/










































































































































































































































































































































































































Автор: Хамидов А. Латипов К. Хайдаров Э.
Теги: физика механика масъалахо
ISBN: 5-645-0385-1
Год: 2002




Текст
ь
НАЗАРИЙ
МЕХАНИКАДАН
КУРС ИШЛАРИ УЧУН
ТОПШИРИКДАР
ТУПЛАМИ
Техника алий уцув юртларининг талабалари учун
УКУв кулланма
Тулдирилган ва Е^йта ишланган русча 4-нашридан таржима
ТОШКЕНТ “УКИТУВЧИ” - 2002
Мазкур туплам назарий механика курси дастурида кузда тутилган
статика, кинематика, динамика, аналитик механика ва механик систе-
манинг тебранишларига оид 45 та топширикди уз ичига олган.
Бир катар топширикдар текширишлар олиб боришни талаб кдлади.
Айрим топширикдарда ЭХМ дан фойдаланиш кузда тутилган. Хар бир
топширик; 30 та вариантдан иборат. Хар бир мавзуда тошпирикдарни
бажариш намуналари дам келтирилган.
Ушбу кулланма кундузи ва сиртдан таълим олаётган техника-олий
укув юртлари талабалари учун мулжалланган.
Русча натри А. А Яблонскийнинг умумий тадрири остида
чоп этилган.
Такризчилар: Физика-математика фанлари доктори, профес-
сор А ХАМИДОВ, техника фанлари доктори,
профессор К, ЛАТИПОВ, техника фанлари ном-
зоди, доцент Э. ХАЙДАРОВ.
Таржимонлар: . Т. АНОРКУЛОВ, К- ХУСАНОВ, А. КОМИЛ-
ЖОНОВ.
4802030000 - 82
353(04) - 2002 1?а'п'ий-6УюР™а—2002- © Высшая школа", 1985
© “Уждту»чж” иащриёш,
ISBN 5-645-0385-1 “Зиё-Ношир” КШК, 2002
СУЗ БОШИ
Назарий механика физика-математика фанларидан энг мухи-
ми булиб, у барча ихтисосдаги мухдндислар тайёрлашда асосий
рол уйнайди.
Материаллар харшилиги, курилиш механикаси, гидравлика,
механизм ва машиналар назарияси, машина деталлари ва бошха
шу каби умуммухандислик фанлари назарий механиканинг асо-
сий крнун ва принциплари негизига хурилган.
Машинасозлик, механика, асбобсозлик ва купгина бошха их-
тисослар буйича турли босхичларда хам назарий механиканинг
хонун-хоидаларидан кенг фойдаланилади.
Назарий механика фанини яхши узлаштириш учуй назарияни
чукур Урганиш билан бирга масалалар ечиш буйича мустахкам
кУникма хосил кдлиш хам талаб хилинади. Бунинг учун барча
булимларга дойр куплаб масалаларни мустахил равишда ечиш
зарур.
Мазкур тупламнинг туртинчи нашри олий ва урта махсус таъ-
лим вазирлиги томонидан тасдикданган дастурларнинг барча асо-
сий мавзулари буйича хар бири 30 вариантдан иборат 45 топши-
рихни уз ичига олади: статикадан — 9 та, кинематикадан — 9 та,
динамикадан — 13 та, аналитик механикадан — 9 та, механик
системанинг тебранишларидан — 5 та.
Учинчи нашрга кирган баъзи топширикдарга узгартишлар ва
хушимчалар киритилган, улардан баъзилари эса тубдан кайта
ишланган, мавзулари буйича ухшаш айрим топширихлар бир-
лаштирилган, янги топширихлар кушилган.
Тупламдан ЭХМдан фойдаланиш максадга мувофих булган
учта топширих (статика, кинематика ва динамикадан) урин ол-
ган. Бу топширикларнинг хар бирига ечиш алгоритми ва ЭХМда
хисоблаш натижалари кУрсатилган намунавий мисол берилган.
Топширихларни бажариш намуналарида дастурлар ва уларни
тузиш буйича тавсиялар берилмаган, чунки айни давлат олий ухув
юртларида хар хил дастурлаш тиллари ва амалий системалар хУлла-
нилиши хамда турли ЭХМ лардан фойдаланилиши мумкин.
Статика ва кинематикадан топширихларни бажариш учун ал-
гебраик тенгламалар системасини ечиш зарур, динамикадан топ-
ширикни бажарганда эса дифференциал тенгламани рахамли ин-
теграллаш лозим. Хар хандай ЭХМнинг стандарт дастурлар ку-
тубхонасида бундай дастурлар мавжуд.
3
Курс булимларининг \ар бирига дойр топширикдар сонининг
куплиги мутахассисларни тайёрлаш йуналишига, яъни урганила-
ётган назарий механика фанининг \ажми ва мазмунига боклик
холда курс ишларининг мавзуи ва сонини белгилаш имконини
беради.
Курс ишига кирувчи алохида топширикдар вариантларини
талаба китоб сунггида берилган махсус жадвалдан фойдаланган
Холла уз шифрига караб аникдаши мумкин. \ар бир талаба учун
шифрни укдтувчи белгилайди.
Тупламда тошпирикларни бажариш намуналари келтирилган.
Шу намуналарга асосланиб талабалар (айникса, сирткд факуль-
тет талабалари) ушбу тупламдаги тошпирикдарни мустакдл ра-
вишда бажара олишлари мумкин.
Бир цатор топширикдарни бажаришда айрим текширишлар-
ни олиб бориш талаб кдлинади. Бундай топширикдар талабалар-
нинг назарий механика буйича укув-текшириш ишларини таш-
кил кдлишда асос булиб хизмат кдлади.
Таржима муаллифлари таржима ишига рахрарлик кдлган мар-
хум профессор А. Г. Лзизовнинг кдмматли маслахдтлари ва ёрдам-
ларини чукур мамнуният билан хамиша ёдларида сакдайдилар.
Мазкур кулланма Тошкент ирригация ва кишлок; хужалигини
механизациялаштириш инженерлари институти хомийлигида на-
шрга тайёрланди.
Кулланманинг С. 1—С.9, К1—К9, Д. 14—Д.27-тошпирикдарини
доцент ТС. Аноркулов, Д.1— Д.9-тонширикдарини доцент К-Б.
Аусанов, Д. 10—Д.18-топширикдарини эса доцент А.Х. Комилжо-
нов таржима цилган.
4
БИРИНЧИ БУДИМ
КАТТИК ЖИСМ СТАТИ К АСИ
I. ТЕКИСЛИКДАГИ КУЧЛАР СИСТЕМАСИ
ИХТИЁРИЙ ЖОЙЛАШГАН КУЧЛАР СИСТЕМАСИ
С. 1 -т о п ш и р и К- КатгиК жисмнинг таянч
реакцияларияи ани^лаш.
Схемаларда (1—4-чизмалар) уки синих чизикдан иборат булган
брусни махкамлашнинг учта усули к$фсатилган. Берилган юкла-
ма (1-жадвалга кдранг) ва улчамлар (м) учала холда хам бир хил.
Таянчларнинг реакциялари брусни махкамлашнинг шундай
усули учун анихлансинки, бунда 1-жадвалда курсатшпан реакция
энг кичик модулга эга булсин.
1 - жадвал
Вариант разами 1—4-чиз- малар Р, кН М кН.м кН/м Текшири- лаётган реакция Вариант раками 1-4- чизмалар Р, кН м, кН.м Q кН/м Текшири- лаётган реакция
1 10 6 2 16 12 6 2 мА
2 20 5 4 17 20 4 3
3 15 8 1 18 14 4 2
4 5 2 1 19 16 6 1 Rs
5 10 4 —— 20 10 — 4
6 6 2 1 Ч 21 20 10 2
7 2 4 2 22 6 6 1
8 20 10 4 23 10 4 2 мА
9 10 6 — 24 4 3 1
10 2 4 2 25 10 10 2
11 4 10 1 26 20 5 2 МА
12 10 5 2 27 10 6 1
13 20 12 2 28 20 10 2
14 15 4 3 29 25 —— 1 МА
15 10 5 2 30 20 10 2
Топширикди бажариш намунаси. Берилган: брусни махкамлаш
схемалари (5-чизма, а, б, в); Р=5 кН; М=8 кН • м; q= 1,2 кН м.
Кртирмадаги МА момент энг кичик сон кийматга эга буладиган
таянч реакцияларини махкамлашнинг усулини аникданг.
5 ' ’
I
I
•|
6
•ЕМЕИЬ-Z
8
•ВК£ЯЬ-£
4-чмзма.
9
5-чязма.
Ечиш. Конструкцияга куйилган мувозанатлашган кучлар сис-
темасини текшириб чицамиз. Богланишларнинг конструкцияга
таъсирини уларнинг реакциялари билан алмаштирамиз (6-чиз-
ма): а схемада — ХА, YA, МА, б схемада — YyA, Мул ва Re; в схемада —
М1А, Хв ва Ys. Интенсивлиги q булган текис тацсимланган юкла-
мани
Q=q • 2=2,4 кН.
тенг таъсир этувчи билан алмаштирамиз.
Кдйси холла кртирмадаги момент энг кичик булишини би-
лиш учун, цолган реакцияларни аникдащдан олдин унинг к,ий-
матини учта схеманинг хаммаси учун топиб оламиз.
а схема учун
^Мл(^) = 0; Ма-Р-2 sin 45°+М-2 ‘ 5=0.
Бу ердан М= 11,07 кН • м.
б схема учун
^Мс(^) = 0; M^+M-Q-5=0.
яъни Л/ул=4,00 кН • м.
в схема учун
= Му^Р- BD+M+Q-\=0.
10
Чизмадан вуйидагини топамиз:
BD=BE+ ED= >/2 + 2л/2 =4,24 м.
Демак,
ЛГЛ=-31,61 кН* м.
Шундай килиб, кртирмадаги моментнинг энг кичик кцймати
брусни б схема буйича ма^камлаганда булар экан. Энди пгу схема
учун долган таянч реакцияларипи аникдаймиз:
£Х=0; Pcos45°-7?3=0 бу ер дан RB= 3,54 кН;
£К=0; У'л-Р* sin45°- Q=Q буердан Гл=5,94кН;
Хисоблаш натижалари 2-жадвалда келтирилган.
2-жадвал
6-чизма буйича схема Момент; кН-м (Мл, МА, М'А) Кучлар, кН-
а 11,07 — —
б ' 4,00 5,94 3,54
в -31,61 — —
С.2.-Топширик. Текис ферманинг таянч реакцияларипи
ва стерженларидаги кучларни аникдаш
Ферманинг берилган юкланишидаги таянч реакциялари хдмда
унинг барча стерженларидаги кучлар тугунларни кесиш усули би-
лан аниклансин. Ферманинг схемалари 7—9-чизмада курсатилган.
Хисоблаш учун зарур булган маълумотлар 3-жадвалда келтирилган.
3-жадвал
Вариант ра- кдми (7-9- чизмалар) Л Л Л а h а, град Стерженларни-
кН j л нг ракдмлари
1 4 9 2 2,0 — 30 3, 8, 9
2 10 3 4 2,5 — 60 2, 5, 7
3 2 12 6 3,0 — 60 4, 5, 10
4 10 10 5 4,0 — 60 5, 6, 11
5 2 4 2 — 2,0 60 4, 5, 10
11
Давоми
Вариант раками (7-9- чичмалар) Л Л а h а, град Стерже нларни -
кН м нг ракамлари
6 3 7 5 4,0 3,0 — 8, 9, 11
7 4 6 3 4,0 — 6,0 4, 6, 12
8 5 7 7 3,2 — 45 3, 4, 5
9 10 8 2 5,0 — 60 6, 7, 12
10 3 4 5 4,4 3,3 — 3, 5, 7
11 2 6 8 2,5 3,0 — 2, 7, 8
12 5 7 2 4,0 —• 60 4, 5, 10
13 4 6 2 4,8 3,6 — 4, 5, 10 '
14 3 5 5 3,0 — 60 5, 6, 8
15 2 2 10 4,0 6,0 — 2, 6, 9
16 5 6 2 5,0 — 60 3, 5, 6
17 4 4 10 4,0 6,0 — 4, 7, 8
18 5 2 8 — 5,0 60 1, 4, 8
19 8 4 10 5,0 10,0 60 4, 5, 7
20 2 3 5 4,0 6,0 — 5, 6, 8
21 3 2 7 6,0 —• 45 5, 8, 9
22 4 2 9 4,0 — 45 2, 6, 8
23 5 8 8 4,0 9,0 30 4, 7, 9
24 6 10 2 3,6 -- 45 4, 5, 10
25 7 10 5 4,4 3,3 8, 10, 11
26 8 12 2 4,0 — 30 4, 5, 9
27 9 4 4 4,0 .3,0 — 5, 9, 11
28 10 5 3 5,0 —• 30 3, 5, 6
29 12 8 2 6,0 — 45 5, 6, 11
'30 5 10 4 4,0 2,0 — 6, 7, 12
Кушимча равищца ферманинг худди шу юкланишида унинг учта
стерженидаги кучлар Риттер усули билан аникдансин (стерженлар-
нинг ракамлари 3-жадвалда кУрсатилган).
Топширщни бажариш намунаси. Берилган: ферманинг схемаси
(10-чизма); Р=1кИ, Р2=4кН, Р3=6кН; а=4,0 м; ЬЗ,0м.
Ечиш. 1. Таянчреакцияларини аницлаш. Фермата куйилган та-
шки кучларни курсатамиз: актив (берилаётган) Ри р2, рз кучлар хдмда
А ва В таянчларнииг реакциялари (11 -чизма).
12
7-чизма.
13
8-чжзма.
14
9-чизма.
15
12-чязма.
А таянч реакциясининг таъсир чизиги номаълум болтани учун
унинг координата Укдари буйича ташкил этувчилари ХА ва ни
аниклаймиз.
В таянч стержендан иборат; унинг реакциясининг таъсир чи-
зити маълум — у таянч стержени буйлаб йуналган.
Фер мага цУйилган кучларнинг мувозанат тенгламаларини ту-
замиз:
^Мя(Й‘) = 0;Р1 -3h + P2-2h + Rs а = 0;
£Z,.=0; XA-Pl-P2 =0;
Ya + Rs-P3 =0.
(1)
Бу тенгламалардан
/?.=- 10,5 кН; У=6,0 кН; X= 16,5 кН.
2. Ферма стерженларидаги кучларни тугунларни кесиш усули билан
аницлаш. Ферманинг тугунида учрашувчи стерженлар, тугун учун
богланишлар хисобланади. Богланишларни хаёлан олиб ташлаб
уларнинг тугунларга таъсирини реакциялар билан алмапггира-
миз. 12-чизмада ферманинг тугунлари уларга куйилган кучлар
билан бирга курсатилган.
i номерли стержендаги кучни S1 билан, стерженнинг тугунга
куйилган реакциясини эса S.M билан белгилаймиз. М ва N тугун-
ларни бирлаштирувчи стержень учун
' лекин
Барча стерженларнинг реакциялари стерженлар чУзилади, деб
фараз цилиниб, тугунлардан стерженларнинг ичига кдраб йунал-
16
тирилган. Агар ечиш натижасида стерженнинг реакцияси ман-
фий булиб чи^са, бу айни стерженнинг сикилишини билдиради.
Хар бир тугун учун иккита мувозанат тенгламасини тузамиз:
2^=0,2 К=о < (2)
Бу тенгламалар дан фацат барча кучларнигина эмас, балки таг
янч реакцияларини кам аникдаш мумкинлигига ишонч косил кдяа-
миз. Демак, таянч реакцияларини оддиндан^никдаш шарт эмас.
Хакикдтан кам, тугунлар 7 та (А, В, С, D, Е, F, Н), демак, тенгла-
малар 14 та, номаълумлар кам 14 та, яъни стерженлардаги 11 та
куч ва таянч реакцияларининг 3 та ташкил этувчиси мавжуд.
Аввал топилган таянч реакцияларидан ечимни текширишда фой-
даланиш мумкин.
Агар тенгламалар ЭХМ кулланмасдан ечиладиган булса, ту-
гунларни шундай кетма-кетликда цараш тавсия кддинадики, бунда
Кар гал (2) тенгламага 2 тадан ортик номаълум кирмайдиган булсин.
Н тугундан бошлаймиз:
£^.=0; - Рг 51?..со&:с=0; .
£Г=0; - since- S2ff = 0.
бу ердан '
5;я= о, = - 2,5 кН ни аникдаймиз, демак стержень сицилган ва
52Я=52= 1,5 кН.
Е тугун учун
2^0; 51£cos«+52£=0;
2К=0; 5usin«-P3-S4£=0,
бу ердан
5ЗЯ= 53= 2,0 кН, 5, £= 54 = - 7,5 кН ни топамиз, демак стержень
сицилган.
Сунгра F С, D, В, А. тугунларга цуйилган кучларнинг мувоза-
нат тенгламалар ини тузамиз.
Хисобни текшириш учун кар бир тугунга тегишли куч купбур-
чагини куриш максадга мувофиц (13-чизма).
Н тугун учун кучни масштабда куямиз камда бу векторнинг
охири ва боши орцали Sis ва S2E реакцияларнинг йуналишларшш
улар узаро кесишгунча утказамиз. 31Н ва S2H векторларнинг стрел-
каларини шундай куямизки, натижада куч учбурчаги ёпик булсин.
Бунинг учун 13-чизма SlH нинг стрелкасини 12-чизмада курса-
тилганига карма-карши булган томонга йуналтиришга тугри ке-
лади. Бу эса аналитик ечимдаги манфий ишорага мос келади. Е
тугун учун куч купбурчагини кураётганда Р3 ва SlE (га кдра-
ма-карши йуналтирилади) кучларни куямиз камда S3£ ва S4E реак-
2-
17
щшларнинг й^алишларини узаро кесишгунча давом эттирамиз
ва \.к. Стерженларнинг кур ши масштабида улчанган-реакциялари
аналитик усулда топилганларидан камрокфарк килиши керак.
Стерженлардаги кучлар жадвалини (4-жадвал) ва ферманинг схе-
масини кучлар нинг асл тасвири билан биргаликда келтирамиз (14-
чизма).
4-жадвал
Стерж. раками 1 2 3 4 5 6 7 8 9 10 11
Кучнинг ишораси + + — — + + __ — +
Куч, кН 2,5 1,5 2,0 7,5 7,5 6,0 6,0 12,0 7,5 10,5 0
- Сикилган стержень
...Чузилган стержень
„ _ _ Кучи нолга тенг булган стер-
жень
,14-чизма.
3. Ферма стерженларидаги куч-
ларни кесиш усули (Риттер усули)
билан аниклаш. 4,5 ва 8 стержен-
лардаги кучларни аниклаш талаб
Килинади.
Риттер усулига биноан хар бир
куч алохида тенгламадан топили-
ши ва у бошка стерженлардаги
кучлар оркали ифодаланмаслиги
керак.
54 ва 55 кучларни аниклаш
учун фермани I— I кесим билан
иккига булишан, деб фараз кдла-
миз (15-чизма).
18
Ферманинг юкори кис мига куйил- | у
ган кучларнинг мувозанатини куриб [
чикамиз*. Олиб ташланган куйи кис- [/?
мининг юкори кисмига таъсири S4, Ss I
ва S6 кучлар билан амалга ошириладо. V
Аввалгидек шартли равишда барча |
стерженлар чузилади, деб фараз кила-
миз. Жавобдаги манфий ишора стержен-
нинг сикилишини курсатади
54 ни аникдаш учун Ss ва 56 кучлар-
нинг таъсир чизикдари кесишувчи F
нукгага (стержень 4 учун Риттер нуктаси) нисбатан моментлар тенг-
ламасини тузамиз:
М,(Й) = • в+?,-<»+Л •*-«
Буердан
. ’ 54=-7,5кН.
55 ни аникдаш учун, У4 ва 56 зУрикишларни тангламага кирит-
маслик максадида, кучларни х Укига проекциялаймиз:
£Л>=0; -Pj-P2-55cosa=0.
кучни аникдаш учун II— Якесимни утказамиз (бу кесимни 8,
7 ва 6 стерженлар оркдли утказиш \ам
мумкин эди). Ферманинг куйи кисми-
га куйилган кучларнинг мувозанатини
текшириб чикамиз (16-чизма).
D тугун 8 стержень учун Риттер
нуктаси булиб, бу нукгада 59 ва 510 куч-
ларнинг таъсир чизиклари кесишади
*
УА
’’
16-чизма.
* Ферманинг кдйси кисмини танлаш одатда дисоблаш ишларининг
дажми билан аникданади. Ушбу долда шуни таъкидлаш лозимки, фер-
манинг юкори кисмини танлаш изланаётган кучларни, аввал топилган
таянч реакция кучларидан дальни назар, фадат берилган кучлар орда ли
гопишга имкон беради.
19
ва шунинг учун мазкур кучлар куйилаги тенгламада ипггирок
этмайди:
£MD{K) = 0; -5, • а-Г,• а+Х*-h = 0.
Буердан:
5S=-12,0 кН нитопамиз.
С.З.-т о п ш и р и К- Кушма конструкциянинг таяич
реакцияларинн амнкдаш
(икквгга жисмдан иборат система).
Конструкция иккита кисмдан иборат. Конструкциянинг кием-
лари кдйси усул билан уланганда 5-жадвалда курсатилгая реакция-
нинг модули энг кичик булиши аниклансин хамда уланишнинг шу
усули учун таянчларнинг ва С улагичнинг реакциялари топилсин.
5-жадаал
Вариант разами (17-19- чизма- лар) Р. Р2 м, кН-м кН/м Текш- ирила- ётганре- акция ВфЕИНГ раками (17-19- чизма- лар) Л М, кН-м 4, кН/м Текш- иргаа- ёпжре- акция
кН кН
1 5,0 — 24,0 0,8 16 7,0 10,0 14,0 3,8
2 6,0 10,0 22,0 1,0 17 9,0 12,0 26,0 4,0
3 7,0 9,0 20,0 1,2 18 11,0 10,0 18,0 3,5 Мв
4 8,0 — 18,0 1,4 19 13,0 9,0 30,0 3,5 Ms
5 9,0 — 16,0 1,6 20 15,0 8,0 25,2 2,5 Rb
6 10,0 8,0 25,0 1,8 Ч 21 10,0 7,0 20,0 2,0
7 11,0 7,0 20,0 2,0 RB 22 5,0 6,0 15,0 1,5
8 12,0 6,0 15,0 2,2 23 8,0 5,0 10,0 1,4
9 5.3,0 — 10,0 2,4 24 1 1.0 4,0 5,0 1,3 м.
10 14,0 — 12,0 2,6 25 14,0 6,0 7,0 1,2
И 15,0 5,0 14,0 2,8 л» 26 1 2,0 8,0 9,0 1,( Л.
.12 12,0 4,0 16,0 з,о 27 10,0 7,0 11,0 1,0
13 9,0 6,0 18,0 3,2 28 8,0 9,0 13,0 1,2
14 6,0 — 20,0 3,4 Мл 29 6,0 10,0 15,0 1,4 МА
15 5,0 8,0 22,0 3,6 30 10.0 nJ 17,0 i,v Ms
20
17—19-чизмаларда кисмларни биринчи усулда — С шарнир ёрдами-
да улаш курсатилган. Иккинчи усулда улаш схемалари 6-жадвалда
курсатилган сирпанувчи котирмалар ёрдамида амалга оширилади.
Д 7-чизма. •
21
18-чнзма.
19-чмзма.
23
6 - жадвал.
Тошпирикди бажариш намунаси. Берилган: конструкциянинг схе-
маси (20-чизма); Р=5 кН, Р2=7 кН; М=22 кН • м; q=2 кН/м; а=60°.
Таянчларнинг Хамда С улагичнинг реакциялари улашнинг
шундай усули (шарнир ёки сирпанувчи цотирма) учун апикдан-
синки, бунда А таянч реакциясининг модули энг кичик булсин.
Е ч и ш. I. А таянчнинг реакцияларини С нукрпадаги уланиш шар-
нирли булган хол учун аницлаш.
Бутун конструкцияга куйилган мувозанатлашган кучлар систе-
масини текшириб чикамиз (21-чизма). В нуцгага нисбатан кучлар
момеши тенгламасини тузамиз: р\ кучнинг моментини хисоблашни
енгиллапггириш учун уни вертикал ва горизонтал ташкил этувчи-
ларга ажратамиз: Р/ = Р{ • cos 60°=2,5 кН; Р”= Р} sin 60” =4,33 кН.
£Мд(^) = 0; Р{ -3+ Р" -8-Q- 1-Ya • 5 + Хл • 1-М+Р2
ф,0)2 +(1,5)2 =0, (1)
24
20-чжзма. 21-чмзма.
бу ерда Q= q • 4=2 • 4= 8 кН
Берилганларни куйиб хдсоблагандан кейин (1) тенглама куйида-
ги куринишга эга булади:
^-5^=-24,74 кН (Г)
Конструкциянинг С шарнирдан чапда жойлашган кисмига куйил-
ган мувозанатлашган кучлар системасини куриб чигдаб (22-чизма), Хл
ва Ya номаълумлар учун иккинчи тенгламага эга буламиз:
= Р" •б+е-2+^-4-г/з=о,
ёки хисоблашлардан кейин
4Г-ЗГ =-41,98 кН (2)
(1') ва (2) тенгламалар системасини ечиб, куйидагини топамиз:
Х =-7,97 кН, У = 3,36 кН
С нукдадаги уланиш шарнирли булганда А таянч реакциясининг
модули куйидагига тенг булади:
Я'л = = 7(7. Э7)2 + (3,36)2 = VH81 = 8,65 кН.
22-чнзма.
23-чизма.
25
2. Конструкция кисмла-
ри С Hyjfmada сирпанувчи
цотирма ёрдамида уланган-
даги %исоб схемаси 23-чиз-
мада курсатилган. 21- ва
23-чизмаларда курсатилган
кучлар системалари бир-
биридан асло фаркчкдтмай-
ди. Шунинг учун (Г) тен-
глама Уз кучида цолади.
24-чизма.
Иккинчи тенгламага эга
булшн учун конструкциянинг С сирпанувчи котирмадан чапда жой-
лашган кис ми га куйилган мувозанатда булган кучлар системасини
текшириб чикдмиз (24-чизма, а).
Мувозаиат тенгламасини тузамиз:
S^=o; xa+q-p[=o (3)
буердан
Z=-5,50kH,
ва (Г) тенгламадан куйидагини топамиз:
Ул=3,85кН.
Демак, С нукгада сирпанувчи котирма булганда А таянч реакци-
ясининг модули
Я" = = 7(5,50)2 + (3,85)2 = 743,07 = 6,71 кН.
га тенг экан.
Шувдай кдтиб, С нукгада сирпанувчи кртирма булганда А таянч
реакциясининг модули шарнирли уланишдагигя Караганда (=22%
га) кам экан. В таянч ва сирпанувчи дотирма реакцияларининг
ташкил этувчиларини топамиз.
С нукдадан чапда ётган кием учун (24-чизма, а).
^Y=Q-, -Д" + Ул+Ус=0, (4)
бу ердан
К,= Р" - У =0,48 кН
ь J А 7
В таянч реакциясининг ташкил эгувчиларини ва сирпанувчи
котирмадаги моментни конструкциянинг С нуктадан унгда ётган
Кисми учун тузилган мувозанат тенгламаларидан топамиз (24-чиз-
ма, б):
26
Mc+Yc'2-M+P2’ 1,80 = 0, (5)
2^=0; - P2cos/?+2^=0, (6)
£Г=0; -Гг+К-Л8й1£=0 С D 2 (7)
BCD тутрибурчакли учбурчакдан
sW=W^C-2,0/V22 + 32 = 2,0/3,61 = 0,555
cos£= CD/BC= 3,0/3,61 = 0,832
(5)—(7) тенгламаларни Mc, Xy Ys ларга нисбатан ечиб, куйидаги-
ларни топамиз:
М =8,44 кН -м; Х = 5,82 кН; 7 =4,37 кН.
Реакцияларнинг тугри топилганлигини текшириш учун бутун
конструкцияга куйилган кучлар учун аввал фойдаланилмаган муво-
занат тенгламаси эканлигита ишонч хосил килайлик (21-чизмага,
К) масалан,
2^(Л) = Л' ’4+ р" '3-2’2-M-P2sinp-4+P2cos/?-2,5-
-Хв • 1+ Ys ♦ 5 = 2,5 • 4+4,33 • 3-8 ♦ 2- 22-7 • 0,555 • 4+
+ 7 • 0,832 • 2,5-5,82 • 1 + 4,37 • 5= 59,40-59,36^0
Хисоб натижалари 7-жадвалда келтирилтан.
7-жадвал
Кучлар, кН Момент, кН.м
Л Мс
20-чизмадаги схема учун 3,36 8,65 — — — —
23-чизма д аги схема учун -5,50 3,85 6,71 ±0,48 5,82 4,37 ±8,44 .
С.4.-Т о п ш и р и к. Хушма конструкциянинг таянч
реакцияларини аницлаш (учта цисмдан иборат система)
D нукгада бирлаштирилган учта жисмдан иборат кушма конст-
рукциянинг таянч реакциялари топилсин. Конструкцияпарнинг схе-
малари 25—27-чизмаларда келтирилтан (улчамлар — метрда), юкла-
ма 8-жадвалда курсатилган. 1—15, 21—30-вариантларда таркибий
кисмлар шарнирлар ёрдамида, 16—20-вариантларда эса кичик узун-
ликдаги силлик втулка ёрдамида бирлапггирилган.
27
25-чизма.
26-чизм a.
29
27-чизма.
3©
Тошпирицни бажариш намунаси. Берилган: коиструкциянинг схе-
мной (28-чизма); юклама: Р = 10 кН, Л=20 кН, М=40 кН - м, q=2
кН/м.
А, В, С ва Е нукталардаги таянч реакциялари топилсин.
Ечиш: 29-чизмада система ташкил килувчи учтя жисмнинг \ам-
маси алохцда тасвирланган. Жисмларнинг \ар бирига берилган (ак-
тив) кучлар ва богланишларнинг реакциялари куйилган.
8-жадвал
Вариант раками Л Л М2 Q, кН/м Вариант раками Л Л М2 Q, кН/м
(31-33- чизма) кН кН •м (31-33- чизма) кН кН •м
1 6,0 — 25,0 0,8 16 13,0 — 26,0 — 0,9
2 11,0 8,0 34,0 — 1,0 17 7,0 7,0 23,0 34,0 —
3 9,0 12,0 20,0 — 1,0 18 9,0 9,0 29,0 — 1,3
4 10,0 14,0 •30,0 20,0 — 19 12,0 7,0 33,0 — .1,2
5 8,0 15,0 22,0 —• 1,1 20 11,0 — 38,0 — 1,5
6 10,0 17',0 28,0 — 1,0 21 6,0 — 25,0 — ' 0,8
7 16,0 10,0 — 30,0 22 11,0 8,0 34,0 — —
13,0 12,0 25,0 34,0 — 23 9,0 12,0 20,0 — 1,0
11,0 — 29,0 37,0 — 24 10,0 14,0 30,0 — —
10 12,0 — 34,0 35,0 1,4 25 8,0 15,0 22,0 — 1,1
11 8,0 —- 28,0 — 1,0 26 10,0 17,0 28,0 — —
12 12,0 14,0 36,0 28,0 — 27 16,0 — 36,0 3,0 —
13 15,0 — 30,0 21,0 — 28 13,0 — 25,0 34,0 —
14 10,0 16,0 35,0 — — 29 11,0 — 29,0 37,0 —
15 12,0 8,0 32,0 — 1,2 30 12,0 — 34,0 — 1,4
D улагичдаги реакциялар ташкил этувчиларининг ва. реактив
моментларнинг йуналишлари олдиндан маълум булмаганлиги учун
уларни коиструкциянинг хдр бир кисми учун бир хил йуналти-
рилгаи тарзда курсатамиз. Реакцияларнинг ва моментларнинг
Хакикий йуналишлари жавобдаги ишорага кдраб аникланади: мус-
бат ишора уларнинг хакцкий йуналишлари чизмада курсатилган-
га мос келишини билдиради. Масаладаги номаълум реакциялар-
нинг умумий сони 11 та (Хл, Ул, Мв, Y^, Y^, Y^,
МПз, Rc, RJ.
Учта жисмнинг \ар бири учун бир-бирига боглиц булмаган
учла мувозанат тенгламасини тузиш мумкин булиб, улар бирга-
31
28-чиша.
ликда т^вдизта тенгламани беради. Етиптмаётган иккига тенгла-
мани топиш учун Dt, 1)2 ва D, нукуаларга куйилган кучлар ва мо-
ментларни куриб чищамиз. Таъсир ва акс таъсир хавддаги крнундан
бу кучларнииг геометрик йигиндиси хамда реактив моментлари-
нинг йигиндиси волга тенглиги келиб чикади. Демак, Dv В2 ва Д
нукдаларга куйилган барча кучларнииг исталган укка проекцияла-
рининг йигиндиси нолга тенг булиши керак. Л2 ва Z>3 нукдалар-
даги барча жуфтлар момешларишшг алгебраик йигиндиси хдм нол-
га тенг. Бу тенгламалар мувозанат тенгламаларини 11 татенглама-
лар системасигача туддириб боради.
Ушбу масалада дастлаб ABD[ жисмга куйилган мувозанатдаги
кучлар системасини текшириб чикамиз (29-чизма):
Л+р2=°; «
5К=0; V^=0; (2)
2^(^)=0; (3)
CD2 жисмга куйилган кучларнииг мувозанат тенгламалари:
£2=0; P1cos60°-Af,=0;
(4)
£К=0; -PjCOS^’+K =0; (5)
32
2Л^(^)=0; Мд+Р^ояЗО0 • 2-/^cos 60° • 1 = 0. (6)
EDV жисмга куйилган кучларнинг мувозанат тенгламалари:
2Х=0; V^=°; (7)
2К=0; 1^=0; (8)
2М£да=0; М» + 0-1=0. (9)
Таъсир ва акс таъсирнинг тенглиги хавдцаги аксиомадан келиб
чикддиган тенгламалар:
2Л=о; + V Д=«, (Ю)
Ж = 0; . (11)
(1), (4), (5)—(10), (2), (11) ва (3) тенгламаларни кетма-кет ечиб,
. изланаётган катталикларнинг сон юийматларини оламиз. Хисоблаш
натижалари 9-жадвалда келтирилтан. .
9-жадвал
Кучлар, кН Моментлар, кН.м
re у JD1 а
-20 8,66 5 4 -8,66 8,66 0 -19 16,32 -12,32 -4
30-чизма.
31-чизма.
3-
33
Хисобларнинг тугрилигини текшириш учун бутун конструкция-
га куйилган кучлар учун (30-чизма) мувозанат тенгламаларининг
бажарилишига ишонч хрсил цилшп керак.
Масалан:
%Х=ХА+ ?,+ Pj sin 30° - Rc- Q+ R£=-20 + 20+ 10 • 0,5- 5-4+4=0;
2 Y= Ya-Pl cos 30° = 8,66-10 • 0,866 = 0;
(R)=-Py l + MH+M+Asm30°-3-R -4+R -4-0-3 =
= -20-19 + 40+10 • 0,5 • 3-5 • 4+4 • 4-4 • 3=-71+ 71 = 0.
Э с л а т м а. Агар жисмлар D нукуада шарнир билан бирлашти-
рилган булса ва бу шарнирга бир нукгага тупланган куч куйилган
булса, уни исталган таркибий кдсмга тегишли килиб олиш мумкин.
31-чизмада мисол тарицасида Р куч конструкциянинг / кцс мига
тегишли килиб олинтан.
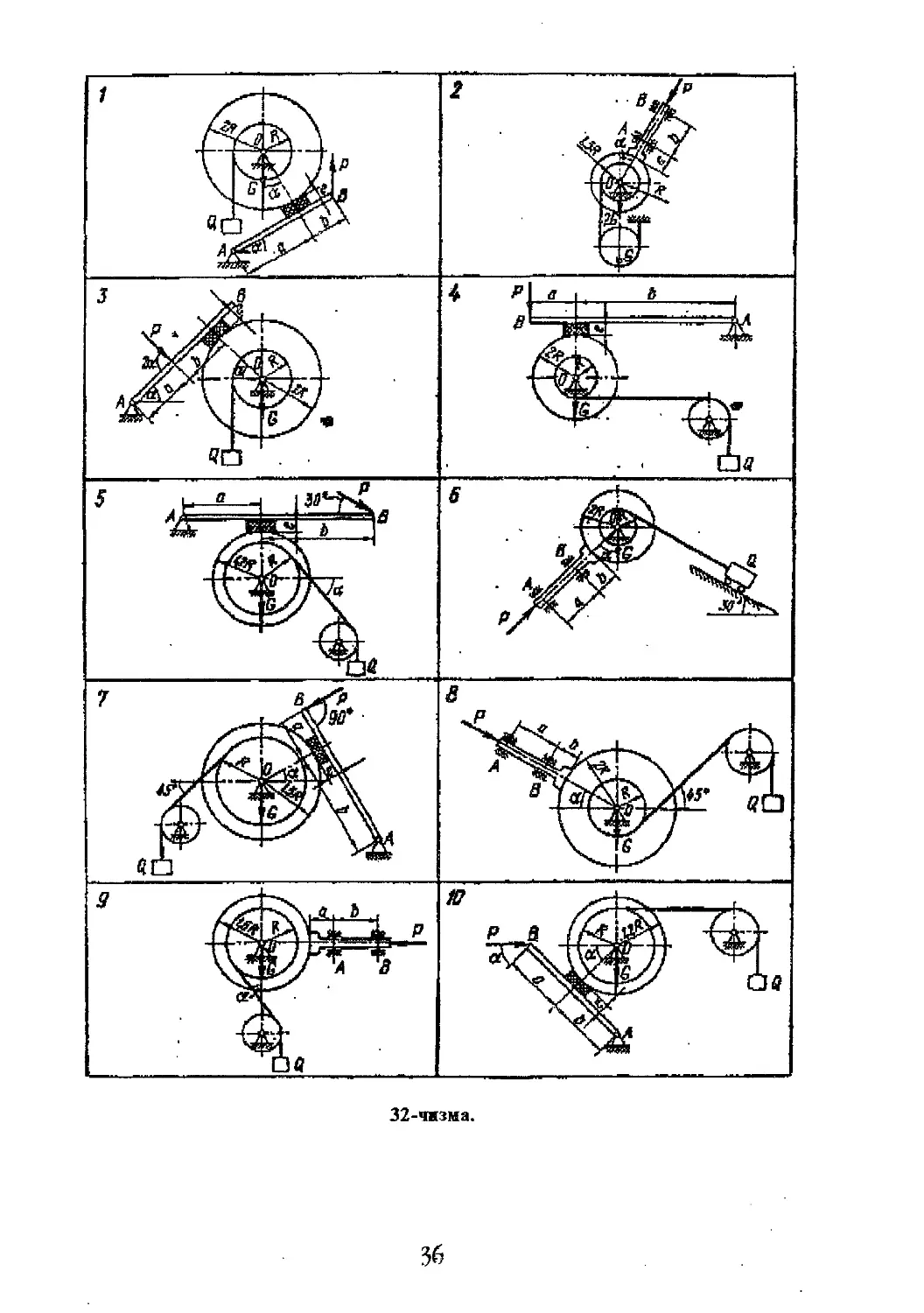
С-5 -топширик, ТишлаШиш (тинч хрлатдаги
ишкалан!нп)ни хдсобга олган х^олда кучларнииг мувозанати
Ркучнинг минимал 1—20, 25, 26, 29, 30-вариантларда ёки мак-
симал (21—24, 27, 28-вариангларда) кдймати ва тинч долатда булган
системанинг таянч реакциялари аникдансин. Вариантларнинг схе-
малари 32—34-чизмаларда, хцсоб учун керакли маълумотлар эса 10-
жадвалда берилган.
1—20-вариантларда факдт тормоз колодкаси билан барабан ора-
сидаги тишлашиш (тинч холатдаги ишцаланиш) уисобга олинсин.
21—30-вариантларда G отирликдаги жисмнинг икки таянч нукуаси-
даги тишлашиш уисобга олинсин.
10-жадвал
Вариант раками (32-34- чизмалар) G Q а b С «, град Тишлашиш коэффициента (тинч холатдаги иныаниш коэф- фициента) Реакция- лари аник,-
кН м ланадиган яукдалар
1 1,0 10 0,20 0,10 0,04 30 0,10 ОГА
2 1,1 — 0,10 0,15 — 30 0,15 О, А, В
3 1,3 14 0,45 0,40 0,05 45 0,20 О. А
4 1,8 15 0,10 0,40 0,06 0,25 О, А
5 1,5 16 0,20 0,30 0,04 45 0,30 О, А
6 1,6 18 0,15 0,10 45 0,35 0, А, В
7 2,0 20 0,20 0,50 0,05 30 0,40 О, А
Давоми
Вариант раками G Q а b с а, град Тишлашиш коэффициент (тинч холатдаги Реакция- лари аник-
(32-34- чизмалар) кН м ишланиш коэф- фициента) ланадиган нукталар
8 2,2 18 0,20 0,10 — 30 0,35 О, А, В
9 2,1 20 0,10 0,20 — 30 0,30 О, А, В
10 1,8 22 0,30 0,30 0,04 45 0,25 О, А
11 1,9 24 0,40 0,50 0,06 — 0,20 О, А
12 2,0 25 0,10 0,25 — 30 0,15 О, А, В
13 1,6 20 0,10 0,10 — 45 0,10 О, А, В
14 1,7 24 0,10 0,25 0,04 60 0,15 О, А
15 1,8 20 0,10 0,15 — 45 0,20 О, А, В
16 1,2 15 0,20 0,45 0,04 45 0,25 О, А
17 1,3 12 0,15 0,15 — 45 0,30 О, А, В, С
18 1,4 14 0,20 0,30 0,05 60 0,35 О, А ’
19 1,7 16 0,50 0,20 0,06 30 0,40 А, С, П
20 1,6 18 0,10 0,15 — — 0,45 О, А, В
21 1,0 — 2 0,50 — 45 0,45 А, В, С, D
22 1,5 — 3 0,80 — 30 0,35 А, В, С, D
23 2 — 5 1,4 — — 0,40 А, В, С
24 3 — 4 0,8 —“ — 0,30 А, В, С, D
25 1,0 — 0,8 0,4 — 30 0,25 А, В, С, D
26 2,0 — 0,4 — — — 0,25 А, В, С
27 4 — 4 1,0 — 45 0,35 А, В, С, D
28 5 — 5 0,8 — 30 0,40 А, В, С, D
29 2,0 — 2 0,3 — 30 0,20 А, В, С
30 1 — 2 0,8 30 0,20 А, В, С, D
Топширикии бажариш намунаси (1—20-вариантлар). Берилган:
(?=2 кН, (2=20 кН, тишлашиш (тинч холатдаги инщаланиш) ко-
эффициенты /^=0,1; а=20°, а= 10 см; />=20 см (35-чизма).
Р кучнинг минимал киймати камда О, А ва В таянчларнинг
реакциялари аниклаисин.
Ечиш. Дастлаб Q жисмга куйилган мувозанатда булган куч-
лар системасини куриб чикдмиз (36-чизма). Жисмга огирлик кучи
Q, иннинг реакцияси f ва нормал реакция таъсир килади.
Q жисмни моддий нукда деб цараб, курсатилган кучлар нинг
мувозанат тенгламаларини тузамиз:
35
32-чизма.
33-чизма.
37
34-чжзма.
38
£ cos 45°-7=0;- £У=0; Q sin 45°=0.
Бу ердан
Т= Q cos 45°; N= Q sin 45°.
Энди барабанга куйилган кучларнинг мувозанатини курамиз
(37-чизма):
(/)=<), -T'R+ F„-l, 5й=0, (1)
бу ерда — тишлашиш кучи (тинч \олатлаги ипщаланиш кучи);
2Х.= 0; Т' + F^cosa - N2 sin«+ Хо=0; (2)
УК=0; N,cosa+F sin«+ Yn- G=Q. (3)
Чегаравий мувозанат хрлатида P куч минимал кусйматга эга
булади, тормоз колодкаси билан барабан орасидаги тишлашиш
(тинч холатдаги ипщаланиш) кучи эса куйидаги тенгликдан то-
пилади:
Р =f 'Ы,- (4)
(1)—(4) тенгламалардан куйидагиларни топамиз:
F =Г/1,5; N = F /f' X=-T’-Fm cosa+W,sin«;
Y = - X, cosa— F • sina+ G
0 2 пн
39
9
38-пзма.
Р кучнинг минимал кийматини хдмда А ва В таянчларнинг реак-
цияларини (бу реакциялар А ва В йуналтирувчиларга перпендику-
ляр, чулки бу ерда ипщаланишни хисобга олмаймиз) топиш учун
тормоз курилмасининг штокига кУйилган кучларнинг мувозанат
тенгламасини тузамиз (38-чизма):
2^(/;)=о; F’ a+R-b=AF, . (5)
2^=0; N,-P . =0; 2 тш 7 (6)
£1>0; RA-Ri-F' =0. А В тс (7)
Бу тенгламаларнинг ечими куйидагича булади:
RB=-F•
Шартда берилган сон цийматларни хисобга олиб, куйидаги-
ларни хосил хиламиз:
# = 14,1 кН; Fm=9,4 кН;
# = 94 кН; Л”о=9,2 кН;
У0=-89,6кН; Яг=-4,7 кН;
R = 14,1 кН; Р =94 кН.
С таянчнинг реакцияларини аникдаш учун блокка куйилган
кучларнинг мувозанат тенгламаларини тузиш етарлидир.
Топширикди бажариш намунаси (21—30-вариантлар). Берил-
ган: (?=1 кН, /^=0,4; а=6 м, Ь= 2м (39-чизма).
Р кучнинг максимал кдймати \амда А, В, Л ва Е нукдалардаги
реакциялар топилсин.
Ечиш. Дастлаб G огирликдаги жисмга куйилган мувозанатда
булган кучлар системасини текшириб чикдмиз (40-чизма). Жисмга
Илл
39-чжзма.
40-чизма.
G огирлик кучи, р куч, реакциянинг нормал ташкил этувчилари
ND ва Ne хамда уринма ташкил этувчилари, тишлашиш кучлари-
нинг тинч холатдаги ишкаланиш кучлари ^in(D) ва Дш(Е) куйил-
ган.
Курсатилган кучлар учун учта мувозанат тенгламасини туза-
миз:
М=о; -^)-Wp=0’ W
2К=0; ND+NrG=^. (2)
2^(^)=0; -Gb/2+NE-b-Pb/4=0. (3)
Чегаравий мувозанат холатида Р= Р^. Бу холатда тишлашиш
кучлари (тинч хрлатдаги ишкдланиш кучлар и) экстремал кий-
матларни кабул килади, (1)—(3) тенгламалар системаси эса куйи-
цаги тенгламалар билан тулдирилади:
(4)
(5)
(1)—(5) тенгламалар системасини ечиб куйидаги ифодаларга
эга буламиз:
pm=fmG- N=(G/2)(\-(i,5fJ.
Бу ердан
кН;
А^=0,4 кН; ^=0,16 кН;
ЛГ,=0,6 кН; F^=0,24 кН.
41
ND ва хамла Ns ва F^E} кучлар мое равишда D хамда Е
нукдалардаги таянч реаккияларини ташкил кдлади.
Энди бутун системага куйилган RA, XS,YS,G ва р = Ртк куч-
лар системасининг мувозанат холатини куриб чикдмиз. (39-чиз-
мага кдранг):
(6)
Ж (7)
~Pmx-b/4+G-a/2-RA-a=Q (8)
Бу тенгламаларни ечиб, куйидагиларни оламиз:
Хг-Р^’ RA=(G-a/2-Pm-b/4)/a-, Y = G-RA.
Булардан
Z8=-0,4kH; 7^=0,467 к• Н; YB=0,533 кН.
II. БИР ТЕКИСЛИКДА ЁТМАГАН КУЧЛАР СИСТЕМАСИ
С.б-т о п ш и р и К- Кучлар системасини энг содда
курин^шга келтириш
Берилган кучлар системасининг О марказга нисбатан бош век-
тори R* ва бош моменти Мо топилсин хамда бу система кдндай
энг содда куринишга келиши аникдансин. Параллелепипеднинг
(41-чизма) Улчамлари хамда кучларнииг модуллари ва йуналиш-
лари 11-жадвалда келтирилган.
Топширикни куйидаги тартибда бажариш зарур.
1. Параллелешшедни масштабда чизиб, берилган кучлар сис-
темасини тасвирлаш. Ох укд буйича улчамларни 1:2 нисбатда цис-
кдртириб олиш.
2. Координата укдари системасини танлаб олиб, берилган куч-
лар системаси бош векторининг модули ва йуналишини унинг
координата укдарига проекциялари буйича аникдаш хамда R* ни
шаклда тасвирлаш.
3. Берилган кучлар системасининг О марказга нисбатан бош
моментини унинг координата Укдарига проекциялари буйича хи-
соблаш ва М* ни чизмада тасвирлаш.
4. Берилган кучлар системасининг энг кичик бош моментини
Хисоблаш.
*
42
42-чнзма.
5. Бош векторни ва энг кичик бош момент М® ни хисоблаш
натижалари асосида берилган кучлар системаси кдвдай энг содда
куринишга келишини аникдаш. Буни куйидаги тартибда бажа-
риш даркор:
а) агар берилган кучлар системаси жуфт кучга келтирилса, бу
жуфтнинг моментики О нукгага куйиб курсатиш.
б) агар берилган кучлар системаси тент таъсир этувчига келти-
рилса, тенг таъсир этувчи таъсир чизигининг тенгламасини то-
пиш, бу чизикдинг координата текисликлари билан кесишиш
нукгаларини аникдаш ва R ни чизмада тасвирлаш.
в) агар берилган кучлар системаси динамага (куч винтига) кел-
тирилса, марказий укнинг тенгламаларини топиш, бу $ч;нинг ко-
ордината текисликлари билан кесишиш нукталарини анигдаш ва
чизмада R ва М' ларни тасвирлаш.
11- жадвал
Вари- ант разами Тугри бурчакли паралелепи- педнинг улчамлари (41-чизма) Системанинг кучлари
К р2 Рз
модули, Н кУйилиш нуктаси йуналиши модули, Н КУйилиш нуктаси йуналиши модули, Н КУйилиш нуктаси йуналиши модули, Н кУйилиш нуктаси йуналиши |
1 60 30 20 4 F FK 6 А АЕ 8 В ВА 10 D DK
2 30 40 40 20 А АС 24 О OD 10 К КВ —— — —
3 20 10 10 4 В ВА 2 С СК 8 Е ED —— —
4 30 40 20 15 А АВ 20 К КС ——- — — — — —
5 20 20 20 8 О OD 10 D DF 8 к КС 10 в во
6 30 40 20 8 А АО 4 Е EF 6 F FB 20 D DF
43
Давоми
Вари- Ту гр и бурчакли паралелепи- Системанинг кучлари
Р, Р Р р
ант разами педнинг улчамлари (41-чизма) модули, И куйилиш нуктаси йуналипги модули, I. кУйилиш нуктаси йуналиши модули, Н КУйилиш нуктаси йупалиши модули, В кУйилиш нуктаси йуналиши
7 30 40 40 10 5 ВК 16 с СО 20 в BF — —
8 20 30 10 10 О ОА 10 В BF 10 в ВК — — —
9 30 40 30 10 А АС 20 к КВ — — — — — —
10 10 10 20 20 А АС 30 О ОВ 20 к КЕ 30 Е £4
11 10 40 30 8 А АЕ 12 с СВ 20 О ОК 16 К КВ
12 4 8 6 6 А АЕ 20 F FA 10 с СК 8 В ВК
13 20 20 20 8 О ОВ 8 С СВ 8 Е ЕК __ —
14 20 . 5 8 40 В ВА 30 О ОВ — —
15 40 20 40 15 Е АЕ 10 Е FE 15 В BE 10 в ВК
16 30 ' 30 30 6 О ОС 10 В ВК 20 К КО — — —
17 15 15 20 30 Е ЕВ 40 В ВК 10 О ОС 32 в во
18 10 15 20 40 А АВ 20 к КС 10 В BE — □ —
19 20 15 15 40 С СА 20 в BF — — — — — —
20 20 20 10 10 А АВ 20 в ВО 10 к кв 20 в BF
21 20 20 20 10 О ОВ 8 в ВА 6 к KF 8 в ВК
22 40 20 30 30 О ОА 50 Е ЕВ 50 с СВ 25 в ВК
23 50 20 40 10 О ОА 5 F FB 8 к КВ — — —
24 30 40 30 40 А АВ 20 К КЕ — — — — — —
25 30 20 40 25 А АС 20 В ВА 25 к КЕ 20 в ВК
26 30 40 20 10 Е ЕА 12 О ОС 10 с СК 8 К КЕ
27 30 20 40 8 О ОВ 6 С СВ 4 в ВК — — —
28 10 14 40 4 О ОА 10 F FE 16 с СК — — —
29 30 30 40 80 В ВК 100 В ВС — — — — — —
30 40 20 30 10 А АВ 5 В ВО 10 к кв 5 в BF
Топширикди бажариш яамунаси. />, Д, кучлар системаси
берилган. Бу кучларнинг модуллари, куйилиш нукгалари ва
йуналишлари 12-жадвалда кУрсатшпан.
44
12-жадвал
Ечиш. 1. Берилган кучлар системасининг бош векторини аник-
лаш. Берилган кучлар системаси 42-чизмада курсатилган.
Аввал куйидагиларни аникдаймиз:
cos а = а / л/а2 + с2, sin а = с / ^а2 + с2.
Ушбу холда cos а=0,6, sin а=0,8.
Бош векторнинг координата укдарига проекциялари:
Х=Р3+Р4 cos а, К=Рр Z=-P2-P4 sin а.
Бош векторнинг модули
R* = >1Х2 +Y2 + Z2.
Йуналтирувчи косинуслари:
cos(A* ? X) = X / R*; cos(A‘ ? Y) = Y / R*; cos(R* *Z) = Z/R\
Берилганларга асосан куйидагиларни оламиз:
1=10,6 Н; Г=10,0 Н; Z=- 12,8 Н; R*= 19,4 Н.
cos(A* ?X) = 0,547; cos(A* С П = 0,515; cos(A* ? Z) = -0,660.
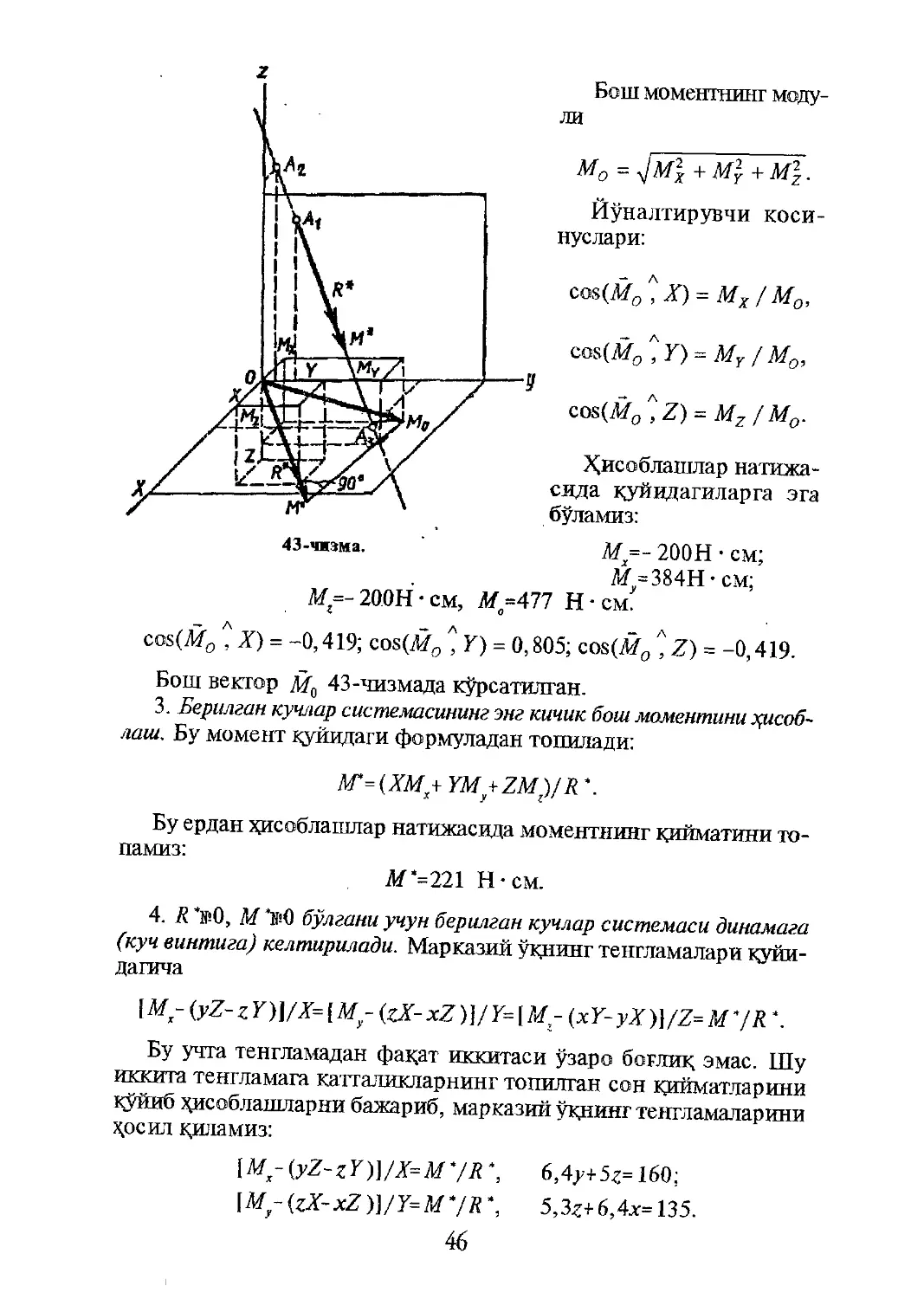
Бош вектор 43-чизмада курсатилган.
2. Берилган кучлар системасининг О марказга нисбатан бош мо-
ментини аниклаш.
Берилган кучлар системасининг координата укдарига нисба-
ган бош моментлари:
М =- РЛ ’ />; М =Р • а+Р. cosa • с; М=-Р'Ь.
X 2 3 Y 2 4 ’ Z3
45
Бош моментнинг моду-
ли
MO^^M2X+M2Y+M22.
ЙУналтирувчи коси-
нуслари:
СО8(УЙО?Х)= М,!Мо,
т^м0У) = my / м0,
cos(Mo У) = Мг/М0.
Хисоблашлар натижа-
сида куйидагиларга эга
буламиз:
43-чжзма. М =- 200Н • см;
М=384Н-см;
М=- 20.0Н • см, М =477 Н • см.
cos(Mo , X) = -0,419; cos(Mo , К) = 0,805; cos(A?o У) = -0,419.
Бош вектор 43-чизмада курсатилган.
3. Берилган кучлар системасининг энг кичик бош моментини хрсоб-
лаш. Бу момент куйидаги формуладан топилади:
М'={ХМ + YMy+ZM;)/R*.
Бу ердан хисоблашлар натижасида моментнинг кийматини то-
памиз:
М=221 Н-см.
4. R *w0, М *»0 булгани учун берилган кучлар системаси динамага
(куч винтига) келтирилади. Марказий укнинг тенгламалари куйи-
дагича
[М- (yZ- z Y)\/X= |М- (zX-xZ)J/ У= 1M- (xY-yX)]/Z= M */R *.
Бу учла тенгламадан факдт иккитаси узаро боглик эмас. Шу
иккита тенгламага катталикларнинг топилган сон кийматларини
Куйиб хисоблашларни бажариб, марказий укнинг тенгламаларини
\осил к;иламиз:
\Мх- (yZ-zY)]/X=M*/R \ 6,4Л+5г= 160;
\Mf-(zX-xZ)]/Y=M*/R\ 5,3z+6,4x=135.
46
Марказий укнинг координата текисликлари билан кесишиш нук-
талари координаталарининг шу тенгламалар ёрдамида хисобланган
кийматлари 13-жадвалда берилган.
13-жадвал
Нукталар Коордииаталар, см
X Y Z
0 5Д 25,5
-5,4 0 32,0
.А^ 21,1 25,0 0
Кучлар системасининг марказий уци 43-чизмада курсатилган.
Эслатма. Агар кучлар системаси тенг таъсир этувчига келтирилса,
льни М'=0, лекин R =R ф 0 булса, у уолда тенг таъсир этувчи таъсир
чизигининг тенгламалари куйидагича булади:
M=yZ-zY; M=zX-xZ- M=xY-yX,
л Jf
бу ерда X, Y, Z — тенг таъсир этувчи кучнинг координата укларига
проекциялари; Мх, Му, Mz — берилган кучлар системасининг коор-
дината укларига нисбатан бош моментлари.
Бу учта тенгламанинг хам факдт иккитаси узаро боглиц эмас.
С.7-топширик- КатгиК жисмнинг таянч реакцияларини
аниклаш
Конструкциянинг таянч реакциялари аниклансин. Конструкци-
янинг схемалари 44--46-чизмаларда курсатилган. Хисоблаш учун
керакли маълумотлар 14-жадвалда келтиридган.
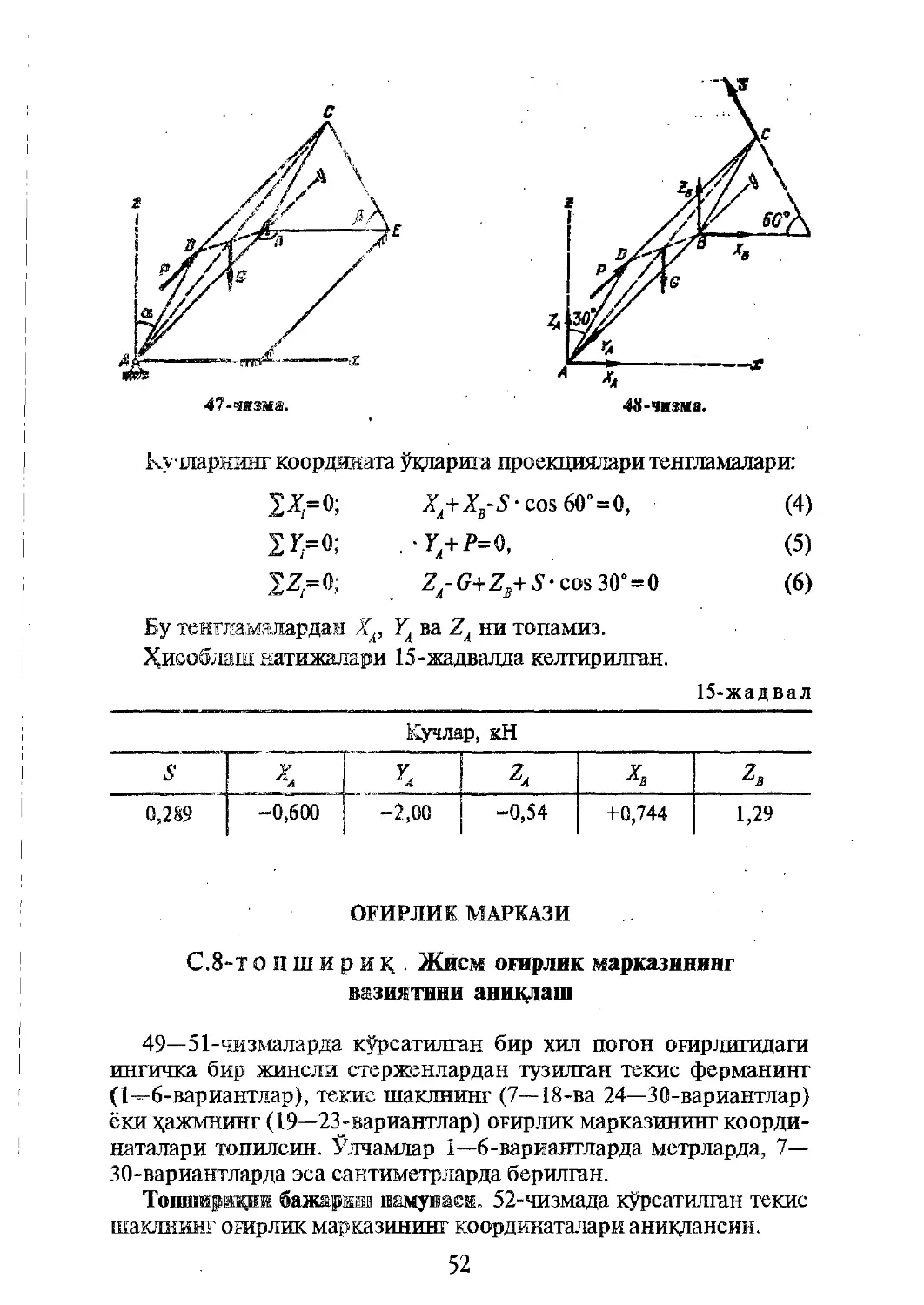
Топширикдк бажариш намунаси. Берилган: G- 1 кН огирликдаги
ABCD ром, Р= 2 кН, Р //Av, AD= ВС= 60 см, АВ= CD= 100 см, а= 30°,
(3= 60° (47-чизма). А ва В таянчларнинг реакциялари топилсин. (/1-
золдирли шарнир, /?-ошик-.\Ю1Ш1к).
Е ч и ш. ABCD ромга G огирлик кучи, Р куч, СЕ стерженнинг
реакцияси S хамда А ва В таянчларнинг реакциялари куйилган. А
золдирли шарнирнинг реакцияси учта XA,YA,ZA ташкил этувчилар
билан, В ошиц-мошикдгинг реакцияси эса иккита Хв ва ZB таш-
кил этувчилар билан аникланади (48-чизма).
Бу кучларнииг олтитаси номаълум: В, XA,YA, ZA, Хв, ZB • Улар-
ни аниклаш учун олтита мувозанат тенгламасини тузиш мумкин.
47
14-жадвал
Вариант ракдми (44—46- чизмалар) Кучлар, кН Улчамлар, см Вариант ракдми (44-46- чизуалар) Кучлар, кН Улчамлар, см
Q т G а b С R Г Q Т G а b С R г
1 2 — 20 20 30 10 15 5 16 4 — 2 50 30 — — —
2 4 — 2 20 10 30 10 10 17 2 — 1 15 10 20 20 5
3 20 — 18 400 400 450 __ — 18 6 — 2 60 40 60 —
4 3 — 2 30 20 40 15 10 19 — 8 2 20 30 40 20 15
5 5 — 3 30 40 20 20 10 20 4 — — 60 60 20 — —
6 1 4 2 40 30 20 20 10 21 2 — — 40 60 30 — —
7 — 3 1 30 10 5 18 6 22 — — 5 20 50 30 — —
8 4 6 3 20 40 15 20 10 23 — — 4 40 30 50 — —
9 5 — 3 20 15 10 30 40 24 5 — 2 — — — — —
10 1 4 2 30 40 20 20 10 25 — — 3 50 50 60 — —
11 — 2 1 20 30 15 15 10 26 — — 1 20 60 40 — —
12 4 — 1 25 20 8 15 10 27 10 — — 50 30 50 — —
13 10 5 40 30 20 25 15 28 35 — 32 400 200 200 — —
14 — 2 1 30 90 20 30 10 29 — 4 3 15 20 15 15 10
15 3 — 2 60 20 40 20 5 30 5 — 40 40 10 — —
Эслатмалар: 1. 16, 18, 22—26-вариантларда опгиц-мошиктар ром-
нинг АВ томони буйлаб силжишига царшилик курсатмайди, деб дисоб-
лансин.
2. 20- ва 21-вариантларда узаро тегиб турган сиртлар мутлак; силлид,
деб дисоблаисин.
Кучларнинг координата укдарига нисбатан моментлари тенгла-
шлари:
=0; - Р- AD cos 30°- G • АВ/2+ Scos 30° • AB+ZB • Л5=0, (1)
2Af(^)=0; G(7?C/2) ° sin 30°-5-sin 60° = 0, (2)
£M(j?)=0; P-AD -sin 30“ + Seos 60° -AB- ^-AS=0. (3)
(2) тенгламадан 5 ни аникдаймиз; сунгра (1) ва (3) тенгламалар-
дан Zs ва Х; ларни топамиз.
48
44-чизма.
4--
49
45-чжэма.
50
46-чизм a.
51
кучларнииг координата укларига проекциялари тенгламалари:
£Д-0; Хл+Хв-$ ’cos 60°=0, (4)
2^=0; .-Г,+ Р=0, (5)
^Z = 0; Z-G+Z^+A-cos 30° = 0 (6)
Бу тенгжмалардан ва 7Л ни топамиз.
Хисоблаш натижалари 15-жадвалда келтирилган.
15-жадвал
Кучлар, кН
5 У. Л
0,289 -0,600 -2,00 -0,54 +0,744 1,29
ОБИРЛИК МАРКАЗИ
С.8-Т о п ш и р и к Жясм огирлик марказининг
вазиятини анш^паш
49—51-чизмаларда курсатилган бир хил погон отирлигидаги
ингичка бир жинсли стерженлардан тузилган текис ферманинг
(I 6-вариантлар), текис шаклнинг (7—18-ва 24—30-вариантлар)
ёки кажмнинг (19—23-вариантлар) отирлик марказининг ко орд и-
наталари топилсин. Улчамлар 1—6-вариантларда метрларда, 7—
30-вариантларда эса сантиметрларда берилган.
Тошаирвдди бажар» ишувас®. 52-чизмада курсатилган текис
шаклнинг отирлик марказининг координаталари аникдансин.
52
49-чизма.
53
50-чязма.
54
51-чя1ма.
55
52-чизма.
s
53-чиэмэ.
Ечиш. Текис шаклнинг огирлик марказининг координаталари-
ни куйидаги формулалардан топамиз:
xc=5/F: y^SJF.
(1)
Бу ерда
5 =е Fxt, Sf=e F/yi — текис шаклнинг мое равишда у ва х укдарига
нисбатан статик моментлари, ’/ — текис шаклнинг юзаси.
(1) формулалардан фондазаниш учун текис шаклнинг юзалари Ft
хамда огирлик маркахтариникг координаталари х. ва > маълум бутган
ёки осоп аникданадиган булакларга ажратамиз.
Ушбу \олда мана шундай булаклар сифатида тУгри тУртбурчак,
учбурчак ва ярим доирани оламиз (53-чизма), Тугри туртбурчак-
дан киркиб олинган ярим доиранинг юзасини манфий, деб хисоб-
лаймиз.
Барча хисоб натижаларини жадвалга киритамиз (16-жадвал).
16-жадвал
Элемент ракдми F., см1 2 У, см Ft, см см3 S=F4y. см2
1 1200 15,0 20,0 18 000 24 000
2 1000 46,7 13,3 46 700 13 300
3 - 628 8,5 20,0 - 5338 - 12 500
е 1572 — 59 362 24 700
(1) формулалар буйича текис шаклнинг огирлик марказининг
координазаларини хисоб лаймиз:
х, = 59362/1572=37,8 см, уг= 24700/1572= 15,7 см.
Юзасининг огирлик маркази 53-чизмада кУрсатилган.
56
Эслатма. Топишрикдарни бажараётганда учрайдиган баъзи текис
щаклларнинг юзалари ва огирлик марказларинииг координаталари 17-
жадвалда келтирилган.
17-жад вал
Ясс и шакл
Огирлик марказининг
координаталари
Ус = J
Л'с = |(Х1 + х2 + х3)
бунда л,, х,, у — О, А,
В координаталарнинг
чук-килари
_ 2 Asin а _ iFb
хс —
а = р/2 F=pR2/2 x=4R/(3p)
ярим айлана
а = р/6 F=pR2/6 xc~2R/p
III. СТАТИКА МАСАЛАЛАРИНИ ЕЧИШДА
ЭХМ НИ КУЛЛАШ
С.9-т о п ш и р и к • Ички бир томонлама богланишли
кушма коиструкциянинг таянч реакцияларини аннцлаш
Кушма коиструкциянинг таянч реакциялари хдмда ички икки
томонлама ва бир томонлама богланишларидаги кучлар топилсин.
Конструкцияларнинг схемалари 54-56-чизмаларда берилган
(Улчамлар метр лар да), юклама 18-жадвалда к$фсатилган. Конст-
57
циянинг берилган юкланиш схемасида реакция бир томонлама бог-
ланишларнинг Е ёки Рфакдт бигтасида иавдо булиши хисобга олин-
син (тиркдшлар йук). Ташки кучлар олинганда тайней ва ички бог-
ланишларнинг реакциялари нолга айланади.
18-жа двал
Вариант раками -Рр кН Рг, кН М, кН.м 7, кН/м Эслатаалар
1 8 9 10 1,5 ЕКъа NF-пплар
2 9 10 12 1 ЕК ва да-иплар
3 12 15 20 2
4 7 5 13 1,2
5 8 12 16 1 ЕК ва АГГ-иплар
6 9 14 8 3
7 9 6 10 1,5
8 8 10 12 2. ЕКкл NF-muiap
9 6 7 8 1
10 7 5 14 •1,8 NF-ап
И 12 14 6 1,4
12 20 15 23 3
13 11 12 16 2,2
14 8 10 12 1,5
15 22 18 20 1,8
16 8 7 10 1,2
17 20 18 24 2
18 16 15 20 2,8
19 18 14 12 3 ЕКъа jVF-ивлар
20 19 14 18 2,5 ЕК-нп
21 6 11 15 1,8
22 10 10 11 2
23 16 15 9 3 ЕКъа NF-пплар
24 14 11 20 2 NF-nn
25 8 9 18 1,6
26 6 5 7 1,6
27 16 16 20 2,5
28 14 11 15 1,9
29 16 12 14 2 ЕК ва ЛТ-иплар
30 17 23 18 1,7 ЕК ва NF-штар
58
54-чизма.
55-чизма.
60
56-чжзма.
61
Тошиирицни бажариш намунаси. Берилган: коиструкциянинг схе-
маси (57-чизма), Pt= 10 кН, Р2-3 кН, Л/=20 кН • м, q= 1 кН/м.
А ва В таянчларнинг реакциялари хамда ички икки томонлама
богланишлардаги (С ва D шарнирлардаги) ва бир томонлама бог-
ланишлардаги (Е ва F) зУрицишлар аникдансин.
Ечиш. Масаланинг шартида бир томонлама Е ва ЕбогланипП
ларнинг цайси бирида реакция пайдо булиши хакида маълумбт
булмаганлиги учун иккита холни билан танишиб чикдш керак:
l-ypjr. Rf=0. Бу \олда (58-чизма) коиструкциянинг ED ва АС
элемент.лар и бир-бирига сицилган, шунинг учун Rs реакциянинг
йуналиши 59-расмда курсатилгандек булади. Ёбогланиш “ишла-
майди”.
Дастлаб коиструкциянинг АС кцсмига куйилган кучларнй тек-
шириб чицамиз (59-чизма). Бу системанинг мувозанат тенглама-
лари куйидаги куринишга эга:
62
2МС(Ы=Ъ RE-2+M-XA-3+YA-T=b (1)
*C+Z=O; (2)
£Г.= 0; r,+ V^=O. (3)
Кейин CD элемент™ куйилган кучлар учун мувозанат тенгла-
малари системасинйёзамиз (60-чизма):
£M/Z)(^)=0; -Л7с-1-Гс-1О-Р2-1О=О; (4)
2*=0; Л7с+^=0; (5)
2К=0; Гс+Р2+Гл=0. (6)
Энди ED элементга куйилган мувозанатда булган кучлар си-
стемасини куриб чикдмиз (61-чйЗма).
Конструкциянинг бу кдсмига куйилган кучларнинг мувозанат
тенгламалари куйидаги куринишга эга:
2^(^)=0;rr6+P1sin60°«6-2-l+ri)-2=0; (7)
2Z=0; ^+V^cos60o=(); (8)
£}>0; -R’rP, sin 60° + YB-Q+Y=0. (9)
(1)—(9) мувозанат тенгламаларидан танщари С ва D шарнир-
лардаги таъсир ва акс таъсирларнинг узаро тенглигини ифодалов-
чи тенгламаларни хам ёзамиз.
С шарнир учун
2Г=0; Yc+Yc=0; (10)
2Z=0; Xc+Xc=0; (11)
D шарнир учун
2^=0; Гр+Г^О; (12>
SZ=0; (13)-
’ (10)—(13) тенгламалардан
эканлиги келиб чи^ади.
Юкрридагиларни хамда R'Е- R£ эканлигини хисобга олиб,
(1)—(9) тенгламалар системасини куйидаги куринишда ифода-
лаймиз:
63
2R£+M - 3XA + 7YA = 0;
^ + ^=0;
Ya+Re+Yc =0;
Xc + 10Ус - 10P2 = 0;
- ^+^=0;
- yc + p2 + yd=o;
6Re +6P1-sin60°-Q-l-2Kz, = ();
- XB + XB - Pj • cos 60° = 0;
- Re -Pj •sin60° + r2)-Q-YB =0.
(14)
(14) чизикди алгебраиктенгламалар системаси унинг ицдизи R£>$
булганлагина барча вддирилаётган кучларнииг хакдкдй кдйматла-
рини аниклайди.
2-xo:i: R£=0. Бухолда (62-чизма) FD ва CD элементлар бир-
бирига сикилтан ва демак, RT рсакциянинг йуналиши 63- ва 64-
чвдмаларда курсатилгандек булади (R'f= RF). Е. богланиш “ишла-
майди”.
Конструкциянинг АС кисмига куйилган кучлар системасини
текшириб курамиз (65-чизма). Бу кучлар системасининг мувоза-
нат тенгламалари куйидаги куринишга эта:
2Л/с(^)=0; М+Ул-7~Хл-3=0-, (15)
£Z-0; 2Q+Zc=0; (16)
£1>0; Vrc=0- <17)
Конструкциянинг CD элементига куйилган кучларнииг муво-
занат тенгламаларини ёзамиз (63-чизма га кдранг):
2^=0; -Ус- 10-х с' 1-Р2- 10+Pf-6=0; (18) X.+X=Q‘, (19)
Ус+Р2-Р?+^=0. (20)
FD элементга куйилган кучларнииг мувозанат тенгламалари (64-
чизмага кдранг):
2Л//^.)=0; 6Р/sin 60°-^-4-(2- 1+Г'2)-2=0; (21)
£Х=0; Zi+rj)-P1-cos60° = 0; (22)
2Г=0; rj+r2)-2+A/-P1-sin60’=0. (23)
64
Бу ерда хам (10)-—(13) тенгламалардан келиб чикадиган натижа-
ларни хисобга олиб, (15)—(23) тенгламалар системасини куиидаги
куринишда кайта ёзамиз:
М + 7К-ЗХА =0;
хА + хс-$, . .
Уя+Кс=0;
10Кс + Хс - 10Д + = 0;
- Хс + XD = 0; ;
- Yc + - Rf 4-ГдаО;
6Р, sin60° - 4RF~Q~ 2Yn - 0;
Хв ~ - Pi • cos 60° = 0;
Y B-Yd-Q + Rf -P sin60° = 0.
2Э J-f J л. у
(24)
Чизикди тенгламалар системаси (24) нинг илдизи RF > 0 булган
Холдагина барча номаълумларнинг хакикди кийматларини аниклай-
ди. -;
(14) ва (24) тенгламалар системаларини Pv М ва Q ларнинг кдймат-
ларини хисобга олган хода, матрица шаклида кайта ёзамиз:
AjX^B.
65
(25)
(26)
I
5-
Буерда ( 2 -3 7 0 0 0 0 0 O'
0 10 0 0 0 0 1 0
1 0 10 0 0 0 0
0 0 0 0 0 0 0 1 к )
4 = 0 0 0 0 0 1 c -1 0
0 0 0 0 0 0 1 0
6 0 0 0 0 0 -2 0 0
0 0 0 10 -1 c 0 0
V -1 0 0 0 1 0 -1 0 oj
0 - -3 7 0 0 0 0 0 0 \
0 10 0 0 0 0 1 0
0 3 10 0 0 0 0 1
6 3 0 0 0 0 0 1 к
4 = 0 3 0 0 0 1 0 -1 0
-1 3 0 0 0 0 1 0 1
-4 ) 0 0 0 0 -2 0 0
0 3 0 10 -1 0 0 0
1 3 0 0 1 0 -1 0 0 J
rv fV -20
4 Xa 0
Ya Ya 0
xs XB 30
4 = YB ; 4 = Ys , B= 0
XD xD -3
yd YD -49,96
Xc Xc 5
Ы 10,56
(25) ва (26) системалар мувозанат тенгламалари системасини тан-
лаб берувчи тенге изликлар “калиги” билан биргаликда ечилиши
керак. Агар (25) системани ечиш жараёнида RE > 0 булиб чикса, у
холда курилаётган кушма конструкциянинг мувозанат тенгламала-
ри (25) тенгламалардан иборат булади. Агар RE < 0 булса. демак,
Re> 0 булади ва бинобарин, мувозанаттенгламалари (26) тенглама-
лардан иборат булиб колади.
66
Олинган алгебраик тенгламалар системасини ечиш учун Гаусс
усулидан (номаълумларни кетма-кет йукотиш усулидан) фойда-
ланиш мумкин.
(25) ва (26) системаларини ечиш дастурининг блок-схемаси
“калитлар” билан бирга 66-чизмада берилган, бунда Ф, — даст-
лабки маълумотларни киритиш; Ф2 ~ (25) системани Гаусс усули
билан топилган ечими, Ф3 — агар RE> 0 булса, Ф4 га утиш, RE< О
булганда эса Ф6 га утиш; Ф4 — натижаларни чоп этиш; Ф5 — дас-
турнинг тугаши; Ф6 — (26) системани Гаусс усули билан ечиш.
Хисоб натижалари 19-жадвалда келтирилган.
19-жадвал
Кучлар, кН
у. у» Ус
9,949 11,023 -6,023 11,023 -1 ГО- 23 1,867 5,793 5,082 -1,867
Жадвалдан RE реакциянинг мусбат булиб чшданлигини куриш
мумкин. Бу, кушма конструкциянинг берилган юкланиш схема-
сида F богланиш “ишлайди”, Е богланишда эса зуршдаш хосил
буллтаслигини англатади.
Бажарилган хисобларнинг тугрилигини текшириш учун бутуй
конструкцияга куйилган кучлар учун мувозанат тенгламаларига
риоя кдлинганлигига ишонч хосил кдлиш керак:
^Мл (FJ = sin60° • 5- Pj cos 60° -4- Р2 • 7 + • 1 + 2ГЛ • 4-
- Q • 2 = 20+ 10 • 0,866 • 5- 10 • 0,5 • 4- 3 • 7+ 5,793- 6,023 • 4-
-2- 2=49,093-49,092-0;
У У.= У. + Ун+ Р,-Р} sin 60°- Q= 1,867 + 5,793 + 3-8,66- 2=
= 10,66-10,66 = 0;
УХ=Х+2ГД-Р, cos 60°= 11,023-6,023- 10 • 0,5=0.
j А В 1 7 7 7
67
w - к»
ИККИНЧИ Б УЛ им
КИНЕМАТИКА
I. НУКДА КИНЕМАТИКАСИ
Kl-топширик - Нукга^аракатяняягберилган
теягламаларига кура унияг тезлиги ва тезланиишни
аникдаш.
М нукданинг берилган харакат тенгламаларита кура траектори-
ясининг куриниши аниклансин ва t= (Ду) ваку они учун нукда-
нинг траектория устидаги вазияти, унинг тезлиги, туда, уринма ва
нормал тезланишлари хамда траекториянинг эгрилик радиуси то-
пилсин.
Топширикди ечиш учун зарур булган маълумотлар 20-жадвал-
да келтирилган."
Топширикди бажариш намунаси. Берилган маълумотлар:
х=4/ у= 161М; zjs
/^0,5 (х ва у — см, t ва t1 — в сек.) ' '
Ечиш. Харакат тенгламалари (1) ни нукда траекториясининг
параметрик тенгламалари, деб кдраш мумкин. Траекториянинг
тенгламаларини координата куринишида олиш учун (1) тенглама-
лардан вакд t ни йукотамиз.
у=У— I ни оламиз, яъни нукданинг траекгорияси 67-чизмада
курсатилган параболадан иборат булади.
Нукданинг тезлик вектори
и = + \yyj. (2)
Тезланиш вектори
а = axi + ayj.
Бу ерда F, j — х ва у Укдарнинг ортлари; их, о , ах, af — нукда-
шиг тезлиги ва тезланишининг координата укларига проекция-
лари.
Уларни хдракат тенгламалари (1)ни вакд буйича дифференци-
аллаб куйидагиларни топамиз:
их=х=4 см/с; ах=х=0; (3)
и. - у— 32t; а= у - 32 см/с2.
68
20-жадвал
Вариант ракдми Харакат тенгламалари /P c
х=х(/), см y=v(0, cm
1 -2/2+3 -5/ 1/2
2 4 cos2 (л//3)+2 4 sin2 (л//3) 1
3 -cos(jr/2/3)+3 sin(jr/2/3) -1 1
4 4/+4 -4/(/+l) 2
5 2 sin (jtZ/3) -3 cos (л//3)+4 1
6 3/2+2 -4/ 1/2
7 3/2-/+1 5/2-5//3-2 1
8 7 sin (тг/2/6)+3 2-7 cos(jt/2/6) 1
9 -3/ (/+2) 3/+6 2
10 -4 cos (jri/3) -2 sin (л//3) -3 1
11 - 4/2+1 -3/ 1/2
• ' 12 5 sin2 (jtZ/6) -5 cos2 (+Z/6)—3 1
13 5 cos(jr/2/3) -5 sin.0r/2/3) 1
14 -2/-2 -2/(/+D 2
15 4 cos(jt//3) -3 sin (jt//3) 1
16 3/ 4/2+1 1/2
17 7 sin2 (л//6)-5 -7 cos2 (jt//6) 1
18 1+3 cos (jt/2/3) 3 sin (jrZ2/3)+3 1
19 -5t2-4 3/ 1
20 2-3/-6/2 3-3//2-3/2 0
21 6 sin (л/2/6)-2 6 cos (jt/2/6)+3) 1
22 7 /2-3 5/ 1/4
23 3-3/2+t 4-5/2+5//3 1
24 -4 cos (л7/3)-1 -4 sin (jt//3) 1
25 -6/ -2/2-4 1
26 8 cos2 (тг//6)+2 —8 sin2 (л//6)-7 1
27 —3—9 sin (тг/2/б) —9 cos (jr/2/6)+5 1
28 -4/2+1 -3/ 1
29 5/2+5//3-3 3 f+/+3 1
30 2 cos(jr/2/3)—2 —2 sin(jr/2/3)+3 1
69
» t Mi » 2tx
1 " n J * с I яен/s
50 s w e » sw*A*
Ш 1 I 1-1.-J
Топилган проекцияларга кура нукда тез-
лигининг модули:
и = + и* (4)
ва тезланишининг модули
а = ^а2 + а2 (5)
аникланади.
Нукта уринма тезланишининг модули
67-чжзма.
а= | d/v>/dt\
ёки
ат =| о • а / и |;
й,= КиА^иА^ /и1’
(6)
(6')
(6")
d\',/dt нукда тезланишининг унинг тезлиги йуналишига проек-
циясини ифодалайди. dv/dt нинг “ + ” ишораси нукда харакати-
нинг тезланувчан эканлигини, ва б ларнинг йуналишлари уст-
ма-уст тушганлигини, “ - ” ишораси эса харакатнинг секинланув-
чан булишини билдиради.
Нукданинг нормал тезланишининг модули
a=v2/o. (7)
Агар траекториянинг каралаётган нухтадаги эгрилик радиуси о
номаълум булса, ая ни куйидаги формуладан аникдаш мумкин:
ап =| б х а | / и . (8)
Нукда текисликда харакат кдлганда (8) формула
а =|и а - о а 1/и (8')
п 1 X у у X1' ' '
куринишга эга булади.
Нормал тезланишнинг модулини куйидагича аникдаш хам мум-
кин:
ап = ^а2 - а2. (9)
Нормал тезланиш (8) ёки (9) формулалар буиича топилгандан
кейин траекториянинг курилаётган нукдадаги эгрилик радиуси
ушбу формуладан топилади:
р=о2/ал. , (10)
70
Берилган /(=0,5 с вакг они учун (3) — (6), (8) ва (10) формулалар
буйича дисоблашлар натижалари 21-жадвалда келтирилгап.
21-жад вал
Координа- талар, см Тезлик, см/с Тезланиш, см/с2 Эгрилик радиуса, см
X .V U X и У и ах а У а ат а п Р
2,0 3,0 4,0 16,0 16,5 0 32,0 32,0 31,0 7,8 35,0
67-чизмада М нуктанинг берилган вакг онидаги вазияти курса-
тилган, б векторни 6Х ва ташкил эзувчилари буйича курамиз.
Бу вектор йуналиши буйича траекторияга уринма билан устма-уст
тушиши керак. а векторни ах ва ау ташкил этувчилари буйича
КУрамиз, сунгра эса ах ва ап ташкил этувчиларга ажратамиз. Чиз-
мадан ах ва ап лар учун топилган микдорларнинг аналитик кий-
матлар билан устма-уст тушиши ечимнинг тугрилигини билди-
ради. ' .
К. 1 -т о п ш и р и к ка к У ш и м ч а. Мазкур топширикдан нукга
фазовий траектория буйлаб хДракаг килганда унинг тезлигини ва
тезланишини аниклащда фовдаланиш мумкин. Бунинг учун ик-
кита харакат тенгламасига (20-жадвалга кдранг) учинчи тенглама
кушилади (22-жадвал).
Бу \олда топширикни бажаришнинг умумий тартиби юкррида
келтирилган намунадагидек булади.
22-жадвал
Вариант разами z=z(z), см Вариант радами z=z(z), см Вариант радами z=z(r), см Вариант радами £=£(/), см Вариант радами z=<(z), см Вариант радами <—z(/), см
1 3/ 6 3/ 11 21 16 1,5/ 21 4/ 26 6/
2 2/ 7 2,5/ 12 3/ 17 5/ 22 1 27 3,5/
3 1,5л 8 5/ 13 1,5/ 18 3,5/ 23 1,5/ 28 4/
4 4/+4 9 4/+8 14 21+2 19 6/ 24 2/ 29 5/
5 1 10 / 15 3/ 20 21 25 5/ 30 1,5/
71
II. КАП ИК ЖИCM КИНЕМАТИКАСИ
КАТТИ К ЖИСМНИНГ ИЛГАРИЛАНМА ВА АЙЛАНМА
Харакатлари
К.2-Т0 п ши р и к Илгариланма ва айланма харакатларда
каттик; жисм иукгаларининг тезликлари
ва тезланншларинн аннкдаш.
1 юкнинг харакати
х=с2/2+с1Г+с0 (1,
тенглама билан тавсифланиши керак. Бу ерда I — вакг, с: с0; с, —
баъзи бир доимийлар.
Вактнинг бошлангич онида (/=0) юкнинг координатаси х0, тез-
лиги эса и0 булиши керак.
23-жадва л
Вариант ра- ками (68-70- чизмалар) Радиуслар, см 1 юкнинг координаталари ва тезликларп Хисоб учун вакд онлари, с
А ri ri х0, см °<р см/с xv см Ч />
1 60 45 36 — • 2 12 173 3 12
2 80 — 60 45 5 10 41 2 1
3 100 60 75 — 8 6 40 4 2
4 58 45 60 — 4 4 172 4 3
5 80 .... 45 30 3 15 102 3 2
6 100 60 30 — 7 16 215 4 2
7 45 35 105 __ 8 5 124 4 3
8 35 10 10 — 6 2 111 3 2
9 40 30 15 — 10 7 48 2 1
10 15 — 40 35 5 3 129 4 3
11 40 25 20 — 9 8 65 2 1
12 20 15 10 — 5 10 179 3 2
13 30 20 40 — 7 0 557 5 2
14 15 10 15 — 6 3 80 2 1
15 15 10 15 — 5 2 189 4 2
16 20 15 15 — 4 6 220 4 3
17 15 10 20 — 8 4 44 • 2 1
18 20 15 10 — 3 12 211 4 1
19 15 10 20 — 5 10 505 5 3
20 25 15 10 — 10 8 277 3 1
72
Давоми
Вариант раками (68-70-чиз- малар) Радиуслар, см 1 юкнииг координаталари ва тезликлари Хпсоб учун вчк г онларп, с
Г2 R. х0, см °0’ см/с X,, см Ч h
21 20 10 30 10 6 5 356 5 2
22 40 20 35 — • 7 6 103 2 1
23 40 30 30 15 5 9 194 3 2
24 30 15 40 20 9 8 105 4 2
25 50 20 60 — 8 4 119 3 2
26 32 16 32 16 6 14 862 4 2
27 40 18 40 18 5 10 193 2 1
28 40 20 40 15 8 5 347 3 2
29 25 20 50 25 4 6 32 2 1
30 30 15 20 — 10 7 128 2 1
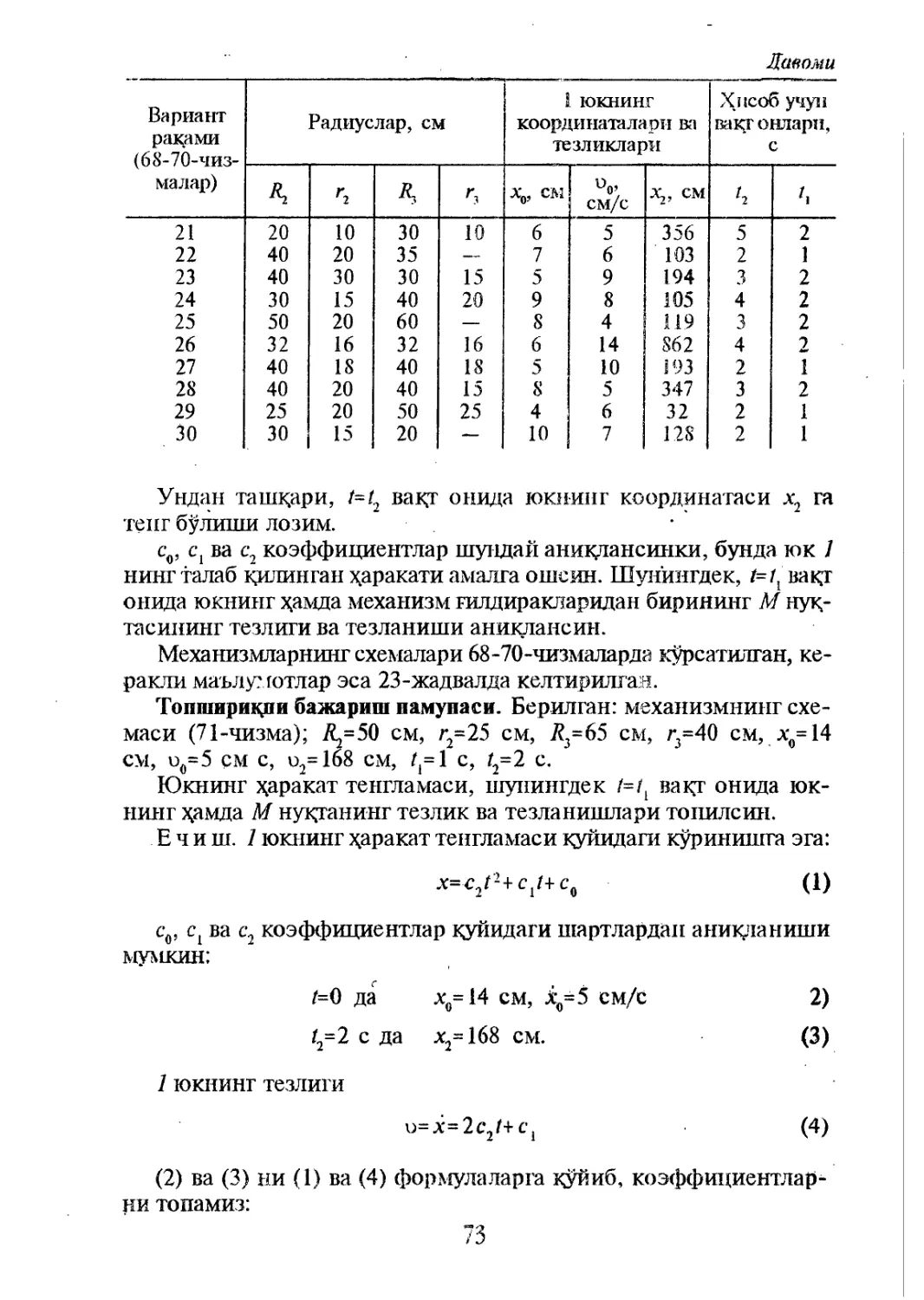
Ундан ташкдри, t=t2 вакд онида юкнииг координатаси х2 га
тепг булиши лозим.
с0, Cj ва с2 коэффициентлар шундай аиидлансинки, бунда юк 1
нинг тала б ьдишиган харакати амалга ошсин. Шуниигдек, вакд
онида юкнииг хамда механизм гилдиракларидан бир ин ин г М нук,-
тасининг тезлиги ва тезланиши аниклансин.
Механизмларнинг схемалари 68-70-чизмаларда курсатилган, ке-
ракли маълу? ютлар эса 23-жадвалда келтирилтан.
Топширикди бажариш памупаси. Берилган: механизмнинг схе-
маси (71-чизма); 7^=50 см, г2=25 см, 7?3=65 см, д=40 см, х0=14
см, и0=5 см с, и2=168 см, ^=1 с, /2=2 с.
Юкнинг ядракат тенгламаси, шуниигдек t=tl вакд онида юк-
нинг хдмда М нукданинг тезлик ва тезланишлари топилсин.
Ечиш. 1 юкнинг хдракат тенгламаси куйидаги куринишга эга:
Х=€2/2+С1/+С)|
(1)
с0, ва с2 коэффициентлар куйидаги шартлардап аникданиши
мумкин:
/=0 да х0=14 см, Хо=5 см/с 2)
/2=2 с да х2= 168 см. (3)
1 юкнинг тезлиги
и= x=2c2/+Cj (4)
(2) ва (3) ни (1) ва (4) формула ларга куйиб, коэффициентлар-
ни топамиз:
68-чкзма.
74
69-чизма.
75
•X
70-чмша.
76
с0=14см; с =5 см/с;
с2=3бсм/с2
Шундай кдлиб, 1 юк-
нинг харакат тенгламаси
х=36 t2+5t+14. (5)
1 юкнинг тезлиги
(6)
и=х= 72/+5.
7 юкнинг тезланиши
а=х = 72см/с2.
М нукганинг тезлигини ва тезланишини аниклаш учун юкнинг
тезлиги и хамда гилдиракларнинг бурчак тезликлари <в2 ва <в3 лар-
ни богловчи тенгламаларни ёзамиз.
Механизм схемасига биноан
о = г2а2;
9 7^2® 2 ~ ? *
буердан
<о3=иЯ2/(г2Я3)
ёки (6) ни хисобга олган холда берилганларни урнига куйсак,
<о3=2,215/+О,154.
3 гилдиракнинг бурчак тезланиши
е3=<в3= 2,215 рад/с2.
М нукганинг тезлиги, унинг айланма, марказга интилма ва туда
тезланишлари куйидаги формулалар буйича топилади:
<=гз®|;
^=Mto)2+W)2.
Берилган /= 1 с вакд они
учун хисоблаш натижалари
24-жадвалда келтирилган.
7 юкнинг хамда М нук-
ганинг тезликлари ва тезла-
ришлари 72-расмда к$фса-
гилган.
77
24-жадваЛ’
V, см/с а, см/с2 ш3, рад/с ev рад/с2 v^cm/c см/с2 см/с2 см/с2
77 72 2,37 2,22 94,8 224 88,6 241
«АТТИК ЖИСМНИНГ ТЕКИ С-П АРАЛ Л ЕЛ ХАРАКАТИ
К.З-т о п ш и р и к Текис механизмнинг кинематик гахдили
Механизмнинг берилган вазияти учун В ва С нукдаларнинг
тезликлари ва тезланишлари хдмда шу нукдалар тегишли булган
звенонинг бурчак тезлиги ва бурчак тезланиши топилсин. Меха-
низмларнинг схемалари 73—75-чизмаларда курсатилган, кисоблаш
учун керакли маълумотлар эса 25-жадвалда келгирилган.
25-жа двал
Вариант разами (73- 75-раем) Улла wrap, см рад/с рад/с е0Л’ рад/с2 см/с см/с2
ОА Г АВ АС
1 40 15 — 8 2 — 2 — —
2 30 15 — 8 3 -— 2 — —
3 — 50 — — — — — 50 100
4 35 — — 45 4 — 8 — —
5 25 — — 20 1 — 1 — —
6 40 15 — 6 1 1 0 —
7 35 — 75 60 5 — 10 —
8 __ — 20 10 — — 40 20
9 — — 45 30 — — 20 10
10 25 — 80 20 1 — 2 — —
11 — — 30 15 — .— — 10 0
12 — — .30 20 — — — 20 20
13 25 — 55 40 2 — 4 — —
14 45 15 — 8 3 12 0 — —
15 40 15 -— 8 1 — 1 — —
16 55 20 — — 2 — 5 — —
17 30 — 10 — — — 80 50
18 10 — 10 5 2 — 6 — —
19 20 15 — 10 1 2,5 0 — —
20 — — 20 6 — — — 10 15
21 30 — 60 15 3 — 8 — —
22 35 — 60 40 4 — 10 — —
23 — — 60 20 — — — 5 10
24 25 — 35 15 2 — 3 — —
25 20 — 70 20 1 — 2 — —
26 20 15 — 10 2 1,2 0 — —
27 — 15 — 5 — — 60 30
28 20 — 50 25 1 — 1 —
29 12 — 35 15 4 — 6 —
30 40 — 20 5 — 10 — —
78
Э с л а т м а. ® ол, г ол — О А кривошип механизмнинг берилган вазияти-
даги бурчак тезлиги ва бурчак тезланиши; — I гилдиракнинг бурчак
тезлиги (доимий); ва аА — А нукданинг тезлиги ва тезланиши. Рил-
дираклар сирпанишсиз айланади.
Топширищш бажариш вамунаси. Берилган: механизмнинг бе-
рилган вазиятдаги схемаси (76-чизма); керакли маълумотлар (26-
жадвал).
26-жадвал
Улчамлар, см (оОА, рад/с еол, рад/с2
ОА АВ АС
10 60 20 1,5 2
Ечиш. 1. Нуцталарнинг тезликларини ва звенонинг бурчак тезли-
гини аник^гаш (77-чизма). Механизмнинг берилган вазиятида ОА
кривошип А панжаси тезлигининг модулини хисоблаймиз:
иЛ=®ОЛ ’ 0А
А нукданинг тезлиги ОА кривошипга перпендикуляр.
В ползуннинг тезлиги вертикал буйлаб йуналган. АВ шатун тез-
ликларининг оний маркази РАВ А ва В нукдалардан уларнинг тез-
ликларига утказилган перпендикулярна рнинг кесишган нукдаси-
да ётади.
АВ звенонинг бурчак тезлиги
G)AB= ^А^^АВ
2? ва С нукдалар тезликларининг модуллари
^АВ ^АВ’ ^С~®АВ СР АВ'
АРав, ВРав ва СРав масофалар АВРав ва ЛСР^ учбурчаклардан
топилади:
ЛР. =52,0 см; ВР.д =30,0 см; СР =36,1 см.
Юкрридагиларга асосан
о = 15,0 см/с; и =0,29 рад/с; о =8,7 см/с; о„= 10,5 см/с.
Л лл-D D С*
♦
бс вектор СРав кесмага перпендикуляр равишда АВ звенонинг
айланиш йуналиши томонига кдраб йуналган.
79
73-чизма.
80
-d
74-'1мзма.
81
75-чжзиа.
82
Текшириш учун В нукданинг тезлигини бошка усул билан аник-
лаймиз. Икки нухда тезликларининг бу нухталардан утказилган
УХХа проекцияларининг тенглиги хавддаги теоремадан фойдала-
намиз.
х ухини АВ шатун буйлаб В дан А га кдраб йуналтирамиз. Куй-
идагига эга булган холда
СО8(бл *х) = COS(65 $ X)
ёки 77-чизмадан куринадики,
cos 60” = cos 30°.
Бу ердан
Ug= 8,7 см/с.
С нухганинг аввал топилтан тезлиги хам шу теоремани ханоат-
лантиришига ишояч хосил килиш махсадга мувофихдир.
2. Нукталарнинг тезланишларини ва звенонинг бурчак тезлани-
шини ани^лаш (78-чизма). А нукданинг тезланиши айланма ва мар-
казга интилма тезланишлардан ташкил топади:
5 л = а^1 + = еш- ОА; аТ = О А.
Z1 А А ’ А 1/А ~ /1 L/A
Текис шакл нукдаларининг тезланишлари хакддаги теоремага
асосак
=аА +а^ +а^,
ёки
а„=аГ +аГ+а^+а^. (1)
АВ шатз ининг А дутб атрофидаги айланма харакатида В нукда-
нинг мар казн? интилма тезланиши
83 .
78-чкзма.
Келтирилган формулалар буйича хисоблаймиз:
- 20,0 см/с2, а“и = 22,5 см/с2, ав™ = 5,0 см/с2.
аУ°' вектор А дан О га караб йуналган. вектор векторга
перпендикуляр равишда ил га кар а ма-кар ши йуналган (ОА кри-
во шиллинг айлапиши — секинланувчан).
вектор В дан А га Кадаб йуналган. В нукданинг тезланиши
ав ва айланма тезланиш а вл га келсак, бу векгорларнинг факат
таъсир чизитутари маълум: йв вертикал буйича ползуннинг йунал-
тирувчилари буйлаб, ^вл эса АВ га перпендикуляр йуналган.
Уларнинг курсатилган чизиклар буйлаб йуналишларини ихти-
ёрий равишда танлаб оламиз (78-чизма, а). Бу тезланишларни (1)
вектор тенгликнинг координата Укларига проекциялари тенг-
ламаларидан аникдаймиз. Жавобнинг ишорасига кдраб векторнинг
Хакикий йуналиши хисоблашда кабул цилинганига мос келиш ёки
келмаслиги аникданади.
х ва у уктарнипг йуналишларини 78-чизма, а да кУрсатилган-
дек танлаб олиб, куйидагиларни косил киламиз:
ав cos 30° = -а^я cos 60° + а”н cos 30° + a™ ; (2)
ав cos 60° = а^я cos 30° + a™ cos 60° + a^1 . (3)
(2) тенгламадан куйидагига эга буламиз:
ог=16,7 см/с2.
ав тезланиш 78-расм, а да курсатилгандек йуналган. (3) тенг-
ламадан ушбу кийматни топамиз:
84
авА =- 20,2 см/с2.
^вл пинг йУналиши 78-чизма, а да курсатилганига тескари.
ав тезланиш ва унинг барча ташкил этувчилари уларнинг
хакикий йуналииыари ва масштаби хисобга олинган холла 78-чиз-
ма, б да курсатилган.
АВ шатуннинг бурчак тезланиши куйидаги формуладан топи-
лади:
гм=а^/АВ.
Хисоблашлардан сунг:
e^=0,34 рад/с2.
Ява тезланишнинг йуналиши гАВ бурчак тезланишнинг йуна-
лишини белгилайди. Бу ерда бурчак тезланишнинг йуналиши де-
ганда ёйсимон стрелканинг йуналиши тушунилиб, у звенонинг
тезланувчан айланишида айланиш йуналиши билан устма-уст гу-
шади, секинланувчан айланишда эса бу айланиш йуналишига тес-
кари булади. Мазкур холда бурчак тезланишнинг йуналиши ша-
туннинг айланиш йуналишига карама-карши1.
ав ва ^ва ларни график усулда — тезланишлар купбурчагини
куриш ортали хам аникдаш мумкин.
(1) га асосан В нукдадан бошлаб танланган масштаб да кетма-
кет а™ ва векторларни куямиз (78-чизма, в), век-
торнинг охири оркали тезланишга параллел, яъни АВ га пер-
пендикуляр булган тугри чизикни ав тезланишнинг йуналиш чи-
зиги билан кесишгунча давом эттирамиз.
ав тезланишлар купбурчагининг ёпувчи томони каби аникда-
нади.
ав ва Ява ларнинг модуллари чизмадан улчаш нули билан то-
пилиши мумкин.
С нукданинг тезланишини топамиз:
ас ~ аА +аА + аСА + аСА
1 Бу масалага жиддий ёндошиладиган булса, ва s^g векторлар
шакл текислигига перпендикуляр йуналган булади. шундай йунал-
ганки, унинг угадан каралганда АВ шатуннинг А кутб атрофида айланиш
йуналиши соат стрелкасининг айланиш йуналишига тескари булиб кури-
нади. Ушбу холда ® шакл текислигига тик равишда бизга тескари то-
монга караб йуналган. айланиш тезланувчан булганда &лв билан
бир хил, секинланувчан булганда эса га тескари йуналган булади.
Курилаётган масалада e^g. га тескари, яъни шакл текислигига тик
равишда узимиз томонга кдраб йуналган.
85
АВ нинг А кутб атрофидаги айланма харакатида С нукуанинг
айланма ва марказга интилма тезланишлари
аСА ~ 4 SA£ ' ^СА = ®АВ АС ,
ёки
=6,8 см/с2, а‘™ = 1,7 см/с2.
а^л вектор а™ векторга перпендикуляр хамда sAB бурчак тез-
ланишининг йуналишига мос равишда йуналган.
С нукданинг тезланишини проекциялар усули билан топамиз
(78-чизма, а):
асх = аАс + ал" cos ^0° - аА™ cos 60°,
ас = аТ cos 60° + af” cos 30° - а^1,
ас = у/(асх)2 +(аСу)2
Хисоблаб куйидагиларни топамиз (78-чизма, г): ас =11,2 см/
с2, ас =21,8 см/с2, ас=24,5 см/с2.
Шу масаланинг ечимини — умумийрок усул билан келтира-
миз.
79-чизмада механизмнинг схемаси ихтиёрий вазиятда курса-
тилган.
Координата укдарини утказамиз. Берилган механизм учун бог-
ланиш тенгламалари куйидаги шартлардан иборат:
fs=OA + AB (4)
(/в — В нукданинг О мар каздан утказилган радиус-вектор и),
х =a=const
Л
79-чязма.
(4) ни хУкига проекциялаб, (5) нихисоб-
га олган холда куйидагига эта буламиз:
- ОА • sina+AS • sinp=a (6)
АВ звеноннинг бурчак тезлиги р ва
бурчак тезланиши = 0 ларни топиш учун
р ни (6) дан олишга хожати йУк- (6)ни бево-
сита икки марта дифференциаллаш осонрок
бажарилади.
а=ю0>), эканлигини эътиборга олиб, би-
ринчи дифференциаллаш натижасида куй-
идаги ифодани хосил киламиз.
86
- 04 • cosa AB' cosP'© =0. (7)
Бу ердан
®лв=<эо1 • OA cosa/ (AB • cos0). (8)
(7)ни дифференциаллаб ва %л=£ол эканлигини хисобга олиб,
куйидагига эга буламиз:
ОА • sina • g>20A - ОА ’ cosa • гол~АВ • strip • ©^ +АВ • cosp • s^=0;
бу ердан
е^= &2ав ШР+ Ш(£0Лсо8а- ©ол sina)/(A# • cosp). (9)
(8) ва (9) ифодалар <яЛБ ва ел5 ларни механизмнинг ихтиёрий,
хусусан, берилган (а=0°, р=30°) вазияти учун хисоблаш имкони-
ни беради.
Бу ифодаларга &0А ва &0А лар а бурчакнинг кабул хилинган
улчаш йуналишига мое равишда “+” ёки ишора билан кира-
ди. Ушбу холда ®ол=1,5 рад/с; -'
еол=-2,0 рад/с2. ©^ ва е^ларнииг ишоралари р бурчакнинг
Улчаш йуналиши билан белгиланади.
В нукга тезлигининг модули ид=|г/ Тезланишининг модули
(4) ни у укига проекциялаб, ушбу тенгламани хосил киламиз.
у = О А • cosa+AS • cosp.
Дифференциаллагандан сУнг
уя=- ОА • sina • ©„.-АВ ’ sinp ♦ © .в;
г Л ОА • АВ 7
у=- ОА • cosa • ©ол " ОА • sina • еоа - АВ • cosp • ©^g -АВ • sinp • .
С нуктанинг тезлиги ва тезланишини аникдаш учун
гс = О А +.АС радиус-вектори .v ва у укдарига проекциялаб, унинг
координата куринишидаги харакат тенгламаларини тузиш лозим.
К.4-То пшири к. Куп звенели механизмнинг
кинематик тахдвля
0{А кривошип доимий ®йу|=2 рад/с бурчак тезлиги билан ай-
ланади. Механизмнинг берилган вазияти учун кП<идагилар аних-
лансин:
1)тезликлар режаси ёрдамида механизмнинг Д Д С, ... нухта-
ларининг тезлиги ва унинг барча звеноларининг бурчак тезлик-
лари;
87
2) тезликларнинг оний маркази ёрдамида механизмнинг худди
шу нукдаларининг тезлиги ва звеноларининг бурчак тезликлари;
3) А ва В нукгаларнинг тезланишлари хдмда АВ звенонинг бур-
чак тезланиши;
4) АВ звено тезланишлар оний мар казининг вазияти;
5) АВ звенони тент иккига б^лувчи М нукганинг тезланиши.
Механизмларнинг схемалари 80—83-чизмаларда курсатилган,
хисоблашлар учун керакли маълумотлар эса 27-жадвалда келги-
рйлган.
ТопшириЕ^ни бажариш намунаси. Берилган: механизмнинг бе-
рилган вазиятдаги схемаси (84-расм); керакли маълумотлар 28-
жадвалдан олинади.
27-жадвал
Вариант разами (80-83- чизма- . лар) ф, град Масофалар, см Звеноларнинг узунликлари, см
а b с d е О,Л О2В O2D о,г О/ АВ ВС CD СЕ DE EF
1 200 18 23 18 22 23 14 28 — 28 — 21 21 48 38 — 42
2 60 56 10 26 16 25 21 25 — — 20 54 52 69 35 — 32
3 90 15 25 54 35 15 28 — 58 — 42 21 47 26 — 31
4 155 26 15 23 — — 15 65 — — — 51 22 38 — —
5 125 19 19 10 22 — 12 — 19 — — 55 19 23 — 38 22
6 60 65 49 — — — 15 29 — 24 —— 50 25 32 23 — 39
7 250 11 42 11 7 24 16 34 —— — 41 25 25 42 21 49
8 90 27 18 14 15 30 14 29 —— 23 — 55 32 15 — 45 —
9 200 23 19 20 28 21 21 31 — 25 — 65 62 31 —— 11 29
10 20 55 21 25 — — 15 — 24 — — 70 35 33 — 17 12
11 50 50 30 — — — 14 29 — — — 45 54 34 — 37 —
12 55 10 86 32 28 — 21 — — 55 — 60 30 19 60 — 49
13 315 17 54 — — — 15 — 40 — — 50 35 40 22 22 50
14 0 28 40 6 18 15 15 31 — 15 — 50 25 70 35 — 50
15 220 46 31 — — — 15 20 — 20 — 45 15 31 17 17 37
16 40 36 22 15 — — 15 20 40 — — 45 20 24 — 40 —
17 145 96 — — — — 15 28 — — — 84 20 51 — — —
18 45 70 9 37 — — 16 — 39 — 25 78 38 41 19 — 57
19 40 42 39 — — — 20 — 20 — — 71 30 — — 57 —
20 145 27 .24 30 — — 20 50 — — 30 80 32 58 29 — 35
21 115 46 — — — — 15 — 45 — — 78 39 26 52 — 38
22 305 46 23 11 — — 15 15 — 38 — 44 25 30 22 15 40
23 130 31 30 50 — — 15 30 — 50 — 40 16 60 30 — 30
88
Дав ом и
Вариант раками (80-83- чъ Масофалар, см Звеноларнинг узунликлари, см
чизма- град abed е О,Л о„в O,D ОД) ОД АВ ВС CD СЕ DE ЕЕ
лар) 1 2
24 115 36 39 13 31 17 23 - 17 - 35 11 45 25 25 44
25 325 72 36 - -- — 15 — 30 - - 76 46 50 35 - 51
26 215 36 53 36 32 — 19 40 - - 19 76 38 68 35 - 29
27 140 71 27 32 40 — 16 30 - 50 - 46 33 40 20 - 50
. 28 215 30 20 35 - — 19 - 19 - - 59 29 24 -- 48 36
29 180 35 15 38 7 — 10 16 - 15 - 50 33 16 - 45 33
30 25 46 28 17 - — 16 25 - 75 - 50 11 33 - 26 44
28-жад вал
ср, Масофа, см Звеноларнинг узунликлари, см
град а Ь- с d в А АВ , 4D ОД) DE ОД FG G-Д FH O.G 2. 4
52 32 4 39 19 32 .12 46 29 32 53 18 25 -1 4 14 20
Ечиш. 1. Нуцтпаларнинг тезликларини ва механизм звенолари-
нинг бурчак тезликларини тезликлар планы ёрдамида аниклаш.
а) Нукталарнинг тезликларини ани^шш. Таиланган масштабда
механизмнинг схемасини курамиз (85-чизма, a). OtA кривошип А
нуктаси тезлигининг модулями хисоблаймиз:
. и =со„ • О.А=2 • 12=24 см/с.
А 0,л 1 '
бл вектор О{А га перпендикуляр ва кривошипнинг айланиш
томонига караб йуналган.
Тезликлар режасийи курамиз (85-чизма, о). Ихтиёрий танлаб
олинган О нукгадан таиланган масштабда А нукганинг тезлигини
тасвирловчи Оа нурии утказамиз. В нукганинг тезлигини топиш
учун О кутб оркали б5 тезликка параллел булган тугри чизик, а
пукга оркали эса АВ га перпендикуляр булган тугри чизик утказа-
миз. ПироварДида b нуктани косил киламиз. ОЬ кесма В нукта-
нинг тезлигини ифодалайди. Бу кесманинг узунлигини таиланган
масштабда улчаб, куйидагини топамиз:
ог=17,5 см/с.
С нукганинг тезлигини топиш учун тезликлар режасининг кес-
масиии ac/ce^AC/CB нисбатда буламиз.
Ос нур С нукганингтезлигини ифодалайди. Масштабдан фой-
даланиб, улчаш ёрдамида куйидагини аникдаймиз.
89
80-чизма.
90
81-чизма.
91
82-чиз.ча.
92
83-чизма.
93
ис= 17,5 см/с.
Тезликлар режасини ку-
ришни давом эттириб, ил, иг,
ис, Uj,, и£, ис, ия ларни то-
памиз. Барча хисоблаш нати-
жалари 29-жадвалда келти-
рилган.
Механизм чизмасида зве-
нонинг нукгалари бир тугри
чизикда ётса (масалан, А, В,
С ёки D, Е, /’нукд’алар каби),
уларнинг тезлик векгорлари-
нинг учлари хам бир тугри
чизикда ётади (85-чизма, а).
29-жадвал
Аниклаш усули Нукдаларнинг тезликлари, см/с
°C Uj,
Тезликлар режасй буйича Тезликларнинг оний маркази ёрдамида 24 24 17,5 17,3 17,5 17,5 17,5 17,4 17,5 17,4 17,5 17,4 14,8- 14,6 14,4 14,1
б) Механизм звеноларининг бурчак тезликларини аникугаш. Тезлик-
лар режасининг ab кесмаси (85-чизма, б) В нукганинг А нукда агро-
фидаги айланма тезлитини ифодалайди:
ab=^=(a.' AB",
BA AB 7
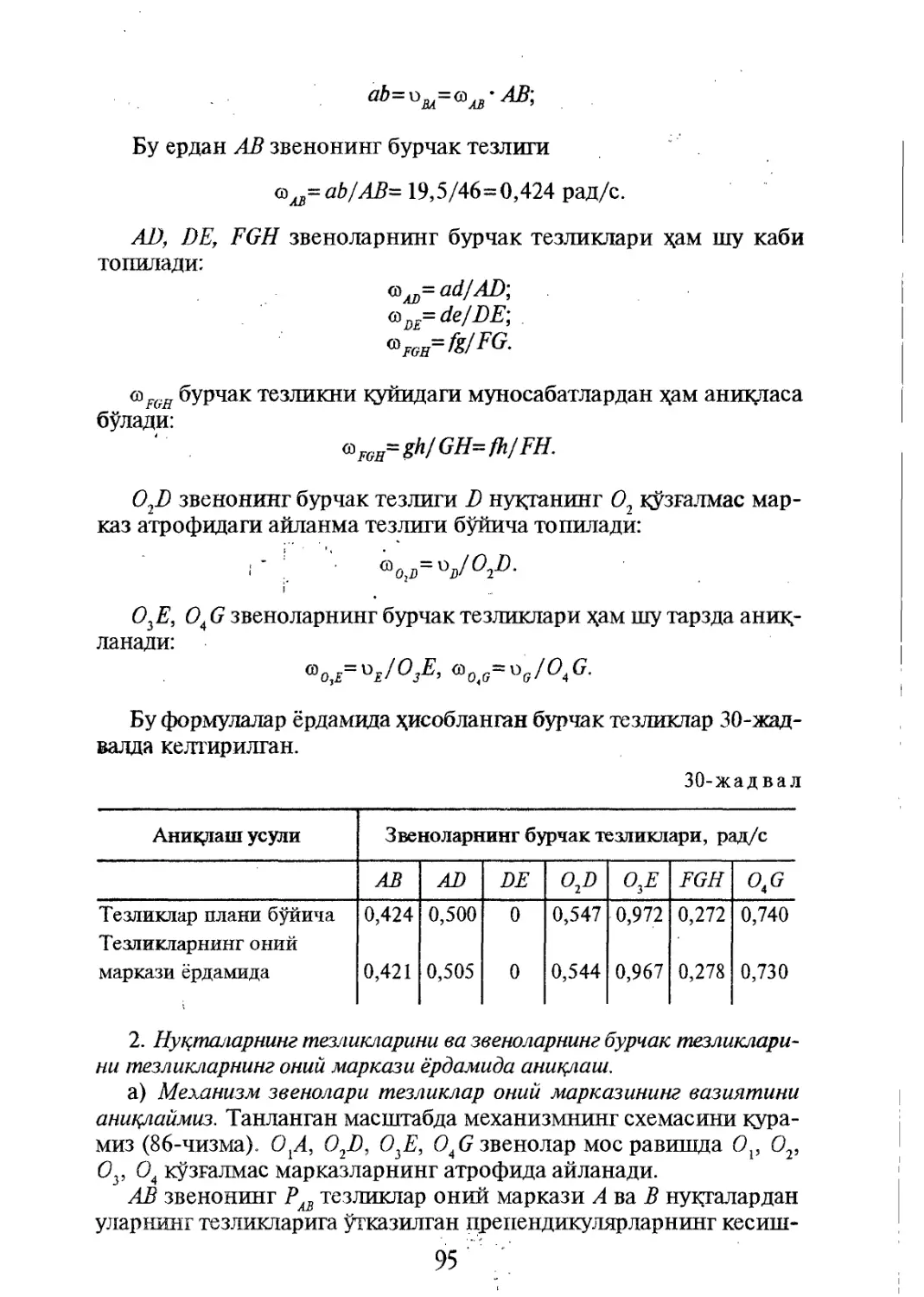
Бу ердан AB звенонинг бурчак тезлиги
бз AB=ab/AB= 19,5/46=0,424 рад/с.
AD, DE, FGH звеноларнинг бурчак тезликлари хам шу каби
топилади:
взА]у= ad] AD\
<bDE=de/DE-,
<»FGH=fg/FG.
аз FGH бурчак тезликни куйидаги муносабатлардан хам аникласа
булади:
63FG=gh/GH=fh/FH.
O,D звенонинг бурчак тезлиги D нукданинг О2 кузгалмас мар-
каз атрофидаги айланма тезлиги буйича топилади:
; ® O,jD ~ O2D.
I
(DE, О4G звеноларнинг бурчак тезликлари хам шу тарзда аник;-
ланади:
®otG~ vg/O4G.
Бу формулалар ёрдамида хисобланган бурчак тезликлар 30-жад-
валда келтирилган.
30-жад вал
Аникдаш усули Звеноларнинг бурчак тезликлари, рад/с
АВ AD DE O2D О3Е FGH o4g
Тезликлар плани буйича Тезликларнинг оний 0,424 0,500 0 0,547 0,972 0,272 0,740
маркази ёрдамида 0,421 0,505 0 0,544 0,967 0,278 0,730
2. Пукталарнинг тезликларини ва звеноларнинг бурчак тезликлари-
ни тезликларнинг оний маркази ёрдамида аникушш.
а) Механизм звенолари тезликлар оний марказининг вазиятини
аницлаймиз. Танланган масштабда механизмнинг схемасини кура-
миз (86-чизма). С\А, О2В, О2Е, О4(гзвенолар мосравишда О2,
О3, О4 кузгалмас марказларнинг атрофида айланади.
АВ звенонинг РАВ тезликлар оний маркази А ва В нукдалардан
уларнинг тезликларига утказилган препендикулярларнинг кесиш-
95
тан нуктаси каби топилади. Рм ва PF0H тезликлар опий марказлари-
нинг вазияти хам шунга ухшаш тарзда аникданади. DE звенонинг
тезликлар оний маркази чексизликда ётади.
б) Нуцталарнинг тезликларини аниклаш. Механизм звенолари
нукдаларининг тезликлари бу нукдалардан мое звеноларнинг тез-
ликлар оний марказларигача булган масофаларга пропорционал.
Бу масофалар чизмадан Улчаб олинади.
АВ звено В ва С нукдаларининг тезликларини аниклаш учун
куйидаги пропорциялардан фойдаланамиз:
и, /ил=ЛРЛ£ /ВРЛ£, /vc=APJ С Р^.
Демак,
и5=и • ВР /АР , ос=и' CP IAP
Шунга ухшаш, АВ звенонинг D нуктаси учун
бу ердан
DE звенонинг тезликлар оний маркази чексизликда ётгани учун
G ва Н нукдаларнинг тезликларини аниклаш учун куйидаги
пропорциялардан фойдаланамиз
иг/о = FP„.J GPf,„ , и ,/о = FP / HP
FJ D FGHJ FCrH ’ Я FGHJ FGH
Демак,
GPfoh/FPF(}H, vs-vf HPFlfBIFPF(iS.
Масштабдан фойдаланиб, нукдалардан тезликларнинг оний мар-
казларигача булган масофаларни аниклаймиз.
Бу масофалар (см лар да) 31-жадвалда келтирилган.
31-жадва л
АРлп АВ ВРлв АВ ЛРл» ОРал FP 1 1 FCrH GPfGH hpfgh
57 41 41,5 47,5 34,5 62,7 52,8 50,8
Нукдаларнинг курсатилган формулалар буйича хисобланган тез-
ликлари 29-жадвалда келтирилган.
Нукталар тезликларининг модулларини аниклаш билан бир
вакдда уларнинг йуналишларини, шунингдек, механизм звенолари-
96
нинг айланиш й^налишлари-
ни топамиз. Масалан, А нук-
та тезлигининг йуналиши ва
тезликлар оний маркази-
нинг вазиятидан АВ звено-
нинг соат стрелкаси буйича
айланишини аникдаймиз.
Шунинг учун В нукданинг
тезлиги механизмнинг бе-
рилган вазиятида юкррига
кдраб йуналган.
Колган звеноларнинг
айланиш йуналишларини ва
механизм нукгалари тезлик-
ларининг йуналишларини
Хам худди шу тарзда аник-
лаймиз (86-чизма).
в) Механизм звенолари-
нинг бурчак тезликларини
аниклаш. Звено хар кдндай
нукдасининг тезлиги шу
звенонинг бурчак тезлиги
билан нукдадан тезликлар-
нидг оний марказигача
86-чизма.
булган масофанинг купайтмасига тенг:
° A &AD * АР AD'
Бу ердан АВ ва AD звеноларнинг бурчак тезликларини аник;-
лаймиз:
® AS ~ ° ( aAD~ ABjU) •
О2В звенонинг бурчак тезлиги D нукданинг тезлиги оркдли
аникданади:
®0,Г— I
DE звенонинг бурчак тезлиги механизмнинг берилган вазия-
тида нолга тенг, чунки звенонинг тезликлар оний маркази бу холда
чексизликда ётади: <ом.=О.
Механизмнинг колган звеноларининг бурчак тезликларини \ам
шу каби тартибда топамиз:
^FGH ~ PPpGEP
4-52
97
Звеноларнинг курсатилган муносабат-
лар буйича \исобланган бурчак тезлик-
лари 30-жадвалда келтирилган.
3. А, В, D нуцталарнинг тезланишла-
рини хамда АВ ва AD звеноларнинг бурчак
тезланишларини аник^аш *
а) аА, ав ва ларни аницлаш (87-чиз-
ма). Текис шакл накталарининг тезла-
нишлари хакдцаги теорема ёрдамида В
нукданинг тезланишини аникдаймиз:
О .А кривошип текис айланаётганли-
ги учун А нукданинг тезланиши 01 мар-
казга кдраб йуналган ва куйидагига тент:
87-изма дми =ол ^2 12.22 = 48 см/с1
АВ шатунинг А кутб атрофидаги айланма \аракатида В нукта-
нйнг марказга интилма тезланиши В нукдад'ан А нукдага кдраб
йуналган ва у куйидагига тенг:
а™ = АВ аг’ = 46 • 0,42= 7,36 см/с2.
В нукдадан бошлаб тегишли масштабда А кутбнинг тезланиши
аА ни куямиз. аА векторнинг охирига АВ га параллел килиб
векторни курамиз. а^ векторнинг охири оркали АВ га перпенди-
куляр, яъни а^л айланма тезланишга параллел тугри чизик угка-
замиз. Бу тугри чизикнинг В ползуннинг тезланиш вектори йунал-
ган тугри чизик билан кесишиш нукдаси ав ва afA векторлар-
нинг охирини белгилайди.
Чизмадан улчаш оркали куйидагиларни топамиз:
аг= 39 см/с2, а^ = 30 см/с2.
afA = АВ ъАВ булгани учун АВ звенонинг бурчак тезланиши
ъа= а3^ /АВ= 30/46 = 0,652 рад/с2.
* Топширикдан тутилган максад А, В нукдаларнинг тезланишлари
Хамда АВ звенонинг бурчак тезланишини аникдашдан иборат. Лекин
наМунада шу тоифадаги масалаларда учрайдиган иккита х°лни назарда
туТйб, D нукданинг тезланиши ва АВ звенонинг бурчак тезланиши дам
аникданади.
98
6) aD ва ел£ ни аниклаш (88-чизма). D нукга иккита звенога
тегишли: AD ва 02D. А нукдани кутб килиб олиб, куйидагини ёза
оламиз:
aD=aA+a^+a^.
А нукганинг тезланиши ю кор ид а топилган эди: ял=48 см/с2.
AD звенонинг А Бутб атрофидаги айланма каракатица D нукда-
нинг марказга интилма тезланиши D нукцадан А нукдага кдраб
йуналган ва у вуйидагига тенг:
а^А = AD а2А0 = 28,5 • 0,52=7,1 см/с2.
D нукдадан бошлаб тегишли масштабда А кугбнинг тезланиши
аА ни куямиз. аА векторнинг охирига AD га параллел кдтиб а™
векторни курамиз. а™ векторнинг охири оркали AD га перпенди-
куляр, яъни а%А айланма тезланишга параллел булган JK тугри
чизикни утказамиз. Бирок бу билан aD тезланишни аникдаб
булмайди, чунБси унинг йуналиши номаълум.
D нукданинг тезланишини топиш учун бу нуктани O2D звенога
тегишли деб караб, иккинчи Буришни баЖариш лозим. Бу колда
= а™ + а%*
D нукганинг марказга интилма тезланиши
< = O2D = 8 см/с2.
D нуктадан бошлаб а™ векторни О2 марказга кдраб йуналти-
рамиз. а™ векторнинг охири оркали О~Б га перпендикуляр, яъни
а^1 айланма тезланишга параллел булган LNтугри чизикни угка-
замиз.
38-чизма.
89-чизма.
99
Бу тугри чизикдинг JK билан кесишган нуктаси а^, afA ва
а^л вектор лари инг охирларини белгилайди.
Чизмадан улчаш ёрдамида куйидагиларни оламиз:
аг=42см/с2, а^л =30 см/с2.
аЁА =AD-£m булган учун АВ звенонинг бурчак тезланиши
sJ7 = аы М0= 30/29= 1,03 рад/с2.
4. АВ звено тезланишлари оний марказининг вазиятини аникушш
(89-чизма). А нукгани кугб кдлиб оламиз. Унда В нуктанинг тез-
ланиши
а в ~ а а + а ав
В нукдада аЁ диагонал ва аА томон буйича тезланишлар па-
раллелограммини курамиз. Параллелограммнинг а1;/ томони АВ
нинг А кутб атрофида айланишида В нукданинг тезланишини
ифодалайди. аВА тезланиш АВ кесма билан а бурчак ташкил килиб,
бу бурчакни чизмадан улчаб олиш мумкин.
векторнинг Л кутбга нисбатан йуналиши нинг йунали-
шини аникдаш имкониятини бериб, ушбу холла бу йуналиш соат
стрелкасининг айланиш йуналиши билан мое тушади.
ал ва ав векторлардан бошлаб шу йУналищда а бурчакни куииб
ва иккита ярим тУгри чизик утказиб, уларнинг кесишиш нукдаси
QM ни, яъни АВ звенонинг тезланишлар оний марказини топа-
миз.
5. М нуктанинг тезланишини аницлаш. М нуктанинг
тезланишини тезланишларнинг оний маркази ёрдамида топамиз.
Текис шакл нукгаларининг тезланишлари уларнинг тезла-
нишларяинг оний марказигача булган масофаларига пропорционал:
aJaA =MQaJAQaB‘
Бу ерга чизмадан аникданган MQ^ = 67,5 см; AQ^ = 77 см
масофаларни ьуйиб, М нукданинг тезланишини топамиз:
см = аА • MQJAQ^ = 48 67,5/77 =42,1 см/с2.
ам тезланиш вектор и MQA£ тугри чизик билан а бурчак ташкил
килиб, бу векторнинг йуналиши бурчак тезланишининг
йуналишига караб аникданади.
190
КД1ТИК ЖИСМНИНГ СФЕРИК ХАРАКАТИ
ГС5-То пшир и к. Эйлер тенгламалари буйича кдтгик жисм
ва унинг нукталари хдракатинннг кинематик
характеристикаларини аникдаш
Капик; жисм сферик харакатининг тенгламалари \р = О =
=0(0 ва <р = <р(0 берилган, бу ер да \р, 0 ва <р — Эйлер бурчаклари
(90-чизма).
t = вакт они учун каптж жисмнинг бурчак тезлиги ва бурчак
тезланиши, шунингдек жисм билан мадам богланган кузгалувчи
системадаги координаталари с. п- ч булган М нукганинг тезлик ва.
тезланиши аникдансин.
Зарур маълумотлар 32-жадвалда келтирилган.
Топширикди бажариш намупаси. Дастлабки берилганлар: \р==2<й+ 3t
рад, 0 = л/6 рад, <р = 24? рад; ^ = 3 см, ц = 2 см, <^ = 5 см; /}= 1 с.
Е ч и ш. 1. Жисмнинг бурчак тезлигини аниклаш. Жисм бурчак
тезлигининг кузгалувчи координата укларига проекциялари
Куйидаги формулалар буйича аникланади:
®?=\j/sin 0 sin ф + 0 cos ср,
fflT,=q/sin 0 cos (р-0 sin ф,
<D^=vj/COS 0 + ф.
Дастлабки маълумотлардан фойдаланиб, куйидагиларни
топамиз.
<о?=(4/ + 3)0,5 sin24/
сол=(4/+ 3)0,5 cos 24/ >
(0^—(4/ + 3) 0,866 + 24
Бурчак тезликнинг кузгалмас координата укларига проек- циялари: <йх = ф sin \р sin 0 + 0 cos \р, <0v = — фсо8 \р sin 0 + 0 sin ip, О.\ = фсО8 0 + ф. ёки ушбу \олда •toА = 24 • 0,5 sin(2/2 + 3/), wy = -24 • 0,5cos(2/2+3Z), > (2) озг =24-0,866 + 4/ + 3 \ м X J £ 90-чжзма.
101
32-жадва л
Вари- ант радами Жисмнинг даракат тенгламалари M нукданинг координатала- ри, см Zp c
у=\|/(г), рад 0=0(1), рад 4>=4>(Z), Рад i; 0 m
1 312+61 л/З 41 2 5 4 1
. 2 21 (%/6)sm 21 251 3 1 2 2
3 -41 (k/4)cos 31 151 4 -3 5 1
4 212+31 7t/6 -21 -2 4 4 3
5 412 -it/4 201 3 2 -3 2
6 31 -(7t/3)sin 41 61 2 3 2 1
7 412—21 Tt/4 -201 6 2 3 0,5
8 12+41 я/3 181 7 4 1 1
9 -3Z2+2Z 7t/6 301 -4 5 3 2
10 51 (tt/3)cos 21 101 5 3 3 0,5
11 -21 (7t/4)sm 31 — 121 4 -2 4 2
12 212-41 —it/4 151 -6 4 2 1
13 312+21 -it/3 241 3 10 5 0,5
14 -31 (7t/6)sm 81 —301 10 -4 3 1
15 -412+31 Tt/4 161 9 5 5 2
16 21 (л/3)зш 61 31 6 8 10 1
17 -212+51 я/5 51 1 3 -2 1
18 412+31 it/9 251 7 5 4 0,5
19 Z2-2Z —7t/6 -41 5 4 3 2
20 41 (k/5)cos 31 181 -3 2 1 2
21 -51 (7t/4)sin 61 121 8 6 10 1
22 -2Р-2/ —tt/5 21 4 -1 3 4
23 3t2-2t it/4 -51 -5 7 4 3
24 2t —(7t/5)sin 31 - 301 10 8 —6 1
25 -t (л/9)cos 81 181 7 4 5 2
26 31 (7t/3)sin 2t 101 -2 1 3 1
27 -312+41 -л/9 51 8 9 6 2
28 -51 —(-/3)sin 31 81 4 -2 -2 2
29 t (л/4) sin 61 91 7 6 10 3
30 -31 (7t/6)sin 41 -151 6 8 5 1
102
Жисмнинг t = 1 с даги бурчак тезлигини аникдаш учун дастлаб
куйидагиларни хисоблаб оламиз:
sin 24/ = sin 24 = sm(8?r- 1,133) = sin(- 1,133) = -0,906;
cos 24f = 0,424;
sin(2r2+30 = sin 5 = sin(2n-1,283) = sin(-1,283) =-0,959;
cos(2r2+3f) = 0,284.
Унда (1) ва (2) га биноан хисоблашлар натижасида куйидаги-
ларни топамиз (рад/с):
со, = -3,17; со^ = 1,48; cof = 30,1;
со = —11,5; со = —3,41; о = 27,8.
Бурчак тезликнинг модули
I 2 2 2
СО — ЛСО^ + СО^ + СО,
ёки
I 2 2 2~
(й = JG3x + (йу + С0г .
Бурчак тезликнинг модулини, унинг координата укдарига про-
екцияларини хисобламасдан туриб, куйидаги формула буйича хам
аникдаш мумкин:
® = уф2 + О2 + ф2 + 2ффсоз 0
Бу формулаларнинг исталган биридан
со = 30,3 рад/с ни топамиз.
Бурчак тезликнинг, ва демак, жисм оний айланиш укининг
\ам йуналишини йуналтирувчи косинуслар билан, масалан
cos(<5 л, £) = со? / со >
анихлаш мумкин.
Колган йуналтирувчи косинуслар учун хам формулалар айнан
шунга ухшашдир.
Хисоблашлар натижасида вуйидаги натижаларни оламиз: кузга-
лувчи координаталар системасида:
' cos(co? О = -0,Ю5; cos(co$ р) = 0,049;
cos(®?O = 0,993;
кузгалмас системада
cos(coC х) = -0,380, cos(co7 у) = -0,113,
cos(co $ z) = 0,917.
103
2. Жисмнинг бурчак тезланишини аницлаш. Жисм бурчак тезла-
НИШИНЖ1Т кузгалувчи координата укларига нроекциялари куйида-
гича аникданади:
s. = со., £ = ё , s. = ё,.
(1 ) га биноан
st = 2 sin 24 Z+ (2/+1,5)24 cos 24/ ;
е.г = 2 sin 24/-(2/+1,5)24 sin 24/;
£j = 3,46,
Бурчак тезлашшшинг кузгалмас координата укларига проек-
циялари:
Бх = ёж, е, = ё/3 е =ё?.
(2 ) га биноан
= 12 (4/+3)cos (2/430,
12 (4/+3)sin (2/430,
st = 4.
f( = 1 с б^лганда куйидагиларни топамиз (рад/с2):
е, = 33,8; s = 76,9; е, = 3,46;
s’= 23,9; s=-80,5; е,= 4.
Бурчак тезланишининг модули
£ = ^8* +£*+£* ,
ёки
Г~2 7 "т”
£ = tJsx + еу + е,.
Бу формулаларнинт исталган бири буйича
а = 84,1 рад/с2.
Бурчак тезлашшшинг йуналиши йуналтирувчи косинуслар
билан аникланади,
К^згалувчи координаталар системасвда
cos(e $ Q = 0,402; cos(g q) - 0,914; cos(s * £) = 0,041.
Кузгалмас координаталар системасида
cos(e * х) = 0,284; cos(s ? у) = -0,957; cos(s t Z) = 0,048.
3. т|, Q нуктанинг тезлигшш анналам, Нукда тезлигининг
кузгалувчи координата укларига проекциялари гуйвдаги форму-
лалар буйича аникланади:
104
v. = ~ <й/П> ч = ®Л ~ Ч = © Л ~ Чъ
tv = 1 с вахт они ва <, р, С, ларнинг берилган киймаглари учун
куйидагиларга эта буламиз (см/с):
и4 = -52,8; ич = 106,2; и, = -10,7.
Нукта тезлигининг модули
и = + ^ +
Хисоблаб топамиз:
и = 119 см/с
Йуналтирувчи косинуслар:
cos(6 О О = -0,444; cos(6 С р) = 0,892; cos(6 С = -0,090.
4. Л7(£, р, Q нуцтанинг тезланишини аншдшш. Нукга тезлани-
шининг кузгалувчи координата укларига проекциялари куйидаги
формулалар буйича аникданади:
Ч = s^-’Sfp+^(®^+(01p+<0jC)-®2^
а\ = s^-s^+ffi^co^+co^p+ffljO-^p,
at = ...
/ = 1 с вахт онида куйидагига эга буламиз (см/с2):
а.. = -2829, я = -1780, а{ = -414.
Нукда тезланишининг модули
а = + а1 + а1
ёки
а = 3367 см/с2.
Йуналтирувчи косинуслар:
cos(«C ъ) = -0,841, cos(oC р) = -0,529, cos(#C Q = -0,123.
К. 6 - т о п ш и р и к. Кузгалмас сирт буйлаб сирланишсиз
юмалайдиган ва кузгалмас нукдага эга булган кдтгиц жисм
%ара катин ин г кинематик тадлила
А жисм кузгалмас О ну^тага эга булган хонда кузгалмас В жис-
мнинг сирти буйлаб сирпанмасдан юмалайди. А жисмнинг ОС Уки
кузгалмас Oz УКИ атрофида айланади ва А жисмнинг берилган ва-
зиятида Oj бурчак тезлигига ва gj бурчак тезланишига эга.
105
А жисмнинг курсатилган вазиятида унинг бурчак тезлиги ва бур-
чак тезланиши, шуниигдек М нукданинг тезлиги ва тезланиши аник,-
лансин.
Схемалар 91—93-чизмаларда, хисоблаш учун зарур маълумот-
лар эса 33-жадвалда келтирилтан.
33-жадва л
Вариант раками (91—93- чи змалар) 04; см рад/с ei, рад/с2 см Вариант раками (91-93- чизмалар) ом0, СМ рад/с Ер рад/с2 м9м, см
1 30 2,3 4,0 16 16 45 2,4 5,4 20
2 45 3,0 3,0 5 17 50 3,5 -3,0 10
3 50 1,2 -3,6 — 18 30 1,0 2,2 10
4 40 2,0 4,2 10 19 50 2,7 4,4 20
5 40 0,8 2,0 10 20 30 3,3 -4,6 10
6 70 4,0 5,6 30 21 40 4,0 -5,0 25
7. 60 1,5 -2,5 — 22 30 1,6 2,8 5
8 40 2,1 3,2 20 23 40 2,0 3,7 5
. 9 50 3,2 -4,7 10 24 60 3,5 4,1 10
10 20 1,3 1,8 10 25 40 1,6 -3,0 15
11 30 0,9 2,6 20 26 40 2,2 3,3 15
12 40 2,2 3,0 — 27 30 4,1 -5,5 10
13 20 3,8 4,3 10 28 45 3,0 4,2 5
14 30 1,4 -2,8 10 29 40 1,4 3,6 15
15 40 0,7 2,2 15 30 50 2,9 -5,2 15
Эслатма. s, нинг мусбат ёки манфий ишораси О, укининг Oz уки
атрофида схемада курсатилган йуналиш буйича айланйши мос равишда
тезланувчан ёки секинланувчан булишини биддиради.
Тошиирикни бажариш намунаси. А ва В жисмлар тугри доира-
вий конусдан иборат (94-чизма).
Берилган: а = 60°, 0 = 90°, OMQ = I = 30 см, = 1,2 рад/с; s1 =
2,7 рад/с2; М9М = 10 см.
Ечиш. 1. Жисмнинг бурчак тезлигини аншушш. А конус сфе-
рик хдракат килади. Оний айланиш уки OQ конус.-ярнинт уму-
мий ясовчиси билан устма-уст тушади (95-чизма).
Ох ва Оу координата укдарини шундай танлаб оламизки, OL ва
ОО уклари xOz текислигида ётсин.
С нудтанинг тезлиги ос оний ук атрофвдаги айланма гезлик-
дан иборат.
ос = 3 ' ОС, :
Ife
91 "-чизма.
107
92 -чизма.
108
93-чмзма.
109
бу ерда ® — А жисмнинг бурчак тезлиги.
Ammo, бс — Oz уки атрофидаги айланма тезлик.
Шунингучун
ис = ю1 х ОС. (2)
(1) ва (2) дан куйидаги келиб читали:
о sin(a/2) = ffl1sin[(a+ Р)/2]. (3)
Берилганларни хисобга олиб, ушбу кдйматни топамиз:
о = 2,32 рад/с.
й нинг йуналиши (1) га биноан ис нинг йуналиши буйича
аникданади.
А жисмнинг бурчак тезлигини кесишувчи укдар атрофидаги
айланишларни кушиш — бурчак тезликлар параллелограммини
куриш йули билан хам топиш мумкин (96-чизма).
й ~ ©j + й2.
Бу ерда й2 — конуснинг хусусий айланиш уки ОС атрофида
айланипщцаги бурчак тезлиги.
Синуслар теоремасига асосан
ffl/sin[(a+13)/2] = ro|/sin(a/2),
ПО
(4)
Бурчак тез лик векторный куйидаги куринишда ёзамиз:
Ю = (5)
бу ерда а — ® векгорнинг модули, 4 — унинг йуналишининг
бирлик вектори.
Демак,
ё = (J© / dt)in+Gydin /dt. (6)
эканлигини кдйд этган ходда
d ia / dt = ©J x zQ,
ва iQ ларнинг йуналишларини хисобга олганда эса (97-
чизма)
d iQ / dt = al sin(P / 2) J.
Унда (6) нинг урнига куйидагига эга буламиз:
ё = (Joo/ df)in + 0©! §m(P/2)j (7)
ёки
8 = ^+sl, (8)
бу ерда
ea = (da/dt)in, (9)
ё± =®®jSm(p/2)J. (Ю)
ё ташкил этувчиларининг бу ифодалари бурчак тезланишнинг гео-
метрик жихатдан © вектор охирининг тезлиги щ ва й± = ё±
ташкил этувчилари бу нукданинг мое равишда радиал ва транс-
версал (кундаланг) тезликларидир.
&. вектор оний айланиш уки СЮ буйлаб йуналган. Унинг мо-
дули
8ц = | d®/dt |.
(3) га биноан ва desjdt = эканлигини хисобга олиб, ёзамиз:
da/dt = s1sm[(a+ p)/2]/sin(a/2)
ёки берилганларни хисобга олсак,
dca/dt = 5,22 рад/с2.
Демак,
Ец=5, 22 рад/с2.
111
da>/dt (Sg) нинг олдидаги “ + ” шпора Sg ва ® ларнинг йуналиш-
лари мое тушишини курсатади.
(10)данкелибчикадики, е± вектор у бирлик векторнинг йуна-
лишига эга. Унинг модули
sL = coco; sin©/2),
ёки
ех = 1,97 рад/с2.
ва лар узаро перпендикуляр булганлари учун
2 = 7^ +Еа2 ’
ёки
е = 5,58 рад/с2.
Sg, е± ва § векторлар 97-чизмада курсатилган.
3. Жисм нук/тасининг тезлигини аниклаш. М нукганинг тезли-
гини оний ук атрофидаги айланма тезлик каби аникдаймиз:
йм=<Ь*ОМ. (Н)
со ва ОМ векторлар xOz текислигида жойлашган. Демак,
вектор Оу уккд параллел. У ис вектор билан бир хил йуналишга
эга.
Тезликнинг модули
=<o -OAfsin(® Ш). (12)
95-чизмадан курин адики,
ОМ sin (5 С ОМ) = MN - DM cos(a / 2),
DM = 21 sin (ex / 2) - MM0.
Бу муносабатларни хисобга олган ходда (12) формула буйича
куйидагини топамиз:
им = 40,2 см/с.
4. Жисм нуцтасининг тезланишини аницлаш. М нукданинг тез-
ланишини укка интилма ва айланма тезланишларнинг геометрик
йигиндиси каби топамиз:
а - + аайл
им ~ им + им
Укдд интилма тезланиш
а-м = ®W
у оний айланиш укига перпендикуляр й/налган (97-чизма).
Унинг модули
= sin 90 =
Айланма тезланиш
= s х ОМ
ёки (9) ни хисобга олиб
-Jm _ -айл -айл
аМ ~ иМП + аМ1’
бу ерда
а^=%хОМ, (13)
df^z.xOM. (14)
(13) ва (11) билан таккослаб ва хамда ® ларнинг йуналиш-
ларининг мос тушишини эътиборга олиб, аа£ ва бм ларнинг хам
йуналишлари мос тушади, деган хулосага келамиз.
М нукда тезланишининг ташкил этувчисининг модули
ама = % • ОМ • sin (^^ ОМ) = • DM cos(a / 2).
вектор xOz текислигида жойлашган ва ОМ га перпендику-
ляр. Унинг модули
=SL ’ОЛТsin90° =8Л -ОМ,
ОМ = 7/2 + (М0Л/)2 - 2Z • MQM • sin(a/ 2).
Хисоблашлар натижасида куйидагиларни топамиз:
ашк = 90,4 см/с2, = 52,2 см/с2.
М нукданинг тезланишини учта ташкил этувчининг геометрик
йигиндиси каби топамиз:
8—- 113
a — zJS™ J- лайл -Ц
ам ~ ам + амп + аМ1-
ва 5^ векгорлар xOz текислигида жойлашган, вектор
эса унта перпендикуляр.
Шунинг учун Л/нукта тезланишининг модули (97-чизма)
аМ = )2 + (а%[ 'у - 2а% • < cos у + « )2.
Бу ерда
cos у = cos Z MOD = (I - DM-sin (а/2))/(Ж
Хисоблашлардап кейин пировардвда куйидагини оламиз:
ам = 110,9 см/с2.
Агар бу масалада жисм ва унинг нукдаси хдракатининг кине-
матик харакгеристикаларини бирор берилган вакд онида эмас,
балки ихтиёрий вакдда аникдаш талаб килинганида эди, масала-
нинг шартини Эйлер тенгламалари шаклида ёзиш кулан булар эди.
Масалан, sx = const, tOj- 07 укднинг Oz атрофида айланиш бур-
чак тезлигининг бошлангич кдймати, деб олсак (98-чизма), куйи-
дагига эга буламиз:
д = со / + е/2/2
(\|/ бурчакнинг бошлангич киймати \р0 = 0 деб кдбул килинган),
е = (а+ р)/2.
<р = ср(О ни аникдаш учун ф ва ф бурчак тезликларнинг конус-
лар асосларининг айланалари узунликларига ёки радиусларига
тескари пропорционал эканлигини эътиборга оламиз, яъни (96-
чизмадан кам шу келиб чикдди)
ф = [sin(fJ/2)/sin(a/2)]\p
ёки
<р = [sin(₽/2)/sin(a/2)Jv|/ (<рс=0). .
Демак,
<р = [sin(p/2)/sin(cx/2)I(co/+s/2/2).
Ушбу масаланинг шартларида
у = 1,3512+ 1,20/; 0 = 5л/12;
ср = 72 ф.
М нуктанинг кузгалувчи коор-
динаталар системасидаги коорди-
98-чизма. наталари
114
= /sin(a/2)~ М^М = 30 • 0,5- 10 = 5,0 см;
т| = 0, С, = I cos(a/2) = 30 • 0,866 = 26,0 см.
Бундай масалани ечиш тартиби К.5-тошпирикни бажариш на-
мунасида берилган.
III. МУРАККАБ ХА РА КАТ
НУКГАНИНГ МУРАККАБ ХДРАКАТИ
i К.7-Т о п ш и р и к. Нукганинг абсолют тезлиги ва абсолют
тезланишини аниклаш
М нукга D жисмга нисбатан харакат кил ад и. М нукга нисбий
Харакатининг ва D жисм харакатининг берилган тенгламалари
буйича М нукганинг t = вахт онидаги абсолют тезлиги ва абсо-
лют тезланиши аниклансин.
Механизмларнинг схемалари 99—101-чизмаларда курсатилган,
Хисоблаш учун зарур маълумотлар эса 34-жадвалда келтирилган.
Топширикди бажариш памунаси. Берилган: механизмнинг схе-
маси (102-чизма).
sr = ОМ = 16-8cos3tH см; <ре = 0,9/2-9/3 рад; t{ = 2^9 с.
Ечиш. Берилган вахтонида чизматекислиги (102-чизма) уч-
бурчакнинг текислиги билан устма-уст тушади, деб хисоблаймиз.
М нукганинг D жисм устидаги вазияти sr = ОМ масофа билан аник-
ланади.
t= 2/9 с да
sr = 16-8cos(3tc • 2/9) = 20,0 см.
М нукганинг абсолют тезлигини нисбий ва кучирма тезлик-
лар нинг геометрик йигиндиси каби топамиз:
б = иг+ие.
Нисбий тезликнинг модули
I 'A- L
бу ерда
бг = dsr/dt = 24тс5тЗтсЛ
t= 2/9 с да
бг = 65,2 см/с; иг = 65,2 см/с.
П5
>4-жал»ал
Вариант раками (99—101 -чиз- малар) М нукданинг нисбий харакат тенгламаси Жисмнинг ^аракат тенгламаси /р с R, см а, см а, град Кушита маълумотлар
<р,=<р,(0, рад СМ
1 18 sin(itZ/4) 2/3-/2 — 2/3 — 25 —
2 20 sinjt? 0,4? 2+t 5/3 20 — —
3 6t3 2?+0,5?3 — 2 — 30 —
; - 4 10 sin(it//6) 0,6t2 — 1 — — 60
' 5 40 ЛСО8(л?/6) 3t-0,5?3 — 2 30 — —
6 — — 3/+0,27/3 10/3 15 — — ср —0,15 л/ 3
7 20 cos2n/ 0,5?2 — 3/8 — 40 60
8 6(/ + 0,5?2) ?3-5? — 2 — — 30
9 i 10(l+sm2Tt?) 4?+1,6?2 — 1/8 — — —
10 20 rccos(rc? 14) 1,2?-?2 — 4/3 20 20 —
11 25 sin(n? 13) 2/ 2-0,5 ?2 — 4 — 25 —
12 15 -sit -’/8 5? 2-4?2 — 2 30 30 —
13 120 nt2 8/ 2-3/ — 1/3 40 — —
14 3+14 sinjt? 4/—2/2 — 2/3 — — 30
15 5 (t2+f) 0,2/3+/ — 2 — 60 45
16 20 sinit? /-0,5/2 — 1/3 — 20 —
17 8/3+2? 0,5/2 — 1 — 475 —
18 10?+/3 8/—/2 — 2 — — 60
19 6/+?3 /+3/2 — 2 40 — —
20 • 30rccos(rc?/6) 6/+/2 — 3 60 — —
21 25rc(/+t2) 2/-4/2 — 1/2 25 — —
22 10itsin(7t//4) 4/—0,2/2 — 2/3 30 — —
23 6л?2 — — 1 18 — — ср—л/ 3/6,
24 75л(0,1/+0,3/3) 2/-0,3/2 — 1 30 — — 0,0+7’20 см
25 15хш(л/ /3) Юг—0,1/2 — 5 — — — 1
26 8 cos(n//2) — 2л/2 — 3/2 — 45
27 — — 50г2 2 75 — — Фг=5л/ 3/48
28 2,5л/2 27-5/ — 2 40 — —
29 5л/74 — — 2 30 — — <р=л/ 7^, 0.0=07=40 см
30 4л t2 — 13 + 4/ 2 48 — —
Эслатмалар. Хар бир вариант учун М нукганинг схемадаги вазияти sr нинг мусбат дийматига мое келади; 5, 10, 12,
13, 20—24, 28—30-вариантларда ОМ = sr— айлананинг ёйи; 5, 10, 12, 21, 24-схемаларда ОМ — марказий бурчакнинг
кичигига мос келувчи ей. М нудганинг 6 ва 27-вариантлардаги нисбий даракати дамда D жисмнинг 23 ва 29-вариант-
лардаги даракати 34-жадвалнинг охирги устунида келтирилган тенгламалар билан анидланади.
99-чизма.
118
100-чизма.
119
101-чхзжа.
120
бг нинг олдидаги мусбат ишора бг вектор-
нинг sr нинг усиш томонига караб йуналганли-
гини курсатади.
Кучирма гезликнинг модули
и (1)
бу ерда R — жисмнинг берилган онда М нукта
билан устма-уст тушувчи нукдаси томонидан чи-
зиладиган L айлананинг радиус и, R = ^sin 30° =
10,0 см; — жисм бурчак тезлигининг модули:
юе = |юе|, cbe=d(pe / dt = 1,81-2712.
102-чизма.
t = 2/9 с да
- -0,93 рад/с; <ос = 0,93 рад/с.
б>е катталикнинг олдидаги манфий ишора учбурчакнинг Oz уки
атрофидаги айланиши <р бурчакнинг санок йуналишига тескари
томонга караб руй бер ишини курсатади. Шунинг учун юе вектор
Oz УКИ буйлаб пастга караб йзшалган (103-чизма, а).
Кучирма тезликнинг модули, (1) формула буйича,
ое = 9,3 см/с.
бе вектор L айланага уринма буйлаб жисмнинг айланиш томо-
нига караб йуналган. бе ва бг узаро перпендикуляр булгани учун
М нукга абсолют тезлигининг модули
7 2 1
+и; ,
ёки
о = 65,9 см/с.
Ну^танинг абсолют тезланиши нисбий, кучирма ва кориолис
тезланишларининг геометрик йигипдисига тенг:
а = аг + ае + ас,
ёки ёйилган куринишда
а = az + а" + а/Ял + а.ми + а.
Нисбий уринма тезланишнинг модули
а = а ,
ГТ | ГТ I’
бу ерда
arz = cPs JdP = 72л2со.чЗтгЛ
/= 2/9 с да
ап ~ -355 см/с2, агх = 355 см/с2.
art нинг манфий ишораси ап векторнинг sr нинг манфий кдй-
матлари томонига караб йуналганлигини курсатади. ва
ларнинг ишоралари бир хил. Демак, М нукганинг нисбий ядра ка-
ти тезланувчан.
Нисбий нормал тезланиш
а" = и2/р = О,
чунки нисбий хдракатнинг траекторияси — тугри чизик (р = °°).
Кучирма айланма тезланишнинг модули
аГ = Дег, (2)
бу ерда se = |sj — D жисм бурчактезланишининг модули,
se = t/2cpe / dt- = 1,8- 54/.
t = 2/9 с да
ge = -10,2 рад/с2; se = 10,2 рад/с2.
ва йе ларнинг ишоралари бир хил. Демак, D учбурчакнинг
айланиши тезланувчан, йе ва ге векторларнинг йуналишлари уст-
ма-уст тушади (103-чизма, а. б). (2) га асосан
af” = 102 см/с2.
122
af* вектор бе йуналган томонга караб йуналган.
Кучирма марказга интилма тезланишнинг модули
a™ = Rm2 ёки я/и = 9 см/с2.
яеми вектор L айлананинг марказига кдраб йуналган.
Кориолис тезланиши
ас = 2®е х бг.
Кориолис тезланишининг модули
ас = 2coeor sin(coe ? бг),
бу ерда
sin(Se $ бг) = sin 150° = 0,5.
ва и. ларнинг юкорила топилган кдшматларини хисобга ол-
ган холда куйидагини оламиз:
. ас = 61 см/с2.
ас вектор купайтманинг коидасига мувофик йуналган (103-
чизма, б).
М нукда абсолют тезлитининг модулини проекциялар усули
билан топамиз:
ах = af* + ас, ау - -af*- | а, | cos 60°,
а7 = - I a} I cos30°, a - da2 + а2 + а2
Хисоб натижалари 35-жадвалга йигилган.
35-жад вал
рад/с Тезлик, см/с 7 рад/с2 Тезланиш, см/с2
V) е и МИ ае айл ае ат ас ау а Z а
-0,93 9,3 65,2 65,9 -10,2 9 102 0 -355 61 163 -186 308 395
123
КДТТИК. ЖИСМНИНГ МУРАККАБ ХДРАКАТИ,
ПАРАЛЛЕЛ ВА КЕСИШУВЧИ УКДАР АТРОФИДАГИ
АЙЛАНИШЛАРНИ К.УП1ИШ
К.8-топширик- Планетар редуктор звеноларининг бурчак
тезликларини аниклаш
Етакланувчи вал II ва редуктор сателлитларининг бурчак тез-
ликлари топилсин. Редукторларнинг схемалари 104—106-чизма-
ларда, хисоблаш учун зарур маълумотлар эса 36-жадвалда келти-
рилган.
36-жадвал
Вариант раками (104-106- чизмалар) Радиус, см Бурчак тезлик, рад/с
Л г, ®3 ®4 ®5
1 15 20 15 20 200 — — -40 —.
2 30 30 15 45 350 50 — — —
3 • 15 30 15 60 240 — — : 40
4 20 30 20 120 30 — — —
5 . 40 10 20 10 — — — -20
6 80 15 35 30 120 — — —
7 50 10 15 55 80 20 — — —
8 20 15 25 60 300 — — — 30
9 15 7 5 17 — — —
10 10 10 12 54 200 — — -10 —
11 50 10 15 55 30 — — -30 —
12 30 15 30 75 330 — — 70 —
13 20 30 15 30 100 — — —
14 100 30 20 40 -50 — — —
15 15 5 9 11 270 — — — 20
16 40 10 20 50 40 — — — -30
17 50 15 10 25 50 — .— —
18 50 10 10 50 40 — — —
19 20 15 10 25 200 — — —
20 50 10 15 25 90 — — —
21 100 92 52 60 20 — — —
22 50 289 16 30 70 — — -150 —
23 40 42 22 22 90 — — 200 —
24 20 44 20 — 250 — 40 — —.
25 20 10 20 40 150 — — —
26 40 42 20 20 130 -250 — — —
27 30 30 30 — 100 — — 40 —
28 45 60 45 — 50 -120 — — —
29 20 20 40 40 320 — — 50 —
30 15 15 20 20 30 -350 — — —
Эслатма. Бурчак гезликларнинг мусбат ва манфий ишоралари I
етакловчи вал томондаи (цилиндрик гилдиракли редуктор учуй) ёки мое
укнинг мусбат йуналиши томондан (коник тилдиракли редуктор учун)
Караганда соат стрелкаси буйича ва унта царши айланиш йуналишини
билдиради.
124
104-чмзма.
125
105-чизма.
126
127
памиз (108-раем, а):
Топширикни бажариш намунаси
(1—20-вариантлар). Цилиндрик
гилдираклардан иборат редуктор.
Берилган маълумотлар: редуктор-
нинг схемаси (107-чизма); гилди-
ракларнинг радиуслари (см); - 30,
г2 = 15, г3 = 30, г4 - 75; бурчак тезлик-
лар (рад/с); <nz = 80, coj = 20.
Ечиш. Тезликларнинг оний
маркази усулини куллаймиз. Етак-
ловчи звеноларнинг бурчак тезлик-
лари буйича сателлитлар блоки
УКининг А нукдасининг тезлигини
хамда 1 ва 2 гилдиракларнинг ури-
ниш нуктаси В нинг тезлигини то-
= ®i(ri+r2); = «/р
ёки
= 3600 см/с; vB = 600 см/с.
бл ва \5В векторларни куйиб, 2—3 сателлитлар тезликларининг
оний маркази Р2 3 ни топамиз. Шуниигдек, С нуктанинг тезлиги
ни хамда 2—3 сателлитларнинг ва 4 гилдиракнинг (етакланув-
чи //валнинг) айланиш й^налишларини курсатамиз. Чизмага би-
ноан сателлитларнинг бурчак тезлиги
«Ч.з = (ох-ол)/А5.
С нукданинг тезлиги
°C = °Л + <22-3 '
Етакланувчи валнинг бурчак тезлиги
108-шзма.
128
= со4 = Dc/r4,
Хисоблаб:
co23 = 200 рад/с, ur = 9600 см/с, <вд = 128 рад/с.
ни топамиз.
Ечимни текшириШ учун крттик жисмнинг параллел укчаг ,
рофидаги айланишларини кушиш назар цясини куллаип а асос >ан
ган усул (Виллис усули) дан фойдаланамиз.
Редукторнинг гилдираклари 1) уз укдари атрофидаги нисбин
айланишда (етакчига нисбатан) ва 2) етакчи 1илдирак билан бир
галикда унинг ухи атрофида кучирма айланишда иштирок этадо
Хар бир гилдирак учун кучирма бурчак тезлик етакчи гилди-
ракнинг бурчак тезлиги со0 дан иборат.
Рилдиракларнинг нисбии бурчак тезликлари абсолют ва кучирма
бурчак тезликларнинг айирмалари каби аникданади:
<D2r= со2-со0;
со, = со, —со,.
кг к О
Бу нисбии тезликлар гилдиракларни етакчиси тухтатиб куйил-
ган деб фараз килтам уолдаги бурчак тезликларидир.
Бу холатда нисбии бурчак тезликлар орасида кузгалмас айла-
ниш укига эга булган тишли узатмалардаги каби муносабатлар
мавжуддир. Демак,
(cBj-co^/G^-co^) = (~1)'Ч (1)
бу ерда т — 1 ва к гилдиракдар орасидаги ташки туташишлар
сони; i — нисбий хдракатда (тухтатилган етакчида) 1 гилдиракдан
к гилдиракка узатиш сони.
Шуни таъкидлаш жоизки, бу муносабатга (Виллис формула-
сита) бурчак тезликларнинг алгебраик кдйматлари киради.
ишораси соат стрелкасига тес кари айланишга, ишораси эса
соат стрелкаси буйича айланишга мос келади, деб кабул киламиз.
(1) формулани курилаётган масалани ечишга куллаймиз (108-
чизма, б). 1 ва 2 гилдиракдар ташки, 3 ва 4 гилдираклар эса ички
туташишда хамда етакчининг бурчак тезлиги соу булгани учун (108-
чизма а. б)
(a»!—cOiV^n^,—сох) = (—1 )1r2r4/(rir3),
бу ердан
= = (Or(C1l~®l)rir3/(r2/4)*
2—3 сателлитларнинг бурчак тезлиги со , 3 ни куйидаги нисбат
дан аниклаймиз:
129
(со,-^)/^,-^) = -r2/r,,
бу ердан
Берилган маълумотлардан фойдаланиб куйидагини топамиз:
<пп = 128 рад/с, <о,_, = 200 рад/с.
Жавоблардаги “ + ” ишораси Z/вал ва 2—3 сателлитларнинг соат
стрелкасининг айланишига карама-кдрши йуналишда айланиш-
ларини курсатади.
Тошиирицпи бажариш иамунаси (21—30-вариаптлар). Коник
гилдираклардан иборат редуктор. Берилган маълумотлар: редук-
тор нинг схемаси (109-чизма); гилдиракларнинг радиуслари (см):
= 24, гг = 30, г3 = 40, г4 = 44; бурчак тезликлар (рад/с): cdj = 60,
<в1 = —40.
Ечиш. 2—3 сателлитлар блокининг даракати икки айланма
Харакатнинг мажмуаси, деб кдралиши мумкин. Бунда кучирма
Харакат сифатида етакчининг Oz УКИ атрофидаги айланишигина
эмас (каралаётган масалада етакчининг бурчак тезлиги етакловчи
валнинг бурчак тезлиги <Bj га тенг), балки 1 гилдиракнинг ёки 4
гилдиракнинг айланиши хам олиниши мумкин. Демак,
= S>i+го1с, (5^ = ю, + юс=а4+го4с. (2)
Бу ерда а1с, а1с, ®4с — сателлитларнинг мос равишда етак-
чига, 1 гилдиракка ва 4 гилдиракка нисбатан бурчак тезликлари.
Куриниб турибдики, <п. векторнинг иккала ташкил этувчи-
сининг хам таъсир чизикдари маълум.
©i, го1; га4 бурчак тезликлар Oz Уки
буйлаб (110-расм, a), с51с -ОС уки
буйлаб, б1с ва й4с — мос равишда Оа
ва ОЬ чизикдар буйлаб (нисбий хара-
катдаги оний айланиш укдари буй-
лаб) йуналган.
Ихтиёрий О1 кутбдан (110-чизма,
б) берилган S>i ва 5t бурчак тезлик-
лар векторларини Oz укда параллел,
го1с, й1с, ва ю4(Г векторларни эса
мос равишда Oz, Оа, ОЬ ларга парал-
лел хилиб куямиз.
(2) вектор ифодаларни С, ва z
укдарга проекциялаб, куйидагиларни
оламиз:
2
Й!л
109-чизма.
130
CO = CO ' CO , == CO ’
cz Ic’ _ cz I’
co , = co, sin a; co = -co, + co, cos a; (3)
cf lc ’ cz 1 lc_ ’ v '
<0 = co. cos B; co = -co.+co. sin B;
(3) тенгламалар системасини ечиб, куйидагиларни топамиз:
(cDi+COiHgOC, .
= <°Р
со4 = <0j+ (cOj+co^tg a • tg 0.
Хисоблашларда tg a = rjrv tg p = соп = co4 эканлигини эъти-
борга оламиз.
Берилган маълумотларга ва бу ерда со, = 40 рад/с (“- ” ишораси
110-чизма, б да coj нинг йуналишида хисобга олинган) эканлиги-
ни билган холда куйидагига эга буламиз (рад/с):
со . = 80; со = 60; со„ = 132,7.
cf ’ CZ 5 П 5
2—3 сателлитларнинг бурчак тезлиги
12 2
®С — у ®с£, + ®cz >
ёки
ос — 100 рад/с.
Шуни таъкидлаш жоизки, (2) вектор тенгламалар график усулда
хам ечилиши мумкин. Бунинг учун ихтиёрий О.у марказдаи (110-
чизма, в) берилган й, ва бурчак тезликлар векторлариии зан-
ланган масштабда Oz укига параллел килиб куямиз. вектор-
нинг охири оркали Oz (й1с нинг таъсир чизиги)га параллел килиб
KL тугри чизикпи, й, векторнинг охиридан Оа (й1с нинг таъсир
чизиги) га параллел килиб MNтугри чизикни утказамиз. Бу тугри
131
<-t щк^арниш кесишиш нукгаси ис векторнинг, шунингдек й1с ва
' кекторларнинг охирини белгилайди.
Ч измадан улчаш ёрдамида куйидагини топамиз:
еос = 100 рад/с.
нинг йуналиши сателлит оний айланиш уки 001 нинг вази-
ятини белгилайди (110-чизма, а). ®п ни аниклаш учун <вс ни Oz ва
с/Л ларга параллел йуналган иккита ташкил этувчига ажратамиз.
Хосил булган векторлар <5П (й4)ва ®Пс (<э4с) лардан иборат.
Чизмадан улчаш оркали куйидагини топамиз:
соц = 135 рад/с.
Бу масаланинг Виллис усули билан ечилишини хам келтира-
миз. (I) формулани коник гилдираклардан иборат механизм учун,
яъни гилдиракларнинг айланиш уклари кесишганда хам куллаш
мумкин. Бу холда куйидагиларни назарда тутиш керак:
1. 2—3 сателлитлар кесишувчи уклар атрофидаги айланишлар-
да иштирок этади. Шунинг учун уларнинг етакчига нисбатан бур-
чак тезлигини абсолют ва кучирма бурчак тезликларнинг алгебра-
ик айирмаси билан ифодалаш мумкин эмас.
2. Виллис формуласидагибир гилдиракдан иккинчи гилдиракка
узатиш сонининг ишораси куйидаги шартдан аникланади: агар
укдарнинг мусбат йуналиши томондан кдралганда мос гилдирак-
ларнинг айланиши етакчи тухтатиб куйилганда бир йуналишда
булса, “ + агар гилдиракларнинг айланиши турли йуналишда
бурса, “ - ” булади.
Курилаётган масалада етакчининг бурчак тезлиги етакловчи
валнинг бурчак тезлиги га тенг. Сателлитларнинг етакчига нис-
батан бурчак тезлиги <о1с билан белгиланган. Унда 7 ва 2 гилдирак-
ларга нисбатан куйидагига эга буламиз:
(®1-<в1)/со1с = -r2/rr (4)
3 ва 4 гилдираклар учун
ak/(®4-®i) = Ц/Гу (5)
(4) ва (5) ни бир-бирига купайтириб, куйидагини оламиз:
бу ердан
®n = ®4 = ®])ХГ)/('2Г4)- (6)
(6) га сон кийматларни куйиб, куйидагини топамиз ®п = 132,7
рад/с.
132
<пп даги мусбат ишора етаклаиувчи валнинг соат стрелкасининг
айланишига тескари йуналишда (агар Oz укининг мусбат йунали-
ши томондан кдралса) айланишини курсатади.
Сателлитнинг бурчак тезлигини аникдаш учун (4) дан дастлао
унинг етакчига нисбатан бурчак тезлигини аникдаб оламиз:
ёки
®1с = 80 рад/с.
Сателлитнинг абсолют бурчак тезлиги
®с = + ®1с ,
бунда вектор Oz буйлаб, ю1с эса ОС укд буйлаб йуналган.
©1с ва й j лар узаро перпендикуляр булганиучун
= уЦ + wj
ёки
<вс = 100 рад/с.
IV. КИНЕМАТИКАНИНГ МАСАЛАЛАРИНИ ЕЧИШГА
ЭХМ НИ КУЛЛАШ
К.9-Т о п in и р и к- Ишчи нукданинг берилган хдракати
буйича манипулятор механизм звеноларинннг бурчак
тезликлари ва бурчак тезланшпларини аникдаш
Роботнинг манипулятори текис механизмдан иборат (111— 113-
чизма). Бу курилманинг звенолари А нукгада ушлагичи булган
“механик кул” ни ташкил кдыади.
Берилган координата системасида ишчи нукда А (ушлагич)-
нинг харакат тенгламалари маълум. А нукданинг харакати i с да-
вом этади.
Шу вакт оралигида <р, у, G бурчакларни ва s масофани аникдаш
талаб кдыинади. Шунингдек звеноларнинг бурчак тезликлари ва
бурчак тезланишлари хамда В нукданинг нисбий (1—13, 15—25,
27—30 вариантлар) ёки абсолют (14, 26-вариантлар) тезликлари s
ва тезланишлари 5 хисоблансин. Барча хисоблашлар 0 дан 1 с гача
булган вакд оралиги учун Д/ = 0,2 с кддам билан олиб борилсин.
<р, ц/, 0 бурчакларни ва 5 масофани хисоблашнинг мусба г йуна-
лишлари вариантларнинг чизмаларида курсатилган. Бурчакларнинг
<р = <р0, ц/ = бошлашич кийматлари маълум, деб хисоблансин.
Хисоб учун зарур маълумотлар 37-жадвалда келтирилган.
133
37-жад вал
Варна нт ра к,а аги (111-113- а b с % % Харакат тенгламалари
*л ' Ул
чшмалар) м град м
I 0,5 1,2 0,4 60 15 0,7436-0,3t
2 0,4 0,7 0,24 70 25 0,0800+0,2/
3 0,4 1,2 — 115 25 0,7429
4 0,4 0,7 — 45 10
5 0,3 0,7 0,4 115 25
6 0,8 0,6 0,6 30 25 0,1464+0,2/
7 0,9 0,24 0,64 40 25
8 0,3 0,66 38 25
9 0,74 0,8 0,32 35 15
10 0,3 0,36 — 80 5
11 0,28 0,34 — 50 40 -0,0122+0,3/
12 0,6 0,8 — 35 15 0,1371
13 0,8 0,6 — 35 15 1,2349 0,3036+0,2/
14 0,46 0,82 0,6 70 15 0,9494+0,2/ 0,2200
15 0,5 0,3 — 125 25 0,5289 0,7899-0,4/
16 0,6 1,2 0,54 35 25 0,8513
17 0,42 1,0 0,56 50 15 0,5806-0,2/
18 0,4 0,46 — 40 20
19 0,34 0,9 — 65 12
20 0,4 0,5 -- 60 17
21 0,3 0,9 — 50 30
22 0,3 1,3 60 20
23 0,82 0,4 135 35
24 0,3 0,5 — 32 17
25 0,4 0,9 0,6 40 15
26 0,4 0,8 0,34 50 20 1,1374
27 0,2 0,3 — 65 20 1,339-0,3/
28 0,3 о,з 0,4 130 35 0,5444+0,3/
29 0,34 0,24 - 55 30 1,0264
30 0,28 0,86 0,4 135 41 0,4511+0,2/
Манипуляторларнинг конструкцияларида схемаси ва шартли
белгиси 114-чизма, а, б да келгирилган бирикмадан фойдаланилган.
Звеноларнинг узаро нисбий харакатлари куйидагича: 1 ва 3 — ай-
ланма, 7 ва 2 — текис-параллел.
Топширицни бажарнш намунаси. 115-чизма, а да манипулятор
механизми бошлангич вазиятда тасвирланган хамда <р, гр, 0 бур-
чакларни ва s масофани хисоблашнинг мусбат йуналишлари курса-
тилган. Звеноларнинг улчамлари (м): а - 1,30; Ь = 1,10; с = 0,55.
Ушлагич (А нудта)
xA(t) = 1,5329-0,2/ ] ’
jy(/> = 0,5487-0,089/} ' ’
тенгламаларга мувофик, 1 с давомида харакат гдилади.
Бошлангич вахт онида (/ = 0)
<р = <р0 = 62°; у = % = 33°.
134
111-чизма.
135
112-чязма.
136
113-чизма.
137
114-чязма.
Курсатилган вакт оралиги
учун <р. чл 6 бурчакларнинг кий-
матлари ва s масофа аниклансин.
Шуниигдек ф, ф, 0 бурчак тез-
ликлар, ф д, 0 бурчак тезланиш-
лар, В нукданинг нисбий тезли-
ги s ва-нисбий тезланиши j'
115-чизма.
Хисоблансин. Хисоблашлар 0; 0,2; 0,4; 0,6; 0,8; 1с вакт онлари учун
бажарилсин.
Ечиш. Механизмнинг ихтиёрий вазияти учун куйидаги вектор
муносабатлар уринлидир (115-чизма, б):
ОА = ОС + СА, (2)
DB = DC + CB, (3)
бу ерда ________ _
I ОС I = а = const, I СА |= b = const, |
____ _ > (4)
| DC | = 0,31а = const, | DB |= с = const.)
(2)—(4) тенгликлар системага куйилган богланишларнинг тенг-
ламаларидир. (2) ва (3) ни координата укдарига проекциялаймиз:
хА = a cos ср + b cos
уА = asincp -Z>siny; J
c cos 0 = 0,31 a cos <p + s cos у;]
r (6)
c sin 0 = 0,31 a sin <p - s sin 4/. j
(4) ни хисобга олиб, (5) ва (6) ни вакд буйича икки марта диф-
ференциаллаймиз. Бир марта дифференциаллаш натижасида номаъ-
лум ф, ф, 6 бурчак тезликларга ва s тезликка нисбатан куйидаги
алгебраик тенгламаларга эга буламиз: v
-аф sin ср - by sin ф =
, . ‘С (7)
acp cos ф - рф cos ф -- уА; j
138
-0,31аф sin <р - 5ф sin у + г cos 4/ + cQ sin 0 = 0;
0,31аф cos ср - 5ф cos \р - X cos \р + с0 cos 0 = 0.
(8)
Иккинчи марта дифференциаллагандан кейин ф, ф, 0 бурчак
тезланишларни ва з; нисбий тезланишни богловчи куйидаги ик-
кита алгебраик тенгламалар системасини хосил кдпамиз:
-аф sin у - Ьф sin ф = хА + аф2 cos <р + b\\r cos
аф cos vp - Ьф cos ф = уА + аф2 sin ср - bч/2 sin ц/, ]
-0,31 аф sin <р - 5ф sin \р + S; cos ц/ + с0 sin 0 =
= 0,31 аф2 cos ср + 2зф sin + л'ф2 cos \р — с02 cos 0,
0,31 аф cos ср - 5ф cos \р - j’ sin \р - с0 cos 0 =
= 0,31 яф2 sin ср + 2i\p cos \р - 5ф2 sin vp - с02 sin0.
(Ю)
(7) ва (9) ифодаларга кирувчи хл, уА, хл, уА катталиклар камраб
ушлагичнинг харакат тенгламалари (1) ни дифференциаллаш би-
лан аникланади:
хА = -0,2; хА = 0;'
уА =-0,089; УА=0.
(И)
Бошлангич ваку они Z = i0 = 0 учун (7) ва (8) тенгламалар сис-
темалари куйидаги куринишга эга булади:
-аф0 sin ср0 - Ьфц sin ц/0 = -0,2;
аср0 cos (р0 - b\y0 cos \р0 = -0,089;
-0,31 аф sin ср0 - 50ф0 sin \р0 + s0 cos \р0 + с0о sin 0О = 0 | 0
) (8 )
0,31 аф0 cos <р0 - 50ф0 cos \р0 - 50 sin ц/0 - с0о cos 0О = 0.J
50 ва 0О ни аникдаш учун бошлангич вазият (1 = 0) учун ёзилган
(6) системадан фойдаланамиз:
с cos0o = 0,31 a cos <p0+.y0cos \р0;
с sin0o = 0,31 a sin <р0- 50sin \р0.
Мазкур системани ва tg0o ларга нисбатан ечиб, куйидагилар-
га эга буламиз:
5-0 = ^(0,31а)2 + с2 - 0,62а с cos (<р0 - 0О),-у0 =0,4102 м;
ta 0 = 03 la sin фр - б-р sin ур .
с 0 6,31 a cos фо + -S'o cos фо ’
tg0o = 0,2483;
139
бу ердан
0О = 13,946°.
а, Ь, с, <р0, \р0, б0, ларнинг кийматларини (7') ва (8') га куйиб,
куйидаги тенгламалар системасига эга буламиз.
-1,1478ф0-О,5991ф0 =-0,2;
0,6103 ф0 - 0,9225ф0 = 0,089;
-0,3558 ф0 - 0,2234 ф0 + 0,8387 50 + 0,1326 Оо = 0;
0,1892 ф0 - 0,344 ф0 - 0.5446 j0 - 0,5338 0О = 0.
Бу тенгламалар системасини ечиб, куйидагиларни топамиз:
ф0 = 0,0921 рад/с; ф0 = 0,1574 рад/с;
е0 = -0,1806 рад/с; з0 - 0,1095 м/с.
Куриниб турибдики, биринчи иккита тенглама охирги иккита
тенгламага богланган холда бирпникда ечилади.
Топилган натижалардан фойдаланиб, (9) ва (10) тешламалар-
ни бошлангич вазият учун тузамиз:
-0,1478 ф0 - 0,5991 ф0 = 0,028;
-0,6103 ф0 -0,9225 Фо = -0,0051;
-0,3558Фо -0,2234ф0 +0,8387^ + 0,1326 ё0 =0,0115;
0,1892фо -0,344фо -0,5446s0 -0,5338 ё0 = 0,0221.
Бу тенгламалар системаларини ечиб, куйидагиларни оламиз:
Фо = -0,0203 рад/с2; ф0 = 0,0079 рад/с2;
ё0 = -0,0555 рад/с2; з0 = 0,0118 м/с2.
Шуни таъкидлаш жоизки, бу холда хам биринчи иккита тенг-
лама охирги иккитасига богланмаган холда алохида ечилади.
Клдирилаёттан катталикларни аникдаш лозим булган кейинги
вакд они t = = ДГ-0,2 с дан иборат. Д/ ни кичик микдор, деб
олиб, куйидагиларни ёзиш мумкин:
Ф1 = Фо + Фод/ + ФоА?2 /
Ф1 = Фо + Фод/ + Фод^ / 2; (12)
9j = 0о+ОоД/ +ё„д/2 /2;
= .Vo + SqM + 50Д/2 / 2.
(12) ифодалар бевосита <р(/), \у(/), 0(0, ХО функнияларни / = О
нинг атрофида Маклорен кдторига ёйишдан келиб чикади.
140
(12) га мувофих <рр Ч'Р 0( ва ларни хисоблаймиз:
cpt = - 1,1001 рад; \|/г = 0,6073 рад;
0t = -0,2062 рад; = 0,4323 м.
Умумий холда <р., \|/., 0., 5’ лардан <р.+1, ц/.+ 1, 0/+Р -s/+1 ларга у’тиш
куйидаги формулалар буйича амалга оширилади: бу ерда i — ме-
ханизмнинг хисобланаётган вазиятининг тартиб номери. Шуни
таъкидлаш жоизки, (13) тенгламалар <р, ф, 0, .v параметрларнинг
/ + 1| вакт оралигидаги узгармас тезланиш билан кечадиган узга-
риш конуни (токис узгарувчан \аракат)га мое келади.
(12) га мувофих топилган <рр ц/р 0р st лар буйича (7) ва (8)
тенгламалар систамасини фр фр 0Г ^номаълумларга нисбатан кай-
тадан тузамиз:
-1,1586ф1-0,б277ф1 = -0,2;
0,5896 ф! - 0,9033 = -0,089;
-0,3592 фх - 0,2467ч/г - 0,8212 +0,1126^ = 0;
О,Г828ф1-О,355Оф1-О,57О7$1-°,5383 01 = 0. . *
Бу тенгламалар системасини ечиб, куйидагиларни топамиз:
ф! = 0,0881 рад/с; ф2 = 0,1560 рад/с;
= -0,1913 рад/с; =0,1116 м/с.
Олинган натижалардан фойдаланиб, яна (9) ва (40) тенгламалар
системаларини ф!, чй, 0Х, номаълумларга нисбатан тузамиз:
-1,1586ф1 - 0,6277 ч?! = 0,0265;
0,5896 Ф1 - 0,9033 = -0,0063;
-0,3592 ф1 -0,2467 + 0,8212 + 0,1126 = 0,0102;
0,1828ф1 -0,3550 +0,5707^ -0,5383 0j =0,0212.
Бу тенгламалар системаларини ечиб, куйидагиларни хосил хила-
миз:
ф} = -0,0197 рад/с2; = 0,0059 рад/с2;
0, = -0,0520 рад/с2; = 0,0092 м/с2.
Кддирилаётган катталикларни аникдаш лозим булган навбат-
даги вак;т они t = = 2Д/-0,4 с дан иборат.
(13) дан фойдаланиб, / = 1 да <р2, \p2, 02, ларни топамиз.
Юкррида тавсифланган хисоблаш тартиби к марта бажарила-
ди, унда !
141
A
116-чизма.
Бу ерда т — харакат жараёнининг давомийлиги (т = 1 с).
Тавсифланган алгоритмнинг блок-схемаси 116-чизмада курса-
тилган. Бунда:
А1 — берилган маълумотларни киритиш;
А; — (7) системани ечиш — <р, у ларни аникдаш;
А3 — (8) системани ечиш — Q, з ларни аникдаш;
А4 — (9) системани ечиш — ф, ф ларни аншдаш;
А, — (10) системани ечиш — 0, j ларни аникдаш;
\ — натижаларни чоп этиш;
А, — (13) га биноан <р, 0, .? ларни кейинги вакт они учун
дисоблаш;
А, — агар /< 6 булса, хисоблашларни такрорлаш;
. А, — ишнинг тугаши.
Барча хисоблашлар бажариб булингандан кейин турли вакд
онлари учун <р, 0, з, ф, ф, 0, з, ф, ф, 0, j — ларнинг кдйматлари
жадвали тузилади.
Келтирилган мисол учун учинчи унли ракдмгача аникдикда
хисоблаш натижалари 38-жадвалда келтирилган.
/, с <Р, рад рад 6, рад S, м
0,000 1,082 0,576 0,243 0,410
0,200 1,100 0,607 0,206 0,432
0,400 1,117 0,638 0,167 0,455
0,600 1,134 0,669 0,126 0,478
0,800 1,150 0,700 0,083 0,501
1,000 1,164 0,731 0,038 0,524
/, с ф. МА й рад/с .1. м/с
0,000 0,092 0,157 -0,181 0,110
0,200 0,088 0,156 -0,191 0,112
0,400 0,084 0,155 -0,201 0,113
0,600 0,080 0,154 -0,211 0,114
0,800 0,077 0,154 -0,220 0,115
1,000 0,073 0,154 -0,228 0,115
t, с А. Р;'Д/с2 ш рад/с2 6 рад/с2 V м/с2
0,000 -0,020 -0,008 -0,056 0,012
0,200 -0,020 -0,006 -0,052 0,009
0,400 -0,019 -0,004 -0,049 0,007
0,600 -0,019 -0,002 -0,046 0,004
0,800 -0,019 -0,000 -0,043 0,002
1,000 -0,020 -0,001 -0,040 -6,001
38-жа двал
142
УЧИНЧИ БУЛИМ
ДИНАМИКА
I. МОДДИЙ НУКГА ДИНАМИКАСИ
МОДДИЙ нукганинг
ХАРАКАТ ДИФФЕРЕНЦИАЛ ТЕНГЛАМАЛАРИ
Д. 1 -т о п ш и р и к Узгармас кучлар таъсирида булган
моддий нуцтанинг ^аракат дифференциал тенгламаларини
интеграллаш
1—5-вариаитлар (117-чизма, 1-схема). Жисм А нукдадан гори-
зонт билан а бурчак ташкил кдлувчи кия текисликнинг / узунлик-
даги АВ кисми буйлаб тс. давомида харакат килади. Унинг бошла-
нгич тезлиги Жисмнинг текислик буйлаб сирпаниш ишкала-
нит коэффициенти f га тенг.
В нукдада жисм текисликни тезлик билан тарк этади ва хавода
Т с. буяиб, горизонтга 0 бурчак остида кияланган BD текислик-
нинг С нуктасига ис тезлик билан тушади.
Масалани ечишда жисм моддий нукга, деб кабул килинсин.
Хавонинг каршилиги хисобга олинмасин.
1-вариант. Берилган: а=30°, ол=0, /=0,2; /= 10 м, 0=60°. тва
h аникдансин.
2-вариант. Берилган: а= 15°, 0^=2 м/с, /=0,2; й=4м, 0=45".
/ ва нукганинг ВС кис мд аги траекториясининг тенгламаси тузил-
син.
3-в а р и а н т. Берилган: а= 30°, ил= 2,5 м/с; /> 0, /= 8 м, d= 10 м.
0=60°. ва т аникдансин.
4-вариант. Берилган: ил=0, т=2с, /=9,8м; 0=60°,/=0. а ва Т
аникдансин.
5-вариант. Берилган: а=30°, оя=0, /=9,8 м; т=3 с, 0=45°./ва
ис аникдансин.
6—10 вариантлар (117-чизма, 2-схема). Чангичи горизонтга а
бурчак остида кияланган трамплиннинг / узунликдаги АВ кисми-
нинг А нуктасига тезлик билан келади. Чангининг АВ кисмдаги
сирпаниш ишкаланиш коэффициента f га тенг. Чангичи А дан В
гача тс. давомида харакатланади. У В нукдада трамплинни тезлик
билан тарк этади. Т с. дан кейин чангичи горизонт билан 0 бурчак
ташкил килувчи тогнинг С нуктасига ис тезлик билан келиб тушади.
Масалани ечишда чангичи моддий нукга, деб кабул килинсин
ва хавонинг каршилик кучи хисобга олинмасин.
143
6-вариант. Берилган: а=20°; f=0,]; т=0,2 с; Л=40 м; (3=30". I
ва ис аникдансин.
7-вариант. Берилган: а= 15"; /=0,1; ил=16 м/с; 1=5 м; (3=45°.
и8ва Т аникдансин.
8-вариант. Берилган: ол=21 м/с; /=0; т=0,3 с; ог=20 м/с,
(3=60°, а ва d аникдансин.
9-вариант. Берилган: а= 15°; т=0,3 с; /=0,1; А= 30\/2 м; (3=45°.
иг ва аникдансин.
10-вариант. Берилган: а= 15°;/=0, ^=12 м/с; г/=50м; (3=60°.
т ва чаши линии г ВС кдсмидаги траекториясининг тенгламаси
аникдансин.
И—15-вариаитлар (117-чизма, 3-схема). Мотоцикл А нуктада
тезликка эга булмб, горизонт билан а бурчак ташкил кдлувчи I
узунликдаги Лвкдсм буйлаб тс. давомида кутарилади. Мотоцикл
бутун АВ кием давомвда доимий Р куч таъсирида харакатланган
холла В нукцага келиб ов тезликка эга булади ва Гс давомида
хавода булиб, эни d булган жарликдан учиб утади хамда С нукгага
ис тезлик билан келиб тушади. Мотоциклнинг мотоциклчи билан
биргаликдаги массаси т.
Масалани ечищда мотоцикл мотоциклчи билан биргаликда
моддий нукга, деб хисоблансин ва харакатга кдршилик кучлари
инобагга олинмасин.
11-вариант. Берилган: а=30°, Р*0,1=40 м, ол=0, и5=4,5м/с;
d= 3 м. т ва h аникдансин.
12-вариант. Берилган: а=30°, Р= 0, /=40м, ог=4,5м/с; h= 1,5
м. ва d аникдансин.
13-вариант. Берилган: а=30°, zn=400 кг, ил=0, т=20 с, d=3
м, h= 1,5 м. Р ва / аникдансин.
14-вариант. Берилган: а=30°, т=400кг, Р=2,2кН, "х=0. /=40
м, d= 5 м. \зъ ва ис аникдансин.
15-вариант. Берилган: а=30°, иА=0, Р=2кН, /=50м, /г=2м,
d=4 м. Т ва m аникдансин.
16—20-вариаитлар (117-чизма, 4-схема). Тош нишабликнинг
горизонт билан а бурчак ташкил килувчи ва узунлиги / булган АВ
Кисми буйлаб т с давомида сирпанади. Унинг бошланкич тезлиги
о,. Тошнинг нишаблик буйлаб сирпаниш ишкаланиш коэффици-
енти /га тенг. Тош В нукдада тезликка эга булиб, т с дан кейин
С нукгада вертикал жойлашган химоя деворига бориб урилади.
Масалани ечишда тош моддий нукди, деб кабул кдлинсин. Хаво-
нинг кдршилиги хисобга олинмасин.
16-вариант. Берилган: а=30“; ил=1 м/с; 1=3 м; /=0,2; d=2,5
м. h ва Т аникдансин.
17-вариант. Берилган: а=45°, 1=6 м, ог=2 ол, т= 1 с, h=6 м. d
ва f аникдансин.
144
117-чжзма.
18-вариант. Берилган: <х=30°, 1=2 м, 1^=0, /==0,1; d=3 м. h ва
т аникдансив. 1
19-в а р и а н т. Берилган: а~ 15°, 1=3 м, 3 м/с. 0, х= 1,5 с;
d=2 м. ^(5 ва h аниктавсин.
10—
145
20-вариант. Берилган: а=45°, «^=0,/=0,3; </=2м, Ым. /ва
т ’аникдансин.
21—25-вар^актлар (117-чизма, 5-схема). Жисм горизонт би-
лан а бурчак ташкил килудчи кия текисликнинг /узунликдаги АВ
кисми буйлаб А нукгадан харакат килади. Унинг бошлангич тез-
лиги ох. Сирпаниш ипщаланиш коэффициента fra тенг. т с. дан
кейин жисм В нуктада тезлик билан кия текисликни тарк этади
ва горизонтал текисликнинг С нуктасига и,, тезлик билан тушади.
Бунда у хавода Т с. вакт мобайнида булади.
Масалани ечишда жисм моддий нукга, деб кабул килинсин ва
хавонинг каршилиги хисобга олинмасин.
21-вариант. Берилган: а=30°, /=0,1; ил= 1 м/с, т= 1,5 с; k- 10
м, ил ва d аникдансин.
22-вариант. Берилган: ох=0, а=45\ /=10 к, т=2 с. f zz ВС
кисмда траекгориянинг тенгламаси аникдансин.
23-вариант. Берилган: /=0, ил=0, /=9,81 м; %=2 с, /:-2б и.
а ва / аникдансин.
24-вариант. Берилган: ии=0, а=30°, /=0,2; I- 10 и. d- 12 м.
т ва h анжлаисин.
25-вариант. Берилган: ил=0, а=30°, /=0,2; /=6 м, А» 4,5 м.
т на ис аникдансин.
26—30-варшитлав (117-чизма, 6-схема). Ж.жм А нуктада. v
тезликка эга булиб, i узунликдаги горизонтал АВ кием буйлаб т с.
давомида хдракатланади. Жисмнинг текислик буйлаб сирпаниш
ишкаланиш коэффициента / га тенг. Жисм В нуктада тезлик
билан текисликни тарк этади ва хавода Т с. вакт давомида булиб,
С нукгага ос тезлик билан тушади. Масалани ечишда жисм мод-
дий нукга, деб хдбул килинсин. Хавонинг каршилиги хисобга олин-
масин.
26-вариант. Берилган: ол=7 м/с, /=0,2; /=8 м, й=20м. </ва и.
аникдансин.
27-ва р и ан т. Берилган: ил=4 м/с, /= 0,1; т=2 с, d=2 м. ва h
аникдансин.
28-вариант. Берилган: ив=3 м/с, /=0,3; !=3м, к=5м. о^ ва Т
аникдансин.
29-в а р и а н т. Берилган: их= 3 м/с, и3= 1 м/с, /= 2,5 м; h~ 20 м. /
ва d аникдансин.
30-вариант. Берилган: /=0,25; /=4 м; d=3 м; й=5 м. ол ва
т аникдансин.
Топширикн» бажариш намунаси (118-чизма). Крянинг темир
чул утган уймаларида кюветларни улар га нишабликлардан тош
кучкичарининг гушишидан химоя килиш учун DC “супа” кдли-
; ши. Тошнинг нишабликнинг энг юкори нуктаси А дан тушиши
чкинлигини эътиборга олиб ва бунда унинг бошлангич тезли-
146
гини и0=О деб хисоблаб, супанинг энг кичик эни b ва унга тошнинг
тушиш тезлиги анйкдансин. Тош нишабликнинг горизонт билаИ
а бурчак ташкил килувчи ва узунлиги / булган АВ кисми буйлаб
т с. давомида харакат килади.
Масалани ечищда тошнинг АВ кисмдаги сирпаниш ишкала-
ниш коэффициента /узгармас, деб хисоблансин, хдвонинг цар-
шилиги эса эътиборга олинмасин.
Берилган: ол=0; а=60°; 1-4 м; т= 1 с; h=5u; р=75°. b ва ис
аникдансин.
Ечиш. АВ кисмда тошнинг хдракатини куриб чикамиз. Тош-
ни моддий нукда деб олиб, унга таъсир килувчи кучларни курса-
тамиз (118-чизма), огирлик кучи G, нормал реакция кучи N ва
сирпаниш ишкаланиш кучи F. Тошнинг АВ цисмдаги харакат
дифференциал тенгламасини тузамиз:
1=2 1 ’ 1= s*n а ~ ?
Ишкаланиш кучи
бу ерда
N—G cos а.
Шундай килиб,
тхг= sina-/Crcosoi. х ^^sina-/^ cosa.
Дифференциал тенгламани икки марта интеграллаб, куйида-
гиларни оламиз.
ёки
x=g (sina-/’cosa)/+
147
x(= jg(sma-fcos<x)/2|f‘+ Ctt+ Cr
Интеграллашнинг ^згармас ифодаларини аникдаш учун маса-
ланинг бошлангич шартларидан фойдаланамиз:
f=0 да х(-0, ^=0'.
Бу бошлантич шартларни юцорида интеграллаб топилган тенг-
ламзларга куйиб, узгармаслар учун куиидаги кийматларни оламиз:
С1=0, С2=0.
Унда
x=g (sma-fcosaV,
^g(sina-/’cosa)/2|/2.
Тош АВ кисмни тарк этган т он учун
*1=U8’ Х1=1>
яъни
v^=g (sina-fcosa)^
/=Jg (sina-/cosa)/2J't2,
бу ерда-н
uf = 11/-С, яъни o5= 2 • 4/1 = 8 м/с.
Тошнинг В выгадан С нукгагача булган хдракатини кдраймиз.
Тошга таъсир килувчи отирлик кучи G ни к^рсатиб, унинг
Харакат дифференциал тенгламаларини тузамиз:
тх- 0, my-G.
Масаланинг бошлапгич шартлари:
f-Ода х=0, у=0;
х= oleosa; у - u^ina.
Дифференциал тенгламаларни икки марта интеграллаймиз:
х=С3: y-gt+CA:
л^С3/+С5; y=gf/2+r/+C6.
Бу ерта бошлантич шартларни куйиб, куйидагиларни топамиз:
*Топ1пирпкнинг барча 30 вариантвда - С6 интеграллаш узгармас-
ларини бошлангич шартларни нукга харакатининг биринчи ва иккинчи
кисмларида киритиб топиш мумкин. Шундай булса \ам, кагор вариант-
ларида координаталарнинг ва тезликларнинг кдйматлари бир эмас, бал-
ки турли вахт онлари учун берилган чегаравий шартлардан фойдаланиш
уринлидир.
148
C3= UgCosa; С4= o^sina;
С=0; С=0.
J 1 и
Тошнинг тезликлар и проекцияларининг куйидаги тенгламала-
рини:
х= oleosa, у =gt+ o^sina,
ва унинг харакат тенгламаларини:
х= oleosa • t, у= g^/2 + o^sina * t.
оламиз.
Тош траекториясининг тенгламасини харакат тенгламаларидан
t параметрни йукртиб топамиз. Биринчи тенгламадан t ни аник-
лаб ва унинг кийматини иккинчисига куйиб, параболанинг тенг-
ламасини хосил кдламиз ,
у = gx2/(2 о2В cos2 a)+х tga.
Тошнинг тушиш онида у= h,x-d. булади, унда траекториянинг
генгламасидан ушбу кийматларни топамиз:
^=2,11 м; J2=-7,75m.
Тошнинг харакат траекторияси параболанинг мусбат абсцис-
сали нукталар тар моги булгани учун d= 2,11 м.
Супанинг минимал эни b= d- ED- d- h/Vgl5° ёки 6=0,77 м.
Тошнинг харакат тенгламаси jc= oleosa • Г дан фойдаланиб, унинг
В нукгадан С нукгагача булган харакат вакги Т ни топамиз:
7=0,53 с.
Тошнинг тушаётгандаги тезлигини тезликнинг координата укда-
рига проекциялари
х= oleosa; y=gt+ Ursina.
оркдли куйидаги формуладан топамиз:
о = ^х2 + у2. Тошнинг тушиш они t= 7=0,53 с.
cos a)2 + (g7 + sina)2
ёки
uc= 12,8 м/с.
149
Д.2-топширик- Узгарувчи кучлар таъсирида булган
моддий нукганинг харакат дифференциал тенгламаларини
интеграллаш
Моддий нукда деб олинадиган ва узгарувчи р = Xi +Yj + Zk
куч таъсирида булган т массали М жисмнинг (119—121-чизма
берилган бошлангич шартлардаги харакат тенгламалари топилсин
8 ва 30-вариантлардан ташкари барча вариантларда z УКИ (курса-
тилган жойда) вертикал.
Ечиш учун зарур маълумотлар 39-жадвалда келтирилган булиб.
бунда куйидаги белгилашлар кабул килинган: i, j, к ~ мос ра-
вишда х, у, z координата укдарининг ортлари; g — эркин тушиш
тезланиши: f— сирпаниш ишцаланиш коэффициенти; t — вакт, с,
х, у, z, х, у, z — мос равишда нукганинг координаталари ва тез-
лигининг координата Укларига проекциялари, м ва м/с. Р куч-
нинг х, х, z, z ларга боглик булган барча холатларида нукганинг
Харакатини бу катгаликлар факат мусбат кийматга эга булганда-
гина куриб чикйлсин.
Тошпирикди бажариш намупаси. Берилган. т= 1 кг; х0=0, 10 м,
xfl=20 м/с, ^=0, P = cr(i cos<p+ к sirup), R = -аг ,с=4Н/м,а=2Н-с/м.
R кучни хисобга олмасдан хамда уни эътиборга олган холда
нукганинг харакат тенгламалари топилсин.
Ечиш. Моддий нукгага G огирлик кучи ва таъсир чизиги
кузгалмас О марказдан утувчи Р куч таъсир килади (122-чизма).
R кучни эътиборга олмаймиз. Р куч М нукгани О марказга тор-
тади. Бу кучнинг модули нукгадан кутбгача булган г масофага тугри
пропорционал.
Бошлангич вакт онида (t=Q)M нукта z укининг устида санок
бошидан 10 м масофада жойлаппан ва унта хутсига параллел йунал-
ган 20 м/с бошлангич тезлик берилади.
Берилган рг G кучлар ва бошлангич тезлик вектор и„ xOz te-
кислигида жойлашган ва шунинг учун нукганинг кейинги хараКа-
ти шу текисликда руй беради.
Моддий нукганинг харакат дифференциал тенгламалари куйи-
даги куринишга эга:
mx=-crcos<p, mz = -crsm<p- G.
Бу ерда
cos<p=x/r, sincp=K/r.
булгани учун
т 'х = - Сх, triz = -cz~ G.
ёки
x+Fx=0, 'i + k2z=-g, (1)
бу ерда
150
at*
119-чизма.
151
120-чвзма.
152
121-чизма.
153
39-жадвал
Вариант радами (119-121- да, р, н Бошлангич шартлар Изох
f xo ’ Ло *0
чизмалар) M м/с
1 2 -0,5(xi + zk) — 0 — 0 20 20 —
2 0,25 100 xl 0,3 0,03 — ' — 0,5 —
3 2 -(20х - 4х)Г 0 0,15 — — 1 — — Фадат Р куч хисобга один-
4 т -2Г -цг к — — — a — — 72ц /(та) син ц, а — мусбатдоимийлар
5 50 -(5х - 15х)1 0 0 — — 1 — — о0>0, ц>0 (const)
6 т -Эт -шрх 1 0 a — — —
7 2 4i cos(irt / 6) + yj 0 0 0 — 0 3 —
8 150 120t(i cos 30° + к sin 30°) 0 0 0 0 0,5 2 0
9 1 4r(i cos <p + к sin <p) — 0 — 2 5 — 0
10 1 -3-JiC 0 0 — — 16 — —
11 20 -3S — — 0 0 — 15 0 />0, z>0 булгандаги харакат кузатилсин
12 т r>2 -2 г -mgR z k — — — R —' — JlgR 7?>0(const), факдт Р куч дисобга олинсин
13 т -9mr(t cos a + j cos p + к cos y) — 2 2 2 1 0 1
14 1,5 (4, 5 + 3x)i 0,1 1 — — 0,3 — —
15 1,5 (6-1,5z + 3?)£ 0 — 0,5 — — 1
1 2 3 4 5 6 7 8 9 10 11
16 100 -20xi 0 0 — — 2,5 — —
17 1 5(1- e~2t)i 0 0 — —. 0 — —
18 2 -6x2i 0 0 — — 10 — —
19 6 (30e3z - 18x - 12x)Z 0 0 — — 10 — —
20 од -0, 2zk — — — 200 — — 0,1 Факдтр куч хисобга олинсин
21 0,1 -0, lz 3k — — — 300 — — 2,5 Шунинг узи
22 т -4mr(i cos cp + / sin <p) 0 20 0 0 0 8 0
23 100 50(3 + x)T 0,2 0 — — 1 — —
24 3 -3(x + 2x)i 0 0 — — 2 — —
25 1,5 -7,5{x3 i - 2gk) — 0 — 100 4 — 0
26 0,1 -(2z - 0,981)fc — — — 0 — — 7
27 2 3ti 0 0 0 — 3 4 0
28 4 -2(xi + yj + zk) — 0 0 0 1 1 2
29 0,01 -ЗуЦк — — — 0 — — 125 Огирлик кучининг таъсири эътиборга олинмасин
30 100 .20(7,5 + f)(i cos 30° + к sin 30°) 0,25 0 — 0. 0,5 — 0
к = у]с/т, к= 2 рад/с.
(1) тенгламалар узгармас коэффициентам иккинчи тартибли чи-
зикди дифференциал тенгламалардир. Уларнинг биринчиси бир
жинсли, иккинчиси эса — бир жинсли эмас.
(1) тенгламаларнинг ечимлари куйидагича:
х = Cj cos kt + Ci sin kt;
Z = C3 cos kt + Сь sin kt - g I k2
демак,
x = -Crk sin kt+ C? к cos kt;
Z = -C3ksinkt + Cikcoskt.
(3)
Cp Ср C3, C4 интеграллаш узгармасларини куйидаги бошлан-
гич шартлардан топамиз:
х0 = 0; 20 = Ю; 1
(=0 = 20; j, = 0. / <4>
(4) ни (2) ва (3) га куйиб, куйидагиларни оламиз:
х<= Ср C3-gjk\
*о= CJc; 'z = С4к.
Бу ердан
С=0; С=х./к; C^+g/k1; С4=0. (5)
(5) ни (2) га куйиб, пировардида куйидагиларга эга буламиз:
х = (Xq / A:) sin kt = 10sin2i; 1
Z = (z0 + g/k2)coskt - g/к2 = 12,45 cos It - 24,5. J
Демак,
x = x0 cos kt - 20 cos It;
Z - ~k(z0 + g/k2) sin kt --24,9 sin 2t.j
Курилаётган масалада нук^а траекториясинингтенгламаси оли-
ниши мумкин. Бунинг учун (6) харакат тенгламаларини куйидаги
куринишда ёзиб оламиз:
x/{xjk)=sinZr; (z+ g/k1)/^g/k^coskt.
Бу ифодаларни квадратга кутариб ва натижаларни кушиб, куй-
идагини оламиз:
156
x2 + (z+g/k2)2 _J
(хц/к)1 (ZQ+g/k^-
ёки
x2 (z+2,45)2 _ ,
10' + 2,452
Бу А маркази z УКИ буйлаб координата бошига нисбатан 2,45 м
пастга сурилган эллипснинг тенгламасидир. Эллипснинг ярим
укдари;-горизонтали а= 10 м; вертикали Ь- 12,45 м. (123-чизма). М
нукданинг эллипс буйлаб харакати давомида Р ва G кучларнинг
А нукдага нисбатан моментларининг йигиндиси хамма вакд нолга
тенг булади. Бошкдча айттанда, Р ва G кучларнинг тенг таъсир
этувчиси хамма вакд Я нукдадан утади.
Нукданинг эллипс буйлаб айланиш даври
Т=2лД=л=3,14 с.
Нукда радиус — векторининг бир давр мобайнида коплаган
юзаси эллипснинг юзасига тенг:
F= itab=тг(^+g/k2Y\}/k.
Энди нукданинг кдршиликли харакатини урганишга Утамиз.
Харакатга кдршилик кучи
R = -аг = -аб = -a(xi + yj). (8)
Моддий нукданинг харакат дифференциал тенгламалари куйи-
даги куринипши о ла ди:
тх = - сх-ах, m'z ~ - cz - az - G*,
ёки
х + 2 пх+ к2х= 0, z + 2«z+ k2z=-g, (9)
бу ерда
2п=а/т, п=1с1.
п<к булгани учун (9) гетламаларнинг ечимлари куйидаги кури-
нишда булади:
157
x = e nl(С\ cosA*Z + C, sink,/);
Z = e~l1> (Cj cos Lt + C4 sin Lt) - / k2,
(10)
1.3
L = 4k1 - n2 - /4 - 1 » 1,73 рад/с.
i смак,
e n‘ (-C^ sin Lt + C?L cos Lt) - e~”'n(Cl cos Lt + G sin Lt);
e n‘(~C3L sin Lt + C\L cosk^t) -e~,:1n(C3 cosfcZ + Q sinLt). j
(4) бошлангич шартларни (10) ва (11) га куйиб, куйидагиларни
. >с ил килами з:
х0=С,; х^С^-пС^
Z^C-g/k2; = С^к-пСу
бу ердан
С. =0, С2 = хп / L;
С3 = z^g/k2-,C, = ^Z(>+g/k2)4
(12)
(12) ни (10) га куйиб, пировардида куйидагиларга эга буламиз:
х = ^2 е sin Lt = 11,56e ' sm 1,73Z;
к
Z = (Zo + g / k2)ent ^cos k*t + sin Lt\- g / k2,
'(cos l,73/+0,577sin 1,73t)-2,45.
Нукданинг траскторияси А нукдага ура-
лувчи спиралдан иборат булиб (124-чизма),
бу нукгада Р ва G кучлар узаро мувоза-
натлашипптни тушуниш кдйин эмас. Мод-
дий нукта А нукгага асимптотик равишда
як,инлашиб боришини таъкидлаш жоиз.
Моддий нукта
T = 2it/k,-, Т = 3,63 с
ичида бир марта тулик айланади. Бунда А
марказдан харакатланаётган нуктагача
булган масофа хар бир Т, с. вакд ичида е"7*
марта, яъни тахминан 37,7 марта камайиб
боради.
158
Д.З.-топширик- Моддий нукданинг тебранма
^аракатини текшириш
1—5-вариаптлар (125-чизма). mD массали 1) юкнинг (2 ва
вариантлар) ёки массалари ть ва тЕ булган D ва Е юклар система
сининг (1, 3, 5-вариантлар) х уци буйича харакат тенгламаси го-
пилсин. Санок боши В юкнинг ёки мос равишда I) ва Е юклар
сисгемасининг тинч вазиятида (пружиналарнинг статик деформа-
цияси холатида) олинсин. Юкларни бирлаштириб турувчи стер-
жень огирликсиз ва деформацияланмайди, деб хисоблансин.
1-в а р и а н т. D юк (mD- 2 кг) хар бирининг бикирлик коэффи-
циента с= 3 Н/см булган иккита бир хил параллел пружинага осил-
ган АВ тахтачага махкамланган, D юк махкамланган иукда пружи-
наларнинг ухдаридан тенг масофаларда жойлашган.
Бирор вакт онида D юкка Е юк (m£= 1 кг) осиб куйилади. Юк-
лар системасининг харакатига каршилик кучи тезликка пропор-
ционал: R- 12и (Н), бу ерда о — тезлик (м/с).
.Муглак бикир АВ тахтачанинг ва унга махкамланган демпфер
кисмининг массаси хисобга олинмасин.
• 2-в а р и а н т. D(mT = 1 кг) ва Е(тЕ= 2 кг) юкларни бирлаштириб
тирувчи стержень кесиб юборилган ондан бошлаб В нукда (кетма-
кет уланган пружиналарнинг юкори учи) £= 1,5 sin 18/ (см) крнун
буйича харакат кила бошлайди (с укд вертикал буйлаб пастта йунал-
ган). Пруткиналарнинг бикирлик коэффициентлари ct= 12 Н/см,
с2=36 Н/см.
3-в а р и а н т. D юк (тг=0,8 кг) АВ тахтачанинг F нукдаеига мах-
камланган ва бикирлик коэффициента ct= 10 Н/см булган пружи-
нага осилган. Тахтача бикирлик коэффициентлари с2=4 Н/см, с3= 6
Н/см булган иккита параллел пружинага осиб куйилган. F нукга
бу пружиналарнинг укдаридан а ва b масофаларда жойлашган: а/
b=cjcr
Бирор вакд онида D юкка Е юк (тЕ= 1,2 кг) осиб куйилади.
Худди шу вакд онида юклар системасига пастга йуналган о0=0,2
м/с тезлик берилади. Мутлак бикир АВ тахтачанинг массаси хисобга
олинмасин.
4-вариант. Иккита бир хил параллел пружинанинг D(mb=0,5
кг) ва Е(тЕ= 1,5 кг) юклар таъсиридаги статик деформацияси /ст=4
см. Юклар пружиналарга му гл а к бикир АВ тахтача ёрдамида осил-
ган. Бирор вакд онида юкларни бирлаштириб турувчи стержень
кесиб юборилади. D юкнинг харакатига каршилик тезликка про-
порционал R= 6u (Н), бу ерда о — тезлик (м/с). Тахтачанинг ва унга
махкамланган демпфер кисмининг массаси хисобга олинмасин.
5-в а р и а н т. Бикирлик коэффициенти ( = 4 Н/см болтан пр\
жинага осиглик; D юкка (mD= 1,6 кг) Е юк (т£-2,4 кг) оси.п
159
125-чмзма.
ондан бошлаб В нукга (пружинанииг юкори учи) £=2 sinStfcw) xpiiyu
буйича харакатлана бошлайди (5 уки вертикал буйлаб пасгга йуЧсЛ-
ган).
160
Э слатма. Санок; бошининг х укддаги вазияти В нукданинг урта ва-
зиятига (s=0) мос келади.
6—10-вариантлар (125-чизма). т массали D юкнинг горизонт
билан а бурчак ташкил килувчи кия текислик буйлаб харакат тенг-
ламаси уни паужинага ёки пружиналар системасига келиб тегиш
онидан бошлаб топилсин; бунда юк кейинги харакати давомида
пружиналардан ажралмайди, деб фараз бдшинсин. Санок боши
учун юкнинг тинч вазияти (пружиналарнинг статик деформация-
си холати) кабул килиниб, унинг харакати х укига келтирилсин.
6-в а р и а н т. D юк (т=4 кг) кия текислик буйлаб (а= 30°) бош-
лангич тезликсиз s= 0,1 м масофани угиб, бикирлик коэффициент-
лари с(=48 Н/см, с2=24 Н/см булган деформацияланмаган, кетма-
кет уланган пружиналарга бориб урилади.
7-вариант. Бирор вакд онида D юк (т=2 кг) с\= 12 Н/см,
с2= 6 Н/см бикирлик коэффициентларига эга булган деформация-
ланмаган, кетма-кет уланган пружиналарнинг А учига бошлангич
тезликсиз улаб куйилади. Худди шу ондан бошлаб (/=0) пружина-
ларнинг иккинчи В учи кия текислик буйлаб (а=45°) 2=0,02 sin
20/ (м) конун буйича харакат кила бошлайди уки кия текислик
буйлаб пастга йуналган).
Э с. л атм а. Санок бошининг х уквдаги вазияти В нукданинг урта ва-
зиятига (s=0) мос келади.
8-в а р и а н т. с}=4 Н/см ва с2= 6 Н/см бикирлик коэффициент-
ларига эга булган 1 ва 2 параллел пружиналар мутлак. бикир АВ
тахтача билан бирлаштирилган булиб, унинг К нуктасига бикир-
лик коэффициент с3= 15 Н/см булган 3 пружина махкамланган.
К нукта 1 ва 2 пружиналарнинг укдаридан а ва Ъ масофаларда
жойлашган: a/b-cjcv 1, 2ва 3 пружиналар деформацияланмаган,
1,5 кг массали D юк 3 пружинанинг N учига уланади. Худди шу
онда D юкка кия текисликка (а=45°) параллел равишда пастга
йуналган о0=0,5 м/с тезлик берилади. АВ тахтачанинг массаси
Хисобга олинмасин.
9-вариант. D юк (м=1,2 кг) кия текислик буйлаб (<х=30°)
бошлангич тезликсиз 5=0,2 м масофани утиб, бикирлик коэффи-
циента с=4,8 Н/см булган девормацияланмаган пружинага бориб
урилади. Худди шу ондан бошлаб (/=0) В нукта (пружинанинг
пастки учи) кия текислик буйлаб 2=0,03 sin 12/ (м) конун буйича
харакат кила бошлайди (2 уки кия текислик буйлаб пастга йунал-
ган) (7-вариантга берилган эслатмага каранг).
10-в а р и а н т. D юк (т= 1 кг) иккита бир хил параллел пружи-
наларнинг учларини бирлашгирувчи мутлак бикир АВ тахтачанинг
уртасига бошлангич тезликсиз махкамлаб куйилади. Пружиналар
6-52 161
к:(!и»р-,-1а!1иятанмаган. Пружиналарнинг бикирлик коэффициентла-
с~ I.S Н/см. Юкнинг харакатига каршиликтезликкапропорци-
ча г /?= X и (Н), бу ерда и —-тезлик (м/с), а= 60°. АВ тахтачанинг ва
-па маххамданган демпфер кисмининг массаси хисобга олинма-
нн
11—lS-вариантлар (126-чизма). т массали D юк горизонтал
:екисликда Е Ук атрофида айлана олувчи вазнсиз стерженнинг
учига махкамланган. Юк пружина билан ёки пружиналар систе-
маси билан бириктирилган. Стерженнинг чизмада курсатилган тинч
турган холати дефор мацияланмаган пружиналарга мос келади.
Моддий нукга, сифатида кабул килинадиган В юк тугри чизик;
буйлаб харакатланади, деб хисоблаб, бу юкнинг харакат тенглама-
\ и аникдансин (юкнинг текислик буйлаб сирпаниш ипщаланиши
хисобга олинмасин).
Харакат х укига келтирилсин, санок боши ктигиб юкнинг тинч-
турган холатига мос келувчи нукда олинсин.
11-вариант. В юк (т=2,4 кг) бикирлик коэффициентлари
Cj= 1 Н/см ва с2= 1,4 Н/см булган иккита параллел пружинанииг
учларини богловчи АВтахтачанинг /’нуктасига бириктирилган. F
нукга пружиналарнинг укларидан а ва b масофаларда жойлашган:
alb=cjcv
В юк чизмада курсатилган вазиятидан чап томонга ?.= 2 см кий-
матга огдирилади ва бошлангич тезликсиз куйиб юборилади.
Юкнинг харакатига каршилик тезликка пропорционал: R= 6о (Н).
бу ерда о — тезлик (м/с). Мутлак бикир АВ тахтачанинг ва демп-
фер нинг массаси хисобга олинмасин.
12-в а р и а н т. Бирор вакт онида пружинанинг %= 2 см кийматта-
ча сикиб ушлаб турилган В юк (т= 3 кг) бошлангич тезликсиз куйиб
юборилади. Пружинанинг бикирлик коэффициента с= 9 Н/см. Шу
ондан бошлаб (1=0) В нукга (пружинанинг унг учи) §= 1,2 sin 8/ (см)
Конун буйича харакат кила бошлайди « Уки чаша йуналган).
Э с л а тм а. Санок бошининг х укидаги вазияти В нукганинг урта ва-
зиятига (-:=0) мос келади.
13-вариант. В юк (ти= 1 кг) бикирлик коэффициента с= 12
Н/см булган пружинанинг учига махкамланган булиб, бу пружи-
нанинг иккинчи учи АВ тахтачанинг F нуктаси билан бирикти-
рилган. АВ тахтача \ар бирининг бикирлик коэффициента с= 13
Н/см булган иккита параллел пружинанинг учларини боглайди. F
нукга параллел пружиналарнинг укларидан тенг масафаларда жой-
лашган. Юкка ЕВ стерженнинг чизмада курсатилган вазиятидан
Унг томонга йуналган о=0,5 м/с тезлик берилади.
Юкнинг харакатига каршилик тезликка пропорционал: R= 12
цН), бу ерда о — тезлик (м/с).
162
Демпфернинг сурилгичи вазнсиз АВ тахггачадаги тешик оркдли у?кл
зилиб, D юк билан бириктирилган.
14-вариант. D юк (т= 1,5 кг) бир томони билан с =4,4 Н/см
бикирлик коэффициентига эга булган пружинанинг учига, иккинчи
томони билан эса бикирлик коэффициентлари с2= 2 Н/см, с.= 8 Н
см булган иккита кетма-кет уланган пружинаниг учига мадам
лантан.
Юк чизмада курсатилган вазиятидан чап томонга л=2,5 см
КИйматга огдирилиб, куйиб юборилади ва шу билан бир вактда
унга унг томонга йуналган ио=О,4 м/с бошлангич тезлик бери-
лади.
15-в а р и а н т. D юк (т= 1 кг) кетма-кет уланган пружинанинг
А учига махкамланган. Пружиналарнинг иккинчи В учи <= 1,8 sin
12/ (см) конун буйича харакатланади ухи чапга йуналган). Пру-
жиналарнинг бикирлик коэффициентлари с =4 Н/см, с2=12 Н/
см. /=0 да юк деформацияланмаган пружиналарга мое келувчи
тинчлик вазиятида туради (12-вариантга эслатмага кдранг).
16—20-вариантлар (126-чизма). тв массали D юкнинг (17-ва
19-вариантлар) ёки тЕ ва тЕ массали D ва Е юклар сисгемасининг
(16, 18, 20-вариантлар) харакат тенгламаси топилсин (бу харакат х
укига келтирилсин). Санок, боши D юкнинг ёки мое равишда D ва
Е юклар сисгемасининг тинч вазиятида (пружиналарнинг статик
деформацияси вазиятида) о лине ин. D ва Е юклар биргаликдаги
Харакатларида ажралиб кетмайди, деб фараз килинади.
16~в а р и а н т. Устида D юкни (тв= 10 кг) ушлаб турувчи 1 пру-
жина F нукдада иккита 2 ва 3 параллел пружиналарнинг учларини
бирлаштириб турувчи АВ тахтачага таянади. 1, 2 ва 3 пружиналар-
нинг бикирлик коэффициентлари (Н/см): ^=200, с2= 160, с3= 140.
F нукта 2 ва 3 пружиналарнинг укдаридан а ва b масофаларда
жойлашган: a/b=cjcr
Вахтнинг бирор онида D юкнинг устига Е юк (тЕ= 20 кг) куйи-
лади ва шу билан бир вакгда юклар системасига пастга йуналган
^=0,4 м/с тезлик берилади. Мутлак, бикир АВ тахтачанинг масса-
си хисобга олинмасин.
—-~ 17-в а р и а н т. Бирор вахт онида Е юк D юкнинг устидан оли-
нади (иккала юк хам пружинанинг статик деформациясига мое
келувчи тинч холатда турибди). D ва Е юклар сисгемасининг пружи-
на устидаги хусусий тебранишларининг циклик частотаси к= 20
рад/с, массалар нисбати m Jm=2/3.
18-вариант. Иккита бир хил параллел пружиналардан \ар
бирининг D юк (/л . = 20 кг) таъсиридаги статик деформацияск
/<5= 2 см. Бирор вахт онида D юкнинг устига Е юк (тЕ= 10 кг)
куйилади. Юкларнинг харакатига каршилик тезликка пропорци-
онал: R=6Q>j3 о(Н), бу ерда о — з< -тик (м/с;. Мутлак бикир , у
163
126-чизма.
тахтачанинг ва у билан боглантан демпфер кисмининг массаси хисобга
олинмасин.
, 19-в а р и а н т. Иккита D ва Е юк (/пл= 15 кг, тЕ= 25 кг) 250
Н/см ва с2=375 Н/см бикирлик коэффициентларига эга булган
164
кетма-кет уланган пружиналарнинг устида тинч турибди. Е юк
олинган ондан бошлаб пружиналарнинг таянч нукдаси В с=0,5 sin
30/ (см) крнун буйича харакат кдла бошлайди (£ уци вертикал буйлаб
пастга йуналган).
Эслатма. Санок бошининг х укддаги вазияти В нукганинг урта ва-
зиятига (^=0) мос келади.
20-в а р и а н т. Пружинанинг статик деформацияга мос келувчи
тинч холатда булган D юкнинг устига вакднинг бирор онида Е юк
Куйилади. Худди шу онда юклар системасига пастга йуналган о0=0,3
м/с тезлик берилади. D юкнинг пружина устидаги хусусий тебра-
нишларининг циклик частотаси kD= 24 рад/с, массалар нисбати т£/
ms=3.
21—25-вариантлар (127-чизма). т массали D юкнинг горизонт
билан а бурчак ташкил цилувчи силлик кия текислик буйлаб кара-
кат тенгламаси, харакат х укита келтирилган холда топилсин. Са-
нок боши килиб юкнинг тинч турган холати пружиналарнинг ста-
тик деформация холати кабул кидинсин.
21-вариант . Бирор вахт онида D юк (т=2 кг) с = 2 Н/см ва
с2=3 Н/см бикирлик коэффициентларга эга булган деформация-
ланмаган пружиналарнинг учларига махкамланади. Шу билан бир
вактда юкка кия текислик (а= 45°) буйлаб пастга йуналган ио=О,4
М/с тезлик берилади.
22-в а р и а н т. D юк кия текисликнинг (а= 30°) устида пружина-
нинг статик деформацияси fc= 2 см га мос келувчи тинч вазиятда
туради. Бирор вакт онида (/=0) К нукта (пружинанинг юцориучи)
£,= 0,01 sin 10/ (м) конун буйича харакат кила бошлайди (£ уки
текислик буйлаб пастга йуналган).
Эслатма. Санок бошининг х укидаги вазияти В нукганинг урта ва-
зиятига (s=0) мос келади.
23-в а р и а н т. D юк (т= 3 кг) иккита деформацияланмаган па-
раллел пружиналарнинг учларини бирлаштирувчи АВ тахтачанинг F
нукгасига махкамланади ва бошлангич тезликсиз куйиб юборилади.
Пружиналарнинг бикирлик коэффициентлари с = 2 Н/см ва с2=4
Н/см. Сггукга пружиналарнинг укларидан а ва b масофаларда жой-
лашган: а//>=с2/ср а=60°.
Юкнинг харакатига карпгилик тезликка пропорционал: В= 12 и
(Н), бу ерда о — тезлик (м/с). АВ тахтачанинг ва демпфернинг мас-
саси хисобга олинмасин.
24-вариант. Бирор вакт онида D юк (т= 1 кг), 12 Н/см ва
с2=4 Н/см бикирлик коэффициентларига эга булган деформация-
ланмаган кетма-кет уланган пружиналарнинг А учига махкамланади
ва бошлангич тезликсиз куйиб юборилади.
165
Шу билан бир вакгда (/=()) пружиналарнинг иккинчи В учи
£= 1,5 sin 101 (см) конун буйича харакат кила бошлайди. £ Уки кия
текислик (а=30°) буйлаб пастга йуналган (22-вар иантга, эслатмага
каранг).
25-в а р и а н т. Иккита бир хил параллел пружиналарнинг учлари
АВ тахтача билан бирлаштирилган. Хар бир пружинанинг кия те-
кислик (а=30°) уствда ётган В юк (т= 1,5 кг) таъсиридаги статик
деформацияси f„=4,9 см. Бирор вакт онида D юкка кия текислик
буйлаб юкорига йуналган и0=0,3 м/с бошлангич тезлик берилади.
Юкнинг харакатига каршилик тезликка пропорционал: R- би (Н),
бу ерда и — тезлик, (м/с).
Муглак бикир АВ тахтачанинг ва у билан богланган демпфер
Кисмининг массаси хисобга олинмасин.
26—30-вариантла р (127-чизма). Плитанинг массасини эътибор-
га олмасдан ва уни муглак бикир, деб хисоблаб, т массали D жисм-
нинг харакат тенгламаси, юк кейинги харакати давомида плитадан
ажралмайди, деб, фараз килинган холда топилсин.
Юкнинг харакати х укига келтирилсин. Санок боши цилиб бу
юкнинг тинч холатдаги вазияти (пружиналарнинг статик деформа-
ция холатида) олинсин.
26-в а р и а н т. Плита с= 600 Н/см ва с2=400 Н/см бикирлик ко-
эффициентларига эга булган иккита параллел пружинанинг устида
ётибди. D юк (т=50 кг) плитанинг пружина укларидан а ва b масо-
фалар да жойлашган F нуктасига й=0,1 м баландликдан бошлангич
тезликсиз тушади: ajb=cjcv
27-в а р и а н т. Устига плита кУйилган иккита параллел пружина-
дан хар бирининг бикирлик коэффициенти с= 130 Н/см. D юк (wi=40
кг) плитанинг уртасига куйилади ва пружиналарнинг деформация-
ланмаган вазиятида бошлангич тезликсиз кУйиб юборилади. Юк-
нинг харакатига каршилик тезликка пропорционал: Л=400 о (Н).
Бу ерда о — тезлик (см/с). Плитанинг ва демпфернинг массаси
Хисобга олинмасин.
28-в а р и а н т. D юк плитанинг устига /г= 5 см баландликдан ту-
шади. Пружинанинг бу юк таъсир идан статик эгилиши /сгп= 1 см.
29-в а р и а н т. Плита бикирлик коэффициентлари с = с = с=400
Н/см булган иккита бир хил параллел 1 ва 2 пружиналарнинг усти-
да ётибди. Бирор вакт онида D юк (т= 200 кг) плитанинг уртасига
урнатилади ва шу билан бир вакгда с3= 200 Н/см бикирлик коэф-
фициентига эга булгаи деформациялнмаган пружинага махкамлаб
куйилади. Худци шу вакт онида (деформацияланмаган пружиналар-
да) юкка пастга йуналган ио=О,6 м/с тезлик берилади.
30-вариант. Бирор вакт онида I) юк (т= 100 кг) плитанинг
устига урнатилади ва (деформацияланмаган пружиналарда) бопг-
166
127-чизма.
лангич тезликсиз куйиб юборилади. Худди шу ондан бошлаб В
нухта (пружинанинг пастки учи) ^=0,5 sin 201 (см) хонунга муво-
фих вертикал буйлаб харакат куша бошлайди (£ ухи пастга йунал-
ган). Пружинанинг бикирлик коэффициента с= 20Q Н/см.
167
g Эслатма. x уклада санок.
\ боши В нукданинг урта вази-
ятига (£=()) мос келади.
Тошиирицни бажариш па-
мунаси (128-раем). Масса-
лари mD=2 кг ва т =3 кг
булган D ва Е юклар гори-
зонтга нисбатан а- 30° бур-
чак остида кцяланган сил-
лиц текисликнинг устида
бикирлик коэффициента
с= 6 Н/см булган пружина-
га тиралиб турибди.
Бирор вакд онвда Е юк
олиб ташланади. Шу билан
бир вакгда (/= 0) пружининг
пастки учи В кия текислик
буйлаб ^=0,02 sin 16? (м) копун буйича харакат цила бошлайди. D
юкнинг харакат тенгламаси топилсин.
Ечиш. Масалани ечиш учун нукданинг харакат дифференциал
тенгламаларидан фойдаланамиз. Координата системасининт боши-
ни юк D нинг В нуцта узининг урта вазиятини (t= 0) олганда пру-
жинанинг статик деформациясига мос келувчи тинчлик вазиятида
оламиз.
х уцини кия текислик буйлаб тепага (D юкнинг Е юк олинган-
дан кейинги харакати томонга) йуналтирамиз. D юкнинг харакати
цуйидаги дифференциал тенглама билан ифодаланади:
бу ерда D юкка таъсир цилувчи кучлар (128-расм, a); Gs —
огирлик кучи, N — ция текисликнинг нормал реакцияси ва Р —
пружинанинг бикирлик кучининг х укига проекцияларининг йи-
гиндиси.
Шундай цилиб,
mDx = - Gd since- Р.
Бунда
P=c(x-fal)+£),
бу ерда faD — пружининг D юк таъсиридаги статик деформацияси, £;
— пружинанинг пастки учи махкамланган нуктанинг '^-d sin.pt
(d=Q,02 м; р= 10 рад/с) цонун буйича кучиши.
Пружинанинг статик деформацияси ни D юкнинг кия текис-
лик устидаги тинч холати теягламасидан топамиз (128-расм, б):
168
2Х.=0, - Gd sma+Po=O,
яъни
- Gn sina+ cf =0,
бу ердан
f n= Gr.
Бу тешликка асосан D юкнинг харакат дифференциал тенглама-
си
V = “ Gn sina~ с(х~
цуйидаги куринишни олади:
твх+ cx=cd sinp/.
Тенгламанинг барча хадларини mD га булиб, куйидаги
с/тв= к2, cd/m§L= h
белтилашларни киригиб, дифференциал тенгламани куйидаги кури-
нишга келтирамиз:
х+ k2x=h sin pt.
Бу бир жинсли булмаган тенгламанинг ечими бир жинсли тенг-
ламанинг умумий ечими х* ва мазкур бир жинсли булмаган тенгла-
манинг хусусий ечими х** дан ташкил топади:
х=х*+х**.
Бир жинсли тенгламанинг умумий ечими куйидаги куринишга
эга:
х*= Ct cos/tf+ С2 sin/cZ.
Бир жинсли булмаган тенгламанинг хусусий ечими:
х** = |h/(k2- р2)]sin pt.
Умумий интеграл
х= cos kt+ С2 sin kt+ \h/(k2-p2)]sin pt.
ва C2 интеграллаш доимийларининг кийматларини аникдаш
учун куйидаги цушимча тенгламани тузамиз:
х=- CJc sin kt+ С2к cos kt+ \hp/(k2-p^)]cos pt
ва масаланинг бошлангич шартларидаи фойдаланамиз.
Текширилаётган харакат пружинанинг D ва Е юклар таъсирида-
ги деформацияси статик деформациядан иборат булган ондан (/=0)
бошланади. Санок боши О нинг кабул килинган вазиятида D юк-
нинг бошлангич координатаси х0=-4г, бунда 4£= C£sina/c — пру-
жининг Е юк таъсир идаги статик деформацией.
169
Шундай килиб, t=0 да
x=-f „, хл=0.
О zcr£’ О
л= х(1) ва (1) тенгламаларини 1=0 учун тузамиз:
Ср х\= cik+ hP/(k2~ Р1)’
бу ердан
с,=-4г
Энди В юкнинг харакат тенгламаеи куйидаги куринишга эга
булади:
х= - f . cos kt - —, sin kt+ тт~~т: 8*п Рг
к(к?-р2) к -Р
Тенгламага кирувчи катталикларнинг сон кдйматларини топа-
миз:
k-J^ = J^ = 17,3 с-1;
V mD Ч 2 ’ ’
f GT-sina 3-9,81-0,5 _ n..c
f- = ~------= <<nn = 0,0245 м;
ct-E c 6100
h _ cd 600-0,02
РЧ7 ” ^D(k2-p2) ~ 2(300-200) ~0’03 M’
hp 0,03-10
k(k2-p2) 17,3 0,0173 M.
Демак, D юкнинг харакат тенгламаеи
x=-2,45 cos 17,31- 1,73 sin 17,31+3 sin 101 (cm).
4-tопшиphi;. Моддий нукганинг нисбий харакатина
текшириш
Моддий нукга, деб кдралувчи М шарча харакатдаги А жисмнинг
цилиндрик капали буйлаб кучади (129— 131-чизмалар). О нукгани
санок; боши килиб олиб, шу шарчанинг нисбий харакат тенгламаеи
х= fit) топилсин.
А жисм кузгалмас укатрофида текис айланади (2, 3, 4, 7, 10, И,
14, 20, 23, 26 ва 30-вариантларда айланиш укд г, вертикал; 1, 12, 15
ва 25-вариантларда айланиш уки Xj горизонтал). 5, 6, 8, 9, 13, 16,
17, 18, 19, 21, 22, 24, 27, 28 ва 29-вариантларда А жисм
вертикал текисликка параллел равишда илгариланма харакат кдла-
ди.
170
129-чизма.
171
130-чизма.
172
131-чизма.
173
Шунингдек, берилган t= гдийматда шарчанинг координатаси х
за унинг канал деворйга бос ими топилсин. Топширикди бажариш
учун зарур маълумотлар 40-жадвалда келтирилган.
40-жад вал
Вариант разами (129-131- чизмалар) а, град т, /С кг СО, рад- /с Бошлан- гич маъ- лумотлар с г, Н/см h0 к М Жисмнинг Харакат тенг- ламаси rh, м /
х0, м м/с
1 — 0,02 л 0 0,4 0,5 — — — — 0
2 — 0,02 л 0 0,2 0,4 — — — 0,15 0
3 45 0,03 2л 0,5 0 0,2 — 0
4 — 0,09 4л 0,2 -0,8 0,1 0,36 0,15 — — 0
5 60 0,02 — 0,6 0 0,2 — у,=06-2/’ (м) — 0
6 — 0,01 10л 0,5 0 0,2 — — — 0,10 0
7 — 0,03 2л 0,3 0 0,2 — — — 0,20 0
8 30 0,03 — 0,8 0 0,1 — — г]=0,1схк2л/(м) — 0
9 30 0,02 — 0,4 0 0,1 .0,20 0,20 у1=413 (м) — 0
10 60 0,05 6л 0,4 0 0,1 — — — 0,20 0
11 30 0,05 к 0 0 0,4 — — — 0
12 — 0,08 6л 0,05 0 0,1 0,20 0,10 — — 0
13 — 0,01 0 0,5 0,2 — — z=5-10f (м) — 0,1
14 — 0,05 4л 0,5 0 0,1 — — — 0,20 0,2
15 — 0,01 7С 0,5 0 1,0 — — — 0
16 45 0,02 __ 1,0 2,0 0,1 — — у, =0,06 t3 (м) — 0
17 — 0,02 6л 0 4,0 0,2 — — — 0,20 0
18 40 0,02 — 0,6 0 0,1 — — у, =0,1 8Шл/(м) — 0
19 — 0,08 — 0,4 -0,8 0,1 0,40 0,20 У, =8?-г' (м) — 0
20 — 0,01 10л 0,1 0 0,2 0,20 0,10 — — 0
21 30 0,05 — 0,5 0,1 0,1 — — y=2+fi (м) — 0,2
22 — 0,03 4л 0,1 3,0 0,1 — — 0,10 0
23 0,01 2л -0,5 -0,1 0,2 — — — — 0
24 60 0,01 — 0 0,2 0,2 — — >-“-0,1ав1,5лЛм) — 0
25 — 0,05 2л о,1 -0,4 0,1 0,20 0,20 — __ 0
26 — 0,09 7С 0,2 •0,3 0,1 0,20 0,1 — — 0
27 75 0,02 1,0 0,6 0,3 — — г,=Ю,1агй,5лГ(м) — 0
28 — 0,03 0,8 0 0,3 — — yj=8-5^ (м) — 0,1
29 60 0,10 0,4 1,0 0,1 0,20 0,20 у,=8+/3 (м) — 0
30 50 0,02 л/2 0 0,5 0,2 — 0,50 0
174
132-чизма.
Топширикда куйцдагича бел-
гилашлар кабул килинган: т—
М шарчанинг массаси; со—А
жисмнинг (1—4, 10—12, 14, 15,
20, 23, 25, 26, 30-вариантларда)
ёки OJB ва О2С кривошиплар-
нинг (6, 17, 22-вариантларда)
доимий бурчак тезлиги; с—М
шарча махкамланган пружина-
нинг бикирлик коэффициента,
/0—деформацияланмаган пружи-
нанинг узунлиги; f — шарчанинг
канал девори буйлаб сирпаниш
ипщаланиш коэффициента; х0,
_х0 — бошлангич координата ва
бошлангич тезликнинг х уцига
проекцияси.
Тонширикди бажариш паму-
иаси (132-чизма). Берилган:
а=30°, (о=7с рад/с; ли=0,01 кг;
т=0,2 с; хо=О,3 м; х0=2 м/с; с= 1 Н/м; /0=0,2 м; г=0,2 м.
М шарчанинг нисбий харакат тенгламаси x=x(t'), шуниигдек,
унинг берилган t- ондаги координатаси ва каналнинг девори-
га босими топилсин.
Ечиш. Кузгалувчи Oxyz координата системасини айланаётган
канал (найча) билан боглаб, х уцини М шарчанинг нисбий хара-
кат траекторияси билан устма-уст туширамиз.
Бу системанинг zv УКИ атрофида айланиши М шарча учун кучир-
ма харакат булади. М шарчанинг нисбий харакати найча буйлаб
харакатдан иборат. Кучирма харакат текис айланма харакатдан
иборат булган холда нукданинг нисбий харакати куйидаги тенгла-
ма билан аникданади:
М шарчага куйидаги кучлар куйилган: огирлик G , пружина-
нинг реакцияси Р ва найча деворининг нормал реакцияси; бу
реакцияни узаро перпендикуляр иккита ва N2 ташкил этув-
чиларга ажратиш мумкин.
Шарчага таъсир этувчи кучлар цаторига фм ва ас тезланишлар-
га кдрама-карши йуналган кучирма марказдан цочма инерция кучи
ср/ ни ва Кориолис инерция кучи Фс ни кушамиз. ас тезланиш-
нинг йуналишини маълум коида буйича топамиз. М нуктанинг
нисбий тезлиги бг нинг йушалиши х укцнинг мусбат йуналиши
билан устма-уст тушади, деб фараз цилайлик. Бу холда Кориолис
175
инерция кучи Фс xOz текислигига перпендикуляр ва 132-чизмаДа
курсатилтанидек йуналган булади.
Инерция кучларининг модуллари куйидаги формулалар буйи-
ча аникданади:
Ф“ = та* = ma2(r + xsin а);
Фс= та = 2m<oeo/sina,
бу ерда
М нукданинг нисбий харакат тенгламаеи ушбу холда куйидаги
куринишга эга:
mar = G + Р + Ny + N7 + Ф“ + Фс. (1)
М шарчанинг х укц буйлаб нисбий харакат дифференциал тен-
гламасини тузамиз:
тх = Xf = Ф" sin a - G cos a - P,
ёки
mx = ma2 (r + x sin a) sin a - my cos a - c(x - Zo)
(пружинанинг реакцияси P бикирлик коэффициента билан пру-
жина деформациясининг купайтмасига тенг).
Охирги тенгдамани куйидаги куринишда ёзамиз:
х+ (c/m-<o2sin2a)x=co2r sina-g cosa+ cljm. (2)
Олинган (2) дифференциал тенгламанинг умумий ечими куйи-
даги куринишга эга:
х=х*+х**,
бу ерда х* — бир жинсли мос тенгламанинг умумий ечими, х** —
(2) тенгламанинг хусусий ечими.
Характеристик тенгламани тузамиз ва унинг илдизларини то-
памиз:
л2+ c/m-ffl2sin2a=0;
= д/со2 sin2 а,-с / т = • 0,52 -Г/ 0,01 = 9,876 I;
\=-9,87 /.
Шундай килиб, бир жинсли тенгламанинг умумий ечими куй-
идаги куринишга эга булади:
х*= C1cos9,876 i+C,sin 9,876 t.
176
(2) тенгламанинг хусусий ечимини куйидаги курингшла тот
миз:
х**=В.
(2) дифференциал тенгламадан
** _ n_ ®2г sin a-g cosa+c/0 / тп
X — JJ — - 2 ; 2 ,
.. с/ т-а sin а
Хисоблашлар натижасида
£=0,128 м.
эканлиги келиб чикади.
М шарчанинг нисбий харакат дифференциал тенгламаси (2) нинг
ечими куйидаги кУринишга эга булади:
х= С1 cos9,876/+ С2 sin9,876/+0,128. (3)
Бу харакатнинг тезлиги
х= — 9,876^ sin 9,876/+9,-876 С2 cos 9,876/. (4)
С£ ва С, узгармасларни куйидаги бошлангич шар 1лардан фойда-
ланиб топамиз:
/=0 да хо=О,3 м: хо=2,О м/с.
(3) ва (4) тенгламаларни /=0 холат учун тузамиз:
х0=Сх+0,128; х0= 9,876 С2,
бу ердан
. С =0,172; С2=0,202.
М шарчанинг нисбий харакат тенгламаси куйидаги куринишни
олади:
х— 0,172 cos 9,876/+0,202 sin9,876/+0,128.
Шарчанинг нисбий харакат тезлш и
х = - 16,9 sin 9,876/+ 1,99 cos 9,876/.
Найча девори реакциясининг /=/=0,2 с даги ва N2 ташкил
этувчиларини аникдаш учун (2) вектор тенгламани у ва z утутарга
проекцияларда ифодалаймиз. аг векторнинг бу у кд ар га перпендику-
ляр эканлигини хисобга олиб, куйидагиларни хосил г иламиз:
О = N, - Фс; О = N{~G cos 60° - Ф“ cns 0°.
Бу теш лама лардан yr toy ифодалар ни топа 4 сиз:
177
Лг =Ф =2/жоо sina;
Nk = G cos 60° + Ф“ cos 30° = mg cos 60° + та2 (г + x sin a) cos 30°.
Nt ва N2 ларнинг сон кдйматларини топиш учун t = 0,2 е кдймат-
га мос келувчи х{ координатани ва нукга нисбий тезлигининг про-
екцияси Xj ни аниклаш зарур;
х1= 0,172 cos(9,876 • 0,2)+0,202 sin(9,876 • 0,2)+0,128 =
= 0,172 cosll3° + 0,202 sin 113° + 0,128 = 0,246 м;
х=- 1,69 sinll3°+ 1,99 cosll3° = -2,33 м/с.
Демак, реакциянинг ташкил этувчилари
;V=0,077H; А> 0,080 Н.
Наина деворининг реакцияси
+ N2 = ^0,0772 + 0,0802 = 0,111 Н.
М шарчанинг'найча деворига босими сон кдймати жихатидан
топилган А^реакцияга тенг, йуналиши эса унга кдрама-кдрши.
МОДДИЙ НУКТА ДИНАМИКАСИНИНГ
АСОСИЙ ТЕОРЕМАЛАРИ
Д. 5.-то и шири к,, Харакат микдорининг узгариши
Закддаги теоремани моддий нукданвдг тезлигини
аницлашга тадбик, этиш,
т массали жисмга горизонт билан а бурчак ташкил дилувчи кия
текислик буйлаб тепага йуналган о0 бошлангич тезлик берилган.
Жисмга уша томонга цараб йуналган р куч таъсир цилади (133-
чизма).
Кучнинг узгариш конуни Р= Р(1) ни ва сирпаниш ишцаланшц
коэффициента /ни билган хрлда жисмнинг /р /2, / вакт онларидаги
тезлиги аникдансин ва олинган натижа харакат дифференциал тен-
гламаси ёрдамида tl вакт они учун текширилсин.
Ечиш учун зарур маьлумотлар 41-жадвадда келтирилган.
Р кучнинг узгариш графигини унинг /0. /р t2, /3 вакд онлари учун
берилган Р9, ?р ?2, Р3 кдйматлари буйича цурищда Р= P(t) муноса-
бат курсатилган вакд онлари оралишда чизицти, деб хисоблансин.
Р кучнинг 41-жадвалда каср курипишида берилган киймати куч-
нинг модули шу вакт онида “сакрашини” курсатади: суратда куч-
нинг вакт оралшининг охиридаги, махражда эса кейинги оралита-
нинг бошидаги модули берилган.
178
41-жадва л
Вариант т, Оп, 'i <2 К, Л Л Л а,
разами кг м/с с н град
1 35 5,4 4 10 18 100 200 150 1 250 25 0,10
2 20 0 6 10 15 200 160 160 180 37 0,25
3 25 0 4 10 16 200 200/120 120 0 21 0,10
4 10 4,5 5 10 16 0 180 40 100 32 0,12
5 16 9,0 4 8 16 120 120/0 0 160 24 0,08
6 40 4,0 4 8 12 400 300 300 0 40 0,06
7 20 8,0 5 8 11 0 300 0 0 25 0,20
8 16 7,6 6 11 13 75 200 0 0 23 0,12
9 12 0 6 10 14 100 140 0 0 20 0,20
10 50 12,0 2 6 12 0 300 200 200 27 0,08
И 10 5,0 6 10 16 50 100 100 200 35 0,24
12 12 3,0 3 8 14 60 180 120 120 42 0,15
13 10 8,0 4 12 16 0 150 150 100 30 0,18
14 20 8,5 5 8 15 40 100 150 0 23 0,07
15 14 9,0 7 12 18 0 140 0 100 18 0,15
16 20 3,0 5 9 17 300 150 100 100 39 0,12
17 24 10,0 6 10 15 0 180 60 140 15 0,20
18 15 13,0 8 16 20 НО 150 0 90 26 0,22
19 15 7,2 3 10 16 150 ПО 90 120 30 0,30
20 22 8,2 2 9 И 70 110 110 50 15 0,15
21 13 10,0 8 12 16 0 200/0 200/0 100 28 0,14
22 11 6,0 7 9 14 160 0 0/100 120 31 0,11
23 12 4,5 5 10 16 50 120 40 80 21 0,22
24 10 7,0 4 14 29 100 50 50 0 18 0,09
25 18 0 8 10 16 180 160/0 0/140 180 33 0,17
26 8 9,0 4 8 12 0 150 0 120 45 0,10
27 17 5,0 7 10 18 190 170/0 100 280 38 0,21
28 9 7,5 4 12 17 0 140/70 100/70 70 26 0,20
29 20 9,5 5 6 11 0 400 400/100 200 15 0,25
30 10 10,2 6 7 10 120 70 0 120 33 0,15
Топширикди бажариш намупаси. Берилган: т=40 кг, и0= 10 м/с,
t=3 с, /,= 8 с, /=12 с; Р0=0; Р=250 Н; Р2= 300/200 Н; Р3= 150 Н;
<х=30°;/=0,1.
/, tv / вакд онлари учун тезликнинг ир и2, и3 кцйматлари аник-
лансин.
Ечиш. Жисмга таъсир хилувчи кучларни курсатамиз: огирлик
G, текисликнинг нормал реакцияси N, Р куч ва бошлангич тез-
ликка царама-карши, яъни кия текислик буйлаб пастга йуналган
сирпаниш ишцаланиш кучи F.
Берилган Ро, Рр Р2 ва Р, дийматлар буйича Р= Р(0 графикни
курамиз (134-чизма).
1. Ж змни моддий нукда, деб даб ул цилиб, харакат микдорининг
узгаршпи хавддаги теоремани ифодаловчи тенгламани х удита проек-
цияларда 0 дан / гача булган вакд оралиги учун тузамиз:
179
:п\ -тп -У S., (1)
L. мл x-* p-’ v •
бу ерда
У5. =-G/,sin a - h,+S .
-’згарувчи P кучнинг tx вакт ичйдаги импульсининг проекцияси
о
Бу интегрални P=P(J) нинг графигидаги ОВМ учбурчакнинг
то киш каби аиикдаймиз:
5 х=3 • 250/2=375 Н • с.
Сирпанипт ишкдланиш кучи F=fN=fG cos а эканлигини хисобга
олиб, (1) тенгламани куйидаги к^ринишда хосил киламиз:
mvVs--mgt{ sina-fmgt^oia+375,
бу ердан
°ix=uox-^i shl a-fgt^os a+375/m.
Берилган маълумотларни хисобга олтан холда ушбу кийматнй
топамиз:
о=| о. 1=2,10 м/с.
Эслат ма.. Сирпаниш иищалапил кучи F тезликка кдрама-карши
йуналган ва Шунпнг учун келтирилган хисоблашни бажариш дан аввал
жисм тезлщиниш кия текислик буйлаб юкорига булган (и0х>0), демак-
ки, ишкаляншп кучининг пастга булган дастлабки йуналишининг tt вакт
Ичида узгариш ёки узгармаслигини аниклаб олиш керак.
Буиинг учун узгар.шс G, N, F кучлар ва Ш тугри чизик конуни
Р=(250/*Я буйича узгарадиган Р кучтаъсирида жисмнинг тезлиги
нолга тенг буладитан /*< /( вакт ояининг мавжуд ёки мавжудмасли-
гини текшириш керак.
Харакат микдоришшгузгарипги хакидагитеореманиифодаловчи
тешлачгагш тахмин кидинаёгган 0 дан t* гача булган вакт оралиги
учун гузамиз:
180
mvx- - w^*sm a- ftngf*zo$ a+5^,
бу ерда мазкур х°л учун
и =0, Spx = ] Рх dt = J (250/3)l dt = (125/3 )/*2.
0 О' ’
Натижада t* ни аниклаш учун куйидаги тенгламани \осил кдла-
миз:
(125/3)/*2- zng(sm a+fcos a)r*+mu0x=0,
яъни
Г*2- (196,2+34,1)3 Г/125+400 • 3/125=0,
ёки
Г*2-5,52Г*+9,6=0.
Бу тенгламани ечиб, курсатилган кучлар таъсирида булган жис-
мнинг тезлиги нолга тенг буладиган вакд они мавжуд эмас, деган
хулосага келамиз.
2. Жисмнинг t2 вакд онидаги тезлигини аниклаш учун харакат
микдорининг узгариши хакддаги теоремани ифодаловчи тенгла-
мани t2-вахт оралиги учун тузамиз:
- /пи. =У 5., (2)
бу ерда
2Х=-<?Ц-/>та-Г((2-/)+5,„.
Узгарувчи Ркучнинг t2- / вакд оралигидаги импульсининг про-
екцияси P=P(t) нинг графигидаги MBCI трапециянинг юзаси
билан ифодаланади:
5х=5(250+300)/2= 1375 Н • с.
Шунинг учун (2) тенглама куйидаги куринишга эга булади:
mvb- mvlx=-mg (t2~ /)sin a-fmg (t2~/)cos a+1375,
бу ердан
°2x=uu“S <Z2- 6)sin (6~ zi)cos a+1375/m,
ёки
U2=W=7’68 M/C-
Э с л атм а. (2) тенгламани тузишдан аввал дастлабки тезлик (и1х>0)
t2~tl вакд ичида уз йуналишини узгартирмаслигига ишонч хосил килиш
керак. Ушбу хоада бу ораликдаги харакат бошида куч Р> (G sin a+fG cos a)
булади ва у усишда давом этади, демак, жисмнинг тезлиги уз йуналиши-
ни узгартира олмайди.
3. Харакат микдорининг узгариши хакддаги теоремани ифо-
даловчи ва /-12 вакд оралиги учун тузилган тенглама жисмнинг t2
ондаги тезлигини аниклаш имконини беради:
181
- ти„ =У S.,
бу ерда
2 У = - G(t- Qsin a-fG(fr Qcos a+5t.
Узгарувчи P кучнинг t2-t2 ичидаги импульс ининг проекцияси
IDEKтрапециянинг юзаси билан ифодаланади:
5^=4(200+150)/2=700 Н-с.
Увда
°3х=иъг-£ 0з“ Qsin a~ & <?з~ Qcos «+700/40,
бу ердан
о3=| о3х|=2,15 м/е.
Эслатма. (3) тенгламани учинчи ораликда хам жисм уз дастлабки
тезлигининг йуналишини (+2х>0) узгартирмаслиги ва сирпанишдаги
ишкдланиш кучи бутуй (,-/2 вакд оралиги давомида кдя текислик буйлаб
пастга йуналганлиги текшириб курилгандан кейингина тузиш мумкин.
Бунинг учун узгармас G, N, F кучлар ва графикнинг учинчи цисмида
(133-чизмага кдранг) узгариш крнуни DE тугри чизиц билан берилган Р
кучнинг таъсирида жисмнинг тезлиги нолга тенг буладиган т*</, вакд
онининг булиши мумкин ёки мумкин эмаслигини аникдаш керак. DE
нинг тенгламаси куйидаги куринишга эга:
Р=200-Ц200- 150)/4]т=200- 12,5т,
бу ерда т- /2=8 с онидан бошлаб саналадиган вакд.
Харакат микдорининг узгариши хакдщаги теоремани ифода-
ловчи тенгламани т0=0 дан т=т* гача булган вахт оралиги учун
тузамиз:
mv>- ти2=-a-/Jngx*cos a+5^,
бу ерда мазкур хол учун их=0 ва
г* z*
Spx = J Рх dx = j (200 - 12,5r)dT = 200т* - 6,25т*2.
о о
Хисоблашлардан сунг т* ни аникдашга имкон берувчи куйида-
ги тенгламани хосил киламиз.
6,25т*2-200т*+/И£ (sin a+f cos а)т*- mo2r=0,
яъни
*2 230,3-200 * 40-7,68 _n
Т +~Т25 Т
ёки
т*2+4,85т*-49,1=0,
бу ердан
182
т* = -2,42 ±75786 + 49,1 =-2,42 ±7,41 с.
Шундай килиб,
т*=4,99 с.
Тезлик т*=4,99 с да нолга тенг булади, лекин (/3- /2)< т*, шунинг
учун каралаётган /3- /2 вакт оралигида тезлик уз йуналишини узгар-
тирмайди.
4. Тезликнинг tx ондаги киймати о1 ни куйидаги дифференциал
тенглама ёрдамида топамиз:
тх = 2 -Т-
Тенгламанинг унг кцсмини очамиз:
тх = - G sin a-F+P
ёки
тх - - mg sin a- fmg cos а+Р
яъни
х = -g sin а- fg cos а+Р/т,
бу ерда Р= (250/3) t- ОБ тугри чизикнинг тенгламаси, шунинг учун
х = - g sin осcos ос+(25/12)/.
Олинган дифференциал тенгламани интеграллаб, куйидагини
Хосил кцламиз:
х= —g (sin oc+/cos a)/+(25/24)/2+ С.
С ни аникдаш учун масаланинг бошлангич шартидан фойдала-
намиз: /=0 да o0(,=i0= 10 м/с.
Интеграллаш билан олинган тенгламани /=0 учун тузиб, С=10
м/с ни топамиз. Шундай кцлиб, тезликнинг 0 дан /3 гача булган
вакд ораликидаги узгаришини аникловчи тенглама куйидаги кури-
нишни олади: °
х= -g (sin a+/cos a)/+(25/24)/2+10.
/=/ да
°i=I^=J=2’10m/c-
Эслатма: Агар каралаётган вакт оралигида жисмнинг тезлиги
но тга тенг буладиган бирор t* он мавжуд булса, у хрлда масалани бу
ораликда ечишни икки боскичга булиб бажаришга тугри келади: t*-t.
ораликда юкорида тузилган тенгламалар узгаришсиз колади, ора-
ликда эса бу тенгламаларда сирпанишдаги ицщаланиш кучига тегишли
Кадлар тескари ишора билан олинади.
183
Д 6-топширик Динамиканинг асосий теоремаларини
модций нукданинг харакатини текширишга тадбик этиш
Моддий нукга, деб кабул килинувчи шарча уки вертикал текис -
ликда жойлашган найчанинг ичида А вазиятдан харакат бошлайди.
(135—137-чизмалар). Шарчанинг В ва С вазиятларидаги тезлиги
Хамда С вазиятда унинг найча девор ига берадиган босими топил-
син. Траекториянинг эгри чизикли кисмларидаги ишкдланиш хисобга
олинмасин. 3, 6, 7, 10, 13, 15, 17, 19, 25, 28 , 29-вариантларда шарча
Ло йул угиб пружинадан ажралади.
Ечиш учун зарур маълумотлар 42-жадвалда келтирилтан.
42-жадва л
Вариант ракамлари (135-137- чизмалар) т, кг м/с т, с R, м f а, град ₽, град см Н/см Кушимча аникда- надиган катталиклар
. ' 1 0,5 20 2,0 2,0 0,20 30 45 — ’ — —
2 0,6 16 0,2 4,0 0,10 45 20 — — н
3 0,4 0 2,0 0,2 0,15 30 — 10 1 Од
4 0,2 5 0,5 1,0 0,10 45 — — — »д
5 0,1 8 1,5 0,2 0,20 30 — — —
6 0,3 2 2,0 4,0 0,10 30 20 30 2 ой
7 0,4 5 1,0 1,0 0,10 30 — 50 5 Ол
8 0,2 1 0,5 1,5 0,15 30 60 0 4 hD
9 0,5 2 1,5 4,0 0,25 20 60 — — »д
10 0,4 4 0,1 0,5 0,10 30 60 0,2 0,2 Од
11 12 0,2 0,4 6 5 1,0 0,4 1,0 2,0 0,30 0,20 45 30 60 — 3 Од, h °n
13 0,3 0 0,1 1,0 0,10 30 60 50 10 Од
14 0,6 0 2,0 3,0 0,20 60 30 — — У
15 0,1 1 0,1 1,0 0,15 60 20 50 0,2 Од
16 0,4 2 0,2 2,0 0,40 30 — — — Од
17 0,2 0 0,1 1,0 0,20 30 — 40 1,0 Од
18 0,3 3 0,4 1,5 0,10 45 — — —
19 0,1 4 0,1 0,4 0,30 30 60 10 0,5 Од
20 0,2 10 1,0 0,5 0,10 60 — 0 1,2 h
21 0,7 3 0,3 0,3 0,20 45 — — — —
22 0,4 1 0,2 0,2 0,40 45 — 0 1,1 Од, h
23 0,6 2 0,4 0,2 0,20 45 — — —
24 0,5 0 0,5 0,6 0,30 60 30 — — Н
25 0,1 0 0,2 0,5 0,25 — 30 30 0,4 »3
26 0,1 2 0,1 0,2 0,20 30 — — — Од
27 0,8 3 0,2 0,4 0,15 45 — — — Од
28 0,3 4 0,1 0,6 0,35 30 15 60 0,1 »д
29 0,5 0 0,2 0.5 0,20 45 30 50 0,8 о,.
30 0,8 5 0,3 0,6 0,15 30 — — —
Топширикда куйидаги белгилашлар кабул килинган: т — шар-
чанинг массаси, ил — шарчанинг бошлангич тезлиги, т — шарча-
нинг АВ кисмда (1, 2, 5, 8, 14, 18, 20, 21, 23, 24, 27, 30-вариантлар-
184
135-чизма.
185
136-чизна.
186
137-чизма.
187
да) ёки BD кцсм-
да (3, 4, 6, 7, 9-13,
15-17, 19, 22, 25, 26,
28, 29-вариантларда)
харакатланиш вакги,
f — шарчанинг най-
ча деворига сирпа-
ниш ипщаланиш ко-
эффициенти, /г€ —
пружинанинг бош-
лангич деформация-
си, h — пружи-
нанинг максимал
сикилиши, с — пру-
жинанинг бикирлик
коэффициенти, Н — шарчанинг максимал кутарилиш баландли-
ги, — шарчанинг т^хтагунча утган йули.
Топширикни бажариш намунаси (138-чизма). Берилган: /и=0,5
кг, оя=0,8 м/с; т=0,1 с (BD кисмда харакатланиш вакги); А=0,2 м;
/=0,1; а—60°; р=30; Ао=О; с= 1000 Н/см.
ол, ос, Nc, N^, h аникдансин.
Ечиш: ва ис ни аникдаш учун моддий нукга кинетик энер-
гиясининг узгариши хакидаги теоремани куллаймиз. Шарчани
траекгориянинг АС ва АВ кцсмларидаги харакати огирлик кучи G
таъсири остида руй беради (эгри чизикди кисмлардаги ишкдла-
ниш кучини хисобга олмаймиз):
/ 2 - mv2A /2 = ^Ai = GfL = mg АВ sin а = (>mgR sin а,
ид - = 12gAsina,
= 4,59 м/с;
тк>2с / 2 - mv>2A /2 = 24 - GH2 = mg (4А sin а + 2R cos а),
_ ~ sin а + cos a),
oc = + 4gR (2 sin a + cos a),
ёки
uc = 4,26 м/с.
Шарчанинг канал деворига босимини унинг С вазиятида аник-
лаймиз.
Моддий нукга учун Даламбер принципита асосан нукдага к^йил-
ган кучларнииг ва бу нукга инерция кучининг геометрик йигин-
диси нолга тенг:
188
G + N'c + Ф = 0.
Моддий нукданинг инерция кучини нормал ва уринма :> апггцд
этувчиларга ажратиш мумкин:
ф = фп+фт.
G, N^ ва Ф кучларнинг х Укига проекцияларининг йигинли -
си нолга тенг булиши керак:
^-<?cos6O°-0„ =0.
Бу ердан
ги 2
N'c - G cos 60° + Фп = mg cos 60° -г ,
ёки
< = 25,2Н.
N'c реакцияни шуниигдек табиий харакат тенгламалари ёрда-
мида \ам аниклаш мумкин: ’
= S Pi cos- U> ? п) = N'c - G eos 60°.
2 A
Бу ердан' ?
N'r = C?cos60° + ^¥.
2R
Шарчанинг найча деворига бос ими Nc сон киймати жихатт дан
топилган N'c реакцияга тенг ва карама-кдрши томонга йуналган.
Шарчанинг D вазиятдаги тезлигини моддий нукга yap кат мик-
дорининг узгариши хакидаги теоремани BD кием учун тадбик; эгио
топамиз (139-чизма):
mu^-mu =У
Dx Вх
Нукчага огирлик кучи С
нинг реакцияси N' ваипп
куйилган:
F=fN'=fG со
S.=- Gsin р • t- F’ F-
= - mg sin' p • t- fmg cos p • t,
булгани учун
mv T- mvB= - mg sin p • t-
fmg cos p • t,
189
уу ердан
1)^=4,01 м/с.
Пружинанинг максимал сикилиши h ни топиш учун DE кдсм-
ia моддий нукта кинетик энергиясининг узгариши хакидаги
георемадан фойдаланамиз:
/ 2 - /лид /2 = 24 = -ch2 / 2 - GH} - Fh.
иг=0 ва H=h sin p эканлигини хисобга олиб, куйидаги тенгла-
мани хосил киламиз:
ch2/2+G(&m p+/cos р)/г- wio^/2=0,
ёки
A2+2G7z(sm p+/cos р)/с- /«ид/с=0.
Олинган квадрат тенгламани h га нисбатан ечамиз:
h=(-0,003± 0,090) м.
Кдцирилаётган катталик сифатида квадрат тенгламанинг мусбат
илдизини оламиз: •
й= - 0,003+0,090=0,087 м.
II. МЕХАНИК СИСТЕМА ДИНАМИКАСИ
МЕХАНИК СИСТЕМА ДИНАМИКАСИНИНГ АСОСИЙ
ТЕОРЕМАЛАРИ
Д7-Т о п ш и р и К- Массалар марказининг харакати
Хакидаги теоремани механик системанинг харакатини
текширишга гадбнк килиш
Жисм 1 ва 2 лар жисм 3 га нисбатан шу жисмнинг устида урна-
тилган механизмлар ёрдамцдаги харакатланади (140—142-чизма-
лар), (механизмларни харакатга келтирувчи кучлар мазкур меха-
ник системанинг ички кучларини ташкил кил а ди). Жисм 3 гори-
зонтал текисликда жойлашган.
1. Агар механик система каралаётган харакатнинг бошида (Г=0)
тинч холатда ва ,=0 булса, горизонтал текисликни сил-
лик деб, фараз килиб жисм 3 нинг кучиши л3=л’3(О билан жисм 1
нинг (жисм 3 га нисбатан) нисбий кучиши j’lr=Jlz(Z) орасидаги бог-
ланиш аниклансин: шунингдек жисм 3 ни кучишдан ушлаб турув-
чи тиргаклардан бири реакциясининг горизонтал ташкил этувчи-
си R аникдансин.
190
161
*ВН£ЖЬ-ОИ
I
141-чизма.
192
142-чизма.
7-52
193
2. Горизонтал текислик гадир-будир, деб фараз хилиниб, жисм
3 нинг харакат дифференциал тенгламаеи ёзилсин: жисм 3 нинг
харакатга келиш шарти (системанинг берилган параметрларида)
анжлансин хамда кейинги харакат шу шартга амал кдлинган холда
руй беради, деб хисобланиб, s3(0 ва л1г(0 орасидаги богланиш то-
пилсин (?=0 да л 1г(|—0,
Куйидагилар: mp т, — жисм 7 ва 2 ларнинг массалари; т3 —
жисм 3 нинг унинг устидаги харакатлантирувчи механизмлар би-
лан биргаликдаги массаси (массалар маркази С3 жисм 3 га нисба-
тан кучмайди); R. г — жисм 7 ва 2 лар ёки харакатлантирувчи
механизмлар А ва В звеноларининг катта ва кичик айланалари-
нинг радиуслари; а, ₽ — призма (жисм 3) ёкдарининг ва транс-
портёрлар ленталарининг горизонтал текисликка огиш бурчакла-
ри берилган. f мос равишда тинч холатдаги (тишлашиш) ва
сирпанищцаги ишхаланиш коэффициентлари булиб, улар барча
вариантлар учун бир хил олинади: /^=0,11; /==0,10; Jlr=Jb(Z) — вах-
тнинг узлуксиз ва усиб борувчи функцияси (унинг хосиласи хам
узлуксиз ва усувчи).
Жисмлар сирпанмасдан юмалайди: иплар огирликсиз ва чузил-
мавди.
Схемаларда жисм 7, 2, 3 лар бошлангич (?=0) вазиятдан огди-
рилган: жисм 7 ва 2 ларнинг нисбий кучишлари л1г ва s2r хамда
жисм 3 нинг фараз хилинадиган абсолют кучиши бу кучишлар-
нинг усиш томонида курсатилган. Ечиш учун зарур маълумотлар
43-жадвалда келтирилган Тишли рейканинг (1, 6, 7, 14, 15, 20, 22,
29-вариантлар) массаси хисобга олинмасин.
Топширикди бажариш намунаси (143-чизма). Берилган: т,=600;
т2=240; /п3=400 кг; RA/r=3; а=30“; (3=60°; /^=0,11; Л=0, 10.
Ечиш. 1. Горизонтал текислик — силлиц. Механик система (143-
чизма, а) массалар марказининг харакати хахвдаги теоремани х
ухига проекцияларда ёзамиз:
тхс - .
Ушбу холда
тхс - 0, (1)
бу ерда m=m1+m2+m3 — бутун системанинг массаси.
(1) тенгламани Д=0 да хсо#0, хС0=0 булган бошлангич шартлар-
да икки марта интеграллаб, цуйидагиларни ёзамиз:
х„= С3; хс= С/+ С2.
Бу тенгламалар /=0 учун куйидаги куринишга эга булади:
ХС0~ ^2’
194
43-жадвал
Вариант разами (140-142- чизмалар) т2 ЛА Rb/?B а/э а Р Эслатма
кг гр ад
1 800 200 800 2 2 3 30 г =гй
2 200 600 1000 V2 30 45
3 300 800 500 3 2 60 30 RA = RB
4 5 200 100 800 700 1000 600 2 72 2 15 45 ГА~ГВ> RB ~RB
6 600 300 600 3 2 30 45 Г=Гп
7 300 500 1000 2 4. 45 А В гл~гв
8 9 500 400 200 200 400 500 2 2 2 2 60 30 ГЛ~ГВ’ RA'~~RA’ RB'=RB
Кузга лувчан блокнинг массаси эътиборга олинмасин
10 500 300 600 2 45 г =гй
И 600 200 800 2 2 3 30 60 А В ГА~Гв
12 300 600 500 2 3 30 60 RA~RB’ ГА~ГА’ ГВ'=ГВ
13 700 300 600 3 30 30
14 400 500 1000 2 2 3 45 г=г„
15 400 900 500 2 2 60 30 А В Г=Ги
16 600 200 700 2 3 30 45 R=&b
17 500 400 800 2 30 Кузгалувчан блокнинг маесаси эътиборга олинмасин
18 700 400 800 2 30 15
19 20 300 800 600 200 700 1000 V ' 2 2 2 2 3 45 ГА=ГВ> RA=RA> RB=RB Г=Г„
21 22 500 300 180 700 300 500 3 2 2 3 45 30 60 А В ГА=^ RA=R. RB=RB
23 600 300 500 2 2 30 60
Вариант ракдми (140-142- чизмалар) тг тз ЛА ад ад а Р Эслатма
КГ гр ад
24 400 300 600 2 30 Кузталувчан блокнинг массаси эътиборга олинмасин
25 200 700 600 2 2 15 45 г =ГП
26 600 300 800 2 2 30 60 rA=RB
27 200 600 800 2 2 30 60 г=г' R'—R,
28 500 200 600 2 2 30 60
29 600 300 800 2 4 45 7?=
30 300 800 600 2 2 4 30 15 А В г=гп .А— .е
бу ердан С=0, С2=хс(1. Шундай килиб, ихтиёрий вакд они учун
-^с—0, хс— хСц (2)
(2) тенгламалардан куринадики, механик системанинг масса-
лар маркази х уки буйлаб кучмайди хамда жисм 1 ва 2 ларнинг
харакати бир вактнинг узида жисм 3 нинг хам харакатланишига
олиб келади.
(2) га асосан система массалар марказининг ихтиёрий вахт они-
даги
_ miXCi + W12a'C2 + тзхсз
лс ~
т
(3)
абсциссасини унинг каралаётган харакатнинг бошлангич онидаги
т1хС10 + т2хС20 + тЗхСЗО
хсо ~
абсциссасига тенглаштирамиз.
Жисм 3 нинг кУчиши 53 0
координатанинг усиш томо-
нига йуналган, деб олиб,
уни чизмада курсатамиз.
(3) ифодада
=Х,1О + 5. + 5lrcos а,
ХС2~~ХС2о+ S3~ ^2/-COS Р, (5)
ХСЗ~ \’ЗО + S3' (
(5) да Slr ни з[г оркали
ифодалаш лозим. 1 ва 2 жис-
мдарни А блок билан бог-
ловчи ипларнинг огирлик-
сиз ва чузилмаслиги шарти-
дан куйидагини ёза оламиз
(143-чизма, а)\
sJRrs2JrA=4’ <5')
бу ерда <р— А блокнинг бу-
рилиш бурчаги.
(3) ва (4) ни тенглашти-
риб (5) ва (5') ни хисобга ол-
ган холда. куйидагига эга
буламиз:
™1(-l:a»+'s3+',i1cos “)+™2(Jccio+
+53-51гГлСО8 Р/^л)+
+/п!(хст+^1>тЛ.ю+т1ха(1+т,хот
т
143-чизма.
197
бу ердан изланаетган богланишни дуйидагича ёзамиз:
s _ -Ст] cos а+ /И2Г4 cosp/Дл
3 т 1г ' '
ёки сонли маълумотлардан фойдаланиб ушбу ифодани топамиз:
з=-0,39з'1г (м).
“ - ” ишораси шуни билдирадики, системанинг берилган пара-
метрларида жисм 1 нинг мусбат з'1г координатасига ./,<() коорди-
ната мос келади, яъни жисм дастлабки вазиятидан чапга кучади
(дастлаб фараз дилинганидек, л, ни дисоблашнинг мусбат йунали-
шида эмас).
Юдоридагиларга кура жисм 3 нинг абсолют тезлиги о3=53 ва
жисм 1 нинг нисбий тезлиги Oj,=^k орасидаги ботланиш (6) га
асосан куйидаги ифодадан топилади:
_ -т, cosa + m2rA cosp/
ёки
о=-0,39о1г (м/с). (7')
Жисм 3 силлид горизонтал текисликнинг устида тиргаклар
билан ушлаб турилган булсин (143-чизма, б да улар пунктир би-
лан курсатилган).
(7') буйича жисм 3 тезлигининг йуналишини хисобга олиб, чап
тиргак реакциясининг горизонтал ташкил этувчиси Rx ни курса-
тамиз.
Унинг катталигини анидлаш учун система массалар марка-
зининг харакат дифференциал тенгламасини тузамиз:
Ушбу холда ~ &х-
(3) ифодадан вадт буйича хосилалар олиб, система массалар
маркази тезланишининг удда проекциясини система жисмлари
массалар марказлари тезланишларининг мос проекциялари орда-
ли ифодалаймиз:
y _ "'1^С1 + т2^С2+/?,3^’СЗ
хс---------m-------- (»)
Унда
+ 1щха = Rx. (9)
Система жисмлари массалар марказларининг координаталари
(5) нинг иккинчи досилалари [(5') эътиборга олинган холда]:
198
хС1 = 53 + slr cos a, xC2 = 53 - 5^ cos |3 /RAf xC3 = 's3. (10)
Тиргаклар булганлиги учун жисм 3 кучмайди (53=const=0), яъни
5=0. (11)
(10) ва (11) ни хисобга олиб, (9) тенгламадан куйидагиларни
топамиз:
R=(m{cos a--tfi2^cos (12)
ёки
R =480,25, Н.
(12) ифодадан 1 ва 2 жисмлар тезланиш билан харакат-
лангандагина (51г^0) тир гак жисм 3 томонидан горизонтал босим-
га (жисм 3 эса — Rx реакцияга) учрайди, деган хулосага келиш
мумкин.
Система параметрларининг баъзи нисбатларида 5]г*0 булган
Холда хам Rx нолга тенг булиб холиши мумкин. Масалан, ушбу
масалада бу нисбат (12) ифодадан n^cos a=m2rA cos (i/RA дан ибо-
рат эканлиги куринади.
2. Горизонтал текислик силлиц эмас. Система массалар марка-
зининг харакат дифференциал тенгламасини тузамиз:
тЗсс = ^Х^.
Ушбу холда (143-чизма, в) х ухига жисм 3 билан горизонтал
текислик орасидаги сирпанишдаги ишхаланиш кучи F проекци-
яланиб, у жисм 3 нинг тезлигига кдрама-харши йуналган, жисм 3
тезлигининг йуналиши эса (7) ифода билан анихданади, шунинг
учун хам 52 xi = булади.
(8) ифодадан фойдаланиб, хуйидагини ёзамиз:
т&сг + т^ + ^хсз = Fx
ёки (10) ни хисобга олсак, куйидагига эга буламиз:
ml^s3+slrc,o^a) + m2{s3-s3rrAcGS^/RA+m3s3=Fx (13)
Сирпанишдаги ишхаланиш кучини куйидаги куринишда ёзамиз:
F=fN', (14)
бу ерда N' — системанинг горизонтал текисликка нормал босими.
N' катталикни аникдаш учун система массалар марказининг
харакати хахидаги теоремани у укига проекцияларда ёзамиз:
wyc = Xy^-
Система массалар маркази тезланишининг у ухига проекция-
сини система жисмлари массалар марказлари тезланишларининг
мос проекциялари орхали ифодалаймиз |(8) га ухшаш]:
199
Ус =
т^Ус^т^Усз+т^Уа
т
Унда дифференциал тенглама куйидаги куринипши олади:
т1Уа + "ЪУЪ + «6Усз = -<?i ~ G2 - Gi + N- (15)
Бу ерда N — горизонтал текисликнинг нормал реакцияси:
У=- N'; Gv Gv G3 — I, 2, 3 жисмларнинг огирлик кучлари.
Система жисмлари массалар марказлари ординаталарининг
ифодаларини тузамиз:
УсГУш +\rsin а> Усг^Уа^^ sin z>sin Ус^У'сзо-
Бу ифодалардан вакд буйича хосилалар олиб, куйидагиларни
ёзамиз:
= j'lr sin а, уС2 =5^81113/RA, усз=0. (16)
(16) ни хисобга олиб, (15) дан реакциянинг у укига проекция-
сини гопамиз:
N = G + sin а + sin р / RA (17)
(G= 6\+ G2+ G3 — бутун системанинг огирлик кучи).
(17) дан куринадики, горизонтал текисликнинг реакцияси мав-
жуд булиши учун N> 0 беляши, яъни системанинг нараметрлари
билан 1 юкнинг нисбий тезланиши орасида куйидаги шарт бажа-
рилиши керак:
>-G/(п\ sin a + m2r4sinP/JR4). (18)
Бу шарт > 0 булганда \ар доим бажарилади.
Демак, горизонтал текисликнинг реакцияси мавжуд булиши
учун ёки % > 0 булиши, ёки агар slr <0 булса (18) шартнинг ба-
жарилиши зарур экан.
Топширицнинг шарти буйича jlr усувчи булгани учун \ар доим
slr > 0 . Шунинг учун ушбу холда N>Q булиб, горизонтал текис-
ликнинг реакцияси хар доим мавжуд ва
ЛТ=№|У,|=У. (19)
Унда (14) ва (17) дан фойдаланиб, (13) дифференциал тенгла-
мани куйидаги кУринишда ёзиш мумкин:
та?3 + aslr = ± fN, (20)
бу ерда
а= /HjCOS a- /Bj^cos $/RA-
(20) нинг Унг томонида агар жисм 3 чап томонга харакатланса
(л, < 0 ) “+” ишора, акс холла (i} > 0 ) шпора билан олинади.
200
Жисм 3 нинг кайси томонга харакатланиши эса функциянинг
узгариш характерига боглиц.
Вактнинг бошлангич онида у=0 булгани учун жисм 3 нинг
Харакат йуналиши У, нинг ишорасига боглик булади: У, < 0 булса
чан томонга, У3 >0 булса унг томонга харакатланади. Бу шартлар
(29), (19) ва (17) га асосан slr учун куйидаги шартларга олиб кела-
ди (<7>0 булган хол учун):
s\r>fG/(a-fb), s\r<-fG/(a + fb), (21)
бу ерда i
6=m1sin a+m2rA sin
Жисм 3 нинг мувозанат вазиятдан харакатга келиш шартини
топиш учун (21) да максимал ишкдланиш коэффициента ^1ах=/ш
ни олиш керак булади. Шунинг учун жисм 3 нинг чап ёки унг
томонга харакатланиш шартлари мос равишда куйидагича ёзилади:
\r > f^G /(а - f^b), slr < -f^G /(а + f^b). (22)
Тошпирикнинг шартига асосан slr > 0 булгани учун ушбу холда
жисм 3 чап томонга харакатланиб, унинг харакатга келиш шарти
эса куйидагича булади:
*1г > *1г0 ’ (23)
бу ерда
*1*0 = f^G /{а - f^b) (24)
0 жисм 1 нинг (жисм 3 мувозанатда) чегаравий нисбий тез-
ланиши. Хисоблашларни бажариб, бу тезланиш учун куйидаги
цийматни топамиз:
У*г0 = 3,05 м/с2.
Жисм 1 нинг харакатдаги чегаравий нисбий тезланиши эса
Аз* = fG/(a-fb) (25)
формуладан топилади ва унинг киймати куйидагига тенг:
У* =2,72 м/с2.
Жисм 1 нинг нисбий тезланиши бирон-бир узлуксиз s*r = s*r (/)
цонун буйича узгариб, исталган вакт они учун s*r > s*r булсин
(акс холда, яъни s*r < s^. булса, юкорида айтилганидек, жисм 3
Харакатга. келмайди).
Бу холда жисм 3 нинг харакати (20), (19) ва (17) га асосан куй-
идаги дифференциал тенглама билан тавсифланади:
201
j3 = fg-Bsir,
(26)
бу ерда
B=(a-fb)/m .
(26) ни интеграллаймиз (бошлангич шартлар: f=0 да ^=^=^0=0,
АгО > ^2г0 ~ ^30 ~ б) :
j3 = fgt - Bs3r + С, s3 = fgt2 / 2 - Bslr +Ct + D.
Бу тенгламаларни 1=0 учун ёзамиз:
^зо = ~В$1г0 + С, 530 = -Bslr0 + D,
бу ердан (бошлангич шартларни назарда тутган холда) интеграл-
лаш доимийларини топамиз:
С=0, В=0.
Шундай килиб,
s3=fgt-Bslr, s3 =/gt2/2-Bslr.
Сонли хисоблашларни бажариб, куйидагиларга эга буламиз:
= 0,98r-0,36slr, s3 =0,49^-0,36^. (27)
Д8-то п ш ир и к, Харакат микдорининг узгариши
Хакидаги теоремани механик системанинг хдракатини
текширишга тадбиц этиш
Механик система (144—146-чизмалар) массалари мос равишда
/яр т2, т, булган 1, 2, 3 жисмлардан иборат. Системани ташкил
кдлувчи бошкд жисмларнинг массалари хисобга олинмасин.
Жисм 1 га иккита богланиш куйилган. А богланиш таянч сир-
тларнинг нормали буйлаб (вертикал йуналишда) кучишга тускин-
лик килади, В богланиш эса вертикал ва горизонтал буйича кучишга
имкон беради, лекин айланишга йул куймайди.
Вакгнинг жисм 1 нинг тезлиги ою га, жисм 2 нинг бурчак тез-
лиги эса ®2(| га тенг булган бирор (бошлангич деб олинадиган)
онида жисм 2 ва 3 ларнинг жисм 1 га нисбатан харакати секинла-
ша бошлайди (жисм 2 нинг айланиш йуналиши ва и0 тезликнинг
йуналиши 144—146-чизмаларда курсатилган). Тормозлаш бутун
система учун ички булган кучлар ёрдамида бажарилади. Тормоз-
лашни амалга оширувчи курилма схемаларда курсатилмаган. Тор-
мозлаш жараёнида жисм 2 нинг бурчак тезланиши (секинлани-
ши) узгармасдан крлади.
202
144-чизма.
203
145-чизма.
204
146-чизма.
205
Жисм 1 нинг <а2 нолга тенг булган, яъни жисм 2 ва 3 лар нисбий
даракатдан тухтаган вахт онидаги тезлиги аникдансин. и., ни хдсоб-
лаш куйидаги шартларнинг бири учун бажарилсин*.
а) Жисм 7 га Л йуналгирувчилар томонидан Кулон (соф) ишх-
аланиш кучи F = -f | N | таъсир килади (f — сирпаниш иигка-
ланиш коэффициента, N — А нуктадаги реакциянинг модули);
б) Жисм 7 га Л таянчдаги сирпаниш ишхаланиш кучи F дан
ташкари В таянч томонидан “ховушокдик” ишхаланиш кучи R
дам таъсир хилади: R = -Ьй (Ь — “ховушокдик” харшилик коэф-
фициента, б — жисм 1 нинг тезлик вектори).
ог ни дисоблаш аних ва тахрибан бажарилсин. Такрибий дисоб-
лашда T=a>2Q/s2 вахт оралигига нисбатан биринчи ва ундан юхори
тартибли кичик микдорлар инобатга олинмасин.
Барча вариантлар учун ос=2 м/с; <oM=lO рад/с; s2=250 рад/с2;
/=0,25; Z>=10 Н с/м, деб хабул хилинсин.
Билдираклар мос сиртлар буйлаб сирпанмасдан юмалайди, деб
хисоблансин..
Хисоблаш учун зарур маълумотлар 44-жадвалда келтирилган.
44-жадвал
Вариант ракдми т2 т3 А Л а, Вариант раками тл т3 а,
/144 146- /144 146-
град град
чизмалар КГ м чизмалар) КГ
1 10 5 2 0,5 —_ 40 16 10 5 2 0,9 0,4 30
2 12 4 3 0,5 — 30 17 15 4 1 0,8 0,2 30
3 10 4 5 0.35 0,5 20 18 12 2 4 0,8 — 40
4 12 4 2 6,7 — 40 19 12 2 6 0,6 0,8 30
5 10 1 6 0,5 0,4 30 20 14 2 4 0,8 0,5 20
6 15 1 6 0,5 40 21 13 1 6 0,8 0,4 25
7 16 4 4 0,7 — 40 22 12 4 2 0,6 0,4 20
8 19 2 6 0,7 0,7 40 23 20 1 8 0,8 — 35
9 10 5 5 0,7 0,5 30 24 13 1 6 0,6 — 25
10 12 4 6 0,8 0,6 30 25 10 2 4 0,6 — 25
11 18 6 4 0,8 0.4 25 26 11 2 4 0,7 — 25
12 13 1 6 0,8 0,6 35 27 20 1 6 0,7 ___ 30
13 12 2 6 0,4 — 40 28 14 1 6 0,8 0,6 20
14 12 6 2 0,8 0,4 40 29 10 4 3 0,8 0,6 20
15 10 5 3 0,8 0,4 30 30 12 4 4 0,8 0,6 25
* Шартлар укитувчи томонидан танланади; б) шарт мустакил текши-
риш учун тавсия кдлинади.
206
Тошпиршдаи бажариш намунаси. Берилган (147-чизма): т^Пкг;
м2=4 кг, т3=3 кг; ^=0,5 м; г2=0,25 м; а=30°; и0=2 м/с; ®20=Ю рад/
с; е2=250 рад/с2; /=0,25; Z>=10 Н • с/м;
®2=®20-s2/ (0</<®20/s2). (1)
Жисм 1 нинг T=(d20/s2 вакд онидаги тезлиги аниклансин.
Ечиш. а) Механик системага куйидаги ташки кучлар таъсир
Килади: F — А таянчдаги соф ишкаланиш кучи; G3, G2, G3 —
жисм 1, 2 ва 3 ларнинг огирлик кучлари; N — А нукдадаги нор-
мал реакция кучи; Мв — В таянчдаги реактив момент.
Топширикни бажариш учун механик система харакат мик-
дорининг узгариши хдкидаги теореманинг дифференциал кури-
нишини куллаймиз. Координата укларига проекцияларда:
бу ерда Кх, Kv — система харакат мждори векторининг координа-
та укдарига проекциялар; А ~ ташки кучларнинг мос
координата укларига проекцияларининг йигиндиси.
Жисм 1, 2 ва 3 лар системасининг харакат микдори
K = K1 + f2 + K3, (3)
булиб,
Ку — ГПуй, К2 — 1П2^>с2 ~ т2^У)С2е + ^С2г)’
(4)
К3 = т3\5сз = ^(бСЗе + бСЗг).
Бу ерда б, бС2, исз — 2, 2ва Зжисмлар массалар марказларининг
тезликлари; бС2е, бСЗе, бС2г, бСЗг — массалар марказларининг мос
равищда кучирма ва нисбий тезликлари (147-чизма).
Маълумки,
^C2e ~ ^СЗе = >
°с2г = ©2^2» = 2со2А2; •ок = a2(R2 + r2);J
oC3r = (о;+о^)/2 = ю2(ЗЛ+г2)/2;'
Г (б)
®3 = (°L “ / 2^3 — СО2(А2 — г2) / 2г3.
(3) вектор тенгликнинг иккала томонини координата укларига
проекциялаб, (4), (5) ва (6) ни хисобга олган холда куйидагиларни
оламиз:
T/=mx-|j.ffi2cos a, K = p©2sina, (7)
бу ерда а' — б векторнинг х укига проекцияси;
207
m=ml+m2+mJ; 14ц=^2’^'+0,5т3(ЗЛ2+г2).
Ташкд кучлар бош векторининг координата укдарига проек-
циялари
= = -GY-G2-G, + N. (8)
Бу ерда ишораси х>0 булган ^олга, “+” ишораси х<0
булган долга мос келади.
(7) ва (8) ни (2) га куйиб, куйидагиларни ёза оламиз:
тх + це2 cos а = +fN, - ре, sin а = -Gx - G2 - G3 + N (9)
(9) системанинг иккинчи тенгламасидан нормал реакциянинг
ифодасини топиб, уни биринчи тенгламага куямиз. Натижада куй-
идагиларни оламиз:
х = -а, х>0 булганда; (10)
х - -а, х>0 булганда, (11)
бу ерда
а = — s7 cos а + f g- — е, sin а , а = — s, cos a - f д - - sin a .
m 2 J * m 2 m 2 m 1
Жисм 1 унттомонгахаракат киладиган, яъни х > 0 буладиган
0<t<T* вакд оралигини кдраймиз. (10) га кУра:
х = -at + С = -at + и0, (12)
бу ерда С — интеграллаш доимийси куйидаги бошлангич шартдан
топилди:
t=0 да х = и0. (13)
208
t= T. да жгс м 1 нинг тезлиги нолга тенг, шунинг учун
Т*=^. (14)
। а
Ечишни давом эттириш учун топилган катталикни 7=©20/е2
катталик билан таккослаш керак.
Агар Т* >Т булиб чикса, изланаётган и тезлик (12) формула
буйича /= Т шарт буйича топилиши мумкин.
Агар Т* =Т булса, и=0 булади, яъни системадаги барча жисм-
ларнинг харакати г= 7 да бир вакгда тугайди.
Агар Т* <Т булса, жисм 1 t= 7* булганда тухтайди (яъни, \ар
Кандай /> 7* холатда и=0 булади) ёки тескари йуналишда харакат-
лана бошлайди. Бу холларнинг биринчиси а = 0 да, иккинчиси
эса а > 0 да амалга ошади. Бу холатларнинг уринлилиги (11) диф-
ференциал тенгламадан келиб чикади.
Курилаётган мисолда
а=57,92 м/с2; а =47,60 м/с2;
7* =0,0346 с; 7=0,04 с.
яъни 7* < 7 ва а > 0. Демак, жисм 1 тескари томонга харакатлана
бошлайди. Бу харакат I
/= 7* да х = 0
бошлангич шартда (11) дифференциал тенглама билан тасвир-
ланади. (11) ни (15) шартни хисобга олган холда ццтеграллаб, 1\
<t<T шартга мувофик КУЙидагини ёзамиз:
х = -a(t - 7*). (16)
I- 7 да (16) дан жисм 1 тезлигининг изланаётган кийматини <о2=0
булган он учун оламиз: ।
оТя= х(7) = -а(Т - Тх), ип. = -0,26 м/с.
Бу натижани ишцаланиш кучи булмаган холда хисобланган ит
тезлик билан солиштириш куйидаги хулосага олиб келади. Бунда
барча хисоблашларда f=0, деб олиш керак. Хисоблаш натижасида
v>Tx- -0,11 м/с кийматга эга буламиз. Бу ишкаланиш мавжуд булган
системадагидан икки баробар камдир.
б) механик системага олдинги бандда с^наб утилган ташки
кучлардан ташкари “ковушокдик” ишкалаццш кучи R хам таъ-
сир килади.
Масаланинг $ник ечими. а) бандда баён килинган усулдан фой-
дал.ац$б, жцсэд / ринг куйидаги харакат дифференциал тенгла-
^сдниёздмйЗ-:
$+flx = -a, х > 0 булганда; (17)
14- 209
х + 0х = -а, х < 0 булганда, (18)
буерДа р=/>/т (0=0,526 рад/с).
(17) дан ва (13) бошлангич шартлардан 0<f< Т* да
^=(«о+й/₽)е^'-а/Р,
эканлиги келиб чикади.
Бу ердан
Т* = |1п(»о₽/« + 1)
ёки
Т* =0,0343 с.
(18) дан ва (15) бошлангич шартлардан Tt< t< Тбулганда куйи-
дагини оламиз:
x = (o/p)[e~₽('-7i) -1]. (19)
t=T да (19) дан куйидагини топамиз:
оГх=-0,27 м/с.
Масаланинг.тацрибий ечими*. Механик система харакат мик-
дорининг Узгариши хакидаги теореманинг чекли куринишидан
0< t< Т* ва T»<t<Tвакд ораликдари учун фойдаланамиз:
Кх,-Кхй=^, .
кхТ - Кх. = куТ - кг =
буерда У 5^’, Х^ё>’ — ташки кучларнииг мос
равишда оиринчи ва иккинчи вакд ораликдаридаги импульсла-
рининг координата укдарига проекцияларининг йигиндиси.
Маълумки, система харакат микдорининг проекциялари:
Кхй = /яо0х - ц©20 cos а;
^уо = Р®20 sin а;
Кх„ = -и®,* cos а;
У - (21)
Ку. = ри2.5Ша;
^хТ =
куТ=о,
бу ерда <о2, — жисм 2 нинг /= 7» даги бурчак тезлиги.
* Масаланинг такрибий ечиш тартиби а) шарти учун хам худди шун-
дай.
210
Тапщи кучлар импульсларининг проекциялари мос равищда куй-
идагича булади:
I '
£> = -fixdt - J JN dt = -bx. - fNT.;
=-<Gl + G2+G})T.+NT.-,
_ T T
= -Jbxdt + f JNdt = -b^Xj. -x.) + JN(T-T*);
71 7*
(22)
X $?’ = -((?, + G2 + G3 )(T - T.) + N(T - T.),
бу ерда x, хт — жисм 1 нинг мос равищда 71* ва Тс ичидаги кучиш-
лари
(21) ва (22) ни (20) га куямиз:
- fiascos а- циОх+p®20cos a=- bx^-fNT^ (23)
(<o2.- со20)ц sin a= - (G2+ G2+ G3) T*+NT*} (24)
mvTx+^G)2tcosa=~b(xT-x^)+fN(T- T*), (25)
-lia2*sina^-(Gl+G2+G3)(T-T*')+N(T-T*'). (26)
(24) ва (26) тенгламалардан мос равишда NT* ва N(T- Т*) лар-
ни топиб, натижаларни (23) ва (25) га куямиз:
- h®2„cos a- mo0x+ |io20cos a= - bx*- f [ (Gr+ G2+ G3) T*-
~(<o2*-G)20)y.sma], (27)
/ao^+pio^cos a—Z»(xr-x.)+/’[(6!1+6!2+ G^(T-T^)- pco2* sin a]. (28)
- I
Жисм 1 нинг илгариланма харакатини тавсифловчи х жорий
координата t ва^гнинг бирор x=x(t) функциясидан иборат. Шу
функцияни t нинг даражалари буйича Макдорен кдторига ёямиз:
х(О=хо+хоГ+...
ло=О ва х< Т, Т — кичик микдор булгани учун Т га нисбатан
бир ва ундан юкрри тартибли кичик микдорларни ташлаб юбор-
сак, жисм 1 нинг Т дан кичик булган хар кдндай вахт ораликлари-
даги кучишини эътиборга олмаган буламиз, яъни
ва хг~0.
Худди шу мулохазаларга кура (27) ва (28) да (G{+G2+G3)T* ва
(G{+ G2+ G3)( Т- Т*) кушЕИлувчиларни ташлаб юбориш керак булади.
211
Айтилганларга биноан, (27) ва (28) датьий тенгликлар куйидаги
содда тадрибий куринишларга эга булади:
-pico2>cos a- ffiofa+pco2ecos a»-/’(<DM-<Dy)p sin а; (29)
mub+prn2icospsina. (30)
(29) дан <a2, ни, (30) дан эса ни аниклаймиз:
®2Л®20~ тео0х/Г h(cos a+fsin a)],
ол»а>2.(ц /те)( /sin a-cos a).
(31) ва (32) формулалар буйича хисоблашларни бажариб, дуй-
идагича натижага эга буламиз:
0,31 м/с.
Бу натижа юдорида олинган аник; дийматга деярли мос келади.
!
Д9-то пши р и к. Кинегик момевтнинг узгариши
дацидаги теоремани даттик жисмнинг бурчак тезлигини
анидлашга тадбик этиш
массали Н жисм вертикал z УДИ атрофида узгармас <йв бурчак
тезлиги билан айланади; бунда Н жисм АВ тарновининг О нудта-
сида А нуктадан тарнов буйича хисобланадиган АО масофада т2
массали К нудга жойлашган. Вадгнинг бирор (i=0) онида систе-
мага моменти Мбулган жуфт куч таъсир дила бошлайди.
/=т булганда кучларнинг таъсири тухтайди.
Н жисмнинг t=i онидаги бурчак тезлиги <в, аниддансин.
Н жисм инерция буйича <of бурчак тезлиги билан айланади.
Вадгнинг бирор Г,:=0 (вадгнинг янги хисоб боши) онида К нуд-
та (узиюрар механизм) О нудгадан АВ тарнов буйлаб (В га дараб)
OK=s~s(tl) донун буйича нисбий харакатлана бошлайди.
Н жисмнинг t~ Т булгандаги бурчак тезлиги <ат анидлансин.
Н жисмнинг чизмаси 148—150-чизмаларда курсатилган бир
жинсли пластинка, деб даралсин. Ечиш учун зарур маълумотлар
45—46-жадвалларда келтирилтан.
Топширидни бажариш намупаси (151-чизма). Берилган: /я,=200
кг; т2=80 кг; М=592 t Н-м; <й0=-2 рад/с; ЛО=0,8 м; j?=2,4 м;
й=1,2м; Д=т=4 с; OK=s=0,5t^ м; t = T=2c.
Н жисм бир жинсли дойравий пластинка, деб дисобланиб, со7
ва <Dj анидлансин.
212
45-жад в а л
Вариант разами (148-150- т2 рад/с а, м Ь, м R, м а, град АО, м Нм Ь с OK^siQ, м о
чизмалар) к г
1 32 10 -1 1 1,5 1,2 — itR/6 -29,6/2 3 (5тс7?/12)/, 1
2 200 60 -2 — — 2 120 73/2 101 5 А2 1
3 120 40 0 2 — — — 0 -120/ 4 (72/4)/? 2
4 16 5 -3 — — 1 30 0,4 21/ 2 0,6/, 2
5 66 10 1,5 2 1,5 — — 0 1577 4 0,5/, 2,5
6 160 80 -1,25 1,5 — 2,5 — ita/6 -700/ 3 (5..Л/18)/? 3
7 300 50 -2 1,6 1 0,8 — 0 968 1 (яа/2)/? 1
8 80 20 0 1,2 — 2 — гса/2 24077 4 (яй/4)/, 2
9 20 5 5 1,2 — 0,4 45 ятг/4 -29,2/ 3 (З^Л/4)/,2 1
10 100 40 2 2 •л/2 — — 72/2 -9077 4 (V2/4)Zf 1
11 60 20 -1 2. — — 15 0 40/ 2 0,4/? 2
12 40 10 -3 1 — 2 — 0 50/2 3 (жа/3)/1 2
13 24 4 4 1 — — — 0,5 -2777 1 0,3/, 2
14 40 10 2 — — 1 — 0 120/ 1 0,5/, 3
15 120 50 -4 1 — 2 — 0 330/2 2 (яа/2)/? 1
16 60 10 -5 1 1,2 — 30 0,4 74 2 о, зг,2 2
17 50 10 -2 — — 1,6 30 0,6 69/ 4 0,6/, 2
18 120 50 3 2 3 0,8 — itR/2 324 3 (тсТг/8)/? 2
19 90 30 1 1,5 — — — 0 -135/ 2 (W/4JZ,2 1
20 50 12 3 1 — 1,2 — ita/6 -14/2 3 (тса/12)/? 2
21 40 10 -6 — — 1 — 72/2 7577 1 (Д/16)/2 2
22 150 50 -1 1,6 1,2 0,6 — nR/2 163 4 (яЯ/2)/? 1
23 90 20 2 72 1 — — Тз/2 -210 2 (VWi 1
24 50 12 -3 0,6 — — 60 0,2 27/2 2 0,4/, 2
25 36 8 -5 — — 0,5 — 0 20/ 2 (7Cj?/6)/? 2
26 150 40 -4 1,5 — 2 — ita/6 117077 1 (яа/2)/? 1
27 120 30 0 1 — — 60 0 -25/ 2 'f 1
28 15 4 -2 0,6 — — —- 0,1 5,6/ 3 0,4/, 1
29 20 5 5 0,6 0,6 — 0 -6,377 4 (5itR/6)t' 1
30 150 50 0 1,6 1,2 — — 1,6 652/ 2 0,2/? 2
213
Эслатма. М ва о нинг сыдидаги манфий шпора z уцининг мусбат
йуналиши томондан гуриб царалганда соат стрелкасининг айланиш йуна-
лишига мос келади.
Ечиш. Масалани ечишга механик система кинетик моменти-
нинг узгариши хакидаги теореманинг куйидаги ифодасини тад-
бик, этамиз:
dt
бу ерда А, — системанинг, ушбу холда у Н жисм ва К нуктадан
иборат, z укига нисбатан кинетик момента; = ~ сис"
темага куйилган ташки кучларнинг z укига нисбатан бош момента.
Системага 1=0 дан t=r гача булган вахт ичида куйидаги кучлар
таъсир кдшади: Н жисмнинг отирлиги GY, К нукданинг огирлиги
G2, момента М, болтан жуфт куч хамда подпятник ва подшитшик-
нинг реакциялари (151-чизма, а).
Н жисм z укцнинг мусбат йуналиши томондан гуриб кдралган-
да соат стрелкасининг айланишига тескари томонга карай айланади,
деб фараз кцламиз; кинетик моментларнинг ишораларини аник,-
лаётганда бу йуналишни мусбат, деб хисоблаймиз.
Системанинг кинетик моменти L7 жисмнинг кинетик момента
/,<й хамда Н жисмнинг О нукдасида турган ва o=ra • 0,0 тезликка
эга булган К нукданинг куйидаги харакат микдори моментидан
иборат:
• О1О=П12<йф OjO2.
Шундай килиб,
L • О O2=(J + m. • 0,02)а>.
Z z 2 1 '•’21'
Ташки кучларнинг бош моменти айлантирувчи момент Мг га
тенг, чунки бопгка кучлар z укига нисбатан момент хосил кил-
майди.
Кинетик моментнинг узгариши хакидаги теоремани ифода-
ловчи тенглама куйидаги куринишни олади:
-~[(Jz+m2OlO2)a] = Mz, (1)
бу ерда
M=ct (с=592 Н • м/с).
(1) тенгламада узгарувчиларни ажратамиз ва унинг чап ва унг
кисмларини интеграллаймиз:
(Jz + wij • Ор2) | day = j ct dt.
®о о
214
Унда
(Z? + rn, • O,O2)(«>t - <о0) = . (2)
(2) тенгламага едрувчи катгаликларнинг сон кдйматларипн
топамиз.
215
148-чизма.
216
149-чизма.
217
150-чизма.
218
Н жисмнинг z укдга нисбатан моментини параллел укларга нис-
батан инерция моментлар орасидаги богланиш хакидаги теоремадан
фойдаланиб топамиз:
бу ерда 7 с — Н жисмнинг бир жинсли доиравий пластинканинг
унинг массалар марказидан утувчи ва z укига параллел булган вер-
тикал уцца нисбатан инерция моменти:
Jz=m{R2/2.
Унда
2 = т{№/2+т{а2,
яъни
7=864 кг ° м2.
I
Чизмадан (151-чизма, б) куйидагиларни топамиз:
(О1О)2=(ОС)2+(О1С)2 ёки (С\О)2=4м2,
шунинг учун
J + т • О. (22= 8 64+ 80 • 4= 1184 кг • м2.
Z 1 1
Шундай цилиб, (2) тенгламадан:
1184[сот- (-2)]=592 • 42/2
куйидагига эга буламиз:
а\=2 рад/с.
М7 моментинингтаъсирит$таагандан кейин Я жисм инерция буйича
<Dt бурчак тезлиги билан айланади; бунда системага С2 кучлар,
подпятник ва подщипникнинг реакциялари куйилган (151-чизма, б).
Системага /=0 дан /= Т гача булган вацг оралигида узиюрар
аравачанинг харакати вакдида хам худди шу ташки кучлар таъсир
кдлади.
Система кинетик моментининг узгариши хакидаги теоремани
ифода кцлувчи теорема вакднинг шу даври учун куйидаги кури-
нишга эга булади:
'Я- л
-аг=0-
яъни
L =const.
Z
Кинетик моментнинг /=0 даги L# ва(=Т даги LzT цийматларини
аникутаймиз ва бу кдйматларни тенглаштирамиз.
1=0 учун
L =(J+m. • 0.02)(о =2368 кг • м2/с.
219
151-адзма.
/>0 ва К нукданинг тезлиги унинг Н жисмга нисбатан нисбий
тезлиги бг билан Нжисм билан биргаликдаги^ракатидаолган кучирма
тезлиги ие нинг йитиндисидан иборат. Шу туфайли t = Тучун нукта-
нинг иккита хдракат микдори моментини курсатамиз: m2ur ва т2бе.
1 = Т учун
ОХС.
Бундан
{ОХКТУ=(ОХС^(СКТ)\
бу ерда
СК = ОКТ- ОС, OK=s/t_=0,5 Р=0,5 • 22=2 м,
яъни
СК=2-1,6=0,4 м; (Ofi^l^+O^lJ м2.
Нисбий тезлик
v>=ds/dt=tx,
t= Т=2 с да
и=2 м/с.
Шуи ИНГ учун
^7.=864®3.+80ог • 1,6- 80 • 2 • 1,2=992<йг- 192.
ва LzT ни тенглаштирамиз:
2368=992<аг- 192,
ни топамиз;
fflr=2,59 рад/с.
220
Д. 10-то п шир и к. Кинетик энергиянинг узгариши
^а^идаги теоремаии механик системанинг ^аракатини
урганишга тадбиц этиш
Механик система тинч холатдан огирлик кучи таъсирида хара-
катга келади; системанинг бошлангич холати 152—154-чизмалар-
да курсатилган. Жисм 1 нинг ишкаланиш кучини (1—3, 5, 6, 8—
12, 17—23 , 28-30)- вариантларда ва сирпанмасдан гилдирайдиган
жисм 3 нинг думалашга каршилигини (2, 4, 6—9, 11, 13—15, 20,
21, 24, 27, 29-вариантлар) хисобга олиб, бошха каршилик кучла-
рини хамда чузилмайди, деб фараз килинган ипларнинг массала-
рини хисобга олмаган холда жисм 1 нинг тезлигини, у босиб утган
йул з’ га тенг булган вахт они учун аникланг.
Топширихда хуйидаги белгилашлар кабул хилинган: mt, т2, т3,
т4 — жисм 1, 2, 3, 4 ларнинг массалари; R2, r2, R3, г3 — катта ва
кичик айланаларнинг радиуслари; i^, i3 — жисм 2, 3 ларнинг огир-
лик марказидан утган горизонтал уктарига нисбатан инерция ра-
диуслари; а, р — текисликларнинг горизонтга огиш бурчаклари, f
— сирпанищцаги ишкаланиш коэффициенти; 5 — юмалащцаги
ишкаланиш коэффициенти.
Ечиш учун зарур маълумотлар 47-жадвалда келтирилган.
Жадвалда инерция радиуслари курсатилмаган блоклар ва ка-
таклар тугаш бир жинсли цилиндрлар, деб харалсин.
Ипларнинг нишаб хисмлари мос хия текисликларга параллел.
Топширикни бажариш намунаси. Берилган: т3 — юк 1 нинг мас-
саси, т2=2т , т =т , m4=0,5 т3, т5=20 mv R = R3=12 см, г2=0,5
/L, г= 0,75 А, л =20 см, Л2?=/=47С z =8 см, i = 10 см, ос=30°,
/=0,1; 6=0,2 см, з=0,06 к м.
Жисм 2 нинг думалашга харшилиги хисобга олинмасин. Ша-
тун 4 ингичка бир жинсли стержень, деб харалсин; юмалагич 5
бир жинсли тугаш цилиндр. ВС. хисм ва В ползун массалари эъти-
борга олинмасин. 155-чизма, а да механик системанинг бошлан-
гич холати курсатилган.
Жисм 1 нинг тезлиги ох охирги холат учун топилсин.
Ечиш. Система кинетик энергиясининг узгариши хахидаги
теоремани хуллаймиз:
бу ерда То ва Т системанинг бошлангич ва охирги холатлардаги
кинетик энергиялари: ^Е) — системага хуйилган ташки куч-
ларнинг система бошлангич холатдан охирги холатга кучганда ба-
жарган ишларининг йигиндиси: 2^' — системасига хуйилган
ички кучларнинг шу кучишларда бажарган ишларининг йигинди-
си. Чузилмайдиган иплар ва стерженлар билан уланган муллах
хагтик жисмлардан ташкил топтан текширилаётган система учун
221
47-жадвал
Вариант разами (152-154- чизмалар) W2, тг т3 l2x 1Ц a p f 8, cm s, Bst Эслатма
КГ CM CM rp ад
1 т 4т 7s"2 — — — — 60 — 0,10 1
2 т 1/2т 73w — 30 — 20 30 45 0,22 0,20 1
3 т т 7.о"2 m — — — — 45 — 0,10 — 1
4 т 1т 46wi m 20 40 18 — — — — 0,30 0,1л АВ, ВС звеноларнинг ва 5 ползун- нинг массалари дисобга олинмасин.
5 т 1т m — 20 15 18 — 60 0,12 0,2 8p Етакчининг массаси дисобга один-
6 т Зт m — — 28 — — 30 45 0,10 0,28 1,5 масин
7 т 1 Im — 16 25 14 — 30 — — 0,20 2
8 т т r/,m — — 30 — — 30 45 0,15 0,20 1,75
9 т 2 т 9'm — — 30 — 20 30 — 0,12 0,25 1,5
10 т 1/лт — — — — 60 — 0,10 — 3 _ _ —
11 т x/'m — 30 — 25 30 45 0,17 0,20 2,5
12 т 1/гт х/\т m 30 — 20 — 30 — 0,20 — 2,5
13 т 2 т 5m Im 30 20 26 — 30 — — 0,24 2
14 т 1/гт 5m 4m —- 25 — — — — — 0,20 2 Туртта гилдиракнинг дар бирининг массалари бир хил
15 16 17 т т т А/Зп 7^ 1/.т 4m 7^ y.m l/2m у1пт 20 10 20 15 12 18 15 — 60 60 — 0,10 0,25 1,5 0,05л 0,16л Етакчининг массаси дисобга олин- масин
Шатун 3 ингичка бир жинсли стер- жень, деб даралсин
18 т Зт m — 35 15 32 — 60 — 0,15 — 0,2л Етакчининг массаси дисобга олинмасин
19 т V3m l/k0m m 24 — 20 — 60 — 0,15 — 1,5
20 т 1т ibm — 20 15 16 — 30 — 0,10 0,20 0,2л АВ, В С звеноларнинг ва В ползуннинг
21 22 23 24 т т т т т Ч2т т Зт 2т */5т 20 20 20 20 20 10 30 16 18 18 — 30 60 30 45 0,20 0,17 0,10 0,32 0,60 1,2 0,1я 1 0,08я Етакчининг массаси хцсобга олинмасин АВ, В С звеноларнинг ва В ползуннинг массалари хисобга олинмасин
25 т т Ч^п — 16 20 — — — — — — 0,04я Етакчининг массаси хцсобга олинмасин
26 т т Чут 30 20 0,6я Блок 2 ва 5 ларнинг массалари ва инерция моментлари бир хил Шатун 3 ингичка бир жинсли стер- жень, деб кдралсин
27 т т 6т 72/п 20 20 16 — 30 — — 0,20 2 Шатун 3 ингичка бир жинсли стер-
28 т 2т Зт — 20 — 14 — 60 — 0,10 — 0,1я жень, деб кдралсин
29 т ЧАт Чът — — 35 — — 15 30 6,20 □л 2,4
Зо т 77w 26 20 20 18 30 — 0,12 * Z 2
152-тазма.
224
153-чизма.
&52
225
154-чизма.
226
ix’=o.
(2)
куриншпни олади.
Системанинг кинетик энергияси Т ва ташки кучларнинг ба-
жарган ишларини аникдаш учун системани охирги холатда тас-
вирлаш керак (155-чизма, б, в лар).
Система нукдаларининг тезликлари ва кучишлари орасидаги
кинематик муносабатларни, яъни богланишлар тенгламаларини
ёзамиз. Шу билан бирга тезликлар ва кучишларни мос равищда
жисм 1 нинг тезлиги ва кучиши о р кали ифодалаймиз.
Юмалагич 2 массалар марказининг тезлиги С юк 7 нинг'тезли-
гига тент:
°С2~ (3)
Тезликларининг оний маркази Р2 нукдада булган юмалагич 2
нинг бурчак тезли-
ги
®2 — ^С2>/( ^2^2^'
(3) ни хисобга'
олиб, куйидагини
Косил киламиз:
С02=О1/Т?2. (4)
юмалагич 2 нинг JD
нуктасини тезлиги
— ^2 ’
ЯЪНИ
^D=^(R2+r2).
Блок 3 Е нукта-
сининг тезлиги
юмалагич 2 D нук-
тасининг тезлигига
тенг:
о г- Од. (5)
Аммо
ог=®3т3.
Демак, (5) га
155-чизма.
асосан
227
m3r3 = ^(Д2 + /,).
Лекин
^=2rr
Демак,
®згз=3/2о1,
бунда
(6) формулада
алмаштиришларни бажариб, куйидагини хосил килам из:
Лрз _ 3 ds
dt Iry dt ’
ёки
Интеграллагандан кейин (нолта тенг булган бошлангич шарт-
ларда)
Юк 1 5=0,06 тс М йул босиб утганида блок 5^<р3 бурчакка бури-
лади:
Блок 3 нинг шу 180° га бурилганида унинг Ао нукдаси охирги А
нуктага кучади ва шатун 4 А^ бошлангич холатдан охирги АВ
Холатга утади.
Блок 3 л/2 бурчакка бурилганда юмалагич 5 аввал унгга ва яна
л/2 га бурилганда эса чапга силжийди; демак юмалагич 5 нинг
охирги холата унинг бошлангич холатига мос келади.
Шундай дилиб, бутун системанинг охирги холати гула аник;-
ланди (155-чизма, б).
Системанинг охирги холатадаги кинетик энергиясини жисм 1,
2, 3, 4, 5 лар кинетик энергияларининг йигиндиси каби хисоблай-
миз:
Т= 7\+ 73+ 74+ Т5. (8)
Илгариланма харакат кдлувчи жисмнинг кинетик энергияси:
TL =171^/2. (9)
228
Текис параллел харакат кдлувчи юмалагич 2 нинг кинетик энер-
гичен
Тг = | | (1°)
бу ерда J2— юмалагич 2 нинг узунасига утган марказий С.ц укига
нисбатан инерция моменти:
J2е = (11)
(3), (4), (11) ларни (10) формулага куйиб, куйидаги тенгламани
хосил хиламиз
2 m ;2 , < 2 А
r’=T+2?iU? = 2"%(I + 4j^ (12)
Ох ухи атрофида айланувчи жисм 3 нинг кинетик энергичен:
Ti = 2 (13)
бу ерда J3x — блок 3 нинг Ох ухига нисбатан инерция моменти:
Лх='из42х- (14)
(6), (14) ларни (13) формулага куйиб, ушбу тенгланани хосил
Хиламиз: I
Т _ тзВх (3 Uj _ 9 Чх 2 /1
Текис параллел харакат хилувчи шатун 4 нинг кинетик энер-
гияси
•2 г
т - т41С4 J4x'®4
** ~"2~ ~Т~’
бу ерда оС4 — шатун 4 массалар маркази С4 нинг тезлиги; <в4 —
шатун 4 нинг бурчак тезлиги;— шатуннинг марказий С ухига
нисбатан инерция моменти.
иС4 ва <о4 ларни аникдаш учун шатун 4 тезликларининг оний
марказининг вазиятини топамиз. А ва В нукдаларнинг тезликлари
бу онда параллел булганлиги учун шатун 4 нинг тезликларининг
оний маркази чексизликда жойлашади. Демак, шатуннинг шу
ондаги бурчак тезлиги ®4=0, унинг хамма нуцталарининг тезлик-
лари эса параллел ва узаро тенг. Шундай хилиб, шутун 4 нинг
кинетик энергияси
Т4=т4о42/2, (16)
бу ерда
оа = о4, (17)
229
жисм А нукгасининг айланма тезлиги
оя=®37?3, (18)
еки (14) га асосан
ия=%^зиА-
r3=3/4 R3 булгани учун:
ил=2иг
(17) га кура
°С4=ОХ’ °С4= 2°Г (!9)
(19) ни (16) га куйганимиздан сунг шатун 4 нинг кинетик энер-
гичен куйидаги куринипши олади:
Т4 =l/2ffl4(2U1)2 = 2т4»2 (20)
Текис параллел харакат килувчи юмалагичнинг кинетик энер-
гичен:
Т$ = / 2 + /55® 5 / 2,
бу ерда и,.. — юмалагич 5 массалар маркази С5 нинг тезлиги J;c —
юмалагич 5 (бир жинсли туташ цилиндр)нинг марказий буйлама
С5С Укига нисбатан инерции момента.
= m^R] / 2; со5 — юмалагич 5 нинг бурчак тезлиги.
Юмалагич сирпанмасдан юмалагани учун тезликларининг оний
маркази Р5 нуктада жойлашади. Шунинг учун
®5=ос5/Я5.
Бинобарин
Т5 = фЬ. + | /я5и2 .
5 2 2-2$ 4 5 С5
ВС5 кием текис параллел харакат килгани учун о„=ог, аммо
оя=иС4=2ог Демак, ог5=2ог
Шунинг учун юмалагич 5 кинетик энергичен куйидаги кури-
нишда ифодаланади:
Ts = 3 / 4т5(2е>1)2 = 3/я5о2 (21)
Бутун механик системанинг кинетик энергичен (8) формуладан
(9), (12), (15), (20), (21) ларни хисобга олган холда аникланади:
Т = in^ / 2 + f»2(1 + I Я22)о2 / 2 + 9 / 8^o2z32x / /j2 +
+2m4o2 + 3m5o2.
230
Бу ер га масаланинг берилган кийматларини куйиб, куйидагига
эга буламиз: ।
Т = /я^Ц + 2(1 + % / Я22) + 9/4/^ /г?+2 + 120]/2,
ёки
Т = 129>ад/2. (22)
Системага куйилган барча гашки кучлар системасининг берил-
ган кучишда бажарган ишлари йигиндисини топамиз. Системага
Куйилган ташки кучларни курсатамиз (155-чизма, в).
G{ огирлик кучининг бажарган иши
Аг = G.h = m.»'-sina (23)
ul 1 1 1^ v z
сирпаниш ишкаланиш кучининг бажарган иши
А~ =-F • s.
ГИПЩ ПИЩ
Аммо
F =fN = FG.cgscl,
ПИЩ '1'1 5
демак,
ЛЛШИ; = _/’ТО1^*С08а- (24)
G2 огирлик кучининг бажарган иши
Ar = GJir = m~gs • sina. (25)
IZx 2. 2
юмалагичларнинг тишлашиш кучлари Fmui2,FmuiS нинг бажарган
ишлари нолга тенг, чунки бу кучлар юмалагичлар тезликларининг
оний марказларига куйилган.
С4 огирлик кучининг бажарган иши
Л. = Ga * hrt.
G4 4 С45
бу ерда hC4 — шатун 4 огирлик маркази С4 нинг бошлангич холат-
дан унинг охирги холатига вертикал силжиши (155-чизма, г):
1
(26)
Юмалагич 5 нинг юмалашига кар шилик курсатувчи жуфт ку-
чининг бажарган иши
Лм=-тИ<р. (27)
бу ерда Mk=5N5=8G5 — юмалагич 5 нинг юмалашига кар ши лик
курсатувчи жуфт кучнинг моменти; <р5 — юмалагич 5 нинг бури-
лиш бурчаги.
Юмалагич 5 сирпанмасдан юмалагани учун унинг бурилиш
бурчаги
231
бу ерда sCi — юмалагич 5 огирлик маркази С5 нинг кучиши.
Бу мисолда юмалашга каршилик курсатувчи жуфт кучининг
бажарган ишини жисм 3 тг/2 бурчакка бурилганида юмалагич 5
нинг чапга, жисм 3 яна тг/2 бурчакка бурилганида эса унгга юма-
лашидаги уша жуфтнинг бажарган ишларининг йигиндиси сифа-
тида хисоблаймиз.
Юмалагич 5 огирлик маркази С5 нинг кучиши В ползуннинг
чап ва уиг кучишлари йигиндисига тенг:
•уС5=2(Я0Я') (29)
Жисм 3 тг/2 бурчакка бурилганида BJ8’ кучишни аникдаймиз.
В нукганинг координаталарини хисоблашнинг ботли учун текис-
ликнинг кузгалмас К нукгасини кабул киламиз (155-чизма, г). Жисм
3 нинг бу бурилишида шатун A(Bfi холатдан КВ' холатга кучади,
яъни
ВаВ' = КВГКВ’,
бу ерда
КВ. = КО + OB. = R3 + ^А.В0)2 -(Д>0)2 = Я, + ф2-%,
KB' = l=4Ry
Демак,
В.В' = Я, + 7^-^2 - / = Я, + ^(4^)2 - % - 4Я3 = 0,88 Я3 (30)
(30) ни (29) га, сунгра (28) га куйиб юмалагич 5 нинг туда
бурилиш бурчагини аникдаймиз:
<Р5=1,76 R2/Rs. (31)
(27) га асосан юмалашга каршилик курсатувчи жуфт кучининг
бажарган иши
AM=-8msg'l,™ R3/Rr (32)
Ташки кучлар бажарган ишларнинг йигиндиси (23)—(26) хамда
(32) формулалар буйича хисобланувчи ишларни кушиш йули би-
лан топилади:
^2 Д'£> = srna-fm^s coscc+ m2gs
sina+m^l^-Swijg- 1,76 R2/Rs.
Массаларнинг берилган кийматларини к^йиб, куйидагини хосил
киламиз:
( • г • Rx 5-20-l,76Ki 3
> Д- ' = m,gs sin а - f cos а + 2 sin а + ,
\ 2л' r^-s )
232
ёки
= 1,51 mxgs. (33)
(2)теоремагаасосан (22) ва (33)формулаларга курааншщанувчи
Т ва zL 4Е) ларнинг хийматларини тенглаштирамиз:
бундан
Dt=0,21 м/с.
ЕДТТИК ЖИСМНИНГ ХАРАКАТ деференциал
ТЕНГЛАМАЛАРИ
Д. 11 -т о п ш и р и к- КаттиХ жисмнинг илгарилама ва
айланма харакатларини текшириш
Механик система механизм (гилдираклар 1 ва 2) хамда юк 3
дан иборат.
Рилдирак 1 га моменты М= M(f) (харакатланувчи момент) булган
жуфт куч ёки харакатлантирувчи Р= P(t) куч куйилган.
t вакд — гилдирак 1 нинг бурчак тезлиги <оо га тенг буладиган маъ-
лум бир вакд (Г=0) дан бошлаб хисобланади. Етакланувчи гилдирак 2
нинг каршилик кучларининг моменти Мс га тенг. Система харакатига
бошкд кдршилик кучларининг таъсири хисобга олинмасин.
Рилдирак 1, 2 ларнинг массалари ва т2 га тенг, юк 3 нинг
массаси эса — ту
Рилдиракларнинг катга ва кичик айланаларининг радиуслари
Rv i\, R2, rr
Механик системаларининг схемалари 156—158-чизмаларда курса-
тилган, ечиш учун зарур маълумотлар эса 48-жадвалда келтирилтан.
48-жадвалнинг охирги устунида курсатилган жисмнинг хара-
кат тенгламаси топилсин.
Шуниигдек, ипларнинг берилган вакд онидаги таранглиги аник-
лансин; бундан ташкари гилдирак 7 ва 2 лар тугашиши со дир булган
вариантларда эса уларнинг уриниш нукдасидаги айланма зури-
киш топилсин. 48-жадвалда ixl ва курсатилмаган гилдираклар 7
ва 2 туташ бир жинсли дисклар, деб кдралсин.
Топширикди бажариш намунаси. Берилган: т = 100 кг; т,= 150
кг; /и3=400 кг; 7k7=4200 + 200r Н-м; М=2000 H'M = const; 7^=60
см; 7L=40 см; г2=20 см; Zrl=20 V2 см; 1^=3$ см; <и)0=2 рад/с.
Механизм гилдираги 2 нинг айланма харакат тенгламаси <р2=/(0
Хамда гилдирак 7 ва 2 ларнинг уриниш нукдасидаги s айланма
зурикдш! ва ипнинг t= 1 с вакт онидаги таранглиги Таникдансин.
(159-чизма, а).
233
48-жадвалд
Вариант ракдми (156 тг т2 тз А ri Л Г2 Та ?д2 м Л М, 'р с Харакат тенг- ламаси ани^-
-158- кг Нм Н Нм рад“/с ланиши лозим
чизмалар) булган жисм
1 100 300 500 20 — 60 40 — 50 2100+20/ — 1000 2 2 1
2 300 80 500 70 50 20 — 60 — 10200+100/ 600 1 0,5 2
3 200 100 400 60 — 30 20 60 20V2 6100+20/ — 800 0,5 2,5 1
4 100 250 300 20 — 50 30 — 40 1000+40/ — 1400 1,5 2 1
5 150 300 600 30 — 50 20 — 30 5500+200/ 1500 2 1 3
6 400 250 600 70 — 30 20 70 20^2 4800+10/ — 800 3 4 1
7 300 200 400 60 40 30 20 50 20 — 3000+100/ 500 0 3 3
8 300 250 700 50 30 40 20 40 30 — 9700+50/ 500 1 2 1
9 200 100 500 80 60 20 — 50 4г — 5900+30/ — 600 2 3 2
4*s 10 250 100 400 40 20 30 — 30 — 2500+50/ — 1200 0 1,5 2
И 150 300 700 40 30 60 30 30 40 — 3900+50/ 1000 1 2 1
12 100 200 600 30 20 60 — 20 4г 60 — 5700+50/ 1500 2 2 1
13 180 100 300 50 40 30 20 зо 4г 20 — 2700+200/ 400 0,5 1 2
14 150 80 400 40 20 30 — 30 1800+20/ — 700 1,5 2,5 3
15 300 180 500 20 10 50 — ю 4г 50 700+ 40/ — 300 0 1,5 1
16 300 250 400 60 40 50 30 50 40 — 7300+100/ 1200 1 2 1
17 250 100 800 50 30 20 — 40 — 5400+50/ — 900 2 2 1
18 200 100 600 20 — 50 — — 50 1900+20/ — 1500 0,5 1 2
19 250 150 400 50 30 30 20 40 го4г — 14200+200/ 500 0,5 2 1
20 400 100 800 50 20 30 — 40 — 3700+50/ — 1200 2 1 2
21 200 150 300 50 40 30 20 20 — 3800+100/ 800 1 1,5 2
22 250 100 800 60 20 10 — 50 — — 9700+200/ 700 2 0,5 1
23 200 80 400 40 20 30 — 30 — 2300+20/ — 900 0,5 1 2
24 100 200 500 30 — 40 20 — 30 — 12600+100/ 500 1,5 1 1
25 150 80 400 60 — 20 — 60 — 4900+40/ — 800 0 1,5 2
26 250 200 500 50 20 40 30 40 30 — 3500+150/ 600 2 2 1
27 250 150 500 50 30 40 30 30 900+10/ 15200+100/ 700 1,5 1 1
28 60 200 900 20 — 60 10 — 50 2100+20/ — 1500 0 2 2
29 50 200 500 20 — 40 30 — — — 1000 2 0,5 1
30 300 60 600 50 30 20 — 40 7200+50/ 700 1,5 1 2
Эслатма 1 ва 2 звеноларнинг инерция радиуслари ixl \амда шу звеноларнинг кузгалмас укдарига нисбатан
берилган.
tsi
156-чизма.
236
157-чизма.
237
158-чизма.
238
Ечиш. Ушбу механик системада механизмнинг 7 ва 2 гилдирак-
лари хузгалмас уклар атрофида айланади, кутарилаётган юк 3 эса
илгариланма харакат кил ад и.
Бу уч жисмнинг \ар бирининг харакат дифференциал тенгла-
маларини ёзамиз, бунинг учун юк 3 ни ушлаб турувчи ипни хир-
Киб хамда гилдирак 7 ва 2 ларни тишларнинг туташиш нухталари-
да ажратиб, уларни кисмларга буламиз (159-чизма, б).
Механизмнинг гилдираги 7 га огирлик кучи, царшилик куч-
ларининг М моменти, подшипникреакциясининг YB,_ZB ташкил
этувчилари, юк 3 осилган ипнинг Ттаранглиги Т, S2 айланма
зурикиш ва гилдирак 7 нинг N2 иормал реакцияси куйилган.
Юк 3 га огирлик кучи ва ипнинг Т" таранглиги куйилган.
Маълумки,
S2 = -51? N, = -N2 ва f' = -Т
Гилдирак 7 нинг х{ ухи атрофидаги айланма харакат диффе-
ренциал тенгламасини тузамиз:
= m'S
бу ерда — гилдирак 7 га хуйилган ташци кучлар-
нинг айланиш ухига нисбатан бош моменти:
£й=^-л-Л-
239
(М момент гил дира к 1 ни харакатга келтиради, шунинг учун у
мусбат, деб кдбул кдтинган, айланма зурикиш хосил кдладиган
момент эса гилдирак 1 нинг айланишига тускднлик кдлади, де-
мак, у манфий). ;
Гилдирак 1 нинг айланма харакат дифференциал тенгламаеи
куйидаги куринишга эга булади: '
(1)
Гилдирак 2 нинг х, уки атрофидаги айланма харакат диффе-
ренциал тенгламасини тузамиз:
Л2Ф2 = <?
Бу ерда — гилдирак 2 га куйилган ташки кучлар-
нинг х, укдга нисбатан бош моменти:
£<2’=^-7г2-Мс.
(Айланма зурикиш хосил киладиган момент, У2 гилдирак 2 ни
Харакатга келтиради. Шунинг учун хам у мусбат, деб кабул кдлин-
ган. Ип f таранглик кучининг моменти ва царшилик кучлари-
нинг Мс моменти гилдиракнинг харакатига туцинлик килади, де-
мак, улар манфий).
Гилдирак 2 нинг айланма харакат дифференциал тенгламаеи
куйидаги куринишда ёзилади.
/х2Ф2 ~ S2^2 ~ ?Г2 ~ Мс- (2)
Юк 3 нинг илгариланма харакат дифференциал тенгламасини
тузамиз.
m2z = Zie\
Бу ерда Ze = ^Z,-e) — юк 3 га куйилган ташки кучлар бош
векторинингдок харакат кдладиган томонига, яъни юцорига йунал-
ган z укига проекдияси:
£Z/e) = Г _ <уз
Юк 3 нинг илгариланма харакат дифференциал тенгламаеи:
m;t=T'-Gy (3)
(1), (2), (3) тенгламаларда куйидагилар номаьлум: Т'= Т ва
S=S,= S кучлар, шунингдек, <рг(0, Ф2(0 ва z(t) функциялар уларга
мос равишда гилдирак 1, 2 ларнинг бурчак тезланишлари ва юк 3
нинг тезланиши.
Аммо мазкур функциялар узаро куйидаги муносабатлар билан
богланган:
240
<Pi/<p2=/уЛр <4)
£ = <Р/Г (5)
Демак, учта тенгламада учта: Т, S ва <р2 лар номаълум.
(4) дан <р ни куйцдагича ифодалаймиз:
ва уни (1) га куямиз:
J^RJR^M-SR, (6)
(2) дифференциал тенгламадан Т кучни йукотамиз. Бунинг учун
(3) дан Т(Т- Т') нитопиб оламиз:
T=m3z+ G3
(5) ни хисобга олиб, цуйидагини ёзамиз:
T=m3<p2r2+G3
У холда (2) куйидаги куринишга эга булади:
Jx2% = S2R2~ (тз%Г2+ G1K~ Mc
ёки
(*Лс2 m3f2 )ф2 = s2^2 ~ G3?2 ~ Мс- (7)
(6) ва (7) дан S(S= SL= S2) ни йуцотамиз, бунинг учун (6) ни R2
га, (7) ни эса R{ га купайтирамиз:
/х1ф2Rl /Rx = MR2 - S^Rt,
(jx2 + m3r2^(p2R2 = S2R2RX - G3r2Rx - McR3.
Олинган тенгламаларнинг мос томонларини кушиб, куйидаги-
га эга буламиз:
Ф21Лс1(^2 / ^i) + Л-2^1 + ~ ^^2 ~ G2r2Rx - MCRX,
бундан
.. MR2Rl-(m3gr2+Mc)Rl
2 Л1^2 +(^х2 +m3r2 ) А2"
(8) ифода механизм гилдираги 2 нинг бурчак тезланишини
умумий куринишда ифодалайди.
Рилдирак 1 ва 2 ларнинг ва х2 уцларга нисбатан инерция
моментлари
х! ~ ,ni^xl’ А-2 ~ т2^х2-
Дастлабки берилганларни хисобга олиб, куйидагиларни топа
миз:
гб-
241
J^Skt-m2; J2= 13,5 кг-m2.
(8) формулага асосан:
<p2=4,034/+0,4597 (9)
Масаланинг куйидаги бошлангич шартларидан фойдаланиб, бу
тенгламани икки марта интеграллаймиз:
Г=Ода<р20=О, <^„=0,0^/^ ёки ^=3 рад/с.
Биринчи интегал <^0=2,017/40,45971+ Cv
Иккинчи интеграл <р20=О,672/3+О,230/2+ CJ+ Сг
Олинган <р2=<^(Г) ва <р2=<р2(/) тенгламаларни /=0 учун ёзамиз:
Фго-^2’
бундан
С\=3 рад/с, С2=0.
Звено 2 нинг бурчак тезлиги тенгламаси куйидаги курин инна
эга булади:
<^= 2,017/40,4597/+ 3 (рад/с).
Гилдирак 2 нинг изланаётган айланма харакат тенгламаси куйи-
дагича ёзилади:
<р2=0,672/4 0,230/43/ (рад).
Иннинг Т таранглигини курсатилгандек, (3) тенгламадан топа-
миз:
T=myz+Gv
ёки
- Т= m^r2+
t = 1 с да (9) тенглама хамда берилганларни хисобга олиб куйи-
дагига эга буламиз:
7=4285 Н
Айланма зуридишни (2) тенгламадан аникдаймиз:
5=52=(/292+7г2+М)/Я2;
/ = 1 с да 5=7295 Н.
242
Д. 12-топшир ик. Кдтпщ жисмнинг текис параллел
Харакатини текпшриш
Узгармас Р кучнинг кдймати т массали гилдиракнинг сир-
панмасдан юмалаши чегаравий характер га эга буладиган, яъни гил-
диракнинг асос билан тишлашиши узилиш чегарасида буладиган
Холатда аникдансин.
Шунингдек, бошлангич ваьд онида гилдиракнинг координата-
си хсо=О ва тезлиги исо=О булса, шу хол учун унинг С массалар
марказининг харакат тенгламаеи топилсин.
Топширикдинг вариантлари 160—162-чизмаларда курсатилган,
ечиш учун зарур маълумотлар эса 49-жадвалда келтирилган.
Топширикда куйидаги белгилашлар кабул килинган: ic — гил-
диракнинг уз текислигига тик булган марказий укига нисбатан инер-
ция радиуси; R ва г — катта ва кичик айланаларнинг радиуслари;
— тишлашиш коэффициента (тинч холатдаги ишцаланиш коэф-
фициента); 5 — юмаланиш ишцаланиш коэффициента.
. ' 49-жадвал
Вариант раками (160— 162- чизма) т, кг ZC’ см R, см г, см а, град Р, град S, см
1 300 50 80 40 20 — 0,35 0
2 200 40 60 30 — — 0,20 0,8
3 180 50 60 20 30 — 0,10 0
4 220 30 70 25 30 30 0,20 0
5 240 40 60 15 — — 0,10 1,0
6 200 — 50 — 15 — 0,20 0
7 200 45 60 25 30 15 0,25 0
8 150 40 70 25 15 — 0,50 0
9 250 — — — — 30 0,15 0
10 150 40 50 15 20 — 0,30 0,7
11 200 30 50 20 30 — 0,20 0,6
12 220 — — — 30 30 0,25 0
13 140 — — — — 30 0,10 0
14 300 — — — 30 — 0,15 0,6
15 180 20 50 20 — 15 0,15 0
16 180 30 50 35 — — 0,15 0,9
17 160 50 60 20 15 20 0,30 0
18 260 — 50 — — — 0,10 1,0
19 200 50 60 20 — 20 0,10 0
20 250 40 50 30 20 — 0,25 0
21 200 — 40 — 30 — 0,25 1,2
22 150 30 50 20 — — 0,25 1,2
23 200 30 60 30 30 15 0,40 0
24 240 30 70 30 15 — 0,15 0
25 100 — — — --- 60 0,10 0
26 150 — — — 30 15 0,15 0
27 120 — 30 — — — 0,40 1,5
28 150 30 60 25 25 — 0,30 0
29 200 — — — — 20 0,30 0
30 160 — 40 — 20 — 0,20 0
243
Эслатма. Иверцня радпусяарм курсотвимаган гаодираклар туташ
бир живет даскаар, деб уисобланснн.
Товяяврлк;ня бажарит намунаси Берилган: т=2()0кг; й=60см;
г=10см; «.= 50 см; а=15“; (3=30°; /^=0,10; 6=0 (163-чизма, а).
Ечиш: Еилдиракка куйидаги кучлар таъсир киладш_ гилди-
ракнинг G огирлик кучи, N нормал реакция, Р куч ва F^ тиш-
лашиш кучи (163-чизма, о) (агар 6^0 булса, юмаланишга царпги-
лик Kj/рсатувчи жуфт кучининг моментами курсатиш зарур).
F™ кучини шартли равишда х уцининг мусбат йуналиши то-
монга караб йуналтирамиз:
Рилдиракнинг текис параллел харакати тенгламаси:
т*с =ХЛ‘-е>’ тУс=Х^(е)’
ёки ушбу холда
тхс= Pcosp- Gsina+ Fnii: (1)
тус= N- G cosa— Psinp; (2)
Jc-<P=Pr-Fm-R. . (3)
Рилдиракнинг бурилиш бурчагини хисоблашнинг мусбат йуна-
лиши килиб соат милининг айланиш йуналиши кабул килинган
булиб, бу гилдирак марказининг хукининг мусбат йуналиши буйлаб
Харакатига мос келади.
Шунга асосан, соат милининг айланиш йуналиши (3) тенгла-
мадаги ташки кучлар моментлариниш ишораларини аникдашда
хам мусбат, деб кабул килинган.
(1)—(3) дефференциал тенгламаларга богланишлар тенглама-
ларини куллаймиз:
yc=R= const; (4)
и = Ф= \jc/R-xC/R. (5)
Рилдиракнинг о бурчак тезлигини марказнинг ог тезлиги би-
лан богловчи охирги тенглама рилдиракнинг сирпанмасдан юма-
лаш шартини ифодалайди.
* Рилдиракнинг айланиш дифференциал тенгламасини харакат те-
кислигига тик б ушан ва лекин унинг массалар марказидан эмас, балки
тезликларнинг оний марказидан рилдиракнинг асосга тегиб турган нук-
тасидан утувчи укка нисбатан хам худди шу куринишда ёзит мумкин.
Бувдай имконият массалалар маркази билан тезликларнинг оний марка-
зи орасвдаги масофа гилдирак харакатланганда Узгармаслиги билан бог-
лик
244
160-чизма.
245
161-чизма.
246
162-чизма.
2<П
163-чнзма.
(4) ифодадан
Ус=0 . ' (6)
эканлиги маълум булади.
(5) ни вахт буйича дифференциаллаб:
'i=xc/R. (7)
(6) ва (7) ни (2) ва (3) га куйиб хамда G- mg, Jс - mi? эканли-
гини хисобга олиб, куйидагини хосил хиламиз:
N= Р sin.fi + mg cosa; (2')
mi^xc / R - Pr - F^ R. (3')
(1) ва (3') тенгламалардан хс ни йухотиб ни топамиз:
Лш = I~ гс cos ₽) + F,nS sin «] /(Р2 +4),
ёки берилганларни хисобга олсак,
Fm=-0,257 Р+208 (8)
(8) богланипшинг графиги 164-чизмада курсатилган. График Р
ухни Ро= 809 Н нухгада кесиб утади.
0<Р<Р0 да Рта>0 — тишлашиш кучи, чизмада курсатилгани-
дек, х ухининг мусбат томонига хараб йуналган.
Р> Ро да Fm < 0 — тишлашиш кучи кдрама-кдрши томонга йунал-
ган.
Рилдиракнинг сирпанмасдан юмаланишини таъминловчи тиш-
лашиш кучининг модули куйидаги чеклашга буйсунади:
| F | < f N.
1 тш 1 'пл
(хар доим N> 0 эканлиги назарда тутилган).
(2) га асосан тишлашиш кучи модулининг энг катта хиймати
I Fm \*=Nf^= (р sil^+ mS cosa) ‘
ёки берилганларни хисобга олсак,
248
(9)
I/1 I*=0,05 P+190.
1 ТПЕ 1 7
164-чизмада | Fm| нинг P га богликдик графиги курсатилган
булиб, синик; чизикдан иборат. Уша ернинг узида (9) тугри чизик
Утказилган. У | Рш | нинг графитини абсциссалари Р1 ва Р2, булган
А ва В нукгаларда кесиб утади.
Р кучнинг гилдирак сирпанмасдан юмалайдиган (| < Nf^
Кийматлари сохаси,
Р<Р<РГ
(8) ва (9) дан фойдаланиб, Р кучнинг чегаравий кийматларини
ушбу шартлардан топамиз:
F =1F I* ва -F =1F I*
ГПЕ ' 2 IUL । ТШ 1 ТШ I
Хисоблашлар натижасида куйидагини хосил киламиз:
Р=58,6 Н, Р = 1923 Н.
(1) ва (3') лардан Рш ни йукотганимиздан кейин гилдирак мар-
казининг харакат дифференциал тенгламаеи куйидаги куринишга
эга булади
хс = R[P(R cos р + г) - mgR sin a] /[m(R2 + /£)] 5
ёки берилганларни хисобга олсак,
хс=0,003047 Р- 1,498 (10)
(10) богликдикнинг графиги 165-чизмада курсатилган: Р=492 Н
да хс=0. Р= PY да хс=- 1,32 м/с2 га эга буламиз.
Бу дифференциал тенгламаларни икки марта интеграллаб ва
нолга баробар булган бошлангич шартларни кузда тутиб, хс ни
топамиз.
249
xc=-0,66 Z2;
де мак, рилдирак кия текислик буйлаб пастга юмалайди.
Р=Дда
хс=4,36 м/с2; хс=2,18/2,
рилдирак кия текислик буйлаб юкррига — х укмнинг мусбат йуна-
лиши томонга караб юмалайди.
Эслатма. Сирпанмасдан юмалаётган гилдиракка куйилган барча
кучларнинг тенг таъсир этувчиси массалар марказининг тезлигига тик
булган диаметрда, массалар марказидан СК =Iq/R масофада жойлаш-
ган К яукуа^ая утади.
Бунда К нукга ва рилдиракнинг тезликлар оний маркази массалар
марказининг турли томонларида жойлашади.
Ушбу мисолда
СК= 502/60=41,7 см, -
К нукга 163-чизма, о да курсатилган. Гилдиракка куйилган барча
кучларнинг К нукгадан утувчи ва харакат текислигига тик булган
укда нисбатан моментларининг йигиндиси нолга тенг.
Шж=0 (11)
(11) шарт дифференциал тенгламаларни тузмасдан туриб, тиш-
лашиш кучининг гилдиракка таъсир килувчи бошка кучларга бог-
ликдигини топишга имкон беради.
Каттак жисмнинг текис параллел харакати дифференциал тенг-
ламаларини ечиш масаласидан келиб чиккан хисоблаш натижала-
рини текшириб чикиш учун хам бу шартдан фойдаланиш мум-
кин.
ЗАРБА
Д. 13-т о п ш и р и К- Каттик1 жисмларнинг узаро
уринишларини текшнриш
1—10-вариаитлар (166-чизма). 1-вариант. Умумий /^=6000
кг массали, горизонтал тугри чизикди йулда oL=2,5 м/с тезлик
билан харакатланувчи аравача 1, контейнер билан биргаликда
/я2=4000 кг массага эга булган кузгалмас аравача 2 га бориб урил-
ган. Тукнашишнинг охирида аравача 2 и. = 2 м/с тезликка, кон-
тейнер эса тирговуч тахта билан махкамланган А киррз тгрофида-
1И айланма бурчактезликка эга булади. Контейнер т*- яд) к< м.-юса-
250
166-чизма.
251
ли, бир жинсли тугри бурчакли параллепипед (а=0,8 м; h= 1,5 м),
деб кдралсин. Аравачаларнинг тик урилиши текисликлари сил-
лик, деб фараз килинсин. Рельслар текислиги мутлок гадир-бу-
дир, яъни аравачаларнинг тукнашишида гилдиракларнинг сирпа-
нишларига каршилик курсатади. Гилдиракларнинг уз Укларига
нисбатан инерция моментлари хисобга олинмайдиган даражада
кичик.
Аравача 1 нинг тезлиги аравача 2 билан урилишнинг охири учун
ва тирговуч тахтача кабул килган зарбали импульс аникдансин.
2-вариант. А кузгалмас шарнирли тахтача ва бикирлик ко-
эффициенти с= 20000 Н/см булган В эластик таянчга эга булган
мутлок Каттик балканинг D нуктасига mfl=500 кг массали юк h= 1
м баландликдан келиб тушади. Юкнинг балкага зарбаси эластик
эмас. Балканинг массаси т= 6000 кг, унинг узунлиги 1=4 м. Расм-
да курсатилган балканинг горизонтал холати эластик таянчнинг
балка огирлиги таъсиридаги статик деформациясига мос келади.
Балкани ингичка бир жинсли стержень деб, юкни эса моддий нукга,
деб кабул килинсин.
Балканинг D нуктада кабул килган зарбали импульси, шунинг-
дек В нукга тугри чизикди харакат килади, деб хисоблаб, эластик
таянчдаги энг катта деформация аникдансин.
3-вариант. Тутиб турувчи троснинг узилиши натижасида
т0= 500 кг массали юк h= 1 м баландликдан, бир хил ва симметрик
жойлашган рельслар устидаги платформага келиб тушади. Юк
келиб тушган А нукга платформанинг тик кундаланг симметрик
текислигида, платформанинг огирлик маркази С дан <1= 0,6 м ма-
софа узокда жойлашган.
Юкнинг платформага зарбаси эластик эмас. Платформа масса-
си т= 5000 кг, унинг горизонтал буйлама симметрия укига нисба-
тан инерция моменти <с=0,5 м.
Платформани муглак каттик жисм, деб кабул килиб хамда юкни
моддий нукга, деб хисоблаб огирлик марказининг тезлиги ва плат-
форманинг бурчак тезлиги зарбанинг о.хирги они учун аникдан-
син. Шунингдек А нукгадаги зарбали импульс топилсин.
4-вариант. т= 200 кг массали, г= 0,2 м радиусли бир жинсли
туташ цилиндр транспортёр ёрдамида кучирилади. Транспонтёр
лентаси горизонтал, унинг узгармас тезлиги и-0,6 м/с; лента 1 ва
2 шкивлар буйлаб сирпанмайди. Вактнинг бирор онида транспор-
тёр харакати тусатдан тухтатилади.
Транспортёр лентасининг сирти мутлако гадир-будир булгани
учун, яъни зарба таъсирида жисмнинг силжишига йул куймаган-
лш'и боис транспортёр тусатдан тухтатилганида цилиндр лента ус-
тида юмалайди. Юмалашга курсатилган каршилик хисобга олин-
майдиган даражада кичик.
252
Транспортёр тусатдан тухтатилгавда лентанинг мутлаф гадир-
будир сирти кабул килган зарбали импульс аникдансин.
Цилиндр огирлик марказининг ушбу холат учун топилган тез-
лигини (ёки бурчак тезлигини) Карно теоремасига кура текши-
ринг.
Баландлиги h=0,03 м булган тиргакли тусикка цилиндр маъ-
лум масафани босиб утиб урилгандаги зарбада цилиндр тусикдан
ажралмаса ва унинг сирпаниши содир булмаса, [усик кабул кал-
ган зарбали импульс топилсин.
5-в а р и а н т. Текширилаётган юклар А нуцтадан, бошлангич
тезликсиз, горизонт билан а= 15° бурчак ташкил килган кия те-
кисликда юмалайди ва у буйлаб sL= 3 м масофа босиб утиб, гори-
зонтал текислик буйлаб юмалапши давом эттиради. Сирпаниш
содир б^лмайди; юмаланишдаги ишцалаииш коэффициенти
5=0,8 см.
Юклар зинапоянинг /?киррасша бориб урилиб, ^киррани пари
силжитмасдан факат унинг устига кутарила о лиши учун баланд-
лиги /1=0.2 м булган зинапояли тир гак тусикнинг кандай s2 масо-
фага куйилиши кераклиги аникдансин.
Хисоблаш массаси «1=500 кг ва радиуси г=0,5 м булган бир-
жинсли тугаш цилиндрсимон юк учун бажарилсин.
Цилиндр зинаноядан ажралмайди, зинапоя сирти эса мутлако
гадир-будир, яъни зарба таъсирида цилиндрнинг сирпанишига
каршилик курстади, деб хисоблансин.
Шунингдек, цилиндрнинг зинапоядан хрсил килган зарбали
импульсининг горизонтал ва вертикал ташкил этувчилари курса-
тилган шартларга асосан аникдансин.
6-вариант. Тебрангич 7= 1,2 м узунликдаги стержендан ва
г=0,1 м радиусли бир жинсли доиравий дискдан ташкил топтан.
Стержень массаси хисобга олинмайдиган даражада кичик; диск
массаси т= 5 кг.
Абсолют мувозанат холатидан четлатилган тебрангич уз огир-
лиги таъсирида тушиб, кузгалмас О ук атрофида тебранади; вер-
тикал холатида ®=3 рад/с бурчак тезликка эга булган тебрангич D
жисмнинг массаси т=6т^ булган бир жинсли тугри бурчакли па-
раллелепипеднинг (а=0,8 м: 5=0,4 м; 5=0,2 м) ён томонидаги В
нуктасига келиб урилади.
Зарбадаги тикланиш коэффициенти 5=0,5. Тебрангичнинг ва
D жисмнинг урилиш нуцтасидаги сиртлари силлик. D жисм тинч
турадиган текислик мутлако гадир-будир, яъни зарбанинг таъси-
ридан жисмнинг силжишига йул куиилмайди.
Зарба якунида D жисмнинг А кирра атрофидаги айланиш бур-
чак тезлиги, худди шундай гадир-будир сиртнинг А нукгаси кабул
кцлган зарбали импульси аникдансин.
253
7-в а р и а нт . Ричаг Узаро тугри бурчак остида уланган иккита
мугладо датчик АВ ва AD стерженлардан ташкил топтан. Ричаг дузгал-
мас горизонтал А айланиш Укига эга ва В нудгада пружина ёрдами-
да тугиб турилади; AD= а= 1,5 м.
Тинч долатда турган ричагнинг горизонтал стержендаги D нуд-
тасига й=0,5 м баландликдан массаси me= 100 кг булган юк туш-
ган. Ричаг массаси т= 1000 кг, унинг айланиш Укига нисбатан
инерция радиуси /х=0,5 м. Ричагнинг огирлик маркази С нинг
Холати унинг координаталари хс=0,4 м ва ус=0,3 м ёрдамида анид-
ланади. Юкни моддий нудта деб, юкнинг ричагга зарбасини эса
эластик эмас, деб кабул килинган.
Худци шундай А таянч кабул цилган зарбали импульснинг го-
ризонтал ва вертикал ташкил этувчилари анидлансин.
8-вариант. Аравача 1 да массаси mv= 500 кг, радиуси г= 0,4 м
булган бир жинсли ичи ковак, юпка цилиндр жойлашган булиб,
уни аравача буйлаб мумкин булган кучишлардан зинача ва гори-
зонт билан а= 60° бурчак ташкил килувчи кия текислик садлаб
туради.
Юки билан биргаликдаги массаси т{= 3000 кг булган аравача 1
горизонтал тугри чизикди йУдда ut=3 м/с тезлик билан хдракатла-
ниб, умумий массаси т2= 6000 кг булган, даракатланмаган вагонча 2
га бориб урилади. Зарбанинг охирида аравача 1 харакатдан тухтайди,
цилиндр эса кия текисликка урилиб, у буйлаб юмалай бошлайди.
Зарба жараёнида цилиндр кия текисликдан ажрамайди; кия
текисликнинг мугладо гадир-будирлити туфайли цилиндр зарба
таъсиридан сирпанмайди. Аравача билан вагончанинг туднаша-
диган вертикал текисликлари силлид, деб каралсин. Рельс сирт-
лари мутлако гадир-будир, яъни аравачаларнинг тУднашишида у
гилдиракларнинг сирпанишига даршилик курсатади. Тилдирак-
ларнинг уз удларига нисбатан инерция моментлари хисобга олин-
майдиган даражада кичик.
Кця текислик билан туднашишнинг охири учун цилиндрпинг
бурчак тезлиги анидлансин; Карно теоремасига асосан топилган
бурчак тезлик ифодасининг тугрилиги текширилсин.
Вагонча 2 нинг тезлиги аравача 1 билан туднашишнинг охирги
они учун топилсин.
9-вариант. Массаси т0 булган, горизонтал текисликда илга-
рилама харакат килувчи D жисм тинч турган ферманинг С тугуни-
га и0=3 м/с тезлик билан келиб урилган. D жисмнинг ва С тугун-
нинг туднашиш нудгаларидаги сиртлар силлик; зарбадаги тикла-
ниш коэффициента &=0,5. Мутлако каттид ферма дузгалмас
шарнирли О таянчга ва эластик А таянчга эга; ВС= а= 2 м. Ферма-
нинг массаси т-20 т(1. унинг горизонтал О айланиш удига нисба-
тан инерция радиуси ze= 1 м.
254
Ферманинг бурчак тезлиги зарбанинг охирги они учун аникдан-
син ва у Карно теоремасига асосан текширилсин.
Силлик горизонтал текислик буйлаб, В жисмнинг зарбадан сунг
кандай тезлик билан илгариланма харакат килиши аникдансин.
10-вариант. Устивор мувозанат холатидан а=60° бурчакка
огган тебрангич, бошлангич тезликсиз кузгалмас О ук атрофида
уз огирлиги таъсирида айланиб, тушади. Вертикал холатида теб-
рангич F нукдаси билан тинч турган А вазиятдаги жисмга келиб
урилади.
Айланиш ухи билан тебрангичнинг вертикал симметрик текисли-
ги кесишган О нукгадан унинг огирлик маркази С гача ва шу текис-
ликда ётувчи ^нукдагача булган масофа ОС= d= 0,9 м ва OF= 1= 1,1 м.
Тебрангич массаси т= 18 кг, унинг айланиш укдга нисбатан
инерция радиуси z0= 1 м. Жисм т0= 6 кг массага эга ва моддий
нукда сифатида кабул кдлиниши мумкин. Тебрангичнинг жисм
билан зарбасидагитикланиш коэффициента &=0,2.
Зарба таъсирида жисм АВ текисликнинг А нукдасцдан силлик
горизонтал BE текисликнинг В нуктасига тушади. BE текислик
АВ текисликдан h= 1 м пастга жойлашган. Жисмнинг В нукдаси-
даги зарбани эластик эмас (к=0), деб хисоблаш мумкин.
В нукдадаги зарбали импульс ва харакатни xDy координата сис-
темасига нисбатан текшириб, жисмнинг зарбадан кейинги хара-
кат тенгламаеи аникдансин.
Шунингдек, жисмнинг А нуктасига урилгандан кейинги тебра-
нишнинг огиш бурчаги 0 аникдансин.
11—20-вариантлар (167-чизма). 11-вариант. Зарбали юкла-
нишга текширишда массаси то=5ОО кг булган копёр тебрангичи,
устивор мувозанат холатидан а= 60° бурчакка огган булиб, бошлан-
гич тезликсиз, уз огирлиги таъсирида кузгалмас О нукда атрофида
пастга, айланиб тушади.
Вертикал холатда тебрангич А нукгаси билан тинч турган, В
кузгалмас шарнир ли таянчга ва F эластик таянчга эга булган т= 2000
кг массали тик BF балканинг уртасидаги В нукдага урилади
(BF= 2/з=3,2 м); балками бир жинсли ингичка стержень, деб хисоб-
лаш мумкин; зарбадаги тикланиш коэффициента Л=0,4.
Тебрангичнинг айланиш уки билан унинг тик симметрия те-
кислиги кесишган О нуктадан тебрангичнинг огирлик маркази С
гача булган масофа ОС= d~ 1,5 м. О нукгадан худди шу симметрия
текислигида ётувчи А нукдагача булган масофа эса ОА= 1= 2 м; теб-
рангичнинг айланиш укига нисбатан инерция радиуси /0= 1,8 м.
Зарбадан кейин р бурчакка тебрангични худди шу холатида мах-
сус туткич ушлаб туради.
В нукдадаги зарбали импульс хамда В нукгадан шундай бир
нукдагача булган масофани топиш керакки бу нуктага зарба берил-
ганида В таянч зарбали импульс ни сезмайдиган булсин.
255
167-чизма.
256
12-в а р и а н т. Контейнер билан биргаликдаги массаси т= 2000
кг булган, горизонтал тугри чизицли йудда ut=2,5 м/с тезлик би-
лан харакатланувчи аравача 1 худди шу йудда ва шу йуналишда
о2=0,5 м/с тезлик билан харакатланувчи умумий массаси т2= 8000
кг булган аравача 2 га келиб тукнашади.
Зарбанинг охирида аравача 1 харакатдан тухтайди, контейнер
эса махкамловчи тирговуч тахтачанинг А цирраси атрофидаги ай-
ланиш бурчак тезлигига эга булади. Контейнерни массаси /и0= 500
кг булган бир жинсли тугри бурчакли паралепипед (я=0,9 м; h= 1,2
м) деб, аравачанинг вертикал тукдашиш хрлатдаги тукдашиш те-
кисликларини эса силлиц, деб хисоблансин. Рельс сиртлари мут-
лацо гадир-будур, яъни аравачаларнинг тукдашишвда гилдирак-
ларнинг сирпанишига каршилик курсатади. Рилдиракларнинг уз
Укларига нисбатан инерция моментлари хисобга олинмайдиган
даражада кичик.
Аравачалар туцнашишининг охирги они учун контейнер бур-
чак тезлиги аникдансин ва топилган ифода Карно теоремасига
асосан текширилсин. Аравача 1 билан тукдашишнинг охирги они
учун аравача 2 нинг тезлиги аникдансин.
13-вариант. .Тебрангич осилган О нукта горизонтал текис-
ликда узгармас тезлик билан илгариланма харакат килади, шу билан
б ирга тебрангич нисбий мувозанатнинг вертикал холатини эгал-
лайди. О уцка нисбатан тебрангичнинг инерция радиуси /0=0,8 м.
Тебрангич осилган Ух тусатдан харакатдан тухтатилганда теб-
рангич шу холатида бурчак тезликка эга булиб, А нуктаси билан
тинч турган, массаси, /и0=2,5 т булган D жисмга урилади, бу ерда
т тебрангичнинг массаси. Тебрангич хамда D жисмнинг сиртлари
урилиш нуктасида силиц. Тебрангич ва жисмнинг зарбадаги тик-
ланиш коэффициенти £=0,6.
О нуктадан А нукдагача хамда тебрангичнинг С огирлик мар-
казигача булган, унинг вертикал симметрия уки буйлаб хисобла-
ниладиган масофалари мос равишда /= 1 м ва d-0,7 м га тенг.
Тебрангич билан тукдашишнинг охирида D жисм горизонтал
силлиц текислик буйлаб м=0,5 м/с тезликли илгариланма хара-
катга эга булади.
Тебрангич осилит О уцининг тусатдан тухтатилиш олдидаги
тезлиги ва тебрангичнинг D жисм билан туцнашишидан кейинги
Р огиш бурчаги аникдансин:
14-в а р и а н т. Томонлари АВ= а= 1 м ва В1)=Ь= 2 м булган тугри
бурчакли учбурчак шаклидаги мустахкам каттиц курилма кузгал-
мас шарнирли А таянчга тираб цуйилган ва В нуцтада пружина
ёрдамида тугиб турилади.
Тинч турган В1) гомони горизонтал булган курилманинг D нуц-
тасита /г-0,5 м балавдликдан массаси /ио=2ОО кг булган юк туш-
9-52 257
ган; юкнинг зарбаси эластик эмас. Массаси т- 20000 кг булган
курилма бир жинсли учбурчак деб, юкни эса моддий нукга, деб
каралсин.
Системанинг бурчак тезлиги зарбанинг охирги они учун аник-
лансин ва топилган бурчак тезлигининг ифодаси Карно теорема-
сига асосан текширилсин. Шуниигдек, А таянчга тушган зарбали
импульс аникдансин.
15-вариант. Юкларниташишучун улар Ахолатданбошлан-
гич тезликсиз, горизонт билан а= 30° бурчак ташкил килувчи кия
текисликда силжий бошлайди, текислик буйлаб ^=3 м масофа
босиб утилганидан кейин, горизонтал текислик буйлаб харакатла-
нишни давом эттиради.
Юкларни харакатдан тухтатиш ва уларнинг агдарилиб кетмас-
лиги учун D тиргак куйилиши лозим булган энг киска BD масофа
аниклансин. Хисоблаш бир жинсли, массаси т= 500 кг булган тугри
бурчакли параллепипед (b=2a= 1 м) учун бажарилсин. Сирпаниш
ишкаланиш коэффициенти /=0,2 деб кабул килинсин.
Шуниигдек, юкоридаги шартларга асосан тиргак кабул кили-
ши мумкин булган зарбали импульс аникдансин.
16-в а р и а н т. Умумий. массаси 6500 кг булган, горизонтал
тУгри чизикди йулда харакатланувчи вагонча, 1 юк билан бирга-
ликдаги массаси т2=4000 кг булган тинч турган аравача 2 билан
тУкнашган. Юк — массаси т0=500 кг ва радиуси г=0,5 м булган
бир жинсли, ичи буш, тонка деворли цилиндр — аравача буйлаб
мумкин булган кУчишпардан иккита тиргаклар ёрдамида тутиб ту-
рилади.
ТУкнашиш охирида вагонча 7 ва 2 тугри чизикди горизонтал йул
буйлаб бир хил харакат тезлигита, цилиндр эса — ЕЕ зинапоянинг Е
цирраси атрофидаги айланиш бурчак тезлигита эга булади. Зинапоя
сирти мутлако гадир-будир, яъни цилиндрнинг зарба таъсиридан
силжишига каршилик курсатади, цилиндр Е киррага урилганда ун-
дан ажралмайди Зарбадан кейин цилиндр баланддиги h=0,1 м булган
ЕЕ зинапояга кУтарилади. Цилиндрнинг зинапояга кугарилиши жа-
раёнида аравача 2 нинг зарба охирида олган тезлиги узгармасдан
колади деб, вагончанинг аравача билан тУкнашадиган текислиги эса
силлик деб хисоблансин. Рельслар сирти мутлако гадир-будир, яъни
аравачаларнинг тукнашишида гилдиракларнинг сирпанишига кдр-
шилик курсатади. Рилдиракларпинг уз укдарига нисбатан инерция
моментлари хисобга олинмайдиган даражада кичик.
Цилиндрнинг ЕЕ зинапоя томонидан сезган зарбали импуль-
си, шуниндек аравача 7 нинг у аравача 2 билан тукнашгунига кддар
тезлиги аникдансин.
17-вариант. Тебрангичнинг О осилитУки горизонтал текис-
ликда о=2 м/с узгармас тезлик билан илгариланма харакат кила
258
ди, шу билан бирга тебрангич нисбий мувозанатнинг вертикал хола-
тини эгаллайди. Тебрангич бир жинсли ингичка стержень булиб,
узунлиги /= 1 м ва массаси то=2О кг.
Тебрангич осилган ук тусатдан тухтатилтанида тебрангич шу
Холатида крлиб, бурчак тезликка эга булиб, Е нукдаси билан ра-
диуси /-0,2 м ва массаси т= 2 /и0 булган тинч турган бир жинсли,
ковак, юнца деворли цилиндр га урилади. Жисмларнинг тукдаши-
шидаги тикланиш коэффициента к= 1/3. Тебрангич ва цилиндр-
нинг сиртлари тукнашиш нукдасида силлид. Цилиндр жойлашган
сирт мутлацо гадир-будир, яъни зарба таъсиридан жисмнинг сир-
панишига йул куймайди.
Тебрангичнинг О осилит укд, у тусатдан тухтатилтанда сезган
зарбали импульс, шунингдек цилиндрнинг тебрангич билан тугда-
шиши охиридаги бурчак тезлиги аникдансин.
18-вариант. Массаси /и=8000 кг ва узунлиги 1=4 м булган
муглако каттик; балка А эластик таянчга ва В кузгалмас шарнирли
таянчга эга. Балка тинч холатида А пружинанинг статик дефор ма-
циясига- мос келувчи горизонтал вазиятни эгаллайди: пружинани-
нинг бикирлиги с= 10000 Н/см. Балканинг горизонтал В айланиш
укига. нисбатан инерция радиуси 1В= 2,2 м. .
Балка массаси т0= 800 кг булган болта, шток ва поршенли бут-
болта ёрдамида зарбали юк таъсирига текширилади. Болта ва у
билан богланган кдсмлар бут босими таъсирида h=0,8 м баланд-
ликдан балка уртасига тушади, балка билан тукдашган онда бу
цисмлар эркин тушиш тезлигидан икки марта катта булган тез-
ликка эга булади. Болтанинг балка билан зарбасидаги тикланиш
коэффициента £=0,2.
Болта ва у билан богланган кисмларни моддий нукда, деб кабул
цилинсин; балка нуцгалари тугри чизик буйлаб харакатланади, деб
хисоблансин.
Болта балкадан кайтганидан кейин яна тушмайди, балки бут-
нинг тескари босими остида тутиб колинади, деб хисоблаб, А эла-
стик таянчнинг энг катта деформацияси, шунингдек В таянч кабул
Килган зарбали импульс аникдансин.
19-в ар и ант. Тиргак буфер учун ишлатиладиган тусинларни
зарбага текшириш учун т= 500 кг массали, кузгалмас горизонтал
О айланиш укига нисбатан инерция радиуси /0= 1,2 м булган копр
тебрангичи устивор мувозанат холатидан а= 90° бурчакка огдири-
либ, бошлангич бурчак тезликсиз куйиб юборилган. Тушаётиб,
тебрангич А нукдаси билан, массаси /и0= 1000 кг, пружиналар тупла-
мининг бикирлиги с= 10000 Н/см булган буферли тусинга урил-
ган. Зарбадаги тикланиш коэффициента £=0,5. Зарбадан кейин 0
бурчакка атдирилтан тебрангични худди шу холатида махсус тут-
кич ушлаб туради.
259
Айланиш укининг тебрангичнинт вертикал симметрия текислиги
билан кесишган О нукгасидан тебрангичнинг огирлик маркази С
гача булган масофа ОС= <7= 0,9 м; О нукдадан шу симметрия текис-
лигида ётган А нукгагача булган масофа ОА= 1= 1,5 м га тенг.
Тусиннинг горизонтал текислик буйлаб сирпанишидаги ишка-
ланишини хисобга олмаган холда буферли пружиналарнинг энг
купи билан цанчага сицилиши, А нуцтадаги зарбали импульс ва
шуниигдек О нукдадан зарба марказигача булган масофа аник-
лансин.
20-в а р и а н т. Гипоциклик механизмда массаси т= 2 кг булган
ОС кривошип ва ^=30 см радиусли тишли гилдирак 1 мос равиш-
да <в0= 1,5 рад/с ва 1 рад/с бурчак тезликлари билан айланади.
Тишли гилдирак 2 т2=8 кг массага ва г2= 10 см радиусга эга. Вак-
тнинг бирор онида гилдирак 7 тусатдан тухтатилган.
Кривошипни бир жинсли ингичка стержень деб, гилдирак 2
ни эса бир жинсли туташ диск, деб хисоблаб кривошипнинг зарба
охиридаги бурчак тезлиги, шуниигдек Л ва С нуцталардаги зарба-
ли импульслар аникдансин.
21—30-вариантлар (168-чизма). 21-в а р и а н т. Транспортёр лен-
таси горизонт билан а=45° бурчак ташкил цилган. Шкивларнинг
радиуслари г=0,2 м.Шкив 1 ва 2 лар да сирпанмайдиган транспор-
тёр лентасининг устида массаси то=2ОО кг, томонларининг узун-
лиги <з=0,5 м булган бир жинсли юк — куб жойлашган. Вакгнинг
бирор онида транспортёр харакати тусатдан тухтатилади. Бунда
юк, тиргак тахтача билан махкамланган А кирра атрофида айла-
ниш бурчак тезлигита эга булади.
Шкивлар харакати тухтатилган онда юк огдариладиган энг ки-
чик бурчак тезлик аникдансин; шуниигдек шкивлар харакати тусат-
дан тухтатилганда мазкур бурчак тезлик билан айланадиган тир-
говуч тахтача кабул килган зарбали импульс аникдансин.
22-вариант. Массаси т=800 кг ва радиуси г=0,4 м булган
бир жинсли ковак юпка деворли цилиндр — юк харакатдаги плат-
форманинг усзида, тиргавуч зинапоялар орасида жойлашган. Плат-
форма тусатдан тухтатилганида АВ зинапоя юкни гутаб тура ол-
майди: цилиндр зинапояга кутарилиб, горизонтал BE майдонча-
нинг BD~s= 1 м цисми буйлаб юмалайди хамда бошка, баландлиги
Л=0,1 м булган EF тиргак — зинапоянинг киррасига урилиб, F
кирра атрофида бурилади ва натижада цилиндрнинг огирлик мар-
кази буйлаб /^=0,07 м баландликка кутарилади. Цилиндрнинг В
дан F гача юмалаши сирпанишсиз содир булади. Цилиндрнинг
юмалашга каршилик коэффициента 5=0,1 см. Зарбада цилиндр-
нинг зинапоядан ажралиши кузатилмайди, зинапоянинг мутлако
гадир-будир сирти цилиндрнинг зарба таъсиридан силжипгига йул
КУймайди.
260
168-чизма.
261
Харакатнинг бошлангич онида цилиндрнинг огирлик маркази-
нинг BD цисмдаги тезлиги шунингдек, ТТзинапоянинг Ткирраси-
га тушган зарбали импульс аникдансин.
23-вариант. Тебрангич ингичка бир жинсли, массаси т=4
кг, узунлиги 1=0,7 м булган АВ стержендан ва массаси mQ=2 кг,
радиуси r=0,1 м булган бир жинсли тугаш шар дан иборат. Теб-
рангичнинг уки горизонтал текисликда узгармас и= 1,4 м/с тезлик
билан илгариланма харакатланади, шу билан бирга тебрангич вер-
тикал вазиятда устивор мувозанат холатига эга.
Осилиш укдшинг тусатдан тухтатилиши натижасида тебрангич
шу укнинг атрофидаги айланма бурчак тезлигига эга булади ва шу
вертикал холатида D нукдаси билан кузгалмас вертикал текисликка
урилади. Тебрангичнинг ва тик текисликнинг тукцашиш нуктаси-
даги сиртлари силлик;. Зарбадан тикланиш коэффициента к=0,4.
Осилиш уки тусатдан тухтатилганидаги тебрангичнинг бурчак
тезлиги аникдансин ва топилган ифода Карно теоремасига асосан
текширилсин. Шунингдек, тебрангичнинг тик текисликка урил-
ганидан кейинги огиш бурчаги р ва тебрангичнинг А укига туш-
ган зарбали импульс аникдансин.
24-в а р и а н т. Пойдеворни зарбали юкка текширишда копр теб-
рангичи кузгалмас ук атрофида тебраниб чизмада курсатилган тик
Холатдан уз огирлиги таъсирида, бошлангич бурчак тезликсиз ту^-
шади. Горизонтал холатида тебрангич А нукраси билан курилган
пойдеворнинг юкрридаги циррасининг Уртасига урилади.
Тебрангичнинг массаси т= 500 кг унинг айланиш укдга нисба-
тан инерция радиуси iQ= 1,8 м, бир жинсли пойдеворнинг массаси
т= 10000 кг. Зарбадан тикланиш коэффициента £=0,2. Зарбадан
кейин кайтган тебрангични шу холатида махсус гуткич тутиб ту-
ради. Айланиш укцнинг тебрангичнинг тик симметрия текислиги
билан кесишган О нукдасидан тебрангичнинг огирлик маркази С
гача ва шу симметрия текислигида ётувчи А нукдагача булган ма-
софа OC=d= 1,5 м ва ОА=1=2 м.
Бикирлик коэффициента с= 16 • 105 Н/см булган пойдеворнинг
энг катта эластик чукиши, А нуктадаги зарбали импульс хамда О
нудтадан зарба марказигача булган масофа аниклансин.
25-в а р и а н т. Умумий массаси т= 3000 кг булган аравача / тугри
чизикди горизонтал йулда 0^5 м/с тезлик билан харакатланиб,
шу йулда ва шу йуналишда о,= 1 м/с тезлик билан харакатланув-
чи, юк билан биргаликдаги массаси /и, = 2000 кг булган аравача 2
га келиб тукнашади.
Бир жинсли, ковак юлка деворли, массаси т = 500 кг ва ради-
уси г=0,5 м булган цилиндр — юк аравача буйлаб мумкин булган
кучишдан иккита тусик, — кия текислик ёрдамида саклаб турилади.
Зарба охирида аравачаларнинг харакат тезлиги шу горизонтал
тугри чизикди йулда узгаради, цилиндр эса <х= 60° бурчак ташкил
262
килган АВ кия текисликка урилиб, шу текислик буйлаб юмалай
бошлайди.
Цилиндр кия текислик буйлаб л-0,1 м масофани сирпанмас-
дан босиб утади; юмалашга курсатиладиган каршиликни хисобга
олмаса хам булади. Зарбада цилиндрнинг кия текисликдан ажра-
шиши кузатилмайди, кия текисликнинг мутлако гадир-будир були-
ши цилиндрнинг зарба таъсиридан силжишига имкон бермайди.
Цилиндрнинг кия текисликка кутарилиши учун кетган вакт
давомида аравача 2 нинг зарба охирида олган тезлиги узгармайди,
аравачаларнинг уриладиган вертикал текисликлари эса силлик
Рельс сиртлари эса гадир-будир, яъни аравачаларнинг урилишида
гилдиракларнинг сирнанишига каршилик курсатади. Билдирак-
ларнинг уз укларига нисбатан инерция моментлари хисобга олин-
майдиган даражада кичик.
Аравача 1 нинг аравача 2 билан тукнашишининг охиридаги
тезлиги, шунингдек кия текисликнинг цилиндр таъсирида олган
зарбали импульси аникдансин.
26-в а р и а н т. Эпициклик механизмда массаси т= 3 кг ва узун-
лиги /= 30 см булган ОС кривошип соо= 2 рад/с бурчак тезлик билан
тишли гилдирак 1 эса coL= 3 рад/с бурчак тезлик билан айланади.
Тишли гилдирак 2 нинг массаси /и2= 10 кг, радиусй эса г2= 10 см.
Вактнинг бирор онида гилдирак 1 тусатдан тухтатилган. Рил-
дирак 2 ни бир жинсли туташ диск деб, кривошипни эса бир жин-
сли ингичка стержень деб, хисоблаб зарбанинг охирги они учун
гилдирак 2 нинг бурчак тезлиги, шунингдек Ава С нукгалардаги
зарбали импульслар аникдансин.
27-вариант. Массаси т =5000 кг ва узунлиги /=3 м булган
мутлако катгик балканинг D нукгасига А = 1,2 м баландликдан мас-
саси /и=400 кг булган юк тушган. Балка кузгалмас — шарнир ли А
таянчга ва эластик В таянчга эга; тинч х°латида балка чизмада
курсатилган горизонтал вазиятни эгаллаган. Юкнинг балкага зар-
баси — эластик эмас.
Балкани бир жинсли ингичка стержень деб, юкни эса моддий
нукта, деб хисоблансин.
Зарбанинг охирги они учун балканинг бурчак тезлиги аник-
лансин ва топилган бурчак тезлик ифодаси Карно теоремасига
асосан текширилсин. Шунингдек, А таянч кабул килган зарбали
импульс аникдансин.
28-в а р и а н т. Механизм цузгалмас горизонтал О ук атрофида
айланувчи кулочокли шестерналардан ташкил топтан. Механизм
массаси т = 50 кг айланиш укига нисбатан инерция радиус и /0=0,2
м. Механизм массаси /и0= 2 кг булган темир балванкаларни АВ
текисликнинг А нукгасидан ED горизонтал текисликка, А нукта-
дан горизонтал буйича улчанган d= 1,5 м масофага отади. ED те-
кислик АВ текисликдан А= 1 м пастда жойлашган.
263
Балванкани моддий нукта деб, хисоблаб зарбанинг бошлангич
они учун шестерналар бурчак тезлиги, шуниигдек, А ва Е нукта-
ларда балванкага тушган зарбали импульслар аникдансин.
29-в а р и а н т. Устивор мувозанат холатидан бирор а бурчакка
огдирилган тебрангич бошлангич тезликсиз, уз огирлиги таъси-
рида тушиб, кузгалмас О ук атрофида айланиб, тик холатида А
нуктаси билан массаси т{,-200 кг ва радиуси г=0,2 м булган, тинч
турган бир жинсли юпка деворли ковак цилиндрга урилган. Теб-
рангич массаси т= 100 кг, айланиш укига нисбатан инерция ра-
диуси /0= 1. м.
Айланиш укининг симметрия текислиги билан кесишган О
иуктасидан тебрангичнинт огирлик маркази С гача ва шу симмет-
рия текислигида ётувчи А нукгагача булган масофалар OC=d=0,8
м ва ОА- 1= 1,2 м. Тебрангич ва цилиндрнинг зарбадаги тикланиш
коэффициента ^=0,6.
Зарбадан сунг цилиндр айланмасдан, горизонтал текислик
буйлаб сирпанади ва баландлиги /г=0,05 м булган BE зинапояга
тукнашиб унинг устига кутарилади, аммо Е кдррасидан нарига
силжимайди. Цилиндрнинг зинапояга урилишида Е киррадан
ажралиш кузатилмайди, зинапоянинг мутлако гадир-будир сирти
цилиндрнинг зарба таъсиридан сирпанишига йул кУймайди.
Тебрангичнинг дастлабки огиш бурчаги а, шуниигдек тебран-
гич томонидан цилиндрга тушган зарбали импульс аникдансин.
30-в а р и а н т. Ричаг иккита узаро мутлако каттик тугри бурчак
остида уланган OD ва ОТстерженлардан ташкил топтан; ОВ=а=1
м, OF=b= 1,5 м. Ричаг кузгалмас-шарнирли О таянчга эга ва Е
нукгада пружина ёрдамида тутиб турилади. Ричаг массаси ж-400
кг, унинг айланиш О укига нисбатан инерция радиуси ;0=О,4 м.
Ричаг пружинанинг статик дефор мациясита мос келувчи холатда
тинч туради, шу билан бирга унинг ОВ стержени — горизонтал.
Ричагнинг В нуктасига массаси /ил=20 кг булган А юк /г=0,5 м
баландликдан тушган. Ричагнинг ОВ стерженига юкнинг .зарбаси
— эластик эмас (к=0). Бурчак тезлик олган ричаг F нуктаси би-
лан массаси тг= 120 кг булган, кузгалмас В жисмга урилади; бу
зарбада тикланиш коэффициента ^=0,2. А юк ва В жисмни мод-
дий нукгалар, деб хисоблансин.
OF стержени билан тукнашишнинг охирида В жисмнинг кан-
дай тезлик олиши, шуниигдек В жисм кабул килган зарбали им-
пульс аникдансин.
Топширикди бажариш на му нас и (169-чизма). Массаси т=500
кг ва радиуси г=0,5 м булган бир жинсли туташ цилиндр — юк
харакатланувчи платформа устида жойлашган ва уни платформа
буйлаб мумкин булган кучишлардан тиргаклар — зинапоялар сак-
лаб туради.
264
169-чмзма.
Платформа тусатдан тухтатилганида цилиндр баландлиги А=0,1
м булган AD зинапоянинг В киррасига урилади ва шу зинапояга
кутарилади. Кейин цилиндр горизонтал DK супачанинг DE кисми
буйлаб юмалайди ва горизонт билан а= 60° бурчак ташкил килган
бошка гусикда — KN кия текисликка урилиб, у буйлаб 7W=^=0,l
м масофани босиб утади. Цилиндрнинг юмалаши сирпанишсиз
содир булиб, юмалашга курсатилган каршилик хисобга олинмай-
диган даражада кичик.
Цилиндр зинапояга ва кия текисликка урилганида ундан аж-
ралмайди, зинапоя ва кия текисликларнинг мутлако гадир-будир-
лиги цилиндрнинг зарба таъсиридан силжишига йул куймайди.
Платформанинг тухтагунга кддар тезлигини, шунингдек цилин-
дрга зинапоя ва кия текисликдан тушган зарбали импульслари
аникдансин.
Цилиндрнинг зинапоя ва кия текисликка урилганидан кейин-
ги, топилган бурчак тезликларининг ифодалари Карно теорема-
сига асосан текширилсин.
Ечиш. Платформа тусатдан тухтатилганида цилиндрнинг ил-
гариланма харакати бир дамда BD зинапоянинг D кирраси атро-
фидаги айланма харакатга айланади, яъни цилиндр зарба таъси-
рини сезади.
Механик системанинг кинетик моментининг узгариши хакидаги
теоремани ифодаловчи тенгламани зарба учун тузамиз, момент-
лар уки учун D кирра оркали утувчи горизонтал укни оламиз (BD
зинапоянинг D кирраси билан буладиган зарбанинг боши ва охи-
рига мос келувчи / ва Л холатлар бир хил; 170-расм, а):
Liid ~ = )
Цилиндрга куйилган ташки зарбали импульсларнипг I) укка
нисбатан моментлари йигиндиси MD(S-) = 0 га тенг (SD зарба-
ли импульс D укини кесиб утади) ва шунинг учун
^‘'OD=^‘W
2б5
170-чизма.
Зарбанинг бошида цилиндрнинг D укига нисбатан кинетик
моменти
Lw=mvcl(r-h),
бу ерда uci= и цилиндр огирлик марказининг зарба бошидаги тез-
лиги платформанинг тусатдан тухтати.'гунга цадар олган тезлиги-
га тенг.
Зарбанинг охирида цилиндрнинг В укига нисбатан кинетик
моменти
бу ерда JD цилиндрнинг D укига нисбатан инерция момента; ®ц —
цилиндрнинг зарба охиридаги бурчак тезлиги.
(Л+ тт2)аа= (тг1/2+
266
Ammo
яъни
бундан
^Ш) ^10’
J/2m/-2<DII= m\y(r-h),
<йп=2(г-Ь)о/(312).
(i)
Цилиндрнинг бурчак тезлиги учун чикдрилтан (1) ифодани
Карно теоремасига асосан текширамиз:
Бу ерда 7\ — моддий нукдалар системасининг зарба бошлани-
шидаги кинетик энергичен; Тй — системанинг зарба охиридаги
кинетик энергичен; Т* — система нувдаларининг йукртилган тез-
ликларига мос келувчи кинетик энергичен.
Цилиндрнинг зинапояга урилиши бошланипшдаги кинетик
энергичен
Т^Дти2. • '
• Цилиндрнинг зинапояга урилиши охиридаги кинетик энергичен
2ц ~ У1 (^С +
Энди текис параллел харакатда каттик жисмнинг М. нукда-
ларининг йукотган Аб; тезликларига мос келувчи кинетик энер-
гиянинг ифодасини келтириб чикарамиз:
Аи,. = бп - бш,
бу ерда
4i = бС1 + бод, бш = бсп + бод,
аммо С ук атрофидаги айлантирувчи тезлик куйидагича ифода-
ланади:
бод = ®l х l’i, VcMj ~ ШП х Г1-
Жисмнинг нукталари йукртган тезликларига мос келувчи ки-
нетик энергичен:
_ °сп) "+ (бод. "* бод.)J ,
ЯЪНИ
~ (б CI “ бел) + 2^ /иДбд - ба1)(бод _ бод ) +
267
чунки
Буерда _ _ _
/ ,(uci °сп) ~ m(uci ucu) >
wi (^ci - ^ca^cMi ~ =(^ci _ Scn)^ffJ/(®i х ~
- ®ц / г) = (бС1 - oai) ^(tt)T - ®п) х = Oj
= mrc =0;
У^,/и; (йд — ^сп ) = т(Ра ~ ^сп) >
У2т;'(^СЛГ, - ^аи, )" ~У^, т: ~&nri) ~ Л?(®1 ~ ®ц) •
Шундай килиб,
Г* = У2т (Cd — 6CT) + У2 Jc(®i ~ ®п) ,
ёки
71* = от[(исц - uaiJ2 + (оау - Од^)2^ + /2^с(®1 ~ ®ц) • (2)
(2) ифода текис параллел хдракатдаги катгик жисмнинг нукда-
лари йукотган тезликларига мос келувчи кинетик энергиянинг
умумий формуласидир.
Курилаётган масаладаги цилиндр учун (170-чизма, а).
Т* = %т[(иа- Одд cosp)2 + и^ц sin2 р] + Xви-
льни
Т* = y2m(v2a - 2uauaI cos ₽ + и£„) + ^/с®п-
Ammo
иа - о, Од! = CDU г2, Jс = тг2/2,
демак, Tj- Та ва Т* ни тенглаштириб куйидагини уосил кдыамиз:
У ш\У - У mco^r2 - У тг2®^ - у2 та2 + mucoar cos р +
ёстг +Ута>2аг2 +%mr2®^,
VJSJfl
У та^г2 = тписодГ cos Р,
бу ерда
cos р= (г-й)/г.
Бунда
®п = 2(г - й)о /(Зг2).
Механик системанинг кинетик энергиясининг узгариши хакида-
ги теоремани ифодаловчи тенгламани ва цилиндрнинг BD зина-
пояга кутаритшпита — //холатдан ///уолатга утишига мос келув-
чи тенгламани тузамиз (170-чизма, в).
268
Tm-Tu = XAf.
Кучиш D ук атрофидаги бурилиш туфайли бажарилади, демак
X *Ао®п1 ~ X Ло®п ~
ёки
% mr2® - % тг2®ц = -mgh,
бундан
®ш = 7®п -4g/i/(3r2). (3)
Механик системанинг кинетик энергиясининг узгариши .хакида-
ги теоремани ифодаловчи тенгламани ва цилиндрнинг DE кдсм-
даги юмалашига — Ш-холатдан /И-холатга утишига мос келувчи
тенгламани тузамиз (170-чизма, г):
Курилаётган кучищда Д£ = О булгани учун •
Т = Т
.IV Jni’
ёки
°СГУ— °СШ Ва ®IV— ®Ш (4)
Цилиндр кия текислик билан тукнашганида цилиндрнинг оний
айланиш уки (тезликяарнинг оний маркази) Е холатдан /’холатга
кучади, яъни цилиндрга тушади.
Моментлар уки учун цилиндрнинг F ясовчиси билан мос ке-
лувчи горизонтал укни олиб, механик системанинг кинетик мо-
ментининг узгариши хакидаги теоремани ифодаловчи тенгламани
зарба учун тузамиз (зарбанинг бошланишига ва охирига мос ке-
лувчи цилиндрнинг Г/ ва V холатлари бир хил; 170-чизма, д):
Аммо ^MF(StE) = 0, чунки цилиндрга, таъсир килувчи 5^
зарбали импульс F укини кесиб утади. Шунинг учун
= Av7-
Цилиндрнинг кинетик моментлари L^f ва Lvf ларни хисоб-
лашда система харакатининг умумий холи учун система кинетик
моменти хакидаги теоремадан фойдаланамиз.
Цилиндрнинг Оукита нисбатан кинетик моменти, зарба бош-
ланишида
Iqyp — OjyF СОЬ ОС 4" J
269
бу ерда oriv=©iv • ЕС, чунки тезликларнинг оний маркази-# нукга;
Lm- = molv/'2 cos а + (mr2/2)©IV= та,-/' (cos а +
Цилиндрнинг # укига нисбатан кинетик моменти, зарба охи-
рида
бу ерда ocv=®v- CF, чунки тезликларнинг оний маркази F нук-
гада;
LyF = тв)уГ2 + (mr2/2)®v = ^та,/2.
Ammo LyF = I^F, яъни
%m<nvr2= m&wr2(cosa + %).
шунинг учун
<dv= <d]V(2cos a+ l)/3. (5)
Цилиндрнинг топилган бурчак тезлиги ифодасини Карно тео-
ремасига асосан текширамиз:
Цилиндрнинг кия текисликка зарбаси бошланишидаги кине-
тик энергияси
Tjv = (wioCIV + 7с(йту).
Цилиндрнинг кия текисликка зарбаси охиридаги кинетик энер-
гияси
Ту = M(«’u?v + -Zc®v)-
(2) формулани куллаб, цилиндрнинг нукталари йукотган тезлик-
ларига мос келувчи кинетик энергиясини топамиз (170-чизма, ф:
Т* — У т^(oqv^ - оОТх) + (oqv^ - Ucvy) J + У^с(®iv ~ ®v) >
ЯЪНИ
T* = У2 «[(оду - oCT cos a)2 + Ост sin2 a J + [/2 7c(mw - ®v)2,
еки
— /2 ni(o^jy — 2о^ст^ст cos cl + Ост) + Jc(®iv ” ®v)
Ammo
oCIV=fflwT, ccv=©vr,
булгани учун 7^-7^ ва 7* ни тенглаптгириб, куйидагини хосил
Киламиз:
270
x mo^r2 + X w2®™ - X - И mrmy = X rm^r +
+mawG)vr2 cos a + X т®уГ2 + X /w2®rv “ X ww*2®iv®v + X №Х>
ёки
X ®v = ®iv®v(C0S a + XX
бундан
®V=®IV(2 cos a+ l)/3.
Механик системанинг кинетик энергиясининг узгариши хдкида-
ги теоремани ифодаловчи тенгламани ва цилиндрнинг кия текис-
лик буйлаб К-холатдан ИРхолатга, яъни s масофага юмалашга мос
келувчи тенгламани тузамиз (170-чизма, е):
Аммо 7’^=0 булгани учун
, 7С(Ву А _ ZX, •
— — — — — — —зш ОС,
/2 2 )
ёки
_ m^r2 _ (jnr2/l)4 _ .
— —_— -----------—mgs ми ис5
ЯЪНИ
х ®/Г2 = gs sin a,
бундан
2 I gs • sin a
®r J —;—•
r v 3
(3)—(5) ифодалардан фойдаланиб, куйидагини топамиз:
= I 9^ 4gh
11 \ (2 cosa+1)2 Зг7 5
(6) ифодани хисобга олиб, ушбу тенгламага эга буламиз
_ 2 I 3gssina , gh
(£)тт — —- I-----ту "Г —
г y(2cosa+iy 3 *
Шундай цилиб, (1) га асосан платформанинг тезлиги
V = Зг2 - / 3ffi'-sina +
2(r-h) г у (2 cos a+l)7 3 ’
ЯЪНИ
о=3,68 м/с.
271
Цилиндрга зинапоядан тушган зарбали импульсни топамиз. Бу-
пинг учун зарбада механик система харакат микдорининг узгариши
Хакидаги теоремани ифодаловчи тенгламанинг х ва у укларидаги
проекцияларини тузамиз (170-чизма, а):
т>спх ~ тх:>ах ~ У muciiy ~ mv)ay = У*. 7? >
ёки
-moaicosp-(-moa) = 5Bx; - mo^sinp = SDy,
бундан (
SSx = mva - /иосп cos р = mo - та>пг(г - й) / г =
= то[1-%(г-й)2 /г2],
яъни
SDx = 1055 Н • с,
Sv = mo ед sin Р = ma^ryjl - cos2 Р =
= %(r- h)(mv / г) 71-(т-й)7г2;
яъни
=589 Нс.
•°?
Цилиндрга зинапоядан тушган зарбали импульси
ёки
Sf = 1208 Н • с.
Цилиндрга кия текисликдан тушган зарбали импульсни топа-
миз, бунинг учун зарбада механик система харакат микдорининг
Узгариши хакидаги теоремани ифодаловчи тенгламанинг с ва д
Укларидаги проекцияларини тузамиз (170-чизма, д'):
mv>cv^ ~ muciv5 = У ~ muavn - У
ёки
-(-/moqv -sina) = SFi; тору-moavcosa = 57,
бундан
Sn - тису sin a = mo^r sin a = m3covr sin a /[(2 cos a +1)];
= mocv - woqv cos a = mcovr - cos a =
= movr - m3ravr cos a /[(2 cos a +1)].
272
(6) ифодадан фойдаланиб куйидагиларни ёзамиз:
5^ = 6mjgs sin а / 3 sin ос /[ (2 cos ос +1)],
яъни
= 691 Нс;
5^ = Irn^lgs sin ос / 3[(1 - 3 cos а /(2 cos ос + 1)],
ёки
5^ = 133 Н с.
Цилиндрга кия текисликдан тушган зарбали импульс
,
-ёки
5=704 Н-с.
г
III. АНАЛИТИК МЕХАНИКА
МУМКИН БУЛГАН КУЧИШЛАР ПРИНЦИПИ
Д. 14-т о пшир и к Мумкин булган кучишлар принципнни
битта эркинлик даражаснга эга булган механик системага
куйилган кучларнинг мувозанатига дойр масалаларни
ечншга тадбик этиш
Узаро мувозанатлашган кучлар таъсири остида булган меха-
низмларнинг схемалари 171— 173-чизмаларда курсатилган, зарур
маълумотлар эса 50-жадвадца келтирилтан.
Мумкин булган кучишлар принципини куллаб ва каршилик
кучларини хисобга олмай 50-жадвалнинг охиридан иккинчи ус-
тунда курсатилган катталик аникдансин.
Эслатма. Механизмлар 3, 6, 10, 14, 16, 18, 19, 25 ва 30-вариантлар-
да вертикал, крлганларида эса горизонтал текисликда жойлашган.
Топширикни бажариш намунаси. Берилган: Q= 100 Н; с= 5 Н/
см; г = 20 см; г2=40 см; г3= 10 см; Ш=/=50 см; ос=30°, [3=90° (174-
чизма).
О А ва АВ звеноларнинг огирликлариии хисобга олмай пружи-
нанинг деформацияси h аникдансин.
Ечиш. Кдралаётган механизм (174-чизма) куйидаги мувоза-
натлашган кучлар системаси таъсири остида турибди: кайишкок-
лик кучи F , 2 шестерняли вал 1 нинг Gx, ползун В нинг G4, юк
Q огирлик кучлари ва таянчларнинг реакциялари.
18- 273
Вариант ракдми (171-173- чизмалар) Чизикди улчамлар Кучлар, Н Л/жуфт кучнинг момента М, Н'М
Q Р
1 04=10 см — — 20
2 0,4=20 см — 100 —
3 г, =20 см, г2=30 см, г3=40 см — — 100
4 ОС: 04=4 : 5 — 200 —
5 ОЛ-ЮО см — — 10
6 г =15 см, г =50 см, г=20 см, 200
0,4=80 см
7 ОС=ОА — — —
8 рс=лс — 200 —
9 04=20 см 200 — —
10 г =15 см, г =40 см, г =20 см, 04=100 см 2-10’ — —
11 04=20 см — — 300
12 0,21=60 см, 40=20 см — — 100
13 04=40 см — — 200
14 1 ОВ=2ОА 20 —
50-жадвал
Бикрлик коэффи- циент с, Н/см Пружина деформа- цияси, h см Аникдани- ши керак булган катгаликлар Эслагмалар
— — Р
— — М
— — Q
— 4 с
— — р
— р Дрсга Ц^нинготирлиги эътиборга олинмасин
10 3 р Пружина ешцтлган
10 2 Q
— — М
—. 4 С Даста ОА нинг огир- лиги эътиборга олин- масин
— — р
— * — р
—- — р
25 3 р Стерженлар ОА ва ОВ нинг огирлиги эъти- борга олинмасин; пру- жина чузилган
15 AC=OC=OD 3 • 10-1 — — 250 3 p Пружина сикдлган
16 dj=80 см, <72=25cm 5>103 — — 100 4 p Стерженлар 0}A ва 02B нинг вазни эъти борга олинмасин
17 04=20 cm — — 200 — — p Пружина чузилган
18 200 200 — 100 — h Р — г2 радиусли блок ОЕИрЛИГИ
19 /•]=20 cm, r2=30 cm, 04=25 cm — — 100 — — P АВ звенонинг огирлиги эътиборга олинмасин
20 OA=AB=AC=5Q cm 50 100 — — — M
21 OA=AB=AC=DC=25 cm — 200 — — — M
22 04=40 cm — — 400 — — p
tsJ 23 ОС=20Л=100 см — 200 50 50 — h
Ч-Л 24 AD=0D=0B — 250 — 150 2,5 Q Пружина сикдлган
25 0D=DB=Q,8 AO 400 — — 120 3 P Стерженлар АО ва ВО нинг огирликла-ри эргибор га олин-масин Пружина чу-зилган
26 04=25 cm — 500 120 ——• 2 c Пружина чузилган
27 0B=AB — — — 180 2 p
28 0В=5/, OA — 450 — — — Q
29 XO=30 CM, BD=0J) — — 120 160 — h
30 г =15см, r =36 cm, r, = 10 cm, r =20 cm 600 — — — Q
171-чизма.
276
172-чизма.
173-чязма.
278
174-чизма.
Мумкин булган кучишлар принципини ифодаловчи ишлар тен-
гламасини тузамиз:
^^•8^=0 ёки ^^;cos(^,A851) = 0.
Механизмга куйилган богланишлар унинг звеноларининг куй-
идаги элементар кучишларига йул куяди: 1 валнинг 2 шестерня
билан биргаликда 8ц/i бурчакка бур ил иши, 3 шестернянинг 8\у1
бурчакка бурилиши ва юкнинг вертикал буйлаб 8sQ га илгарилан-
ма кучиши. ползун &Бкучишга (горизонтал кучиш), А нукта эса
8лл кучишга (8лл кесма ОА га перпендикуляр) эга булиши мумкин.
Мумкин булган кучишлар принципини ифодаловчи ишлар тенг-
ламаси куйидаги куринишни олади:
Q- 8^=0. (1)
Система нукгаларининг мумкин булган кучишлари орасидаги
богланишларни топамиз. Q юк боглангаи ип чузилмайдиган булган-
лиги учун ип билан вал 1 орасида сирпаниш йук, Q юкнинг кучи-
ши 1 гилдирак тугипи нуктасининг кучишига тенг. Шунинг учун
1 валнинг 2 шестерня билан биргаликдаги бурилиш бурчаги
8<р1=6л’с /гу
2 гилдирак тугини К нуктасининг кучиши
279
2 ва 3 шестернялар орасида сирпаниш йуюшга учун бу шес-
тернялар уриниш нукуаларининг кучишлари тенг ва 3 шестерня-
нинг бурилиш бурчаги
5ф3=8л1/г3= [^/(г/з)]^.
Рилдирак билан маркам кушилган кривошип А нуктасининг
кУчиши
SsA= ОА 5фз = ^//(г/зЛЦ,.
8sА ва 8ss мумкин булган кучишлар орасидаги богланишни апик,-
лаш учун АВ звенонинг оний айланиш маркази Р нукданинг вази-
ятини топамиз.
Унда
8ss/8sA= РВ/ РА; 8ss= (РВ/ PA')8s..
ДАРВ дан
РВ/РА= 1/cos 30°.
Демак,
8s = [г2! (г£г3 cos 30°)]&2.
Пружинанинг бикрлик кучи унинг деформациясига пропор-
ционал: F=ch. Ишлар тенгламаси (1) га бикрлик кучи ва система
нукталари мумкин булган кУчишларининг ифодаларини куйиб,
куйидагини хосил кдгламиз:
Q S-Sg-chfr/Ar/jCos 30°)]S5e=0.
Бу ердан
й= Qr^ cosl(F/(cr.J); h= 1,74 см.
Демак, пружина 1,74 см га сикилган.
Шу масаланинг Узини мумкин булган тезликлар принципини
ифодаловчи куйидаги кувватлар тенгламасини тузиб ечамиз:
ТА ч =о.
ёки
^/’u;.cos(^.C б;) = 0.
1 валга 2 шестерня билан биргаликда Ук О, атрофида, масалан,
соат стрелкасининг айланиш йуналишида, мумкин булган <и12
бурчак тезлик берамиз (175-чизма). Q юк о вертикал тезлик ола-
ди. Шестерня 3 унга маркам бириккан О А кривошип билан бирга-
ликда О уки атрофида <d3 бурчак тезлик олади. АВ звено бурчак
280
тезликка эга булади, уни
АВ звено А ва В нукдала-
р инин г бл ва бг тезлик-
лар ига мос нукталардан
утказилган перпендику-
лярларнинг кесишиш
нукгасида ётувчи тезлик-
ларнинт оний маркази
нинг атрофида курсата-
миз (ОА кривошипта те-
гишли А нукганинг тез-
лиги О А га перпенди-
куляр, ползунга тегишли
В нукганинг тезлиги
эса ползуннинг йуналти-
рувчиларига параллел
йуналган).
Кувватлар тенглама-
сини тузамиз:
ёки
175-чизма.
- Q' Og+Т7- о5=0,
- Q • vQ+ch • ол=0.
Бу ерда пружинанинг деформацияси h, шунингдек ва тез-
ликлар номаълумдир. Юкнинг тезлиги гилдирак тугини нукдала-
рининг тезлигига тенг, чунки юк осилган ин чузилмайди ва шу-
нинг учун
°(2 = ®1-2ГГ
Шестерня 2 ва 3 урипиш нукдалари К нинг тезликлари мос
равишда куйидагича ифодаланади:
1)А' ®1-2^2’ ®3^3’
улар узаро тенг, чунки шестернялар орасида сирпаниш йук.
А нукганинг тезлигини икки томонлама ифодалаш мумкин,
чунки у бир вактнинг узида ОА кривошипта ва АВ звенога те-
гишли:
и,=о), ♦ ОА; и =®АР.
АВ нукганинг В нуктадаги тезлиги
"в=&л£'бр-
Шундай килиб,
<й1-2Г2=®3Г3’ Сй^ ОА=(йлв'АР,
281
бу ердан
®3=®i-2r2/rj’ ®лл=®з' OA/AP=&i_2r2 - OA/(r3 -АР).
Б нукданинг тезлиги юдорида айтганимиздек
°г=®иГ^Р
ёки
и =со г• ОА-ВР/(г-АР).
ААРВ дан
АР=ВР cos 30°.
Демак,
и=® г - CM/(k cos 30°).
Шундай дилиб, кувватлар тенгламаси куйидаги куринишни
олади:
- С®1-2Г1+ ch(i>l 2r2[/(r3COS 30°)= 0.
Бу тенгламанинг барча дадларини со^ га булиб, пружинанинг
изланаётган деформациясини топамиз;
й= <2r/3cos 30°/(сг2/).
Д.15-топширид. Мумкин булган кучишлар
принципини душма дурилма таянчларининг
реакцияларини анидлашга тадбид этиш
Мумкин булган кучишлар принципини дуллаб. кушма конст-
рукция таянчларининг реакциялари аникдансин.
Конструкцияларнинг схемалари 176— 178-чизмаларда курса-
тилган, ечиш учун зарур маълумотлар эса 51-жадвалда келтирил-
ган. Чизмаларда барча улчамлар метрларда берилган.
Топширидни бажариш намунаси. Берилган: цушма ром (179-
шакл), Р=2 кН, Р2=4 кН, М= 5 кН • м, q= 1,5 кН/м.
Ром таянчларининг реакциялари анидлансин.
Ечиш. Текис тадсимланган юкламани юкланган дисмнинг
уртасига куйилган бир жойга тупланган Q= q • 4- 1,5 • 4 = 6 кН куч
билан алмаштирамиз.
Сурилувчи А таянчнинг реакциясини топамиз, бунинг учун бу
богланишни хаёлан ташлаб юбориб, унинг таъсирини реакция
билан алмаштирамиз (180-чизма).
Ром чап кисмининг мумкин булган кучиши унинг С шарнир
атрофида, масалан соат стрелкасининг айланишига тескари йуна-
лишда, 8ф бурчакка бурилишидир. Ромнинг унг дисми кузгалиш-
сиз цолади.
282
Мумкин булган кучишлар принципини ифодаловчи ишлар тенг-
ламасини тузамиз, бунда жисмнинг бурилишидаги кучнинг бажар-
ган иши айланиш марказита нисбатан куч момента билан бурилиш
бурчагининг купайтмасига тенг эканлигини хисобга оламиз:
Q • 25ср+ М • 5ср- RA • 45ср=0,
I
51-жад вал
Вариант разами (176-178- чизмалар) Ю клама Вариант раками (176-178- чизмалар) Ю илама
Р. кН Pv кН Q, кН/м А7, кН-м кН кН Q, кН/м А7, кН-м
1 15 14 3 10 16 3 10 2 10
2 13 12 2 6 17 1 8 1 8
3 11 10 1 5 18 3 6 3 6
4 9 8- ' 3 14 19 5 4 2 7 ‘
5 7 6 2 12 20 7 2 1 5
6 8 5 1 4 21 10 9 2 4
7 7 4 2 10 22 8 7 1 7
8 6 6 1 7 23 6 5 2 8
9 5 8 3 8 24 4 3 1 3
10 4 10 2 6 25 2 1 2 2
11 12 И 1 12 26 7 1 2 7
12 10 6 2 10 27 6 2 1 5
13 9 5 1 6 28 5 3 2 10
14 7 10 2 13 29 4 4 1 5
15 6 8 1 5 30 3 5 2 10
бу ердан
RA=(Q • 2+М)/4; 7^ =4,25 кН.
Кртирманинг реакцияларини аницлаш учун мумкин булган
кувватлар тенгламасидан фойдаланамиз:
бу ерда б; — мумкин булган тезликлар.
Дастлаб Мв реактив моментни топамиз. Бунинг учун Унг кис-
мининг бурилишига тускинлик цилувчи богланишни ташлаб юбо-
риб, цотирмани шарнирли кузгалмас таянч билан алмаштирамиз
ва изланаётган Ms моментни куямиз (181-чизма).
283
176-чжзма.
284
177-чизма.
I
I
285
378-чизма.
286
179-чжзма.
131-чиша.
Ромнинг унг кисмига В укнинг атрофида соат стрелкасининг
айланиш йуналишида мумкин булган <Dj бурчак тезлик берамиз.
Ромнинг чоп цисми С ва А нукдаларнинг бс ва тезликларига
утказилган перпендикуляр лар нинг кесишган нукга сид а ётувчи
тезликлар оний маркази OL нинг атрофида <э2 бурчак тезлик олади
(С нукданинг тезлиги СВ га перпендикуляр йуналган, сурилувчи
таянч нукдасининг тезлиги эса таянч текислигига параллел йунал-
ган). I
С нукганинг тезлигини икки томонлама ифодалаш мумкин,
чунки бу нукда чап ва унг кисмга тегишлидир:
ос=®1* СВ, и2=<о2-С(?р
яъни
©1 • СВ=(й2 • СОр
бу ердан
<в1 = (в2=<о, чунки СВ= СО,.
Мумкин булган кувватлар тенгламасини тузамиз:
М• <- Q • 2«- Р, • 2®-Р; • 5&-Мя • <о=0,
бу ерда
P;=P2sm30°.
Тенгламадан куйидаги келиб чикади:
M=M-Q'2-P^2-P -0,5-5.
Бу ердан
М „=-21 кН • м.
D
Кртирма реакциясининг вертикал ташкил этувчиси YB ни аник-
лаш учун В нукганинг вертикал кучишига гускинлик к.илувчи бог-
287
ланишни ташлаб юбориб, кртирмани вертикал йуналишдаги сир-
панма билан алмаштирамиз ва реакцияни куямиз (182-чизма).
Ромнинг унг кисмига тепага йуналган б тезлик билан мумкин
булган илгариланма харакат берамиз (йуналтирувчилар унг кисм-
нинг бурилишига йул куймайди).
Ромнинг чап кцсми С ва Л нукдаларнинг бс ва бА тезликлари-
га утказилган перпендикулярларпинг кесишиш нукдасида ётувчи
тезликларнинг оний маркази О2 атрофида <о бурчак тезлиги олади
(Сс = б л ).
Мумкин булган гувватлар тенгламасини тузамиз:
М • со - Q • 2<в - • о-Р”2 • и+ Уд • о=О,
бу ерда
Р2= P2cos 30°, о=ис=<о • С02=<о - 4.
Демак,
М • со— Q • 2о- Р. 4о+ Д • 0,866 • 4<о+ У„ • 4<о=0,
бу ердан . j
Ys= (-M+Q- 2 + Р{ • 4- Р2 • 0,866 4)/4=0,29 кН.
Кртирма реакциясининг горизонтал ташкил этувчиси хв ни
аникдаш учдт В нукданинг горизонтал кучишига тускднлик кдлув-
чи богланишни ташлаб юбориб, кртирмани горизонтал йуналиш-
даги сирпанма билан алмаштирамиз ва Хв реакцияни куямиз (183-
чизма).
Ромнинг унг кисмига унгга йуналган б тезлик билан мумкин
булган илгариланма харакат берамиз (йуналтирувчилар унг цисм-
нинг бурилишига йул куймайди). С ва Л нуцгаларпинг тезликлари
параллел булади. Демак, ромнинг чап цисми, Унг цисми каби, б
илгариланма харакат тезлиги олади.
Мумкин булган кувватлар тенгламасини тузамиз:
-Р2 cos 60° • о+ Хв • о= 0,
бу ердан
X= 4 -0,5 = 2 кН.
Масаланинг тугри ечилганлигини текширамиз.
Катталикларнинг топилган сон кийматлари кучларнинг бутун
ром учун тузилган куйидаги мувозанат тенгламаларини кдноат-
лантиришига ишонч хосил циламиз (184-чизма):
ул-,=о, Х^ = о, ]>>а=о.
Куйидагиларга эга буламиз:
'£Xi = 2Q - Р2 sin30° = 2-4-0,5 = 2-2 = 0;
288
182-чмзма.
^Yi = Ra - Q~ Pi + P2 cos 30° + = 4,25 - 6 - 2 +
+4 • 0,87 + 0,29 = 8,02 - 8,00 = 0.
Y,MiB =-^-8 + ^+0-6 + P1-2+P2cos6O°-5 + M5 =
= -4,25-8 + 5+ 6 -6+ 2’2+ 4 0,5 -5-21 = 55-55 = 0.
1
ДАЛАМБЕР ПРИНЦИПЕ
Д. 1 6-t о п ш и p и к Богланишларнинг реакцияларини
аницлашга Даламбер принципини татбик, этиш
Механик система ташки богланишларининг реакциялари куй-
идаги вакд онларида аникдансин:
а) ихтиёрий вакд онида — 4, 5, 10, 12—14, 16—18, 21—30-вари-
антлар учун (185— 187-чизмалар);
б) t=t{ вакд онида — 1, 8, 9, 11, 20-вариантлар учун;
в) бурилиш бурчаги <р=<р1 булган вакд онида — 2, 3, 6, 7-вари-
антлар учун;
г) чизмада курсатилган вазиятда — 15 ва 19-вариантлар учун.
Схемаларда (185—187-чизмалар) хОу (хАу) текислик горизонтал,
yOz (yAz) текислик вертикал. Ечиш учун зарур маълумотлар 52-жад-
валда келтирилтан булиб, унда со — бурчак тезлик, <р0 ва — бури-
лиш бурчаги ва бурчак тезликнинг бошлангич вакд онидаги кдш-
матлари. ।
Топширицни бажариш намунаси. Берилган: /д = 3 кг, т2=2 кг,
/и3= 5 кг; ^=0,30 м; /2=0,20 м; а=30°; <в= 120 рад/с=const. Система-
нинг схемаси ва зарур улчамлар 188-чизма, а да келтирилтан.
10-52
289
52-жадвал
Вариант раками (185-187- чизмалар) тг 7 R М, (const) рад/с ^1 Ф1 Фо ®0>, Эслатмалар
КГ м Н-м с град. рад/с
1 20 — 0,60 — 1,0 — 10 — 0 0
2 25 — 0,50 — — — — 60 0 0
3 40 — 0,80 — — — — 60 0 6,3
4 20 — 0,80 — — — — — — —
5 30 1,5 0,60 — — — — — — —
6 40 — — 0,30 — — — 30 0 0
7 20 — — 0,25 — — — 60 0 5,5
8 50 — — 0,30 4,0 — 5 — 0 0
_ 9 20 30 0,50 0,10 20—0,1/ — 200 — — 0 t = t1 да Cj ва С2 шкивлар огирлик марказла- рининг координаталари; х~=0; у =-0,1 см: Za=a+b-, х2=0,1 см;
10 20 5 0,25 — — — — — — —
11 25 40 0,30 — 5—0,1/ — 50 — 0 0 1=1, да стержень 7 нинг ук,и у укда, стержень 2 нинг уки х увда параллел; =25, 1г=40 см.
12 30 — 0,40 — — 10 — — — —
13 25 25 0,40 — — 15 — — — —
14 20 20 0,40 — — — — — — —
15 20 45 0,20 — — 8 — — — —
16 80 20 — 0,10 65 — — — — —
17 100 10 1,50 — 160 — — — — — Двигатель 3 ротори 2 нинг радиуси zx=0,10 м.
18 30 — 0,40 — — 12 — — — —
19 40 — 0,60 — — 9 — — — —
20 40 — — 0,30 3,0 — 4 — — 2,0
21 80 10 1,20 0,15 124 — — — — — Двигатель 3 ротори 2 нинг инерция радиуси i =0,12 м.
22 100 40 — 0,20 216 — — — — —
23 30 — 0,60 — — 9 — — — —
24 60 20 0,50 — — — — — — —
25 50 70 — 0,20 — — — — — — Шкив 3 нинг инерция радиуси /^=0,18 м.
26 80 200 1,50 0,25 — — — — — — Шунинг узи, zx=0,22 м.
27 _ 100 150 1,20 0,20 — — — — — Шунинг узи, i =0,15 м.
28 80 40 — — — — — — — — Р=1300 Н
29 20 .20 0,42 — — — — — — • —
30 50 — 0,60 — — 12 — — — —
Эслатмалар: 1. Инерция радиуслари курсатилмаган айланувчи
жисмлар ингичка бир жинсли стерженлар (1—5, 10—15, 18, 19, 23, 24, 29,
30-вариантлар) ёки бир жинсли дисклар (6—9, 16, 20, 22, 28-вариантлар)
деб кд рал син; 10-вариантда жисм 2 моддий нудта деб кдралсин.
2. 1, 8, 9, 11, 16, 17, 20—22 схемаларда тапщи моментлар М курсатил-
ган.
А товоностлигининг (подпятник), В подшипникнинг, шунинг-
дек JDN пружинанинг реакциялари топилсин.
I, 2, 3 стерженларнинг к^ндаланг улчамлари ва пружинанинг
массаси хисобга олинмасин.
Ечиш. Богланишларнинг реакцияларини аникдаш учун Да-
ламбер принципидан фойдаланамиз. а=const булгани учун хар бир
стержень заррачаларининг фацат марказдан кочма инерция куч-
ларини караймиз. Маълумки, айланаётган жисм нукталари инер-
ция кучларининг бош вектори куйидаги формула билан аникла-
нади:
Ф* = -тас,
бу ерда т — жисмнинг массаси, ас — жисм массалар маркази-
нинг тезланиши.
Жисмнин г нукталари инерция кучларининг тенг таъсир этув-
чиси уларнинг бош векторига тенг. Шунта кура 1 ва 2 стерженлар
учун
Ф[= т1ас= «1^(0,51, sin а+ /2),
Ф = т.аг = тлЗ1 0,5/,.
Таянч реакцияларини аникдаш учун Ф] кучнинг кУйилиш нук-
тасини билиш зарур (Ф2 кучнинг таъсир чизити стержень 2 нинг
уки билан устма-уст тушади ва шунинг учун у аникданган). Стер-
жень нукталарининг параллел инерция кучларининг О нуктага
нисбатан моментлари йигиндиси бу кучлар тенг таъсир этувчиси-
нинг моментига тенг булганлиги учун
4
Ф,А = J Е, cos а с/Ф,
о
бу ерда h — Фх кучнинг О нуктага нисбатан елкаси, t/Ф — стер-
женнинг de. узунликдаги элементининг инерция кучи, Е, — стер-
жень элементининг координатаси (188-чизма, о).
Фг кучнинг кийматидан фойдаланиб ва куйидагини хисобга
олиб:
г/Ф =(/,+ £ sina)®)2 у de.
бу ерда у — стержень бир бирлик узунлигининг массаси, ушбуни
Хосил киламиз:
292
I
185-чизма.
293
186-чизма.
294
187 -чизма.
295
4 . ।
/n1ffl2(0,5/1sina+/2)A= f (/2+^sina)ffl2y^cosa dt,
о
интеграллангандан кейин бу ерда
/(/j sin a + 2i2) = 16,4 cos a.
' 2 . \
L + - I, sin a cos a
2 3 1 /
А подпятник ва В подшипник реакцияларининг ХА, YA, ZA
ва Хв, Ув ташкил этувчиларини, стерженларнинг Ц, (?,, G} огир-
лик кучлар ини хамда Ф| ва Ф2 инерция кучларини курсатамиз
(188-чизма. в). Бу кучлар Даламбер принципидан келиб чикувчи
Куйидаги тенгламаларни цаноатлантириши керак:
296
i 5X=°;
-Ya 50 - Ф2 • 40 - G2 • 10 - G, • 27,5 - Ф, (40 -16,4 cos a
ZX=0; Ya + YB + Ф, + Ф2 = 0;
£Z,=0; Zb-G,-G2-G3=0;
бу тенгламалардан |
Г =-8,47 кН; У =-6,28 кН; Z =0,098 кН.
Кдралаётган кучлар yAz текислигида жойлашганлиги учун
Хв=Хл=0. DN пружинанинг реакциясини аникдаш учун I стер-
женга куйилган кучларни кдраб (188-чизма, г), куйидаги тенгла-
мани тузамиз: f
^Л//о=О; -G1(/1/2)sina + O1/z-JD/1cosa = 0,
бу ердан
Р=6,47кН.
Д. 17-то пширик. Кузгалмас ук, атрофида айланма
^аракат кцлаётган катпщ жисмнинг таянч
реакцияларини аникдаш
' I " ' '
т массали бир жинсли Q жисм кузгалмас вертикал z уки атро-
фида горизонтал текисликда жойлашган ва моменти М булган жуфт
куч таъсирида айланади. А товоностлиги (подпятник)нинг ва В
подшилникнинг реакциялари жисмнинг моддий симметрия те-
кислиги yAz текислик билан устма-уст тушадиган t~вакд онида
аникдансин. Бошлангич бурчак тезлиги <в0=0. Q жисм билан бог-
ланган стерженларнинг массаси х;исобга олинмасин.
Тошпирикнинг вариантлари 189-191-чизмаларда, зарур маъ-
лумотлар эса 53-жадвалда курсатилган.
Топширицни бажариш намунаеи. О жисм (ичидан конус кесиб
олинган бир жинсли цилиндр) кузгалмас z УК атрофида айланади
(192-чизма, а).
Берилган: т=32 кг; М=60 Н- м; г=0,25 м; ОО=Ъ,5 м; h= 1 м;
у=30°; а= 1м; 6=2 м, т=2 с. ОО{ стержень жисмнинг симметрия
уйди билан устма-уст тушади. Стерженларнинг массаси хисобга
олинмасин. Ra ва RB топилсин.
Ечиш. Q жисмнинг бош марказий инерция укдари; J, -q, G
куч, М момент хамда таянчлар реакцияларининг ХА, YA, ZA ва
Хъ, YB ташкил этувчиларини курсатамиз (192-чизма, б).
297
Масалани ечиш учун Даламбер принципидан келиб чикувчи куй-
идаги тенгламалар системасидан фойдаланамиз:
j 53-жадвал
Вариант рацами т, R Н Ус Л Y, АВ, м, t с Кушимча
(189-191- чизмалар) кг см град см Н-м улчамлар, см
1 40 25 — 0 60 20 120 юд1 10,0
2 42 10 50 0 32 16 70 2,8 8,0
3 20 8 30 3 30 20 55 2,0 3,5
4 38 10 45 -20 38 25 80 18,0 7,0
5 120 — 60 0 50 18 ПО 22,0 10,0
6 45 10 50 0 33 20 75 3,6 7,0
7 40 — 30 -20 55 30 100 12,0 12,0
8 40 10 40 5 28 10 60 2,2 6,0
9 26 12 48 33 50 20 100 16,0 15,0
10 12 15 — 3 32 15 70 1,2 5,0
И 50 10 40 — 28 12 48 4,0 6,0
12 28 — 50 0 36 30 80 1,8 11,0 а=18, 6=30, а =14, В =24
13 90 12 50 14 35 10 75 13,0 7,0 а=15
14 . 36 6 42 1 25 — 52 0,8 5,0
15 8 12 50 15 36 8 70 2,4 4,5
16 48 20 10 -22 32 30 65 15,0 18,0
17 55 8 70 5 55 12 120 4,0 14,0 а=30
18 60 16 50 0 28 10 60 5,0 16,0
19 32 15 6 0 15 15 35 4,5 5,5
20 65 6 30 0 36 25 75 6,2 9,0
21 80 15 40 — 35 30 78 126,0 10,0
22 24 10 40 0 28 10 60 0,6 6,5
23 55 16 50 0 42 5 80 3,8 8,5
24 85 14 60 — 30 10 90 4,4 9,5
25 22 — 48 — 42 15 75 5,0 4,0
26 64 18 8 3 36 12 70 7,0 9,0
27 80 14 55 -6 50 15 80 9,0 6,0
28 85 15 45 — 48 25 76 8,5 7,0
29 80 12 56 -2 42 20 80 9,5 8,0
30 ПО 16 52 — 50 8 85 10,5 9,0
I
ХА + Х3 + тх-сВ + тус& = 0;
+ YB + тус&2 - тхс& = 0; ZA - G - 0;
-Ys(a + b)-G • ОС sin у - = 0;
XXa + b) + J „a2 + J.7s = 0; M - Ле = 0.
D ' z У-C A.
(1) системанинг охирги тенгламасидан s бурчак тезланишини
аникдаш учун Q жисмнинг z айланиш укита нисбатан инерция мо-
ментики куйидаги формула буйича топамиз:
298
О©
299
190-чизма.
301
I
192-чизма.
J = J , + тсР, (2)
бу ерда J L — Q жисмнинг z Укдга параллел булган марказий С L
Укига нисбатан инерция моменти, d — z ва zY укдар орасидаги
масофа.
Куйидаги формуладан фойдаланамиз:
J^J.cos^a+J^ cos2p+Jfcos2y, (3)
бу ерда а, р, у — z{ УКииинг мос равищда т|, Q укдари билан
хосил килган бурчаклари а=90° бултанлиги учун
J j=2? cos2 р+Js cos2 у. (4)
J ва J терция моментларини I жисмнинг (тугаш цилиндр)
ва И жисмнинг (конус) инерция моментларининг айирмаси каби
анигщаймиз (192-чизма, б)-.
(5)
Q жисмнинг массаси т ни билган холда / жисмнинг ва //жис-
мнинг массасини аникдаймиз:
= ртгг2й, /«п = | pnr2h,
бу ерда р — жисмнинг зичлиги, г — цилиндр ва конус асосининг
радиуси. Демак,
та = | «г,
302
I
2
т = тх - mu = - = 32 кг.
Бу ердан '
= у -32 = 48 кг, = 48/3 = 16 кг.
Q жисмнинг инерция моментини хисоблаш учун унинг огир-
лик марказининг вазиятини — унинг нукдадан масофасини
билиш зарур. (Барча вариантларда огирлик марказларининг коор-
динаталари берилган булиб, масалани ечиш учун зарур булган
бошка катгаликларни аникдаш лозим).
Бу масофа
OtC= (mj • (\СГ ти • 0^^)/^- тп),
бу ерда
. 01С1=|А4м’ О1Сд=|л=|м.
Демак, 1
Цилиндрнинг Ст| укига нисбатан инерция момента
J' = + т^С)2, (6)
бу ерда = тх (г2 / 4 + h2 /12) цилиндрнинг унинг С2 огирлик мар-
казидан утувчи т|1 укца нисбатан инерция момента; СХС=(\СХ-
(\С= 1/2-3/8= 1/8 м — т] ва т|1 укдар орасидаги масофа.
(6) га катталикларнинг бу кдйматларини куйиб, куйидагини
оламиз:
=48(0,252 /4 + 12/12) + 48(1/8)2 =5,5кг-м2.
Конуснинг Ст| укка нисбатан инерция момента
An=An2+^n(CnC)2, . (7)
бу ерда — конуснинг Сп огирлик марказидан утувчи т|2 укдд
нисбатан инерция момента.
Уз навбатида, учун куйидагига эгамиз:
ЛП2=ЛПз-^(О2Сп)2. (8)
Бу ерда — конуснинг унинг асос маркази О2 дан утувчи ва
т|2 укка параллел булган уцца нисбатан инерция момента.
(8) ни (7) формулага кУйиб, куйидагини оламиз:
А” = 4' - "".i(Acu)2 + /МВД2 = Д + «ъКСпС)2 - (О2с„)2],
303
I.
бунда конуснинг ц, Укка нисбатан инерция моменти ушбу формула
билан аникданади:
= 0,15л1пг2 + 0,1лгпА2 = (0,15 0,252 + 0,1 • I2) 16 = 1,75 кг м2.
Масофаларни хисоблаймиз:
СПС= О,СП- ОГС= - - g = g м,
°.сп= -{ = 4 м.
Шундай килиб,
Энди / ва J ни (5) формулалар буйича хдсоблаш мумкин:
= J'-Jn = 5,5-3 = 2,5кг • м2;
бу ерда
= »у2 /2 = 48-0,252 /2 = 1,5 кг-м2; ’
J° = 0,ЗтцГ2 = 0,3 16 • 0,252 = 0,3 кг • м2.
Унда
J = 1,5-0,3= 1,2 кг • м2.
(4) формула буйича 0= 120°, у=30° эканлигини эътиборга олиб,
/г1 ни хисоблаймиз:
Jz= J4cos2120"+Jf cos230°=2,5(l/2)2+1,2( 7з/2)2= 1,525 кг • м2.
Q жисмнинг z айланиш укига нисбатан инерция моментини
(2) формула буйича хисоблаймиз:
J=Jzi+m(P,
бу ерда
d= OCsiny=(OOl+ O^sin y=(l/2+3/8)sin 30°=0,437 м.
Демак,
J2= 1,525+32- (0,437)2=7,65 кг • м2.
(1) системанинг охирги тенгламасидан
е= M/J = 60/7,65= 7,85 рад/с2=const.
Жисмнинг текис тезланувчан айланма харакатидати бурчак тез-
лиги
304
<в=<в0+е/,
шунинг учун <оо=О ва /=т=2 с да
®=7,85 • 2= 15,7 рад/с.
Таянчларнинг реакцияларини топиш учун J)z ва J марказдан
Кочма инерция моментларини аникдаш лозим. чунки Q
жисмнинг моддий симметрия текислигига перпендикуляр булган
х уки А нукта учун бош инерция уцидан иборат.
Jy_ марказдан кочма инерция моментини куйидаги формула
буйича аниклаймиз:
JK=J,M+my^c>
бу ерда
<ui=(V^)<sitl2Y)/2’
яъни
/ш=(2,5- l,2)(sin 60°)/2=562 кг - м2.
В жисм огирлик марказининг координаталари куйидагича:
Хс=0, >C=J= 0,437 м;
’Zc=tf+ OCcos у=а+(ОС\+ C^Qcos у= 1,76 м.
Шундай килиб,
4= 0,562+32 • 0,437 • 1,76 = 25,16 кг • м2.
Маълум катталикларни (1) тенгламалар системасига куйиб,
цуйидаги тенгликларни косил киламиз:
А/^+32- 0,437 -7,85 = 0;
Ул+У^+32 • 0,437 • (15,7)2=0;
2,-32-9,81=0;
-3^-32-9,81 • 0,437-25,6- (15,7)2=0;
3^+25,16-7,85 = 0.
Бу ердан I
X= -43,6 Н; У=- 1340 Н; Z=314H; X= -65,8 Н;
А 7 7 А 7 А 7 Л 77
Д. 18-т о п ш и р и К- Динамиканинг теоремаларини
ва принципларини механик системанинг харакатиии
текширишга тадбик этиш
Механик система тл массали А жисмдан, тв массали В гилди-
ракдан ва системани харакатга келтирувчи элекгр двигателдан
иборат. А жисм В гилдиракнинг укига ва горизонтал гадир-будир
го- ! 305
I
текисликка таянади. Двигателнинг айланувчи кисмлари В гилди-
ракка б икр богланган булиб, уларнинг массалари ва инерция мо-
ментлари В гилдиракнинг мос равишда массасида ва инерция
моментида хисобга олинган.
Электр двигатель берадиган M(t) айлантирувчи момент куйи-
даги дифференциал тенглама билан аникданади:
+ ь2м = Ь, - ООО, (1)
бу ерда b{, bv Ь} ва а — узгармас коэффициентлар, <в — двигатель
валининг айланиш бурчак тезлиги. В гилдирак таянч текислик
буйлаб сирпанмайди.
Двигателнинг танаси 1—7, 9, 11—20, 30-вариантларда А жисм
билан бикр богланган ва унинг массаси тл да хисобга олинган.
8, 10, 21—29-вариантларда двигателнинг танаси А ва В жисм-
лар билан богланмаган ва, демак, айлантирувчи момент бу жисм-
лар системасига нисбатан ташки булади.
Двигатель бошлангич вакт онида (I = 0) система тинч турган
пайтда ишга туширилади. Таянч текислйк томонидан А жисмга
куйилган тинч холатдаги (тишлашиш) ишкаланиш кучининг мав-
жудлиги шунга олиб келадики, механик системанинг харакати
двигатель ишга туширилгандан т/с кейин бошланади. Сунгра си-
стеманинг илгарилама харакати тезлиги бирор и, кийматгача оша-
ди. Ундан кейин тормоз берилади ва системанинг илгарилама хара-
кат тезлиги s йул давомида 0,9ич кийматгача камаяди.
Куйидагилар талаб килинади:
1. 0< t< т да М= M(t) богланишни, харакатнинг бошланиш они-
даги Mf= кийматни ва т вакдии аниклаш.
2. 1>х ва о=и(0 богланишни аниклаш, мукимлашган ш тез-
ликнинг кийматини ва мукимлашган М, моментнинг кийматини
топиш.
3. Тормозлаш боскичида и нинг 0,9и, кийматгача камайишида
системанинг угган йулмни тормозлашнинг икки тартиби учун аник-
лаш.
1-тартиб — двигатель билан тормозлаш — двигатель тормоз
ролини утайди. Бунда двигателнинг вали берадиган момент куйи-
даги тенглама билан аникланади:
, dM
b, . - -оссо.
1 dt
2-тартиб — механик тормозлаш. Бунда Af=const=0.
Тормозлашнинг биринчи ва иккинчи макомларидаги з ва I тор-
мозлаш йуллари таккослансин.
Механизмларнинг схемалари 193—195-чизмаларда, хисоблаш
учун зарур маълумотлар эса 54-жадвалда келтирилган.
306
54-жадвад
Вариант раза- ми (193-195- чизмалар) тл> кг кг г, м z, м f OH HC OE ED a bi Ь2 Ь3 Эслатма
M
1 30 80 0,6 0,3 0,2 1,2 0,25 0,8 0,8 3 1,00 0,33 40
2 10 50 0,3 0,2 0,35 0,5 0,3 1,0 0,7 3 1,33 0,27 30
3 50 120 0,5 0,35 0,25 1,1 0,2 1,5 0,5 4 1,25 0,32 70
4 40 90 0,45 d,4 0,4 1,6 0,1 17 0,6 3,5 2,28 0,20 60
5 25 70 0,4 0,3 0,3 2,0 0 1,5 0.5 5 2,33 0,28 50
6 15 60 0,35 0,25 0,35 1,2 0.2 1,8 6 4,5 1,33 0,27 40
7 35 105 0,5 0,3 0,4 1,6 6 1,0 0,5 5 1,0 0,19 50
8 7 18 0,4 0,3 0,3 1,09 0 0,3 0,5 4 0,75 0,22 40
9 25 80 0,6 0,4 0,4 0 0,3 0,8 0,8 4 1,75 0,17 60 OE=OE, EXD=ED i
10 5 15 0,3 0,2 0,3 0,7 0,1 0,5 0,4 4,5 1,33 0,44 40
11 30 110 0,7 0,5 0,3 6 0,4 1,2 0,7 3 2,67 0,30 55 OE=OE, ED=ED
12 20 85 0,3 0,25 0,4 1,3 0,3 1,3 0,15 4 2,25 0,42 60 1 ’ll
13 20 70 0,4 0,3 0,4 0,9 0,3 1,8 0,4 2 1,50 0,50 50
14 30 95 0,5 0,4 0,3 1,7 0,3 1,3 0,8 3 2,67 0,46 70
15 25 80 0,55 0,4 0,2 1,8 0,3 1,5 0,7 3,5 2,00 0,17 50
16 40 100 0,6 0,5 0,25 0,5 0,6 1,9 0,9 4 1,50 0,17 60
17 35 НО 0,65 0,5 0,45 0,8 0,25 1,4 0,25' 5 • 1,60 0,16 40 Электромеханик табиатга эга
18 35 120 0,6 0,5 0,4 2,0 0 1,0 0,8 5 1,60 0,14 80 булган a, bv й^ва by коэффи- циентларнинг улчамлари бе-
19 10 40 0,4 0,3 0,4 1,9 0,2 1,2 0,7 3 3,00 0,26 50
20 25 85 0,55 0,4 03 1,1 0,1 2,3 0 4 1,0 0,22 45 рилмади. Уларнинг сон кдй-
21 2 10 0,1 0,06 0,3 o,7 0,05 1,0 0,2 У 3,33 1,33 30 матлари СИ сйстемада берил-
22 4 30 0,2 0,15 0,4 0,5 0,1 0,9 0,3 3,50 0,75 40 ган.
23 3 20 0,2 0,1 0,3 0,8 0,2 0,6 0,4 3 2,67 0,66 35
24 15 0,3 0,2 0,3 0,9 0,1 0,7 0,4 2 3,00 0,45 40
25 2,5 15 0,25 0,2 0,3 0,5 0,2 1,2 0,2 3 2,33 0,56 35
26 4,5 18 0.35 0.25 0,4 1,9 0.2 1,2 0,5 4 1,50 0,35 40
27 3,2 16 б,з d,2 0,2 1,4 6 1,0 0,9 3 2,00 0,43 35
28 2,8 15 0,25 0,2 0,3 1,1 0,3 1,3 0,2 4 1,25 0,45 45
29 4,7 21 d,3 0,25 0,4 1,8 0,2 0,8 0,1 3,5 2,57 0,43 40
30 10 60 0,6 0,5 0,4 0 0,3 0,8 0,7 4 1,75 0,15 70 ОЕ=Ъ,9; £^,=0,6
193-чизма.
308
194-чизма.
309
195-чнзма.
зю
> 193—195-чизмаларда С — А жисмнинг огирлик маркази, стрелка
билан харакат йуналиши курсатилган; D — А жисмнинг гадир-бу-
дир текисликка таяниш нухгаси.
9, 11, 30-вариантларда А жисм таянч текислигига тезлашишда
D нукдага, тормозлашда эса нукдага тегиб туради.
54-жадвалда куйидаги параметрларнинг хийматлари келти-
рилган: тА, тв — Л ва В жисмларнинг массалари, г — В гилдирак
радиуси, i — В гилдиракнинг айланиш укдгга нисбатан инерция
радиуси, f— ишхаланиш коэффициента; ОН, НС, ОЕ, ED — 193—
195-чизмаларга харанг; a, bv b2, Ь3 — узгармас коэффициента^.
Топишрикни бажариш намуиаси. Берилган: тА- 20 кг, тв= 100
кг, г=0,5м; i= 0,4м; /=0,35; ОН=а=1,4 м; ОЕ=Ь=2,Ом; CH=h=0,4
м; ED= С=0,7 м; а=2; ^=2,5* 10’2; 62=0,25; Ь=50.
0</<т булганда ни; />т, о* булганда Мл, т, о=и(/) ни;
М,, ва / ни топинг.
Ечиш. 1. Система харакатининг мукимлашган тезликкача тез-
лашиш боскрлчидаги параметрларини аниклаш.
Механик система 196-чизмада унинг \исоб схемаси эса 197-
чизмада келтирилган.
Механик системанинг харакатини тавсифловчи дифференциал
тенгламаларни тузамиз (197-чизма, а). В гилдиракка М айлан-
тирувчи момент, G= mBg огирлик кучи, К таянч нукдада YK нормал
реакция хамда хаёлан унгга йуналтирилган Е^ тишлашиш кучи
куйилган. А жисмга С огирлик марказита куйилган Q= mAg огир-
лик кучи, Yn реакция, XD-fYB ишхаланиш кучи ва юритгич тана-
сининг М' реактив моменти таъсир хилади. А жисм билан В гил-
диракнинг О нукдадаги узаро таъсир кучлари ички идеал богла-
нишларнинг реакциялари булиб, улар чизмада курсатилмаган.
Системани хисмларга ажратганда (197-шакл, б, в) О нукдаларга А
ва В жисмлар орасидаги узаро таъсир кучлари Хо = Х° ва Yo = Y'o
куйилади.
Харакат дифференциал тенгламаларини олиш учун кинетик
энергия хахидаги теореманинг хосила куринишидан фойдаланамиз:
= ' (2)
бу ерда X кувват барча ташхи ва
ички куч хасида моментлар учун
аникданади.
Система кинетик энергияси-
нинг ифодасини тузамиз:
ЗН
197-чиэма.
Богланишлар тенгламалари:
л=о=ол=ис=и0, <£>=х/г. (4)
(4) ни (3) га куйиб, куйидагини оламиз:
Т^\ткхг, (5)
бу ерда келтирилган масса |
тк = тА + тв Г1 +
Системадаги кучлар ва моментларнинг куввати ифодасини ту-
замиз:
^=Лfa-Z>=(Лf/r-ZD)x. (6)
(5) ва (6) ифодаларни (2) га куйиб, куйидагини оламиз:
mkx=M/r-fYs. (7)
Бу тенглама Ys номаълум кучни Уз ичига олади. Уни йукртиш
максадида А жисм учун (197-чизма, в) Даламбер принципига би-
ноан барча кучларнинг ва Ф инерция кучининг О нукдага нисба-
тан моментлари йипшдисини тузамиз ва уни нолга тенглаймиз:
М'- Q • a-fYB • с+ YB’ Ь+Ф • h=0.
Ф= тАх эканлитини эътиборга олиб, куйидаги тенгламани хрсил
ьдгламиз: '
mAxh =-М'+ mAg • a- Ys’ d, (8)
бу ерда
d=b-fc.
(7) ва (8) тенгламалардан YB кучни йуцотиб, куйидагини ола-
миз:
акх = а]М- av (9)
бу ерда |
312
a, = f+ d/r, a=fam.g, a=m,d-fhm..
i dt A j К A
(9')
(9) дифференциал тенглама системанинг x укд буйлаб харака-
тини тавсифлайди. I
t нинг 0 дан т гача узгариш интервалида М= M(t) богланишни
аниклаймиз. Бунинг учун (1) тенгламада <о=0 деб олиб, уни ин-
теграллаймиз. М(/=0)=0, бошлангич шартни хисобга олиб, куйида-
гига эга буламиз:
"2
(10)
Жойдан кузгалиш шарти куйидагича булади: i’>0.
(9) тенгламадан фойдаланиб, айлантирувчи момент учун куйи-
даги жойдан кузгалиш шартини оламиз:
М> a2/av
Моментнинг система хдракатга келадиган М6 бошлангич ций-
мати I
M=aJaY.
(Н)
Двигатель ишга тушган ондан то система харакатга келгунга
цадар булган т вакд интервалини аниклаймиз. М(= М(т) эканлиги-
ни хисобга олиб, (10) тенгламадан куйидагини оламиз:
t> т булганда о= о(0 богланишни топамиз.
х=и эканлигини хисобга олиб, (1) ва (9) тенгламаларни куйи-
даги куринишда ёзамиз:
(13)
Бу системанинг иккинчи тенгламасидан куйидагини топамиз:
(14)
й1 dt
Бу тенгламани t буйича дифференциаллаймиз:
dM _ й3
dt av ~dt^
(15)
313
(14) ва (15) ни (13) системанинг биринчи тенгламасига куямиз.
Шакл алмаштиришлардан кейин куйидагини оламиз:
+ +k2v = D, (16)
dt2 dt ’ v '
бу ерда
п = Ь к = Б; D = (17)
2!\ \ra3bi а3Ьу '1/''
(16) тенглама учун бошлангич шартлар:
/=тдао=0ва = 0. (18)
^ = 0 киймат (13) системанинг иккинчи тенгламасидан
M{i)= М. шартга асосан келиб чикади.
Маълумки, (16) тенгламанинг п>к булгандаги ечими куйвдаги
куринишга эга (п>к эканлигига сон кийматларни куйиб ишонч
косил кдлиш мумкин):
v=Ae~n,sh (kJ+$)+D/k\ (19)
бу ерда
к* = 7и2 -к2.
А ва р интеграллаш узгармасларини (18) бошлангич. шартлар
буйича топамиз: i
бу ердан
A = -JLen\ р = 0,5 In f
кк* (n-fc.)
Тезликнинг мукдмлашган кдймати о. (19) ифоданинг унг то-
монидаги иккинчи хад билан аникданади, чунки биринчи хад нолга
интилади:
v*=D/k\ (20)
Таъкидлаймизки, мукимлашган тезлик билан харакатда электр
юритгичнинг вали берадиган момент хам М, мукдмлашган^ кий-
матга эришиб, у (13) системанинг иккинчи тенгламасидан = 0
шартда аникданади:
M*=M=aJav (21)
Берилган маълумотларни куямиз ва харакат параметрларининг
тезлашиш боскичидаги кдйматларини аникдаймиз:
314
(9) тенгламага кирувчи коэффицентларнинг кийматлари:
т = 184 кг; d= 1,735 м;
^=3,82; а = 96,04 Н-м; л3=316,44 Н • с2.
Электр юритгичнинг тезлашиш боскдчидаги моменти [(10)га kJ:
М(Г)=200 (1-е"10/).
Моментнинг жойдан кузгалишдаги (11) дан топиладиган бош-
лангич кдймати
М>= 25,14 Н-м.
б 5
Юритгич ёкилгандан то харакат бошлангунга кадар булган ва
(12) га асосан хисобланадиган вакт интервали
т= 0,0134 с.
о(0 богланишни аникдаймиз. Бунинг учун (16) ва (19) тенгла-
маларга кирувчи параметрларнинг гдшматларини хисоблаймиз:
й=5с-'; 1,39 с-1; 2)=21,11 м/с3;
£ = 4,80 с’1; Л=-3,38м/с; (3= 1,89.
Мукимлашган тезликнинг кдймати [(20) га к.]
о4= 10,93 м/с.
А, р ва и* катталикларнинг кийматларини (19) тенгликка куйиб,
t>x даги o(t) богланишни оламиз:
o(t)=-3,38 е-5/ 5/z(4,80r+ 1,89)+ 10,93.
Тезлашиш боскдчида мукимлашган моментнинг киймати, (21)
дан куринадики, Мъ бошлангич киймат билан устма-уст тушади:
М*=25,14Н-м.
Тормозлаш вактида йулни аницлаш. Тормозлаш о=и0 илгарила-
ма харакат тезлигида ва М= М> моментда бошланиб, о= 0,9о, булган-
да тугайди. |
Тормозлашнинг икки тартиби (режими)ни текширамиз.
Тормозлашнинг 1-тартиби. Тормоз йули s ни аниклаш учун ме-
ханик системанинг кинетик энергияси хакидаги теореманинг чекли
куринишидан фойдаланамиз:
7;-^=54 (22)
бу ’рда ташкд ва ички кучлар ишларининг йигиндиси:
315
<P2 %2 x2 Й
У 4 = J Md<p - J XDdx = 1J Mdx - / J Ysdx.
Ф1 *i | *i *i
(5) ифодадан фойдаланиб, (22) ни куйидаги куринишда ёза-
миз:
Й й>
2 тк (х2 - х2) = - j Mdx - f J YBdx.
Й Й
Бу ерда 1 индекс билан номаълумларнинг тормозлашнинг бош-
лангич t{ онидаги кдйматлари, 2 индекс билан эса тормозлашнинг:
охирги /2 онидаги кийматлари белгиланган. (23) тенгламанинг унг
кисмадаги иккинчи кушилувчи Ys номаълумни уз ичига олади.
Шунинг учун худди шу номаълум уз ичига олувчи яна бир тенгла-
ма тузиш зарур.
(8) ифодани х буйича интеграллаймиз. xdx = j эканлиги-
ни хисобга олиб, куйидагини хосил кдламиз:
х2 х2 . ' ->
A mAh - х2) = ~ J Mdx + my°(x2 - у) - J Ynd dx. ^4)
й й
(23) ва (24) тенгламалардан Ys нинг интегралини йукотсак, (9')
белгилашлардан фойдаланиб, цуйидагига эга буламиз:
х2
-х2)^ j Mdx-a^-Xi). (25)
й
Таъкидлаймизки, бу тенгламани (9) ни х буйича интеграллаб
Хам олиш мумкин. Тормозлаш вактида юритгичнинг вали беради-
ган момент учун дифференциал тенглама куйидаги куринишга эга:
, dM
\ у- = -а®-
Бу тенгламани дан t гача чегарада интеграллаймиз:
М-M^-^tx-xJ. (26)
(26) ни х буйича х, дан х2 гача чегарада интеграллаймиз:
Х2 / \ f 2 2\
J M^ = [M1+^i|(y-x1)-Abp_ . (27)
J V j 1 Z J
й
(27) ни (25) га куямиз:
j «з (х2 - А2) = «1 (X + <*2 - х1) - " Х1)‘ <28>
316
Бу ифодада
х£=0, M = M = aJaY,
x2=s, х'2=0,9о*.
деб олиш керак. Бу кийматларни (28) га куйиб, куйидагини хосил
киламиз:
^(0,92-l)v?=-^-A
Z Zftq
Тезлик 0,9 о, кийматгача камаядиган тормозлаш йули
5 = U-J—»9)
У ^***1
Тормозлашнинг иккинчи тартиби. Тормозлашнинг иккинчи тар-
тибида системанинг хдракатини тавсифловчи тенглама (28) дан
а=0 да куйидаги ифода келиб чикдди:
I я3(х% - хг2) = -«2(*2 - Xi). (30)
хг=0, %j= и*, х2= I, х2=0,9 и* деб кабул килиб, куйидагини оламиз:
Параметрларнинг кийматларини (29) ва (31) формулаларга
Куйиб, ушбуни косил киламиз:
3,43 м; /=37,39 м.
Тормозлашнинг биринчи ва иккинчи тартибидаги ва / йуллар-
ни таккослаб юритгичнинг тормозлаш моментини ишга солиш
тормоз йулини кескин камайтиради, деган хулосага келамиз.
ДИНАМИКАНИНГ УМУМИЙ ТЕНГЛАМАСИ
Д. 19 -т о п ш и р и к- Динамиканинг умумий тенгламасини
битга эркинлик даражасига эга булган механик
системанинг харакатини текширишга тадбик этиш
Берилган механик система учун юкларнинг тезланишлари ва
шу юклар маккамланган ипларнинг тармокдаридаги тарангликла-
ри аникдансин. Ипларнинг огирлиги эътиборга олинмасин. Юма-
ланиш ишкаланиши ва подшипниклардаги кдршилик кучлари
Хисобга олинмасин. Система тинч холатдан бошлаб харакатланади.
Механик системаларнинг вариантлари 198—200-чизма лар да
курсатилган, ечиш учун зарур маълумотлар эса 55-жадвалда кел-
тирилган.
317
55-жадва л
Вариант разами (198-200- чизмалар) Огирлик кучлари R/r Инерция радиус- лари р К^шимча маълумотлар
<?. <5 !2х !'зх
1 G G 3G — 2 — — —
2 G G G — 2 Г -Л — — —
3 3G G G — 2 г J2 — __ 0,1
4 G G 2G — — __ — — 0,2 г2=г3
5 2G G G G 3 2г — — —
6 2G G 2G — 3 2г — 0,2
7 2G G 2G — 3 2г — — 0,2
8 2G G 2G — 3 2г — — 0,2
9 2G G 2G — 3 — — 0,2G 0,2
10 2G 2G G — 4 2г G/3 0,4
И 2G G 2G 0,2(7 3 2г — 0,2
12 2G G 2G 0,2(7 3 • 2г — — 0,2
13 4G 2G G 4(7 — riJ2 2г3 — — '•2=2Г3,' ^^3
14 — 2G G 4(7 — гЛз 2г3 8G — г2=2г3; ^=1,57^
15 4G G 2G 4(7 — 2г3 — — г=2г3; ^=1,57^
16 — G G 4(7 — г2^2 4G — г2=2г3; 7^=1,572,
17 2G G G — 2 rh — — 0,1
18 3G 0,2 G( 0,1 G 0,5 G 2 — — — 0,4
19 4G' 0,3 G 0,2 G 3(7 3 2г 1,2г — 0,1. г3=1,2?; 7?з=1,2г3
20 4G 0,2 G 0,1(7 3(7 2 1,6г гТг — 0,2 ' г2=1,5?; 7fj=l,2r2
21 5G 0,1(7 0,2(7 — 3 — г V2 G —
22 G 0,2(7 0,3(7 — 2 — гТ2 G —
23 G 0,2(7 0,1(7 — 1,5 1,2г — 2G — ^=1,2 г
24 2G G G 8(7 — — — — — ТУрпа
25 6G 2G 2G (7 — — — — — гилдиракнинг
26 6G G 2G — — — — — — массаси бир хил
11 G G G 4G 2 г /г г Тг — — Г3=Г4
28 3G G G — 2 гТг — — 0,1 Г2=Г3
29 6G 3G G G 2 — г Тг — —
30 8G G G 2G — — — — 0,1 hx~hx
Эслатмалар. 1. Инерция радиуслари шакл текислигига перпенди-
куляр булган марказий укдарга нисбатан берилган (198—200-чизмалар).
2. Ишкдланиш коэффициента жисм текислик буйлаб сирпанганда
\ам, колодка ёрдамида тормозланганда дам бир хил кдшиб олинсин (9—
12-вариантлар).
318
198-чнзма.
319
199-чизма.
320
—1£
200-чизма.
11-52
321
Жадвалда инерция радиуслари курсатилмаган блок (айлангич) ва
гилдирак (каток)лар туташ бир жинсли цилиндрл ар, деб хисоблан-
син.
Топширицни бажаришнамунаси. Берилган: G = G, = 2G, G3= G = G,
R=2r, ; /=0,2.
Блок 3 — туташ бир жинсли цилиндр (201-шакл). Юклар 7 ва V
нинг тезланишлари хамда иннинг тармокдар 1—2 ва 3—4 даги та-
рангликлар аникдансин.
Ечиш. Топширикни ечишда динамиканинг умумий тенгла-
масини куллаймиз. Система тинч холатдан бошлаб харакатта кел-
ганлиги учун жисмлар тезланишларининг йуналишлари уларнинг
Харакат йуналишларига мос келади.
Системанинг жисмларига таъсир килувчи кучлар ичида ишка-
ланиш кучи булганлиги туфайли унинг йуналишини туйри курса-
тиш учун дастлаб берилган маълумотлар буйича система харака-
тининг хакик,ий йуналишини то ниш макуадга мувофикдир.
Агар системанинг харакат йуналиши хато олинган булса, унда
изланаётган тезланиш шпора билан чикали. Бу холда ишка-
ланиш кучининг ва инерция кучининг йуналишларини узгарти-
риш хамда динамиканинг умумий тенгламасига мос тузатишлар
киритиш лозим.
Ушбу мисолда системанинг харакати шундай: жисм 1 пастга
тушади.
Берилган кучларни курсатамиз: — юк 1 нинг, С2 — блок 2
нинг, — блок 3 нинг ва С4 — юк 4 нинг огирлик кучлари,
шуниигдек F — юк 1 нинг кця текислик буйлаб сирпаниш итика-
ланиш кучи (202-чизмада).
201-чкзиа. 202-чжзиа.
322
Инерция кучларини куямиз, ах тезланиш билан илгарилама хара-
кат хилувчи юк 1 нинг инерция кучи куйидаги вектор билан ифо-
даланади:
Ф1 = -"&
Кузгалмас ук атрофида s2 бурчак тезланиш билан айланувчи
блок 2 нинг инерция кучлари моменти куйидагича булган жуфтга
келтирилади:
M2°=J2xS2-
Текис-параллел харакат кцлувчи блок 3 нинг инерция кучлари
куйидаги векторга келтирилади:
Ф3=-ГП&,
бу ерда dy — блок 3 инерция марказининг тезланиши ва моменти
Куйидагича булган жуфтга олиб келинади:
М3Ф=/3х83.
бу ерда s, — блокнинг бурчак тезланиши.
Системага унинг хакидий харакати йуналишида мумкин булган
кучиш берамиз (202-чизма) (мумкин булган кучишни тескари йуна-
лишда берса хам булади).
Динамиканинг умумий тенгламасини тузамиз:
CjSSj sin 60° - - Мфбср2 - -
-Ф38д М3ФЗф3 ~ G4§s4 - Ф4554 = 0, (1)
бу ерда 5ср2 ва 8ср3 — блоклар 2 ва 3 нинг бурилиш бурчаклари.
Мумкин булган кучишлар ораеидаги богланишлар мос тезлик-
лар орасидаги богланишлар билан бир хил.
Система жисмларининг бурчак тезликларини ва массалар мар-
казларининг тезликларини жисм 1 нинг тезлиги ордали ифода-
лаймиз (богланишларнинг тенгламаларини тузамиз),
202-чизмада курсатилганидек, блок 3 учун тезликларнинг оний
маркази блок 2 нинг маркази билан бир вертикалда ётади, Тез-
ликларинг оний маркази билан блок 3 нинг маркази орасидаги
масофа
Ь=Зг/2-г= г/2.
Энди топамиз:
со2 = ®3 = v>i / R = v>i / 2г,
о3 = о4 = (о3Ь = / 4.
Мумкин булган кучишлар орасида хам худди шундай богла-
нишлар мавжуд:
323
Зср2 = 8<р3 = 8st /(2r),
8s} = 854 = Sjj / 4.
(3)
(1) тенглама (3) га асосан куйидаги куринишни олади:
Gy sin60° - F - Ф3 - М* /(2г) - (?3 /4- Ф3 /4-
-M* /(2r) -GJ 4 -Ф4/ 4 = 0*.
Куйидагиларга эгамиз:
G = G= 2G= 2mg, G3= G = G= mg. (4)
Унда
F = fGy cos 60° = fmg,
Ф3 = ШуОу - 2mar,
M® = J2x&2 - ^2x^2 = 4mr2&2,
Ф3 = »^a3 = ma.,
M* = JJs, = [ щ (1,5r)2 / 2]e3 = 9ffiA3 / 8,
Ф4 = m4a4 = mat.
(2) га биноан, тезланишлар орасидаги богланитплар
22=^5=^/2d
а3 = а4=а1/4. J <6>
(5) ва (6) ни (4) га куйиб, куйидагини оламиз:
gj - fg- 2а - arg/4-а/16- 9а/32-g/4-а/16^ 0,
бу ердан
oL=^(V3-/-0,5)/3,41; д1=2,9б м/с2;
а^-а/4, а4=0,74м/с2,
Ипнинг 7—2 тармогидаги тарангликни аниклаш учун ипни
хаёлан кесамиз ва унинг юк 2 га таъсирини реакция билан
алмаштирамиз (203-чизма).
Динамиканинг умумий тенгламаеи
* Худди шу тенгламани системага мумкин булган тезликлар бериб,
(1) нинг урнига кувватлар тенгламасини тузиш билан хам олиш мумкин.
Система жисмларининг хакикий тезикпари учун келтирилган (2) муно-
сабатлар мумкин булган тезликлар учун хам шундай булади.
324
204-чизма.
G.Ss. sm60°- F8s -Ф,&уч- Д_ ,$ =0,
XX X X«z Х“ X 1
бу ердан
Д_2= Gt sm60'’- F- Ф = 2G sin60° - 2(?/cos60°- 2( G/g)av
Д_2=0,93 G.
Ип 3—4 даги тарангликни аникдаш учун бу ипни хаёлан кеса-
миз ва унинг юк 4 га таъсирини Т3_4 реакция билан алмапггира-
миз (204-чизма).
Динамиканинг умумий тенгламасини тузмасдан, Даламбер
принципига асосан
Д = (7. + Ф =G+(G/g)a- Д = 1,08 G.
3-4 4 4 4/0/4? з-4 ?
ЛАГАРАНЖНИНГ II ТУР ТЕНГЛАМАЛАРИ
Д. 20-т о п ш и р и к. Лагранжнияг II тур тенгламаларини
манипулягорнинЕ дастурли хдракатини таъмияловчи куч
ва моментларни аникдашга тадбик, этиш
1, 2 звенолардан ва D кам раб ушлагичдан иборат манипулятор
(205—207-чизмалар) А ва В келтиргичлар билан ядракатга келти-
рилади. D ушлагич ON тугри чизик буйлаб кучади. А келтиргич
томонидан А звенога ёки МА бопщарувчи момент (2, 4, 7, 8, 12, 22,
24—26, 29-вариантлар), ёки РА бопщарувчи куч (1, 3, 5, 6, 9—11,
13—21, 23, 27, 28, 30-вариантлар) куйилади. В юритма звено 2 га
ёки Мв момент билан (1—3, 5, 6, 8—11, 13—21, 23, 27-вариант-
лар), ёки Рв бопгкдрувчи куч билан (4, 7, 12, 22, 24—26, 28—30-
вариантлар) таъсир килади.
Манипулятор звеноси 1 нинг (3, 4, 7, 12, 22, 24—26, 28—30-
вариантлар) ёки звено 2 нинг (1, 2, 5, 6, 8—11, 13—21, 23, 27-
325
205-чизма.
326
206-чкзма.
327
207-чжзма.
328
вариантлар) кучиши тусикдар К ва L билан чегараланган, шунинг
учун бу звенонинг <р=<р(0 бурилиш бурчаги факдт [<р(0), <р(т)] ин-
тервалда узгариши мумкин, бу ерда т — звенонинг харакат вакти.
Манипулятор ишининт техник шартлари шуни талаб кдладики,
курсатилган звено /=0 да богланиш К дан тушиши ва L тусикда
t=T да шундай “юмшок” тегиши керакки, куйидаги шартлар ба-
жарилсин:
Звено I нинг “юмшок” тегиш талабларини кдноатлантирувчи
дастурли харакатлари куйидаги куринишда кабул килиигаи:
1) <р(/)=<р(О)+ [<р(т)-<р(0)](10- 15Г/т+ 6/2/т2)Г3/т3 (2, 4, 6, 7, 11, 12,
16, 19, 22, 24—26, 28—30-вариантлар):
2) <р(?)=<р(О)+ [<р(т)-<р(0)][?/т-(1/(2л) sin (2тП/т)(1, 3, 5, 8—10, 13—
15, 17, 18, 20, 21, 23, 27-вариантлар).
56-жад вал
Вариант Wj т2 Л Л <р(0) ’ ф(т)
разами 7 » ,
(205-207- чизмалар) кг кг м2 рад
1 3 — 0,5 0,6 0,5 1 тс/з 2л/3
2 4 — 1 2 0,3 0,25 0 тс/3
3 2 — 1 2 0,2 1 0 л/3
4 2,5 2,5 0,8 — 0,8 0,5 7с/6 л/6
5 4 2 2 0,5 2 It/6 тс/3
6 2,5 — 1,2 1,5 0,3 0,9 0 тс/3
7 2 3 0,6 0,7 0,5 %/6 тс/3
8 3 — 0,9 2 0,4 0,3 7с/6 тс/3
9 2 — 0,8 1,4 0,3 1 0 л/3
10 3,5 — 1,4 1,6 0,4 2 0 л/6
И 2,5 — 1 1,4 0,5 0,5 0 л/4
12 3 3 0,7 0,7 0,4 ТС/6 тс/3
13 4 — 1,5 2 0,3 0,5 0 л/6
14 3 — 1,4 1,8 0,4 1,5 7t/6 тс/3
15 2,5 — 1 1,2 0,5 0,5 п/6* тс/3
16 3 — 1,2 2 0,3 0,3 0 л/4
17 3 — 1,2 2 0,3 1,8 7с/6 тс/3
18 2 0,6 0,8 0,4 0,8 7г/6 тс/3
19 3 — 1,7 2 0,3 0,6 л/6 тс/3
20 3,5 — 1,2 1,6 0,4 0,6 л/4 л/2
21 4 — 2 2 0,5 0,5 л/6 л/4
22 2,5 4 1,2 1.8 0,3 0,8 ТС/6 л/2
23 4 — 1,1 1,7 0,4 1 л/3 л/2
24 3 3 1,4 0,6 1 0 тс/3
25 2,5 3 1 — 0,8 0,5 0 л/3
26 3,5 4 1,6 2 0,4 0,9 0 л/6
27 2 — 1,1 1,5 0,4 0,7 0 л/3
28 3 2,5 0,7 0,7 0,4 тс/6 л/3
29 2 3 1,3 — 0,5 1,2 0 л/3
30 2,5 4 0,8 — 0,6 0,4 л/6 л/4
329
ф(10) ва <р(т) ларнинг кийматлари 56-жадвалда, <р=<р(?) нинг ipa-
фиги эса 208-чизмада курсатилган. Харакатга каршилик кучлари
Хисобга олинмасин. Механизм горизонтал текисликда жойлашган.
Кдмраб ушлагичнинг звено 1 га нисбатан харакати хисобга олинма-
син.
Топширикда куйидаги белгилашлар кабул килинган:
т1 — биринчи звено, камраб ушлагич ва унда кучириладиган
жисмнинг биргаликдаги массаси,
т2 — иккинчи звенонинг массаси,
J1 — звено 1, камраб ушлагич ва унда кучириладиган жисм-
нинг биргаликда бош марказий инерция укига нисбатан инерция
моменти,
</, — звено 2 нинг инерция моменти.
Звено 1 нинг огирлик маркази С нуктада (1—4, 6—8, 11—13,
16, 18—20, 22—30-вариантлар) ёки А нуктада (5, 9, 10, 14, 15, 17,
21-вариантлар) ётади.
Куйидагилар талаб килинади: |
1 .- Бошкарувчи кучлар ва моментларнинг звено 1 ни тормоз-
лаш бошидаги кийматларини хисоблаш. Звено 1 ни тормозлаш
унинг бурчак тезланиши нолга интилганда бошланади, деб хисоб-
лансин.
2 . Бошкарувчи момент ва кучларнииг вакгга богликдик гра-
фикларини куриш.
Топширикни бажариш намупаси. Берилган: т=2 кг, т,= 3 кг,
^=0,8 кг - м2; 1= 1 м, <р(0)=0, <р(т)=л/6 рад; т=0,5 с.
Звено 1 нинг огирлик маркази Cs нуктада ётади (209-чизма)
tp(O=<p(O)+ |ф(т)-ф(0)]р/т- (l/(2rc))sin(27tf/r)J.
Бошкарувчи момент М ва бошкарувчи куч Р топилсин.
Ечиш. Масалани ечиш учун Лагранжнинг II тур тенгламала-
рини куллаймиз. Механик системани иккита эркинлик даражаси-
га эга булган система деб караб, умумлашган координаталар си-
фатида звено 1 нинг ф бурилиш бурчагини ва звено 2 нинг х сури-
лишини кабул киламиз.
208-чизма.
209-чизма.
330
Кдралаётган механик система учун куйидагиларни ёзиш мумкин:
xc=x+l cos<p, yc=l simp, yC2=const.
(1)
Бу тенгламалар богланишларнинг тенгламалар и ролини утайди.
Танланган умумлашган координаталарга мос равишда куйида-
гиларга эгамиз:
dt бф J
dt V дх J
(2)
(1) ва (2) тенгламалар мажмуи механик системанинг харакат
дифференциал тенгламаларини тузишга имкон беради.
Системанинг Т кинетик энергияси ифодасини фва х умумлаш-
ган тезликларнинг хамда <р ва х умумлашган координаталарнинг
функцияси сифатида тузамиз.
Системанинг кинетик энергияси звено 1 нинт. Т{ ва звено 2
нинг Т2 кинетик энергияларининг йигиндисига тенг.
Текис-параллел харакат килувчи звено 1 нинг кинетик энергияси
т1 1 2 1 г 2
7] = 2^оС1+-/1С01.
I
Илгарилама харакат килувчи звено 2 нинг кинетик энергияси
1 1
7т 1 2
2 - 2
бу ерда
COj^tp, о2=х.
(1) ни вакд буйича дифференциаллаб, куйидагига эга буламиз:
xci=x-/<psin<p, уС1=/<pcos<p,
бу ердан
uci = *ci + Ус1 = %2 + 12ф2 - 2Z<pxsmcp.
Шундай килиб,
Т - у п\х2 + ~ mj2^2 - 2m1/xcp(sin <р) / 2 + | ^ф2 +-
1 7 1 . J 1 )
+ у гщх = tn^x + - (mJ + - mjxq> sin q>.
Лагранж тенгламалари кушилувчиларининг ифодаларини то-
памиз:
331
~ = (n\ + tnjfx- п\1ф sin <р,
It = + ^h)*- mji? sin <p - п\1ф2 cos <p,
^1 = 0, !
dx
dT ?
~ = (mJ + 7| )ф - m/rsincp,
™ (у*) = + ~ /wi^s^1 Ф _ cos Ф>
~ = -mjxj> cos (p.
(3)
Qx ва Q умумлашган кучларни аниклаймиз.
Qx ни аниклаш учун системага хаёлан <р= const богланиш куйган
холда унта х мумкин булган тезлик бериб, системага таъсир килувчи
кучларнииг мумкин булган кувватини хисоблаймиз:
бу ердан
Nx = Qx= Pi,
(4)
Шунга ухшаш, механик системага хаёлан х= const богланиш
куйган холда унта <р мумкин булган тезлик бериб, N мумкин булган
кувватнинг ифодасини оламиз:
бу ердан
Q=M. (5)
Qx ва Qi? умумлашган кучларни системанинг хар бир умумлаш-
ган координатанинг вариациясига мос келган элементар кучиш-
ларида кучларнииг бажарган иши ифодасидан хам аниклаш мум-
кин:
8A=Q8x=P8x, 8^=^8ср=М8ср.
(3), (4) ва (5) ни (2) га куйиб, куйидагиларни оламиз:
(/И[ + т^х- /Wj/ф sin ср - /И[/ф2 cos<p = Р,
(ml2 + Jj'J - m/isincp = М.
(6)
Манипуляторнинг D камраб ушлагичи масаланинг шартига кура
х укига перпендикуляр тугри чизик буйлаб харакатлангани сабаб-
ли механизмга кушимча яна х+ 21 cos<p=х0 богланиш куйилади, яьни
х=х0- 21 cosep (х=const),
демак,
332
x= 2/<psin<p.
Бу ердан
%=2/<р sin<p+2/<p2cos<p. (7)
(7) ни (6) га хуйиб, куйидаги муносабатларга келамиз:
М = (mJ2 + JJ)q - 2/2^ф sin2 ср - mj2q>2 sin 2<p,
/Q\
P - (n\ + 2/722 )(ф sin ф + Ф2 COScp)/. ' 7
(8) тенгликлар M бошкдрувчи момент ва P бошкарувчи куч-
нинг маълум ф, ср ва <р функцияларга богликдигини билдиради.
Ф вакднинг берилган функцияси булгани учун ф ва ф хосила-
ларни, ва демак, М моментни хдм, Р кучни хдм хисоблаш хийин
эмас.
М ва Р ни звено 1 ни тормозлашни бошлаш онида хисоблай-
миз.
Бу онда ф бурчак тезланиш нолга интилади. ф ва ф хосилалар
мос равишда куйидагиларга тенг:
Ф = [ф(т)-ф(0)](1-сО82л//т)/т, ф = 2тг[ф(т)-ф(0)] (8ш2тгг/т)/т2.
Бу ердан
2л[<р(т)-<р(0)] • 2л . п
.. г2 Т
еки
2-/ = л ва / =
х 2
I
Шундай хилиб звено 1 ни тормозлаш t-xll вакт онида бошла-
нади. Бу вахт онида
Ф(т/2) = [Ф(О) + Ф(т)]12,
ф(т/2) = 2[ф(т)-ф(0)]/т, >
ф(т / 2) = 0. J
(9) ни (8) га куйиб, куйидагиларни оламиз:
71/(т/2)=-4/и1/2[ф(т)-ф(0)]2(1/т2) 8ш[ф(0)+ф(т)];
Р(т/2)=4/(т1 + 2т2)|ф(т)-ф(0)]2(1/т2) cos[(t(0)+t(t))/2],
Масаланинг шартини хисобга олиб, куйидагиларги эга була-
миз:
М(т/2)=-4,39 Н • м; Р(т/2)= 33,90 Н.
Ва нихоят, бошхарувчи момент ва кучнинг вактга боГликлик
графигини куришга киришамиз.
333
Хисоблашларни [0, т] интервалда 0,1 т кддам билан-бажарамиз.
М ва Р нинг вакдга богликдик графиклари 210, 211-чизмаларда
курсатилган.
Хисоблашлар (8) формулаларни артументнинг турли кийматла-
рида хисоб-китоб килиб чикишдан иборат булгани учун уларни \ар
кандай хисоблаш курилмаларида бажариш мумкин.
Д. 21 -т о п ш и р и к- Лагранжнинг II тур тенгламаларини
иккита эркинлик даражасига эга булган механик
системанинг харакатини текширишга тадбик этиш
Жисмлар 1—6 механик системаси (212—214-чизмалар) узгар-
мас р кучлар ва моментлар М булган жуфт кучлар ёки фа кат огир-
лик кучлари таъсирида даракатланади.
Берилган бошлангич шартларда системанинг ва q2 умумлаш-
ган координаталардаги харакат тенгдамалари топилсин. Зарур
маълумотлар 57-жадвалда келтирилтан. Уша ерда тавсия килинув-
чи умумлашган координаталар хам курсатилган (х ва ср — абсолют
харакат учун умумлашган координатлар, £ эса — нисбий харакат
учун).
Масалани ечишда ипларнинг массалари эътиборга олинмасин.
Гилдираклар сирпанмасдан юмалайди, деб хисоблансин. Подшип-
никлардаги юмаланиш ишкдланиши ва каршилик кучлари хисоб-
га олинмасин. Жадвалда инерция радиуслари курсатилмаган гил-
дираклар туташ бир жинсли дисклар, деб олинсин. Етакчилар (кри-
вошиплар) ингичка бир жинсли стреженлар, деб каралсин. 6, 9,
11, 20, 22 ва 30-вариантларда механизм горизонтал текисликда
жойлашган, деб кабул килмнсин.
334
212-чизма.
335
213-чжзма.
336
214-чязма.
337
57-жавдвал
Умум- лашган коорди- наталар Бошлантич щартаар К^шимча маълумотлар
Qi % QK ?20 ?10 ?20
X £. 0 0 0 0
ср X 0 *0 0 0 Тасма огирлиги
эътиборга олинмасин
ф X 0 0 0 0 М момент етакчига
куйилган
X 0 0 *0 0 1 -моддий нудта
Х1 Х2 0 0 0 0 Блоклар 5 ва б нинг —
огирликлари бир хил
булиб, улар умумий уьда
урнатилган
Ф1 Фг 0 0 0 0 момент етакчига
куйилган
Х1 0 0 0 0
X 0 0 0 ^0
Ф1 Фг 0 0 0 0 Мх момент етакчига
*0 куйилган
X £ 0 0 0
Ф1 Фг 0 0 0 0
X $ 0 ^0 0 .0
X $ 0 0 0 1 — моддий нукда
14 2т т т 2 т — — — — м — — Ф 0 0 0
15 Зт т 2т — — — — р м — — Ф X 0 0 0 0 Тасма огирлиги эътаборга олинмасин
16 2т Зт 2т т — 2г — — м — — Ф X 0 0 0 М момент етакчига
17 т Зт — — — — — р — 0 b X 0 ^0 0 0 куйилган
18 2т 2т т т Зт — — — — f — X 0 0 0 0 7—моддий нукда
19 2т 2т Зт т — — г — — f — X 0 0 0
20 2т Зт т Зт — — — — MVM2 — — Ф1 4>7. 0 0 0 0
21 2т 2т Зт 2т т — г — — — — X £ 0 0 *0 0 Мг момент етакчига
22 т Зт 2 т т — — — — м- м. 1’ L — — Ф1 ф2 0 0 0 0 куйилган
23 7 W7 т т Зт 0 0 0 ^0
-X- c,
24 т Зт т — — — — р — — b X £ 0 '^0 0 0 Шунинг узи
05 05 25 2т 2т т — — — — — j* — A. A' 0 0 0 0
26 т Зт 2т Зт т — г м — — Ф 0 0 0 1 — моддий нукга
27 2т 2т Зт т 2т г г — м — —- Ф к 0 0 0 0
28 т Зт т — — — — р — — — X 0 0 0
29 2т 4т т т — — — р — f — X 0 0 0
30 Зт 2т 2т — — — — — MVM2 — — Ф1 •ф2 0 0 0
Эслатмалар. 1. Жисм 2 ёки 3 нинг инерция момента шакл текислигига перпендикуляр булган марказий уккд
нисбатан аникданган.
2. Крвушкркдик кдршилиги коэффициента деб, жисм 1 ёки 2 нинг нисбий харакатига кдршилик кучининг ифодаси
R — -66 даги пропорционаллик коэффициента аталган, бу ерда 6 ~ жисмнинг нисбий тезлиги.
Топширнкни бажариш намунасм. Берилган: механик система (215-
чизма) жисмларининг массалари wi1=3/n, m2=8m, m*=tn= т6-2т,
т5=4т, т.= т; р — жисм 2 га куйилган узгармас куч, М — гилди-
рак 6 га куйилган Узгармас момент, b — жисм 5 нинг харакатига
Каршилик кучининг ифодаси R = -Z>65( и5 — жисм 5 нинг тезлиги)
даги пропорционалик коэффициента, L —ип 3 нинг узунлиги, г
гилдираклар 4 ва 6 нинг радиуси.
Барча гилдиракларга туташ бир жинсли дисклар, деб царалсин.
Жисм 2 нинг сирпаниш ишцаланиши эътиборга олинмасин.
Системанинг q=x^ q2=x2 умумлашган координаталардати харакат
тенгламалари топилсин.
Бошлангич шартлар: £10=0 (бунда ип 3 нинг пастки учидан унинг
горизонтал кисмигача булган вертикал буйича бошлангич масофа /0
га тенг), я20=О, д10=0, 720=-<20.
215-чизмада система бошлангич вазиягда тасвирланган.
Ечиш. Масалани ечиш учун Лагранижнинг II тур тенгламала-
рини кУллаймиз:
— ——+ 0-
dt dXj &Х1 Sxj + 11 ' '
d дТ _ дТ ап
dt 8х2 8х2 8х2+^2'
Бу ерда Т — системанинг кинетик энергияси, П — потенциал
энергия, ва Q2 — ноконсерватив кучларга мос келган умумлаш-
ган кучлар.
Мазкур система учун 7 !
T-Y.T- (3)
(=1
Системанинг каттик жисмлари массалар марказларининг тезлик-
ларини умумлашган тезликлар оркали ифодалаймиз:
°1 - °5 = А» |
О2 = ой = Хг, 1 >
о? = (xt + х2)2/4 + х}_ - (Х[ + x2)x2 cos a J
ёки а= 30° эканлигини назарда тутсак,
и7 = 0,25[х2 + (5 - 2^3 )х^ - 2(Л -1)*^ ].
Бу ерда (х^+х^/2 — жисм 2—7 массалар марказининг жисм 2 га
нисбатан тезлиги, х2 эса — унинг кучирма тезлиги (216-чизма) экан-
лиги хисобга олинган. ; , , .
* Бу ерда 3 иннинг огирлиги эътиборга олинган булиб, бу топшириKi-
нинг умумий шартидан кура мураккабровдир.
340 .
Жисмларнинг бурчак тезликлари (215—217-чизмаларга /()
®4 = xj г,
ю6 = ю7 = (хг + х,)/г.
(5)
Рилдиракларнинг марказий укдарга нисбатан инерция момент-
лари
J=J6-2mrJ/2=mri,
2^(т/2)(г/2)2=тг>/%.
Жисмлар 1, 2, 4— 7 нинг кинетик энергиялари
7] = тр} / 2 = Зтх^ / 2;
Т2 = / 2 = 4шх^; |
Т4 = / 2 = тх} / 2;
Т5 = /и5и5 / 2 = 2тху;
Т6 = m6vj /2 + /2 = 0,5m(Xi + Зх^ + 2^X2);
Т, = / 2 + J7®? / 2 = (m /16)[Эх? +(11- 4a/3)xj - 2(2л/3 - 3)ед ].
217-чизма.
218-чизма.
341
Ип 3 нинг Т3 = 0,5]Г /и31.и3; кинетик энергиясини унинг барча нук-
таларининг тезликлари тенг эканлигини хисобга олиб топамиз, яъни:
и =и,=х ва У/и =/и:
Тг - / 2 = тх3.
Tt кинетик энергияларнинг топилган ифодаларини (3) га куйиб,
куйидагини оламиз:
Т = (m / 16)[75х2 + (99 - 4л/з )х22 + 2(11 - 2л/3)*Л ]. (6)
Системанинг потенциал энергиясини жисмлар 1 ва 7 хамда ип 3
огирлик кучларининг уларнинг хг ва х2 координаталар билан аник;-
ланувчи берилган вазиятида н бирон бир дастлабки нол деб олина-
диган вазиятда, масалан, умумлашган координаталардан бошлаб
хисобланувчи вазиятга кучишида бажарган ишларининг йитиндиси
каби топамиз:
П=П1+П7+П3; n„=/«,gy7. (7)
бу ерда у, — гилдирак 7 марказининг у, х=0 ва х,=0 булганда
эгаллайдиган сатздан баландлиги. Рилдирак маркази тезлигининг у
укупа проекцияси (216-чизма, д:.)
и7;,=у;= (хх+ х^О, 5 sina.
Демак,
П„= WL,g(x1+x2)0,5 sina.
П3 ни аниклаш учун шунга эътибор киламизки, ип 3 нинг а'Ь'
вазиятдан х£=0 булган ab вазиятга кучишида унинг огирлик кучи-
нинг бажарган шли иннинг bb' кисмининг аа' вазиятга кучишида
унинг огирлик кучининг бажарган ишига тенг (218-чизма).
Шундай кушиб,
n3=-m3x1g(Xi/2+/0)/Z.
Бу кугйматларни (7) га кушиб, куйидагини топамиз:
П=£[- J^)0,5 sina- mixl(xjl+ Q/L\,
ёки
П = mg[-x3 / L - (2,75 + 2/0 / L)x3 + x2 / 4]. (8)
<2, ва <2, умумлашган кучларни системанинг хар бир умумлашган
координатига мос келувчи элементар кучишларида ноконсерватив
кучларнинг бажарган иши ифодаларидан ёки, барибир, системанинг
хар бир умумлашган координатанинг усишига мос келган мумкин
булган тезликдарида ноконсерватив кучларнинг ва хувватла-
рининг ифодаларидан аниклаш мумкин:
342
Мазкур холда
Q=NJkv Q=l^.
- R^>5(x2^) ^®6(x2 = 0),
ёки (4) ва (5) ни хисобга олганда
N^-Rx-Mxjr.
Бу ердан
Q=-R-M/r
ёки
Q=-bx-M/r. (9)
Шунга ухшаш
^2 ~ ^°2(х=0) - -^^®6(Xj=0)
(4) ва (5) ни хисобга олиб, куйидагига эга буламиз:
бу ердан
Q=P-M/r. (10)
(6), (8), (9) ва (10) ни (1) ва (2) га куйиб, системанинг куйидаги
Харакат дифференциал тешламаларини оламиз:
-%mxl +—-—тх2 = 2mg-± +mg 12,75+ -±]-bxl- —; (11)
= + (12)
х2 ни (12) дан ифодалаб ва (11) га куйиб, куйидагини оламиз:
x^+lnx-cx^a. (13)
Бу ерда
«=0,0538 b/m\ c=0,215g/Z;
0=^(0,298+0,215//D-0,099 М/(М~0,0088 Р/т.
Чизикли бир жинсли булмаган (13) дифференциал тенгламанинг
ечимини топамиз. j
Характеристик тенгламаеи
£2+2«£-с=0.
Унинг илдизлари
г1;2 = -п ± л/«2 + с.
(13) дифференциал тенгламанинг умумий ечими куйидаги кури-
нишга эга:
= е-”' (14)
343
С\ ва С2 узтармасларни аниклаш учуй (14) ни дифференциаллай-
миз:
хх = е
+ с)С\е
+ С )C*2^
(15)
Куйидаги бошлантич шартлардан фойдаланиб: 1=0 да xt=0, х(=0
— (14) ва (15) дан топамиз:
С(+ С2-а/с=0,
(-и + ^п~ + с)С1 - (п + V«2 + с)С2 = 0.
Бу ердан
Q = .°
1 -I 12
2су/п +с
с2 = .°
2су1п2+с
(16)
(14) тенглама, (16) ни хисобга олган холда, системанинт биринчи
умумлашган координатанинг узгаришини тавсифловчи харакат тен-
гламаси булади. . -
Иккинчи харакат тенгламасини олиш учун (12) дан топамиз:
х, = 8 н-2^ х
99-4/3 I 4 т тг) 99-4^3 р
ёки
буерда
х2= А-0,0818 х
(17)
к = 0,0869
(17) ни интеграллаб, куйидагини оламиз:
х2= Л?-0,0818 х2+ С3,
х2=А/2/2-0,0818 хх+ C3t+ С4.
(18)
(19)
С2 ва С4 узгармасларни аниклаш учун туртта бошлантич шарт-
нинг хаммасицан фойдаланамиз: t- 0 да хх=0, х,= 0, х= 0, х= х^.
(18) ва (19) дан С3=х20, С4=0.
Энди (19) нинг урнига, (14) ни хисобга олган холда, куйидагига
эга буламиз:
х, = С - 0,0818 ent (С.е^' + C?e-'^ct'\ - а
2 i 1 z I с
Бу системанинт иккинчи харакат тенгламасидир.
+ W-
344
КОНСЕРВАТИВ МЕХАНИК СИСТЕМА МУВОЗАНАТ (ТИНЧ)
ВАЗИЯТИНИНГ ТУРРУНЛИГИ
Д. 22-т о п ш и р и К- Эркинлик даражаси бирга тенг булган
консерватив механик системанинг мувозанат (тинч)
вазиятларини аникдаш ва уларнинг тургуилигини
текшириш
Битга эркинлик даражасига эга булган консерватив механик си-
стема учун куйидагилар талаб кдлинади:
1. Крвунщок элементларнинг массалари эътиборга олинмасдан
мувозанат вазиятлари аникдансин.
2. Топилган мувозанат вазиятларнинг тургунлиги текширилсин.
Механик системаларнинг вариантлари 219—221-чизмаларда курса-
тилган, зарур муносабатлар эса 58-жадвалда келтирилтан.
58-жад вал
Вариант раза- ми (219-221- чизмалар) Параметрлар орасидаги муносабатлар Эслатмалар
1 lG=8RGr Иннинг огирлиги хисобга
2 6=1,56,;7=27; 7с/=126. олинмасин
3 6=1.56- с/=46,; 7 =27
4 2 cl=5G., l=2k
5 G=3G- l=2l,cl=8G.
6 6=2,56,; 7°= 1,5/; c/=126,
7 G’=d; lcl=5&, l=b ‘
8 6,+26,=2c7?, y=0
9 G=G=cl, 1=1 Ишкаланиш хисобга
10 G=2G_; cR=GG-f=2R олинмасин
11 R=\ G=cf G=ct, 7=0,57
12
13 6 =G - G=cl; 7 =0,5 7
14 15 6=36.; 6=c7; 7=0,5 I l=t, G-2G=cl
16 6,=1,5 6=0,15cJ; C=C=icv/=6,2 7;/=O;/=7 0,5-6> 6 =c/;>l
17
18 Цилиндрга тасма 2 елимлаб ёпишгирилади
19 GJ=4G2R Иннинг огирлиги хисобга
олинмасин
20 G =2G.; 7=7?; cJ?=0,5 6 •
7=27?
21 6 =267; 7=0,52a Шунинг узи
22 6=6c7; а=2Д_7>=1,5 7- Шунинг узи
23 4= Д' G=3G}=3cl, b^2l+l0 Стерженнинг огирлиги Хисобга олинмасин
24 G=G=cl; b=3l, 1=41 Стерженнинг огирлиги Хисобга олинмасин
25 62=1,5Y7; 4с/о-18у/-5с7=О Стержень огирлиги хисобга
олинсин
345
Давоми
Вариант ра- зами (219-221- чизмалар) Параметрлар орасидаги муносабатлар Эслатмалар
26 G^l; 4(b-lB-L)=3l Иннинг огирлиги дисобга олинмасин
27 С=0,5у/ Стержень огирлиги хисобга олинсин
28 4(7=156; Стерженлар огирлиги Хисобга олинмасин
29 G=cl; G=c(f+0,5l) Ипнинт огирлиги хисобга олинмасин
30 G=0,5pl; L=2l Иннинг солкиланиши Хисобга олинмасин
Жадвалда куйидагилар белгиланган: (?р G2 — жисмдарнинг огирлик-
лари, р — огир ип, тасма бир бирлик узунлигининг огирлиги, L — ип
узунлиги, с — пружинаниг бикрлик коэффициента,/— пружинанинг <р=0
даги деформацияси, у — стержень бир бирлик узунлигининг огирлиги, /0
— деформацияланмаган пружинанинг узунлиги, R — диск радиуси; b, I —
конструктив улчамлар.
Умумлашган координата сифатида <р бурчак олинсин. 219-221-
чизмаларда. механик система бирор мусбат <р бурчакда курсатилган.
Барча вариантларда шлдираклар сирпанишсиз юмалайди ва туташ
жойларда ипгкдланиш йук. Масалани ечишда барча стерженлар ва
дисклар бир жинсли, деб дисоблансин.
Тошпирикди бажариш намунаси. Консерватив механик система
(222-чизма) 21 узунликдаги бир жинсли АВ стержень, жисм 1 ва 2
бикрлик коэффициента с булган пружина ва L узунликдаги огир
BE ицдан иборат. Ип бир бирлик узунлигининг огирлиги р. Умум-
лашган координата сифатида <р бурчак кабул кдлинади. <р= 0 да пру-
жина f каггаликка сикилган. Жисмлар 1 ва 2 нинг огирликлари мос
равишда, С, ва Gr Ипнинт солкилиги дисобга олинмасин.
Системанинг параметрлари куйидаги шартларни кдноатлантира-
ди:
G2=c\f\+±pl, G^(p + c)l.
Системанинг мувозанат вазиятлари топилсин ва улар гургунлик-
ка текширилсин.
1. Системанинг мувозанат вазиятларини аниклаш. Системанинг
мувозанат холатларини текшириш учун потенциал энергиянинг
ифодасини тузамиз. Системанинг потенциал энергичен система эле-
ментларининг огирлик кучи майдонидаги Пок потенциал энергия
ва деформацияланган пружина ковушцоклик кучларининг П по-
тенциал энергиясидан ташкил топтан:
П= П к + nw (1)
346
219-чнзма.
347
220-члзма.
348
I
221-чизма.
349
1
222-чнзма.
Элементларнинг огирлик кучлари майдонидаги потенциал энер-
гиясининг нол сат\и сифатида О нукдадан угукчи горизонтал тутри
чизицни танлаймиз. Унда хар бир I нчи элемент учун, Оу уцининг
танланган йуналишида, куйидагини оламиз:
бу ерда Gs — i нчи элементнинг огирлиги, у; — 1 нчи элемент
огирлик марказининг вертикал координатаси.
Кдралаётган система учун Пок цуйидаги куринишга эта булади:
П« = G1>1+ G^3 + G^4-
Бу ерда G^ ва G&. салмокли BE иннинг ВК ва КЕ цисмларининг
огириликлари, у3 ва у4 уларнинг огирлик марказларининг вертикал
координаталари (223-чизма):
• G^p-BK^p-KE-ptf-BK).
ВК узунликни тенг ёнли ОВК учбурчакдан топамиз, бунда
ОВ= ОК= I:
ВК - 2/ sin'2₽.
sin у нинг модули, формула <р> 0 да \ам, <р< 0 да \ам тутри були-
ши учун киритилган. Унда куйидагига эга буламиз:
350
Gr>K
вл
= 2pZ
sift у ? &KE
= p \L-2l
sin у
у. координаталар ьуиидагиларга тенг:
jy = I cos ф = I (1 - 2 sin2 у I;
\ ** /
y3 = -OJ cos у = -I cos2 у = -I 1 - sin2 у I;
1
Л =- / + 1Х2
l + ~\L-2l sin? И;
2 I 2
2
y2 = - {Z + KE + e) = - < I + e + L - 2/1 sin у
Топилган муносабатларни Пох нинг ифодасига куйсак, куйида-
гига эга буламиз: I
По.к.
= GA (1 - 2 sin2 ?) - G2 [l + е + L - 21
1 \ 2) 2
sin у
—2pZ2 sin у
- sin2 yj - p - 21 sin у ) < I + y
L-21
sin у
Пружина цовупщокдик кучининг потенциал энергияси куйида-
ги тенглик билан анигданади:
' ' I 1 2
Щк = уСА ,
Бу ерда X — пружинанинг деформацияси:
% = f + ВК = f + 21
• ф
sm|
f> 0, агар <р= 0 да пружина чузилган булса,
f< 0, агар <р= 0 да пружина сищилган булса.
Шундай кдлиб, 2
n=?f/ + 2Zsin?K
Пок ва П уларнинг ифодаларини кушиб, система потенциал
энергиясининг ифодасини куйидаги куринишда оламиз:
П = П(Ф) = 6^(1 + 2sin2-G2
I + е + L - 21 sin у
-2pZ2.siny 11 - sin2 yj - pf L - 21 sin у
Z + |l L-21
sin?
2 J
2
2
z +2
+ ?| f + 21 sin? I .
2 I/ 2 J
351
П(<р) функция sin21
ва sin | га боглик, булгани учун у жуфт
функция булади, яъни П(-ф)= П(<р).
• 2 Ф
sin
sin2 (А тс +
ва sin | функциялар исталган бутун к учун sin2 =
<р\ ч>
ва SH1 г = sm
тенгликларни каноатлантирган-
ликлари туфайли П(<р) функциянинг графиги <р= кп вертикалларга
нисбатан симметрии булади.
Бу П(<р) функцияни факат 0< <р< п кисмда тахдмл цилиш ва сим-
метрия мулохазаларидан фойдаланиб, натижаларни <р нинг исталган
бошкд интервалига ёйигп имконини беради.
Кулайлик учун куйидагича белгилаш киритамиз:
х = sin j.
Унда
П=П(х(ф))= G^l-2х?)-G2(l+ е+ L- 211 х |)-2р/21 х | (1 -х2)-
-р(£ - 211 х |) [/ +1 {L - 211 х |)] +1 (/ + 211 х |)2.. (2)
Мувозанат вазиятларини Q умумлашган кучнинг нолга тенглик
шарзидан аннктаймиз:
х'л с*П /л с*П 5Г1 дх /л ,
2 = "»f = 0»™ = СТ
(2) ифода (х) функцияни уз ичига олиб, унинг графиги х=0
(<р=0) да синишга эта, яъни хосила х=0 да аникланмаган. Шу-
ниш учун дастлаб (3) тенгламан лнт илдизларини л>0 (<р>0) да аниц-
лаймиз, сунгра эса х=0(<р=0) вазиятни текширамиз. 0«р<л интер-
вал учун потенциал энергия куйидаги ифода билан берилиши мум-
кин: |
П(х(ср)) = 21 (jх3 - bx2 - bx2 + d х\ + const, (4)
бу ерда а= 3pl, b- GL+ (р- с)/, d- G2+pl+ cf. Шартда берилган муноса-
батларни хисобга олиб, куйидагиларни хосил кдламиз:
a=3pl, 6=(р+с)/+(р-с)/=2р/;
d=c\f|+ |р/+р/-с| Г|= ^pl.
Демак,
П (х(ф))=2pf (х3 - 2х2 + 1,25х)+const.
(5)
352
I
I
(4) ва (5) нинг Унг дисмидаги х га боглик, булмаган кушилувчи-
ларни ёйиб ёзишта зарурат йук.
ап ап
—- ва —- ларни оламиз:
дх а<р
^ = 2рР(Зх2-4х+1,25), ^ = |cosr
(3) шарт иккита тенглама беради:
Яг
^ = 0 ёки cos| = 0; (6)
||=0 ёки Зх2-4х+1,25=0. (7)
0< <р< л; интервалда (6) тенглама ягона <р1=тг (<р3= 180°) илдизга
. эта.
(7) квадрат тенгламани караймиз. Унинг илдизлари
_ 4+716-4-31,25 _ 5 . _ 4-716-4-3-1,25 _ 1
1 6 6 ’ 6 2
ва х2 модуль жихдтдан бирдан кичик булгаии учун уларга
системанинг куйидаги тенгликлар билан аникданувчи мувозанат
вазиятлари мос келади:
sin^- = x1; sin^- = X2.
0<<p<7i интервалда иккита мувозанат вазиятини оламиз:
<р2= 2 arcsin х(= 2 arcsin | = 112,89°,
<р3= 2 arcsin х2=2 arcsin 0,5= 60°.
Энди системанинг <р= 0 даги вазиятини текширамиз. Куриниб
турибдики, <р= 0 (х= 0) да механик система мувозанат вазиятида була-
ди, чунки барча фаол кучлар OD вертикал буйича йуналган булиб,
О таянчнинг реакцияси билан мувозанатлашади (224-чизма).
<р= 0 да ип бутун L узунлик буйлаб чузилганлигини курсатиб
угамиз, чунки масаланинг шартига кура с| f\< Gr
Шундай килиб, 0< <р< л интервалда система туртта мувозанат ва-
зиятига эга: <рх= 180°; <р2= 112,89°; <р3=60°; <р4=0.
Эслатма. Параметрларнинг бошка кдйматларида механик система
0<ф<л интервалда учта ёки иккита мувозанат вазиятига эга булиши мумкин.
Кдралаётган системанинг ъ< <р< 2тс (ёки -тг<<р< 0) интервалдаги
мувозанат вазиятлари П(<р) функцияттинг жуфтлиги шартидан аник-
ланади ва куйидагиларга тенг:
12-52
353
и
$
Ф5-60"=300".
<р6=-<р2=-112,89°= 247,11°.
2. Мувозанат вазиятларни тургунликка текши-
рши.
0<<р<тг ингервалдаги мувозанат вазиятларни ту-
ргунликка текширамиз. Бунинг учун мувозанат ва-
зиятларда П(<р) функция экстремумининг курини-
шини (максимум ёки минимум) аниктаймиз. П дан
<р буйича иккинчи хосилани тузамиз:
PL
Э2П _ б2П (бх) , дП е2х
Sep2 дх2 IstpJ Зх dtp2
(8)
,&2
СИ
учун (8) дан куйидагига эга буламиз:
5П ( д2х
Зх («р2
224-чжзма.
<p=7t да х= 1 эканлигини хисобга олиб, куйида-
гини хосил кцламиз:
= 2р/2 (3 -4 + 1,25) (- 0,25 sin -) = - < 0-
\ 2/о
Демак, 9=*^=л да П(<р) функция максимумта эга. <р=<р2 ва <р=<р3
да хосила —- = 0 [(7) га ц.], шунинг учун
е2п)
д<р /ф21<р3
а2 и/
дх2 IStpJ
(9)
(9) дан келиб чицадики, <р=<р2 ва <р=<р3 да иккинчи хосиланинг
<+п -
ишораси —2 нинг ишораси билан аникданади.
= 2лР(6х-4) булгани учун <р=% да х=х]= ~ ва
^ = 2р/2(б |-4] = 2Р/2 >0,
flv2 \ 6 /
<р-<р3 да х=х2= у- ва
= 2р/2 (б • | - 4] = -2р/2 < 0.
Ят--1- \ 1 f
дх2 Г \ 2
354
Шундай килиб, П(<р) функция <р=<р2 да минимумга, <р= <р3 да эса
максимумга эга.
<р=<р4=О мувозанат вазиятда потенциал энергиянинг <р буйича
биринчи косиласи кам, иккинчи косиласи кам аникданмаган. Шу-
дП
нинг учун <р=0 да П(<р) функцияни — нинг <р=0 вазият атрофида-
ги ишораси буйича текширамиз.
Нолдаги унг косила ।
= lim ) limf—"| =
\ / <р=+0 х->+0 ' ' <р—>+0 \ ^Ф )
ф>0 х>0 ф>0
= lim 2р/2 (За:2 - 4х + 1,25) lim 0,5 cos у = 1,25р/2 > 0.
х->+0 <р—>+0
х>0 ф>0
Нолдаги унг косила мусбат булгани учун П(<р) функция <р ус ган-
да (<р> 0) усади, яъни • '
кичик Аср>0 да П(Дф)>П(ср=0).
П(<р) функция жуфт булгани учун у П(-Дср)>П(<р=0) тенгсиз-
ликни кам цаноатлантиради. Демак, <р=0 да П(<р) функция мини-
мумга эга.
Шундай килиб, ГТ (ср) функция <p=<pt= 180° ва <р=<р3=60° да мак-
симумга, <р= <р2= 112,89° ва <р=<р4=О да эса минимумга эга. Лагаранж
—- Дирихле теоремасига асосан система <р=<р2 ва <р=<р4 да тургун
мувозанат вазиятига, Н. Г. Четаев теоремасига асосан эса <р=<р1 ва
<р=<р3 да тургун булмаган мувозанат вазиятига эга.
Н. Г. Четаев теоремаси. Агар танколанган мувозанат вазиятида
умумлашган координаталарнинг аналитик функцияси, деб фараз
Килинадиган потенциал
энергия минимумга эга
булмаса, у колда мувозанат
тургун эмас.
<р=<р5 мувозанат вазият
<р=<р3 каби тургун эмас,
<р=<р2 вазиятга мос келувчи
<р=<р6 мувозанат вазият эса
тургун.
Текшириш натижалари-
ни 59-жадвалга йигамиз ва
П(<р) функциянинг графи-
гида мувозанат вазияглар-
ни белгилаймиз (225-чиз-
ма).
59-жадвал
Мувозанат вазият Мувозанат вазиятнинг тургунлиги Мувозанат вазият Мувозанат вазиятнинг тургунлиги
•6-е -6 Vimi ОМ—>— О Г— GO = О Ъс ° хе о нотургун тургун туртун Ф4=° ср , = —60° ф’=-112,89° Туртун Нотургун Тургун
I
IV. МЕХАНИК СИСТЕМАНИНГ ТЕБРАНИШЛАРИ
Д.23-Т о п hi и р и к. Битта эркинлик даражасига эга
булган механик системанинг эркин тебранишларини
текшириш
Кдршилик кучларини ва ипларнинг массаларини эъгиборга ол-
масдан битта эркинлик даражасига эга булган механик система ки-
чик эркин тебранишларининг частотаси ва даври аникдансин.
Санок; боши юк 1 нинг тинч вазиятвда (пружиналарнинг статик
деформациясида) олиниб, шу юкнинг харакат конуни у= y(Z), шу-
нингдек тебраниш амплитудаси топилсин.
Системаларнинг схемалари 226—228-чизмаларда, зарур маълумот-
лар эса 60-жадвалда келтирилтан.
Тошгшрикда куйидаги белгилашлар кабул килинган:
/ — т1 массали юк, 2 — т2 массали ва г2 радиусли блок (туташ
бир жинсли диск), 3 — /и3 массали ва инерция радиусли 1Х булган
блок, 4 — т4 массали ва радиусли туташ бир жинсли диск, 5 — т5
массали i'x инерция радиусли диск, 6 — т6 массали ва узунлиги I
булган ипгичка бир жинсли стержень, 7 — массаси хисобга олин-
майдиган стержень, с — пружинанинг бикрлик коэффициенти, г0
— юк 1 нинг пружинанинг статик дефор мациясига мое келувчи
тинч вазиятидан вертикал буйича дастлабки огиши, ус — юк I бош-
лангич тезлиги б0 нинг вертикал укд;а проекцияси.
226—229-чизмалар жисмлар 1— 7системаси тинч вазиятда (пру-
жиналарнинг стагик деформациясида) курсатилган.
5, 6, 14 ва 23-вариантларда стержень 6 диск 4 га бикр махкам-
ланган.
Топширикни бажариш намунаси. Берилган: т = 1 кг, кг,
m4= 1 кг, т6=3 кг, Z= 0,6 м; с=20 Н/см, уо=О,2 см; у0=8 см/с (229-
чизма).
Система кичик эркин тебранишларининг циклик частотаси к ва
даври Т аникдансин, шунингдек юк 1 нинг тебраниш тенгламаси
y=y(Z) олинсин хамда унинг тебраниш амплитудаси а топилсин.
356
60-жад вал
Вариант раками (226-228- чизмалар) / ix i'x тг т2 т5 т, 6 с Бошлангич шартлар (/=0)
м кг Н/см Уо, см >0
1 0,5 — — — 1 2 — 3 40 0,1 5,0
2 0,5 — — 0,2 1 2 2 3 40 0 6,0
3 0,5 — — Г — 4 3 20 0,2 7,0
4 0,6 — — 1 2 3 2 36 0,2 0
5 0,6 — 0,15 1 — 3 3 16 0 8,0
6 0,6 — — 0,15 1 — 1 1 40 0,3 7,0
7 — — — — 1 — 2 2 40 0,4 0
8 — — — — 1 3 2 — 40 0 6,0
9 0,6 — — — 1 2 — 3 38 0,5 5,0
10 0,6 — — — 1 2 — 3 32 0 6,0
11 —“ — — — 1 2 — 3 30 0,4 7,0
12 0,5' — — — 1 2 —, 3 20 0,2 0
13 0,3 — — — 1 1 1 2 32 0 8,0
14 0,4 — — 0,1 1 — 2 3 20 0 ’ 7,0
15 0,4 г-]з — — 1 — 2 2 20 0,1 0
16 С, — — — — 1 2 3 — 32 0,3 6,0
17 — — — — 1 2 — 2 20 0 5,0
18 — — — .— 1 2 1 — 40 0 6,0
19 С 0,2 — — — 1 1 — 1 32 0,1 0
20 0,5 — — — 1 2 — 3 20 0,4 7,0
21 — 2г — — 1 — 2 3 32 0 8,0
22 — — г41 — 1 2 4 — 40 0,1 7,0
23 0,4 — — 0,2 1 2 2 3 40 0,3 0
24 — — Гд/з — 1 —- 3 2 40 0 6,0
25 0,3 — — 0,1 1 2 2 1 40 0,2 5,0
26 . — гЛ — — 1 — 2 — 40 0,3 0
27 — — Зг/2 — 1 2 3 — 40 0 6,0
28 — — гуЗ — 1 2 3 — 40 0,2 0
29 — — 4г/1 г41 — 1 2 3 40 0 7,0
30 — — — 1 2 3 — 40 0,3 7,0
Ечиш. Консерватив системаучун ЛагранжиингIIтургенглама-
сидан фойдаланамиз. Системанинг умумлашган координатаси си-
фатида юк I нинг пружинанинг статик деформациясига мос келув-
чи тинч вазиятидан вертикал о тиши у ни кабул кил сак. куйидагига
эга буламиз:
357
226-чизиа.
358
227-чизма.
359
228 -чизма.
360
d [_ 37 _ _ ан
dt dy J dy dy ' ' 1 •
бу ерда T — системанинг кинетик энергияси, П — системанинг
потенциал энергияси.
Т кинетик энергияни у ва у га нисбатан иккинчи тартибли ки-
чик микдор аникдигида, П потенциал энергияни эса у умумлашган
координатага нисбатан иккинчи тартибли кичик микдор аниклк и-
да уис облай миз.
Системанинг кинетик энергияси жисмлар 1, 2, б ва 4 кинетик
энергияларининг йигиндисига тенг:
Т=Т.лТлТлТ..
12 6 4
Жисмлар 1, 2, 4 ва 6 нинг кинетик энергиялари эса куйидаги
формулалар билан хисобланади:
7} - - , т 7^=—72®2,
’ • Г4 = 7б=|Л®б;
Жисм 4 массалар марказининг тезлигини хамда жисм 2. 4 ва 6
ларнинг бурчак тезликларини умумлашган тезлик у орцали ифода-
лаймиз:
<й2=>7/2’ ^€=<й2 = У/ГГ
Кичик тебранишлар каралаётганлиги учун и? = диск 4 сирпа-
нишсиз юмалаётганлиги учун эса ос= и/2. Демак,
ос=ил/2=<й6//2=®:2//2=у7/(2г2)= 2у,
®4=ЪС/Г4=,1У/Г4-
Жисм 4 нинг марказий уккд нисбатан инерция момента.
/с=|ад2,
Жисмлар 2 ва 6 нинг айланиш укдга нисбатан инерция момс!гг-
лари
/6=|л%/2.
Энди жисмлар 1, 2, 4 ва 6 нинг кинетик энергиялари куйидаги
куринишда ёзилади:
гтпг 1 • 2 'гт1 2
7]=-^у,
74=3т4у2, 7,=|/^у2.
361
У холда кдралаётган механик системанинг кинетик энергияси
Т = 7] + Т2 + Т6 + | тху' +1 тгу" +1 «V2 + 3т4У2 =
1 ( 1 16 z- 1 • 7
+
Системанинг потенциал энергиясини топамиз. У система огир-
лик кучларининг ва пружиналарнинг ковушкоклик кучларининг
системанинг юк у координатага эга булган пайтдаги огдирилган
вазиятдан нол вазият, деб хисобланадиган тинч вазиятга кучишида-
ги бажарган ишларининг йитиндиси каби аникданади:
П=П!+ПП.
Курсатилган кучипща огирлик кучларига мое келган потенциал
энергия
Пт—— G.y— G.h,
1 Кб3
бу ерда h — стержень 6 огирлик марказининг вертикал сурилиши
булиб, уни у умумлашган координатага.нисбатан иккинчи тартибли
. кицик микдор аникдигида хисоблаймиз.
- УЗЗО-чизма буйича
h=l/2-(//2)cos <р= 0/2)(1 - cos <р).
Куйидаги ёйиш формуласида:
cos<p= 1-<р2/2!+<р4/4!-...
биринчи иккита хад билан чегараланиб, ва
<р==у/гу=4у/1,
эканлигини хдсобга олиб, куйидагига эга буламиз:
/г-(//2)<р2/2=(1/4)^У =4f/l.
Шундай кдлиб,
ц=- (?1У- G^f/l.
Деформацияланган пружинанинг курсатилган кучишдаги потен-
циал энергияси
Пп=с(Гя+Х//2-С^/2,
бу ерда — пружинанинг статик деформацияси, Хк — пружина
махкамланган К нукданинг у координатага мое келган кучиши.
229-чизмадан
362
229-чнзма.
яъни Хк- Зу булгани учун
Пп = | C(f„ + Зу )2 -1 cfl = 3f„y +1 су1.
Системанинг потенциал энергияси
n=n]+n„=-G,v-44G6//)}43CV+ | су>.
Пружинанинг статик деформациясига мос келувчи тинч вазият-
Ж
(Ш/ЭД^О булгани учун
-^+Зс4«0.(а)
(а) тенгламани системанинг тинч вазияти учун куйидаги кучлар
моментининг тенгламасини тузиб хам олиш мумкин (231-чизма):
-роЯ/-сл=о,
ёки
cfCT-yl-Gll/4 = Q, яъни 3cfCT-G.=Q,
Шундай килиб, царалаетган механик системанинг потенциал
энергияси I
9 2 2 1 (q 8(?б \ 2
П = 2 СУ I У = 2 (9С ~ l)У '
363
(1) тенглама хадларининг ифодаларини топамиз:
d (дТ \ { пъ 16 z \ --
££ = о, ® = (9с-^Ь.
дУ ЗУ \ I Г
(1) тенглама куйидаги куринишни олади:
(«А + "y + у "% + ) У + (9с - -у6 j у = О,
ёки
9с-^
у +--------.Л-----у = 0.
ГТЬ 16лк Z-
т1 +
2 э
у нинг олдидаги коэффициентам F билан белгилаб, куйидагига
эга буламиз:
у + к2 у = 0. (2)
Эркин тебранишларнинг циклик частотаси
к = I 9с-8<76/72____ к = 27,1 с'".
V mv + т2 / 2+/3 + 6т±
Эркин тебранишлар даври
Т=2я/к=2 • 3,14/27,1=0,23 с.
(2) тенгламани интеграллаб, юк 7 нинг харакат тенгламасини
оламиз:
у= С\ cos kt+ С2 sin kt.
С{ ва С2 узгармасларни аниклаш учун юк тезлигининг тенгла-
масини топамиз:
у- - кС. sin kt+ кС, cos kt
ва масалаиинг бошлангич шарттаридан фойдаланамиз. /=0 у=у(О ва
У=У (0 тенгламалардан куйидагиларга эга буламиз:
•Ч- Ср Уц— кСг.
Демак,
CL=JO’ С2=ЛА-
Cj ва С2 ларнинг бу кийматларини у=у(О тснгламага куямиз:
364
y=y0cos kl+ (yjk) sin kt
ёки
y= 0,2 cos 27,1/+0,3 sin 27,1/.
Arap
C^osinp, C2=6fcos|3
деб кабул килиб, лиги а ва (3 интеграллаш узгармасларига утилса,
y=y(t) тенгламани бошкдча куринищца косил килиш мумкин. Унда
г= a sin(^/+ р),
бу ерда . ____
а = + С22; р = arctg(Cj / С2)
ёки
а = 7^0 + (Л М)2 J ₽ = arctg(£y0 / Л)•
а ва р ларнинг сон кийматларини топамиз:
а=3,6 • 10~2 м; p=arctg 0,68.
sin р> О (С\> 0) булгани учун
р= 34° 12'=0,597 рад.
Пировардида
у=3,6- 10-2sin (27,1/+ 0,597) м.
Д.24-Т о п ш и р и к- Иккита эркинлик даражасига эга
булган механик системанинг эркин тебранишларини
текшириш
Кдршилик кучлари, пружиналарнинг массалари ва буралаётган
валларнинг инерция моментлари эътиборга олинмасдан эркинлик
даражаси икки булган системанинг кичик эркин тебранишларининг
частоталари хамда бош тебранишларининг шакллари аникдансин.
Жисмлар 1—3 дан иборат механик системаларнинг тинч вазият-
даги схемалари 232—234-чизмаларда курсатилган, ечиш учун зарур
маълумотлар эса 61-жадвалда келтирилган.
Э сл атм а. Хамма вариантларда гилдираклар туташ бир жинсли дис-
клар, стерженлар эса ингичка бир жинсли деб хисоблансин. Барча хол-
ларда гилдираклар сирпанишсиз юмалайди.
Топширикди бажариш намунаси. 235-чизмада курсатилган икки-
та эркинлик даражасига эга булган системанинг эркин тебранишла-
ри частотаси аникдансин ва бош тебранишлари шакли топилсин.
365
61-жадвал
Вариант разами (232-234- Жисмлар- нинг массалари, кг Ра- диус Жисм 1 нинг айланиш укдга zv га Крвушкрд элементларнинг бикрлик коэффициентлари Ма- софа Эслатмалар
чизмалар) R, м нисбатан инерция ci : с2 . сз 1, м
т2 тз радиуси, м Н/см Н-м/рад Н/см Н-м/рад Н/см Н-м/рад
1 1 2 — — — 40 — 30 — 20 — 0,5
2 10 2 4 0,2 0,6 400 2 103 1 Редуктор корпуси гилдирак 3 уди атрофида айланиш имконига эга.Рилдирак 2 укд корпусга бевосита бог- ланган (мадкамланган).кор- пуснинг отирлик маркази гилдирак 2 нинг марказига мос келади.
• » — —
3 4 — __ — — 30 — 20 — 10 — — Система даракат 0уладш ан горизонтал текисликда жой- лашган. Пружина тинч до- латда турганда деформа- цияланмайди. Жисм 1 га моддий нудта каби к,ара- лади.
4 2 5 — — — 6 — 8 — 7 — 0,5
5 5 2 — — — 8 — 6 — 7 — 0,5
6 8 2 — — — 20 — 15 — — — —
7 3 1 — - — 6 — 4 — ' 8 — 0,5
8 4 1 — 0,2 — 40 — 30 — — — 0,3
9 1 0,5 — — — 80 — 10
10 6 4 — 0,2 0,3 4 — 3
11 10 3 — — — 10 — 10
12 6 — — — — 20 — 30
13 30 30 10 0,4 — — 2 -104 —
14 40 20 10 — — — 3 • 104 100
15 6 — — — 0,6 40 — 30
16 4 6 — — — 60 — 100
17 50 60 40 0,2 — — 2-Ю4 —
18 2 3 8 0,4 — 20 — 40
19 40 60 30 0,35 — — 1 • 104 —
20 8 10 — — — 40 — 60
21 4 2 — — 0,6 20 — 30
— 60 — 0,4
-— — — 0,1
— 6 — 0,4
•— 40 — 0,5
1 -,104 200 — _ —
— 150 — —
— 50 — 1
.— 80 — 0,4
3 -104 — 1-104 —
— 30 — —
3 -104 — — —
— — — 0,5
— 30 — 0,5
Жисм 1 нинг огирлик мар-
кази бикрлик коэффициен-
та Cj булган пружина укдда
жойлашган. Пружина тинч
^олатда турганда дефор-
мацияланмаган.
Тинч холатда бикрлик коэф-
фициента сг булган пру-
жина деформацияланмай-
ДИ.
ix — огирлик маркази ор-
к,али утувчи ва чизма те-
кислигига перпендикуляр
булган укда нисбатан инер-
ция радиуси.
т=т.
4 1
4 I
Система харакат юз бераёт-
ган горизонтал текисликда
жойлашган. Пружина тинч
Холатда турганда деформа-
цияланмайди.
Дав ом и
Вариант ра^ми (232-234- чизмалар) 22 23 24 25 26 27 28 29 30 Жисмлар- Ш1НГ массалари, кг Ра- диус Д, м 0,4 Жисм 7 нинг айланиш укрта ix га нисбатан инерция радиуси, м 0,5 0,4 Крвушдок. элементларнинг бикрлик коэффициентлари Ма- софа 1, м 0,4 0,3 0,2 0,5 Эслатмалар ixl—ix1 Система даракат юз бе-раётган горизонтал текис-ликда жойлашган. Пружина тинч долатда турганда деформа- цияланмайди.Жисм 7 га моддий нукда каби кдралади. Пружина тинч долатда тур- ганда деформацияланмайди Жисм 7 учти бир хил сгержен- дан ташкил топтан. 4 ]
mf 30 3 40 2 6 V о б 4 30 т2 40 2 1 2 2 4 3 30 т3 20 0,5 3 С2 сл
Н/см 10 2 20 40 30 20 30 Н-м/рад 1 -104 2-10* Н/см 20 1 40 30 60 10 20 80 Н-м/рад з-Ю3 Н/см 30 30 10 30 '40 100 Н-м/рад 2-Ю4
232-чизма.
369
233-чизма.
234-чмзма.
I
371
Берилган; / = 0,2 м;
/,2=О,6 м; /,=0,3 м; юк-
нинг массаси т= 0,5 кг;
бир жинсли ED стержен-
нинг массаси т^З кг,
цружиналарнинг бикр-
лик коэффициентлари:
с = 60 Н/см, с = 40 Н/см,
с.=40 Н/с.
Ечиш. Система ED
тирсакка бикрлик коэф-
фициента с, булган пру-
жина ёрдамида осилган
В юкдан иборат. Тирсак
Е ва D иукталарда бик-
рлик коэффициентлари
ct ва сг булган пружина-
ларга таянади.
Тирсак тинч холатда
горизонтал вазиятни
эгаллайди. Бикрлик ко-
эффициентлари с2 ва с2
булган пружиналар мос равищца ва /С, микдорларга деформаци-
ялаяган (сикилтан ёки чузилган). Бикрлик коэффициента с3 булган
пружина микдорга чузилган.
Умумлашган координаталар сифатида куйидагиларни оламиз:
z — юкнинг тинч вазиятда вертикал силжиши, <р — ED тирсак-
нинг тинч вазиятдан бурилиш бурчага. 236-чизмада системанинг
мусбат умумлашган координаталардаги вазияти курсатилган.
Системанинг кинетик ва потенциал энергияларини топамиз.
Системанинг кинетик энергияси юкнинг кинетик энергияси битам
ричагнинг кинетик энергиясидан ташкил то тан:
Т = |/и,/2+рйф2,
бу ерда z, ф — умумлашган тезликлар, ./() — Е£> стерженнинг О
айланиш уцига нисбатан инерция моменти.
Инерция моменти
/0 = mJ2 + "hd2,
бу ерда I — ED стерженнинг узунлиги, d=OC — стерженнинг С
огирдик марказидан О айланиш уцшача булган масофа (235-чизма-
га к):
372
Стерженнинг инерция моменти
Jo=O,28 кг • м2.
Системанинг потенциал энергияси унинг огдирилган вазиятдан
нол вазиятга (статик мувозанат вазиятига) кучишида кучлариинг
бажарган ишига тенг.
Системанинг потенциал энергиясини куйидаги йигин'гь каби
хцеоблаймиз:
П^+Щ,
бу ерда П} — юкнинг ва тирсакнинг огирлик кучлари майдонидаги
потенциал энергияси, Пп — деформацияланган пружиналарнинг по-
тенциал энергияси,
Пд=- G{z+ G2h,
ёки
h = осч, = <р,
булгани учун
Пг = -G{z + G2 ср.
Пружиналарнинг потенциал энергиясини системанинг дасз лаб
огдирилган вазиятдан деформацияланмаган пружиналарга мое ке-
лувчи вазиятга, сунгра эса бу вазиятдан тинч вазиятга кучиштаи
топамиз.
Пружиналарнинг деформациялари куйидагича: \= ± —
бикрлик коэффициента с1 булган пружина учун, /2ф ± fcr2 — бик-
рлик коэффициента с2 булган пружина учун, 1,=/^+/3ф+£ — бикр-
лик коэффициенте, с, булган пружина учун. •
Демак, -
2 ^гУст2 “I” 2 ^з(^стз + 2 Gfmi’
ёки соддалаштиришлардан кейин
Пц = * с^ф2 +1 с2/22ф2 + А сч(/3ф + z)2 ± ^/i/^ф ±
± Gli /стгФ + сзАтз (4ф + Z).
Бутун системанинг потенциал энергияси
П = ~GlZ + [G2 (/2 - 4) / 2]ф +1 с2/2ф2 +1 с2/2ф2 + А с3/32ср2 +
+ сз4<р^ + | GZ2 + сЛ/е-пФ ± с/эДзф + С3/ст3/3ф + C3fCTiZ.
.. 373
Каралаётган потеши ишта эга булган кучлар таъсиридаги систе-
манинг мувозанат шартл-'ридан куйидагиларга эга буламиз:
(ЗП/оуМ =-Gr =0;
ф = (1
(<ЭП / Эср)г = о = (72 ± С14-/ст1 ± '-'з4Л-й “Г Сз4л.т) = О'
Системанинг потенциал энергияси мувозанат шартларини хисобга
олганда куйидаги куринишга эга булади:
П = | CjZfcp2 + 1 c2Zf ср2 +1 cjtf + с3/3 гср +1 с3?.
Шундай килиб,
т = +|/0ф2;
П = | с3<2 + q/jZcp +1 (Cj/f + с2/2 + с3/2)ср2;
еки Т = | (anz2 + 2с,2хф + с22ф)2;
П = | <сп£2 + 2с12^Ф + с22ср2).
Бу ерда а.. — инерция коэффициентлари:
fln=mp ai2=°; а^=-К’
cv — бикрлик коэффициентлари:
СН=С3=’ СП=СЛ = Clll +C2l2 +С£-
Кдралаётган консерватив система учун Лагранж тенгламалари
КУйидаги куринишга эга:
_ ег _ _ еп.
dt \ dz I Sz 8z ’
d Г8Т} _ ST _ _ ап
dt I аф j аф a<p
Хосилаларни хцсоблаб:
8Т п 8Т d [ет\ ап
___°, ^-anzf "К ~CllZ + С12ф’
8Т п ет d (етУ „ •• ап
^~0’ 0ф_а22Ср’ It аф ) ~ ^2<р’ - с22^ + с12(р
ва уларни Лагаранж тенгламаларига куйиб, куйидагиларни косил
Киламиз:
374
~ ^12Ф’
= “С21£ “ С22Ф>
буерда с21=си.
Шундай килиб, мазкур система учун эркин тебранишларнинг
дифференциал тенгламалари куйидаги куринишда булади:
с1гФ = О?
£Z?2(p ^21^ ^*22 Ф ~
Бу тенгламаларнинг хусусий ечимлари
£=4 sin (£/+(3);
<p=^sin(^+P);
бу ерда 4 ва Av — бош тебранишларнинг амплитудалари, к — эркин
тебранишларнинг частоталари, р — тебранишларнинг бошлангич
фазаси.
Мазкур дифференциал тенгламалар системасидан келиб чикдци-
ган частоталар тенгламаеи куйидагичадир:
(Cl,-flll't2)(CJ2-a22<:2)-^ = 0-
Бу биквадрат тенгламанинг частоталар квадратларига мос келув-
чи илдизлари куйидаги формулалар буйича аницланади:
,2 _ а11с11 + а22с22 + 7(аНсН+а22с22)2~4а11а22(сНс22~с12)
112 2aufl22
Кдралаётган масалада
wi=0,5 кг; си=с3=4000 Н/м; с12=с3/3= 1200 Н;
я22=4=0,28 кг • м2; с22 = q/f + с2/2 + с3/32 = 2040 Н • м.
Демак, эркин тебранишлар частоталари
4=66,4с-1; 4= 104с-1.
к{ ва 4 — частоталарга мос келувчи таксимлаш коэффициентла-
ри умумий холда куйидаги кзфинишга эга булади:
ц, = _ CL2 ~ a12^j2 •
1 41 с12 “ а12^1 с22 - а22^2
ц2 = ^Р2 - _ С11 ~ аИ^2 _ _ с12 ~ а12^2
2 4?2 с12 ~ а12&2 с22 ~ а22^2
Мазкур холда
iq=-1,49 рад/м; ц2= 1,2 рад/м.
375
д) Дистел анинг ба оинчи баш тебраншии
к,=бб,1(С~!; jit = -f,l9paii/M
Сист&манинг иккинчи бош тебраниши
237-чнзма.
Биринчи бош тебра-
нишни аникдовчи тенгла-
малар куйидаги кури-
нишни олади:
Zl-A7 $111(66,41+0^,
4^=- 1,49Лг sin(66,4/+01).
Иккинчи бош тебра-
нипши аникиовчи тенгла-
малар
£=4Tsin(104H- 02),
<р2= 1,2Л, sin(104z+ 02).
Тебранишларнинг
шакллари 237-чизма, а, б
да курсатилган.
Дифференциал тенгла-
маларнинг умумий ечими
хусусий ечимларнинг йи-
гиндисидан иборат була-
ди:
Z= £[+Az sin(66,4/+ р,) + Az _sm(104/+ 02),
ср=ср1+<р2=-О,О149Д $1п(66,4/+01)+О,О12Л sin(lO4Z+02).
А, ва р; дийматлар масаланинг бошлангич шартлари буйича аник-
ланади.
I.
Д.25-топширик,- Битта эркинлик даражасига эга
булган механик системанинг мажбурий
тебранишлариня текшириш
Битта эркинлик даражасига эга булган механик системанинг ди-
намик (2—5, 7—9, 12—15, 17. 18, 20; 22—25, 27, 28, 30-вариантлар)
ёки кинематик (1, 6, 10, 11, 16, 19, 21, 26, 29-вариантлар) огдириш-
даги мажбурий тебранишлари текширилсин.
Механик системаларнинг схемалари 238—240-чизмаларда курса-
гилган.
Динамик огдириш. Системанинг хамда динамик огдиришнинг
параметрлари хдцидаги зарур маълумотлар 62-жадвалда келтирил-
, ан. Системанинг диссипативлик хусусиятлари система тебраниш-
ларининг логарпфмик декремента биган берилган.
9, 23, 30-в ] < штларда механик системалар горизонтал гекис-
ликй<’ .•тойланиан.
376
62-жадвал
Вариант ракдми Жисмларнинг массалари, кг Радиу- Масо- Жисм 1 нинг £ —Е, ук^днис- Пружиналарнинг бикрлик коэффициентлари р, А, р Логорифмик
(238-240- фа 1, м батан инерция т_т декремент
т, ci С2 п м
чизмалар) радиуси, /, м
т. т, С’ -1
1 2 3 Н/см Н • м/рад Н/см Н • м/рад
2 8 2 — 0,3 0,9 — 50 — — — 50 — 2л 0,48
3 2 4 — 0,2 — — 2-Ю4 — 3 • 104 40 — 1,75
4 20 5 4 0,1 — 10 — — 30 0,2 4л 0,50
5 40 10 20 0,4 — 20 — — — 10 0,1 4- ГС 0,40
7 5 5 — — 0,6 — 15 — — — 15 3.5л - 0,35
8 40 30 — — — — 20 — — — 35 — 2- ГС 0,62
9 40 15 10 0,3 — — 10 — — — 8 — 1,5л 1,70
12 40 — — 0,2 0,5 0,4 18 — — — 12 — 2,5л 0,66
13 30 30 — 0,3 — — 1 • 104 — — 25 0,4 4,5л 1,32
14 20 15 — 0,2 — 12 — — — 20 2,2л 0,50
15 45 30 — 0,3 — — — 2-Ю4 — 3 • 104 16 — Зл 1,10
17 40 30 — — 0,4 — 14 — — 24 0,1 2л 1,08
18 50 10 — 0,4 — — 10 — — — 26 Зл 0,56
20 80 20 — — — — 22 — — — 18 — 1,4л 1,60
22 40 — — 0,4 0,6 0,5 16 — — — 14 — 3,2л 1,04
23 30 15 — — 0,4 - — 12 — — — 18 0,15 2,2л 0,95
24 70 — — 0,2 — 14 ’ — 30 — 24 0,1 Зл 1,62
25 10 50 — о,з — — 25 — — — 40 0,05 2,5л 0,98
27 40 — — 0,2 — — 14 — — — 12 — 1,5 л 1Д4
28 25 — — 0,3 — — 15 — — — 18 — 3,2л 0,86
30 40 — — — — 12 — — — 20 — 2,5л 1,35
63-жадвал
Вариант 1 раками ] т D-105, ₽, 8 1 f d ь
238-240- Н-м2 Нм/с
чизмалар) м
1 0,08 1 0,009 0,005 0,12 0,02 0,01 0,07
6 0,09 2 0,009 0,006 0,12 0,04 — 0,05
10 0,1 2,5 0,008 0,008 0,09 — — 0,07
11 0,08 1 0,008 0,005 0,008 0,02 0,06 0,04
16 0,15 1,5 0,01 0,006 0,1 — 0,06 0,08
19 0,05 1 0,007 0,007 0,08 0,03 0,06 0,05
21 0,07 1,1 0,08 0,014 0,22 0,03 0,09 0,04
26 0,12 3,6 0,08 0,011 0,08 — — 0,07
29 0,1 1,5 0,007 0,006 0,12 — — 0,06
2, 7, 9, 18-вариантларда бикрлик коэффициента с; булган пру-
жиналар тинч вазиятда деформацияланмаган.
Куйидагилар аникдансин: сундиргичда косил килинадиган цо-
вушцоклик каршилигини харакгерловчи коэффициент а; берилган
огдириш частотасида система мажбурий тебранишларининг тенгла-
маси; огдириш частотней узгариши мумкин, деб фараз килиниб умум-
лашган координата; тезлик ва тезланишларнинг узгариш амплиту-
даларининг максимал ва резонанс кдйматлари.
Э слатм а. Барча вариантларда гилдираклар туташ бир жинсли диск-
лар, стерженлар эса ингичка бир жинсли, деб дисоблансин; гилдираклар
сирпанишсиз юмалайди.
Кинематик огдириш. Кинематик от-диришга оид 1, 6, 10, 11, 16,
19, 21, 26, 29-вариантлар учун зарур маълумотлар 63-жадвалда кел-
тирилган.
Система т массали кузгалувчан якордан иборат буяиб, у пружи-
на ёрдамида чизмада тасвирланган тинч вазиятда ушлаб турилади
(238—240-чизмаларта к)
Якор ингичка бир жинсли стержень, деб хисоблансаин. Якорнинг
огирлик маркази М нукдада жойлашган. Якор хдракатланганда унга
шарнир томондан якорнинг бурчак тезлигита пропорционал булган
крвушкоклик царшилик кучларининг момента таъсир цилади (про-
порционаллик коэффициента (3).
Якорга узгармас магнит томонидан \аво тиркдши уки буйлаб
йуналган тортиш кучи таъсир килади. Бу куч F=D/&, бу ерда D —
бирор доимий, 5 — хаво тиркиши катталиги.
Чизма текислиги вертикал текислик билан устма-уст тушади.
Хаво таркишининг катталиги тинч вазиятда 5С га тенг.
Курилма корпуси чизмада курсатилган йУналиш буйича илгари-
лама харакат килиб, sin pt конунга мувофицтитрайди; бу ерда
— кичик микдор, р — татрашнинг циклик частотаси.
378
238-чмзма.
379
239-чмзма.
380
240-чизма.
I
381
Курилманинг нормал
ишлаши учун у куйида-
ги шартларни кдноатлан-
тириши керак:
1. Якор учининг ре-
зонанс найтидаги (р=к,
бу ерда к — эркин теб-
ранишларнинг циклик
частотаси) нисбий кучиш
амплитудаси Лри микдор
80 нинг 2/3 кисмини
ташкил килипги керак.
2. Якор учининг
ордиришнинг юкрри частоталаридаги (р>> к) нисбий кучиш ампли-
тудаси А* микдор 80нинг 1/3 кис мига тенг булиши керак.
Шу талаблардан келиб чикиб, куйвдагилар аникдансин:
1. Якорнинг кичик эркин тебранишларининг циклик частотаси.
2. Пружинанинг статик деформацияси ва бикрлик коэффи-
циента сг
3. Курилмакорпусититрашамплитудасининг максимал йулкуйи-
ладиган киймати
4. Якор мажбурий тебранишларининг максимал амплитудаси.
Топширикни бажариш учун зарур маълумотлар 63-жэдвадда кел-
тирилган.
2—5, 7-9, 12-15, 17, 18, 20, 22-25, 27, 28, 30-вариантларга
дойр топширицви бажариш намунаеи.
Берилган: /ti^IOkt, /п2=5кг, т3=2кг, т4= 18 кг, А=0,3 м; /=0,9
м; с2=40 Н/см, с,=70 Н/см, Р=20 Н; x=Asinpf; А=0,1 м; р=4пс-{-,
ц=0,812. Иккала пружина \ам тинч вазиятда деформацияланмаган.
1—3 системага 241-чизмага мувофик уланган демпферда хосил
Килинадиган цовушцокдик каршилигини характерловчи коэффи-
циент а хисоблансин.
Системанинг берилган р огдириш частотасидаги мажбурий теб-
ранишларининг тенгламаси аникдансин. Шунингдек умумлашган
координата, тезлик ва тезланишларнинг узгариш амплитудалари-
нинг максимал ва резонанс кдйматлари топилсин.
Ечи ш. Умумлашган координата сифатида гилдирак 1 нинг
бурилиш бурчагини кабул киламиз (242-чизма).
Лагаранж тенгламаси каралаётган \олда куйидаги куринишга эга
булади:
А ।5T । _ 571 _ _5/7 _5ф +
J 5<pi Stpi Stpi p’
(1)
382
бу ерда Т — системанинг кинетик энергияси, Ф — системанинг
таркдлиш функцияси (Релейнинг диссипатив функцияси), П— си-
стеманинг потенциал энергияси, Qp — умумлашган огдирувчи куч.
Т, Ф ва П функциялар куйидаги формулалар урин ли буладиган
аникдикда хисобланади:
Т = |аф?, Ф = рф{, П = |сср?,
бу ерда а ва с — системанинг инерция ва бикрлик коэффициентлари,
b — системадаги кдрпгиликни характерно вчи коэффициент.
Системанинг кинетик энергиясини жисмлар 7, 2, 3, ва 4 нинг
кинетик энергияларининг йигиндиси каби топамиз:
Т- 7\+ Тг+ Т3+ Т,
= 2 mivci + 2 ^ci^i ’ Т? = 2 ’
?з = у^з^з? Д =
Жисмлар 1 ва 3 нинг массалар марказларининг оС1 ва осз тезлик-
ларини, жисм 2 нинг о2 тезлигини хамда жисмлар 7, 3 ва 4 нинг со р
со2 ва со4 бурчак тезликларини умумлашган тезлик <р3 оркали ифода-
лаймиз:
®1=<Рр ^с^^^^Фр о2= 2оС1= 27?фг
Стержень 3 текис-параллел харакат килади. Бу звенонинг тинч
Холат билан устма-уст тушувчи вазиятидаги тезликларнинг оний
маркази чексизликда ётади. Демак, кинетик энергия ифодасининг
юкрридаги аниклигини таъминлаш учун <э3=0 ва ео= Од= ог= v>2= 27?cp'p
со4=v>y/= 'IRqJl деб хисоблаш мумкин.
Жисм 7 нинг марказий уда нисбатан инерция моменти JC[- mJ?1/
2. Жисм 4 нинг айланиш укига нисбатан инерция моменти J4= m//
3. Унда жисмлар 7, 2, 3 ва 4 нинг кинетик энергиялари куйидаги
куринишларга эга булади:
Тх = | Т2 = 2т2^2ф?,
Т3 = 2/^7?2ф2, Т4 - у m4R2<p2.
Бутун системанинг кинетик энергияси
Т = - ^7?2ф2 + in^R2^2 + 2/^7?2ф2 + |>Й4$2ф1 = у <7(^15
!
383
бу ерда системанинг инерция коэффициента
/3 л л 4 \ ,.7
а = I 2 тУ + ^т1 + ^т3 + J W4 I Л .
Системанинг таркалиш функциясини топамиз:
Ф = | auj = | а(2 Аф! )2 = А 6Ф12,
бу ерда
b=4R-a.
Системанинг потенциал энергиясини аникдашга утамиз. Тинч
вазиятда
, (ап/зФ1)^с=о,
шунинг учун П нинг ифодасида биринчи тартибли кичик микдор
булган барча хадларнинг йикиндиси нолга тенг. Бу системанинг
потенциал энергиясини бевосита факат иккинчи тартибли кичик
микдор булган хадларпи хисоблаб аниклаш имконини беради.
Системанинг потенциал энергиясини огирлик кучларининг ва
пружиналар ковушкокдик кучларининг система <р, бурчак билан
аникяанувчи огдирилган вазиятдан нол вазият хисобланувчи тинч
вазиятга кучгапда бажарган ишларининг йигиндиси каби топамиз.
Бунда тинч вазиятда гокланмаган пружина деформациясининг ифо-
дасида Ф1 га нисбатан биринчи тартибли кичик микдор булган \ад-
ларгина, система элементлари огирлик марказларининг вертикал
силжишлари ифодаларида эса факат иккинчи тартибли кичик мик-
дор булган хадлар хисобга олинади. Тинч вазиятда юкланган пру-
жиналарнинг деформациялари иккинчи тартибли кичик микдор
булган катгаликлар аникдитада хисобланади.
Огирлик кучларига мсс келган потенциал энергия. . .
242-чизма.
бу ерда hC3 ва hCA — 3
ва 4 элемеггглар огир-
лик марказларининг
иккинчи тартибли
кичик микдорлар
аниклигида хисоб-
ланган вертикал сил-
жишлари.
242-чизмадан
куриниб, турибдики,
йС4=//2-(//2)
cos <р4= (//2)
(l-cos<p4).
384
Ушбу ёйиш формуласида:
cos (р4 = 1 - ф2 / 2! + ф4 / 4! - ...
биринчи иккита хад билан чегараланиб ва
Ф4 = \/1= \/1= l=2R^Y/l,
эканлигини хисобга олиб, куйидагига эга буламиз:
АС4 = (/ / 2)(р4 / 2 = (// 4)4Я2Ф2 / /2 = (Д2 / /)Ф2.
йо=/^/2= ^С4 эканлигини хисобга олиб, тубандагини хосил цила-
миз:
П1 = -G3hC3 - GJiCt = -G3R2q2 11 - GiR\211 = -(R2 / /)(С3 + С4)ф; .
Деформацияланган пружиналарнинг курсатилган кучишдаш по-
тенциал энергияси
Пц +|c2(A.?cos45° -М2,
бу ерда Хк — пружиналар махкамланган нукталарнинг диск 1
нинг Ф1 бурчакка бурилиши туфайли кучиши.
Бу катталикларни Ф1 га нисбатан биринчи тартибли кичик мйц-
дор булган хадлар аниклигида хисоблаб, куйидагиларга эга була-
миз:
ХЕ = LE Ф1 = R-flty), \р = LF • Ф1 = Ал/2ф1?
= ОК • ф4 = 17?фг
Шундай цилиб,
Системанинг потенциал энергияси
п = Ц + Пъ = -(R2 /l)(G3 + С4)ф? + (С1 +с2 /18)7?2ф2 = 1сФ12,
бу ерда системанинг бикрлик коэффициента
с=|2С1+с2/9-2(С3+С4)//]А2.
Р огдирувчи кучга мос келган Qp умумлашган кучни аникааймиз:
Q = Рх • 5Ф1/(5Ф1)= Рх= РА sin pt,
бу ерда 5Ф1 — умумлашган координатанинг орттирмаси, —
системанинг умумлашган координатанинг 5Ф1 орттирмасига мос кел-
ган кучишида Р кучнинг бажарган иши.
Т, Ф, Пв'л Qp учун олинган ифодалардан фойдаланиб, (1) тенгла-
мани куйидаги куринишда хосил киламиз:
13-52
385
аф1 + b<pL + cq>t - P A sin pt,
ёки
ф, + 2лф1 + А:2ф1 = h sin pt, (2)
бу ерда
b!a-2n, cja=№, PAja=h.
Система мажбурий тебранишларининг тенгламаеи бир жинсли
булмаган (2) дифференциал тенгламанинг хусусий ечимидан иборат
ва куйидаги куринишга эга:
cp^jSin^-e), (3)
бу ерда А — мажбурий тебранишларнинг амплитудаси, е — мажбу-
рий тебранишларнинг фаза сурилиши,
. h t 2rw ,..
Д>1 = --- — , tg е = —. (4)
y/(tP-p2)2+4n2p2 к -Р
h, к, п ларни аникдаймиз:
й= Р -А/а, .к= / а,
бу ердан
/г=0,271с"2: к= 10,2 с'1.
п нинг кийматини система тебранишларининг берилган лога-
рифмик декременти буйича аникдаймиз:
Бу ердан
и = , к----; яъни п -2,55 с'1.
/1 + я2/т]2 >
Сундиргичда хосил рилинадитан кдршиликни характерловчи
коэффициентни куйидаги формула буйича хисоблаймиз:
b ап
а. “ —т = —1-
4R2 2R2
Шундай цилиб,
а= 104,5 Н • с/м.
<pt бурчак Узгаришининг амплитудаси ва система мажбурий теб-
раншллари фаза сурилишининг р=4лс'1= 12,57с'1 даги кдйматлари-
ни (4) формулалар буйича аникдаймиз:
Avl=0,00325 рад; tg е=-1,19; е= 130°04'=2,27 рад.
386
Пировардида (3) формула буйича куйидагига эга буламиз:
(рх=0,00325 sin (4лt- 2,27) рад.
Кузгатиш частотней р узгариши мумкин, деган шартда <рр <рр ва
<рх нинг узгариш амплитудаларининг максимал кииматларини аник-
лаймиз.
t тебранишлар амплитудаси р нинг куйидаги куш.матида мак-
симумга эга булади:
р = а = Jk2 -2п2 = 7ю,22 - 2-2,552 = 9,53с-1.
Демак,
А - h
'Ар 1 max гт; ~
2п^к2-п2
-------...........= 0,00537 рад.
2-2,55 ДО,22-2,552
Умумлашган тезлик
hp
/(к2-Р2)2+4п2р2
cos(pt - е)
Ф1 =
-__=====_ cos(A - е)
^к2-Р2)2 /р2+4п2
Демак, умумлашган тезликнинг амплитудаси р=р2= к кийматда
максимумга эга булади: i
Aimax = h/(2n); 4plmax =0,0531 И -рад/с.
Умумлашган тезланиш
hp2
^(к2-Р2)2+4п2р2
sm(pt - s) =
sin(A - s).
Шундай р=р3 кийматни топамизки, бунда умумлашган тезла-
нишнинг амплитудаси максимумга, демакки, илдиз остидаги |(F-
-р2)/р2]2+4(«/р)2 ифода минимумга эга булсин. Бунинг учун шу
ифоданинг р буйича хрсиласини ^исоблаймиз ва уни нолга тенг-
лашгирамиз:
Соддалаштиришлардан кейин куйидагини оламиз:
№-р2к2+2п2р2=Ъ,
бу ердан
р = к2 / у/к2-2п2.
Каралаётган масалада
387
1m ах
/>=р3=10,9с~1.
Умумлашган тезланиш амплитудасининг максимал куймати
______________________________h_________.
У1№/р3)2-Ц2+4(п/р})2 ’
Хисоблашлардан кейин куйидагини оламиз:
4pim« =0,559 рад/с2.
Энди умумлашган координат, тезлик ва тезланишлар узгариши-
нинг резонанс пайтидаги амплитудаларини аникдаймиз:
4р1(Р=*> = W«£)=0,271/(2-2,55- 10,2)=0,00520 рад;
Ак^) = Ainux =0,0531 рад/с;
Ai(W) = W2«= 0,271-10,2/(2 - 2,55)=0,54 рад/с2.
Хисоблашлардан келиб чикадики, умумлашган координата ва
тезланиш узгаришининг резонанс пайтидаги (р= к) амплитудалари
максимум кийматларига жуда якдн.
1,6, 10, 11, 16, 19, 21, 26, 29-вариаптларга дойр топширикдв
бажариш намунаси.
Курилманинг схемаси 243-чизмада курсатилган.
Берилган: да=0,1кг; р=0,01 Н-м• с; 5о=0,006м; /=0,1 м;/"=0,04
м; </=0,05 м; />=0,08 м; D= 3 • 105 Н • м2.
Ечиш. Умумлашган координата сифатида якорнинг <р бурилиш
бурчагини олиб (244-чизма), уни тинч вазиятдан бошлаб \аво тирк,-
иши 5 ни камайиш томонита караб улчаймиз.
Якорнинг нисбий харакатини тавсифловчи Лагранжнинг II тур
тенгламаеи куйидаги куринишга эга:
булиб, T — якорнинг кинетик энергияси, Qn = ~ потенциалга
эга булган механик кучларнинг умумлашган кучи (П — потенциал
энергия), — якор тортиш кучининг умумлашган кучи, Сд = ' ^р
ковушкоцлик каршилик кучларининг умумлашган кучи, Qe — Фе
кучирма инерция кучининг умумлашган кучи.
Системанинг тебранма харакатини урганишда Т, П ва Ф функ-
цияларни <р, ср, £, ва <|ларга нисбатан иккинчи тартибли, умумлаш-
ган кучларни эса биринчи тартибли кичик микдор аниклигида хисоб-
лаймиз. !
Умумлашган кучларни хисоблаш. Quумумлашганкуч-
ни куйидаги формула буйича топамиз:
Q = ¥1. =
м ф ф
бу ерда Nf — якор F тортиш кучининг куввати, Ъм - F куч куйил-
ган нукганинг тезлиги.
= /ф, бм ва F векгорлар эса бир тугри чизик буйлаб бир
томонга йуналган булганлари учун, 5=5ю-/<р эканлигини хисобга
олиб, куйидагига эга буламиз:
Q = Ш = FI = —= Z)/(80 - /ср)".
М <р ( (50-Z^F V 0
QM ни <р га нисбатан биринчи тартибли кичик микдор аииклиги-
да Маклорен каторига ёзамиз:
<2м = <2м(0) + !+ (□' = dQ / . (2)
Q'M =D/(-2)(50-/<p)-3(-/),
булгани учун
Q'M(Q) = 2DP/^.
QM(Q) = DI I §J. эканлигини хисобга олиб, куйидагини хосил
киламиз:
QM = DI / % + Wl2 /83„. (3)
Qs умумлашган куч куйидагига тенг:
4Q=Nr/^ = -Mr^ = -M,,
бу ерда — ковушкокдик каршилик кучлари моментининг кувва-
ти, MR= (3<р— ковушкокдик каршилик кучларининг моменти.
Шундай килиб,
. (4)
Ф£ кучирма инерция кучига мос келган (2Ф умумлашган кучнн
КУЙидаги формула буйича аниклаймиз:
389
О» = Л© /Ф = Фе • «с /Ф> (5)
бу ерда Уф — Фе кучирма инерция кучининг куввати; бс — Фе куч
куйилган нукданинг тезлиги, ис=(//2)<р.
Кучирма инерция кучи
Фе = -тае,
бу ерда ае = | — кучирма тезланиш.
Фе ва и,, нинг кийматларини (5) га куйиб, куйидагини оламиз:
бф = -т£(/ / 2)ф cos ср / ф = -mt(l / 2) cos ф.
0Ф ни Маклорен кдторига ёйиб ва бу ёйилмада ф га нисбатан
биринчи тартибли кичик микдордан катта булмаган хадларни кол-
дир иб, тубандагини хосил кцламиз:
еф=-т/^/2. (4)
Qn ни хисоблаш учун якорнинг огирлик кучи майдонидаги П,
потенциал энергияси билан деформацияланган пружинанинг Пп по-
тенциал энергиясининг йигиндисидан иборат _П потенциал энерги-
яни топамиз:
П=П1+Пп. (7)
Юкорида кабул килинган аникликдаги П, потенциал энергия
nj=-(?(//2)sin<pU - (?(//2)ф. (8)
Пп потенциал энергия куйидаги ифода билан аникданади:
Пл=С,(Хо+^)2/2~С^/2, (9)
бу ерда Хо — пружинанинг тинч вазиятдаги деформацияси, X,—
пружинанинг якорнинг ф бурчакка бурилиши туфайли олтан кушим-
ча деформацияси.
(9) дан келиб чикрдики, потенциал энергияни хисоблашда юкорида
кабул килинган аникдикни таъминлаш учун X л ш ф га нисбатан иккин-
чи тартибли кичик микдор аникдигида хисоблаб чикиш едарлидир.
Х^ ни хисоблашни куйидагича бажарган маъкул. ОА, АВ ва BE
кесмаларга 244-чизмада курсатилгандек йуналиш берамиз. Унда
ОА + АВ + BE = const. (Ю)
(10) ни шундай танланган х ва у укдарга проекциялаймизки, улар-
нинг бири тинч вазиятдаги пружинанинг укига параллел булсин:
b + d = d cos ф + /sinф + (b - Хф)cos кр;
f = -б/8Шф + /С08ф + (Ь - Хф)8П1ф, (11)
бу ерда д/ — пружина укининг бурилиш бурчаги (244-чизма).
(11) ни ф, % ва д/ кичик микдорларнинг даражалари буйича
Каторга ёямиз ва иккинчи тартиблигача кичик кушилувчиларни
узлари хам киради:
390
b + d = б/(1 - <p2/ 2) + /ф + В - \ - b\\/2 / 2, (12)
f = -6/cp + /(1 - <p2/ 2) + (B - (13)
Бу тенгламаларни шундай кайта ёзамизки, изланаётган 7 ва
катталикларга нисбатан биринчи тартибли кичик кушилувчилар тен-
гликларнинг чан томонларида жойлашсин:
%=/ф-Ар2/2-^2/2, (14)
6\|/=^<р+Ар2/2+%д. (15)
(14) ифода ц/ бурчакнинг квадратини уз ичига олади, шу туфай-
ли \ ни хисоблашнинг цабул килинган аникдигини сацлаш учун
бурчакни <р га нисбатан биринчи тартибли кичик микдоргача аниц-
ликда хисоблаш лозим. Бунинг учун (15) да иккинчи тартибли ки-
чик микдорларни ташлаб юборамиз:
Ь\у= б/<р ёки \|/= (d/b)<p.
Демак,
. %^/<р-б/(<р2/2)(1 + б//6)=^р-е<р72, (16)
буерда
e=d(l + d/b).-
(16) ни (9) га куямиз. Унда (9) функция <р га нисбатан иккинчи
тартибли кичик микдорларгача аникдикда куйидаги куринишни ола-
ди:
Пп = ^(У2 -Х0е)ф2 + сД„/<р. (17)
(8) ва (17) ни кушиб, (7) га биноан куйидагини хосил киламиз:
П = G(//2)<p +1 слр-М<Р2 + сЛо/ф- • (18)
Бу ердан умумлашган куч
бп =--g = G//2-c1(/2-20e)4>-CiV- (19)
(3), (4), (6) ва (19) дан QM, QR, ва Qn ларнинг ифодаларини
(2) га куйиб, куйидагини оламиз:
О, = DI / 82 + 2Dl\/Sl-^-mli/l + Gl/l-c^f2 - - c^f,
ёки
Q,, = -С(Р-рф-т/^/2-с1Х0/ + (?//2 + /)//502, (20)
бу ерда
с = ci(/2 ~ - / 8g-
Механик системанинг <р=0, <р = 0 ва |=0 даги нисбий мувозанат
шарти куйидаги куринишга эга булади:
391
<2рН = 0.
W .
tj = 0
Бу ер. чан
Gl/2-c^f + Dl/^ =0. (21)
Шундай килиб,
2f, = —сер - <3ф - {ml / 2)£. (22)
Кинетик энергияни хисоблаш. Якорнингнисбийхара-
кати О нукгадаи утувчи ук атрофидаги айланма харакатдан иборат
булгани учун унинг кинетик энергияси куйидаги формула буйича
Хисобланади: г
Т = Л)Ф ,
бу ерда — якорнинг айланиш дана нисбатан инерция
моменти; демак,
Т = (ml2/ 3)(ф2/ 2) = аф2/ 2, (23)
бу ерда а= тР-/3 — системанинг инерция коэффициенти.
(22) ва (23) ни (1) га куйиб, якор мажбурий тебранишларининг
дифференциал тенгламасини хреил киламиз:
аф + рф + сер = ~(т! / 2)с,
ёки
ф + 2лф + АЛр = hp2 sin pt, ^4)
бу ерда 2п= p/а, /г= т/^/(2а); к= л/с / а — эркин тебранишларнинг
циклик частотаси.
Системанинг мажбурий тебранишлари бир жинсли булмаган (24)
дифференциал тенгламанинг куйидаги хусусий ечими билан тав-
сифланади:
<р=Лм sin(p/-c),
бу ерда — мажбурий тебранишларнинг амплитудаси, s — мажбурий
тебранишлар фазасининг огдирувчи куч фазасига нисбатан сурилиши:
А =- hp2
М ^2-р2)2+41Гр2
(25)
Аи=Ам(Р) функция
pt = к2 / -Jk2 - 2п2 (кг > 2л2)
цийматда максимумга эга булади (бундан олдинги мисолдаги шунга
ухшаш функцияга каранг). Бу максимум куйидагига тент:
7^1>П13Х д*)2-1]2+4(л/^)2 (26)
392
р чексиз ус ганда
рий тебранишларнинг Ам
амплитудаси асимптотик
равишда h га интилади.
Резонанс пайтида, к=р
булганда, куйидагига эга
буламиз:
A^=hk/(2n). (27)
245-чизмада Ам=Ам(р)
функция графигининг
куриниши турли п учун
курсатилган. Кдралаётган
масала учун Ам= Ам(р) нинг
графиги туташ чизик билан
245-чизма.
берилган.
Изланаётган параметр лар ни хисоблаймиз. Шартдан якор учи
нисбий кучипшнинг резонанс пайтидаги амплитудаси маълум; де-
мак, (27) дан унинг эркин тебранишларининг частотасини аниклаш
мумкин. Лрез= 1А^а ва Аа= lh эканлигини хисобга олиб, куйидагини
Хосил киламиз:
k=2A^n/h=3Ap^/(mP’AJ. (28)
Пружинанинг статик деформациясини ва унинг с1 бикрлик
коэффициентини аниклаймиз; (21) дан ни топамиз:
^0 = [l/(clf)](Gl/2 + Dl/82). (29)
Унда (20) дан куйидагига эга буламиз:
с = cj2 - сДое - 2D/2 /= cj2 - (е/ f)(Gl/2 + Dl/b20)- 2D12 /S30.
Бу ердан с= ale2 эканлигини эътиборга олиб, топамиз:
q = [ml2k2/3 + (e/f)(Gl/2 + D//52) + 2D/2 /53]/ f2. (30)
ни хисоблаш учун якор учи нисбий кучишининг юцори кузга-
тиш частоталаридаги Аа амплитудаси берилганлигидан фойдалана-
миз. р» кбулганда Ам□ h =^ml/(2a). Буерданкурилматанаситит-
рашининг максимал йул куйиладиган амплитудасини куйидаги фор-
мула буйича топиш мумкгшлигини курамиз:
= 2ah /(ml) = 2aAB/(ml2) = | Д,- (31)
(28) — (31) формулаларга улар га кирувчи катталикларнинг кдй-
матларини куйиб, куйидагиларни оламиз:
А;=6О с-1; q= 2654 Н/м; %0= 0,00125 м= 1,25 мм;
^=0,00133 м= 1,33 м.м.
393
(26) формула ёрдамида якор учи мажбурий тебранишларининг
максимал амплигудасини ва огдирувчи кучнинг шу максимумга эри-
шиладиган частотасини хисоблаймиз:
г), - к11 -Jk2 - In2 = к2 / -Jk2 - 9fJ2 /(2m2/4) = 64,14c
^4
= = 1......T-Т------ /=0,0041 M.
^(А:/^)2-1]2+4(и/^)2
Бу ердан куринадики, амалда Лрез дан фарк хилмайди.
Д. 26-топширих Иккита эркинлик даражаснга
эга булган механик системанинг мажбурий
тебранишларини текширшп
Иккита эркинлик даражасига эга булган механик система Р=
cospt (Н) куч ёки М = М9 cospt (Н • м) момент куринишидаги гармоник
огдирувчи динамик таъсир остида туради. Кдршилик эътиборга олин-
масдан системанинг мажбурий тебранишлари текширилсин.
Механик системаларнинг тинч'вазиятдаги схемалари 232-234-
чизмаларда курсатилган. Системанинг инерцион ва ковушкокдик
хусусиятлари хакидаги зарур маълумотлар, шунингдек унинг улчам-
лари 61-жадвалда келтирилган. Пружиналарнинг ва буралувчи вал-
ларнинг массалари эътиборга олинмасин.
64-жадвалда системанинг жисмларидан дайси бирига Р огди-
рувчи куч ёки моменти М булган жуфт куч куйилганлиги курса-
тилган. Р кучнинг таъсир чизиги барча холларда шу куч куйилган
жисмнинг огирлик марказидан утади. Тебранишлар жараёнида куч-
нинг таъсир чизиги вертикал ёки горизонтал крлади.
Моменти М булган жуфт куч у куйилган жисм тебранишлари-
нинг текислигцда жойлашган. Барча вариантларда Р кучнинг ва
М моментнинг мусбат йуналиши ихтиёрий танлаб олиниши мум-
кин.
64-жадвалда доимий Р= Р(1 куч ёки М= момент (куч ёки мо-
мент огдиришининг узгариш частотаси но л булган хол) таъсир эт-
ган холда динамик огдириш куйилган жисмнинг чизикди ёки бур-
чакли силжиши берилган. Куч таъсири остида булган системалар
учун силжиш шу кучнинг таъсир чизиги буйлаб берилади, жуфт
куч таъсири остида булган системалар учун эса бурчакли силжиш
шу жуфт куч текислигида берилади.
Тоиишрющи бажариш намунаси. Кдршилик эътиборга олинмас-
дан эркинлик даражаси икки булган, тинч вазиятда тасвирланган
системанинг манжбурий тебринишлари текширилсин (246-чизма).
Тебранишлар стерженга куйилган ва шакл текислигида жойлаш-
394
ган жуфт куч таъсири остида руй беради. Огдирувчи жуфтнинг
моменти куйидаги крнун буйича узгаради:
М= cospt.
Берилган: системаэлементларинингмассалари: т= 0,5кг; т2=3
кг; пружиналарнинг бикрлик коэффициентлари (Н/см): с= 60, с2=40,
с3=40; чизикли улчамлар (см): /=20, /=60, /=30. DE стерженнинг
узгармас М= моментли жуфт куч таъсиридаги бурилиш бурчаги
^ = 0,01 рад.
64-жадвал
Вариант ракдми (232-234- чизмалар) Отдириш тури Отдириш куйилган жисм номери Г кучнинг таъсир чизиги долдаги чизикди ку- чиш, м М-Мй дол- даги бур- чакли кучиш, рад
1 М 1 — — 0,01
2 М 3 — — 0,01
3 Р 1 Вертикал 0,002 —
4 М 2 — — 0,005
5 м 1 — — 0,02
6- р 1 Горизонтал 0,001 —
7 р 1 Горизонтал 0,002 —
8 р 1 Горизонтал 0,001 —
• 9 м 1 — -— 0,005
10 м 1 — — 0,01
11 р 1 Вертикал 0,001 —
12 р 1 Вертикал 0,002 —
13 р 3 Горизонтал 0,003
14 р 2 Вертикал 0,001 —
15 м 1 — — 0,01
16 м 1 — — 0,02
17 м 2 —— — 0,005
18 р 2 Горизонтал 0,002 —
19 м 1 — — 0,005
20 р 2 Вертикал 0,001 —
21 м 1 — — 0,01
22 м 2 — — 0,005
23 р 1 Горизонтал 0,003 —
24 м 1 — — 0,01
25 р 2 Вертикал 0,005 —
26 м 1 — — 0,02
27 р 1 Горизонтал 0,004 — •
28 р 1 Горизонтал 0,003 ——-
29 р 2 Горизонтал 0,002 —
30 м 1 — — 0,005
Ечиш. Умумлашган координаталар килиб куйидагиларни ола-
миз: z — юкнинг тинч вазиятдан бошлаб вертикал силжиши ва ср —
ЕЕ стерженнинг тинч вазиятдан бошлаб бурилиш бурчаги.
246-чизмада пунктир чизик билан системанинг мусбат умум-
лашган координаталардаги вазияти курсатилган.
Лагранж тенгламалари кдралаётган система учун куйидаги кури-
нишга эга:
395
‘L fёП - дТ = - 5Г1 + п d С5Г V д1 = - _ + о
dt р di J dz nz ’’ dt Эф J dtp dtp '
(1)
' ерда 0, ва Q — умумлашган огдирувчи кучлар.
Кинетйк ва потенциал знергияларнинг ифодалари Д. 24-тошпи-
рик мисолида олинган булиб, у ерда кдралаётган системанинг эркин
тебранишлари текширилган эди:
r 1 .7 . . 1 Л
/ = 2 anz + a„z<p + у аисР ’
„ 1 2 1 2
П — у CltZ + С|2<Ср + — С22ф ,
бу ерда а ва с, — системанинг инерция ва бикрлик коэффициент-
лари: а,, = т=0,5 кг: а=0; a=J=0,28 кг-м2; с, =<*,=400 Н/м;
с12= с.,=су1,= 1200 Н; с22= + с2/22 + с,/; = 2040 Н м.
Эркин тебранишларнинг частоталари ва мос тацсимлаш коэф-
фициентлари Д. 24-топширицнинг мисолида олинган:
(2)
^=66,4 с1; ц. = - 1,49 рад/м: кг= 104 с'!: = 1,2 рад/м.
Огдирувчи моментнинг таъсири билан боглик; Q, ва умум-
лашган кучларни аникдаймиз:
Q=3A№/(8z); Q=8AUv/(^), (4)
бу ерда 8А^~ <р= const шартда z умумлашган координатанинг эле-
ментар орттирмаси туфайли системанинг кучишида огдирувчи мо-
ментниш бажарган элементар иши; 8Aiff~z= const шартда умумлаш-
ган координатанинг элементар орттирмаси туфайли сигемашшг кучи-
шида огдирувчи моментнинг бажарган элементар иши: 8z, бср —
умумлашган координаталгрнинт элементар ортгирмалари.
Агар 1= 0 да огдирувчи моментнинг йуналишини мусбат деб
Кабул цилсак ва у <р бурчакнинг мусбат кийматларини санаш йуна-
лиши билан устма-уст
тушади деб хисобласак,
унда (4) муносабатлардан
куйидагиларни оламиз:
2 =0; Q=M^ cos pt.
Демак, системанинг z
ва ср умумлашган коорди-
наталардаги мажбурий
тебранишларини тавсиф-
ловчи (1) дифференциал
тенгламалар ушбу кури-
нишга эга булади:
396
an^ + ct/+c12(p=O; fl22<p + c21^+c22<p=M0cosp/. (5)
(5) дифференциал тенгламалар системанинг мажбурий тебраниш-
ларни аникдовчи хусусий ечимини куйидаги куринишда цидирамит.
Z=Az cos pt, <р=А cos pt.
Бу ифодаларни (5) дифференциал тенгламаларга куйиб, тубанда-
гилар ни оламиз:
" с^А + ^-а-^А^М,,.
А ва А* га нисбатан бу икки алгебраик тенгламалар системасидан
топамиз:
4 = М0СП /[(СП -^11/)(C22 -«22/)-4L . (6)
4 = М0(си -allp2)/[(cll -а^р2)^ -а^р2)-с?2]. (7)
Мажбурий тебранишларнинг амплитудалари Az ва А^ нинг абсо-
лют цийматларига тенг.
Огдирувчи моментнинг амплитудасини аникдаш. учун (7)
формуладан фойдаланамиз. Масаланинг шартига кура р=0 да DE
стерженнниг бурилиш бурчат <р0 га тенг; демак, р=0 да
4>0 = Фо = /(С11С22 — С1г)>
!
бу ердан
JIAq — Фо(С22 ^12 / ==
Юкнинг ЕЕ стерженга куйилган узгармас М= MQ момент таъси-
ридан кучишини (6) муносабатдан р=0 шартда топиш мумкин:
4о = Zo = ~мос12 /(снС22 - 4); А^-0,003 м.
(6) ва (7) формулаларда махраж р2 га нисбатан квадрат кунхад. бу
купхаднинг илдизлари эса система эркин тебранишлари к{ ва к2
частоталарининг квадратлари к2 ва к2 дан иборат булганиучун (6)
ва (7) формулаларни куйидаги куринишда ёзиш мумкин:
Л (РГ4414)(^2-10870) ’
д =_ M0(Cll-allP2) =_ 120(4000-0,5д2)
^2_4414)(;?Т_10870) • (V)
(6), (7) ёки (8), (9) формулалар А ва А^ нинг р частотага боглиц-
лигини кузатиб бориш ва мос графикларни куриш имконини бера-
ди (247-чизма, а, б).
Огдирувчи момент циклик частотасининг куйидаги учта узга-
риш оралигида Az ва А^ нинг узгариш характерини курайлик:
0<р<&р kL<p<k2, к<р<<х>.
397
1. 0<p<k1 kY<k„ булгани учун р1 2 -к2 <0, р2 -к2_ <0; демак,
(8) ва (9) формулаларнинг махражлари мусбат. Бундан кедиб чи-
дадики, биринчи ораликда А<0 ва Л{>0. р нинг микдори усиши
билан стерженнинг ва юкнинг тебраниш амплитудалари Усади, бун-
да стерженнинг тебранишлари огдирувчи моментнинг узгариши би-
лан бир фазада, юкнинг тебранишлари эса дарши фазада кечади
(248-шакл, а). р=0 да Л^ = <р0=О,О1 рад ва 4г=^=-0,03 м ларга эга
буламиз.
^=^=66,4 с'1 да системада биринчи резонанс руй беради ва А,
\амда А функциялар чексиз узилищ олади (247-чизмага даранг).
2. kt< р<к2. kL<k2 булгани учун р2 - к2 > 0 ва р2 - к2 < 0. Демак,
(8) ва (9) формулаларнинг махражлари манфий. Бундан келиб чидади-
ки, иккинчи ораликда А> 0, яъни юкнинг тебранишлари огдирувчи
моментнинг узгариши билан фазадош булади (248- чизма, ф в).
функциянинг ишорасини аникдаш учун (9) формуланинг су-
ратини текгпириш лозим. Агар к2< р< усн / ап булса, унда Л^сО ва
стерженнинг хам, юкнинг дам тебранишлари М нинг узгариши би-
лан фазадош булади (248-чизма, в).
398
248-'шзма.
Р = 7cii / аи = / 0,5 = 89,4 с1 да стержень мажбурий теб-
ранишлари амплитудасининг биринчи парциал частотаси (249-чиз-
ма, а да тасвирланган системанинг эркин тебранишларининг часто-
таси) нолга тенг (Л^=0 — антирезонанс холи). Бу холда тх массали
жисм стержень тебранишларининг сундиргичи деб каралиши мум-
кин. А, нинг хиймати бу макрмда (6) формула буйича осон аникла-
нади: А = MJcn, Л =0,014 м • ркх дан ^/сп / гача усганда стержен-
нинг | Л | тебраниш амплитудаси нолгача камаяди, кейин эса р нинг
/ ап дан к2 гача усиши билан ошади.
р = „Д22 / аГ1 - д/2040 / 0,28 = 85,6 с-1 да, яъни иккинчи парциал
частотада (249-чизма, о) да тасвирланган система эркин тебранишла-
рининг частотасида мажбурий тебранишларнинг (6) ва (7) формула-
лар билан аникданадиган Л, ва Д, амплитудалари куйидагича
Л = М0/с,2; Л =0,014 м;
4Р = -М0(сп - а^)/4, Др = -0,00414 рад.
р кх дан к2 гача булган ораликда узгарганда юк мажбурий тебра-
нишларининг амплитудаси — Az функция минимумга эга булиб, у
(6) ва (7) формулалар махражининг максимумига мос келади. Бу
399
ифодадан р буйича хрсила олиб ва уни нолга тенглаб, куйидаги-
ни хосил кдламиз:
2o1Ja22p2-(a1Jc22+«22cu)=0,
бу ердан р нинг Я га минимум берадиган кийматини топамиз:
р = ^0,5(с22 /<з22 4-Сп/Оц) = 87,4 с'1. (10)
р= к2= 104 с*! да системада иккинчи резонанс руй беради..
3. к2< р< оо. к{< к2 булгани учун р2 - к{ > 0 ва р2 - &2 > 0; демак;
(8) ва (9) формулаларнинг махражлари мусбат. к-, > / ап экан-
лигини эътиборга олиб, шундай хулоса к;илиш мумкинки, бу ора-
ликда \ам А<0, хам ДсО, яъни тебранишлар огдирувчи момент-
нинг узгариши билан кдрши фазада кечади. (249-чизма, г га к;.). Р
мажбурийтебранишлар амплитудасинингусиши билан | Д | ва | А|
камайиб, нолга интила боради.
(9) ни (8) га булиб, мажбурий тебранишларнинг амплитудалари-
ни аникдовчи А^ ва Л, функцияларнинг нисбатини оламиз:
Л/Д=- <с1Га^/са = - (4000 - 0,5г)/1200. (11)
р=0 да ЛД4г=-сн/с12, А/А=-3,33 рад/м. р=к =66,4 с~>.
да AJA = Ц1=-1,49 рад/м. р= =89,4 с’1 да ЛДД=О.
р= к = 104 с-1 да А^/А=р2= 1,2 рад/м.
AJA^ нинг р огдириш частота-
сита богликлик графики 250-чиз-
мада курсатилган. Резонанс пай-
тларида мажбурий ва эркин теб-
ранишларнинг шакллари
устма-уст тушади (274-чизмага
К).
Резонанс тебранишларни (р= kY
ва р=к^ текшириш учун систе-
манинг rij ва т]2 бош коор-
400
<Р координаталар билан куйидаги муносабатлар ёрдамида боглан-
ган:
<Р= IVli+ IW Ч2>
qt ва q2 умумлашган координаталарга мос келган Q=Hpn (р,+ - )
ва Q2= H2sin(pt+8) умумлашган огдирувчи кучлар таъсир идаги .р
кинлик даражаси икки булган механик система тебранишларинин с
т|1 ва т|2 бош координаталар даги дифференциал тенгламалари куп к-
даги куринишга эга:
Л1 + sin(/rt + 5), (13)
f|2 + k2x\2 - + S)5 (14)
U2
бу ерда /2j = an + 2а121л2 + = au + 2a12p2 + Hi Ba H2 ~ Q\
ва q2 умумлашган координаталарнинг эркин тебранишлардаги тац-
симлаш коэффициентлари. 1
Мазкур холда //;=(), Я2=Д/0, 5 = Шунинг учун (13) диффе-
ренциал тенгламалар куйидаги куринишни олади:
• ’i1 +*i4 = ^sin(x + y),
п2+Уъ =~^sin Ц' + Л- ЛЭ
а2 \
р= к{ (биринчи резонанс) да (15) система биринчи дифференциал
тенгламасининг хусусий интеграли ушбу куринишга эга:
тв = t sin k.i.
1 2^ 1
Иккинчи дифференциал тенгламанинг хусусий интеграли
12 \ 1 2/
(12) формулалар буйича z ва <р умумлашган координаталарга угсак.
Куйидагиларни хосил кдламиз:
_ t 8|д t + cos £ t
2к1й1 1 a2(j^k^) 1 ’
Ф = t sin kyt + —cos £
(16)
p=k2 (иккинчи резонанс) да (15) дифференциал тенгламаларнинг
хусусий интеграллари ушбу куринишга эга:
Л1 = S*n + 2 ) ’7,2 = ifcai Z S^1
бу ердан z ва ср умумлашган коор динаталар:
401
Z = t sin k,t - cos k,t,
Zk2a2
q> = 1 sin _ —L^0 -,- cos k-p.
r 2k2a2
(17)
(16) ва (17) тенгламаларга кирувчи параметрлар куйидаги сон
кийматларга эга: Л/О=16,8 Н-м; ^ = -1,49 рад/м; ц2=1,2 рад/м;
а = 1,13 кг; а2=0,9 кг.
Бу кийматларни (16) ва (17) формулаларга куйиб, мажбурий теб-
ранишларнинг биринчи ва иккинчи резонанслардаги тенгламалари-
ни оламиз.
Биринчи резонанс: р= к = 66,4 с-1 да
Z= -0,168 t sin 66,4 t+ 0,0035 cos 66,4 t;
<p=0,252 t sin 66,4 /4-0,0042 cos 66,4 t.
Иккинчи резонанс: p= k.= 104 c1 да
2=0,108 / sin 104/+0,0035 cosl04 t,
<p= 1,30 t sin 104 /-0,0052 cos 104 /.
Олинган натижалар каршилик кучлари унчалик катга булмай, ре-
зонансли макомлар киска муддатли булганда системада резонанс пай-
гида кечадиган тебранишларни бахолаш имконини беради.
V. ДИНАМИКАНИНГ МАСАЛАЛАРИНИ ЕЧИШГА
Э\М НИ К^ЛЛАШ
Д. 27-топ шири к;. Механик система эркин
тебранишларининг дифференциал тенгламаларини ЭХМ
ёрдамида интеграллаш
Эркинлик даражаси бир булган механик система (251—253-чиз-
малар) мувозанат вазияти атрофида тебранигпи мумкин. Бошлангич
онда (/= 0) система мувозанат вазиятидан чикарилган ва унинг барча
нукталари тезликлари нолга тенг. Бундан кейин уз-узига куйиб
берилган система факат консерватив кучлар таъсири остида тебра-
нади.
8 ва 20-вариантларнинг схемаларида р ковушкоклик кучи к де-
формация билан p(X)=cX.4-aX.J муносабатда богланган пружиналар
Кулланилган. Колган схемаларда р цовушкокдик кучи к деформация
билан чизикди богланган пружиналардан фойдаланилган, р= ск. 3, 4,
7, 9—11, 21, 22-вариантларда пружиналар тинч вазиятда /деформа-
циягаэга (олдиндан юкланган). 12—17, 23—28-вариантларнинг схе-
маларида пружиналар s тиркиш крлдириб урнатилган.
402
251-чизма.
403
252-чиэма.
404
253-чмзма.
405
Топширикда куйидагитар талаб килинади:
1. Системанинг харакатини (системанинг эркин тебранишлари-
ни) тавсифловчи дифференциал тенглама тузилсин.
2. ЭХМ да сонли интергаллаш ёрдамида дифференциал тенгла-
манинг берилган бошлангич шартлардаги ечими топилсин.
3. Сонли интеграллаш натижалари буйича тебранишларнинг цик-
лик частотаси ва Тдаври аникдансин.
Механик системаларнингтинч вазиятдаги схемалари 251-253-
чизмаларда кеягирилган. Хар бир схемада умумлашган координата
сифатида олинйши лозим булган координата курсатилган. Хисоб-
лаш учун зарур маълумотлар 65-жадвалда кеягирилган. Бу ерда
т2 — система жисмларининг массалари; i — марказий укка нисбатан
айланма хдракатда иштирок килувчи жисмнинг инерция радиуси;
ср с, — чизицли пружиналарнинг бикрлик коэффициентлари, с ва
а — чизикди булмаган пружиналар учун цовушцоклик кучи билан
деформация орасидаги богликликни аникдовчи коэффициентлар, f
— пружинанинг тинч вазиятдаги деформацияси (эслатмада пружи-
нанинг сикилтан ёки чузитганлиги курсатилган) — умумлашган .
координатанинг бошлангич циймати, s — тирциш катгалиги, d —
айланиш укидан жисмнинг огирлик марказигача булган масофа.
Барча холларда жисм сирпанишсиз юмалайди. Инерция радиуслари
кУрсатилмаган жисмлар туташ цилиндрлар, деб хисоблансин.
Топпшрикди бажариш намупаси. Механик система (254-чизма, а)
да тасвирланган. Жисм 1 йуналтирувчиларда илгарилама харакат
цилганда диск 2 горизонтал текислик буйлаб сирпанмасдан юма-
лайди. Система тинч вазиятда f микдорга сицилган иккита пружина
ёрдамида мувозанат холатда ушлаб турилади. Пружиналарнинг крву-
пгкоклик кучлари жисм 1 га шайбалар 3 орцали берилади. Унг шай-
банинг кучиши чап таянч билан, чан шайбанинг кучиши эса унг
таянч билан чегараланган. Таянчлар орасидаги масофа жисм 1 нинг
узунлигига тенг. Шунинг учун жисм 1 мувозанат холатдан чаша
кучганда унга фацат чап пружинанинг ковушкоклик кучи (254-
чизма, б), лгувозанат холатдан унг томонга кучганда эса факат унг
пружинанинг крвушцогдик кучи таъсир кцлади. ХаР бир пружина-
нинг Р ковушкрклик кучи унинг дефор
254-чизма.
406
Вариант ракдми (251-253- чизмалар) т15 кг т2, кг /, м Н/см Н/см а Н/см f М [3, град 1
м
1 15 0,25 — — — — — 0,2 -
2 25 0,22 — — — — — — 0,1 —
3 10 15 — 5 — — 0,05 60 -
4 15 10 — 7 — 0,08 — — —
5 30 — — — — — ——— — 30 — -
6 20 15 — — — — — 45 — -
7 30 20 — 8 — — 0,05 — — —
8 7 12 0,2 3 — 0,02 0 — —
9 14 5 — 14 — — 0,15 — —
10 10 16 — 20 — — ОД 30 — -
11 12 8 — 15 — — 0,08 30 — -
12 25 5 — 5 10 . 0
13 20 10 — 12 8 — — — -
14 12 — — 15 10 — — — 0,8 -
15 15 — — 23 — — — — 0,7 -
16 10 10 0,25 5 2 — — — 0,6 -
65-жадвал
У ъ R ^0’ град S, м Эслатма
— 0,4 — 0,122 — sin q^q
— 0,39 — 0,07 — sin q&q
— — — ОД 0,12 — Диск массаси дисобга олинмасин
— — 0,2 1,2 — q=Q да пружина сикдлган
— —~ 0,25 0,2 — q=Q да пружиналар сш^илган
__ — — 0,35 — Роликлар массаси дисобга олинмаган
— 0,2 0,2 0,08 — q=Q да пружина чузилган
— — 0,2 — Пружиналар параметрлари бир хил
— — 0,3 0,1 — q=Q да пружиналарги ь^илган
— — — 0,14 — Ролик массаси эътиборга олинмасин q=Q да пружина сикдлган
— — — — Роликлар массалари эътиборга олинмасин, q—Q да пружина сидилган
— — — 0,2 0,1
— — 1 0,15 1,0 0,06
— 0,5 — 0,122 0,03 sin q^q
— — — 0,1 0,02 sin q^q
— 0,4 — 0,11 0,02
.,1, lOMtl
Вариант разами (251-253- чизмалар) OTj, кг /и2, кг /, м Н/см Н/см а Н/см /, М ₽, град 1 d ъ R %, град S, м
м
17 16 0,24 0,35 21 — — — — — 0,35 — 0,3 0,04 0,01
18 12 20 — — — — —- — 0,6 — — 0,25 0,5 —
19 20 30 — 3 — — — — 0,8 — — о,з 0,35 —
20 30 — — 10 — 0,1 0 — — — — 0,35 0,5 —
21 12 10 — 15 — — 0,2 — — — 0,6 0,2 0,3 —.
22 10 14 0,43 25 — — 0,1 — — 0,48 0,3 0,4 0,14 —
23 25 — 0,3 20 — — —— — — — — 0,35 д.б 0,08
24 30 10 о,з 22 — — — — —. — — 0,4 0,75 0,06
25 12 20 — 20 — — —- — — — — 0,3 0,5 0,07
26 16 — — 5 — — -— — 0,4 — — — 0,13 0,016
27 18 18 0,4 26 — — —• — 0,5 0,35 — — 0,15 0,03
28 8 18 — 6 — — — — 0.5 0,1 0,3 0,3 0,10 0,015
29 20 10 —• 7 — — 0 — 0,4 — — , — 0,4 —,
30 25 10 -- 23 — — — 30 — —* — 0,15 0,15
Эслатма
sin (q/R)~q/R
sin q—q—q5/^
sin q=q—qi/6
АВва ВСиплар.Пружиналар
бир хил
7=0 да пружина чузилган
7=0 да пружина чузилган
sin q~q
Механизм горизонтал
вазиятда жойлашган
si nq~ q- cf/6
Эслатма. 7, 21 ва 22-вариангларда умумлашган кучнинг ифодаси Маклорен даторига ёйилсин ва умумлашган
координатага нисбатан тартиби учдан говори булмаган хадлар крлдирилсин. 1-ва 2-вариантларда таянч цирралар атро-
фидаги “опгиб утиш” тебранишлари энергия сарфисиз руй беради, деб кабул кдлинсин.
мацияси X билан Р(Х)=сХ+аХ3 муносабатда богланган (255-чиз-
ма, а). Пружиналар томондан жисм 1 га таъсир гдигувчи Р(х) куч-
нинг графиги 255-чизма, б да келтирилган, бу ерда Ро — крвушцок;-
лик кучининг тинч холатдаги киймати, х — жисм 1 нинг горизон-
тал силжиши. Масалани ечишда шайбалар 3 нинг массалари ва
Харакатга каршилик кучлари хисобга олинмасин.
Масала куйидаги берилган маълумотлар асосида ечилсин: т = 20
кг, т2=40 кг, с= 10 Н/см; а=0,03 Н/см3; R= 0,3 м; /о=О, <?=0,5 рад;
q=Q; 7=0,1 м.
Е ч и ш. Системанинг харакат дифференциал тенгламалариви олиш
учун консерватив системалар учун Лагранжнинг II тур тенг-
ламаларидан фойдаланамиз:
- 57 = -5П
dt ( dq J dq dq ’ W
бу ерда Т ва П — системанинг кинетик ва потенциал энергиялари. q
умумлашган координата сифатида диск 2 нинг <р бурилиш бурчаги-
ни оламиз (q= <р).
Системанинг кинетик энергияси
Т = - mtx + ~ ~ Jc3<p .
Куйидаги богланишлар тенгламаларини:
ис= &р = Rq, х = 2Rq (2)
ва бир жинсли диск 2 нинг марказий уцца нисбатан инерция мо-
1 2
ментининг JC3 = -m2R ифодасини хисобга олиб, кинетик энерги-
янинг ифодасини хосил киламиз:
T = ~aq2, (3)
буерда
а=(4 т3+ 1,5 m2)R3, а= 12,6 кг.м2.
Системанинг потенциал энергияси огдирилган вазиятдан но л
вазиятга (тинч холатта) кучирилганда крушцокдик кучларининг ба-
жарган ипш каби аникданади:
О х
П(х) = \ P(x)dx (-P(x)')dx. - (4)
х О
Р(х) богликлик (225-чизма, б) куйидаги ифодалар билан аникда-
нади:
f-P0 - Ьхх - Ь2х2 - ах3, х > 0;
Р(х) = 0, х = 0; (5)
- b,x + b?x2 - ах3, х < 0,
бу ерда Р0=Дс+а/2), b=c+Pp\ b2=3af Агар х>0да + 1,х<Одаэса —
1 цийматларни кабул килувчи Д функциядан фойдаланилса, бу
И1 х
ифодаларни ихчамрок, килиб ёзиш мумкин булади. х= 0 да щ нинг
циймати нолга тент, деб шартлашамиз.
Р(х) богликдик ушбу куринишни олади:
Р(х) = ~(Р0 + Ь2х2)~- fyx-ax3. (6)
(6) ни (4) га куйиб, П(х) нинг ифодасини косил циламиз:
П(х) = (д+^х2)|х|+ух2+^-- (7)
х= 2Rq эканлигини хисобга олиб, потенциал энергияни q нинг фун-
кцияси каби ифодалаймиз:
П(?) = \2RP0 + | +2R2big2 + 4a7?V-
V J (°)
Лагарнжнинг II тур тенгламасига П нинг q буйича хосиласини
куйиш керак. дп
(8) функция q=0 нуцгадан бошца хамма жойда - F(q) хоси-
лага эга:
P(?) = (2P0P + 8Z>2PV)l + 4P2d1(? + 16aPy. (9)
q=0 да F(q) функция нолга тент деб олиниши керак, чунки бу
вазиятда системанинг жисмларига таъсир цилувчи кучлар узаро му-
возанатлашади. (3) ва (9) ни (2) тенгламага цуйиб, системанинг
чизикди булмаган харакат дифференциал тенгламасини хосил кцла-
миз:
aq+F(q)=G. (10)
(9) ифодалинг коэффициентларини хисоблаймиз:
P=cf+af3= 103 • 0,1 + 0,3 • 105 • 0,Р= 130 Н;
2PPfl= 2 • 0,3 ’ 130=78 Н • м; ^=1900H-m; 47?26=684Н-м;
16a R<= 16 • 0,3 • Ю5 • 0,3-*= 3888 Н • м; SR3b^ 1944 Н • м.
410
F(q) функция куйидаги куринишни олади:
F(q) = (78 + 1944?2)^ + 684? + 3888?J. (Ц)
Кдралаётган системанинг харакат дифференциал тенгламаси:
12,6? + (78 + 1944?2)^ + 684? + 3888?5 =0. (12)
Системанинг харакатини аниклаш учун (12) тенгламани Э\М да
куйидаги бошлангич шартларда сонли интеграллаш керак:
/=() да ?0=0,5 рад; ?о=О. (13)
Хисоблаш натижалари 66-жадвалга келтирилтан. 256-чизмада
Хисоблаш натижалари буйича <р(/> ботликликнинг графиги берил-
ган. Графикнинг <р максимал киймагдан <р0 нолгача узгарадиган кис-
минигина куриш керак. Графикнинг давомини симметриклик му-
лохазалардан келиб чикиб
куриш мумкин.
График буйича тебран-йш-
нинг чорак даври 0,25 Т ни
осонгина аницлаш мумкин:
4= 0,25 Т онда ср нинг киймати
нолга тенг булади. 4=0,114 с
булгани учун тебраниш даври
Г= 0,456 с ни, циклик частота
эса к= 13,77 с-1 ни ташкил эта-
ди.
66-жадвал
Z, С <p(Z), рад 1, с cp(t), рад /, с ср(/), рад Z, с cp(Z), рад
0,000 0,5000 0,088 0,1618 0,176 -0,3687 0,264 -0,4268
0,011 0,4933 0,099 0,0927 0,187 -0,4164 0,275 -0,3814
0,022 0,4737 0,110 0,0220 0,198 -0,4546 0,286 -0,3279
0,033 0,4420 0,121 -0,0488 0,209 -0,4818 0,297 -0,2682
0,044 0,3999 0,132 -0,1189 0,220 -0,4966 0,308 -0,2038
0,055 0,3491 0,143 -0,1871 0,231 -0,4982 0,319 -0,1363
0,066 0,2913 0,154 -0,2524 0,242 -0,4867 0,330 -0,0667
0,077 0,2284 0,165 -0,3134 0,253 -0,4625 0,341 +0,0042
411
КУРС ИШЛАРИГА КИРУВЧИ
ТОПШИРИКДАР ВАРИАНТЛАРИНИНГЖДДВАЛИ
Т опширикдарнинг Т опширикдарнинг Тотпирикларптшг
рак;амлари ракдмлари рак^млари
1 2 3 4 5 6 1 3 4 5 6 ттт 1 2 3 4 5 6
ш 7 8 9 10 11 12 т тя 7 8 9 10 и 12 LLL 7 8 9 10 11 12
и 13 14 15 16 17 18 К1 13 14 15 16 17 18 13 14 15 16 17 18
ф 19 20 21 22 23 24 ф р 19 20 21 22 23 24 Ф р 19 20 21 22 23 24
г 25 26 27 г 25 26 27 г 25 26 27
Топшириютарнинг Т о нширикдарнинг Топпшрикларнинг
вариаятлари вариаятлари вариаятлари
1 23 25 19 3 5 1 35 19 4 8 18 17 13 о9 21 ь 29 7 1 24
2 20 22 2 6 8 3 36 16 30 11 21 24 16 70 18 6 1 10 29 27
3 17 19 20 9 11 6 37 13 27 14 24 21 19 71 15 3 7 13 18 2
4 14 10 28 12 17 9 38 10 24 17 27 28 22 72 12 1 6 16 6 5
5 И 13 22 15 14 12 39 7 21 20 30 1 25 73 9 29 9 19 8 18
6 8 10 5 18 20 15 40 4 18 23 4 29 28 74 6 26 12 22 15 11
7 5 7 8 21 23 18 41 30 15 20 7 3 30 75 3 23 15 25 12 14
8 2 4 11 24 26 21 42 '27 12 29 10 6 4 76 1 20 18 28 11 17
9 19 30 14 27 29 24 43 24 9 1 13 9 7 77 29 17 21 2 19 20
10 16 27 17 30 1 27 44 21 6 3 16 12 10 78 26 14 24 5 20 27
И 13 24 20 4 3 2 45 18 3 6 19 15 12 79 9 11 27 8 23 26
12 10 21 23 7 6 5 46 15 1 9 92 18 16 80 20 8 30 11 3 29
13 7 18 26 10 9 8 47 12 29 12 25 21 19 81 17 5 4 14 18 2
14 15 29 13 12 30 11 48 9 26 15 28 24 22 82 14 2 7 17 8 5
15 30 12 1 16 15 14 49 6 23 18 2 27 25 83 11 19 10 20 16 8
16 27 9 3 19 18 17 50 3 20 21 5 30 28 84 8 18 13 23 7 11
17 24 6 9 11 21 20 51 1 17 24 8 4 1 85 5 13 16 26 6 14
18 21 3 6 25 24 23 52 29 14 27 И 7 30 86 2 10 19 29 9 17
19 18 1 12 28 27 26 53 26 11 30 14 10 6 87 25 7 2 1 22 20
20 15 29 18 5 4 29 54 23 8 4 17 13 9 88 21 4 5 9 25 23
21 12 26 15 2 30 2 ээ 20 5 7 20 16 12 89 7 27 8 12 28 26
22 9 23 21 8 7 5 56 17 2 10 23 19 15 90 19 24 11 15 2 29
23 6 20 24 И 10 8 57 28 19 13 26 22 18 91 30 21 19 18 5 30
24 3 17 27 14 13 11 58 25 16 19 29 25 21 92 27 18 17 21 8 4
25 1 14 30 17 16 14 59 22 13 16 6 28 24 93 24 15 20 24 И 7
26 29 И 4 20 19 17 60 18 10 15 9 2 27 94 21 12 23 27 14 10
27 28 8 7 23 22 20 61 16 4 5 12 5 17 95 18 9 26 30 17 13
28 23 5 10 26 25 23 62 13 30 8 15 11 3 96 15 6 29 4 9 16
29 20 2 13 29 28 26 63 10 27 11 18 8 16 97 12 3 1 7 23 22
30 14 19 22 3 2 29 64 7 24 14 21 14 9 98 9 1 3 10 26 25
31 11 16 25 6 5 30 65 4 21 17 24 17 12 99 6 29 6 13 19 28
32 8 13 28 9 8 4 66 30 18 20 27 20 15 100 26 28 16 1 2 16
33 5 10 2 12 11 7 67 27 15 23 30 23 18
34 2 7 5 15 14 10 68 24 12 26 4 26 21
412
МУНДАРИЖА
суз боши..............:................................ ?
БИРИНЧИ БУЛИМ
КАПИК ЖИСМ СТАТИКАСИ
I. ТЕКИСЛИКДАГИ КУЧЛАР СИСТЕМАСИ
ИХТИЁРИЙ ЖОЙЛАШГАН КУЧЛАР СИСТЕМАСИ.........................5
С. 1-топширик- Каттак жисмнинг таянч реакцияларини аникдаш.5
С-2-топширик- Текис ферманинг таянч реакцияларини ва
стерженларидаги кучларини аникдаш..........................11
С.З-топширик- Кушма конструкциянинг таянч реакцияларини
аникдаш (иккита жисмдан иборат система)....................20
С.4-гопширик- Кушма конструкциянинг таянч реакцияларини
. аникдаш (учта жисмдан иборат система) .,.................27
С.5-топширик- Тишлашиш (тинч холатдаги ишкаланпш) ни хисобга
олган холда кучларнинг мувозанати..........................34
II. Бир текисликда ётмаган кучлар системаси............... 42
С.б-гопширик- Кучлар системасини энг содда куринишга келтириш 42
С.7-топширик- Каттак жисмнинг таянч реакцияларини аникдаш
Огирлик маркази............................................47
С.8-топширик- Жисм огирлик марказининг вазиятини аникдаш...52
III. Статика масалаларини ечишда ЭХМни куллаш..............57
С.9-топширик- Ички бир томонлама богланишли кушма
конструкциянинг таянч реакцияларини аникдаш................57
ИККИНЧИ БУЛИМ
КИНЕМАТИКА
I
I. Нукда кинематикаси .....................................68
К. 1-топширик- Нух'га харакатининг берилган тенгламаларига кура
унинг тезлиги ва тезланишини аникдаш.......................68
II. Каттак, жисм кинематикаси..............................72
Каттак; жисмнинг илгариланма ва айланма харакатлари........72
К.2-топширик- Илгариланма ва айланма харакатларда катти к жисм
нукдаларининг тезликлари ва тезланишларини аникдаш.........72
Каттак; жисмнинг текис-параллел харакати...................78
К.З-топширик- Текис механизмнинг кинематик тахлили.........78
К.4- гопширик- Куп звеноли механизмнинг кинематик тахтили .87
Катгик жисмнинг сферик харакати.......................... 101
К.5-топширик- Эйлер тенгламалари буйича катгик жисм ва унинг
нукдалари харакатининг кинематик характеристикаларини аникдаш 101
К.6-топширик- Кузгалмас сирт буйлаб сирпанишсиз юмалайдиган
ва кузгалмас нуктага эга булган катгик жисм харакатининг
кинематик тахдили ........;.............................. 105
413
III. Мураккаб харакат..................................... 115
Нукданинг мураккаб харакати............................... 115
К.7-топпгирик. Нукданинг абсолют тезлиги ва абсолют
тезланишини аникдаш....................................... 115
Кдтгик жисмнинг мураккаб харакати, параллел ва кесишувчи уклар
атрофидаги айланишларни кушиш............................. 124
К.8-топширик;. Планетар редуктор звеноларининг бурчак
тезликларини аникдаш...................................... 124
IV. Кинематиканинг масалаларини ечишга ЭХ, Мни куллаш...... 133
К9-топширих. Ишчи нукданинг берилган харакати буйича
манипулятор механизм звеноларининг бурчак тезликлари ва бурчак
тезланишларини аникдаш.................................... 133
УЧИНЧИ БУДИМ
ДИНАМИКА
I. Моддий нукда динамикаси................................ 143
Моддий нуктанинг харакат дифференциал тенгламалари........ 143
Д. 1-топширид. Узгармас кучлар таъсирида булган моддий
нукданинг харакат дифференциал тенгламаларини интеграллаш. 143
Д.2-тошпирик;. Узгирувчи кучлар таъсирида булган моддий
нукданинг харакат дифференциал тенгламаларини интеграллаш. 150
Д.З-топширйк;. Моддий нукданинг тебранма харакатини текшириш 159
Д.4-топширик;. Моддий нукданинг нисбий харакатини текшириш ... 170
Моддий нукга динамикасининг асосий теоремалари............ 178
Д.5-топширик Харакат микдорининг узгариши хадидаги
теоремани моддий нукданинг тезлигини анидлашга тадбик; этиш.... 178
Д.б-топширик,. Динамиканинг асосий теоремаларини моддий
нукданинг харакатини текширишга тадбик, этиш.............. 184
Д.7-топширик;. Массалар марказининг харакати хакдгдаги теоре-
мани механик системанинг харакатини текширишга тадбик, этиш .. 190
Д.8-топширик,. Харакат микдорининг узгариши хакддаги теоремани
механик системанинг харакатини текширишга тадбик; этиш...... 202
Д.9-топширик. Кинетик моментнинг узгариши хакддаги теоре-
мани кдтгик, жисмнинг бурчак тезлигини аникдашга тадбик этиш.. 212
Д. 10-то пширик;. Кинетик энергиянинг узгариши хаквдаги теоре-
мани механик системанинг харакатини урганишга тадбик; этиш.. 221
Катгик; жисмнинг харакат дифференциал тенгламалари........ 233
Д.П-топширик;. Катгик жисмнинг илгарилама ва айланма
Харакатларини текшириш ................................... 233
Д. 12-тошпирик;. Катгик; жисмнинг текис параллел харакатини
текшириш ................................................. 243
Зарба..................................................... 250
Д. 13-топширик;. Катгик; жисмларнинг узаро уринишларини
текшириш ................................................. 250
III. Аналитик механика.....................................273
Мумкин булган кучишлар принципи............................273
Д. 14-топширик;. Мумкин булган кучишлар принципини битта эркинлик
даражасига эга булган механик системага куйилган кучларнинг
мувозанатига дойр масалаларни ечишга тадбик; этиш......... 273
414
Д. 15-то пширик- Мумкин булган кучишлар приннипини кушма
конструкция таянчларининг реакцияларини аникдашга тадбик,
этиш.........................................................282
Д. 16-топширик;. Богланишларнинг реакцияларини аникдашга
Даламбер принципини тадбик, этиш.............................289
Д. 17-топширик,. Кузгалмас ук, атрофида айланма харакат кдлаётган
катгик жисмнинг таянч реакцияларини аникдаш................. 297
Д. 18-топширик;- Динамиканинг теоремаларини ва принципларини
механик системанинг харакатини текширишга тадбик, этиш.......305
Динамиканинг умумий тенгламаси...............................317
Д.19-топширик;. Динамиканинг умумий тенгламасини битта
эркинлик даражасига эга булган механик системанинг харакатини
текширишга тадбик, этиш......................................317
Лагранжнинг II тур тенгламалари............................... 325
Д.20-топширик;. Лагранжнинг II тур тенгламаларини манипуля-
торнинг дастурли хаРакатини таъминловчи куч ва моментларини
аникдашга тадбик; этиш.......................................325
Д. 21-топширик,. Лагранжнинг II тур тенгламаларини иккита
эркинлик даражаси булган механик системанинг харакатини
текширишга тадбик; этиш......................................334
Консерватив механик система мувозанат (тинч) вазиятининг
тургунлиги.................................................. 345
Д. 22-топширик;. Эркинлик даражаси бирга тенг булган консерватив
механик системанинг мувозанат (тинч) вазиятларини аникдаш
ва уларнинг тургунлигини текшириш............................345
IV. Механик системанинг тебранишлари..........................356
Д.23-топширик;. Иккита эркинлик даражасига эга булган механик
системанинг эркин тебранишларини текшириш................... 356
Д. 24-топширик. Иккита эркинлик даражасига эга булган механик
системанинг эркин тебранишларини текшириш................... 365
Д.25-топширик,. Эркинлик даражаси бир булган механик
системанинг мажбурий тебранишларини текшириш.................376
Д.26-топширик,. Иккита эркинлик даражасига эга булган механик
системанинг мажбурий тебранишларини текшириш.................394
V. Динамиканинг масалаларини ечишга Э^Мни куллаш ............402
Д.27-топширик,. Механик система эркин тебранишларининг
дифференциал тенгламаларини ЭДМ ёрдамида интеграллаш.........402
415
Н18 Назарий механикадан курс ишлари учун топ-
шириклар туплами: Олий укув юртлари учун укув
кулланма /А. А. Яблонский, С. С. Норейко, С. А.
Вольфсон ва бошк; А. А. Яблонскийнинг умумий
такрири остида. — Т.: Укитувчи, 2002,— 416 б.
I. Яблонский А. А ва бошк;.
22.21Я 73
Александр Александрович Яблонский
Сергей Сергеевич Норейко
Саул Аронович Вольфсон
Наталья Васильевна Карпова ва б.
НАЗАРИЙ МЕХАНИКАДАН КУРС ИШЛАРИ
УЧУН ТОПШИРИКЛАР ТУПЛАМИ
(укув кулланма)
Ташкент «Укитувчи», «Зиё-Ноишр» КШК, 2002
Таржимонлар Т. Аноркулов, Д. Ху санов, А. Комилжонов
Му.уаррир Ф. Орипова
Расмлар мударрири Ф. Неккадамбоев
Техник мударрир М. Суркова
Компыотерда тайёрловчи Э. Ким
ОИБ 8043
Оригинал-макетдан босишга рухсат этилди 19.03.2002.
Бичими 60х901/16. Кегли 10 шпонли. Таймс гарнитураси.
Офсет босма усулида босилди. Шартли б.т. 26,0. Шартли кр.-отг. 26,25.
Нашр. т. 21,8. 1000 нусхада босилди. Бугортма №
«Зиё-Ношир» КШК,Тошкент, Навоий кучаси, 30.
Шартнома № 16-2001
ООО «Рангли Туркистон» босмахонаси.
Тошкент, Хуршид кучаси, 122.
52 зак. 1000 шт. 2002 г.
416