/




































































































































































































































































































































































































































































































































































































































































Похожие




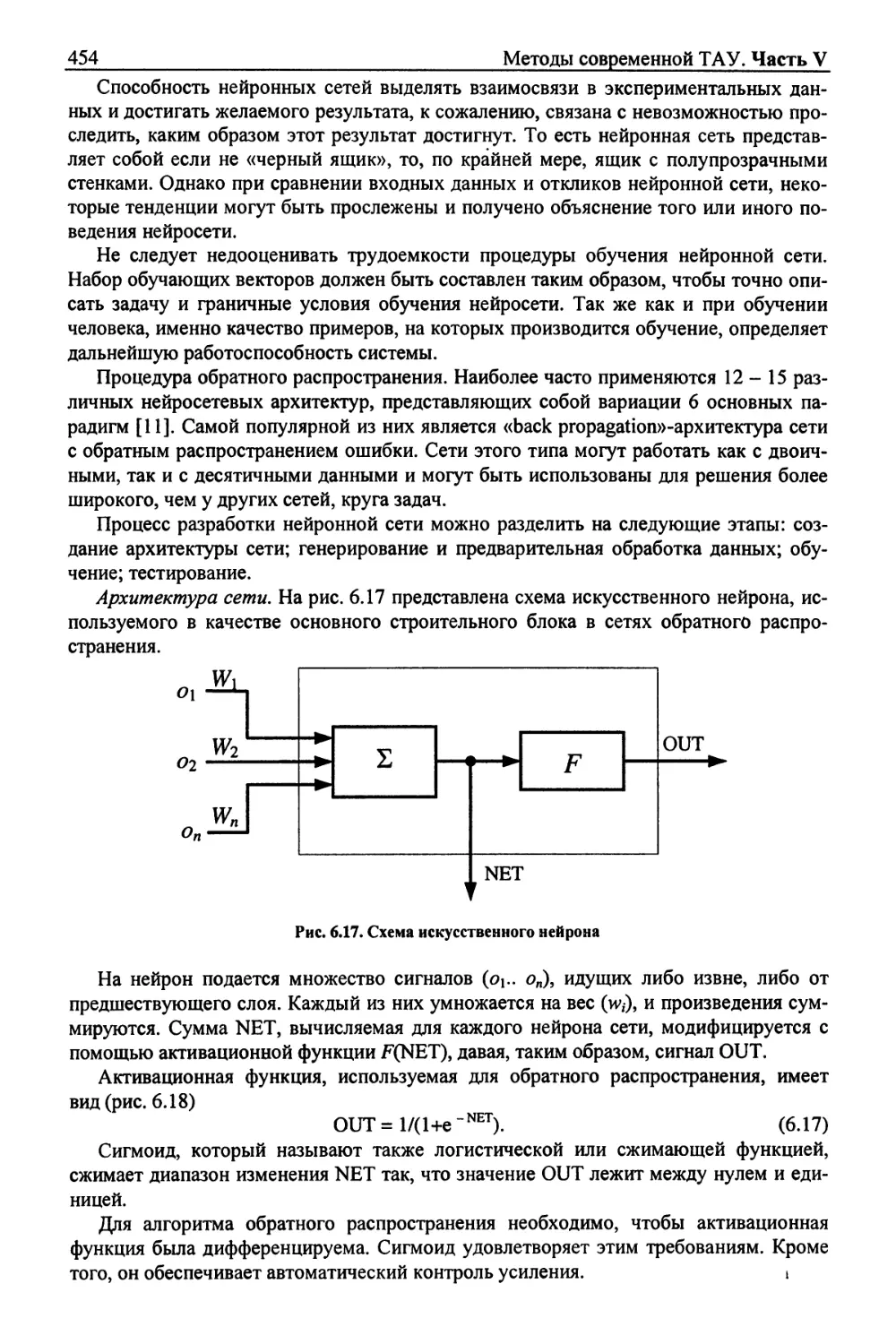
Текст
МЕТОДЫ ТЕОРИИ
АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
Цикл учебников и учебных пособий
основан в 1997 г.
Под общей редакцией заслуженного деятеля науки РФ,
доктора технических наук, профессора
К А. Пупкова
МЕТОДЫ КЛАССИЧЕСКОЙ
И СОВРЕМЕННОЙ ТЕОРИИ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Учебник в трех томах
ТОМЗ
МЕТОДЫ
СОВРЕМЕННОЙ ТЕОРИИ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Под редакцией заслуженного деятеля науки РФ,
доктора технических наук,
профессора Н.Д. Егупова
Рекомендовано Министерством образования Российской Федерации
в качестве учебника для студентов высших учебных заведений,
обучающихся по машиностроительным
и приборостроительным специальностям
Москва
Издательство МГТУ им. Н.Э. Баумана
2000
УДК 681.5:681.3(075.8)
ББК 14.2.6
М54
Рецензенты:
1. Академик РАН ЕЛ. Попов;
2. Кафедра автоматических систем Московского института радиотехники,
электроники и автоматики (заведующий кафедрой, член-корреспондент
РАН ЕЛ Теряев).
Авторы:
Д-р техн. наук, проф. К А. Пупков, д-р техн. наук, проф. НД. Егупов, д-р
техн. наук, проф. А.И. Баркин, д-р техн. наук, проф. ЕМ. Воронов, канд.
техн. наук, доц. Л.Г. Комарцова, канд. техн. наук, доц. В.Г. Коньков, д-р
техн. наук, проф. Ю.П. Корнюгиин, канд. техн. наук, доц. В.И. Красно-
щеченко, канд. техн. наук, доц. АЛ. Курдюков, канд. техн. наук, доц.
А. В. Максимов, инженер ЮЛ. Мышляев, канд. техн. наук, доц. В Л. Пи-
лишкин, канд. техн. наук, доц. В.И. Сивцов, д-р техн. наук, проф.
А.И. Трофимов, д-р техн. наук, проф. Н.В. Фалдин
М54 Методы классической и современной теории автоматического управления:
Учебник в 3-х т. Т.З: Методы современной теории автоматического управления /
Под ред. Н.Д. Егупова. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2000. - 748 с, ил.
ISBN 5-7038-1632-7 (Т.З)
ISBN 5-7038-1579-7
В третьем томе учебника изложены основные теоретические положения некоторых
направлений теории автоматического управления, интенсивно развиваемых в последние десятилетия
Рассмотрены методы расчета и проектирования систем, использующие аппарат дифференциальной
геометрии Отражены центральные положения теории катастроф, теории хаоса; приведены
понятия, связанные с теорией фракталов и их использованием
В конце 70-х годов возникла теория робастного управления. Рассмотрены перспективные
направления теории робастного управления, основанные на методах Н°° -оптимизаций.
Значительное внимание уделено освещению вопросов оптимизации многообъектных
многокритериальных систем на основе стабильно-эффективных компромиссов (игровые подходы в
управлении) Достаточно полно рассмотрен класс адаптивных систем Впервые в учебной литературе с
необходимой полнотой и глубиной отражены основные положения теории интеллектуальных
систем В последней главе третьего тома рассмотрены вопросы применения нейрокомпьютеров
в системах управления
Материал является частью общего курса теории автоматического управления, читаемого
студентам МГТУ им Н Э Баумана, ТулГУ, ОИАТЭ и других вузов.
Учебник предназначен для студентов вузов; он может быть также использован аспирантами и
инженерами, а некоторые положения - научными работниками, занимающимися автоматическими
системами.
УДК 681.5:681.3(075.8)
ББК 14.2.6
ISBN 5-7038-1632-7 (Т.З) © Пупков К.А, Егупов Н.Д, Баркин А И. и др , 2000
I<sRN 5 7018 157Q 7 © МГТУ им. Н.Э. Баумана, 2000
i д огч э- / и jo- 1 э / у- i о Издательств0 МГТу им Н Э Баумана, 2000
Нашим учителям
посвящается.
ОБЩЕЕ ПРЕДИСЛОВИЕ К УЧЕБНИКУ
I. Особенности учебника. Учебник издается в трех томах, с >стоящих из четырех
частей и заданий для самостоятельной работы. Для него характерно следующее:
1. Учебник охватывает основные положения, составляющие содержание
теории автоматического управления. Изложение материала начинается с
основных понятий и определений (сущность проблемы автоматического управления,
определение системы управления, фундаментальные принципы управления, основные
виды и законы автоматического управления и др.) и заканчивается детальным
рассмотрением содержания некоторых современных направлений теории
автоматического управления.
Поскольку курс теории автоматического управления включен в учебные планы
различных инженерных специальностей и является одним из важнейших элементов
общетехнического образования, учебник может быть рекомендован студентам,
заново приобретающим знания в области теории автоматического управления, и
специалистам, которым приходится эти знания восстанавливать. Учебником могут
пользоваться также студенты тех специальностей, для которых курс является
профилирующим, определяющим квалификацию инженера.
При изучении курса студент или специалист должен сделать выборку материала,
определяемого конкретной задачей и возможностями общего плана обучения.
2. Содержание учебника имеет инженерную направленность, поэтому
изложение ведется с инженерной точки зрения: подчеркиваются главные идеи, лежащие в
основе методов, но не всегда приводятся строгие математические доказательства.
Учитывая, что без освоения технического аспекта изучение методов теории автоматического
управления не приводит к нужному результату (часто имеют место трудности в
постановке и решении инженерных задач даже при хороших знаниях теоретических
положений), физическая и содержательная сторона дела подчеркивается в течение
всего курса. Более того, значительное внимание уделено рассмотрению конкретных
промышленных систем управления. Например, в главе 7 тома 2 рассмотрены
системы управления теплоэнергетическими параметрами атомных электростанций; в
заданиях для самостоятельной работы описаны системы управления, применяемые в
атомной промышленности. Примеры, иллюстрирующие теоретические положения и
методы расчета, тесно связаны с решением конкретных инженерных задач в таких
отраслях, как атомная энергетика, производство летательных аппаратов и др.
3. Методы теории автоматического управления, рассмотренные в учебнике, в
большинстве своем ориентированы на применение ЭВМ.
Интенсивное развитие процессов автоматизации проектирования систем
автоматического управления, обусловленное развертыванием высокопроизводительных
вычислительных комплексов в проектно-конструкторских организациях,
перемещение центра тяжести процесса проектирования от аппаратного обеспечения к
алгоритмическому и программному обеспечению приводят к необходимости разработки
нового методологического обеспечения, включая соответствующие вычислительные
технологии ([156], том 1).
Предисловие
Для содержания книги характерна, в известной мере, «вычислительная окраска»,
поскольку возможности современных ЭВМ позволяют значительно ускорить сроки
проектирования САУ и, таким образом, налагают свой отпечаток на вычислительную
часть ТАУ. Успех в решении поставленных задач расчета и проектирования с
использованием ЭВМ зависит от многих факторов, основными из которых являются: степень
адекватности математической модели системы; степень эффективности численных
методов ТАУ, используемых в алгоритмическом обеспечении; наличие
высококачественного программного обеспечения; от того, насколько успешно используется
творческий потенциал исследователя-проектировщика. При этом решающий фактор остается
за человеком, который может решать многие неформализованные задачи.
Поскольку системы автоматизированного проектирования (САПР) являются в
настоящее время одним из наиболее эффективных средств повышения
производительности инженерного труда и научной деятельности, сокращения сроков и улучшения
качества разработок, то в главе 8 (том 1) кратко отражены соответствующие положения, в
том числе изложены численные методы (аппарат матричных операторов).
Рассмотренное в трехтомнике методологическое обеспечение, ориентированное
на применение ЭВМ, может служить базой для решения весьма сложных задач
инженерного проектирования САУ.
4. В учебнике с единых позиций изложены как основные методы классической
ТАУ, так и положения, определяющие содержание некоторых современных
направлений теории управления.
При рассмотрении материала учитывался тот факт, что периодизация развития
ТАУ не является установившейся и общепринятой ([156], том 1).
К классическим можно отнести положения, базирующиеся на рассмотрении
линейных и нелинейных дифференциальных и разностных уравнении с постоянными и
переменными коэффициентами применительно к описанию систем, исследованию их
устойчивости и качества процессов.
К классическим положениям также можно отнести и описание процессов в про-
странствах состояний, поскольку в классической теории широко применялось
описание движения в фазовом пространстве.
В конце пятидесятых - начале шестидесятых годов появились известные работы
Л.С. Понтрягина, Р. Белмана, Р. Калмана, в которых заложены основы теории
оптимального управления: принцип максимума, динамическое программирование,
функционально-аналитические методы и др. Хорошо известно, что многие идеи теории
оптимального управления сформировались на инженерном уровне в классический
период ТАУ.
Важнейшие результаты теории оптимального управления можно отнести к
классическим положениям ТА У.
Все указанные положения с необходимой глубиной и полнотой изложены в
первых двух томах учебника.
Методы современной ТАУ, интенсивно разрабатываемые в настоящее время и
включающие аппарат синтеза грубых систем автоматического управления в
пространстве состояний, Н* -теория оптимального управления, задачи оптимизации
многообъектных многокритериальных систем с использованием стабильно-
эффективных компромиссов, синтез систем автоматического управления
методами дифференциальной геометрии (геометрический подход), использование непро-
компьютерных управляющих вычислительных систем, основные положения теории
катастроф, фракталов, хаоса, а также задачи исследования и проектирования
адаптивных и интеллектуальных систем отражены во 2-м и в 3-м томах учебника.
Таким образом, учебник охватывает наиболее важные разделы теории
автоматического управления; вместе с тем он не претендует на всесторонний охват проблема-
Предисловие
как инвариантность, теория чувствительности, методы и алгоритмы оценивания
динамических процессов, идентифицируемость и методы и алгоритмы идентификации
(отражены лишь содержание проблемы и подходы к ее решению), системы со
случайной структурой, стохастические системы, теория нелинейной фильтрации и др.
5. Основное содержание и структуру учебника определил коллектив авторов,
включающий представителей разных российский школ науки об управлении:
К.А. Пупков (МГТУ им. Н.Э. Баумана), А.И. Баркин (Институт системного анализа
РАН), Е.М. Воронов (МГТУ им. Н.Э. Баумана), Н.Д. Егупов (МГТУ им. Н.Э. Баумана),
В.Г. Коньков (МГТУ им. Н.Э. Баумана), А.П. Курдюков (Институт проблем
управления РАН), Л.Т. Милов (Московский государственный автомобильно-дорожный
институт (МАДИ)), В.Н. Пилишкин (МГТУ им. Н.Э. Баумана), В.И. Рыбин (Московский
государственный инженерно-физический институт (МИФИ)), В.И. Сивцов (МГТУ им.
Н.Э. Баумана), Я.В. Слекеничс (Обнинский институт атомной энергетики (ОИАТЭ)),
А.И. Трофимов (Обнинский институт атомной энергетики (ОИАТЭ)), Н.В. Фалдин
(Тульский государственный университет); этими авторами написана большая часть
трехтомника.
II. Методические вопросы. Необходимо указать, что никакой учебник не может
дать окончательных рецептов для решения широчайшего спектра задач,
порожденных практикой проектирования сложных систем автоматического управления.
Изложенный в книгах материал призван служить базой, фундаментом,
позволяющим с большей скоростью и эффективностью находить пути для решения задач
практики.
Вместе с тем материал излагается таким образом, чтобы читателю были видны
пути практического применения рассматриваемых методов. В большинстве своем
методы доведены до расчетных алгоритмов, приводятся таблицы и другой
вспомогательный материал, облегчающий их применение. Положения, изложенные во всех
разделах, иллюстрируются подробно рассмотренными примерами, связанными с
задачами расчета и проектирования конкретных систем.
Весьма важным является вопрос методики изучения курса «Теории автоматического
управления» с целью стать специалистом в этой области, пользуясь циклом учебных
пособий и учебников, издаваемых указанным выше коллективом авторов.
Весь цикл учебников и учебных пособий можно условно разбить на три серии:
1-я серия - базовая; эта серия включает три тома настоящего учебника.
2-я серия - базовая повышенного уровня, в которой основное внимание уделено
глубокому и достаточно полному изложению методов, определяющих содержание
современных направлений теории автоматического управления.
3-я серия - серия учебных пособий, посвященная полному и глубокому изложению
теоретических положений конкретных направлений ТАУ, например, статистической
динамике нелинейных САУ и др.
Сказанное выше иллюстрируется рис. В.1.
Базовый уровень приобретается изучением предлагаемого учебника, в котором
систематически изложены методы классической и современной теории управления и дано
достаточно полное представление о проблематике и путях развития науки об
управлении техническими объектами.
Содержание каждого из томов учебника серии базового уровня иллюстрируется
рис. В.2.
После освоения базового уровня можно приступить к специализации в той или
другой области теории автоматического управления, изучая соответствующие тома 2-й
серии, а также статьи и монографии по специальным проблемам теории управления.
Цикл: Методы теории
автоматического управления
1-я серия учебников "Методы
классической и современной теории
автоматического управления" - серия
базового уровня
Том 1: Анализ и статистическая
динамика
систем автоматического управления.
М: Изд-во МГТУ, 2000. - 748 с.
♦
Том 2: Синтез регуляторов
и теория оптимизации систем
автоматического управления.
М: Изд-во МГТУ, 2000. - 736 с.
Том 3: Методы современной теории
автоматического управления.
М.: Изд-во МГТУ, 2000. - 748 с.
♦
2-я серия учебников - серия
повышенного базового уровня
Том 1: Методы синтеза
оптимальных систем автоматического
управления. М.: Изд-во МГТУ, 2000. - 512 с.
♦
Том 2: Оптимизация многообъектных
многокритериальных систем.
М.: Изд-во МГТУ, 2001.
♦
Том 3: Адаптивные, робастные
и интеллектуальные системы
автоматического управления.
М.: Изд-во МГТУ, 2001.
3-я серия - серия учебных пособий,
в которых отражены конкретные
направления ТАУ (специализация)
К.А. Пупков, Н.Д. Егупов,
А.И. Трофимов. Статистические
методы анализа, синтеза и
идентификации нелинейных систем
автоматического управления.
М.: Изд-во МГТУ, 1998. - 562 с.
*
К.А. Пупков, Н.Д. Егупов,
В.Г. Коньков. Методы анализа, синтеза
и оптимизации нестационарных
систем автоматического управления.
М.: Изд-во МГТУ, 1999.- 684 с.
Рис. В.1. Структура цикла учебников и учебных пособий «Методы теории автоматического управления»
Предисловие
1 том: Анализ и статистическая динамика систем автоматического управления
В этом томе изучаются*
Математическое описание классов систем, отраженных
на приводимой ниже структурной схеме
1 САУ, 2 Линейные САУ, 3 Нелинейные САУ, 4 Непрерывные САУ,
S Дискретные САУ, 6 Непрерывно-дискретные САУ, 7 Стационарные САУ,
8 Нестационарные САУ, 9 САУ с сосредоточенными параметрами,
10 САУ с распределенными параметрами
Анализ и статистическая динамика САУ
Детерминированный
анализ систем
1 Устойчивость,
2 Качество
в переходном
режиме,
3 Качество
в установившемся
режиме и др
Статистический
анализ линейных
и нелинейных
систем
Линейная фильтрация
(фильтры Винера -
Колмогорова,
фильтры Калмана -
Бьюси), нелинейная
фильтрация
Идентификация
объектов
управления
в классе
линейных
и нелинейных
систем
2 том: Синтез регуляторов и теория оптимизации
систем автоматического управления
^ -— Методы и задачи. *———^_^
Синтез систем по заданным показателям
качества
Методы синтеза регуляторов
1 Группа методов, основанная
на принципе динамической
компенсации,
2 Группа методов, использующая
аппарат математического
программирования,
3 Частотный метод,
4 Модальное управление,
5 Методы синтеза грубых систем
управления
6 Метод моментов и др
Синтез оптимальных систем
Методы оптимизации
1 Вариационное исчисление,
2 Принцип максимума, включая
управление при ограничениях на фазовые
координаты,
3 Динамическое программирование,
4 Аналитическое конструирование
регуляторов,
S Нелинейное программирование,
6 Метод моментов,
7 Синтез оптимальных обратных связей и др
3 том: Методы современной теории автоматического управления:
1 Синтез систем методами дифференциальной геометрии,
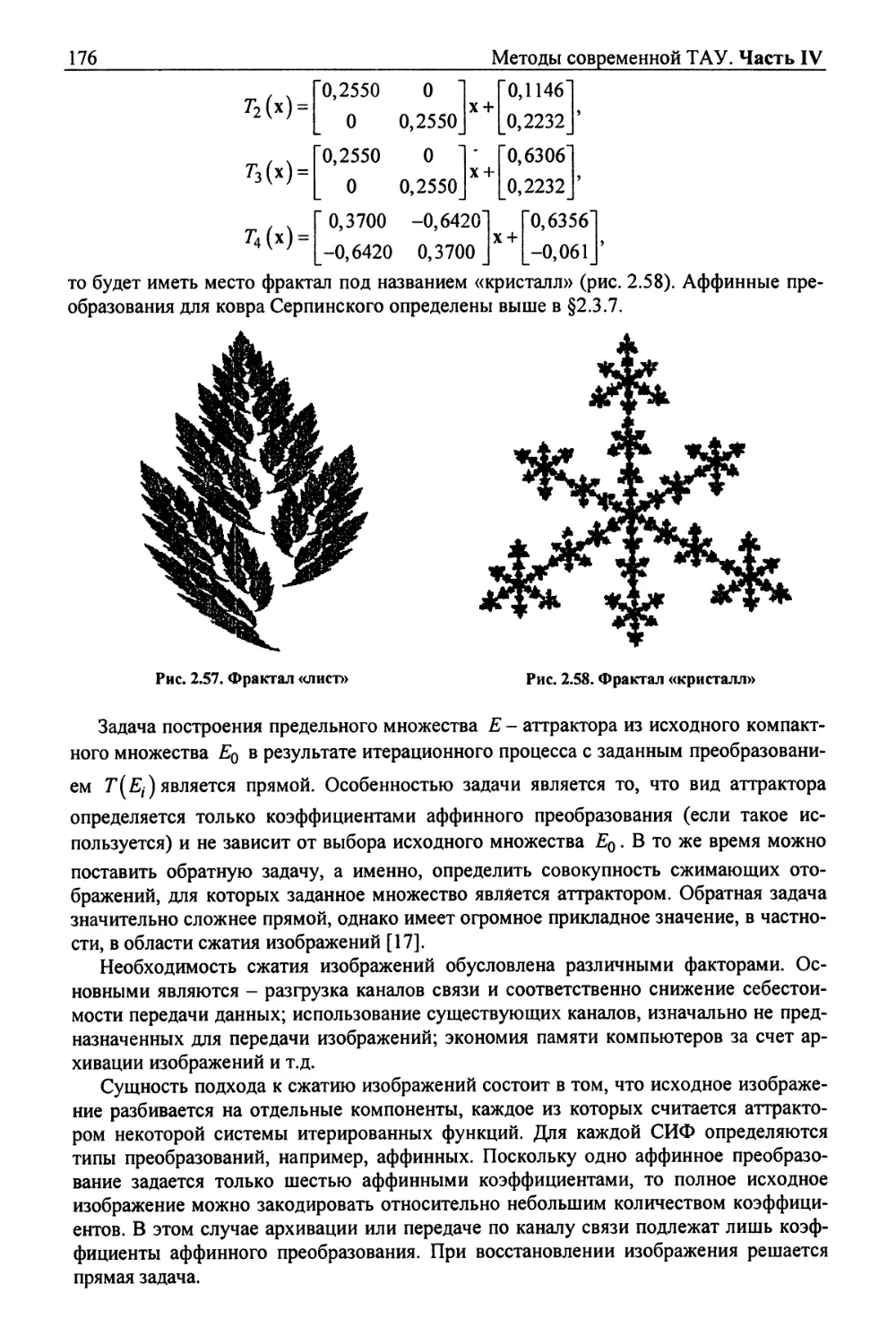
2 Теория катастроф Детерминированный хаос Фракталы,
3 Я" -теория оптимального управления,
4 Адаптивные системы,
5 Оптимизация многообъектных, многокритериальных систем,
6 Интеллектуальные системы и др
7 Нейросетевые методы для решения задач проектирования вычислительных систем
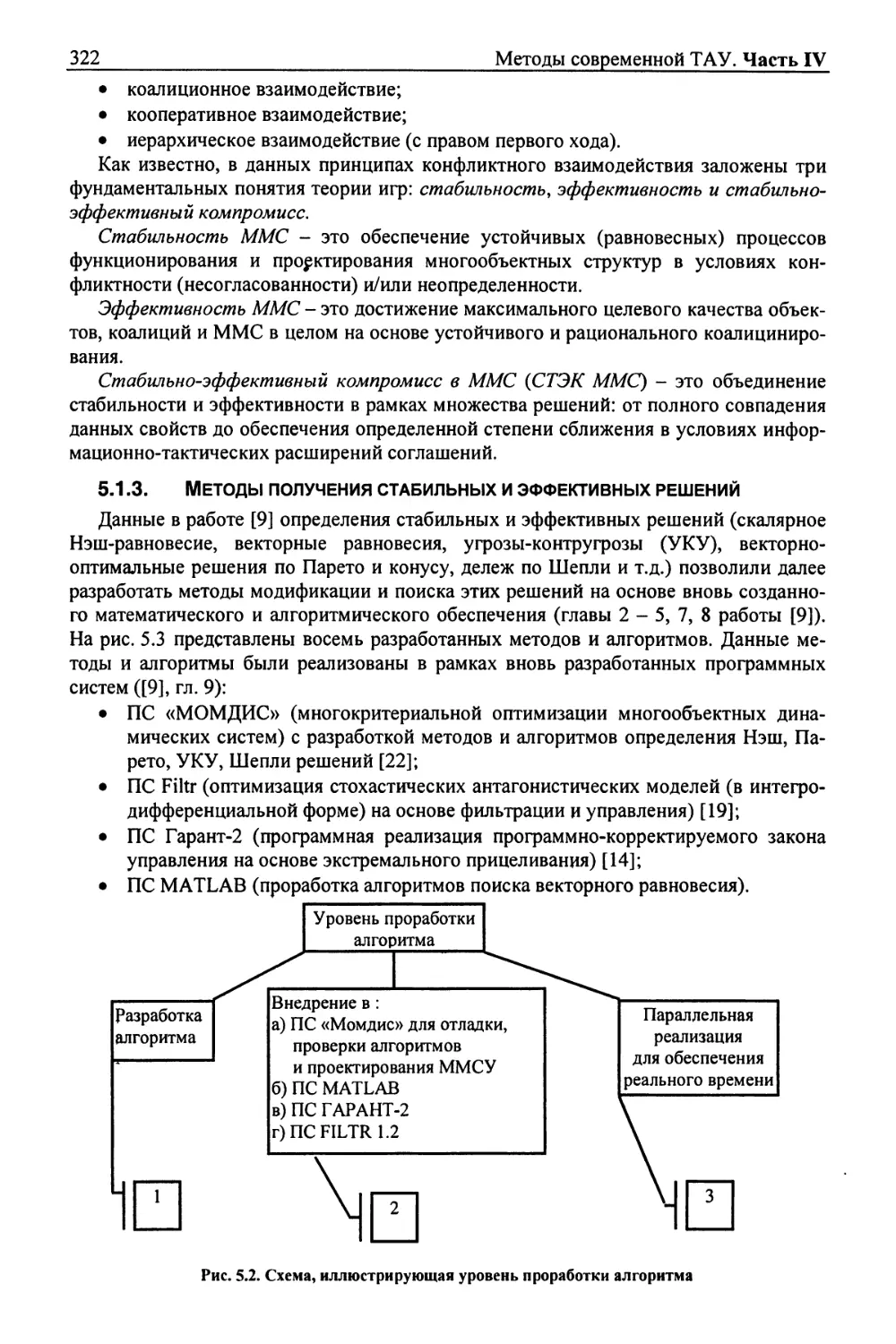
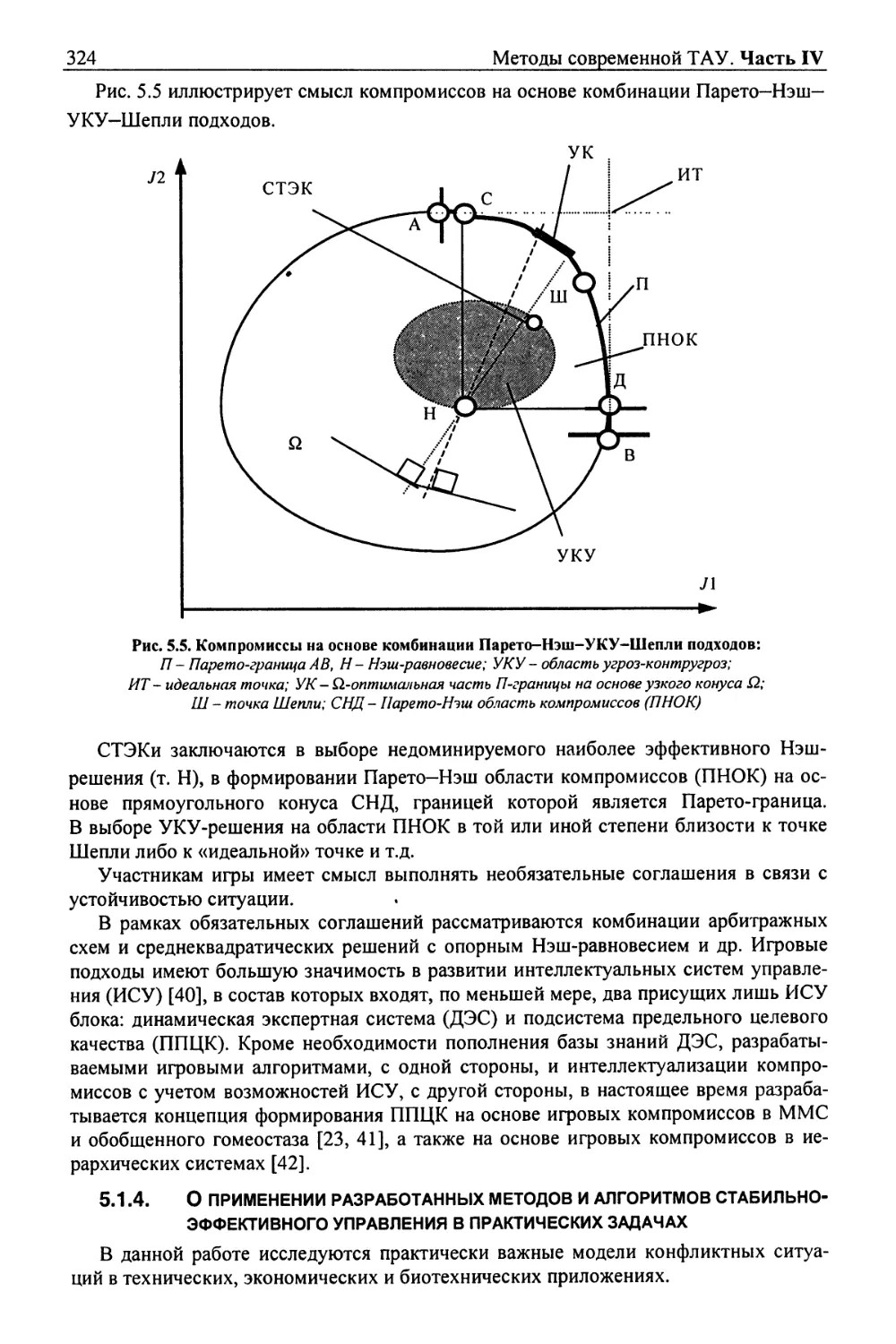
Рис. В.2. Структурная схема, иллюстрирующая содержание трехтомника
«Методы классической и современной теории автоматического управления» (базовый уровень)
JO Предисловие
Если специализация предусматривает расширенное изучение статистической
динамики нелинейных систем автоматического управления, то можно воспользоваться
учебным пособием К.А. Пупкова, Н.Д. Егупова, А.И. Трофимова «Статистические методы
анализа, синтеза и идентификации нелинейных систем автоматического управления». -
М: Издательство МГТУ им. Н.Э. Баумана, 1998. - 562 с. (под редакцией д-ра техн. наук,
проф. Н.Д. Егупова), в котором систематически изложено содержание основных
положений статистической теории нелинейных систем, методов их анализа, синтеза,
оптимизации и идентификации.
При специализации в области систем автоматического управления с переменными
параметрами полезным может оказаться учебное пособие К.А. Пупкова, Н.Д. Егупова,
В.Г. Конькова, Л.Т. Милова, А.И. Трофимова «Методы анализа, синтеза и оптимизации
нестационарных систем автоматического управления». - М.: Издательство МГТУ
им. Н.Э. Баумана, 1999. - 684 с. (под редакцией д-ра техн. наук, проф. Н.Д. Егупова).
Этот труд представляет собой первое учебное пособие в отечественной литературе,
специально посвященное рассмотрению методов математического описания,
детерминированного и статистического исследования, синтеза и оптимизации
нестационарных систем. Работа включает две части: в первой части изложена теория линейных
систем с переменными параметрами; вторая часть посвящена разработке алгоритмов
исследования, синтеза и оптимизации сложных нестационарных систем, поведение
которых описывается скалярными и векторно-матричными дифференциальными
уравнениями высокого порядка. Алгоритмы предназначены для решения задач, имеющих
место в повседневной инженерной практике при расчете и проектировании систем
управления одноконтурными и многоконтурными сложными объектами с переменными
параметрами.
Авторы выражают глубокую благодарность рецензентам - академику РАН
Е.П. Попову и коллективу кафедры «Автоматические системы» Московского
государственного института радиотехники, электроники и автоматики (МИРЭА), руководимой
членом-корреспондентом РАН Е.Д. Теряевым, за ценные замечания, способствовавшие
улучшению содержания книги. Авторы благодарят заслуженного деятеля науки и
техники РФ, д-ра техн. наук, проф. А.С. Шаталова, заслуженного деятеля науки и техники
РФ, д-ра техн. наук, проф. Б.И. Шахтарина (МГТУ им. Н.Э. Баумана), которые своими
советами позволили значительно улучшить структуру учебника, углубить изложение
отдельных теоретических положений, улучшить окончательный вариант рукописи.
Авторы благодарят концерн «Росэнергоатом», научно-исследовательский центр
космической системотехники, департамент образования и науки Правительства
Калужской области, а также Издательский Дом «Манускрипт» за помощь в издании учебника.
Большой объем книги и широта охваченного материала вызвали большие трудности
при ее написании. Конечно, эти трудности не всегда удавалось преодолеть наилучшим
образом. Читатели, вероятно, смогут высказать много замечаний и дать свои
предложения по улучшению книги.
Авторы заранее признательны всем читателям, которые не сочтут за труд указать
на замеченные неточности, ошибки, на пути совершенствования структуры учебника
и его содержания.
К.А. Пупков
Н.Д. Егупов
Предисловие 11
ПРЕДИСЛОВИЕ К 3-МУ ТОМУ
Настоящая книга представляет собой 3-й том учебника «Методы классической и
современной теории автоматического управления».
Авторы ставили своей целью в 3-х томах изложить как единое целое положения
классической и современной теории автоматического управления. Если в первом
томе изучаются математические модели широкого класса систем и их динамические
характеристики, методы детерминированного и статистического анализа, то
второй том целиком посвящен изложению задач синтеза СА У при соблюдении
противоречивых требований к устойчивости и качеству и теории оптимизации.
В третьем томе отражены основные положения важных направлений теории
автоматического управления, развиваемых в последние десятилетия. Назначение IV
части третьего тома состоит не в том, чтобы студенты получили полное
представление об изучаемой проблеме, а в том, чтобы познакомить их лишь с
некоторыми актуальными направлениями и указать пути глубокого изучения их
содержания.
При этом изложенный во втором и в третьем томах круг вопросов, которые сами
по себе имеют важное значение, может служить основой для последующего изучения
монографий и статей, связанных с рассмотрением таких проблем, как применение в
теории управления геометрических методов, теории катастроф и теории хаоса,
Н"3-теории оптимизации, методов оптимизации многокритериальных систем,
класса интеллектуальных систем и нейрокомпьютеров и др.
В IV части введено понятие бифуркаций, рассматриваются соответствующие
определения, для класса операторов определены точки бифуркации, т.е. точки, в которых в
уравнении с соответствующим оператором происходит рождение нового,
нетривиального решения этого уравнения. Показано также, что хаотическое поведение
динамических систем определяется высокой чувствительностью к начальным условиям и
невозможностью предсказания поведения на большом интервале времени.
Рассмотрены некоторые положения Я00-теории оптимизации. Проектировщик
часто не располагает полной информацией о моделях объектов, т.е. последние
содержат неопределенности и, таким образом, имеют место информационные
ограничения, например, при проектировании новых технологических процессов, объектов
новой техники и др. Однако и в этих случаях задача обеспечения требуемых
характеристик замкнутой системы должна получить необходимое решение.
Сформулированную проблему называют проблемой робастного управления.
При проектировании систем автоматического управления часто используют
свойство адаптации, когда недостаточная' степень априорной информации
восполняется обработкой по соответствующим алгоритмам текущей информации. Системы,
обладающие свойством адаптации (что позволяет сократить сроки их
проектирования, наладки и испытаний), называют адаптивными.
С учетом сказанного можно поставить вопрос о решении проблемы оптимизации
в условиях неполной априорной информации (адаптивное оптимальное управление).
Подходы к решению указанных задач изложены в учебнике.
Пятая часть учебника «Задания для самостоятельной работы и методические
пояснения» играет важную роль и содержит 14 тем; она ориентирована на
систематизацию, закрепление и расширение теоретических знаний и практических навыков при
решении конкретные технических задач. Подчеркивается положение, что абстракт-
\2 Предисловие
нов изучение теории автоматического управления без учета физических процессов,
протекающих в проектируемой системе, недопустимо и может привести к полной
беспомощности в постановке и решении практических задач [108, том 1]. При
проведении расчетных работ с помощью ЭВМ студенты обязаны с необходимой глубиной
освоить численные методы и иметь представление о реально используемых в
вычислительной практике алгоритмах и таких понятиях, как корректность, устойчивость
и обусловленность вычислительных задач; об особенностях поведения вычислительной
погрешности и др.
Другими словами, V часть является органической составляющей учебника и
соответствующие темы должны быть освоены с необходимой глубиной: студент должен
показать умение использовать теоретические знания, накопленные в результате
изучения I - IV частей для решения конкретных задач и освоить в короткий срок
соответствующие численные методы, алгоритмическое и программное обеспечение.
Некоторые материалы, изложенные во всех томах учебника, могут быть использованы
для самостоятельной работы, в частности, для написания рефератов, отражающих с
необходимой полнотой содержание актуальных проблем с привлечением других
источников.
Соавторами отдельных разделов третьего тома являются: канд. техн. наук, доц.
И.Г. Владимиров (глава 3 части IV), канд. техн. наук, доц. В.Н. Тимин (глава 3 части
IV), инженер К.Ю. Савинченко (глава 4 части IV), канд. техн. наук, доц. Д.А. Аки-
менко (часть V), инженер Э.Р. Ахундова (часть V), канд. техн. наук М.О. Габибулаев
(часть V), канд. техн. наук, доц. А.К Карышев (часть V), канд. техн. наук, доц.
A.M. Макаренков (часть V), инженер Д.В. Мельников (часть V), канд. техн. наук,
доц. Я.В. Слекеничс (часть V); главы 3 и 5 части II второго тома и главы 1, 2 части
IV третьего тома написаны кандидатом техн. наук, доцентом В.И. Краснощеченко.
Авторы выражают признательность сотрудникам редакционно-издательского
отдела Калужского филиала МГТУ им. Н.Э. Баумана К.И. Желнову, С.Н. Капранову,
К.Ю. Савинченко, МЛ. Трубачеву за подготовку рукописи к изданию и создание
оригинал-макета учебника.
ЧАСТЬ IV
МЕТОДЫ СОВРЕМЕННОЙ
ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
14 Методы современной ТАУ. Часть IV
ВВЕДЕНИЕ
В IV части учебника отражены основные положения некоторых направлений,
интенсивно развиваемых в настоящее время. Одно из них формулируется так: расчет и
проектирование САУ с использованием методов дифференциальной геометрии. В
учебнике изложены основные теоретические положения, в частности, теория алгебры
и групп Ли для гладких векторных полей. Рассмотрены подходы к решению
актуальных задач теории оптимальных систем, таких как управляемость и
наблюдаемость нелинейных объектов. Значительное внимание уделено вопросам синтеза
систем стабилизации со скалярным и векторным управлением.
В современной теории управления широко применяются такие понятия, как
бифуркации, катастрофы, фракталы, теория хаоса. Изучены особенности гладких
отображений, приведены основные типы элементарных катастроф.
Изучение основных положений теории катастроф направлено на их применение в
теории систем управления, в частности, для рассмотрения свойств объектов,
связанных с их управляемостью.
В этой же главе введено понятие детерминированного хаоса; показано, что он
возникает только в нелинейных системах; изучены парадигмы хаоса, приведены
классические примеры, характеризующие хаос. Аттракторами хаотических систем
являются фрактальные множества с дробной размерностью Хаусдорфа.
В третьей главе отражены положения метода Я00 -теории автоматического
управления и алгоритм построения робастных регуляторов.
Некоторые положения одного из наиболее перспективных направлений теории
робастного управления, основанного на методах Я00-оптимизации, изложены в 3-ей
главе части.
В IV части достаточно подробно рассмотрены методы оптимизации
многокритериальных систем, составляющие содержание игровых подходов в управлении.
Значительное внимание в IV части уделено рассмотрению теории нового класса
систем - интеллектуальным системам. Подробно изложены модели и алгоритмы
интеллектуальных систем, параллельные алгоритмы обработки информации,
инструментальные средства и пути реализации интеллектуальных систем (глава 6).
На решение сложных задач автоматического управления огромное влияние
оказало появление вычислительное систем. Наиболее перспективным классом
вычислительных систем являются распределенные вычислительные системы (РВС),
состоящие, в общем случае, из большого числа удаленных вычислителей, образующих
сетевую структуру. Распределенные вычисления позволяют полностью задействовать
все ресурсы сети. Вычислительные системы на основе модели распределенных
вычислений обладают такими свойствами, как масштабируемость, совместимость,
мобильность, т.е. являются открытыми системами.
В главе 7 рассмотрены процедуры проектирования РВС с использованием
нейронной сети и ряд других вопросов, связанных с применением нейрокомпьютеров в
системах управления.
Список используемых аббревиатур и обозначения
15
СПИСОК ИСПОЛЬЗУЕМЫХ АББРЕВИАТУР
АдСУ - адаптивная система управления
АСГ -алгоритм скоростного градиента
АСУ ТП - автоматизированная система управления технологическими
процессами
БД - база данных
БЗ - база знаний
ВИ - внезапные изменения
ВС - вычислительная система
ДАЗУ - динамическое автоматическое запоминающее устройство
ДЭС - динамическая экспертная система
ИС - интеллектуальная система
ИСУ - интеллектуальная система управления
МВГ - метод ветвей и границ
МВС - многопроцессорная вычислительная сеть
ОНО - обобщенный настраиваемый объект
ООУ - обобщенный объект управления
ОУ - объект управления
ПП - переменные переключения
ППП - процессор параллельного представления
СНС - самонастраивающаяся система
СПС - система с переменной структурой
СТР - среда транспьютерной реализации
ЦУ - цель управления
п
16 Методы современной ТАУ. Часть IV
СПИСОК ИСПОЛЬЗУЕМЫХ ОБОЗНАЧЕНИЙ
~, R - отношение эквивалентности
= -отношение изоморфизма
X,Y -векторные поля в естественном базисе как дифференциальные
операторы для гладких функций, определенных
на многообразии Мп
X(x),Y(x) -координатные представления векторных полей в точке хеМ
х -точка многообразия Мп , вектор состояния
Мп -гладкое многообразие размерности п
U(x) -окрестность точки jc e Мп
Gr -r-параметрическая группа
G - непрерывная группа преобразований, изоморфная
своей г-параметрической группе Gr (группа Ли)
ф(я,6) -групповая операция в группе Gr
L(G) - алгебра Ли группы Ли G
а,Ь,с - элементы г-параметрической группы Gr
TaiTb - элементы группы преобразования G (действия группы
Gr на многообразии Мп)
Xt,Yt -однопараметрическая группа преобразований, фазовый поток
для векторных полей X(x)9Y(x)
[X,Y](x) -коммутатор, скобка Ли векторных полей X(x),Y(x)
I(D) - наименьшая алгебра Ли, содержащая множество управляемых
векторных полей D
Lx -производная Ли вдоль векторного поля AT(jc)
J (Т) - наименьшее линейное подпространство дифференциальных
1-форм, замкнутое относительно операции дифференцирования
Ли функций множества функций / векторными полями
алгебры /0(£>)
у - вектор выхода размерности / х 1
и - вектор управления размерности т х 1
ClczRm - множество управлений
(xl9...,xw) - координаты точки хеМп в Rn в исходном базисе
(Уи—уУп) - координаты точки хеМп в Rn в новом базисе
х' -точка многообразия Мп (х'еМп ), полученная
преобразованием точки хеМп
х - производная по / по функции x(t)
Глава 1. Синтез САУ методами дифференциальной геометрии 17
ГЛАВА 1. СИНТЕЗ СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ МЕТОДАМИ
ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ
В 1872 г. Феликс Клейн в своей знаменитой Эрлангенской программе
сформулировал идею классификации всех видов геометрий на основе симметрии, согласно
которой каждая геометрия характеризуется преобразованиями, которые допускается
в ней производить над геометрическими объектами, а также свойствами этих
объектов, которые не изменяются, остаются инвариантными при этих преобразованиях.
Каждая геометрия определяется группой преобразований (группой симметрии),
оставляющих те или иные свойства геометрических фигур инвариантными. Так были
классифицированы евклидова, аффинная, проективная геометрия и «резиновая
геометрия» - топология.
Эта идея применения группового подхода давно, широко и с успехом
используется в прикладных науках: квантовой механике, кристаллографии, небесной
механике и др. Два десятилетия назад геометрический язык проник и в теорию
управления, где симметрия реализуется в виде непрерывных групп преобразований (групп
Ли). О значении этого подхода говорит тот факт, что ведутся работы по созданию
«Единой геометрической теории управления» (ЕГТУ) [38]. Автор ЕГТУ А.Г. Бут-
ковский пишет [39]: «Каждое поколение говорит на своём языке: 30 - 40 лет назад
в теории управления начался переход на язык функционального анализа, в
механике ещё раньше происходил небезболезненный переход на векторный и тензорный
языки. Сейчас, по-видимому, настало время переходить на язык современной
геометрии. Причём это веление не только внутренних императивов науки. Можно
указать, в частности, весьма актуальные научно-технические проблемы, для
решения которых нужны более мощные, по сравнению с существующими,
теоретические и технические средства. Такие средства нужны, например, для создания
распределённых регуляторов для активных, нелинейных, неоднородных и
неизотропных сплошных сред».
Геометрический подход позволяет с гораздо более широких позиций взглянуть
на фундаментальные проблемы теории управления: управляемость, наблюдаемость,
инвариантность, декомпозицию и агрегирование. Особенно он полезен для
исследования нелинейных систем управления, трудности анализа и синтеза которых
общеизвестны.
В данном разделе будут изложены основные математические понятия, теоремы и
некоторые методы, используемые при геометрическом подходе к задачам синтеза
систем управления. Рассмотрены геометрические аспекты управляемости,
наблюдаемости, синтеза регуляторов для нелинейных систем управления, приведены
многочисленные примеры. К сожалению, охватить все проблемы теории управления
достаточно сложно. Более подробную информацию о применении дифференциально-
геометрических методов в теории управления можно найти в прекрасном обзоре
Ю.Н. Андреева [2].
1.1. ГЛАДКИЕ МНОГООБРАЗИЯ И ИХ РОЛЬ
В ИССЛЕДОВАНИИ НЕЛИНЕЙНЫХ СИСТЕМ УПРАВЛЕНИЯ
Развитие теории для достаточно общих классов нелинейных систем требует
применения класса пространств состояний более общих, чем линейные пространства. Об
этом свидетельствуют следующие примеры [2]:
О о~„ л л с
JUj Методы современной ТАУ. Часть IV
1) Множества достижимости билинейных систем (простейших нелинейных
систем) подпространствами не являются.
2) При изучении задач управления ориентацией твёрдого тела в качестве
пространства состояний фигурирует векторное расслоение (объединение
касательных пространств) группы SO(3) (группа кососимметричных
ортогональных матриц третьего порядка). Это расслоение не обладает структурой
векторного пространства (сумма двух положительных поворотов может дать
нулевой поворот).
3) Часто требуется рассматривать движение системы в открытой области Rn,
которая не обладает структурой векторного пространства.
4) В задачах аналитического конструирования регуляторов целесообразно
рассматривать движение системы не из определённого фиксированного
состояния, а сразу из всех возможных состояний, принадлежащих некоторой
области, т.е. изучать не отдельные траектории, а переходные отображения системы,
заданные фиксированным управлением.
При таком обобщении задачи, существенном с позиции приложений, «-мерное
дифференциальное уравнение заменяется матричным, а в качестве пространства
состояний рассматривается группа по умножению невырожденных квадратных матриц
п-го порядка. Такой приём, называемый иногда подъёмом динамики системы из
фазового пространства в группу, оказывается весьма полезным в различных задачах.
Необходимое для изучения перечисленных ситуаций обобщение достигается
применением в качестве пространств состояний дифференцируемых гладких многообразий.
1. Дифференцируемые многообразия. Основная идея дифференциальной
геометрии состоит в применении математического анализа к решению геометрических
задач. Поэтому объектами изучения должны быть топологические пространства, в
которых имеют смысл такие понятия, как дифференцирование и интегрирование.
Кривые и поверхности в трехмерном пространстве являются именно такими
объектами. Основными инструментами их изучения являются криволинейные координаты.
Рассмотрим, как они вводятся на произвольном топологическом пространстве.
Введение координат. Если в окрестности U(x) топологического пространства
MaRN введены координаты (xu...,xN), то каждую точку окрестности U можно
отождествить с некоторой точкой у = (у\,—,у„) арифметического (координатного)
пространства Rn(n<N), используя непрерывное взаимнооднозначное (т.е. гомео-
морфное) отображение (р.
Определение 1.1 [10]. Если задан гомеоморфизм: q>: U(x)-> R", n<N,
удовлетворяющий условиям:
1) феС,г>1 (Сг - пространство r-непрерывно дифференцируемых функций),
как отображение из RN в Rn\
2) rank — = п для любой точки у е R" , то пара (U (х) ,ф) называется картой
\ду )
точких в Мкласса Сг, или Сг -картой в М
Замечание 1.1. Из определения 1.1 следует что карта (£/(л:),ф) точки х является
картой любой точки z eU(x).
Таким образом, задание карты означает локальное задание множества М (задание
окрестности U(x)) в виде:
Глава 1. Синтез САУ методами дифференциальной геометрии 19_
': (1.1)
где ф;, / = 1,2,..,« (n<N) - функции класса Сг, определяющие гомеоморфизм ф.
Окрестность точки U(x) часто называют координатной окрестностью ввиду
того, что гомеоморфизм (1.1) определяет на множестве U(x) криволинейные
координаты уи...,уП9 не связанные, вообще говоря, со стандартными координатами
объемлющего пространства RN .
Для линейных систем характерно то, что карта (£/(*), ф) взаимнооднозначно
отображает всё множество М. Для нелинейных систем это несправедливо. Поэтому карт
требуется несколько. Введём ещё одно определение.
Определение 1.2. Множество М <zRN называется «-мерным подмногообразием
в RN класса Сг(г>1), или Сг -подмногообразием, если каждая его точка имеет
некоторую Сг -карту.
Будем обозначать это подмногообразие через Мп . Другими словами, множество
М в ¥?* - «-мерное подмногообразие, если для каждой его точки можно построить
координатную систему; каждая координатная система определена локально (и
называется локальной системой координат). Но всё множество координатных систем
«охватывает» всё многообразие.
Множество координатных систем определяет многообразие Мп с помощью атласа.
Определение 1.3. Атласом многообразия Мп называют такое множество карт
{(£/а,фа)} класса Сг, открытые множества {Ua} которых образуют покрытие Мп .
Атлас {(Ua, фа)} многообразия Мп задает множество координатных систем,
«обслуживающих» всё многообразие. Чтобы задать многообразие, достаточно задать
какой-нибудь атлас.
00
Ясно, что Мп = [JUa и так как каждая окрестность Ua является открытой, то в
а=1
окрестности отдельных карт Ua и U$ (Ua n Up) отображения фа и фр должны быть
согласованы, т.е. должен существовать гомеоморфизм перехода от одной системы
координат к другой.
Пусть (£/,ф) (ф: U->R"% (F,v|/) (у:I/ -> R") - две карты Мп и U п V* 0. Тогда
каждой точке Jce£/nF отвечают две системы координат: {^(л:),...,^(д:)} и {А, (л:),...,
Aw(jc)} - координаты точек ф(л:)еф(£/пР) и v|/ (jc)gv|/ (UnV), которые, вообще говоря,
различны. Обе системы координат равнозначны в том смысле, что существует
гомеоморфизм перехода
\\1Ц>'] :ц>(иnV)->\\j(UnV)9
связывающий обе системы координат и позволяющий первые координаты
непрерывно выразить через вторые:
(1.2)
20
Методы современной ТАУ. Часть IV
и, наоборот, вторые непрерывно выразить через первые:
А, =К,(4,,-..,4„),
(1.3)
В формулах (1.2) и (1.3) через Хь"-,Хт Viv» Vw обозначены координатные
функции отображения
q>V~l=(Xi.-.Xii).
Если все карты Ua, Fp согласованы таким образом в атласе, то атлас называют
согласованным.
Для любого атласа А обозначим через Атах множество всех карт, согласованных
с каждой картой атласа, и назовем Атах - максимальным атласом атласа А или
гладкой структурой на М".
Определение 1.4. Хаусдорфово пространство Мсо счетной базой и с заданной на
нем гладкой структурой называется гладким (дифференциальным) многообразием.
При этом число п (размерность образа карт) называется размерностью многообразия.
Другими словами, дифференцируемое многообразие в окрестности каждой своей
точки устроено как R", т.е. существует диффеоморфное (гладкий изоморфизм)
отображение окрестностей каждой точки в Rn, причем дифференцируемые окрестности
близких точек согласованы таким образом, что при помощи гладких замен
переменных можно перейти с одной окрестности в другую.
Графически это выглядит следующим образом.
<V(Ur\V) #nF)
Рис. 1.1. Гладкое многообразие и две его карты
Пример 1.1. В качестве примера гладкого многообразия рассмотрим проективную плоскость RP2 и
найдем максимальный атлас этого многообразия.
Точками RP2 являются всевозможные прямые, проходящие через начало координат в R2. Каждая такая
прямая однозначно определяется своим направляющим вектором а, а *■ 0. При этом векторы а и Ха, X * 0,
являются направляющими для одной и той же прямой. Обозначим через (х\: х2: х») прямую с
направляющим вектором а = (хх; х2, *3)т Будем считать, что (х\: х2: *з) = (у\ • Уг: Уз) в том и только том случае, когда
~_« Л „а„,тдВпА иырпп* что v, = Хлл. v->=Xx->. vi= A*3.
Глава 1. Синтез САУ методами дифференциальной геометрии zj_
Введём следующие координаты на RP2 Рассмотрим множество прямых U, (/ = 1,2, 3), у которых /-я
координата направляющего вектора не равна нулю. Заметим, что если у одного направляющего вектора а
какой-то прямой /-я координата не равна нулю, то это верно и для любого другого направляющего вектора
этой прямой, т.к. этот (второй) вектор имеет вид Ха, \±0. Поэтому множества U\, U2> Иъ определены
однозначно. А т.к. направляющий вектор прямой не равен нулевому вектору, то, по крайней мере, одна его
координата не равна нулю, и, значит, r?,.\ Ut= RP2
Пусть (х\ : х2 : х3) 6 U\. Поставим в соответствие этой прямой точку R2 с координатами ух = x2lx^
у2 =хъ1хх. Числа у\ и у2 назовём координатами прямой (хь х2 x$) как точки RP2 в системе координат,
связанной с U\. Таким образом, получено отображение фь (х\: х2 дгз) -> (у\ Уг)
Отображение ф| должно иметь обратное, т.к. ф| - диффеоморфизм, имеем фГ1 {у\ у2)=-> (1 У\ )'i),
что проверяется непосредственной подстановкой У\=х2/хь у2=х3/х{ и учетом х\ ф О Аналогично
определяются диффеоморфизмы
Ф2 : U2 -> R2 * (*i: х2. хъ) -> {хх1хг: x3fx1),
y3:U3^>R2: (х]: х2 • хъ) -> (х{ 1хъ: хг1х£.
Таким образом, на RP2 вводятся три локальные системы координат (три карты) и атлас на RP2 можно
задать из 3-х карт (U,, ф,), / =1,2,3
^i={*-*i*0}> 9iW = (^2/^i^3/^i).
и2 = {х:хг*0}9 4>2{x) = (xl/x2ix3/x2)i
U3 = {x:x3±0}, щ(х) = (х]/х3,х2/хъ).
Найдём отображение перехода из одной системы координат в другую, в такую, где определены обе
системы координат. Пусть /= (х{: х2: *з) е U\n U2. В системе координат (£Д, ф,) точка / имеет координаты
У\-х21хх> У2=хъ1хь а в системе {и2^2)~У\ =х\1хг> У2~хз^х2- Легко видеть, что У\=\/у\,
У2 - У2 I У\ • Эту же связь можно получить, записав в координатах отображениеугуСх. Действительно,
{УиУг)-^-^^ У\'У2)-^-*{иУьУг1У\)
Так как прямая / = (*,: х2: хъ) - (1: ух у2) лежит в(/|П U2i тоу\ * 0 и отображение ф2 ° фГ1 задается
бесконечно дифференцируемыми функциями Аналогичное утверждение верно и для отражений
Ф1°Ф21> Фз°Ф21» Фг^з1» Ф^Фз1. Фз°ФТ1-
Многообразия - это наиболее общая формулировка пространства состояний
(фазового пространства) для динамической системы. Для исследования поведения
динамической системы важно знать, как взаимосвязаны точки этого многообразия. И
здесь на первый план выходит нахождение группы преобразований, которая
действует на заданном многообразии. К изучению свойств таких групп мы и приступаем.
1.2. ГРУППЫ И АЛГЕБРЫ ЛИ
1.2.1. Определение группы
Множества и функции на них - вот два типа объектов, к изучению которых
сводится, в конечном счете, любая математическая теория [48]. Если аргументы
функции/пробегают множество М и она принимает при этом значения из того же самого
множества, то / называется алгебраической операцией на множестве М. Наука,
изучающая алгебраические операции, называется алгеброй. При этом алгебру
интересует только вопрос, как действует та или иная алгебраическая операция, и вовсе не
интересует вопрос, на чем она действует. Отвлечься от второго вопроса и
сосредоточиться на первом позволяет понятие изоморфизма. Пусть заданы два множества с
отмеченными на них алгебраическими операциями, и можно установить взаимно
однозначное соответствие между самими множествами и между множествами
операций на них, причем соответственные операции будут функциями одинакового числа
аргументов и при соответствующих значениях аргументов будут принимать соответ-
22 Методы современной ТАУ. Часть IV
ственные значения. Тогда эти множества с операциями называются изоморфными.
Изоморфные объекты одинаково устроены в смысле операций, поэтому в алгебре их
не различают. Каждый класс изоморфных объектов выделяет в чистом виде
некоторый тип алгебраических операций. Это сводит задачу алгебры - изучение
алгебраических операций - к более осязаемой задаче изучения множеств с операциями с
точностью до изоморфизма. Один из самых распространенных типов алгебраических
операций - бинарная (двуместная) операция, подчиненная некоторым аксиомам,
которая стала самостоятельным разделом современной алгебры, - а именно разделом
теории групп.
Сразу заметим, что термин «алгебра», используемый выше, - это термин,
используемый для названия одного из разделов современной математики. Далее, при
введении понятий «группа Ли» и «алгебра Ли» термин «алгебра» трактуется в более узком
смысле и будет раскрыт позднее.
Чтобы понять всю мощь применения теории групп для решения задач математики
и прикладных наук, достаточно упомянуть следующий факт: в 1830 г. Эварист Галуа,
(который ввел термин «группа»), используя групповой подход, достаточно просто
показал неразрешимость в общем случае алгебраического уравнения в радикалах при
п > 5. Широкое применение эта теория в форме непрерывных групп преобразований
получила в физике, в частности, в квантовой механике, в небесной механике и, в
последнее время, в теории управления [2, 6, 14]. Непрерывные группы
(преобразований) иначе называются группами Ли -в честь норвежского математика Софуса Ли,
стоявшего у истоков этой теории и получившего в своих трудах на основе
группового подхода основные теоремы о разрешимости системы дифференциальных
уравнений в квадратурах. Прежде чем изучать группы Ли, дадим определение абстрактному
понятию «группа».
Пусть G - множество элементов произвольной природы. Введем на этом
множестве бинарную операцию.
Бинарная операция (также используется термин «групповая операция») на
множестве G - это соответствие, при котором каждой упорядоченной паре элементов
данного множества отвечает однозначно определенный элемент этого же множества.
Бинарную операцию будем обозначать точкой •.
Определение 1.5. Множество G с бинарной операцией • называется группой, если
выполнены следующие 3 аксиомы:
1) Ассоциативность
(a>b)-c = a-(b-c),Va,b,ceG; (1.4)
2) Существование единицы. В множестве G существует единственный элемент
ее G, такой, что
а-е = е-а = a,VaeG', (1-5)
3) Наличие обратного элемента. Для любого а е G существует в G элемент х,
такой, что
а-х = х-а = е. (1-6)
Обратный к а элемент будем обозначать а'1.
Если V а, Ь е G имеет место равенство
a-b = b-a,
тогда группа называется коммутативной, или абелевой.
Изоморфизм, т.е. взаимно однозначное гомоморфное отображение, абстрактно
равных групп позволяет распространить полученные результаты для одной группы
на группу, изоморфную ей, т.к. изоморфные группы имеют одну и ту же групповую
структуру. Напомним, что гомоморфным отображением (гомоморфизмом) называ-
Глава 1. Синтез САУ методами дифференциальной геометрии 23_
ется отображение одной группы, алгебраической структуры в другую, сохраняющее
операции. Последнее означает, что образ результата операции (в частности
бинарной), производимой над элементами исходного множества, можно получить,
выполнив над образами элементов операцию, определенную на содержащем их множестве.
Другими словами, если, например, рассматриваются две группы Gx и G2 с
соответствующими бинарными операциями ®! для Gx и ®2 - G2, а/- гомоморфизм/:
Gx -> G2, то V а, Ь е Gx имеет место равенство
f{a®xb) = f(a)®2f{b),
где f(a),f{b)eG2.
Рассмотрим пример, где структуру одной плохо формализованной группы Н
можно изучать по изоморфной ей хорошо формализованной группе G.
Пример 1.2. Пусть элементами группы G служат корни уравнения jc4 — 1 = О,
G = {\J-\-j}, где j = <fl .
Групповая операция • - обычное умножение. Рассмотрим группу Я вращений квадрата в плоскости,
где элементами служат повороты квадрата на соответствующие углы: д° .ф = 0 ; а . ф = 90; а2 • ф =180;
а2: ф = 270°, те Я = {e,a = al,a2,a3}
В группе G. единичный элемент е-\. Обратные элементы для 1->1; для j->-j ; для -1 -> -1,
для -у->/ В группе Я единичный элемент е = а°. Обратные элементы, для а->а3, для а2-+а2, для
аг -> а, для е -> е. Обозначим через/. Я -> G отображение группы Я на G
а0 а а2 аъЛ
1 J -I -J)
Легко проверить, что для любых элементов r,s e И
f(rs) = f(r)of(s)
Можно показать, что это отображение является изоморфным
Например,
г • ^ = а4 = а0 (поворот на 360°);
/(г.5) = /К) = 1 = / = /(г)./(5) = ;.(-у).
Таким образом, изучить структуру группы Я (группы вращения квадрата) можно с помощью более
формализованной изоморфной ей группы G
1.2.2. Группы Ли
Определение 1.6. Гладкое многообразие Gr размерности г называется группой
Ли, если на Gr задана структура гладкого многообразия, т.е. групповые операции
гладкие. Иначе говоря, группа Ли (или непрерывная группа преобразований) - это
множество преобразований, которое наделено двумя структурами: 1) алгебраически -
это группа; 2) топологически - это многообразие, причем обе структуры согласованы
между собой. Что она преобразует, мы рассмотрим чуть ниже, а пока определим, в
чем заключается согласованность двух этих структур.
Пусть ao,bQeGr - некоторые элементы Gr. Существуют такие координатные
окрестности Va^, Vbo, VCq точек а0, b0, со= а0- Ьо (• - групповая операция),
соответственно с координатами (д1,...,аг),(61,...,6г),(с1,...,сг) - структура многообразия, -
что Vao-VbodVCQ и координаты с,-=ф1(а1,...,аг;й,,...,6г) / = 1,г, точки c = a-beVCo
являются гладкими функциями от координат точек aeVa),be VbQ, где
КО|) • Vba = [а ■ Ыа е Vao,b e Vb<>} (см. рис. 1.2).
24
Методы современной ТАУ. Часть IV
Рис. 1.2. Топологическая группа Gr и ее элементы
Требование гладкости операции а-> а~х означает следующее. Пусть вблизи
точки с0 = Oq1 есть карта Vc с координатами (сь..., сг). Тогда существует такая
координатная окрестность VOq точки а0 с координатами (аи...,аг\ что Го~] с VCq и
координаты с, =А|-(а1,...,аг), / = 1,г точек с = а"1еГС() - гладкие функции от координат
точек ае FO(), где V~} = [a~l \aeV%) (рис. 1.3).
Gr
Рис. 1.3. К согласованности топологической и алгебраической структур группы С
Иначе говоря, если а - групповой элемент вблизи а0, тогда а~] - групповой
элемент вблизи uq {. Элементы a, be Gr называются параметрами и определяют группу
Gr как r-параметрическую группу. Благодаря изоморфизму непрерывные группы
Gr можно рассматривать как непрерывные группы преобразований (действий) на
гладком многообразии Мп .
Пусть Gr - группа Ли, Мп - гладкое многообразие размерности п. Скажем, что
группа Ли Gr действует на многообразии Мп , если для любого элемента а е Gr,
хеМ" задано гладкое отображение Та : Мп -> Мп . По другому: каждой паре (а, х),
где aeGr, хеМ", соответствует точка ТахеМ", т.е. задано отображение
h\Gr хМп -> М" .На отображение И накладываются следующие 3 ограничения
(соответствующие аксиомам группы).
1) Отображение h: Gr xM" -> Мп - гладкое. Пусть (х\,...,х'п) - локальная
система координат в окрестности Ua Мп точки Та^х0 e(J , где aoeGr, xQeM".
Тогда найдутся такие координатные окрестности V, W точек aoeGr, хое М"
соответственно, что VWcz{Tv W\v e V с: Gr, w e W аМ" }е U. Поэтому
отображение Та : W -+ U можно записать в виде
*' = У;(а1,...,аг;л:1,...,х/7), / = 1,л, (1.7)
Глава 1. Синтез САУ методами дифференциальной геометрии 25_
где яь..., аг- локальные координаты в окрестности V, а хь..., хп - локальные
координаты в окрестности W,
В (1.7) штрих « '» обозначает не производную, а служит для введения
новой точки.
Тогда требование гладкости отображения h заключается в том, что все
функции xl = fl(al,...,ar;xb...,xn), i = \,n гладкие по а иjc.
2) Произведению двух элементов a, be С с групповой операцией (р(я, Ь)
соответствует композиция соответствующих преобразований с групповой операцией •, т.е.
Тф,ь)=Та.Ть. (1.8)
3) Единичному элементу eeGr отвечает тождественное преобразование id (от
английского identity - тождество) многообразия Мп , т.е.
Tex = id(x) = x. (1.9)
В этом случае r-параметрическая группа Gr изоморфна непрерывной группе
преобразований Gf (конечно, каждая группа имеет свою групповую операцию).
Структурные свойства группы - это те, которые одновременно принадлежат всем
изоморфным между собой группам, а также их алгебрам. Поэтому при изучении
структуры группы преобразований G? можно ограничиться ее r-параметрической группой
Gr. Исходя из этого, мы в дальнейшем G будем называть r-параметрической
группой преобразований (действующей на гладком многообразии Мп) (G = Gr) и не
делать между ними различий.
Пример 1.3. Группа вращений плоскости. Действует в R2. Преобразование Та
_ ( costf s\na\
V-sina cosoy
параметр а е G1 (однопараметрическая группа преобразований). Действие в R2
(х'А-т Y-(cosa sina)(x^
х~\ II
х'2) " y-sina соБаДд
Композиция преобразований
(cos a sinaVcos^ sinZ>^| (cos(a + b) sin(a-+-6)^
a b l^-sina cosaj^-sin6 cos^J [-sin(a + ^) cos(a + 6)J
Отсюда делаем вывод, что групповая операция в G1
(p(a,b) = a + b
соответствует обычному сложению, а групповая операция в O\'TaTh- обычному умножению матриц
У данной группы есть специальное обозначение 50(2), что означает: специальная
ортогональная, действующая в R2. Группа 50(2) интересна и тем, что здесь можно
наглядно проанализировать две структуры (алгебраическую и топологическую).
Покажем это:
а) алгебраическая структура:
cos a sin а} }
:0<а<2п[;
-sin a cos a) J
б) топологическая структура. G1 можно отождествить с единичной
окружностью (многообразие с 2-мя картами)
Sl ={(cosa,sma):0<a<2n)
в R2, что позволяет определить на S0(2) структуру многообразия.
26 Методы современной ТАУ. Часть IV
Определение 1.7. Пусть задано действие группы Ли GrHa многообразии Мп.
Орбитой точки хеМ" называется множество
O(x) = {Tax\aeGr}cMn.
Пример 1.4. Орбитой для любой точки х0 = (x]0,x2i))е ^2 группы SO(2) будет окружность радиуса
г = ^xw + х20.
Пример 1.5. Найдем орбиту действия группы линейных замен координат на множестве матриц
линейных операторов.
Пусть х - матрица линейного оператора размера nxn,aeG" - множество невырожденных
квадратных матриц (пхп) Тогда
О(х) = {тах оха"1, VaeG"2}
является орбитой (матрицы) х и определяет множество матриц, подобных х .
Определение 1.8. Функция co(jc), постоянная на орбитах, называется
инвариантом группы преобразований, т.е.
co(ro,jc) = co(jc)
для всех aeGr,xeO(x)a M".
1.2.3. ИНФИНИТЕЗИМАЛЬНЫЙ ОПЕРАТОР НЕПРЕРЫВНОЙ ГРУППЫ
ПРЕОБРАЗОВАНИЙ
Рассмотрим преобразования (1.7), которые определяют действие г-параметриче-
ской группы Gr на многообразии Мп. Пусть г = 1, тогда
*;=/;(я;л:), / = 1Я (1.10)
причем /(0;л:)=л:.
Пусть z(xj,...,jt^) = z(jc') - произвольная функция от х'. Проведем
линеаризацию группы (1.10) в окрестности ее единицы, т.е. разложим функцию z(x') по
степеням а в окрестности точки а = 0. Имеем
, ,, , . dz(x')\ a2 d2z(x')
2(x) = z(x) + a-^rl\ + — ■—^
da I _n 2 da2
\a=0
(1.11)
a=0
Обозначим
V да Ja=0
и запишем оператор
Учитывая правило дифференцирования сложной функции, можем в первом
приближении записать равенство (1.11) как
z(x') = z(x) + aXz. (1.14)
Равенство (1.14) называется инфинитезимальным преобразованием группы, а
(1.13) - ее инфинитезимальным оператором.
Глава 1. Синтез САУ методами дифференциальной геометрии 2Л_
1.2.4. Алгебры Ли
Изучение структуры и свойств группы Ли G - достаточно сложная проблема,
подчас неподдающаяся решению. Поэтому неоценимо открытие, сделанное С. Ли,
который уже в первых работах установил, что многие свойства, связанные с
группами преобразований, такие как инварианты, вопросы структуры, изоморфизм и др.,
выражаются в терминах алгебры Ли, порожденной данной группой. Алгебра Ли L
является линеаризацией группы Ли G в окрестности ее единичного элемента.
Поэтому вопросы, связанные с действиями группы Gr, на многообразии (фазовом
пространстве) Мп в теории управления определяет управляемость, наблюдаемость,
инвариантность, возможность декомпозиции. В силу локального изоморфизма между
группой и алгеброй Ли эти групповые свойства можно исследовать по
линеаризованной модели группы - ее алгебре Ли. Теория алгебр Ли играет при этом примерно ту
же роль, какая отводится в теории линейных систем линейной алгебре. Дадим
определение алгебры Ли.
Определение 1.9. Алгеброй Ли L называется векторное пространство над
вещественным полем R, для любой пары элементов которых а, Ь определена билинейная
операция (умножение), удовлетворяющая определенным условиям, а-Ъ = с так, что
полученный вектор с принадлежит этому же пространству.
Иначе говоря, алгебра Ли - это векторное пространство, занкнутое относительно
операции умножения. Это умножение называется коммутатором элементов a, b и
обозначается
с = [а,Ь]. (1.15)
В теории управления коммутатор часто называют скобкой Ли [30, 31, 34, 36], в
механике его называют скобкой Пуассона [17, 23]. Мы далее будем называть это
умножение коммутатором (это наиболее общее название) либо скобками Ли - когда
элементами алгебры Ли будут векторные поля.
Введенный коммутатор (операция умножения) должен отвечать следующим
условиям:
1) билинейности
[сш + №9с] = [а{а,с)] + $[Ь,с], ^ ^
[а>о6 + Рс] = а[а,6] + Р[а,с];
2) кососимметричности
М=-М; (1.17)
3) для него справедливо тождество Якоби
[[а,б],с] + [[6>с]>а] + [[с>а]>б] = 0 (1.18)
для любых а,Ь,сеЬи a,$eR.
• Из выражений (1.17) и (1.18) видно, что алгебра Ли является
антикоммуникативной (формула (1.17)) и неассоциативной, где условие ассоциативности заменено
тождеством Якоби (1.18).
Из свойства 2) также следует, что
[а,а] = 0. (1.19)
Примеры алгебр Ли
1) Пространство R3 с обычным векторным умножением axb, a,beR3 является
алгеброй Ли. Тождество Якоби следует из равенства
а х (b х с) = b(a, с) - с(а, Ь),
справедливого для произвольных трех векторов a,b,ce R
28
Методы современной ТАУ. Часть IV
2) Множество полиномов от вещественной переменной с коммутатором
[p(x)M*)>P{*)fyQ-4{x)fyiy
3) В теории гладких многообразий алгебры Ли (над полем R) возникают как
алгебры векторных полей.
Векторные поля на гладких многообразиях (обобщение понятия поверхности)
выступают как элементы касательных пространств к данному многообразию.
Линейное пространство всех касательных векторов к многообразию Мп в точке х
называют касательным пространством к многообразию Мп в точке jc и обозначают
ТМпх (1.4).
Рис. 1.4. Касательное пространство к многообразию
Рассмотрим дизъюнктивное объединение
всех касательных пространств к многообразию М", которое называется касательным
расслоением.
Свое название расслоение берет из свойств касательных пространств к
многообразию: касательные пространства ТМпх Г\ТМп2 =0 не пересекаются, если х1 фх2,
т.е. это объединение выглядит как слоеный вертикально стоящий пирог (см. рис. 1.5).
ТМ\ ТМп2
/ v -
-гМ
\
М"
хх х2
Рис. 1.5. Касательное расслоение
Можно показать [15], что на множестве ТМп можно также ввести структуру
гладкого многообразия.
Определение 1.10. Векторным полем на многообразии Мп называется
отображение
Х:М" ->.ТМ",
такое, что Х(х)е ТМ" для каждого х е Мп.
Глава 1. Синтез САУ методами дифференциальной геометрии 29^
Векторное поле иногда называют сечением касательного расслоения ТМп. На
рис. 1.5 это отображено сплошной волнистой линией на касательном расслоении
ТМ" (подробнее см. [10, 17, 42]).
Каждое векторное поле AT(jc) является инфинитезимальной образующей для од-
нопараметрической (параметр /) группы непрерывных преобразований
(диффеоморфизмов, т.е. гладких изоморфизмов) G = {Xt} на многообразии Мп. Выше было
рассмотрено, как по действию группы получить ее инфинитезимальную образующую
(инфинитезимальной оператор) X , и ниже будет показано, как по инфинитезималь-
ному оператору восстановить группу. Векторное поле Х(х) для каждой гладкой
функции z(x), определенной на многообразии Мп, является линейным
дифференциальном оператором X (оператором дифференцирования вдоль векторного поля
Х{х)). Будем придерживаться следующих обозначений:
• Ar(jc) = (^1 (jc),...,£w(a:)) - это координатное представление поля в
конкретной точке х.
• X = ^^i(x)— - векторное поле как дифференциальный оператор для
гладких функций, определенных на М".
Векторные поля AT(jc), заданные на произвольном гладком многообразии М",
образуют алгебру Ли L с коммутатором (скобками Ли) - дифференциальным
оператором первого порядка, имеющим координаты
[*,Г]Д*) = Лть(*)-И-,(дс), / = 1Я (1.20)
где
[X,F].(jc) - /-я координата векторного поля [Л',У].(л:) в точке jc. В координатной
форме векторное поле (1.20) можно записать в виде
[X,F]W = [|]xW-[|]fW, (1.21)
fdQ] , ч
где т— - матрица Якоби вектор-функции Q(x).
1.3. ГРУППОВОЙ АНАЛИЗ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ.
ОДНОПАРАМЕТРИЧЕСКИЕ ГРУППЫ ПРЕОБРАЗОВАНИЙ
Для исследования системы обыкновенных дифференциальных уравнений, где в
качестве параметра используется время, важно рассмотреть так называемые однопараметри-
ческие группы (локальных диффеоморфизмов - взаимно однозначных и непрерывно
дифференцируемых отображений), часто называемые фазовыми потоками [17,18].
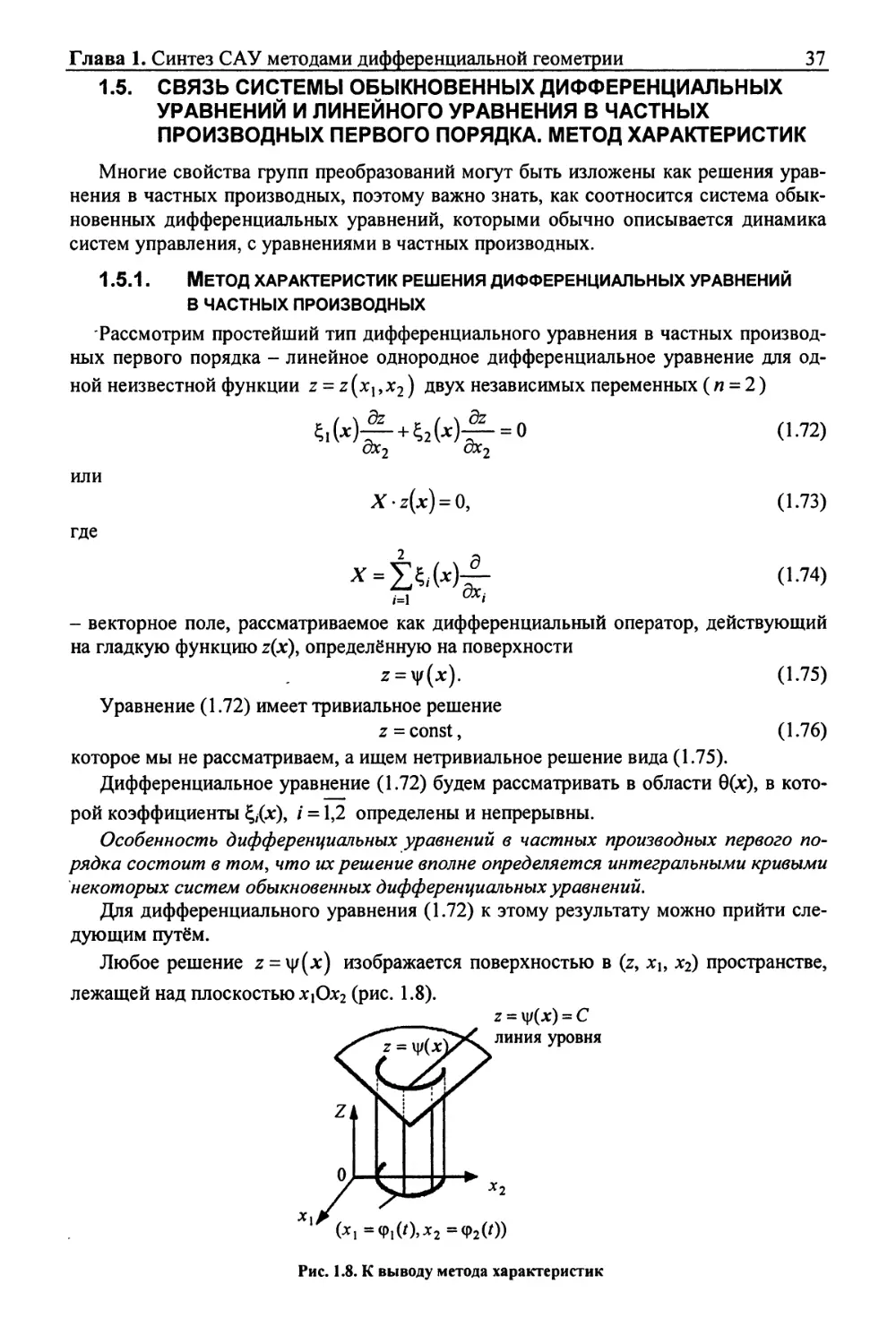
Пусть на «-мерном арифметическом координатном пространстве Rn задана
группа G однопараметрических преобразований (параметр /?), связывающая две точки
фазового пространства следующим соотношением (см. формулу (1.10))
х',=Ъ(х,р), (1.22)
jK) Методы современной ТАУ. Часть IV
где Ft{x,p) - аналитическая функция по переменным (х,р) в некотором открытом
множестве изменения переменной х и в некоторой окрестности параметра р0,
соответствующего тождественному преобразованию (pQ — единичный элемент группы
G, т.е. х = F(x, p0)). Для удобства сделаем следующее преобразование. Заменим
Р = Ро+а, (1.23)
где а - также скалярный параметр. Замена (1.23) позволяет свести преобразование
(1.22) к следующему
х;=^Д*,/?0 + я) = /,(л:,а), / = 1,л, (1.24)
где тождественному преобразованию х\ = /; (х,а) соответствует ненулевое значение
параметра а, т.е. единичный элемент а0 - 0.
Инфинитезимальный оператор для преобразования (1.24) группы G имеет вид (см.
пункт 1.2.3)
*=!>ц£-> (125)
/=1
где
$/ =
_Щх,а)
да
'дх,
>У({Х,а)\ _. _
да
, / = 1,«. (1.26)
'о
Так как группа G преобразований (1.24) является непрерывной, естественно
рассмотреть постепенное преобразование точек пространства, по мере того, как мы
изменяем непрерывным образом параметр а ота0=0. Итак, имеем
*' = /(*,*). (1.27)
Рассмотрим вариацию параметра а\а-* a + da. Соседнее значение параметра
а л-da будет переводить х в jc' + atc', т.к. / - аналитическая функция параметра
а. Но мы можем также найти значение параметра 5а очень близкое к 0 (т.е.
преобразование очень близкое к тождественному), которое переводит точку х' в х' + dx'.
Значит, мы имеем 2 пути перехода из точки х в х' + dx':
а) x' + dx' = f(x,a + da), (1.28)
б) *' = /(*,*); x' + dx' = f{x',8a). ' (1.29)
Геометрически это выглядит следующим образом (рис. 1.6).
f(x';5a)
" >
X
f(x;a+5a) x+dxf
Рис. 1.6. Действие однопараметрической группы в окрестности единичного элемента
Разложим последнее соотношение (1.29) в ряд Тейлора в окрестности
тождественного преобразования а0 = 0.
Глава 1. Синтез САУ методами дифференциальной геометрии
31
Имеем
jc'+c&' = /(jc',O) +
df{x\b)
ЪЪ
6 = 0
5a+... = jc'+$(jc')6a+....
(1.30)
В формуле (1.30) учтена зависимость (1.26). Если вариация параметра Ъа очень
мала, можно принять
ах' = ^(х')да. (1.31)
С другой стороны, пользуясь определением группы Ли, имеем
x' + ck' = f(x\8a) = f(f(x9a),8a) = f{xMa>4)> С1-32)
где q>(a,b) - групповая операция параметрической группы Gj(cm. ниже). Сравнивая
выражения (1.28) и (1.32), получим
a + da = y(a,ba). (1.33)
Найдём, как связан дифференциал da с вариацией параметра 5а. Разложим
правую часть (1.33) в ряд Тейлора в окрестности а0 = 0
а + яя = ф(а,0) +
S(p(fl,fr)
5b
6 = 0
5я + ... = а +
5q>(a,fr)
ЪЬ
6 = 0
Ьа +.
Если вариация Ъа мала, то можно принять
,_dq>(a,fr)
da = -
Откуда
8а =
д^{а,Ь)
дЪ
дЪ
6 = 0
6 = 0
-1
5а.
da- \y(a)da.
Подставляя формулу (1.36) в (1.31), получим
dx' = t,(x')\y(a)da.
Если ввести новый параметр /
а
t = $\\f(a)da,
т.е.
dt = \\t(a)da,
тогда из (1.37) можно определить
dx^
dt
= фс'),х'{0)=х.
(1.34)
(1.35)
(1.36)
(1.37)
(1.38)
(1.39)
(1.40)
Новый параметр / для однопараметрической группы преобразований G
называется каноническим, т.к. в этом случае групповая операция имеет простейший вид
'з=ф('1>'2) = '1+'2- С1-41)
Обратный элемент канонического параметра группы G
rl=-t. (1.42)
Свойства (1.41) и (1.42) очевидны, т.к. согласно (1.40) дифференциал
преобразования dxr линейно связан с дифференциалом параметра /
Лс' = $(х')Л,
конечно же, при условии, что £(•) не является функцией параметра /. Если параметр t
определить как время, то соотношение (1.40) можно трактовать следующим образом:
32 Методы современной ТАУ. Часть IV
между однопараметрической группой преобразований в пространстве Rn и системой
автономных обыкновенных дифференциальных уравнений с аналитическими правыми
частями существует взаимно однозначное соответствие (с точностью до
несущественной замены параметра). Интегрируя систему (1.40) мы полностью восстанавливаем
группу по её инфинитезимальному оператору (с точностью до замены параметра).
Связь однопараметрической группы преобразований G с введенным каноническим
параметром / и автономными обыкновенными дифференциальными уравнениями
позволяет дать следующее (широко используемое) её определение [3,5].
Определение 1.11. Локальная однопараметрическая группа G (диффеоморфных
преобразований) {xt} в многообразии Мп - это отображение RxM в М,
(t,x)e IxM -^ Xt(x)eMn ,1 = (-е,е)е R, которое удовлетворяет следующим
аксиомам группы:
1) для каждого t e R Xt : х -» Xtx есть преобразование в Мп ;
2) для всех t,s e /, t + s e /, хеМ"
Xt+sx = Xt \Xsx) = XtXsx\ (1.43)
3) обратное преобразование имеет вид: если х' = Xtx, то
x = X~lx = X_tx'. (1.44)
Замечание 1.2. Термин «локальная» показывает, что для нелинейной системы
дифференциальных уравнений решение может существовать не для всех t e R .
Ниже мы будем придерживаться этого определения, но прилагательное
«локальная» для краткости опустим.
Сопоставляя введенные аксиомы с аксиомами абстрактной группы (см. §1.2), мы
видим, что:
1) параметр а здесь единственный и обозначен через t\
2) групповой операцией параметрической группы G1 ц>(а,Ь)= a + b = t + s
является обычное сложение;
3) умножением в группе преобразований G = {xt) является в общем случае
композиция преобразований.
Пример 1.6.
Рассмотрим группу подобия G , действующую в пространстве R2(n = 2)
х' = рх, peR, xeR2 (145)
Найдем однопараметрическую группу преобразований и канонический параметр / для данной
группы Представим параметр р в окрестности единичного элемента р0 -1 в виде р- ро + а = \ + а .
Согласно аксиомам группы
а) условие композиции преобразований
х' = (\ + а)х, х" = (l + b)x' = (l + b){\ + a)x = (l + a + b + ba)x = (l + c)x
Таким образом, групповая операция параметрической группы G1, где единичным элементом является
я О = 0, имеет вид
с - q>\a,b) = a + b + ab ; (146)
б) обратный элемент группы G1
ф(д,а"1) = а + а"|+а"1а = ао = 0, (I 47)
где а0 =0 - единственный элемент группы G1. Напомним, что единичным элементом группы G
является р0 = 1 . Заметим, что в формуле (1.47) нельзя перемножать а~ха обычным образом, т.е. а~1а -1 , т.к. в
этом случае получаемое значение а'1 = -(1 + а) не удовлетворяет групповой операции
Глава 1. Синтез САУ методами дифференциальной геометрии 33_
ф(д,я~1) = а + а~1 +а'1а = а-(\ + а)-(\ + а)а = -(\ + а + аа)* О .
Выражала"1 из (1.47), получим
а-'=--^-. (1.48)
\ + а
В этом случае ф(я,я~Ч = 0.
Найдем инфинитезимальный оператор группы G . Имеем х\ = ft (х,а) = (1 + a)xh / = 1,2.
Согласно формуле (1 26)
_У,(х,д)
да
т.е. оператор группы подобия имеет вид
1.-'-«
Ых) = ^РЩ =х„ / = 1,2. • (1.49)
С*2
Определим функцию у(д) (см. (1.36))
*В*«ЖГ+*'ЖГ " (150)
v(g)=l д. ;
= (i + e)-'=-L
А = 0J 1 + а
Канонический параметр
Откуда
/-j9(flVfa-f—=ln(l + a) = lnp
о ol + fl
р = г/. (1.51)
Подставляя (1.51) в (1.45), окончательно получим
х;=в'х„ 1 = 1,2, (1.52)
где / = 0 - единичный элемент параметрической группы G соответствует е = 1 единичному элементу
группы преобразований G. Уравнения (1.52) - не что иное, как решение системы дифференциальных
уравнений xt = xt, / = 1,2 с начальными условиями х, (о) = х, .
Пример 1.7. Рассмотрим на плоскости группу вращения (параметр а - угол поворота):
х\ = Xicosa + x2sma = / (х,а),
11 2 -М ' '' (1.53)
хг2 = -х, sina + x2cosa = /2(х,а).
Найдем инфинитезимальный оператор данной группы. По определению
.5/,(д
W*
«--^
да |а = о 2
Таким образом, оператор имеет вид:
*=<-<■ (U4)
Найдем групповую операцию*
xJ = x',cos^ + X2sina = (x1cosa + X2sina)cos^+(-A:,sina + X2COSa)sin6 =
= х, cos(a + b) + x2sin(a + b);
x\ = -x'j sinb + x'2cosb = -(xjcosa + x2sina)sin6 + (-XjSina+x2cosa)cos6 =
= -x, sin (a + b) + x2 cos(a + b)
Таким образом, групповая операция параметрической группы G есть
с = ф(д,б)=д + 6. (1.55)
А параметр а группы (1.53) является в то же время каноническим, т.е. а = t, преобразование самой
группы G имеет вид
*,=fC0S' ""'I 0.56)
V sin ^ cos /)
М Методы современной ТАУ. Часть IV
Можно заметить, что преобразование (1 56) однопараметрической группы вращения G - это
переходная матрица состояния для системы дифференциальных уравнений, определяемых оператором группы
(1.54)
^! = *
т.е. 0(t, 0) = Xt.. Это же утверждение справедливо и для примера 1 6.
1.4. ВЕКТОРНЫЕ ПОЛЯ НА МНОГООБРАЗИЯХ.
ПОЛНЫЕ ВЕКТОРНЫЕ ПОЛЯ
С каждым элементом а е G группы Ли G связаны два гладких отображения:
Ra\ Gr ->Gr ,La: G ->G группы Ли G , которые определяются равенствами
Ra{b) = ba, (1.58)
La{b)=ab. (1.59)
Отображение La называется левым сдвигом, a Ra - правым сдвигом на элемент
а е Gr. В координатах имеем:
(Lab)t =ф|-(а1,...,аг,й,,...А). О-60)
{Rab). =<pl{bb...9br,a]9...9ar), / = l,r, (1.61)
где а имеет координаты (a\9...9ar)9 a (bu...,br) - координаты элемента b, La и Ra -
гладкие отображения, которые имеют обратные. Формулы (1.60) и (1.61) определяют
собой координатные представления групповой операции группы Ли G .
Между левым La и правым сдвигом Ra имеют место следующие соотношения:
a) LaLb =Lab,
b)RaRb=Rab, (1.62)
с) LaRb=RbLa.
В дальнейшем при исследовании глобального поведения динамической системы
на многообразии нам потребуется специальные векторные поля на группах Ли - так
называемые лево инвариантные векторные поля.
Определение 1.12. Векторное полезна группе Ли Gr называется левоивариант-
ным, если оно переходит в себя при увлечении любым левым групповым сдвигом, т.е.
L{a\x{Thx)=X{TJbx) (1.63)
для произвольных элементов a,b e G . Здесь (La)+ - увлечение векторов Х(Тух)
отображением La, т.е.
{La)*:TGrb-*TGrab. (1.64)
Иначе говоря, при рассмотрении группы G как многообразия увлечение (La)*
определяет отображение касательного пространства элемента beG в касательное
пространство элемента abe Gr, и это отображение определяется дифференциалом
действия элемента а, т.е.
(La)*=>dTa. (1.65)
Графически левоинвариантность векторного поля X может быть показана
следующим образом (рис. 1.7).
Глава 1. Синтез САУ методами дифференциальной геометрии 35
rju^V^ wax)
Рис. 1.7. Графическая интерпретация левоинвариантного векторного поля
Итак, соотношение (1.63) запишется следующим образом
dTa(Tbx)=X(TJbx). (1.66)
Это говорит о том, что левоинвариантные векторные поля многообразия Мп
касательными отображениями группы переводятся в векторные поля этого же
многообразия Мп.
Другими словами, левоинвариантное векторное поле всюду на многообразии не
имеет особенностей. Это свойство отражено в следующей лемме. л
Лемма 1.1 [25]. Левоинвариантные векторные поля на группе Gr однозначно
определяются своими значениями в единице группы.
Это значит, что единица параметрической группы Gr a = О соответствует
тождественному преобразованию: Тох =х (единица группы преобразований) и
X{Tax) = (LalX{Tox) = {La),X(x) = dTa(x), (1.67)
т.е. касательным отображением группы преобразований можно получить вектор Х(х)
в любой точке jc е Мп , где 5с = Тах.
Следствие (леммы 1.1) [25]. Пространство левоинвариантных векторных полей
на группе Ли конечномерно и его размерность равна размерности группы Ли Gr.
Определение 1.13. Алгеброй Ли L(Gr) группы Ли Gr называется пространство
всех левоинвариантных векторных полей на группе Ли Gr с операцией умножения -
коммутатором векторных полей [•,].
Пример 1.8. Покажем, что инфинитезимальный оператор X группы вращении формирует
левоинвариантное векторное поле Х(х).
Имеем:
1) оператор X = х2 xj ;
дхх дх2
2) векторное поле в координатах
х2
3) группа G1 (один параметр а = /)
х\ = дг, cos г + дг2 sin r,
х\ = —jr, sin/ +дг2 cos/;
4) действие группы Та = Х(
х (cost sin/ ^
' [-sin/ cos/J'
Пусть в единице группы (/0 = О, Хо = Е ), дс(О) =дсь
Имеем:
36 Методы современной ТАУ. Часть IV
x10cos/ + :)C2osinO
{-x]0sint + x20cost)
Тогда векторное поле в точке Х#о
X(TaXo) = X(XlXQJ **<f)U -*»*>' + *»*"'.
I -*i(')J l,-(^ocos/ + jr20sin/)j
С другой стороны, векторное поле в начальной точке Хо
Касательное отображение группы G
v " 1^-cos/ - sin /J
что дает
l^-COS/ -SlnfJ^20J ^-(ДС10С08» + *2051П/);
Отсюда мы делаем вывод,
X(X,xe)-dX,{xt),
т.е. векторное поле Х(х) левоинвариантно.
Важнейшее свойство левоинвариантных векторных полей - их полнота.
Определение 1.14. Векторное поле Х(х) называется полным, если его однопара-
метрическая группа G = (Xt) определена для всех /е(-оо,оо), т.е. решение
дифференциального уравнения
x(t) = X(x) (1.68)
может быть продолжено неограниченно. Уравнение (1.68) с действием группы Xt
может быть записано в следующем виде
—(Xtx) = X(Xtx), XtxeM\ VxeM", teR]. (1.69)
dt
Полные векторные поля и их группы G = {х,} удовлетворяют уравнению (1.69) для
любого /е (-оо,оо), для неполных это справедливо только в локальной окрестности.
Пример 1.9 [17]. Рассмотрим дифференциальное уравнение х = 1.
Пусть фазовым пространством (многообразием) для этого уравнения будет открытое подмножество R:
M]={xeR:0<x<\}. (1.70)
Группа преобразования G определяется действием Х( = (l + f), что приводит к тому, что для всех teO
преобразование Xt не переводит фазовое пространство в себя, т.е. XtM] Ч> М] при teO, т.е. векторное
поле Х{х) = 1 не имеет однопараметрической группы на этом фазовом пространстве (многообразии). Так
как решение определено только для / = 0 - векторное поле не является полным.
Причина этого - в некомпактности многообразия Мх (1.70). Имеет место
следующая теорема о существовании однопараметрической группы преобразований для
некоторого векторного поля Х{х).
Теорема 1.1 [17]. Пусть М" - гладкое (класса С,г>2) многообразие,
X: Мп -» ТМп - векторное поле. Пусть вектор Х(х) отличен от нулевого вектора
ТМпх только лишь компактной части К многообразия Мп. Тогда существует однопа-
раметрическая группа преобразований Xt :M" *->Mw, для которой поле Х(х)
является полем фазовой скорости, т.е. удовлетворяет дифференциальному уравнению
4(ад=ед*)- (i.7i)
at
Глава 1. Синтез САУ методами дифференциальной геометрии
37
1.5. СВЯЗЬ СИСТЕМЫ ОБЫКНОВЕННЫХ ДИФФЕРЕНЦИАЛЬНЫХ
УРАВНЕНИЙ И ЛИНЕЙНОГО УРАВНЕНИЯ В ЧАСТНЫХ
ПРОИЗВОДНЫХ ПЕРВОГО ПОРЯДКА. МЕТОД ХАРАКТЕРИСТИК
Многие свойства групп преобразований могут быть изложены как решения
уравнения в частных производных, поэтому важно знать, как соотносится система
обыкновенных дифференциальных уравнений, которыми обычно описывается динамика
систем управления, с уравнениями в частных производных.
1.5.1. Метод характеристик решения дифференциальных уравнений
в частных производных
-Рассмотрим простейший тип дифференциального уравнения в частных
производных первого порядка - линейное однородное дифференциальное уравнение для
одной неизвестной функции z = z(xl9x2) двух независимых переменных (п = 2)
или
где
дх2 ох2
X -z(x). О,
/=1 mi
(1.72)
(1.73)
(1.74)
- векторное поле, рассматриваемое как дифференциальный оператор, действующий
на гладкую функцию z(x), определённую на поверхности
z = v|/(*). (1.75)
Уравнение (1.72) имеет тривиальное решение
z = const, (1-76)
которое мы не рассматриваем, а ищем нетривиальное решение вида (1.75).
Дифференциальное уравнение (1.72) будем рассматривать в области 8(х), в
которой коэффициенты £,•(*), / = 1,2 определены и непрерывны.
Особенность дифференциальных уравнений в частных производных первого
порядка состоит в том, что их решение вполне определяется интегральными кривыми
некоторых систем обыкновенных дифференциальных уравнений.
Для дифференциального уравнения (1.72) к этому результату можно прийти
следующим путём.
Любое решение z = \\f(x) изображается поверхностью в (z, xh x2) пространстве,
лежащей над плоскостью хх0х2 (рис. 1.8).
z = m>(a:)>^ линия УР°ВНЯ
О
(*! =Ф1(О,*2=Ф2(О)
Рис. 1.8. К выводу метода характеристик
38 Методы современной ТАУ. Часть IV
Точки этой поверхности, лежащие на одной и той же высоте С
z = 4/(*) = C, (1.77)
образуют некоторую кривую, называемую линией уровня.
Уравнение линий уровня имеет вид
*1 =Ф1(0» Х2 =Ф2(0» ^ = v(Pl(0» Ф2(0) = С» С1'78)
где t - параметр. Дифференцируя соотношение
Ч/(ф1(0>Ф2(')) = С
по /, получим:
f^M')> <P2(')H.(')+|rW')> Ф2('))-Ф2(') = °- (1-79)
Так как функция vj/ удовлетворяет уравнению (1.72), то имеем:
SiMO. v2(t))'^-M)'Ф2(О)+^(Ф.(О.ф2(0)~(ф.(0.ф2(')И. (1.80)
ОХХ ОХ2
Если
5vj/
ас,
5v|/
> 0 всюду, то из соотношений (1.79), (1.80) следует, что
<Pi ('Mi Ы')>Ф2 (>))>]
Ф2 (0 = ^2 (Ф1 (0» Ф2 (^))-J
Итак, проекции линий уровня на плоскости х\Ох2 заданы уравнениями (1.81) и для
всех интегральных поверхностей одинаковы.
На основании сказанного можно сделать вывод об отыскании интегральных
поверхностей: находим интегральные кривые системы дифференциальных уравнений:
*'м"!1(м1 <182>
*2('M2(*)J
Xj =9j(/), jc2 =ф2(^) и поднимаем эти кривые на подходящую высоту так, чтобы
они образовали некоторую дифференцируемую поверхность z - v|/(jc).
Каждая кривая
*l=9l(')>*2=92(0>Z = C О'83)
с произвольной константой С называется характеристической кривой или просто
характеристикой дифференциального уравнения (1.72). Дифференциальные
уравнения (1.82) по отношению к дифференциальному уравнению (1.72) называют
характеристическими уравнениями.
Интегральные кривыехх =yx{t), х2 =Фг(О в приложениях теории групп Ли
называются орбитами действия однопараметрических групп диффеоморфизмов.
Справедливы следующие утверждения [4]:
1) каждый интеграл z = \\f(x) уравнения (1.72) постоянен вдоль каждой
характеристической кривой (орбиты), т.е.
Ч>(ф1(0>Ф2(0) = сош*; С1-84)
2) каждая характеристика (орбита) (1.83), которая имеет хотя бы одну общую
точку с интегральной поверхностью уравнения (1,72), целиком лежит на этой
поверхности. Таким образом, каждая интегральная поверхность (в теории
групп Ли - дифференцируемое многообразие) построена из характеристик
(орбит);
Глава 1. Синтез САУ методами дифференциальной геометрии 39^
3) если две интегральные поверхности уравнения (1.72) имеют общую точку, то
они имеют и всю характеристику (орбиту), проходящую через эту точку.
Пример 1.10.
Найти решение уравнения
*'£--*>£-=0- (185)
Из характеристического уравнения (1.82)
*1=*2' (1.86)
х2 = -х,
находим
*1*1 = *\*2
х2х2 - -ххх2
хххх + х2х2 = 0
или
х? +х2= const,
т.е. все характеристические кривые являются концентрическими окружностями с центром в начале
координат.
Но можно подойти к решению этой задачи иначе. Рассмотрим действие векторного поля (оператора)
*=*£■*£ (187)
на функцию z(x). Тогда уравнение (1.86) примет вид
Х-г{х)=0. (1.88)
Уравнение (1.88) показывает, что функция z(x) является инвариантом (см. §1.6) группы вращения G,
для которой X является инфинитезимальным оператором. Интегрируя уравнения (1.86) или используя ряд
Ли (см. §1.6), восстановим эту группу G. Ее действие имеет вид
^ (cos/ sin^
' ^-sin/ cost)
а орбиты (характеристики) определяются выражением
с константой уровня с- xf(o)+x2(6).
Замечание 1.3. Для дифференциального уравнения (1.72) при п>2 все выводы,
полученные для задачи с п - 2, остаются в силе.
Замечание 1.4. Инварианты однопараметрических групп Xz(x) = 0 расслаивают
пространство Rn на непересекающиеся между собой поверхности, что напрямую в
задачах управления связано с управляемостью систем (это будет рассмотрено ниже).
1.6. ВОССТАНОВЛЕНИЕ ГРУППЫ ПО ЕЕ ИНФИНИТЕЗИМАЛЬНОМУ
ОПЕРАТОРУ. РЯД ЛИ. ИНВАРИАНТЫ ГРУППЫ
Рассмотрим однопараметрическую группу преобразований в окрестности ее
единицы (формула (1.14) для z(x') = х')
х5=х,+§,(х)-/ + ..., (1.90)
где
*'<*> = (ir] =i" / = I^ (L91)
V ot jt=0
t - канонический параметр.
Пусть z(jc) - некоторая функция. Рассмотрим, как преобразуется данная
функция с помощью однопараметрической группы (1.90). Имеем
z(jc') = z(xi+§1(jc)-/ + ...>x2+§2(jc)-/ + ...,x/i+§ii(jc)./ + ...) = 5(jc;/). (1.92)
_40 Методы современной ТАУ. Часть IV
Найдём полную производную функции z(x') по параметру /:
± = ±?LK. (1.93)
Учитывая, что (считаем поле левоинвариантным)
|Ц,И. (1-94)
формулу (1.93) можно записать в виде
^ = Xz(x'), (1.95)
at
где
* = Ъм4т d-96)
/=1 oxi
- инфинитезимальный оператор. Уравнение (1.95) называется уравнением Лиувилля.
Найдем связь преобразованной функции z(x;t) с исходной z(x) и оператором X .
Разложим функцию z[x;t) по степеням / в ряд Тейлора в окрестности точки t = 0 .
Получим
+ ... . (1.97)
/=о
Из выражения (1.92) ясно, что
z(x;0) = z(x),
а из уравнения Лиувилля (1.95) имеем
dt dt v '
В формуле (1.97) это соотношение дает
f =XZW-
Обозначив Xz(x') = q(xr), т.е. вводя новую функцию, получим согласно
уравнению (1.95)
^ = ХЯ(х') = Х(Щх'))=Х^(х'),
т.е.
dt2 dt2 v ; dt2, n
= X2zW.
Продолжая аналогичную процедуру, мы находим искомую связь
л
z(jc;/) = z(jc) + /-X-z(jc) + — -X2-z(jc) + ... . (1.98)
Данный ряд называют рядам Ли. Формально рассматривая (1.98) как
экспоненциальный ряд, можно записать
z{x;t) = etxz(x)9 (1.99)
где еа называется операторной экспонентой.
Если z(x) = х, тогда формула (1.99) примет вид
Глава 1. Синтез САУ методами дифференциальной геометрии 41_
xi(x;t) = xl =etXxh i = \,n (1.100)
или
*;=*,.+/■£,.(*) + ..., i = ~n. (1.101)
Формулы (1.100), (1.101) показывают, как можно с помощью ряда Ли
восстанавливать группу по ее инфинитезимальному оператору X.
Учитывая соотношение (1.101), формулу Лиувилля (1.95) можно записать в
следующем виде:
ИЛИ
— = А5. (1.102)
dt
Дополнив (1.102) начальным условием z(x;0) = z(x), получаем задачу Коши для
линейного управления в частных производных относительно искомой функции
z(x\t), эквивалентную системе нелинейных дифференциальных уравнений (1.91),
т.е. если решение системы (1.91) будет
*;. = /;(*,/), /=п, (1.ЮЗ)
тогда решение уравнения (1.102) имеет вид
z(x;t) = z(/, (*;*), /2 (*;')>-> fn №)). (1.104)
Пример 1.11. Рассмотрим группу вращений плоскости
х\ =costtj +s'mtx2
(1.105)
х2 = —sin/Xj + cosfic2,'
которая порождается следующим инфинитезимальным оператором
х=**х~ж«т-- (1106)
СИГ] ОХ2
Пусть функция z(a:) имеет вид
z(x) = Xlx2. (1107)
Найдем, как будет изменяться функция z(x) при действии Xt группы вращений
*,-(Т sin'l. см»)
^-sin/ cos/J
В точке д:' функция z(x') будет
z{x') = x'vx2i (1.109)
а функцию z(x\i) найдем подстановкой выражений (1.105) в (1.109). Получим
Убедимся, что функция (1.110) удовлетворяет уравнению (1.102), а значит, является его решением, т.е.
при подстановке выражения (1.110) в левую и правую часть (1.102) мы должны получить тождество.
Итак,
~ = cos2/(x|-x12)-2sin2fic,x2; (1.111)
Xz = \x2——xl^\\-s\n2t(xl-xf) + cos2lxlx2\ = cosb(xl-xf)--2sm2txlx2. (1.112)
^ dx] dx )\2 x ' ) y '
Из выражений (1.111), (1.112) видно, что соотношение (1.110) действительно является решением
уравнения (1.102).
Рассматривая ряд Ли (1.98), мы можем сделать вывод, что некоторая функция
z(x') не изменяется при действии однопараметрической группы, т.е.
2(^;/) = 2(^') = (cos^l+sin^2)(-sin^1+cos^2) = -sin2/(x2-Jc12) + cos2ficix2. (1.110)
_42 Методы современной ТАУ. Часть IV
z(x;t) = z(x), (1.113)
если
Xz(x) = 0. (1.114)
Напомним, что такая функция называется инвариантом группы (см. §1.2).
Однородное линейное уравнение в частных производных (1.114) позволяет найти орбиты
действия Xt.
Основное свойство инварианта группы: при умножении инварианта z(x) на
произвольную функцию у(х) инвариант является константой для инфинитезимального
оператора данной группы.
Действительно, учитывая, что z(x) - инвариант, получим
X{y(x).z(x)) = X(y(x))z(x) + y(x)X(z(x)) = z(x)X(y(x)). (1.115)
Пример 1.12. Для группы вращений плоскости с инфинитезимальным оператором
инвариантом группы является функция
z(x) = xf+xl,
что находится непосредственной проверкой.
Инвариантное семейство. Если функция z(x) является инвариантом группы, то,
приравнивая ее произвольной постоянной z(x) = c, получим семейство кривых,
каждая из которых группой не изменяется, т.е. каждая кривая преобразуется сама в
себя, т.е. любая кривая такого семейства является инвариантом кривой.
Для практических применений важен иной случай. Пусть задано семейство
кривых z(x) = c, причем функция z(jc) не является инвариантом группы G, т.е.
преобразования (действия) группы Xt изменяют кривые семейства. Найдем условия,
при которых действия группы преобразуют кривые семейства в другие кривые того
же семейства. Такое семейство будем называться инвариантным. Задача: найти
функцию z(x), которая определяет инвариантное семейство.
Пусть zx (х) = с{ и z2(x) = c2 два представления одного и того же семейства. Это
значит, что константы сх и с2 функционально связаны, т.е.
c2=P(q), (1.116)
тогда
*2(*)=рЫ*)) 0-Ц7)
и условие инвариантности семейства zx (х) = сх состоит в следующем
zx(x'j) = ${zx{x)j). (1.118)
Разложим lx(x\t) в ряд Тейлора по степеням /, получим
z,(Jr,0 = 2l(*) + lpI[zI(*)] + ^p2[z1(*)] + .... (1.119)
Сравнивая этот ряд с рядом Ли (1.98), находим необходимое условие инвариантности
семейства
Аг1(дс) = р(г1(дс)). (1.120)
Это условие является и достаточным, т.к. если оно выполняется, то
Глава 1. Синтез САУ методами дифференциальной геометрии 43_
х\(х) = ХЬ(ъ(х)) = ^(21(х)) = р2(ф)) (1.121)
azx
(см. основное свойство инварианта), т.е. p,^^*)), P2(*i(*)) и т.д. являются
инвариантами.
Эти условия нахождения инвариантного семейства можно привести к более
компактному виду, если учесть следующее. Так как некоторая функция Q(zj (x))
определяет то же инвариантное семейство, то
ХО(21(дс)) = Л(2,(дс)).
Отсюда следует
f.X{zx{x)) = h{zx{x)).
Пользуясь свободой в выборе функции Q, положим
f-*('.W>
Это приводит к условию
Az,(*) = l, • (1.122)
которое позволяет найти инвариантное семейство.
Пример 1.13. Найдем инвариантное семейство для группы вращений плоскости. Инфинитезимальный
оператор группы
Из условия (1.122) получим
*-Х2&Г*'&Г
*&-x'a£=1- (1123)
Уравнение (1.123) является неоднородным уравнением. Его можно привести к
однородному, если воспользоваться следующим правилом. Пусть (рассматривается
общий случай)
(o(zux) = 0 (1.124)
- неявное решение уравнения (1.122). Тогда имеем
dxt oz{ oxt cbc;
откуда
После подстановки (1.126) в (1.122) получим однородное уравнение
±Ш£+Г-0, 0-127)
где по-прежнему
/=1 uxi
Продолжим решение примера. С учетом (1.127) (п = 3) имеем
*2- *! —+_ = 0. (1.128)
дхх дх2 ozx
44
Методы современной ТАУ. Часть IV
Этому однородному дифференциальному уравнению первого порядка в частных производных
соответствует следующая система обыкновенных дифференциальных уравнений:
Л,
dt
dt
dt
= *2>
= 1.
После исключения параметра t из системы (1.129) получим следующую систему уравнений
dxx _ dx-y dzi
2)
1 '
. jc, x<
=> ou = z, -arcsm—- = z, -arcsin . '
'af-x? ai >K^
x2 -X|
которая имеет следующие первые интегралы:
1) *L.*l =>
(1.129)
(1.130)
a,=^?+^2;
= 2,-arctg-
x2
Общее решение уравнения (1.128)
co = p(a1,a2) = pk/xf+:tL2i-arctg-L '
V х2;
где р - произвольная функция от 2-х первых интегралов (у однородного уравнения должно быть п -1
первых интеграла: для (1 128) п = 3 ).
Пусть
\ / х2
Приравнивая р() = 0 , согласно (1 124) получим
z^arctg^ + yUxf + xl).
х2 \ /
Для у^О
z', =arctg—^- = 0,
х2
определяет пучок прямых, для у = у]х* + х\
z\ = arctg— + yjxf +x\-c2
х2
- семейство спиралей Архимеда.
Оба семейства zj, z\ являются инвариантными относительно действия группы вращений. На рис. 1.9
изображено инвариантное семейство arctg—*- = с]
х2
arctg—- = c"
х2
(второе
инвариантное
семейство)
x' = Xtx
JCi -
arctg—L = c\
x2
(первое
инвариантное
семейство) ^
действие группы вращений
Рис. 1.9. Инвариантное семейство для группы вращений
Глава 1. Синтез САУ методами дифференциальной геометрии 45_
1.7. КАНОНИЧЕСКИЕ КООРДИНАТЫ
Известно, что для линейных систем управления можно подобрать такой базис,
при котором виды дифференциальных уравнений имеют особенно простой вид
(диагональная или жорданова матрица общего вида). Такие координаты называют
каноническими.
В теории непрерывных групп преобразований вид инфинитезимального
оператора также зависит от выбранного базиса, поэтому важно найти такую систему
координат, при котором вид оператора будет наиболее простым. Попробуем определить ее.
Без уменьшения общности рассмотрим однопараметрическую группу
преобразований на двумерном многообразии М2. Пусть х = (хьх2)9 хеМ2 - исходные
координаты.
Введем новые координаты
х[=х[{х), х'2=х'2(х). (1.131)
Пусть в старых координатах х инфинитезимальный оператор X имеет вид
Х = ф)^- + ф)^. (1.132)
дхх дх2
Обозначим через X данный оператор в новых координатах
X = Ux')^- + l2{x')-^r- (1-133)
dXj ox2
Дифференциальному оператору (1.133) соответствует следующая система
обыкновенных дифференциальных уравнений (см. §1.5):
., \ (1-134)
Уравнение Лиувилля (1.95) здесь имеет вид
*± = Хх'и^ = Хх'2. (1.135)
at at
Таким образом, имеем
' (1-136)
где указано, что после применения оператора X необходимо перейти от старых
координат к новым. Итак, в новых координатах оператор X имеет вид
Х = (Ъ\)\х--х{хщНМ2)\х=х{х.щ. (1.137)
Если найти такие координаты х\ что
Ajc{ = 1, Х*;=0, (1.138)
то в этом случае оператор (1.137) имеет вид
х=4т- О-139)
Назовем такие координаты дс', где оператор X имеет вид (1.139), каноническими.
Для случая, когда п > 2, уравнения перехода к каноническим координатам
*i = А (дс), х'2 = х'2 (х), ..., х'„ = *; (х)
46 Методы современной ТАУ. Часть IV
выглядят следующим образом:
Хх[=1, Л*;=0,..., Хх'„=0, (1.140)
где х'2(х), ...,х'п(х) - представляет собой (п-\) функционально независимых
инварианта группы инфинитезимального операторах. Функция х[(х) определяет
инвариантное семейство группы.
Инварианты х'2 (jc), ..., х'п (х) и функция х[(х) являются каноническими
координатами группы.
1.8. ФОРМУЛА ХАУСДОРФА. ГРУППЫ СИММЕТРИИ. ТЕОРЕМА ЛИ
В § 1.6 было рассмотрено действие Xt однопараметрической группы на функцию
z(x). Основной же задачей непрерывных групп преобразований (групп Ли), ради
которой и была разработана Софусом Ли теория непрерывных групп, является
изучение- групповых свойств дифференциальных уравнений. Поэтому определим, как
изменяется система дифференциальных уравнений при действии на нее некоторой
однопараметрической группы преобразований.
Без уменьшения общности будем рассматривать систему второго порядка:
ах{ , ч
ах2 с / \
хеМ2. (1-141)
Пусть на многообразии М2 задана однопараметрическая группа преобразований:
х\ =/j(a:,t),]
It \ (1Л42)
где т - канонический параметр преобразования. Согласно §1.3 уравнения (1.141)
порождают однопараметрическую группу преобразований (диффеоморфизмов) с оператором
А = ф)^- + ?>2{х)^-, (1.143)
дхх ох2
а группа преобразований (1.142) определяется ее инфинитезимальным оператором
Х = ф)-Ц- + г\2{хУ£-. (1.144)
axi ох2
Необходимо найти, как изменится уравнения (1.141) при преобразованиях (1.142).
В новых переменных х[, х2 уравнения (1.141) примут вид:
7, (1-145)
ах2 z / , \
Этим дифференциальным уравнениям соответствует инфинитезимальный
оператор группы
л=^*'т)^2(*'т)^г (1Л46)
Найдем связь между дифференциальными операторами А,Х,А . Для чего
запишем преобразование группы (1.142) и обратное ему в виде рядов Ли (операторной
экспоненты (1.99)). Имеем:
Глава 1. Синтез САУ методами дифференциальной геометрии
47
х[=е«хь
х'2=ехХх2,
хх=е хХх{, х2=е *хх2.
(1.147)
Воспользуемся формулами (1.147) и (1.136), для того чтобы представить оператор
А в старых координатах. Имеем:
"-(А'>1~(.>£+Ы~м5Г от
Из формулы (1.148) находим
(Ае-*х\)\х,=хЬ)=^(х),
{Ае-*хх'2)\х.=Ах)=ЬП-
Так как £, (x)(i = 1,2) не зависит от т (это параметр группы с оператором X), имеем
(1.149)
откуда
— е~хХх[ - AXe~zXx\ + ХАе~хХх[ = 0 .
di
(1.150)
В формуле (1.150) первые два слагаемых - это дифференцирование функций
а(х\т) и е~хХ по т, а последний член определяется формулой Лиувилля (1.95) для
функции z = Ае~хХх[. Аналогичная формула имеет место для координаты х2. Таким
образом, из соотношения (1.150) имеем дифференциальные уравнения
с начальным условием
— = АХ-ХА = [А9Х\
А{х\т]Хж0=А{х').
(1.151)
(1.152)
Уравнение (1.151), определяющее преобразованный оператор А, является
аналогом уравнения Лиувилля, определяющего преобразованную функцию. Из
соотношения (1.151) можно дать другое определение коммутатора (скобки Ли): это есть
производная преобразованного оператора А по параметру группы, определяемой
оператором X . Решение задачи Коши (1.151), (1.152) осуществим разложением
оператора а(х',т) в ряд Тейлора по степеням параметра т :
А(х\
Из формул (1.151),
Аналогично можнс
и ряд примет вид
о-
--А(х')+х
дА
дх
т2 Э2А
т = о+2! di2
152)имеем
дА
dz
) показать, что
д2А
дг2
^о = [[А,Х],Х],
+ ... .
т = 0
(1.153)
(1.157)
^8 Методы современной ТАУ. Часть IV
А = А + т[А,Х] + ^[[а,Х\х} + ... . (1.154)
Данный ряд называется формулой Хаусдорфа, которая связывает операторы
А,Х,А . Если в (1.154) имеет место равенство
[Л,Х] = О, (1.155)
тогда
А = А, (1.156)
т.е. преобразования группы с оператором X не изменяют оператора А (или
системы дифференциальных уравнений (1.151)).
Такая группа (1.142) называется группой симметрии и основная особенность ее
преобразований заключается в том, что любое решение системы дифференциальных
уравнений (1.141) она переводит в решение этих же дифференциальных уравнений.
Основное назначение групп симметрии - это возможность понижения порядка
системы дифференциальных уравнений и, в конечном счете, решение этой системы в
квадратурах. Именно этой цели и добивался С. Ли при формировании своей теории
групп непрерывных преобразований.
Полученный результат справедлив для произвольной размерности п. Имеет
место следующая теорема.
Теорема 1.2 [24]. Пусть задана система обыкновенных дифференциальных уравнений
Если известна группа симметрии этой системы, оператор которой
Х=2>м^' (1Л58)
т.е. [/4,х] = 0 , где А - оператор системы (1.157), тогда система (1.157) может быть
понижена в порядке.
Доказательство. Предположим, что известна полная группа инвариантов
группы оператора (1.158), т.е. известны ее канонические координаты
х{=х[{х),
х' =х'(х) I
в которых оператор X имеет наиболее простой вид (см. §1.7)
Тогда условие [/4,x] = 0 переходит в условие
[Л,х] = |Я-|г| = 0, (1.15S
которое говорит о том, что все координаты оператора
Глава 1. Синтез САУ методами дифференциальной геометрии
49
не зависят от переменной х{, т.е. система уравнений (1.157) в новых координатах х'
имеет вид
^i _ I ( \
~Г -^п\х2>хЪ>"''>хп)-
(1.160)
Система уравнений (1.160) имеет порядок (п -1):
л;
2 _
л
-£>2\х2>хЗ>—>хп)>
at
(1.161)
а решение первого уравнения (1.160) может быть получено после получения решения
системы (1.161).
Итак, было показано, что если рассматривается однородное дифференциальное
линейное уравнение первого порядка в частных производных
Az = 09 (1.162)
где
А = 1Ьъ{х)4г> хеМ" (1Л63)
и на многообразии Мп задана однопараметрическая группа преобразований {xt} с
инфинитезимальным оператором
д
*-Z*M£,
(1.164)
/=i
то группа G = {Xt} является группой симметрии для дифференциального уравнения
(1.162), если она переводит любое решение уравнения (1.162) в некоторое решение
этого же уравнения. Необходимым и достаточным условием этого является
выполнение равенства
[Л,Х] = О. (1.165)
Условие (1.165) довольно жесткое, а наличие оператора X , который переводит
решение (1.162) в его же решение, можно ослабить, если ввести следующее определение.
Определение 1.15. Скажем, что уравнение (1.162) допускает оператор (1.164),
который переводит решения уравнения (1.162) в его же решения тогда и только
тогда, когда
[А,х] = Х{х)А, (1.166)
где Х(х) - некоторая функция, зависящая от вида оператора X . Ясно, что если ш(л:)
- решение (1.162), тогда
[А, Х](о{х) = А{хф))- Х{А®{х)) = \(х)Аа>{х) = 0 . (1.167)
Из этого следует, что
А{х{(о{х))) = 09 (1.168)
т.е. функция
^{х)=Х{4х)) (1.169)
5 Зак 416
_50 Методы современной ТАУ. Часть IV
тоже является решением уравнения (1.162), а это значит, что оператор X переводит
любое решение (1.162) в другое его решение. Тогда решение (1.162)
ш(дс) = const (1.170)
должно быть инвариантным семейством для однопараметрической группы
преобразования {xt} оператора X (см. §1.6).
Для практических приложений важно определить действие нескольких однопара-
метрических групп. Но предварительно введем некоторые определения, которые
расширяют известные понятия из линейной алгебры.
Определение 1.16. Вектор-функции ф;(л:) =(ф;1(д:),...,ф/Л(д:)), / = 1,/и
называются линейно связанными, если существуют такие ненулевые функции c,(jc), не все
равные нулю, что
т
2>,(*М*)=о.
/=0
Если (1.170) справедливо только для c,(jc) = 0, / = 1,/и, тогда вектор-функции
{ф, (х), / = 1, т) называются линейно несвязанными.
Ясно, что введенные термины являются обобщением понятия линейной
зависимости и независимости для векторных пространств. Если в (1.170) с, [х) = ch i = 1,т , т.е.
это константы, тогда вектор-функции ф, (х) называются линейно зависимыми.
Определение 1.17. Операторы Х} =У]£д(*) ,j = hw являются полной сис-
к=\ &*
темой, если в некоторой открытой области выполнены следующие два условия:
1) операторы Х} линейно не связаны, т.е.
гапк{^,(л:)Д2(.х),...^„,(л:)}=/и; (1.171)
2) коммутатор любой пары операторов линейно связанно выражается через
операторы системы
г 1 т
[x,,X,j = ]Tc,,iA (*)*,. (1.172)
к=\
Полную систему в теории управления часто называют инволютивной [31, 43].
Если у полной системы операторы коммутируют, т.е.
[Х7,Х;] = О, V/,y = lT^, (1.173)
тогда такую систему называют инволюционной [4]. Каждую инволютивную систему
подходящей заменой базиса можно привести к инволюционной [4] (см. также §1.13).
Для инволютивных (инволюционных) систем имеется следующая важная теорема.
Теорема 1.3 [13]. Инволютивные (инволюционные) системы характеризуются
тем, что однопараметрические группы преобразований (диффеоморфизмов),
определенные операторами системы, имеют (п-т) общих функционально независимых
инвариантов (интегральный базис), т.е. система уравнений
А> = 0, / = Cw (1.174)
имеет (п-т) функционально независимых решения coj(jc),...,co/i_/ii(jc) , а любое
другое решение является функцией от этих решений. При этом нахождение каждого
инварианта позволяет понизить порядок системы на единицу.
Глава 1. Синтез САУ методами дифференциальной геометрии
51
Зная h частных интегралов (инвариантов) со, (л:),...,соЛ (л:), 1 <h<n-m , можно
найти остальные (n — m — h) инвариантов посредством введения новых независимых
переменных:
У\=®\{х)> >>2=ю2(*)>-> Ун=®1,{х)>}
Ун+\ ~х/1+\^—->Уп ~хп-
В этом случае число переменных уменьшается на h, и переменные y\...yh pac-
(1.175)
сматриваются как параметры.
Пример 1.14. Даны два дифференциальных оператора.
OJCj U%2 3
В координатной форме
а д / ч а а
*,w=
(1 176)
' 1 ^
1
-2
. 0,
х2
~{х\+х2)
Хл
Коммутатор операторов
[xt,X2lx)=
<1
0
-1
.0
0
1
-1
0
0
0
0
0
(Г
0
0
1.
г 1'
1
-2
о,
-(о)=
f 1 ^
1
-2
о,
= AT,W,
те. система {Х1,АГ2} является инволютивной (полной), где С\г{х)- 1
Составим уравнения для нахождения инвариантов операторов (1 176) (л = 4, т = 2, число
инвариантов-2)
Аг,со(л-) = 0, Х2а(х) = 0. (1.177)
Первый инвариант для (1.177):
<й]{х)=х1+х2+х3.
Введем новые переменные*
У\ =*i +*2+*з> Уг =Х2> Уз =*з; ^4 =*4 (1.178)
Обозначим преобразования (1.178) через
У = ^(^) •
Выразим старые координаты через новые:
*1 =У\-У2~УЗ> Х2 =УЪ ХЪ =^3; Х4 =^4 (1 179)
Тогда
x = g-l(y)-
Если в старых координатах х, каждое уравнение в частных производных X,со = 0 соответствует
системе обыкновенных дифференциальных уравнений
**= Sit (*),* = 1,2,3,4, / = U,
то в новых координатах (у^} имеем
• ±дук
V,. = > -^-^-Х . =
Ук
U*j
xj=r\,k{y) = xiyk{x)
х=8'ЬУ
В этом случае операторы Хх,Хг в новых координатах имеют вид
УМ-хА^п-^-хЦ
**к-\у) ''
(\
0
0
0
1
1
0
0
1
0
1
0
(Г
0
0
1
г п
1
-2
0
'<р
1
-2
0 ,
5*
52
Методы современной ТАУ. Часть IV
r1=JL-2J-
ду2 дуъ
(1.180)
Аналогично, для оператора Y2 получим
Уг(у) = Х2у(х)
_»(*)
*=к"'(у) Зх
*,(*)
~«"<у) ■
'1
0
0
,0
1
1
0
0
1
0
1
0
0^
0
0
h
Х] 1
х4 )
-{х]+х2
V
х4
)
)
Х=*\У)
' 0 >
Уг
Уъ~У\
У2 = У2-г-+(уз-У1)т-+У4—-
ду2 ду2 ду4
(1.181)
Из соотношений (1.180), (1.181) видно, что в новых координатах понижен порядок системы,
координата у{= const является параметром.
Ищем второй инвариант (в координатах у ).
Инвариант для (1 182):
±2.-2-^ = 0,
ду2 ду3
«.М-2***-*
(1.182)
Заменяя новые координаты на старые
получим второй инвариант в исходных координатах
х4
Рассмотрим теперь действие нескольких однопараметрических групп. Пусть на
многообразии Мп действует г однопараметрических групп преобразования
G, (/ = 1, А (параметр /;) с инфинитезимальными линейно несвязанными
операторами AT, (i = lr).
В этом случае можно считать, что на многообразии Мп действует одна
/--параметрическая группа Gr [45], где G, (/ = l,rj - однопараметрическая
подгруппа группы Gr. Если г - п-\, то знаменитая теорема Ли о разрешимости уравнения
(1.1) в квадратурах определяется следующим образом.
Теорема 1.4 (С. Ли, 1873 г.) [8,23]. Если уравнение (1.162) и, соответственно, система
обыкновенных дифференциальных уравнений (характеристические уравнения):
*i=M*).
; (1.183)
*i/i=ii(*).
допускает (л-1) -параметрическую разрешимую группу G""1, операторы которой
Х1,...,Хп_1 вместе с оператором А составляют линейно несвязанную систему, то
уравнение (1.162) решается в квадратурах.
Глава 1. Синтез САУ методами дифференциальной геометрии 53_
Так как локальные свойства группы Ли (непрерывных групп преобразований)
можно изучать по их линейному приближению - их алгебре Ли, то, не вдаваясь в
подробное изложение термина «разрешимая группа» (детали см. в [45]), покажем, как
эта теорема выглядит в алгебраической форме.
Пусть {Х]9...,Хп_х} - базис алгебры Ли Ln_x (полная система операторов), т.е.
\/Xi е Ln_x, / = 1, п -1, имеем
и все другие Скобки Ли также принадлежат Ln_x. Составим новую подалгебру V
алгебры Ln_x, которая состоит из элементов
У*=[х,.,АД,и = пй * = 1,2... (1.185)
и их линейных комбинаций. Из V получим новую подалгебру L\ где элементами
являются операторы
Zk=[Yi>Yj\> '>> = U-1, * = 1,2... (1.186)
и т.д.
Определение 1.18. Подалгебра Ls с Lr некоторой алгебры Lr называется
идеалом в Lr, если для любых X eLriY e Ls справедливо включение
[X,Y]gLs.
Для алгебры разрешимой группы Gr (разрешимой алгебры) имеют место включения:
Ln_x эГэГз...эО, (1.187)
где каждое следующее L является идеалом предыдущего.
Теорема 1.5. Уравнение (1.162) решается в квадратурах тогда и только тогда, когда
алгебра Ли Ln_x группы Gn~l является разрешимой, т.е. имеет место включение (1.187).
Эта теорема имеет важное значение в теории управления для синтеза регуляторов.
Рассмотрим уравнение второго порядка
Л =/,*!. (,.188)
dt2 Ч'7*
Если это уравнение допускает оператор Хх, то оно сводится к уравнению первого
порядка
^- = v(/,x'). (1.189)
at
В свою очередь, если это последнее уравнение допускает оператор Х2, оно
решается в квадратурах. Легко показать, что любая алгебра L2 = {X]9X2}IA
разрешима, точнее, в ней можно выбрать базис так, что [хх, Х2 ] = ${х)Хх. Это означает , что
Хх составляет в L2 идеал и мы имеем цепочку L2 zd Lx z>0, т.е. уравнение (1.25)
допускает разрешимую группу и разрешимо в квадратурах.
Пример 1.15. Рассмотрим уравнение
Az = 0, (1190)
где
AJ± + -2—2-f\. (1191)
{дх{ дх2 дх3)
Уравнение (1 190) имеет («-l)= (3-l)= 2 интегралов а1(х),(а2(х) Найдем их с помощью групп
симметрии. Уравнение (1.190) допускает оператор
_54 Методы современной ТАУ. Часть IV
X = xt± + X2JL-(Xl+X2)±. (1192)
ОХ\ 0X2 °х\
Действительно, коммутатор двух операторов
[А,Х] = А (1.193)
подтверждает это и, следовательно, оператор X является инфинитезимальным оператором группы
симметрии Для перехода к каноническим координатам У-g(x), y = (yl,y]iy3)T найдем инварианты группы
симметрии aj(A*),a2(jc) Имеем (см §1 7 о нахождении канонических координат)-
^ = ^ = _^_ (1 194)
*1 Х2 -(Х\+Х2)
Из уравнения
dxx dx-y
находим первый инвариант
a,(jc) = -S- = const. (1.195)
Х2
dx2 _ с^ъ
Из уравнения
х2 -(а1*2 + *г)
получим второй инвариант
a2(*)= ^i + х2 +х3 = const . (1.196)
Найдем канонические координаты Составим систему уравнений
A>,(x)=l,
Ху2{х)=0,
(1.197)
*л(*)=о..
Две координаты
у2(дс) = а,(дс) = ^-, уАх) = *2(х) = *х+*г + Хз d-^8)
х2
известны Необходимо найти третью каноническую координату у\{х). Неоднородное уравнение
^>W=i
соответствует следующему однородному уравнению
*'аГ*21Г(*+*2)аГфГ0' (И99)
из которого имеем следующую систему уравнений*
dxL=dxL=dxL__dyL (1200)
*1 Х2 (Х\+Х2) 1
первые два уравнения дали нам два инварианта cti(:c),a2(:c). Из уравнения
^1 = У] (1.201)
х\
получим У\{х)= \пх} . Это и есть третья каноническая координата. Найдем, как будет выглядеть оператор
А в новых координатах (канонических)
Л = Лух(х)-1- + Луг(х)±-+Луг(х)-Ц- =-^-4--^)^-*0^-\ . (1.202)
оу\ оуг оуъ
-«-W *'*' V*2 X2j^2 ^3|«.f-W
Найдем обратные преобразования д: = g~](y)'.
Х2= >
У2
>^2 J
хъ = уъ-еу<-—.
(1.203)
Глава 1. Синтез САУ методами дифференциальной геометрии
55
Заменяя старые координаты в (1 202) на новые (1.203), получим*
^е-л1 + в-л(Л-,|)1 (1.204)
Заметим, что в выражении (1.202)
это значит, что
является интегралом уравнения (1 140), второй интеграл исходного уравнения определим из уравнения
Лг = 0. (1205)
Этому уравнению соответствует следующая система обыкновенных дифференциальных уравнений1
dt
dt
(у>-у1)
(1 206)
Данная система легко решается:
j,=ln
Уг
Уг-\
+ 1пс.
Переход к исходным координатам определяет еще один интеграл уравнения (1.190)
©2(*)=*,-дг2. (1207)
Проверим, что оператор X действительно является оператором группы симметрии:
*©,(*)= 0,
что уже показано выше,
Лю2(дс)= х, —+ *2- (х, +х2)—- (х, -х2) = х{ -х2 ,
^ дхх дх2 дх3)
т.е. оператор X переводит решения уравнения (1.190) в его же решения
1.9. КОММУТАТИВНОСТЬ ОДНОПАРАМЕТРИЧЕСКИХ ГРУПП
И РАЗДЕЛЕНИЕ ДВИЖЕНИЙ В НЕЛИНЕЙНЫХ СИСТЕМАХ
Групповой подход к анализу систем-обыкновенных дифференциальных
уравнений может быть весьма полезен, когда имеется возможность разделить общее
движение системы на отдельные составляющие (эквивалент принципа суперпозиции для
линейных систем). При этом не требуется восстанавливать всю группу, а вывод о
разделимости можно сделать по их инфинитезимальным операторам.
Рассмотрим две системы обыкновенных дифференциальных уравнений:
(1.208)
л
dt
d^_
di
d-z
= $„
= Л„
(*).
(x).
Этим системам уравнений соответствуют однопараметрические группы:
Gx : x)=/)(x,/), / = l,w,
(1.209)
(1.210)
^6 Методы современной ТАУ. Часть IV
G2: *; = ?,(*, т), / = п; (1.211)
причем
х'{0) = х. (1.212)
Инфинитезимальные операторы этих групп:
В = Тг\1(х)^-- С1-214)
Выясним, как влияет последовательное действие каждой из групп на некоторую
точку хе М", т.е. определим коммутацию преобразований из разных групп. Имеем:
x' = f(x,t), 1
L (1 215)
дс' = *(*',т) = *(/(дг,г),т),|
т.е. это коммутация действий однопараметрических групп АпВх:
х" = ВхА(х. (1.216)
Теперь в другом порядке:
x' = BxAtx. (1.217)
Определим, при каких условиях х" = х", т.е. композиция преобразований не
зависит от порядка выполнения преобразований:
BxAt =AtBx. (1.218)
Оказывается, коммутативное свойство (1.218) групп G, и G2 имеет место тогда и
только тогда, когда коммутируют их инфинитезимальные операторы:
АВ = ВА. (1.219)
Связь между соотношениями (1.218) и (1.219) легко выявить из рядов Ли.
Практическая значимость полученного соответствия определяется следующим
утверждением.
Утверждение [23]. Если группы G] и G2 коммутируют, то их коммутация является
также группой при условии, что отождествляются параметры / и т обеих групп, т.е.
q{f[x'9t)9t) = f(q(x,t),t) -группа.
Доказательство. Согласно теореме о восстановлении однопараметрической
группы G по ее инфинитезимальному оператору А с помощью ряда Ли имеем:
q(f(xj)j) = e8teAtx = BtAtx9
f(q{x,t),t) = eAte8tx = AtBtx,
тогда условие коммутативности дает
BlAtx = AtBtx = (A + B)tx, (1.220)
т.е. получена новая параметрическая группа с преобразованием
Ct={A + B)t (1.221)
и инфинитезимальным оператором
С = А + В. (1.222)
Из соотношения (1.222) вытекает следующая теорема.
Теорема 1.6 (принцип суперпозиции в нелинейных системах) [23]. Если
система дифференциальных уравнений
Глава 1. Синтез САУ методами дифференциальной геометрии
57
~Л{х)^В(х)
(1.223)
такова, что операторы А и В коммутируют: [Л,/?] = 0, тогда решение системы
(1.223) является суперпозицией решений систем (1.208), (1.209)
* = ?(/(*o>')>')s/(tf(*o>')>0'
где д:0 - начальные условия для систем (1.208), (1.209).
Пример 1.16. рассмотрим следующую систему дифференциальных уравнений:
Запишем ее в следующем виде:
х4 = Зх? + Х\
х = А(х)
+ Х2+Х3.
+ В(х),
(1.224)
где
' 0 ^
1
1
Г 1 Л
0
0
М+Х3>
А(х) =
Найдем коммутатор (скобку Ли) векторных полей (дифференциальных операторов) А и В:
(1 225)
дх2 дх3 дх4
■i^+<=
[А,В](х) =
0 0 0 01
0 0 0 0
0 0 0 0
6х, 0 1 0
( 0 >
1
1
0
0
ь
0
0
0
1
0
0
0
0
0>
0
0
1 л
0
0
+ x3j
0
0
т.е. операторы А и В коммутируют, поэтому можно рассмотреть две системы.
1. (Оператор А)
i,=0,
хг=1,
*з=1,
Х4 = JCj +Х2,
решение которой
x2(t) = t + x20,
x3(t) = t + x2Q>
,2
x4(t) = xlQt + -j + x2Qt + x4Q,
где xi0, i - 1,2,3,4 - начальные условия для системы (1.226).
2, (Оператор В)
*,=1,
х4 =3xf + x3,
решение которой
4 Зак 416
(1 226)
(1 227)
(1.228)
_58 Методы современной ТАУ. Часть IV
*2(') = *20,
V6 )
(1.229)
где xlQ, i= 1,2, 3,4 - начальные условия для системы (1.228)
Общее решение системы дифференциальных уравнений (1.224) определяется композицией действий
однопараметрических групп At,B(, причем в любой последовательности Пусть для определенности
*'(') = Vo.
т.е.
*И') = *2<»
*'з(') = *з<»
Лз Л
Х\ (') = 3 Т + /2ДГЮ + *">' -Y30/ + -Г4()
I6 )
Действие однопараметрической группы А, на х' определяет общее решение
*(/) = *"(/) = 4*r(/) = 4£,Xo,
или покоординатно'
x2(t) = t + x'2(t) = t + x20,
x3{t) = t + x'3(t) = t + x3l),
Г /2 Г/3 1
x4(t) = x\t + — + x2t + x\t = (t + xl0)t+ — + x2{{ + 3 — + t2xU)+x]{(\ + x3{1 + xAl>
2 * ч ч 1и/ 2 "г [в )
Изменение порядка действий однопараметрических групп
x(t) = BtAtx0
даст тот же результат
После введения основных понятий и теорем рассмотрим теперь, как применяются
дифференциально-геометрические методы для решения конкретных проблем теории
управления. И начнем мы с основной проблемы теории управления - проблемы
управляемости систем управления.
1.10. УПРАВЛЯЕМОСТЬ НЕЛИНЕЙНЫХ СИСТЕМ
В начале 60-х годов Р. Калман сформулировал понятия и критерии для
управляемости и наблюдаемости. Аналогичные вопросы применительно к нелинейным системам
были рассмотрены в начале 70-х годов. Опираясь на работы Чоу (Chow), Германа
(Herman), Хеймса - Хермеса (Heymes - Hermes), Брокетта (Brockett [30]) и работая
независимо, Лобри (Lobry [47]), Суссман - Джурджевич (Sussman - Jurdjevic [36]) и Кре-
нер (Krener [37]) разработали нелинейный аналог линейной управляемости в терминах
алгебры Ли /(D) векторных полей на многообразии Мп, генерируемых векторными
полями /к иг1'), полученными при постоянных управлениях ir7' e Q,y = 1,2,....
1. Постановка задачи. Рассматривается нелинейная система управления общего вида
У: * = /(*'И)> (1.230)
где ueQaR"\ хеМ" - гладкое многообразие размерности n,yeRl, / и g -
гладкие функции.
Глава 1. Синтез САУ методами дифференциальной геометрии 59^
Ставится задача: найти алгебраические условия управляемости для системы ]Г .
Замечание 1.5. Если рассматриваются неавтономные системы, то вид (1.230)
сохраняется, если в качестве переменной состояния возьмем время / с уравнением
состояния х0 = 1.
Предположим, что у системы ^ векторные поля /к п^'\ являются полными,
т.е. для каждого jc° e Ып существует решение дифференциального уравнения
х- f[x[t)y*/(')), удовлетворяющего условиям x(t0) = x°,x(t) е Мп для всех
te R . Обозначим через (z(/) ,[^o^i]) функцию, определенную на интервале [/0>'i] •
Чтобы выяснить, какие возникают тонкости для определения условий
управляемости, и найти алгебраические критерии управляемости, введем некоторые определения.
Отношение эквивалентности. Термин «отношение» используется для
обозначения некоторых видов отображений, заданных на одном и том же множестве. Пусть
отображение (Н,#) является отношением, гдеН - некоторое множество, R -
некоторое отношение между элементами этого множества. Будем говорить, что элемент
у е Е находится в отношении R к элементу х е S, и запишем это в виде
yRx. (1.231)
Некоторые элементы множества можно рассматривать как эквивалентные в том
смысле, что любой из этих элементов при рассмотрении может быть заменен другим. В
этом случае говорят, что данные элементы находятся в отношении эквивалентности.
Чтобы разбить множество Е на группы (классы эквивалентности) эквивалентных
элементов, необходимо выполнить три условия:
1) каждый элемент эквивалентен сам себе, т.е.
xRx - условие рефлективности; (1.232)
2) два элемента являются эквивалентными вне зависимости от их расположения в
отношении эквивалентности, т.е.
если xRy , то yRx - условие симметричности] (1.233)
3) два элемента, эквивалентные третьему, эквивалентны между собой,
если xRy и yRz , то xRz - условие транзитивности. (1.234)
Таким образом, отношение R является отношением эквивалентности, если оно
рефлексивно, симметрично и транзитивно.
Заметим, что свойства отношения эквивалентности в точности повторяют в более
общем виде аксиомы группы. Действительно:
1) рефлексивность - соответствует наличию единичного элемента группы;
2) симметричность - соответствует наличию обратного элемента;
3) транзитивность - соответствует аксиоме ассоциативности.
Вернемся к задаче управляемости.
Определение 1.19. Для заданного подмножества U е М" точка д:1 является
U -достижимой из начальной точки л:0 (обозначение х] Ах°), если существует
ограниченное измеримое управление (w(/),[/0>^]) > удовлетворяющее условию u[t) e Q
для t e[/0,/,], такое, что соответствующее решение (*(0>['o»'i])
дифференциального уравнения (1.230) удовлетворяет соотношению лг(/0) = х° , x(i}) = л:1 и jc(/) eU
для всех / е [/0)/, ]. Мп -достижимость или достижимость любой точки многообразия
jc1 e Мп из х° будем обозначать
4*
^0 Методы современной ТАУ. Часть IV
А(х°)={х1еМп:х]Ах0}.
Определение 1.20. Будем называть систему ]Г управляемой в точке л*°, если
а(х°) = Мп , и управляемой, если Л[х) = Мп для любой точки х е М" .
Данное определение управляемости характеризует глобальные свойства системы
]Г и отображает ее групповые свойства. К сожалению, в реальных условиях
групповые отношение нам неизвестны, и мы можем воспользоваться только линеаризацией
группы Ли, действующей на многообразии М" G = fra eG:xl =Тах°',х\х° е М"\
в окрестности ее единицы, и тем самым рассмотреть ее алгебру Ли. Это приводит к
необходимости ввести понятие локальной управляемости.
Определение 1.21. Динамическая система управления ^ называется локально
управляемой в точке л:0 , если для каждой окрестности U точки л:0 множество
достижимости A^jlx0) также является окрестностью точки л:0 (рис. 1.10).
U
{х1 еМп :х1Аих()} = Аи(х0)
Рис. 1.10. Множество достижимости /^Д*0)
Определение 1.22. Динамическая система управления ^ называется локально
управляемой, если она локально управляема для любой точки х е Мп .
Последние два определения также не в полной мере отражают возможность
анализа алгеброй Ли динамической системы ^ для оценки управляемости, т.к. для
достижимости выполняются условия рефлексивности, т.е. хАх и транзитивности
х]Аих° и х2Аих1 следует х2Аих°, но в общем случае не удовлетворяется условие
симметричности, т.к. нелинейные системы не обязательно должны быть
симметричными, т.е. из х]Аих° не обязательно следует x°AiJxl\ симметричные системы
характеризуются тем, что f(x,u) = -/(jc,w) , т.е. существует управление ueQ,
позволяющее, сохраняя длину вектора скорости, изменить его на противоположный.
По этой же причине вводится более слабое отношение. Для заданного открытого
множества [/сЛ/ существует (если система ]£ управляема) единственное
наименьшее отношение эквивалентности на U , которое содержит все U -достижимые
точки и на которых выполнены все три аксиомы отношения эквивалентности:
рефлексивность, симметричность и транзитивность.
Будем называть это отношение слабой U -достижимостью и обозначим через
WAy. Тогда легко заметить, что x'WAyx" тогда и только тогда, когда существуют
точки л:0,...,** е U , такие, что л:0 = х'9...9хк = х", и либо х'Ах1~{, либо xl~xAxl для
всех i = \,k.
Пллпотто лллтилшриир vc*v ncn YanairTpnunvpT гтапйгтш! РИММРТПИЧНПГ.ТИ
Глава 1. Синтез САУ методами дифференциальной геометрии 61_
Определение 1.23. Система ]Г является слабо управляемой в точке л:0, если
WA(x) = M" для всех хеМ".
Заметим, что слабая управляемость является глобальной концепцией и не
отражает локального поведения системы ^, рассматриваемого в окрестности точки х°,
поэтому вновь вводится понятие локальности.
Определение 1.24. Динамическая система уравнений ])Г называется слабо
локально управляемой в точке л:0 , если для каждой окрестности U точки дс°
множество WAy (x° J также является окрестностью точки д:0. Система ^ является слабо
локально управляемой, если она локально слабо управляема для каждой точки
хеМ".
Связь между всеми введенными видами управляемости для нелинейных систем
можно изобразить в виде коммутивной диаграммы (рис. 1.11).
]>] локально управляема => ^ управляема
^ локально слабо управляема => ]Г слабо управляема
Рис. 1.11. Связь между типами управляемости для нелинейных систем
Заметим, что для линейных стационарных систем все 4 вида управляемости
эквивалентны [37].
Из всех видов управляемости мы рассматриваем только слабую локальную
управляемость, преимущество которой перед остальными видами заключается в том,
что она имеет аналог критерия управляемости для линейных стационарных систем, а
именно алгебраический критерий управляемости.
Пусть V\Mn\ определяет множество векторных полей на многообразии Мп.
Введем на V\Мпj операцию умножения двух элементов множества, в качестве
которой используем коммутатор (скобки Ли)
X-Y = [X,Y] = XY-YX.
Пусть D = |/(*>к ) • к £ Q,ir^ = const, / = 1,2, ...> - множество векторных полей
для системы ]Г , каждое из которых получено введением некоторого постоянного
управления ir ' e Q. Предполагается, что Da V\Mn\ Обозначим через l[D)
наименьшую подалгебру V\Mn j, которая содержит D и все линейные комбинации
произведений управляемых векторных полей ([*,]) всех порядков, полученных из
элементов D . Типовыми элементами I(D) являются линейные комбинации вида
где f'(x) = f(x,u ''М для некоторого постоянного управления ir' eQ, / = 1,2,....
Если l(D)(x) = {X(x):X e/(£>)}, тогда для каждого хеМ",I(D) .является ли-
62 Методы современной ТАУ. Часть IV
нейным подпространством (в общем случае переменной размерности) касательного
пространства ТМ" в точке JC,T.e. l(D)(x)aTM".
Подпространство /(D)(jc) постоянной размерности связано с таким понятием
теории гладких многообразий как распределение, которое позволяет строить
интегральные подмногообразия на многообразии М", что, в свою очередь, связано с
управляемостью, инвариантностью, декомпозицией динамических систем.
Определение 1.25. Назовем р -мерным дифференциальным распределением
(1 < р<п) (или дифференциальной системой размерности р) на многообразии М"
отображение Ар:М" ->Tp(x)qTM" (где Тр(х) - р-мерное подпространство
касательного пространства ТМ" Vjc е М" ), такое, что Ар = Тр (jc) с ТМ", р = const.
Иначе говоря, распределение А^ размерности р на многообразии Мп есть
сопоставление каждой точке дсиз М" р -мерного подпространства ^(jc) из ТМ" .
Распределение Ар называется инволютивным, если [AT,F](jc)e Ар(х) как
только два векторных поля Х(х) и У(х) принадлежат Ар для всех хеМ".
Пусть Xl(x)(i = \,p) - гладкие векторные поля, такие, что в каждой точке
хеМ" векторы Xl(x)(i = \,p) образуют базис в Ар(х). Требование инволютив-
ности заключается в следующем:
[xhXJ](x) = fjCl(x)Xk(x),k=\Tp (1.235)
(т.е. скобка Ли любых векторных полей Xf (д:), Xj (л:) е Ар является линейно
связанной комбинацией базисных векторов распределения), где С~ (х) - гладкие функции
на М" . Условие (1.235) говорит о том, что если векторы Х{ (x)(i = \,p\ формируют
базис в А^ инволютивного распределения, то их взаимодействие - умножение [у] -
не изменяет данного базиса, т.к. нетрудно показать [6], если Xt (x)(i = l9pj
порождают инволютивное распределение Ар и функции fl} (дс)еС°°Ши j таковы, что
Vjc е Л/, det||/7 (д:) ^ 0, эти векторные поля Х{ {х) = 2^fy {x)Xj {x) порождают то
7=1
же распределение Ар, только с другой параметризацией.
Отсюда можно записать, что инволютивное распределение формирует подалгебру
Ли размерности р.
Мы делаем вывод, что множество I(D) является инволютивным распределением
для системы ^ , если dim l(D)(x) = dim Ар (дс) = /? = const, Vjc g M" .
Инволютивное распределение на любом гладком многообразии формирует
интегральные подмногообразия, связанные с управляемостью, наблюдаемостью,
инвариантностью и другими важнейшими понятиями теории управления.
Глава 1. Синтез САУ методами дифференциальной геометрии 63_
Каждое гладкое полное (см. §1.4) векторное поле Х(х) на гладком многообразии
формирует одномерное интегральное многообразие (однопараметрическую группу
диффеоморфизмов {Xt})
y(t) = Xtx0, причем y(t) = X(Xtx0).
Из этого можно заключить, что, в отличие от параметризованной кривой
р(/): р: / -> М,I = [to,t{] на многообразии Мп, которая имеет самый общий вид, в
том числе и самопересечения (в локальной окрестности),
р('1
интегральная кривая y(t) (как одномерное многообразие) векторного поля Х(х)
точек самопересечения иметь не может,
y{t)=X{X,x0)
а в каждой точке х касательным вектором к интегральной кривой у(/) будет Х(х).
Инволютивность определяет, как должны быть связаны векторные поля
Хх(х)9...9Хр{х)9 чтобы формировать интегральное многообразие размерности
\<р<п.
Определение 1.26 [3]. Связное подмногообразие Np размерности р в Мп
называется интегральным многообразием распределения Ар, если Va: е Np
AP = TN"X,
т.е. интегральное многообразие Np в каждой точке хе Np касается распределения А^.
Распределение Ар называется (вполне) интегрируемым, если для любых х е Мп
существует р -мерное интегральное многообразие, проходящее через jc. Если не
существует других интегральных многообразий для А^, которые содержат Np, то
Np называется максимальным интегральным многообразием для Ар.
Классическая теорема Фробениуса устанавливает связь между инволютивными
распределениями и интегральными многообразиями. Эта теорема может быть
сформулирована в нескольких вариантах, в зависимости от того, какой аспект важен.
Теорема Фробениуса 1.7 [34]. Распределение А^ тогда и только тогда
интегрируемо, когда оно инволютивно.
Теорема Фробениуса 1.8 [3]. Пусть Ар - инволютивное распределение на
многообразии Мп . Через каждую точку х е Мп проходит единственное максимальное
64 Методы современной ТАУ. Часть IV
интегральное многообразие Np для Ар. Любое интегральное многообразие,
проходящее через х, есть открытое подмногообразие в Мп .
Теорема Фробениуса 1.9 [37]. Если размерность I(D) = p для каждых х, т.е.
/(D) = Др, тогда существует разбиение многообразия Мп на максимальные
интегральные многообразия, которые все имеют размерность р и либо не пересекаются,
либо совпадают.
Ранее мы показали, что действие однопараметрической группы преобразований
G = {Xt) на многообразии Мп формирует орбиту (интегральную кривую) Xtx0.
Теорема Фробениуса обобщает этот случай при действии нескольких однопараметри-
ческих групп {^л,,* = hp\ и показывает, что для инволютивных распределений эти
действия формируют орбиту (максимальное интегральное многообразие).
Орбиты действия группы локальных диффеоморфизмов обладают очень важным
свойством: все точки максимального интегрального многообразия (орбиты) могут
быть соединены под действием этой группы, т.к. все точки орбиты находятся в
отношении эквивалентности. А это уже определяет управляемость системы. При этом
размерность инволютивного распределения Ap(x) = TNp является одной и той же
для всех точек х, принадлежащих данной орбите 5,dim Ар (х) = р9 Va: e S .
Сформируем теперь алгебраический критерий управляемости.
Теорема 1.10 (достаточные условия управляемости). Если динамическая система
управления ]Г удовлетворяет ранговому условию управляемости в точке л:0, т.е.
RC: dim /(D)(a:°)= dim &„(х°)=п, (1.236)
тогда ^ локально слабо управляема в точке л:0 .
Замечание 1.6. Если правая часть ])Г является аналитической вектор-функцией,
тогда ранговые условия (1.236) являются необходимым и достаточным условием
локальной управляемости [37].
2. Рассмотрим, как полученный критерий соотносится с известным
алгебраическим критерием для линейных стационарных систем. В этом случае
уравнения состояния ]Г определяют множество векторных полей
Z) = {Ax + Bii:iieQ}, (1.237)
так что алгебра Ли генерируется векторными полями
Х1(х) = Ах,Х2{х) = Ь{9...,Хт+1{х) = Ьт, (1.238)
где bj - /-ый столбец матрицы В , */ = 1,т рассматривается как постоянное
векторное поле. Заметим, что управление и не входит в базисные векторные поля
|Х;л(д:), f = 1,/и + 1>,т.к. система (1.237) линейна по управлению и, а как было
сказано выше, умножение векторного поля на ненулевую функцию не измени
интегральную кривую поля, а лишь изменит параметризацию векторного поля.
Вычисляя скобки Ли (коммутаторы) векторных полей Хх (jc),...,ATm+1 (*),
получим (в координатной форме)
[Ax,bj](x)=-AbJ,[bi,bj](x)=0;
Глава 1. Синтез САУ методами дифференциальной геометрии
65
[Ax,[Ax,bj]](x) = -A2br [bj[Ax9bj]](x) = 0
и т.д. По теореме Кэли - Гамильтона алгебра Ли I(D) управляемых векторных
полей включает в себя постоянные векторные поля A'bj9 i = 0, л -1, j = 1, т.
Данная система является аналитической, так что согласно теореме Хермана - На-
гано [37] существуют максимальные интегральные многообразия множества D,
проходящие через каждую точку xeR". Ранговое условие управляемости (1&36)
приводит к хорошо известному критерию Калмана
гапк{В;АВ;...,Ап"1в} = л.
Несмотря на то, что ранговое условие управляемости (1.236) определяет слабую
локальную управляемость, для линейных систем оно определяет и их полную
управляемость [37]. •
3. Рассмотрим линейную нестационарную систему
x = A(t)x + B(t)u, xeR\ ueRm, (1.239)
где A[t)yB[t) - гладкие функции переменной /. Введем дополнительную
переменную х0 = t и перепишем уравнение( 1.239) в виде
xQ = 1.
х = А(хо)х + В(хо)и. (1.240)
Построим алгебру для векторных полей
D = {(l^(x0)x)T)(0,6l(x0))T,...,(0,ftm(x0))T} = {Xl(x0)Jc))...,Xm+I(x0^)}.
Сформируем алгебру Ли I(D)
0
['••*лм-[и^)Ц,.
о
о
l—bJ(x0)-A(x0)bJ(x0)
, j,k=\,m.
; y = i,w;
Из этих выражений видно, что ранговое условие управляемости (1.236) для системы
(1.240) эквивалентно следующему требованию (достаточное условие управляемости):
rank(B{t);DAB{t);D2AB(t);...) = n (1.241)
для каждого / е R , где
DAB(t)=-B(t)-A(t)B(t),
(1.242)
(1.243)
D'AB(t) = [j-rA(t)yA-lB(t).
Условие (1.241) будет и необходимым, если A(t)x,bx(t)9...,bm[t) -
аналитические векторные поля.
Пример 1.17. Проанализируем управляемость линейной нестационарной системы вида
Х =
2 2
й<"
(1.244)
66
Методы современной ТАУ. Часть IV
Решим задачу управляемости сначала классическим способом с использованием граммиана управляемости
^M)-Hwi)b(0bt(0*tM<*.
о
где Ф(*,*о) - (ф(/0,/))~ - переходная матрица состояния для системы (1.244). Для матрицы
(1.245)
А« =
1
/
2
I t1
0
2
t j
переходная матрица управляемости имеет вид [1]:
Ф(','о) =
'п
U 4
,0</0£/,
что дает
Ф('о.<) =
1
J
к
t
0
tl
Кроме того, из (1.244) имеем
в(0 =
0)
Подставляя (1.246), (1.247) в формулу (1.245) получим
И<о,'») =
/о—*"
8 1 2/02
з"/о з/,3 is/о"/, arf'ftfj
(1 246)
(1.247)
(1.248)
Если система (1.244) управляема, то для /, > t0 матрица W(tQitx) должна быть положительно
определенной. Чтобы проверить это, в формуле (1.248) сделаем подстановку /, =а/0 , где а>1 . После замены
граммиан (1.248) примет вид
' 'о(а-0
W(tQiat0)--
2^1
3 а + 3а3
^З"а + 3а3 foll5 а + 3а3 5а5 J,
Проверка матрицы W(tQiato) на положительную определенность по критерию Сильвестра дает:
Д,=/0£(а-1)>0,
л (8 7 7 1 W89 1 10 1 > Л
д, = -—а+—+ j + —г - —+—7 + —г + —г >0-
~ \\5 За 15а4 5а5J \45 За2 9а3 9a6J
Матрица W^ (/0, /,) - положительно определена (0 < г0 < /,). Это говорит о том, что система (1.244)
полностью управляема.
Проверим теперь управляемость системы (1.244) по алгебраическому критерию (1.236). Используя
выражения (1.243), (1.247), получим
•*)=(;>
ед.
^в(0=|в(0-а(»)в(»)=-
'I о
L 1
(i>
( П
\t
= Хг{х).
Глава 1. Синтез САУ методами дифференциальной геометрии
67
02в(О=Ц-А(,))о,в(,)=(4-а(о|
ч/
V г
( 2 \
10
u
= р,Х1(дС)-р2Х2(л:) = [Х„Х2](д:)
Отсюда делаем вывод, что базис алгебры /(D) составляют векторные поля Х^х) и Л^дг). Проверка
рангового условия
rank/(£>) = rank
1 -j
= 2 = я , для / > 0,
значит система полностью управляема, что совпадает с ранее полученным результатом.
4. Управляемость билинейных систем. Билинейные системы (БС) описывают
динамику многих систем в науке и технике. Уравнения описывают динамику
управляемых объектов электроники, химии, биологии, экономики, теплофизики, квантовой
механики и имеют следующий вид:
*(о4л+У>Л'и]*(>)>
1 ' [ U ) (1-249)
y(*)=Cx(t)9
где xeR£ =R" -{0}, С -матрица /хя, ut{t) - скалярные функции, Л, В
-матрицы пхп. Из уравнения (1.249) видно, что БС могут служить моделями систем с
переменной структурой.
В качестве гладкого многообразия для системы (1.249) рассматривается
пространство Щ . Сформулируем алгебру Ли I(D) для совокупности векторных полей
D = Iax,B,x, i = 1,/wl. Скобки Ли (коммутатор) имеют вид
[Нх,Кх] = (НК-КН)х = [Н,К](х)
для любых Нх,Кхе D . Тогда
/(D) = {^^;ZJ2^;...;^^;[^^i]^;[^H,^]]^;[^H,^]]^;...}. (1.250)
Вид алгебры /(£>) говорит о том, что все векторные поля получаются умножением
некоторой матрицы размера пхп на один и тот же вектор дге R£ . Из этого можно
заключить, что алгебра /(£>) изоморфна (взаимнооднозначный гомоморфизм)
подалгебре L алгебры Ли gl (n,R) всех вещественных матриц размера пхп, где в качестве
операции умножения (•) используется коммутатор квадратных матриц
RrR2=[R,9R2] = R{R-R2R]9 (1.251)
где /?,,/ = 1,я е gl(n,R) - произвольные матрицы.
Восстановить группу G, которая действует на /^ , по ее алгебре I(D) можно с
помощью экспоненциального отображения (см. §1.6)
G = {exptX:Xel(D)}. (1.252)
j>8 Методы современной ТАУ. Часть IV
Свойство управляемости для БС связано с транзитивностью группы G на R% .
Говорят, что множество матриц Q транзитивно на R% , если для любых х, у е R£
существует матрица РeQ, такая, что Рх = у . Транзитивность матричной алгебры
означает, что любой линейный базис этой алгебры C\,C2,...,CW,т < п удовлетворяет
условию
гапк/({С1д:;С2д:;...;Сшдс}) = « для всех хе/?£. (1.253)
Для однородных билинейных систем (А = 0) транзитивность алгебры Ли
является необходимым и достаточным условием управляемости на /?J [44]. Для
неоднородной билинейной системы (1.249) транзитивность матричной алгебры L - это
условие только необходимое. Во многих работах рассмотрены и достаточные условия
управляемости для билинейных систем (подробнее см. обзор [2]).
5. Выделение базиса и проверка управляемости нелинейных систем общего
вида. Рассмотрим систему уравнений
^- = fi(x9u), (1.254)
at
где х = (х{,...,хп)е Мп,u = (u]9...,um)eQ<z Rm . Функции fi(x9u) полагаем такими,
что при каждом допустимом управлении u(t) существует единственное решение,
проходящее через точку дс0. Ранее было показано, что движение системы происходит
в том, что здесь есть управляющее воздействие и, которое входит нелинейно и
параметризует векторное поле Х(х), координаты которого при фиксированном
управлении и в каждой точке описываются вектор-функциями (yj (дс,£Г),/ = 1,...,л?).
Иногда удается за конечное число шагов выделить базис и для параметризованных
векторных полей. Рассмотрим процедуру построения такого базиса.
Введем оператор
Х = £/,{х>«)^- (1-255)
и рассмотрим этот оператор как семейство, параметризованное управлением и.
Придавая управлению и различные постоянные допустимые значения и е Q,
получаем операторы семейства. Выделим в этом семействе базис, т.е. подставим в (1.255)
такие допустимые управления ir1',ir',-,и , что операторы
/=1 Я*/
где £>iJ(x)=fi(x9uu)}, п^ =lu{J\...9uJjA9 j = Up - линейно не связаны, а
подстановка в формулу (1.255) любого другого допустимого уравнения приводит к
оператору, который линейно связанно выражается через ХХ,Х29...>Хр
Х = £ц,(*,1<)Х7.. (1.257)
Процесс выделения базиса сводится к исследованию на линейную зависимость.
Подставляем в (1.255) любое допустимое значение и1 и решаем задачу: найдется ли
такое допустимое управление и, что ранг матрицы размера их2
Глава 1. Синтез САУ методами дифференциальной геометрии
69
(Л(х,и) /;(*>«(1)Л
rank
= 2.
Если такое и = ir2' е Q находится, то решаем задачу нахождения такого и е Q, что
ранг матрицы размера п х 3
'/,(*,«) а(х,^) fi(x,&f
rank
= 3
^(дси) /Я(*,Я«) Л(*,В<2))^ .
и т.д. Если на некотором шаге р для любого и е Q ранг матрицы
'/,(*,«) /if*,*05) - A(x,n{p)f
rank
</> + !,
то это означает, что левый ее столбец линейно связанно выражается через остальные.
После выделения базиса Xj9 j = 1,2,...,р, он пополняется, в результате чего
возникает полная система операторов Хх,Х2->~.,Хк\к <п (не путать с полным векторным
полем). Таким образом, каждой точке х е Мп ставится в соответствие полная
система операторов Хх,Х2,».<>Хк, но, вообще говоря, в разных точках может быть свое
число операторов.
Определение 1.27. Динамическую систему (1.230) будем называть регулярной [13],
если в каждой точке jc e M" рассматриваемой области один и тот же набор
постоянных допустимых управлений «'%..., lvp' выделяет базисные операторы и
пополненная система X]fX29'.',Xk состоит из одного и того же их числа к операторов.
Заметим, что полная система операторов для регулярной системы формирует
конечномерную алгебру Ли и, более того, т.к. базис остается одним и тем же для всех
х е Мп , можно сделать вывод о том, что полная система операторов для регулярной
системы формирует инволютивное распределение А* размерностью к < п (см.
определение 1.25).
Пример 1.18 [13]. Рассмотрим систему управления
d*\ 2
-^- = щххх2+х2ъи2,
cbc7
- = «1*1.
dt
dx3
-£ = *2«2,
Ы*1.
|*2|<1.
(1.258)
Для такого класса систем, которые называются аффинными системами управления (т.е. системы,
линейные по управлению), имеются другие критерии управляемости в случае, когда и,, / = 1,2 неограниче-
ны. Здесь же мы рассмотрим предложенный выше алгоритм. Рассмотрим первый оператор для
«W:«<"=0,5<"=l:
-, 1 О \j
'а*
^70 Методы современной ТАУ. Часть IV
Второй оператор для и® • ti^ = 1, п^ = 0:
v _ д д
Проверяем их линейную несвязанность:
, f х-уХ-х 0 х71 п
rank 23 2 =2,если хгх2*0.
\Х\Хг х\ °)
Третий оператор для i/(3): wf3) = -1, п^ = 0:
v - д д
Проверка линейной несвязанности:
rank
хгх\ 0 х2
ххх2 х, 0
= 3, если д:, • х2 * 0.
-х{х2 х, 0
Система операторов ХЬХ2,ХЪ является полной. Действительно, при любых допустимых управлениях
и,,и2 оператор X выражается линейно связанно через ХиХ2,Хъ (это инволютивная система для
области х1х2 * 0) в виде
Х = щХ, + Х-(их-и2)Х2-±{щ + и2)Хъ.
Полная система операторов позволяет судить об управляемости системы (1.254)
по наличию у нее первых интегралов. У системы уравнений
Ху(о(^) = 0,у=п (1.259)
имеется (n-к) функционально независимых инварианта, которые являются
первыми интегралами для системы (1.254). Если у динамической системы (1.254) есть
первый интеграл co(jc), тогда пространство Rn расслаивается на (п-\)-мерные
инвариантные поверхности со(д:) = С: если начальная точка принадлежит поверхности
со(д:) = Со , то при любом управлении u(t) траектория *(/) будет оставаться на этой
поверхности. Следовательно, наличие у динамической системы первого интеграла
исключает полную управляемость. Из этого следует следующая теорема.
Теорема 1.11 [13]. Динамическая система управления (1.254) управляема тогда,
когда система операторов Хх> АГ2,..., Хк , полученная в результате пополнения
операторов Х\,Х2>—> Хр , содержит п операторов, т.е. к = п.
Рассмотренный выше пример не имеет первых интегралов (инвариантов), поэтому
она управляема в локальной окрестности некоторой точки хх ф 0,х2 * 0.
Замечание 1.7. Фактически теорема 1.11 - это другая формулировка рангового
условия управляемости (1.236), где полная система операторов {Х1,Х2,...9Хк,к = п)
получена для системы управления общего вида:
vwfc{XuX2,...,Xk}u=r*nkl(D) = n.
1.11. НАБЛЮДАЕМОСТЬ В НЕЛИНЕЙНЫХ СИСТЕМАХ
1. Рассматривается динамическая система управления общего вида
Глава 1. Синтез САУ методами дифференциальной геометрии 7j_
где и е Q с Rn\ х е М" - гладкое многообразие (фазовое пространство) размерности
п, у е R\ f и g - гладкие функции.
Наблюдаемость системы ^ отражает возможность по наблюдениям за вектором
выхода y(t) однозначно восстановить вектор состояния x(t). Отсутствие полной
наблюдаемости возникает в случае неоднозначности восстановления, т.е. когда
одному и тому же выходу y(t) соответствует два и более состояния jc1 (/), х2 (/).
Система ^ определяет следующее отображение: для каждого допустимого входа
{и (0 > 1Уо А ]) и начального условия jc(/0 ) = х0 дифференциальное уравнение
д: = /(л:,1/(/)) определяет решение (■*('), ['о >'il) с заданным начальным условием,
которое, в свою очередь, формирует выход {у(*),[(о>*\]) согласно соотношению
.КО = g{x{t)) • Обозначим это отображение как
2,0 :(«(<).['<>>'.])-*CK'UW.])- (1-261)
Определение 1.28. Будем говорить, что пара точек х0 и Jc0 неразличима
(обозначение: хо1хо), если для каждого допустимого управления (w(^),[^o,^]) имеем
Ч (u(t),[t0A]) = 4 {«ШМ])> (1-262)
т.е. при одном и том же входном воздействии и(/) и разных (в общем случае
jc0 ф Jc0) начальных условиях выходные сигналы (j>(')>lA)>'i]) совпадают.
Неразличимость / (как некоторое отношение на М") определяет на множестве
Мп отношение эквивалентности. Действительно, это отношение удовлетворяет
аксиомам эквивалентности:
1) a:0/Jc0 , рефлексивность,
2) jco/jco о хо1хо, симметричность,
3) если хо1хо, a jco/Jco , то jco/jco , транзитивность.
Данный подход позволяет нам дать следующее определение наблюдаемости.
Пусть 1(х0) обозначает класс эквивалентности (т.е. множество элементов МЛ,
которые эквивалентны по отношению / элементу jc0 ) х0 е Мп.
Определение 1.29. Говорят, что система ^ наблюдаема в точке д:0, если
1(хо) = {хо), т.е. класс эквивалентности (неразличимости точек) состоит из одной
точки д:0. Если /(*) = {jc} Va: е Мп, то система ]Г называется наблюдаемой.
В отличие от линейных стационарных систем, где понятие наблюдаемости
является глобальным понятием и определяется только видом матриц А и С
(jc = Ax + Bu;y = Cx + Du)9 для нелинейных систем необходимо ввести локальное
понятие наблюдаемости.
Определение 1.30. Пусть U - это некоторое подмножество Мп и xo,xoeU.
Будем говорить, что точка х0 U -неразличима от хо(хо1ихо), если для каждого
управления (w(/),[/o^il) траектории (*(/),I/o>'i])> (Jc(/),[/0,/1 ]), начинающиеся
12 Методы современной ТАУ. Часть IV
соответственно в точках хои х0, обе лежат в £/,т.е. x(t)eU , x(t)eU для [/0,'i],
и при этом
Me(').[<o.'i]) = Me('MWi])- (1-263)
^/-неразличимость 1и в общем случае не является отношением эквивалентности
(в отличие от глобального отношения /). И в основном не выполняется аксиома о
транзитивности [37]. Поэтому вводят понятие локальной наблюдаемости.
Определение 1.31. Система ]Г является локально наблюдаемой в точке х0, если
для каждой открытой окрестности U точки дс0, 1и (xQ) = {x0) . Система ^
является локально наблюдаемой, если она локально наблюдаема в каждой точке х е Мп.
С другой стороны, понятие «наблюдаемость» можно ослабить, т.к. на практике
достаточно различать точку дс0 не от всех точек многообразия М", а только от ее
соседей. Поэтому введем следующее определение.
Определение 1.32. Система ]Г называется слабо наблюдаемой в точке jc0, если
существует окрестность U точки д:0, такая что l(xo)nU(xo) = {xQ). Система ^
- слабо локально наблюдаема, если это условие выполнено в каждой точке л: е Мп.
Локальный вариант этого вида наблюдаемости может быть определен следующим
образом.
Определение 1.33. Система ^ -локально слабо наблюдаема в точке д:0, если
существует открытая окрестность U точки jc0 , такая, что для каждой открытой
окрестности V[x0) точки х0, V(xo)q U(x0), Iy (x0) = {xq} , и называется локалъно
слабо наблюдаемой, если это условие выполнено для каждой точки х е Мп.
Другими словами, ^Г является локально слабо наблюдаемой, если можно
мгновенно различить каждую точку от соседней.
Между различными видами наблюдаемости существует следующая связь
(рис. 1.12).
^ локально наблюдаема => ]Г наблюдаема
]Г локально слабо наблюдаема => ^ слабо наблюдаема
Рис. 1.12. Виды наблюдаемости в нелинейных системах
Эти соотношения справедливы для нелинейных систем, но для линейных
стационарных систем можно показать, что все 4 вида наблюдаемости совпадают [37, 47].
Как для локальной слабой управляемости нелинейных систем ранее был получен
алгебраический критерий, так и для проверки локальной слабой наблюдаемости
имеет место простой алгебраический критерий.
Обозначим через Lx производную Ли вдоль векторного поля Х(х), т.е. для вел*
кой гладкой функции q>(je), определенной на многообразии Мп, имеем
Хф(*).А»(»(*))-ЙЙ,ДГ(лг)1 (1.264)
*м - («. м.ь м i. «)т .*£Ч*& ^1.
дх [ дх{ дхп
Глава 1. Синтез САУ методами дифференциальной геометрии 73^
(v) - скалярное произведение векторов.
Обозначим через dq> градиент —.Пусть fJ (x) = f(x,u^ ) определяет вектор-
ное поле на многообразие М" для некоторого постоянного управления
sO)=fc0) jiWf / = 12
Из теории линейных систем известна дуальная связь между управляемостью и
наблюдаемостью. Для нелинейных систем эта связь проявляется как дуальность между
векторными полями и дифференциальными 1-формами (подробнее см. [18]).
Покажем, как наблюдаемость определяется через 1-формы.
Пусть F0 обозначает подмножество гладких функций на многообразии М",
состоящее из функций g\(x),...,gl(x):Jr° = {g, (*),/ = 1,/} , и пусть Т определяет
наименьшее линейное подпространство гладких функций С00 \М" J, которое
замкнуто относительно дифференцирований Ли векторными полями I(D) множества Т .
Элемент Т является линейной комбинацией функций вида
V(-(M*'■))••)■ (1265)
Если обозначить fl =Xuf2 = Х2,..., то для любых Xi9Xj e I(D), [Xi9Xj]e I(D)
имеем
LXi (LXi (ф))-1Х2 (LXi (ф)) = V,^] (ф)' С-266)
где [AT,, АГ2 ] - скобка Ли (коммутатор) операторов Xl9X2.
Ранее нами получено, что
l(D)(x) = Ap(x)<zTMnx, (1.267)
где A/7(jc) - распределение размерности /? в точке jc, TM" - касательное
пространство к многообразию Мп в точке х. Элементами ТМ" являются касательные
векторы Х(х) (х - фиксировано). Если рассмотреть действие оператора X (мы
отождествляем касательные вектора с соответствующими им дифференциальными
операторами) на функцию (p(jc) е С00 \Мп\ и зафиксировать ф, то возникает
линейный функционал на пространстве ТМ" :Х(х)-+ Х(ц>)(х). Этот функционал
обозначается символом d<p(x). По определению
d<p(X)(x) = X(<p)(x). (1.268)
Элемент d(p(x) принадлежит ТМ"* - сопряженному с ТМ" пространству.
( д Т
Пусть — - базис в ТМ" , a dx - дифференциал функции х; (х), тогда согласно
(1.268) имеем
( Y7 ( \
dxt = х, = 8„ (символ Кронекера). (1.269)
_74 Методы современной ТАУ. Часть IV
Следовательно, {А,}"=1 - двойственный к < — > базис в ТМ"*. Отсюда следу-
ет, что ТМ"* (х - фиксировано) состоит из всевозможных линейных комбинаций
^tf/A, \ с вещественными коэффициентами. Для произвольной функции
ф(д:) е С00 Шп ) и оператора X = ^£, (д:)— имеем соотношение
d9(X)(x) - Х(Ф)(х) -1§, (x)^i . (1.270)
Это соотношение, названное нами выше производной Ли функции ф(дс)
применительно к дифференциальным формам, называется значением линейной
дифференциальной 1-формы со = af(p на векторе X в точке д:: со(Х) = ^ф(Лг)(д:) [18]. Найдем
явную формулу для dq>. Имеем
*=&/(*)■£■• о-271)
Используя соотношения (1.268), (1.269), получим
dxt (X)(x) = dx, {fj-j (x)^-\ = %t (х). (1.272)
Подставляя левую часть (1.272) в (1.270) вместо £7 (х), найдем
МХ)(х)-\±^Ь,ух)(х). (1.273)
В силу произвольности Х(х)еТМ" имеем
Получен полный дифференциал функции ф(дс).
Полный дифференциал функции Лр является частным случаем более общего
дифференциального геометрического объекта, а именно дифференциальной 1-формы,
общий вид которой следующий
ю-!>,(*) А,, О-275)
где а, (х) - гладкие функции на М". Элементы множества ТМ"* называются ко-
векторами в точке х е Мп .
Вернемся к рассмотрению слабой локальной наблюдаемости. Обозначим
подпространство J(F)(x)<zTMnx* -подпространство дифференциальных 1-форм
(с/ф:фе^*). Производная Ли Lx(ty){x) показывает, как воздействует векторное
поле (дифференциальный оператор) X на гладкую функцию ф(:к).
Глава 1. Синтез САУ методами дифференциальной геометрии 75_
Рассмотрим, как действует дифференцирование Ли на дифференциальные
1-формы. Пусть со - дифференциальная 1-форма вида (1.275), тогда имеет место
формула [3]
Lx (со)(д:) = d((o(X))+ d<x>(X). (1.276)
Если со = ^ф, т.е. это полный дифференциал или точная форма, то согласно лемме
Картана[12]
d(u = d(dy) = 0. (1.277)
Поэтому формулу (1.276) с учетом (1.277) можно записать как
Lx(dq) = d(Lx(<p))9 (1.278)
т.е. операции дифференцирования Ли Lx и d (так называемое внешнее
дифференцирование) перестановочны. Из этого следует, что J^F) является наименьшим
линейным подпространством дифференциальных 1-форм, которое замкнуто относительно
операции дифференцирования Ли элементами I(D). Элементы J^) - конечные
линейные комбинации дифференциальных 1-форм для функций множества Т
d{lf (...(l,. (&))••))= Lfl (...(Lft (dg,))..), (1.279)
где по-прежнему /' (jc) = f(xfu^1' j для некоторых постоянных управлений и>1' е Q.
Ковекторное пространство J[Jr)(x) определяет локальную слабую наблюдаемость
системы ]|Г в точке д:0.
Определение 1.34. Говорят, что ^ удовлетворяет ранговому условию
наблюдаемости в точке jc0 если размерность пространства J(Jr)(x0)равна и. ^
удовлетворяет ранговому условию наблюдаемости, если это условие справедливо для
каждого jc е Мп.
Теорема 1.12 [37] (о локальной слабой наблюдаемости). Если ]Г удовлетворяет
ранговому условию наблюдаемости в точке д:0, тогда ]Г локально слабо
наблюдаема в точке д:0.
Доказательство. Для доказательства теоремы используем следующую лемму.
Лемма 1.2 [37]. Пусть V - некоторое открытое множество Мп . Если д:0, jco e V;
хо1ух0, тогда ф(л:0) = ф(jco) для всех ф е Т.
Если размерность dimУ(^*)(д:0) = «, тогда существует п функций ф^фз,...,
ц>пе!Г, таких что дифференциалы dty (xo),dq>2{xo)>—>^Фи(-^о) линейно
независимы. Определим отображение:
Ф:д:-^(ф1(д:)...фДд:))Т.
Якобиан отображения Ф в точке д:0 невырожден, т.е.
.д(Ф.(*)-фД*))
rank-
d(Xl...xn)
X=Xq
поэтому по теореме о неявной функции [10] отображение Ф взаимнооднозначно
отображает открытую окрестность U точки д:0. Если V(xQ)czU(x0) - открытая
76 Методы современной ТАУ. Часть IV
окрестность точки jc0, тогда по лемме 1.2 1у(хо) = {хо}9 так что ^ является
локально слабо наблюдаемой.
2. Рассмотрим хорошо известную задачу наблюдаемости для линейных
стационарных систем. Имеем систему управления
д: = Ах + Ви9]
у-СХ. } (1280)
Обозначим через С,* - /-ю строку \хп матрицы С, т.е.
д>,=С,.*, / = п. (1.281)
В соответствии с (1.260) имеем
ft(jc) = C^Jc, i = M 0.282)
При выводе условий управляемости получено, что алгебра Ли I(D) для системы
(1.280) формируется векторными полями <Ах, Albj : / = 0, п -1, j = 1, т |, где bj -
у-столбец матрицы В. Пусть
/o(D)(jc) = span{Ac,^*y:i = O,/i-l,y = ui}, (1.283)
где span - линейная оболочка векторов Ax,A'bj ... в точке д:. Найдем линейное
пространство J(P) дифференциальных 1-форм, получаемых дифференцированием
множества функций
^ = {a(*),..,g,(*)}={c,.x, / = U} (1-284)
векторными полями /0 (D)(x). Имеем
М^*) = Е1Х*У^ £СЛ | = ZS^A =С/И^ / = U (L285)
Тогда общая формула дифференцирования Т вдоль векторного поля Ах будет
L^ (ct.AJx)= СрА'+1х, j = 0,1,... • (1.286)
По аналогии получим выражение для дифференцирования вдоль векторных полей
A'bj. Имеем
ЬА^{с^Акхус^кЬг (1.287)
что приводит к следующему результату
L^faA'bj^CpA'bj =0, / = 0,1,.... (1.288)
Тогда пространство гладких функций Т, замкнутое относительно
дифференцирований Ли Lx (Х е /0 (D)), с учетом теоремы Кэли - Гамильтона имеет вид
Т = span fcj*Akx, C^Akbi :/ = Ц j = ппЛ =0,«~l|.
Построим алгебру дифференциальных 1-форм для функций пространства Т . Для
каждой точки х е Мп имеем
j(f)(x) = df(x) = span{Cl.Ak :i = V, *=0f/i-l}f (1.289)
т.к.
Глава 1. Синтез САУ методами дифференциальной геометрии 77_
d(ci*Akx) = Cl*Ak;
В силу того что базис пространства (1.289) не зависит от jc , то он имеет
постоянную размерность. Ранговый критерий наблюдаемости (теорема 1.12)
rankJ(F) = rank\с^Лк : / = U, к =0,«-l} = п (1.290)
приводит к известному критерию наблюдаемости Калмана.
Замечание 1.8. Элементами J(Jr) как ковекторного пространства являются
дифференциальные 1-формы-вида
А^)==\^(Сф4)^Л-0^Л, / = UL (1.291)
[7=1/7=1 J
где akpi -элемент apj(p = \,n, j = 1,л)) матрицы Ак, к = 0,л-1. Всего в J{F) nx\
дифференциальных 1-форм.
3. Линейные нестационарные системы. Как и в задаче управляемости, добавим
к вектору состояния дополнительную переменную х0 =t, получим
х = А(хо)х + В(хо)и,
У = С{хо)х.
Рассмотрим два векторных поля:
(1.292)
Дифференцирование функции yi=Ci(x0)xf / = 1,/ вдоль векторного поля Х}(х)
дает нам
| ( rs П П Я | /1 | П Я
LxC,(x0)x= _ + ^^(xo)xy— ХСф(^о)^ =£т-С/рЫ*л +
^ar0 M>l ar^j^, j л.,&о (1294)
Аг=1 у=1
Обозначим через
П П ( Q \
+ miakj{xo)xjCik{xo)=\^-Ci'(xo) + C,(x0)A{x0) \х, i = l,l.
k=\j=i K^o )
DAC(x0)J-£-C(x0) + C(x0)A(x0)\ (1.295)
Тогда (1.294) можно переписать в виде
LXi(C(x0)x) = DAC(x0)x. (1.296)
Дальнейшее дифференцирование функции DAC(x0)x приводит к реккурентной
формуле
(LXi(...(LxC(xo)x))) = LkXiC(xo)x = DkAC(xo)x =
* (1.297)
= {^-DA->C(xo) + DA->(c(xo)A(xo))y
78
Методы современной ТАУ. Часть IV
Так как векторное поле Х2 (х) не зависит от х, то при формировании линейного
пространства J{F) (кораспределения) дифференциальных 1-форм
J(F)(x) = dF(x)
необходимо учитывать только функции вида (1.297) (см. формулу (1.289) для
стационарного случая), поэтому ранговый критерий наблюдаемости (теорема 1.12) для
системы (1.292) приводит к следующему критерию наблюдаемости:
DAC(x0)
D2AC(xQ)
rankj(^*) = rank
DkAC{x0)
-п.
(1.298)
Перепишем условие наблюдаемости (1.298), заменив переменную jc0 на /. Получим
( c(t) )
DAC(t)
D\C{t)
гапкУ(^г) = гапк
DkAC{t)
= n,
где
/)^c(/)-Jc(0+c(/H(/),
^с(/) = -|(^-1с(/))+(1)Гс(/))^(0,
(1.299)
Л = 1,2,... .
4. Рассмотрим практический пример применения рангового критерия
наблюдаемости для нелинейной системы.
Пример 1.19. Наблюдаемость в нелинейной системе.
Рассмотрим следующую систему 3-го порядка:
Х2=-*1Х3,
*з=0,
>> = *!•
Определим необходимые элементы (л = 3, / = 1).
Векторное поле (как дифференциальный оператор), определяющее динамику системы
дх} дх2 дхъ
Множество функций Т* = {g, (x)} ={х1}.
Сформируем пространство функций Т :
, ( \ ( д д)
^ йх, дх2)
(д д ^
*2*3 д ХХХЪ— кдг3 =~Х]Хз,
ах{ ахг )
Глава 1. Синтез САУ методами дифференциальной геометрии 79^
4',(gl(*)H*2*3-I *1*3— (-*!*>)= *2*?;
^ охх dx2)
4,(g,(A:)) = U^^--^^— 1(-*2*з) = *1*з3;
Сформируем из полученных функций Т пространство J(F) дифференциальных 1-форм
^{^В1(х)) = х3сЬс2+х2сЫ3-
d[L2Xtgl(x)) = -x3dxl-xldx3;
d{^xxS\ (*)) = -*? А* -2хъх2сЬсъ\
d(L%gl(x)) = xldxl+3xlx23ch3-
d[L5Xy g, (*)) = x\dx2 + 4x2x3dx3;
Для проверки рангового условия сформируем матрицу Мс из коэффициентов (гладких функций)
полученных дифференциальных 1-форм:
'О ,3
-дг3 0 -д;,
К
с-
О -*J -2хъх2
х\ О Здг^з2
. О х$ Ах2х\ w
Из анализа данной матрицы видно, что rank Мс < 3, если либо дг30 = 0 , либо дг10 = х20 = 0 , где
Xjo,jc,0,jc20 -точка, в окрестности которой рассматривается наблюдаемость данной системы. Исходя из
полученных соотношений можно определить области слабой локальной (в том числе м локальной)
наблюдаемости. Например,
I: дг30 >0;х10 > 0; II: jc3o <O;*io >0-
1.12. ЛИНЕЙНЫЕ ЭКВИВАЛЕНТЫ НЕЛИНЕЙНЫХ СИСТЕМ.
СИНТЕЗ НЕЛИНЕЙНЫХ РЕГУЛЯТОРОВ
Проблема построения регуляторов для нелинейных систем в отличие от линейных
все еще далека от решения. Тем не менее идея использования хорошо разработанной
теории построения линейных регуляторов для нелинейных систем остается весьма
притягательной и актуальной. Главная сложность здесь - найти диффеоморфизм
(гладкий изоморфизм) между исходной нелинейной системой и некоторой линейной
системой.
Здесь будет показано, что наличие преобразования, позволяющего перейти от
нелинейной системы к линейной, сводится к условию существования группы
симметрии для нелинейной системы управления. В [7] получено, что для автономных
управляемых систем dx/dt = f(x,u) группа симметрии действует на множестве
решений данной системы, если диффеоморфизм имеет следующую структуру:
и' = и'(х,и), х' = х'{х) , где (х,и) - старые локальные координаты и управление,
(х\и') - соответственно новые.
1. Постановка задачи. Рассматривается класс нелинейных динамических систем
линейных по управлению, класс так называемых аффинных систем
$0 Методы современной ТАУ. Часть IV
dx/dt = X(x) + uY(x)9 хеМ", ueR\ Y(xo)*O9 (1.300)
где Мп - гладкое многообразие размерности л, д:0 - равновесная точка, Х(х),
Y(y) - гладкие векторные поля на М\
Х(х) = [Ъ(х),...Л„(х)]\
¥(х) = [щ(х),..,Цп(х)]7 ■
Если векторные поля рассматриваются как дифференциальные операторы g
гладких функций, определенных на многообразии Мп , то они представляются в виде
(см. пункт 1.2.4)
х-±ь(х)±;Гш£ц,(х)±.
ы\ dxi /=1 о^-
Ставится задача: найти преобразования для гладкой замены координат у = у{х)
и управления v = v(jc,w) (статическая обратная связь), такие, что система (1.300)
приводится к некоторой изоморфной ей системе вида
dy/dt = Acy + Bcv, (1.301)
где Ас, Вс -матрицы канонической формы Бруновского [19, 32].
2. Линейные эквиваленты. Каноническая форма Бруновского имеет следующий
вид
dy\/dt^y29
, _ (1.302]
dyn^/dt = yn9
dynldt-\.
Таким образом, если известно некоторое преобразование ух = 7J (х), то
последующие преобразования yi = 7](дс), / = 2,а? можно получить последовательным
дифференцированием функции Т{(х) вдоль векторного поля (Х(дс) + иК(дс)),т.е, нахожде
нием производных Ли функции 7] (*) вдоль векторного поля (X(x) + uY(x)).
Система дифференциальных уравнений, определяющих преобразование 7] (*)
Имеем
т.к. у2=Т2(х) не зависит от управления и и поэтому
У(Г,(дс)) = О. (1.304
Аналогично получаем
dy2 Idt = у, - LX+H,X(TX (*)) - X2 (Г, (х))+и¥(х(Ц (*))) = X2 (Г, (*)). (1.305
соответственно
F(JV(7J (*))) = 0. (1.306
Заметим, что в формуле (1.305) и ниже под ^(^(дс)) понимается производна
Ли/-го порядка функции 7j(:t) вдоль векторного поля Х[х)
Глава 1. Синтез САУ методами дифференциальной геометрии 81_
Х'(7|(х))-Л'(х(..ЛГ(7'1(х))...))
Продолжая находить производные Ли более высоких порядков, получим
dyn-ildt = yn = Lx+uYXn-2(Tx{x)) =
= Х»-'{Тх{х)) + иУ(х»-*{Тх(х))Ух^{Тх{х)). (1'307)
Итак, из (1.304), (1.306) и (1.307) имеем
■ Y(x'(Tl[x))) = 0, i = 2,и-2, (1.308)
dyn/dt = v = Lx+uYXn-i(Tl{x)) = Xn{Tl{x)) + uY(x"-\T,(x))). (1.309)
Для того, чтобы из (1.309) определить и, необходимо обязательно выполнить
условие
Г^""1 (7] (*)))* 0. (1.310)
Из анализа (1.308) - (1.310) можно сделать следующие выводы. Преобразование
(невырожденная замена координат) ух = 7] (дс) определяется из решения системы
линейных дифференциальных уравнений в частных производных (1.308), (1.310), т.е.
y(xi(T1(x))) = 09 1 = 2^=2, (1.311а)
Г^""1 (7] (*)))* 0. (1.3116)
Остальные координаты получим из (1.303), (1.305), (1.307), т.е.
Л=ХМ(ВД),1=2^. (1.312)
Формулу (1.312) можно записать в более привычной форме
yi=Tl(x)=X(ri_l(x))=(dTi_l(x)/dxiX{x)),i = 2^9 (1.313)
где (d,r) - скалярное произведение векторов dи г.
Теорема 1.13. Для аффиных систем (1.300) система дифференциальных
уравнений в частных производных (1.311), из которой находится преобразование 7^(л:),
эквивалентна системе дифференциальных уравнений в частных производных первого
порядка, определенных последовательным дифференцированием векторного поля
Y[x) вдоль векторного поля Х[х) и последующим дифференцированием функции
Тх[х) вдоль полученных векторных полей, т.е.
(ad',F)(7i(*))=0, / = M^2, (1.314а)
(ad7lF)(r1(^))^0, (1.3146)
где ad^F - производная Ли векторного поля аё/^1К(д:) вдоль векторного поля
Х[х), причем для
/ = 0: ad°xY{x) = Y(x),
, = i adxY(x) = LxY(x)=(XY-YX)(x)={X,Y](x) =
= ((dY(x)/dx)X(x)-(dX(x)/dx)Y(x))(x),
i = k: adxY(x)=Lxad^Y(x)=[xMlx1Y(x)],
здесь [X,F](x) - скобка (коммутатор) Ли векторных полей Х(х) nY(x).
7 Зак 416
J$2 Методы современной ТАУ. Часть IV
Доказательство. Доказательство проведем по индукции. Для / = 0:
ad^ Y(Tx (л:)) = К(Г1 (л:)) = 0 и первые уравнения (1.311) и (1.314) совпадают. Для
(ad^F)(7-1(*)) = IrF(7-I(*))-(^-Hf)(7-,(JC)) =
^(хХг(т1(х)))уг(х(т1{х)))ш-г(х(т1{х))).
т.к. К(Г,(д:)) = 0. Выше было использовано свойство производной Ли
^](Г.(*)) = [^,^](7-1(*))[3].
Исходя из определения скобок Ли и непосредственными вычислениями можно
показать, что для
(аЧхг)(Тх(х)) = 1х(^г)(Т,(х)) =
= t(-iyc)Ar^KY^(7'1(x))=(-i)iKv:i(r1(x))=o, ■(1315)
7=о
т.к.
YXj(Tx(x)) = 0, j = O,k-l, (1.316)
причем в (1.315)
с)=км(р.{к-]у).
Формулы (1.315), (1.316)справедливы для к = 0,п-2. Для к-п-\
(ай"х-'¥)(Т,(х)) = (-1)п-1¥Х"-х{Тх(х))^0. (1.317)
Эквивалентность формул (1.311), (1.314) доказана.
Функция Тх (л:) определяется из системы линейных дифференциальных
уравнений в частных производных первого порядка (1.314), но при этом векторные поля
adlxY(x) п = 0,л-2] должны подчиняться условию их совместной
интегрируемости - условию инволютивности.
Заметим, что при Y(x) = Y = const
(ad'<fF)(7-1(*)) = (-l)'(FY')(7-1(jC)), / = 0^1, (1.318)
и формулы (1.311) и (1.314) полностью совпадают.
Инволютивность. Инволютивность является краеугольным камнем при выводе
условий интегрируемости уравнений в частных производных и фактически при этом
является синонимом термина «интегрируемость». Подробно этот вопрос мы
рассмотрели в §1.10.
Говорят, что множество векторных полей ^Xl(x),.,.,Xm(x)] инволютивно, если
существуют скалярные поля (функции) aijk[x)y такие, что
В этом случае совокупность ^X](x),...iXm(x)] определяет алгебру Ли
{х1(д:),...,Лгш(д:)} относительно бинарной операции [•,•]. Фробениус показал [6]
(см. теоремы 1.7-1.9), что система векторных полей тогда и только тогда интегри-
Глава 1. Синтез САУ методами дифференциальной геометрии 83^
руема, когда она инволютивна. Сначала рассмотрим только класс так называемых
инволюционных систем. Система векторных полей S = (Х} (л:),...,Хт (jc)) находится
в инволюции, т.е. векторные поля попарно коммутируют, если
XiXJ{z{x)) = XjXl{z{x))i ij = ui
или
[XhXJ](x) = (XrXJ-Xj-Xi)(x) = O (1.320)
для любой дважды и более дифференцируемой функции z[x) [4], т.е. условия
(1.320) совпадают с (1.319) для а^ =0. Покажем, что любая инволютивная система
векторных полей имеет в качестве канонического (исходного) базиса
инволюционную систему, из которой она определяется умножением на некоторые гладкие
функции, определяя тем самым то же самое гладкое инволютивное распределение Ая
(подпространство касательного пространства ТМ" постоянной размерности,
базисные векторные поля которого замкнуты относительно бинарной операции [•,])
размерности/?, что и исходная инволюционная система.
Пусть S = {Х1(х),...,Хп_1 (*)} - инволюционная система на подмногообразии V.
Пусть из системы S получена новая система 5' = {F1(a:),...,Fw_1(a:)} умножением
векторных полей Хх на гладкие функции £,(*), i = \,n-\, не обращающиеся в нуль
в окрестности точки xQ. В этом случае Sx определяет то же распределение \_х , но с
другой параметризацией [6]. Например, для «-1 = 2 имеем Yx = gx(x)X],
Y2 =82{X)X2- ТогДа
[К1,К2]/(л:)=(у1(^)К1+у2(л:)К2(л:)+Уз(л:)[Х1,Х2])/(л:) =
= Ых)Ух+У2{х)У2(х))А*)>
т.к. из (1.320) [Х{,Х2] = 0 . Функции у, (*), / = 1,2,3 находятся из следующих
соотношений
yl{x)^(-g2{x)X2(gl{x)))/gl(x)9
y2(x)=[gi(x)Xx(g2(x)))/g2(x)9
Уз(*) = g\(x)-g2{x).
Видим, что если S = {Хх,...,Хп_1) - инволюционная система на подмногообразии V,
то Sx ={F1,...,FW_1} определяет инволютивную систему на том же подмногообразии.
Что касается исходной системы S = {Xx(x),...,Xn_x(x)} ={ad^ У(х), / = 0,л-2|,
определяющей систему (1.314а), то из вывода уравнений (1.311а) следует, что в
общем случае это инволютивная система на подмногообразии V, т.к. из условия
Гл^Л^ ]/(*) = 0, \/Xt е Ап_{ не обязательно следует, что Гх,, X Л = 0.
Группы преобразований. Вопрос о существовании преобразования у = Т(х),
v = v( x9u) для исходной системы (1.300) сводится к проблеме наличия группы
симметрии - группы диффеоморфизмов, переводящих решения управляемой системы
7*
JS4 Методы современной ТАУ. Часть IV
(1.309) в решения системы (1.301) и наоборот. Здесь основную роль играет теорема
С. Ли (аналог теоремы Руффини - Абеля - Галуа о разрешимости алгебраического
уравнения в радикалах) о разрешимости линейного дифференциального уравнения в
частных производных
Az = 0,
рассмотренная в §1.8. Эта теорема приводит к следующим условиям наличия у
(1.300) группы симметрии:
1) Х,(Т1(х)) = 0, i = l,/i-l, (1.321а)
Хп(Т{(х))*0; (1.3216)
2) система S = {Xl(x),...,Xn_l(x)} = ladlxY(<x)j = 0,n-2\ -является инволю-
тивной;
3) векторные поля {^(д:),...,^., (д:)} =|ас!/хУ(д:), / = 0,л-1| - линейно
независимы в окрестности равновесной точки х0.
Формулы (1.321а), (1.3216) в точности повторяют условия (1.311а), (1.3116) или
(1.314а), (1.3146), условия 2) выполнены для S и единственным дополнительным
условием существования является 3).
Если равновесная точка х0 &Q , тогда преобразование
^=7](*)-7iW (1.322)
позволяет получить интегральное многообразие, проходящее через данную точку х0.
Суммируя вышесказанное, сформулируем основную теорему о наличии линейных
эквивалентов у системы (1.300).
Теорема 1.14. Нелинейная система (1.300) тогда и только тогда имеет линейный
эквивалент - систему (1.301) в окрестности равновесной точки х0, когда выполнены
следующие условия:
а) система 5' = |ad/v У{х), i = 0,и-2} - инволютивна;
б) ad^"1 Y(х) * 0 в точке равновесия и ее окрестности;
с) векторы ad'jf Y[x), / = 0, л -1 линейно независимы в точке равновесия и ее
окрестности;
д) преобразование 7] (л:), полученное из системы дифференциальных уравнений
(1.314а), связано с переменной ух соотношением (1.322), остальные
преобразования находятся из (1.303), (1.305), (1.307);
е) статическая обратная связь определяется из уравнения (1.10)
v = X"-I(7'1(x)) + W.ad"x-IF(7i(^)))
откуда после нахождения v = v(j») и замены у = Т(х) получим обратную
связь в исходной системе
и(х)= У l 'J. . /'; ". (1.323)
Рассмотрим пример синтеза регулятора.
Пример 1.20 [27]. Задан нелинейный объект управления
*1=*2>
х2 =sinjt, +х3.
(1 324)
Глава 1. Синтез САУ методами дифференциальной геометрии 85^
Математическая модель (1.324) описывает движение математического маятника в верхнем
неустойчивом положении, при этом хх - угол отклонения маятника от вертикали, х2 - скорость отклонения, х3 -
момент, приложенный к маятнику. Уравнениями (1.324) описываются многие электромеханические
объекты: синхронные генераторы, двигатели с асинхронным пуском и др.
Поставим задачу синтеза регулятора для системы (1.324). Для этого проверим, можно ли свести
данную систему к канонической форме Бруновского заменой координат и введением статической обратной
связи. Имеем векторные поля
( Ч ) (0]
X(x) = \sinXl+xA Y(x) = \o\. (1.325)
Для получения невырожденного преобразования 7* = (7],Г2,Г3) и статической обратной связи v
проверим все условия теоремы.
Имеем.
(°1 (°1 (Ч
1) ad°xY(x) = Y(x) = \ О , аЛхГ(х) = [Х,Г](х)-\-\ \, аЛхГ(х) = [Х,вЛхГ] = \ О
Ы loj [о)
rank{ad'rK(jc),J! = 0,1,2} = 3 в точке равновесия дго=О,- условие с) выполнено
2) Так как все векторные поля ad'^ Y(x), i = 0,1,2 не зависят от х, то система |ad'v Y(x), / = 0,1,2}
векторных полей инволютивна (полная система), - условие а) выполнено
Р1
3) ad^ Y(x) =0*0 - условие б) выполнено.
W
Таким образом, преобразование Т(х) существует и статическая обратная связь v(T(x)) также
может быгь получена. Приведем исходную систему к канонической форме Бруновского Находим
компоненту преобразования ух = 7] (*). Согласно (1314)
\дх ) obc, дх2 дхъ
^,ad,KW] = 0;H.0 + ^.(-l) + ^.0 = 0,
дх'"л'""') " дхх " дх2 v '' дх3 ' " ° 326)
?Ь.МхУ(х))*0. ^.1 + ^04-^.0*0.
дх х v }) дхх дх2 дхъ
Данной системе дифференциальных уравнений в частных производных, в частности, удовлетворяет
следующее решение
И =7; (*) = *,.
Остальные компоненты преобразования Т2(х),Тъ(х) и статическую обратную связь v найдем из
выражений (1.303), (1 305), (1.308), (1.309)
гйт ^ *2 ^
У2 = Г2(х) = (°±,Х(х)у(\А0)
sin xx +х3 =д:2,
о
Уз = Гз(лг)=(1г'х(л:))=5'п*|+*3' (1327)
[8Т \
—-,X(x) + uY(x) =cos x, -x2+u
дх )
Проверим невырожденность преобразования у-Т(х) в окрестности равновесной точки Имеем
( 1 0 Q\
б4—\А о 1 оUо,
{дх) U^oiJ
а это значит, что существует взаимооднозначная связь между решениями исходной системы (1 324) и ее
линейным эквивалентом в форме Бруновского
L = v.
86 Методы современной ТАУ. Часть IV
а/
Ввиду диффеоморфности систем (1 324) и (1.328) синтезируем регулятор для линейной системы
(1 328), а из уравнения (1 327) найдем синтезируемое управление для исходной системы.
Пусть для определенности для системы (1.328) был синтезирован регулятор по известным методам
синтеза
ч(у)=К\У1+К2У2+КзК,
где Кх = -1, К2 - Къ = -3. Тогда уравнение и(х) для исходной системы будет
м(дг) = v(r(:c))-cos хххц =-х, -3*2 — 3(sin ^ +^)-cos xlx2.
Замечание, если управление и в уравнении (1.300) будет векторным, тогда вид его линейного
эквивалента является блочно-диагональным, где каждый блок - клетка Бруновского. Пример такого синтеза
приведен в [24].
1.13. ПРОВЕРКА ИНВОЛЮТИВНОСТИ РАСПРЕДЕЛЕНИЯ
ВЕКТОРНЫХ ПОЛЕЙ
При получении линейных эквивалентов нелинейных систем и нахождения общих
инвариантов для нескольких однопараметрических групп необходимо определить,
является ли заданная система инфинитезимальных операторов инволютивной, т.е.
составляет ли она базис алгебры Ли векторных полей.
Рассмотрим достаточно простой, аналитический метод решения данной
проблемы, основанный на взаимно однозначном соответствии между инволютивным
семейством векторных полей V и инволюционным (с попарно коммутирующими
векторными полями) семейством векторных полей V-\хп / = 1,/и|, полученном из V
некоторым невырожденным преобразованием.
Пусть на гладком многообразии Мп задано множество векторных полей в
естественном базисе
Xi=^lJ(x)^r;i = ut;\<m<n-\. (1.329)
7=1 VXj
Теорема 1.15. Для того, чтобы независимые векторные поля Х1(х),...9Хт(х),
\<т<п-\, где п - размерность вектора хеМп, определяли инволютивное
распределение Дда(дс), необходимо и достаточно, чтобы базис Х{(х),...,Хт(х),
полученный из Хх (х),...,Хт ( jc), был инволюционным.
Доказательство. Необходимость. Пусть векторные поля Хх (х),...,Хт(х)
определяют инволютивное распределение &т(х) касательного пространства ТМ"
многообразия Мп, т.е.
m
[*,,Ху](*)=2>91А(*)**(*). (1.330)
*=1
где atJ k [х] - гладкие функции на Мп .
Кроме того, по теореме Фробениуса, выраженной через дифференциальные 1-формы
[6], для инволютивного распределения Ат(х) существуетанну^ятор Ann(Am)
Глава 1. Синтез САУ методами дифференциальной геометрии
87
Ann(Aw) = {со, = dzt:со, (*,) = 0, / = 1,л-т\ j = 1,w],
где со, - дифференциальная 1-форма, здесь, в частности, дифференциал функции
(скалярного поля) z,- (х). Пусть некоторый дифференциал dz e Ann (Ат). В этом
случае с учетом (1.329) имеем
д_
dz{x)(xJ) = XJz{x)=Y4^k{x)—z = 0i y = l,да> (1.331)
к=\ °Хк
т.е. (1.331) определяет систему однородных дифференциальных уравнений в частных
производных первого порядка.
Пусть (без уменьшения общности) в системе уравнений (1.331) первые т
координат каждого из векторных полей Xj[x) lj = \,m\ определяют невырожденный
минор Л[х) порядка т в области решения (1.331). Представим (1.331) в виде
п
....
....
■z-A(x)-
' д "
ах,
д
•z-
i=m+\ О*!
Z = 0,
где
|Чц(*) - кМ)
А(х)= \ \ I
Запишем уравнение (1.332) следующим образом:
я \ ( » я
\(У Л
....
....
-А(х).
' д '
дх,
д
[дхт)
-
\\
/=/и+1
z = 0.
Домножим слева левую и правую часть (1.333) на А~х [х) и, обозначая
М*1
-л-Чху
/=/и+1 ^
z^w^-,
V/=m+l ^ j
= ^-'(х).
(1.332)
(1.333)
(1.334)
(1.335)
получим
88
Методы современной ТАУ. Часть IV
'*N
\famj
\\
,=m+i ca<
z = 0.
(1.336)
Умножение слева невырожденной матрицы Л"1 (х) на столбец векторных полей
(Xl9...9Xm) определяет столбец векторных полей (xl9...9Xm) , которые также
удовлетворяют условию (1.331), т.е.
dz{x)(Xj) = Xjz[x)=09j=ui9 (1.337)
где
~ д vp z i \ д . -—
,. „ -,-. (1-338)
Л7 i=m+\ ^i
Выразим из уравнений (1.338) постоянные независимые векторные поля
(естественный базис (репер)):
~J /=/И + 1
Из отношения (1.338) имеем
д ~ А: мй . г
(1.339)
*/=5Х* (*)**.
^=l
(1.340)
Тогда скобка Ли (коммутатор) векторных полей XhXj через векторные поля
Xt, t = 1,/и выразится следующим образом:
mm mm
/=1 JU1
/=1 Л=1
m m
-§>Л*/^)**)=ХЕ(§^/[**"*/]+
(1.341)
/=1 A=l
С другой стороны, учитывая (1.338), получим
v=m+lji=m+l^ OXv ^ ал:ц ал:у
д (I \ ' д д (£ \ д
(1.342)
Из выражений (1.338) и (1.342) замечаем, что скобка Ли [х^,^/] не может быть
выражена в виде линейно связанной комбинации векторных полей Xt, t = 1,/и , т.к.
Гх^АГЛ зависит только от последних [п-т) координат, а первые т координат
Глава 1. Синтез САУ методами дифференциальной геометрии
89
равны нулю. Подставляя в (1.341) вместо Хп t = \,m правую часть (1.338) и
учитывая (1.330), получим
т т т ш
(1.343)
к=\
/=1 к=\
<И
где
P^W^ZZ^i^^^K'-^y^^^J^OW^^^^bw (1.344)
/=i к=\
и А~] (x)-(t,s) -элемент обратной матрицы А~1(х).
Равенство (1.343) в силу сделанного выше замечания и формулы (1.338) будет
иметь место тогда и только тогда, когда
*«ЛХ) = К(*)> Ш = п^> (1.345)
[xk,Xt] = 0, kj = lm. (1.346)
Последняя формула указывает на то, что векторные поля Xt(x), t = \,m являются
инволюционными (т.е. попарно коммутирующими).
Достаточность. Пусть для совокупности полей Xnt = \,m справедливо
соотношение (1.346), т.е. это инволюционные векторные поля, причем векторные поля
Xnt = \,m связаны с векторными полями Xnt = \,m матричным уравнением
(1.334). Подставляя (1.334) и (1.346), получим
0 =
Ш III
q=\
q=\ t=\
(1.347)
^=i u=i J /=i U=i )
Уравнения (1.347) определяют систему С% линейных алгебраических уравнений
относительно скобок Гх^^хЛ; qj = \,m, решая которую, получим
т
[Xq,Xt] = Y,a4t,v{x)Xv>cl = ^c]<t^m>
v=l
т.е. инволюционность векторных полей Хп t = \,m определяет инволютивную
систему Хп t = \,т в области, где матрица А(х) невырождена
Таким образом, алгоритм проверки инволютивности семейства векторных полей
Хи...,Хт сводится к получению семейства Хп t = \9m и проверки последнего на
инволюционность (попарную коммутируемость). Если условие инволюционности
выполнено, то исходная система инволютивна.
Пример 1.21. Рассмотрим 2 векторных поля Х1(х),Х2(х) гладкого распределения Am(x)(zTMl,
инволютивность которого традиционным путем проверить достаточно сложно Векторные поля в
координатном представлении:
вд=
*2
. вд=
<(х{+хъ)х2)
Скобка Ли этих векторных полей имеет вид
1
(1 348)
6 Зак 416
90
Методы современной ТАУ. Часть IV
-(*,+*2)
[ХиХ2](х) = -1 , (1.349)
<-xl-x2(xl+x2)j
и сказать что-либо определенное об инволютивности Хх (х) и Х2 (х) сразу нельзя Тем не менее они
действительно инволютивны в области, где хъ * х2 и их скобка Ли может быть выражена в виде линейно
связанной комбинации векторных подлей Х] (х) и Х2 (х):
[Х1,Х2](х)= V =И*.+*2)ад+*(*+*)-*ад = ^(х)ад> (135о)
(-X]-x2(Xl+X2)} Х>-Х>
а это значит, что векторные поля Хх(х) и Х2(х) формируют инволютивное распределение и
соответственно интегральное подмногообразие. Функции а, (*)(/ = 1,2) имеют сложный вид, и определить их
методом проб и ошибок непросто . Рассмотренный подход позволяет найти функции чисто формально.
Покажем это.
Исходные векторные поля в естественном базисе согласно (1.329) имеют вид-
1 1 (хх+х2) )
&
(Х*+Х*)]£Г i
= А(х)
дхх
д
дх2
j_
{дх3)
дхх
_5_
[дх2)
■(? ?)
дх,
дхг)
(1.351)
Домножая (1.351) слева на Л 1 (д:) и считая, что определитель <\е\(А(х)) = хъ-х2*0, получим
' а ^
дх,
д
[дх2
+
( д\
а
или в координатном представлении
*,(*)= ° L*2W= 0
(1.352)
(1.353)
Проверка Гх1,Л'2](д:) = 0 показывает, что Х^х), Х2(х) образуют инволюционную систему
Найдем связь между X, и Х2 (/ = 1,2), а затем определим функции а, (*)(/ = 1,2) инволютивности Х{,Х2 .
Из (1 352) выделим естественный базис:
дх2
Подставляя (1.354) в (1.351), получим
3 _i> a
^
'3 J
(1.354)
X, =х3 Хх -х2— \ + х2\ Х2-хх— \ + (х] +хъ)х2—- = хъХ{ +х2Х2
(1.355)
Формулы (1.335) определяют связь между инволютивными л", (/ = 1,2) и инволюционными
Л".,(/ = 1,2) векторными полями Теперь найдем функции а, (*)•(/= 1,2). Из (1.335) имеем
Глава 1. Синтез САУ методами дифференциальной геометрии
91
х2) U i)[xj
Тогда
X,
1
-х-у
хъ-х2 хъ-х2
-1 *з
\хъ-х2 х3-х2)
{%
Ранее было получено
Подставляя в (1.358) выражения (1.354), имеем
[XuX2} = -(xl+X2)±-JL--(X] + X2(xl+x2))±.
-(*, +х2(Х] +х2))— = -(хх +х2)Х1 -Х2.
0ХЪ
И, наконец, сделав замену в (1.359) инволюционных векторных полей Xt (/ = 1,2) на X, (/
формуле (1.357), окончательно получим
х3-х2 хъ-х2 /=,
что и доказывает инволютивность распределения Ат (х).
(1 356)
(1 357)
(1.358)
(1.359)
= 1,2) по
6*
_92 Методы современной ТАУ. Часть IV
ГЛАВА 2. ТЕОРИЯ КАТАСТРОФ.
ДЕТЕРМИНИРОВАННЫЙ ХАОС. ФРАКТАЛЫ
2.1. ТЕОРИЯ КАТАСТРОФ
2.1.1. Введение
Теория катастроф родилась на стыке двух дисциплин - топологии и
математического анализа, ее источниками являются теория особенностей гладких отображений
X. Уитни и теория устойчивости и бифуркаций динамических систем А. Пуанкаре,
А. Ляпунова, А. Андронова. Оба эти направления слились, благодаря усилиям
французского математика Р. Тома, в единую теорию, которая получила название - теория
катастроф.
При изучении свойств решений дифференциального уравнений сначала
необходимо явно оценить полное множество решений и лишь потом анализировать их
свойства. Проблем не возникает, если это линейная, лучше стационарная система
дифференциальных уравнений. Для нелинейных систем полное множество решений можно
построить для уравнений второго порядка (например, методом фазовой плоскости).
Что же -касается уравнений третьего и более высокого порядка, то здесь известны
решения только частных задач. Как же поступать в этом случае?
Выдающийся французский ученый Анри Пуанкаре убедительно показал, что во
многих случаях необходим лишь ограниченный объем информации качественного
характера, которая, в конечном итоге, и представляет интерес при изучении
конкретных динамических систем.
Основы современного подхода к определению качественных изменений в
поведении решений обыкновенных дифференциальных уравнений были заложены А.
Пуанкаре в конце 19 века. Он впервые ввел такие понятия, как структурная устойчивость,
динамическая устойчивость и критические множества. Особенно интересовало
Пуанкаре, как качественно меняется поведение динамической системы при изменении
описывающих ее параметров.
Перестройка качественной картины движения динамической системы при
изменении ее параметров получила название бифуркации (буквально, раздвоение).
Работы А. Пуанкаре по исследованию структурной (топологической) устойчивости
динамических систем в 30-е годы XX века продолжили советские ученые А.А.
Андронов и Л.С. Понтрягин. Структурно устойчивые системы они назвали грубыми [1].
В это же время Марстон Морс исследовал структуру некоторой функции (которую
теперь называют морсовской) в окрестности изолированной точки многообразия,
которое содержит траектории динамической системы. Он показал, что невырожденные
критические точки такой функции являются изолированными точками, что определяет
структурную устойчивость данной динамической системы к возмущениям.
Одновременно Хаслер Уитни описал особенности гладких отображений. Рене
Том заметил (в конце 50-х годов), что эти две теории - особенности гладких
отображений и структурная устойчивость динамических систем - могут быть объединены в
одну общую теорию. Он ввел важное понятие «трансверсальность», которое стало
основным при описании структурной устойчивости. Позднее Р. Том использовал его
при описании канонических форм определенных особенностей отображений
R" -> R1 (функций), которые он назвал катастрофами.
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы 93_
Предмет теории катастроф - изучение зависимости качественной природы
решений уравнений от значений параметров, присутствующих в заданных уравнениях.
Для данной теории требуется определенный математический аппарат, с изучения
которого и начинаем изложение.
2.1.2. От аналитичности к гладкости. К-струи и ростки функций
Рассмотрим некоторую дифференцируемую функцию f:R->R и разложим ее в
ряд Тейлора в окрестности некоторой точки xQ
f(xo+x) = ao+alx + a2x2+.... (2.1)
По традиции представление этим рядом считается полезным только в том случае,
если он сходится в некоторой окрестности UX) и сумма его равна f(xo+x). В этом
случае /(*) называют аналитической в точке х0. Ряд можно дифференцировать в
некоторой (возможно) меньшей окрестности VXq и его коэффициенты равны
1_
/!
Z)'/l = *Х
I ° ax1
где
х=х0
Для дальнейшего анализа нам потребуется ввести некоторые определения и
обозначения.
Пусть Мп с Rn ,Nm с: Rm - гладкие многообразия (подробнее см. главу 1) и
имеется некоторое отображение /: Мп -> Nm .
Определение 2.1. а) Будем говорить, что отображение / является
дифференцируемым класса к и обозначается f eCk(M"9Nm), если каждая их функций
fi(x\ / = 1,/и является к раз дифференцируемой вещественной функцией на Мп ;
б) Отображение / называется (вещественно) аналитическим и обозначается
/еС®(Мп,Nm), если каждая из функции /Дх), / = 1,/й является аналитической,
т.е. может быть разложена в сходящийся ряд Тейлора;
в) отображение / называется гладким (или бесконечно дифференцируемым, или
принадлежащим классу С00) и обозначается f еС™(Мп,Nm), если для всякого
неотрицательного целого к отображение / является дифференцируемым класса Ск .
Справедливо включение: С03 с С00 с... с С1 е С0.
Рассмотрим теперь функцию f(x) = sin x . Данная функция является
аналитической, т.е. f(x) e С03(/?,[-1,1]) и ее ряд Тейлора имеет вид
А , х(2*+1)
На рис. 2.1 показаны графики полиномиальных функций, которые получаются,
если ограничиться первыми к членами к < 13 .
Из рис. 2.1 отчетливо видна сходимость ряда Тейлора. Однако замечаем, что даже
при очень большом числе членов разложения приближение очень плохое вдали от
начала координат. Но, с другой стороны, вблизи начала координат приближение
очень хорошее. С увеличением числа членов разложения интервал, на котором
точность приближения улучшается, также растёт. Это принципиальное отличие
аналитических функций от другого класса функций, а именно гладких функций.
94
Методы современной ТАУ. Часть IV
Рис. 2.1. Усечение ряда Тейлора для аналитической функции y = sinx
(цифры определяют число членов разложения)
Для гладких функций ряд Тейлора может расходиться или сходиться, но не к той
сумме.
Рассмотрим пример. / е С00 (/?, R),
[О, х = 0,
[е Ux , х*0.
Данная функция имеет следующий вид (рис. 2.2).
Рис. 2.2. Гладкая функция f(x) = e 1/х
Легко проверить, что для любого к
*->0
Действительно, например, для к = 1 имеем
2 , Hi (*-'"1
HmD1 fl=\\mA-e~Ux =21im^ ^=lim^ ^- = ... = 0.
lim D /L- ..п. --.
x-+0
-\lx
Это значит, что функция е очень «плоская» вблизи начала координат,
причем более «плоская», чем любой одночлен xJ, у = 3,5,7,....
Так как D*/10= 0 для любого к , ряд Тейлора вблизи начала координат имеет вид
0 + 0х2 +0х3+ (2.4)
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы 95^
Он, конечно, сходится, но не к /(*), а к /(х) = 0, т.е. f(x) является гладкой,
но не аналитической функцией.
Следует ли из этого, что гладкие функции не могут использоваться для
приближений. Отнюдь! Как остроумно заметил Зиман (один из теоретиков теории
катастроф), пора, когда сходимость остаточного члена
R0(x) = f(x0+x)-(a0 + alx + ... + akxk)
при к -> оо являлась основным инструментом приближений и когда «было
дозволено, чтобы «хвост» (ряда Тейлора) вилял собакой», явно прошла. Например, ряд
Тейлора (2.4) хотя и не сходится к /(*), прекрасно приближает эту функцию в начале
координат с качественной точки зрения. Он чётко улавливает, что /очень плоская в
нуле. Чего он не улавливает, так это то, что начало есть локальный минимум для/
Для любой гладкой функции /е С00 (R,R) определим ряд Тейлора в начале как
формальный ряд
/(*) = Zj^V !<>*'• (2-5)
<=о/!
Ограничиваясь членами степени не выше к, получаем Л-струю.
Определение 2.2. к-струей гладкой функции fe С00 (R,R) в точке л:0
(обозначение j\ f(x)) назовем усеченный ряд Тейлора данной функции в окрестности точки
/=0 ' •
Если ввести замену переменных у = х-х0 и перейти от функции /(*) к
функции /(у), т.е.
Дх) = Ах(у)) = Яу+хо) = Ау),
то
Д/оо-Е-^аУ- (2-7)
/=0 1'
Поэтому без снижения общности точку л:0 можно считать началом координат и в
дальнейшем мы считаем, если нет особой оговорки, что л:0 = 0, а формулу (2.6) мы
запишем в следующем виде (индекс «О» у jkf опущен)
/Л*) = 1Т[Я71о*'. (2-8)
Замечание 2.1. Обозначение jkf(x) для £-струи взято по первой букве
английского слова «jet» - «струя».
Замечание 2.2. Определение (2.8) для Л-струи, вообще говоря, не совсем
математически строгое, а является представлением Л-струи в некоторой координатной
системе; в данном случае это координаты х0,*1,*2,...,** . Строгое же определение
дается в бескоординатной форме, но мы всегда будем рассматривать £-струи в некотором
координатном представлении, поэтому выражение (2.8) принимаем за определение.
Усеченный ряд Тейлора (2.8) представляет собой многочлен, задающий
полиномиальные функции
% Методы современной ТАУ. Часть IV
//: R -> R (2.9)
независимо от того, сходится или нет ряд Тейлора.
Напомним некоторые определения.
Определение 2.3. Степенью одночлена назовем сумму степеней всех
переменных, входящих в данный одночлен.
Например: х[х\х™ - многочлен 26-й степени.
Определение 2.4. Степенью многочлена (полинома) р(х) назовем наивысшую из
степеней одночленов, входящих в данный многочлен. В случае, когда х е R1, степень
многочлена определяет наивысшая степень переменной х.
Определение 2.5 [20]. Порядком многочлена (полинома) р{х) назовем
наинизшую из степеней одночленов, входящих в данный многочлен. Для xeR1 порядок
многочлена определяет наинизшая степень переменной х.
Определение 2.6. Будем говорить, что функция f:R->R имеет в начале
координат (т.е. в точке х0 = 0) порядок к, если
/(O) = D/|o=D2/lo=- = ^"1/lo = O. (2.10)
Если jkf(x) многочлен степени к, то многочлен f(x)-jkf(x) имеет порядок
(к+\). Другими словами, /-е производные в нуле для jk f(x) и f(x) совпадают для
/ = 0Д. Тем самым ряд Тейлора и его усечение в виде Л-струи оказывается удобным
формальным средством для получения информации о производных функции/и,
значит, о ее форме вблизи начала координат, т.е. х0 = 0.
2.1.3. Регулярные и критические невырожденные точки
гладких функций
Ниже мы будем рассматривать только гладкие функции, т.е. /: Мп -» N с: Rl,
либо семейство гладких функций / :М" хАр -» N1 qR\M" qR" ,Ар с Rp -
множество параметров, Мп,Ар - гладкие многообразия.
Рассмотрим, какие особенности присущи функциям. В свое время П. Монтень
тонко заметил, что «функции, как и живые существа, характеризуются своими
особенностями» (цит. по [4]). Именно особенности гладких функций (а в общем случае,
гладких отображений) позволяют выявить качественные изменения фазовых
траекторий динамических систем на основе их особенностей анализа на данном фазовом
пространстве. И здесь большую роль играют критические точки гладких функций.
Определение 2.7. Пусть задана гладкая функция / на гладком многообразии
М" c:Rn ; /: М" -> N czR1. Точка х0 е Мп называется регулярной (некритической)
точкой функцииДх), если
_ df а/
—I ......
.5*1 dxnyxQ
*0. (2.11)
Для регулярных точек известна теорема о неявной функции, которая определяется
следующим образом.
Теорема 2.1 [8] (теорема о неявной функции). Пусть U с R", V a Rm - открытые
множества и (xo,yo)eUxV с: R"+m. Если f:UxV->Rm-Cl - отображение,
Дхо>Уо) = 0 и det — ф 0, то существует такая открытая окрестность W(\0)dU
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
97
точки х0 и такое отображение g:W(xo)-> V , что g(xo) = yo и /(x,g(x)) = 0 для
любого х е W(xq) , причем такое отображение g единственно. Кроме того, g e С1 и
(2.12)
dg) R-iA
— =-В А,
дх)
(fif • ^ (fif Л
где матрицы В и А получаются из матриц —(х,у) и —(х,у) соответственно
\ду ) \дх )
при замене аргумента у на g(x).
Используя теорему о неявной функции, для регулярных точек можно провести
гладкую замену координат у = у(х), при которой данную функцию в точке х0 и ее
окрестности можно представить в канонической форме /(х) = Xj, т.е.
/(x) = /(x(x)) = /(x) = x,. (2.13)
Соотношение (2.13) не что иное, как отображение того факта, что / и / являются
эквивалентными функциями (ниже дается строгое определение этому отношению).
Покажем один из возможных вариантов такой регулярной замены. Пусть /(х) и
/(х) две функции, которые описывают один и тот же физический процесс в различных
системах координат. Сделаем следующую замену х = х(х) в окрестности точки л:0:
x2=a2lx]+... + a2nxl9
Ху, =аи,х,+... + аиихи.
(2.14)
Матрица Якоби этого преобразования в данной регулярной точке х0 не
вырождена при условии, что
дхх ' ' дх„
det
\dxt
= det
x=xoeR"
Л2\
*n\
<*2n
9tO.
(2.15)
Если Df Ц * 0 , то вещественные числа ay-(i = 2,n, j = l,ri) можно выбрать таким
образом, чтобы якобиан был отличен от нуля. В этом случае преобразование (2.14)
обратимо и по теореме о неявной функции имеет место равенство (2.13).
Пример 2.1. Пусть в системе координат (xltx2) функцияJ[\) имеет вид
/(х) = 2х,х2. (2.16)
Сделаем замену переменных
*,=2х,д:2, (2.17)
х2=х2. (2.18)
Рассмотрим окрестность точки *0 = (x,o,*2o)T » причем дг20 * 0 . В этом случае якобиан преобразования
det
ы=
= det
2х20 2xh
О . 1
= 2х2о*0.
Перепишем уравнение (2.17) и (2.18) в следующем виде*
/|(х,х) = (5,-2х|дг2) = 0,
/2(х,х>(*2-х2) = 0.
(2.19)
(2.20)
98
Методы современной ТАУ. Часть IV
Согласно теореме 2.1 о неявной функции выделим из (2.19) и (2.20) координаты х1 и х2 как функции
от переменных (х\,х2). Хотя это легко можно сделать и алгебраически, но мы сделаем полные выкладки.
Имеем
*i=gi(*h (2.21)
*2 = *2(*). (2-22)
Тогда (2.19) и (2.20) примут вид:
/,(g(x),x) = 0, (2.23)
/2Wx),x) = 0. (2.24)
Взяв полную производную в (2.23) и (2.24) по х, получим
4Г(^(х)>х) = У(ж,ж)
dx дх
lx=g(x)
lx=g(x)
М)ш0>
дх
(2.25)
где / = [/|,/2]т. Разрешая (2.25) относительно . , получим
^ Эх ;
Ж,
а*,
foffl dg2(x)
аг,
аг.
= 2g,(i)
I о
или в координатной форме:
х=К(х)
1 0
0 1
£fci(x)=__L_;
а^, 2g2(x)'
dg,(x)= gl(ic).
ag2(x)
= 0;
ag2(x)_1
dx2
Интегрируя (2.29), с учетом (2.28) получим
*2=£2(*) = *2+С|.
(2.26)
(2.27)
(2.28)
(2.29)
(2.30)
С учетом того, что /(g(x),x) = 0, из (2.18) получим С, =0 . В этом случае два уравнения (2.26) и
(2.27) в частных производных приводятся к следующему виду
dgl(x)_ 1 .
dx, 2x2
Из (2.31), (2.32) легко находим
3gi(*)= gi(*)
5^2 х2
*l=g|(« = ^-
^Х2
(2.31)
(2.32)
(2.33)
Ранее было получено
*2=g2(*) = *2+e|- ' (2-34)
Выражения (2.33), (2.34) определяют переход от координат (х,,*2) к {х\,х2), причем в координатах
(jcj,jc2) имеем
/(х) = /(х) = 2ххх2 = /(g(x)) = 2^-х2 = х,.
ix2
т.е. получен канонический вид (2.13).
"лава 2. Теория катастроф. Детерминированный хаос. Фракталы 99^
В том случае, если в некоторой точке х0 £>/|Х(=0, а /(х) имеет смысл
потенциальной функции, то эта точка характеризует состояние равновесия (устой-
швого или неустойчивого) и ее называют критической. При этом тип равновесия
определяется собственными значениями матрицы устойчивости, или матрицы
Гессе в точке х0
G/(xo) =
9V(x)
(2.35)
J х„
dxfixj
Так как Df |Xq = 0, то условия применимости теоремы о неявной функции не
выполняются, поэтому /(х) не может быть представлена в канонической форме (2.13).
Однако если
det(G/(xo))*O, (2.36)
то лемма Марстона Морса гарантирует существование гладкой замены переменных,
такой, что /(х) локально (в окрестности Ux ) может быть представлена
квадратичной формой
Дх) = /(х(у)) = /(у) = /(Хо)-у? -у\ -:.:-yl + у2ш +... + у2п. (2.37)
Число отрицательных членов /(у) называется индексом функции Морса, саму
функцию называют h-м морсовским седлом и обозначают МЦу). Если й = 0, то в
точке х0 = 0 достигается минимум /(х), если И = я, то соответственно максимум.
Такого рода точки х0 , где Df\x = 0, detG/*(xo):?tO, называют критическими
невырожденными точками. Если все критические точки функции /(х) являются
критическими невырожденными, то функция /(х) называется морсовской.
Далее мы рассмотрим лемму Морса, но прежде нам необходимо ознакомиться с
широко используемой в дифференциальной геометрии и топологии леммой о
представлении гладких функций.
Лемма 2.1 (о представлении гладких функций) [8, 21]. Пусть f-Cr+] -функция
(г > 0 ) (имеет производные до (г+1) порядка), заданная на выпуклой окрестности Vx
точки х0 в R" . Тогда существуют С -функции gt:Vx ->Rl, / = 1,л, такие, что
причем
/(х) = Дхо) + £&(хХ*, -*,<>), (2-38>
/=1
ft(xo) = |r(xo). (2*39)
дх,
Доказательство. Положим
ftW = J-J-(xO+^-xo))A (2.40)
Это всегда можно сделать, т.к. х е VXq ,аКХ() - выпуклая окрестность точки х0 .
Применяя элементарные преобразования анализа, получаем
100 Методы современной ТАУ. Часть IV
/(»)-/(».)-Jy('°'"('~Ko)df-}ft(»i-^.)|L(»o-b<(»-».)V-
0 Ut (Л/=1 °Xi )
п г df n
= Y<(xi-xio)\j-(xo+t(x-4)dt = Y,(xi-xio)gi(xl
i=\ о dxi i-l
что и требовалось доказать.
Пример 2.2. Рассмотрим гладкую функцию f:R->R
Дх) = хъ + 3х2 (2.41)
и найдем ее представление (2.38) в окрестности точки дг0 = 1.
Имеем
дх dx
Найдем функцию g\(x). Согласно (2.40) получим
i
gi(x) = J3(\+t(x-l))2+6(\ + t(x-\))dt = (x-\)2+6(X'\) + 9i
о
тогда f(x0) = /(1) = 4 и представление имеет вид
/М = 4 + ((х-1)2 + 6(х-1) + 9)(;с-1). ' (2.42)
Это точное представление, т.к. раскрытие скобок формулы (2.42) дает (2.41).
Лемма 2.2 (лемма Морса [8, 9, 19]). Пусть Мп - гладкое многообразие
(обобщенное понятие поверхности, см. подробнее главу 1) и пусть /: Мп -> R{ и х0 -
невырожденная критическая точка функции/ Тогда в некоторой окрестности VXq точки х0
существует такая локальная система координат у\,...,у„9 что ^(хо) = О, / = 1,и и в
КХ() справедливо тождество
/(х) = /My)) = /(У) = Дхо)-*2 -...-yl +y2h+1 +... + У2п , (2.43)
где У)9~.,у„ - координаты точки у, а А - индекс функции /в точке х0, т.е. число
отрицательных членов в формуле (2.43).
Доказательство. Применим лемму 2.1 о представлении гладких функций к
функции Дх). Имеем
/00 = /M+Za(x)(*i -*.«). (2-44)
/=1
где
1
причем
g,(x) = J-^(xo+/(x-xo)A, (2.45)
0 ™i
а(хо) = -^(хо),/ = п (2.46)
Так как х0 - критическая точка, то
а(хо) = О,/ = п. (2.47)
Применим к g/(x) вновь лемму о представлении гладких функций.
Имеем
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы 101
П rsr
Дх) = /(х0) + ЕтЧхо)(**-*-о) +
•_i OXi
'-' (2.48)
+SS VXK*i ~Xio){Xj ~Xjo)>
i=l 7=1
где
l
^(х)=№(хо+/(х-хо))А, /,У = 1,«. (2.49)
С учетом (2.47) представление (2.48) имеет вид
/(x) = /(xo) + ZZ^(x)(*/-*/o)(^-^o) (2-50)
/=1 7=1
Сделаем замену переменных
yt =xi-xi09 / = l,/i. (2.51)
Тогда (2.50) можно записать в следующем виде:
/(х) = Д*(у)) = /(у) = Дхо) + ZS^, (У)Л^- (2-52>
i=i j=\
Обозначим
/(У) = /(У)-/(ХО). (2.53)
Тогда
ку) = ££~Ь0{у)у>Уу (2.54)
/=1 7=1
Матрицу вторых частных производных £//(.?) сделаем симметричной, вводя замену
4 =^ft+W'"л=ь* (2-55)
После чего получаем
Лу) = ЕЕ4(у)^г (2.56)
/=1 7=1
Отметим, что
1 а2/
2%9Р7
и по определению матрица р,7(0) невырождена, соответственно матрица б/ДО)
тоже невырождена.
Если бы функции by (у) были константами, то для доказательства теоремы
(леммы Морса) нам было достаточно привести квадратичную форму (2.56) к
каноническому виду. В общем же случае процедура приведения состоит в следующем.
д2?
Пусть для определенности —у (0)^0 (это не снижает общности, т.к. линейным
дух
изменением координат всегда можно добиться этого), т.е. 6ц(0) ф 0 . Тогда в
некоторой окрестности точки у0 = 0 можно записать
%(0) = ^г^<0) (2-57)
102
Методы современной ТАУ. Часть IV
/(у)=ZS4 Ш& = Si (у)ti+ 2Z5i {уУуГух +ZI4 (у)яру =
i-l 7=1
/>1
/>1 У>1
= sign6n(0)
'»sign4i,(0)Vii,(y) J
Mfl
ZZ5i (y)5y (y)A^+ZZ4 (у)луу =
(2.58)
Ы ;>i
/>i y>i
= sign^(0)7l2+XZ
;>1 >>1
^(У)-
WiMl,
Ь,|(У)
V^y
где новая координата ух зависит от координат уи...,у„
У\
=Ku)\*+±-—i
Матрица
ы signal (0)^, (у). ■
ш-
5.(у)*л(у)
ш\
, \<ij<n
(2.59)
(2.60)
невырождена в точке у0 = 0 и симметрична. Следовательно, мы сможем применить
приведенное выше рассуждение к функции
ЕЕ
/>l j>\
ш-
шш
ш
УгУ,
(2.62)
и т.д., как в классическом алгоритме Лагранжа приведения квадратичной формы к
каноническому виду.
Пример 2.3. Рассмотрим функцию
Дх) = х\ -4х, + х{х2 -х\ + х2. (2.61)
Градиент этой функции
grad/(х) = 0x1 - 4 + х2;-2х2 + х, + 1)т.
Критические точки функции:
grad/(х) = 0, => У- = 0; $- = 0;
дхх дх2
х0 -(1,1) ,х0 -^ 6, i2j.
Рассмотрим критическую точку х0 = х^. В данной точке гессиан функции/*)
det(G/(x)) = det^ _У = -Щ-2
невырожден detG(xo) = -14^O, поэтому данная критическая точка является невырожденной и
изолированной, а по лемме Морса ее можно представить некоторой квадратичной формой в каноническом виде.
Получим это представление.
Сначала найдем функции g,(x), / = 1,2 (формула (2.40))
&« = Яг(*о+'(1-*о))Л.
[^
(2.63)
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
103
Имеем
х7 5
g1(x) = {3(l + ^!-l))2-4 + (l + ^2-l))^ = xI2+x1+^-^.
о 1 1
Согласно (2.48) найдем коэффициенты для квадратичной формы:
bu(x) = \f&.(x0 + t(x-x0))dt = \(2(\ + t(xl-\)) + l)dt = xl+2;
№
М*) = )|£Ч*о + Ф'-*о))<* = }^' = |;
Jo*2
*21(х) = |^-(х0+'(х-х0))Л = )1л = 1;
b22(x) = \^(x(t+t(x-xa))dt = \(-l)dt = -l.
Итак, имеем матрицу
>2
В(х) =
х, +2
1
1 2
Г
2
-1
)
Заметим, что
*(*„)=
= fG/(x0).
Получено следующее представление функции^Дх) (с учетом g/(x0) = 0, / = 1,2, /(х0) = -2)
/(х) = -2 + (х1 +2)(Xi -1)2 +(х, -1)(*2 -1)>(^ -I)2 (2.64)
Если раскрыть скобки в (2.64), то получим искомое выражение (2.61), т.е. представление квадратичной
формы (2.64) выполнено верно.
Введем замену переменных:
U=*! -*!0 =*1 "I (2-65)
У2=х2-х2О=х2-\ (2.66)
Тогда
*1 = Л + 1;*2=Л + 1- (2-67)
Подставляя (2.67) в (2.64), получим
f(y) = -2 + (yl+3)yf+yry2-yl.
Матрица
*(У) =
^ -.
(2.68)
является симметрической, поэтому Z?(y) = В(у).
Обозначим
/(У) = 7(У) + 2.
Тогда имеем
ку) = (п+1)у?+У1У2-У22. (2-69)
Приведем квадратичную форму (2.69) к каноническому виду. Согласно (2.59) введем замену
координат
Ч^Л+^Ч
(2.70)
где sign £ц(0) = I. После замены имеем
104
Методы современной ТАУ. Часть IV
/(**) = >?+ -1"
у1
Обозначив
окончательно получим
/(у) = у\-у1
(2 71)
(2.72)
С точностью до перестановки индексов (сначала идут положительные, затем отрицательные члены)
мы получили каноническую квадратичную форму индекса 1. Если сделать обратную замену, то имеем
следующую цепочку:
/(У) = /ОЧУ) = /(У) = /(У) + 2 = /(Ях» + 2 = /(х) + 2 .
Действительно,
(2 70),(2 71)
/СКУ)) = sign bu(0)\
1
= U+3)>f + yry2 + -
У\
|Л+3|] I1 + 4|j>,+3|
1
Й =
Т~>>2 "ТГ^
(2 65), (2 66)
= (х, + 2)(х1-1)2 +
4|*+3| "2 4|й+3|
+ (xl-\)(x2-\)-(x2-\)2=f(x)-f{x0)=f(x) + 21
т е. представление выполнено верно.
Следствие 2.1 (леммы Морса) [19]. Всякая невырожденная критическая точка
функции/ изолирована в множестве всех критических точек этой функции, т.е.
обладает окрестностью, свободной от других критических точек.
Критические точки имеют большую ценность, чем регулярные (некритические),
т.к. именно они в основном характеризуют глобальные качественные изменения в
поведении функции/*). Рассмотрим морсовскую функцию fM{x\xe R], имеющую
вид (рис. 2.3).
Здесь три критические изолированные точки, причем точки х§\х^ имеют по
морсовской классификации индекс 0, а х^ - индекс 1.
Точки j$\jcJ2) являются аттракторами (множествами притяжения; в данном
случае каждый состоит из одной точки), причем каждый со своим «бассейном»
(областью притяжения) [3]. Важность критических точек состоит в том, что при
переходе из одного «бассейна» в другой всегда необходимо проходить через критическую
точку, имеющую другой морсовский тип.
Следовательно, если/х) имеет лишь изолированные критические точки (является
морсовской) и координаты всех этих точек известны, можно определить все
качественные изменения в поведении функции/*) при условии, что известен тип каждой
морсовской точки.
Рис. 2.3. Морсовская функция с двумя «бассейнами» (областями притяжения)
и аттракторами Xq\x^
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы 105^
Немалую роль в поведении некоторых динамических систем играют критические
вырожденные точки, наличие которых подчас приводит к внезапному качественному
изменению состояния систем. Появление критических вырожденных точек Df \ч = 0,
det||G/(xo)|| = O обычно связано с погружением данной функции fix) в
параметрическое семейство функций, т.е. / = /(х,а),где а = (а{,...,аку - вектор параметров.
Перестройки качественной картины движения динамической системы, появление
особенностей отображения у функции fix, а) при плавном изменении параметров
изучают теория бифуркаций (бифуркация - раздвоение), теория особенностей
гладких отображений, а приложения этих теорий к исследованию скачкообразных
реакций механических, физических, химических, биологических, экономических систем,
систем управления и иных систем на плавное изменение внешних условий
(управляющих параметров) получили название теории катастроф [4].
2.1.4. Неморсовские функции. Лемма расщепления.
Функции катастроф
Определение 2.8. Критические точки функции fix), в которых гессиан
det(G/(x0)) = 0, являются неизолированными вырожденными, или неморсовскими
критическими точками.
Если функция fix) зависит от одного или более управляющих параметров
ах,...,ар, то матрица Гессе Gfix) и ее собственные значения зависят от этих
параметров. В этом случае возможно, что при некоторых значениях управляющих
параметров одно (или несколько) собственных значений матрицы G может (могут)
обратиться в нуль. Если это так, то det(G/(x0)) = 0 и, следовательно, условие, необходимое
для леммы Морса Df\Xo = O, det(G/(xo))*O, не выполняется и в точке равновесия
функция fix) не может быть представлена в канонической форме (в виде
квадратичной формы).
Но, оказывается, можно найти каноническую форму функции /(х), х е Rn ив
неморсовской критической точке.
Пусть в критической точке х0 = 0 (для определенности и без снижения
общности) D/Lo = O Hdet(G/(xo)) = O.
Пусть
rank G/(x) = («-/), (2.73)
т.е. матрица Гессе Gfix) имеет / нулевых собственных значений (/ > 1). В этом случае
лемма Морса не применима, т.е. представление fix) в виде квадратичной формы
Г и Л
~Х-У'2+ X у) невозможно.
Рене Том [31] показал, что в этом случае функцию fix) можно также привести к
некоторой канонической форме.
Лемма 2.2 (лемма расщепления). Пусть / собственных значений матрицы Гессе
G/(xo,a°) обращаются в нуль в точке (хо,а°), х0 =(х10,...,*л0)Т, а0 =(а10,...,^) .
Тогда можно найти такую замену переменных х = я(х).,.лто функция fix) может быть
представлена в виде суммы двух функций: неморсовской fm, зависящей от координат
106 Методы современной ТАУ. Часть IV
*!,...,х,, которые являются гладкими функциями переменных (хь...,хп) и параметров
а^,...,а°р , и морсовскойум зависящей от х1+{9...,хп, которые являются гладкими
функциями только искомых координат [х},..., хп), т.е.
Дх,а°) = /(*(х),а) = /(х,а) =
Л /о о \ Л Q-74)
= /мм{х\(х'>* ),-..,*/(х,а )))+/м(х1+](х),...,хп(х)).
Назовем координаты х = (хх,...,хе) - неморсовскими, х = (х/+1,...,х„)
-соответственно морсовскими.
Более того, если / = /(х,а), х е Rn, a e Rp , то при р < 5 (т.е. когда число
параметров семейства не более 5), Р. Том показал [31], что (2.74) может быть
представлено в следующем виде:
/(х, а) = /(х, а) = /(х, х; а) = Cat (x, a) + fM (x), (2.75)
где x = (i,,...,5/)T, x = (x/+1,...,*w)T, a = (a1,...,a/7) ,
Cat(x,a) = [Cat](x) + /7(x,a), (2.76)
fM(x) = ±xf+{±xj+2±...±x2n (2.77)
(знак ± в (2.77), означает, что тип морсовского седла в точке х0А/£(х0) может быть
любым). Функцию Cat(x,a) называют функцией катастрофы, или просто
катастрофой, I - число нулевых собственных значений матрицы Гессе G/(x0) (число не-
морсовских координат),/? - число управляющих параметров, [Cat]0(x) - росток
катастрофы в точке х0 =0 (определение ростка функции будет дано ниже), р(х,а) -
возмущение ростка. Из представления (2.75) и названия функций можно сделать
предварительный вывод о том, что именно неморсовские функции «создают
катастрофы», в чем мы далее убедимся.
2.1.5. Возмущение морсовских и неморсовских функций.
Элементарные катастрофы
В чем же качественное отличие морсовских и неморсовских функций в их
критической точке х0 ? Прежде всего в их реакции на возмущение. Пусть х0 = 0 -
критическая точка /(х). Пусть /(хо,а°) характеризует для критической точки х0 и
некоторого значения вектора параметров а0 состояние равновесия. Для удобства
возьмем х0 = 0, а0 = 0 (это всегда можно сделать, вводя соответствующую замену
переменных для сдвига начала координат). Возмущенная функция F(x, а) в окрестности
точки (хо,а°]е Rn xRp определяется следующим образом:
F(x,a) = /(x)+/>(x;a), (2.78)
где/дс) - значение функции/в окрестности точки х0 = 0,/?(х;а) - возмущение
данной функции.
' Посмотрим, как ведет себя морсовская функция при возмущении. Пусть хе R1
(скалярный аргумент) и
Дх) = Хх2(Х*0). (2.79)
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
107
Разложим возмущение р(х, а) по степеням х в окрестности точки х0 = 0, а е Уо -
окрестность точки а0 = 0 .
р(х;а) = р(0,а)Л\ -хА
КО/»)
э*2
•X +... .
(0/1)
Объединяя (2.79) и (2.80), получим возмущенную функцию
F(x;a) = p(0,a) +
др\
дх
0,а)
•JC+ Л.+
Обозначим для удобства
Р\
дх
(0,о)
дгр
дх
(0,о)
д'р
■;р'=-д7
(2.80)
(2.81)
(2.82)
(0,а)
Сделаем замену переменных
х = у + В2у2+В3у3+...9 (2.83)
в результате которой из ряда (2.81) можно исключить члены выше второй степени.
Покажем это. Сделав подстановку (2.83) в (2.81), с учетом (2.82) получим:
у '. Произвольная константа = /?j \
у '. Произвольная константа = Р\В2 + (А, + р2 )\
y3:0 = PlB2+(X + p2)-2B2+p3- j. (2.84)
/ :0 = PlBA +(X + p2)-(2B3 + В\)+ ръ -ЗВ2+рл;
Если р\ = 0, то система уравнений, определяемая при членах выше второй
степени уг,у*,..., является линейной и может быть легко решена:
Ръ
В2=-
2(\ + р2У
в,-^-
рА
(2.85)
&(\ + p2f 2(X + p2y
В этом случае все коэффициенты В2,В3,... определены корректно, т.к.
единственный множитель, который встречается в знаменателях, - это отличная от нуля
сумма (к + р2). Если же рх *0, система уравнений может быть также разрешена и
коэффициенты 52(р1),53(/?1)... зависят от рх непрерывным образом. Существенным
моментом является то, что, если X Ф 0, всегда может быть найдено гладкое
обратимое преобразование (2.83), удаляющее все члены выше второй степени.
Таким образом, в новых координатах возмущенная функция F(x, а) примет вид
F(x(y),a) = P(0;a) + Ply + {(\ + p2) + PlB2}y2 = p(0;a) + Ply + iy2. (2.86)
Сделав замену переменных у -» у = \Ц2 у и перенося начало координат
А
У = V+ Д^,
у = у +
2#|
108
Методы современной ТАУ. Часть IV
имеем
Пу,а) = \р(0;а)-Я\ + \у2.
(2.87)
Таким образом, возмущение функции одной переменной в морсовской
критической точке не влияет на качественную природу этой функции и, хотя при этом
критическая точка сдвигается, тип критической точки остается без изменения
(рис. 2.4), т.е. морсовские функции структурно {качественно) устойчивы.
Рис. 2.4. Возмущение функции в морсовской критической точке
Можно показать, что для xeR" возмущение морсовского/i-седла М£(у) также
не приводит к локальным качественным изменениям.
Рассмотрим, что происходит, если возмущение действует в окрестности немор-
совской критической точки. Из леммы расщепления (лемма 2.2) следует, что
невозмущенная функция имеет вид
/М = /ш 00+ /*(*)■ (2.88)
где х = (х,,...,*,),х = (х/+1,...,х„). Напомним, что матрица Гессе в точке xo-G/(xo)
имеет / нулевых собственных значений. Самое общее возмущение функции/задается
следующей формулой (считаем, что р(0,а) = 0):
F(x;a) = /(х) + /?(х;а) = £аЛ +£Ё(±8(/ + Py)xixj +/ш00 +
+ члены 3-й степени и выше,
(2.89)
(0/1)
R ГI ' = J, dp dp
где5/7=<! . . Pi=—\ ; Ау=т-г-
Можно показать [9, 10], применяя описанную выше процедуру нелинейного
преобразования координат, что каноническая форма возмущенной неморсовской
функции имеет вид
F(x(y);a) = F(y;a) = FNM (y;a) + FM (y;a), (2.90)
где
/ / /
Ш=ЕМ+Е±^ (2-93)
/=/+1
/=/+1
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
109
у = (yl(xia)9...,yl(x,a))T9 у = (yl+l(xl.,.,yn(x)). (2.94)
Напомним, что знак ± в (2.93) указывает на любой тип морсовского //-седла М% в
данной критической точке.
Из выражений (2.91) - (2.94) можно сделать следующие важные выводы.
Если в семействе функций fix; а) встречается функция /(х,а°), имеющая немор-
совскую критическую точку в х0, то согласно (2.90) для любой другой точки fix; a)
а Ф а0 близкой к fix; а) можно найти такую координатную систему, что возмущенная
функция /(х;а) = /(х;а°) + /?(х) может быть получена отдельным возмущением
п
морсовской ^Г ±xf и неморсовской fNM части функции / Мы уже выяснили, что
/=/+1
возмущение морсовской функции (морсовской части) не вызывает качественных
изменений. Возмущения же неморсовской части функции fix) - кардинально меняет
топологию этой функции.
Покажем это. Но прежде обратим внимание на то, что fNM (ух,...,.у()не содержит
члены 1-м и 2-й степени, т.к. по определению точка х0 - критическая и
вырожденная, т.е. /м/(>'!»•♦•>>'/) = /ла/(у) включает члены 3-й степени и выше. Р. Том изучил
неморсовские критические точки с одной (/= 1) и двумя (/ = 2) степенями
вырождений и показал, что в канонической форме FNM(y;u) может быть представлена в виде
ростка неморсовской функции, называемого ростком катастроф, [Cat]0(y) и
возмущения этого ростка. Если число управляющих параметров /?<5, то для (/= 1,
/ = 2) Р. Томом были получены следующие элементарные катастрофы (табл. 2.1).
Элементарные катастрофы Р. Тома
Таблица 2.1
1
1
2
Тип
катастрофы
Л2
4з
А,
As
А
Д+4
о5
р
1
2
3
4
5
3
3
4
5
5
5
Росток
[<*].(*)
хъ
±х4
х$
±х6
х1
v2v г5
*i хг ~ хг
х\хг+х\
х\±4
Возмущение Р(х;а)
ахх
а^х + а2х
ахх+а2х2 + аъхъ
ахх + а2х2 + аъхг + а4х4
ахх+а2х2 + а3х3 + а4х4 + аьхь
аххх+а2х2+аъх\
ахх+а2х2 + аъх2
ахх + а2х2 + аъх2 + аАх2
ахх + а2х2 + аъх2 + аАх2 + аъх\
ахх + а2х2 + а3х2 + а^х\ + аьх\
а\х\ + агхг + аъх\х2 + а*х\ + а5х\х\
Пример 2.4. Рассмотрим неморсовскую функцию одной переменной х (/= I) в 1-м параметрическом
семействе, т.е. рассмотрим росток элементарной катастрофы А2 (по табл. 2.1)
/м/« = *3=[Са1]0(х) (2 95)
110
Методы современной ТАУ. Часть IV
Покажем, что каноническим возмущением для этого ростка является ахх. Действительно, возмущение
p(x;a) = po + plx + p2x2+p3x3+p4xA + ., (2.96)
где ро = р(0;а), А=-ТТ
Тогда
/ = 1,... .
:о,«)
(2.97)
Если сделать замену переменных
х = у + В1у2+В3у3+..9 (2.98)
то, так же как и в (2.84), в силу того, что коэффициенты (1 + р3) не являются малыми, а р^р^рг считаем
малыми вблизи а0 = 0 , можно подстановкой (2.98) в (2.97) и выбором соответствующих коэффициентов
pi9 i = 2,3,... исключить все члены ряда (2.97), начиная сх4.В этом случае имеем
/nm (У) + возмущение = ро + Р\У + Р2У2 + /• (2.99)
Сделаем замену переменных в (2.99) (как в методе решения уравнения 3-й степени)
"*-f.
получим
/nm (z) + возмущение = qo+qxz + z3. (2.100)
Постоянная составляющая q0 не влияет на качественные изменения неморсовской функции, поэтому
можно принять q0 = 0 . Таким образом, возвращаясь к исходным обозначениям, имеем:
каноническое
возмущение
[Cat]()(x) = x3 -> x3 + alX. (2.101)
Проанализируем свойства этого 1-параметрического семейства функций F(x\a)
(рис. 2.5):
1) при ах = 0 F(jc;O) имеет критическую вырожденную точку в х0 = 0;
2) при ах < 0 F(x;a) имеет в плоскости две изолированные морсовские
критические точки. При возрастании ах эти две критические точки стремятся друг к
другу и становятся вырожденной точкой при ах = 0;
3) при а} > 0 F(x;a) не имеет критических точек.
А
1 S
1 а
s
а
-5
1 0
1 S
Ь F(x\a)
■—^
У
-^
а, <0
Рис. 2.5.1-параметрическое семейство функций F(x\a) = х3 +ахх
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы Ш_
В общем случае возмущение ростка катастрофы, имеющего вырожденную
критическую точку, вызывает расщепление вырожденной точки на ряд невырожденных
критических точек («морсификация»). Максимальное число изолированных
критических точек, получаемых при возмущении ростка катастрофы, указывается в нижнем
индексе ростка. Например, росток А2 может при возмущении иметь 2
изолированные критические точки.
Отсюда можно сделать вывод: возмущение функции f(x) в неморсовской
критической точке вызывает качественное изменение в поведении f(x) в окрестности
данной критической точки.
2.1.6. Устойчивость. Качественные изменения в системе
Теория катастроф с самого начала пыталась дать ответ на вопрос: почему при
плавном изменении некоторых параметров динамические системы вдруг качественно
меняют свою динамику? Чтобы понять, почему данная наука смогла ответить на многие
такие вопросы, необходимо сказать, что ее фундаментом стали следующие теории:
• теория особенностей устойчивых гладких отображений (Уитни);
• теория бифуркаций.
В теории катастроф теория особенностей гладких отображений используется при
изучении качественных изменений гладких функций, т.е. отображений /еС°°(мп,я\,
а теория бифуркаций позволяет рассмотреть целое семейство таких функций,
зависящих от управляющих параметров, которые могут плавно изменяться на некотором
многообразии.
Качественное изменение поведения динамической системы прежде всего связано
с понятием устойчивости гладких отображений. Поэтому изложение мы начнем с
раскрытия этого понятия.
Здесь необходимо сказать, что такие изменения возможны только с изменением
топологической картины фазовых траекторий. Топология, или как ее еще называют,
«резиновая геометрия» не делает, например, различия между устойчивыми фокусом
и узлом на плоскости. Здесь важно, что поведение двух систем с такими фазовыми
портретами качественно одинаковое. Как же выразить на языке математики такую
эквивалентность!
Введём определения.
Определение 2.9 [И]. Пусть/ и / -два элемента С00 (мп, Nm V Назовем/и /
эквивалентными, если существуют такие диффеоморфизмы (взаимно-однозначные
отображения, дифференцируемые вместе со своими обратными) g: Мп -»Мп и
h\Nm -> Nm , что диаграмма
(2.102)
коммутативна.
На языке локальных координат это трактуется следующим образом: если х = g(x)
- гладкая замена независимых координат на многообразии Мп (подробнее о
многообразиях см. главу 1), у = h(y) - гладкая замена зависимых координат, тогда
коммутативность диаграммы (2.102) означает, что справедливы следующие соотношения:
м"
gi
мп
f
f
-»
N
i
N
112
Методы современной ТАУ. Часть IV
/00 = *(/(*"'(*)))>
или
(2.103)
(2.104)
f(x) = h-\f(g(x))).
Выражения (2.103), (2.104) говорят о том, что два отображения f \Мп —» Nm и
/: Мп -» Nm эквивалентны, если можно одно отображение преобразовать в
другое при помощи гладкой замены независимых и зависимых переменных.
Пример 2.5. Пусть М2 -двумерное многообразие (плоскость), вложенное в пространство R3 с
координатами: 1) (х,,х2) и 2) (*1»*г) (рис 2.6) Отобразим многообразие М2 в R3 в многообразие N3 с /?3
(седло), используя отображения/ и / :
М2 : (хьх2) eR2->N2\ [хьхъ-х2 +х\) е Л3,
M2:(xlix2)eR2^N3:(xlix2i2xlx2)eR2.
Уз=Уз
Рис. 2.6. Изображение морсовского 1-седла М2 зависит от выбранной системы координат
Покажем, что отображения / и / являются эквивалентными. Для этого, согласно формулы (2 103),
надо найти диффеоморфизмы h и g.
Определим g. Л/2 -> Л/2 следующим образом
Замена координат в пространстве независимых переменных.
, ч Хг+Х2 - / ч ~Xi+X2
^l=gl(x)=-J-7rJ-, X2=g2(x)=—V-2-.
V2 V2
Отображение /: Л/2 -> //3
^=yi(x) = x,,
;уз = /з(х) = -*|2+*2-
В координатах (^1,^2'^з) многообразие Л^3 задается уравнением у3=-у?+у1 (седло)
Отображение /: М2 -> Л^3
55i=/i(^) = ^i,
Уг =Л(*) = *2.
>)3=/з(^)=2^2
В координатах (i'l,^,^) многообразие /V3 задается уравнением .Рз^йй (седло).
Найдем теперь отображение A N3 -> /V3 (замена координат в пространстве зависимых переменных)
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
ИЗ
Й=*(У> = ^.
Уз=*>2(у) = -у}+у1
Убедимся теперь, что полученные отображения действительно удовлетворяют, например, первому
выражению (2.104).
Имеем
g"l00:
_ хх - х2
Jc,+jc2
/(«"'(5)) =
У\
Уг
Х\ ~ Х2 1 I Х\ + Х2 I -» - -
:,х2
и, наконец
*(/(*-(*)))=
Уг = !Г = *:
V2
- \2
= ^2>
- \2
= /(*),
что подтверждает правильность найденных преобразований.
Перейдем к понятию устойчивости отображений.
Определение 2.10 [1]. Пусть feC00 \Mn ,Nm Y Отображение/называется (c/w/ту/с-
турно) устойчивым, если существует такая окрестность Wj точки/в С00 (мп, Nw Y
что всякое отражение f ^Wf эквивалентно/
Иными словами, отображение/устойчиво, если всякое достаточно близкое
отображение / может быть превращено в/с помощью подходящих замен координат в
прообразе и образе / .
Как же определить, когда для гладких отображений и, в частности, для гладких
функций имеет место устойчивость? И здесь, прежде всего, необходимо найти тот
атрибут отображения (функции), который отвечает за устойчивость. Таким
атрибутом является росток отображений (функции), о котором мы ранее уже упоминали,
теперь дадим ему определение.
Определение 2.11 [11]. Пусть М" - гладкое многообразие их- точка Мп.
а) Две гладкие вещественные функции / и g, определенные в некоторых
окрестностях Ux и Vx точки х, называются эквивалентными вблизи х, если они
совпадают (/ = g) в некоторой окрестности GxczUxnVx.
Замечание. Это отношение эквивалентности отлично от того, что дано в определении
2.9, и относится к определению ростка функции, а неустойчивости отображений.
9 Зак 416
114
Методы современной ТАУ. Часть IV
Пусть f \UX-+ R - гладкая функция, где Ux - некоторая окрестность точки х.
Тогда ростком функции f в точке х (обозначение [f]x) называется класс
эквивалентности функции по отношению к эквивалентности, введенному в пункте а). Про
две функции из одного класса говорят, что они имеют общий росток в точке х.
Графически это определение можно отобразить следующим образом (рис. 2.7).
Рис. 2.7. Функции/и g с общим ростком в точке jc
Таких функций/и g, имеющих общий росток в точке х, может быть бесконечное
множество, поэтому росток [/] определяют как класс, т.е. как множество
однотипных (эквивалентных) функций по определенному выше отношению эквивалентности.
По аналогии с эквивалентностью функций введем эквивалентность ростков функций.
Определение 2.12 [4]. Два ростка [f]x и Г/1 гладких функций f:M"^>R и
/: М" -> R называются эквивалентными, если существуют ростки
диффеоморфизмов прообраза [g]x и образа [h] , переводящие первый росток во второй
[/l-MH'L-IV'l-
Определение 2.13 [4]. Росток [f]x гладкой функции f\Mn-*R в точке хеМп
называют устойчивым, если для сколь угодно малой окрестности Ux точки х
существует окрестность Wf функции / в С00 (мп ,/Л, в которой для любой функции
feWj в Ux найдется точка х, такая, что росток [/]. эквивалентен ростку [f]x-
Устойчивость функции в точке - это свойство ростка, а не функции [4]. Это
свойство не теряется при изменении/ не затрагивающих хоть как-нибудь
окрестность точки х.
Правила нахождения ростков функции и определение их устойчивости будет
рассмотрено ниже.
2.1.7. Трансверсальность и устойчивость
Теперь мы приступаем к изучению вопросов о том, что определяет структурную
устойчивость, как определить ростки функций и найти наиболее универсальное
возмущение для данного ростка функции. Начнем с фундаментального понятия,
введенного Р. Томом, а именно с понятия «трансверсальность». Г.Э. Винкелькемпер назвал
трансверсальность «ключом к открытию секретов многообразий».
Существуют различные виды трансверсальности: трансверсальность
многообразий, трансверсальность отображений и многообразий, трансверсальность отображе-
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
115
ний. В дальнейшем для нас наиболее важную роль будет играть трансверсальность
отображений и многообразий, поэтому мы дадим определение именно этому
понятию (по остальным видам трансверсальности см., например, [9, 10, 11, 20]).
Определение 2.14 [10]. Пусть Мп и Nm - гладкие многообразия и f\Mn-+Nm
- гладкое отображение Мп ci?w,iVm ci?m . Пусть W - подмногообразие в N"1 и
х е Мп . Тогда говорят, что отображение/трансверсально многообразию We точке
хеМ" (обозначается f rhW в х), если выполняется одно из двух условий:
а)/(х)*Ж, (2.105)
б) f(x)eW и TNm(f(x)) = TW(f(x)) + (Df)TM"(x). (2.106)
Условие б) говорит о том, что если /(х) е W , то касательные пространства к W и
f\Mn \ в точке х порождают пространство Rm .
Введенные условия трансверсальности позволяют определить структурную
устойчивость или неустойчивость отображений и, в частности, функций. А именно:
если отображение/трансверсально W в точке х, то оно будет трансверсальным W
при малых возмущениях этого отображения [11,31].
Сформулируем это в виде следующего факта.
Утверждение 2.1 [11]. Если зависящее от параметра семейство отображений
(функций) трансверсально данному многообразию, то для плотного множества
значений параметра индивидуальные отображения (функции) также трансверсальны
этому многообразию.
Рассмотрим пример определения трансверсальности отображений и многобразий.
Пример 2.6. Пусть W- одномерное многообразие (прямая), вложенное в Я3 и задаваемое координат-
но: W = {xeR3:xx =\ух2= 2,х3}<=>(1>2,х3)• Пусть M2 = R2 - двумерное многообразие в R3 (плоскость)
Отобразим М2 = R2 в R2, используя следующее отображение:
/: (xj,jc2) e R2 Ц 2хь3х2>е~^+xlA e R3.
Тогда /(м2) и Wпересекаются в точке хо=(1;2;еч)'694)еЛ3.
В касательном пространстве к^в точке х0 можно взять базисный вектор V3 = (0,0,1) . В
касательном пространстве к f\M2) в точке х0 можно взять базисные векторы (рис. 2.8)
*3ь /
W = (l,2,x3)
Рис. 2.8. Определение трансверсальности/и УУк примеру 2.6
116
Методы современной ТАУ. Часть IV
Так как
det
2 О
,,-0,694
О 3 ~е*
О 0 1
= 6*0,
то векторы V,,V2,V3 порождают пространство R3. Следовательно, /(^2) трансверсально W в любой
точке их пересечения.
Пример 2.7. Пусть М = R = W,W <zR2 и / R->R2, /(x) = (x,*2). Тогда f cf\W для всех
ненулевых х f можно возмутить сколь угодно мало и сделать / трансверсальным к V/ для всех х А именно:
f(M)rfiW = 0 (рис. 2.10, а\ f(M)nW в точках пересечения *„ / = 1,2 (рис. 2.10, б).
L f(M)
R*
Л")
w
Рис. 2.9. Определение трансверсальности/и Wk примеру 2.7
f(M)
./
f(M)
w
a) f(M)nW = 0=*f(M)rfiW б) f(M)(t\W в точках дг„/ = 1,2
Рис. 2.10. Возмущение отображения/(к примеру 2.7)
Видно, что здесь fix) является морсовской функцией, и теперь мы наглядно
видим, а ранее показали это аналитически, что морсовские функции являются
структурно устойчивыми.
2.1.8. Многообразия катастрофы и бифуркационные множества
Рассмотрим семейство функций
f:MnxAp^R9 (2,107)
где Мп - гладкое многообразие, Мп с Rn; Ар - другое гладкое многообразие,
Лр е Rn ; Rn - пространство состояний; Rp - пространство управляющих
параметров (управлений).
Определение 2,15 [20]. Многообразие катастрофы М* назовем подмножество в
Rn xRp, определяемое уравнением
М#: D/(x;a) = 0, (2.108)
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы П7^
т.е. это пересечение п гиперповерхностей в Rn xRp:
М#:-^-(х;а) = 0, /=п. (2.109)
dxt
Определение 2.16. Отображением катастрофы % называется ограничение на
Мп естественной проекции
n:RnxRp->Rp,
т.е.
п(х,Ар)=Ар.
Определение 2.17. Особым множеством S называется подмножество в Мп , сб-
стоящее из особых точек отображения х> те- точек (х,а)еМиА где х является
особым, т.е. rank D% < p.
Определение 2.18. Образ особого множества %(S)<zAp называется
бифуркационным множеством и обозначается JB.
Особое множество S с Ми и бифуркационное множество JB с Ар имеют меру
нуль в соответствующих пространствах, о чем свидетельствует следующая теорема.
Теорема 2.2 (теорема Сарда) [11]. Пусть Мп и Nm - гладкие многообразия и
f\Mn-±Nm - гладкое отображение. Тогда множество критических
значений/имеет меру нуль в Nm .
Из введенных определений, в частности, следует, что S - это множество точек
(х,а) € М , в которых /(х;а) имеет вырожденную критическую точку, а значит JB
- место, где меняется число и природа критических точек; ввиду структурной
устойчивости (устойчивость относительно малых возмущений) морсовских функций такое
изменение может произойти лишь при переходе через вырожденную критическую
точку.
Рассмотрим подробно пример, где определим все отображения и множества,
которые были введены выше.
Пример 2.8. Катастрофа Аъ (катастрофа «сборки»):
/(*;а) - [Cat]0 (х) + каноническое возмущение = -х4 + ахх + -а2х2. (2 110)
Замечание. Коэффициенты 1/4 и 1/2 взяты для удобства. Итак, последовательно определяем:
1) Многообразие катастрофы (множество критических точек)
M*:Df(x;*) = x* + a2x + al=Oy (2 111)
ах=-а2х-х\ (2.112)
Любая точка реМ* имеет следующие координаты:
(хуа2,щ) = (х,а2-а2х-х3). (2 113)
Это отображение:
Д2->М, (хуа2)->(х,а2,-а2х-х3). (2 114)
2) Множество критических вырожденных точек (особое множество Sa Ми):
3x2+a2=0, D2/(x;a) = 0, (2.115)
6х = 0, D3/(*;a) = 0. (2.116)
Из (2.115) получаем точки пространства управляющих параметров, которые определяют
вырожденную критическую точку на S с М*(1 = 1):
118
Методы современной ТАУ. Часть IV
(2Ш)
а2=-3х , => я, =2*.
3) Если исключить xeS из (2.117), то получим
\3 / \2
т) ♦(?) -'
(2.117)
(2.118)
Уравнение (2 118) определяет часть бифуркационного множества JB. Оставшуюся часть найдем из
выражения (2 116) для дважды вырожденных точек (/ = 2).
„ Точка сборки
Многообразие катастрофы Л/*
а2
Рис. 2.11. Многообразие катастрофы и бифуркационное множество элементарной катастрофы А3
А"2 . +/(*)
/м
ЧУ
U
м
\
V7
/н
^
♦ /W
«1
Рис. 2.12. Бифуркационное множество JB и вид функции /(х;а) при разных значениях
параметров (аьа2): I - 1 критическая точка, II - 2 критические точки, III -3 критические точки
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы 119
Имеем:
(2 115) (2 111)
6х = 0=>х = 0 => д2 = 0 => д,=0 (2 119)
Итак, бифуркационное множество (сепаратриса управляющих параметров) JB состоит из точки
(я,,я2) = (0,0) (точка сборки) и-кривой складок, описываемой уравнением (2.118) (рис. 2.11). Функция
/(х;а) в разных областях пространства управляющих параметров А2 имеет вид (рис. 2.12).
2.1.9. Топология Уитни. Эквивалентность (устойчивость) функций
С ТОЧКИ ЗРЕНИЯ ТЕОРИИ НЕПРЕРЫВНЫХ ГРУПП
Цель этого параграфа - ввести топологию на множестве гладких отображений
(гладких функций).
Все понятия эквивалентности отображений (функций), которые мы ввели ранее,
определялись тем, что нелинейной заменой координат можно одно отображение
перевести в другое. Но конечные нелинейные преобразования достаточно сложны и
трудно реализуемы. Можно ли найти какой-нибудь инфинитезимальный, т.е.
работающий с бесконечно малыми преобразованиями, аналог такой нелинейной
процедуры, который бы позволил относительно просто решать задачу приведения гладкой
функции к каноническому виду? Такой анализ был найден, для чего использовались
i-струи гладких отображений (функций). Напомним (см. §2.1), что i-струя в точке
х0 =0 (для определенности) jkf(\) - это усеченный ряд Тейлора отображения/в
точке х0 = 0 до членов порядка к включительно.
Определение 2.19 [11]. Пусть Мп и Nm - гладкие многообразия и хоеМ".
Пусть f,g: Мп -> Nm - гладкие отображения, удовлетворяющие условию /(х0) =
= £(*о) = Уо-
1) /имеет касание первого порядка с g в точке х0, если Df \Xo = Dg |^ как
отображение ТХ()Мп -+TyQNm (т.е. как отображение касательных пространств).
2) /имеет касание к-то порядка с g в точке х0, если Df: ТМп -> TNm имеет
касание (к -1) порядка с отображением (Dg) в каждой точке ТХМ" . Этот факт
записывается следующим образом: « / ~к g в точке х0 » (к - положительное
целое число).
3) Обозначим через Jk [Mn,Nm) множество классов эквивалентности по от-
ношению « ~к в точке х0 » в пространстве отображений /: Мп -> Nm,
удовлетворяющих условию /(х0) = у0.
4) Сформулируем множество Jk(Mn,Nm)= u Jk (м",Nm )
Элементами множества Jk (Mn,Nm\ являются Л-струи в любой точке \0еМп9
причем каждый элемент j4f можно рассматривать как некоторый класс
эквивалентности, т.е. набор элементов, которые эквивалентны друг другу по признаку «все
функции, входящие в данный класс, имеют одинаковый усеченный ряд Тейлора до
к-й степени включительно в данной точке х0 ».
Теперь на множестве гладких отображений можно ввести топологию.
120 Методы современной ТАУ. Часть IV
Определение 2.20. Пусть Мп и Nm - гладкие многообразия.
1) Обозначим через С™ (M",Nm j множество гладких отображений из М" в Nm .
2) Фиксируем неотрицательное целое число к. Пусть U некоторое подмножество
в Jk(M\Nm}. Обозначим
M(U) = {feC-(M\Nm):jkf\x€Mnc:u}.
3) Семейство множеств {M(U)}, где U - открытое множество в Jk (мп,Nm\
образует базис некоторой топологии на С00 [Мп\Nm). Эта топология
называется Ск -топологией Уитни. Обозначим через Wk множество открытых
подмножеств в С™ \Мп,Nm j в Ск -топологииУитни.
4) С*-топологией Уитни называется топология, базисом которой является
w = [}wk.
к=0
Введем на Jk \Mn\Nm j метрику d, совместимую с топологией. Открытая
окрестность элемента/в пространстве С00 \Мп\Nm\ в Ск -топологии Уитни
Bb(f)^{geC^(M\Nm):d(jkf(x)Jkg(x))<5(x)yxeMn].
Семейство {#§(/)} образует базис окрестности точки / в С00^",^) в
Ск -топологии Уитни. Мы можем представить себе Bb(f) как множество гладких
отображений, у которых к частных производных 5 близки к соответствующим
производным/
После введения топологии в пространстве Cco(Mn,Nm ) его можно
рассматривать как многообразия Фреше [И]. Более детально структуру и свойства этого
многообразия мы рассматривать не будем (подробнее см. [II]). Главная же цель
введенных понятий и множеств - это сформулировать инфинитезимальный критерий
устойчивости отображений Джона Мазера, который позволит получить
конструктивный алгоритм поиска ростка и деформации функции.
Так как С00 Шп\Nmj - гладкое многообразие, то можно рассмотреть на
C°°(Mn,Nm) действие непрерывных групп преобразований (диффеоморфизмов)
(подробнее о группах см. главу 1)
где Diff\Mn\ (соответственно Diff\Nm\) - группа всех диффеоморфизмов
многообразия Мп (соответственно Nm ). Это действие знакомо нам по диаграмме,
определяющей эквивалентность двух отображений/и / е С00 (мп, Nm \
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы 12^
мп —£-> Nm
gi ih
Мп —£-> Nm9
geDiff(Mn\heDiff(Nm\ {gih)eG.
Действие G на элемент f еС*{мп,Nm\ определяется равенством (#,/*)•/ =
= h-f-g~l = f, т.е. элемент группы G, действуя на/ переводит его в /.
Напомним определение (подробнее см. главу 1).
Определение 2.21. Орбитой точки f еС*[мп ,Nm\ называется множество
G.f = {feC«(M\Nm):f = {g,h).fy{g,h)eG}9
т.е. орбита точки/- это всевозможные элементы, принадлежащие Cco(MniNm)i
которые могут быть получены действием на/всеми элементами группы G.
Лемма 2.3 (об устойчивости) [11]. Пусть feC°° (Mn,Nm).
Отображение/является устойчивым тогда и только тогда, когда орбита / под действием группы
G = DifflM") х DiffyN™) является открытым множеством в С00 (Мп, Nm 1.
Это лемма говорит о том, что / лежит в орбите/тогда и только тогда, когда /
эквивалентно/ Применение этого критерия для нахождения эквивалентных функций
также затруднительно, в силу того что весьма сложно определить элемент группы G.
Но можно линеаризовать группу, рассмотрев ее инфинитезимальные преобразования
в окрестности тождественного преобразования В этом случае решение во многих
случаях будет намного проще. Используя фундаментальное свойство устойчивости
трансверсальных к многообразиям отображений, Джон Мазер дал инфинитезималь-
ный критерий устойчивости отображений (замены переменных).
2.1.10. Инфинитезимальная устойчивость. Алгоритм Д. Мазера
Изложим алгоритм Д. Мазера [20, 27, 28]. Предположим, что мы имеем Острую
jkf(\) ряда Тейлора функции/в окрестности х0 = 0 . Ясно, что jk f{\) - это
полином k-й степени. Если считать, что функция (полином)
7(х) = //(х), (2.120)
то задачей является определение всех функций geCco(Mn,Nm)i эквивалентных
данной функции /. Если сама функция/будет эквивалентна /, тогда усечение ряда
Тейлора не влияет на качественные изменения в поведение данной функции.
Пусть xeR. Рассмотрим однопараметрическую замену (действие однопарамет-
рической группы Xt) координат (параметр t). Пусть
Xtx = х + tq(x)9 Xox = х,
где
Я(0) = М =0,
dxL
т.е. полином порядка 2.
Функция
8 Зак. 416
122 Методы современной ТАУ. Часть IV
foXt:x^f(Xtx)
начинает изменяться с Л Мы хотим привести ее к более простому виду. Для этого
рассмотрим как начинает смещаться (£+1)-струя jk+\foXtx). Чтобы найти
независимые смещения (&+1)-струи в точке jk+lf(x), используем бесконечно малые
преобразования. Имеем вектор касательного пространства в точке jk+lf(x)
/-►о t
в пространстве (£+1)-струй, который будем считать выходящим из точки jMf(x).
Из свойств линейного разложения Тейлора вытекает, что
Если положить F{x,t) = foXtx = f{Xtx\ то
v limJk+\nx,t)-F(x,0))
Компонентами вектора jk+l (F(x9t)-F(x90)) являются различные производные по
х. Так как F гладко (по построению), порядок дифференцирования можно изменить
v = /♦« r,im^,Q-F(,,O)-| = /+1 СшЛх + *х))-Ю\
V'->o t ) V^o t )
Рассмотрим разложение в ряд Тейлора функции f(x + tq(x)>j по степеням / в
точке х. Имеем
f(x + tq(x)) = f(x) + tq(x)Df\x -И2/(х,0, (2.122)
где /(л:, 0 - гладкая функция (это не зависит от того, сходится этот ряд Тейлора или
нет). Поэтому (2.121) с учетом (2.122) примет вид
v = /+1 {\im±(nx) + tq(x)Df\x +t2l(x,t)-f(*)fj = /+1 (q(x)Df \x). (2.123)
Таким образом, для (М1 = Rl) v является конструкцией функции q— = qDf \x, т.е.
^ dxJ \ (2.124)
<7(0) = ^(0) = 0.
ах
Для дальнейшего анализа алгоритма Мазера нам необходим некоторый
дополнительный математический аппарат.
Имея дело со струями, часто приходится производить «усеченные»
алгебраические операции. Для данного многочленар(\), где х = (хх,...,хп), мы назовем его
усечением до степени к (включительно), многочлен, образованный всеми членами
к
/?(х), степени которых равны или меньше к. Это усечение обозначим через р[\) .
Например:
г 2
Ъх-2у + 1ху + 9х j+43jc^ = Зх - 2у + 7ху.
Фактически (напоминаем х0 = 0)
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы 123^
Щк=/р(х). (2.125)
(Проверить!).
Фиксируем какое-нибудь значение &, и пусть р и q - произвольные многочлены.
Тогда
p + q =pk+qk. (2.126)
Для произведений соответствующая формула имеет вид
РЯ=ркЯк . (2.127)
На основании этого анализа мы сможем рассмотреть операции над ^-струями:
j\p + q) = jkp + jkq, (2-128)
7*
jk{pq) = (jkp)(jkq) > (2.129)
JkUoq) = jkjojkgk (2.130)
(струйный аналог «цепного правила»).
«Цепное правило» - обобщенное правило дифференцирования сложных функций,
суть которого состоит в следующем. Если / :Rn -» Rm - дифференцируемое
отображение в точке, a g\Rm —» Rp - дифференцируемое отображение в точке /(х), то
композиция отображений
gof:Rn^Rp9^gof = g(f(x))
также является дифференцируемым отображением в точке х и ее производная
находится по формуле
D{gof)\x=Dg\f{x)oDf\x.
С А:-струями функций связан ряд векторных пространств (пространства /:-струй),
где элементами векторов являются соответствующие коэффициенты ряда Тейлора в
точке х0 = 0:
Ek={jkf:BCQf:Rn^R}9 (2.131)
4={//:все/:ЛЛ^/?с/(0) = 0}, (2.132)
/*={//:Bce/:^->«c/(0) = 0,zy|0=0}, (2.133)
Мк = {jkf: все/: R" -+ R порядка к(к> 2); (2 ] щ
ряд Тейлора начинается с &-го элемента}.
Короткий комментарий. Пространство Ек совпадает с пространством Jk(Rn,R) в
обозначениях предыдущего параграфа; Jk не требует комментария; 1к - множество
£-струй функции с критическими точками; Мк - множество Л-струй функций, у
которых отсутствует начальный участок ряда Тейлора
С учетом алгебраических операций (2.128) - (2.130) вектор v (2.124)
касательного пространства можно записать следующим образом:
v = /+I(**)f)-/+W/+If'+1. (2-135)
Струи jk+]q(x) образуют векторное пространство /j*+1, которое можно
представить себе как пространство всех многочленов со степенями одночленов, заключен-
8*
124 Методы современной ТАУ. Часть IV
ных между 2 и (£+1). Выбрав какой-нибудь i
тересующего нас касательного пространства
iep,
странстве jk+lf(x) будет
ных между 2 и (£+1). Выбрав какой-нибудь базис в /j*+1, мы можем найти базис ин-
Например, если полиномы р{(х),...,рг(х) в 1хк+], тогда базис в касательном про-
/+1(Л(*)01£«-£г. (2.136)
Из них можно отбросить те, которые после усечения оказываются линейными
комбинациями других. Очевидно, базис в IXM: jc2,jc3,...,jc*+i . Возьмем для примера
1хк+\к = 3). Предположим, что
ff{x) = px2+qx3+rx4.
Тогда
/[ — I (х) = 2рх + Зрх2 + 4гх3 + ах4,
\dx)
где а зависит от 5-й производной/ которую нельзя определить по 4-струе. Выбирая
x2,*3,*4 в качестве базиса для 1хк+х, приходим к следующей системе образующих
для касательного пространства к орбите струй f f под действием группы замены
переменных:
рх = / Г*2 (2рх + 3qx2 + 4пс3 + осе4 )1 = 2рх3 + 3qx4;
р2 = / [х3(2рх + 3qx2 + 4гх3 + осе4)] = 2рх4;
ръ = f [V (2рх + 3qx2 + 4гх3 + осе4 )] = 0.
Для/? Ф 0 получаем
4 1
' -тР»_
Д. Мазер показал, что, если базис phi = l,r позволяет получить любой одночлен
степени (Л+1) в виде линейной комбинации базисных элементов phQ= Ь^) с
постоянными коэффициентами, тогда Л-струя jkf(x) эквивалентна множеству функций
jkf(x) + g(x)» гДе &(*) ~ полином порядка (к+1). В этом случае такую функцию
называют ^-определенной. Дадим точное определение.
Определение 2.22. Функцию /(х) назовем к-определенной в точке х0 (здесь
принято х0 = 0), если для любой другой функции / с той же самой Л-струей
существует гладкая замена переменных, такая, что
Дх) = /(*(х)).
Нахождение ^-определенности функции /(х) позволяет найти (если, конечно,
это возможно) полином конечной и достаточно небольшой степени, эквивалентный/
Из этого следует, что если jkf(x) = f(x) и /(х) эквивалентна /(х), то возможно
усечение ряда Тейлора для функции /(х) до &-й степени включительно.
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы 125^
В случае функций многих переменных f:Rn-+R общий касательный вектор к
орбите (£+1)-струи jk+]f(x) будет [4]
где Qj - произвольный полином из Ixk+l. Так как любой член порядка к и (£+1) в
jk\ — исчезает после умножения на элементы QXx) порядка >2 и усечения до
[dxj
*+i.
(Л+1)-й степени, касательное пространство к орбите j f зависит только от много-
членов jk+l -I- . Итак, ^-определенность функции /(х),х е R" означает, что каж-
[dxj
дое направление в Mnk+l (см. (2.134)) фяд Тейлора начинается с (&+1)-й степени)
лежит в этом касательном пространстве. Алгоритмически это означает, что
Ht+i Л
taW/+1(^J :flW6//+1 • (2-138)
Если (2.138) выполнено, то каждая гладкая функция g: Rn —> R порядка (k+\)
может быть представлена в некоторой окрестности нуля (х0 = 0) в виде
%^ь ■
где <?Дх) - гладкие функция порядка < 2 .
Алгоритм Д. Мазера для вычисления ^-определенности функции
//-переменных [9, 27, 28]. 1. Вычислить полиномы:
RiJ(x) = jM\jj-pJ(x)\ /,7 = 1,2,..., (2.139)
где {pj(x)) - базис пространства |//+l :х,2,...,^, ххх2,..., ^i^...}.
2. Функция f{x) будет k-определенной, если все одночлены (к + \) степени
могут быть записаны в виде линейных комбинаций полиномов Ry(x) с постоянными
коэффициентами, т.е. выполнено включение (2.138).
Пример 2.9.
Вычислить определенность функции (х0 = 0)
Предположим, что к - 3, тогда
Найдем полином Rlt(x):
/(x) = i(JCl+jt2)2+iX|. (2 140)
+(6*,+2*2)|^=ол;?+4^^
х} + хх\ х,+
(2 141)
126
Методы современной ТАУ. Часть IV
где знак = означает равенство с точностью до некоторых постоянных множителей, не влияющих на
базовый полином Ru(x). Представление (2.141) говорит о том, что если разложение в ряд Тейлора
производится в нуле хо = О, то (А+1)-струя для всех полиномов со степенью s<,k + \ будет совпадать с самим
полиномом. Это было показано для полинома (х, + x2)xf .
Рассмотрим случай, где s > к +1. Например,
1
В табл. 2.2 приведены полиномы R,j(x) для функции /(*) = — (х, +х2) +—х\.
Таблица 2.2
j
1
2
3
4
5
6
7
8
PjM
*!*2
4
х\х2
ххх\
4
(хх+х2)х1
(xl+x2)xlx2
(xt+x2)xl
(x{+x2)xl
(x]+x2)xfx2
(*1+*2)*2*1
(Xi+x2)x\
0
1
дхх J _
Rij(x) = /
~fPjw
_dx2 J
(xt + x^xf+xfxl
(xl+x2)xlx2 + xlxl
(x{+x2)xl + xt
(Х,+Л2)х,3
(хх + х2)х^х2
(*!+*2>*2*l
(xi+x2)xl
0
I
Все множество одночленов степени k+\ = 3+1 = 4 может быть выражено через Яу(х). Действительно:
x42=R23(x)-Rn(x),
xlxl = R12(x)-Rl2(x),
xtxl = R2i(x)-Rn(x),
xlx2=R25(x)-(R2l(x)-Rn(x)),
xf = R24{x) - {R25(x) - (R2l(x) - Rx ,(x)).
Таким образом, функция fix) в нуле является 3-определенной.
2.1.11. Деформация (универсальные возмущения) функции
Функции с неморсовскими критическими точками, к которым относится и ростки
функции катастроф, могут устойчиво встречаться лишь в семействах функций,
зависящих от одного или более управляющих параметров. Поэтому можно изучить
возмущения на данную функцию с вырожденной критической точкой, вложив немор-
совскую функцию/х) в семейство функций F(x\a):
/ = /(х),х = (*!,...,*„), (2.142)
F = F(x;a),a = (a1,...,a;?) (2.143)
- вектор параметров
/(x) = F(x;0). (2.144)
Определение 2.23. Семейство функций F(x\ а) называетсяр-мерной деформацией
функции^х).
Чем больше семейство функций, тем больше общие возмущения могут быть
описаны. Можно ли найти такое семейство, которое, с одной стороны, достаточно
велико, чтобы с его помощью можно было описать все возможные качественно различ-
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы 127_
ные возмущения X*), а с другой стороны, достаточно мало, чтобы с ним было легко
работать? Такие возмущения были найдены.
Определение 2.24 [20]. Заданная р-мерная деформация F(x;a) называется вер-
сальной, если любая другая деформация F(x\a) функции Дх) может быть получена
из нее путем гладкой замены переменных:
(2.145)
uj =aj(a),j = lp,
где р не обязательно равно р.
Определение 2.25. Деформация F(x\ а) называется универсальной деформацией
/(х), если она является версальной и имеет минимальную размерность.
Д. Мазер [27, 28] предложил алгоритм определения универсальной деформации
(возмущения) функции (в теории катастроф - это ростки функции катастроф).
Алгоритм требует найти число ^-определенность функции/*), для того чтобы ра-
боть лишь с полиномом f(x) = jkf(\). При этом предполагается, что
• иу-последовательность одночленов от переменных xl,x2,...ixl (/ - число не-
морсовских переменных) степеней 0, 1, 2...
rij : l\xl9X2,..,xl\Xx,xlx2.. ; (2.146)
• F(x:a) является/?-мерной деформацией полинома f(x).
Определим многочлены
Г,(х) =—jk+lF(x-a)\a__o. (2.147)
aj
Кроме того, должны быть перечислены все многочлены вида:
5(/(х) = /|^-«у(х)1. (2.148)
Тогда, если все одночлены степени не выше к могут быть выражены в виде:
любые одночлены степени < к = ^s^Sy (x) + ^tjTj(x), (2.149)
U J
(где Sy-ytj - вещественные числа), то это означает, что F(jc; а) является версальной
деформацией /(х); если 7}(х) минимально, то F(x;a) - универсальная деформация
полинома /(х).
Полиномы Tj(x) образуют минимальное множество тогда и только тогда, когда
они линейно независимы.
При нахождении канонической линейной (по 7)(х)) формы универсальной
деформации полинома f(x)
F(x;a) = /(x) + f>y7}(x)
7=1
для определения параметров деформации яу может быть применена теорема о
неявной функции.
Пример 2.10. Вычислить универсальную деформацию функции (ростка катастрофы D^ , см. табл. 2.1)
Дх) = х?х2+х1/3.
Ясно, что полином
128
Методы современной ТАУ. Часть IV
/« = /А*) = /« = *12*2+*23/3.
Функция /(*) является 3-определенной (проверить!).
Имеем
Найдем полиномы S,j(x) (формула (2.148)).
. |4*) = 2*,*2,£-(x) = *? + **.
Таблица 2.3
j
0
1
2
3
"j
1
х2
sly(x) = /
f*;(x)~
ax, ;
xfx2
х\4
0
*|(*|2 + *2>
X2(X,2+X22)
0
Ни один из одночленов первой степени х{,х2 не может быть выражен в виде линейной комбинации
S,j , поэтому полагаем 7J(x) = xly Т2(х) = х2. Для одночленов второй степени в качестве базисных можно
использовать Su(x) = xlx2, S2l(\) = дг,2 + х\. Множество полиномов второй степени является линейным
вектором пространства размерностью 3. Два базисных вектора Su{\\ S2X{\) уже есть. В качестве
третьего вектора можно взять х2,*2 или х2 -х\ . Возьмем Т3(х) = х\. Все одночлены х\,х\хъххх\,х\ (А: = 3)
могут быть выражены с помощью полиномов Si}{x). Например
xl = Sl3(x)-Sn(x).
Таким образом, универсальной деформацией (с точностью до гладкой замены координат).Дх) будет
х3
F(x\alia2ia3) = xtx2+-Z- + a]xi + a2x2+ajc22.
2.1.12. РОСТОК ФУНКЦИИ КАТАСТРОФЫ
Росток функции в точке х0 представляет собой результат двух процессов:
использование управляющих параметров для удаления начальных членов разложения
функции в ряд Тейлора и использование гладкой замены переменных для удаления
крайних членов разложения. В действительности росток лежит между двумя
линейными векторами пространства, конструируемыми в алгоритмах вычисления
определенности и деформации (возмущений).
Алгоритм нахождения ростка функции можно определить следующим образом
[10,28]:
1) найти ^-определенность функции, после чего можно работать с полиномом
/(х) = //(х);
2) пусть Vk - линейное векторное подпространство, порождаемое всеми
одночленами от хх,...,хе (переменные неморсовской функции степени) не выше к,
при этом
,. .. (* + /)!
dimK*=^7T;
3) пусть VR - линейное векторное подпространство Vk, порождаемое всеми
многочленами R,j(x), получаемыми в алгоритме нахождения определенности;
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
129
4) пусть VD - линейное векторное подпространство, порожденное минимальным
множеством 7}(х), получаемых в алгоритме деформации.
Тогда Vk-(VR®VD) = Vkl(yR®VD) является линейным векторным
пространством, порожденным первыми частными производными ростка/
Пример 2.11. Найти канонический (простейший) росток [/]0(х)> связанный с функцией
Л*1,х2) = х2х2 + х\/3 + х\/2, (/ = 2).
Наша задача: найти определенность данной функции, что позволяет отбросить «хвост» порядка (А+1)
всех функций, имеющих такую же Дг-струю, а затем в Дг-струе извлечь информацию об универсальной
деформации. Остаток и есть росток данной функции.
Прежде всего найдем полиномы /?^(х) и 5^(х), связанные с нахождением ^-определенности и
деформации (возмущения). Данные функции приведены в табл. 2.4. Сразу заметим, что в данной таблице
помещены полиномы RtJ{\) и для базисных одночленов хьх2, которые не используются для нахождения к-
определенности данной функции, но необходимы в дальнейшем для определения размерности пространства
VR . Функция Дх) является 4-определенной, 5 членов 5-й степени х[х{, (/ + / = 5, / = 0,5) из 6
непосредственно совпадают с отдельными полиномами Rtj{x) (они заключены в штриховую рамку, например
х\ = #2,1зОО), а оставшийся одночлен х\ = Rlb{\)- Rxl{\)- Ru{\) является линейной комбинацией ^;(х).
Полиномы для нахождения ростка функций f(x) = х2х2 + х\ /3 + х\ 12.
Перейдем к определению пространств VkiVRyD.
Пространство Ук = У4 имеет размерность (/ = 2)
* kill 4!2!
Таблица 2.4
j
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
-
xi
Х2
хххг
4
*?
х\*г
х\*\
4
х]хг
*\*\
х\хг
А
А
1
^i
Х2
*i
ххх2
4
Х1хг
ххх\
4
xi
-
-
-
-
—
-
х\х2
х\4
4хг
44
х\4
\xfx2
\x\x\
\44
"о""
1
х\хг
х\хг
х\4
4Х2
44
х\4
0
1
Л2у(х) =
-
дг,3 + хх2х2 + ххх2
^^2 +Х1Х2+ Х{ Х%
44+4^)
х\+х\х\+х]х2
х*х2 + х1х\ + х\х\
х]х\ + ххх\ + ххх\
Х\ Х2 ~^" Х2 "^V^2 У
г-4-"«
\Х\Х2\
'3 2'
\Х\4\
! x{2xl!
1 d •
\Х\Х2\
• 5 ;
0
1
S2j(x) =
■ASM
4+4+х2
х,3 + ххх\ + хх х2
Х2ХХ2 + ^2+^2
х\4+х12х1+х12х2
xx2x2+xlxl + xlxl
x2xl+x\ + x\
4Х2
44
xi4
4
0
130
Методы современной ТАУ. Часть IV
Для нахождения размерности пространства VRcV4i базисом которого являются полиномы /^(х),
представим базис пространства V4 в виде узлов некоторой сетки, где узлы определяют базисные
одночлены V4 (произведения x[x'2(i + j < 4, ij= 0,4)) (рис. 2.13).
Х2
\
0^
4
£$-
*г
4
О
Ш
-&
\
*1
v° X] V2 Y3 4
JC| * JC| Л] -Xj
Рис. 2.13. Базисные элементы пространства У4
Прежде всего, найдем полиномы (одночлены) /^(х), которые в точности совпадают с некоторыми
базисными одночленами У4 . Это одночлены /fy(jc), /= 1,5 (они обведены сплошной тонкой рамкой в
табл. 2.4 и отмечены на рис. 2.13 черными кружками). Следующие базисные одночлены подпространства
VR получены в виде линейной комбинации полиномов /fy(x), в табл. 2.4 они обведены кружком, а на
рис. 2.13 представлены белыми кружками. Имеем
х< = Д29(х)-Д2|2(х)-Я214(х).
Заметим, что полином Л28(х) = Л2,4(х) + Л2>13(х)+ /?i5(x)' те* является линейной комбинацией других
полиномов. Далее
4 = Я25(Х) - ДмЮ - (*29« " Я2,12(Х)Я2.14М);
xi=R23(x)-Rl4(x)-Rn(x);
4 = Д22(х) - Л, ,(х) - (Я25(х) - Л14(х) - (Я29(х) - R2,M - R 2tlix))).
Других базисных одночленов мы получить больше не можем, но к 9 базисным одночленам мы можем
добавить линейно независимый многочлен R2\(x) = xl + xlxj+ Х\Х2. Таким образом, размерность
сИтКл = 10.
Для определения размерности пространства VD необходимо дополнить базисные одночлены (черные
и белые кружки на рис. 2.13) пространства VR независимыми полиномами 5^(х) и получить размерность
пространства полиномов ^(х). Это два одночлена
х|х2 = 5|0(1),
x* = S2l(x)-Sl2(x)-Sw(x).
На рис. 2.13 эти базисные элементы показаны треугольниками.
Линейное подпространство V4, порождаемое полиномами Sy(x), определяется 11 базисными
одночленами (черные и белые кружки и треугольники) и многочленом S20(x) = х\ + х\ + х2.
Дополнение к этому пространству в V4 имеет размерность 15 - 12 = 3 и порождается многочленами
Tj (x). В качестве базисных векторов этого пространства VD выбираем три одночлена, l,xt, x? (показаны
на рис. 2.13 прямоугольниками).
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
131
Тогда пространство VR®VD порождается одночленами, изображенными на рис. 2.13 белыми и
черными кружками и квадратами вместе с многочленом R2l(х) = х,3 + х,х\ + х,х2 . Пространство V4 -(VD @Vr)
имеет размерность 15 - (10+3) = 2 и порождается двумя линейно независимыми комбинациями из трех
одночленов х3, х{х2, х2, которые также линейно независимы от Л21(х) • В качестве базисных векторов
удобно взять пару одночленов х2, х,3.
Первые производные ростка [/]0(х) порождают двумерное пространство
^-[/]о«~*?,^-[/]о«~*2-
<ХС| ОХ2
Следовательно,
[/]0W = cucf + Px22,a^0, р*0
и /является 4-определенной. Как только определим знаки а и р, то с помощью обычного преобразования
масштабов получим канонический росток вида ±х,4 ± х\ .
Матрица Гессе функции.Дх) в точке х0 = 0 имеет вид
«1-е г
так что коэффициент р, связанный в ростке [/]0(*) с х\, должен быть положительным. Коэффициент a
одночлена х\ должен быть отрицательным. Это может быть определено путем решения уравнения
J{\) = 0. Линия корней и знаки функций в трех открытых областях, на которые эти линии корней
разбивают пространство R2, изображены на рис. 2.14.
Если взять <х>0 , т.е. сделать [/]0(х) и соответственно /(х) положительно определённой функцией,
то из рис. 2.14 видно, что область G+ = {lUH:/(*)>0} состоит из двух компонент связности и любая
деформация, соединяющая две точки из области I и II, например, С и D, должна проходить через границу
/(х) = 0. Это обстоятельство не позволяет сдеформировать любой росток ax,4 + Px2,a>0,р>0
непрерывным образом в функцию /(х). Напротив, в области G" = {III :/(х) < 0} любые две точки, например А
и В, могут быть продеформированы друг в друга, поэтому эта связная область и росток
ax,4 + pX2,a<0,*p>0 можно продеформировать непрерывно в /(х). Таким образом, необходимо взять
росток [/]о(х) < 0, т.е. отрицательно определенную функцию, и, следовательно, a < 0 .
I
/W<o
Рис. 2.14. Корни уравнения /(х) = 0: /(x) = xfx2+x23/3 + xf/2 = 0 = x2 hc,2+ifx2+|j -~
Итак, окончательно канонический росток функции
132
Методы современной ТАУ. Часть IV
имеет вид
2.1.13 Пример исследования бифуркационного поведения
летательного аппарата
Рассмотрим поведение симметричного реактивного летательного аппарата, для
которого потеря устойчивости соответствует одной элементарной катастрофе [10,29].
Переменные состояния: три компоненты угловой скорости xx=(bxi х2=(йу,
х3 = cdz, х4 = а (угол атаки), х5 = р (угол скольжения), xeR5.
Управляющие параметры: а е R2. В данном случае мы их обозначим так, как
принято в теории управления - через и и назовем управлением.
Итак,
И1=Д1=5э=-(8э.л+5э.п),
где 5ЭЛ, 5ЭП - отклонение соответственно левого и правого элеронов;
1
(2.150)
и2=а2=5в=--(5вл+5вп),
(2.151)
5BJ1,5ВП - отклонение соответственно левого и правого рулей высоты. Таким
образом, имеем х € R5, u(= a) e R2.
Уравнения движения летательного аппарата имеют следующий вид:
х,=/,(х;и), / = U чеД2, (2.152)
стационарное решение которого
х/0 = 0, / = U; Uj0 = 0, j = п. . (2.153)
Разложим систему уравнений (2.152) в ряд Тейлора в окрестности стационарной
точки (х0 = 0, и0 = 0). Имеем
,=y^,y+Z^My+ZZ.
л'Ы
%диЛ J %^^М
XjXk,i = 1,3;
(2.154)
*.Л&
~l JU
У-1&У
ху+Е
ди,
uj, / = 4,5.
(2.155)
7=1 ^J
В разложении (2.154), (2.155) первая сумма представляет линейные
аэродинамические составляющие, вторая сумма - линейные управляющие воздействия, третья
сумма (2.154) учитывает инерционные параметры.
Стационарные решения системы (2.154), (2.155) находим, полагая
*,=0, / = ТЗ";
5 Я/* I 2 Я/* I 3 3 Я2 /* I
>1&Ло
,=.'9«,
>1*>^А*|0
Ьо, J J—lb,.
j.\
ди,
Uj.
(2.156)
(2.157)
Обозначим для удобства
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
133
Щ = ^;/=4,5,у=1,5;
дх
J\o
Щ ;у= 1,2,1=1,5;
ди
*/, 1 _
dxjdxk\
= Bijk-
(2.158)
(2.159)
(2.160)
Два уравнения (2.157) линейны по переменным хь...,х5. Используя их, выразим
переменные х4, х5 с учётом ((2.158) - (2.160)) в виде линейной комбинации
управляющих параметров и остальных переменных jc,,...,jc3 .
Подставляя эти выражения в (2.156), получим 3 нелинейных алгебраических
уравнения
2 ~ 5
0 = Z^iywy + 1LKXJ + *1,23*2*з>
7=1 у=1
2 5
0 = Z^27W7 + Z А^у + ^2,31^3^1, [ (2Л61)
7=1 7=1
2 5
0 = Z^37W7' +ZAy*>^3,12*1*2.
7=1 7=1
Константы UiJ9F\j получены при подстановке хА и х5 в (2.156) и приведении
подобных членов. Инерционные члены не изменяются, т.к. в их сумму не входят
переменные JC4, JC5-
Решим систему алгебраических нелинейных уравнений (2.161). Выразим из
второго и третьего уравнений (2.161) переменные х2,х3 через переменную хх
где
2 а(х)' 3 a(x,W)j
а(X) = (F23 + ^3^,)(F32 + Я3,21*1)-^22^33 .
(2.162)
(2.163)
&(*.и) = ч£#зу«у+£лХ^ (2.164)
7=1 >1
&(X,U) = -(Z^27W7^ +^2Л)(^23 +*2,31*l) + ^22(Z*V7 +^l^l)- (2-165)
7=1 7=1
Подстановка (2.162) - (2.165) в первое уравнение (2.161) приводит к следующему
алгебраическому уравнению:
o=Z^7w7a2w+^ia2(^u)+
7=1 (2.166)
+F12a(x,u)e2(x,u)+/;3a(^«)e3(^»)+^a(^»)a(^»)-
Это уравнение 5-й степени относительно переменной х = хх. Заметим, что Q\(x)
не завит от управляющих параметров (управлений).
134
Методы современной ТАУ. Часть IV
Рассмотрим конкретный числовой пример. Пусть (2.166) имеет вид (напомним,
здесь обозначено и = а)
5
0 = Zfl*x* =grad0(x;u) = 0;(x;u); (2.167)
*5=-21,6;
*4=-326,44и,;
аъ = 50,Зм2 +358,9;
сзг2 = 5412,6^;
^=11752,81/2-1525,9;
а0 =-23015г/!.
Выражение (2.167) определяет двумерное многообразие (гиперповерхность),
погруженное в трехмерное пространство R3 с координатами (х; щ; и2).
Определим бифуркационное множество Ув для функции Ф(х; и), т.е. множество
меры нуль в пространстве управляющих параметров (u e R2), точки которого
параметризуют функцию Ф(х\ и) с вырожденными критическими точками. Для этого нам
необходимо найти пересечение 2-х гиперповерхностей
Ф;(х;и) = 0, (2.168)
<J£(x;u) = 0. (2.169)
Используем переменную х для параметрического представления управляющих
параметров (управлений) (щ(х),и2(х)) на бифуркационном множестве Ув.
Запишем
<p;(*;u) = 2>,(u)*'=o,
/•=0
/«о
v.0-1) -
= 0
(2.170)
(2.171)
в матричном виде. Имеем
1
5jc5 4jc4 3jc3 2jc2 1 0
0
0
50,3
0
-21,6
0
358,9
0
11752,8 -1525,9
0
0
= 0.
(2.172)
0
-326,4
0
5412,6
0
-23015
Каждому значению х в (2.172) соответствует пара совместных уравнений для
управлений (щ;и2). Решение этих уравнений единственно при условии, что
определитель системы не равен нулю.
Параметрическое представление кривых складки (цх(х)\и2(х)) показано на
рис. 2.15. Эта проекция многообразия катастрофы на плоскость управляющих
параметров (управлений) м1=5э;м2=5в формирует бифуркационное множество Ув.
Множество Ув 3-х делит плоскость R2 управляющих параметров на открытые
непересекающиеся области, в которых функция Ф{х\ и) имеет различное число (1, 3, 5)
критических точек, а динамическая система соответственно 1, 3, 5 устойчивых или
неустойчивых состояний равновесия.
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
135
0.12
0.1
0.08
0.06
0.04
0.02
0
-0 02
-0.04
-0.06
"2 =SB(рад)
-1
-0.5
0
0.5
1
м,=5э(рад)
Рис. 2.15. Бифуркационное множество Jb многообразия катастрофы реактивного летательного
аппарата в плоскости управляющих параметров 63,5B(w,,w2). Цифры указывают на число
состояний равновесия (устойчивых и неустойчивых)
Рассмотрим случай, когда управление производится только элеронами 5Э, т.е. щ
при фиксированном положении руля высоты и2 =5В =0,01 рад «0,6° (сечение А,
рис. 2.15). Пусть щ\ы0 = 0, и мы начинаем медленно увеличивать угол 5Э = щ .
Сначала переменная х{(=юх) линейно реагирует на.изменение щ (рис. 2.16), но при
достижении точки а(~ 6°), т.е. при попадании на бифуркационное множество Ув, скачком
переходит на нижний лист (точка 5, рис. 2.16). На этом листе состояние летательного
аппарата по координате х = х} = ®х совершенно неуправляемо при отклонении
элеронов (-25° <их< 25°). Другими словами, если пилот попытается вернуть летательный
аппарат в состояние х = 0, уменьшая щ при и2 = const, он потерпит неудачу.
Летательный аппарат не будет реагировать на изменение щ до тех пор, пока не достигнет
значения щ «-25° (точка в, рис. 2.16), при котором происходит скачкообразный
переход на верхний лист. Последующее увеличение щ вновь сопровождается
отсутствием необходимой реакции вплоть до значения щ = +25° (точка д), при котором точка*
вновь перескочит на нижний лист (точка е). Средний лист остается недостижимым
при и2 = const = 0,6° . Заставить систему вернуться на средний лист (в том числе в
состояние х = х{ = 0 ) можно только изменив оба управления щ и и2.
136
Современные методы ТАУ. Часть IV
X = Xi
-40
-30
-20
-10
10
20
30
40
«1=8, С)
Рис. 2.16. Зависимость координаты х, = сох от угла поворота элеронов
при постоянном отклонение руля высоты 0,6° (сечение А, рис. 2.15)
Если взять другое сечение, и2 = const, например, увеличить и2 до и2 =1,2°
(сечение Б, рис. 2.15), то точки скачкообразного перехода с нижнего листа на верхний и
наоборот еще более сдвинутся (точка г'« -60°).
Таким образом, на основе использования теории катастроф возможно
качественное изучение особенностей поведения динамических управляющих систем, в том
числе получение бифуркационных множеств и устойчивых компонент многообразия
систем.
liX = X
и
-60
-40
-20
20
40
60
Мв)
Рис. 2.17. Зависимость координаты х, = шх от угла поворота элеронов
при постоянном угле отклонения рулей высоты 1,2° (сечение Б, рис. 2.15)
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы 1Т7
2.2. ДЕТЕРМИНИРОВАННЫЙ ХАОС
2.2.1. Бифуркации и хаос
При рассмотрении функций катастроф мы установили, что фундаментом их
изучения являются теория особенностей гладких устойчивых отображений и теория
бифуркаций. Изменение качественной картины фазовых траекторий при наличии
бифуркаций иногда приводит к возникновению нового типа движений, которое
получило, и вполне обоснованно, название «хаос».
Совсем недавно было обнаружено, что движение некоторых очень простых
динамических систем не всегда можно предсказать на большой интервал времени. Такие
явления были названы хаотическими.
В чем же различие между случайным и хаотическим движением? При случайном
движении мы имеем ситуации, когда неизвестны действующие силы, а известны,
например, случайные характеристики некоторых параметров. При хаотическом
движении мы рассматриваем задачу как детерминированную, где отсутствуют
случайные или непредсказуемые силы или параметры, а характер движения динамической
системы в значительной степени зависит от начальных условий. Такая динамика
возможна только в нелинейных системах. А. Пуанкаре, стоявший у истоков
нелинейной механики, в очерке «Наука и метод» писал: «иногда небольшая разница в
первоначальных состояниях вызывает большие различия в окончательном явлении.
Небольшая погрешность в первом вызвала бы огромную ошибку в последнем.
Предсказание становиться невозможным».
В современной литературе термин «хаотический» применяется к таким
движениям в детерминированных физических и математических системах, траектории
которых обнаруживают сильную зависимость от начальных условий.
Системы с хаотической динамикой иногда еще называют системами с
нерегулярной динамикой. Подчеркивая детерминированность задачи, хаос иногда называют
детерминированным [25].
Следует ли считать хаотические движения исключительным случаем в реальных
физических задачах или они встречаются в широком диапазоне изменения
параметров (что напрямую, как мы видели ранее, связано с возможностью появления
бифуркаций)? При проектировании систем управления необходимо уметь предугадывать
их поведение. Выбрав параметры, при которых могут возникнуть хаотические
колебания, проектировщик лишается возможности предсказывать поведение системы. До
недавнего времени основным инструментом при расчетах системы управления была
линейная теория. Но потребности современных технологий приводят к тому, что
рабочие значения параметров переместились в область нелинейных режимов, что
увеличивает возможность возникновения явлений хаотической динамики.
В каких динамических системах могут возникнуть хаотические колебания?
Прежде всего в системах, где присутствуют сильные нелинейности [17]:
1) колебания изогнутых упругих структур;
2) механические системы с зазором или мертвой зоной;
3) динамика колесо - рельс;
4) системы с трением скольжения;
5) системы управления с нелинейными обратными связями]
6) лазеры и нелинейные оптические системы.
Хаотические звенья обладают новым геометрическим свойством, называемым
фрактальной структурой, что нельзя наблюдать в классической нелинейной
механике. Фракталы, фрактальные размерности, странные аттракторы будут подробно
рассмотрены в данной главе, но начнем ее мы с парадигм хаоса, потому что, как за-
138
Современные методы ТАУ. Часть IV
метил Томас Кун (цит. по [17]), «крупные изменения происходят в науке в общем не
тогда, когда выдвигаются новые теории, а когда меняются простые модели, с
помощью которых ученые формируют и осваивают новую теорию».
Парадигма (греч. paradigma - пример, образец), как известно, - это
концептуальная теория, модель или задача, которая охватывает основные свойства целого класса
задач.
Известны парадигмы: теории колебаний - модель, состоящая из массы и
пружины; нелинейной динамики - движение маятника или задача 3-х тел. Парадигмами
хаоса являются странный аттрактор Эдварда Лоренца и логистическое уравнение, к
изучению которых мы и приступаем.
2.2.2. Парадигмы хаоса: странный аттрактор Лоренца
и логистическое уравнение
2.2.2.1. Аттрактор Лоренца
В 1963 г. специалист по физике атмосферы Э.Н. Лоренц из Массачусетского
технологического института предложил простую модель тепловой конвекции в
атмосфере, которая, как затем выяснилось, стала хорошей моделью для изучения
турбулентности.
Представим себе слой жидкости, находящийся под действием сил тяготения,
который подогревается снизу. Пусть То - температура в верхней части слоя жидкости,
Тх - соответственно нижней (рис. 2.18).
2
,У
g
11
Тепловой поток
Рис. 2.18. Модель тепловой конвекции Лоренца
ttt
Когда эта разность становиться достаточно большой, возникают циркулярные,
подобные вихрям, движения жидкости; жидкость, подогреваемая снизу становится
легче и всплывает, а более тяжелая опускается под действием гравитации (рис. 2.18).
В общем случае тепловые процессы и конвективные течения жидкости
описываются уравнением теплопроводности и уравнением Навье - Стокса, которые являются
уравнениями в частных производных. Э. Лоренц сделал ряд допущений и получил
3-х мерную модель тепловой конвекции в обыкновенных дифференциальных
уравнениях:
xl=c(x2-xl)9 (2.173).
x2=pxl-x2-xlx3, (2.174)
*з=*1*2"Р*з> (2.175)
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
139
где хх - безразмерная переменная, пропорциональная амплитуде скорости, с которой
жидкость циркулирует в жидком кольце; *2,х3 ~ безразмерные переменные, которые
отражают распределение температуры по каналу.
В уравнениях (2.173) - (2.175) присутствуют 3 параметра: а, р - связаны с
числами Прандтля и Рэлея соответственно, а р описывает геометрию системы: а = 10,
р = 8/3, р>1 - набор значений, которые предпочитают специалисты в данной
области. В дальнейшем при исследовании два параметра р, р считались постоянными,
а изучалось влияние р на динамику описываемых конвективных процессов (р > 0).
Рассмотрим состояние равновесия для уравнений Лоренца (2.173) - (2.175). Имеем
0 = а(*2-х,), (2.176)
0 = рхх-х2-хххЪ9 (2.177)
О = х1лг2-рлг3. (2.178)
Уравнения (2.176) - (2.178) имеют 3 решения, т.е. существует три положения
равновесия:
4° = (0;0;0), (2.179)
42) = (>/P(p-1Wp(/-1);p-1) (2-18°)
х® = (-7р(р-1); -VP(P-I); Р -1) (2.181)
Первая неподвижная точка х{/ соответствует состоянию теплопроводности без
движения жидкости (происходит диффузионная форма передачи тепла, без
конвекции). Линеаризируя уравнения (2.173) - (2.175) в точке х|,', получим:
f-a с 0Л
р -1 0 . (2.182)
,0 0 -р,
дО)_
Ао -
Sft
дх,
.о
Матрица Ау имеет собственные значения:
Чг =-^-±^(ст+1)2+4(р-1)^^з =-Р- (2-183)
Таким образом, при принятых параметрах: а = 10,р = 8/3 и 0 <р < 1, состояние
Х51' устойчиво. При а = 1 начинается конвекция Бенара, т.к. Хх = 0 и именно в этот
момент «принимают эстафету» равновесные точки Х5 \ X5' (которые соответствуют
движущимся валам). Линеаризация (2.173) - (2.175) в этих точках дает:
А(2)_
Ао -
дЛ
dXj
х(2)
Х0
д(3)_
Ао -
df,
dXj
х(3)
-с
1
-а
1
-л/Р(р"О
о
-1
VP(p-0
-1
-л/Р(р-0
0
л/Р(р-0
0
-VP(p-i)
-Р
(2.184)
(2.185)
140
Современные методы ТАУ. Часть IV
Характеристические уравнения для матриц Ау и Ау совпадают и имеют вид
<р(\) = \3+(а + $ + 1)Х2+$(а + р)\ + 2$а(р-1)=0. (2.186)
При р = 1Д] =0Д2 =-р = -8/ЗД3 =-(а + 1) = -11, т.е. «конвективная»
равновесная точка находится на границе устойчивости.
Рассмотрим движение корней характеристического уравнения (2.186) при
изменении параметра р(а = 10, р = 8/3, р>1). Траектории движения корней А>,(р),
/ = 1,2,3 на комплексной плоскости изображены на рис. 2.19. При 1 < р < рв = 1,3456
все корни левые и вещественные; при р = рв =1,3456 два корня сливаются в один
двойной Хх (рв) = Х2 (рв) = -1,2894 (точка А, рис. 2.19) - устойчивый узел переходит
в устойчивый фокус; дальнейшее увеличение р(р>рв) приводит к появлению пары
комплексно-сопряженных корней, которые движутся к мнимой оси. При
р = рс = 24,7368 (критическое значение р) имеется пара чисто мнимых корней:
возникают структурно и динамические неустойчивые периодические орбиты - циклы.
При р > рс имеет место неустойчивый фокус и появление устойчивых
периодических движений - предельных циклов, т.е. имеет место бифуркация Хопфа. Ниже о
ней будет подробно изложено.
плХ
+/' j
Mp>pJ
/ ММ
+1
= А,2(1,3456) = -1,29) \'-7
МрЛ
Д10 Мр>Рс)
Рис. 2.19. Траектории движения корней матриц линеаризации А^, А(о3)
в равновесных точках \^\ х^ при изменении параметра р
Критическое значение параметра р = рс можно определить по формуле:
а + 6 + 3
Рс=с
с-Ь-1
= 24,7368 (для а = 10, р = 8/3).
(2.187)
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
141
На рис. 2.20 и рис. 2.21 показаны траектории модели Лоренца для р = 10 и
р = 23 , т.е. р < рс . Аттрактором (притягивающим множеством) в этих двух случаях
является некоторая точка, определяемая выражениями (2.179) - (2.181), причем
устойчивыми являются точки х^ и ц\ ху - неустойчивое седло.
30
Рис. 2.20. Фазовая траектория модели Лоренца (а = 10; р = 10; р = 8/3), устойчивый фокус
50
40
30
20
-10 Ю
Рис. 2.21. Фазовая траектория модели Лоренца (а = 10; р = 23 < рс =24,7368; р = 8/3),
устойчивый фокус
При р > рс два положения равновесия Х5 ' и ху становятся неустойчивыми
фокусами, и сложная хаотическая траектория блуждает между 3-мя неустойчивыми
равновесными точками (рис. 2.22), наступает хаос (нерегулярная динамика).
Первая особенность нового качественного движения системы заключается в том,
что каждая из точек равновесия не является притягивающей, однако траектория не
уходит далеко от 3-х точек равновесия и занимает ограниченную область, которая в
142
Современные методы ТАУ. Часть IV
отличие от случаев р < рс уже не является точкой; аттрактором является множество
точек, внутри которых содержатся 3 точки равновесия.
Рис. 2.22. Точки равновесия и фазовые траектории в модели Лоренца при р > рс
40
30
-10
20
10
-20 0
Рис. 2.23. Странный аттрактор Лоренца (р = 25 > рс = 24,7368; р = 8/3)
Вторая особенность: внутри аттрактора Лоренца (рис. 2.23) невозможно точно
предугадать поведение траектории на длительный интервал (траектория очень
чувствительна к начальным условиям), движения ее блуждающие. Такие аттракторы
получили название странных аттракторов.
Третья особенность: аттрактор, т.е. множество, к которому притягиваются
траектории в модели Лоренца, не является ни двумерной поверхностью, ни спаянным
двумерным многообразием. По существу он представляет собой топологический
объект патологической природы. Он имеет дробную хаусдорфову {фрактальную)
размерность: df = 2,06. Подробнее о фракталах и фрактальных множествах см. §2.3.
Заметим, что все обнаруженные в настоящее время странные аттракторы имеют
дробную хаусдорфову размерность, т.е. являются фрактальными множествами. Об-
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
143
щую картину качественных изменений, свойств аттрактора Лоренца можно
проследить на следующей диаграмме [9, 10], (рис. 2.24).
Бифуркация Хопфе: Рс «
метастабильный хаос
Изолированные глобальные
аттракторы узлы-фокусы
Р^ =1,35
Бифуркация А+3 и
24,74
13,93
Аттрактор Лоренца
(фрактальное
множество)
Бесконечно много периодически замкнутых
траекторий и бесконечно много неустойчивых
турбулентных замкнутых траекторий
фокус
седло
фокус
узел
седло
узел
i 1 \
\ I f
3 точки
равновесия
1 точка
J ^— равновесия
t (Узел)
Рис. 2.24. Качественные изменения свойств аттрактора Лоренца при варьировании параметра р
2.2.2.2. Логистическое уравнение
Второй парадигмой хаоса (хаотического поведения) является так называемое
логистическое уравнение, или уравнение роста популяций
xn+l=axn-bx2n, (2.188)
где ахп - рост или рождение популяции за и-й период, Ъх\ - ограничения роста,
связанные с ограниченностью энергетических и пищевых ресурсов, хп+] - число
популяций к началу (л + 1)-го периода. Перепишем (2.188) в безразмерном виде, вводя
, Ь а' , _
замену переменных х4 =— хп\ хп=—хп . Тогда
а Ъ
<+1=<+1К) = ^^-^К)2=у^0-<) = К0-^)Д = у. (2Л89)
Запишем (2.189) в исходных обозначениях
хп+{=1хп{\-хп). (2.190)
Это и есть логистическое уравнение, где X является параметром. При этом, для
того чтобы относительное значение численности популяций (например, насекомых)
находилось между 0 и 1, следует ограничить X е [0,4].
144 Современные методы ТАУ. Часть IV
Для того, чтобы оценить влияние параметра X на численность популяций,
рассмотрим рост численности за два цикла. Имеем
хп+1=1хп{\-хп) = /{х„), (2.191)
*п+2=^п+{{\-хп+1) = f{xn+]) = f(f{xn)) = /2{хп). (2-192)
Если хп,хп+1>хп+2,— принадлежит некоторому множеству М <zRx, то данная
функция / отображает множество М в себя, т.е.
/:М->М. (2.193)
В связи с этим введем некоторые определения. Отображения (2.191) и (2.192)
можно рассматривать как итеративный процесс воздействия функции / на
начальную точку х0. Ясно, что для произвольного п имеем
rw=/or'U)=/(r'U))-
Поскольку каждая точка х0 е М функции / как-то перемещается по множеству
М, то функция (2.191) задает дискретную динамику системы.
Если для некоторой точки х0 е М определены все итерации fn (*0), то
множество {fn(x0) neN - множество натуральных чисел} называется орбитой точки х0
под действием функции f (мы имеем еще одну наглядную интерпретацию действия
группы на многообразии).
Определение 2.26. Точка хе называется неподвижной точкой функции (а в
общем случае отображения) /, если fn (хе) = хе, \/neN .
Определение 2.27. Неподвижная точка хе функции / называется
притягивающей, если
p(/"(*6.*«))<p(r"'U.*.)). (2-194)
где р(х,у) - расстояние между точками х и уеМ ; в частности, (2.194) может
иметь вид
\/"Ы-хе\<\/"-1(х0)п-хе\. (2.195)
В этом случае отображение / \М -» М называют сжимающим. Для того, чтобы
точка хе была притягивающей, а отображение (функция) / сжимающим,
достаточно, чтобы функция / в окрестности точки хе (включая саму точку) удовлетворяла
условию Липшица [13]
|/Ы-/(*.)ИЬ-*.| (2-196)
с константой к<\\ хих2 принадлежат окрестности точки хе. В частности, условие
сжатия выполнено, если функция в окрестности точки хе Шх^ \ имеет производную
f'(x), причем
|/'(ф*<1. (2.197)
Естественно, условие (2.197)должно быть выполнено и в точке хе, т.е.
|/'(*е)|<1. (2.198)
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
145
На рис. 2.25 и рис. 2.26 изображен ход последовательных приближений в случае
О< f'(x) < 1 и в случае -1 < /'(*) <0 (М - \а,Ь\). Это так называемые диаграммы
Ламерея.
1 Хе /2 *1 =/(*b) Х0 Ь X
*2=/(*,)=7ым
Рис. 2.25. Притягивающая точка хе при 0 < /'(*) < 1 > х е М , f:M->M9 M = UXf
ь .
м<
ГЫ
/м
A*hy
7 *,*l=f{*o)j> Х
Рис. 2.26. Притягивающая точка при -1 < /'(*) <0, хеМ , j:M -> М 9 М = УХе
Если в окрестности Ux , включая саму точку хе, имеем |/'(*)| > 1, то такую
точку назовем отталкивающей точкой.
Определение 2.28. Точка хр называется периодической точкой функции /
периода А:, если /* (хр ) = хр при f'{xp)*xp для /< к . Орбита периодической точки
состоит из к точек и называется циклом периода к.
Определение 2.29. Точка хр является периодической точкой функции f периода
к, если она является неподвижной точкой функции / периода к, но не является
неподвижной точкой итераций с меньшим номером.
11 Зак. 416
146
Современные методы ТАУ. Часть IV
Теперь вернемся к логистическому уравнению (2.190) и рассмотрим как
изменяется его динамика при гладком изменении параметра X. Прежде всего найдем
неподвижные точки отображения fx (мы используем индекс X для того, чтобы
подчеркнуть зависимость / от параметра X).
Имеем
хе=1хе(\-хе),Х>0. (2.199)
Неподвижные точки:
4')=0, 42)= —• • (2-200)
А,
Оценим тип неподвижных точек:
Л(0) = Х; (2.201)
A'(ir)=2~x- (2-202)
Приравняв их к ±1, получаем, что неподвижные точки теряют гиперболичность
при X = 1 и X = 3. Потеря гиперболичности приводит к качественному изменению
динамики, т.е. при X = 1 и X = 3 имеют место бифуркации.
Построим диаграммы Ламерея при изменении 0 < X < 3.
1. 0< X < 1 (рис. 2.27). Две неподвижные точки. Для X = 0,5, ху =0, х[' = -\.
Диаграмма Ламерея показывает, что ху = 0 - притягивающая точка, ху = -1
- отталкивающая.
Рис. 2.27. Диаграмма Ламерея логистического уравнения для X = 0,5
2. Х^0' = 1 (первая бифуркация). Смена типа неподвижных точек.
Неподвижная точка хе = 0 - ни притягивающая, ни отталкивающая, а является
бифуркационным седлом.
3. 1 < X < 3. Теперь неподвижная точка л^1' = 0 является отталкивающей, а точка
ху = становится притягивающей. На рис. 2.29 показана диаграмма Ла-
X
мерея для X = 2 .
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
147
Рис. 2.28. Бифуркационное седло (А.'0' = 1), две неподвижные точки слились в одну ху = х) -О
*'о 1 х
Рис. 2.29. Диаграмма Ламерея для X = 2. Точка х® = О становится отталкивающей,
х»-^1-
притягивающей
На первый взгляд при 0 < А, < 1 и 1<^<3 отображение fx:M -+М
принципиально не изменилось, разве что поменялись местами притягивающая и
отталкивающая точки. Но в этом и состоит основное различие. На участке 0 < X < 1
притягивающей является точка jc^ = 0, поэтому при большом количестве генераций
f\ (Jce1))=Jc^) =^' те* ПРИ 0<^<1> относительного роста числа популяций не
наблюдается. Совершенно другая картина наблюдается при 1 < X < 3. В этом случае
11*
148
Современные методы ТАУ. Часть IV
притягивающей точкой будет х^ = >0, поэтому f"(x^)=x^ и наблюдается
рост популяций. Эту зависимость можно наблюдать на бифуркационной диаграмме
(рис. 2.30).
х h
0,5
х
-►
0 1 2 3 X
Рис. 2.30. Бифуркационная диаграмма логистического уравнения для периода 0 < X < 3
Еще одной особенностью является то, что на этом интервале сначала х^, а затем
х^Р являются периодическими точками периода 1 (Т = \). При Х = 3 |Л'(*в)| = 1 и
наступает вторая бифуркация.
4) Х^ = 3 (вторая бифуркация) - бифуркация удвоения периода: притягивающая
неподвижная точка х^Р = (период Т = 1) превращается в отталкивающую, а ря-
X
дом с ней появляется цикл вдвое большего периода (Г = 2), fx{xe) = xe
(рис. 2.31). При Х>3 все точки интервала (0,1) притягиваются к этому циклу
(рис. 2.32).
На интервале (0,1) отображение /х2 (х) = /х (/х (х)) имеет 3 неподвижные точки,
причем 2 из них притягивающие х^ и х^ , и одна х^ - отталкивающая.
|Л(*).Л2М
1 X
Рис. 231. Неподвижные точки д£!) = 0, д£2) =-; периоды Г = 1, Г = 2.
X = 3 - бифуркация удвоения периода
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
149
Увеличение Х(Х > 3) происходит до некоторого Х(2), при котором происходит
третья бифуркация: бифуркация удвоения периода 2 (Т = 4). Эта бифуркация имеет
место при (Л2)'(*)
= 1, что соответствует Х(2) = 3,45.
>
\Л(*Ш*)
Рис. 2.32. Неподвижные точки циклов 1,2 (Т = 1;2) х^1\ х™ - отталкивающие (цикла 2, Т = 2),
*е3)>44) - притягивающие (цикла 2) для Я. = 3,2, хе[0,1]
При X > Х^ для отображения f£ (*) вблизи каждой из точек х£3) и х£4)
появится еще две неподвижные точки, т.е. возникает цикл периода 4 (Т = 4), причем
устойчивый. Дальнейшее увеличение \>\^ =3,45 приводит к появлению бесконечной
последовательности (Х^"\ « = 3,4,5) значений параметра X: при Х = Х^ происходит
потеря устойчивости цикла периода 2п~1 и возникает устойчивый цикл периода 2п .
Этот процесс удвоения периода происходит до тех пор, пока X не достигнет
значения ^=3,56994. Вблизи этого значения последовательные значения параметров,
при которых происходит удвоение периода, подчиняются закону
__ —- _> 5 = 4,66920 (число Фейгенбаума).
При Х>Х<О могут возникнуть хаотические колебания (рис. 2.33). Отображение,
соответствующее X > Х^, имеет инвариантное множество канторовского типа
F (подробнее о канторовском множестве см. в разделе «фракталы»), окруженного
бесконечным числом неустойчивых циклов периода 2". При этом все точки
интервала [0,1], кроме точек этих циклов и их прообразов, притягиваются к множеству F,
которое является фрактальным и его дробная (фрактальная) разность равна
df « 0,518. Для X = 4 уравнение (2.190) может быть решено путем замены
переменных, что позволит увидеть чрезвычайную зависимость решения от начальных
условий. Покажем это [2]. Итак, сделаем следующую замену
1-COS27C0W
(2.203)
х„ =-
(2.204)
150
i
0.9
о.а
0.7
o.e
0 S
0.*
0 0
02
0 1
0
X
Бифуркация
удвоения \v
периода N4
^^^^
Г = 1
2.S /,\
Современные методы ТАУ. Часть IV
V
т
ДЦ Хаос
/МЛ
T = 2
'.ЯП
Э S
Рис. 2.33. Бифуркационная диаграмма логистического уравнения, X е [2,4]
При такой замене уравнения (2.190) преобразуется следующим образом (X = 4 ):
I(l-cos2rten+1) = 4^(l-cos2uen)^l-i-(l-cos27ren)jl = i(l-cos47ten). (2.205)
т.е.
Одним из решений уравнения (2.205) является
е„+1=2е„,
е =2Леп.
(2.206)
(2.207)
Можно непосредственно убедиться в том, что это решение соответствует хаосу в
системе. Действительно, поскольку хп связано с 0„ функцией cos27T0n, добавление
целого числа к 0„ (или замена знака) приводит к тому же самому значению хп .
Поэтому, если записать 0„ в обычной десятичной системе, например, положив
вп =11,2693..., то можно просто отбросить 11. Еще лучше использовать двоичную
систему для 0О , положив, например,
ео=- + - + — + —+ ... = 0,101101.... (2.208)
0 2 8 16 64
При этом умножение на два (переход от п -»(п +1)) означает просто сдвиг
запятых в «десятых» вправо на 1 знак, так что
0, =0,01101... ,02 =0,1101...,03 =0,101...,04 =0,01....
Таким образом, значения 0„ , порождаемые любыми начальными 0О , зависят от
п -го и следующего разрядов 0О . Это позволяет дать одно из возможных
определений хаотического поведения (о чем мы уже выше говорили): динамическая
переменная хп при больших п принимает значения, которые чрезвычайно сильно зависят
от точного начального значения х0.
В рассматриваемом случае предложим, что имеется два начальных значения х0 и
х'о, которые различаются на малое число 6 и порождают две последовательности
популяций хп и х'п , начинающиеся соответственно с х0 и х'о. Тогда после п шагов
разница между ними увеличивается до значения 2" г.
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
151
2.2.2.3. Производная Шварца и бифуркация удвоения периода
Бесконечная последовательность бифуркаций удвоения периода, как это имело
место для логистического уравнения, соответствует не всем унимодальным (одномо-
дальным) функциям, т.е. непрерывно дифференцируемым отображениям единичного
интервала [0,1] (в частности всем, имеющим один максимум при х = — и
монотонным при 0<д:< —, — <л:<1).
Кроме свойств унимодальности, необходимо, чтобы производная Шварца
функции / (обозначается Sf) [4]
была отрицательна на всем интервале [0,1].
Это справедливо для логистического уравнения, т.к. для него fm(x) = 0.
Отметим, что из условия Sf < 0 следует Sf" < 0 длявсех итераций /.
2.2.3. Бифуркация Хопфа и хаос. Критерий Рюэля - Такенса
Бифуркация Хопфа является одним из возможных путей зарождения хаоса в
системе, поэтому йайсно изучить ее подробнее.
Рассмотрим линейную систему 2-го порядка:
х1=7ах-ш29 (2.209)
Л д£ = гох, + Хха , . (2.210)
где X является параметром. Собей^ённые значения матрицы А:
^ ' (X -CDN *
А-[» *
- два комплексных корня Slf2 =X±j®. При X = 0 (два чисто мнимых корня) фазовые
траектории системы (2.209), (2.210)-это круговые орбиты (центры) (рис. 2.34).
В этом случае система (2.209)," &Щ 10) является как статически, так и динамически
неустойчивой системой, поэтому значение параметра X = 0 определяет множество
(точку) бифуркаций.
\
1
v(
Рис. 2.34. Фазовые траектории для чисто мнимых корней матрицы А (X = 0)
152 Современные методы ТАУ. Часть IV
Рассмотрим, как влияют возмущения (деформации) на центры. Для этого удобно
перейти от декартовой к полярной системе координат:
*!=rcos0, (2.211)
*2=rsin0. (2.212)
Тогда (2.209), (2.210) примут вид:
г = Хг, (2.213)
ё = ш. (2.214)
На бифуркационном множестве JB = {X = 0} происходит изменение
динамической устойчивости, что сопровождается появлением качественно новых решений.
Рассмотрим возмущение (деформацией) вырожденной (для Х = 0) системы (2.213),
(2.214). Для этого запишем:
г = fr (г, 0) = Хг + члены более высокой степени, • (2.215)
0 = /е (г, 0) = ю + члены более высокой степени. (2.216)
На бифуркационном множестве JB первые члены, разлагаемые /е(г,0) в ряд
Тейлора, отличны от нуля (со Ф 0); поэтому можно ожидать, что члены более
высокой степени несущественны и ими можно пренебречь [9].
В первом приближении можно ограничиться только возмущениями,
инвариантными относительно вращения (деформации радиальные), т.е.
fr(r,Q) = fr(r). (2.217)
Радиальная функция fr(r) может включать только члены с нечетными
степенями г, поскольку из инвариантности относительно вращения следует, что замена
хх -» -хх, х2 -» -х2 дает it -» -хх, х2 -> -х2.
Эта симметрия нарушается, если fr (г) содержит члены с четными степенями г.
Таким образом, достаточно общая деформация (возмущение) динамической
системы (2.213), (2.214) имеет вид
r = \r + Ar3 + Br5+..<, (2.218)
0 = ш. (2.219)
Ограничившись первыми двумя членами разложения (2.218), т.е., считая г*0
при Х = 0, ==> АфО, и вводя замену переменных г ->|А\ 2 г, получим следующий
канонический вид деформированной системы (в старых обозначениях):
r = Xr±r\ (2.220)
0 = со. (2.221)
Рассмотрим стационарные значения (неподвижные точки) для данной
динамической системы. Пусть
r = Xr-r\ (2.222)
Очевидно, что ге = 0 всегда является стационарным значением. Это есть точка
притяжения (устойчивая) при \<0 и отталкивающая (неустойчивая) точка при
X > 0. При X > 0 имеется устойчивый предельный цикл с радиусом
r = yjx. (2.223)
Решение (2.221) тривиально
0(/) = 0о+со/, (2.224)
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
153
именно поэтому радиальное решение уравнений (2.220), (2.222) ответственно за
появление качественно новых решений. Итак, имеем следующую картину
качественных изменений в начале координат:
• X < 0 (Sl2 = Х± ую) - устойчивый фокус.
• X = 0 - фокус теряет устойчивость и становится неустойчивым.
• X > 0. - неустойчивый фокус переходит в устойчивый предельный цикл
радиуса г = \Х . Такой бифуркационный переход называется суперкритической
бифуркацией Хопфа. Фазовый портрет такой бифуркации показан на рис. 2.35.
устойчивый
х = о
Х<0
устойчивый
фокус
предельный
цикл
неустойчивый
фокус
Рис. 2.35. Суперкритическая бифуркация Хопфа в точке ге = 0
Для динамической системы
r = Xr + r3 (2.225)
точка ге = 0 всегда является равновесной. Она устойчива при 1<0 и неустойчива
при X > 0. При X < 0 имеется неустойчивый предельный цикл с радиусом
г = урХ. (2.226)
Если X подходит к нулю снизу, отталкивающее множество (неустойчивый
предельный цикл) «наползает» на устойчивый фокус в начале координат и, наконец,
полностью вытесняет его при X = 0. Это явление называется субкритической
бифуркацией Хопфа, Фазовый портрет этой бифуркации показан на рис. 2.36.
Х<0
устойчивый
предельный4^
цикл
неустойчивый
фокус
Рис. 236. Субкритическая бифуркация Хопфа в точке ге = 0
10 3ак.416
154
Современные методы ТАУ. Часть IV
Другими словами суперкритическая (субкритическая) бифуркация Хопфа
определяет наличие периодических решений (предельных циклов) при X < Хо, где Хо -
точка бифуркации (здесь Хо = 0).
В 1971 г. Рюэль и Такенс предложили путь перехода к хаосу в динамических
системах на основе бифуркаций Хопфа. Изучая поведение динамических систем при
бифуркациях Хопфа, они пришли к выводу, что даже после двух бифуркаций Хопфа
регулярное движение может стать сильно неустойчивым и переходит в хаотическое
движение на странном аттракторе [30]. При этом подразумевается, что хаотическое
движение становится возможным только после двух бифуркаций Хопфа, когда
траектория выходит в дополнительное измерение, т.к. двухпериодическое движение
соответствует траектории на торе, на котором появление хаоса запрещается теоремой
Пуанкаре - Бендиксона [25].
Однако после двух бифуркаций Хопфа появление странного аттрактора не только
возможно и неизбежно (критерий Рюэля - Такенса).
Переход к хаосу по модели Рюэля - Такенса - Ньюхауса имеет следующий вид
(рис. 2.37).
Л А Ас
dim Aq = 0
странный
аттрактор с
большой
размерностью
"Ч
J
dim Al = 1
(1-я бифуркация
Хопфа;
предельный
цикл)
dimA2=2
(2-я бифуркация
Хопфа; движение
на торе)
dim Ar > 2
Рис. 2.37. Переход к хаосу через 2 бифуркации Хопфа по модели Рюэля - Такенса - Ньюхауса
2.2.4. Качественные и количественные признаки хаоса
Прежде всего необходимо еще раз напомнить, что хаотические колебания могут
возникнуть в системе, содержащей нелинейный элемент. В линейной системе
хаотические колебания отсутствуют.
Какие же качественные признаки могут сигнализировать о возможности
появления хаотических компонент? Мы их уже рассмотрели выше, теперь только
суммируем полученные результаты:
1) высокая чувствительность к изменению начальных условий;
2) растущая сложность регулярных движений по мере изменения некоторых
параметров;
3) фрактальные свойства движения в фазовом пространстве, которые указывают
на присутствие странного аттрактора (странный аттрактор Лоренца);
4) наличие в непрерывной системе бифуркаций Хопфа;
5) наличие в дискретной системе бифуркаций удвоения периода (логистическое
уравнение).
Количественные признаки хаоса определяются ее показателями:
1) положительный показатель Ляпунова;
2) фрактальная размерность аттрактора.
Рассмотрим подробнее каждый из показателей.
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
155
2.2.4.1. Показатель Ляпунова
Хаос в детерминированных системах подразумевает высокую чувствительность к
изменению начальных условий. Это означает, что две траектории, близкие друг к
другу в фазовом пространстве в некоторый начальный момент, экспоненциально
расходятся за малое в среднем время. Если р0 - мера начального расстояния между
двумя исходными точками, то, спустя малое время /, расстояние между
траекториями, выходящими из этих точек, становится равным
р(О = Ро^- (2-227)
Для дискретных систем соответственно имеем
Pn=Po^. (2.228)
Величина а называется показателем Ляпунова.
Критерий хаоса в терминах показателя Ляпунова:
сс>0 - хаотичное движение,
сс<0 - регулярное движение-J
Рассмотрим процедуру экспериментального определения показателя Ляпунова.
Вычисление показателя Ляпунова а:
1) начинается с выбора опорной траектории, точки на соседней траектории и из-
Р(')
(2.229)
мерения величины L-^-L (рис. 2.38);
Ро
2) интегрируются уравнения движения вдоль соседней траектории и
определяется ро(0;
3) когда расстояние p(t) становится слишком большим и рост его отклоняется
от экспоненциального поведения, находим новую соседнюю траекторию и
определяем новое начальное расстояние р0 (/) и т.д.;
4) показатель Ляпунова находится осреднением:
сс = -
1
■2>^
(2.230)
'to-'ом Po('*-i)'
где N - число точек на опорной траектории, равное числу соседних траекторий,
взятых для получения экспоненциального показателя Ляпунова а.
опорная траектория
Рис. 2.38. Геометрические построения, характеризующие определение
показателя Ляпунова для непрерывных систем
10*
156
Методы современной ТАУ. Часть IV
Для дискретных систем
*„+1 =/(*„) (2.231)
- показатель Ляпунова характеризует среднюю потерю информации за одну
итерацию [4].
Рассмотрим разность между итерированными отображениями fn (х0) и fn (*0 + е),
где 8 - малая величина. Имеем:
Ро = е>
df
рН/(*о+*)-/Ы|=?-
dx
•£,
*0
рп=\Г(хо+е)-Г(хо)\ = ге"а^\
Тогда
а(х0) = lim lim — In
«->оое->0«
fn(xo+z)-fn{xo)
ГЫ
= lim —In
л-»оо п
4ГМ
dx*
(2.232)
Выражение (2.232) определяет показатель Ляпунова для дискретных систем при
итерированных отображениях.
Рассмотрим пример: известное нам логистическое уравнение (2.190) и найдем
показатель Ляпунова для X = 4 . В этом случае, используя замену переменных (2.204),
мы получим соотношение между хп -» вп и х0 -» 0О (формула (2.207))
е„=2"е0.
Используя (2.232), получим
a(eo)=limilnf^iMl = in2>O,
/7->сол ^ dQ0 )
это значит, что для X = 4 имеет место хаос, в чем мы еще раз убедились.
2.3. ФРАКТАЛЫ
2.3.1. Понятие о фракталах
Знакомство с фракталами начнем с экскурса в историю.
В 1890 г. итальянский математик и логик Джузеппе Пеано построил кривую
(кривую Пеано), областью определения которой является отрезок (dim = l), а областью
значений - квадрат (dim = 2). Было показано, каким образом одна точка, двигаясь
непрерывно по квадрату, может (за бесконечное время) пройти, по крайней мере,
один раз через каждую точку квадрата и его границы. Кривая Пеано, ее потом
окрестили «монстром», является непрерывной кривой, но нигде (ни в одной точке) не
дифференцируема.
В 1904 г. шведский математик Хельга фон Кох, используя итерированные
отображения, получила фигуру, названную позднее «снежинкой Кох», особенностью
которой является бесконечная протяженность границы при ограниченных размерах
самой снежинки. Были получены и другие монстры.
В 1919 г. немецкий тополог Феликс Хаусдорф решил проблему размерности
извивающихся кривых, приписав им дробную размерность.
Систематическое изучение объектов такой необычной группы было начато
французским математиком Бенуа Мандельбротом. Термин «фрактал» (английское «fractal»)
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
157
был введен Б. Мандельбротом в 1975 году. Он был получен от двух латинских
глаголов: frangere - ломать и fractus - дробный.
Дадим теперь два определения фрактала.
Определение 2.30 [22]. Фракталом называется множество, размерность Хаус-
дорфа - Безиковича (ниже будет показано вычисление этой размерности), dHB
которого строго больше его топологической размерности dT (dHB > dT) .
Кривая Пеано, имея топологическую размерность dT = 1 (одномерная кривая),
имеет фрактальную размерность 1 < df < 2 .
Определение 2.31 [22]. Фракталом называется структура, состоящая из частей,
которые в каком-то смысле подобны целому (именно самоподобные объекты стали
основным инструментом Б. Мандельброта для исследования фракталов).
Определение 2.30 является строгим и наиболее точно отражает суть фракталов, а
именно их дробную размерность. Однако, при всей правильности и точности, оно
слишком ограничено, т.к. исключает многие фракталы в различных технических и
физических задачах.
Определение 2.31 содержит еще один отличительный признак: фрактал выглядит
одинаково, в каком бы масштабе его не наблюдать. Ниже мы подробно
познакомимся с самоподобными объектами.
Несмотря на данные выше определения, по признанию даже самого Б.
Мандельброта, строгого и полного определения фракталов пока не существует [22], тем не
менее мь! будем придерживаться следующего определения.
Определение 2.32 [23]. Фракталами называются масштабно-инвариантные
множества, обладающие дробной размерностью Хаусдорфа - Безиковича. Это определение
объединяет отличительные признаки фракталов, данные определениями 2.30 и 2.31.
2.3.2. Размерность Хаусдорфа - Безиковича
Фракталы сложно рассматривать как множество точек, вложенных в
пространство. Когда речь идет об обычных геометрических объектах: линия, поверхность, шар,
то их топологические размерности dT известны и являются целыми числами.
Рассмотрим, как вводится мера некоторого множества точек G, вложенного в
пространство при определении размерности Хаусдорфа - Безиковича (dHB).
Простой способ измерить длину кривых, площадь поверхности или объем тела
состоит в том, чтобы разделить пространство на небольшие кубы с ребрами г
(рис. 22).
Р' Р Q
Рис. 2.39. Измерение «величины» различных множеств точек с помощью кубов с ребрами г
158 Методы современной ТАУ. Часть IV
Пусть для некоторой кривой (3 (рис. 2.39) длиной Lq получено N(r) количество
прямолинейных отрезков длиной г, аппроксимирующих данную кривую. Тогда
^(')т->А/ = Аи 0.233)
Г->0,
где г - длина прямолинейного отрезка.
В пределе г -» О мера L становится равной длине кривой Lq и не зависит от г.
Множеству точек кривой (3 можно поставить в соответствие и площадь. Если
N(r) - число квадратов, г2 - площадь каждого из них, то площадь кривой р
определяется как
A = N(r)r2->Lorl9 (2.234)
г->0.
Аналогично, объем V кривой (3 может быть найден как
V = N(r)r2=L0-r\ (2.235)
г->0.
Разумеется, что для обычных кривых р площадь А и объем V обращаются в нули
при мОи единственной представляющей интерес мерой является длина кривой Р .
Теперь перейдем к поверхности р (см. рис. 2.39), для которой в качестве меры
множества точек возьмем площадь
Л = ЛГ(г)г2->4/ = 4>. (2236)
г->0.
Можно ли для поверхности р в качестве меры взять объем? Формально это
выглядит следующим образом:
У = М(гУ^А0-г\ (2237)
г->0,
при г -> 0 этот объем для обычной (!) поверхности также равен нулю.
Поставим другой вопрос: можно ли поверхности р поставить в соответствие
какую-нибудь длину?
Формально мы можем принять за такую длину величину
L = N(r)-r^>A0-r\ (223g)
г-»0,
которая расходится при г -> 0. Этот результат имеет смысл, т.к. поверхность
невозможно покрыть конечным числом прямолинейных отрезков.
Вывод: единственной мерой множества точек, образующих поверхность в
трехмерном пространстве является площадь, однако «монстры», подобные кривой Пеано,
«снежинке Кох» и другие, требуют обобщить меру величины множества точек.
До сих пор, определяя меру величины множества точек G в пространстве, мы
выбирали некоторую пробную функцию h(r) [17,22] (элементарную меру)
h(r) = y(d)rd, (2.239)
где y(d)- геометрический коэффициент, зависящий от пробной функции:
у (d) = 1 - для прямолинейных отрезков, кубов, квадратов;
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы Ij59^
y(d) = для круга;
y{d) = --- для сферы;
6
d - размерность меры.
После выбора пробной функции h(r) множество G покрывается N{r) пробными
функциями (элементарными мерами) и определяется мера этого множества
N(r)
Л/„=$>(г). (2.240)
/=i
Отсюда можно сделать вывод: при г -> 0 мера Md равна нулю или
бесконечности в зависимости от выбора d - размерности меры.
Определение 2.33 [22]. Размерность Хаусдорфа - Безиковича dHB данного
множества точек G есть критическая размерность, при которой мера Md изменяет свое
значение с нуля на бесконечность
Ясно, что когда d = dHB, мера Md должна быть конечной, она и определяет
размерность Хаусдорфа - Безиковича dHB .
Приняв y(d) = 1, т.е. покрыв множество точек прямолинейными объектами
(отрезок, квадрат, куб) и приравняв (2.241) некоторой конечной величине, .например 1, мы
получим:
N(r)rd»B =\, (2.242)
откуда размерность Хаусдорфа - Безиковича определим как
\n(N(r)), ч
dHB =— ,\[=dfi если dHB -дробное число]. (2.243)
Если dHB является дробной, то размерность Хаусдорфа - Безиковича будем
обозначать df и называть фрактальной размерностью Хаусдорфа - Безиковича.
Теперь перейдем к построению и изучению самоподобных фракталов.
2.3.3. Принцип самоподобия. Самоподобные фракталы
Рассмотрим несколько примеров на построение множеств с использованием
формулы (2.243).
Возьмем отрезок прямой единичной длины (это можно сделать для любого отрезка,
приняв длину этого отрезка за единицу, т.к. размерность длины в данном случае не
играет никакой роли). Разделим отрезок на Nx (г) равных частей, где г- длина
каждой части. Каждую часть можно считать копией исходного отрезка, уменьшенной в
1/г раз. Очевидно, что Nx(r)-r = l. Назовем исходный отрезок сегментом 0-й
итерации (0-го поколения [22]). Ясно, что если мы используем формулу (2.243), то получаем
1и(АГ,(г)) ЫК,(г)
160 . Методы современной ТАУ. Часть IV
т.е. исходный отрезок без дополнительных преобразований имеет размерность Хаус-
дорфа - Безиковича, совпадающую с размерностью топологической. Поступим
теперь по-другому: от исходного отрезка АВ (сегмента 0-й итерации) (рис. 2.40, а)
перейдем, например, к образующей 1-й итерации самоподобного фрактала CD, где
число сегментов равно 7, а длина каждого отрезка по-прежнему равна г = 1/3,
(рис. 2.40, б).
1
А ( | | ^| В сегмент 0-й итерации
8=1/3 1/3 1/3
*,(г) = 3
1/3
(А) 1/3
С\
~±
1/3
1/3 (В) образующая 1-й
1/3
D итерации
1/3
ЛГ(г) = 7 сегмент 1 -й итерации
б
Рис. 2.40. Построение образующей самоподобного фрактала с г = 1/3, N(r) = l
Если теперь использовать формулу (2.243), то получим
Таким образом, величина </у=1,81 (фрактальная размерность самоподобного
фрактала с образующей CD) показывает, что кривая CD в 1,81 раза «более
извилистая» на отрезке АВ, чем сам отрезок АВ. Можно провести и обратную процедуру,
выкидывая, например, часть отрезков длины г из сегмента АВ. В этом случае
размерность образующей будет меньше размерности сегмента АВ, т.е. df e (0,1).
Построение самого фрактального множества (самоподобного фрактала)
производят последовательным использованием сегмента /-й итерации для образующей (/ + 1)
итерации. При / -> оо получим предельное (фрактальное) множество.
Аналогичный алгоритм используется и для двумерных объектов, например,
квадратов.
Возьмем квадрат единичной площади (квадрат 0-й итерации) и, разделив каждую
сторону на Nx (г) равных частей длиной г, получим N2 (r) квадратов, подобных
исходному, но имеющих сторону в 1/г раз меньше исходной (рис. 2.41, а).
Сформируем образующую 1-й итерации самоподобного фрактала, выкидывая из
исходного квадрата N3 (r) e (l, #2 (г)) квадратов (рис. 2.41, б). На рис. 2.41, б
r = i,^(r) = 4,^2(r) = 16,^3(r) = 10.
Если теперь определить число копий исходного квадрата в образующей 1-й
итерации, то оно равно
N(r) = 6 = N2(r)-N3(r).
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
161
1/4 1/4 1/4 1/4
Рис. 2.41, я. Квадрат 0-й итерации, N2 (r) = 16
Рис. 2.41, б. Образующая самоподобного
фрактала N(r) = 6 1-й итерации
Найдем фрактальную размерность получаемого множества
' 1пГП In4 J'39
Совершенно аналогичную процедуру можно производить над геометрическими
объектами размерности п > 2.
Из проведенного анализа следует, что для того, чтобы найти размерность
самоподобного фрактала, необходимо определить число элементарных мер (пробных
функций) N(r) образующей 1-й итерации (число подобъектов), вычислить коэффициент
подобия г и использовать формулу (2.243).
Рассмотрим построение некоторых классических фрактальных множеств.
2.3.4. Классические фракталы [14]
Примерами классических фракталов, построенных задолго до появления данного
понятия, являются снежинка Кох, ковер Серпинского, губка Менгера, пыль Кантора
и множество других.
Снежинка Кох представляет собой замкнутую кривую, составленную из трех
одинаковых фракталов, каждый из которых строится на стороне равностороннего
треугольника. Процедуру построения рассмотрим на примере одной из сторон
треугольника. Она выполняется для каждой из сторон. Пусть Ко - исходный отрезок
(одна сторона треугольника). Разделим его на 3 части и уберем среднюю часть.
Вместо средней части добавим два новых отрезка той же длины так, чтобы в центре
отрезка образовался новый (маленький) равносторонний треугольник, но без
основания. В результате получим новое множество Кх (см. рис. 2.42). Данную процедуру
можно выполнять многократно над каждым из отрезков, получая все новые и новые
множества К2,К3 и т.д. В результате на и-м шаге итерационного процесса получим
снежинку Кох (рис. 2.43).
Поскольку N = 49з. г = -, то размерность фрактала
£/,= — «1,2618.
f 1пЗ
Особенностью данного фрактала является бесконечная длина предельной кривой,
4
описывающей его границу. Действительно, длина кривой Кх - 1Х = —, длина кривой
162
Методы современной ТАУ. Часть IV
42 4"
К2 -12 = —> на и-м шаге итерационного процесса длина кривой /„ = —. При п -> оо
4"
длина предельной кривой для одной стороны фрактала / = lim > оо .
л->оо 3"
^j\a_
^aJ 1л,
Рис. 2.42. Построение снежинки Кох:
a —Kq\ б —К\\ в —Кг\ г —Ку
Рис. 2.43. Снежинка Кох
Алгоритмы построения таких фракталов, как ковер Серпинского, пыль Кантора и
других, во многом сходны с алгоритмом построения снежинки Кох.
Принцип построения ковра состоит в разбиении некоторой замкнутой области
(исходного множества) на непересекающиеся подобласти (пересекающие
подмножества), обязательно содержащие внутреннюю подобласть, и последующем удалении
именно внутренней подобласти. Процедура итеративно повторяется с каждым из
оставшихся подмножеств. Наиболее иллюстративно это видно на примере ковра,
построенного на базе прямоугольного треугольника (рис. 2.44), хотя ковер можно
строить, взяв за основу квадрат или другую плоскую фигуру.
Пусть исходным множеством SQ является равносторонний треугольник вместе с
областью, которую он замыкает. Разобьем его на четыре меньших треугольника и
удалим внутренний треугольник без замыкающих его сторон. Получим множество
«Sj. Выполним аналогичную операцию над оставшимися треугольниками. В
результате будет иметь место множество S2. Продолжая итерационный процесс, на п -м
шаге получим множество Sn (см. рис. 2.45). Предельное множество и образует ковер
Серпинского.
▲ЛА
Рис. 2.44. Ковер Серпинского
Рис. 2.45. Построение ковра Серпинского
«/, =^«1,585.
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы \63_
Так как коэффициент подобия г = —, а количество элементов, участвующих в
итерационном процессе N = 3, то размерность фрактала (ковра), построенного на
основе треугольника,
1пЗ
1п2
Так же как и снежинка, данный ковер имеет свою особенность, а именно то, что
предельное множество S имеет площадь нулевой меры.
Действительно, на первом шаге удаляется 1/4 площади треугольника, на втором
шаге 3 треугольника площадью l/42 от исходного и т.д.
Поскольку
то имеет место меры нуль.
К множествам нулевой меры относится и пыль Кантора (фрактальная пыль).
Принцип построения этого множества состоит в следующем. На первом шаге отрезок
единичной длины [0,1] разбивается на три части и удаляется средний, открытый ин-
теграл -,— . На последующих шагах вновь удаляются центральные части
оставшихся отрезков, не включая их концы (рис. 2.46). Предельным множеством является
пыль Кантора.
Рис. 2.46. Построение пыли Кантора
Так как N = 2, а коэффициент подобия г = -, то размерность фрактала
d ,= — «0,6309.
f In3
Подсчитаем длину выбрасываемых интервалов. На первом шаге выбрасывается
интервал длиной 1/3. На втором шаге выбрасываются два интервала длиной 1/32 от
длины исходного единичного отрезка. На и-м шаге выбрасываются 2п~{ интервалов,
каждый длиной —. Таким образом, общая длина выбрасываемых интервалов для
предельного множества
164 Методы современной ТАУ. Часть IV
Как видим, пыль Кантора относится к множествам нулевой меры Лебега.
Множества типа «пыль Кантора» могут быть построены и на основе плоских фигур, путем
выбрасывания отдельных частей. В отличие от снежинки Кох или ковра Серпинского
фрактальная пыль является разрывным множеством.
Множества Кантора, являющиеся самоподобными фракталами, могут иметь
различную размерность, в зависимости от того, на какое количество частей разбивается
отрезок (фигура) и какое количество частей выбрасывается при переходе от одного
множества к другому.
Если Канторова пыль образуется путем деления отрезка на N частей, то при
выбрасывании одной части размерность фрактала составит
in(N-l)
'"■' \n{N) '
при выбрасывании N -1 частей (одна пылинка) соответственно
d ~ 1П0)
А \n(N)'
При N -» оо, dfN i -> 1, d^ -> 0. Таким образом, различные фракталы,
относящиеся к множествам Кантора, построенных на основе отрезка, могут иметь размерность
rfy, принадлежащую интервалу (0,1).
Если при построении пыли Кантора за основу взять плоские фигуры, то
размерность фракталов может меняться в более широких пределах.
Отметим, что различные множества Кантора обладают тремя основными
свойствами: они компактны, совершенны и вполне разрывны.
2.3.5. Фрактальная размерность аттракторов. Применение теории
фракталов в некоторых задачах управления
Существуют три альтернативных подхода к определению фрактальной
размерности аттракторов [17]:
1) поточечная размерность;
2) корреляционная размерность;
3) информационная размерность.
Мы рассмотрим две из них, поточечную и корреляционную, причем последняя
будет использована нами для нахождения фрактальных характеристик динамики
объектов управления.
Поточечная (фрактальная) размерность. Рассмотрим какую-нибудь
траекторию в фазовом пространстве на протяжении длительного времени (рис. 2.47).
Проведем выборку точек на траектории (достаточно большое число Л^)
произвольным образом. Опишем вокруг какой-нибудь точки х0 на траектории сферу
диаметра 8 (или куб с ребром 5) и подсчитаем число выборочных точек N(b),
попавших внутрь сферы. Вероятность того, что выборочная точка окажется внутри сферы,
определяется выражением
Р(5) = ^й, (2.244)
где #0 - общее число точек на траектории. Размерность траектории в точке х^' (где
х^' - вектор в фазовом пространстве), полученная путем измерения доли времени,
проведенного траекторией внутри малой сферы, имеет вид
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
165
*i
*3
dfp-
\с
< ■
с.
С
In Р\
У0)
11ГП —
5->0 In 8
Траектория в фазовом пространстве
ж • • <• • •
:; у -
. 1
1
\ /
.' X
Вь
/ »
1
у
бор<
г
энные точки
(2.245)
Рис. 2.47. Геометрические построения для нахождения поточечной (фрактальной) размерности
Несмотря на то, что формула (2.245) отличается от общей формулы (2.243) по
определению фрактальной размерности, тем не менее выражение (2.245) можно
привести к (2.243). Покажем это. Вернемся к рис. 2.47. Пусть длина всей кривой L равна
1 (уже говорилось ранее, что это всегда можно допустить). Пусть г - расстояние
между отдельными точками. Тогда N[r)r (где N(r) - число точек, попавших в
сферу) определяет длину кривой L(b) в сфере диаметра 5, a Nor = 1.
Имеем
/Vо -Г
Рассмотрим отрезок 8 (диаметр сферы). Если вновь принять длину этого отрезка
за 1, т.е. 6 = 1, то число отрезков, покрывающих длину 6 = 1, определится как 1/г, в
то же время число отрезков, покрывающих 1(8), равно
Тогда
N(r)-r-- = N(r).
, \nN{r)
dfp = \\m s-t
"До. (П
1пЫ
и мы получим исходную формулу (2.243). Как мы видим, здесь вновь использовался
основной принцип - принцип самоподобия фракталов. Для многих аттракторов это
определение не зависит от х^, но для других аттракторов dfp зависит от х^,
поэтому лучше воспользоваться усредненной поточечной размерностью.
166 Методы современной ТАУ. Часть IV
Выберем случайным образом множество точек М <N0 ив каждой точке
вычислим dfp nr' V Усредненная поточечная размерность определяется как
ъ-ЬЫ*)-
ми
Корреляционная (фрактальная) размерность [17]. Эта размерность широко
используется для определения меры упорядоченности движений и является нижней
оценкой хаусдорфовой размерности странного аттрактора.
На первом этапе определяется корреляционный интеграл С (5) по формуле
c(s)->™^|l'h|»w-»(1} оме
где \[z] - функция Хевисайда; Ц...Ц - какая-либо норма. Фактически двойная сумма в
(2.246) определяет число пар х''',х^', расстояние х^'-х'7' между которыми не
превышает 5. Предполагается, что х*1' - вектор, описывающий положение
изображающее точки х^' = х(/,) в фазовом пространстве в момент времени, где
tt =t0 +iT, i = 1,2,...,TV, T- некоторый заданный промежуток времени. При малых 5
корреляционный интеграл С(5)~8/с, поэтому корреляционную размерность dfc
можно определить по наклону зависимости In С (5) от In 8 или
rf =IimlL£i*i. (2.247)
fC 5н>0 In 5
В случае изучения скалярной динамической системы или одной координаты
вектора состояния х, размерность странного аттрактора можно определить с помощью
процедуры Паккарда - Такенса [17]. Пусть х, - реализация одной из координат
фазового пространства систем, х,=х(/,). Введем в рассмотрение новое фазовое
пространство (пространство вложения размерности р\ точки которого определяются
векторами уу^ ={*/,*/+i,-.,*/+/7-i}> сконструированными из последних значений
величин x(j = \,2,...9п = N-р + \). При изменении / получим в этом пространстве
траекторию, воспроизводящую некоторое множество, корреляционная размерность
которого dyy может быть вычислена через корреляционный интеграл
CW(6)= Km\±±lk-W-№fl (2-248)
*->0°" J=\k=\ V " П/
по наклону зависимости In Ор' (5) от In 5 или
J 8->0 In 8
Изменяя размерность р векторов у, проанализируем зависимость dyy от р и
назовем ее кривой Паккарда - Такенса. Оказывается, при малых р размерность dy
с ростом р увеличивается. Однако если регистрируемый сигнал есть проявление
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
167
детерминированного хаоса, то при некотором р = р0 величина djp перестает расти
(!). Достигнутое при этом значение df*' принимается за размерность djc
странного аттрактора исходной системы. Если же рост dyy продолжается без
насыщения, то это свидетельствует о том, что наблюдаемый сигнал шумовой (!).
Таким образом, обычный случайный процесс можно рассматривать как
движение системы на аттракторе бесконечной размерности. Конечная размерность
аттрактора означает, что данный сигнал можно воссоздать с помощью динамической
системы. При решении задач управления важно отличать детерминированный хаос
от обычных шумов и помех. Дело в том, что наличие внутреннего порядка в
детерминированном хаосе позволяет в принципе управлять им, в то же время как шумовой
хаос неуправляем [23].
Покажем [17], что минимальное число динамических переменных, необходимое
для описания наблюдаемого хаотического движения оценивается как Г^с1 + 1, где
[z] - целая часть z. Эта оценка может быть использована, в частности, для решения
одной из самых сложных задач, возникающих при идентификации модели
рассматриваемой системы, - задачи определения ее сложности.
Рассмотрим примеры, связанные с применением процедуры Паккарда - Такенса
для: 1) идентификации размерности математической модели и 2) диагностики
объекта управления.
Пример 2.12 [23]. Обработка записей пульсаций давления, вызванных работой штангового
глубинного насоса (данные с тензодатчиков с глубины 390 м).
На рис. 2.48 представлены графики пульсации давления глубинного насоса для различных жидкостей.
yu/ivwi
я- 1^=>
Рис. 2.48. Пульсация давления в скважине:
Р - давление, ц - вязкость, Рст - статическое давление', а - ц * 1,0 ц, Па-с (вязкость пластовой воды),
б — \х* 50\х , Пас (дегазированнаянефть)', в - ц«500ц, Пас (водоэмульсионнаясмесь)
168
Методы современной ТАУ. Часть IV
Как видно из рис. 2.48, при большой вязкости начинаются периодические колебания с периодом,
равным продолжительности одного цикла качания насоса. С уменьшением вязкости ц движения
усложняются и, можно предположить, устанавливаются хаотические колебания при малых ц (рис 2.48, а) Проверим
эту гипотезу процедурой Паккарда - Такенса На рис. 2 49 построена зависимость корреляционной
размерности dyy от размерности р вектора у.
15
20
Рис. 2.49. Построение кривой Паккарда - Такенса для выявления хаоса
и определения фрактальной размерности (ц «1,0ц Па с)
Из рис. 2.49 видно, что при р «12 наступает насыщение dyy . Следовательно, в данном случае
действительно наблюдается детерминированный хаос, причем [^1 = 3 , поэтому минимальное число
динамических переменных, необходимых для описания наблюдаемых колебаний, равно 4.
Пример 2.13 (диагностика объекта управления) [23] При бурении скважины одной из важнейших
технических задач является оценка степени износа долота с целью его своевременной замены. Косвенная
оценка состояния бурильного инструмента по изменению механической скорости проходки не всегда
надежна, поскольку изменение скорости проходки может быть связано с изменением свойств породы, а не
с износом долота. Для диагностики состояния долота предложена оценка значения корреляционной
размерности пульсаций давления промывочной жидкости.
На рис. 2.50 представлены графики рассчитанных корреляционных размерностей для изношенного и
неизношенного инструментов.
4<'>
1 5 9 13 17
Рис. 2.50. Кривые Паккарда - Такенса, характеризующие неизношенное (1) и изношенное (2) долото
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы 169^
Видно, что неизношенное долото характеризуется конечной фрактальной
размерностью dfC « 4,5 , в то время как фрактальная размерность изношенного инструмента
не ограничивается конечной величиной и определяет случайный процесс, а не
детерминированный хаос.
2.3.6. L-системы. Тертл-графика
Для рассмотренных выше классических фракталов характерен единый принцип
построения - добавляются либо выбрасываются отдельные линии или области.
Процесс повторяется многократно (итерационно). Этот процесс лег в основу L -систем,
позволяющих создавать отдельную, достаточную большую группу самоподобных
фракталов (предложены в 1968 г. А. Линденмайером). С помощью L -систем,
использующих подсистему графического вывода под названием тертл-графика (ТГ)
(от английского turtle - черепаха), обычно строят связанные и несвязанные
фрактальные множества - снежинки, ковры, кривые (Госиера, Гильберта, Пеано и др.), а также
фрактальные деревья, растения, русла рек и т.д.
Сущность тертл-графики состоит в том, что изображающая точка (черепашка)
движется по экрану монитора прямолинейно, дискретными шагами, оставляя или не
оставляя свой след. После каждого перемещения она может повернуться на
некоторый угол в ту или иную сторону, или продолжить движение вновь по прямой. Так
образуется непрерывная или разрывная дискретная линия на экране. Изображающая
точка может вернуться на несколько шагов назад, не прерывая свой след, и начать
движение в новом направлении. В этом случае происходит ветвление траектории
движения.
Изображающая точка движется по командам, задаваемых кодовыми словами.
В каждой точке экрана положение изображающей точки задается тремя параметрами:
х,у,а (х,у - координаты точки; а - направление движения). Кодовое слово
состоит из указаний перемещения на один шаг с оставлением или неоставлением следа,
увеличением или уменьшением направления движения на некоторый угол 0,
открытием ветви, закрытием ветви.
L -систему образуют алфавит, инициатор (слово инициализации, аксиома) и
набор порождающих правил, определяющих преобразование аксиомы для организации
итерационного процесса. Алфавит состоит из набора отдельных символов. Каждый
символ представляет собой микрокоманду предписывающую определенное действие
выполняемое изображающей точкой. Например:
F - переместиться вперед на один шаг, прорисовывая след;
Ъ - переместиться вперед на один шаг, не прорисовывая след;
[ - открыть ветвь;
] - закрыть ветвь;
+ -увеличить угол а на величину 0;
- - уменьшить угол а на величину 0.
Из элементов алфавита можно создавать слова инициализации (аксиомы).
Например L -система, позволяющая нарисовать на экране равносторонний треугольник,
следующая:
-!•
аксиома F + +F + +F.
Изображающая точка имеет первоначальное направление движения под углом —.
Согласно команде F выполняется движение на один шаг. По командам + и + осу-
170
Методы современной ТАУ. Часть IV
ществляется поворот на угол 2 —. Следующая команда F предписывает движение
еще на один шаг. Команды + и + поворачивают изображающую точку вновь в
положительном направлении на угол 2—. Окончательная команда F замыкает
треугольник.
Порождающее правило предназначено для замены микрокоманды в аксиоме
группой микрокоманд. Например, если в приведенной выше аксиоме команду F
заменить порождающим правилом newf = F-F + +F-F, то изображающая точка
при движении по экрану нарисует снежинку Кох. Порождающее правило - это
разновидность рекурсивной процедуры. Глубина рекурсии показывает, какое количество
итераций по замене микрокоманд группой микрокоманд необходимо выполнить.
С помощью микрокоманды ветвления осуществляется построение деревьев и
растений. Порождающие правила позволяют выполнять ветвления многократно не
только от линии основного направления движения изображающей точки, но и от
построенных ранее ветвей. На рис. 2.51 и рис. 2.52 изображены фракталы, построенные с
помощью микрокоманды ветвления.
Выше рассматривалась лишь алгоритмическая сторона построения фракталов -
множеств дробной размерности. Для понимания того, как из множеств
образовываются фракталы, какие преобразования над ними выполняются, как организуется
итерационный процесс, будет ли последовательность множеств сходящейся или нет,
остановимся на отдельных математических аспектах теории фракталов.
Рис. 2.51. Куст после 4-х итераций
Рис. 2.52. Цветок после 3-х итераций
2.3.7. Аффинные преобразования
Выполняемые над линиями или плоскими фигурами преобразования при
построении фракталов относятся к аффинным преобразованиям (АП). Аффинное
преобразование состоит из линейного преобразования пространства R" в пространство
Rm и преобразования сдвига. В матричной форме это задается формулой
Г(х) = Ах + В, Х€Д\
где А - прямоугольная матрица вещественных чисел размера тхп, В - вектор из
т элементов.
Наиболее иллюстративны действия, выполняемые АП в пространстве R2.
Линейная составляющая аффинного преобразования осуществляет деформацию (сжатие
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
171
или растяжение) плоской фигуры. Причем площадь фигуры уменьшается или
увеличивается в det(^) раз. Если, например, плоская фигура - многоугольник, то каждая
из его сторон, являющаяся отрезком с координатами [(*n,.yii),(*2i,,)bi)],
преобразуется в новую сторону, т.е. отрезок с координатами [(^п^п)»!^»^)]» причем
левая сторона оригинала отражается в левую сторону изображения, правая - в
правую, внутренняя область - во внутреннюю область. Операция сдвига, не меняя
формы фигуры, осуществляет лишь ее перемещение в плоскости.
При преобразовании, выполняемом в плоскости, т.е. в пространстве R2, АП
имеет вид
/г-
*1
Х|Т]=Га11 а'2][
•*2_|J |_a2l а22_||_
* Hi
Коэффициенты aiJ9iij = \i2;bi: / = 1,2 называются аффинными коэффициентами
и однозначно определяются при отображении трех несовпадающих точек (хп,уп),
(Х2\>У2\)> (*3i>Уз\) в три другие точки (хХ2,у12), (*22>;И22)> (^32^32) из следую-
щей системы уравнений
*21
.*31
*21
.*31
Уг\
Уз\
У и
Уг\
Уг\
1
1
1
Г
1
1
«11
ап
Л.
~аг\
ап
Л.
=
=
хп
х22
/32.
~Уп
Уп
У гг.
Преобразования, выполняемые для ковра Серпинского на любом из шагов для
одной из треугольных областей (координаты вершин треугольника (0,0), (1,0),
—,— |), можно задать с помощью трех аффинных преобразований (рис. 2.53)
1
2
0
"1
2
0
1
2
0
0
1
2.
0
1
2.
0
1
2.
[::№]•
(2.250)
И-
о
4
й
L 4 J
Одной из разновидностей аффинных преобразований является изометрия
T(x) = Qx + B.
172 Методы современной ТАУ. Часть IV
Матрица Q, определяющая линейное преобразование, ортонормирована, т.е.
QTQ = QQT=i,
где I - единичная матрица п х п.
Рис. 2.53. Аффинные преобразования для ковра Серпинского
Столбцы матрицы Q образуют ортонормированный базис. Действительно,
результат перемножения строки матрицы QT и столбца матрицы Q можно рассматривать
как скалярное произведение двух векторов q, и q] (q, - /-й столбец матрицы Q)
(q,q() = Z^=^={0)/^,
Здесь 5/у - символ Кронекера.
Для изометрии характерна неизменность метрики до и после преобразования
И*)-Пу)1Их-у«2>х.уе*й-
В пространстве R2 вращение плоской фигуры, ее отражение и сдвиг являются
изометриями.
Обобщением изометрии является преобразование подобия. Преобразование
S:Rn -» R" задается выражением
S(x) = rQx + B,
где Q - ортонормированная функция, г - коэффициент подобия, вещественное
число, г>0.
Для преобразования подобия справедливо
1И(х)-5(у)|2=Н|х-у||2,х,уе/г".
Изменяя коэффициент подобия г в ходе итерационного процесса, можно
получать разнообразные фракталы.
2.3.8. Метрика Хаусдорфа
При построении фракталов в ходе итерационного процесса осуществляется
переход от одного подмножества к другому. На каждом шаге выполняются аффинные
(или другие) преобразования. В ходе этого процесса формируется некоторая
последовательность множеств. Последовательность может быть как сходящейся, так и
расходящейся. Известно, что последовательность {х„ }™=1 из X сходится к точке хеХ в
метрике р, определенной для этого пространства, если
Нтр(х„,х) = 0.
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
173
Для определения сходимости последовательности множеств к фракталу
используется метрика Хаусдорфа Н(А9В), т.е. мера для измерения расстояния между двумя
множествами А и В . Метрика Хаусдорфа задается на множестве К всех непустых
компактных подмножеств пространства Rn следующим образом:
H(AiB) = m2Oi{d(AiB)id(BiA)}i А,ВеК.
Здесь d(X9 Y)- расстояние между двумя компактными множествами X и Y.
Расстояние d(X, Y), в свою очередь, определяется так:
d(X,Y) = max{d(x,Y):xeX),
где d(x9 Y) = min||x - у|2 : у е Y - расстояние между точкой х е X и множеством Y.
Понятия d(x,Y) и d(X,Y) иллюстрируются на рис. 2.54 ирис. 2.55.
d{x9Y)
х
Рис. 2.54. К пояснению понятия d(x,Y)
X Y
Рис. 2.55. К пояснению понятия d(X,\)
Метрику Хаусдорфа можно определить, используя понятие дилатации
(расширения). Дилатацией множества X из пространства R" радиуса г (обозначается X + г)
является векторная сумма X + Вт (0), где Вт (0) - замкнутый шар радиуса г с
центром в начале координат, т.е.
X + r = U{Br(x):xeX}9
где U - знак единения множеств.
Метрика Хаусдорфа между двумя непустыми компактными множествами А и
В через дилатацию определяется зависимостью
Н(А,В) = тт{е>О:Ас^В + г, £<=Л + г},
где с - знак вложения множеств.
Графическая иллюстрация данного понятия приведена на рис. 2.56.
Введенная метрика Хаусдорфа позволяет определить сходимость
последовательности компактных множеств {^л}^ к компактному множеству А . Для того, чтобы
lim An= A
Я->00
в метрике Хаусдорфа, необходимо и достаточно, чтобы для любого 6 можно было
выбрать такое N, что из п > N следует Ап<^А + г,АсАп+г.
174
Методы современной ТАУ. Часть IV
*А
Дилатация В
(В + гв)
Дилатация А
Рис. 2.56. Нахождение метрики Хаусдорфа между множествами А и В:
Н(А,В) = пшх{гАугв: АаВ + гв> ВсА + гА} = гв , sB=d(A,B)3 sA=d(B,A)
Множества Ап являются аппроксимирующими множествами для множества А .
2.3.9. Система итерированных функций
Как отмечалось ранее, прсщедура построения фракталов представляет собой
итерационный процесс - переход от одного множества к другому. На каждом шаге
выполняются преобразования над множеством, полученном на предыдущем шаге.
Данный алгоритм можно представить в виде следующей схемы:
Ео - исходное компактное множество,
£,=7J(£:W), / = 1.2 (2.251)
Здесь Ti (£м) - преобразования, выполняемые на / -м шаге над множеством £м .
Например, для ковра Серпинского преобразование 7)(£м) будет объединением
трех аффинных преобразований, определенных формулами (2.250):
7-(£i_I) = 7i(£;w) U Т2(£,.,) U Т3{ЕМ).
На каждом шаге итерационного процесса выполняются однотипные
преобразования. В общем же случае на каждом шаге могут выполняться различные
преобразования, определяемые следующим образом
T(E)=UTj(E). (2.252)
Преобразования вида (2.252) называются преобразованиями Хатчинсона.
Преобразования Хатчинсона Т позволяют строить разнообразные фракталы за счет выбора
различных элементарных преобразований 7) (Е).
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
175
Необходимо отметить, что если преобразования 7J(£/_1) заранее определены, то
получаемый результат совершенно не зависит от выбора исходного компактного
множества Ео . Кроме того, не любые преобразования Т порождают фракталы.
Пусть имеется совокупность 7), / = 1,/и действующих на Rn и образующих одно
преобразование Т вида (2.252), тогда система итерированных функций (СИФ) будет
являться совокупностью данных отображений вместе с итерационной схемой (2.251).
Итерационная схема (2.251) может порождать предельное множество Е :
Е = lim En
(2.253)
вследствие сходимости в метрике Хаусдорфа, но может и не порождать. Если предел
существует, то предельное множество является аттрактором системы
итерированных функций. Достаточно часто аттрактор является фракталом.
Для того, чтобы предел (2.253) существовал, необходимо и достаточно, чтобы
отображения 7} :/ = 1,/и были сжимающими отображениями с коэффициентом
сжатия Sj < 1 (смотри также логистическое уравнение в §2.2). В этом случае
преобразование Хатчинсона Т также будет сжимающим, с коэффициентом сжатия
определяемым из условия
S = max(Su...9Sm)9
и аттрактор будет являться неподвижной точкой отображения Т в полном
пространстве К с метрикой Хаусдорфа. Под точкой здесь понимается компактное множество.
Действительно, для любого компактного множества А выполняется условие
с е А + 6 тогда и только тогда, когда существует такой элемент а е А , что d(c, а) < г .
Следовательно, если А а В + г и В с А + г , то для каждого отображения 7}
справедливо Ti(A)cTi(B) + SiE и соответственно Ti(B)czTj(A) + SiE. Поскольку
преобразование Хатчинсона есть объединение сжимающих отображений 7}, то Т(А) с T(B) + S-z
и Г(Я)<=Г(Л) + 5-е. Пусть Б = #(Л,Я),тогда H(T(A)j(B))<S-r или
H(T(A)9T(B)) = S'H(A,B).
Таким образом, преобразование Т является сжимающим и предел (2.253) существует.
Алгоритмы, реализующие СИФ, позволяют строить самые разнообразные
фракталы в зависимости от того, из каких и какого количества сжимающих отображений
сформировано преобразование Хатчинсона.
Если, например, преобразование Хатчинсона получено с использованием двух
аффинных преобразований
Т2(х) =
х +
0,4 -0,3733]
0,6 0,6
" -0,8 -0,1867
0,1371 0,8
0,3533
0,0
х +
т.е.
Г(х) = Г,(х)иГ2(х),
то можно построить фрактал под названием «лист» (рис. 2.57).
Если использовать четыре аффинных преобразований вида
Г0,2550 0 1 Г0,3726]
ri(X)"L 0 0,2550
х +
к
6714J'
176
Методы современной ТАУ. Часть IV
Г2(х) =
h («) =
Г4(х) =
0,2550 0
0 0,2550
0,2550 О
О 0,2550
х +
х +
0,1146
0,2232
0,6306
0,2232
0,3700 -0,6420] ГО, 6356
-0,6420] ГО, 63561
0,3700 J[-0,06l}
-0,6420
то будет иметь место фрактал под названием «кристалл» (рис. 2.58). Аффинные
преобразования для ковра Серпинского определены выше в §2.3.7.
Рис. 2.57. Фрактал «лист»
Рис. 2.58. Фрактал «кристалл»
Задача построения предельного множества Е - аттрактора из исходного
компактного множества Ео в результате итерационного процесса с заданным
преобразованием T(Ej) является прямой. Особенностью задачи является то, что вид аттрактора
определяется только коэффициентами аффинного преобразования (если такое
используется) и не зависит от выбора исходного множества Ео. В то же время можно
поставить обратную задачу, а именно, определить совокупность сжимающих
отображений, для которых заданное множество является аттрактором. Обратная задача
значительно сложнее прямой, однако имеет огромное прикладное значение, в
частности, в области сжатия изображений [17].
Необходимость сжатия изображений обусловлена различными факторами.
Основными являются - разгрузка каналов связи и соответственно снижение
себестоимости передачи данных; использование существующих каналов, изначально не
предназначенных для передачи изображений; экономия памяти компьютеров за счет
архивации изображений и т.д.
Сущность подхода к сжатию изображений состоит в том, что исходное
изображение разбивается на отдельные компоненты, каждое из которых считается
аттрактором некоторой системы итерированных функций. Для каждой СИФ определяются
типы преобразований, например, аффинных. Поскольку одно аффинное
преобразование задается только шестью аффинными коэффициентами, то полное исходное
изображение можно закодировать относительно небольшим количеством
коэффициентов. В этом случае архивации или передаче по каналу связи подлежат лишь
коэффициенты аффинного преобразования. При восстановлении изображения решается
прямая задача.
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы 177^
2.3.10. Случайные фракталы
Все объекты, с которыми сталкивается человек, можно разделить на
искусственные и естественные. Все искусственные объекты имеют, как правило, четкие формы,
в то время как формы естественных объектов в большинстве своем являются
неправильными. Поэтому такие образования, как горные хребты, береговые линии или
облака подобием, в смысле неизменностью, при линейном увеличении или
уменьшении не обладают. При изменении масштаба рассмотрения объектов случайным
образом меняются их отдельные элементы. Принцип самоподобия в приведенных случаях
необходимо рассматривать со статистических позиций, т.е. понятие «подобный»
необходимо толковать как «похожий».
Отдельную группу, предназначенную для моделирования природных объектов,
образуют случайные фракталы. Наиболее наглядным случайным фракталом
является рандомизированная снежинка Кох. Для ее получения достаточно на каждом
шаге итерационного процесса обращать вовнутрь или наружу вершину нового
строящегося треугольника (рис. 2.59). Фрактальная размерность построенной таким
образом кривой остается прежней. Предельная кривая рандомизированной
снежинки Кох может служить прекрасной моделью, например, контура облака или
острова. Аналогичный подход может быть реализован при построении фракталов с
помощью L -систем, когда случайным образом реализуется, например, операция
ветвления. Построенные таким образом деревья, растения или снежинки будут
иметь более естественный вид. В приведенных примерах рандомизации
подвергаются лишь отдельные параметры итерационного процесса, в то время как сам
алгоритм (система итерированных функций) построения фракталов остается
неизменным - детерминированным.
П
Рис. 2.59. Рандомизированная кривая Кох
Очевидно, что итерационный процесс также может быть случайным. Для того,
чтобы в результате этого процесса осуществлялось построение именно фракталов,
необходимо выполнение принципа самоподобия (статистического самоподобия).
Свойством статистического самоподобия обладает винеровский процесс
(броуновское движение), имеющий нормальное распределение.
Случайный процесс Х(/) будет винеровским с нормальным распределением на
заданном интервале изменения аргумента t е[я,б], если удовлетворяет следующим
требованиям:
1) Х(0) = 0 и функция Х(/) почти всегда непрерывна.
2) Приращение случайного процесса X(t) для двух значений аргумента
(моментов времени)
13 Зак 416
178 Методы современной ТАУ. Часть IV
ДХ(Д*) = Х(/2)-Х(*,), h>tb At = t2-tx
является случайной величиной, имеющей нормальный дифференциальный закон
распределения с нулевым математическим ожиданием /Идх =0 и дисперсией
ЯДХ(д,)=а2Дг,т.е.
/дх(Ах)= , ехр -
Ыс2М { 2c2At)
Поскольку дисперсия приращений зависит только от разности аргументов
А/ = t2 - t{, а не от самих значений tx и t2, то приращения являются стационарными.
Приращения винеровского процесса для независимых моментов времени являются
независимыми случайными величинами в том смысле, что если
а < Ц < t{ < t2 < t2 <... < tk < t'k < b,
то
м{ах(а/1)ах(а/2)...ах(а^)} = м{ах(аг1)}-л/{ах(а/2)}...л/{ах(а/а)},
где ty=t\-tt :i = \J.
To есть винеровский процесс является марковским, если значение процесса в
текущий момент времени зависит только от значений в предыдущий момент времени и
величины приращения.
Приращения винеровского процесса обладают свойствами статического
самоподобия. Для них справедливо
АХ (At) = 4-АХ (гAt), (2.254)
или
X(t + At)-X(t) = -j=[X(t + rAt)-X(t)]
для любого г > 0. Здесь символ = означает, что две случайные величины имеют
одинаковые дифференциальные законы распределения.
Действительно, приращения винеровского процесса являются нормальными
случайными величинами. Интегральный закон распределения для левой части
соотношения (2.254) имеет вид
^ < s2 V
^^Ьтгтт/Ч-
2а2At Г'
Для правой части
^х(Д*) = -7=== J Н-^У*- (2*255)
Выполнив замену переменных s = y[ru в (2.255), видим, что дисперсии
одинаковые. Таким образом, величина Vr является коэффициентом статического
самоподобия.
Определим фрактальную разность винеровского процесса. Без потери общности
полагаем, что интервал изменения значений аргумента [0,1]. Разделим этот интервал
на п равных подинтервалов одинаковой длины At = — и таким же образом разделим
п
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы Г79^
|ДХ|
вертикальную ось на подинтервалы длины At. Выражение J L служит в качестве
At
оценки числа квадратов размера А/, необходимых для покрытия части графика
y = X(t), расположенной над одним подинтервалом. Так как математическое
ожидание величины |АХ| пропорционально Va/ , то число квадратов, необходимых на
одном подинтервале, пропорционально Va/ . Всего имеется — таких подинтерва-
At
_з
лов, поэтому общее число квадратов пропорционально At 2 , т.е.
_3
N(At)*At 2.
Таким образом, фрактальная размерность винеровского процесса
г \nN(At)
df =- lim -—- = 1,5 .
J Д/-*0 In At
Как было показано выше, фракталы, построенные на основе детерминированных
алгоритмов, имеют различную размерность. Поэтому вполне естественным является
вопрос: можно ли построить случайные фракталы, имеющие размерность отличную
от df = 1,5? И ответ на этот вопрос является положительным.
Обобщением классического винеровского процесса (КВП) является фрактальный
винеровский процесс (ФВП). КВП обладает свойством марковости, т.е. это процесс
без памяти, для него условная вероятность того, что Х(/2) достигает определенного
значения при задании Х(^) (^ <t2), зависит только от tx и t2i а не от поведения
Х(/) при t <tx. ФВП, в отличие от КВП, относится к числу случайных процессов с
памятью. Приращения ФВП для различных интервалов изменения аргументов
являются зависимыми.
Наиболее удобно фрактальный винеровский процесс определить при помощи
параметра Я, 0 < Я < 1. При Н = 1/2 ФВП совпадает с КВП. Гаусовский процесс
Х(/) является фрактальным винеровским процессом с параметром Я, 0<Я<1,
если он удовлетворяет следующим требованиям:
1) Х(0) = 0 и почти все реализации Х(/) непрерывны.
2) Приращения процесса Х(/)
АХ(А/) = Х(/2)-Х(/1),
At = t2-tb t2>tx
являются случайной величиной, имеющей нормальное распределение
/дх (Дг) = __1__ехрЦ[—^-Л . (2.256)
Как видно из (2.256), математическое ожидание нулевое, дисперсия -
^дх = °21*2 ~'i| • Так как дисперсия приращений зависит только от разности
аргументов, а не от их значений, то данный случайный процесс является стационарным.
То, что случайный процесс не является марковским, означает зависимость двух
его приращений. Действительно, т.к. Х(0) = 0, то
13*
180 Методы современной ТАУ. Часть IV
(Х(г)-Х(0))(Х(/ + А/)-Х(0)-
=1{(х(/+д0-х(о))2-(х(0-х(о))2-(х(,+д0-х(0)2}.
Учитывая, что /)дх = a2\t2 -t\\ , имеем
л/{(х(/)-х(о))(х(,+д0-х(0)}=^2[(^а02Я-/2я-дг2Я].
Как видно, полученное выражение равно нулю только при Н = — (классический
винеровский процесс), оно отрицательно при Н < — и положительно при Н > —.
Фрактальный винеровский процесс так же, как и классический винеровский
процесс, обладает принципом статистического самоподобия с коэффициентом
самоподобия rli, т.е.
ЛХ(Л/) = -^-ЛХ(гЛ/), дляг>0.
1Сь I i Т | <_Я* I I
^ = -.Нп>. ,.,..ч -2-Я. (2.257)
Размерность фрактального винеровского процесса вычисляется аналогично
вычислению фрактальной размерности классического винеровского процесса. Поскольку
то
Д/->0 lg(A/)
Как видно из (2.257), изменяя параметр Н, можно менять фрактальную
размерность.
Визуально можно отметить следующие изменения в реализациях фрактального
винеровского процесса для различных значений Н (рис. 2.60). Увеличение Н
приводит не только к уменьшению df , но и к уменьшению дисперсии процесса, т.е. он
становится менее «изрезанным», более гладким. Больших отклонений от
математического ожидания нет. Таким образом, изменяя Н, можно менять вид случайного
фрактала при постоянном значении параметра а.
Рассмотренные выше теоретические положения определяют сущность случайных
фракталов. Одномерные классические и фрактальные винеровские процессы может
быть и не имеют самостоятельного значения при моделировании природных
образований, однако являются основой для построения двумерных процессов, с помощью
которых можно моделировать естественные ландшафты - горные хребты, лесную
поверхность, волнение моря и т.д.
Двумерный фрактальный винеровский процесс (поверхность) определяется
следующим образом. Это функция двух аргументов Х(*,.у), обладающая следующими
свойствами:
1) Х(0,0) = 0 и почти все реализации процесса непрерывны;
2) Приращения процесса Х(х,у)
АХ = Х(х + Ах,у + Ау)-Х{х,у),
где Ах = х [t2) - х (/]), Ay = у (t2) - у (t\) - являются случайной величиной, имеющей
нормальный интегральный закон распределения
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы
181
/-дх(Дх) = ,Р(ДХ<Я) =
Л2ла2(дх2+Ду2)2Я о
S
= Jexp
U2
■) i ■) ->\2Н
2ст2(Дх2+Ду2)
du. (2.258)
#=0,8; £>=1,2
Я=0,6;£>=1,4
Я=0,4;£>=1,6 Я= 0,2; Я =1,8
Рис. 2.60. Реализации фрактального винеровского процесса
Как видно из (2.258) математическое ожидание нулевое, дисперсия
Л5Я
= G2(yJAx2+Ay2Y .
Фрактальная размерность двумерного винеровского процесса
df=3-H.
Это аналогично вычислению фрактальной размерности для классического
одномерного винеровского процесса.
На рис. 2.61 - рис. 2.63 приведены примеры части фрактальной поверхности
(функция max{X,0}), соответствующие двумерным винеровским процессам с
различными значениями параметра Н . Изменяя значение Н , можно моделировать
самые разнообразные типы земной поверхности - от равнин до горных хребтов.
Рис. 2.61. Двумерный фрактальный винеровский процесс: #=0,5
182
Методы современной ТАУ. Часть IV
Рис. 2.62. Двумерный фрактальный винеровский процесс: # = 0,2
Рис. 2.63. Двумерный фрактальный винеровский процесс: # = 0,8
Моделировать одномерные и двумерные фрактальные винеровские процессы
целесообразно, используя преобразование Фурье и основываясь на том, что спектраль-
1
У-2Я+1
ная плотность ФВП аппроксимируется степенной функцией ^ил , т.е.
(2.259)
являясь функцией убывающей при увеличении частоты / .
Справедливость зависимости (2.259) можно показать, основываясь на следующих
положениях.
Известно, что спектральную плотность стационарного случайного процесса
X(t), определенного на полубесконечном интервале [0,оо), можно определить не
только через его корреляционную функцию, но и как предельный переход от
спектральной плотности мощности процесса Хт (/), определенного на конечном
интервале [О, Г], а именно
(2.260)
Sx{f)=YxmJx(fj),
где
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы Ш.
Sx(f,T) = ^\x(jfjf (2.261)
- спектральная плотность мощности функции хт (/),
т
X(jf,T) = jXT(t)e~2nifdt- преобразование Фурье «усеченного» фрактального
о
винеровского процесса,
хг(0={х(')'°^г'
w [ 0, / > Т.
Учитывая, что ФВП удовлетворяет принципу статического самоподобия, т.е.
X(t)^±X(ri)
для любого г>0, найдем связь между спектральными плотностями для x(t) и
Введем обозначение
*(,).[><">. «*<* г.
[ 0, / > Т.
Преобразовывая данную функцию по Фурье, имеем
Y{jfj) = lYT(t)e-Wdt = ^lxT(x)i2nJ^dt. (2.262)
о г о
Интеграл в правой части соотношения (2.262) есть Х\ j—,rT , т.е.
I г )
f(jf>T)~x[jl,rTy
Соответственно спектральная плотность мощности для YT (/) будет определяться
зависимостью
м/.г)--4д4
iH
rw+l rT
Используя предельный переход (2.260), получаем
Поскольку x(t)n y(t) статистически самоподобны, то спектральные плотности
Sx (/) и SY (/) совпадают, следовательно
Если формально плотность г = f , то
5Л/)=4тгМ1).
г2Н+\
Справедливость зависимости (2.259) показана.
184 Методы современной ТАУ. Часть IV
Основная идея моделирования ФВП состоит в произвольном задании
спектральной плотности Sx (/), сохраняющей требуемые свойства, определенные
зависимостью (2.259), и последующем применении обратного преобразования Фурье.
Моделирование осуществляется на конечном интервале изменения аргумента
функции X[t), т.е. рассматривается функция Хт (/). Поскольку используются
средства вычислительной техники, то в итоге формируется числовая последовательность
Хт [пТ0], являющаяся дискретной аппроксимацией Хт (/):
Хт[пТ0] = Хт(()1пТо,п = 0^1,
т
где То = шаг дискретизации процесса,
N
N - число дискретных отсчетов.
Практическая реализация выполняется следующим образом. Синтезируется
дискретное преобразование Фурье для числовой последовательности Хт [пТ0] в виде
Хп=-^,п = 0^Г\. (2.263)
Здесь*, =-^(7/, Г).
уо
Зависимость (2.263) определяется в данной форме в силу справедливости
соотношений (2.259) и (2.263). Поскольку для каждого значения п Хп является
произвольным комплексным числом, то коэффициент К можно задать в форме
K=ve2nJU,
где v - значение нормально распределенной случайной величины с нулевым
математическим ожиданием и единичной дисперсией, и - значение равномерно
распределенной случайной величины на отрезке [0,1].
К синтезированному комплексному вектору Хп применяется обратное
дискретное преобразование Фурье. Результатом является искомая числовая
последовательность *Г[«ГО].
При построении случайных фрактальных поверхностей двумерных ФВП
используются те же процедуры, что и в одномерном случае. В отличие от одномерного
случая вместо вектора хп вначале синтезируется двумерная матрица Хпк : и, к = 0,7V-1,
удовлетворяющая условию
I Р
чЯ+1
а затем применяется двумерное обратное преобразование Фурье.
2.3.11. Множества Жюлиа
В §2.3.9 при рассмотрении системы интегрированных функций не
конкретизировались типы преобразований 7)(£м) (2.251) (указывалось лишь, что они
должны быть сжимающими) и вид исходного компактного множества Ео. В
приведенных там же примерах использовались только аффинные преобразования. Однако, в
общем случае, выполняемые преобразования могут быть нелинейными, а исходным
компактом - точка на плоскости. Для удобства записи математических операций
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы \&5_
над точками плоскости последние часто рассматриваются как комплексные числа
вида z-a + jb. Поэтому исходное комплексное множество, над которым выпол-
няются операции при построении фракталов, может быть некоторым комплексным
числом z, и все выполняемые преобразования можно осуществить над
комплексными числами.
Нелинейную функцию, используемую в итерационном процессе, также можно
выбрать произвольно, однако наиболее часто при рассмотрении множеств Жюлиа
ограничиваются полиномами одного комплексного переменного вида
д*)=2>,*', <2-264>
/=0
где п > 2, ах; : / = 0, и - комплексные числа.
Для каждого zoeC (С - множество комплексных чисел) соотношение
z*+i=/0O> л = 0,1,2,...
определяет некоторую последовательность точек, которые определенным образом
заполняют комплексную плоскость.
Под множеством Жюлиа функции /(z), обозначаемое как J(f), будем
понимать границу множества точек z, стремящихся к бесконечности при бесконечном
интегрировании функции f(z):
J(/) = a{z :/">-► *>,*->«>}.
Здесь для обозначения итерационного процесса используется запись
рп> = /(...(/(/(z)))), символ д - означает границу.
Множество названо в честь французского математика Гастона Жюлиа, который
одновременно с Пьером Фату исследовал поведение функции комплексного
переменного при ее бесконечном итерировании.
Простейшим полиномом степени два является функция /(z) = z2 . Для нее можно
построить простейшее множество Жюлиа. Так как /^(z) = z^ n\ то /'^(z)->oo
при п -» оо только тогда, когда |z| > 1. То есть единичная окружность \z: \z\ = l}
является границей множества Жюлиа, хотя фракталом и не является.
Наибольший интерес при построении множеств Жюлиа среди полиномов второй
степени представляет квадратичная функция
fc{z) = z2+c9 (2.265)
где с е С - константа.
Функция (2.265) не является частным случаем полиномов второй степени. Замена
переменных в (2.265) вида
I— а\
2у]а2
сводит ее к полиному общего вида
f(x) = a2x2 +а{х + а0.
12 3ак 416
186
Методы современной ТАУ. Часть IV
Изменяя константу с можно построить на экране компьютера удивительной
красоты заполняющие множества Жюлиа. Заполняющее множество Жюлиа состоит из
точек, орбиты (траектории движения) которых, получающиеся в ходе итерационно-
сти процесса zn+x =/(zn), ограничены. Границей орбит является само множество
Жюлиа. На рис. 2.64 - 2.66 приведены примеры заполняющих множеств Жюлиа для
различных значений с. Из рисунков видно, что заполняющие множества Жюлиа
являются фракталами и значения констант с влияет на их вид. Изменяя с, можно
получить их невероятное разнообразие.
Множества Жюлиа будут иметь место только в том случае, если при
итерировании функции (2.265) |г„|<2для и-»оо. Если при некотором щ z,J>2, то
lim zn = оо, т.е. траектория изменения z , строящаяся в ходе итерационного
процесса, стремится в бесконечность и z не принадлежит множеству Жюлиа.
Рис. 2.64. Заполняющее множество Жюлиа для z2- 0,20+0,75/
Рис. 2.65. Заполняющее множество Жюлиа для z2- 0,1244+0,7560/
Действительно, условие |zWo I > 2 будет выполняться либо при выборе достаточно
большого значения константы с, либо при выборе z0 далеко от нуля. Положим
|с| = 2 - 25, где 5 - малая (бесконечно малая) величина, т.е. |с| < 2 . Рассмотрим
модуль функции fc (z):
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы 187
|/c(z)|=|z2+c|>h2-H=h[n-}^].
Рис. 2.66. Заполняющее множество Жюлиа для z2- 0,1194+0,6289/
На интервале [2,оо) для вещественной функции <р(х) = х-— имеем ф(х)>ф(2),
х
поэтому
Так как |с| = 2 -26, то |/с (z)| > (l + 5)|zj.
Таким образом, для «-й итерации имеем
|/J">(z)|>(l + 6)>|.
Данное выражение стремится к <х> для всех z0, для которых |zo| > 0. Таким
образом, граничным значением для z , порождающих множества Жюлиа, являются |z| < 2.
Заполняющие множества Жюлиа при их отображении на экране компьютера
могут иметь не только черно-белую окраску, но и цветную. Один из подходов в выборе
цвета для его индикации состоит в подсчете числа итераций, необходимых для
выполнения условия |zw|>z?/7. ггр- некоторое фиксированное граничное значение
переменной z в заполняющем множестве Жюлиа. Если число итераций находится в
интервале [«i,«2] > то эта область окрашивается в один цвет, если в другом
интервале, то цвет другой. Аналогично могут окрашиваться области за пределами множества
Жюлиа.
В ходе итерационного процесса формируется некоторая траектория 0r (z)
изменения z в виде последовательности точек. Если при некотором п - zn = z0, то z0
является периодической точкой. Наименьшее натуральное число п, обладающее
указанным свойством, является периодом траектории. А сама траектория (напоминаем)
является периодической траекторией, или циклом. Для того, чтобы охарактеризовать
устойчивость периодической точки z0 и соответственно определить устойчивость
траектории в окрестностях периодической точки, находится производная от
итерируемой функции в этой точке:
12*
188
Методы современной ТАУ. Часть IV
=ц/<"><4.,„-
собственное значение точки z0 .
В зависимости от значения X периодическая точка называется:
• сверхпритягивающей, если X = О ,
• притягивающей, если |^| < 1,
• нейтральной, если |^| = 1,
• отталкивающей, если |^| > 1.
Если z0 - некоторая притягивающая или сверхпритягивающая неподвижная
точка, то бассейн (область) ее притяжения определяется следующим образом:
^(zo) = JzgC:/W(z)^zOj когдал-><х>}. (2.266)
A(z0) состоит из тех точек z, чьи траектории сходятся к точке z0. Если
у = |zo,/(zo),...,/'w~1'(zo)> - притягивающий цикл периода п, то каждая из
неподвижных точек /'^(zo):/ = O,h-1 функции y'(z) имеет свой бассейн притяжения,
а Л (у) - представляет собой просто объединение этих бассейнов. На рис. 2.67,
рис. 2.68 приведены примеры множеств Жюлиа, ограничивающих один и три
бассейна притягивающих неподвижных точек.
Бесконечно удаленная точка оо также может быть классифицирована.
Определение типа бесконечно удаленной точки осуществляется заменой z на —. Поведение
z
функции /(z) в окрестностях этой точки эквивалентно поведению функции
F{z)-——— в окрестностях точки ноль. Если точка 0 - притягивающая
периодическая точка для F(z), то бесконечно удаленная точка оо также будет
притягивающей и т.д.; для функции fc(z) = z2 +с - бесконечно удаленная точка оо является
сверхпритягивающей.
Рис. 2.67. Бассейн притягивающей
неподвижной точки
Рис. 2.68. Бассейн притягивающего
цикла периода 3
Теперь можно дать следующие, более расширенные, определения множеству
Жюлиа.
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы 189^
1) Если у - притягивающий цикл функции /(z),to J(f) = dA(y). Или J(f) -
граница области притяжения всех притягивающих неподвижных точек f(z),
включая оо.
2) Каждая отталкивающая периодическая точка принадлежит J(/),h J(f)
является замыканием множеством всех отталкивающих периодических точек
/(z). Или, пусть Р - множество всех отталкивающих периодических точек
функции /(z), тогда множество Р плотно в J(f), т.е. каждая точка из
J(f) является некоторой последовательностью точек из Р.
О фрактальной размерности множеств Жюлиа почти ничего не известно. Однако
если используется отображение вида /(z) = z2+c, то для |?|«1 можно оценить
фрактальную размерность множества Жюлиа по формуле
м2
df = 1 + ——— + члены более высоких порядков.
f 41og2 F
Как видно из формулы, множества Жюлиа имеют дробную размерность большую
единицы.
Дополнением к множеству Жюлиа J(f) в С является множество Фату
(обозначается F(f))
F(f) = C\J(f).
Таким образом, если у - притягивающий цикл периода п, а Л(у)- объединение
бассейнов притягивающего цикла, то
^(Y)c=F(/).
2.3.12. Множества Мандельброта
Множества Жюлиа принадлежат к числу наиболее прекрасных фракталов.
Большинство из них самоподобны. Вид множества Жюлиа зависит от выбора
константы с. Меняя с, можно получить невероятное разнообразие множеств. Их граница
постоянно меняет свою форму и при некоторых значениях с «взрывается»,
превращаясь в пыль. Несмотря на большее разнообразие, существует всего два типа
множеств Жюлиа. Множество Жюлиа может быть либо связным, либо множеством
вполне несвязанным.
Множество значений константы с, для которых множество Жюлиа является
связанным, есть множество Мандельброта М. Для значений с £ М множество Жюлиа
несвязно.
Для различных типов итерируемых функций множество Мандельброта может
иметь различный вид, но в основе каждого из них лежат «маленькие копии»
множества Мандельброта для функции fc(z) = z2 +с. Это связано с тем, что многочлен
высокой степени в отдельных, малых областях изменения аргумента подобен
источнику второй степени (сравните с функцией Морса).
Множество Мандельброта для функции fc (z) = z1 + с определяется следующим
образом:
М = jceC:/cW(O)-~O, когдал->оо\.
190
Методы современной ТАУ. Часть IV
В определении множества Мандельброта используются нулевая точка
комплексной плоскости. Это связано со следующими обстоятельствами. Любой
притягивающий или рационально нейтральный цикл содержит в своей области притяжения хотя
бы одну критическую (периодическую) точку. Но функция /с (z) имеет только две
критические точки: 0 и оо . Обе точки не зависят от с. Точка оо является сверхпритя-
гивающей неподвижной точкой, поэтому интерес представляет только точка z = 0.
Выбирая отдельные значения с, например, с -1, получим траекторию (орбиту)
последовательности точек: 0; 1; 2; 5; 26; 677..., т.е. ОеЛ(оо). Для таких значений с
другого аттрактора, кроме оо, не может быть. С другой стороны, существуют такие с,
например, с = 0, при которых второй аттрактор существует. В данном случае точка
z = 0 притягивает все z, для которых |z| < 1.
Ранее было показано, что граничным значением для z , порождающих множества
Жюлиа для функции fc(z) = z2 +с, являются те, которые удовлетворяют условию
|z|<2. Поэтому проверять орбиты fc(z) на ограниченность при z = 0необходимо
только для констант |с| < 2 . В частности, точка с = -2 принадлежит множеству
Мандельброта.
Не останавливаясь на теоремах Жюлиа и Фату, доказывающих связность J(f)
при се М, рассмотрим, какой вид имеет множество Мандельброта.
При рассмотрении множества Мандельброта первое, что бросается в глаза - это
область, ограниченная большой кардиоидной (рис. 2.69), с острием в точке 0,25 и
закругленной вершиной в точке - 0,75. Для значений с, лежащих в этой области,
множества Жюлиа имеют притягивающую неподвижную точку.
J
1
0.5
-0.5
-1
.1 *
i
2 V
5 - —;
\
f
3'
ig—~— 4
V— 5
к—5
"-2 -1.5 -1 -0.5 0 0.5 1
Рис. 2.69. Множество Мандельброта для г2 + с
Действительно, если z - неподвижная точка периода 1, то
fc(z) = z2+c = z.
Точка будет притягивающей, если
W =
-г/сМИ-
<к
Глава 2. Теория катастроф. Детерминированный хаос. Фракталы \9\_
Так как
то имеем
N<i-
Таким образом, граничные точки притягивающего цикла лежат на окружности
радиуса —. Это точки z = — е7ф, где 0 < ср < 2п .
Из условия неподвижности точки z (2.266) следует уравнение для кривой,
ограничивающей область притягивающих неподвижных точек:
2 4
При изменении ср в интервале [0,2я] с описывает кардиоиду.
Если z является притягивающей точкой периода 2, то она будет неподвижной
для функции /J ' (z), т.е.
(z2 + с) +c = z .
Данное уравнение можно записать следующим образом:
(z2 +c\+c-z = (z2+c- z\[z2 + z +1 + c\ = 0 .
Решения уравнения z2+£-z = 0 - это рассмотренные выше неподвижные точки
для z .
Пусть z, и z2 - решения уравнения
z2+z + l-c = 0. (2.267)
Так как они точки периода 2 для /с (z), то имеем
Jz2+c = z2,
Откуда следует, что
4/c(2)(^) = 4z,(Z2+c)=4Z|z2)
az v 7
а также
|/c(2)(^) = 4z,z2.
Произведения zxz2 двух решений уравнения (2.267) равно свободному члену
этого уравнения, откуда получаем
zxz2=l + c.
Точки z периода 2 будут притягивающими, если
^'Ч1'
откуда
|4(1 + с)|<1.
192 Методы современной ТАУ. Часть IV
Таким образом, область значений с, для которых существуют периодические
притягивающие точки периода 2 в множестве Жюлиа, лежат в круге радиуса 0,25 с
центром в точке-1.
Используя компьютер, можно алгоритмическим путем (аналитически
затруднительно) определить области для периодических притягивающих точек с другими
периодами.
Все эти области называются обрамлением множества Мандельброта. Каждая
бифуркация - изменение периода притягивающей точки - порождает новые области.
Они касательны к кардиоиде, а по форме похожи на круг. К каждой из них, в свою
очередь, прикреплено бесконечное число еще меньших, также имеющих форму круга
областей и т.д. Но и это еще не все. Если мы, выйдя из большой кардиоиды и
двигаясь налево, попадем в круг, затем налево - в следующую область и продолжим
движение дальше, то при этом будем все время приближаться к так называемой точке
Мирберга - Фейгенбаума, которая имеет координату -1,401... . Отрезок от этой
точки до - 2 также принадлежит множеству Мандельброта. И на нем есть маленькая,
напоминающая кардиоиду, область с заостренной вершиной в точке -1,75 (ее центр
находится в точке - 1,754877666...). К этой маленькой кардиоиде прикрепляется
точно так же семейство круглых областей, как и к большой. На рис. 2.69 эта область
отмечена стрелкой. Оказывается, что число таких «кардиоидных» бесконечно велико.
Кроме того, они встречаются не только на действительной оси.
Отдельного рассмотрения требуют вопросы, связанные с хаосом и множествами
Жюлиа, т.к. квадратичная функция fc(z) = z2 +c проявляет хаотическое поведение
на своем множестве Жюлиа; проблема Кэли - нахождения корней комплексных
полиномов методами Ньютона; внешние углы и деревья Хаббарда и многое другое,
связанное с фрактальной геометрией. Мы предлагаем заинтересованному читателю
самостоятельно ознакомиться с данными проблемами.
Глава 3. Построение оптимальных робастных регуляторов 193^
ГЛАВА 3. ПОСТРОЕНИЕ ОПТИМАЛЬНЫХ
РОБАСТНЫХ РЕГУЛЯТОРОВ
ПРИ ДЕЙСТВИИ ВНЕШНИХ ВОЗМУЩЕНИЙ
Теория автоматического управления развивается как в направлении более
полного и глубокого анализа функционирования и эффективности автоматических систем
и устройств при учете реальных режимов работы и действующих возмущений, так и
в направлении разработки методов синтеза оптимальных систем управления. Эти
общие направления теории систем управления получили особое развитие с
появлением быстродействующих электронных вычислительных машин, позволяющих
реализовать сложные вычислительные алгоритмы анализа и синтеза систем управления.
Развитие теории автоматического управления с конца 50-х годов в значительной
мере связаны с работами Р. Калмана и Р. Бьюси [36] по оптимальной линейной
фильтрации, а также A.M. Летова [11] и Р. Калмана [7] по синтезу линейных
динамических систем, оптимальных по квадратическому критерию качества. Данные работы
сформировали теоретические основы для широкого применения теории в различных
областях науки и техники и позволили решить принципиально новые теоретические
и прикладные задачи.
В то же время практика применения теории оптимальных систем при решении
конкретных технических задач показала, что оптимальные системы,
синтезированные по квадратическому критерию качества, являются чувствительными к
параметрам модели реального объекта и характеристикам входных воздействий, т.е.
являются негрубыми, и иногда теряют не только оптимальность, но и работоспособность в
тех случаях, когда априорная информация об объекте и внешней среде известна не
точно, а лишь с некоторой достоверностью, задаваемой интервалами
принадлежности (классами неопределенности).
Это привело к тому, что в начале 80-х годов стали возникать постановки
оптимальных задач управления, которые смогли бы избежать указанных выше недостатков.
Современный период развития теории управления характеризуется постановкой и
решением задач, учитывающих неточность наших знаний об объектах управления и
действующих на них внешних возмущений. Задачи синтеза регулятора и оценивания
состояния с учетом неопределенности в модели объекта и характеристиках входных
воздействий являются одними из центральных в современной теории управления. Их
важность обусловлена прежде всего тем, что практически в любой инженерной
задаче конструирования системы управления присутствует неопределенность (или
ошибка) в модели объекта (математическая модель объекта, полученная на основе теории
или в результате идентификации, отличается от реальной технической системы) и в
знании класса входных возмущений.
Основная и принципиально новая идея по синтезу робастного управления
состояла в том, чтобы единственным регулятором обеспечить устойчивость замкнутой
системы не только для номинального (без учета ошибок модели) объекта, но и для
любого объекта, принадлежащего множеству «возмущенных» объектов, определяемых
классом неопределенности.
Началом построения более строгой классической теории робастного управления,
распространенной на многомерные системы, послужила статья Зеймса [62], в кото-
194 Методы современной ТАУ. Часть IV
рой был предложен новый критерий оптимальности на основе Н°° -нормы
многомерной передаточной функции замкнутой системы. Использование Н°° -нормы в
качестве критерия оптимальности при синтезе многомерных систем основано на том факте,
что Н°° -норма может служить мерой усиления системы. Н°° -норма передаточной
функции есть энергия выхода системы при подаче на вход сигнала с единичной
энергией. Если выходом является ошибка, а входом возмущение, то минимизируя
Н°° -норму передаточной функции, мы минимизируем энергию ошибки для
наихудшего случая входного возмущения. В скалярном случае норма такой функции
конечна и равна максимальному значению амплитудно-частотной характеристики.
Таким же важным первоисточником для сегодняшнего уровня понимания
проблемы является статья Дойла и Стейна [26], которая положила начало проблеме грубого,
или робастного, управления для модели, заданной в условиях неопределенности.
Появившиеся в начале 80-х годов новые постановки задач синтеза систем
управления, сводящиеся к задаче Н°° -оптимизации [26, 62] и учитывающие
неопределенности в системе, информация о которых минимальна, получили свои первые решения
к середине 80-х годов на базе сразу нескольких подходов [29,40, 61].
Однако эти работы имели скорее теоретическое значение, поскольку процедуры
синтеза регуляторов были достаточно трудоемкими и громоздкими. Порой
процедуры синтеза приводили к курьезным результатам. Так, для системы второго порядка
оптимальный Н°° -регулятор имел десятый порядок [14].
Многие работы, опубликованные после 1984 г., развивали так называемый
«подход 1984», предложенный Дж. Дойлом [24], в котором на основе теории ганкелевской
аппроксимации Гловера [30] дана процедура в пространстве состояний решения
проблемы Н°° -оптимизации для случая конечномерных линейных систем.
В 1989 г. на основе ряда ключевых результатов в фундаментальной работе [25]
была сформулирована новая концепция подхода к решению задачи Н °° -оптимизации,
получившая название «2-Риккати подхода». Суть подхода заключалась в том, что
оптимальная задача заменялась субоптимальной. Метод «2-Риккати подход» сочетает в
себе классическую теорию автоматического управления и метод пространства
состояний, а именно: постановка задачи производится в частотной области, а ее решение
осуществляется с использованием метода пространства состояний. Кроме того, данный
подход позволяет разработчикам в процессе проектирования задавать требуемые
характеристики качества и робастной устойчивости замкнутой системы.
В рамках этого подхода процедура синтеза Н°° -субоптимального управления
была похожа на процедуру синтеза Н2 -оптимального управления. Применяя этот
подход, удалось сформулировать принцип разделения в Н°° -теории управления,
аналогичный хорошо известному принципу разделения в LQG-теории. Было показано, что
при определенных условиях Я2-теория управления является предельным случаем
Н°° -теории.
Была существенно упрощена процедура нахождения субоптимальных
регуляторов [31]. Выявлено, что степень регулятора для объекта порядка п не
превосходит п [42].
В рамках «2-Риккати подхода» искомый оптимальный регулятор в форме
наблюдателя определяется на основе решения двух многомерных уравнений Лурье - Рик-
кати для фильтрации (восстановление состояния) и оптимального управления
Глава 3. Построение оптимальных робастных регуляторов 195^
в смысле минимума Н°° -нормы замкнутой системы. Регуляторы, синтезированные с
использованием этого критерия оптимальности, обеспечивают устойчивость
замкнутой системы и минимальную чувствительность к возмущениям.
В настоящее время процедуры синтеза Н°° -регуляторов в рамках «2-Рикатти
подхода» приняты в качестве стандарта.
После создания Н °° -теории для стационарных непрерывных систем эта теория
была распространена и на другие классы систем. Так, в работе [34] описано решение
задачи Н°° -оптимизации для линейных дискретных систем, а в статье [54]
сформулирована и решена задача Н °° -оптимизации для нестационарных систем. Однако
практическое применение нестационарной теории затруднено отсутствием
эффективных алгоритмов решения нестационарных уравнений Риккати.
Явные успехи линейной Н°° -теории управления привлекли внимание
специалистов по нелинейной теории управления. В рамках нелинейной теории появились
постановки задач, аналогичные задачам в линейной теории. Получены и числовые
алгоритмы их решений [22, 58]. Однако, как показали результаты практического
применения нелинейной Н°° -теории [27], она представляет собой пока теоретический
интерес. Н°° -теория рассмотрена также и с игровой точки зрения [23,41].
Изложению различных подходов по синтезу систем управления для систем с
различными видами представления неопределенности (параметрическими,
непараметрическими, структурированными и неструктурированными) посвящены сборники
статей [28, 55, 56]. Существуют опубликованные обзоры [1, 8, 10, 12] и монографии
[15] по Н°° -теории и в отечественной литературе.
Появление новых просто алгоритмизируемых процедур нахождения регуляторов
вызвало большой интерес к этой проблематике в среде инженеров - разработчиков
систем управления. Были созданы пакеты прикладных программ для разработчиков
робастных систем управления. Наиболее популярным пакетом программ считается
Robust Control Toolbox для пакета Matlab [16].
В этом введении авторы не ставят своей целью осветить достаточно полно
приложения Н°° -теории. По этому поводу есть большое количество литературы за
рубежом, есть и работы на русском языке. Нам бы хотелось обратить внимание
специалистов на некоторые работы в традиционной области приложения теории управления
- управлении движущимися объектами, а более конкретно - летательными
аппаратами, где применение новой теории продвинулось достаточно далеко.
Еще в начале 90-х годов появился ряд работ (см. [33, 52]), посвященных
применению Н°° -теории в задачах управления движением. Одной из такого рода задач
является задача построения управления, минимизирующего действие внешнего
возмущения на систему. Одним из таких внешних возмущений является микропорыв ветра -
внезапный порыв ветра большой интенсивности. Особенно опасен микропорыв ветра
при взлете и посадке самолета, полете на низких высотах.
Предложенные в [27, 37] алгоритмы показали принципиальную возможность
применить Н°° -методы для уменьшения влияния микропорыва ветра на траекторию
полета.
В первом параграфе этой главы мы изложим результаты, полученные авторами по
разработке методики решения задачи построения робастного регулятора при посадке
самолета в условиях микропорыва ветра.
Результаты применения Н °° -регуляторов в задаче посадки самолета в условиях
микропорыва ветра показали, что эти регуляторы наряду с рядом неоспоримых досто-
196 Методы современной ТАУ. Часть IV
инств имеют и недостатки. Основной особенностью Н °° -регуляторов является тот
факт, что в процессе функционирования робастной системы используется только
априорная информация о возможных внешних возмущениях. Это приводит к тому, что ро-
бастные системы управления отличаются некоторым консерватизмом. Это объясняется
тем, что робастные системы должны оставаться работоспособными (сохранять робаст-
ную устойчивость и заданный уровень качества) при максимально допустимых
возмущениях, не «имея информации» о том, когда это возмущение произойдет, т.е.
регулятор «всегда готов» к наихудшему случаю. Это общая характерная особенность всех
минимаксных регуляторов, к которым относятся и Н°° -регуляторы.
Учитывая вышесказанное, в работах [3, 5] была предложена новая концепция
построения регуляторов в условиях неопределенных внешних возмущений. Эта
концепция представлена во втором параграфе этой главы. Здесь изложен стохастический
подход к Н°° -оптимизации систем автоматического управления и основанный на
использовании как критерия качества стохастической нормы системы. Такая норма
количественно характеризует чувствительность выхода системы к случайным
входным возмущениям, вероятностное распределение которых известно не точно.
Конкретизация этого подхода, получаемая комбинированием понятия стохастической
нормы системы и средней анизотропии сигнала [3], приводит к специальному
варианту стохастической нормы - анизотропийной норме.
Средняя анизотропия представляет собой характеристику пространственно-
временной окрашенности стационарного гауссовского сигнала, которая тесно
связана, с одной стороны, с теоретико-информационным подходом к количественному
описанию хаоса с помощью колмогоровской е -энтропии вероятностных
распределений [6, 19], а с другой - с принципом изотропности конечномерного евклидова
пространства [3].
Анизотропийная норма системы характеризует ее чувствительность к входным
гауссовским шумам, средняя анизотропия которых ограничена сверху неким
неотрицательным параметром а.
Во втором параграфе этой главы излагаются методы анизотропийного анализа и
синтеза систем. Приводятся и обсуждаются результаты по решению конкретной
задачи построения регулятора для управления самолетом в условиях действия на
систему внешних возмущений.
В работе приводятся сравнения применения анизотропийных регуляторов,
построенных для разных уровней средней анизотропии входного сигнала, с
применением Н2 ILQG- и Н°° -регуляторов для этой задачи. Показано, что при применении
анизотропийных регуляторов, построенных при соответствующем уровне средней
анизотропии входного сигнала, существенно меньшим по величине управлением
достигается практически одинаковое качество переходных процессов по
управляемым переменным по сравнению с Н°° -субоптимальным регулятором.
3.1. ПОСТРОЕНИЕ РОБАСТНЫХ РЕГУЛЯТОРОВ
С ПОМОЩЬЮ Я00-ТЕОРИИ
В первой главе изложена методика синтеза Н°° -субоптимальных регуляторов для
линейных непрерывных систем управления. Решение задачи построения робастного
регулятора на основе Н°° -теории управления в этой главе изложено на примере
решения важной прикладной задачи построения робастного регулятора для управления
самолетом при посадке в условиях действия локальных возмущений состояния
атмосферы, так называемых микропорывов ветра.
Глава 3. Построение оптимальных робастных регуляторов 197^
Такая методика изложения выбрана не случайно. Авторы решили отказаться от
формального изложения Н°° -теории управления по ряду причин. Формальное
изложение этой теории можно найти в ряде монографий, в том числе и на русском языке.
Изложение Н°° -теории управления в рамках данной главы перегрузило бы материал
рядом специфических для этой теории терминов (стандартный объект, внутренняя
устойчивость, нормализованная взаимно простая факторизация и т.д.). Краткое
формальное изложение основ Н°° -теории управления можно найти в [9]. Авторы
преследовали цель продемонстрировать методы этой теории на конкретной важной для
приложения задаче. В этом параграфе строго изложен метод решения Н°°-
субоптимальной задачи на основе «2-Риккати подхода». Этот метод и применен к
решению сформулированной выше задачи.
Неожиданно возникающие возмущения состояния атмосферы чрезвычайно
опасны при посадке самолета. Так, они привели к известным катастрофам [45]:
• в Международном аэропорту Нового Орлеана 9 июля 1982 г. при посадке
разбился самолет Boing B-727 авиакомпании Pan American;
• в Международном аэропорту Далласа, также при посадке, 2 августа 1985 г.
потерпел катастрофу самолет Lockheed L-1011 компании Delta Airlines.
Ввиду большой актуальности проблемы, построением автоматизированных
систем управления полетом, способных предотвращать такого рода катастрофы,
занимались разработчики в разных странах мира. Были предложены различные алгоритмы
управления, основанные на различных физических принципах и математических
концепциях, построенные для различных моделей локального состояния атмосферы,
которые так или иначе решали эту задачу [33, 46 - 49, 52].
В данном параграфе авторы исследовали применение Н°° -теории управления для
решения задачи построения регулятора, минимизирующего влияние действия
микропорыва ветра на выходные параметры системы (воздушную скорость и высоту
самолета). Проанализировав имеющуюся в распоряжении авторов литературу, авторы
выбрали для исследований математическую модель микропорыва ветра в форме
вихревого кольца, описание которой изложено в этом параграфе.
На базе изложенной в параграфе методики построен робастный
Я'"-субоптимальный алгоритм управления для самолета ТУ-154. Построен также Н2 ILQG-
оптимальный алгоритм управления для того же самолета. Приведены сравнения
поведения замкнутых различными регуляторами систем управления.
Эти сравнения показывают, что, значительно превосходя применение
Я2-оптимальных регуляторов по обеспечению минимальности отклонения воздушной
скорости и высоты (основные характеристики безопасности самолета при посадке) от
номинальных значений, применение Н°° -субоптимальных регуляторов требует для
этой цели использование больших возможностей управления.
В работах [38, 39] рассмотрены более общие постановки задачи построения
робастных регуляторов для посадки самолета в условиях действия неконтролируемых
возмущений, в которых вводятся так называемые весовые функции. Эти функции
позволяют задать требования в частотной области к характеристикам замкнутой
системы по качеству переходных процессов и робастной устойчивости. Введение
весовых функций уменьшает потребность в энергетике управления. Однако мы считаем,
что детальное рассмотрение этих вопросов перегрузит материал главы техническими
деталями.
198
Методы современной ТАУ. Часть IV
3.1.1. Задачи робастного управления самолетом
Математическая модель продольного движения самолета
Кинематические и динамические переменные для уравнений движения центра
масс самолета представлены на рис. 3.1.
Ось самолета
О
Рис. 3.1. Система координат и переменных самолета
На рис. 3.1: D - сила лобового сопротивления; jc, у - оси системы координат; L -
подъемная сила; О - центр масс самолета; V - воздушная скорость самолета;
Ve - скорость самолета относительно земли; wx - горизонтальная составляющая
скорости ветра; wy - вертикальная составляющая скорости ветра; а - угол атаки;
8 - угол наклона траектории в воздушной системе координат.
Динамические уравнения движения самолета в вертикальной плоскости с учетом
ветровых возмущений в проекциях на оси воздушной системы координат задаются
следующей системой нелинейных дифференциальных уравнений [2]
mV =rcosa-D-mgsin0-m(wJccos0 + wysin0);
mVe = Tsma + L-mgcosQ + m(wxsinQ-wycosQ)\
Jz(bz=Mz;
f} = coz,
где т - масса самолета, Jz - момент инерции самолета относительно поперечной оси
z, Т - сила тяги двигателей, Mz - момент сил относительно оси z, f> = 0В + a - угол
тангажа, сог - угловая скорость относительно оси z.
Управляющими переменными являются сила тяги Т и угол атаки а, которые
зависят соответственно от отклонения сектора газа и руля высоты.
Эти уравнения справедливы в предположении, что направление силы тяги
совпадает с осью самолета, масса самолета постоянна, Земля плоская, ветер стационарный.
Вращением Земли также пренебрегаем.
Дифференциальное уравнение для высоты центра масс h записывается в виде
A = Vsine + W^. (3.2)
Уравнение в приращениях, описывающее динамику двигателя, приведено ниже
At = ±(-AT + KmASt). (3.3)
Здесь 8, - отклонение сектора газа от заданного значения.
Формирование отклонения руля высоты де с учетом контура короткопериодиче-
ского движения осуществляется в следующем виде:
Глава 3. Построение оптимальных робастных регуляторов 199
8с=КШ:Дсог+/^Д£+КсуДОсу,
где Кш , К$ и Ксу - числовые коэффициенты, ДФсу - управление, формируемое
робастным регулятором.
В результате линеаризации нелинейной модели самолета система нелинейных
дифференциальных уравнений (3.1) с учетом (3.2), (3.3) и предыдущего уравнения
сводится к линейной системе обыкновенных дифференциальных уравнений в
приращениях, которая в матричной форме имеет вид
Х = АХ + В1п\¥ + В2„и, (3.4)
где X = (AV, Д0, Awz,AbyAh,AT)T - вектор состояния,
W = (wy, wx, wy ) - вектор ветровых возмущений,
U = (Д$су»Д8,) - вектор управления.
Уравнение для измеряемого выхода у в пространстве состояний в присутствии
шумов измерений пу записывается в виде
Y = CyX + IyNy, -
где Су - матрица измеряемых выходов, а 1У - единичная матрица соответствующей
размерности.
Таким образом, математическая модель продольного движения самолета с учетом
внешних ветровых возмущений в пространстве состояний описывается следующей
системой уравнений:
fX=AX + BlnW + B2wU,
{п 2 (3.5)
[Y = CyX + IyNy.
Постановка задач управления
Рассмотрим задачу управления полетом самолета в вертикальной плоскости при
посадке в условиях неопределенных ветровых возмущений W. Ветровое возмущение
приводит к отклонению воздушной скорости V и высоты полета h от заданных
значений, определяемых траекторией снижения (глиссадой). Задача системы управления
(регулятора) состоит в том, чтобы поддерживать постоянную воздушную скорость V
и заданную высоту h. Данная задача является классической задачей слежения в
теории автоматического управления.
Для линейной модели продольного движения самолета с учетом внешних
ветровых возмущений в пространстве состояний (3.5) вектор управляемых выходов Ъ\
может быть записан в виде
Zl=C,iX, (3.6)
где матрица
Сг =Р ° ° ° ° °1. (3.7)
21 [о о о о 1 oj
Рассмотрим вектор контролируемых выходов Z, определенный следующим
образом:
Объединяя (3.5), (3.6), (3.7) и (3.8), получаем систему уравнений, описывающую
управляемую систему:
200
Методы современной ТАУ. Часть IV
X = AX + BlnW + B2nU;
Z,=C^X;
Z2=IHU;
Y = CyX + I,N,.
Блок-схема системы (3.9) представлена на рис. 3.2.
(3.9)
G -
w
W
1
+А+ z
К
пл.
Рис. 3.2. Блок-схема системы (3.9)
Рассмотрим расширенный вектор входных возмущений
_ rw
4n.
(3.10)
(3.11)
Учитывая (3.10), систему (3.9) можно переписать в виде
X = AX + B1W + B2nU;
Z,=C2X;
Z2=IMU;
Y^X + D^W,
где В! = В{п 0Пу , D^ =10* Iyl. Здесь 0"v и 0ш - нулевые матрицы
соответствующих размерностей, 1М - единичная матрица.
Ниже сформулируем задачи управления самолетом при наличии внешних
возмущений, решаемые в этой главе. В общем их все можно сформулировать как
построение для системы (3.9) (или (3.11)) линейного управления U, которое минимизирует
влияние возмущения W на выход системы Z .
При проектировании регулятора необходимо обеспечить компромисс между
минимально возможными отклонениями управляемых выходов (воздушной скорости V
и высоты К) от номинальных значений и ограничениями по мощности управляющих
агрегатов (двигателей и рулей высоты). С этой целью в критерий оптимальности
вводят величину, характеризующую управление.
В зависимости от предположений о внешнем возмущении Who критерии
качества получаем разные оптимальные задачи теории управления.
Предполагая, что W является гауссовским белым шумом, и выбирая в качестве
критерия оптимальности функционал
<
J(K) = \imE\\zTZdt
(3.12)
Глава 3. Построение оптимальных робастных регуляторов 201
где Е - символ математического ожидания, получаем LQG-задачу - построение для
системы (3.9) линейного управления в виде обратной связи
U(s) = K(s)Y(s), (3.13)
минимизирующего критерий (3.12).
Предполагая, что W является квадратично интегрируемой функцией, и выбирая в
качестве критерия оптимальности Н2 -норму передаточной функции 7^ от входа
W к выходу Z , получаем формулировку задачи построения Н2 -оптимального
регулятора: для системы управления, математическая модель которой описывается
системой (3.11), требуется найти закон управления в виде линейной обратной связи
(3.13), минимизирующий вышеописанный критерий, т.е.
ll^wzIL ->min. (3.14)
Напомним, что Н2 -норма передаточной функции F{s), аналитичной в правой
полуплоскости Re 51 > 0, определяется следующим образом
l|F|l2=(^Jtr(FO'0))(FO'C0))*)rfCU|'
где tr(») - след матрицы.
Предполагая, что W является квадратично интегрируемой функцией, и выбирая в
качестве критерия оптимальности Н°° -норму передаточной функции 7^ , получаем
задачу построения Н°° -оптимального регулятора: для системы управления,
математическая модель которой описывается системой (3.11), требуется найти закон
управления в виде линейной обратной связи (3.13), минимизирующий вышеописанный
критерий, т.е.
NzL-*™11- (ЗЛ5)
Напомним, что #°°-норма передаточной функции F(s) определяется
следующим образом
|F||eo=supa(F(7Co)), cog[0,oo),
(О
где а() обозначает максимальное сингулярное значение матрицы.
Минимизируя Н°° -норму передаточной функции 7^, мы минимизируем
энергию сигнала ошибки сближения.
H2/LQG -оптимальная задача является классической в теории автоматического
управления и применение хорошо разработанных численных процедур для ее
решения (см., например, Matlab Control Toolbox) могут без каких-либо модификаций быть
использованы для построения управления летательными аппаратами в условиях
неопределенных внешних возмущений.
3.1.2. ПОСТРОЕНИЕ Н°° -СУБОПТИМАЛЬНОГО РЕГУЛЯТОРА
ДЛЯ УПРАВЛЕНИЯ САМОЛЕТОМ В УСЛОВИЯХ ВНЕШНИХ ВОЗМУЩЕНИЙ
Напомним, что линейная математическая модель летательного аппарата
описывается следующей системой линейных уравнений:
202 Методы современной ТАУ. Часть IV
X = AX + B,W + B2||U;
(3.16)
Zi=CZ|X;
Z2=IMU;
Y = CyX + D^W,
где X = (AV\ A0, Acoz, Afl, ДА, АГ) - вектор состояния,
- / т\т
W = (wy, wx, wy, ny J - вектор возмущений,
/ т т\^
Z = (zl, z2 J - вектор контролируемых выходов,
U = (АФсу, Д8,) - вектор управления.
Динамическая неопределенность удовлетворяет следующим соотношениям
|^(-)|2<С„<оо. (3.17)
Задача построения Н°° -оптимального регулятора. Для линейной модели (3.16)
с учетом (3.8) в классе линейных управлений
U{s) = K(s)Y(s) (3.18)
найти управление U*, которое минимизирует Jt^L :
flTwzIL^"11"' С-19)
где Т^^ ~ матрица передаточных функций от вектора возмущений W к
управляемому выходу Z в замкнутой системе.
В реальных задачах оптимальная задача, сформулированная выше, заменяется
субоптимальной задачей.
Задача построения Н°° -субоптимального регулятора. Для линейной модели
(3.16) с учетом (3.8) в классе линейных управлений
U(s) = K(s)Y(s) (3.20)
найти управление U*, которое гарантирует оценку:
HTwzL<Y, (3.21)
где Тф2 - матрица передаточных функций от вектора возмущений W к
контролируемому выходу Z в замкнутой системе.
Для решения сформулированной выше субоптимальной задачи воспользуемся
хорошо известным методом, называемым Two Riccati Approach (2-Риккати подходом) [56].
Построение н°° -субоптимальных регуляторов с помощью
«2-риккати подхода»
Пусть некий объект управления описывается линейной системой уравнений:
i = AX+BtW + B2U,
^Z = C1X + DllW+Dl2U, (3.22)
Y = C2X + D21W + D22U.
Здесь X - вектор состояния, Y - вектор измерений, Z - вектор контролируемых
выходов, U - вектор управления, W - внешний вход системы.
Глава 3. Построение оптимальных робастных регуляторов 203
Пусть удовлетворяются следующие предположения:
1) (A,Bi, Ci) является стабилизируемой и детектируемой;
2) (А, В2, С2) является стабилизируемой и детектируемой;
3) D[2[d D12] = [0 1];
4)
М-
Справедлива теорема:
Теорема 3.1 [25]. Регулятор для системы (3.22), который гарантирует выполнение
неравенства
IWL<y.
существует тогда и только тогда, когда
1) ЗХ^ >0 - решение обобщенного алгебраического уравнения Риккати
управления (по-английски Generalized Control Algebraic Equation - GCARE)
ATXeo + X^ A - Хм (В2В£ - Y^BX )xoo +-С7С! = 0 ;
2) BY^ > 0 - решение обобщенного алгебраического уравнения Риккати
фильтрации (по-английски Generalized Filtering Algebraic Equation - GFARE)
AY.. + Y^AT - Y^(cJC2 -Y^CfoJY.. +ВХВТ = 0;
3) Спектральный радиус p (X^Y^) < у.
При этом регулятор получается в форме наблюдателя
[XC=ACXC+BCY;
где
(3.23)
[U = CCXC,
Ас = А - В2В^Х^ - (I - у"2 Y^X^ )"1 Y^Cl + Y^B^,
Be=(l-r2YJL.JlY.Cl, (3.24)
Cc=-BjX^.
Для построения субоптимального регулятора применяется итерационная
процедура по y • На каждом шаге решается субоптимальная задача, т.е. определяется
регулятор К( (s), для которого
ITws|L<Y'
где i - номер шага. Затем величина у уменьшается, субоптимальная задача
решается до тех пор, пока существуют неотрицательно определенные решения
алгебраических уравнений Риккати GCARE, GFARE и выполняется условие на ограничение
спектрального радиуса. Полученное в результате итерационной процедуры
минимальное значение у , близкое к Ymin c заданной степенью точности, а также решения
Х^, и Y^ используются для синтеза робастного Н°° -субоптимального регулятора в
соответствии с формулами в формулировке теоремы 3.1.
204 Методы современной ТАУ. Часть IV
«2-РИККАТИ ПОДХОД» ПРИ ПОСТРОЕНИИ Я "-РЕГУЛЯТОРА
ДЛЯ ПОСАДКИ САМОЛЕТА
Для использования описанного выше «2-Риккати подхода» в задаче построения
Н°° -субоптимального управления самолетом в условиях неопределенных входных
возмущений надо проверить выполнение предполагаемых в этом алгоритме условий
1-4, изложенных выше.
Напомним, что мы решаем следующую задачу построения Н°° -субоптимального
управления самолетом в условиях неопределенных входных возмущений:
для линейной модели (3.25)
X = AX + BlflW + B2llUf
z2=iMu,
с учетом
z,=c,x,
V
(3.25)
Y = CyX + IyNy
■й
z.z'
И
в классе линейных управлений
U(s) = K(s)Y(s) (3.26)
найти управление U*, которое гарантирует оценку
||Twz|L<Y. (3-27)
где Туу£ - матрица передаточных функций от вектора возмущений W к
контролируемому выходу Z в замкнутой системе.
Перед использованием описанного выше «2-Риккати подхода» в этой задаче надо
проверить выполнение предполагаемых в этом алгоритме условий 1 - 4, изложенных
выше.
Если ввести обозначения
Х^Х, Y^Y, W = W, Z = Z,
В1=[В1л 0], В2=В2л,
D,2=^°j,D21=[O I,], D22=0,
где 0 - нулевые матрицы соответствующих размерностей, то система (3.25)
принимает вид (3.22). Для этой системы (с матрицами Bb B2, Cb C2, Dn, Dl2, D21, D22,
представленными выше) предположения 1 - 4 выполняются, и мы можем
воспользоваться описанным выше алгоритмом построения субоптимального Н°° -регулятора.
Глава 3. Построение оптимальных робастных регуляторов
205
3.1.3. Моделирование
При моделировании предложенных выше алгоритмов управления в условиях
ветровых возмущений использовались пространственные модели ветра, описанные ниже.
Модели микропорывов ветра
Локальное возмущение состояния атмосферы, получившее название микропорыва
ветра, обусловлено перемещением направляемых вниз к земле локальных областей
воздушных масс. Типовой микропорыв ветра формируется потоком холодного
воздуха диаметром от нескольких сотен метров до 1 км. Продолжительность этого
явления составляет в среднем 5-10 мин. В зоне микропорыва возникают значительные
градиенты ветра, которые создают неблагоприятные условия для пилотирования
самолета при прохождении данной области. Для исследования и отработки
автоматических или ручных систем управления разработаны математические модели
микропорыва ветра различной сложности.
Математическая модель микропорыва ветра в форме вихревого кольца.
Достаточно полные и наиболее приемлемые с практической точки зрения модели
основаны на теории газовой струи, соударяющейся с плоской поверхностью, и модели
микропорыва ветра в форме вихревого кольца.'ЙиШ'Ьпйсывается математическая
модель микропорыва ветра в форме вихревого кольца. Генерируемые профили ветра
данной модели позволяют имитировать атмосферные условия, соответствующие
некоторым реальным ситуациям, имевшим место, в частности, в аэропортах Далласа t
(1985) и Нью-Орлеана (1982) [63].
Согласно этой модели [35] область микропорыва ветра формируется течением
вокруг вихревого кольца, расположенного над плоской поверхностью. Геометрические
соотношения показаны на рис. 3.3.
R
R
Рис. 3.3. Область микропорыва ветра
Все характеристики потока в этой модели выражаются через функцию тока
трехмерного невращающегося течения несжимаемой жидкости, индуцируемого
вихревым кольцом, которая описывается выражением
V-~('i+r2)[F(X)-E(X)])
206
Методы современной ТАУ. Часть IV
где Г - циркуляция, R - радиус вихревой нити кольца, F(X)y E(X) - полные
эллиптические интегралы первого и второго рода, г{, г2 - наибольшее и наименьшее
расстояния от текущей точки (jc,z,/i) до вихревой нити кольца, Rc - эффективный
радиус ядра вихревого кольца и безразмерная переменная
х = h - П
г2+гх '
Поле скоростей, индуцированное кольцевой вихревой нитью, определяется пятью
параметрами: положением центра кольца (X, Z, Н), циркуляцией Г и радиусом R .
Параметры X, Z, Н оказывают влияние на относительное положение, а не на форму
распределения скоростей, Г дает линейный эффект, a R служит коэффициентом
масштаба.
Окончательные формулы для скоростей ветра в точках пространства с
координатами (x,h) имеют вид:
1,182рГ
271
R [К hA
((х-Х)2+/гр2-н/?2)1/21Г2Р 'И
R
((
\>/2
x-xf+hl+R2)'^*»
wy =
1,576рГ
2п
R
[I(*-x)2+/v2 + *2]
R
^(x-xf+hl+R*
I3'4 \rV
ip
*2
r3/4
Г2р
где
xx=x-X-R, hp=h-H, rlp=^2+/ip2, r2p=X2+/ip,
x2=x-X+R, hm=h + H, rlm=xf+hl, r2m=xl+h2m,
ro = min(rlp,r2p), p = l-£ Rc.
Приведенные формулы для составляющих скорости ветра описывают течение от
единичного вихря с центром в начале цилиндрической системы координат. В работе
[63] приведены данные идентификации параметров данной модели на основании
измеренных профилей ветра в ситуациях, приведших к катастрофам самолетов В-727 и
L-1011. Параметры вихревой модели в ситуации на посадке L-1011 в городе Даллас в
1985 г. приведены в табл. 3.1.
Глава 3. Построение оптимальных робастных регуляторов
207
Таблица 3.1
Параметры вихревой модели при посадке в Далласе (1985 г.)
Параметр
Г
Лс
Я
R
Единица измерения
м2/с
м
м
м
Значение параметра
41319
122
689
1090
В данной работе моделируется микропорыв ветра с более интенсивным
воздействием. Параметры этого микропорыва приведены в табл. 3.3.
Таблица 3.2
Параметры вихревой модели, используемой при моделировании
Параметр
Г
Н
R
Единица измерения
м2/с
м
м
м
Значение параметра
45000
35
700
350
Графики вертикальной wy и горизонтальной составляющих wx профиля ветра
относительно центра вихря в зоне микропорыва ветра на высоте полета в 400 м с
параметрами из табл. 3.2 приведены на рис. 3.4.
w^ м/с
-15
-2000 -1500 -1000 -500 0 500 1000 1500 2000 м
-2000 -1500 -1000 -500 0 500 1000 1500 2000 м
Рис. 3.4. Графики вертикальной и горизонтальной составляющих профиля порыва ветра
208
Методы современной ТАУ. Часть IV
Результаты моделирования
В данном разделе рассматривается движение самолета ТУ-154 по конкретной
траектории глиссады. Эта траектория в координатах высоты и дальности представляет
собой прямую линию с заданным углом наклона траектории 0ГЛ (0ГЛ = -2,7 град.).
Задача системы управления состоит в том, чтобы при движении по глиссаде
обеспечить постоянную воздушную скорость Vo =71,375 м/с и заданную высоту при
действии ветровых возмущений, модель которых описана в предыдущем параграфе.
Постоянная времени двигателя Гдв=2,5с; Кдъ =2600 н/град. Коэффициенты равны:
J^=3,5; ^=4; Ксу=-4.
В результате линеаризации нелинейной системы (3.1) в точке траектории с
параметрами xx=V =71,375 м/с, х2 =0гл =~2,7 град., jc3=coz=0, х4=Ъ = 0, х5 =
= h = 400 м , х6 = Т = 52540 н получена линейная модель системы управления,
соответствующая (3.9), где матрицы А, В1л, B2w, Cy, CZi имеют соответственно
значения
А =
-0,0608
0,2187
0,0053
0
-0,0471
0
-0,0841
-0,6218
0,5221
0
1,2437
0
=
" 0
0
0
0
[ 0
1 0,1082
-1,5902
1,0000
0
0
-0,0869 0 0,0904
0,7234 0 0,0036
-1,5549 0 0
0 0 0
0 0 0
0 0 -0,4000
-0,9989 0,0471 "
-0,0378 -0,8019
0
0
1,0000 0
0
В2п =
0
0
0,0309
-0,2951
0
0
0
0
0
0
0
0,0904"
0,0036
0
0
0
0,4000
>
>
(3.28)
(3.29)
(3.30)
су-с'- о oooi
(3.31)
'1 О О О О 01
о|"
Заметим, что матрица А - неустойчива, т.к. имеет нулевое собственное значение.
Результаты моделирования показали, что линейная модель (3.9) с приведенными
выше матрицами достаточно точно аппроксимирует нелинейную модель на
указанном участке траектории движения самолета [13].
В результате применения описанных выше обозначений
Глава 3. Построение оптимальных робастных регуляторов
209
А =
-0,0608
0,2187
0,0053
0
-0,0471
0
та _
1>1 —
-0,0841 0
-0,6218 0,1082
0,5221
0
1,2437
0
0
0
0
0
1,0000
0
В2 =
г* _
ч -
-0,0869
0,7234
[ -1,5902 -1,5549
1,0000
0
0
-0,9989
-0,0378
0
0
0
0
0
0,0309
-0,2951
0
0
0
10 0
0 0 0
0 0 0
0 0 0
0
0
0
0,0471
-0,8019
0
0
0
0
0,0904'
0,0036
0
0
0
0,4000
0 0 0"
0 1 0
0 0 0
0 0 0
>
»
0
0
0
0
0
0
0
0
0
0
0
0
0"
0
0
0
0
0
0,0904
0,0036
0
0
0
-0,4000
_П о о о о о
2 ~ [о о о о 1 о
Dn =
0 0 0 0 0'
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
Dl2 =
0
0
1
0
0
0
0
1
Го о о 1
21 ~ [о о о о
■Чоо]
(3.32)
(3.33)
(3.34)
(3.35)
(3.36)
(3.37)
(3.38)
(3.39)
(3.40)
Для этого объекта в соответствии с описанной выше методикой был произведен
синтез Н°° -субоптимального регулятора, матрицы которого приведены ниже
15 3ак 416
210
Методы современной ТАУ. Часть IV
Ан-_
-0,3498
-ОД 024
-0,0334
0,0404
-0,7181
-2,2293
-0,0689
-0,9242
-0,3408
-0,4558
0,4802
-2,3347
ц//~ 1
**соп ~
-0,0235
0,2913
-0,8686
0,4953
0,9114
-2,3827
"-0,2756
-0,1492
-0,0391
0,1436
-2,8988
-6,5173
-0,0250
0,4481
-0,7297
-0,9065
-0,1059
-0,6504
-0,0575"
-0,3807
-0,1686
-0,0220
0,4744
-3,2306
0,4237
-0,2129
-0,5402
1,1539
-1,6559
-0,4498
2,0368 "
0,1758
0,9028
-3,5805
-0,6974
-5,0569
(3.41)
(3.42)
^соп
0,1173 -0,2464 0,0941 -0,0370 -0,7299 2,6561]
0,3470 -0,0749 0,0087 -0,0376 1,5576 4,9417J'
0 01
0"" =
"con
о о
(3.43)
(3.44)
**con ~
(3.45)
Для системы (3.9) с матрицами (3.32) - (3.40) была также решена задача синтеза
Н2 -оптимального регулятора. Ниже приведены результаты сравнения переходных
процессов в системах, замкнутых соответственно Н°° -субоптимальным и Н2 -
оптимальным регуляторами
"-0,5084 -0,0584 -0,0119 0,0501 -0,0230 -0,3246"
-0,1472 -0,9213 0,0559 -0,5122 -0,0682 -0,2893
0,3629 -0,0259 -0,6884 -0,4144 -0,1085 1,2738
0,0746 0,5507 0,3879 -1,0033 -1,5115 -1,0050
0,4565 0,0995 -0,0420 0,4579 -1,0174 -1,5880
0,5085 1,2466 -0,6444 -1,1550 -0,7127 -1,5600
0,4315 0,0837 "
0,1211 0,3740
-0,7011 -0,1076
0,1741 -0,1267
-0,8906 -0,0119
-0,3547 1,5271
,2309 0,2515 0,2475 0,0232
Вп _
con ~
(3.46)
'con ^_0,
0,1023 1,5883]
2888 0,1882 0,3410 -0,0437 0,3406 0,1329j'
**соп
о о
о о
(3.47)
(3.48)
3.1.4. Обсуждение результатов моделирования
Приведем результаты сравнения качества переходных процессов замкнутых
систем с Н°° -субоптимальным и Н2 /LQG -оптимальным регуляторами по управляв-
Глава 3. Построение оптимальных робастных регуляторов
211
мым выходам (отклонения высоты h и воздушной скорости V) и управлениям. При
моделировании на вход каждой замкнутой системы подавался одинаковый сигнал,
моделирующий ветровое возмущение W, действующее на самолет при его
движении в зоне микропорыва ветра. При моделировании полагали, что N^ = 0 .
В графических материалах, иллюстрирующих сравнительные характеристики
указанных регуляторов, Я °° -субоптимальный регулятор обозначается Ны, а
Я2 ILQG -оптимальный регулятор - H2ILQG .
V, м/с ill
-10
Рис. 3.5. Графики отклонения скорости V при использовании Н°° - и Н2 -регуляторов
На рис. 3.5 приведены графики отклонений воздушной скорости V от
номинального значения для двух регуляторов. Диапазон изменения скорости при
использовании в контуре обратной связи Я °° -регулятора на 60 процентов меньше, чем при
использовании Я2-регулятора. Максимальное отклонение скорости при
использовании Я2 ILQG -регулятора составляет около 22 м/с, а при использовании Я°°-
субоптимального регулятора - около 13 м/с, т.е. уменьшение отклонения примерно в
1,7 раза. Таким образом, по отклонениям воздушной скорости Я°°-субоптимальный
регулятор обеспечивает значительно лучшее качество переходных процессов, чем
Я2 / LQG -регулятор.
На рис. 3.6 приведены графики отклонений h от номинального значения для двух
регуляторов. По отклонениям высоты Я°°-субоптимальный регулятор также
обеспечивает лучшее качество переходных процессов, чем Я21LQG -регулятор, а именно:
максимальное отклонение высоты для Я2 / LQG -регулятора составляет около 50 м, а
для Я°°-субоптимального регулятора - около 30 м, т.е. меньше примерно в 1,7 раза.
Эта характеристика является чрезвычайно важной, т.к. резкая потеря самолетом
высоты в условии действия микропорыва ветра и является основной причиной
катастроф при посадке самолета.
15*
212
Методы современной ТАУ. Часть IV
Я,м 10'
-10
-20
-30
-40
-50
10
20
30
40
50
60
U с
Рис. 3,6. Графики отклонения высоты h при использовании Я°°- и Н2 -регуляторов
Следовательно, по управляемым выходам Н°° -регулятор обеспечивает
значительно лучшее подавление внешнего ветрового возмущения.
TetaCY,
град 25
20
15
10
-5
10
20
30
40
50
60
U с
Рис. 3.7. Графики управления Ь^, при использовании #~-и Я2-регуляторов
Глава 3. Построение оптимальных робастных регуляторов
213
Проанализируем управление, формируемое Н°°~ и Н21LQG -регуляторами. На
рис. 3.7 приведено управление ©су (обозначение на рисунке TetaCY). H°° -регулятор
обеспечивает незначительное уменьшение (примерно на 5°) сигнала управления дсу .
DLsgt
град
60
50
30
20
10
-10
-20
10
20
30
40
50
60
/, С
Рис. 3.8. Графики управления 5, при использовании Н°° - и Н2 -регуляторов
Значительно меньшие отклонения выходных координат скорости и высоты при
использовании Н°° -регулятора определяются значительно более интенсивной
работой двигателя (см. рис. 3.8). На графике управление 8, обозначается DLsg. Таким
образом, как это видно из графиков, Н°° -субоптимальный регулятор обеспечивает
наименьшие отклонения по воздушной скорости и высоте, но это определяется
большими энергетическими затратами по управлению (интенсивная работа
двигателя). Приведенные количественные характеристики по управляемым выходам и
управлению иллюстрируют возможности Н2 -регулятора.
В работах [38, 39] рассмотрены более общие постановки задачи построения
робастных регуляторов для посадки самолета в условиях действия неконтролируемых
возмущений, в которых вводятся так называемые весовые функции, которые
позволяют задать требования в частотной области к характеристикам замкнутой системы
по качеству переходных процессов и робастной устойчивости.
3.2. ПОСТРОЕНИЕ АНИЗОТРОПИЙНЫХ РЕГУЛЯТОРОВ
В этом параграфе кратко излагаются концепция и математические основы
стохастической теории Н°° -оптимизации конечномерных, линейных, стационарных систем
автоматического управления с дискретным временем.
Как известно, Я2- и Н°°-теории оптимизации линейных стационарных систем
автоматического управления (см., например, [25, 29, 34]) основаны на использовании
214 Методы современной ТАУ. Часть IV
Я2- и Я°°-норм (в соответствующих пространствах Харди матричных
передаточных функций) как критериев качества, которые обусловлены различными гипотезами
относительно природы поступающих на вход системы возмущений. Первая из них
(называемая также стохастической теорией фильтрации-управления Винера - Хопфа
- Калмана) предполагает, что входное возмущение является случайным белым
шумом, тогда как вторая (Н °° -теория управления) считает входное возмущение
детерминированным квадратично суммируемым сигналом.
Как следствие, использование Я2 -оптимального регулятора в контуре обратной
связи приводит к плохому функционированию замкнутой системы автоматического
управления в случае, если на вход такой системы поступает сильно окрашенный
случайный шум. В то же время Н°° -оптимальный регулятор проявляет
консервативность (излишнюю перестраховочность), если входное возмущение является все же
белым или слабо окрашенным шумом. Все эти положения полностью
подтверждаются результатами моделирования предыдущего параграфа.
Стохастический подход к Н°° -оптимизации систем автоматического управления,
предложенный в [5, 57] и основанный на использовании как критерия качества
стохастической нормы системы, представляет собой альтернативу упомянутым выше
классическим подходам. Конкретизация этого подхода, получаемая
комбинированием понятия стохастической нормы системы и средней анизотропии сигнала [3],
приводит к специальному варианту стохастической нормы - анизотропийной норме.
В этом параграфе излагается анизотропийный анализ систем (вычисление
анизотропийной нормы) и анизотропийный систез систем (задача построения регулятора,
при котором минимальна анизотропийная норма замкнутой системы при действии на
ее вход окрашенного сигнала с уровнем анизотропии а).
Решение задачи анализа сводится, в силу результатов работ [59, 60], к решению
системы алгебраических матричных уравнений Риккати и Ляпунова, а также
уравнения специального вида. Решение основной задачи синтеза также сводится к решению
трех перекрестно связанных алгебраических матричных уравнений Риккати,
уравнения Ляпунова, а также уравнения специального вида. Эти уравнения решаются с
помощью метода гомотопии [43], заключающегося в сведении этих уравнений к
системам нелинейных неавтономных дифференциальных уравнений по параметру.
В этом параграфе решается задача синтеза анизотропийных регуляторов для
системы управления самолетом в условии действия локальных ветровых возмущений.
Показано, что применение анизотропийного регулятора дает значительный выигрыш
по энергетике управления, обеспечивая тем не менее хорошие показатели
переходных процессов. Этот факт показывает целесообразность применения построенных
регуляторов в системах с неполной информацией о входных возмущениях.
3.2.1. Анизотропийный анализ систем
Средняя анизотропия гауссовского сигнала
Определение и основные свойства средней анизотропии. Пусть
V = (v^ )_oo<jt<+eo - дискретный m-мерный гауссовский белый шум с нулевым
математическим ожиданием и единичной ковариационной матрицей:
£V*=O, £(V*VJ)=IW, -oo<*<+oo.
Рассмотрим m-мерную стационарную гауссовскую последовательность
Глава 3. Построение оптимальных робастных регуляторов 215
получаемую из белого шума V посредством формирующего фильтра G с импульсной
переходной характеристикой gk e Rmxm4 k>0 (рис. 3.9):
W
Рис. Э.9. Получение m-мерной стационарной гауссовской последовательности W
Такой фильтр отождествляется со своей передаточной функцией
G(z)sSfo**. (3.49)
жтхт
которая предполагается лежащей в пространстве Харди Н% . Последнее означает,
что функция (3.49) аналитична в открытом единичном круге {ze С: |z| < 1} на
комплексной плоскости и имеет конечную Н2 -норму
г- V/2 (1 ? Y'2
\G\\i = S^ftrf) = ^jTr(G(0))(G(0))*)^0) ,
где через
6(co)s lim G(re/(0), coe[-7t;7t]
г-И-0
обозначено угловое граничное значение функции (3.49).
Средняя анизотропия [44] последовательности W = G® V определяется как
величина
1 п
A(G) и -— J Indet -^-6(ш)(6(а)))Ф
-71
112
d(Oy (3.50)
принимающая неотрицательное значение, как только формирующий фильтр
Ge H™*"1 имеет максимальный ранг, т.е.
rankG(co) = m, cog [-я; я],
и полагаемая равной +«>, если фильтр G - немаксимального ранга.
Заметим, что A(G) = 0 в том и только в том случае, если формирующий фильтр G
является с точностью до ненулевого постоянного множителя системой полного
пропускания, т.е. если последовательность W - гауссовский белый шум со скалярной
ковариационной матрицей.
Свойства функционала средней анизотропии (3.50) можно найти в работах [7, 11,
26, 36, 40, 62], где содержатся также указания на его связи, с одной стороны, с
теоретико-информационным подходом к количественному описанию хаоса, основанным
на колмогоровской е-энтропии вероятностных распределений [6, 19], а с другой - с
принципом изотропности конечномерного евклидова пространства.
Формулы для средней анизотропии в пространстве состояний. Пусть фильтр
Ge H™*"1, формирующий из белого шума V гауссовскую последовательность
W = G ® V , имеет n-мерное внутреннее состояние X, связанное с входом V и
выходом W фильтра уравнениями
216 Методы современной ТАУ. Часть IV
^ ,, ><£<+о
wk =Cxk+Dvk
где А, В, С и D - постоянные матрицы соответствующих размеров, причем матрица
А асимптотически устойчива (т.е. для ее спектрального радиуса выполнено строгое
неравенство р(А) < 1), а матрица D невырожденна. Иными словами, формирующий
фильтр G имеет реализацию
Чс I]
в пространстве состояний. Рассмотрим связанное с фильтром (3.51) уравнение Рикка-
ти относительно матрицы R e RnXn
R = ARAT + ВВТ - LTLT, (3.52)
Te=CRCt+DDt, (3.53)
Le=(ARCt+BDt)T-1. (3.54)
Решение R уравнения (3.52) - (3.54) называется допустимым, если эта матрица
симметрична, неотрицательно определена, а матрица А - LG асимптотически
устойчива.
Известно [21, 32], что при сделанных предположениях об асимптотической
устойчивости матрицы А и невырожденности матрицы D, уравнение Риккати (3.52) -
(3.54) имеет единственное допустимое решение.
Теорема 3.2 [49]. Пусть формирующий фильтр Ge H™*"1 имеет реализацию в
пространстве состояний (3.51) с асимптотически устойчивой матрицей А и
невырожденной матрицей D. Тогда средняя анизотропия (3.50) последовательности
W = G ® V вычисляется по формуле
1, , Y тТ \
A(G) = —In det
2 [tr(CPCT+DDT)|
где Т - матрица, связанная посредством (3.53) с допустимым решением R уравнения
Риккати (3.52) - (3.54); Р - граммиан управляемости фильтра G, являющийся
решением уравнения Ляпунова
Р = АРАТ+ВВТ. (3.55)
По поводу численного решения уравнений Риккати типа (3.52) - (3.54) заметим,
что существует эффективный алгоритм Шура, сводящий такое решение к отысканию
обобщенных собственных векторов, специальным образом строящихся по
параметрам уравнения пучков симплектических матриц, тесно связанный с так называемым
QZ-разложением пары матриц [44].
Что касается уравнений Ляпунова вида (3.55), то наиболее экономичным
представляется алгоритм решения, основанный на теореме Шура об унитарной триангу-
ляризации матриц [20]. Альтернативный метод (менее эффективный в смысле
«экономии размерности», но дающий явное выражение для решения уравнения
Ляпунова), основан на идее развертывания матрицы в вектор-столбец и описывается ниже.
Пример вычисления средней анизотропии. Ниже приведен пример вычисления
средней анизотропии для дискретной системы G, заданной (А, В, С, D) -
представлением:
Глава 3. Построение оптимальных робастных регуляторов
217
G~
0,4501
-0,2689
0,1068
0,3936
-0,4421
-0,0140
0,3913
0,2621
-0,1471
0,3132
-0,0435
-0,4815
0,3214
-0,4901
-0,3611
0,2382
-0,3237
-0,0943
-0,2972
-0,3013
0,4355
0,4169
-0,0897
0,1038
-0,2278
с трехмерным внутренним состоянием и спектральным радиусом матрицы А
р(А) = 0,4962,
вычисление средней анизотропии, соответствующей двумерной гауссовской
последовательности, дает
A(G) = 0,6389.
АНИЗОТРОПИЙНАЯ НОРМА ЛИНЕЙНОЙ СИСТЕМЫ
Определение и основные свойства анизотропийной нормы. Пусть F -
физически реализуемая линейная стационарная система, функционирующая в дискретном
времени и имеющая m-мерный вход W и р-мерный выход Z = F<8> W . Предположим,
что ее передаточная функция лежит в пространстве Харди Н^т , т.е. аналитична в
открытом единичном круге на комплексной плоскости и имеет конечную Н°° -норму
||F||eo=supa(F(z)) = ess sup a(F(co)),
|z|<l -71<(l)<71
где a(-) обозначает максимальное сингулярное значение матрицы. Введем множество
Ga={GeH?xm:A(G)<a] (3.56)
формирующих фильтров, генерирующих гауссовские последовательности, средняя
анизотропия (3.50) которых ограничена сверху заданным неотрицательным
параметром а. Соответственно я-анизотропийная норма системы F определяется как
1fILssup
■<ieGa
(3.57)
и характеризует чувствительность системы в среднем к случайным входным
возмущениям с уровнем средней анизотропии а.
Использование анизотропийной нормы системы F является важным в ситуации,
иллюстрированной на рис. 3.10, где о входном сигнале W известно только, что он
сгенерирован из гауссовского белого шума с помощью неизвестного фильтра
GeG,,.
GeG,
Рис. 3.10. Система F с выходом Z и входным возмущением W, генерированным
неизвестным фильтром GeGa из гауссовского белого шума V
с единичной ковариационной матрицей
Для фиксированной системы Fe Hj*™ ее я-анизотропийная норма (3.57)
представляет собой неубывающую непрерывную функцию параметра а > 0, причем
выполнены следующие соотношения
-^|F||2=||F|0<elimJ|F|o=lF|L, (3.58)
14 3ак 416
218
Методы современной ТАУ. Часть ГУ
в силу которых стандартные Н - и Н °° -нормы системы являются двумя
предельными случаями анизотропийной нормы.
Как показывают соотношения (3.58), вычисление я-анизотропийной нормы ||F||a
представляет интерес лишь для положительных значений параметра а и систем
Fe H^71, удовлетворяющих строгому неравенству
£и,*ц.
(3.59)
Последнее нарушается лишь в том случае, если система F является внутренней с
точностью до ненулевого постоянного множителя (т.е. если существует число а Ф О
такое, что (F(o)))*F(co) = a2lm для почти всех сое [-я;я]). Если система F не
является нулевой, то при соотношении р<т между размерностями ее выхода и входа
условие (3.59) выполняется автоматически.
Формулы для анизотропийной нормы в пространстве состояний. Пусть
система Fe Н^*™ имеет л-мерное внутреннее состояние X, связанное с m-мерным
входом W и р-мерным выходом Z = F® W системы уравнениями:
где А, В, С, D - постоянные матрицы соответствующих размеров, причем матрица А
асимптотически устойчива. Таким образом, система F имеет реализацию
(Ml)
> < к < +оо,
(3.60)
F~
С D
в пространстве состояний.
Схематически система (3.60) изображена на рис. 3.11.
А
X
F
-HgH
I
—+®+
г
w
D
Рис. 3.11. Схематическое представление системы F:
W, X и Z - входу внутреннее состояние и выход соответственно', г - оператор сдвига
Рассмотрим следующее уравнение Риккати относительно матрицы Re Rnxn:
R = ATRA + <7CTC-LTE~lL, (3.62)
L^(Im-^DTD-BTRB)-1, (3.63)
L = L(BTRA + ^DTC). (3.64)
Решение R уравнения Риккати (3.62) - (3.64) называется допустимым, если эта
матрица симметрична, матрица L положительно определена, а матрица A+BL
асимптотически устойчива.
Глава 3. Построение оптимальных робастных регуляторов
219
Заметим, что при любом qe [OjlFflJ2] уравнение (3.62) - (3.64) имеет
единственное допустимое решение, причем последнее является неотрицательно определенной
матрицей.
Следующая теорема дает представление в пространстве состояний как для
наихудшего формирующего фильтра, так и для анизотропийной нормы системы.
Теорема 3.3 [59]. Пусть заданы асимптотически устойчивая система (3.61),
удовлетворяющая строгому неравенству (3.59), и уровень средней анизотропии входа
а > 0. Тогда найдется единственная пара (<?,R) параметра qe |0;||F||~2j и
допустимого решения R уравнения Риккати (3.62) - (3.64) (с сопутствующими матрицами Е и
L), такая, что
--lndetl
mL
= *.
2 [Tr(LPL1+L)y
где Р - граммиан управляемости формирующего фильтра
G~
A + BL bL
1/2"
?1/2
(3.65)
(3.66)
L Г
удовлетворяющий уравнению Ляпунова
P = (A + BL)P(A + BL)T+B2BT. (3.67)
При этом фильтр (3.66) является наихудшим формирующим фильтром, и
а-анизотропийная норма (3.57) системы F дается выражением
т
" "а L tr(LPLT+L)
\1/2
(3.68)
Представление в пространстве состояний наихудшего входного генерирующего
фильтра (3.66) для системы (3.61) схематически представлено на рис. 3.12.
X
В
D
Vs
W
Рис. Э.12. Представление в пространстве состояний наихудшего
входного генерирующего фильтра G для системы F
14*
220 Методы современной ТАУ. Часть ГУ
Вычисление анизотропийной нормы методом гомотопии
Сведение к системе дифференциальных уравнений. Предполагая
асимптотически устойчивую систему (3.61) фиксированной, введем для каждого значения
параметра qe 0;||F||~ J следующее непустое множество: R(q) = {Re RnXn : R = RT,
матрица E положительно определена, матрица A+BL асимптотически устойчива}.
Тем самым посредством соотношений (3.63) и (3.64) на множестве
П ее {(4,R): qe [0;||F||:2), Re R(q)} (3.69)
определены матричнозначные отображения
Е:П-^/?тХт, Ь:П->ЯтХ\
бесконечно дифференцируемые по своим аргументам ^hR. Последним свойством
(как композиция гладких отображений) обладает и связанная уравнением Ляпунова
(3.67) с £ и L матрица Р, которую тоже можно рассматривать как матрично-значное
отображение
Р: П -> Rnxn .
Далее, под R: 0;||F||~ )-^Rnxn понимается матрично-значное отображение,
сопоставляющее каждому значению параметра q из указанного полуинтервала
допустимое решение R(q) уравнения Риккати (3.62) - (3.64). Введем функции
A, W:[0;|F|;2)^*
(первая из которых принимает неотрицательные значения, а вторая - значения из
полуинтервала [/n~l/2 ||F||2 ^IfH^) ), определив их посредством левой и правой частей
соотношений (3.65) и (3.68) соответственно:
1, ■/ mZ \
A(<7) = --Mn det
2 [tr(LPLT+L)|
4l/2
I М уу, \
N(qy
,.w.- -
q{ tr(LPLT+2:)JJ
Теорема 3.3 приводит к следующему выражению для я-анизотропийной нормы
системы F в терминах функций А и N:
\\¥\\a=N(A-\a)). (3.70)
Иными словами, параметрически заданная кривая, построенная на плоскости
путем откладывания по оси абсцисс значений функции А, а по оси ординат - функции N
(при пробегании параметра q из полуинтервала O;||F||~ 1), представляет собой
график зависимости а-анизотропийной нормы фиксированной системы F от уровня
средней анизотропии входа а > 0 .
Построение такой кривой сводится в конечном итоге к решению уравнения
Риккати (3.62) - (3.64) при различных значениях параметра q.
Гладкая зависимость правой части рассматриваемого уравнения от параметра q и
использование результатов [53] приводит к следующим двум наблюдениям: во-
первых, при малом приращении этого параметра слабо возмущается и решение R(q)
уравнения, поэтому можно вычислить поправку, описывающую возмущенное
решение с точностью до омалого относительно такого приращения, не решая «заново»
модифицированное уравнение; во-вторых, при q = 0 уравнение Риккати (3.62) - (3.64)
Глава 3. Построение оптимальных робастных регуляторов 221
имеет простое явное решение R(0) = 0. Сказанное представляет собой неформальное
описание метода гомотопии [43], строгая реализация которого в рассматриваемом
случае основана на следующей лемме.
Лемма 3.1. Для заданной асимптотически устойчивой системы (3.61) допустимое
решение уравнения Риккати (3.62) - (3.64) и соответствующие матрицы (3.63), (3.64) и
(3.67) аналитичны по qe\ 0;||F||~ ) и удовлетворяют дифференциальным уравнениям
R = (A + BL)TR(A + BL) + (C + DL)T(C + DL), (3.71)
Р = (А + BL)P( A + BL)T + BLP( А + BL)T +
+(А + BL)PLTBT +В!ВТ, (3.72)
L = L(BTR(A + BL) + DT(C + DL)), (3.73)
± = L(DTD + BTRB)L. • (3.74)
Поскольку функция А строго возрастает и выпукла, вычисление я-анизотро-
пийной нормы по формуле (3.70) может осуществляться с помощью ньютоновских
итераций, сходимость которых обеспечивается строгой монотонностью и
выпуклостью функции Л. Именно, рекуррентная последовательность
ft+i=i 2 ,*^0 (3.75)
Мяк)
с начальным условием q0 = 0 сходится к пределу
lim qk = A~l(a).
Эта сходимость монотонна в том смысле, что при
A((1-2^)||F||:2)>«
последовательность qk убывает. При этом в качестве практического условия
окончания описанных итераций можно использовать выполнение неравенства
(A(qk)-a)mJl N(f^ 1<е, (3.76)
{ A(qk)N(qk)J
обеспечивающего вычисление я-анизотропийной нормы системы с относительной
погрешностью е. Производные функций А и N, участвующие в (3.75) и (3.76),
рассчитываются по формулам
A(9) = -ifi2i+tr(tL-1)
2 \ W
2 [q 1-T
где
Ф
* = -2?-, (3.78)
Ф2
Ф = 1г(ЬРЬт + 2:)) (3.79)
222
Методы современной ТАУ. Часть ГУ
(3.80)
O = tr(LPLT+2LPLT+£),
которые дополняются уравнениями (3.71) - (3.74).
Пример вычисления анизотропийной нормы. Пусть задана дискретная
система, (А, В, С, D) -представление которой имеет вид:
А В"
С D
F~
0,4501
-0,2689
0,1068
-0,3012
-0,4847
-0,0140
0,3913
0,2621
0,2468
-0,0549
-0,0435
-0,4815
0,3214
0,4318
-0,0340
-0,0553
0,1154
0,2919
-0,0814
0,3462
0,4218
0,2382
-0,3237
0,0252
-0,2974
-0,0943
0,4355
0,4169
0,1721
0,3381
-0,0897
0,3936
-0,4421
-0,4804
0,1813
с трехмерным внутренним состоянием и спектральным радиусом матрицы А
р(А) = 0,4962.
Вычисление ее Я2-и Н°° -норм дает
||F||2 =0,9454, |FL= 1,0591.
Результаты вычисления анизотропийной нормы системы при некоторых
значениях уровня анизотропии сведены в табл. 3.3.
Таблица 3.3
Соответствие между уровнем средней анизотропии
входного сигнала и анизотропийной нормой системы
а
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0,08
0,09
И.
0,4730
0,5064
0,5204
0,5313
0,5404
0,5483
0,5555
0,5622
0,5689
0,5745
а
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
И.
0,5800
0,6254
0,6597
0,6886-
0,7137
0,7362
0,7564
0,7748
0,7917
0,8074
а
2
3
4
5
6
7
8
9
10
11
WL
0,9161
0,9751
1,0091
1,0291
1,0410
1,0482
1,0525
1,0551
1,0567
1,0576
3.2.2. АНИЗОТРОПИЙНЫЙ СИНТЕЗ СИСТЕМ
Задача оптимального управления по критерию минимума
анизотропийной нормы
Постановка задачи. Рассмотрим физически реализуемую линейную
стационарную систему F (не предполагаемую устойчивой, т.е. ее передаточная функция не
обязательно аналитична в единичном круге на комплексной плоскости), которая имеет
два входа: тх -мерное возмущение W и т2 -мерное управление U; два выхода:
рх -мерный управляемый сигнал Z и р2 -мерное наблюдение Y. Перечисленные
сигналы представляют собой двусторонние последовательности векторов указанных
размерностей. В соответствии с этим система F имеет блочную структуру
Глава 3. Построение оптимальных робастных регуляторов
223
F =
(3.81)
F12
[F21 F22_
Если управляющий сигнал U формируется по наблюдению Y регулятором К,
являющимся физически реализуемой линейной стационарной (не обязательно
устойчивой) системой, т.е. U = К (8) Y, то передаточная функция от W к Z получающейся
замкнутой системы представляет собой нижнее дробно-линейное преобразование
пары (F,K):
L(F,K) = Fn+Fl2K(Ip2-F22K)-lF21. (3.82)
Предположим теперь, что входное возмущение W является случайным сигналом,
априорная информация о вероятностном распределении которого исчерпывается
следующим: W - т{ -мерная стационарная гауссовская последовательность, средняя
анизотропия которой ограничена сверху известным неотрицательным параметром а.
Точнее, последнее означает, что W генерируется из тх -мерного гауссовского белого шума
V с нулевым математическим ожиданием и единичной ковариационной матрицей
Evk = 0, E(v* vj) = lml -оо <к < +оо,
посредством неизвестного формирующего фильтра G, лежащего в семействе
Ga = {Ge #2WlXmi : A(G)<a], (3.83)
где
1
A(G) = -— fin det
Att J
Ag(co)(G(co))* \d(o
llGll2
(3.84)
- функционал средней анизотропии.
Учитывая прикладной аспект проблемы, следует ограничиться рассмотрением
лишь строго неупреждающих регуляторов К, для которых управление ик зависит в
каждый момент времени к только от предшествующих наблюдений UjJ < к.
Регулятор К называется допустимым, если он является строго неупреждающим и
внутренне стабилизирует [29] замкнутую систему (3.82). Множество всевозможных
допустимых регуляторов для заданной системы F обозначается далее через К.
Сформулируем стохастическую проблему Н °° -оптимизации, основанную на
понятии анизотропии сигналов [17, 18, 60] для заданных системы (3.81) и уровня а > 0
средней анизотропии (3.84) входного возмущения W найти допустимый регулятор К,
минимизирующий a-анизотропийную норму замкнутой системы (3.82):
||UF,K)G|2
||L(F,K)||a=sup
«G||2
•:Ge&J->inf, KeK.
(3.85)
Сформулированная выше задача проиллюстрирована на рис. 3.13.
Z
1—
Y
I(F,1
А
К)
К
—
и
W
GeGa
Рис. 3.13. Структурная схема системы
224 Методы современной ТАУ. Часть ГУ
Сформулированная проблема (как и всякая минимаксная задача) представляет
собой антагонистическую игру двух игроков, в качестве первого из которых выступаем
мы (множеством наших стратегий в этой игре является множество К внутренне
стабилизирующих регуляторов), а в качестве второго - природа (множеством ее
стратегий является семейство (3.83) формирующих фильтров с ограниченной известным
параметром а средней анизотропией). Заметим, что в случае нулевого уровня а = О
средней анизотропии, задача (3.85) совпадает со стандартной проблемой
Я2-оптимизации, решение которой составляет основу стохастической теории
фильтрации-управления Винера - Хопфа - Калмана.
Уравнения для оптимального регулятора в пространстве состояний. Пусть
разомкнутая система F имеет л-мерное внутреннее состояние X, связанное с
тх -мерным возмущением W, т2-мерным управлением U, р^мерным управляемым
сигналом Z и р2-мерным наблюдением Y уравнениями:
**+l = Axk+B\wk +B2"* 1
Ч =с\хк +Dii^ +Di2w* k -оо</:<+оо> (3.86)
yk=C2xk+D2lwk J
где А, С,, By и D,y - постоянные матрицы соответствующих размеров. Иными
словами, система F, а также ее подсистемы F,y в (3.81) имеют следующие реализации в
пространстве состояний:
В, В,
F~
Dn Dl2
D21 0
(3.87)
А В
f«-[c d;}1*"*2 (з-88)
(без ограничения общности полагается D22 = 0).
Ниже для системы (3.87) приводятся уравнения для решения сформулированной в
предыдущем разделе стохастической проблемы (3.85) Н°° -оптимизации по критерию
минимума анизотропийной нормы. При этом используются следующие стандартные
предположения:
• (А1) подсистема F22 в (3.88) стабилизируема и детектируема (чтобы
обеспечить непустоту множества К допустимых регуляторов);
• (А2) размерность управляемого сигнала Z меньше размерности входного
возмущения W: рх < тх (чтобы замкнутая система L(F,K) не была внутренней с
точностью до ненулевого постоянного множителя);
• (A3) матрица D2l в (3.87) имеет полный строчный ранг: rankD2{= p2 ^тх
(во избежание вырожденности в уравнении Риккати для оценивающего
регулятора);
• (А4) матрица D12 в (3.87) имеет полный столбцовый ранг: rankDl2 =m2 < р{
(во избежание вырожденности в уравнении Риккати для оптимального
регулятора).
Пусть К - допустимый регулятор, имеющий «-мерное внутреннее состояние Н,
связанное с сигналами наблюдения Y и управления U уравнениями:
Иы=Мк+Вук\_ <х<к<^ (389)
uk=Chk j
Глава 3. Построение оптимальных робастных регуляторов
225
где А, В и С - постоянные матрицы соответствующих размеров и, следовательно,
К имеет реализацию
ГА в]
к~
с о
(3.90)
в пространстве состояний. Тогда реализация замкнутой системы (3.82) в
пространстве состояний имеет вид
А В2С В,
«F.KHg * I- BC2 A BD21
В
Dl2C
Dn
(3.91)
причем матрица А асимптотически устойчива. Учитывая (3.91), рассмотрим
уравнение Риккати
R = ATRA + 9CTC + LTE"!L; (3.92)
Es(IJlll-9D?lD11-BTRBrI; (3.93)
L = [Li L2] = E(BTRA + (?DnC), (3.94)
где q - скалярный параметр, принимающий значения из полуоткрытого интервала
[0;||L(F,K)|~2), а матрица L разбита на блоки Ь1?Ь2 е Ящхп .
Решение R = RTe R2nx2n уравнения (3.92) - (3.94) называется допустимым, если
матрица L положительно определена, а матрица А + BL асимптотически устойчива.
Каков бы ни был допустимый регулятор (3.90), уравнение (3.92) - (3.94) имеет для
любого qe [O;||L(F,AT)|~") единственное допустимое решение, причем это решение
является неотрицательно определенной матрицей.
Теорема 3.4 [18, 60]. Пусть система (3.97) удовлетворяет предположениям А1 и
Л2. Тогда, каковы бы ни были допустимый регулятор (3.90) и уровень а > 0 средней
анизотропии входа, существует единственная пара (<?, R) параметра
qe [0;||L(F,K)||~ ) и допустимого решения R уравнения Риккати (3.92) - (3.94),
такая, что
11 , [ WiS
—In det ~
2 tr(LPLT+L)
= я,
r,2nx2n
где Ре R п - граммиан управляемости формирующего фильтра
G~
A + BL
A + BiL, B,L9+B9C
J1M
1^2
B^+D^L!) A + BD21L2
B^
BD21L
1/2
1/2
M/2
(3.95)
(3.96)
удовлетворяющий уравнению Ляпунова
P = (A + BL)P(A + BL)T + BLBT . (3.97)
Этот фильтр является наихудшим формирующим фильтром, и я-анизотропийная
норма замкнутой системы (3.91) вычисляется по формуле:
( ( ^V/2
■^-ч-Ш-ййЫ ■ <398)
226 Методы современной ТАУ. Часть IV
Рассмотрим уравнение Риккати
S = (А + В^ )S( А + В^ )т + В^В? - Л0Лт; (3.99)
0 = (С2+ Dj^OSCCa + D21L1)T + D^ED^; (3.100)
Л = ((А + B^^SCCa + D2lL{)T + B{EDlx)»'\ (3.101)
где матрицы £ и L определены в теореме 3.4.
Решение S = ST e Rnxn уравнения (3.99) - (3.101) называется допустимым, если
матрица S неотрицательно определена, а матрица A + BjL^ -Л(С2 + D21L4)
асимптотически устойчива.
Заметим, что уравнения (3.99) - (3.101) имеют не более одного допустимого
решения. Наконец, рассмотрим уравнение Риккати
T = ATTAT + CTC-NTIIN; (3.102)
n = BTTB + D^2D12; (3.103)
Ns[N, N2]s-n"!(BTTA + D72c), (3.104)
где матрица N разбита на блоки N{ , N2е /Г2*", а матрицы Ае R2nx2\ Be я2лХ/и2,
CeRPlX2n имеют вид
А В]
С *J =
A BiM
0 A + BxM + BtC
В2
о
(3.105)
где, в свою очередь, через
M = L!+L2 (3.106)
обозначена сумма блоков матрицы (3.94).
Решение Т = Тт б R2nx2n уравнения (3.102) - (3.104) называется допустимым,
если матрица Т неотрицательно определена, а матрица A + BN асимптотически
устойчива.
Заметим, что уравнения (3.102) - (3.104) имеют не более одного допустимого
решения.
Теорема 3.5 [18, 60]. Пусть система (3.87) удовлетворяет предположениям А1-
А4, и пусть матрицы реализации допустимого регулятора (3.90) подчиняются
соотношениям
А = В2С + [.,-А][сА! £][у. (3..07,
В = Л, (3.108)
C = N!+N2, (3.109)
где матрицы Nt, N2 связаны с допустимым решением уравнения Риккати (3.102) -
(3.104). Тогда этот регулятор является решением задачи (3.85).
Теоремы 3.4 и 3.5 дают полный набор нелинейных уравнений для отыскания
матриц реализации в пространстве состояний оптимального регулятора (3.90) в задаче
стохастической Н°° -оптимизации (3.85) по критерию минимума анизотропийной
нормы для n-мерной системы (3.87). Этот набор состоит из следующих перекрестно
связанных уравнений: три алгебраических матричных уравнения Риккати (два
(2пх2п)-уравнений Риккати (3.92) - (3.94) и (3.102) - (3.104) и (пхп)-уравнение
Глава 3. Построение оптимальных робастных регуляторов 227
Риккати (3.99) - (3.101), уравнение Ляпунова (3.97), уравнение специального вида
(3.95), уравнения (3.107) - (3.109), а также обозначения (3.91), (3.106) и (3.105).
Удовлетворение этой системе соотношений является достаточным условием для
оптимальности n-мерного регулятора (3.90).
Вычисление оптимального регулятора методом гомотопии
Векторизация матриц. Введем оператор векторизации со\: RpXq -^ Rpq,
сопоставляющий матрице Х = (х л) вектор
г V JK /I uj < р, 1 < к < q
col(X) =
* | II I
mod(/-l,p)+l, — +1
L Р 1
+1
A <l<>pq
образованный последовательно выписанными столбцами матрицы X, где
mod (я, bj - остаток от деления а на Ь, a |_-J - нижняя целая часть числа.
Очевидно, что отображение col является линейной бисекцией пространств Rpxq и Rpq.
Лемма 3.2.
а) Для любых матриц ае RrXp , ре Rpxq nyeRsxq '
col(apyT) = (y®a) col(p),
где (8) - кронекерово произведение матриц [20].
б) Для любой матрицы X е RpXq
col(xT) = y^col(X),
где
8
pmod(y-i, q)+\ 11 l+i, к
(3.110)
4p,q
puiuu^y-i, ^j+| |i-i, к
A <j<pq, I <k<pq
и 8д - символ Кронекера.
Заметим, что матрица (3.110) ортогональна для любых р, q, причем ур q=yT ,
откуда, в частности, вытекает симметричность и идемпотентность матрицы урр .
Лемма 3.3. Векторизованное решение Хе RpXp уравнения Ляпунова
X = AXAT+Y + YT,
где A, Ye RpXp - заданные матрицы, причем А асимптотически устойчива, имеет
вид
col(X) = (lp2-A®A)"'(l;)2+Y;(,p)col(Y).
r)Y
Далее, под производной —- гладкого матрично-значного отображения Y:
ЭХ
RPX(*-^Rrxs понимается (rs)x(pq) матрица Якоби ±—^ соответствующего
Эсо1(Х)
векторизованнного отображения. Более того, для упорядоченного набора матрично-
значных отображений У^..., Yb, зависящих от матриц Х^.^.Хд, полагается
228
Методы современной ТАУ. Часть IV
a(Y,,...,Yt)
э(х„...,ха)
эх,
ant
эх,
3Y,
«Г
эх„
л1
Я'*« и Y:
Заметим, что для любых гладких отображений X
R"" -» Rqxr, зависящих от матрицы Z, справедливо
Дифференцирование решений уравнений Риккати. Рассмотрим уравнение
Риккати относительно матрицы Se Rnxn
S = ASAT +BBT -Л0Лт ; (3.111)
0 = CTSC + DDT; (3.112)
Л = (ASCT + BDT)0"1, (3.113)
где Ae Rnxn, Be Rpxm , Ce Rpxn , De RpXm - заданные матрицы, называя его
решение допустимым, если матрица
F = A-AC (3.114)
асимптотически устойчива. Такое решение единственно и гладким образом зависит
от матриц А, В , С , D в окрестности тех их значений, где оно существует [53].
Лемма 3.4. Производные допустимого решения уравнения Риккати (3.111) -
(3.113) и сопутствующих ему матриц имеют вид
x[[FS|B-AD]®Iw|-[FS|B-AD](8)A],
30 -(СвС): Э8
(3.115)
3(A,B,C,D) v 'a(A,B,C,D)
x[°^»(«-)|(V+TM)([CS|D]eip)],
э(та)=(0"1ш»)((с@А)э(та)х
x[[CS|D]<8.In|yn,p([AS|D]®Ip)]-
90 "1
(3.116)
(3.117)
-(1„®Л)
Э(А,В,СВ)Г
Нулевая анизотропия: Я -оптимальный регулятор. Далее предполагается,
что разомкнутая система F с реализацией (3.87) в пространстве состояний
удовлетворяет условиям А1 - А4 и фиксирована. При нулевой средней анизотропии а = 0-,
набор уравнений для оптимального регулятора сводится к двум независимым (ихи)-
уравнениям Риккати
S = ASAT+B,B1T-A0AT, (3.118)
Глава 3. Построение оптимальных робастных регуляторов
229
e = C2SCT2+D2lDT2l,
A = (ASC2T + B1D21)0"1
T = ATTA + ClTC1-NTnN,
n = B^TB2+Dj2D12,
N^ir^BjTA + DUC,),
(3.119)
(3.120)
(3.121)
(3.122)
(3.123)
что приводит к известным выражениям для матриц реализации Я -оптимального
регулятора в пространстве состояний:
A = A + B2N-AC2, В = Л, C = N (3.124)
(при этом матрицы А-ВС2 и А + В2С асимптотически устойчивы). Этот регулятор
обозначается далее через Ко, а его матрицы (3.124) через Ао, Во и Со
соответственно.
Метод гомотопии с ньютоновскими итерациями. Сопоставим всякому
регулятору К вида (3.90) результат векторизации его матриц реализации в пространстве
состояний
Q =
col (A)
col (Ё)
col (с)
еЯг,
где
r = n(n + p2+m2),
и обозначим
Y(fi)-|L(F,K)C.
Уравнения для оптимального регулятора зависят от параметра q и могут быть
записаны в виде
Q = F(«7, Q), (3.125)
Л(<7, q) = *. (3.126)
На решении (q, Qj системы (3.125) - (3.126) вычисляется некоторая функция
N(<7, Qj, дающая минимальную а-анизотропийную норму min^^ L(F, Kj
замкнутой системы (с оптимальным регулятором). Гладкая ветвь Q: Го, qA->Rr
решений уравнения (3.125), где
h£|L(F, K)L
-2
удовлетворяет дифференциальному уравнению
dq
где
(3.127)
230
Методы современной ТАУ. Часть ГУ
-1
( д¥
с начальным условием Q(0), получаемым векторизацией матриц Н2 -оптимального
регулятора (3.124). Поэтому численная реализация метода гомотопии для решения
системы уравнений (3.125) - (3.126) сводится к построению последовательности
(ft» Qk)> к-® с начальным условием (0,Q(0)), подчиняющейся следующему
рекуррентному правилу. Пусть уже построен к~й элемент последовательности
(ft» Qk ) • ПРИ фиксированном qk производится серия ньютоновских итераций
e*.w-fi*.i+GM*.i)(FM*.i)-fi*.i)-ls^'*"
с начальным условием б*,о=б* и условием окончания \Qk,ik -Qktik-i\/\Qktik
задаваемые малое число, после чего следующий элемент вычисляется как
ft+i = ft + Aft» Qm = Qkt k + Аб* »
где е -
где
Aft =
g-A(ft.Qib,/J
dA dA ^ dF / Л \
v9F,
В качестве практического условия остановки при вычислении
последовательности [ак, Qk) можно использовать неравенство
mzx§A(qk,Qklk)-a\/a,A\Qk\/\Qk\)<t.
9(F,A)
Лежащие в основе алгоритма выражения для матрицы производных —± ^ по-
^U»Q)
лучаются применением лемм 3.3 и 3.4 и здесь не приводятся в силу их чрезвычайной
громоздкости.
Пример синтеза оптимального регулятора. Рассмотрим систему управления
траекторным движением самолета ТУ-154, описанную в разделе «Результаты
моделирования» предыдущей главы. Матрицы дискретной модели этой системы при шаге
дискретизации, равном 0,01 с, имеют вид
0,9994 -0,0008 0,0000 -0,0009 0 0,0009"
0,0022 0,9938 0,0011 0,0072 0 0,0000
0,0001 0,0052 0,9842 -0,0154 0 0,0000
, (3.128)
0,0000 0,0000 0,0099 0,9999 0 0,0000
-0,0005 0,0124 0,0000 0,0000 1,0000 0,0000
0 0 0 0 0 0,9960
Глава 3. Построение оптимальных робастных регуляторов
231
0
0
0
0
-0,0100 0,0005'
-0,0004 -0,0080
0,0000 0,0000
0,0000 0,0000
0,0100 0,0000 0,0000
0
В2„ =
0 С
■ о.оооо о.оооо'
-0,0012 0,0000
0,0117 0,0000
0,0001 0,0000
0,0000 0,0000
0 0,0040
Матрицы стандартного объекта для дискретной
0,01 с имеют вид
А —
Ast ~
' 0,9994
0,0022
0,0001
0,0000
-0,0005
0
-0,0008
0,9938
0,0052
0,0000
0,0124
0
0
0
0
0
0,0100
0
•
0,0000 -0,0009
0,0011 0,0072
0,9842 -0,0154
0,0099 0,9999
0,0000 0,0000
0 0
-0,0100 0,0005
1
•
»
модели
0
0
0
0
1,000С
0
-0,0004 -0,0080 0
0,0000 0,0000
0,0000 0,0000
0,0000 0,0000
0 0
" 0,0000 0,0000"
-0,0012 0,0000
0,0117 0,0000
0,0001 0,0000
0,0000 0,0000
0 0,0040^
10 0 0 0 0'
0 0 0 0 10
0 0 0 0 0 0
0 0 0 0 0 0
0
0
0
0
0
0"
0
0
0
0
0
при шаге
0,0009"
0,0000
0,0000
0,0000
> 0,0000
0,9960
>
(3.129)
(3.130)
дискретизации
(3.131)
(3.132)
(3.133)
(3.134)
СЯ2 ~
1 0 0 0 0 01
0 0 0 0 1 oj'
(3.135)
232
Методы современной ТАУ. Часть IV
D*n =
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
(3.136)
D*12 =
0
0
1
0
0"
0
0
1
(3.137)
D«2i =
D«22 =
(3.138)
(3.139)
a=0,05 _
con
0,9880
0,0015
-0,0170
-0,0004
-0,0025
-0,0148
0,0000
0,9973
-0,0229
-0,0001
0,0130
-0,0033
0,0002
0,0023
0,9741
0,0099
0,0002
-0,0007
-0,0006
0,0091
-0,0312
0,9998
0,0003
-0,0007
-0,0020
-0,0035
-0,0149
-0,0014
0,9842
-0,0025
0,0017
0,0004
-0,0026
0,0000
0,0001
0,9926
0 0 0 10
0 0 0 0 1
M.
L° °J
В результате применения описанной выше процедуры построения анизотропий-
ного регулятора для многомерного входного сигнала, средний уровень анизотропии
которого не превышает 0,05, получен анизотропийный регулятор (А, В, C,D),
который представлен ниже
(3.140)
0,0149 0,0026"
0,0030 0,0053
0,0004 0,0006
0,0004 0,0013
0,0027 0,0162
0 0
"-1,4210 -2,3935 -0,8618 -1,3472 -1,2199 -0,22471
-3,7006 -0,8298 -0,1630 -0,1853 -0,6201 -0,844lJ'
D.=0.05 Г0 01
соп [0 О}'
3.2.3. Сравнение систем управления с различными регуляторами
В данном разделе на основе результатов моделирования проводится сравнение
характеристик переходных процессов замкнутых систем и управлений,
синтезированных описанными ниже тремя типами регуляторов, при воздействии на замкнутую
систему четырех различных видов входных сигналов, которые характеризуются
различным уровнем пространственно-временной окрашенности (цветности).
При моделировании рассматривались следующие типы регуляторов: H2/LQG-
регулятор, два анизотропийных регулятора и Н °° -регулятор, которые были синтези-
В
я=0,05 _
(3.141)
Са=0,05 _
(3.142)
(3.143)
Глава 3. Построение оптимальных робастных регуляторов
233
рованы для дискретной системы управления, матрицы стандартного объекта которой
представлены в (3.131) - (3.139). Анизотропийные регуляторы были синтезированы
для двух различных уровней цветности входного сигнала, который определяется
средним уровнем анизотропии входного сигнала, равных а = 0,05 (см. предыдущий
параграф) и а = 0,5.
Матрицы (А, В, С, О)-представлений соответствующих регуляторов приведены
ниже:
l Д=0,5 _
-*а =0,5 _
0,9816
-0,0005
-0,0224
-0,0009
-0,0057
-0,0232
-1,8508
-5,8054
0,0005
0,9975
-0,0240
-0,0001
0,0130
-0,0051
вя=0,5 _
"con —
-2,4923
-1,2797
0,0003
0,0024
0,9738
0,0099
0,0002
-0,0010
'0,0234
0,0058
0,0008
0,0008
0,0062
0
-0,8810
-0,2443
-0,000!
0,0092
-0,031^
0,9998
0,0003
-0,001
0,0062'
0,0065
0,0008
0,0015
0,0177
0
-1,369?
-0,2761
) -0,0052
-0,0046
\ -0,0159
-0,0016
0,9827
1 -0,0039
»
» -1,2944
1 -0,9674
0,0022
0,0006
-0,0038
0,0000
0,0002
0,9907
-0,3255"
-1,3399
D'
,а=0,5
-Г° °1.
[о oj
Матрицы
а"~ -
Н -регулятора:
" 0,9818
-0,0013
-0,0294
-0,0124
-0,0131
-0,0107
сн- р>9057
соп [0,8359
-0,0024
0,9909
-0,0085
-0,0039
-0,0054
0,0001
и"~ -
"con ~~
0,4677
-0,9483
]
0,0063
0,0020
0,9824
-0,0079
0,0050
-0,0046
"-0,0004
-0,0022
0,0002
-0,0002
-0,0058
-0,0360
0,0362
-0,0038
»соп 0
-0,0053
-0,0014
0,0130
0,9937
-0,0053
0,0062
0,0112"
0,0032
-0,0022
0,0031
0,0198
-0,0192
0,1127
-0,0069
°i.
0
0,0055
0,0105
0,0363
0,0116
0,9838
-0,0044
-3,1338
2,0728
-0,0702
0,0767
-0,1515
-0,0338
0,0165
0,8742
13,6706"
25,3549_
(3.144)
(3.145)
(3.146)
(3.147)
(3.148)
(3.149)
(3.150)
(3.151)
234
Методы современной ТАУ. Час?> IV
Матрицы
г"2-
H2/LQG-
' 0,9901
0,0021
-0,0079
-0,0001
-0,0006
-0,0030
'-0,6669
-0,7478
регулятора:
-0,0008
0,9963
-0,0186
-0,0001
0,0124
-0,0007
R"2 -
Ucon -
2,0266 ■
-0,1772 -
В
0,0000
0,0020
0,9753
0,0099
0,0000
-0,0002
'0,0093
0,0009
0,0002
0,0000
0,0001
0
-0,7570
-0,0396
>»2=[°
СОП л
-0,000$
0,0087
-0,0294
0,9999
0,0001
-0,0002
0,0001"
0,0037
0,0004
0,0010
0,0138
0
-1,1921
-0,0446
°л
) -0,0001
-0,0025
[ -0,0120
-0,0011
0,9862
> -0,0005
>
-0,9890
0,1246
0,0009 "
0,0001
-0,0007
0,0000
0,0000
0,9954
-0,0624]
-0,1565J
(3.152)
(3.153)
(3.154)
(3.155)
м/с
-10-
-15
Рис. 3.14. Реализация белого шума, подаваемого иа вход регуляторов
Для сравнения свойств регуляторов на многомерный вход каждой из четырех
замкнутых систем с соответствующими регуляторами подавались тестовые входные
сигналы, моделирующие ветровое возмущение, следующих видов:
• на входы подавался идентичный гауссовский белый шум, который
представлен на рис. 3.14 (сигнал с нулевой средней анизотропией);
Глава 3. Построение оптимальных робастных регуляторов 235
• окрашенный сигнал, полученный в результате прохождения белого шума
через формирующий фильтр, на выходе которого формируется сигнал с уровнем
средней анизотропии равным 0,05;
• более окрашенный сигнал, полученный в результате прохождения белого
шума через формирующий фильтр, на выходе которого формируется сигнал с
уровнем средней анизотропии равным 0,5;
• на входы подавался одинаковый детерминированный сигнал в виде
единичного ступенчатого сигнала (сигнал с бесконечной средней анизотропией).
Формирующие фильтры с уровнями средней анизотропии равными
соответственно а = 0,05 и а = 0,5 были получены при синтезе соответствующих анизотропийных
регуляторов.
Два многомерных окрашенных сигнала были получены из одной и той же
последовательности, моделирующей гауссовский белый шум.
В результате моделирования были получены реакции замкнутых систем по
управляемым переменным (отклонения воздушной скорости и высоты) и управления
(управление Ьсу и отклонение ручки сектора газа), формируемые соответствующими
регуляторами, на различные виды внешнего ветрового возмущения.
Полученные результаты моделирования представлены на графиках и сведены в
таблицы следующим образом:
• На рис. 3.15 - 3.18 и табл. 3.4 - 3.7 приведены результаты моделирования для
случая входного возмущения в виде белого шума.
• На рис. 3.19 - 3.22 и табл. 3.8 - 3.11 приведены результаты моделирования для
случая, когда на вход подавался входной сигнал, сгенерированный
формирующим фильтром со средним уровнем анизотропии, равном 0,05.
• На рис. 3.23 - 3.26 и табл. 3.12-3.15 приведены результаты моделирования
для случая, когда на вход подавался входной сигнал, сгенерированный
формирующим фильтром со средним уровнем анизотропии, равном 0,5.
• На рис. 3.27 - 3.30 и табл. 3.16 - 3.19 приведены результаты моделирования
для случая, когда на вход подавался детерминированный единичный
ступенчатый сигнал.
На рисунках и в таблицах приняты следующие обозначения: Н2/LQG -регулятор
- Н2; анизотропийный регулятор, синтезированый при уровне средней анизотропии
входного сигнала, равного 0,05 - Anisotropy a = 0,05; анизотропийный регулятор,
синтезированый при уровне средней анизотропии входного сигнала, равного 0,5 -
Anisotropy а = 0,5; Я°°-субоптимальный регулятор - Яш/; Ьсу - TetaCY ; сектор
газа - DLsg.
Внешнее возмущение - белый шум
Проанализируем поведение замкнутых систем при моделировании ветрового
возмущения гауссовским белым шумом.
Графики переходных процессов (рис. 3.15) и диапазоны изменения отклонений
воздушной скорости и высоты (табл. 3.4 и 3.5) для всех регуляторов практически не
отличаются друг от друга. Но Н °° -субоптимальный регулятор незначительно, но все
же обеспечивает наилучшее качество подавления ветрового возмущения по
управляемым переменным.
236
Методы современной ТАУ. Часть IV
V,m/c
О 5 10 15 20 25 30 35 40
Г, С
Я,м к
-2-
Рис. 3.15. Совместные графики отклонения воздушной скорости V и высоты Н при воздействии
на вход замкнутых систем с соответствующими регуляторами белого шума
Совершенно другая картина наблюдается по виду и величинам синтезируемых
регуляторами управлений (рис. 3.16 - 3.18 и табл. 3.6, 3.7). Наихудшими показателями
по величинам и производным по управлениям обладает Н°° -субоптимальный
регулятор, а наилучшими - Н2 -регулятор. Так, по управлению f>cy диапазон изменения
для Н2 -регулятора примерно в 6,3 раза меньше, чем для Н °° -субоптимального
регулятора.
Таблица 3.4
Отклонение от номинального значения воздушной скорости V
при действии белого шума на систему, замкнутую различными
регуляторами
Вход - белый шум
Тип регулятора
Н2
Анизотропийный а = 0,05
Анизотропийный а = 0,5
V ■
'mm
-2,7446
-2,1839
-2,0807
-2,0921
у
т max
2,1409
1,5279
1,4036
1,3675
V -V
r max mm
4,9055
3,7118
3,4843
3,4596
Анизотропийные регуляторы занимают промежуточное положение между Н - и
Н °° -субоптимальными регуляторами. Причем при увеличении уровня анизотропии
увеличивается амплитуда управлений и ухудшается их «гладкость».
Глава 3. Построение оптимальных робастных регуляторов
237
Таблица 3.5
Отклонение от номинального значения высоты Н при действии
белого шума на систему, замкнутую различными регуляторами
Вход - белый шум
Тип регулятора
н2
Анизотропийный а = 0,05
Анизотропийный а = 0,5
Н°°
-5,2361
- 5,4079
-4,7440
-4,3424
#max
3,1526
2,7074
2,7195
2,6048
#max ~ #min
8,3888
8,1153
7,4636
6,9472
Гораздо более существенное различие наблюдается по отклонению сектора газа
(обозначение DLsg). Диапазон изменения отклонения сектора газа для Н2 -
регулятора примерно в 26 раз меньше, чем для Н°° -регулятора. Это объясняется тем,
что Н °° -регулятор в силу своей динамичности (перестраховочности) не обладает
сглаживающим свойством как Н2 -регулятор и воспринимает белый шум как
детерминированный сигнал и пытается его парировать.
Отношение диапазонов изменения управления Фсу и отклонения сектора газа для
анизотропийного регулятора при уровне а =0,05 и Я2-регулятора составляют
соответственно 1,7 и 5,3. Аналогичные соотношения для анизотропийного регулятора при
уровне а =0,5 равны 2,1 и 9,3.
Таким образом, при входном воздействии в виде белого шума Н2 -регулятор
является наилучшим. В то же время при заданных уровнях средней анизотропии
входного сигнала анизотропийные регуляторы парируют белый шум с гораздо меньшими
энергетическими затратами по управлению по сравнению с Н °° -субоптимальным
регулятором.
Таблица 3.6
Отклонение от номинального значения управления TetaCY
при действии помехи на систему, замкнутую различными регуляторами
Тип регулятора
Н2
Анизотропийный а = 0,05
Анизотропийный а = 0,5
Н°°
Вход-белый шум
TetaCYmn
-3,8987
- 6,4245
- 8,7093
-25,8491
TetaCY^
4,8061
8,7425
10,0284
29,1145
TetaCY^ -TetaCYmin
8,4049
15,1670
18,7376
54,9636
Таблица 3.7
Отклонение от номинального значения сектора DLsg газа
при действии помехи на систему, замкнутую различными регуляторами
Вход - белый шум
Тип регулятора
Н2
Анизотропийный а = 0,05
Анизотропийный а = 0,5
Я°°
OLsgmn
-1,7300
-8,4345
-16,0535
-46,3739
2,0312
11,3490
19,0867
52,0337
3,7612
19,7835
35,1403
98,4076
238
Методы современной ТАУ. Часть IV
TetaCY,
град
-30
град
-501
Рис. 3.16. Совместные графики управления Ь^, и сектора газа при воздействии на вход замкнутых
систем с соответствующими регуляторами белого шума
TetaCY,
град А Н1
*&*»фЬ
TetaCY,
град
ю
10 15 20 25
Анизотропийный а = 0,05
ю
TetaCY, °
град
10
зо
35
40
г, с
10
10 15 20 25
Анизотропийный а = 0,5
зо
35
40
ty С
TetaCY,
град
(
i
50
0
SO
) 5
i
!
10
15
20
H~
25
J
i
30
35
1
40
f, С
10
15
20
25
30
35
40
U с
Рис. 3.17. Раздельные графики управления Ь^ при воздействии на вход замкнутых систем
с соответствующими регуляторами белого шума
Глава 3. Построение оптимальных робастных регуляторов
239
DLsg, *
град
0
DLsg,
град i
20
0
20
DLsg,
град i
20
0
DLsg,
град i
50
0
50
Э 5 10
i
э •
5 10
5 10
я2
15 20
Анизотропийный с
%^
15 20
Анизотропийный
15 20
г
25
г = 0,05
25
а = 0,5
25
30
3
0
30
35
35
35
##
40
',с
4
^, с
40 "
Г, С
iftflf
►
10
15
20
25
30
35
40
t, С
Рис. 3.18. Раздельные графики сектора газа при воздействии на вход замкнутых систем
с соответствующими регуляторами белого шума
Внешнее возмущение - цветной шум. Рассмотрим более реальные внешние
возмущения в виде цветного белого шума с двумя разными «уровнями цветности»,
которые моделируются двумя формирующими фильтрами, описанным выше.
Анализ рис. 3.19 и 3.23 показывает, что сравнительное поведение замкнутых
систем по отклонениям воздушной скорости и высоты примерно одинаково и отличается
только масштабом. Величины отклонений (см. табл. 3.8, 3.9 и 3.12, 3.13) для
Н °° -субоптимального регулятора и двух анизотропийных регуляторов отличаются
незначительно.
При этом с ростом уровня средней анизотропии максимальные амплитуды
отклонений и диапазоны изменений уменьшаются и приближаются по реакции к
замкнутой системе с Н°° -регулятором. Так, в случае входного сигнала с уровнем
анизотропии а = 0,05 диапазон изменения воздушной скорости для анизотропийного
регулятора (а = 0,05) только в 1,2 раза больше, чем для Н°°-регулятора. Для высоты это
соотношение равно 1,3. В случае цветного сигнала с уровнем анизотропии а = 0,5
данные соотношения незначительно больше и составляют 1,25 и 1,35 соответственно.
Тогда как для Н2 -регулятора по сравнению с Н°° -регулятором в случае входного
сигнала с уровнем анизотропии а =0,05 отношение диапазонов изменения по
скорости составляют 1,8 , а по высоте 1,95. Аналогичные соотношения в случае входного
сигнала с уровнем анизотропии а - 0,5 равны соответственно 2 и 2,6.
Характер синтезируемых управлений при двух различных цветных возмущениях
также аналогичен (при а =0,05 см. рис. 3.12 - 3.14, а при а = 0,5 см. рис. 3.24 -
3.26) и также отличается только масштабом (при а = 0,05 см. табл. 3.8, 3.9, а при
240
Методы современной ТАУ. Часть IV
а = 0,5 см. табл. 3.12, 3.13). Самое слабое по величине и самое гладкое управление
формируется Я2-регулятором. В противоположность ему Н°° -субоптимальный
регулятор формирует самое сильное по амплитуде управление с большой величиной
производной по управлению, что является существенным недостатком. Анизотро-
пийные регуляторы как по амплитуде, так и по «гладкости» управлений занимают
промежуточное значение, что видно из табл. 3.10, 3.11, 3.14, 3.15.
Таким образом, одним из основных достоинств синтезированных в данной работе
анизотропийных регуляторов является то, что существенно меньшим по величине
управлением достигаются практически одинаковые (лишь незначительное
ухудшение) переходные процессы для отклонений воздушной скорости и высоты, по
сравнению с Н°° -субоптимальным регулятором.
V, м/с*
Я,м ^
10
Рис. 3.19. Совместные графики отклонения воздушной скорости V и высоты Н
при воздействии на вход замкнутых систем с соответствующими регуляторами
сигнала со средним уровнем анизотропии а = 0,05
Таблица 3.8
Отклонение от номинального значения воздушной скорости V
при действии цветной помехи на систему, замкнутую различными
регуляторами
Вход - сигнал с уровнем анизотропии 0,5
Тип регулятора
я2
Анизотропийный а = 0,05
Анизотропийный а = 0,5
V ■
r mm
-3,1483
- 1,9381
- 1,6930
-1,6076
Vmax
3,0725
2,1209
1,8612
1,7383
у max Y mm
6,2208
4,0591
3,5541
3,3458
Глава 3. Построение оптимальных робастных регуляторов
241
Таблица 3.9
Отклонение от номинального значения высоты Н при действии
помехи на систему, замкнутую различными регуляторами
Вход - сигнал с уровнем анизотропии 0,05
Тип регулятора
я2
Анизотропийный а = 0,05
Анизотропийный а = 0,5
Я~
# nun
-2,3017
-2,0763
- 1,9275
- 1,5534
#max
2,6180
1,1909
1,0600
0,9733
#max ~ #min
4,9196
3,2672
2,9875
2,5267
DLsg,
град
10
15
20
25
30
35
i
15
10
5
0
-5
10
:
il'l "тРг"
PfvF h i
i I
, j 1—^
40
t, С
Рис. 3.20. Совместные графики управления f^, и отклонения ручки сектора газа
при воздействии на вход замкнутых систем с соответствующими регуляторами
сигнала со средним уровнем анизотропии а = 0,05
Таблица 3.10
Отклонение от номинального значения управления TetaCY
при действии помехи на систему, замкнутую различными регуляторами
Вход - сигнал с уровнем анизотропии 0,05
Тип регулятора
Н2
Анизотропийный а = 0,05
Анизотропийный а = 0,5
Н°°
TetaCYwn
-2,5906
-2,6848
-3,0811
-5,9990
TetaCYmax
1,9499
2,5365
3,0039
6,2844
TetaCY^ - TetaCY^
4,5405
5,2214
6,0850
12,2833
17 3ак. 416
242
Методы современной ТАУ. Часть ГУ
TetaCYji
град
-5
TetaCY,
град
Н2
-5
TetaCY,
град ,
10 15 20 25
Анизотропийный а = 0,05
30
35
40
t, С
-5
TetaCY,
град10
10 15 20 25
Анизотропийный а = 0,5
30
35
40
Г, С
10
15
•10
20
25
30
35
40
f, С
10
15
20
25
30
35
40
U с
Рис. 3.21. Раздельные графики управления Ь^, при воздействии иа вход замкнутых систем
с соответствующими регуляторами сигнала со средним уровнем анизотропии а = 0,05
DLsg,
град s
Н2
DLsg, о
град
1С
DLsg,
10 15 20
Анизотропийный а-
25
:0,05
30
35 40
U с
град
*b*w\fc^J^^
10 15 20 25
30
35 40
U С
Рис. 3.22. Раздельные графики управления DLsg при воздействии на вход замкнутых систем
с соответствующими регуляторами сигнала со средним уровнем анизотропии а = 0,05
Глава 3. Построение оптимальных робастных регуляторов
243
Таблица 3.11
Отклонение от номинального значения управления DLsg при действии
помехи на систему, замкнутую различными регуляторами
Вход - сигнал с уровнем анизотропии 0,05
Тип регулятора
нг
Анизотропийный а = 0,05
Анизотропийный а = 0,5
Н°°
DLsgmn
-2,1901
-5,9787
-8,1486
- 13,7717
DLsgM
1,8319
5,6191
7,8866
13,6505
DLsgma* - DLsgmn
4,0220
11,5978
16,0352
27,4222
V.m/c
Я,м
Рис. 3.23. Совместные графики отклонения воздушной скорости V и высоты Н при воздействии
на вход замкнутых систем с соответствующими регуляторами сигнала со средним уровнем
анизотропии а = 0,5
Таблица 3.12
Отклонение от номинального значения воздушной скорости
при действии цветной помехи на систему,
замкнутую различными регуляторами
Вход - сигнал с уровнем анизотропии 0,5
Тип регулятора
Н2
Анизотропийный а = 0,05
Анизотропийный а = 0,5
-8,1184
-4,8519
-4,1898
-3,8827
Vmax
8,6577
5,7701
4,9786
4,6070
V -V
у max у min
16,7761
10,6219
9,1683
8,4896
17*
244
Методы современной ТАУ. Часть IV
Таблица 3.13
Отклонение от номинального значения высоты при действии помехи
на систему, замкнутую различными регуляторами
Вход - сигнал с уровнем анизотропии 0,5
Тип регулятора
Н2
Анизотропийный а = 0,05
Анизотропийный а = 0,5
«*min
-4,5573
-3,3589
-3,1698
-2,5141
#max
6,0100
2,1177
1,7270
1,5566
Нтах ~" Нпап
10,5673
5,4766
4,8969
4,0707
TetaCY, j
град ю
-30
Рис. 3.24. Совместные графики управления й^ и отклонения сектора газа при воздействии
на вход замкнутых систем с соответствующими регуляторами сигнала
со средним уровнем анизотропии а = 0,5
Таблица 3.14
Отклонение от номинального значения управления TetaCY
при действии помехи на систему, замкнутую различными регуляторами
Вход - сигнал с уровнем анизотропии 0,5
Тип регулятора
Я2
Анизотропийный а = 0,05
Анизотропийный а = 0,5
Н°°
TetaCYmia
- 5,8544
-5,3089
-5,4796
-8,5715
TetaCY^
4,5034
4,4107
4,8613
7,8705
TetaCYmn - TetaCYmin
10,3578
9,7196
10,3410
16,4420
Глава 3. Построение оптимальных робастных регуляторов
245
TetaCY,
град ю
TetaCY% °
град
-ю
TetaCY,
град
TetaCY,
град
-к
ю
10
15 20 25 30
Анизотропийный а =0,05
15 20 25
Анизотропийный а - 0,5
30
35
35
40
Л с
40
Л с
oa^w^vHv^
10
15
20
25
30
35
40
U с
Рис. 3.25. Раздельные графики управления Ь^ при воздействии на вход замкнутых систем
с соответствующими регуляторами сигнала со средним уровнем анизотропии а = 0,5
DLsg,
град ю
DLsg? о
град
20
-20
DLsg,
град
20
-20
DLsg,
град
ю
15 20 25
Анизотропийный а = 0,05
зо
ю
15 20 25
Анизотропийный а = 0,5
30
10
15
20
25
30
35
35
35
40
t, С
4°f, С
0
J [
50
5 10
1 1
15
1
20
/Г
25
1
30
i
35
1
►
40
t, С
Рис. 3.26. Раздельные графики управления DLsg при воздействии на вход замкнутых систем
с соответствующими регуляторами сигнала со средним уровнем анизотропии а = 0,5
246
Методы современной ТАУ. Часть ГУ
Таблица 3.15
Отклонение от номинального значения управления DLsg при действии
помехи на систему, замкнутую различными регуляторами
Вход - сигнал с уровнем анизотропии 0,5
Тип регулятора
я2
Анизотропийный а = 0,05
Анизотропийный а - 0,5
DLsgmn
-5,9413
- 14,5751
- 17,2360
- 24,0006
DLsgjw
4,7944
11,9413
15,0450
21,3063
DLsg^ - DLsgmn
10,7357
26,5163
32,2810
45,3070
Таблица3.16
Отклонение от номинального значения воздушной V скорости
при действии детерминированной помехи на систему, замкнутую
различными регуляторами
Вход - детерминированный сигнал
Тип регулятора
я2
Анизотропийный а =0,05
Анизотропийный а = 0,5
у .
ПИП
- 10,5557
-4,7143
-3,9916
-3,8048
Vmax
0
0
0
0
F max т mm
10,5557
4,7143
3,9916
3,8048
Внешнее возмущение - детерминированный входной сигнал
Рассмотрим другой, крайний, с точки зрения средней анизотропии входного
сигнала, случай, когда входное воздействие является детерминированным сигналом. Как
отмечалось выше, он задается единичным ступенчатым сигналом. Как видно из
графиков переходных процессов (см. рис. 3.21) и установившихся состояний
отклонений воздушной скорости и высоты (см. табл. 3.16 и 3.17), Я2 -регулятор
обеспечивает наихудшую реакцию на детерминированный ступенчатый сигнал. Его
установившиеся значения по высоте и скорости примерно в 2 раза больше по сравнению с
Я°° -субоптимальным регулятором. Реакция обоих анизотропийных регуляторов по
высоте и скорости практически совпадает с Я °°-субоптимальным регулятором. Вид
управления и их диапазоны изменения показаны на рис. 3.28 - 3.30 и сведены в
табл. 3.18 и 3.19. В установившемся состоянии величины управлений у
анизотропийных регуляторов также практически совпадает с Я°° -субоптимальным регулятором.
Как видно из графиков, управления отличаются только во время переходного
процесса и иллюстрируют различную скорость реакции (динамичность) на входной
сигнал. Наименьшей скоростью реакции обладает Я2 -регулятор, а наибольшей -
Я°°-субоптимальный регулятор. Скорость реакции у анизотропийных регуляторов
увеличивается с ростом уровня средней анизотропии входного сигнала, для которого
он был синтезирован.
Таким образом, в случае детерминированного возмущения оба анизотропийных
регулятора обеспечивают качество переходных процессов по управляемым перемен-
ным и управлению, близкое к Н°° -субоптимальному регулятору. Я2 -регулятор
достаточно вяло реагирует на детерминированный сигнал, т.к. он воспринимает его
белым шумом в силу предположений о входном сигнале в процедуре синтеза.
Глава 3, Построение оптимальных робастных регуляторов
247
V,m/c
-12
Я,м
[ J
к
0
-10
-15
i
<гГЛ^
10
15
20
25
30
35
40
U с
Рис. 3.27* Совместные графики отклонения воздушной скорости V и высоты Н при воздействии
на вход замкнутых систем с соответствующими регуляторами детерминированного сигнала
Таблица 3.17
Отклонение от номинального значения высоты Н
при действии детерминированной помехи на систему,
замкнутую различными регуляторами
Вход - детерминированный сигнал
Тип регулятора
Н2
Анизотропийный а = 0,05
Анизотропийный а -0,5
И°°
-10,1441
-6,3245
-5,6498
-4,9393
#тах
0,5926
0,6070
0,6123
0,6103
#тах ~ #min
10,7367
6,9315
6,2622
5,5496
Таблица 3.18
Отклонение от номинального значения управления TetaCY
при действии детерминированной помехи на систему,
замкнутую различными регуляторами
Вход- детерминированный сигнал
Тип регулятора
Н2
Анизотропийный а = 0,05
Анизотропийный л = 0,5
TetaCYam
-1,3533
-2,1398
-2,6321
-4,7789
TetaCY^
6,3396
3,8159
3,4150
3,1027
TetaCYmM - TetaCY^
7,6930
5,9556
J6.4070
7,8816
248
Методы современной ТАУ. Часть IV
TetaCY,
град ю
DLsg,
град
ю
15
20
25
30
35
40
U с
!
j
—'^—■
-
►
10
15
20
25
30
35
40
U с
Рис. 3.28. Совместные графики управлений Oq, и сектора газа при воздействии на вход
замкнутых систем с соответствующими регуляторами детерминированного сигнала
TetaCY,
град
10
0
10
TetaCY,*
град i
0
_5
TetaCY,
град ^
0
TetaCY, C
град 5^
0
-5
i
i
5 10
) 5 10
i
) 5 10
i
1
н2
i i
15 20
Анизотропийный
15 20
Анизотропийный
15 20
1
2
д = 0,
1
5 30
05
25 30
а = 0,5
25 30
35
35
35
—
40
U с
—►
10
15
20
25
30
40
U с
Рис. 3.29. Раздельные графики управления Ф^, при воздействии на вход замкнутых систем
с соответствующими регуляторами детерминированного сигнала
Глава 3. Построение оптимальных робастных регуляторов
249
DLsg, i
град 10
0
DLsg™
град i
10
0
-10
DLsg,
град i
10
0
-10
DLsg,
град i
10
0
-10
i
'
Э !
i
3
i
V
/
5 10
г* •
5 10
5 10
н2
_ '
15 20
Анизотропийный
15 20
Анизотропийный
15 20
2
д = С
5 30
,05
25 30
а = 0,5
25 30
1
35
35
35
40 г. с
4
о ty (Г
40 Л с
►
10
15
20
25
30
35
40
Г, С
Рис. 3.30. Раздельные графики управления DLsg при воздействии на вход замкнутых систем
с соответствующими регуляторами детерминированного сигнала
Таблица 3.19
Отклонение от номинального значения управления DLsg
при действии детерминированной помехи на систему,
замкнутую различными регуляторами
Вход - детерминированный сигнал
Тип регулятора
н2
Анизотропийный а = 0,05
Анизотропийный а = 0,5
DLsgmn
-0,3700
-2,4761
-4,5492
- 8,4532
6,3304
8,6888
9,0034
9,0225
DLsgw - DLsgnin
6,7005
11,1649
13,5526
17,4757
Обобщая результаты сравнительного моделирования, можно констатировать, что
Н2 -регулятор удовлетворительно работает только при входном воздействии в виде
белого шума, а Н°° -субоптимальный регулятор - при детерминированном сигнале.
Анизотропийный регулятор может быть синтезирован для произвольного уровня
цветности входного сигнала и обеспечивать высокий уровень подавления внешнего
возмущения (близкий к Н°° -субоптимальному регулятору) при существенно
меньшей величине управления.
16 Зак. 416
250 Методы современной ТАУ. Часть IV
ГЛАВА 4. АДАПТИВНЫЕ СИСТЕМЫ
Теория адаптивных систем возникла в связи с необходимостью решения
широкого класса прикладных задач, для которых неприемлемы традиционные методы,
требующие знания адекватной математической модели объекта. Качество
традиционных (неадаптивных) методов управления тем выше, чем больше априорной
информации о самом объекте и условиях его функционирования. На практике
достаточно трудно обеспечить точное математическое описание объекта управления.
Так, например, при разработке автоматических систем управления
технологическими процессами в химической, металлургической промышленности создание
адекватной математической модели представляет обычно сложную
самостоятельную задачу. Более того, характеристики объекта в процессе функционирования
могут существенно изменяться. Динамические характеристики летательных аппаратов
сильно зависят от режима полета, технологических разбросов, состояния
атмосферы. В этих условиях традиционные методы часто оказываются неприменимыми
либо дают плохие результаты.
В связи с этим уже на начальном этапе развития теории автоматического
управления представлялся весьма эффективным путь построения управляющих систем, не
требующих полной априорной информации об объекте и условиях его функционирования.
Эффект приспособления к условиям функционирования в адаптивных системах
обеспечивается за счет накопления и обработки информации о поведении объекта в
процессе его функционирования. Это позволяет существенно снизить влияние
неопределенности на качество управления, компенсируя недостаток априорной
информации на этапе проектирования систем.
4.1. ОПРЕДЕЛЕНИЕ И КЛАССИФИКАЦИЯ АДАПТИВНЫХ СИСТЕМ
Управляющая система, автоматически определяющая нужный закон управления
посредством анализа поведения объекта при текущем управлении, называется
адаптивной.
Многочисленные обзоры по теории адаптивных систем имеют разнообразные
варианты классификации. Мы будем придерживаться классификации, приведенной
А.А. Вороновым и В.Ю. Рутковским в обзоре [6].
Адаптивные системы можно разделить на два больших класса:
самоорганизующиеся и самонастраивающиеся.
В самоорганизующихся системах в процессе функционирования происходит
формирование алгоритма управления (его структуры и параметров), позволяющего
оптимизировать систему с точки зрения поставленной цели управления (ЦУ). Такого
рода задача возникает, например, в условиях изменения структуры и параметров
объекта управления в зависимости от режима функционирования, когда априорной
информации недостаточно для определения текущего режима. При широком классе
возможных структур объекта трудно надеяться на выбор единственной структуры
алгоритма управления, способной обеспечить замкнутой системе достижение ЦУ во
всех режимах функционирования. Таким образом, речь идет о синтезе при свободной
структуре регулятора. Очевидная сложность постановки задачи не позволяет
надеяться на простые алгоритмы ее решения, а следовательно, и на широкое внедрение в
настоящее время таких систем в практику.
Глава 4. Адаптивные системы 251
Задача существенно упрощается, если структура объекта управления известна и
неизменна, а поведение зависит от ряда неизвестных параметров. Эта задача
решается в классе самонастраивающихся систем (СНС), в которых структура регулятора
задана (заранее выбрана) и требуется определить лишь алгоритм настройки его
коэффициентов (алгоритм адаптации).
СНС делятся на два подкласса: поисковые и беспоисковые. В поисковых СНС
минимум (или максимум) меры качества (производительность установки, расход
топлива и т.д.) ищется с помощью специально организованных поисковых сигналов.
Простейшими поисковыми системами являются большинство экстремальных систем, в
которых недостаток априорной информации восполняется за счет текущей
информации, получаемой в виде реакции объекта на искусственно вводимые поисковые
(пробные, тестовые) воздействия.
В беспоисковых СНС в явном или неявном виде имеется модель с желаемыми
динамическими характеристиками. Задача алгоритма адаптации состоит в настройке
коэффициентов регулятора таким образом, чтобы свести рассогласование между
объектом управления и моделью к нулю. Такое управление называют прямым
адаптивным управлением (direct adaptive control), а системы - адаптивными системами с
эталонной моделью (model reference adaptive systems). В случае непрямого
адаптивного управления (indirect adaptive control) сначала проводят идентификацию объекта,
а затем определяют соответствующие коэффициенты регулятора. Такие регуляторы
называются самонастраивающимися (self-turning regulators).
При прямом адаптивном управлении контуры адаптации работают по замкнутому
циклу. Это позволяет парировать изменения параметров объекта и регулятора.
Однако, каждый контур самонастройки повышает порядок системы как минимум на
единицу, и при этом существенно влияет на общую динамику замкнутой системы.
В случае непрямого адаптивного управления контуры самонастройки работают по
разомкнутому циклу и, следовательно, не влияют на динамику системы. Однако все
ошибки идентификации, уходы параметров объекта и регулятора существенно
влияют на точность управления.
В беспоисковых самонастраивающихся системах эталонная модель может быть
реализована в виде реального динамического звена {явная модель) или
присутствовать в виде некоторого эталонного управления, связывающего регулируемые
переменные и их производные {неявная модель). В неявной модели коэффициенты
эталонного уравнения являются параметрами алгоритма адаптации.
4.2. ПОСТАНОВКА ЗАДАЧИ СИНТЕЗА АДАПТИВНОЙ СИСТЕМЫ
УПРАВЛЕНИЯ. ГИПОТЕЗА О КВАЗИСТАЦИОНАРНОСТИ
Ограничимся рассмотрением задачи синтеза для непрерывных динамических
объектов [35]. Пусть на объект управления (ОУ) влияют измеряемые возмущения
(задающие воздействия) Y = Y(/), неизмеряемые возмущения N = N(/) и управляющие
воздействия U = U{t). Наблюдениям доступны выходные переменный объекта
Х = ХВ(/). Поведение объекта зависит от ряда неизвестных параметров,
совокупность которых обозначаем через £. Задано множество S возможных значений £,
определяющих класс допустимых объектов и возмущений. Задана цель управления,
определяющая желаемое поведение ОУ. Требуется синтезировать алгоритм
управления, использующий измеряемые или вычисляемые на основе измерений величины, не
зависящие от £ е S, и обеспечивающий для каждого £ е Е достижение заданной ЦУ.
Вектор неизвестных параметров £ обычно состоит из коэффициентов уравнений,
составляющих математическое описание объекта, а также из коэффициентов, опре-
16*
252
Методы современной ТАУ. Часть IV
деляющих изменение внешних воздействий (состояния среды). Кроме того, вектор £
может содержать абстрактные параметры, описывающие неизмеряемые возмущения,
обусловленные неточностью описания ОУ. Вектор £, как правило, считается
квазистационарным: постоянным или меняющимся медленно (медленнее динамических
процессов в объекте и изменений внешних воздействий).
В дальнейшем будем говорить, что процесс {вектор) Z рассматриваемой
системы квазистационарен, если он меняется существенно медленнее остальных
динамических процессов, протекающих в системе.
Описанная выше задача является задачей управления в условиях
неопределенности, связанной с £ е S. Задача может решаться поэтапно: вначале идентификация
вектора £ , а затем определение алгоритма управления, обеспечивающего требуемое
качество функционирования одним из традиционных методов. Однако такая
стратегия синтеза требует дополнительного времени на изучение объекта и неприменима в
нестационарных условиях.
N,(0
Y(0
ОУ
Обобщенный
настраиваемый объект
(ОНО)
1ВД
Блок
датчиков
r^MiA^l
±$
L
Регулятор
0(0
Алгоритм
адаптации
Алгоритм адаптивного управления
Рис. 4.1. Структурная схема адаптивной системы управления
Более совершенной стратегией управления является адаптивная стратегия,
состоящая в одновременном изучении объекта и управлении им. Алгоритм адаптивного
управления имеет двухуровневую структуру (рис. 4.1). Алгоритм 1-го уровня
(алгоритм регулирования или алгоритм основного уровня) зависит от вектора параметров
0 (вектора параметров регулятора), при каждом ^ е S он должен обеспечивать
достижение ЦУ при соответствующем выборе 0 = 0(£). Алгоритм 2-го уровня изменяет
(настраивает) вектор 0 таким образом, чтобы обеспечить достижение ЦУ при
неизвестном £ е S. Совокупность алгоритмов регулирования и адаптации называется
алгоритмом адаптивного управления, а динамическая система, состоящая из объекта и
устройства, реализующего алгоритм адаптивного управления, - адаптивной системой
управления (АдСУ). Формализуем задачу синтеза. Пусть непрерывная динамическая
система, так называемый «обобщенный объект», описывается уравнениями состояния
Глава 4. Адаптивные системы 253
X(O = F(X,Y,U,N,,$,O, (4.1)
XB(O = G(X,Y,U,N2,$,O, (4.2)
где FQ,GQ - известные вектор-функции;
Nj, N2 - возмущения на ОУ и помехи измерений;
XeRn,V eRm9Y eRr9XueRl - векторы состояния, управления, внешних
входов и выходов ОУ соответственно.
В уравнения (4.1), (4.2) помимо самого объекта управления могут входить
математические модели исполнительных, измерительных устройств, эталонная модель и т.п.
В простейшем случае цель управления задается в виде целевого неравенства
д<А при t>U,A>0, (4.3)
где q(t) = q(X(t), U(0) - целевая функция.
В задачах слежения в качестве целевой функции выбирается функция невязки
между действительной и желаемой траекторией движения объекта q = q(E(t\t),
Е(/) = Х(/)-Хм(/). Желаемое поведение системы может быть задано, например, с
помощью эталонной модели
XM(0 = /rM(XM,Y,0, (4.4)
где Хм е Rn - вектор состояния эталонной модели, Y e Rm - вектор задающих
воздействий.
В частном случае при Хм(/) = 0 (задача стабилизации) получается целевая
функция текущего состояния объекта q = q(X(t), t).
Задача синтеза состоит в нахождении алгоритма управления из заданного класса
двухуровневых алгоритмов вида
и(0 = i/,(X(/),u(0,e(0, Y(0), (4.5)
0(0 = 0, (Х(/),и(0,в(0, Y(0), . (4.6)
обеспечивающих достижение ЦУ (4.3) в системе (4.1), (4.2), (4.5), (4.6) для каждого
£>еЕ . Здесь £/,(•)> ©*(•) некоторые операторы. Если АдСУ функционирует в
стохастической среде, то цель (4.3) заменяется «усредненной» целью
Mq < А при t > U. (4.7)
Система (4.1), (4.2), (4.5), (4.6) называется адаптивной в классе 3 по
отношению к цели управления, заданной одним из неравенств (4.3), (4.7), если для любого
£ е 3 и при любых начальных условиях Х(0), U(0), 0(0) выполняется
соответствующее неравенство (4.3) или (4.7).
Так как адаптивные системы управления отличаются от традиционных
(неадаптивных) систем управления н&чичием контура адаптации, то для формулировки
задачи синтеза алгоритма адаптации удобно использовать понятие «обобщенного
настраиваемого объекта» (ОНО). Обобщенный настраиваемый объект включает в себя
всю неизменяемую часть системы («обобщенный объект» и регулятор основного
контура). В качестве входов ОНО могут выступать как настраиваемые параметры
регулятора (4.5) 0(/) (см. рис. 4.1), так и входы обобщенного объекта U(f)
(0(f) = U(/)), если основной контур управления отсутствует. При этом формально
описание системы в форме (4.1), (4.2) или в форме (4.1) - (4.3) представляет собой
систему алгебраических и дифференциальных уравнений. В первом случае задача
состоит в синтезе алгоритма адаптивного управления (4.5), (4.6), а во втором случае -
алгоритма адаптации (4.6).
254 Методы современной ТАУ. Часть IV
В рамках приведенных выше схем можно рассматривать также нестационарные
задачи, в которых вектор неизвестных параметров £ меняется во времени (£ = £(/)).
При этом вектор «идеальных», с точки зрения ЦУ, параметров регулятора 0*
также зависит от времени. Он должен для достижения цели «отслеживать» дрейф
неизвестных параметров, приспосабливаясь к изменяющимся условиям. Ясно, что такое
поведение системы возможно лишь при медленном изменении £ по сравнению с
изменением состояния объекта X, когда в измерениях накапливается достаточно
информации о дрейфе. При этом быстрые процессы управляются первым уровнем системы -
регулятором, а медленные изменения отслеживаются вторым уровнем - адаптором.
Двухуровневая система управления находится в соответствии с разделением движений
объекта на быстрые {координатные) и медленные (параметрические).
Предположения о медленном изменении неизвестных параметров (гипотеза
квазистационарности) практически означает, что параметры объекта считаются
постоянными, «замороженными». Если же скорость изменения £ сравнима со скоростью
процессов в объекте и изменением внешних воздействий, то целесообразно
задаваться законом дрейфа £ , а параметры закона считать новыми параметрами. Тем самым
задача сводится к квазистационарной.
4.3. МЕТОДЫ СИНТЕЗА АЛГОРИТМОВ АДАПТАЦИИ
Условно методы синтеза адаптивных систем можно разделить на эвристические и
теоретические. В эвристических методах отсутствует строгое обоснование
устойчивости адаптивной системы и, как следствие, условия применимости рассматриваемых
методов. Этот подход был характерен для раннего этапа развития адаптивных систем.
Теоретические (строго обоснованные) методы можно разделить на два класса:
точные и приближенные. В соответствии с двухуровневой схемой адаптивной
системы задача разбивается на два этапа: синтез основного контура и контура адаптации.
Среди точных методов синтеза основного контура наибольшее распространение
получили следующие методы:
1) метод инвариантности [11, 24], реализующий идею выбора «идеального»
управления из равенства правых частей эталонной модели и модели объекта
управления;
2) метод модального управления, в котором «идеальное» управление выбирается
исходя из желаемых показателей качества переходного процесса;
3) оптимальный синтез, в котором решается задача оптимизации по управляющему
воздействию некоторого асимптотического (при t -> оо) показателя качества.
В основе приближенных подходов лежат методы декомпозиции, основанные на
упрощении модели и синтезе по упрощенной модели. Для упрощения и
декомпозиции используются методы теории возмущений [20, 41], методы скалярных и
векторных функций Ляпунова [6, 19], линеаризация, понижение порядка, отбрасывание
возмущений. Популярным является подход, основанный на выделении быстрых и
медленных движений системы, при этом синтез осуществляется по модели,
описывающей медленные движения. К таким методам относятся:
1) метод усреднения, начало которого было положено работами Н.М. Крылова,
Н.Н. Боголюбова [16] и Б. Ван дер Поля [4];
2) метод сингулярных возмущений. Фундаментальные результаты в этой области
принадлежат Н.Н. Красовскому [12], Л.С. Понтрягину [25], А.Н. Тихонову [30]
и их ученикам.
Основными методами синтеза алгоритмов адаптации являются:
I) градиентные методы. Алгоритм изменения настраиваемых параметров
строится в направлении антиградиента целевой функции от ошибки рассогласова-
Глава 4. Адаптивные системы 255
ния. Алгоритмы требуют вычисления функции чувствительности, которая
зависит от параметров объекта, что противоречит постановке задачи
адаптивного управления. Это преодолевается приближенным вычислением функции
чувствительности с использованием эталонной модели [24];
2) методы, основанные на применении функций Ляпунова. Большое число
алгоритмов этой группы можно получить в рамках схемы скоростного градиента
[2, 33, 35, 41]. В методе используется тот факт, что градиент целевой функции
близок по направлению с градиентом ее приращения по времени. Алгоритм
адаптации строится в антиградиентном направлении от скорости изменения
целевой функции. Метод обеспечивает существование функции Ляпунова в
виде суммы целевой функции и квадрата невязки между настраиваемыми и
идеальными параметрами;
3) методы, основанные на теории гиперустойчивости. Синтез контура
адаптации осуществляется из условия гиперустойчивости системы с адаптивным
регулятором. Сравнение методов группы 2 и 3 приведены в работе [45];
4) методы, основанные на организации скользящих режимов. При
возникновении скользящего режима система приобретает свойства инвариантности по
отношению к параметрическим возмущениям и помехам. К этой группе
примыкают системы с сигнальной адаптацией, полученные на основе схемы
скоростного градиента;
5) методы, основанные на введении «бесконечно большого» коэффициента
усиления [13, 18]. В методе используется бесконечно большой коэффициент
усиления, за счет которого передаточная функция системы становится
эквивалентной передаточной функции эталонной модели. Главные недостатки
метода: возможная потеря устойчивости при большом коэффициенте усиления,
слабая помехозащищенность.
Системы, построенные на основе методов четвертой и пятой группы, часто
называют системами с адаптивными свойствами, поскольку в них отсутствует контур
настройки параметров.
4.4. ПОИСКОВЫЕ АДАПТИВНЫЕ СИСТЕМЫ
В поисковых адаптивных системах (ПАС) выбор направления настройки
параметров, обеспечивающих экстремальное значение меры качества, осуществляется на
основе организации специальных поисковых сигналов.
4.4.1. Системы экстремального регулирования
Простейшими ПАС являются большинство экстремальных систем. В системах
экстремального регулирования инерционностью объекта часто пренебрегают, а задача
состоит в «отслеживании» дрейфа экстремума статической характеристики объекта.
Типовая блок-схема экстремальной системы регулирования представлена на рис. 4.2.
На входы объекта подаются поисковые воздействия, и оценивается реакция на
них объекта, проявляющаяся в изменении целевой функции q(t). Определяются те
воздействия, которые приближают целевую функцию к экстремуму.
Экстремальные системы классифицируются по способу поиска экстремума:
системы с регулярным поиском и случайным поиском. К регулярным методам относятся
хорошо известные методы полного перебора, Гаусса - Зейделя, градиентного поиска
и их модификации. В случайных методах направление поиска ищется случайным
образом. Подробнее представление об экстремальных системах можно получить из
учебных пособий [1, 5] и справочников [27, 28].
256
Методы современной ТАУ. Часть IV
U(t)
Органы
управления
J
N
ОУ
х.(/)
Устройство
формирования
целевой функции
Устройство
организации
поиска
Я(!)
Y
Рис. 4.2. Структурная схема экстремального регулирования
4.4.2. Поисковые алгоритмы непрямого адаптивного управления
с настраиваемой моделью
Непрямое адаптивное управление предполагает решение задачи в два этапа. На
первом этапе осуществляется идентификация объекта. На втором этапе - выбор
коэффициентов регулятора.
В поисковых системах идентификации измеряются входные и выходные сигналы
объекта, но, в отличие от беспоисковых систем, ведется активный поиск,
сопровождающийся испытаниями адаптивной модели по параметрическим каналам. При этом
расширяются границы работоспособности систем идентификации с адаптивной
моделью. При неполной структурной адекватности модели и объекта, при воздействии на
объект случайных возмущений, при сильном отличии в начальных значениях
параметров настраиваемой модели от параметров объекта возможно существование множества
экстремумов целевой функции по настраиваемым параметрам. В этих условиях
беспоисковые алгоритмы идентификации часто оказываются неработоспособными.
В основе поисковых систем могут использоваться простейшие методы поиска
экстремума, начиная от простого перебора параметров и кончая градиентными
методами, а также их комбинации. Общая структурная схема поисковой идентификации
представлена на рис. 4.3.
Задачей алгоритма поисковой настройки является изменение параметров модели
0М таким образом, чтобы минимизировать целевую функцию невязки q(E).
Рассмотрим подробнее непрерывный градиентный алгоритм идентификации с
синхронным детектированием [28].
Пусть объект и модель описываются уравнениями состояния
X = F(X>Y,e>/,N1), XB=G(X,Y,0 + N2, (4.8)
XM=FM(XM,Y,0M,O, XBM=GM(XM,Y,0, (4.9)
где X e Д\ XM e #", XB e /?', Хвм е #', 0 e Rm, 0M efjef - векторы
состояний, выходов, параметров и входов объекта и модели соответственно; Nl9 N2 -
векторы возмущений и помех измерения. Целью идентификации является минимизация
целевой функции q(E) невязки
' Е = ХВ-ХВМ. (4.10)
Глава 4. Адаптивные системы
257
—Ли —N-Ji—,
+
г*
X = F(X,Y,©,/,N,)
X
G(X,Y,/,N2)
Объект управления
Алгоритм
поисковой
настройки
4-
КгЗг
,<7(Е)
Вычисление
целевой
функции
т
0.
XM=FM(XM,Y,0M,')
Gm(Xm,y,o
*в.м
I
| Настраиваемая модель
Рис. 4.3. Структурная схема системы поисковой идентификации
Предполагается, что #(Е) - выпуклая, положительно определенная функция, а
настраиваемая модель - наблюдаемая, так что известны текущие значения Хм, Хм, €>м.
Настройку параметров модели будем осуществлять в направлении антиградиента
целевой функции
eM=-rVQug(E)9 (4.11)
где Г = Гт>0 - тхт матрица коэффициентов усиления, V0 ff(E) = -
V ^м )
градиент целевой функции по параметрам модели.
Для осуществления градиентного метода необходимо определить
а?(Е)= дд(Е) dGM dXM
50М 5Е 'дХм'дем '
Основная трудность в вычислении правой части уравнения (4.12) состоит в нахожде-
нии ——. Добавим к вектору параметров 0М малую высокочастотную центрированную
составляющую 50М (0. При этом уравнение модели в вариациях будет иметь вид
(4.12)
дК
5F.
м 5ХМ м Э0М м
(4.13)
Пусть поисковый сигнал 80М является быстроменяющейся вектор-функцией по
сравнению с собственными движениями модели и движением, порожденным
внешним воздействием Y(/) (т.е. процесс Х(0 считается квазистационарным). Тогда
вариацией 5Хм(0 можно пренебречь ввиду ее малости по отношению к 80М, так что
будет справедливо приближенное равенство
258 Методы современной ТАУ. Часть IV
или в операторной форме
5ХМ«|^50М (4.14)
8Х«*-рШ;т»> (4Л5)
где p-dldt - символ дифференцирования по времени.
Из соотношения (4.15) при квазистационарном режиме получаем
д&и* Рд&м'
причем для достаточно высокочастотного поискового сигнала 80М приближенное
равенство можно заменить строгим.
С учетом (4.16) уравнение (4.12) принимает вид
д&м дЕдхм(рдему
Для вычисления (1//?)(9FM/50M) применим процедуру синхронного
детектирования. Умножим выражение (4.15) справа на 80^ и усредним полученное уравнение
по некоторому скользящему интервалу времени
1 dFM
где
5ХМ(50М)Т = ^-80м(50м)\ (4.18)
5ХМ(50М)Т=Д } 8Хм(т)(80м(т))Т</т.
t-T
Учитывая квазистационарность настройки модели, получаем
5ХМ(50М)Т=~^-50М(5ОМ)Т. (4.19)
Пусть поисковые сигналы выбираются из условия невырожденности матрицы
80М(80М)Т. Тогда алгоритм настройки параметров (4.11) с учетом (4.17), (4.19)
принимает вид
0М = г{80м(50м)Тр60M(5XH)T^^J . (4.20)
Структурная схема системы идентификации представлена на рис. 4.4.
Заметим, что термин синхронное детектирование связан с изменением вариации
8ХМ(/) синхронно изменению вариации 80М (поисковых сигналов) согласно
равенству (4.15) при достаточно высокочастотном сигнале 80М, а также с возможностью
детектирования (выделения) градиента на основе измеряемых величин путем их
усреднения (сравните (4.11) и (4.20)).
Условия применимости алгоритма:
1) целевая функция q(E) - положительно определенная и выпуклая по Е;
2) отличие структуры модели объекта, а также начальное рассогласование
векторов 0 и 0М обеспечивают единственное значение экстремума целевой
функции;
Глава 4. Адаптивные системы
259
3) поисковые сигналы 8@м - малы и центрированы, удовлетворяют условию
квазистационарности процесса Хм(0 и невырожденности матрицы 80М(50М) .
j>
X
Л
X = F(X,Y,e,/,N,)
0м + 50.
XM = FM(XM,Y,0H,O
GM(XM,Y,0
Рис. 4.4. Структурная схема поисковой системы с градиентным алгоритмом
Замечания:
1) В случае многоэкстремальности целевой функции целесообразно использовать
градиентный метод в сочетании с другими методами поиска, например, со
случайным поиском района главного экстремума.
2) Условие невырожденности матрицы 8@М(80М) , в частности, выполняется
для ортогональных функций, обладающих свойством
5©H(50M)T=diag80M(50M)T.
К таким функциям, например, относятся периодические сигналы с
различными частотными компонентами, функции Уолша и т.п.
3) Вычислительные затраты при реализации алгоритма могут быть сокращены за
счет вычисления матрицы 80М(80М) заранее на стадии проектирования, а
также при аналитическом раскрытии матрицы столбца —
4) Процедура усреднения типа скользящего среднего может быть заменена
усреднением в любом линейном фильтре низких частот, а с учетом наличия в
алгоритме блока интегрирования Tip может быть и вовсе опущена.
Пример 4.1.
Пусть объект управления описывается передаточной функцией вида
260
Методы современной ТАУ. Часть IV
где к - коэффициент усиления, а - неизвестный параметр.
Провести идентификацию параметра а методом синхронного детектирования, считая, что на объект
действует задающее воздействие у = sin(/),& = 2 , а выход измеряется с аддитивной помехой г| в виде
центрированного случайного стационарного процесса с нормальным распределением.
Выберем настраиваемую модель в виде звена первого,порядка
где 6 = 6(/) - настраиваемый параметр.
Пусть на вход модели поступает измеряемое задающее воздействие у с аддитивной помехой г| в
виде центрированного случайного стационарного процесса с нормальным распределением.
Целью управления будем считать синтез алгоритма настройки параметра 6 , обеспечивающего
минимизацию целевой функции q = e2, где е = х-хм - рассогласование между выходами объекта и
настраиваемой модели.
Выберем в качестве поискового сигнала высокочастотный, по сравнению с задающим воздействием,
сигнал вида 60 = 0,lsin(200/). Тогда в соответствии с (4.20) алгоритм идентификации будет иметь вид
582
где б92 = 200 - заранее вычисленное значение для заданного поискового сигнала.
Структурная схема системы идентификации приведена на рис. 4.5, а. Результаты моделирования при
разных значениях дисперсии помехи Эц - 0; 0,1; 0,3 приведены на рис. 4.5, б - г соответственно.
х = -Зх + 2у
бб&х
Генератор
поисковых
сигналов
56
х = -Qx + 1у
0(')f e.
02040608 1 12141618 2 22242628 3
г02Ь'40 60в 112141618 22 22 42 62 8332
Рис. 4.5. Структурная схема и результаты моделирования
Глава
4. Адаптивные системы
У
1
12-
1-
08
Об
04
1 ill 11 I
.и JulUJkii
Jr PL
. iNF1 ]Ши
IjJJ'1 Ж\
0 2-||И \Щ1
W Л
J02040608 1 12141618 2 22242628 З"1'
-0 2:
i
8(0 -
36
34
32
3
28
26
24
22
2
18
16
1 4
12
1
08
* 06
L 04
261
\ /^\
\ / ^\.
I
1
1
1
/
/
1
I
I
I
1
1
у t
Ь20'40б6в 1 121 41618 2 222*42628 3 32 ^
0 20 40 60 8 1 12141618 2 22242628 3 32
Рис. 4.5. Структурная схема и результаты моделирования (окончание)
В заключение следует отметить, что, несмотря на очевидные преимущества
поисковых алгоритмов, их реализация намного сложнее, чем беспоисковых алгоритмов
адаптивного управления, т.к., по крайней мере, требует наличия генератора
поисковых сигналов.
4.5. БЕСПОИСКОВЫЕ АДАПТИВНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
Выше подчеркивалось, что динамика контура самонастройки (адаптации)
существенно влияет на общую динамику СНС. Поэтому синтез неразрывно связан с
обеспечением устойчивости замкнутого объекта с контуром адаптации.
4.5.1. Синтез адаптивной системы методом функций Ляпунова
Метод функций Ляпунова является одним из основных методов исследования
устойчивости и качества движения нелинейных систем, описываемых обыкновенными
дифференциальными уравнениями. Метод нашел глубокое и эффективное
приложение к проблеме синтеза адаптивных систем управления.
Поясним идею применения метода функций Ляпунова на примере синтеза
алгоритма адаптивного управления для линейного стационарного объекта управления [46].
Постановка задачи. Пусть объект управления (ОУ) описывается уравнением
состояния:
262 Методы современной ТАУ. Часть IV
X = AX(f) + BU(f), (4.21)
где XeR" - вектор состояний ОУ; UeRm - вектор управления; А,В- пхп и
п х т постоянные матрицы параметров ОУ.
Предполагается доступность измерению всего вектора состояния ОУ, так что
Х. = Х(/).
Рассмотрим задачу обеспечения ОУ желаемой динамики, которую зададим с
помощью эталонной модели
Хм=АмХм(0 + Вм*(0> (4.22)
где Хм е Rn -вектор состояния эталонной модели, Y(/) e Rm -задающее воздействие.
Выбор эталонной модели зависит от требований, предъявляемых к замкнутой
системе (времени переходного процесса, перерегулирования, астатизма и т.д.). При
этом, естественно, она должно быть устойчивой, т.е. матрица Ам - гурвицева.
Будем считать, что вектор параметров £ ОУ, состоящий из коэффициентов
матриц А, В, заранее не определен. Известно лишь, что % е S. Множество S можно
задать, например, с помощью максимальных и минимальных значений, которые
могут принимать параметры ОУ в зависимости от условий изготовления и
функционирования.
Формализуем цель управления (ЦУ), потребовав, чтобы
ШпЕ(0 = 0, (4.23)
/-»оо
где Е(/) = Х(/)-Хм(/) -ошибка системы (4.21) и (4.22).
Таким образом, в соответствии с ранее рассмотренной классификацией ставится
задача построения СНС с явной эталонной моделью. Решим задачу на основе прямого
адаптивного подхода. В соответствии с двухуровневой структурой СНС будем решать
задачу в два этапа: построение основного контура и синтез контура адаптации.
Синтез основного контура. Задача решается в предположении, что параметры
ОУ известны. Для получения структуры «идеального» регулятора запишем
уравнение в отклонениях
E(0 = AME(0+(A-AH)X(/) + BU(/)-BMY(/). (4.24)
Потребуем выполнение условия разрешимости уравнения
(A-AM)X(/) + BU(f)-BMY(/) = O (4.25)
относительно U, e Rm при любых X е Rn, Y e Rm .
При этом уравнение (4.24) будет иметь вид
Ё = А„Е(0,
решение которого асимптотически устойчиво в силу гурвицевости матрицы Ам, и,
следовательно, в идеальных условиях ЦУ (4.23) достигается.
Идеальное управление, удовлетворяющее соотношению (4.25), описывается
уравнением
U.(0 = K?X(/) + K.YY(0,
которое можно записать в форме
U+(0 = K+YK+xX(0 + K+YY(0, (4.26)
где К^,кУ,К^,кУ - матрицы идеальных коэффициентов регулятора,
удовлетворяющие уравнениям:
Глава 4. Адаптивные системы
263
ВК,Х=АМ-А, BK+Y=BM,
ВМК* = Ам — А, ВК+ = Вм .
(4.27а)
(4.276)
Условия (4.27) часто называют условиями согласованности модели и ОУ, и они
определяют возможность решения поставленной задачи в условиях точного знания
параметров ОУ. Заметим, что в соответствии с (4.27) матрицы идеальных
коэффициентов регулятора зависят от конкретных параметров ОУ £ е Е. Поэтому в ситуации
неопределенности параметров ОУ целесообразно настраивать матрицы
коэффициентов регулятора для достижения в системе ЦУ (4.23).
Выберем структуру основного контура в соответствии с (4.26) в виде
u(0 = ky(0kx(/)x(0+ky(/)y(0,
(4.28)
где Kx(f),KY(/) - матрицы настраиваемых коэффициентов регулятора.
Подставляя (4.28) в уравнение (4.24), получаем описание обобщенного
настраиваемого объекта (ОНО), состоящего из ОУ (4.21), модели (4.22) и регулятора
основного контура (4.28), в форме
e(0 = ame(/)+bm(kx(/)-k<x)x(0+bm[(k.v)"'ky(0-i]x
x(kx(/)X(/) + Y(/))=AhE(/)+ (4.29)
+BII[o(/)x(0+'r(0Kv(0(v(0+Kx(0x(0)].
где 1-тхт единичная матрица, Ф(/), Ч*(0 - матрицы отклонений коэффициентов
регулятора от «идеальных» значений
ф(0 = кх(г)-к?, ч»(/) = (кГ)"'-(ку (/))"'. (4.зо)
Структура ОНО показана на рис. 4.6.
*м=Амхм+Вмг
5) N
кг(0
U
х - Ах + Ви
кх(0
X
Ч|
Рис. 4.6. Структурная схема обобщенного настраиваемого объекта
Синтез контура адаптации. Для синтеза алгоритмов настройки матриц Кх (/) и
KY (/) запишем уравнение ОНО (4.29) в виде
Ё(/) = АмЕ(/) + Вмв(/)2:(/)> (4.31)
где 0(/) = (Ф(/):|Р(/)) - расширенная матрица отклонений настраиваемых
коэффициентов от их «идеальных» значений,
264 Методы современной ТАУ. Часть IV
е(')ш[к*(о[у(О+к»(г)х(о1)
- р х 1 вектор сенсоров (вектор, элементы которого являются измеримыми или
вычислимыми на основе измерений функциями), р = п+т.
Рассмотрим в качестве претендента на роль функции Ляпунова квадратичную
скалярную функцию вида
F = O,5ETHE + O,5tr(0Tr~l0), Н = НТ, Г = ГТ. (4.32)
Здесь trD означает сумму элементов главной диагонали матрицы D (след
матрицы).
Определим производную функции (4.32), используя уравнение ОНО (4.31)
V = ЕТНЁ + tr ((-^Г1©) = ЕТНАМЕ + ЕтНВм0£ + tr (в7!4"1©) =
= ЕТНАМЕ + trNB7HE2:T + Г"1©)1 ©1
Нетрудно заметить, что если алгоритм адаптации выбрать в виде
0 = -ГВ7НЕ2Т (/), Г = Гт > 0, (4.33)
то функция V обладает свойствами
V>0 и F<0,
т.е. является функцией Ляпунова.
Последнее утверждение следует из гурвицевости матрицы Ам, для которой в силу
леммы Ляпунова существует Н = Нт > 0 , удовлетворяющее матричному уравнению
A7H + HAM=-Q, Q = QT>0,
и,следовательно,
F = -0,5ETQE. (4.34)
Таким образом, система (4.31), (4.33) устойчива и в силу (4.34) ЦУ E(f) -> 0 при
t -» оо достигается. Так как V (4.34) не содержит в явном виде настраиваемых
параметров, то из приведенных рассуждений следует лишь ограниченность матрицы 0 .
Условия идентифицируемости. Усилим задачу, потребовав, чтобы адаптивная
система (4.31), (4.33) была асимптотически устойчивой, т.е. выполнялось
НтЕ(/) = 0,
^°° /ч (4.35)
lim 0(0 = 0.
Последнее условие эквивалентно требованию
Кх(/)->К?, К¥(/)->кУ при *->оо,
что означает наделение алгоритма (4.33) идентифицирующими свойствами.
Предположим, что компоненты вектора Е(/) - ограниченные функции времени.
Тогда из устойчивости системы (4.31), (4.33) и Е(/) = 0 при t -> оо следует
lim 0(0 = lim (-ГВМЕ2Т )= 0
и, следовательно, 0да = lim 0(0 - постоянная матрица.
Рассмотрим траектории, вдоль которых V = 0 или Е = 0 . Из (4.31) получаем
Глава 4. Адаптивные системы 265
Ви0„Щ = О. (4.36)
Пусть Вм - матрица полного ранга, тогда из (4.36) следует тождество
е„Щ = о. (4.37)
Обозначим 0, - вектор-столбец матрицы 0да и а, - элемент вектора £ . Это
позволяет переписать (4.37) в виде
Z®,a,(0 = 0. (4.38)
Предположим, что £(/) - периодический вектор (£(/) = £(/ + Г)), элементы
которого являются сигналами с различающимися частотными компонентами. Это
означает, что а, (/) - линейно независимые функции времени. При этом уравнение (4.38)
имеет только тривиальное решение
0,=О, / = 1,2,...,/?,
так что
000=0.
Таким образом, в предположении периодичности вектора £(/) из Е = 0 следует
0 = 0.
Проведенный анализ устойчивости позволяет сформулировать следующую теорему.
Теорема 4.1. Пусть пхп матрица Ам является устойчивой, пхт матрица Вм -
полного ранга, Г = Гт>0 - тхт матрица, Н = НТ - пхп матрица,
удовлетворяющая уравнению Ляпунова
А^Н + НАМ = -Q, Q = QT > 0, (4.39)
и Е(/)-рх1 вектор ограниченных функций. Тогда система [п + тр)
дифференциальных уравнений (4.31), (4.33)
Ё = АмЕ + ВмО(02(0>
0 = -ГВ^НЕ(/)2(/)Т
устойчива и Е(/)-»0 при /-»оо. Более того, если р компонент вектора £(/) -
сигналы с взаимно различными частотными компонентами, то система (4.31), (4.33)
асимптотически устойчива в целом.
Таким образом, теорема 4.1 сводит задачу синтеза адаптивной системы
управления к конструированию структуры основного контура, обеспечивающего приведение
описания ОНО к виду (4.31) и использованию для настройки неизвестных
параметров регулятора (или самого ОУ) алгоритма (4.33). При этом в вектор сенсоров £(/)
должны входить лишь измеряемые или вычисляемые на основе измерений
ограниченные функции времени, а матрицы Ам, Г, Н удовлетворять условиям теоремы.
Для реализации алгоритма адаптации следует записать уравнение (4.33) в
терминах матриц настраиваемых коэффициентов KX(/),KY(/). Для этого достаточно
представить Г в виде
О
где Г, = ГJ > 0 - квадратные матрицы соответствующих размеров. При этом система
(4.33) записывается в виде
266
Методы современной ТАУ. Часть IV
Ф = -Г,В^НЕ(0Хт(0,
Ф = -Г2В£НЕ (/) (Y+К ХХ )Т (к v )T.
Используя равенства (4.30), с учетом К? = 0, К^ = 0 получаем
Кх(/) = -Г,вЗ;НЕХт(/),
ky (t)=-к¥г2в^не (y+кхх)т (ky )t ky.
Структурная схема адаптивной системы ((4.31), (4.33)) с учетом структуры ОНО
(4.40)
(рис. 4.6) приведена на рис. 4.7.
Y
*2_
ОНО
ky(0
Кх(0
К = -Г.В/.НЕХ
Е?
3^
.=-=.Y__V /.ttlV\T_—i
KY = -KYr2B^HE(Y+Kxx) (KY) К
Рис. 4.7. Структурная схема адаптивного управления линейным ОНО
Пример 4.2.
Пусть объект управления описывается моделью вида
Х = АХ + Ви,
. , ГО П ЛЛ
где X е R , и € R ; А = , В = ; а0, at, Р - неизвестные параметры.
Требуется синтезировать алгоритм адаптивного управления, обеспечивающий достижение близости
траекторий замкнутой системы и эталонной модели, т.е. ЦУ: X - Хм -* 0 при / -> оо.
Зададим структуру эталонной модели в виде уравнения состояния
ХМ = АМХМ + ВМ^,
где
Хм е R2, у е R1; Ам в , Вм = ; aQ , ах, b - параметры эталонной модели.
\а0 ах) \Ь)
Параметры эталонной модели выберем исходя из желаемого расположения полюсов замкнутой
системы A,J=-1, Л.2 =-2 так, что s2-als-aQ=[s-\\Ms-'k2) - характеристическое уравнение эталонной
модели.
Получаем я, = -3 , а0 = -2 . Значение b выберем равным 2. При этом статическая ошибка эталонной
модели будет равна нулю.
Этап 1. Синтез алгоритма основного контура управления.
Проверим условия согласованности модели объекта управления и эталонной модели (4.276)
в£'=вм,
ВМК* =Ац~*А.
Очевидно, что условия выполнены при любых параметрах объекта и эталонной модели (р * 0, h*Q).
Идеальное управление выберем в форме (4.26)
и.(() = кУ[кЩ)+у(1)],
где k? щ 6/Р» *i* = (ао ~ ао )/Ь, к\ = («1 - Щ )/b - «идеальные» параметры регулятора (к? = [к\ к\)),
Заменяя «идеальные» параметры регулятора настраиваемыми, получаем алгоритм основного контура
управления в виде
Глава 4. Адаптивные системы
267
«(О = *ЧО[(М'М')+Ы'М'))+>(')]-
Этап 2. Синтез алгоритма адаптации.
Алгоритм настройки параметров регулятора выберем в виде (4.40) при Г, = у,1, у, > 0, у2 > 0
к*=-У1(о б)н(*'~*ык *2)>
\x2~X2mJ
F = -y2(P)3(0 *)н(* "*"](,-+*,*.+*Л). .
\Х2 Х2гл)
где Н = Нт > 0 - 2x2 матрица, являющаяся решением уравнения Ляпунова для эталонной модели:
HAM+Aj,H = -G,
где G = GT > 0 .
(4 0\
Выбирая G = , получаем Н --
4з '
1 1
г)
Таким образом, алгоритм адаптации имеет вид
*i=-Y|8(')*i(').
*2s-Y|8(0*2(0.
^—Yi8WH0 + *ix(0*iW + *2X W*2W)^W.
8(0 = 2е,(0 + 4е2(0А
где et =Jf,(/)~Jf/.M , Y2=Y2*(^) >0 " коэффициент усиления, введенный для упрощения реализации
алгоритма (при этом антиградиентное направление настройки ку не меняется, а изменяется лишь ее
скорость).
01 2 4 6 8 10 12 14t16 18 20Й 24 26 28 30
Л
V
ib
f
2t)
3d
к/
*
t
40 *
10
kv
Рис. 4.8. Результаты моделирования (пример 4.2)
268 Методы современной ТАУ. Часть IV
Результаты моделирования системы адаптивного управления при ао = -1, а, =1, р = 1, у, =5,
у2 = 10 , нулевых начальных условиях для эталонной модели и объекта и начальных условиях алгоритма
адаптации к\0' = 0, к\°' =0, ... , Р(0) = 1 ... приведены на рис. 4.8. Соответствующие значения
идеальных коэффициентов регулятора основного контура равны к/ - 2, к\ - -0,5 , к*2 = -2 . В качестве
заданного входного воздействия был выбран меандровый сигнал у - 0,5(l+sign(sin((rc /)/б))), обеспечивающий
алгоритму адаптации дополнительные идентификационные свойства.
4.5.2. Схема скоростного градиента
Многообразие структур объектов и целей управления, возможность широкого
выбора структуры основного контура даже при использовании квадратичных форм
функции Ляпунова порождает целый спектр алгоритмов адаптации. Для каждого из
этих алгоритмов, подобно теореме 4.1, должны быть сформулированы условия
применимости, обеспечивающие достижение поставленной ЦУ и устойчивости системы
адаптивного управления. Обоснование работоспособности алгоритмов, как было
показано в предыдущем параграфе, - задача не простая, а изобилие теоретических
выкладок затрудняет их использование в инженерной практике. Представляется
разумным иметь методы или схемы синтеза, позволяющие для конкретной ЦУ с учетом
специфики ОУ осуществлять выбор алгоритмов адаптации из некоторого семейства
(класса) алгоритмов и путем проверки выполнения заранее оговоренных условий
доказывать их работоспособность. К таким методам относится схема скоростного
градиента, в основе которой лежит идея настройки параметров в направлении,
противоположном скорости изменения целевого функционала вдоль траектории ОНО.
Эта идея принадлежит А.А. Красовскому [14, 15], который для задачи
идентификации с адаптивной моделью установил общий вид алгоритма адаптации, оптимального
по критерию обобщенной работы. Оптимальный алгоритм описывается
функциональным рядом и в чистом виде не реализуем. Однако в первом приближении он
совпадает с хорошо известными беспоисковыми градиентными алгоритмами. Если
взять второе приближение и предположить высокочастотность входного сигнала и
квазистационарность процесса настройки, то получается семейство алгоритмов
скоростного градиента. Обоснование алгоритмов скоростного градиента, их
модификации, способы огрубления, обеспечивающие сохранение работоспособности при
аддитивных и мультипликативных шумах, а также дискретизации алгоритмов управления
для нестационарных ОУ, наличия фазовых ограничений, сингулярных возмущений
рассматривались в работах А.Л. Фрадкова [2, 7, 33, 35, 37, 39,40,41].
Алгоритмы скоростного градиента и условия их применимости
Вернемся к постановке задачи, описанной в §4.2. В предположении измеряемости
компонент вектора состояния (ХВ(/) = Х(/)), отсутствии внешних возмущений
(Nj, N2 =0) и с учетом структуры основного контура (4.5), обобщенный
настраиваемый объект (ОНО) описывается дифференциальным уравнением вида
X = F(X,0($),;), (4.41)
где Xе R" - вектор состояния ОНО, 0е/?т° - вектор входов (вектор
настраиваемых коэффициентов регулятора).
Будем предполагать, что вектор-функция F(-) непрерывна по X, 0, t и
непрерывно дифференцируема по 0 , а ЦУ задается целевым неравенством (4.3) q < А при
t>U, А>0, где q -локальный q = q(X{t),t) или интегральный
Глава 4. Адаптивные системы 269
q = \q(X(s)>&{s),s)ds
О
целевой функционал (#(•) - скалярная функция).
Алгоритмом скоростного градиента (АСГ) называется правило изменения
вектора 0 , задаваемое уравнением адаптера вида
-* У; ;; = -rV0co X, 0, t), (4.42)
at
где Г = Гт > 0 - mQxmQ матрица коэффициентов усиления,
o(X,0,O = ^ + Vx<7TF(X,0,O
ot
- для локального функционала и
а>(Х,в,/) = ?(Х,в,/)
- для интегрального функционала представляет собой полную производную
функционала по времени в силу траектории системы (4.41), v|/(X, 0,/) - некоторая
вектор-функция, удовлетворяющая условию псевдоградиентности
V|/(X,0,/)T.V0co(X,0,/)>O. (4.43)
Это условие эквивалентно требованию, чтобы угол ф между векторами v|/() и
со(-) лежал в пределах от — до — (см. рис. 4.9).
V0co(X,0,/)
Рис. 4.9. Геометрическая интерпретация условия псевдоградиентности
Условие (4.43) выполняется, например, если
V|/(X, 0, /) = Г,У0со(Х, 0, /), (4.44а)
или
V (X, 0, /) = r2sign (V0co (X, 0, /)), (4.446)
где Г, =Г^ >0 (/ = 1,2) - твхтд матрицы, причем Г2 -диагональная, sign(V0co(-))
- вектор, состоящий из знаков компонент вектора Veco().
Условия применимости АСГ (4.42) для локального и интегрального целевого
функционала даются соответственно теоремами 4.2,4.3 [2].
Теорема 4.2. Пусть целевой функционал локальный и выполнены условия:
1) Условие разрешимости. Для любого PeRm0 существует единственное
решение 0 = Ф(Х,Р,/) уравнения 0 + v|/(X,P,/) = P.
2) Условие локальной ограниченности. Функции F(X, 0, t), Vxq(X,t),
vj/(X, 0, /), V0co(X, 0, /) локально ограничены равномерно по t, т.е. для
любого Р>0 существует c(fi) такое,что
270 Методы современной ТАУ. Часть IV
|f(x, ©, oHlvx<Kx> ОНИ*, ®, ОНК0^®, Oil £ *(р)
в любой области {(X, 0, /): ||х|| + ||е| < р, / > 0}.
3) Условие роста. Функция q(X,t) - неотрицательная, равномерно
непрерывная в любой области {(X, t): ||х|| < р, f > 0} и удовлетворяет соотношению
inf q(X, t) -> +оо при ||Л1| -> оо . (4.45)
4) Условие выпуклости. Функция о)(Х, 0, t) - выпуклая по 0 е Rm, т.е. для
любых 0,0, X, t выполнено неравенство
со(х, 0, /)-со(Х, 0, t) >(0-0)Т У0ю(Х, 0, t). (4.46)
5). Условие достижимости. Существует вектор 0*€Лтв и функция р(^)>0
при q > 0, такие, что для любых X, t
о)(Х,0„/)<-р(<7). (4.47)
Тогда все траектории системы (4.41), (4.42) с начальными условиями го множества
По = {(Хо, ©о): (lMe -Г+Г)(0о -0.) = О}
ограничены и #(Х(/), /)-> 0 при t -> оо , т.е. достигается цель управления (4.3) при
любом Д>0.
Теорема 4.3. Пусть целевой функционал - интегральный и выполнены условия
разрешимости, ограниченности функций F(X, 0, t), V0co(X, 0, t), Ф(Х, Р, t\ роста и
выпуклости теоремы 4.2. Пусть, кроме того, существует вектор 0* е Rm* , такой, что
ю(Х,0*,/)^О (4.48)
(условие достижимости для интегрального целевого функционала).
Тогда при любых Х(0), 0(0) в системе (4.41), (4.42) достигается цель управления
(4.3) при
A = ^(Xo,O) + O,5||0o-0.-v|/(Xo,0o,O)|2r+.
В теоремах приняты обозначения:
I n
||Х|| = J^xf - евклидова норма вектора X е R" ;
|Х||А = VXT АХ - норма, порождаемая матрицей А ;
А+ - матрица псевдообратная кА1;
0О = 0(0) - начальные условия.
Доказательство теорем 4.2, 4.3 проводится с использованием функций Ляпунова
вида
F(X, 0, 0 = <7(Х,О+О,5||0-0,|р • (4.49)
1 Вещественная матрица А+ размера тхп называется псевдообратной или обобщенно обратной для
матрицы А размера их/я, если выполняются условия
АА+А = А, A+=UAT = ATV,
где U,V - некоторые матрицы.
Глава 4. Адаптивные системы 271
В частности, это означает, что алгоритм адаптации, приведенный в пункте 4.5.1
принадлежит классу АСГ. В этом легко убедиться, непосредственно заменив Х(0 на
Е(0 , выбрав q(E, 0 = 0,5ЕтНЕ и вычислив со(Х, 0, t) в силу уравнения (4.31).
Для пояснения условий теорем 4.2,4.3 рассмотрим доказательство теоремы 4.2.
Доказательство теоремы 4.2 [2, 35].
Вычисляя скорость изменения функции (4.49) в силу системы (4.41), (4.42), имеем
Vt = o)(X(0,0(0,0 - P,Tr+rV0co(X(f), 0(0,0,
где Р, = 0(0-0* + Н/(Х(0,0(0,0•
По условию теоремы (Хо, 0О) е Qq , т.е. Ро е ЦГ), где ЦГ) - линейная
оболочка столбцов матрицы Г. В силу алгоритма (4.42) dPt/dteL(T) и, следовательно,
Р, е ЦГ) при всех / > 0. Но Г+Г - проектор на множество ЦГ) и, следовательно,
Г+ГР,=Р,.
При этом Vt принимает вид
Vt = со(Х(0,0(0,0-P,TV0co(X(0,0(0,0=
= со(Х(0,0», 0 + [<о(Х(0, в(0,0-со(Х(0,0*, 0]-
-P,TV0co(X(0,0(0,0-
Из условия выпуклости и достижимости получаем
Vt <-р(<?(Х, 0, O+(O(O-O*)TV0co(X(0,0(0, O-P/TV0co(X(0,0(0, 0 =
= -р(<7(Х, 0,0 - Ч/(Х(О, ©(0,0Т • V0co(X(O, 0(0,0-
Далее, из условия псевдоградиентности (4.43) имеем
F,<-p(4(X,0,0^0. (4.50)
Следовательно, F(X(0, 0(0, 0 ^ ^(Х(0), 0(0), 0) и траектории системы (4.41),
(4.42) ограничены.
оо
Наконец, из конечности интеграла \q(X(t), t)dt, вытекающего из (4.50), условий
о
локальной ограниченности и равномерной непрерывности #(Х(0,0 следует
достижение ЦУ #(Х(0, /) -> 0 при t -> оо.
Доказательство теоремы 4.3 проводится аналогично.
Замечания к теоремам 4.2,4.3:
1) Для однозначной разрешимости уравнения 0 + у(Х, 0, t) = t достаточно,
чтобы функция vj/(X, 0(0, 0 удовлетворяла условию Лившица по 0 с
константой / < 1: ||ч/(Х, ®, 0-Ч/(Х, 0,0|| ^ /|в-в|.
2) Условие роста можно ослабить, заменив его требованием, чтобы го
ограниченности q на решениях системы (4.41), (4.42) вытекала ограниченность Х(0 .
3) Условие выпуклости ю(Х, 0,0 по 0 е R™* означает, что скалярная функция
ю(Х, 0,0 растет по аргументу 0 не медленнее линейной функции (см.
рис. 4.10). В частности, при линейности со(Х, 0,0 по 0 неравенство (4.46)
обращается в равенство.
272 Методы современной ТАУ. Часть IV
со(Х,0,О
со(Х,0,/)
й(Х,0,О-со(Х,0,О
-т
0 0
Рис. 4.10. Геометрическая интерпретация условия выпуклости при 0е R1
4) АСГ, описываемые уравнением (4.42), принято называть алгоритмами в
конечно-дифференциальной форме. Частными случаями АСГ являются алгоритмы:
if**
а) — = -ГУ0ю(Х, 0, /) - дифференциальной формы; (4.51)
б) 0 = 0О -уi|/(X, 0, t) - конечной формы (у - множитель шага), (4.52)
которые получаются из уравнения (4.42) при V|/(X, 0, /) = 0 и Г = 0
соответственно.
Условия применения АСГ в дифференциальной форме (4.51) вытекают
непосредственно из теорем 4.2, 4.3. Условия применения АСГ в конечной форме (4.52) будут
рассмотрены ниже.
5) Смысл требований принадлежности начальных условий множеству Qo состоит
в том, что отклонение настраиваемых параметров от своих идеальных
значений вдоль направлений, по которым не действуют дифференциальные
составляющие, должно быть ограничено. Только при этом возможна компенсация
начального отклонения за счет конечных составляющих. При использовании
АСГ в дифференциальной форме (4.51) это требование снимается, т.е.
результат теоремы справедлив при любых начальных условиях ХО,0О. При этом
матрица Г+ в функции Ляпунова (4.49) заменяется на Г"1 (detr*O).
6) Наиболее существенными условиями теорем 4.2, 4.3 являются условия
выпуклости и достижимости, которые гарантируют достижение ЦУ. Условие
достижимости, по существу, означает наличие «идеального» управления,
позволяющего решать поставленную задачу в условиях полной априорной
информации о параметрах ОУ (0* = 0(£)).
Условия применимости АСГ в конечной форме (4.52) и интегральном целевом
функционале приведены в теоремах 4.4,4.5.
Теорема 4.4. Пусть целевой функционал локальный и выполнены условия
разрешимости, выпуклости и достижимости (при 0* = 0(Х, 0) теоремы 4,2. Пусть, кроме
того, при некоторых р > 0, 8 > 1 вектор 0Ф = 0(Х, О удовлетворяет условию
РY(X, O|V0co(X, 0, 0|w > ||0О -0ДХ, 0|, (4.53)
а вектор-функция v|/(X, 0, t) - усиленному условию псевдоградиентности
Ч/(Х, 0, /)т V0co(X, 0,0 £ p||V0co(X, 0, /)f, (4,54)
тогда в системе (4.41), (4.42) достигается цель управления (4.3).
Теорема 4.5. Пусть целевой функционал интегральный, выполнены условия
разрешимости и выпуклости теоремы 4.2.
Глава 4. Адаптивные системы 273
Пусть вектор 0* = 0(Х, /) удовлетворяет условиям (4.48), (4.53), а функция
\|/(Х, 0, i) - условию (4.54).
Тогда в системе (4.41), (4.52) достигается цель управления (4.3).
Замечания:
1) Усиленному условию псевдоградиентности удовлетворяют, например,
функции (4.44а) и (4.446) при 8 = 2,р = ачпй|(Г1) и 5 = 2,р = Хт[п(Г2)/ф^
соответственно. Здесь Xmin (Г) - минимальное собственное число матрицы Г.
2) При выполнении условий теоремы 4.4 доказано, что ЦУ (4.3) при А = 0
достигается за конечное время / = /* и при t > t* в системе возможно возникновение
скользящего режима на поверхности q = О.
3) Если величина ||0О -0*(Х, /)|| ограничена, то в (4.52) можно брать у = const.
В заключении отметим, что при дополнительных условиях АСГ обладают
идентифицирующими свойствами, т.е. обеспечивают в системе (4.41), (4.42) достижение
дополнительной ЦУ 0 -» 0* при /->оо. В частности, в линейных системах эти
условия сводятся к достаточному разнообразию внешних воздействий.
Подробнее с этими вопросами можно познакомиться, например, в [2] или
монографии [35].
Огрубление алгоритмов скоростного градиента [35]
Способность сохранения системой некоторых свойств (устойчивости, диссипа-
тивности и т.п.) при достаточно малых вариациях ее математической модели
называется грубостью (робастностью) системы к данному классу вариации модели.
Практическая ценность свойства грубости алгоритма управления состоит в
возможности получения приемлемых, с позиции точности, результатов управления
реальной технической системой с помощью регулятора, синтезированного по ее
математической модели.
Доказано, что АСГ в конечной форме (4.52) в естественных условиях при
ограниченных возмущениях N(0 (||N(/)| < AN < оо) и описании ОНО в виде
X = F(X,e,0 + N(0, (4-55)
или
X = F(X,e + N(f),0 (4.56)
является робастным даже при зависимости возмущения от фазовых координат
N = N(X, 0, t). Это достигается путем выбора достаточно большого коэффициента
у . Отметим, что модели (4.55), (4.56) являются характерными при учете шумов
датчиков измерения и адаптера.
Что касается АСГ в дифференциальной форме (4.51) или
конечно-дифференциальной форме (4.42), то они обладают робастностью только при дополнительных
условиях. Это объясняется тем, что система (4.41), (4.42) или (4.41), (4.51) находится
на границе устойчивости. Имеет место лишь ограниченность траектории (Х(0,0(0)
системы и асимптотическая устойчивость по части переменных состояния, а именно
по Х(0. Это приводит к тому, что при сколь угодно малых возмущениях управление
0(0 неограниченно растет при /-»оо, в то время как основная цель управления
продолжает достигаться.
Для преодоления негрубости алгоритмов используются два подхода: а)
препятствовать росту 0(0 при достаточно больших 0 ; б) прекращать изменение 0(0 при
19 Зак 416
274 Методы современной ТАУ. Часть IV
малых значениях q. Первый вариант реализуется введением в АСГ отрицательной
обратной связи, второй - введением зоны нечувствительности по целевой функции.
АСГ с отрицательной обратной связью имеет вид
</(О + М/(Х,О,/)) = _Г[АVeffl(X> в, г) + А/(в + V(X, 0, /))]. (4-57)
где Г = Гт > 0, к > 0, i|/Q удовлетворяет условию псевдоградиентности (4.34),
Л/(0) - вектор-функция, препятствующая чрезмерному увеличению ||©(f)|| •
Доказано, что при описании ОУ в форме (4.55), где N(/) = N(X, 0, /), и
локальном целевом функционале АСГ (4.57) обеспечивает замкнутой системе диссипатив-
ность. Более того, если при «идеальном» управлении в замкнутой системе
достигается ЦУ с А = А*, то при любых начальных условиях Х(0), 0(0) и достаточно
большом к АСГ (4.57) обеспечивает системе достижение ЦУ с уровнем, сколь угодно
близким к предельно достижимому.
На практике регуляризующую функцию М(0) часто выбирают в виде
М(0) = а0 (сх>0). Недостатком этого способа является существенное искажение
процесса управления при малых V0co(X, 0, /). Преодолеть этот недостаток можно
путем введения зоны нечувствительности по 1|о — oil, например, если взять
а(в-в) при 0-0 >d,
М(О) = \ _ (4.58)
[0 при||0-0|<</,
где а, d- положительные числа, 0 е ЯШв - некоторая априорная оценка вектора 0+;
или использовать релейную обратную связь
fGsign(0-0) при||в-0||></,
М(0) = " (4.59)
0 при 0-0 <rf,
где G > 0.
АСГ в дифференциальной форме с зоной нечувствительности по целевой
функции имеет вид
de f-rV0co(X, 0, /) при<7(Х,/)>Д,
(4.60)
dt [0 при q(X, t) < А, А > 0.
Применение огрубленных АСГ позволяет обеспечить работоспособность
синтезированных систем в условиях стохастических возмущений ограниченной
интенсивности, нестационарности ОУ, а также обеспечивает сохранение свойств системы при
дискретизации алгоритмов управления.
Если параметры системы постоянны, но на объект управления действуют
случайные возмущения, то настраиваемые параметры будут флуктуировать. Размах
флуктуации убывает с уменьшением коэффициента усиления Г. Поэтому выбор
подходящего коэффициента усиления в алгоритмах адаптивного управления осуществляется
как компромис между скоростью адаптации и точностью. Типичным является
использование алгоритмов с убывающим коэффициентом усиления. Наиболее простой
закон убывания имеет вид
г(о = г,+-£ц
где Г, = Г] > 0 - матрицы с постоянными коэффициентами, ц > 0 . Другая
модификация алгоритма настройки матрицы усиления имеет вид
Глава 4. Адаптивные системы 275
г(0 = ^
ц + ||У0со(Х,0,О|Г
При использовании того или иного алгоритма настройки матрицы усиления Г(/)
следует помнить о выполнении условия двухсторонней ограниченности
o<rmin<r(o<rmax,
которое гарантирует сохранение работоспособности АСГ.
Этапы синтеза алгоритмов адаптивного управления
на основе схемы скоростного градиента
Последовательность действий при синтезе адаптивных систем обычно состоит из
шести этапов.
Этап 1. Постановка задачи синтеза.
Постановка задачи синтеза включает:
• описание объекта управления математической моделью;
• формализация цели управления путем выбора подходящей целевой функции
(локального или интегрального вида) и задание ЦУ в виде целевого
неравенства (4.3) или (4.7).
Математическую модель объекта следует привести к виду
X = F(X,U,f,$) + N(X,U,/,S), (4-61)
где £ е S - набор неизвестных параметров ОУ, функция N(X, U, /, £) отражает
действия малых неизмеряемых возмущений и помех, о которых известны лишь оценки
их уровня и которые отбрасываются при первоначальном синтезе.
Выбор подходящей целевой функции, с одной стороны, связан с основными
требованиями, предъявляемыми к системе (точности, быстродействия,
помехоустойчивости и т.п.), с другой стороны, решающую роль в применимости схемы скоростного
гряпиента играет степень сглаживания задачи, которая тесно связана с видом
целевого функционала.
Степенью сглаживания задачи d называется наименьшее целое число я, при
котором п-я производная по времени от целевой функции (q^) в силу уравнений ОУ
явно зависит от 0 , так что Veg(/) = 0 при / = 0,...,</-1, V0<7(J) * 0 .
Для непосредственного применения АСГ необходимо, чтобы d = 1.
Случай d = 0 соответствует случаю явной зависимости целевой функции от
настраиваемых параметров (д(Х, Ф(Х, 0,/)> 0 > гДе Ф() ~ некоторая вектор-функция,
явно зависящая от 0). Для применения АСГ необходимо ввести дополнительные
инерционные звенья в ОУ или целевой функционал.
Повысить инерционность объекта можно, например, введением дополнительного
фильтра
eZ = -Z + O(X,0,O,
где 8 > 0 - малый параметр.
При этом, естественно, расширяется вектор состояния объекта, а целевая функция
q(X,t) (где X = (X:Z)T) имеет степень сглаживания d = \.
Можно «сгладить» саму целевую функцию, например, по формуле
9 = -а£ + Р<з<Х,Ф(Х,0,О>О> ol>0.
При а = 0, (3 = 1 сглаживание соответствует замене локального целевого
функционала q() на интегральный q(-).
19*
276 Методы современной ТАУ. Часть IV
При d > 2, наоборот, требуется снижение степени сглаживания. Этого можно
добиться или переходом к новому целевому функционалу q = — (переходом от инте-
dt
трального целевого функционала к локальному), или отбрасыванием
малоинерционных звеньев в ОУ.
Таким образом, переход от локального целевого функционала к интегральному и
наоборот служит средством приведения порядка сглаживания к d = 1. Наконец,
выбираемый целевой функционал должен удовлетворять условию роста (4.45).
Этап 2. Выбор структуры регулятора (синтез основного контура).
На этом этапе осуществляется выбор алгоритма основного контура из семейства
алгоритмов (4.5)
и(О = и,(х,(/),и(о,в(О),
где 0 - конечномерный вектор.
Алгоритм основного конура управления при идеальных параметрах регулятора
0 = 0,(£) и N(X, 0, /) = 0 должен обеспечивать достижение поставленной цели
управления для любого набора параметров ОУ (£ е Е), т.е. должно выполняться
соответствующее условие достижимости теорем 4.2 - 4.5. Синтез регулятора основного
контура может осуществляться, например, одним из методов, описанных в §4.3.
Этап 3. Выбор настраиваемых параметров.
На данном этапе неизвестные параметры регулятора основного контура
заменяются настраиваемыми. Так как компоненты вектора 0*(£) являются функциями
параметров ОУ, то возможны два подхода к выбору настраиваемых параметров: при
прямом подходе в качестве настраиваемых параметров выбирается непосредственно
вектор параметров регулятора 0 ; при идентификационном подходе настраиваемым
является вектор 4 (оценка параметров ОУ), а параметры регулятора вычисляются
как 0 = 0(4)-
Решающую роль при выборе настраиваемых параметров играет необходимость
выполнения условия выпуклости функции со(Х, 0, /) по настраиваемым параметрам.
Итогом этапа является составление уравнения обобщенного объекта (ОНО) (4.41).
Этап 4. Выбор алгоритма адаптации.
Для полученного на этапе 3 описания ОНО формулируется новая цель адаптации,
которая при прямом подходе совпадает с исходной ЦУ. При идентификационном
подходе целью является сходимость оценок параметров ОУ к истинным значениям
(£->£). Затем осуществляется выбор формы базового алгоритма из семейства АСГ
(4.42). При выборе формы алгоритма можно руководствоваться следующими
практическими рекомендациями: дифференциальная составляющая АСГ позволяет
осуществлять отслеживание параметрических возмущений, меняющихся медленно (см.
гипотезу о квазистационарности), но в широких пределах. Конечные составляющие
АСГ позволяют бороться с достаточно быстрыми возмущениями, но в относительно
узком диапазоне.
Следует отметить, что выбранный алгоритм адаптации должен зависеть только от
измеряемых или вычисляемых на основе измерений переменных.
Этап 5. Обоснование работоспособности адаптивной системы.
Обоснование работоспособности синтезированной системы в условиях отсутствия
неизмеряемых возмущений (N0 = 0) осуществляется путем проверки условий
соответствующей теоремы 4.2 - 4.5.
Глава 4. Адаптивные системы 277
Этап 6. Огрубление АСГ.
При использовании дифференциальной составляющей в АСГ, наличии неизме-
ряемых возмущений и помех, действующих на ОНО и адаптер, а также при
дискретизации алгоритма адаптации следует провести огрубление АСГ способами,
описанными ранее.
Этап 7. Настройка адаптера.
Настройка контура адаптации состоит в выборе параметров алгоритма адаптации:
коэффициентов усиления (Г = Гт > 0), влияющих на скорость изменения
настраиваемых параметров, параметров регуляризующей обратной связи (а >0), величины
зоны нечувствительности (А > 0), влияющих на помехоустойчивость системы.
Выбор указанных параметров тесно связан со спецификой ОУ, условиями его
функционирования и определяется исходя из качества процесса самоностройки методом
математического моделирования.
В заключение следует отметить, что при формализации цели управления
желаемая динамика системы управления задается в виде явной или неявной эталонной
модели. Многочисленные примеры синтеза алгоритмов адаптивного управления для
линейных и нелинейных непрерывных объектов методом скоростного градиента
приведены в работах [2, 7, 17,26, 29, 34 - 38,41, 43].
Ниже рассмотрены примеры применения схемы скоростного градиента при
синтезе адаптивного управления линейными объектами с использованием явной и
неявной эталонной модели. При этом преследуется цель не столько показать
универсальность схемы и широту охвата решаемых задач управления, сколько отработать
методику использования самой схемы синтеза и обсудить достоинства и недостатки форм
эталонной модели.
Алгоритмы скоростного градиента в системах
с явной эталонной моделью
•Системы с явной эталонной моделью по способу достижения цели управления
можно разделить на системы параметрической и сигнальной адаптации.
В системах с сигнальной настройкой эффект адаптации достигается без
изменения параметров управляющего устройства за счет повышения коэффиециента
усиления или на основе создания скользящих режимов. При этом к управляющему
воздействию добавляют специальный сигнал - сигнал адаптации. Эти системы достаточно
просто реализуются, но обеспечивают требуемое качество управления лишь в
ограниченном диапазоне изменения параметров ОУ.
В системах с параметрической адаптацией цель управления достигается за счет
изменения параметров управляющего устройства. Такие системы более
универсальные, но имеют более сложную структуру. Сложность таких систем определяется
числом настраиваемых параметров.
С целью повышения точности системы и быстродействия процесса адаптации
применяются алгоритмы, сочетающие в себе методы сигнальной и параметрической
адаптации. В таких системах алгоритм сигнальной настройки выбирается обычно
релейным, обеспечивая в системе высокое быстродействие. Параметрическая часть
настройки служит для стабилизации коэффициента усиления в требуемых пределах.
Системы с сигнально-параметрической адаптацией обеспечивают достаточно
высокую точность и отличаются простотой реализации, т.к. наличие сигнальной
составляющей позволяет уменьшить число перенастраиваемых параметров.
В качестве примера рассмотрим синтез АСГ для ОУ, описываемого в форме
пространства состояния уравнением (4.21)
X(0 = AX(/) + BU(0,
278 Методы современной ТАУ. Часть IV
где X е R'\ U e Rm - векторы состояния и входа ОУ; А, В - пхп и пхт
постоянные матрицы неизвестных параметров ОУ.
Эталонную модель выберем в форме (4.22).
XM(/) = AMXM(0 + BMY(0,
где Хм е Rn\ Y е Rm - задающее воздействие.
Потребуем для замкнутой системы достижения ЦУ (4.23) в условиях
параметрической неопределенности
lim Е(/) = 0,
где Е(/) = Х(/)-Хм(0 - вектор ошибки.
Будем предполагать управляемость ОУ и измеряемость вектора состояния
(ХВ = Х).
Система с параметрической адаптацией. В соответствии с методикой синтеза, с
учетом отсутствия неизмеряемых возмущений (N(X, U, £, t) = 0) проведем синтез в
пять этапов.
Этап 1. Для применения схемы скоростного градиента выберем локальный
целевой функционал, например, в форме скалярной квадратичной функции ^ = 0,5ЕтНЕ,
Н = Нт > 0. Очевидно, что из q -> 0 при / -> оо следует выполнение ЦУ (4.23)
(Е(0 -> 0 при t -> оо ).
Этап 2. Действуя по схеме скоростного градиента, получим производную
целевой функции в силу траекторий системы в (4.21), (4.22)
<?, =ю(Х, 0, O = ETH(AX + BU-AMXM-BMY) .
Структуру основного контура управления выберем из класса допустимых
алгоритмов, удовлетворяющих условию достижимости (4.47).
Условие достижимости будет выполнено, например, если уравнение (4.25)
(A-AM)X(0 + BU,(/)-BMY(0 = 0
разрешимо относительно U* е Rm при любых Хе R",Y eRm и Ам - гурвицева
матрица. Действительно, при этих условиях существует матрица Н = Нт > 0,
удовлетворяющая уравнению Ляпунова НАМ + А^Н = -G, G = GT > 0, и при этом
ш(Х, U, 0 = -0,5ETGE < -ад, (<х0 = ^Ш > 0), *
AmaxlHJ
т.е. условие (4.47) выполняется.
Идеальное управление запишем в виде
U, =K?X + K+YY, (4.62)
где матрицы идеальных коэффициентов регулятора удовлетворяют соотношениям
(4.27а)
ВК?=АМ-А, ВКУ =ВМ.
* Оценка величины а0, определяющей скорость достижения ЦУ, получается на основе известного
матричного неравенства.
^,п(м)|ф*тм*^гаа.ч(м)14
где Xinin(M),XmlK(M) - минимальное и максимальное собственное число матрицы М размера лхя, xeR".
Глава 4. Адаптивные системы 279
Выполнение соотношений (4.27а), в свою очередь, эквивалентно ранговым
условиям Эрцбергера [2]
rank В = rank{B,BM} = rank{B, Ам - А}. (4.63)
Этап 3. Используя прямой подход к синтезу, выберем в качестве настраиваемых
параметры регулятора 0(/) = col{Kx(O, Kv(0} • При этом структура основного
контура имеет вид
U(0 = Кх (/)Х(0 + КY (ОY(/). (4.64)
Этап 4. Перейдем к синтезу алгоритма адаптации в классе АСГ. Скоростной
градиент имеет вид
VKxco(X, 0, 0 = ВТНЕХТ, VKycu(X, 0, /) = BTHEYT .
Выбирая АСГ в дифференциальной форме (4.51) и полагая Г = у1л, у > 0 , получим
^L = _уВтНЕХт, $Ь- = -YBTHEYT . (4.65)
dt dt
С целью повышения быстродействия в контурах параметрической настройки
коэффициентов регулятора (4.64) можно применять пропорционально-интегральные
алгоритмы адаптации (АСГ в конечно-дифференциальной форме (4.42), (4.44а))
^- = -уВтНЕХт-у,-ГвтНЕХт1
Ж 7 (466)
^ = -уВтНЕ¥т-У|^ГвтНЕ¥т1.
dt dtL J
Этап 5. Проверим выполнение условий теоремы 4.2. Условия достижимости
выполнены, если выполнено условие Эрцбергера (4.63) и Ам - гурвицева матрица.
Условие выпуклости выполнено (см. замечание 4.3 к теоремам 4.2, 4.3) в силу
линейности (4.21) по 0 . Условие роста выполнено, если Ам - гурвицева и \(t) -
ограниченная функция. В силу теоремы 4.2 все траектории системы (4.24), (4.64), (4.65)
ограничены и выполняется ЦУ q(E(t), t) -> 0 при t -» оо .
Существенной особенностью систем с алгоритмами вида (4.65), (4.66) является
свойство сохранять работоспособность при изменении координатных и
параметрических возмущений в широких пределах. Недостатком является ухудшение качества
системы при высокой скорости изменения параметрических возмущений. В этом
случае целесообразнее применять алгоритмы сигнальной адаптации.
Система с сигнальной адаптацией. Вернемся к рассматриваемой задаче синтеза,
предполагая этапы 1 - 3 выполненными аналогично системе с параметрической
адаптацией. На четвертом этапе вместо алгоритмов (4.65) или (4.66) выберем АСГ в
конечной форме (4.52), (4.44а)
Кх = -уВтНЕХт, KY = -yBTHEYT, (4.67)
или в форме (4.65), (4.446)
Kx=-ysign(BTHEXT), Kx=-ysign(BTHEYT). (4.68)
Подстановка (4.67), (4.68) в (4.64) приводит соответственно к алгоритмам
управления вида
U(/) = -у(|Y(/)f +||Х(О||2)ВТНЕ , (4.69)
«(о=-Л i>'«i+Zk«lвТнЕ• (4/70)
1<=1 7=1 )
280 Методы современной ТАУ. Часть IV
Заметим, что при управлении вида (4.69) или (4.70) контур адаптивной
подстройки параметров регулятора отсутствует.
Этап 5. Для обоснования работоспособности алгоритмов (4.69), (4.70)
используем теорему 4.4. Рассмотрим, например, выполнение условий теоремы 4.4 для
алгоритма (4.70). Условие разрешимости выполнено, т.к. градиент функции ш(Х, 0, t) по
настраиваемым параметрам не зависит от 0 . Условие выпуклости выполнено в силу
линейности ОУ по входам. Условие достижимости выполнено при p(q) = aoq,
а0 = —— и U* вида (4.62). Условие роста выполнено при 5 = 1. Наконец, усло-
^тах(Н)
вие (4.53) выполняется при
y>|b+M|a-am|2+|bm|2.
Следовательно, в системе (4.24), (4.70) достигается ЦУ Е(/) -» 0 при t -> оо .
Другой вариант структуры основного контура для рассматриваемой задачи можно
получить, если в качестве настраиваемых параметров выбрать непосредственно вход
ОУ (0 = U). Скоростной градиент в этом случае равен Vuco(X, U, t) = ВТНЕ и
алгоритм (4.65), (4.446) (при 0О = 0) примет вид
U =-у sign(BTHE). (4.71)
Для обоснования работоспособности алгоритма вновь воспользуемся теоремой 4.4 с
учетом замечаний. Условие псевдоградиентности выполнено при 8 = 1. Условие
роста: если Y(0 - ограниченная функция. Условие однозначной разрешимости
выполняется в силу того, что v|/(X, 0, /) = sign(BTHE) не зависит от 0 . Условие
выпуклости выполняется в силу линейности ОУ по управлению. Условие достижимости
выполнено при p(q) = aoq, a0 =^min(G)/^max(H) и U*(X,/) вида (4.62). Из теоре-
п
мы 4.4 с учетом замечаний следует, что при у(Х, /) = ух |Х|ч-уY|V|, где |Х| = ^|х,|,
/=i
IYI = ZM >Ух * ||В+ (Ам " А)\\р'1 > Yy *К^Цр'1 > траектории системы (4.21), (4.22),
/=1
(4.71) ограничены и Е(/) -> 0 при / -» 0.
Алгоритмы вида (4.69) - (4.71) рекомендуется применять в случае быстро
меняющихся параметрических возмущений ОУ, но в узком диапазоне. При этом
возможно возникновение скользящих режимов на поверхности #(Е) = 0.
Системы сигнально-параметрической адаптации
Другой класс алгоритмов адаптивного управления для ОУ вида (4.21) с эталонной
моделью (4.22) можно получить, если перераспределить составляющие закона
идеального управления (4.62), задав структуру основного контура вида
U = KXX + KYY + US (4.72)
и выбрав вектор настраиваемых параметров в виде 0 = col(Kx, KY, UkV) e Rmn+m +m.
Здесь U5 - сигнальная составляющая управления. В"овь выбирая целевую функцию
q = 0,5ЕтНЕ , вычислим компоненты скоростного градиента
VKx<7, =BTHEXT, VKy<7, =BtHEY\ V^*, =BtHE.
Глава 4. Адаптивные системы 281
Если в алгоритме адаптации (4.42) положить Г = diag{y1Iw/2, у21ш2,Ош}, а
алгоритм для сигнальной составляющей взять в конечной форме (4.52), то адаптивный
регулятор будет описываться уравнением (4.72) при
U5=-y|E|sign(BTHE),
^L = -YlBTHEXT, ^v=-Y2BTHEYT, (4'?3)
dt dt
где у, > 0, у2 > 0, у > 0.
Для проверки условия достижимости положим
ВК,Х=(АМ-А), К?=В+ВМ,
BU5 =(AM -G)E, 0* =col(K*x, К7, U,)».
Тогда ю(Х, 0*, t) = -ETHGE < -<xoq и, следовательно, условие достижимости
выполнено при любой гурвицевой матрице G , удовлетворяющей неравенству
Ляпунова HG +GTH < 0. Матрица задает желаемую динамику процесса адаптации, которая
в данной структуре не зависит от динамики эталонной модели.
Из теоремы 4.4 следует, что при у > В+(АМ -G) /р система (4.24), (4.72), (4.73)
асимптотически устойчива по переменным ошибки Е(/) и все её траектории при
отсутствии помех ограничены.
Следует заметить, что перераспределить составляющие закона управления можно
по разному. Например, выбрав
U* = В+(АМ -ДА), К* = В+(АМ - А), К? = В+Вм,
где А = А + ДА. .
Основные структуры адаптивных систем с явной ЭМ представлены в табл. 4.1.
В алгоритмах адаптации в системах с явной ЭМ присутствует матрица В,
которая, вообще говоря, неизвестна. Однако можно показать, что АдСУ сохраняет
работоспособность, если заменить матрицу В на любую матрицу того же размера В
связанную с В соотношением В = KB, где К = Кт > 0 . В частности, можно
заменить В на Вм, если выбрать структуру основного контура в форме (4.26) и
выполнены условия разрешимости (4.276).
С ростом размерности векторов входа, выхода, состояния ОУ реализация АдСУ в
явной ЭМ становится более громоздкой. Упрощению структуры препятствует
условие адаптируемости (4.63). В следующем параграфе описываются адаптивные
системы с неявной эталонной моделью, позволяющие за счет ослабления условия
адаптируемости снизить требования к структуре основного контура и полноте измеряемой
информации.
Пример 4.3.
Рассмотрим объект управления, описываемый моделью в форме пространства состояния
Х = АХ+Вм,
где
X € R2, и е R1; А = , В = ; а0, а,, Р - неизвестные параметры ОУ.
Требуется синтезировать АСГ с явной эталонной моделью, обеспечивающий достижение в замкнутой
системе цели управления (ЦУ) X - Хм -> 0 при / -> «, где Хм € R2 - вектор состояния эталонной модели
ХМ=АМХМ + ВМ^
с известной матрицей Ам = , Вм = и скалярным задающим воздействием y(i).
18 Зак. 416
Алгоритмы адаптивного управления с явной эталонной моделью [2, 35]
Таблица 4.1
1
Уравнения объекта;
вектор управления
2
Целевой функционал
3
Ал гор
1
2
3
4
а) настройка коэффициентов
регулятора
X = AX + BU,
XM = AMXM+BMY(/),
Е = Х-ХМ,
U = KYY+KXX,
0 = col(KY,Kx)
?—ЕтНЕ,
Н = Нт > 0
Алгоритм управления при
Г = у1
4
Условия сходимости,
результат
5
Авторы
6
>итмы параметрической адаптации
KY=-ysign(BTHEYT),
Kx=-ysign(BTHEXT)
^ = -yBTHEYT,
dt
^. = -УВтНЕХт
dt
^- = -yBTHEYT - Yj 4sign(BTHEYT),
at dt
^- = -yBTHEXT - у, ~sign(BTHEXT)
dt dt
^X = -yBTHEYT - Yl ^-(BTHEYT),
dt dtx '
^S- = -YBTHEXT - Yl -(BTHEXT)
dt dt^ '
Ач - гурвицева
ham + aJh = -g,g = gt>o
У >11 В+ || Vll А - Ам ||2 +1| Вм |р
rankB = rank{B, Вм} =
rank{B,AM-A}
Е(/)->0 при /->«>
Ам -гурвицева
у>0
rankB = rank{B, Вм} =
rank{B,AM-A}
Е(/) -► 0 при / -> ад
Ам - гурвицева
у >0 и у, >0
rankB = rank{B, BM} =
rank{B,AM-A}
Е(/)->0 при /->оо
Ам -гурвицева
у > 0 и у, > 0
rankB = rank{B, BM} =
rank{B,AM-A}
Е(0->0 при /->оо
[24]
[10,24]
[24]
[10,23]
1
5
6
7
2
U = KYKXX + KYY
б) настройка коэффициентов
уравнения состояния
X = (А + АА)Х + (В + ДВ) Y(0,
XM = AMXM + BMY(/),
Е = Х-ХМ,
0 = со1(АА,ЛВ)
3
<?=ДетНЕ,
Н = Нт>0
Ал го
8
X = AX + BU,
XM=AMXM+BMY(/),
Е=Х-ХМ
^=1етне,
Н = Нт>0
4
^=-yb;heyt,
^r=-y,kyb;he(y~ kxx)tkyky
at
^ = -yHEXT,
^ = -yHEYT
dt
^■ = -yHEXT-y1-^-HEXT>
at at
^ = -yHEYT-y,4HEYT
at dt
Продолжение
5
Ам -гурвицева
у > 0 и у, > 0
rank В = rank {В, Вм}
rankBM = гапк{Вм, Ам - А}
Е(/)-*0 при /->оо
Ам -гурвицева, у>0
Е(/)->0 при /->оо
Ам -гурвицева,
у > 0 и Yj > 0
Е(/)->0 при /-»«>
табл. 4.1
6
[46]
[23,44]
[44]
ритмы сигнальной адаптации
U = -ysign(BTHE),
Y = YxlX|+YY|Y|,
1=1 1=1
Ам -гурвицева
ух>||В+(Ам-А)||,
yY>||B+BM||,
rank В = rank{B, BM} =
= rank{B,AM-A}
Е(/)-»0 при /->оо
[3,24,31,44]
Алгоритмы адаптации системы с переменной структурой
9
X = AX + BU,
XM=AMXM + BMY,
Е = Х-ХМ,
S = GE
*=IsTs
U = -ysign(GB)TS,
Y = YxJXJ+yV|Y|+yE|E|
А* -гурвицева,
А* = [1„ - BfGBr'GJA,,, det(GB) * 0,
YxM >II(GB)-1GA ||, yY НКСВГ^В, ||,
Ye>!I(GB)"1G(Am-A)||,
rankB = rank{B, BM} =
= rank{B,AM-A},
E(/)->0 при /->«>
[47]
i1
DO
4^
Ю
00
Окончание табл. 4.1
2
Алгоритмы сигнально-параметрической адаптации
10
11
X = AX + BU,
XM = AMXM + BMY(/),
Е = Х-ХМ,
S = GE,
U = KXX + KYY+US
<7=-ETHE,
Н = Нт>0
<7 = J||E-DE||2^
= -yBTHEYT,
<flCY
dt
^L = -yBTHEXT,
at
ил=-у55^п(ВтНЕ),
T,=Yo|E|
^>l = -yBT(E-DE)YT-
dt
-уДвт(Ё-ОЕ)Ут,
at
^^ = -yBT(E-DE)XT-
dt
-у,4вТ(Ё-ОЕ)Хт,
Ш
U,=-y,sign(BT(E-DE)),
Y,=YolE|
AM - гурвицева, у > 0
yo>||B+(AM-A)||,
rankB = rank{B, Вм} =
= rank{B, Ам-А},
E(/)->0 при ^-^оо
D - гурвицева,
y>0, y, >0
yo>||B+(D-AM)||,
rankB = rank{B, BM} =
= rank{B,AM-D}5
E(/)->0 при /->qo
[8, 23, 24]
[2]
о
ю
о
ас
о
Sc
>
ВТ
Глава 4. Адаптивные системы 285
1. Синтез системы параметрической адаптации
Этап 1. Синтез алгоритма основного контура.
Выберем локальную целевую функцию ^(Е) = 0,5ЕтНЕ , где Е = Х-ХМ - ошибка слежения,
Н = Нт > 0 При этом ЦУ зададим в виде q(E) -> 0 при / -> <х>.
Для синтеза основного контура проверим выполнение условия Эрцбергера (4 64):
ВК* =АМ-А,
где К* = I Лг* £*2I, к*у - скаляр.
Решая (4.64), находим коэффициенты идеального регулятора
Таким образом, система (4.64) разрешима, если р * 0 . Идеальное управление зададим в форме
линейной обратной связи (4.62)
Заменяя идеальные коэффициенты регулятора настраиваемыми параметрами, получаем структуру
основного контура управления
ц(0 = кх(/)х(/)+^(/)Я/)=*х1(0*.(0+*х|(0*2(0+*Л0^(0
Этап 2. Синтез алгоритма адаптации
Выбирая АСГ в дифференциальной форме (4.65), получаем
К* =-у,ВтНЕХт,
*, = -у2ВтНЕу,
где у, > 0, у2 > 0, Н = Нт > 0 - 2x2 матрица, являющаяся решением уравнения Ляпунова для эталон-
ной
где
модели
G = GT>
Выбирая
0.
G
1°
3
, получаем Н
НАМ
=
41
1
H = -G,
1
2
Ъ)
Таким образом, алгоритм адаптации имеет вид
*х,=-У|в('Ь(')>
*,=-У2М0>'(0>
где б(/) = 2,1(0+4в2(/)/3, ^(0 = ^(0-^/(0
Дискретизованный и огрубленный согласно §4 6 2.2 параметрический алгоритм адаптивного
управления описывается следующими уравнениями:
"(O = MO*i(O + MOMO + M'"MO>
KAt^\) = kx^n)-h{yfi(tn)x2(tn)-pi{)kX2(tn)},
МЫ=МО - Ч^МОЯО - м.МО}'
6(/я) = 2е1(/и) + 4е2(/|1)/3, eXtn) = xt{tn)-xMt(tn), / = 1,2,
где tn=nh,h>0 - шаг дискретизации, п = 0,1,..., ц, > 0
Результаты моделирования приведены на рис. 4.11. Моделирование проводилось при следующих
условиях*
а) объект управления а0 = -1, а, = 1, р = 1, дг, (0) = 0 , х2 (0) = 0 ,
б) эталонная модель* а0 = -2 , а, = -3 , 6 = 2, хм] (0) = хм2 (0) = 0 ;
286
Методы современной ТАУ. Часть IV
в) алгоритм адаптивного управления: у, = 2 , у2 = 10 , ц0 = 0, щ = 0, А:Х| (0) = 0 , kXj (0) = 0, ку (0) = 1,
Л = 0,02;
г) задающее воздействие y(tn) = 0,5(l + sign (sin (я -/„/16))), шаг дискретизации h = 0,02.
л*.
ч(0
-1
-'•40 3 10 13 20 И 30 35 4» 4S 50* """ 5 10 |5 »"'» 30 » «'« »'
Рис. 4.11. Результаты моделирования системы параметрической адаптации
2. Синтез системы сигнальной адаптации. Вернемся к рассматриваемой задаче, предполагая, что
структура алгоритма управления выбрана в виде (4.69) или (4.70). Для рассматриваемого примера имеем
«(') = -У3(И')|+|*.('М^(')|)8(0.
или
и(') = -У4 sign б(/),
где 8(/) = 2е, (/) + 4е2 (/)/3 , е, (/) = *, (/) - ^ (/) .
Результаты моделирования при нулевых начальных условиях объекта управления и эталонной модели,
коэффициентах усиления у3 =36, у4 =10 для синтезированных алгоритмов управления приведены
соответственно на рис. 4.12,4.13.
«(О
15
20
25
-1,5
20
25
Рис. 4.12. Результаты моделирования системы сигнальной адаптации в форме (4.69)
Глава 4. Адаптивные системы
287
1.2
1
0.8
0.6
0.4
0.2
-0.2
>.(') .у
f
Э 2 4 1
♦ «(') •
ю ппнцц|ПП Г
[Л
" , .-Jill U
> 8 10 1
2 14 16 18 0 2 4
и
J
6
111'
ни
11111III1IIU
В 10 12 14 16
L /
Рис. 4.13. Результаты моделирования системы сигнальной адаптации в форме (4.70)
3. Система сигнально-параметрической адаптации. Объединяя алгоритмы параметрической и
сигнальной адаптации, получаем управление вида
м(')=М')+мД'Ь
где up{t) - параметрический алгоритм адаптивного управления в дискретизованной форме описывается
системой
kb(tn+\) = kXx(tn)-h{yxb(tn)xx(tn)-v^
^(^i) = *y(^)-*{Y28(/JH'i.)-My(^)}.^i.) = 2ei(^) + 4«2(^)/3. e;(r/J) = x,(/w)-xM/(/w), / = 1,2,
a us (t) можно выбрать, например, в форме
w,(/) = -Y4sign6(/).
Результаты моделирования при у, =5,у2 =2,у4 =0,8, р.о = 0, ц, =0, ^(0) = 0, ЛХ2(0) = 0, ^(0) = 0,
h - 0,02 приведены на рис. 4.14.
И')
20
Рис. 4.14. Результаты моделирования системы сигнально-параметрической адаптации
288 Методы современной ТАУ. Часть IV
Алгоритмы скоростного градиента в системах
с неявной эталонной моделью
Рассмотрим адаптивную систему управления, в которой эталонная модель
выступает не в виде реализуемого динамического звена, а в виде некоторого «эталонного
уравнения».
Системы с параметрической адаптацией. Задача стабилизации
Рассмотрим ОУ, описываемый уравнениями состояния
X = AX + BU, XB = LTX, (4.74)
где X = Х(/) е Rn, U = U(/) е Rm , Хв = Хв(0 е R1 - векторы состояния, управления в
выхода объекта; А = А(£), В = В(£), L = Ц£) - параметры ОУ, зависящие от £ е S.
Поставим задачу синтеза алгоритма адаптации
0 = F(XB), (4.75)
обеспечивающего для любого £ е Е достижение цели управления
lim X(f) = 0, lim 0(0 = const. (4.76)
/—►00 /—ЮО
Регулятор основного контура выберем в виде линейной обратной связи по
измеряемым выходам объекта
U = 0TXB, (4.77)
где 0/хш - матрица настраиваемых параметров.
Поставленную задачу синтеза будем решать методом скоростного градиента.
Выберем локальный целевой функционал вида
<?(Х) = -ХТНХ, Н = Нт>0.
Преобразуем алгоритм основного контура (4.77) к виду
U = RT(XB)0, (4.78)
где QT =(&J ...QTm) - \xlrn вектор настраиваемых параметров, составленных из
столбцов 6, (/ = 1, т) матрицы 0 ,
R(XB) =
- Imxm матрица.
о хв
Вычислим со(Х,0) -производную q(X) в силу траектории системы (4.74), (4.78),
а затем градиент У^ю(Х, 0). Имеем
a(x,0)=XTH(AX + BRT(XB)0),
V^(X,0) = [XTHBRT(XB)]T =R(XB)BTHX. (4.79)
В правую часть равенства (4.79) входят неизмеряемые переменные состояния X,
в то время как в алгоритм адаптации должны входить только измеряемые выходы ОУ
Хв. Потребуем выполнение дополнительного условия
HB = LG, (4.80)
где G = (Gj ... Gm) - некоторая Ыт матрица со столбцами G; e R1, / = 1,/и.
Подставляя уравнение (4.80) в (4.79), получаем
Глава 4. Адаптивные системы
289
Veco(x,0) = R(XB)GTLTX = R(XB)GfXB =
■(сТх.ух/
(gX}xb
(4.81)
Выбирая АСГ в дифференциальной форме (4.51), получаем алгоритм адаптации
вида
0 = -Г
'(g7"xb)xbn
(gIxb)xb
(4.82)
где Г = Гт > 0 - lm x 1т матрица.
Если матрицу Г выбрать в блочно-диагональной форме и учесть, что GjXB -
скалярные функции, то алгоритм адаптации можно записать в виде
e,=-GTXBr,XB> / = 1Я (4.83)
где 9, - столбцы матрицы & 9 Г(=Г] >0 - 1x1 матрицы.
Структурная схема адаптивной системы представлена на рис. 4.15.
Хп
Х = АХ + Вм,
Хв = LTX
U = 0XB,
© = (e1,..,ej
-Ж-
1±
s
1
X
л
гт
1>
L
/-я подсистема алгоритма
адаптации (/ = Ця)
Алгоритм управления
J
Рис. 4.15. Структура адаптивной системы управления с неявной эталонной моделью
290 Методы современной ТАУ. Часть IV
Заметим, что в системе (4.74), (4.77), (4.82) (или (4.83)) отсутствует в явной форме
эталонная модель. Однако при достижении в системе ЦУ (4.76) процесс адаптации
прекращается (0 = 0J. Следовательно,
G^XB=0, i = un, (4.84)
что позволяет трактовать эти уравнения как неявно заданную (с помощью
коэффициентов векторов матрицы G ) эталонную модель. Поясним это на следующем
примере. Пусть ОУ (4.74) имеет скалярный вход u(i), а в качестве выходных переменных
выступает скалярный выход xB(t) и его производные хв(/),...,хвМ)(/), так что
xB=(xB,;...4M))T=(ip...p(/-|))TxB,
где р = dl dt- оператор дифференцирования. Матрица G в этом случае
представляет собой вектор размером /xl. С учетом этого уравнение G]XB = 0 можно записать
в виде
*(/>)*.(0 = 0, (4.85)
где g(p) = gi-\p!~l + gi-гР12 + — £о ~ многочлен от оператора дифференцирования с
коэффициентами вектора G .
Выражение (4.85) представляет собой запись однородного дифференциального
уравнения с постоянными коэффициентами, характер общего решения которого
определяется корнями характеристического уравнения g(X) = 0. Таким образом,
выбирая коэффициенты матрицы G можно задать желаемую динамику эталонного
уравнения (4.85) и как следствие - желаемую динамику адаптивной системы.
Для обоснования работоспособности системы (4.74), (4.77), (4.82) воспользуемся
теоремой 4.2. Условия локальной ограниченности и роста выполнены, т.к. правые
части системы и функция q(X) являются гладкими функциями, не зависящими от /.
Условие выпуклости выполняется в силу линейности системы по 0 . Условие
достижимости будет выполнено, если существует матрица ©♦, такая, что
ю(Х,0,) = Хтн(АХ + В0тХв)<О при Х*0,Н = Нт>0. (4.86)
При этом нет необходимости находить матрицы Н и 0*, поскольку алгоритм
(4,79) от них не зависит. Достаточно убедиться, что они существуют. Таким образом,
возникает следующая алгебраическая задача.
Даны пхп матрица А, пхт матрица В, их/ матрица L, Ыт матрица G.
Требуется найти условия существования пхп матрицы Н = Нт>0 и/х/и матрицы
0«, таких, что
НА,+АГН<0, HB;=LG, A*=A + B0?Lt. (4.87)
Для формулировки утверждения, являющегося решением поставленной задачи»
понадобится следующее определение.
Пусть Р(К) - тхт матрица, состоящая из правильных дробно-рациональных
функций от X, имеющая вид P(X) = Sjr(\I/?-R)"'1S2, где R - п*п матрица, S,t S2
-п^т матрицы, \п - (п*п) единичная матрица.
Введем следующие обозначения
8(X) = det(XIn-R)> cp(X) = 5(A,)detP(?i), D= lim XP(\).
|X|->oo
Глава 4. Адаптивные системы 291
Можно показать, что <р(Х) - многочлен не выше п-т порядка со старшим
членом V~wdetD.
Матрица Р(Х) называется минимально-фазовой, если многочлен <р(Х) - гурвицев.
Матрица Р(Х) называется строго минимально-фазовой, если многочлен <р(Х) -
гурвицев, а матрица D - симметричная и положительно определенная.
В частности, при т = 1 Р(Х) = <р(Х)/5(Х) - дробно-рациональная функция, а (р(Х)
- многочлен степени не выше п -1. Требование минимально-фазовости Р(^)
означает гурвицевость многочлена ф(^), а для строгой минимально-фазовости требуется,
чтобы многочлен ф(А.) был гурвицевым степени п-\ с положительными
коэффициентами.
Теорема 4.6. Пусть для любого £ = S матрица TGTW(A,) - строго минимально-
фазовая при некоторой T = diag{T,,...,T/w},T/>0, где W(^) = LT(^I-A)~1 В
-матричная передаточная функция ОУ.
Тогда существуют матрицы Н = Нт > 0 и 0*, удовлетворяющие условиям (4.87),
и в системе (4.74), (4.77), (4.82) достигается ЦУ (4.76).
Кроме того, у системы существует квадратичная функция Ляпунова
F(X,0) = XTHX + |0-0*|VI,
где Г = Гт>0 - mlxml матрица.
Замечания:
1. Согласно условию теоремы и определению строго минимально-фазовой
матрицы при любом £ = S должны выполняться условия;
а) 8(A,)detGTW(X) - гурвицев многочлен;
б) Матрица TD - симметричная и положительно определенная, где
D = GTlimkW(b) = GTLTB.
2. Если ОУ имеет скалярный вход (т = 1), то условия теоремы 4.6 сводятся к
требованию строгой минимально-фазовости функции GTW(A,), что, в свою очередь,
эквивалентно выполнению условия: n(A,) = GTQ(^) - устойчивый многочлен степени п-1 с
положительными коэффициентами. Здесь Q(k) = а(К)ЩХ), а(Х) = det(M - А).
Согласно критерию Стодолы необходимым условием устойчивости многочлена
является требование, чтобы все коэффициенты многочлена имели одинаковый знак.
Следовательно, достаточно проверить положительность хотя бы одного, например,
старшего, коэффициента ц(А,), Требование гурвицевости \i(k) сохраняется.
3. В связи с формулировкой теоремы в терминах матричной передаточной
функции W(^) объекта управления не обязательно приведение описания ОУ к форме
пространства состояния (4,74).
4. В теореме не требуется ни управляемость, ни наблюдаемость ОУ» Поэтому
многочлены числителя и знаменателя дробно-рациональной функции w,y(X), яв*
ляющейся элементом матрицы W(\), могут иметь одинакоэые корни (нули и
полюса Wjj(X)). Однако в силу условия теоремы эти корни должны иметь отрицательные
вещественные части, т.е. общие многочлены числителя и знаменателя w^X) должны
быть гурвицевыми.
292 Методы современной ТАУ. Часть IV
Системы с параметрической адаптацией. Задача слежения
Описанный подход распространяется на задачу слежения. Целью управления в
этом случае является
Пт||Х(/)-Х*(/)|| = 0 (4.88)
и ограниченность всех траекторий замкнутой системы.
В качестве Х*(/) выбирается решение, удовлетворяющее равенству
A,X,(O = B0jY(O, (4.89)
где А* - желаемая матрица замкнутой системы, состоящей из ОУ (4.74) и алгоритма
«идеального» управления
U,=0?XB(O-0?Y(O, (4.90)
так что А* = A + B0ll7 . В частности, при Y(/) = const уравнение (4.89) описывает
замкнутую систему в установившемся состоянии. Уравнение (4.89) можно
рассматривать как неявную эталонную модель, построенную без учета динамики ОУ.
Покажем, что закон управления (4.90) обеспечивает в системе (4.74), (4.90)
достижение ЦУ (4.88). Для этого, выбирая целевую функцию квадратичной формы
<7(Е) = 0,5ЕтН Е, Н = НТ, Е = X - X*, с учетом уравнения (4.90) вычислим
co(E,0*)=(X-X»)TH[(A+B0lLT)X-B0lY(O-XJ =
= (Х-Х,)ТНА*(Х-Х*)-(Х-Х*)ТНХ*.
(4.91)
Пусть матрица идеальных параметров 0» выбирается из условия гурвицевости
матрицы А* так, что существует матрица Н = Нт > 0, удовлетворяющая
неравенству а!н + Н*А* <-рН <0, р>0. Тогда получаем
ш(Е, 0*) < -рЕтН Е +||Е||||Н|||Х*|. (4.92)
Первое слагаемое неравенства (4.92) является квадратичной отрицательной
функцией по ||Е||. Второе слагаемое неравенства с учетом эталонного уравнения (4.89) не
превышает по норме величины C||e||||y(/)|, где С ^ЦнЦЦл^ВвГЦ, и является линей-
00
ной функцией по Це||. Пусть вектор-функция Y(t)e £2(0,00), т.е. $YT(t)Y(t)dt<co,
о
тогда при достаточно большом р > 0 и малом Ср > 0 справедливо неравенство
ш(Е,0О<-СрЕтНЕ.
Таким образом, управление (4.90) обеспечивает замкнутой системе (4.74), (4.90)
достижение ЦУ (4.88) в условиях полной априорной информации о параметрах ОУ
при гурвицевости матрицы А* и YeL2(0,°o).
Регулятор основного контура при адаптивной постановке задачи управления
зададим уравнением
U = 0TXB(O-0TY(O, (4.93)
где 0(0. 0(0 - матрицы настраиваемых параметров.
Преобразуем уравнение (4.93) к виду
U(O = RT(XB)0-QT(Y)0, (4.94)
Глава 4. Адаптивные системы
293
где 0T=(6i",...,e£V вт = (ej* в„) - \xlrn и lx/я2 векторы настраиваемых
параметров, составленные из столбцов матриц 0 и 0 соответственно,
R(XB) =
Гх.
о
(П
Г¥а
,Q(Y) =
(П
- mxml и тхт матрицы.
Вычисляя градиенты от функции со(е, 0, 0), являющейся производной от q(E)
вдоль траектории системы (4.74), (4.94), получаем
V^co(e,0,0)=/?(Xb)BtH(X-XO,
V6co(e,0,0)=-Q(Y)BtH(X-X*).
Выбирая АСГ в дифференциальной форме с учетом выполнения условия (4.80), а
также дополнительного условия существования 0*, такого, что
GTLTX*=Y, (4.95)
получаем
Г5,(0ХЛ
0 = -Г
W0X.,
0 = Г
(4.96)
1Л№ _
6#) = С]Хв-у„ / = l,w,
где Г = Гт > 0, Г = Гт > 0 - Imxlm и т2 хт2 матрицы, у-г - /-я компонента вектора Y.
Убедимся в возможности выполнения условия (4.95). Учитывая уравнение
эталонной модели (4.89), имеем
GTLTX, = GTLTA;1B0?Y . (4.97)
Выбирая @J = (GTLTA^B^ , получаем равенство (4.95).
Если матрицы Г и Г выбрать в блочно-диагональной форме, то алгоритм (4.96)
запищется в виде
е,=-5,(ог,хв,
в, =5,(0^ _ (4.98)
5l(t) = G]X,-yl, i = ui9
где в„ в,- - столбцы матриц 0,0, Г = ГТ >0, Г = ГТ >0 -/xl ц тхт матрицы.
Для проверки работоспособности системы (4.74), (4.93), (4.96) (или (4.98)) вновь
воспользуемся теоремой 4.2. Условие достижимости выполняется, если Y e Z,2(0,oo)
и существует матрица 0*, обеспечивающая выполнение условия (4.87). Условие
роста выполнено, если Y(0 - ограниченная вектор-функция. Условие выпуклости
выполняется в силу линейности ОУ по векторам 0 и 0. Таким образом, условия
теоремы 4.2 выполнены и справедливо следующее утверждение.
294 Методы современной ТАУ. Часть IV
Теорема 4.7. Пусть выполнены условия теоремы 4.6, Y(t) - ограниченная
вектор-функция, такая, что ее производная YeZ,2(0,oo). Тогда все траектории системы
(4.74), (4.93), (4.96) (или (4.98)) ограничены и достигается ЦУ (4.88).
Замечания.
1. При достижении ЦУ (4.88) 5, -> 0 , что позволяет трактовать систему
уравнений G]Xb=yhi = l,m как неявно заданную модель, характеризующую желаемое
качество системы.
2. Условие Y eL2(09oo) означает, что вектор-функция Y(t) - гладкая функция,
стремящаяся к нулю на конечном интервале времени. Последнее означает, что задача
слежения должна плавно переходить в задачу стабилизации.
Пример 4.4 [7]. Рассмотрим частный случай ОУ (4.74), описываемого дифференциальным уравнением
вида
р(р2 + ахр + ao)x(t) = (V + bQ)u(t) + n(t), (4.99)
где <30,<3,,£b,£j - параметры ОУ, n(t) - ограниченное возмущение, p-dldt -оператор дифференцирования.
Целью управления является приближение вектора состояния Х(/) ОУ (4.99) к состоянию равновесия
X* системы с «идеальными» коэффициентами регулятора, вычисленными в предположении, что задающее
воздействие установилось на уровне y{t).
Выберем непрерывный закон управления в виде
"(О=ео(ОМО - ЯО)+е, (/)*, (4. кх»
являющегося частным случаем алгоритма управления (4.93).
Параметрический алгоритм адаптации в соответствии с (4.98) и при n(i) = 0 будут иметь вид
ео=-Уо5(')(*(О-:К')Ь
ё,(О = -У.8*(О, (4.101)
8(0 = So (*(')-КО)+ &*('),
где у0 , Yi - положительные числа.
Для достижения ЦУ (выполнения условий теоремы 4.7) требуется, чтобы многочлен
{g{k + gQ\t\k + b^) был гурвицев с положительными коэффициентами, что выполняется, если
So» Si»*b»Ь[ имеют одинаковый знак.
Кроме того, требуется, чтобы задающее воздействие y(t) и его производные были ограничены.
Неявная эталонная модель получается из равенства 5(0 = 0 и имеет следующий вид
(giP + go№) = go)it). (4Ю2)
Так как на ОУ (4.99) действует ограниченное возмущение n(t), то в соответствии с пунктом 4.5.2.2
алгоритм адаптации (4.101) необходимо «огрубить», например, введением отрицательной обратной связи
в0 = -YoS(O(*« - МО) - <ХсА)(О ,
ё^-у.бОЖО-а.еКО, (4.103)
5(0 = So (*(0 - Л0) + Si*(0> ао > 0, а, > 0.
Структурная схема адаптивной системы управления представлена на рис. 4.16. Предполагается, что
возмущение n(t) является стационарным случайным процессом и моделируется как реакция формирую-
щего фильтра с передаточной функцией WF(p) - —*- на белый шум (л0(0 ).
Хф + 1
Введение отрицательной обратной связи позволяет использовать алгоритм адаптивного управления
(4.100), (4.103) в дискретной форме
и(О = 9о*(** "Л) + Мь.4 ^<<fc+i»
вОЛ+1 = 90* " hYioh(xk -Ук)~ а(А)*]»
Qik+i=*ik-h[yfik(xk-yk)-afllk]y (4.104)
Глава 4. Адаптивные системы
295
где
9* =6(/Д;к*=;Ка** =*('*)>
"О
Рис. 4.16. Структурная схема адаптивной следящей системы с неявной эталонной моделью
При достаточно малом шаге h система (4.99), (4.104) сохраняет свою работоспособность (является
экспоненциально диссипативной).
Результаты моделирования системы с дискретным алгоритмом управления приведены на рис. 4.17.
б
1,0
0,5
0
1,0
0,5
0
И*)
2 4 6 8 10 12 14 16 18
/У
ty С
2 4
8 10 12 14 16 18 ,,(
16
24
32
Рис. 4.17. Результаты моделирования
296 Методы современной ТАУ. Часть IV
При этом параметры эталонного уравнения (4.102) были выбраны в виде g0 = 1, gj = 1,2 с исходя из
требований, что обеспечивают нулевую статическую ошибку слежения и время переходного процесса не
более 3,6 с при отсутствии возмущения (n(t) = 0). Начальные условия на ОУ и контур адаптации
выбирались нулевыми. Диапазон возможных значений параметров ОУ задавался в виде
4с"3<р0<18с"3, 1,6с-2<р0<16с-2,
lc'^a^^c"1, Зс~2<а0<20с~2,
параметры формирующего фильтра аф =0,14,тф = 1. В качестве задающего воздействия был выбран ме-
андровый сигнал y(t) = 0,5(1 + sign go/) с периодом 14 с. Методом математического моделирования было
получено приемлемое качество системы при значенияху0 =ух =10, а0 = а, =0,1, Л = 0,04с . На рис. 4.17
для сравнения представлен график выхода у* эталонной модели (4.102) с передаточной функцией
1 + 1,2/7
Следует заметить (см. рис. 4 17, б), что параметры регулятора имеют тенденцию к неограниченному
росту. Это объясняется тем, что задающее воздействие у(0 = 0,5(1 + sign©/) не удовлетворяет условию
теоремы 4.7 (у е /^(0,оо)).
Однако на любом конечном промежутке времени или при выполнении условия
.. [0,5(1+signo/), 0<t<T,
y(l)-\j,
где \у\ < оо , параметры будут иметь ограниченные значения, причем скорость их изменений можно
регулировать соответствующим выбором значений у;,а;.
Системы с сигнальной и сигнально-параметрической адаптацией
Алгоритмы с сигнальной адаптацией, получаемые на основе использования АСГ в
конечной форме, при выборе в качестве входов ОНО непосредственно вектора
управления объекта, фактически относятся к классу систем с переменной структурой
(СПС). Синтез СПС, в том числе и на основе схемы скоростного градиента, будет
рассмотрен в следующем параграфе.
Системы с сигнально-параметрическими алгоритмами адаптации, сочетающими в
себе релейное (знаковое) управление и параметрическую обратную связь,
рассмотрим на примере стабилизации ОУ со скалярным входом и выходом [2].
Пусть ОУ имеет вид
Х(/) = АХ(0 + Ви(0, ^ = LTX, (4.105)
где X(t)eRn, u(t)eR], sgR1 - функция «невязки».
Зададим целевой функционал в виде q = 0,5||s|| , а цель управления в виде q -» 0
при / -> оо . Тогда, действуя по схеме скоростного градиента, получим
^ = ю(Х,0,/)=^(О(ьтАХ(О + ЬтВм(о). (4.106)
. Структуру основного контура выберем в виде
и(/) = КХ(0 + и,(0. (4.107)
где вектор настраиваемых параметров 0 = col(K, us). Вычислив градиент функции
со(Х,0,/) (4.106) по настраиваемым параметрам, получим
VKco(X, 0, t) = (LTB)T *(0Xt, VMj0)(X, 0, /) = (ЬТВ)Т s(t).
Если алгоритм настройки параметров выбрать в конечной форме (4.52), тогда
закон адаптивного управления примет вид
Глава 4. Адаптивные системы 297
w(0 = K(0X(0-Ysign(LTB)T5(/),
т (4.108)
k(o = -y,(ltb) *(/)хт(/).
Для обоснования работоспособности алгоритма воспользуемся теоремой 4.4.
Условие строгой псевдоградиентности выполняется при 8 = 1. Условие однозначной
разрешимости выполняется, т.к.
^1(X,0,/) = sign(LTB)%(/), ^2(X,0,/) = (LTB)TS(OXT(/)
не зависят от и. Условие выпуклости выполнено в силу линейности ОУ (4.105).
Условие достижимости выполнено при
р(?) = «о>/?э K*=-(hTBjlLTA, ui=-ao(LTBylsigns,
если detLTB*0. Из замечания к теореме 4.4 следует, что ЦУ q->0 достигается,
если y>ao|(LTB)i|/p, у >Ц^в)"1 Lta| /(р<х0).
Условие роста для вектора состояния Х(/) не выполнено, и, следовательно, более
сильная ЦУ 1 i m ||X(r)|| —> 0 может не достигаться. Следующее утверждение показы-
вает, что если ОУ (4.105) строго минимально-фазовый, то условие роста выполнено и
ЦУ lim||X(0||->0 достигается.
Лемма. Пусть система (4.105) - строго минимально-фазовая, пара {А, В} -
управляема. Тогда из ^(/)->0, [|^(0|| dt<oo следует, что ||Х(0|->0, а из
о
|s(r)||< const следует ||Х(/)|| < const.
Аналогично, с помощью проверки условий теоремы 4.2 доказывается
работоспособность системы с законом настройки К в чисто дифференциальной форме
и(0 = K(0X(0-ysign^(LTB)T *(/)),
k = -y(ltb)tj(/)xt(o,
где у = у(/) = у0 \x(t)\, у0 > (ltb) (LTA + LT) p"1 или в конечно-дифференциальной
форме
к = -у1(ьтв)^)хт(о-у2^:{(ьтв)^)хт(о}.
Сигнально-параметрические АСГ с неявной эталонной моделью обладают высоким
быстродействием, простотой реализации и сохраняют свою работоспособность в
условиях параметрических и координатных возмущений, изменяющихся быстро и в
достаточно широких пределах. Однако в условиях сильных параметрических и
координатных возмущений переходные процессы в контуре адаптации носят существенно
колебательный характер. Одним из способов борьбы с этим явлением является введение
дополнительного демпфирования (производной от «невязки») в контур адаптации.
Основные типовые структуры алгоритмов адаптации с неявной эталонной
моделью приведены в табл. 4.2.
Таблица 4.2
00
Алгоритмы адаптивного управления с неявной эталонной моделью
№ пп
1
Уравнения объекта,
вектор управления
2
1 Функционал
3
Алгоритм управления при Г = yl
4
Условия сходимости
результат
5
Литература
6
Алгоритмы параметрической адаптации
1
2
X = АХ + Вн,
XB=LX,
w = 0TXB,
Ж(^) = ЦМ„-А)-'В,
6(Х) = **(*.!„-А),
O(X) = d(k)w(k),eeRl
w = 0GTXB,
? = -XTHX,
Н = Нт > 0,
HB=LTG
^ = -ХтНХ,
Н = Нт>0,
НВ = LTG
5(0 = GTXB
5(0 = GTXB
GTQ(X) -гурвицев
многочлен степени п-\,
GTQ(X) > 0, Х(/) -^ 0,
|О(/)|| < const при t -> оо
GTW(X) -строго
минимально фазовая,
Х(0->0, ||0(О|< const
при / —> оо
[7]
[42]
Алгоритмы сигнально-параметрической адаптации
3
4
X = АХ + Вм,
s = GX,
u = KX + uSJ
0 = co\(K,us)eR"+l
t
O = J||i-^||2^
0
^ = -y(GB)T,XT-T^-(GB)T,XT,
at at
w,=-y|X|sign(GB)T^,
lxl=ZW
1=1
^ = -y(GB)T(i -<fc)XT - y^(GB)T(s - ds)X\
at at
us=-yss\gn(GB)T(s-ds), Y5=y0|^l
А* - гурвицева
A*=[Ifl-B(GB)-|G]A
y>O,yr>||(GB)-IGAI!
X(t)->0 при /->oo
\*,d - гурвицевы
А*=[1Л-В(СВ)С]А
у>0, YoHKGBr^H
Х(/)->0 при /->оо
[2]
[29]
сг
о
о
DO
2
п
о
>
so
и*
Глава 4. Адаптивные системы
299
§
а:
<з
а:
о
О
<
Is
гг ^
о
% 1-
и
|
о
t
2_
5.4
II
i
и
II
II
С*
<
СО
- о
1 * *
II чГ
а
* 2
•се
о °
300 Методы современной ТАУ. Часть IV
4.5.3. Алгоритмы систем с переменной структурой
Системы с переменной структурой (СПС) впервые были предложены СВ.
Емельяновым в работах [8, 9] и получили дальнейшее развитие в работах В.И. Уткина [32].
4.5.3.1. Скользящие режимы
В общем случае процедура синтеза СПС рассчитана на класс нелинейных
динамических объектов
X = F(X,0 + B(X,/)U, (4.109)
где Xe/?",Uetfm,a ¥(X,t),B(X,t) - непрерывные по своим аргументам матрицы
размером их1 и пхт соответственно.
Управление строится в виде
U = -yG(X,0signL(X), (4.110)
где у > 0, G(X,t) - мажорирующая функция для компонент эквивалентного
управления
g/(X,o>h3K(X,/)|,
meG(X,/) = (gl(X,/)...gw(X,0)T, иэк=(и1эк... итж)\
Предполагая, что управление осуществляется в скользящем режиме на
многообразии ЦХ) = 0, ЦХ) = (а,(X)...ат(Х))т , эквивалентное управление вычисляется из
условия ЦХ) = 0:
Ё(Х) = — Х = — F(X,/) + — В(Х,/)иэк =0.
ах эх ах 9К
Откуда
иэ =-["—В(Х,о] — F(X,0, detf— B(X,oVo.
эк [ex J ax [ex )
Синтез осуществляется в два этапа. На первом этапе выбираются поверхности
разрыва L = 0 таким образом, чтобы движение в скользящем режиме обладало
желаемым качеством. На втором этапе строится управление, гарантирующее
возникновение и существование полного скользящего режима в системе. Двухэтапный подход
реализуется введением наряду с основной целью управления lim Х(/) = 0 , вспомога-
/->оо
тельной цели lim ЦХ) = 0.
/-»оо
Доказательство, что управление (4.110) гарантирует возникновение скользящего
режима, как правило, проводится методом Ляпунова с использованием квадратичной
формы вектора функции ЦХ), играющей роль функции отклонения траектории от
поверхности скольжения.
Аналогичность первого этапа синтеза СПС выбору структуры основного контура
в адаптивных системах, а второго этапа - синтезу алгоритма адаптации, позволяет
осуществлять синтез СПС на основе схемы скоростного градиента.
Продемонстрируем применение схемы скоростного градиента на примере синтеза
СПС для линейного стационарного объекта [2]
Х(0 = АХ(/) + Ви(0, (4.111)
где X(t)eR\ u(t)eR].
Глава 4. Адаптивные системы 301
Цель управления ПтХ(/) = 0, и требуется обеспечить скользящий режим по
плоскости а(Х) = 0ТХ = 0.
Предполагается, что первый этап синтеза, состоящий в выборе поверхности
скольжения а = 0, обеспечивающий системе
Гх = АХ(0 + Вм(0,
|<=>тх(о = о
в скользящем режиме достижение ЦУ Х(/)-»0 при /->» с заданным качеством,
выполнен. Детально этот этап синтеза будет разобран ниже в примере 4.5.
Выберем локальный целевой функционал вида q(a) = —GTG и вспомогательную
ЦУ lima = 0.
Вычисляя последовательно
0(а) = со(Х, w, 0 = a(0TAX + 0тВм),
Vwco(X,w,O = ©TBa(X)
и выбирая АСГ в конечной форме (4.52), ^(Х, и, /) = signVww(X, и, /), получаем
алгоритм управления вида
и = -у sign(<=>TBa(X)). (4.112)
Для обоснования работоспособности воспользуемся теоремой 4.4.
Условие сильной псевдоградиентности выполнено при 8 = 1. Условие
разрешимости выполнено, т.к. Т(Х, w, /) = 0TBa(X) не зависит от u(t). Условие
выпуклости выполнено в силу линейности ОУ по входу. Условие достижимости выполнено
при w,(O = -[(®TB)'10TA + 0T]x(O, т.к. при этом
co(X,M+,/) = af0TAX-0TB(0TB)"10TAxl-a(0TB)a<-ao~cjTa.
Заметим, что предполагается выполнение условия 0ТВ > 0, 0 < ос0 < 0ТВ.
Таким образом, на основании теоремы 4.4 приходим к заключению, что в системе
(4.111), (4.112) достигается ЦУ: 0(с) -> 0 при t -» a>, если
у = уо|Х|,уо>|0тВ-10тА+0т|/р, p>0.
Если измерению доступен не весь вектор состояния ОУ, а лишь вектор выходов
Xb(/) = LtX(/)g/?/, to выбирая уравнение плоскости скольжения в форме
a = 0TXB=O, (®eRiy а целевую функцию вида q(X) = 0,5XTHX, H = HT>0,
действуя по схеме скоростного градиента, приходим к алгоритму АСГ в конечной
форме
M = -ysigna, a = 0TXB, XB = LTX . (4.113)
Все условия теоремы 4.4 выполнены, а для выполнения условия достижимости
требуется существование Н = НТ >0 и вектора 0#, удовлетворяющих неравенству (4.87)
ha*+aJh<o,
при HB = L0, A+=A + B0jLT.
302
Методы современной ТАУ. Часть IV
Согласно теореме 4.6, последнее выполняется, если W(k) = QT (W- А) В -
строго минимально-фазовая передаточная функция, что обеспечивается
соответствующим выбором вектора 0.
Таким образом, если W(X) - строго минимально-фазовая передаточная функция,
то в системе (4.111), (4.113) ЦУ Х(/) -» оо при / -» оо достигается.
Пример 4.5. Рассмотрим систему второго порядка, заданную моделью в пространстве состояний
f*l =*М*1 +tfl2*2>
1*2 ~а1\Х\ + а22*2 + ^">
где a,j,b - параметры ОУ
Х2
х2 = -Bxj
-►
(4 114)
(4 116)
tga = -G
На первом этапе синтеза выберем уравнение отклонения траектории ОУ от плоскости скольжения в
виде
a = (k,+jt2, (4.115)
где 9 - параметр, определяющий тангенс угла наклона прямой х2 = -9*,, являющейся поверхностью
скольжения
В скользящем режиме (a = 0 ) система (4.114) описывается уравнениями
*,=(<2Г||-еа|2)х„
х2=-вх„
которые не зависят от параметров я2|,я22,6, что позволяет говорить об инвариантности системы,
находящейся в скользящем режиме по параметрам исходного объекта, точнее, от части параметров.
Выберем значение параметра 9 = 9, из уравнения
a,,-9.al2 =-p. (4 117)
При этом решение системы (4.114) имеет вид
л-,(/) = ^,(0)е-р',
*2(/) = -9ф*,(0)е-р/.
Очевидно, что при р>9 система (4.116) экспоненциально устойчива (х, -»0, х2 ->0 при /-*оо).
Более того, желаемое качество системы (скорость сходимости) может быть обеспечено соответствующим
выбором значений р.
На втором этапе выбираем управление вида (4.112)
« = -Ysign{9^a} = -ysign{9.W.Jt,+;c2)}, (4 118)
которое гарантирует возникновение скользящего режима в системе (4.114), (4.118).
Так как в рассматриваемом примере b - скалярная величина, а значение 9Ф выбрано на первом этапе
синтеза, то, предполагая известным значение х = sign 9,6 , получаем управление (4 118) в виде
w = -ysign a(x,,x2) = -ysign (9Фх, +*2), (4 119)
где У = ХУо(|*|| + ЫЬ y(,^sup|9^-lA+9jj/p,
Глава 4. Адаптивные системы
303
" , I - 2x2 единичная матрица
а21 а22)
Задаваясь допустимой областью начальных условий (дг, (0),л'2(0)) можно использовать алгоритм
(4 119) с постоянным коэффициентом усиления
Y>Yo(M)| + |.v2(O)|)
Заметим, что при разбросе параметров аи,а12 ОУ следует выбирать 6, из уравнения (4 117),
рассчитывая на наихудший вариант значений ап,аа , таким образом, чтобы выполнялось неравенство
а\\ -®*а\2 ^~Р- ^а\Ьа\2
В этих условиях гарантируется, что в скользящем режиме система будет иметь запас устойчивости не
ниже р , т е.
дг1(/)<дг1(О)^-р/,
*2(/)<-е.х,(0)е-р'
Результаты моделирования системы (4 114), (4.119) при параметрах ОУ 1<ям<3, -1<я12<1,
а2\ =1» а22 = 2, Ь=\, начальных условиях jC((O) = 1, jc2(O) = 2 , при выбранном р = +1, при постоянном и
переменном коэффициенте усиления (у(/)) релейного элемента приведены на рис. 4 18 - 4 20. Графики на
рис 4 18 (6 = -0,5) иллюстрируют возникновение неустойчивого скользящего процесса
Рис. 4.18. Результаты моделирования при 0 = -0,5, у(О = 2|0+l|(|.x:,| + з|д:2|)
Приведённый алгоритм управления (4.112) обеспечивает высокое
быстродействие, простую реализацию, возможность сохранения стабильных динамических
свойств при быстроменяющихся параметрических возмущениях. К недостаткам
следует отнести возможную потерю работоспособности системы при изменении
параметрических возмущений в широких пределах и большой инерционности
исполнительных элементов.
304
Методы современной ТАУ, Часть IV
1 4
12
1
08
06
04
02
t ,
02 04 06 08 1 12 14
»(')
0,2 0,4 0,6 0,8 1 12 14
ЛРГ0608112 14
t
Рис. 4.19. Результаты моделирования при 9 = 2, у(/) = 2|e+l|(|x,|+ з|дг2|)
0 0,2 0,4 0,6 0,8 1 1,2 1,4
■: "(О
з-
2-
1-
6|| 0^8 I | р.|р у 11
Рис. 4.20. Результаты моделирования при 9 = 2, у = 47
Глава 4. Адаптивные системы
305
Первый, из указанных недостатков СПС связан с тем, что задача формирования
поверхности разрыва а = 0, обеспечивающая требуемое качество системы в
скользящем режиме, тесно связана с точностью априорной информации о параметрах ОУ.
В частности, в предыдущем примере было указано на необходимость выбора
параметров поверхности скольжения Э„ исходя из наихудшего набора возможных
параметров ОУ. Это позволяет решить задачу обеспечения качества системы в
скользящем режиме не хуже заданного. Однако при большом разбросе параметров это ведёт
к увеличению коэффициента усиления у0 и, следовательно, к большому значению
управляющего воздействия. На практике такое увеличение управления часто бывает
неприемлемо, т.к. задача решается в условиях ограниченной энергии управления.
Кроме того, желание упростить реализацию алгоритма управления за счёт выбора
постоянного, но достаточно большого коэффициента усиления у приведёт к
большим амплитудным колебаниям системы в реальном скользящем режиме.
Для расширения границ применения алгоритмов СПС можно использовать
рассмотренные выше сигнально-параметрические алгоритмы скоростного градиента с
явной или неявной эталонной моделью. Параметрическая обратная связь вводится
для дополнительной стабилизации ОУ. При этом в системе достигается ЦУ при
широком изменении параметров ОУ и возможно возникновение скользящего режима
при меньших значениях коэффициента усиления у. Более того, если
параметрическая обратная связь строится на основе явной эталонной модели, то появляется
возможность выбора поверхности скольжения исходя из параметров эталонной модели.
В этом случае независимо от параметров ОУ при возникновении скользящего
режима система будет иметь заданную скорость сходимости (быстродействие).
Функциональная схема системы с явной эталонной моделью представлена на
рис. 4.21.
X
i
ОУ
Параметрическая
ОС
Адаптер
ЭМ
о(Х)
=>
Рис. 4.21. Функциональная схема сигнально-параметрического алгоритма адаптивного управления
Перераспределяя энергетические ресурсы между релейным (сигнальным) и
параметрическим управлением можно добиться желаемого качества замкнутой системы.
Ниже рассмотрим иной путь синтеза, основанный на настройке поверхности
скольжения [21].
21 Зак 416
306 Методы современной ТАУ. Часть IV
4.5.3.2. Система с переменной структурой и настраиваемой
поверхностью скольжения
Процедура синтеза. Процедура синтеза систем с настраиваемой поверхностью
скольжения осуществляется в три этапа. На первом этапе в условиях полной
априорной информации о параметрах объекта управления (ОУ) выбираем «идеальное»
уравнение поверхностей разрыва а(0*,Х) = О, (0* = 0(£) - матрица идеальных
параметров уравнения разрыва) таким образом, чтобы движение в скользящем режиме
обладало желаемыми свойствами.
На втором этапе синтезируется алгоритм настройки параметров уравнения
разрыва, обеспечивающий желаемое качество при отсутствии априорной информации о
параметрах объекта управления (£ е S, S - выпуклое множество).
На третьем этапе строится управление, гарантирующее возникновение и
существование полного скользящего режима.
Опишем идею синтеза на примере стабилизации линейного стационарного ОУ,
описываемого в виде
X = AX + BU, Х(0) = Х0, (4.120)
где X е R" - вектор состояния, U e Rm - управление, А = А(£); В = В(£) -
постоянные матрицы размером пхп и тхт соответственно, причем rank B = /w; £eE
- неизвестные параметры ОУ. Предполагается, что система управляема при любом
£е Е . С помощью неособого преобразования приведем, систему (4.120) к регулярной
форме
. ' " ' п 2 (4.121)
Х2 = А21Х, + А22Х2 + B2U, X, (0) = Х10, Х2 (0) = Х20,
где А^(£) (/,7 = 1,2), В2(£) - постоянные матрицы соответствующих размеров,
X! - п-т -мерный вектор, Х2 -/w-мерный вектор, det B2 *0 .
Базовый алгоритм адаптивного управления
Первый этап синтеза. Поверхности разрыва выбираем в виде
Ц0„Х) = 0,Х1 + Х2=О, (4.122)
где 0, =0(§)-1их(/!-/и) матрица, Е(0„Х)еДда.
В идеальном скользящем режиме система описывается уравнениями
|Е =0,Х1+Х2=О, Х,(0) = Х10.
Желаемое поведение системы в скользящем режиме зададим эталонной моделью
Хэ1=АДэ1, Хэ1(0) = Хэ10, (4.124)
где А* - гурвицева матрица с заданным расположением собственных чисел,
X3]eR"-m.
Идеальные параметры 0* выбцраем из условия
А| j — А120* = А*,
так что 0* = А^2(АП -A»), Af2 -псевдообратная м^1рица.
Матрица 0* существует, т.к. объект управляем. Определением 0* заканчивается
первый этап синтеза.
Глава 4. Адаптивные системы 307^
Второй этап синтеза. Целью второго этапа является синтез алгоритма
адаптации. Так как А,у = А,у(£), заменим идеальные параметры 0* настраиваемыми
параметрами 0(/). Синтез проведем методом функции Ляпунова. Рассмотрим
квадратичную скалярную функцию вида
Vx (Е, 0) = ^ETHE + ltr[(0-0,)T Г"1 (0-0.)], (4.125)
где Е = Х,-Хэ1, Н = Нт>0, Г = Гт>0.
Определим производную от функции Fj(E, 0) в силу уравнений (4.123), (4.124)
F1(E,0) = ETHA+E + ETH(A11-A120-A,)X1+tr[(0-0*)Tr-10] =
= ETHA,E + tr[(0-0*)T(-A]r2HEX[+r'"10)].
Выберем алгоритм управления в виде
0 = ГА^2НЕХ^. (4.126)
С учетом существования матрицы Н = Нт > 0 , удовлетворяющей уравнению
Ляпунова
HA*+A?H = -G, G=Gt>0, (4.127)
получаем
F,<--pETHE, ' (4.128)
где р=—яии >о, ^min(G),Xmax(H) - соответственно минимальное и максималь-
^тах(Н)
ное собственные числа матриц G и Н.
Таким образом, все траекторий системы (4.123), (4.126) ограничены. Далее, учи-
оо
тывая конечность интеграла Je(t)HE(t) dx, линейность системы (4.123), (4.124),
о *
выполнение условий роста ^(Е, 0)->оо при Цх^-х» в силу гурвицевости А*,
доказывается стандартным образом (см. например лемму П. 1.1 [35]) ограниченность
всех траекторий системы (4.123), (4.124), (4.127) и Е(0 -> 0 при t -» оо.
Третий этап синтеза. Задача третьего этапа заключается в выборе разрывного
управления, при котором на многообразии £ = 0 возникает и поддерживается
скользящий режим. С этой целью на основе исходных уравнений системы вычислим
производную по времени функции Г(0, X)
L = R(X) + B2U, (4.129)
где R(X) =(0А,! + А21 +0)Х1 +(0А12 + А22)Х2.
Для синтеза разрывного управления выберем квадратичную форму
f2(l)=~2:t(b21)tb212: (4.ш)
и вычислим ее производную
к2(г) = -lt (в2!)т щх± = ет (в2!)т в2 ^(Х)^!:1 (в2])т и.
Выбирая разрывное управление в виде
U(O = -ysignB21r, (4.131)
получаем
21*
308 Методы современной ТАУ. Часть IV
в;^\<
Bi'4
v2 =(вг|е)т{в;'0(а11х1 +а12х2)+вг|0х1 +в2-'(а21х1 +а22х2)}-у
^|B2I4B21|W(|IAJI|X.IЧIAП|||X2|)Ч|A2.|||X^||A22|||X2| + ||0||X1|}-У
Для того чтобы при VE Ф 0 выполнялось V2 < 0 , достаточно потребовать
Y>Y=Yo{(Yxl|X1| + YXi|X2|)|e| + yX||X1| + yXa|X2| + |e||X1|}> (4.132)
где |фув|Е|.|Х,|,Уе Н1ГАИ1' у0 >||в^||, ух, Н1Аи|, ух, >||А12||,
ух >||А21||, Ух2 ^||А22|| V^eH и введено обозначение И = ХЫ*
Таким образом, получен следующий релейный алгоритм управления с
настраиваемой поверхностью скольжения:
U = -ysignB212:j
Г = 0Х1+Х2,
. ГО при £*0,
" ~[ГА^2НЕХ^ при Г = 0,
где Г = Гт > 0 , у = у(0 удовлетворяет условию (4.132), Е = Xj - Хэ1.
Замечания:
1) В алгоритм (4.126) входит неизвестная матрица А12 = А12(£), £еЕ. Для
исключения А, 2 из алгоритма адаптации следует подобрать
матрицу А12 = const, связанную с A]2 зависимостью
А12А1Г2(^) = Р(О ,гдеР(£) = Р(£)т>0 V^eS.
При этом выполняется условие псевдоградиентности: 4/T(E)V0F,(E, 0)> 0,
где
VeK(.) = Aj,HEX?, 4>(E) = AT2]HEXj
и настройка коэффициентов матрицы 0 будет осуществляться в направлении
псевдоградиентности. В этом случае соответственно корректируется
уравнение (4.132).
2) Недостатком рассмотренного алгоритма является возможность настройки
поверхности разрыва лишь при возникновении скользящего режима. Кроме того,
следует заметить, что в реальном скользящем режиме моменты времени, при
которых Г(/) = 0, будут изолированы.
Модифицированный алгоритм адаптивного управления.
Для преодоления указанного недостатка рассмотрим возможность непрерывной
настройки поверхности скольжения. Для этого вернемся к исходному описанию ОУ в
форме (4.121) с учётом уравнения ЦХ, 0) =0Х,+Х2, которое при выполнении
условия £ = 0 является уравнением поверхности разрыва. Вычисляя из последнего
уравнения Х2 и подставляя его в первое уравнение системы (4.121), получаем
описание системы в виде
Х,=(А11-А|2в)Х1+А12Г,
^ Х2 = А21Х,+А22Х2+В2и, (4.133)
£=0Х,+Х2,
Х1(0) = Х10,Х2(0) = Х20.
Глава 4. Адаптивные системы 309
Желаемое поведение объекта по координатам X! зададим уравнением эталонной
модели
Хэ1=А,Хэ1+ВэГ, Хэ|(О) = Хэ1.о, (4.134)
где А* - гурвицева матрица.
Введем вспомогательную цель управления
Ilxi-X3i||-»0 ПРИ '->°°, Д0 = 0 при t>t>, (4.135)
выполнение которой при ограниченном 0 обеспечивает достижение цели
X, (t) -> 0, Х2 (t) -> 0 при t -+ оо .
Очевидно, что при известных параметрах £ ОУ цель управления (4.135)
достигается, если существуют такие 0 = 0*(£), Вэ = Вэ*(£), что выполнены условия
Апй)-А12(§)в. = А.э ВЭ,=А12(© (4.136)
и управление имеет вид
U*=-y,(X)signB212:,
где у*(Х) выбирается из условия К2(Е)<0.
В условиях неизвестных параметров £eS, считая 0(/), Вэ(0, U(/)
настраиваемыми переменными, проведем синтез алгоритма адаптивного управления, используя
сепарабельную квадратичную форму
к3(е,0,вэ) = 1етне+11г||0-042г-1+^г!|вэ-в42г-,+/(5:),
где Е = X, -Хэ1 и введены обозначения:
Цс-allJL, «(с-с^г-Чс-со, /(г) = 1гт(в21)тв215:.
Вычислим F3(») вдоль траектории системы (4.133), (4.134) с учетом (4.136)
Кз=ЕтН{(Ап-А120)Х1+А122:-А,Хэ1-Вэ2:} +
+ 1г{(0-0*)ТГГ10}+1г{(Вэ-ВэОТГ21Вэ} + /(Г) =
= ЕтНА,Е + ЕтН{-А12(0-0+)Х1+(Вэ*-Вэ)2:} +
+ tr{(0-0.)T Г^0} + 1г{(Вэ -Вэ0Т r,1^} +/(L).
Выбирая алгоритмы настройки в виде
|0 = Г,А[2НЕХ[, (4137)
[ВЭ=Г2НЕГТ
и учитывая существование матрицы Н = Нт > 0, удовлетворяющей уравнению
(4.127), а также равенство (4.129), получаем:
f3 < --!-рЕтНЕ+2:т (в2 !)т в2 ]± =
= -ipETHE + (B212:)TB21{(0A11+A21+0)x1+(0A12+A22)X2}+(B2l2:)rU.
Выбрав разрывное управление в форме (4.131), окончательно получаем:
Кз<-1рЕтНЕ+|вг14||в21Н|И1(||А||||-|Х1| + ||А|2||.|Х2|) +
+||А21|НХ1| + ||А22|НХ2|+||0||-|Х1|}-у|в212:
310
Методы современной ТАУ. Часть IV
Для того чтобы при \/ШфО функция V3 <0, достаточно потребовать, чтобы у
удовлетворяла условию (4.132).
Далее стандартным способом доказывается ограниченность всех траекторий
системы (4.133), (4.137), (4.131) и достижение цели уравнения (4.134).
Замечание. Можно отказаться от настройки параметров Вэ(/), исключив из
функции Уъ{*) слагаемое 1гасе||Вэ-Вэ*||г_, и увеличив коэффициент усиления у
релейного управления на величину Шт2 (А12-В*) НЕ . Более того, можно
исключить из уравнения эталонной модели слагаемое А*Е .
Пример 4.6.
Пусть объект управления описывается системой уравнений
(xl=auxl+a]2x2i
\х2 = a2]x + a22x + b2u, jc,(O) = 1,jc2(0) = 2,
где ац (i,y = 1,2), Ь2 - неизвестные параметры ОУ, но известно, что sign (b2) > 0 .
Желаемое поведение системы в соответствии с (4.134) зададим уравнением
*1э = -Зх1э + Аэ(/)<т(/), х,э(0) = 2,
где a(t) = e(t)x,(/) + x2(/).
Алгоритм адаптивного управления с учетом (4.136), (4.137) и sign(62) > 0 имеет следующий вид
n(0 = -Y(/)signa(/), 9(/) = 6e(/)x1(/), £,(/) = е(0а(/),
где в(/) = х,(/)-х|э(/), у(/) = 2.(|х||(|в| + 2|е| + 1) + |х2|(2|в| + 3)).
Результаты моделирования при начальных условиях: 9(0) = -0,5; Ьэ(0) = 0,1; jc,(O) = 1; х2(0) = 2; д:,э(0) = 2
и параметрах объекта управления ап = 1; ап = 2; а2] =1; а22 = 3; ^ =1 приведены на рис. 4 22.
Заметим, что при выбранном начальном условии на параметр плоскости скольжения 0(0) = -0,5 без
контура адаптации система в скользящем режиме неустойчива по координатам хх 9х2 .
♦»(о
2
1 5
1
05
0
i Л
У\
02 04 Об 08
12 14 16 18
12 14 16 18
02 04 Об
Рис. 4.22. Результаты моделирования системы стабилизации с базовым алгоритмом
Глава 4. Адаптивные системы 311
Задача слежения [22]
Распространим описанный выше метод синтеза систем с настраиваемой
поверхностью скольжения на задачу слежения.
Вновь рассмотрим линейный стационарный ОУ (4.120), приведенный к
регулярной форме (4.121).
Базовый алгоритм адаптивного управления
Первый этап синтеза. Поверхности разрыва выберем в виде
L(0*,D*,X) = 0*X1-D*G + X2=O, (4.138)
где 0*=0(£) - тх(п-т) матрица, D*=D(£) - тхт матрица, G e Rm -вектор-
функция задающих воздействий.
В идеальном скользящем режиме система описывается уравнениями
[г = о.
Желаемое поведение системы в скользящем режиме зададим эталонной моделью
Хэ1 = А,Хэ1+В,С, Хэ1(0) = Х°„ (4.140)
где А* - гурвицева матрица. Идеальные параметры 0*,D» выбираем из условий
Аи-А120*=А*, A12D*=B»,
так что 0* = А^2(АИ-A»), D^Aj^B*.
Очевидно, что при выбранных идеальных параметрах, гурвицевости матрицы А*
и ограниченности задающих воздействий (||G|| < Cg < оо) достигается цель
управления Х,-»Хэ1 при /->оо и все траектории системы (4.139), (4.140) ограничены
(ИМ-
Второй этап синтеза. Синтез алгоритма адаптации проведем методом
функции Ляпунова, выбрав скалярную квадратичную форму в виде
K1(E,0,D) = O,5ETHE + O,5trace[(0-0*)Trj"1(€)-€)*)] +
+0,5 trace[(D - D* )т Г2 х (D - D*)],
где Е = Х1-Хэ1, Г;=Г^>0, / = 1,2; D = D(O, 0 = 0(0 - настраиваемые
параметры. Вычислим производную ^(Е,0) в силу уравнений (4.139), (4.140)
K1(E,0,D) = ETHA+E-ETHA12(0-0*)X1+ETHA12(D-D*)G +
+ trace{(0 - 0* )T rj"!0 + (D - D*)T T^D} =
= ETHA*E + trace{(0 - 0* )Т (-А[2НЕХ[ + Г^0) +
+ (D-DOT(A?2HEG?'+^1))}.
Выбирая алгоритм настройки параметров D и 0 в виде
^) = |Г1Л(О-Х^(О при 2 = 0,
\ 0 при Г * 0,
f-r2A(O-GT(O при Г = 0,
D = J k2^vj ^ vj i.pnw-v/, (4 142)
[О при Е Ф 0,
Л(0 = А?2НЕ(0,
312 Методы современной ТАУ. Часть IV
получаем
Vx (Е) = ЕТНА*Е < -рЕтНЕ,
X (G^
где р = —ПШ! > 0, матрица Н = Нт > 0 удовлетворяет уравнению Ляпунова
^тах(Н)
ha*+aJh = -g, g=gt>o.
Далее из ограниченности G(0 и гурвицевости матрицы А* стандартным
способом доказывается ограниченность траекторий системы (4.139), (4.140), (4.142) и
достижение ЦУ Е(0 -> 0 при t -> оо .
Третий этап синтеза. Выберем разрывное управление, при котором на
многообразии L(0,D,X) = O возникает и поддерживается скользящий режим. С этой
целью на основе исходных уравнений системы вычислим производную L(0,D,X):
Е(0, D, X) = «(X,G)+ B2U, (4.143)
где /?(X,G) = (0A11+A12+0)X1+(0A12+A22)X2-DG-DG.
Используя для синтеза разрывного управления квадратичную форму (4.130)
F2(L) = 0,52:T(B21)TB212:,
вычисляя ее производную в силу (4.143)
F2(L) = 2:T(B21)TB21/?(X,G) + 2:T(B21)TU
и выбирая разрывное управление
U = -ysignB212:, (4.144)
получаем
K2(2:) = /?(X,G)(B21)TB21I-Y
Для того чтобы V2 <-p В2]Г при некотором значении р >0, достаточно
потребовать у > у = /?(X,G)T(B21)T . Последнее условие выполняется, например, если
Y>Y = Yo{(Yx1|X1| + YxJX2|)||0||+yXi|Xl| + yxJX2| +
HAKYeftl + YDlGQ+lDlGl),
где
Yo *|в?| , Ух, ^|Ац|. Yx2 ^|Ai2|, Yx, ^||A2i||. Yx2 ^||a22||.
|Л|<|А21НЕ|, ув>||Г,|, YD>||r2||.
Замечание. Для обеспечения ограниченности управления (см. (4.145))
необходимо потребовать ограниченности вектор-функции задающих воздействий и ее
производной (G(0 - ограниченная, гладкая вектор-функция).
Наконец, первые два замечания остаются справедливыми и для задачи слежения.
Модифицированный алгоритм адаптивного управления
Для синтеза модифицированного алгоритма вновь вернемся к описанию системы
в форме (4.121) с учетом уравнения £(0,D,X) =0Xj -DG + X2 :
X, = (Ап - A120)X, + А12Г + Al2DC,
Х2 = А21Х, + А22Х2 + B2U, (4.146)
r = 0X,~DG + X2, Х^О^Хю, Х2(0) = Х20.
в;Щ.
Глава 4. Адаптивные системы 313
Желаемое поведение объекта по координатам X, зададим уравнением
Хэ1=А.Хэ1+Вэ£ + ВЛ, ХЭ|(О) = Х?1, (4.147)
где А* - гурвицева матрица, G(/) - гладкая, ограниченная вектор-функция.
Введем вспомогательную ЦУ (4.135)
||Х, -Хэ1||-»0 при /->оо, £(0 = 0 ПРИ t>U,
выполнение которой при ограниченности 0(f), D(/), G(0 гарантирует заданную
динамику системы по переменным Х.{ и ограниченность всех траекторий адаптивной
системы управления.
Синтез алгоритма адаптивного управления проводится методом функции
Ляпунова на основе сепарабельной формы
К3(Е,Г,0,О,Вэ) = К1(Е,0,О) + К2(2:) + О,51гасе{(Вэ-В;)тП1(Вэ-В;)},
где В; = А12(£).
Вычисляя производную К3(») по времени в силу уравнений (4.146), (4.147) и
выбирая алгоритм адаптивного управления в виде
U = -ysignB21£(0,
D = -r2A(/)G(0T,
Вэ=Г3НЕ(0£(0Т,
где Л(/) = А^2НЕ(/), у - удовлетворяет условию (4.145), и учитывая, что матрица
Н = Нт>0 удовлетворяет в силу гурвицевости А* уравнению Ляпунова (4.127),
получаем
k3(e,i:)^-piethe-p2|b2Ii:|, р, >о, р2 >о.
Далее стандартным образом доказывается ограниченность всех траекторий
системы (4.146) - (4.148) и достижение ЦУ (4.135).
Замечание. Можно показать, что при переменной вектор-функции G(/)
задающих воздействий в реальном скользящем режиме алгоритм (4.148) приобретает
идентифицирующие свойства по настраиваемым параметрам, а именно 0(/)->0*,
D(0 -+ D*, Вэ(0 -+ А,2 при / -» оо .
Замечания 3, 4 для алгоритма управления (4.148) сохраняют свою силу.
Заключение. Предлагаемая процедура синтеза, основанная на настройке
поверхности скольжения, в отличие от ранее предложенных процедур синтеза задает
желаемое поведение ОУ лишь по части переменных состояния, что позволяет в общем
случае уменьшить общее количество настраиваемых параметров. К недостаткам
полученных алгоритмов следует отнести некоторое увеличение релейного управления
за счет составляющей пропорциональной ||0 , необходимой для поддержания
скользящего режима при повороте плоскости скольжения.
Пример 4.7. Пусть объект управления описывается уравнением
|*1=*11*1+*12*2.
|*2 = а1Ххх -; а22х2 + Ь2и, х,(0) = 1,х2(0) = 2,
где atJ (ij = 1,2), b2 - параметры ОУ (b2 > 0,a,2 > 0 ).
Синтез базового алгоритма
20 3ак.416
314
Методы современной ТАУ. Часть IV
Желаемое поведение системы в соответствии с (4.140) зададим уравнением
*1э = -3*|, + ЗЯО. *1э(0) = 2,
где >>(/) = sin(7t//3) - задающее воздействие.
Алгоритм адаптивного управления в соответствии с (4.142), (4.144) с учётом знаков Ь2, а]2 имеет
следующий вид
«(/) = -y(Osigno(/),
в(0 =
0,
1-1
~У2еУ-
Н>5,
|а|<8,
Н>8.
H<8,
где
а(/) = е(/)*,0) + x2(t) - d(t)y(t\ e(t) = jc,(/) - х1э(/),
y(/) = 3-(|x1| + fle| + H + l) + |x2|(2|e| + 3) + H + icH),
5 = 6(А) - положительная величина введенная для обеспечения работоспособности алгоритма при
дискретизации с шагом И.
На рис. 4.23 приведены результаты моделирования системы с базовым алгоритмом адаптивного
управления при начальных условиях 0(0) = -0,5; d(0) = 0,1, параметрах объекта управления дп = 1;а12=2;
а2\ -1; а22 = 3; ^2 = 1, параметрах адаптера h = 0,01, б = 0,01, yj =6, у2 = 2, у0 = 3.
Синтез модифицированного алгоритма управления
Желаемое поведение системы в соответствии с (4.147) зададим уравнением
*1э = "3*1э + ЫО + b,(tMt), хь(0) = 2 ,
где >>(/) = sin(7t//3) - задающее воздействие.
J
2
1,5
1
0,5
0
-0,5
0 2
г-
4 6 8 10 12 14 16 18 20
\
t
_Лт_1 , , , , , , ^w.
16 18 20
1,6
1,4
1,2
1
0,8
0,6
0,4
0,2
0
-0,2
;>D
D*
10 12 14 16 18 20
8 10 12 14 16 18
-г
Рис. 4.23. Результаты моделирования системы слежения
с настраиваемой поверхностью скольжения (базовый алгоритм)
Глава 4. Адаптивные системы
315
Модифицированный алгоритм адаптивного управления в соответствии с (4 148) и условием задачи
имеет вид
и(0 = -Y(/)signa(/), G(r) = у,*(/)*, (г), </(/) = -У*(t)y(t\ 4 = y3e(/)a(/),
где
а(/) = в(/)х,(/) + х2(/)-</(/)*(/), *(/) = х,(0-*„(/),
у(/) = 3-(|д:1| + (|в| + И + 1)+|х2|(2|в| + 3) + |в| + я|4
На рис. 4.24 приведены результаты моделирования системы с базовым алгоритмом адаптивного
управления при начальных условиях 9(0) = -0,5; </(0) = 0,1, параметрах объекта управления 0ц = 1,
ai2 = 2; a2i = !i ап = 3; ^2 = *» параметрах адаптера у, = 12, у2 = 2, у0 =60.
Заметим, что при выбранном начальном условии на параметр плоскости скольжения 6(0) = -0,5 без
контура адаптации система в скользящем режиме неустойчива по координатам хх,х2
2(0
i
"У .
1,5 -
1 -
0,5 -
0 .
-0,5 •
V
X \ \
-1
-5
fVN/N*
i
1 •
0 •
-1.
-2-
-3 •
—4 ■
-5-
-6 •
-7-
-8
) 5
Л"
10 15 20 25 30
\
А|2
t
10 15 20 25 30
150
100
«(<)
20
25
30
20
30
Рис. 4.24. Результаты моделирования системы слежения
с настраиваемой поверхностью скольжения (модифицированный алгоритм)
20*
316 Методы современной ТАУ. Часть IV
ГЛАВА 5. ВВЕДЕНИЕ В ОПТИМИЗАЦИЮ
МНОГООБЪЕКТНЫХ
МНОГОКРИТЕРИАЛЬНЫХ СИСТЕМ (ММС)
НА ОСНОВЕ СТАБИЛЬНО-ЭФФЕКТИВНЫХ
КОМПРОМИССОВ
(ИГРОВЫЕ ПОДХОДЫ В УПРАВЛЕНИИ)
5.1. ПОСТАНОВКА ЗАДАЧ ПРОЕКТИРОВАНИЯ И УПРАВЛЕНИЯ
МНОГОКРИТЕРИАЛЬНОЙ МНОГООБЪЕКТНОЙ СИСТЕМОЙ
(ММС) НА ОСНОВЕ СТАБИЛЬНЫХ ЭФФЕКТИВНЫХ РЕШЕНИЙ
И КОМПРОМИССОВ В УСЛОВИЯХ КОНФЛИКТА
И НЕОПРЕДЕЛЕННОСТИ
С ростом информационной и структурно-целевой сложности функционирования и
проектирования управляемых систем все более существенным становится учет
факторов несогласованности (конфликтности) и неопределенности различного характера.
Развиваемые игровые подходы управления в условиях конфликта являются
основными в одном из классов задач теории оптимального управления. Проблема
взаимодействия объектов (коалиций) возникает при прямом формировании многообъектной
модели конфликтной ситуации, при структуризации классической однообъектной и
однокритериальной задачи управления с формированием многообъектной
многокритериальной системы (ММС), а также при представлении сложной задачи и системы
многоуровневой структурой. Действительно, структура многоуровневой системы [33, 39]
(рис. 5.1) позволяет выделить три вида систем: систему - объект, систему, которую
составляет горизонтальный ряд в общем случае равноправных объектов (ММС), и
полную иерархическую систему (ИС). Каждый вид системы формирует свой «вклад» в
задачи оптимизации. В рамках ММС формируется класс задач оптимизации, в котором
известные подходы оптимизации объекта (вариационные подходы, принцип
максимума, методы динамического программирования и процедуры нелинейного
программирования) существенно дополняются игровыми подходами с собственными принципами
оптимизации, методы решения которых базируются на многообъектности структуры,
многокритериальности задач и свойствах конфликтного взаимодействия объектов при
проектировании и управлении ММС: антагонистического, бескоалиционного,
коалиционного, кооперативного и комбинированного характера. По существу, создается
достаточно полный набор методов оптимизации ММС, как основа теории оптимального
управления ММС, которая занимает определенное промежуточное место между
классической теорией управления и теорией оптимизации решений в многоуровневых
системах. Поэтому предлагаемая разработка способов управления ММС, имеющих
свойства устойчивости и эффективности в конфликте и обеспечивающих компромиссы на
тактической и информационной основе с элементами интеллектуализации, является
актуальной задачей теории управления ММС.
Глава 5. Введение в оптимизацию ММС
31/
—►
«*—
—►
«*—
—►
<4—
х
н if п
Рис. 5.1. Структура многоуровневой системы
UN,
ОБЪЕКТ
Известна [34, 47] следующая классификация неопределенных факторов:
• неопределенные факторы, как следствие недостаточной изученности каких-
либо процессов функционирования объекта - подсистемы (внешних
воздействий, возмущений, начальных условий, текущего состояния - позиции,
параметров функций, в частности, законов распределения и моментов случайных
функций и т.д.) - это так называемые природные неопределенности или
неопределенности среды;
• неопределенные факторы, отражающие неопределенность во взаимной
информации, связанной с описанием, действиями объектов - подсистем в
сложной многообъектной системе, - неопределенности взаимодействующих
объектов - подсистем (неопределенность «активного партнера»);
• неопределенные факторы, отражающие неточное знание цели и показателей
цели в сложной системе (это проблема перехода от цели, сформулированной
на естественном языке, к вектору показателей, обладающему независимостью
свойств, ограниченной размерностью и полнотой описания исходной цели, это
неопределенность по выбору решения в задаче с векторным показателем, это
параметрическая неопределенность скалярного показателя и т.д.), - так
называемая неопределенность цели.
Данный подход является достаточно универсальным в условиях всех трех видов
неопределенности.
5.1.1. Общее определение игры. Частные классы игр
Определение 5.1 [6]. Игрой называется набор
Г = \м,Р, {Хк}, 5, {S(XK)}> [K)l
(5.1)
где N- произвольное множество игроков,
Р - коалиционная структура Ре Р,
К - коалиция - группа игроков, которой приписаны действия и интересы,
Xк - произвольное множество стратегий коалиции,
Ке Ре? (при любом Р: KczN),
318 Методы современной ТАУ. Часть IV
S - произвольное множество всех исходов игры на Ре Р,
s(xK) - множество возможных исходов на Ре Р, если коалиция К применяет
стратегию хк ,
>-
К - транзитивное отношение предпочтения коалиции Ке Ре Р.
Индивидуальные предпочтения, как правило, представляются некоторыми
отображениями У, на 5, KQjopbie являются функциями выигрыша (потерь). Тогда
предпочтительность исхода s' по «сравнению с исходом s" (s'ys") означает,
к
Ji(s')> Ji{s") для всех /еК.
Множество S(xK)dS позволяет каждой коалиции оценивать, как выбор коалицией
К конкретной стратегии хкеХк изменяет множество возможных исходов.
Определение 5.2. Коалиционной структурой (разбиение множества N) называется
такое семейство коалиций Ре Р, что
Хкф 0 для всех Ке Р (и Х& 0 ie К),
Кг\К'= 0 для всех К, К'е Р,КфК\ (5.2)
(иК) пК'ф 0 для любого А:7.
\КеР/
Если игроки разбились на коалиции и эти коалиции выбрали свои стратегии, то
считается, что игра Г разы грана.
Определение 5.3. Для любой коалиционной структуры Р набор стратегий
х(р} = U**, Ке Р называется ситуацией в игре.
При реализации ситуации х(Р) множество исходов сужается до r\S(xK), Ке Р.
Далее предполагается, что последнее множество исходов состоит из единственного
элемента [6].
Замечание 5.1. При отсутствии коалиций Р = (1, ...,/,..., ЛО (К = i) получаем
частный случай определения 5.1
Г = [#, {*,}, 5, 5(0, {*■}].
Определение 5,4 [6]. Динамической игрой называется набор
r = U P, S, W, {XK(s)}, {s(xK)}, {£}], (5.3)
где N, Р, 5, W, SnW* 0 - произвольные множества игроков, коалиционных структур,
неокончательных состояний игры и множества окончательных исходов игры; Xk(s) -
произвольное множество стратегий коалиции К в состоянии seS; S(xK)aSuW -
множество исходов (как окончательных, так и неокончательных) после применения
>-
коалицией стратегий х е XK(s)\ к - предпочтение коалиции К на множестве
конечных исходов W.
Реализация динамической игры состоит из последовательности состояний игры
sb...9sme 5, коалиционных структур Ри ...РтеР в данных состояниях и выбранных
ситуаций x[Pj9 Sj) = (xK)KeP.» xPgX&j) (J = 1» •••m)> причем в ситуациях x(PJ9 Sj)
(j <m) возможны исходы из 5, в том числе 5,+1, а в ситуации х(Рту sm) - только из W. То
есть из S(x(P,s))= n s(xK)следуетsj+leS(x(Pj,Sj))j= 1,..., m- h S(x(Ptmsm))czW.
Глава 5. Введение в оптимизацию ММС 319
Определение 5.5. Бескоалиционной игрой при фиксированном Р называется набор
Г = [^Л(Щ,Ш1, (5.4)
где Р - фиксированное разбиение, JK ={Ji}ieK или /^ =]£./,■, (^к=Ха<^;
Ха/ = *» 0 <а,- < 1), при отсутствии разбиения РФ0 - набор
V=[NAXi}AJi)l (5.5)
Аналогичное описание коалиционной игры приводит к следующему определению.
Определение 5.6. Коалиционной игрой называется набор
T = [N,P, {XK}, {JK}], (5.6)
КеРсР (при любом Р: KczN),
ieK
Для получения определения кооперативной игры вводится характеристическая
функция v(K)9 KdN, т.е. числовая функция, определенная на множестве 2N всех
подмножеств множества игроков N, v ( 0) = 0.
Определение 5.7. Кооперативная игра на основе характеристической функции
v(K) с v(0) = 0 моделирует распределение между игроками из N общего их
выигрыша v(N) согласно силе коалиции v(K) и описывается набором
r = U 5, {Хк}9 s(xK\ Щ\ 45.7)
гдеЛ^={1, ...,^};
S = {х = (xi **): xt> v(/), 2д,- = v(A0};
XK=\xeS: %xl<v(K)\t К a N ;
[ ieK J
5(/)=((/)),/gX,;
x>y означает jc, > yi9 ie К .
Частный случай кооперативной игры может быть сформулирован на основе
векторной оптимизации.
Определение 5.8 [5]. Кооперативной игрой называется набор
T = [N9X,X(N)]> (5-8)
где множество ситуаций
Х(лО = {4ЛО}=(]сеХ:тах ЕЛ(*) = ЕЛ«1-
[ хеХ i=i /=1 J
И, наконец, в плане иерархических игр один или несколько игроков ограничивают
множество исходов остальных на основе права первого хода. Остальные игроки в
зависимости от условий разыгрывают игру в рамках одного из четырех классов игр.
В работе Э.Н. Вайсборда, В.И. Жуковского [5] предложено следующее определение.
Определение 5.9 [5]. Иерархической игрой называется набор
• r = [N9L,N/L,XN,XM], (5.9)
где N - число игроков в игре,
L - число игроков, имеющих право первого хода,
NIL - число координируемых игроков,
XN = u X, - общее множество стратегий,
ieN
XNfL = u X; - множество стратегий координируемых игроков.
320
Методы современной ТАУ. Часть IV
5.1.2. Математическая модель конфликтной ситуации в ММС
Математическое описание ММС. В качестве основного описания ММС
принимается система динамико-алгебраических связей
хд = /(г, х, q, иь ..., иД х(го) = хо, (5.10а)
ха=(г, х, q, и1э ..., иД хеХ, (5.106)
* у = у(х, q, г), qEQ, (5.10в)
и = и(/, х, и, q)), uet/, (5ЛОг)
где N- число объектов в ММС;
х = (хд, ха j - вектор состояния ММС с хд - динамическими и ха -
алгебраическими состояниями; у - вектор выхода ММС; ue U - вектор управления ММС; qe Q -
вектор параметров ММС, которые характеризуют параметрическую
неопределенность в (5.10а, - 6, в) и возможную параметризацию в (5. Юг).
Выражения (5.10) характеризуют динамические связи (а), алгебраические связи
(б), вектор выхода (в) и функцию принятия решения и управления (г). Управление
ueU=UlX...xUN, (5.11)
u,e Uj - подвектор управления /-м объектом ММС.
Свойства правых частей (5.10а), (5.106). В основном, это непрерывность и диф-
ференцируемость, а для (5.10а) - выполнение условий Липшица.
О выборе управляющих сил. Как известно, существует несколько способов
задания управляющих сил:
Вектор параметров qe Q.
Программное управление и = u(t).
Закон управления (или позиционное управление) и = u(f, x), ug U.
Параметризированное программное управление щ = {м5}, где
5Й-/Д0. (5Л2а)
где qs = (qs{,...qf)e Qs: u,G <У„ (/, = fl^ ; & = П^ >.//<') - непрерывные функции,
i[0-0-i] =
заданные на отрезке [r0, T) (5.12а) или на отрезке [г,ч, Т\ (5.126); U^-ry-i] - интервал
применения управления и^ (5.126)
1 при te[tH, tj];
0 при te[tH, Гу],
при этом 1[(,- -/,ч ] = l[/-/>i] - Ц/-(/] и [fe. ^ь •■•. (/-ь О"» ••' ^ ~ заданное разбиение
отрезка [г0, Г].
Параметризованный закон управления (стратегия) ui = \us \qs,x9tj>
(5.13)
us=us[qs, x, /) = <
S^(*.0i[o-'/-i].
Глава 5. Введение в оптимизацию ММС 321
где qse Q,, use Us,fj{x, i) - заданные непрерывные функции.
Программно-корректируемый закон управления (ПКЗУ) (стратегия) при заданном
разбиении отрезка [г0, 7] с малым At = tr tjA
н
где u5j(x(tj.{), t) - usj(i) - допустимое программное управление м4е Usj на отрезке [r;.i, 7]
при известном начальном условии *(/,-. О и реализуемое на /е [г,.! - /,].
Параметризованный ПКЗУ, который получается на основе комбинации 4 и 6,
например, в виде (5.14), где
с разбиением [tj.l9 tu ..., /ы, tk, ...7] на отрезке [tj.{, 7] при фиксированном x{tjA).
Векторный целевой показатель. Целевые свойства ММС характеризуются
вектором
J = J[*6,f0, Г, 9.^(0, и(-)у(01, (5.16)
который представляет собой сложную функциональную связь с указанными
величинами. Типичным видом /-й функции выигрыша (потерь) является функционал на
to<t<T
т
Ji(u{,...yuN) = <S>i(Tix(T)) + JFi(t,x,uli...,uN)dti / = l,...,m. (5.17)
Коалиционная структура действий и интересов ММС. Пусть Р = (РД,РИ) -
коалиционная структура действий и интересов с размерностью множества индексов
коалиций в каждой М* = (1, ..., mk).
Тогда
p-4a?,...,a£
ATfn^=0; u K?=R = [U]V (5.18)
&j J iGMk J
где г - множество индексов вектора параметров (после параметризации
управлений и параметризации ММС) или множество индексов управлений (без
параметризации)
Ри ={лгГ ЛГ^ К?пК"=0; u К,и=М=[1,т]1, (5.19)
[ т i*j ieMic J
где m - множество индексов вектора показателей.
В свою очередь, каждой К/1 соответствует, например, при полной параметризации
вектор параметров q, = {q^ I q^G АГ;Д} (или вектор и, = {и5|идбАГ,д} (без
параметризации). Каждой К" соответствует целевой вектор
Принципы конфликтного взаимодействия. Понятия стабильности и
эффективности. В общем случае имеют место пять принципов конфликтного
взаимодействия:
• антагонизм {мk = {h2},jl = -J2};
• бескоалиционное взаимодействие;
322
Методы современной ТАУ. Часть IV
• коалиционное взаимодействие;
• кооперативное взаимодействие;
• иерархическое взаимодействие (с правом первого хода).
Как известно, в данных принципах конфликтного взаимодействия заложены три
фундаментальных понятия теории игр: стабильность, эффективность и стабильно-
эффективный компромисс.
Стабильность ММС - это обеспечение устойчивых (равновесных) процессов
функционирования и проектирования многообъектных структур в условиях
конфликтности (несогласованности) и/или неопределенности.
Эффективность ММС - это достижение максимального целевого качества
объектов, коалиций и ММС в целом на основе устойчивого и рационального коалициниро-
вания.
Стабильно-эффективный компромисс в ММС (СТЭК ММС) - это объединение
стабильности и эффективности в рамках множества решений: от полного совпадения
данных свойств до обеспечения определенной степени сближения в условиях
информационно-тактических расширений соглашений.
5.1.3. Методы получения стабильных и эффективных решений
Данные в работе [9] определения стабильных и эффективных решений (скалярное
Нэш-равновесие, векторные равновесия, угрозы-контругрозы (УКУ), векторно-
оптимальные решения по Парето и конусу, дележ по Шепли и т.д.) позволили далее
разработать методы модификации и поиска этих решений на основе вновь
созданного математического и алгоритмического обеспечения (главы 2 - 5, 7, 8 работы [9]).
На рис. 5.3 представлены восемь разработанных методов и алгоритмов. Данные
методы и алгоритмы были реализованы в рамках вновь разработанных программных
систем ([9], гл. 9):
• ПС «МОМДИС» (многокритериальной оптимизации многообъектных
динамических систем) с разработкой методов и алгоритмов определения Нэш,
Парето, УКУ, Шепли решений [22];
• ПС Filtr (оптимизация стохастических антагонистических моделей (в интегро-
дифференциальной форме) на основе фильтрации и управления) [19];
• ПС Гарант-2 (программная реализация программно-корректируемого закона
управления на основе экстремального прицеливания) [14];
• ПС MATLAB (проработка алгоритмов поиска векторного равновесия).
Уровень проработки
алгоритма
Разработка
алгоритма
Внедрение в :
а) ПС «Момдис» для отладки,
проверки алгоритмов
и проектирования ММСУ
б) ПС MATLAB
в) ПС ГАРАНТ-2
r)nCFILTR1.2
Параллельная
реализация
для обеспечения
реального времени
Рис. 5.2. Схема, иллюстрирующая уровень проработки алгоритма
Глава 5. Введение в оптимизацию ММС
5LS
На рис. 5.3 справа указана степень проработки каждого алгоритма в соответствии
с рис. 5.2.
АНТАГОНИЗМ
Метод оптимального управления для
интегродифференциальной стохастической
модели конфликта с учетом "прототипа"
и ограничений
Программно-корректируемый закон
выработки управления на основе принципа
"экстремального направления"
Н Н Красовского
1,2
1,2,3
1 БЕСКОАЛИЦ.
| ВЗАИМОД.
ч
1 КОАЛИЦ.
| ВЗАИМОД.
\/
\
Модифицированный метод скалярной
Нэш-оптимизации
Метод векторной
Нэш-оптимизации
{векторное равновесие)
Метод оптимизации на основе
£2-равновесия
(векторное равновесие)
Двухэтапный метод оптимизации
по методу "Угроз и контругроз"
(коалиционное управление)
Двухэтапный метод оптимизации
на основе вектора "дележа" Шепли
(эффективная кооперация)
1,2
1,2
1,2
1,2,3
1,2,3
КООПЕРАТИВ, у
ВЗАИМОД. 1
Метод векторной оптимизации
на основе конуса доминирования
(Парето-оптимизация,
Q. -оптимизация)
1,2,3
Рис. 5.3. Разработанные методы и алгоритмы взаимодействия объектов и коалиций
Для ряда алгоритмов были исследованы возможности их параллельной
реализации ([9], гл. 9).
На рис. 5.4 дана классификация разработанных стабильно-эффективных
компонентов (СТЭК) ММС на основе необязательных соглашений Мулена и строгой
договорной основе ([9], гл. 6).
Необязательные
соглашения
СТЭК
Парето-Нэш-УКУ-Шепли комбинации
СТЭК 1-СТЭК 7
На основе неравновесности и информации
о партнерах
СТЭК 8-СТЭК 10
Обязательные
соглашения
Модификации арбитражных схем
и среднеквадратических решений
СТЭК 11 - СТЭК 14
С учетом интеллектуального
договорного процесса
Рис. 5.4. Схема, иллюстрирующая классификацию стабильно-эффективных компонентов ММС
324
Методы современной ТАУ. Часть IV
Рис. 5.5 иллюстрирует смысл компромиссов на основе комбинации Парето—Нэш—
УКУ—Шепли подходов.
УК
п к
стэк
/
V
ШШШш
щ
i
1
А.
-У
УКУ
%
ит
[НОК
л
Рис. 5.5. Компромиссы на основе комбинации Парето-Нэш-УКУ-Шепли подходов:
П - Парето-граница АВ, И- Нэш-равновесие; УКУ- область угроз-контругроз;
ИТ- идеальная точка; УК- ^.-оптимальная часть П-границы на основе узкого конуса Q;
Ш - точка Шепли; СНД - Парето-Нэш область компромиссов (ПНОК)
СТЭКи заключаются в выборе недоминируемого наиболее эффективного Нэш-
решения (т. Н), в формировании Парето—Нэш области компромиссов (ПНОК) на
основе прямоугольного конуса СНД, границей которой является Парето-граница.
В выборе УКУ-решения на области ПНОК в той или иной степени близости к точке
Шепли либо к «идеальной» точке и т.д.
Участникам игры имеет смысл выполнять необязательные соглашения в связи с
устойчивостью ситуации.
В рамках обязательных соглашений рассматриваются комбинации арбитражных
схем и среднеквадратических решений с опорным Нэш-равновесием и др. Игровые
подходы имеют большую значимость в развитии интеллектуальных систем
управления (ИСУ) [40], в состав которых входят, по меньшей мере, два присущих лишь ИСУ
блока: динамическая экспертная система (ДЭС) и подсистема предельного целевого
качества (ППЦК). Кроме необходимости пополнения базы знаний ДЭС,
разрабатываемыми игровыми алгоритмами, с одной стороны, и интеллектуализации
компромиссов с учетом возможностей ИСУ, с другой стороны, в настоящее время
разрабатывается концепция формирования ППЦК на основе игровых компромиссов в ММС
и обобщенного гомеостаза [23, 41], а также на основе игровых компромиссов в
иерархических системах [42].
5.1.4. О ПРИМЕНЕНИИ РАЗРАБОТАННЫХ МЕТОДОВ И АЛГОРИТМОВ СТАБИЛЬНО-
ЭФФЕКТИВНОГО УПРАВЛЕНИЯ В ПРАКТИЧЕСКИХ ЗАДАЧАХ
В данной работе исследуются практически важные модели конфликтных
ситуаций в технических, экономических и биотехнических приложениях.
Глава 5. Введение в оптимизацию ММС 325
Так, в рамках технических задач разработаны методы оптимизации на основе
игровых подходов фрагментов трехуровневой конфликтной ситуации ЛС СВН - ЛС
ПВО (локальной подсистемы системы воздушного нападения и локальной
подсистемы ПВО) [9].
В рамках экономических задач микроэкономики разработанные методы
применяются для исследования конкуренции фирмы-предприятия на товарном и
финансовом рынке. Так, на товарном рынке исследования проводятся на реальных моделях
статической и динамической олигополии, на финансовом рынке ГДО сформирована
модель и исследована эффективность «портфеля» инвестора [9].
В рамках биотехнических приложений рассмотрены вопросы стабильно-
эффективного функционирования системы естественной технологии организма
(СЕТО) на основе предложенной модели обобщенного гомеостаза (самосохранения
организма) в задачах геронтологии, токсикологии, экологии и разработке
искусственных органов с биологической (процессы жизнедеятельности и потоки веществ) и
«кибернетической» моделью СЕТО и гомеостаза по В.Н. Новосельцеву [9, 36].
В связи со спецификой СЕТО следует отметить, что СЕТО содержит четыре
основные функции: доставка в организм «горючего» и окислителя - функция систем
пищеварения и дыхания; внутренний транспорт с помощью функции
сердечнососудистой системы; собственно процессы жизнедеятельности (суммарное описание
синтеза биополимеров (метаболизм), проведение нервного импульса, сокращение
мышечных волокон и др.) с образованием конечных продуктов; элиминация и
выведение конечных продуктов (функции печени и почек).
5.2. МОДИФИЦИРОВАННЫЙ ДВУХУРОВНЕВЫЙ МЕТОД
СКАЛЯРНОЙ НЭШ-ОПТИМИЗАЦИИ В БЕСКОАЛИЦИОННОЙ
КОНФЛИКТНОЙ СИТУАЦИИ (СТАБИЛЬНЫЕ РЕШЕНИЯ)
5.2.1. Необходимое условие равновесия по Нэшу
в форме двухуровневой структуры Пдо [52]
Рассматривается конфликтное взаимодействие N коалиций со скаляризованными
показателями У, на фиксированном интервале времени [0,Г] как бескоалиционная
игра с ненулевой суммой.
Модель конфликтной ситуации дана следующими соотношениями
х(О = Г(х,и(-),О,
xo(0 = g(«0,z(0),0,
г(г) = (х(О,хо(О)е£л+\
x(t)ex(t)aE\
мОХ-ещ-с*;, i = iN F = F{x...xFN,
ug F,
где Ек - евклидово пространство размерности к;
F; - рефлексивное банахово (полное, линейное, нормированное) пространство
действительных функций, определенных на интервале [0,Г], с предгильбертовым
скалярным произведением <•»•>: Fi хFif -» Ех; ,
%{t) - заданное компактное множество в Еп при любых te [0,7], и такое, что
дополнительное к %(t) множество в Е" - связанное;
326 Методы современной ТАУ. Часть IV
х(0 - вектор состояния в Еп, для которого определены ограничения %(t) для
всехtе [О,Г]; начальное состояние х(0)е%(0) - задано; конечное состояние
принадлежит х(Г);
|И;(-) - заданное замкнутое ограниченное компактное подмножество из Ft, такое,
что дополнительное к щ (•) подмножество в Fi связанное;
И/О) - управляющий функционал /-й коалиции, кусочно-непрерывный на [0,Г],
fk - для всех ке(19п) непрерывно дифференцируемые функции,
удовлетворяющие условиям Липшица; а также непрерывно дифференцируемые по и;
Ji - для всех ie\9N непрерывные и дифференцируемые функции для всех
м(-), х(0)е %(0), дважды непрерывно дифференцируемые по м(-) в смысле Фреше;
кроме того, обычно g,- явно зависит от состояния x(t), а т.к. состояние
единственно для заданных х(0) и м(), то применяется сокращенное обозначение для
8i = *}("(•), z(0), t).
Показатели коалиций сведены к минимизируемому относительно м(-)
терминальному виду
/,. =Jco/.(7) = jco/(W(.),z(0),r), / = UV,
г г i (5-21)
^.(«O.2(0),0 = ^/(0) + Jgi(nO,z(0)fT)rfT, re [0,Г].
о
Терминальные платы хы дважды непрерывно дифференцируемы по Фреше
относительно м(-).
Определение 5.10. Управление и(-)е F является допустимым для данного *(0),
если u(-)e\il(-)x...X[xN(') и если x(t) удовлетворяет условию x(t)e%(t) для всех
ге[О,Г].
Определение 5.11. Управление u(-)eF является оптимальным по Нэшу для
данного *(0),если и{-) является допустимым для jc(O) и удовлетворяет условиям
равновесия по Нэшу для терминальных плат
Vm,(.)€H,O,
Vte&N) <uoC =(«;,...«;_!, ut,u*M...yN) = u\\uc, (5.22)
xot (и О, z(0),Г) < ^ (м0^ (•), z(0), Г).
То есть уход любой подсистемы от ситуации равновесия в первую очередь
невыгоден ей самой, т.к. увеличивает ее собственную плату.
Необходимое условие Пао формируется с учетом конструктивной идеи поиска
решения, которая заключается в том, что бескоалиционное конфликтное
взаимодействие систем с неполной информацией может быть сведено к двухуровневой
иерархической системе (рис. 5.6), которая включает в себя:
1) N элементарных подсистем - коалиций, имеющих целью минимизацию своих
локальных показателей xoi(u(-)9z(Q\,T), i = l9N\
2) одну сверхсистему - фиктивного или реального арбитра (/ = 0), глобальный
показатель которой g при его минимизации формирует локальное
необходимое условие равновесия по Нэшу.
Глава 5. Введение в оптимизацию ММС
327
Opt g(u(-U (.),*(0),Г))
!!(.)€ D(M*(.))
I
а(-)
Min x0l
Min xOi
Min x,
ow
Рис. 5.6. Необходимое условие Нэш-Пао
Координация подсистем осуществляется таким образом, что вначале
обеспечиваются интересы арбитра, а потом - остальных подсистем.
Координация выполняется итеративно координирующей функцией
fl(-) = (fliO,-.-,M0)6Ff
составляющей наилучшую текущую аппроксимацию м*(*)> которая используется /-й
элементарной подсистемой в качестве фиксированной компоненты а{ в векторе
управления
u\\ai=(uu...ui_bai,ui+l...?uN)
при минимизации показателей подсистем.
Оптимизация управления м(-) в каждой элементарной подсистеме нижнего
уровня осуществляется по компонентам партнеров. Таким образом, каждая элементарная
подсистема откликается на функцию координации я() тем, что «сообщает» арбитру
локальную информацию о том, каково должно быть управление остальных (N- 1)
подсистем, чтобы оно минимизировало плату i'-й подсистемы.
Арбитр осуществляет следующий итеративный шаг по определению
координации, учитывая информацию, полученную от подсистем.
Подобная двухуровневая структура имеет универсальный характер и может быть
использована для того, чтобы найти другие типы равновесных управлений,
(например на основе «угроз и контругроз» и т.д.) при конфликтном взаимодействии.
Смысл оптимизационной конфликтной задачи «заложен» в структуре функции
качества g(w(-), «*(•)> ■*(()), Г), а «предельно неконфликтные» (похожие с учетом
координации на аппроксимацию «утопической точки») итерационные оценки на
нижнем уровне формируют максимально возможные начальные отклонения для каждой
итерации на верхнем уровне.
Данная двухуровневая структура учитывает определенную неполноту
информации, которая может иметь место при конфликтном взаимодействии.
Определение 5.12. Пусть v(-) и м(-) - допустимые управления, определенные на
F при х(0). Функция качества Пао определяется выражением
„(„(.,,«■>.,«,>.,)= п (^^.м>-,<> ,
(5.23)
v = (v1,...,v^), v°e = (v? v?_lfM,,v?+1,...,v£),
где v = a , voi - результат оптимизации хоС на нижнем уровне (на итерации),
частные производные определены в смысле Фреше, < v >t - предгильбертово скалярное
произведение. Под знаком скалярного произведения находится частный
дифференциал xoi
328
Методы современной ТАУ. Часть IV
дис
Субоптимальный алгоритм Пао-Нэш параметризированного оптимального
управления. В данном пункте формируется «рабочий» субоптимальный алгоритм на
основе прямого использования структуры Пао и аппроксимации оптимального
управления. При этом аппроксимация ПКЗУ на такте заключается в параметризации
программно-корректируемого позиционного управления (зависящего от начальной
позиции такта).
Для этого исходное управление мД/), i = l,N заменяем на управление
к
u^^q^lU-tj^-Ht-tj]), (5.24)
Н
где to,tb...itj_ljj,...iT суть разбиение отрезка [to,T] на достаточно малые отрезки;
qi} - параметры, qijmin < qtj < qijmax .
При этом ПКЗУ получен, если параметрическая оптимизация будет реализовы-
ваться на отрезках [tj_XiT] при измеряемых позициях x(tj_{) и оптимальная
программа применяется на такте [tj_{Jj] до следующей коррекции (оптимизации на
[tj9T] при вновь измеренном x(tj)).
Для ускорения вычислений можно применить упрощенную аппроксимацию
управления на каждом [tj_bT] типа
и: =
qx при re
q2 при/G
o-i.
T+tM
T + tj_i
J.
(5.25)
В этом случае точность возрастает по мере уменьшения оставшегося времени. В
целом исходная задача превращается в задачу нелинейного программирования,
взаимосвязь которых сохраняется при достаточно малом шаге Дг.
Глобальный показатель в соответствии с [15, 52] будем определять в виде
\Т
i€Mk
Щ(я\\я')
dq>
{я1-я)
(5.26)
где q - старая функция координации, q - новая функция координации.
Итерацию алгоритма поиска равновесного по Нэшу решения можно представить в
виде следующей последовательности:
~о
Шаг 1. Выбор начального приближения старой функции координации q .
Присваиваем q = q° . Задаем г - условие остановки.
Шаг 2. Решение тк оптимизационных задач вида
определить min0,-(g),/E Мк с Р, (5.27)
qeQWk\i)
где Q(Mk\i) = {qe Er \ql =ql,qj eQj, je Mkij*i}, a Mk -множество коалиций
фиксированного коалиционного разбиения Р .
Глава 5. Введение в оптимизацию ММС
329
Результатом решения /-и оптимизационной подзадачи является вектор
q(*/) = -
ЛМкЧ)(
,_AMk\i)i
(5.28)
где в qi} - первый верхний индекс означает номер подсистемы, к которой относится
соответствующая компонента, а второй индекс - номер оптимизационной подзадачи
(номер подсистемы, параметры которой фиксируются).
Таким образом, каждая подсистема «откликается» на функцию координации q
тем, что сообщает арбитру локальную информацию о том, какими по ее, /-и
подсистемы, «мнению», должны быть параметры остальных подсистем, чтобы достигался
минимум показателя 0,.
Шаг 3. Выбор начального приближения новой функции координации q° на
основе обработки «рекомендаций» подсистем. Для вычисления q° усредняем по
формуле:
*0i
1
Я = —
W+^2 5>*
J€Mk
,/е Mk\krX,\r2 >0;Xrl +A,r2 =1.
(5.29)
Выбор коэффициентов \ri зависит от свойств показателя 0, и влияет на скорость
сходимости всего алгоритма.
Обработка Минимизация
рекомендаций функционала арбитра
0
$0=(pte(tf,)fieAfft}
V(q,q) —> min
qeQ
Минимизация на
1 J
1 (q) -> min
qeQ(Mk\\)
уровне коалиций
0. (q) —> min
qeQ(Mk\i)
1
j
Щ qeQ(ML\mk)
[
Рис. 5.7. Численный алгоритм Нэш-Пао оптимизации
Шаг 4. Решение задачи минимизации функционала арбитра:
определить min V{q, q),
qeQaE'
(5.30)
получаем решение q .
Шаг 5. Проверка условия останова алгоритма. Если \V{q ,q) \< г, то полагаем,
что начальное приближение для градиентного алгоритма: q° -q . Алгоритм
завершает работу. Если же | V(q , q) \> г, то полагаем q = q и возвращаемся к шагу 2.
Применение градиентного алгоритма Ермольева для ускорения сходимости в
малой окрестности равновесного решения [26]. В малой окрестности Нэш-
330 Методы современной ТАУ. Часть IV
равновесия итерационная процедура алгоритма Пао-Нэш-равновесия
останавливается (если V < е) и формируется начальное приближение для алгоритма Ермольева.
Применение градиентного алгоритма дает высокую скорость сходимости и малые
вычислительные затраты в достаточно малой окрестности равновесного решения qr,
чему соответствует | V \< г. При | V \> г имеет место либо «заклинивание» алгоритма
(вследствие наличия овражных областей), либо останов в локально равновесной
точке (вследствие невыпуклости компонент векторного показателя ММС).
Выбор начальных приближений на основе сетевых подходов. Для
определения начальных приближений равновесных решений при существовании Нэш-
равновесия или выявления равновесных «предпосылок» при отсутствии информации
о существовании равновесия предлагается следующий подход.
Как известно, на основе безусловной оптимизации с учетом ограничений
простейшие необходимые условия равновесия q по Нэшу принимают вид системы
^miUi^jmux^^-^ (531)
dql dql
где gla - активные ограничения i-й подсистемы,
/, - скалярный показатель /-й подсистемы,
q' - Подвектор параметров /-й подсистемы
q'Ga,c£r/,
Qri - ri -мерный куб ограничений, соответствующий параметризации
программного управления ПКЗУ на отрезке [tj_l9T], например, при j = 1
ui(t) = qrl[tl-to] + q2'l[t2-tl]-^... + qrrl[T-tri_{],
где l[/,-y = l[f-/*]-l[f-U '/>'*•
В каждом п-мерном кубе сформируем равномерную (на основе ЛП-
последовательности [22, 45]) или ортогональную сеть.
Для каждого фиксированного набора (яф ||я') = (д1ф,...,д\...дф ) получаем
задачу перебора /;(q||qf) сети куба параметров /-й подсистемы с целью минимизации,
где
ЫЧфЮ =
»'
dq'
2
2
->min. (5.32)
q
Для знутренних точек q' (v' =0). Пусть min/,- = /,^ф Hq^) ♦
Многократно решаем q подобную матричную задачу для различных
фиксированных наборов в пределах сетей j-x подсистем (i Ф j).
Выбираем среди множества решений одну точку (или несколько)
min[/;-(qTM || q' t)] = min min lt(q || q') = e.
cftu q™ q'
Если е достаточно малая величина, то запоминаем точку #ш и соответствующую
ей q'opt, т.е.
(Яф 1кор/) = (^фор/»---»^рГ"-^форг) •
Глава 5. Введение в оптимизацию ММС 331
Если е - большая величина, то увеличиваем плотность г( -сетей для уменьшения
е. Аналогичные задачи решаем для всех N .
Далее производим сравнение результатов. Если «встречаются» общие вектора
Яф II 4oPt ПРИ решении всех N задач, то это свидетельствует о существовании
равновесия, эти вектора - потенциальные первые приближения. Если вектора параметров
близки друг другу, то необходимо увеличить плотность сетей е в многомерных
/;• -кубах, что, возможно, приведет к сближению векторов или к полному совпадению.
О параллельной реализации алгоритма. Для введения ПКЗУ в реальное время
полезно использовать структурные возможности Пао-подхода.
Действительно, судя по структурной схеме алгоритма, на итерации одновременно
решается N + 1 задача оптимизации, что может быть реализовано на N + 1 процессоре
в параллельном режиме.
Но для ускорения вычислительных процедур приблизительно в (N+ 1) раз
необходимо сравнить время вычислений в задаче-арбитре и в однотипных задачах
нижнего уровня. Если задача-арбитр решается по времени дольше, чем каждая задача
нижнего уровня, то введение N+ 1 процессоров не имеет смысла, т.к. часть времени N
процессоров будут простаивать и увеличение стоимости вычислительной системы
неправомерно.
Исследование тестовых примеров показало, что время решения задачи арбитра
соизмеримо с временем решения задачи в каждой системе на нижнем уровне,
поэтому параллельная реализация допустима. И решение может быть ускорено в N раз.
Ресурсы распараллеливания структурными свойствами не исчерпываются и могут
быть дополнены в подсистеме моделирования на этапе формирования градиентного
алгоритма и при вычислении начальных приближений, что исследовано в
соответствующей главе [9], посвященной реализации стабильных и эффективных решений, а
также СТЭК.
5.3. СТАБИЛЬНЫЕ И ЭФФЕКТИВНЫЕ ОПТИМАЛЬНЫЕ РЕШЕНИЯ
НА ОСНОВЕ КОАЛИЦИОННОГО РАВНОВЕСИЯ
5.3.1. Классификация стабильных и эффективных решений
на основе коалиционного равновесия
Определение 5.13 [6]. Пара (К, хк), хкеХкф0 называется угрозой против исхода
seS, если s'ys для всех s'eS\xK).
Определение 5.14 [6]. Пара \Q,xQ\ x®eXQ*0 называется контругрозой на
угрозу (К,хк), если KnQ* 0 и для некоторого s'eS(xK) и всех s'esfx®) имеет
место s">-s'.
Q
Определение 5.15 [6]. Угроза считается эффективной, если на нее нет
контругрозы. Исход игры считается оптимальным, если против него нет эффективных угроз.
Множество всех оптимальных исходов есть V-решение.
Определение 5.16 [6]. Игра называется игрой без запрещенных ситуаций, если
для любой ее реализации (Р, х(Р))
S(x(P))= f|S(**)*0, (5.33)
КеР
где Р- коалиционное разбиение, х(Р) = \хк JКеР- набор решений (ситуация).
332 Методы современной ТАУ. Часть IV
Отсутствие запрещенных ситуаций означает, что игру можно разыграть без
согласования действий непересекающихся коалиций, когда независимый выбор любой
коалицией своих решений в рамках данной структуры Р приводит к исходу игры.
Утверждение 5.1 [6]. Для любой игры без запрещенных ситуаций существует
такая реализация игры (Р, х(Р)% что
Vd f)S(xK)*0. (5.34)
КеР
Определение 5.17 [6]. Ситуация хр называется коалиционным равновесием, если
принадлежит V-решению и для любых КеРсР и хкеХк
- либо J,(хр) > J,(хр \хк), хотя бы для одного ie К,
и
-либо Ji(xp) = Ji(xphcK) для всех ieK.
Таким образом, ситуация хр будет коалиционным равновесием, если хр е V и для
любого КеР стратегия хр максимизирует по Парето вектор выигрышей J/(*4jcM,
ie К в Хк в том смысле, что если другая стратегия-решение дает больший
выигрыш игроку ie К, то одновременно она дает меньший выигрыш игроку je К.
Определение 5.18 [6]. Коалиционное равновесие называется сильным
(абсолютным) равновесием х , если оно оптимально по Парето в хк относительно Jf-(jc Ьс^),
(ie К) для всех KczN.
Против сильного равновесия, очевидно, нет угроз. Кроме того, оно является
равновесием при любом Р. Поэтому сильное равновесие является коалиционным
равновесием при любом Р.
Определение 5.19. Множество собственно коалиционных равновесий
определяется множеством оптимальных исходов в V-решении (множеством неэффективных
угроз) на допустимом множестве коалиционных структур Р при локальной Парето-
оптимизации в рамках коалиции.
К собственно коалиционным равновесиям относится понятие угроз и контругроз
(УКУ-решения), введенное Вайсбордом - Жуковским [5, 8].
Определение 5.20. При отсутствии угроз (частный сЛучай V-решения) и
фиксации коалиционной структуры Р коалиционное равновесие хр принимает вид
векторного Нэш-равновесия (ВНР), т.к. устойчивость данного равновесия определяется
потерей эффективности при отклонении АГ-й коалиции от Парето-решения хк е хр
относительно вектора Ji(xp \xK), ie К.
Определение 5.21. При отсутствии угрозы и фиксации коалиционной структуры в
виде одной коалиции К = N коалиционное равновесие хр принимает вид Парето-
оптимального решения в задаче векторной оптимизации J, (х ), ie К = N.
«Сужение» множества решений может быть обеспечено тем или иным подходом
Парето-оптимизации, например, Q-оптимизацией на основе конусов доминирования
[15,48,53]
Q = (х: B/(jc)>0), (5.35)
где В - матрица конуса доминирования Q.
Глава 5. Введение в оптимизацию ММС 333
Определение 5.22. Подмножество (xq,KeP) ВНР-решений называется
Q-равновесием, если матрицы Вк, Kg P многогранных конусов доминирования Паре-
то-оптимизации коалиции К
QK={xK: BKJK(xp\xK)^0)t КеР
не равны единичной матрице В^Е хотя бы частично.
Определение 5.23. При отсутствии угроз, фиксации коалиционной структуры Р и
полной свертке показателей коалиции
<^ = £М/> 0<а,<1, $> =1, КеР (5.36)
is К
коалиционное равновесие хр приобретает смысл скалярного Нэш-равновесия.
Определение 5.24. При отсутствии угроз, фиксации набора коалиционных
структур Р (Р е Р) и свертке показателей коалиции коалиционное равновесие принимает
вид кооперативного решения Харшанъи - Скеруса на основе множества
недоминируемых Нэш-равновесий на Р [5].
5.3.2. Алгоритм векторной оптимизации на основе конусов
доминирования (эффективные решения)
Сравнительный анализ методов векторной оптимизации дан в работе [9]. Здесь
основное внимание уделяется Парето-оптимизации как частному случаю
коалиционного равновесия.
С учетом параметризации управляющих сил, основная постановка имеет вид
max{J''(q)|K,., R\ ieMkaPN, (5.37)
qeQV) '
где Q{i) = {qGQcEr| q'eQ,cEr,; q(AV/)} - фиксированы;
J'(q) - векторный показатель эффективности /-и коалиции;
Мк - множество коалиций коалиционного разбиения Р ММС, состоящей из N
объектов;
Q(i) - множество параметров /-и коалиции;
Rt - отношение предпочтения на подмножестве К,-.
Из (5.37) следует, что необходимо определить значение векторного показателя
J'(q) на множестве Парето /-й коалиции К„ максимальное в смысле отношения
предпочтения R,, варьируя лишь компоненты вектора q'. Остальные компоненты вектора
q известны и фиксированы. Если предположить К1, = К = N, то ММС составляет
единую коалицию и задача (5.37) сводится к определению решений q, оптимальных
по Парето (qn) относительно векторного показателя J(q).
Ввиду сложности точного решения задачи (5.37), в связи с проблемой глобальной
оптимизации J' на множестве Q(i), предлагается двухэтапная процедура, первый
этап которой - определение
{^тЦЬ.Ъ) (5.38)
- является дискретной аппроксимацией задачи (5.37).
Здесь J'Ri - дискретная аппроксимация множества Парето-оптимальных в смысле
£li (7) значений J '. При этом множество 7^ формируется на соответствующем
дискретном множестве QJR[ e Qi.
334 Методы современной ТАУ. Часть IV
Задача (5.38) дает возможность сформировать начальные приближения для задачи
(5.37) или для более сложной задачи из серии задач поиска коалиционного равновесия
тах{/(<2)|Р, {Д,Ьем<} (5.39)
относительно коалиционных разбиений Р и системы отношений предпочтения R,,
ieMk.
Понятие конуса доминирования £2. Необходимые условия Парето- и Q-оптимизации.
Утверждение 5.2 [49]. Пусть Q, - многогранный конус, определенный матрицей В
Q={zEEm|Bz<0,>}.
Пусть H(q)e Ер и H(q) = BJ(q).
Тогда эффективные (оптимальные по Парето) решения для векторного показателя
Н(д) точно совпадают с Q-оптимальными решениями для векторного показателя I(q)
на множестве Q:
GQ=Qn, (5.40)
т.е. конус определяет часть множества Парето-решений.
Следствие 5.1. Из утверждения 5.2 следует, что
Qq=Qu приВ = Е, (5.41)
т.е. «прямоугольный» конус доминирования определяет все множество Парето-
решений.
Определение 5.25 [15, 48]. Решение J* = J(q*) называется слабо оптимальным по
конусу Q с матрицей В = [рхт] в критериальном пространстве Ет векторного
показателя J, если не существует такого qeQ, для которого справедлива система
неравенств
B(J(q)-J(q*))<OP. (5.42)
Утверждение 5.3. Пусть q* - оптимальное решение по конусу доминирования Q
относительно целевого вектора J и множества Q, заданного в виде
Q={qEEr|G(q)<0},
где G(q) = {g,(q) < 0, i = l9sg ; Cq<b, С = [sc, г], b = (*cxl), qL< q <qH}.
Функционал *¥Т = [JT,Gj] дифференцируем по Фреше в точке q*, где s -
множество индексов ограничений G, активных в точке q*.
Тогда является совместной система уравнений
у>0, у = (ji,v), .dim ц = р, ц^О, dim \ = s\ (5.43)
B = [pxm], E = [^x^].
Следствие 5.2. Так как множество слабо оптимальных по конусу решений
содержит в себе множество оптимальных по конусу решений, то условие (5.43) является
также необходимум условием оптимальности по конусу.
Следствие 5.3. При В = Е условие (5.43) превращается в необходимое условие
Парето-оптимальности q*.
Об алгоритмах вычисления конусов доминирования. В [15, 48] сформировано
несколько вариантов вычисления конусов доминирования в рамках задач векторной
оптимизации, в которых учитываются:
• требование проектировщика к допустимым взаимным локальным изменениям
показателей;
Глава 5. Введение в оптимизацию ММС
335
определить max z;
|dT.z)£O
D:
UdJ(<i))d + ZP<OP;
Aad<Os ;
a,
6)
e)
г)
• равномерное улучшение компонент векторного показателя;
• неопределенность весовых коэффициентов компонент векторного показателя.
Так, третий вариант оптимально учитывает условия неопределенности.
Второй вариант используется, например, для построения модифицированной
арбитражной схемы в условиях обязательных соглашений.
Первый вариант вычисления конуса как функции матрицы коэффициентов
замещения рассматривается далее как основной при формировании алгоритмического
обеспечения Q-оптимизации [48].
Выбор направления спуска внутри конуса доминирования. Как следует из [48, 49,
53], условие доминирования решения Г над решением Г относительно конуса Q с
матрицей В записывается в виде
BAJ <О, (5.44)
где AJ = J'-r
Использование соотношения (5.44) в качестве условия спуска в алгоритме
векторной релаксации позволяет сформулировать задачу выбора направления спуска
внутри конуса доминирования в виде
(5.45)
где (5.456) - условие deQ; (5.45e) - условие того, что вектор d направлен вовнутрь
области допустимых значений параметров Q; Аа = [s&xr] - матрица линейных
ограничений (как общего вида, так и тривиальных), активных в точке q\ ||||к - условие
нормировки.
Постановка задачи выбора направления вида (5.45) [48] является более общей по
сравнению с постановками [43, 51], которые могут быть получены из (5.45) как ее
частные случаи. Для этого матрицу В конуса доминирования О, необходимо задать с
помощью первого алгоритма в виде функции коэффициентов замещения.
В вычислительной практике, как правило, используются следующие виды
нормировки:
при К = оо |rf.| < 1, i = 1^7, (5.46а)
при К = 2 dTd<l. (5.466)
В [43] учет условия нормировки (5.46а) при решении задачи выбора направления
спуска приводит к задаче линейного программирования. В работе [15] методика,
предложенная в [43], распространяется на задачу Q-оптимизации вида (5.45). В
результате получаем задачу линейного программирования вида
(5.47а)
(5.476)
(5.47в)
(5.47г)
D:
определить max z;
iaT,z]eD
В —— (d-GO + Z,, <Op,
Afl(d-G)<O5e;
0<d,<2, | = Гт; z>0,
336 Методы современной ТАУ. Часть IV
где G - вспомогательный вектор, с помощью которого осуществляется переход от
переменной d к неотрицательной вспомогательной переменной d, необходимой для
решения задачи (5.45):
d=d+G. (5.48)
Для решения задачи (5.47) используется симплекс-метод.
Процедуру поиска оптимального решения в [48] предлагается рассматривать в
виде последовательности следующих основных этапов, составляющих в
совокупности одну диалоговую итерацию:
• формирование конуса доминирования;
• выбор направления спуска внутри конуса доминирования;
• вычисление шаговой длины в выбранном направлении.
Выбор начального приближения в задаче многокритериальной оптимизации
{постановка (5.38)). Как известно, для векторного показателя J(q) общего вида, когда
некоторые его компоненты, вообще говоря, являются невыпуклыми на Q функциями,
на множестве достижимых векторных оценок J(Q) могут существовать локально
эффективные точки, не принадлежащие глобальному множеству Парето J/KQ). В этих
точках также выполняются необходимые условия Q-оптимальности (5.43). Поэтому
неудачное расположение начального приближения в задаче (5.37) может привести к
неправильному результату вследствие преждевременного останова алгоритма
Q-оптимизации в локально эффективной внутренней точке множества J(Q).
С другой стороны, при решении задачи Нэш-оптимизации в случае
неединственности равновесия по Нэшу необходимо на множестве равновесных решений
определить недоминируемые точки, т.е. ближайшие к множеству Парето [5]. В этом случае
начальное приближение целесообразно назначать в окрестности множеств Парето,
что повышает возможность определения недоминируемого равновесного решения.
Таким образом, выбор начального приближения является важным фактором,
влияющим на эффективность вычислительных процедур и правильность получаемых
результатов.
В данном разделе для решения задачи (5.38) предлагается использовать
известный метод зондирования пространства параметров, основанный на методике
ЛП-поиска [45]. В этом методе условно можно выделить два основных этапа:
1) составления таблицы испытаний;
2) оптимизация таблицы испытаний.
Для определенности полагаем, что К, = К.
Этап 1. Генерируется последовательность точек {р(0}, равномерно
распределенная в r-мерном единичном кубе. Как обосновывается в [45], наилучшими
характеристиками равномерности обладают так называемые ЛПт-последовательности. Для
генерации ЛПт-последовательности в [45] предлагается арифметический алгоритм,
использующий специальную таблицу направляющих чисел. После этого с помощью
линейного преобразования L, сохраняющего равномерность распределения,
преобразуем множество сгенерированных точек {р0), / = 1, N }еПр в множество точек
{q(/), i = l,N}}, равномерно заполняющих r-мерный параллелепипед П^,
определяемый верхними и нижними ограничениями на параметры задачи gL и qu'-
П, = ЦПР). (5.49)
Преобразование L задается [45] в виде
9?=Яц+Р$П(Ящ-Яц). (5-50)
Так как в описании области Q используются линейные ограничения общего вида,
то в каждой точке q(0 необходимо проверять выполнение системы неравенств Cq(0<b.
Глава 5. Введение в оптимизацию ММС 337_
Если q(0 является допустимой, то в ней вычисляется значение векторного показателя
J(q(0) и заносится в таблицу испытаний.
Этап 2. В данной работе предлагается алгоритм оптимизации таблицы
испытаний по конусу доминирования Q. Для этого из таблицы испытаний выбирается какая-
либо точка q(l) и помечается. Просматривая все точки q0) таблицы испытаний,
отличные от q(l), исключим те из них, для которых
B(J(q°Vj(q(°))>0, (5.51)
причем хотя бы одно из неравенств строгое. То есть проверяется принадлежность
точек А,-, конусу (- Q); Ду = J(q0)) - J(q(0).
Затем среди оставшихся точек выбирается непомеченная и вновь повторяется
процесс исключения по правилу (5.51). После конечного числа шагов останутся
только помеченные точки, являющиеся дискретной аппроксимацией множества Q-
оптимальных решений.
Второй этап данного алгоритма (см. [48]) отличается от приведенного в работе
[45] более общей постановкой, основанной на использовании понятия конуса
доминирования. В случае В = Е оптимизация таблицы испытаний приведет к построению
дискретной аппроксимации всего множества Парето.
5.3.3. Методы определения векторного равновесия
(стабильные решения)
Необходимые условия векторного равновесия (Нэш-равновесия и Q-равновесия).
В соответствии с понятиями коалиционного равновесия, изложенными ранее,
формулировка вида коалиционного равновесия определяется тремя степенями свободы:
• множество коалиционных разбиений Р;
• вид V-решения;
• степенью «охвата» Парето-области коалиции.
На основе определения 5.20, векторное равновесие по Нэшу является частным
случаем коалиционного равновесия при единственном коалиционном разбиении,
отсутствии угроз (частный случай V-решений) и с получением полной Парето-области
коалиции.
В соответствии с определением 5.22 Q-равновесие является частным случаем
векторного равновесия по Нэшу, т.к. формулируется на части Парето-области коалиции.
С другой стороны, при применении единой технологии решения обеих задач,
например, на основе конусов доминирования, необходимые условия и алгоритмы
определения близки. Поэтому имеет смысл объединить оба определения 5.20, 5.22 в рамках
единой схемы поиска векторного равновесия.
Раскрывая необходимое условие Q-оптимальности, можно получить
где jut, v > 0, jli Ф 0; Gfl - переобозначение активных ограничений.
Как известно, при В = Е данное условие дает необходимое условие Парето-опти-
мальности.
Формирование постановки (5.38) для каждого ieMk и совместных необходимых
условий (5.52) для всех i приводит к следующему утверждению.
23 Зак. 416
338
Методы современной ТАУ. Часть ГУ
Утверждение 5.4 [13, 21, 48]. Пусть qr - векторное равновесное решение. Тогда
является совместной система равенств
3q<
(5.53)
ц', v'>0, ц'*0, /еМ*,/ = 1, тк,
где J', Bt, G^, q' - соответственно показатели, матрица конуса доминирования Slh
активные ограничения, параметры /-й коалиции К,. Доказательство следует из
определений 5.20, 5.22 векторных равновесий как частных случаев коалиционного
равновесия (определение 5.19) и необходимых условий Q-оптимизации.
Сведение необходимых условий (5.53) к задаче квадратического
программирования. Существо преобразования состоит в формировании и минимизации целевой
функции специального вида *F(q), значения которой характеризуют «степень
несовместимости» необходимых условий векторного равновесия вида (5.53).
Для произвольного qe Q введем вектор
<p'(q, ц', v1) = MiiqyiJ+NfayV, ieMh (5.54)
На переменные |i',v' наложены ограничения
Обозначим:
jLil,v' > 0, м,'* 0.
§,=[М„ ^-],р'т=[ц'т, v'T].
Тогда ф'=Stp'.
Образуется показатель вида
0,.=i9'V=4p'ts,p'"
cTr
где S/=S/S/ =
(5.55)
- симметричная положительно полуопределенная
матрица.
Далее определяется показатель вида
(5.56)
i£Mk
где S =
0
>Мк_
- симметричная положительно полуопределенная матри-
ца,рт=[р'т,...,р^т].
Ставится оптимизационная задача в виде
определить min0(q,p) = xF(q,p (q)) = xF(q),
ре(2Р
(5.57а)
Глава 5. Введение в оптимизацию ММС 339
р>0, (5.576)
(5.57в)
6р
1*)Ы
м
х"\к > 1.
I"' ; (5.57г)
Наличие группы ограничений (5.57в) обусловлено следующими причинами: во-
первых, они отражают требование \х' Ф О, /е Мк.
Во-вторых, условия (5.57в) ограничивают ||р| снизу, и поэтому *F(q) = 0 в (5.57а)
получается только в точках, удовлетворяющих необходимым условиям векторного
равновесия (5.53).
Таким образом, решение оптимизационной задачи (5.57) определяет значение
показателя ^(q), характеризующее «степень несовместности» совокупности
уравнений вида (5.53).
Задача (5.57) является задачей квадратичного программирования с положительно
полуопределенным показа!елем, и, следовательно, она имеет единственное решение.
Структура задачи (5.57) позволяет найти это решение за конечное число шагов, что
очень важно для вычисления T(q).
Значение 44q) характеризует степень «неравновесности» точки q. Если qr -
равновесие по Нэшу, то xF(qr) = 0. Следовательно, для нахождения qr необходимо
решить задачу:
определить min ^(q). (5.58)
Так как 4*^)^0 для любых qeQ и xF(qr) = 0, то решение задачи (5.58)
существует, если существует в принципе равновесие по Нэшу. Это обеспечивает сходимость
применяемых алгоритмов к q.
Задача выпуклого квадратичного программирования реализована в
универсальных вычислительных системах, например MATLAB, для анализа и проектирования
ММС, а также может быть реализована в специализированных вычислительных
системах при проектировании системы управления ММС. Поэтому полезно
проанализировать ее свойства для повышения быстродействия.
Разработка метода определения векторного равновесия и управления ММС с
использованием СТЭК 3 [9, 13]. В основе метода лежит приведение необходимых
условий векторного равновесия к задаче квадратичного программирования и ее
непосредственное решение.
В процессе оптимизации ММС осуществляется глобальное зондирование области
показателей J с целью выявления ее границы, приближенного определения Парето-
области, а также для нахождения множества векторных решений.
Метод состоит из нескольких этапов.
Этап 1 Заключается в том, что на области параметров Q определяется
равномерная «сеть» размерности Mk и густоты /. Узлы этой сети отображаются в пространство
показателей У, формируя, таким образом, ее вид, а также примерную Парето-область
(а) и «идеальную точку» (б) (см. рис. 5.8). В дальнейшем найденная «идеальная
точка» используется, для выявления эффективной точки векторного равновесия при
анализе множества решений. При этом для увеличения быстродействия алгоритма
используется апроксимация описания ММС на основе рядов и ПС «Maple» [9].
23*
340
Методы современной ТАУ. Часть IV
Этап 2. Для каждой ячейки сети реализуется итерационный процесс поиска
равновесного решения.
Шаг 1. За начальное приближение оптимизации на области выбирается
геометрический центр ячейки «гиперкуба» с границами: минимальная - qlmin, максимальная
- #пах,0'=1>---"1/с)(рис.5.9).
аи2
[
j
] ••
:
1
1
I I i
j i 1
...| 1 ]
■•■) 1 \
! i 1
\
i
i
L—►
0 qLl
Ян
0 /min
Рис. 5.8. Отображение множества значений параметров на множество значений показателей
«24
~2
^тах
^2
~2
0
/
Ж
Ж
~' !
* :
^\ 1
1"
J 1
►
-1 -1 ~1
Рис. 5.9. Область локальной оптимизации
Таким образом,
~/ _ ffmax +<7min / _ i m
(5.59)
и является начальной точной итерационного поиска равновесного решения.
Шаг 2. Решается задача квадратической минимизации min0(q,p) = xF(q,p*(q)) =
ре<2р
= 4F(Q).
Шаг 3. На каждом итерационном шаге находится вектор направления убывания
fj/ функции 4(q)
0 a' k,/=y,
(5.60)
где малая величина £j выбирается особым образом и зависит от линейного размера
/-го ребра «гиперкуба».
Глава 5. Введение в оптимизацию ММС
341
Находим точку qgr пересечения вектора Ро; и границ данной ячейки
оптимизации. На отрезке (%,qgr) модифицированным методом «золотого сечения»
производим поиск минимального значения функции ^(q).
Шаг 4. Полученную точку принимаем за начальную q0, и процесс повторяется с
самого начала до тех пор, пока либо координаты точки совпадут с координатами,
полученными на предыдущем этапе, и это будет решение, либо минимум окажется на
границе, и мы переходим к следующей ячейке сетки.
Таким способом удается достаточно точно выявить множество решений.
Этап 3. Проводится анализ полученного множества и на основе СТЭК
выявляются равновесные решения, обладающие преимуществами по всем показателям
(доминирующие точки).
Для СТЭК 3 Этап 3 состоит из следующих шагов.
Шаг 1. Попарное сравнение всех решений и отбрасывание тех, чьи значения
хуже по всем показателям (доминируемые точки).
Шаг 2. Формирование «идеальной точки» Уи(см. рис. 5.8)
Г = J7j е Ет |У;И = min Jj;; = 1,/и}, (5.61)
которая представляет собой вершину прямоугольной m-мерной пирамиды,
образованной пересечением т плоскостей, перпендикулярных осям координат и
проходящими через минимальные значения показателей (см. рис. 5.10).
Шаг 3. Выбор из прореженного множества решений точки, наиболее близкой к
«идеальной», т.е. удовлетворяющей условию:
т
5>;-/,и)2->гшп. (5.62)
Этап 4. Формирование проекции типа (рис. 5.10, б). Формирование
оптимальных ПКЗУ ММС. Моделирование оптимальных траекторий ММС. На рис. 5.11, а и
5.11, б дана блок-схема алгоритма получения управления ММС на основе векторного
равновесия.
/|п
+» h
«идеальная точка» —/ /
Рис. 5.10. Формирование идеальной точки и проекции
В [9] данный алгоритм применяется в практической задаче наведения звена-
двойки высокоскоростных ЛА как группового перехвата цели с учетом
противодействия. Рассматриваются нелинейные динамические модели ЛА высокого порядка
(общий порядок системы - 18), учитываются ограничения на управление и
координаты, показатели учитывают точность наведения и маневренность ЛА, построение
ведущий-ведомый. Получен наиболее эффективный векторно-равновесный
приближенный ПКЗУ ЛА в конфликте с учетом рассмотренного СТЭК-3 для начальных
продольных, поперечных и встречных курсов ЛА.
342
Методы современной ТАУ. Часть IV
Исходные
данные
шаг1
Формирование наборов
временных интервалов ПКЗУ
шаг 2
Выбор у-го временного
интервала ПКЗУ (у = 1,л)
шагЗ
Параметрическая аппроксимация
программного управления на интервале
ПКЗУ и выбор плотности сети
_Е
Построение
траекторий
шаг 4
Отображение узлов сети
параметров на пространстве
показателей
шаг 5
Выбор области начальных
приближений на основе
минимаксного подхода
Выбор ячейки из области
начальных приближений
Поиск точки векторного
равновесия
> Этап1
у
V Этап 2
Возможно j
распараллеливание I
Определение идеальной точки
±
Выбор векторного равновесия,
близкого к идеальному
> Этап 3
Построение
Парето-области
1
Вывод
результатов
Этап 4
Рис. 5.11, а. Блок-схема алгоритма управления иа основе векторного равновесия
Глава 5. Введение в оптимизацию ММС
343
Формирование S(q):
S, ... О
S(q) =
О S20
Формирование 0(q,p):
0(q,p) = l/2pTS(q)p
Квадратичная минимизация
Ф(ц,р) по р
Формирование Y(q)
4/(q)=min0(q,p)
Минимизация Y по q
Запись в множество
точек векторного
равновесия
Рис. 5.11, б. Блок-схема алгоритма поиска векторного равновесия
с данным начальным приближением (этап 2)
344 Методы современной ТАУ. Часть IV
Повышение быстродействия метода. В соответствии с рис. 5.11, а для
увеличения быстродействия алгоритма применены аппроксимация описания ММС,
минимаксный подход для уменьшения области начальных условий и оценивается
возможность параллельной реализации этапа 2 метода [9].
5.4. СТАБИЛЬНЫЕ КОАЛИЦИОННЫЕ РЕШЕНИЯ В ММС.
УПРАВЛЕНИЯ НА ОСНОВЕ МЕТОДА «УГРОЗ И КОНТРУГРОЗ»
5.4.1. Понятие равновесия на основе «угроз и контругроз» (УКУ).
Стратегическая значимость УКУ. Существование УКУ.
ДВУХЭТАПНАЯ ПРОЦЕДУРА ОПТИМИЗАЦИИ НА ОСНОВЕ ПРИНЦИПА УКУ
«Угрозой» коалиции S , где S = Kte P или S - объединение нескольких
коалиций: S=(J#/, S £ Р, S е Р, называется [5] возможность такого изменения управ-
1<тк
ления us на v5 е Us , чтобы
Js(vS>uN/s)<Js(uS>uN/s)> (5-63>
где N/S - контркоалиция, составленная из всех, кроме состава 5, игроков множества
N (N/SeP).
Из неравенства (5.63) следует, что хотя потери какого-либо из игроков из S могут
и увеличиться, но игроки коалиции 5, в свою очередь, могут договориться, чтобы
суммарное снижение потерь
75(w5,w^/5)-/(v5,wN/5) = A>0
разделить между собой поровну, уменьшив потери каждого участника коалиции S на
величину А/5.
Чтобы у игроков коалиции S при выполнении условия (5.63) не было стремления
к изменению ситуации (uSiuN/s), у контркоалиции N/S должна быть возможность
заменить свои управления uN/s на управления vN/s e Un/s так, что для набора
v = (vs,vN/s) выполняются условия контругрозы контркоалиции N/S
JS(VS>VN/S)^JS(US>»N/S)> (5 64)
Jn/s(vs,vn,s) < JN,s(vs,uN,s)-
Условия (5.64) показывают, что если коалиция S заменила набор (us,uN/s)
набором (vs,uN/s), то у контркоалиции N/S есть возможность заменить набор (vSiuN/s)
набором (vs,vN/s), для которого ее суммарные потери меньше, чем при наборе
(vSiuN/s), а суммарные потери S выше, чем при начальном наборе (us,uN/s).
Поэтому коалиция Sтеряет стимул для замены (uSiuN/s) на (vs,uN/s).
Определение 5.26. Набор (us,uNts^ является угрозой и контругрозой (УКУ) для
коалиции 5, если для любой ее угрозы существует контругроза контркоалиции N/S.
Определение5.27. Набор (uSiuN/s) является УКУ-оптимальным решением
дифференциальной коалиционной игры, если для любой угрозы любой коалиции S у
контркоалиции существует контругроза.
В [6] на основе принципа УКУ сформировано общее понятие ^-оптимальности и
коалиционного равновесия.
Угроза считается эффективной, если на нее нет контругрозы.
Исход игры считается оптимальным, если против него нет эффективных угроз.
Множество всех оптимальных исходов есть V-решение игры.
Глава 5. Введение в оптимизацию ММС 345
Тогда для динамической игры исход называется V-оптимальным, если на любую
угрозу против него существует контругроза. Определение для коалиционной
дифференциальной игры принимает вид:
Определение 5.28. Ситуация ир будет коалиционным равновесием, если ир е V
и для любого Ке РсР и uKeUK ситуация ирк минимизирует (максимизирует) по
Парето вектор потерь (выигрышей) J,(wp ||%);ел: в Uk-
Обобщает понятие коалиционного равновесия так называемое сильное
равновесие [б].
При кажущейся конструктивности существующих необходимых и достаточных
условий [9] применить их сложно. Поэтому, используя определенным образом
условия существования УКУ-решений, можно предложить следующий двухэтапный
метод их определения [8].
На первом этапе, на основе простейшей параметризации управлений и создания
ортогональной сети на основе определений УКУ, формируется сеть приближенных
решений.
На втором этапе, используя найденные оценки множества УКУ в качестве
начальных приближений в сетевой «ячейке», решается задача определения точных
УКУ-решений на основе понятия локальных угроз и контругроз [5,8].
5.4.2. Этап 1. Выбор начальных приближений УКУ на основе
ПОСТРОЕНИЯ ОРТОГОНАЛЬНОЙ РАВНОМЕРНОЙ СЕТИ
Формирование ортогональной равномерной сети. Рассмотрим кусочно-
непрерывные управления Uj(t) вида
^(0 = ^ir(l[^/0]-l[^^]) + ..- + ^-(l[^^i]-l[^^]X jeMk={mk], (5.65)
где qtj mn < qVj < q^ , a qijmn и q^ определяются значениями сети параметров
Управление (5.65) является параметризованной программой на r-м интервале
п
ПКЗУвида м,(0 = £ 9И1['-'м]-1['-'«]) ПРИ r = L
На каждом интервале ПКЗУ формируется п - г наборов т*-мерной ортогональной
сети шагов управлений (или тк наборов (п - г)-мерной ортогональной сети каждого
управления).
То есть для выбора начальных приближений УКУ для каждого шага управления
^(0 = ^-(l[^^i]-l[^^]) (5.66)
формируется шгмерная совместная ортогональная сеть точек густоты /,, на
множестве которых и вычисляются области стабильного по УКУ взаимодействия коалиций.
Множество точек этой сети отображается в пространство показателей J,
формируя, таким образом, ее вид.
Если рассматривается многошаговое двухкоалиционное взаимодействие, то на
каждом /-м шаге изменения управления формируется совместная двухмерная
ортогональная равномерная сеть. В том случае, когда имеет место вырожденное
управление, постоянное на всем интервале взаимодействия
Uj(t) = qj = const,
22 3ак.41б
-Як^Ян,
h
346 Методы современной ТАУ. Часть IV
сеть формируется перед началом игры и остается неизменной при взаимодействии
(не зависит от /).
Густота сети /, (длина шага сети) неявно характеризует точность определения
области показателей J в целом, а также области УКУ-равновесных точек в частности.
В каждом конкретном случае «густота», достаточная в смысле точности области У,
определяется свойствами сжатия функционалов J. При этом густота сети и
размерность области q непосредственно связаны с временем оптимизации - уменьшение
шага сети ведет к значительному увеличению продолжительности работы алгоритма
поиска УКУ-оптимальных решений, т.к. количество «ячеек» сети N^ и точек сети
NTi определяется для (5.65) из выражения
/=1 1=1 j=\
где п - размерность области параметров q9
U - густота сети на /-м шаге,
Ян >Як. ~ нижняя и верхняя границы /-й компоненты вектора параметров q,y.
Так как УКУ-решения, полученные на первом этапе алгоритма оптимизации
методом УКУ, используются только для формирования начальных приближений для
дальнейшей оптимизации, то возможен выбор достаточно большого значения шага
(малой густоты) сети /. При этом имеет место увеличение быстродействия алгоритма.
Например, для ряда приложений имеет место
«Ы*^5-10.
h
Алгоритм получения сетевых УКУ-решений. Алгоритм вычисления сетевых
УКУ-решений является итерационным и в общем случае имеет следующий вид:
Шаг 1: задается модель конфликта, определяются параметры системы;
Шаг 2: для r-го интервала ПКЗУ формируется ортогональная равномерная сеть с
ЛГЯ и NT для te[tr_{J rj;
Шаг 3: для точки в сети с координатами (uStuNfS) проверяется наличие
«угрозы» коалиции 5, т.е. точки с координатами (vs ,uN/s ) для которой выполняется
условие (5.49);
Шаг 4:
а) если «угроза» существует, проверяется наличие «контругрозы» коалиции N/S,
т.е. точки с координатами (vs,vN/s), для которой выполняются условие (5.50);
б) если «угрозы» не существует, то переходим на шаг 6;
Шаг 5:
а) если «контругроза» существует, то проверяется наличие другой «угрозы» (шаг 3);
б) если «контругрозы» не существует, то данная точка не является УКУ-опти-
мальной и происходит переход на шаг 7;
Шаг 6: точка (us,uN/s) является УКУ-решением;
Шаг 7:
а) переходим к следующей точке сети на шаге 3;
б) если перебраны все точки сформированной сети, то переходим к шагу 2 для
формирования (г+1)-го шага ПКЗУ.
Глава 5. Введение в оптимизацию ММС 347
5.4.3. Этап 2. Оптимизация управления ММС на основе
МОДИФИЦИРОВАННЫХ ДОСТАТОЧНЫХ УСЛОВИЙ ЛОКАЛЬНЫХ УКУ
(ЛУКУ) [8] И МЕТОДА МОМЕНТОВ Н.Н. КРАСОВСКОГО [30]
Модифицированные достаточные условия ЛУКУ Э. Вайсборда и В.
Жуковского [5]. Локальной угрозой коалиции S = Kt (или S = \^Kt по некоторым Kt из
/
Р) является возможность замены коалицией S управления us(t) на vs (t) е Us ,
т
i\\us (0 - vs (t)f dt < г так, чтобы
'о
Js(uS>uN/s)>Js(vS>uN/s)- (5-67)
Локальной контругрозой контркоалиции N/S является возможность замены
т
контркоалицией N/S управления um{f) на vNfs (t) e UNfs, J \uNfs (t) - vNfs (0|| dt < e
так, чтобы
Js(vS>vNts)>Js(uS>uN/s)>
Jn/s(vs>vn/s)< jn/s(vs>un/s)- (5-68)
Локальный характер угроз и контругроз принят к рассмотрению для уточнения
сетевых УКУ в промежутках между узлами сети.
Определение 5.29. Локальной угрозой и контругрозой для коалиции S называется
набор управлений u{t) = {us(t)9 uNfS}e U = J^£/, , для которого существует посто-
/=1
янная е > 0, такая, что на любую локальную угрозу коалиции S у контркоалиции N/S
имеемся локальная контругроза.
Определение 5.30. Если один и тот же набор управлений является локальной
угрозой и контругрозой для любой допустимой коалиции S, то u(t) называется
локальной угрозой и контругрозой коалиционной игры.
Для получения достаточных условий класс допустимых вариаций us(i) и uN/^t)
ограничивается допустимыми управлениями вида
Vs(O = us(t) + yS'Us(t);
где useUs, uNfs e UNIS, a ys, yN/s - постоянные.
Постоянные Ys> Yms можно выбрать настолько малыми по абсолютной величине,
что при ограниченных us, uNis имеет место:
]\ius{t)-Vs{t)f+\\uNIS{t)-vNIS(t)t^dt<t. (5.69)
'о
Вводятся системы вида
4,(0 = А(гКу(г) + В,(0-пД')> §('o) = ft (5-7°)
где А(0 = —; В(/) = -^- 0' = £ N/S) - матрицы Якоби, Y(t) - матрица фундамен-
дх oUj
тальных решений. Далее для удобства будем обозначать УКУ-решение, как
«°-{«S. 4/s)-
22*
348
Методы современной ТАУ. Часть IV
Теорема 5.1. Для того, чтобы набор u°(t) = {w$(0» u^/s} был локальной угрозой
и контругрозой для коалиции S, достаточно, чтобы для любых допустимых
u(t) = {us (0, u^is IG U выполнялась система неравенств:
[Э/5(0,0) . Э/5(0,0) Л dfN/s Л
где
djj [ дх J J
^Ft(U°(O,n0)
Эл:
.§до +
где
k,j = [S,N/S], ij(t) = X(t)^j(t) + Bj(t)-uj(t), Zj(t{
„)=о, л = {|£},
(5.71)
•Л, (5.72)
- Э/ .
*°(0 = /U»"5 •м^/5)> ^о) = *о> vj s "у + Yj'м; ~ реализация угроз и контругроз,
О 77
Vj, м;, му принадлежат Uj, вектор малых величин уу выбираем из условия
Jl|«?-vyf.A<e.
где е > 0 - малая величина.
Если показатели имеют смысл показателей эффективности, то знаки второго и
третьего неравенств в (5.71) меняются на противоположные.
Как показано в [9], данные достаточные условия локальных УКУ (5.71) являются
более удобными для практических применений.
Метод оптимизации. Один из вариантов методического упрощения структуры
метода на втором этапе заключается в сведении исходной задачи к такому виду,
когда для получения и0 достаточно использовать лишь области достижимости.
Для этого вводятся дополнительные координаты:
Ч, =FK(t,x,u)9 хОаг(*о) = О,
и исходная задача сводится к задаче с терминальным показателем
/^=Ф^(х(Г),Г) + хо^(Г) = Ф^(х(Г),Г),
где х(Т) = (хОк (Г),х(Г)) - расширенный вектор, К = (SyN/S).
Тогда
(5.73)
(5.74)
дФк(х\пт)_
Эх
Мт)
$y(O = A(O-Sy(O + By(O-uy(O, Уо) = О, ujeUj'
S°(0 = 7(x%s,4/s)' ВД = х0,
где последняя система имеет вид
[xS,(O = F^AnSfnJw)f xOi>) = O;
[i\t) = f(x°9uos,uoN,s), x(ro) = xo.
(5.75)
(5.76)
(5.77)
(5.78)
Глава 5. Введение в оптимизацию ММС
349
В данной трактовке достаточные условия принимают вид системы
Эу5
дФ8(т9х°(Т))
Эх
. fe(D
*0;
дФ8(тл°(Т))
Эх
. ^/*(Г)
>0;
(5.79)
ЭФ^/5(г,х°(Г))
Эх
. W^)
<0
при наличии связей (5.76) - (5.78).
Здесь и далее рассматриваются кусочно-непрерывные управления Uj(t) вида
uj(t) = qljil[t-t0]-l[t-t{]) + q2j.(l[t~tl]-l[t-t2]) + ...i (5.80)
гДе % min ^ 4ij ^ <lij max ™и параметризованные стратегии Uj(t) = (qj9x(t)).
Таким образом, необходимо найти пару (u®9u°N/s), которая на множествах
допустимых управлений useUs и uNjSeUNis и, как следствие, на множествах
£s (0» ^>nis (0 обеспечивает систему неравенств (5.79).
Общую алгоритмическую структуру этапа 2 теперь можно базировать на основе
следующей геометрической трактовки.
Примем для рассуждений без ограничения общности результата, что размерность
систем (5.76) и (5.77) dimfy = 2, dimx = 2.
Тогда система (5.79) является системой скалярных неравенств следующего вида
(прочерки над переменными опускаем)
э/5_
Jfs_
= (а,%дг/5(Г)) = в1-5№Ш(Г) + в2.^дг/5д(Г)>0,
(5.81)
<tyw/s
= (b^NIS(T)) = bl^N/Stl(T) + b2^NISi2(T)<0.
Вектора a, b являются векторами, однозначно зависящими от и0. Вектора
%s (T),£,n/s (^) заполняют соответствующие области достижимости (ОД).
Утверждение 5.5. Для того, чтобы третье неравенство системы (5.81)
выполнялось на всей ОД^ , достаточно, чтобы вектор нормали b гиперплоскости находился
«внутри» конуса (М1), где /' и /" - вектора нормали касательных гиперплоскостей к
Утверждение 5.6. Для того, чтобы второе неравенство системы (5.81)
выполнялось на всей ОД^$, достаточно, чтобы вектор нормали к гиперплоскости находился
- «внутри» конуса (-Л)-/11).
Утверждение 5.7. Первое неравенство системы (5.81) ограничивает область
допустимых значений нормали а гиперплоскости второго неравенства системы
пересечением конусов (- /г0-/п) и (- /1У0-/ш), где /ш и /IV - нормали к гиперплоскостям,
касающимся од^5.
350
Методы современной ТАУ. Часть IV
Утверждение 5.8. При касании ОД^ начала координат или при включении
начала координат во внутреннюю точку области ОД^ (ОД^ ) задача решения не
имеет.
I
-I
ш
IV
Рис. 5.12. Топология метода на основе ОД
Теорема 5.2 [8]. Оптимальное управление, приводящее траекторию \^г) системы
f-(0 = A^.(0 + Bru,., ^0) = 0 (5.82)
в точку касания ОД и гиперплоскости, а также вектор нормали 1 в точке касания
определяются при решении задачи
т _
min тах|1т-Х(Г,т)-В-иДт)^т = 0, (5.83)
INI- uj ,o
где Х(7\т) - матрица фундаментальных решений системы (матрица перехода):
~xn(T,t) ••• xln(T,t)'
Х(7\0 =
(5.84)
xnl(Tj) ••• xnn(T,t)_
В соответствии с полученными результатами общая структура алгоритма 2-го
этапа оптимизации управлений на основе объединения модифицированных доста-
Глава 5. Введение в оптимизацию ММС 351
точных условий ЛУКУ (МДУ ЛУКУ) и метода моментов Н.Н. Красовского можно
представить итерационным процессом, основой которого являются следующие шесть
шагов:
Шаг 1: приведение исходной постановки к виду (5.74) - (5.78);
Шаг 2: формирование системы неравенств (5.77) (МДУ ЛУКУ);
Шаг 3: итерация 1: задание начальных приближений и0 и «ячейки» V
допустимых значений и е U на основе сетевых решений этапа 1;
итерация / > 1: формирование текущих приближений и0 е U\
Шаг 4: формирование системы (5.82) (А, #, X(T,t)) на основе приближений
u°eU;
- решение задачи (5.83) для определения границ конусов нормалей Con /,
удовлетворяющих МДУ ЛУКУ:
а также соответствующих конусов Con £, образованных векторами £5(Г), J^/sCO
касательных к ОД^;
Шаг 5: решение задачи Парето-оптимизации ueU (или Q-оптимизации) для
набора коалиций К\ = S и К = N/S на множестве U, начальных или текущих
приближениях и0 е U и дополнительных ограничениях, сформированных на шаге 4 в одном
из двух видах: - и0 е Con I; - м° е Con %, т.е. удовлетворяют системе неравенств
(5.79) МДУ ЛУКУ при %S{T) и %NiS{T) - векторах касательных соответствующих
ОД^ и являющихся границами множеств Con % ;
Шаг 6: а) задача решена, если управление и0 eU оптимизирует (экстремизиру-
ет) набор Ф$>Флг/5 внутри «ячейки» U сети при удовлетворении неравенств МДУ
ЛУКУ; б) если ограничения не выполняются, то возвращаемся к шагу 3 на итерации
5.4.4. Применение двухэтапного метода получения УКУ-оптимального
УПРАВЛЕНИЯ ПРОГНОЗОМ ДИНАМИКИ КОНФЛИКТА Л С СВН - Л С ПВО
Постановка задачи. Рассмотрим этап задачи противодействия локальной
системы воздушного нападения (ЛС СВН) и локальной системы ПВО (ЛС ПВО) [35].
Противодействие ЛС СВН - ЛС ПВО состоит в том, что ЛС СВН стремится
преодолеть ЛС ПВО для поражения защищаемого объекта, а ЛС ПВО препятствует
прорыву.
Задача получения программно-корректируемого закона управления активными
средствами при взаимодействий ЛС СВН - ЛС ПВО представляет собой
итерационную процедуру, на каждой итерации которой выполняются четыре шага:
Шаг 1: формирование конфигурации конфликта;
Шаг 2: целераспределение АС СВН и ПВО по активным и пассивным средствам
ПВО и СВН соответственно;
Шаг 3: имитация конфликта;
Шаг 4: прогнозирование динамики конфликта.
Далее рассматривается упрощенный вариант последнего шага прогноза динамики
конфликта. В данной задаче является естественным поиск таких режимов
функционирования ЛС СВН - ЛС ПВО, которые были бы конфликтно-оптимальными.
352
Методы современной ТАУ. Часть ГУ
Каждая система состоит из двух подсистем: активной и пассивной. Активные
средства каждой коалиции воздействуют на активные и пассивные средства
противоположной коалиции. Для ЛС СВН активными средствами являются истребители-
перехватчики с ракетами «воздух-земля» и противорадиолокационными ракетами, а
для ЛС ПВО - зенитно-ракетные комплексы. Пассивные средства для ЛС СВН -
бомбардировщики, для ЛС ПВО - радиолокационные станции [35].
На рис. 5.13 приведена структура взаимодействия сторон, где АС - совокупность
активных средств коалиции, ПС - совокупность пассивных средств коалиции.
лссвн
ПС
Хг
J
Ч\
АС
Xi
i J
i
\
АС
Хъ
1-92
ПС
х4
лспво
Система А
Система Б
Рис. 5.13. Структура взаимодействия в ММС
- система А;
- система Б,
(5.85)
Система задается на основе динамики средних [9] следующим образом:
хз=-Р\ъ-<1\-х\-К(хз)
X4=-pi4'Q--4l)-xl'R(x4)
где Ру - эффективность воздействия одного объекта /-го вида одной системы на один
объекту-го типа другой системы, 0 < Р$ < 1; qx? - доли активных средств воздействия
на активные средства партнера, 0 < qi-, < 1; (1 - qt) - доля активных средств
воздействия на пассивные средства партнера; jc, - текущая средняя численность объектов /-го
типа
к-,*/<1;
11, *,->!.
Рассмотрим данную систему в пошаговом варианте. Шаг- конечный интервал
времени; число шагов конечно (к = 1...Л. Каждое активное средство делает на шаге
один ход.
Шаг равен
Т
*(*«•) =
В пошаговом варианте система (5.85) преобразуется в систему:
Глава 5. Введение в оптимизацию ММС 353
xl(k + l) = xl(k)-Pil-q2-xi(k)-R(xl),
x2(k + l) = x2(k)-Pn-(l-q2)-Xi(k)-R(x2)
(j.oO)
Лз(* + 1) = дг3(*)-Р13-91-*1(*)-Л(дгз), Г
x4(k + l) = x4(K)-Pl4.(l-ql)-xl(k)-R(x4).
Здесь: * = 1, 2,..., О < qt< I (i = 1,2), 0 < Ру< 1 (i = 1,3;; = 1,2,3,4) xt> 0, *,<*) -
численность к началу к-го шага.
В качестве показателя терминальных потерь (У) выберем показатель, имеющий
смысл суммарного перевеса по активным и пассивным средствам и скорости
убывания активных средств «партнера».
т
^A = aii{^!(^)-^2(7')]+ai2{^(r)-^(7')] + a13.J^-A,
'° (5.87)
О
где УА => min; Уб => min;
УА - показатель потерь коалиции А. Чем меньше УА, тем больше выигрыш
коалиции А;
УБ - показатель потерь коалиции Б. Чем меньше УБ, тем больше выигрыш
коалиции Б;
(Ху - весовые коэффициенты, определяющие целевой приоритет каждой стороны
в поражении активных или пассивных средств противоположной стороны
(терминальная составляющая) или в увеличении интегральной скорости убывания
активных средств противника (интегральная составляющая). (О < ау< 1; <Хц +
+ а,2 + ос/з = U i = U»2}), значения коэффициентов задаются в зависимости от
тактики каждой из сторон.
Применение сетевого подхода для получения начального приближения УКУ.
Для реализации сетевого подхода, используя алгоритм общего вида, базирующийся
на определении угроз и контругроз, сформирован алгоритм получения сетевых
приближений УКУ-решений для задач данного класса: двухкоалиционных, двухкритери-
альных (со сверткой векторных показателей) [8, 12].
На шаге 1 алгоритма формируется двумерная ортогональная равномерная сеть.
На шагах 2-8 формируется множество УКУ-оптимальных сетевых решений,
которые можно использовать в качестве начальных приближений для 2-го этапа
получения оптимального управления ММС. Структура алгоритма (шаги 2-8) показана на
рис. 5.14.
Реализация сетевого алгоритма УКУ-оптимизации осуществлена на
алгоритмическом языке Borland Pascal в среде ПС МОМДИС [18, 22]. В качестве базового
рассматривался следующий вариант:
• начальные условия задачи: ^(го) = 1О, / = 1...4;
• эффективности воздействия объектов /-го типа одной системы на объекты
;-го типа другой системы: Р13 = Р{4 = P3i = ^32 = 0,8;
• весовые коэффициенты, определяющие приоритет каждой из систем в
поражении активных и пассивных средств противника:
осп =0,7, а12 =0,3, а21 =0,3, а22 =0,7;
354
Методы современной ТАУ. Часть IV
• квадратичный критерий (без учета скорости):
7A=air[^-^2]+a12-[^-4]->min,
• анализ проводился на двух тактах.
г* -
GO l= minfi I
G02.= min£?2
ТОЧКА ПРИНАДЛЕЖИТ
ОБЛАСТИ СТАБИЛЬНОГО
ВЗАИМОДЕЙСТВИЯ
| QO2:=QQ2HiQ2 |
~^б(С0 I ,G 12) < MQOI ,С02Г
| QU.= mmQ\ \
MQOI,Q12)<MQOIQO2)
-| Qlh=m\nQl |
КОНЕЦ
Рис. 5.14. Сетевой алгоритм поиска начальных приближений УКУ-решений
Глава 5. Введение в оптимизацию ММС \ 355
Реализация сетевого алгоритма УКУ-оптимизации осуществлена на
алгоритмическом языке Borland Pascal в среде ПС МОМДИС [18, 22]. В качестве базового
рассматривался следующий вариант:
• начальные условия задачи: *Дго) = 1О, / = 1...4;
• эффективности воздействия объектов /-го типа одной системы на объекты
У-го типа другой системы: Pl3 = Pw = Р31 = ^32 = 0,8;
• весовые коэффициенты, определяющие приоритет каждой из систем в
поражении активных и пассивных средств противника:
аи =0,7; а12 =0,3; а21 =0,3; а22 =0,7;
• квадратичный критерий (без учета скорости):
/А = а„ -[*з -*i2] + <*i2 '[4 -*2]-> min ,
7Б = а21 •[*? -4]+а22\х\-^]">min;
• анализ проводился на двух тактах.
На рис. 5.15 показаны область параметров и область показателей для базового
варианта. Результаты временных замеров приведены в табл. 5.1.
Таблица 5.1
Число точек
Время, с
100
1
625
4
1600
15
2500
30
5625
125
к = 1,2; Xk = 10; Р13 = Р14 = P3i = ^32 = 0,8;
ап =0,7; ап =0,3; а21 =0,3; а22 =0,7.
Показатели - терминальные квадратичные.
Анализ влияния изменения параметров моделей. Исследования [9]
проводились в следующих направлениях:
• влияние соотношения весовых коэффициентов вектора показателей a(j
(приближенное положение Парето-оптимальной точки УКУ-СТЭК на ПНОК,
данное на рис. 5.15, полностью отражает тактические свойства конфликта (а^),
когда ЛС СВН стремится к прорыву АС ЛС ПВО, а ЛС ПВО стремится в
основном к поражению ПС ЛС СВН);
• влияние соотношения численностей объектов xt;
• влияние соотношения эффективности воздействия Pt-;
• влияние вида показателей У,;
• влияние числа шагов AT.
О пересечении множества УКУ и ПНОК при различных ресурсных соотношениях
коалиций. Из анализа прикладных результатов выявляются некоторые общие
закономерности, которые сложно получить «прямыми» теоретическими исследованиями.
Среди других следует отметить явно проявившуюся тенденцию не
единственности УКУ-решений коалиционной дифференциальной игры. При этом большая часть
решений находится внутри области Парето-Нэш-компромиссов (ПНОК).
Если ресурсы коалиций не равные, то на ПНОК имеем небольшое число точек
УКУ, которые смещены в пользу коалиции с большими ресурсами.
При выравнивании ресурсов число УКУ-решений увеличивается, а само
множество заполняет ПНОК, принимая во многих случаях очертания ПНОК.
356
Методы современной ТАУ. Часть IV
42
1
j
0,5 _
0
Г
УКУ-
0,5 |Парето-граница [/ \
Рис. 5.15, а. Результаты Нэш-Парето-УКУ-оптимизации (область параметров)
|Парепмраница
i>
[Облапь УКУ|
Рис. 5.15, 0. Результаты Нэш-Парето-УКУ-оптимизации (область показателей)
5.5. ОЦЕНКА ЭФФЕКТИВНОСТИ КООПЕРАТИВНОГО
КОМПРОМИССА И ОПТИМИЗАЦИЯ РЕШЕНИЙ В ММС
НА ОСНОВЕ ВЕКТОРА ДЕЛЕЖА ШЕПЛИ
5.5.1. Обобщение характеристической функции, предпосылка игры,
дележ и его свойства
В данном параграфе формулируется и исследуется способ оценки средней
эффективности игры с позиции каждого объекта ММС на полном множестве возможных
коалиционных структур с его участием. Основой являются Парето-Нэш-множество
Глава 5. Введение в оптимизацию ММС 357
предпосылок, заданное в критериальной и параметрической форме, и вектор дележа
Шепли, который формирует указанную оценку без применения сложного
коалиционного компромисса. Рассмотрим обобщение понятия характеристической функции
на основе Нэш-равновесия.
Определение 5.31. Характеристической функцией игры N лиц {i e N }
называется вещественная функция V, определенная на подмножествах множества N и
ставящая в соответствие любой коалиции S с N равновесное значение (для S)
бескоалиционной игры (или гарантирующее значение антагонистической игры) двух лиц,
которую сыграли бы S и NIS (множество N без S), если бы эти две коалиции
действительно возникли; при этом показатель коалиции S есть сумма взвешенных
показателей участников коалиции
Ф5=£а,/,;а,. >();]►>, =1
ieS ieS
(в типичном случае «без приоритетов» а{ = III, где / - число элементов S ).
Далее без ограничения общности будем считать величины / показателя
эффективности Ф5 выигрышами систем-игроков. Для показателей потерь все неравенства в
определениях и результатах меняются на противоположные.
Тогда характеристическая функция для коалиции S на основе бескоалиционного
равновесия имеет вид
V(S) = max <Ps(S,(N\S)r) = 05(Sr,(W\S)r), (5.88)
где Sr ,(N\ S)r) находятся из системы неравенств
0s(S9(N\S)r)<0s(Sry(N\S)r)9 1
0ys(Sr9(N\S))<0ys(Sr9(N\S)r)A (5*89)
Характеристическая функция для коалиции S на основе гарантирующих
решений
V(S) = max min Ф8 (5, N \ S). (5.90)
S N/S
Определение 5.32. Характеристическая функция обладает следующими
свойствами:
1) V(0) = 0;
2) V(N) = max 0N (min - для минимизируемых /,);
3) супераддитивность V(S (JR)> V(s) + V(R) (< для минимизируемых /4);
4) V(S) + V(N \S) = V(N) (для игр с постоянной суммой ^ /,- = const).
Определение 5.33. Дележом для кооперативного компромисса N-лиц с
характеристической функцией V называется вектор ld, удовлетворяющий условиям:
1) ^id^VW) (коллективнаярациональность);
2) ld[ > V{i) (индивидуальная рациональность) для всех /е N .
Для предпосылки дележа игры условие коллективной рациональности имеет вид
£/4<У(Л0. (5.91)
Понятие дележа существенно отличает кооперативную игру от бескоалиционной.
Бескоалиционные игры являются стратегическими в том смысле, что исход игры
формируется в результате действий тех игроков, которые в исходе получают те или
358 Методы современной ТАУ. Часть IV
иные выигрыши. Исходом кооперативной игры является дележ, который возникает
не как следствие действий игроков, а как результат их соглашений. То есть в
кооперативных играх сравниваются по предпочтительности не действия с исходами, а
дележи, и сравнение это не ограничивается рассмотрением индивидуальных
выигрышей, а носит более содержательный характер.
Условием существования наилучшего дележа является свойство трансферабелъ-
ности выигрышей коалиции S , когда совокупный выигрыш коалиции S может быть
произвольным образом поделен между членами коалиции. Если данное свойство не
выполняется и дележ единственный, то объединение игроков в коалиции не приведет
к увеличению выигрышей всех игроков и в этом смысле игра несущественна.
Определение 5.34 [7]. Несущественной игрой называется кооперативная игра с
аддитивной характеристической функцией, когда
V(S U R) = V(S) + V(R). (5.92)
Утверждение 5.8. Всякая кооперативная игра двух игроков с постоянной суммой
несущественна.
Утверждение 5.9. Для того, чтобы характеристическая функция V(S) была
аддитивной, необходимо и достаточно, чтобы выполнялось равенство
%V(i) = V(N). (5.93)
ieN
5.5.2. Методы оптимизации дележей
Принципы оптимальности классической теории кооперативных игр, заданных в
форме характеристических функций, условно можно разделить на два типа [5]:
1) оптимальность на основе принципов устойчивого поведения каждого игрока
(оптимальность по Парето, С-ядро, Н-М-решение);
2) оптимальность на основе «здравых» гипотез о свойствах, которыми должно
обладать решение, исходящее от явно или неявно существующего арбитра
(вектор Шепли, арбитражные схемы). -,
Из свойства коллективной рациональности дележа следует, что предпосылки
дележа оптимальны по Парето, но из свойства индивидуальной рациональности
следует, что не все решения по Парето являются предпосылками дележа.
Утверждение 5.10. Парето-граница Парето-Нэш множества компромиссов
однотипных ММС содержит множество предпосылок дележей.
5.5.3. Оптимизация дележа в форме вектора Шепли
Вывод общего выражения вектора Шепли [38]. Имеет смысл поставить вопрос
о заранее ожидаемом определенном значении выигрыша каждого игрока.
Оказывается, что некоторое априорно ожидаемое значение можно найти.
Пусть п - любая перестановка множества N , т.е. преобразование каждого игрока
/ в 7i(/). Всего таких преобразований М, где N - число элементов множества N.
Пусть игроки образуют одну коалицию, вступая в нее по одному в произвольном
порядке, т.е. порядок вступления в коалицию случаен. Следовательно, игроки
упорядочиваются согласно некоторой случайной перестановке п: N —» N.
Все перестановки равновероятны, т.е. имеют вероятность 1/NI каждая. Множество
первых / игроков по порожденному перестановкой п порядку обозначим через 5"
й*={*еЛ|я(*) </}.
Когда игрок i входит в коалицию я(/)-м по порядку, то множество игроков,
вступивших в коалицию до него, имеет вид
SlU)j{i)={keN\THk)<n{i)}.
Глава 5. Введение в оптимизацию ММС 359
Общий выигрыш коалиции S*U)/(i) есть V(S%{i)/(/)).
После вступления в коалицию / игрока равновесный выигрыш соответственно
V(Smn).
Тогда разность V( S£(/)) - V( S^/ii)) - «лепта» игрока /, вносимая им в коалицию
Определение 5.35. Игрок / в кооперативной игре называется болваном, если
V(5:(l))-V(5:(/)/(0) = H0. (5.94)
То есть игрок / не привносит в коалицию ничего по сравнению с тем, что он имел
бы, если бы действовал самостоятельно.
Определение 5.36. Коалиция, содержащая всех игроков, не являющихся
болванами,
R = {ieN: V(S) - V(S\(i))>V(i), S с W, (i)dS} (5.95)
называется носителем игры.
Определение 5.37. Если R - носитель игры, а К - любая коалиция K(zN,to
V(K) = V(R {} /Q+IV(i), (Об МЛ, (5.96)
где N \ R - множество болванов.
Так как игроки вступают в коалицию в любом порядке, то можно сформировать
«априорно ожидаемый выигрыш» игрока / как усредненную по всем перестановкам
«долю» игрока i [38]
ф/^) = -^Е^(^(о)-^(^(/)\(О)]. (5.97)
Определение 5.38. Вектор
ф.(1О = {ФД1О,/=1,ЛГ} (5.98)
называется вектором Шепли.
Вычисление вектора Шепли. Рассмотрим способ вычисления вектора Шепли.
Для этого фиксируем S с N и вводим обозначение s = |5|; где |5| - «мощность»
множества S (число элементов).
Пусть
Q = {ti|^(0=4
Заменим в соотношении (5.97) S*(/) на S, а сумму по всем перестановкам
соответственно на сумму по всем S с N. Тогда получим
ф^) = ^ XlW(S)-^(S\(0)yeS, (5.99)
N -ScN
где суммирование ведется по всем 5, содержащим /-го игрока. Пусть перестановка
пе Q. Представим ее как
1,..., S-l, S.S + l,...,N .
В соотношении (5.99) надо вычислить |Q|. Это число всевозможных перестановок
71, таких, что
я(0 = s и S* 0 = 5, где S* 0 = {к е N \ п(к) < n(i)}.
Очевидно, что для множества £*(/) \(/) имеем (5 - 1)! перестановок, где s - число
элементов множества S, а для множества NXS^ находим (N - s)\ всевозможных
перестановок, где
360 Методы современной ТАУ. Часть IV
s;(0\(0=(i *-D,
N\SZU)=(s+l ЛО,
следовательно
|Q| = (5-l)!(N-5)!.
Подставляя это выражение в формулу (5.99), получаем формулу, удобную для
вычисления вектора Шепли:
ф.(у) = 77Т £ " \„ \[V(S)-V(S\(i))], ieS, (5.100)
где суммирование происходит по всем коалициям S, содержащим i-ro игрока.
Приведем несколько вариантов решения в зависимости от N.
При N = 2
^(V) = ^[V(h2)-V(2)] + ^-[V(l)-V(0)] = kv(l2) + V(l)-V(2)l
(5.101)
O2(V) = ^[V(l,2)-V(l)]+™[V(2)-V(0)] = ^[V(l,2) + V(2)-V(l)].
При N = 3 возможные коалиции S с игроком i
i=l: (1,2,3);(1,2);(1,3);(1),
i = 2: (1,2,3); (1,2); (2,3); (2),
i = 3: (1,2,3);(1,3);(3,2);(3).
Поэтому, например,
O,(V) = ^W2,3)-V(2,3)] +
14. VV 0-2- (5Ш2)
+-^-[V(l,2)-V(2)] + ^-[V(l,3)-V(3)]+^[V(l)-V(0)].
Утверждение 5.11. Вектор Шепли при общих свойствах Парето-множества и при
любой характеристической функции обеспечивает на Парето-границе ПНОК (Паре-
то-Нэш области компромиссов) предпосылку или сильную предпосылку (дележ)
игры, где для задачи максимизации (а)
5>,(V)<V(A0 = max £/,.,)
Ф,->У(0;
и для задачи минимизации (б)
i
Ot<V(/).
Пусть для (б) при N = 2 точка Нэша - равновесная точка, которая обладает
свойствами устойчивости (стабильности), имеет вид V(l), V(2).
Точка min(/i+/2) - точка Парето-множества - минимальные суммарные потери
(максимальный суммарный выигрыш) систем, объединившихся в коалицию.
Точка Шепли - «априорно ожидаемое значение» - ожидаемое значение выигрыша
каждого игрока, усредненное по всем перестановкам, по всем возможным коалициям.
Утверждение 5.12. При N = 2 имеет место геометрический метод получения
точки Шепли в системе координат (УРУ2). Точка Шепли есть пересечение двух прямых,
одна из которых проведена под углом 45° к оси OJ и проходит через точку (V(l),
V(2)), другая проведена под углом 135° к оси OJ и проходит через точку Парето-
границы min(7, +У2)для (б) (или тах(У1+У2) для (а)).
Глава 5. Введение в оптимизацию ММС 361_
5.5.4. Формирование двухэтапного алгоритма оптимизации решений
в ммс на основе вектора дележа шепли
Может быть сформирован алгоритм оптимизации решений, состоящий из
следующих двух этапов.
Этап 1. Определение значений вектора дележа Шепли {Ф/, ieN} на основе
выражений (5.100), которые для N = 2, 3 приведены в точной форме (5.101).
Утверждение 5.13. Численные значения компонент {Ф/, ieN} вектора дележа
Шепли являются линейными комбинациями конечного числа tf-задач Парето- и Нэш-
оптимизации, причем R удовлетворяет следующему соотношению:
RN+l = 2RN, при R2 = 2 ... N > 2. (5.103)
В конечном наборе RNnpn каждом фиксированном N имеет место N- 1 задача
Нэш-оптимизации. Доказательство следует из анализа выражений (5.100).
Если при решении задачи этапа 1 применяется параметризация управления, то
данный набор задач может быть решен с помощью ПС «МОМДИС», в составе
которой реализованы модули Парето- и Нэш-оптимизации.
При не единственности вектора Шепли, вызванной возможной не
единственностью решения задач Парето-Нэш-оптимизации, в качестве дополнительного подэтапа
возникает задача определения дополнительного компромисса на основе групповой
неудовлетворенности.
Теперь выбирается Ф*е {Ф} из условия
ттУ[Ф:-1*]2->Ф*, (5.104)
ф
где I* = {I*,; ieN} - идеальная точка векторной оптимизации.
Этап 2. Целью данного этапа является решение относительно управлений
системы функциональных уравнений
[1» = Ф*, ieN;
(5.105)
[* = /(*,w,0, ueU, x(to) = Xq.
Данная система может быть приведена к обычной форме задачи оптимизации.
С учетом параметризации ПКЗУ и параметрическим уточнением кооперативной
структуры ММС задача оптимизации принимает вид:
тт£[1;-Ф,*}2;
qq teN
х = f{x,qMq,xj\t\x{to) = xQ\ (5.106)
sr =
qeQ\qeQ\ ueU.
Для решения задачи определения параметризованного программного управления
и ПКЗУ применяется модуль Q-оптимизации ПС «МОМДИС». Детально алгоритм
рассмотрен в [9].
5.5.5. Применение двухэтапного алгоритма для получения УКУ-Шепли
ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ПРОГНОЗОМ ДИНАМИКИ КОНФЛИКТА
ЛС СВН-ЛС ПВО
Постановка данной задачи подобна постановке рассмотренной ранее.
Первый такт прогноза:
362
Методы современной ТАУ. Часть ГУ
Л^! =10
W2=10
Л^з = 10
W4=10
Ja = Jx
= аи[*32
= a21[jcf
hi
P}2
Pn
Pu
= 0,8
= 0,8
= 0,8
= 0,8
] + a,2[jc42-
-.х1] + а2г[х\
«12
a21
«22
= 0,7
= 0,3
= 0,3 '
= 0,7
>min,
-x4]—>min.
1) Определение значений вектора дележа Шепли на основе Парето-Нэш-оптими-
зации (первый этап прогноза).
Общий вид множества показателей Ju J2 на основе ортогональной и ЛП-сетей
приведен на рис. 5.16.
УКУ, Парето-граница, точки Нэша и Шепли даны на рис. 5.17:
• точка mn(J\+J2): <?i = 1; <?2 = 0; /i = - 38,7; J2 = - 40,4;
• точка Нэша: q{ = 0,668; q{ = 0,430; J{ = - 10,2; J{ = - 7,29;
• точка Шепли: Фх = - 41,005; Ф2 = - 38,095.
2) Векторная оптимизация управления коалициями для минимизации отклонения
от точки Шепли (на основе Q-оптимизации) (второй этап прогноза):
• множество показателей 7,, 72 (рис. 5.18, 5.19);
• точка Нэша q[ = 0,668, q2 = 0,430, J{ = 948,948, Т2 = 948,948 (рис. 5.18);
• точка Шепли Ф{ =0, Ф2 =0 (рис. 5.18, 5.19);
• точка сильной предпосылки игры и УКУ (СТЭК при однотактовом прогнозе)
(рис. 5.17-5.19):
9i =0,995; q2 =0,003; Jx =0,043; J2 =0,003;
ft =0,995; q2 =0,003; Jx =-41,003; J2 =-38,094.
Парето-УКУ-Шепли-оптимальный вектор параметров на первом такте:
^' =0,995
9е? =0,003
ортогональная
сеть
ЛП-сеть
Рис. 5.16. Множество показателей JifJ2 (первый этап алгоритма)
Глава 5. Введение в оптимизацию ММС
363
Парето-граница
точка Нэша
точка
УКУ и сильной
предпосылки
игоы
/точка minf Л + J2)
Рис. 5.17. УКУ, Парето-граница, точки Нэша и Шепли
Вектор состояния к концу первого такта: хх = 9,972; х2 = 2,027; х3 = 2,039;
jc4 = 9,96.
Второй такт прогноза.
*i(2) =
*з(2) =
хЛ2) =
•%
*02
*03
^04
= 9,972
= 2,027
= 2,039
= 9,960
Рц
Рп
Рк
Ры
= 0,8
= 0,8
= 0,8
= 0,8
«п
«12
«21
«22
= 0,7
= 0,3
= 0,3
= 0,7
1) Определение значений вектора дележа Шепли на основе Парето-Неш-
оптимизации (на первом этапе алгоритма) (см. рис. 5.20):
• множество показателей Уь У;
• УКУ-Парето-граница;
• точка minC^+jy: q\ - 1; qi = 0; J\ = - 39,7; J2 = - 39,6;
• точка Нэша: qxr = 0,321; q{ = 0,988; У,г = - 50,1; J{ = 23,8;
• точка Шепли: Фх = - 76,6; Ф2 = - 2,7.
rt=i
к.УКУ„
Рис. 5.18. Точка Нэша
364
Методы современной ТАУ. Часть ГУ
J2 L
множество
показателей
\
тОчка Шепяи^^^^
•
•
\
точка сильной
предпосылки игры и
точка min(J1
\
*
*
\
УКУ
стэк
+J2)
•
л *
Рис. 5.19. СТЭК при однотактовом прогнозе
Парето-граница
точка УКУ
и сильной \
предпосылки
игры
точка min(J1+J2)
Рис. 5.20. Точка Шепли
множество
показателей
точка сильной предпосылки игры и
УКУ<СТЭК на двух тактах >
Рис. 5.21. Множество показателей J{,J2 (второй этап алгоритма)
2) Векторная оптимизация управления коалициями для минимизации отклонения
от точки Шепли (на основе Q-оптимизации) (на втором этапе алгоритма):
Глава 5. Введение в оптимизацию ММС
365
• множество показателей Jb J2 (рис. 5.21, 5.22);
• точка mint/!+ /2): ^ =1, <?2 = 0, 7^ =1361,61, 72 =1361,61 (рис. 5.21, 5.22);
• точка Нэша: q[ =0,321, q2 =0,988, J{ =702,25, 72r =702,24 (рис. 5.21);
• точка Шепли ф[ = 0, &, = 0 (рис. 5.21, 5.22);
• точка сильной предпосылки игры и УКУ (СТЭК на двух тактах прогноза):
^=0,295, q2 =0,068, Т^ =301,67, 72 =68,96;
q{ =0,295, q2 =0,068, Jx =-59,23, J2 =5,6.
Парето-УКУ-Шепли-оптимальный вектор параметров на втором такте
U = 0,295,1 •
[^2=0,068.]
Вектор состояния после двух тактов прогноза ^ (Г) =9,86; х2(Г) = 0; х3(Т) = 0:
^4(7) = 4,335.
множество
показателей
Рис. 5.22. множество показателей У,, J2
Таким образом, изменение численностей и Парето-УКУ-Шепли-оптимального
параметризованного управления имеют вид (рис. 5.23).
На двух тактах формируется оптимальное управление активными средствами ЛС
СВНиЛСПВО-^р', q°2pt.
л, = 10
*2=10
*з=10
*4=10
qx = 0,995
^2=0,003
д:, = 9,972
*2= 2,027
л:3= 2,039
*4= 9,960
qx = 0,295
^2= 0,068
Х\ = 9,860
*2=0
^3 = 0
^4 = 4,335
0 1-й такт Г/2 2-й такт Т
Рис. 5.23. Формирование оптимального управления активными средствами ЛС СВН и ЛС ПВО
366
Методы современной ТАУ. Часть FV
ЛС СВН отдает предпочтение поражению активных средств ЛС ПВО
(ап =0,7; ос12 =0,3), т.к. ее задача подавить активные средства ЛС ПВО с целью
обеспечения прорыва своих пассивных средств к охраняемому ЛС ПВО объекту.
ЛС ПВО отдает предпочтение поражению пассивных средств ЛС СВН
(а21 = 0,3; а22 = 0,7), т.е. задача ЛС ПВО не пропустить противника, а именно
пассивные средства ЛС СВН к охраняемому объекту, тем самым не допустить
поражение объекта.
В начале первого такта имею/ место равные начальные количества активных и
пассивных средств ЛС СВН и ЛС ПВО: хх = х2 = х3 = х4 = 10.
На первом такте получены следующие численности активных и пассивных
средств ЛС СВН и ЛС ПВО: хх = 9,972; х2 = 2,027; хъ = 2,039; х4 =9,96 и
оптимальный вектор параметров: q°pt = 0,995; q2pt = 0,003.
Результаты в конце первого такта соответствуют точке сильной предпосылке
игры первого такта.
Результаты показывают, что ЛС СВН, выбрав оптимальное управление
q°pt =0,995, направив тем самым практически все активные средства на поражение
активных средств ЛС ПВО, добьется нужного результата - активные средства ЛС
ПВО уменьшаются в численности до х3 = 2,039. ЛС ПВО, выбрав оптимальное
управление q2pt =0,003; (l-q2pt =0,997), направляет практически все активные
средства на уничтожение пассивных средств ЛС СВН. Выполняет свою задачу -
пассивные средства ЛС СВН уменьшились по численности до х2 = 2,027.
Активные средства ЛС СВН и пассивные средства ЛС ПВО существенно не
изменяются (х\ = 9,972; *4 = 9,960), т.к. они по приоритетам стоят на втором месте для
обеих систем соответственно.
На втором такте численности активных и пассивных средств ЛС СВН и ЛС ПВО
убывают до значений: х{ =9,860; х2 =0; х3 =0; х4 =4,335, а оптимальный вектор
параметров qxopt =0,295, q2pt =0,068. Результаты в конце второго такта
соответствуют точке сильной предпосылки игры.
Результаты показывают, что ЛС СВН, задав оптимальное управление
q°pt =0,295, не только завершит выполнение своей главной задачи - численность
активных средств ЛС ПВО х3 = 0, но и, выделив практически большую часть своих
активных средств на поражение пассивных средств ЛС ПВО, нанесет урон
противнику по пассивным средствам х4 =4,335.
42 = 0,732
= 0,995
Ч\
= 0,295
i
-►
772
Рис. 5.24. Оптимальное параметризованное управление активными средствами ЛС СВН (а)
и ЛС ПВО (б) на двух тактах
Глава 5. Введение в оптимизацию ММС 367
ЛС ПВО, выбрав оптимальное управление q0^1 =0,068, практически все
активные средства направляет на поражение пассивных средств ЛС СВН из-за того, что в
результате 1 такта взаимодействия ее активные средства значительно уменьшились.
В результате ЛС ПВО достигает своей цели - численность пассивных средств ЛС
СВН *2=0.
Окончательно Парето-УКУ-Шепли-оптимальные параметризованные управления
(СТЭК-7) ЛС СВН и ЛС ПВО даны на рис. 5.24.
Применение полученных программных управлений обеспечивает Парето-Нэш-
УКУ-Шепли-компромисс с двухтактным прогнозом. В общем случае повторение
данной процедуры на следующем временном интервале (Г, 27) с измеренным вектором
х(Т) позволяет получить ПКЗУ.
5.6. МЕТОДЫ КОМБИНИРОВАНИЯ РЕШЕНИЙ ПО НЭШУ
(СКАЛЯРНЫЙ И ВЕКТОРНЫЙ ВАРИАНТЫ), ПАРЕТО, УКУ,
ШЕПЛИ, «ИДЕАЛЬНОЙ ТОЧКИ», € -РАВНОВЕСНЫХ
ПРИБЛИЖЕНИЙ И АРБИТРАЖНЫХ СХЕМ ДЛЯ ПОЛУЧЕНИЯ
СТАБИЛЬНО-ЭФФЕКТИВНЫХ КОМПРОМИССОВ ММС
(СТЭК-ММС)
5.6.1. СТЭК на основе Парето-Нэш-Уку-Шепли комбинаций [10]
В данном разделе рассматриваются схемы формирования компромиссов, их
систематизация на основе принципа необязательных соглашений и в условиях, в
основном, объективной информации о ММС.
Выбор наиболее эффективного решения по Нэшу (СТЭК-1). Потребность в
данном СТЭК возникает, когда скалярное равновесие по Нэшу при фиксированной
структуре ММС является неединственным. Практически речь идет о выборе
недоминируемых решений по Нэшу.
Определение 5.39. Нэш-решение игры Г(Р)
доминирует решение иг , если
IKi(ur')>IKi(ur\i=l,...J.
В рамках СТЭК-1 предполагается, что недоминируемое решение иг -
единственное, тогда оно наиболее эффективно для всего коалиционного разбиения ММС,
поэтому принимается игроками как необязательное соглашение.
Таким образом, итерация алгоритма для получения СТЭК-1 состоит из трех
этапов.
Этап 1. Получение решения, равновесного по
Этап 2. Сравнение данного решения с полученными
Этап 3. Исключение доминируемых решений на данном
Данная схема реализуется на интерактивной комбинации программных модулей
ПС «МОМДИС».
Выбор компромиссного недоминируемого Нэш-решения по критерию
уравновешивания потерь в окрестности наилучшего для каждой коалиции Нэш-
решения (СТЭК-2). Предыдущий СТЭК-1 может иметь не единственное не
доминируемое решение и", i = 1,2,...,/. Тогда сужение полученного множества может быть
достигнуто дополнительными компромиссными условиями близости к наилучшему
368 Методы современной ТАУ. Часть IV
для каждой коалиции значению max /^ и/или уравновешиванию потерь А'^ в связи
с его недостижимостью, где
Д«=-« : >0.
* max/ft
По заданным двум условиям может быть введен дополнительный критерий
оптимизации на конечном множестве недрминируемых НЭШ-решений:
mm/?(/) = min[X(A^-A'^)2+pX(A^)2], j^-UJJФц.
1 jv j
Первая сумма обеспечивает уравновешивание потерь, вторая - близость к
наилучшему для каждой Kj решению, р - весовой коэффициент.
Общая схема алгоритма для получения СТЭК-2 имеет следующую общую
этапную структуру.
Этап 1. Получение решения, равновесного по Нэшу.
Этап 2. Сравнение данного решения с полученными ранее.
Этап 3. Исключение доминируемого решения и переход к этапу 1.
Этап 4. Нахождение полного набора недоминируемых решений и переход к
этапу 5.
Этап 5. Получение точек тах/£ и переход к этапу 6.
j J
Этап 6. Вычисление разностей AlKji = 1,..., nj = 1,..., / и переход к этапу 7.
Этап 7. Формирование процедуры перебора недоминируемых Нэш-решений.
Выбор векторного Нэш-решения относительно идеальной для множества
допустимых решений точки (СТЭК-3). Общий алгоритм определения компромисса
принимает вид следующей многоэтапной последовательности.
Этап 1. Получение векторных Нэш-равновесий: ир\ / = 1,...,/.
Этап 2. Фиксация множества недоминируемых векторных равновесий l™(upi).
Этап 3. Получение идеального решения /] =тах/у(м), j = l,...,m .
Этап 4. Получение компромиссного решения на конечном множестве
недоминируемых векторных равновесий.
Х(С(^'Ь/;) ->min.
Формирование Парето-Нэш области компромиссов (ПНОК) (СТЭК-4).
Алгоритм получения ПНОК базируется на комбинации алгоритмов Парето, оптимизации
Нэш-оптимизации и получения СТЭК-1 (2, 3), что может быть представлено в
упрощенном виде следующей процедурой.
Этап 1. Получение множества скалярных (векторных) недоминируемых Нэш-
равновесий.
Этап 2. Определение стабильно-эффективных решений СТЭК-1 (2, 3).
Этап 3. Формирование конуса доминирования на области значений показателей
как на отображении области решений.
Этап 4. Получение области Парето-оптимальных решений и подобласти Un на
основе конуса.
Этап 5. Формирование системы значений показателей и системы решений,
удовлетворяющих ПНОК, с элементами проективнографического анализа.
Глава 5. Введение в оптимизацию ММС 369
Взаимосвязь ПНОК и области УКУ-решений (СТЭК-5) [10]. Взаимосвязь
ПНОК и множества дележей (СТЭК-6) [10]. Выбор наиболее эффективного
УКУ-решения на основе ПНОК и точки дележа Шепли (СТЭК-7). СТЭК-5 и
СТЭК-6 обобщаются в виде СТЭК-7, который имеет наиболее общий вид в
условиях необязательных соглашений и содержит предыдущие СТЭК-1 - СТЭК-6 как
частные случаи.
Определение 5.40. Общий стабильно-эффективный компромисс в условиях
необязательных соглашений формируется как устойчивое решение с
предостережением, обладающее максимальной степенью близости к оценке наилучшего результата,
который может быть достигнут при кооперативном объединении на основе
обязательных соглашений. Таким свойством обладает УКУ-равновесие на ПНОК, которое
является наиболее близким к точке дележа по Шепли или максимальной реализуемой
предпосылки (СТЭК-7).
Общая схема алгоритма определения данного СТЭК заключается в
последовательном поэтапном решении следующих задач.
Этап 1. Определение множества Нэш-равновесий.
Этап 2. Определение наилучшего Нэш-решения на основе СТЭК-1 - СТЭК-3.
Этап 3. Определение множества УКУ-равновесных решений.
Этап 4. Формирование подмножества УКУ-решений на основе СТЭК-4, СТЭК-5.
Этап 5. Определение дележа по Шепли на ПНОК (СТЭК-6).
Этап 6. Определение УКУ-решения, принадлежащего ПНОК и наиболее
близкого к точке дележа по Шепли.
5.6.2. Комбинированные методы в условиях 8 -равновесия по Нэшу,
минимизации угроз и неполной информации о партнерах [44, 48]
Рассматриваются комбинированные процедуры, объединяющие алгоритмические
модули: Q -оптимизации (модуль 1), векторной НЭШ-оптимизации (модуль 2а),
скалярной НЭШ-оптимизации (модуль 26), начального приближения Парето-множества
на основе (5.38) (модель 3).
Выбор эффективного решения с допустимыми техническими
требованиями и степенью неравновесности с оценкой и минимизацией угроз (полная
информация о коалициях-партнерах) (СТЭК-8). Рассмотрим подробно
алгоритм получения данного СТЭК, структурная схема которого изображена на
рис. 5.25.
Этап 1. Построение дискретной аппроксимации множества Парето в
пространстве показателя 1^ при варьировании вектора параметров qj. To есть решается
задача (модуль 3) определения
[Ц( Q U)\Kj9E?},
гдеQ(/) = (qeQcEr|q7e Q,,q(Af<vj) = фикс}.
Е%1 означает, что на любом Ещ решается задача минимизации.
Qn - дискретная аппроксимация множества Парето относительно 1У в
пространстве параметров.
Этап 2. Полагаем к = 0.
i'w=i;(q<*>),q<*>ea"-
25 Зак. 416
370 Методы современной ТАУ. Часть IV
Шаг 1. Из множества lpj(k) (Q(/)) проектировщик выбирает наиболее подходящее
решение, удовлетворяющее априорным техническим требованиям.
Шаг 2. Решение задачи Ц(*} -оптимизации (модуль 1) из начального
приближения q(/:): определить
unn{lj(q)\Kj9uf}. (5.107)
Если к = 0, то матрица конуса доминирования п{к):
B(/)=E = [wi.xwy].
И в результате находим решение ljik+l), более предпочтительное, чем lj{k):
1У(*+1)<|Д*)
Шаг 3. Формирование матрицы В^ допустимых взаимных локальных
изменений компонент вектора 1^к). Решается задача вида (5.107) и находится решение
jj(M) _ i№^ q(k+\) e qIj
оптимальное по конусу доминирования, определяемому матрицей В^.
Шаг 4. Вычисляется степень неравновесности £(*+1) решения
j(Mk\№+\) _ iWk\j), (*+i)^
относительно контркоалиции К{ МкЧ у Для этого решается оптимизационная задача в
модуле 2а, в которой определяется степень несовместности необходимых условий
векторного равновесия относительно векторного показателя l(M*Vy) и вектора
параметров q^M^j)\ полагаем Jfc = Jfc + 1.
Шаг 5. Если значения некоторых компонент вектора 1^к) или степень
неравновесности решения г(к) не устраивают проектировщика, то перейти к шагу 3 и сделать
очередную попытку й/Л) -оптимизации. Иначе положить
qopt = q(*); ^opt = lJ(qopt)
и перейти к этапу 3.
Этап 3. Определение «угрозы» со стороны контркоалиции K(Mkv) при
q Jf = qW* и варьировании параметров контркоалиции. Для этого решается задача
относительно всего векторного показателя I при варьировании вектора параметров
q(AW.
Определить {, Q(Q {Mk \ j) )| к{МкЧ); Q), qe Q (Мк \ j), где Q (Мк \j) = { qe Q с
При этом матрица конуса доминирования Q, формируется в виде, необходимом
для оценки «угроз» [48].
Таким образом, использование комбинированной процедуры СТЭК-8 дает
возможность не только определить, Ц-оптимальные параметры qjopt коалиции Kjy
обладающие максимальной степенью равновесности, но и оценить при этом
возможности контркоалиции К(МкЧ) по созданию «угрозы» для коалиции Kj.
Глава 5. Введение в оптимизацию ММС
371
Модуль 3. Построение дискретной
аппроксимации множества Парето
в пространстве /;
при варьировании с/
у
Выбор начального приближения.
Решение последовательности задач
^-оптимизации (модуль 1).
Вычисление степени неравновесности
е относительно / к J и IJ на основе
модуля 2а
^^ е<ео ^^
у
да
Проверка угрозы со стороны
контркоалиции
{Mk\j)
модуль 3
Уточнение параметров «угрозы»
и окончательный выбор
эффективного режима защиты
с максимальной степенью
равновесности
т
Рис. 5.25. Алгоритм СТЭК-8
Выбор скалярного Нэш-решения, близкого к идеальной точке, на основе
е-равновесного эффективного решения (взаимная параметрическая
неопределенность (СТЭК-9)). Структурная схема, изображенная на рис. 5.26, используется,
когда приоритеты показателей внутри коалиции заданы в виде векторов весовых
коэффициентов, т.е. возможна скаляризация:
25*
372
Методы современной ТАУ. Часть ГУ
i
Модуль 3 (5.108). Глобальный анализ
в пространстве Ф. Выбор начального
приближения идеальной точки Ф*
Модуль 1 (£.109). Построение идеальной
точки Ф*. Решение тк задач
й-оптимизации
i
Модуль 2а. Выбор на приближенном
множестве Парето решений, обладающих
максимальной степенью равновесности
i
Модуль 26 (5.110). Построение
Нэш-решения Фг, максимально
приближённого к идеальной точке Ф*
(5.111)
i
Модуль 1.
«Проецирование» Фг на множество
Парето с помощью арбитражной схемы
(5.112)
t
Рис. 5.26. Алгоритм СТЭК-9
Этап 1. Построение начального приближения целевой (идеальной) точки.
Шаг 1. Решение задачи глобального анализа в модуле 3 в критериальном
пространстве показателя Ф = [Фь ..,, Фт*]т при варьировании вектора параметров qs Q:
{OP(Q)| «,££*}, (5.108)
qe Q, R = (1, r) - множество индексов компонент вектора q. Получаем дискретную
аппроксимацию множества Парето:
ФР(О) = {Ф«\кеМ„={1,тп}},
где тп - количество точек в множестве Ф„((3).
Шаг 2. Дляу = 1,.., т* определяем
Ф*у = mm Фуда = 0/0*0")),
кеЫр.
Полагаем Ф* = [ Ф\,...,Ф^ ]т - начальное приближение к идеальной точке.
Этап 2. Построение идеальной точки Ф*. Для j = l,mk решаем совокупность
задач (модуль 1):
Глава 5. Введение в оптимизацию ММС 373
определить
minO/q),qeQ (5.109)
из начального приближения Ф *= Фу(q *(;)).
Получаем решение Ф*. Полагаем Ф* = [Oj*, -Ф^ ]Т-
Этап 3. Построение множества начальных приближений для определения
равновесных решений.
Шаг 1. Для к = 1, тр решаем совокупность задач (модуль 2а) в точках Ф(к)е
Ф*Р(О) и получаем г(к) - степень неравновесности решения Q>{k\q(k)).
Шаг 2. Из множества Ф*Р(О) формируем множество
ФХд)={Ф(0,^Мг={1,тг}}
решений, у которых е(/) < г^к), эти точки будут использоваться в качестве начальных
приближений при поиске равновесных по Нэшу решений.
Этап 4. Поиск равновесного по Нэшу решения, максимально,приближенного к
идеальной точке.
Шаг 1. Для к = 1>тг решаем совокупность задач поиска равновесия по Нэшу
между скалярными показателями (модуль 26).
Определить
min{O(qK,{R,}feMt} (5.110)
из начального приближения Ф{к)е \3}Q£Q), где К = (Kj =j, je Ык), R, = А/ - вектор
весовых коэффициентов, определяющий конус доминирования Ц в виде гиперплоскости
в подпространстве Ету. В результате получаем множество равновесных решений:
Or(Q)= { O(*UeMr= {1,тг}},тг<Рш
Шаг 2. Решение задачи вида:
определить
min |ф*-Ф(Л) |, (5.111)
Ф(к) е ФГ(Р).
То есть определяем решение Ф1* = Ф(^) е Ф£О), максимально приближенное к
идеальной точке Ф*.
Этап 5. Проецирование равновесной точки Ф1* на множество Парето Фр((3). Для
этого решаем задачу Q-оптимизации (модуль 1) в «узком» конусе доминирования с
матрицей вида, обеспечивающей равномерное улучшение векторного показателя [48].
Определить
min^(tf)|R,Q} (5.112)
q е Q,
из начального приближения Ф1* = Ф^*).
Задание матрицы В в указанном виде характеризует разумность поведения
коалиций-партнеров, без дискриминации какой-либо из сторон, что в определенном
смысле может компенсировать отсутствие возможности переговоров между партнерами.
В результате осуществляется согласованный выход q = q p* на множество Парето.
5.6.3. Понятие о договорных компромиссах на основе комбинации
обязательных и необязательных соглашений
Практически при усложнении алгоритма компромисса с соответствующим
увеличением числа условий его выполнения и повышением структурной сложности
элемент обязательности выполнения соглашения усиливается, т.к. свойство
устойчивости с предостережением существенно дополняется обязательным договорным
элементом. Данная динамика имеет место в последних алгоритмах поиска СТЭК.
374 Методы современной ТАУ. Часть IV
В данном разделе кратко рассматриваются некоторые пути формирования
обязательных компромиссов при управлении ММС (СТЭК-11 -14), использующие
результаты необязательных компромиссов и содержащие, в том числе, элементы
модификации арбитражных схем и среднеквадратических решений, комбинации УКУ-реше-
ний и дележа Шепли и др.
Договорной диапазон на основе комбинации вектора Шепли и УКУ-решений
(СТЭК-11).
Как известно, СТЭК-7 в условиях необязательных соглашений обеспечивает
выбор УКУ-решения на ПНОК наиболее близкого к точке Шепли, которая является
средней оценкой эффективности данной коалиции - объекта на множестве
возможных кооперативных объединений.
В результате, в общем случае, остается диапазон между СТЭК-7 (УКУ-решением)
и точкой Шепли, на котором может быть сформировано обязательное соглашение.
Алгоритм данного варианта базируется также на модифицированном двухэтапном
алгоритме (см. 5.5.4) с введением последовательной системы предпосылок вида
Модификации арбитражных схем. При всем разнообразии структурных
вариантов арбитражных схем (АС), рассмотренном в обзоре главы 6 в работе [9],
выделяются четыре АС: АС Нэша, АС Райфы, пропорциональная АС [6] и АС Нэша - Харша-
ньи - Селтена при неполной информации (АСНХС) [9].
О модификации арбитражных схем Нэша и Райфы с использованием Нэш- и
УКУ-решений (СТЭК-12). По определению арбитражной схемы Нэша арбитражное
решение удовлетворяет условию
тахПа/(и)-1;)-*<Л (5.113)
и ieN
где I* - значения вектора показателей в начальной точке, иа - Парето-решение.
В классической АСН в качестве I/* выбирается гарантированное значение показателя
/-го объекта (коалиции)
1^ = тах min \(и1,и1и1).
u'eU'u/uiZU/Ui
По определенно арбитражной схемы Райфы [6] арбитражное решение
удовлетворяет условию
maxmin1^*"1' -»и", (5Д14)
ueU ieN IJ«
где I* - значения вектора показателей в начальной точке; 1,ид - значения вектора
показателей в «идеальной точке».
Предлагается в качестве I* использовать значения СТЭК-3 или СТЭК-7, как
наилучших Нэш- и УКУ-решений соответственно, которые «продвинуты» к Парето-
границе по сравнению с гарантированным значением показателя и поэтому имеют
большую эффективность. Кроме того, АС меньше подвержена влиянию локальных
экстремумов.
Таким образом, имеем
i;=i™y,(i; = iH). (5U5)
Таким образом, модифицированная задача определения, например арбитражного
решения по схеме Райфы, решается в постановке (5.114), (5.115).
Общая схема алгоритма содержит, по крайней мере, три этапа.
Этап 1. Определение идеальной точки.
Этап 2. Определение СТЭК-7 (СТЭК-3) для получения Г.
Глава 5. Введение в оптимизацию ММС 375
Этап 3. Формирование итерационного процесса максимизации наименьшей
компоненты текущего приближения (5.114).
Модифицированная арбитражная схема на основе «узкого» конуса
доминирования и ПНОК (СТЭК-13).
Алгоритм СТЭК-13 имеет следующий вид:
• Формирование СТЭК-7 (СТЭК-1 -3).
• Формирование «узкого» конуса доминирования О, с равномерным улучшением
вектора показателей [48] вершиной в СТЭК-7 (СТЭК-1 - 3).
• Процедура оптимизации по конусу Д.
• Среднеквадратическое решение (СКР) относительно идеальной точки и
значения дележа по Шепли (СТЭК-14).
СКР является решением задачи:
1шп£МВД-17]2->ис. (5.116)
иеи ы\
где
I* = max If-(и), i = 1, N,
и
где веса X,- удовлетворяют условию
0<Хх<1, S^ = l.
м
В данном разделе рассматривается модифицированное СКР как задача (5.116) с
дополнительным условием
||1-1Ш||<С,
N N
тах{Х^[1/(«)-1*]2+рЕ^/[1Д")-1/Ш]2}» (5.И7)
где if1 - компоненты вектора дележа по Шепли; р - множитель Лагранжа, который
после получения решения как функции и (•, р) определяется из дополнительного
условия.
Очевидно, что общий алгоритм решения полученной задачи имеет три этапа.
Этап 1. Решение N задач для получения идеальной точки I* (см. СТЭК-3, СТЭК-9).
Этап 2. Решение задачи получения значения дележа по Шепли 1ш(см. СТЭК-6).
Этап 3. Получение СКР на основе решения задачи (5.117).
5.6.4. Об интеллектуальных СТЭК на основе обобщенного
ГОМЕОСТАЗА В ФОРМЕ ПРЕДЕЛЬНОГО ЦЕЛЕВОГО КАЧЕСТВА
ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМЫ (ИС) С ДИНАМИЧЕСКОЙ
ЭКСПЕРТНОЙ ПОДДЕРЖКОЙ [23, 36, 42]
Интеллектуализация СТЭК, т.е. внедрение интеллектуальных подходов в
сложный механизм формирования СТЭК на основе экспертных систем, является
важным технологическим фактором. С другой стороны, подходы на основе емких
структур информационно-тактических компромиссов, учитывающих факторы мно-
гообъектности и многокритериальности сложных систем и задач, позволяют
сформировать оценки предельного целевого качества ИС, в которой в соответствии с ее
структурой [41] существенными являются вопросы взаимодействия с внешней и
внутренней средой.
Современное состояние управления сложными техническими системами
порождает потребность в формировании положений кибернетики, которые равноправно
объединяют технические и биологические аспекты управления [23, 36, 42].
376 Методы современной ТАУ. Часть ГУ
В данной работе рассматривается обобщение свойств формального представления
гомеостаза [36] на основе учета целевых признаков и стабильно-эффективных
компромиссов при компенсаторном взаимодействии ИС с активной средой. Игровые
подходы обогащают методы анализа охранительных свойств гомеостаза в условиях
конфликта и неопределенности среды, а учет целевых признаков позволяет
сформировать предельное целевое качество ИС как обобщенное самосохранение.
В общем случае, развивая точку зрения [36], можно утверждать, что термин
«самосохранение» означает поддержание эффективной работоспособности системы и
обеспечения ее энергетическими, материальными и информационными потоками,
необходимыми для производственных процессов реального времени.
Существенным элементом обеспечения самосохранения живых, технических и
биотехнических систем является их ресурсная и алгоритмическая избыточность,
которая у живых систем образовалась в ходе естественной эволюции, а у технических -
в ходе эпигенетического [36] развития с формированием в составе ИС экспертной
подсистемы реального времени с развитой базой знаний [41]. Избыточность
позволяет достигать более высоких целей (оптимизационных, адаптационных,
интеллектуальных и т.п.).
Интеллектуальная техническая система [41] по своей функциональной гибкости,
благодаря встроенной динамической экспертной системе и биофизически подобным
механизмам саморегуляции с использованием афферентного синтеза цели,
эфферентной программе действия, обратной афферентации, является технической средой,
способной воспринять и реализовать предельное целевое качество на основе
самосохранения в форме обобщенного гомеостаза [42].
Общий характер целей управления, связанных с самосохранением ИС,
формируется в следующем порядке: обеспечение собственно функционирования ИС;
поддержание гомеостаза и обеспечение стабильного хода основных процессов; обеспечение
обобщенного гомеостаза для реализации предельного целевого качества ИС.
В соответствии со структурными схемами функциональной и интеллектуальной
систем обстановочная афферентация с учетом памяти, прогноза и мотивации
порождает на этапе афферентного синтеза цели две структурные обобщенные категории
собственного состояния и окружающей среды.
Каждая из категорий может быть достаточно полно описана системой с пятью
компартментами системы и среды соответственно: ресурсные процессы; векторы
состояний динамических объектов; информационные процессы притока и оттока
информации; энергетические процессы; целевые процессы (обновление и реализация
целевых признаков в реальном времени).
Система уравнений на пространстве компартментных состояний описывает
совокупность процессов возникновения, перемещения, накопления, преобразования и
элиминации некоторого набора веществ (материалов, продуктов, и т.п.), энергии и
информации и имеет вид [36]
dx n n
^=^УкМ>*)-^У]к(х^) + Уко(х>У)-Уок(х>У) + ™к> (5Л18)
j*k )Фк
где£= 1,2, ...п.
Модель (5.118) содержит п компартментов, каждому из которых отвечает одна
переменная состояния хк. Вектор х = (хих2...хп) - вектор компартментного состояния
системы, вектор у*,- - темп транспортного потока вещества, энергии, информации из
к-го компартмента в у'-й, вектор v = (Vi v2... vm) - вектор возмущений, вектор
w = (w,, w2,..., wn) - вектор режимов протекания вещественно-энергетических про-
Глава 5. Введение в оптимизацию ММС 377
цессов в компартментах, который может быть дополнен вектором управления u(t).
Компартменты подразделяются на производственные и>,(0*0 и накопительные
В общем случае для учета эффективности функциональных свойств и
конкретизации оценок в ИС необходимо сформулировать общую цель эффективного
самосохранения на естественном языке (явный вид), а если это невозможно, то
сформировать набор целевых признаков самосохранения (неявный вид). Явный или неявный
вид эффективного самосохранения необходимо формализовать вектором
показателей, обладающим минимальной размерностью, независимостью свойств и полнотой
описания (отражения) общей цели эффективного самосохранения.
Векторный целевой компартмент системы компартментов формирует полный
набор признаков цели в данный момент времени, значимость каждого из которых в
следующий момент времени меняется либо учитывается возможность частичного
обновления признаков цели в реальном времени.
Свойствами полноты обладает следующий формализованный набор признаков
цели: эффективность (точность, быстродействие, степень чувствительности
некоторых скалярных компонентов к возмущениям среды, качество исполнения
управления, надежность), стабильность функционирования в условиях неопределенности
среды взаимодействия и цели, материальные затраты, энергетические расходы,
информационные потери. Количественные показатели, введенные в соответствии с
целевыми признаками, позволяют получить динамическое описание векторного ком-
партмента целевых процессов.
Общий вектор компартментного состояния принимает вид:
X == (Л|,.., Хщ, -Xtij+i*»! Хп> хп+\>*" *л+г> ^Ti+r+l»"» xn+r+p )» (5.119)
где *i,.., хщ - производственные компартменты, *„1+1,.., хп - накопительные
компартменты, *Л+1,... хп+г - целевые компартменты ИС, хп+г+ь.., хп+г+р - целевые
компартменты среды.
Стабильно-эффективный обобщенный гомеостатический режим определяется
следующим образом. Пусть:
1) В пространстве (v, w) возмущений и управлений соответственно существует
такая область £ls(v, w), что для всех точек (v*, w*)e£2, существует
стационарный режим вектора (5.119)
x*(v*, w*) = const; (5.120)
2) Существует область ЙЛ (v, w)e£i5 (v, w), такая, что в точке
(v*+Av, w*+Aw)e£2,(v, w) в системе устанавливается новый
стационарный режим х*+Дх с малой чувствительностью и малыми градиентами:
ТГЧ «T^l ,/e(l,..,n,n + l,..,n + r),7€(l,..,/),/<w, (5.121)
,/e(n + l,..,n + r), tea..,*!), (5.122)
, /e(n + r + l,..,n + r+p), *e(l,..,/), /<w. (5.123)
При этом условия (5.122), (5.123) по содержанию суть условия коалиционного
равновесия [6] взаимодействующих системы и среды. Соотношения (5.120) - (5.123)
24 3ак.416
378 Методы современной ТАУ. Часть ГУ
составляют определение стабильно-эффективного обобщенно^ гомеостаза.
Обобщение состоит в развитии модели компенсаторных динамических свойств гомеостаза
в соответствии с функциональными свойствами организма на основе игровых
стабильно-эффективных компромиссов, что обогащает механизмы обеспечения
самосохранения ИС в подсистеме предельного целевого качества (ППЦК).
Таким образом, в условиях неопределенности и активнодействующей среды в ИС
имеет смысл формировать количественные методы с учетом явно
взаимодействующих партнеров - системы и среды функционирования - при различных степенях их
несогласованности и на основе стабильно-эффективных компромиссов [9,12].
В связи с последними замечаниями алгоритмы СТЭК помещаются в базу знаний
экспертной подст-тгемы ИС и применяются в качестве робастных алгоритмов
управления ИС в yv л*иях неопределенности и для обеспечения предельного целевого
качества ИС в условиях активной среды функционирования ИС.
5.7. ПРОГРАММНО-КОРРЕКТИРУЕМОЕ СТАБИЛЬНО-
ЭФФЕКТИВНОЕ ПОЗИЦИОННОЕ УПРАВЛЕНИЕ НЕЛИНЕЙНОЙ
ДИНАМИЧЕСКОЙ ДВУХКОАЛИЦИОННОЙ СИСТЕМОЙ
НА ОСНОВЕ ПРИНЦИПА «ЭКСТРЕМАЛЬНОГО
ПРИЦЕЛИВАНИЯ» Н.Н. КРАСОВСКОГО
5.7.1. Постановка и анализ существования гарантирующих
и равновесных решений
В работе [9] выполнен сравнительный анализ подходов к исследованию двухкоа-
лиционных ММС в условиях антагонизма, известных как задачи сближения-
уклонения (или преследования-убегания) с анализом методов получения
гарантирующих (максиминных, минимаксных) и равновесных решений для преследователя Р
и цели Е. За ошибку преследования в данном параграфе принят один из самых
конструктивных подходов для получения программно-корректируемого закона управления
в условиях антагонизма и бескоалиционной ситуации с высокой степенью
конфликтности и коалиционного преследования - принцип «экстремального прицеливания»
Н.Н. Красовского.
В данном параграфе общий показатель эффективности (потерь)
г
J = F(t,x(T)) + lfo(x,u9uE)dt = J(uE9uP)9 (5.124)
'о
при описании ММС, например, в виде системы
i = f{x9up9uE,t). (5Л25)
Утверждение 5.14 [2, 16, 30]. Пусть UP и UE - компактные множества (одно из
множеств компактно), j(uP,uE)- функционал, выпукло-вогнутый или квазивыпук-
ло-квазивогнутый и непрерывный на UPxUE .
Тогда
maxinf J(upyuE)- xmn$>uvJ(uP,uE) = v supinf J(uP,uE) = infswpJ(upyuE) = vx .
"£ "/» "/» UE У UE UP UP UE )
Как видно, теорема формулирует типовые условия существования равновесия и
6 -равновесия.
В последнем равенстве отклонение от найденных решений может улучшить
результат «отклоняющегося» не более чем на малое е > 0(vt ±e).
Глава 5. Введение в оптимизацию ММС 379
Сделаем некоторые замечания.
Если J является лишь полунепрерывным, то существование равновесия возможно
лишь при его вогнуто-выпуклости. J(uP,uE) называется полунепрерывным снизу по
иР (сверху по иЕ) в точке иР (иЕ), если для любого о 0 существует такая
окрестность точки, в которой
J(uP,uE)>J(upyuE)-c,
(J(up,uE)<J(uP,uE) + c).
Для существования 6 -равновесия компактность одного из множеств t/f1 может
быть заменена слабой компактностью.
Условия равновесия и 8-равновесия для стохастической модели приводят к
обобщению утверждения 5.14 (см., например, [11, 16]}.
Существование равновесных управлений обеспечивается, если имеет место
следующее «расщепление» (или разделение) правых частей (5.125)
х = f(x9uP,uEtt) = fp(x,upyt) + fE(x,uEtt) и подинтегральной функции (5.124)
/о=/ор(-*»мр>О + /оеС*>"£;>О.
Как было отмечено выше, равновесие - «седло» является частным случаем
равновесия по Нэшу двух и более игроков (объекта, неопределенности среды, активных
партнеров и т.д.), которые обобщают рассмотренные условия.
Основные структурные особенности принципа экстремального прицеливания
и его применение в классах линейных и нелинейных дифференциальных игр.
Одним из самых конструктивных подходов, позволяющих получить программно-
корректируемый закон управления в условиях антагонизма, является принцип
экстремального прицеливания. Принцип экстремального прицеливания Н.Н. Красовского
основан на использовании экстремальной конструкции, фундаментом которой является
понятие области достижимости (управляемости) динамической системы. Он включает
в себя три этапа:
• формирование областей достижимости объектов управления;
• определение экстремальных направлений и соответствующих им траекторий
движения;
• получение законов управления, реализующих движение по экстремальным
траекториям.
Областью достижимости (ОД) объекта называется область фазового пространства
G(to,T), в каждую точку которого объект может попасть в момент Г, выбирая любое
допустимое управление.
Первый символ в скобках означает момент начала движения, а второй символ -
момент определения ОД.
Символом dG(T) будет обозначаться граница ОД в момент Т.
Анализ взаимного расположения ОД объекта-преследователя GP(T)w ОД
объекта-цели GE(T) и использование свойства сжимаемости ОД
G(t,T)<zG(t0J), to<t<T (5.126)
делает весьма наглядным и простым решение задачи сближения-уклонения
линейных объектов фиксированной продолжительности Т с критерием конечного промаха
Kh(uPiuE) = h(T)9 (5.127)
где
24*
380
Методы современной ТАУ. Часть ГУ
[р(Г),р(Г)>/,
*(Г) = |0. р(Г)</;
P(t) = \\YP(t)-YE(t)\\t
I > О - заранее заданное число, характеризующее область влияния преследователя,
Т - фиксированный известный момент окончания игры.
Для определения оптимальных управлений u°P(i) и u°E(t) достаточно построить
области N\ и GEl{t\T) и проанализировать их взаимоположение. Здесь возможны
ситуации (рис. 5.27) неполного и полного поглощения.
^AtVT) ^r 7 6о(ЛГ)
*м№
bGAt\T)
^p(i
х.ЛП
*»<п
S0(t\T)
Рис. 5.27. Поглощение:
а - неполное, б - полное
В случае неполного поглощения прогнозируемые значения конечного промаха
£0(;',Г)>0. Для максимизации этого промаха цель направляет (прицеливает) свое
движение в точку ^ - точку наиболее удаленную от GP/(T). Причем ясно [29, 30],
что
>42eaG£(r)cG£(r). (5Д28)
Ибо если это не так, то существует другая точка А^ € dGE (T)cGE (T), для
которой eo(f\7) больше. Таким образом, величина E0(t\T) есть минимальный гаранта
рованный запас цели по уклонению. Объект-преследователь должен прицеливать
свое движение, рассчитывая на самое неблагоприятное (экстремальное) поведение
цели, в точку Д е dGP (T)<zGP (T). Точка Ах должна быть наиболее близкой к
точке А2, т.е. аналогично (5.128)
Глава 5. Введение в оптимизацию ММС 381
AiedGP(T)czGP(T). (5.129)
Управления и°Р и и\, нацеливающие движение объектов в точки Д и Aj
соответственно, доставляют седловую точку игры и при этом
ufeU?, ' (5.130)
U? - множество программных управлений i -го объекта, приводящих на границу
ЭбДГ), называемое множеством граничных управлений;
GE(T)c GPl (Г) - полное поглощение.
В этом случае ясно, что преследователь всегда может обеспечить себе нулевой
промах, т.к. у него есть некоторый запас [50] 80(г',Г)>0 поглощения, как бы себя
ни вела цель.
Поэтому теоретически допустимы любые управления иР, иЕ, пока существует
ситуация 2. В.М. Кейн [29] заметил, что, с практической точки зрения, такой
«произвол» в выборе оптимальных управлений никак не оправдан, поскольку
преследователь заинтересован в сохранении ситуации 2, а цель заинтересована в превращении
ситуации 2 в ситуацию 1. Используя свойство (5.126), цели необходимо направлять
свое движение в точку /Ц , максимально приближенную к dGPl (Г). Тем самым
будет достигнуто невозрастание запаса поглощения &0(t\T) в процессе игры, а при
неоптимальном движении преследователя запас поглощения будет убывать. Таким
образом, будет обеспечено выполнение неравенства
Э5°У'Г)<0, tf<t<Tt (5.131)
dt
что, возможно, приведет в некоторый момент t > f' к ситуации
80(Лг) = 0, (5.132)
а затем и к ситуации 1, где
£0(f,r)>0,;*<f<7. (5.133)
Преследователь, наоборот, стремится сохранить запас поглощения &0(t\T), и, по
возможности, увеличивать его. Для этого ему необходимо нацеливать свое движение
в точку А[9 ближайшую к А2 . Тогда по свойству (5.126) 80(t\T) не будет убывать
со временем, а при неоптимальности наведения цели возможно даже увеличение
запаса, таким образом, обеспечивается выполнение неравенства
Э6о(и%-°'/|<'-:г- (5Л34)
При этом опять справедливо включение (5.130). Здесь необходимо заметить, что
при выполнении включения
GE(T)czGP(T) (5.135)
преследователь может нацеливаться в точку А2, допуская медленное уменьшение
запаса 80 (г,Г), г■ < г < Т, но обеспечивая выполнение условия
£0(*,Г) = 0,;'<;<7\ (5.136)
При ЭТОМ Мр £ Up .
382 Методы современной ТАУ, Часть IV
Описанному способу управления в ситуации полного поглощения, предлбженно-
му В.М. Кейном в [29], можно найти аналогию в классической теории
регулирования, когда в закон управления по ошибке
и = кх-е
вводят производную от ошибки ё для улучшения качества регулирования
Для решения задачи может быть предложен другой по форме способ определения
оптимальных управлений, взаимосвязанный с подходами А.Б. Куржанского,
В.Ф. Бирюкова, Д.А. Овсянникова, Л.А. Петросяна [38, 47], суть которого состоит в
построении только области GE(T) и множества Up - множества управлений,
потребных для /-сближения к моменту Г. Тогда на основании анализа взаимного
положения ансамбля располагаемых и потребных траекторий определяется
оптимальное управление обоих объектов. Именно такой подход будет использоваться при
решении поставленных нелинейных задач игрового управления.
Рассмотрим задачу преследования-уклонения с критерием времени до /-встречи
объектов
Kt(uP9uE) = \l-dt,
где/^тфгЦКрСО-^СОЦ^/}.
В рассматриваемых задачах экстремального прицеливания положение точки
экстремального прицеливания \ или А2 определяется конфигурацией ОД и их
взаимным положением. Поэтому вполне возможны ситуации, когда таких точек у
каждого объекта окажется несколько. Такая ситуация называется нерегулярной
[25,29, 30].
В нерегулярной ситуации необходимо выбрать одну точку - любую из них [29],
В принципе, нерегулярная ситуация более выгодна для цели, потому что
преследователю не удастся обеспечить невозрастание величины прогнозируемого промаха
ео(г\Г)и E0(t\b) в случае непоглощения или не удастся обеспечить неубывание
запаса 80(t\-Q) в случае поглощения с критерием промаха и не удается обеспечить
невозрастание времени встречи t* в случае поглощения с критерием времени. В
нерегулярной ситуации поэтому процедура экстремального прицеливания не позволяет
предсказать гарантированный результат, но, как отмечает В.М. Кейн [29], дает
способ выбора управления, который во многих случаях оказывается вполне
приемлемым.
Формально и здесь задача определения управления и°Р и и°Е может быть решена
несколько иначе [20, 50]: для всего ансамбля траекторий, определяемого множеством
граничных управлений и\, необходимо определить множество потребных
траекторий, необходимых для / -встречи. При этом сами моменты / -встречи будут
различными. Затем на основе анализа ансамбля располагаемых и потребных траекторий
находится оптимальное управление. Этот способ дает существенный выигрыш в
простоте процесса решения. При использовании построения ОД достаточно трудоемкой
операцией является определение момента и поглощения, если он существует,
поскольку необходимо строить ОД не в фиксированный момент Т, а в некотором
интервале [tx, t2 ], а затем уже определять и е [tx, t2 ].
Глава 5. Введение в оптимизацию ММС 383
Применение принципа экстремального прицеливания для линейных объектов
управления достаточно подробно освещено в литературе [15, 25, 30]. В.М. Кейн [29]
рассмотрел вопросы гарантированного управления самолетом при взлете и посадке
при наличии ветра, Л.Н. Лысенко [25] рассмотрел задачу оптимального наведения
телеуправляемого снаряда на маневрирующую цель применительно к линейным
моделям движения с критериями конечного промаха и времени до встречи.
Принцип максимума в сочетании с подходом Е.А. Ивановой [27] использован
Е.М. Вороновым и А.В. Савиным для определения границ ОД нелинейного объекта
пятого порядка.
В задачах преследования-уклонения полное поглощение
GE(t*)aGPl(u) (5.137)
является необходимым условием встречи, Н.К, Гупта [50] показал, что это условие
может быть заменено менее жестким условием: преследователь может обеспечить / -
встречу с целью при любом ее поведении, если часть ее ОД поглощается областью
достижимости преследователя в момент и, а оставшаяся часть - в какой-то другой
(другие) момент времени. Другими словами, если процесс поглощения ОД цели
областью достижимости преследователя происходит на интервале [t*j*], то разумное
поведение преследователя обеспечит ему / -встречу не позднее, чем к моменту t*,
при любом поведении цели, хотя ни в один отдельно взятый момент времени полного
поглощения не происходит. Это ведет к тому, что если полного поглощения в момент
и не существует и выполняется условие
GE(U)<ZGPl(u), (5.138)
то это не означает, что цель может гарантировать себе уклонение, поскольку может
иметь место поглощение на интервале. Таким образом, задача сближения-уклонения
к фиксированному моменту времени Т с критерием промаха не может быть решена
в общем случае для нелинейных объектов построением GPl(T)n GE(T), как в
линейном случае. Значение минимального промаха никак не связано с величиной
ео(г',Г), которое определяется по областям GPl(T)u GE(T), а момент времени
минимального промаха никак не связан с моментом Т. Эти соображения приводят к
выводу о возможной модификации подхода к решению задачи оптимального
наведения, рассмотренном Е.А. Ивановой в работе [27], поскольку необходимо решать
задачу с критерием промаха при условии, что сам момент времени минимального
промаха заранее неизвестен и он определяется в процессе игры.
5.7.2. Постановка и формализация задач оптимального
ПРЕСЛЕДОВАНИЯ И УКЛОНЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Краткая характеристика противодействующих объектов и множеств
допустимых управлений. Противодействующими аэродинамическими объектами
являются летательный аппарат-перехватчик Р и летательный аппарат-цель Е. Параметры и
координаты перехватчика будут записываться с индексом «Р», а цели - с индексом
«£». В задаче преследования Р является союзником, а Е - противником.
Известно [31], что для воздействия на величину скорости полета необходимо
изменить тангенциальную силу, действующую на ЛА в направлении движения, а для
изменения направления полета необходимо приложить к ЛА силу,
перпендикулярную вектору скорости, то есть нормальную силу. Диапазон располагаемых
нормальных перегрузок современных целей и ракет-перехватчиков на этапе наведения на
порядок шире диапазона располагаемых тангенциальных перегрузок. Это позволяет
384
Методы современной ТАУ. Часть ГУ
сделать вывод о неэффективности использования тангенциальных перегрузок для
решения задач преследования и уклонения. Поэтому в качестве вектора управления
U;, (/ = Р, Е) принимается вектор нормальной перегрузки щ .
Для Р рассматриваются два возможных способа управления: «управление в
полярных координатах» - для летательных аппаратов обычной самолетной схемы и
«управление в декартовых координатах» - для летательных аппаратов с
крестообразным крылом.
Для создания нормальной перегруз'ки требуемой величины щ и требуемого
направления Yd B обычной самолетной схеме (с крыльями, расположенными в одной
плоскости) используются угол атаки а, и угол крена у, («управление в полярных
координатах»). Поскольку между ос, и щ;, а также Y/ и уы существуют
определенные связи, то вектор й, характеризуется величиной нормальной перегрузки п{ и
углом Yd > задающим положение щ в плоскости, ортогональной вектору скорости У{
(рис. 5.28).
<С
ПАР
\
*/*
У^ о,
Xk(v,noXt)*4
f
1 J^
—^—s
•
7
J*
ЛАЕ
fXk{vE»<>Xk)
Z?-7<
Рис. 5.28. Введенные системы координат и допустимое множество управлений
Базой для отсчета угла Yd является вертикальная плоскость. Таким образом,
вектор управления имеет вид
и,=К,у«]т. (5Л39)
Множество допустимых управлений [//" является кругом плоскости,
ортогональной вектору Vi, и определяется следующим образом
\п(\<п^ (5.140)
Угол Yd неограничен и его требуемое значение всегда можно найти в диапазоне
[-я,я]. Предполагается, что влияние угла скольжения Р, несущественно и им
можно пренебречь.
Для создания нормальной перегрузки требуемой величины и требуемого
направления у ЛА с крестообразным крылом используются угол атаки сс; и угол
скольжения Р;. Поскольку между nYi и а,, а также между пл и Р, существуют определен-
Глава 5. Введение в оптимизацию ММС 385
ные связи, то вектор й, создается в результате геометрического сложения перегрузок
nYi и nzi» формируемых в двух взаимно-перпендикулярных плоскостях
(«управление в декартовых координатах»). Вектор управления имеет вид
и,=[ли,Ла]Т- (5.141)
При этом накренение ЛА уже не требуется. Более того, предполагается, что угол
крена жестко стабилизирован и равен нулю.
Для того чтобы использовать математическое описание вектора управления в
виде (5.141) для Л А с управлением в «полярных координатах», необходимо определить
пУ1,Пя по следующим соотношениям
nYi=nicosyci> (5.142)
wa=nf.sinYrf. (5.143)
Тогда множество допустимых управлений £//" вида (5.140) будет определяться
К|| <nf\ (5.144)
где символ ||»|| обозначает евклидову норму, т.е.
1К11 = (4+4)1/2. (5.145)
В качестве ЛА-противника будет всегда рассматриваться объект, для которого
известно ограничение на нормальную к вектору скорости V( перегрузку. Поэтому и для
ЛА-противника вектор управления имеет вид (5.141), а множество допустимых
управлений t/f имеет вид (5.144).
Будем предполагать, что длительность этапа управляемого движения невелика,
поэтому множества допустимых управлений (множества располагаемых перегрузок)
I/f\(i = P,E) изменяются незначительно и этими изменениями можно пренебречь.
Разрабатываемые алгоритмы преследования и уклонения являются позиционными
«в обратных связях», поэтому возмущения, возникающие в системе Р - Е из-за
неидеальной работы системы стабилизации ЛА-союзника и возможного
неоптимального поведения ЛА-противника, будут учитываться при формировании закона
управления.
Движение центров масс Р и Е в системе координат OXgYgZg описывается
системой линейных дифференциальных уравнений [31]:
dV-
-^ = *(**-sin в,),
at
d&{
dt
W,
dt
dX
.# ^(пи-совб,),
at Vi
. =-*-*a/(Vfcose,),
at
^- = V;cos01cos4'|., (5.146)
dt
^■ = ^sin0(,
at
^ = -V;.cos0,sin4'/,
dt
i = P,E,
386 Методы современной ТАУ. Часть IV
где g - ускорение свободного падения;
VJ - скорость ЛА.
При активном маневрировании Е на малой высоте полета возможно столкновение
с Землей, поэтому необходимо формировать закон управления м,,(/ = Р,Е) с учетом
требования
YgE>0. (5.147)
Предполагается, что высота полета Р всегда положительна и поэтому подобное
ограничение на движение Р не накладывается.
Критерии управления. Вектором координат JIAi в СК OXgYgZg будем называть
Ygi=[XgiJgi,Zgi]T. (5.148)
Вектором позиции JIAi в СК будем называть
Х„ -[X^Y^Z^V^Wf, (5.149)
где \gi = [V/,©;,4?,]7 - вектор скорости JIAi, a Vi - модуль скорости JIAi.
Множество позиционных стратегий JIAi обозначается
и((Х8Р,Х8Е)с:и?. (5.150)
Множество программных стратегий JIAi обозначается
Ut(t)cur. (5.151)
Предполагается, что ЛА-союзнику в каждый момент управляемого движения
i{t > t0) точно известны векторы позиций и множества допустимых управлений Р и
Е. Процесс принятия решения от замера позиций до выдачи оптимального
управления осуществляется мгновенно. Способы определения векторов позиций
рассматриваются ниже.
Расстояние между Р и Е обозначается
r(t) = \\ygP(t)-yge(t)\\. (5.152)
Пусть управляемое движение системы (5.146) началось в некоторый момент
времени t = tQ, и зона перехвата Р имеет радиус действия L.
Тогда целью управления Р является обеспечение в некоторый момент времени
t = t* условия
r(t*)<L,t*>t0, (5.153)
которое называется L -встречей, при этом Е стремится не допустить выполнения
условия (5.152).
Введем критерии управления.
1, Пусть t*th - момент времени, когда выполняется условие
r{tH)*infr(t), (5.154)
Конечный промах h( определим следующим образом
лЛГ(аК;Л)>Д (5.155)
Тогда в качестве первого критерия управления принимается
Kh=Kh(up,ug)*h- (5Д56)
Таким образом, Р стремится достичь минимально-возможного конечного промаха
h, а Я, наоборот, стремится увеличить конечный промах, причем никаких
дополнительных условий на момент th конечного промаха не накладывается.
Глава 5. Введение в оптимизацию ММС
387
Минимальный промах и минимальное время до L-встречи.
*«('п)
Рис; $.29. Минимальный промах и время до t-встречн
2. Пусть t = tL - момент времени, когда впервые выполняется условие (5.153)
(рис. 5.29), где
to<tL<t*. (5.157)
То есть
^=infU*:r(f*) = L}. (5.158)
Р стремится обесценить выполнение условия (5.153), причем за минимальное
время, а Е стремится не допустить ^-встречи (5.153) или хотя бы отдалить ее во
времени. Поэтому э качестве второго критерия управления принимается
\и
fCt^K((up^)^jhdt,
(5.159)
Следует заметить, что момент существует всегда, поскольку для каждой пары
траекторий Р цЕ всегда найдется момент времени, когда расстояние (5.151) между
ними минимально, Момент существует только в том случае, если выполняется
условие (5.153), а если £ - единственный, то г* - tl.
Сформулируем задачи преследования и уклонения в соответствии с введенными
критериями Кн (5.156) и К, (5.159).
Задача 1, Kh, В классе позиционных стратегий Up(XgP,X^) требуется найти
оптимальное управление н% удовлетворяющее условию
max Kh(ц%,Не)^ min щах КЛи^Не) (5Д60)
и условию (5,147), какими бы ни были начальные позиции объектов.
Вектора управления щ({ = Р,Е) являются двумерными
u^K^f, i = P,E. (5.161)
388 Методы современной ТАУ. Часть IV
Допустимые множества управлений t/f задаются в виде (5.144)
(4+4)1/2^"Г- (5.162)
Задача 2. Kt. Формулируется аналогично задаче 1. Kh, но вместо критерия Kh
используется критерий Kt (5.158).
Задача 3. Kh. В классе позиционных ^стратегий UE(XgP,XgE) требуется найти
оптимальное управление и°Е , удовлетворяющее условию
min Kh(uPiu°E) = max min Kh(uP,uE) (5.163)
uP*UmP uEzUE{XgP,XgE)uP*UmP
и условию (5.147), какими бы ни были начальные позиции объектов. Вектора
управления щ являются двумерными
и,-=[лк.Ла]Т. * = Л£.
Допустимые множества управлений t/f задаются в виде (5.144).
Задача 4. Kt. Формулируется аналогично задаче 2. Kh, но вместо критерия Kh
используется критерий Kt (5.159).
Об анализе условий существования равновесия (седловой точки).
Приведенное доказательство базируется на приведенной выше теореме существования
равновесия. В антагонистической дифференциальной игре имеет место равенство
min max К(иР>иЕ) = max min К(иР,йЕ), (5.164)
uPe UP uEe UE uEe UE uPe UP
если оптимальные управления и°Р, и°Е доставляют седловую точку [30].
Соотношение (5.164) соответствует выполнению равенства
max min H = min max H , (5.165)
uPeUP uEeUE uEeifE uPeUP
где Н - функция Гамильтона для данной игры.
В случае терминального показателя (5.165) Kh(uP,uE) = h . Гамильтониан имеет
вид
Hh=4T-f(XP,XEiuP,uE), (5.166)
где *F - сопряженный вектор, f(X,uP,uE) -векторная запись уравнений (5.156).
Поскольку движение всей системы (5.146) есть две отдельные траектории Р и Е
(т.е. уравнения, описывающие движения одного объекта, не зависят от вектора
управлений другого), то уравнение (5.166) представимо в виде (5.167)
H = 4?TP-fP(XpyuP) + 4TE-fE(XE,uE) = HP + HE. (5.167)
Поскольку НР явно зависит только от«Р,а Я£- только от иЕ , то
max min HP = min max HP = max HP , (5.168)
uPeUP uEe(JE uEeUE uPeUP uPeUP
max min HE = min max HE = min HE . (5.169)
upEl/p uEe(JE uEeUE uPeUP uEeUE
Таким образом,
max min H = max min (HP + HE)= max #P+ min HE> (5.170)
upeUpUEeUE uPeUPuEeUE uPe(JP uEeUE
min max H = min max(HP + HE)= max #P+ min HE . (5.171)
uEeUEuPe(JP uEeUEuPe(JP uPe(JP uEe(JE
Поскольку правые части уравнений (5.170) и (5.171) равны друг другу и
выполняется условие «разделения» [см. утверждение 5.14], то в случае К = Kh(uP,uE) имеет
место седловая точка.
Глава 5. Введение в оптимизацию ММС
389
Общая характеристика способа оценки области достижимости. Область
достижимости G(to,T) в момент времени Т из начальной точки Xg(tQ) и начального
момента t0 определяется как множество значений вектора координат Yg(t0) в
момент времени Т, полученные при всевозможных допустимых законах управления
u(t)e Um(t0<t<T) и начальном условии Xg(t0). Динамика области достижимости
(ОД) может быть описана динамикой ее границ [29]. Если движение исследуемого
объекта описывается линейной системой уравнений, то существуют относительно
простые способы построения границы ОД с использованием фундаментальной
матрицы решений [29, 30]. Граница ОД определяется траекториями предельного
быстродействия [29]. Эта методика существенно использует выпуклость ОД линейных
систем. Для нелинейных систем свойство выпуклости ОД в общем случае не имеет
места. Поэтому для них задача определения границ ОД, или граничных управлений
(т.е. приводящих на границу ОД), может быть сформулирована в следующем виде
[29]. Необходимо в пространстве координат OgX gYgZg каким-либо образом задать
направление v, например, задав прямую, проходящую через начальное положение
центра масс ЛА Oq , и некоторую другую тонну О' этого пространства (рис. 5.30), и
решить две отдельные задачи:
1) найти управление, максимизирующее расстояние R2(T), пройденное
объектом за фиксированное время Г в направлении v;
2) найти управление, минимизирующее расстояние Л2(Г), пройденное объектом
за фиксированное время Т в направлении v.
Варьируя направлением v в пространстве координат и каждый раз решая зти две
поставленные задачи, можно сделать поточечную [23] оценку ОД для
фиксированного Г.
П
Риь 9Ж Постановки задач экпремум» расстояния
При решении обеда задач весьма желательно выявить структурные свойства
оптимального в смысле общих критериев (та*Д2(Г) и mm /?г (Т)) управления, не
зависящие от конкретного направления v и времени Т, Знание структуры граничного
управления существенно упрощает определение границ ОД в фиксированный момент
времени Т.
В работе [9] показано, что решению задачи минимизации R2(T) соответствует
управление со структурными свойствами предельного быстродействия, а решению
390 Методы современной ТАУ. Часть ГУ
задачи максимизации R2(T) - в общем случае, некоторая другая структура
управления с одной точкой выключения.
В соответствии с приведенным анализом в [9] получен необходимый набор
систем координат, для которого описание движения объекта и вектора управления имеет
компактную форму, наиболее удобную для оценки области достижимости ОД.
Задача оценки ОД нелинейного объекта в трехмерном пространстве сформулирована как
задача экстремума расстояния, пройденного объектом за фиксированный интервал
времени.
Решена задача оценки пространственной ОД рассматриваемого нелинейного
объекта с учетом гипотезы постоянства модуля его скорости в будущем времени.
Получено параметрическое описание границ ОД, при этом параметрами являются ус и
положение точки переключения или выключения п. На основе параметрического
описания сформирован алгоритм вычисления границ пространственной ОД
рассматриваемого нелинейного объекта, обладающий экономичностью вычислительных
процедур.
5.7.3. Формирование нелинейных алгоритмов преследования
и уклонения на основе принципа экстремального прицеливания
Н.Н. Красовского
Алгоритм оптимального нелинейного позиционного уклонения. Пусть
управляемое движение системы началось в некоторый момент времени t = t0.
Формирование оптимального управления [/£ в каждый момент времени t\t'>tQ) основывается
на точном знании векторов позиции Xgp (г') и XgE (t'), прогнозировании будущего
хода игры на основе гипотезы равномерного (с постоянной скоростью) движения
обоих объектов Р и Е. Прогнозируемое время, в отличие от реального или прошлого
времени t, обозначается символом т.
Таким образом,
v;-(t) = 1A(To), / = />,£;
т>т0,
где т0 = г' ив каждый момент *' решается вспомогательная задача
min Kh{uP,ui)- max min Kh(uP,uE), (5.172)
uPeUP(x) uEeUE(x)uPeUP(x)
решение которой является оптимальным решением исходной задачи в момент г'.
Символы иР(х)> UE(x) обозначают множества программных управлений, где
UP(x)cUp , UE(x)(zUE, a Kh(uP,uE) - прогнозируемый промах на любой паре
траекторий, определяемых управлениями uPeUP(x)t uEeUE(x). Прогнозируемый
промах определяется так же, как и в постановке задачи с заменой t на т:
Iinf р(т), если inf р(т) > /,
т т (5.173)
0, если infp(x)</.
Величина / предполагается известной, в частном случае можно принять / = 0.
Программные траектории Yg/>(x) и Yg£(x), определяемые управлениями
uPeUP(x) и иЕе UE(x), подвержены возмущениям, вносимым силой тяжести,
причем эти возмущения могут как «помогать», так и «мешать» Е в решении задачи
уклонения. По «принципу наибольшей неприятности» будем предполагать, что возмуще-
Глава 5. Введение в оптимизацию ММС 391^
ния всегда «мешают». Это приводит к необходимости расширения множества
допустимых управлений Р Up на максимальную величину возможного возмущения и
необходимости сужения множества допустимых управлений Е на эту величину.
Возмущение, вносимое силой тяжести, не превышает единицы перегрузки, поэтому
вместо множеств Up и UP(x) используются Up и Up(x)9 а вместо множеств UE и
UE(x) используются Ц_Е и ЦЕ(т).
Множество Up задается
VnK,+wi^> (5.174)
где
n7 = /z£+l. (5.175)
Множество и_Е задается
V4+ni^> <5Л76)
где
П£ = л2-1. (5.177)
С учетом указанных замен равенство (5.173) принимает вид
вдп Kh(uP,u°E)= max rain Kh(uP>uE). (5.178)
uPeUp(x) uEeUE(T)uP€Up{x)
Было показано, что в случае неполного поглощения на прогнозируемом участке т
оптимальное управление и°Е является граничным, т.е.
и°Беи1, где u\cUE(x). (5.179)
В случае полного поглощения на прогнозируемом участке
адс^(т)
в соответствии со способом, предложенном В.М. Кейном [29], оптимальное
управление и°Е также является граничным. Поэтому, независимо от вида поглощения,
равенство (5.178) приобретает вид
rain Kh(uPtu°E)= max rain Kh(uP,uE). (5.180)
uPeUp(x) ^ L uEeUi(T)uPeUp(T)
Ранее было показано, что граница субдостижимости dGE(T) состоит из двух
частей: ближней границы d~GE(T), достигаемой с использованием управления
w2G^i> и дальней границы 9+GE(7), достигаемой с использованием управления
и2 е Ц^ . Поэтому
Й=Й"=£й^Й. (5.181)
а равенство (5.180) приобретает вид
rain Kh(uP,u°E)= max rain Kh(uP,uE). (5.182)
uPeUP(T) uEeU+E-(x)uPeUp(x)
Как известно, чтобы найти максиминное значение промаха (5.182), необходимо
сформировать последовательно два этапа оптимизации:
а) этап минимизации выражения
392 Методы современной ТАУ. Часть IV
Kh(uP,uE)= min Kh(uP,u*E), (5.183)
up€Up(t)
где uE - любое управление из множества Ц+Е~;
б) этап максимизации показателя
Kh(upyu\) = .max Kh(uP,uE) = max \ ццп Kh(uP,uE)\. (5.184)
Этап минимизации. Для граничной траектории £, определяемой граничным
управлением иЕ е Ц"Е, необходимо подобрать такую траекторию Р, определяемую
управлением u*PeUp, которая будет минимизировать конечный промах в момент т*
(минимизировать (5.152)), причем сам момент т* заранее неизвестен. Траектория
движения Е должна удовлетворять ограничению по высоте. Алгоритм решения такой
задачи состоит из трех шагов.
Для всех граничных управлений Е находится множество потребных управлений
Up . Для этого необходимо повторить все вычисления первого шага этапа
минимизации при варьировании параметров управления иЕ е £/£": ус варьируется в пределах
[О 2тс] (ус и YCp - постоянные величины на такте ПКЗУ), т£ или х~Е варьируется
в пределах Го тЛ 1. Все исследуемые траектории Е проверяются на предмет
удовлетворения ограничению (5.147) и отбрасываются те, которые не обеспечивают (5.147)
(второй шаг этапа минимизации). Затем формируется множество управлений U*p,
минимизирующих прогнозируемый конечный промах в соответствии с третьим ша-
?*ом этапа минимизации, и множество KhdL*E~>Up) минимальных для каждого
иЕ б £/J" конечных промахов.
Этап максимизации. Если Up * Up и, следовательно, Up d Up , то из множества
конечных промахов Kh(U£,Up) необходимо выбрать максимальный элемент,
удовлетворяющий равенству (5Л85>и являющийся точкой экстремального прицеливания
(ТЭП)
Kh(uP,u°E) * max Kh(uP,uE). (5.185)
несоответствующее управление и\ является оптимальным.
Если Up ^Up и, следовательно Up<zUp% то множество Kh(H+E"fUp) состоит из
нулевых элементов, Это означает, что для любого управления существует
управление, приводящее к встрече. В этом случае точка экстремального прицеливания
ищется на множестве Up как злемент этого множества, обладающий максимальным по
модулю параметром управления пр. Тогда соответствующее управление и°Е
является оптимальным, и задача решена.
Алгоритм оптимального нелинейного позиционного преследования. Повторяя
рассуждения, приведенные ранее, легко показать, что решение задачи Kh будет
совпадать в каждый момент времени f' с решением вспомогательной задачи
Глава 5. Введение в оптимизацию ММС 393^
maxKh(u°PtuE)= min max Kh(uP,uE)y (5.186)
uEeUE uPeUp(x)uEeUE
где UdEaUE(x).
Программные траектории Yg/>(x) и Yg£(x), определяемые управлениями
ир € ир(т) и иЕ е UE{i), подвержены возмущениям, вносимым силой тяжести,
причем эти возмущения могут как «помогать», так и «мешать» Р в решении задачи
сближения. По «принципу наибольшей неприятности» предполагается, что
возмущения всегда «мешают». Это приводит к необходимости расширения множества
допустимых управлений Е UE на максимальную величину возможного возмущения и
необходимости сужения множества допустимых управлений Р U™ на эту величину.
Возмущение, вносимое силой тяжести, не превышает единицы перегрузки, поэтому
вместо множеств U™ и Up(x) используются U_p и С/р(т), а вместо множеств UE и
UE(x) используются Ue и С/е(т).
Поэтому равенство (5.186) приобретает вид
maxKh(u°P,uE)= min max Kh(uP,uE). (5.187)
Поскольку
ul=ut, (5.188)
то равенство (5.187) приобретает вид
тгхКн(и%иЕ)= min max Kh(uP,uE). (5.189)
В данной игре имеет место седловая точка, поэтому справедливо и следующее
равенство
max min Kh(uL>uF)= min max Kh(uPiuF). (5.190)
Алгоритм решения максиминной задачи уже известен. Особенность его
применения для решения минимаксной задачи (5.187) состоит в использовании множеств
управлений ЦР(х) и £/е(т) вместо Up(x) и ЦЕ(х) соответственно.
Выбор точки экстремального прицеливания - элемента множества Kh(Hp9UE) в
случае неполного поглощения Up (£ U_P или элемента множества Up в случае
полного поглощения UpCllp - определяет не только оптимальное управление и°Е, но и
оптимальное управление и°Р.
Формирование программно-корректируемого закона управления. ПКЗУ
реализуется в виде многотактового алгоритма. Длительность такта определяется
необходимой точностью наведения с учетом полосы пропускания системы стабилизации
ЛА. На каждом такте осуществляется коррекция программного закона управления
преследователя, полученного на предыдущем такте, причем вычисленный в данный
конкретный момент закон управления является программой движения на всем
временном интервале вплоть до прогнозируемого момента встречи. Алгоритм синтеза
ПКЗУ на отдельно взятом такте состоит из пяти этапов.
394 Методы современной ТАУ. Часть IV
На последнем этапе в соответствии с полученным программным законом
управления вычисляются для текущего момента времени t оптимальные значения вектора
управления Р [п°Р,у°сР]. Далее для учета силы тяжести ЛА они корректируются
пкР = sign(noP){(noPsinfcP)2 + (n°Pcosy°cP +cos9P)2}I/2,
уксР = arctg(np sin y°cP/(n°P cos y°cP + cos 9P))
и формируются и выдаются команды для системы стабилизации.
Необходимо отметить, что для реализации данного алгоритма в реальных
условиях необходима мощная вычислительная база борта. Для обеспечения требуемой
точности наведения для высокоскоростных ЛА каждая граница области достижимости
должна аппроксимироваться массивом из 200 точек. Внутри цикла по их расчету
выполняется сложная итерационная процедура оптимизации нелинейного функционала.
Благодаря хорошей геометрической интерпретации алгоритм может быть
распараллелен на большое количество параллельных процессов и реализован в
многопроцессорной вычислительной системе, например, на транспьютерах. Однако, учитывая,
что в настоящее время параллельные системы еще не нашли широкое применение в
системах управления ЛА, ниже будет рассмотрен упрощенный (субоптимальный)
алгоритм преследования-уклонения, предъявляющий значительно меньшие
требования по быстродействию и поэтому легко реализуемый в реальном времени.
ПКЗУ может быть адаптирован к реальным условиям воздушного боя, когда в
конфликте находятся не один, а несколько ЛА. В [9] приведены результаты
моделирования противодействия высокоскоростных ЛА. Сопоставление результатов
применения различных штатных методов наведения и ПКЗУ дают основание утверждать,
что на основе ПКЗУ формируется высокоэффективный алгоритм конфликтно-
оптимального наведения с прогнозом. При неоптимальном поведении цели и
небольших временах взаимодействия ЛА ПКЗУ близок по своим свойствам к методу
наведения в мгновенную точку встречи.
Формирование программно-корректируемого закона управления в задаче
уклонения осуществляется таким же образом, как и в задаче преследования. Разница
состоит лишь в отличии входных и выходных данных. Данные для Р заменяются на
данные для Е и наоборот. Кроме этого, вместо закона управления преследователем
формируется закон управления целью.
5.7.4. Алгоритм субоптимального позиционного
преследования-уклонения
Алгоритмы преследования и уклонения остаются труднореализуемыми в
реальном масштабе времени из-за высоких требований к быстродействию вычислительной
системы, поскольку необходимо формировать поточечно области достижимости ЛА,
проводить расчет с помощью численных методов управлений, обеспечивающих
минимальный промах, и выполнять оптимизацию на множествах значений критериев
управления (на каждом программном такте). В связи с этим рассмотрим алгоритм
субоптимального преследования-уклонения.
При формировании субоптимального алгоритма применяется аппроксимизация
областей достижимости изохронами (поверхностями, состоящими из конечных точек
траекторий постоянной кривизны). При этом было установлено, что при средних и
малых интервалах времени противодействия аппроксимация близка к точному
описанию, а применяемая оценка близка к точному времени противодействия.
Для взаимного положения Р и Е в момент г' (рис. 5.31) точка 2 является точкой
экстремального прицеливания для уклоняющегося ЛА, т.к. она наиболее удалена от
всех точек ОД преследователя, а точка 1 наилучшая точка для Р.
Глава 5. Введение в оптимизацию ММС 395
Л-
кхЛЕ(О
А
,
(0)
9*0,(1»
a-G,,«?)
и э
г
Рис. 5.31. Формирование точки прицеливания
При формировании субоптимального алгоритма сделаем два обоснованных
предположения. Области G{(T) заменяются на изохроны СДГ), а оптимальные
управления на такте заменяются на постоянные управления. Кроме строгой проверки
работоспособности полученного алгоритма и близости к оптимальному, выполненной в
работе, можно привести и простое физическое обоснование. При уменьшении времени
противодействия внешние и внутренние границы приближаются друг к другу
(алгоритм самоуточняется), а построенное потребное управление Р, равное по площади
под кривой оптимальному, приводит примерно в ту же точку 1 (рис. S.32) при том же
значении уРс. Бели за основу принять максиминный подход и, следовательно, задачу
уклонения, то подобная аппроксимация выполняется за игрока-противника Р. Таким
образом, вместо всей GP(T) необходимо ограничиться построением в момент v
изохроны СР(Т) траекторий постоянной кривизны.
Для каждой точки области GE(T) необходимо найти ближайшую к ней точку
изохроны, всегда принадлежащей нормали, проведенной из точки области GE(T) к
изохроне СР(Т),
Найденное множество точек изохроны СР(Т) приближенно оценивает множество
потребных траекторий Р (рис. 5.32) и, следовательно, множество потребных
ускорений перехватчика, поскольку в работе показано, что для траекторий постоянной
кривизны справедливо соотношение
7Щ2&* (5192>
Пр 4Vp
где Г - угол между вектором скорости VP(0 и направлением на некоторую точку А
изохроны СР(Т), tip - потребная перегрузка для точки А.
396
Методы современной ТАУ. Часть IV
*#('')
1>Т
Рис. 5.32. Формирование множества потребных траекторий
Следует отметить, что отрезок изохроны СР(Т), ярко выделенный на рис. 5.32,
является аппроксимацией множества, которое минимизирует промах при всех
фиксированных управлениях Е (для всех точек области GE(T)). Изохрона СР(Т)
близка к окружности некоторого радиуса, поэтому нормаль из точки области
GE(T) к изохроне совпадает с направлением на точку центра Окружности, что
позволяет заменить фактическое построение изохроны СР(Т) и нормали к ней из
каждой точки области GE(T) определением угла Г (а следовательно, потребной
перегрузки пр) между Vp(0 и направлением на каждую точку GE(T). Максимальное
значение угла Г, т.е. потребной перегрузки Р, определяет точку экстремального
прицеливания для Р.
По свойству оптимальных управлений ТЭП определяется траекторией Е
максимальной кривизны, поэтому значение перегрузки преследуемого ЛА
4 = «£.
Остается определить субоптимальное значение параметра Ye/- Множество концов
траекторий предельной кривизны Е являются окружностью определенного радиуса R
(рис. 5.33) с центром в точке F. Окружность лежит в некоторой плоскости Л,
направленной к плоскости XOY. Необходимо решить геометрическую задачу: найти на
окружности (F, R) точку, направление на которую из точки О] составляет
максимальный угол Г с вектором скорости VP(f). Решение данной задачи иллюстрируется на
рис. 5.33. В результате получаем
"-sign^ )-п£"
Ли
П5Е
ы
2ЕсА
arctg
-*/~
1в J
(5.193)
где YB \/ ^ + УР, Хв
-г—sm| —— |, ZB 7r + ZP ,
VXP
nEg
\ y. )•
VXP
Глава 5. Введение в оптимизацию ММС
397
УхрУуруУгр ~ проекции вектора скорости V^ на оси системы координат O2XYZ,
Xp,Yp9Zp - проекции точки Oi на оси системы координат O2XYZ.
Рис. 5.33» Определение у*
'сЕ
(5.194)
Управляющие воздействия Е определяются из соотношений
^EZ ~ "пЕ '%В/ У^В + %В •
Так как задача противодействия имеет седловую точку, то точка Cj (рис. 5.33)
определяет субоптимальный вектор управления Р и Е. Для Р получаем
HI
(5495)
где
Пр ■
(signKe)-2rVf
' т, если
irv,
2ГУР
У8т\^
(signYF)-np, вели
Л\рс/_
\>п\
tmt
\РС
XPC = XF-R(XB-XF)-((XB-XFf + Y^+Z2Fy,
398 Методы современной ТАУ. Часть IV
1-cos
пЬГ
Ve
xF + xE,
YF=^-XF+YE,
ZF=^~XF+ZE,
где Vex^ey^ez ~ проекции VE на оси системы координат OiXYZ, XE,YE,ZE -
проекции точки О2 на оси системы координат OtXYZ.
В работе [20] для оценки времени встречи Т получено выражение
Г =-__!_ ., (5.196)
№-v*+vl±vEr
где ± используется, если Е приближается и удаляется по отношению к Р
соответственно, VEr - проекция вектора скорости Е на линию визирования. Относительная
погрешность формулы составляет 5 - 10% от точного значения Г.
5.7.5. Формирование ПКЗУ в бескоалиционной конфликтной ситуации
С АНТАГОНИСТИЧЕСКИМ ЯДРОМ НА ОСНОВЕ ПРИНЦИПА
ЭКСТРЕМАЛЬНОГО НАПРАВЛЕНИЯ Н.Н. КРАСОВСКОГО
Сведение задачи преследования-уклонения с векторными показателями к
бескоалиционному конфликту с антагонистическим ядром. Рассмотренный
алгоритм формирования ПКЗУ позволяет решать исходную задачу конфликтного
взаимодействия двух ЛА при строгом антагонизме критериев управления
Jp = Kh(uP>uE)-* min max Kh(uP,uE)y
uPeU?uEeU%
J£=~^/i(wp»m£)-^ max ™п Kh(upyuE)y (5.197)
1 uEeU%uPeU?
Jp+Je-0.
При этом искомые решения определяются путем построения областей
достижимости объектов и формирования ансамблей траекторий движения, что требует
значительных вычислительных мощностей для практической реализации ПКЗУ.
В реальных системах помимо основных показателей управления часто требуется
учитывать дополнительные критерии управления, например время до встречи,
энергетические затраты и т.д. В общем виде критерий управления двухобъектной
системой с антагонистическим ядром имеет вид
Jp = Jl =|У11»«Л2>—>J\nP J »
J£=J2=[^21^22,..^2W£]T, m (5.198)
/n+/21=0.
Для использования результатов преобразуем (5.198) к скалярному виду путем
введения весовых коэффициентов, учитывающих приоритетность того или иного
показателя
Глава 5, Введение в оптимизацию ММС
399
1=1
Уп + У21=0,
(5.199)
Va,,p,.>0, Sai=SPi=1 ПРИ ' = *•.."p, ; = 1...Л£.
В [9] сформировано следующее утверждение: при небольшом уходе от
антагонизма в пределах 10 - 30%
а^0,7, О2+... + аЛ/,<0,3;
Р!>0,7, Р2+... + РЯ/,<0,3
структура оптимальных ПКЗУ Р и £, сформированных в соответствии с
принципом экстремального направления Н.Н. Красовского, эффективна с параметрической
перенастройкой, где
[nm,tH<t<T+
0,т*<*<7
"+(t+,y;)=
и (t",y;) =
.Yc=Yc = const, усе [~7i,ii]
nm,tH<t£%~
n = ^
^o->0-i»
^o-^O-i-
(5.200)
[-nm,T~<f<7
Yc =Y; = const, yce [-71,7i]^
Выражение (5.200) есть не что иное, как параметрическая запись закона
управления JIA на такте [f/чТ]- Здесь т*(г~) - определяют соответственно момент
времени «выключения» («переключения») при движении по экстремальной траекторий на
дальнюю (ближнюю) границы области достижимости, а Yc(Yc) ~ скоростной угол
крена.
Таким образом, исходная задача преследования-уклонения сформулирована в
новой постановке с векторными показателями и сведена к бескоалиционному
конфликту с антагонистическим ядром Jn = -J2\. Степень конфликтности определяется так:
D^minta^Pi}. (5.201)
Обобщенная степень конфликтности при свертке показателей (5.199)
7=У/1+(1-уУ2=у|)а^1/ + а~У)ЁМ2^ °^1
М 7=1
имеет вид
D^mintYMl-Y^b (5.202)
«?
Алгоритмическое обеспечение настройки ПКЗУ формируется на основе Парето-
Неш-оптимизации и реализовано в програмной системе «МОМДИС».
400
Методы современной ТАУ. Часть IV
5.8. РАЗРАБОТКА СТОХАСТИЧЕСКОЙ
ИНТЕГРО-ДИФФЕРЕНЦИАЛЬНОЙ МОДЕЛИ
СТАБИЛЬНОГО АНТАГОНИСТИЧЕСКОГО КОНФЛИКТА
В ДВУХКОАЛИЦИОННЫХ ММС В УСЛОВИЯХ €-РАВНОВЕСИЯ
НА ОСНОВЕ КОМБИНАЦИИ ФИЛЬТРАЦИИ И УПРАВЛЕНИЯ
С УЧЕТОМ ПРОМЕЖУТОЧНЫХ КООРДИНАТ, ПРОТОТИПА,
ЗАДАННОЙ ЧАСТИ МОДЕЛИ, АДДИТИВНЫХ
И МУЛЬТИПЛИКАТИВНЫХ ПОМЕХ
5.8.1. Максиминная постановка задачи сближения-уклонения
позиционно (р)- и программно-управляемого (q) объектов
с интегро-дифференциальной моделью,
адекватной реальным системам
Общая характеристика подходов, формализация и сравнительный анализ работ по
исследованию позиционно-программных задач сближения-уклонения.
В данной главе в качестве основного рассматривается максиминный вариант
задачи сближения-уклонения программно-управляемого уклоняющегося объекта Q и
позиционно-управляемого объекта Р, который при наличии е-равновесия, кроме
гарантированного решения для Q, позволяет оценивать оптимальное решение для Р
более простым способом, чем минимаксный. Излагается метод оценки
эффективности и поиска оптимального (гарантирующего) управления (стратегии) объекта Q в
условиях антагонизма и частичной неопределенности описания СУ объекта Р при
аддитивных и «мультипликативных» помехах в его каналах измерения.
Постановка задачи. Расчетная схема задачи/ справедливая для телеуправляемого
и самонаводящегося объектов Р, приведена на рис. 5.34.
х«>(0
Рис. 5,34. Расчетная схема задачи
Активным средством лица, принимающего решение (ЛПР), является
уклоняющийся от встречи е объектом Р объект Q, описываемый векторным
дифференциальным уравнением;
*,(0 ^ /о( W>' V'o) = *!• <5'203)
где tQ= 0-момент начала операции; tk>tQ - момент окончания операции;
xq(t)e Xq(t)ml - вектор фазовых координат, где Xq - непустое компактное и
непрерывное в /Г множество допустимых значений фазовых координат, задаваемое с
помощью конечного или бесконечного семейства действительных непрерывных
функций ti: Xq(t) = [xq(t):hi(xq(t))>0, / = 1,2,3,...}; uq(t)eSq(t)-rxl вектор
Глава 5. Введение в оптимизацию ММС 401
управления-стратегии ЛПР (Q), где Sq(t) = {uq(t) :\uqi(t)\<uqi(t)t i = l,r} -
множество измеримых функций - пространство стратегий ЛПР (Q); fo(xq(t),uqj) -
удовлетворяющая условию Липшица на прямом произведении X q(t)xSq(t)x[tojk]
вектор-функций; множество {fo(xq,uq9t):uqe Sq(t)} векторов скорости полагается при
каждом фиксированном наборе (xq,t), xq(t)e Xq(t), te[to,tk] выпуклым и
ограниченным. В число фазовых координат xq(t) входят координаты центра масс объекта в
системе координат O0XqYqZq или О0г(р%. Эти координаты составляют
n-мерный вектор xq(t), п<т,п<Ъ. Так что xq(t) = L-xq(t), где L-nxm матрица,
«вырезающая» из вектора xq(t) координаты xq(t).
Активное средство противника - стремящийся к сближению с объектом Q объект
Р - полагается линеаризованным относительно опорной траектории xp0(t),
соответствующей «опорной» траектории объекта Q xq(t)e Xq(t):
S,o(0 = /o(*,o.w*o.O, ^о(*о) = *2. (5-204)
где uq0(t)e Sq(t) - «опорное» управление, назначаемое ЛПР.
На опорной траектории ЛПР принята следующая модель объекта Р. Объект Р
описывается нелинейными непрерывными ограниченными известными операторами Яо, Ко, Ао
из R" в /У1, соответствующими связями векторов х^(/), y(r); y(r), jp(0; jp(0» xp(t) на опорной
траектории. Так что yo(t) = H0(xqQ(t)), }pQ(t) = K0(yQ(t)), xp0(r) = Ao(jpO(O) и
xpo(O = A)(^o(^o(x^o(O))) • Выражения для операторов Яо и Ао приведены, например,
в П. 1 [28]; оператор Ко определяется конкретной системой.
На линеаризованной траектории принята следующая модель объекта Р. Объект
описывается известной пхп матрицей HA(t) = lh^j(t)e C[to,tk], /, j = 1,п],
неизвестной пхп МИПФ Кд(г,т), to<x<t<tk (стратегия противника), и известной
невырожденной \/x<t пхп МИПФ Ад(г,т) = {аД/:/(г,т)Е Сд[г0,^], /,; = 1,п}, которые
соответствуют связям векторов xq(t), y(t)\ y(0, jp(0*> Jp(O» xp(r) на этой траектории.
Таким образом,
у д (0 = Нд (О[Г(г)х, (0 - х^о (01. (5.205)
где Г(0 - диагональная пхп матрица случайных функций с единичным средним
значением и положительно определенной корреляционной матрицей
Rr(r1,r2) = diag(rYll(r1,r2),rY22(rl,r2),...,rYW/?(r1,r2)),rY//(r1,r2)G/^[/о^^х^^,^], i = l,n-
мультипликативная векторная помеха, допускающая аппроксимацию
нестационарным «белым» шумом (случайный фиксированный фактор).
При этом Af [уд (г)] = Уд (0.
При нулевых начальных условиях:
xPA(O = jAA(rfx)jPA(x)dxf (5.206)
'о
t
jPA(O = jKA(rfx)[yA(x) + n(x)]dxf (5.207)
'о
27 Зак. 416
400
Методы современной ТАУ. Часть ГУ
5.8. РАЗРАБОТКА СТОХАСТИЧЕСКОЙ
ИНТЕГРО-ДИФФЕРЕНЦИАЛЬНОЙ МОДЕЛИ
СТАБИЛЬНОГО АНТАГОНИСТИЧЕСКОГО КОНФЛИКТА
В ДВУХКОАЛИЦИОННЫХ ММС В УСЛОВИЯХ £-РАВНОВЕСИЯ
НА ОСНОВЕ КОМБИНАЦИИ ФИЛЬТРАЦИИ И УПРАВЛЕНИЯ
С УЧЕТОМ ПРОМЕЖУТОЧНЫХ КООРДИНАТ, ПРОТОТИПА,
ЗАДАННОЙ ЧАСТИ МОДЕЛИ, АДДИТИВНЫХ
И МУЛЬТИПЛИКАТИВНЫХ ПОМЕХ
5.8.1. Максиминная постановка задачи сближения-уклонения
позиционно (р)- и программно-управляемого (q) объектов
с интегро-дифференциальной моделью,
адекватной реальным системам
Общая характеристика подходов, формализация и сравнительный анализ работ по
исследованию позиционно-программных задач сближения-уклонения.
В данной главе в качестве основного рассматривается максиминный вариант
задачи сближения-уклонения программно-управляемого уклоняющегося объекта Q и
позиционно-управляемого объекта Р, который при наличии е-равновесия, кроме
гарантированного решения для Q, позволяет оценивать оптимальное решение для F
более простым способом, чем минимаксный. Излагается метод оценки
эффективности и поиска оптимального (гарантирующего) управления (стратегии) объекта Q г
условиях антагонизма и частичной неопределенности описания СУ объекта Р npi
аддитивных и «мультипликативных» помехах в его каналах измерения.
Постановка задачи. Расчетная схема задачи, справедливая для телеуправляемой
и самонаводящегося объектов Р, приведена на рис. 5.34.
»«(0
»
и,(0
Рис. 5.34. Расчетная схема задачи
Активным средством лица, принимающего решение (ЛПР), является уклоня*
щийся от встречи с объектом Р объект Q, описываемый векторным дифференциал
ным уравнением;
fyO = /o(VV>'W = *«. (5'2С
где Го= 0-момент начала операции; tk>tQ - момент окончания операц*
%q(t)e Xq(t)mi - вектор фазовых координат, где Яя - непустое компактное и \
прерывное В /Г множество допустимых значений фазовых координат, задаваемое
помощью конечного или бесконечного семейства действительных непрерывн
функций ti
**(')
.{xJt):ti(xJt))>0, / = 1,2,3,...}; uJt)e SJt)-rxl вею
Глава 5. Введение в оптимизацию ММС 403
K(tk,x) = JAA(tk,Q)KA(Q,x)dQ, to<x<tk. (5.214)
Т
Операторы По, £ и матрица Пд(г) приведены, например, в [28]. В качестве
критерия эффективности операции, который ЛПР стремится максимизировать,
рассматривается критерий Солодовникова - Баткова - неотрицательный вещественный
функционал:
£1(и<?,гьКд) = 1г{М[ед(г,)].М[едТ (rft)]} +
+^1г{М{[ед(/,)]-М(£д(г,))][-//-]т}},
где Xq = const, 0 < \ < оо - известная величина,
т
£д(^О-М[£д(^)] = Пд(^)|К(гьт){Нд(т)[Г(т)--Е]х^(т) + п(т)}^. (5.216)
'о
Ставится задача поиска:
1) гарантированной оценки эффективности заданной стратегии и^(0
Е*х(ц tk) = El(uq9tkXA) = v min ^(u ,f*,KA); (5.217)
K^{t,X)ESp
2) оптимальной (гарантирующей) стратегии
u*(r) = arg max E*x(xx tk). (5.218)
' Uq(t)ESq Ч
Вследствие того что задача 1 входит в задачу 2, далее рассматривается только
задача 2, которая называется при этом просто «задача».
В результате того что для фигурирующих в (5.216) - (5.218) математических
ожиданий и дисперсий легко найти аналитические выражения (так, что критерий
качества-операции и функционалы сложности оказываются известными
детерминированными функциями 11^(0, Кд, tk, p), сформулированная задача представляет собой
детерминированную «бесшумную» позиционно-программную игру с идеальной
информацией. Первый этап решения этой игры состоит в нахождении оптимальной
стратегии объекта Р - МИПФ:
Kl(u,O,fJk>T,e) = aig min ^(и^.Кд). (5.219)
В соответствии с принципом ограниченной сложности [46] эта задача сводится к
минимизации по Кд функционала:
£л(и^^,р,Кд) = £1(и,,^,Кд) + р^)(и^г„Кд). (5.220)
Для этого на первом шаге решается задача
тт£Л(и^^,р,Кд) = £Л(и^^,р,К*д(и<7(.),^,р,т,е)) =
кд
= £л*(и^^,р) = £1(и^^,К*д(и^(-),^,р,т,е))+ (5.221)
+р^|\и^г4,к;(и^(О,гл,рд,в)) = £;(и^^,р) + р^|Г(и^^,р), 1 = 1,2,
где множитель Лагранжа р = р > 0 определяется на втором шаге:
E«)\uqjk,p*) = E«)*\uqjk)e[Sii)(urtk)±Esl i = l,2. (5.222)
Заметим, что величина E*(uq,tk,p*) = E**(uq,tk) является гарантированной
оценкой эффективности стратегии uq(t).
27*
402 Методы современной ТАУ. Часть IV
где п(т) - аддитивная векторная помеха (случайный фиксированный фактор) не
коррелированная с Г(г), допускающая аппроксимацию нестационарным «белым» шумом и
имеющая нулевое среднее значение и симметричную положительно определенную
корреляционную матрицу Rn(г,,t2) = {rnij(t{,t2)6 l^[t0,tk]xL>[t09tk]9 iJ = T^}.
Множество допустимых стратегий Sp объекта Р задается с помощью
«функционала сложности» E2(uqitkiKA).
Именно,
Sp=iKA(urtiT) = K^uq(')1tix):E2(uqjkiK^e[S(urtk)±Es]}i
где S(uq,tk),es - принятая ЛПР известная положительная функция - уровень
ограничения сложности и требуемая точность соответственно. Рассматриваются два
функционала сложности.
Функционал сложности E2\uqitkiKA) > ограничивающий полосу пропускания
контура наведения объекта Р:
^l)(u^^,KA) = tr{J^(T)xM{[j/,A(T)-M(j/,A(T))][-//-]TWT}, (5.208)
'о
где ft(T) = diag(w11(T),w22(T),..,w^(T))1 1<wii(x)<ooi / = 1,и - известная матрица
веса
т
^д(т)-Мирд(т)] = |кд(г,0){Нд(0)[Г(0)-£]х,(е) + п(0)}^0. (5.209)
'о
Функционал сложности E22)(uqitkiKA), ограничивающий «удаленность»
параметров контура наведения объекта Р от «прототипа», в качестве которого может быть
использован объект-аналог объекта Р:
h т
^2)(u^,r,,KA) = tr{JJ а(т,0)х[Кд(т,0)-К^(т,0)]х[-//-]т^0^т}, (5.210)
'о'о
где £l(T,0) = diag(wll(T,0),w22(T,0),..,wAln(T,0)), 1< wi7(t,0)<oo, w/7(t,0)e CD[foAL
i = l,n - известная матрица веса; Kl(t9x) = {k^(t9x)eCQ[tQftk]9 ij = ln} - МИПФ
«прототипа».
Критерий эффективности операции строится на основе nxl вектора декартовых
компонент «промаха» объектов в момент времени tk\
£fl(^) = £fl(u^^,KA) = £f(u^r,,KA) + £?(u^rbK0), (5.211)
где
е5(и^^>Ко) = х5о(^)-х;(^) = ЯохрО(/л)-ХМ/*^0' (5*212)
Ef(urtk,K0) = n^tk)JK(tk,x)[yA(x) + n(x)]dx. (5.213)
'о
Здесь По и X ~ нелинейные непрерывно ограниченные операторы из Rn в R\
соответствующие кинематическим связям векторов xpo(t) их^(г) с этими же векторами
хро(О> х£(0 в декартовой системе координат; nA(t) = [nAij(t)e C[tOitk], ij = \yn} -
пхп матрица, соответствующая кинематическим связям вектора хрД(О с этим же
вектором х^д(г) в декартовой системе координат; пхп МИПФ
Глава 5. Введение в оптимизацию ММС 405
Краткая характеристика этапов исследования. В [9] приводится постановка
задачи оценки эффективности и поиска оптимальных (гарантирующих) стратегий
уклонения программно управляемого объекта Q. При этом используется
терминология [24]. Задача ставится как задача исследования операции объекта Q в условиях
наличия противника (объекта Р) и случайных неконтролируемых факторов
(мультипликативных и аддитивных помех). Множество стратегий противника - матрица
ИПФ Кд(г,т) - ограничено с помощью двух интегральных функционалов сложности
[46]. Первый функционал сложности использует вектор ускорений jpt\(t) объекта
РЦ; второй - МИПФ «прототипа» оптимизируемой части этого объекта. Все
изложение главы ведется для обоих этих функционалов. Исходная задача исследования
операции сводится к позиционно-программной «бесшумной» игре с идеальной
информацией, решение которой распадается на два этапа.
В [9] рассматривается первый шаг первого этапа решения игры - для случая
помех, аппроксимируемых, «белыми» шумами, находятся явные выражения для
оптимальных стратегий объекта Р, как функций стратегий uq объекта Q, момента времени
окончания игры tk и множителя Лагранжа р, с помощью которого вводятся
функционалы сложности.
Материал [9] дополняют параграфы 2 и 3 приложения [28], в которых выведены
матричные интегральные уравнения, задающие необходимые и достаточные условия
оптимальнее™ стратегий объекта Р, и решено матричное интегральное уравнение,
задающее необходимое и достаточное условие оптимальности МИПФ Кд(г,т) в
случае расширенного первого функционала сложности.
В пункте 8.3 работы [9] рассматривается второй шаг первого этапа решения игры
- определяются множители Лагранжа р*, обеспечивающие заданный уровень
ограничения сложности стратегии Кд(г,х). Материал пункта 8.3 работы [9] дополняет
параграф 4 приложения [28], в котором приводится вывод уравнения, задающего
оценку сверху р* при использовании второго функционала сложности.
В пункте 8.4 работы [9] рассматривается второй этап решения игры - нахождение
оптимальной стратегии и*(0 объекта Q.
Пункт 8.5 посвящен исследованию равновесия в данной задаче сближения-
уклонения, сравнительному анализу и оценке преимущества максиминного подхода
для получения оптимального управления объектом Q и оценке оптимальной системы
позиционного управления объектом Р.
В пункте 8.6 работы [9] на основе АО разработанного метода исследования пози-
ционно-программных задач сближения-уклонения, детальное описание которого
приведено в главе 9 работы [9], приведены два упрощенных примера применения
метода для практически полезных задач сближения-уклонения: уклонения
маневрирующего аэродинамического объекта от телеуправляемой ЗУР и защиты РЛС от СУ
ПРР с помощью ДИИ (система РЛС-ДИИ-СУ ПРР). Полное исследования данных
задач приведено в главе 10 работы [9].
5.8.2. Решение задачи поиска оптимальной стратегии объекта Р
(ДЛ# ПОМЕХ ТИПА «БЕЛОГО» ШУМА)
Данный пункт посвящен рассмотрению первого шага определения оптимальной
стратегии объекта Р и опирается на [9], в котором с использованием известной
формальной процедуры определения первой вариации функционала получены
матричные интегральные уравнения, задающие необходимые и достаточные условия опти- •
мальности МИПФ Кд(т,0). В параграфе рассматривается решение этих уравнений.
406 Методы современной ТАУ. Часть ГУ
Мультипликативная и аддитивная помехи аппроксимируются здесь не
коррелированными между собой нестационарными векторными «белыми» шумами: полагается
R(Tl,T2) = HA(T1)X,(Tl)N2r(T1)5(T1-T2)X^(T2)Hj(T2) + N^(T2)8(T1-T2), (5.228)
где N/Ctj) = [пГу(х1)е /^[г0,^], i,j = l,n} - положительная положительно
определенная пхп матрица уровней спектральных плотностей «белой» мультипликативной
помехи; N^(T1) = {wm-/-(x1)6 L2[r0,^], ij = l,n] - симметричная положительная
положительно определенная пхп матрица уровней спектральных плотностей «белой»
аддитивной помехи; 8(х{ -х2) - символ дельта-функции.
В пункте 8.2.1 работы [9] получено решение уравнения, соответствующего
функционалу качества (5.215) и функционалу сложности (5.208). В пункте 8.2.2 -
уравнения, соответствующего тому же функционалу качества (5.215) и функционалу
сложности (5.210).
В обоих случаях для Vxb to<x{<tk существенно используется положительная
определенность и интегрируемость с квадратом элементов матрицы
N2(t1) = N^(x1) + N^(t1), (5.229)
где
Й2г(т1) = Нд(т1)Х^(т1)^(т1)Х^(т1)Н^(т1). (5.230)
Для положительной определенности (45) достаточна неотрицательная
определенность матрицы Й2-^) Vx1? t0 < х{ < tk , что с учетом положительной определенности
матрицы N2-^) следует из леммы 8.1 [9].
Ограничение множества допустимых стратегий с помощью функционала
сложности, использующего вектор ускорений (функционала £21}). Подставляя
интегральное уравнение [9] выражение (5.228) для R(xI}t2) и транспонируя
результат, получим
XjAT(rbr2)A(r,,r3)K;(r3,x1)^3N2(x1) + pn(r2)K;(r2,x1)N2(x1) =
Т] (5.231)
= -Ат(гьг2)[||Ааь^)К;(Гз,х2)уд(х2)^х2^з+г2(^)]у1(х1),
'о'о
где матрица N2(xt) положительно определена, интегрируема с квадратом в
1^°1[^гк], в первом интеграле учтено, что K^(f3,Xi) = 0 при t3<x{. В случае
использования противником оптимальной стратегии:
иА(^,Гз)К;(г3,х2)уд(х2)^х2Лз+^(^) = ^[£д*(г,)] = £д*(г,)<оо. (5.232)
'о'о
Окончательное искомое явное выражение для оптимальной МИПФ ♦
к;(г2д0 = ЛР"1п"1(г2)АТ(^,г2)УГ1(х1)ВГ1(^)ед(^)у1(т1)^2(х1), (5.233)
где t2e[t0itkl to<xx<t2.
Утверждение 5.15. Решение матричного интегрального уравнения (5.231)
существует, единственно в пространстве I^01 [to,tk] и задается для любого xq(t)e Xq(t).
Глава 5. Введение в оптимизацию ММС 407
Ограничение множества допустимых стратегий с помощью функционала
сложности, использующего «прототип» (функционал £22)) [9, 28]. Подставляя в
уравнение выражение (5.228) для R(x1,x2) B случае мультипликативной и
аддитивной помех типа «белых» шумов и транспонируя результат аналогично (5.231),
получим
h
XjAT(rbr2)A(^,r3)K;a3,T1)N2(T1)^3+pn(rbT1)K*A(^^i) =
= рП(г2,т1)К2(г2,х1)-||Ат(^^2)А(гь^)К;(г3,т2)уд(т2)ут(т1)^2^з- (5.234)
'о'о
-AT(rftfr2)£5(rJk)]yI(x1),
где N2(xt) положительно определена, интегрируема с квадратом в Ц?п [to,tk] и
определяется выражениями (5.229), (5.230). Введем в рассмотрение неизвестный
nxl вектор €д*(^)<оо. Тогда из (5.234) при фиксированных tk,%{, tk>xx следует
матричное интегральное уравнение Фредгольма второго рода с вырожденным ядром
Ат(^,/2)А(^з)
Ч
4jAT(rb^)A(rbr3)K;(r3,T1)^3+pQ(r2,T1)K;(r2,Tl)N-2(Tl) =
J (5.235)
= paa2,T1)K^(r2,Tl)N-2(T1)-AT(rbr2)€^(^)]yI(Tl)N-2(T1).
Уравнения (5.232), (5.235) образуют систему, эквивалентную (5.234) для
определения МИПФ Кд(гд).
Явное выражение для искомой оптимальной МИПФ
\Kl(t2,x0 = \K2(t2ix0-\[^-\t2ix0AT(tkj2)®N2(xl)]x
xG-4x1)x(E®N-2(x0)|K^(rft^0-V'I»fl'1(r2^i)AT(^,r2)eN-2(x1)]><
xG-4T0(V(x1)®N-2(x1)yA(x1)) + ^1[n-la2,xl)ATabr2)®yA(x1)]}x
xD?(tk)\pI3(tk) + $(tk)]9 (5.236)
где t2e[t0,tkl t^xx<tk.
Утверждение 5.16. Решение матричного интегрального уравнения (5.234)
существует и единственно в пространстве l!^n[tOitk] и задается выражением (5.236) для
любого xq(t)eXq(t).
Далее в [9] рассматривается второй шаг этапа определения оптимальной
стратегии обьекта Р - задача поиска множителя Лагранжа р, обеспечивающего значение
функционала сложности, не превышающего заданное (5.222).
5.8.3. Об алгоритме определения оптимальной стратегии объекта Q
В параграфе рассматривается второй этап решения игры - поиск оптимальной
(гарантирующей)стратегии и*(г).
Выражения для функционала выигрыша £**(rJt) = £'1(^,K^(p*,rJt,x,0)) могут
быть получены путем подстановки (при р = р*) выражений для МИПФ Кд(х,0) в
408 Методы современной ТАУ. Часть IV
интегральные уравнения. Однако такой путь приводит к слишком громоздким
результатам.
Представим функционал Ex**(tk) в виде суммы двух функционалов:
El\tk) = E{l)(l»\p\tk)) + XqE{2)(tkX(p\tk,T)) =
= ЕГ(<к)+\ЕГ(^ (5>237)
где
E^\tk) = tv[ER\p\tk)lJl*T(p\tk)]i (5.238)
h
E[lr\tk) = lr[]K\p\tk,xx)K\Tx)K*1{p\tk,Tx)dTx]. (5.239)
'о
В случае первого функционала сложности путем несложных преобразований
получим
£r^ = P*tr{JV(xOVfV^i)V(^^^ (5.240)
'о
Задача оптимального управления для определения оптимальной стратегии и* (г)
формируется в результате следующим образом.
Объект управления Q описывается системой дифференциальных уравнений в
нормальной форме Коши (5.204), где xq(t) - вектор фазовых координат, uq(t) -
вектор управлений.
Начальное состояние объекта задается вектором z°q , «целевое множество» -
множеством Xq(tk).
Имеется совокупность ограничений на фазовые координаты объекта, задаваемая
системой hl(xq(t))>0.
Классом допустимых управлений является класс измеримых на [to,tk] функций;
«ограничивающее множество» задается множеством Sq(t).
Утверждение 5.17. Решение сформулированной задачи оптимального управления
для обоих функционалов сложности существует.
Для доказательства достаточно показать, что в условиях сформулированной
задачи оптимального управления:
• существует равномерная оценка для всех решений (5.204) при uq(t)e U ;
• критерий качества управления (5.237) непрерывен по xq(t) в Rm.
Вопросы алгоритмического и программного обеспечения метода поиска
оптимальных (гарантирующих) решений для обьекта Q, оценки его вычислительной
точности с анализом путей повышения быстродействия рассмотрены в работах [18, 19] и
изложены в главе 9 работы [9].
5.8.4. Программные системы FILTR, FILTR-1, FILTR-2
Алгоритмическое обеспечение метода поиска оптимальных
(гарантирующих) управлений обьекта Q. Общую структуру программной системы [19]
«Р1ЬТЯ»для решения задач оптимального управления рекомендованными ранее
методами можно представить в виде изображенной на рис. 5.35 (сервисные блоки не
показаны). Основными в этой схеме, для задачи поиска оптимальных гарантирующих
стратегий, являются блоки 2, 5 и 6.
Глава 5. Введение в оптимизацию ММС
409
2
1
Управляющая
программа
*
Программа, реализующая
численный метод
оптимального управления
3
Вычисление
фазовых ограничений
4
Вычисление
ограничений
на управление
5
Вычисление времени
окончания процесса
6
Вычисление
функционала качества
Рис. 5.35. Структура программной системы «FILTR»
Структура блока 6 приведена на рис. 5.36. Основу блока составляет программа
К1РР(модуль KPFO - в случае функционала сложности Е^ и модуль KPFP - в
случае функционала сложности Е^). Подпрограмма KIPF при заданном моменте
времени окончания процесса tk, векторах фазовых координат х^т), х^(т), хро(т),
те [to,tk] и множителе Лагранжа р вычисляет математическое ожидание и
корреляционную матрицу вектора «промаха» е(^) и значение функционала Е^*. Сама
подпрограмма FFG вычисляет по этим результатам функционал качества Е{ , а также
реализует какой-либо численный метод решения нелинейного алгебраического
уравнения - для вычисления множителя Лагранжа р , обеспечивающего заданный
уровень ограничения сложности E^l)*. Исходными данными для работы подпрограммы
FFG, кроме перечисленных возможностей программы KIPF, являются: заданный
уровень ограничения сложности г^ , / = 1,2; исходное значение множителя Лагранжа
р=р°; максимально допустимое количество итераций для определения р*. Модуль
FFG реализует известный «метод секущих», при котором итерационный процесс
задается формулой
3(рл)-3(рл-рл"1)'
(5.241)
где 3(pw) = ^°*(^,pn)-S(0(^), i = l,2.
В модуле KPF0 для вычисления математического ожидания вектора «промаха»
„-д*
€"д (tk) используются полученные ранее соотношения, корреляционная пхп
матрица этого вектора
R[ед* (tk )] = -р"21 V(T!)Vf2 (р/с!)\(х{ЖХ| )*i *~д* (Р,h). (5.242)
'о
Для вычисления функционала сложности Е^* используется формула,
приведенная в [47]. Фигурирующие в этих формулах матрицы N2(x), V^t), \\{tk\ ^\{tk) и век-
26 Зак. 416
410
Методы современной ТАУ. Часть IV
тор z(0 определяются по известным соотношениям. Модуль KPFP соответствует
рассмотренному частному случаю.
R[eR\tk)] = lK\9,tk9h)N2(xl)K*T(9,tk,x{)dxl.
'о
В обоих случаях
Уд(х) = Нд(х)х^д(х).
(5.243)
(5.244)
Рис. 5.36. Структура блока 6-программной системы «FILTR»
При работе подпрограммы KIPF используются подпрограммы (см. рис. 5.36)
ННО, HHD, PRO, SSS, соответствующие операторам #О,#Д,Е; подпрограмма AIPF
соответствует МИПФ Ад(/,х); подпрограммы WOM, WNR соответствуют матрицам
П(х) (в модуле KPFP - П(х,©)), N2(x); подпрограммы MULM, INV -
вспомогательные, осуществляют операции матричной алгебры. Модуль KPFP использует,
кроме того, подпрограмму PIPF, соответствующую МИПФ «прототипа» Кд Q(x,9).
Блоку 5 соответствует (см. рис. 5.35) подпрограмма FIN. Обычно момент времени
окончания процесса tk = t*k задается с помощью некоторой монотонной функции
h(t,x(t)). При этом полагается, что
h(tlx(t*k)) = O (5.245)
с заданной точностью s, > 0.
Этот способ задания tk =4E [®*>®*1 принят в данном пункте. Основу FIN
составляет подпрограмма FFG. Сама подпрограмма FIN реализует некоторый метод
поиска минимума £** функционала Е*{ по гк. Исходными данными для работы
подпрограммы FIN кроме величин, указанных при описачии подпрограммы FFG,
являются: моменты времени вЛ,0£,е,, исходное значение момента времени гк =°К,
максимально допустимое количество итераций для определения tk . В модулр FINO pea-
Глава 5. Введение в оптимизацию ММС 411
лизуется метод локального поиска минимума путем сокращения интервала
неопределенности - «метод золотого сечения». Заметим, что при исследовании операция с
фиксированным временем окончания подпрограммы FIN становится очень простой,
вследствие чего следует ожидать существенного сокращения времени решения всей
задачи.
Программный блок 2 иллюстрируем случаем, когда управление объекта Q
ограничено по модулю u9(0<u° и оптимальное гарантирующее управление и* (0
определяется в классе релейных управлений с конечным числом точек переключения.
Обозначим через К количество точек переключения в каждой компоненте
исходного управления, а через tyx , j = \,m ,i = l,K - моменты переключениями
компоненты вектора управления и^(0. Тогда очевидны ограничения на параметры
tji>thi^i = XKJ = \^i, (5.246)
которые естественно упорядочить следующим образом:
*К+2 -*2\>*К+2 =*23>—>*2хК ~12К*
(5.247)
/(m-l)tf+l -'ml>'(m-l)A:+2 ~*т2>-->*тхК "1тК-
Полученная тхК параметрическая задача нелинейного програмирования с
ограничениями (5.246) может быть решена известными методами нелинейного
программирования.
Общая структура блока 2 для нахождения оптимальных гарантирующих (в классе
релейных функций) управлений программно-управляемого объекта Q включает в
себя два сервисных модуля (модуль ввода и контроля данных и модуль вывода
результатов): модуль, реализующий один из методов нелинейного программирования с
ограничениями, - модуль EKSTREM, а также обрабатывающий модуль FUNK.
Модуль FUNK вычисляет для каждого набора параметров ttj, j = 1, w, i = l,K
(точнее для соответствующего вектора управления Uq(t)) значение функционала
E"(Uq(t)). Кроме того, для работы модуля EKSTREM необходимо вычисление
ограничений (5.246), которое осуществляется в модуле GRAND.
Структура связей модулей в подпрограмме FUNK приведена на рис. 5.37.
E,=El\UqX(U%,Uq)).
Здесь блок WUQ вычисляет вектор управления Uq(t), соответствующий
параметрам ttj: WXQ вычисляет значения фазовых координат Xq(t) объекта Q на интервале
[0,tB] при управлении Uq(t), в блоке WXP определяются значения фазовых
координат Xpo(t) объекта Р на опорной траектории.
Блок WE2 вычисляет значение функционала сложности при Ку(г,т,м^,р). При
работе этого блока кроме подпрограммы, вычисляющей матрицу Kq(^,t,m^,p) ,
используются: в первом случае - подпрограмма WNR, которая вычисляет функционал
качества E3(uq,t) объекта Q и зависит от его конкретного вида.
Матрица ИПФ K*0(t,t,uq,p) и матрица K*(t,x,uq,p) вычисляются с помощью
подпрограммы KIPF, для работы которой, как было показано выше, в первом случае
412
Методы современной ТАУ. Часть ГУ
используются подпрограммы PIPF, WOM, AIPF, PPD, WNR, PRO, SSS, а во втором
случае - подпрограммы WOM, AIPF, PPD, WNR, PRO, SSS.
SI
| HHO | | HHD 1 | PPO 1 | PPD | | WOMl | WNR [ | SSS [
1 |MULM| 1MULC | 1 ADD | | INV*| [ REP
Рис. 5.37. Структура связей модулей в подпрограмме FUNK
При решении поиска гарантированной оценки эффективности заданной uq(t)
объекта Q из АО исключается блок 2 (см. рис. 5.35). При исключении блока 2
оптимизации управления объекта Q задача превращается также в задачу гарантированной
оценки многомерного фильтра с заданной частью и прототипом [3, 18].
С учетом измерений разработаны варианты получения характеристик фильтра с
ограничением промежуточной координаты FILTR-1 и учетом прототипа FILTR-2 [9].
5.8.5. Об анализе близости минимаксных и максиминных оценок
эффективности в интегро-дифференциальной позиционно-
программной задаче сближения-уклонения на основе
6-равновесия
Сравнение алгоритмических особенностей минимаксных и максиминных
подходов. Полное исследование рассматриваемой задачи сближения-уклонения
требует ее решения с позиции обоих сторон, т.е. решения максиминной (для Q) и
минимаксной (для Р) задач, причем решение последней задачи дает оптимальную
матричную ИПФ, которая имеет смысл оптимального описания замкнутой системы
управления объектом Р.
Как известно, обе задачи могут быть также интерпретированы как задачи
фильтрации, например [1, 3, 11], с получением гарантированных оценок фильтрации и
характеристик фильтров. При этом «технологии» получения решения в обоих видах
интерпретации (управления и фильтрации) одинаковы (см., например, максиминные
задачи получения гарантирующего управления [4] и гарантирующего фильтра [3]).
Из анализа следует, что в отличие от линейной задачи фильтрации максиминного
подхода (см. пункты 8.2, 8.3 работы [9]) с ее аналитической разрешимостью
относительно K(tk,x) при фиксированном uq(t) (даже при учете заданной части сс(г,т))
минимаксная задача сводится к комбинации задач нелинейной фильтрации и «накоп-
Глава 5. Введение в оптимизацию ММС 413
ления возмущений», которая еще более усложнится при ее рассмотрении в общем
виде и учете заданной части фильтра.
Условия е-равновесия и равновесия в интегро-дифференциальной задаче
сближения-уклонения. Очевидно, что если между минимаксными и максиминными
оценками имеет место близость (£-равновесие), то находить оптимальные решения
для Р и Q можно на основе одного из двух подходов, при этом сравнение подходов в
пункте 8.5.1 и в работе [9] показывает преимущество максиминного подхода.
Поэтому выполнение условий равновесия или е-равновесия упрощает поиск
оптимальных решений противодействующих сторон. Кроме того, как известно (9,
гл. 7), равновесные решения являются устойчивыми к дополнительной
информации.
В главе 7 работы [9] даны типичные условия равновесия и е-равновесия. С учетом
специфики рассматриваемой интегро-дифференциальной задачи условия близости
максимина и минимакса обсуждаются, например, в работах [1, И, 16]. Если в работе
[1] анализ равновесия для родственной задачи фильтрации проводится на
интуитивной основе, то в [11, 16] для исследования е-равновесия рассматриваемой задачи с
учетом ограничений, заданной части и аддитивных шумов привлечены результаты
общей теории игр - теоремы Сайона, Фань-Цзи, Никайдо [2]. В данном пункте на
основе сформулированных типовых условий приводятся результаты исследований
специфических особенностей условий равновесия и е-равновесия для интегро-
дифференциальной задачи противодействия с учетом мультипликативных и
аддитивных помех, обобщенных ограничений для обоих объектов (двух видов
ограничений сложности решения для Р, общих свойств множества управления Q), обобщения
заданной части (для теле- самонаведения объектов Р), нелинейного описания объекта
Q, а также обобщенного анализа требуемых условий квазивогнутости показателя по
управлению объекта Q.
Вначале рассмотрим утверждение при условии, что Г(г) = Е и описание объекта Q
линейно.
Утверждение 5.18 (условия е-равновесия). Пусть Хк и U - выпуклые
множества евклидова или гильбертова бесконечного мерного пространства (в частном
случае, XkaCl[tOytk]\ UaL2[to,tk] или Xk,Uс 1^ио^к]),£/- слабокомпактное в la
(или компактное без релейных управлений вида |мг-| = wf-, / = 1,2,...). Если
функционал J(u,K) при каждом ueU определен, непрерывен (следовательно,
полунепрерывен снизу) и выпуклый на замыкании Xkj при каждом Ке Хк, определен,
непрерывен (следовательно, полунепрерывен сверху) и вогнутый на U, то
mfsupJ(u,K) = supMJ(u,K) = J(u°9K0). (5.248)
То есть имеет место ситуация е-равновесия:
(5.249)
supJ(uiK)>J(u°yK°)-z,
mfJ(uiK)<J(u°iK°) + E, e>0,
к
которая означает, что объект Р при всех возможных действиях может улучшить свой
результат (уменьшить потери J) по сравнению с (5.248) не более, чем на малое е > 0;
аналогично, объект Q может улучшить свой результат (увеличить «выигрыш» J) по
сравнению с (5.248) не более, чем на малое е > 0.
Перед тем как перейти к доказательству, укажем несколько следствий.
414
Методы современной ТАУ. Часть IV
Следствие 1. Так как из выпуклости и вогнутости функционала J следует его
квазивыпуклость и квазивогнутость, то утверждение 5.18 справедливо и для квазивогну-
то-квазивыпуклых J.
Следствие 2. Если U - компактное, утверждение 5.18 близко к теореме Сайона
[2, 11], а при Хк - ограниченном и замкнутом, еще сильнее компактном, всегда
имеет место ситуация равновесия (е = 0).
5.8.6. Примеры применения интегро-дифференциальной задачи
сближения-уклонения
Как было указано в главе 1 и пункте 1.3 главы 8 работы [9], данная методика
нашла применение в двух практически полезных задачах сближения-уклонения,
которые, как известно, имеют место в конфликтной ситуации ЛС СВН - ЛС ПВО (см.
[17, 32, 35, 37 и др.]). Это задача защиты РЛС от управляемой противорадиолокаци-
онной ракеты (ПРР) с помощью дополнительных источников излучения (ДИИ) и
задача уклонения программно-маневрирующего аэродинамического объекта (АДО) от
зенитно-управляемой ракеты (ЗУР).
В данном пункте рассматриваются частные случаи приведенных задач в качестве
иллюстративных примеров. Более полное исследование данных задач приведено в
главе 10 работы [9].
Защита РЛС от СУ ПРР (объект Р) с помощью ДИИ (объект Q). При
обращении ДИИ вокруг РЛС с частотой в полосе пропускания ПРР с РГСН с опережающим
РЛС импульсным излучением ДИИ или с выключением РЛС на малом интервале
времени (см. [9], гл. 10) задача может быть описана следующей моделью, для
которой приводятся полученные результаты.
Рассматривается программно-управляемый объект Q, равномерно движущийся по
окружности радиуса /0 в плоскости, перпендикулярной оси ОХ системы координат
OXYZ (рис. 5.38), и самонаводящийся объект Р, находящийся в момент времени
г0 = 0 в начале координат системы OXYZ.
X
Рис. 5.38. Равномерное движение программно-управляемого объекта Q
Объект Q описывается в разрешенном относительно системы координат OXYZ
виде xqA(L = E, n = 2):
\|/(0 = arctg(/0//)sin(wf+ &), tj(O = arctg(/0/Ocos(wf+ &),
где u(t) = u = consteU(u:Q<u<u) - угловая скорость движения объекта (г = 1),
Ъ - угол, задающий начальное положение объекта, и - определяется полосой частот
СУ ПРР.
Глава 5. Введение в оптимизацию ММС
415
В качестве опорного используется движение объекта Р по прямой 001 со
скоростью VpQ= const. Кроме того, полагается, что HA(t) = (ll(l-VpOt))E, \A(tk,x) =
= ((tk-x)/(VpOtk))E.
Рассматривается случай ограничения сложности стратегии объекта Р с помощью
функционала сложности Е^Кд), где в качестве прототипа используется матрица
ИПФ
К'д (t,т) = (5е~а('~т) sin(w(t - т) + (3)£ .
На рис. 5.39 приведены величины Аотн (отношения преобразованной в декартову
систему координат гарантированной оценки динамической компоненты
tr[M[za(tk)]M[едТ(^)]} = /(К*) «промаха» к /0) для различных стратегий объекта Q,
разных уровней ограничения сложности 5(2) и двух начальных углов Ь. Случайная
компонента «промаха» в широком диапазоне изменения уровня спектральной
плотности помехи здесь мала по сравнению с динамической компонентой. Таким
образом, оптимальной (гарантирующей) стратегией объекта Q является при Ъ = О
движение с угловой скоростью и = 0,8 с"1, а при Ъ = 1,57 - с угловой скоростью и - 0,3 с"1.
Представляет интерес также рис. 5.40, на котором приведены осредненные по
начальному углу Ь, полагаемому равномерно распределенным в интервале (0,2тс),
величины Аотн - Дотн. Приведенные результаты получены при /0 = 200 м, / = 2500 м,
Vpo = 521 м/с, h = 4,7 с, 5 = 5, сс = 0,35, со = 0,41 с"1, р = 0, X^=l, Q(r,x) = E,
Г(Г) = £, N2n(T) = N2nE, W2 = const = МО"6-1-10"8 с"1.
Следует отметить, что возможность получения оптимального решения для Р в
«окрестности» прототипа (ПРР - СТАНДАРТ, ХАРМ и т.д.) отражает возможную
для Q неопределенность действий объекта Р (отсутствия точной информации о
методе наведения объекта Р, ресурсах и т.п.). Поэтому данная методика, кроме всего
остального, позволяет получать решение для Q в условиях неопределенности
относительно объекта Р [4].
1
6
5
4
3
2
1
~ Т/ 7 /
jl/L
Г1 1
0,4
Рис.
СГ—*Ol
1
0,8
\
\
Л
к—
1
1,2
5.Э9. Графики
D
О
Д
\
Л
i
1,6
Доп.
-S(2) = 0,l
-S(2) = l
- S(2) = 10
=^
1 ^
и, 1/с
6
5
4
3
2
1
Ь-Аогн-Аотн
1 ^
V 1 1
0,4 0,8
D-S(2) = 0,l
o-S(2)=l
A-S(2)=10
Д—.
■a n
i i i ^
U 1,6 M>1/c
Рис. 5.40. Графики 4m,-4m
Уклонение программно-маневрирующего аэродинамического объекта
(объект Q) от системы управления ЗУР (объект Р). В соответствии с рис. 5.41 про-
416
Методы современной ТАУ. Часть IV
стейшее описание объекта Q, программно-маневрирующего в вертикальной
плоскости, имеет вид
( О М (О (Л т
*,д=АЛд+ВЛ> to<t<tk, \q=\L A В,= I I, и^=(0,М)Т,
2 , г2
где ^1A(ro) = ^2A^o) = °. гй=го-уй*> V^=V^0=const, го = Щ+Ц>.
У4^ Q l^x
Ш
Рис. 5.41. Объек Q, программно-маневрирующий в вертикальной плоскости
В данном примере п = 2, г = 1. Множество допустимых управлений Q
определяется условием U = U(и: |и| < at) (рис. 5.42).
x(t)
0,05
"0,05
f*=17c I
Рис. 5.42. Графики оптимальных управлений и траекторий *°1д('*)
Примем, что объекту Р доступна для измерения координата д^1д(г). Nf = const.
Тогда у, = jc^,(O + Л!(г) и Нд = (1,0). Кинематические связи объекта Р имеют вид
где
zp
(0 =
= const.
Ад
а*
zp(0
Глава 5. Введение в оптимизацию ММС
417
Величина tk определяется из равенства rP(tk) = rQ(tk).
В данной задаче рассматривается функционал ограничений вида Е^[) с
ограничением среднего квадрата ускорений объекта Р jp(t).
На рис. 5.42 - 5.44 приведены некоторые результаты решения задачи для трех
правых условий задачи максимизации:
W*) =-0,065,
W*) = "0,05,
W*) = -o,oi.
Графики оптимальных управлений и траекторий x^{A(tk) изображены на
рис. 5.42. Характерной особенностью управлений является наличие одной точки
переключения (для данных вариантов tn = 8-9 с).
Анализ рис. 5.43 позволяет сделать вывод о характере роста среднеквадратиче-
ской оптимальной ошибки при увеличении уровня спектральной плотности N2
помехи.
Т77
XX
80
60
40
20
5 10" 5 10"7 5 10-6 N{
Рис. 5.43. Графики среднеквадратической оптимальной ошибки
ГАГ
М[е?(г,)], м2
85
75.
30
J lJI.
,2,0
1,5
1,5
•2,0-
.1,0
,1,7_
ю-7
10":
ю-3
Рис. 5.44. Зависимость величины M[t\(tk)} на оптимальной траектории
418 Методы современной ТАУ. Часть IV
На рис. 5.44 приведена зависимость величины M[ef (tk)] на оптимальной
траектории от уровня ограничения нормальных ускорений объекта Р. На этом же рисунке
приведены столбцами максимальные на траекториях Р среднеквадратические
значения jp(t), значения дисперсии и математического ожидания jp(t). Показан характер
роста ошибки с увеличением уровня ограничений (или уровня сложности) и
убывания трех характеристик ускорения. Рис. 5.43, 5.44 позволяют построить
параметрические области возможного ускорения и перехвата объекта Q.
Глава 6. Интеллектуальные системы 419
ГЛАВА 6. ИНТЕЛЛЕКТУАЛЬНЫЕ СИСТЕМЫ
Научное и практическое направление исследований и разработки
интеллектуальных систем было сформировано в конце 1989 г. и нашло свое отражение в виде
научно-технической программы фундаментальных и прикладных исследований
«Интеллектуальные системы», утвержденной приказом Государственного Комитета
СССР по народному образованию 30 августа 1989 г. № 701.
В соответствии с этой программой впервые в мире было дано определение
интеллектуальной системы как объединенной информационным процессом совокупности
технических средств и программного обеспечения, работающего во взаимосвязи с
человеком (коллективом людей) или автономно, способную на основе использования
сведений и знаний при наличии мотивации вырабатывать решение о действии и
находить рациональные способы его реализации.
Целью этой программы являлось создание научных основ и разработка опытных
образцов интеллектуальных систем на базе достижений нейрофизиологии, теории
управления, информационных технологий, мехатроники и микропроцессорных
вычислительных средств.
В разработке программы принимали участие научные коллективы практически
всех крупных университетов и институтов страны. Научным руководителем
программы был определен автор настоящей главы. Срок выполнения программы был
ограничен 1989 - 1991 гг. В процессе разработки программы были получены
оригинальные и весьма полезные результаты в связи, в том числе, с новизной
поставленной проблемы.
В основу концепции и структуры интеллектуальной системы были положены
результаты, полученные академиком П.К. Анохиным по исследованию
приспособительной деятельности живого организма при достижении цели.
Несмотря на крупные политические изменения, произошедшие в нашей стране,
исследования по проблеме «Интеллектуальные системы» были продолжены в рамках
научно-технической программы с тем же названием, но уже в соответствии с
федеральной программой «Университеты России» в период с 1992 по 1998 гг., работы
продолжаются и в настоящее время по программе «Университеты России -
фундаментальные исследования».
В процессе исследований были получены крупные научные результаты. Они
нашли отражение в различных публикациях в виде монографий, статей в научных
журналах.
В зарубежных изданиях практически нет данных по разработке интеллектуальных
систем в той постановке, как это показано в данном учебнике. В монографии
М.М. Гупты и Н.К. Синха, носящей название «Интеллектуальные системы
управления» (Intelligent Control System, IEEE, Press, 1996) рассматриваются лишь
традиционные задачи адаптации и обучаемости и другие проблемы теории систем.
Материал данной главы составлен на основе публикаций материалов в различных
изданиях, полученных разработчиками научно-технической программы
«Интеллектуальные системы».
Материал данной главы не претендует на полный охват и анализ полученных
результатов, а лишь отмечает важные фрагменты в теории и практике систем нового
поколения - интеллектуальных и вводит студентов в новую область знаний.
Достижения в области нейрофизиологии, микроэлектроники, информационной
технологии, теории и техники обработки информации и управления привели к воз-
420 Методы современной ТАУ. Часть IV
можности создания нового поколения систем - интеллектуальных. В основу
концепции таких систем положена теория функциональной системы, описывающая
системную приспособительную реакцию живого организма.
Исторические предпосылки. В 1935 г. П.К. Анохин изложил разработанный им
системный подход к изучению и пониманию функций живого организма на основе
предложенной им же оригинальной теории функциональной системы [1]. Используя
тончайшие методы аналитического исследования нервной системы, П.К. Анохин
находит место любому микрофизиологическому процессу в архитектуре целостной
приспособительной реакции организма. В этой работе функциональная система
впервые была определена как замкнутое физиологическое образование с наличием
обратной информации о результатах действия. Каждая функциональная система,
обеспечивающая тот или иной приспособительный эффект, имеет многочисленные
каналы, по которым информация с периферии достигает соответствующих нервных
центров. Полезный приспособительный эффект является определяющим в любой
функциональной системе, поскольку способствует достижению цели, которая
выступает в том числе как системообразующий фактор. Отличительная черта любого, даже
самого маленького результата, способствующего достижению цели, - то, что он
непременно получается на основе принципа саморегуляции и независимо от уровня и
сложности обладает одними и теми же узловыми механизмами, такими, как
афферентный синтез цели; принятие решения к действию; эфферентная программа
действия; акцептор действия, предсказывающий параметры результата; обратная афферен-
тация о параметрах результата и, наконец, сличение параметров полученного
результата с параметрами, предсказанными или прогнозированными акцептором действия.
Афферентный синтез является исходным для построения любой
целенаправленной деятельности. Четыре ведущих его компонента - исходная доминирующая
мотивация, обстановочная и пусковая афферентация и, наконец, память - позволяют
представить механизм афферентного синтеза следующим образом: на основе
исходной доминирующей мотивации, возникающей в результате той или иной внутренней
потребности организма и памяти, организм, стимулируемый различными пусковыми
сигналами, активно оценивает раздражители внешней среды, вырабатывает цель и
принимает соответствующее решение к действию. В соответствии с целью все
компоненты системы взаимодействуют так, чтобы выполнялась эфферентная программа
действия. Аппарат акцептора результатов действия, формирующийся на основе
определенной потребности, памяти, обстановки и специальных сигналов, заключает в
себе все свойства будущего результата и поэтому служит для сопоставления
предсказанного и реально полученного результатов. Обратная афферентация о параметрах
результата есть не что иное, как обратная связь. Поэтому функциональная система
Анохина является фундаментальным результатом, наиболее полно и просто
объясняющим характер происходящих процессов. Норберт Винер в 1960 г. признал, что
рассмотренный в плоскости физиологической кибернетики этот результат намного
опередил рождение кибернетического направления в целом, а Гордон Паск в 1963 г.
отметил, что, вероятно, наиболее ценная кибернетическая модель предложена
П.К. Анохиным.
Структурная схема функциональной системы приведена на рис. 6.1.
В реализации поведенческого акта, если действия достигают результата,
параметры которого соответствуют свойствам акцептора действия, приспособительный акт
заканчивается. В противном случае за счет ориентировочной реакции
перестраивается афферентный синтез, реорганизуется программа действия и, таким образом,
действие происходит до тех пор, пока результаты не будут соответствовать ранее
сформированным параметрам акцептора действия. Механизм сопоставления
интегрированных признаков акцептора действия с реально полученной сигнализацией о пара-
Глава 6. Интеллектуальные системы
421
метрах достигнутых результатов дополнен еще одним важным звеном -
эмоциональным компонентом удовлетворяемости или неудовлетворяемости. Этот фактор
является дополнительным стимулом к поиску новых программ, обеспечивающих
удовлетворение поставленной цели. Как правило, полное совпадение свойств акцептора
действия с информацией, идущей по цепи обратной афферентации о результате
действия, всегда сопровождается положительными, приятными эмоциями,
санкционирующими успех совершенного действия. Наоборот, любое «рассогласование» -
источник неприятных, биологически отрицательных эмоций, способствующих
быстрейшему удовлетворению возникших потребностей.
Афферентные
возбуждения
2 S
о ас
8 8.
Обстановочная
афферентация
Память
Мотивация
Т
Цель
Решение
к
действию
Обстановочная
афферентация
Проп
дейс
рамма
ЛВИЯ
ия команд]
с
Акцептор
действия
i
г
Действие
t
Результаты
действия
Параметры
результата
Обратная
афферентация
Афферентный синтез
Рис. 6.1. Структурная схема функциональной системы
В семидесятые годы нашего столетия наметилась тенденция развития
технической кибернетики на основе системных взглядов Берталанфи, Богданова, Винера,
Эшби, Месаровича и других ученых. Были получены полезные результаты по теории
систем [8]. Однако слабое развитие информационной технологии и техники не
смогли вызвать к жизни фундаментальные результаты П.К. Анохина по системной
организации функций живого организма. Поэтому системы управления в этот период
строились в основном с использованием априорных сведений об окружающей среде,
понятие цели вырождалось в решение задачи отработки некоторого программного
сигнала системой и лишь иногда вводились некоторые элементы адаптации систем к
тем или иным изменяющимся условиям. Практически всю интеллектуальную часть
работы выполнял человек, сводя функционирование системы управления к
реализации фиксированных алгоритмов, выработанных им. Реальная ситуация требует
других подходов к созданию систем. В действительности изменяется окружающая среда,
изменяются характеристики собственного состояния системы. Учесть эти изменения
априори практически невозможно. Поэтому хотелось бы построить такие системы,
которые при наличии мотивации, учитывая предшествующий опыт, на основе
текущих сведений об окружающей среде и собственном состоянии могли бы решать
задачу достижения цели при взаимодействии всех компонентов.
422 Методы современной ТАУ. Часть IV
Концепция и определение понятия интеллектуальной системы. Появление
микропроцессоров высокой производительности и с большой емкостью памяти,
возможность организации мультитранспьютерных сетей для реализации параллельных
вычислений, с одной стороны, и необходимость обработки значительных массивов
информации, применения базы знаний для формирования целенаправленной
деятельности - с другой, привели к созданию интеллектуальных систем. Под
интеллектуальной системой будем понимать объединенную информационным процессом
совокупность технических средств и программного обеспечения, работающую во
взаимосвязи с человеком (коллективом людей) или автономно, способную на основе
сведений и знаний при наличии мотивации синтезировать цель, вырабатывать решение о
действии и находить рациональные способы достижения цели.
Рассмотрим структуру интеллектуальной системы (рис. 6.2). На основании
сведений об окружающей среде и собственном состоянии системы при наличии памяти и
мотивации синтезируется цель, которая наряду с другими данными воспринимается
динамической экспертной системой. Последняя с использованием базы знаний
производит экспертную оценку, на основании которой принимается решение о действии
и прогнозируются результаты действия (акцептор действия). В соответствии с
принятым решением вырабатывается управление, т.е. синтезируется тот или иной алгоритм
или закон управления, который реализуется с помощью различных исполнительных
органов и воздействует непосредственно на объект управления. Результаты этого
воздействия сравниваются с прогнозируемыми (механизм обратной связи, акцептор
действия). При несоответствии результатов на базе новой экспертной оценки
принимается решение, вырабатывается и реализуется управление, устраняющее это
несоответствие. При соответствии результатов подкрепляется предшествующее
управление. Если соответствие недостижимо, то уточняется цель. Данная структура
инвариантна к объекту управления и носит универсальный характер.
Проблемы теории и практики. Решение задачи синтеза цели требует разработки
методов и средств получения информации об окружающей среде и эффективной
идентификации собственного состояния как объекта управления, так и самой
системы. При формировании цели возникает проблема достаточности базы знаний, а
следовательно, и памяти, возможности их реализации как на содержательном, так и на
конструктивном уровне. Динамическая экспертная система выполняет расчет,
оптимизацию, прогноз и моделирование результатов, поэтому должна обладать высоким
быстродействием. Потенциал, накопленный при разработке алгоритмов принятия
решений и выработки управления, может успешно использоваться в
интеллектуальных системах, однако потребуется распараллеливание алгоритмов и их
мультитранспьютерная реализация и, конечно, не исключается синтез новых, эффективных
параллельных алгоритмов.
Источником возмущающего воздействия для интеллектуальной системы является
окружающая среда, а функционирование системы должно обеспечить в конечном
итоге компенсацию этого воздействия при достижении цели. И.П. Павлов писал:
«Вся жизнь - от простейших до сложнейших организмов, включая, конечно, и
человека, есть длинный ряд все усложняющихся до высочайшей степени
уравновешиваний внешней среды. Придет время, пусть отдаленное, когда математический анализ,
опираясь на естественнонаучный, осветит величественными формулами уравнений
все эти уравновешивания, включая в них и самого себя» (И.П. Павлов. Поли. собр.
соч. Т.З. С. 124-125).
Поэтому одной из фундаментальных проблем теории интеллектуальных систем
является разработка адекватных живой природе математических моделей.
OB
Синтез цели
Окружающая
среда
Память
Мотивация
Собственное
состояние
База знаний
Цель
Динамическая
экспертная
система
Прогноз
результатов
действия
Экспертная
оценка
Принятие
решения
Выработка
управления
Е
о
о
Я
2
«г
Копия команды
А Результат действия
Объект
управления
Исполнение
управления
Рис. 6.2. Структурная схема интеллектуальной системы
й
LO
424 Методы современной ТАУ. Часть V
Представляет значительный интерес построение модели афферентного синтеза
цели. Действительно, такие компоненты, как мотивация, обстановочная и пусковая
афферентация, память, находясь во взаимодействии, приводят к появлению цели и
принятию решения к действию.
Каков механизм этого взаимодействия, каков критический потенциал этой
совокупности компонентов, при котором синтезируется цель? Этот вопрос требует
глубокого анализа, положенного в основу разработки моделей. Принятие решения к
действию сопровождается формированием программы действия с одновременным
прогнозом результата (акцептор действия). Это - важнейший феномен, связанный с
функционированием интеллектуальной системы, - когда в конце процесса получается
результат, который уже в начале этого процесса имелся в ее представлении. Каким
образом построить модели программы действия и акцептора действия, чтобы
использовать их в интеллектуальных системах? Вероятно, необходимо разрабатывать теорию
целенаправленных систем, способную описать эти механизмы на уровне понятий.
Цель в интеллектуальных системах выступает и как цель, и как
системообразующий фактор, обеспечивающий взаимодействие отдельных элементов системы
таким образом, чтобы достигалась цель. При этом результаты действия
сравниваются с прогнозируемыми, т.е. имеет место обратная связь. В традиционном смысле,
мы здесь соприкасаемся с проблемами структурного синтеза систем, обеспечения
устойчивого функционирования за счет выбора рационального управления. В
значительной мере для построения моделей интеллектуальных систем могут быть
использованы элементы теории управления, теории информационных процессов. При
наличии трех составляющих: цели, окружающей среды и внутреннего состояния -
для построения моделей интеллектуальных систем может быть развита теория ро-
бастного управления.
6.1. МОДЕЛИ И АЛГОРИТМЫ ИНТЕЛЛЕКТУАЛЬНЫХ СИСТЕМ
6.1.1. Дифференциально-модельная концепция в систематике базы
макрофизических знаний для интеллектуальных систем
Дифференциальные модели повсеместно и привычно используются в
современной науке и технике для представления динамических систем. Естественен интерес к
построению и применению этих моделей при разработке и создании перспективных
интеллектуальных систем автоматизированного проектирования, управления и
обучения. Здесь целью является изложение тех далеко идущих фундаментальных
результатов в области систематики базы макрофизических знаний, которые
проистекают из исследования проблемы алгоритмизации построения дифференциальных
моделей [7].
С точки зрения гносеологии, физика является наукой о познании физических
сущностей материальных объектов и систем. В макрофизике познание ведется без
привлечения сведений о строении вещества, начиная с молекулярно-кинетического
уровня, а физическая сущность отождествляется с дифференциальной моделью, т.е.
познание физической сущности заключается в построении соответствующей
дифференциальной модели. Подобная интерпретация приводит к выделению
дифференциальной макрофизики - совокупности макрофизических наук, достигших, по
классификации А, Ампера, наивысшего дифференциального уровня развития.
Дифференциальную макрофизику образуют: механика (линейная и угловая),
гидравлика (для жидкостей и газов), электрика (включая электромеханику) и
термодинамика. К сожалению, упомянутая и подчеркнутая дифференциально-модельная
концепция в познании является единственным, что их объединяет. Все остальное -
Глава 6. Интеллектуальные системы 425
традиции, терминология, переменные, законы природы, принципы и т.д. -
специфично для каждой из наук и не способствует восприятию дифференциальной
макрофизики как единого систематизированного и интегрированного целого. В каждой науке
занимаются одним и тем же - познают физическую сущность, т.е. строят
дифференциальные модели, но своим узкоспециализированным путем. Это многоязычие
физиков не смущает. Они считают свою задачу выполненной. А многочисленная армия не
физиков, занимающаяся построением и применением дифференциальных моделей,
вынужденно мирится с возникающими непростыми междисциплинарными
трудностями. Особенно остро это проявляется при обучении студентов, прежде всего, в
областях автоматизированного проектирования, управления и технической кибернетики.
Таким образом, интересующая нас проблема алгоритмизации построения
дифференциальных моделей до некоторой степени оказывается на «ничейной»
междисциплинарной полосе. И один из путей ее решения - внимательный анализ базы макрофи-
зических знаний с позиций дифференциально-модельной концепции, единственно
общей для всех макрофизических наук. Прежде всего, обратимся к единой процедуре
построения дифференциальных моделей, включающей следующие этапы:
1) выбор учитываемых в модели физических эффектов и соответствующего им
перечня используемых законов природы;
2) определение физического смысла причинных и следственных переменных;
3) причинно-следственная интерпретация в используемых законах природы;
4) применение принципа композиции;
5) построение искомой дифференциальной модели с учетом
причинно-следственной интерпретации законов природы.
Специфика каждой макрофизической науки проявляется во всех четырех этапах.
Однако внимательный анализ используемых в различных науках принципов
композиции (четвертый этап) приводит к однозначному выводу о целесообразности
признания принципа Лагранжа - Рэлея в качестве универсального для
дифференциальной макрофизики в целом. Это закономерное следствие из уже доказанной его
применимости для линейной и угловой механик (Ж. Лагранж), для электрики и
электромеханики (Дж. Максвелл).
Исследование принятой структуры записи принципа композиции Лагранжа -
Рэлея приводит к получению важной информации по второму и третьему этапам
означенной выше процедуры.
Во-первых, принцип подразумевает необходимость использования четырех типов
переменных: причинных - координаты р и скорости р, следственных - координаты
q и скорости q .
Во-вторых, принцип представляет собой уравнение баланса внешней (входной)
к
А* и внутренних рюг />BHj2, ... , рЩк причинных скоростей ръх = £рВНщ , где к
определяется количеством учитываемых в дифференциальной модели физических
эффектов. Задание физического смысла ръх, т.е. вида идеального ее источника, дает
возможность определить физический смысл остальных переменных с учетом, что
произведение причинной и следственной скоростей всегда есть мощность N = pq.
В-третьих, принцип устанавливает существование и форму записи трех видов
причинно-следственно интерпретированных законов природы:
• кинетического р = A q = —— ,
dq
• потенциального p = Cq =
bq
426 Методы современной ТАУ. Часть V
• диссипативного р = Bq = —г^,
где Л, В, С - соответствующего названия коэффициенты для линейного варианта
законов. Названия законов связаны с определяемыми ими кинетической Эк и
потенциальной Эп энергиями, а также с диссипативной функцией Рэлея Фр. Законы
представлены в нормальной форме записи, которая для кинетического вида отлична от
естественной, общепринятой формы. Для диссипативных законов возможны
нелинейные варианты, при формировании которых следует учитывать положительность
диссипативной функции Фр > О.
Опуская дальнейшую детализацию, все представленное позволяет наполнить
процедуру-алгоритм построения дифференциальных моделей систематизированным
междисциплинарным звучанием с позиций дифференциальной макрофизики в целом.
Каждая макрофизическая наука лишь упорядоченно конкретизирует этот алгоритм
физическим смыслом переменных и законов природы. Причем появляется
возможность очень компактного представления подобной конкретизации с помощью
соответствующих частных диаграмм (рис. 6.3).
Рис. 6.3. Частная диаграмма
Крайне важна и интересна, с науковедческой точки зрения, появляющаяся
возможность нахождения способа соотнесения частных диаграмм между собой. Ведь
это, с одной стороны, просто иная и более конкретная постановка задачи
преодоления разобщенности макрофизических наук, а с другой - продолжение на более
высоком уровне систематики базы макрофизических знаний. Ясно, что при подобном
общем рассмотрении соотносить можно только размерности переменных и
коэффициентов. Переход к частным диаграммам размерностей очевиден. Единственной
проблемой является выбор подходящей для междисциплинарных исследований системы
размерностей. По этому признаку система СИ не подходит, поскольку отражает
многоязычие разобщенных физических наук. Полностью свободной от этого недостатка
является лишь кинематическая система размерностей, позволяющая соотносить
переменные и коэффициенты любой физической природы, на что обратил внимание
P.O. Ди Бартини.
[A.+1.J
!
-LT
■-I
LT° ' LT°
[Pn,nJ ► [P.J ► [А,.„+.]
I
LT"1
IPn-lJ
Рис. 6.4. Кинематическая система размерностей
Глава 6. Интеллектуальные системы
427
В случае применения кинематической системы частные диаграммы порождают
обобщенную диаграмму размерностей. Каждая из частных диаграмм связана с
четырьмя соседними порождающими правилами (рис. 6.4).
В результате обобщенная диаграмма размерностей приобретает вид, показанный
на рис. 6.5.
i
i
i
UT4! LrX ^L7T*|
Г
I-'
L2T .I^T4!
X
L2T—► LIT51
[
X
LT .MTA\ L°T llT4
X ! X
LT°—►L'T5!
1
LT> L^T3!
X
L'T1—► UT1
J
LV—► L5T5
1 1
Ll° L4T3 ! LV .L'T3
Л
LT1—► LV4
L'T ^
X
"X
L°T"1—► Lfr4
X
LT2!0—>*L7rT5|
1
L-V .L6!-3
X
L-iX-L-^LfT^1
L4^1 LT2
Л
jjwpi l2t-2
X
L3r2_^L2r3
X
L2r2—*-L*T3
Ы ^ L*T2
X
LT2—►LV3
L°r' ^ L5T2
X
L5T2 ^ LV1
X
LV2 ^ Ы1
X ,
L'T2—►LT2
L'T2 ^ L'T1
X
L2^
X
LT2 L*T'
Л
LT3—► L*T2
X
L'T'—►LV
I I
LT3 L"I°
A
LfT4—►LT'T1
L5T3 LV
A
L4T3 ^ LT^
X
L^—^ LT1
L2T3 ^ L3!^
X
L'T4—► L'T1
L'T4 ^ LT2T
X
iJT5_^ L-2^
LfT4 . L'T
X
L5T* L^
X
LT4 , LT
L5r5—► LV
X
UT4 ^L2!
L*T5—► L1°
X
LT—► LV
.L.
Рис. 6.5. Обобщенная диаграмма размерностей
Не обсуждая в деталях все интереснейшие особенности обобщенной диаграммы,
отметим лишь главное:
о Благодаря формальным порождающим правилам она не только включает в
себя все известные частные диаграммы, но и обладает ярко выраженными
прогнозирующими свойствами, предлагая «информацию для размышления» о
множестве ранее не рассматриваемых частных диаграмм, т.е. о совершенно
новой точке зрения на дифференциальную макрофизику в целом с
открывающимися новыми возможностями систематики и развития базы макрофизиче-
ских знаний для перспективных интеллектуальных систем.
428 Методы современной ТАУ. Часть V
• Существенно новые возможности возникают в области алгоритмизации
построения дифференциальных моделей.
• Стимулируется развитие новой прогнозирующей ветви теории размерностей.
6.1.2. Динамические экспертные системы в управлении
Новое поколение систем - интеллектуальные системы (ИС) - вызвало к жизни
другие принципы организации компонентов систем: появились иные понятия,
термины, блоки, не встречавшиеся ранее в разработках и, следовательно, в научной
литературе.
Интеллектуальные системы способны синтезировать цель, принимать решение к
действию, обеспечивать действие для достижения цели, прогнозировать значения
параметров результата действия и сопоставлять их с реальными, образуя обратную
связь, корректировать цель или управление [9, 10]. На рис. 6.6 приведена структурная
схема ИС, где выделены два крупных блока системы: синтез цели и ее реализация.
В первом блоке на основе активного оценивания информации, полученной от
системы датчиков, при наличии мотивации и знаний синтезируется цель и принимается
решение к действию. Активное оценивание информации осуществляется под
воздействием пусковых сигналов. Изменчивость окружающей среды и собственного
состояния системы может приводить к потребности в чем-либо (мотивации), а при
наличии знаний может быть синтезирована цель. Под целью понимается идеальное,
мысленное предвосхищение результата деятельности. Продолжая активно оценивать
информацию об окружающей среде и собственном состоянии системы, в том числе
объекта управления, при сопоставлении вариантов достижения цели можно принять
решение к действию.
Далее, во втором блоке динамическая экспертная система (ДЭС) на основании
текущих сведений об окружающей среде-и собственном состоянии ИС при наличии
цели и знаний осуществляет экспертную оценку, принимает решение об управлении,
прогнозирует результаты действия и вырабатывает управление. Представленное в
кодированном виде управление преобразуется в физический сигнал и поступает на
исполнительные устройства. Объект управления, получая сигнал от исполнительных
устройств, осуществляет то или иное действие, результаты которого, представленные
в виде параметров, по цепи обратной связи 2 поступают в ДЭС, где сравниваются с
прогнозированными. Одновременно параметры результата действия,
интерпретированные в соответствии со свойствами цели и поступающие в блок 1, могут
использоваться для эмоциональной оценки достигнутого результата: например, цель
достигнута, но результат не нравится. Если цель достигается по всем параметрам, то
управление подкрепляется. В противном случае происходит коррекция управления. Когда
же цель недостижима, то корректируется цель. Следует заметить, что при внезапных
изменениях состояния окружающей среды, или объекта управления, или системы в
целом возможен синтез новой цели и организация ее достижения. Структура ИС
наряду с новыми содержит традиционные элементы и связи, центральное место в ней
занимает динамическая экспертная система.
Динамические экспертные системы и база знаний. Формально ИС описывается
следующими шестью выражениями:
TxXxS—^МхГ;
TxMxS—^->СхГ;
CxTxXxS "3 )/?хГ;
TxX={AxT}XxT + {BxT}UxT;
Глава 6. Интеллектуальные системы
429
TxY = [DxT}XxT\
TxRxY—^CxT,
где Т - множество моментов времени; X, 5, М, С, R и Y - множества
состояний системы, окружающей среды, мотивации, цели, прогнозируемого и реального
результата; А, В и D - матрицы параметров; щ - а4 - интеллектуальные операторы
преобразования, использующие знания.
§ I Внешнее воздействие (окружающая среда)
X
о
§
о
yci
Е
-►
(
Система датчиков
]
Мотива- ■
ЦИЯ «
1
t
<*-
j
Знания
г
i
Система датчиков
Внут
Цель
{ 1
ijQ
СО
ос
8
1
реннее g
воздействие vo
собственное состояние
о
S
S
)S
<D
S
X
(D
э
Си
дэс
L J
j:
м
DC
объекта управления и
системы)
В
зульта
с цели
8-5
05 S
гаци
шен
5 о
II
S
о
ос
братна
О
льтата
>%
8
^етры
а.
а
ос
S
X
П,
с
11
vo р"
о о
с
05
м
5 2
гзул
paej
ьй DQ
§ в
с >%
о
S
I
V
Блок I - синтез цели
^Ч
Блок II - реализация цели
Рис. 6.6. Структурная схема ИС
В этом описании сочетаются представления объектов системы в виде множества
значейий, либо множества высказываний, либо каких-то других форм.
Динамические свойства ИС могут быть описаны в пространстве состояний.
Интеллектуальные операторы, реализующие восприятие, представление, формирование понятия,
суждения и умозаключения в процессе познания, являются формальным средством
обработки сведений и знаний, а также принятия решения. Все эти аспекты должны
быть положены в основу построения ДЭС, функционирующих в реальном времени
и реальном мире.
Динамическая экспертная система есть некоторое комплексное образование,
способное оценивать состояние системы и среды, сопоставлять параметры желаемого и
430 Методы современной ТАУ. Часть V
реального результатов действия, принимать решение и вырабатывать управление,
способствующее достижению цели. Для этого ДЭС должна обладать запасом знаний
и располагать методами решения задач. Знания, передаваемые экспертной системе,
можно разделить на три категории [10].
Концептуальное (на уровне понятий) знание - это знание, воплощенное в словах
человеческой речи или, конкретнее, - в научно-технических терминах и, естественно,
в стоящих за этими терминами классах и свойствах объектов окружающей среды.
Сюда же входят связи, отношения и зависимости между понятиями и их свойствами,
причем связи абстрактные, также выраженные словами и терминами.
Концептуальное знание - это сфера, главным образом, фундаментальных наук, если учитывать,
что понятие есть высший продукт высшего продукта материи - мозга.
Фактуальное, предметное знание - это совокупность сведений о качественных и
количественных характеристиках конкретных объектов. Именно с этой категорией
знания связываются термины «информация» и «данные», хотя такое употребление
этих терминов несколько принижает их значение. Любое знание несет информацию и
может быть представлено в виде данных; фактуальное знание - это то, с чем всегда
имели дело вычислительные машины и с чем они больше всего имеют дело до сих
пор. Современную форму накопления данных принято называть базами данных.
Конечно, для организации баз данных, для поиска в них нужной информации надо
опираться на концептуальное знание.
Алгоритмическое, процедурное знание - это то, что принято называть словами
«умение», «технология» и др. В вычислительном деле алгоритмическое знание
реализуется в виде алгоритмов, программ и подпрограмм, но не всяких, а таких, которые
могут передаваться из рук в руки и использоваться без участия авторов. Такая
реализация алгоритмического знания называется программным продуктом. Наиболее
распространенные формы программного продукта - пакеты прикладных программ,
программные системы и другие, ориентированные на конкретную область применения
ДЭС. Организация и использование пакетов прикладных программ базируется на
концептуальном знании.
Ясно, что концептуальное знание является более высокой, определяющей
категорией знания, хотя, с точки зрения практики, другие категории могут казаться более
важными. Именно поэтому, вероятно, концептуальное знание редко воплощается в
форме, доступной для обработки на вычислительных машинах. А если воплощается,
то чаще всего неполно и односторонне. Носителем концептуального знания остается
в большинстве случаев человек. Это тормозит автоматизацию многих процессов.
Представления концептуального знания, а точнее, системы, реализующие все три
категории знания, но выделяющие концептуальное знание на первый план и
работающие на основе его интенсивного использования, называются базами знаний.
Создание и широкое применение баз знаний в ИС - одна из актуальнейших задач.
Концептуальную часть базы знаний будем называть моделью предметной
области, алгоритмическую часть - программной системой, а фактуальную часть - базой
данных. #
Следующая функция ДЭС - решение задач. Задача может быть решена машиной
только в том случае, если она формально поставлена - если для нее написана
формальная спецификация. Последняя должна опираться на некоторую базу знаний.
Модель предметной области описывает общую обстановку, в которой возникла задача, а
спецификация - содержание задачи. В совокупности они позволяют установить,
какие абстрактные связи и зависимости, в каких сочетаниях и в какой
последовательности должны быть использованы для решения задачи. Прикладные программы
представляют собой конкретные средства, стоящие за этими зависимостями, а также
Глава 6. Интеллектуальные системы 431
содержат алгоритмы для решения возникающих при этом уравнений. Наконец, база
данных поставляет все исходные данные или часть их для выполнения этих
алгоритмов, недостающие данные должны содержаться в спецификации.
Этим трем частям баз знаний соответствуют три этапа решения задачи:
1) построение абстрактной программы решения (включая возникновение задачи,
ее постановку и спецификацию);
2) перевод задачи на подходящий машинный язык;
3) трансляция и выполнение программы.
Построение абстрактной программы связано с представлением и обработкой
концептуального знания в ИС и по определению является достоянием искусственного
интеллекта.
Искусственный интеллект связывают с обработкой текстов, устных сообщений на
естественном языке, с анализом и обработкой информации (распознавание всех
видов изображений, доказательство теорем, логический вывод и т.д.).
Функциями ДЭС являются также оценка результатов решения задачи,
формирование параметров будущего результата действия, принятие решения об управлении,
выработка управления и сличение параметров желаемого и реального результатов.
Здесь предусматривается моделирование процессов для оценки возможных
последствий и корректности решения задачи.
Отметим, что в реальных случаях существует проблема описания исследуемых
объектов. Такое описание неправомерно считать частью спецификации задачи,
поскольку относительно одного объекта ставится, как правило, много задач, что,
естественно, требуется учитывать при формировании базы знаний. Кроме того, может
оказаться, что возникшую задачу не решить до конца автоматически, например, из-за
неполноты спецификации или описания объекта. Поэтому в ИС целесообразен на
определенных стадиях интерактивный режим работы с ДЭС. Надо помнить, что
модель предметной области описывает общую обстановку (знание), а спецификация -
содержание задачи.
Очень важными проблемами являются создание единой программной среды и
синтез алгоритмов непосредственно по постановке задачи.
В зависимости от цели, которая стоит перед ИС, база знаний, алгоритмы решения
задачи, принятия решения, выработки управления могут, естественно, иметь
различное представление, зависящее, в свою очередь, от характера решения задач.
Соответственно этому можно видеть три типа ДЭС.
Структура ДЭС первого типа приведена на рис. 6.7.
Здесь предполагается, что концептуальные и фактуальные знания точно отражают
процессы и сведения, относящиеся к некоторой предметной области. Тогда решение
задачи, возникающей в этой области, будет получено на основе строгих
математических методов, в соответствии с постановкой и спецификацией. Результаты
исследования решения и прогноз используются для получения экспертной оценки и
принятия решения о необходимости управления. Затем на основе подходящего алгоритма
управления, имеющегося в базе знаний, формируется управляющее воздействие.
Эффективность и непротиворечивость этого воздействия, прежде чем оно поступит
на объект управления, оценивается с помощью имитационной математической
модели. Оценка должна выполняться быстрее реальных процессов в ИС.
Однако ДЭС, реализующие принятие решения, представляют собой сложные
программные комплексы, предназначенные для автоматического принятия решения или
для помощи лицам, принимающим решения, и при оперативном управлении
сложными системами и процессами, как правило, работают в условиях жестких
временных ограничений.
432
Методы современной ТАУ. Часть V
I Знания в области интеллектуальных систем
Собственное состояние системы —•
Окружающая среда
Цель
База знаний
1. Концептуальное
знание;
2. Фактуальное знание
(база данных);
3. Алгоритмическое
знание
1.
2.
3.
4.
5.
Решение задачи
Модель объекта,
системы;
Постановка задачи;
Содержание задачи
(спецификация);
Решение;
Анализ
±
Экспертная оценка
Принятие решения
Выработка управления
Объект управления
Имитационная
модель системы
Рис. 6.7. Структура ДЭС первого типа
В отличие от ДЭС первого типа, предназначенных для поиска оптимального
решения и базирующихся на строгих математических методах и моделях оптимизации,
ДЭС второго типа в основном ориентированы на решение трудно формализуемых
задач в отсутствие полной и достоверной информации. Здесь используются
экспертные модели, построенные на основе знаний экспертов - специалистов в данной
проблемной области, и эвристические методы поиска решения. Одной из основных
проблем при проектировании ДЭС второго типа является выбор формального аппарата
для описания процессов принятия решений и построение на его основе модели
принятия решений, адекватной проблемной области (семантически корректной). В
качестве такого аппарата обычно используют продукционные системы. Однако основные
исследования ведутся в контексте алгоритмической (детерминированной) трактовки
продукционной системы с присущей ей последовательной схемой поиска решения.
Получающиеся в результате модели зачастую неадекватны реальным
проблемным областям, характеризующимся не детерминизмом процесса поиска решения
(рис. 6.8). Выход из такого положения - параллелизм при поисье.
Глава 6. Интеллектуальные системы
433
Знания в области интеллектуальных
систем
Собственное состояние
системы
♦
Окружающая среда
♦
Цель
♦
База знаний
1. Концептуальное знание;
2. Фактуальное знание
(база данных);
3. Алгоритмическое знание;
4. Сетевая и логическая
продукция
у
Г }
г
Решение задачи
1. Экспертные модели
на основе знаний
специалистов-экспертов;
2. Эвристические методы
поиска решения;
3. Композиция математических
и эвристических методов
(расчетно-логические
методы);
4. «Гибкая логика»;
5. Продукционные системы;
6. Параллелизм в обработке
продукций
Экспертная оценка
}
Принятие решения
\
Выработка управления
Имитационная
модель системы
i
Объект управления
Рис. 6.8. Структура ДЭС второго типа
Реально следует ориентироваться на объединение ДЭС первого и второго типа в
расчетно-логическую ДЭС третьего типа, где база знаний сочетает описание в виде
строгих математических формул с информацией экспертов, а также соответственно -
29 Зак. 416
434
Методы современной ТАУ. Часть V
математические методы поиска решения с нестрогими эвристическими методами,
причем вес того или другого компонента определяется возможностью адекватного
описания предметной области и способом отыскания решения (рис. 6.9).
Знания в области интеллектуальных
систем
Собственное состояние
системы
±
Окружающая среда
±
Цель
±
1.
2.
3.
4.
База знаний
Знания специалистов-экспертов;
Фактуальное знание
(база данных);
Алгоритмическое знание;
Сетевая и логическая
продукция
1.
2.
3.
4.
5.
6.
Решение задачи
Экспертные модели
на основе знаний
специалистов-экспертов;
Эвристические методы
поиска решения;
«Гибкая логика»;
Продукционные системы;
Параллелизм в обработке
продукций;
Прогноз
Экспертная оценка
Принятие решения
Выработка управления
Имитационная
модель системы
Объект управления
Рис. 6.9. Расчетно-логическая ДЭС третьего типа
Глава 6. Интеллектуальные системы 435
При разработке ДЭС возникают следующие проблемы:
• определение состава базы знаний и ее формирование;
• разработка новых и использование известных теорий и методов для описания
информационных процессов в ИС;
• разработка способов представления и организации использования знаний;
• разработка алгоритмов и программного обеспечения с распараллеливанием и
использованием «гибкой логики»;
• отыскание подходящих вычислительных сред для реализации параллельных
алгоритмов при формировании ДЭС.
Наряду с изложенным важно отметить, что ДЭС должны обладать свойством
адаптации к динамической проблемной области, способностью ввода новых
элементов и связей в описание ситуаций, изменения правил и стратегии функционирования
объектов в процессе принятия решения и выработки управления, работы с неполной,
нечеткой и противоречивой информацией и т.д.
Требования к ДЭС. Динамические экспертные системы функционируют в
составе ИС, имеющих обратные связи, и поэтому важно обеспечить устойчивую работу
таких ИС. С традиционных позиций можно считать, что длительность реакции ДЭС
на входные воздействия, т.е. время, затрачиваемое на обработку входной
информации и выработку управляющего воздействия, есть чистое запаздывание. На основе
частотного анализа можно оценить изменение фазовых свойств системы и тем самым
определить запас устойчивости. При необходимости можно произвести коррекцию
системы посредством фильтров.
Однако с точки зрения классической теории управления ИС являются
многообъектными многосвязными системами, анализ устойчивости которых обычными
способами весьма затруднителен.
6.1.3. Комбинирование робастного и адаптивного управления
с помощью интеллектуальных систем
В настоящее время теория робастного управления (Н°° -теория управления, Я°°-
управление) является одной из интенсивно развивающихся ветвей теории управления
[6]. Сравнительно молодая (первые работы появились в начале 80-х гг.), она возникла
из насущных практических проблем синтеза многомерных линейных систем
управления, функционирующих в условиях различного рода возмущений и изменения
параметров. Бурно развиваются такие новые направления, как нелинейная и
нестационарная Н°° - теории управления, задачи которой рассматриваются как задачи теории
игр. Растет число публикаций - зарубежных и отечественных. На Европейской
конференции по управлению (ЕСС'93) в Гронингене значительная часть докладов так
или иначе касалась теории робастного управления.
Несколько лет назад наиболее популярной ветвью теории управления была теория
адаптивного управления. Она развивалась как для детерминированной, так и для
вероятностной постановки задачи. Существует громадная библиография в этой
области. Однако в последние годы ее объем стал заметно уменьшаться. Причина этого не
только в сложности развитой теории, но и в сложности реализации предлагаемых
алгоритмов. Алгоритмы адаптивного управления (прямого и непрямого) оказались
негрубыми к неучтенным внешним и параметрическим возмущениям, причем
алгоритмы беспоисковой самонастройки ляпуновского типа - особенно
чувствительными. В восьмидесятые годы предприняты попытки строить грубые адаптивные
регуляторы; однако эти алгоритмы были сложны в реализации и, по сути, являлись
«подправленными» алгоритмами ляпуновского типа.
29*
436 Методы современной ТАУ. Часть V
Можно подойти к проблеме проектирования управления реальным сложным
объектом, функционирующим в условиях неопределенности, другим образом: не
пытаться использовать один тип управления - адаптивный или робастный. Очевидно,
следует выбирать тот тип, который соответствует состоянию окружающей среды и
системы, определенному по имеющейся в распоряжении системы информации. Если
же в процессе функционирования системы можно организовать получение
информации, целесообразно использовать ее в процессе управления.
Но реализация такого комбинированного управления до недавнего времени
наталкивалась на непреодолимые трудности при определении алгоритма выбора типа
управления. Достигнутые в разработке проблем искусственного интеллекта успехи
делают возможным синтез такого алгоритма. Действительно, поставим задачу:
спроектировать систему, использующую адаптивное и робастное управление и
осуществляющую выбор типа управления на основе методов искусственного интеллекта. Для
этого рассмотрим особенности обоих типов и, учитывая их специфические качества,
определим, как можно построить систему комбинированного управления.
Особенности робастного управления. Одним из основных понятий в теории ро-
бастного управления является понятие неопределенности. Неопределенность объекта
отражает неточность модели объекта, причем как параметрическую, так и
структурную. Рассмотрим подробнее формы задания неопределенности в робастной теории
управления с помощью простой системы - с одним входом и одним выходом
(рис. 6.10). Сигналы имеют следующую интерпретацию: г - задающий входной
сигнал; и -входной сигнал (вход) объекта; d - внешнее возмущение; у - выходной
сигнал (выход) объекта, измеряемый.
и
г
—н®—Н с |—»(8)—ч р И-»»
Рис. 6.10. Система с одним входом и одним выходом
В Н °° -теории управления неопределенность удобно задавать в частотной
области. Предположим, что передаточная функция нормального объекта Р, и рассмотрим
возмущенный объект, передаточная функция которого, например, Р = (1 + AW)P.
Здесь W - фиксированная передаточная функция (весовая функция), а А -
произвольная устойчивая передаточная функция, удовлетворяющая неравенству ЦдЦ^ < 1.
Такое возмущение Д будем называть допустимым. Ниже приведем некоторые варианты
моделей неопределенности:
(1 + ДИОР; P + AW; /V(1 + AWP); /V(1 + AW).
Соответствующие предположения должны быть сделаны для величин Д и W в
каждом случае. Неопределенность входных сигналов d отражает различную природу
внешних возмущений, действующих на объект и регулятор. Неопределенный объект,
таким образом, может рассматриваться как некое множество объектов. Выберем
некую характеристику систем с обратной связью, например устойчивость. Регулятор С
является робастным относительно этой характеристики, если ею обладает любой из
множества объектов, задаваемых неопределенностью.
Глава 6. Интеллектуальные системы
437
Таким образом, понятие робастности подразумевает наличие регулятора,
множества объектов и фиксацию определенной характеристики системы.
В этой работе мы не будем затрагивать всего множества задач, решаемых в
рамках /Г°-теории управления. Коснемся лишь задачи минимальной чувствительности:
построения такого регулятора С, который стабилизирует замкнутую систему и
минимизирует влияние внешних возмущений на выход у, иначе говоря, минимизирует
Я~-норму матрицы передаточных функций от внешних возмущений к выходу у.
Одной из особенностей решения этой, да и всего множества задач робастного
управления является тот факт, что мы заранее в процессе проектирования регулятора
закладываем ограничения на входные воздействия и неопределенность объекта в виде
неравенств ||ДЦ^ < 1, ||d|2 < с{.
В процессе функционирования робастноп системы информация о
неопределенностях в системе не используется для управления.
Естественно, это приводит к тому, что робастные системы консервативны и
качество переходных процессов порой не удовлетворяет разработчиков этих систем.
Особенности адаптивных систем управления. Подобно робастной адаптивная
система управления строится для объектов, информация о которых или о
воздействиях на которые недоступна в начале функционирования системы. Чаще всего свойство
адаптации достигается посредством формирования в явном или неявном виде
математической модели объекта или входного воздействия. Этим отличается как
поисковое адаптивное управление, в основе которого поиск и удержание экстремума
показателя качества управления, так и беспоисковое, в основе которого компенсация
отклонения фактических изменений управляемых координат от желаемых изменений,
соответствующих требуемому уровню показателя качества. Далее по уточненной
модели происходит подстройка адаптивного регулятора.
Таким образом, основная особенность адаптивных систем управления -
возможность получения информации в процессе функционирования и использования этой
информации для управления.
Более того, в адаптивных системах всегда используется априорная информация о
неопределенности в системе. Это принципиальное отличие адаптивного подхода от
робастного.
Рассмотрим простейшую адаптивную систему управления, обеспечивающую
отслеживания входного сигнала в присутствии помехи на входе объекта (рис. 6.11).
Алгоритмы построения такой системы управления широко известны и описаны,
например, в работе [6].
^®-+
с
и J
р
Рис. 6.11. Адаптивная система управления
438
Методы современной ТАУ. Часть V
Формальное отличие от схемы на рис. 6.10 - блок адаптации А, который на
основании выходного сигнала объекта и сигнала, характеризующего заданное качество,
вырабатывает сигнал подстройки коэффициентов адаптивного регулятора. Имея в
виду недостатки каждого из регуляторов, целесообразно попытаться использовать их
достоинства, предложив комбинированную схему управления объектом. Адаптивная
система при помощи блока адаптации вырабатывает некоторую информацию о
состоянии внешней среды. В частности, в рассматриваемом случае можно получить
информацию о внешнем возмущении d. Алгоритм управления Са соответствует
текущему состоянию внешней среды согласно заложенному в блоке адаптации
критерию. Но адаптивная система требует, чтобы входной сигнал г имел достаточно
широкий частотный диапазон, и накладывает жесткие ограничения на значение и
частотный спектр сигнала внешнего возмущения d. Поэтому адаптивные системы могут
работать только в узких диапазонах входного сигнала г и внешнего возмущения d.
Вне этих диапазонов адаптивная система имеет низкое качество управления и может
даже потерять устойчивость.
Рассмотренные выше свойства робастного и адаптивного управления приводят к
заключению, что в процессе функционирования системы в одних случаях выгодно
использовать робастное управление, в других - адаптивное, т.е. иметь возможность
комбинировать управление в зависимости от состояния внешней среды.
Комбинированное управление. Основной вопрос при проектировании систем
комбинированного управления заключается в том, каким образом, на основании
каких знаний (информации) осуществлять выбор того или иного типа управления.
Наиболее широкие возможности для этого представляют методы искусственного
интеллекта [6]. Их преимущество по сравнению с простыми переключающими
алгоритмами состоит в использовании широкого спектра данных и знаний для формирования
алгоритма выбора типа управления.
Если формально объединить схемы, приведенные на рис. 6.10, 6.11, то получим
схему комбинированного управления (рис. 6.12). Как видно из рисунка, сигнал
управления и должен переключаться с робастного регулятора на адаптивный и
наоборот - по мере изменения окружающей среды в процессе функционирования
системы. Используя методы теории интеллектуальных систем, можно обеспечить
переход с одного типа управления на другой в зависимости от условий работы системы.
1-*§у~
• Са
' А
А
и {
1 Ь. /
Рис. 6.12. Схема комбинированного управления
Рассмотрим сначала, какую информацию можно использовать для работы
интеллектуального блока системы. Как известно, системы с одним входом и одним выхо-
Глава 6. Интеллектуальные системы
439
дом хорошо описываются в частотной области. Поэтому естественно использовать
частотные характеристики для организации процесса принятия решений при выборе
типа управления. Как указывалось выше, частотная характеристика системы с роба-
стным управлением соответствует наихудшему сочетанию параметров в области
неопределенности. Поэтому робастное управление можно принять за одну из границ
выбираемого управления. Другая граница определяется возможностями исследуемой
системы (быстродействие привода, энерговооруженность и т.д.). Между этими двумя
границами находится область, где разумно использовать адаптивное управление.
Так как адаптивный алгоритм чувствителен к начальному этапу
функционирования системы, то на этом этапе целесообразно использовать робастное управление,
которое достаточно нечувствительно к скорости изменения внешней помехи. Но его
недостатком является большая длительность переходных процессов и большие до
пустимые значения выходной координаты при действии помехи.
По истечении некоторого времени робастное управление имеет смысл
переключить на адаптивное. Адаптивное управление позволяет более точно отследить
входной сигнал при наличии информации о помехе. Адаптивное управление
требовательно к богатству спектра входного сигнала, и, например, при медленно меняющихся
сигналах возможны срывы процессов адаптации или сильное их замедление. В такой
ситуации необходимо снова переходить на робастное управление, гарантирующее
устойчивость работы системы.
Из вышеизложенного следует, что для функционирования системы необходимо
иметь информацию о частотном спектре полезного сигнала помехи и об отношении
сигнал/шум. Кроме того, требуется предварительная информация о частотном
спектре, на котором работает адаптивная система, и о частных характеристиках объекта
управления на границах области неопределенности. Из этой информации можно
сформировать базу данных, в которую информация, индивидуальная для каждого
шщссз объектов, заносится заранее. Информация о частотном спектре полезного
сигнала, помех и об отношении сигнал/шум поступает в базу данных по мере
функционирования системы и постоянно обновляется.
БПОИ
1
БД
►
<4
БЗ
►
•4
БПР
-4g^
Рис. 6.13. Структурная схема системы с интеллектуальным блоком (ИБ)
440 Методы современной ТАУ. Часть V
Содержимое базы данных может быть использовано в базе знаний, которая
формируется в виде правил. В зависимости от конкретных свойств системы можно
установить переключения двух типов управления. Требуемые правила формируются в
одной из логических систем, подходящей для рассматриваемого случая.
Имея базы данных и знаний, можно разработать механизм принятия решений,
который будет обеспечивать правильный выбор типа управления в зависимости от
условий функционирования системы.
Интеллектуальная часть системы работает дискретно, на заданных интервалах
времени. На рис. 6.13 приведена структурная схема системы с интеллектуальным
блоком ИБ, обеспечивающим выбор типа управления. На вход блока поступают
сигнал г и измеряемый, выходной сигнал объекта у. В блоке предварительной обработки
информации БПОИ по временным характеристикам сигналов r(r), y(t) определяются
частотные характеристики входного сигнала riw) и внешнего возмущения d(w),
взаимное расположение спектров r(w) и d(w) и характерные значения отношения
сигнал/шум r(w)/d(w). Вся эта информация поступает в базу данных БД. Блок принятия
решения БПР, используя сформированную базу знаний БЗ и данные БД,
вырабатывает решение, в соответствии с которым включается один из типов управления. На
следующем интервале процесс повторяется с использованием новых данных.
6.2. ПАРАЛЛЕЛЬНЫЕ АЛГОРИТМЫ ОБРАБОТКИ ИНФОРМАЦИИ
И УПРАВЛЕНИЯ
6.2.1. Синтез параллельных алгоритмов обработки информации
в интеллектуальных динамических системах
при внезапных возмущениях
В настоящее время бурное развитие средств вычислительной техники,
внедрение современных компьютерных технологий открывает широкие возможности
для достижения качественного скачка в уровне эффективности информационно-
управляющих систем в аэрокосмической технике, на производстве, транспорте, в
экономике, экологии, медицине и других областях на основе использования
принципов искусственного интеллекта, методов самоорганизации и адаптации к
изменяющимся условиям и целям функционирования, характеристикам системы
и внешней среды, неконтролируемой обстановке.
Реализация этих принципов в динамических задачах требует создания
адекватного теоретического аппарата, достаточно развитых и апробированных методов анализа
и синтеза интеллектуальных динамических систем. Создаваемый аппарат должен
включать эффективные методы обнаружения и распознавания внезапных изменений,
структурно-параметрической идентификации и адаптивной фильтрации, которые
пригодны для использования в реальном времени и обеспечивают извлечение из
доступных наблюдений всей апостериорной информации, необходимой для принятия
достоверных решений и выработки эффективных управляющих воздействий в
условиях неопределенности.
При этом необходимо получить алгоритмы параллельного типа, поскольку
сложность решаемых с их помощью задач приводит к необходимости выполнения
больших объемов вычислений в реальном времени. Следует выделить два направления
теоретических исследований, связанных с построением параллельных алгоритмов
обработки информации. Первое направление заключается в разработке специальных
методов синтеза, ориентированных на получение параллельных структур. Второе -
состоит в разработке специальных алгоритмов выполнения операций с матрицами,
содержащих цепочки не связанных друг с другом расчетов. В рамках первого на-
Глава 6. Интеллектуальные системы 441
правления предлагается принцип минимальной сложности алгоритмов
распознавания-оценивания, позволяющий корректно синтезировать алгоритмы,
ориентированные на реализацию в реальном времени на транспьютерах, для широкого класса
интеллектуальных динамических систем с внезапными возмущающими факторами.
Постановка задачи. Решение проблемы создания высокоэффективных методов
обработки информации в интеллектуальных динамических системах
непосредственно связано с разработкой математических моделей, которые отражают специфику
сложных условий функционирования системы, таких, как неопределенность и
изменение характеристик внешней среды, появление аномальных ситуаций, отказов
источников информации, каналов связи, устройств, реализующих формирование
управляющих команд другого оборудования, а также влияние возмущений и помех.
Проведенные исследования показали, что формализация рассматриваемого класса
задач может быть естественным образом осуществлена с использованием
математического языка гибридных стохастических моделей, представляющих собой
композицию случайных процессов и цепей.
Такая модель может быть представлена в виде следующих стохастических
уравнений
х(* + 1) = Ф*[|и(*), y(*), m(* + l), Y(* + l). u(*)]-x(*) +
+rjm(ft), y(*), m(* + l), Y(* + D. u(ft)].w(ft); (6.1)
z(k + \) = nk+l[m(k + \), Y(W)] + Gw[m(W), y(*+1)]-v(*),
где x(k) - расширенный вектор состояния обобщенного объекта управления (ООУ)
и модели окружающей среды (ОКС); и(к) - вектор управляющих врздействий;
z(£ + l) - вектор доступных наблюдений; w(&) и \(к) - некоррелированные между
собой чисто случайные последовательности векторов (дискретные белые шумы);
Ф*[-], Г^[-], Hfc+l[-] и G^+1[-] - матричные функции соответствующих
размерностей.
Специфика рассматриваемой задачи заключается в том, что вследствие
возникновения аномальных явлений и ситуаций в ОКС, а также отказов в ООУ такие
характеристики, как ООУ и ОКС, подвержены разнородным случайным внезапным
изменениям (ВИ), для описания которых используются совместно марковские и
полумарковские цепи. В уравнениях (6.1) т(к) - совокупность моментов последних
изменений характеристик ООУ и ОКС, описываемых полумарковскими моделями, причем
т(к + 1) = {т{(к), щ(к\ ..., mN(k))9 (6.2)
где т((к) - момент последнего, предшествующего текущему моменту к, ВИ /-го
типа в ООУ (или ОКС):
Л + 1, при возникновении
ВИ /-го типа в момент Л + 1,
тДЛ), при возникновении
такого ВИ.
В начальный момент к = О формально принимается, что
m,(0) = 0, i = lf2f .... N = IN.
Внезапные изменения характеристик ООУ и ОКС отражаются в изменении
совокупностей переменных переключения (ПП) у (к) > которые, в свою очередь, состоят
из двух наборов величин
Y(*) = (y'(*), Y'U)}. (6.4)
28 Зак. 416
W; (*+!) =
(6.3)
442 Методы современной ТАУ. Часть V
Переменные переключения, входящие в состав этих совокупностей, принимают
значения на конечных множествах. При этом у'(к) изменяется в соответствии с
полумарковскими моделями
Pr{m(k + l) = mk+l Y(k + 1)= yk+l/m(k) = mk, у(к) = ук} =
(6.5)
a i"(k) согласно марковским моделям
Pr{ Y"(*+l) = Y*+i/ Y"(*) = У1 m(k+l) = mk+{, y'(k+D= Y'*+i) = (g g)
= Рш( Уы/ Y*. Щ+i* Yi+i).
где Рг[А/В] обозначает условную вероятность события А при фиксированном
условии В , Ya: — конкретное значение совокупности у(к) в момент (к).
Для совокупности ПП у (к) задано также начальное распределение в момент
к=0
Pr{ Y(O) = Yo} = Po(Yo)- (6-7)
Условные априорные плотности вероятности начального состояния ООУ и ОКС,
а также шумов w{k) и v(k) при фиксированных значениях ПП аппроксимируется
гауссовскими распределениями в заданном виде
/,(0)U/Y(0) = Yol = Щх/ШО), Ро(Уо)1
fw(k)Hm(k) = mk> Y(*) = Yjk. m(t + l) = m k+l9 у(к +1) = Y*+i} =
= N{w/wk(mki yk, mk+u yM\ Qk(mk, yki mk+u yk+i)}9 (6.8)
/v(*+i) (VM* +1) = wit+i. Y(* +1) = Y*+i) =
= ^{v/v*+i(mt+1, Yife+i). 4iK+i' Yjk+i)}.
где N{x/x, P] обозначает гауссовскую плотность распределения в точке х с
математическим ожиданием (МО) Зс и ковариацией Р .
Задача обработки информации в интеллектуальной самоорганизующейся системе
ставится как задача определения условных апостериорных оценок вектора состояния
и переменных переключения:
x(k) = M[x(k)/zk, m(k) = mki Y(*) = Y*h
y(*) = argmax [Pr{m(*) = m,, y(k)=yk/zk}l (6*9)
где Zk ={z(l), z(2), ..., z(&)} - измерительная информация, поступившая к
моменту к, М{-} - математической ожидание (МО).
Принцип минимальной сложности байесовских алгоритмов обработки
информации в переключающейся среде. Решение поставленной задачи представляет
собой теоретическую проблему, сложность которой обусловлена случайными
переключениями матриц в уравнениях ООУ и ОКС (6.1) под влиянием разнородных
внезапных возмущающих факторов. Для нреодоления этой проблемы предлагается
подход, базирующийся на развитии идей и концепций [5] применительно к задачам
динамического искусственного интеллекта, в основе которого лежат специальные
процедуры «ветвления-свертки» гипотез о внезапных изменениях в системе,
реализуемой в реальном времени в процессе обработки информации.
В принципе, существует множество вариантов «ветвления-свертки» гипотез на
различных этапах процесса оценивания (перед прогнозированием состояния ООУ и
ОКС, перед обработкой текущих изменений и т.д.). Каждый из этих вариантов разли-
Глава 6. Интеллектуальные системы 443
чается алгоритмом трансформации множества гипотез при их размножении и при
объединении нескольких гипотез в одну. Для каждой из тестируемых гипотез
вычисляются условные (парциальные) оценки расширенного вектора состояния ООУ и
ОКС. Поэтому вычислительная сложность синтезируемого алгоритма обработки
информации возрастает пропорционально количеству гипотез о ВИ. Следовательно, для
получения наиболее простого в вычислительном отношении алгоритма следует
стремиться уменьшать число рассматриваемых гипотез на каждом этапе процесса
оценивания. С другой стороны, такое уменьшение, как правило, влечет за собой снижение
точности вычисляемых оценок и достоверности решений, принимаемых при
распознавании случайных событий. Существует принципиальный вопрос об ограничениях
снизу на число рассматриваемых гипотез, накладываемых исходной постановкой
задачи (математической моделью изменения ПП). Эти ограничения сформулированы
ниже в виде совокупности условий, составляющих существо установленного
принципа минимальной вычислительной сложности алгоритмов распознавания-
оценивания.
Условие 6.1. После завершения обработки информации на каждом текущем шаге
должна быть сформирована совокупность статистик,.достаточных для
прогнозирования состояния ООУ и ОКС, а также значений переменных переключения в будущие
моменты времени с учетом математической модели обобщенного объекта и
используемой аппроксимации парциальных апостериорных плотностей вероятности вектора
состояния.
Условие 6.2. Перед парциальным прогнозированием вектора состояния с к-ro на
(к +1) -й шаг совокупность фиксируемых в гипотезах значений ПП должна
обеспечивать независимость значения вектора х(к +1) в момент (к +1) от ВИ в случае,
когда его значение х(к) на предыдущем к-м шаге фиксировано.
Условие 6.3. Вычисление парциальных апостериорных оценок вектора состояния
должно производиться для совокупности гипотез, в которых значения ПП
зафиксированы таким образом, чтобы при заданном значении вектора состояния х(к +1)
вектор измерений z(k +1) не зависел от ВИ.
Условие 6.4. Перед обработкой текущих измерений набор парциальных
прогнозируемых оценок вектора состояния должен обеспечивать возможность вычисления
функций правдоподобия любой из тестируемых в этот момент гипотез.
Выполнение всех перечисленных условий гарантирует корректность процесса
обработки информации и, напротив, нарушение любого из них делает такой процесс
некорректным.
Адаптивная обработка информации в интеллектуальных динамических
системах. Применим сформулированный принцип минимальной сложности при
построении алгоритма распознавания-оценивания для рассматриваемой задачи (6.1) -
(6.9).
Достаточные статистики при гауссовской аппроксимации парциальных
апостериорных плотностей вероятности расширенного вектора состояния х(к) включают в
себя апостериорные вероятности
дк(щ, yk) = Pr{Uk(mk, yk)/zk) (6.10)
гипотез Uk(mk, ук) = [т(к) = тк, у(к)=ук) и совокупность первых двух моментов
апостериорных парциальных плотностей вероятности
х*К> 4k) = M{x(k)/zkt Uk(mk, ук),
Рк(тк, ук) = М[[х(к)-хк(тк, yk)]'[-]T/z*, Uk(mk, ук)}.
28*
444 Методы современной ТАУ. Часть V
Здесь и далее для краткости обозначено [х]-[-]т = [х]-[х]т.
Совокупность статистик (6.10) и (6.11) должна быть вычислена на каждом к-ы
шаге процесса обработки информации. Пусть на шаге к-ы они определены. Рассмотрим
поэтапно процедуру их вычисления на (к +1) -м шаге.
Этап 1. «Ветвление» гипотез с учетом полумарковских и марковских ВИ в ООУ
и ОКС подразумевает вычисление вероятностей
Яш/к(Щ> Y*. Щ+\> yk+\) = Pr[Uk(mk9 Yjk). Uk+l(mk+l, Y*+i)} =
= Як(тк> Vk)-Pk+\(mk+\> Ук+х/щ* Ук)'Ры(Уы/Ук> Щ+ь Y*+i).
Этап 2. Парциальное прогнозирование при фиксированных «разветвленных»
гипотезах Uk(mki ук), UM(mM, ук+1) заключается в определении условных
парциальных МО и ковариаций
x*+y*0"*. Y*> Щ+и yk+0 = M{x(k + \)/zk, Uk(mk, у*), Uw(mk+{, Y*+i)},
Рш/к(Щ> Ук) =
= М{[х(к + 1)-хк+{/к(тк, у*, тм, ум)]х[-]Т/zk, Uk(mk, у*), UM(mk+u ук+{)}
с помощью стандартных соотношений прогнозирования фильтра Калмана,
составленных по уравнению состояния (6.1) при фиксированных значениях т(к), у (к),
m(* + l), Y(*+l)«
Этап 3. «Свертка» гипотез по переменным тк и ук означает вычисление
вероятностей
Як+\/к(Щ+1> Уш) = Мим(тм, yM)/zk} =
= X Яы/к(Щ, Y*, mM, Yt+i). (6Л2)
ft(^ik. Y*M+lf yM) = Pr[Uk(mk9 yk)/zky Uk+l(mk+u Уш))= ,,л~,
(p. 13)
= Яы/к(Щ> Y*. ^+1, yk+i)/qk+i/k(mM, yM).
Этап 4. «Свертка» парциальных прогнозируемых оценок и ковариаций по тк и
ук осуществляется по формулам:
x*+i/*("**+i> Y*+i) = Af{jc(ft + l)/z*f Uk+l(mMf Ук+1)} =
= X Як (mk . Y* М+1. Yik+i) * *к+\/к (Щ. Yt > ^+i. Yifc+i)' ^+1Д (w*. Yifc /щ+\, Yjk+i) =
= S ft(m*« YtM+i. Yit+i)[^+i/it(^. Y*M+t. Y*+i) +
«».Y*
+[**+!/* <m*+i • Yik+i)" Xjk+i/jk (mA ,Ук,тк+ь ук+1)] • [-f ]•
Этап 5. Парциальное оценивание расширенного вектора состояния в момент
(£ +1) с учетом текущего измерения z(k +1) производится в соответствии со
стандартным алгоритмом фильтра Калмана для каждой из фиксированных гипотез
Uk+l(mk+{, Y*+i)- В результате вычисляются искомые апостериорные парциальные
оценки и ковариаций вида (6.11), но уже для текущего момента (к +1).
Этап 6. Процесс обработки информации завершается тестированием гипотез
Uk+\(mk+i* Y*+i)> которое означает вычисление апостериорных вероятностей
Як+\/к (тк+\» Ук+\) виДа (6.10) по формуле Байеса.
Глава 6. Интеллектуальные системы 445
При этом в качестве «априорных» выступают вероятности (6.13), а функциями
правдоподобия гипотез являются гауссовские плотности
n*+i(ro*+i, Ук+\) = м№к+\(ты> Y*+i)/0, DM(mk+{i yk+l)},
где &zk+\(mk+{i Yjk+i) - невязка измерений, a Dk+{(mk+i, y*+i) - ее ковариация,
вычисленные для каждой пары значений тк+1 и y*+i на предыдущем этапе в процессе
реализации процедуры калмановской фильтрации.
Наконец, согласно (6.9) вычисляется искомая оценка значений совокупности ПП в
виде
y(£ + l) = argmax Мщ+ъУы)]-
Синтезированный алгоритм адаптивной обработки информации на каждом из
рассмотренных этапов имеет ярко выраженную параллельную структуру, т.к.
определение всех парциальных оценок и вероятностей гипотез должно быть произведено
для всех комбинаций значений ПП и моментов последних изменений т. Поэтому он
идеально приспособлен для реализации на параллельных вычислительных
структурах. В представленном виде количество вычислений растет в этом алгоритме
линейно во времени. Однако, используя отбрасывание маловероятных гипотез на границе
скользящего окна [5], можно ограничить объем вычислений заранее заданной
конечной величиной.
Проведенные исследования показали, что предлагаемый принцип минимальной
вычислительной сложности алгоритмов обработки информации в интеллектуальных
динамических системах, функционирующих в условиях влияния внезапных
возмущающих факторов, позволяет эффективно решить широкий спектр важных
практических задач, в которых такие факторы имеют различную физическую природу и
могут действовать как поочередно, так и одновременно.
6.2.2. Динамическая нейронная сеть для распознавания
речевых сигналов
Трудности применения нейронных сетей к распознаванию речи обусловлены
спецификой динамической природы речевого сигнала и выражаются в том, что в
процессе классификации сигнал должен быть нелинейно деформирован по шкале
времени с целью нормализации длительностей различных его участков [11].
Ввиду этого возможности применения стационарных нейронных сетей
(многослойных персептронов) ограничены либо распознаванием фонем, соответствующих
коротким участкам сигнала, на которых не требуется нормализация длительности;
либо распознаванием слов в небольших словарях, где оказывается возможным
вообще не учитывать порядок следования участков сигнала во времени, а для
распознавания достаточно просто набора признаков, выделенных на всей длине слова.
Попытки достичь нормализации длительности сигнала при использовании
стационарных нейронных сетей требуют нелинейной деформации пространства входов
сети, которая может быть осуществлена за счет введения в нейроподобные элементы
дополнительных входов, организующих временные задержки информации во всех
слоях. Такое усложнение сети ведет к значительному увеличению времени обучения.
Применение традиционных рекуррентных сетей аналогично введению в сеть
механизма задержек за счет обратных связей. Кроме того, представления эталонов
оказываются скрытыми в весах сети и не допускают наглядной интерпретации, что
является важным на этапе отладки системы распознавания и выбора параметров первичной
обработки сигнала.
446
Методы современной ТАУ. Часть V
Предлагаемая динамическая нейронная сеть позволяет решить указанные
проблемы и формирует хорошо интерпретируемые многоуровневые иерархические
представления эталонов речевых событий, а также отличается быстротой обучения.
В основе нейронной сети, называемой динамическим ассоциативным
запоминающим устройством (ДАЗУ), лежит идея отображения входных
последовательностей в траектории-трубки многомерного сигнального пространства с сохранением
топологии пространства перцептивных признаков. Этот принцип, предложенный
А.Н. Радченко для интерпретации работы реального нейрона и развитый
впоследствии в [11], позволяет построить нейронную сеть, способную к распознаванию
речевых образов на основе последовательностей векторов параметров первичного
описания сигнала.
ДАЗУ позволяет сформировать эталон речевого образа в форме графа,
порожденного объединением трубок, соответствующих отображениям конкретных
акустических реализаций из обучающего множества в сигнальное пространство. Форма
эталона в ДАЗУ соответствует принятому в распознавании речи представлению
эталонов речевых событий в виде сетей состояний и переходов. В такой сети состояния
описывают относительно короткие участки сигнала, а переходы между ними
выражают отношения следования во времени. Каждой реализации речевого образа в сети
соответствует (является наиболее близкой) определенная последовательность
состояний и связывающих их переходов-траекторий. Распознавание осуществляется
как выбор эталона, содержащего траекторию, наиболее близкую к той, в которую
отображается входной сигнал.
Формирование эталона в ДАЗУ. Структура ДАЗУ. ДАЗУ представляет собой
набор нейроподобных элементов (НЭ) с общим входом и общим выходом, каждый из
которых моделирует точку сигнального пространства (СП) или гиперсферу с центром
в этой точке. Выход ДАЗУ замыкается на общий вход всех НЭ через механизм
управления, называемый механизмом внимания (MB), что реализует обратную связь
(рис. 6.14).
НЭ
У\
Л2
W
i 1
1
иЛ]-1р
PC
t
MB
У2
Л2
W
a i
Ями-1
1
i
a,-i
<
1
Л2
W
- ah
У\
Рис. 6.14. Структура ДАЗУ
НЭ содержит адресную часть - вектор весов wA = (м^1,...,^), интерпретируемый
как координаты точки в СП. Общим входом всех НЭ является регистр сдвига (PC),
моделирующий задержку при прохождении сигнала по дендритному дереву
реального нейрона. На каждом такте работы сети содержимое PC сдвигается и в
освободившиеся позиции добавляется очередной входной вектор параметров (ВП) первичного
описания сигнала. Преобразование, осуществляемое PC, разбивает последователь-
Глава 6. Интеллектуальные системы '447
ность ВП на последовательность л-грамм, сдвинутых одна относительно другой на
один ВП.
Обозначив последовательность ВП как А = (я,), можно записать преобразование,
осуществляемое PC как отображение F, Лл = F(A):
F(A) = FU*M,a,,...) =
= (..., (Я/.„,Ямн-1>-..,Ям) М» (Я/-п+1>Я/-п+Ь--.,Я/) /•••) =
= (..., а\и а\..) = (ал,) = Ал, (6.14)
где Лл - последовательность точек сигнального пространства, яЛ,.- координаты
точек.
Кроме того, НЭ содержит арифмётическо-логическое устройство (АЛУ) и
пороговый элемент. АЛУ вычисляет расстояние от текущей n-граммы а\ находящейся в
окне PC, до адреса НЭ мЛ по метрике D:
D = Dn[a\w*i] = max{ df. dj= d(a«t - w**dj = 1-я },
где ahi и w^ -./-ые компоненты соответствующих n-грамм, представляющие
отдельные ВП. Конкретный вид метрики d определяется особенностью используемых
параметров описания речевого сигнала. Вычисленное значение D сравнивается с
радиусом расфокусировки г и в случае D<r НЭ срабатывает - на выход ДАЗУ поступает
сигнал У; * 0. Уравнение D[x*, wA,] = г описывает в СП некоторую область -
псевдогиперсферу с центром в точке с координатами и>л, и с радиусом, определяемым г.
Топология сигнального пространства ДАЗУ. Рассмотрим* что представляет
собой образ ЛЛ некоторой последовательности ВП сигнала А, формируемый в PC на
основании (6.14). , £
Представляя значения ВП сигнала как приращения ВП в предшествующий
момент: at+\ = а,+Да/+1, координаты последовательных n-грамм в СП можно записав
как:
аЛ, = (ah д,+Да,+1,..., а/+Аа/+1+...+Аа/+л.1),
aA/+i - (а&ка»и a,+Aa,+i+Aa/+2,..., а/+Аа/+1+...+Аа/+п.1+Аа/+п).
Отсюда видно, что представляет собой вектор приращения координаты точки в
СП на t\ такте:
ДаЛ,+1 = (Да,+1, Аа/+2 &at+n ). '$>•
Ввиду того, что параметры речевого сигнала изменяются относительно плавно,
т.е, при Аг—Ю Аа,—Ю, а шаг извлечения параметров Аг на практике выбирается
малым, соседние точки аА, и aA,+i в СП оказываются близкими и при некотором г их
r-окрестности перекрываются. Это означает, что при рассмотрении n-грамм аЛ, в
качестве центров гиперсфер а(г)л, с радиусом г образ входной последовательности в СП
представляет собой непрерывную область, образованную внутренностью
перекрывающихся гиперсфер. На более стационарных участках образа Аа, будет меньше, чем
на переходных, где сигнал изменяется быстрее, и центры гиперсфер будут
располагаться более плотно (рис. 6.15).
Отображение F сохраняет отношение связанности между точками образа в СП -
последние и первые (пЛ) координат центров гиперсфер аЛ, и ал/+1 совпадают, что
видно из рис, 6.14. Такие точки будем называть автоассоциативно связанными.
Ввиду наличия связанности последовательность АА будем называть траекторией. Область
в СП, образованную внутренностью гиперсфер, описанных вокруг точек траектории
при г>0, будем называть трубкой траекторий Л(Г)Л.
Отображение F в трубку СП автоматически нормализует длительность сигнала -
сигналы с различными длительностями своих участков будут отображаться в одну
трубку (рис, 6.15). Кроме того, в траекториях трубки оказывается представлено
множество близких сигналов.
448 Методы современной ТАУ. Часть V
Рис. 6.15. Трубка СП
Отображение F в СП сохраняет топологию пространства перцептивных признаков
- более близкие участки сигнала отображаются в более близкие траектории А. При
использовании радиуса гиперсфер, равного г, участки сигнала с расстоянием D<r
могут быть отображены в один участок гипертрубки, а более далекие участки
сигнала отобразятся в разные гипертрубки. Это свойство отображения F позволяет
представить все множество реализаций речевого образа {А,} в виде графа, образованного
объединением гипертрубок в СП, где каждая гипертрубка соответствует множеству
близких реализаций образа, а близкие участки реализаций представляются одним
участком трубки (рис. 6.16).
Рис. 6.16. Граф, образованный объединением гипертрубок в СП
Обучение ДАЗУ. В процессе обучения ДАЗУ происходит покрытие
гиперсферами областей СП, в которые отображаются реализации речевых образов из
обучающего множества.
При обучении ДАЗУ запоминает образ ЛЛ эталонной последовательности в СП.
Это реализуется запоминанием n-грамм aAt в соответствующих НЭ: w* = дЛ,. Для
обеспечения компактности представления эталона близкие точки образа а\ лежащие
на расстоянии D<r, отображаются в одну гиперсферу и запоминаются в одном НЭ:
wAw+1 = а\ если Bi: Dn[wA ,яА ]<r, i = 1 ..m, (6.15)
где т - число НЭ, уже задействованных к моменту г. Таким образом, НЭ выделяются
динамически. При отсутствии сигнала yt в уже обученных НЭ текущая и-грамма в
окне PC является новой для сети и запоминается - в одном из свободных НЭ
значение адреса принимает значение и-граммы: wAw+l = а\ При наличии сигнала в
некотором НЭ у{ Ф О текущая n-грамма считается уже представленной в этом НЭ
(отличается не более, чем на г от его адреса) и запоминания не происходит.
Точки образа (аЛ,), формируемого PC на основании (6.14), ассоциативно связаны
между собой. Для точек - центров гиперсфер запомненного в ДАЗУ на основе (6.15)
образа W(r)A = {w(r)A,} такая связь нарушается ввиду «проглатывания» некоторых
и-грамм, оказавшихся близкими к уже запомненным. Однако для двух
последовательных точек W(r)A оказывается справедливо следующее свойство: расстояние между
последней и-1-граммой первой точки и первой и-1-граммой последующей точки по
Глава 6. Интеллектуальные системы 449
метрике Dn.\ не превышает г. Ввиду этого под ассоциативно связанными в
дальнейшем будем понимать именно такие точки. Можно говорить, что на множестве НЭ
W(r)A определена функция автоассоциации:
Fac(w(rA) = { W(r/V D^i^i^W^dXw^j^W^j)) < Г. (6.16)
Если на вход обучающегося ДАЗУ подается пара последовательностей А\ и Л2,
представляющих различные реализации одного образа, то их близкие участки
отобразятся в один участок трубки-траектории. Запомненный в ДАЗУ образ Wir)A =
= W(r)AiUW(r)A2 будет представлять в СП две трубки, сходящиеся в одну на близких
участках (рис. 6.16). Отображая все обучающее множество последовательностей {А,}
в СП и запоминая его в ДАЗУ с динамическим выделением НЭ при некотором г, мы
получаем образ-эталон в виде графа SG(r)A, представленного объединением трубок,
соответствующих отдельным реализациям А,:
SG(r)A = uF(r)(A,) = uW(r)A
а
Вершинам такого графа соответствуют отдельные гиперсферы w(r)A/-,
представленные в соответствующих НЭ, а направленным переходам между вершинами -
ассоциативные связи между ними. При этом каждой реализации речевого образа А, из
обучающей выборки {А,} соответствует последовательность связанных вершин
такого графа - траектория. При достаточной полноте обучающего множества в
траекториях на графе SGir)A оказываются представлены все возможные реализации речевого
образа, причем такое представление компактно, т.к. их близкие участки
отображаются в одни участки траекторий.
Увеличение радиуса расфокусировки при обучении позволяет отобразить более
далекие участки обучающих реализаций в одну трубку и, таким образом, уменьшить
число НЭ, требуемых для представления эталона 5G(r)A. Поскольку значение г также
определяет автоассоциативно связанные НЭ (6.16), то увеличение г после обучения
означает не только расширение трубок эталона, но и увеличение числа
ассоциативных связей между гиперсферами, т.е. увеличение числа переходов из одних трубок в
другие. Отметим также, что увеличение длины n-грамм п ведет к увеличению
размерности СП и повышению разделимости различных реализаций, т.е. увеличивает
число вершин графа 5G(r)A и уменьшает число связей между ними. Все эти свойства
позволяют варьировать форму и детальность представления эталона.
Оптимальным расположением центров гипертрубок являются точки СП,
соответствующие максимумам плотности распределения точек образов обучающих
реализаций аА„ что, при достаточной полноте обучающего множества, дает гарантию
наиболее полного покрытия трубками тех областей СП, в которые может отобразиться
произвольная реализация.
Такой топологии расположения трубок позволяет достичь применение к
обучению ДАЗУ алгоритма самоорганизующихся карт Кохонена [11]. В этом случае на
каждом такте обучения t при наличии сигнала на выходе ДАЗУ выбирается НЭ,
оказавшийся ближайшим к входной и-грамме по метрике D, и его адрес модифицируется
по правилу:
wA(r+l) = wA(0 + e(«AoWAW)
для /, такого, что
Dn[a\ wA ] = min Dn[aAt, wA ], где £ « 1, j\
что означает сдвиг (притяжение) координат центра гиперсферы иЛ в СП по
направлению входной и-грамы aAt на расстояние, пропорциональное величине (дА„ иЛ(г)).
Алгоритм повторяется некоторое число итераций, постепенно сдвигая оси
трубок к максимумам распределения точек дА, в своей г-окрестности - центрам
притяжения. Применение алгоритма Кохонена модификации весов НЭ к ДАЗУ,
работающему в режиме распознавания, делает его адаптивным - способным подстраи-
450 Методы современной ТАУ. Часть V
вать координаты осей трубок к изменяющимся условиям функционирования
(например, к изменению произнесения диктора).
Распознавание в динамическом ассоциативном запоминающем устройстве
под управлением механизма внимания. Распознавание в ДАЗУ осуществляется как
вложение траектории АЛ, соответствующей входной последовательности ВП А, в
траекторию эталона - область одной из трубок графа SGir)A. Попаданию образа АЛ,
формируемого PC ДАЗУ, в трубку Wir)Ai соответствует наличие непрерывной
последовательности откликов сответствующих НЭ (yt), т.е., сигнала на выходе ДАЗУ, что и
является критерием распознавания. j
При распознавании каждое ДАЗУ хранит свой эталон, а все ДАЗУ работают как
единое сигнальное пространство. Ввиду сложной топологии СП с возможностью
перекрытия близких гиперсфер и отображением входного сигнала в несколько
гипертрубок, как в разных ДАЗУ, так и в одном, для управления ДАЗУ в режиме
распознавания используется механизм, реализующий функции, подобные локализации и
генерализации внимания, и потому называемый механизмом внимания (MB). Работа
MB основана на использовании ранее распознанной информации для предсказания
следующей и подстройки радиусов расфокусировки НЭ под наилучшее
распознавание ожидаемой.
Управление вниманием в отдельном ДАЗУ в общем случае может быть описано
функцией /Г зависимости радиусов расфокусировок R(t) = {n(t)} всех НЭ WA от
предыдущего состояния {Y(t),R(t)}, которое характеризуется наличием/отсутствием
распознающего НЭ vt/y yp(t) Ф 0 и парой параметров Яас(0 и ЯОбщ(0> задающих радиусы
расфокусировки на множествах НЭ W\c = F^iw^p) и И^общ = WA/W\C:
,(f+i) = /?-(y(o,mo=K('+1)'ecflH3wV^(0^0llvvA'cwV
I #общ(' + 1)» в противном случае,
где
r (г + 1) = |^ас(О + А^(АО,еслиЗи;Лр:з;/,(О^0ии;Лрс^Лас,
[ Яобщ(' +1), в противном случае,
D , 1Ч [яобщ(0-ДЯ(ДО.еетиЭ*др:у p(t)*0nwApc:w\c,
[Яобщ(0 + А#(Дг), в противном случае,
Г(0) = 0, W^ = WA, W\c = 0, Я(0) = Добщ(0) = #о - нулевые начальные условия.
Здесь AR - положительная функция времени, монотонно убывающая до нуля,
Af = f-f0, a fo есть последний такт времени, на котором происходила генерализация
внимания (отсутствие распознавания) или его переключение скачком на другую
траекторию, т.е. vt/yzfw^Jac.
Таким образом, при наличии распознавания в одном из НЭ MB увеличивает
радиусы расфокусировки на ассоциативно связанных с ним НЭ и уменьшает на
остальных, увеличивая вероятность вложения в ожидаемые продолжения траектории в слуг
чае искажения входной информации, что соответствует локализации внимания. При
отсутствии распознавания во всех НЭ MB увеличивает все радиусы, помогая
вложиться в ближайший участок траектории, что соответствует генерализации внимания.
Понимая под установившимся процессом непрерывное распознавание,
сопровождаемое вложением образа входной последовательности в одну траекторию ДАЗУ, а
под его устойчивостью - нечувствительность к отклонениям входной
последовательности ВП от эталонных, качественно описать динамику процесса распознавания в
ДАЗУ под управлением MB можно следующим образом.
Глава 6. Интеллектуальные системы 451
При незначительном искажении начального участка входной последовательности
переходный процесс отсутствует и локализация внимания плавно переходит по
ассоциативно связанным НЭ в ДАЗУ, что соответствует установившемуся
распознаванию, запас устойчивости которого зависит от /?aC(A0 и /?общ(Д0 и потому
возрастает с течением времени до некоторого предельного значения, определяемого
функцией A#(Af). В случае сильного искажения входной последовательности начало
распознавания может сопровождаться длительным переходным процессом, в ходе
которого внимание то переключается скачком от одних участков траекторий к другим, то
вообще генерализуется - ДАЗУ ищет участок адекватной трубки-траектории,
соответствующей достаточно длительному слабо искаженному участку на входе,
захватив который, можно локализовать внимание на правильной траектории в течение
длительного интервала времени Аг, после чего возросший tfac(Af) и
уменьшившийся #общ(Д0 позволят устойчиво распознавать далее при значительном искажении
следующих участков последовательности на входе.
Эксперименты. Модель ДАЗУ была реализована и экспериментально
исследована на ПЭВМ. Речевой сигнал, получаемый с выхода 16-разрядного АЦП с частотой
квантования 8 кГц, преобразовывался в последовательность векторов из шести
параметров, вычисляемых на временном окне длинной 32 мс, сканирующем сигнал с
шагом 12 мс.
В качестве метода первичной обработки сигнала для получения
вектора.параметров был использован метод перцептивного линейного предсказания, учитывающий
основные особенности психоакустического восприятия и порождения речи,
описывающий анализируемый сегмент сигнала пятью параметрами. В качестве шестого
параметра использовался регрессионный коэффициент энергии, позволяющий
подчеркнуть особенности динамики спектра.
В ходе предварительных экспериментов была определена оптимальная длина PC
(n-грамм) ДАЗУ, равная трем векторам параметров (п = 3).
Эксперименты по исследованию параметров ДАЗУ проводились на обучающем
множестве, состоящем из акустических реализаций 30 первых ударных слогов из
частотного словаря [11], произносимых изолированно одним диктором. 7 и 10
различных реализаций на каждый слог было использовано при обучении и
распознавании соответственно.
В ходе экспериментов было выяснено, что, при оптимальном радиусе
расфокусировки, составившем около 5 % от максимально возможного расстояния в СП, среднее
число НЭ на слог равно 22.
6.2.3. Нейросетевые технологии интеллектуальных систем
Программные технологии, применяемые в системах управления, могут быть
подразделены на традиционные, использующие обычные вычислительные
процедуры, и подпадающие под определение «систем искусственного интеллекта», или
интеллектуальных систем [2]. Типичными примерами последних являются экспертные
системы и нейронные сети. В общем случае вопрос выбора типа программного
обеспечения (ПО) зависит непосредственно от требований предметной области и от
стоимости разработки ПО опосредованно. Так, например, система G-2,
использующая весь спектр современных информационных технологий, позволяет решать
достаточно широкий круг задач управления, но ее применение становится
проблематичным при решении задач прикладного характера не столько по причине высокой
стоимости системы, сколько из-за высоких требований к вычислительным ресурсам.
Широко известная система СИАМ, использующая традиционные вычислительные
452
Методы современной ТАУ. Часть V
процедуры, к сожалению, позволяет решать только задачи моделирования в
достаточно узких пределах, что ограничивает возможности её применение в основном
рамками учебного процесса. Более мощная система моделирования MATLAB+
SIMULINK дает возможность работать с широким классом объектов и
методологических подходов, в том числе с использованием элементов искусственного
интеллекта (NEURAL NETWORK TOOLBOX, FUZZY LOGIC TOOLBOX). Трудности,
связанные с сопряжением системы с реальными объектами и отдельными
программными модулями, ограничивают область применения системы задачами моделирования.
Помимо вышеназванных, создан ряд компактных программно-аппаратных
комплексов, использующих как традиционные методы, так и элементы искусственного
интеллекта для решения прикладных задач управления.
Однако существует ряд задач управления, в которых информация об объекте
может быть неполной, неточной или нечеткой, когда применение традиционных
вычислительных алгоритмов становится проблематичным и не дает желаемого результата.
Кроме того, связь между входными и выходными параметрами может быть
настолько сложна, что моделирование в традиционном смысле становится мало
эффективным, а порой просто невозможным. В таких ситуациях желаемый результат может
принести применение нейросетевых технологий. Наибольший эффект использование
нейросетевых технологий дает в таких областях, как распознавание образов, анализ
данных, моделирование и управление. Перечень типичных задач, решаемых с
помощью нейросетей, приведен в табл. 6.1.
Применение нейронных сетей
Таблица 6.1
Описание системы
Системы
распознавания текста
Автопилот автомобиля
NETtalk
Нейронная система
управления
технологическим
процессом сварки
NNET
Основные задачи
Распознавание
печатных
или рукописных букв
и цифр
Автоматическое
управление
автомобилем
Синтез речи
Предсказание качества
сварного соединения
на основе анализа
параметров сварки
Многофункциональная
система разработки
нейроконтроллеров
Входы системы
Сканируемое
изображение
Расстояние между
задним бампером
и машиной, идущей
сзади; скорость
впереди идущей
машины, изгиб дороги,
место расположения
машины
Коды символов
алфавита
Сварочные параметры
(напряжение, ток,
скорость перемещения
электрода)
Произвольные
Выходы системы
ASCII-коды символов
Команды изменения
скорости, смены ряда,
команда углового
поворота руля
Команды генерации
фонем
Протокол качества
сварного соединения
Произвольные
Парадигмы нейросетевой технологии. Искусственные нейронные сети
индуцированы биологией, т.к. они состоят из элементов, функциональные возможности
которых аналогичны большинству элементарных функций биологического нейрона.
Эти элементы затем организуются по способу, который может соответствовать (или
не соответствовать) анатомии мозга. Несмотря на такое поверхностное сходство, ис-
Глава 6. Интеллектуальные системы 453
кусственные нейронные сети демонстрируют удивительное число свойств, присущих
мозгу. Например, они обучаются на основе опыта, обобщают предыдущие
прецеденты на новые случаи и извлекают существенные свойства из поступающей
информации, содержащей излишние данные.
Свойства нейронных сетей. Обучение. Искусственные нейронные сети могут
менять свое поведение в зависимости от внешней среды. Этот фактор в большей
степени, чем какой-либо другой, ответствен за интерес, который они вызывают.
После предъявления входных сигналов (возможно с соответствующими выходами),
нейронные сети самонастраиваются, чтобы обеспечить требуемую реакцию.
Обобщение. Отклик сети после обучения может быть до некоторой степени
нечувствителен к небольшим изменениям входных сигналов. Эта внутренне присущая
способность видеть образ сквозь шум и искажения позволяет преодолеть требования
строгой точности, предъявляемое обычным компьютерам. Важно отметить, что
нейронная сеть делает обобщения автоматически благодаря своей структуре, а не с
помощью «человеческого интеллекта», представленного в форме специально
написанных компьютерных программ.
Абстрагирование. Некоторые из нейронных сетей обладают способностью
извлекать сущность из входных сигналов, т.е. оперировать с данными, которые не
возникали в процессе обучения.
Нейронные сети и другие виды программного обеспечения. Традиционные
программы выполняют точно установленные инструкции в определенный момент
времени. Например, выполняя вычисления, программа производит шаг за шагом
последовательность действий, пока не будет получен некоторый результат. Прохождение
данных по нейронной сети, напротив, не может быть заранее определено по причине
иерархической структуры сети и распределенности по связям весовых
коэффициентов. Кроме того, входные данные могут быть недоопределены или определены
нечетко, что в традиционных программах не представляется возможным. Поставленная
задача может быть решена нейросетью, даже если входная информация не
рассматривалась ранее при обучении, при условии, что данные не выходят за предъявляемые
к ним ограничения. Нейронные сети занимают небольшой объем памяти, т.к.
сохраняется лишь структура нейронной сети. Нейронные сети идеально подходят для
решения задач управления, т.к. обеспечивают благодаря параллельной структуре
чрезвычайно высокую скорость выполнения операций.
Для решения таких прикладных задач, как прогнозирование и выдача
рекомендаций (управление) на основе анализа данных, могут быть использованы как
экспертные системы, так и нейронные сети. Но основное преимущество нейронных
сетей заключается в возможности избежать традиционной процедуры
программирования и сбора информации или знаний при помощи экспертов или конечных
пользователей. При создании экспертных систем, наоборот, требуется проводить
«интервью» с экспертами для получения «правил» поведения системы или объекта
при определенных условиях, что требует значительного времени и материальных
вложений и порой не приносит желаемого эффекта, т.к. нет гарантии, что все
необходимые правила будут получены и что экспертная система будет работать в
различных условиях.
Дополнительное преимущество нейронных сетей состоит в способности выделять
общие принципы (обобщение) при предъявлении некоторого набора обучающих
векторов с неполным набором данных (абстрагирование). Также стоит выделить
способность получать желаемый выход в случае неполного или нечеткого набора
данных, когда работа множества традиционных компьютерных программ завершается
ошибкой.
454
Методы современной ТАУ. Часть V
Способность нейронных сетей выделять взаимосвязи в экспериментальных
данных и достигать желаемого результата, к сожалению, связана с невозможностью
проследить, каким образом этот результат достигнут. То есть нейронная сеть
представляет собой если не «черный ящик», то, по крайней мере, ящик с полупрозрачными
стенками. Однако при сравнении входных данных и откликов нейронной сети,
некоторые тенденции могут быть прослежены и получено объяснение того или иного
поведения нейросети.
Не следует недооценивать трудоемкости процедуры обучения нейронной сети.
Набор обучающих векторов должен быть составлен таким образом, чтобы точно
описать задачу и граничные условия обучения нейросети. Так же как и при обучении
человека, именно качество примеров, на которых производится обучение, определяет
дальнейшую работоспособность системы.
Процедура обратного распространения. Наиболее часто применяются 12-15
различных нейросетевых архитектур, представляющих собой вариации 6 основных
парадигм [11]. Самой популярной из них является «back propagation»-apxHTeKrypa сети
с обратным распространением ошибки. Сети этого типа могут работать как с
двоичными, так и с десятичными данными и могут быть использованы для решения более
широкого, чем у других сетей, круга задач.
Процесс разработки нейронной сети можно разделить на следующие этапы:
создание архитектуры сети; генерирование и предварительная обработка данных;
обучение; тестирование.
Архитектура сети. На рис. 6.17 представлена схема искусственного нейрона,
используемого в качестве основного строительного блока в сетях обратного
распространения.
о\
о2
w2
wn\
F
tNET
OUT
►
Рис. 6.17. Схема искусственного нейрона
На нейрон подается множество сигналов {р\.. оп), идущих либо извне, либо от
предшествующего слоя. Каждый из них умножается на вес (и>,), и произведения
суммируются. Сумма NET, вычисляемая для каждого нейрона сети, модифицируется с
помощью активационной функции F(NET), давая, таким образом, сигнал OUT.
Активационная функция, используемая для обратного распространения, имеет
вид (рис. 6.18)
OUT=l/(l+e-NET). (6.17)
Сигмоид, который называют также логистической или сжимающей функцией,
сжимает диапазон изменения NET так, что значение OUT лежит между нулем и
единицей.
Для алгоритма обратного распространения необходимо, чтобы активационная
функция была дифференцируема. Сигмоид удовлетворяет этим требованиям. Кроме
того, он обеспечивает автоматический контроль усиления. t
Глава 6. Интеллектуальные системы
455
На рис. 6.19 изображена многослойная сеть, которая может обучаться при
помощи процедуры обратного распространения.
OUT '
0,5
i
0
- —-—
NET
Рис. 6.18. Активационная функция
Входной
слой /
Скрытый
слой у
Выходной
слой к
Желаемый
сигнал 1
Ошибка п I
Рис. 6.19. Многослойная сеть
При проектировании архитектуры нейронной сети необходимо определить число
слоев нейронов и количество нейронов в каждом слое. Процедура обратного
распространения применима к сетям с любым числом слоев, но традиционно
рассматриваются сети, содержащие входной, выходной и скрытый слой. Число нейронов в
выходном и входном слоях определяется соответственно количеством выходов и
входов системы. В общем случае, чем меньше нейронов в выходном слое, тем быстрее
сеть обучается. Число нейронов в скрытом слое и число скрытых слоев определяется
прикладной задачей, но чаще всего подбирается методом проб и ошибок. Чем
сложнее связь между входными и выходными переменными, тем большее число нейронов
в скрытом слое необходимо предусмотреть.
Обзор обучения. Целью обучения сети является подстройка ее весов таким
образом, чтобы приложения некоторого множества входных векторов приводило к
требуемому множеству выходов. При обучении предполагается, что каждому вектору
входа соответствует целевой вектор выхода. Перед началом обучения весам должны
быть присвоены небольшие начальные значения, выбранные случайным образом.
Обучение сети обратного распространения требует выполнения следующих
действий:
1) Выбрать очередную обучающую пару из обучающего множества, подать
входной вектор на вход сети.
2) Вычислить выход сети.
3) Вычислить разность между выходом сети и требуемым выходом (целевым
вектором обучающей пары).
456
Методы современной ТАУ. Часть V
4) Подкорректировать веса сети так, чтобы минимизировать ошибку.
5) Повторять шаги 1 - 4 для каждого вектора обучающего множества до тех пор,
пока ошибка на всем множестве не достигнет приемлемого уровня.
Подробное описание процедуры обратного распространения приведено в [11].
Применение нейросетей в системах управления. Наиболее типичным
прикладным применением нейронных сетей является распознавание образов, т.е. анализ
визуальных изображений, речи и других сигналов. Помимо этого, нейронные сети
могут быть использованы для моделирования и управления различными системами и
процессами. Функциональная схема аппаратно-программного комплекса АСУ ТП
приведена на рис. 6.20.
Возмущения
Оператор
(пользователь)
XL
ТОУ
Физический
объект
управления
i
Датчики
I
Измеряемые технологические параметры
Технологическое
оборудование
т
Установка параметров управления
2L
Устройства сопряжения
Интерфейс
пользователя
тг
—
.ЭВМ
Реляционная база данных
(РБД)
1 4
Т 1
Управляющая
нейросетевая модель
Прогнозирующая
нейросетевая модель
Рис. 6.20. Функциональная схема аппаратно-программного комплекса АСУ ТП
Глава 6. Интеллектуальные системы 457
6.3. ИНСТРУМЕНТАЛЬНЫЕ СРЕДСТВА
И РЕАЛИЗАЦИЯ ИНТЕЛЛЕКТУАЛЬНЫХ СИСТЕМ
6.3.1. Отображение интеллектуальной системы управления
на архитектуру многопроцессорной вычислительной сети
Интеллектуальные системы управления (ИСУ) с разветвленной структурой
характеризуются большим объемом перерабатываемой информации и высокой
сложностью используемых алгоритмов обработки информации и принятия решений. Наряду
с этим предъявляются жесткие требования к надежности ИСУ. Указанные
характеристики ИСУ могут быть обеспечены только за счет использования
многопроцессорных вычислительных сетей (МВС), например, транспьютерных систем [4].
Здесь рассматривается задача оптимального отображения структуры ИСУ на
архитектуру МВС, заключающаяся в таком распределении программ, реализующих
подсистемы ИСУ, по процессорам МВС, которое минимизирует заданный критерий
эффективности отображения.
Широко известным приближенным методом решения задач отображения является
метод балансировки загрузки. При этом программы назначают процессорам таким
образом, чтобы вычислительная загрузка последних была максимально одинаковой.
Предлагается формализация задачи оптимального отображения структуры ИСУ на
архитектуру МВС в виде задачи глобальной балансировки загрузки. Подход,
основанный на математическом программировании, позволяет свести задачу
балансировки к задаче булева линейного программирования.
Основной целью работы является исследование эффективности метода решения
задачи оптимального отображения структуры ИСУ на архитектуру МВС, в котором
указанная задача булева линейного программирования решается приближенно
методом релаксации. Идея заключается в решении этой задачи как задачи
нецелочисленного линейного программирования (симплекс-методом) и в последующем
булевом округлении результата. Целесообразность такого подхода основана на том, что
задача булева линейного программирования является NP-сложной, а задача
нецелочисленного линейного программирования - Р-сложной. Заметим, что симплекс-
метод в большинстве случаев практически также обеспечивает полиномиальное
время решения.
Постановка задачи. Пусть {Рг, ie [1, л]} - множество подсистем ИСУ; р{ -
вычислительная сложность (количество арифметических операций) программы,
реализующей подсистему Р,; С = {с( j, с, , =0, /, ./€[1, п]}- коммуникационная
матрица ИСУ, где Cq - количество информации, в байтах, которое подсистема Р, передает
подсистеме Pj.
Пусть {Qv> ve[l, N]} - множество процессоров МВС; qv - производительность
процессора Qv\ D = {dVix, dv v =0, v,^g[1, N]} - коммуникационная матрица
МВС, где dVt)i - минимальное время передачи байта данных от процессора Qv
процессору QM.
Отображение подсистем ИСУ на процессоры МВС зададим отображающей
матрицей X = {jcv/, ve[l, N], /е[1, п]}еХ размером Nxn, где
fl, если подсистема Р{ выполняется на процессоре Qv,
V%1 [О в противном случае;
X - множество допустимых отображений.
458 Методы современной ТАУ. Часть IV
Имеют место очевидные ограничения:
xv, I +xv,2 +'- + xv,n -n> xli +X2,i +--- + xN,i = 1- (6.18)
Критерий эффективности построим на основе вычислительной и
коммуникационной загрузок процессоров. Вычислительная загрузка WL (Work Load) процессора
{Qv> VE[1» N]} определяется суммарным временем выполнения назначенных ему
программ
WL,=qvfJxvjPi. (6.19)
Коммуникационная загрузка CL (Communication Load) процессора Qv - это
суммарное время обменов, которые должны выполнить программы, назначенные этому
процессору:
ц=1 ЫХ ;=1
В качестве критерия эффективности отображения используем максимальную из
суммарных загрузок процессоров МВС
Е(Х) = max EV(X) = max (И^(Х) + С^(Х)). (6.21)
\>е[1,ЛП ve[l,N]
Ставится задача поиска отображающей матрицы X = X*, доставляющей минимум
критерию эффективности (6.21)
£* = £(X*) = minE(X). (6.22)
Заметим, что модель (6.18) - (6.22) не учитывает коммуникационную загрузку
процессоров МВС, обусловленную транзитными обменами; возможные задержки
обменов из-за перегрузки каналов обмена; дополнительное время на организацию
обменов. Последнюю составляющую, которая в транспьютерных сетях, например,
может быть весьма существенной, легко учесть, если положить
^v, ц*ч", j "" 'v, fifsr "*" ci, ycom»
где /у,ц - «расстояние» между процессорами QVi QM; tst - стартовое время; tcom - время
передачи байта данных между соседними процессорами МВС.
Точное решение задачи. Входящая в соотношение (6.22) составляющая (6.19)
линейна, а составляющая (6.20) нелинейна относительно компонентов
отображающей матрицы X. Введем вспомогательную отображающую N2xn2 - матрицу X ,
компоненты которой представляют собой произведение компонентов матрицы X.
С использованием матрицы X выражение запишется в виде
ц=1 ,=1 7=1
где л\,ц ^ - элемент матрицы X, находящейся в строке, соответствующей v, ц, и
столбце, соответствующем ij.
Вычислительная загрузка (6.19) выражается через матрицу X в виде
п2
где
р = (Л 0...0 | 0 р2 0...0 | ... | 0 О.../?„)т
- (п2х1) -вектор.
Глава 6. Интеллектуальные системы 459
Таким образом, критерий эффективности согласования EV(X) оказывается
линейным относительно матрицы X .
Стандартным приемом с помощью вспомогательных переменных
a, Y = {yOi y{i ...,)>#} задача поиска отображающей матрицы Х = Х*,
доставляющей минимум критерию эффективности Е(Х) (см. формулы (6.21), (6.22)),
сводится к задаче смешанного булева линейного программирования
min o(X) = o* (6.23)
Х,а
с ограничениями
а+уо=О, £v(X)-a + ;yv =0,
п2
Zj *vh, ij = *
и ограничениями а < 0, хУЦу=0, 1; V[iG[l, N2], ije[l, п2].
Задача содержит (n2N2 + N + 1) переменных и (п2 + N2 + N + 2)
ограничений.
Теорема 6.1. Задача оптимального отображения структуры ИСУ на архитектуру
МВС является NP-сложной.
Справедливость теоремы следует из того факта, что задача булева линейного
программирования (6.23) является NP-сложной.
Точное решение задачи отображения реализовано в последовательном фортра-
новском GOMORY-отображателе, использующем программу HO2BAF решения
задачи целочисленного линейного программирования (6.23) известным методом Гомо-
ри из библиотеки численного анализа NAG (National Algorithmic Group).
Проиллюстрированная далее эффективность GOMORY-отображателя может быть
значительно повышена за счет использования параллельных алгоритмов метода Го-
мори.
Приближенное решение задачи на основе метода релаксации. Обозначим
алгоритм решения задачи линейного программирования (6.23) с помощью симплекс-
метода (SIMPLEX), а соответствующие значения отображающей матрицы
(нецелочисленной) и критерия эффективности Xs, Es. Введем алгоритмы ROUND,
UNIFORM!, UNIFORM* COMBI.
Алгоритм ROUND заменяет величину (jc,)v>/ ее целочисленным значением (jcr)Vt/ по
формуле
fl, если v = v0;
(*r)vfi=jA (6-24)
[0 в противном случае,
где v0 определяется из условия
max(xf)Vt,=(jcf)Voi/f ve[l, N], ie[l, л]. (6.25)
При этом выполнение ограничений (6.18) обеспечивается автоматически.
Алгоритм UNIFORM] каждому процессору (кроме Qx или QN) назначает пх = [n/N\
программ независимо от их вычислительной сложности. Здесь [nIN] - ближайшее
целое, меньшее nIN.
Алгоритм UNIFORM2 каждому процессору назначает такое количество программ
со смежными номерами, чтобы вычислительная загрузка этого процессора не
превышала средней:
p=tpt/N-
/=i
460
Методы современной ТАУ. Часть IV
Алгоритм COMBI является комбинацией алгоритмов ROUND, UNIFORM{ и
UNIFORM2. Выбирается лучший из них по критерию (6.22).
Эффективность рассматриваемых приближенных алгоритмов решения задачи
отображения исследована с помощью статистического моделирования.
Приведем результаты исследования для МВС с архитектурой типа «линейка», в
которой Host - процессор Q\ и процессоры Q2, ..., Qn одинаковы. Положим, что
вычислительная сложность рь р2, ..., рп программ определяется случайными
величинами, равномерно распределенными в интервале [0, ртах]- При этом обмены
происходят только с программой, выполняемой на Host-процессоре, и параметры этих
обменов одинаковы.
На рис. 6.21, 6.22 представлены результаты исследования при следующих
данных: количество процессоров N = 8, количество программ п = 20, при одинаковых
значениях параметров обменов с = 1 количество статистических испытаний равно
300. На рис. 6.21 проиллюстрирован случай, когда средняя вычислительная
сложность программ р превышает сложность коммуникаций в 5 раз; на рис. 6.22 - в 50
раз. Символом Е обозначена оценка математического ожидания критерия
эффективности отображения, кривым 1 - 5 соответствуют алгоритмы GOMORY, COMBI,
ROUND, UNIFORM,, UNIFORM2.
Эффективность
.5
1
i i I
_i I i i i i
0 0,2 0,4 0,6 0,8 1,0 £/£5
Рис. 6.21. Результаты исследования для МВС с архитектурой типа «линейка»
Эффективность
0 0,2 0,4 0,6 0,8 1,0 e/Es
Рис. 6.22. Результаты исследования для МВС с архитектурой типа «линейка»
Автором были проведены подобные исследования и с другими количествами
программ, процессоров и ртах. Во всех случаях результаты были близки к
представленным на рис. 6.21, 6.22, что дает основание сделать следующие выводы.
Глава 6. Интеллектуальные системы 461
При приближенном решении задачи отображения алгоритм релаксации ROUND
целесообразно комбинировать с простейшими алгоритмами равномерного
распределения UNIFORM!, UNIFORM2, т.е. использовать комбинированный алгоритм
COMBI. При этом средняя эффективность отображения повышается на 5 - 10 %
(в зависимости от соотношения средней вычислительной сложности программ и
стоимости коммуникаций).
При некоторых наборах исходных данных стандартные программы,
использующие симплекс-метод, могут не давать решения (из-за погрешностей
вычислений и представления данных). Алгоритм COMBI обеспечивает решение* задачи во
всех случаях.
Алгоритм COMBI обеспечивает среднюю эффективность отображения лишь на
5 % худшую, чем точный алгоритм целочисленного линейного программирования
GOMORY.
Были также рассмотрены более сложные, чем ROUND, алгоритмы округления и
более сложные, чем UNIFORM 1 и UNIFORM2, алгоритмы равномерного
распределения. Так, при округлении компонентов отображающей матрицы X наряду с
алгоритмом (6.24) использовалась величина max(;c5)v ,; для равномерного
распределено
ния был использован алгоритм, близкий к «жадному алгоритму упаковки в
контейнеры». Заметного повышения эффективности алгоритма COMBI эти усложнения не
дали.
Приближенное решение задачи отображения с помощью метода релаксации
было реализовано в последовательном фортрановском COMBI-отображателе.
Алгоритм SIMPLEX в COMBI-отображателе реализован на основе одной из
библиотечных программ симплекс-метода.
6.3.2. Стохастические методы решения задачи отображения
алгоритмов и программ на мультитранспьютерные системы
Графовое представление алгоритмов. Вычислительные алгоритмы
представляются взвешенными ориентированными ациклическими графами [4] (рис. 6.23).
Вершины таких графов соответствуют некоторым частям алгоритма, в дальнейшем
называемыми операциями. Дуги графа, соединяющие вершины, означают наличие
информационной зависимости между соответствующими операциями алгоритма -
результат выполнения одной операции является аргументом для другой. Веса вершин
пропорциональны времени выполнения соответствующих операций — будем
измерять их числом некоторых элементарных операций, содержащихся в
соответствующей данной вершине операции. Под элементарной операцией можно понимать,
например, арифметическую операцию (сложения/умножения) или один такт
процессора. Дуги графа алгоритма также являются взвешенными, и их вес равен объему
(например, в байтах) передаваемой по этой дуге информации.
Будем задавать введенный граф алгоритма, как ГА = <л, с, S>, где п - число
вершин в графе, С/={с/, /=1..л} - вектор весов вершин, S - взвешенная матрица
смежности графа. Это матрица размерности яхл, элементы sy которой равны 0, если i-я и
7-я вершины не связаны дугой, и весу связывающей их дуги - в противном случае,
Каждую дугу графа будем представлять в виде упорядоченной пары номеров
вершин (/, Д которые эта дуга соединяет.
За Uа обозначим число элементарных операций алгоритма
UA = £ С,.
/=1,л
Назовем степенью параллелизма графа алгоритма максимальное число попарно
независимых вершин в графе. Степень параллелизма графа определяет максимально
462
Методы современной ТАУ. Часть ГУ
возможное число процессоров ВС для эффективного распараллеливания алгоритма
при заданной агрегации операций алгоритма в вершины графа. При числе
процессоров, большем степени параллелизма, в любой момент времени часть их обязательно
будет простаивать.
program EXAMPLE
parameter N=100
real A(N,N),B(N)
real X(N) ^
h=l/N
do 1 i=l,N
1 B(i)=i*h
do 2 i=l,N
do 2 j=l,N
2 A(ifj)=0.1*(i+j)
do 3 i=l,N
3 x(i)=x(i)+A(iyj)*B(j)
stop
end
n = 4; UK = 22101; с = [1,100,11000,11000];
Г0 1 0 0
0 0 0 100
0 0 0 10000
0 0 0 0
S =
н =
10 10'
0 10 0
0 0 0 1
Рис. 6.23. Пример графового представления алгоритма
Ациклические орграфы допускают поярусное разложение. На первый ярус
помещаются вершины, которые не имеют входных дуг. На каждый последующий ярус
помещаются те вершины, которые не имеют предшественников, за исключением уже
распределенных на предыдущие ярусы. Обозначим число таких ярусов за h. А само
поярусное распределение буем представлять в виде матрицы Н размерности /гхл,
элементы Hkj которой равны 1, еслиу-я вершина принадлежит к-му ярусу, и 0 - в
противном случае. Смысл такого поярусного распределения состоит в том, что операции
алгоритма, соответствующие вершинам одного уровня, могут выполняться
параллельно.
Средней степеныр параллелизма назовем отношение h/n, которое для
последовательных (h = п) алгоритмов равно 1, а для полностью параллельных (h = 1)
алгоритмов - п.
Графовое представление мультитранспьютерных систем. Под
мультитранспьютерной системой (ВС) будем понимать набор, состоящий из п транспьютеров,
объединенных некоторой системой связи. Такие ВС будем представлять в виде
взвешенных ориентированных графов, вершины которых соответствуют процессорам ВС
и их число равно р. Каждая вершина является взвешенной, и ее вес равен
производительности (оп/с) соответствующего процессора ВС.
Если два процессора в ВС связаны ориентированным каналом передачи
информации (т.е. информация может быть передана от первого процессора второму
процессору), то соответствующие вершины в графе ВС связываются дугой, направленной
Глава 6. Интеллектуальные системы
463
в вершину, соответствующую второму процессору. Каждая дуга в графе является
взвешенной, и ее вес равен скорости передачи информации (Бт/с) по
соответствующему физическому каналу. Предполагается, что в графе ВС для любых двух его
вершин существует ориентированный путь, ведущий из первой вершины во вторую, что
означает возможность обмена информацией между любыми процессорами ВС.
Таким образом, в рассмотрение вводится граф ВС, который будем представлять
в виде ГС = <р, я, ц>, где я={7Г„ i=\..p} - есть вектор производительностей
процессоров, \i= {ji/f, i,j= l...p} - взвешенная матрица смежности графа ГС, элементы
которой равны 0, если i-я и^'-я вершины не связаны дугой, и весу этой дуги - в
противном случае. За 71о обозначим производительность самого мощного процессора в ВС.
На рис. 6.24 приведен пример параллельной ВС и ее графовое представление.
1
л
л
2
л
5
i \
Параллельный процессор FPS
Т/20
(минимальная конфигурация)
8 7
Р = 8; П = 12х106х[1 1111111]; ло=12х1О6;
0 10 110 0 0"
10 10 0 10 0
0 10 10 0 10
10 10 0 0 0 1
10 0 0 0 10 1
0 10 0 10 10
0 0 10 0 10 1
0 0 0 110 10
М = 5х105х
; Л = 2х10"6х
0
1
2
1
1
2
3
2
1
0
1
to to
1
2
3
2
1
0
1
3
2
1
2
1
2
1
0
2
3
2
1
1
2
3
2
0
1
2
1
2
1
2
3
1
0
1
2
3
2
1
to to
1
0
1
2
3
2
1
1
2
1
0
Рнс. 6.24. Параллельная вычислительная система и ее графовое представление
Принята следующая схема обмена информацией во введенной модели ВС. Пусть
процессор с номером 1 должен передать некоторую информацию объема V
процессору с номером 2. Пусть обмен начинается в момент времени и Возможны
следующие варианты:
1) Процессоры 1 и 2 связаны каналом со скоростью передачи информации т.
Тогда на время обмена [г, / + V/m] оба процессора считаются занятыми только
этим обменом и не могут выполнять вычисления или другие обмены.
2) В графе ВС существует ориентированный путь из вершины 1 в вершину 2.
В этом случае весь путь разбивается на последовательность дуг, каждая из
которых соединяет по два процессора. Тогда процесс передачи информации
распадается на последовательность обменов первого типа.
Существенным ограничением введенной модели ВС является то, что каждый
процессор в каждый момент времени может либо выполнять вычисления, либо обме-
464
Методы современной ТАУ. Часть ГУ
ниваться с одним другим процессором, т.к. во многих параллельных ВС выполнение
этих операций может совмещаться по времени. Однако некоторые режимы
совмещения счета и обменов могут быть промоделированы в рамках построенной модели.
Основная идея заключается в том, что для каждого процессора с «нестандартным»
режимом работы вводится несколько дополнительных процессоров, имеющих
нулевую производительность и связанных с основным процессором бесконечно
быстрыми каналами.
На рис. 6.25 приведены графовые представления ВС с различными режимами
работы 1-го процессора. Рис. 6.25, а изображает ВС со стандартным режимом 1-го
процессора. На остальных рисунках показаны системы, в которых процессор 1
может совмещать выполнение вычислений и обменов. На рис. 6.25, б процессор 1
выполняет обмены по всем каналам последовательно. Для этого вводится
дополнительный процессор 6. Все каналы, связывающие 1-й процессор с другими
устройствами, предназначаются на процессор 6. Если процессору 1 надо передать
информацию процессору 2, то он передает ее за нулевое время процессору 6 и может
продолжать вычисления, а процессор 6 уже в нормальном режиме передает
информацию дальше. Таким образом, вычисления и обмены для процессора 1 могут
совмещаться по времени.
/
и*
\
\
2
1
ч
! .
4
ш
Рис. 6.25. Моделирование некоторых режимов совмещения счета и обменов для процессора 1
(дуги, помеченные «х», имеют бесконечно большой вес)
Глава 6. Интеллектуальные системы
465
На рис. 6.25, в показана система, в которой процессор 1 может выполнять обмены
по всем каналам параллельно. Для этого в модель добавлено 4 дополнительных
процессора. На рис. 6.25, г показана система, в которой все каналы 1-го процессора
разбиты на 2 группы и все обмены в каждой группе выполняются последовательно, а
обмены по каналам из разных групп могут выполняться параллельно.
Постановка задачи распараллеливания вычислений. Под распараллеливанием
вычислительных алгоритмов будем понимать распределение операций этого
алгоритма по процессорам, а в графовых представлениях - вершин графа ГА по
подграфам, общее число которых равно р и каждому из которых соответствует один из
процессоров (одна из вершин ГС). Такое распределение будем представлять в виде
матрицы разрезания R размерности рхп , элементы г которой равны 1 - если 1-я
вершина принадлежит /-му подграфу, и нулю - в противном случае (рис. 6.26).
4) (5) (р (7
11) />-.
R =
11100000100000 0
000111100010000
00000001000101 1
000000000100100
3
1
0
0
4
1
0
0
1
1
1
1
0
1
1
0
, VP —
0
0
0
2
0
0
2
1
0
2
0
1
2
1
1
0
G =
Рис. 6.26. Отображение графа алгоритма на граф ВС
Так как операции, соответствующие вершинам одного яруса в ГА, способны
выполняться параллельно, то степень параллелизма будет оцениваться поярусно. С этой
целью вводится в рассмотрение матрица вычислительной нагрузки G размерности
hxp, в которой
п
/=i
Элементы такой матрицы определяют суммарный вес вершин, принадлежащих
/-му подграфу и к-му ярусу в ГА. Время на выполнение межпроцессорных обменов
информацией будет определяться объемом дуг, соединяющих вершины, принадле-
31 Зак. 416
466
Методы современной ТАУ. Часть IV
жащие разным подграфам. Для вычисления этого объема вводится матрица
коммуникационной нагрузки F размерности р х р, элементы которой определяют
связность двух подграфов
п п
/=1 т=\
Основываясь на графовых представлениях алгоритмов и ВС, а также на
введенных матрицах G и F, напишем функционал /(R), который будем называть
приведенным временем выполнения алгоритма на ВС при заданном отображении R
uA[k=\ '-1 (, Щ ) /=1 ;=/+i J
Первое слагаемое функционала отражает время, затрачиваемое на выполнение
вычислений, второе - время на выполнение межпроцессорных обменов информацией
(накладные расходы на организацию параллельных вычислений). Множитель no/UA
введен в функционал для его нормировки, т.к. UA/n0 есть время выполнения
алгоритма на самом быстром процессоре данной ВС. Записанный функционал, в
некоторой степени, можно рассматривать как величину, обратную ускорению,
достигаемому при выполнении алгоритма на ВС при заданном распараллеливании R.
Оптимизационную задачу распараллеливания вычислений сформулируем
следующим образом: пусть заданы ГА = <п, с, S> и ГС = <р, я, ц>. Найти матрицу
разрезания R графа ГА нар подграфов, дающую минимум функционалу /(R).
Свойства функционала /(R) и поставленной задачи. Относительно
поставленной задачи отображения графов алгоритмов на архитектуры многопроцессорных ВС
известно, что она является NP-сложной. По этой причине для ее решения
малопригодны точные (переборные) методы, типа метода ветвей и границ. Некоторое
представление о характере функционала /(R) дает рис. 6.27. На этом рисунке построены
две функции распределения относительной ошибки Е = (/(R) - J^n УДК), где за
^min обозначено минимальное значение функционала для задачи отображения
двоичного дерева с числом вершин на верхнем уровне 40 на БС, содержащую 8
процессоров.
Рис. 6.27. Функция распределения относительной ошибки Е = (/(/?)- JmmVJiR) при:
1 - случайном выборе разрезания R\2- случайном выборе локального минимума J(R)
Кривая 1 соответствует функции распределения данной ошибки при случайном
выборе разрезания R. Видно, что наиболее вероятным является выбор разрезания со
Глава 6. Интеллектуальные системы 467
значением ошибки 0,8 <£< 0,85. Кривая 2 соответствует функции распределения
относительной ошибки при случайном выборе локального минимум функционала
/(R). Для получения этой кривой случайным образом выбиралось разрезание R,
а затем искался ближайший к этому R минимум (алгоритм такого поиска
описывается ниже). Видно, что функционал /(R) содержит большое количество локальных
минимумов, что подавляющее большинство локальных минимумов сосредоточено в
области 0,5 < Е < 0,6 и что вероятность случайного выбора хорошего решения
(Е < 0,1) практически равна нулю.
6.3.3. Стохастический метод попарной оптимизации подграфов
Описание метода. Для приближенного решения задачи минимизации
функционала /(R) был разработан эвристический рандомизированный алгоритм. Общая схема
метода следующая.
Алгоритм А1:
1) Выбираем случайное начальное разрезание R, вычисляем / = /(R).
2) Выбираем пару подграфов с номерами /, j с вероятностью пропорциональной
связности этих подграфов (чем больше связность двух подграфов, тем больше
вероятность выбора этой пары).
3) Случайно выбираем пару вершин / и т в этих подграфах (т.о. перебираются
все пары вершин в этих подграфах); меняем местами эти вершины, получаем
новое разрезание R', вычисляем /' = /(R').
4) Если J'> J , т.е. произошло увеличение функционала, то переходим к 3, иначе
за R обозначаем R' и переходим к 3.
5) Если зафиксирован выход функционала /(R) на стационарное решение, то
конец алгоритма, иначе переходим на 2.
Описанный алгоритм является итерационным. Внешние итерации связаны с
попарным просмотром подграфов, а внутренние - с просмотром вершин в этих
подграфах. Переход от разрезания к разрезанию происходит, если выполняется условие
перехода 5.
Численное исследование алгоритма. На основе метода А1 была написана
программа, с помощью которой было проведено численное исследование метода А1.
В качестве графов алгоритма исследовались, в основном, двоичные деревья с
числом вершин на верхнем уровне N. В качестве ВС - полносвязные графы, имеющие
р вершин.
На рис. 6.28 построена зависимость времени работы программы Т (в секундах) от
N при р = N , т.е. при одновременном увеличении и размерности графа N, и числа
подграфов разрезания. Полученные зависимости позволяют сделать вывод, что
сложность алгоритма А1 есть 0( pN2).
Исследование на точность метода проводилось для алгоритмов сдваивания с
N = 8 при разрезании их на р = 4, 8 подграфов. Было проведено по 70 опытов для
каждого случая. На рис. 6.29 изображена функция распределения / относительной
погрешности для этих двух случаев.
Проведенное исследование позволяет сделать следующие выводы. Как минимум
кубическая (по пир) сложность метода не позволяет использовать его при больших
графах ГА и большом числе подграфов разрезания. Сходимость метода к решению не
является плохой (плоской), однако очень неудовлетворительной является точность
получаемых решений. Этот недостаток, однако, может быть в некоторой степени
сглажен за счет специального выбора начального разрезания.
3V
468
Методы современной ТАУ. Часть IV
Метод выбора начального разрезания. Метод использует локальные
характеристики графа ГА - связность каждой вершины и ее вес. Общая схема метода такова.
Алгоритм А2:
1) Выбираем равновероятно вершину с номером 1.
2) Составляем вектор g = [gh i = 1, р} связанности данной вершины со всеми
подграфами.
3) Выбираем подграфы, связность которых с 1 равна.
4) Вершину 1 заносим в тот из выбранных подграфов, который имеет
наименьший вес, и переходим на 1.
Алгоритм заканчивает работу, когда все вершины распределены по подграфам.
Было проведено аналогичное исследование алгоритма A3 (метод А1 с выбором
начального разрезания А2) на сложность, сходимость и точность. Результаты
исследования представлены на рис. 6.28 - 6.30. Выигрыш по сравнению с А1 очевиден.
Уменьшилась сложность алгоритма. Улучшилась точность метода. Зато оказалась
очень плоской зависимость функционала J по итерациям. Это объясняется тем, что
алгоритм А2 в большинстве случаев сразу приводит к локальному минимуму.
Г, с
2,0
1,5
1,0
0,5
0
10 N
Рис. 6.28. Зависимость времени работы алгоритмов А1 (1) и A3 (2)
от размеров графа сдваивания N прир = N
f
0,3-
0,2
0,1
0
{
!. >
к/у
1
:
]
1
:
!
1
0 20 40 60
80 100
б,'
Рис. 6.29. Функция распределения/относительной погрешности 8 алгоритма А1
при разрезании графа сдваивания с п -15 на 1 -р = 4; 2 -р = 8 подграфов
Глава 6. Интеллектуальные системы
469
О 5 10 15 20 25 30 35 5,%
Рис. 6.30. Функция распределения/относительной ошибки 5 алгоритма A3
при разрезании графа сдваивания с п - 15 на 1 -р = 4; 2 -р = 8 подграфов
Хотя метод A3 и дает вполне удовлетворительные решения задачи
распараллеливания для относительно небольших значений п р, его применение для
отображения графов алгоритмов большой размерности на большое число процессоров
проблематично в силу значительного возрастания времени работы метода и ухудшения
точности получаемых решений.
6.3.4. Стохастический метод Монте-Карло
Аналоговое решение оптимизационной задачи распараллеливания
вычислений. Для эффективного решения поставленной оптимизационной задачи для
больших размерностей графов алгоритма и ВС в данном параграфе
разрабатывается стохастический метод Монте-Карло. В сформулированной задаче каждому
варианту R разрезания графа алгоритма на подграфы соответствует функционал
времени счета /(R). Требуется определить такое разрезание R, которое доставляет
минимум функционалу J. Заметим, что эквивалентом варианта разрезания является
определенное расположение вершин графа ГА в подграфах, a R соответствует их
«координатам».
Аналоговое решение оптимизационной задачи строится следующим образом.
Вершины графа ГА будем моделировать частицами, совершающими вязкое
движение в потенциальном силовом поле. В качестве потенциала взаимодействия частиц
выберем функционал времени счета /(R). Тогда координаты частиц меняются со
временем согласно уравнению
M=_Yffi). (6.26)
dt dR
Под действием поля частицы-вершины графа будут стремиться расположиться
по подграфам так, чтобы доставить минимум функционалу /. Однако расчет
координат по детерминистическому уравнению (6.26) может привести к попаданию
частиц в один из локальных минимумов, из которого они не в состоянии выбраться.
Поэтому в систему вводятся дополнительные стохастические силы, приводящие к
тепловым флуктуациям частиц, которые помогают им выбраться из локальных ми»
нимумов. Тогда процесс поиска оптимального расположения частиц в подграфах
будем моделировать процессом случайного блуждания в потенциальном силовОм
поле /(R). Пусть вероятность P(R, t) обнаружить частицу в момент / в точке с
координатами R подчиняется уравнению Фоккера - Планка
дР д ( dJ n
— I «у р
dt dR \ dR
+ D
£1
dR2
(6.27)
470 Методы современной ТАУ. Часть IV
Стационарное распределение вероятностей для уравнения (6.27) запишется
следующим образом
1 — J(R)
Ps(R) = -e D . (6.28)
Максимум вероятности (6.28) соответствует такому расположению частиц по
подграфам, которое доставляет минимум функционалу /. Соотношение Эйнштейна
D = yQ
связывает подвижность у и коэффициент диффузии 0, характеризующий тепловые
флуктуации. Распределение (6.28) является распределением Больцмана с
температурой 0.
Тепловые флуктуации ведут к перебросам частиц между минимумами
потенциала /(R). Если два минимума разделены потенциальным барьером У, то среднее
время перехода между ними оценивается как t ехр(/ / У) . Характерное время
установления равновесного распределения вероятностей при температуре J тем больше,
чем выше потенциальные барьеры и ниже температура J.
Если в область абсолютного минимума попадают другие локальные минимумы,
отделенные от него потенциальным барьером А/ ~ 0, то при наличии флуктуации
динамическая система не может отличить их от абсолютного минимума. Чтобы
избежать этого, используют имитацию «отжига» системы [4], постепенно понижая
температуру / и устремляя ее к нулю. Чтобы длительность отжига,
гарантирующего правильное отыскание глобального минимума /, не была экспоненциально
велика, его нужно начинать с температуры / = /тах.
Описание метода Монте-Карло. Стационарное решение (6.28) моделируется
методом Монте-Карло. Общая схема метода такова:
1) Полагаем начальную температуру равной 0О.
2) Выбираем равновероятно начальное расположение вершин R и вычисляем
его эффективность / = /(R).
3) На каждой итерации t случайным образом перебираем все частицы-вершины.
Для каждой из вершин случайно выбираем новый подграф и определяем
приращение функционала А/ при переносе в него данной вершины. Если
Д/<0, то вершина переносится в новый подграф, иначе она переносится в
него с вероятностью ехр(- АУ/В).
4) Понижаем температуру по закону 0 = 0О /1.
5) Если зафиксирован выход ^асти системы на стационарное значение
функционала /, то конец алгоритма, иначе переход на 3.
Результаты численного тестирования. С помощью программы, реализующей
метод Монте-Карло, было проведено исследование данного метода. В качестве
графов алгоритмов исследовались графы, состоящие из Р двоичных деревьев,
имеющих N вершин на верхнем ярусе, для которых аналитически вычисляется
значение 7min. Будем обозначать такие графы за B(Ny P).
На рис. 6.31 изображена зависимость точности от номера итерации для графа
алгоритма 5(10, 10). Граф вычислительной системы содержит 10 вершин,
связанных каждая с каждой. Кривые соответствуют четырем значениям 0О = - 0,1; 0,2; 0,5
и 5. Полученные зависимости позволяют сделать следующий вывод. Чем меньше
0О, тем более быстрой является сходимость метода. Однако при достаточно малых
0О метод начинает застревать в локальных минимумах. Предельным случаем явля-
Глава 6. Интеллектуальные системы
471
ется 0О = 0, когда метод быстро сходится к некоторому ближайшему от R
локальному минимуму.
Е
0,6
0,4
0,2
0
: :
i
j
ч*
\....
500 1000
• -
\
- -4
\
!
1500
:
:
j
1
:
:
:ii
2000
1
2
3 _
4
T
Рис. 6.31. Сходимость ошибки Е в методе Монте-Карло для различных значений
начальной температуры Л:
l-Jo=OJ;2-Jo=O,2\3-Jo=O,5;4-Jo=2
На рис. 6.32 построена зависимость E(t), которая демонстрирует способность
метода выходить из локальных минимумов «функционала /(R). В этом случае
ГА = 5(100, 1), р = 10. В момент t = 0 - 00 = 0, поэтому алгоритм достаточно быстро
приводит систему в локальный минимум. В момент t = 50 полагается 050 = J50,
после чего наблюдается выход из локального минимума.
Е *
Рис. 6.32. Сходимость ошибки £, показывающая способность метода Монте-Карло
выходить из локальных минимумов функционала/
Были проведены расчеты по определению сложности метода, которые показали,
что время достижения методом заданной точности Е имеет порядок 0(рл2).
На рис. 6.33 отражены результаты сравнительного анализа предложенного
алгоритма и алгоритма попарной оптимизации подграфов A3. Изображена зависимость
времени работы алгоритмов от р при ГА = В(%р, 1). Кривая 1 соответствует
времени работы алгоритма попарной оптимизации, а кривая 2 - времени работы
алгоритма Монте-Карло по достижении точности, достигнутой при реализации метода
A3. Видно преимущество подхода, основанного на методе Монте-Карло, при
решении больших задач распараллеливания.
472
Методы современной ТАУ. Часть ГУ
Т, с
60
40
20
0
10
12
14 р
Рис. 6.33. Время достижения одинаковой точности алгоритмов A3 (1) и Монте-Карло (2)
отр при п - 16р - 1
6.3.5. Стохастический метод наискорейшего спуска
Описание метода. Хотя метод Монте-Карло, описанный в предыдущем пункте,
и оказался пригодным к решению больших задач отображения алгоритмов на
мультитранспьютерные ВС, его слабым местом является достаточно медленная
сходимость. Попытки увеличить скорость сходимости за счет увеличения начальной
температуры приводят к ухудшению стационарного решения. В силу этого был
разработан новый стохастический алгоритм наискорейшего спуска. В этом методе,
так же как и в методе Монте-Карло, используется процедура имитации отжига,
чтобы гарантировать сходимость метода. Общая схема метода такова:
1) Полагаем начальную температуру равной 6 = а.
2) Выбираем равновероятно начальное расположение вершин R и вычисляем
его эффективность / = /(R).
3) На каждой итерации t случайным образом перебираем все частицы-вершины.
Для каждой из вершин определяем вектор значений функционала У, при
переносе данной вершины во все подграфы. Случайным образом перемещаем
вершину в другой подграф, при этом вероятность переноса вершины в
/-й подграф равна ехр(1//,)/ ^ехр(1//;).
/ П
4) Понижаем температуру по закону 0 = 1 / (а + 11 b).
5) Если зафиксирован выход системы части на стационарное значение
функционала У, то конец алгоритма, иначе переход на 3.
При больших значениях температуры все переходы в системе частиц-вершин
являются равновероятными. При уменьшении же температуры системы
увеличивается вероятность перехода в подграф с максимальным уменьшением функционала
/(R). При достаточно низких значениях температуры вероятность только одного
перехода становится равной 1. Этот механизм гарантирует сходимость метода.
Параметры а и Ъ позволяют регулировать скорость сходимости метода (подобно
значению начальной температуры в методе Монте-Карло).
Реализация метода. На основе метода была создана программа, с помощью
которой было проведено численное исследование метода. Это исследование показало
более высокую скорость сходимости, чем в методе Монте-Карло. На рис. 6.34 по-
Глава 6. Интеллектуальные системы
473
строены графики зависимости функционала / по итерациям алгоритма Монте-
Карло и стохастического алгоритма наискорейшего спуска. Кривая 1 соответствует
наиболее методу Монте-Карло в случае наиболее быстрого получения
оптимального решения. Кривые 2 и 3 соответствуют методу наискорейшего спуска для
различных значений а и Ъ - кривая 2 - а = 10, Ъ = 10; кривая 3 - а = 20, Ъ = 2.
100
150
200
Рис. 6.34. Сходимость функционала в методе Монте-Карло (1) и методе наискорейшего спуска (2,3)
при решении задачи сл = 27нр = 8
Применение стохастических методов к распараллеливанию базовых
алгоритмов линейной алгебры. Общая характеристика исследования. Было
проведено тестирование разработанных стохастических методов на распараллеливании
некоторых базовых алгоритмов линейной алгебры.
Все исследованные алгоритмы определялись двумя параметрами, которые задают
некоторое разбиение на блоки матриц и векторов, участвующих в алгоритме. Пусть N
обозначает размер задачи, т.е. все матрицы имеют размер NxN , а вектора имеют
длину N. Первый параметр пъ определяет блочный размер (nbxnb) матриц и число
векторных блоков в разбиении векторов. Второй параметр ть = N/nb определяет
размер самих блоков. Таким образом тъ - это либо размер квадратных блоков (mbxmb)
в разбиении матриц, либо длина векторных блоков.
Исследовались графы следующих алгоритмов:
• Блочный алгоритм скалярного умножения векторов.
• Блочный алгоритм умножения матрицы на вектор.
• LU-разложение блочной матрицы.
• Решение системы линейных уравнений с блочно-треугольной матрицей.
• Метод декомпозиции области решения трехдиагональной системы линейных
уравнений.
Первые 4 метода являются блочными вариантами обычных методов, а в
последнем методе производится специальное (несколько отличное от блочного) разбиение
векторов и матриц, приводящее к системе уравнений со стреловидной матрицей,
метод решения которой обладает достаточно большим параллелизмом.
В качестве графов ВС, на которые производилось распараллеливание этих
методов, были выбраны однородные полносвязные графы с весами вершин, равными 1.
ЗОЗак.416
474
Методы современной ТАУ. Часть IV
Эти графы также определяются двумя параметрами: числом процессоров р и
временем передачи единицы информации т.
Анализ зависимости распараллеливания алгоритмов линейной алгебры от
параметров ВС. В настоящем пункте описываются результаты численного
исследования отображения графов алгоритмов линейной алгебры на полносвязные
однородные графы ВС в зависимости от числа транспьютеров и скорости работы каналов
мультитранспьютерной ВС. Для всех вышеуказанных методов зафиксированы
следующие параметры - пъ = 0 и тъ - 100.
Результаты проведенного исследования отражены на рис. 6.32, 6.33. На рис. 6.35
построены графики зависимости ускорения S от числа процессоров р при т = 1. Пять
изображенных кривых соответствуют перечисленным выше пяти методам. Прямая
линия соответствует максимально возможному ускорению S(p) = р. Следует
отметить, что поведение этих кривых - линейный рост, выход на плоский максимум и
затем некоторое снижение ускорения - совпадает с поведением экспериментально
полученных зависимостей, описанным в ряде работ [10]. Наилучшим ускорением
обладает алгоритм умножения матрицы на вектор, что объясняется тем, что, во-
первых, граф данного метода состоит из 10 (в данном случае) независимых
подграфов, во-вторых, этот граф имеет наименьшее число дуг в расчете на одну вершину.
Последним свойством обладает и граф скалярного умножения векторов, однако он
имеет в десять раз меньше вершин, что приводит к более плохой балансировке
загрузки процессоров и, следовательно, к снижению ускорения. Наихудшим
ускорением обладает метод решения блочно-треугольной системы линейных уравнений, т.к.
граф этого метода имеет наименьшую среднюю степень параллелизма, что опять же
приводит к очень плохой балансировке загрузки процессоров.
S
21 Р
Рис. 6.35. Зависимость ускорения S от числа процессоров/?
для различных алгоритмов линейной алгебры
На рис. 6.36 построены графики зависимости ускорения S от времени т передачи
единицы информации по каналам связи в ВС при р = 8. Вполне естественно, что с
ростом х ускорение стремится к 1, т.к. в общем времени выполнения алгоритма
возрастает доля обменов по сравнению со временем вычислений. Вместе с тем для
разных методов ускорение падает по-разному. Наилучший результат, опять же,
наблюдается для метода умножения матрицы на вектор. Наиболее чувствительны к этому
параметру оказались методы LU-разложения и декомпозиции области решения трех-
диагональных систем. Величина ускорения S при х —> 0 обусловлена только
балансировкой вычислительной нагрузки процессоров, т.к. соответствует ситуации, когда
время на выполнение обменов стремится к 0.
Глава 6. Интеллектуальные системы
475
Рис. 6.36. Зависимость ускорения S от времени передачи единицы информации по каналам в ВС
при распараллеливании некоторых алгоритмов линейной алгебры
Рис. 6.37. Зависимость ускорения S от числа блоков пь
для некоторых алгоритмов линейной алгебры
Зависимость распараллеливания алгоритмов линейной алгебры от
параметров самих алгоритмов. В данном пункте описываются результаты численного
анализа распараллеливания пяти алгоритмов линейной алгебры, описанных в
предыдущем пункте, при изменении параметров самих алгоритмов - блочной размерности пъ
и размера блоков ть.
На рис. 6.37 изображены зависимости ускорения S от блочной размерности пъ при
тъ = 100, р - 6, х = 1, достигнутые при распараллеливании алгоритмов. Видно, что
ускорение S в среднем возрастает при увеличении пь, т.к. при этом увеличивается
число вершин в графе алгоритма и его степень параллелизма, что при
фиксированном р4 ведет к лучшей балансировке процессоров. Хотя при увеличении пь растет и
число обменов, однако, как следует из рисунка, этот рост в меньшей степени влияет
на ускорение, чем увеличение числа вершин. Немонотонность S(nb) для некоторых
методов объясняется небольшим количеством вершин в соответствующих графах.
На рис. 6.38 построены графики зависимости ускорения S от размеров блоков тъ
при пь = 8, р = 8, х = 1. В данном случае рост ускорения при увеличении ть
объясняется уже уменьшением относительной доли времени обменов по сравнению со
временем счета. Например, для LU-разложения максимальный вес вершин есть 0(т&3), в
то время как максимальный вес дуг 0(ть2). Следовательно, при увеличении ть доля
обменов в общем времени стремится к нулю.
30*
476
Методы современной ТАУ. Часть IV
Si
6
4
2
К
V
5
-*1 * -.
!
1
!
1
100
200
300
400
Mb
Рис. 6.38. Зависимость ускорения S от блочной размерности ть
для некоторых алгоритмов линейной алгебры
Распараллеливание метода обратной итерации поиска собственных функций.
При решении некоторых задач в линейной алгебре возникает задача определения
собственных чисел и соответствующих им собственных функций, операторов с блоч-
но-трехдиагональной матрицей L. Сложность задачи определяется, как правило,
плохой обусловленностью матрицы, когда максимальное и минимальное собственные
числа отличаются на несколько порядков. Для решения этой задачи используется
метод обратной итерации.
Итерационный процесс строится следующим образом
^Ll5L = q Lf + (1 - а) LY', Y'+1 = y/|y| . (6.29)
Известно, что при г —> °° Y, стремится к собственной функции, отвечающей
собственному значению, наиболее близкому к величине у .
Приведем (6.29) к виду
(6.30)
QY = FY', где Q = -I-gL, F = -I + (1-o)L.
X X
Видно, что матрицы Q и F являются блочно-трехдиагональными. (6.30) можно
привести к виду Y = AY', где матрица А является решением матричного уравнения
QA = F. Это уравнение может быть решено с помощью метода четно-нечетной
редукции [2]. Таким образом, общая схема алгоритма поиска одной собственной
функции (при фиксированном параметре х) выглядит следующим образом:
• составление матр'иц Q и F по формулам (6.30);
• решение матричного уравнения QA = F методом четно-нечетной редукции;
• г = 0, выбор начального приближения Y0;
• умножение матрицы А на вектор Y* : Y = AY';
• нахождение нормы |Y |;
• определение вектора Y'+1 = y/|y| ;
• если II Y'+I - Y' [I > e, то t = t+1 и переход на 4, иначе конец алгоритма.
Для проведения исследования параметры метода - блочная размерность пь
матрицы L и размер ее блоков тъ - были зафиксированы следующими: пъ = 10 и тъ = 30.
Глава 6. Интеллектуальные системы
477
Исследовалось распараллеливание алгоритма на следующие топологии
многопроцессорных ВС:
• полносвязная топология;
• гиперкуб;
• двумерный тор;
• двумерная квадратная решетка;
• кольцо;
• линейный массив процессоров.
Рис. 6.39. Зависимость ускорения S от числа процессоровр при распараллеливании метода обратной
итерации поиска собственных функций на различные топологии многопроцессорных ВС
Результаты проведенного исследования отражены на рис. 6.39, на котором
построена зависимость ускорения S от числа процессоров р для перечисленных выше
топологий. Прямая S(p) = p показывает максимально возможное ускорение. В общем,
изображенные на рисунке кривые соответствуют общепринятой иерархии
рассмотренных топологий [2]. Наилучшим ускорением обладает архитектура с полносвязной
топологией, т.к. при одинаковом р все остальные топологии являются ее некоторыми
подмножествами. Однако на практике ВС с подобной топологией практически не
используются, т.к. соединение большого числа процессоров каждый с каждым
сопряжено с большими техническими трудностями. Из реально используемых в
современных ВС топологий наилучшее ускорение для анализируемой задачи
соответствует гиперкубическая топология. Затем идут двухмерный тор и решетка, причем
последняя проигрывает тору за счет наличия у того дополнительных связей,
замыкающих границы решетки и делающих максимальное расстояние между двумя
процессорами в два раза меньшим. Замыкают список кольцевой и линейный массивы.
Последняя топология характерна тем, что имеет максимальную среди всех
анализируемых топологий длину (р - 1) пути между самыми удаленными процессорами, что и
делает ее наименее подходящей для выполнения анализируемого алгоритма.
6.3.6. Распараллеливание явного метода решения
нелинейной динамической системы
Общая схема метода. Рассмотрим систему трехмерных уравнений магнитной
гидродинамики, описывающих течение жидкости, способной проводить
электрический ток [8]. Система имеет следующий вид
|^ + div(F) = 0;
ш
u(x,0) = (f>(x).
(6.31)
478
Методы современной ТАУ. Часть IV
Здесь и = { р, pV^, pVy, pVz, Bx, By, Bz} - вектор решения; тензор системы
F, определяющий плотности потоков, имеет вид
Pvx
pV2 + р-В2х+±В2
pVxVy-BxBy
pVxVz-BxBz
0
-(VxBy-VyBx)
-(VXBZ-VZBX)
PV,
pVxVy-BxBy
pV2y+p-B2y+±B2
pVyVz-ByBz
VxBy-VyBx
0
-(VyBz-VzBy)
pvz
pVxVz-BxBz
pVyVz-ByBz
pVz2+p-B2+±B2<
vxbz-vzbx
-(VyBz-VzBy)
0
Из 21 элемента этого тензора только 12 являются различными.
Явная разностная схема для выписанной системы имеет вид
Г Pi+l, j,k~ %-1, j, к Qi, У+1, * ~ Qi, j-\, к §, j, k+l ~ ^i, j, k-l
ljk ljk 2Ajc 2Ajc 2Ajc
(6.32)
где P,QyR- столбцы тензора F.
На рис. 6.40 изображен граф такой вычислительной модели на одном временном
шаге. Он имеет 26 вершин, распределенных по трем ярусам. Первый ярус составляют
вершины, имеющие нулевой вес и определяющие рассылку компонентов вектора и с
предыдущего временного шага. На втором ярусе располагаются вершины,
соответствующие операциям по подсчету элементов тензора F. Данные вершины имеют веса
(ЛГ3, ЛГ3, ЛГ3, 5ЛГ.3, ЗЛГ3, ЗЛГ3, 5ЛГ3, ЗЛГ3, 5N\ 2N\2N\2N3\ где ЛГ - число узлов
сетки по каждому направлению. На третьем уровне находятся вершины,
соответствующие операциям по пересчету вектора и по формулам (6.32). Их веса равны
(3N3, 3N3, 3N3, 3N3, 2N3, 2N3, 2N3). Каждая из дуг графа обозначает пересылку
одного трехмерного массива, поэтому вес всех дуг равен N слов, и если положить,
что 1 слово = 4 байтам, то вес дуг равен 64N Бт.
Распараллеливание метода. Видно, что функционал /(R) для данной модели от
N не зависит, т.к. веса всех вершин и дуг есть величины одного порядка Q(N3).
Следовательно, можно сделать вывод, что задачу поиска оптимального
распараллеливания модели можно решать только при одном N (например, при N = 1), и это решение
будет справедливо для всех N » 1.
Рис. 6.40. Граф явного метода решения нелинейной динамической системы
Глава 6. Интеллектуальные системы
479
С помощью системы PARALLAX было проведено исследование зависимости
ускорения S от числа процессоров р и времени передачи единицы информации t для
вышеописанного явного метода. Результаты этого исследования отражены на
рис. 6.41. Из представленных на нем графиков видно, что ускорение может быть
достигнуто только при достаточно большой, по сравнению с производительностью
процессоров, производительности каналов связи. Так, для вычислительных систем, в
которых выполняется условие, ускорение ведет себя практически линейно по числу
процессоров для р = 7. Дальнейшее увеличение числа процессоров на ускорение
практически не влияет, хотя степень параллелизма анализируемого графа и больше 7.
В результате проведенных исследований были получены следующие основные
результаты.
Поставлена задача отображения алгоритмов, представленных взвешенными
графами большой размерности, на архитектуры мультитранспьютерных
вычислительных систем, содержащих большое число транспьютерных элементов. Проведено
теоретическое и численное исследование поставленной задачи. Исследование показало,
что функционал, подлежащий минимизации, обладает ярко выраженной овражной
структурой и содержит большое число локальных минимумов, что затрудняет и даже
делает невозможным применение большинства методов решения подобных задач -
различных эвристических методов, методов безусловного спуска, методов
наискорейшего спуска и т.п. Единственной возможной альтернативой этим меггодам
является использование стохастических алгоритмов.
4
3
sril
*>-
р = 6
р = А
0,005 0,010
0,015
Рис. 6.41. Зависимость ускорения 5, достигаемого при распараллеливании явного метода решения
нелинейной динамической системы, от времени t передачи единицы информации по каналам ВС
для разного числа процессоровр
Разработан ряд стохастических методов решения поставленной оптимизационной
задачи распараллеливания вычислений. В первом методе - стохастическом методе
попарной оптимизации подграфов - поиск оптимального решения осуществляется за
счет взаимного (стохастического) переноса вершин между различными парами
подграфов графа алгоритма. Второй метод - метод Монте-Карло случайного блуждания
вершин графа алгоритма по подграфам - основан на отождествлении вершин графа
алгоритма с некоторыми частицами, совершающими случайные блуждания по
областям-подграфам в потенциальном силовом поле, роль потенциала которого играет
минимизируемый функционал. Наиболее вероятное состояние подобной системы
частиц соответствует минимуму потенциала - и, следовательно, является искомым
решением. Поиск такого состояния осуществляется методом Монте-Карло с
использованием специальной процедуры «имитации отжига». Третий метод - стохастиче-
480
Методы современной ТАУ. Часть ГУ
ский метод наискорейшего спуска - основан* на использовании дискретного аналога
градиента минимизируемого функционала. Все разработанные методы реализованы
программно и являются частью системы программ PARALLAX. Проведено
тестирование созданных программ и сравнение их работы на простейших примерах.
С помощью программной системы PARALLAX было проведено численное
исследование распараллеливания ряда наиболее распространенных алгоритмов линейной
алгебры на различные архитектуры мультитранспьютерных вычислительных систем.
Исследована зависимость эффективности выполнения нескольких блочных
алгоритмов линейной алгебры на прлносвязных топологиях ВС от параметров ВС и
параметров алгоритмов. Показано, что поведение полученных численно кривых S(p) (где за S
обозначено достигаемое при распараллеливании ускорение) совпадает с поведением
ускорения, "полученного из расчетов на реальных многопроцессорных ВС - сначала
линейный рост, затем выход на плоский максимум и, наконец, постепенное
уменьшение ускорения, что обусловлено возрастающими временными затратами на
организацию обменов данными при увеличении числа процессоров.
Библиотека
параллельных
алгоритмов
Средства
параллельного
программирования
ш!ш
Информация
о сети
Диаграмма
времен
Начальное
распределение
Алгоритм
балансировки
N
Конечное
распределение
времен блоков
Рис. 6.42. Структурная с^ема функционирования программно-аппаратного комплекса
Проведен численный анализ зависимости ускорения, достигаемого при
распараллеливании явного метода решения системы нелинейных динамических систем от
параметров ВС - числа процессоров и скорости работы каналов обмена данными.
Однако отчетливо просматривается путь, позволяющий выполнить сквозное
проектирование некоторого алгоритма обработки, предназначенного для
параллельной работы. Это - создание программно-аппаратного комплекса, в составе
которого возможно выполнить предварительный синтез и тщательное исследование
алгоритма обработки (закона управления), используя для этого универсальные
математические алгоритмы (УМП), и выполнить генерацию обработанного
математического описания в программную реализацию на языке параллельного
программирования.
Глава 6. Интеллектуальные системы 481
В настоящий момент существуют соответствующие программно-аппаратные
средства, которые принципиально позволяют создать указанный комплекс.
В данной главе для класса описания в обыкновенных алгебраических
дифференциальных и разностных уравнениях показана осуществимость подобного
комплекса, т.е. практически показаны все особенности его создания.
Работа комплекса проверена на ряде задач моделирования систем управления.
Предполагается дальнейшее развитие исследований и разработок в данном
направлении. Структурная схема функционирования комплекса изображена на рис. 6.42.
6.3.7. Логико-динамические модели и программно-технические
средства интеллектуальной системы управления
дискретными производственными процессами
Современные автоматизированные производства являются примером сложных
комплексов дискретных распределенных объектов управления, включающих
основное обрабатывающее и вспомогательное технологическое оборудование, средства
транспортировки и складирования, а также рабочие места персонала. Все эти
объекты связаны между собой и функционируют последовательно-параллельно во
времени. В совокупности они образуют сложную распределенную дискретно-непрерывную
техническую и программно-информационную среду, требующую от системы
управления решения достаточно большого набора разнообразных логико-вычислительных
задач, связанных со сбором и обработкой значительного объема информации, ее
классификацией, принятием решений с использованием сложноструктурированных
данных и планированием действий в многокомпонентной среде. В этих условиях
одним из многообещающих путей развития устройств управления для
производственных сред является построение их как интеллектуальных систем, позволяющих
наиболее рационально реализовать необходимые функции обработки сложной
информации на основе моделей знаний и логических методов.
Проблемная среда интеллектуальных систем управления. Основные
предпосылки целесообразности построения систем управления дискретными
автоматизированными производствами как интеллектуальных систем состоят в следующем:
• условия функционирования систем характеризуются многообразием данных и
качественных характеристик;
• область функционирования систем, как правило, плохо формализуема;
• компоненты распределенных объектов, с которыми работает система, требуют
для описания своего состава, структуры и состояния создания сложнооргани-
зованной информационной модели;
• данные о текущем состоянии объектов влияют на процесс выработки реакций
системы;
• процессы рассматриваемого класса имеют скорее логический, нежели
вычислительный характер;
• логическая структура алгоритмов работы с внешними объектами сложна и в
основном представляется моделями, базирующимися на правилах и законах
логической обработки неоднородно интерпретируемых данных.
В рассматриваемой проблемной среде для интеллектуальных систем могут быть
выделены следующие классы прикладных задач: мониторинга, контроля,
диагностики, принятия решений, управления. Рассмотрим более подробно каждый из этих
классов.
Задачи мониторинга. Имеется комплекс распределенных производственных
объектов, взаимодействующих друг с другом и воспроизводящих определенный
процесс. Требуется создать систему, собирающую в реальном времени необходимые
482 Методы современной ТАУ. Часть IV
данные о процессе и отображающую их в наглядной и удобной для пользователя
форме. При нормальном ходе процесса необходимо следить только за основными
параметрами, но при выполнении определенных условий или возникновении
непредвиденных ситуаций система должна сигнализировать о них персоналу, а также
формировать специальные дополнительные отчетно-справочные данные, или
запрашивать у объектов дополнительную информацию, или тестировать объекты.
Формальная схема работы такой системы может быть задана следующими правилами:
Й(«->ЗД.); (6.33)
Fj(S)-+Pj(S), (6.34)
где S - динамическая информационная модель состояния наблюдаемых объектов;
Qi(S), Ej(S) - описания состояний информационной модели 5; 5(с5 - подмножество
информационных элементов модели 5; Z,(S,) - функция означивания (присвоения
знаков) информационных элементов 5, в 5; Р/5) - функция преобразования состояния
модели S.
Из формулы (6.33) следует, что в состоянии, удовлетворяющем логическому
выражению Qi(S\ должны быть дополнительно означены определенные
информационные элементы 5, модели S. Считаем, что для каждого элемента qe S известна
функция U(q), возвращающая в S значение q. Эта функция может содержать любые
необходимые операции над 5, операции вывода команд, а также запросы или тесты,
обеспечивающие получение необходимых данных для означивания q.
Из формулы (6.34), в свою очередь, следует, что в состоянии, удовлетворяющем
Fj(S), можно выполнить преобразование Р, содержимого 5, отражающее
определенное логическое заключение о ходе наблюдаемого процесса.
Задачи контроля. Имеется система мониторинга, собирающая данные о
состоянии комплекса дискретных распределенных объектов. Задана целевая траектория Т*
наблюдаемого комплекса объектов в пространстве состояний. В ходе работы
комплекс воспроизводит определенную фактическую траекторию Т, которая может
отличаться от целевой. Требуется построить систему, обеспечивающую обнаружение
отклонений фактической траектории Т от идеальной целевой Г* с передачей данных
об этих отклонениях оператору или группе операторов.
Эта задача может быть сведена к решению более простых подзадач, когда
траектория Г* представляется единственной вершиной, описывающей определенную
область в пространстве состояний. В общем случае такое описание может иметь вид
предикатной формулы G(jc), где х - набор определенных предметных переменных.
Тогда обнаружение отклонения* от заданной области заключается в опровержении
формулы для текущих наблюдаемых значений х.
Вместе с тем допустима инвертированная постановка: в пространстве состояний
задается совокупность областей С, фактическая траектория системы в которых должна
отсутствовать. Здесь С описывается набором неблагоприятных для системы ситуаций.
Если область функционирования системы обширна и набор выделенных ситуаций
велик и многообразен, то описывающую их модель в ряде случаев можно
представить как модель знаний, а для сопоставления использовать какую-либо процедуру,
характерную для искусственного интеллекта.
Задачи диагностики. Имеется система контроля некоторого процесса,
воспроизводимого комплексом распределенных объектов. Известно, что наблюдаемые
отклонения от процесса являются следствием определенных причин или первичных
событий в объектах. Требуется создать систему контроля отклонений, определяющих их
истинные первопричины. Эта задача относится к классу типичных приложений
экспертных систем реального времени. Функции контроля и диагностики могут соче-
Глава 6. Интеллектуальные системы 483
таться с формированием рекомендаций по выводу процесса на нормальный режим
функционирования.
Задачи поддержки принятия решений при планировании производственной
деятельности. Задача диспетчерского планирования производственных процессов
трудно разрешима, т.к. строгому решению препятствует ряд плохо формализуемых
факторов, учитываемых планово-диспетчерскими службами при формировании
планов. В связи с этим в данной задаче перспективным представляется сочетание
моделей оптимизации (в особенности - многокритериальной) с моделями представления в
ЭВМ, а также использование эвристических знаний диспетчеров-плановиков.
Задачи управления комплексами дискретных распределенных объектов
в реальном времени. Эти задачи являются наиболее функционально емкими и
включают в себя задачи мониторинга, контроля и принятия решений. Наиболее
простым развитием рассмотренных выше систем контроля, в том числе
интеллектуальных, является управление компенсацией выявленных нежелательных отклонений от
заданной идеальной целевой траектории системы в пространстве состояний.
Необходимым дополнительным элементом здесь становится модель, описывающая
структуру комплекса объектов, их свойства и среду функционирования, а также динамику их
поведения. Такие модели должны содержать сложно структурированный
декларированный компонент, а описания процессов будут иметь вид логико-динамических
моделей. В связи с этим процедуры обработки целесообразно строить как решающие
процедуры определенных интеллектуальных систем.
В более полном варианте задача предполагает выработку воздействий,
обеспечивающих их заданную целевую траекторию в пространстве состояний. В общем
случае такая траектория имеет вид сети, каждая вершина которой сопоставляется с
определенным логическим выражением, описывающим требуемое состояние объектов
управления и/или объектов производства, с которыми работает система. Выработка
закона управления реализуется как процесс принятия решения в сложной среде, а
при планировании многошаговых цепочек достижения целевых состояний задача
имеет непосредственный логический вывод.
Логическая структура интеллектуальной системы управления дискретными
производственными процессами. Представленные выше задачи имеют ряд общих
особенностей, позволяющих эффективно объединить средства их решения в единой
оболочке интегрированной интеллектуальной системы управления, структура
которой приведена на рис. 6.43.
Центральным звеном комплекса является управляющая система, состоящая из
динамической базы оперативных состояний и совокупности процедур выработки
закона управления. Действия этих процедур определяются содержимым баз знаний
Б31 - БЗЗ и моделью, описывающей заданную целевую траекторию управляемого
комплекса объектов в пространстве состояний. Центральный компонент
интегрированной системы (подробно рассмотренный далее) в настоящее время реализован и
опробован в ряде производственных приложений.
Модель, описывающая целевую траекторию, в общем виде может быть
представлена сетью, где каждой вершине соответствует определенное требуемое состояние.
Целью управляющей системы в любой фиксированный момент времени является
перевод подчиненных объектов в целевое состояние, описываемое некоторым
подмножеством вершин сети, задающей целевую траекторию. В производственных
системах целевая траектория строится, как определенное детализированное
представление технологического маршрута, и математически может быть описана, например,
сетью переходов или сетью Петри.
484
Методы современной ТАУ. Часть IV
База БЗ1 содержит сведения о структуре и постоянных свойствах объектов и
среды, с которыми взаимодействует система, и имеет преимущественно декларативный
характер.
Б32
Логико-динамические
модели объектов
Б31
Структура
и свойства
объектов и среды
Целевая
траектория
комплекса
в пространстве
состояний
Объекты
управления
Внешние ИС
Внешняя среда I
БЗЗ
Логико-динамическая
модель процесса
управления
Б34
Логико-динамические модели
для идентификации
и оценки состояния процесса
УПРАВЛЯЮЩАЯ
СИСТЕМА
Динамическая
база
оперативных
состояний
Выработка
закона
управления
Г Команды
1 ^TtW\ABauu<
(требования)
на поиск
оптимальных
решений
Оценки
ситуаций
и решений
&
.1
-^Процедуры i
| принятия !
| решений t
JU"
Решения
1ЛПР1
Оператор
Рнс. 6.43. Структура интегрированной интеллектуальной системы управления
В системе ПРОДУС, рассматриваемой далее, эта база знаний является
компонентом базы оперативных состояний (что, как показывает опыт, не всегда удобно) и
строится как совокупность объектов, объединяемых в подмножество/классы
произвольного состава и иерархии. Каждый из объектов характеризуется набором
параметров/свойств и определенным протоколом информационного взаимодействия с
системой и/или другими объектами.
База знаний Б32 представляет собой совокупность логико-динамических моделей,
описывающих поведение во времени подчиненных системе дискретных объектов с
учетом допустимых управляющих воздействий. Для объектов, воспроизводящих
функции переключательного или автоматного типа, такие модели могут быть
представлены, например, правилами преобразования состояния предметной области во
времени. Особенность данной модели заключается в том, что для записи результатов
действия операторов в общем случае удобно пользоваться логикой времени (логикой
временных соотношений).
База знаний БЗЗ, являющаяся логико-динамической моделью процесса
управления, реализуемого интеллектуальной системой, представляет собой совокупность
правил, законов и алгоритмов генерации реакции системы на поступающую входную
информацию. Обрабатывающее исполнительное ядро управляющей системы в
заданной схеме можно рассматривать как интерпретатор модели процесса управления.
Эта модель руководит работой исполнительного ядра и задает логику выполняемых
им действий. В таком виде программное обеспечение управляющей системы может
Глава 6. Интеллектуальные системы 485
быть построено как инвариантное, т.е. настраиваемое на задачу путем изменения
описания модели требуемого процесса.
Структура и организация динамической базы оперативных состояний
управляющей системы тесно связана с языком и формой представления модели процесса
управления, хранящейся в БЗЗ, с моделями из Б32, Б31 и с математической моделью
описания целевой траектории системы. В частности, для этого база управляющей
системы должна хранить предысторию временных состояний наблюдаемых
объектов. Таким образом, можно считать, что понятие состояния отображается в
интеллектуальной управляющей системе в виде определенной динамической
информационной модели.
База оперативных состояний управляющей системы реального времени должна
быть оснащена программным монитором асинхронного ввода данных от объектов
управления и/или внешних информационных систем (ИС), собирающих также
сведения о состоянии внешней среды.
Для обеспечения интерактивного режима работы с операторами аналогичным
образом должен обеспечиваться ввод в базу поступающих от них команд, запросов и
сообщений. То же самое относится к внешним программным комплексам.
Функциональные возможности и уровень интеллектуализации системы
управления в целом могут быть довольно существенно расширены и развиты за счет
организации взаимодействия интеллектуальной управляющей системы с входящими в
состав базы знаний Б34 внешними экспертными системами (ЭС) и
специализированными процедурами оптимального выбора и принятия решений.
В рамках имеющейся логико-динамической модели процесса управления система
самостоятельно принимает решения по компенсации обнаруживаемых отклонений от
целевой траектории и формирует управляющие воздействия, переводящие объекты в
очередные целевые состояния. При возникновении сложных аномальных явлений и
ситуаций или невозможности достижения целевых состояний собственными
средствами управляющая система обращается к внешней дедуктивной ЭС с требованием
разобраться в ситуации и выдать диагноз или рекомендовать соответствующие меры
по нормализации состояния предметной области. В результате ЭС либо выдает
диагностические оценки ситуаций и решений, либо обнаруживает, что имеющихся
данных недостаточно для заключения и формирует команду с требованием получения
недостающей информации. С этого момента управляющая система начинает работать
под управлением ЭС. В ходе их совместной работы могут возникнуть ситуации, в
которых будет существовать целое множество допустимых альтернативных решений.
Например, в производственных системах это могут быть решения о
перераспределении партий деталей между оборудованием и восстановлении хода производства, а
также другие решения, связанные альтернативным использованием распределяемых
ресурсов, что в итоге обусловливает необходимость поиска оптимального варианта
управления. С этой целью в состав интеллектуальной системы управления включены
специализированные процедуры оптимального выбора и принятия решений. Особо
рациональным представляется здесь использование процедур поиска оптимальных
решений по Парето в условиях многокритериальных задач с обращением к лицу,
принимающему решения (ЛПР).
Базовые инвариантные программно-информационные средства
интеллектуальной системы управления. В качестве базовой программной платформы
рассмотренной интеллектуальной управляющей системы используется динамическая
продукционная управляющая система реального времени ПРОДУС-85 [3].
Инвариантность системы подтверждается следующими свойствами:
• дает возможность изменять состав, структуру и состояние объектов;
486 Методы современной ТАУ. Часть IV
• позволяет расширять правила, законы, алгоритмы управления, контроля,
мониторинга для заданного комплекса дискретных распределенных объектов;
• позволяет дополнять, развивать и модифицировать прикладные функции
управления, контроля, мониторинга в процессе эксплуатации без
перепрограммирования.
Внутренняя организация системы и технология создания в ее среде конкретных
прикладных систем основана на использовании методологии и моделей
искусственного интеллекта. Базовой моделью является продукционная система с прямым
выводом, которая была развита, расширена и переработана для описания и реализации
процессов управления комплексами дискретных распределенных объектов в
реальном времени. Настраиваемая база продукционной системы реального времени
предназначена для хранения данных о динамике изменения состояний объектов и имеет
прямой асинхронный информационный вход от внешних объектов и подсистем.
Алгоритмы принятия решения и управления описываются на языке правил-продукций
высокого уровня, допускающем квантификацию по объектам. Результатом
продукционного логического вывода являются заключения о состоянии и ходе
контролируемого процесса либо управляющие воздействия (команды) и сообщения,
выдаваемые системой объектам по соответствующим каналам связи. Методы и внутренние
формальные модели, положенные в основу реализации продукционной управляющей
системы реального времени, демонстрируют следующие ключевые характеристики и
особенности.
Наличие динамической информационной базы с хранением предыстории
состояния объектов (в привязке ко времени) на заданную пользователем глубину.
Работа с правилами, использующими сложную квантифицированную
предикатную логику времени в условиях применимости продукций и расширенный
операционный базис действий. Язык позволяет описывать рассуждения о подмножествах
объектов, а также о времени как в терминах точечных, так и интервальных событий с
фиксацией их частичного порядка и относительного положения на шкале времени.
Функционирование интерпретатора продукций базируется на расширенном
толковании логических выражений. Значениями в используемой логике являются не
только «ложь» и «истина», а также подмножество объектов базы и моментов времени
(или интервала), для которых утверждение истинно. Эти данные используются в ходе
работы интерпретатора и передаются в операционную часть продукций для
выполнения действий с объектами базы и выработки реакций.
Механизм разрешения конфликтов носит множественный характер и оставляет на
каждом шаге работы системы в списке применимых несколько не конфликтующих
продукций, поддерживающих процесс взаимодействия с различными внешними
объектами. В результате обеспечивается псевдопараллельная работа системы с
распределенными объектами и реализация параллельных цепочек логических выводов по
различным аспектам наблюдаемого процесса.
Система располагает средствами динамической фокусировки и переключения
внимания при изменении внешней обстановки и возникновении особых ситуаций.
Эти функции поддерживаются механизмами активации продукций и экстренного
вызова. Экстренным может быть объявлено любое правило, и тогда при
удовлетворении его условий прерывается процесс интерпретации и логического вывода. Эти
действия могут активировать другие правила и вызвать тем самым лавинообразный
процесс концентрации внимания системы на определенном фрагменте проблемной
области. Несколько экстренных продукций, записанных подряд и активирующих
друг друга, обеспечивают сверхбыстрое реагирование и логический вывод по особо
важным событиям. Такие цепочки правил обеспечивают прерывание всех процессов,
выполняемых интерпретирующей системой в текущий момент.
Глава 6. Интеллектуальные системы
487
Основные компоненты оболочки продукционной управляющей системы
представлены на рис. 6.44.
Конструктор
CONST
I
Исходные
файлы
настройки
системы
Оператор
и
Отладчик
OTLOAD
Компилятор
GENER
Загрузочные
настройки
системы
Продукционная
система
моделирования
PS
Данные о
состоянии
Управление
Инвариантное
исполнительное
ядро
продукционной
системы
PS
Рис. 6.44. Основные компоненты оболочки продукционной управляющей системы
Программа-конструктор CONST, предназначенная для диалогового
конструирования прикладных продукционных систем в оболочке ПРОДУС, выполняет
следующие основные функции:
• внешнюю спецификацию прикладной системы;
• построение базы фактов и базы правил продукционной системы;
• описание продукционного алгоритма управления, контроля или мониторинга
для прикладной системы.
Конструктор может создавать либо непосредственно файлы настройки системы,
либо файлы настройки на языке компилятора GENER с последующим их переводом
компилятором во внутренний код системы. Для удобства работы конструктор
поддерживает облегченный стандартизированный интерфейс пользователя,
включающий структурные элементы типа интерфейса программы-оболочки Norton
Commander и современных Turbosystems фирмы «Borland».
Компилятор GENER компилирует тексты продукций из исходных файлов
настройки системы (языка пользователя), извлекает из них атрибуты и параметры
описания состояний объектов, строит внутреннее представление базы, кодирует условия
правил с помощью ролевых фреймов, транслирует операционные части правил,
контролирует синтаксис языка, обнаруживая ошибки, и анализирует семантику
алгоритма, выявляя конфликтные правила. В результате создаются верифицированные
загрузочные файлы системы, конфигурирующие и настраивающие ее на прикладную
задачу управления, контроля и мониторинга.
Исполнительное инвариантное ядро PS продукционной управляющей системы
реального времени считывает загрузочные файлы настройки, в которых описаны:
структура и состав информационной базы прикладной системы; продукции
управления, контроля, мониторинга, принятия решений и диалога; правила разрешения
конфликтов; данные, необходимые для активации продукций, а также спецификации
форматов входных и выходных сообщений и команд, которыми система
обменивается с внешними объектами. Эти данные управляют действиями системы в заданном
488 Методы современной ТАУ. Часть IV
прикладном применении. Внутренняя структура исполнительного ядра системы
описана в работах [8]. Его основные функции состоят в проверке условий и выполнении
действий правил, разрешении конфликтов между ними, выполнении преобразований
базы, формировании и выводе команд и сообщений внешним объектам, а также в
активации правил. Ядро обеспечивает высокое быстродействие интерпретации
продукций с чрезвычайно избирательной их активацией в зависимости от наблюдаемой
ситуации и текущего состоянии процесса логического вывода.
Взаимодействие с внешними объектами организовано по асинхронному принципу
и поддерживается вход-выходным программным монитором системы. Обеспечена
также устойчивость системы к сбоям ЭВМ, на которой она устанавливается, и
возможность выполнения рестартов после аварий.
Отладчик OTLAD поддерживает работу системы в режиме отладки построенного
прикладного варианта базы факторов и правил. В этом режиме разработчику
предоставляется возможность наблюдать и оперативно вмешиваться в ход процесса
управления. На любом шаге интерпретации набора продукций разработчик может вызвать
функции, позволяющие создать, удалить или модифицировать любой элемент базы
системы. В частности, для базы факторов можно оценить и изменить значение
любого параметра выбранного объекта базы или выбранной команды, значение любого
элемента рабочей памяти и т.д.
При отладке базы правил можно редактировать состав условий и/или действий
выбранной продукции, значение любого слова выбранной операции, правила
разрешения конфликтов и правила активации. При необходимости можно создать или
удалить связи между объектами базы, сами эти объекты и их параметры, продукции
и их условия, правила разрешения конфликтов, правила активации, команды
объектов и их параметры. Все внесенные изменения сохраняются в файлах настройки,
которые используются ядром на следующем шаге интерпретации набора продукций.
Это позволяет осуществлять модификации в отлаживаемой системе непосредственно
в ходе ее работы.
Продукционная система моделирования PSM является инструментом отладки
прикладных систем реального времени и средством оценки их эффективности.
Система моделирования реализуется на базе инвариантного ядра ПРОДУС с
использованием всех методов, средств и компонентов оболочки продукционной управляющей
системы. Продукционная система моделирования предназначена для обработки
команд, поступающих от исполнительной системы управления, передачи ей сообщений
о состоянии моделируемых объектов, визуализации процессов функционирования
моделируемых объектов управления в реальном или модельном времени. Физически
PSM и исполнительная система расположены в разных ЭВМ, связь между которыми
реализована непосредственно через последовательные порты ввода-вывода RS-232.
Это значительно упрощает требования как к используемым при моделировании
техническим средствам ЭВМ, так и к линии связи. Реализованный интерфейс PSM с
исполнительной системой основан на реальном протоколе связи, что позволяет
сочетать в процессе функционирования комплекса реальные физические объекты
управления с моделями объектов, т.е. использовать возможности методов и средств
полунатурного моделирования.
Новыми элементами продукционного языка описания процессов реального
времени, поддерживаемого конструктором и системой в целом, являются иерархия
системы правил и макроопределения, операторы динамической подкачки/выгрузки
дополнительных источников знаний в систему, а также операторы фокусировки
внимания системы на определенных фрагментах базы правил в процессе работы. Язык
макроопределений позволяет проектировать иерархические базы правил с использо-
Глава 6. Интеллектуальные системы 489
ванием модульного принципа, что существенно упрощает процесс их синтеза и
способствует рациональной структуризации прикладных продукционных систем.
Правила языка макроопределений имеют вид
М: если £/,'то Q,
где М - наименование функции данного макроправила; U - условие, предъявляемое к
состоянию процесса, при котором действует данное макроправило; Q -
последовательность операций или функций, выполняемых после состояния U. Здесь U задает
переход к определенному режиму управления и принятия решений или к
определенной функционально замкнутой совокупности операций Q. Эти операции могут быть
либо условными, либо безусловными. Условные операции детализируются в виде
макроправил следующего более низкого уровня или в виде традиционных
продукций. В результате макроправила образуют иерархическое описание продукционного
алгоритма по методике «сверху вниз», где на самом низком уровне располагаются
обычные продукции.
Пример 6.1.
Макрос М4. Отработка требования на перевозку:
Если требование на перевозку установлено, то
1) вызов Спутника (продукция Р7);
2) перегрузка кассеты на Спутник (продукция Р8);
3) отправка Спутника (продукция Р9);
4) разгрузка прибывшего Спутника (макрос М5);
5) фиксация отработки требования (продукция Р12).
Макрос М5. Разгрузка прибывшего Спутника:
Если Спутник прибыл к Приемнику, то
1) выдача Приемнику команды разгрузки (продукция Р10);
2) фиксация доставки кассеты (продукция Р11).
Здесь макроправило М4 описывает режим отработки требования на перевозку, включающий функции
1 - 5, которые выполняются только при определенных условиях. Условия и действия функций 1 - 3 и 5
задаются продукциями, а функция 4 - макросом М5 более низкого уровня иерархии. В свою очередь,
функции этого макроса определяются продукциями Р10 и Р11. Подобные описания более наглядны, чем
простой линейный набор правил, и точнее характеризуют логическую структуру знаний для сложных
процессов управления, контроля и мониторинга.
В язык продукций и макросов введены операторы extend и extendReturn
динамической подкачки и выгрузки дополнительных источников знаний, а также оператор
focus. Оператор extend (P,,...,/^) может быть включен в операционную часть любого
правила. Он обеспечивает загрузку в систему подмножества правил {Ph...,Pj}9
которые подключаются к анализу базы на очередном шаге интерпретации вместе с
использованными ранее правилами. В результате к управлению логико- •
вычислительным процессом будут привлечены дополнительные знания,
представленные в {Р„...,Ру}, т.е. система как бы расширит свое понимание. Оператор
extendReturn обеспечивает возврат к использованию первоначального набора
правил.
Оператор focus(Pb...,Pm) сосредоточивает систему на фрагменте модели знаний,
описываемом правилами Q = {РЬ...,РШ}. Если такой оператор встречается в
операционной части какой-либо применимой продукции из подмножества правил R, то
процесс интерпретации правил R и функционирования продукции Р, прерывается и
происходит рекурсивное обращение к подпроцессу интерпретации правил Q,
указанных в операторе focus. Система начинает функционировать только под
управлением правил (/*,..., Рт) е Q, т.е. концентрирует внимание на свойствах и ситуациях
предметной области, описанных в этих правилах. Оператор focusReturn
обеспечивает рекурсивный возврат к прерванному ранее процессу интерпретации правил из
подмножества R. При этом невыполненные операции продукции Ру е R , указанные
после оператора focus(P*,...,Pm), довыполняются.
490
Методы современной ТАУ. Часть IV
Транспьютерная реализация инвариантного ядра системы. Повысить
эффективность управляющей системы можно при распараллеливании процесса обработки
информации несколькими процессорами, объединенными в единую
вычислительную структуру. Такая мультипроцессорная система может быть построена на основе
транспьютеров - специальных программируемых СБИС, предназначенных как для
автономного использования, так и в качестве элемента мультипроцессорной
системы [7, 8]. Реально доступными являются дополнительные платы к IBM PC,
содержащие 1, 2 или 4 транспьютера. При этом процессор самой IBM PC также
включается в состав системы и применяется для подготовки программного обеспечения для
транспьютеров, загрузки кодов программ и данных, для связи с сетью
транспьютеров через специальную программу AFSERVER. Для программирования
транспьютеров используются языки OCCAM, Parallel С и др.
Для реализации ядра рассматриваемой системы предлагается программа,
состоящая из задач двух типов - PRO и TASK, представленных на рис. 6.45. Задача
PRO загружается в корневой транспьютер и поддерживает связь с загрузочным
процессором для осуществления ввода-вывода данных (клавиатуры, экран, файлы,
технологическое оборудование). Эта задача используется для передачи данных другим
транспьютерам и задачам, а также для обобщения результатов работы задач второго
типа. Задачи TASK загружаются во все транспьютеры и параллельно выполняются
необходимые действия по обновлению базы, активации продукций и их применимости.
Программы PRO и TASK, учитывая наличие в транспьютерах локальной памяти,
осуществляют связь друг с другом через корневой транспьютер.
Iafserver -
1
То
—1
-►
PRO -
Вход^
f
TASK1 |
м
г,
■^
Вход
| TASK 2
Выход
Вход
| TASK3
Тг
• Вы>
юд
Вход
TASK 4 |
т4
Выход
Рис. 6.45. Структура программы реализации ядра
Для распараллеливания процессов обработки информации в интеллектуальной
продукционной управляющей системе используются два основных способа:
разделение на отдельные фрагменты списка продукций (правил) и разделение на
фрагменты базы (т.е. базы фактов).
Первый способ. Список продукций разделяется на 4 фрагмента, которые
загружаются в память транспьютеров Т\ - Г4. При этом в транспьютеры загружаются
только необходимые для работы продукций подмножества базы фактов.
Инициировать обновление базы и дублирование ее в транспьютеры на каждом цикле работы
системы можно из программы-диспетчера PRO.
Структура программ PRO и TASK представлена на рис. 6.46. Здесь штриховыми
линиями показаны моменты синхронизации программ и обмена данными.
Глава 6. Интеллектуальные системы
491
Транспьютер Тх
Задача PRO
Транспьютеры Т2 - Т4
Задачи TASK 2 - 4
[Начальная загрузка\-
Процесс TASK 1
Обеспечение
обновления
содержимого
базы
Обработка
конфликтов
Изменение
Обновление
содержимого
базы
I
I Активация
Выбор
применений
Да
Обработка
конфликтов
Действие
L
Действие
I
Изменение
содержимого
базы
Прием
исходных данных
Рис. 6.46. Структура программ PRO и TASK
Этап обновления базы в начале каждого цикла работы системы проводится под
управлением программы PRO и заключается в рассылке по каналам связи
изменившихся параметров базы. В дальнейшем каждый транспьютер работает автономно как
небольшая продукционная система. Необходимость в синхронизации и обобщении
результатов возникает только при наличии конфликтов продукций, хранящихся в
разных транспьютерах. При отсутствии конфликтов между группами правил,
расположенных на разных транспьютерах, каждый из транспьютеров продолжает
автономно выполнять работу вплоть до этапа изменения содержимого базы. Этот этап
контролируется программой PRO, которая определяет наличие изменений в базе
после выполнения продукций и дублирует эти изменения в других транспьютерах.
Второй способ распараллеливания работы управляющей системы
предусматривает разделение базы на 4 непересекающихся подмножества и загрузку их в
транспьютеры вместе с полным списком продукций. Особенностью способа является необхо-
492 Методы современной ТАУ. Часть IV
димость обобщения результатов работы транспьютеров после частичной обработки
продукций в разных транспьютерах. При этом увеличивается количество пересылок
данных и моментов синхронизации. В остальном алгоритм работы системы сходен с
алгоритмом для первого способа распараллеливания.
6.3.8. О НЕКОТОРЫХ ЗАДАЧАХ ТЕОРИИ И ТЕХНИКИ
ИНТЕЛЛЕКТУАЛЬНЫХ СИСТЕМ
Развитие информационных технологий в двадцать первом столетии будет
сопряжено с разработкой и созданием интеллектуальных систем обработки информации и
управления в различных средах обитания и деятельности человека. Сегодня
вычислительные средства (различного рода компьютеры) значительно превзошли человека
в таких хорошо определенных областях, как вычисления, обработка текстов, а в
последнее время - даже в области логического вывода. Тем не менее им еще не достает
гибкости и они отстают от человека во многих областях, например, в распознавании
образов, решении задач при неполной информации, в способности к обучению,
прогнозе результатов предполагаемого действия и выработки управления с учетом
динамики протекания процессов в реальном времени. Такая работа с информацией,
свойственная человеку, характеризуется понятием «гибкой» обработки информации,
в отличие от традиционной «жесткой» обработки информации и выработки
управления вычислительной системой, которая предполагает наличие полностью заданной
информации в «априори» оговоренном мире или проблемной области. Этот подход к
обработке информации, который можно назвать ассоциативным или «интуитивным»
в противовес «логическому», еще совсем не развит в существующей ныне
информационной технологии. Здесь уместно отметить, что развитие информационных
технологий происходило во взаимосвязи с эволюцией вычислительных систем. Если такие
системы первых поколений позволяли осуществлять цифровую обработку данных и
текстов, создавать и использовать базы данных, то вычислительные системы пятого
поколения уже дают возможность обрабатывать знания, осуществлять логический
вывод и тем самым создают начала их интеллектуализации. Такие вычислительные
системы представляли собой некоторые самостоятельные образования - инструмент,
не входящий органически в «состав» естественных и общественных процессов, а
лишь предназначались для выполнения некоторых весьма важных вычислительных
операций, отображающих эти процессы. Взаимодействие же человека или
коллектива людей с вычислительной системой состояло в необходимости разработки
программы вычислений, ее отладки и представлении результатов в удобной для
понимания человеком форме и т.п. Однако ясно, что получение информации для обработки
ее в вычислительных системах сопряжено с проведением различного рода измерений
тех или иных характеристик1 окружающей среды, а результаты обработки данных
должны использоваться для принятия решения о том или ином действии, в
соответствии с управлением, выработанным вычислительной системой, с последующим
контролем результатов управления. Возможно, поэтому в конце восьмидесятых годов
текущего века была выдвинута новая парадигма систем обработки информации и
управления - концепция «Интеллектуальные системы» [9]. Несколько позже, в
начале 90-х годов в Японии, как продолжение программы «Вычислительные системы
пятого поколения» выдвигается программа «Вычислительные системы реального
мира» (Real-World Computing-RWC), при мотивировке ее появления
прогнозируемыми требованиями к потребностям в информации общества XXI века. Сутью этой
программы является поиск алгоритмов, обеспечивающих интеграцию новых базисных
функций при поддержке следующих областей знаний:
Глава 6. Интеллектуальные системы 493
• распознавание и понимание, вплоть до восприятия жестов или движения
пальцев;
• понимание устной речи;
• логический вывод и решение задач;
• разработка информационных баз для конкретных областей знания и
алгоритмов принятия решений на основе статистических данных при тех или иных
ограничениях;
• методы самоорганизации сложных информационных баз;
• решение задач моделирования и организация пользовательского интерфейса;
• распознавание намерений человека и работа с широкополосными каналами
связи, которые он использует для передачи информации (с помощью жестов,
звуков, рисунков);
• автономный и совокупный контроль, одной из задач которого служит
выявление принципиальной методологии интеграции восприятия и осознания,
планирования и действия в реальном мире с точки зрения адаптации и познания.
Дальнейшие исследования, ориентированные на приложения, будут направлены
на реализацию автономных информационных интегральных систем и
информационных систем об окружающей среде. По сути предполагается создание
вычислительных систем реального мира, в которых новые функции будут интегрироваться с
другими, снова образуя новые функции, не нарушая при этом жизненности и открытости
системы. Тем не менее вычислительные системы реального мира все-таки остаются в
рамках автономных вычислительных систем, хотя и предусматривающих в своем
составе функции контроля, планирования и действия в реальном мире.
В концепции интеллектуальных систем принципиально предполагается ее
взаимодействие с окружающей средой, наличие мотивации, использование знаний для
синтеза цели, оценки, принятия решения и выработки управления, контроль
реальных результатов управления и сопоставление их с прогнозированными динамической
экспертной системой результатами действия [10]. Поэтому исследование и создание
интеллектуальных систем потребовало разработки новых информационных
технологий. Частично, особенно в области алгоритмов «мягкой» логики, в настоящее время
они коррелируются с программой RWC.
Информационная технология, развиваемая в интеллектуальных системах и
поддерживаемая вычислительной техникой и технической связью, порождает перемены
в обществе. Эти перемены проникают не только в промышленную сферу, такую как
система рационального распределения и производства новых товаров и услуг, но
также вызывают качественное улучшение образа жизни, стимулируют развитие
регионов, а также образования и культуры. Так, в сфере информационных сетей
результатом будет значительный рост не только количества, но и качества и
разнообразия информации, требующей обработки. Поэтому для такого связанного в
информационную сеть общества потребуется новая технологическая база, которая каждому
даст возможность легко и эффективно пользоваться различными информационными
ресурсами сети.
В связи с этим в различных прикладных системах обработки информации и
управления информационные среды вычислительных систем должны отражать
интеллектуальную деятельность и быть способными к сотрудничеству с людьми в
обстановке реального мира. Поскольку под интеллектуальной системой понимается
объединенная информационным процессом совокупность технических средств и
программного обеспечения, работающая автономно или во взаимосвязи с человеком
(коллективом людей), способная на основе сведений и знаний при наличии
мотивации синтезировать цель, вырабатывать решения о действии и находить рациональные
494 Методы современной ТАУ. Часть IV
способы достижения цели, то в технологическом аспекте вычислительные части
интеллектуальных систем должны уметь гибко обрабатывать информацию о реальном
мире, как это делает человек, поскольку многие задачи этого мира плохо определены
и их трудно представить в виде алгоритма [9].
Для разработки интеллектуальных систем важно, прежде всего, изучить
интуитивный (ассоциативный) аспект обработки информации человеком и воплотить его в
виде новой информационной технологии. В связи с этим, координируя логический и
интуитивный аспекты обработки информации, интеллектуальные системы, выступая
как новая парадигма информационной технологии, будут включать также новые
функции:
• синтез цели на основании мотивации, сведений об окружающей среде и
собственном состоянии системы;
• интеграции разнообразной, сложной, с перекрестными связями информации,
содержащей неопределенности, и получение подходящего (приближенного)
• решения в разумное время;
• активного овладения необходимой информацией и знаниями и приобретения
знаний индуктивно;
• адаптации самой системы к потребителю и меняющейся обстановке;
• выработка и исполнение управления для достижения цели.
Поскольку человек способен гибко обрабатывать информацию потому, что мозг
соединяет распределенное представление информации, высокопараллельную
обработку, способность к обучению и самоорганизации, а также способность
интегрировать информацию, то в технической реализации этих характеристик естественных
интеллектуальных систем можно указать два аспекта:
• функциональный аспект, для которого характерны допустимость и интеграция
неопределенной и сомнительной информации и способность к адаптации и
обучению;
• вычислительный аспект, для которого характерна высокопараллельная и
распределенная обработка многомодульной, многомерной, с большим
количеством связей информации.
По сути, обработка информации - это функция, способность, которую
приобретали люди в процессе эволюции, приспосабливаясь к меняющейся обстановке и
воздействиям окружающей среды. Эта функция хотя и многогранна, в ней, как
отмечалось, можно выделить аспекты логической и интуитивной обработки информации.
В этой связи полезно рассмотреть, каким образом эти два аспекта обработки
информации развиваются и интегрируются в вычислительной части интеллектуальной
системы по отношению к обработке информации и выработке управления человеком.
Имеется некоторая разность е между результатами обработки информации
человеческим мозгом и с помощью алгоритмов, реализованных в той или иной
вычислительной среде.
Эта разность должна быть минимизирована, принимая во внимание, что
способность к «гибкой» обработке информации пока все-таки принадлежит человеку.
Кроме того, должно быть синтезировано такое управление, которое способствовало бы
достижению цели, выбранной в интеллектуальной системе.
Технология обработки информации должна дополнить или заменить
человеческую функцию ее обработки путем автоматизации и интеграции логического и
интуитивного подходов. Однако, исторически, механизмы автоматизации развивались
теоретически и технологически применительно к логической обработке в
традиционных цифровых компьютерах и в связи с этим последовательная обработка
утвердилась сегодня как господствующая парадигма. Однако интуитивная обработка инфор-
Глава 6. Интеллектуальные системы 495
мации изучалась в таких областях, как распознавание образов и обучение, алгоритмы
которых реализуются на базе нейронных вычислительных сетей, на которых может
быть реализована параллельная и распределенная обработка информация. Тем не
менее интуитивная обработка информации остается еще слабо развитой областью
информационной технологии.
Отсюда вытекают новые проблемы в разработке и создании интеллектуальных
систем. Эти системы должны поддерживать различные аспекты человеческой
деятельности, накапливая в базе знаний информацию о реальном мире и используя ее
для принятия решений и выработки управления для достижения прогнозируемых
результатов действия всей системы. Такая информация чрезвычайно обширна и по
самой природе ей свойственна модальность, неопределенность и неполнота. Поэтому
интеллектуальные системы требуют реализации новых функций с разной гибкостью,
которая впитывает в себя такие понятия, как устойчивость функционирования,
качество протекаемых процессов в реальном времени, открытость. Новизна функций
должна строиться на основе новых теоретических подходов или алгоритмов,
пригодных для интеллектуальных систем, включающих такие гибкие функции, как
интеграция символов и образов, обучение и самоорганизацию.
Поскольку гибкая обработка информации и управления выходят за пределы
традиционных подходов, то можно указать некоторые области исследования функций,
выходящие за эти пределы, а именно:
• распознавание и понимание разного рода информации типа рисунков, звуков
речи и символьной информации, присущей естественным языкам;
• вывод и решение задач с помощью баз знаний, которые допускают прямую
обработку информации и обладают способностью к обучению и
самоорганизации;
• интерфейс и моделирование взаимодействия человека с реальным миром;
• управление и автоматическое управление в интеллектуальных системах,
функционирующих в реальной среде.
В связи с этим можно указать два направления развития интеллектуальных
систем. Это - автоматические интеллектуальные системы, адаптированные к реальной
окружающей среде, и диалоговые системы, в которых интегрируются функции
автоматических систем и человека в их взаимодействии.
Первое направление означает объединение интеллектуальных систем с реальным
миром. При этом системы должны быть способными автономно понимать и
контролировать среду путем активного и адаптивного взаимодействия с реальным миром и
способны взять на себя часть деятельности человека в этом мире. Таким системам
необходимо справляться с неполнотой, неопределенностью и изменчивостью
информации, характерными для реального мира. К новым функциям таких систем можно
отнести понимание воздействий окружающей среды, моделирование реального мира,
планирование последовательности действий, оптимальное управление с целью
достижения желаемого результата, элементы адаптации и самоорганизации.
Второе направление означает «объединение» системы с человеком. Это должны
быть гибкие системы, поддерживающие и повышающие интеллектуальную
деятельность людей в таких областях, как решение задач и получение информации за счет
расширения каналов связи между людьми и системами. Чтобы помочь людям в
решении задач и получении новой информации, потребуется гибко воспринимать и
интегрирование различной информации. Здесь новые функции в системе: это вопрос
и ответ, высказанные на естественном языке, понимание намерений на базе
различной информации, поступающей от людей, реализация интеллектуальной поддержки
для нахождения и представления полезной информации в огромном количестве дан-
496 Методы современной ТАУ. Часть IV
ных, хранящихся в базах данных, и прогнозирования изменений в реальном мире,
методы интеграции для обеспечения взаимодействия человека и системы,
вычислительная модель реального мира и т.д.
Для интеллектуальных систем эти новые функции необходимо оценить с точки
зрения обеспечения таких важных характеристик интеллектуальных систем, как
устойчивость, открытость и работа в реальном времени.
Кроме того, интеллектуальные системы XXI века будут базироваться не на одной,
а на разных ключевых информационных технологиях, таких как технологии для
высокопараллельных вычислительных сетей (транспьютероподобных), оптических
вычислительных систем, нейросистем и логических вычислительных систем. Эти
технологии должны интегрироваться в интеллектуальных системах, чтобы справляться с
задачами реального мира.
Глава 7. Применение нейрокомпьютеров в системах управления
497
ГЛАВА 7. ПРИМЕНЕНИЕ НЕЙРОКОМПЬЮТЕРОВ
В СИСТЕМАХ УПРАВЛЕНИЯ
Данная глава посвящена одному из бурно развивающихся сейчас направлению в
вычислительной технике - нейрокомпьютерам. Рассматриваются их принцип работы,
архитектурные особенности, разновидности, теоретические основы решения
различных задач на этих компьютерах, некоторые методы их проектирования, примеры
решения конкретных задач.
7.1. СИСТЕМА УПРАВЛЕНИЯ С ЭВМ В КОНТУРЕ: СТРУКТУРА,
ОСОБЕННОСТИ РАБОТЫ
В классической теории управления техническими объектами рассматривают
различные варианты схем систем управления с ЦВМ в контуре [4, 5, 19, 21]. Однако для
более лучшего понимания принципа построения нейрокомпьютеров рассмотрим
несколько отличную от привычных схему (рис. 7 1).
И')
« ►
Рис. 7.1. Структурная схема системы управления с ЦВМ в контуре:
ЗДП - задатчик программного движения, ИМ- исполнительные механизмы,
ЦАП - цифро-аналоговый преобразователь, АЦП - аналого-цифровой преобразователь,
У ЦВМ - управляющая ЦВМ
На этой схеме обозначены: Х(г) - вектор состояния системы, хизм (t) - вектор
измеряемых параметров состояния объекта, увыч (г) - вектор вычисленных
параметров, Ynp(r) - вектор программного входного воздействия, a(t) - сигнал ошибки,
u(t) - управляющее воздействие, F(r) - возмущение. Нетрудно заметить, что
применяя к данной схеме известные в теории управления правила преобразования
структурных схем можно получить классическую схему системы управления с ЦВМ в
контуре.
Система на рис. 7.1 работает следующим образом. Под действием управления
u(t) объект движется в заданном направлении. Однако случайные, неуправляемые
возмущения F(r) отклоняют его движение от заданного. Отдельные компоненты
вектора состояния объекта измеряются датчиками, квантуются по амплитуде на
аналого-цифровых преобразователях (АЦП) и передаются в управляющую ЦВМ
(УЦВМ), которая, преобразовав измеренную входную информацию по заданному
33 Зак 416
498 Методы современной ТАУ. Часть IV
алгоритму, подает на узел сравнения вектор вычисленного воздействия увыч (г),
соответствующего состоянию объекта на момент измерения. Узел сравнения
вырабатывает сигнал ошибки a(t) и передает его исполнительному механизму. Последний
вырабатывает такое управление u(t), которое, воздействуя на объект, возвращает
его на программную траекторию.
Очевидно, что ЦВМ, включенная в контур рассмотренной системы управления,
должна удовлетворять следующим требованиям: осуществлять возложенные на нее
вычисления с точностью, позволяющей системе нормально выполнять свои функции;
производить обработку входной информации в темпе работы системы. Иначе говоря,
управляющая ЦВМ должна выдавать результаты с требуемой точностью и работать в
реальном масштабе времени.
Современный уровень развития элементной базы вычислительной техники
позволяет выполнять задатчик программного движения и узел сравнения в виде
программных модулей, размещаемых в памяти той же УЦВМ, что и основной алгоритм
обработки входной информации. В этом случае УЦВМ будет вырабатывать
непосредственно сигнал ошибки и, очевидно, будет иметь большую вычислительную нагрузку.
Значительное повышение качества работы системы дает применение
адаптируемых (интеллектуальных) задатчиков программного движения. Если программные
модули УЦВМ оценивают характер влияния окружающей среды на движение
объекта, вырабатывают тактику поведения объекта в новых условиях, корректируют
программную траекторию, рассчитывают управляющие воздействия под новую
программную траекторию, то такая система приобретает элементы интеллекта. Понятно,
что вычислительная нагрузка УЦВМ таких систем значительно больше, чем в
обычной системе. Удовлетворить требованию работы в реальном времени УЦВМ,
построенной по классической фоннеймановской архитектуре, с каждым новым проектом
становится всё более сложнее. Однопроцессорная архитектура фон Неймана имеет
физический предел, определяемый скоростью распространения электрических
сигналов по линиям связи структурных модулей ЭВМ. Очевидно, что выход может быть
найден в параллельной организации работы УЦВМ, когда данные и алгоритмы
распределяются между несколькими, а может быть и очень многими, процессорами.
В настоящее время специалистами предложено несколько классов
вычислительных систем с параллельной организацией работы. Одним из наиболее развиваемых
сегодня является класс нейрокомпьютеров. Этому классу вычислительных машин
посвящены последующие разделы настоящей главы.
7.2. НЕЙРОКОМПЬЮТЕРЫ - ЭВМ НОВОГО ПОКОЛЕНИЯ
С момента появления первых реально работающих ЭВМ (приблизительно
середина 40-х годов нынешнего столетия) до сегодняшнего дня принято разделять
развитие ЭВМ на пять поколений, в соответствии с используемой для них элементной
базой. Сейчас можно говорить о развитии нового, шестого поколения ЭВМ,
принципиально отличающегося от предыдущих. Речь идет не о смене элементной базы, а об
изменении принципа и архитектуры, а также области применения новых ЭВМ, в
некоторой степени моделирующих работу человеческого мозга. На пороге третьего
тысячелетия появился новый класс ЭВМ - нейрокомпьютеры.
Основные отличия нейрокомпьютеров от традиционной ЭВМ с архитектурой фон
Неймана заключаются в следующем:
• большое число параллельно работающих элементов - нейронов (от нескольких
десятков до 106- 108), что обеспечивает колоссальный скачок в
быстродействии;
Глава 7. Применение нейрокомпьютеров в системах управления 499
• вместо программирования используется обучение (воспитание) - машина
учится решать задачи, изменяя параметры нейронов и связи между ними.
Попытки создания ЭВМ, моделирующих работу мозга, предпринимались еще с
40-х годов специалистами по нейрокибернетике. Они стремились разработать
самоорганизующиеся системы, способные обучаться интеллектуальному поведению в
процессе взаимодействия с окружающим миром, причем компонентами их систем
обычно являлись модели нервных клеток. Однако зарождавшаяся в это же время
вычислительная техника и связанные с нею науки, особенно математическая логика и
теория автоматов, оказали сильное влияние на области исследования, связанные с
мозгом.
К концу 50-х годов сформировался логико-символьный подход к моделированию
интеллекта. Развитие этого подхода породило такие направления, как эвристическое
программирование и машинный интеллект, и способствовало угасанию интереса к
нейронным сетям [38]. Неблагоприятным моментом, затормозившим развитие нейро-
сетевой тематики более чем на два десятилетия, явилось опубликование тезиса,
выдвинутого авторитетнейшими учеными 60-х годов М. Минским и С. Пейпертом о
невозможности воспроизведения произвольной функции нейронной сетью.
Таким образом, в течение длительного времени основным направлением в
развитии искусственного интеллекта являлся логико-символьный подход, который может
быть реализован на обычных компьютерах. Было получено решение многих
«интеллектуальных» задач из определенных предметных областей. Однако самое сложное
программное обеспечение, способное решать трудные задачи в специализированной
области, отказывает, как только проблема выходит за рамки, определенные
разработчиками при создании системы.
К концу 70-х годов созрели условия для возрождения интереса к нейросетевым
моделям. Это было связано с накоплением новых данных при экспериментальных
исследованиях мозга. Кроме того, развитие микроэлектроники и компьютерной
техники, создав техническую базу для моделирования сложных нейронных систем,
привело к пониманию того, что радикально увеличить производительность можно лишь
за счет параллельной обработки данных, которая органически присуща нейронным
сетям головного мозга.
На сегодняшний момент сотни фирм и лабораторий занимаются исследованиями
в области нейросетевых технологий. Разработаны ряд нейрокомпьютеров и нейромо-
дулей, которые могут работать под управлением обычных ЭВМ и самостоятельно с
существенно более высоким быстродействием.
Создание высокоэффективных нейрокомпьютеров требует изучения трех видов
моделей нейронных сетей: физических, математических, технологических. Львиную
долю публикаций по вопросам создания нейросетевых моделей составляют работы
по реализации различных видов нейропроцессоров на основе СБИС, оптической,
ПЛИС и т.д. технологий (технологические модели нейронных сетей). Однако
подавляющее большинство аппаратных реализаций нейрокомпьютеров использует фон-
неймановский процессор (универсальный или специализированный), который не
может обеспечить «истинного» параллелизма, свойственного биологическим
нейронным сетям.
Работы по исследованию физических моделей нейронных сетей, в которых
отображаются физические принципы функционирования головного мозга, привели к
созданию проекта Кремниевой Мозговой Коры (SCX - Silicon Cortex),
возглавляемого немецким биологом М. Маховальдом. Тем не менее, несмотря на значительные
достижения в разработке физических моделей мозга, пока не создано такой модели,
которая адекватно отображала бы работу мозга и позволяла бы генерировать новое
зз*
500 Методы современной ТАУ. Часть IV
знание. Более того, главная проблема - моделирование зрения, внимания,
координированного управления поведением - не имеет удовлетворительного решения в
рамках нейросетевой технологии.
С этих позиций наиболее важными представляются работы по созданию
математических моделей нейросетевых вычислений, которые позволяют отрабатывать и
создавать новые принципы организации параллельной работы многих
вычислительных элементов - формальных нейронов.
Идея коннекционизма. Большое влияние на разработку теории искусственных
нейронных сетей оказал коннекционизм. Это - раздел искусственного интеллекта,
связанный с созданием, исследованием и развитием моделей мозга (мышления)
человека. С точки зрения коннекционизма (connection - связь), основу концепции
построения нейронных сетей составляет идея о том, что нейроны можно моделировать
довольно простыми автоматами, а вся сложность мозга, гибкость его
функционирования и другие важнейшие качества определяются связями между нейронами.
Каждая связь представляется как простой элемент, служащий для передачи сигнала. При
таком подходе для нейросетевой модели характерно следующее:
• однородность системы (элементы нейронной сети одинаковы и простые, все
определяется структурой связи);
• надежность системы, построенной из ненадежных элементов, за счет
избыточного числа связей;
• «голографичность», предопределяющая, что при разрушении части система
сохраняет свои свойства.
Предполагается, что широкие возможности систем связи: демаскирование старых
связей и добавление новых - компенсируют бедность набора элементов, из которых
строится модель, их ненадежность, а также возможные разрушения части связей.
На первых этапах развития нейросетевых математических моделей
коннекционизм сыграл исключительно важную роль, поскольку были поняты основные
механизмы индуктивного вывода, осуществляемого нейронной сетью, позволившие
решить большое количество прикладных задач. Однако для создания математических
нейросетевых моделей, адекватных реальным задачам, требуются более глубокие
исследования биологических принципов функционирования головного мозга.
7.3. БИОЛОГИЧЕСКАЯ ПАРАЛЛЕЛЬ НЕЙРОКОМПЬЮТЕРАМ
Основатель кибернетики Норберт Винер назвал свой главный труд «Кибернетика,
или управление и связь в животном и машине» [24]. Этим определением Винер
показал, что законы управления являются общими для живой и неживой природы, тем
самым предопределил фундаментальность кибернетики. Рассмотрим в общем виде
функции сенсорных систем человека с точки зрения кибернетики.
Информацию об окружающем мире и о внутренней среде организма человек
получает с помощью сенсорных систем, названных Павловым анализаторами. С точки
зрения современной нейрофизиологии под сенсорными системами понимаются
специализированные части нервной системы, состоящей из периферических рецепторов
(органы чувств), отходящие от них нервные волокна (проводящие пути) и клетки
центральной нервной системы, сгруппированные вместе в так называемые сенсорные
центры.
В сенсорных органах происходит преобразование энергии стимула в нервный
сигнал (рецепторный потенциал), который трансформируется в импульсную
активность нервных клеток (потенциалы действия). По проводящим путям эти потенциалы
достигают сенсорных центров, на клетках которых происходит переключение
нервных волокон и преобразование нервного сигнала (перекодировка). На всех уровнях
Глава 7. Применение нейрокомпьютеров в системах управления 501
сенсорной системы одновременно с кодирование и анализом стимулов
осуществляется декодирование сигналов (считывание сенсорного кода). Декодирование
осуществляется на основе связей сенсорных центров с двигательными и ассоциативными
отделами мозга. Нервные импульсы клеток двигательных систем вызывают
возбуждение или торможение. Результатом этих процессов является движение или
остановка (действие и бездействие). Следует подчеркнуть, что природа носителя
информации в сенсорных системах является электрической. Таким образом,
основными функциями сенсорных систем являются: рецепция сигнала; преобразование
рецепторного потенциала в импульсную активность проводящих путей; передача
первичной активности в сенсорные центры; преобразование первичной активности
в сенсорных центрах; анализ свойств сигналов; идентификация свойств сигналов;
принятие решения [7].
Нетрудно заметить, что приведенное в предыдущем абзаце описание восприятие
Человеком влияния внешней среды есть описание работы системы управления с
ЦВМ в контуре по рис. 7.1 в терминах физиологии. Роль датчиков системы
управления играют рецепторы, роль управляющей ЦВМ - головной мозг человека, роль
исполнительных механизмов - двигательная система человека (его мышцы), роль за-
датчика программного движения - головной мозг.
Очевидно, центральным звеном в биологических системах управления является
мозг, состоящий из более 100 млрд. нервных клеток - нейронов, каждая из которых
имеет в среднем 10000 связей.
Дендриты
Аксон
Рис. 7.2. Биологический нейрон
Нейрон имеет тело (сому), дерево входов - дендритов, и выход - аксон (рис. 7.2)
Длина дендритов может достигать 1 мм, длина аксона - сотен миллиметров. На соме
и дендритах располагаются окончания других нервных клеток. Каждое такое
окончание называется синапсом. Проходя через синапс, электрический сигнал меняет свою
амплитуду: увеличивает или уменьшает. Это можно интерпретировать как
умножение амплитуды сигнала на весовой (синаптический) коэффициент. Взвешенные в
дендритном дереве входные сигналы суммируются в соме и затем на аксонном
выходе генерируется выходной импульс (спайк) или пачка импульсов. Выходной сигнал
проходит по ветви аксона и достигает синапсов, которые соединяют аксон с
дендритными деревьями других нейронов. Через синапсы сигнал трансформируется в
новый входной сигнал для смежных нейронов. Этот сигнал может быть
положительным или отрицательным (возбуждающим или тормозящим), в зависимости от вида
синапса. Величина сигнала, генерируемого на выходе синапса, может быть различ-
502 Методы современной ТАУ. Часть IV
ной даже при одинаковой величине сигнала на входе синапса. Эти различия
определяются синаптическим коэффициентом (весом синапса), который может меняться в
процессе функционирования синапса [26].
В настоящее время нейроны разделяют на три большие группы: рецепторные,
промежуточные и эффекторные [26]. Рецепторные нейроны предназначены для ввода
сенсорной информации в мозг. Они преобразуют воздействие окружающей среды на
органы чувств (свет на сетчатку глаза, звук на ушную улитку) в электрические
импульсы на выходе своих аксонов. Эффекторные нейроны передают приходящие на
них электрические сигналы исполнительным органам, например мышцам, также
через специальные синапсы своих аксонов. Промежуточные нейроны образуют
центральную нервную систему и предназначены для обработки информации,
полученной от рецепторов и передачи управляющих воздействий на эффекторы.
Головной мозг человека и высших животных состоит из серого и белого
вещества. Серое вещество есть скопление дендритов, аксонов и нейронов. Белое вещество
образовано волокнами, соединяющие различные области мозга друг с другом, с
органами чувств, мускулами. Волокна покрыты специальной миэлинированной
оболочкой, играющей роль электрического изолятора. В мозге существуют структурно
обособленные отделы, такие как кора, гиппокамп, таламус, мозжечек, миндалина, и т.п.
(рис. 7.3). Каждый из отделов имеет сложное модульное строение. Особое место в
мозге занимает церебральная кора, которая является его новейшей частью.
В настоящее время принято считать, что именно в коре происходят важнейшие
процессы ассоциативной переработки информации [26].
Рис. 7.3. Схема слоев коры больших полушарий (по [33])
Связи между сенсорными областями и корой, между различными участками коры
физически параллельны. Один слой клеток проецируется на другой, причем
проекции состоят из множества разветвляющихся и сливающихся волокон (проекции ди-
вергируют и конвергируют). В настоящее время наиболее изучен ввод в мозг
зрительной информации [26]. Возбуждение от сетчатки достигает коры топографически
упорядоченным образом, т.е. ближайшие точки сетчатки активируют ближайшие
точки коры. По реакции на зрительные стимулы различной сложности различают
простые, сложные и гиперсложные нейроны. Имеется тенденция к усложнению ре-
цепторных свойств нейронов по мере удаления от входных областей коры. Можно
предположить, что функциональная роль нейронных структур, примыкающих к
органам чувств, включая сенсорные области коры, заключается в преобразовании
сенсорной информации путем выделения все более сложных и информативных призна-
Глава 7. Применение нейрокомпьютеров в системах управления 503
ков входных сигналов. Ассоциативная обработка получающихся при этом
совокупностей сенсорных признаков осуществляется в ассоциативных зонах коры, куда
поступают и другие сенсорные образы [26].
Приведенное весьма поверхностное описание принципа обработки информации в
живой природе позволяет сделать вывод, что техническая кибернетика вплотную
подошла к решению задачи управления в реальном времени методами,
отшлифованными за миллионы лет «Создателем». Поэтому будет вполне резонным появление в
настоящее время термина «нейроуправление», под которым понимается «область
теории управления, занимающаяся вопросами применения нейронных сетей для
решения задач управления динамическими объектами...» [10].
Дадим определение нейрокомпьютера: нейрокомпьютером называют ЭВМ
{аналоговую или цифровую), основной операционный блок {центральный процессор)
которой построен на основе нейронной сети и реализует нейросетевые алгоритмы.
7.4. ЗАДАЧИ, РЕШАЕМЫЕ НЕЙРОКОМПЬЮТЕРАМИ
Весь класс задач, которые решают с помощью средств вычислительной техники,
удобно разделить на три класса [9]: формализуемые', трудноформализуемые; нефор-
мализуемые.
Формализуемая задача имеет четко сформулированный алгоритм решения.
Причем, как правило, этот алгоритм учитывает класс машин, на котором будет
решаться задача. Примером таких задач может быть интегрирование кинематических
уравнений в бесплатформенных системах инерциальной навигации, вычисление
элементарных функций, представленных рядами и т.п.
Трудноформализуемая задача имеет алгоритм решения, качество которого
трудно оценить или трудно оценить достижимость решения. Этот класс задач
возникает из-за большой размерности моделируемых в этой задаче" систем (известное
выражение «проклятия размерности»). К таким задачам можно отнести моделирование
сложных электронных устройств в системах автоматизированного проектирования,
задачи интегрированной подготовки производства и т.д.
Неформализуемая задача имеет в своей постановке неявно заданные функции
и параметры. К этому классу относят задачи распознавания образов,
кластеризации, идентификации информативных признаков и т.п. Необходимость решения
таких задач породило появление реальных нейронных ЭВМ в бывшем СССР еще
30 лет назад [9].
7.5. МОДЕЛИ ФОРМАЛЬНЫХ НЕЙРОНОВ
В дальнейшем изложении будем говорить о нейронах, нейронных сетях, понимая
под этим искусственно созданные технические объекты, принцип работы которых
сравним с работой одноименных биологических объектов.
Приведем несколько определений:
Нейронной сетью {НС) называется динамическая система, состоящая из
совокупности связанных между собой по типу узлов направленного графа элементарных
процессоров, называемых формальными нейронами, и способная генерировать
выходную информацию в ответ на входное воздействие.
Нейронная сеть является основной операционной частью нейронных ЭВМ,
реализующей алгоритм решения задачи.
Формальным нейроном называется элементарный процессор, используемый в
узлах нейронной сети.
504
Методы современной ТАУ. Часть IV
Математическая модель формального нейрона может быть представлена в
следующем виде
У = ф(1Х*/+*о)> (7.1)
где у - выходной сигал нейрона, xt - /-й входной сигнал, а{ - вес /-го входа, х0 -
начальное состояние нейрона, / = 1,2,3,...,л - номер входа нейрона, п - число
входов, ф - функция выходного блока нейрона (функция активации). Суммирование в
(7.1) идет по параметру /.
Выражению (7.1) может быть поставлена в соответствие следующая структурная
схема формального нейрона (рис. 7.4):
•V
1
<р(*
)
Рис. 7.4. Структурная схема формального нейрона
Как видно из рисунка на блоке Z осуществляется взвешенное суммирование
входных сигналов. Эта сумма подается на блок функционального преобразования
ф(лс). Функция, которую реализует этот блок, получила название функции
активации (или функция возбуждения, или переходная функция).
Функция активации может быть линейной с насыщением, релейной (пороговой),
релейной с зоной нечувствительности, квадратичной, сигмоидальной и т.п.
Параметры функций активаций могут быть как фиксированными, так и настраиваемые.
Графики некоторых функций активации приведены на рис. 7.5.
i
Г,
1
у\
/
...
/
1
1
Г,
Рис. 7.5. Вилы функции активации:
а - пороговая со смещением, б - сигмоидальная, в - линейная с насыщением
Вид функции активации во многом определяет вычислительные возможности
нейронной сети, состоящей из формальных нейронов. Основной недостаток модели с
пороговым элементом - отсутствие достаточной гибкости при обучении и настройке
нейронной сети на заданную задачу. Если значение вычисляемого скалярного
произведения JC,- -ai даже незначительно не достигает заданного порога, то выходной
сигнал не формируется, и нейрон «не срабатывает». Это значит, что теряется
интенсивность выходного сигнала (аксона) данного нейрона и, следовательно, формируется
невысокое значение уровня на взвешенных входах в следующем слое нейронов.
Этого недостатка в большей степени лишена линейная (в общем случае кусочно-
линейная) функция активации, реализация которой обеспечивает невысокую
вычислительную сложность.
Глава 7. Применение нейрокомпьютеров в системах управления 505
Сигмоидальная функция является некоторым компромиссом между линейной и
ступенчатой функцией и сохраняет достоинства обеих. По аналогии со ступенчатой
функцией, она нелинейна, и это дает возможность выделять в поисковом
пространстве исследуемых объектов области сложной формы, в том числе невыпуклые и
несвязные. С другой стороны, в отличие от ступенчатой функции, она позволяет
переходить от одного значения входного сигнала к другому без разрывов, как это
происходит в линейной функции. Однако любую из преобразующих функций активации
(возбуждения) необходимо рассматривать как приближенную. Учитывая сложность
архитектуры нейросети и трудность настройки ее параметров на решение
определенной задачи, необходимо переходить к более гибким произвольным нелинейным
функциям. Для повышения эффективности работы нейронной сети разработан класс
моделей нейронов, реализующих различные функции активации, которые можно
подстраивать под соответствующие задачи. Для реализации произвольной функции
активации разработан оригинальный алгоритм обучения в нейронной сети,
основанный на генетическом поиске.
Описанный вычислительный элемент - формальный нейрон - можно считать
упрощенной математической моделью биологических нейронов.
Во многих практических задачах входы, веса и смещения могут принимать лишь
некоторые фиксированные значения. Синаптические связи с положительными
весами называют возбуждающими, с отрицательными весами - тормозящими.
Фактически формальный нейрон представляет собой процессор с очень
ограниченной специальной системой команд (в литературе принято называть нейросетевой
базис). По способу представления информации формальные нейроны могут быть
аналоговыми и цифровыми. Они выполняют единообразные вычислительные
действия и не требуют внешнего управления. Большое число параллельно работающих
вычислительных элементов обеспечивают высокое быстродействие.
7.6. РАЗНОВИДНОСТИ ТОПОЛОГИЙ НЕЙРОННЫХ СЕТЕЙ
В основу искусственных НС положены следующие особенности биологических
нейронных сетей:
• простой обрабатывающий элемент - нейрон;
• очень большое число нейронов участвует в обработке информации;
• один нейрон связан с большим числом других нейронов;
• изменяющиеся веса связей между нейронами;
• параллельная обработка информации.
Графическую иллюстрацию соединения нейронов между собой в сети принято
называть топологией. По виду топологии различают однослойные и многослойные
сети.
В однослойных сетях нейроны могут соединятся либо по принципу каждый с
каждым, либо регулярно. В многослойных сетях нейроны группируются по слоям.
Классическим является связь нейрона одного слоя с каждым нейроном другого слоя.
Внутри слоя нейроны между собой связей не имеют. Два внешних слоя
многослойной сети принято называть входным и выходным слоями.
Внутренние слои принято называть скрытыми слоями. Число скрытых слоев
неограниченно. Известна практика применения также двухслойных сетей, у которых
только входной и выходной слои.
Работает сеть следующим образом. На нейроны входного слоя подаются входные
сигналы (входной вектор (xl,x2,x3,...ixn))i кодирующее входное воздействие или
образ внешней среды путем активации нейронов этого слоя. Выходы нейронов вы-
32 Зак. 416
506
Методы современной ТАУ. Часть IV
ходного слоя являются выходами сети. Множество выходных сигналов у{,...,уk
называют вектором выходной активности или паттерном активности нейронной сети.
Веса связей нейронов сети удобно представлять в виде матрицы А, где а^ - вес
связи между /-м и 7-м нейронами. В процессе функционирования (эволюции состояний)
сети осуществляется преобразование входного вектора в выходной. Конкретный вид
выполняемого сетью преобразования информации обуславливается не только
характеристиками нейронов, но и особенностями ее архитектуры, т.е. той или иной
топологией межнейронных связей, выбором определенных подмножеств входных и
выходных нейронов и т.д.
На рис. 7.6.-7.10 представлены некоторые варианты топологий нейронных
сетей.
Рис. 7.6. Однослойная ортогональная сеть
}
}
Входной слой
Выходной слой
Рис. 7.7. Двухслойная сеть с прямыми связями
Входной Скрытый Выходной
слой слой слой
Рис. 7.8. Трехслойная сеть с прямыми связями
Глава 7. Применение нейрокомпьютеров в системах управления
507
Рис. 7.9. Нейронная сеть с перекрестными связями [9]
Рис. 7.10. Нейронная сеть с обратными связями
На рис. 7.6 представлена однослойная сеть с ортогональными связями между
нейронами. В этой сети любой из нейронов может быть входным и любой может быть
выходным. На рис. 7.7 представлена сеть с прямыми связями. Характерной
особенностью такой сети является равенство числа входов, выходов и нейронов в каждом из
двух слоев сети, а также наличие так называемых латеральных связей между
нейронами 1-го и 2-го слоев [9]. На рис. 7.8 показана многослойная, в частности
трехслойная сеть. Число скрытых слоев в общем случае может быть несколько.
В многослойных сетях, как правило, нейроны одного слоя имеют функцию
активации одного типа. На рис. 7.9 представлена нейронная сеть с перекрестными связями.
Число связей может быть и больше, чем показано на рисунке. Рис. 7.10 иллюстрирует
топологию сети с обратными связями. Обратные связи могут быть как с выходного
слоя на входной, так и с внутренних (скрытых) слоев на входной.
Нетрудно отметить, что при конструировании сети разработчик имеет в качестве
исходных данных:
• размерность вектора входного сигнала(ов);
• размерность вектора выходного сигнала(ов);
• формулировку решаемой задачи;
• точность решения задачи.
32*
508 Методы современной ТАУ. Часть IV
При этом разработчик должен выбрать:
• тип топологии сети;
• общее число нейронов в сети и число нейронов по слоям;
• функции активации нейронов;
• способ задания коэффициентов синаптической связи;
• метод доказательства работоспособности новой сети.
В работе А.И. Галушкина [8] разработана методология синтеза многослойных НС,
как адаптивных систем определенного вида. Общая задача синтеза топологии
многослойных НС в настоящее время не решена. Предлагаются некоторые частные
методики. В обычной практике построения нейронных сетей следуют следующим
рекомендациям [8]:
• число слоев в выходном слое равно числу классов;
• все входные сигналы подаются всем нейронам;
• вариант топологии сети определяется на основе априорных знаний о задаче;
• для улучшения характеристик сети используются комбинированные
многослойные сети, каждый слой которой представляется различной топологией и
обучается по определенному алгоритму.
7.7. КЛАССИФИКАЦИЯ НЕЙРОННЫХ СЕТЕЙ
Классификация сложных систем, а нейронные сети являются таковыми, всегда
проводится по определенному признаку. В предыдущем пункте была приведена
классификация нейронных сетей по топологии. Еще ранее (см. §7.3) было упомянуто,
что нейрокомпьютеры, а следовательно и нейронные сети, могут быть аналоговыми и
цифровыми. Кроме этого, нейронные сети классифицируют по способу решения
задач. С точки зрения этого признака сети делят на формируемые, сети с формируемой
матрицей связи и обучаемые.
Формируемые сети. Сети этого класса проектируются для формализуемых задач,
имеющих четко сформулированный в нейросетевом базисе алгоритм решения
конкретной задачи.
Сети с формируемой матрицей связей. Сети этого класса применяются для
трудноформализуемых задач. Как правило, эти сети имеют одинаковую структуру и
различаются лишь матрицей связи. Примером таких сетей является сеть Хопфилда.
Достоинством таких сетей является их наглядность в работе [11].
Обучаемые сети. Этот класс сетей используют для решения неформализуемых
задач. В процессе обучения сети автоматически изменяются такие ее параметры, как
коэффициенты синаптической связи, а в некоторых случаях и топология. Серьезным
препятствием в широком применении нейрокомпьютеров все еще остается большое
время обучения сети. Поэтому выбор или разработка алгоритма обучения является
ключевой задачей разработчика нейронных систем.
Для сетей с формируемой матрицей связи и обучаемых характерным является
процедура обучения. Рассмотрим принцип этой процедуры.
Обучение нейронных сетей. В процессе функционирования нейронная сеть
формирует выходной сигнал Y в соответствии с входным сигналом X, реализуя
некоторую функцию g : Y = g (X). Если архитектура сети задана, то вид функции g
определяется значениями весов связей (синаптических весов) между нейронами wtj
и смещений нейронов в сети (Ь). Обозначим буквой G множество всех возможных
функций g , соответствующих заданной архитектуре сети. Пусть решение некоторой
задачи - функция F: Y = F(X), заданная парами входных и выходных данных
Глава 7. Применение нейрокомпьютеров в системах управления 509
(х1>У\)>(х2>У2)>--->(хт>Ут)> Д™ которых yj = F(xj), (j = 1,2,...,m), и пусть
Е - функция ошибки, показывающая для каждой из функций g степень близости к
F. Решить поставленную задачу с помощью нейронной сети заданной архитектуры
- это значит построить (синтезировать) функцию, подобрав параметры нейронов (си-
наптические веса и смещения) таким образом, чтобы функционал качества являлся
оптимальным для всех пар (хт,ут). Задача обучения определяется совокупностью
пяти элементов:
<X,Y,G,F,£>,
где X и Y - вход и выход нейронной сети соответственно; F - функция,
определяющая желаемый результат обучения (в задаче обучения по примерам функция F
задается парами входных и выходных данных: (х{,у{), (*2>У2)»---»(*т»};/и)> Для
которых yj - F(xj), (j = l,2,...,m), при этом архитектура связей нейронной сети
считается заданной до начала обучения и определяет множество функций G; Е -
функция ошибки, показывающая для каждого входного вектора степень близости
реализуемой функции к F.
Обучение состоит в поиске (синтезе) функции F, оптимальной по Е . Обучение -
это итерационная процедура, причем на каждой итерации происходит уменьшение
значения функции ошибки Е до заранее заданной величины. В общем случае такая
задача при ограниченном наборе входных данных имеет бесконечное множество
решений.
Таким образом, результатом обучения нейронной сети должно явиться
отображение
F:X->Y, (7.2)
такое, чтобы на каждый возможный входной сигнал формировался правильный
выходной сигнал Y; если используется единственный выход сети, то Y является
скаляром. Отображение задается конечным набором пар (вход - известный выход).
Число таких пар (обучающих примеров) существенно меньше общего числа возможных
сочетаний значений входных и выходных сигналов. Совокупность всех обучающих
примеров носит название обучающей выборки. В результате построения отображения
необходимо добиться того, чтобы:
1) обеспечивалось формирование правильных выходных сигналов в соответствии
со всеми примерами обучающей выборки;
2) обеспечивалось формирование правильных выходных сигналов в соответствии
со всеми возможными входными сигналами, которые не вошли в обучающую
выборку.
Второе требование связано с необходимостью реализации процедуры
предсказания значения выхода в зависимости от входного сигнала. Иными словами,
необходимо построить такое отображение (7.2), реализуемое нейронной сетью, которое при
подаче входного вектора X на выходе сети определяло бы значение одного или
нескольких правильных выходных сигналов. Решение этой задачи в значительной
степени зависит от качества обучающей выборки. Формализация процедуры
формирования обучающей выборки в общем виде в настоящее время не решена [9] и требует
дальнейшей проработки.
Задача построения отображения (7.2) опирается на известную теорему
А.Н. Колмогорова [16] о представлении непрерывных функций нескольких
переменных в виде суперпозиции непрерывных функций одного переменного и операции
сложения, обобщенную затем Хехт - Нильсеном [36] применительно к нейронным
510 Методы современной ТАУ. Часть IV
сетям. Основной результат этого обобщения - возможность реализации
произвольной функции /(*1,х2,...,*л) нейронной сетью. В монографии [36] показано, что для
любого множества пар \Хк,yk J, где ук - скаляр, существует двухслойная
однородная (с одинаковыми функциями активации каждого нейрона) нейронная сеть первого
порядка с последовательными связями и с конечным числом нейронов, которая
выполняет отображение X -> Y, выдавая на каждый входной сигнал Хк правильный
выходной сигнал ук. Таким образом, уже с помощью даже двухслойной нейронной
сети отображение (7.2) может быть построено.
Однако теорема Хехт - Нильсена не конструктивна, это лишь теорема
существования, в ней не заложена методика определения числа нейронов в сети для
некоторой конкретной обучающей выборки. Для первоначальной оценки числа
нейронов в скрытых слоях однородных нейронных сетей часто используется формула
для оценки необходимого числа синаптических весов Nw в многослойной сети,
выведенная в [38]:
у—£ <NW<NV —^- + 1 I (Л^ + ЛГ+1) + ЛГ,
l + log2 (Np) w \NX у * y
где Ny - размерность выходного сигнала, Nр - число элементов обучающей
выборки, Nx - размерность входного сигнала. Оценив Nw, можно рассчитать число
нейронов в скрытых слоях.
7.8. СИНТЕЗ ФОРМИРУЕМЫХ СЕТЕЙ
Как уже отмечалось, формируемые сети эффективны при решении тех задач, для
которых имеется хорошо сформулированный в нейросетевом базисе алгоритм
решения. Вычислительная математика специализируется на разработке таких методов
решения задач, которые могут быть реализованы на ЭВМ. Базисными командами
практически для любого класса ЦВМ являются арифметические команды: сложение,
вычитание, умножение, деление. Поскольку нейросетевой базис представляет собой
операцию нелинейного преобразования взвешенной суммы, то естественно
предположить об эффективности реализации методов вычислительной математики при
решении задач управления динамическими объектами. В теории и практике систем
управления для повышения качества проектируемых технических устройств широко
используются блоки аппаратного и/или программного интегрирования и
дифференцирования сигналов, блоки аппаратной и/или программной аппроксимации функций,
блоки решения систем алгебраических линейных или нелинейных уравнений. Так,
например, в системах, бесплатформенной инерциальной навигации и ориентации
принципиально необходимо интегрировать кинематические уравнения по данным,
получаемым с датчиков угловой скорости и датчиков линейного ускорения
(акселерометров). Это интегрирование ложится на бортовую УЦВМ. Кроме того, в таких
системах УЦВМ должна решать задачу преобразования координат, а эта задача
всегда связана с вычислением тригонометрических и обратных тригонрметрических
функций. Таким образом, общая размерность решаемой УЦВМ системы уравнений
для обеспечения качественного управления полетом доходит в отдельных случаях до
100-120.
Следует особо выделить тот факт, что в настоящее время специалисты по
системам управления разрабатывают новые методы анализа, синтеза систем,
ориентированные на программно-аппаратную реализацию на ЦВМ. К таким методам можно
Глава 7. Применение нейрокомпьютеров в системах управления 511
отнести спектральные методы [21]. Реализация этих методов в общем случае
предполагает применение операций над матрицами, которые, в свою очередь, сводятся к
арифметическим. Размерность матриц при описании современных систем
управления, как правило, очень большая. Это открывает широкий фронт для исследования
возможности реализации спектральных методов в нейросетевом базисе.
Далее рассматриваются методы синтеза нейронных сетей для решения
нормальных систем дифференциальных уравнений и аппроксимации элементарных функций.
Синтез нейронной сети для решения нормальной системы
дифференциальных уравнений. В соответствии с выражением (7.1) нейросетевой базис
представляет собой операцию взвешенного суммирования нескольких входных сигналов с
последующим преобразованием этой суммы посредством функцией активации
формального нейрона, которая может быть как линейной, так и нелинейной. Рассмотрим,
в какой мере численные методы решения дифференциальных уравнений могут
удовлетворять нейросетевому базису, какую при этом необходимо иметь функцию
активации, какова будет топология нейронной сети. Не уменьшая общности рассуждений,
с целью упрощения выкладок, рассмотрим вначале случай стационарной системы, а
затем распространим полученные результаты на случай нестационарных систем.
Пусть задана нормальная система п дифференциальных уравнений первого
порядка
Y'(0 = AY(r), (7.3)
где А - квадратная матрица постоянных коэффициентов размерности пхп,
Y - п -мерный вектор искомой функции аргумента t.
Хорошо известны различные варианты аналитического решения системы (7.3),
определяемые видом корней характеристического уравнения. Именно наличие
вариантов и затрудняет разработку единого метода решения произвольной системы.
Поэтому реализацию аналитических решений системы (7.3) в нейросетевом базисе пока
рассматривать не будем.
Обобщенное решение системы (7.3) численными методами Рунге - Кутта можно
представить в следующем виде [22]:
Y/+l=exp(/*A)Y,., (7.4)
где h - шаг интегрирования, а / - его номер.
Элементы матричной экспоненты ехр(/гА) суть постоянные коэффициенты.
Произведение вектора Y, на разложение этой экспоненты в степенной ряд есть не
что иное, как взвешенное суммирование. Поэтому итерационный процесс (7.4)
полностью удовлетворяет требованиям нейросетевого базиса. Удерживая в разложении
экспоненты два, три, четыре и более членов (включая единицу), можно получить
нейросетевую реализацию решения системы (7.3) методами Рунге - Кутта первого,
второго, третьего и более порядков аппроксимации.
Реализация процесса численного интегрирования (7.4) будет возможна в том
случае, если нейронная сеть будет синхронной, а функции активации нейронов -
линейными. Элементы матрицы A (ajki jyk =1,2,...,и) определяют связь между
компонентами вектора Y (у\,У2>Уъ>Уа) в прямом направлении (от У\ к у2 - ап, от у{ к уъ -
а13 и т.д.), в обратном (от у2 к у{ - а1Х и т.д.) и самого компонента на себя
(элементы главной диагонали матрицы А). Поэтому для нейросетевой реализации
необходимо, чтобы нейроны в слое, реализующем интегрирование по формуле (7.4),
соединялись бы между собой по принципу «каждый с каждым», включая связь с
выхода нейрона на свой же вход. Далее, поскольку размерность вектора искомой функции
512 Методы современной ТАУ. Часть IV
Y не зависит от используемого численного метода, то число нейронов, необходимых
для интегрирования системы (7.3), в соответствии с выражением (7.4), определяется
размерностью вектора Y (в нашем случае - п).
Рассмотрим конкретные примеры. Решение системы (7.3) методом
прямоугольников (метод Рунге - Кутта 1-го порядка аппроксимации) представляется в виде [29]
Y,+1=Y/ + AAY,.
Представим последнее равенство в следующем виде:
Y/+I=(E + /zA)Y/=B1Y/, (7.5)
где Е -единичная матрица размерности пхп.
Элементы матрицы В{ = Е + Ah - первые два члена разложения матричной
экспоненты ехр(/гА) в степенной ряд. Для системы двух уравнений выражение (7.5)
принимает вид:
Уи+\ = bnyXi+bny2i = yu(\ + han) + hany2h tn ,.
Угм =Ь2\Уи + h2y2i = yuha2l + {l + ha22)y2i.
Уравнения (7.6) содержат лишь операции взвешенного суммирования. На
рис. 7.11 представлена схема соединения нейронов, реализующая алгоритм (7.6). На
этом рисунке Nel, Ne2 - нейроны, участвующие в операции интегрирования.
Для системы трех уравнений (п = 3) выражение (7.5) принимает вид:
У\м =Ь\\Уи+Ь\2Уи+1>1зУм=(1 + *1ап)уи+}1а{2у21+1га{3уь,
Уъ+\ =Ь21Уи+Ь22У21+Ь2зУз1=*1а2\Уи+{1 + *1а22)У2<+Ьа23у3(, (7.7)
Лм =Ь3{уи +^2У2/ +*ззУз/ = Наъ\Ум +ha32y2i + (1 + йа33)э>з/-
Как и в случае системы двух уравнений, в алгоритме (7.7) присутствуют лишь
операции взвешенного суммирования, следовательно и он тоже удовлетворяет нейросете-
вому базису. На рис. 7.12 показана схема соединения нейронов для решения системы
трех уравнений методом прямоугольников.
Очевидно, что выражения, подобные (7.6) и (7.7), можно получить для системы с
любым числом уравнений. Нетрудно заметить, что при а31,а32,а33,а23,а{3 равными
нулю выражение (7.7) переходят в выражение (7.6), а следовательно и схема на
рис. 7.12 переходит в схему на рис. 7.11.
Рассмотрим решение системы (7.3) численным методом Рунге - Кутта 2-го порядка
аппроксимации (метод трапеции). В этом случае общее решение имеет вид [29]:
Ч+1=Ч+0,5А(К1 + К2),
K1 = AY,, K2 = A(Yi+AKl).
Подставим выражения для К1 и К2 в первое уравнение (7.8) и после несложных
преобразований получим:
Yj+1 =B2Y, =(e+/iA + 0,5/i2A2)Y;. (7.9)
Элементы матрицы В2 =(e+/iA + 0,5/*2A2), как и элементы матрицы Вх,
удовлетворяют нейросетевому базису, а сама матрица определяет топологию нейронной
сети для решения системы (7.3) рассматриваемым методом. Так, например, схема
соединения нейронов для решения систем двух уравнений методом Рунге - Кутта
2-го порядка аппроксимации будет точно такой же, как и схема, приведенная на
рис. 7.11. Изменятся лишь коэффициенты синаптических связей. Например,
коэффициент (1 + han) в случае метода прямоугольников (рис. 7.11) изменится на
Глава 7. Применение нейрокомпьютеров в системах управления
513
\\ + hau +0,5(/шп) +O,5/z2tf12a2i) B случае применения метода второго порядка.
Аналогичным образом изменятся и другие коэффициенты. Нетрудно заметить, что
число нейронов, необходимых для решения конкретной системы, и в этом случае
будет равно размерности этой системы. Решение системы (7.3) методом Рунге - Кут-
та 3-го порядка аппроксимации в общем случае будет иметь вид [29]:
YM =Y,.+1/6(K1 + 4K2 + K3),
K1 = AY,, K2 = A(Y/+O,5AK1)> K3 = A(Y/-AK1 + 2AK2).
После подстановки выражений Kl, K2, КЗ в первое уравнение (7.10) и
соответствующих преобразований получим
Y^^BsY^fE + AA + O^AW+l/e^A3)^. (7.11)
Nel
(7.10)
г
1
1 1
—ь
1
J
1
|—
,1
\
1
1
t
|_
l+han
Nel
ha21
— -
Nf2
ha12
1+ta22 1
XI
X2
S
XI
X2
I
h
n
1
1
1
'i
I
1
i
- -i
i
i
i
i2
i
i
j
1
^У1
Ч>У2
2
1+han
Ь»21
ha3i
hai2
l+ha22
Ьаз2
hai3
ha23
1+Ьазз
XI
X2
X3
Yl
XI
X2
X3
fa
Ne2
Y2
XI
X2
X3
Ne3
Y3
Рис. 7.11. Схема решения системы двух
дифференциальных уравнений общего вида
методом прямоугольников
Рис. 7.12. Схема соединения нейронов для
решения системы трех дифференциальных
уравнений общего вида методом прямоугольников
Аналогичные рассуждения и преобразования для метода Рунге - Кутта 4-го
порядка аппроксимации дают следующий результат
у/+1=В4Х=(Е + /гА + 0,5/г2А2+1/6/г3А3+1/24/г4А4)^. (7.12)
Очевидно, что в выражениях (7.5), (7.9), (7.11), (7.12) матрицы BlvB2,B3 и В4
представляют собой ряд разложения матричной экспоненты аргумента /гА,
ограниченный до 2-х, 3-х, 4-х и 5-ти членов соответственно. Следовательно, решение
системы (7.3) методом Рунге - Кутта в общем виде можно представить как
Y,+1=exp(AA)Y,«BtX., (7.13)
где к - порядок метода интегрирования.
Как и для методов первого и второго порядков, элементы матриц В3 и В4
полностью удовлетворяют нейросетевому базису и определяют схему решения системы (7.4).
514 Методы современной ТАУ. Часть IV
Выражение (7.13) делает возможным построения нейросетей, интегрирующих
систему (7.3) с любой, наперед заданной, точностью. Анализируя особенности
матриц В^ в выражениях (7.5), (7.9), (7.10), (7.12), можно сделать вывод, что точность
решения системы (7.3) в нейронных сетях будет определяться точностью
установки коэффициентов синаптической связи, а не числом используемых нейронов.
В случае нестационарных систем элементы матрицы А являются в общем случае
произвольными функциями аргумента t и не существуют аналитические выражения
решений таких систем. Однако богатейшая практика моделирования и разработки
различных сложных объектов, процессов, систем управления показывает, что
решение нестационарных систем численными методами, в том числе и методами Рунге -
Кутта, дает вполне приемлемые результаты. При разработке алгоритмов решения
таких систем предполагают, что элементы матрицы А не меняют своего значения в
пределах шага интегрирования. Следовательно, можно применять формулы (7.5, 7.9,
7.10, 7.12) и в случае нестационарных систем. Высокая точность решения будет
достигаться, если скорость изменения элементов матрицы А будет хотя бы на порядок
ниже скорости изменения искомой функции Y (требования гладкости компонентов
матрицы А и удовлетворения условию Липшица [22]).
Применение степенных рядов для синтеза формируемых нейронных сетей.
Степенные ряды имеют огромное значение при конструировании алгоритмов УЦВМ.
Воспроизведение элементарных функций, аналитических нелинейностей
производится в вычислительной технике с помощью степенных рядов. Поэтому актуальность
постановки задачи о реализации вычислительных алгоритмов на базе степенных
рядов в нейронных сетях несомненна.
Рассмотрим, в какой мере степенные ряды могут удовлетворять требованиям ней-
росетевого базиса. Попытаемся также дать ответы на вопросы: какие функции
активации должны иметь нейроны для успешной реализации алгоритмов, основанных на
степенных рядах; какова должна быть топология сети, реализующей эти алгоритмы.
По определению степенным рядом называется функциональный ряд вида [25]:
ao+a{(x-c) + a2(x-cf +a3(x-cf +... + ап_{(х-с)п~1 +ап(х-с)п +..., (7.14)
где коэффициенты ряда ах,(/ = 0,1,2,3,...) и с суть некоторые постоянные числа.
Частичная сумма ряда (7.14), определенная для п его членов с заранее известным
методом задания коэффициентов ai, применяется для приближенного вычисления
аналитически нелинейных функций. Тому примеры - ряды Тейлора и Маклорена.
Хорошо известна методология применения этих рядов для приближения функций.
Существенным ограничением на класс функций, приближенное значение которых
определяется с помощью рядов Тейлора или Маклорена, является требование
непрерывности производных этих функций до « + 1 порядка. Это ограничение не
уменьшает значимости решения поставленной задачи.
Не снижая общности рассуждений, а лишь экономя место, рассмотрим
разложение функции / (*) в ряд Маклорена:
f(x) = f(0) + xf{0) + x2f'(0)/2\+...+x"fW(0)/n\ + .... (7.15)
Задаваясь требуемой точностью вычисления /(*), ограничивают ряд (7.15)
конечным числом членов п. На практике для многих известных элементарных
функций высокая точность достигается уже при п = 5 -7.
Выражение (7.15) является основой для получения ответов на поставленные выше
вопросы. Покажем это на примере.
Глава 7. Применение нейрокомпьютеров в системах управления 515
Пусть для конкретности п = 5 . Введем обозначения:
«о = /(О), «,=/'(0). «2=/'(0). «э = /*(<>). a4=/'V(0),a5=/v(0).
В этом случае можно записать
/ (*) = а0 +а{х + а2х2 + аъхъ +аАх4 +а5х5. (7.16)
Нетрудно заметить, что приближенное равенство (7.16) есть взвешенная сумма
степеней аргумента искомой функции. Следовательно, в идеальном случае для
реализации этого выражения на нейронной сети необходимы нейроны с линейной,
квадратичной, кубичной и т.д. функциями активации. В этом (идеальном) случае
топология нейронной сети может быть определена как однослойная, двухслойная,
трехслойная и т.д. Рассмотрим для конкретности случай двухслойной сети. Тогда
аргумент искомой функции должен подаваться на пять нейронов входного слоя. Функции
активации этих нейронов являются соответственно линейной, квадратичной,
кубичной, параболами 4-й и 5-й степеней. Выходные сигналы нейронов первого слоя через
коэффициенты синаптической связи, равные al,a2,a3,a4,a5, поступают на
единственный нейрон выходного слоя. На сумматор этого нейрона поступает также сигнал,
эквивалентный 1.
Сигнал с сумматора нейрона выходного слоя и есть искомое значение /(*). Для
того чтобы это значение не претерпело дальнейших искажений, функция активации
нейрона выходного слоя должна быть линейной.
Уравнение такой сети может быть записано в виде
/(дО=ф,2Ц+Х«л>.-|(*)). (7Л7)
где суммирование ведется по /(/ = 1,2,3,4,5), а фп -линейная функция активации
нейрона, ф21 - квадратичная, ф31 - кубичная и т.д. Вторая цифра индекса при ф
указывает на номер слоя. На рис. 7.13 представлена идеальная нейронная сеть,
реализующая степенной ряд Маклорена, имеющего шесть членов (включая а0), и
описываемая уравнением (7.17).
Практически на сегодня разработчик ограничен в выборе функций активаций
нейронов. В лучшем случае он имеет возможность применять линейную,
квадратичную и кубичную функции. Покажем, что и в этом случае возможно решение
поставленных задач. Пусть мы имеем возможность использовать лишь линейную и
квадратичную функции активации. Перепишем (7.16) в виде
f(x) = ao+alX + a2x2 +а3((х2)(х))+а4(х2)\а5(((х2)(х))(х2)). (7.18)
В последнем выражении введена следующая условность: члены взвешенного
суммирования, не имеющие скобок, реализуются в одном слое на нейронах,
имеющих линейную или квадратичную функции а^ивации; члены, имеющие скобки,
реализуются через операцию умножения переменных по нейросетевому алгоритму. Как
видно из выражения (7.18), для реализации х5 необходимо дважды применить
операцию нейросетевого умножения.
Нейросетевой алгоритм операции умножения двух переменных рассмотрен в [14].
Идея метода может быть пояснена следующим выражением:
z = X'y = 0>25({x+yf-(x-y)2y (7.19)
здесь х, у - переменные-сомножители, a z - их произведение.
Применяя принятые выше обозначения, запишем уравнение двухслойной сети,
реализующей выражение (7.19)
516
Методы современной ТАУ. Часть IV
г = Ф121(ф2п(0,5х + 0,5;у)-ф212(0,5*-0,5у)).
Здесь три цифры индекса при ф означают: вид функции, номер слоя, номер нейрона
в слое соответственно.
Ne
Ne
Ne
Ne
Ne
ЯЧ
ф2
zi
ill
4
Ne
<Pl
f(X)
I
Входной слой I Выходной слой
Рис. 7.1Э. Идеальная нейронная сеть ряда Маклорена, содержащего 6 членов
В соответствии с этим выражением два нейрона первого слоя имеют'квадратич-
ную функцию активации, а один нейрон второго слоя - линейную. Коэффициенты
синаптических связей нейронов первого слоя равны 0,5; 0,5; 0,5; - 0,5 соответственно
для первого и второго нейронов, а нейрона второго слоя 1 и -1. На рис. 7.14
приведена схема соединения нейронов для реализации операции умножения двух
переменных.
Рассмотрим реализацию в нейросетевом базисе получения третьей, четвертой и
пятой степеней аргумента (четвертый, пятый и шестой слагаемые в (7.18)).
Уравнение возведения аргумента в третью степень в нейросетевом базисе имеет
вид
jc3 = (jc2)(jc) = 91fl-(0,5;c2+0,5jc)2--b(0,5jc2-0,5^)2>|.
Глава 7. Применение нейрокомпьютеров в системах управления
517
X
Y
0.5
0.5
0.5
-0.5
Ne211
Ф2
Ne212
%
1
■■
Nel21
1-й слой 2-й ^ой
Рис. 7.14. Топология нейронной сети для реализации операции умножения двух переменных
Преобразуем в нейросетевой базис внутренние скобки последнего выражения и
введем индексацию для функций активации нейронов тройными индексами. После
преобразований получим:
х3 = ф131 (Ьф221 (0,5х2 +0,5х)-Ьф222 (0,5х2 -0,5л:)) =
= Ф131 (ЬФ221 (0,5-ф21! (Цх)) + 0,5-ф! 12 (1.(х))) - Ьфггг (О,5-ф21 х (Цх)) - (7.20)
-0,5.Фп2(1.(х)))).
В выражении (7.20) принята следующая индексация при обозначении функции
активации нейронов: первая цифра индекса означает тип функции (1 - линейная, 2 -
квадратичная), вторая цифра означает номер слоя, в котором находится нейрон с этой
функцией, третья цифра - порядковый номер нейрона в слое. Таким образом, для
получения куба аргумента необходима трехслойная сеть, у которой в первом слое
будут два нейрона с функциями активации ф! и ф2, во втором слое будут два
нейрона с функциями ф2, в третьем - один нейрон с функцией (рх. Коэффициенты синап-
тической связи у нейронов первого слоя будут равны 1, у нейронов второго слоя 0,5 и
0,5 для первого нейрона, 0,5 и -0,5 для второго, у нейрона третьего слоя 1 и -1.
На рис. 7.15 приведена схема соединения нейронов для возведения аргумента в куб.
Если разработчик имеет возможность применять сеть, которая позволяет вводить
входные данные и в первый, и во второй слои, то схему на рис. 7.15 можно
упростить, исключив в первом слое нейрон Nel 12 с функцией активации <рх.
Получим выражение и синтезируем по нему схему соединения нейронов для
вычисления четвертой степени аргумента (пятый член в (7.18))
\2
/ = (*2 ) = ф22 (b(*2 )) = ф22 (Ьф21 (х)).
(7.21)
518
Методы современной ТАУ. Часть IV
Ne211
ч>
Nell2
0.5
Ne221
0.5
Ф.
~ч]
0.5
-0.5
Ne222
*2
-1
Nel31
<Pi
1-й слой
2-й слой
3-й слой
Рис. 7.15. Топология нейронной сети для возведения аргумента в куб
Для реализации этого выражения необходима двухслойная сеть, в каждом из
которых будет по одному нейрону с функцией активации типа ф2 . На рис. 7.16
приведена схема соединения нейронов, реализующая (7.21).
1
1
Рис. 7.16. Топология нейронной сети для возведения аргумента в четвертую степень
Выражение для возведения аргумента в пятую степень в нейросетевом базисе
может быть записано в следующем виде (шестой член в правой части равенства (7.19)):
xs = (xf (xf =({x2)(x))(x2) = ^(h<p2(0,5x3+0,5x2)-H2(0,5x3-Q,5x2)).
Раскрывая внутренние скобки последнего равенства в нейросетевом базисе и вводя
трехзначные индексы, получим:
х5 =(Pi5i (Ьф241 (о,5чр131 (ЬФ221 (0,5*2 +0,5*)-1.ф222 (0,5х2 -0,5л:))-0,5-ф232 (*))-
-Ьф242 (о,5-ф131 (Ьф22, (0,5*2 +0,5х)-1.ф222 (0,5х2 -0,5л:))-0,5-ф232 (*))) =
= Ф151 (Ьф241 (0,5-ф131 (1-ф221 (0,5.ф211 (х)+0,5.ф112 (х)У (7 22)
-Ьф222 (0,5.ф211 (х)-0,5.ф112 (х))+0,5.ф232 (*))-
-Ьф242 (0,5-ф131 (Ьф221 (0,5.ф211 (*)+0,5.ф112 (л))-
-Ьф222 (0,5.ф211 (х)-0,5.ф112 (*))+0,5.ф232 {х))).
Этому выражения соответствует схема соединения нейронов, приведенная на
рис. 7.17. Как видно из (7.22) и рисунка, для возведения аргумента в пятую степень
необходима пятислойная сеть. В схему на рис. 7.17 искусственно введен нейрон
Nel23. Это сделано в предположении, что разработчик имеет возможность
осуществлять связь'нейронов первого слоя с нейронами третьего, минуя второй. Если такую
связь осуществлять представляется возможным, то схему можно упростить,
исключив не только нейрон Nel23, но и Ne232.
Глава 7. Применение нейрокомпьютеров в системах управления
519
1
1
Ne2ll
Nel 12
1-Й СЛОЙ
05
Ne22l
%
1_
JT
Neli3
2-й слой
1
-1
Nel31
Ne232
Ф2
3-й слой
Ne241
Ф,
-0 5
%
4-й слой
flL
1
-1
NelSl
5-й слой
Рис. 7.17. Топология нейронной сети для возведения аргумента в пятую степень
Итак, синтезированы схемы для составляющих уравнения (7.18), степень при
аргументе х которых превышает 2. Что же касается второго и третьего членов
уравнения (7.18), то для их реализации необходимо по одному нейрону с функциями
активации ф! и ф2 соответственно. Постоянный коэффициент а0 можно учесть в
нейроне последнего слоя в виде коэффициента синаптической связи входа, на который
подают сигнал, равный 1. Таким образом, вся подготовительная работа по синтезу
схемы по уравнению (7.18) проведена. Полная схема нейронной сети, реализующей ряд
Маклорена, может быть получена объединением схем 7.15, 7.16, 7.17 с добавлением к
ним двух нейронов для реализации второго и третьего слагаемых (7.18). Выходы
х, х2у х3, jc4, х5, а также постоянный сигнал «1» необходимо подать на входы
нейрона шестого слоя с коэффициентами синаптической связи а{,а2,а3,а4,а5,а0
соответственно. Полная схема нейронной сети для реализации ряда Маклорена на шесть
членов представлена на рис. 7.18.
гЦ
I
_гН
!
пЬ
X5
X4
X2
1
ф,
1-й слой i 2-й слой 3-й слой 4-й слой 5-й слой ' 6-й слой
Рис. 7.18. Топология нейронной сети для реализации ряда Маклорена на шесть членов
520
Методы современной ТАУ. Часть IV
Предложенная сеть является в некотором роде универсальной, т.к. может
применяться для вычисления любой функции, разложенной в ряд Маклорена до шести
членов. С различием функций меняются лишь коэффициенты синаптической связи а{.
Легко видеть, что предлагаемая топология сети не является единственной. Можно
рассматривать сеть и с большим числом слоев, и с иным числом нейронов в слоях.
Все будет определяться опытом разработчика и его реальными условиями.
Пример 7.1. Схема, приведенная на рис. 7.18, была испытана на функциях sin и cos на имитаторе
нейронных сетей Neurolterator, разработанным в КФ МГТУ им Н.Э. Баумана [32]. Коэффициенты
синаптической связи в этом случае имеют следующие значения:
для функции sin - ao = O; ах =1; а2 =0; аъ =-0,16667; аА =0; а5 =0,00833;
для функции cos - а0 = 1; ах - 0; а2 = -0,5; а2 = 0; а4 = 0,04667; а5 = 0.
Диапазон изменения аргумента был взят от -1,8 до +1,8 рад. Для этого диапазона была получена
точность в 1,1%. Следует подчеркнуть, что на практике используют разложение функций sin и cos в ряд
Тейлора для диапазона от -я/4 до +л/4 . В этом случае ряд имеет хорошую скорость сходимости. Если
же практический диапазон изменения аргумента превышает ±1 рад., то для повышения точности при
минимальных аппаратных (или программных) затратах необходимо привести представляемый угол к
диапазону ±я/4 , а затем уже вычислять тригонометрические функции. На практике очень часто приходится
учитывать ортогональную связь функций sin и cos:
sin2(jt) + cos2(jt)=l.
Нетрудно заметить, что в этом случае резко возрастает нагрузка на УЦВМ
Итак, применение степенных рядов для проектирования нейросетевых алгоритмов
вычисления простейших функций встречает такие же трудности, как и при
реализации этих функций на машинах с фоннеймановской архитектурой.
7.9. СЕТЬ ХОПФИЛДА
В сетях с формируемой матрицей связей весовые коэффициенты рассчитываются
только однажды перед началом функционирования сети на основе информации об
обрабатываемых данных, и все обучение сети сводится именно к этому расчету.
Из сетей с подобной логикой работы наиболее известны сеть Хопфилда,
вероятностная сеть (машина Больцмана), которые обычно используются для организации
ассоциативной памяти. Далее речь пойдет именно о них.
Структурная схема сети Хопфилда приведена на рис. 7.19. Она состоит из
единственного слоя нейронов, число которых является одновременно числом входов и
выходов сети. Каждый нейрон связан со всеми остальными нейронами, а также имеет
один вход, через который осуществляется ввод сигнала.
Выходы
Входы
Рис. 7.19. Сеть Хопфилда
Глава 7. Применение нейрокомпьютеров в системах управления 521
В сети Хопфилда нейроны принимают решения асинхронно, связь между
нейронами осуществляется мгновенно, все связи симметричны, т.е. w- = и>у7. При этих
ограничениях все возможные состояния сети образуют некое подобие холмистой
поверхности, а текущее состояние сети аналогично поведению тяжелого шарика,
пущенного на эту поверхность: он движется вниз по склону в ближайший «локальный
минимум». Каждая точка поверхности соответствует некоторому сочетанию
активностей нейронов в сети, а высота подъема поверхности в данной точке характеризует
«энергию» этого сочетания. Энергия может быть представлена следующим образом:
Е = -^ w,y*/*/ — rnin (7.23)
и интерпретируется как некоторая обобщенная энергия [12]. Если связь между
какими-то нейронами имеет большой положительный вес, то сочетания, в которых эти
нейроны активны, характеризуются низким уровнем энергии - именно к таким
сочетаниям будет стремиться вся сеть. И наоборот, нейроны с отрицательной связью при
активизации добавляют к энергии сети большую величину, поэтому сеть стремится
избегать подобных состояний. Такая интерпретация берет начало от известной
модели Изинга, в которой совокупность взаимодействующих магнитных диполей
(спинов) стремится занять такое положение, в котором суммарная энергия будет
минимальна. Модель Хопфилда обобщает модель Изинга в двух отношениях:
• коэффициенты связей могут принимать любые значения, как положительные,
так и отрицательные;
• эти значения не являются фиксированными и могут изменяться в процессе
обучения.
Чтобы обучить сеть, необходимо сформировать соответствующий профиль
энергетической поверхности (рис. 7.20), т.е. выбрать веса таким образом, чтобы при
фиксировании каждого входного вектора сеть приходила к энергетическому минимуму,
соответствующему нужному выходному вектору. Важнейшее свойство такой сети
состоит в том, что одна и та же сеть с одними и теми же весами связей может хранить
и воспроизводить несколько различных эталонов. Каждый эталон является
аттрактором [12], вокруг которого существует область притяжения. Любая система с
несколькими аттракторами, к которым она тяготеет, может рассматриваться как
содержательно адресуемая память, т. е. как ассоциативная память. Если системе задается
некоторое начальное состояние, отличное от эталонного, то это равносильно заданию
частичной информации об эталоне. Если начальное состояние близко к эталону и
попадает в область его притяжения, то система начинает двигаться к этому эталону -
«вспоминает» его. Это можно представить как процесс восстановления неверно
заданных или отсутствующих признаков эталонного образа, восстановление полной
информации о нем. Если одним из признаков, предъявлявшихся при обучении,
является имя класса, то его восстановление будет равносильно отнесению образа к
определенному классу, т.е. распознаванию.
Алгоритм обучения сети Хопфилда основывается на правиле Хебба.
Для сети Хопфилда, представляемой в виде ассоциативной памяти, задача
обучения формулируется следующим образом. Известен некоторый набор двоичных
сигналов (изображений, оцифровки звука, данных, описывающих некоторые объекты
или характеристики процессов), которые считаются образцовыми. Сеть должна уметь
из произвольного неидеального сигнала, поданного на ее вход, выделить
(«вспомнить» по частичной информации) соответствующий образец (если такой есть) или
«дать заключение» о том, что входные данные не соответствуют ни одному из
образцов. В общем случае любой сигнал может быть описан вектором
522
Методы современной ТАУ. Часть IV
X = {jc, : i = 0...n-l}, где п - число нейронов в сети и соответственно размерность
входных и выходных векторов.
Каждый элемент jc,- равен либо +1, либо-1.
i
Энергетическая функция
сети л
/
/
V^ Начал
, Л:, х - "*
'- -чл'- ^,-^-
>> S V, **/
ьное состояние if
V Л
ffftte
mk
1 Л
li J1
В
i
1
1
1
liiii iilii
—►
Эталон 1 Эталон 2 Эталон 3
Рис. 7.20. Состояние сети
+1
-1
X
Рис. 7.21. Функция активации нейронов
сети Хопфилда
Обозначим вектор, описывающий к-й образец, через X , а его компоненты
соответственно - jcf , к=0...т-\, где т - число образцов. Когда сеть распознает (или
«вспомнит») какой-либо образец на основе предъявленных ей данных, ее выходы
будут содержать Y = X*, где Y - вектор выходных значений сети:
Y = {^. :/ = 0...л-1}. В противном случае выходной вектор не совпадет ни с одним
образцом.
Алгоритм обучения сети Хопфилда основывается на правиле Хебба и включает
следующие шаги.
1) Начальная установка значений выходов:
yi(0) = xh / = 0.1 л —1.
2) Рассчитывается новое состояние нейронов; t - номер текущей итерации:
п-\
Jy('+1) = SwirO'«(0. ; = o.../i-i
и новые значения выхода yj (t +1) = / [V- (t + l)l, где / - функция активации
(рис. 7.21).
3) Проверка изменения выходного сигнала. Если да - переход к шагу 2, иначе
(если выходной сигнал находится в зоне притяжения определенного
аттрактора и не меняется) - конец. При этом выходной вектор представляет собой
образец, наилучшим образом сочетающийся с входными данными.
Машина Больцмана (вероятностная сеть). Одним из основных недостатков
сети Хопфилда является тенденция «стабилизации» выходного сигнала в
локальном, а не в глобальном минимуме. Желательно, чтобы сеть находила глубокие
минимумы чаще, чем мелкие, и чтобы относительная вероятность перехода сети в
один из двух различных минимумов зависела только от соотношения их глубин.
Это позволило бы управлять вероятностями получения конкретных выходных
векторов путем изменения профиля энергетической поверхности системы за счет
модификации весов связей.
Глава 7. Применение нейрокомпьютеров в системах управления
523
Мысль об использовании «теплового шума» для выхода из локальных минимумов
и для повышения вероятности попадания в более глубокие минимумы принадлежит
С. Кирпатрику [37]. Он показал, что при решении сложных задач, когда финансовые
затраты на решение задачи оптимизации аналогичны энергии шарика,
перемещающегося по поверхности, поиск более дешевых решений разумно начинать в ситуации
с высоким уровнем теплового шума, в дальнейшем постепенно уменьшая его; этот
процесс Кирпатрик назвал «имитацией отжига». Введем некоторый параметр t -
аналог уровня теплового шума. Тогда вероятность активности некоторого нейрона к
определяется на основе вероятностной функции Больцмана:
Рк = г г. (7.24)
* l + exp(-A£*/f)
где t - уровень теплового шума в сети; Д£ - сумма весов связей к -го нейрона со
всеми активными в данный момент нейронами. Кривая изменения вероятности
активности к -го нейрона показана на рис. 7.22. При уменьшении г колебания
активности нейрона уменьшаются: при t = 0 кривая становится пороговой.
Сформулируем задачу обучения вероятностной сети (машины Больцмана), в
которой вероятность активности нейрона вычисляется по формуле (7.24).
Пусть для каждого набора возможных входных векторов требуется получить с.
определенной вероятностью все допустимые выходные вектора. В большинстве
случаев эта вероятность близка к нулю.
Процедура обучения машины Больцмана сводится к выполнению двух
чередующихся шагов.
Л у t = 0,25
1,0 ^
-6 -4 -2 01 2 4 6
Рис. 7.22. Изменения вероятности активности нейрона в зависимости от параметра /
1) Подать на вход сети входной вектор и зафиксировать выходной (как в
процедуре обучения с учителем). Предоставить сети возможность приблизиться к
состоянию теплового равновесия:
а) приписать состоянию каждого нейрона с вероятностью рк (7.24) значение 1
(активный нейрон), а с вероятностью 1 - рк - нуль (не активный нейрон);
б) уменьшить параметр /; перейти к а).
В соответствии с правилом Хебба увеличить вес связи между активными
нейронами на величину 8. Эти действия повторить для всех пар векторов
обучающей выборки.
2) Подать на вход сети входной вектор без фиксации выходного вектора.
Повторить пункты а), б). Уменьшить вес связи между активными нейронами на
величину 8.
524 Методы современной ТАУ. Часть IV
Результирующее изменение веса связи между двумя произвольно взятыми
нейронами на определенном шаге обучения будет пропорционально разности между
вероятностями активности этих нейронов на шаге 1 и шаге 2. При повторении шагов 1 и 2
эта разность стремится к нулю.
Ассоциативность памяти нейронной сети Хопфилда и различных ее модификаций
не является единственным ее достоинством, которое используется на практике.
С помощью данной сети могут решаться такие традиционные задачи, как
дифференциальные уравнения в вариационной постановке; задачи линейной алгебры и
системы нелинейных алгебраических уравнений, где решение ищется в форме
минимизации невязки, и др.
7.10. ПОСТАНОВКА ЗАДАЧИ ОПТИМИЗАЦИИ
ПРИ ОБУЧЕНИИ МНОГОСЛОЙНОЙ НЕЙРОННОЙ СЕТИ
БЕЗ ОБРАТНЫХ СВЯЗЕЙ
Пусть нейронная сеть имеет п входов и т выходов. Каждому входу НС
соответствует входной сигнал *,, i = l...n, а каждому выходу - выходной сигнал
yj, j = l...m . Тогда входу нейронной сети соответствует вектор X с координатами
(х{,х2>х3,...,хп\ выходу - вектор Yc координатами (у\,У2*Уъ*->Ут)- Основным
функциональным назначением искусственной нейронной сети является
преобразование входных сигналов (некоторой разрозненной информации о внешней среде) в
выходные сигналы (понятия о внешней среде). Нейронная сеть в этом случае
представляется как некоторая многомерная функция F: X —> Y.
Если множество весовых коэффициентов и>, входных сигналов нейронов сети не
упорядочено, то функция F, реализуемая сетью, является произвольной.
Совокупности всех весовых коэффициентов всех нейронов соответствует вектор W.
Множество векторов W образует пространство состояний нейронной сети. Начальному
состоянию сети поставим в соответствие некоторый произвольный вектор W0. Тогда
обученной нейронной сети соответствует W*, т.е. такое состояние, при котором
реализуется однозначное отображение F: X -» Y. В этом случае задача построения
функции F, заданной в неявном йиде (задача обучения НС), формально сводится к
задаче перехода от некоторого начального состояния сети, соответствующего W0, к
конечному состоянию, соответствующему W*.
Пусть имеется обучающая выборка, состоящая из к пар векторов (при стратегии
обучения с учителем):
(x\Y'")f i=l...*.
Ошибка сети Е, появляющаяся в некотором состоянии Wj, может быть
представлена как среднеквадратичная ошибка, усредненная по выборке
i j
где к - число примеров в обучающей выборке.
Если при этом сеть не делает ошибки, то Е = 0. Значит, необходимо стремиться к
тому, чтобы в обученном состоянии сети Е —> min . Таким образом, задача обучения
нейронной сети является задачей поиска минимума функции ошибки (7.25) в
пространстве состояний W, и для ее решения могут быть использованы стандартные
методы теории оптимизации.
Глава 7. Применение нейрокомпьютеров в системах управления 525
Особенности задач оптимизации при обучении нейронной сети. Алгоритм
обучения нейронной сети задается набором обучающих правил. Обучающие правила
определяют, каким образом изменяются межнейронные связи в ответ на входное
воздействие. В настоящее время существует множество различных правил обучения
многослойных НС: обратного распространения ошибки, квазиньютоновские методы,
различные градиентные методы и т.д.
Простейший способ обучения нейронной сети - по очереди менять каждый
весовой коэффициент сети (далее просто - вес связи) таким образом, чтобы
оптимизировался какой-либо критерий качества работы сети (обычно - среднеквадратичное
отклонение). Этот способ является малоэффективным, целесообразнее вычислить
совокупность производных ошибки сети по весовым коэффициентам - градиент ошибки
по весам связей - и изменить все веса сразу на величину, пропорциональную
соответствующей производной. Один из возможных методов, позволяющих вычислить
градиент ошибки, - алгоритм обратного распространения, являющийся наиболее
известным в процедурах обучения НС.
Специфические ограничения при решении задачи обучения. По сравнению с
традиционными задачами оптимизации при обучении НС существует ряд
специфических ограничений. Они связаны, в первую очередь, с большой размерностью
задачи (даже в простейших нейроимитаторах, реализованных на ПК, количество
параметров 103 - 104). Это определяет требования, предъявляемые к алгоритмам
оптимизации:
1) ограничения по памяти; если производится оптимизация по п переменным, а
алгоритм требует затрат порядка 2п , то он не может быть применен для
обучения НС, желательнее линейная зависимость объема памяти от числа
оптимизируемых переменных, т.е. v = сп, где v - объем памяти , с - некоторый
коэффициент;
2) организация нейронной сети предопределяет возможность параллельного
выполнения вычислительных операций по каждой связи «вход-выход»;
организация параллельных или, в лучшем случае, мультиагентных вычислений
может значительно снизить время обучения НС.
Кроме того, необходимо также учитывать следующие обстоятельства.
Согласно теореме Геделя о неполноте [15], никакая система не может быть
логически замкнутой: всегда можно найти такую теорему, для доказательства которой
потребуется внешнее дополнение. Поэтому критерии выбора модели сложных
объектов необходимо разделять на внутренние и внешние.
Внутренние критерии вычисляются на основе результатов экспериментирования с
моделью объекта. При обучении НС на основе примеров из обучающего множества
вычисляется среднеквадратичная ошибка обучения Е по формуле (7.25), которая
является внутренним критерием. В этом случае ошибка Е называется ошибкой
обучения.
Для получения ошибки обобщения необходима проверка НС по тестовой
выборке, тогда вычисляемая ошибка Е - внешний критерий. Основная цель обучения НС
- создание модели объекта, обладающей свойством непротиворечивости, т.е. такой, в
которой ошибка обобщения сохраняется на приемлемом уровне при исследовании
всего поискового пространства и даже за его пределами.
Таким образом, если ставится задача оптимизации НС, то для получения
объективного результата производится разделение базы исходных данных на две части,
называемые обучающей и тестовой выборкой. Критерием выбора решающего
правила, синтезируемого по примерам из обучающей выборки, является
среднеквадратичная ошибка обобщения, вычисленная по тестовой выборке. Так создается первое
внешнее дополнение.
526 Методы современной ТАУ. Часть IV
Если ставится задача оптимизации разделения данных на обучающую и
проверочную части, то требуется еще одно внешнее дополнение. База данных в этом
случае разбивается на три части: обучающее, тестовое, подтверждающее множество.
Следовательно, ошибка обобщения является «критерием регулярности» выбора
соответствующего языка описаний решающих правил, разделяющих выходы НС. При
конструировании решающего правила задача обучения НС является
многокритериальной задачей оптимизации, поскольку необходимо найти общую точку минимума
большого числа функций.
Для обучения НС необходимо принятие гипотезы о существовании общего
минимума, т.е. такой точки в поисковом пространстве, в которой значение всех оценочных
функций по каждой связи «вход-выход» мало отличаются от минимальных. Опыт,
накопленный при решении практических задач на НС, показывает, что такие точки
существуют [13].
Многокритериальность и сложность зависимости функции оценки Е от
параметров нейросети приводит к тому, что адаптивный рельеф (график функции оценки)
может содержать много локальных минимумов, извилистых оврагов. Таким образом,
при поиске минимальной ошибки Е необходимо использовать глобальные методы
оптимизации.
Кроме того, к исследуемым методам оптимизации добавляют еще следующие
требования. Во время процедуры обучения необходимо, чтобы НС могла обретать
новые навыки без потери старых. Более слабое требование: приобретение новых
навыков может сопровождаться потерей точности старых, но эта потеря не должна
быть существенной (ошибка обобщения должна оставаться на приемлемом уровне), а
качественные изменения должны быть исключены. Это означает, что в достаточно
большой окрестности существования точки общего минимума значения функции
оценки Е не должны существенно отличаться от минимума. Иными словами, точка
общего минимума должна лежать в достаточно широкой низменности изменения
функций оценки.
Таким образом, можно выделить четыре специальных ограничения, выделяющих
обучение НС из общих задач оптимизации:
• большое число параметров нейросети;
• необходимость обеспечения параллельности вычисления;
• многокритериальность задачи оптимизации;
• необходимость нахождения достаточно широкой области, в которой значение
всех минимальных функций —> min .
Для решения этих задач в наибольшей степени подходят методы нелокальной
оптимизации. Еще больший эффект достигается при использовании глобально-
локальных алгоритмов, когда для выхода в зону поиска применяется подходящий
глобальный метод оптимизации, а для более точного нахождения минимума -
локальный метод.
Учет ограничений при обучении. Для параметров сети (вектора весовых
коэффициентов W) возможны ограничения простейшего вида:
W/max>W/>W|.|nill.
Учет ограничений при оптимизации осуществляется двумя способами: а) методом
штрафных функций; б) методом проекций. В методе а) в оценку добавляется штраф
за выход параметров из области ограничений. Это не требует никаких
дополнительных изменений структуры сети, а в градиент Е вводят производные штрафных
функций. Метод б) предполагает, что если в сети необходимо произвести изменение
весовых коэффициентов, и они выходят за установленные ограничения, то необходимо
положить:
Глава 7. Применение нейрокомпьютеров в системах управления
527
w =
wh если wimax>Wi>winkk9
^max> если wi^wimux>
Анализ алгоритма обратного распространения ошибки {Back Propagation -
ВР). Рассмотрим наиболее известный алгоритм обучения многослойной НС и
определим условия повышения эффективности процедуры обучения. ВР - это
итеративный градиентный алгоритм обучения многослойных НС без обратных связей
(рис. 7.23).
*i ^Г~\ ^f~\ ^f~\ У\
входной
слой-
слой 1
(л-нейронов)
скрытый
слой -
слой 2
(/-нейронов)
выходной
слой-
спойк
(р-нейронов)
Рис. 1.23. Многослойная нейронная сеть
В такой сети на каждый нейрон первого слоя подаются все компоненты входного
вектора. Все выходы скрытого слоя т подаются на слой т+1 и т.д., т.е. сеть является
полносвязной. При обучении ставится задача минимизации ошибки нейронной сети,
которая находится по методу наименьших квадратов:
zW)=\£{yj-dj)>
2%1
где yj - значение 7-го выхода нейронной сети; dj - известное значение j-ro выхода; р -
число нейронов в выходном слое.
Обучение НС производится методом градиентного спуска, т.е. на каждой
итерации изменение веса производится по формуле:
идЕ
(7.26)
где h - параметр, определяющий скорость обучения.
дЕ _ дЕ fyj dSj
dwij dyj dSj dwtj '
где yj - значение выхода 7-го нейрона; 5, - взвешенная сумма входных сигналов. При
dS:
этом множитель —- = jc, , где xt - значение /-го выхода нейрона.
д^-
Определим первый множитель формулы (7.26).
дЕ _ y дЕ dyk dSk _y dE dyk (/J+i)
где к - число нейронов в слое п + 1.
528 Методы современной ТАУ. Часть IV
Введем вспомогательную переменную 5^ = -.Тогда возможно определить
дУ; dSj
рекурсивную формулу для определения 5^ п-го слоя, если известно 5(^2+1)
следующего (и+ 1)слоя:
Sf =ЫГ-Т1)}^-- (7-27)
Нахождение б^ для последнего слоя НС не представляет трудностей, т.к.
априори известен вектор тех значений, который должна выдавать сеть при заданном
входном векторе:
8f=(y?-dA (7.28)
В результате получим следующее выражение:
Д^=-А8(/У. (7.29)
Таким образом, можно сформулировать полный алгоритм обучения НС.
1) Подать на вход нейронной сети очередной входной вектор из обучающей
выборки и определить значения выходов нейронов в выходном слое.
2) Рассчитать 8Р по формуле (7.28) и AwjjP) по формуле (7.29) для выходного
слоя НС.
3) Рассчитать 8" и Ди^п) по формулам (7.27) и (7.29) для остальных слоев НС.
4) Скорректировать все веса НС:
и^1)(0 = <)(г-1) + Дн^)(0,
где t - номер текущей итерации.
5) Если ошибка существенна, то вернуться к шагу 1, в противном случае - конец.
Рассмотрим некоторые трудности, связанные#с применением данного алгоритма в
процедуре обучения НС.
Блокировка сети. Данный алгоритм не эффективен в случае, когда производные
по различным весам сильно отличаются. Это соответствует ситуации, когда значения
функций S для некоторых нейронов близки по модулю к 1 или когда модуль
некоторых весов много больше 1. В этом случае для придания процессу коррекции весов
некоторой инерционности, сглаживающей резкие скачки при перемещении по
поверхности целевой функции, (7.29) вводится некоторый коэффициент инерционности
\х, позволяющий корректировать приращение веса на предыдущей итерации:
Ди$(О = -hSfx? + цДн^г -1).
Дополнительным преимуществом от введения инерционности является
способность алгоритма преодолевать мелкие локальные минимумы.
Медленная сходимость процесса обучения. Сходимость строго доказана для
дифференциальных уравнений, т.е. для бесконечно малых шагов в пространстве
весов. Но бесконечно малые шаги означают бесконечно большое время обучения.
Следовательно при конечных шагах сходимость не гарантируется.
Переобучение. Необходимо отметить, что высокая точность, получаемая на
обучающей выборке, может привести к неустойчивости результатов на тестовой
выборке. Чем лучше сеть адаптирована к конкретным условиям (к обучающей выборке),
тем меньше она способна к обобщению и экстраполяции. Этот эффект называется
эффектом «бабушкиного воспитания»: в этом случае сеть моделирует не функцию, а
Глава 7. Применение нейрокомпьютеров в системах управления 529
шум, присутствующий в обучающей выборке. Кардинальное средство борьбы с этим
недостатком - использование подтверждающей выборки примеров.
«Ловушки», создаваемые локальными минимумами. Детерминированный
алгоритм обучения типа ВР не всегда может обнаружить глобальный минимум или
выти из локального минимума. Одним из способов, позволяющих обходить
«ловушки», является расширение размерности пространства весов за счет увеличения
скрытых слоев и числа нейронов скрытого слоя. Другой способ - использование
эвристических алгоритмов оптимизации, один из которых - генетический алгоритм -
рассматривается в следующем параграфе.
Выбор стратегии обучения нейронной сети. Можно выделить три основных
направления, которые влияют на выбор наилучшей стратегии обучения [13]: 1)
формирование последовательности подачи входных векторов из обучающей выборки;
2) выбор шага обучения; 3) выбор направления обучения.
Различают следующие способы обучения, в зависимости от последовательности
подачи примеров из обучающей выборки: обучение по примерам, по страницам, по
всему задачнику.
В стандартном алгоритме ВР коррекция весов происходит сразу после подачи
очередного примера - это обучение по примерам; если веса модифицируются после
просчета всего обучающего множества, то это обучение по всему задачнику. Процесс
обучения по задачнику (на всех примерах из обучающего множества) сходится
быстрее, но требует больше памяти (для хранения промежуточных значений
вычисляемых в ВР величин)" Компромиссом является обучение по страницам задачника
(обучение на пакетах). В этом случае обучающее множество разбивается на
подмножества (страницы) и задается последовательность прохождения страниц. Коррекция весов
осуществляется после прохождения страницы (пакета). Если при обучении вначале
брать небольшие пакеты, а затем увеличивать их объем вплоть до общего количества
примеров в обучающем множестве, время обучения будет уменьшаться.
Выбор шага обучения. Выбор величины шага имеет ключевое значение для
успешной работы обучающего алгоритма, т.к. от значения шага А зависит скорость
сходимости алгоритма. Так как к моменту выбора шага для следующей итерации
градиент ошибки в методе ВР уже вычислен, то можно интерпретировать функцию
ошибки E(Y) как функцию шага £(А). Тогда, учитывая, что значение E(h) вычислено
на предыдущем шаге, можно записать следующий алгоритм (А1):
1) Сделать пробный шаг А, полученный на предыдущем шаге обучения, и
вычислить E(h).
2) Если E(h) > £(А0), то А:=А/4 («наказание»); переход к пункту 1.
3) Если E(h) < £(А), то h:=2h («поощрение»).
Приведенный алгоритм А1, как показано в [13], является оптимальным для поза-
дачной стратегии. Для улучшения стратегии алгоритма А1 при обучении по
задачнику и по страницам используется следующий алгоритм А2:
1) Как пункт 1 в А1.
2) Если £(А) > £(А0), то: 2.1 hx :=А/2; если E(h\) > Е(й0), то 2.2 А := Аь переход к
2.1.; 2.3 если E(h\) < £(Ао), то переход к пункту 4.
3) Если E(h)<E(hoi то 3.1 hx:=h9 А:=2Аь 3.2 если Е(А)< ДАО, то переход к 3.1;
3.3 если E(h) > E(h\), то переход к 4.
4) По значениям A, h\, £(А0), £(А), E{hx) строим параболу и находим ее вершину hp
(из-за выбора точек Ai и А парабола всегда будет выпуклой вниз).
5) Если E(hp) < £(Ai), то искомый шаг - Аь иначе - hp.
Экспериментальные исследования алгоритма А2 при работе нейросетевой
экспертной системы ЛОКНЕС [18] показали, что предлагаемый алгоритм позволяет по-
35 Зак. 416
530 Методы современной ТАУ. Часть IV
высить скорость обучения в 2 - 3 раза на стандартных решаемых задачах, однако при
его использовании возникают сложности с выводом сети из локальных минимумов.
Выбор направления обучения. Примером более быстрых стратегий являются
так называемые РагТап-метощл [13]. В общем случае РягГяи-стратегия состоит из
следующих этапов:
1) Запоминание первоначального распределения весов (вектор W0.
2) Проведение одного или нескольких шагов вдоль антиградиента: получаем
распределение весов W2.
3) Шаг обучения с использованием вектора (Wi - W2) вместо антиградиента.
Рассмотрим одну из реализаций РагТап-стрэтегии: алгоритм кРагТап. Схема
кРагТап-стрэтегии в точности совпадает с вышеописанной схемой, где на втором
этапе выполняется ровно к шагов обучения (при к = 2 получается классическая схема
сопряженных градиентов). Для реализации данной стратегии необходим объем
памяти для хранения одного распределения весов.
Другой способ реализации РагТап-стратегии - mParTan-стратегия требует
дополнительный объем памяти для хранения двух последних распределений весов в сети.
Алгоритм метода:
1) Запоминание первоначального распределения весов (Wi).
2) Шаг обучения вдоль антиградиента.
3) Запоминание распределения W2.
4) Шаг обучения вдоль антиградиента.
5) Запоминание распределения W3.
6) Шаг обучения с использованием вектора (W3 -Wi) вместо антиградиента.
7) Wi := W2; W2 := W3; переход к п. 4.
Хотя стратегия mParTan требует больше памяти, чем кРагТап, при длительном
функционировании необходимо только одно вычисление градиента на два шага
обучения, тогда как в kParTan-стратъгии требуется (к) вычислений градиента на (к+1)
шагов обучения. Хотя этот метод и не дает заметного выигрыша в числе
необходимых шагов, в реальности он дает выигрыш в 2 - 10 раз [18].
Для улучшения процесса обучения можно использовать информацию о
производных второго порядка от функции ошибки Е. Соответствующие методы оптимизации
называются квадратичными (квазиньютоновский метод, метод сопряженных
градиентов). Невозможность применения этих алгоритмов для сетей большой размерности
объясняется тем, что при их реализации, кроме основной сети, нужно иметь одну или
несколько дополнительных взаимосвязанных сетей и для вычисления градиента
требуется большой объем вычислительных операций.
Выбор эффективного обучающего алгоритма всегда включает в себя компромисс
между сложностью решаемой задачи и техническими ограничениями
(быстродействие, время, цена, объем памяти) инструментальной ЭВМ, на которой реализуются
данные алгоритмы. Поэтому необходимо исследовать новые алгоритмы обучения
НС, позволяющие добиваться лучшей эффективности.
7.11. ЭВРИСТИЧЕСКИЙ АЛГОРИТМ ОПТИМИЗАЦИИ
НА ОСНОВЕ ГЕНЕТИЧЕСКОГО АЛГОРИТМА
В ПРОЦЕДУРЕ ОБУЧЕНИЯ НЕЙРОННОЙ СЕТИ
Суть генетического алгоритма. Рассмотрим возможность использования в
процедуре обучения многослойной нейронной сети одного из методов эвристической
оптимизации - генетического алгоритма, моделирующего процессы природной
эволюции и относящегося к так называемым эволюционным методам поиска.
Глава 7. Применение нейрокомпьютеров в системах управления 5.31
При практической реализации данных алгоритмов на каждом шаге используются
стандартные операции, изменяющие решение. С помощью генетического алгоритма
(ГА) можно получить решение, соответствующее глобальному оптимуму или
близкое к нему, при этом на каждом шаге производятся некоторые стандартные операции
одновременно над множеством решений (популяций), что позволяет значительно
увеличить скорость приближения к экстремуму.
Отметим основные отличия ГА от стандартных локальных (например,
градиентных) и глобальных (например, случайных) алгоритмов оптимизации:
• поиск субоптимального решения основан на оптимизации случайно заданного
множества решений, а не одного решения, что позволяет одновременно
анализировать несколько путей приближения к экстремуму; оценка таких решений
на каждом шаге позволяет синтезировать новые решения на основе старых, т.е.
происходит эволюционное развитие оптимальных решений;
• решения рассматриваются как некоторые закодированные структуры
(символьные модели), а не как совокупность параметров, что позволяет в
некоторых случаях значительно уменьшить время преобразования данных, т.е.
увеличить скорость поиска оптимальных решений;
• для оценки «пригодности» решения для последующего эволюционного
развития наряду с использованием целевой функции дополнительно моделируются
«правила выживания», которые повышают разнообразие множества решений и
определяют эволюционное развитие;
• при инициализации, преобразовании и других видах операций с решениями
используются вероятностные, а не детерминированные правила, которые
вносят в направленность генетического поиска элементы случайности; тем самым
решается проблема выхода из локальных оптимумов;
• отсутствует необходимость расчета производных от целевой функции (как
в градиентных методах) или матрицы производных второго порядка (как в
квазиньютоновских);
• некритичность к количеству компонентов вектора допустимого решения.
Процесс получения оптимального решения с помощью ГА представлен на
рис. 7.24. Далее общая схема уточняется, в зависимости от применяемых
генетических операторов.
Новые
хромосомы
Формирование
начальной
популяции
к
Текущая
популяция
/^^етическиГ^Ч условие
V операторы У
#
Остановка
эволюции
Оптимальное
решение
35*
Рис. 7.24. Схема простого генетического алгоритма
532 Методы современной ТАУ. Часть IV
Генетическим алгоритмом называется следующий объект:
ГА (P°,rJ,sl,Fit,cr,m,ot),
где ГА - генетический алгоритм; Р°- исходная популяция; г- количество элементов
популяции; / - длина битовой строки, кодирующей решение; si - оператор селекции;
Fit- функция фитнесса (функция полезности), определяющая «пригодность»
решения; сг - оператор кроссинговера, определяющий возможность получения нового
решения; т - оператор мутации; ot - оператор отбора.
Согласно [2], среди принципов создания символьной модели (кодирования
потенциального решения) основным является принцип минимальной избыточности:
каждое решение должно быть представлено минимальным количеством хромосом
(в идеале одной), чтобы сохранить размер области поиска. Необходимо отметить, что
выбор символьной модели оптимизационной задачи во многом определяет
эффективность и качество применяемых ГА.
Будем считать; что область поиска решения D задачи однокритериального выбора
является конечным множеством решений, в котором каждое допустимое решение
хе D является я-мерным вектором x = (xl,x2,...,xn). Каждая компонента xh / = 1,л
вектора хе D кодируется с помощью целого неотрицательного числа [27]
Z/ е [О, АГ{], / = 1,л, где Ki+\ - число возможных дискретных значений i-й переменной
в области поиска D. Это позволяет поставить во взаимно-однозначное соответствие
каждому вектору хе D вектор z с целочисленными компонентами
(хьх2,....9хп) о (Zi,z2,...>zn)>
где для каждой компоненты z,-, / = 1,л областью возможных значений являются
целые числа от 0 до Kt.
Введем алфавит А2, содержащий два символа 0 и 1: А2 ={0,1}. Для
представления целочисленного вектора z = (z\,Z2>—*zn) в алфавите А2 необходимо определить
максимальное число двоичных символов а* которое достаточно для представления в
двоичном коде любого значения гх из области его допустимых значений [0, КЦ.
Параметр символьной модели а должен удовлетворять неравенству k < 2а, где
k = тах(К(). Символьная запись целочисленного кода z( фиксированного значения
1</<л
переменной х{ в двоичном коде запишется в виде следующей битовой комбинации:
К^д \8\ \8г 1 — 1 £q I.
1 _а ►'
где g, - двоичный символ 0 или 1, / = 1,л; Ла(г,) - символьное описание
компоненты jc,. Для представления допустимого решения хе D в алфавите А2 объединим
символьные записи кодовых комбинаций, описывающих все п компонент вектора х, в
виде линейной последовательности битовых строк из двоичных символов:
Мг.)
...
Aa(Z2)
1*4-1
nxa
•
n)
Таким образом, в соответствии с [2], символьная модель экстремальной задачи
переборного типа может быть представлена в виде битовой строки, с помощью
которой задается множество допустимых решений xt, принадлежащих области поиска D.
Глава 7. Применение нейрокомпьютеров в системах управления
533
Наименьшей неделимой единицей биологического вида, подверженной действию
факторов эволюции, является особь Н[, где к - номер особи, t - момент времени
эволюционного процесса. В качестве аналога особи в задаче оптимизации
принимается произвольное допустимое решение хе D, которому присвоено имя Н[.
Действительно, вектор х - это наименьшая неделимая единица, характеризующая в
экстремальной задаче внутренние параметры объекта оптимизации на каждом t-м шаге
поиска оптимального решения, которые изменяют свои значения в процессе
минимизации некоторого критерия оптимальности J(x).
Качественные признаки особи Н[ определяются из символьной модели как
соответствующие точке х с именем Н[ (битовой строке). Интерпретация этих признаков
проводится в терминах хромосомной наследственности [35]. В качестве гена -
единицы наследственного материала, ответственного за формирование альтернативных
признаков особи, принимается бинарная комбинация ha(zi), которая определяет
фиксированное значение целочисленного кода ц параметра х( в двоичном коде.
Некоторая особь Н[ будет характеризоваться п генами, каждый из которых отвечает за
формирование целочисленного кода соответствующей переменной. Тогда структуру
битовой строки можно интерпретировать хромосомой, содержащей п сцепленных
между собой генов. Местоположение /-го гена в хромосоме - локус, значение -
аллель /ia(z,).
Hi
ген 1
<
ген 2
ha(z2)
хромосома
ген п
►
Хромосома, содержащая в своих локусах конкретные значения аллелей,
называется генотипом (генетическим кодом), который содержит всю наследственную
генетическую информацию об особи Н[ . Конечное множество всех допустимых генотипов
- генофонд.
Текущая
популяция
Родители
Родители
(^ Скрещивание J)
Потомки
Текущая
популяция:
родители +
потомки
(^ Мутация ^)
Рис. 7.25. Формирование популяции
При взаимодействии особи с внешней средой ее генотип Н[ порождает фенотип
F\H[\ который может быть оценен количественно с помощью функции
приспособленности (функции фитнесса) к внешней среде.
534 Методы современной ТАУ. Часть ГУ
Фитнесс F/пЯП каждой особи Н[ представляет собой численное значение
функции У(х), вычисленное для допустимого решения xeD с именем Н[ . Чем
больше значение функции финтесса при решении задачи нахождения max У(х), тем лучше
особь приспособлена к внешней среде.
Формирование популяции. Совокупность особей (Н[У...УН'Г) образуют
популяцию Р\ Число г - численность популяции. Эволюция популяции Р* рассматривается
как чередование поколений.
Номер поколения отождествляется с моментом времени t = 0,1,...,Г, где Т-
жизненный цикл популяции, определяющий период ее эволюции. Совокупность
генотипов всех особей Н[ образует хромосомный набор, который полностью содержит в
себе генетическую информацию.
Цель эволюции популяции. Цель эволюции популяции заключается в основной
тенденции развития популяции - росте среднего значения функции фитнесса по по-
пуляции в целом max(F/rCD(o) = max ~VF/rCD с одновременным уменьшением
генетического разнообразия хромосомного набора популяции с помощью
генетической вариансы olp(t):
min(ac2p(0) = tninj -±-f^Fit(H'i)-FcP (ОМ-
Свертывание введенных частных критериев Fitcp(t) и о2(t) с помощью мульти-
• 1
пликативной функции f(t) = Fitco (t)—~— позволяет сформулировать цель эволю-
о (t)
ции популяции как обеспечение максимального значения обобщенного критерия в
течение ее жизненного цикла.
Оценка генетического разнообразия популяции. Совокупность из г особей Н[
популяции F* образует хромосомный набор. Наличие изменчивости хромосомного
набора от поколения к поколению является необходимым условием эволюции
популяции /*, т.е. ее развития в смысле увеличения значения функции приспособленности
особей популяции. Изменчивость и разнообразие генофонда влияют на качество
получаемого решения, т.к. позволяют выходить из локальных оптимумов. Оценку
генетического разнообразия популяции по всем п локусам будем производить в
соответствии с [2] по формуле:
Var^-YVard),
г1 (\ f
где Var(i) = l 7 -- max p(ha(k),i) , г - численность популяции Р>\
(\-ry\r \<к<ъг ')
p(ha(k)j) = -i- - частота встречаемости аллельной формы в i-м локусе; г, - число
генотипов в хромосомном наборе популяции /*, в котором /-й локус содержит ал-
лельную форму ha(k); b( - число форм аллелей в i-m локусе.
Var = 0, когда все г генотипов имеют в /-м локусе одну и ту же аллельную форму;
Var = 1, если все аллельные формы в i-м локусе всех генотипов хромосомного набора
Глава 7. Применение нейрокомпьютеров в системах управления 535
Чем выше генетическое разнообразие популяции, тем эффективнее ГА будет
выходить из локальных экстремумов, но на этапе сходимости высокое значение Var
может привести к потере оптимального решения. В связи с этим необходимо
разработать динамическую стратегию поиска оптимума, позволяющую на первых этапах
эволюции иметь высокое генетическое разнообразие, а на заключительных этапах,
при сходимости алгоритма, оно должно быть сведено к минимуму.
Способы создания начальной популяции Р°. В настоящее время наиболее
известными являются три стратегии создания стартового множества решений [27]:
1) формирование полной популяции; 2) генерация случайного множества решений,
достаточно большого, но не исчерпывающего все возможные варианты; 3) генерация
множества решений, включающего разновидности одного решения.
Первая стратегия реализует полный набор всевозможных решений, что
невозможно из-за чрезмерных вычислительных затрат и большой области поиска для задач
высокой размерности, которые мы и рассматриваем. Стартовая популяция, созданная
на основе данной стратегии, не может развиваться, т.е. в ней уже содержатся все
решения, в том числе и оптимальные.
Третья стратегия применяется в тех случаях, когда есть предположение, что
некоторое решение является разновидностью известного. В этом случае происходит
выход сразу в область существования экстремума и время поиска оптимума
значительно сокращается.
Для большинства задач проектирования неприемлемы первая стратегия
(вследствие проблематичности полного перебора) и третья (из-за сужения области поиска
и большой вероятности попадания в локальный экстремум). Наиболее приемлемой
является вторая стратегия, т.к. она создает возможность перехода из одной
подобласти области поиска D в другую в результате эволюции популяции и имеет
сравнительно небольшую размерность оптимизационной задачи.
Эффективность ГА, качество получаемого решения и успех дальнейшего развития
эволюции во многом определяются структурой и качеством начальной популяции.
Наиболее целесообразным представляется подход, основанный на комбинировании
второй и третьей стратегии: путем предварительного анализа решаемой задачи
выявляются подобласти в области поиска D, в которых могут находиться оптимальные
решения, т.е. определяются особи с высоким значением фитнесса, а затем случайным
образом формируются стартовые решения в этих подобластях.
Классификация генетических операторов. Выделим два основных способа
генерации новых решений:
1) путем перекомпоновки (скрещивания) двух родительских решений (оператор
скрещивания или кроссинговер сг)\
2) путем случайной перестройки отдельных решений (оператор мутации т).
Кроссинговер сг производит структурированный и рандомизированный обмен
информацией внутри родительской пары, т.е. между двумя хромосомами, формируя
новые решения. Задача состоит в создании такой комбинации участков хромосом,
которая давала бы наилучшее решение. Таким образом, основная цель скрещивания
заключается в накоплении всех лучших функциональных признаков,
характеризующих отдельные участки хромосом, копируемых в конечном решении.
Одноточечный оператор кроссинговера Холланда [35] реализуется следующим
образом. Сначала случайным образом определяется точка скрещивания. Затем
цепочка генов, ограниченная точкой скрещивания, одной хромосомы меняется местами
с аналогичной частью генов второй хромосомы (рис. 7.26), т.е. путем
перекомпоновки двух родительских решений генерируются два качественно новых решения
(потомки). Помимо одноточечного, применяются и многоточечные кроссинговеры.
536
Методы современной ТАУ. Часть IV
В результате применения сг могут появиться повторяющиеся кодовые комбинации
хромосом. Поэтому для использования генетического алгоритма в задачах
оптимизации необходимо разработать новые типы операторов сг.
Использование оператора мутации т в процессе биологической эволюции
предотвращает потерю важного генетического материала; в генетических алгоритмах т
применяется для выхода из локальных экстремумов. В практике использования ГА
для решения задач оптимизации встречаются классические операторы генной
мутации: изменение величины случайно выбранного гена (рис. 7.27). Для улучшения
технологии генетического поиска оптимальных решений целесообразно применять
операторы хромосомной мутации, предложенные в данной работе.
Хромосома А Хромосома В
Мутация
потомка А
Результат
мутации
Мутация
V
ъ
К
А.
►
К
А.
Рис. 7.26. Одноточечный кроссинговер
Рис. 7.27. Оператор мутации
Значительное улучшение качества и скорости сходимости ГА дает
комбинирование ГА с классическими детерминированными методами оптимизации, разработка
модифицированных операторов кроссинговера и мутации, основанных на знании
решаемой задачи.
Селекция решений. Качество поколений потомков во многом зависит от выбора
операторов селекции si родительской пары. Поэтому для аккумуляции всех лучших
функциональных признаков, имеющихся в популяции, используется подбор
хромосом для скрещивания. Наиболее часто в ГА используются следующие типы
операторов селекции si: панмиксия (случайный выбор пар); ассортативный
(предпочтительный выбор на основе функции фитнесса). При панмиксии частота k образования
родительской пары не зависит от «качества» хромосом Н[ и полностью определяется
численностью популяции г. к = 1/г(г —1). Таким образом, реализации si в виде
панмиксии соответствует случайный выбор Н[.
Второй способ реализации si связан с использованием функции фитнесса Fit, при
этом реализуются два типа выбора: положительный ассоциативный и отрицательный
ассоциативный. В первом случае предпочтение отдается парам хромосом с близкими
и высокими значениями Fit, но отличающимися по структуре. Во втором случае
предпочтение отдается хромосомам, характеризующимися функциями Fit, сильно
различающимися между собой.
Для реализации первой стратегии случайным образом с вероятностью
рк = Fit {н[ )/ ^Fit (н\), к = 1,г выбираются две разных хромосомы Н[ ,
Глава 7. Применение нейрокомпьютеров в системах управления 537
H'k+le Р* (н[ фН[+Л. Вторая стратегия реализуется следующим образом: одна из
хромосом Н[ е Р* выбирается случайным образом, а вторая #£+1 е Р* с
вероятностью pk=\l Fit{H[)j^ll Fit(ti\), k = lr.
Частным случаем положительного ассортативного выбора является введение
уровня «отсечки»: если Fit(H[)< /чготсечки, то в целях улучшения качества
популяции Н[ временно устраняется из процедуры скрещивания; например, можно
положить F/rOTce4KH = Fitcp(t).
С помощью оператора селекции si моделируется естественный отбор в
популяции. Панмиксия и отрицательный ассортативный выбор способствуют повышению
генетического разнообразия в популяции, что, в свою очередь, повышает скорость
сходимости ГА на начальном этапе оптимизации и позволяет выходить из локальных
экстремумов. На конечном этапе поиска целесообразно применять положительный
ассортативный выбор, т.е. искать решение только среди лучших Н[. Для реализации
этих стратегий необходимо разработать процедуру, допускающую смену типа
оператора si в процессе эволюционного развития популяции.
Способы отбора решений в популяцию. Необходимой составляющей
естественного отбора является устранение неудачных решений. Основная проблема
устранения - нахождение компромисса между разнообразием генетического материала и
качеством решений. Схема отбора включает два этапа:
• формирование репродукционной группы из всех решений, образовавшихся в
популяции Р*;
• естественный отбор решений в следующую Р""1 популяцию.
Если в этой схеме в репродукционную группу входят все решения, полученные в
t-м поколении, то численность новой популяции Р*+1 вычисляется по формуле
где г - численность популяции Р*; г[г - «потомки», полученные в результате
применения оператора скрещивания сг\ г*т - «мутанты», полученные в результате
применения оператора мутации т.
Для учета информации о степени приспособленности особей к внешней среде Fit
и сокращения численности репродукционной группы популяции Р*+{ используются
следующие схемы.
1) Элитарная схема (огэ).
В репродукционную группу включаются все Н[+1 е Р* и только те потомки и
мутанты, для которых выполняются следующие условия:
\/Н'кер<, к=п 3 Hkcr(Fit(Hkcr)>Fit(Htk))9
\/Н'кер', к=п 3 Hkm(Fit(Hkm)>Fit(Htk)).
2) Селекционная схема (pts).
Осуществляется упорядочение по убыванию функций Fit для всей
репродукционной группы. Задается численность г° популяции. В следующую популяцию Р/+1
включаются только первые из г° хромосом, т.е. те, для которых в упорядоченном
ряде ранг к(Н[)<г°.
34 Зак. 416
538 Методы современной ТАУ. Часть IV
Данная схема может быть модифицирована следующим образом. Определяется
средняя Fitcp для всех решений, полученных в популяции Р':
где R* - численность репродукционной группы популяции Р'\ R* = r + r[r + rlm .
В следующую популяцию включаются хромосомы, у которых функция Fit выше
или равна средней Fit[p , т.е. Rt+{ = {#£| Fit{H[) > Fit'cp, к = 1, R'}.
При использовании селекционной схемы часть полученных на r-м шаге решений
устраняется из дальнейшего анализа в процессе естественного отбора.
3). Схема пропорционального отбора (otP).
В соответствии с otP r решений популяции P/+l выбираются из R1 случайным
образом с вероятностью
p(H'k) = Fit(H'k)/YFit(H'), к=1^.
1 = 1
В этом случае каждое решение Н[ е R1 может потенциально войти в состав
популяции РпХ в виде одной или нескольких копий с одним и тем же генотипом.
4). Схема на основе линейно упорядоченного отбора (ot{).
Согласно [27] ot\ выбирает хромосомы из репродукционной группы R* с
вероятностью
р(И'к)=^{а-(а-Ь)Т^} *=1'*''
где а - параметр, выбираемый случайным образом с равной вероятностью из
интервала [4, 5]; Ь = 2-а.
Частный случай линейного упорядочения при а = 1 - равновероятный отбор (otR)
р{Н[) = \, к=\^.
R*
При использовании otR все решения Н[ е R* имеют одинаковую вероятность
быть выбранными в следующую популяцию Pr+1.
Рассмотренные операторы отбора <?/э, ots, otP, ot\, otr производят выбор
Н[, k=\,Rf до тех пор, пока в популяцию Р**х не будет включено г решений
(//,/+I,#2+l>...,#J+l)• Затем процесс развития популяции повторяется для
следующего (/+1) поколения.
Анализ операторов отбора показывает, что случайный отбор приводит к
высокому генетическому разнообразию, однако многие качественные решения могут быть
потеряны. Элитный отбор сохраняет качество решения, но после смены нескольких
поколений хромосомы становятся сходными. Таким образом, на начальных этапах
оптимизации с помощью ГА огэ дает значительное ускорение роста качества
решения, оцениваемое по Fit, в сравнении с ots, однако дальнейшее повышение качества
становится проблематичным из-за скудного генетического разнообразия. Поэтому
необходимо разработать динамический otA, использующий преимущества каждого ot
в соответствующий момент эволюции.
Повышения эффективности ГА. Предлагается один из таких способов,
связанный с параллельным развитием нескольких популяций и применением генетических
операторов к хромосомам из разных популяций. Такой подход позволяет повысить
Глава 7. Применение нейрокомпьютеров в системах управления 539
генетическое разнообразие наследственного материала и приводит к улучшению
окончательного решения. Мотивом создания этого подхода является известный из
генетики факт: из аллелей формируются генотипы особей, из особей популяции, из
популяций биоценозы, являющиеся итогом прогрессивного развития нескольких
популяций [1]. В соответствии с вышесказанным, ГА, в котором генетические
операторы применяются к хромосомам разных популяций, будем называть многопопуляци-
онным (биоценозным).
В предложенном многопопуляционном ГА одновременно создается N начальных
популяций P1°,P2°»—,^v > которые развиваются независимо друг от друга до
определенного момента tv (начало периода взаимодействия), после которого популяции
обмениваются хромосомами, затем снова развиваются независимо. Норму
взаимодействия (количество обменных хромосом) можно регулировать с тем, чтобы каждая из
популяций могла также создать «свои» уникальные хромосомы. Главные проблемы
реализации биоценозного алгоритма ГА: 1) определение момента tv и 2) выбор
принципа отбора обменных хромосом.
Первая проблема решается следующим образом. Вводится условие наступления
события tv: если сумма отклонений Fitmax в текущих поколениях от предыдущих за
последние / поколений не превосходит некоторого заданного положительного числа
8, то развитие популяции не приводит к появлению лучших решений и наступает
период взаимодействия. Пусть / - количество поколений, за которое производится
оценка развития популяции; 5 - уровень улучшения решений, определяется как
разность Fit*muK - Fit'^A ; тогда процесс определения момента tv может быть описан
следующим образом.
1) Установление значений / и 8;
2) F/fmax = 0» максимальное значение Fit в предыдущем поколении;
3) t = 1; счетчик номера поколения;
4) 5 = 0; сумма отклонений
Fit'-FiCl
5) к=\\ счетчик числа поколений;
6) Если к < 1, то переход 7, иначе 12;
7) FuJnax = max Fit(H[); определение max Fit в текущем поколении;
8) 5 = 5 +
Fit'-FifcL
9) Fit^=FitfmuX;
10) jfc = jfc+l;f = f+l;
11) Переход 6;
12) Если 5 > 8, то переход 4, иначе 13;
13) Конец.
Если условие наступления события tv выполняется хотя бы для одной популяции,
то происходит обмен хромосомами между этой популяцией и другой, выбранной
случайным или детерминированным способом.
Для решения второй проблемы после наступления момента tv происходит
ранжирование всех хромосом по функции Fit по возрастанию в обменивающихся
популяциях. Из каждой популяции удаляется qr худших хромосом (q - процент
исключения; 0 < q < 1; г - количество хромосом в популяции), и на их место включается qr
лучших хромосом из другой популяции. Выбор обменных хромосом из каждой
популяции осуществляется с вероятностью:
34*
Fit(Hl')
Pi r-a
540 Методы современной ТАУ. Часть IV
г
7=1
Условие останова многопопуляционного алгоритма ГА: разность функций фит-
несса разных популяций, участвующих в обмене за несколько последних популяций,
меньше 8. Так, если развиваются только две популяции, то условие останова
X г *'max "~ ^max < S за последние / поколений.
Исследование ГА для решения задачи обучения НС. Круг практических задач,
решаемых с помощью нейронных сетей НС, постоянно расширяется, но, несмотря на
этот фактор, вопросам обучения НС в литературе уделяется недостаточное внимание.
А между тем качество обучения напрямую влияет на предсказательные возможности
нейронной сети и, следовательно, на точность решаемых задач классификации,
распознавания образов, принятия решений и т.д. В классической постановке, как было
показано, задача обучения нейронной сети рассматривается как задача поиска
минимума ошибки обучения, зависящей от параметров сети. В связи с этим для
реализации алгоритмов обучения нейронной сети используются всесторонне исследованные
стандартные методы оптимизации, которые в большинстве случаев позволяют найти
локальный, а не глобальный экстремум. С целью повышения достоверности
принимаемых на основе нейронной сети решений необходимо исследовать альтернативные
алгоритмы оптимизации, позволяющие находить глобальный экстремум, но не
нашедшие пока широкого распространения на практике. Наиболее перспективными в
этом плане и являются рассмотренные генетические алгоритмы оптимизации.
Для выполнения процедуры оптимизации с использованием генетического
алгоритма необходимо:
1) подобрать представление оптимизационных параметров в виде определенного
формата данных: строки, вектора, таблицы, массива и т.д.;
2) разработать или выбрать из набора генетических операторов такие, которые
наилучшим образом учитывают особенности поискового пространства;
3) определить размер начальной популяции;
4) разработать методику использования генетических операторов;
5) задать функцию фитнесса или приспособленности (целевую функцию, по
которой производится отбор вариантов в популяцию);
6) разработать методику отбора вариантов в новую популяцию;
7) задать критерий останова эволюционного процесса.
Для минимизации ошибки обучения НС на основе генетического алгоритма
каждому варианту вектора весовых коэффициентов будем ставить в соответствие
некоторую хромосому, представленную в виде битовой строки.
Как оказалось в дальнейшем, использование классических операторов селекции
(например, панмиксии или ассортативного скрещивания) является не всегда
эффективным, необходимо было разработать новые операторы выбора хромосом для
скрещивания - операторы рекомбинации (рис. 7.28), которые позволяют уменьшить
число переборов и, соответственно, время сходимости алгоритма оптимизации.
Введение операторов рекомбинации связано с тем обстоятельством, что в
реальном биологическом пространстве существования генотипов имеет место
неравномерность их распределения по классам, наличие видов, семейств, родов. Поэтому в
целях исследования «дальнего родства» целесообразно производить скрещивание
хромосом, находящихся на самом далеком расстоянии друг от друга.
Глава 7. Применение нейрокомпьютеров в системах управления
541
Нл\ Н%ч Нч% Н>
42
21
z22
а2
аъ
«4
.а5.
V
h
\
h
с2
съ
С4
.С5.
dx
d2
d,
d4
d5
\ X
V
c.
c2
V
c2
6,
b2
Л.
«.
«2
dx
d,
d2
d,
Нъ На Не Hf.
Рис. 7.28. Оператор рекомбинации
В результате применения операторов рекомбинации «дальнего родства» к
различным классам генотипов (А и В - классы двумерных хромосом на рис. 7.28)
происходит переход в другие области поискового пространства. Выбор хромосом,
относящихся к различным классам для выполнения операции рекомбинации,
осуществляется по вычисляемой между хромосомами мере различия («радиусу скрещивания») R; в
рекомбинации участвуют хромосомы, мера различия которых является наибольшей.
Если хромосомы рассматривать как точки метрического пространства, например, как
n-мерные векторы Н =(А1,А2,...,АЛ), координатами которых являются значения
генов, то в качестве меры различия двух хромосом можно принять евклидово
расстояние между ними.
При входе в область существования экстремума для повышения скорости
сходимости алгоритма скрещивание осуществляется между хромосомами, расстояние
между которыми является наименьшим («близкое родство»). Оператор рекомбинации
имеет естественный аналог [1], при этом в операции скрещивания участвуют две
пары хромосом. В соответствии с этим правилом из популяции выбираются две пары
хромосом Нц, Н12 и Н2и #22» каждая пара соответствует своему классу. Между двумя
хромосомами первой пары и двумя хромосомами второй пары выполняется оператор
скрещивания. В результате получается четыре новых решения Я3, Я4, Я5, Я6.
Применение предлагаемых операторов скрещивания позволяет во многих случаях
переходить из одной локальной области пространства решений в другую, а в пределах
одной области осуществлять поиск лучших решений.
Процент хромосом, подвергающихся мутации, задается коэффициентом мутации,
который определяется экспериментально. Эффективным (с точки зрения выхода из
локального экстремума) является использование, кроме генной мутации (изменение
одного гена в хромосоме), хромосомной мутации (хромосомной перестройки). В
генетике рассматриваются типы хромосомной мутации, изменяющие структуру целой
хромосомы, - делеция (потеря участка хромосомы), дефишенси (концевые нехватки
хромосом), дупликация (удвоение участков хромосом), инверсия (перестройка части
542
Методы современной ТАУ. Часть ГУ
генов в обратном порядке) - рис. 7.29, а\ транслокация, т.е. перенос части генов в той
же хромосоме на новое место - образование изохромосомы - рис. 7.29, б.
^>
*<
£/
\ 1
VJ
п
/ \
<*4
&
/
)
<*2
"з
**-
Рис. 7.29. Оператор инверсии (а) и транслокации (б)
Данные типы перестроек играют очень важную роль в естественной эволюции
организмов, позволяя переходить к другим видам [1]. Построение операторов мутации
генетического алгоритма на их основе, как показали эксперименты, позволяет
обходить локальные экстремумы.
В процессе отбора производится направленный поиск хромосом, которые
являются ценными в смысле некоторой заданной целевой функции (функции фитнесса),
в качестве которой в процедуре обучения НС используется функция ошибки Е.
Каждой /-й реализации, / = 1,...£ вектора весовых коэффициентов ставится в
соответствие некоторая хромосома Я„ начальная популяция формируется из к таких
хромосом. Для определения Е каждый /-й вектор весовых коэффициентов W, (фенотип),
закодированный в хромосоме Я, (генотип), обучается на «своей» нейронной сети.
Тогда ошибка обучения / -й нейронной сети Е1 может быть вычислена по
результатам ее обучения
^=ЯСД^.), (7.30)
где НС( - нейронная сеть для обучения вектора W,. Ошибка Е1 и будет являться
функцией фитнесса Fit для хромосомы, кодирующей вектор W,.
Само понятие обучения нейронной сети при использовании для этих целей
генетического алгоритма, в отличие от традиционных методов обучения, имеет несколько
иной смысл: обучение здесь заключается в применении генетических операторов к
генотипу вектора W,, т.е. к хромосоме Я„ а обучающая выборка служит для
вычисления ошибки обучения Е1 нейронной сети НС, с конкретными значениями W,.
При отборе хромосом в новую популяцию используется следующее правило: чем
меньше целевая функция для данной хромосомы Я,, тем выше вероятность ее выбора
для репродукции. При определении лучшего варианта используется: 1) лучшая Я,
в текущей популяции (элитная хромосома); 2) лучшая Я, в нескольких популяциях
(в этом случае функция фитнесса Fit может быть вычислена на текущей либо на
последних п популяциях). Сравнение вариантов в текущей популяции производится на
основе нормализованного Fitnorm. Оценочная функция такого вида показывает вес
данного варианта во всей популяции. Вычисление Fitnorm производится по формуле
^7логт(Я1) = Яг(Я/)/ХЩЯ/),
(7.31)
где Я, - i-я хромосома (/-й вариант реализации W); к - количество вариантов в
популяции.
Глава 7. Применение нейрокомпьютеров в системах управления
543
»
а
4
b
f
►
С
i
d
»
e
4
f
f
4
i
5
f
h
Исходная
популяция
D » популяция
Рис. 7.Э0. Схема отбора хромосом в новую популяцию:
<зДсДе/,£,Л - хромосомы текущей популяции; b,d,e,g-хромосомы новой популяции
На основе (7.31) на следующем шаге работы алгоритма осуществляется отбор
хромосом (вариантов W) для репродукции новых поколений. Размер текущей
популяции в этом случае обычно уменьшается до размера начальной популяции с
помощью соответствующих алгоритмов. Для экспериментов использовался oth - оператор
пропорционального отбора и его модификации (рис. 7.30).
Таким образом, процедура оптимизации с помощью генетического алгоритма
является итерационной и включает два повторяющихся этапа: 1) синтез новых
хромосом (скрещивание и мутация); 2) отбор хромосом в новую популяцию. Процесс
продолжается до тех пор, пока не будет получено а) оптимальное решение или б)
заданное число поколений. При этом каждая последующая популяция должна быть лучше
предыдущей. Решению задачи соответствует хромосома с минимальным значением
фитнесс-функции, определяющая оптимальный вектор весовых коэффициентов W,
при этом ошибка обучения Ё становится меньше заданной величины 8. Если условие
останова обучения по а) не может быть выполнено, то происходит завершение
процедуры обучения по б) с выбором элитной хромосомы в одном или нескольких
поколениях. В зависимости от вида используемых генетических операторов и схемы
отбора, могут быть сконструированы различные генетические алгоритмы, каждый из
которых будет эффективным с точки зрения скорости сходимости и наилучшего
приближения к экстремуму при решении реальных задач.
Экспериментальное исследование алгоритма. Обычно для оценки
эффективности разрабатываемых алгоритмов оптимизации используются тестовые функции,
экстремум которых известен. Исследование генетического алгоритма и отдельных
генетических операторов производилось с использованием двух, часто применяемых на
практике, следующих тестовых функций [28]:
1) Функции Жилинскаса
F(x{,x2) = х? +x\ -cosie*! -cosl8*2.
Ограничения: 0 < хх < 271, / = 1,2.
Минимум: F(x*) = -2, х* = [0,0f .
2) Функции Вуда
F(x{,x29x3,x4) = l00(x2-x*)2 +(1-хх)2 +90(х4 -*32) + (1-*3)3 +
+ 1O,1U2-1)2 + U-1)2 + 19,8U2-1)U4-1).
Ограничения: —10< jc, < 10, / = 1,2,3,4.
Минимум: F(x*) =0, jc* = [l, 1, 1, if .
544
Методы современной ТАУ. Часть IV
Варианты генетического алгоритма:
1) Оператор скрещивания - «дальнее родство» на генотипе; процент генной
мутации - 0,1, хромосомная мутация - транслокация; отбор хромосом в
популяцию - элитный (с лучшей функцией фитнесса).
2) Оператор скрещивания - многоточечный или одноточечный кроссинговер;
процент генной мутации - 0,001; отбор - элитный.
3) Оператор скрещивания - «дальнее родство» на генотипе; процент генной
мутации - 0,1, хромосомная мутация - инверсия; отбор - элитный, причем
допускается повторение не более 10 одинаковых хромосом в новой популяции.
4) Оператор скрещивания - «ближнее родство» (первая хромосома выбирается
случайным образом, а вторая наиболее близко расположенная к ней - по
значению функции фитнесса); процент генной мутации - 0,1, хромосомная
мутация - транслокация; отбор, как в алгоритме 3.
Процент 60
найденных
точных 50
экстремумов
20 50
Число популяций
100
Рис. 7.31. Вероятность нахождения точного значения экстремумов тестовых функций
при заданном числе популяций
Для каждого из алгоритмов на рис. 7.31 представлены усредненные по двум
тестовым функциям результаты, показывающие зависимость процента нахождения
точного значения экстремума от числа запусков ГА (от числа популяций).
Полученные результаты свидетельствуют о низком проценте экспериментов, в
которых было получено точное значение минимума, в зависимости от общего числа
запусков ГА. Однако, как показано на рис. 7.32, наблюдается хорошее приближение
найденных минимумов к точному значению минимума.
Действительно, из диаграммы на рис. 7.32 видно, что величина т, равная
усредненному по тестовым функциям значениям экстремума, находится в пределах
0,9-0,95.
т = 1 abs(x*-xrA)
х*
где л:* - точное значение экстремума; хГА - найденное значение экстремума с
помощью генетического алгоритма.
Другой важный результат, следующий из экспериментов: скорость приближения
к экстремуму в ГА является очень высокой, для нахождения минимума во всех
экспериментах достаточное число запусков 20 - 30; увеличение числа запусков ГА
практически не сказывается на точности приближения к экстремуму. Причиной этого
является возможность быстрой локализации области глобального минимума за счет
накопления информации о пространстве поиска в целом, например, путем
применения оператора скрещивания «дальнее родство», увеличения вероятности генной му-
Глава 7. Применение нейрокомпьютеров в системах управления
545
тации, использования новых операторов хромосомной мутации. Вероятность
мутации оказывает существенное влияние на результаты поиска. Низкий процент генной
мутации в варианте 2 генетического алгоритма практически не позволил найти
экстремум функции, несмотря на увеличение числа запусков ГА.
□ 1
□ 2
20 50
Число популяций
Рис. 7.32. Отношение т найденных значений экстремумов функций
к точным значениям при заданном числе популяций
Учитывая особенности постановки задачи оптимизации при обучении нейронной
сети и основываясь на полученных экспериментальных результатах, можно
предположить, что генетический алгоритм будет наиболее эффективной процедурой на
первоначальном этапе поиска минимума ошибки обучения нейронной сети, на котором
определяется область существования глобального экстремума. Второй этап
процедуры обучения НС, связанный с уточнением значения Е в формуле (7.30), должен
осуществляться с использованием локального алгоритма оптимизации.
Преимущества генетического алгоритма оптимизации в процедуре обучения
нейронной сети перед другими альтернативными методами иллюстрируются рис. 7.33:
здесь представлены результаты распознавания структуры памяти в распределенной
многопроцессорной системе с помощью нейронной сети, обученной с помощью
двухэтапного алгоритма на основе генетического поиска (первый этап -
рассмотренная выше процедура ГА; второй этап - авторский алгоритм оптимизации,
всесторонне исследованный в [17]) и метода обратного распространения ошибки (Back
Propagation). Процент распознавания в ГА больше на 15 - 20%.
100
90
70
60
50
40
30
20
10
0
л
_ - ,,*"""L».
1
" г
1
1
А.
1
. 4-
1
^—-~~
4 ~
I
I
1
1
I
1
j
I
ц
1
1
1
1
Т
1
1
- - J - - - -
1
. 1
1
1
- - J
1
1
1
1
1
........ J
1
J
10
15
20
25
30 примеры
|-*-ВР(12121)-д-ГА|
Рис. 7.33. Сравнение возможностей распознавания генетического алгоритма
и алгоритма Back Propagation (ВР)
546
Методы современной ТАУ. Часть IV
Возможность нахождения глобального экстремума ошибки обучения с помощью
генетического алгоритма повышает процент распознавания, что позволяет говорить о
перспективности его использования в задачах проектирования сложных технических
систем. Метод оптимизации на основе генетического поиска, используемый в
процедуре обучения нейронной сети, дает возможность повышать достоверность
принимаемых проектных решений при одновременном сокращении времени исследования.
Кроме того, необходимо также отметить, что при использовании ГА в процедуре
поиска минимума Е активационная функция нейронного элемента не должна быть
обязательно дифференцируемой, что позволяет адаптировать нейросетевую модель к
реальной решаемой задаче. Генетический алгоритм допускает высокую степень
параллельности при его реализации на распределенных вычислительных системах, что
может значительно уменьшить время обучения нейронной сети. Простота
выполняемых генетических операторов при обучении. НС открывает перспективы для
разработки высокоэффективных нейропроцессоров на основе tf/SC-модели.
7.12. НАСТРОЙКА НЕЙРОННОЙ СЕТИ НА РЕШЕНИЕ ЗАДАЧ
КЛАССИФИКАЦИИ И РАСПОЗНАВАНИЯ
Для практического использования нейронной сети при решении реальных задач
необходимо следующее:
1) обучение нейронной сети на известных примерах (на обучающей выборке);
2) работа обученной нейронной сети.
Предварительная
обработка входных
данных
Выбор архитектуры
нейронной сети (НС)
Выбор алгоритма
обучения
Выбор способа
интерпретации ответов
НС
Выбор функции
активации нейрона
Обучение(процесс
формирования
решающего правила)
Порождение
гипотез(распознавание)
Рис. 7.Э4. Схема настройки нейронной сети на решение задач классификации и распознавания
Реализация этих действий связана с выполнением следующих пунктов:
1) выполнить предобработку входных данных для корректного построения
обучающей выборки (предобработчик данных);
2) определить способ интерпретации ответов сети;
3) выбрать критерий оценки работы сети;
4) провести собственно процедуру обучения сети;
5) обеспечить работу сети в режиме классификации и предсказания.
Предобработчик входных данных. Для обучения нейронной сети необходимо
наличие обучающей выборки. Обычно при обучении на вход сети примеры образцов
приходится подавать многократно (как правило, 100 - 1000 примеров [13, 31]).
Поэтому скорость обработки обучающей выборки может существенно влиять на
скорость обучения нейронной сети. При работе с обучающей выборкой удобно исполь-
Глава 7. Применение нейрокомпьютеров в системах управления 547
зовать привычный для пользователя формат данных. В мощных иностранных
универсальных нейропакетах, таких как NeuroSolutions - фирмы NeuroDimension Inc.,
NeuralWorks Professional ll/Plus - фирмы NeuralWare, поддерживаются основные
типы представления данных: текстовые данные в формате ASCII, изображения в
формате Ътр и т.д. С целью удобства работы производят нормирование и
центрирование данных, для того чтобы каждая компонента вектора данных лежала на отрезке
[0,1] или [-1,1].
Стандартные преобразования для каждого элемента исходной выборки X могут
*; -Af(*;) Xj-MiXi)
быть выполнены следующим образом: х : = — — или х := ■ ■,
У Р ' а(х-) ' тах|х.-М(х.)|
N
1 N
где Xi - /-я координата входного вектора; М(х,) = —^х, - выборочная оценка мате-
N i=i
матического ожидания jc, (среднее значение); выборочная оценка среднего квадра-
\_
( 1 N 2V
тичного отклонения - а(;с,) = — ^ (jc,- - М (jc, ))
{ N <=i J
Если эти преобразования не делать, то необходимо было бы выбирать пределы
изменения параметров нейрона в зависимости от данных. При кодировании
параметров исследуемых объектов целесообразно учитывать специфику их представления:
например, при определении характеристик памяти в ЭВМ более информативным
является параметр отношения времени выборки информации из памяти к стоимости,
чем оба эти показателя в отдельности, что позволяет уменьшить размерность
нейронной сети.
Интерпретатор ответов сети. Стандартные («обезразмеренные») нейронные сети
формируются таким образом, чтобы их выходные сигналы лежали в интервалах [0,1]
или [-1,1]. Если необходимо получить выход в интервале [а, Ь], то производится
масштабирование выходного сигнала для попадания в нужный диапазон ответов. Для
а+b Ъ-а _
выходного сигнала у в этом случае имеем у = + у . В другом варианте
интерпретации весь отрезок значений [а, Ь], в котором должен лежать выходной сигнал
нейронной сети, разбивается на т частей (т выбирается довольно большим, так,
чтобы \b - а)1т было величиной порядка требуемой точности). Этим т интервалам
ставится в соответствие т нейронов. Выходные сигналы нейронов обрабатываются по
правилу «победитель забирает все»: если сигнал, принятый с /-го нейрона, больше,
чем другие, то делается вывод, что искомая величина лежит в /-й части отрезка [а, Ь],
этому интервалу можно поставить в соответствие 1, а всем остальным - 0.
Большинство других известных вариантов масштабирования носит гибридный характер: за
каждым нейроном закрепляется его область на отрезке [а, Ь], а выходные сигналы
нейронов позволяют более точно локализовать точку в этой области.
Наиболее полный обзор наиболее известных методов интерпретации ответов
нейронной сети можно найти в [13]. В задачах классификации наиболее распространено
правило интерпретации «победитель забирает все»: число выходных нейронов равно
числу распознаваемых классов, номер нейрона с максимальным сигналом
интерпретируется как номер класса. Однако, есйи классов много, для реализации метода
требуется много выходных нейронов.
Знаковая интерпретация требует log 2 M нейронов (М- число классов). Допустим,
что у\9 эъ»--.» Ут - совокупность выходных сигналов нейронов. Заменим в этой
последовательности положительные числа единицами, а отрицательные - нулями. Полу-
548
Методы современной ТАУ. Часть IV
ченная последовательность нулей и единиц рассматривается как номер класса в
двоичной записи.
Порядковая интерпретация определяет возможность для М выходных нейронов
описать принадлежность к М\ классам (а в знаковой 2т). Если провести сортировку
выходные сигналов нейронов уь У2,---, ут и обозначить пх - номер /-го сигнала после
сортировки (1 соответствует самому маленькому сигналу, М- самому большому), то
перестановку
123.. .М
п{п2пъ...пм
можно рассматривать как слово, кодирующее номер класса. Всего возможно М\
перестановок. Для использования этого интерпретатора необходимо, чтобы
характерная ошибка выходного сигнала была меньше ММ. Даже при числе нейронов М= 10
требование к точности е < 0,1, а число возможных классифицируемых объектов = 10!
Для улучшения качества распознавания (более точного проведения разделяющей
поверхности) используют «2-на-2» кодирование. В этом случае для распознавания М
классов необходимо иметь М(М- 1)/2 нейронов, каждый из которых реагирует
только на два класса. Окончательное присваивание элементу /-го номера класса
осуществляется с помощью булевой функции; на вход элемента, реализующего эту функцию,
подают выходы с этих нейронов. Рис. 7.35 иллюстрирует проблему кодирования
выхода на примере двумерной задачи с тремя классами. С помощью «2-на-2»
кодирования задача классификации решается просто, тогда как в методе «победитель забирает
все» необходимо строить нелинейные разделяющие границы.
Xi
Х2
хз
Xi
Х2
б
Хз
Рис. 7.35. Кодирование выхода:
а - «победитель забирает все»; б - «2-на-2» кодирование
Нечеткая интерпретация для классификаторов также основывается на правиле
«победитель забирает все». Выходные сигналы нейронов (после масштабирования -
приведения значений в отрезок [0, 1]) могут рассматриваться как функции
принадлежности к соответствующим классам. В этом случае возможны следующие способы
интерпретации:
Глава 7. Применение нейрокомпьютеров в системах управления 549
1) выбирается класс, у которого значение выхода является максимальным;
достоверность распознавания определяется как разность максимального сигнала и
следующего за ним по величине;
2) значения выходов нейронов (классов) интерпретируются как меры
уверенности принадлежности к тому или иному классу с указанием наилучшего
приближения к какому-то классу.
Перечень приведенных способов интерпретации ответов НС не является
полным. Для каждой предметной области при решении конкретных задач необходимо
их экспериментальное исследование. В нашей практике применения нейронных
сетей для исследования вычислительных систем наиболее часто использовалась
интерпретация, основывающаяся на правиле «победитель забирает все» и нечеткая
интерпретация.
Оценка качества работы нейронной сети. Поскольку обучение основывается на
минимизации значения некоторой функции, показывающей отклонение результатов,
которые выдает сеть на данном обучающем множестве, от идеальных требуемых, то
необходимо выбирать соответствующую оценку. Обычно в качестве такой оценки
берется средняя квадратичная ошибка (MSE), которая определяется как сумма
квадратов разностей между желаемой величиной выхода ф и реально полученными на
сети значениями у, для каждого примера /:
г 1=1
иногда берется корень квадратный из нее (RMSE).
Оценка MSE используется в тех случаях, когда выходные сигналы сети должны с
заданной и одинаковой для всех сигналов точностью е совпадать с известными
векторами, где е определяется как уровень надежности [13]. .
Для учета уровня надежности обучения обычно используется модифицированный
MSE:
£ = i£f^-4, (7.32)
где е имеет различный диапазон изменения для используемых способов
интерпретации: 0< е < 1 - для знаковой интерпретации; 0 < е < 2 - для правила «победитель
забирает все»; 0 < е < 2/ (N - 1)- для порядковой интерпретации, где N - размерность
вектора входных сигналов [13].
Уровень надежности обучения вводится с целью обеспечения устойчивой работы
сети. Критерий устойчивости формулируется следующим образом: работа сети
считается устойчивой, если при изменении выходных сигналов сети на величину,
меньшую е, интерпретация ответов сети не меняется. Этот факт можно использовать для
обеспечения ускоренного обучения сети: целесообразно при вычислении оценки по
формуле (7.32) использовать только такие выходные сигналы (множество
правильных ответов), интерпретация которых не меняется при изменении их значений на
величину, меньшую е.
Оценку MSE можно обобщить, если использовать суммирование квадратов
разностей {di-yi)2 с соответствующими весами:
* = iEM4-*)2- (7.33)
где Ki - вес /-го примера в обучающей выборке. Использование оценки (7.33)
позволяет выделить наиболее важные примеры из обучающей выборки, устанавливая для
550 Методы современной ТАУ. Часть IV
этого соответствующий вес. Кроме того, эту оценку целесообразно использовать для
уравновешивания различных групп примеров в задачах классификации. С этой целью
необходимо назначать веса К{ так, чтобы суммарный вес обучающих примеров в
каждом классе не зависел от класса (например, можно назначить для любого примера
Wi = 1/m, где / - номер класса, т - число примеров в классе). В случае нечеткой
экспертной оценки «учителя» отдельных вариантов примеров при формировании
обучающей выборки также целесообразно увеличить вес этих вариантов, чтобы они
могли влиять на процесс обучения сети.
Наряду с оценкой MSE можно использовать и другие оценки, например,
расстояние Кульбака - Лейблера, связанное с критерием максимума правдоподобия [6]:
£ = f>/log^ + (W,)log^-.
ы У( 1-У/
Более простыми являются оценки, часто используемые при аппаратной
реализации нейронных сетей (например, ZISC Accelerator cards для IBM Compatible PC) и в
нейроимитаторах:
я=Si и-<u
E = Max\yi-di\,
м
где М- число выходов сети.
Процедура классификации на основе нейронной сети. Обучение многослойной
нейронной сети производится в два этапа:
1) предъявление нейронной сети обучающего множества примеров до тех пор,
пока не будет выполнено условие останова обучения: а) вычисляемая ошибка
сети Е становится меньше заданной или перестает изменяться в течение
определенного числа итераций («эпох»); б) по истечении заданного числа
итераций;
2) проверка правильности работы сети на тестовом множестве; если ошибка
обобщения £обобщ > 8, где 8 - заданная ошибка обобщения, производится
увеличение числа итераций либо число обучающих примеров, либо происходит
модификация архитектуры нейронной сети.
Задача классификации с помощью обученных нейронных сетей понимается как
задача отнесения некоторого примера к одному из нескольких попарно не
пересекающихся множеств объектов. В реальных ситуациях при классификации объектов
выделяют три уровня сложности (рис. 7.36).
1) Классы можно разделить прямыми линиями (или гиперплоскостями, если
пространство параметров более двух): линейная отделимость.
2) Классы можно разделить несколькими гиперплоскостями: нелинейная
отделимость.
3) Классы пересекаются, поэтому их разделение можно трактовать только в
вероятностном смысле.
а
Рис. 7.36. Различные степени сложности в разделении классов (в данном случае двух классов):
а — линейно отделимые', б, в- нелинейно отделимые \ г - неразделимые
Глава 7. Применение нейрокомпьютеров в системах управления
551
Нейронная сеть может осуществлять классификацию на всех трех уровнях
сложности с заданной ошибкой обобщения. Решение задачи классификации с помощью
нейронной сети сводится к предъявлению обученной сети набора входных векторов,
не включенных в обучающую выборку. Нейронная сеть должна каждый из этих
векторов отнести к определенному классу. Используемое при этом решающее правило
зависит от выбранного метода интерпретации ответов сети. Так, если выбран метод
«победитель забирает все», то сеть относит предъявляемый ей входной вектор только
к одному из классов. Если же выбран метод нечеткой классификации, то сеть выдает
последовательность чисел, например в интервале [0;1], каждое из которых
определяет вероятность отнесения входного вектора к тому или иному классу. В такой
постановке решение задачи классификации будет идентично решению задачи
распознавания. В этом случае на вход сети подается вектор с неизвестными ранее значениями
параметров, сеть относит входной образ к определенному классу.
Алгоритмы классификации в нейронных сетях основаны на использовании мер
близости между объектами (рис. 7.37).
1
Y1
Класс В
Класс А £\
CL
КлассС
и *
Класс В
Класс А
IX*
Y2 D2
Рис. 7.Э7. Определение расстояния между классами и внутри класса
Простейшая мера близости объектов - квадрат евклидова расстояния между
векторами значений параметров, характеризующих объект (чем меньше расстояние
между векторами значений их параметров, тем ближе объекты). Другая мера
близости, обычно возникающая при обработке с помощью нейронной сети сигналов,
изображений и т.п., - квадрат коэффициента корреляции (чем он больше, тем
ближе объекты). В качестве многомерного критерия часто используется расстояние
Махаланобиса [6]:
distM = [\iKi -\iKj) Yj "l (H -Vkj )>
где £ - общая ковариационная матрица классов Кг и АГ,.
Этот критерий можно интерпретировать как евклидово расстояние между
классами, взятое с весами, определенными дисперсией разности \хк -\iK..
Для всех этих мер близости для каждого класса обычно выбирают типичный
объект, вектор значений параметров которого получается путем усреднения по всему
классу.
Для минимизации ошибки распознавания с помощью нейронной сети необходимо
определить степень близости между объектами, принадлежащими к одному классу, и
степень удаленности объектов, относящихся к разным классам. В качестве оценки
552 Методы современной ТАУ. Часть IV
близости между объектами будем использовать усредненное расстояние между
объектами /-го класса, вычисленное в соответствии с выбранной метрикой:
1 Mi
где N; = (it,- • к{;-1) / 2 - количество связей между объектами в классе Kh
Оценка близости образов, принадлежащих двум разным классам:
1 4^4
Nij Ы\ y=l
где Ny - количество связей между объектами классов К( и Ку
Интегральные оценки, вычисленные в результате усреднения по всем классам,
представляются как:
где т - количество классов.
В идеальном случае, когда /?—>0 и Q—»<», минимизация ошибки сети Е при
обучении на любом • подмножестве обучающей выборки обеспечит минимизацию
ошибки распознавания.
Если при этом Q<R, то можно предположить несколько гипотез, объясняющих
этот факт:
1) имеются ошибки при определении соответствия между объектами и
заданными классами;
2) выбранные примеры образцов в обучающем множестве не являются
достаточно информативными;
3) используемый способ предобработки данных неадекватен решаемой задаче.
Первые два предположения связаны в основном с общей организацией работ по
синтезу нейронной сети для решения задач распознавания. Последняя гипотеза имеет
непосредственное отношение к проблеме обучения нейронных сетей. Поэтому для
повышения достоверности распознавания необходимо иметь генератор обучающих
примеров (один из способов рассмотрен в следующем пункте). Если после
процедуры обучения сети Q<R, необходимо производить коррекцию выбранной
нейронной сети или изменить способ представления входного вектора.
ЧАСТЬ V
ЗАДАНИЯ ДЛЯ САМОСТОЯТЕЛЬНОЙ РАБОТЫ
И МЕТОДИЧЕСКИЕ ПОЯСНЕНИЯ
554 Задания для самостоятельной работы и методические пояснения. Часть V
ВВЕДЕНИЕ
Задания, представленные в этом разделе, имеют разную степень трудности, но все
они предполагают использование ЭВМ. Все задания включают теоретические,
алгоритмические и программные вопросы. При реализации заданий необходимо в явной
форме отразить все этапы решения конкретных задач на ЭВМ (вычислительную
технологию), начиная от содержательной постановки и кончая численным результатом и
его анализом. Развитие творческих навыков также является одной из целей
выполнения приведенных ниже заданий.
Выполнение каждого из заданий должно включать следующие части:
1) Изложение содержательной постановки задачи, математическая постановка
задачи, изучение и изложение основных положений теории, предмашинный
анализ математической модели.
2) Разработка и теоретическое обоснование вычислительного алгоритма,
структурная схема алгоритма и ее особенности, обоснование вычислительной
устойчивости, выводы.
3) Программирование и расчет на ЭВМ.
4) Решение на ЭВМ конкретной задачи, анализ результатов решения, построение
графиков и структурных схем синтезированных систем, анализ ресурсов,
используемых для решения рассматриваемой задачи.
Конкретные входные данные для выполнения заданий задаются преподавателем.
Задания могут быть использованы в качестве домашних заданий, курсовых работ,
курсовых проектов и др.
Для лучшего уяснения излагаемого в учебнике материала по расчету САУ,
используемых в различных областях техники, целесообразно систематически
пользоваться задачниками:
1) Топчеев Ю.И., Цыпляков А.П. Задачник по теории автоматического
регулирования. - М.: Машиностроение, 1977. - 592 с;
2) Задачник по теории автоматического управления / Под общ. ред. А.С. Шаталова.
-М.: Энергия, 1971.-496 с;
3) Сборник задач по теории автоматического регулирования и управления / Под
ред. В.А. Бесекерского. - М.: Наука, 1978. - 510 с.
В указанных задачниках приведен обширный материал по всем разделам теории
автоматического управления (некоторые из заданий, приведенные ниже,
заимствованы из указанных задачников).
Тема 1. Математические модели и динамические характеристики САУ 555
ТЕМА 1. МАТЕМАТИЧЕСКИЕ МОДЕЛИ
И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ЛИНЕЙНЫХ СТАЦИОНАРНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Исходная информация для решения задач расчета и проектирования САУ
содержится в постановке технической задачи, которая может формулироваться в терминах,
определяющих содержание задачи (содержательных терминах). На этом этапе
разработчик оперирует с принципиальными и функциональными схемами элементов САУ
или системы в целом.
Конечным же результатом решения задачи являются количественные параметры;
в целом теория автоматического управления - точная наука, оперирующая
количественными характеристиками. Ее аппарат - математические методы. Для применения
же математических методов необходима четкая и строгая формулировка задачи,
которая бы устраняла возможные неопределенности и двусмысленности и
одновременно делала бы задачу математически корректной. С этой целью для технической
задачи необходима адекватная ей математическая формулировка, центральным
понятием которой является математическая модель.
Математическая модель САУ отражает в той или иной мере свойства реальной
системы, в том числе ограничения, существующие в реальных условиях.
Математическая модель разрабатывается в математических терминах и имеет, как
уже говорилось, количественное описание. Математические модели могут быть
представлены различными математическими средствами: действительными или
комплексными величинами, векторами, матрицами; геометрическими образами;
неравенствами, функциями и функционалами; множествами; алгебраическими,
разностными, дифференциальными и интегральными уравнениями и т.д.
При расчете конкретных систем выделяются наиболее существенные свойства и
признаки системы, они представляются в такой упрощенной форме, которая
необходима для последующего теоретического и экспериментального исследования.
На основе сказанного следует, что математическая модель отображает в
рамках выбранной степени приближения и детализации исходную техническую задачу в
математическую схему, характеризуемую совокупностью определенных
математических соотношений между ее элементами.
Например, математическая модель процесса x(t) (накопленный конденсатором
заряд как функция времени), протекающего в электрической цепи (рис. Т 1.1) под
воздействием внешней электродвижущей силы у (г), представляется (в соответствии
с законом Кирхгофа для электрической цепи) дифференциальным уравнением вида
L^+R^+ix(t)=y{t)' х(0)=х°' x'{0)=Xl- (TU)
Разные физические процессы могут иметь одинаковые математические модели.
Процесс, протекающий в механическом осцилляторе (рис. Т1.2), также
описывается уравнением второго порядка
556 Задания для самостоятельной работы и методические пояснения. Часть V
m^± + ^+Kx(t) = y(t), (T1.2)
at at
где т - масса материальной точки, К - коэффициент упругости пружины, Р -
коэффициент затухания демпфера, x(t) - положение материальной точки как функции
времени, y(t) - воздействие внешней силы.
Рис. ТЫ. К определению математической Рис. Т1.2. К определению математической
модели электрической цепи модели механического осциллятора
Наиболее часто при построении математических моделей CAY используется
аппарат дифференциальных уравнений.
Принципиально важным является следующее положение: переход от физической
модели (электрическая цепь или механический осциллятор) к ее математической
модели (дифференциальные уравнения Т1.1 и Т1.2) приводит к возможности
количественного описания различных по своей природе физических процессов одинаковы-
миДУ.
Например, угол отклонения руля летательного аппарата 8р(г) и его угол атаки
(угол между вектором скорости и продольной осью ракеты) a(t) связаны между
собой также дифференциальным уравнением второго порядка
а+2£шоа+(Ооа = я58р,
где соо - собственная частота колебаний угла атаки; £ - коэффициент
демпфирования колебаний угла атаки.
В факте описания одним и тем же уравнением процессов, протекающих в
электрической цепи, механическом осцилляторе, ЛА и др. проявляется одно из
важнейших свойств математической формализации предмета исследования, благодаря
которому при постановке и решении новых задач расчета и проектирования СЛ У в
большинстве случаев не требуется создавать новый математический аппарат, а
можно воспользоваться существующим.
Понятие математической модели может быть использовано для решения
большого числа частных, конкретных задач и в этом смысле оно выражает одно из
главных практических назначений теории.
Математические модели могут быть представлены различными математическими
средствами; основными из них являются:
• дифференциальные уравнения;
• интегральные уравнения;
• уравнения с матричными операторами;
• векторно-матричными дифференциальными уравнениями в форме Коши и др.
К динамическим характеристикам относятся:
• временные динамические характеристики (импульсная переходная функция,
переходная характеристика);
Тема 1. Математические модели и динамические характеристики САУ 557
• частотные характеристики (АЧХ, ФЧХ, АФХ и др.).
Цель нижеследующих заданий - изучение всех этапов построения
математических моделей линейных одномерных стационарных САУ.
Важное внимание уделено изучению физических процессов, протекающих в
системах. Показано, что знание физических процессов, имеющих место во всех
элементах САУ, позволяет математически описать как элементы, так и систему в целом.
ЗАДАНИЕ 1.1. МАТЕМАТИЧЕСКИЕ МОДЕЛИ И ДИНАМИЧЕСКИЕ
ХАРАКТЕРИСТИКИ САУ МОЩНОСТЬЮ
ФИЗИЧЕСКОГО ЯДЕРНОГО РЕАКТОРА
Упрощенная принципиальная схема системы автоматического управления
представлена на рис. Т1.3. Управление ядерным реактором (ЯР) осуществляется при
помощи регулирующего стержня (PC). Глубина его погружения в активную зону задаёт
реактивность р, которая, в свою очередь, определяет мощность ЯР - п (под
мощностью ЯР понимают плотность нейтронного потока). Связь между входом y(t) = p и
выходом x(t) = n ЯР определяется передаточной функцией W0(s). Конкретный вид
и параметры W0(s) зависят от типа реактора и точности описания соответствующей
моделью.
Так, для ЯР на тепловых нейтронах при учете одной группы запаздывающих
нейтронов W0(s) определяется зависимостью
Иго(,) = М*51(12,8, + 1),
S
а в трехгрупповом приближении имеет вид
( ч_0,078к0 123л3 + 219,у2 + 44,3^ + 1
W s 9,56s2 + 13,7s+ 1
где п0 - уровень мощности.
Заметим, что ЯР представляет астатический объект, коэффициент передачи
которого зависит от уровня мощности.
Для измерения мощности применяется ионизационная камера (ИК), которая
представляет конденсатор, помещенный в газе. Нейтроны, попадая в ИК, вызывают
ядерную реакцию деления, продукты которой в виде ионов под действием источника
напряжения Ек создает ток 1к. Величина 1к в зависимости от мощности и места
расположения ИК может находиться в диапазоне 10~12 -10~3 А. Для его усиления
применятся операционный усилитель DA1, включенный по схеме преобразователя ток-
напряжение.
Операционный усилитель широко применяется в САУ. Это связано с тремя
основными его свойствами, вытекающими из его параметров:, нулевое входное
напряжение (следствие большого коэффициента усиления); отсутствие входного тока
(следствие большого входного сопротивления); независимость выходного
напряжения от нагрузки (следствие малого выходного сопротивления).
Учет перечисленных свойств позволяет легко получить передаточные функции
устройств САУ, построенных на операционных усилителях.
ИК и DA1 совместно с Rk, Ck определяют токовый измеритель мощности
(ТИМ) ЯР.
558
Задания для самостоятельной работы и методические пояснения. Часть V
тхг
Rn
ЭМУ
эд
Рис. Т1.Э. Упрощенная принципиальная схема САУ
Ток 1к протекает через цепочку Rk, Ск. Поэтому напряжение на выходе DA1
Un (s) = -Z(s)lk (s), где Z(s) - операторное сопротивление цепочки Rk , Ск .
Тогда передаточная функция ТИМ определяется формулой
W (s) = H*l*l = —*L-9 (T1.3)
thmW Ik(s) l + Tks
где Тк = RkCk , и обычно Тк =0,1-1 с.
Конденсатор Ск используется для сглаживания пульсаций тока ИК.
На элементах DA2, Rn, R3, Ro реализованы задающее и сравнивающее устройства
САУ.
Через /?3 текут токи, созданные выходным напряжением ТИМ -Un и
источником опорного напряжения Ео. Эти токи суммируются резистором Rn . Поэтому
напряжение на выходе DA2 пропорционально разности сигналов Un-U3 и зависит от
переменного резистора R2
При UE =0 получим:
к0 я3
Ко
(Т1.4)
(Т1.5)
т.е. с помощью R2 можно осуществлять задание уровня мощности ЯР.
В зависимости от мощности ЯР, ее уровень может меняться в пределах 5 - 12
декад. Для того чтобы охватить такой широкий диапазон, для задания мощности
используются также Rk . При помощи переключения Rk задают декаду, а посредством
/?3 - уровень мощности внутри декады.
С учетом (Т1.5) преобразуем (Т1.4) к виду
иг=КпУ^±, (Т1.6)
Тема 1. Математические модели и динамические характеристики САУ 559
п
где Кп=-Е0-л- - коэффициент пропорциональности.
Из последнего выражения следует, что данная САУ работает не по сигналу
отклонения U3 -Un, а по сигналу ошибки - (U3 -Un )/U3 .
Это позволяет устранить зависимость свойств системы от изменения
коэффициента передачи ЯР. Так как U3 в соответствующем масштабе отражает заданный
уровень мощности п3, который приблизительно равен п0 в выражении
передаточной функции ЯР, то в замкнутой системе эти величины компенсируют друг друга.
Обычно Кп =100. В этом случае 1 В на выходе DA2 соответствует 1% ошибки по
мощности.
На основе DA3 реализовано второе сравнивающее устройство для внутренней
обратной связи. Выходной сигнал DA3 Uu усиливается электромашинным усилителем
(ЭМУ) и подается на электродвигатель (ЭД) постоянного тока, который посредством
привода (обычно барабан-трос или шестерня-рейка) перемещает PC.
Передаточная функция ЭМУ представляет собой инерционное звено 2-го порядка
"-«"(u^fe)' (Т17)
7i,r2=0,l-5c,
а ЭД с приводом - последовательное включение инерционного звена 1-го порядка и
интегратора
"'"«■Tflf^ (TL8>
Гу=0,1-1с.
Реактивность ЯР р измеряется в относительных единицах (Зэф . Правила ядерной
безопасности требуют, чтобы скорость перемещения PC не превышала величины
О,О7(Зэф/с . Допустим, что максимальное напряжение на выходе DA3 Uumux=\5 В.
Тогда Kv < 0,07/15 = О,ОО46(Зэф/(с- В).
Такой подход позволяет отвлечься от величины физического коэффициента
передачи ЭМУ (можно условно считать его единицей в передаточной функции ЭМУ)
путем его косвенного учета в значении Kv.
Из приведенных передаточных функций следует, что система имеет астатизм 2-го
порядка (ЯР и ЭД с приводом PC). В таких системах возникают проблемы с
обеспечением устойчивости и требуемого качества переходных процессов. Для их решения
вводят местную обратную связь по скорости ЭД, реализованную на основе тахогене-
ратора (ТХГ). В данной системе ТХГ нагружен резистором Roc.
Если /?ос выбрать достаточно большим, то ТХГ можно представить в виде
идеального дифференциатора с ПФ
Посредством же Яж можно менять коэффициент передачи Кж местной
обратной связи. Величину Кж выбирают на этапе исследования устойчивости и качества
переходных процессов САУ.
560 Задания для самостоятельной работы и методические пояснения. Часть V
На рис. Т1.4 представлена функциональная схема САУ.
1
2
+ ^
п'
3
4
[_
»» 5
6
-*•
1
м
9
8
10
Рис. Т1.4. Функциональная схема системы автоматического управления мощностью ЯР:
1 - задающее устройство', 2,4- сравнивающие устройства', 3 -регулятор; 5 - ЭМУ\ 6 - ЭД;
7-привод\8-ЯР\9-ТХГ\ 10-ТИМ
Задающее устройство 1 реализуют переменные резисторы R3 и RK. С помощью
операционных усилителей DA2 и DA3 с соответствующими элементами
осуществляется реализация сравнивающих устройств. Факт зависимости коэффициента
регулятора 3 от заданной мощности п2 отражен дополнительной стрелкой. Кроме
плотности нейтронного потока для измерения мощности ЯР можно применить другие
относительные единицы, например, ток ИК. Тогда выходной сигнал ТИМ п можно
представить как некоторую оценку действительной мощности ЯР п . При этом
коэффициент передачи ТИМ становится равным единице.
Последние замечания позволяют построить структурную схему данной САУ,
которая с введением стандартных обозначений принимает вид, показанный на
рис. Т 1.5.
5(1
т
+ Г,*)(1 + 72*)(1
+
Trs
)
и
('
)
Рис. Т1.5. Структурная схема системы автоматического управления мощностью ЯР
Заметим, что подобные САУ использовались для регулирования маломощных ЯР
в первые десятилетия освоения ядерной энергетики. В современных САУ ЯР ЭМУ и
ТХГ не используются. Вместо них принимаются тиристорные усилители,
реализующие релейный закон регулирования. Это позволяет существенно снизить габариты и
стоимость, повысить надежность. Однако точность регулирования и качество
переходных процессов в релейных САУ ЯР, как правило, несколько хуже.
Приведем некоторые результаты описания рассмотренной системы с помощью
переходных характеристик. На рис. Т 1.6 представлен переходной процесс, вызванный
скачкообразным изменением заданной мощности на 10% при следующих параметрах:
Кп =100 В/%; Kv =0,001 Рзф/(с-В); Кос =1000 в/(рэф/с); Tk =T2 =TV =1 с;
Г, =5 с.
Тема 1. Математические модели и динамические характеристики САУ
561
100
150
200
Рис. Т1.6. Переходные процессы в САУ ЯР:
1 - входной сигнал (изменения задания на 10%)\ 2 - выходной сигнал С А У;
3,4 - выходные сигналы СА У мощностью ЯР с коррекцией по сигналу периодомера
Из анализа кривой 2 следует, что переходной процесс является колебательным и
перерегулирование составляет приблизительно 60%. С точки зрения безопасности
ЯР, такой переходной процесс недопустим.
Более приемлемой, с точки зрения параметров переходного процесса, является
САУ ЯР с коррекцией по сигналу периодомера (рис. Т1.7).
Под периодом ЯР понимают время, за которое его мощность меняется в
е = 2,718... раз (если мощность ЯР не меняется, тогда период равен бесконечности).
1
i —
\
3
5
6
-*
7
9
Р
8
10
Рис. Т1.7. Функциональная схема САУ ЯР с коррекцией по периоду
(9 - периодомер\ остальные обозначения см. рис. Т1.4)
На практике измеряют обратную периоду реактора величину - обратный период
y(t). Для измерения обратного периода периодомер осуществляет операции
логарифмирования и дифференцирования
/ \ d 1 и(О
y(t) = — In—^.
37 3ак. 416
562 Задания для самостоятельной работы и методические пояснения. Часть V
После линеаризации последнего выражения передаточная функция периодомера
может быть записана в виде
n(s) п0
Так как операцию дифференцирования в «чистом» виде технически реализовать
невозможно, то в передаточной функции периодомера присутствуют две
инерционности (рис. Т 1.8).
x(t)
Н0 +
{£)-► 100 н*®-*"
+
0,001
5,)(1
+
и
ч
(0
l + s
К ys
(1 + 0,Ь)(1 + s)
Рис. Т1.8. Структурная схема САУ мощностью ЯР с коррекцией по периоду
В зависимости от коэффициента передачи местной обратной связи переходной
процесс может быть с перерегулированием при ^=1000 В/(%/с) или монотонным
при Ку = 2500 В/(%/с) (см. рис. Т1.6).
В обеих системах местные обратные связи - дифференцирующие. Однако
обратная связь по периоду охватывает не только исполнительную часть, но объект
управления. Это повышает эффективность САУ.
Задание 1.1 включает в себя следующие пункты:
1.1-1. Пользуясь соответствующими источниками, необходимо изучить
физические процессы, происходящие в системе, её функциональные и структурные схемы;
1.1-2. На примере рассматриваемой САУ ознакомьтесь с фундаментальными
принципами управления:
• принцип разомкнутого управления;
• принцип обратной связи.
Дайте определения и охарактеризуйте основные виды автоматического
управления:
• стабилизация;
• программное управление.
Определите принципы и особенности статического и астатического управления.
Укажите, какие возмущения действуют на САУ;
1.1-3. Дайте определение математической модели САУ; укажите, какие
существуют формы представления математической модели;
1.1-4. В чем состоит задача линеаризации уравнения САУ и укажите
математическую основу линеаризации;
1.1-5. Изучите физику работы элементов системы и их математические модели;
1.1-6. Постройте математическую модель системы в форме передаточной
функции и скалярного ДУ; сформулируйте основные правила преобразования
структурных схем САУ;
1.1-7. Постройте математические модели системы в форме скалярных
интегральных уравнений 2 рода относительно x(t) и *'"'(*);
Тема 1. Математические модели и динамические характеристики САУ 563
1.1-8- Постройте математическую модель системы в форме скалярной ПФ и
найдите ее обратное преобразование Лапласа; запишите интеграл Дюамеля;
1.1-9. Постройте временные динамические характеристики САУ и запишите
зависимости (интегральные соотношения), связывающие вход системы с её выходом
через ИПФ и ПХ;
1.1-10. Дайте определение частотных характеристик САУ; изложите методику
экспериментального определения АЧХ и ФЧХ; в чем состоят преимущества ЛЧХ в
сравнении с амплитудно-фазовыми характеристиками; изложите правила вычисления
ЛЧХ САУ; постройте частотные характеристики (АЧХ, ФЧХ, ДЧХ, МЧХ, ЛЧХ,
АФХ) рассматриваемой системы; на какие технические свойства САУ оказывают
влияние низко-, средне- и высокочастотные области ЛЧХ?
ЗАДАНИЕ 1.2. ФОРМЫ ПРЕДСТАВЛЕНИЯ МАТЕМАТИЧЕСКИХ
МОДЕЛЕЙ И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ
СКОРОСТЬЮ ВРАЩЕНИЯ ПАРОВОЙ ТУРБИНЫ
Рассматриваемая САУ предназначена для автоматического управления скоростью
вращения турбины во время её пуска (разворота) и стабилизации заданного числа
(3000 или 1500 об/мин) оборотов при её работе на нагрузку. Таким образом, входом
системы являются заданные числа оборотов пг (t) = 0 - 3000(1500) об/мин, выходом -
n(t) -действительное число оборотов.
Упрощенная принципиальная схема рассматриваемой САУ показана на рис. Т1.9.
Остановимся на принципе ее работы. Пусть, например, вследствие изменения
нагрузки генератора (Г) обороты турбины (Т) возросли. Для измерения скорости
вращения Т применяется центробежный насос - импеллер (И). Возрастание оборотов И
вызывает рост давления масла Ри и перемещение поршня 5 вверх.
Масло из напорной линии постоянного давления Ро через дроссель So поступает
в дифференциальный сервомотор (ДС) и сливается через параллельно включенные
три сечения: механизма управления турбиной (МУТ) - Fx, ДС - Fy и обратной
связи (ОС)- Fz. _
Увеличение Fx из-за возрастания оборотов приводит к уменьшению давления Рх ,
в результате чего нарушается баланс ДС.
Золотник 1 ДС движется вверх, уменьшая сечение Fy и восстанавливая давление
Рх , а поршень 2 главного сервомотора (ГС) - вниз, уменьшая расход пара
(соответственно обороты Т) и сечение Fz.
Давление Рх возрастает, и ДС посредством отсечного золотника (03) прекращает
движение регулирующего клапана (РК).
В установившемся режиме давление Рх = const и золотник 1 ДС занимает всегда
одно и то же положение, т.е. Fy = const. Тогда Fx + Fz = const, или AFX +AFZ =0,
т.е. изменение сливного сечения МУТ компенсируется изменением сливного сечения
ОС. Так как из-за изменения нагрузки генератора РК занял новое положение, то
новые условия равновесия в системе возникают при новой скорости вращения турбины.
Таким образом, САУ поддерживает заданные обороты с некоторой статической
погрешностью, которая называется неравномерностью регулирования 8 и
регламентируется (8 = 4-5%). Другими словами, система регулирования турбины является
статической.
37*
564 Задания для самостоятельной работы и методические пояснения. Часть V
Для задания оборотов турбины используется МУТ. Если, например, переместить
его буксу 3 вверх, то из-за уменьшения усилия пружины 4, поршень 5 под действием
давления масла импеллера также переместится вверх и увеличит сечение Fx. Так как
AFX = -AFZ, то РК переместится вниз и уменьшит обороты турбины.
w(/)
Рис. Т1.9. Упрощенная принципиальная схема системы управления числом оборотов турбины:
Т- турбина; Г- генератор; МУТ - механизм управления турбиной (синхронизатор); И-импеллер;
ГС - главный сервомотор; ДС - дифференциальный сервомотор; 03 - отсечной золотник;
ОС - обратная связь; РК - регулирующий клапан
Описанная принципиальная схема (рис. Т1.9) позволяет построить
функциональную схему (рис. Т1.10).
К (О
-*— »(0.ф(0
Рис. Т1.10. Функциональная схема САУ
Рассматриваемая САУ является нелинейной. Кроме турбины, нелинейными
элементами являются импеллер (давление пропорционально квадрату частоты вращения),
регулирующий клапан (расход пара - S -образная функция степени открытия т).
Тема 1. Математические модели и динамические характеристики САУ 565
Тем не менее для небольших отклонений регулируемых переменных её линейная
модель имеет достаточную для практических целей точность. Обычно при
исследовании линеаризованных САУ турбины вводят относительные переменные:
• скорость (частота вращения) - (р (/) = ——,
степень открытия клапанов
- ц(г) = ^ и т.д.
Основным возмущением системы является электрическая нагрузка генератора
В относительных переменных и в стандартных обозначениях структурная схема
САУ показана на рис. Tl.ll.
LnitbikliaJ^^--^)
к,
r,j + i
&»
ч.
к,
1
Tos + l
*_(')=/(О
Рис. Tl.ll. Структурная схема САУ турбины
Кроме линеаризации нелинейности предполагается постоянство давления пара
перед РК и нагрузки турбины. Последнее справедливо только при наличии холостого
хода генератора, например, во время разворота турбины. В этом случае турбину
можно представить в виде инерционного звена с постоянной времени То.
Инерционное звено с параметрами К{, Тх и усилительное звено К2 отражают влияние объема
пара после РК. Главный сервомотор с отсечным золотником является интегратором с
постоянной времени Тм . Импеллер представлен в виде усилителя с Кж .
Ориентировочные значения параметров:
То = 20 с; К{ = К2 =0,5; 7] =1,5 с; Гм =1 с; Кос =0,1.
Неединичная основная обратная связь выбрана для обеспечения заданной
статической погрешности регулирования. Легко проверить, что установившаяся ошибка
—к, + к2 m
Задание 1.2 для самостоятельной работы с целью построения математических
моделей включает в себя следующее:
пользуясь источниками
а) Паровые и газовые турбины атомных электростанций: Учеб. пособие для
вузов / Б.М. Трояновский, Т.А. Филиппов, А.Е. Булкин - М: Энергоатомиздат, 1985;
б) Кириллов И.И., Иванов В.А.. Регулирование паровых и газовых турбин.
Примерные расчеты и задачи: Для втузов / Под ред. И.И. Кирикова - М.-Л.:
Машиностроение, 1966., изучите физические процессы, протекающие в системе; рассмотрите
процедуры построения функциональной и структурной схем.
^уст
566 Задания для самостоятельной работы и методические пояснения. Часть V
Далее необходимо выполнить пункты (1-2) - (1-10) задания 1.1 (для первого
варианта можно задать То = 20 с; КХ=К2= 0,5; Т{ = 1,5 с; Тм = 1 с, Кос = 0,1; для
остальных вариантов входные данные задаются преподавателем).
ЗАДАНИЕ 1.3. ГАЗОПЕРЕКАЧИВАЮЩИЕ АГРЕГАТЫ
Большинство крупных газовых месторождений отстоят от промышленных
коммунальных потребителей на расстоянии нескольких тысяч километров, и несмотря на
то, что природный газ на выходе из скважин имеет давление более 10,0 МПа,
транспортирование его за счет естественного давления возможно только на коротких
участках газопровода.
Увеличение пропускной способности газопроводов достигается путем установки
на расстояниях 100 - 150 км друг от друга промежуточных компрессорных станций
(КС). КС восстанавливают давление газа на участке газопровода до расчетного
значения. Компрессорные станции оборудуются комплексом технических средств,
обеспечивающих надежную работу газоперекачивающих агрегатов (ГПА), обычно
включенных в последовательные и параллельные группы.
ГПА состоит из нагнетателя и привода, в качестве которого преимущественно
используются газотурбинные установки (ГТУ). В нагнетателе, который представляет
собой лопаточную машину сжатия, энергия внешнего источника сообщается газу, за
счет чего и повышается его давление.
Задачей системы регулирования является поддержание одного или нескольких
параметров на требуемом уровне. В ГПА регулируемыми параметрами являются
либо частота вращения нагнетателя, либо давление газа на выходе из КС.
Рассмотрим работу ГПА с двухвальной ГТУ и регулятором давления (рис. Т1.12).
Из атмосферы воздух с давлением р{ и температурой Тх забирают компрессором К,
после чего при повышенном давлении р2 его подают в камеру сгорания КС, куда
одновременно подводятся топливо от коллектора топливного клапана. В камере
сгорания воздух разделяется на два потока: один поток в количестве, необходимом для
сгорания топлива, поступает внутрь жаровой трубы (ЖТ); второй поток обтекает
жаровую трубу снаружи и подмешивается к продуктам сгорания для понижения их
температуры. Этим достигается уменьшение начальной температуры газа перед
турбиной до значений, приемлемых с точки зрения длительной и надежной работы
вращающихся горячих элементов газовой турбины (рабочие лопатки, диски и др.).
Процесс сгорания в камере происходит практически при постоянном давлении.
Получающийся после смешения газ с давлением р2 и температурой Тъ поступает
в турбину, которая состоит из двух частей: турбины высокого давления (ТВД) и
турбины низкого давления (ТНД). Между ТВД и ТНД существует только
газодинамическая связь: газ сначала расширяется в ТВД, передавая ее валу механическую энергию
для привода компрессора, а затем до конечного давления расширяется в ТНД,
которая является приводом нагнетателя. После ТНД газ с давлением р5 и температурой
Т5 выбрасывается в атмосферу.
К нагнетателю от входного участка магистрального газопровода с помощью
запорных органов 3 подается природный газ с давлением ри. Рабочее колесо
нагнетателя имеет определенное количество лопаток, загнутых в сторону, противоположную
вращению колеса. С помощью их происходит передача механической энергии от
колеса газу, что сопровождается повышением давления до р2г и скоростного напора.
Тема 1. Математические модели и динамические характеристики САУ 567
Увеличением (уменьшением) числа оборотов нагнетателя п2 можно добиться
расчетного давления р2г0. Дальше газ с р2г0 возвращается в газопровод, к
потребителям. Расчетное значение р2г0 достигается с помощью регулятора давления,
который изменяет подачу топлива в камеру сгорания, тем самым увеличивая или
уменьшая частоту вращения нагнетателя.
В системе регулирования ГПА используется непрямое регулирование: в цепь
чувствительный элемент - регулируемый объект вводят усилительные устройства,
которые применительно к энергетическим объектам называют сервомоторами.
В регуляторе давления в качестве чувствительного элемента используется
мембранный датчик 1, который состоит из мембраны 2, пружины 3 и штока 4. Пружина
подбирается таким образом, чтобы датчик был настроен на нужное давление р2г0.
Мембрана прогибается вверх (р2г < р2г0) или вниз (Р2г > Р2го) на относительную
величину х\, тем самым перемещая шток 4, на конце которого жестко закреплен
дроссель 5 усилителя 6. Это вызывает изменения давления под поршнем 7, в
результате чего он смещается на относительную величину \х{, поднимая или опуская
рычаг 8. Рычаг 8 жестко связан с главным сервомоторам 10. В состоянии равновесия
отверстия в золотнике сервомотора 9 перекрываются поршнями 11. Давление в
верхней и нижней части главного сервомотора одинаково и регулирующий орган 12
неподвижен. В зависимости от направления движения рычага 8 будут открываться
отверстия для поступления масла от источника постоянного давления в одну из
полостей главного сервомотора 10, при этом из другой полости будет открывается слив
масла. Усилие, возникшее за счет разности давлений масла в полостях, перемещает
поршень 13 и связанный с ним дозирующий топливный клапан 12 (регулирующий
орган). Обратная связь осуществляется с помощью штока 14.
Газотурбинная установка с нагнетателем и газопровод представляют собой
динамическую систему (объект регулирования), которую можно представить в виде
отдельных элементов или звеньев. Уравнения движения элементов ГПА составляют,
исходя из условий баланса мощностей (моментов) и законов сохранения массы,
энергии или других свойств. Основными характеристиками любого звена являются
динамические константы, определяемые расчетным или экспериментальным способом.
Применительно к решению задач устойчивости и определения качества
переходного процесса будем рассматривать только малые колебания динамической системы
около равновесного положения. Это означает, что математическая модель включает
только линейные дифференциальные уравнения с постоянными коэффициентами,
или, что то же самое, из-за малости отклонений параметров от состояния равновесия,
нелинейную зависимость при разложении в ряд Тейлора представляют только
первыми членами разложения (учитываются только линейные члены). Изменение
искомых величин и независимых параметров удобно представить в безразмерном виде в
относительных координатах:
Я _ PlO - Р\ . г _ Р20 ~ Pi . с _ PlrQ-Plr. 5 _ Р2г0 - Р2г
О{ , О2 , О1г - , О2г -
PlO P20 PlrO Р2гО
- относительные изменения давления на входе и выходе из компрессора (или
нагнетателя). Индекс «0» обозначает значение параметра в установившемся режиме.
Я _ Р40 - Ра . g _ Р50 - Ps
Р40 РвО
- относительные изменения давления на входе и выходе ТНД;
14
m Pjl
Рис. Т1.12. Принципиальная схема ГПА
569
Тема 1. Математические модели и динамические характеристики САУ
- _ 1 30 - 1 3 . ^ _ у 40 "" 1 4 . ^ _ * 50 - у 5
1 30 '40 '50
- относительные изменения температур перед ТВД и на входе и выходе ТНД.
В качестве масштабов приведения величин к безразмерному виду целесообразно
принимать их значения в равновесном состоянии.
Заданный режим работы объекта нарушается вследствие возмущающих
воздействий. Для ГПА это, в основном, изменение потребления газа, приводящее к
изменениям крутящего момента нагнетателя и связанной с ним турбины. К возмущающим
воздействиям для ГПА следует отнести и изменения температуры и давления
окружающей среды. На рис. Т1.13 представлена функциональная схема процесса
регулирования.
X
л
2
Л.
3
4
1
Рис. Т1.13. Функциональная схема системы автоматического регулирования ГПА:
1 - чувствительный элемент', 2 -усилитель; 3 - главный сервомотор', 4 - ГПА
Возмущением системы является относительное изменение потребления газа X в
выходном участке газопровода. Регулируемой величиной является относительное
изменение давления газа на выходе нагнетателя 82г, а регулирующим воздействием
является относительное открытие топливного клапана \х.
Уравнения регулирования со статическим регулятором давления с жесткой
обратной связью:
5рт1 = -82г - уравнение чувствительного элемента;
(Tss + KQ)\ii=t\ - уравнение усилителя, Кс - коэффициент самовыравнивания.
Примем Кс = 1.
(TS2s + 1)ц = щ - уравнение главного сервомотора;
8р - степень неравномерности чувствительного органа; г\ - относительное
смещение мембраны; \х{ - относительное смещение поршня усилителя; TSi, TS2 -
постоянные времени усилителя и главного сервомотора.
Передаточная функция регулятора имеет вид
-1
%«-#%=:
52r(*) TsTS28ps2 + (TSi+TS2)8ps + 8p'
Математическая модель ГПА описывается уравнениями:
уравнение движения ротора ТВД и компрессора
уравнение движения ротора ТНД и нагнетателя
Г^Фг + Я21Ф2 = Я22$4 -Я2з52г +^24Sir +a25T4 >
36 Зак. 416
570 Задания для самостоятельной работы и методические пояснения. Часть V
уравнение процессов в камере сгорания
031*3 = а32<Р2 + Я3352 + «34*2 + «35^ + «3654 i
уравнение для объема компрессор - турбина
ГТ82 + а4182 = а42ф, + «43тз + «4454 + а45Ъ + «46*2;
уравнение для объема между турбинами высокого и низкого давления
ТПЬ4 +я5184 =а5282 -я5з*з +«54*4 ;
уравнение объема между газопроводом и нагнетателем на входе
Л381г +а6181г = -я6282г -я63ф2;
уравнение объема между газопроводом и нагнетателем на выходе
А*82г +Я7,82г = -«72^1г +«73Ф2 ""^'
т4 =т3 -&2i(82 -84); *2 =Ьц82,
где коэффициенты а^ - безразмерные величины; Тщь Тп2 - постоянные времени
ТВД и ТНД, которые зависят от размеров и форм роторов, их мощностей и угловых
скоростей вращения; Аъ, А^ - постоянные времени в подводящей и отводящей
ветках газопровода; Гт, Гп - постоянные времени, зависящие от объема патрубков ме-
• жду камерой сгорания и ТВД, между ТВД и ТНД. Для ГТН-16 коэффициенты
математической модели имеют следующие значения:
ап =2,1; ап =1,12; а1Ъ =0,7; а14 =0,5;
а2{ =15,3; я22 =2; а23 =-19; а24 =-19; а25 =0,5;
аъх = 0,5 с; аЪ2 = 1; я3з = ~^Л\ ^34 = 0»5; аЪ5 = 0,35; а36 = 0,07;
Тт = 0,03 с; аАХ = 1,16; аА2 = 2,1; аАЪ = 0,5; я44 = 0,07; а45 = 0,02; а46 = 0,04;
Тп =0,02 с;я51 =1,01; а52 =1,08; а5Ъ =0,5; а54 =0,5;
Л3 = 14 с; а61 = 21,7; а62 = -20,5; д63 = 15,1;
А, = 9,54 с; а1Х = 24,8; а12 = -20,5; а1Ъ = 15,1;
Ьц =0,314; &2! =0,201.
Структурная схема системы представлена на рис. Т1.14.
Исключая промежуточные переменные из уравнений математической модели
ГПА и регулятора давления, можно получить ПФ всей системы, коэффициенты
которой зависят от параметров системы
7
W(s) =
_82г_
5Х
w=0
Tl 8
и=0
где
Ь, =-0,205-8р -Таг -Тга1 -TSx TS2 +0,291e-3-Sp -Таг -Та] TS{ TS2;
b6 =-0,184-8р ТО2 -^ -TSi -TS2 -25,271-5р -ГО2 -^ TSi -TS2 +
+0,313е-3-8р-Гй2 -Га1 -Г,, -^ +0,291е-3.8р-Га2 -Г^^ -
3 г t ■ TSi + 0,4461058780 е- 2 ■ 8р • Т*
-3,143-Sp Т4 -Г„ -7;2 +0,4461058780е-2-8р -Т* -TSi -TS2 -
-0,205-8р -Таг -Та\ TS2 +0,291е-3-8р Тпг -Т* Т,, -0,205-8р -Г^ -^ Т,,;
Тема 1. Математические модели и динамические характеристики САУ 571
Д, -O.345e-l.6p -Таг -^ -^ -Т,2 -702,041-6р -7^ -Та] -Г,, -7,2 -
-23,375-8р -7^ Т4 -Г,, -Г,2 -382,448-8р -7О* -Г,, -Тн +
+0,479е-2-5р -7Oi -7J( -Ть -3,143-5р -7J| -7,2 -2,833-8р -7^ Г$| -Г,, -
-0,184-5,, -Та2 -Та] TS2 + 0,446е-2-8р -Т% Т,2 +0,446е-2-8р -Та] -^ -
-25,271-8р Тп2 -Tl TS2 -3,143-8р -^ Тч -25,271-8р -Гв2 -7^ -TS{ -
-0,184-8р -Та2 -^ -Г,, +0,313е-3-5р -ГО2 -Г, •?;, +
+О,313е-3-8р -Гв2 •?;, -Г12 +0,396е-14-5р ^ -Г,, -Г^ -
-0,205-8р -Та2 -Tl +0,291е-3-8р -Таг -Т^;
Ь4 = -1028,213-8р -Тп2 -Тъщ -^ -Тн -1293,743-5р -Г02 -^ -TSi -Т$2 +
+0,446е-2-8р Т^ +1.838-8,, Тв2 -^ -^ -Г12 -702,041-8р -Таг -т\ -Th -
-3,143-8р -7J -10229.8б8-8р -^ -Г,, -Тн -353,854-8р -Т\ -TSi T$2 -
-382,448-5р -^ Тн -2,833-8р -Т2Щ Т$г +0,522-8р TOi -^ •?; +
+0,697е-12-8р -Таг -Т5< -TSi + 0,3459301206е- 1-8р -Таг -ТОх TSi -
-23,375-8р -7;2 -Т* TS2 -702,041-8р -^ -Т> TS2 -23,375-5р ТОг -7^ -TS{ +
+0,345е-1-8р -ТО2 -^ -Тц +0,479е-2-8р •?;, -Г,2 +0,479е-2-8р -Тщ -TSi -
-2,833-8р -Тгщ Тц -25,271-5р -^ -^ +0,605е-13-8р -TSi -Т5г -
-0,184-8р Та2 .Т$ -382,448-8р -7^ Tfi +0,396e-14-Sp -7^ TS2 +
+0,313е-3-8р-Гв2 -Гй| +0,396е-14-8р-7в2 -Г,,;
Ь3 =-1949,831-8рГО2 .^-^ Т,2 -2,833-8рт4+2,767-8рГв2 -Тщ -TSt TH -
-1028,213-8р Га2 .Tl -TSt -382,448-8р -Т* +0,396е-14-8р Г02 +
+0,605е-13-8рТ,2 +0,605е-13-8р-7;| -2137,452-8р^ ^ -Г,2 -
-19321,121-5р -Т% -TSi -Ts% -10229,868-8р -Т* -TSi -353,854-8р -7^ Тн +
+0,479е-2-8р -Тщ +27,427-5р -7О( -TSy -Т$г +0,107е-11-5р -7О2 -TSi -7,2 +
+1,838-8р -7аг -7fl| -7i2 -1293,743-8р -7^ -7^ -Th -1028,213-5р -7в2 -7^ -7,2 -
-1293,743-8р -7в2 -Та] -T,t +1,838-5р -7fl2 -7Oi -7^ +0,522-8р -Тщ -Т,2 +
+0,522-8р Tai TSi -353,854-8p -7^ -7,( -702,041-8р -7О2 -7^ +
+0,105е-10-8р -TSi -Th -23,375-8p -7O2 -T^ -10229,868-8p -7JJ -7,( +
+0,697е-12-8р-7О2 -7,2 +0,345е-1-8р-7а2 -7Oi +0,697е-12-8р -7Л2 -Г,,;
*2 =-353,854-8р -7JJ -10229,868-5р -Т* +0,697е-12-8р -7О2 +
+0,105е-10-8р -7,2 +О,1О5е-1О-8р -Г,, -4053,313-5р -7^ TSi Ть -
36*
572
Задания для самостоятельной работы и методические пояснения. Часть V
ее
£
6
Тема 1. Математические модели и динамические характеристики САУ 573
-2137,452-8р -7J) -Ть -19321,121-5р -Т% -7^ + 0,522Sp-7fl| +
+5,753-8р -Гв1 -TSi TS2 + 2,767-8р -7^ -7О| -Ть -1949,831 8р -Таг -Т$ TSi -
-1949,831-8р Г02 -Т% -TSi + 2,767-8р -7^ -7Oi -7„ +0,605e-13-5p +
+27,427-8,, Tai TS7 +27,427-8p -7Oi -TSi -19321,121-8,, -Т% -7,, -
-1028,213-5р -Таг -Tl +0,222е-11-8р -Г,, -Т$г -1293,743-8р Ta% -T* -
-2137,452-8р -Tl -Г,, +0,107е-11-8р Тп2 -Ts% +l,838-8p -Таг -Тщ +
+0,107е-11-8р-:ГО2-7;1;
1\ =0,107 е-11-8р ГО2 +27,427-8р -Тщ +0,105е-108р -19321,121-8р -Т* -
-4053,313-8р -Tl -TS2 -1949,831-бр -Таг -Т* -2137,452-8р -Т* +
+5,753-8р -Тщ -Т5г +5,753-8р -Тщ ТЖ| -4053,313-8р -Г^ -^ +
+2,767-8р-7О2 -Tai +0,222е-11-8рТ% +0,222е-118р -Гч;
ib=-4053,313-8pTo40,222e-ll-8p+5,753-8p-7;i;
а8 = 1,959-8р-Га2 -Г^ Т, -Г^ -0,278е-2-8рТв2 Т^Г,, Т,2;
а7 = 246,187-8р -^ -^ -^ -^ +1,755-8р -7а2 -^ Т,, -^ +1,959-8р -7в2 -^ Tfj -
-0,278е-2-8р Га2 -7^ -7^ -0,298е-2-8р -ТО2 -Тщ -Г,, -^ +1,959-8р ГО2 -^ -^ -
-0,278е-2-8р ТО2 -^ Тч +29,984-8р -Т^ -TSi TSi -0,425e-l-8p TJ| -^ Г,2;
аб = 29,984-8р -Т* -TSi -0,425е-1-5р'-7^ -Г,, +29,984-8р -7^ TSi -
-0,425е-1-8р -^ Т$г +27,005-8p Г^ -^ -7^ +3667,565-8р -Тгщ TSi -TSi +
+1,755-8р -7;2 -Т\ Т5г +246,187-8р Таг -Тъщ TSi +1,755-8р Таг -Т* -Г, +
+246,187-8р -7^ -Г^ -7;2 + 7318,048494-8р -Га2 -^ ^ Г,2 -
-0,337-8р -7;2 -Тщ -Тн -TS2 +227,598-8p -Тпг -^ -^ -^ -
-0,298е-2-8р .Гв2 -^ -^ -0,377е-13-8р -Таг -TSi -Тн -
-0,298е-2-8р.ТО2 TOi -Т,, +1,959.8р-Гв2 -^ -0,278е-2-8р Т„, -^ -
-0,457е-1.8р-Гв1Г,|-Г,2;
а5 =26470,741.8р -7О2 -7^ .Г„ -7^ +12916,474-8р -7О2 -7^ -7,, -7,2 -
-0,425е-1-8р -7^ -18,386-8,, -7О2 -7fli -TSi -Т!г +7318,048-8р -7в2 -7^ -7,, +
+29,984-8р -Tl +99905,447-8р -rjj -7„ -7,2 +3392,914-8р -7^ -7^ -7,2 +
+3667,565-8р -7^ -7,2 +27,005-8р -7а" -7,2 -5,01?-5р -7а| -7^ -7,2 -
-0,675е-11-8р -7fl2 -7,, -7,2 -0,337-8р -7а2 -7а, -7,2 +227,598-8р -7О2 -7^ Ts% +
574 Задания для самостоятельной работы и методические пояснения. Часть V
+7318,048-8,, -Таг Та] -7,2 + 227,598■ 5р • 7^ -7^ -Г,, -0,337-6р -Т^ .Тщ -7„ -
-0,971e-14-7J| -0,457е-1-8рГО1 -7,2 -0,457е-1-8р -7^ -TSi +
+27,005-Sp -T* TSi +246,187-8р -Таг -Т% -0,578е-12-8р -TSi -TS2 +
+1,755-8р -Г02 -Т* + 3667,565-5р -Т% -Г,, -0,377е-13-8р -7Й2 -Т,2 -
-0,2984е-2-8р ^ Т., -0,377е-13-8р -ГО2 -Г^;
а4 =-0,578е-12-8р-Г,1 -0,130е-2Г^ + 3667,565-8р-Г^ -0,377 е-13-8р -ТО2 +
+0,920-7^ -18,386-8р ТОг -ТОх TSi +5586,944-8р ТОг -^ -^ -Г^ +
+186463,124• 8р -^ TS{ TS2 -18,386-8р Таг -Тп{ -Т$г +26470,741-8р Тв1 -^ Т$г +
+12916,474-8р ГО2 -Tl Th +82181,930-бр -^ -7;, -Т$г +
+12916,474-8р -Тп2 rjj -Г,, +26470,741-8р Таг -7^ Г1( -0,675е-11-8р -Тп2 TS{ +
+7318,048-8р Г02 -Т\ -0,6756е-11-8р Т02 Г,2 -5,017-8р -Тщ -TSi -
-5,017-8р Га, -TS2 -0,101е-9-8р -Г,, -Ть -264,822-8р -Тщ TSi -TS2 +
+99905,447-8р -Т% -T,t +3392,914-8p -Т% -TS2 +227,598-8p -Т02 -Т% -
-70,9698р -ТО2 -Тщ -TSi -TS2 +49993,159-8р -Гв2 -7^ -^ -^ -0,578e-12-Sp -TSi -
-0,273е-10-8рГв2 -^ -Г^ -0,457e-l-Sp-7-Oi +27,005-8p -Т% +
+99905,447-8р -7^ -^ +3392,914-8р -Г^ -^ -0,337-8р -Тп2 -Tai;
а3 =-0,101е-9-8р-^+1,7917^+99905,447-SpT^-0,675е-118р-Га2 +
+100,044-^ -70,969-8р -ТОг -Т0{ -TS{ +155452,697-бр -Т^ -TS{ -TSi -
-70,969-Sp ТО2 Тщ -TS2 +5586,944-8р -Тп2 -Т* Т$г + 49993,159• 8р -Т^ -Т* Т5г +
+10712,045-8р -Tl -TS{ -Т5г +49993,159-8р -Та2 -Тгщ -Ts> +5586,944-8p -Та2 -Тгау Т$х -
-0,273е-10-8р ТОг -Т5< +26470,74Ь8р ТО2 -Т> -0,578е-12-8р -
-0,273е-10бр ТО2 -Т5г -264,822-8р -Тщ ^ -264,822-8р -Та{ -Т1г -
-0,852е-10-8р -TSi TS2 -220,664-8р -Тщ -TSi Т$2 +82181,930-8р -Т* TS2 +
+186463,124-8р -Т* -TS2 +12916,474бр -Таг -Тгщ -15,037 • 8р -Г^ -Тщ -TS{ -TSi +
+10594,684-8р -ТО2 -Т* Т„ Г,2 -0,101е-9-8р -Г^ -0,582е-11-8р -ГО2 -7;, -7^ -
-5,017-8рГО1+3392,914-8р-Га:|-0>274е-2-Га|+82181>930.8р-7^-Г11 +
+186463Д246РГ4Т,, -18,386-8рГа2 -Гц;
а2 =-0,852е-10бр-Г;[1 +100,590-Г^ +82181,930-8р-7^ -0,273е-10-8р -Т02 +
+5838,354-7^ -15,037• бр -7Й2 -Тах -TSi +20313,562-бр -Т\ Ts< TSi -
-15,037• бр -7Й2 -70| -7,2 +10594,684-8р -7fl2 -7^ -7,2 +10594,684• 8р -7О2 -т\ -TSi -
Тема 1. Математические модели и динамические характеристики САУ 575
-О,582е-1Ь8р-Га2 -TSi + 5586,944-8р Таг -7^ -0,101е-9-8р-
-0,582е-1Ь8р Таг TS2 -220,664-8р -Тщ -TS{ -220,664-8, -Тпх -^ -
-ОЛИбе-Ю-бр.^ Тч -28,832-6р-Гв1 -Г,, Г52 +10712,045• 8р Г^ Т,2 +
+155452,697-8р -rjj 7^ + 49993,159-8р -Гв2 -Гв* -0,.852е-10-8р -7^ -
-264,822-8р-ГО1 +186463,124-8р.Г^-0,789е-13-0,154-Га1 +
+10712,045-8р -Tl -^ +155452,697-8р -^ -TS{ -70,969-8р -Г^ .Гв1;
^ =-0,111е-10-5р-Г12 -О,582е-11-8р-Г^ -27,000-Га1 +499,695-^ +
+155452,697-8р.Г^-0,852-10-8p~28,832-8p-rfli.rj2-15,037-8p.rfl2.rfli +
+10594,684-8р -Таг -Т* -28,832-8р -Тщ -^ +20313,562-8р -Т* TS2 +
+20313>5б2.8р.^Т11 -220,664-8рТа| +10712,0458р TJ| -0,111е-108р -^ -
-0,529 е-11 +19022,609 • Т^;
а0 =1629,7716-^-0,453е-12-0,111е-10.8р-28,832.8р.Га1 +
+20313,562-8рт4 -2,313-7^.
Параметры могут иметь следующие значения:
8р =0,03-0,06; Гв| =2-10с;ГО2 =0,5 + 4 с;
Г5| =0,01 + 0,3 с; Т5г =1 + 6 с; Л = -0,15 + 0,15.
Если взять конкретные значения параметров 8р, Гв|, Тп2, Г^, TSi и Л из указанных
промежутков, то легко получить необходимое число вариантов для выполнения
конкретных заданий.
Содержание настоящего задания заключается в выполнении всех пунктов,
сформулированных в задании 1.1.
ЗАДАНИЕ 1.4. СЛЕДЯЩАЯ СИСТЕМА С ЭЛЕКТРОННЫМ
УСИЛИТЕЛЕМ И ДВИГАТЕЛЕМ
ПОСТОЯННОГО ТОКА
Электрическая схема следящей системы с электронным усилителем и двигателем
постоянного тока представлена на рис. Т1.15.
На схеме используются следующие обозначения: СД-сельсин-датчик, СП-
сельсин-приемник, ЭУ - электронный усилитель, ФЧВ - фазочувствительный
выпрямитель, КУ - корректирующее устройство, УПТ - усилитель постоянного тока,
ЭМУ - электромашинный усилитель, ИД - исполнительный двигатель постоянного
тока с независимым возбуждением, ПД - приводной двигатель. Механические связи
показаны в виде двух параллельных линий. Объект регулирования условно показан
в виде вращающегося маховика.
Главная обратная связь
Местная обратная связь
Рис. Т1.15. Электрокинетическая схема следящей системы
Объект
регулирования
X
to
<
Тема 1. Математические модели и динамические характеристики САУ 577
Следящая система работает следующим образом. Задающее воздействие y(t) в
виде некоторого угла поворота воспринимается сельсином-датчиком (СД). Сельсины
работают попарно. Сельсин-приемник (СП) расположен на валу объекта
регулирования. Если угол поворота объекта x(t) отличается от задающего воздействие y(t), то на
однофазной обмотке СП появляется переменное напряжение рассогласования U{.
Оно поступает на вход электронного усилителя (ЭУ). ЭУ состоит из фазочувстви-
тельного выпрямителя (ФЧВ), где переменное напряжение U\ выпрямляется,
последовательного корректирующего устройства (КУ) и усилителя постоянного тока
(УПТ). Корректирующее устройство предназначено для обеспечения необходимых
динамических свойств следящей системе. Усиленный УПТ сигнал подается на вход
(обмотки управления) электромашинного усилителя (ЭМУ). Ротор ЭМУ приводится
во вращение приводным двигателем ПД переменного тока. Нагрузкой ЭМУ является
исполнительный двигатель (ИД) постоянного тока с независимым возбуждением.
Исполнительный двигатель через редуктор вращает вал объекта управления так,
чтобы уменьшить сигнал рассогласования, формируемый сельсином-приемником. Для
увеличения демпфирования электромашинного усилителя и исполнительного
двигателя в систему введена местная обратная связь по току якоря. Сигнал местной
обратной связи снимается с резистора Rc и подается на вход усилителя постоянного тока.
Таким образом, объект регулирования с требуемой точностью отслеживает угловое
перемещение задающего воздействия y(t).
Функциональная схема следящей системы приведена на рис. Т1.16.
У(0 г—1 г—лЕ г-г-1 wi г—1"2 r-T-iM4 m г-r-i а г-г-1 *(0
i
6
Н
U—
7 ■
а
Рис. Т1.16. Функциональная схема следящей системы:
1-СД,2-СП,3-ФЧВ,4-КУ,5- УПТ, б - ЭМУ, 7-ИД, 8- редуктор,
9 - цепь местной обратной связи
Рассмотрим работу отдельных элементов системы и их математические модели.
Сельсины. Сельсины - электрические машины переменного тока,
предназначенные для работы в качестве датчиков или в качестве элементов дистанционной
передачи сигналов. Сельсины, применяемые в качестве датчиков, работают в так
называемом трансформаторном режиме и имеют четыре обмотки (рис. Т1.17).
Рис. Т1.17. Схема соединения обмоток сельсинов, работающих в качестве датчика
Сельсины работают попарно. Один сельсин называется сельсином-датчиком (СД),
второй - сельсином-приемником (СП).
578 Задания для самостоятельной работы и методические пояснения. Часть V
Трехфазные обмотки сельсинов соединены звездой. Их магнитные оси сдвинуты
на 120°. Соответствующие трехфазные обмотки СД и СП, распложенные на роторах,
соединены между собой. Статорные обмотки являются однофазными.
Входным сигналом датчика является угол поворота ротора СД относительно
ротора СП, т.е. разность в угловых положениях роторов. Выходным сигналом является
напряжение £/вых, наводимое в статорной обмотке СП.
Для построения математической модели датчика запишем эффективные значения
э.д.с. в обмотках ротора СД. Пренебрежем малыми значениями э.д.с. самоиндукции и
взаимоиндукции:
Е,=ЕМ cos а,
<E2 = £Mcos(a-120°), (T1.9)
£^ = £Mcos(a+120°).
Здесь Ем - эффективное значение э.д.с, наводимое в обмотке 1 (рис. Т1.17)
потоком возбуждения Ф, созданным переменным напряжением, поданным на
однофазную обмотку U при a = 0.
Пусть Z - сопротивление каждой из трехфазных обмоток. Считаем, что магнито-
проводы сельсинов работают в ненасыщенном режиме и сопротивление
соединительных проводов является малым. Тогда эффективные значения токов в трехфазных
обмотках определяются формулами
/.=£.
2Z
Ei
2Z'
h=^
(П. Ю)
-Ь.
2Z'
Эти токи создают переменные магнитные потоки, которые индуцируют в
однофазной обмотке СП электродвижущие силы, эффективные значения которых
соответственно равны
Ех =Ar/,cosP,
Е2' = К12 cos((3 -120°), (Т1.11)
£3' = A:/3Cos(p+120o),
где К- коэффициент пропорциональности.
Эффективное значение напряжения в однофазной обмотке СП будет следующим
ивых=Е{ + Е2' + Е3'. (Т1.12)
Преобразовывая (Т1.12), с учетом (Т1.9), (Т1.10) и (Tl.ll) получим
и.
или
KF
= ^=^-[cospcosa + cos(p-1200)cos(a-1200) + cos((3 + 1200)cos(a + 1200)],
Um =
ЪКЕ}
4Z
*-cos(p-a) = £/Mcos(p-a),
(Т1.13)
где UM - амплитудное значение напряжения при нулевом рассогласовании Р~а.
Из формулы (Т1.13) следует, что независимо от абсолютного углового положения
роторов выходное напряжение на однофазной обмотке СП зависит только от
величины рассогласования р-a относительного положения роторов СД и СП.
Тема 1. Математические модели и динамические характеристики САУ 579
Если выходное напряжение £/вых подавать на фазочувствительный выпрямитель,
то можно выделить сигнал рассогласования (3 — сх . Таким образом, СД и СП
совместно с ФЧВ образуют элемент сравнения, обозначенный на структурной схеме
цифрами 1 - 3. Выпрямительная часть ФЧВ обозначена на структурной схеме элементом с
цифрой 3. Напряжение, снимаемое ФЧВ, определяется так
U{=KrE. (T1.14)
Соответственно передаточная функция данного звена И^+ФЧв(^)=^1-
Корректирующее устройство. Коррекция динамических характеристик систем
управления осуществляется, как правило, путем введения в систему корректирующих
устройств (регуляторов).
Различают два вида таких КУ - последовательные, включаемые в прямую цепь
последовательно с объектом управления, и параллельные, включаемые в цепь
местной обратной связи, охватывающей объект управления.
В качестве последовательных корректирующих устройств наиболее часто
используют пропорционально-интегрально-дифференцирующие (ПИД) регуляторы, или
регуляторы, реализующие более простые законы управления.
Передаточная функция ПИД-регулятора имеет вид
WKy(s) = Kn+Kas+^-.
Структурная схема ПИД-регулятора (КУ) изображена на рис. Т1.18.
y(t)
S
I
Рис. Т1.18. Структурная схема ПИД-регулятора
Наибольшее распространение получили электрические корректирующие
устройства в виде различных схем из резисторов и конденсаторов (пассивные
четырехполюсники). Основной их недостаток в том, что они ослабляют сигнал. Поэтому
приходится включать два или несколько четырехполюсников через разделительные
усилители.
Большими возможностями обладают корректирующие устройства,
представляющие собой активные четырехполюсники, основным элементом которых является
операционный усилитель (ОУ) - усилитель постоянного тока с различного типа
отрицательными обратными связями. Как видно из структурной схемы (см. рис. Т1.18),
для реализации корректирующего устройства необходимо иметь элементы,
обеспечивающие выполнение операций усиления, суммирования, интегрирования и
дифференцирования сигналов. Все указанные операции достаточно часто реализуются на
базе операционных усилителей.
Рассмотрим отдельные, наиболее часто используемые на практике схемы,
выполняющие указанные математические операции.
Инвертирующий усилитель (пропорциональное звено). Функциональная схема
звена изображена на рис. Т1.19.
580 Задания для самостоятельной работы и методические пояснения. Часть V
U,
К
Рис. Т1.19. Инвертирующий усилитель:
а - функциональная схема звена на ОУ\ б - обозначение на структурной схеме
Входное сопротивление ОУ является достаточно большим, поэтому ток i,
обусловленный напряжением на входе £/ь протекает через резисторы R и /?ос. В
соответствии с этим для рассматриваемой схемы можно записать следующую систему
уравнений
UR=R-i,
UR<x=Roc-i,
t/2=f/0-t/^,
U2=-Kg-U0.
Здесь Kg - коэффициент усиления ОУ.
Исключая из данной системы уравнений промежуточные переменные /, URi Ur ,
(Jo можно получить следующее уравнение
£/,+-L( l + ^oo. )и ^.п
к.
R
-,v R )
Поскольку коэффициент усиления ОУ достаточно большой, то полагая Kg
имеем
и,-^
ИЛИ
где
tfi,
U2=K-UX,
(Т1.15)
Как видно из (Т1.15), данное звено является пропорциональным с коэффициентом
передачи К, инвертирующим входной сигнал.
Далее приведем только функциональные схемы основных типов звеньев на базе
ОУ и соответствующие им передаточные функции.
Неинвертирующий усилитель (пропорциональное звено). Функциональная
схема звена изображена на рис. Т1.20.
Тема 1. Математические модели и динамические характеристики САУ
581
*ос
г<=>
и,
U,
К
Uo
-о
и2
1
1
Имеем
или
где
Рис. Т1.20. Неинвертирующий усилитель:
а - функциональная схема звена наОУ^б- обозначение на структурной схеме
U2 = KUU
К=-
R
Передаточная функция имеет вид
W(s) = К.
Усилитель с дифференциальным входом (элемент сравнения с
пропорциональными звеньями по каждому входу)
с/.
V,
к,
1ЩА
+il
к,
1
Рис. Т1.21. Усилитель с дифференциальным входом:
а - функциональная схема звена на ОУ, б - обозначение на структурной схеме
Имеем
где
иъ = кги{ + к2и2,
„ ^ocl ^dc2(^l +^ocl)
R Я,(Я2 + Яос2)
Передаточные функции звеньев по каждому входу определены зависимостями
WUiu,(s) = Kl,
582 Задания для самостоятельной работы и методические пояснения. Часть V
Инвертирующий сумматор (сумматор с пропорциональными звеньями по
каждому входу)
U,
U,
к2
vSt
Рис. Т1.22. Инвертирующий сумматор:
а - функциональная схема звена на ОУ\ б - обозначение на структурной схеме
Имеем
U3 = KrUx + K2U2j
где
v Яос Яос
Передаточные функции звеньев по каждому входу имеют вид
WUiUi(s) = Kb
Неинвертирующий сумматор (сумматор с пропорциональными звеньями по
каждом входу)
и.
и,
К2
+i
^
Рис. Т1.2Э. Неинвертирующий сумматор:
а - функциональная схема звена наОУ\б- обозначение на структурной схеме
Тема 1. Математические модели и динамические характеристики САУ 583
Имеем
иъ=кхи{ + к2 -и2,
где
_ Я0с(До+^осо) к _ ^ос(^0+^осо)
]" R0(R{+ROC) ' 2~~ R0(R2+ROC) '
Предварительные функции звеньев по каждому входу:
Интегратор
Имеем
dU2
Л
- = к-и{,
где АГ = —
RC
Передаточная функция звена определяется формулой
к
S
R
П 1 1 г
° 1 1 *
h
с
с б
N.
Г 1
1—
Ух „
к
s
1
и,
Рис. Т1.24. Интегратор:
а - функциональная схема; б - обозначение на структурной схеме
На рис. Т 1.24 приведена функциональная схема идеального интегратора.
Интегратор, построенный по данной схеме, выполняет интегрирование с низкой
точностью. Более высокой точностью интегрирования обладает модифицированный
интегратор, функциональная схема которого приведена на рис. Т1.25.
Без учета RK0Mn модифицированный интегратор описывается следующим
дифференциальным уравнением
Л RpC 2 RC l
Согласно приведенному уравнению данный тип интегратора представляет собой
апериодическое звено, но апериодический характер АЧХ рассматриваемого
интегратора проявляется только в области низких частот: от 0 до частоты со = .
Величину резистора Rp выбирают исходя из значения со*, которая обычно
составляет 1% от требуемой полосы пропускной системы.
584
Задания для самостоятельной работы и методические пояснения. Часть V
Рис. Т1.25. Функциональная схема модифицированного интегратора
Дифференциатор (дифференцирующее звено). Функциональная система
приведена на рис. Т1.26.
С R *
и,
и,
Ks
и,
—о
1
Рис. Т1.26. Дифференциатор:
а - функциональная схема, б - обозначение на структурной схеме
Дифференциатор описывается уравнением
U'2 = K-
,dU{
dt '
где К = -RC .
Соответственно передаточная функция звена следующая
W(s) = Ks.
Поскольку полупроводниковые элементы и сопротивления, образующие
электрическую схему операционного усилителя, имеют собственные шумы, то в выходном
сигнале, кроме полезной составляющей, присутствует помеха. Для устранения помех
коэффициент передачи дифференциатора ограничивают, начиная с некоторой
частоты со*, применяя схему скорректированного дифференциатора (рис. Т1.27).
Как видно из этого рисунка, коррекция частотных свойств дифференциатора
достигается введением дополнительных элементов - RK и Ск.
Тема 1. Математические модели и динамические характеристики САУ
R
585
Рис. Т1.27. Функциональная схема скорректированного дифференциатора
Скорректированный дифференциатор описывается уравнением
dUx
d2U,
dt2 { R С ) dt RC 2 dt
Собственно передаточная функция имеет вид
где со, =
, coo = ,
CRK CKR
Если положить щ = co2 , то передаточная функция запишется так
Ks
W(s) =
- + 1
со,
где К = -RC .
Как видно из приведенного выражения, скорректированный дифференциатор
представляет собой последовательное соединение дифференцирующего звена и
апериодического звена 2-го порядка. На низких частотах, определяемых величиной соь
он будет работать как дифференцирующее звено, на высоких частотах - как
апериодическое.
Величину coj рекомендуется выбирать исходя из полосы пропускания системы
управления о>о. Обычно cOj = (50 —1ОО)сОо.
Если в рассматриваемой системе для улучшения ее динамических свойств в
качестве корректирующего устройства применяет ПД-регулятор, то его передаточная
функция имеет вид
WKy(s) = Kas+Kn ^^s + l),
где K2=KnJ тх =-±.
Кп
Соответственно КУ описывается уравнением
586 Задания для самостоятельной работы и методические пояснения. Часть V
Функциональная схема данного корректирующего устройства на базе ОУ
представлена на рис. Т1.28.
Рис. Т1.28. Функциональная схема корректирующего устройства
Элементы корректирующего устройства - конденсаторы и резисторы - выбираются
из условия получения необходимых значений коэффициентов передачи Кп и Кп.
Усилитель постоянного тока. Усилитель постоянного тока (УПТ) предназначен
для усиления медленно меняющихся сигналов постоянного тока, так называемых
инфранизкочастотных сигналов. УПТ, как правило, выполняются на
полупроводниковых приборах, имеют коэффициент усиления, достигающий нескольких десятков
тысяч, полосу пропускания до 1000 Гц. Поэтому для рассматриваемого типа
следящей системы УПТ является безынерционным элементом (пропорциональным
звеном). Его уравнение можно записать следующим образом:
U4 = K3(U2-U5).
Передаточная функция УПТ WynT(s) = Къ.
Электромашинный усилитель. Электромашинный усилитель (ЭМУ)
представляет собой генератор постоянного тока с внешним управлением и предназначен для
усиления электрических сигналов по мощности. Генератор приводится во вращение
приводным двигателем (ПД). Усиление сигналов производится за счет энергии
приводного двигателя.
В системах управления наибольшее распределение получили двухкаскадные
ЭМУ (рис. Т1.29), в качестве нагрузки которых используются двигатели постоянного
тока. ЭМУ усиливает сигналы управления, поступающие на двигатель.
Особенностью двухкаскадного ЭМУ является наличие двух пар щеток на
коллекторе. Одна пара находится на нейтральной линии, вторая пара (рабочие щетки)
- на линии, перпендикулярной к ней. Поперечные щетки, находящиеся на
нейтральной линии, замкнуты накоротко. К рабочим щеткам подключена цепь
нагрузки (двигатель).
ема 1. Математические модели и динамические характеристики САУ
Принцип работы ЭМУ: к обмотке
возрождения, являющейся одновременно об-
откой управления, подводится управ-
чющий сигнал Uy. Под действием управ-
яющего сигнала в статоре ЭМУ наводит-
я магнитный поток
Фу =с,соу/у,
це С\ - конструктивная постоянная, 0)у -
оличество витков обмотки управления,
,- ток в обмотке управления.
При вращении якоря в этом магнитном
ютоке в якорной обмотке наводится э.д.с.
еп=кФу&,
де Q - угловая скорость вращения якоря.
Так как поперечные щетки замкнуты
гакоротко, то в них возникает достаточно
юльшой ток
/ =-Ss-
п *„'
587
ич
COv
Рис. Т1.29. Принципиальная схема
двухкаскадного ЭМУ
^де Rn - сопротивление коротко замкнутой цепи.
Этот ток создает поперечный поток
Фп=С2СОя/п>
где с2 - конструктивная постоянная, соя - число витков в якорной обмотке.
Вращение якоря в магнитном потоке Фп приводит к появлению на рабочих
щетках э.д.с.
е„=кФпп.
Таким образом, зависимость напряжения на рабочих щетках ер от управляющего
тока /у определяется зависимостью.
_; K2cxc2(uy(uaQ2 ,
'v •
Rn
(Т1.16)
Зависимость (Т1.16) называется характеристикой холостого хода. Как видим, ер
зависит от квадрата угловой скорости приводного двигателя.
При включении нагрузки по рабочей цепи пойдет ток. В соответствии с этим
возникает магнитный поток реакции якоря Фр, который направлен навстречу потоку
Фу. Поток Фр искажает поток Фу. Для устранения этого явления в ЭМУ
предусмотрена компенсационная обмотка, которая включена последовательно с обмоткой
якоря в цепь рабочих щеток. Компенсационная обмотка включена так, что
протекающий по ней ток создает компенсационный поток Фк, который направлен против
потока реакции якоря Фр . Тем самым поток Фк компенсирует влияние потока Фр .
Для регулировки величины Фк параллельно компенсационной обмотке включено
сопротивление RK .
588 Задания для самостоятельной работы и методические пояснения. Часть V
Составим уравнения динамики ЭМУ, предполагая, что он работает в режиме
полной компенсации, т.е. Фк = Фр. Уравнения электрических процессов в рабочей,
поперечной и управляющей цепях имеют вид
dL
/^QVn^BH+KJ'p+^p^
K2QLyIy=RnIn+Ln
dl
dt '
(T1.17)
Uy =tfy/y + Zy
^вых ^н*р'
d±
dt
Последнее уравнение определяет выходное напряжение ЭМУ.
В формулах (Т1.17) используются следующие обозначения: /п, /р, /у - токи
в поперечной, рабочей и управляющей цепях; Rn , Ry , RH , RBH - сопротивления
поперечной и управляющей цепей нагрузки, сопротивление участка рабочей цепи, в
которую входят: обмотка якоря, щетки и компенсационная обмотка, зашунтирован-
ная сопротивлением RK ; Z^, L^, Ly - индуктивности поперечной, рабочей и
управляющей цепей; К{, К2 - конструктивные постоянные.
Учитывая, что э.д.с. самоиндукции и падение напряжения в рабочей цепи малы по
отношению к э.д.с, наводимой внешним магнитным полем, отдельными слагаемыми
в первом уравнении системы (Т1.17) можно пренебречь. В результате получим
dl
dt
(Т1.18)
К2Ш^/у=*п/п+А,
dL
Uy-Ryly + L,-*:
Исключая из (Т1.18) промежуточные переменные /п, /у, находим одно
уравнение, связывающее управляющее напряжение с напряжением выхода,
Л/.,
,2rr
ТТ ВЬ1Х +(Т +Г )-
dtL
dt
■ + t/.Ux=*v-t/v>
(T1.19)
где
Тп =~п-,Гу =—2-, Ку = KXK2Q ТпТу - постоянные времени поперечной цепи,
Rn Ry
цепи управления; коэффициент усиления ЭМУ по напряжению.
Передаточная функция ЭМУ имеет следующий вид
W3mv(*) = -
Kv
г эму
(Гп* + 1)(Гу* + 1)
Исполнительный двигатель постоянного тока. От двигателей, применяемых в
следящих системах, требуется преобразование электрического сигнала
(управляющего напряжения) в пропорциональную величине сигнала скорость вращения якоря.
Как правило, используются двигатели постоянного тока с независимым
возбуждением. Принципиальная схема двигателя приведена на рис. Т1.30.
Тема 1. Математические модели и динамические характеристики САУ 589
U
(О
Рис. Т1.Э0. Принципиальная схема двигателя постоянного тока
Управление двигателем возможно путем изменения напряжений или по цепи
якоря ия, или по цепи обмотки управления UB.
Рассмотрим вначале уравнения статики. Ток в цепи якоря /я, магнитный поток
возбуждения Фв, вращающий момент Л/вр, скорость вращения вала двигателя со и
противоэлектродвижущая сила еп, наводимая в обмотке якоря, связаны следующими
соотношениями:
ия=1яКя+еп,
<Мвр=смФв/п, (Т1.20)
еп=сеФвсо,
где
с* =-
2па м 9,81
N - число проводников якоря, Р - число пар полюсов, а - число пар параллельных
ветвей, /?я - активное сопротивление цепи якоря. Исключая из уравнения еп и /я,
получим
Мв =-^-Фв£/я -^-Фв2со. (Т1.21)
вр п в я D в \ /
Из формулы (Т1.21), которая определяет механическую характеристику
двигателя, видно, что при постоянном потоке возбуждения Фв, создаваемым неизменяемым
напряжением возбуждения £/в, возвращающий момент линейно зависит от
управляющего сигнала по цепи якоря Ыя. Это позволяет плавно изменять скорость
двигателя в широком диапазоне. В связи с этим обстоятельством в рассматриваемой
следящей системе управление двигателем осуществляется именно по цепи якоря.
Составим уравнение динамики для двигателя, управляемого по цепи якоря.
Уравнение движения якоря двигателя имеет вид
rdco
Здесь J - момент инерции всех вращающихся масс, приведенных к валу
двигателя, с - коэффициент вязкого трения, Мс - момент сопротивления.
Из (Т1.21) и (Т1.22) получим
dt Яя *я
или
Тм— + (д = Кмия-КсМс, (Т1.23)
dt
J™ = Mtp-co>-Mc. (T1.22)
590 Задания для самостоятельной работы и методические пояснения. Часть V
где
Гм = 2 - постоянная времени двигателя,
Км = н г- - коэффициент передачи двигателя по управлению,
сЛц + Се^Ф.
к = з коэффициент передачи двигателя по возмущению.
<Яя+сссмФв
Соответственно передаточные функции двигателя по управлению и возмущению
(моменту сопротивления) относительно угловой скорости имеют вид
W00 (s)= ^
О)=- Кс
<TuS + l)
Уравнение (Т1.23) можно записать относительно угла поворота. Учитывая, что
da
— = со>
Л
из (Т1.22) получаем следующее уравнение
dt2 + Л
Двигателю, описываемому уравнением (Т1.24), соответствует две передаточные
функции: по управлению и по возмущению относительно угла поворота
Тм-т+ — = Кмия-КсМс. (Т1.24)
^даву(^)= ^м.,ч, (Т1.25)
w-(1)-7(v«)- (TL26)
Редуктор. Редуктор предназначен для изменения числа оборотов двигателя и для
связи двигателя с объектом управления. Уравнение, которым описывается редуктор,
имеет вид
х = К?а.
То есть редуктор является безынерционным (пропорциональным) звеном. Ему
соответствует передаточная функция
Wp(s) = Kp.
Цепь местной обратной связи. Как указывалось выше, местная обратная связь
предназначена для увеличения демпфирования системы ЭМУ-ИД. Снимаемый с
сопротивления Rc сигнал пропорционален току в цепи якоря двигателя. Регулировка
предназначена для изменения глубины обратной связи.
Составим уравнения, связывающие токи и напряжения в местной обратной связи.
Напряжение, снимаемое с сопротивления jRc, определяется формулой
U5=RGI,. (T1.27)
Найдем зависимость, связывающую /я с угловой скоростью двигателя. Для этого
воспользуемся уравнением системы (Т 1.21) и уравнением (Т1.22). Если считать, что
момент вязкого трения М^ = с • со и момент сопротивления Мс много меньше, чем
вращающий момент Мвр, то будем иметь
Тема 1. Математические модели и динамические характеристики САУ
у-=мвр,
591
где
Отсюда следует
Учитывая (Т1.27), получаем
К* = <\, •<*>.•
/dш - к 1
./—-V/..
5 *„„ Л'
или
где Кос =
/?ГУ
_ **С
к,
а/ -к d(u
- коэффициент передачи обратной связи.
(Т1.28)
вр
Из формулы (Т1.28) следует, что сигнал U5 пропорционален производной от
угловой скорости вращения вала двигателя, или второй производной от угла поворота
и* = к
ocdt2
(Т1.29)
Таким образом, местная обратная связь представляет собой разновидность гибкой
обратной связи.
Передаточная функция местной обратной связи по углу имеет вид
W£(s) = K0C-s2;
по угловой скорости запишется так
CW =
бесструктурная схема следящей системы с учетом определенных выше
передаточных функций отдельных звеньев имеет вид, представленный на рис. Т1.31.
Найдем передаточную функцию внутреннего контура, включающего УПТ, ЭМУ-
ИД, цепь местной обратной связи. Поскольку имеет место соединение с
отрицательной обратной связью, то
Wbk«=-
Wym(s)-W3My(S)-W?m(s)
i+nww-»ww-icw-icw
ryrrrV
гэму
Л3ЛуЛм
ТпТуТУ + (ТпТу +ТпТи +TyTJ-s2+(TM +Ту +ГП + К3КуКнКж)1 + 1
Соответственно дифференциальное уравнение внутреннего контура имеет вид
</3со
</2со
at at
+(Ти +Ту +Та+ К^КуКМ^ + а* K3KyKuU2.
592
Задания для самостоятельной работы и методические пояснения. Часть V
±
*С
I
1
+
{
+
1-4
+
IS
s
а*
2
Тема 1. Математические модели и динамические характеристики САУ 593
Передаточная функция всей системы относительно задающего воздействия у (г)
определяется формулой
WOy(s)=
1 + ^д+фч^) • И^ (*)• Wbk М-'W
K3KyKMKxK2(txs + \)
TnTTMs4+(TaTy +Т„ТМ + TyTJs3 + (TM+T +ТП + K.K^K^s2 +
Hl + KxK2K3KyKMKpzx)s + (KxK2K3KyKMKp)
Соответственно дифференциальное уравнение следящей системы относительно
задающего воздействия y(t) имеет вид
d4x d*x d2x dx . ч , dy ,
aA—^ + az-— + a2—T + al— + a0x{t) = bx-j- + btiy,
dr dr dr dt dt
где
aA =Т„ТуТм, а3 =ТпТу+Т„Тм+ТуТм, а2 =Тм+Ту+Тп + К3КуКыК0С,
CL\ = 1 + /Ci/C^/v^/Cj^/Cy/vpT], Gq = К^К2^2^м у p^ 1 = 12 3 м y^l> ^0 = 1 2 3 мУ
Относительно возмущения (момента сопротивления двигателя Л/с) передаточная
функция следящей системы запишется так
= -Kc[TJys2 + (Tn+Ty)s + l]
TaTyTMs4 +(ТпТу +ТПТЫ +ТуТи)** + (Ты+Ту+Тп + K3KyKuKw)s2 +
+(\ + К{К2КгКуК№Крхх)* + (КхК2КъКуКыК?)
Соответственно дифференциальное уравнение следящей системы относительно
возмущения Мс имеет вид
d4x d%x d2x dx d2Mc dM.
^^+ailF+a2lF+a^+a°x=~C2~dT-Cl-dT-CoM-
где коэффициенты а{: i =0,4 определены выше,
сг = KJnTy* q = Kc(Гп +Гу), c0 = Kc.
В силу принципа суперпозиции дифференциальное уравнение относительно
задающего воздействия у (t) и момента сопротивления Мс следующее
dAx d3x d2x dx udy , d2Mc dMc
dt dt dr dt dt dt dt
Содержание настоящего задания заключается в выполнении всех пунктов,
сформулированных в задании 1.1.
Варианты заданий для самостоятельной работы приведены в табл. Т1.1.
39 Зак. 416
594 Задания для самостоятельной работы и методические пояснения. Часть V
заданий для самостоятельной работы
Варианты
о4
\
о4
\
as
X
h?
^Г
^s
ks
***
*
о
0,01
о
-2,1
•о
0,1
S'O
0,2
со
0,22
«n
0,5
0,01
CM
100
CM
c?
о
«n
8'0
vH
О
0,01
о"
-2,0
«о
0,2
0,6
0,1
со
0,022
«n
0,5
0,01
см
200
од
0,9
о
о
о
1
-0,15
as
I
«n
0,3
0,7
0,1
0,22
о
0,5
0,02
300
0,1
0,9
о
-0,01
-0,15
00
1
«n
0,5
0,5
o"
2,5
0,022
о
0,02
100
0,5
100
-
о
0,01
0,15
1
о
0,7
0,6
0,2
CO
0,022
о
0,02
«n
200
O
О
«n
о
0,01
<Ч
о
1
о
0,9
0,7
о"
го
0,22
0,03
«п
300
0,8
о
го
О
0,01
<ч
о
1
о
-
0,5
2
3,5
0,022
*Ч
0,03
«п
300
0,9
О
-0,01
-0,2
1
о
CN
СО
0,6
0,3
3,5
0,22
§
0,03
200
«о
о
-0,01
-0,1
-0,5
«/■>
0,7
0,4
"t
0,022
о
со
0,03
о
200
ON
о
-0,01
о
1
-0,5
0,5
0,4
"t
0,022
0,5
«п
0,04
о
8
!2
о
«О
00
о
о
0,01
0,2
-0,3
й
0,6
0,4
4,5
0,022
£'0
2,0
0,04
о
100
О
«О
со
о
0,01
0,2
-0,3
о
го
00
0,7
0,5
4,5
0,22
0,5
2,0
0,04
о
8
СО
с*
о
0,01
о"
О
6'1
0,5
?0
«п
0,022
-
0,05
г*
8
*ч
of
О
-0,01
о
1
о
1
8
2,0
0,6
0,5
«п
0,5
«о
-
0,05
г^
100
"1
-
О
-0,01
<N
о"
1
о
8
0,7
0,5
«/■>
0,01
0,5
0,05
г*
100
о
со"
о
»о
оо
Тема 2. Исследование линейных непрерывных стационарных систем 595
ТЕМА 2. ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ
И ПОСТРОЕНИЕ ВЫХОДНЫХ СИГНАЛОВ
ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ
СТАЦИОНАРНЫХ СИСТЕМ
С СОСРЕДОТОЧЕННЫМИ
И С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ
Перед выполнением заданий, включенных в тему 2, познакомьтесь с основными
положениями теории устойчивости:
• Дайте строгое определение устойчивости САУ по Ляпунову и определение
критерия устойчивости.
• Поясните, в чем состоят достоинства и недостатки алгебраических и
частотных критериев устойчивости САУ; в чем состоит принцип аргумента?
• Сформулируйте и проиллюстрируйте на примерах частотные критерии
Михайлова и Найквиста, используя АЧХ, а также частотный критерий
устойчивости Найквиста с использованием ЛЧХ.
• Поясните понятия: «запас устойчивости по модулю» и «запас устойчивости по
фазе»; что они характеризуют?
• Дайте определение полосы пропускания системы.
• Поясните алгоритм построения области устойчивости САУ в плоскости
одного параметра и необходимость реализации указанного алгоритма (что он дает
проектировщику?).
Следующие задания посвящены вопросам исследования устойчивости САУ. В
заданиях 1.1 - 1.4 построены математические модели САУ. В последующих заданиях
преподавателем задаются численные значения параметров САУ и, таким образом,
рассчитывается математическая модель, соответствующая выбранным параметрам.
Далее исследуется её устойчивость.
ЗАДАНИЕ 2.1
Найдите ПФ исследуемой замкнутой САУ и рассчитайте все её показатели;
укажите: нули (левые и правые), полюса (левые, правые, нейтральные), порядок п,
степень гс=п-т; индекс апериодической нейтральности, индекс неустойчивости,
индекс неминимально-фазовости. Пользуясь необходимыми и достаточными
условиями, проведите исследование асимптотической устойчивости системы.
ЗАДАНИЕ 2.2
Пользуясь алгебраическими критериями (критерий Раусса, критерий Гурвица,
критерий Льенара - Шипара) и частотными критериями устойчивости (принцип
аргумента, критерий устойчивости Михайлова, критерий устойчивости Найквиста,
критерий устойчивости Найквиста применительно к логарифмическим частотным харак-
39*
596 Задания для самостоятельной работы и методические пояснения. Часть V
теристикам), проведите исследование устойчивости САУ, найдите показатель
колебательности, резонансную (собственную) частоту с^, полосу пропускания, частоту
среза, запасы устойчивости по модулю и фазе.
ЗАДАНИЕ 2.3
Изложите теоретические положения о возможности использования полиномов
Чебышева для построения областей устойчивости и областей с заданным
распределением полюсов применительно к рассматриваемым системам (задание 1.1 - 1.4).
Приведите примеры (исходные данные задаются преподавателем); изучите метод
выделения областей устойчивости с помощью D-разбиения и примените его к
системам, рассмотренным в заданиях 1.1-1.4.
Перед выполнением следующих заданий необходимо познакомиться с
соответствующими теоретическими положениями. С этой целью сформулируйте задачи
анализа САУ и укажите основные методы расчета вынужденных и свободных колебаний,
раскройте содержание понятия «качество САУ»; раскройте связь между частотными
характеристиками САУ и параметрами, характеризующими переходный процесс;
расскажите о физическом смысле коэффициентов ошибок и установите их
зависимость от параметров системы.
Одной из основных инженерных задач исследования САУ является задача
построения выходных сигналов для заданных воздействий, в частности, нахождение
кривых переходных процессов. Знание выходного сигнала, являющегося реакцией на
конкретное воздействие (вход), позволяет получить полную информацию о качестве
работы САУ как в переходном, так и в установившемся режимах, в частности, о
точности отработки входного сигнала.
Построить выходной сигнал (переходный процесс) - это значит проинтегрировать
дифференциальное уравнение, описывающее поведение исследуемой САУ. Получить
точное решение ДУ аналитическими методами удается лишь в простейших случаях,
не представляющих интереса для практики, поэтому важной является задача
разработки приближенных методов, удобных для реализации на ЭВМ.
В главе 8 (том ,1) изложен спектральный метод (метод матричных операторов)
приближенного расчета выходных сигналов, если задана ММ в форме скалярного
или векторно-матричного ДУ.
Этот метод применим для решения ДУ с постоянными и переменными
коэффициентами, позволяет установить явную аналитическую связь между входом и выходом
САУ (этот эффект является определяющим, поскольку он используется далее для
статистического анализа, построения оптимальных систем и др.), ориентирован на
использование ЭВМ, имеет оценку погрешности. Задача построения выходного
сигнала САУ поставлена корректно, поэтому спектральным методом могут с высокой
точностью исследоваться весьма сложные стационарные и нестационарные системы
(в этой теме рассматривается только класс стационарных систем).
Далее будут использоваться такие понятия, с которыми необходимо
познакомиться: линейные операторы в гильбертовом пространстве, операторы в конечномерных
пространствах, матрица оператора в ОНБ, теорема о связи операций над линейными
отображениями и их матрицами, общий вид линейного ограниченного оператора в
гильбертовом пространстве, сопряженные и самосопряженные операторы,
конечномерные и вполне непрерывные (компактные) операторы, операторы Гильберта -
Шмидта; применяется алгоритм расчета собственных функций и собственных
значений интегрального оператора с вырожденным ядром.
В заданиях используются законы преобразования сигналов системами во
временной (с использованием импульсной переходной функции), частотной (с
использованием передаточной функции) и спектральной (с использованием СХ) областях.
Тема 2. Исследование линейных непрерывных стационарных систем 597
В приведенных ниже заданиях находит применение аппарат матричного
представления операторов.
ЗАДАНИЕ 2.4
Постройте с помощью преобразования Лапласа график вынужденного выходного
сигнала x(t), если задано воздействие y(t) (конкретные системы из задания 1.1 — 1.4 и
воздействие задаются преподавателем).
ЗАДАНИЕ 2.5
Постройте график свободных колебаний, порожденных вектором начальных
условий Х° =(jc(O),jc/(O),xyr(O),...,Jc(n~1)(O))T (конкретная система и Х°задаются
преподавателем).
ЗАДАНИЕ 2.6
Разработайте алгоритмическое и программное обеспечение для решения задач
построения выходных сигналов спектральным методом (методом матричных
операторов) в следующих базисах: тригонометрические функции, функции Уолша,
полиномы Лежандра, полиномы Чебышева 1-го и 2-го рода, функции Лягерра,
ортогональные экспоненциальные функции.
ЗАДАНИЕ 2.7
Пользуясь спектральным методом, постройте спектральные характеристики
(матричные операторы) интегратора, дифференциатора, множительного элемента,
запаздывающего звена в базисах, указанных в предыдущем задании. Разработайте
алгоритмическое и программное обеспечение для построения выходных сигналов,
реализующее аппарат структурных преобразований с использованием матричных
операторов интегрирования, дифференцирования, запаздывания, суммирования и т.д.
ЗАДАНИЕ 2.8
Разработайте алгоритмическое и программное обеспечение для численного
обращения преобразования Лапласа с применением разложения оригинала по ОНБ и
примените его для расчета выходных сигналов систем x(t) e L2[0, ©о).
Наиболее просто алгоритм численного обращения преобразования Лапласа
реализуется, если в качестве базиса использовать полиномы Лежандра, определяемые
формулой
r(t)-f( р* (п+*)! „■-*"
причем
1
-, п -т,
jPn(t)Pm(t)e-a'dt =
К2л + 1)а]
0 0, п * т.
Оригинал в рассматриваемом случае находится в виде
=о
598
где
Задания для самостоятельной работы и методические пояснения. Часть V
ci=a(2n + l)jx(t)PH(t)e Л.
Поскольку
За/
Sat
(2n+\)at
Pn(t)e 2 = сп()е 2 +сп{е 2 +сп2е 2 +... + сппе 2 ,
то
°°( п (2k+\)at \ п оо (2к+\)ш
с* = а(2п + 1)П ^спке~ 2 Ьг(ОА = £1(2/1 + 1)5^/^(0/ 2 dt.
0[к=0 J к=0 о
В сформулированной задаче изображение процесса x(t) известно, т.е. функция
X(s) задается, например, в виде
X(s) = W(s)Y(s\
где W(s) - ПФ замкнутой САУ; Y(s) - изображение воздействия y(t).
Учитывая, что
оо
X(s) = jx(t)e~stdtt
о
легко получить формулу для расчета коэффициентов Фурье
схп=а{2п + \)^спкХ{8)
*=о
(2к+\)а
(Т2.1)
Приближение оригинала можно представить так:
/ п
/7=0Л'=0
i/(0sSXfl(2«+1)c«*xW
(2k+l)a
'Pn(t)e 2.
(Т2.2)
При реализации описанного алгоритма следует обратить внимание на следующие
обстоятельства:
• численные значения коэффициентов матрицы ортогонализации
с10 сп О
с20 С21 С22
с30 С31 С32 С33
U =
^Сл0 сп\ Сп2 СпЪ Сп
быстро растут, поэтому при расчете матрицы Сх=(с$,с{,с%9 ,с^) имеет место
вычислительная неустойчивость, что приводит к накоплению ошибок;
• анализируемый процесс должен принадлежать пространству L2[0,°o);
• неизвестный коэффициент а, вводимый для ускорения сходимости
приближенного решения к точному, находится поисковым методом.
В качестве ОНБ можно применять функции Лягерра.
Тема 2. Исследование линейных непрерывных стационарных систем 599
Пусть заданы изображения выхода X(s)y x(t)e L2[0,°°), а оригинал x(t) находится
в виде разложения по функциям Лягерра (см. §2.9, часть II, том 2)
5,(0 = *Ес/%('). (Т2.3)
Л
где Lm(t) = ^cmvtve 2 , К - масштабный множитель, вводимый для ускорения схо-
v=0
димости разложения (Т2.3) к функции x(t).
Поскольку для коэффициентов Фурье справедлива формула
с? = J *(*)*, (О*.
то
i
с? = S civ j '"*«*" 2 ■dt = Ё c^v> (T2.4)
v=0 о v=0
где
kt
dv
\xv=\tvx{t)e~*dt = {-\y^X{s)
о
dsv
(T2.5)
5=I
Из последней формулы следует, что нахождение приближения оригинала xt(t)
сводится к дифференцированию изображения по s и вычислению коэффициентов по
формуле (Т2.4).
Вопрос выбора коэффициента К достаточно сложен и один из подходов -
поисковый.
Алгоритмы разложения оригиналов по полиномам Якоби, Чебышева и др.
приведены в ([158], том 1).
Можно в качестве базиса использовать тригонометрические функции. Построим
оригинал в виде
*ic(e) = Xtfsin(2*+l)e, •
*=i
где
^(0) = х\ —In cos 0 , а > 0 - произвольное число.
I а )
В интеграле Лапласа воспользуемся следующей заменой переменной
<ffl'=cos0, (T2.6)
где а > 0 - произвольное число.
Тогда
-af = lncos0,
t = —In cos 0,
a
0 = arccos(e-tff).
Следовательно
x(t) = x[--Incos0 | = *!(в). (Т2.7)
I a J
600 Задания для самостоятельной работы и методические пояснения. Часть V
Принимая во внимание, что
7Т -lncosG с
te (0,oo), бе (0,-), e~st =ea = -cos0,
2 а
dt = —(lncosG)1 = sinG,
a a cosG
интеграл Лапласа можно записать в другой форме
у? у
aX(s) = j (cosG/0"1 sinG-Jc^GVG. (T2.8)
о
Последнее уравнение является интегральным уравнением 1-го рода относительно
функции ^(G).
Функцию ^(6), бе (0,я/2) продолжим на промежутке (я/2,я), при этом
положим ее равной х{(п-В) в интервале (-71,0) нечетным образом, а вне интервала
(-я:, 7i) - 2я периодической.
Представим х{ (G) в виде разложения по ортогональному базису
хх(0) = £ с* sin(2£ + 1)G, (T2.9)
при этом, очевидно, элементы спектральной характеристики находятся по формуле
с*'=- Г jc1(6)sin[(2A: + l)0]^9.
71 о
При нахождении коэффициентов с^' (Л =0,1,2,...) будем использовать значения
изображения X(s) в точках s = 1,2,3,... . Положим s=(2n+l)a, (n = 0,1,2,...). С учетом
этого положим
яХ[(2л + 1)я]= Jcos^GsinG-Jc^GyG. (T2.10)
о
Ядро интегрального уравнения можно представить в более удобной форме, а
именно
cos2''0-sine = 2-2'I|:|"PMj-Pn_ijlsin[2(n-*) + l]e. (T2.11)
(2п\
При этом следует полагать =0.
Подставляя зависимости (Т2.9), (Т2.11) в (Т2.10), получим
(Т2.12)
xScs j sin{[2(n-*) + l]9}sin{(2g + l)e}de.
S=0 о
Условия ортогональности для данного случая имеют вид
J sin(2fi + 1)G • sin(2d + 1)GdQ = j ./ '
о 1/4, ^~ '
Тема 2. Исследование линейных непрерывных стационарных систем
601
С учетом последней зависимости формула (Т2.12) перепишется так
^2nn^ff2n^ (2п
аХ[(2п + \)а] = 2~
'72
Сп-к
Очевидно, что выражение справедливо при g =п-к\ это приводит к следующей
системе равенств
~г2п\ (2п
4п+1аХ[(2п + \)а] = п^
*=0
*-1
СА> (/1=0,1,2,...).
Или, что то же самое,
где
£j2n + l(n-
к Р
—
71
Последнюю зависимость можно записать так
'1
1
2
5
14
42
132
429
1430
4862
16796
1
3
9
28
90
297
1001
3432
11934
41990
1
5
20
75
275
1001
3640
13260
48450
1Г1СЛ
1
7
35
154
637
2548
9996
38760
«=м,
1
9
54
273
1260
5508
23256
1
11
77
440
2244
10659
1
13
104
663
3705
j-
1
15 1
135 17 1
950 170 18 1
(Т2.13)
(Т2.14)
M = Oi0Hi Ц2 .... Мт-)Т,
причем элементы этой матрицы определяются зависимостью
лп+\
к=-
-аХ[(2л + 1)а], (« = 0,1,2,...).
Таким образом, формула для расчета коэффициентов Фурье функции хх(в)
получена.
ЗАДАНИЕ 2.9
Постройте алгоритмическое и программное обеспечение для расчета выходных
сигналов систем с запаздыванием по методу матричных операторов (предварительно
построив матричный оператор с запаздыванием); ОНБ приведены в приложении 3 (том 1).
ЗАДАНИЕ 2.10
Пользуясь построенным в 2-х предыдущих заданиях алгоритмическим и
программным обеспечением, постройте временные динамические характеристики и
реакции на заданные воздействия (в качестве воздействия можно принять y(t) = у^е~ш)
систем с запаздыванием.
38 Зак 416
602 Задания для самостоятельной работы и методические пояснения. Часть V
2.10-1. Система имеет структурную схему (рис. Т2.1).
У(0
wo(s)
Wp(s)
Wm(s)
ч
Рис. Т2.1. Структурная схема системы с распределенными параметрами
Передаточные функции элементов
W0(s) =
АГл
1 + Г05
pV 5(1 + Г25)
l-2yth(T5)
Wnr(s) =
l + yth(T5)
где Ko= 2; Го= 31,5 с; у = 0,03; Kv= 0,77 с"1; Т{= 12,5 с; Г2= 0,48 с.
0 1 + V, р 8 пт l + yth(T5)
где 8 = 0,05; То =6 с; Ко = 1; у = 0,05; т = 0,2с.
Указать трудности использования 2-й теоремы разложения и причины, их
породившие.
2.10-3. ПФ разомкнутой системы имеет вид
К
5(75 + 1)
Wp(s) =
где К = 20 с"1; Г= 0,1 с; т = 0,03 с.
2.10-4. W(5)= ^(ri5 + 1)g-^ _ ПФ разомкнутой САУ,
р 52(Г25 + 1)
где 7; =0,5 с; Г2= 0,2 с; т = 0,3 с; К =0,1.
2.10-5. WJs) = Д e~TS - ПФ разомкнутой САУ,
р 5(ГТ + 1)
где A: = 2c-1; Г = 0,1с; т = 0,5с.
К
2.10-6. Wp(5) = «
^ ™ - ПФ разомкнутой САУ,
5(75 + 1)
где К= 10 с"1; Г= 0,1 с; т = 0,04 с.
Познакомьтесь с понятием устойчивости систем с запаздыванием ([45], том 1).
2.10-7. ПФ САУ
Г(Гс5 + 1)е-* ,
() s(T2s2 +27^ + 1)'
АГ = 1,0с"1; Гс=1,76с; Г = 0,55с; ^ = 0,35; Гр =0,1 с; 7] =0,05 с.
Тема 2. Исследование линейных непрерывных стационарных систем
603
2.10-8. ПФ САУ
W(s) = -
Къ(Тхз-\)е
-1V"^
ЛГ5=4,0; Г1=0,5с; Г5 = 100с; Г2=1,0с; £ = 0,5; Г3=5,0с.
2.10-9. ПФ САУ
АГ = 1,0; Г1=0,5с; Г2=0,1с.
2.10-10. ПФ САУ имеет вид
Кдэ(7> + 1)
s\Txs + \)
l-a{thTs~\
W(s) = -
l + a2thTs]
(T{s + 1)(Г25 + l)(r3V + 2Т£ъз +1)'
Л:дэ=2; 7^=50 с; Г2=1с; Г4=20с; ^=0,2; а2=0,1\ т = 1,0с; Г3=0,5с;
ЗАДАНИЕ 2.11
Математические модели систем с распределенными параметрами. В системах
с распределенными параметрами входные и выходные сигналы образуют множество,
определенное в некоторой непрерывной области пространственных аргументов; они
могут быть описаны дифференциальными уравнениями в частных производных.
Примерами систем, идеализируемых как многосвязные системы с распределенными
параметрами, являются многие аэрогазодинамические, магнитные, газодинамические
и упругие системы, длинные электрические линии. Одним из методов описания
рассматриваемого класса систем с распределенными параметрами является подход,
предполагающий реализацию процесса эквивалентирования системой с
сосредоточенными параметрами счетного порядка ([99, 100], том 1).
Рассмотрим математическое описание
системы автоматического управления полем
энерговыделения ядерным реактором.
Для современных энергетических ядерных
реакторов (ЯР) с большими размерами активной
зоны актуальна задача управления полем
энерговыделения. Это требует рассматривать ЯР как
объект управления с распределенными
параметрами.
Управляется ЯР посредством перемещения
регулирующих стержней (PC), что изменяет
коэффициент размножения нейтронов K(rj) в
заданной точке г (рис. Т2.2).
Размещенные в активной зоне детекторы
нейтронов контролируют плотность нейтронного
потока, который определяет энерговыделение.
Для пространственного управления
плотностью нейтронного потока применяются
локальные автоматические регуляторы (ЛАР),
количество которых определяется числом PC.
38*
// = 750 см
Рис. Т2.2. Ядерный реактор как объект
управления:
• 1-6 -регулирующие стержни;
о 1-7 - детекторы нейтронов',
A3 - активная зона
604 Задания для самостоятельной работы и методические пояснения. Часть V
Математическая модель ЯР как объекта управления строится на основе
линеаризованных уравнений кинетики:
^Л^(г,,)Фо(Г)+^а«^ф(г.о+^у^г.О-^;
Эг т т т Эг
*МЛф(Г1,)-хс<г,о.
dt T
(Т2.15)
(Т2.16)
э2 э2 э2
где V2 =—- +—- +—- - оператор Лапласа; Ф0(г) - стационарное значение плот-
Эх ду dZ
ности потока нейтронов; ф(г,г) - возмущение плотности потока нейтронов; К0(г} -
стационарное значение коэффициента размножения; K(r,t) - отключение
коэффициента размножения.
Так как количество ЛАР ограничено, то ЯР описывают как многомерный объект
посредством передаточной матрицы H(s), т.е.
Ф(5) = Н(*)К(5), (Т2.17)
где
ф=[ф1.ф2.-Фп1т;
К = [К1,К2,.:,Кт] .
При размещении семи детекторов (п = 7 ) и шести PC (т = 6) в соответствии с
рис. Т2.2, H(s) можно представить в виде
Т-с + 1
(Т2.18)
Н(5)4^^А0+5£±1А1 + Аг,
2 0.5V-1 2V-1
где Ао - матрица размером 7x6 со всеми членами, равными единице;
"+0,81 +0,81 -0,31 -1,00 -0,31 0"
-0,31 +0,81 +0,81 -0,31 -1,00 0
-1,00 -0,31 +0,81 +0,81 -0,31 О
А, = -0,31 -1,00 -0,31 +0,81 +0,81 О
+0,81 -0,31 -1,00 -0,31 +0,81 О
+0,50 +0,15 -0,40 -0,40 +0,15 О
-0,50 -0,15 +0,40 +0,40 -0,15 О
0,1 0,1 -0,04 -0,04 -0,04 -0,04"
-0,04 0,1 0,1 -0,04 -0,04 -0,04
-0,04 -0,04 0,1 0,1 -0,04 -0,04
А, = -0,04 -0,04 -0,04 0,1 0,1 -0,04
0,1 -0,04 -0,04 -0,04 0,1 -0,04
-0,04 -0,04 -0,04 -0,04 -0,04 0,1
-0,04 -0,04 -0,04 -0,04 -0,04 0,1
Г0 = 10с.
Функциональная схема одного канала ЛАР представлена на рис. Т2.3.
Каждый ЛАР состоит из сравнивающего устройства 1, измерителя плотности
нейтронного потока в точках 1 - 7(см. рис. Т2.2) - 3; сервопривода РС-2.
Тема 2. Исследование линейных непрерывных стационарных систем
605
ЛАР №6, воздействующий на центральный стержень, работает одновременно от
двух детекторов 6 и 7 по полусумме их сигналов. Перемещение остальных PC с
изменением коэффициентов размножения К{ представлены в виде возмущений.
к, к'-1.к:Л
-Н2>
к„
5 (0,2s+ 1)
К.
ж
ЯР
ф/
ф/
45 + 1
Рис. Т2.3. Функциональная схема одного ЛАР
С применением стандартных обозначений структурная схема САУ полем
энерговыделения ЯР представлена на рис. Т2.4.
+ е(0
Рис. Т2.4. Структурная схема САУ энергополей ЯР
Использованы следующие обозначения:
Y = [у{, у2,....Уб1Т - вектор локальных заданий;
U = [и{,и2у...,и6]т - вектор изменений локальных коэффициентов размножения;
X = [a:,,jc2,...,jc7]t - вектор изменений плотности нейтронного потока в точках
размещения детекторов;
Q(5) =
1
4s + l
1
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
О 0 0 0 0 0,5 0,5
606
Задания для самостоятельной работы и методические пояснения. Часть V
R(*) =
К„
j(0,h + lr
0
1
0
О
О
О
Примечание: ориентировочное значение Ксп =0,08-10 с 1,т.к. объект
неустойчив, то существует Kmmin и Ксптах.
Задания для самостоятельной работы:
2.11-1. Пользуясь книгой Филипчука Е.В., Потопенко П.Т. и Почтникова В.В.
«Управление нейтронным полем ядерного реактора». - М.: Энергоиздат, 1981. -
280 с, изучите физические процессы, происходящие в системе;
2.11-2. Изучите методы математического описания систем с распределенными
параметрами:
• с помощью дифференциальных уравнений в частных производных;
• с помощью эквивалентирования системы с распределенными параметрами
системой с сосредоточенными параметрами счетного порядка. Изучить
теоретические положения и алгоритм эквивалентирования ([99], том 1).
Изучите теоретические положения ДУ вида ([87], том 1):
а)
д2х(и) , d2x(z,t) . d2x(z,t) , дхЩ) . dx(z,t)
Яц^Гг— + Д22 ^ о +а12—ТЧ— + al——— + a2-
Эг Эг otdz
x(z,t)\z=0 = yi(t), x(z,t)\z=e = y2\
bt
Эг
б) ах—к^- + а1—ш + ох(г,0 = 0, x(zj)\z=o = y(t)\
в) длинная однородная электрическая линия с распределенными параметрами
при соответствующих граничных условиях
^ + cM^)+Gm(z,0=0;
dz bt
где L, С, R, G - индуктивность, емкость, сопротивление, проводимость утечки на
единицу длины линии; i(z, t) и w(z, 0 - ток и напряжение в линии на удалении Z от
начала линии в момент времени t с помощью аппарата ПФ и частотных
характеристик.
2.11-3. Изучите основные численные методы решения ДУ в частных производных
и применение их для исследования простейших систем с распределенными
параметрами. Обратите внимание на следующие обстоятельства.
При применении преобразования Лапласа для исследования систем, описываемых
обыкновенными дифференциальными уравнениями, хотя и имеется точное
соответствие X(s)< >x(t), но необходимость знания корней характеристического уровня,
необозримость результатов при высоком порядке исходного уравнения приводят к
известным затруднениям в решении соответствующих задач.
Очень удобный операционный метод в применении к уравнениям в частных
производных приводит к необходимости решения обыкновенного дифференциального
уоавнения относительно изображения. Отсюда изображение функции X(z, s) будет
Тема 2. Исследование линейных непрерывных стационарных систем 607
уже не дробно-рациональным, а трансцендентным. Наличие трансцендентных
функций приводит к тому, что оригинал в этом случае находится в виде бесконечного
ряда, т.к. число корней характеристического уровня является бесконечным. Формула
обращения Римана - Меллина в этом случае справедлива, однако ее использование
вызывает серьезные трудности. В большинстве случаев пользуются теоремой
разложения.
Наличие трансцендентных функций в формуле для функции X(z, s) приводит к
тому, что при исследовании систем с распределенными параметрами проблема
построения оригинала по изображению существенно усложняется.
В связи с этим разработаны численные методы обращения интеграла Лапласа,
позволяющие приближенно восстановить оригинал по заданному изображению в виде
разложению по ортогональным базисам (см. задание 2.8).
Численные методы целесообразно использовать также для обращения
изображений выходных сигналов систем с запаздыванием.
ЗАДАНИЕ 2.12
Изучите методы обращения преобразования Лапласа, включая и частотный,
когда изображение отлично от дробно-рациональной функции (этот случай имеет
место в системах с распределенными параметрами); трудности применения методов;
изучите аппарат численного обращения преобразования Лапласа, его достоинства и
недостатки и примените для решения задач исследования конкретных систем
(см. задание 2.8).
608 Задания для самостоятельной работы и методические пояснения. Часть V
ТЕМА 3. ПОСТРОЕНИЕ ВЫХОДНЫХ СИГНАЛОВ
ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ
НЕСТАЦИОНАРНЫХ СИСТЕМ
С СОСРЕДОТОЧЕННЫМИ ПАРАМЕТРАМИ
МЕТОДОМ МАТРИЧНЫХ ОПЕРАТОРОВ
ЗАДАНИЕ 3.1
Постройте алгоритмическое и программное обеспечение для расчета выходных
сигналов линейных скалярных нестационарных систем методом матричных
операторов с использованием различных ОНБ и аппарата быстрых алгоритмов (быстрое
преобразование Фурье и др.) (см. главу 8, том 1).
ЗАДАНИЕ 3.2
Используя разработанное алгоритмическое и программное обеспечение для
метода матричных операторов (см. предыдущие два задания), постройте графики
выходных сигналов линейных нестационарных систем jc(f), если заданы воздействия y(t) и
дифференциальные уравнения САУ.
Установите факт явной связи между спектральными характеристиками входа и
выхода САУ и ее спектральной характеристикой.
Конкретные системы имеют вид (входные данные задаются преподавателем):
3.2-1. Схема цепи представлена на рис. Т3.1.
R{t) /9 R(t) /f
о 1 S I -i о—TZIl
КО .*t- C(t)
Рис. Т3.1. К заданию 3.2-1 Рис. Т3.2. К заданию 3.2-2
Уравнение цепи
ДО^+ГД(0+^1 <(>) = Я>); у(0 - эдс; /(О) = /0
at \_ at J
(y(t)9R(t)9L(t),i(0)H [0;Г] - задаются преподавателем). Постройте/^).
3.2-2. Задана электрическая цепь (рис. Т3.2), поведение которой описывается
уравнением
t
q(t) - заряд; q(t) = j i(x)dx; q(0) = q0.
Тема 3. Построение выходных сигналов нестационарных систем
609
Постройте решение задач, т.е. найдите q(t).
3.2-3. Задана электрическая цепь (рис. ТЗ.З), поведение которой описывается
уравнением
<7(0) = <7o;<7(O) = <7i.
Постройте q(t).
/- C(t)
W)
Рис. ТЗ.З. К заданию 3.2-3
3.2-4. Задана электрическая цепь (рис. Т3.4) (схема с емкостным микрофоном, в
котором мембрана, колеблющаяся под действием переменного давления, является
одной из пластин конденсатора C{t)). Уравнение цепи (dq(t)Idt) + o0(t)q(t) = y(t),
где ao(t) = (l + wsinco/o); y(t) = EIR\ C(/) = Co/(l + msincoof), m<\. Постройте
RC0
q(t) и /(/).
C(t)
^
Рис. Т3.4. К заданию 3.2-4
+ -
Рис. Т3.5. К заданию 3.2-5
3.2-5. Задана электрическая цепь (рис. Т3.5).
Уравнение цепи di(t)/dt + ao(t)i(t) = y(t\
где /?(/) = До(1 + w sinco0/),/w<l; «O(0 = (^o/^)(l + wsinco0/); y(t) = E/L.
Постройте /(0-
3.2-6. Дифференциальное уравнение электрической цепи имеет вид
^w+_L,-(ow(/)=0;^0>
Произведите спектральный анализ u{f) в выбранном ОНБ при м(0)= и0.
3.2-7. Рассматривается электрическая цепь, в которой резистор управляется током
по закону uR =a2i2. Постройте алгоритм и программу для спектрального анализа в
базисе полиномов Чебышева 1-го рода напряжения uR на резисторе в свободном
режиме, если ип(0) = Е , а уравнение в безразмернрй форме имеет вид
610 Задания для самостоятельной работы и методические пояснения. Часть V
(dx/dt)2-x = 0;x(0) = \,
где uR/E = x9 Еа2с2 = Т2; x = t/T.
3.2-8. Сопротивление резистора в цепи, изображенной на рис. Т3.5, модулируется
по закону /?(/) = Я(1-|Л-cosсооО , при этом Е = 1,5 В; R = 100 Ом; ц = 0,5; L = 5 мГ;
соо = 5000 рад/с.
Составьте алгоритм и программу для спектрального анализа тока в
тригонометрическом базисе. Дифференциальное уравнение цепи:
at
di R, v. E
-+I(l-Hcos<v)< = p
безразмерная форма (dx/dt) + a(\ + tisinT)x = ai где x = iR/E9 т = со0/-(я/2),
я = /?/со0£.
3.2-9. Разработайте алгоритм и программу для спектрального анализа выходного
сигнала колебательного контура, у которого индуктивность L[t) и емкость
С (г) изменяются по законам I(/) = Z0(1 + jli1/(/)); С(/) = С0(1 + ц2с(0) \ контур
находится под действием ЭДС £(/). В качестве базиса используйте
тригонометрическую систему Лежандра и Чебышева 1-го рода, функции Уолша.
Дифференциальное уравнение контура
,2 R + — L(t) , , ,
^+_dLi:^+_L_9(0=-L£(0.
dt2 ДО dt Д/)С(0 ДО
3.2-10. Выполните задание, содержание которого изложено в предыдущем
задании, для напряжения на конденсаторе последовательной LCR-тпи, к которой
подключена ЭДС £(/). Параметры цепи изменяются по закону R(t) = at; ДО = 1^еш ;
Уравнение цепи
ZflCo^ + (a/Coe-a'-aZ<)Co)^+(l-aCoafe-a')Mc=£(O.
ЗАДАНИЕ 3.3
Постройте выходные сигналы систем, математические модели которых заданы
дифференциальными уравнениями вида
3.3-1. в2х"(0 + в|(0*'(0 + яь*(0 = У(0,
где
a2 = lc2;alW = (0,9 + 0,U)c;a0 = 0)16;
у(0 = Уо-1{*-х)>Уо = '[>6>х = 1с-
3.3-2. агх "(0 + а2*"(/) + a, (t)x '(Г) + а„*(0 = VW»
где
а3=0,1с3; я2=4,2с2; a,(0 = (72-0,U)c;
а0 = 400; бь = 400; y(t) = yo+ yxt,
Тема 3. Построение выходных сигналов нестационарных систем
611
3.3-3. аъ(О* 1И(0 + *2(О*"(О + ах(t)x'(О + ao(t)x(t) = bQу (О,
где
а3(0 = 0,0268[2-^5/]с3;д2(0 = 0,337[з-2^и5/]с2;
д4(0 = 2,65с ; aQ(t) = 17,8; b0 = 17,8; у (О = 1(0, re [0,2]c.
3.3-4. fl3(0x'40W0*40+ai(0*W+^
где
Л3(О= 0,0268 с3; я2(0 = (0,337+0,520 с2; ^(0 = 2,65 с;
£10(0 = 17,8; ^(0 = 0,155^"10/с2; ^(0 =0,966е~5' с; ^(0 = 17,8.
3.3-5. 4х "(О + (1 + t)x V) + x(t) = у(0.
где y(/) = r; re [0; 12 с].
3.3-6. (О, It +1,25)к + (0,4f + 2,3)х = (6,25 + It + 0,16г2 )^"3г, х(0) = 0.
d\
dx
3.3-7. д2(0—+ ^(0^ + ^(0* = )>(0,
где
я2 (/) = 0,0144г2 + 0,072г + 0,09; а{ (г) = 0,0864г2 + 0,4032Г + 0,468;
яо(О =0,16f2+0,7136f+ 0,8128; у(0 = (l + l,2r + 0,48r2+0,064r3)^r.
3.3-8.
^(Ол: + ^о(Ох=у(О;^(О=О,1г + 1,5;до(О=О,к + 1,4;з;(О = 2 + г;Гб[О;1Ос].
3.3-9. Х^(О^(У) = у(О,где вДО^Х^О'550'1 5)-
v=o ;=o
Тогда
яо(О
ax(f)
a2(t)
a3(t)
aA(t)
«5(0.
0,5596 1,8918 2,5825 1,7855 0,6277 0,0909
0,7113 2,3843 3,2220 2,1975 0,7588 0,1065
0,3717 1,2333 1,6449 1,1038 0,3728 0,0507
0,1002 0,3278 0,4300 0,2827 0,0930 0,0122
0,0140 0,0449 0,0576 0,0369 0,0118 0,0015
0,0008 0,0025 0,0031 0,0019 0,0006 0,00007
Проведите детерминированный анализ этой системы, предполагая, что
детерминированное воздействие имеет вид
y(t) = (85,7661+ 338,5984г +497,0437Г2 +406,9496f3 +
+186,9354г4 +46,7809г5 +4,8258г6)е~4'.
3.3-10. Система описывается дифференциальным уравнением первого порядка с
экспоненциальными коэффициентами вида
al(t)x + a0(t)x=y(t\
где
^(0=0,375 + 0,25*"'; ao(t) = 1,5 + 1,25*Г/;
у(0 = 2,25^2г+3^3/+^.
612 Задания для самостоятельной работы и методические пояснения. Часть V
3.3-11. Дифференциальное уравнение, описывающее поведение системы, имеет
вид
где
£*v(0*(v)=;K'),
v=0
«v(0 = Z^"'4v = 0,l,...,5).
7=0
Процессы изменения коэффициентов дифференциального уравнения
определяются следующей матрицей А = (яу/) :
"1,0000 3,5489 5,1523 3,8608 1,5192 0,2620"
1,1716 4,1050 5,8550 4,2732 1,6091 0,2511
0,5579 1,9211 2,6761 1,8881 0,6743 0,0973
А =
1,8881
0,1349 0,4537 0,6125 0,4146 0,1405 0,0190
0,0165 0,0539 0,0699 0,0452 0,0146 0,0018
0,0008 0,0025 0,0031 0,0019 0,0006 0,0000
Детерминированное воздействие, поступающее на вход системы
Тема 4. Метод пространства состояний 613
ТЕМА 4. МЕТОД ПРОСТРАНСТВА СОСТОЯНИЙ
ЗАДАНИЕ 4.1
Изучите методы перехода от скалярных ДУ вида (класс стационарных систем)
v=0
п-\ т
v=0 v=0
к эквивалентным векторно-матричным ДУ в нормальной форме Коши. Постройте
структурные схемы устройств для восстановления всех фазовых координат вектора
состояния Х(г). Изучите метод канонического разложения, метод разложения на
простые сомножители.
Приведите примеры.
ЗАДАНИЕ 4.2
Скалярные системы, рассмотренные в предыдущих темах, опишите по методу
пространства состояний.
ЗАДАНИЕ 4.3
Изучите метод перехода от скалярного ДУ вида
хм+5Х(о*м = f>v(0)'(v)
v=0 v=0
к векторно-матричному ДУ
Х = А(Г)Х(О + В(ОУ(О.
Важным является положение: переход от скалярных ДУ к векторно-матричным
ДУ можно рассматривать в качестве перехода к модели в переменных состояния;
использование такого перехода позволяет состояние исходной системы в каждый
момент времени полностью описать значениями п координат, называемых
координатами переменными состояния, или фазовыми координатами.
ЗАДАНИЕ 4.4
Дайте определение переменных состояния САУ; поясните физическую сущность
понятия состояния системы и математическое содержание в терминах скалярных и
векторно-матричных ДУ. Дайте определение переходной матрицы и постройте
алгоритм ее нахождения для ДУ с постоянными и переменными коэффициентами.
Поясните физический смысл элементов матрицы перехода.
ЗАДАНИЕ 4.5
Изучите математические модели САУ в пространстве состояний. Опишите
системы, рассмотренные в заданиях 1.1 - 1.4, векторно-матричными ДУ, матричными
передаточными функциями и векторно-матричными интегралами Дюамеля. Дайте оп-
614 Задания для самостоятельной работы и методические пояснения. Часть V
ределение динамических характеристик систем в пространстве состояний и
произведите их расчет. Изучите задачу получения ПФ с помощью программ, учитывая при
этом раскрытие скобок, приведение подобных членов и т.д.; познакомьтесь с
проблемой построения характеристического уравнения по исходным матрицам
коэффициентов.
ЗАДАНИЕ 4.6
Постройте алгоритмическое и программное обеспечение для анализа
устойчивости САУ, рассмотренных в заданиях (1.1 - 1.4), по уравнениям переменных
состояния и по характеристическому уравнению.
Познакомьтесь с методами Данилевского, Крылова, интерполяции, Леверье-
Фаддеева и изложите их достоинства и недостатки. Изучите построение ПФ с
помощью топологических методов. Проведите критический анализ методов исследования
устойчивости (Раусса, Гурвица, Льенара-Шипара и др.) с точки зрения простоты,
удобства в реализации и надежности вычислительной схемы.
ЗАДАНИЕ 4.7
Познакомьтесь с основами метода функционально-преобразованных матриц
(основы метода были заложены В.И. Зубовым в 1959 г. ([161], том 1)) и сформулируйте
критерий, устанавливающий необходимые и достаточные условия асимптотической
устойчивости САУ, описываемых уравнением
X = AX + Y(r). (T4.1)
Постройте алгоритм, реализующий рассматриваемый критерий; установите его
достоинства и недостатки.
Проведите исследование асимптотической устойчивости систем, рассмотренных в
предыдущих темах.
ЗАДАНИЕ 4.8
Изучите численные методы построения выходных сигналов САУ, описываемых
уравнением
X = AX + Y(O,
основанные на использовании дискретного аналога интегрального соотношения
Х(Г) = е А'Х° + J eMt~x) Y(x)dx. (T4.2)
о
Проведите исследование качества работы систем, описанных в заданиях (1.1-
1.4) (входные данные задаются преподавателем).
ЗАДАНИЕ 4.9
Изучите стандартные методы численного интегрирования ДУ (методы Эйлера,
Рунге - Кутта, Адамса, Хемминга, Гира и др.) и примените их для расчета выходных
сигналов систем, рассмотренных в заданиях (1.1-1.4) (входные данные задаются
преподавателем).
ЗАДАНИЕ 4.10
Постройте алгоритмическое и программное обеспечение для расчета вектор-
функции состояния Х(г) и вектор-функция выхода Хв(г)для стационарных систем
методом матричных операторов с использованием различных ОНБ и быстрых
преобразований.
Тема 4. Метод пространства состояний 615
Проведите исследование качества работы систем (расчет выходных сигналов),
математические модели которых построены в заданиях (1.1 - 1.4). Проведите
сравнение методов, реализуемых в предыдущих заданиях, с точки зрения их эффективности
для построения выходных сигналов сложных динамических систем.
ЗАДАНИЕ 4.11
Постройте алгоритмическое и программное обеспечение для расчета Х(г) и
Хв(г) нестационарных систем, используя их математическое описание по методу
пространства состояний.
Найдите Х(г) и Хв(г) для систем, математические модели которых описаны
выше.
616 Задания для самостоятельной работы и методические пояснения. Часть V
ТЕМА 5. МЕТОДЫ ИССЛЕДОВАНИЯ НЕЛИНЕЙНЫХ
СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ЗАДАНИЕ 5.1
Постройте алгоритмическое и программное обеспечение для решения
нелинейных ДУ с использованием матричных операторов (включая оператор умножения).
Проведите исследование систем, имеющих следующие математические модели:
5.1-1.
— = -x[l + xl)-2y; -р = *+у.
dt v ' dt
Начальные условия: *(0) = 0,5; y(0) = 0,5.
5.1-2.
/l(^ll-/2WU1)2 + ^l+a-/3U(O) = -/o-Mg-^,
a
где
x(4a -x) x (4a-x)~
ayjx{4a-x)l la J
Параметры системы / = 1 м; а = 0,7 м; г = 0,1 м; т = 5 кг; М = 12кг; g = 9,8 м/с2;
271-10 < со < 271-500.
5.1-3.
ТхТ2х "(Г) + (Т2+Тх)х V) + x(f) = Ku(t)\
u(t) = sign(e(O); E(t) = y(t)-x(t).
1) y(O = KO;
2) ^(r) = Acos(or.
Параметры системы и воздействий:
АГ0 = 10; 7] =0,1 с; Г2=0,05с;
А = 10; со = 271-10 рад/с.
Начальные условия - нулевые.
" 1-4.
х '(г) = *(0+sin( у (г)) + z(0; У "(0 = 40 ~ у (0+40 • у(0 + z(0.
где z(0 = cos(2rclOO - входное воздействие.
5.1-5.
где
л2 л з л
Q=M±-3£ = wl(MS-RC); cog =—; у2 =Зсо^М5р; ф(«) = м3;
L/\^ Li Lj\^
Тема 5. Методы исследования нелинейных САУ
617
М- взаимная индуктивность катушек, М = 10; 5 - крутизна характеристик
транзистора, S = 1,2 - 100; E(t) = 9В; R = 10 Ом; С = 0,001 мкФ; L = 0,001 мГн; р = 5.
5.1-6.
7*'"(0 + *"(0 = *е(0; z(/)=sign(x(/)); e(r) = y(O-z(r).
Параметры системы: К = 5; Т = 0,1 с.
Начальные условия: л:(0) = 0,5; jc'(0) = 0,5; jc"(0) = 0.
5.1-7.
Y"(0+*xxY'(0 = -*хэ8(О; 8(0 = а(0+—z(0;
дхэ
Tu'(t) + u(t) = Kb{K2EXt) + K2E№ e(O = y(O-Y(O; а(0 = Ф(и(0).
Нелинейная зависимость представляет собой кусочно-линейную функцию вида
1, и > 1;
о = ф(н) =
и, Н<1;
-1, i/<-1.
Параметры системы и воздействия: ахх = 4 с"1; ахэ = 40 с"2; Г = 0,05 с; К{ = 1;
ЛГ2 = 5 с; £5 = №* 2(0 = 1» 256 • 1(0 - возмущающее воздействие; y(t) = 2 • 1(0 -
входной полезный сигнал.
5.1-8.
гв'(/)+«(о = е(0; «(0 = л:2Ф(«(О);
Гмг"(/) + г'(0 = ^n(r); e(r) = y(t) - z(t).
Нелинейная зависимость представляет собой кусочно-линейную функцию вида
-еу 0(0 <-а;
н(0 = АГ2ф(в(0) =
0, |О(0|<а;
е, *(0>а.
Параметры системы и воздействия: Г = 10 с; Гм = 0,1 с; К2 = 0,01 рад/град;
^=500; в = 25В; а = 2;у(0 = Ю0-1(0.
5.1-9.
TRx"(Г) + х'(0 = KAKpu(t); Тхи'(/) + н(0 = Кэ£2(/);
е2(О = г)(О-г(О; г(0 = АГ3а'(0; а(0 = Ф«0);
D(r) = кхг«) + АГ2е'(О; е(0 = у(0-40-
Параметры системы и воздействия: ^=0,04,^2=0,02; АГ3 =0,001; Кэ =240;
АГД =30; ^ =1; Гд =0,5 с; Г, =0,165 с; y(t) = \(t).
Нелинейная зависимость ф(х) представляет собой кусочно-линейную функцию
вида
а(0 = Ф(*(0) =
*(0, *>0,5;
0, |х(0|<0,5;
-jc(O, jc<-0,5.
5.1-10.
1{щ =(/2 -/3)w2(o3 +m,(0;/2w2 =(/3-/1)0)30)! +w2(0;
/3Шз=(/1-/2)О)1О)2+мз(О.
618 Задания для самостоятельной работы и методические пояснения. Часть V
Параметры объекта: 1Х = /2 =50 Н-м-с2; /3 =100 Н-м-с2; ux{t\u2{t\ мз(0 ~
входные воздействия, ux{t) = 0,5-1(0; u2(t) = sin(2nf2t); u3(t) = cos(2nfy)\ /2=10c"1;
/з=5с"1.
ЗАДАНИЕ 5.2
Пользуясь стандартными численными методами интегрирования ДУ (методы
Эйлера, Рунге - Кутта, Адамса, Хемминга, Гира), постройте выходные сигналы на
заданные воздействия (ММ 5.1-1 - 5.1-10).
ЗАДАНИЕ 5.3
Пользуясь методом Ньютона - Канторовича постройте линеаризованные модели
для нелинейных систем (ММ 5.1-1 - 5.1-10). Постройте структурные схемы
нелинейных и линеаризованных моделей.
ЗАДАНИЕ 5.4
Проведите исследование автоколебательных режимов для ММ 5.1-1, 5.1-5, 5.1-6,
воспользовавшись методом определения периодических режимов работы
нелинейных автоколебательных систем, в котором частное периодическое решение ищется в
виде нелинейной комбинации заданных функций времени.
Для примера будем рассматривать автоколебательную систему с одним
нелинейным элементом, описываемую уравнениями вида [108, том 1]
/1-1 т
*<">(0+£дЛ)=-1>,Ул(0, .„.,.
i=o у=о U^-U
y(t) = F[x(t)l
где F[x(t)] - нелинейная функция.
Данной модели соответствует структурная схема системы, к которой не
приложены внешние воздействия (рис. Т5.1).
®—*
Линейная
часть
x(t)
О >
у(0
Нелинейная
часть
Рис. Т5.1. Структурная схема автоколебательной системы
Будем искать приближенные решения x(i) в виде разложения по ортогональному
базису, в качестве которого выберем тригонометрические функции
где
Ф(2/+1)(О = [фо(О.ф1(О,».,Ф/(О,ф1(О,...,Ф?(О] ,
(р*(0 = со8(&со0, £=0,1,2,...;
ф£ = sin(&G0O> к =1,2,3,....
Тема 5. Методы исследования нелинейных САУ 619
Тогда искомая функция x(t) представляется рядом Фурье
x(t) = х, (0 = *£Фо(О + Х[«*Ч (0 + %Щ (О] = (С" )Т Ф(2/+1)(О, (Т5.2)
к=\
где С* =(а£,а{,...,а?9Ь{,...,$) - вектор-столбец, элементами которого являются
коэффициенты Фурье ахк, Ъ{, определяемые формулами
1 т
at=-jx(t)dt,
о
2 Т
a* =-Jjc(r)cos(*(or)A, (T5.3)
b£ = — lx(t)sin(k(i)t)dt, к = 1,...,/.
271
Такое представление задает x(i) как периодическую с периодом Т = — функцию,
со
определенную на интервале f e [0;Г], который будем называть интервалом
исследования периодического решения.
Функцию y(t) также представим в виде разложения по ортогональному базису
Ф(2/+1)(0:
У(О«У/(О = (СУ)ТФ(2/+1)(О. (Т5.4)
Определению подлежат неизвестные спектральные характеристики Сх и Сх\ а
также неизвестная угловая частота автоколебаний (0.
Связь между неизвестными Сх и Су можно найти, подставляя представления
(Т5.2) и (Т5.4) в уравнение нелинейного элемента
5^,(0 = ^^(0]
или
(С')Т Ф(2;+1)(0 = F[(C*)T Ф(2;+1)(0]. (Т5.5)
Из (Т5.5) следует, что элементами вектора С являются коэффициенты
разложения Г-периодической функции F [х, (I)] по ортогональному базису Ф(2/+1)(0, т.е.
С =(ао',а,у,...,в/УЛУ,....^)Т =С((0),
воУ(ю) = ^/'г[(Сх)ТФ(2/+1)(о]л,
а4'(ш) = |/^[(с*)ТФ(2,+1)(о]сов(*а»)Л, (Т5 g)
Ч {<a) = j\F \(CX )Т Ф(2;+1) (о1мп(*ам)Л,
* = !,...,/.
где
620 Задания для самостоятельной работы и методические пояснения. Часть V
С другой стороны, связь между неизвестными спектральными характеристиками
Сх (со) и Cy(w) задается векторно-матричным уравнением, описывающим в
спектральной области линейную часть системы. Это уравнение имеет вид
СЛ'(м) = -А(со)Су((о) + С0, (Т5.7)
где А - квадратная матрица спектральной характеристики линейной части системы,
имеющая размер (2/+1)х(2/+1), Со - вектор-столбец размером 2/+1, учитывающий
начальные условия.
При заданной нелинейной характеристике F[x(t)] можно вычислить по формулам
(Т5.6) зависимость
Су =CF(C*,co), (T5.8)
подстановка которой в (Т5.7) дает уравнение для определения неизвестной
спектральной характеристики Сх :
Cv(w) = -A((o)CF(Cr,(o) + C0. (T5.9)
Векторно-матричное уравнение (Т5.9) можно представить как систему из 2/+1
нелинейных уравнений. При условии, что выходной сигнал x(j) имеет нулевое среднее
значение, а значит коэффициент разложения а$ , входящий в вектор СЛ , равен нулю,
имеем 2/ неизвестных коэффициентов а%, b£ и неизвестную угловую частоту ш, для
определения которых имеется 2/+1 уравнений (Т5.9). Вектор-столбец начальных
условий Со считается заданным.
Решение системы (Т5.9) может быть получено одним из известных методов
решения систем нелинейных уравнений, хотя доказать существование этого решения
в общем случае затруднено. Вектор-столбец CF(C\co) в (Т5.9) может
вычисляться, например, по следующей схеме. По спектральной характеристике СЛ при
заданной со приближенно восстанавливается функция Л'ДО . Для этого можно
использовать известный алгоритм обратного быстрого преобразования Фурье. По
полученным значениям функции *,(/) вычисляются значения функции F[jc/(OJ, по
которым с помощью алгоритма прямого быстрого преобразования Фурье при той же со
вычисляется спектральная характеристика Ch. Алгоритмическая форма
зависимости (Т5.8) предполагает использование в основном численных методов решения
уравнения (Т5.9).
Матрица спектральной характеристики линейной части автоколебательной
системы А, входящая в уравнение (Т5.9), может быть легко вычислена с использованием
аппарата структурных преобразований и операционных матриц интегрирования и
умножения для тригонометрического базиса (см. главу 8, том 1).
ЗАДАНИЕ 5.5
Разработайте алгоритмическое и программное обеспечение для построения
выходных сигналов простейших нелинейных систем, используя при этом линеаризацию
по методу Ньютона- Канторовича и спектральный метод решения линеаризованных
уравнений с переменными коэффициентами.
ЗАДАНИЕ 5.6
Постройте алгоритм и программу для спектрального анализа в базисе
тригонометрических функций и полиномов Чебышева 1-го рода напряжения в свободном
режиме на нелинейном резисторе в цепи, изображенной на рис. Т5.2, если:
Тема 5. Методы исследования нелинейных САУ 621
1) начальное условие м(0) = £";
2) /=-ки-о3);
Л
du 1
3) уравнение цепи— + u(l-q2u2) = 0\
dx
(безразмерная форма — + х(1 -q2x2) = 0; jc(O) = 1; х = и/E\i = tlT\
/7т V '
dx
q2E2 = я2; RC = T).
Постройте матричный оператор умножения и воспользуйтесь им для получения
нелинейной системы алгебраических уравнений относительно вектор-столбца С".
Рис. Т5.2. Электрическая цепь с нелинейным резистором
ЗАДАНИЕ 5.7
Дифференциальное уравнение консервативного колебательного контура имеет
вид
d2x/dr+(u2+ух3=0
(безразмерная форма —£ + х + а2*3 = 0; т = со0г, а2 = Д5-).
Л2 (05
Проведите исследование выходного сигнала в переходном и установившемся
режимах, если правая часть уравнения равна y(t)=p-s\n cof (базис - тригонометрические
функции; полиномы Чебышева 1-го рода).
Постройте алгоритмическое и программное обеспечение с использованием
матричного оператора умножения.
622 Задания для самостоятельной работы и методические пояснения. Часть V
ТЕМА 6. СТАТИСТИЧЕСКИЙ АНАЛИЗ ЛИНЕЙНЫХ
(СТАЦИОНАРНЫХ И НЕСТАЦИОНАРНЫХ)
СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ЗАДАНИЕ 6.1
Изучите следующие теоретические положения:
• сформулируйте постановку задачи исследования точности САУ, находящейся
под воздействием случайных процессов;
• дайте определение стационарного случайного процесса;
• дайте определение корреляционной функции (для нестационарного и
стационарного СП) и приведите ее основные свойства;
• постройте алгоритм расчета автокорреляционной функции стационарного СП
по экспериментальным данным;
• дайте определение спектральной плотности стационарного СП и приведите ее
основные свойства;
• приведите зависимости, связывающие автокорреляционные функции и
спектральные плотности на входе и выходе линейной системы для различных
режимов работы.
ЗАДАНИЕ 6.2
Найдите ответы на следующие вопросы:
6.2-1. С каким интервалом времени t надо сгенерировать последовательность
независимых случайных чисел, чтобы получить процесс с граничной частотой
спектральной плотности (Со = 5 рад/с%?
Ответ: Аг = 0,628 с.
6.2-2. Для условия задачи 6.2-1 найдите уровень спектральной плотности So,
4=1.
Ответ: с2 = At.
6.2-3. Методом наименьших квадратов найдите коэффициенты а и Ъ, если ошибка
t2=£{yi-(axi+b)f.
6.2-4. Определите спектральную плотность, если корреляционная функция равна
6.2-5. Найдите корреляционную функцию периодического процесса
*(o=^+Efl«cos(/iCD'+en)-
2 1 «о
Ответ: /?xx(T) = -f + ^S^cosn(0T •
4 2 /i=i
Тема 6. Статистический анализ линейных САУ 623
6.2-6. Найдите формирующий фильтр для случайного процесса с корреляционной
функцией Rxx (т) = с2х • е~а™.
6.2-7. Определите передаточную функцию оптимального линейного фильтра для
разделения шума n(t) и сигнала m{t\ если их спектральные плотности равны
ЗАДАНИЕ
6.3
(со) =
1
со2 + 1 '
(со) =
2со2
ш4+1
На вход элементарных звеньев (усилительное, интегрирующее,
дифференцирующее, запаздывающее, апериодическое, колебательное без затухания) действует
случайный процесс типа белого шума с нулевым математическим ожиданием и
интенсивностью So-
Найдите зависимости, определяющие корреляционную функцию и дисперсию, а в
установившемся режиме - спектральную плотность на выходе звеньев. Получите
решение задач с использованием ИПФ звеньев.
ЗАДАНИЕ 6.4
На вход колебательного звена, описанного уравнением X + 2£,щХ + (jOqX = (OqK,
где coo, £ - параметры звена, поступает случайный сигнал вида
Y(t) = m(t) + n(t) + YQb(t-t0) + Y08<<t-t0\ (T6.1)
причем m{i) - полезный сигнал с математическим ожиданием mm{t) и
корреляционной функцией Rmm{x) = Dmme~°^x4 cosgowt sincom|x| , n{t) - высокочастотная по-
L ww J
меха с нулевым математическим ожиданием и корреляционной функцией
Я„„(т) = 505(т).
Начальная координата Ко и скорость YQ — случайные величины, причем
mYo, Шу , Dyoyo, DYY - МО и дисперсии указанных величин.
Слагаемые в формуле, определяющей Y(t)9 - некоррелированные между собой
функции.
Вычислите математические ожидания и корреляционные моменты X(t) и X(t) и
определите моменты ошибки работы звена (задача имеет самостоятельный интерес и
с ее подробным решением можно ознакомиться в ([116], том 1)).
ЗАДАНИЕ 6.5
Разработайте алгоритмическое и программное обеспечение для статистического
анализа скалярных стационарных и нестационарных систем n-го порядка методом
матричных операторов при предположении, что вход - в общем случае
нестационарный сигнал. ОНБ - функции Уолша, тригонометрические функции, полиномы Ле-
жандра, Чебышева 1-го рода, Чебышева 2-го рода, функции Лягерра.
ЗАДАНИЕ 6.6
Рассмотрим следящую систему, функциональная схема которой представлена на
рис. Т6.1.
624
Задания для самостоятельной работы и методические пояснения. Часть V
г
Электронный
усилитель
1
Магнитный
, усилитель
2
»
Дифференцирующая
цепочка • *
5
Электрод ви гател ь
с редуктором
3
Тахогенератор
к 4
Потенциометр
6
Рис. Т6.1. Функциональная схема следя шей системы
Структурная схема может быть представлена так (рис. Т6.2).
2 3
«Ь^
i
T2s + \
к
s(Ts + l)
X(t)
Ts
Ts + l
T.s
a:.
Рис. Т6.2. Структурная схема следящей системы
Приведем этапы задания для самостоятельной работы:
6.6-1. Найдите ПФ замкнутой системы и рассчитайте ИПФ, переходную
характеристику, частотные характеристики (АЧХ, ФЧХ, АФХ, ДЧХ, МЧХ и др.).
6.6-2. Рассчитайте спектральную плотность и дисперсию выходного сигнала
системы в установившемся режиме, если входной сигнал имеет автокорреляционную
функцию
%(T) = DiTr°H, (T6.2)
воспользовавшись формулой, связывающей спектральные плотности входа и выхода
(решение задачи в частотной области).
6.6-3. Проведите исследование точности работы системы при следующих условиях:
1. На вход поступает сигнал Y(t) = g(t)+n(t), где g(t) = go+glt+g2f - регулярный
полезный сигнал, n(t) - помеха, причем /?т,(т) = 2tlS05(t);
2. Точность работы оценивается критерием
а2 = а^+Хе2(г),
оо
где £(г) = 2)сгту-г)(г) - установившаяся ошибка отработки детерминированного сиг-
нала g(/); в последней формуле сг - коэффициенты ошибок, /wy(r)(f) - г-я производная
математического ожидания входного сигнала, а2 - дисперсия ошибки, порожденная
Тема 6. Статистический анализ линейных САУ
625
наличием помехи n{t) (поскольку полезный сигнал является детерминированной
функцией, то дисперсия ошибки равна дисперсии выходного сигнала Х(г)), X -
весовой коэффициент.
6.6-4. Проведите исследование точности работы системы в установившемся
режиме, если Y(t) - m(t)+n(t)9 где m{t) - полезный входной сигнал, n(t) - помеха, m(t) и
n(t) - не коррелированны, их корреляционные функции определяются
зависимостями:
R**W = D^e-^cospt; Rnn(x) = A,,,^^.
Варианты заданий ([116], том 1)
Таблица Т6.1
№п/п
1
2
//-
Кх
2,0
2,2
Кг
0,12 АВ1
0,12 АВ1
Кг
350 ВА'С'
340 ВА'С1
-II-
Кь
1,0
1,0
Тг
0,01с
0,01с
0,2 с
0,2 с
0,04с
0,04с
-II-
Т5
0,55с
0,55с
-II-
Постройте графики зависимости критерия точности от коэффициента усиления в
прямой цепи при следующих значениях параметров: Кь - 1,0 с; Т3 = 0,2 с; Г4 = 0,04 с;
Т5 = 0,55 с, So = 5-Ю"6 рад2-с и различных скоростях полезного сигнала gi = var.
Покажите, что существует оптимальное значение коэффициента усиления К*,
обеспечивающее минимум критерия, характеризующего точность работы системы.
Постройте график зависимости эффективной полосы пропускания системы от
коэффициента усиления прямой цепи ([116], том 1).
ЗАДАНИЕ 6.7
Проведите статистическое исследование системы стабилизации угла крена,
структурная схема которой имеет вид (рис. Т6.3) ([116], том 1).
п
(Kt+K2
Ts + l
s)
б
У *
-о»
S
щ
Рис. Т6.3. Структурная схема системы поперечной стабилизации
Проведите статистический анализ при следующих данных: K=KVK& = 5\
т = КхКь = 0,4 с, ахх = 4 с" *; аю = 40 с"2; Т = 0,05 с; (коэффициенты ахх и ахз зависят от
момента инерции летательного аппарата относительно продольной оси, скорости,
высоты полета и аэродинамических коэффициентов).
На ЛА действует возмущение n(t)9 имеющее нулевое математическое ожидание и
постоянную спектральную плотность 50. В установившемся режиме математическое
ожидание угла крена равно нулю, а дисперсия вычисляется по формуле
Dri=Soj\WU®fd(i>, (T6.3)
41 Зак. 416
626 Задания для самостоятельной работы и методические пояснения. Часть V
где W(s) = — - L±l£ .
Ts3 + (1 + axj)s2 + (axx + а„КъК2 )s + а„КъКх
Покажите, что в области устойчивости системы выполнено неравенство ([116], том 1)
0<^<*хх(1+*ххП+т(1+«ххг)>
ахзТ Т
где К = КХКЬ - коэффициент усиления; т = К2КЪ - коэффициент демпфирования.
Из условия выполнения неравенства (Т6.4) выбираются численные значения К и т.
Проведите статистический анализ системы (рис. Т6.3) при следующих данных:
я™ = 4 с "1; ахэ = 40 с"2; Г= 0,05 с; К= К{КЬ = 3; т = К2КЪ = 0,17 с.
ЗАДАНИЕ 6.8
Рассмотрим следующую систему (подробное описание системы приведено в
задании 1.4). Принципиальная схема имеет вид (рис. Т6.4).
Главная обратная связь
Рис. Т6.4. Принципиальная схема следящей системы
Ее функциональная схема представлена на рис. Т6.5.
| J |i4 Г
«А
Рис. Т6.5. Функциональная схема следящей системы:
/ - чувствительный элемент', 2 - фазочувствительнып выпрямитель и последовательное
корректирующее устройство; 3 - выходной каскад электронного усилителя', 4 - электромагнитный
усилитель и исполнительный двигатель постоянного тока независимого возбуждения; 5 -редуктор;
б - элемент, реализующий ОС по току
Передаточные функции элементов, входящих в функциональную схему
(рис. Т6.5), определяются зависимостями ([94], том 1):
ЩЮ
_KxK2(TlS + l)
(7i* + l)
- ПФ чувствительного элемента и последовательного
корректирующего устройства;
Тема 6. Статистический анализ линейных САУ
627
W2{s)=-
КЪКу
- ПФ выходного каскада электронного усили-
^T^+r^ + iKTyj + D/p
теля, ЭМУ и исполнительного двигателя;
W3(s) - ipK5s2 - ПФ элемента, отражающего наличие в системе ОС по току.
С учетом сказанного на основе функциональной схемы легко представить
структурную схему следящей системы (рис. Т6.6).
-^®
Wx{s) = -
(Txs + \)
^®—
u2(t) Y-
W2(s) =
(C,Ky
s(.TJus2 + T^s +1)(7; s +1)/
H»«
W,(s) = iKiS2
Рис. Т6.6. Структурная схема следящей системы
Передаточная функция следящей системы, структурная схема которой
представлена на рис. Т6.6, определяется зависимостью
W(s) =
a5s +aAs -\-a3s +a2s +a{s + a0
TRQa5 = TMTaTyTl;
a4 = TMTaTy+ TMTaT{+ TJ*yT{\
-3 = ТМТЛ+ TMTy+ TJX+ ТуТх+КуКъК5Тх\
di = TM+ Ty+ Tx+ КуКъК5\
ax = 1+ЛГТь
ao = К;
Ъ\ - - K\fTuTyT\\
bo = -Kx{TJy+TyT{+TJ{)\
K _ ^iK2K^Ky
1P
Выполните все пункты задания применительно к рассматриваемой системе при
следующих данных: К = 200 с"1; KyA^s = 40; Ту = 0,02 с; Га = 0,83 с; Гм = 1,2 с;
r,=0,lc;Xi = lc.
Отсюда следует, что ([94], том 1):
а5 = 0,002; а4 = 0,1224; аъ = 5,146; а2 = 41,32; а{ = 201; а0 = 200; Ьх = 200; Ьо = 200.
ЗАДАНИЕ 6.9
Выполните все пункты задания 6.8 применительно к следящей системе,
математическая модель которой построена в задании 1.4.
ЗАДАНИЕ 6.10
Пользуясь алгоритмическим и программным обеспечением, построенным в
задании 1.4, рассчитайте автокорреляционные функции и дисперсии выходного сигнала
41*
628 Задания для самостоятельной работы и методические пояснения. Часть V
X(i) систем, структурные схемы которых представлены на рис. Т6.2, Т6.3 и Т6.6
(рассмотреть установившиеся и неустановившиеся режимы). На вход поступают
центрированные случайные функции с автокорреляционными функциями вида
RYY{tbt2) = DYYe-^h-h\\
Ryyitbh) = Dyye^^ cosp(f2 -Г,);
Ryyi^h) = Окк^'Г1'(со8р(г2 -r,) + |sinP|r2 -r^);
RYy(tbt2) = DyYe-^2^2;
Ryy(tx,t2) = Dyye-^X cos|3(r2 -tx);
/?ry(r1,r2) = Dry^alr2-ril(l + a|r2-r1|);
(численные значения a, P, промежуток [О, 7] задаются преподавателем).
ЗАДАНИЕ 6.11
Выполните все пункты предыдущих заданий, пользуясь методом матричных
операторов.
ЗАДАНИЕ 6.12
Пользуясь алгоритмическим и программным обеспечением, построенным в
предыдущем задании, рассчитайте автокорреляционные функции выходных сигналов
нестационарных систем, математические модели которых представлены в заданиях,
рассмотренных выше.
Тема 7. Линейная фильтрация полезного сигнала
629
ТЕМА 7. ЛИНЕЙНАЯ ФИЛЬТРАЦИЯ
ПОЛЕЗНОГО СИГНАЛА ИЗ СМЕСИ
«ПОЛЕЗНЫЙ СИГНАЛ+ШУМ»
Перед выполнением заданий надо изучить положения: задачи фильтрации;
критерии, используемые при фильтрации; требования, предъявляемые к аппаратуре
оперативного спектрального анализа сигналов; гауссовость случайных процессов и
фильтрация; фильтры Винера - Колмогорова, методы решения уравнения Винера - Хопфа
для случая стационарных и нестационарных сигналов; фильтры Калмана - Бьюси
(сраните с фильтрами Винера - Колмогорова) и их структурные схемы; уравнение
Риккати; согласованные фильтры.
ЗАДАНИЕ 7.1
Широкой областью применения систем автоматического управления является
область, связанная с проектированием летательных аппаратов различного назначения:
самолеты, ракеты, космические аппараты и др. Целью настоящего задания является
изучение с помощью источников, приведенных в ([168], том 1), аспектов применения
САУ при проектировании летательных аппаратов, математических моделей систем,
знакомство с физикой протекающих в них процессов, физической сущностью
параметров, определяющих ПФ САУ и др. Важной особенностью этих систем является то
обстоятельство, что они в большинстве своем подвергаются действию помех.
Например, ЛА имеют САУ, предназначенную для стабилизации по углу крена.
Помеха, действующая на объект управления "(ЛА), таиеет нулевое математическое
ожидание и постоянную спектральную плотность. Важной является задача
уменьшения действия помех на качество процессов управления. Одним из подходов решения
этой задачи является выбор таких параметров специально вводимого
корректирующего устройства, которые уменьшали бы степень влияния помех.
Для этого случая структурная схема САУ принимает вид (рис. Т7.1).
Г(0 = т(0 + "(0+ *(О
W^S, р\, Р2,.., Рк)
иш-по
неизменяемой части
САУ
X(f)
Рис. Т7.1. Структурная схема САУ с корректирующим устройством, предназначенным
для уменьшения степени влияния помехи n(t) на качество процессов управления
СКО системы, на вход которой поступает полезный сигнал m(t) и помеха n(t\
определяется формулой
о2
(Л)= J
1-
Wv(s,pK)W0(s)
l + W^pJW^s)
Smm(co)dco+J
S=J(O
Wv(s,pK)W0(s)
l*Wv(s,pK)W0(s)
SnnW«>.
S=J(O
Из последней зависимости следует, что
°2(PK) = °2(Pi>/
зависит от параметров корректирующего устройства Pi,p2,—,Pr-
°2(pK) = °2(Pi>P2>->Pr)
630 Задания для самостоятельной работы и методические пояснения. Часть V
Найдите общие зависимости (численные значения параметров в такой постановке
можно не задавать), определяющие p*,pl,...,p*r - оптимальные значения параметров
корректирующих устройств, обеспечивающих минимум СКО систем с заданной
структурой, структурные схемы которых приведены ниже.
На вход систем поступает сигнал Y(t) = m(t) + n(t)> где Rmm(i) = Dmme~a^,
Лда|(т) = 2яЯ08(т).
Найдите параметры корректирующего устройства, обеспечивающие минимальное
значение критерия
G2=Gn2+te2(0
при условиях, которые приведены в пункте 6.6-3 задания 6.6.
Структурная схема корректирующего устройства и параметры, подлежащие
определению, задаются преподавателем.
Y«)j.jt° I 1 m I 1 I Г
—►&-*• WK(s) \—*\ Kv
1
i*+i*
X(t)
Рис. Т7.2. Структурная схема следящей системы стабилизации сектора обзора
Y(t) е(0 U(t)
WK(s) i *
©:
s(s + 2t,(an)
X(t)
Рис Т7.3. Структурная схема системы автосопровождения цели
I/, е(0 . .^О
-Ий-^
(Wk(£)_|-
к„
KJTvs + l)
T02s2 + 2t,T0s + \
-н~
Рис. Т7.4. Структурная схема системы автоматического управления полетом
баллистической ракеты на активном участке
я3(') е(0 г Щ)
А в аш аш тш Л ^""^^^
H{t)
Рис. Т7.5. Структурная схема системы стабилизации высоты полета ракеты
_ _ _ _ i
к.
s(Tys + l)
Рис. Т7.6. Структурная схема системы управления крсиом ракеты
Тема 7. Линейная фильтрация полезного сигнала
631
Уз(0 е(/) , {u(t)
-*§►*
,Wk(£)_|
(7> + 1Жс
^V+2^ + 1)
v(0
Рис. Т7.7. Структурная схема системы управления углом рыскания
крсстокрылого реактивного снаряда
Z3« е(0 г 5Н
•9 ^
Ир
z,
Ь Ik
Рис. Т7.8. Структурная схема системы управления центром тяжести крсстокрылого снаряда (КPC)
в боковом движении
8(0
к.
вр
V+1
■*\1Ш!Г
КшКинКу
Рис. Т7.9. РЛС автоматического сопровождения цели по дальности
и„
!LjMShVk(5)
рв
t
KCT(Tvs + l)
s2 + 2 d(DQs + (o2Q
■H"
Рис. Т7.10. Структурная схема контура стабилизации угла тангажа
по е% "W + kn
,, •— _ _ j I +
AT.
Tys + l
m до
>хЫ-
Рис. T7.ll. Структурная схема контура стабилизации крена
632
Задания для самостоятельной работы и методические пояснения. Часть V
-ч
[
-ns(s + n22)
s2 + 2do(uos + ©о
и
(0
Рис. Т7.12. Структурная схема системы управления угловой скоростью тангажа
ъ
—^®-Н wK(S) ]■
к..
-nH(s + nu)
s2 + 2do(dos + C0q
♦(«j.
Рис. Т7.13. Структурная схема системы управления угловой скоростью ракеты
Уз
Г
пп
Тз
s2-
s + nu
S
<
f 2d0co0s
У
(0
Рис. Т7.14. Структурная схема канала крена с учетом перекрестных связей
-H^TOrHgHsMS**"
Рис. Т7.15. Структурная схема системы управления высотой полета ЛА
t
L
К
«7
S2+n22S
j + KjS
)
пы
r0s
Рс
V
Рис. Т7.16. Структурная схема системы управления курсовым углом ведомого самолета
Тема 7. Линейная фильтрация полезного сигнала
633
Sfcvftw1 +'
1
■\KjTs+ !){•*
-1
Рис. Т7.17. Структурная схема системы управления временной дистанцией
ЗАДАНИЕ 7.2
Разработайте алгоритмическое и программное обеспечение для решения
скалярного уравнения Винера-Хопфа спектральным методом для двух случаев: n(t) -
белый шум; n(t) - отличен от белого шума (ОНБ задается преподавателем).
ЗАДАНИЕ 7.3
Разработайте алгоритмическое и программное обеспечение для решения вектор-
но-матричного интегрального уравнения Винера-Хопфа спектральным методом
(ОНБ задается преподавателем).
ЗАДАНИЕ 7.4
Изложите основы теории, разработайте алгоритмы и программы для расчета
оптимальной спектральной характеристики (матричного оператора) системы, реализуя
следующие этапы:
• записывается выражение для дисперсии сигнала ошибки через спектральную
характеристику системы (см. §8.12, том 1);
• берутся частные производные по элементам спектральной характеристики
системы;
• решается система алгебраических уравнений или находится минимум
численным методом.
Представьте структурную схему оптимальной системы, используя ОНБ,
указанные в приложении 3, том 1.
ЗАДАНИЕ 7.5
Запишите уравнения Винера- Хопфа, определяющие импульсные передаточные
функции оптимальных фильтров и постройте алгоритм их решения на основе
спектральных методов, сделайте вывод о вычислительной устойчивости алгоритма.
Познакомьтесь с методами регуляризации А.Н. Тихонова решения некорректных задач,
а также воспользуйтесь аппаратом формирующих фильтров.
Разработайте алгоритм решения уравнения Винера - Хопфа, обладающий
вычислительной устойчивостью (с использованием регуляризации по А.Н. Тихонову).
40 3ак.416
634 Задания для самостоятельной работы и методические пояснения. Часть V
ЗАДАНИЕ 7.6
На вход фильтра поступает аддитивная смесь полезного входного сигнала m(t) и
помехи n(t), причем n(t) - белый шум с функцией корреляции Rnn(h,t2) =
= 2nS05(r2-r1).
Корреляционная функция полезного входного сигнала Rmm(t{,t2) имеет вид,
приведенный в задании 7.1.
Пользуясь спектральным методом решения уравнения Винера -Хопфа, найдите
оптимальные по минимуму СКО импульсные переходные функции фильтров.
Представьте структурные схемы оптимальных фильтров.
ЗАДАНИЕ 7.7
В постановке задачи, изложенной в предыдущем задании, полезный сигнал m(t)
имеет автокорреляционную функцию Rmm{t\,t2) = Dmme~c^2~t^, а автокорреляционная
функция помехи имеет вид Rnn (t{, t2) = 2nS08(t2 - tx).
Разработайте алгоритм и программу для синтеза оптимальных фильтров по
минимуму СКО с помощью собственных функций. Изложите свойства собственных
функций и собственных значений. Начертите структурную схему оптимальной
системы.
ЗАДАНИЕ 7.8
Используя теорию согласованной фильтрации: изложите основы теории;
разработайте алгоритмы и программу для синтеза фильтров с целью выделения сигналов
известной и неизвестной формы из белого шума, используя при этом в качестве ОНБ
тригонометрическую систему и полиномы Лежандра, выделите синусоидальные
сигналы и определите их параметры; выделите оптимальные сигналы в
радиолокационном приемнике.
ЗАДАНИЕ 7.9
Изучите теоретические положения, лежащие в основе фильтров Калмана - Бьюси.
Покажите, что если входные воздействия являются стационарными случайными
процессами, то метод Калмана - Бьюси не имеет существенных преимуществ перед
методом синтеза оптимальных фильтров Колмогорова - Винера. Этот метод в основном
применяют для синтеза оптимальных нестационарных линейных фильтров. Обратите
внимание на тот факт, что в теории синтеза фильтров Калмана - Бьюси
существенным является то, что случайный процесс m(t) должен быть представлен
дифференциальным уравнением, другими словами, он должен быть сформирован с помощью
формирующего фильтра. Для скалярных стационарных, в широком смысле,
случайных процессов, определенных на всей прямой, непрерывных в среднеквадратичном,
задача синтеза формирующих фильтров изучена. В этом случае задача решается
наиболее просто, если случайный процесс имеет дробно-рациональную спектральную
плотность, и формирующий фильтр можно описать обыкновенным
дифференциальным уравнением с постоянными коэффициентами. Последнее получается на основе
факторизации дробно-рациональной спектральной плотности.
Для нестационарных случайных процессов задача синтеза формирующих
фильтров несравненно более сложная.
Тема 7. Линейная фильтрация полезного сигнала 635
В §8.13, том 1 рассмотрен параметрический синтез нестационарных
формирующих фильтров с использованием процедуры оптимизации. Как правило, необходимо
решать задачу поиска глобального минимума.
Если задача синтеза нестационарного формирующего фильтра решена, то далее
используется стандартная структура фильтра Калмана - Бьюси.
ЗАДАНИЕ 7.10
Разработайте алгоритм и программу для решения скалярного и векторно-
матричного уравнения Риккати с целью синтеза одномерных и многомерных
оптимальных фильтров Калмана - Бьюси. Кратко изложите основные положения теории
этих фильтров и представьте их структурные схемы.
ЗАДАНИЕ 7.11
Синтезируйте фильтр Калмана - Бьюси, если полезный входной сигнал имеет
функцию корреляции
где аир- положительные величины; величина с равна СКО при t -» <
Формирующий фильтр описывается уравнением
[cVP('2-'')(l-e~a'2), h>t2,
— + 2$tm(t) = cV4p/(l-^"a/) + a^a/v(0,
dt
ЗАДАНИЕ 7.12
Синтезируйте фильтр Калмана - Бьюси, если полезный входной сигнал имеет
функцию корреляции вида
*-(Ш-&*■*:
где ох - СКО, р - положительная величина.
Формирующий фильтр описывается уравнением
ЗАДАНИЕ 7.13
Разработайте алгоритмическое и программное обеспечение для расчета
формирующих фильтров (см. §8.13, том 1) спектральным методом (ОНБ задается
преподавателем). Корреляционные функции выходных сигналов формирующих фильтров
имеют вид:
7.13-1. /?yT(r1,r2) = DrKe"a|r2"/l1.
2-'?)+P('2-'l)l.
7.13-2. RYY(h,t2) = DYy [fle~|a('22~'l2)
+^-Ф(г22-/12)+Р(/2-/.)1СО8(60а(Г22 -ri2) + 120P(f2 -*! ))1,
40*
636 Задания для самостоятельной работы и методические пояснения. Часть V
аир - задаются преподавателем; а =0,85; 6 = 0,15; с = 0,25.
7.13-3. Ryy(tl,t2) = \ 2 / * 1 2.
аир- положительные величины.
7.13-4. Задана система
где Rzzttbh) = ОдГ*2"'1', 7], Г2, К, а - постоянные.
7.13-5. Корреляционная функция случайного переходного процесса Y(t),
образующегося в системе после снятия воздействия, при t = 0 имеет вид
R (t t\- Dzz K (T T\2r-{h+h)IT
JL-t-Ui| /j
Построить формирующий фильтр для формирования случайного переходного
процесса.
7.13-6. Rxx(h>h) = (aie~ai'1 -V"02'2)'^"01'1 "V"02'2)» ^i^O; f2>0,
где ах =5,5; Ь\ =4,5; а2 =12; Z?2 =10,9; а{ -задается, а2 =1;а3 =0,415.
Тема 8. Статистический анализ нелинейных САУ
637
ТЕМА 8. СТАТИСТИЧЕСКИЙ АНАЛИЗ НЕЛИНЕЙНЫХ
СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ЗАДАНИЕ 8.1.
КОНСТРУКЦИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО
ВИБРОСТЕНДА И ЕГО НЕЛИНЕЙНАЯ
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ.
СТАТИСТИЧЕСКИЙ АНАЛИЗ
Основным исполнительным механизмом электрогидравлического вибрационного
стенда является электрогидравлический следящий вибратор (ЭГСВ) ([122], том 1).
Функциональная схема ЭГСВ изображена на рис. Т8.1.
Г
1^
эмп
ЗУУ
гд
Y(t)
Uo.it)
.2CYj
ДП
Рис. Т8.1. Функциональная схема ЭГСВ
Он представляет собой гидродвигатель (ГД) поршневого типа, приводимый в
движение потоком рабочей жидкости (минеральное масло). Управление потоком
рабочей жидкости производится золотниковым управляющим устройством (ЗУУ),
золотник которого приводится в движение по заданному закону
электромеханическим преобразователем (ЭМП). ЭМП и ЗУУ образуют электрогидравлический
усилитель (ЭГУ). Золотник, перемещаясь по заданному закону, открывает и закрывает
рабочие окна, соединяя полости гидродвигателя с напорной или сливной
магистралями. Контроль за положением исполнительного органа осуществляется за счет
главной отрицательной обратной связи {датчиком перемещений ДП). Это позволяет
обеспечить необходимую точность воспроизведения формы вибровоздействия. На
функциональной схеме ЭГСВ также обозначены: ГФВН - генератор случайных
функций вибрационных нагружений (генератор случайных входных сигналов), УСО
- усилитель сигнала ошибки.
На рис. Т8.2 показана принципиальная схема ЭГСВ. На ней обозначены: 1 -
усилитель сигнала ошибки (УСО); 2 - электромеханический преобразователь (ЭМП);
3 - золотниковое управляющее устройство (ЗУУ); 4 - гидравлический двигатель
(ГД); 5 - датчик перемещений (ДП); 6 - якорь электромеханического
преобразователя; 7 - золотник золотникового устройства управления; 8 - поршень гидравлического
двигателя; 9 - гидравлический дроссель.
Отслеживание входного воздействия £/вх (г) исполнительным органом (поршнем
гидродвигателя) ЭГСВ можно описать следующим образом. При подаче напряжения
UbX на вход усилителя сигнала ошибки, на выходе УСО появляется напряжение U,
которое подается на обмотку катушки управления ЭМП. Под действием этого
напряжения якорь 6 ЭМП, закрепленный на корпусе ЭМП посредством пружины,
провернется, например, против часовой стрелки относительно точки крепления (направ-
638 Задания для самостоятельной работы и методические пояснения. Часть V
ление поворота зависит от знака напряжения U на входе УСО). При этом создается
перепад давлений на торцах золотника 7, под действием которого золотник
переместится влево на определенную величину (величина этого перемещения зависит от
жесткости второй (консольной) пружины якоря 6 ЭМП, непосредственно соединенной с
золотником). Рабочие окна золотника откроются, жидкость с линии нагнетания с
давлением рн поступит в левую полость гидродвигателя 4. Под действием
образовавшегося перепада давлений на поршне 8 гидродвигателя, поршень начнет
движение вправо. Движение поршня будет продолжаться до тех пор, пока напряжение £/ос
на выходе датчика перемещений 5 не достигнет по модулю значения входного
воздействия иъх. При этом напряжение U на входе УСО станет равным нулю, якорь 6
ЭМП займет среднее положение, давления на торцах золотника 7 уравняются и
золотник также займет среднее положение, закрыв рабочие окна. Закрытие рабочих
окон золотника приведет к останову движения поршня 8 гидродвигателя. Таким
образом, значению входного напряжения UBX соответствует положение поршня
гидродвигателя Y.
1 2 6
z
Ш1^ЖйШ
Рн
Рис. Т8.2. Принципиальная схема ЭГСВ
Тема 8. Статистический анализ нелинейных САУ 639
Примем следующие основные допущения при составлении математической
модели ЭГСВ (соавторами математической модели являются канд. техн. наук, доц.
Е.А. Мусатов и канд. техн. наук, доц. Б.В. Добровольский). Будем пренебрегать:
1) противо э.д.с, возникающей в обмотке управления ЭМП;
2) влиянием гидродинамических сил на якорь (заслонку) ЭМП;
3) объемами торцевых полостей золотника ЭГУ;
4) утечками и перетечками рабочей жидкости по поршню гидродвигателя;
5) используем линеаризованное уравнение расходов гидравлического
исполнительного механизма с учетом насыщения, возникающего при полном открытии
рабочих окон золотника (это является причиной возникновения кусочно-
линейной нелинейности).
При принятых допущениях динамику ЭГСВ можно описать следующими
уравнениями:
1) Уравнение электронного усилителя и электрической отрицательной обратной
связи
V = K^{Vn-K,J), (T8.1)
где КуС - коэффициент усиления электронного усилителя, К^ - коэффициент
передачи электрической обратной связи, UBX - входное напряжение, Y - перемещение
поршня гидродвигателя, U - напряжение на выходе электронного усилителя.
2) Уравнение электрического равновесия обмотки управления ЭМП
L^ + RJ=U-KW^, (Т8.2)
at at
где L - индуктивность обмотки управления, Яа - активное сопротивление обмотки
управления, / - ток в обмотке управления, Kw- коэффициент, учитывающий влияние
противо э.д.с, фя - угол поворота якоря ЭМП.
С учетом принятых допущений Kw = 0.
3) Уравнение движения якоря ЭМП
1*^ + 1гя^- + (КМ19 + К„) <ря=КМ11-КМруРу-КыжХ, (Т8.3)
где Уя - момент инерции якоря относительно оси его вращения, Ля - коэффициент
вязкого трения якоря, Кмч> и Кш - коэффициенты внешней моментной характери-
ЗЕ • J • I
стики ЭМП, Кмос = —ст Зст °° - коэффициент обратной связи по перемещению зо-
лотника, АГСТ = АГМ0С • /ос - коэффициент пропорциональности, Ест - модуль упругости
консольной пружины якоря, Уст - момент инерции сечения консольной пружины
якоря относительно главной центральной оси, перпендикулярной плоскости изгибающей
силы, /ос - расстояние от оси поворота заслонки (якоря) до оси золотника,
/ст - расстояние от оси сопел до оси золотника, X - перемещение золотника ЭГУ,
КМр - коэффициент, учитывающий влияние гидродинамических сил на заслонку,
ру - перепад давлений на торцах золотника (давление управления).
С учетом принятых допущений КМр = 0.
4) Линеаризованное уравнение расходов ЭГУ
640 Задания для самостоятельной работы и методические пояснения. Часть V
в
s
Тема 8. Статистический анализ нелинейных САУ 641
где Kq р и Kq ф - коэффициенты линеаризации расходно-перепадной
характеристики элемента типа сопло-заслонка, F3 - площадь торца золотника, Vy - средний
объем торцевых полостей золотника ЭГУ, В - модуль объемной упругости рабочей
жидкости.
С учетом принятых допущений Vy= 0.
5) Уравнение движения управляющего золотника ЭГУ
"h^T- + h^+C* ■x = F*Py (Т8-5)
at at
где т3 - масса золотника, h3 - коэффициент вязкого трения золотника о гильзу
золотника, С3 - жесткость консольной пружины якоря, соединенной с золотником,
плюс жесткость гидродинамической пружины.
6) Уравнение расходов гидравлического исполнительного механизма
У dp ( и_^уО„ V f(Y\ T7dY (T**\
И ллп + Ап Н ~ \р = Knyt л -г , (lo.o)
2В Л ( Qp 2 у Qx V ' dt
где V - средний объем полостей гидроцилиндра, KQp и KQX - коэффициенты
линеаризации расходно-перепадной характеристики золотника, F - рабочая площадь
поршня, р - перепад давлений на поршне, Ъ - ширина рабочих окон золотника,
Кп - коэффициент перетечек, учитывающий перетечки рабочей жидкости по поршню
гидродвигателя, Kyj - коэффициент утечек, учитывающий утечки жидкости из
полостей гидроцилиндра
X, -b<x<b,
Ъ, Х>Ь,
-*, X < -Ь.
С учетом принятых допущений Кп = К^ 0.
7) Уравнение движения поршня гидродвигателя
M^f + /i^ + CHr = Fp, (T8.7)
где М - приведенная масса нагрузки, h - коэффициент вязкого трения поршня,
Сн - жесткость пружины нагрузки.
Приведенным уравнениям (Т8.1) - (Т8.7), описывающим динамику ЭГСВ,
соответствует структурная схема, изображенная на рис. Т8.3, в которой ПФ определены
зависимостями:
_kiukmi . w кум
Щ~ Гэ, + 1 ' Щ-тУ+2$яТя* + 1'
W KxPy W -_*£_.
3~r3V+2№ + r 4~Trs + l>
/(*)=
Wc=-
к,
Ур
rHV+25HrHj+r
Введем новые обозначения: входной сигнал системы (входное напряжение UBX(t))
обозначим'через Y(t); выходной сигнал системы (перемещение поршня Y{t))
обозначим через Х(г), сигнал на входе нелинейного элемента (перемещение золотника X(t))
обозначим через Z(t). Эквивалентная структурная схема ЭГСВ с новыми
обозначениями сигналов системы представлена на рис. Т8.4.
642 Задания для самостоятельной работы и методические пояснения. Часть V
Передаточные функции Wj(j), W2(s), W3(s) имеют следующий вид:
fy)0
Wi(s) =
5 4 3 2
W2(s) =
^01
#31$ +#21** + Лц J + £Xq|
W3 (*) = *«•
y(f) e(0
0
Z(f)
b
/
r
~-b
7Г
b
на
z
')
X(f)
w;(s)
Рис. Т8.4. Эквивалентная структурная схема ЭГСВ
Системы вибрационных испытаний (СВИ) предназначены для имитации
реальных вибрационных нагружений, действующих на изделия в условиях эксплуатации.
Реальные нагружения, действующие на изделия при транспортировке
автомобильным, водным, железнодорожным транспортом, относятся к классу случайных, в
общем случае нестационарных процессов. Такая же картина имеет место в случае, если
изделие установлено на летательных аппаратах: самолетах, ракетах, космических
аппаратах. Таким образом, систему вибрационных испытаний можно рассматривать
как нелинейную автоматическую систему, на которую поступают случайные
воздействия. Случайный процесс X (г) (выходной сигнал системы вибрационных
испытаний) должен иметь статические характеристики (корреляционная функция,
спектральная плотность, ДЗР, ИЗР и т.д.) незначительно (в известном смысле)
отличающиеся от статистических характеристик вибрационных нагружений,
действующих на объект в реальных условиях эксплуатации. Тогда на изделие,
установленное на платформе вибростенда, будут действовать нагрузки, близкие к реаль
ным, испытания на которые позволят сделать вывод о надежности испытуемого
изделия и, в конечном итоге, внести такие изменения в конструкцию изделия, чтобы
обеспечить заданную степень надежности.
8.1-1. Постройте алгоритм перехода от структурной схемы рис. Т8.3 к
структурной схеме, представленной на рис. Т8.4, и рассчитайте коэффициенты ПФ W{ (s),
W2(s), W3(s). Если параметры в уравнениях системы имеют следующие значения:
L = 0,4Th, Яа=80Ом, /Я=3-1(Г7 кг-м2, Ня =710'5 Н-м-с, К„ =0,3 Нм,
Кмос = 10 Н,
КМф=0,1Нм,
-1
Кш=1НмА~\
В = 1109 Па,
Ко в =Ы0-6м4.с-кг-\ ^ф = 11О"3м3-с-1, F3 = 0,785• 10"4 м2, т3=1-Ю"2кг,
У У *yi'
Л3=0,5Нс/м, С3=2Н/м, V = 1,2935-10 "4 м 3, F= 1,99-10 "3 м 2, М= 5000 кг,
Тема 8. Статистический анализ нелинейных САУ
643
Л = 10 Н-с/м, Сн =2.10бН/м,АГус=0,5> ^ =5 В/м, KQX = 4,3м2-с"1, Ь = 210"3 м,
4
КПп -1 • Ю~10 , то коэффициенты ПФ структурной схемы (рис. Т8.3) равны
vQp
кг
KILJ=l/R^= 0,0125 (Ом)
л,
-I
ЧуРу
Кг =
К,
= 110
м с
ю кг
К,
L =.^ = 3,925 Ю-5—,
б/>
м4с'
^=^- = 9>95.10-10^-,
r3=_L=5-io-3-^.
э Яа Ом
Г2=^. = 5-10-3с2,
тя2 =
KMq> + ^ст
н
= 7,5-10~7 с2,
С,
71=-
2BKt
V = 6,4675-ЮЛ,
(2/>
2^я^я =
^Л/ф + ^ст
= 1,75 10"4с,
2^нГн=А = 5.10-бс.
Т2 ^ О ^ 1ГГ3 ^2
/н = — = 2,5-10 с ,
Тгу =/гз=7,85-10"5 м2,
2^3=-f = 0,25c,
xr=F = l,99 10-3M2.
Коэффициенты ПФ Wj(s), U^C^), ^3(^) имеют следующие значения:
а50= 1,875-10"и;я4о = 9,О6-1О-9; а30 = 2,52-10"5; а20 = 6,29-10"3;
Лю = 0,26; яоо = 1,98; &оо = 6,136-Ю"4;
л31 = 1,617-10"6; fl2i = 2,5-10"3; ап = 2,04-10"2; а01 = 1; Ь01 = 42,785; /^ос = 5.
Пункты этого задания (8.1-2 - 8.1-9) выполните при следующих значениях
параметров (структурная схема представлена на рис. Т8.3).
Неизменяемые параметры (для всех вариантов одинаковы):
Кш = 0,0125; Кш = 1; Кф = 2,5; /^ = МО"3; К^ = 1-106; Кхру = 3,925-Ю"5;
Кф = 4,3 м2/с; Кт = 110ю; Кур = 9,95-10 "10; Л:мос = 10; Тэ = 0,005 с; Тя2 = 7,5-10 "7 с2;
Г3Т=0,005с2;Гг = 6,4675-10-<(с;2^Гя=1,75-10-4с;тгу = 7,85-10-5м2;тг=1,99-10-3м2;
2^3Г3 = 0,25с.
Параметры, зависящие от варианта задания, определяются формулами
Тн = у/М/С; £н = ; (С = Ъ106 Н/м, h = 15 000 кг/с); а численные значения ЯуС,
2 • С • Гн
Кос, М а также параметры корреляционной функции и численное значение mY
воздействия /?кг (x) = Drr^"a'T' приведены в табл. Т8.1.
Таблица Т8.1
№ п/п
1
2
3
4
АГус
0,75
0,92
0,33
0,92
Кос
5,56
8,22
6,44
9,11
Л/, кг
5222
5778
5000
5333
ту, В
2
1
3
2,5
£>ут, В2
9
10
7
15
a
50
40
30
60
644 Задания для самостоятельной работы
и методические пояснения. Часть V
Продолжение табл. Т8.1
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
0,75
0,25
0,5
0,4
0,55
0,85
0,32
0,95
0,77
0,27
0,88
0,39
0,97
0,35
0,82
0,52
0,71
0,37
0,89
0,42
0,57
0,23
0,99
0,36
0,78
0,49
0,86
0,44
0,27
0,91
0,32
0,81
0,41
0,93
0,57
0,83
0,38
0,73
0,61
0,46
0,76
0,31
0,87
0,98
0,31
0,45
8,22
6,44
_ 2,0
7,1
8,5
9,55
6,75
2,2
8,44
5,71
L. 4'5
7,9
9,72
2,7
7,4
8,9
9,41
_ 5,22
2,71
6,41
4,49
9,22
4,19
8,72
2,17
4,37
9,45
7,52
3,72
2,47
9,91
1,9
2,58
4,13
1,95
9,44
8,41
3,36
9,12
1,8
9,51
3,15
4,21
1,85
8,64
3,57
5889
5111
5444
5555
4777
5666
4888
5157
5900
4650
5500
4700
5600
4800
5700
4900
5200
4500
4927
5575
4757
5720
4300
5950
4400
5850
4350
5675
4450
5820
5125
4589
5745
4942
5347
4738
5582
4874
5634
5000
4925
5825
5342
4437
5234
5371
4
2
1
2,2
3,5
1,1
1,7
2,6
3,2
1,5
4,2
2,4
1,2
3,7
1,9
2,7
3,4
4,4
2,1
1,2
2,9
2,3
1,6
2,9
1,8
3,65
2,15
1,37
2,6
3,41
1,57
4,7
1,34
3,33
2,21
4,9
1,42
5,1
3,9
2,42
4,55
1,85
3,64
2,52
4,72
5,2
5
28
12
6
5,5
8,2
17,6
6,5
9,4
25,1
8,8
19,7
11,5
20
15
19
25
16
29
15,65
10,27
8,12
6,67
14
10,5
8,51
17
9,65
28,5
16,5
21,4
36
27
17,7
39
30
41
27
35
17,5
9,2
33,5
8,17
5,41
7,8
14,5
70
55
45
35
65
72
80
90
100
77
57
82
47
62
42
75
27
59
85
66
92
71
47
52
33
49
95
39
54
67
38
63
39
41
94
31
76
52
44
97
36
99
46
78
32
79
Тема 8. Статистический анализ нелинейных САУ 645
Численные значения «Ь» определяются так:
с 1-го по 12-й варианты принять: Ь=1-10~3м, Dyy- 75 В2;
с 13-го по 25-й вариант: Ъ = МО"3 м, DYY= 85 В2;
с 26-го по 37-й вариант: ^ = 1,510"3м, Dyy= 95 В2;
с 38-го по 50-й вариант: Ь= 1,5*10~3м, ^ут= W5 В2.
8.1-2. С целью изучения содержания основных задач проблемы вибрационных
испытаний необходимо по соответствующим источникам ([44], том 1)
познакомиться с вопросами:
• конструктивно-силовая схема изделий, например, летательных аппаратов;
• общая характеристика внешнего нагружения конструкции летательного
аппарата;
• нагружение конструкций изделий при транспортировании по железной дороге;
• нагружение конструкций изделий при перевозке автомобильным транспортом;
• условия нагружения конструкций при перевозке изделий водным транспортом;
• нагружение конструкций изделий при их эксплуатации (воздействия
сейсмического характера, ветровые воздействия и др.);
• основные понятия об ударе, параметры ударного движения;
• основные понятия о вибрационных нагружениях;
• общая характеристика вибраций частей конструкций летательных аппаратов;
• методы экспериментальной отработки механической надежности изделий,
подверженных вибрационным нагружениям;
• методы построения математических моделей функций вибрационных нагру-
жений, действующих на изделие в условиях эксплуатации;
аппаратно-программные комплексы для измерения вибраций;
• виды испытаний изделий (испытания на виброустойчивость, вибропрочность,
ударную прочность, ударную устойчивость, испытание прочности при
транспортировании и др.); содержание экспериментальных исследований;
• системы вибрационных испытаний:
электродинамические, электрогидравлические, классификация, конструкции
основных элементов и их назначение, однокомпонентные и
многокомпонентные системы вибрационных испытаний, ударные стенды и копры, центрифуги,
функциональные и структурные схемы, сигналы, действующие на систему,
формулировка задач испытаний в терминах теории автоматического
управления;
• проблемы проектирования систем вибрационных испытаний на случайные
нагрузки:
- проблемы идентификации;
- проблемы синтеза регуляторов;
- проблема оценки точности имитации реальных вибрационных нагружений;
- проблема фильтрации;
• информационно-измерительные комплексы для фиксации и обработки
результатов испытаний: общие положения, основные элементы, требования к
проведению измерений вибраций, измерительная аппаратура и датчики, основные
принципы автоматизации проведения испытаний, структурная схема
информационно-измерительного комплекса; алгоритмическая и аппаратная база
комплекса;
• системы ударовиброзащиты машин, оборудования и аппаратуры, оптимизация
систем ударовиброзащиты, экспериментальные методы исследования систем
ударовиброзащиты;
646 Задания для самостоятельной работы и методические пояснения. Часть V
• динамические гасители колебаний в транспортных средствах: назначение,
конструктивные решения, синтез оптимальных виброзащитных систем,
формулировка задач анализа, синтеза и оптимизации виброзащитных систем в
терминах теории автоматического управления;
• понятия о виброакустической диагностике зарождающихся дефектов: изделие
как объект диагностирования, виброакустический сигнал и его свойства.
Методология диагностирования зарождающихся дефектов, средства
виброакустического диагностирования, алгоритмическое обеспечение для обработки
виброакустических процессов: фильтрация, выделение огибающей, стробиро-
вание, расчет корреляционных функций и спектральных плотностей, расчет
дифференциальных законов распределения; аппаратная база и др.
8.1-3. Постройте алгоритмическое и программное обеспечение для
вероятностного исследования СВИ в установившемся режиме методом статистической
линеаризации с использованием:
• графического метода;
• метода последовательных приближений.
Рассчитайте математическое ожидание и дисперсию выходного сигнала, СВИ
(рис. Т8.4), если воздействие является нормальным случайным процессом с
известной автокорреляционной функцией (см. задание 8.1-1).
8.1-4. Изучите теоретические положения и постройте алгоритмическое и
программное обеспечение для вероятностного исследования СВИ в неустановившемся и
установившемся режимах с помощью спектрального метода при применении
статистической линеаризации нелинейного элемента (см. рис. Т8.4).
Постройте алгоритмическое и программное обеспечение для следующих ОНБ:
- полиномы Лежандра,
- полиномы Чебышева,
- функции Уолша,
- тригонометрические функции.
С помощью построенного алгоритмического и программного обеспечения
рассчитайте математическое ожидание, функцию корреляции и дисперсию выходного
сигнала, если Y(t) - нормальный случайный процесс с известной корреляционной
функцией вида (см. задание 8.1-1).
Полученные результаты сравните с теми, которые имели место при
вероятностном расчете СВИ методом статистической линеаризации (установившийся режим).
8.1-5. Пользуясь ([122], том 1), изучите теоретические положения и постройте
алгоритмическое и программное обеспечение для вероятностного исследования СВИ
(см. рис. Т8.4) с помощью метода канонических разложений.
Постройте алгоритмическое и программное обеспечение для решения
интегральных уравнений спектральным методом.
С помощью построенного алгоритмического и программного обеспечения
рассчитайте математическое ожидание и дисперсию выходного сигнала ДО-
8.1-6. Изучить теоретические положения ([122], том 1) и постройте
алгоритмическое и программное обеспечение для вероятностного исследования СВИ методом
эквивалентных возмущений (при g = 2) и интерполяционным методом.
С помощью построенного алгоритмического и программного обеспечения
рассчитайте математическое ожидание и дисперсию выходного сигнала СВИ
(см. рис. Т8.4) (входной сигнал задается преподавателем).
Сравните указанные методы по степени их эффективности, определите их
достоинства и недостатки.
Тема 8. Статистический анализ нелинейных САУ 647
8.1-7. Изучите теоретические положения и постройте алгоритмическое и
программное обеспечение для вероятностного исследования СВИ (рис.) с помощью
метода статистических испытаний.
С помощью построенного алгоритмического и программного обеспечения
рассчитайте математическое ожидание, функцию корреляции и дисперсию выходного
сигнала в неустановившемся и установившемся режимах (входной сигнал задается
преподавателем).
Результаты сравните с теми результатами, которые получены другими методами.
8.1-8. Изучите теоретические положения и постройте алгоритмическое и
программное обеспечение для вероятностного исследования СВИ методом
статистического баланса (([122], том 1); учитывать первые два момента).
Проведите анализ метода статистической линеаризации и метода статистического
баланса с точки зрения выявления достоинств и недостатков указанных методов.
Рассчитайте математическое ожидание и дисперсию выходного сигнала СВИ
методом статистической линеаризации и методом статистического баланса при одних и
тех же исходных данных. Проведите исследование, связанное с выявлением влияния
эффекта обогащения спектрального состава выхода нелинейным элементом и
искажения им спектральной плотности выходного процесса.
Пользуясь результатами расчетов, сделайте соответствующие выводы о степени
эффективности методов в части учета указанных двух факторов.
Проведите серию расчетов электрогидравлического следящего привода методом
статистической линеаризации и методом баланса математических ожиданий и
спектральных плотностей с точки зрения выявления влияния указанных двух факторов
(обогащение и искажение спектральной плотности выходного сигнала нелинейного
элемента) на точность метода в зависимости от степени инерционности системы.
8.1-9. По результатам выполнения предыдущих заданий сделайте выводы о
степени эффективности рассмотренных выше методов статистического исследования
нелинейных систем, учитывая при этом:
• применимость для исследования систем, поведение которых описывается
дифференциальными уравнениями высокого порядка, а структурная схема
содержит несколько нелинейных элементов;
• применимость для исследования сложных нестационарных систем;
• точность метода и наличие теоретического обоснования;
• сложность алгоритмического и программного обеспечения;
• доступность современному инженеру-разработчику;
• возможность использования современных пакетов программ;
• степень эффективности при решении практических задач, в том числе при
исследовании точности работы систем, работающих в условиях помех.
ЗАДАНИЕ 8.2
Выполните все пункты предыдущего задания для следящего привода, структурная
схема которого показана на рис. Т8.5.
Неизменяемые параметры системы (для всех вариантов одинаковы):
Кп = 6,1909-КГ4; KQx =4,3; KQp =И(Г10; Кн = 9,95-К)-10; 7> 6,4675-10"4 с;
т^ 4,6279-1(Г 4 с.
Параметры, зависящие от варианта задания:
Тн = JM/C , £н = -^-, Кос, Кус, Ь, где h = 15000 — ; С = 2-106 Н/м,
2СТН с
648 Задания для самостоятельной работы и методические пояснения. Часть V
где KyCi К0С9 М, mY, DYy, ос приведены в табл. Т8.1 задания 8.1, а параметр «6»,
зависящий также от варианта задания, приведен в табл. Т8.2.
mv(t)
1
Кос
и
-Ъ
А*)
ь
-ъ
*■
КуС
X
KQ*
KQP
1
V
1
}
г ДО
(TrS+l) (Гн2^+2^ГнЛ-1)
<—1
mx{i)
Rxxituti
Рис. Т8.5. Структурная схема нелинейной системы
Таблица Т8.2
№ п/п
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
Ъ, м
0,05
0,Q5
0,04
0,06
0,03
0,045
0,05
0,03
0,03
0,03
0,03
0,04
0,04
0,04
0,04
0,05
0,05
0,05
0,05
0,06
0,06
0,06
0,06
0,035
0,035
№п/п
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
Ь, м
0,035
0,035
0,045
0,045
0,045
0,045
0,055
0,055
0,055
0,055
0,06
0,06
0,06
0,06
0,07
0,07
0,07
0,07
0,052
0,052
0,052
0,052
0,042
0,042
0,042
Тема 8. Статистический анализ нелинейных САУ
649
ЗАДАНИЕ 8.3
Изучите теоретические положения численно-спектрального метода
статистического исследования нелинейных нестационарных систем со случайными
параметрами. Постройте алгоритмическое и программное обеспечение метода, разбив его на
соответствующие блоки:
- блок замены многомерного интеграла суммой;
- блок численного решения дифференциальных уравнений системы;
- блок обработки сигналов и др.;
Рассмотрите возможности применения метода для решения задачи о выбросах, а
также синтеза статистически оптимальных систем.
Приведите статистический анализ систем, структурные схемы которых
приведены в заданиях 8.1 и 8.2.
ЗАДАНИЕ 8.4
Разработайте алгоритмическое и программное обеспечение для решения обратной
задачи статистической динамики методом нелинейного программирования с
использованием статистической линеаризации нелинейного элемента, при этом (см. ([122],
том 1)):
• сформулируйте обратную задачу динамики применительно к системам,
рассматриваемым в заданиях 8.1 и 8.2; назовите оптимизируемые параметры
входа и системы;
• покажите возможность повышения точности имитации реальных вибрационных
нагружений с помощью применения обратной задачи динамики ([122], том 1);
• изложите содержание метода нелинейного программирования и примените его
для решения обратной задачи динамики ([122], том 1);
• исследуйте вопрос, связанный с повышением точности имитации реальных
случайных нагружений, в том числе нестационарных, путем применения
концепции обратных задач динамики ([122], том 1);
• рассмотрите случай, когда оптимизируемыми параметрами являются
параметры входного сигнала (например, если вход имеет корреляционную функцию
RYY (fi,/2)= £fyre~a''2~ri', то DYy и a - оптимизируемые параметры), и случай,
когда оптимизируемыми параметрами являются параметры входа и системы;
изучите влияние параметров входа и параметров системы на точность
воспроизведения случайного эталонного выхода.
ЗАДАНИЕ 8.5
Структурная схема динамической системы имеет вид (рис. Т8.6).
У 0)
Ф
(Ts + \)2Tos
X(f)
3*
Рис. Т8.6. Структурная схема динамической системы
650 Задания для самостоятельной работы и методические пояснения. Часть V
К рассматриваемому классу систем относятся следящие системы, имеющие
чувствительный элемент релейного типа.
На входе системы действует случайное возмущение типа белого шума с
математическим ожиданием ту и интенсивностью So-
Проведите статистическое исследование следящей системы; выполните все
пункты задания 8.1 при следующих значениях параметров: к = 5; То = 0,5 с; / = 1; So = 0,1
([116], том 1).
Исследуйте положение максимума спектральной плотности сигнала x(t) в
зависимости от интенсивности So.
Постройте график в координатах
nSn
'Sx((u)n2To _Л л.
2 2 з ' при фиксированных
значениях |ы = —т^- = 0,0;0,1;0,2;0,5;1;2;3 при указанных выше параметрах системы и воз-
2ГТ
действия Y(t).
ЗАДАНИЕ 8.6
Структурная схема нелинейной системы стабилизации угла крена представлена
на рис. Т8.7.
п
K^Ky + Kjs)
7i + l
1/-
-4
а*э
s2+axxs
У
Рис. Т8.7. Схема системы стабилизации крена
Выше (см. задание 6.7) была рассмотрена линейная модель системы
стабилизации. Наличие ограничений (углы отклонения элеронов ограничены, конечность
мощности привода приводит к ограничению максимальной скорости вращения элеронов
и др.) приводит к необходимости использования нелинейной модели системы
стабилизации. В состав системы стабилизации входят измерители угла крена и его
производной, усилители мощности и привод. Динамические свойства этих элементов
достаточно хорошо описываются уравнением ([116], том 1)
П + 8=Кь(Кху + К2у)9
где Г, АГ5- параметры привода; Кх, К2- параметры измерителей и усилителей.
Нелинейный элемент определяется зависимостью
-/ при 8 < -d;
Ф(5) =
—8 при |8|<d;
d
I при8></.
Движение ЛА описывается уравнением ([116], том 1)
Тема 8. Статистический анализ нелинейных САУ
651
где n{t) - внешнее возмущение в единицах углового ускорения, имеющее нулевое
математическое ожидание и So = const.
Проведите статистическое исследование системы, выполнив все пункты
задания 8.1 при следующих значениях параметров ([116], том 1):
ахх =4 с"1; дхэ=4Ос~2; Г = 0,05 с; 27i50 =1,256 с"3;
/ = d = 10 град; К = 5,0; т = 0,4,
где К = К1Кь;х = КьК2.
ЗАДАНИЕ 8.7
Рассмотрим систему регулирования температуры инерционного объекта,
уравнение которого имеет вид ([116], том 1)
Tv + v = -Kz + n(t),
где Т- постоянная времени, К - коэффициент усиления, z - координата регулятора
n(t) - внешнее возмущение, описывающее изменение температуры объекта.
Элементами системы регулирования являются датчик температуры -
биметаллическая пластинка с потенциометром, балансное реле и электродвигатель.
Нелинейный элемент - контактное устройство биметаллической пластины вместе с
балансным реле.
Уравнение регулятора записывается так ([116], том 1):
где Тм - электромеханическая постоянная привода; К м - передаточное число
привода; К2 - коэффициент передачи биметаллической пластины; нелинейный элемент
описывается зависимостью
-/ при K2v < -d;
ф(М =
0 при |a:2v|<J;
/ при K2v > d.
Спектральная плотность сигнала n(f) определяется соотношением
А,„ос 1
*»» = -
а2+со2'
Задача заключается в выполнении всех пунктов задания 8.1 для данной системы.
n(t)
i
е(0
*
К,
v(r)
—►
Рис. Т8.8. Структурная схема системы стабилизации температуры
Структурная схема системы имеет вид (рис. Т8.8), а параметры имеют следующие
численные значения ([116], том 1):
652 Задания для самостоятельной работы и методические пояснения. Часть V
Ко = КМК2К = 0,01 В"1 с"1; / =25 В; К2 =0,01 рад-град"1;
Т = 10 с; Dnn =100 град2; а = 0,1с~1;
поскольку ТМ«Т, то для первого варианта Тм можно пренебречь, а для второго
варианта положить Гм = 0,1 с.
ЗАДАНИЕ 8.9
В этом задании рассматривается система со случайными параметрами. К этому
классу систем можно отнести измерительные устройства при учете жесткости
конструкции, маятниковые устройства при ускоренных движениях точки подвеса,
электрические цепи при флюктуациях величин параметров и др. ([116], том 1).
Дифференциальные уравнения для рассматриваемых случаев можно записать так:
X +(2&0+n2(t))x +(a>20+n{(t))x =n(t),
где л2(0, >?i(0 - параметрические возмущения; n(t) - аддитивное возмущение; £-
коэффициент затухания; щ - собственная частота системы.
Сигналы n{(t), n2(t) и n(t) являются некоррелированными белыми шумами с
нулевыми средними интенсивностями S,h,h, 5rt,/b, Snn .
Постройте алгоритм статистического анализа стохастической системы численно-
спектральным методом.
ЗАДАНИЕ 8.10
Исследуемая САУ описывается дифференциальным уравнением вида
а2х + ахх + аох + с2х2 + съхъ = y(t) (T8.8)
(численные значения коэффициентов a2ia{,a09c2,c3 задаются преподавателем).
Изучите аппарат рядов Вольтерра, воспользовавшись ([122], том 1). Этот аппарат
позволяет представить проблемы описания, исследования, оптимизации и
идентификации класса нелинейных систем на единой методологической основе,
охватывающей разнообразные нелинейные системы, и является доступным современному
инженеру. Последнее достигается благодаря использованию понятий импульсной
переходной функции, передаточной функции, частотных характеристик. Эти понятия,
которые являются эффективным инструментом исследования линейных систем,
можно обобщить на нелинейные системы и тем самым внести методологическое
единообразие в исследование произвольных динамических систем. Кроме этого,
необходимо изучить описание нелинейных систем с помощью операторов Немыцкого,
Гаммерштейна, Урысона, а также с помощью аппарата дифференциальных
уравнений. Выявите достоинства и недостатки разных методов описания нелинейных
систем, проведите критический анализ.
Пользуясь методами, описанными в главе 4 тома 1, а также в ([122], том 1),
постройте описание рассматриваемой нелинейной системы в виде функционального
ряда Вольтерра и, таким образом, представьте нелинейную систему в виде
параллельного соединения элементарных систем, свойства которых описываются
соответствующими ИПФ ki(xi), k2(x{, т2), ... , kN{xu т2 , ... , Тлг). Построенная модель дает
конкретное описание системы, с помощью которой можно определить выходной
процесс через входной сигнал и последовательность ИПФ (рис. Т8.9).
Очевидно, ряд Вольтерра представляет собой соотношение, отражающее
явную связь между входом системы и её выходом.
Тема 8. Статистический анализ нелинейных САУ
653
Y(t)
ki(x\W{(s)
fefri, T2),W2(sus2)
*з(ТьТ2,Хз).^з(51,52Л)
Рис. Т8.9. Функциональная модель нелинейной системы
Поскольку система состоит из параллельного соединения элементарных систем,
то, следовательно, ее можно характеризовать последовательностью многомерных
импульсных переходных функций &i(X|), к2(х{, x2), ... , kN{X\, т2, ... , iN) и
последовательностью передаточных функций W\(s\) = L{{k\{x{)}, W2(s\,s2) = L2{k2(Xi,x2)}, ...,
WN (sx,s2, ... ,sN)= LN{kN(T{,T2> — >Tw)} • Необходимо найти и записать
аналитические зависимости, определяющие &,( ть т2,..., х,-) и Wj(5h52,..., st).
Полагая st =yco, (/ = 1,2,..., N)y получаем зависимости, определяющие частотные
характеристики элементарных систем
Щ( М»М M) = ^'(Jl J«)l5ryto,M N'
Частотная характеристика WJ (уш^уа^,.--»./^) представляет собой
многомерную комплексную функцию, которая при изменении частоты ш, от нуля до
бесконечности описывает в комплексном пространстве размерности И некоторую
поверхность. При / = 1 это пространство превращается в хорошо известную комплексную
плоскость, в которой ^(ycDj) характеризуется некоторой кривой. При / = 2
рассматривается W2^j(Ouj(O2^ в четырехмерном пространстве. Для описания
исследуемой системы могут быть использованы частотные характеристики W{(j(oA,
^(У^^У^г)» WN (]<йх, j(u2,..., j(uNY Во многих задачах исследования
использование частотных характеристик позволяет получить удобные и достаточно простые
расчётные соотношения ([123], том 1). Постройте частотные характеристики
линейной и квадратичной подсистем.
Нелинейная система называется ограниченной, если её реакция на ограниченное
входное возмущение также ограничена, причем величина этого ограничения не
зависит от интервала времени наблюдения за системой ([123], том 1). Это означает, что
если|У(0|</?,то|Х(^)|<С.
Для рассматриваемых систем понятие ограниченности близко к понятию
устойчивости. Система ограничена, если
оо оо
J...JI *1.(т„т2,...,т,)|Л,...Л<<-г.
АЛ А
(Т8.9)
о о
Из приведенного условия следует, что многомерные ИПФ ki(xu т2, ..., т,) должны
стремиться к нулю при х{, х2, ... , х,- -» °о и интегралы от абсолютной величины их
654 Задания для самостоятельной работы и методические пояснения. Часть V
должны убывать, как —. Условие (Т8.9) является достаточным, и если
последовать
тельность ИПФ не удовлетворяет ему, то это ещё не означает, что исследуемая
система не ограничена. В подобном случае проведите дополнительное исследование
([123], том 1).
Исследуйте рассматриваемую систему на свойство ограниченности.
Пользуясь описанием нелинейной системы с помощью функционального ряда
Вольтерра, найдите математическое ожидание, корреляционную функцию и
дисперсию выходной переменной, если входное воздействие представляет собой нормально
распределенную случайную функцию времени Y(t), математическое ожидание
которой равно mY, а функция корреляции имеет вид
ММ2)=Ате~ак2~М (Т8.10)
(конкретные значения mY, DYY и а приведены в табл. Т8.3).
Исследуйте статистические характеристики выходного сигнала Y(t) в
неустановившемся и в установившемся режимах.
ЗАДАНИЕ 8.11
Изучите теоретические положения и разработайте алгоритмическое и
программное обеспечение для расчета математического ожидания, автокорреляционной
функции и дисперсии сигнала X(i) на выходе нестационарной системы, уравнение которой
имеет вид
jc(o+fl|+^+C|g22x(O+^+v+c^x(O+F(x(O)-
W a2+b2t + c2t2 W a2+b2t + c2t2 W v w/
= —2-r(0.
a2+b2t + c2t
где a0 = 2cT2 + 2b\T + a, b0 = b + 4£сГ, c0 =c,ax = 2bT2 + 2а%Г, b{ = 4cT2 + 2fyT,
d = 2lfT, a2 = aT2, b2 = bT2, c2 = cT2,
а структурная схема представлена на рис. Т8.10.
Параметры а, Ь, с, Т, £, а также параметры случайного воздействия mY, Dm и а
приведены в таблице (RYY {hJ2) = DYye~a^2~^). При расчетах принять K=l,d=l.
Алгоритмическое и программное обеспечение постройте для:
• спектрального метода с использованием статистической линеаризации
нелинейного элемента,
• метода рядов Вольтерра,
• метода канонических разложений,
• метода эквивалентных возмущений,
• интерполяционного метода,
• метода статистического баланса с учётом первых двух моментов,
• метода статистических испытаний,
• численно-спектрального метода.
Проведите критический анализ методов, учитывая при этом степень их
теоретического обоснования, сложность алгоритмического и программного обеспечения,
точность получаемых результатов, возможность обобщения на другие классы систем,
методологическое единообразие при исследовании произвольных динамических
систем, доступность современному инженеру-разработчику.
Тема 8. Статистический анализ нелинейных САУ
655
Y(t)
a2+b2t + c2t
X(t)
mx(t)
RxxOuh)
ao+bot + cot
a2 + b2t + c2t2
-d
7
FVO
-d
Рис. Т8.10. Структурная схема нелинейной нестационарной системы
Таблица Т8.3
№
п/п
1
2
3
4
5
6
7
8
9
10
И
12
13
14
15
16
17
18
19
Г, с
0,2
0,5
0,22
0,48
0,25
0,65
0,46
0,6
0,44
0,52
0,42
0,62
0,07
0,54
0,38
0,41
0,36
0,21
0,34
0,1
0,5
0,11
0,48
0,1
0,13
0,15
0,46
0,17
0,44
0,19
0,31
0,21
0,4
0,23
0,38
0,25
0,36
0,27
а
0,1
1
0,2
0,8
0,4
0,3
0,3
0,3
0,3
0,4
0,4
0,4
0,4
0,5
0,5
0,5
0,5
0,2
0,2
Ъ
0,3
0,3
0,3
0,3
0,3
0,4
0,4
0,4
0,4
0,3
0,3
0,3
0,3
0,2
0,2
0,2
0,2
0,3
0,3
с
0,001
0,001
0,001
0,001
0,001
0,002
0,002
0,002
0,002
0,003
0,003
0,003
0,003
0,004
0,004
0,004
0,004
0,005
0,005
П1у
1
2
1,5
1Д
2
3
1,2
3,1
1,6
3,9
2,2
4,2
0
5
3,2
6,1
3,6
1,7
4,6
DYY
1
2
3
4
9
10
5
6
20
12
14
30
25
13
33
17
22
2,5
3,5
а
20
22
24
26
50
30
32
47
36
23
40
19
44
25
48
28
10
42
14
656
Задание
i для самостоятельной работы и методические пояснения
Часть V
Продолжение табл. Т8.3
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
0,П8
0,25
0,32
0,27
0,29
0,3
0,28
0,12
0,52
0,33
0,64
0,35
0,57
0,37
0,22
0,39
0,14
0,41
0,16
0,43
0,18
0,45
0,2
0,47
0,22
0,05
0,24
0,39
0,26
0,37
0,5
0,34
0,17
0,29
0,3
0,48
0,12
0,31
0,49
0,13
0,47
0,17
0,45
0,19
0,43
0,41
0,21
0,09
0,07
0,39
0,08
0,16
0,09
0,4
0,2
0,14
0,1
0,16
0,22
0,37
0,12
0,25
0,2
0,2
0,4
0,4
0,4
0,4
0,6
0,6
0,6
0,6
1
1
1
1
0,7
0,7
0,7
0,7
0,9
0,9
0,9
0,9
0,8
0,8
0,8
0,8
0,2
0,2
0,2
0,2
0,25
0,3
0,3
0,4
0,4
0,4
0,4
0,1
0,1
0,1
0,1
0,2
0,2
0,2
0,2
0,5
0,5
0,5
0,5
0,6
0,6
0,6
0,6
0,45
0,45
0,45
0,45
0,25
0,25
0,25
0,25
0,25
0,005
0,005
0,01
0,01
0,01
0,01
0,02
0,02
0,02
0,02
0,03
0,03
0,03
0,03
0,007
0,007
0,007
0,007
0,015
0,015
0,015
0,015
0,009
0,009
0,009
0,009
0,025
0,025
0,025
0,025
0,005
0,5
2,3
4,7
2,9
5,1
3,5
4
0
3
4,5
1
2,5
3,7
1,5
2,2
1,3
0,2
1,7
0,6
3,3
0,15
1,9
3,9
1,15
2,4
0
1,35
2,9
1,75
3,5
2,5
4,5
5,5
16,5
7,5
27
9,5
8
2
9
19
9,5
17
15
4,5
5,5
16
3
9,2
2,5
7,5
1,15
15,7
11
4,5
18,7
3,7
6,5
14,5
9,5
5
7,5
21
18
45
13
52
17
28
49
21
47
23
10
45
25
37
43
27
41
29
39
31
37
43
35
10
17
32
22
44
32
25
Тема 9. Идентификация объектов управления 657
ТЕМА 9. ИДЕНТИФИКАЦИЯ ОБЪЕКТОВ УПРАВЛЕНИЯ
Исходными данными для расчета и проектирования САУ является
математическая модель объекта управления, которая обычно известна лишь частично (например,
известна структура, но неизвестны параметры). Поэтому прибегают к
экспериментальным исследованиям для определения динамики объектов управления.
В некоторых случаях вообще отсутствует какая-либо априорная информация об
объекте, поэтому как его структура, так и параметры определяются из эксперимента.
Идентификация - это определение математической модели объекта, или,
точнее - определение оптимальной, в известном смысле, оценки А истинного
оператора реального объекта А из заданного класса операторов с помощью анализа
входных и выходных сигналов этого объекта.
Перед выполнением заданий для самостоятельной работы изучите содержание
прбблемы идентификации и трудности, которые преодолевает проектировщик при ее
решении: вычислительная неустойчивость, исключение влияния шумов на точность
расчета динамических характеристик и др.
Познакомьтесь с основными подходами, используемыми в инженерной практике
с целью идентификации динамических характеристик.
Изучите достоинства и недостатки детерминированного и статистического
подходов, их содержание и область применения.
Оцените круг задач, в которых целесообразно применять байесовские оценки и
оценки с использованием максимального правдоподобия.
Познакомьтесь со структурой самонастраивающихся систем и оцените место
задачи идентификации в общей проблеме синтеза самонастраивающихся систем.
Пользуясь ([179], том 1), изучите методы идентификации нелинейных объектов,
проведите их классификацию, оцените область их применимости.
ЗАДАНИЕ 9.1
Разработайте алгоритмическое и программное обеспечение для построения ИПФ
объектов управления путем решения интегрального уравнения свертки методом
механических квадратур (детерминированный подход). Изучите проблему
некорректности, в частности, проблему решения уравнений 1-го рода. Познакомьтесь с
понятиями вычислительной неустойчивости алгоритма, числа обусловленности
матричного оператора. Изучите влияние шумов на точность расчета ИПФ. Полагая
известным входной сигнал y(t) на [0,7] (например, y(t) = yo + y{t + y2t2 или
у(0 = Уо + У\е~ш X численным методом рассчитайте соответствующую реакцию x(t)
с наложенными на нее шумами, имитирующими погрешности измерения, полагая,
что на этом этапе эксперимента ДУ объекта известно (рис. Т9.1).
y(t)
управления
"об^—Г" ±*ю«*)+»<0
Рис. Т9.1. Структурная схема объекта
43 Зак. 416
658 Задания для самостоятельной работы и методические пояснения. Часть V
Примените разработанное алгоритмическое и программное обеспечение для
идентификации ИПФ объекта, полагая, что известны лишь сигналы y(t) и xn(t).
Сделайте вывод о точности решения задачи идентификации в зависимости от
величины шага Аг (размерности системы алгебраических уравнений) и дисперсии
помехи n(t).
Постройте зависимость числа обусловленности К(Х) от размерности системы
алгебраических уравнений и оцените его влияние на точность решения задачи
идентификации при наличии погрешностей измерения.
Изучите вопрос расчета норм матриц, в частности, спектральной нормы матрицы,
согласованной с квадратичной нормировкой векторов.
ЗАДАНИЕ 9.2
Содержание настоящего задания состоит в реализации предыдущего задания с
той лишь разницей, что уравнение свертки решается разложением сигналов y(t) и
*„(/) по ортонормированным базисам (детерминированный подход).
Другими словами, разработайте алгоритмическое и программное обеспечение для
идентификации ИПФ в форме разложения по ОНБ путем решения интегрального
уравнения свертки ( y(t) - задается, x(t) - реакция рассчитывается численным
методом с учетом погрешности измерения). Примените разработанное алгоритмическое и
программное обеспечение для идентификации объектов, имеющих известные ПФ
W0(s). Постройте зависимость числа обусловленности К(А) от размерности системы
линейных алгебраических уравнений, сравните с предыдущим случаем и сделайте
соответствующие выводы.
ЗАДАНИЕ 9.3
Разработайте алгоритмическое и программное обеспечение для идентификации
ИПФ путем решения интегрального уравнения Фредгольма 1-го рода методом
механических квадратур (статистический подход).
Примените разработанное алгоритмическое и программное обеспечение для
идентификации объектов, имеющих известную ПФ W0(s). Корреляционные функции
/?кк(т) и RXy(x) рассчитайте методами моделирования на ЭВМ. Сравните
результаты решения задачи идентификации с точной ИПФ и сделайте выводы.
Постройте зависимость числа обусловленности К(А) от размерности системы
линейных алгебраических уравнений и отметьте принципиальное отличие
статистического подхода от детерминированного.
ЗАДАНИЕ 9.4
Разработайте алгоритмическое и программное обеспечение для построения
решений уравнений Фредгольма 1-го рода в форме разложения по ОНБ. Идентифицируйте
ИПФ объектов с ПФ W0(s). Исследуйте устойчивость вычислительного процесса.
ЗАДАНИЕ 9.5
Исследуйте проблему выбора критерия идентификации и соотнесите полученные
выводы к классу объектов, динамические характеристики которых могут
идентифицироваться с использованием выбранного критерия. Могут оказаться полезными еле-
Тема 9. Идентификация объектов управления 659
дующие соображения. Пусть xn(t) - измеренный выходной сигнал объекта
управления, являющийся реакцией на тестовый сигнал y(t) (например, y(t) = 1(0, a xn(t) -
измеренный выходной сигнал с наложенными на него шумами). Положим, что
удается найти аналитическую зависимость для этого же сигнала x(t) (т.е. решение ДУ
объекта, но без учета влияния помех) в зависимости от идентифицируемых
параметров объекта р{,р2, рг, т.е. в распоряжении проектировщика имеется
аналитическая зависимость вида x(t) = x(t,p{,p2, pr) - решение дифференциального
уравнения объекта в функции идентифицируемых параметров.
Тогда критерием идентификации может быть выбран функционал вида
Л(Л.Р2»- pr) = ™M\x(t,pl,p2,...pr)-xn(t)\, (Т9.1)
где [0,Г] - промежуток, на котором известны сигналы x(t,p{,p2,...pr) и xn(t)
(промежуток идентификации выбирается исходя из требований, определяемых степенью
решения задачи идентификации).
Параметры Р\,р2,...р* находятся из условия
Практическое применение (Т9.1) встречается весьма редко по причинам
аналитического и вычислительного характера (в рассматриваемой постановке задачи
идентификации сводится к задаче аппроксимации функции xn{t) функцией x(t,p{ip2, pr) в
пространстве С[0,Г], которая известна своей сложностью).
Наиболее часто применяются функционалы вида
т
I2(pl,p2i...pr) = j[x(t,pl,p2,...pr)-xn(t)]s dt,
о
где g = 1 или 2.
Неизвестные параметры могут быть найдены с помощью соотношения
h(PuPi*-Pr)-> min • (Т9-2)
Принципиальным недостатком изложенного подхода является то, что в
функционале фигурирует решение ДУ объекта в функции от идентифицируемых параметров
x(t9p{9p29...pr)9 которое в общем случае не может быть построено даже для
простейших объектов. Поэтому такой подход при решении инженерных задач
применяется чрезвычайно редко.
Задача значительно упрощается, если воспользоваться следующими
положениями. Рассмотрим наиболее сложный случай, когда объект управления является
нелинейным и описывается системой ДУ вида (положим Х° = 0)
X = /(XfY,Pi,p2....Pr). (T9-3)
где Х(г) - n-мерный вектор состояния; Y(r) - m-мерный вектор входа.
Из (Т9.3) находим
t
X(r) = //(X(x),Y(T),A,ft,...,pr)rfT. (T9.4)
О
Уравнения (Т9.3) и (Т9.4) эквивалентны.
Если сигналы Х(г) и Y(f) доступны измерению, то вместо, например,
функционала (Т9.1) можно записать функционал вида
43*
660 Задания для самостоятельной работы и методические пояснения. Часть V
'(Pi,ft..».Pr) = j|x(O-J/(X(T)^(x),p1>p2>...>pr)dJdT.
о II о ||
В последнем случае нет необходимости находить аналитическое выражение для
выходного сигнала вида X(t,pl,p2,...,pr).
Зависимости же вида x(t,p{,p2,...,pr) или X(t,px,p2,...,pr) представляют собой
не что иное, как явный вид решения ДУ, описывающего поведение
идентифицируемого объекта. Подчеркнем еще раз, что указанные функции могут быть найдены в
исключительно простых случаях, не представляющих какого-либо интереса в
инженерной практике.
Итак, в первом случае (функционал (Т9.1)) невязка £(r) = xn(t) - x(t, р{, р2,..., рг)
порождается разностью между измеренным сигналом xn(t) и соответствующим
аналитическим решением x(t,p{,p2,...,pr) ДУ объекта; во втором же случае
невязка порождается между правой и левой частями ДУ объекта. Реализация второго
подхода не вызывает никаких затруднений при решении проблемы идентификации.
Идентифицируемые параметры определяются по формуле
II ' f
min ( X(0- f/(X(x)>Y(x),Pi,ft.»..Pr)rf4 dz. (T9.5)
ft-ft ^ oil о II
Содержание задания. Разработайте алгоритмическое и программное обеспечение
для идентификации класса линейных скалярных стационарных объектов с
использованием функционала (Т9.5).
В рассматриваемом случае идентифицируется ПФ вида
W{s) = b^+bm_^+... + b0
sn +an_xsn 1+... + я0
Первый шаг алгоритма состоит в нахождении интегрального уравнения,
эквивалентного дифференциальному уравнению объекта идентификации (переход к
интегральным уравнениям (Т9.4) и (Т9.5) исключает необходимость измерения
производных сигналов x(t) и y(t))
x(t) + ]kx(t^9P)xW* = ]ky{UT,P)yWT9 (T9.6)
где Р = {av: v = 0,n -1; bk : к = 0,m} - неизвестные коэффициенты ПФ.
Второй шаг предполагает запись невязки
t t
e(r,F) = x{t) + \kx{t,T,P)x(T)dt-\ky(t^P)y{T)dx.
о о
Далее, на третьем шаге строится функционал качества
г
/(A.P2.-.Pr) = Je2('.'>)*.
о
а на четвертом шаге составляется система алгебраических уравнений
р =0, / = 1,л + /и + 1=Гг. (Т9.7)
dPi
Реализация пятого шага решения системы алгебраических уравнений (Т9.7) дает
решение задачи идентификации: находится оптимальный вектор Р* =(р*,Р2>--->Р*) •
Тема 9. Идентификация объектов управления 661
ЗАДАНИЕ 9.6
Изучите метод идентификации стационарных объектов с помощью модели с
настраиваемыми параметрами и примените его для решения конкретных задач.
Этот метод относится к группе компенсационных методов, использующих модели
систем управления (объектов) с настраиваемыми параметрами. Сущность метода
состоит в следующем. Строится модель объекта на основе имеющихся априорных
данных. Если структура объекта известна, то модель выбирается такой же структуры.
На вход модели подают те же самые сигналы, которые действуют и на реальный
объект и являются контролируемыми. Сигналы выхода также контролируются. На
основе сравнения соответствующим образом преобразованных моделью сигналов входа и
выхода объекта формируется невязка, свидетельствующая о том, что при выбранных
значениях параметров модель неадекватно описывает объект. В соответствии с
заданным критерием идентификации производится настройка параметров модели
таким образом, чтобы получить минимум функционала. В рассматриваемом случае
модель объекта является адаптивной. При достижении минимума критерия полагают,
что модель для данного типа входного воздействия адекватна объекту и параметры
модели отождествляются с параметрами объекта. Таким образом, задача
идентификации состоит в определении структуры модели и построении алгоритма настройки
ее параметров.
Стационарные объекты описываются дифференциальными уравнениями вида
/1-1 т
хм(0 + ^аУ(1) = 2ьууЧ0. (Т9.8)
v=0 v=0
Если настраиваемая модель также описывается уравнением
/1—1 т
*(n)(O + Z<Xv*v(O = £Pv/(O, (T9.9)
v=0 v=0
то для настройки ее параметров av: v = 0,n-l; (5V: v=O,m потребуется измерять не
только входной и выходной сигналы реальной системы, но и соответствующее
количество их производных. Поэтому рассмотрим другую форму описания настраиваемой
модели - интегральную.
Полагаем, что идентифицируемый объект имеет нулевые начальные условия.
Проинтегрировав п раз левую и правую части уравнения (Т9.9), получим
/i-l t т ,
*(0 + 2>vJ- J x(Tn_v)di{...dTn_v =
v=0 о О
(Т9.10)
Tn-v-l
= EPvf- \ x(Tn_v)dT{...dTn_v.
v=0
Последнее уравнение будем использовать для построения адаптивной модели.
Подадим на вход идентифицируемого объекта воздействие y(t). Это же
воздействие приложим к звену, выполняющему операцию
7' Л-»)Л,.Д.Г (T9.ll)
v=0 о О
lfi.5- I
662 Задания для самостоятельной работы и методические пояснения. Часть V
Сигнал с выхода идентифицируемого объекта подадим на вход звена,
выполняющего операцию
п-\ t тп ,
*(O + 2XJ- J x(Tn_v)dT{...dxn_v. (T9.12)
v=0 о О
n-v
Устройства, реализующие операции (T9.ll), (Т9.12), представляют собой модель
идентифицируемого объекта. Параметры ctv: v = 0,и-1; (3V: v =0,m можно изменять
- настраивать.
Структурная схема идентифицируемого объекта с настраиваемой моделью
приведена на рис. Т9.2.
у(*)
Идентифицируемый объект
»-0 v-0
x(t)
Рис. Т9.2. Структурная схема идентифицируемого объекта с настраиваемой моделью
Разность сигналов с выходов звеньев, реализующих операции, описываемые
выражениями (Т9.11) и (Т9.12), порождает сигнал ошибки
v=0 о О
t *n-v-l
(Т9.13)
v=0 о О
Сигнал 6(r) зависит от настраиваемых параметров av:v = 0,n-l; pv:v = 0,m,
а также коэффициентов av: v = 0, п -1; bv: v = 0, т .
Далее рассмотрим принципиальную сторону вопроса, связанного с определением
параметров av и pv. Пусть
У-1е'(0.
(Т9.14)
Тема 9. Идентификация объектов управления
663
Критерий (Т9.14) является функцией параметров математической модели объекта
A = [ao,al9...9an_l], В = {Ь0,Ь{,...,Ьп_{} и параметров настраиваемой модели
o = {o0>al>...>all.i}> p = {Po,Pi,-,P*-i} •
То есть J = J(А, В, а, р, г). При выполнении равенств av =av: v = 0,n-l;
Pv = bv: v = 0,m критерий принимает нулевое значение.
Осуществить минимизацию (Т9.14) можно, используя непрерывный вариант
градиентного метода поиска экстремума функций многих переменных:
da: . dJ . dz
J- = -k = -кг-
dt
dat
dOL;
t *n-i-\
= -*eJ... | x(Tn_i)dT{...dxn_h i=0,n-l,
(T9.15)
d% _ dJ _ dz _
— 1С — Act —
dt rfp, rfft
= kej... J y(Tn4)dxl...dTn_i,i = Oim.
о о
(T9.16)
Формулы (Т9.15) и (Т9.16) определяют алгоритм настройки параметров модели.
Коэффициент к позволяет изменять скорость настройки. При приближении к
экстремуму величину к необходимо увеличивать. На рис. Т9.3 приведена структурная схема
настройки параметров модели (показана настройка параметров ап_2 и (Зт).
у(0
Идентифицируемый объект
х(0
Рис. Т9.3. Структурная схема настройки параметров модели в процессе идентификации
Алгоритм достаточно просто реализуется на современной элементной базе. При
достижении экстремума настройка параметров прекращается, поскольку е(г)
принимает значение, близкое к нулю.
664 Задания для самостоятельной работы и методические пояснения. Часть V
Применение подхода, связанного с минимизацией мгновенного значения сигнала
ошибки е(г), встречает известные трудности. Поэтому на практике применяют
критерий
т т
/ = Je2(r,a,p)^ = Je2(r,/71,p2,...,pr)^r. (T9.17)
о о
При использовании автоматического вычислительного устройства,
предназначенного для минимизации (Т9.17), обычно реализуется метод градиента, согласно
которому
^- = 2grad(/),/ = 1,2,...,/.
at
Для вычисления компонент градиента можно использовать метод
вспомогательного оператора ([3], том 2)
dt dz dc{
где /(e) - функция ошибки (см. подробно в ([3], том 2)).
Выполните следующие этапы задания:
1) постройте модели объекта: аналоговый и цифровой варианты;
2) изучите методы поиска экстремума функции многих переменных;
3) постройте алгоритмы настройки для разных функционалов качества;
4) примените метод для идентификации объектов с конкретными ПФ.
Тема 10. Непрерывно-дискретные системы 665
ТЕМА 10. НЕПРЕРЫВНО-ДИСКРЕТНЫЕ СИСТЕМЫ
1) Какие характеристики динамических систем называются системными и
почему?
2) Что общего у системных характеристик разных классов линейных систем
(непрерывных, дискретных, непрерывно-дискретных) и какие отличия?
3) Почему для одной и той же динамической системы приходится определять
несколько типов передаточных функций?
4) Оцените достоинства и недостатки описания нестационарных систем
передаточными функциями.
5) Какие задачи удобно решать с помощью
а) сопряженных,
б) обобщенных,
в) бичастотных
передаточных функций ?
6) Какая разница между передаточными функциями в пространстве состояний и
в пространстве «вход-выход»?
7) Перечислите известные вам виды передаточных функций и дайте краткую
характеристику каждого типа.
8) Как связаны передаточные функции с весовой функцией и друг с другом?
9) Сформулируйте физический смысл известных вам системных характеристик.
10) Какие звенья называют типовыми и почему?
11) Как по виду передаточной функции понять, является ли система
стационарной?
12) Сравните связи вход-выход на основе передаточных функций при
детерминированных и случайных воздействиях для стационарных и нестационарных
систем.
13) Какие характеристики системы и воздействий потребуются для вычисления
переходных процессов по дисперсии реакций?
14) Как по известной спектральной функции вычислить изображение дисперсии
нестационарного процесса?
15) Запишите и сравните передаточные функции экстраполяторов разных
порядков.
16) Объясните методические проблемы непрерывно-дискретных систем.
17) Почему при использовании известных передаточных функций дискретных
систем W(z) для многих соединений не удается получить соотношений,
подобных связям для непрерывных стационарных систем?
18) Запишите и сравните соотношения для вычисления реакций непрерывно-
дискретных систем в тактовые моменты времени и для произвольных
моментов времени.
19) Как найти передаточные функции по дифференциальному уравнению?
20) Как оценить устойчивость системы по известной бичастотной передаточной
функции?
42 Зак. 416
666
Задания для самостоятельной работы и методические пояснения. Часть V
ТЕМА 11. СИНТЕЗ РЕГУЛЯТОРОВ
Содержание заданий можно условно подразделить на две группы:
• группа заданий, содержание которых направлено на освоение теоретических
положений, которые изложены в настоящем томе;
• группа заданий, содержание которых направлено на решение конкретных
(иногда достаточно сложных) задач, связанных с проблемой синтеза систем
автоматического управления.
ЗАДАНИЕ 11.1
Структурные схемы систем автоматического управления представлены на
рисунках Т11.1 - Т11.23, причем численные значения параметров не указаны. Изучите
физику работы САУ по источникам, приведенным в ([168], том 1).
XOi
У1£Ц8н-^ку(,)}—igh->
EL
й „
{
ку
Косе
1/(с(
1 +
h
>Р
,s
)
ф
Рис. ТН.1. Следящая система с асинхронным двухфазным двигателем
и жесткой отрицательной связью по скорости
т+ь®—^уСвШг-*®*'
к.
l+Tns
1/(с.-/„)
S(l +TS)
Tos
l + Tos
*Vc/p
ж
Рис. Т11.2. Следящая система копнровально-фрезерного станка
К„
1
{Л
Рис. TI1.3. Следящая система стабилизации сектора обзора
У(0 +
Л^-'-г-*
_^L
5(5 + 2^0)-,^
x(f)
f—►
Рис. Т11.4. Система автосопровождення цели
Тема 11. Синтез регуляторов
667
1
' +T»s+l)(Tys+l)ip
•4
Рис. Т11.5. Следящая система с электромашииным усилителем
и исполнительным двигателем постоянного тока
УСОАс
i
9—^JZelvJI—^T
i ------ ^
l+Tas
a+xs
l + xs
l/(ce-/D)
5(1 +ГМ5)
*(0
Рнс.ТП.6. Следящая система с гибкой и жесткой обратными связями по скорости
У(П±
^я.Уг-*
^(7j5 + l)
sz(T2s+l)
х«
Рис. Т11.7. Следящая система
v3
^ку(5)^
^
/»м(Д + Яп)
S +
2a%5+tOQ
х(0
—►
Рис. Til.8. Система управления угловой скоростью рысканья
_ i
-Уз
rV ^
«О
«12^+ «14
Y
Рис. Т11.9. Система управления креном с учетом перекрестных связей
42*
608 Задания для самостоятельной работы и методические пояснения. Часть V
"%:^^W
Рис. Т11.10. Система управления высотой полета летательных аппаратов
1 - уЗ Ду
>i?
s +n22s
Kj + KjS
"14
Т„5
—»
Ts
V
-M2bt-4
Рис. Tll.ll. Система управления курсовым углом ведомого самолета
~%ЧукйИ§
T*.s + l
и,
и.
-%Hg)—►
K(Ts+l)
V
Рис. Т11.12. Система управления временной дистанцией
у (О
**&.
s^s + \)
Ф
Рис. Т11.13. Следящая система
Тема 11. Синтез регуляторов
669
"^?^У]у:-
кг
Кр(Ту + 1)
Tqs2 + 2£>Tqs+1
ДО
Рис. Т11.14. Система автоматического управления полетом
баллистической ракеты на активном участке
Y«W
У*<А>
к.
пр
к„
s(Tys+l)
Ш
Рис. Т11.15. Канал управления креном ракеты
*з(0^
"^ ^^.1 ТТЛ /■ N ' к.
1
ч
►
«8
шо
а
1
TyS
е
S
H(t)
Рис. Т11.16. Система стабилизации высоты полета ракеты
^?К^йЬ*
Kc(Tys + l)
s(Th2+2^5 + 1)
«е
Рис. Т11.17. Система управления углом рысканья
крестокрылого реактивного снаряда
у«) +
WvAs)\
! »
*с*у/(*е/,)
*(Гм* + 1)
^(0
Рис. Т11.18. Следящая система с асинхронным двухфазным двигателем
ч 5„
2,(0+. г - t.
"8н
ир
К,
6о
V
2д(0
Рис. ТП.19. Система управления центром тяжести
крестокрылого снаряда в боковом движении
670
Задания для самостоятельной работы и методические пояснения. Часть V
'от + ^ ,
—Ц&-*
к
sp
Tsps+l
w«As)r
К К V
^5MiYHHiVy
At\
Рис. Т11.20. Радиолокационные станции
автоматического сопровождения цели по дальности
5оп
%^iL"(V)iw*
_л
1ГГК^°>
Рис. Т11.21. Контур стабилизации угла тангажа
у(0Л г—
Рис. Т11.22. Контур стабилизации крена
U
3+,
1^14
ч
-tlQ(S + n22)
s +2aoo>y + coo
x(t)
Рис. Т11.23. Система управления угловой скоростью тангажа
Постройте в общем виде (без задания численных значений параметров
неизменяемой части) алгоритмы расчета параметров регулятора рьРг,---,рг (структура
регулятора и изменяемые параметры рь р2»--» Рг задаются преподавателем), такие,
которые обеспечили бы заданное качество переходного процесса (Тр < Гр доп; о% < а%доп;
со < СодоП; ^1 < сх доп;-..), пользуясь методами:
• динамической компенсации;
• математического программирования (решение задачи проводится во
временной и частотной областях);
• проекционным;
• стандартных передаточных функций;
• уравнений синтеза;
• стандартных коэффициентов.
Тема 11. Синтез регуляторов
671
При необходимости доведите расчет до конкретных численных результатов,
задаваясь численными значениями параметров неизменяемой части, структурой
регулятора и изменяемыми параметрами ри рг,..., рг\ разработайте соответствующее
алгоритмическое и программное обеспечение.
Методы, использующие аппарат нелинейного программирования, предполагают
нахождение глобального экстремума. Решение этой задачи встречает серьезные
трудности (это относится ко всем задачам, рассмотренным в книге и использующим
нелинейное программирование). Распространены методы поиска глобального
экстремума, связанные с использованием метода статистических испытаний.
Непосредственное применение метода статистических испытаний, с высокой точностью
позволяющего найти глобальный экстремум, требует большого числа испытаний.
Поэтому, как правило, используется сочетание метода статистических испытаний
с методом локального поиска ([6], том 1). На первом этапе методом статистических
испытаний с использованием больших шагов в различных областях поиска находится
несколько опорных точек, в которых выполняются все ограничения задачи. На
втором этапе поиск производится в окрестности опорных точек с использованием
методов поиска локального экстремума. Наименьшее из полученных значений
функционала качества принимается за ее глобальный экстремум. Отметим, что некоторые
методы синтеза регуляторов в неявной форме реализуют принцип динамической
компенсации и этот факт надо учитывать при синтезе корректирующих устройств.
Прежде чем синтезировать регуляторы с заданной ПФ, необходимо учесть
следующие соображения.
Передаточная функция регулятора может быть реализована технически, если у
нее степень полинома знаменателя больше или равна степени полинома числителя.
Это - грубое условие реализуемости, здесь не учитываются ПФ, удовлетворяющие
этому условию, но имеющие малые постоянные времени.
Возможность реализовать замкнутую САУ еще не означает, что при заданной
неизменяемой части может быть реализовано корректирующее устройство.
Для того чтобы регулятор был реализуем, необходимо, чтобы ПФ замкнутой
системы обладала некоторым избытком степени знаменателя над степенью числителя.
ЗАДАНИЕ 11.2
Проведите синтез регуляторов, обеспечивающих заданное качество работы САУ в
переходном режиме с помощью методов, описанных во Н-й части учебника.
Разработайте соответствующее алгоритмическое и программное обеспечение.
Структурные схемы систем представлены на рис. Т11.24. Передаточные функции
неизменяемой части системы приведены на структурных схемах, а параметры
неизменяемой части и требования к качеству работы САУ указаны в табл. Т11.1 - Т11.5.
y(t)+*(t)r.
КУ
Уд
К-
Г,5 + 1
Кл
к.
s(T2s +l)(T3s +1)
*(0.
672
Задания для самостоятельной работы и методические пояснения. Часть V
^у -----
Кг
s(TlS + W^ + l)
к4
T3s + l
к.
е(0г
р-+\ КУ г-**
i i
К2
►
К}
(Г2* + 1)(7> + 1)
►
x(t)
—►
—hS>->] КУ J—*
к,
(Г,*+1)(Г2* + 1)
АГ,
Г^ + 1
^
ж (О
—►
е
Г
(Or-
-►•
КУ г
1
+D(V
+1XV + 1)
х(0
Рис. Т11.24. Структурные схемы систем
Таблица Т11.1
№
варианта
1
2
3
4
5
6
7
Параметры неизменяемой части (рис. Т11.24, а)
Кг
3
4
5
4
3
2
1,5
Кг,
рад/с
4
5
6
7
S
9
10
Г., с
0,015
0,012
0,02
0,014
0,016
0,018
0,02
Г2, С
0,07
0,08
0,09
0,1
0,11
0,12
0,14
0,15
0,2
0,25
0,3
0,34
0,27
0,24
к,,
В/рад
0,01
0,018
0,006
0,012
0,012
0,01
0,014
Требования к системе
30
32
34
36
38
35
35
ГР,с
1,5
1,6
1,7
1,8
1,9
1,4
1,3
Порядок
астатизма
1
1
1
1
1
1
1
Тема 11. Синтез регуляторов
673
Таблица Т11.2
№
варианта
1
2
3
4
5
6
7
Параметры неизменяемой части (рис. Т11.24, б)
град/В-с
200
210
220
230
240
250
260
Къ
1
1
1
1
1
1
1
к4,
В-с/град
0,05
0,055
0,06
0,065
0,07
0,075
0,08
Г,, с
0,2
0,19
0Д8
0,17
0,16
0,15
0,14
Г2,с
0,01
0,01
0,01
0,009
0,009
0,011
0,011
7э,с
0,008
0,007
0,007
0,007
0,006
0,006
0,006
Требования к системе
а,%
25
25
20
20
30
30
20
ГР,с
0,3
0,3
0,3
0,28
0,28
0,28
0,28
Порядок астатизма
0
0
0
0
0
0
0
Таблица Т11.3
№
варианта
1
2
3
4
5
6
7
Параметры неизменяемой части (рис. Т11.24, в)
1
i
1
1
1
1
1
Къ,
град/В-с
5
5
5
5
2,4
2,4
2,4
Ка,
мм/град
0,03
0,02
0,025
0,035
0,038
0,04
0,042
Ть с
0,02
0,03
0,06
0,05
0,04
0,08
0,07
Тг,с
ОД
0,15
0,2
0,3
0,25
0,22
0,28
Гз,с
0,07
0,09
ОД
0,06
0,05
0,09
ОД
Требования к системе
а,%
20
30
25
28
20
32
35
ГР,с
0,3
0,4
0,5
0,6
0,35
0,45
0,3
Порядок астатизма
1
1
1
1
1
1
1
Таблица Т11.4
№
варианта
1
2
3
4
5
6
7
Параметры неизменяемой части (рис. Т11.24, г)
К2
4
5
6
7
6
5
4
Къ
1,5
2
2,2
2,8
1,7
2,6
2,5
к4
од
0,1
од
ОД
0,2
0,2
0,2
Г., с
0,01
0,02
0,03
0,02
0,01
0,03
0,01
Тг, с
0,03
0,04
0,05
0,05
0,04
0,04
0,05
Гз,с
ОД
0,12
0,15
0,18
0,2
0,18
0,16
Требования к системе
а,%
25
30
35
30
25
20
30
ГР,с
ОД
0,15
0,2
0,25
0,26
0,24
0,2
Порядок астатизма
0
0
0
0
0
0
0
Таблица Т11.5
№
варианта
1
2
3
4
5
6
7
Параметры неизменяемой части (рис. Т11.24, д)
Тис
0,1
0,11
0,11
0,13
0,14
0,15
0,16
Тг, с
0,02
0,021
0,022
0,2
0,21
0,022
0,023
Гз,с
0,01
0,01
0,01
0,01
0,01
0,01
0,01
Г4,с
0,005
0,005
0,005
0,005 •
0,005
0,005
0,005
Требования к системе
с,%
30
30
30
•30
30
30
30
ГР,с
0,8
0,9
1
1.1
1,2
1,3
1,4
Порядок астатизма
1
1
1
1
1
1
1
674 Задания для самостоятельной работы и методические пояснения. Часть V
ЗАДАНИЕ 11.3
Рассмотрим подход, позволяющий получить решение задачи синтеза регулятора
при условии его физической реализуемости (предполагается, что к^т) е L2[0,°o)).
Отличительной особенностью этого подхода является то, что задача синтеза
регулятора сводится к задаче решения интегрального уравнения 2-го рода, чем
обеспечивается корректная постановка задачи и вычислительная устойчивость.
Имеем
(l^WKy(s)Wo(s))W(s) = WKy(s)Wo(s), (T11.1)
где W(s) - эталонная ПФ (например, она может быть задана стандартными
коэффициентами, может иметь вид фильтра Баттерворса, может быть найдена по
стандартной ПФ разомкнутой системы). Из последнего уравнения можно получить
зависимость, определяющую W^is). Нахождение же ИПФ к^т) в этом случае сводится к
необходимости решения уравнения 1-го рода, что приводит к известным трудностям.
Получим уравнение 2-го рода относительно ИПФ регулятора. Имеем
W^W^W^W + W^sW^sWis). (T11.2)
Или, что то же самое,
WKy(s) = WKy(s)W(s) + W0-l(s)W(s). (T11.3)
Полагая, что W~l(s)W(s), WKy(s)W(s) и WKy(s)- правильные
дробно-рациональные функции, из последней зависимости найдем (перейдя из комплексной области во
временную)
MO=KyW*('--^+/(o, (T11-4)
о
где
kKy(t) = L-l{WKy(s)}; k(t) = L-l{W(s)}; f(t) = L~l{W(s)Wo\s)}. (T11.5)
Полученное интегральное уравнение относительно ИПФ корректирующего
устройства &ку(О относится к классу интегральных уравнений Вольтерра 2-го рода.
Построение вычислительного метода решения этого уравнения или указание на
возможность построения есть лишь первый шаг в создании теории метода.
За ним должно следовать выяснение условий сходимости, правила определение
скорости сходимости, нахождение оценки погрешностей - априорной и
апостериорной, выработка способов улучшения сходимости, если последняя окажется
недостаточно быстрой, исследование вычислительной устойчивости и т.д.
Если ИПФ корректирующего устройства найдено в виде разложения по ортонор-
мированному базису
*(t)=I>v4v(t), (T11.6)
v=l
то этим выражением сразу же определяется структура и параметры корректирующего
устройства (рис. Т11.25).
Для спектрального метода синтеза корректирующих устройств характерно
следующее: он применим как к стационарным, так и к нестационарным системам (в этом
случае уравнение относительно ИПФ регулятора находится во временной области),
ориентирован на использование ЭВМ, он обладает вычислительной устойчивостью,
позволяет оценивать погрешность, с которой рассчитывается приближенная ИПФ
корректирующего устройства.
Тема 11. Синтез регуляторов
675
Рис. Т11.25. Структурная схема системы
Разработайте соответствующее алгоритмическое и программное обеспечение
синтеза регулятора методом интегральных уравнений 2-го рода с использованием
различных ОНБ.
ЗАДАНИЕ 11.4
Разработайте алгоритмическое и программное обеспечение для синтеза
корректирующих устройств методом моментов. С использованием метода моментов проведите
синтез регуляторов систем, структурные схемы которых представлены в задании 11.1.
В главе 5, том 2 подробно изложен метод расчета оптимальных управлений,
основанный на результатах решения проблемы моментов.
Этот метод с успехом может быть использован для синтеза регуляторов.
Формула, определяющая последовательное корректирующее устройство (если
известны ПФ Wo(s) неизменяемой части и W(s) эталонной замкнутой системы), имеет
вид
WK,(s) = !~^ , (Т11.7)
ку W0(s){l-W(s))
где W^s) - правильная дробно-рациональная функция.
Последнюю зависимость можно переписать так
jkKy(t)e~kctdt = ць к= 1,2,3,...,
где
И* =
W(s)
W0(s)(l-W(s))
\s=kc>
(Т11.8)
(Т11.9)
с - известная постоянная величина.
Задача построения ИПФ регулятора к^{г) в терминах метода моментов
формулируется так: заданы моменты \хк (к = 1,2,...) функции kKy(t) относительно моментной
системы {e~kct\ к- 1,2,...}; требуется найти условия существования, единственности,
а также вычислить ИПФ k^{t), такую, что
676 Задания для самостоятельной работы и методические пояснения. Часть V
оо
Jjfc^(T)*-»min. (T11.10)
О
ЗАДАНИЕ 11.5 ([7], ТОМ 2)
С помощью методов, изложенных в части II, определите четыре коэффициента
усиления регулятора возбуждения синхронного генератора при регулировании по
производным двух режимных величин: тока и напряжения. Коэффициенты
необходимо определить из условия получения оптимального переходного процесса и
устойчивости при малых колебаниях. Изображение координаты x(t) (угол передачи
генератора) задано выражением
x(t) = X(s)=b<+b>S + b>s22 + b>S\+boS\, СГП.11)
я4 + a^s + a2s +diS +aos
где
bo=b{=O,
b2 = 0,287 - 0,389p2 - 0,632y2,
^3=4,86-0,389p1-0,632y1,
b4 =l,ll-0,389po-0,632y0,
яо = а21-1,63р2-2,65у2)-1(Г2,
ax = (20,5-1,63^! -0,124p2 +2,65yt +0,201y2)40"2,
^2=(18,7-1,63ро-0,124р1+29,Зр2-2,65у0-0,201у1-39,9у2)-10-2, (Til.12)
а3=2,10-0Л24-10"2р0+0?293р1-0,201 •10"2y0-0,399y1,
a4 = 0,298 + 0,293РО - 0,399y0.
Здесь уо и ро - коэффициенты усиления при регулировании по отклонениям
напряжения и тока от нормальных значений; они равны р0 = 1,0; у0 = -15,0.
Коэффициенты усиления по первой и второй производным тока и напряжения
обозначены соответственно ph p2, Yi. Y2- Определите их, исходя из следующих
требований:
а) система должна быть устойчивой;
б) переходный процесс должен быть монотонным (или с малым
перерегулированием), время переходного режима Г =2,5 с, максимальная скорость протекания
процесса D = 2,5 рад/с.
Изучите физические процессы, протекающие в системе ([7], том 2).
Разработайте алгоритмическое и программное обеспечения для метода
математического программирования.
ЗАДАНИЕ 11.6
Рассмотрите решение задачи синтеза регулятора (см. предыдущее задание) при
следующих условиях:
• рассчитайте для режима малых колебаний четыре коэффициента усиления при
регулировании возбуждения синхронного генератора по производным двух
режимных величин: тока и напряжения. Генератор работает через дальнюю
передачу на систему U = const. Уравнения генератора записаны в упрощенной
форме Лебедева - Жданова; учитывается постоянная времени цепи возбуждения.
-2
(Т11.14)
Тема 11. Синтез регуляторов 677
Постоянными времени возбудителя и дифференцирующих звеньев регулятора
пренебрегаем. Изображение приращения угла 0 между вектором э.д.с. и
вектором напряжения U при внезапном малом изменении нагрузки имеет вид ([7],
том 2)
Д0(,) = Ьг+bs + bJ СГ11.13)
a4+a3s + a2s +axs +aos
где
&0=0,287-0,389р2-0,632у2,
fcl=4,86-0,389p1-0,632yl,
Ьз =10,2,
яо = (1,21-1,63Р2 -2,65у2)-10~2,
д1=(20,5-1,63Р1-0,124р2+2,65у1+0,201у2)10
а2= (56,8-0,124^ + 29,3р2 -0,20^ -39,9у2)-10"2,
д3 = 2,13 + 0,293р1-0,399у1,
д4=6,57.
Эти выражения записаны для нормального режима, которому соответствует угол
передачи 0 = 67°, pi, р2, Yi и у2 - искомые коэффициенты усиления (регулирования)
регулятора соответственно по первой и второй производным тока и напряжения.
Коэффициенты усиления при регулировании по отклонениям (от номинальных) тока
и напряжения определяются статизмом; они приняты: р0 = 1,0, Yi = - 15,0.
Рассчитайте коэффициенты усиления pi, p2, Yi, у2, исходя из следующих
требований:
1) переходный процесс должен быть близким к монотонному при времени
протекания переходного режима в пределах Г= 2,5 с, и максимальной скорости
протекания процесса и = 2,5 рад/с;
2) система должна быть устойчивой.
Разработайте алгоритмическое и программное обеспечение для метода
математического программирования.
ЗАДАНИЕ 11.7
Передаточная функция ошибки е (г) замкнутой следящей системы по отношению
к управляющему воздействию имеет следующий вид
,(о,2,+1)(о,(ш+1)+ад
eV ' 14,2ffy+j(0,2j + l)(0,07j + l) + Z1(.O
где Z{(s) = 1920ATyZ(s), Z(s) - передаточная функция искомого корректирующего
звена (обратной связи), Ку-~ коэффициент усиления электронного усилителя. Его
значение выбрано в результате приближенного рассмотрения поведения системы при
гармоническом управляющем воздействии ЛГУ =15 [7, том 2]. Рассчитайте параметры
корректирующего звена, исходя из следующих качественных показателей следящей
системы: максимальная динамическая ошибка слежения етах < 30 - 35' при
синусоидальном входном воздействии с амплитудой 0 = 25° и периодом Г= 9,5 с; время
переходного процесса Тр < 0,4 с; переходной процесс почти монотонный, с малым
перерегулированием.
678 Задания для самостоятельной работы и методические пояснения. Часть V
ЗАДАНИЕ 11.8
Рассмотрите возможность упрощения задачи статистического синтеза систем (см.
задание 7.1) с использованием стандартных передаточных функций (структурные
схемы систем представлены на рис. Т7.2 - Т7.17).
Эта задача решается следующим образом. При выполнении задания 11.1 были
рассмотрены подходы к определению структуры и параметров наиболее простых
корректирующих устройств и стандартной ПФ разомкнутой системы (см. §2.5,
том 2). Этот этап сохраняется и при выполнении настоящего задания. Положим, что
найдена стандартная ПФ разомкнутой системы с неизвестным параметром соо, по
которой легко найти стандартную ПФ замкнутой системы, т.е.
W^.0)= W^0) . (T11.16)
l + WpCT(5,C00)
Если на вход действует полезный сигнал m(i) и помеха n(t) (полагаем их
некоррелированными), то СКО воспроизведения полезного сигнала в установившемся
режиме определяется зависимостью
с2 =
-WctO\co,co0)| Wco)</co+ J |^ст(Лсо,со0)| Snn(a)d(>>. (T11.17)
Поскольку последний интеграл вычисляется точно, то легко записать
g2=g2(co0). (Til.18)
Таким образом, при известных 5mm(ca), Snn((u) и W°T(5,coo) СКО зависит лишь от
одного параметра coq.
Оптимальное значение щ можно найти или аналитически (для простых случаев)
^W=0( (Т11.19)
Эсо0
или численным методом.
Поскольку а2(со0) является функцией унимодальной, то для нахождения щ
можно использовать следующие методы: перебора, поразрядного поиска,
исключения отрезков, парабол, можно применить методы, использующие производные
функции (методы средней точки, хорд, Ньютона, кубической аппроксимации).
Далее, если известна оптимальная стандартная ПФ замкнутой системы, легко
находится ПФ W^is) и осуществляется расчет параметров корректирующего
устройства так же, как и в детерминированном случае.
Корреляционные функции Rmm(x) и Rnn(x) задаются преподавателем; например,
можно положить
RmmW = Отте~°^; Rnn(x) = 2я505(т). (Т11.20)
Тогда
Smm((*)=Dmm / ; 5/ш(со) = 5о. (Т11.21)
я а2 + со2
Численные значения Dmm, a, So задаются преподавателем. Проведите
статистический анализ синтезированных САУ.
Для систем, структурные схемы которых представлены на рис. рис. Т7.2 - Т7.17,
постройте решение следующей задачи: будем полагать, что полезный входной сигнал
имеет вид
Тема П. Синтез регуляторов 679
«(О = go+ ft' +ft'2+- + */'/. (Т11.22)
а помеха n(t) - белый шум с нулевым средним значением и спектральной плотностью
So (#o> £i>---, gi и Sq задаются преподавателем).
Установившаяся ошибка определяется формулой
E(O = c0g(O + ^-g(O + ^g(O + ..- , (T11.23)
а ошибка, порожденная помехой n(t\ имеет вид
оо
On = /|W(y(o)|2Snrt((o)da), (Tl 1.24)
—оо
где с0, си ^2> • - коэффициенты ошибок, определяемые через ПФ замкнутой САУ.
Среднее значение квадрата общей ошибки САУ определяется выражением
a2=e2 + c2. (T11.25)
Задача состоит в том, чтобы путем выбора параметров корректирующего
устройства минимизировать ошибку a .
Для решения поставленной задачи можно воспользоваться тем же алгоритмом,
который приведен выше. Приведем его этапы:
1) по структуре неизменяемой части выбирается структура и параметры наиболее
простого корректирующего устройства таким образом, чтобы
W^(s^0) = WKy(s)Wo(s). (T11.26)
В последнем выражении coq неизвестно;
2) находится ПФ замкнутой стандартной системы И^т(5,соь), зависящая от одного
параметра соо;
3) находятся коэффициенты ошибок с0(соо), С|(соь), с2(соь),... и ^(Ц))»
4) записывается выражение для критерия качества
а2(со0) = Е2(сй0) + а2(со0),
зависящего от одного параметра со^;
5) рассчитывается щ, обеспечивающее min^ (щ)- На этом этапе найдено оп-
тимальное значение параметра со0 = со0 ;
6) находится WpCT(s,coo) по известной WCT(s,coo) - стандартной ПФ замкнутой
системы (на этом этапе со0 = coq );
7) рассчитываются параметры корректирующего устройства в соответствии с
идеологией метода стандартных ПФ.
Конкретные исходные данные для каждого студента задаются преподавателем.
ЗАДАНИЕ 11.9
Изучите постановку задачи синтеза регуляторов в классе многомерных систем и
основные этапы ее решения.
С целью знакомства с конкретными многомерными системами, физикой их
работы, принципиальными, функциональными и структурными схемами многомерных
680 Задания для самостоятельной работы и методические пояснения. Часть V
систем, постановкой задачи синтеза регуляторов и их конкретной реализацией,
рассмотрим двумерную систему автоматического управления барабаном-сепаратором.
Рассматриваемая САУ предназначена для автоматического поддержания
заданного уровня Л3 воды и заданного давления Р3 в барабане-сепараторе (БС) на АЭС с
реакторами типа РБМК-1000.
На рис. Т11.26 приведена упрощенная принципиальная схема САУ БС.
Рис. ТП.26. Упрощенная схема САУ БС:
БС - барабан-сепаратор; ТГ'- турбогенератор; РЗ - ручной задатчик; ЭП - электропривод;
РД- регулятор давления; РУ - регулятор уровня; РК-регулирующий клапан;
РПК - регулирующий питающий клапан
В БС подается пароводяная смесь от реактора (на рис. Т11.26 не показана),
смешивается с питательной водой и разделяется на фракции: пар и воду. Пар через
регулирующий клапан (РК) поступает на турбогенератор (ТГ).
Давление пара Р в БС должно поддерживаться на уровне 69±0,25 кГс/см2 в
стационарном режиме энергоблока. Понижение давления приводит к вскипанию
теплоносителя в реакторе, что чревато расплавлением активной зоны. Повышение
давления может привести к разрыву паропроводов и БС.
Давление пара в БС зависит от двух процессов: генерации пара в реакторе и
расхода пара ТГ. На давление оказывает влияние количество подаваемой в БС более
холодной питательной воды.
Заданное давление Р3 устанавливается ручным задатчиком (РЗ), сигнал от
которого сравнивается с измеренным давлением Р. Регулятор давления (РД) по разбалансу
£р = рз - р посредством электропривода (ЭП) открывает регулирующий клапан (РК),
если Р> Р3, или закрывает РК - в противном случае.
Уровень воды h в БС также играет важную роль для нормальной эксплуатации
энергоблока. Понижение уровня может вызвать «срыв» работы главных
циркуляционных насосов и прекращению охлаждения реактора. Повышение уровня может
вызвать аварию ТГ из-за заброса влаги в турбину. В стационарных условиях работы
энергоблока точность поддержания заданного уровня ±50 мм.
Уровень воды h в БС зависит от материального баланса притока воды GB и
расхода пара Gn. Так как под зеркалом испарения в БС находится большой объем пара, то
на уровень воды оказывает влияние давление пара. Увеличение давления приводит к
снижению уровня и наоборот.
Процесс управления уровнем сопровождается явлением, известным как «парадокс
БС». Суть этого явления заключается в следующем: увеличение подачи питательной
Тема П. Синтез регуляторов
681
воды с целью повышения уровня в течение 1 - 2 минут приводит к обратному
эффекту, т.е. к его понижению. Объясняется это уменьшением количества пара под
зеркалом испарения из-за более низкой температуры питательной воды. По этой причине
регулятор уровня (РУ) реализован по трехимпульсной схеме.
Наряду с сигналами h3 и h управление регулирующим питательным клапаном
(РПК) формируется сигналами Gn и GB (рис. Т11.27):
%=h2-h + KQ(Gn-GB).
РЗ
АР
; w :
!^Д !
эп
?к
РЗ
h «
1
1
1
1
1
Щ
k i
РУ
{ ■
е
АР
Яе
эп
—►
РПК
2! ►
GB
т
БС
Gn
» ►
/i
Рис. Т11.27. Функциональная схема САУ БС:
АР - аппаратура регулирования, (остальные обозначения см. на рис. Til.26)
Возмущениями в данной САУ является тепловая мощность пТ реактора и
электрическая мощность пэ генератора.
Линеаризованная упрощенная схема БС как объекта управления показана на
рис. Т11.28.
т/ч
т/ч
Рис. Т11.28. Структурная схема БС как объекта управления при пт = const и п> = const
Будем считать регулировочные характеристики РК и РПК линейными, а в
качестве РУ и РД (см. рис. Т11.26) используем АР, которая совместно с ЭП формирует
пропорционально-интегральный закон управления.
682 Задания для самостоятельной работы и методические пояснения. Часть V
Тогда структурная схема регулятора САУ БС может быть представлена в
следующем виде (рис. Т11.29).
кГс/см2
и%
У2 =
ММ
^^г^
К,
KJ1 + -
Ths
и,
Рис. Т11.29. Структурная схема регулятора САУ БС
Задания для самостоятельной работы
Пользуясь источниками
а) Головач Е.А., Иванов В.А., Попов Б.С., Фрейберг В.Г. Математическое
моделирование блока кипящий реактор-турбина-генератор // Энергетика. - 1981. №3.
С. 46-51;
б) Давыдов Н.И., Филатьева Р.Н., Везеницын Ю.Н. и др. Выбор параметров
настройки регуляторов уровня и давления в барабанах-сепараторах энергоблока с
реактором РБМК-1000 // Теплоэнергетика. - 1983. №10. С. 10 - 15:
1) Изучите физические процессы, происходящие в рассматриваемой САУ; с
использованием указанных источников изучите проблему математического
моделирования системы.
2) Сделайте постановку задачи синтеза регулятора в классе многомерных систем
автоматического управления; укажите трудности решения этой задачи.
3) Изучите методику выбора параметров настройки регуляторов уровня и
давления в барабанах-сепараторах с реактором РБМК-1000.
4) При следующих значениях параметров
МВТ Г -50с
К =80-
р кГс/см'
Kh=\0-
чмм
,Гр=40с,
м/ч
а) постройте полную структурную схему двумерней системы автоматического
управления барабаном-сепаратором и запишите ее векторно-матричное
дифференциальное уравнение с постоянными коэффициентами в форме Коши;
Тема 11. Синтез регуляторов
683
б) проведите анализ устойчивости рассматриваемой САУ с использованием
характеристического уравнения, воспользовавшись методами Раусса, Гурвица,
Льенара - Шипара, Михайлова. Познакомьтесь с методами Гершгорина,
Островского, Брауэра локализации собственных чисел матрицы А и укажите
недостатки этих методов; проанализируйте возможность реализации на ЭВМ
метода D-разбиения;
в) изучите критерий устойчивости В.И. Зубова [161, том 1] и, воспользовавшись
этим критерием, исследуйте устойчивость рассматриваемой системы.
Разработайте алгоритм и программу, реализующие метод В.И. Зубова, укажите его
достоинства и недостатки;
г) пользуясь стандартными численными методами интегрирования, постройте
переходные процессы в системе (они показаны на рис. ТП.ЗО и на рис. Т11.31);
сравните полученные результаты с теми, которые представлены на рис. Т11.30 и
рис. Т11.31;
30-+
-10
100
200
300
400
500
Рис. Т11.30. Отклонения уровня 3 и давления 2 САУ БС при снижении
заданного давления 1 на 10 кГс/см2
2
2
X
I
а
80-
^ 60
h
| 20
о
г, с
100
200
300
400
500
Рис. Т11.31. Отклонения уровня 2 и давления 3 САУ БС при увеличении
заданного уровня 1 на 100 мм
д) изучите задачу определения матрицы перехода и передаточной функции с
помощью преобразования Лапласа из уравнений системы; постройте матричную
передаточную функцию системы и матричную ИПФ. Запишите векторно-
матричный интеграл Дюамеля. Постройте фундаментальную систему и
рассчитайте свободные колебания для конкретных начальных условий;
684 Задания для самостоятельной работы и методические пояснения. Часть V
е) запишите уравнения системы в виде
Х(0 = еА'Х° + JeA('-T)BY(T) А
и постройте решение задачи, рассчитав Х(0 по формуле
hk
X{fk) = eXhkX° + J емкИ~т)В\(т)с1т,
о
что эквивалентно следующему алгоритму расчета X(tk)
Х(^+1)=| I + Afc + ^у- |[Х(**) + ЙВ¥(*Л)].
(Т 11.27)
(Т 11.28)
(Т11.29)
Последний алгоритм может использоваться для построения переходных процессов в
линейных системах при внешних воздействиях, меняющихся в широком диапазоне
([161], том 1). Постройте алгоритмическое и программное обеспечение для расчета
Х(0 с использованием метода матричных операторов (глава 8); проведите синтез
регулятора методами, рассмотренными в главе 5 (исходные данные задаются
преподавателем).
ЗАДАНИЕ 11.10
Проведите синтез регуляторов в классе многомерных систем при следующих
условиях:
а) математическая модель объекта имеет вид ([76], часть II, том 2)
1 ( 3,4(0,45 + 1) 6,8(0,555 + т
O,38r+l,l5 + l[o,18(l,135 + l) 0,9(1,15 + 1) j'
а требования к системе формулируются так:
• астатизм сепаратных каналов v = 1,
• перерегулирование а = 0,
• время регулирования Тр < 2 с;
б) математическая модель объекта имеет вид ([76], часть И, том 2)
X = AX + BY, Y = CXB,
(Т 11.30)
А =
' -0,16
-18,191
-0,158
0
' 0
-14,131
-0,432
0
0,177
-1,162
-0,04
1
0,02 '
-0,554
-0,966
0
-0,984
0,82
-0,297
0,18
с-(°
0,104'
0
0
0
*
0 0 1
0 0 0
(Т11.31)
в =
а требования к системе формулируются так:
• перерегулирование а<30%,
• время регулирования Тр < 5 с;
в) ПФ объекта имеет вид ([76], часть II, том 2)
Тема 11. Синтез регуляторов
685
5(j)lW21(j) W22(5)
где
Wn(j) = -14,2k2 - 6,565 - 6,4; Wl2(j) = 0,3852 -1,155 -18,18;
W21 (5) = -2,08s2 - 2,35 - 0,45; W22(5) = 0,0253 +1,08j2 +1,065 - 0,09;
5(5) = 54 +1,653 + 3,6552 + 3,4 Is + 0,53.
Остальные данные задаются преподавателем.
(Т11.32)
(Tl 1.33)
ЗАДАНИЕ 11.11
Постройте вектор обратной связи К, такой, чтобы замкнутая система
X = [А -ВК]Х имела заданного вида характеристический многочлен (заданные
собственные значения). Изобразите структурную схему системы, выделив обратную
связь по состоянию (заданный набор собственных значений задается
преподавателем). Синтезируйте наблюдатели полного порядка. Выполните задание для
следующих объектов:
а) объект задан уравнением
X = AX + BY,
(Т11.34)
где
А =
(2
0
0
-3
5
; в =
(-\
1
0
2Л
-2
2
Y =
Х =
Х2
х3
причем замкнутая система имеет эталонный спектр Лэ = (-1,-1,-1):
б) объект имеет параметры ([76], часть II, том 2)
А =
(-0,0297
-1,2155
0,4304
0
0
0
-0,7923
0,021
1,0
0
0,0438 0}
0
0
0
0
в =
0
-0,0402
0,3807
0
0
0
1,5671
-0,0671
0
0
1.0
0,1306
-0,0152
0
1,0
при этом эталонный спектр Лэ =(-0,895; -0,376 ±7-1,292; -0,576 ±j -0,534);
в) объект имеет параметры ([76], часть II, том 2)
'-0,033 -0,007 2,205 -9,803
0,108 -0,803 -55,415 -0,378
0,0016 -0,01507 -0,676 О
(Т11.35)
А =
В =
0
'-12,58
46,722
8,822
0
0
-0,05
76,9
4,322
0
1
0
0
-1,089
0
,0 0
0,00015^
0
0
0
(Т11.36)
с =
(1,0 О О
О 1,0 О
о4
о
О 0 0 1,0
Система неустойчива, т.к.
Х{ =-1,66135; Х2#3 = -0,023129±у• 0,10196; Х4 =0,19561.
686
Задания для самостоятельной работы и методические пояснения. Часть V
<
и
к
ее
S
О.
ft
н
ПКУ
+
+
+
«о
£
+
Тема 11. Синтез регуляторов 687
Эталонный спектр
Лэ= (-1,66135 -1,0 -1,0 -1,0).
В следующих заданиях рассматривается задача синтеза регуляторов в классе
нелинейных одномерных стационарных систем (примеры заимствованы из ([76], часть
II, том 2)).
ЗАДАНИЕ 11.12 ([6], ТОМ 1)
Уравнение движения нелинейной автоматической системы имеет вид
(7,5-10-6/75 + 1,025-10-3/74+3,05-10-2/73 + 0,31р2+5/73)^+ (ТП37)
+5(р2р + Pi)F(x) = 5(р2р + px)y(t\
где р - —, а нелинейная функция
dt
F(x) =
kxb + k2(x-b) при x>b9
к{х при|*|<&, (Т11.38)
-k{b + k2(x + b) при x<-b
имеет следующие значения параметров: кх = 0,5; к2= 1,0; b = 0,2.
К системе приложено внешнее воздействие y(t) = 1(0 = const. Требуется
определить варьируемые параметры регулятора /т, (/ = 1, 2, 3) из условия наилучшего
приближения к желаемой переходной функции с временем затухания Тр = 1 с и
максимальным отклонением в переходном режиме о= 1,1 при безусловном обеспечении
абсолютной устойчивости системы и обеспечении допустимой статической ошибки
системы не более 5% от установившегося значения.
ЗАДАНИЕ 11.13 ([12,13], ТОМ 1)
Рассмотрим задачу определения варьируемых параметров нелинейной САУ по
заданным показателям качества переходного и установившегося режимов.
Структурная схема системы изображена на рис. Т11.32, где приняты следующие обозначения:
ЭУ - электронный усилитель; ПКУ - последовательное корректирующее устройство;
ЭГУ - электрогидроусилитель; ГД и 3 - гидродвигатель с золотником; ДОС - датчик
обратной связи.
Требуется определить варьируемые параметры 7} (/ = 1, •••, 4) последовательного
корректирующего устройства (ПКУ) таким образом, чтобы при входном воздействии
UBX, изменяющемся в диапазоне от 0 до 15 В, время переходного процесса в системе
составляло около 0,1 с при перерегулировании 40%, а статистическая ошибка во всех
режимах работы не превышала 10% от установившегося значения.
Числовые значения известных параметров системы следующие: Гу = 510~3 с,
Л:у = 28, Л:Э1У = О,2 м/А, 7тЭрУ = 610-3 с, Gm=10"6 м4Н"1/2 с"1, Хт = 0,6*10 "3 м,
£=1,5109 Па, V= 18-10-*m3, /4n = 28,310"4 м2, т=12,3 Нс2/м, РППТ = 0,08 Па,
/= 6,5-104 Нх/м, МТ = 1132 Н, Ад = 0,21-10 "5 Вм2/Н, Гд = 7104 с, § = 0,7.
При решении рассматриваемой задачи в качестве входного воздействия
необходимо принять UBX= 10 В = const. Как показало предварительное исследование,
нелинейности «насыщение» в ЭГУ и «сухое трение» в ГД (рис. Т11.32) не оказывают
существенного влияния на динамику системы. Поэтому при проведении синтеза
указанные нелинейности для упрощения расчета можно во внимание не принимать.
Результаты решения задачи можно сравнить с теми, которые получены в ([12, 13] том 1).
Задания для самостоятельной работы и методические пояснения. Часть V
ЗАДАНИЕ 11.14 ([6], ТОМ 1)
Структурная схема нелинейной САУ приведена на рис. Т11.33. Здесь
- передаточная функция детектора и фильтра,
*3
T3s +1
КА
T0sz+2Tfy+\
- передаточная функция сглаживающего фильтра,
^г^5^6 ^7 ^-8
5(7>5 +1X^5+ 1X7^5 + 1)
- передаточная функция электромашинного усилителя
с электродвигателем,
К9 - передаточная функция редуктора.
Рис. TU.33. Структурная схема САУ
Числовые значения параметров системы: Г3 = 0,013с; 7Ь = 0,01 с; 7}= 0,02 с;
Tk = 0,02 с; Гдв = 0,11 с; tg а = 1,0; Ъ = 0,2; § = 0,35; КтКъКАК5КьКпК%К9 = 13,8.
Требуется определить варьируемые параметры р; (/= 1, ..., 5) корректирующего
устройства в цепи местной обратной связи
wKy(s)=]^JW±£l ел ,.39)
S +/?2* + /?1
таким образом, чтобы при входном воздействии y(t) = 1(0 = const и нулевых началь-
' ных условиях Тр< 2 с, а% < 15%.
ЗАДАНИЕ 11.15 ([6], ТОМ 1)
Уравнение движения статической нелинейной САУ, записанное относительно
выходной координаты, имеет вид
[Т{р2 +(l + KlP3)p + KlPl]x+ KlP4F(x) = K{(p2+ p3p)l(t), (T11.40)
где р = —, a F(x) - нелинейность типа «насыщение», для которой KF равен единице:
dt
F(jc) = -
при
х>Ъ,
Кх при -b<x<b,
(Т11.41)
-с при х < -Ъ.
Заданы также параметры К = 1; Ъ = с = 0,5; Т\ = 0,15 с; К{ = 10.
Требуется определить параметры системы ръ р3» Р4> обеспечивающие в
синтезируемой системе монотонный переходный процесс, причем время переходного
процесса должно составлять Гр- 0,5 с. Необходимо обеспечить устойчивость системы и
статическую ошибку не более 5%. На искомые параметры наложены ограничения
Р2>0,/?з>0,р4>0.
Тема 11. Синтез регуляторов
689
Можно положить, что эталонный выходной сигнал .\y{t) определяется
зависимостью ([6], том I)
л-Д/) = (яо-Яо^6/).1(/).
ЗАДАНИЕ 11.16 ([6], ТОМ 1)
Структурная схема нелинейной САУ приведена на рис. ТП.34.
Дифференциальное уравнение движения системы, записанное относительно выходной координаты,
имеет вид
[71Г1Н/;3+(Г1+Глв)/Г+(1 + /Г)/ъ)я + ^з/7|]х +
+K)P?>pF(x) = (А>, + Кэр2р)у(П,
(Т 11.42)
где K, = K3MyKwK]KV р = —.
Заданы значения параметров системы: T:w = 0,5 с: Т{ =0,165 с; Кэ = 240.
С учетом численных значений параметров системы дифференциальное уравнение
движения (Т11.42) принимает вид ([6], том 1)
[0,0825/>3 + 0,665/Г + (1 + 240р2)р + 240/;, ].v + 240p$pF(x) =
= (240/>! +24()/>2/>)v(0,
(Т 11.43)
где,.-.
Р\+Р2Р
7, д- + 1
л-(Глвл- + 1)
^ред
А'(/)
Ptf
F(x)
Рис. Т11.34. Сгрукг>рная схема chcicmli
0,5
- 1 - 0,5>
F(x)
0,5
-0,5
Рис. Т11.35. Харакчсрисшка нелинейно!о ).(смеша
Характеристика нелинейного элемента F(x) типа «зона нечувствительности без
насыщения» изображена на рис. Т11.35 и имеет следующие значения параметров:
b - 0,4; К = tg a = 1,0; Kf. - 1,0. Требуется определить положительные значения
параметров нелинейной системы р\, /ь, Ps таким образом, чтобы удовлетворялись
следующие требования:
45 Зак 416
690 Задания для самостоятельной работы и методические пояснения. Часть V
1) при скачкообразном внешнем воздействии y(t)= 1(0 время переходного
процесса в системе должно составить Тр~ 1,0 с, а перерегулирование а% ~ 20%;
2) обеспечивалась абсолютная устойчивость и грубость системы по варьируемым
параметрам ри р2, рг не менее А° = 15%.
ЗАДАНИЕ 11.17
Рассмотрим систему (рис. Т11.36).
Г
F(x)
p4s +
p5s
Ръ
+• 1
sd\s
к
+ 1)(Г2* +
+ 1)
x(t)
Рис. Т1136. Структурная схема САУ
В данном примере рассматривается синтез параметров регулятора нелинейной
САУ. Динамический процесс в системе описывается нелинейным
дифференциальным уравнением
{Т\Т2Т3р5р5 + [ТХТ2ТЪ + р5(ТхТ2 + ТХТЪ + Т2Т3)]р4 +
+ [7^ +Т{Гг +Т2Т3 + р5(Тх +Г2 +Г3)]р3 +
+ (r1+r2+r3 + p5)p2+PU + (P4P + P3)^W= (T11.44)
= {Т\Т2ТзР5р5 +[Т{Г2ТЪ + р5(Т{Г2 +Т{Г3 +Т2Тъ)]р4 +
+ [7^ +ТХТ3 +Т2ТЪ + Р5(ТХ +Т2 +Г3)]р3 + (Тх +Г2 +Г3 + р5)р2 + p)y{t\
которое записано относительно координаты ошибки системы (здесь р = —).
at
Нелинейный элемент системы F(x) типа «переменный коэффициент усиления»
имеет следующие значения параметров: ^ = 0,5; К2= 1,0; 6 = 0,2; KF= 1,0. Заданы
значения параметров системы: К = 5; Тх = ОД с; Т2 = 0,01 с; Тъ = 0,15 сх
Дифференциальное уравнение с учетом известных параметров системы примет
вид
[0,15-10"3р5Р5+(0Д5.10"3+0,0175р5)р4+(0,0175 + 0,26/?5)/73 +
+(0,26+ р5)р2 + р]х + (р4р + p3)F(x) = [0,l5-l0-3 р5р5 +(ОЛ5ЛО~3 + (Т11.45)
+0,0175р5)р4 +(0,0175+0,26р5)р3 +(0,26 +/75)р2 + p]y(t).
Требуется определить параметры регулятора системы рз>0, рл> 0, р5> 0 из
следующих условий:
1) переходный процесс в системе при y(t) = 1(0 должен быть монотонным,
причем время переходного процесса должно составлять Гр ~ 4 с;
2) а % < 45%, должна обеспечиваться абсолютная устойчивость.
Тема 12. Оптимальные системы автоматического управления 691
ТЕМА 12. ОПТИМАЛЬНЫЕ СИСТЕМЫ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ЗАДАНИЕ 12.1
Изучите постановку задачи оптимизации систем автоматического управления.
Задача оптимизации формулируется так:
1) Задано векторно-матричное дифференциальное уравнение, описывающее
поведение объекта управления
X = F(X,U,p,O, 0<r<7\ (T12.1)
где Х(г) - n-вектор переменных состояния, U(r) - m-вектор управляющих
воздействий, р = (pl9 /?2>—>Ps) - вектор проектных параметров, F - /г-вектор-функция,
предполагаемая непрерывной и непрерывно дифференцируемой по всем переменным.
Если объект линейный стационарный, то система (Т12.1) имеет вид
X = A(p)X + B(p)U, A(p) = const, B(p) = const, 0<f<7;
если же объект линейный нестационарный, то векторно-матричное уравнение
объекта запишется так
X = A(p,r)X + B(p,OU, 0<г<7\
а А(р, г), В(р, t) - переменные матрицы, зависящие от вектора проектных параметров р.
2) Задан показатель качества управления, или критериальный функционал
т
/ = J/o(X(O,U(O,p,OA + go(X°,Xr,r,/7). (T12.2)
о
3) Заданы ограничения на управление, связанные с ограниченностью ресурсов
управления.
Например, ограничение вида |U(r)| < uM встречается при управлении поворотами
космического аппарата, если вращающий момент создается парой поворотных
реактивных двигателей ([48], часть III, том 2).
Вектор U(r) принимает значения из некоторого множества Um m-мерного
пространства Rm с координатами иь и2, ..., ит. Это множество может быть всем
пространством Rm (задача без ограничений) или его частью Um cRm .
Например, в механике полета чаще всего Um - замкнутая область пространства Я1".
Множество Um называют множеством допустимых значений управления
([48], часть III, том 2). Некоторые виды множеств Um приведены на рис. Т12.1.
В механике полета управляющими переменными м,(0 обычно являются
координаты отклонения рулевых поверхностей, вектора тяги. В некоторых «усеченных»
задачах, т.е. задачах, не имеющих достаточно полного описания реального объекта, в
качестве управляющих переменных могут выступать координаты углового
положения летательного аппарата, компоненты скорости и ее направления и т.д.
4) Заданы ограничения на траекторию.
В ряде реальных ситуаций система не может заходить в те или иные области
фазового пространства. Это находит отражение в соответствующих ограничениях на
45*
692 Задания для самостоятельной работы и методические пояснения. Часть V
траекторию Х(г) движения системы, состоящих в том, что в каждый момент
времени t задается область Хп с Rn , в которой может находиться вектор состояния Х(г).
Указанные условия определяются запасами механической прочности объекта, его
термической прочностью, нежеланием попасть в «опасную зону» и т.д. Например,
угол атаки летательного аппарата не должен превышать определенного значения.
Большим углам атаки соответствуют значительные нормальные ускорения, которые
могут вызвать поломку приборов, корпуса.
i
«hi
< ч \\
•Л °
^ и2 ^
«2м
«1м
«1
V °
и2 v
J
U1 :[щт <щ <иы\и2т <м2 <м2м}
а
U2:[u-+ul<ul)
Ч\
t/2 :{|«,|+|«2|<мм}
в
1
■«2
2
щ
Щ Мы
112
М2м
иы щ
"2м
U1:{/(«,, »2)<0}
6/2:{«f+«22<^}
t/2:{|«,| + |M2|<«M}
1/2:{(и„.И2,).(и,я.И2,)
("lm'M2m)'("lM'"2m)}
Рис. Т12.1. Виды множеств U2 допустимых значений:
а -в - замкнутые ограниченные выпуклые области, содержащие начало координат; г - невыпуклая
область, не содержащая начало координат, д - невыпуклые одномерные области Ui2 и Ui", e — дискретное
множество допустимых значений (1-4- изолированные точки)
Ограничения накладываются и на скорость космического корабля при его входе в
атмосферу, поскольку чрезмерная скорость приводит к значительному повышению
температуры. При этом может расплавиться защитная оболочка и т.д. ([48], часть III,
том 2).
5) Заданы граничные условия.
Цель управления состоит в том, чтобы перевести объект из некоторого
начального состояния в заданное конечное состояние. Начальное и конечное состояния
простейшим способом можно задать двумя точками в фазовом пространстве:
Х(0|,=0 = X^^OWO),...,*^))1
- начальное состояние, г - го= 0 - начальный момент времени (начало управления),
Тема 12. Оптимальные системы автоматического управления 693
Х(0|,иГ =ХТ = (х{(Т),х2(Т),...,хп(Т))т
- конечное состояние, Т- конечный момент времени (конец управления).
В зависимости от вида этих ограничений выделяют различные классы задач
управления. В задачах с фиксированными концами начальное Х° и конечное ХТ
состояния заданы. Если же Х° или ХТ не задано, то соответствующая задача
называется задачей со свободным левым или правым концом траектории. Задачей с
подвижными концами называется такая задача, в которой моменты t = 0 и t-T
заданы, а Х° и ХТ могут изменяться в пределах областей G° и GT.
В фазовом пространстве множества G0 и GT часто записывают в виде
G°[X(0)] = 0,Gr[X(r)] = 0.
Множества G0 и GT называют целевыми множествами. Из всего множества
фазовых траекторий, начинающихся на G0 и заканчивающихся на Gr, в процессе
оптимизации выбирается то, которое доставляет экстремальное значение
критерию качества.
В задачах с изопериметрическими ограничениями считаются заданными
величины интервалов
т
/. = ffOj(X(t),t)dt = 0, j = U0, (T12.3)
о
где fOj - заданные скалярные функции.
Возможны также ограничения типа неравенств
г
/,. = jfOj(X(t),t)dt<O, i = *0,ft,. (Т12.3я)
о
Возможные виды граничных условий в задачах оптимального управления
представлены на рис. Т12.2 ([48], часть III, том 2).
Определение управлений U(0 , при которых решение системы
дифференциальных уравнений (Т12.1) удовлетворяет краевым условиям, называется двухточечной
краевой задачей.
Перевод объекта из состояния Х° в состояние ХТ на [О,Г] не всегда возможен.
Если же найдется хотя бы одна пара векторов {U(r),p}, осуществляющая указанный
переход, то обычно существуют и другие пары векторов, реализующие перевод
объекта из Х° в X7. При оптимизации ставится задача об отыскании таких {U(/),p),
которые доставляют экстремум функционалу качества. Для построений
оптимальных управлений в большинстве своем используются приближенные методы, поэтому
часто ставится задача достичь желаемого состояния X7 с некоторой точностью,
задаваемой условием ([48], часть III, том 2)
[Х(Г) - ХТ ]т Q[X(T) - Хт ] < 5,
где Q - неотрицательно определенная матрица, 8 - заданное число, X7 - эталонный
вектор, Х(Т) - реальный вектор.
Можно использовать в качестве критерия приближения независимые условия по
каким-либо (не обязательно всем) координатам типа
(x3j(T)-x»j(T))2<8j,
где x3j(T) - соответственно эталонное и реальное значения координаты Xj(t) при/ = Г.
694 Задания для самостоятельной работы и методические пояснения. Часть V
Приведенный факт будет использоваться при расчете оптимальных программных
управлений приближенными методами.
* X,
(Хг;л/
JC^
х2''
G0
Рис. Т12.2. Примеры граничных условий:
а - левый и правый концы фазовой траектории закреплены', б - левый конец закреплен, правый - свободен',
в - левый и правый концы подвижные', г - левый конец закреплен, правый - свободен^ за исключением
координаты х\\ д - общий случай подвижных граничных условий', е - граничные условия в задаче встречи
движений (перехвата); оптимальная траектория, произвольная траектория
Тема 12. Оптимальные системы автоматического управления
695
6) Задано допустимое программное управление.
Вектор-функция U(0 называется допустимым программным управлением, если:
а) U(r) принадлежит к классу кусочно-непрерывных по t на промежутке [0,7]
функций, т.е. может иметь лишь конечное число точек разрыва 1-го рода;
б) V(t)eUmVte[O,T].
На рис. Т12.3 приведены примеры допустимых управлений ([48], часть III, том 2).
Далее приведем постановку задачи оптимизации (для упрощения постановки
задачи полагается, что функции от вектора р не зависят).
При заданных управлениях объекта (Т12.1), ограничениях (Т12.3) и (Т12.3а) и
краевых условиях X 6 G , X 6 G требуется найти такие программное
управление U (0 или управление с обратной связью U (X(t),t) из класса всех допустимых и
фазовую траекторию Х*(0> при которых критерий (Т12.2) на решениях системы
(Т12.1) принимает экстремальное значение.
Управления U*(0 и U*(X(f),0 и траектория Х*(Г) называются оптимальными.
и/0
ujiti
-*-►
Uj{t)i
to
i
\
tf t"\
/
r
9
/7
i
t
Uj{t) i
to
1 1
t' t"\ ,
—\
t'"
*1 t
Рис. T12J. Примеры управлений щЩ, принадлежащих различным классам функций:
а - гладкое управление; б - кусочно-гладкое непрерывное управление; в - непрерывное управление (в
окрестности точки t\ функция u}{t) не дифференцируем а); г - кусочно-непрерывное управление
Предыдущую постановку задачи можно сделать более полной, если учесть вектор
параметров р ([48], часть III, том 2).
Тогда можно сделать следующую постановку: среди всех допустимых на отрезке
[0,7] программных управлений U(0^ Um или управлений с обратной связью
U(f,X(f))e Um и управляющих параметров реР5, переводящих объект из состояния
G0 в состояние G7, найти такие, для которых функционал (Т12.2) на решениях
системы (Т12.1) принимает экстремальное значение.
В механике полета в качестве управляющих параметров реР5 выступают
конструктивные, весовые и геометрические характеристики летательного аппарата.
Замкнутость и ограниченность множества Р5 означает, что в реальных конструкциях
указанные параметры не могут быть произвольно большими.
696 Задания для самостоятельной работы и методические пояснения. Часть V
Формальная постановка задачи:
т
/=f/(,(X(/XU(/),p,O^ + ^o(X°,Xr,7,p)-^ min
JQ X(/),U(/)p
при следующих ограничениях:
а) X = F(X,U,p,/), 0<r<7;
б) U(r)e Um V/6 [ОТ], X(r)€ Xm Vr e [0,7];
в) Х(0) = X(/)|,=o = X° g G°, Х(Г) = X(0|r=r =XTeGT;
r) U(/) принадлежит к классу допустимых управлений.
ЗАДАНИЕ 12.2
Изучите теорию оптимального управления, содержанием которой является
принцип максимума Понтрягина. Сформулируйте принцип максимума для задачи с
закрепленными концами и фиксированным временем и для задачи с подвижными
концами. Установите связь между принципом максимума и методом множителей Лагран-
жа. Раскройте содержание задачи максимального быстродействия и покажите, что в
случае линейной задачи при выполнении условий нормальности принцип максимума
является не только необходимым, но и достаточным условием оптимальности.
Сформулируйте теорему об п интервалах. Раскройте содержание задач с
ограничением на фазовые координаты, вырожденных и особых задач.
ЗАДАНИЕ 12.3
Изложите основы метода динамического программирования и его базовые
положения: принцип оптимальности, инвариантное погружение и полученное на их
основе функциональное уравнение.
Функция и уравнение Беллмана.
Изложите алгоритм построения оптимального управления методом
динамического программирования. Обратите внимание на то обстоятельство, что метод
динамического программирования позволит находить оптимальное управление как функцию
фазовых координат. Сформулируйте условия, при выполнении которых метод
динамического программирования дает достаточное условие оптимальности.
ЗАДАНИЕ 12.4
Изложите основы теории синтеза оптимальных линейных систем по
интегральному квадратичному критерию, рассматривая при этом линейные нестационарные и
стационарные объекты (нестационарные и стационарные задачи); отразите роль
матричного уравнения Риккати и изложите подходы к его решению.
Обратите внимание на следующие факты:
• в рассматриваемом случае реализуется принцип обратной связи, поскольку
вектор управления непосредственно зависит от вектора состояния;
• закон управления не является динамическим, т.к. в определяющую его
зависимость не входят производные и интегралы от соответствующих сигналов;
• поскольку закон управления содержит матрицу, зависящую от времени, то
замкнутая система относится к классу систем с переменными параметрами.
Рассмотрите представляющие интерес частные случаи.
Рассмотрите задачу синтеза оптимальных линейных систем по интегральному
квадратичному критерию в классе систем с распределенными параметрами.
Тема 12. Оптимальные системы автоматического управления 697
Покажите, что и в случае систем с распределенными параметрами решением
линейно-квадратичной задачи является оптимальный закон обратной связи.
Изложите основы теории оптимального управления в классе систем с
запаздыванием, познакомьтесь с принципом максимума.
Сформулируйте содержание линейно-квадратичной задачи управления в классе
систем с запаздыванием (для класса объектов).
Убедитесь в том, что в зависимость, определяющую оптимальный закон
управления, реализующий принцип обратной связи, входят слагаемые, вызванные наличием
запаздываний по управлениям и состояниям. Отбрасывание членов, обусловленных
запаздываниями, приводит к стандартной форме линейного квадратично-
оптимального закона.
ЗАДАНИЕ 12.5
Познакомьтесь с понятием линейной стохастической оптимальной системы;
системы при полной информации о состоянии. Сформулируйте основные положения
связанные с синтезом оптимальных систем при неполной информации о состоянии и
познакомьтесь с теорией наблюдателей Калмана- Бьюси.
Сформулируйте принцип разделимости и укажите его значение в решении задачи
синтеза стохастической линейной оптимальной системы управления при неполной
информации о состоянии (задача разбивается на две: задачу синтеза линейного
оптимального наблюдателя и детерминированную задачу синтеза оптимальной системы).
Познакомьтесь с основами теории стохастического управления в классе систем с
распределёнными параметрами; сформулируйте основные положения, связанные с
решением задачи оценки состояний для систем, описываемыми гиперболическими
уравнениями в частных производных первого порядка, уравнениями в частных
производных второго порядка, наблюдаемость, оценка состояний, наблюдатели.
ЗАДАНИЕ 12.6
Изучите математические методы синтеза систем, обладающих минимальной
нормой функции управления в некотором функциональном пространстве. Практически к
постановкам математических задач, где эти методы применяются, сводятся при
определённых предположениях прикладные задачи о переводе систем из одних
состояний фазового пространства в другие при минимуме энергетических затрат,
максимальной величины усилий или импульса усилии за счёт управляемых воздействии,
приложенных к системе. Развитие такого типа методов синтеза оптимальных систем
наиболее глубоко представлено как решение задач L -проблемы моментов и
аппроксимаций в соответствующих функциональных пространствах. Рассмотрите наиболее
важные частные случаи построения оптимальных управлений применительно к
линейным системам:
• с сосредоточенными параметрами;
• с распределенными параметрами;
• с запаздыванием.
ЗАДАНИЕ 12.7
Изучите постановку и классификацию задач математического программирования,
задач на условный экстремум; сформулируйте условия оптимальности в задаче
выпуклого программирования; приведите доказательство теоремы Куна - Таккера.
Познакомьтесь с методами решения задач линейного программирования, в
частности, с симплекс-методом.
44 Зак 416
698 Задания для самостоятельной работы и методические пояснения. Часть V
Убедитесь в том, что симплекс-метод позволяет за конечное число шагов
алгоритма либо найти решение задачи, либо показать, что решения не существует (число
итераций симплекс-метода имеет порядок п-2п , где п - количество переменных).
Изучите численные методы решения задач нелинейного программирования
(задачи, сводящиеся к линейному программированию, методы возможных направлений,
градиентные методы). Покажите, что решение некоторых задач нелинейного
программирования можно свести к решению задач линейного программирования (задачи
дробно-линейного и квадратичного программирования).
Важность задач линейного программирования обусловлена не только сведением к
ним задач нелинейного программирования, но и тем обстоятельством, что для ряда
других задач нелинейного программирования приходится решать вспомогательные
задачи линейного программирования.
ЗАДАНИЕ 12.8
Сформулируйте содержание направлений построения оптимальных программных
управлений и оптимальных программ методами математического программирования.
Убедитесь, что в этом случае бесконечномерную задачу заменяют
конечномерной, что связанно с аппроксимацией функциональных пространств конечномерными.
Эффективность метода существенно зависит от того, как используется конкретная
функциональная природа того или иного объекта.
Применение метода математического программирования предполагает замену
исходной задачи конечно-разностной или проекционной аппроксимацией; затем
переписывает все ограничения задачи в виде ограничений на значения
аппроксимированных функций (например, сеточных), интегралы заменяют конечномерным
эквивалентом (например, при конечно-разностной аппроксимации интегралы заменяют
суммами) и т.д.
В результате имеет место конечномерная задача оптимизации, для решения
которой можно применить аппарат нелинейного программирования.
Укажите трудности, которые необходимо преодолеть при таком подходе к
решению задач оптимального управления.
ЗАДАНИЕ 12.9
На плоскости задана линия у = х2 и точка с координатами (jc = O, у = 10).
Используя вариационное исчисление, найдите линию, соединяющую точку (0,10) с
кривой у = л2 и имеющую минимальную длину.
ЗАДАНИЕ 12.10
Среди линий у = у(х), удовлетворяющих условию у(1) = 4, у(5) = 0, найдите
линии, минимизирующие функционалы
5
/ = Jsin(y-jc)^;
5
/ = J(y2 + a2(y)2№; a = const;
i
5
/ = [(ay2 +u2)dx, если у = ay + bu\ y(l) = 4; v(5) = 0.
Тема 12. Оптимальные системы автоматического управления 699
ЗАДАНИЕ 12.11
Для объекта, движение которого задаётся уравнением
jc + 4jc = 2m, |m|<1,
с помощью принципа максимума найдите управление u(t), переводящее переменную
x(t) из состояния jc(O) = 0 в состояние *(10) = 4 и минимизирующее функционал
ю
/ = \xdx.
о
Для того же объекта постройте методом моментов управление u*(t), переводящее
объект из состояния х(0) = 0 в состояние jc(10) = 4, при этом
1
(Ю \2
а) / = \u2{t)dt ->min,
б) / = vrai тах|м(Г)| -> min.
o<r<r ' '
Сформулированные выше задачи решите методом математического
программирования, используя матричное представление операторов и конечно-разностные схемы:
• без ограничения на переменную x(t);
• с ограничением на переменную x(t) на промежутке [0;10].
ЗАДАНИЕ 12.12
Процесс поворота вала двигателя описывается следующей системой
дифференциальных уравнений:
х{ = х2, х2 = и .
Постройте решение следующих задач:
• Найдите с помощью уравнения Эйлера - Лагранжа формулы, определяющие
и (t), x{(t) и x2(t) при следующих условиях:
1
Х°=(0,0), Хг=(1,0), Г = 1; JVw-»min.
о
• Постройте решение сформулированной выше задачи с помощью метода
моментов. Проведите анализ степени трудоёмкости применяемых методов.
• Постройте решение рассматриваемой задачи методом математического
программирования с использованием матричных операторов и конечно-
разностных схем для двух случаев:
а) без ограничения на фазовые переменные;
б) с ограничением на фазовые переменные.
ЗАДАНИЕ 12.13
Постройте решение задачи поворота вала двигателя за заданное время Т на
максимальный угол:
х{ -х2\ х2 -и\ |м|<м0;
jc1(0) = jc2(0) = 0; x2(T) = 0\ / = -jc1(r)->min
1) с помощью принципа максимума Понтрягина;
44*
700 Задания для самостоятельной работы и методические пояснения. Часть V
2) с помощью методов математического программирования (используя
матричное представление операторов и конечно-разностную аппроксимацию):
• без ограничения на фазовые переменные;
• с ограничением на фазовые переменные.
ЗАДАНИЕ 12.14
Задача на максимальное быстродействие формулируется так:
*1 = *2» *2 ~и'-> |м|-м0»
Xo=(jc!(O),jc2(O)); Хг=(л,(Г) = </>0; *2(Г) = 0); /=r^min.
1) Постройте решение задачи на максимальное быстродействие, т.е. найдите
оптимальное программное управление и (t) с помощью принципа максимума
Л.С. Понтрягина.
2) Постройте решение задачи методом моментов, формулируя её так:
найти управление, удовлетворяющее ограничению
vrai тах|м(г)|<//0,
о</<г' '
такое, которое переводило бы объект из состояния Х° в состояние Хт за Т —> min.
3) Постройте решение сформулированной задачи методом математического
программирования без ограничения на фазовые переменные и с наложенными на
них ограничениями.
4) С помощью принципа максимума найдите решение задачи на максимальное
быстродействие для уравнений х = -м, |м(/)|^1; задача состоит в переводе
объекта из состояния Х° Ф 0 в начало координат за минимальное время.
Постройте двухлистную фазовую плоскость оптимальной системы и её
структурную схему (работающую по принципу обратной связи).
ЗАДАНИЕ 12.15
Методом математического программирования постройте решение задачи:
*i = Х2' *2 = и >
Х°(0;0); Хт =(x{(T) = d>0;x2(T) = 0)
I =r-»min
при следующих ограничениях:
|м| < и0 - ограничения по току якоря;
т
\u2(t)dt < Ъ - ограничения по нагреву.
о
Познакомьтесь с решением рассматриваемой задачи методом множителей Ла-
гранжа.
ЗАДАНИЕ 12.16
Движение системы задаётся уравнениями
dxx dx<> .I
Тема 12. Оптимальные системы автоматического управления 701
Требуется решить задачу о наибыстрейшем переводе фазовой точки Х = (х{,х2)
из заданного начального положения Х° = (х{(0),х2(0)) на прямую х{ = 0. В качестве
начальной необходимо рассмотреть любую точку фазового пространства, т.е.
требуется выделить всю совокупность оптимальных траекторий.
ЗАДАНИЕ 12.17
Для объекта, движение которого задаётся уравнениями
dxx dx2 , . -
найдите решение задачи о переводе фазовой точки X = (jc1>jc2) из заданного
начального состояния Х° =(jc1(0),jc2(0))b начало координат так, чтобы следующий
т
функционал / = [(& + u2)dt, где к >0 и момент времени Т не фиксирован, прини-
о
мал своё наименьшее значение. Требуется выделить всю совокупность
оптимальных траекторий.
ЗАДАНИЕ 12.18
Рассматривается система, движение которой задаётся уравнением
х + 2ссс + (а2 + (З2 )х = м, \и\ < 1,
(а>0, р>0).
Используя принцип максимума, требуется осуществить синтез оптимального по
быстродействию управления, переводящего фазовую точку из произвольного
начального состояния Х° в начало координат Хг =0.
ЗАДАНИЕ 12.19
Для системы, движение которой задаётся уравнениями
dxx dx2
dt dt
требуется осуществить синтез оптимального по быстродействию управления,
переводящего фазовую точку X = (jc1,jc2) из произвольного начального состояния Х° в
начало координат Хт =0 при ограничениях на управляющий параметр и и фазовую
переменную х2:
|и|<и0, |*2|<Д,
где и0 и В - некоторые положительные числа.
Постройте решение задачи с помощью:
• принципа максимума;
• математического программирования.
ЗАДАНИЕ 12.20
Процесс управления материальной точкой, которая движется в вертикальной
плоскости под действием реактивной силы и силы тяжести , описывается системой
дифференциальных уравнений:
702 Задания для самостоятельной работы и методические пояснения. Часть V
X\=X2* *г~Щ\ х3=х4\ x4=u2-g.
Найдите и* (г) и u*2(t), если:
[0,Г] = [0;1], Х°=(-1;0;0;0), Хг =(0;0;0;0),
'= J(«i2(0 + «2(0)a| .
Постройте и*(г) и u\(i) с помощью принципа максимума и методом моментов.
Постройте решение сформулированной задачи методом математического
программирования:
• без ограничений на фазовые переменные;
• с ограничением на xx(t) и x2(t).
ЗАДАНИЕ 12.21
Поведение вполне управляемого объекта описывается системой уравнений вида
х{=-х2\ х2=хх+и + 3.
Постройте и*(0 методом моментов, если:
Х° = (-4;0), Хг = (0:0), [0;Г] = [0;я],
/ = vrai тах|и(т)|.
Ю;я]! '
Объект имеет описание вида
хх=х2\ х2=-хх+и, |w|^l.
Функционал (расход топлива) определяется зависимостью
г
/=f|n(O|*-
о
Задача заключается в переводе объекта из состояния Х° = (^ (0), jc2 (0)) в начало
координат таким образом, чтобы было выполнено указанное ограничение на
управление, при этом
/ —> min.
Постройте решение с помощью принципа максимума.
Проведите исследование соответствующей краевой задачи.
ЗАДАНИЕ 12.22
Широкий класс объектов управления описывается дифференциальным
уравнением вида
W0(s)= , , К ,
° 7V+27-^ + 1
или, что то же самое,
T2x + 2Tfyc + x = Ku(t).
Постройте м*(0, переводящее объект из точки Х° =(хх(0),х2(0)) в точку
Хг = (хх (Г), х2 (Т)), (х{ (0 = x(t), x2 (t) = x{t)) за время Т, если
Тема 12. Оптимальные системы автоматического управления 703
т
а) / = ju2(t)dt - энергия управления;
о
б) / = у red max|//(/)|.
о</</' '
Преподавателем задаются исходные данные 7\ £, /С, .V|(0), .v2(0), х{(Т), л:(7'), Т
Найдите решение задачи с помощью принципа максимума (/- энергия
управления) и методом моментов ( / - энергия и сила управления).
Решите ту же задачу методом математического программирования как без
ограничений на фазовые переменные, так и с соответствующими ограничениями
(например, модульного типа).
Решите рассмотренную задачу, формулируя её, как задачу на максимальное
быстродействие. Рассмотрите её решение методом математического программирования с
ограничением на фазовые координаты.
Пользуясь принципом максимума JI.C. Понтрягина, найдите оптимальное
управление рассмотренным в случае, когда £ * 0 (гармонический осциллятор с
демпфированием и с одним входом) и q = 0 (консервативный объект).
Задача ставится так: постройте управление |м(/)|<1, переводящее объект ш
состояния Х° в начало координат за Tr = min.
Постройте решение задачи максимального быстродействия при управлении
гармоническим осциллятором с двумя входами. Система описывается уравнением
Ш1х + /Л1(/).
Х =
-со 0
WX(/)=(-r'(;)l:u(/)-fl"(/)U = conS.:
|и,(ф1: |и2(/)|<1:
Х° =(л-|(О),дг2(О)) - любое начальное состояние, X' =0.
Найдите решение тех же задач, если объект управления имеет передаточную
функцию вида
вд= ,, к
$(Г\у-+27ф + 1)
ЗАДАНИЕ 12.23
Полагая, что объект управления - апериодическое звено, т.е.
л* + а{).\ = и,
постройте функции
Т =/1(дЧО),«сф11№) = /|и(О));
7-r=/2(.v(O)+IIKC,eo) = /2(flo).
где Т - минимальное время перевода объекта из состояния л(0)*0 в состояние
х(Т) = 0 с помощью управления |м(/)| < 1;
%|)икс - фиксированное значение а0,
х(0)(|)ИКС - фиксированное значение начального состояния л(0).
704 Задания для самостоятельной работы и методические пояснения. Часть V
ЗАДАНИЕ 12.24
Найдите оптимальное управление |и(0|^1, переводящее объект х = и-и2 из
состояния х(0) = -1 в начало координат за минимальное время.
ЗАДАНИЕ 12.25
Для объекта, движение которого задаётся уравнением
dx
— = и - 4х ,
dt
найти методом динамического программирования управление m(jc),
минимизирующее функционал
I = j(x2+u2)dx.
ЗАДАНИЕ 12.26
Для объекта, движение которого описывается уравнениями
х{=х2; х2=и,
постройте методом динамического программирования управление и(х{,х2) при
следующих условиях:
Х°= (^(0)^(0)), Хг=0,
т
I=j(x?(t) + u2(t))dt;
о
момент Т не фиксирован.
ЗАДАНИЕ 12.27
Поведение объекта описывается уравнениями вида:
х{ = х2 +щ, х2 =и2 •
На u{(t)vi u2(t) наложены ограничения |и,(г)|<1; |м2(0|^1. Постройте решение
задачи оптимального быстродействия по переводу объекта из произвольной точки
фазового пространства в начало координат.
При решении задачи необходимо учитывать тот факт, что рассматриваемая
система не удовлетворяет условию общности положения, тем не менее принципы
максимума являются необходимым и достаточным условием в задаче о быстродействии
этой системы с начальным состоянием Х° и конечным состоянием X = 0.
Постройте решение задачи с помощью принципа максимума, метода моментов и
математического программирования.
ЗАДАНИЕ 12.28
Принцип максимума для неавтономных систем может быть использован для
решения задач следующего содержания.
Между пунктами А и В необходимо наметить профиль железнодорожного пути,
задаваемый функцией у(х) (используется прямоугольная система координат). Пункт
Тема 12. Оптимальные системы автоматического управления 705
А имеет координаты (х = 0, у = 0), а пункт В - координаты (х = 1000, у = 10).
Рельеф местности задаётся функцией y = f(x)y а стоимость строительных работ
функционалом
1000
/= J (y(x)-f(x))2dx.
о
Предполагается, что задано ограничение на уклон пути
|/(*)|<Л.
Полагая, что
/(jc) = 20sin—xy /? = 0,1,
J 50
требуется найти профиль железнодорожного пути (функцию у(х))у
минимизирующий стоимость строительных работ (функционал / ). Задачу решать в двух
вариантах:
1) функция у(х) проходит через точки (0,0) и (1000,10);
2) значения функции у(х) при х = 0 и jc = 1000 не заданы, а выбираются из
условия минимизации функционала.
ЗАДАНИЕ 12.29
Синтезируйте оптимальную систему, работающую по принципу обратной связи,
если:
• объект имеет описание вида .V = и ;
• управление имеет ограничение |м| < и0.
Синтезируйте управление и = u(x(t),x(t)), обеспечивающее перевод объекта из
состояния Х° = (.v(0),i(0)) в начало координат за минимальное время.
Постройте структурную схему системы.
ЗАДАНИЕ 12.30
Изучите применение метода сеток для редукции задачи оптимального управления
к задаче математического программирования с использованием интегральных
уравнений объекта.
Изложите основные положения на примере скалярных нестационарных линейных
объектов, поведение которых описывается дифференциальным уравнением вида
Jt>v(/)*(O)="(O. (T12.4)
v=0
Далее будем пользоваться интегральными операторами, поскольку операция
дифференцирования может вызвать накопление ошибок, например, при неточном
знании математической модели объекта. Перейдем от уравнения (Т12.4) к
эквивалентному уравнению с интегральным оператором.
Последовательным дифференцированием (Т12.4) с учетом *(0) = *0, х'(0) = х1у ... ,
-Vd(0) = хпЛ, x{n)(t) = z(t) получим
х(п~{) (?) = *("-" (0) + J z.(x)dx = дс„_, + J z(T)rft,
706 Задания для самостоятельной работы и методические пояснения. Часть V
t
хы~2)(/) = хп_2 + л-„_,/ + J (/ - x)z(x)dx ,
о
-v("~3)(/) = xn_} +xn_2t + *„_! — + — J(/ -xfz(x)clx,
о
x(t) = xo+x]t + x2^ + ..^xn_l7^ + —^\(t-T)"-lz(T)clT.
2 (л-1)! (h-1)!j0
При выводе предыдущих зависимостей была использована формула
JJ...J F(x)dx...dx = —^— Ut-T)n-lF{T)dx. (T12.5)
и
л
Поскольку в (Т12.5) .x{v\t) определяется соотношением
^(v)(O = ^+JCv+lr + .Yr+2 —+ ... + .V,,.,- —+ - ■ -J(r-X)ll"1-Vz(X)£/X =
2! (w-r-1)! (/?-l-v)!p
л-1-v fk-v i /
= У\ хк— + [(/-т)"-1-'-(т)Лт,
с дифференциальным оператором, уравнению (Т12.4) эквивалентно следующее
уравнение с интегральным оператором (положим а„(0 = 1)
*)+iIo'("^ri!<I)rf"ll'<1'('>" т^с" ■ т">
о
Введем обозначения
кг(/.т) = £«„(')- }
/J-l Л-1-V /^~1'
С учетом последней зависимости уравнение (Т12.6) принимает вид
z(O + Jffr(/,x)z(x)rfx = /.(O.
о
Это уравнение относится к классу интегральных уравнении Вольтера 2-го рода\
в нем функции К:(1Л) uf:(t) полагаются известными, a z(t) подлежит определению.
Решению x{t) соответствует формула
.v(O = Jf(O) + .v/(O)/t... + .v(ll"l)(O)- + \{1-х)п-^:(х)с1х. (Т12.7)
(/?-1)! (n-i)lJ0
Отметим, что входные данные Kz(t,x) и ./1(0 Ие содержат производных от
коэффициентов, определяющих математическую модель нестационарного объекта.
В случае, если математическая модель в форме дифференциального уравнения
(Т12.1) определена с погрешностями, то наличие производных от коэффициентов
av(t), v = 0,/j-1 могло бы способствовать накоплению ошибок при проведении
расчетов на ЭВМ. В этом - одно из преимуществ использования интегральных
операторов.
Тема 12. Оптимальные системы автоматического управления
707
С другой стороны, важным является фактор сходимости при приближенном
решении уравнения. Если приближенное решение Z/(0—> z(i) в среднеквадратичном, то
J Z/ (x)dx => J z{i)dx, т.е. имеет место равномерная сходимость.
о о
Редукция бесконечномерной задачи к конечномерной задаче оптимизации
проводится с помощью квадратурных формул, которые подробно рассмотрены в
приложении.
Пример Т12.1. Управление положением ротора двигателя постоянного тока
В примере приведены уравнения объекта управления
xl(t) = x2(t)> *2С) = "(')•
Задача оптимального управления формулируется так* перевести объект из начального состояния Х° = (1;0)
в конечное состояние Хг= (0;0) за время Т= 1 с, при этом функционал качества / =ju2(t)dt должен
принять минимальное значение.
Имеем:
xl(t) = xl(O) + x2(O)-t + j(t-T)u(T)dT,
о
t
x2(t) = x2(O) + ju(z)dx.
В конечномерной форме (N = 30) имеет место задача:
найти набор дискретных значений м(г*), такой , что
N-\
I = h^u2(tk)
принимает минимальное значение, при этом имеют место ограничения
т
xl(T) = xl(0) + x2(0)'T + j(T-T)u(T)dxt
и
г
*2(Г) = *2(0) + {и(т)<*т.
о
Формулы, определяющие точное решение задачи, имеют вид
w*(/) = -6+12r,
/,(/)= 1-3/2+2Л
x\(t) = - 6г + 6г2.
Сеточные функции u\tk\ Jc,*(fA), x\(tk)% полученные в результате решения задачи конечномерной
оптимизации, наряду с точными дискретными значениями и*(г*). -**|('*). **2(f*) приведены в табл. Т12 1.
Графики указанных процессов представлены на рис Т12.4.
Таблица Т12.1
Дискретные значения u(tk), u(tk), x*(tk), **('*)> Хг{гк)
u\tk)
-5,5862
-5,5730
-5,1599
-4,7471
u\tk)
-6,0000
-5,5862
-5,1724
-4,7586
1
0,99644
0,98625
0,96993
1
0,99651
0,98639
0,97010
0
-0,19930
-0,38435
-0,55516
0
-0,19977
-0,38526
- 0,55649
708
Задания для самостоятельной работы и методические пояснения. Часть V
Продолжение табл. Т12.1
-4,3343
-3,9215
-3,5087
- 3,0960
- 2,6832
- 2,2704
- 1,8576
- 1,4448
- 1,0321
-0,6193
-0.2065
0,2065
0,6193
1,0321
1,4448
1,8576
2,2704
2,6832
3,096
3,5088
3,9216
4,3344
4,7472
5,1600
5,5728
5,9857
-4,3448
-3,9310
-3,5172
-3,1034
- 2,6896
-2,2758
- 1,8620
-1,4482
-1,0344
- 0,6206
-0,2068
0,2010
0,6208
1,0346
1,4484
1,8622
2,2760
2,6898
3,1036
3,517
3,931
4,345
4,759
5,172
5,586
6,00
0,94797
0,52065
0,88907
0,85311
0,81348
0,7705
0,72500
0,67738
0,62793
0,57723
0,52583
0,47416
0,42276
0,37207
0,32264
0,27487
0,22935
0,18653
0,14688
0,11092
0,079120
0,052020
0,030030
0,013750
0,0036593
0,0000889
0,94817
0,92106
0,88929
0,85334
0,81368
0,77083
0,72528
0,67752
0,62802
0,57729
0,52583
0,47413
0,42267
0,37200
0,32248
0,27468
0,22914
918628
0,14662
0,11066
0,0789
0,0519
0,0298
0,0136
0,0035
0
-0,71173
- 0,85408
-0,98219
-1,0961
- 1,1957
-1,2810
-1,3522
-1,4092
-1,4519
-1,4804
-1,4947
-1,4946
-1,4804
-1,4519
-1,4092
- 1,3523
-1,2811
-1,1956
- 1,0960
-0,98220
- 0,85403
-0,71169
-0,55510
-0,38428
-0,19922
0,00007
-0,71344
-0,85613
-0,98455
-1,0987
-1,1986
-1,2842
-1,3555
-1,4126
- 1.4554
- 1,4839
-1,4982
-1,4982
- 1,4839
- 1,4555
-1,4126
-1,3555
-1,2842
-1,1986
-1,0987
- 0,9846
-0,8561
-0,7134
-0,5565
-0,3953
-0,1998
-0,0001
Тема 12. Оптимальные системы автоматического управления
709
и{1) '
и 0) 6
4
2
0
-2
-4
-ft
-
-
г
" i i i i I i i
: 0,2
, , | , ,
0,6
i i I i i
0,8
1 1 1 1 Ъ
1
Рис. Т12.4. Графики функций и (t),u\t) ,x\(t) ,x\{t) ,x\(t) tx"2{t)
Решим поставленную выше задачу при ограничении на фазовые координаты
Потребуем, чтобы
дг2(/)>- 1,45.
При этом в оптимизаторе к предыдущей вычислительной схеме достаточно добавить ограничения на
дискретные значения л;2(/*):
лг2(^) >- 1,45.
Результаты решения с oi раничениями приведены в табл Т12.2
Графики указанных функций представлены на рис Т12.5.
710
Задания для самостоятельной работы и методические пояснения. Часть V
Таблица Т12.2
Дискретные значения u(tk), x*(tk), x*2(tk)
tk
0
0,034483
0.068967
0,10345
0,13794
0,17242
0,20690
0,24138
0,27587
0,31035
0,34483
0,37932
0,41380
0,44828
0,48277
0,51725
0,55173
0,58621
0,62070
0,65518
0,68966
0,72415
0,75863
0,79311
0,82760
0,86208
0,89656
0,93104
0,96552
1,0000
u{tk)
- 4,335
-5,525
-5,114
-4,703
-4,292
-3,882
-3,471
- 3,060
-2,649
-2,239
-1,827
-1,416
-1,006
-0,5951
-0,1951
0,19517
-0,1951
0,19515
1,4168
1,8277
2,2385
2,6494
3,0603
3,4712
3,8821
4,2929
4,7058
5,114
5,5256
5.9365
1
0,99742
0,98827
0,97305
0,95223
0,92629
0,89575
0,86109
0,82277
0,78132
0,73718
0,69088
0,64289
0,59374
0,54385
0,49372
0,44366
0,39373
0,34386
0,29562
0,24964
0,20626
0,16606
0,12945
0,097060
0,069190
0,046450
0,029380
0,018419
0,013821
0
-0,17003
-0,35350
- 0,52278
- 0,67790
-0,81884
-0,94562
-1,0583
-1,1567
-1,2410
-1,3111
-1,3670
-1,4088
-1,4365
-1,4501
-1,4500
- 1,4501
-1,4500
- 1,4223
-1,3663
- 1,2962
-1,2119
-1,1134
-1,0008
- 0,87400
-0,73304
- 0,57792
- 0,40863
-0,22510
-0,02755
Тема 12. Оптимальные системы автоматического управления
711
и1 (О
£(/)
*—► Г, с
♦—► /,с
*—► Л с
Рис. Т12.5. Графики функций м*(г), Jcj*(/), xl(t)
712 Задания для самостоятельной работы и методические пояснения. Часть V
ТЕМА 13. ДИФФЕРЕНЦИАЛЬНО-ГЕОМЕТРИЧЕСКИЕ
МЕТОДЫ
1) Рассмотрите движение равностороннего треугольника, который может
вращаться в своей плоскости вокруг оси, проходящей через его центр. Пусть
элементами группы движений будет вращение этого треугольника, а в качестве
групповой операции используется их суперпозиция, или «последовательное»
выполнение. Пусть g элемент этой группы движений G, который переводит
треугольник из произвольного выбранного начального положения в такое
положение, когда он совмещается с исходным (меняются только номера
вершин). Найдите все элементы этой группы, в том числе обратный и единичный
элементы.
2) Пусть Р - множество положительных действительных чисел и L -
множество их логарифмов. Доказать, что каждое из множеств является группой: Р -
группа, где групповой операцией является обычное умножение, L - группа с
групповой операцией - сложение. Найдите их единичные и обратные
элементы. Докажите, что отображение /: Р —> L, определённое формулой
f(x) = log.v, является изоморфизмом Р- L, т.е. a) f(xy) = /(jc)/(v),Va, ye Р;
б)отображение / -взаимнооднозначно.
3) Пусть G - группа иг- некоторый её фиксированный элемент. Если jc -
любой элемент группы G, то и г~[хг - элемент этой группы. Определим
отображение f:G->G формулой f:x->r~xxr, или f(x) = r~]xr. Докажите,
что / - изоморфизм группы на себя. Указание: воспользуйтесь аксиомами
группы.
4) Рассмотрите группу кватернионов (открыта Гамильтоном). Кватернион с/ есть
комбинация четырех единиц 1,/, УД , т.е. комбинация вида q = a + i$+ jy-\-k8 ,
где a,(3,Y,5 -действительные числа. Эти гиперкомплексные числа 1,/, у'Д -
представляют вращение в трехмерном пространстве. По определению
i2 = j2 -к2 = ijk =-l. Найдите все элементы группы, в том числе единичный
и обратный элемент. Является ли эта группа коммутативной?
5) Для проективной группы на плоскости
^шг + ру + у
ел: + £у + 6 '
ех + £у + 6
при
'а р
v =
det
А,
*0
£ £ е
найти инфинитезимальные операторы (напомним, что (х\у') - это точка,
получаемая преобразованиями проективной группы точки (х, у)).
Тема 13. Дифференциально-геометрические методы 713
6) Пользуясь рядами Ли, восстановите группу вращений
х[ = x{cost + x2s\nty
х2 =-oclsitU + x2cosf
по ее инфинитезимальному оператору X = х2 х{ .
djci дх2
7) Пусть Х{ и Х2 - инфинитезимальные операторы двух однопараметрических
групп диффеоморфизмов. Доказать, что равенство etXletXl =eaXl+Xl) имеет
место тогда и только тогда, когда [Хх,Х2] = 0 .
8) Рассмотрите систему управления
\ХГ4' 1«И-
[х2=-х]+и,
Покажите, что область управляемости Q = R2. Указание: постройте алгебру
Ли для векторных полей Х(х) = (х1,-х{)т и К(л:) = (0,1)т в окрестности точки
Р = (0,0)т.
9) Пусть we £/ = /?, xeM = R, yeR2,x(0) = 0 и
х' = 14,
у{ =cosx,
у2 = sin jc.
Покажите, что данная система управления слабо локально наблюдаема, но не
наблюдаема.
10) Дайте определение дифференцируемого многообразия. Объясните, как
вводятся координаты на произвольном топологическом пространстве. Приведите
примеры гладких многообразий.
11) Что такое бинарная операция на множестве? Дайте определение понятия
«группа», назовите аксиомы группы. Приведите примеры групп.
12) Что такое непрерывная группа преобразований? Что такое действие группы на
множестве?
13) Дайте определение понятию «группа Ли». Как связаны группы Ли с решением
дифференциальных уравнений?
14) Дайте определение инфинитезимального оператора группы. Покажите связь
оператора с его группой непрерывных преобразований.
15) Пусть задана группа винтов в R3:
х[ = хх+%,
х2 = х2 cos х + jc3 sin x,
Х3 = ""Х2 s*n х + ХЪ COS X'
Найдите ее инфинитезимальный оператор, инвариант.
16) Дайте определение однопараметрической группы преобразований. Покажите
связь инфинитезимального оператора группы с системой обыкновенных
дифференциальных уравнений.
17) Даны: 1. Группа сдвигов в направлении вектора (аДу) •
х[ = хх + ш,
х2 =jc2+Pf,
x'3=x3+yt.
714 Задания для самостоятельной работы и методические пояснения. Часть V
2. Группа вращений вокруг оси хъ:
х[ =jc1cosf-jc2sinf,
х'2 =;t1sinf+ jc2cosf,
х3=х3.
Найдите: а) инфинитезимальные операторы обеих групп; б) определите
коммутатор (скобку Ли) этих операторов; в) найдите общий инвариант обеих
групп.
18) Дайте определение линейной связности (несвязности) вектор-функций.
В чем отличие линейной связности (несвязности) от линейной зависимости
(независимости) вектор-функций?
19) Что такое полная система инфинитезимальных операторов? Как производится
пополнение неполной системы?
20) Заданы три инфинитезимальных оператора в RxR3:
v _э 2 э э
ot ох{ ох3
v э э э
ot дхх дх2
v _э э э
А3 - — -Х^- Хх ——.
at oxl ах2
Предполагая, что рассматривается область, где х{х2 * 0, определите связность
операторов Х1э..., Хъ, полноту этой системы и найдите инварианты этой
системы операторов.
21) Как производится восстановление группы по ее инфинитезимальному
оператору? Что такое ряд Ли?
22) Назовите аксиомы алгебры Ли. Приведите примеры алгебр Ли. Как вы пониг
маете тождество Якоби?
23) Выведите уравнение Лиувилля. Что данное уравнение характеризует?
24) Что такое канонические координаты группы? Как они связаны с инвариантами
и инвариантным семейством группы?
25) Дайте определение группы симметрии. Покажите связь группы симметрии с
решением дифференциальных уравнений.
26) Выведите формулу Хаусдорфа. Что характеризует данная формула?
27) Покажите, при каких условиях справедлив принцип суперпозиции для
нелинейных систем. Объясните, как вы понимаете коммутативность фазовых
потоков?
28) Назовите условия, которые определяют отношение эквивалентности на
множестве элементов.
29) Дайте определение дифференциального распределения на многообразии Мп.
Как связана инволютивность распределения с интегрируемостью?
30) Сформулируете теорему Фробениуса. Дайте определение алгебраического
критерия слабой локальной управляемости для нелинейных систем управления
в терминах алгебры Ли.
31) Сформулируйте достаточное условие управляемости для линейных
нестационарных систем в терминах алгебры Ли.
32) Дайте определение производной Ли векторного поля Y(x), гладкой функции
Z(jc) , дифференциальной 1-формы co(jc) вдоль векторного поля Х(х).
Тема 13. Дифференциально-геометрические методы 715
33) Докажите теорему о слабой локальной наблюдаемости для нелинейных
аффинных систем.
34) Математическая модель, описывающая процессы в синхронном генераторе,
имеет вид
х{ - х2,
х2 = Вх - А{х2 - А2 sin JC| • jc3 — В2 sin(2Xi),
х'3 = -С{х3 + С2 cos xx + и,
где Вх,АиАъВъС{уС2 - некоторые константы. Найдите линейный эквивалент
для данной нелинейной модели и синтезируйте регулятор в окрестности
некоторой равновесной точки jc/ =(*ю/,0,%)т, *io >0» *з/ >0-
716 Задания для самостоятельной работы и методические пояснения. Часть V
ТЕМА 14. АДАПТИВНЫЕ СИСТЕМЫ
1) Дайте определение адаптивной системы управления. В чем отличие в
постановке задач управления при адаптивном и неадаптивном подходах?
2) Чем отличаются самонастраивающиеся системы от самоорганизующихся?
3) Каковы особенности в построении поисковых и беспоисковых
самонастраивающихся систем?
4) Объясните различие между прямым и непрямым адаптивным подходом,
явной и неявной эталонной моделью.
5) Дайте определение квазистационарного процесса. Чем объясняется
необходимость выполнения гипотезы квазистационарности неизвестных параметров
объекта? Каким приемом задача может быть сведена к квазистационарной?
6) Что такое обобщенный настраиваемый объект? Какие подсистемы он в себя
включает?
7) Перечислите основные методы синтеза алгоритмов основного контура
управления и адаптации.
8) Сформулируйте основную идею и условия применения метода синхронного
детектирования.
9) Методом синхронного детектирования синтезируйте алгоритм
идентификации параметров системы
где Хе #~, we Rl,fe Rl - состояние, управление, возмущение
(и - sin(7tf/3),/ = 0). Считайте, что параметры ay, j = 1,2 принадлежат интервалам
-3 < (Х| < -1, -5 < а2 < -1, а эталонная модель имеет вид
(t>0 61J И
где 90, Q{ - настраиваемые параметры.
Поисковые сигналы выберите двумя способами: в классе периодических сигналов
с разными частотами, функций Уолша.
Проведите математическое моделирование, оцените качество идентификации
параметров при воздействии на систему неизмеряемого возмущения, заданного в виде
стационарного случайного процесса с нулевым математическим ожиданием и
спектральной плотностью S f (со) = —Z .
j v ' со2+4
10) Для объекта, рассмотренного в примере 4.2, считая алгоритм основного
контура заданным в виде
«(0-kx(0x(0+*'(0y(i).
где Кх (/) = (*!(0,*2(0). *у(0 ~ настраиваемые параметры, проведите синтез
алгоритма адаптации методом функций Ляпунова.
В качестве функции Ляпунова возьмите квадратичную сепарабельную форму
(4.32), считая параметр Р известным с точностью до знака (sign (р) > 0).
Тема 14. Адаптивные системы 717
Проведите настройку контура адаптации, получите результаты моделирования
для двух-трех вариантов параметров объекта, проверьте наличие идентифицирующих
свойств при задающем воздействии меандрового типа с периодом 6 с. Сравните
полученный при синтезе алгоритм адаптивного управления с алгоритмом
параметрической адаптации, приведенном в примере 4.3.
11) Перечислите этапы синтеза алгоритмов адаптивного управления методом
функции Ляпунова. Какую роль при синтезе играет условие согласованности
объекта управления и эталонной модели? При каких условиях алгоритм
адаптации приобретает идентифицирующие свойства?
12) Дайте определение алгоритма скоростного градиента. Укажите
геометрическую интерпретацию условия псевдоградиентности и примеры функций, для
которых это условие выполняется.
13) Перечислите условия применимости алгоритмов скоростного градиента в
конечно-дифференциальной форме для локального функционала качества,
укажите наиболее существенные условия и возможность ослабления этих
условий.
14) Перечислите условия применимости алгоритмов скоростного градиента в
конечно-дифференциальной форме для интегрального функционала качества,
укажите наиболее существенные условия и возможность ослабления этих
условий.
15) Перечислите условия применимости алгоритмов скоростного градиента в
конечной форме для локального и интегрального функционалов качества, дайте
геометрическую интерпретацию усиленному условию псевдоградиентности,
укажите функции, удовлетворяющие этому условию.
16) Укажите подходы, обеспечивающие робастность алгоритмов скоростного
градиента в дифференциальной и конечно-дифференциальной формах.
За счет чего достигается робастность алгоритмов в конечной форме?
17) Перечислите этапы синтеза алгоритмов адаптивного управления методом
скоростного градиента.
18) Дайте определение степени сглаживания задачи адаптивного управления.
При какой степени сглаживания задачи возможно непосредственное
применение схемы скоростного градиента? Какими приемами можно повысить,
понизить степень сглаживания задачи?
19) Проведите сравнительный анализ систем с параметрической, сигнальной и
сигнально-параметрической адаптацией.
20) Используя целевую функцию q = ЕТНЕ и теорему 4.2, докажите
работоспособность ранее синтезированного методом Ляпунова (см. п. 4.6.1) алгоритма
адаптивного управления (4.26), (4.40).
21) В условиях задачи примера 4.2, считая выбранным алгоритм основного
контура в виде u(t) - ку(t)[kx(t)xx(t) + к2(t)x2(t) + y(t)], синтезируйте АСГ
дифференциальной и конечно-дифференциальной форме. Убедитесь, что АСГ в
дифференциальной форме совпадает с алгоритмом адаптации, приведенным
в примере 4.2. проведите математическое моделирование системы с АСГ в
конечно-дифференциальной форме. Сравните результаты моделирования
АСГ в дифференциальной форме (рис. 4.8) и АСГ в конечно-
дифференциальной форме. Сохранились ли идентифицирующие свойства у
АСГ в конечно-дифференциальной форме?
22) Для объекта управления, заданного апериодическим звеном третьего порядка
с передаточной функцией
718 Задания для самостоятельной работы и методические пояснения. Часть V
W (s) = -
V ; (71* + 1)(72* + 1)(Г3* + 1)§
где £,7J(/ = 1,3) - постоянные коэффициенты, проведите синтез алгоритмов
параметрической, сигнальной и сигнально-параметрической адаптации методом
скоростного градиента. В качестве эталонной модели выберите передаточную функцию вида
W9(s) = ^>—
(Ъ + if
где кэ =1;ГЭ =0,5 с, а в качестве основного контура адаптивного управления
выберите линейную обратную связь, считая доступными измерению выход объекта, его
первую и вторую производные. Считать, что объект управления может
функционировать в двух режимах с соответствующим набором параметров (см. табл. Т14.1)
Таблица Т14.1
Режим
1
2
к
1
1
Г,
1
2
т2
од
0,4
0,01
0,04
Проведите моделирование, выбрав в качестве задающего воздействия сигнал
у = sign(sin7tf/l,5). Сравните качество синтезированных алгоритмов адаптивного
управления между собой и неадаптивной линейной обратной связью, рассчитанной
на наихудший режим работы объекта таким образом, чтобы обеспечить степень
устойчивости замкнутой системы не менее 2 с"1.
23) Методом скоростного градиента синтезируйте алгоритмы параметрической,
сигнальной, сигнально-параметрической адаптации по редуцированной
(Г3 = 0) модели объекта (см. задание 22), соответственно понизив порядок
эталонной модели до п = 2. Проведите моделирование, сравните качество
синтезированных алгоритмов управления. Проверьте работоспособность
алгоритмов адаптивного управления на исходной модели объекта.
24) Укажите отличия между системами адаптивного управления с явной и
неявной эталонной моделью.
25) Дайте определение строгой минимально-фазовой системы.
26) Укажите признаки строгой минимально-фазовости систем со скалярным
входом, выходом.
27) С чем связано требование Ye L2(0,oo) для систем с неявной эталонной
моделью? К чему приводит нарушение этого требования? Обладают ли системы
с неявной эталонной моделью идентифицирующими свойствами?
28) Для объекта управления, заданного дифференциальным уравнением вида
—~-^ + fli—— + aox(t) = by(t) + ф(0, где ф(0 - возмущение, ао=1,
dr dt
-2<а{<2 , 0<Ь<2 - неизвестные параметры ОУ, синтезируйте алгоритм
адаптивного управления, обеспечивающий решение задачи слежения с
заданной динамикой при ф = 0. Считать измеряемыми выход ОУ, его
производную и задающее воздействие. Задачу решить в классе параметрических
АСГ в дифференциальной форме при явно и неявно заданной эталонной
модели. Явную эталонную модель считать заданной в форме дифференциально-
Тема 14. Адаптивные системы
719
го уравнения вида ?LL + a^——+ Лэо*э(0 = *эг(0 , где r(t) = sign(sin 2t)
dt at
- задающее воздействие, яэ1, аэ0, b - параметры. Параметры эталонной
модели выберите из условий: время переходного процесса не более 3 с,
перерегулирование не более 5%, статический коэффициент усиления равен 1.
Структуру основного контура выберите в классе линейной обратной связи.
Проведите настройку контура адаптации, математическое моделирование
систем адаптивного управления с явной и неявной эталонной моделью для
трех вариантов параметров ОУ а{ = -2; 0; 2 и Ь = 1. Сравните результаты
моделирования систем с явной и неявной эталонной моделью. Проведите
огрубление алгоритмов адаптации и проверьте робастность синтезированных
систем по отношению к возмущению ф(0. Считать ф(г) - центрированным
4
цветным шумом с заданной спектральной плотностью 5ю(0)) = —= . Заме-
ф со2+9
чание: система с АСГ и неявно заданной эталонной моделью при
дискретизации может потерять устойчивость, поэтому целесообразно «огрубить» АСГ
введением отрицательной обратной связи.
29) Дайте определение систем с переменной структурой. Почему системы с
переменной структурой относятся к классу систем с бесконечным
коэффициентом усиления?
30) На примере линейных объектов укажите этапы синтеза скользящих режимов.
Какая цель управления характерна для каждого этапа?
31) Пусть объект управления задан линейной моделью в форме пространства
состояния Х = АХ + Вм + В//, где Хе/?3, ueR\feRl - неизмерямое
возмущение, А =
0
-42
"31
1 0л
а22 а2ъ
0 %.
. в =
'(Г
0
ъ
. в/ =
'(Г
0
1
. Параметры объекта в
зависимости от режима функционирования приведены в табл. Т14.2.
Таблица Т14.2
Режим
1
2
3
ап
1
2
3
022
0
-2
- 1
023
1
1.3
1,5
031
-2
-1
3
язз
2
1
2
Ь
2
2,5
3
На основе скользящих режимов при / = 0 обеспечьте решение задачи слежения
за задающим воздействием y(t) = 2cos2t с динамикой по вектору (jc^) не хуже,
чем у эталонной модели Хэ = АэХэ+Вэ;у, где Хэ =(*1э х2э) , Аэ =
I""1 ~2J
В =
и ограниченность фазовой переменной хъ. В качестве поверхности
скольжения выберите гиперплоскость, заданную уравнением Е = 0тХ1+х3, где
720 Задания для самостоятельной работы и методические пояснения. Часть V
Xj =(*! х2) , Эе R2 - постоянные параметры. Проведите математическое
моделирование синтезированной системы для всех режимов функционирования при
постоянном и переменном коэффициенте усиления релейного элемента. Исследуйте
влияние шага дискретизации алгоритма управления на качество работы замкнутой
системы. Подайте на вход объекта возмущение /(0> представляющее центрированный
случайный процесс, распределенный по нормальному закону с дисперсией Dj = 2.
За счет повышения коэффициента усиления релейного элемента добейтесь
работоспособности системы в условиях аддитивного возмущения.
32) С какой целью вводится настройка параметров поверхности скольжения?
33) Укажите этапы синтеза систем с настраиваемой поверхностью скольжения.
Каковы цели каждого этапа и за счет чего они достигаются?
34) Чем отличаются базовый и модифицированный алгоритм адаптивного
управления с настраиваемой поверхностью скольжения?
35) Решите задачу п. 31 на основе скользящих режимов с настраиваемой
поверхностью разрыва. Сравните результаты моделирования системы с базовым и
модифицированным алгоритмом адаптации параметров поверхности разрыва
между собой и результатами, полученными в п. 31.
Список литературы 721
СПИСОК ЛИТЕРАТУРЫ
ЛИТЕРАТУРА К 1-Й ГЛАВЕ
1. Андреев ЮЛ. Дифференциально-геометрические методы в теории управления //
Автоматика и телемеханика. 1982. № 10. - С. 5 - 46.
2. Андреев ЮЛ. Управление конечномерными линейными объектами. - М.:
Наука, 1976.-404 с.
3. Арнольд ВЛ. Математические основы классической механики. - М: Наука,
1979. -432 с.
4. Арнольд В Л. Обыкновенные дифференциальные уравнения. - М.: Наука, 1984.
-272 с.
5. Борецкий И.Ф. К определению одного класса симметрии нелинейных
управляемых систем // Автоматика и телемеханика. 1981. № 12. - С. 171 - 173.
6. Бутковскип АТ.'К геометрической теории управления системами с
распределёнными параметрами // Теория и системы уравнений. 1995. № 4. - С. 137 - 179.
7. Бутковскип AT. Кибернетика и структуры // Проблемы управления и
информатика. 1996. №1 - 2. - С. 8 - 20.
8. Введение в топологию: Учебное пособие для вузов / Борисович Ю.Г., Белизня-
ков Н.М., Израилевич Л.А. и др. - М: Высш. шк., 1980. - 296 с.
9. Воронов А.А. Устойчивость, управляемость, наблюдаемость. - М.: Наука, 1979.
-336 с.
10. Гроссман Я., Магнус В. Группы и их графы. - М.: Мир, 1971. - 246 с.
И. Ефимов Н.В., Розендорн Э.Р. Линейная алгебра и многомерная геометрия. -
М.: Наука, 1970.-528 с.
12. Журавлёв В.Ф., Копылов ДМ. Прикладные методы в теории колебаний. - М.:
Наука, 1988.-288 с.
13. Камке Э. Справочник по дифференциальным уравнениям в частных
производных первого порядка. - М.: Наука, 1961. - 260 с.
14. Каргополов МЛ., Мерзляков ЮЛ. Основы теории групп. - М.: Наука, 1977. -
240 с.
15. КобаясиШ., НомидзуК. Основы дифференциальной геометрии. Т.1. -
М.: Наука, 1981.-344 с.
16. Краснощёченко ВЛ. Построение функций Ляпунова для нелинейных систем
управления, приводимых к канонической форме Бруновского // Труды МГТУ.
1998. №571. -С. 3-9.
17. Краснощёченко ВЛ. Синтез регуляторов для нелинейных систем, приводимых
к канонической форме Бруновского // Труды МГТУ. 1997. № 569. - С. 28 - 33.
18. Краснощёченко В.И., Мышляев ЮЛ. Синтез регулятора для задачи
стабилизации вращения спутника: нелинейная модель, векторное управление, фазовые
ограничения // Труды МГТУ. 1999. № 573. - С. 3 - 15.
19. КрищенкоАЛ. Исследование управляемости и множеств достижимости
нелинейных систем управления // Автоматика и телемеханика. 1984. № 6. - С. 30 - 36.
20. ЛиЭ.В., Маркус Л. Основы теории оптимального управления. - М.: Наука,
1972.-576 с.
21. Макаров К.А., Фрадков АЛ. Линеаризация негомономных систем
управления // Автоматика и телемеханика. 1996. № 10. - С. 3 - 16.
47 3ак.416
722 Список литерат
22. Методы анализа, синтеза и оптимизации нестационарных систем автома!
ского управления: Учебное пособие / К.А. Пупков, Н.Д. Егупов, В.Г. Коньков
др. / Под ред. Н.Д. Егупова. - М.: Изд-во МГТУ им. Н.Э. Баумана, 1999. - 684 с.
23. Овсянников Л.В. Групповой анализ дифференциальных уравнений. - М.:
Наука, 1978.-320 с.
24. ОлверП. Применения групп Ли к дифференциальным уравнениям. - М.: Мир,
1989. -636 с.
25. Петров Н.Н. О локальной управляемости // Дифференциальные уравнения.
1976. Т.12. № 12. - С. 2214 - 2222.
26. Полищук ЕМ. Софус Ли. - Л.: Наука, 1983. - 214 с.
27. Понтрягин Л.С. Непрерывные группы. - М.: Наука, 1984. - 520 с.
28. Торн Д. Начальные главы дифференциальной геометрии. - М.: Мир, 1982. - 360 с.
29. Трофимов В.В. Введение в геометрию многообразий с симметриями. - М.:
Изд-во МГУ, 1989.-360 с.
30. Уорнер Ф. Основы теории гладких многообразий и групп Ли. - М.: Мир, 1987.
-302 с.
31. Фиников CJI. Метод внешних форм Картана в дифференциальной геометрии.
- М. - Л.: Гостехиздат, 1948. - 510 с.
32. Хоръкова Н.Г., Четвериков В.Н. Элементы дифференциальной геометрии и
топологии. Векторные поля на многообразиях. - М.: Изд-во МГТУ им.
Н.Э. Баумана, 1996.-48 с.
33. Яковенко Г.Н. Групповой подход к управляемости и инвариантности
динамических систем // Кибернетика и вычислит, техника. 1978. Вып. 39. - С. 26 - 39.
34. Яковенко Г.Н. Траекторный синтез оптимального управления // Автоматика и
телемеханика. 1972. № 6. - С. 5 - 12.
35. BaccoittiA., StefaniG. On the relationship between global and local controllability //
Math. Systems Theory. 1983. №16. - P. 79 - 91.
36. Boothby W.M. A transitivity problem from control theory // J. Diff. Equat. 1975.
Vol. 17. №3.-P. 296-307.
37. BrockettR.W. Feedback invariants for nonlinear systems. - In: Preprints of 7-th
World Congress IF AC. - Oxford: Pergamon Press. 1978. Vol. 2. - P. 1115 - 1120.
38. Brunovsky P. On classification of linear controllable systems // Kybernetica. 1970.
Vol. 6.-P. 173-178.
39. Croush P.E. Spacecraft attitude control and stabilization: applications of geometric
control theory to rigid body models // IEEE Trans. Aut. Cont. 1984. Vol. 29. №4. -
P. 321-331.
40. Croush P.E., Byrnes CJ. Local accessibility, local reachability and representations
of compact groups // Math. Systems Theory. 1986. №19. - P. 43-65.
41. Hermann R., KrenerAJ. Nonlinear controllability and observability // IEEE.
Trans. Aut. Contr. 1977. Vol. AC-22. №5. - P. 728 - 740.
42. Hermes Я. Lie algebrals of vector fields and local approximation sets // SIAM J.
Cont. & Opt. 1978. Vol. 16. №5. - P. 715 - 727.
43. HuntL.R. Controllability of general nonlinear systems // Math. Systems Theory.
1979. №12.-P. 361-370.
44. JucubczykB., Respondek W. On linearization of control systems // Bull. L'acad Pol.
Science. 1980. V.XXVIII. №9 - 10. - P. 517 - 522.
45. Lobry C. Dynamical poly systems and control theory. -- In: Geometric methods in
system theory. - Boston: Dordrecht, 1973. - P. 1 - 42.
46. SuR. On the linear equivalents of nonlinear systems // Syst&Cont. letter. 1982.
Vol. 2. №1.-P. 48-52.
47. Sussmann H A sufficient condition for local controllability // SIAM. J.Cont.&Opt.
1983. Vol. 16. №5. - P. 790 - 802.
qk литературы 723^
Sussmann H. Orbits of families of vector fields and integrability of distributions //
Trans. Amer. Math. Soc. 1973. Vol. 180. - P. 171 - 188.
ЛИТЕРАТУРА К 2-Й ГЛАВЕ
1. Андронов Л А., Понтрягин А.С. Грубые системы // ДАН. Т, 14. № 5. 1937.
2. Арнольд В,И., Верченко А.Н., Гусейн-заде СМ. Особенности
дифференцируемых отображений. Т.1. - М: Наука, 1982. - 304 с.
3. Арнольд В.И. Обыкновенные дифференциальные уравнения. - М.: Наука, 1984.
-272 с.
4. Арнольд В.И. Теория катастроф. - М.: Наука, 1990. - 126 с.
5. Базыкин АД., Кузнецов Ю.А., Хибник А.И. Портреты бифуркаций. - М:
Знание, 1989.-40 с.
6. Баутин Н.Н., Леонтович Е.А. Методы и приемы качественного исследования
динамических систем на плоскости. - М.: Наука, 1976. - 496 с.
7. Бондаренко В.А..Дольников В.Л. Фрактальное сжатие информации по Барнсли
- Слоану // Автоматика и телемеханика. №5. 1994. - С. 12 - 20.
8. Введение в топологию: Учебное пособие для вузов / Борисович Ю.Г., Близня-
ков Н.М., Израилевич Я.А., Фоменко Т.Н. - М.: Высшая школа, 1980. - 296 с.
9. Гилмор Р. Прикладная теория катастроф: В 2-х книгах. Кн.1. - М.: Мир, 1984.
-350 с.
10. Гилмор Р. Прикладная теория катастроф: В 2-х книгах. Кн.2. - М.: Мир, 1984.
-286 с.
11. Голубицкий М, Гийемин В. Устойчивые отображения и их особенности. - М.:
Мир, 1972.-290 с.
12. Каданов Л.П. Пути к хаосу. - В кн.: Физика за рубежом. - М.: Мир, 1985. -
С. 9-32.
13. Колмогоров А.Н., Фомин СВ. Элементы теории функций и функционального
анализа. - М.: Наука, 1981. - 544 с.
14. Кроновер. Фракталы и хаос в динамические системах. Основы теории. - М.:
Постмарект, 2000. - 352 с.
15. Кузнецов Н.А., Матвеенко Н.И., Юмагулов М.Г. Признаки суб- и
суперкритических бифуракций Хопфа и задачи односторонней бифуркации // Автоматика
и телемеханика. №12. 1998. - С. 51 - 59.
16. Медведева Н.Б. Динамика логистической функции // Соросовский
образовательный журнал. Т.6. №8. 2000. - С. 121 - 127.
17. Мун Ф. Хаотические колебания. - М.: Мир, 1990. - 312 с.
18. Нагиев Ф.В. Система Лоренца и проблема прогнозирования нефтедобычи
пластов // Автоматика и телемеханика. №9. 1998. - С. 182 - 186.
19. Постников ММ. Введение в теорию Морса. - М.: Наука, 1971. - 568 с.
20. Постон Г., Стюарт И. Теория катастроф и ее приложения. - М.: Мир, 1981.
21. Рохлин В.А., Фукс Д.Б. Начальный курс топологии. Геометрические главы. -
М.: Наука, 1972.-488 с.
22. Федер Е. Фракталы. - М.: Мир, 1991. - 254 с.
23. Хасанов М.Н. Фрактальные характеристики динамики объектов управления //
Автоматика и телемеханика. 1994. №2. - С. 59 - 67.
24. Хирш М. Дифференциальная топология. - М.: Мир, 1979. - 280 с.
25. Шустер Т.Г. Детерминированный хаос. - М.: Мир, 1988. - 240 с.
26. Mandelbrot В.В. Fractals. Encyclopedia of Physical Science and Technology. - №5,
1987.-P. 579-593.
27. Mather I.N. Stability of С oo Mappins, II: Infinitesimal stability implies stability //
Annals of Math. Vol. 89. №2, 1969. - P. 254 - 291.
46 Зак. 416
724 Список литературы
28. Mather LN. Stability of С 00 Mappins, III: Finitely determined map germs // Publ.
Math. Vol. 35. 1968. - P. 127 - 156.
29. Mehra R.K., Kessel W.C., Caroll I.V. Global Stability and Control Analysis of
Aircraft of High Angels of Attach. - Cambridge: Scientific Systems, 1977.
30. Newhouse S., Ruelle £>., Tokens F. Occurrence of Strange Axiom - A Attractors near
Quasiperiodie Flow on Tm , m < 3" // Commun. Math. Phys. 1978. № 64. - P. 35.
31. Thorn R. Stabilite Structurelle of Morphgenese. - New York: W.A. Benjamin, Inc.,
1972.
ЛИТЕРАТУРА К 3-Й ГЛАВЕ
1. Барабанов А.Е., Первозванский А.А. Оптимизация по равномерночастотным
показателям (Я00 -теория) // Автоматика и телемеханика. №9. 1992.
2. Буков В.Н. Адаптивные прогнозирующие системы управления полетом. - М.:
Наука, 1987.
3. Владимиров И.Г., Курдюков А.П., Семенов А.В. Анизотропия сигналов и
энтропия линейных стационарных систем // Доклады РАН. Т. 342. № 3. 1995.
4. Владимиров И.Г., Курдюков А.П., Семенов. А.В. Асимптотика анизотропийной
нормы линейных стационарных систем // Автоматика и телемеханика. №3.
1999.
5. Владимиров И.Г., Курдюков А.П., Семенов А.В. Стохастическая проблема Я00 -
оптимизации // Доклады РАН. Т. 343. №5. 1995.
6. Гельфанд ИМ., Колмогоров А.Н., Яглом A.M. Информация и энтропия для
непрерывных распределений // Труды III Всесоюзного математического съезда.
Москва. Т. 3. 1958.
7. Калман Р. Вариационный принцип выбора оптимального фильтра из условия
минимума квадратов ошибки. - В сб.: Самонастраивающиеся автоматические
системы / Труды международного симпозиума (ИФАК). - М.: Наука, 1964.
8. Конструирование робастных систем управления с использованием методов
Я00 -оптимизации. Обзор / Под ред. Е.А. Федосова. - М.: ГосНИИАС, 1991.
9. Курдюков АЛ. Основы робастного управления. - М.: Изд-во МГТУ им.
Н.Э. Баумана, 1995.
10. Курдюков А.П., Семенов А.В., Павлов Б.В., Применение Я00 -теории в задачах
проектирования // Приборы и системы управления. 1994. №11.
11. Летов A.M. Аналитическое конструирование регуляторов IIII // Автоматика и
телемеханика. Т. 21. № 6. 1960.
12. Новые перспективные методы проектирования многомерных динамических
систем управления. Обзор / Под ред. Е.А. Федосова. - М.: ГосНИИАС, 1989.
13. Отчет Института проблем управления № 23191/01. Исследование новых
принципов автоматизации управления и контроля посадочными режимами
ЛА. 1991.
14. Позняк А.С. Реализация метода Неванлины Пика синтеза шуровских функций из
RH"3 с действительными коэффициентами в задаче робастной устойчивости //
V-й Ленинградский симпозиум по теории адаптивных систем. - Л., 1991.
15. Позняк А.С, Себряков Г.Г., Семенов А.В. Я03-теория управления: феномен,
достижения, перспективы, открытые проблемы. - М.: ГосНИИАС, Институт
проблем управления АН СССР, 1990.
16. Потемкин В.Г. Система MATLAB: Справочное пособие. - М.: ДИАЛОГ
МИФИ, 1997.
Список литературы 725
17. Семенов А.В., Владимиров И.Г. Методы стохастической Я00-оптимизации в
приложении к проблемам конструирования робастных регуляторов и
фильтров. Технический отчет № 117 (14027)95. - М: ГосНИИАС, 1995.
18. Семенов А.В., Владимиров И.Г., Фурлетов М.Ю. Методы стохастической Я00 -
оптимизации в приложении к проблемам конструирования робастных
регуляторов и фильтров. Технический отчет № 184 (1390)94. - М.: ГосНИИАС, 1994.
19. Тихомиров В.М. Работы А.Н.Колмогорова по е-энтропии функциональных
классов и суперпозициям функций // Успехи математических наук. Т. XVIII.
№5(113). 1963.
20. Хорн Р., Джонсон Ч. Матричный анализ. - М.: Мир, 1990.
21. Ширяев АЛ., Липцер РШ. Статистика случайных процессов. - М.: Наука, 1974.
22. Ball Jf.A., Helton J.W., Walker M.L H infinity Control for Nonlinear Systems with
Output Feedback // IEEE Trans. Automat. Contr. Vol. 38. №4,1993.
23. Basar Т., Bernhard P. Я infinity Optimal Control and Related Minimax Design
Problems, Gynamic Game Approach, Systems and Control: Foundations and
Applications. Birhauser, 1991.
24. Doyle J.C. Lecture notes in advances in multivariable control. ONR / Honeywell,
Workshop, Minneapolis, MN, 1984.
25. Doyle J.C, Glover K., Khargonekar P.P., Francis B.A. Statespace solutions to
standard Я2 and Я00 control problems // IEEE Transactions on Automatic Control,
AC34.№8. 1989.
26. Doyle J.C, Stein G. Multivariable Feedback Design: Concepts for a Classical /
Modern Synthesis // IEEE Trans. Auto. Control. 1981. Vol. AC26. №1.
27. Dorato P. UParameter design example: Robust Flight Control for WindShear
Protection // Proceeding of the 29nd Conf. on Dec. and Control. 1990. Vol. 1.
28. Essays on Control: Perspectives in the Theory and its Applications. Progress in
System and Control Theory, vol. 14, Editors H.L. Trentelman, J.C. Willems. Birk-
hauser, 1993.
29. Francis B.A. A Course in Я00 Control Theory. Lecture Notes in Control and
Information Sciences, Vol. 88, SpringerVerlag, Berlin etc., 1987.
30. Glover K. All optimal Hankelnorm approximations of linear multivariable systems
and their Я00 error bounds / Int. J. Control, vol. 39, 1984.
31. Glover K., MacFarline D. Robust Controller Design Using Normalised Coprime
Factor Plant Descriptions // LNCIS. vol. 138. - NY: SpringerVerlag, 1990.
32. Gu D.W., Tsai M.C, О'Young S.D., Postlethwaite I. Statespace formulae for discre-
tetime Я00 -optimization // International Journal of Control, vol. 49. №5. 1989.
33. Hyde R.A.9 Glover K. Taking Я00 control into Flight // Proc. of the 32nd Conf. on
Dec. and Control. Vol. 2. 1993.
34. lglesias P.A., Glover K. Statespace approach to discretetime Я00-control //
International Journal of Control, vol. 54. №5. 1991.
35. Ivan M. A RingVortex Downburst Model for Flight Simulations // J. Aircraft,
vol. 23. №3. March 1986.
36. Kalman R.E., Busy R.S. New Results in Linear Filtering and Prediction Theory //
Trans. ASME, J. Basic Engineering, 1961.
37. Kang W., De P.K., Isidori A. Flight Control in a Windshear via Nonlinear Я00
Methods//Proceeding of the 31st Conf. on Dec. and Control, vol. 1, 1992.
38. Kurdjukov A., Pavlov В., Timin V. Longitude flight control in a windshear via Я00
Methods // AIAA Conference, July 1520, SanDiego, USA, 1996.
46*
726 Список литературы
39. Kurdjukov A.9 Pavlov В., Timin V. Robust flight control in a windshear // European
Control Conference (ECC 95), September 58, Roma, Italy, 1995.
40. Kwakernaak HA, Polynomial Approach to Minimax Frequency Domain of
Multivariable Feedback Systems // Int. J. Contr. 1986. №1.
41. Limebeer P.J., Anderson BJ.O., Khargonekar P.P. A game theoretic approach to
control for time varying systems // SIAM J. Contr. and Opt, vol. 30. №2. 1992.
42. Limebeer D.J., Halikias G.D. A controller degree bound for Я00 optimal control
problems of the second kind // SIAM J. Contr. and Opt, vol. 26, 1988.
43. Mariton Л/., Bertrand P. A homotopy algorithm for solving coupled Riccati
equations // Optimal Control Applications & Methods, vol. 6. 1985.
44. Mehrmann V.L. The Autonomous Linear Quadratic Control Problem: Theory and
Numerical Solution. Lecture Notes in Control and Information Sciences, vol. 163,
SpringerVerlag. Berlin etc. 1994.
45. Miele A.9 Wang Г., Melvin W.W. Gamma guidance scheme for flight in a windshear
// J.Guid. Contr. and Dyn., v. 11. №4. 1988.
46. Miele A., Wang Г., Melvin W.W. Guidance Strategies for NearOptimum Takeoff
Performance in a Windshear // Journal of Optimization Theory and Applications,
v. 50. №1, July, 1986.
47. Miele A., Wang Г., Melvin W.W. Maximum Survival Capability of an Aircraft in a
Severe Windshear // Journal of Optimization Theory and Applications, vol. 53.
№12, May, 1987.
48. Miele A., Wang Г., Melvin W.W. Optimal Flight Takeoff Trajectories in the Presense
of Windshear // Journal of Optimization Theory and Applications, vol. 49. №1,
April, 1986.
49. Miele A., Wang Г., Melvin W.W. Optimization and acceleration guidance of flight
trajectories in a windshear // J.Guid. Contr. and Dyn. Vol. 10. №4, 1987.
50. Miele A., Wang Т., Tzeng C.Y., Melvin W.W. Optimization and Guidance of Abort
Landing Trajectories in an Windshear // Paper №AIAA872341, AIAA Guidance,
Navigation, and Control Conference, August 1719, Monterey, California, 1987.
51. Mustafa D., Glover К Minimum Entropy #°° -control. Lecture Notes in Control
and Information Sciences, SpringerVerlag, Berlin etc., 1991.
52. Ohno M, Takahami M, Kimura Т., Tokuda E. Я00-control Design Method
Combined with Exact Model Matching Design of Longitudinal Robust Flight
Control System // Proceeding of the 32rd Conf. on Dec. and Control, vol 1, 1993.
53. Ran A.C.M., Rodman L. On parameter dependence of solutions of algebraic Riccati
equations. Mathematics of Control Signals fc Systems. Vol. 1, 1988.
54. Ravi R., Nagpal K.M., Khargonekar P.P. Я00 -control of linear time varing systems:
a statespace approach // SIAM J. Contr. and Opt. Vol. 29, №6, 1991.
55. Recent Advances in Robust Control. Edited by P.Dorato, Rama K.Yedavalli. IEEE
PRESS. 1990.
56. Robust Control. Edited by P. Dorato. IEEE PRESS, 1987.
57. Semyonov A.V., Vladimirov I.G., Kurdjukov A.P. Stochastic approach to Я00-
optimization // Proceedings of the 33rd Conference on Decision and Control,
Florida, USA, December 14 - 16, 1994. Vol. 3.
58. Van der Schaft AJ. Nonlinear State Space Я00 -control Theory, in Essay an Control:
Perspectives in the Theory and Applications, Birhauser, 1993.
59. Vladimirov 7.G., Kurdjukov A.P., Semyonov A.V. On computing the anisotropic
norm of linear discretetimeinvariant systems // Proceedings of the 13th IFAC World
Congress. SanFrancisco. California, USA, June 30July 5, 1996, v. G, Paper
IFAC2dO 1.6. 1996.
Список литературы 727
60. Vladimirov 7.G., Kurdjukov A.P., Semyonov A.V. Statespace solution to anisotropy-
based stochastic Я-infinity optimization problem // Proceedings of the 13th IFAC
World Congress, SanFrancisco, California, USA, June 30July 5, 1996, v. H, Paper
IFAC3dO1.6, 1996.
61. Young NJ. The NevanlinnaPick Problem for Matrixvalued Functions // J. of
Operator Theory. 1986. Vol. 15.
62. Zames G. Feedback and optimal sensitivity: model reference transformations,
multiplicative seminorms, and approximate inverses // IEEE Trans. Auto. Control. 1981.
Vol. AC2.6. №2.
63. Zhao Y. A Simplified RingVortex Downburst Model // AIAA Paper. №580, 1990.
P. 111.
ЛИТЕРАТУРА К 4-Й ГЛАВЕ
1. Александров AT. Оптимальные и адаптивные системы: Учеб. пособие для
вузов по спец. «Автоматика и управление в техн. системах». - М.: Высш. шк.,
1989.-264 с.
2. Андриевский Б.Р., Стоцкий А.А., Фрадков АЛ. Алгоритмы скоростного
градиента в задачах управления и адаптации // Автоматика и телемеханика. 1988.
№12.-С. 3-39.
3. Борцов Ю.А., Юнгер Н.Б. Автоматические системы с разрывным управлением.
-Л.: Энергоатомиздат. Ленинградское отд-ние, 1986. - 168 с.
4. Ван-дер-Поль Б. Нелинейная теория электрический колебаний. - М.: Связьиз-
дат, 1935.
5. Воронов А.А. Введение в динамику сложных управляемых систем. - М.: Наука,
1985.-352 с.
6. Воронов А.А., Рутковский В.Ю. Современное состояние и перспективы
развития адаптивных систем // Вопросы кибернетики. Проблемы теории и практики
адаптивного управления. - М: Научный совет по кибернетике АН СССР, 1985.
-С.5-48.
7. Деревицкий Д.П., Фрадков А.Л. Прикладная теория дискретных адаптивных
систем управления. - М.: Наука, 1981. - 216 с.
8. Емельянов СВ. Способ получения сложных законов регулирования с
использованием лишь сигнала ошибки или регулируемой координаты и ее первой
производной // Автоматика и телемеханика. 1975. №10. - С. 874 - 875.
9. Емельянов СВ. Применение нелинейных корректирующих устройств типа
«ключ» для улучшения качества систем автоматического регулирования
второго порядка // Автоматика и телемеханика. 1959. №7. - С. 867 - 883.
10. Земляков С Д., Рутковский В.Ю. Синтез алгоритмов изменения
перестраиваемых коэффициентов в самонастраивающихся системах управления с
эталонной моделью // ДАН СССР. 1967. Т. 174. №1. - С. 47-49.
И. Земляков С Д., Рутковский В.Ю. Павлов Б.В. Структурный синтез
самонастраивающейся системы управления // Автоматика и телемеханика. 1969. №8.
-С. 53-63.
12. Климушев A.M., Красовский Н.Н. Равномерная асимптотическая устойчивость
системы дифференциальных уравнений с малыми параметрами при
производных // Прикладная математика и механика. 1961. Т.25. №4. - С. 680 - 694.
13. Козлов Ю.М., Юсупов P.M. Беспоисковые самонастраивающиеся системы. -
М: Наука, 1969.-456 с.
14. Красовский А.А. Оптимальные алгоритмы в задачах идентификации с
адаптивной моделью // Автоматика и телемеханика. 1976. №12. - С. 75 - 82.
15. Красовский А.А., Буков В.Н., Шендрик B.C. Универсальные алгоритмы
оптимального управления непрерывными процессами. - М.: Наука, 1977. - 272 с.
728 Список литературы
16. Крылов Н.М., Боголюбов Н.Н. Введение в нелинейную механику. - К.: Изд-во
АН УССР, 1937.
17. Люблинский Б.С, Фрадков АЛ. Адаптивная стабилизация нелинейных
объектов с неявно заданной статической характеристикой // Автоматика и
телемеханика. 1983. №4.-С. 126-136.
18. Мееров М.В. Синтез структур систем автоматического регулирования высокой
точности. - М.: Наука, 1967. - 424 с.
19. Метод векторных функций Ляпунова в теории устойчивости / Под ред. А.А.
Воронова, В.М. Матросова. - М: Наука, 1987. - 312 с.
20. Моисеев Н.Н. Математические задачи системного анализа. - М.: Наука, 1981. -
488 с.
21. Мышляев Ю.И. Об одном подходе к синтезу систем с переменной структурой
в условиях параметрической неопределенности // Труды МГТУ им. Н.Э.
Баумана. 1999. №575. - С. 68 - 73.
22. Мышляев Ю.И., Мышляева СВ. Синтез систем управления с настраиваемой
плоскостью скольжения; задача слежения, линейные объекты // Труды МГТУ
им. Н.Э. Баумана. 2000. №577. - С. 129 - 133.
23. Петров А.С, Рутковскип В.Ю., Земляков С Д. Адаптивное координатно-
^араметрическое управление нестационарными объектами. - М.: Наука, 1980.
-234 с.
24. Петров Б.Н., Рутковскип В.Ю., Крутова И.Н., Земляков С Д. Принципы
построения и проектирования самонастраивающихся систем управления. - М.:
Машиностроение, 1972. - 260 с.
25. Понтрягин Л.С., Родыгин Л.В. Асимптотическое поведение решений систем с
малым параметром при высших производных // ДАН СССР. 1960. Т. 131, №2. -
С. 255-258.
26. Попов A.M., Фрадков АЛ. Адаптивное управление сингулярно-возмущенными
объектами // Труды XI Всесоюзного совещания по проблемам управления. -
Ереван, 1983.-С. 166-178.
27. Самонастраивающиеся системы: Справочник / Под ред. П.Н. Чинаева. - Киев,
1959.-528 с.
28. Справочник по теории автоматического управления / Под ред. А.А. Красовско-
го.-М.: Наука, 1987.-712 с.
29. Стоцкий А.А. Сигнально-параметрические алгоритмы адаптивного управления
с неявной эталонной моделью // Микропроцессорные системы автоматизации
технологических процессов. Тез. Всесоюз. конф. - Новосибирск: НЭТИ, 1987.
-С. 78-79.
30. Тихонов А.Н. Системы дифференциальных уравнений, содержащих малые
параметры при производных // Математический сборник. 1952. Т.31. №3. -
С. 575-585.
31. Топчеев Ю.И., Потемкин В.Г., Иваненко ВТ. Системы стабилизации. - М.:
Машиностроение, 1974.-248 с.
32. Уткин В.И. Скользящие режимы в задачах оптимизации и управления. - М.:
Наука, 1981.-368 с.
33. Фомин В.Н., Фрадков А.Л., Якубович В А. Адаптивное управление
динамическими объектами. - М.: Наука, 1981. - 448 с.
34. Фрадков АЛ. Адаптивная стабилизация минимально-фазовых объектов с
векторным входом без изменения производных от выхода // ДАН РАН. 1994.
Т. 337, №5. - С. 592 - 594.
35. Фрадков АЛ. Адаптивное управление в сложных системах. - М.: Наука, 1990.
292 с.
Список литературы 729
36. Фрадков АЛ. Алгоритмы скоростного градиента в задачах адаптации и
управления нелинейными системами // Проблемы динамики неоднородных систем.
- М: ВНИИСИ, 1985. - С. 46 - 58.
37. Фрадков АЛ. Интегро-дифференцирующие алгоритмы скоростного градиента
// ДАН АН СССР. Т. 288, №4. - С. 832 - 835.
38. Фрадков А.Л. Метод синтеза алгоритмов стабилизации линейного
многосвязанного динамического объекта // Вопросы кибернетики. Адаптивные
системы. - М: Научный совет по кибернетике АН СССР, 1976. - С. 82 - 85.
39. Фрадков АЛ. Разделение движений в адаптивных системах управления //
Вопросы кибернетики. Теория и практика адаптивного управления. - М:
Научный совет по кибернетике АН СССР, 1985. - С. 71 - 82.
40. Фрадков АЛ. Синтез адаптивных систем управления нелинейными
сингулярно-возмущенными объектами // Автоматика и телемеханика. 1987. №6. -
С. 100-110.
41. Фрадков АЛ. Схема скоростного градиента и ее применение в задачах
адаптивного управления // Автоматика и телемеханика. 1979. №9. - С. 90 - 101.
42. Цыкунов AM. Алгоритмы скоростного градиента для систем с запаздыванием //
Автоматика и телемеханика. 1987. №3. - С. 97 - 106.
43. Fradkov A.L., Stotsky A.A. Speed gradient adaptive algorithms for mechanical
system // International journal of adaptive control and signal processing. 1992. Vol. 6. -
P. 211-220.
44. Landau T.D. Adaptive control system: the Model Reference approach. - N.Y.
Marcel Dekker, 1979.-P. 406.
45. Narendra K.S., Valavani L.S. A comparison of Lyapunov's and hyperstability
approaches to adaptive control of continues systems // IEEE Trans. Automat. Confr.,
1980, AC - 25, №2. - P. 243 - 247.
46. Narendra K.S., Kudva P. Stable adaptive schemes for system identification and
control - Part I, II // IEEE Trans. Automat. Confr. 1974. Vol. SMC - 4, №6. -
P. 542 - 560.
47. Young K.K.D. Design of variable structure model following control system // IEEE
Trans. Automat. Control. 1978. Vol. AC - 23, №6. - P. 1079 - 1085.
ЛИТЕРАТУРА К 5-Й ГЛАВЕ
1. Александров ВМ. Минимаксный подход к решению задачи обработки
информации // Техническая кибернетика. 1966. № 5. - С. 3 - 17.
2. Бесконечные антогонистические игры / Под. ред. Н.Н. Воробьева. - М.:
Физмат, изд., 1963.-504 с.
3. Бирюков В.Ф., Воронов ЕМ., Карпенко АЛ. Гарантированная оценка
эффективности многомерного нелинейного фильтра с заданной частью и прототипом //
Изв. АН СССР. Техническая кибернетика. 1989. № 4. - С. 130 - 136.
4. Бирюков В.Ф.У Воронов ЕМ., Карпенко АЛ. О применении принципа
сложности и гарантированных решений в задачах программного управления в
условиях неопределенности. Киев.: Автоматика. 1986. № 2. - С. 53 - 60.
5. Вапсборд ЭМ., Жуковский В.Н. Введение в дифференциальные игры
нескольких лиц и их приложения. - М.: Сов. радио, 1980. - 304 с.
6. Вилкас Э.И. Оптимальность в играх и решениях. - М.: Наука, 1990. - 256 с.
7. Воробьев Н.Н. Основы теории игр. Бескоалиционные игры. - М.: Наука, 1984.
-496 с.
8. Воронов ЕМ. Анализ стабильно-эффективных компромиссов в сложных
системах на основе метода угроз и контругроз // Вестник МГТУ. Серия
приборостроение. 1998. № 1.
730 Список литературы
9. Воронов ЕМ. Методы оптимизации управления многообъектными
многокритериальными системами на основе разработки и модификации стабильно-
эффективных игровых решений и компромиссовю. Цикл «Методы теории
автоматического управления» / Под ред. К.А. Пупкова, Н.Д. Егупова. - М.:
Изд-во МГТУ им. Н.Э. Баумана, 2000. - 650 с.
10. Воронов ЕМ. Оценка эффективности взаимодействия маневрирующего
объекта и системы управления летательным аппаратом // Диссертация на соискание
ученой степени канд. техн. наук 05.13.08 / МВТУ им. Н.Э. Баумана. - М.: 1972.
-162 с.
И. Воронов ЕМ. Стабильно-эффективные компромиссы при управлении
многокритериальными многообъектными большими системами в условиях
конфликта и неопределенности // Труды Международной конференции
«Управление большими системами». - М.: Изд-во ИПУ РАН, 1997. - 124 с.
12. Воронов ЕМ. Бурлакин АЛ. Методы формирования компромиссов в ММС на
основе стабильных и эффективных решений // Вестник МГТУ. Серия
приборостроение. 1999. № 4. - С. 68 - 96.
13. Воронов ЕМ., Вдовин АЛ. Некоторые особенности реализации алгоритмов
векторной Нэш-оптимизации // Труды I Международного симпозиума «ИН-
ТЕЛС94» / Под ред. К.А. Пупкова - М.: Изд-во. РУДН ПАИМС, 1994. - С. 121
-124.
14. Воронов ЕМ., Килимник ЮЯ. Программная система «Гарантия-М» для
моделирования и анализа эффективности законов управления // Вестник МГТУ.
Серия приборостроение. 1998. № 2.
15. Воронов ЕМ., Серов В.А. Особенности функциональной части пакета
прикладных программ многокритериальной оптимизации. Автоматизированное
проектирование систем управления // Труды МВТУ, №429. - М., 1985. Вып. 3.
-С. 137-144.
16. Воронов ЕМ., Карабанов В.А. Исследование задачи сближения-уклонения
подвижных объектов в интегро-дифференциальной форме с учетом
ограничений, случайных возмущений и заданных связей // Труды VII Всесоюзного
совещания по проблемам управления, Минск. 1977. - М.: ИПУ, кн. 2. -
С. 221-224.
17. Воронов ЕМ., Карпенко АЛ. Метод анализа систем телесамонаведения на
основе принципа гарантированных решений и принципа сложности // Известия
ВУЗов. Серия приборостроение. 1984. -№ 8.
18. Воронов ЕМ., Карпенко А.П. Параметрическая оптимизация вычислительного
процесса для одной задачи фильтрации // Известия ВУЗов. Серия
приборостроение. 1992. № 3-4. - С. 9 - 15.
19. Воронов ЕМ., Карпенко АЛ. ППП для исследования гарантированных
стратегий в позиционно-программной задаче сближения-уклонения // Труды МВТУ.
№314. 1979.-С. 133-138.
20. Воронов ЕМ., Савин А.В. Модификация алгоритма конфликтно-оптимального
управления // Труды МВТУ. № 513. - М.: МВТУ, 1988.
21. Воронов ЕМ., Серов В.А. Равновесие по Нэшу между векторными
показателями эффективности в задаче многокритериальной параметрической оптимиза-.
ции. Создание и внедрение систем автоматического и автоматизированного
управления технологическими процессами: Тезисы докладов XI Всесоюзного
н/т совещания (Новгород, 1986 г.). - М., 1986. - 4.1. - С. 23 - 36.
22. Воронов ЕМ., Серов В.А., Степанищев А.Е. ППП для автоматизации
проектирования многообьектных многокритериальных систем управления // Вестник
МГТУ. Серия приборостроение. 1991. №2.
Список литературы 731
23. Воронов Е.М., Пупков КА. Предельное целевое качество интеллектуальной
системы на основе стабильного гомеостаза // Труды III Международного
симпозиума «ИНТЕЛС98» / Под ред. К.А. Пупкова - М.: ООО «ТВК», 1998.
-С. 43-48.
24. Гермейер Ю.Б. Введение в теорию исследования операций. - М.: Наука, 1971.
-384 с.
25. Дмитриевский А.Л., Лысенко Л.Н. Прикладные задачи теории оптимального
управления движением летательных аппаратов. - М: Машиностроение, 1978.
-328 с.
26. Ермольев Ю.М., Урясъев СП. О поиске равновесия по Нэшу в играх многих
лиц // Кибернетика. 1982. № 3. - С. 85 - 88.
27. Иванова Е.А. Построение на основе игрового подхода оптимального алгоритма
наведения на маневрирующую цель // Сб. трудов. - Л.: ЛМИ, 1980.
28. Карпенко АЛ. Разработка метода и алгоритмического обеспечения для
исследования динамических режимов позиционно-програмного сближения-
уклонения // Дисертация на соискание уч. ст. канд. техн. наук - М.: МВТУ,
1980.
29. Кейн В.М. Оптимизация систем управления по минимаксному критерию. - М.:
Наука, 1985.-248 с.
30. Красовский Н.Н. Игровые задачи о встрече движений. - М.: Наука, 1970. -
420 с. (РЖМат, 1970, 12В445К).
31. Лебедев А А., Караванов В А. Динамика систем управления беспилотными
летательными аппаратами: Учебн. пособие. - М.: Машиностроение, 1965. - 528 с.
32. Мальгин А.Е. Управление огнем ЗРК. - М: Воениздат, 1987. - 222 с.
33. Месарович М, Мако Д., Такахара Н. Теория иерархических многоуровневых
систем: Пер. с англ. - М.: Мир, 1973. - 344 с.
34. Моисеев Н.Н. Математические методы системного анализа. - М.: Наука, 1981.
-488 с.
35. Неупокоев Ф.К. Противовоздушный конфликт. - М.:Воениздат, 1989. - 262 с.
36. Нефедов В.П., Ясейтис АА., Новосельцев В.Н. и др. Гомеостаз на различных
уровнях организации биосистем. - Новосибирск: Наука, сиб. отд., 1991.-232 с.
37. Основы синтеза систем летательных аппаратов / Под ред. А.А. Лебедева. - М.:
Машиностроение, 1987. - 224 с.
38. Петросян Л А., Томский Г.В. Динамические игры и их приложения. - Л.: Изд.
Ленингр. ун-та, 1982.-252 с.
39. Плотников В.Н., Зверев В.Ю. Принятие решений в системах управления. 4.2:
Теория и проектирование алгоритмов принятия проектных решений для
многообъектных распределенных систем управления. - М.: Изд-во МГТУ, 1994. -
146 с.
40. Пупков КА. О некоторых новых задачах теории и техники интеллектуальных
систем // Труды III Международной конференции «ИНТЕЛСИТ'98» / Под ред.
К.А. Пупкова - М.: 000 «ТВК», 1998. - С. 19 - 23.
41. Пупков КА., Воронов Е.М., Калинин СА. Обобщенный гомеостаз в
динамических системах естественных технологий организма (СЕТО) и
интеллектуальных технических системах (ИТС) // Труды Международной конференции
«Управление большими системами». - М.: Изд. ИЛУ РАН, 1997. - С. 296.
42. Пупков КА., Серов В А. Стабильные компромиссы как инструмент
иерархического структурно-целевого синтеза в интеллектуальных интегрированных
системах // Труды II Международного симпозиума «ИНТЕЛС96» / Под ред.
К.А. Пупкова. Т.1. - М.: Изд. РУДН ПАИМС, 1996. - С. 73 - 79.
732 Список литературы
43. Растригин Л.А*, Эпдук Я.Ю. Поисковые алгоритмы определения множества
Парето // Вопросы кибернетики. Адаптация в системах со сложной
организацией. - М, 1977. - С. 93 - 98.
44. Серов В А. Е-стабильное обобщенное равновесие в модели конфликта с
векторными целевыми функционалами участников // Труды III Международного
симпозиума «ИНТЕЛС98» / Под ред. К.А. Пупкова. - М: 000 «ТВК», 1998. -
С. 198-201.
45. Соболь ИМ., Статников Р.Б. Выбор оптимальных параметров в задачах со
многими критериями. - М.: Наука, 1981. - 110 с.
46. Солодовников В.В. и др. Оптимизация процессов управления в условиях
неопределенности: Учеб. пособие / В.В. Солодовников, Е.М. Воронов, В.П.
Колесник. - М.: МВТУ, 1985. - 64 с.
47. Солодовников В.В., Бирюков В.Ф., Тумаркин В.И. Принцип сложности в теории
управления. - М.: Наука, 1977. - 340 с.
48. Я/7/7 «ИГРА». Выбор параметров сложных динамических систем по
векторному показателю: Описание / В.В. Солодовников, Е.М. Воронов, В.А. Серов;
МВТУ им. Н.Э. Баумана. ГОСФАП; №50870000100. - М., 1985. - 4.1. - 102 с,
4.2. - 108 с.
49. Frehel J. Problemes multicriteres: therie de la domination de Yu et efficacite de
Pareto. Merta. 1974. Vol. 13. №1. - P. 47 - 57.
50. Gupta N.K. Reachable set methods // Control & Dynamic Systems, Adv. in Theory
&Appl. 1981. Vol. 17.-P. 323-344.
51. Mukai H. Algorithm for mul ticriterion optimization IEEE. Trans on aut. control.
Vol. AC-25 №2. 1980. P. 177 - 186.
52. Pau L.F. Differential games and a Nash equilibrium searching algorithm. SIAM J.
Contr. 1975. №4. - P. 835 - 852.
53. Yu PL. Cone convexity, cone extreme points and nondominated solution in decision
problems with multiobjectives. J. Opt. Theory and appl. 1974. Vol. 14. №3. - P. 319
- 377. (РЖМАТ 1975,2Б426).
ЛИТЕРАТУРА К 6-Й ГЛАВЕ
1. Анохин П.К. Проблемы центра и периферии в физиологии нервной
деятельности. - Горький, 1935.
2. Воеводин В.В. Математические основы параллельных вычислений. - М.: Изд-
во МГУ, 1991.
3. Евсеев О.В., Кравченко В А. Применение ЭВМ в управлении
технологическими процессами: Автоматизация и интеллектуализация производств. - М.: Рос-
вузнаука, 1992.
4. Ершов Н.М., Попова Н.Н: Компьютерный анализ распараллеливания
вычислений для моделей сплошной среды. В сб.: Программно-аппаратные средства и
математическое обеспечение вычислительных систем. - М.: Изд-во МГУ, 1995.
5. Зубов А.Г., Петров А.И. Оценивание в нелинейных стохастических системах
при внезапных изменениях структуры и координат состояния // Известия АН
СССР. Техническая кибернетика. 1990. №4. - С. 64 - 77.
6. Курдюков АЛ., Tumuh B.H. Синтез робастной системы управления на режиме
посадки самолета в условиях сдвига ветра // Известия АН СССР. Техническая
кибернетика. 1993. №6. С. 200-208.
7. Лобачев В.И. Дифференциально-модельная концепция в систематике базы мак-
рофизических знаний для интеллектуальных систем. В сб.: Машиностроение,
приборостроение, энергетика. - М.: Изд-во МГУ, 1995. - С. 230 - 234.
8. Основы кибернетики / Под ред. К.А. Пупкова. - М.: Высшая школа, 1976.
Список литературы 733_
9. Пупков К.А. Интеллектуальные системы проблемы теории и практики // Изв.
Вузов. Приборостроение. 1994. Т.37. №9 - 10. - С. 5 - 7.
10. Пупков К.А. Динамические экспертные системы в управлении // Изв. Вузов.
Приборостроение. 1996. №8 - 9. - С. 39 - 50.
11. Kharlamov A.A. Attention mechanism usage to form framework structures on a
semantic net // Neurocomputers and Attention. Vol.11: Connectionism and neurocom-
puters. A.V. Holden, V.I. Krynkov, ed. Manchester, New York: Manchester
University Press. 1991.-P. 747-756.
ЛИТЕРАТУРА К 7-Й ГЛАВЕ
1. Антонов А.С. Мы похожи, но насколько: новое в молекулярной биологии (ге-
носистематика). - М.: Знание, 1975.-42 с.
2. Батищев Д.И. Генетические алгоритмы решения экстремальных задач:
Учебное пособие / Под ред. Я.Е. Львовича. - Воронеж: ВГТУ, 1995.
3. Беклемишев Д.В. Курс аналитической геометрии и линейной алгебры. - М.:
Наука, 1971.-120 с.
4. Бесекерский В.А. Цифровые автоматические системы. - М.: Наука, 1976. - 576 с.
5. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. -
М.: Наука, 1975.-768 с.
6. БэстэнсД., Ванденберг В., ВудД. Нейронные сети и финансовые рынки. - М.:
ТВП - Научное издательство, 1997. - 236 с.
7. Вартанян И.А. Физиология сенсорных систем: Руководство / Серия «Мир
медицины». - СПб.: Изд-во Лань, 1999. - 224 с.
8. Галушкин А.И. Синтез многослойных систем распознавания образов. - М.:
Энергия, 1974.-368 с.
9. Галушкин А.И. Теория нейронных сетей. Кн. 1: Учебное пособие для вузов /
Общая ред. А.И. Галушкина. - М.: ИПРРЖР, 2000. - 416 с.
10. Галушкин А.И., Логовский А.С. Нейроуправление: основные принципы и
направления применения нейрокомпьютеров для решения задач управления
динамическими объектами // Нейрокомпьютеры: разработка и применение. 1999.
№1.-С56-66.
11. Гилева Л.В., Гилев С.Е., Горбань А.Н. и др. Нейропрограммы: Учебное
пособие: В 2 ч. 4.2 / Под ред А.Н. Горбаня. - Красноярск: КГТУ, 1994. - 124 с.
12. Голицын ГА. Применение нейросетевой технологии в ЭС // Материалы
семинара «Экспертные системы реального времени». - М.: РДЗ, 1995.
13. Горбань А.Н., Россиев Д.А. Нейронные сети на персональном компьютере. -
Новосибирск: Наука. Сибирская издательская фирма РАН, 1996. - 276 с.
14. Губайдулин ГГ., Зозуля Ю.И., Арутюнов Э.С. Синтез нейросетевых обратных
динамических моделей роботов // Сб. докладов на V-ой Всеросийской
конференции «Нейрокомпьютеры и их применение». - Москва, 1999. - С. 136 - 139.
15. Иваненко AT. Непрерывность и дискретность. Переборные методы
моделирования и кластеризации. - Киев: Наукова думка, 1990. - 296 с.
16. Колмогоров А.Н. О представлении непрерывных функций нескольких
переменных в виде суперпозиций непрерывных функций одного переменного и
сложения // Докл.АН СССР. 1957. Т.114. №5. - С. 953 - 956.
17. Комарцова Л.Г. Исследование методов оптимизации имтационных моделей
вычислительных систем // Вестник МГТУ. Серия приборостроение. 1999. № 2.
-С. 121-130.
18. Комарцова Л.Г., Бобков А.В. Нейросетевая экспертная система для выбора
параметров локальной вычислительной сети // Сб. докладов на V-й Всероссий-
48 Зак. 416
734 Список литературы
ской коференции «Нейрокомпьютеры и их применение». - Москва, 1999. -
С. 248-252.
19. Куо Б. Теория и проектирование цифровых систем управления: Пер. с англ. -
М.: Машиностроение, 1986.-448 с.
20. Лорьер Ж.-Л. Системы искусственного интеллекта. - М.: Мир, 1991. - 568 с.
21. Методы анализа, синтеза и оптимизации нестационарных систем
автоматического управления: Учебное пособие / К.А. Пупков, Н.Д. Егупов, В.Г. Коньков и
др. / Под ред. Н.Д. Егупова. - М.: Изд-во МГТУ им. Н.Э. Баумана, 1999. - 684 с.
22. Методы вычислений на ЭВМ: Справочное пособие / В.В. Иванов. - Киев:
Наукова думка, 1986. - 584 с.
23. Милитцер Ю., Парке П. Свойства сходимости ассоциативной памяти в
обучающихся системах управления // Автоматика и телемеханика. 1989. №2. -
С. 158-184.
24. Н. Винер. Кибернетика, или управление и связь в животном и машине: 2-е изд.
-М.: Наука, 1983.-344 с.
25. Н.Н. Воробьев. Теория рядов. - М.: Наука, 1975. - 368 с.
26. Нейрокомпьютеры и интеллектуальные роботы / Амосов Н.М., Байдык Т.Н.,
Гольцев А.Д. и др. / Под ред. Н.М. Амосова. АН УССР. Ин-т кибернетики. -
Киев: Наукова думка, 1991. - 272 с.
27. Норенков ИЛ. Эвристики и их комбинирование в генетических методах
дискретной оптимизации // Информационные технологии. 1999. №1. - С. 2 - 7.
28. Реклептис А., Рейвиндран А. и др. Оптимизация в технике: В 2-х кн. - М.:
Мир, 1988.-668 с.
29. Самарский А.А., Гулин А.В. Численные методы. - М.: Наука, 1989. - 432 с.
30. Транспьютеры. Архитектура и программное обеспечение: Пер. с англ. / Под
ред. Г. Харпа. - М.: Радио и связь, 1993. - 304 с.
31. Уоссермен Ф. Нейрокомпьютерная техника. Теория и практика: Пер. с англ. /
Под ред. А.И. Галушкина - М.: Мир, 1992. - 238 с.
32. XX лет кафедре П2-КФ: В 16-ти книгах / Под ред. А.В. Максимова. Кн. 4:
Программная система Neurolterator I И.В. Винокуров. - Калуга: Изд-во
Н.Ф. Бочкаревой, 1997.-20 с.
33. Хэм А., КормакД. Гистология: Пер. с англ. В 3-х томах. Т.З. - М.: Мир, 1983. -
294 с.
34. Albus J.S. A new approach to manipulator control: the cerebella model articulation
controller // ASME Trans., J. Dynamic system,measurement Control, 1975. Vol. 97.
№3. P. 220-227.
35. Foundation of generic Algorithms, edited by Laurence Davis, Van Nostrand
Reynold, New York, 1991.
36. Hecht-Nielsen R. Kolmogorov's Mapping Neural Network Existence Theorem // IEEE
First Annual Int. Conf. on Neural Networks, San Diego, 1987. Vol. 3. P. 11 - 13.
37. Kirpatrick S., Gellant C. Optimization by Simulated Annealing. Science, 1983.
Vol. 220. P. 671-680.
38. Widrow В., Lehr M.A. 30 years of adaptive neural networks: perceptron, madaline,
and backpropagation // Proceedings of the IEEE. Vol. 78. - №9, 1990. - P. 1415 -
1442.
Предметный указатель
735
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
> А ^J
Адаптивная обработка 255
Адаптивная система управления 252
Акцептор действия 500
Алгебра Ли 27
Алгоритм
- адаптивного управления 253
- Д. Мазера 121,125
- параллельный 440
- последовательный 442
- скоростного градиента 261
Атлас многообразия 19
Аттрактор Лоренца 138
Афферентация 503
- обратная 510
- обстановочная 510
- пусковая 512
я-анизотропийная норма 514
■ б *
База
-данных 424
- знаний 424
Беспоисковая самонастраивающаяся
стлема 251
Бинарная операция 22
Бифуркация 92,105, 137
-Хопфа 140,151
в '
Вектор параметров 255
Векторное поле 28
- левоинвариантное 34
- полное 36
■ г »
Гиперсфера 447
Гомоморфизм 22
Граф 508
Графовое представление 508
Группа
- абелева 22
- абстрактная 22
- Ли 23
- локальная однопараметрическая 32
-симметрии 48
Группы
-аксиомы 22
-действие 24
48*
■ д ■
Действие 524
Деформация р-мерная 126
Диаграмма Ламерея 145
ж I
Живучесть 509
Жидкое течение 527
Знание
- концептуальное 435
- процедурное 435
и '
Инвариант группы 26
Инвариантное семейство 42
Инволютивное распределение 62
Индекс функции Морса 99
Интегральное многообразие 63
Интегрируемое распределение 63
Интеллектуальные
- операторы 451
- информация 451
Инфинитезимальный критерий
устойчивости 121
Инфинитезимальный оператор 26
Искусственный интеллект 492
Канонический параметр группы 31
Карта гладкого многообразия 18
Касательное пространство 28
Катастрофы многообразие 116
Квазистационарный объект 260
Координаты
- входные 261
- выходные 261
- канонические 45
Критерий управляемости 64
^-определенность 124
к-сгтруя гладкой функции 95,122
■ п '
Лемма
-Морса 100,104
- о представлении гладких функций 99
-расщепления 105,108
Логистическое уравнение 143
Логический вывод 459
LQG-задача 443
736
М II
Матрица строго-минимально-фазовая 271
Матрицы параметров 491
Метод
- гомотопии 499
- синхронного детектирования 260
Метрика Хаусдорфа 172
Множество
-бифуркационное 117
-Жюлиа 184
- Мандельброта 189
-особое 117
Модель математическая 469
Мотивация 483
I " ^^1
Наблюдаемости ранговый критерий 75
Нейроподобный элемент 503
Непрямое адаптивное управление 252
Неявная эталонная модель 253
Нижнее дробно-линейное преобразование .. 223
Я2 -оптимальная задача 201
Ях -оптимальная задача 201
Я2 -норма передаточной функции 203
Я00-норма передаточной функции 203
■ ° '
Обобщенный настраиваемый объект 250
Объект управления 251
Орбитаточки 26
Отношение эквивалентности 59
Отображение
-катастрофы 117
- трансверсальное 115
-устойчивое • 113
Оценка экспертная 488
п »
Поисковая самонастраивающаяся система.. 254
Показатель Ляпунова 155
Полная система 50
Порядок полинома 96
Преобразования Хатчинсона 174
Признаки хаоса 154
Принятие решения 466
Программная система 450
Производная Ли 72
Пространство Харди 213
Прямое адаптивное управление 250
Пыль Кантора 163
Размерность
-многообразия 20
-фрактальная 142
- Хаусдорфа - Безиковича 157, 159
Предметный указатель
Регулятор оптимальный 215
Росток
- катастрофы 109
-устойчивый 114
-функции 114
Ряд Ли 40
Сила
- лобового сопротивления 427
- подъемная 439
-тяги 427
Синтез афферентный 432
Система
- инволютивная 50
- инволюционная 50
- интеллектуальная 419
- локально слабо наблюдаемая 72
- локально наблюдаемая 72
- самонастраивающаяся 252
- самоорганизующаяся 252
- слабо локально управляемая 61
- слабо управляемая 61
- с параметрической адаптацией 252
- с сигнальной адаптацией 252
- с сигнально-параметрической
адаптацией 252
-функциональная 444
- экспертная 445
Скобка Ли 27
Скорость воздушная 489
Снежинка Кох 161
Среда окружающая 428
Средняя анизотропия 438
Степень
- сглаживания задачи 456
Стохастическая проблема
Я00-оптимизации 215
С -карта 18
т »
Теорема
- Ли 52
- о неявной функции 96
- Фробениуса 63
Теория катастроф 92, 105
Топология Уитни 120
Точка
- критическая 99
- регулярная 96
Трансляция 216
II у ■
Угол
- атаки 461
- наклона траектории 461
-тангажа 462
Предметный указатель
Управление
- адаптивное 251
-оптимальное 221
- робастное 221
Управляемость локальная 60
Уравнение
-Лиувилля 40
-Ляпунова 252
- Риккати 221
Условие
- псевдоградиентности 261
- согласованности объекта и модели 261
- Эрцберга 262
Устойчивости инфинитезимальный
критерий 121
Фильтрация кальмановская 471
Формула Хаусдорфа 48
Фрактал 137,156
Фракталы случайные 176
Функция
- весовая 221
- катастрофы 106
- Морсовская 99
-передаточная 221
■ х '
Хаос 137,141,150
Характеристика системы 221
737
Частотные характеристики 231
1 "
Целенаправленная деятельность . 452
Цель 452
ш
Шум 461
» э ~»
Эквивалентные функции 97, 111
Эффективность отображения 471
■ ю '
{/-достижимость 60
Явная эталонная модель 252
Язык машинный 482
Язык программирования 482
738 Содержание
СОДЕРЖАНИЕ
ОБЩЕЕ ПРЕДИСЛОВИЕ К УЧЕБНИКУ 5
ПРЕДИСЛОВИЕ К 3-МУ ТОМУ 11
ЧАСТЬ IV. МЕТОДЫ СОВРЕМЕННОЙ
ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 13
ВВЕДЕНИЕ 14
СПИСОК ИСПОЛЬЗУЕМЫХ АББРЕВИАТУР 15
СПИСОК ИСПОЛЬЗУЕМЫХ ОБОЗНАЧЕНИЙ 16
ГЛАВА 1. СИНТЕЗ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
МЕТОДАМИ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ 17
1.1. Гладкие многообразия и их роль в исследовании
нелинейных систем управления 17
1.2. Группы и алгебры ли 21
1.2.1. Определение группы 21
1.2.2. Группы Ли 23
1.2.3. Инфинитезимальный оператор непрерывной группы
преобразований 26
1.2.4. Алгебры Ли 27
1.3. Групповой анализ дифференциальных уравнений,
однопараметрические группы преобразований 29
1.4. Векторные поля на многообразиях.
Полные векторные поля 34
1.5. связь системы обыкновенных дифференциальных
уравнений и линейного уравнения в частных производных
первого порядка. метод характеристик 37
1.5.1. Метод характеристик решения дифференциальных
уравнений в частных производных 37
1.6. Восстановление группы по ее инфинитезимальному
оператору. Ряд Ли. Инварианты группы 39
1.7. Канонические координаты 45
1.8. Формула Хаусдорфа. Группы симметрии. Теорема Ли 46
1.9. Коммутативность однопараметрических групп
и разделение движений в нелинейных системах 55
1.10. Управляемость нелинейных систем 58
1.11. Наблюдаемость в нелинейных системах 70
1.12. Линейные эквиваленты нелинейных систем.
Синтез нелинейных регуляторов 79
1.13. Проверка инволютивности распределения
векторных полей 86
Содержание 739^
ГЛАВА 2. ТЕОРИЯ КАТАСТРОФ. ХАОС. ФРАКТАЛЫ 92
2.1. Теория катастроф 92
2.1.1. Введение 92
2.1.2. От аналитичности к гладкости. К-струи и ростки
функций 93
2.1.3. Регулярные и критические невырожденные точки
гладких функций 96
2.1.4. Неморсовские функции. Лемма расщепления. Функции
катастроф 105
2.1.5. Возмущение морсовских и неморсовских функций.
Элементарные катастрофы 106
2.1.6. Устойчивость. Качественные изменения в системе 111
2.1.7. Трансверсальность и устойчивость 114
2.1.8. Многообразия катастрофы и бифуркационные
множества 116
2.1.9. Топология Уитни. Эквивалентность (устойчивость)
функций с точки зрения теории непрерывных групп 119
2.1.10. Инфинитезимальная устойчивость. Алгоритм
Д. Мазера 121
2.1.11. Деформация (универсальные возмущения) функции 126
2.1.12. Росток функции катастрофы 128
2.1.13 Пример исследования бифуркационного поведения
летательного аппарата 132
2.2. Детерминированный хаос 137
2.2.1. Бифуркации и хаос 137
2.2.2. Парадигмы хаоса: странный аттрактор Лоренца
и логистическое уравнение 138
2.2.3. Бифуркация Хопфа и хаос. Критерий Рюэля - Такенса 151
2.2.4. Качественные и количественные признаки хаоса 154
2.3. Фракталы 156
2.3.1. Понятие о фракталах 156
2.3.2. Размерность Хаусдорфа - Безиковича 157
2.3.3. Принцип самоподобия. Самоподобные фракталы 159
2.3.4. Классические фракталы 161
2.3.5. Фрактальная размерность аттракторов. Применение
теории фракталов в некоторых задачах управления 164
2.3.6. L-системы. Тертл-графика 169
2.3.7. Аффинные преобразования 170
2.3.8. Метрика Хаусдорфа 172
2.3.9. Система итерированных функций 174
2.3.10. Случайные фракталы 177
2.3.11. Множества Жюлиа 184
2.3.12. Множества Мандельброта 189
ГЛАВА 3. ПОСТРОЕНИЕ ОПТИМАЛЬНЫХ РОБАСТНЫХ
РЕГУЛЯТОРОВ ПРИ ДЕЙСТВИИ ВНЕШНИХ
ВОЗМУЩЕНИЙ 193
3.1. Построение робастных регуляторов с помощью
я00-теории 196
3.1.1. Задачи робастного управления самолетом 198
740 Содержание
3.1.2. Построение Я00 -субоптимального регулятора
для управления самолетом в условиях внешних
возмущений 201
3.1.3. Моделирование 205
3.1.4. Обсуждение результатов моделирования 210
3.2. Построение анизотропийных регуляторов 213
3.2.1. Анизотропийный анализ систем 214
3.2.2. Анизотропийный синтез систем 222
3.2.3. Сравнение систем управления с различными
регуляторами 232
ГЛАВА 4. АДАПТИВНЫЕ СИСТЕМЫ 250
4.1. Определение и классификация адаптивных систем 250
4.2. Постановка задачи синтеза адаптивной системы
управления. Гипотеза о квазистационарности 251
4.3. Методы синтеза алгоритмов адаптации 254
4.4. Поисковые адаптивные системы 255
4.4.1. Системы экстремального регулирования 255
4.4.2. Поисковые алгоритмы непрямого адаптивного
управления с настраиваемой моделью 256
4.5. Беспоисковые адаптивные системы управления 269
4.5.1. Синтез адаптивной системы методом функций
Ляпунова 261
4.5.2. Схема скоростного градиента 261
4.5.3. Алгоритмы систем с переменной структурой 300
ГЛАВА 5. ВВЕДЕНИЕ В ОПТИМИЗАЦИЮ МНОГООБЪЕКТНЫХ
МНОГОКРИТЕРИАЛЬНЫХ СИСТЕМ (ММС) НА ОСНОВЕ
СТАБИЛЬНО-ЭФФЕКТИВНЫХ КОМПРОМИССОВ
(ИГРОВЫЕ ПОДХОДЫ В УПРАВЛЕНИИ) 316
5.1. Постановка задач проектирования и управления
многокритериальной многообъектной системой (ммс)
на основе стабильных эффективных решений
и компромиссов в условиях конфликта и неопределенности ... 316
5.1.1. Общее определение игры. Частные классы игр 317
5.1.2. Математическая модель конфликтной ситуации
в ММС 320
5.1.3. Методы получения стабильных и эффективных
решений 322
5.1.4. О применении разработанных методов и алгоритмов
стабильно-эффективного управления в практических
задачах 324
5.2. Модифицированный двухуровневый метод скалярной
нэш-оптимизации в бескоалиционной конфликтной
ситуации (стабильные решения) 325
5.2.1. Необходимое условие равновесия по Нэшу в форме
двухуровневой структуры Пао 325
5.3. Стабильные и эффективные оптимальные решения
на основе коалиционного равновесия 331
Содержание 741_
5.3.1. Классификация стабильных и эффективных решений
на основе коалиционного равновесия 331
5.3.2. Алгоритм векторной оптимизации на основе конусов
доминирования (эффективные решения) 333
5.3.3. Методы определения векторного равновесия
(стабильные решения) 337
5.4. Стабильные коалиционные решения в ММС управления
НА ОСНОВЕ МЕТОДА «УГРОЗ И КОНТРУГРОЗ» 344
5.4.1. Понятие равновесия на основе «угроз и контругроз»
(УКУ). Стратегическая значимость УКУ.
Существование УКУ. Двухэтапная процедура
оптимизации на основе принципа УКУ 344
5.4.2. Этап 1: выбор начальных приближений УКУ на основе
построения ортогональной равномерной сети 345
5.4.3. Этап 2. Оптимизация управления ММС на основе
модифицированных достаточных условий локальных
УКУ (ЛУКУ) и метода моментов Н.Н. Красовского 347
5.4.4. Применение двухэтапного метода получения УКУ-
оптимального управления прогнозом динамики
конфликта ЛС СВН - ЛС ПВО 551
5.5. Оценка эффективности кооперативного компромисса
и оптимизация решений в ммс на основе вектора дележа
ШЕПЛИ 356
5.5.1. Обобщение характеристической функции,
предпосылка игры, делёж и его свойства 356
5.5.2. Методы оптимизации дележей 358
5.5.3. Оптимизация дележа в форме вектора Шепли 358
5.5.4. Формирование двухэтапного алгоритма оптимизации
решений в ММС на основе вектора дележа Шепли 361
5.5.5. Применение двухэтапного алгоритма для получения
УКУ-Шепли оптимального управления прогнозом
динамики конфликта ЛС СВН-ЛС ПВО 361
5.6. Методы комбинирования решений по Нэшу (скалярный
и векторный варианты), Парето, УКУ, Шепли, «идеальной
ТОЧКИ», 8-РАВНОВЕСНЫХ ПРИБЛИЖЕНИЙ И АРБИТРАЖНЫХ СХЕМ
ДЛЯ ПОЛУЧЕНИЯ СТАБИЛЬНО-ЭФФЕКТИВНЫХ КОМПРОМИССОВ
ММС (СТЭК-ММС) 367
5.6.1. СТЭК на основе Парето-Нэш-УКУ-Шепли-комбинаций 367
5.6.2. Комбинированные методы в условиях е -равновесия
по Нэшу, минимизации угроз и неполной информации
о партнерах 369
5.6.3. Понятие о договорных компромиссах на основе
комбинации обязательных и необязательных
соглашений 373
5.6.4. Об интеллектуальных СТЭК на основе обобщённого
гомеостаза в форме предельного целевого качества
интеллектуальной системы (ИС) с динамической
экспертной поддержкой 375
742 Содержание
5.7. Программно-корректируемое стабильно-эффективное
позиционное управление нелинейной динамической
двухкоалиционной системой на основе принципа
«экстремального прицеливания» н.н. красовского 378
5.7.1. Постановка и анализ существования гарантирующих
и равновесных решений 378
5.7.2. Постановка и формализаия задач оптимального
преследования и уклонения летательных аппаратов 383
5.7.3. Формирование нелинейных алгоритмов преследования
и уклонения на основе принципа экстремального
прицеливания Н.Н. Красовского 390
5.7.4. Алгоритм субоптимального позиционного
преследования-уклонения 394
5.7.5. Формирование ПКЗУ в бескоалиционной конфликтной
ситуации с антагонистическим ядром на основе
принципа экстремального направления
Н.Н. Красовского 398
5.8. Разработка стохастической интегро-дифференциальной
модели стабильного антагонистического конфликта
в двухкоалиционных ммс в условиях 8-равновесия
на основе комбинации фильтрации и управления с учетом
промежуточных координат, прототипа, заданной части
модели, аддитивных и мультипликативных помех 400
5.8.1. Максиминная постановка задачи сближения-уклонения
позиционно (Р) и программно-управляемого (Q)
объектов с интегро-дифференциальной моделью,
адекватной реальным системам 400
5.8.2. Решение задачи поиска оптимальной стратегии
объекта Р (для помех типа «белого» шума) 405
5.8.3. Об алгоритме определения оптимальной стратегии
объекта Q 407
5.8.4. Программные системы FILTR, FILTR-1, FILTR-2 408
5.8.5. Об анализе близости минимаксных и максиминных
оценок эффективности в интегро-дифференциальной
позиционно-программноп задаче сближения уклонения
на основе г-равновесия 412
5.8.6. Примеры применения интегро-дифференциальной
задачи сближения-уклонения 414
ГЛАВА 6. ИНТЕЛЛЕКТУАЛЬНЫЕ СИСТЕМЫ 419
6.1. Модели и алгоритмы интеллектуальных систем 419
6.1.1. Дифференциально-модельная концепция
в систематике базы макрофизических знаний
для интеллектуальных систем 424
6.1.2. Динамические экспертные системы в управлении 428
6.1.3. Комбинирование робастного и адаптивного
управления с помощью интеллектуальных систем 435
6.2. Параллельные алгоритмы обработки информации
и управления 440
Содержание 743
6.2.1. Синтез параллельных алгоритмов обработки
информации в интеллектуальных динамических
системах при внезапных возмущениях 440
6.2.2. Динамическая нейронная сеть для распознавания
речевых сигналов 445
6.2.3. Нейросетевые технологии интеллектуальных
систем 451
6.3. Инструментальные средства и реализация
интеллектуальных систем 457
6.3.1. Отображение интеллектуальной системы
управления на архитектуру многопроцессорной
вычислительной сети 457
6.3.2. Стохастические методы решения задачи
отображения алгоритмов и программ
на мультитранспьютерные системы 461
6.3.3. Стохастический метод попарной оптимизации
подграфов 467
6.3.4. Стохастический метод Монте - Карло 469
6.3.5. Стохастический метод наискорейшего спуска 472
6.3.6. Распараллеливание явного метода решения
нелинейной динамической системы 477
6.3.7. Логико-динамические модели и программно-
технические средства интеллектуальной системы
управления дискретными производственными
процессами 481
6.3.8. О некоторых задачах теории и техники
интеллектуальных систем 492
ГЛАВА 7. ПРИМЕНЕНИЕ НЕЙРОКОМПЬЮТЕРОВ
В СИСТЕМАХ УПРАВЛЕНИЯ 497
7.1. Система управления с ЭВМ в контуре: структура,
ОСОБЕННОСТИ РАБОТЫ 497
7.2. Нейрокомпьютеры - ЭВМ нового поколения 498
7.3. Биологическая параллель нейрокомпьютерам 500
7.4. Задачи, решаемые нейрокомпьютерами 503
7.5. Модели формальных нейронов 503
7.6. Разновидности топологий нейронных сетей 505
7.7. Классификация нейронных сетей 508
7.8. Синтез формируемых сетей 510
7.9. СетьХопфилда 520
7.10. Постановка задачи оптимизации при обучении
многослойной нейронной сети без обратных связей 524
7.11. Эвристический алгоритм оптимизации на основе
генетического алгоритма в процедуре обучения нейронной
СЕТИ 530
7.12. Настройка нейронной сети на решение задач
классификации и распознавания 546
ЧАСТЬ V. ЗАДАНИЯ ДЛЯ САМОСТОЯТЕЛЬНОЙ РАБОТЫ.
МЕТОДИЧЕСКИЕ ПОЯСНЕНИЯ 553
744
Содержание
ВВЕДЕНИЕ 554
ТЕМА 1. МАТЕМАТИЧЕСКИЕ МОДЕЛИ И ДИНАМИЧЕСКИЕ
ХАРАКТЕРИСТИКИ ЛИНЕЙНЫХ СТАЦИОНАРНЫХ
СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 555
ТЕМА 2. ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ И ПОСТРОЕНИЕ
ВЫХОДНЫХ СИГНАЛОВ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ
СТАЦИОНАРНЫХ СИСТЕМ С СОСРЕДОТОЧЕННЫМИ
И РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ 595
ТЕМА 3. ПОСТРОЕНИЕ ВЫХОДНЫХ СИГНАЛОВ ЛИНЕЙНЫХ
НЕПРЕРЫВНЫХ НЕСТАЦИОНАРНЫХ СИСТЕМ
С СОСРЕДОТОЧЕННЫМИ ПАРАМЕТРАМИ МЕТОДОМ
МАТРИЧНЫХ ОПЕРАТОРОВ 608
ТЕМА 4. МЕТОД ПРОСТРАНСТВА СОСТОЯНИЙ 613
ТЕМА 5. МЕТОДЫ ИССЛЕДОВАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 616
ТЕМА 6. СТАТИСТИЧЕСКИЙ АНАЛИЗ ЛИНЕЙНЫХ
(СТАЦИОНАРНЫХ И НЕСТАЦИОНАРНЫХ) СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 622
ТЕМА 7. ЛИНЕЙНАЯ ФИЛЬТРАЦИЯ ПОЛЕЗНОГО СИГНАЛА
ИЗ СМЕСИ «ПОЛЕЗНЫЙ СИГНАЛ+ШУМ» 629
ТЕМА 8. СТАТИСТИЧЕСКИЙ АНАЛИЗ НЕЛИНЕЙНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 637
ТЕМА 9. ИДЕНТИФИКАЦИЯ ОБЪЕКТОВ УПРАВЛЕНИЯ 657
ТЕМА 10. НЕПРЕРЫВНО-ДИСКРЕТНЫЕ СИСТЕМЫ 665
ТЕМА 11. СИНТЕЗ РЕГУЛЯТОРОВ 666
ТЕМА 12. ОПТИМАЛЬНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ 691
ТЕМА 13. ГЕОМЕТРИЧЕСКИЕ МЕТОДЫ 712
ТЕМА 14. АДАПТИВНЫЕ СИСТЕМЫ 716
СПИСОК ЛИТЕРАТУРЫ 721
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ 735
745
ANNOTATION TO THE TEXTBOOK
"Classical and state-of-the-art control theory methods".
This textbook is published in three volumes.
I volume: "Analysis and automatic control systems statistic dynamics".
II volume: "Regulator synthesis and automatic control systems optimization theory".
HI volume: "State-of-the-art control theory methods".
I. Characteristic properties of the textbook.
1. This textbook is addressed to the broad reading public.
a). Students who begin to obtain knowledge in the field of control theory. It should be
mentioned that this subject may be both an obligatory one evaluating the level of
engineer's proficiency and an optional one.
b). Students and specialists who have to resume studies in the field of control theory
because of expanding tasks of process automation for different purposes.
c). Students and specialists who want to refresh their knowledge studying the part of the
textbook, which has not been included into engineering specialities curricula.
The readers have to choose the material according to the particular tasks a), b), c) and to
general curriculum opportunities. Taking into consideration the purpose of this textbook it
should be noted that it presents sufficient material for the choice to be made.
2. Material introduction methods.
This textbook attempts to provide the readers with knowledge of control theory methods
from initial concepts of control theory (control aims and concepts, control systems analysis,
systems classification, analysis and synthesis of the main tasks and others) to its state-of-
the-art issues.
In other words, this textbook presents both fundamental concepts of classical control
theory and concepts determining the subject-matter of some state-of-the-art trends.
Thorough understanding of control theory is impossible within the limits of up-to-date
investigation programmes, that is why the subject-matter of some trends has not been included
into this textbook.
3. The level of readers mathematical background.
The authors of this textbook set out the material in easy and readily available way.
A scope of knowledge of higher mathematics required for the textbook contents
understanding is restricted to the programme for junior students at higher technical educational
institutions.
Concepts of functional analysis are implemented in this textbook. The necessary
information is given in a due corresponding section of the textbook. Owing to language
application and the results of functional analysis the subject-matter of each method is better
revealed, the opportunity of obtaining in - depth theoretical information is developed, the
connection between methods that seem to be different at first sight is clarified.
4. Technical character of the textbook.
The subject matter of the textbook is presented from the engineering point of view.
The author stresses the main ideas forming the bases of the methods but does not always
adduce strict methodological proofs. The subject-matter of the textbook is supposed to
form the base.
It is supposed that the material of the textbook will be the base for finding more easily
the ways of solving practical tasks. Besides, the material is presented in such a way that the
reader can imagine the ways of practical use of the methods under consideration.
746
In most cases the methods are reduced to the calculated algorithms, the tables and other
additional material, facilitating their application are given in the textbook.
The main merit of the textbook is the consideration of the particular control systems
being used in the atomic industry with the aim of regulating the thermotechnical processes:
• It presents principal, functional and structural circuits of the system.
• It illustrates the calculations using particular algorithms.
• It gives the analysis of the results, etc.
It is impossible to study control theory without mastering the engineering aspect. That is
why the engineering aspect of formulating and solving practical tasks is accentuated during
the whole course.
5. "Computing colouring" of the material.
The contents of the book is characterized by a certain "computing colouring" because
the present-day computers give the possibility of reducing the term of the automatic control
systems design and thus make an imprint on numerical methods of the automatic control
theory.
Successful solving of problems of computing and design with the use of computer
depends on many factors:
• The degree of the adequacy of the system mathematical model.
• The degree of the numerical methods efficiency being used in the algorithmic
provision.
• The presence of high-quality software.
• To what degree the creativeness of a researcher-designer is used.
The author of the textbook tried to take into consideration all these factors.
II. The contents.
1. Mathematical models of the automatic control systems.
The problems of the mathematical description of the singular and nonsingular linear and
non linear control systems, the systems with the distributed parameters, the continuous
discrete systems are considered in the textbook in detail. Considerable attention is paid to the
method of the state space in the linear system which gives basically new possibilities of the
system analysis and control laws synthesis. The description by the Volterra series is
considered in the non-linear system class.
2. Determinated analysis of the automatic control systems.
The system theory methods were studied for solving the following problems:
a). The investigation of the steady-state singular, non-stationary and non-linear systems:
- the criteria of stability are considered in detail;
- considerable attention is paid to non-linear system class;
(The original material concerning the problems of stability is given in a due chapter).
b). The study of the system performance in unstable mode and creation of output
processes,
c). The investigation of performance accuracy in the stable mode.
3. Statistic analysis of the automatic control systems.
The technical methods of the broad class ACS statistic research, including non-linear
and stochastic system are considered in the textbook.
4. Filtration and control systems statistical synthesis.
This chapter includes the following methods:
a). Synthesis of optimal filters, using Kolmogorov - Wienner's theory as well as
R. Caiman and R. Busy,
b). Synthesis of optimal observers,
c). Synthesis of optimal analytical and non-linear filters, described by Volterra series
and so on.
747_
5. Numerical methods of complex control system analysis under determined and
random action.
Matrix operator method forms the bases of computerized control system investigation
useful for algorithmisation and programming.
6. Control objects identification.
Formulation of the problem of linear and non-linear objects class identification, main
problems, engineering approach to its solution are outlined in this textbook.
7. Control system synthesis based on quality (regulators synthesis).
Alongside with traditional methods of regulator synthesis (frequency, modal control,
dynamic compensation methods and other) great attention is devoted to mathematics
programming process application due to the fact, that the latter one determines general
approach to optimization problems solution and is computer oriented.
8. Synthesis of optimal automatic control systems.
The following problems were depicted:
a). Basis principles of calculus of variations;
b). Pontryagin's principle of the maximum including the problem of phase variables;
c). Dynamic programming;
d). Linear-quadratic problems;
e). Moments method;
f). Mathematic programming process as applied to optimal programmed controls
development.
9. Method of up-to-date CAD theory.
Method including the process of rough control systems synthesis, H - control theory
and robust methods as well as, the problems of multi-object and multi-criteria systems
optimization together with the application of effective compromises, calculation tasks and
design of adaptive and intellectual control systems, differential geometry methods
application in control theory and others.
Учебное издание
Константин Александрович Пупков
Николай Дмитриевич Егупов
Александр Иванович Баркин
Евгений Михайлович Воронов
Людмила Георгиевна Комарцова
Виктор Григорьевич Коньков
Юрий Петрович Корню шин
Владимир Иванович Краснощеченко
Александр Петрович Курдюков
Александр Викторович Максимов
Юрий Игоревич Мышляев
Владимир Николаевич Пилишкин
Владислав Иванович Сивцов
Адольф Иванович Трофимов
Николай Васильевич Фал дин
МЕТОДЫ КЛАССИЧЕСКОЙ
И СОВРЕМЕННОЙ ТЕОРИИ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
В трех томах
ТомЗ
МЕТОДЫ СОВРЕМЕННОЙ
ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Редактор С.Н Капранов
Корректор К.Ю. Савинченко
Компьютерная верстка К.Ю. Савинченко, МЛ. Трубачев
Изд. лиц. №020523 от 25.04.97. Подписано в печать 15.12.2000.
Формат 70 х 100 1/16 Печ. л. 46,75. Уел печ. л. 60,8 Уч.-изд. л. 59,3.
Бумага офсетная. Печать офсетная Тираж 2000 экз. Заказ № 416
Издательство МГТУ им. Н Э. Баумана
107005, Москва, 2-я Бауманская, 5
Оригинал-макет подготовлен редакционно-издательским отделом
филиала МГТУ им Н.Э. Баумана в г. Калуге
E-mail: rio@bmstu.kaluga ru; http:\\www.bmstu.kaluga.ru\rio
Отпечатано с готового оригинал-макета в ГУП «Облиздат»
248640, г. Калуга, пл. Старый торг, 5
ISBN 5-7038-1632-7
78570G
"81