — х2г ~ zc%2 + гсЪ- (Х •Х 3)
Тогда к моменту t = t2 получим
Д2*1— A2g = (C2 —^2e — ^2 + V1)T2 + -^T2-g(0|^2+g(0|^1.
(Х.14)
В течение последующего отрезка времени t = %\ — т2
движение системы осуществляется по инерции с постоянной фазовой
скоростью х2 = х22 и разность координат изображающей точки
и линии Х\ = —Ci возрастает до величины
Азх1 — Аз£ = (^2 — х2&—zc%2 ~г" гсЩ xi —
-^ + V^2-£(0|(=<1+Tl + £(0|(=fl- (X.15)
В этот момент управляющая функция гзт(а) принимает
значение — 1 и включаются исполнительные органы, которые
остаются в работе до тех пор, пока фазовая скорость не уменьшится
до величины х2 = С2 — х2г —zcx2, т. е. время их включения равно
t2. При этом координаты изображающей точки и линии Х\ = —С}
будут отличаться на величину
Ай-А4ьа = xj2~^- (t\ + %l) +
+ (C,-^e)^-g(0|^I+x1+ffWU+x1- (X.16)
260
Далее, в течение отрезка времени t$, определяемого
зависимостью
8® | ,=«,+,,+,,-£(91 ,=2*,+*, + АЛ- А4£ =
= (С2 — Х2г — ZcT2)(/3+ 24 + Хг),
(Х.17)
движение осуществляется с постоянной фазовой скоростью х2 =
= С2 — х2г —Zc%2, а затем процесс повторяется, т. е. можно
снова воспользоваться формулами (Х.11) — (Х.17). Таким
образом, нетрудно построить весь переходный процесс.
Если окажется, ятр Д^1 — A4g"<0, то это означает, что
линия переключения Х\ = —С{ догнала изображающую точку еще
до попадания последней на линию L8. В этом случае время t =
= t5 работы исполнительных органов, соответствующих
значению управляющей функции ггх(о) =—1, определяется из
соотношений
xJi f-t\ + A3%—A3g = g{t)\ t=t— g(t)\ t=u+Xi.
Тогда для момента t = h находим
(X.18)
^1-^ё = {^~^^-^А~ёЩ1=^^)^и- (x-19)
Через время t = %\—%2 управляющая функция гъх {о)
становится равной +1, и процесс повторяется.
Остановимся на вопросе нахождения значений t{ и U из
выражений (Х.12) и (Х.18). Наиболее просто это осуществляется,
когда функция g(t) табулирована или задана в виде графика.
В последнем случае величина tx находится как точка
пересечения кривых
g = gtf)l )
zc (X.20)
F(0 = -^/i + (C1-x2e-zcT1)f-(Ci-x2e-zcTi)T1. f
Легко заметить, что F(t)—парабола с вершиной,
обращенной вниз и имеющей координаты
С* х2г гСт2
t,=
F.
(С2 — х2г — гсх2)2
2zr
■(С,
v2e
-Z^T0)T
.)'
сьу ч
(Х.21)
J
Поскольку в формулах (Х.21) все величины известны,
построить функцию F(t) не составляет труда.
261
Аналогично для t* запишем
F(t) = — t2 -f xj + AgXi—A3g-;
'.=
^e=
Л22 .
=Aa-
-\£ +
2гс
(Х.22)
Отличие здесь в том, что парабола имеет вершину,
обращенную вверх. Таким образом можно определить графически
значения t\ И tA.
3. Сильно изменяющийся сигнал
вида g(t) = a(t), a = const
Как было отмечено выше, при сильно изменяющемся
управляющем сигнале, когда удовлетворяется соотношение (X. 10), на
участке движения изображающей точки от линии L5 до линии
Lx очередное переключение управляющей функции гг(о)
происходит, если движущаяся линия переключения х\ = —Сх догоняет
изображающую точку. Это может произойти, когда
изображающая точка уже движется вдоль линии переключения L8, либо
раньше, т. е. на этапе движения изображающей точки от линии
L5 до линии L8.
Итак, пусть при некотором значении фазовой скорости С2 —
— х22 — Zct2 < *2о < я в правой полуплоскости (zs (от) = —1)
движущаяся линия переключения Х\ = —С\ догнала
изображающую точку. В соответствии с законом движения системы при
этом управляющая функция Z\(x\) принимает значение zc. В
течение последующего времени t = %2 продолжают оставаться
включенными исполнительные органы, соответствующие
значению 23(а) = —1, и изображающая точка пройдет расстояние
zc
^Л = *20Т2 ~ Т2 '
За это же время фазовая скорость уменьшится до величины
■^21 ~ -^20 ^£^2'
После выключения исполнительных органов в течение
отрезка времени t = ti — тг движение происходит по инерции.
Координата Х\ возрастет на величину
^2-^1 = «^21 (^1 ^2'
262
и общее приращение координаты х\ составит
За это время линия переключения #i = —С\ пройдет
расстояние
и будет опережать изображающую точку на
&ig — Д8^1 = (а—*2o)Ti f" т2 + zcTiT2-
Управляющая функция 2зт(сг) принимает значение +1,
которое остается неизменным до тех пор, пока изображающая точка
не догонит движущуюся линию переключения х\ = — С\ и ещё
в течение времени t = T2; обозначим все это время t2.
Принимая во внимание уравнения фазовых траекторий (Х.З)
и управляющего воздействия (Х.1), получим
a-x20 + 2zcx2 /~(а-х2, + гсх2у 2т, ~~~ Г
**- Г + 1/ ■ з - + — (а — ^2о) + 2т1т20—т|.
Значение фазовой скорости при t = t2 будет
х22 = а + гст2 + ]/~(а — х20 + zcx2)2 + 2zcxx (а—#20) + 2z2cxxx2—z2cx\,
а изображающая точка обгонит линию Х\ = —С{ на величину
X у(а—х20 + zcx2f + 2zcx1{a — x20) + 2z2cx1x2—z2x2.
Далее, в течение отрезка времени t = х\— х2 движение снова
происходит с постоянной фазовой скоростью х2 = #22, после
чего функция 23т((т) становится равной —1, и т. д.
В итоге в системе устанавливается колебательный процесс,
изображенный на рис. Х.З. Для суждения об устойчивости
такого колебательного процесса построим точечное отображение
полупрямой х2 = х20 в полупрямую х2 = х2б, где координаты точки
6 нетрудно установить, следуя изложенной выше методике.
Очевидно, если х2б > #2о, то колебательный процесс затухает;
случай #26 = #2о соответствует границе устойчивости.
Искомая зависимость имеет вид
(a-x26f = {гс(хг + т2) + /[а-#20 + гс(т1 + т2)]2-4(^ + т2)}2 -
-4(*? + *?)- (Х-23)
263
Обозначим л'2о = и, *2б = v. Тогда функции точечного
отображения запишутся следующим образом:
FM = {гс{хг + т2) Н- / [а-и+гс{ъ+х1] *-г% (%\-%\)Y - (х • 24>
-*!(т? + т|). ]
Диапазоны изменения а и v заключены между значениями
u0 = v0 = 0; ) (х 25)
что следует из физических соображений.
хг
-ел -cl
*1
Рис. Х.З. Затухающий переходный процесс при
а>\С2 — *2S —гсхч\
Кривые F\(v) и F2(u) пересекаются в точке с координатами
^2Пр
'■ unp = vnp = a-
Fmp{u) = Flnp(v)
Ti + X2
гСт1т2
(Ti + X2)2 '
(Х.26)
которая не находится в диапазоне изменения аргументов и и v.
Кроме того, из выражений (Х.24) можно заключить, что
РгЩ^<РМ\и^ (Х.27)
Учитывая, что Л (а)' — парабола с вершиной, обращенной
вниз, a F2(u)—функция, монотонно убывающая с увеличением
и, можно сделать вывод: полученный колебательный переходный
процесс является затухающим. Скорость изменения координаты
хх все время уменьшается и, таким образом, изображающая точка
обязательно попадает на линию переключения L8. Используем
ту же последовательность рассуждений.
264
Пусть при х2 = С2— х2& —гс%2 линия Х\ = —Сх догнала
изображающую точку. Через время t = х2 функция управления
z3t (сг) примет значение +1. За время %\ разность расстояний,
пройденных линией хх = —С{ и изображающей точкой, составит
Aig—ДЛ = (а—С2 + x2E + zc%2) xx. (X.28)
Включаются исполнительные органы, соответствующие
^зт (о) = +1, которые работают до тех пор, пока изображающая
точка не догонит линию переключения Х\ = — С\ и еще в
течение времени t = т2. Обозначая все это время через U, получим
CL — С2 ~Т~ ^пв "Г б2г,Х2
+ уГ (а-С, + ^ + ^). +^{a_c^ + ZrSy (X29)
Значение фазовой скорости при t = t2 будет
x22=--a + zcT2 +
+ |/(a_C2 + ^28 + zcT2)2 + 2zcT1(a-C2 + ^2£ + zcT2), (X.30)
и изображающая точка обгонит линию Х\ = —С\ на величину
A2xt — A2g = (x22—гста)та + у-т|. (х.31)
За последующий отрезок времени t = %\—т2, в течение
которого движение осуществляется по инерции с постоянной фазовой
скоростью х2 = #22, разность (Х.31) увеличится на
Д з*1—Д 3£ = *22 К ~ т2) — ать
т. е. общая разность составит
Да—Д4£ = (*22—як—yt2- (х-32>
В эгот момент функция управления гъ% (о) принимает
значение— 1, включаются исполнительные органы, которые работают
до тех пор, пока фазовая скорость не станет равной х2 = С2 —
— #2я —2сТ2. За время
t3 = х**~с* + х2* + гсЪ (Х33)
zc
изображающая точка пройдет расстояние
Л5% = X^C^ + Z^ (*. + Ct-xat-zcxt), (X.34)
zzc
265
а линия Х\ = —С{ — расстояние
Л5£ = — (^22—С 2 + *2е + zcT2>
(Х.35)
К моменту выключения исполнительных органов линия Х\ =
= —сх будет отставать от изображающей точки на расстояние
/х22—2а + С2—*28—zct2
2zr
Т2 + #22^1 "
-а%л.
(Х.36)
Дальше движение осуществляется по инерции с постоянной
фазовой скоростью х2 = С2— х2г — 2СТ2 до тех пор, пока линия
переключения хх = —С{ вновь не догонит изображающую точку.
Это время определится как
Ал-А_б£ (Х.37)
4 ~~ г \ I
05 — С2 ~г -^28 ~г" ^с^2
При а > ^cTi + С2 — Х2г имеем
(Х.38)
т. е. при больших а время U определяется только запаздыванием.
Таким образом, в системе устанавливается незатухающий
колебательный переходный процесс, представленный для случая
С2 — #2 8 — Zci>2 > 0 на рис. Х.4 и имеющий параметры
•^2min ^2"
^22> ^2min — ^2 ^28 ZCT2» Т —2%х Т2 +2^2 + ?4» (X. о9)
где величины х22, t2 и ^4 определяются из соотношений (Х.29),
(Х.ЗО) и (Х.37). Характер изменения координат
определяется выражениями (Х.28) — (Х.37). Отметим, что рассмотренный
Ч
1
4- 5
7
/ \_jCz ^2£~^С ^2
*7
Рис. Х.4. Переходный процесс при
0<С2 — *2S — zc%2<a
колебательный переходный процесс имеет небольшой период,
который инвариантен к изменению зоны чувствительности
нелинейного звена Z\{x\).
266
При С2— x2t><zc%2 формулы (Х.28) — (Х.37) остаются в
силе, а переходный процесс примет вид, изображенный на
рис. Х.5
Cz-X2l~Zc ?2
Рис. Х.5. Переходный процесс при 0 < zct2 — С2 + х2% <а
4. Переходные процессы при слабо изменяющемся
управляющем сигнале. Управляющий сигнал вида
g(t) = at; a= const
Определение вида и параметров переходного процесса при
слабо изменяющемся управляющем сигнале, т. е. при
выполнении условия (Х.9), производится в той же последовательности,
что и при исследовании свободного движения системы. Разница
заключается лишь в том, что, поскольку в левую часть каждого
из уравнений (Х.5) линий переключения L\ — L6 добавляется
член g(t), изменяются координаты изображающей точки при
попадании последней на указанные линии переключения.
Для линейно изменяющегося управляющего сигнала g(i) =
= at, a = const в интервале начальных условий х20 > х2А
получим следующие зависимости между координатой х20
произвольной точки на полупрямой L5 и координатой х2\ соответствующей
ей точки на полупрямой L2\
а) если линии переключения движутся навстречу
изображающей точке при переходе последней из верхней фазовой
полуплоскости в нижнюю, или, другими словами, при
«положительном» управляющем сигнале, то
ii + 2 (zcT2—a) *2i = 4о + 2 (*с*1—а)х*
(Х.40а)
б) если линии переключения движутся в противоположную
сторону (удаляются от изображающей точки), или, другими
словами, при «отрицательном» управляющем сигнале, то
+ 2(zc%2 + a)x2
гЛ2
= v2
20 + 2(ZCTl + fl)*» —
2z2c%l+2zJx1-Ti)a.
(X.406)
267
Выражение же для х%а будет иметь вид:
а)при «положительном» управляющем сигнале
Х2А= —zcXl + a +
+ V[C%—^28 + zc(Ti~x2) — a]2+ 42^ + 4x1+2zc(T1 — x2)a;
(X.41a)
б) при «отрицательном» управляющем сигнале
^2 А=: ' С 1 ^ '
+ /[Ca-x2e + zc(x1-Tj + a]2 + 4zcC1 + z2T|-2zc(T1-T2)C.
(Х.416)
Из выражений (Х.40а) — (Х.406) следует, что фазовая
плоскость рассматриваемой системы стала несимметричной
относительно начала координат.
Условия (Х.7а), (Х.76) при наличии управляющего сигнала
g(t) = at можно записать в виде
zct2 + а+ [(С2 + x2s — zc%2)2 + 2 {гсхг =F а) | С2—х2е~гст21 +
+ (zct2 т ^)2-4т22]2 > с2+*2£; (х •42а)
^ст2 ±а +
+ /(С, + х2г)> + 2 (zcTl Т а) (С, + х 2е) + (гсх2 ^af-z^l < х2А,
(Х.426)
где знак минус соответствует «положительному» управляющему
сигналу, а знак плюс — «отрицательному» управляющему
сигналу.
Если требования (Х.42а), (Х.426) удовлетворяются и
остается справедливым неравенство (Х.7в), то возникающий в системе
процесс будет сохранять основные черты автоколебаний.первого
рода с тем отличием, что, поскольку фазовый портрет стал
несимметричным, изменяются отрезки времени движения
изображающей точки по отдельным участкам фазовой плоскости и
значения фазовых координат при попадании этой точки на линии
переключения L2 и L5 (рис. Х.6).
Методика нахождения параметров процесса в этом случае
совершенно аналогична рассмотренной выше методике
определения параметров автоколебаний.
Амплитуды колебаний по координате х2 для
«положительного» .х^тах+и «отрицательного» ^2max-управляющих сигналов
определяются левой частью формулы (Х.42а). Изменение во време-
268
ни координаты х\ может быть записано как сумма вынужденной
и периодической составляющих
x1(t) = at + xlT{f), (X.43a)
причем амплитуда периодической составляющей совпадает с
амплитудой автоколебаний первого рода
: Q + -J- { [C,-x28 + zc(t1-t1)]2-4t?} (X.436)
1 Ттах '
и, таким образом, не зависит от параметров управляющего
сигнала.
Cz+Xzz
L3 L2 L3 L2 l-3 t-Z 4 L2
Рис. Х.6. Переходный процесс при 0 < С2 — a;2s — ^ct2 > a
Период колебаний может быть найден как сумма времен
движения изображающей точки по каждому из участков фазовой
плоскости:
2zcC1-xz2max_-[zc(T1-T2)--a]x2max_ + 2zcT1(C2--x2&--
~2cx2)-}-azc(x1~T2)
(С2
+ (G
v28"
2 Х2г 2CXV „ '
-a) 2
2.v.
'8 + *4
2max.
+ .
2*.
.2
; t3 - t7 — тх т2; r6 -|- rs
2max_
2ZcCl-*2max_b- [гС (Tl-T2) + A] *2max+ + 22,CTl(C2-X28-
— гст2) — azc(Tj— x2)
f G 2 -^28 — ^C^2 "T" ^) ^Q
+ (C2 x28 zct2) —.
zc
(X.44a)
269
Закон движения изображающей точки по каждому из
участков фазовой плоскости остается неизменным как для
переходного процесса, так и для автоколебаний первого рода.
Если а стремится к \С2 — х2г — zcx2\y то это вызывает
неограниченное увеличение отрезка времени tu т. е. длительности
движения изображающей точки вдоль линии переключения Ls
(или, при другой полярности управляющего сигнала, линии пе-
Рис. Х.7. Переходные процессы при 0 < zcx2— С2 + z 2S > a
реключения L10). В этом случае периодическая составляющая
в выражении (Х.43а) пропадает, что соответствует движению по
инерции с постоянной фазовой скоростью а = С2— х2е—2СТ2,
с выключенными исполнительными органами zx = z2 = 0.
Заметим, что при С2 — х2& > zcx2 знак управляющего
воздействия не влияет на вид переходного процесса. По-иному
выглядит процесс отработки управляющего сигнала, когда С2 — х28 <
< zcx2. Теперь знак величины а имеет большое значение.
Оставляя прежним ход рассуждений, можно показать, что если
направление движения линий переключения совпадает с
направлением движения изображающей точки по линии L8, то переходный
270
процесс принимает вид, изображенный на рис. Х.7, а, а если эти
направления встречные, то картина переходного процесса
несколько изменяется (рис. Х.7, б). Параметры указанных
процессов записываются следующим образом:
*2max+ — ZCT2
2тах_
-zcx2 Ta+ [(Vc2-C2 + x2s)2 + 2(гстг ?а)Х
X (zcx2-C2 + х28) + (гст2 ^ 6)2 -z*t| ]Т.
r==2'i;
„2
4=
^2 max;
:++[Zc(Tl - **) + «] *2тахт ± ^С (Ti ~ **)
*3 — тх т2;
•^1-г ^«v . — ^i"
(гст2 — С2 + *2е + а)гС
Г" (гсТ2 ^2 + ^2 е)'»
^ (Л'2тах_ + x2maxj^_)
* 17* max.
+
2гг
■[[гсЫ — г2) —C2 + x2s}2- г^т2};
17 max_
= ct-
2zr
[2x
2
2maxn
+ (^ — ^2)^:
2тахт
-(■
zcx2-
" c2 + *28)2 — 2zctx (zct2—C2 + x2e)]
I (X.446)
Верхний знак перед а соответствует варианту,
изображенному на рис. Х.7, а, а нижний — на рис. Х.7, б.
Выражения (Х.446) показывают, что при С2 — х2& <zc%2
устремление а к zc%2— С2 + #2 8 в одном случае увеличивает период
колебаний, а в другом, наоборот, уменьшает.
Таким, образом, переходные процессы при слабо
изменяющемся управляющем сигнале сохраняют характерные
особенности автоколебаний, реализующихся в системе при заданном
соотношении ее параметров.
5. Области устойчивости системы
при линейно изменяющемся управляющем сигнале
При воздействии на систему рассматриваемого
управляющего сигнала фазовый портрет системы становится
несимметричным, что следует из выражений (Х.40). В этом случае при опре-
271
делении областей устойчивости по начальным условиям уже
нельзя ограничиваться построением точечного отображения
полупрямой L5 в симметричную с ней полупрямую L2, а
необходимо находить точечное отображение полупрямой L5 в самое себя.
Однако, ограничиваясь отысканием лишь достаточных
условий устойчивости, этого трудоемкого построения можно
избежать. В самом деле, изучая точечное отображение полупрямой
L5 в полупрямую L2 в соответствии с уравнениями (Х.40),
найдем, что в указанном ранее интервале начальных условий
имеется неустойчивый предельный цикл. Амплитуда этого цикла по
координате Х2 равна:
а) для положительного управляющего сигнала
2zcC1 + z2cx22 + zc(x1-x2)a
х2пР = ;—;—:— ', (Л •4Da)
б) для отрицательного управляющего сигнала
2zcCx + z2Qx\ — zc (ti—То) а
zc{xi + x2) + 2a
(Х.456)
Формула (Х.45а) характеризует предельные начальные
отклонения координаты *2, при которых система осталась бы
устойчивой, если бы как на участке движения изображающей
точки от L5 до L2, так и на участке от L2 до L5 линии переключения
двигались навстречу этой точке. В свою очередь, формула
(Х.456) характеризует предельные начальные отклонения, при
которых система осталась бы устойчивой, если бы на всех
участках движения изображающей точки линии переключения
удалялись от нее.
Сравнивая формулы (Х.45а) и (Х.456) заметим, что
неустойчивый предельный цикл, получающийся как точка пересечения
функций соответствия
F1(v) = v2 —2(zrTt + u)v\ )
iv ) lC2T;' (X.46)
F2(u) = и2 + 2(zcxx + o)u~4zcC1 — 2z2cil + 2zca{%1 —т2) ]
и характеризующийся амплитудным значением координаты Хо
(Х.456), определяет совокупность предельных начальных
отклонений фазовых координат, при которых система остается
устойчивой и в случае «положительного» и в случае «отрицательного»
управляющего сигнала. Попадание начальных отклонений
фазовых координат внутрь указанной области не является
необходимым, а служит лишь достаточным условием устойчивости
системы.
Из формулы (Х.456) следует, что введение управляющего
воздействия уменьшает область устойчивости системы по
начальным условиям.
272
Для интервала начальных условий 0 < х20 < С2 + х2г
зависимость между координатой х20 произвольной точки на
полупрямой L5 и координатой х2х соответствующей ей точки на
полупрямой L2 можно записать в виде:
а) для «положительного» управляющего сигнала
А1 + 2 (*ст«—а)х* + *ст2 = vl о + 2 (zcTi—а) х20; (X. 47а)
б) для «отрицательного» управляющего сигнала
х\х+2 (гст2 + а) х21 + zl%\ = х*0 + 2 (гстг + а) х20. (X. 476)
Функции jFi (t;) и F2{u), построенные по уравнениям (Х.47а),
(Х.476), приведены на рис. Х.8. Взаимное расположение кривых
Рис. Х.8. Функции точечного отображения при 0 < х2о < С2 + х 2Ъ
точечного отображения F\(v) и F2(u) позволяет установить
координаты точки их пересечения, определяющей наличие в
рассматриваемом интервале начальных условий неустойчивого
предельного цикла:
L ^tip %2tip '
zCl2
2(zcxL^rZcx2—2a)
4^4
Fz(u) = FAv) =
2.pXi
Cl2
*2„.2
+
*c4(zcxi-a)
4 (2cTi + zc%2 — 2a)2 zc%y + zct2—2a
(X.48)
Выражения (Х.48) справедливы для «положительного»
управляющего сигнала. Для «отрицательного» управляющего
сигнала в выражении (Х.48) изменится знак перед а.
Отметим еще раз, что речь идет об условных предельных
циклах, которые возникали бы в системе, если бы направление
движения линий переключения под действием управляющего
сигнала по отношению к направлению движения изображающей
точки оставалось неизменным как при переходе этой точки из
18 Заказ 33 273
верхней фазовой полуплоскости в нижнюю, так и при переходе
из нижней полуплоскости в верхнюю.
Из выражений (Х.48) нетрудно заметить, что при условиях
а = Ц.т2 < | C2—x2s—zcx21; К > О (Х.49)
система может стать устойчивой во всем интервале начальных
условий 0 < х2о < С2 + х2& только при «положительном»
управляющем сигнале и выполнении неравенств
1 <^<2^—1. (Х.50)
При этом точка пересечения кривых Fi(v) и F2{u)
располагается левее оси ординат, т. е. вне интервалов изменения
аргументов и и v. Как следует из выражений (Х.48), при
«отрицательном» управляющем сигнале система остается неустойчивой
во всем указанном интервале начальных условий.
ВИН
i л а ва
XI
Применение
теории
чувствительности
к нелинейным
системам
управления
Теория чувствительности — это новое
направление в технической кибернетике, основными задачами
которого являются анализ влияния изменений
параметров объекта и регулятора и внешних условий на
динамику системы, а также синтез
систем,'малочувствительных к влиянию этих факторов.
Автоматизированные системы управления
Проектируются обычно для определенной совокупности
внешних условий и конструктивных параметров
заданной части системы (объекта, привода и
измерительных элементов). При эксплуатации в силу ряда
причин (производственные допуски, старение
деталей и т. д.) параметры системы и внешние условия
претерпевают определенные изменения. Последние
вызывают соответствующую вариацию показателя,
характеризующего качество работы системы.
1. Основные положения
18*
Показатели качества систем управления
характеризуются различными функционалами. Допустим,
275
*Ш) одним из таких функционалов является следующий:
J = J[z(t, a), /•(*)], (XL 1)
где z — вектор переменных состояния;
г —вектор управления;
а—вектор параметров объекта, регулятора и, возможно,
внешних возмущающих воздействий.
В замкнутых системах управления r(t) является функцией
переменных состояния. Поэтому функционал (XI. 1) примет вид
J=J[z(t, a)]. (XI.2)
Расчетное (номинальное) значение вектора параметров
обозначим через ею. Тогда выражение (XI.2) перепишем в виде
J = J[z(t, а0 + Да)], (XI.3)
где Д а— вариация вектора а.
Пусть нас интересует влияние на качество работы системы
скалярного параметра ак = а, т. е.
J = J[z(t, aK + AaK)]. (XI.4)
Разложим правую часть выражения (XI.4) в ряд Тейлора,
тогда получим
J = J0 + u{l)Aa + u{2)Aa2+ ..., (XI. 5)
где
J0 = J[z(t,a0)]; a(s) = -i--^4 s=l, 2...
s! **;
Первый член разложения (XI.5) характеризует показатель
качества при номинальном значении параметра а. Остальные
члены определяют изменение показателя качества за счет
вариации параметра Да. Величины и^ выполняют роль
коэффициентов пропорциональности, или весовых коэффициентов, при
соответствующих степенях вариации Да. Они фактически
показывают, насколько показатель качества чувствителен к этим
вариациям. В связи с этим величины и& в теории
чувствительности принято называть коэффициентами или, в более общем
случае, функциями чувствительности, причем величина а(1) = и
называется функцией чувствительности первого порядка, и^ —
функцией чувствительности второго порядка и т. д.
При малых вариациях параметров в разложении (XI.5)
можно ограничиться двумя первыми членами. Аппарат теории
чувствительности глубоко разработан именно для случая такой
линейной аппроксимации показателя качества относительно
вариации Да.
При исследовании нелинейных систем, особенно точными
методами, качество их работы оценивается в общем случае
непосредственно по виду временых характеристик, в частности по
виду составляющих г (t). Применительно к вариации этого век-
276
тора Az(t) в теории чувствительности используется термин
«дополнительное движение», причем
Az(t)=z(t, a0 + Aa)—z(t, a0) = u{l)(t)Aa + и{2)Аа2 + . .., (XI.6)
(s) tj\ 1 dsr
где и (t) = вектор чувствительного 5-го порядка.
s! das
Составляющие вектора u^(t) являются функциями
чувствительности 5-го порядка.
Если рассматривается вектор параметров а, то вводится
понятие матрицы чувствительности. Например, матрица
чувствительности первого порядка (обычно ее называют просто
матрицей чувствительности) определяется следующим образом:
dzL-], i = l,2, ...,n; /--=1,2, .... m. (XI.7)
7 J
da
Матрица чувствительности состоит из т векторов
чувствительности ut = и из т X п функций чувствительности
да,-
11 да/
Дополнительное движение при линейной аппроксимации
через матрицу чувствительности выражается следующим образом:
Az = U(t)Aa (XI.8)
или, в скалярной форме,
т
bzK = ^uKl{t) Иьщ. (XI.9)
Понятие функции чувствительности (соответственно вектора
и матрицы чувствительности) является фундаментальным в
теории чувствительности. По существу все проблемы этой теории
связаны в основном с получением и использованием функций
чувствительности для решения разнообразных задач анализа и
синтеза автоматического управления.
Наиболее универсальным методом нахождения функций
чувствительности нелинейных систем является составление и
интегрирование уравнений чувствительности.
Рассмотрим вначале системы, которые описываются
уравнением
z = F(z, t, a), (XI. 10)
при начальных условиях
t0 = t0(a), z(t0, a)=z0, (XI. И)
где вектор-функция F(z, t, а) удовлетворяет условиям теоремы
непрерывной зависимости и дифференцируемости решений по
277
параметрам [147], т. е. существуют и непрерывны частные
производные вектор-функции F по всем аргументам.
Тогда в соответствии с этой теоремой вектор-функция
чувствительности удовлетворяет уравнению
и = —и + — . (XI.12)
dz да
Найдем начальные условия для уравнения (XI. 12). Для этого
представим уравнение (XI. 10) в виде
t
z(t)= [ F(z, т, a)di + z0(a).
Дифференцируя последнее соотношение по параметру а,
получим
a{t)=J^-P{Zo,t0,a)^+ f [iL « + -£-] Л. (XI.13)
da da J [ д?< да \
*о(«)
В выражении (XI. 13) перейдем к пределу при t->tQ:
lim*(*)=-^ F(z0,t0,a)-%2-.
t->t0 da da
Таким образом, начальные условия будут
t0 = t0(a); u(t0) =^ F(z0, t09 а)-^Ц (XL 14)
da da
Перейдем теперь к более сложному классу нелинейных
систем. Рассмотрим разрывные системы, которые на различных
интервалах времени описываются некоторыми
дифференциальными уравнениями вида
z = Ft{z,t,a.)\ */-!<*<*,, i = l, 2, ..., (XI. 15)
где Ft — вектор нелинейных функций;
а — скалярный параметр.
Моменты времени U, определяющие смену одного уравнения
вида (XI. 15) другим и называемые моментами переключения,
определяются из условий переключения
£/(«,2,^=0, 1 = 1, 2, ..., (XI. 16)
где gi — скалярная функция.
Далее предполагаем, что векторы Fi и функции gi являются
непрерывно дифференцируемыми по всем аргументам.
При заданных начальных условиях
*o = *tt> + 0, а); t0 = t0(a) (XI. 17)
уравнения (XI. 15) и (XI. 16) определяют решение
Z = z(ty *0(a), z0% а). (XI. 18)
278
Заметим, что в общем случае при различном выборе
начальных условий решение (XI. 18) будет характеризовать во времени
различные последовательности уравнений вида (XI. 15).
Пусть Т > t0 — некоторый момент времени и пусть
n={t1. i2, ...} (XI. 19)
— конечная или бесконечная последовательность номеров
уравнений (XI.15), описывающих решение (XI.18) с начальными
условиями (t0l z0) на интервале (t0l T). Последовательность (XI. 19)
принято называть типом (формулой) рассматриваемого
решения (движения).
Существенно отметить, что уравнения чувствительности
составляются не вообще, а для конкретного типа движения.
Уравнения (XI. 15) — (XI. 17) описывают широкий класс
нелинейных систем с сосредоточенными параметрами, включая такие
характерные для практики системы, как релейные системы,
системы с кусочно-линейными характеристиками и т. п.
Рассмотрим, например, систему вида (П.1), т. е.
п
zK = ^aKaza + bKf(a)\ я=1, ...,/?;
а=\
П
° = 2 CiZh
/ = 1
или, в векторно-матричных обозначениях,
z = Az + Bf{o);
G = CTZ
где А — постоянная матрица, В, С—постоянные векторы, и
пусть /(от) = signer.
Условия переключения для данной системы имеют вид
0&)=С"г&)=О.
В зависимости от нахождения изображающей точки на том
или ином участке нелинейной характеристики имеем две
системы линейных дифференицальных уравнений
z = Az + B; (XI.21)
z = Az-B. (XL22)
Кроме того, система (XI.20) может двигаться в скользящем
режиме [52], уравнения которого имеют вид
z=(A~ik BCA)- (XI-23)
279
(XI. 20)
В зависимости от начальных условий движение
рассматриваемой системы описывается различными последовательностями
систем (XI.21) — (XI.23), которым соответственно присвоим
номера 1, 2, 3.
В системе (XI.20) возможны самые разнообразные типы
движений. Так, нормальный периодический режим
характеризуется формулой
П={1, 2, 1,2, ...}
или
П={2, 1,2, 1, ...}.
Простейший периодический режим с участками скольжения
может иметь тип
П = {1, 3, 2, 1, 3, 2, ...}
или
П = {2, 3, 1,2,3, 1, ...}.
При определенных начальных условиях допустимы
движения конечного типа, например
П = {1, 2, 3}.
Нашей дальнейшей задачей является составление уравнений
чувствительности для заданных типов движений системы,
описываемой уравнениями (XI. 15). В результате интегрирования
этих уравнений находятся функции чувствительности. Они
являются составляющими вектора чувствительности
я(*,а)=-^А. (XI.24)
да
В отличие от уравнений (XI.10) уравнения вида (XI.15) не
удовлетворяют условиям теоремы о непрерывной зависимости
и дифференцируемое™ решения г (t) по параметру а. Условия
теоремы удовлетворяются только внутри интервалов (^_ь U).
Поэтому можно говорить о том, что на каждом из этих
интервалов вектор — функция чувствительности является решением
уравнений
и = ^и + -^. (XI.25)
dz да
Начальное условие при этом имеет вид (XI.14). В результате
для интегрирования уравнений (XI.25) остается найти условия,
с помощью которых осуществляется переход от одного
уравнения вида (XI.25) к другому.
280
Указанные условия доказываются следующей теоремой. Для
системы (XI. 15) — (XI. 17) вектор чувствительности
удовлетворяет уравнениям
и = -^и + ^-, ti-i<t<t; (XI.26)
dz да
при начальном условии
da da
причем переход от одного уравнения (XI.26) к другому
осуществляется с помощью условий скачков
Aa, = itf-—иГ=—Д/7/—, (XI.28)
da
где
dgj _ , dgj dgL , dgj
dt( dz l da dz l da
da dgj dgj dgj , _dgt_
dz i + dt dz l + dt
(XI. 29)
uj = u(tt + 0); щ = u{ti — 0);
bFl = F?—FT = Fi+i(th xf, a)—Fi(th xT, a).
По существу в данной теореме осталось доказать
справедливость соотношений (XI.28) и (XI.29) [158]. Приведем
геометрический способ доказательства. Для наглядности рассмотрим
систему, описываемую уравнением первого порядка
4 = /(rU«). (XI. 30)
и имеющую один момент переключения, который определяется
условием
«(т,,^ а)=0. (XI.31)
Тогда уравнения системы примут вид
WiOb', a), *o<'<'i; (XI.32)
ч = Ш,*,*)> k<t. (xi.зз)
Обозначим решение уравнения (XI.32) через x\\{t> a), а
решение уравнения (XI.33) через т]2(^ а).
Введем в рассмотрение трехмерное пространство с системой
прямоугольных координат т], /, а. В этом пространстве
рассмотрим следующие поверхности:
£(ть*. а)=0; (XI.34)
<PiCn, t, a)=i\(i)-^(t9 a)=0; (XI.35)
Фя(т|, U а) = л(')-%& сс) =0, (XI.36)
281
тде r\\(t) —двухпараметрическое семейство гладких кривых,
совпадающее в интервале tQ<t<ctY с семейством интегральных
кривых исходного уравнения (XI.30);
r\2(t)—двухпараметрическое семейство гладких кривых,
совпадающее в интервале t > tx с семейством интегральных кривых
уравнения (XI.30).
Для наглядности поверхности, описываемые введенными
уравнениями, изображены на рис. XI. 1.
Рис. XI.1. Поверхности, описываемые уравнениями
(XI.34) — (XI.36) в пространстве параметров ц, t, a
На рис. XI. 1 поверхность переключения g(r\, t, a) = 0
обозначена через G. Эта поверхность по кривой L пересекается в
моменты времени t = t{{a) с семейством интегральных кривых
г] = ц (t, а, ^о(а)), берущих начало на кривой К начальных
условий t0 = U(a).
Поверхности, заданные уравнениями (XI.34) и (XI.35),
определяют в рассматриваемом пространстве линию L{. В свою
очередь, линия L2 определяется поверхностями, заданными
уравнениями (XI.34) и (XI.36).
Уравнения касательных к линиям Lx и L2 в точках (т]*, а*,
t\) и (г|**, а**, ***) имеют вид
282
Д<2>
W
Д(2)
t-ty
Д<2>
(XI.37)
(XI.38)
где т], a, t — текущие координаты,
Д(/) -
dg dg
да dt
дф/ dq>i
да dt
i = 1,2.
1ла —
dg dg
dr\ dt
dq>j d(pi
dx\ dt
AJ
U)
dg dg
dr) da
dq>i dyi
dr\ doc
(XI.39)
Так как линии L\ и L2 геометрически совпадают, то две
касательные, проведенные через точку т]* = т]**, а* = а**, t* = t**t
коллинеарны.
Условия коллинеарности, как известно, имеют вид
<>
д<>>
д<'>
д(2)
1
д<2> д(2,
С учетом соотношений (XI.39) и зависимостей
^ф! _ дф2 _ 1 5фх _ _ 5rja ^ф] _
(XI. 40)
^Г]2
^Г]
дт]
аа
дф2
дгц
da
дф2
а*
а*
аа da dt dt
из условия (XI.40) получим два следующих независимых
уравнения:
где
dg dr]2
da dt
dx\
dg dx\2 _ ^
dt da
dr\2 , dg =v
aa da
~_dg__dHj__
act a^
Г dg dvu
[ dr] aa
dg dg drix
dt +
an a;
a*
aa
drii
aa
'
; (XI. 41)
(XI. 42)
В момент времени t = t{ справедливы соотношения
dru
dt
дц2
■fi(k—о, ли). °0=Л;
drii
da
dt
aa
283
Тогда выражения (XI.41) и (XI.42) можно записать в виде
да
dg ,+
dt
U7 = v(ti)
dg +
U\
dr\
dg
da
*LfT_Ji.uT
da dt
dg ..- i dg
где
dx\
dg
Ml
4'i)
-Hti)
dt dr\
dg . _dg_ f_
dt + dx\ h
da
(XI. 43)
(XI. 44)
Прибавим к левой и правой частям соотношения (XI.43)
величину—^- иТ.В результате после несложных преобразований
находим
Аи\ =uf — щ = A/i
dg _ dg
dx\ da
dg dg
dt + дц h
(XI. 45)
Если же прибавить к обеим частям соотношения (XI.45)
величину v(^i) ——uf, то нетрудно получить зависимость
Аиг = ДД
dg
dg
dt
и+ + -
+ 1Г
dg_
da
■ft
(XI.46)
Зависимости (XI.45) и (Х1.46) могут быть также определены
на основе уравнения (XI.44).
Условие скачков (XI.31) в момент t = t\ обращается в
тождество
gOl(*i). *i, а)=0.
Продифференцируем это тождество по параметру а:
dg dr) (*i) , dg dtx
dg
= 0.
d\\ da ' dt da ' da
По аналогии с начальным условием (XI.27) имеем
(XI.47)
da
■ut + ff-^-.
da
284
Подставляя последнее выражение в соотношение (XI.27),
найдем
dtx
da
dg , dg
uT +
дц 1 да
dt + дц h
дц ' ' да
dt + дц h
Таким образом, теорема для системы (XI.30), (XI.31)
доказана. Доказательство для системы (XI. 15) (XI. 16) выполняется
аналогично [159].
Из условия (XI.28) следует, что вектор чувствительности
может оказаться непрерывным по а в одном из двух случаев: во-
первых, при AF = 0, т. е. когда правые части исходной системы
дифференциальных уравнений непрерывны, и, во-вторых, при
dt,' л
—— = 0, т. е. когда моменты переключения не зависят от пара-
da
метра. Возможен и третий случай, когда функция U = ti(a)
имеет экстремум. При этом в точке экстремума — = 0. Но такой
dx
случай для практики не типичен.
Из условия (XI.28) вытекает также, что разрывными могут
быть только те составляющие вектора чувствительности,
которым соответствуют отличные от нуля компоненты вектора А/7/.
Изложенный подход может быть использован и при выводе
уравнений чувствительности для систем, у которых, помимо
правых частей, разрывными являются и решения. Такая ситуация
характерна, например для систем с импульсным управлением и
для некоторых нелинейных систем, заданных операторными
уравнениями.
При этом разрывы решений в общем случае определяются
соотношениями
гТ^ФАгТ,^*), (XI. 48)
где Фг — вектор нелинейных функций, имеющий непрерывные
частные производные по всем аргументам.
Для таких систем уравнения чувствительности сохраняются
теми же, за исключением условий скачков, которые принимают
вид
Ли, =
-АЛ-+ —^ E)F7
dz J dt
1± +
да
В ряде задач условия скачков (XI.49) удобно представить в
форме
Ди, = Р,иГ + 0,, (XI. 50)
285
где
Pl=
Л/V
A^-(
/ дФ~
' дФ~
-)
—Е
FT-
)FT~
д®7 "
dt
д*Т
dt
dgT
да
^Т .
д>.
. dgT
dt
dgT
dt '
дФ~
да
(XI. 51)
. (XI.52)
Q,=
В случае непрерывных решений z (t) вместо выражений
(XI.50) — (XI.52) имеем более простые соотношения
Дщ = Р\иТ + q; = Pint + Ql
(XI. 53)
где
p;=af,-
Q=AFr
dgi
дг
dgT
dt
dgi
da
Pi = ^Fi
dgi
dz
dgi
■+
QT = bFi
dt
da
dt
dgf
dt
(XI. 54)
Вывод соотношения (Х1.49) можно найти в работе [159].
В принципе аналогичные уравнения чувствительности могут
быть получены и для функций чувствительности высших
порядков. Методика составления этих уравнений изложена в работе
[1591
Аппарат функций чувствительности позволяет эффективно
решать разнообразные задачи теории автоматического
управления и технической кибернетики. В первую очередь укажем на
прямую и обратную задачи анализа. Прямая задача связана с
исследованием влияния параметрических возмущений на
динамику управляемых систем. При решении этой задачи по
известным функциям чувствительности и заданным параметрическим
возмущениям определяется обусловленное ими дополнительное
движение.
В обратной задаче анализа по заданному дополнительному
движению и заданным функциям чувствительности выявляются
параметрические возмущения, вызвавшие указанное
дополнительное движение. Обратная задача является по существу
частью проблемы идентификации, заключающейся в оценке
характеристик управляемых процессов. Многие задачи
автоматического контроля, проверок и испытаний систем и объектов
управления, а также адаптации могут быть рассмотрены с позиций
идентификации, т. е. обратной задачи теории чувствительности.
286
Не менее плодотворно функции чувствительности
используются и могут быть использованы при синтезе автоматических
систем.
Являясь составляющими градиента функционалов в
пространстве параметров управления, функции чувствительности
широко используются в задачах оптимизации. Кроме того, функции,
чувствительности и определенные функционалы от них могут
рассматриваться как показатели грубости систем управления.
Эти же показатели целесообразно использовать как
ограничения или функции цели при синтезе малочувствительных систем..
Многие из перечисленных задач, решаемых с помощью
функций чувствительности, описаны в ряде работ по теории
чувствительности, например в работе [74]. Здесь мы остановимся на
вопросах применения функций чувствительности к задачам
устойчивости и точности нелинейных систем.
2. Применение метода функций чувствительности
к задаче устойчивости разрывных систем
Многие важные классы систем автоматического управления
описываются разрывными системами дифференциальных
уравнений [4, 90]. Сюда относятся, например, релейные и импульсные-
системы, системы с произвольными кусочно-линейными
характеристиками и т. п. Исследование устойчивости по первому
приближению таких систем связано с рядом особенностей, не
присущих обычным непрерывным системам.
Перейдем теперь к постановке задачи об устойчивости
неустановившихся режимов в рассматриваемых разрывных системах.
Рассмотрим наряду с решением (XI. 18) семейство решений
исходной системы, соответствующих начальным условиям
z(t0) = zt + 6z0, (XI.55)
где 6z0—произвольный вектор, компоненты которого
достаточно малы по модулю.
При этом будем предполагать, что существует г\ > 0, такое,
что при всех векторах бг0, компоненты которых бт]ок
удовлетворяют условию
п
2 бт]оЛ <8Ь
все решения, соответствующие начальным условиям (XI.55),
имеют один и тот же тип на некотором интервале времени.
Тогда исходное решение (XI. 18), которое будем называть
невозмущенным, окажется включенным в многопараметрическое
семейство решений, где параметрами являются начальные условия.
287
Возмущенное движение, определяемое начальными
условиями (XI.55), будем обозначать через
z{t,t0, *t + 6*o), (XL 56)
я функцию
6s = s(f, t0, zt + bZo)—z{t, tQ, zt) (XL57)
обычно называют отклонением от возмущенного движения.
Теперь сформулируем определение устойчивости,
являющееся очевидным распространением классического определения
Ляпунова на рассматриваемый случай разрывной системы.
Невозмущенное движение (XI. 18) будем называть
асимптотически устойчивым, если для любого б > 0 существует г < si,
такое, что из условия
п
2 8цок < 8
/с=1
следует
\\uzM = J£i&V,to)<b9 (XI.58)
и, кроме того,
lim||6s(*)|| = 0. (XI. 59)
t-+oo
Запись соотношений (XI.58) и (XI.59) подразумевает
выполнение соответствующих условий в каждой точке непрерывности
вектора 6z(t) и для пределов слева и справа в точках разрыва
вектора 6z(t). Нашей дальнейшей задачей будет построение
эффективных приемов исследования асимптотической
устойчивости.
Построим уравнения первого приближения, являющиеся
аналогом уравнений первого приближения в классической теории
Ляпунова. Для вывода удобно использовать общие уравнения
чувствительности разрывных систем (XI.26) — (XI.29),
позволяющие вычислять производные по параметрам от решений
разрывных дифференциальных уравнений.
Используя указанные соотношения, найдем матрицу,
составленную из векторов чувствительности по составляющим вектора
6;г0, вычисленную при 8г0 = 0. Предварительно введем
обозначение
U = (-^-) . (XI.60)
Из выражения (XI.26), учитывая, что уравнение (XI.18)
явно не зависит от вектора 6z0, имеем
U^^-U, tt-xKtKb. (XI.61)
288
Нетрудно убедиться, что дли каждой из составляющих
вектора 6#о соответствующий вектор Q i обращается в нуль,
поэтому из выражения (XI.50) найдем
bUt^PiUT, (XI. 62)
где матрица Pt по-прежнему определяется выражением (XI.51).
Из выражения (XI.61) следует также, что
Ut = RiUr\ Ri = Pl + E. (XL 63)
При этом из соотношений (XI. 14) непосредственно следует,
что матрица U (t) в начальный момент U удовлетворяет
начальному условию
Ut'=E. (XI. 64)
Нетрудно убедиться, что матрица U определяет главную
(линейную относительно б£0)часть отклонения bz{t),
определяемого выражением (XI.57). Действительно, при каждом t,
отличном от момента разрыва U, а также слева и справа от U,
разлагая выражение (XI.57) в ряд Тейлора, получим
дд2° S
]где векторы RK являются формами /с-го порядка относительно
компонент вектора 6z0.
Из сравнения соотношений (XI.60) и (XI.65) нетрудно
получить требуемое доказательство. Отсюда вытекает, что система
дифференциальных "уравнений (XI.61), (XI.63) и является
искомой системой уравнений первого приближения, а матрица
чувствительности по начальным условиям U является
фундаментальной матрицей уравнений первого приближения,
нормированной в точке t = to.
Рассмотрим пример применения приведенных соотношений
в конкретном случае.
Составим уравнения первого приближения для различных
типов движения релейной системы вида (XI.20), где f{o) =
= sign a.
Из выражений (XI.61), (XI.21), (XI.22) следует, что при
движение на участках нелинейной характеристики имеем одно
уравнение
U = AU, ti-x<t<tt. (XL 66)
Составим теперь матрицы перехода Pi при переходе от
системы (XI.21) к системе (XI.22) и обратно, для чего
воспользуемся выражением (XI.54), поскольку решения в
рассматриваемой системе непрерывны.
19 Заказ 33 289
Переписывая условие переключения в виде
gi(z9B)=Crz(ti)=09 (XI. 67)
находим, что
Кроме того,
-^-=СТ. (XI.68)
дг
or(^-0); -^_=crft + 0). (XI.69)
dt ' dt
При переходе от уравнений (Х1.21) к уравнениям (XI.22)
имеем
AFi=—2B, (XI. 70)
а при обратном переходе
AFt = 2B. (XI. 71)
Используя соотношения (XI.61) и (XI.54), находим, что при
переходе с верхнего отрезка релейной характеристики на
нижний имеют место равенства
AUt = P'iUT = PlUt, (XI. 72)
где
р> _ 2вст />; = _.2ВСТ . (XI.73)
При обратном переходе воспользуемся формулой (XI.72),
тогда
Р£ = . 2ВСТ ; К= .2jgCr . (XI.74)
Если заметить, что в случае нормального переключения при
переходе с верхнего отрезка на нижний
с^._0)<0; а& + 0)<0,
а при обратном переходе
а(*,-0)>0; а(*/ + 0)>0,
то формулы (XI.73) и (XI.74) можно объединить. В частности,
всегда имеем, независимо от направления перехода,
или, что то же самое,
Uf=(E+ ..2BCT , )иГ. (XI.76)
290
Таким образом, для любого решения, имеющего только
нормальные переключения, система первого приближения
определяется последовательностью уравнений вида (XI.66) и
условиями перехода (XI.76).
Рассмотрим теперь движения, содержащие участки
скольжения, когда имеется уравнение (XI.23).
На участке скольжения с помощью выражений (XI.61) и
(XI.23) найдем
и^^А+^ВСАу. (XI.77)
При переходе с нижнего отрезка нелинейной характеристики
в скользящий режим имеем
AjF, = — BCtAz (*,)+ В, q=CTB. (XL 78)
я
Так как уравнение поверхности переключения по-прежнему
имеет вид (XI.67), то имеют место соотношения (XI.68) и (XI.69)
и поэтому можно написать
Pt = ^-1 \—ВСтАг(^)+в\ Ст. (XI.79)
a(tt-0)
я
Второе соотношение (XI.73) в данном случае неприменимо,
так как для скользящего режима всегда
а(*, + 0)=0.
Используя полученные соотношения, можно получить
уравнения первого приближения для режимов движения релейной
системы.
Рассмотрим теперь вопрос о практическом построении
матрицы £/(/), определяемой выражением (XI.60).
Как следует из сказанного выше, матрица U (t),
являющаяся фундаментальной матрицей уравнений первого приближения,
является решением линейной системы дифференциальных
уравнений (XI.61) с условиями разрывов (XI.62). Используя эти
уравнения, можно построить явное выражение для матрицы
U (t). Для нахождения этого явного выражения мы
воспользуемся методом припасовывания, т. е. сшивания решений
различных уравнений (XI.61). Каждая из систем (XI.61) представляет
собой обычную систему линейных дифференциальных
уравнений с переменными коэффициентами. Пусть ^-(f, т) —норми»
рованные фундаментальные матрицы соответствующих .систем
(XI.61), такие, что
19* 291
Учитывая начальные условия (XI.64) и интегрируя первое
уравнение (XI.61), имеем
При t = t{ найдем
^ = tf('i-0)=Y(/b /0).
Используя выражение (XI.63), получим
Ut = U(t1 + 0) = R1W(t1,t0).
Взяв матрицу Uf за начальное условие для второго
уравнения (XI.61), имеем
U(t) = ад tJUt = Y2(/, «^(/0, fx), t±<t<t%.
Рассуждая далее аналогичным образом, найдем, что
U(t)=Wi+1(t, /г)П RsVsV» fs-i), tt<t<ti+i. (XI.80)
s = l
В формулу (Х1.80) входит произведение матриц,
записанное справа налево.
В ряде случаев выражение для фундаментальной матрицы
(XI.80) упрощается. Если, в частности, исходная система урав-
рений.(Х1.15) кусочно-линейная, то имеем
г = А£г + 0{^); t^<t<ti9 (XL81)
где Аг — постоянные матрицы.
Для системы (XI.81) уравнения (XI.61) имеют вид
U=AtU. (XI. 82)
В этом случае, очевидно, имеем
ад %)=еА1«-хК (XI.83)
Подставляя выражение (XI.83) в (XI.80), найдем
U(t) = Л+1 С-'/)П R^\ (XL 84)
s = \
где AtR = tR — ts-\ —полное время движения на 5-м участке.
В качестве иллюстрации изложенного построим явное
выражение матрицы U (/) для режима движения с нормальными
переключениями для релейной системы (XI.20). В этом случае в
соответствии с соотношениями (XI.66) и (XI.83) имеем
адт)=*
292
(Л(*—т.)
По выражениям (Х1.63), (XI.73) и (XI.84) определяем
U(t)=eA{t-V П / 2ВСТ +£V^s-i). (XI.85)
1=1\ 1а^-0)| ^ J
Аналогично можно составить общее выражение матрицы
U(t) для режима движения с участками скольжения.
Как и в классических случаях, по свойствам матрицы (XI.80)
при определенных предположениях можно судить об
устойчивости исходного невозмущенного движения. Это определяется
следующей теоремой об устойчивости по первому приближению:
если элементы UiK(t) матрицы чувствительности (XI.80)
удовлетворяют неравенству
\uiK{t)\<™-W~U\ (XI.86)
где а и р — положительные постоянные, не зависящие от U, то
невозмущенное движение асимптотически устойчиво.
В неравенстве (XI.86) подразумевается, что, если ts — точка
разрыва функции UiK(t), то имеем одновременно
\iiK(ts + 0)\<ae-^s-^
\щкУа-0)\«"Г**'~**.
Если ввести в рассмотрение норму матрицы \\U\\, например,
как сумму квадратов элементов матрицы, то условие (XI.86)
эквивалентно следующему:
\\иЦ)\\<Ье-*{*-*°\ (XI. 87)
где Ъ также не зависит от /о-
Доказательство сформулированной теоремы приводить не
будем, отметим только что его можно получить, например,
несколько видоизменив рассуждения работы [90], где рассматривалась
более частная задача. Другое доказательство можно получить
как следствие общих теорем об устойчивости решений
дифференциальных уравнений в Банаховом пространстве [22].
Приведенные выше результаты могут быть существенно
усилены для случая, когда рассматриваются периодические
движения.
Предположим, в случае неавтономной системы, что правые
части уравнений (XI.15), условия переключения и разрывов
(XI. 16) периодичны по t с периодом Г, т. е.
*■/(*, t) = Fl(z, t + T)\ gi(z, t)=gi(z, t + T)\
Oi(z9i)=Oi(z9 t + T). (XI.88)
В таком случае будем рассматривать периодические режимы,
имеющие период Т.
293
Если все функции, входящие в соотношение (XI.18), не
зависят от аргумента t, то имеем автономную систему, и
периодические решения будут соответствовать автоколебаниям системы.
В этом случае период может быть произвольным. Тип
периодического решения определяется последовательностью чисел qu
указывающих смену уравнений (XI.15) за промежуток времени,
равный периоду, например,
t0<t<t0 + T.
Если исходное невозмущенное движение (XI. 18) периодично,
то имеем
z(t + T, /о, Zo)=z(t, /о, zt). (XI.89)
Соотношение (XI.64), с учетом выражения (XI.60) можно
переписать в виде
оо
zif, t0, z0 + 6z0)-z(t, t0, z0)=U(t)6z0 + ^ RK(t, 6z0). (XI.90)
Подставляя в соотношение (XI.89) значение
и учитывая условия периодичности (XI.88), получим
Z{T + t0 + 0, 6г0)-г(/0 + 0, zQ) = u(t0 + T + 0) +
оо
+ ^RK(T + t0 + 0,dz0). (XI.91)
i=2
Соотношение (XI.91) определяет точечное преобразование
плоскости t = t0 + 0 в плоскость t=T +to+ 0в окрестности
невозмущенного периодического решения. Так как функции yPk
имеют порядок не ниже второго относительно составляющих
вектора б£о, то матрица U (t0 + Т + 0) определяет линейную
часть этого точечного преобразования. Поэтому, исходя из
общих теорем о точечных преобразованиях и их связи с
устойчивостью исходного решения, можно считать доказанной
следующую теорему.
Если корни уравнения
d(k)=det[kE—U(t0 + T + 0)] (XI.92)
лежат внутри единичного круга, т. е.
|\|<1, 9=1,2, ...,/2, (XI.93)
то периодическое движение (XI.88) асимптотически устойчиво.
Используя соотношение (XI.80), легко найти явное
выражение для матрицы U(t + Г0 + 0) и соответственно построить
характеристическое уравнение (XI.92).
294
Действительно, из выражения (XI.80) получим при t = t0 +
+ Т + 0
U(t0 + T + 0)=URsWs(ts, f_i), (XI.94)
где произведение распространяется на все интервалы движения
за период.
С учетом выражений (XI.88) характеристическое уравнение
(XI.92) принимает вид
det ГЬЕ—ПДДв(*в> k-il = 0. (XI.95)
Для кусочно-линейной системы (XI.81) характеристическое
уравнение имеет следующую форму:
det[^£-n/?/s*<s]=o. (XI.96)
Фактически проверку расположения корней
характеристического уравнения (XI.95) относительно единичного круга можно
выполнять, пользуясь известными методами теории импульсных
систем. Отметим теперь, что для автономных систем условие
(XI.93) не может быть выполнено, так как в этом случае
характеристическое уравнение имеет, по крайней мере, один корень
К= 1. Докажем это утверждение. Предположим, что все
функции, входящие в выражения (XI.88), не зависят от t\ тогда
наряду с периодическим решением (XI.88) исходная система буде!
иметь семейство периодических решений вида
*(f + P, to zt), (XL 97)
где р — любая постоянная.
Рассмотрим функцию чувствительности
Щ~, (XI.98)
которая при t = t0 удовлетворяет начальным условиям
йро = ^о±Р). (XI.99)
Очевидно, функция (XI.98) является периодической,, т. е.
при этом она удовлетворяет уравнениям чувствительности,
которые могут быть получены из общих уравнений предыдущего
параграфа.
295
Учитывая, что параметр |3 в уравнения движения, условия
переключения и разрывов не входит, найдем
Ul = JLLUp9 (XI. 100)
dz
и, кроме того,
n£i = Ai*v; (XI, 101)
где матрицы Ri те же, что и в соотношениях (XI.63).
Вычислим вектор u$(t), учитывая начальные условия (XI. 17).
Применяя метод припасовывания и замечая, что уравнения
(XI.90), (XI.91) не отличаются от уравнений (XI.61), (XI.63),
можем написать
Щ = и®Що, (XI. 102)
где матрица U (t) определяется соотношением (XI.80).
При t = t0 + T + 0 из выражения (XI.102) получим щ (t0 +
+ Т + 0) = U (to + Т + 0)»р0, но из периодичности вектора щ
следует, что
Ир(^о + 7, + 0) = иРв>
поэтому предыдущее соотношение можно записать так:
щЦо + Т + 0)=щ0. (XI. 103)
Соотношение (XI.103) представляет собой систему линейных
однородных алгебраических уравнений относительно
составляющих вектора щ0. Так как среди этих составляющих заведомо
есть ненулевые, то из соотношения (XI. 103) следует, что
det[E—U(t0 + T + 0)] = 0. (XI. 104)
Сравнивая выражения (XI.92) и (XI. 104), убеждаемся, что
в автономной задаче характеристическое уравнение (XI.92)
имеет, по крайней мере, один корень, равный единице. Поэтому
в автономной задаче мы приходим, как и в классической
постановке, к особому случаю.
Тем не менее, если остальные корни Xq уравнения (XI.92)
удовлетворяют условию (XI.93), то на основании теоремы
А. А. Андронова и А. А. Витта [105] можно утверждать, что
исследуемый автоколебательный режим устойчив (не
асимптотически).
Приведенные соотношения позволяют рассматривать задачу
устойчивости периодических решений различных конкретных
типов разрывных нелинейных систем.
Пример XI.1. Составим характеристическое уравнение для простейшего
симметричного автоколебательного режима релейной системы (XI.20).
Предполагая, что времена движения по участкам нелинейной характеристики Л^ =
Т
= д^2 = f и принимая во внимание соотношение (XI.85), найдем
U(T0 + 0) = V*, (XI. 105)
296
где
2ВС7
\о(Т/2-0)\
•+Е
AT
о 2
(XI. 106)
При выводе формулы (XI. 105) было учтено, что в автоколебательном
режиме можно полагать t0 = 0 и, кроме того, в силу периодичности и симметрии
а(-0)
-ч-н-
Далее характеристическое уравнение (XI.92) на основании соотношения
(XI. 105) можно записать
det[%E-V*] = 0. (XI. 107)
Но из теории матриц [41] известно, что если собственные числа матрицы V2
лежат внутри единичного круга, то собственные числа матрицы V обладают
тем же свойством. Поэтому уравнение (XI. 106) эквивалентно следующему:
det[A,£ + K] = 0. (XI. 108)
В развернутом виде это характеристическое уравнение с учетом (XI. 106)
записывается так:
det
Л^
%Е + е 2 +
2ВС7
А^
п 2
*(f-)
= 0.
(XI. 109)
Для устойчивости автоколебательного режима корни уравнения (XI. 109)
за исключением одного, равного единице, должны лежать внутри единичного
круга.
Пример XI.2. Предположим,-что мы имеем релейную систему с упорами,
когда уравнения движения имеют вид (XI.20). Однако, при переходе от
уравнения (XI.21) к уравнению (XI.22) и обратно имеем разрывы вида
4 = QzJ, (XI. ПО)
где Q — постоянная матрица.
Составим характеристическое уравнение для симметричного
автоколебательного режима.
При этом будем считать, что
Т
z = Az + B9 0<t<—> t0 = 0;
Az—B, —<t<T.
(XI.Ill)
В; соответствии с формулой (Х1.94) нам необходимо вычислить матрицы
^i(^b h), ^(h, h), которые в данном случае равны
AT
2
Ввиду симметрии, по аналогии с предыдущим примером, имеем
(XI. 112)
Поэтому для составления матрицы U (Г + 0) остается найти матрицу /?х,
для чего следует воспользоваться формулой (Х1.63).~
19* Заказ 33 297
Так как условия переключения в данном примере имеют вид
а(*,-0) = 0,
запишем
С
дг
dt
дг
dt
2(5
Далее имеем
^F1=-^F2=A
(*-•)'
(XI. ИЗ)
(XI. 114)
2Я.
(т+')-(т-
С учетом выражений (XI.111) это соотношение принимает вид
Учитывая также, что в данном случае
(XI. 115)
дФТ дФГ
дг
найдем
дФТ
дФГ
Е FJ-+-
dz J l dt
и, следовательно, матрица Ri равна
dt
--(QA-AQ)z[ y-0
(Q + E)B,
*i=e(J_0) [^ + (0 + Л-ЛО)я1^~о) + (0 + Л)в]с. (XI.1
жения предыдущ
ДЕ + U/ V J=0,
16)
Окончательно, используя соображения предыдущего примера, получим
характеристическое уравнение
det
или, иначе
[iP^D / 2
]-..
det [XE + R^ JJ=0. (XI.117)
В развернутой форме характеристическое уравнение имеет вид
det
Г£+ар.1-0) E + (Q^-AQ)z(-Y^o\ + (Q + E)Be
А±
2
= 0.
(XI. 118)
Для непрерывного решения, когда Q — Е, это характеристическое
уравнение переходит в уравнение (XI.109).
3. Применение функций чувствительности для анализа точности
нелинейных систем
Как уже было отмечено выше, при малых вариациях
параметров Aai,..., Дат решение нелинейной системы можно
представить в виде
*(*) = *(*, a0)+U(t)Aa. (XI.119)
298
Такое линеаризованное относительно Да представление
используется для оценки точности рассматриваемой системы. При
этом предполагается, что заданы исходные дифференциальные
уравнения и вероятностные характеристики компонент
вектора Да.
Применение аппроксимации (XI.119) для решения задач
точности нелинейных систем, описываемых дифференциальными
уравнениями с достаточно гладкими правыми частями
рассмотрено в работе [153]. Использование функций чувствительности
позволяет обобщить этот классический метод линеаризации на
системы с разрывными решениями, для которых разложение в
ряд Тейлора на первый взгляд представляется невозможным.
Рассмотрим кратко подход к исследованию точности на
примере систем, описываемых уравнениями вида (XI.15) — (XI.17):
Z = Fi(z,t, a0 + ba), U-xKKtt (XI.120)
gt(x9 f, cc0 + Agc)=0; (XI. 121)
x0--=x(t0 + 0,a0 + Aayf t0 = t0(a + Да), (XI.122)
где cc0—математическое ожидание вектора ее.
Так как вектор сс=сс0 + Дсси решение z(t) являются
случайными, то условия (XI.121) и (XI.122) являются
стохастическими. Вследствие этого моменты переключения U также будут
случайными величинами.
В выражении (XI.119) вектор £ = £ (ty сс0) определяется в
результате интегрирования уравнений
z = Ft{t, z, сс0); U-\ < t<h\
Z = Z{t0l CC0); *0='о(«оЬ
Величины ti находятся из условий
&(Я£, «о)=0. (XI. 124)
Матрица чувствительности U (t) является решением
уравнения
(j^dFilz, а0, t) jj | dFdz, a0, t) (XI 125)
dz aa°
с начальным условием
act0 aoc0
(XI.123)
(XI.126)
299
Значения матриц чувствительности в моменты U — 0 и U + О
связываются условиями скачков
dti
MJi=—bFr
da0
где
AFt = Fi+i(zt, th aQ)^Ft{zfth a0). (XI. 127)
Таким образом, все составляющие правой части
соотношения (XI.119) могут быть найдены. Остается произвести оценку
вероятностных характеристик вектора z (t) или его компонент.
Рассмотрим, например, компоненту цк вектора z уравнения
(XI.120)
~~ т
4,(0=4*(0 + 2M')Aa,. (XI.128)
Очевидно, в качестве оценки математического ожидания
переменной г]к(0 можно использовать первое слагаемое в правой
части выражения (XI.128), т. е.
ММО]^*)- (XI. 129)
Тогда для дисперсии получим следующую оценку:
т
d МО]-2 u^t)D[Ла']+2 2M9M№y«i, (XI. 130)
где /Сауа/ —соответствующий корреляционный момент.
При отсутствии корреляционной связи между параметрами
аь..., "От имеем
т
D[Ti,(0]-S^^D[Aa/]- (XI.131)
/=1
Зависимости (XI.130) или (XI.131) могут быть использованы
для получения точностных оценок, в частности для определения
вероятности того, что переменная r\K(t) системы в момент
времени / находится в допустимых пределах т)*, т)**. Так, например,
в случае нормального распределения величин Ла;- имеем
1 /,
^<Ч,<ткФ,<) = у)Ф
** и\
V'2D[%]
где Ф(я) —интеграл вероятности вида
х
ф(х)^1Гг|!Л.
-ф
^-4,(0
L /2D[%]
(XI. 132)
300
F(x)
Заметим, что при использовании выражений (XI.130), (XI.131)
и (XI.132) необходимо помнить о том, что дисперсия D[r\K(t)]
в общем случае является разрывной функцией вследствие
разрывности функций чувствительности uKj(t). Поэтому вероятности
(XI. 132) в моменты, в которые дисперсия претерпевает разрывы,
не определимы. Имеют смысл только вероятности Р{ц^<Цк<
<ti**> ti-О) иР(г];< 1\п<1\*к\и + 0). '
Рассмотренный метод в отличие от других методов
исследования стохастических систем (метод Монте-Карло,
интерполяционный метод, метод Доступова и т. д.) обладает двумя
существенными преимуществами. Во-первых, метод линеаризации
требуем весьма малого по сравнению с
другими методами машинного времени.
Во-вторых, изложенный метод позволяет
выявить влияние на точность системы
каждого из случайных параметров щ
отдельно. Последнее очень важно, особенно
в задачах синтеза.
В заключение параграфа рассмотрим
случайные возмущения
автоколебательных режимов в кусочно-линейных
системах.
Указанная задача может быть решена
с использованием функций
чувствительности. При этом расчетные формулы получаются более
простыми. Для сравнения исследование возмущений
автоколебательной системы с помощью функций чувствительности произведем
на примере системы, рассмотренной методом припасовывания в
работе [138].
Рис. XI.2. Нелинейная
характеристика
Пример XI.3. Пусть система описывается уравнениями
y=f(x),
(XI. 133)
где ф — случайная возмущающая сила;
f(x) —нелинейная характеристика, вид которой изображен на рис. XI.2.
Q(p)
R(p)
Ёсе нули Яь ...Дп_1 полинома Ri(p) различны и имеют отрицательные
вещественные части.
Запишем систему (XI.133) в канонической форме
хп = У,
Xt^XiXi + y, i=l,2,..., n— 1;
л-1
/=0
(IX. 134)
301
где
Уп~-
Q(Q) ,
Ri(0) '
i=l, 2,...
В исходной системе сигнал ф отсутствует. При этом в системе
устанавливается симметричный периодический режим с периодом 27\ При действии
возмущающей силы ф этот периодический режим нарушается. Задача заключается
в анализе возмущенного периодического режима с помощью аппарата теории
чувствительности.
Запишем систему (XI.134) в матричной форме
dx
- = Ах + Ву; y = f(x)\
(XI. 135)
dt
где
В'=[1, 1,..., 1]; А =
C' = [?i 72,..., Vrtl;
Л* 0...0
о л,2...о
О 0...0
Пусть в некоторый момент времени, который примем за начальный момент
t0 = О, состояние системы определяется условиями x(t0) = jc0, х(0) = *0, а
дальнейшее движение изображающей точки осуществляется при x(t) > 0.
Тогда при отсутствии возмущающей силы на полупериодах длительностью
Т исходная система описывается уравнениями вида
-^ = Ax + (-l)i+1BKp, (XI.136)
где i = 1,2,... — номера полупериодов.
Моменты перехода от одной системы вида (XI.136) к другой будем
обозначать через tu t2} ... Очевидно, что при ф(^) =, имеем:
т=*,-*,_,.
При воздействии случайной силы ф симметрия периодического движения
нарушается. В частности, появляется случайное смещение моментов
переключения tu t2, .... Обозначим эту флюктуацию моментов переключения через AtK,
к = 1, 2, .... Предположим, что возмущение ф(0 действует на систему, начиная
с момента, лежащего внутри первого полупериода. Значения ф(^) каждого
интервала, внутри которого выходной сигнал реле постоянен, обозначим через ф*.
Тогда для величины флюктуации А^к можем записать
*Я = 2^Ф/'
(XI. 137)
dtK
Значения -— будем определять по одному из соотношений
dgK .. m , dgK
dtK ox дц)[
<% dgK . dgK
дх *к + dt
302
dgK ,, . m , dgK
-T-ttH^ + o-f—-
дх дф/
dgK x+,dgK
дх K ^ dt
Если учесть, что
gK=CTxK + (—l)KA + yK\
EZjL^cr. ^c=0; Ei!L=u \ (Х1Л38)
дх ' dtK ' дцк
то вместо выражения (XI.137) получим
Сгщук--ОУ+1
AtK=-
^J CT[AxK + (-l)K~lBKp]
к
C^(k + 0) + l
CT[AxK + (-l)K-lBKp]
(XI.139)
Как видно из последних соотношений для нахождения флюктуации AtK
дх
необходимо знать значения вектор-функций чувствительности и i (t) —— в
моменты tK — 0 или tK + 0. Эти величины могут быть найдены в результате
интегрирования уравнений чувствительности
diti
-£- = Аиг, tt/(0) = ^_I(r) + Att/K, 0<^<T, (XI. 140)
где
AuiK=-^-AFK. (XL 141)
При этом
ап (0) = 0; и12 (0) = Аап и т. д. (XI. 142)
В предыдущих соотношениях индекс «к» означает номер полупериода, на
котором рассматривается вектор-функция чувствительности И;(г).
На основании выражения (XI. 137) можно вычислить величину «набега
фазы»
s
ЛФз^у-^ЛтЛ-ЧГ-1, (XI. 143)
/с=1
где Атк = At к — AtK_i.
Вероятностные характеристики флюктуации моментов переключения AtK
и набега фазы могут быть определены по соотношениям (XI.137) и (XI.143)
аналитически или методом статических исследований.
При этом случайными являются только величины ср*.
Произведем сравнение приведенных нами выражений для AtK и ACPS с
аналитическими выражениями, полученными в работе [138], методом припасовыва-
ния.
303
По данным этой работы имеем:
где
Чс=-2Л<ф*-Н-1'
Лх= —; А2= — ( 1+ — );
«1
^i
S—1
As= —
р=1
л-1
«^S^Vp^-1)^1^ ' = 2.3....
Р=1
"р "pi
2К,
1
2Кп
1
р1~ ХА 1 + ^Р
v ; ^2~ хА "i + ^p
Кт
vp I -h e; • "р
Нетрудно показать, что для рассматриваемой системы
Ст [AxK + (-lf-x ВКр\ = {-\)к-ха{,
Ст [Ахк + (- \)КВКР\=(- 1)V
Тогда вместо (XI. 137) имеем
к
1 ч
с=(-1)к^-^[сЧ(^-о) + 1]фг
= (-!)'
1=1
К
[СЧйе+ 0)+1]ф,.
Из сравнения выражений (XI. 147) и (XI. 144) видно, что
1
At =
аг
[c,u/c__i,l(tK—0)+1], если к нечетное;
[cfuK__i_^_l(tK—0) + 1], если к четное,
At =
(XI.144)
} (XI. 145)
— [c'uK_i4_l (^/c + 0) + l]i если /с нечетное;
[c'uK_i+l (tK + 0) + 1], если к четное.
304
(XI.146)
(XI. 147)
(XI. 148)
(XI.149)
Это утверждение легко доказывается непосредственной проверкой. В
частности, для А\ в соответствии с соотношениями (XI. 145) имеем
В нашем случае
A]=—[c'uK(tK-0) + l].
Так как uK{tK — 0) = 0, то
Аг=А\.
Для А2 в соответствии с соотношениями (XI. 145) имеем
а\ ~Ь а2
Л2=-
А '
С учетом выражений для ах и а2 из соотношений (XI. 145) после несложных
лреобразований получим
/ л-1 х
-fli + 2/Cp Уп+%УР1
А=- ^—^
В нашем случае
cX_,fa-o) + i+ сч-^-,-Q) + i (ХМ50)
Величину ик_х (tK—0) найдем как решение уравнения чувствительности
dtt
—=Аи; и(0) = Ди/с_1>
•где
dtK_x 2BKP
Д^-Д^,—= -—. (XI.151)
Подставляя выражение для uK__l(tK — 0) = u(T) в соотношение (XI.150),
получим
Аналогичным же образом можно показать справедливость тождеств
(XI.148) и (XI.149) при всех i = 1, 2, ..., к.
Функции чувствительности позволяют определить флюктуации любых
переменных систем. В частности, для флюктуации сигнала a(t) имеем выражение
■»-2£*-
305
или с учетом последнего соотношения системы (XI. 135)
AM0 = 2C^/(0<P/, (XI. 152)
где
дхк
«w(0 = -
аф/
индекс к означает принадлежность функции (XI. 152) соответствующему
интервалу.
Таким образом, определено периодическое движение нелинейной системы
при действии случайной силы. Оценено также влияние изменения переменных
системы на периодическое движение.
ЛИТЕРАТУРА
1. Абгарян К. А. Асимптотическое расщепление уравнений
регулируемого процесса при медленном изменении параметров регулируемого объекта и
системы регулирования. Докл. АН. СССР. т. 158, № 3, 1964.
2. А й з е р м а н М. А. Об одной проблеме, касающейся устойчивости
«в большом» динамических систем. Успехи математических наук, № 4, 1949.
3. Айзерман М. А. и Гантмахер Ф. Р. Об определении
периодических режимов в нелинейной динамической системе с кусочно-линейной
характеристикой. Прикл. матем. и мех. Т. XVII, вып. 5, 1956.
•4. Айзерман М. А. и Гантмахер Ф. Р. Устойчивость по линейному
приближению периодического решения систем дифференциальных уравнений
с разрывными правыми частями. Прикл. матем. и мех. Т. XXI, вып. 5, 195*7.
5. Айзерман М. А. и Гантмахер Ф. Р. Некоторые вопросы теории
нелинейных систем автоматического регулирования с разрывными
характеристиками. Труды 1-го Международ, конгр. Международной федерации по
автоматическому управлению. Т. 1, АН СССР, 1961.
6. Айзерман М. А. и Гантмахер Ф. Р. Абсолютная устойчивость
регулируемых систем. АН СССР, 1963.
7. А й з е р м а н М. А., Лурье А. И. Методы определения периодических
режимов в кусочно-линейных системах. Труды Международного симпозимума
по нелинейным колебаниям. Т. 1, Киев, 1963.
8. Андронов А. А. иБаутинН. Н. Движение нейтрального самолета,
снабженного автопилотом, и теория точечных преобразований поверхностей.
Докл. АН СССР. Т. XLIII, 1944, № 5.
9. Андронов А. А. и Б а у т и н Н. Н. Стабилизация курса
нейтрального самолета автопилотом с постоянной скоростью сервомотора и зоной
нечувствительности. Докл. АН СССР. Т. XLVI, 1945, № 4.
Ю.Андронов А. А. и Баутин Н. Н. Об одном вырожденном
случае общей задачи прямого регулирования. Докл. АН СССР. Т. 46, 1945, № 7.
11. Андронов А. А. и Баутин Н. Н. О влиянии кулоновского трения
в золотнике на процесс непрямого регулирования. Изв АН СССР, ОТН,
1955, № 7.
12. А н д р о н о в А, А., Баутин Н. Н. и Горелик Г. С.
Автоколебания простейшей схемы, содержащей автоматический винт изменяемого шага.
Докл. АН СССР. Т. 47, 1945, № 4.
13. Андронов А. А., Баутин Н. Н. и Горелик Г. С. Теория
непрямого регулирования при учете кулоновского трения в чувствительном
элементе. «Автоматика и телемеханика», 1946, № 1.
14. А н д р о н о в А. А., В и т т А. А. и X а й к и н С. Э. Теория колебаний.
2-е изд. Физматгиз, 1959 (1-е изд. Гостехиздат, 1937).
15. Андронов А. А., Леонтович Е. А., Гордон И. И., Май-
ер А. Г. Теория бифуркаций динамических систем на плоскости. «Наука», 1967.
16. А н д р о н о в А. А., М а й е р А. Г. Задача Мизеса в теории прямого
регулирования и теория точечных преобразований поверхностей. Докл.
АН СССР. Т. 43, 1944, № 2.
307
17. А н д р о н о в А. А. и М а й е р А. Г. Задача Вышнеградского в теории
прямого регулирования. Докл. АН СССР, Т. 47, № 5, 1945, «Автоматика и
телемеханика», 1947, № 5; 1953, № 5.
18. Аронович Г. В. К теории одной простейшей системы регулирования
с сервомотором переменной скорости и зоной насыщения. «Изв вузов,
Радиофизика», Т. 1, 1958, № 1.
19. Бараталиев К. и Красицкий М. С. Об исследовании
нелинейных многосвязных систем управления с запаздыванием методом сечений
пространства параметров. II научно-техн. конференция по автоматическому
управлению. Институт автоматики АН Киргизской ССР, Фрунзе, 1966.
20. Б а р б а ш и н Е. А. Метод сечений в теории динамических систем.
Математический сборник. Т. 29, вып. 2, 1951.
21. Барбашин Е. А. О построении функций Ляпунова для нелинейных
систем. Труды Международ, конгр. Международной федерации по автоматич.
управлению. Т. 1, М., Изд. АН СССР, 1961.
22. Б а р б а ш и н Е. А. Введение в теорию устойчивости. «Наука», 1967.
23. Барбашин Е. А. и Красовский Н. Н. Об устойчивости
движения в целом. Докл. АН СССР. Т. 86, вып. 3, 1952.
24. Б а т а л о в а 3. С. Численное исследование некоторых динамических
систем с помощью метода точечных преобразований. Диссертация. Горьковский
гос. университет, 1967.
25. Баутин Н. Н. Поведение динамических систем,вблизи границ
области устойчивости. Гостёхиздат, 1949.
26. Б а у тин Н. Н. О задаче Л. И. Мандельштама в теории часов Докл.
АН СССР. Т. 65, 1949, № 3.
27. Б а у т и н Н. Н. Теория спускового регулятора с пружинящей
пластинкой. Докл. АН СССР. Т. 72, 1950, № 1.
28. Б е д ел ь б-а ев А. К. Устойчивость нелинейных систем
автоматического регулирования. Изд. АН КазССР, Алма-Ата, 1960:
29. Б е к к е н б а х Э., Б е л л м а н Р., Неравенства. М., «Мир», 1965.
30. Б е л я К. К. О точном определении периодических режимов в
релейных системах автоматического регулирования с несколькими релейными
элементами. «Автоматика и телемеханика», 1961, № 12.
31. Беля К- К. Нелинейные колебания в системах 'автоматического
регулирования и управления. М., Машгиз, 1962.
32. Б е с е к е р с к и й В. А. и Попов Е. П. Теория систем
автоматического регулирования. «Наука», 1966.
33." Боярин о в Bt- С. и Леонов Н. Н. К-теории одной релейной
системы. «Автоматика и телемеханика», 1958, № 2.
34. Б р у с и н Б. А. Об абсолютной устойчивости следящей системы
с люфтом. «Изд. вузов, Радиофизика», 1964, № 3.
35. Булгаков Б. В. Колебания. М., Гостёхиздат, 1954.
36. Бутенен Н. В. Автоколебания стенда с автопилотом. Труды ЛВВА,
вып. 3, 1943.
37. Бутенин Н. В. Элементы теории нелинейных колебаний. Л., Суд-
промгиз, 1962.
38. Бутенин Н. В., Л у н ц Я. Л. Нелинейные задачи теории свободного
гироскопа. Труды 2-го Всесоюзного съезда по теоретической и прикладной
механике. Обзорные доклады, вып. 2, М., «Наука», 1965.
39. Б у т е н и н Н. В., Н е л е п и н Р. А. Точные аналитические методы
исследования нелинейных систем управления. Сб. трудов ЛВВМИУ, вып. 31, 1968.
40. Вознесенский И. Н. О регулировании машин с большим числом
регулируемых параметров. «Автоматика и телемеханика», 1938, № 4—5.
41. Гантмахер Ф. Р. Теория матриц. М., «Наука», 1967.
42. Г а н т м а х е р Ф. Р., Якубович В. А. Абсолютная устойчивость
нелинейных регулируемых систем. Труды 2-го Всесоюзного съезда по
.теоретической и прикладной механике. Вып. 1, М., 1965.
308
43. Г е л и г А. X. Об устойчивости движения систем с неединственным
положением равновесия. Докл. АН СССР. Т. 147, 1962, № 3.
44. Гермаидзе В. Е. и Красовский Н. Н. Об устойчивости при
постоянно действующих возмущениях. Прикл. матем. и мех. Т. 21, вып. 6, 1957.
45. Г о р б а т е и к о С. А. Об устойчивости одной нелинейной системы
автоматического управления. Прикл. математ. и мех., вып. 6, 1961.
46. Горская Н. С, К р у т о в а И. Н. и Рутковский В. Ю.
Динамика нелинейных сервомеханизмов. АН СССР, 1959.
47. Г р д и н а Я. Движения регулятора прямого действия и его
устойчивость. «Вестник общества технологов», 1898, № 4—7.
48. Г у с е в Л. А. Определение периодических режимов в системах
автоматического регулирования, содержащих нелинейный элемент с
кусочно-линейной характеристикой. «Автоматика и телемеханика», Т. 19, № 10, 1958.
49. Дал едкий Ю. А. Докл. АН СССР. Т. 92, 1953, стр. 881.
50. Далецкий Ю. Л. и Крейн С Г. Украинский математический
журнал. Т. 2, 1950, № 4.
51. Дмитриев КХ А. Асимптотическая устойчивость «в большом»
некоторых динамических систем. Труды семинара-симпозимума по 2-му методу
Ляпунова и его приложению в энергетике. Ч. II. Новосибирск, 1966.
52. Д о л г о л е н к о Ю. В. Скользящие режимы в релейных системах
непрямого регулирования. Труды II Всесоюзного совещания по теории
автоматического регулирования. Т. 1, АН СССР, 1955.
53. Д о л г о л е н к о Ю. В. О точном определении автоколебательных
режимов в релейных системах экстремального регулирования. Труды конференции
по теории и применению дискретных автоматических систем, АН СССР, М.,
1959.
54. Д у б о ш и н Г. Н. Основы теории устойчивости движения. МГУ, 1952.
55. Д у в а к и н А. П. и Л е т о в А. М. Об устойчивости регулируемых
систем с двумя органами управления. Прикл. матем. и мех. Т. 18, вып. 2, 1954.
56. Емельянов СВ. Применение нелинейных корректирующих
устройств типа «ключ» для улучшения качества систем автоматического
регулирования второго порядка. «Автоматика и телемеханика», 1957, № 7.
57. Е р у г и н Н. П. О некоторых вопросах устойчивости движения и
качественной теории дифференциальных уравнений в целом. Прикл матем. и мех.
Т. XIV, вып. 5, 1950.
58. Е р у г и н Н. П. Методы Ляпунова и вопросы устойчивости в целом.
Прикл. матем. и мех. Т. XVII, вып. 4, 1953.
59. Ж е л е з ц о в Н. А. Метод точечных преобразований и задача о
вынужденных колебаниях осциллятора с комбинированным трением. Прикл.
матем. и мех. Т. 13, вып. 1, 1949.
60. Ж у к о в с к и й Н. Е. Теория регулирования хода машин. М., 1909.
61. Заславская Т. Б., Тагиров М. А. Анализ устойчивости
электрических систем при конечных возмущениях методом функций Ляпунова. Труды
семинара-симпозимума по 2-му методу Ляпунова и его приложениям в
энергетике. Ч. II, Новосибирск, 1966.
62. 3 у б о в В. И. Методы Ляпунова и их применение. Изд. ЛГУ, 1957.
63. 3 у б о в В. И. Колебания в нелинейных и управляемых системах. Суд-
промгиз, 1962.
64f. К а з а к е в и ч В. В. Многократные системы и простейшие
динамические модели часов. Докл. АН СССР, нов. сер., т. LXXIV, 1950, № 4.
65. К а з а к е в и ч В. В. Об автоколебаниях, порождаемых в системах
регулирования падающими характеристиками трения в сервомоторах.
«Автоматика и телемеханика», 1951, № 6.
66. Казакевич В. В. Анализ динамики некоторых систем
автоматического регулирования с учетом сухого трения и люфтов. В книге «Основы
автоматического регулирования», под ред В. В. Солодовникова. Т. 1, М., Машгиз,
1954.
67. Казакевич В. В. и Островский Г. М. К вопросу о непрямом
20 Заказ 33 309
регулировании при учете кулоновского трения в чувствительном элементе.
«Автоматика и телемеханика», т. XVII, 1956, № 5.
68. К а л м а н Р. Е. Об общей теории систем управления. Труды 1-го
Международного конгресса Международной федерации по автоматическому
управлению. Т. II, М, АН СССР, 1961.
69. Каменков Г. В. Об устойчивости движения в одном особенном
случае. Труды Казанского авиационного института, 1934, № 3.
70. К а ц А. М. а) Влияние кулонова трения на процесс непрямого
регулирования, б) Устойчивость системы регулирования с двумя усилениями при
наличии трения в золотнике. В сб. «Исследования в области регулирования
паровых турбин», под ред. М. 3. Хейфеца, Госэнергоиздат, 1950.
71. Киняпин С. Д. Об одной релейной системе регулирования
неустойчивого объекта. Изв. вузов, «Радиофизика», Т. IV, 1961, № 1.
72. К о к о р е в Г. Д. Определение праметров периодических режимов
в нелинейных системах с одной кусочно-линейной нелинейностью. Сб.
«Некоторые методы расчета систем автоматического регулирования и их элементов»
(Труды МАИ им. Серго Орджоникидзе, вып. 112), под ред. Б. Н. Петрова, Суд-
промгиз, 1959.
73. К о к о т о в и ч П. В., Р у т м а н Р. С. Чувствительность
автоматических систем (обзор). «Автоматика и телемеханика», 1965, № 4.
74. К о м а р н и ц к а я О. И. Применение теории вычетов к приведению
уравнении систем автоматического регулирования к каноническим переменным.
Прикл. матем. и мех. Т. XXIII, вып. 5, 1959.
75. К о м р а з Л. А. К динамике автомата курса. Изв. АН СССР,
«Механика и машиностроение», 1964, № 5.
76. К о т е л ьн и к о в В. А. Продольная устойчивость самолета с
автопилотом типа АВП-12. Труды ЛИИ, 1941, № 2.
77. К р а с о в с к и й А. А. и Поспелов Г. С. Основы автоматики и
технической кибернетики. М., Госэнергоиздат, 1962.
78. К р а с о в с к и й Н Н. Некоторые задачи теории устойчивости
движения. М., Физматгиз, 1959,
79. Круто в а И. Н. Динамика вибрационного механизма электрического
автопилота. «Автоматика и телемеханика», 1959, № 2.
80. Куликов Н. К. Новый метод решения нелинейных и линейных с
переменными коэффициентами уравнений в полных производных. Нахождение
периодических решений. Изв. вузов, «Математика», 1958, № 4 (5).
81. Кунцевич В. М. Анализ нелинейных и экстремальных импульсных
систем на разностной фазовой плоскости. «Автоматика и телемеханика»,
т. XXII, 1961, № 5.
82. Кунцевич В. М. Импульсные экстремальные и
самонастраивающиеся системы. Киев, изд-во «Техника», 1966.
83. К у н ц е в и ч В. М., Чеховой Ю. Н. Исследование устойчивости
импульсных систем управления с частотно-импульсной модуляцией прямым
методом Ляпунова. «Автоматика и телемеханика», 1967, № 2.
84. Кунцевич В. М., Чеховой Ю. Н. Устойчивость систем
управления с двойной (частотной и широтной) импульсной модуляцией. «Автоматика
и телемеханика», 1967, № 7.
85. К у п р и я н о в а Л. И. Об устойчивости одной нелинейной системы
регулирования с нейтральным объектом. «Автоматика и телемеханика», 1959, № 2.
86. Л е о н т о в и ч Е. А. О рождении предельных циклов от сепаратрисы.
Докл. АН СССР. Т. 78, 1951, стр. 641.
87. Л ето в А. М. К задаче об автопилоте. Вестник МГУ, 1946, № 1.
88. Л е т о в А. М. К теории изодромного регулятора. Прикл. матем. и мех.
Т. XII. г.ып. 4, 1948.
89. Л ето в А. М. Устойчивость нелинейных регулируемых систем.
Физматгиз, 1962 (1-е изд. Гостехиздат, 1955).
90. Л и в а р т о в с к и й И. В. Некоторые критерии устойчивости решений
системы дифференциальных уравнений с разрывными правыми частями. Докл.
АН СССР. Т. 125, 1959, № 4.
310
91. Лурье А. И. Некоторые нелинейные задачи теории автоматического
регулирования. М., Гостехиздат, 1951.
92. Л у р ь е А. И. и Л е т о в А. М. Ссостояние и задачи развития
теории устойчивости нелинейных систем автоматического регулирования. Сессия
АН СССР по научным проблемам автоматизации производства. Октябрь 1956г
т. 1, АН СССР, 1957.
93. Лурье А. И. и Постников В. Н. К теории устойчивости
регулируемых систем. Прикл. матем. и мех. Т. VIII, вып. 3, 1944.
94. Ляпунов А. М. Общая задача об устойчивости движения.
Гостехиздат, 1950 (1-е изд. Харьков, 1892).
95. М а й г а р и н Б. Ж. Об абсолютной устойчивости нелинейных систем
автоматического регулирования третьего порядка. «Автоматика и
телемеханика», 1963, № 6.
96. Малкин И. Г. Некоторые основные теоремы устойчивости в
критических случаях. Прикл. матем. и мех. Т. 6, вып. 6, 1942.
97. Малкин И. Г. Теория устойчивости движения. Изд. «Наука», 1966
(1-е изд. Гостехиздат, 1952).
98. М а н д е л ь ш т а м Л. И. Лекции по колебаниям. АН СССР, М., 1955.
99. Н а у м о в Б. Н. Выбор характеристики нелинейной скоростной
обратной связи позиционных следящих систем. «Автоматика и телемеханика»,
т. XX, 1959, № 3.
100. Наумов Б. Н. Исследование абсолютной устойчивости положения
равновесия в нелинейных системах автоматического управления при помощи
логарифмических частотных характеристик. «Автоматика и телемеханика»,
1965, № 4.
101. Н а у м о в Б. Н., Цыпкин Я. 3. Частотный критерий абсолютной
устойчивости процессов в нелинейных системах автоматического управления.
Автоматика и телемеханика, 1964, № 6.
102. Наумов Б. Н. Частотный метод исследования абсолютной
устойчивости и качества нелинейных систем и систем с переменными параметрами при
заданных и случайных воздействиях. Сб. «Многосвязные, инвариантные,
нелинейные и дискретные системы. М., «Наука», 1968.
103. Неймарк Ю. И. Устойчивость линеаризованных систем
(дискретных и распределенных). ЛВВВИА им. Ф. А. Можайского, 1949.
104. Неймарк Ю. И. О периодических режимах и устойчивости
релейных систем. «Автоматика и телемеханика», 1953, № 5.
105. Неймарк Ю. И. Метод точечных отображений в теории нелинейных
колебаний. I, II, III, Изв. вузов, «Радиофизика». Т. 1, 1958, № 1, 2, 5—6.
106. Неймарк Ю. И. О допустимости линеаризации при исследовании
устойчивости. Докл. АН СССР. Т. 127, 1959, № 5.
107. Неймарк Ю. И. О зависимости от параметров периодических
движений систем автоматического регулирования. Труды 1-го Международ, конгр.
Международной федерации по автоматическому управлению. Т. 1 АН СССР,
1961.
108. Неймарк Ю. И. и Киняпин С. Д. О рождении периодического
движения из состояния равновесия, расположенного на поверхности разрыва.
Изв. вузов, «Радиофизика», 1962, № 6.
109. Неймарк Ю. И., Ф е й г и н М. И. Об одном типе бифуркаций
релейных систем. Изв. вузов, «Радиофизика», 1964, № 2.
,110. Нелепин Р. А. Вопросы динамики систем автоматического
регулирования с силовой обратной связью при учете кулоновского трения.
«Энергомашиностроение», 1957, № 9.
111. Нелепин Р. А. Вопросы динамики одного типа нелинейных
корабельных регулируемых систем второго порядка. Труды ВВМИОЛУ
им. Ф. Э. Дзержинского, 1957, № 19.
112. Нелепин Р. А. Устойчивость системы автоматического
регулирования корабельного типа при учете сухого трения. Труды ВВМИОЛУ
им. Ф. Э. Дзержинского, 1957, № 19.
113. Нелепин Р. А. О построении фазовых портретов некоторых авто-
20* 311
колебательных систем с неоднозначной кусочно-линейной характеристикой при
•исследовании их методом точечных преобразований. Труды ВВМИОЛУ
им. Ф. Э. Дзержинского, 1957, № 20.
114 Н е л е п и н Р. А. Теория некоторых нелинейных систем непрямого
регулирования. Труды ВВМИОЛУ им. Ф. Э. Дзержинского, 1958, № 28.
115. Н е л е п и н Р. А. Влияние нелинейной характеристики сервомотора на
характер автоколебаний некоторых простейших систем непрямого
регулирования. Сб. трудов ЛВВМИУ, вып. 7, 1958.
116. Нелепин Р. А. Динамика непрямого регулирования при учете ку-
лоновского трения в золотнике и сервомоторе и нелинейной характеристики
сервомотора типа насыщения. Изв. АН СССР, ОТН, «Энергетика и автоматика»,
1959, № 1.
117. Нелепин Р. А. Исследование простейшей самонастраивающейся
системы экстремального регулирования методом точечных преобразований.
Труды НТО Судпрома, вып. 2, Л., Судпромгиз, 1960.
118. Нелепин Р. А. Теория некоторых систем непрямого регулирования
с несколькими существенными нелинейностями. «Автоматика и телемеханика»,
1960, № 6.
119. Нелепин Р. А. Динамика непрямого регулирования с переменной
скоростью сервомотора при учете кулоновского трения в золотнике и
сервомоторе. «Автоматическое управление и вычислительная техника», вып. 4, М.,
Машгиз, 1961.
120. Нелепин Р. А. Влияние сухого трения на динамику некоторых
систем автоматического регулирования непрямого действия. Buletinul institutului
politehnic din Ia§i, serie noua, T. VIII (XII), fasc. 1—2, 1962.
121. Нелепин Р. А. Метод сечений пространства параметров в теории
нелинейных автоматических систем. Сб. трудов ЛВВМИУ, вып. 23, 1964.
122. Нелепин Р. А. Об исследовании нелинейных автоматических
систем методом сечений пространства параметров. Изв. АН СССР, «Техническая
кибернетика», 1964, № 6.
123. Нелепин Р. А. Об исследовании методом сечений пространства
параметров одного класса систем управления. Изв. АН СССР, «Техническая
кибернетика», 1965, № 4.
124. Нелепин Р. А. Об исследовании нелинейных автоматических систем
высокого порядка точными аналитическими методами. Докл. АН СССР. Т. 161,
1965, № 4.
125. Нелепин Р. А. Об исследовании точными методами систем с двумя
нелинейными элементами. Изв. вузов, «Радиофизика», 1965, № 3.
126. Нелепин Р. А. Об абсолютной устойчивости нелинейных
регулируемых систем. Сб. трудов ЛВВМИУ, вып. 24, 1965.
127. Нелепин Р. А. О синтезе нелинейных законов управления Докл.
АН СССР. Т. 166, 1966, № 6.
128. Нелепин Р. А. Точные аналитические методы в теории нелинейных
автоматических систем. Изд-во «Судостроение», 1967
129. Нелепин Р. А. К вопросу о точной границе области абсолютной
устойчивости регулируемых систем. «Автоматика и телемеханика», 1967, № 4.
130. Нелепин Р. А. Об одном методе анализа и синтеза нелинейных
автоматических систем. Сб. «Многосвязные, инвариантные, нелинейные и
дискретные системы». М., «Наука», 1968.
131. Нелепин Р. А., Тимофеев Ф. П. Исследование нелинейной
системы управления курсом судна методом сечений пространства параметров. Сб.
«Состояние и пути развития комплексной автоматизации морских судов», Л.,
«Судостроение», 1968,
132. Немыцкий В. В. Метод вращающих функций Ляпунова для
разыскания колебательных режимов. Докл. АН СССР. Т. 97, 1954, стр. 33.
133. Немыцкий В. В. О некоторых методах качественного исследования
в большом многомерных автономных систем. Труды Московского
математического общества. Т. 5, 1956.
312
134. Немыцкий В. В. О проблеме качественного исследования в целом
методами функций Ляпунова. Вестник МГУ, серия I, матем., мех., 1962, № 6.
135. Немыцкий В. В. и Степанов В. В. Качественная теория
дифференциальных уравнений. М., Гостехиздат, 1949.
136. Островский А. М. Решение уравнений и систем уравнений.
Перевод с англ. ИЛ, 1963.
137. Павлов А. А. Динамика быстродействующих релейных
сервомеханизмов с запаздыванием. Изв. АН СССР, «Техническая кибернетика», 1963, № 1.
138. Первозванский А. А. Случайные процессы в нелинейных
автоматических системах. М., Физматгиз, 1962.
139. Петров Б. Н. О построении и преобразовании структурных систем.
Изв. АН СССР, ОТН, 1945, № 12.
140. Петров Б. Н. Принцип инвариантности и условия его применения
при расчете линейных и нелинейных систем. Труды 1-го Международн. конгр.
Международной федерации по автоматическому управлению. Т. 1, АН СССР,
М., 1961.
141. Петров В. В. Применение метода точечных преобразований к
анализу нелинейных систем автоматического регулирования. Стабилизация
нелинейных сервомеханизмов. В кн. «Основы автоматического регулирования», под
ред. В. В. Солодовникова. Т. 1, М., Машгиз, 1954.
142. Петров В. В. Динамика одно- и двухкаскадных сервомеханизмов
с несколькими нелинейными характеристиками. Труды II Всесоюзного
совещания по теории автоматич. регулирования. Т. 1, АН СССР, М., 1955.
143. Петров В. В. и Уланов Г. М. Теория двух простейших релейных
систем автоматического регулирования. «Автоматика и телемеханика», 1950,
№ 5.
144. Петров В. В. и Уланов Г. М. К теории непрямого
регулирования при учете сухого трения в чувствительном элементе. Докл. АН СССР.
Т. 101, 1955, № 4.
145. Петров В. В. и Уланов Г. М. О состоянии и задачах изучения
динамики нелинейных систем автоматического регулирования при помощи
фазового пространства и о вопросах их динамической точности. Сессия АН СССР
по научным проблемам автоматизации производства. Т. II, АН СССР, 1957.
146. Плисе В. А. Некоторые проблемы теории устойчивости движения
в целом. Изд. ЛГУ, 1959.
147. Понтрягин Л. С. Обыкновенные дифференциальные уравнения.
М., «Наука», 1965.
148. Попов В. М. Об абсолютной устойчивости нелинейных систем
автоматического регулирования. «Автоматика и телемеханика», 1961, № 8.
149. Попов Е# П. Динамика систем автоматического регулирования. М.,
Гостехиздат, 1954.
150. Попов Е. П. О нелинейных законах управления в автоматике. Изв.
АН СССР, ОТН, «Энергетика и автоматика», 1962, № 5.
151. Поспелов Г. С. Подавление автоколебаний дополнительными
нелинейными элементами. Сб. «Некоторые методы расчета систем
автоматического регулирования и их элементов». Труды МАИ им. С. Орджоникидзе,
вып. 112. М., Судпромгиз, 1959.
152. Поспелов Г. С. Динамика релейных систем автоматического
управления. В кн. «Современные методы проектирования систем автоматического
управления», М., Машиностроение, 1967.
153. Пугачев В. С. Теория случайных функций и ее применение к
задачам автоматического управления. М., Физматгиз, 1960.
154. Пятницкий Е. С. Новые исследования по абсолютной
устойчивости систем автоматического регулирования (обзор). «Автоматика и
телемеханика», 1968, № 6.
155. Разумихин Б. С. Применение метода Ляпунова к задачам
устойчивости систем с запаздыванием. «Автоматика и телемеханика», т. 1, 1960, №6.
156. Рерих К. Э. Влияние трения на процесс регулирования центробеж-
313
ных регуляторов прямого действия. Изв. Екатеринославского горного
института. Т. 14, ч. 2, 1924.
157. Розенвассер Е. Н. О точном определении периодических
режимов в кусочно-линейных системах автоматического регулирования.
«Автоматика и телемеханика», 1960, № 9.
158. Розенвассер Е. Н. Общие уравнения чувствительности
разрывных систем. «Автоматика и телемеханика», 1967, № 3.
159. Розенвассер Е. Н., Юсупов Р. М. Чувствительность систем
автоматического управления. М., «Энергия», 1969.
160. Румянцев В. В. Об устойчивости движения по отношению к части
переменных. Вестник МГУ, серия мат.-мех., 1957, № 4.
161. С а г и р о в М. С, Филатов А. Н. Об устойчивости по Ляпунову
в одном критическом случае, когда определяющее уравнение имеет четное
число нулевых корней. Прикл. матем. и мех. Т. 29, вып. 1, 1965.
162. С и р а з е т д и н о в Т. К. Об устойчивости случайных процессов
с распределенными параметрами. Прикл. матем. и мех. Т. 28, вып. 6, 1964.
163. Скачков Б. Н. Об устойчивости в целом одного класса нелинейных
систем автоматического регулирования. «Вестник ЛГУ», 1957, № 1.
164. Соколов А. А. Влияние нечувствительности на процесс непрямого
регулирования скорости паровых турбин. Сб. «Исследования в области
регулирования паровых турбин». Под ред. М. 3. Хейфеца, М., Госэнергоиздат,
1950.
165. Страхов В. П. Отображение движения цифровой следящей
системы на многолистной фазовой поверхности «Автоматика и телемеханика»,
1962, № 4.
166. Султанов И. С. Разрешающие уравнения для исследования
абсолютной устойчивости регулируемых систем со многими регулирующими
органами. «Автоматика и телемеханика», 1964, № 2.
167. Таль А. А. Влияние саморегулирования и воздействия по
производной на процесс прямого регулирования. Сб. «Памяти А. А Андронова»,
АН СССР, М., 1955.
168. Троицкий В. А. О канонических преобразованиях уравнений
теории автоматического регулирования. Прикл. матем. и мех., Т. XVII, вып. 1,
1953.
169. Троицкий В. А. О канонических преобразованиях уравнений
теории автоматического регулирования при наличии кратных корней. Прикл.
матем. и мех. Т. XXI, в. 4, 1957.
170. Тузов А. П. Вопросы устойчивости для одной системы
регулирования. «Вестник ЛГУ», 1955, № 2.
171. Филиппов А. Ф. Приложение теории дифференциальных
уравнений с разрывной правой частью к нелинейным задачам автоматического
регулирования. Труды 1-го Международн. конгр. Международной федерации по ав-
томатич. управл. Т. 1, АН СССР, М., 1961.
172. Фищенко С. Ф. Украинский математический журнал, Т. 7, 1955,
№ 2.
173. Формальский А. М. Построение области устойчивости систем,
не являющихся устойчивыми в целом. Вестник МГУ, «Математика и механика».
1967, № 1.
174. Ф у ф а е в Н. А. Теория электромагнитного прерывателя. Сб. «Памяти
А. А. Андронова», АН СССР, 1955.
175. Халанай А. Абсолютная устойчивость нелинейных регулируемых
систем с запаздывающим аргументом. «Автоматика и телемеханика», 1964,
№ 10.
176. Цыпкин Я. 3. Теория релейных систем автоматического
регулирования. М., Гостехиздат, 1955.
177. Чета ев Н. Г. Устойчивость движения. М., Гостехиздат, 1955.
178. Чеховой Ю. Н. Динамика импульсных систем с
частотно-импульсной модуляцией. Точные методы анализа. Киев, «Наукова думка», 1966.
314
179. Широкорад Б. В. О существовании цикла вне условий
абсолютной устойчивости трехмерной системы. «Автоматика и телемеханика», 1958,
№ 10.
180. Якубович В. А. О нелинейных дифференциальных уравнениях
систем автоматического регулирования с одним регулирующим органом. «Вестник
ЛГУ», 1960, № 7.
181. Якубович В. А. Решение некоторых матричных неравенств,
встречающихся в теории автоматического регулирования. Докл. АН СССР. Т. 143,
стр. 1304, 1962,
182. Якубович В. А. Метод матричных неравенств в теории
устойчивости нелинейных регулируемых систем. «Автоматика и телемеханика», 1964,
№ 7; 1965, № 4.
183. A t k i п s о n S. Р., В h a 11 S. J., P а с i 11 T. TASME, series E.
Number 2, June, 1963.
184. Barbalat I. Une propriete globale des trajectoires d'un systeme
d'equations differentielles equivalent a l'equation des osillations non lineaires
de Lienard. Acad. Repub. Pop. Romine Bui. Sti Mat. Fiz., t. 6, 853—860. 1954.
185. Bellman R. On the Stability of System of Differential Equations.
Proc. Nat. Acad. Sci. U.S.S., Vol 32, pp. 190—193. 1946.
186. Bellman R. Survey of the Theory of the Boundedness, Stability
and Asymptotic Behavior of Solutions of Linear and Nonlinear Differential and
Difference Equations. Off. of Naval Research, Washington, D. C, 1949.
187. Bellman R. A Stability Theory of Differential Equation. McGraw
Hill Book Company, Inc., New York, 1954.
188. Bendixson J. Sur les courbes definies par les equations differen-
tialles. Acta Math., Vol. 24, 1901.
189. Bergen A. and Williams S. Verification of Aizerman's
Conjecture for a Class of Third-Order Systems IRE Transactions on Automatic
Control, Vol. AC—7, No. 3, 1962.
190. Birkhoff G. D. Dynamical Systems with Two Degrees of Freedom
Proc. Nat. Acad. Sci. U.S.A., Vol. 3, pp. 314—316, 1917.
191. Birkhoff G. D. Dynamical System with Two Degrees of Freedom.
Trans. Amer. Math. Soc, Vol. 18, pp. 199—300. 1917.
192. Birkhoff G. D. Surface Transformations and their Dynamical
Applications. Acta Math., Vol. 43, pp. 1—119, 1920.
193. Birkhoff G. D. An Extension of Poincare's Last Geometric
Theorem. Acta Math., Vol. 47, pp. 297—311, 1925.
194. Birkhoff G. D, Stability and the Equations of Dynamics. Amer.
J. Math., Vol. 49, pp. 1—38, 1927.
195. Birkhoff G. D. Dynamical Systems. Amer. Math. Soc. Coll. Publ—
New York, 1927.
196. Birkhoff G. D. A Remark on the Dynamical Role of Poincare's Last
Geometrical Theorem. Acta Sci. Math. Szeged, Vol. 4, pp. 6—11, 1928.
197. Bow S. Т., Van Ness Т. Е. Use of Phase Space in Transientstabi-
lity Studies. Applic. and Ind., № 38, 1958.
198. В rocket t R. W., Lee H. B. Frequency-Domain Instability
Criteria for Time — varying and Nonlinear Systems. Proceedings of the IEEE, Vol. 55,
No. 5, May, 1967.
199. В г о с к e 11 R. W., W i 11 e m s J. L. Frequency-Domain Stability
Criteria. Part 1. IEEE Trans, on Automatic Control, AC—10, July, 1965.
' 200. С a r t w r i g h t M. L. On the Stability of Solutions of Certain
Differential Equations of Fourth Order. Quart. I. Mech. and Appl. Math., 9, No. 2, 1956.
201. Cesari L. Asymptotic Behavior and Stability Problems in Ordinary
Differential Equations. Springer — Verlag, 1959.
202. Clauser Francis H. The Behavior of Nonlinear Systems. J.
Aeronaut. Sci., No. 3, No. 5, 1956.
203. Cunningham W. J. Introduction to Nonlinear Analysis. McGraw —
Hill Book Company, Inc., New York, 1958.
204. Den Hartog J. P. Mechanical Vibrations, 4th ed., New York, 1956.
315
205. Farley В. G. Dynamics of Transistor Negative — Resistance Circuits.
Proc. IRE Vol. 40, pp. 1497—1508, 1952.
206. Flugge-Lotz I. Discontinuons Automatic Control. Princeton
University Press, Princeton, N. Y., 1953.
207. Flugge-Lotz I., Klotter K. Uber Bewegungen eines Schwin-
gers ubter dem Einfluss von Schwarz — Weiss — Steuerungen, Zeitschrift fur
Angewandte Math, und Mech., В., 28, S. 317, 1948.
208. Flugge-Lotz I., Meissenger H. Uber Bewegungen eines
Schwingers unter dem Einfluss von Schwarz — Weiss — Steurungen. Zentrale
fur wissenschaftliches Berichwessen der Luftfahrtforschung des Generalluftzeug-
meisters (ZWB), Untersuchungen und Mitteilungen, No. 1329, 1944.
209. Flugge-Lotz I., T i t u s H. A. TASME, s. D., No. 4, 1962.
210. Frommer M. Uber das Auftreten von Wirbeln und Strudeln (gesch-
lossener und spiraliger Integralkurven) in der Umgebung rationaler Unbestimm-
theitsstellen. Math. Ann., B. 109, S. 395—424, 1934.
211. Gibson R. Stability Analysis of Non-Linear Control System
by Second Method of Liapunow. 9 RE Prof. Group. A. C. January, 1962.
212. Gibson J. E., Schultz D. G. The Variable Gradient Technique-
for Generating Liapunov Functions. ASTIA Document. No. TR — ЕЕ 62—3, April,
1962.
213. Gomory R. E. and Haas F. A. Study of Trajectories wich Tend
to a Limit Cycle on Three-Space. Annals of Mathematics. 62, No. 1, 1955.
214. H a a g J. Les oscillations non lineaires. I le de Porquerolles, 1—16,
1951.
215. Hahn W. Probleme und Methoden der modernen Stabilitatstheorie.
MTW —Mitt., B. 4, No. 5, 1957.
216. Hahn W. Eine Bemerkung zur zweiten Methode von Ljapunov. Math.,
Nachr. B. 14, No. 4—6, 1955, 1956.
217. Hahn W. Behandlung von Stabilitatsproblem mit der zweiten Methode-
von Ljapunov. Nichtlineare Regelungsvorgange, Beiheft zur Zeitschrift Rege-
lungstechnik. Verlag R. Oldenbourg, Munchen, 1956.
218. Hahn W. Theorie und Anwendung der direkten Methoden von
Ljapunov. Springer Verlag, Berlin, 1959.
219. Hal an ay A. Almost periodic solutions of certain nonlinear systems.
Gaz. Mat. Fiz., t. 7, 396—399, 1955.
220. H a 1 a n а у A. Generalizarea unei teoreme a lui K. P. Persidski. Comun..
Acad. RPR, B. 10, No. 12, 1960.
221. Hale J. K. Nonlinear Oscillations, McGrow — Hill, 1963.
222. Hansen H. M., Chenea P. Mechanics of Vibration. John Wiley and
Sons, Inc., New York, 1952.
223. H a z e n H. L. Design and Test of a High — performance Servomecha-
nism. Journal of the Franklin Institute, Vol. 218, November, 1934.
224. H а у a s h i С Studies on low frequency oscillations in transformer
circuits. Elec. Rev., Vol. 29, pp. 599—608, 670—677, 732—740, 1941; Vol. 30,
pp. 418—425, 479—495, 551—560, 597—609, 1942.
225. H а у a s h i C. Forced Oscillations on Nonlinear Systems. Nippon
Printing and Publishing Company, Osaka, Japan, 1953.
226. Hayashi С Forced Oscillations with Nonlinear Restoring Force.
Journal Applied Physics, New York, Vol. 24, pp. 198—207, 1953.
227. Hayashi C. Stability Investigation of the Nonlinear Periodic
Oscillations. Journal Applied Physics, Vol. 24, pp. 324—348, 1953.
228. Hayashi С Subharmonic Oscillations in Nonlinear Systems. Journal:
Applied Physics, Vol. 24, pp. 521—529, 1953.
229. Hayashi С Initial Conditions for Certain Types of Nonlinear
Oscillations. Symp. Nonlinear Circuit Analysis, Vol. 6, pp. 63—92, New York, 1956.
230. Hayashi С Quasi — periodic Oscillations in Nonlinear Control
Systems. Autom. Remote Control (First Intern. Congr. IFAC), Vol. 2„ London,,
pp. 889—894, 1961.
316
231. HayashiC, Nishikawa Y., Abe M. Subharmonic Oscillations
of Order One —Half. Trans. IRE Circuit Theory, CT—7, pp. 102—111, 1960.
232. Hayashi C, Shibayama H., Nishikawa Y. Frequency Entra-
inment in a Self — oscillatory System With External Force. Trans. IRE Circuit
Theory, CT—7, pp. 413—422, 1960.
233. H i g g i n s T. I. A Resume of the Development and Literature of
Nonlinear Control—System Theory. Taper. Arner. Soc. Mech. Engrs, N1 RD4, 1956.
234. Hop kin A. M. Phase —Plane Approach to the Design of Saturating
Servomechanisms. Transactions American Institute of Electrical Engineers, New
York, Vol. 70, 1951.
235. Hwang Ling Задача об оценке времени затухания для
многомерных нелинейных систем. Acta Scientiarum Naturalium Universitatis Pekinensis.
Vol. VL, № 1, 1960.
236. Ibragim E. S., Rekasius Z. V. A Stability Criterium for
Nonlinear Feedback Systems. IEEE Trans, on Automatic Control, AC—9, April, 1964.
237. К a 1 m a n R. E. Physical and Mathematical Mechanisms of Instability
in Nonlinear Automatic Control Systems. TASME, April, Vol. 79, No. 3, 1953.
238. К a 1 m a n R. E. Phase — Plane Analysis of Automatic Control Systems
with Nonlinear Gain Elements. Trans. AIEE, Vol. 73, Part 11, 1954.
239. К a 1 m a n R. E. Analysis and Design Principles of Second and Higher
Order Saturating Servomechanisms. Trans. AIEE, Vol. 74 (11), pp. 294—308,
1955.
240. К a 1 m a n R. E. Ljapunov Functions for the Problem of Lur'e in
Automatic Control. Proc. Nat. Acad. Sci. U. S., Vol. 49, No. 2, 1963.
241. К a 1 m a n R. E., В e r t r a m I. E. Control System Analysis and Design:
Via the «Second Method» of Liapunov. TASME, series D., Vol. 82, No. 2, 1960.
242. Kaplan W. Stability Theory. Symposium on Nonlinear Circuit Anal.,
Vol. 6, pp. 3—21, Brooklyn, 1957.
243. Kauderer H. Nichtlineare Mechanik. Springer — Verlag, Berlin,
Gottingen, Heidelberg, 1958.
244. Keller E. G. Mathematics of Modern Engineering, vol. 11, John Wiley
and Sons, Inc., New York, 1942.
245. Kl otter K. Free Oscillations of Systems Having Quadratic Damping
and Arbitrary Restoring Forces. Journal of Applied Mechanics, Vol. 22, No. 4,
1955.
246. Klotter K., Kreyszig E. Uber die Grenzamplitude selbsterregter
Schwingungen bei kleinem Energieausrausch. Zeitschrift fur angewandte Mathe-
matik und Mechanik, 40, № 1/3, 1960.
247. К u Y. H. Nonlinear Analysis of Electromechanical Problems. Journal
Franklin Institute, Philadelphia, Vol. 255, pp. 9—31, 1953.
248. Ku Y. H. Acceleration Plane Method for Nonlinear Oscillations. Proc.
Symp. on Nonlinear Circuit Analysis. Polytechnic Inst, of Brooklyn, New Yorkr
pp. 129—152, 1953.
249. К u Y. H. Method of Solving Third and Higher Order Nonlinear
Differential Equations. Journal Franklin Institute, Philadelphia, Pa., 256, 1953.
250. К u Y. H. Analysis of Multiloop Nonlinear Systems. Transactions
Institute of Radio Engineers, New York, CT—1, No. 4, December, pp. 6—12, 1954.
251. Ku Y. H. Acceleration Plane Method for Analysis of a Circuit with
Nonlinear inductance and Nonlinear Capacitance. Transactions American Institute of
Electrteal Engineers, New York, Vol. 73, Part 1, pp. 619—626, 1954.
252. К u Y. H. Analysis of Coupled Circuits. Transactions American Institute
of Electrical Engeneers, Vol. 73, Part 1, pp. 626—631, 1954; Vol. 74, Part 1,
pp. 626—631, 1955.
253. К u Y. H. Analysis of Nonlinear Systems with More than One Degree
of Freedom by Means of Space Trajectories. Journal Franklin Institute,
Philadelphia, Pa., Vol. 259, 1955.
254. К u Y. H. Analysis of Servomechanisms with Nonlinear Feedback
Control. Transactions American Institute of Electrical Engineers, New York, 75,
Part 11, 1956.
317
255. Ku Y. H. The Pase — Space Method for Analysis of Nonlinear Control
Systems. TASME, New York, Vol. 79, No. 8, 1957.
256. Ku Y. H. Boundary Layer Problems Solved by the Method of Nonlinear
.Mechanics. Proc. IXth International Congress of Applied Mechanics, Brussels,
1956, Vol. 4, pp. 132—144, (published 1957).
257. К u Y. H. Analysis and Control of Nonlinear Systems. New York, the
"Ronald Press Company, 1958.
258. Ku Y. H. On Nonlinear Oscillation in Electromechanical Systems.
Journal Franklin Inst., Vol. 272, pp. 253—274, 1961.
259. Ku Y. H. Formulation of Liapunov Functions of Nonlinear Systems for
Stability Studies. Proc. First Annual Allerton Conference on Circuit and System
Theory, University of Illinois, Urbana, pp. 309—319, 1963 (published 1964).
260. К u Y. H. Liapunov Function of a Fourth Order Nonlinear System. IEEE
Trans, on Automatic Control, Vol. AC—9, July, 1964.
261. Ku Y. H. Stability and Boundedness Considerations in Some Nonlinear
"Systems. Proceedings of the National Electronics, Conference, Vol. XXI, 1965.
262. Ku Y. H., Chi eh H. T. Extension of Popov's Theorems for Stability
on Nonlinear Control Systems. Journal Franklin Inst., Vol. 279, No. 6, 1965.
263. Ku Y. H., Mekel R., Su С. С Stability and Design of Nonlinear
'Control Systems via Liapunov's Criterion. IEEE International Convertion Record,
1964 (IEEE Paper 212).
264. Ku Y. H., Puri N. N. On Liapunov Functions of High Order
Nonlinear Systems. Journal Franklin Inst., Vol. 276, pp. 349—364, 1963.
265. Ku Y. H., Wolf A. A. and Dietz J. A. Taylor — Couchy
Transforms for Analysis of a Class of Nonlinear Systems. National Convention Record,
Institute of Radio Engineers, New York, Vol. 7, Part 11, 1959.
266. К u r z w e i 1 J. On the reversibility of the first theorem of Liapunov
'concerning the stability of motion. Casop. pestov. mat., 5 (80), 382—398, 1955.
267. Kurzwei 1 J. On the inversion of the second theorem of Ljapunov on
-stability of motion. Casop. pestov. mat., 6 (81), 217—259, 1956.
268. Lakshmi-Bai С Some New Concepts in Nonlinear Systems.
Journal of the Franklin Institute, Vol. 272, № 2, 1961.
269. Lecornu L. F. A. Regularisation du mouvement dans les machines.
'Gauthier — Villars et Fils, Paris. 1898.
270. Lefschetz S. Differential Equations: Geometric Theory. Interscience
Publishers, Inc., New York, 1957.
271. Leaute H. Memoire sur les oscillations a longues periodes dans les
machines actionnees par des moteurs hydrauliques. Journal He PEcole polytechni-
que, V. LV, No. 1, pp. 1—126, 1885.
272. Levi B. and Massera J. L. Study in the large of a differential
equation of the second order. Math, Notae, Vol. 7, 91—155, 1947.
273. Levinson N. On a Nonlinear Differential Equation of the Second
Order. Proc. Nat. Acad. Sci. U.S.A., Vol. 29, pp. 222—223, 1943.
274. Liu Ruey-Wen, Fett G. H. Analogy of Nonlinear Systems to
Classical Dynamics. Journal of the Franklin Institute, Vol. 272, No. 4, 1961.
275. M a g i г о s D. On Stability Definitions of Dynamical Systems.
Proceedings National Academy of Sciences, U.S.A., pp. 1288—1294, June, 1965.
276. Magnus K. Eigenschwingungen hydraulischer Stellmotore, Teil 1
und II. Regelungstechnik, Vol. 3, № 11, № 12, 1955.
277. Mahalanabis A. K. On Stabilization of Feedback Systems Affected
by Nonlinearities. Appic. and Ind., No. 57, 1961.
278. Manfredi B. Sulla stabilita del motodi sistemi a piu di liberta in
condizioni non lineari. Bolletino della Unione matematica italiana, gr. IV, ser. Ill,
No. 1, Marzo, 1956.
279. Mar с у Н. Т., Yacht er M., Lauderer J. Transactions American
Institute of Electrical Engineers, New York, 68, 1949.
280. Massera J. L. On Liapunoff's Condition of Stability. Annals of
Mathematics, Vol. 50, No. 5, 1949.
318
'281. Massera J. L. Contribution to Stability Theory, Ann. Math., Vol. 64,
pp. 182—206, 1956.
282. McDonald D. С Nonlinear Techniques for Improving Servo
Performance. Proceedings National Electronic Conference, Chicago, III, Vol. 6, 1950.
283. McLachlan N. W. Ordinary Nonlinear Differential Equation, 2d ed.
Oxford University Press, New York, 1955.
284. Minagawa Sitiro. A Proposal of a New Method of Phase
Analysis of On — Off Control Systems with Relation to Sinusoidal Input. Bulletin of
ISME, Vol. 4, No. 16, 1961.
285. Minorsky N. Introduction to Nonlinear Mechanics. I. W. Edwards
Publisher, Inc. Ann Arbor, Mich., 1947.
286. M i s e s R. Zur Theorie der Regulatoren. Elektrotechnik und Maschinen-
•bau, Vol. 26, No. 37, 1908.
287. Mitrinovitch D. S. Comptes rendus de l'Academie des sciences
de Paris, B. 230, S. 1130—1132, 1950.
288. N a r e n d r a K. S., N e u m a n С P. Stability of a Class of
Differential Equations with a Single Monotonic Increasing Nonlinearity. Circuit
Laboratory Technical Report, No. 468, Harvard University, 1965.
289. Nei swan der S. N. and MacNeel R. N. Optimization of
Nonlinear Control Systems by Means of Nonlinear Feedbacks. Transactions American
Institute of Electrical Engineers, New York, 72, Part 11, 1953.
290. О p p e 11 W. Vergleichende Betrachtung verschiederen Regelaufgaben
hinsichtlich der geegneter Regelgesetz massigkeit. Luftfahrforschung, Bd 16,
H 8, 1939.
291. Pavlidis T Stability of a Class of Discontinuous Dynamical
Systems. Information and Control, Vol. 9, No. 3, 1966.
292. Pavlidis Т., J u г у E. I. Analysis of a New Class of
Pulse—Frequency Modulated Feedback Control Systems, 1ЁЕЕ Trans, -on Automatic
-Control, Vol. AC—10, No. 1, 1965.
293. Pestel E. Anwendung der Ljapunovschen Methode und des Verfah-
rens von Krylow — Bogoljubov auf ein technisches Beispiel. Nichtlineare Rege-
lungsvorgange, Beiheft zur Zeitschrift Regelungstechnik, Verlag R. Oldenbourg,
Munchen, 1956.
294. P f a r r A. Der Reguliervorgang bei Turbinen mit indirekt wirkendem
Regulator. Zs. d. Ver. deutsch. Ing., B. 43, No. 50, No. 51, 1899.
295. Pikielny Jerry. Wspolczesny kierunek rozwoju ukladow automa-
iycznej regulacji — uklady nieliniowe. Romiary, automat., kontrola. B. 2, No. 12,
1956.
296. P i n n e у Е. Nonlinear Differential Equation Systems. Tech. Rep. 25,
Division of Eng. Mech., Stanford Univ., 1953.
297. Poincare H. Sur les courbes desinies par une equation differentiel-
le —Oevres. T. I, Paris, 1928.
298. P о r i t s к у Н. Hunting Due to Lost Motion. Paper Amer. Soc. Mech.
Engrs. № 1 RD—12, 1956.
299. P о р о v V. M. Criterii suficiente de stabilitate simptotica in mare pent-
ru sistemele automate cu mai multe organe de executie. Studii si cercetari de
energetica, anul IX, No. 4, 1959.
300. Popov V. M. Noi critterii grafice peutru stabilitates starii stationare
.a sistemelor automate neliniare. Studii si cercetari de energetica. Acad. R.P.R.
anul X, № 3, 1960.
301. Popov V. M. Criterii de stabilitate pentru sistemele automate continif
rlemente neunivoce. Probleme de automatizare, 13 octombric, 1960.
302. Popov V. M. Criterii de stabilitate pentru unele tipuri de sisteme
automate neliniare. Automatica si Electronica, Vol. 5, No. 3, 1961.
303. Porter J., Atkinson С P. A. TASME, Vol. 29, series E, No. 2,
June, 1962.
304. P г о e 11 R. Ueber den indirektwirkenden Regulierapparat Patent Proell.
Zeitschrift des Vereines deutsche Ingenieure, Bd. XXVIII, No. 24, No. 25, 1884.
319
305. R e i fi i g Rolf. Erzwangene Schwingungen mit Zaher Dampfung und
starver Gleitreibung. Math. Nachr., B. 12, No. 1—2, 1954.
306. R e i fi i g Rolf. Uber die totale Stabilitat erzwungener Bewegungen
mit kombinierter Dampfung. Zeitschrift fur angewandte Mathematik und Mecha-
nik, B. 39, No. 9/11, 1959.
307. R e i fi i g Rolf. Ein Kriterium fur asymptotische Stabilitat. Zeitschrift
fur angewandte Mathematik und Mechanik, B. 40, No. 1—3, 1960.
308. R e к a s i u s Z. V. A Stability Criterion for Feedback Systems With One
Nonlinear Element. IEEE Trans, on Automatic Control, AC—9, 1964.
309. R e к a s i u s Z. V., Gibson LP. Stability Analysis of Nonlinear
Control Systems by the Second Method of Liapunov. Trans. I.R.E. PGAC, No. 6,
1962.
310. Romiti A. Sulla stability asimtotica in grande di una classe di sis-
temi non lineari di regolazione automatica. Atti del la Academia nazionale dei
Lencei, Rendiconti, Classe di scienze fisiche, matematiche e naturali, V. 33, Fasc.
No. 1—2, 1962.
311. Rosenberg R. M. TASME, S.E. No. 1, 1962; TASME, S.E., No. 1,
1963.
312. Rosenberg R. M. and Atkinson C. P. On the Natural Modes
and Their Stability in Nonlinear Two — Degree — of — Freedom Systems.
TASME. S.E., Vol. 81, 1959.
313. Salle J. P., La. Some Extensions of Liapunov's second Method. IRE
Trans. Circuit. Theory, Vol. 7, No. 4, 1960.
314. S a 11 e J. P., La., Lefschetz S. Stability by Ljapunov's Direct
Method with Applications, Academic Press, 1961.
315. S a w a r a g e J., F u j i i Т., О к a d a J. Forced Vibrations of the
System with Two Degrees of Freedom with Coulomb Damping. Bulletin of ISME,
Vol. 2, No. 6, 1959.
316. Schubart H. Uber die Grenzamplitude einer Klasse selbsterregter
Schwingungen. Ingenier — Archiv, B. 27, H. 1, 1959.
317. Scott W. E. An Introduction to the Analysis of Nonlinear Closed —
Cycle Control Systems. «Autonatic and Manual Control», edited by A. Tustin,.
Academic Press, New York, N. Y., 1951.
318. Smith Otto J. M. Feedback Control Systems. McGrow Hill Book
Company, Inc. New York, Toronto, London, 1958.
319. Skawronski J., Ziemba S. The Problem of Vibrations of Non-
autonotic Systems with Strong Non—linearity. Arch. Mech. Stosowanej, Vol. 101,
No. 11, 1958.
320. Stoker J. J. Nonlinear Vibrations. Interscience Publishers, Inc., New
York, 1950.
321. Stout T. M. Basic Method for Nonlinear Control — System Analysis.
TASME, Vol. 79, No. 3, April, 1957.
322. S z e g б G. P. A Contribution to Liapunov's Second Method: Nonlinear
Autonomous Systems. TASME. Vol. 84, S.D., No. 4, December, 1962.
323. Szego G. P. On the Application of Zubov's Method of Constructing
Liapunov Functions for Nonlinear Control Systems. TASME, Vol. 85, S.D., No. 2,
1963.
324. Thaler George J., Pastel Marvin P. Analysis and Design
of Nonlinear Feedback Control Systems. McGrow — Hill Book Company, Inc.,
1962.
325. Tou J. and Schultheiss P. M. Static and Sliding Friction in
Feedback Systems. Journal of Applied Physics, Vol. 24, No. 9, September, 1953.
326. T r u x a 1 J. G. Automatic Feedback Control System Synthesis.
McGraw — Hill Book Company, Inc., New York, 1955.
327. Tsien H. S. Engineering Cybernetics. McGrow —Hill Book Company,.
Inc., New York, N. Y., 1954.
328. V a 11 e s e L. M. Comparison of Backlash and Hysteresic Effects in
Second — Order Feedback Systems. Applic. and Ind., No. 26, 1956.
320
329. Wazewski T. Une metode topologique de l'examen du phenomene
.asymptotique relativement aux equations differentielles ordinaires. Rend. Accad.
Lincei, 3, 210—215, 1947.
330. W i 1 1 e m s J L. M. А., В г о с к e 11 R. W. Remarks on the Stability of
Nonlinear Feedback Systems, IEEE Trans, on Automatic Control, Vol. AC—10,
1965.
331. Yoshizawa T. Liapunov's function and boundness of solutions.
Funkciolaj ekacioj. Serio Internacia, Vol. 2, 1959.
332. Ziemba Stefan. Dry Friction Vibration Damping. Arch. Mech.
Stosowynej, V. 9, No. 3, 1957.
П ■ ■
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автоколебания 60, 82, 84, 86
Величина регулируемая 106
Воздействие внешнее 137
исчезающее 138
ограниченное 137
синусоидальное 252
— регулирующее 106
Движение невозмущенное 293
— периодическое 116
асимптотически орбитно
устойчивое 48
— свободное 251
устойчивое 112, 115
условно 115
Критерий абсолютной устойчивости
состояний равновесия частотный 142
процессов частотный 144,
146, 147
— автономности регулирования 192
— времени затухания 191
— гладкости 192
— монотонности 84
— перерегулирования 192, 199
— В. М. Попова 143, 159, 163
Линеаризация гармоническая 178
Метод Гаусса 37
— Ляпунова прямой, 11, 176, 233
— первого приближения 11
— припасовывания 17, 295
— сечений пространства параметров
16, 20, 176
— точечных отображений 14, 30, 55
— фазовой плоскости 13, 251
подвижной 251
Область абсолютной устойчивости 28
неустойчивости состояния
равновесия 67, 91, 105
— автоколебаний 47, 50, 52
жесткого режима 60, 70, 91
мягкого режима 86, 91, 105
ограниченных неустойчивостью
«в большом» 67, 91
— допустимых отклонений 175
— компактная 53
322
— притяжения положения равновесия
175
— существования и устойчивости
периодического режима 52
— устойчивости 44
— устойчивости при линейно
изменяющемся управляющем сигнале
270
■ при ограниченных отклонениях 91
состояния равновесия в целом
60, 70, 86, 91
состояния равновесия по
Ляпунову 44
Поверхность бифуркационная 111
— переключения 281
— сепаратрисная 67, 74, 83, 111, 113,
117
Процесс переходный 68, 259
Сечение вскрывающее 25, 28, 45, 50,
111, 176
Синтез корректирующих устройств
154, 171
последовательных 157
— нелинейных законов управления
125
Система автоколебательная 65
— автономная 205
с переменной структурой 216
— астатическая 244
— каноническая 24, 47, 52, 111, 177
— многомерная 234
— неавтономная 43, 251
с несколькими нелинейностями
43
— нелинейная импульсная 233
— полностью управляемая 22, 189
— разрывная 277
— релейная 203
— статическая 238
— с двойной модуляцией 247
— с переменной структурой 215, 218
Трение кулоново 108
— сухое 109
Теорема Кронекера — Капелли 40
Теорема Ляпунова 11
— В. В. Немыцкого 199, 201
Управление допустимое 189
Условия Липшица 53
— монотонности переходного
процесса 65, 83
— переключения 277
— скачков 58
Устойчивость 138
— абсолютная 135, 175
процессов 140, 153
состояния равновесия 143
— асимптотическая 139
в целом 140
процессов 140
— периодических режимов релейной
системы 209
— при допустимых отклонениях 174
— при ограниченных по модулю
отклонениях 175
Фазовая плоскость 13, 84, 115, 252
подвижная 251
— поверхность бесконечнолистная 58
— траектория 48, 68, 113
замкнутая 112
Фазовое пространство 13, ПО, 112,
185, 251
Функция Ляпунова 12, 181, 237
— нелинейная кусочно-непрерывная
51
— передаточная 135
эквивалентная 135
— скалярная 277
— чувствительности 285, 294, 297
Характеристика
амплитудно-частотная логарифмическая 164
— нелинейная 56, 136, 142, 171
класса А 141
нестационарная 146
разрывная 51
с зоной нечувствительности 140
типовая 57
— релейная 205
— частотная 143, 159, 163
вещественная 151
логарифмическая 149
желаемая 154
Цикл предельный 13
неустойчивый 83, 115, 179
полуустойчивый 115
устойчивый 83, 115
вырожденный 87
изолированный 116
■ ■ Я
Коллектив авторов
ТОЧНЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ
НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО
.УПРАВЛЕНИЯ
Редактор издательства инж. Л. Л Строганов
Технический редактор В. Д. Элькинд
-Корректор О. Е. Мишина
Переплет и суперобложка
художника А. #. Михайлова
Сдано в производство 24/IX 1969 г.
Подписано к печати 14/IX 1970 г.
Т-12371 Тираж 4700 экз.
Печ. л. 20,25 Бум. л. 10,13
Уч.-изд. л. 20 Формат 60 X 90/ю
Цена 2 р. 18 к. Зак. № 33
Издательство «МАШИНОСТРОЕНИЕ»,
Москва, Б-66, 1-й Басманный пер., 3.
Экспериментальная типография ВНИИ полиграфии
.Москва К-51, Цветной бульвар, 30
4
НЕЛИНЕЙНЫЕ
CAV
НЕЛИНЕЙНЫЕ СИСТЕМЫ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Метод гармонической линеаризации в проектировании
нелинейных систем автоматического управления.
В книге изложена теория гармонической линеаризации
и ее практическое применение к расчетам и
проектированию непрерывных дискретных, самонастраивающихся,
с перестраиваемой структурой и с конечными
автоматами нелинейных систем автоматического управления.
Нелинейные корректирующие устройства в системах
автоматического управления.
В книге рассмотрены различные типы нелинейных
корректирующих устройств с однозвенными и
многозвенными фильтрами, расширяющими области
устойчивости и улучшающими показатели качества и точности
систем автоматического управления.
Методы синтеза нелинейных систем автоматического
управления.
В книге изложены способы синтеза нелинейных
систем автоматического управления на основе метода
разделения движений, применения диаграмм качества,
использования показателя колебательности и
логарифмических амплитудных характеристик.
Точные методы исследования нелинейных систем
автоматического управления.
В книге изложены проблемы анализа и синтеза
нелинейных систем автоматического управления, основанные
на методе сечений пространства параметров, методе
фазовой плоскости, втором методе Ляпунова и
частотном методе В. М. Попова.
Нелинейная оптимизация систем автоматического
управления.
В книге изложена теория оптимального управления
линейными и нелинейными объектами, основанная на
принципах максимума, динамического программирования и
теории игр.
Статистические методы в проектировании нелинейных
систем автоматического управления.
В книге рассматриваются различные статистические
методы расчета и проектирования нелинейных систем
автоматического управления. Значительное внимание
уделено применению цифровых вычислительных машин.
книги издательство «Машиностроение» выпускает в 1970/71 г.
< 2Е
55 о
CD »—
С£ СО
lu <з:
о 2Е
О LU
2S Ь-
О
£><
LU -О
О u-i
ИЗДАТЕЛЬСТВ0*МАШИН0СТР0ЕНИЕ«
Nf
НЕЛИНЕЙНЫЕ
DAV
НЕЛИНЕЙНЫЕ СИСТЕМЫ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
В книге рассмотрены
точные методы анализа и
синтеза нелинейных систем
автоматического управления
и приводятся конкретные
результаты их применения.
Изложены основы метода
сечений пространства
параметров, который применен
для изучения систем с
типовыми нелинейностями, для
синтеза нелинейных
законов управления и для
построения областей
устойчивости при допустимых
отклонениях. Описан
частотный метод исследования
абсолютной устойчивости, а
также приведены методы
анализа качества
переходных процессов в
нелинейных системах и
исследования дискретных нелинейных
систем; даны основы
теории чувствительности в
приложении к нелинейным
системам.
Книга рассчитана на
научных работников и
инженеров, занимающихся
вопросами теории
автоматического управления и ее
применением к расчету
автоматических систем, а также
может быть использована
студентами старших курсов
высших учебных заведений.