/
































































































































































































Автор: Шахтарин Б.И.
Теги: электротехника радиоэлектроника радиотехника издательство радио и связь учебное пособие для студентов статистическая радиотехника цикл лекций
ISBN: 5-256-01571-0
Год: 2000




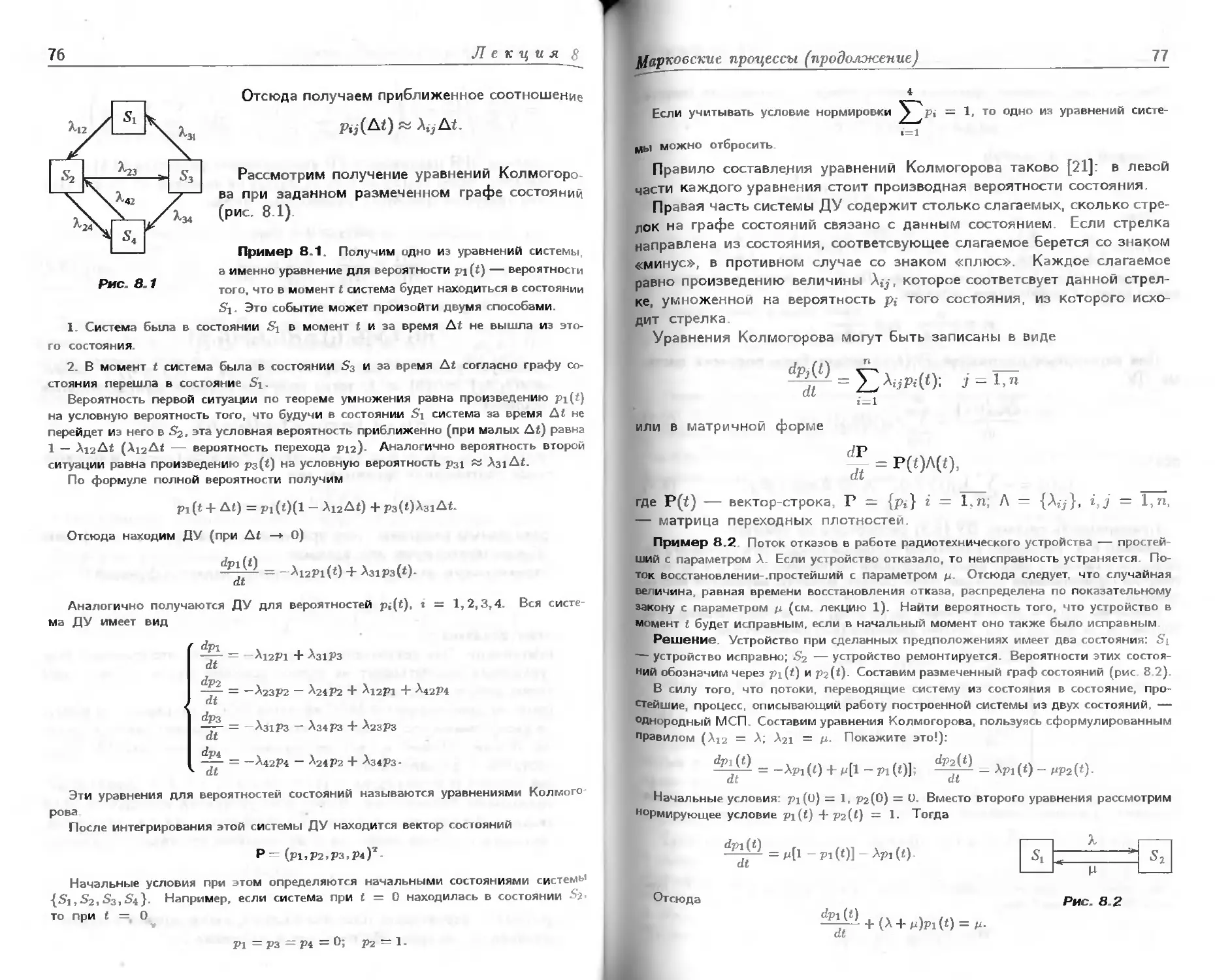
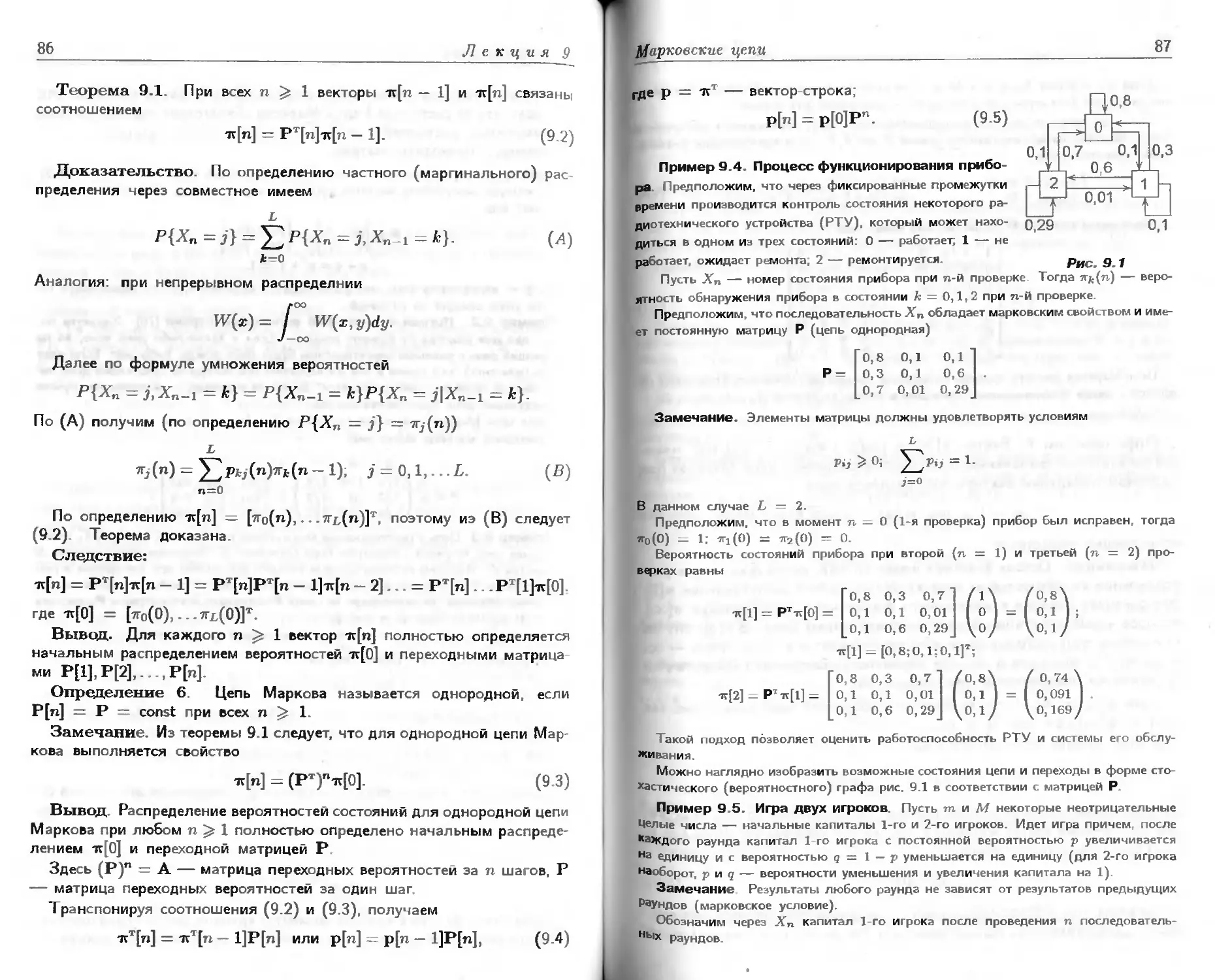
Текст
Б.И. Шахтарин
СЛУЧАЙНЫЕ ПРОЦЕССЫ
В РАДИОТЕХНИКЕ
Цикл лекций
Рекомендовано учебно-методическим объединением вузов
по университетскому политехническому образованию
в качестве учебного пособия
для студентов высших учебных заведений
радиотехнических и приборных специальностей
«Радио и связь»
Москва
2000
УДК 621.37+621.391
ББК 32 841
Ш32
Рецензенты: д.ф.-м.н., проф А.И. Козлов, д.т.н., проф
В Н. Кулешов
Шахтарин Б.И.
Ш32 Случайные процессы в радиотехнике: Цикл лекций — М.. Радио
и связь, 2000 — 584 с.: ил.
ISBN 5-256-01571-0.
Излагаются основы статистической радиотехники. Рассматриваются
различные случайные процессы, их воздействие на линейные и нелинейные
радиотехнические устройства (амплитудные, частотные и фазовые детек
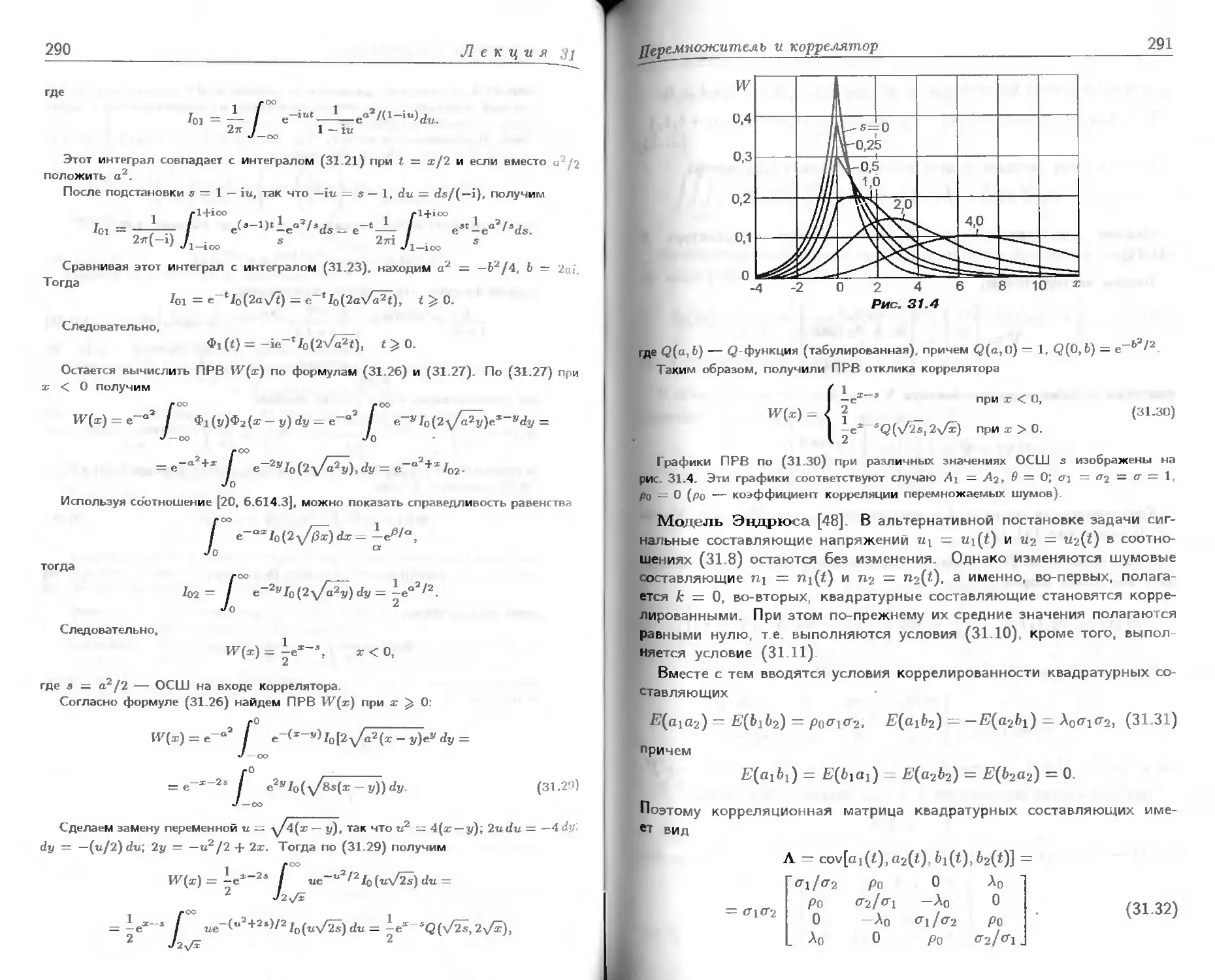
торы, перемножители, корреляторы), методы анализа нелинейных систем.
Отдельный раздел посвящен оптимальным фильтрам случайных сигналов
и помех (согласованный, фильтры Винера Калмана). Анализ и синтез
фильтров проводится для непрерывных и дискретных процессов и систем.
Книга содержит много примеров и задач.
Для студентов старших курсов, обучающихся по радиотехническим спе-
циальностям, и аспирантов Может быть полезна преподавателям, чита-
ющим соответствующие курсы.
ББК 32 841
Оригинал-макет подготовлен в пакете CyrTUGElr+j?X с использова-
нием кириллических шрифтов семейства LH.
Верстка в TfXe: Чернышов Ю Н
ISBN 5-256-01571-0
© Шахтарин Б И 2000
Посвящается светлой памяти
Евгения Павловича Попова.
Предисловие автора
Эта книга по теории и практике статистической радиотехники предна-
значена для тех, кто начинает изучать прикладную теорию случайных
процессов. Для понимания материала книги требуется знание основ те-
ории случайных величин точнее ее основных понятий (функций и плот-
ности распределения вероятностей (ПРВ), их свойств, числовых характе-
ристик случайных величин и некоторых функциональных зависимостей,
таких, как характеристическая, производящая функции, коэффициент
корреляции и др.), а также основ теории функций комплексного пере-
менного (теория вычетов, лемма Жордана) и, естественно основ теории
линейных (непрерывных и дискретных) систем
Материал книги изложен в форме лекций, которые в основном ав
тономны и могут быть рассмотрены почти независимо друг от друга.
Исключение составляют лишь первые несколько лекций вместе с при-
мерами и задачами к ним, лежащие в основе всего остального мате-
риала. Такое построение позволяет использовать каждый из разде-
лов книги, не обращаясь к предыдущим. Это относится в первую оче-
редь к таким частям данного курса, как линейные (ч. 2) и нелинейные
(ч. 3) преобразования случайных процессов, и особенно касается раз-
дела (ч. 4), в котором рассматривается оптимальная фильтрация слу-
чайных сигналов и шумов.
Разделение курса на лекции вовсе не означает, что каждая из них
предназначена для изучения в течение двух или четырех часов ауди-
торного времени. Такое разбиение предпринято автором для лучшего
обозрения всего курса, а также для обеспечения практических (семинар-
ных) занятий примерами и задачами по теме соответствующей лекции
В свое время, 40 лет назад, на решение задач статистической ра
диотехники автора вдохновила только что вышедшая книга В.Б Давен-
порта и В Л. Рута «Введение в теорию случайных сигналов и шумов»
(ИЛ, 1960 г.), которая, по мнению автора, и до сих пор остается луч-
шим учебником для начального ознакомления с проблемами случайных
* Попов Е.П. (1914-1999), доктор техн, наук, профессор, академик Россий-
ской академии наук, выдающийся ученый, автор многих книг по теории автома-
тического управления, трижды Лауреат Государственной премии.
4
Предисловие автора
процессов в радиотехнике, несмотря на то, что дискретные процессы
и системы там не рассмотрены.
Кроме указанной книги энтузиазм автора был стимулирован консуль-
тациями и доброжелательным отношением ныне покойного профессо-
ра Льва Давидовича Гольдштейна, заведующего кафедрой ЛКВВИА
им. А Ф Можайского, за что автор был и остается верен его светлой
памяти и полон искренней благодарности за дружескую поддержку в
критический момент своей жизни
Все это вместе взятое в свое время помогло автору понять как мно-
го значит для начинающего ученого, а тем более студента, доступное,
методически отработанное изложение материала с раэбором примеров
и задач, стимулирующих читателя к самостоятельной работе над изуча-
емым материалом. Автор надеется, что данная книга в какой-то мере
отражает эту его точку зрения.
Автор более 20 лет в МГТУ им Н Э. Баумана читает курс лекций,
подобный предлагаемому в данной книге. Накопленный автором опыт
преподавания курса статистической радиотехники, его участие в разра-
ботке систем радиосвязи и радиолокации, их эксплуатации и испытани-
ях, а также опыт написания книг [25-28] по статистической динамике
систем синхронизации и оптимальным системам позволили построить
курс так, чтобы отразить практически все разделы статистической ра-
диотехники, которые потребуются будущим разработчикам радиоэлек-
тронной аппаратуры различного назначения.
Созданию данной книги способствовало и наличие значительного чи-
сла хороших монографий и учебных пособий, освещающих радиотехни
ческие аспекты случайных процессов как на русском, так и на англий-
ском языках Естественно мнение автора субъективно и перечень лите-
ратуры не отражает всего многообразия источников Но автор в первую
очередь отметил бы книгу [1], а также ряд книг В.И. Тихонова [2—6],
РЛ Стратоновича [7, 8], статьи С.О Райса [9, 10], пособия на русском
[11-15] и английском [16-18] языках.
Отличительной особенностью данного пособия является соединение в
одном объеме сведений, с одной стороны, об анализе различных слу-
чайных процессов (гауссовских, пуассоновских, марковских, импульс-
ных марковских цепей, ортогональных разложений случайных процес
сов, аналитических случайных процессов, случайных полей и т.д. — ч. 1
«Анализ случайных процессов») и, с другой стороны, подробное рассмо-
трение линейных и нелинейных преобразований случайных процессов в
части их прохождения через различные радиотехнические устройства
(усилители, ограничители, амплитудные, фазовые, частотные детекто-
ры, генераторы и т.д — ч. 2 «Анализ линейных систем» и ч 3 «Анализ
нелинейных систем»). Представлены различные точные и приближен-
ные методы анализа нелинейных систем (прямой метод, метод Прайса,
метод марковских СП и др.)
Особо следует выделить часть 4 «Оптимальная фильтрация случай-
ных сигналов и шумов», посвященую различным оптимальным филь-
трам
Предисловие автора
5
В пособии рассматриваются как непрерывные так и дискретные про
цессы и системы В части пособия, где анализируются и синтезиру-
ются линейные системы, рассмотрены как скалярные, так и векторно-
матричные системы уравнений.
Вместе с тем автор не претендует на оригинальность некоторых опре-
делений и теорем, равно как и задач. Свою роль автор видит в их
комплексном применении, в чем и усматривает оригинальность пред-
лагаемого курса лекций.
В заключение автор с большой благодарностью и признательностью
отмечает вклад своих учеников и помощников на разных этапах созда
ния книги аспирантов С В Артюшина и Ю В Соболева осуществивших
компьютерный набор книги д т.н. В.В Сизых — соавтора многих посо-
бий, к.т.н., чл.-корр. РАЕН Ю.Н. Чернышова — бессменного создателя
книг автора в компьютерной форме, много сделавшего для того, чтобы
эта книга увидела свет. Автор благодарит рецензентов д.ф м н., про-
фессора А И Козлова, д.т.н профессора В Н Кулешов, а также к тн
доцента В.Д. Раэевига за критические замечания по материалам книги,
а также д.т.н профессора П А. Бакулева за благожелательный отзыв о
книге При работе над книгой автору большую помощь оказал профес-
сор М.В. Капранов, который, в частности, любезно согласился написать
приложение 9, за что ему автор весьма признателен
За помощь в издании книги автор благодарит лауреата Ленинской
премии к т.н Б.И. Чиркова а также к.т.н доцентов В.А Челыше-
ва, ВИ. Матвеева, А.К Ковальчука, Л В Лабунца, д.т.н., профессора
В Н. Рождествина. Особую благодарность автор выражает проф Тихо
нову В И. за многолетнее сотрудничество советы и поддержку, в том
числе в области преподавания курса статистической радиотехники
Данная книга предназначена студентам старших курсов, аспирантам
и может быть полезной преподавателям ведущим занятия по курсам
«Статистическая радиотехника» и «Радиотехнические цепи и сигналы»
Введение
Теорию случайных процессов создавали фундаментальные работы
А Н Колмогорова, А.Я Хинчина, Н Винера, Д. Дуба и др. История
развития методов статистической радиотехники в России немыслима без
приоритетных работ П И. Кузнецова, Р.Л. Стратоновича, В И Тихоно-
ва, которые к тому же были переведены на английский язык*. Книги
В.И Бунимовича (1951), В.В Солодовникова (1952, 1960), Б Р Леви-
на (1957, 1966, 1968), В.Л Лебедева (1958), РЛ. Стратоновича (1961)
В И Тихонова (1966, 1982), А.А. Свешникова (1968), С.М. Рытова
(1976, 1978) и др создали мощный научный плацдарм для ученых-
радиофизиков России.
Данное пособие относится к другому классу книг, а именно допол-
няет библиотеку учебно-методических пособий, предназначенных для
студентов старших курсов и аспирантов
В первой части книги «Анализ случайных процессов» дается опре-
деление случайных процессов и классификация их по различным при-
знакам (непрерывный, дискретный, стационарный, эргодический, пуас-
соновский, гауссовский, марковский, винеровский и т.д.). Приводятся
основные характеристики случайных процессов. Рассматриваются при-
меры и приводятся задачи, решение которых весьма важно для дальней-
шего изучения материала, так как предметом задач являются в основ-
ном числовые характеристики случайных величин (сечение случайных
процессов).
В двух последующих лекциях этой части доказываются теоремы Вине-
ра-Хинчина для непрерывных и дискретных случайных процессов Сле-
дует особо отметить, что как в этих лекциях, так и в целом в книге
рассматриваются параллельно как непрерывные случайные процессы и
линейные системы, так и их дискретные версии. В этих же лекциях
впервые вводится понятие энергетического спектра (ЭС) непрерывного
и дискретного случайного процесса (СП) и впервые же вводятся пре-
образование области интегрирования (суммирования) — прием, кото-
рый часто используется в дальнейшем.
Далее в следующих лекциях подробно рассматриваются используе-
мые на практике непрерывные и дискретные СП гауссовские (лекции
5, 6), марковские процессы (лекции 7, 8), марковские цепи (лекции 9,
10), пуасоновские (лекция 11) и импульсные (лекция 12) случайные про
цессы В этих лекциях, как и в предыдущих, рассматривается много
примеров и по каждой теме дается перечень задач, вскрывающих спе-
цифику процессов Особенно это относится к марковским процессам и
* Kuznethov P,l., Stratonovich R.L., Tikhonov V.l. Non-linear tranformations of
stochastic process. N.Y.: Pergamon Press, 1965. 498 pp.
Введение
7
цепям, которые прилагаются в дальнейшем для исследования нелиней-
ных систем (генераторов, ФАПЧ и др). Приводится вывод кинетического
уравнения по Стратоновичу [8]
В лекции 13 дается определение ортогонального разложения Кару-
нена-Лоэва, приводятся примеры разложений и предлагаются задачи
для самостоятельного решения. Далее рассматриваются аналитические
СП (лекция 14), дается оценка энергетического спектра (лекция 15),
определяются случайные поля (лекция 16).
Лекции 17-20 (вторая часть) посвящены линейным преобразованиям
случайных процессов и составляют вторую часть курса лекций. Анали-
зируются как стационарные, так и нестационарные режимы. Вслед за
Давенпортом [16] и Папулисом [18] вводится понятие системной корре-
ляционной функции (СКФ) не только для непрерывных, но и для дис-
кретных систем Переходной процесс рассматривается на выходе ин-
тегрирующей цепи (ИЦ) (апериодического эвена) при коррелированном
шуме на входе, а также напряжения на параллельном колебательном
контуре. В лекции 17, кроме того, приводятся интегральные характе-
ристики случайных процессов (время корреляции, эффективная ширина
энергетического спектра) и линейных систем (шумовая полоса СКФ)
Третья часть курса (лекции 21—35) посвящена анализу нелинейных
преобразований случайных процессов. Рассматриваются, в том числе
на многочисленных примерах, почти все используемые в инженерной
практике методы исследования нелинейных систем со случайными воз-
действиями (прямой метод — лекции 21, 22 метод характеристических
функции — лекции 23, 24; метод марковских случайных процессов и
цепей; метод Прайса — лекция 27; метод статистической линеариэа
ции — лекция 28; метод усреднения). Предметом анализа являются
основные элементы радиотехнических устройств (амплитудные, частот-
ные и фазовые детекторы, ограничители, генераторы — лекции 21—24
29; 34 35). В этом же разделе рассмотрены корреляторы (лекция 31),
выбросы случайных процессов (лекция 32) и шумы в радиотехнических
устройствах (лекция 33) Некоторые лекции могут быть использованы в
качестве материала для курсовых и дипломных работ.
В предпоследнем разделе курса (лекции 36-55) рассматривается опти-
мальная фильтрация случайных сигналов и шумов Представлены три
типа фильтров: один из них оптимизирован по критерию максимума от-
ношения сигнал/шум (ОСШ) на выходе (в частном случае в виде согла-
сованного фильтра), два других — фильтр Винера и Калмана — функ-
ционируют по критерию минимума среднеквадратичной ошибки. Синтез
того и другого фильтра осуществляется на основе уравнения Винера-
Хопфа вывод которого основан на доказанном в лекции 36 принципе
ортогональности. Исследуются непрерывные и дискретные (цифровые)
версии оптимальных фильтров. Приводится большое число примеров и
задач, поясняющих действие и эффективность фильтров В каждом слу-
8 Введение
чае рассматриваются ошибка фильтрации и влияние на нее параметров
системы. Фильтры Калмана и Винера сравниваются между собой в ста-
ционарном режиме. Представлены скалярные и многомерные процессы
и системы. В заключение раздела приводятся сведения по нелинейной
оптимальной фильтрации Стратоновича и в частном случае рассмотрен
фильтр Калмана в задаче оптимальной фазовой синхронизации.
В последнем разделе «Дополнение» рассмотрены основы теории на-
дежности.
В приложениях даются дополнительные сведения, не вошедшие в
текст лекций, но использование которых призвано помочь освоить их
материал.
Особенностью данной книги является решение примеров, как прави-
ло, без привлечения справочной литературы, на основе лишь сведений,
содержащихся в лекциях и приложениях.
Часть!
Анализ случайных
процессов
Лекция 1
Определение случайного процесса.
Классификация СП
।
Определение случайного процесса
Определение 1. Случайным процессом (СП) £t(w) называется
функция двух переменных I G Т, ш 6 Q, где fi — пространство эле-
ментарных событий, Т — некоторое множество
При этом каждому 6 £ Т соответствует случайная величина (СВ)
&(ш). Иногда СП называется также вероятностным или стохастическим
процессом, а также случайной функцией y?(t,w) — Ct(w). Причем при
каждом значении аргумента 1=6 величина y>(f?,w) является случайной.
Обычно аргумент t обозначает время. Если Т — {0, ±1, ±2,...}, то
£t(w) называется случайной последовательностью (иначе СП с дискрет-
ным временем), если Т = (—оо,оо), тогда £t(w) является СП с непре-
рывным временем.
Пример 1.1. Пусть Т = {0,1,2...} — номер часа с начала функционирования
АТС, {t(w) — число вызовов, поступающих на АТС в течение t-ro часа, тогда ф(ш) —
случайная последовательность, с другой стороны, если Т = [0, оо), i С Т — произ
вольный момент времени, a — общее число вызовов, зарегистрированных к
моменту i, то тд(ы) — случайная функция (СП с непрерывным временем)
Определение 2. При любом фиксированном О ЕТ СВ^(ш) назы
вается сечением (поперечным сечением) СП £t(w) в точке О
Определение 3. При фиксированном значении у 6 П детермини-
рованная функция = ®(t), определенная на Т называется реали-
зацией СП £t(w) или его выборочной функцией
Замечание. Из определения 2 и 3 следует, что СП можно определить
либо через семейство СВ (сечений СП), либо как пучок неслучайных
Функций (реализаций СП) с соответствующей мерой их вероятностей.
Таким образом, ансамбль реализаций задает случайный процесс при
Л' -» со (рис. 1.1).
Случайный процесс считается заданным (по Слуцкому), если зада-
на его п мерная плотность распределения вероятностей (ПРВ) сечений
^(ж1,ж2, ...,хп), где Xi = x(ti), i = l,n.
10
Лекция J
М*)
Рис. 1.1
Классификация СП
Определение 4. СП с n-мерной гауссовской ПРВ IV(®i, ®2, - - -, »п)
называется гауссовским
Определение 5. Если при сдвиге всех п сечений на величину т по
оси времени вид n-мерной ПРВ СП не изменяется, то такой СП назы-
вается стационарным в узком смысле (или строго стационарным). В
этом случае
1У[ж(/1), ж(Сг),. ., ж(*п)] - И^[ас(/1 + т), ж(/2 + г),..., x(tn + г)],
т.е. ПРВ (в случае случайной последовательности — распределение) ин-
вариантна по отношению к переносу начала отсчета времени.
Рассмотрим определение следующего класса СП — марковского СП.
По теореме умножения вероятностей
IVn(«i,«2, • •,»«) = .. .,®„_i)lVi(a;n I ®1,®2, . .,жп-1).
Отсюда находится условная ПРВ
| Ж1,Ж2,...,ЖП_1) =
И/п(а;1,Ж2, • - ,жп)
IVn_i(®i,®2,.-.,®n-l)’
причем Ж£_1 < Xi < ®i+i, i = 1,2,....
Определение случайного процесса. Классификация СП
11
Назовем сечение Х{ = x(ti) настоящим значением СП, xt 4 — ж(/;_1)
— прошлым значением СП, ж,-+1 — ж(/,-+1) — будущим значением СП.
Определение 6. СП £(/) = {Xt, -00 < t < 00} называется мар-
ковским (МСП), если его будущее значение зависит лишь от настоящего
и не зависит от прошлого значения.
Таким образом, для МСП справедливо свойство условной ПРВ
W(xn | Ж1,ж21.. .,жп_ ) = W(xn | жп-1). п 2. (1.1)
Грубо говоря, марковские процессы (последовательности) являются
вероятностными процессами без последействия. С учетом марковского
свойства п-мерную ПРВ МСП можно записать в виде
УИ(ж1,ж2>. ,хп) = РИ(ж„|ж„_1)ИЛ(ж„_1|ж„_2)...ИЛ(ж2|ж1)1У(ж1).
(1.2)
Таким образом, для МСП при известном начальном распределении
14^1) и переходных ПРВ 1У(ж,- | ж,_1) можно наити ПРВ любой ко-
нечной размерности.
Переходные ПРВ удовлетворяют уравнению Колмогорова-Чепмена
/оо
1^(жз,*з | %2,t2)W(x2,t2 I Ж1,^1)«?Ж2,
•СО
11 <t2 < t3.
Дадим более общее определение марковского СП, которое относит-
ся как к дискретным, так и к непрерывным СП с произвольным мно-
жеством значений.
Определение 6* СП называется марковским, если условная од-
номерная функция распределения
Г(Тж;т1У)=Р{Х(т)<у|Х(/)_ж}1 t<r, (1.3)
не изменяется от дополнительного знания
ранние моменты времени, чем t, т.е. если
•< tn < т выполняется равенство
значений процесса в более
при любых t < < t2
Р{Х(т) < у | х(й) = хъ...Х(1п) = xn,X(t) = ж) =
= Р{ВД < у | X(t) = ж}.
Функция распределения F(t, х, т, у) называется переходной функцией
МСП или марковской переходной функцией.
Определение 6** Марковским процессом с непрерывным множе-
ством значений называется МСП, для которого существует производная
по у от переходной функции
f(t, ж; т, у) = ж; т, у),
оу
называемая плотностью вероятности перехода или просто переходной
плотностью.
12
Лекция 1
Переходная плотность является условной ПРВ
f(t, х;т,у) = W(r,y | x,t). (1.4)
Эта ПРВ удовлетворяет известным соотношениям
/У Г-со
f(t,X',T,y)dy - F(t,x;r,y); / f(t, х; т, у) dy = 1.
СО J — ОО
Отсюда
У. t, т) = h(y,t)f(t, х | т, у).
Интегрируя, получим
Г&О лОО
/ h(x,y,t,T)dx = *)= / fl(x,t)f(t,x | r,y)dx
•'—DO J — DO
ИЛИ
/ОО
fi(x,t)f(t,x;T,y)dx. (1.5)
CO
Эта формула является аналогом формулы полной вероятности для
случая несчетного (континуального) множества гипоте
Переходная плотность f(t, х,; г, у) удовлетворяет уравнению Колмо-
горова-Чепмена
f(t, х; г, у) = i f(s,z;r,y)f(t,x;s,z)dz, (16)
J — ОО
где t < s < т.
Еще раз отметим, что ПРВ wi(x,Zo) = в начальный момент
времени to и переходная плотность f(t, х, т, у) являются исчерпываю-
щими вероятностными характеристиками МСП с непрерывным множе-
ством значений.
Марковский СП {Сх} называется однородным (стационарным) по вре
мени, если переходные функции F(t, х, т, у) при любых у и х зависит
только от разности t — т. Марковский СП {Ct} называется аддитив-
ным (или процессом с независимыми приращениями), если марковские
переходные функции F(t, х; г, у) при любых т и t зависит только от
разности у — х, и в этом случае разность Ст — Ct не зависит от тех
С« для которых и t.
Для непрерывного стационарного МСП переходная плотность
у) — W(r,y | t,x~) зависит не от двух параметров t и т по
отдельности, а только от их разности т — I.
Введем обозначение 1Т(у2,*2 I У1Л1) — Тт(уъ | У1), где т — - tj.
Тогда уравнение Колмогорова-Чепмена при принимает вид
/ОО
| У2)Тг(У2 I У1)^2- (1.7)
ОО
Марковский СП {Ct} называется эргодическим, если предельная фун-
кция распределения lim F{Ct С У | Со = я} существует и не зависит
Определение случайного процесса. Классификация СП 13
от у. В этом случае lim Р{& у} также существует независимо от
начального распределения и совпадает с предыдущим пределом
Переходная плотность f(t,x;r, у) удовлетворяет также следующим
дифференциальным уравнениям (ДУ) в частных производных:
df д 1 д2
<1.8)
Эти уравнения носят название уравнений Колмогорова [(1.8) — пря-
MOI уравнение, (1.9) — обратное уравнение Колмогорова По суще-
ствующей классификации они относятся к уравнениям параболического
типа. Первое из этих уравнений впервые было получено физиками Фок-
кером и Планком в работе по теории диффузии (броуновского движе-
ния) и поэтому называется уравнением Фоккера-Планка-Колмогорова
(ФПК). В теории броуновского движения а(£,ж) называется коэффици-
ентом сноса, a 6(t,x) — коэффициентом диффузии
Пример 1 2 Найти решение уравнения ФПК (1.8) в стационарном режиме
при Э//Э-г = 0.
Решение В этом случае дифференциальное уравнение (1.8) принимает вид
оу 2 ду2-
или
оу I 2 ду )
Интегрируем это равенство по у
a(y)f ~ 77 j [Ь(з/)У] = С = const.
2 dy
Поставим граничное условие
a(y)f - 777-[Ь(1/)/]| =0.
2 1у-±ое
Тогда С — 0. Получаем уравнение первого порядка
lb(j,)£+ [-а(г,) + 1^]/ = 0.
2 dy L 2 dy J
Разделяем переменные и интегрируем:
= трг ехр [-2 [ y~-dz .
ьм L Ло ь(г>
Нижний предел интегрирования ус показателя степени может быть взят любой
Поскольку изменение у0 соответствует изменению постоянного множителя перед по-
казательной функцией Постоянная С определяется из условия нормировки
[ f(y)dy—l.
J — ОО
Определение 6*** Случайным процессом Орнштейна-Уленбека
14
Лекция 1
называется стационарный марковским СП, удовлетворяющий соотноше-
ниям
IVQ/O --1=е^/2;
V
(1.10)
^te|»>=A/2T(i‘-e_-„)“<p
(у-2-J/ie т)2'
2(1-е-29
Здесь условная ПРВ — гауссовская с условными средним значением
У1 е~т и дисперсией 1 — е-2т. Этот процесс однородный и обладает
свойствами гауссовских и марковских СП
Определение 7 Случайный процесс {&} с непрерывным временем
называется процессом с независимыми приращениями, если при любых
0 ti < t% < - -. < tn, tn 6 [0, сю), n = 1,2,... случайные величины
независимы.
Если приращения на непересекающихся интервалах времени незави
симы и имеют гауссовские распределения, то процессы с независимыми
приращениями принадлежат к классу гауссовских СП.
Процесс с независимыми приращениями называется однородным,
если для любых т,<i,t2 (^1 < i’) приращения £<2 — и £<2+т —
распределены одинаково или иначе: функция распределения величи
ны £<+to - £to не зависит от t0.
Простейшим случаем марковского СП является пуассоновский СП
(ПСП)
Определение 8 Предположим, что МСП {£<} является однородным
и аддитивным, разности являются неотрицательными целыми
числами при всех s < t и, кроме того,
ь-»о Р{£<+ь — & = 1}
= 0.
Говорят, что в этом случае {£(} образуют однородный пуассоновский
процесс, который называется также простейшим потоком.
Замечание 1 Согласно определению 8 ПСП является процессом
с независимыми приращениями.
Если (о = 0, то СВ можно рассматривать как число случайных
событий, которые происходят в интервале (0,/).
Замечание 2 Приведенное предельное условие означает, что ве-
роятность того, что за малый промежуток времени произойдет более
одного события есть величина бесконечно малая по сравнению с веро-
ятностью того, что за этот же промежуток времени происходит точ-
но одно событие. Если £о = 0, то положим P{£t = л} = Pn(t) при
t 0. Тогда в общем случае
T’Rt “ €< = п} = Pn(t - s).
Определение случайного процесса. Классификация СП
15
Замечание 3. Предельное соотношение эквивалентно условиям:
Р(Сп = 0) = 1 - АЛ + o(h)- Р(£п = 1) = АЛ + o(h);
P(in 2) = o(h).
Теорема Пуассона. Если {Ct} пуассоновский СП, то
Рп(*) = е-Л<^ , п = 0,1,2,....
П!
Доказательство. Пусть y?t(z) — E(z*) — производящая функция
СВ Ct- (Здесь и далее Е — оператор статистического усреднения.) По
замечанию 1 СВ Ct+Л ~ it и Ct независимые. Следовательно,
<f>t+h(z) = E(z^+h) = E{x^t+h~^+^} = <pt(z)E{z^‘+h~^}.
I В силу однородности СВ Ct+h — it и ih — Со = Сл одинаково рас-
пределены, поэтому
= E(x^h).
По замечанию 3
Е(х^) = (х^ \h_e)P(ih = 0) + (х^ \ih=1)P(ih = 1) =
= 1 — АЛ + о(Л) + zXh + о(Л) = 1 — АЛ + xXh + о(Л), z\ < 1.
Таким образом,
Vt+h(z) = <pt(*)[1 - АЛ + zXh + о(Л)].
Отсюда
Переходя к пределу при Л —► 0 и фиксированном х, получим
d-^L = x(z-i)tpt(z).
Решение этого уравнения при начальном условии 9?о(ж) = 1 имеет вид
<pt(z) = е^-1). (1.11).
Найденная производящая функция соответствует распределению
Пуассона (см пример 2.8). Теорема доказана.
В теореме Пуассона Pn(t) — вероятность п случайных событий в ин-
тервале (0,1). Поэтому, если обозначить через СВ т промежуток времени
между двумя последовательными событиями, то очевидно, что событие
т ~> t эквивалентно тому, что за промежуток времени t событие не по-
явится ни разу, тогда вероятность этого события
Р(т >t) = PD(t) = e-At.
16
Лекция 1
Следовательно функция распределения
F(/) = Р(т < /) = 1 - Р(т > i) = 1 - е"А‘-
Тогда ПРВ
аг
Таким образом, промежутки между событиями распределены по по-
казательному закону.
Определение 9 Винеровским случайным процессом (ВСП) наэы
вается СП {Ct}, удовлетворяющий условиям
1 . {^} — процесс с независимыми приращениями.
2 При любых <1 < /2 s приращения Ct2 ~ Cti> С«2+» — &1+» оди-
наково распределены.
3 Со(^) = 0, и G Q
4 . При h —+ О
ДС0 = «Л + О(Л) мй) =bh + °W-
Р[|Сл|3] = о(Л); — оо < а < со; 0 < b < оо.
Утверждение 1 Если Ct — ВСП то
P(Ct <х) = Г e~(u~ae>3^btdu
(1.12)
(1.13)
Замечание Согласно условиям 1 и 2 ВСП является марковским ад
дитивным и однородным СП При 6—1 ВСП называется стандартным.
Точечный процесс и процесс
восстановления
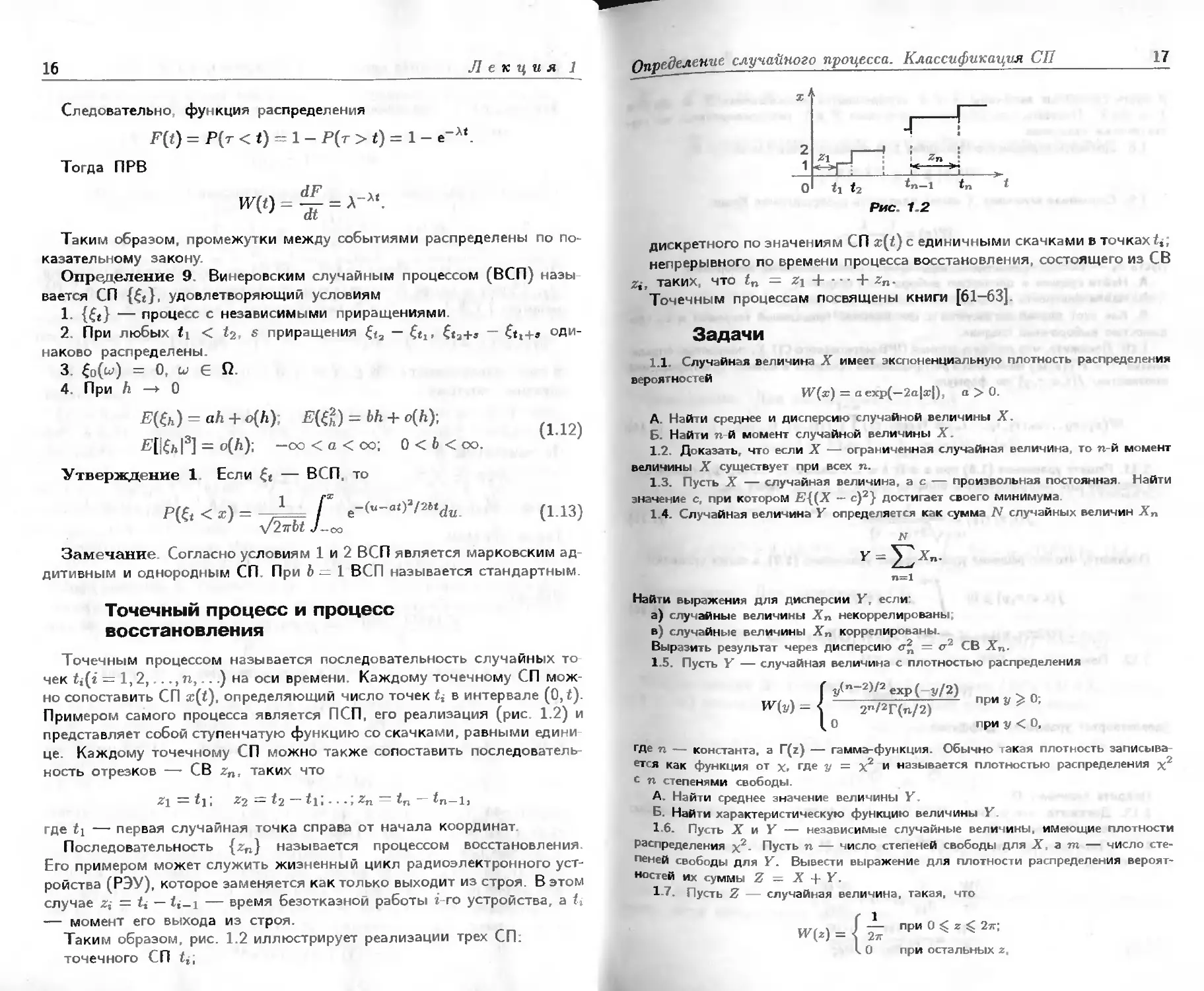
Точечным процессом называется последовательность случайных то
чек ti(i = 1,2, . .,п, ..) на оси времени. Каждому точечному СП мож-
но сопоставить СП x(f), определяющий число точек в интервале (О,/).
Примером самого процесса является ПСП его реализация (рис 1.2) и
представляет собой ступенчатую функцию со скачками, равными едини
це. Каждому точечному СП можно также сопоставить последователь-
ность отрезков — СВ zn, таких что
z1=ty-, Z2=t2—ti-....;zn=tn—in-i,
где fi — первая случайная точка справа от начала координат
Последовательность {zn} называется процессом восстановления
Его примером может служить жизненный цикл радиоэлектронного уст-
ройства (РЭУ), которое заменяется как только выходит из строя. В этом
случае г,- = /, — tt-i — время безотказной работы i го устройства, a ti
— момент его выхода из строя.
Таким образом, рис. 1.2 иллюстрирует реализации трех СП.
точечного СП
Определение случайного процесса. Классификация СП
17
дискретного по значениям СП x(t) с единичными скачками в точках t,,
непрерывного по времени процесса восстановления, состоящего из СВ
Zi, таких что tn — Zy + - • + zn.
Точечным процессам посвящены книги [61—63].
Задачи
1.1 Случайная величина X имеет экспоненциальную плотность распределения
вероятностей
W(a:) = а ехр(—2а|х|) а > О.
А. Найти среднее и дисперсию случайной величины X.
Б. Найти п й момент случайной величины X.
1.2. Доказать, что если X — ограниченная случайная величина то п-й момент
величины X существует при всех п.
1.3. Пусть X — случайная величина, ас — произвольная постоянная Найти
значение с, при котором Е{(Х — с)2} достигает своего минимума
1 4. Случайная величина Y определяется как сумма N случайных величин Хп
N
Y = ^X„.
п=1
Найти выражения для дисперсии Y если'
а) случайные величины Хп некоррелировань
в) случайные величины Хп коррелированье
Выразить результат через дисперсию <т2 = <т2 СВ Хп.
1.5. Пусть У — случайная величина с плотностью распределения
Г у(»-2)/2ехр( у/2)
ИЧ») -< 2"/2Г(п/2)
I о
при у О;
при у < О,
где п — константа, а Г(т) — гамма-функция. Обычно такая плотность записыва
ется как функция от х. гДе У — У? и называется плотностью распределения х2
с п степенями свободы.
А. Найти среднее значение величины Y.
Б Найти характеристическую функцию величины Y
1 6. Пусть X и Y — независимые случайные величины, имеющие плотности
Распределения х2- Пусть п — число степеней свободь для X а т — число сте-
пеней свободы для Y. Вывести выражение для плотности распределения вероят-
ностей их суммы Z = X + Y.
1-7. Пусть Z случайная величина, такая, что
.... . — при 0 < z < 2тг;
И^г) = < 2тг
I 0 при остальных 2,
18
Лекция 1
и пусть случайные величины X и У определяются выражениями X = sin И и
У = cosZ. Показать, что случайные величины X и У некоррелированы, но ста-
тистически зависимы.
1 8. Доказать неравенство Чебышёва для произвольного t > О
Р{|Х| > t} t~2E{X2}.
1.9 . Случайная величина X имеет плотность распределения Коши
Ц-.
7Г 1 + X2
Пусть хъ — выборочное среднее, задаваемое N независимыми выборками
А. Найти среднее и дисперсию выборочного среднего.
Б. Найти плотность распределения выборочного среднего.
В. Как этот случай согласуется с центральной предельной теоремой и со схо-
димостью выборочных средних
1.10 Докажите, что любая п мерная ПРВ марковского СП Xt полностью опреде-
ляется ПРВ Wi(х, to) начального распределения процесса в момент to и переходной
плотностью f(t,x',r,y) по формуле
п—-1
W(xi,x2.. T„;ii,t2 ...tn) = Ж1(х1,/0) f(tk,^k',tk+ixk+i)- {1-14)
Jt=i
1 11. Решите уравнение (1.8) при a = 0; b — 1 Покажите, что его фундаменталь-
ное решение для неограниченной области —оо < у < +оо имеет вид
f(t,x;r,y) = ——1—e-(s-^)3/2(r-r) (1.15)
у/2тг(т- t)
Покажите, что это решение удовлетворяет уравнению (1.9), а также условиям
f(t, х; т, у) О; / f(t,x;r,y)dy= 1,
J-oo (1-16)
/(t.®;ir,j/)|Sl-.oo -> /(t.®;r,y)|r=t = b(y-x).
1 12. Покажите что ПРВ винеровско о СП
удовлетворяет уравнению диффузии
aw _ э2ж
dt ду2
Найдите величину D.
1.13 Докажите, что условная ПРВ Ж(^/2 | 5/1) (1-Ю) удовлетворяет уравнению
Колмогорова-Чепмена (1.7).
1 14 Покажите, что условная ПРВ Ж(?/2 | j/i) (1-Ю) удовлетворяет уравнени-
ям Колмогорова'
ЭЖ д , „„ Э2Ж
-X- =- т-(иЖ + —
от оу? &У2
0W _ dW d2W
Эт - й эм + ~ду^'
Лекция 2
Характеристики случайных процессов
Классификация СП (продолжение)
Определение 1 Средним значением (математическим ожиданием)
СП {Xt, —оо < t < 00} называется неслучайная функция
mx(t) = F[X(t)] = f xW(x,t)dx.
J — со
Замечание. Для дискретных СП {Х„}
тпДтг] = E[Xn] = y^a;t[n]P{a:t[n]}.
»=i
Определение 2 Дисперсией СП {Xt, 00 < t < 00} называется
неслучайная функция
£>c(t) = <rx(t) = E{[X(t) — тх(t)]2} = [ [x — mx(t)]2iy(x, t) dx.
J — CO
Замечание. Для дискретных СП
DO
СЦ71] - Е{(Хп - тДп])2} - У^{х,[тг] - ma:[n]}2P{xi[n]}.
i=l
Определение 3. Корреляционной функцией (КФ) СП {Xt)— 00 <
< t < 00} называется неслучайная функция двух переменных
Earffljtj) = Е[Х(/[)Х(/2)] = [ [ XiX2W[X\,X2',tl,t2) dx\dx2',
J — 00 J — 00
Xi=x(ti), x2 = x(i2).
Замечание. Для дискретных СП {Xn}
^[711,712] = E[X„i,Xn2] = У^У?ж«[п]^[»]Е{х,[п]х^[п2]}-
« з
Замечание. Случайные величины Xi и Х2 называются ортогональ-
ными если выполняется равенство
Е(Х!Х2) = 0 (2.1)
20
Лекция &
Определение 4 Ковариационном функцией (КВФ) СП {Xt, —оо <
< t < 00} называется функция двух переменных
Kx(ti,t2) = £{[X(ii) - пгг(<1)]РФ2) —
Замечание:
K«(ti,t2) - 1 )X(f2)J - rnx(ti)mx(t2) - Rx(t1,t2) ~ mx(ti)mx(t2).
Замечание. Неравенство Чебышева для СП X(t) имеет вид
Р{|2ф) - 77^)1 > е) УЦ^/е2.
Таким образом, среднее значение mT(f) можно рассматривать как
некоторую среднюю траекторию СП вокруг которой группируются ре-
ализации СП При этом величина разброса реализаций относитель-
но mx(t) характеризуется среднеквадратическим отклонением (СКО)
= \/Dx(t).
Замечание. Как и для системы СВ, для СП вводится коэффициент
корреляции (нормированная корреляционная функция)
Px(ti,t2) - Kx(ti,t2)/<Tx(ti)<Tx(t2), -1 С />(«1,t2) 1.
Свойства ковариационной функции:
1. Дс(2) = Kx(t,t), так как
Kx(t,t) - E{[X(t) тД*)]РФ) = У{[Х(/) m^t)]2}.
2. Kx(ti,t2) = Ks(t2,tl)-
Рассмотрим два вещественных СП € У} и Е У}. Пусть ка
ждый из этих процессов имеет соответственно КФ Rx(ti, t2) и Ry(ti,t2y
В дополнение к ним можно определить две взаимные корреляцион-
ные функции.
— E{X-lY2)
xiy2W[xi,y2)dy2\
Zoo ^00
dyi I yix2W(yi,x2)dx2,
•00 J — 00
где Ж] = х(й); x2 ~ x(t2); yi — y(ti); y2 ~ y(t2), причем важен по-
рядок написания индексов
Корреляция между значениями СП € У) и {YJ,t 6 У} в два
различных момента времени (для двух сечений СП) задается корре-
ляционной матрицей
__ -^sc(^lj^2) Rxy{^li^2^
Ryxftlihi) Ry(tlit2)
причем существенно свойство взаимной КФ.
Л^Дй.^г) = Rxy(t2 ti).
(2-2)
Характеристики
случайных процессов
21
Совокупность методов исследования СП, основанных на использова-
нии числовых характеристик mx(t), ax(t) Ях(<1><2) (или ,*2)). а
также взаимных КФ называется корреляционной теорией СП.
Стационарные СП
Определение 1. СП X(t) называется стационарным в широком
смысле, если
1) ЯН(<)|2] < +°°
2) mx(t) = тх = const-
3) R*(ti,h) = Rx(h ~ *1) Для всех t1(t2 G Т,
3*) Ksjtutz) = Kx(t2 - Ъ)-
Замечание. Из определения стационарного СП следует что КФ ста-
ционарного СП зависит лишь от одного аргумента т = t2 — t
Свойства Kx(r) и Dx(r)
1) Dx(t) = Dx = const, так как
Dx{t) = Kx(t, t) = Kx(t -t)= Kx(0) - const;
2) |Z<ac(-7-)| < Kx(0), так как
|/<Дт)| = |JCn(ti,t2)| x/D^D^ = DX = Kx(0).
3) Kx{—т) — Кх(т) (функция четная).
Доказательство.
Кх{-т) = Kx(ti — t2) = Kx(t2,ti) = Kx(ti,t2) = Kx(r).
Свойства КФ Дс(т)
1) Лг(0) = <rx +
где <т — мощность флуктуационной составляющей СП — мощ-
ность постоянной составляющей СП’
2) Rx(-r) = Rxtr),
3) lim Rx(t) = m?.
Для совместно стационарных в широком смысле СП X(t) и Y(t) вэа-
иимные КФ зависят от разности отсчетов причем
RyX = RXy(~ т)- (2-3)
Этот результат следует из того факта, что сдвиг Y(t) в определенном на-
правлении эквивалентен сдвигу X(t) в противоположном направлении
Определение. Процесс X(t) называется циклостационарнь м с пе-
риодом Т в узком смысле если его функция распределения инвариантна
относительно сдвига на целое число периодов Т, т е
Г(х!,.. ,,хп tj 4- тпТ,. = F(x1,...,xn;t1,... tn)
при любом целом m
22
Лекция 2
Процесс X(t) называется циклостационарным с периодом Т в шире
ком смысле, если его среднее значение и КФ инвариантны относительно
сдвига на целое число периодов Т, т.е
mi(t + mT) — Rtyi 4- mT, t-2 + mT) = R{ti, t2)
при любом целом тп.
Пример 2.1 Найти КФ СП AF (2) — os(wq£ 4* V5)» где у? — СВ с равномер
ным распределением в интервале [0,2тг), ш(у>) = 1/2тг, 0 < 2тг Данный СП
является примером периодического СП, у которого каждая реализация функ-
ция, периодическая по t.
Решение
R(t, t 4- т) = E{cos(wot 4- v) cos[tvo(t 4- т) + v>]} —
= (1 /2)£{coswot 4- cos[2(cvot 4- V5) 4- “or]} =
= (1/2) coswot 4- (l/2)E{cos(« 4- 2<p)},
где a = 2u>ot + uzqt, при этом
1-2тг
I cos(a + 2</?) d<f> — 0
о
Таким образом,
Ri(t, t + r) — Rx(r) — (1/2) cosier. (24)
Пример 2.2. Пусть Z(t) = X(t)y(t). где A'(t), У(4) — независимые, стационар-
ные в широком смысле СП. Найти КФ Rx(t,t + т).
Решение
НДС t + т) = E{Z(t)Z(t + т)) = Е{ X (е) X (t 4- т)У(0У(г + т)} =
= E{X(t)X(t+ т)}Я{У0)У(« + г)} = НДт)Н9(т) = НДт). (2.5)
Пример 2.3. Пусть Z(t) = Х(г)У(<), где A(t) — некоторый стационарный в
широком смысле СП, У(4) = cos(o>ot + v)> причем шр — некоторая неслучайная
частота, а ip — независимая случайная фаза (постоянная для каждой реализации
СП), равномерно распределенная на интервале (О,2тг). Найти КФ Rz(t)
Решение. Согласно (2 4) и (2.5)
НДг) = Rx(r)Ry(r) = (1/2)НДт) coswot (2.6)
Пример 2.4. Пусть задан случайный процесс (телеграфный сигнал), в каждый
момент времени принимающий либо значение 1, либо значение 1, причем смена
полярности этого процесса происходит с вероятностью 1/2 в фиксированные моменты
времени —ИГ, .. 0,7,..., кТ,... где Т — неслучайная величина и не зависит от
предыдущих смен полярностей Найти среднее значение, КФ и дисперсию СП X(t).
Решение
1) При каждом значении параметра t случайная величина X(t) с равными вере
ятностями принимает значения ±1. Поэтому Е{А(4)} = 0,5 • 1 4- 0,5 - (—1) = 0.
2) Обозначим = (7fc, 7(fc4- 1)) Поскольку значения сигнала на интерва-
лах времени /fc и /т, соответственно независимы при к ф ш, то при |т| > 7
E{X(t)X(t+r)} = E{X(t)}E{X(t+T)} = 0, а при |-г| < 7 значение Е{Х(t)X(t4-т)}
зависит не только от т, но и от t. Таким образом,
R ft t 4- тЧ - / 1 ПРИ < 1 “
t + т) _ | 0 при |_| > т или при > т _ |т[/т
Характеристики случайных процессов
23
где (t/T”} — дробная часть числа t/T При этом неравенство {t/7} < 1 — |т|/Т
выражает необходимое и достаточное условие того, чтобы величины t и t -f- т при-
надлежали бы одному и тому же интервалу Ik, к £ {0, ±1, ±2,..
3) Dx = R(t,t) = 1.
Замечание В данном случае КФ Rx(t, t + г) при каждом фиксированном т
периодически зависит от текущего времени t. Это означает, что рассматриваемый
процесс не является стационарным (нестационарность имеет периодический харак-
тер)- Можно усреднить значения найденной КФ по параметру t за один период
1 Гт Г^-М/Т . ,
R*(t,t + r)dT= т=1 т’ |т,<т-
Jo Jo
Пример 2 5 Пусть задан случайный процесс X(t) (стационарный телеграф
ный сигнал), в Каждый момент времени принимающий либо значение 1, либо зна-
чение —1, причем смена Полярности этого процесса происходит с вероятностью
0.5 и независимо от предыдущих смен полярности в случайные моменты времени
—кТ + to,---,— Т 4- t0, to,T + to, - --, кТ + to,.... где Т — неслучайная величина,
to — независимая СВ, равномерно распределенная на интервале (0, Т) (для каждой
фиксированной реализации сигнала величина to является постоянной) Требуется
найти среднее значение КФ и дисперсию СП X(t)
Решение
1) Как и в примере 2 4, при каждом значении параметра t случайная величи-
на X(t) с равными вероятностями принимает значения ±1. Поэтому E{X(t)} =
= 0,5 - 1 + 0,5 - (-1) = 0.
2) Обозначим: Т*,(to) = (7fc+to, T^+lJ+to) — интервал со случайными концами
Поскольку значения сигнала на интервалах времени J* (to) И, соответственно, /m(to)
независимы при к m, то при |т| > Т Е{Х(t)X(t + т)} — Е{Х(t)}E{X(t + т)} — 0.
При |т| < Т значение случайной величины X(t)X(t + г) = 1, если to < 1 — |т|/Т, в
противном случае X(t)X(t-f- т) = ±1 (оба значения равновероятны). Поэтому
E{X(t)X(t + т)} = { < 1 - |т|/Г>* И < £
где P{t0 < 1 — |r[/Z} = lTl/T х _ j _ |т|^7' — вероятность события
to < 1 — |т|/Т. В результате:
fi-H/T
R*(t,t + r) = Rx(r)= / dt = 1 — |т)/Т, |т| < T.
Jo 1
3) = R(o) = 1.
Замечание В данном случае КФ Ят(т) не зависит от текущего времени t, и это
означает что рассматриваемый процесс является стационарным. При этом получен-
ное выражение для Rx(r) совпадает с выражением усредненной КФ нестационарного
телеграфного процесса рассмотренного в примере 2.4.
Пример 2 6. Установить необходимые и достаточные условия стационарно-
сти СП
X (t) = a cos ait + b sin wt.
Решение Среднее значение СП
E[X(t)] = E(a)coswt + Е(Ъ) sin wt.
To Значение не должно зависеть от времени. Следовательно, равенства
Е(а) = Е(Ь) = 0
Онал°ТСЯ не°5ходимыми условиями стационарности для той и другой форм стаци-
^"РНости Будем считать, что эти условия выполнены.
24 Лекция 2
Утверждение. СП X(t) стационарен в широком смысле тогда и
только тогда, когда СВ а и 6 некоррелированы и имеют равные дис-
персии*
К(а6) = 0; Е(а2) = Д62) = <т2,
если эти условия выполняются, то КФ СП X(t) имеет вид
ИЦт) = <т2 cos шт.
Докажем утверждение. Если СП X(t) стационарен в широком смысле
то справедливо равенство (дисперсия СП постоянна)
М^2(0)] = Я(0) - ^(тг/рш))].
Но Х(0) = а, Х(тг/(2ш)) — b Следовательно, Е(а2~) — Е7(62). Исполь-
зуя приведенное условие, получим
Rx(t, t + r) = E[X(t + т)X(t)] =
= £'{[а cosu>(f + г) -f- 6 sin u>(t + r)][a coswt + 6 sin wf]} =
= o*2 coswt + E(ab~) sin u>(2Z + r).
КФ Rx(t,t + т) не зависит от времени t только в том случае, если
Е(аЬ) — 0. Таким образом, утверждение доказано.
Пример 2.7. Пусть задан СП
х(«) = a cos(wt + v),
где а = const. СВ ш имеет ПРВ W(u/), а СВ tp равномерно распределена в интервале
(—тг, тг) и не зависит от СВ ш. Показать, что СП X (£) стационарен в широком смысле,
имеет нулевое среднее значение и КФ
R(r) = ^-E(cosivt) — — Re0„(r)
где 0ш(т) = Е (е“"’*) = Е (cos шт) + iE(sinwr).
Решение. Запишем СП X(t) в виде
X (t) — acosaitcostp — asinujtsmt/?.
Найдем среднее значение СП, используя независимость СВ ш и tp,
£[X(t)] = a[£(coswt)E(cos t/?) — E(sin cvt)_E(s>n v)]-
Однако
E(costp) = I cos tp dtp — 0; jE(sinv’) —— I sin tp dtp = 0.
Отсюда следует что E[X (t)] = 0.
Найдем КФ
Rx(t,t + r) — JS[X(t)X(t + r)J = a2E{cos[w(t + r) + v]cos(a,t + v)} =
где Д = E[cos(2wt + шт -f- 2</?)] = 0 по уже доказанному. Следовательно,
Характеристики случайных процессов 25
Замечание. При заданных выше СВ ш и <р СП
Z(t) =
является стационарным в широком смысле, имеет нулевое значение и КФ
Rz(t) - E[Z(t)Z*(t - г)] = а2Е (е’“г) = а2еш(т).
До сих пор использовалось статистическое усреднение (интегриро-
вание с весом ПРВ). такое усреднение называется усреднением по ан-
самблю.
Наряду с этим возможно усреднение по времени. В этом случае по-
лучаем среднее значение стационарного СП
где x(t) — реализация СП.
Аналогично определяется мощность СП
Т
СЛО) = |im / x\t)dt = p:c
Т-^оо 1 JQ
и временная КФ
1 гт
^(т) = lim — / x{t)x(t + r)dt. (2.7)
7-юо1 Jo
Определение. Эргодическим (по соо' ветствующей характеристике)
СП называется такой стационарный СП, для которого операции усредне-
ния по времени и по ансамблю приводят к одному и тому же результату
= (ж(/)); (ar2(t)} = т2з;; /й(т) = гх(т). (2.8)
Замечание. Для эргодического СП его вероятностные характери-
стики могут быть найдены по единственной реализации, полученной на
большом интервале времени.
Отсюда следует, что
1) для эргодического СП среднее значение (математическое ожида-
НИе) — это постоянная составляющая СП;
2) второй начальный момент — это полная мощность СП.
Определение. Белым шумом (БШ) называется такой СП, который
обладает дельтаобразной КФ
ад - S06(r), = 5(йЖй - й), (2.9)
при ем в первом случае при So = const определяется стационарный
ЬШ, во втором — нестационарный БШ
Замечание. Корреляционная функция дискретного БШ определя-
ется символом Кронекера:
(2.Ю)
26
Лекция 2
Поскольку здесь и в дальнейшем часто используется дельта функция
и ее свойства, запишем ее определение.
*-«.)-{? ₽•»«
Наряду с этим используется соотношение
6(х - х0) = [ e^-^du. (2.12)
J — оо
Это соотношение будем называть вторым определением дельта фун
кции Кроме этого, часто используется фильтрующее свойство дельта
функции.
ZOO
y?(t)6(t - t0}dt — p(io)- (2 13)
ОО
Общим для пуассоновского и винеровского СП является их принад
нежность к марковским СП с независимыми приращениями и непрерыв-
ным временем (на рис 1.2 изображена реализация ПСП), в то же время
ВСП — непрерывный, а ПСП — скачкообразный СП
Производная от ПСП и ВСП представляет собой белый шум: пуассо-
новский для ПСП и гауссовский для ВСП.
В результате КФ белого шума пуассоновского (ПБШ) и гауссовско-
го (ГБШ) записываются в виде
_ I *>26(т)
~ \ Аб(т)
для ГБШ
для ПБШ,
(2.14)
где А определяется по (2.11) а b — по (2.12)
Используем соотношения (2.12) и (2 13) для нахождения спектра про-
изведения
s(t) = /(t)coswoC (2-15)
Учитывая второе определние дельта функции, получим
3{cosu0t] = |з[е“°‘ + е~=
e-i(co+coo)t^ — _ Wo) _|. Wo)]
Используем известное соотношение
If00 ,
Fs(u>) - 3{s(0] - £[/(/)coscjof] = — / F(w )Fc(w - w )<fw ,
J— OO
где F(w) = 3[f(0]; Fc(w) = ^(coswoi).
Согласно фильтрующему свойству дельта-функции получим
F,(w) = |[F(w-wo) + F(w + Wo)]. (2.16)
Характеристики случайных процессов
27
Важными характеристиками СП являются характеристическая 0(i-u) и
производящая y>(z) функции. Их определения:
0(i«) = E(eiuX) = f eiuxW(x)dx, (2.17)
J — ОО
оо
= £(*") = £>(«>"’ (2.18)
n—0
где IV( x) — ПРВ СВ X, P(n) — распределение вероятностей, |0(in)|
0(0) = 1; sp(l) = 1
Очевидно, 0(iu) удобно использовать для непрерывных СВ, y?(z) —
для дискретных СВ
При известной функции Ox(iu) ПРВ находится как прямое преобра-
зование Фурье:
И7(х) = — / 0(\и)е~1их du. (2.19)
Jоо
Кроме характеристической функции (ХФ) может быть рассмотрена
моментная функция [18]
ОО
Ф(б) = £?(е,5;)= j esxW(x)dx, (2.20)
— СО
вторая характеристическая функция
Ф(«) = In0n(iw)
и вторая моментная функция
Ф(«) = In Ф($).
Дифференцируя (2.20) п раз, получим
Ф<п)(в) = £?[№]-
Следовательно,
Ф(п)(0) = Е(хп) = тп, (2.21)
гДе тп — начальный момент п-го порядка. Частные случаи: Ф'(0) =
«И; Ф"(0) = m2 = т? + а2.
Разложение моментной функции в ряд Маклорена имеет вид
ОО
П—О
Пример 2 6. При экспоненциальной ПРВ
IV(x) = Де-А\ х^О; ф(в) = -2_; Е(х) = |; <r2 = -L. (2.22)
А — S' A Az
28
Лекция 2
Пример 2 7 Пусть ПРВ W(ar) является гамма-распределением
СЬ
W(x)=yxb-1e~cxl^, (2’23)
где а > О, с > О. причем гамма-функция имеет вид
Г(Ы-1) = [ ybe-Vdy, Ь>-1
Jo (2.24)
Г(1) — 1; Г(п + 1) = п!; Г(Ь + 1) = ЬГ(Ь) Г (0 =
Найти моментную функцию
Решение
*W = ^“-k-’*-(c-,''fa=(S7 = (^jr' <225)
Дифференцируя по s, при s = О получим
ф(п)(О) = ь(ь+1)--(6 + 71-1). = Е(х")
При n = 1 и п = 2
Ъ , b(t>+ 1) 2 Ь
с. -2 = ?
В частном случае, полагая Ь = п/2; с = 1/2, по (2.22) приходим к распределе
нию хи-квадра с п степенями свободы
VV(j.)=
W 2"/2Г(п/2) ' ’
Моментная функция находится по (2 24) при b = fc/2, с = 1/2:
ФЫ = - - Е(г) - к; <т2 = 2к. (2.26)
хЛ1" 2s>
Определение. Кумулянтами СВ n-го порядка называются величины
,, определяемые соотношением
__ £*Ю|
ds" I
(2 27)
где 4* s) — вторая моментная функция Очевидно Ф(0) — Aq
Следовательно,
V(s) = aeis+ |ге2з2 + - + —.aen.sn + • • -,
4 ' 2 п<
причем
2
aej = тп\ ае2 = а >
так как Ф(5) = e»W Ф' = Ф'е* Ф"(з) = [*" + С*')2] е* и при s = О
ф'(0) = Ф'(0) = Ф"(0) = V"(0) + [^'(0)] = m2
Если СВ х является дискретной со значениями xt, то ее ХФ опре
Характеристики случайных процессов 29
деляется соотношением
« = £>е™‘. (2.28)
i
При целочисленных значениях СВ моментная функция носит название
Производящей функции и определяется соотношением (2.18) При этом
p(z-1) является ^-преобразованием последовательности рп Р(п) и
ХФ согласно (2.28) и имеет вид
ОО
0(ш) = у,(е“) = £ рпе*"“,
п=—-оо
те. ХФ является дискретным преобразованием Фурье (ДПФ) последова-
тельности рп, тогда вторая моментная функция
Ф(в) = In у?(ел).
Дифференцируя производную функцию (2.18) к раз, получим
y?W(z) = Е [n(n - 1) .. .(п - к + l)zn-fc] .
При z = 1 находим
у/*)(1) = Е[п(п — 1) .. .(п — к + 1)]. (2.29)
С учетом условия <р \s) — у>(1) = 1 в частном случае следует
/(1) = Е(п\, ^'(1) = Е(п2) - Е(п).
Пример 2 8 Пусть СВ п распределена по закону Пуассона
Рп = е~Х~, 71 = 0,1,....
П1
Тогда
y(z) = е~А Ап= е 1). (2.30)
При этом Ф(®) = A(es - 1), Ф'(0) = А = тпц Ф"(0) = А = о2.
С раведливы формулы, связывающие кумулянты и начальные мо-
менты:
Ж1 = mi; ае2 — т2 — т2 — р2 — °-2;
«з - т3 — ЗТП1ГП2 4- 2?П1 = р3 ;
ав4 ~ т4 — Зт2 — 4?ni т3 -f- 12m2т2 — 6т^ = р4 — Зр^',
....................................................... (2 31)
т1 = ж1. т2 = ае2 -f- ае2; т3 = ае3 -f- 3aeiae2 + ае^;
^4 = ае4 + Зз22 + 4aej ae3 + бае2 ае2 + ае4
30
Лекция 2
Рис. 2.1
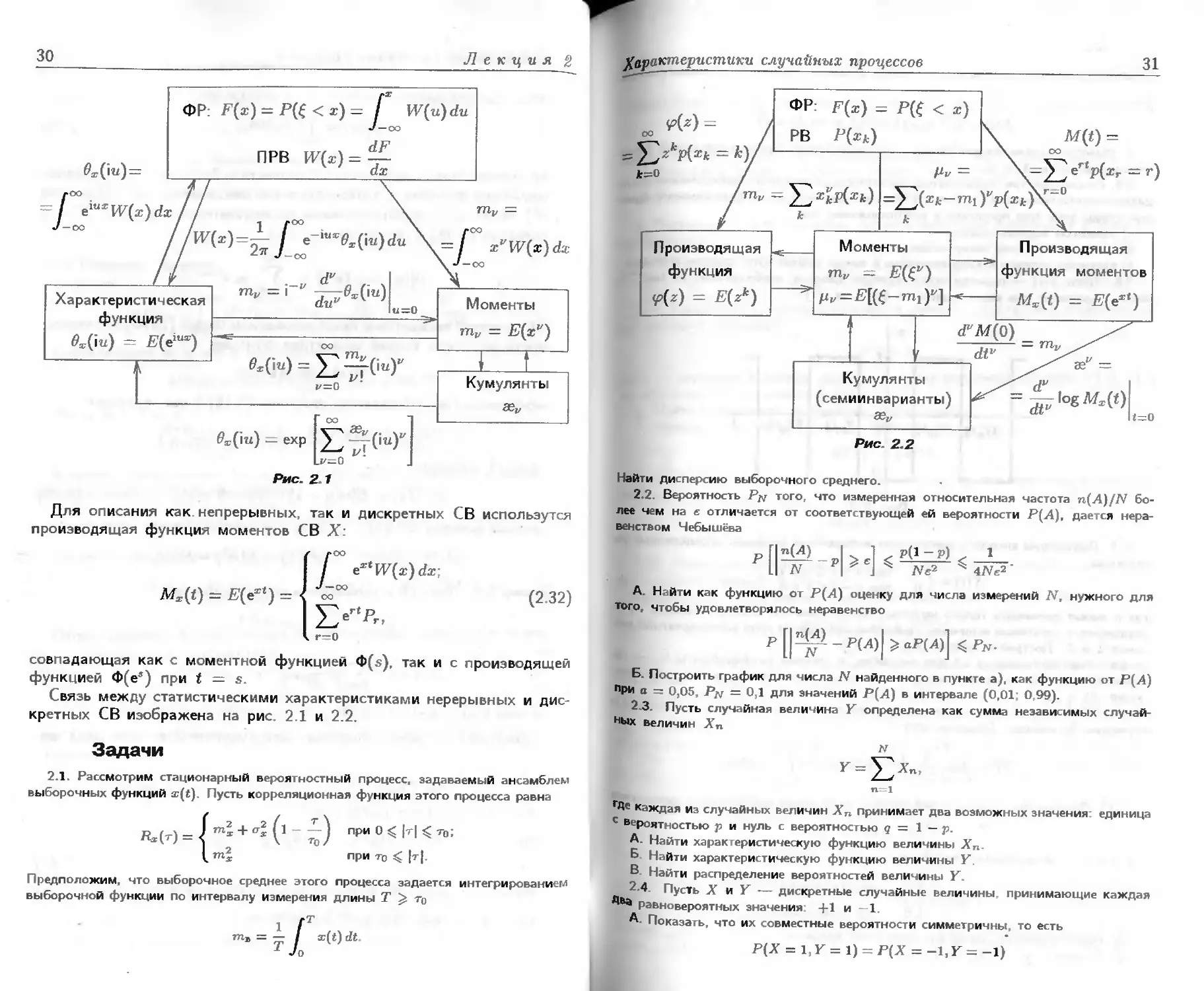
Для описания как непрерывных, так и дискретных СВ испольэутся
производящая функция моментов СВ X:
Mx(t) = E(ext) = <
(2.32)
ОО
г=0
совпадающая как с моментной функцией Ф(в), так и с производящей
функцией Ф(е*) при t — s.
Связь между статистическими характеристиками нерерывных и дис-
кретных СВ изображена на рис. 2.1 и 2.2.
Задачи
2.1. Рассмотрим стационарный вероятностный процесс, задаваемый ансамблем
выборочных функций a:(t). Пусть корреляционная функция этого процесса равна
при О |т| т0;
при т0 |т|
Предположим, что выборочное среднее этого процесса задается интегрированием
выборочной функции по интервалу измерения длины Т т0
771® —
Характеристики случайных процессов
31
Рис 2.2
Найти дисперсию выборочного среднего.
2.2. Вероятность Рц того, что измеренная относительная частота «.(HJ/A' бо-
лее чем на е отличается от соответствующей ей вероятности Р(Л), дается нера-
венством Чебыщёва
Р П 2И) _ РК J Pt1 ~ g) _1_.
L| N ' J A'c2
А. Найти как функцию от Р(Л) оценку для числа измерений N, нужного для
того чтобы удовлетворялось неравенство
Р[|^-Р(Л)|>аР(4)] ^Pn'
Б Построить график для числа N найденного в пункте а), как функцию от Р(А)
пРИ а = 0,05 Pfi = 01 для значений Р(Л) в интервале (0,01 0 99).
2.3. Пусть случайная величина Y определена как сумма независимых случай-
ных величин Хп
N
П—1
гДе каждая из случайных величин Хп принимает два возможных значения единица
с вероятностью р и нуль с вероятностью q = 1 — р.
А- Найти характеристическую функцию величины Хп.
Б Найти характеристическую функцию величины Y.
В Найти распределение вероятностей величины Y.
4 Пусть X и Y — дискретные случайные величины принимающие каждая
Равновероятных значения +1 и —1.
А. Показать, что их совместные вероятности симметричны то есть
Р(Х = 1 Y = 1) = Р(Х = -1, Y = -1)
32
Лекция 2
и
Р(Х = 1,У = -1) = Р(Х = -1,Г = 1)
Б. Вывести выражения для совместных вероятностей через коэффициент корре-
ляции р величин X и Y.
2.5. Рассмотрим три стационарных вероятностных процесса с выборочными функ-
циями соответс венно x(t), y(t) и z(t). Найти выражение для корреляционной функ
ции суммы этих трех процессов в предположении что
а) процессы коррелированы;
6) процессы попарно некоррелированы;
в) процессы попарно некоррелированы и имеют равные нулю средние значения
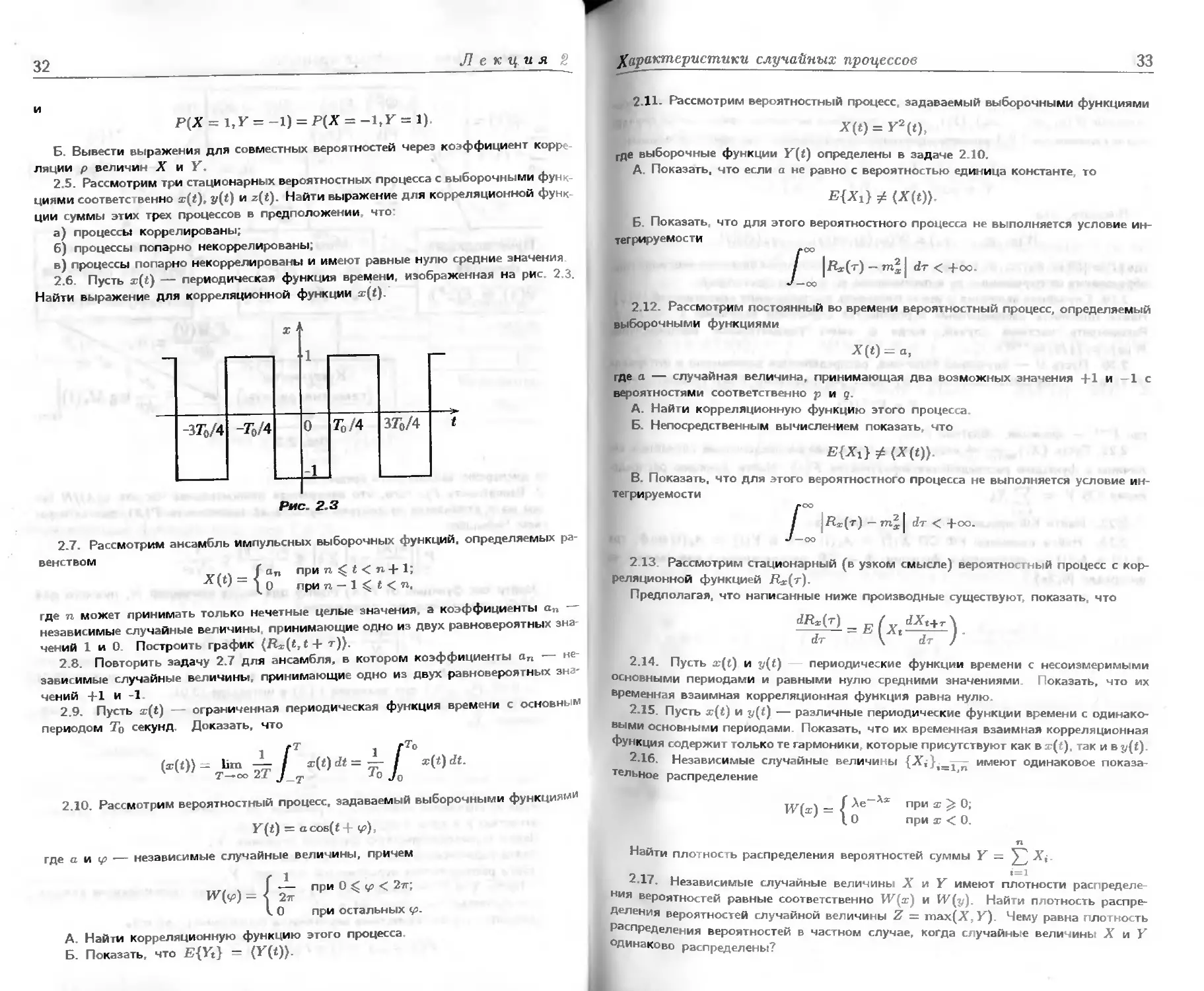
2.6. Пусть x(t) — периодическая функция времени, изображенная на рис 2.3.
Найти выражение для корреляционной функции x(t).
Рис. 2.3
2.7. Рассмотрим ансамбль импульсных выборочных функций, определяемых ра-
венством
vrn_fa„ при га п + 1;
' ' 0 при п - 1 < i < п.
где п может принимать только нечетные целые значения, а коэффициенты а„ —
независимые случайные величины принимающие одно из двух равновероятных зна-
чений 1 и О Построить график {Rx(t,t+ т)}.
2.8. Повторить задачу 2.7 для ансамбля, в котором коэффициенты ап — не-
зависимые случайные величины, принимающие одно из двух равновероятных зна-
чений -f-1 и -1
2.9. Пусть x(t) — ограниченная периодическая функция времени с основным
периодом То секунд. Доказать, что
1 fT 1 гт°
(ar(t)) = lim — / x(t) dt = — / x(t) dt.
7—oo 2T J_T To Jo
2.10. Рассмотрим вероятностный процесс, задаваемый выборочными функциями
K(t) = acos(t-f- у),
где а и tp — независимые случайные величины, причем
при0^<2тг;
I О при остальных <р.
А. Найти корреляционную функцию этого процесса
Б. Показать, что £?{Vt} — (У(4)).
% i перистики случайных процессов 33
2.11- Рассмотрим вероятностный процесс задаваемый выборочными функциями
Х(г) = Г2({),
где выборочные функции F(t) определены в задаче 2.10.
А. Показать, что если а не равно с вероятностью единица константе то
Б. Показать, что для этого вероятностного процесса не выполняется условие ин-
тегрируемости
/ |Лх(т) - m2 j dr < 4-00
•/—оо
2.12. Рассмотрим постоянный во времени вероятностный процесс, определяемый
выборочными функциями
X(t) = а,
где а — случайная величина, принимающая два возможных значения +1 и 1с
вероятностями соответственно р и д.
А. Найти корреляционную функцию этого процесса
Б. Непосредственным вычислением показать, что
В. Показать, что для этого вероятностного процесса не выполняется условие ин-
тегрируемости
I | dr < 4-оо.
•f—oo
2 13 Рассмотрим стационарный (в узком смысле) вероятностный процесс с кор-
реляционной функцией Rx(r).
Предполагая, что написанные ниже производные существуют, показать, что
dr \ dr /
2.14. Пусть з;(() и y(t) периодические функции времени с несоизмеримыми
основными периодами и равными нулю средними значениями Показать, что их
временная взаимная корреляционная функция равна нулю.
2.15. Пусть x(t) и — различные периодические функции времени с одинако-
выми основными периодами Показать, что их временная взаимная корреляционная
Функция содержит только те гармоники которые присутствуют как в □;(£). так и в y(t).
2-16. Независимые случайные величины {Хх}>=1 п имеют одинаковое показа-
тельное распределение
ИЧт) = ( Ае-Ла: приа:>0-
' 1.0 при х < О.
П
Найти плотность распределения вероятностей суммы Y = Х<
217. Независимые случайные величины X и Y имеют плотности распределе
пия вероятностей равные соответственно IVfrr) и W(у) Найти плотность распре-
деления вероятностей случайной величины Z — тах(Х,У). Чему равна плотность
Распределения вероятностей в частном случае, когда случайные величины X и Y
одинаково распределены?
34
Лекция 2
2.18. Пусть {X,} — случайные величины с плотностью распределения веро
ятностей W(a:i,х2,ягп): {К,};_j-~ — случайные величины, связанные со случай-
ными величинами {Xi} взаимно однозначным невырожденным преобразованием
Г4 = Л(Х1,Х2,...,Х„), . = 1^
Xi = Vi(Y1,Y2,...,Yn), i=l“^,
Показать, что
М(зп,у2,.. .,уп) = W(vt(y), v2(y), • • •,¥’n(v))P|>
где [J[ = |D(a;i, x2,. .,xn)JD(yi, y2, - - - ,S(n)| — абсолютное значение якобиана пре
образования от переменных Х{ к переменным у,, у =
2.19. Случайная величина имеет плотность распределения вероятностей W(y>).
Найти плотность распределения вероятностей случайной величины Y = cosv.
Рассмотреть частный случай, когда имеет показательное распределение
W(v) = (1/2)Ле~АИ
2.20. Пусть U — случайная величина, распределенная равномерно в интервале
(0;1), а X — случайная величина с функцией распределения F(jc). Показать, что
X = F~1(U),
где F~1 — функция, обратная F
2.21. Пусть {Xi}t_p^- — независимые одинаково распределенные случайные ве-
личины с функцией распределения вероятностей F(x). Найти функцию распреде-
ления СВ Y = Xfc.
fc=i
2.22. Найти КФ процесса Орнштейна-Уленбека
2.23. Найти взаимную КФ СП X (t) = Ai (t) cosФ и V(t) — A2(t) яшФ, где
Ai(t) и А2 (t) — неслучайные функции Ф — СВ, распределенная равномерно на
интервале [0,2я}.
JJ е к ц и я 3
Теорема Винера-Хинчина для
непрерывных случайных процессов
Рассмотрим реализацию z(t) некоторого случайного процесса на ин-
тервале времени [0; Т] Тогда, как и для обычной детерминированной
функции удовлетворяющей определенным условиям для реализации
справедливо преобразование Фурье
ZOO лТ
x(0e-lwt dt = / хт(/)е'1а;* dt = Xyfiw)
__ -оо Jo
Согласно равенству Парсеваля если X(iw) = ж(0 =
= то
ИЛИ
I Xy(Z) dt —
'о
(31)
r«e Э x^ft^dt —энергия сигнала на интервале [0 Т]
Разделим левую и правую части равенства (3.1) на Т, тогда
Э л 1 [Т 2 , > , 1 f°° |XT(iw)l2 J
— = Pz=x^= — Уо а:т(*) dt= — у ---------------<Ь,
гДе Р — средняя мощность реализации
Назовем величину S'(w,T) — Xr(iw)|2/T периодограммой
Ного процесса X(t).
Перейдем в формуле (3.2) к пределу при Т —► оо Несмотря на то, что
отношение Э/Т при
результате получим сред-
(3-2)
случай
энергия Э возрастает с ростом Т,
оо стремится к конечному пределу В
Нюю мощность реализации в виде
|Хт(М12 ,
11 m - -— dw.
х2 = lim — /
т— Т Jo
Введем среднее значение S-r(w) периодограммы по ансамблю реали
3аЦий St(u>) — Е {|Хт(|ы) 2/Т} Тогда справедливо соотношение
S(w) = lim E{S(w,T)} = lim Sr(w).
36
Лекция 3
Следует отметить, что хотя данный предел и существует, однако, дис-
персия случайной величины S(u>,T) (периодограммы) может не стре-
миться к нулю.
Окончательно получим соотношение
1 Г00
Е{£2} = — J S(w)du. (3.3)
Слева в формуле (3.3) находится мощность случайного процесса, следо-
вательно, размерность величины S(f) [S^/)] = [Вт/Гц] = [Вт-с] — [Дж
Поэтому S'(w) наэь вается спектральной плотностью мощности, иногда
просто спектральной плотностью, или энергетическим спектром (ЭС)
Если случайный процесс имеет не равное нулю среднее значение
тпх — const 0, то энергетический спектр удобно представлять в виде
S(u) — пг22тг5(ш) + S~(u),
(3-4)
где — энергетический спектр флуктуационной составляющей;
6(ш) — дельта-функция.
При интегрировании в (3.3) первое слагаемое в правой части выраже-
ния (3.4) даст то есть мощность постоянной составляющей, второе
слагаемое — мощность флуктуационной составляющей, то есть диспе-
рсию случайного процесса
1 Г00
Теорема Винера—Хинчина (справедлива для стационарных слу
чайных процессов):
S'(w)= [ аде-^т dr; (3.5)
J—оо
ад - Л / s(wywT du, (з.б)
J оо
где /?(т) — корреляционная функция случайного процесса.
Доказательство теоремы проведем при допущении нулевого средне-
го значения случайного процесса тх = 0. Докажем вначале справед-
ливость равенства (3.5). Будем рассматривать реализацию случайного
процесса на интервале t £ [—Г;?1], тогда
A/rfiw) = J x(t)e“lu,< dt.
Среднее значение St(<u) ~ E{S(u,T)} периодограммы S(u,T) за-
пишем в виде
ST(u) -- E{S(u,T)} = = ±£{ХТ(ЧХ;(Ч} -
Теорема Винера-Хинчина
37
R(u-v)e~u<u-v') du dv.
Таким образом, получим
St(w) —
-V)dufJv
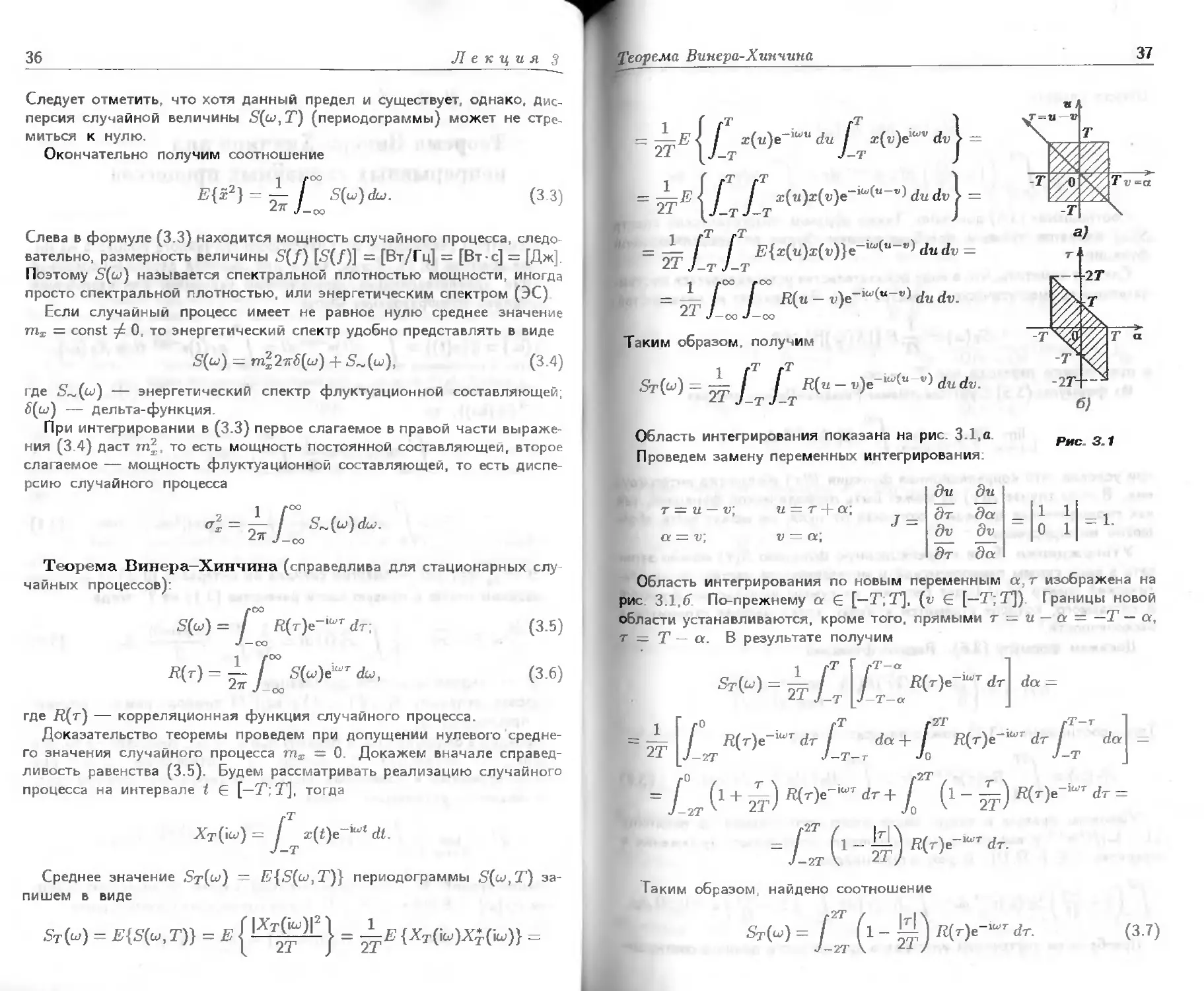
Область интегрирования показана на рис. 3.1 а
Проведем замену переменных интегрирования
т — и — и; и = т 4- а;
а — и; и ~ а;
ди ди
дт да
ди ди
дт да
Область интегрирования по новым переменным а,т изображена на
рис 3.1,б По-прежнему a £ [—Т Т], (и 6 [—Т;Т]) Границы новой
области устанавливаются, кроме того, прямыми т = и — а = —Т — а,
т = Т - а. В результате получим
Таким образом найдено соотношение
= У(1 - И) ВДе— dr. (3.7)
38
Лекция з
Откуда следует
S(w) — lim St(u) —
Т—юс
Соотношение (3.5) доказано. Таким образом, энергетический спектр
S(w) является прямым преобразованием Фурье от корреляционной
функции.
Следует отметить, что в ходе доказательства устанавливается неотри
цательность энергетического спектра 5(ы). Это следует из неравенства
ЭД = ^Е{№)|2}>0
и предельного перехода при Т —♦ оо
Из формулы (3 5) с учетом леммы Римана—Лебега следует
lim -S(u>) = lim [ R{r)e~1UT dr — 0
|<v|—*00 (17-+00 /
при условии, что корреляционная функция 7?(т) абсолютно интегриру-
ема. В этом случае Л(т) не может быть периодической функцией, так
как периодическая функция, отличная от нуля, не может быть абсо
лютно интегрируемой
Утверждение. Если корреляционную функцию й(т) можно запи-
сать в виде суммы периодической и интегрируемой частей, то энерге-
тический спектр будет состоять из суммы импульсных функций
и слагаемого, которое стремится к нулю, когда частота стремится к
бесконечности.
Докажем формулу (3 б). Введем функцию
RA-r)
Тогда соотношение (3.7) можно записать
[2Т ,оо
St(w)= / Ят(т)е-“Т dr = /
J-2T J-oo
в виде
(3.8)
Умножим правую и левую части этого соотношения на величину
(1 |w|/f2)e,wt и выполним интегрирование полученного выражения в
пределах ш € [—0; Q] В результате найдем
ZO / I \ Г<х> гП
II —— I S7’(w)elwt dw= / RA^dr I
П\ “ / J-OO J-n
e-iu,(r-0
Преобразуем внутренний интеграл в правой части данного соотноше-
Теорема Винера-Хикчина
39
ния используя формулу Эйлера,
В силу нечетности подынтегральной функции второе слагаемое
(мнимая часть) равно нулю. Тогда получим
2 |П 2
1 =-----sinw(r —0 — - / w cosw(r — t) dw =
т • t Io jq
2 2 w ifi 2 i«
=-------sin Q(r — t) — -----sin u(r — 0 — —------— cos w(r — Z) =
т-t v ’ Нт-t ' 'Io Q(r-02 V 'Io
2
= O(r-t)2^1 “ cosfi(T ~ *>1 =
= fi
4sin2fi(r — 0/2
Q(r-Z)2
sin Q(r - 0/212
. П(т-0/2 .
= Ф(П, r - t).
Таким образом, приходим к соотношению
I (1-У)5т(а>)е“г^= [ Ф(О,т - t)RT(r)dr. (3.9)
J-n X n / J-oo
Перейдем к пределу при О —♦ оо. При этом учтем соотношение
lim Ф(П,т-0 = 2тг«(т 0 = {£° ПРИГ=5
п-оо v v ’ Ю прит^Т
Кроме того, учтем фильтрующее свойство дельта-функции
f Rr(T)S(T — t')dr = Rr(t).
J—oo
Б результате при О —» оо по (3 9) находим
lim [ (l-^-\sT{w)e,utdw= [ ST(^ywt du = 2nRT(t)
и
• следователь но, окончательно получим
ft(r) = Tlimj /?г(т) - J hm Sr(w)eia" dw = ~ J S(u>yut dcu.
c ~TO (ЗЮ)
^Х-оотношение (3.6) доказано: корреляционная функция 7?(т) является
Ратным преобразованием Фурье от энергетического спектра
Перечислим свойства энергетического спектра S(w).
40
Лекция S
1 Интеграл от S(w) представляет собой среднюю мощность случай-
ного процесса. По (3.6) находим
1 У00
Л(0) = Е { X\t)} =— S(a>) dw.
2* J-oo
2. Энергетический спектр вещественного случайного процесса веще-
ствен. Учтем четность корреляционной функции /?(т), тогда
S(w) - /" Н(г)е~шт dr = 2 /" Я(т) coswt dr.
J—оо J0
3. Энергетический спектр S(a>) неотрицателен (показано ранее), что
следует из неотрицательности StIlE) и предела при Т —> оо.
4. lim S'~(u>) — 0.
|cv|—*оо
5. Энергетический спектр — четная функция частоты, т.е S’(— ы) ~~
— Действительно по (3 5)
di---
1ШТ dr =
Формулы (3 5) и (3 6) справедливы и для взаимных КФ и ЭС
&y(w) — / Rxy(r)e~'WT dr;
1,00 (3-11)
= x- / S^ry^dr,
J —oo
причем в силу свойства взаимной КФ (2.3)
&у(") = ^(щ), (3.12)
где звездочка — знак комплексного сопряжения.
Функция Sxy[w) — комплексная, даже при вещественных СП Х(У) и
У(У). ReSj-^w) и Ре,5'у3;(ц>) — четные функции частоты, и
Im 5'y3;(cj) — нечетные функции частоты.
Пример 3.1 Найти ЭС СП, если его КФ имеет вид
Щт) = с ат2, а>0.
Решение По теореме Винера-Хинчина ЭС
5(ш) = ЙЛ(т)]= / e-“T2e-i“TdT =
J — оо
— [ е-«[т2+2(1ш/2ог)]^т _ f e-o(r3+2m)j^
J—оо «/—оо
Теорема Винера-Хинчина
41
где т = \и>/2а.
Дополняя до полного квадрата выражение в скобках, получим
S(u/) = e“m2 [ e-(’’+m)3 /2<г2 dT. (3.13)
*/--СО
где о = 1/л/2а.
Таким образом,
S(w) - сгл/27ге°""2 = v/^e-Q'2/4“. (3.14)
Пример 3.2 Найти ЭС СП, если его КФ имеет вид:
jR(t) = <r2e~coswoT.
Решение Используем соотношения (2.15) и (2.16) при /(t) = а2е—crr2, f(u») =
— <г2л/^е—г"2/4“. Тогда получим:
—(cj - OIQ )2 -(а> + шо)2
ехр —-------— + ехр —1-------—
4а 4а
Пример 3 3 Определить ЭС СП, если его КФ имеет вид
R(t) = Л-“Н (1 + а|т| + ~а2т2).
Решение Обозначим
J - J(a,u) - — / eiG'T<r2e-c>l’’l dr.
2тг J-oo
Очевидно,
о/ х у W a2a2J
дсх 3 da2
Используя известное соотношение (см. задачу 3.2)
2сг2а
= -2 , ,, (3.15)
О'2 + О'2
После дифференцирования по а и простых преобразований получим
\ _ 16g2 О5
3(ш2 + О2)3 '
Пример 3 4 Пусть имеется СП
X(t) = aei(“'‘-*>>,
где ш — СВ, имеющая ПРВ IVftv), <р — СВ равномерно распределенная в интервале
(~7г|’г). Выразить ЭС Sx(w) через ПРВ W(w).
Решение. В примере 2.7 получена КФ
Используя теорему Винера-Хинчина. находим
Sx(w) — 2тга21Т(ш). (3 16)
Следовательно,
^(ш) = „ 2 ; “2 = [ Sx(w) dw — Rx(0}.
2?raz 2тг /
42
Лекция 3
Эффект Доплера
Спектр излучения
Принятый спектр
Пример 3 5 Эффект Доплера [18]
Генератор гармонических колебаний расположен в точке Р оси абсцисс (рис. 3.2) и
движется в направлении этой оси со скоростью V. Излучаемый сигнал «о(t) — е1"0*.
а сигнал принимаемый потребителем в начале координат (в точке О) имеет вид
s(t) = ае^о(‘-г/с>,
где с — скорость света, г — го + Vt Пусть скорость V — СВ с ПРВ WV(K).
Очевидно, что
s(t) — ае” w — оэс ( 1-I ; v =-------•
Следовательно, согласно (3.16) можно записать ЭС S(u/) принятого сигнала
5"(ш) = 27ra2W(to) = 2?га CWv [^1 - -W ) с] .
При вычислении ЭС S(w) используется преобразование ПРВ
W(u) = Wv[V = v(w)] ,
| du; j
где
f x Л w A I c
= 1-------I c; — = —.
\ cuq / | dw | u»o
Пример 3 6 Пусть СП x(t) имеет вид
a?(t) = aeiwt,
где a — СВ; и; = const.
Найти КФ СП 2?(t).
Решение КФ определяется из соотношения
Н.(*132) =
где звездочка — знак комплексного сопряжения. Подставляя значение СП a:(t),
получим
= Е (ае‘“‘* - a*e-iwt2) = Е(|а|2)е1ш('>-‘2’.
Следствие. Пусть СВ ац — некоррелированные, имеющие нулевое
среднее значение и дисперсию тогда СП
= (3.17)
к
имеет КФ
-- = Я(т), т = ti - t2.
к
Теорема Випера-Хинчина
43
Таким образом, СП х(/) является стационарным в широком смысле.
Используя второе определение 6 функции получим ЭС S'(w)
S(^) = (г)] = 2тг af(a> - u>i)
к
(3.18)
Задачи
3.1 Найти КФ случайного процесса a;(t) = Acos(u>ot + v), где А, ыо = const; —
СВ равномерно распределенная интервале [0,2тг), W(v) = 1/2тг; £ [О, 2тг).
3.2 . Найти ЭС СП X(t) если его КФ Rx(r) — a^e~alrl.
3.3 . Найти ЭС СП X(t), если его КФ Rx(r) — сг2е—“И coswor.
3 4. Стационарный СП имеет КФ
Rx(t) = <z2e-“l’-|(l + о|т|), о > О.
Найти ЭС СП
3.5. Энергетический спектр СП X(t) имеет вид .S(w) = l/(w*+u>2 +1) Найти КФ
Лекция 4
Теорема Винера-Хинчина для
дискретных случайных процессов
Рассмотрим дискретный случайный процесс (случайный процесс с
дискретным временем) в форме последовательности случайных вели-
чин Xi = ti = О, ±Т, ±27.где Т — интервал дискретизации
Ограничимся интервалом времени То — NT, где N — целое число. Вве-
дем приведенную частоту w — шТ и покажем, что эквивалентом первой
формулы Винера-Хинчина (3.5) будет ряд Фурье, коэффициентами ко-
торого являются отсчеты корреляционной функции
Рассмотрим вначале некоторую функцию /(w), периодическую с пе-
риодом 2тг и удовлетворяющую условию Дирихле. Запишем ряд Фу
рье при ш Е [—тг;тг]:
ОО
/(*) = £ Спе-^
п=—ОО
где с„ = a>)etnu du>. Согласно теореме Парсеваля
Предположим, что дискретный случайный процесс имеет нулевое
среднее значение
= 0 при любом i
и представляет собой стационарный в широком смысле случайный про
цесс с корреляционной функцией такой, что
К(г - ]) = Е{ячя:,},
7?(0) = £'{х2} = сг2 — const при любом г.
Аналогично комплексному спектру A'(iuj) непрерывного случайного про
цесса введем функцию (спектр реализации СП)
оо N
/(«) = У2 Хк^~1кШ => У? Хке~'кЫ =
k=—OQ k——N
Сформируем неотрицательную величину (среднее значение периоде'
граммы)
45
Теорема Винера-Хинчина для дискретных СП
F =2J^n®{IM°)l2} =
- N N
= Е Е =
j = -Nk=-N
1 N N
= «тт, Е Е
j = -Nk--N
Введем новые индексы суммирования (рис. 4.1)
т = j — k, I — к Тогда получим
s"<°> “ г2-! Ё Ё =
l=-W m=-N-l
Рис. 4.1
N
IN N-m
0
1
2^+ 1
0
2N
—imcj
.m~-2N I——TV—m
-N
m
m=l
tma>
m=-2N
IN +1J ' ‘
m_ — 27V
2N 4-1
В пределе при N —> co (при условии ^2|/?(m)| < co) находим
m
S(u>)~ lim SN(u) = й(т)е-‘тш. (4.1)
m=—co
Таким образом, энергетический спектр дискретного случайного про-
цесса является рядом Фурье, в котором отсчеты корреляционной функ-
ции 7?(п) являются коэффициентами Фурье сп.
Найдем выражение для коэффициентов сп ряда Фурье
Введем функцию
7?jv(m) —
при |ш| 2N-,
(О
при |ш| > 27V.
46
Лекция J,
Тогда получим
оо
12 = 12 (4.2)
т=-2W т=— оо
Умножим обе части этого соотношения на егги‘>, после чего интегри-
руем в пределах й> € [—7г;тг].
Используем выражение для символа Кронекера
6тп = ± Г е = Л при тп = п;
2тг J_Tr Ю при т ф п
В результате получим (справа в (4 2) останется одно слагаемое /tjv[?i])
Переходя к пределу при N —* сю с учетом (4 1), окончательно находим
аналог второй формуль Винера-Хинчина
Здесь
Я(0)=Е{а:?}=<72= 1 f S(U)dcJ.
Свойства энергетического спектра дискретного случайного процесса те
же, что и для непрерывного случайного процесса, и, кроме того, энер-
гетический спектр обладает периодичностью с периодом 2-тг.
Таким образом, теорема Винера-Хинчина для дискретных случайных
процессов записывается в виде
“ - If"
S(w)= V Я[п]е-,ШП Я[п] = / S(^)eiwnJu>. (4 3)
2тг /„
Запишем ЭС в форме функции переменной z = е1ш
S(z) = S(e™) = S(w).
Тогда S(z) представляет собой двустороннее z-преобразование корре-
ляционной функции
S(z) = У = У R[n]z~n + У Я[п]г-П - Я[0] =
П = — оо п=0 п= —оо
-^i(^) + S2(z)-B[0], (4.4)
Теорема Винера Хинчина для дискретных СП
47
где 5x(z) = 77[n]z " — одностороннее z преобразование функции
R(t) при t 0;
0 при t < 0.
ло =
По (4 4) получим
— Я[0] + 2 7?[n]cosnw. (4 5)
п~0
Для корреляционной функции Я[п] может быть получена формула
обращения Для этого учтем замену переменных под интегралом (4 2
Z = eiw, dz — e^idw, отсюда dw = (l/i)e_ludz — (\/\z)dz. Тогда при
w G [—я-;тг] |elw| = |cos£7+ isinwj = |z| = 1 В результате нахо-
дим формулу обращения
= S(z)zn~ldz.
J|z|=l
(4.6)
Пример 4.1. Пусть корреляционная функция Я[п] дискретного случайного про-
цесса имеет вид
, ,sin2(n.*72)
Д[п] = о2—л=0;±1;±2;...
(nir/2y
Требуется найти ЭС S(u»).
Решение По условию КФ имеет вид
{а2 при п — О;
4<т2/п2тг2 при нечетном п;
О при четном п ?£ О.
По (4 1) получим
5(й7) = 7?[п]е——тг -тг
п=—оо
Отсюда
— 1 оо
Sp) = o2+ ВДе-<п“ + ^Н[п]е-<’*“ =
п=—оо п=1
= Я[п] (е"‘ш + е-п“) = + 2 Я[п] совпоГ =
п=1 п=1
_ оо
2 8cr2 cos(2fc— l)u? —
+ “ 2_> (2fc —I)2 ~
' _ 1 _
cos и; Ч— cos3w
. 9
ажем что получен ряд Фурье для треугольного импульса
при |tu| «С
при |й>| тг.
(4.7)
48
Лекция
Доказательство:
if" - — 2<т2 [ ( ш\ _ _ , sin2(zi7r/2)
Ип] — •— / S(oi)e o'w = ----------- I 11-----I cosnw dw = <z2 —-----
J 2тг / V ' tv L \ it? (птг/2)2
—If U
Пример 4.2. Энергетический спектр имеет вид
с2
5(й) = ---------------------------------:-----, а < 1.
1 ’ (nfa- а)(е-1<г - а)
Найти КФ СП.
Решение По формуле (4 2) получим
с2 е,п“
Rfal = / —---------------------- dti.
2тп У_1г (е1“ — or)(e w — or)
По формуле (4.6) находим
<? [ z"
Д[п] = — ф ---------—------dz = с Resz=a/(z),
2,г J|z|=l (2 “ “К1 “ azi
где /(z) = хп/[(z — о)(1 — ofjs)]- Вычисляя
Ofn
Resz=a/(z) = lim /(z)(z - a) = --
z->a 1 — Ot^
находим, что при n 0
1 — az
Учитывая, что КФ является четной, окончательно получим
„ С>1
R[n] = с2---п = О, ±1, ±2,... (4-8)
1—0(2
Пусть R[n] = а "I. Найдем ЭС СП в z-форме, используя (4 4)
СО СО
х—V—' 1 1 (1 л )z
S(x) = V anz~n + V(oz)n - 1 = —------- + ---- 1 = I . --r
' 1 - az-1 1 - az (z a)(l — az)
n=0 n=0
Таким образом, если КФ R[n] = tJnh то ЭС СП имеет вид
S(z) = t1-"2)* . (4.9)
U (z-a)(l-az)
Используя (4.9), нетрудно показать, что функция S(z) вида
S1 (г} = 1 + _J_ _ ^-^z + z-1) (4 w)
' 1 — az-1 1 az (1 — az-1)(l — az)
соответствует КФ R[ti] — те ,$i(z) — где знак двусто-
роннего z преобразования.
Пусть по заданному непрерывному СП х(/) формируется дискретный
процесс а;[п] = х(пТ), где Т — интервал дискретизации. Тогда сред-
нее значение и КФ дискретного СП связаны с отчетами непрерывного
СП следующим соотношением:
щ[п] = тц(пТ); /фи, пг] = Ин(п1Т, п2Т),
где mjjft) — среднее значение и КФ нерерывного СП ЕсДй
Теорема Винера-Хинчина для дискретных СП
49
СП x(t) стационарный, то и СП ж[п] тоже стационарный со средним
значением т — m/j и КФ Я[ш] = йн(тТ),
Энергетический спектр S (е1ш) дискретного СП определяется соот-
ношением
5'(ei“) = RH(mT)e-ima (4.11)
Щ—“ОО
Используя формулу суммирования Пуассона, можно показать спра-
ведливость соотношения [18]
£ адп.?).-"" 4 £ S, . (4.12)
J \ J. /
7П=—ОО П= —ОО Х Z
Пример 4.3 Пусть непрерывный СП a:(z) имеет вид (3.17)
ж(*) ~ X^c*e><Vfct> = 2тг - wfc); а® = Е(е£).
к 1 fc=i
Найти ЭС S(eio) СП я?[тг] = х(пТ).
Решение Во-первых, покажем справедливость равенства 5(u>/T) = T£(cv). По
второму определиию дельта-функции
[ e-itu/Tdt-T~ [ e~i'lwdu^T6(u>)
\Т/ 2тг / 2тг /
J “ОО J —оо
Следовательно, по (4.11) и (4 12)
оо q
S’(e^) = 2тг — Dj. 4* 2тгп);
n=—оо к=1
В интервале й> € (—тг, тг) содержится q спектральных линий, поэтому [18]
I '• S (е1С) = -)0fc), |u>| < эг; Рк = &к - 2?rnfc; |/3fc| < тг.
fc=l
Вычислим КФ СП я;[та]:
R[m] = 2 / S (eia) eimad^ =
k=1
Причем здесь учтена четность КФ.
Задачи
4.1 Пусть КФ дискретного СП имеет вид
Н[п] = Пе“»‘т1п1, н > О
Найти ЭС S(z) и S(w).
4.2 Пусть ЭС дискретного СП имеет вид
_ ___________ 1 - <Р______________
(1 — 2dcoscD + <Р)(1 — 2di costD + dj) ’
ГД€ d, di < 1. Найти дисперсию этого СП.
Лекция 5
Гауссовские случайные процессы
Одним из самых распространенных СП является гауссовский СП Это-
му способствует ряд причин
во-первых гауссовские СП хорошо аппроксимируют многие экспери
ментальные данные;
во-вторых, СП становятся гауссовскими согласно центральной пре
дельной теореме когда эти СП возникают как следствие наложения
большого числа малых воздействий;
в-третьих, отклик узкополосных линейных систем, как известно, име-
ет гауссовский характер даже в том случае, если на вход воздействует
СП с негауссовским распределением
Рассмотрим некоторые свойства гауссовского СП, которые будут ис
пользованы в дальнейшем
Распределение (ПРВ) одномерного сечения СП имеет вид
W(x) = -2—= N(msci ff*), (5.1)
де тх = Е(Х) — среднее значение СВ (математическое ожидание),
<гх = Dx = Е[(Х — тх)2] — дисперсия; <гх — y/Dx — среднеквадра-
тическое отклонение СВ.
При этом характеристическая функция 0х(\и) — Е(е1их) имеет вид
^(i«)= eium’-"2^/2. (5.2)
Центральный момент порядка п имеет простой вид
_ J 1-3-5. . (п — 1)<тп при четном п 2;
0 при нечетном п ' '
Соотношение (5.2) справедливо и для начальных моментов если по-
ложить 1У(ж) = N(0,<r)
Действительно, сразу замечаем, что начальные моменты нечетного
порядка равны нулю из-за четности ПРВ VT(—х) — W(o:). Для дока
зательства первого соотношения (5.3) необходимо к раз дифференци-
ровать по а равенство
рауссовские случайные процессы
51
При этом получим
1 - 3 -... - (2Jfc - 1) Г я
2k у a2k + l
Подставляя а = 1/(2а2), придем к требуемому результату.
Покажем справедливость соотношения
№П =
1 3...(п — 1)<тп,
2kk><r2k+1y/2/^,
при п = 2k, п 2; . ,
при п = 2k + 1, к = 0,1,... '
В силу четности ПРВ придем к равенству
Jr°° 9 г©о о о Э Г
' x2k+^W{x)dx = -^ I
о (т\/2тт Jo <ту2тг
Воспользуемся подстановкой у = х2/2сг2, тогда найдем
ГОО 1 гоо
/ = / x2fc+1e X*i2c3dx = i(2<r2/+1 / ук е~у dy— 2к а2к+2к\.
Jo 2 Jo
Здесь использовано равенство (доказывается методом математической
индукции)
I yke~ydy=k\.
Jo
Таким образом доказана вторая строка соотношения '5.4)
Функция распределения F(x) = Р(Х SJ ж) при m — 0 и <т = 1 на
зь вается интегралом вероятности
F(x) = L_ Г e~u*l2du. (5.5)
у2тг J-oo
Наряду с ним используется интеграл Лапласа (рис. 5.1)
Ф(х) = JL Ге U^2d-u- Ф(-х) = -Ф(х). (5.6)
у2чг Jo
Обозначим через F±(x) функцию распределе
ния при ПРВ (5 1), тогда нетрудно показать что
справедливы равенства 05 —~~
г, , . ^,(х — тп\ 1 . /х — т\ 0 ®
Г1(^) = F -------- = Т +Ф --------- • <5-7) -0,5
\ сг / 2 \ <т /
Двумерное гауссовское распределение характе- Рис- 5-1
РИзует пару сечений X и Y гауссовского случайного процесса и имеет вид
ттлг \ 1 Г 1 f(x-mi)2
W{X'Л = 2,.,^!-^ “Р Г 2(^7) Н?Г
52
Лекция 5
2р(х -mi)(y-m2)
«Г1<72
(у- ?п2)2
2 СТ 2
(5-8)
где р — cov(X,У)/<71<72 = Р-11 — смешанный централь-
ный момент порядка 1 + 1 (ковариация); «г2 = г2 = Е{(Х — mi)2}-
г2 = а2 = £?{(У-т2)2}; пц - £{%}; т2 _ Е{У}.
Формула (5.8) может быть записана в более компактном виде, если
ввести стандартные случайные величины
_ X - пц
О’!
Y -тп2
q=---------
0"2
Тогда по (5.8) получим (якобиан преобразования равен произведению
о-то-г)
W{i,n) =
1 Г
-----> ехР (
2тгтУ1 — р2 (
так как здесь £/{£} = 0 = Е{т)}; <т2(£) = 1 = tr2(7?).
Можно сформулировать следующую теорему.
Теорема 5.1 Если гауссовские случайные величины X и Y неза-
висимы то р = рху = 0. Если рху = 0 и двумерное распределение
гауссовское, то X и Y независимы.
Нетрудно доказать, что
1 Ptvy Т
причем если рХд = 0, то случайные величины X и Y называются некор-
релированными, если рху — ±1, то — линейно зависимыми
Совместная характеристическая функция имеет вид
^y(iui,iu2) — ехр Цнцщ + тп2и2) - ^(cr2w2 + 2pcricr2«i«2 + ^u2) •
При наличии зависимости гауссовских случайных величин можно най-
ти условную ПРВ W(y | ж), если разделить двумерную ПРВ W'(x,j/) на
одномерную ПРВ ГУ(ж). Для стандартных случайных величин получим
I €) = Г~-....exp
у/2тг(1 -р2)
(л~р£)2'
2(1 -Р2).
Таким образом, условная ПРВ является гауссовской с условным ма
тематическим ожиданием — р£ и дисперсией 1 — р2. Находим
1 ’’=ехр {’Ма-л11' ’ 1 <5’9)
где ту|ж = m2 + mi) Дисперсия сг2^ — — р2) не зависит
от х и называется остаточной дисперсией
Гауссовские случайные процессы
53
Обозначим х = Ху, у = х2, о*^ = о*^^, пг,,^ — тх^Х1 =
,-,/14 2 D 2 о Д®2®1) Дж1Ж2)
= Е(х2 I Ж1); o-j = Яп; o*j = R22; р - ------- = - }- - =
^1^2 VXClltl22
Ri2/\/RiiR22 и положим mXl = ту = 0; тХ2 — т2 — 0, то
гда получим
Е{х2 | а>!) - ажц а - R12/R11. = Р22 ~ «Я12 = Р- (5.10)
Тогда по (5 9) находим
Ж(х2 | xi) = ^__e-(^-«xt)2/2P (5.11)
Для многомерных случайных величин це есообразно пользоваться
матричными обозначениями. Пусть ж — матрица-столбец, образован-
ная величинами Ж] и х2:
х =
3?1
Ж2
ан — матрица-столбец с элементами иу и и2.
«1
«2
Транспонируя эту матрицу, получаем матрицу-строку
uT - [ui; и2].
Используем равенство
UTX = UlS] + и2х2.
Тогда характеристическую функцию случайных величин Х\ и Х2 мож-
но записать в виде
6к(|1Х1,!«2) = 0Х( u) = £7{exp(i«iXi + hz2X2)} = £?{exp(hi X)}.
В частном случае, если Ху и Х2 гауссовские случайные величины, по-
лучим
^х(!ть) = exp j m и — —и Ли
гДе m — матрица-столбец средних значений:
тп, =
ту
т2
ту = Е{Ху},т2 = Е{Х2}-,
А- — матрица ковариации*
0*1 cov(Xi,X2)
cov(Xi,X2) о*|
О-J с-уа-2р
0*10*2/9 <Т2
54
Лекция 5
где &l=E {(Xi — mi)2}, (т^—Е {(Х2 - тп2)2}, p=cov(Xlt X2)/o*iO*2
Пусть Хт. и Х2 имеют нулевые средние значения и с помощью линей-
ного преобразования из них получены случайные величины
Z\ — auZi + Ctl2^2>
Z2 — Oi2Zi + 022^21
или в матричном виде
Z = АХ
где А — матрица преобразования*
А = an “12 ; Z=[Zi,Z2]T.
И21 «22} 1 J
Находим E{Zi} = 0 — E{Z2}.
Возводя в квадрат и усредняя каждую строку соотношений для Z]
и Z2, получим дисперсии:
О’2, = а11^2 + 2аца12<Т1О*2Р + а|2о*|;
С2а - а2!47! + 20210220*1 <?2Р + а22°2
Аналогично, перемножая строки этих же соотношений и усредняя
находим
cov(Zi, Z2) — E{Z}Z2} — аца21(т2 + (аца22 + a2iai2)<Ti<T2p + ai2o22o*;.
Непосредственным вычислением убеждаемся, что матрицу pi ковари-
аций случайных величин Z] и Z2 можно выразить в виде
ц = АЛАТ
Характеристическую функцию случайных величин Z\ и Z2 можно
записать в виде
0x(iu.) = Е {ехр( uTZ)} .
Находим
0x(ru) — Е {exp(iuTAX)} = Е {exp(i*u?X)} = #®(iwT),
где w = [Ат*и]. Если Xi и Х2 — гауссовские случайные величи-
ны с нулевыми математическими ожиданиями, то их характеристиче-
ская функция
0ж(|чв) = exp f—^чвтАад j
Из определения w и равенства ц — АЛАТ следует, что
гв'Лче — •и.тАЛАти = -uTpiu
Гауссовские случайные процессы
55
Отсюда с учетом равенства Z — АХ находим, что характеристическая
функция случайных величин Z\ и Z2 имеет вид
0z(iu) - exp ^-uTp,-u,
И представляет собой характеристическую функцию пары гауссовских
случайных величин с матрицей ковариаций р,
Таким образом, в результате линейного преобразования пары гаус-
совских случайных величин снова получается пара гауссовских случаи
ных величин.
Многомерная совместная ПРВ N стандартных гауссовских случайных
величин Хп-. 2?{ХП} = О, £7{Х2} ~ 1, имеет вид
lVx(xi,®2, - -,хп) =
где р пт — алгебраическое дополнение элемента pnm в определите-
ле корреляционной матрицы
Ри Р12 Pin
р21 Р22 P2N
PN1 PN2 PNN
ГДе Ртт — Рпп — 1-
Соответствующая совместная характеристическая функция
0»(i«i,iu2,
itl/v) = exp
или в векторной форме
йх(ги) = ехр
гДе -ц = • • .,«w]T
введем вектор-столбец ж = [®1(х2,. - -, in]1, тогда ПРВ можно за-
висать в векторной форме-
= (2тг)-^2|рГ1/2е-<1/2>1'>х
Рй ненулевых математических ожиданиях случайных величин Хп по
Мучаем многомерную ПРВ соответственно в скалярной и векторной фор-
мах
W(xl,x2,...,xn) —
56
Лекция 5
- N N
1 1 «—1 m —
)(®m ^rn)
IV(®) = (2тг)-лг/2|А|-1/2е-|(*-т)1л (5.12)
где A|nm — алгебраическое дополнение элемента Лпт в определите-
ле А матрицы ковариаций
Ли Л12 • Л1ЛГ
|А - Л21 Л22 • Л2лг
Лдч Aw2 •
в которой 1\пт = £{(жп - mn)(a-m - mm)} = <тп<гтрпт, ™ — вектор-
столбец математических ожиданий m = [mj, т?, ..., тдг]т.
При этом многомерная характеристическая функция принимает вид
(К 1 W N
12 m,iUn - 2 KnmUnUm
П=1 П=1го=1
или в матричной форме
0x(in.) = ехр НтЛи. — — иЛЛи
(5.13)
Предположим, что N стандартных гауссовских случайных величин
Хп некоррелированы, тогда
_ / 1
Рпт — 1л
при п = тп;
при п т.
При этом матрица р вырождается в единичную I Тогда р = I, рх =
= хтх = 52 хп< Р = 1 и поэтому получаем ПРВ
П = 1
V7(xi, а?2, - • • > #п) = (2тг) ехр
7V
= П WM-
П=1
Отсюда следует вывод: если N гауссовских случайных величин некор-
релированы, то они независимы.
В случае гауссовского случайного процесса Хп = Xftn') в матри
це ковариаций
Лпгп — ^n)(-^Gn ^m)} — • ( 5.14)
Если случайный процесс стационарен в широком смысле то его кор-
реляционная функция Rx(tn,tm) зависит лишь от разности отсчетов
Rx(tn,tm) = Rx(tn — tm), а математическое ожидание — постоянная
величина тп = тпт = т. Тогда оказывается, что Лг-мерная ПРВ зави-
Гауссовские случайные процессы
57
сцт лишь от разности отсчетов Таким образом гауссовский случайный
процесс, стационарный в широком смысле, является стационарным и
в узком смысле.
Теорема 5.2. Для ауссовских СВ Х{, г — 1,4, с нулевыми средними
значениями Е(Х{) = 0, i = 1,4 справедлива формула
Е(Х1Х2Х3Х4) = (5.15)
= Е^Х^УЕ^ХзХ^ + Е(Х1Хз)Е(Х2Х4) + Е(ХГ Х4)ДХ2Х3).
Доказательство. Характеристическая функция имеет вид
/ ! 4 4 \
= ^(iwi, iw2,iw3,iu4) = ехр I -- /С ^n*4'nUjt ) ’
где Anfc = E(XnXk).
Используя соотношение
Е(Ху Х2А'3А'4) — (—i)4-^ —- -—, ,
auidu2ou3duji iul,«2,«3,t14-o
получим (5.15) Теорема доказана
Замечание. Если среднее значение mXi = Е(х,) не равны нулю
то справедлива формула
£(AiA2A3A4) = £(XiA2)E(X3A4) + F(AiA3)F(A2A4)+
+£'(AiX4)£(A2A3) - 2тпХ1 тХ2mX3mXi. (5.16)
Теорема 5.3. Все кумулянты выше второго порядка гауссовского
СП равны нулю.
Г, Доказательство.
По (5.2) получим
In вх — птх — к2 ст2 - - атпх + a2tr2/2, а = \и
Тогда
351 = 1п^(а
da '
.2.
Ж ’
ае2 =
= 0; v = 3,4,....
= ГПХ;
си~0
dV . д { J
Э5„ = —— 1пРа;(а)
аС£1 1а
I Следовательно, для гауссовского СП коэффициенты асимметрии 71 =
2 и эксцесса 72 = 054352 2 равны нулю. Теорема доказана.
Пример 5.1. При достаточно общих предположениях случайный процесс X (t)
•Ложно представить в виде гармоники X(t) = A(t) собФ(4) где A(t) 0.
Найти одномерную плотность распределения процесса X (t), если случайные про-
Чессы A(t) и Ф({) независим в один и тот же момент времени t, случайная фаза
58
Лекция 5
Ф(4) распределена равномерно на промежутке [О; 2тг):
ИлфМ = Л/2’г- v>G[o.2,r);
v£ [0, 2тг),
а случайная амплитуда распределена по закону Релея:
WA(r) = ( (’•/ff2)e-r2/2ff2> г > 0;
l0, т < 0.
Решение. Найдем сначала одномерную функцию распределения
F1(r,t) = P{X(t)<^}- I W(r,v)drdV,
J «/»-coe 9?<at
где W(r, tfi) — плотность вероятности двумерной случайной величины (A(t) Ф(/))
По условию она не зависит от t, следовательно, не зависят от t функции Fj (х, t)
и W] (т, t). Положим Fi(x,t) = F(x); Wi(a:, t) — Ж(а:). Так как A(t) и Ф(()
взаимно независимы, то
W(r, v) - WA(r)W*(v) = ( ^е“г2/2<Га> 0 V < 2тт), т > 0;
10, в остальных случаях.
Тогда
= = l[ re-^'^drd^.
2™ JJrcoev<x
Неравенство г cost/? < х определяет границы для <р и т.
Если х 0„ то arccosfor/r) < < 2-тг — arccos(a?/r) при т —х. Неравенство
г < —х невозможно.
Если х 0, то arccos(a;/r) < < 2тг — arccos(a;/r) при г х. 0 tp <С 2тг
при г < х.
Тогда при х 0
лоо f 2тг—arccos( т-fr)
^(®) = ----II ГС =
— х J arccoe(j/r)
1 /°°
= ------- I [2тг — 2 агссоБ(гг/т)]ге—г ^2<г dr;
J
при х 0
dr =
ге-*-2/2-2^ + -2-
2тг<72
1тг — 2 arccos(rr/r)]re г ^2<т
re г /2 arccos(rr/r)dr.
Для нахождения ПРВ Ж(а:) = ^(х) применим известную формулу дифференци-
рования интеграла с переменным нижним пределом:
- f(x1 х).
(5.17)
Гауссовские случайные процессы
59
Получим
IV(r) =
при х О;
при х О.
Таким образом при любом х
Сделаем подстановку т/т2 — х2 — ау Тогда г2 = х2 + а7,у2 т dr — a2ydy.
Получим
9 t Г°°
^-J.e-(^+^y)/2^dy = — e-l2/2ffJ / e~^'2dy =
<ту к<т Jo
_ —e-*2/20* [* = 1 c-x2'2cr2.
rrcr V 2 ол/2тг
Это гауссовский закон N(0, <r) с параметрами m = О и а
Пример 5 2 Корреляционная функция СП X(t) (угла отклонения в граду
сах) имеет вид
Rx(t,t') = Rx(r) = De~aM cos/Зт,
где т = t — t'.
Вычислить вероятность того, что в момент t' = t + т отсчет X ((') будет больше
15°, если в момент t он был равен равен 5°.
Замечание X(t) — гауссовский СП; mift) = О; т — 2 с; D = 30 град2,
а = 0,02 1/с; (3 = 0,75 1/с.
Решение. Согласно (5.9) условная функция распределения F(y | х) двумерной
гауссовской СВ (X,Y) является гауссовской с условными средним значением пг =
т„ х = my+p(<rtl/crx)(x—mx) и дисперсией а2 = сг2(1 — р2). Тогда по (5.7) находим
Е Г(У|Г) = 1+Ф(^),
где Ф(и) — интеграл Лапласа (5.6).
В данном случае X = X(t), Y = X(t'); тпх — my = 0; х - 5; <г2 = а2 = Лх(0) —
= D = 30;p = Rx(r)/D[T=2 = е-"1т1 сов/Зт\т^ = е0-04 cosl,5 = 0,98-0.071 = 0,069.
Тогда тп = 0,069-5 = 0,35; а = у/Жу/1 — 0,0692 = 5,48 Следовательно, искомая
вероятность P{X(t') > 15 | X(t) = 5} = 1 - F(15/5) = 1/2 - Ф[(15 - m)/a] =
= 0,5 - Ф[(15 - 0,35)/5,48] = 0,5 - Ф(2,68) = 0,5 - 0,4963 - 0,0037 и 0,004.
Лекция 6
Узкополосные гауссовские случайные
процессы
Узкополосный случайный процесс
На практике большое значение имеют узкополосные случайные про-
цессы Случайный процесс называется узкополосным, если ширина его
энергетического спектра значительно меньше средней частоты спектра
Пример 6.1. Рассмотрим случайный процесс с корреляционной функцией
Л(т) — <72e~alrl cos Пт.
Энергетический спектр этого процесса (см. задачу 3.3)
5(1э) - a a [o2 + ^_fij2 + а2 + (ш + Пр] '
При £2 Э> а получаем частоты = ±£2, на которых Sm = Sfiivm) = maxS'(oi).
Пусть = £2, тогда Sm яг <г2/а.
На рис. 6.1 изображены графики ЭС S(w) при о > О. При £2 < о/\/3 ЭС S'(oi)
имеет максимум в точке = О, при £2 > о/\/3 — в точке
и = wrrl = —а1 — £22 + 2£2-^/»2 + £22.
При £2 Э> a та £2; при и = О 5(0) = 2с«г2/(о'2 + £22) и при £2 а 5(0) ~ О
В последнем случае СП с итается узкополосным
Таким образом, энергетический спектр узкополосного случайного процесса имеет
вид, приведенный на рис. 6.2. Реализация узкополосного случайного процесса на ос-
циллографе имеет вид синусоиды с медленно меняющейся огибающей (амплитудой)
и фазой. Это означает что процесс можно записать в виде
Х(2) = V(t) cos[wo( + у?(2)], (6.1)
где V(t) — огибающая; у?(() — фаза; причем V(2) и у?(2) — медленно меняющиеся
функции времени по сравнению с coswot.
Узкополосный случайный процесс можно записать также в виде
X(t) = a(t) cos wat — b(l)sinwoZ, (6.2)
узкополосные гауссовские случайные процессы
61
ГДе °G) и КО — низкочастотные случайные процессы (квадратурные
компоненты). Их средние значения равны нулю:
F{aJ = 0 =
так как равно нулю математическое ожидание СП A'(t).
Запишем КФ СП X(t)
Rx(t.t + г) = F[X(t)X(t + г)] - Е(ХХТ),
где X(t) — X — acoswoi — bsinw0Z; X(t + г) — Xr — ar coswo(t +
r) - bT sinw0(i + t).
После перемножения и усреднения получим
Rx(t,t + т) = Е(аат) cosw0t cosw0(t + г) + E(bbT) sinwo< sin wo(t + r)—
—E(abT) cos wot sin wo(t + r) — E(aTb) sin Wot cos a>o(t + r).
По условию СП X(t) стационарный, поэтому зависимость от времени
t должна исчезнуть, а это в свою очередь приводит к равенствам:
Е(аат) - Rc(t) - E(bbT) = Rs(r) - о%р(т);
Е(аЬт) = Rcl(r) = -Е(атЬ) = a2q(r);
Е(а2) - Е(Ь2) = а2 = Е(Х2)
При этом КФ СП Х(£) примет вид
Вг(т) = Rc(t) cosw0t - /?С5(т) sin Wqt = (т1рх(т), (6.3)
где ра;(т) — коэффициент корреляции СП X(t):
рх(т) = P(r) cos - <?(т)sin wot = r(r) cos[w0r + 0(-r)]; , .
------------ (6.4)
г(т) - у/р^т) + g2(r); 0(r) = arctg[g(r)/p(T)].
По теореме Винера-Хинчина
1 /-oo 1 Г00
Rx(t) = — / ЭДе1" dw = — / 5+(W)cosWTdW,
J-po 2тг Jo
гДе S+(w) = 2SX(w), a> 0
При этом использовалось свойство четности ЭС
^(-ui) - Sx(w).
Введем новую переменную Q — w — Wq. тогда получим
2тг/?.г(г) — coswot f S+(a>o + Q)cosQrc/Q—
J —w0
— sin woт f S^fwo + fi)sin QrdQ. (6-5)
J — Wq
62
Лекция 6
Сравнивая (6.3) и (6.5), приходим к равенствам
2тг7?с(т) = [ 5^(w0 + Q)cosS2tcK2; (6.6)
J—<х/<}
1kRcs(t) = [ S+(w0 + fijsinfi-rdfi. (6.7)
По (6.7) замечаем, что функция 7?CJ(r) (д(т)) является нечетной
функцией т:
Я«(-т") — -Я«(г) или д( г) = д(т).
Кроме того, 77„(0) = 0 и выполняется условие
E(ab) = Rcs(0) = 0. (6.8)
Это означает, что квадратурные компоненты в совпадающие моменты
ортогональны (некоррелированы) (отсюда и их название).
Допустим, что ЭС 5+(w) симметричен относительно частоты wo, т е
выполняется равенство
5+(wo-fi)-5j-(wo + Q).
Тогда, подставив 5+(wo — R) вместо .S+(wq + R) в (6.7) и произведя
вычитание интегралов, получим 7?„(т) = 0 при любых г, а это зна-
чит, что при симметричном ЭС
Rx(t) = Rc(t) cos u>ot = (?2р(т) cosw0r. (6.9)
Тогда, согласно (2.16)
Srfw) = — [-S'c(w — Wq) + Sc(w + w0)], (6-10)
где ,5'c(w) = Зр?е(т)].
Иногда удобно бывает использовать комплексную форму записи уз-
кополосного сигнала и рассматривать СП X(t) в виде
X(t) = РеЛ(7)е1ы°‘,
где Л(7) = Т(7)е1*’(<) — комплексная огибающая узкополосного СП X(t).
2. Узкополосный гауссовский
случайный процесс
В этом случае, как было показано, a(i) и b(t) — некоррелированные
гауссовские случайные величины, поэтому их совместная ПРВ имеет вид
W(zi, я2) - ^2 ®<Р ------J ' Ж1 “ а^’ Х2 =
Найдем распределение огибающей и фазы 1Т(Т) и РУ(у?) узкопо-
Узкополосные гауссовские случайные процессы
63
лесного гауссовского случайного процесса. Находим:
Xi — Vt cos pt = X2 = Vt sin pt = p2(Vt, V’t)-
Отсюда
Vt = yJxl+Xl = (Xj, X2); pt = arctg(X2/Xi) = g2(Xi, X2).
Рассматривая обратные функции от (У, <р), получаем якобиан преобра-
зования
|Л| = dpi dV dpi dp dp2 dV dp2 dp = cosp — V sin p sin p V cosp = V.
Тогда совместная му находим ПРВ - W(a:i = V\,x2 = ^2)|J| Поэто-
IVIV аЛ = / (^/2™’2)ехР(“1/2/20’2) при V > 0, р е [0; 2тг);
’ ( 0 при V < 0, р £ [0; 2тг).
Отсюда ПРВ IV(V) = /02,г W(V,p)dp имеет вид
lyfy) = J (V/a2)exp(-V2/2a2) при V > 0; ,
V } 10 при V < 0, 1
гДе а = а. Эта ПРВ называется распределением Рэлея (рис. 6.3).
Аналогично находим ПРВ V7(y>) = JV(V, р) dV
I W)=(s (6.12)
I 0 при других p.
Таким образом, получили, что фаза гауссовского случайного процесса
Распределена равномерно. В процессе вывода устанавливаем равенство
W(V, <р) = V7(V)IV(99).
64
Лекция (j
Следовательно, V и <р являются независимыми случайными величина-
ми, а это означает, что огибающая V(Z) и фаза <р(1) независимы в со-
впадающие моменты времени.
Найдем начальные моменты СВ распределенной по закону Релея.
Е(хп) = Г xn+1e~x*'2a*dx = Г° |а;|"+1е-а:3/2о2</з:.
a2 Jo 2о J-oo
Тогда по (5 4) получим
Д*") =
( 1 3 ... папу/к/2
I 2*fc!a2*
при п = 2k + 1;
при п — 2k.
(6.13)
Задачи
6.1. Пусть X — гауссовская случайная величина с ПРВ
ИТж) — —;__- ехР
1 ’ y/iib
(f - “)2
2Ь2
А. Вывести выражение для характеристической функции величины X.
Б. Используя результат пункта а), получить выражения для среднего и для стан-
дартного отклонения величины X и выразить через них 1У(а;).
В. Используя результаты двух предыдущих пунктов, получить выражение для и го
момента величины X в том частном случае, когда X имеет нулевое среднее.
6.2 Пусть X и У — независимые гауссовские случайные величины
А. Вывести выражение для плотности совместного распределения вероятностей
Ил(ж, у).
Б. Вывести выражение для совместной характеристической
функции величин X и У.
6 3 Пусть X — гауссовская случайная величина с равным нулю средним значе-
нием и равным единице стандартным отклонением. Пусть, далее, Хп результаты
/V независимых измерений величины X. Образуем новую случайную величину У,
характеризующую этот составной эксперимент и определяемую равенством
^ = Е^-
П=1
Вывести выражение для плотности распределения величины У.
6.4. Показать, что биномиальное распределение
Pn{k)=C^-P)^ ^=^7^-
при п —> оо и постоянном р стремится к гауссовскому распределению
vyn(k) — ---ip=exp
(fe - mfc)2
2<zjr
где mk = E{k}; oj; = E[(k mk)2].
6.5. Пусть X и У — независимые гауссовские случайные величины со средни
значениями тх и ту и дисперсиями <т2 и <т2 соответственно Пусть, далее
Z = X + У.
Узкополосные гауссовские случайные процессы 65
д
А Определить характеристическую функцию величины Z.
Б Определить ПРВ величины Z.
6 6. Показать, что для гауссовского случайного стационарного процесса с нулевым
средним значением справедливо равенство
E{X(tj) X(t2) X(t3) X(J4)} = Н(<2 - - «з) +
+ R(t3 — t2) + R(ts — t2)R(t4 — ti),
где R(t, - «_,) = E{X(ti)X(t})}, i,j = 1,2,3,4.
6 7 Пусть x(t) выборочная функция стационарного действительного гауссовско-
го вероятностного процесса с нулевым средним значением. Пусть новый случайный
процесс задается выборочными функциями
y(t) -
Показать, что
Яу(т) = 7^(0) + 2/^(т). (6.14)
6.8. Пусть X — гауссовская случайная величина с нулевым средним значением
и равной единице дисперсией. Пусть новая случайная величина Y определяется
следующим образом, при X = xq
у _( с вероятностью 1/2,
с вероятностью 1/2
А Определить плотность совместного распределения величин X и У.
Б. Определить плотность распределения одной величины У. Заметим, что, хотя
как X, так и У — гауссовские случайные величины, плотность совместного распре-
деления величин X и У не являются гауссовской.
6.9. Показать, что совместная характеристическая функция случай-
ных величин
Yi = Xi cos в — Х2 sin
У2 — Xi sin# + X2 cos О
имеет вид
Оу (n»i, ii'2) = exp f-1 (p2ot'i + 2pi 1 Vi + Д02 ,
если X] и X2 — независимые гауссовские случайные величины, имеющие нулевые
средние значения Е{Хх} = Е{Х2} = 0, причем
Д20 = E0i2} = c°s2 0 + <?2 sin2 Д02 = #{У?} = <7j sin2 0 + <^2 cos2 0;
Mu = Е{У>У2) — (<7? — Л2) sin cos <т2 = Е{Х2}; = ^{Х^}-
6.10. Пусть случайные величины Xi и Х2 имеют гауссовскую плотность совмест-
ного распределения. Показать, что если случайные величины Ух и Уо получаются
Иэ величин Xj и Х2 в результате поворота относительно точки [E{Xi}, Е{Х2}] и
вели угол поворота G выбран так, чтобы
2/ц)
tg20= -----,
Р20 — Р02
гДе Д11 - <г3.1сга.3р12; д20 = <r2l t д02 = <г22, то величины У) и У2 будут незави-
симыми гауссовскими случайными величинами.
6 11 Пусть корреляционная функция стационарного гауссовского вероятностно-
Го процесса с выборочными функциями Х(1) может быть разложена в интервале
66
Лекция fj
[~у,+у] в ряд Фурье
Пусть, далее, независимые гауссовские случайные величины Хп (п —
—1,0, +1,..Ч-оо) имеют равные нулю средние значения и равные единице дис-
персии Рассмотрим вероятностный процесс с выборочными функциями
ИО = У Ьп^е^»\ 0,0 =
где Ьп — комплексные постоянные.
Показать, что если |ЬП|2 = а-п то при 0 <С t <С 7/2 вероятностный процесс с вы-
борочными функциями y(t) имеет такие же многомерные плотности распределения,
как и процесс с выборочными функциями
6.12. Пусть Vt — огибающая стационарного узкополосного вещественного гаус-
совского вероятностного процесса X(t). Показать, что
s<v.)= (J)'"».;
•М2
где <г2 - дисперсия гауссовского вероятностного процесса X(t).
6.13. Пусть x(t) выборочная функция стационарного узкополосного действи
тельного гауссовского вероятностного процесса. Рассмотрим новый вероятностный
процесс, определяемый- выборочными функциями y(t) = coswot, где fa = wo/2r
мало по сравнению со средней частотой исходного процесса /с, но велико по срав-
нению с шириной спектра исходного процесса. Если записать
x(t) = V(t)cos[wct + v(t)],
то можно назвать
»я(0 = —cos[(wc - w0)t + v(t)]
выборочными функциями «нижней боковой полосы» нового процесса и
v(t)
—^-2. cosl(wc + w0)t + V’tOJ
— выборочными функциями «верхней боковой полосы» нового процесса.
А. Показать, что вероятностные процессы соответствующие как нижней, так и
верхней боковой полосе, являются стационарными вероятностными процессами, хо-
тя сумма их нестационарна.
Б. Показать что вероятностные процессы, соответствующие нижней и верхней
боковым полосам, не являются независимыми.
6.14. Пусть спектральная плотность узкополосного вероятностного процесса име-
ет вид
МЛ -
(/-Л)2
2<т2
+ ехр
(/-/с)2
2сг2
где ст < /с.
узкополосные гауссовские случайные процессы
67
д. Вычислить Rc(r).
Б. Вычислить Rcs.
6.15 Пусть V(t) и <p(t) — соответственно огибающая и фаза выборочной функции
^ационарного узкополосного действительного гауссовского процесса.
д. Показать, что
1
-2|Л|1/2
W(«l 1 Vl > v2, Vz) —
О] 02
4^1ЛР/2 еХ₽
2Rc(t)oiO2 cos(v>2 - Vl) — 2Ясз(т)о1О2 sin(v2 — Vl)]}
О
при других 01,02, V1 И <Р2',
{0102 , (oiO2[B?(t) + _Г
при i/iV2 > О;
О при других г/i, vs;
|Л|1/2
W1-V2) = Ч 4тг2<т^
I О
— 02 + 0(% — arccos0)
(1-02)3/2
при других V1, V21
при О V1, V2 2тг;
где 7о(гс) — модифицированная функция Бесселя первого рода нулевого порядка,
|A|J/2 = <т*(1 - г2); 0 = р(т) cos(v2 - Vl) + <z(r)sin(v2 - Vi)
Б. Доказать неравенство
И^(о1, vi,02, V2) # IV’foi.^JlV’fvi.Vz)
и что, следовательно, пары случайных величин (Ц, V2) и (vi,Vz) не являются не-
зависимыми.
6.16 Пусть x(t) — выборочная функция стационарного узкополосного действи
тельного гауссовского вероятностного процесса. Определим ат и А(т) равенством
Jo
гДе <гт предполагается действительным и неотрицательным Показать, что корреля-
ционная функция огибающей узкополосного процесса имеет вид
Ду(т) = <72[Е(<7г) + В(аг)]= Ja22Fi (-1,-1;1,а2) ,
гДе В и Е — полные эллиптические интегралы; 2fi — гипергеометрическая функ-
ция.
6.17. Пусть x(t) — выборочная функция стационарного узкополосного действи-
тельного гауссовского вероятностного процесса. Определим величины ат и Х(т)
Равенством
4аге’А« = Я:(т)4-5К„(т).
Показать, что двумерная плотность распределения вероятностной фазы
,'lVl>Vs) имеет вид
ОО
__г. к 1 V—v «тсгУ* ry fm \ f тп тп
^(vn^)- тГГ (t + 1)2F42: 2;m + 1;‘4X
m=0
X cos{m[v2 - Vl “
68
Лекция G
6 18. Пусть выборочные функции вероятностного процесса, рассмотренного в за
даче 6.15, выражаются в виде
®(t) -
где V(f) — огибающая, a y(t) — cos[u»ot + v(t)]-
Показать, что корреляционная функция модулированной по фазе несущей У (f
заданного узкополосного процесса определяется равенством
Ду('г)— Т J cos[wot + Х(т)] — Г2^1 Г !cos[wot +А(т)].
2 о \ 2 2 /
6.19. Доказать, что выборочная корреляционная функция является состоятельной
несмещенной оценкой в случае стационарного гауссовского случайного процесса.
Указание Оценка = 5n(A'i, X?. . ..Хп) параметра 0, основанная на п наблю
дениях, называется состоятельной, если 0п—*0 (оценка вп сходится по вероятности
к истинному значению параметра в) (см. приложение 2).
6.20. Доказать, что выборочный спектр не является состоятельной оценкой для
гауссовского стационарного случайного процесса, в отличие от выборочной ковари
ационной (корреляционной) функции.
6.21. Пусть X'(t) гауссовский случайный процесс с нулевым математически л
ожиданием и корреляционной функцией Rx(t). Найти корреляционную функцию
случайного процесса У (t) = sign.Y(t).
6 22 Пусть имеется сумма узкополосного гауссовского СП вида (6.2) и гармони-
ческого сигнала s(t) = j4mcostvot. Определим огибающую
V(t) = x/[Am + a(t)]2 + b2(t) (6-15)
и фазу
е = arctg{b(t)/[/lm + a(t)]} (6-16)
суммарного колебания.
Показать, что совместная ПРВ И'(У,б) имеет вид
1V(V. в) = —К_е-(^3+Л^-2УЛ„ cos »)/2о; V о. (6 )
2тг«т2
6.23 В условиях задачи 6.22 показать, что ПРВ фазы подчиняется распределению
1Г(0) = —е““2/2[1 + v/^acos^Ffacos^e^2/2)^''], (6.1S)
2тг
где 0 б < 2т., F(x) — интеграл вероятности; а — Ат/ох-
6.24 В условиях задачи 6.22 показать, что ПРВ огибающей имеет вид
1У(т,) = „>0, (6.19)
<Г2 \ <72 )
где /о (г) — модифицированная функция Бесселя нулевого порядка.
6 25 При а — 0 получить по (6.19) закон Релея, по (6.18) — равномерное
распределение фазы
Лекция 7
Марковские процессы
Марковские случайные процессы (МСП) после гауссовских СП явля-
ются важными по значимости СП На основе теории МСП анализиру-
ются как линейные, так и нелинейные радиотехнические устройства, в
стационарном и переходном режимах. Кроме того, теория МСП являет
ся основой оптимальной нелинейной фильтрации
Рассмотрим СП X(t). Обозначим ряд его отсчетов (сечений) X(ti),
X(Z2). - • •>X(tn) в моменты времени ti,t2,...,tn < Ц < <
< tn). По теореме умножения вероятностей для л мерной ПРВ имеем
^п(*^1> ®2> • • • э ®п) — Цп—1 (®1, ®2> • • • > хп 1) И 1 (^п|з^ 1 j - • - > Хп— 1),
где ж, = x(tt), г = 1, п. Отсюда находим условную ПРВ
Wn(xi,x2,...,xn)
Wn-i(xl,x2,..., xn-i)'
Wi(a?n|a:i,..., х,
Назовем отсчет xt — x(ti) настоящим значением (состоянием) СП,
ж,_1 — x(ij_i) — прошлым значением, ж1+1 = x(/t+i) — будущим
значением СП
Определение СП X(t) называется марковским, если его буду
щее значение зависит лишь от настоящего и не зависит от прошло-
го значения.
Иначе говоря, будущее и прошлое марковского процесса независи-
мы при известном настоящем Поэтому для МСП вытекает следующее
свойство для условной ПРВ
IV(a;n | Ж1,ж2, ...,хп) = W(xn | x„-i), (7.1)
где п 2.
Учтем известное соотношение
W(xi,x2,.. . ,жп) = ИЛ(ж1)ИЛ(ж2 | Ж1)1У(жз | xi,x2) ...
.. lV(zn-i | Xi,x2,...,xn_2)W(xn | Х1,ж2,...,жп_1) (7.2)
И введем обозначение
И/Г(жп | хп— j) — Р(хп> xn—i),
гДе P(ain,xn_i) называется переходной плотностью. Тогда для п-
Мерной ПРВ находим
Wfci, х2,..., хп) - Р(хп, xn-i)P(xn-i, хп-2) . Р(х2, aj^IVfxi).
70 Лекция 7
Следовательно, для МСП при известных начальном распределении
lV(a:i) и переходной плотности /-’(a?*,xcjt—i) можно найти ПРВ любой
размерности. Эти две функции полностью задают марковский процесс
который на этом основании называется процессом без последействия
Переходная плотность x^-i), как и всякая условная вероят-
ность, удовлетворяет условию нормировки
ZOO
P^XkjXk-ijdx]; = 1.
-оо
Рассмотрим трехмерную ПРВ
ИзСч^ь^г.^яз^з) — W2(yi,ti; у2^2)Р(?з^з | xi,ti;x2,t2) =
— I xi,t1)P23(x3,t3 | x2,t2).
Интегрируя по x2 для ti < t2 < t3, получим
^(^Льхз.^з) ~ W'xCari.tx) f P(x2,t2\xi,ti)P(x3,t3\ X2,t2)dx2.
J-co
Разделив на приходим к уравнению
Р1з(х3,t3 | Xi,ti) = [ P23(x3,t3 | x2,t2)Pi2(x2,t2 | xi,ti)dx2. (7.3)
J—CO
Это соотношение называется уравнением Колмогорова-Чепмена
Этому уравнению должна удовлетворять переходная плотность любого
МСП, кроме того, МСП должен удовлетворять очевидному соотношению
ZOO
Pi2{x2,t2 | xi,ti)Wi(xltti)dxi. (7.4)
-оо
И наоборот, любые две неотрицательные функции Wi и Pi3 =
= Pjj^Xi, Xj), удовлетворяющие уравнению Колмогорова-Чепмена и со-
отношению (7 4), однозначно определяют МСП
Найдем уравнение, характеризующее эволюцию ПРВ lV(a:) непрерыв-
ного марковского СП [8].
Пусть моменты времени t2 и ti связаны соотношениями ti = i
t2 = t + т, при этом положим zcj = х, х2 = хт. Тогда уравнение
Колмогорова—Чепмена принимает вид
VKT(a?T) = f P(xT,x)W{x)dx (7.5)
J — оо
Введем характеристическую функцию ()(и,х) приращения хт — х при
условии, что x(ti) = x(t) = х,
г 1 7°°
6(и,х) = Е = / etu^^P(xr,x)dx =
ОО
Марковские процессы
71
^«(х.-х)^^ । x^dx
Отсюда получаем преобразование Фурье от характеристической функ-
ции
Р(хт, х) = W(xT, х)= — [ х) du.
J-OO
Подставим зто значение переходной плотности в уравнение Колмого-
рова-Чепмена (7.5). В результате получим
WT(xT) = — [ [ e~u^Xr-x'>e(u,x)W(x)dxdu. (7.6)
2jt J .ю J оо
Используем ряд Маклорена для характеристической функции
0(и, х) = 1 + ~~jTmn(a:)>
71.
п=1
где mn(x) — 7?[(a:T — ж)п] — условный начальный момент приращения
хт — х при x(t) = х. Тогда по формуле (7 6) находим выражение для
И4(з:т) - V А— / / e-tu^-x\iu)nmn(x)W(x)dx.
^п!2тг J J ю
Учтем соотношение для производной дельта функции
В результате при использовании фильтрующего свойства дельта-функ-
Чии получим
°° 1 / я \ п
lVT(a:T) = IV(a:r) + [”1п(а:’-)И^(а:т)].
п=1 х т '
После деления на т и перехода к пределу при т —» 0 находим ДУ
dW(x,t)
~дГ~
о° 1 z Л \ п
= £^Т [/<„(*№01,
• п! \ ох /
п1
(7 8)
j*'* Кп(х) = lim — кинетический коэффициент.
Для непрерывного марковского СП x(t) коэффициент Ki = 0 при
72
Лекция 1
г = 3,4,и ДУ (7.8) принимает вид
[ВДЖ(М)] + -^[K2(x)W(x,t)]. (7.9)
Кинетическое уравнение (7.9) называется уравнением Фоккера-План-
ка—Колмогорова (ФПК), при этом /<1(ж) называется коэффициентом
сноса, К2(х) — коэффициентом диффузии.
Пример 7.1. Покажем методику вычисления этих коэффициентов на простом
примере, когда стохастическое ДУ имеет вид
+ h(x) = £(t), (7.10)
at
где £(t) — белый шум с интенсивностью 2D и средним значением равным нулю
Л(х) — некоторая непрерывная функция Здесь x(i) — марковский процесс и ПРВ
W(x, t) находится как решение ДУ Фоккера-Планка-Колмогорова (7.8). Остается
определить коэффициенты сноса и диффузии:
7<1 = liin £?{Дх}/Д(; Л'2 — lim Е{(Дх)2)/Д1.
At—-о At—*0
Выразим приращение Дас из ДУ (7 10)
yt+At
Дх = —Я(х)Д1 + / ^(t) eft;
отсюда £7{Дх) = — E{h(x)At} = —h(x)&t, тогда Kt = — h(x);
Е{(Дх)2} =Л2(х)(Д02 + е|^ =
мфДг rM-At
= Л2 (я?) (At)2 + 2D I I 6(t2 - t1)dt1dt2 = h2(x)(At)2 4- 2D&t.
Jt Jt
Тогда K2 = 2D.
Уравнение ФПК принимает вид
aw(x,t) э „ a2w(x,t)
----’- = —[h(x)W(x,t +n (7.11
at Эх Эх*
Покажем вычисление коэффициентов К] и К2, если ДУ (7 10) задано в форме
Ито (см. приложение 5)
dx = —h(x)dt + y/2Ddr](t), (7.12)
где »j(t) — винеровский процесс с единичной дисперсией, такой, что £7{»j2} = t,
£{4} = 0.
Так как приращения винеровского процесса распределены по нормальному закону
с нулевым средним значением и дисперсией Д1, то сразу получаем Ki = — h(x);
E{(dx)2} = h2(x)(dt)2 + 2DE{(drf)2}. Откуда Z<2 = %D, так как E[(dT))2] = dt.
Уравнение ФПК характеризует непрерывный марковский процесс с непрерывным
временем.
Теорема 7.1. Пусть ПРВ СП Xt имеет вид
W(x2,t2 | *1Л) = , 1 ехр .
11 ' х/24«2-*1) I 2(*2-й)/
Тогда СП Xt является марковским.
Марковские процессы 73
-----
Доказательство Покажем, что указанная ПРВ удовлетворяет урав-
нению Колмогорова—Чепмена
Vy(x21t2 | = У W(x2,t2 I y,s)W(y, s | xi,ti)dy =
Г°° 1 _ I1?"»)2 1 _ <»-»! )2
— I ----- p . p 3(»-<i) ([y
J-oo - s) У2зг(в-*1)
Введем обозначения
f(z) = . 1 е-^/2(Ъ-з).
^/27r(t2 - s)
g(z) = 1
^Trfs -ti)
В этом случае
W(x2,t2 | = Ф(ат2) = / f(x2 - y)g(y)dy.
J—oo
Найдем характеристическую функцию 0*(v) распределения Ф(а?2) По
теореме о свертке
Ы1') = Of(v)eg(v),
где 6j(v) и 0д(у) —соответственно характеристические функции распре-
делений /(z) и <?(z). Для гауссовского распределения с математическим
ожиданием т и дисперсией а2 характеристическая функция имеет вид
0(г>) =
Тогда
Qf(v) - e-2(‘2-’>a; 0g(v) =
При этом
0ф(г>) = ef(v)eg(v) ==
Эта характеристическая функция соответствует ПРВ
Ф(12) = -—- W(x2,t2 |
\/27г(<2 - tl)
Теорема доказана.
Лекция 8
Марковские процессы (продолжение)
Продолжим изучение марковских случайных процессов при непре
рывном времени
Теорема 8.1. [19] Стационарный гауссовский СП является Марков
ским тогда и только тогда, когда его КФ имеет вид г(т) — ехр[ сг|т ]
а > О
Доказательство [19]. План доказательства- сначала определяются
двумерная жг,^) и трехмерная W3(a:i,ti; x2,t2; х3, t3) ПРВ и
после деления второй на первую находится условная ПРВ Из(г31/3
ti, ^21 ti)- Далее При условии ti < t2 < t3 используется марково-
ское свойство СП
W(x3,t3 | x1,tr,x2,t2') — W(x3,t3 | x2,t2). (8.1)
Из этого соотношения находится функциональное уравнение
r(t3 Ц) = r(t3 - t2)r(t2 - ti). (8 2)
Единственным нетривиальным решением этого уравнения является
экспоненциальная функция
Докажем справедливость соотношения (8.2). Для этого запишем вна-
чале ПРВ
“ (2тг) ’|Л| 1/2ехр
где
|И| Ф1.Й) r(ti,t2) .
r(t2,ti) r(t2,t2) '
W3(xl,t1,x2,t2;x3,t3') = (2тг) 3/2|B| 1/2ехр
где
|В| =
r(ti,ti)
Г(<2,*1)
r(t3,tl)
r(t3,t2)
r(t i,i3)
Г(<2,*з)
r(t3,t3)
Тогда условная ПРВ
W3(x3,t3 | xltti;x2,t2) =
W3(xi,ti,x2,t2-.x3, t3)
l^(ii,ti;«2,i2)
75
Марковские процессы (продолжение)
Условная ПРВ марковского СП удовлетворяет равенству (8.1).
Для того чтобы Из^з^з | 2:2,<2) не зависела от Xi = ®(71).
как это требуется для МСП, необходимо, чтобы
Вгз = 0 = В31;
Вц _ В12 _ B2l _ |В| ,g .
Ли Л12 Л21 |Л|
Из первого условия В1з=0 следует, что
г(«2,<2М*3,*1) = r(t3,/2)г(*2, <1)
Используем условия стационарности r(tj,ty) = г(С — tj) и норми-
ровки г(72,7г) = г(0) = 1, тогда получим искомое функциональное
соотношение
г(*з - ti) = r(t3 - t2)r(t2 - <i).
Пусть т = t3 — t2 и v — t2 — ti, тогда т + v = t3 — , и функци-
ональное соотношение принимает вид
г(т + tz) — r(r)r(i/) для всех т, и > 0.
Тривиальным решением этого уравнения служат функции г(т), рав-
ные тождественно нулю или единице
Нетривиальным решением этого уравнения является функция
г(т) = е~“1т1, а > 0.
Теорема доказана.
Замечание При доказательстве теоремы учтено, что функциональ-
ное уравнение удовлетворяет не только условию В\3 — 0 но и всем
Условиям цепочки равенств (8.2)
Одной из разновидностей МСП является МСП с непрерывным време-
нем и дискретными состояниями. Такие МСП называют также марков-
скими цепями Однако в силу непрерывности времени эти СП будут
рассмотрены в разделе МСП
Для такого СП вероятности Pi(t) состояний Si, г = 1,п, удовлетворя-
ет уравнениям Колмогорова. Вывод этих уравнений упрощается, если
предварительно составить размеченный граф состояний, т.е. такой граф
Для которого у стрелок переходов стоит значение переходной плотности
гДе р,ДД/) — вероятность того, что система находившаяся в момент t
в состоянии Si, за время Д< перейдет в состояние Sj
76
Лекция g
Отсюда получаем приближенное соотношение
Pij(Ai) » AvAt.
Рассмотрим получение уравнении Колмогоро-
ва при заданном размеченном графе состояний
(рис. 81)
Пример 8 1 Получим одно из уравнений системы
а именно уравнение для вероятности pi (t) — вероятности
того, что в момент t система будет находиться в состоянии
S]. Это событие может произойти двумя способами.
1. Система была в состоянии в момент t и за время At не вышла из это-
го состояния.
2 В момент t система была в состоянии S3 и за время At согласно графу со-
стояния перешла в состояние Si.
Вероятность первой ситуации по теореме умножения равна произведению pi(f)
на условную вероятность того, что будучи в состоянии Si система за время At не
перейдет из него в S^, эта условная вероятность приближенно (при малых At) равна
1 — AizAt (Ai2Ai — вероятность перехода pia). Аналогично вероятность второй
ситуации равна произведению p3(t) на условную вероятность p3i sa >31 At.
По формуле полной вероятности получим
Pi (t + At) = pi(t)(l — >12 At) + p3(t)>3iAt.
Отсюда находим ДУ (при At —» О)
= —^12Р1(0 + Аз1рз(()-
at
Аналогично получаются ДУ для вероятностей pi(t), г = 1,2,3,4. Вся систе-
ма ДУ имеет вид
^Р1
—~ = Л12Р1 + >31РЗ
at
= — >23Р2 — >24Р2 + ^12Р1 + ^42Р4
dt
-7^- = >31 Рз — >34 РЗ + >23РЗ
dt
— —>42Р4 — \г4Р2 + >34РЗ-
4 dt
Эти уравнения для вероятностей состояний называются уравнениями Колмого
рова
После интегрирования этой системы ДУ находится вектор состояний
Р= (Р1,Р2,РЗ,Р4)Т
Начальные условия при этом определяются начальными состояниями системы
{Si,S2, S3, S4}. Например, если система при t = О находилась в состоянии S2.
то при 1—0
Р1 — рз = Р4 = °; Р2 — 1 -
Марковские процессы (продолжение)
77
4
Если учитывать условие нормировки 'р, = 1, то одно из уравнений систе-
•=1
МЫ можно отбросить
Правило составления уравнений Колмогорова таково [21]’ в левой
части каждого уравнения стоит производная вероятности состояния.
Правая часть системы ДУ содержит столько слагаемых сколько стре-
лок на графе состояний связано с данным состоянием Если стрелка
направлена из состояния, соответсвующее слагаемое берется со знаком
«минус», в противном случае со знаком «плюс». Каждое слагаемое
равно произведению величины A,-j, которое соответсвует данной стрел-
ке, умноженной на вероятность pi того состояния, из которого исхо-
дит стрелка
Уравнения Колмогорова могут быть записаны в виде
£=1
или в матричном форме
dP
= Р^Л^’
где P(t) — вектор-строка, Р = {pt} i = 1?п; Л — {A?:/}, i j = l,n,
— матрица переходных плотностей.
Пример 8 2 Поток отказов в работе радиотехнического устройства — простей-
ший с параметром А Если устройство отказало, то неисправность устраняется По-
ток восстановлении .простейший с параметром д. Отсюда следует, что случайная
величина равная времени восстановления отказа, распределена по показательному
закону с параметром д (см. лекцию 1). Найти вероятность того, что устройство в
момент t будет исправным, если в начальный момент оно также было исправным
Решение. Устройство при сделанных предположениях имеет два состояния: Si
— устройство исправно; S2 — устройство ремонтируется. Вероятности этих состоя-
ний обозначим через pi (t) и P2W- Составим размеченный граф состояний (рис 8.2)
В силу того что потоки, переводящие систему из состояния в состояние, про-
стейшие процесс, описывающий работу построенной системы из двух состояний, —
однородный МСП Составим уравнения Колмогорова, пользуясь сформулированным
правилом (Aja = А; А21 = Д- Покажите это!):
dp^ - -ЛР1(0 + И1 - pi («)]; - мра(0-
Начальные условия: р,(0) = 1 рг(0) = О. Вместо второго уравнения рассмотрим
нормирующее условие pj(t) + рз(0 = 1- Тогда
= 41 - P1W1 - ЛР1 (0-
Отсюда
Рис 8 2
+ (А + д)р1 («) = д.
dt
78
Лекция 8
Решение этого линейного уравнения первого порядка с постоянными коэффи
циентами
Положим t
= О; получим
С =
Тогда
х с.
Л+м)'; Р2 = Р1 (0 = VT
₽1М=тт-
А + р
Функция Pi(t) решает поставленную задачу. При t —* оо наступает стационарным
режим работы с вероятностями состояний:
Р1 = V"
Р2 = ГТ-
А + д
Для переходных плотностей Р,7(/,т) может быть получена систе-
ма ДУ
= (83)
k-1
причем
Лй(<) = ~ £ A0(f) < 0, 0 приг ^Л (8 4)
Применимость системы ДУ (8.3) рассмотрим на примере.
Пример 8.3. Рассмотрим импульсный случайный процесс типа случайного те-
леграфного сигнала с двумя неравновероятными состояниями х\ = О и х? = 1.
Получим корреляционную функцию такого сигнала, используя марковскую модель
процесса.
Обозначим Ai2(t) = Х12 = ст = const; A2i (t) = A2i = = const, тогда no (8 4)
получим Ац = —ст; A22 = —J0. Система уравнений (8.3) принимает вид
dpnJT,f) = -стрц(т, t) + /3pi2(T,i);
at
dP12j,T’ " = стрп(т, t) - 0Р12(т, t);
< dt (8.5)
= “ap21 (t, t) + )3р22(т, t);
at
dP22^, t) _ ap2i^T tJ _ /3p22^Ti t).
at
Заметим, что первые два уравнения этой системы можно решать независимо от двух
последних- Для первых уравнений имеем характеристическое уравнение
det [ °сг-А -/-а] =(« + А)(А + 0)-а/3 = А2 + А(ст + /3) = О,
откуда Ai — О, А2 = — (а + ;0) = —у.
Два линейно независимых решения системы суть [ijer//?]1 и [e'ft; — е'1'*]1. Ма-
трица Вронского имеет вид
Марковские процессы (продолжение)
79
решения первых двух уравнений системы (8.5) находятся как
[pu(-o =W(f)W-i(T)r₽njT^)] =
LP12(t LP12(T,T)J
Г 1 e-,'l[ Д/т Ph If1]- 0/т+(а/'Ое“1<‘_’’)
la/P -e-"»*] L(a/-y)e'rT -(Ph)*^J LoJ ” a/y-(aly)e-^t~T'> ’
Для последних двух уравнений системы (8.5) получим
=www *w [Р21!т,т!1 =
Lp22(T,t)J LP22 (Т, Т) J
Г 1 е“>‘ 1Г д/т д/т 1 Г°]_ Ph-(°th)c~'',(t~'r'>
\_а!Р -е_'1'*][(а/т)е''г -(Д/т)®'’’] L1J «/т+(Д/т)е_^‘~т) ’
В установившемся режиме имеем
lim pii(T,t) - Pu = Ph', 1>т P12(r, t) р^ = о/т;
t—»OQ t—
Вт p2i (т, t) - p^j = Д/т; Вт />22 (т, t) - р^ ~ о/т-
t—co Г—. оо
Таким образом, если выбрать начальные значения вероятностей pi (0) — pfi =
= Ph< Рг(0) = р^ = a/'i, то полученный процесс будет стационарным.
Найдем среднее значение сигнала
т, = a:i P{x(t) — Xi} + x2P{x(t) = х2 } = ЗТР1 + х2Р2 = 0 - pi + 1 - р2 = Р2 — ое/т-
Корреляционная функция сигнала имеет вид
2
Rz(t) — F{a:(t)a;(t + т)} = 'xjX}p{xjXj-,t, t + т) = р(1,1; t, t + -г),
i=l >=1
где p(l,l;t,t+т) = P{^(t) = 1;г(4+т) = 1).
Вероятность P{x(t) = 1; т) = 1} равна произведению вероятности состояния
х2 в момент времени t на вероятность оказаться в этом состоянии в момент времени
1+ т (вероятность перехода pzz(t,t + т)). Таким образом,
Нх(т) = рГр22(4,4+ т) = - (“ + = + ^е-тН.
7 Х'У 7 / 7 7
Марковский процесс рождения и гибели. Рассмотрим СП
Маркова с непрерывным временем называемую процессом рождения
и гибели.
Одно из первых применений процесс рождения и гибели нашел в био-
логии для описания эволюции системы микроорганизмов В настоящее
время этот процесс в разных вариантах применяется в теории массово-
го обслуживания в теории надежности и в других областях естество-
эНания и техники.
Состояние системы может означать, что в момент времени I имеется
в иаличии k частиц или микроорганизмов Эти частицы или микроор-
^Низмь могут гибнуть и размножаться. В теории надежности состоя
Ни® системы интерпретируется как состояние, при котором в момент t
’обслуживаемой сложной системе находится к резервных элементов,
йсло этих элементов со временем уменьшается (гибель) в силу отказов
80
Лекция g
рабочих элементов и замены их резервными или увеличивается (раз-
множение) при восстановлении отказавших элементов.
Рассмотрим непрерывную цепь состояния которой обозначим Sij
i = 1,2,... В общем случае такая цепь может иметь счетное число
состояний Пусть в начальный момент времени процесс находится в
состоянии Sq и удовлетворяет требованиям следующих условий.
1 . Условие перехода Переход из состояния So может осуществляться
только в состояние Si Переход из состояния Sn (n 1) может проис-
ходить либо в состояние либо в состояние Sn
2 Условие неоднородности. Если в момент времени t система на
ходилась в состоянии Sn, то вероятность того, что в течение интер-
вала времени [t;t + At] произойдет переход в состояние Sn+i, равна
anAt + o(At), а в состояние Sn_j — 6nAt + o(At).
3 Условие ординарности. Вероятность более одного изменения со-
стояния в интервале [t, t + At] равна o(At)
Случайный процесс, удовлетворяющий данным требованиям, носит
название процесса рождения и гибели.
Найдем вероятность Pn(t) числа переходов п за время I. Пусть
в момент времени t + At система находится в состоянии Sn. Пере-
ход в это состояние в течение предшествующего интервала времени
[t, t + At] возможен следующими способами:
а) в момент t система находилась в состоянии Sn, и за время от t до
t + At не произошло никаких изменений;
б) в момент времени t система находилась в состоянии 5)1-1, и за
время At произошел переход в состояние S„~
в) в момент времени t система находилась в состоянии 5п-ц. и за
время At сразу произошел переход в состояние Sn',
г) в течение времени At система из некоторого состояния путем двух
или более переходов перешла в состояние Sn.
Способу (а) соответствует вероятность Pn(t)(l — a.nAt — 6nAt) +
+ o(At), способу (б) вероятность Pn_i(t)an iAt + o(At), способу
(в) — вероятность Pn+i(t)bn+iAl + o(At), способу (г) — вероятность
o(At) Эти события являются несовместными, поэтому по правилу сло-
жения вероятностей для n 1 имеем
P„(t + At) - Pn(t)(l - a„At - fc„Af) +
+ Яп-l Pn-l(t}&t + ^n+1 Pn + l(^)At + o(At).
Вычитая из правой и левой частей полученного выражения Рп(0- Де
ля на At и переходя к пределу при At —» 0, получим дифференци-
альное уравнение:
^2 = -(an + fe„)P„(t) + a„_1Pn_1(t) + 6„+1P„+1(t), п>1. (8.6)
at
Для п = 0 согласно условиям наложенным на процесс, возможен тольК0
Марковские процессы (продолжение)
81
церех°Д по способам (а) и (в), следовательно, имеем
= aoPo^ + brP^t). (8.7)
at
Начальные условия для этих уравнений имеют вид Р,(0)=1; Рп(0) = 0
при п £ г, где г — начальное состояние
В качестве иллюстрации процесса рождения и гибели рассмотрим
следующий пример [22].
Пример 8 4. Телефонная станция имеет бесконечное число каналов. Постула
ющие вызовы образуют пуассоновский поток, причем вероятность вызова за малое
врем Д4 равна АД< + о(Д/.). Вероятность окончания разговора за малое время Д1
равна дД< + о(Д/,). Если заняты п линий, то вероятность освобождения одной из
них равна пдД4 + о(Д{). Возможность нескольких вызовов или окончания разго-
вора и вызова за время Д4 равна о(Д<).
Решение В этом случае в уравнениях (8 6) и (8.7) следует положить а„ — Л,
Ьп = пц. При этом уравнения принимают вид
= -АР0 + дЛ,
dP (8’8)
—= -(А + пц)Рп + АРп-1 + д(л. + l)F„+i, п 2.
Воспользуемся для решения уравнений (8.8) методом производящих функций [22]
Введем в рассмотрение производящую функцию <д(г, t) случайного потока
v(z,t) =^z"Pn(t).
n=0
Тогда, с учетом уравнений (8.8) для производящей функции можно записать урав-
нение
Ot L dz J
Перепишем уравнение в виде
+ (z-1)д^5£ = (z-l)AV(z,t). (8.9)
ot oz
Решение неоднородного уравнения (8-9) можно свести к решению однородного урав-
нения, если искать решение в неявной форме Q(</?.z, t) = 0. Тогда
5Г2 ЭП 8<р 80 80 ду
+----— — 0: +----— = 0.
dt---------------------------8<р dt 8z-8tp 8z
Выражая отсюда частные производные — и подставляя эти значения в ура в
8t 8z
Нения (8.8), приходим к однородному уравнению:
80 , . 80 80
— + (z-V)il—- + (z l)v>— =0.
Ot oz dip
Известно, что общее решение уравнения (8 10) есть произвольная функция двух
Первых интегралов системы уравнений
dt dz dtp
1 (z 1)д (z — l)Ay>
Уравнения dz/dt = (z — 1)д находим z — 1 = cieMt. Отсюда первый интеграл
Равен С] = (z — 1)е—Из уравнения dip/dz — находим tp —
(8.10)
82 Л е к ц и я 8
Откуда имеем С2 = tpe~(^/l^)z_
Таким образом, решение уравнения (8,10) можно записать в виде
П = G [(г — , (8.11)
где G -— произвольная функция
Приравнивая функцию (8 10) нулю и выражая из полученного уравнения />, на-
ходим общее решение уравнения:
= JWzf[(z - 1)е-^1, (8.12)
где f — произвольная функция вид которой находим из граничных условий.
Рассмотрим значение функции tp(z, t) при t = 0. В этом случае </>(2,0) —
оо
— \пРп(0) = 2*, поскольку Р,(0) - 1, Рп(0) = 0 при п t Таким обра-
п=0
зом, имеем
у(г,0) = е<А/'х>/(2- 1) = 2*,
откуда /(г — 1) = г*е-(А/м)х Проводя замену переменной и = z — 1,
/(u) = (u+l)*e“e(“+1>.
Подставляя найденное выражение для функции f(u) в формулу (8.12), окончатель-
но получим
v(«, 0 = [1 + (г - 1 )е-м']‘ ехр ( ^(л - I) (1 - е-м‘) ) .
В частном случае « = 0 функция <p(z, t) является производящей функцией за-
кона Пуассона. Действительно.
V>(2, t) = exp {^(2- 1) (1 .
Раскладывая функцию v(z,t) в ряд Маклорена, имеем
v(2, t) = exp (-1 (1 - е">“) ) exp (1 - е""') 2) =
= (’ - eF1)}E [; О - e-M‘)]n i2”
п=0
Сравнивая полученное выражение с определением производящей функции, находим
«•<•> = я [; <* "“’Н(I •
что представляет собой распределение Пуассона с показателем (А/д)(1 — ер1). При
t —♦ 00 распределение стремится к стационарному распределению
р - (Л/^)Пс-(А/м)
* п — , с
п!
Как было отмечено вь ше, рассмотренный марковский процесс рожде-
ния и гибели относится к одному из основных видов марковских процес-
сов и часто, наряду с пуассоновским процессом, используется в качестве
моделей процессов в физике и радиотехнике
Марковские процессы (продолжение) 83
Задачи
81. Пусть СП {.¥t, —оо < t < 00} является гауссовским с нулевым средним
значением и КФ E(XtXs) = е-1 Выразить Xt в форме произведения Xt =
= где {W»,0 $ s < 00} — стандартный винеровский процесс.
82. Пусть СП (Х< , —00 < t < 00} задан в форме
Xt(w) = Л(о>) cos[2?rt + б(ш)|,
где А О, в — независимые СВ. 6 равномерно распределена на интервале (0,2тг).
А- Показать, что СП -¥(<) стационарный
Б Показать, что E(Xt) = О для всех t, для которых Е(А) < оо. Сходится ли
1 Г
интеграл Мт — --- I Xt dt по вероятности к величине Е(Х) при t —г оо?
J—T
В Показать, что СП X(t) гауссовский тогда и только тогда, когда СВ А име-
ет распределение Релея, т.е. W(A) = ^е—А 1° , А О. Будет ли при этом
СП X(t) марковским?
8.3 Решить уравнение ФПК (7 11) при стационарном условии dW(x,t)/dt = О
и при h(x) — sin а:, используя условие нормировки f И7(a.) dx = 1 и граничное
условие IV (—тг) — 1У(тг).
8.4 . Пусть tp — случайный угол и О <р < 2тг. Пусть Pj (^) = 1/2тг и Тт(<р | Vo)
— решение уравнения
ЭТт(ч>)/дт = 'yd2T-r(tp)/d<p2', Tb(v I Vo) = 6(v - Vo)
Найдите функции Pn для этого негауссовского стационарного марковского про-
цесса.
8.5 . Пусть на входе параллельного колебательного контура подключен источ-
ник тока, вырабатывающий ток типа белого шума с интенсивностью No Опреде-
лить плотность распределения вероятностей (двумерную) сигнала на колебатель-
ном контуре и найти ее корреляционную функцию, пользуясь методами марков-
ских процессов.
8 6. Пусть x(t) — Acos(2Trt + в), где А и в — случайные независимые величи-
ны, причем 6 распределена равномерно в интервале [О; 2-я], А — неотрицательная
случайная величина. Показать, что:
a) x(t) — стационарный процесс,
6) если E{x(t)} = О, то Е{А} < оо и x(t) — (1/2Т) x(t) dt сходится по
вероятности к E{x(t)}, когда Т —» оо;
в) x(t) — гауссовский случайный процесс тогда и только тогда, когда А име-
ет распределение Рэлея
ИМг) = 2_e-r2/2< rJS0;
г) x(t) не является марковским случайным процессом.
8.7. Пусть х(£) — стационарный марковский процесс, принимающий конечное чи-
сло значений Х1,Х2> -•• <&N- Пусть тг(т) — переходная матрица, элементы которой
я»у(т) = P{x(t-f-r) = х}|х(«) = х,}. Пусть существует предел lim (1/т)(тг(т) — Е] =
а А, где Е — diag(l, 1,..., 1). Доказать, что тг(т) — етА.
8.8. Найти вероятность того, что за время t стандартный винеровский случайный
Процесс выйдет за границы интервала (—о, а).
8.9. Показать, что дифференциальное уравнение в форме Ито dx = axdt + Ьх dwt
*’*,еет решение x(t) = хоехр{(а — Ь2/2)t + bwt}.
Лекция 9
Марковские цепи
Марковские цепи — это МСП с дискретным множеством значений
Марковские цепи с непрерывным временем рассмотрены в предыдущей
лекции. Здесь будет продолжено их изучение.
Определение 1 Случайная последовательность {Ап}, п = 0,1,
называется конечной цепью Маркова, если:
1) в каждый момент времени п — 0.1,... СВ Ап является дискретной
СВ с конечным множеством значений (реализаций) S ~ {0,1,... L}
L < +оо;
2) выполняется марковское свойство, а это значит, что для всех k, j
ki,.. . fc„_i из S и n 1 справедливо равенство
F{An = j | An_i = k, A'n-2 — fci, - - Ao — fcn-i} —
= P{Xn.= j|Xn_1 = fc}. (9.1)
Определение 2 Множество S = {0,1,... L} называется множеством
состояний конечной цепи Маркова. Цепь {А'„} в момент п находится в
состоянии I, I G S, если произошло событие {Хп — 1}
Замечание 1 Марковское свойство цепи означает, что закон рас-
пределения СВ А’„ при условии, что Хп i = k, к G S не зависит от того,
каким образом цепь попала в состояние к в момент времени п 1. Мар-
ковским свойством обладают многие СП, которые встречаются на прак
тике, в частности процесс авторегулирования в системах синхронизации
Замечание 2 Цепь Маркова {А’п}, п — 0.1,... в общем случае
является последовательностью зависимых СВ
Замечание 3 Помимо конечных цепей Маркова рассматривают-
ся также и цепи Маркова со счетным множеством состояний S
— {0,1, ...£}, когда L — 4-оо.
Определение 3 Вероятность
Phj{n) = Р{Л'„ У|А'„_1 = к}, к j G 5,
того, что цепь в момент и 1 окажется в состоянии j при условии
что в предыдущий момент An_i — к, называется вероятностью пере-
хода из состояния к в состояние j.
Определение 4. Матрица Р(п) с элементами рл-у(п), к, j 6 S, на-
зывается переходной матрицей цепи {А’„}, причем
Ей,- = 1.
1=о
Марковские цепи
85
те сумма элементов строки переходной матрицы Р равна единицы. Это
означает, что из состояния к цепь Маркова обязательно перейдет в одно
из возможных состояний ] — О, L.
Примеры переходных матриц.
Пример 9.1 [22] Допустим, что имеется только два возможных состояния S]
и 5г. которые могут быть названы «успехом» и «неудачей». Переходная матри-
ца имеет вид
Р ; Гр g I _ Грп P12I.
[р‘ ч' J LP21 P22J’
Р + 9 = р' + ч' = 1
Здесь р — вероятность того, что успех следует за успехом, р' — вероятность то-
го, что успех следует за неудачей.
Пример 9.2. Погода в некоторой волшебной стране [76]. Характер по-
годы два дня никогда не бывают ясными. Если в какой-либо день ясно, то на
следующий день с равными вероятностями будет либо дождь, либо снег. Если идет
дождь (или снег), то с одной и той же вероятностью погода на следующий день ли-
бо останется такой же, либо изменится. Если она меняется, то в половине случаев
на следующий день будет ясная погода.
Здесь цепь Маркова имеет три состояния S — {дождь, ясно, снег}.
Переходная матрица имеет вид
Д
Д (1/2
Р - я I 1/2
с \ 1/4
я с
1/4 1/4\
О 1/2 ] =
1/4 1/2/
Р11 Р12 Р13
Р21 Р22 Р23
Р31 Р32 РЗЗ
Пример 9.3 Цепь с поглощающим множеством состояний Е Пусть {Хп} про-
извольная цепь Маркова с пространством состояний S. Выделим подмножество Е
множества S. Изменим первоначальный процесс так, чтобы при попадании в лю-
бое состояние j из £ он не мог покинуть это состояние Новый процесс также бу-
дет цепью Маркова; ее переходная матрица Р' отличается от матрицы Р тем, что
= 1; = 0 Ч? £ & и « / J
Новый процесс называется цепью с поглощающим множеством Е.
Определение 5 Вероятность
ък(п) — /’{A'n.- fc}, kes
того что в момент времени п цепь {Ап} окажется в состоянии к, назы-
вается вероятностью k-го состояния цепи в момент п.
I Вектор Tv[n] = [тго(п),... тг^,(тг)]т называется распределением вероят
ностей состояний цепи {Хп} в момент п — 0,1,....
Замечание Вектор -к[п] задает закон распределения дискретной СВ
Хп со значениями (реализациями) из S, поэтому компоненты вектора
тфг] удовлетворяют условию нормировки
I.
^^(n)- 1,
k-0
Которое означает, что в каждый момент п времени цепь с вероятностью,
Равной единице находится в одном из своих допустимых состояний
86
Лекция 9
Теорема 9.1 При всех п 1 векторы тфг — 1] и -к[п] связаны
соотношением
п[п] = Рт[п]тг[п — 1]. (9.2)
Доказательство. По определению частного (маргинального) рас-
пределения через совместное имеем
L
P{Xn=j} = ^P{Xn=j,Xn.1-k}. (А)
Аналогия при непрерывном распределнии
V7(x) = f W(x, y)dy.
J—ОО
Далее по формуле умножения вероятностей
P{Xn = j,Xn-i = k} = P{Xn_i = к}Р{Хп = j\Xn_r = к}.
По (А) получим (по определению Р{Хп = У} = тгДп))
L
7r;(n) = 52pfcj(n)7rfc(n-1); У = 0, !,...£ (В)
п—О
По определению -к[п] — [тго(п),... тгл(п)]т, поэтому иэ (В) следует
(9.2) Теорема доказана
Следствие:
тг[п] = Рт[п]к[п — 1] = Рт[п]Рт[п — 1]-к[п — 2]. . = Рт[п] Рт[1]тс[0]
где -к[0] = (тго(О),.. .7Гь( )]т.
Вывод. Для каждого n 1 вектор к[п] полностью определяется
начальным распределением вероятностей тг[0] и переходными матрица
ми Р[1],Р[2],...,Р[п].
Определение 6 Цепь Маркова называется однородной если
Р[п] = Р = const при всех п 1.
Замечание. Из теоремы 9 1 следует, что для однородной цепи Мар-
кова выполняется свойство
к[п] = (Рт)птг[0]. (9.3)
Вывод Распределение вероятностей состояний для однородной цепи
Маркова при любом п 1 полностью определено начальным распреде-
лением тг[0] и переходной матрицей Р
Здесь (Р)п = А — матрица переходных вероятностей за п шагов, Р
— матрица переходных вероятностей за один шаг.
Транспонируя соотношения (9.2) и (9.3), получаем
irT[n] = кт[п — 1 Р[п] или р[п] — р[п — ]Р[п], (9 4)
Марковские цепи
87
где р = 'Кт — вектор строка;
р[п] = Р[0]Р". (9.5)
Пример 9 4 Процесс функционирования прибо-
ра Предположим, что через фиксированные промежутки
времени производится контроль состояния некоторого ра-
диотехнического устройства (РТУ), который может нахо-
диться в одном из трех состояний: О — работает; 1 — не
Рис. 9.1
Тогда тг^(п) — веро-
работает, ожидает ремонта, 2 — ремонтируется
Пусть — номер состояния прибора при n-й проверке
ятность обнаружения прибора в состоянии к -0,1,2 при n-й проверке.
Предположим что последовательность обладает марковским свойством и име-
ет постоянную матрицу Р (цепь однородная)
Р-
0,8
0,3
0,7
0.1
0,1
0,01
0,1
0,6
0,29
Замечание. Элементы матрицы должны удовлетворять условиям
В данном случае L — 2.
Предположим, что в момент п — 0 (1-я проверка) прибор был исправен, тогда
тго(0) — 1; тг1(О) = тг2(0) — 0.
[ Вероятность состояний прибора при второй (n = 1) и третьей (п — 2) про-
верках равны
тг[1] = Рттг[0] =
0,8
0,1
0,1
0,7
0,01
0,3
0,1
0,6 0,29
0,8
0,1
0,1
тг[2] — Рттг[1] =
тт[1] - [0,8; 0,1; 0,1]т;
"0,8 0,3 0,7' /о, 8
0,1 0,1 0,01 1 0,1
0,1 0,6 0,29 \0,1
0,74
0,091
0,169
Такой подход позволяет оценить работоспособность РТУ и системы его обслу-
живания.
Можно наглядно изобразить возможные состояния цепи и переходы в форме сто-
хастического (вероятностного) графа рис. 9.1 в соответствии с матрицей Р
Пример 9 5 Игра двух игроков. Пусть т и М некоторые неотрицательные
Целые числа — начальные капиталы 1-го и 2-го игроков. Идет игра причем, после
Каждого раунда капитал 1 го игрока с постоянной вероятностью р увеличивается
На единицу и с вероятностью q = 1 — р уменьшается на единицу (для 2-го игрока
наоборот, р и q — вероятности уменьшения и увеличения капитала на 1).
Замечание Результаты любого раунда не зависят от результатов предыдущих
Рэндов (марковское условие).
Обозначим через Хп капитал 1-го игрока после проведения п последователь-
ных раундов.
88
Лекция 9
Если Хп = О или Хп = т + М — L, то игра прекращается. В первом случае —
это разорение 1-го игрока, во 2-м случае — разорение 2-го игрока.
Заданная этими условиями последовательность {А'»} определяется однородной
цепью Маркова со множеством состояний S = {0,1,___} и постоянными переход
ными вероятностями
Г Pk,k+1 = Pi Pk,k-1 = 9 при 1 k L - 1;
1р*Л+7=0 при зф ±1; ро,о = 1; PLL - 1- *
Переходная матрица Р согласно (9.5) имеет вид
р - ’1 0 0 0 - -0 0’ q 0 р 0 - - -00 0 q 0 р - - - - 0 0 0 q 0 р 0 0 0 q 0 р .0 0 0 0 1 (9.7)
Цепь Маркова данного примера называется процессом случайного блуждания по
прямой с двумя поглощающими границами в точках состояний Х„ = 0; Х„ = L.
Начальным состоянием служит A'o = т.
Определение 7. Вектор -к[оо] = [тг0(оо), %i(oo),... 717,(00)]’ назы-
вается вектором финальных вероятностей состояний цепи Маркова при
заданном начальном векторе тт[О] распределения
7rfc(oo) = lim я7-(п), k — О, L,
п—юо
если предел существует.
Замечание. Особое значение имеет случай, когда финальные рас
пределения вероятностей не зависят от начального распределения тт[О]
Это означает наличие единственного финального распределения тт[сс]
которое называют стационарным распределением цепи. В этом случае
при любом тт[О] распределение тфг] приближается к тт[оо] при п оо,
тогда тт[п] к, тт[оо] при п 1, т.е. вероятности состояний цепи остаются
практически постоянными при больших п
Если -к[0] = тт[оо], то вероятности состояний постоянны, так как
тт[л] = тг[оо] при всех п 0.
В этом случае по (9.5) получим
Р ~ lim Р[п] ~ lim р[0]Р".
п—>00 П—+СО
Такое распределение р = -кт[оо] может быт получено по (9.5) как ле
вый собственный вектор матрицы Р при ее собственном значении А — 1,
что следует из соотношения
Р= РР- . (9-9)
Покажем, что собственное значение А матрицы Р не превосходит еди-
ницы. Действительно, по соотношению Рх = Ах при max£ |zt-| = гп
Марковские цепи
89
получим
|А|пг — max |(Ахс»)г | — max |PxJ — max
max^^p^m = т.
з
i
Отсбюда следует неравенство |А| 1.
Определение 8 Однородная цепь Маркова называется эргодиче-
ской, если вектор финальных вероятностей it [сю] существует при любом
начальном распределении вероятностей тт[0] и не зависит от -к[0].
Пример 9 6 Пусть задана бинарная цепь Маркова
P=[V 1-J’
Рассмотрим два случая 1 — сг = /? = О; 2 — а = 0 = I. Корни характе-
ристического уравнения Aj — 1. А2 — 1 — а — 0- В первом случае Р — I и со-
гласно (9.5) рп] = р[0], т.е. стационарное распределение существует и зависит
от начального распределения.
Во втором случае Р = j . Пусть р[0 = [0 1], тогда р = [1 О], р = [0 1] и
т.д., т.е. на каждом шаге состояния цепи скачкоообразно чередуются. Стационарного
состояния не существует (А = 1; А2 = — 1).
Безусловные (абсолютные) вероятности состоянии однородной цепи
Маркова через п шагов тгДл) (_/ = 0,1... L) можно выразить согласно
теореме 9.1 через начальные вероятности тг,(0) (г = 0. !,...£) и пе-
реходные вероятности Pij(n)
L
*з(п) ~ 52 ъ(0)Рч(п)
1 = 1
(9-Ю)
причем (п) — 1.
з-о
Пример 9.7. Пусть события, означающие передачу сообщений а} (j =
сведены в однородную цепь Маркова с начальными вероятностями 7rt(O) (г = 1,2,
••/) и матрицей переходных вероятностей Рп — {ptJ(n)}
Pll Pl2 PH
р Р21 Р22 P2Z
п —
-РЦ. Р12 PH -
Это означает, что сообщение после сообщения at появится с вероятностью
Pij при каждой передаче.
Требуется написать абсолютные вероятности состояний за один шаг в случае
АВУХ сообщений (1 = 2)
Решение По формуле (9.10)
7Г1(1) = 7Г1(0)рп + тг2(0)р21;
^2(1) — 7Г1 (0)р12 + ТГ2(0)р22-
Пример 9.8. Чередование гласных и согласных в литературном тексте
сновоположник теории цепей А.А. Марков проанализировал 20000 букв произведе-
90
Лекция у
ния А С Пушкина «Евгений Онегин» и установил, что после гласной стоит гласная с
вероятностью 0,128 и согласная с вероятностью 0,872, после согласной — согласная
с вероятностью 0,337 и гласная с вероятностью 0,663 (буква «й» считалась гласной
«ь» и «ъ» в расчет не принимались).
Найти матрицу Рз (за два шага), найти также вероятность того, что третья буква
будет гласной, если первая была гласной.
Решение Обозначим 51 — появление гласной в последовательно читаемом
тексте, S2 — появление согласной.
Эти состояния события связаны в дискретную однородную марковскую цепь с
заданной матрицей переходных вероятностей (матрицей за один шаг)
р = [Ph Р12 1 _ [0 128 0872]
1 [р21 P22J 10,663 0,337]’
Дискретную цепь можно представить в виде последовательности СВ Xlt Х2,
... где к — номер буквы от начала текста; — СВ, принимающая значение
"I", если к-я буква гласная и значение “2", если к-я буква согласная, (к = 1,2,...)
Найдем матрицу Р (матрицу за два шага)
р _ р2 _ [0,128 0,87212 _ [ Рп+Р12Р22 Р11Р12+Р12Р22 ] _
1 [0,663 0,337] I.P21P11 + Р22Р11 Р21Р12+Р22 J
_ [ 0,595 0.4051
“ [0,308 0,692] ’
Искомая вероятность равна
PCS i|Sj,»-2)-p11(2) = 0,595
Лекция 10
Марковские цепи (продолжение)
Теорема 10.1. Финальные вероятности р3 (j = 1,2, ...Z) находятся
как решение системы линейных уравнений
I I
Pj=^2pkPkj, j = ]Гр; = 1 (юл)
fc=l J=1
Пример 10.1. Найти финальные вероятности однородной цепи в примере 9.7.
Решение. При известной одношаговой матрице Р (пример 9.7) система уравне-
ний для финальных вероятностей (при j = 1,2, I — 2) имеет вид
Р1 = Р1Р11 + Р2Р21,
Р2 = Р1Р12 + Р2Р22',
Pl + Р2 = 1
Отбросим второе уравнение, тогда из первого и третьего уравнений получим
Р1 = Р1Р11 + (1 - Pl )Р21 или pi (1 - pu + Р21 ) = Р21
В результате находим
Р21 ,
Р1 = --------; Р2 = 1 - Pi-
Р12 + Р21
Полагая Р12 = 0,872; p2i = 0,663 (см матрицу Pi примера 9.7) получим
Р1 = 0,432; р2 = 0,568.
Марков А А. установил, что эти числа совпали с относительными частотами по-
явления соответственно гласной и согласной в тексте произведения А.С. Пушкина
«Евгений Онегин»
Теорема 10.2. СП Х{1) с дискретными значениями и независимыми
Приращениями является однородной и аддитивной цепью Маркова
Доказательство. Пусть имеется п+2 отсчетов СП. Через Х(т) — j
°6означим п + 1 отсчет, a (n + 2)-й отсчет через X(t) = г. Выразим
Условную вероятность через отношение безусловной вероятности:
P[X(f) = j I Х(Ц) = ч,.. .ХОп) = in; х(т) = г] -
= = Й, - - Ж) = №) = г; X(t) = j] = РД2
P„+1[X(f1) = ii,...X(<n) = i„;X(r)-i] Рд1’ 1 }
r«eti < t2 < ... <tn < т < t; ik,i,j = 1,2...; k = 1,2...n.
Заметим, что произведение событий
X(ti) = ii,---X(tn)-гп; X(r) = i
92
Лекция 10
эквивалентно произведению событий
Х(й) = й, Х(й) - Х(й) = й - й,..., Х(т) - X(tn) = i - in, (10.3)
так как из одной последовательности равенств можно получить другую
и обратно Это означает равество совместных вероятностей
Р[Х(Й) = й, Х(й) = й,.. Х(й) = й; Х(т) = г] =
= Р[Х(й)= й,Х(й)-Х(й) = Й-Й,---Х(т)-Х(й) = г-й] = РД1
По условию X(i) — СП с независимыми приращениями (10.3), тогда
в знаменателе формулы (10.2)
Рд1 =
= Р[Х(й) = Й]Р[Х(Й) - Х(й) = й - й] - • -Р[Х(т) - Х(й) = i - й].
В числителе аналогично получим
Рд2 = Рд1 P[x(i) - Х(т) = j- »].
Следовательно по формуле (10.2)
P[X(t) = j | Х(й) = й - - • Х(й) = й; Х(т) = i] =
= P[X(t)-X(r)=j-i].
Таким образом, нашли, что условная вероятность слева не зависит
от величины п; положив п = 0, получим
P[X(t) = j | Х(т) = г] = P[X(t) - Х(т) - j *1
Отсюда следует марковское свойство СП X(t)
P[X(t) = 3 I Х(й) - й, - - -Х(й) - й; Х(т) = г] -
= P[X(t) = j|X(r) = t].
Пример 10 2 В установившемся режиме работы АТС, имеющей I номеров, в
случайные моменты tj, поступают вызовы и происходят освобождения номе
ров. Будем говорить, что АТС находится в состоянии Sk, если заняты к номеров
В случае, когда все / номеров заняты, вновь поступающие вызовы получают отказ
в разговоре. Пусть X(t^) = Xfc число занятых номеров непосредственно перед
моментом tfc (к = 1.2,3....)- Очевидно, что Xfc = Xk—l + где т)к — случайная
величина, принимающая значения —1, 0„ 1. При этом:
если О < Xfc-1 < I. то Р(т)к — 1) = Р\ P(Uk - -1) = Ч ~ 1 - Р-
если Xk-i - О. то Р(т)к = 1) = Р\ P(Uk = О) = g;
если Xfc_i = I. то Р(т)к = 0) = р; Р(рк = -1) = q.
Будем считать, что т)2,_— взаимно независимые случайные величины. Тогда
Xj, Хг,- - - — дискретная цепь Маркова, так как этот процесс с независимыми прирз-
щениями и с дискретным временем. (Случайную величину X (t^) можно трактовать
как случайную точку, блуждающую на отрезке [О; 1] по целочисленным точкам едИ'
ничный скачок вправо с вероятностью р и влево с вероятностью q При этом в точках
О и I установлены отражающие экраны. Такое движение называется случайным блу
жданием с отражающими экранами.) Найти одношаговую переходную матрицу
Марковские цепи (продолжение)
93
Решение Найдем переходные вероятности ptJ (i,j = О,...,/):
= ] | Л\„1 = »} =
P{Xk = i,Xk^ = j}
P{Xk , = О
_ Р{Х<!_1 = i, r)k = j - *} _ P{Xfc_i = i}P{yk = 3- «'} _
F{Xfc_I = .} “ P{Xfc_i = i}
{О при j - t| 2 или « = j;l<t<Z—1;
p при j — i — 1; 0 i I — 1 или i = j = I;
q при j — t = —1; 1 i / или i - j = 0.
Так как рч зависят только от разности j — i, то цепь Маркова однородная.
Выписываем переходную матрицу за один шаг:
Р = {Р«т) -
Ч Р о
Ч 0 Р
0 <7 0
О О О'
ООО
ООО
ООО
ООО
ООО
О р о
ч О р
о Ч Р
Пример 10.3 Производится последовательность п испытаний, связанных в од-
нородную цепь Маркова с одношаговой переходной матрицей
[ Рп
LP21
Р12 1
Р22 ]
где рц = Р(Л, is/А. и - 1); p2i = P(Atis/A}is - 1); pi? — 1 - Рп =
— P(A,is/A, и — 1), j>22 = 1 — P2.i — P(-4, i'/Л, г/ — I) и начальными вероятности
ми — Р(А) и = 1 — — Р(А). В каждом испытании появляется или
не появляется событие А. Пусть X число появлений события А в п испытаниях
(порядок безразличен). Найти закон распределения X.
Решение Требуется найти вероятность Р(Х = к) (к = 0,1,_______, п). Пусть Bi —-
одно из событий, означающих, что событие А появилось ровно к раз безразлично в
каком порядке и не появилось ровно п — к раз. Таких событий будет С* — столь-
ко, сколькими способами можно расставить символ А на к из п мест. События Bi
(1= 1,2....) попарно несовместны, .так как в каждой серии из п испытаний реали-
зуется только один из С„ возможных случаев.
По аксиоме сложения вероятностей
F{X = А) =
1=1
По общей теореме умножения вероятностей для п событий получаем
P(Bl) =Р^)Р.’143- -Р«„ lin>
где ij... 2, причем точно к из этих символов равны 2, а п — к остальных
символов равны 1.
Например, может иметь случай, когда
(о)
Р2 Р22 - - - 7>22 Р21 PH ..-Р11 -
к множителей n—fc миожителей
Таким образом.
Р{Х = к} = - Р.„_л„ (fc = 0, 1 ...п).
94
Лекция IQ
Сумма содержит Ck слагаемых, в Которых ровно к индексов »i. ,i„ равны 2,
остальные равны 1. Пусть, в частности, п = 3. Тогда
F(X = 0) = р£о)рцрц - Pi0)Pu;
Р(Х = 1) =р£’)р21Р11 + P1O)PI2P21 +Pj0)P11P12;
P(X = 2) = P^O)P12P22 + P]0,P21P12 + p5O)P22P2i;
P(.Y = 3) = P^O)P22P22 = P$0)P22-
Если, в частности, испытания независимы и событие А появляется каждый раз
(о) г-
с вероятностью pj = р, то рассмотренная схема переходит в схему Бернулли и,
следовательно, случайная величина X будет распределена по биномиальному закону:
Р{Х = к} = c*phqn-k, q + p=i.
Задачи
10.1. Простая однородная цепь Маркова с двумя состояниями имеет переход-
ную матрицу
*=( Г
\ Р2 1 — Р2 )
Требуется а) составить характеристическое уравнение и найти характеристические
числа матрицы; 6) найти вектор финальных вероятностей (рт.рг)-
10.2. Точка может занимать позиции х = 1,2,..N. В моменты времени tj <
< t2 < - < tfe <___она может совершить скачек на соседние позиции Если
1 < п < N, то вероятность перехода а? = п—*ж = п—1 равна р, а вероятность
перехода х = п —и = n+ 1 равна q = 1 — р. Если п = 1, то точка с вероятно-
стью р остается на месте и с вероятностью q переходит на позицию п = 1. Если
же п — N, то наоборот, с вероятностью q она остается на месте и с вероятностью
р переходит на предыдущую позицию Составить матрицу переходов данной цепи
Маркова. Вычислить финальные вероятности при N = 4.
10.3. N черных и N белых шаров размещены в двух урнах по N шаров в каждой
Число черных шаров в первой урне определяет состояние системы На каждом ша
ге случайно выбирается по одному шару из каждой урны, и эти выбранные шары
меняются местами Требуется: а) определить число состояний данной цепи Марко
ва; б) найти вероятности переходов за один шаг; в) найти пределы вероятностей
переходов за п шагов при п —> оо.
10.4. Независимые испытания проводятся до тех пор, пока не будет получена серия
из т последовательных появлений события А, вероятность появления которого при
каждом испытании равна Р. Определить математическое ожидание числа испыта-
ний tjt, которые нужно произвести, чтобы получить подряд т наступлений события
А, если известно, что уже к наступлений этого события получено (т.е. остается по-
лучить еще т — к (0 к < лг)) наступлений события А). Расчитать М{t^} при
к = 0,1,2, т = 3, р = 0,5.
10.5. При обсуждении основных положений кинетической теории материи Эри
фестом была предложена следующая модель: т молекул, распределенных в двух
резервуарах, случайно по одной перемещаются из своего резервуара в другой Найти
финальные вероятности числа молекул в первом резервуаре.
10.6. Из таблицы случайных чисел, содержащей все целые числа от 1 до т вклю-
чительно, выбираются числа наудачу. Система находится в состоянии Q}, если наи-
большее из выбранных чисел равно у (j — 1,2,.. ,лг). Найти вероятности р,к(п)
Марковские цепи (продолжение)
95
г = 1,2, ...,тп) того, что после выбора из этой таблицы п случайных чисел наи
большее число равно к, если раньше им было число i.
10.7. По условиям соревнований спортсмен прекращает борьбу при потере двух
очков, что может быть при одном проигрыше или при двух ничьих. При каждой
встрече спортсмен, не имеющий ничьих, выигрывает с вероятностью а, делает ни-
чью с вероятностью Р, и проигрывает с вероятностью 1 а — р Если ничейный
исход был, то вероятность выигрыша в каждой встрече равна -у / а. Определить
вероятность потери различного числа очков за п встреч для спортсмена, результат
предыдущей встречи для которого известен.
10.8. При повышении напряжения в сети электрического тока с вероятностью а
выходит из строя блокирующее устройство прибора, а с вероятностью р прекращается
работа этого прибора Если блокирующее устройство вышло из строя, то последую-
щее повышение напряжение приводит к прекращению работы прибора с вероятностью
7. Определить вероятности исправной работы схемы, выхода из строя только блоки
рующего устройства и прекращения работы прибора после повышения напряжения
в п раз, если начальное состояние прибора известно.
10.9. Простая однородная цепь Маркова с тремя состояниями имеет матрицу пе-
реходов
1 — Р2
о
1-Р1
Р2
1 - РЗ
0 1
о I , Pl, Р2, РЗ > 0.
РЗ/
Требуется: а) составить характеристическое уравнение и найти характеристиче-
ское числа матрицы; б) найти финальные вероятности pi и рг-
Лекция 11
Пуассоновские процессы,
потоки событий
Во многих инженерных проблемах возникает задача о распределении
потока случайных событий во времени Например, при описании дробо-
вого шума в электронных приборах ищется вероятность Рп(т) — Р(п,т\
того, что в интервале времени длины т из катода лампы вылетает ров-
но п электронов, и событием здесь является вылет одного электрона;
вылет последовательности электронов образует поток событий Собы
тием может быть вызов на телефонной станции, а последовательность
вызовов образует поток событий, вызовы скорой помощи и др
В общем случае потоком событий называется последовательность од
нородных событий, следующих одно за другим в случайные моменты
времени
Иногда случайное событие ассоциируется со случайно расположен
ной на оси времени точкой, и такой процесс (поток) называется точеч-
ным, в общем случае ищется вероятность Рп[т) того что на интервале
т расположено ровно п точек.
В теории систем массового обслуживания (СМО) эта задача связыва
ется с распределением вероятностей поступления определенного числа
(п) требований в заданном промежутке времени (г).
Другой задачей является нахождение функции распределения дли-
тельности промежутков времени между отдельными точками потока
(между моментами поступления требований в СМО)
На потоки событий часто накладываются определенные ограничения
и по их виду осуществляется классификация потоков пуассоновский,
обобщенный пуассоновский, поток Пальма (или рекуррентный поток)
поток Эрланга и т д
Введем три основных ограничения, характеризующих простейший
(или пуассоновский) поток
Пусть Ar(Zosf) — число событий на интервале (Z0,Z) — случайная
величина, которая принимает дискретные значения 0,1,...к с вероят-
ностью P{A’(Zq,Z) = А:} = Pk(to,l').
Будем решать сформулированные выше две задачи.
нахождение функции распределения J*’(Z) длительности промежутков
времени между соседними событиями;
распределение вероятностей Ffc(Zo>f) при следующих трех условиях
1 Условие независимости Для любых Zj < <2 < .. - < tr
независимы.
2. Условие однородности (стационарности) потока Вероятности
Pn(to,t) не зависят от конкретного выбора начального момента СП А*
Пуассоновские процессы, потоки событий
97
однороден во времени приращения Xt2 — Xtl и Х<2+, — Xtl+s оди-
наково распределены.
За малый промежуток времени (t, t + Д<) с вероятностью a At + о(Д<)
возникает только одно событие из потока
P{X(t, t + At) = 1} = aAt + о(Д<),
где o(At) — величина меньшего порядка малости по сравнению с At;
а = const; а — параметр пуассоновского СП (потока).
3. Условие ординарности. Вероятность более одного события за вре-
мя At равна о(Д/)
P{X(t,t + At)^2} = o(At).
Замечание 1. Первое условие означает, что пуассоновский СП (по-
ток) является СП без последействия — процессом с независимыми при
ращениями.
Замечание 2 Вероятность того, что за время At не произойдет
ни одного события, имеет вид
Ро = P{X(t, t + At) — 0} = 1 — aAt + o(At).
Определение 1. Поток, обладающий тремя приведенными свой-
ствами (без последействия, однородный, ординарный), называется про-
стейшим потоком или стационарным пуассоновским.
Решим первую задачу. Обозначим через т — интервал времени ме-
жду событиями в потоке. Очевидно, т — это СВ. Найдем функцию
распределения
F(t) = Р(т < t).
Рассмотрим функцию R.(t) — 1 — F(t) — Р(т > t).
Событие т > t эквивалентно тому что за промежуток времени t собы
тие не появится ни разу. Используя первые два условия (независимость
и однородность) получим соотношение
Р(т > t + At) = Р(т > t)P{X(t, t + At) - 0}
Иначе
R(t + At) - R(t)P0 = 7?(t)[l - aAt + o(A/)]
Переходя к пределу при At —у 0, получим ДУ
dR/dt = —aR.
Отсюда
R(t) = 7?(0)e-at - е-“‘,
так как R(0) - Р(т > 0) = 1
В результате получим функцию распределения СВ I
F(t) = l-e~at, t'^Q
98
Лекция li
Отсюда находится ПРВ
Иф) = ae~at, t О
Таким образом, интервалы времени между событиями распределе-
ны по показательному закону.
Определение 2. Поток событий называется потоком Пальма (по-
током восстановления или рекуррентным потоком), если промежутки
времени между последовательными событиями
представляют собой независимые, одинаково распределенные СВ
Замечание 3. Простейший поток является частным случаем потока
Пальма, так как в нем расстояния 7i,T2,..., т^,... представляют собой
СВ, распределенные по одному и тому же показательному закону, их
независимость следует из первого условия (отсутствие последействия)
а расстояние по времени между любыми случайными событиями не за-
висит от того, какие расстояния между другими событиями.
Замечание 4. На практике используются и другие модели потоков,
в частности поток Эрланга, который образуется в результате "проре-
живания" простейшего потока Так, например, если на оси времени
в простейшем потоке сохранить каждую вторую точку, то образуется
поток Эрланга второго порядка, если сохранить каждую k ю точку, то
получим поток Эрланга fc-ro порядка Э*, для которого ПРВ интерва-
ла между событиями имеет вид
LV ____ о(а^) at
1ВД-0ГЛ)Г ’
Этот закон называется законом Эрланга fc-ro порядка
При k = 1 приходим к полученному ранее показательному закону.
Замечение 5. Характеристики других потоков, таких как поток Бер-
нулли, парнокоррелированный, поток группированных точек и др. рас-
сматриваются в специальных курсах.
Замечание 6. Для потоков существует ряд предельных теорем,
утверждающих, что при некоторых условиях сумма потоков сходится
к пуассоновскому потоку. Одним из таких условий, как и в центральной
предельной теореме, может быть малая интенсивность слагаемых пото-
ков. Очевидно, что сумма независимых пуассоновских потоков всегда
представляет собой пуассоновский поток (см задачу 11.2).
Как показано в задаче 11.2, сумма двух независимых процессов Пуас-
сона будет также процессом Пуассона. Таким образом, закон Пуассо-
на, подобно гауссовскому закону, является устойчивым относительно
операции сложения. Приведенное предложение существенно обобщено
А.Я. Хинчиным. Анализируя различные потоки, А Я. Хинчин пришей
к выводу, что простейший поток появляется тогда, когда складывает
ся большое число независимых, ординарных и однородных во време-
Пуассоновские процессы, потоки событий 99
ни потоков с любым последействием, каждый из которых оказывает
на сумму малое влияние.
Проиллюстрируем это предложение примерами.
1. Представим себе большую автомагистраль, по которой движется
поток автомашин. Этот поток складывается из большого числа малых
потоков, приближенно удовлетворяющих перечисленным условиям. Ма-
лые потоки как бы вливаются в поток на автомагистрали из боковых
улиц, Дорог, проездов и т.д Вследствие ранее сказанного, поток авто-
машин на автомагистрали можно приближенно считать простейшим.
Г 2. Поток отказов сложного радиоэлектронного устройства, маши-
ны, механизма можно считать простейшим, если он складывается из
большого числа независимых потоков отказов отдельных частей этого
устройства, причем вероятность отказа каждой части мала.
Высказанное А.Я. Хинчиным предложение имеет строгую математи
ческую формулировку и доказано. Следовательно, пуассоновский поток
среди всех потоков играет такую же роль, как и гауссовский закон по
отношению к другим законам распределения в силу центральной пре-
дельной теоремы (сумма большого числа независимых случайных вели-
чин при выполнении некоторых общих условий распределена прибли-
женно по закону Гаусса).
Из сказанного также ясно, что простейший поток будет наиболее ха
отичным из всех ординарных и однородных во времени потоков так
как слагаемые потоки независимы и малы. Если реальный поток и не
является простейшим (в силу наличия последействия), то считая его
простейшим во многих случаях ведут расчет на наихудший случай
Теорема 11.1 (о пуассоновском потоке). Если выполнены условия
1-3 (независимости, однородности и ординарности), то
P{X(t,t + r) = п} = е-“\ (11.1)
п!
где а = const.
Доказательство.
Из условий 1 и 2 пуассоновского потока вытекает, что для любых t и s
Po(t + s) — fo(i)^o(-s),
гДе Po(t) — вероятность того, что в интервале (0, t) не произойдет ни
°Дного события
Единственным нетривиальным решением этого уравнения для кото-
рого 0 < P0(t) С 1, является
P0(t) = e-“/,
гДе а > 0.
I Отсюда при малых t получим
Po(i) — 1 — at + o(t); Pi(t) = 1 - Po(t) ~ at + o(t).
100
Лекция И
Пуассоновские процессы, потоки событий 101
Найдем вероятность Р(п,т + Ат) при п 1. Произведем разбиение
(т+Дт) — tUAt. Если подынтервал Дт достаточно мал, то имеем лишь
две возможности: либо за время Дт происходит одно событие (причем
совместно с тем, что за время г произошло уже п — 1 событие), либо не
происходит ни одного события (причем совместно с тем, что за время
т произошло п событий). Таким образом, при малых Дт справедливо
равенство (по теореме сложения вероятностей)
Р(п, т + Дт) — Р(п — 1, т; 1, Дт)+ Р(п, т; 0, Дт).
Используя условие независимости, получим:
Р(п, т+ Дт) — Р(п — 1, т)Р(1. Дт)+ Р(п, т)Р(0, Дт).
Подставим сюда выражение для Р(1, Дт) — аДт и Р(0, Дт) = 1 —
—аДт,тогда
+ Р(п’т). + аР(П1 _ аР^п _ ту
Решая это ДУ, находим-
9o(t,z) = еат<г-1) =е-°геа2Т.
Раскладывая в ряд Маклорена экспоненту еагт по степеням т, получим
00 / \п
n=0
Сравнивая это соотношение с выражением для производящей функции
9?(т, z) [см. (2.18)], получим
I Р(п,т) = Рп(т)=Ц^е—.
Теорема доказана.
Для выяснения физического смысла постоянной а найдем среднее
число событий в интервале т:
Переходя к пределу при Дт —* 0, находим ДУ:
</Р(п, т) + apfn, т) _ ар(п — 1, т) при
dr
п > 1.
Решение этого уравнения можно получить двумя способами.
1-й способ. Рассмотрим ДУ как рекуррентное соотношение и учтем
равенство (начальное условие) Р(п, 0) — 0, тогда решение ДУ первого
порядка получаем тоже в рекуррентном виде
l,t)dt.
Положим п = 1 и учтем решение Р(0,£) = е Тогда получим
Р(1.т) — ате~ат. При п = 2 находим
Р(2,т)-а2е-°т [ tdt=^^raT
Jo 2
и т.д Методом математической индукции приходим к закону Пуассо-
на (11.1).
2-й способ. Умножим ДУ на zn и, складывая почленно с учетом ДУ
</Р(0.т) .
---——- — — аР(0,т), получим для производящей функции
dr
©О
^(TjZ)-£P(n,T)z"
п—0
следующее ДУ:
^ = a(z-l)99, y>(0,z) = l.
от
Положим А = ат, тогда
уп-1 00 \fc
Ет(п) = Ае"А V . = Ае~“т V — - А.
(п - 1)! k\
п=1 ' ' к-=0
Таким образом,
Ет[п) = А - ат.
Введем отношение п = Ет{п)/т — среднее число событий за секунду.
Тогда а = п. Заметим, что предположение о постоянстве а, а следова-
тельно, и о постоянстве п равносильно предположению о стационарно-
сти (однородности) случайного процесса (пуассоновского потока)
Замечание 6 Наиболее часто на практике нарушается условие од-
нородности, тогда это условие заменяется на условие неоднородности
P{X(t, t + Д() = 1} = a(t)A/ + o(At),
где a — a(t) — некоторая функция, зависящая от t, которая характери
3Ует среднюю плотность числа событий потока в момент времени I. В
этом случае Р{X(ti, t2) = n} = Pn{ti,h) зависит не только от длины
^2 — ti. но и от начала ti интервала времени.
Тогда
P{X(ti,t2) = nJ = a(u)du^ exp — jf a(u)du .
Это распределение соответствует неоднородному пуассоновскому по-
току событии.
102
Лекция J]
Пример 11.1. Одним из примеров пуассоновского потока событий при соблюде-
нии вышеуказанных условий и теоремы является случайный телеграфный сигнал
(СТС) — рис. 11.1, 11.2.
Вычислим КФ СТС (рис. 11.2) в предположении, что выполняются следующие
условия:
1) скачки от одного значения к другому происходят случайным и независимь м
образом;
2) в интервале времени т происходит к скачков с вероятностью, заданной рас-
пределением Пуассона;
3) значение сигнала в любой момент времени с равной вероятностью равно ну-
лю или единице
Найдем вначале среднее значение СТС
тпх = О - Р{з7 = 0} + 1 - Р{х ~ 1} ~ Р{х — 1} — 0,5.
Пусть a?i = з:(<1) и х% = ^(ta) — дискретные СВ, принимающие два возможных
значения — нуль и единица. Следовательно, используя определение КФ, получим
RX(t) - (0 - 0)Р{з7! = 0,372 = 0} + (0 • 1)Р{®1 = 0,372 - 1} +
+(1 -OjPja:! = 1,372 — 0} + (1 1)Р{з?1 = 1,з72 = 1} = P{xj — 1,а72 = 1}-
Полученная совместная вероятность равна вероятности того, что xj — 1 и за вре-
мя т происходит четное число скачков:
Р{з7т = 1,372 — 1} — Р{з71 — l,fc — четное} = Р{з:1 = l}P{fc — четное}.
Здесь учтено условие независимости. Таким образом
Ri(t) = 0,5P(fc — четное).
Отсюда
Rx(t) = — 0f5e“alTl£>(aj т) при к — четном.
к=0
Ряд Sfa.r) можно представить в виде
Пуассоновские процессы, потоки событии 103
В результате получим (рис. 11 3)
RX(T)= 1(]+е-2“Н).
Предельные значения КФ
Kz(o) = Е{х2} = <т2 +т2 = Rx(<x>) — Пт Rx(t) — т2 =
Таким образом, условие стационарности пуассоновского потока, как и следовало
ожидать, выполняется; КФ зависит лишь от разности отсчетов t2 — <1 = т.
Пример 11.2. Рассмотрим случайный фототелеграфный сигнал, когда состояния
х — О и х = 1 не равновероятны: = g = 1 — р. F{1} = р (р + g = 1). причем
значения х в различных интервалах статистически независимы, а последовательность
точек, в которых происходят скачки, распределена на вещественной оси по закону
Пуассона с параметром А (см рис 111)
Найдем среднее значение СП
E{x(t)} = О - F{z - 0} + 1 Р{х = 1} = F{i = 0} = р.
Среднее значение постоянно и не зависит от t. Это означает, что СП стациона-
рен по среднему значению.
Найдем КФ СП
Rx(t + т, t) = E{x(t + r):r(t)} = гг2) = 0 О F{xi — 0,272 = 0} +
+ О - 1 F{a;i - 0,а?2 = 1} + 1 - 0 F{ei - 1,2:2 = 0} +
+ 1 1 - Р{хг — 1,12 = 1} = F{xi = 1,272 = !}•
Пусть А — такое событие, что А = (arj = 1, з:2 — 1). Существует две возможности:
а) через время т не происходит скачка в сигнале; б) за время т происходит один
скачок. Эти два события образуют полную группу событий, поэтому вероятность
F{/1} можно найти по формуле полной вероятности
2
»=1
где Р{Н,} + Р{Н2} ~ 1.
Гипотеза — событие, заключающееся в отсутствии скачков в интервале т.
Вероятность этого события P{Hi] = Ро(т) ~ Ат, т 0. Эта вероятность на
Ходится по закону Пуассона
п!
При п = 0.
F{F2} — вероятность наступления одного события скачка за время т.
Р{Н2} - 1 - Р{Н1} = 1 -F0(r) = 1 - е-Лг.
104
Лекция Ц
В качестве условных вероятностей Р{А | Н,} принимаются
вероятность события х — 1 при условии отсутствия скачка за время т-
Р{-4 | Нт} = р-.
вероятность события х — 1 при условии наличия одного скачка за время г:
Р{.4 | Нг} = р-р = р2 (в силу независимости событий вероятности перемножаются)
В результате находим КФ
Вх(т) = F{a;i — 1,Х2 = 1} — ре-х1т1 + р2 (1 - е-х,г|) —
= р(1 - р)е-А|т| +р2.
Различие данной модели фототелеграфного сигнала от рассмотренного ранее слу-
чайного телеграфного сигнала в том, что в последнем случае р = 1/2, а = А. Это
различие определяется в частности тем, что в случае телеграфного сигнала скачки от
одного значения к другому происходят случайным образом, т е. в любых точках оси
времени3 а в случае фототелеграфного сигнала скачки управляются пуассоновским
процессом (последовательностью СВ tkik = 0, ±1,±2,_).
Из теоремы 10.2 следует, что пуассоновский СП является однородной и аддитив-
ной цепью Маркова. Найдем переходные вероятности этой цепи По этой теореме
находим выражение для переходной вероятности в виде
Р.ИлО = F[X(t) = 17ВД - г] = Р[Х(4) - Х(т) _ j - »•].
Из определения пуассоновского СП следует
Р[Х(т + Л) X(r) = fc]=
к\
Положив т + h, получим
Pi, (т, t) - i,3 - 1,2,..j > т; I > т; (И. )
(3 - г)!
^(т,0-О
В силу ординарности пуассоновского процесса его каждая выборочная функция
представляет собой последовательность скачков единичной высоты в случайные мо-
менты времени (см. рис. 1.1, 11.1). Эта последовательность однозначно определяет
ся моментами времени, в которых происходят скачки. В свою очередь эти моменть
образуют случайное множество точек на оси времени Количество этих точек между
двумя любыми моментами времени распределено по закону Пуассона (11.2).
Найдем среднее значение и КФ пуассоновского случайного процесса
(ПСП) X(t) = Xt, полагая Х(0) = 0.
По условию
P{X(t) - Х(0) = Л-} = F{X(f) = Л"} = Лг = 0,1,...
Известно, что (см. задачу 11.1)
mx(t) = Dx(t) = at.
Таким образом, ПСП — нестационарный СП.
Найдем КФ А^(^1,<2). Пусть to > fi- Рассмотрим промежуток (0, С-з]-
Разобьем его на два промежутка (0, ti] и (ti, <2]- Приращение ПСП на
всем промежутке (0,/г] равно сумме приращений ПСП на промежут-
ках (0,fi] и (fi,/г]
Х(<2) = Х(М + П*2 fi).
Пуассоновские процессы, потоки событий
105
где У(/2 — <i) = A'(Zz) — X(/i) — приращение процессса за промежуток
(ti, i2] (приращение ПСП можно толковать как число событий за соот-
ветствующий интервал времени). По определению ПСП его приращения
за непересекающиеся промежутки времени являются независимыми СВ.
Поэтому их ковариация равна нулю
е№№-*1)]-о.
Рассмотрим величину
I Ж) - X(t2)-S[x(t2)] _ х(<1)+у(/2-/1)-ВДМ+у(*2-*1)] -
I = X(h) - Вдй)] + У(«2 - й) - 2 - й)] = + y(f2 - h).
Тогда, используя определение ковариационной функции, получим
Л^(й,<2) = ВДй)Х(^)] = Е{Х(^)[Х(^) + Y(t2 -й)]} =
= Я{№)]2} + E[X(h)Y(t2 - «J] = £?{[Х(Й)]2} = £Цй) = atr.
Аналогично при > 12 находим A'a;(Zi,i2) = at2. Объединяя оба
результата, получим
Kx(ti,t2) - amin(t1,t2).
Отсюда снова замечаем, что ПСП —- нестационарный СП.
Задачи
11.1. Случайная величина а: принимает только неотрицательные целые значения, и
вероятность того, что она принимает значение т„ задается распределением Пуассона
\ Атехр(—А)
F(x = m)= 7
т*
а) Найти среднее и дисперсию случайной величины х.
6) Найти характеристическую функцию величины х.
11.2. Дискретные случайные величины х и у имеют распределения Пуассона (как
в задаче 11.1). Предполагая, что х и у независимы найти распределение вероят
ностей их суммы z = х 4- у.
11.3 Дискретная случайная величина а? имеет распределение вероятностей Пуассо-
на
|ч Атехр(-А)
Р(х = т) = ------ - - при m O, 1, 2,... .
ттг!
Пусть х — выборочное среднее /V независмых выборок.
а) Определить среднее и дисперсию выборочного среднего.
б) Найти распределение вероятностей выборочного среднего.
11.4. Показать, что биномиальное распределений стремится к пуассоновскому рас-
пределению
тпп
PN(n) = ехр(-7Пп)}
п!
®сди N —> оо и р —> 0, но pN ~ тп — Е(п) остается постоянным,
И.5. Показать, что при тп —♦ оо пуассоновское распределение, приведенное в
задаче 11.4, стремится к гауссовскому распределению
106
Лекция 1]
11.6. Доказать, что вероятности распределения Пуассона достигают максимума
когда к есть наибольшее целое, не превосходящее Л.
11.7. Проверить тождество, справедливое для распределения Пуассона
к
\i)p(k v. А2) = ?(£, + А2).
«=о
11.8. Доказать, что для распределения Пуассона справедливо равенство
р(0, А) + ... + р(п, А)
е xzn dx.
11.9. Пусть имеется N телефонных линий Поступающие вызовы образуют пуассо-
новский поток с параметром А. Вероятность окончания разговора между моментами
времени t и t + At равна pAt + o(At) (показательное время ожидания). Если все
N каналов заняты, то каждый новый вызов встает в очередь и ожидает до тех пор
пока не освободится какой-либо канал. Определить стационарное распределение ве-
роятностей числа занятых каналов и длину очереди.
11.10. Пусть имеется N независимо работающих приборов Если в момент вре
мени t прибор находится в работающем состоянии, то вероятность того, что он ело
мается в течение времени At равна AAt 4- o(At). Если прибор в момент времени
t находится в ремонте, то вероятность того, что он вернется в рабочее состояние в
течение времени At равна pAt + o(At). Определить стационарное распределение
вероятностей числа неработающих приборов.
11.11. Пусть ft — однородный пуассоновский случайный процесс с параметром
А. Обозначим через {тп} последовательность моментов наступления случайных со-
бытий. Доказать, что временные разности
^п+1 ~ тп ? п — 0,1----, т0 = 0
— одинаково распределенные независимые случайные величины с функцией распре-
деления F(x) = 1 — при х О и F(rr) = О при х < О.
11 12 Пусть {ft} — однородный пуассоновский случайный процесс с параметром
r)t, и пусть случайная величина обозначает интервал времени от момента t до момента
наступления следующего случайного события.
Доказать, что P{i)t х} = 1 — при х 0.
11.13. Доказать^ что если {ft} и {?j£} — два независимых пуассоновских про
цесса с параметрами А и р, соответственно, то процесс {ft + ?jt} является пуассо-
новским с параметром А + Д-
11.14. Предположим, что события пуассоновского процесса {f£} с параметром
А фильтруется таким образом, что каждое событие процесса ’’вычеркивается” с ве-
роятностью 1 — р (и остается с вероятностью р) "Вычеркивание” любого собы-
тия происходит независимо от самих событий и от других "вычеркиваний” событий-
Пусть Ct — число оставшихся событий на интервале (О, t). Доказать, что {f£} ~~
пуассоновский процесс с параметром Ар.
11 15. Резерфорд, Чэдвик и Эллайс в N = 2608 испытаниях исследовали число
тех частиц радиоактивного вещества, которые достигали счетной трубки в течение
интервалов времени, каждый из которых равен t = 7.5 с. Они нашли, что счетчик
зарегистрировал к частиц в случаях, где
к 0 1 2 3 4 5 6 7 8 9 10
57 203 383 525 532 408 276 139 45 27 16 _
Дает ли предположение о пуассоновском характере процесса объяснение полу'
ченным результатам?
Пуассоновские процессы, потоки событий 107
L 11.16. Пусть {ft} — число событий на интервале (О, t) в пуассоновском процессе с
I параметром А и пусть тт. та,...,-г„,... — моменты наступления этих событий Дока-
I зать, что при условии ft — п совместное распределение случайных величин совпадает
с совместным распределением координат п независимых точек, каждая из которых
равном но распределена на интервале (О, t), и расположенных по возрастанию.
11.17. Электронная эмиссия с катода электронной лампы представляет собой
I пуассоновский процесс с параметром А Предположим что времена полета электро-
нов не зависят друг от друга и имеют одну и ту же функцию распределения F(&).
Рассмотрим это явление на интервале времени (О, оо) и обозначим через число
1 электронов, находящихся в лампе в момент времени I. Требуется найти распреде-
|дение вероятности nt и его предел при t —* со.
11.18. Обозначим через {ft} число событий, которые происходят в пуассонов-
ском процессе с параметром А на интервале (О, t). Найти коэффициент корреляции
случайных величин ft и (t+r
11.19. Пусть {ft} — однородный марковский процесс с независимыми прира-
щениями а разности ft G неотрицательные целые числа при s < t. В этом
случае {ft} называют пуассоновским процессом в широком смысле. Найти распре-
деление приращений ft — fs-
11.20. Моменты возникновения событий пуассоновского процесса с параметром А,
которые происходят в течение (О, t), сопоставлены с точками окружности длины t.
ft означает число событий. На окружности из точек, соответствующих моментам по-
явления событий, откладываются интервалы длиной а. Найти распределение числа
точек nt не оказавшихся внутренними точками ни одного из этих интервалов.
11.21. Пусть ту, та,..., т„,... — моменты возникновения событий пуассоновского
процесса с параметром А и рассматриваемом на положительной полуоси времени.
I Определить функцию распределения F(t), ПРВ W(i) и моменты случайной вели-
чины т (п — 1,2,...)-
11 22 Пусть So, Si,..., Sn,...-— возможные состояния марковской цепи. Пусть
случайный процесс ft = п, если в момент времени t цепь находится в состоянии Sn.
Пусть в каждый момент времени возможно только или отсутствие перехода в новое
состояние, или переход в следующее состояние' Sn —> ‘?п+1 Причем вероятность
I перехода в следующее состояние в момент времени t + At, при условии, что в момент
времени t цепь находится в n-ом состоянии зависит только от At и не зависит от
t и п и равна AAt + o(At), t —♦ О (А > О).
Доказать, что {ft} есть однородный пуассоновский процесс
Лекция 12
Импульсные случайные процессы
Основные теоретические сведения
Импульсные случайные процессы находят широкое применение в ра-
диотехнике, радиосвязи, радиолокации радиоавтоматике и т.д. Одна
из разновидностей таких процессов — случайный телеграфный сигнал,
рассмотренный в предыдущей лекции
Импульсным случайным процессом называется случайный процесс
представляющий собой суперпозицию импульсов заданной формы со
случайной амплитудой и временем появления. Иными словами, им-
пульсный случайный процесс можно представить в виде
ОО
(121>
Jt—1
где / <) — функция, описывающая форму импульса, такая, что
/(/) _ 0 при t < 0, ak — амплитуда k го импульса (случайная вели
чина); tk — момент появления k-ro импульса (случайная величина)
Статистические характеристики случайного процесса x(f) получают
при условии, что ряд (12.1) сходится (в смысле существования моментов
распределения случайного процесса x(t\).
Допустим, что число импульсов, появившихся за время t, распреде-
лено по закону Пуассона
Найдем при этом условии статистические характеристики случайного
импульсного процесса x(t).
Для этого необходимо, в первую очередь, определить распределение
случайной величины i*. Обозначим через Д2* — £jt~ tk-i интервал вре-
мени между появлением (fc — 1)-го и k-ro импульса, при этом положим
Д/о = 0 Согласно закону распределения Пуассона случайные величины
Д<;. независимы и подчиняются экспоненциальному закону распределе-
ния Функция распределения случайной величины Д/г имеет вид
Гдп(0 = P{Aifc О = 1 “ е“А* ПРИ
Импульсные случайные процессы 109
’ Плотность распределения вероятности есть
iyAu(t) = = AeAf при i^O. (12.2)
Случайную величину tn можно представить в виде суммы
/П_^Д/*
fc=i
В дальнейшем нам понадобится следующее утверждение. Пусть X и
Y — случайные величины с плотностями распределения вероятностей
IV х) и FV(j/) соответственно. Тогда плотность распределения вероятно-
I стеи случайной величины Z — X + Y равна свертке ПРВ IT(z) и IV(?/):
W(z) = -a) da. (12.3)
J — оо
Лемма 1. Плотность распределения вероятности времени tn воз-
никновения n-го события в пуассоновском потоке событий с показате-
лем А равна
I ^(г)=Ап(^л)!'’л‘' (”4)
Доказательство. Плотность распределения вероятности времени до
первого события определяется формулой (12.2)
WAtl(0= Wb(t) = Ae-At.
ПРВ времени до второго события потока находится согласно вышеиз-
ложенному по формуле
/ТО
= / ^(aJWk^G - «)d« = A2 / e-^e~A((-a)da = A2/e~At.
J — DO JO
ПРВ времени до третьего события равна
Г00 /2
/ Wt2(a)WAt3(/-a)da = А3/ da = A3-e~Af.
J со Jo 2
Предположим, что
/п-1
I tt',-(/) = A"(^i)ie •
тогда
Z- оо
WMWbtn+1(t-a)da =
•оо
Импульсные случайные процессы
111
110 Лекция
= [ \ e-Aae-A(t-a) _ дп+ 1
Л (п-1)1 Щ
Таким образом, утверждение леммы доказано с использованием ме-
тода математической индукции.
Теорема 12.1 (Кемпбэл). Пусть дан импульсный случайный процесс
x(t) (12.1), где ак и tm — независимые случайные величины, случайные
величины tm распределены по закону Пуассона, а распределение случай
ных величин а* не зависит от индекса к и имеет среднее значение £7{а].
Тогда математическое ожидание случайного процесса a;(t) равно
mx(t) = АЕ{а) i /(a) da. (12.5)
Jo
Доказательство. Усредняя левую и правую части равенства (12.1),
получим
mx(t) - £{<<)} _ Е j -tk) 1 = ^E{akf(t — tk)} =
li=l J k=l
OO CO
- £ E{ak]E{f(t - /*)} = E{a} £ E{f(t - tk)}.
fc=i fc=i
Используя определение математического ожидания, находим
mx(t) ~ Е{а} У [ f(t- T)Wtk(Т) dT =
k=lJ
-СО СО
= Е{а} /(t-T^Wt^dT.
J -°° А = 1
Учтем формулу (12.4), тогда
___ ___ 'T’fc —1 °° \krr~k
АГ=*« =
t=i t=i 1 it=o
Т > 0.
Таким образом,
mx(i) = Е{а) [ f(t -T)dT= Е{а} [ /(a) da.
Jo Jo
Согласно условию /(<) = 0 при t < 0, поэтому
mx(t) = Е{a} i f(а) da.
Jo
Заметим, что если f(t) = 0 при t Ти, то
m.x(t) = mx = Е{а} I /(а)da --- const при t>Tu.
Jo
Теорема доказана.
Для вычисления корреляционной функции случайного процесса x{t)
необходимо знать совместную плотность распределения вероятностей
случайных величин tn и tm.
Лемма 2. Совместная плотность распределения вероятностей вре-
мен tn и tm возникновения n-го и m-го событий в пуассоновском потоке
,событии с показателем А равна
Wtnim(Ti,T2) = Wtn(Ti)Wtp(T2 -7)) при p = m — n>0,
. Wtntm(Ti,T2) - 1У<т(Т2)1У<р(7! -T2) при p-n m>0, ’ '
где I'T(n(T) определяется формулой (12.4).
Доказательство. Пусть п < m. Запишем случайные величины
tn и tm в виде
tk» tm ~ Etk — ^tk + A/f — tn 4" Тр,
к-1 Jt=l fc=l l=n+l
где р — тп — п, случайные величины tn и тр независимы в силу того,
что пуассоновский процесс является процессом с независимыми при
ращениями.
Таким образом, совместная плотность распределения вероятностей
случайных величин tn и тр равна
Ю^7Р(Т,т) = 1Т(п(7Ж,(т) - W^W^r).
Введем случайные величины
Cn tn,
Vm tm tn T Тр.
Отсюда tn = fn, Тр = — ^п. Согласно правилу вычисления плот
ности распределения вероятностей при функциональном преобразова
нии случайных величин
Г1. Т2) = , Т2) = 1ТТпГр(Д, Т2 - Т, )| .71,
гДе J — якобиан преобразования, Ti = Т, Т2 — Т{ — т.
дТ
52)
дт
дТ\
дТ
ЙТ2
дт
дЪ
1
-1
0
1
112
Лекция 12
Таким образом получаем
Wtntm(Ti,T2) - - 71), р = п - т > О,
где функция PVt„(i) определяется формулой (12.4)
Аналогично доказывается, что
^„гт(Г1,Т,2) = И7т(Т2Жр(Т1-Т2), р = т п>0.
Лемма доказана полностью.
Теорема 12.2. Пусть задан импульсный случайный процесс x(t)
(12.1), где а* и tk — независимые случайные величины, случайная
величина f * представляет собой время возникновения k-го события в
пуассоновском потоке с показателем А, а распределение случайных ве-
личин at не зависит от индекса к и имеет среднее значение Е^а) и
дисперсию E{a2} — jE72{a} Тогда корреляционная функция случай-
ного процесса x(t) равна
/min(ri,T2)
/^(тьтг) - ^{«(rJxfTs)} = AE{a2} / /(«)/(« + r)da +
Jo
+ A2E2{a} i f(a)da [ f(a)da. (12.7)
Jo Jo
Доказательство. По определению корреляционной функции
{ОО оо • >
Еа*ЛТ1 - tfc)52 ai/(-r2 -i|) f =
t=i (=1 J
oo oo oo
- ^^E{aka,f(Ty
fc=l /=! fc=l
oo oo
+& {«} E E (12-8)
t-i i-i
Найдем средние значения, входящие в эту формулу Имеем
оо оо у»оо
Е - М/Ь tk)} = 52 / f(r, - Т’)/(т2 - T)Wtк(Т)dT =
к=1
ГОО 00
- / /(т-J - Т’)/(т2 - Т) 521Уи(Т) dT.
fc_l
оо
Значение функции 52 ' 1(^) (ЦО — функция единичного
1-_1
скачка) было найдено при доказательстве предыдущей теоремы. Та-
Импульсные случайные процессы
113
ким образом,
ОО лОО
£ е{/(л - zt)f(r2 - tk)} = х^ kti - ТЖТ2 - vdT=
/min(ri,r3)
f(a)f(a + r)da,
-OO
где т — t2 - ti .
Учитывая, что /(a) = 0 при a < 0, получим
oo *»mm(r1 ,T2 )
J2^{f(n-tt)/(7-2-^)} = A y° f(a)f(a+r)da, т =
Для среднего значения, входящего во второе слагаемое выражения
(12.8), находим
оо оо
££*№-/*№-/,)} =
*=11=1
> оо «ОО «ОО
= ЕЕ / / Кт> ~ Т^Т2 - T^W^Tr^dT^ =
к=1 1=1
kjtl
/°° г°° ЕЕ ЕЕ
/ Ап - w - т2) еЕ J™- <12-9)
-со J-CO J. J (-]
Используя формулу (12 6) приходим к выражению
оо оо оо оо
ЕЕ1^^Г>’72) = ££^(Т.)^р(Т2 7П +
*=11=1 fc=lp=l
оо оо оо
+ Е Е - £ игдтА) £ wtr(T2 - Т1) +
Jt=lp=l fc = l Р=1
оо оо
+ E^(T2)£ lV4p(7’i -72).
k=i p=i
Проведя суммирование с учетом формулы (12.4), находим
£ £ W(fct|(Ti, Т2) = А2 -1(7!) 1(Т2 - 71) + А2 1(72) l(7i - 72).
114 Лекция 12
Подставим найденное выражение в формулу (12 9), тогда
00 03 ГСЮ /-оо
Е Е - tk)f(r2 -1,)} I / /(n - 71)/(t2 - T2) X
fc-l/=J J-coJ-co
k*l
x[l(T!) 1(T2 - Ti) + 1(T2) • l(Ti - T2)] JTidT2 =
гОО лОО
= A2 / / /(n - Ti)/(t2 - T2) dT2dTi+
Jo JT1
rCK> гТг
+A2 / / /(ti - Ti)/(r2 - T2) dT2dT. =
Jo Jo
JrOO лею
' / Z(n-Ti)/(r2-T2)dT2dTi-
0 Jo
= A2 [ ‘ /(л Tj) dl\ [ * f(r2 - T2)<ff2.
Jo Jo
Таким образом, окончательно получим
Яг(л,т2) =
ymin(ri,r2) yTi <-т2
— ХЕ{а2} I f(a)f(a+r)da+X2E2{a} f(a)da f(a)da.
Jo Jo Jo
где т — t2 — Ti. Что и требовалось доказать.
Ковариационная функция рассматриваемого импульсного случайно
го процесса
Л'г(ti ; т2) = R^T! ,т2)-тх(и )тх(т2) = ХЕ{а2} f f(a)f(a+r) da.
Jo
где т = т2 — л.
Заметим также, что при Т1,т2 > Т„ ковариационная функция зависит
только от разности отсчетов т — т2 — т\.
/(*) = {
Задачи
12.1. Дан случайный импульсный процесс
=Е“*/(< - м=Е “t/(i _ k7">’
k=0 fc=0
где T =. const — длительность импульсов,
1 при IG [О; 7];
О npHt£[0;T],
at — попарно независимые случайные величины, принимающие значения 1 с вероят
ностью р = 1/2 и —1 с вероятностью q = р = 1/2, Найти корреляционную функцию
и энергетический спектр случайного процесса.
Лекция 13
Ортогональное разложение
случайных процессов
Данное разложение основано на возможности разложения корреля-
ционной функции R(t,s) случайного процесса в равномерно сходящий
ся ряд
ОО
R(t, s) = \k¥>k(t)<Pk(s) при a^i^b,a^s^b, (131)
k-i
где {y’t(i)} — собственные функции а А* — собственные значения од-
нородного интегрального уравнения Фредгольма второго рода
/ R(t,s)(p(s)ds = (13.2)
J а
Функция R(t,s) называется ядром интегрального уравнения (13.2)
Справедливость разложения (13 1) устанавливается теоремой Мерсера
[1], которая утверждает, что, если вещественная функция R(t, s) сим-
метрична, непрерывна и неотрицательна в прямоугольнике а I Ь,
а s b, то она может быть разложена в ряд (13.1). Причем если
R(t,s) вещественная функция то и собственные функции y>n(i) и соб-
ственные значения Ап также вещественны, причем, если R(t, s) положи-
тельно определенная функция (как в случае корреляционном функции),
то система функций {<рп(<)} ортогональна на (а, 6), те.
I ^(1)^(0^ = ^ = {о при т±п, (13-3)
гДе Ьтп — символ Кронекера.
Отсюда следует, что любой непрерывный в среднеквадратичном смы
Сле (см приложение 2) случайный процесс x(t) с автокорреляционной
Функцией R(t, s') может быть представлен в среднеквадратичном смы-
сле на [а 6] ортогональным разложением
z(Z) “ Е ж"^(0> (13 4)
п = 1
где
хп= f x(t)<pn(t)dt. (13.5)
J a
116
Лекция 13
По (13.5) находим
E{xmxn}-E^J x(t)<pm(t)dt J x(s)<pn(s)ds
R[t, s)y>m(Z)^>n(s) dt ds.
Используя условия (13 2) и (13.3), получим
— An I У?т(0^’п(^) dt — ^n^mn-
J a
Таким образом, коэффициентами ряда (13.4) являются некоррели-
рованные (ортогональные) случайные величины имеющие второй на
чальный момент
Е{х2п} = Ап (13.6)
Ряд (13.4) называется разложением Карунена Лоэва или канониче-
ским разложением случайного процесса. Если записать ряд (13.4) в
форме
x(t) — }ernxn<f>n(t), (13.7)
П=1
тогда выполняется условие ортонормированности для случайных вели
чин х'п
Е - — ^тп,
причем <т2 — Ап.
Пример 13,1 Пусть случайный процесс 2?(t) имеет вид гармонического коле'
бания со случайной начальной фазой
x(t) — Acos(ut0t + 6)t
где A.uq = const, а в — случайная величина, равномерно распределенная в ин-
тервале (—тг;тг).
Этот случайный процесс периодический с периодом Т = 2тг/и/о» его корреля
ционная функция имеет вид
Н(т) = (Л2/2) cosluqt
(функция, периодическая с периодом Т = 2к/шо).
Интегральное уравнение (13 2) имеет вид
ГТ/2 А2
I ------cos[u2C(Z — s)]<p(s)ds = Ay(t), —Т/2 t Т/2. (13.8)
У—Т/2 2
Разложение (13.1) записывается в форме
°° А2
R(i — s) = A,;vi(t)y>i(s) — — cos[wo(t — s)] =
Ортогональное разложение случайных процессов 117
А2 А2 . .
— cos ton 1 cos too s Ч-srn ujq t sin wo s.
2 2
Таким образом, интегральное уравнение имеет решение в форме двух собственных
функций и равных собственных значений
V>i(t) — y/l/T cosa>0t, Ai — 4JTA?;
<P2(t) — \/"Z/Tsin wo t, A 2 = 4/7A2.
Замечаем, что хотя собственные функции Vi(0 и V2(0 ортогональны, они не обра-
зуют полной системы, так как корреляционная функция случайного процесса вы-
рожденная.
Ортогональное разложение случайного процесса принимает вид
где Xi = A-^/7/2cosS, Х2 = — Ayjrjism в.
Здесь
(А2Т 1 А2Т А2Т 1 7"
/Да^агг} = Е < ———sinScosS > — ——Z?{sin20} — —-—— / sin20d0 = О,
Е{х2} = ~£{cos2 0} = Е{х2} = ^E{sin2 0} =
Пример 13.2 Пусть корреляционная функция случайного процесса x(t) име-
ет вид
К(г) - De-'’1’’1, D > О, а > О. (13.9)
Будем искать ортогональное разложение случайного процесса на интервале Л
t Л, при этом необходимо найти собственные функции и собственные значения
интегрального уравнения
[ De-°l“-,’lv>(v) dv = W(«), -А и $ А. (13.10)
J-A
I Введем подстановку s — av, t = оси, Т = аЛ, /(t) = y>(u), А — a^/D. Тогда
получим интегральное уравнение
У е-|е-з|Дя) ds = АДО, -7^t^7. (13.11)
Будем решать это уравнение приведением его к дифференциальному уравнению
(см приложение 8). Сначала запишем интегральное уравнение (13.11) в виде
АДО — j es~l f(s) ds + et~sf(s)ds-
В первом слагаемом справа —Т s «С I, во втором — t s Т.
I Воспользуемся формулой дифференцирования интеграла с переменным верхним
пределом:
/•₽(»)
1 (</) = / /(^. v) dx;
rP<v')
I (у) = I f'(x, у) dx + fi'(y)f[p(y), i/] - a'(y)f[a(y), у].
•7"(у)
(13.12)
(13.13)
118
Лекция jg
В результате получим:
>/'(») = - У e—‘/(s)Js + /(0 + y e‘-V(s)/s /(<);
>/"(<) = - f е’-‘/(») ds - f(t) + f ds - /(t) =
J-T Jt
Гт
= / e-l‘-3>/(s)ds-2/(i).
J-T
Тогда приходим к однородному ДУ второго порядка
/"(О - ь2/(0 = О, (13 14)
где Ь2 = (А - 2)/2
Это ДУ имеет решение
/(0 = В^Ы + В2е-Ь‘ при 0 < 62 < оо;
/(t) = С1,'ь‘ + <72е~ при - оо < Ъ2 < 0
/(<) = Di t + d2 при 6=0.
Нетрудно показать, что А > 2, А = О, А = 2 не являются собственными значениями
интегрального уравнения (13.11). Остается рассмотреть случай
О < А < 2, (Ь2 = (А — 2)/2 < О)
Обозначим ib = а, тогда решение принимает вид
f(t) = Сг^ + (72е“‘.
Подстановка этой функции в левую часть интегрального уравнения (13.11) и после
дующее интегрирование приводит к заключению, что возможны лишь два случая а)
Ci = С2', б) <71 = —<72. при этом (а — 1)/(а + 1) = е2а'г.
В первом случае величина Ъ находится как решение трансцендентного уравнения
btgbT^l. (13.15)
Во втором случае b удовлетворяет уравнению
6ctg6T = 1. (13.16)
Обозначим корни уравнений (13 15) и (13.16) соответственно через Ьп и Ьп
(п - 1,2,...).
В первом случае получим
/„(<) = <71е,ь»‘ + <71е-'”>‘ = 2<7, cosM, А„ = 2/(1 + Ь2 ).
Во втором случае находим
/«(«) = <71еа»‘ + <7ie-*^‘ = 2Cn’sinb„i, А„ = 2/(1 + Ь2 ).
Таким образом получаем ортогональное разложение случайного процесса по двум
системам ортонормированных функций {v„(t)} и {Фп(<)}
x(t) — у/Дп£пУп(1),
п=1 П=1
где хп и £п попарно некоррелированные (ортогональные) случайные величины с
равными нулю средними значениями и единичной дисперсией;
= A„D/a = 2D/o(l + Ь2 ); = 2£)/а(1 + 62 );
Ортогональное разложение случайных процессов
119
Vn(<) = An cos ab„l;
sin2«ln4
2abn
1/2
Vn(t) = Ап sinabnt;
- / , sin2ab„j4
Ап = I A H------z---
\ 2abn
Данный пример отражает ортогональное разложение случайного телеграфного
сигнала, если положить а - 2А — параметр закона Пуассона, D = 1/4 [1].
Пример 13 3. Винеровский СП имеет КФ (см. пример 15.3)
= ПРИ“|‘ (13-17)
' ’ 7 1 ( i ПРИ t и
В этом случае (13.2) принимает вид
[ du = Ay(i). (13.18)
Jo
Подставляя (13.17) в (13.18), находим
Ay>(t) = <т2 I и<р(и) du + <r21 I y>(u)du.
Jo Jt
В результате дифференцирования получим
X<p(t) = ст2 / y?(u) du.
Дифференцируя повторно, выразим вторую производную в виде
Аф(1) = и2<р(и)
и при X / О получим
<p(t) + Р/ A)v(0 = О
Существуют три возможные области изменения А: А < О; А = О и А > О Не-
трудно убедиться, что значение А в первых двух случаях не дают решений, удовле-
творяющих интегральному уравнению.
При А > 0 находим
А„ = и2Т2/т12(п - 1/2)2, п = 1,2...
= у^2/Тsin[(n — 1/2)^/7], О t Т.
Задачи
13.1. Найти собственные значения и функции интегрального уравнения
I jR(t, s)v(s) ds = А </?(£), 0 <C t T,
Jo
при корреляционной функции jR(tts) = min(t.s), соответствующей винеровскому
процессу с единичной интенсивностью.
13.2. Пусть AoTAij... собственные значения интегрального уравнения
гь
FUtf s)<£>(s) ds = Xfp(t) при a t Ь.
120
А. Показать, что
«(t,t)-]>3A"lvnWI2 = £
п=0
Б- Показать, что
Лекция 13
¥?n(s)Xs(/s О.
2
ъ
R(it t) dt < оо
п О
и следовательно, ряд
сходится, при
оо, поэтому Ап. —* О
п=0
13.3. Пусть случайный процесс {xt, —оо < t < оо} непрерывен в среднеквадра
тичном смысле и
имеет период Т
стационарен в широком смысле, а его корреляционная функция
R(t + 7’) = Н(т) при т G (—оо;оо).
Пусть
Xte-.n(2n/T)t dt при п = О, ±1, ±2,
А.
Б.
Показать, что {Zn} попарно ортогональны, то есть E{ZrnZn} = О при тп п.
Показать, что при любом t
>n(2lr/T)t
В.
Пусть справедливо разложение
п=0
1 2тг
—— cos ——пт.
|- п2 Т
Найти собственные значения и полную систему ортогональных функций интеграль
ного уравнения
ds = А^>(£) при О t Т.
13.4. Пусть корреляционная функция имеет вид
К(М) =
при других значениях
Найти собственные значения и систему ^отонормированных функций интегрально-
го уравнения
1/2
ds — при О t 1/2.
о
о
Ортогональное разложение случайных процессов
121
Указание Использовать равенство
---— -26(t - s) при s ^1/2.
13.5. Предположим, что корреляционная функция K(t, s) удовлетворяет соотно-
шению
Лх a2k d2h
= 2-jbk^s{t~s} 14)11 “<‘-s<b-
k=0 fc=O
А. Показать, что интегральное уравнение
ГЬ
I H(t, s)y’(s) ds = a t jC b
J a
может быть приведено к дифференциальному уравнению
k * dt2k 1
к—О к=0
совместно с соответствующими граничными условиями.
Б. Установить, что, по крайней мере, формально, если корреляционная функ-
ция R(t, s) удовлетворяет равенству
H(t,s) = [ dv,
d —00
m / n
где F(m,ntv) = E>fc(2-7rw)2* / а^(2тггг)2к, то тогда корреляционная функ-
fc=o / fc=o
ция удовлетворяет соотношению
Xак 5)=zJ bk^6{t"s)-
В. Привести интегральное уравнение
К дифференциальному уравнению и двум линейно независимым граничным усло-
виям на функцию
Указание. Каждую из приведенных величин выразить в виде линейной ком-
бинации интегралов
Ъ .
ef^>(s) ds.
13.6 Допустим, что {H't, t 0} — стандартный винеровский процесс и
xt(w) =
гДе /(t) — непрерывная функция, т(0 - непрерывная неубывающая функция, т(0) =
О. Используя результаты решения уравнения (см задачу 13.2)
-y?(t) = A£(t): 0< t < Т,
122
Лекция 13
найти разложение
оо
Xt(u>) =
п=0
где Zn (п = 0,1.2,...) — независимые гауссовские случайные величины
E{Zm Zm} — 6тп Необходимы ли еще дополнительные условия, чтобы Zn при
надлежали гильбертову пространству?
13.7. А. Показать, что для интегрального уравнения
J ехр(—|t — s|)/(s) ds — Xf(t) при — T t Т
числа 2 и 0 не являются собственными значениями.
Б. Найти собственные значения и собственные функции уравнения
ГЬ
I ехр(—a|t — s|)/(s) ds — XJ(t) при a t $ Ъ.
J a
13.8. Показать, что если
/“ P(—.J2)
R(t)= I exp(jivt) ' df при w-2irf,
где P и Q — полиномы соответственно n-го и m-го порядков относительно (—о/2),
причем п < тп, то собственная функция cp(t) и соответствующее собственное зна-
чение А интегрального уравнения
ГЬ
j R(t s)tp(s)ds = A<p(t) при а t {J Ь,
J а
должны удовлетворять однородному линейному дифференциальному уравнению
/ d2 \ f <Р\
AQ I — ) V>(t) = р I — ) <p(t) при а < t < Ь.
Лекция 14
Преобразование Гильберта.
Аналитический сигнал. Огибающая
и фаза сигнала
В этой лекции рассмотрим еще одно линейное преобразование СП,
используемое в статистической радиотехнике
Пусть S(t) — заданная на всей оси —00 < t < 00 действительная
функция, для которой существует интеграл
dr —
dr
(14.1)
для любого вещественного значения t.
Этот несобственный интеграл понимается в смысле главного значе-
ния Кроме того, интеграл является несобственным по другой причине:
подынтегальная функция терпит разрыв в точке т = t. Вблизи этой
точки интеграл также понимается в смысле главного значения:
dr =
S(r)
----
(14.2)
Определение 1
Функция
dr = G[S’(/)],
(14.3)
где несобственный интеграл понимается в смысле главного значения
называется преобразованием Гильберта функции S(t).
Функция У(1) называется также сопряженной функции S(t) по Гиль-
берту.
Очевидно, что преобразование Гильберта является линейным пре-
образованием.
Образуем комплексную функцию
Z(t) = S(t) +
(14.4)
Представим эту комплексную функцию в показательной ф рме:
Z(t) = /?(1)е1ф1’\ (14.5)
где [{ = \Z\; Ф = argZ;
/?(/) = v/S2(t) + V2(i);
(14.6)
124
Лекция Ц
Преобразование Гильберта
125
Рис. 14.1
S(t) > 0;
V(t) > 0,
S(t) < О
v(/) < о,
S(t) < 0.
(14 7)
Тогда
SV) = ReZ(Z) - /?.(<) cos Ф(<)
(14.8)
Если детерминированную функцию S(t) трактовать как сигнал (точ-
нее как реализацию сигнала — случайного процесса), то функция Z(t)
носит название аналитического сигнала.
Функции /?.(/,) и Ф(<) соответственно называются огибающей и фазой
функции S(t) Огибающая сигнала S(t) называется также его мгновен
ной амплитудой. Название огибающей объясняется тем, что, во-первых,
/?.(7)=|ад>1<?(01,
т.е. график функции у — Rft) нигде не пересекает графика функции
у _ S(t). Во-вторых,
поэтому в точках, где V(i) — 0, а следовательно, 7?(7) = S’(i), будет
выполняться равенство R(t) = Это означает, что в точках сопри
косновения графики функций R(t) и S(t) имеют общую касательную
Значение представления (14 8) для статистической радиотехнки за-
ключается в том, что функция S(t) может рассматриваться как гармо-
ника, модулированная по амплитуде и фазе функциями R(t) и Ф(7).
ЛОО .
_ - _ / smwu 7г
Пример 14 1 Используя известный интеграл / ------ — при о/ > О
Jo u 2
показать, что преобразование Гильберта функции S(t) = coscut равно sina/t.
Решение.
Сделаем подстановку т — t = и. Тогда при dr = du получим
1 f00 cosw(« 4“ 0 , 1 cosum cos — sinumsincvt
’ V(£) — — — /----------------du = —— I ---------------------------------du —
7Г / U 7Г / U
J —co — co
/СО roo .
COSWU 1 . / sinoiv
-------du 4 sin cut I ----------du.
и 7Г I U
-oo J —oo
Первый интегал равен нулю0 так как подынтегральная функция нечетна, а инте-
грал понимается в смысле главного значения. Отсюда
2 /*°° sin или , 2 . тг
V(t) = — sin07f / -----du = — smart • — — smart.
k 7 7Г I u tv 2
J —co
Аналогично доказывается, что преобразование Гильберта функции S(t) — smart
равно V(t) = - coscut.
Полученные результаты кратко можно записать в виде
G[cosu/t] = smart; (14-9)
Gfsinurt] = — cosurt; (14.10)
Пример 14 2 По функции
5(i) = a„ coscunt + bnsiiicjnt
построить ей сопряженную по Гильберту, а затем образовать аналитический сиг-
нал Z(t)
Решение На основе примера 14.1 и своства линейности преобразования Гиль-
берта находим
V(i) = £ Ид Sill CUfit — Ьп COS Cdnt'*
n
Тогда
Z(t) = S(t) + iV(t) = (cos u»nt -j- isintc’nf) 4- (sin “ i cos wnt) =
n n
= - i^bne1^ = £(an - ibn)eiw<
n n. n
Рассмотрим теперь стационарный (в широком смысле) СП X{t). С
помощью преобразования Гильберта сопоставим ему сопряженный про-
цесс У (Г)
У(<) = -1 Г *Qdr = G[X(i)], (14.11)
7Г J — QQ Т - I
где сходимость интеграла понимается в среднем квадратическом (в смы-
сле главного значения) Предполагается, что этот интеграл существует
Можно показать, что процесс У(7) также является стационарным
Образуем комплексный процесс
Z(t) = X(i) + iY(t) = Я(/)е,ф«, (14 12)
где R — \Z\ — \/X2(t) + Y'2(t), Ф = argZ. Отсюда
X(t) = ReZ(Z) = Я(7)созФ(/). (14.13)
В соответствии с ранее принятой терминологией процессы R(t) и Ф(<)
Называются соответственно огибающей и фазой СП X(t)
126
Лекция Ц
Ковариационная функция процесса У(1) равна
ГОО уОО
1<у(т) = / cosu>T.$s(w)dw = I cosuTSx(u)du = Kx(r), (14.14)
Jo Jo
так как Sy(w) = Sx(u>) [см. (18.10)]
Таким образом ковариационные функции (КВФ) исходного процесса
и ему сопряженного совпадают, в частности
Dy = Ks(0) = Кх(0) = Dx.
(14.15)
Найдем теперь КВФ связи процессов X(t) и У(/):
Kxy(t,t+r) E[X(t)Y(t + r)] = Е
1 Г°° E[X(t)X(u)]du _ 1 Г Kx(u-t)d
я" J-oo U-i-T 7Г /_,ч, и - t - Т
Положим и — t = v. Тогда получим
dv = 6'[7<г(т)]
(14.16)
Это означает, во-первых, что стационарные процессы X(t) и У(1) стаци-
онарно связаны, а во-вторых, что корреляционная функция связи про-
цессов X(t) и У(1) есть преобразование Гильберта автокорреляционной
функции исходного процесса X(t) Так как Kxy(t,i + т) не зависит от
I, то будем ее далее обозначать К’1у(т).
Используя спектральное представление для КФ К^г) можем полу
чить спектральное представление для
Кху(т) - С[Л'г(т)] = G
cosujtS^w) du)
sinoirS^w) dev.
Итак,
(14-17)
Из этого представления, в частности, заключаем, что /<1у(0) — 0
т е. в совпадающие моменты времени t = t1 сечения процесса X(t) и
сопряженного ему по Гильберту процесса Y(t) некоррелированы
Рассмотрим частный случай гауссовского стационарного процесса
X(t) Известно, что интеграл от гауссовского процесса является гаус
совским процессом Более того, совместное распределение гауссовско-
го процесса и интеграла от него — тоже гауссовское. Отсюда следу
ет, что распределение двумерного вектора (Х(1), У(1)) — гауссовское
Преобразование Гильберта
127
При I = t' случайные величины X(t') и У(<') некоррелированы, а ста-
ло быть, и независимы.
Этот факт позволяет найти закон расределения огибающей и фазы
гауссовского стационарного процесса с нулевым математическим ожи
данием в фиксированный момент t.
Обозначим Х(<), У(/), /?(#), Ф(<) в фиксированный момент t короче,
через X, Y, R, Ф соответствено. По условию:
1У(ж) - ^е-12/2’2; W(y) = —
сгуЭтг ax/lit
Так как X, Y взаимно независимы, то
W(x,y) = РИ(ж)1У(у) - -^==e-(a:2+»2)/2t’2
<ту2тг
Отсюда при г > О
XR(r) = P(R < г) = Р(у/Х2 + У2 < г) - Р(Х2 + У2 < г2) =
= У/ IV (х, у) dxdy — —— УУ е +v ^2а dxdy.
Х24-у3<Г2 X2 +у2 <г2
Перейдем к полярным координатам р, в:
Fr(t) = —f с!0 [ е“₽ !~a*pdp =
27ПТ Jo Jo
= ±2тг Г e-p^2o3d - 1 - е
2тг Jo \ 2<т2 J 1о
Если г < 0, то Fr(t) = P(R < г) = 0. Итак,
Го 7* <5 0’
F4r) = | е-р2/2о^ Т > 0 (14 18)
Это закон Релея Таким образом, случайная величина R — \/Х2 + У2
При указанных условиях распределена по закону Релея
Случайная величина
Фо — arctg(y/X), если X > 0;
Ф = т Фо +тг, если X < 0, У >0'
[ Фо — 7Г, если X < 0, У <0
при этих же условиях распределена равномерно на промежутке [—тг, тг)
1У(^) = {
t 2тг
при |у>| тг,
при |</?( < тг.
(14.19)
Докажем формулу (14.19).
128
Лекция Ц
Плотность вероятности вектора (X, Y)
W(x,y)= —^е-^/2^ = _J_e-(-2+v2)/2^
СуГХп (Ту/Т-П 2тгСТ “
Тогда функция распределения случайной величины Ф при —тг <
<р < тг равна
F*(y>) = Р(Ф < р) = Л lV(x, у) dxdy,
D
где область D в полярных координатах р, в определяется неравенством
ОО
Перейдем к полярным кооринатам: х = pcosf); у — ps\n6 Тогда
w=LJ0 ^~p/2a3pdpde=z
о
2тг
Очевидно, что F$(y?) = 0 при (р —тг и F$(<p) — 1 при <р тг.
Теперь находим плотность вероятности случайной величины Ф
Дифференцируя функцию Fq.(jp), получаем формулу (14.19).
Пример 14 3. Пусть A'(t) = V/(l +12), где V — случайная величина с конечной
дисперсией Найти аналитический сигнал, огибающую, фазу.
Решение. Находим преобразование Гильберта процесса
Для вычисления этого интеграла разложим подынтегральную функцию на эле-
ментарные дроби:
1
Ат + В ( С
(1 + Т2)(т _ t) - 1 + т2 +
Находим коэффициенты
А = -С-------Ц-; В=-------1—~.
1 + t2 1+t2
Отсюда
V
А
^--dr + В
к-
dr
dr
dr — О как главное значение интеграла от нечетной функции в СИМ'
метричных пределах:
dr Г
..ardgrl
Для вычисления интеграла
— СО
</т ,
----- сделаем подстановку т — t = z, dr = а
Преобразование Гильберта
129
огибающую
.------------------- / 1 & м
ад . ^.(О+гад» + (ТТ^а (1 =
и тангенс фазы
tg$(t) =
ПО _,
x(t)
Статистика энергетического спектра СП
131
Лекция 15
Статистика энергетического спектра
случайных процессов
Пусть x(t) = — некоторая реализация стационарного случай-
ного процесса на интервале времени [0,7]. Тогда, как и для обычной
детерминированной функции, удовлетворяющей определенным услови
ям, для реализации ®(t) справедливо преобразование Фурье
ZOO f-T
x(t)e~ialtdt = / xT(t)e~ib,t =
oo Jo
Введем периодограмму
S^,T) =
Для любой реализации хт(1) периодограмма S(u>,T') дает разложение
по частоте мощности функции x-r(t) в интервале [0,7].
Будем рассматривать периодограмму S(w,T) в качестве оценки энер-
гетического спектра S(u>), причем согласно теореме Винера-Хинчина
S(w) - / R[T)e~iuTdT,
(15-1)
где Я(т) = E(xtxt+T-) — корреляционная функция случайного процесса
Вначале найдем среднее значение 5т(о>) = E'fS'faijT)] случайной ве
личины S(u,T)
St&) = E[S(w,T)] = ^[№)П =
= ^Е[Хт(гЪ)Хт(-^)] = ^E
1 Гт
- / /?(* - s)e-iu^-sUsdt,
J Jo Jo
где lift — s) — Е[жт(/)жт(«)].
Произведем замену переменных интегрирования т = t — s; а — I.
тогда s = t — т; t — а В новых переменных получаем
da =
~ШТ dr =
l^dr
Введем функцию
rT Г°°
ST(u) = E[S(u>,T)] = RT(r)e-l“Tdr- / Пт(т)<Гшт. (15.2)
J-T J-со
При Т —г оо и любом т (если функция /?(т) — абсолютно инте-
грируема) приходим к формуле (15.1). Следовательно справедливо со
отношение
Jim 67(0;) = ^lim JSfSfw.T)] = S(u>).
(15.3)
Это означает, что оценка S(w,T) является асимптотически (при
Т —> оо) несмещенной оценкой энергетического спектра.
Можно предположить на основе свойства (15 3), что при 7 —+ оо слу-
чайные величины S(u,T) (периодограммы) будут приближаться к энер-
гетическому спектру S(a>). Однако в общем случае этого не происходит
Вычислим второй начальный момент и дисперсию случайной вели-
чины S(w,T):
E[S2(u>,T)]-
J JfJ x(t)x(s)x(u)x(v) exp[— iw(t + и — s «)] dldsdudv .
0
Предположим, кроме того, что рассматриваемый случайный процесс
гауссовский. Для него справедливо равенство (5.15)
£[ж(/)ж(з)ж(и)ж(г;)] =
= /?(/ s)R(u — и) + R(t — u)R[s — v) + /?(/ — v)R(s — и).
При этом второй начальный момент принимает вид
Г
E[S\w,T)] - ИЦ[R(t - s)R(u - v) + R(t - u)R(s - t>)+
О
+/?(t — v)R(s «)] exp[ iu>(t + и s — u)] dtdsdudv — + I3I4 + hh,
132
Лекция 15
где
71 = JJ ~ sy~Mt~t}dtds=St^ =
0
7
h = 1 yy fl(u - vy-^-^dudv = S7 (w) = аду.Т)];
0
7
73 = 1 yy R(t - v^-W-^dtdv = ST(w) = E[S(w,T)];
о
T
>duds = ST(u) = E[S(u, T)];
О
г
h-^Jf R(t u^-^+^dudt = hfiu)-.
О
г
Ie = - jj R(s~ ^W{s+V)dsdv =.I5(-iu) =
0
Следовательно,
Io — Isle —
Поэтому
£[№("> Щ = 2{Д5(о;,7)]}2 + Io.
Отсюда следует неравенство
E[S2(«,T)] 2{ВДа;,Т)]}2
ИЛИ
a2[5(W,T)]E[S2(Wjn] - {ад^,Т)]}2 > {E[S(W>T)]}2.
Итак, при Т —► оо для любого значения w дисперсия оценки S(w,T)
к нулю не стремится. Это означает, что для всех ш, при которых
> 0, оценка S(u,T) при Т —> оо не сходится (в пределе) к S(oj),
т.е. оценка S(w,T) (периодограмма) не является состоятельной.
Введем мгновенный спектр
Sr{t,oi) = / х(т)е tUTdT,
Jt-T
Статистика энергетического спектра СП
133
который является случайной функцией времени
Образуем другую случайную функцию времени
= ^|Sr(i;w)|2-
Назовем эту функцию текущей периодограммой и найдем ее сред
нее значение
Е[дт{1, w)] = Е
U_v)e-M« ^dudv.
-i^-^dudv =
Произведем замену переменных т — и — v, а — v, тогда и — т + а,
v — а. Здесь по прежнему а 6 [f — Т, Z], верхняя и нижняя границы
области определяются прямыми г = и — а — t — о и т = t — Т — а
В результате получим
Таким образом,
ЯНИ = Г «т(т)е-Ът
J—T
Эта формула аналогична формуле (15.2). Следовательно, среднее
значение случайного процесса <7-r(i,w) не зависит от времени при фик-
сированных значениях ш и Т является постоянной величиной
Покажем, что функция является эргодической по отношению
к математическому ожиданию
Введем временное среднее функции <7т(С^)
5(w)
-*0 Jo
(15.4)
и покажем, что выполняется равенство
S(w) = £?[<7T(t,w)] - lim J- [ gT(t,a>)dt,
To—oo J. о Jo
т.е условие эргодичности g(t,w) по отношению к математическому ожи-
данию функции <77’(t,w)
134
Лекция 15
Используя определение функции <7r(/,u>), находим
1 Гт°
А(и) - Jlm ТТГ / 9r(J, dt =
То-юо Iq Jo
To *
— lim — f dt~ [ [ x(u)x(v)e~'tL’(u~v) dudv.
To—TO To Jo Г J J
t-T
Изменяя порядок интегрирования и учитывая, что исходный случай-
ный процесс ж(<) является эргодическим по отношению к корреляци-
онной функции, получим
lim S(u>) — [ [ Щи — = E[gr(t, w)].
To—oo J Jt-T
Следовательно, <7-r(i,w) является эргодическим случайным процессом
по отношению к математическому ожиданию, и величину S(w) (15 4),
т.е. временное среднее от текущей периодограммы, можно принять за
оценку энергетического спектра S(u) (15.1).
Оценка S(w) является несмещенной и состоятельной Вычислим сред-
нее значение
ВДщ)] = Е
1 [т°
/ 9T(t,^)dt
'о Jo
1 Л То гоо
— / E{gT(t,bj)]dt = E’[ffT(t,w)] - I Лг(т)е~'итdr.
То Jo J-co
Отсюда lim S(ui) = S(u), т.е. оценка S(w) несмещенная (асимпто
T—юо
тически при Т оо). Известно выражение для дисперсии интеграла
от случайной функции поэтому
1 Л^°
Z)[S(w)] = / / К (и, v)dudv,
Tq Jo Jo
где K(u,v) — ковариационная функция случайного процесса
Отсюда lim Л[5(ш)1 — 0 при условии, что двойной интеграл от кова-
Т-юо
риационной функции конечен при То оо.
Таким образом оценка 5(и>) — временное среднее от текущей пери-
одограммы асимптотически (при То оо) состоятельна.
Лекция 16
Случайные поля.
Определения, характеристики
Случайная функция £(х) т переменных х = (ж,,... , жт) называ
ется случайным полем. Поле может описываться одномерной случай-
ной функцией С(х) — скалярное поле или n-мерной функцией £,(х) =
— [£1(х) €п(х)] — векторное случайное поле Параметр х, назы-
ваемый аргументом поля, принимает значения в некоторой области D
m-мерного пространства Rm. Частным случаем случайного поля при
т — 1 является случайный процесс Случайное поле рассматривает
ся как функция двух переменных £(х,о>), где х — детерминированная
величина, w Е Q — пространство элементарных событий. Придавая ар-
гументу х произвольно фиксированное значение х, получаем функцию
случайного события w — случайную величину £(х,ы) называемую ор-
динатой или сечением случайного поля. Фиксируя некоторое значение
случайного события w, получаем функцию £(х, ш) аргумента х, которая
называется реализацией случайного поля
Скалярные случайные поля
Рассмотрим характеристики, с помощью которых описываются слу-
чайные поля. Многомерным законом распределения случайного поля
называется совместный закон распределения п сечений поля в
точках Xi, х2, .... хп, т.е. закон распределения случайного вектора
(f(xi) ...,£(х„)) Многомерный закон распределения характеризуется
n-мерной ПРВ lV(yi, J/2 - - -, Уп' х1, х«). которая зависит от значений
аргумента X; , х„ как от параметра. Совокупность всех п мерных
законов распределения для всех целых п — 1,2,.. и любых значений
аргумента Xj, ..., хп является исчерпывающей характеристикой поля.
Поле £(х) называется полем с однородным n-мерным распределением,
если при заданном п и любом Дж £ Rm
Wz(y1, у-2.. -, уп; X! + Дх1,..., х„ + Дх) =
= W(y1,y2...,yn;xl ...,х„)
т.е. n-мерное распределение не зависит от сдвига аргумента. Если ра-
венство это выполняется для всех п, то поле называется однородным
в узком смысле
В силу сложности задания многомерных законов распределения на
практике используются более простые характеристики: одномерные
плотности распределения ЕК(у;х), математические ожидания, корреля-
ционные функции и спектральные плотности.
136
Лекция l(i
Одномерным законом распределения называется закон распределения
ординаты поля £(х) при фиксированном х Одномерная плотность рас-
пределения РК(у;х) однородного поля не зависит от аргумента х Ма-
тематическим ожиданием ш(х), дисперсией <т2[£(х)], ковариацией (ко-
вариационной функцией, КВФ) К(х],Х2) и корреляционной функцией
(КФ) jR(xi,X2) называются функции, определяемые формулами:
ш(х) = Ef(x); <т2[£(х)] - Е[£(х) - ше(х)]2;
^(хьхг) = Е[£(х1)С(х2)]:
Х(хъх2) = ^{[Cfxj) - ni(xi)][^(x2) - m(x2)]}.
Корреляционная функция является мерой вероятностной связи сече-
ний поля в точках Xi, Х2. КФ и КВФ связаны соотношением
K(xi,x2) = /?(х1,Х2)— m(xi)ni(x2).
На практике поле чаще задается своей КФ. Случайное поле называет-
ся однородным в широком смысле, если его математическое ожидание
постоянно, а КФ зависит от разности аргументов:
пг(х) — rn — const; jR(xi. Хг) — /?(х); х = хх — х^.
Понятие однородного поля является обобщением понятия стационар-
ного в широком смысле случайного процесса. Однородное случайное
поле называется изотропным, если его корреляционная функция зави-
сит только от расстояния между точками Xj, Х2.
тп
-R(x) — /?(|х|), |х|2 — хтх —
£=1
Поле называется гауссовским, если гауссовскими являются все его
многомерные законы распределения. Гауссовское случайное поле од-
нозначно описывается двумя характеристиками математическим ожи
данием и корреляционной функцией.
Случайное поле называется непрерывным в точке жо в среднеква-
дратическом, если
l.i.m £(х) — С(х0), т.е. lim £[£(х) — £(х0)]2 = 0.
Для среднеквадратической непрерывности случайного поля во всей
области задания необходима и достаточна непрерывность в этой области
его математического ожидания и корреляционной функции при Xi = X-
Для среднеквадратической непрерывности однородного в широком смы
еле случайного поля необходима и достаточна непрерывность /?(х) в
нуле.
Пусть С(х) — случайное поле, а <?(у,х) — неслучайная веществен
ная функция двух переменных у G Rn, х G /?гп. Интеграл по обла-
сти D от случайного поля £(х) с весовой функцией <?(у,х) определя-
(Случайные поля. Определения, характеристики
137
ется равенством
у Н
/ <7(y,x)C(x)dx = l.i.m^2<7(y
как среднеквадратический предел интегральных сумм. Здесь Di,.
JJN — разбиение области D, pij — m-мерный объем Dj, Xj — произ-
вольная точка Xj Е Dj, б — ранг разбиения, равный максимальному из
диаметров множеств Dj. Необходимым и достаточным условием суще-
ствования интеграла является конечность интеграла
Пд(у, Х1 )д(У. х2)7?.(х], хг)^!^.
>
Интеграл j?(y) - JD g(y, x)£(x)cfx является случайным полем пере-
менной у. Его моменты определяются формулами:
п*ч(у) = Ет](у) - / <7(y,x)m?(x)dx;
JD
7<ч(У1,У2) ~ / / д(У1.Х1)<7(у21х2)7<е(х1,х2)<1а:1</ж2;
JD JD
о'2[»?(у)]= / / fffy.xjjsrfy X2)/<e(x1,x2)cfxida;2-
JD JD
Если весовая функция зависит от разности аргументов д{у, х) =
= д(у — х), а область D — R™, то интеграл вида
»?(у) = / g(y - xX(x)cfx
JR™
называется интегралом (пространственной) свертки. Если поле £(х) од-
нородно в широком смысле, то формулы для интеграла свертки име-
ют вид
m(y) — т I g(x)dx = const;
JR™
Лч(У1.У2)= I I g(yi-X!)<7(y2-x2)/<e(x1-хг)^!^;
JR™ JR™
O'2[’7(y)] - / I g(y - Xi)g(y - х2)/<е(х! - x2)da;1</®2.
JR™ JR™
Произведя в формуле для TC(j/i,S/2) замену переменной yi — xj = zb
^2 — х2 — z2, приведем интеграл к виду
^ч(У1,У2)= / / g(zi)g(z2)7Q(y1 -y2 + z2-zjdzjcfc^.
JR™ JR™
138
Лекция l(j
Из этих уравнений следует, что поле //(у) однородно в широком
смысле.
Ковариационная функция непрерывного в среднеквадратическоь
смысле однородного случайного поля может быть представлена в ви
де обратного преобразования Фурье
Л(х) [ e,uIxSe(u)Ai
J R™
т.е. многомерного интеграла Фурье от некоторой функции Sf(u), что
является обобщением теоремы Винера-Хинчина
Функция 5’/-(и) называется спектральной плотностью случайного о
ля. Здесь и = G R™ — m-мерный вектор итх _
т
= — скалярное произведение векторов и и х. Спектральная
i=J
плотность обладает следующими свойствами
5(11) 0, 5(u) - 5(-и), / S(u)du — а
Ju™
т е. она неотрицательна, четна а интеграл от Sf(u) равен дисперси
поля По заданной ковариационной функции спектральная плотность
определяется с помощью формулы обращения
5(и) = , \ f K(x)t-m'xdx.
Получим соотношение, связывающее спектральные плотности «вы
ходного» поля г,(у) и «входного» однородного случайного ПОЛЯ С(х) в
интеграле пространственной свертки Формула свертки в переменных
У = У1 - У2 примет вид
Л’ч(у)=/ / <7(zL)5'(z2)^'e(y + z-2-z1)dz1dz2.
JR™ JRm
Используя теорему Винера-Хинчина, получим
7Ч(у) = [ [ [ ff(zi)<?(z2)5'f(u)e,uT(y+z=_Z1)</udz1dz2.
Jr™ Jr™ Jr™
Введем преобразование Фурье весовой функции
G(u) — / ff(z)e Zdz
Jr™
Функция G(u) называется частотной характеристикой пространст
венного фильтра Используя эту характеристику получим
Лч(у)- [ G(u)G^}S^)^ydu
Jr™
Случайные поля Определения, характеристики 139
Последнее равенство означает, что спектральная плотность поля Т](у)
равна произведению квадрата модуля частотной характеристики про-
странственного фильтра на спектральную плотность входного случай
ного ПОЛЯ'
ЭД) = |G(u)|2S(u).
Эта формула аналогична частотному соотношению теории стационар-
ных процессов. Весовая функция связана с частотной характеристикой
обратным преобразованием Фурье:
Рассмотрим двумерное изотропное поле £(х), х = (ж, у) Его кор
реляционная функция зависит от модуля |х| вектора х, а спектраль-
ная плотность
S(U) = (2^/+Ю J
Перейдем в этом интеграле к полярным координатам
х — pcostp у = psin <р; л/ж2 + у2 — г;
и = («1,1/2); «1 ~ |?t| cos0; «2— |«|sin0
U X = г|«| cos((? — у?).
Здесь <р, 0 — полярные углы векторов х. и и. Тогда
1 уоо 1-21Г
ЭД = 7А2 / / e-iMrcos<e-^K0(r)r^r.
(2тг)2 Jo Jo
Известно соотношение [20]
ад = r\-^coeidt,
2тг Jo
где Т0(г) — функция Бесселя Поэтому для S(u) получим формулу
1 У00
5"(и) - — / Jo(|«|r)Ko(r)rdr.
2^ Jo
Отсюда следует, что спектральная плотность изотропного поля
Sf(u) — Sq(|u|) зависит от модуля пространственной частоты. Фор-
мула, обратная этой, имеет вид
Ко(г) = 2тг / uJo(rw)So(«)d«-
Jo
Аналогичные формулы имеют место и в многомерном случае.
140
Лекция 16
Связь ковариационной функции /<(г) и спектральной плотности
в тг-мерном случае имеет вид
л СЮ
ВД = (2яг)"/2г-("-2)/2 / ц"/2J(„_2)/2(r«)S(«) du;
Jo
rCC
S(u) = (2тг)-"/2ц-(" 2)/2/ rn/2J(n_2)/2(ru)K(r)dr.
Jo
Отсюда при n — 2 находятся уже полученные формулы. При п ~ 3
К(г) — (2тг)3/ г-1/'2 [ i^l^Jii^ruyS^ujdu-,
Jo
S(u) = (I-k^^u-1!2 f r3^2Ji/2(r«)7C(r)dr.
Jo
Используя известное соотношение [20]
Ji/2(x) = (2/тгх)1^2 sin®,
получим-
4тг Г°°
K(r) —— I uS(u) sin ru du;
r Jo
1 Г00
^(«) = Q 2 / rK(r) s n ru dr.
2тг u Jq
При n — 1 используя соотношение [20]
J-i/2(x) = (2/тгх)1/2 COS®,
приходим к теореме Винера-Хинчина в форме
К(г) = [ eir“S(u)du; S(u) — Г° е *ru К (г) dr.
J-oo 2тг Jo
Спектральная плотность изотропного случайного поля £(х), х 6 Л’п
также изотропна, т.е. зависит от модуля |и| вектора u £ Rm.
Векторные случайные поля
Вещественным векторным случайным полем £(х) = (£i(x),..
?п(х))Т называется совокупность п скалярных случайных полей Мно-
гомерным законом распределения векторного случайного поля называ
ется распределение (н/)-мерного случайного вектора т) — (£(xi),.
£(х;))т. Многомерный закон распределения характеризуется ПРВ
Ж(у1, у2,.. -, уг, xj,..xj), зависящей от I векторов yj, у2,.... у; раз-
мерности п и от значений xi,x2,...,xi аргумента поля как от параме-
тра. Совокупность всех /-мерных законов распределения для всех це-
лых / = 1,2,... и любых значений аргумента Xj,..., xj, принадлежащих
Случайные ноля. Определения, характеристики
141
области определения D, является исчерпывающей характеристикой век
торного случайного поля. Зная /-мерные законы распределения мож-
но найти все многомерные распределения каждой компоненты &(х), а
также совместное распределение компонент в любых сочетаниях как в
совпадающих, так и в различных точках пространства.
Векторное случайное поле называется полем с однородным I мерным
распределением, если при заданном I, любых Xi,- - xj Дх 6 Ят,
выполняется условие
И^Уь ...yrxj + Ax xj + Дх) — W(yi,...,у/;хь xi)
те распределение вектора (£(xj + Дх),... ,£(х/ + Дх)) не зависит от
приращения аргумента Поле с однородными I мерными распределени-
ями имеет однородными все распределения размерности li, меньшей I.
Если последнее равенство выполняется для всех I, то векторное поле
называется однородным в узком смысле. Все компоненты такого поля
есть однородные в узком смысле скалярные случайные поля.
Допущение об однородности в узком смысле упрощает описание поля.
Размерность параметрического множества Xi,...,xj, равная 1т плот-
ности 1У(у j,... yr Xi,.. , Хт) уменьшается на т единиц. В частности,
одномерное распределение £(х) не зависит от аргумента х.
Математическое ожидание векторного поля m(x) — E£(jx.) опреде-
ляется как вектор m(x) = (т;(х) ..,тп(х))т, компоненты которого
т,(х) = ££,(х). Матричные корреляционная Я(Х1,Х2) и ковариацион-
ная функции определяются формулами
Мхьхг) - ^К(х1Х(х2)т] = {#iy(xi,X2)},
х2) = M[C(xj) - те(х1)][£(х2) те(х2)]т = {К„(х1,х2)}
Здесь 7ty(xi,x2) = £’[^(х1)^(х2)], J<v(xi,x2) = М€(х1) ~ »МХ1)] х
xKj(x2) - «^(х2)].
Функции А\,(х1, хг), расположенные по диагонали матричной кор-
реляционной функции называются автоковариационными функциями
Ф кции 7<jj(xi,x2) при i ф j — взаимными ковариационными функ-
циями КФ и КВФ связаны соотношением
K(xi,x2) = 7?(xi,x2) - me(xi)m^(x2).
Векторное поле называется однородным в широком смысле, если
m^(x) const; /<(х + у у) —/<(х)
Т-е- его математическое ожидание постоянно, а матричная ковариацион-
ная функция зависит только от разности аргументов. Для нее спра
ведливы равенства
Я(х) = Кт(-х), /<о(х) — Kji(-x)
142
Лекция ]fj
и неравенство
|Mj(x)]
Однородное в узком смысле поле однородно и в широком смысле
обратное неверно Известно, что гауссовское векторное случайное по-
ле однозначно описывается своими двумя характеристиками т^(х)
/<f(xi,X2) Однородное в широком смысле гауссовское поле — одно-
родно и в узком смысле
Однородное в широком смысле случайное поле (называется изотроп-
ным, если
7i(x) — Ко(|х|) |х| = х/х'х,
его матричная ковариационная функция зависит от модуля вектора х
Изотропное векторное случайное поле имеет четные взаимные корре-
ляционные функции.
Векторное случайное поле называется непрерывным в точке Хр в сред
неквадратическом смысле, если в Xq непрерывны в среднеквадратиче-
ском смысле все его компоненты. Для среднеквадратической непрерыв
ности векторного поля £(хо) в хд необходима и достаточна непрерыв
ность mf(x) и /<^(х1,Хг) в точке Xi — хг = хд. Для непрерывности
однородного в широком смысле поля необходима и достаточна непре-
рывность К((х) в нуле. Для ковариационной функции однородного в
широком смысле непрерывного векторного случайного поля справед
ливо представление
/<(х)= / e’uTxS(u)du,
JR™
где Sf(u) = [Sjti(u)] — матричная функция аргумента u € К"1, на-
зываемая матричной спектральной плотностью Матричная спектраль-
ная плотность связана взаимно однозначно с матричной ковариацион-
ной функцией формулой обращения
\.z7rJ JR™
Элементы Sf (u) являются комплексными функциями даже для веще-
ственных полей При каждом фиксированном и матрица S^(u) предста-
вляет собой эрмитовскую неотрицательно определенную матрицу Эр-
митово свойство означает
S(u) = = S» Sw(u) = S№(«),
где черта — знак комплексного сопряжения. Неотрицательная опреде-
143
Случайные. поля. Определения, характеристики
ленность означает, что квадратичная форма
zTS(u)z = zkSkizi О
неотрицательно определена для любых комплексных векторов
z = (xi,. --,^n)T- Из вещественности /<£(х) следует
S(u) = 5(-u).
Для изотропного случайного поля функция S£(u) также изотропна
= Sb(]u|), т.е. зависит от модуля вектора и. Из последней фор-
муль следует, что для изотропного поля S£(u) всегда вещественна.
Интеграл от векторного случайного поля
»?(у) = (ш(у). -.%(у))
с весовой функцией д(у, х) = [<7,,(у, х)], г — 1,..., k, j — 1 ..., тг, опре-
деляется через интеграл от скалярного поля равенством
^(У) = 52/ ^(У.хХ/хХх.
3=1 Jd
Интеграл Т](у) является векторным полем переменной у Его момен
ты определяются формулами
П4(у) - Мг](у)= / 5(y,x)m£(x)dx;
Jd
^(У1,Уг)= / / <?(У1,Х1Х£(х1;х2)5т(у2)х2)(/х1</х2>
JD JD
Интеграл свертки определяется формулой
»?(у) = / з(У - x)£(x)dx.
Jr™
Если поле £(х) — однородно в широком смысле, то эти формулы
принимают вид
х
ш£ = const;
Яч(У1,Уг) = / / ff(yi - xi)/Q(xi - x2)ffT(y2 - x2)dxi(/x2.
Jr™ Jr™
Последняя формула после замены переменных интегрирования пре-
144
Лекция ](j
образуется к виду
/<ч(у) = / / ff(zi)/Q(y + z2 - z1)ffT(z2)dzidz2
Jr™ Jr-
Отсюда следует, что поле т)(у) однородно в широком смысле. Если
же б(х) однородно в узком смысле, то поле т?(у) также обладает свой-
ством узкой однородности.
Частотное соотношение, связывающее спектральные плотности jj(y)
и £(х), имеет вид
S„(u) _ G(u)S(u)G*(u).
Здесь G(u) = [Gjti(u)] = fRm Zdz — матричная частотная
характеристика пространственного фильтра с весовой функцией </(z)
G*(z) = GT(u) — матрица, эрмитовски сопряженная с матрицей G(u);
S(u) и S4(u — матричные спектральные плотности полей £(х) и j?(y)
соответственно Элементы g(z) и G(u) связаны обратным преобразо-
ванием Фурье
Ч а с т ъ II
Линейные
преобразования
случайных
процессов
Лекция 17
Интегральные характеристики
стационарных случайных процессов и
линейных систем
В даной лекции, как и ранее, рассматриваются как непрерывные, так
и дискретные СП, это же относится и к линейным системам (ЛС)
Под интегральными характеристиками будем понимать.
для СП — время корреляции СП и эффективную ширину его энер-
гетического спектра;
для ЛС — шумовую полосу и системную КФ (СКФ).
Непрерывные СП и ЛС
Время корреляции 77. определяется по формуле
(IM)
где р(т) — коэффициент корреляции стационарного СП
Эффективная ширина энергетического спектра
(17-2)
гДе S,(w) — S(a>)/Sm — нормированная спектральная плотность (энер
гетический спектр), Sm = const, Sm — максимальное значение ЭС
Рассмотрим два простых примера
Пример 17.1. Пусть имеется КФ гауссовско-марковского СП
НД-г) = ^е-а|т|-
Требуется найти время корреляции данного СП.
Решение
p(r) = e-QH; Tk= / е-“Tdr=—.
Jo a
Пример 17.2. Найти эффективную ширину энергетического спектра СП, ука-
занного в примере 17.1.
146
Лекция J"/
Решение. Используем известное соотношение (см задачу 3.2)
5[е-“И]=-т5Ч- (1--3)
Тогда
S^=-^2- S0=S(0) = 2a2x/ai /
а2 + w2 Sm 1 + (и>/ а)2
Поэтому
Шумовая полоса ЛС В, Гц, определяется соотношением
rOQ MOQ
(174)
где Я(|ш) — частотная характерстика (ЧХ) ЛС; Нт — максимальное
значение АЧХ
При вычислениях шумовой полосы целесообразно пользоваться ее вы-
ражением в виде
В 2Н2 ’
где
[ H(s)H(—s)ds (17 5)
/тг? /
— табличный интеграл при дробно-рациональной функции H(s) =
= c(s)/d(s), где c(s) = .. + с0, d(s) = dnsn + ... + dv.
Так, например.
Cp j _ c'jd0 + c%d2
2<7p(/i 2dgdid2
(17 6)
Пример 17 3 Вычислить шумовую полосу интегрирующей цепи (ИЦ).
Решение Частотная характеристика ИЦ 77(iw) = 1/(1 4- iwrq,), тогда
1 1,2 -j
I^MI2 = , . 2 2 = ь = —: = 1;
1 + ш2т2 Ь2 + ш2 Тф
В - — — Г dx -Ь
2тг Jo 1 + (w/Ь)2 2тг Jo 1 + х2 4
Используем значение интеграла 7j, при этом 77(a) = Ь/(Ь + s), Co — b; dp = !>'•
dj = 1, тогда
2 2 2b 4
Пример 17.4. Вычислить шумовую полосу параллельного колебательного вы-
сокодобротного контура
Интегральные характеристики стационарных СП и ЛС
147
решение. Найдем вначале величину В, используя приближенное выражение
для ЧХ контура
H(iw)= -----, (17.7)
1 + - <Л0)тк
де Rs — эквивалентное сопротивление контура; шр — резонансная частота тк —
постоянная времени; тк — 2QI^', Q — добротность контура.
|Н(ш,)|2 =
b2 + (ш - а>о)2 ’
Ь1 = 1/тк, Нт = Лэ-
1 Г00 Ь2 da,
2тг Jo Ь1 + (^ - Wo)2
i Д‘ ь2ап ~ bi 700 dx
2тг / Ь? + С12 2тг / 1 + х2
J —U/Q 1 J —ОО
b а,о
2 ~ 4Q
Учтем, что полоса пропускания контура Д.и,п — wo/Q, а Ь; = wo/(2Q). Сле-
довательно, В = i^Wn/4.
Используем значение интеграла 1п при п — 2. Для этого вначале преобразу-
ем ЧХ контура:
H(iw) — Пэ — ____________дэ___________ дэ^и>о _
1 + ia 1 + iQ(w/wo — а>р/а> wu>o + г<Э(о?2 — w2)
(a>oKa/Q)iai _ (woR3/Q)iar
-w2 + w2 + (u>p/Q)iw -w2 + 2f (iu>) + ’
где f — wo/(2Q) — 1/rfe — tn; W2, = Rg- Положим s = iw, тогда получим
H(s) = 2tR3 S -2; (17.8)
s2 + 2(s +
Таким образом, здесь co = 0; cj — 2^Rg; d = u>q, dj — 2^; d^ — 1;
_ c2d0 = с2 ^д2 = z2 ед2 e cup
2 2cf0<*i 2^ 2-2C ЧЭ’ 2H^ 2R2 2 4Q'
Получили тот же результат, что и в предыдущем случае.
Введем системную КФ (СКФ) 77л(т-) непрерывной стационарной ЛС
соотношением [16]
Rh(r) — I h(t)h(t г) dt - Rh(-r),
J—OQ
где h(t) — импульсная характеристика (ИХ) ЛС.
Утверждение 17.1
Wt)] = №)||Li„ = W(s)^(-s).
Доказательство.
(17 9)
(17.10)
~шт dr =
г) dt
J — оо
После замены переменных и — t — г, v = t получим
h(v)e~iuv dv h(u)e,wu du =
е-1шг dr.
148
Лекция ?7
ГОО Г ОС
f h(v)e-iuv dv / h(u)ewu du = = |H(iw)|2.
— OO j — oo
Утверждение доказано.
Выразим шумовую полосу через значение СКФ. Учтем соотношение
1 Г00
МО) I 1Я(Н2(1ш = 7Н^В-
J—оо
Отсюда получим
В = Rh(0)/2H£. (17 11)
Пример 17.5 Найти СКФ интегратора со сбросом.
Решение. ИХ интегратора со сбросом имеет вид
Л(0 = Л[1(0-1(г-7)].
Изображение ИХ
H(s) = £[Л(4)] = ~ (1 - е-^) .
Отсюда
h(s)h(-S)=(4)2esT о-^)2
(17.12)
Рис. 17.1
Рассмотрим отдельно изображение
= ST)
Очевидно, что оригиналом для этого изображения яв-
ляется «ступенька» uCT(t) (рис. 17.1.а).
Тогда оригиналом изображения
F2(s) = ~ (1 -e-sT)2 = Fi(s) (1 -e-sT) . (17.13)
будет треугольный импульс nT(t) (рис 17.1,6)
Именно такой подход будет реализован и при анализе
согласованного фильтра (СФ) при подаче на вход оди-
ночного прямоугольного видеоимпульса, причем величи
на Э — Л2?’ есть энергия такого импульса; Т — длитель-
ность, А — амплитуда импульса. Оригинал для изобра-
жения £з(«) = F2(s)e.sT отличается от оригинала -ит(0
сдвигом в сторону опережения. Поэтому СКФ 7?л(т) для
интегратора со сбросом принимает вид (рис. 17.1,в)
IZh(r) — “ Н/Т] при 1*1 Т' (17 14)
при |t| > Т. U '
Иногда проще вычислить сначала |H(iw)|“ И
затем воспользоваться стандартным переходом к
149
Интегральные характеристики стационарных СП и ЛС
Пример 17 6 Найти СКФ Нн(т) интегрирующей цепи,
решение. Воспользуемся известным соотношением
1 Ь2
wmi2 = 7j. 2— = -•
1 + Тф
fpe Ъ = 1/тф - \/ПС. Используя соотношение (17.3), находим СКФ ИЦ
Я^т) = (6/2)е-ЬИ.
(17.15)
Пример 17 7 Найти СКФ Яд(т) параллельного колебательного контура.
Решение Найдем СКФ ЯЛ(т) приближенно и точно. Для приближенного вы
числения СКФ воспользуемся ЧХ низкочастотного эквивалента.
Представим ЧХ и квадрат АЧХ высокодобротного контура в виде, принятом в
примере 17.4
В /^2
R(iw) = ---, Э — ; |H(iu,)|2 = -------------Э — (17.16)
1 + (ы — ыо)т* 1 + (ш —ы0)2т2
Тогда
ЛЛ(т) = 3-1
[|W(M|2]=if |Н(М|2е‘“^ш.
J — оо
В силу четности функции |H(iui)|2 получаем
Rfc(r)=
I2 cos ujt dcj =
H2
C7
7ГТ*
Лэ
cos[(w0 + ir/rfejr] du
COS (ЛТ duj
(ш - wo)2T2 7TTfc J_2q 1 + -и2
cos(lj0t) cos(ит/Tfc) sin(rj0T)sin(’u7-/rfc) oostx-QT
1 + IZ2 Tfc
cos(ur/Tk) du_ 1
1 + -u2 2tt
----7Г
4- IL2
После подстановки и = vrk получим
' 2 \ 2тг b2 + v2
\ >4 J
Используя (17.3), приходим к равенству F(t) = (l/2)e“l>»lTl
Следовательно, СКФ высокодобротного колебательного контура
Rh(r) = Д|Ь1е~ь>1т| совш0т, Ь, = l/rfc. (17.17)
Рассмотрим точное решение задачи. Используя результат примера 17.4, получим
нередаточную функцию (17.8). Тогда
2bj
Ь2 4- v2
|Н(М12 = н(з)я(-а) = s SJ- =
s2 — 2£s + u>2
s2 + 2fs + ш2
= £RafRi(*)+R2(s)]-
1
1
В результате получим СКФ Rh(u>) в виде
Rfc(r) = ея|(А +12).
150
Лекция /?
где
rioo MX .
h = ----I - - ,eSTds; l2= ’ / , ( S ,e3Tds.
2ят I . s2 + 2fs + u»n 2tti / . s2 — 2fs + u»2
J— loo ' • ' U J ioo • 0
Согласно правилу выбора контура интегрирования,
, , г _ Г J'l при т > О,
/1+/2-{/2 при т < О.
Вычислим значения интегралов 1\ и 12. Эти интегралы представляют собой ори
гиналы для изображений Fi(s) и F2(s).
Рассмотрим изображение
р , , _ ______«______ _ s + SQ_____________sp______
1 s2 + 2fs + ui2 (s + so )2 + 72 (s + s0 )2 + -у2 ’
где s0 = С т2 - ш2[1 - (£/шо)2] - w2(l - 1/(4Q2)).
Используем известные изображения гармонических функций
s а
: cosat; ‘ smat, (17.18)
+ a2 s2 + а2
а также теорему смещения. В результате находим оригинал Ji(t) для изображе-
ния Fi(s)
/1(т) = h = e-{T[cos-yr - (£/-у)sin-yr], т О.
Преобразуем интеграл Гг- При р = — s имеем
/1оо
- „ ept dp, t — —т < 0.
-ioo V + 2^Р + Ш0
В результате получим
/2(т) — 12 — e^T[cos-yr — (f/-y)sin-y(—г)], т < О.
Объединяя результаты, получим
Ял(т) ~ £7?эе_^|т1[соз-ут - (£/7) sm7|r|J. (17 19)
При Q >> 1, когда 7 к а>о, получим приближенную формулу для СКФ Rfc(r) (17.17).
Дискретные СП и ЛС
Системная КФ цифрового фильтра (ЦФ) находится по формуле
ОО
<17-20)
Jb=- оо
Введем системную функцию фильтра (СФФ) G(z) в виде z-преобра-
зования от ИХ дп:
СО
G(z) - Z{gn} - y^gnz~n,
п—0
где Z — знак z-преобразования
оо / со \
Z[/?5(ti)] = I I z~n-
71 — 0 \fc —0 /
Интегральные характеристики стационарных СП и ЯС 151
После введения новых индексов суммирования k — п = т; k ~ I
получим
OQ оо / 1 X
адм] = Е Е^И = G [-) Gv>
m=0 n-О '
Отсюда
i / одс; (J)г"1 dz-
M=1
(17-21)
Если ввести частотную характеристику цифровой ЛС
H(iw) — G(z)|-_ei^, си — wT,
где T — интервал дискретизации, то получим
W = ^~ Г №)|2einC
ля J-
(17,22)
Пример 178. Найдем СКФ дискретного аналога интегрирующей цепи (ИЦ).
Его системная функция имеет вид
з Т
d — с < 1; е — —,
z — d Тф
где тф постоянная времени ИЦ. В этом случае
G(z)G (-} = ----------------.
\z) (z-d)(l-dz)
Поэтому (см. формулу (4.6))
Rs(n) = 1 . Ф -----~.,dz . , = Res/(z) = lim/(z)(z - d) =
2tti J [z — d)\l — dz) z—d z—d 1 — dz
1*1=1
•де Д2) - z"/[(z _ d)(l - dz)].
Учитывая четность СКФ, окончательно находим
dl"l
r9w - п- (17-23)
1 — ая
Задачи
^7-1- Найти выражение для шумовой полосы цифрового фильтра.
Вычислить шумовую полосу цифрового аналога ИЦ.
17.2. Вычислить шумовую полосу цифрового аналога параллельного колеба-
тельного контура.
Найти эффективную ширину полосы СП X(t), если его КФ имеет вид
Rx(t) = “It! costu0T,
*1Р*’ Условии ыо > а.
е ’5' Найти эффективную ширину полосы и время корреляции СП X(t), если
имеет вид
Нл!(т) = ^е-“т3.
Лекция 18
Линейные преобразования случайных
процессов
Дифференцирование и интегрирование
случайных функции
Определение 1 Случайная функция X(t) называется дифферен-
цируемой в среднеквадратическом смысле в точке ip 6 Т, если суще-
ствует СВ X'(to) такая, что
,.т г
At->0 1 At J J
причем CB X'(to) называется производной СП X(t) в точке t0
Теорема 18.1 Для дифференцируемости СП X(t) необходимо и
достаточно существование производных
tfrng(t) d2Kx(tl,t2)
dt И dtidt?
При этом
at
КЛЛЪ) = £{[*'G1) - M‘i)№) - mT,(t2)]} =
Pt 1 ut 2
Замечание. Для стационарного СП X(t)
Кх.(т) = (18 Л)
Пример 18.1. Гауссовско-марковский СП с экспоненциальной КФ не является
дифференцируемым, так у функции е~alTl не существует производной в точке т = О-
Пример 18.2 Случайный процесс с КФ
ЯДт) = о*е-“И(1 + о|т|)
является дифференцируемым, так как
dR(r) 2 _ [ [ 2 _а|т|. . ..
-----— —а те 1 *; -------— — — а е 1 (1 — сцт|).
d,T dr2
преобразования случайных процессов
153
^дрещелеиие 2 Интегральное преобразование СП x(t)
j/(t) - f х(т) dr
Jto
(182)
ывается среднеквадратичным интегралом случайной функции на
[i <] (см приложение 2).
Теорема 18-2. Среднее значение и ковариационая функция СП y(t)
определяются соотношениями:
л
rriy(t) = / тх(т)бт;
Jto
ptl yt3
Ky(tltt2)- / Kx(Ti,T2)dTldT2.
Jto Jto
Отсюда следует, что даже при стационарном СП х(б) интеграл от не-
го является нестационарным СП.
Частный случай. СП x(t) — стационарный, тогда тпх = const;
= mx(t t0); [ [ Кх(т2 ~ dridT2;
Jto Jto
Dv(t) = Ky(t, t)= f f Kx(r2 - ti) dTrdT2
Jto •'to
Преобразуем двукратный интеграл к сумме однократных и вычислим
дисперсию <Ty(t) = Ky(t,t). Пусть to = 0 и t2 > ti. Тогда вводя
новые переменые
Х — т2 — tj; и — т2,
получим
Ky(ti,t2)= [ ([ Kx(X)dx\du.
Jo \Ju-ti /
Изменяя порядок интегрирования, приходим к соотношению
/О rt2-ti
(ti + А)ЛЕ(А)dX + t\ I Kx(X)dX +
t, Jo
/•<2
+ / (t2-X)Kx(X)dX. (18.3)
Jt^-t,
Об
ласти интегрирования для каждого слагаемого отмечены на
РИс. 181
Отсюда при ti = t2 t получим
Zt ft
(t - |AIJ/C^A) dA = 2 / (t - X)Kx(X)dX. (18.4)
t Jo
Пример 18.3. Найти КВФ отклика интегратора, если КВФ входно-
го воздействия имеет вид
Кх(т) = <7^е—“lTl.
Решение. Воспользуемся формулой (18.3)
а-2Ку(1гЛ-2) = [ (£1 + А)е-<11Л1</А4 ti i e-a^dX +
J—t1 Jo
+ I (^2 — A)e dX = /j + /г + Хз-
J t2 —tj
После интегрирования находим
1 1
----------------------2 ----2 *
о/
т ti h
h —----------
ГУ
1
Jj =
<Xt2 _
Le-a(‘2-‘l)
,2 е
В результате при t2
> tj получим КВФ отклика интегратора
[«1 _ _L. 1 -°«1 а. 1
о „2 + „2е +„2е
„2 е
Пример 18.4 Пусть задано интегральное преобразование
(18.5)
то(4) = /
Jo
где f(t) — гауссовский БШ (ГБШ): £[£(<)] = О, Л^(т) = Sq6(t). Следовательно
w(t) — это винеровский СП. Найдем его КФ K{(ti,t2)-
Решение По определению
Ош(0 = ^(0=Е
£'к(т)£(и)]dudT =
5 (-и — т) dudr =
dr — SqI.
Таким образом, дисперсия СП w(f) возрастает с ростом времени линейно, uw =
y/Sot. Поскольку £(£) — ГБШ, то и СП w(t) также будет гауссовским СП.
^инейные преобразования случайных процессов
155
Найдем КФ винеровского СП
Пусть 12 > *1 (рис. 18.2,а). тогда аргумент дельта-функции равен нулю на штри
ховой линии, в остальной области дельта-функция равна нулю. При ^2 > инте-
грируем сначала no v [при любом и 6 (O-ti)L при этом путь интегрирования пе-
ресекает штриховую линию Получим
, 4г) = [ 1 du = Зой-
Jo
Аналогично при t2 < ti (рис. 18.2,6), интегрируя сначала по и, получим
^2) = Sq I 1 dv = Sot2-
Jo
Окончательно находим
R ,\_J5oh npnf2^ti;
Rw(ti, tz) = So min(ti, ti). (18.6)
Тогда Dw(t) = Rw(t,t) = Sot
Воздействие СП на стационарные ЛС
Отклик y(t) Л С имеет вид свертки 1/IX системы ft(t) и входного воз
Действия x(t)
y(t) ~ [ x(r)h(t — r'jdr = f h(r)x(t — r)dr.
J —CO d — co
По определению КФ 7Zj,(/i,t2) = E(yi,y2). где yY - y(ti), y2 - y(h)
°гда КФ Ry(ti,t2) отклика ЛС
Ry(ti,t2) — E [ f /i(a)/iQ3):c(ti — а)ж(<2 — (tydadp.
J — co J—co
156
Лекция
Меняя местами операции усреднения и интегрирования и вводя Кф
= EfxijX?"), получим
/ОО ftx>
I h(a)h(J3)R*(ti — a;t2 — /3) dad/3.
•oo J—oo
Данная формула справедлива при воздействии на ЛС нестационарно-
го СП x(t). Если СП x(i) — стационарный, то
Rx(ti — a;t2 — 0) = Rx(r + а ~ 0),т = t2 - tlt
тогда
/СО *oo
/ hfa'MftyR^r + a - /3) dad/3.
CO J —oo
Сделав замену переменных и = /3 — a; v — /3, получим
Ыт)
Rx(r — и) du.
Замечаем, что в квадратных скобках стоит СКФ Rh(u).
Окончательно находим
Ry(r) = [ Rh(u)Rx(r~u)du, (18 7)
J—оо
т.е. КФ отклика выражается через свертку СКФ и КФ входного воз-
действия
Отсюда следует соотношение для ЭС (частотный образ свертки ра-
вен произведению частотных образов сомножителей подынтегрально-
го выражения)
Sy(Jj = &(ы)№)|2- (18.8)
Частный случай на вход ЛС воздействует БШ, его КФ Rx(r) =
= -Rn(r) = So6(r), тогда
Ryfr) ~ S0Rh(r). (18 9)
Теорема. Пусть задан отклик £/(/) линейной системы в виде свертки
/ОО
x(t — a/h/a) da.
оо
Тогда
Rxy(r) = RJr) * h(-r), R^r) = 2^y(r) * h(r); (18.10)
Sxy(u) Se(w)ff(M; Sy(w) = Sxy^)H^), (18-11)
где звездочкой обозначена операции свертки, черта сверху — знак коМ'
плексного сопряжения.
Динейныс преобразования случайных процессов
157
Доказательство.
Найдем взаимную КФ
П*ЛТ) = E[x(t + r)y(t)] =
7£[:c(Z + r)x(t — a)]h(a) da.
Поскольк
E[e(( + r)x(t - a)] = R^ft + a),
то получим
/ОО лсо
Rx{t + a)ft(a) da = Rx(r - /?)/>(-/?) d(3 = Rx(r) * Л(-т).
- oo J—oo
Аналогично найдем
Д,(т) - E[y(t)y(t -
Е[ж(/ — a)y(t — a)]/i(a) da =
Rxy(t — a}h{a) da = Rxy(r) * h(r).
Соотношения (18.11) получаются на основе (18.10) и теоремы Вине-
ра-Хинчина с учетом соотношения
3[Л(-т)] = Н(,и>)
и свойства преобразования Фурье: свертка временнных функции соот-
ветствует произведению их частотных образов (спектров)
Пример 18 5. Найти КФ отклика ИЦ при условии, что на ее вход воздейству
ет стационарный СП с КФ
Решение Используя известные соотношения
3le-“,Tl] = ^Г-2. 1Я(М12
b2 + a/2
Тф
и формулу (18.8), получим
С / X _ Зш^Ь2
(o2+w2)(b2 + w2)'
Воспользуемся разложением
1
(or2 +си2)(Ь2 +ы2)
и <®отношениями
1 1
а2 cv2 Ъ2 4- ш2
5" (гЪ) = (рЪ) '
D Результате получим КФ отклика ИЦ
(1е-“Н - 1е-ьи)
— а2 \ а Ь /
его Дисперсию
(18.12)
Uy = Ry(p) = ba2J(b+ or).
(18.13)
158
Лекция 18
Отсюда при о > Ь (эффективная ширина ЭС значительно больше полосы про-
пускания ИЦ) Dy « (эффективная фильтрация шума); при Ь >> а (поло
са пропускания ИЦ значительно больше эффективной ширины ЭС СП) Dy й: ст2
(фильтрация шума отсутствует).
Пример 18.6. Найти КФ отклика ИЦ при воздействии БШ с КФ Rn(r) = 5Ь6(т).
Решение. Используя (18.9) и (17 15), получим
Лв(т) - (Sob/2)e-blTl. (18.1'1)
Пример 18 .7. На паралельный колебательный контур подается ток в форме
БШ: R,(t) = So5(t). Требуется найти КФ Ru(r) напряжения на контуре
Решение Поскольку СКФ Rti(t) найдена ранее, то сразу по (18 9) получим
Ru(t) = S0Rh(r) = *|T|[coswfcr-(£/wfc)siiiwfc|r|], (18.15)
где (, = w0/2Q. wk — w0(l - 1/4Q2)1/2; w0 = (LC)-1/2.
При 1/Q < 1; wk и wo; f/wfc » £/w0 = 1/2Q < 1 формула упрощается
й,(т) = So£R^e—coswqt.
Пример 18.8. Преобразование Гильберта Пусть ЧХ системы имеет вид
(рис 18.3)
,// \ f ”7, ПрИ W О, , icA
H(,w)= -isgnw = приш<0. <181С)
Замечание. Фильтр с такой ЧХ называется квадратурным, он соответствует
идеальному фазовращателю — линейному фильтру, сдвигающему фазу на 90°. Его
отклик на гармоническое воздействие x(l) — coswt будет i>(t) = cos(wt—90°) = sin wt.
а при x(t) = sinwt, v(t) = sin(wt — 90°) = — coswt.
Импульсная характеристика квадратурного фильтра
«7 —ОО
Отклик v(t) квадратурного фильтра имеет вид свертки
ГА ГА 1 1 Г 4
* — = — I ------- da,
7ft 7Г / t — a
J —co
причем интеграл понимается в смысле главного значения.
Таким образом, отклик квадратурного фильтра выражается в виде преобразова
ния Гильберта от входного воздействия.
Согласно (18.11)
SxtiG*') — Sx(w)H(iw) = iSx (urjsgncu.
Динейные преобразования случайных процессов 159
Следовательно, с учетом (3 12) получим
S^x(ui) = SIV(w) = — tSx(u,)sgnu7 — -Sxt.(w) (18.17)
Отск>Да (см. рис. 18.3)
iSVI(ia) = S’x(w)sgn(w). (18.18)
СправсД111160 также соотношение
5„(ш) = ЯДш), (18.19)
так как
5„(ш) = £Цш)|Я(1ш)|2.
Рассмотрим аналитический шум
z(t) = x(t) + w(t),
который можно представить как отклик на x(t) системой с ЧХ
H(iw) = = 1 + i(-isgnw) = 2L7(cu),
Л (1UF)
где U(ш) = 1(ш) — единичный скачок.
Тогда
5г(ш) = ^(rx/)|//(icu)|2 = 45х(ш)1/(ш).
С учетом соотношения (18.18) получим (рис. 18.3)
Sz(w) = 2Sx(w) + 2iSt,I(w). (18.20)
Отсюда находим
Rz(t) - 2Кг(т) + 2iRvx(r).
Воздействие дискретных СП на ЦФ
Пусть дп — ИХ ЦФ, тогда отклик ЛС уп на последовательность хп
на входе определяется дискретной сверткой
оо оо
Уп — хк9п — к — / 9кхп — к‘
к=—оо к——со
Среднее значение отклика
(со \
УЗ ) = У? дкЕ(хп_к)
к —— СО / к= — оо
Для стационарного СП тпх — = const. Тогда получим
ОО
Е(уп) -тпу =тпх дк = const.
к~— со
Найдем КФ отклика
ОО оо
Ry [л, т. 4- 71] — —j)-
fc=-*oo j=—оо
1
160 Лекция IS
Если СП {хп} стационарный, то
Jb*£n+m—j ) — 4~ k j],
и поэтому
оо оо
Яу[п,п4-т] = Яу[пг] = УЗ УЗ 4-Ат-j).
fc=—оо J=—оо
Вводя новый индекс суммирования I = j — к, получим
оо / оо \
ЯуМ = Е Е + fl j - fl = 52 #s[fl/k[m - q.
l=— OO \Jc —— OO / l~—oo
(18.21)
где 7?S[Z] — СКФ дискретной ЛС.
Таким образом, как и в непрерывной ЛС, КФ отклика на стацио-
нарное воздействие выражается в виде дискретной свертки СКФ /?.„[/]
и КФ входного воздействия
Введем z-форму ЭС
ОО
S(Z) = Z<2>{fl[n]} = £ R[n]z~n,
П —— ОО
где Я[п] = — / 5(z)zn-1dz; — знак двустороннего z преобра
2ir* /|z|=i
зования.
Найдем 2^-форму ЭС отклика ЛС:
оо оо оо
Sy(z) = ~ 52 52 52 0k9iRx[m+ k-j]z~m.
m— — (X> k——ooj^ — €>o
Введем новый индекс суммирования п = тп + к — j, тогда тройная
сумма распадается на произведение однократных сумм:
ОО оо оо
Е Е Е ^№_n-
fc=—оо j=—оо п=-оо
Сл едо вател ьно,
Sy(z) - Sx(z)G(z)G(l/z). (18.22)
Поскольку
G(z)G(l/z) = Z^{Ry[n]}, (18.23)
то полученный результат для ЭС Sy(z) следует непосредственно из вЫ-
ражения свертки КФ Ят[п] и СКФ
В частотной области полученью результат имеет вид
5y(w) = $c(w)|W(i")|2- (18-24)
динейяь«е преобразования случайных процессов
161
Пример 18 9. Найти КФ отклика дискретного аналога ИЦ, имеющего ИХ
. , _ ( 0 при к < О
— Y J-* при к 0, d = е_“ < 1.
при дискретном белом шуме на входе с дисперсией Dx.
Решение Здесь КФ входного воздействия
Ra?(^t — /) — Dx^rnlt
где 6ml — символ Кронекера Тогда по свертке находим
СО
Rs[rn] = Dx , Rg[Q^n>< = В*Кд[тн], (18.25)
1=—ОО
где СКФ Rg[m] вычислена ранее и имеет вид (17 23)
Задачи
18.1 На вход интегратора с оператором K(t) = X(r)dr поступает СП со сред-
ним значением mx(t) — Acoswt и КФ Rx(t (') = De~“lt-t I
Найти среднее значение и КФ СП V(t) на выходе интегратора.
18 2. Определить, какие СП являются дифференцируемыми, если их средние зна-
чения равны нулю, а КФ имеют вид
a) e-l‘'-‘l(l + |t - t'|);
6) е—cos(t' — t);
в) е-“т2.
18.3 . Сколько производных имеет СП Х(1) с КФ
R*(r) = о2е-а1’’1[1 + о|т| + (1/3)о2т2].
А Определить КФ СП Z(t) — X(t) +
Б Определить взаимную КФ СП X(t) и d2X/dt2.
18 4 Пусть СП X(t) имеет вид X(t) — A cos(u/t + <р), где А — СВ, тд = Da — 1;
v, V — постоянные. Найти среднее значение и КФ СП У(<) — X'(t) + e-2t.
18.5. На плоскости движется случайная точка М так, что ее полярный угол </>
является случайной функцией времени, причем его КФ Rv(t,i') = ст2е——
Найти дисперсию угловой скорости е? полярного радиуса точки М.
8.6 Пусть СП X(t) имеет вид X(t) — acos(o>t + i/>), где а, а> - постоянные у?
СВ, равномерно распределенная на [О, 2тг). Найти V'(t) = X'(t), Шу (t),
Лекция 19
Задание линейных одномерных
и многомерных систем в форме
стохастических ДУ и РУ
Пусть линейная система задается ДУ вида
— = a(t>(t) + 6(t>(0. (19 1)
где w(t) — нестационарный случайный процесс с КФ Rw(ti,tz) и сред
ним значением mw(t) ф 0.
Решением ДУ является
Г*
х(<) = <р(£, to)x(to) + I (p(t, т)Ъ[т)-ш(т) dr,
j to
(19.2)
где <p(f,£o) — функция, связанная с интегрирующим множителем pa-
венством exp
rt
I a(t)dt — <p-1(t, to)- Свойства этой функции:
Jtn
*0
d<p(t,tD)/dt = a(t)<p(t,Zo); = 1;
4»-1(T,to) = <p(to,r)-
Среднее значение mx(t) решения x(f) удовлетворяет ДУ
+ m^to) - mXa. (19.3)
at
Введем функцию h(t, r) = <p(f, т)Ь(т), тогда ковариационную функ-
цию Kx(ti,tz) и дисперсию Dx(t) решения x(t) можно получить в виде
(при нулевых начальных условиях)'
Kx(ti,t2}= I I h(ti,T1)l4t2,T2)K„(TltT2')dTldT2; (194)
'’to ''to
Dx(t) = [ [ /i(ii,Ti)b(t2,T2)/<w(Ti,T2)dTidT2, (19-5)
где Kw(ti,tz) — ковариационная функция воздействия «’(/).
Если воздействие является белым шумом, то
Кш(<1,<г) = — tz),
где 6(ti —tz) — дельта-функция; V’w(ti) — интенсивность белого шумЭ'
^дн«« линейных одномерных и многомерных систем
163
g этом случае для дисперсии Dx(t) получим ДУ
^l = 2a(t)Dx(t) + b2(t)Mt) (19-6)
at
Пример 19.1. Пусть задано стохастическое ДУ
x'(t) + cx(t) = cw(t), (19-7)
еде с = const.
Найти ЭС Sx(w) и КФ Rx(r) решения x(t) ДУ при БШ w(t). когда R,«(r) =
-- gf(r). 9 = const. Найти также среднее значение mx(t) = E[a;(t)] и дисперсию
px(t); в предположении гауссовского БШ w(t) при его нулевом среднем значении
(£?(«»«) — °) и ПРИ начальном условии о?о = ®(0) ~ N(mo,co). cr2 = DXo полу-
чить ПРВ W(x,t) = N[Tnx(t),<r,:(t)].
решение Уравнение (19 7) моделирует воздействие БШ на ИЦ. Линейная си-
стема при ДУ (19.7) характеризуется ЧХ Hfiui) = с/(с + iw), тогда
с2 о
SxM = Sw(u,)|H(MI2 =
Отсюда находим КФ решения ДУ
Лх(т) = а2 = КДО) = 5- (19 8)
2 z
По (19.3) получим однородное ДУ и его решение
^£1 = -стпДг); mx(t) = mDe-rt. (19.9)
dt
По (19 6) найдем неоднородное ДУ
=_2сОя(0 + с29-
dt
Решение этого ДУ
De(t) = DIoe-2c‘ + e-2ct f (^q)e~2crdr = DXofT2ct + у (1 “ e-2ct) - (19-10)
Jo
Согласно условий задачи ПРВ 1V(x,t) — гауссовская с параметрами mx(t) и
”*(1) = y/Dx(t), определяемыми по (19.9) и (19 10). На рис. 19.1 и 19.2 изобра
ж««ы эволюции ПРВ W(x,t) при t = 0;1;2;3;4; т0 = 3, <rg = Dxo = 0,25; с = 0,2;
’ = 0,4 (рис. 19.1); 9 = 4 (рис. 19.2).
Пусть линейная система ДУ задана в векторно-матричной форме
— = F(t)x(t) + GG)w(t), (19.11)
2*PW = {A,(t)} — матрица системы размера п х п; G(0 = Ы(*)}
атрица входа размера п X п, W(t) — нестационарный СП. Тогда
Для вектора mx(t) — Efxff)] принимает вид
= F(t)mx(l) + G(t)mw(t), £[x(t 0)] = шг(<0)- (19 12)
164
Л е к ц и я 19
Решение ДУ (19.11) может быть записано в форме
/t
x(t) — Ф(7, to)x(lo) + I Ф(/, t)G(t)w(t) dr, (19.13)
Jte
где Ф(1,4о) — переходная (нормированная фундаментальная) матрица
системы, которая является решением однородного линейного ДУ
^ф(Мо) F(W;<()) (19.14)
и удовлетворяет равенствам
Ф(1о,<о) = 1 Ф(Мо) = <рО)<Р-1(*о). (19.15)
где! — единичная матрица, <р(1)— фундаментальная матрица системы
также удовлетворяющая однородному ДУ
^^-F(7)<p(t). (19.16)
Замечание. Известно, что решение однородного ДУ
rfx(Z) ,
= Fx(f) (19.17)
где F — постоянная матрица, имеет вид линейной комбинации собствен-
ных векторов матрицы F. Если собственные значения Aj, Л2...Ап
матрицы F различны, тогда всякое решение системы (19.17) имеет вид
х(7) = CieA,tei + Со^е-, + ... + СпеА"'еп> (19 18)
где ej, С2, ...еп — собственные векторы матрицы F Пусть Т =
= {ei,e2,.. .,еп} — матрица, столбцами которой служат собственные
векторы матрицы F, С — (Ci, С21 • - -, Сп)т — вектор-столбец произ-
Задание линейных одномерных и многомерных систем
165
вольных постоянных
еА1Г 0 0
diag(eA1T,eA2T,.--,eA"T) = 0 еАаТ . .. 0 (19 19)
0 0 . еА"т
По определению, фундаментальной матрицей ф(/) системы (реше-
ний (или переходной матрицей состояний) называется такая матрица,
у которой вектор-столбцы <Pi(<), ф2(0- Vnft) являются решения
ми ДУ (19.17). Соотношение (19.18) является линейной комбинацией
таких векторов-столбцов
= eAltei; = eAate2;-. - ^«(/) = eA"ten.
Следовательно,
ф(7) Tdiag (еА11,еА2‘,...,еА"‘) -
= (в1, e2,..., e„) diag(eA*‘, eAa‘>..., eA”‘). (19.20)
Таким образом, линейную комбинацию (19 18) можно записать в виде
х(0 = (Ф1(0, Ф2(0- • , Фп(0)С = Ф(0С. (19.21)
Отсюда находим
С - ф-1(10)х(*0).
Следовательно, решение (19.18) однородного ДУ записывается в виде
х(<)=Ф(Мо>(‘о), (19.22)
где Ф(Мо) ~ ф(<)ф-1(<о)-
Пример 19.2. Пусть шум w(t) в (19.11) имееет нулевое среднее значение
£/[w(()] — 0, найти среднее значение отклика системы, если матрица F име-
ет вид
-[? :?]
Решение По (19.12) получаем ДУ
= Frrb (19.23)
at
Для нахождения решения этого ДУ вычислим собственные значения матрицы F
Для этого составим характеристическое уравнение
det(F->|)= |“А д| = >2 + W + 1 = 0.
Собственные значения
М,2 = —Т ± iwo, -у = шо — 1/1--------------—, 5 < 2.
Определим собственные векторы V матрицы F из решения алгебраических урав
Нений
Fv — Av О
166
Лекция ig
или
—Аг»! — г»2 = 0; v-j — (6 + A)i>2 = 0»
где V = (г>1,г>2)т.
Решением этой системы уравнений является вектор V = [с;—Ас]т, где с — про-
извольная постоянная. Таким образом, матрица F имеет два линейно независимых
вектора-столбца Vj — (1;—A])1, v? — (1;—А2)т. Поэтому матрица Т имеет вид
Т=[ 1 1 1 = -1]
1 -А1 — Аг J 2iu»p [ Aj 1 J ’
так как detT — Ai — А2 = 2iw0 / 0.
Фундаментальная матрица системы имеет вид
<p(t) = Tdiag(eAlt, е*2*),
тогда
’«>=[-£• ;С]
Очевидно, ф 1 (0) = Т 1, по тому решение ДУ (19.23) принимает вид
m4() = =Tdiag(eA’t,eA2t)T-ImIO = Ф(<,0)тго
где
Ф(г,о)=^— [ * 1 ] [e>1
2icvo L — Aj — A2 J L 0
= 1 Г —A2eA1‘+ AieA2t
2iwo [A]A2eAlt A]A2eA2t
0 1 f->2 -1] _
eAa< J [ Ai 1 J -
- eA1‘ + eA2‘ 1
>ieAlt-A2eA2‘j ’
причем Ф 1,0) = I mI0 — (mio,m2o)’- mx = (mxi,m^2)T. После преобразо-
ваний получим
(t) — тюе "|Ч I cosujqI -p —— sinwot
\ wo
m20 .
----e r sinwot;
wq
mx2(t) — mjowo I 14 7 )e sin wot 4-maoe
\ ^7
I COS Wq t---Sin Wo t
\ wo
(19.24)
Ковариационная матрица (KBM) 'Kx(ti,t,z) решения находится по со-
отношению
К®(^1>^2) — Ф(^1,1о)Пг:(/о)Фт(<2,1о) + 7(11,12),
(19.25)
где
7(11,12)= / / Ф(11,п)С(т1)Кя,(т1,^)Ст(т2)Фт(12,т2)<1т1г/т2.
J to
Kw(ti,T2) — КВМ случайного процесса w(l) (матрица размера п х »)•
Dx(<o) — матрица дисперсий в начальный момент времени
В случае нестационарного белого шума имеем
Кш(11,12)=Ч1(11Х(11-12), (19.26)
где V(li) — симметрическая матрица Тогда справедливы соотношения
КХ(1Ь12) =
®(li,12)Dx(t2)
D^ii)®^,!!)
при ti > t2,
при ti < t2.
(19.27)
додан г
линейных одномерных и многомерных систем
167
где б — матрица дисперсии, удовлетворяющая ДУ
I + D4t)F (Z) + G(Z)Ww(Z)GT(Z). (19.28)
at
Пусть линейная дискретная система задана своим стохастическим РУ
«п+1 = апхп + bnwn, (19.29)
где ап и Ьп — коэффициенты РУ; — случайная последовательность,
имеющая среднее значение mw[n] = Efwn) и ковариационную функцию
#w[n, /] - E(wnwi) (wn и wi — центрированные СВ).
Найти среднее значение mt[n], ковариационную функцию =
E(Xnxl) случайной последовательности хп при допущении некоррели-
рованности значений и wm, т.е. при E(incwm) = 0.
Решение РУ имеет вид
п— 1
ХП = Фп.По^По + Vn,1+lblWl, (19.30)
I=n0
где фп,/ — переходная функция
После усреднения находим РУ величины mE[n]:
тх\п + 1] = аптДп] + 6nmw[n]. (19.31)
Пусть mw = 0, а КФ J] — Кт [/, J] имеет вид
ад/, я =
где bi} — символ Кронекера, бц = 1; бу = 0 при I ф j Тогда РУ
Для дисперсии Dx[n] принимает вид
Dx[n + 1] = a„Dr[n] + t2Vw[n], £>Д0] — - тХо)2]. (19.32)
При этом
Г <Pn,fr,Di[fn] при п т,
( £>г[п]фт>п при п т.
(19.33)
Пример 19 3 Пусть задано РУ
х[п + 1] = аз:[п] + Ьи[п + 1], Ku[m] - q6[m]; а — const, b — const.
Найти КФ ЭС Sx(z), среднее значение mi[n] и дисперсию Z)x[n], и в
Предположении гауссовского БШ к[тг] при E(w[n]) = 0 [здесь u[n] ~ N(0, ^/g)J при
Зчальном условии хо — г[0] ~ N(mo,<r0), = Ог[ ] = Dxo получить ПРВ
р ~ ^(птгИ.сМп]).
ОШение Линейная система характеризуется системной функцией
. z — а 1 — az
ОгДа
SI(z) = G(z)G(z-1) =
________qb2_______
(1 — az~*)(! — az)
168
Лекция jg
При этом КФ решения РУ имеет вид
/?ж[п] — gRg[n],
где Я9[п] — СКФ (см. пример 17.8). В результате получим
По (19 31) при 7пи[п] = 0 находим РУ
тДп + 1] ЯИТд; [п] -
Решение этого однородного РУ
ТПд; [п] — CL 7П01 Cl ‘С 1.
Следовательно, нормированной переходной функцией является
v[n, По] = ап п°
Дисперсия ТАДп] удовлетворяет РУ (19 32)
Z>x[n + 1] = a2Dx[n] + b2q.
При этом ковариационная функция находится по (19.33)
г 1 _ при ni п21
К.[т,п2] - |a„2-n1£,4ni] при П1 П2
Найдем дисперсию £>х[п] — решение неоднородного РУ (19.37).
Замечание Решение неоднородного РУ
гг[п + 1] — Ах[п] + /[п]
имеет вид [67]
(1—1 X
V=0 /
где со = const. При J[n] = сх = const получим
n—1 _
®[п] = со>п + «А""1 V X~v - сХп + оЛ71-1 Л ”-1 - с0>п + «——
А-1 -1 1 - А
v=0
(19.34)
(19.35)
(19.36)
(19.37)
(19.38)
(19.39)
(19.40)
(19.11)
где со = ®[0] — хо.
Этот же вид решения можно получить другим путем, рассматривая решение не-
однородного РУ в виде суммы общего решения сХп однородного РУ и частного ре-
шения неоднородного РУ, которое при /[п] — а имеет вид (установившееся зна-
чение) ст/(1 — А). Тогда
а;[п] = сА" + —
1 — А
(19.42)
где с = г[о] — «/(1 — А).
Подставляя значение постоянной с в (19.42) приходим к виду решения в фор-
ме (19.41).
Таким образом, решение РУ (19.37) можно записать в виде
ПхЫ = О^а2” + (1 - а2п) , а < 1. (19.43)
При гауссовском БШ u[n] и начальном распределении xQ = а;[0] ~ Nfmo»*70)'
получим гауссовскую ПРВ ИЛ(а?0,п) = N(mx[n],<тх[?г]), где m^fn] и ТАДп] =
определяются по (19 35) и (19.43). На рис. 19.3 и 19 4 изображены эволюции ПР^
Задание
линейных одномерных и многомерных систем
169
V7(x,n) при п = 0; 1; 2; 3; 4; 5;6; т0 = 3; Do = 0,25 (сто - 0,5); Ь = 1; q = 0,04
(рис. 19.3); q — 0,2 (рис. 19.4); сплошной жирной линией обозначено изменение
среднего значения тг[п].
Согласно (19.38) с учетом (19.43) находим
С^“2П2 + 7^ 0 “ “2П2)
D-“2ni + rTb(1-“2n’)
п1 £ n2i
711 П2-
После преобразований получим
9 ] a^i+«2 1 b 9 Д|П1-п21
1 — а2 / 1 — а2
В установившемся решение при
разности |ni — пя} находим
nj —* оа, тъ2 —* оа, но при конечном значении
А.х[тъ1,п2] —----_ Кх[п], п = П1—П2- (19 44)
1 — а2
Этот результат совпадает с (19.34).
Для многомерной дискретной системы имеем РУ в векторно-матрич-
ной форме
xn+i = Anxn +B„w„
(19.45)
Г®е Ал = А[п] — матрица системы размера п х к; Вп — В[п] — матрица
ВХоДа размера к х п; хп — х[п] и wn — w[n] — векторы соответству
“’Щей размерности (Wn — СП).
Пусть задан вектор средних значений тЕ[и0] и матрица дисперсий
“[^о] в начальный момент времени, Dx[no] = £7{х[по]хт[по]}; х[л0] =
I oj — тЕ[п0]. Кроме того, известно среднее значение (вектор) mw[n]
У айной последовательности w[n]
*4n.q и пусть J&{x[no]wT[no]} =
1 Слагая
и ее ковариационная матрица
0.
«о начальным моментом времени, запишем решение РУ в
170
Лекция lg
форме
Xn = Ф„ ПоХПо + У} ©nJ+tB/Wj,
I—п0
где Фп,( — переходная (нормированная фундаментальная) матрица си-
стемы Для среднего значения mE[n] имеем РУ
тДп + 1] = Апт„[п] + В„тю[п]. (19.47)
Пусть wn — дискретный белый шум, при этом тш = 0, тогда
где Фш[/] — симметрическая матрица. При этом матрица
D[n] удовлетворяет РУ
D[n + 1] = A„D4n]A’ + В„Шш[п]В’,
Dr[0] - 7?(x0Xq).
КВМ Ka;[n,m] имеет вид
Фп.тЙДт] при п т;
6.[п]Ф’,п при п 5J т.
Если указанная система является стационарной, то ее
имеет вид
KE[n,m] —
(19-46)
дисперсии
(19.48)
(19.49)
РУ (19.45)
= Ахп + Bwn.
(19.50)
При стационарном СП wn и = m„,[n] — const Kw[ni,n2]
= К,„[nt — n2] = KL[n] получим матрицу ЭС Sr(c3) в виде
SE(w) — H(icj)BSu,(w)BTHT(—iw), (1951)
где H(iw) — ЧХ дискретной системы, определяемой по формуле
H(iu) = (eiwI А)1 . (19.52)
При этом ковариационная матрица и матрица дисперсий определяют-
ся соотношениями
кдп] = 2-
2тг
— — [ Sr(w) du. (19.53)
2тг / ,
Пример 19.4 Пусть линейная система моделируется ДУ
v"(0 + by'(t) + cy(t) =. x(t),
где Ь, с = const; Rx(t) = qf>(T)
Найти ЭС Syfai) и КФ Дв(т).
Решение. В данном случае
Hfa) = ------2---------------------------------.
с — o’2 4~ ibcu (с — о/2)2 4- b2cv2
Задание
линейных одномерных и многомерных систем
171
следовательно-
5u(w) ~ -------------------.
(с — о»2)2 + Ь2и>2
(19.54)
Здесь
1 1 _ 1____________1 I 1
s2 + bs 4- с s2 — bs + с Ls2 - bs 4- с s2 + bs + с J 2bs
П гь характеристическое уравнение s2 + bs 4- с = 0 имеет комплексные корни
S112 = а ± i/З; « = Ь/2; 0 - у/с-Ъ2/!. (19 55)
Используя прием примера 17.7 с последующим интегрированием, при Ь2 < 4с по-
лучим
Rylr) = 77Г-е~“|т| [cos/3t4- (ot//3) sm/3|r|]; а= ; а2 + 02 = с (19 56)
2Ьс 2
Пример 19.3. Рассмотрим ДУ броуновского движения частицы в жидкости.
Частица подвергается столкновению с другими частицами и может находиться в си-
ловом внешнем поле. В результате ДУ движения частицы принимает вид стоха-
стического ДУ второго порядка
mx"(t) 4- fx'(t)_ + ca:(t) = /'’(£)> (19.57)
где x(t) — положение частицы, F(t) —- сила, воздействующая на частицу (сила
столкновений) т — масса частицы; f — коэффициент трения' <ж(4) — восстана-
вливающая сила, пропорциональная отклонению частицы.
Внешнее возмущение P(t) моделируется гауссовским БШ (ГБШ) с нулевым сред-
ним значением и ЭС
Sjr(ui) = 2kTf,
где к = 1,37 10-23 постоянная Больцмана; Т — абсолютная температура сре-
ды (жидкости)
Рассмотрим статистические характеристики СП x(t). В стационарном режиме с
учетом (19.54) получим
Sx^ (с-т<^)2 4- 72^2
(19.58)
Пусть корни харктеристического уравнения s2 4- (//m)s 4- (с/т) — 0 комплексны:
si,2 = —о: ± i/3; a = //2m; а2 + 02 = с/т.
Заменяя в (19.56) параметры, получим
П^(т)= —е-“1т (сов/3т4- ^вш/3|т|).
с 0
Таким образом, в стационарном режиме x(t) — гауссовский СП с нулевым средним
’начением и дисперсией с2 — Ri(O) — кТ/c.
Одномерная ПРВ сечения СП гауссовская
W) = VrTTe-Cj2/2fcr-
V 2tvki
Условная ПРВ W(х/ха) при а?о — ^(*о) также гауссовская имеет вид (5.11). при-
Чем по (5.10) условное среднее значение т(х/ха) = ахо,
а = Rx(r)/Rx(0); Р = /гг(0)(1 - a2), r = t-t0.
Рассмотрим частный случай ДУ (19.57) при нулевой восстанавливающей силе
Iе = 0)
mx"(t) 4- fx'(t) = F(t).
(19.59)
172
Лекция lg
Решение этого ДУ — процесс нестационарный Поэтому рассмотрим ДУ, моде.
пирующее скорость v(t) = x'(t) частицы
mv(t) + fv(t) = F(t). (19-60)
В установившемся режиме решение этого ДУ — стационарный СП, причем его Эс
и КФ имеют вид [пример 19.1 при H(iu,) = 1/(/+ wno,)]
с z \ 2kTf п f х kT — Дт|/т
- - 2 2 , ,'2; R«(T)= ---е
Таким образом, в этом случае v(t) — гауссовский СП с нулевым средним значе-
нием и дисперсией ст2 = кТ/т, ПРВ скорости
ИЛ(г') = '\/,^те mv2/2fcT- (19-61)
V 2тгк1
Условная ПРВ при v(0) — г>о определяется по (5 11) с учетом (5.10), причем
условное среднее значение m(y/vo) = аг>о, условная дисперсия сг2(я/з:о) = Р, где
а - 7?4t)/7?40) - Р - — (1 - а2) = — (1 - е~2™т).
m m
Таким образом, переходная ПРВ имеет вид
W(v/vD) = 1.____/2р (19.62)
V 2тгР
где
Р — —(1 — е—2сИ); (1963)
m m
Сравнивая (19.61), (19.62) с (1.10), замечаем, что решением уравнения (19-60)
является процесс Орнштейна-Уленбека (стационарный, гауссовско-марковский).
Замечание Уравнение (19 60) называется уравнением Ланжевена [32], а сила
действующая со стороны жидкости — правая часть ДУ
v'(t) = J-v(t) + -F(t),
m тп
называется силой Ланжевена.
Условное среднее и дисперсия могут быть найдены непосредственно по реше-
нию ДУ
T,(t) _T,oe-at+e-“* [ e“‘'z,(4')d4'; L - — F(t). (19.64)
Jo m
Усредняя с учетом равенства B[L(t)] = 0, получим
в(г>/г>о) = Voe~at = avg.
Возводя в квадрат решение (19.64) и усредняя, находим
E(v2fv0) = г,2е 2at + е 2at [ dt' [ '>E[L(t')£(t")] =
Jo Jo
= г^е-2“‘ + е-2“£ [ dt' [ i-(2fcT/)5(4'-t’’) =
Jo Jo
= v2e~2at + e-2“l 1 (e2“‘ - 1) = v2e~2at + —(1 - e-2“').
\ m2 / 2(x in
[ср c (19.10)]. o
Отсюда получим условную дисперсию (19.63) Р = E(v2/vo) — E2(v/vo)- МоЖн°
показать [32, стр. 196], что если f(ro, уо, т, If) — ^(т>У/то1Уо) является решена
Зо^вмие линейных одномерных и многомерных систем
173
& уравнения ФПК (1.8), то
Вт = А(2/о); Вт - В(у0),
ле—о At At—о At
где At = У ~ У° • чеРта сверху — знак статистического усреднения.
По (19-64) получим
Av = аи0 — vq = ^o(a — 1) й vq(1 — ot£±t — 1) —avoAt;
А^ = E[(V- v0)2] = — (1 - е-2“д‘) и ^At.
т m
Следовательно, коэффициенты сноса и диффузии определяются равенствами
А(с) = — —1>;
т
B(v) =
2kTf
т?
Уравнение ФПК принимает вид
9VK(v, t)
at
а, kTa2w
~(t>W) + ——-
o ?n oir
Решением этого уравнения с начальным условием W(v,0) = 8(у — vq) служит
ПРВ (19 62).
Положение частицы a;(t) вычисляется через интеграл от скорости:
x(t) — / v(t)di.
Jo
Найдем второй начальный момент (дисперсию) СП :r(t) Согласно (18 4)
£[x2(t)] - 2 f (t-r)R4T)dT - — [ (t-7iTaTd7 - ft - .
Jo m Jo f \ f f j
(19 65)
Таким образом, процесс перемещения частицы является нестационарным гауссов-
ским СП с нулевым средним значением и дисперсией Dx(t) — E[a:2(t)] по (19.65).
При t >> m/f по (19.65) получим
2fcT
E[*2(t)] ~ — t = 2jDt, D - kT/f,
гДе D — коэффициент диффузии
Рассмотрим другой частный случай. Пренебрегая величиной mx"(t) в ДУ (19.59)
п°лучим ДУ первого порядка
fx'(t) - F(t),
^>гДа s(t) = (l/f)J^F(a)da. Здесь F(t) — гауссовский БШ при So — 2kTf,
"f(T) = 2jtT/£(T).
Тогда КФ СП F(t)// будет /?о(т) = (1//2)Д^(т) - ^«(т). По (18.4)
F[a:2(t)] = 2 [ (t - 7)Ro(7)dT = 2t— f S(r)d7 -
Jo f Jo
= f S(7)dT = ^-t = yt, -y=: 2KTJf = 2D.
J J t *
Таким образом, x(t) нестационарный гауссовский СП, имеющий ПРВ сечения
И^г) = -;-1 е-^/2^.
^/2тгу£
174 Лекция lg
Можно показать, что этот СП является процессом с независимыми приращу
ниями, но поскольку этот СП гауссовский достаточно установить ортогональность
приращений
£{ММ ®(<l)][^(t<) -ат(гз)] = О (19.66)
для *1 < «а < t3 < t4.
Соотношение (19.66) следует из того факта, что приращение a(t,) — зави ит
только от значений СП F(t) на интервале а СП F(t) является ГБШ.
Таким образом,
Rx(ti,tz) — EfcGlMM] — ) + ^Gi)]} =
— )[ят(*2) — ®(il)]} + Е[х2 (tj )J = E[a:2(ti)] = -ytj при t2 > tj
Следовательно,
— -ymin(ti,t2). (19.67)
Можно сделать следующий вывод процесс отклонения частицы, если пренебречь
ее ускорением обладает гауссовским свойством при нулевом среднем значении и дис-
персии = -yt и КФ вида (19.67). Как известно, этот процесс называется ей
неровским СП (ВСП).
Найдем условную ПРВ (гауссовскую) сечения ВСП. По (5.10) получим
“ = в = ? = ^22 aRi2 = R(t, t) aR(t, to) = -yt —tt0.
Rx(to,to)
Следовательно, ПРВ сечения ВСП имеет вид
W(x/x(tD) - х0) ~ 1
y/2-ry(t t0)
Обозначим эту ПРВ через J(xq, to; х. t), тогда дифференцируя один раз по t и to
и дважды по х и хо, получим прямое и обратное диффузионные уравнения:
Dd2f
dt дх ’ dto dxo
Рассмотрим стохастическое ДУ п го порядка
l/n)(i) + + ... + any(t) = x(t), (19.68)
характеризующее отклик y(t) линейной системы на входное воздействие
(СП) x(t)
Умножая обе части ДУ (19 68) на x(t — т) и y(t + г), получим ДУ
относительно КФ
K&V) + а14"-1)(т) + - • + СО = ^(т); (19.69)
4П)(Т) + «1ЧП-1)М + - - - + = ЪАт). (19.70)
По (19.68) находим передаточную функцию системы
Я(«) =-------------|----------.
Пусть передаточная функция линейной системы задана в форме дро^
но-рациональной функции
я(5)= tosm+*>is’n-1+12.+kn = ад fl971)
V J sn+alsn~1 +... +ап D(s)' 1
дние линейных одномерных и многомерных систем 175
где т < « - 1-
Полагая СП на входе системы v(t) в виде БШ, получим ДУ откли-
ка
x^\t) + akx^ !)(/)+... + anx(t) = b0^m\t) + ... + bmv(t). (19.72)
Прошлое х(t - г) СП x(t) зависит лишь от прошлых значений СП
«(<), следовательно СВ x(t — т) ортогональны всей правой части ДУ
(19.72) и тогда по (19.70) получим ДУ
R^\r) + aiI^n 1\т) + ... + апЯ(т) = 0. (19.73)
В предположении наличия простых корней характеристического
уравнения D(s) = 0 найдем решение ДУ (19.73) в форме линейной
комбинации экспонент:
Я(т) = аке’кТ, т > 0, (19 74)
к=1
где коэффициенты ак вычисляются по начальным условиям. Учтем
свойство четности КФ: R(—т) = R(r), тогда по (19.74) можно записать
ад=^а1е’*И.
*—1
Тогда ЭС S(w) в s-форме принимает вид
ад=Ё»*чЁч=Ё—+Ё =«ад+«ад.
' -S2 + st S — St —S — Sk
fc=l к к=1 К к=1 К
(19.75)
причем S(s) = H(s)H(-s).
Возвращаясь к КФ, получим от первой и второй сумм соответственно
7?+(т) = Я(т)1(т), 7?“(т) = Я(т)1(—т),
гДе 1(т) — единичный скачок
Следовательно,
п
Я(т) = 7?+(|т|) = 52 ак е*‘ М. (19.76)
к=1
Пример 19.4. Пусть H(s) — 1/(з + ог), тогда
ЭД'ПТТГ---------= +
(s + s — a) s + or — s + a
Следовательно. Д(т) = (l/2a)e~“lTl.
Пример 19.5. Пусть задано стохастическое ДУ второго порядка
x"(t) + 3ar'(t) + 2x(t) = v(t), R„(r) = 5(т).
Найти КФ Лж(т) отклика линейной системы на БШ v(t).
176
Лекция ig
Решение. По (19.73) получим ДУ
К"(т) + 3R'(r) + 2R(t) = 0.
Характеристическое уравнение имеет вид
А2 + ЗА + 2 = 0;
его корни >1 — —1; Аг — —2.
Решение ДУ имеет вид
Д(т) = qe-т + с2е~2т, т > 0.
Для нахождения постоянных ci и с2 требуется вычислить 7?(0) и Я'(0).
Разложим дробно-рациональную функцию
S(s) _ H(s)H(-s) - +3s + 2)(s2 —3s+ 2) ~ 12 [s2 +3s + 2 + s2 - 3s + 2] '
Первое слагаемое является преобразованием Лапласа (и ображением) 7?+(т).
Оригинал может быть найден достаточно просто (см. пример 17.7). Однако про-
ще воспользоваться теоремой о начальном значении
Я+(0+) = lim sS+(s) = — = ci + с2 = К(0).
S—ОО 12
Аналогично получим
Rz(0+) = lim s(sS+(s)----) = 0 = —cj — 2с2.
s—‘ОО 12
Решая эти два уравнения относительно cj и С2, получим
Д(т) = iе“М - — е-2|т1 = Дп(т),
v ' 6 12 v ’
где 7?ь(т) — СКФ системы.
Рассмотрим дискретные СП и системы. Пусть системная функция
G(z) имеет вид
GW - ОД - 1 + сОД+... + сОД* ’ <19 77)
где М < N.
Полагая корни zt уравнения D(z) — 0 простыми, получим разложение
= 7t —
k
Тогда импульсная характеристика системы принимает вид
Ф] = 1и>
k
так как по формуле обращения
z-1 ( 1 = — / z"~ldz =
\l-ZfcZ~1/ 2ТГ1 J|z|=1 1 - 1
= £ -------dz = Res f — z^,
2^' J|z|=i z- zk
Зо^вние линейных одномерных и многомерных систем 177
.—----
где f = *"/(* - **)•
При наличии БШ с единичной дисперсией на входе системы КФ
отклика 7?х[пг] может быть выражен через СКФ Я5[пг] [см. (18.21),
(18.25)]-
Я[т] - fft’Tj] * р[-™] — 57g[lml + *№] — (19.78)
fc—О
С другой стороны, ЭС в г-форме S(.z) можно представить разложе-
нием по элементарным слагаемым [18]'
k J- ^к* А
где а* = TfcG^l/z,).
Учитывая найденные значения Z-1 (= zk, получим
Я[т] = ^2<п4т|- (19.80)
k
Отклик линейной системы с системной функцией (19.77) при БШ u[n]
на входе удовлетворяет РУ
ж[п] + С1х[п — 1] + .. + с//а;[п — ЛГ] — + • + 6jwu[n — М],
которое можно записать также в виде (при р = N, q = М)
р «
а?[п] — — скх[п — fc] + tjb-u[n — &], (19.81)
fc=l fc=0
или
р «
ж[п] — акх[п — &] + 6;.-м[п — &], (19.82)
fc=l fc=0
где ак - -Ск
Рассмотрим частные случаи.
а) Авторегрессионный процесс (АР процесс).
СП г[п] называется АР-процессом, или процессом авторегрессии по-
Рядк । P' если
G(z) = Ь°
1 + ciZ-1 + ... + cpz~P
R
ЭТОМ случае СП г[п] удовлетворяет РУ
«[n] + cia;[n — 1] + ... + срх[п — р] = (19.83)
Де u[n] — дискретный БШ, причем £/(w2[n]) — 1.
178 Лекция ]д
Другая форма записи
р
= Г ckx[n - А:] + 60w[n], (19 84)
i=i
ИЛИ
^п — «i^n-i 4" ®2^п—2 4-. - - 4~ ярхп _р 4" zn, zn — bo^n- (19 85)
Таким образом, модель авторегрессии выражает текущее значение
процесса через линейную комбинацию предыдущих значений процес-
са и отчета БШ zn
Название процесса — термин математической статистики где линей-
ная комбинация
я — О-1У1 4- 021/2 4-... 4- арУр 4- z- z + aTj/ = z 4- yTa,
связывающая неизвестную переменную х с отчетами у — (l/i,l/2
Ур)т, называется моделью регрессии [х регрессирует на у = (yi.y-j
1/р)т]. В соотношении с (19.85) хп регрессирует на предыдущих отсчетах,
поэтому (19.85) модель авторегрессионная (АР-модель).
Процессы авторегрессии могут быть как стационарными, так и неста-
ционарными. Для стационарности процесса необходимо, чтобы корни
А; характеристического уравнения
A₽-aiAP-1-...-ap = O (19.86)
лежали внутри единичного круга (|А*| < 1)
Найдем КФ стационарного АРпроцесса. Для этого умножим левую и
правую части (19 85) на величину хп-т- В результате получим
Хп—щХп — Я1Хп—гп^п — 1 4" Я2Хп_тХп—2 4" - - • 4" ЯрХп_rn^'ri — р + хп —т%п •
(19.87)
Усредняя при т = 0, получим [при Л_п = E^(xnxn_i) = 77п].
Е (х^) = Ro = aiRy + a2R2+ + apRp + Dz' . осч
„ (19 ooj
Dz = E(xnzn) = E(z„) = Dz.
Здесь учтено, что все слагаемые в (19.85) некоррелированы с вели-
чиной zn, кроме самой величины zn
Обозначим через pt — Ei/Ro — коэффициент корреляции г-й соста
вляющей процесса, тогда дисперсия АР-процесса находится по (19.88)
и принимает вид
Dx = Ro = --------------------------. (19.89)
1 - aiPi - «2Р2 - ... - аррр
При т > 0 по (19.87) находим КФ АР процесса
Ет — яуЕт-г 4- 4- apRm-p. (19 90)
Здесь учтено, что прошлые значения х„_т СП хп зависят только °т
Здание линейных одномерных и многомерных систем 179
прошлых значений СП zn, поэтому после усреднения в (19.87) получим
E(xnzn) - Ъ0Е(хпип) = bo', E(xn mzn) = 0. (19.91)
Поделив в (19.90) на величину Ro = Dx, получим РУ для коэф-
фициента корреляции
Pm — ^Ipm— 1 4" - • . 4" О-рРт—р- (19-92)
Это РУ аналогично РУ самого АР процесса (19.85) Если в (19 92) под
ставить значения т — 1,2,.. ,р и учесть, что рт — Р-т, то получим
систему линейных уравнений для коэффициентов ат
Pi — а1 4- «2Р1 4- • 4- а.ррр-1;
................................. (19.93)
Рр — aiPp-i 4- Я2Рр 2 4- • • 4- аР
Эта система уравнений называет уравнениями Юла-Уокера.
Если учесть первое соотношения (19 88), то получим уравнения Юла-
Уокера в виде
Ro 4" ci Ri + ... 4- CpRp — Ь
7?1 4- с\ Ro 4- • • • 4- CpRp_i = 0
Rp + ciRp-i 4" • • 4- CpRo — 0
Эти уравнения позволяют выразить р 4- 1 параметр АР-модели су: и
Ьо через р+ 1 значение Rm. С другой стороны, если известна систем-
ная функция G(z) (известны коэффициенты с* и 7>о), то решая систе-
му РУ (19.94) можно найти КФ Rm при |т| < р и вычислить Rm по
(19 90) при т > р.
Пример 19 6 Пусть АР-процесс задан моделью второго порядка (рядом Юла)
Хп — агх„-1 — а2Хп-2 = Z„, Е (z£) = Dz (19.95)
Определить условия стационарности АР процесса, найти его КФ R[n] и ЭС S(w).
Решение Характеристичекое уравнение (19 86) имеет вид
z2 — сцг — а2 = 0.
Условием стационарности процесса является равенство |zj < 1, г = 1,2.
Известны соотношения
Z1Z2 — -а2; 21 4-22 = «1-
Из равенства Z]Z2 = — а2 следует, что |а2| — |zi[|гг| с учетом того, что |zi | < 1;
*2 < 1 получим для а2 условие стационарности АР-процесса в виде
-1 < а2 < 1.
Оодставив г2 — —a2/zi в сумму zi + z2 = 0, получим
21Q] + а2 — Zj <1.
180
Лекция 19
Тогда находятся еще два условия стационарности
АРпроцесса
которые вместе с условием —1 < а2 < 1 определя-
ют треугольную область (рис. 19.5).
Для коэффициента корреляции справедливо Ру
(19.92)
Рп = «ИРп—1 + О-7.Рп—2>
(19.96)
Общее решение этого однородного РУ имеет вид
Рп — + (^2Z2 >
где Ci и С2 — произвольные постоянные, определяемые из начальных условий
Ро — 1 = С\ + С2; pi = CjZi -р C2z2,
причем отсчет pi находится по (19 96) при п — 1 (при р_] = pi) р\ = ai/(l — а2)
Тогда постоянная Ci находится из соотношения
------- = Cizi + (1 — Ci)z2 = z2 - Ci(zi — z2).
1 — a2
Отсюда получим
C1 =
(1 + ziz2)(zi - Z2)
Аналогично находится вторая постоянная
С2 = М1
(1 + ZlZ2)(zi - Z2)
Тогда КФ RjJn] = DxPn принимает вид (19.80)
K[n] = ajz” -p o^z", n 0
где
„ = D,C, = P.„ "‘V’
(l + ziz2)(zi — z2)
Дисперсия Dx находится no (19.89)
(19.97)
(1 + Z1Z2)(Z! - Z2)
D.
Dz
1 — “1P1 — O-2P2
где pi = oi/(l — o2), a P2 находится по уравнениям Юла-Уокера (19.93)
Pl — O1 + O2P1; P2 = “1P1 + a2.
= a2 + o?/(l - “2).
подстановки pi и p2 в (19.98) получим
D = C1 ~ ni)pz
(1 + °2)[(1 ~ “2)2 - a2]
zi и z2 характеристического уравнения могут быть как действительные,
Тогда р2
После
(19.98)
(19.99)
Корни
так и комплексные:
“1 4-
— + “2-
4
“1 А.
212 = Т±
Корни Z1 и z2 действительные при о2 -р а2/4 О. На рис. 19 5 этому усло-
Задание линейных одномерных и многомерных систем
181
виК> соответствуют области, расположенные над параболической границей, причем
в области 1 КФ затухает, оставаясь положительной, в области 2 — знакоперемен-
на. В области 1 доминирующим является положительный корень, в области 2
отрицательный.
При комплексно-сопряженных корнях, полагая — т (cosip + i sin<р). z2 =
— Tcosip — isinip. получим z” = rn(cosn<p + isinn^); z” — rn(cosn<p — isinny?),
r = |z,| = y/—a2 < 1. <p = argzi. В результате по (19.97) находим
Я[п] = r”[(ai + аг) cosnip + i(ai — аг) sinny].
Очевидно, (aj + a^)/Dx = 1, так как 7?[0 = Dx'. вычислим разность
ai — a? _ zi — zi Zj + z2 — z2zj _ (zi + z2)(l — zjzj)
Dx (1+Z1Z2)(Z1 Z2) (Z] - Z2)(l +Z!Z2)
_ 01(1 + 02) _ 2
12(1 - a2)^/a2 + aJ/4 1
Таким образом, КФ принимает вид
7?[n] = Dxrn(cosnip + -у sin 7199). (19.100)
’Зависимость 7?[п] изображена на рис. 19.6,е при Dz = 1; кривая 7 — щ =1,5;
а2 = —0,8; кривая 2 — = 1,0; а2 = —0,3; кривая 3 — ец = 0,5; а2 = —0,8;
кривая 4 — a-i = 1,0; а2 = —0,8; di = 0,5; </2 — —0 9 (<7, — — Ь,). На рис. 19.6,а—Г
изображены реализации процессов хп, параметры РУ которых соответствуют кривым
7-4. На рис. 19,6/1 приведены ЭС S(w).
Вычислим ЭС S(w) при Dz = 1
[ эд = аде (Т) = =
\z J (1 — atz-1 — a2z-2)(l — aYz — a2z2)
_ l + dj + d^ - c?i(l - d2)(z + z-1) — <f2(z2 + g~2)
14-af+a2 a^l a2)(z + z-1) - a2(z2 + z-2)
Тогда
1 + cf2 + </2 — 2di(l — d2) cosw — 2d2 cos2w
2 1 + af + — 2ai(l — a2) cosai — 2a2 cos 2w
Зависимость .S(a>) изображена на рис. 19.6,5 при тех же значениях па-
раметров, что и на рис. 19.6,е при di = d2 = 0 (кривые 1-3) и при
di = 0 5; d2 — —0,9; ai — 1; а2 — —0,8 (кривая ^).
6) Процесс скользящего среднего (СС-процесс)
СП а:[п] называется процессом скользящего среднего, если он удо-
влетворяет уравнению
а;[п] = + + — ?]. (19.101)
Другая форма записи этого уравнения
<1
а;[п] — bfcit[n — fc] + f>Qti[n]. (19.102)
fc=i
182
Лекция ]д
В этом случае системная функция G{z) представляет собой полином
G(z) = b0 + bi z-1 + . + bqz~4
Импульсная характеристика (ИХ)
р[п] = МН + - - - + М1П — ?]
183
дадание линейных одномерных и многомерных систем
Поскольку ИХ р[п] — 0 при п > т, то по (19.78) находим КФ
7?[m] = jr[m + = У2 ^k+mbk (19 ЮЗ)
fc__0 fc=o
при О С m у и 2?[т] = 0 при т > q.
Таким образом,
/£[0] — bg 4- by + ... + by ,
7?[1] — Mi + bib? + ... + bq—ibg,
Л[?] = bob ч.
Пример 19.7. Пусть СП a:[n] является среднеарифметическим значением q от-
счетов «[п]
a?[n] = —(u[n] + «[я — !] + -.. + u[n — q + 1]) •
9
Найти КФ и ЭС СП 27(71].
Решение. В данном случае системная функция
1 1 __ 2 9
G(z) = -(1 + г-1 + ... +
9 9(1-2 )
Здесь Ьр = bi = ... = feg_i = 1/q, тогда по (19 103)
о—1 —|тп|
р, . 1 - 9 - lml 1 Л 1ТО1) |то|<„
fc=0
Здесь
2 - л-9 - zq
эд
Тогда
- 2 s™2 (9^/2)
q2 sin2 (w/2)
в) Авторегрессионный скользящего среднего процесс (АРСС).
СП х[п] называется АРСС-процессом, если он удовлетворяет PV
(19.81) или (19 82). В этом случае используя равенство E(a:[n — m] х
Хм[п — г]) = 0 при т < г и умножая на х[п — т] правую и левую
Части РУ (19 81) получим
Л[т] + ci Д[т — 1] + ... + cp7i[m — р] — 0, т > q. (19.104)
Условие т > q отличается от неравенства т > р в АР-модели
Воздействие случайных процессов
на линейные системы
(нестационарные режимы)
Рассмотрим две задачи
прохождение стационарного СП через ИЦ (переходный режим);
прохождение стационарного СП через колебательный контур (пере-
ходный режим)
Задача 20 1. Пусть на вход ИЦ воздействует стационарный СП x(t) с равным
нулю средним значением и ковариационной функцией
Найти ковариационную функцию отклика J<j,(tit2), его дисперсию Dy[t) и стаци-
онарные значения Ку(т), т = t2 — tj, при ti —» 00, t2 —» 00, t —> 00.
Решение: ИХ ИЦ h(t) запишем в виде
Л-(«1, Л2) = — = Ье-Ь<11-‘2)
Тф
где Ь = 1/тф, тф = RC.
Выразим отклик ЛС
y(t) — / x(r)h(t — т) dr,
</t0
где т(т) входное воздействие. Тогда ковариационная функция отклика
Г*1
^»(41,*2)= / I Л(й — Ti)h(t2 — т2)Л'х(т1, т2) d-ri dr2.
JtQ JtQ
Пусть to = 0, тогда КВФ имеет вид
е-Ь(‘1-п)е-6(«2 r2)e =
А'В
где
где
Рис. 20.1
/ / еЪт^ е~а^ -т^ 1еЬт= dT1 dr2.
’о Jo
Пусть t2 > ti, тогда область интегрирования имеет вид
рис. 20.1. Поэтому интеграл 1а можно разбить на три ин-
теграла-
Га — Il 4- I2 + I31
Л = / dri / e(f>+“)’-2 dr2-,
Jo Jo
воздействие случайных процессов на линейные системы 185
Г*1 Г^1
/2= / е(ь+“)’-1 dn / е(Ь-а)тМт2; l3= e^+^dTj/ е(ь+“)’г= dT2.
JO Jtt Jo Jt^
После интегрирования находим
L - 1 _ Л_______!____ Ге(Ь-о)*х _ fl .
1 2Ь(Ь + ар V Ь2_„21 J’
12 - 1 ГеЬ'1 + “Ч+Ь'2 _ ebt2-at2 _ e2bt! + e(t>-»)tij .
b2 — а2 I * ’
7, „ Ъ - а_____ 2И1_______1___ (b-a)ti ,_________
2b(b2 — a2) b2 — a2 2b(b — а)
Тогда
1ае «<‘1+‘2) = е +/2 + /з)
Затем получим формулу, справедливую как при i2 > tj, так и при t2 < tj:
Ay(ti,t2) - - J*7* , { fe-al‘2-41 _ ae-b|4-tfl+
b2 — ex2 1
+(b + a)e-o‘(tl+t2) - b [е-(“'1+м2) + e-(bti+at2)j } (20.1)
Отсюда замечаем три свойства:
1) симметрию по переменным ty и
2) равенство нулю КФ в начальный момент Ку (0,0) = О;
3) КФ зависит не только от абсолютного значения разности |£2 — |> но и от
каждого момента h и 1? в отдельности.
Вывод: СП на выходе нестационарный.
При —► оо, t2 —> оо, но при сохранении конечной разности отсчетов, полу-
чим стационарное значение КФ
A'y(ti,t2) - fiB(tj, t2) = Яв(т) = —(Ье-“И - (20.2)
где т — t2 - ti;
ни°) = 4 = “) = гг-
* b2 — а2 b + а
Вывод: y(t) — стационарный СП
Найдем нестационарную дисперсию
Cs(t) = Ky(h,t2) = Ь"г [t>- а+ (b+a)e“2bt -2Ье-(ь+“)‘] . (20.3)
В установившемся режиме
= = (20.4)
v b + О!
Таким образом, в стационарном режиме приходим к ранее найденными форму
"ам (18.12) и (18.13).
Задача 20 2 Стохастическое ДУ линейной системы имеет вид
1 d2u 6 du 6 deo(t) ,
+----— + « =--------—, (20.5)
dt2 cvq dt ojq dt
•Че и = u(t) — напряжение на выходе колебательного контура; eo(t) — ЭДС ис-
т°чника, включаемого последовательно с эквивалентным сопротивлением кон
Дгра £ — затухание, S = IfQ, Q — добротность контура; шо — резонансная ча-
стота контура (рис 20.2).
186
Лекция 20
Пусть eo(t) — СП с нулевым средним значением и КФ Ro(t) вида 7?o(t) —
= (A'o/2)<6(t) (eo(t) — стационарный белый шум) Начальные условия следующие
£7[ях(О)] = rn;, £[u'(0)] = m2; £{[и(0) — mi]2} — Di,
£{[«'(0) — m2][u(0) — mj]} = D2; £{(«'(0) — m2]2} = D3
Найти среднее значение mu(t) и ковариационную функцию Ku(t11t2) и дисперсию
Du(t) в переходном режиме а также их установившиеся значения
Указание. Предварительно ввести нормированное время т = Сравнить с
решением примера 18.7
Решение. Запишем ДУ системы после введения нормированного времени
7 = WOt
сРи -du -de(r) , , . , .
3-5-+ ^-:—f-u = 6—-—, е(т) = ео(т/а>о), (20.6)
arz ат ат
причем КФ Re(r) = (Л'о<^о/2)£(т).
Схема включения источника ЭДС e(t) изображена на рис. 20.2,а.
Чтобы избежать дифференцирования белого шума, запишем ДУ второго порядка
в форме системы ДУ. Введем переменные состояния
j У1 = У2 + £1/2 - ^е(т),
( Р2 = «•
Тогда получим систему ДУ
j У1 = -У2.
I У2 = У1 - Бу? + 5е(т).
Эта система ДУ в матричной форме имеет вид
y-Fy+Gw (20.7)
где
F=[? Zj]= G-[o -°*]; w = I°;eMl’-
Для вектора средних значений получим ДУ (19.12)
—- = Fm9 + Gm,„
ат
Согласно условию тш = О = (0;0)Т, тогда ДУ упрощается
= Fmj,. (20.9)
ат
Решение этого ДУ имеет вид (19.24) (при у — х).
воздействие случайных процессов на линейные системы
187
Значение mSl0 можно найти, усредняя левые и правые части каждого ДУ си
стемы В результате имеем:
mi/io = т2 + , mS20 = «г].
Окончательно находим среднее значение напряжения на колебательном контуре
ти(т) = mB2(r) = (т2 + 5mi)[l + (т/ы')2]о/е“',т sinw'i 4
fmie rr[cos сЛ; — (у/сУ) smo/т].
Найдем матрицу D дисперсий, решая ДУ
— = FD+DP + G^G’,
dr
где
ф = [° 0 1 D= [О11 £>121,
[о л/оа’о/г]' [£>21 D22 J
Причем £>12 — £>21
В результате преобразований получим систему ДУ:
Г£>и £>121 _ [0 —11 Г£>ц £>12] , [£>и
|_£>12 £>21] [1 —sj [012 £>221 [£>12
Г° °]Г° о 1 го
+ [о -«] [О AWo/2] [о
£>121 Г ° 11.
£>22 J L-i -г]
0 1
«]
или
£>и = —27)12.
£>12 = £>и — «£>12 — £>22.
£>22 = 2£>12 — 2«£>22 + «2и»о£>о/2.
В матричной форме
£>п'
£>12
£>22
О -2
1 -8
О 2
£>и
£>12
£>22
о
о
52оу)Л>о/2
или D = AD + Е
Определим собственные числа матрицы А из решения характеристического урав-
нения det(A — Al) = О или
(« + А)( А2 + 2«А + 4) = О.
Отсюда находим, что
собственные числа А« (i — 1,2,3) имеют вид
Ai = —5 = —2т; А2,з = —2т ± t2w'; о/ = wp = у/1 — «2/4, 8 < 2.
Определим собственные векторы матрицы А из решения системы линейных урав
нений
— Аг>1 — 2v2 — О.
< 61 — (6 + Х)г>2 — 63 = О,
t 262 — (2« + А)бз = О.
Собственный вектор можно записать в виде
V = [С;-1а<7;С(1 + |а(й+А))]’,
Де С — произвольная постоянная.
188
Лекция SO
Введем матрицу Т — (г^,02,^3), столбцами которой являются собственные век
торы матрицы А,
Т = Г 1 -1а, - L 1 1 + 1 1а2 - tA2t4,# 1 — 1 1 |ЛЗ 1‘Азо/. •
Тогда
1/2W*2 —y/w'2 1/2W12
т1 = 1 - 0,5А]Аз 4си'2 — A3/4u'/2 -1/4
1-0,5А1А2 4 со*2 -1/4
Введем переменную z таким образом, что D — Тг Тогда ДУ для z будет иметь вид
z = Т-1 ATz + Т-1 Е.
Учитывая, что Т *АТ — diag(Ai, А2, Аз), получим
Z = diagfAj, Аг, Ag)Z +1 1Е
Это уравнение представляет собой совокупность независимых ДУ, которые лег
ко решаются. В результате получим
Z— diag(eA*r,eA2'r,eA3'r)Zo + <Uag(eA1T,eA2T,eA3T)l 1Е/ — 1
где Е' = 7’diag(Aj~1, AJ"1, A“J)T ЛЕ; Zq — вектор начальных условий. Учтем, что
TdiagfA”1, А^”1, А“1)Т-1Е — А-1Е и Zq = T-1D0, тогда
D = Tdiag(eA1T, еАаГ, еАзГ)Т—1 (Do + Е') - Е'.
Для условий задачи Е = [О, О, — wo5No /4]т
Чтобы определить ковариационную функцию напряжения A\,(£i,t2). необходимо
знать величины Du(t) — O22(i) и О1г(0- После преобразований получим
1 1 - 2-у2 - 2ц/2
---ЗГ Ч------------------COS 2СОТ
2ш'2
е-2^РПо +
2W12
—— cos2u/r 4------------sin2u/t| e 2v‘rPi204-
Q,1'2 u' J
1 1 - 2шп , -у . .
-----------— COS2tU t sin 2cu T
2u'/2 2cu'2-tv'
+ —— Оо-
4
[у Ф'У . 1 j
--- — cos 2cv т Ч-- sin 2cu
2u/2-------------------------2w/2 2сУ
т2 1 ,
+ + COS2W
tit™
C12o + [
Jr 7 f f I
----—- cos 2tv т------sin 2gj t
2ыл 2wa 2w' J
Начальные условия £>ц0,£>i2o,P22„ определяются из ДУ системы
D22d = Du (О) = Di.
Di20 — D2 + 5(Di + mi) — 5mi,
Оц0 — D3 + ml + 52(0>i + mi) + S(O2 + mim2).
Согласно формуле (19.27), KBM A.s(ri, т2) можно найти, зная матрицу дисперсий
и переходную матрицу системы Переходная матрица
Ф(л,тг) - <РЬ)<р- 1(т2),
где ф(т) — фундаментальная матрица системы.
Воздействие случайных процессов на линейные системы
189
Для условий задачи получим
Ф(Т1Т2) = е
1 .
—- sincu т
ЦТ
1 . I-
----smu Т
t- Т .
COS Ц} т------ sin и т
от
П “ Т2-
Таким образом, ковариационная функция напряжения на выходе системы
^22(^г)е ^t'(cosu/|t| — ^sinu/|r|) Ч-------Dnfoje 8ти/[т|
UT UT
при ti > т2;
D22(Ti)e_'rlT'(cosu//|T|----sino/|r|) 4---D12(ti sinu/'lr)
При TJ < T2-
В стационарном режиме
mu = lim mu(r) = О; Du = lim Pu(r) = No В, В =
т—оо т—*оо 4Q
Аи(т) = lim Л'и(т1,Т1 + т) = Due—(coso/т--— sina/|f| ]
тт—оо \ о/ J
С другой стороны, из решения примера 18.7 следует, что
7?в(т) = 5ое/?|е-«И/«о
( - • 'I I
ICOSW Т--------SHlCv ]т|
\ “fc
Заметим, что SoRg = /Vo/2, так как So и No/2 — двусторонние ЭС соответ
ственно источников тока (рис. 20.2,6) и напряжения, а f = wo/(2Q); ы'ыо —
и'т = щт; -yf = cvoTT = ru>0/2Q = (.т.
Таким образом, решение данной задачи указанным пересчетом приводится к ре-
шению примера 18.7.
Прохождение
v ттт сигнала и шума
—-----— через нелинейные
устройства
Лекция 21
Прямой метод анализа нелинейных
систем. Воздействие шума
на квадратичный детектор
Прямой метод анализа нелинейных систем эффективно применяет
ся при гауссовском СП на входе нелинейного элемента НЭ) с харак-
теристикой у = </(х) В этом случае КФ отклика НЭ может быть за
писана в форме ряда
где
^(r)-2^‘n ni
П—О
рх(т) — Р — коэффициент корреляции двумерного гауссовского рас-
пределения
W(x, у, г) —
1
---------ехР
2тгсг2 \/1 — р2
х2 - 2рху + у2
2аЦ\-р2}
у = zr;
п- 0,1,2,...,
причем полиномы Эрмита Нп(х) = (—1)пех2^й-е и Неп(х) связа-
ны соотношением [59]
Неп(х) = 2-п/2Яп(х/л/2); Нп(х) = 2п'2Неп(ху/2).
Коэффициенты сп прямого метода даны в табл. 21.1*
Наилучшеи, с точки зрения автора, версией приложения прямого ме
тода к анализу квадратичного детектора является версия, изложенная в
книге [1]. В лекциях 21 и 22 рассматривается именно эта версия
* Таблица представлена с разрешения автора книги [36] Ю.А. Евсикова.
Прямой метод анализа нелинейных систем 191
Таблица 21.1
Продолжение табл. 21.1
Характеристика НЭ у = д(х) График функции д(х) Формулы для коэффициентов сп
_ f (® - ®о)1>> ® 10, У ~ 1 0, х < ®о У) 0 ®0 ® ^Г(1/ + 1) _А (х0\ Сп = Т=—-е Dn-U-1 — 'J 1т \ <т / Рп(1) — функция параболическогс ,П > I/ + 1 цилиндра
У: _._=== , 0 х С2г+1 = с2г = 0, /7 (2г- !)!!( —1)г Т (1 + М2)г+1/2 ’ т = 0,1,2,...
( Ао, х > 0 У~\-Ао, ®<0 У/ Ао i 0 X “Ао с2г+1 = с2г = 0, /£1о(2г-1)!!(-1)г, г = 0,1,2,...
fl, х > 1, < 1', |®| < 1, 1-1, х < -1 У ’0 ® ЧОО II ? ? О и II ? II ° : ч ।|>о~] - <т)е- 5^Не2г+]
у = eQoa: У! 5 и Сп — а" <гпе а , п = 0,1,2,...
п
К
Й
й
15
н
У = COSE и С2Г = ( С2г+1 = -1)’-<т2ге-^/г, = 0, r=0,l,2,...
у = sinE -я/2 1 /А 7( 1 я/2 X О о to to II t ° II (..^гг+^-а’/г, r = 0,1,2,...
’={ X — Ео , Е Ео , 0, Е < Eq У) Cn = ^e~ ^Hen-2(^-). n^2
у = < Ао, х > го, - Ао, х < го У! б" z- x г»сГ’ g|b 7 * ' QJ о О» 1 (= ч; 1 T-2"’ II II S’ <? , Ф(®) = ^== У е~‘3^2сИ, THen-t , n 1
у = Г Ао, х > xq, (0, х < ®о У1 1 б" co = Ao [| - cn = -^=He %/2тГ ф [т)Ь fxo\ -Д . , n-1 ( — j e n > 1
е
с
sit
6
съ
S
о
си
а
я
а
е
а
194
Лекция 21
(t)----iy(t)------iz(z)
нэ фнч -U
Пусть квадратичный детектор (КД)
имеет характеристику нелинейного эле-
мента (НЭ) вида [1]
Рис. 21 1
у — ах',
где х = x(t) — вход НЭ, y(t) — выход НЭ.
Схема КД имеет вид, показанный на рис 21.1.
Безынерционное преобразование
На вход КД воздействует только гаусовский СП (без сигнала) Сна
чала вычислим ПРВ W(y) отклика у(/) НЭ:
у — ax ;
VK(y) - W[x = <pi(y)]
dyi(y)
dy
+ W\x = V2(y)}
dy
dpi,z(y)
dy
1
2y/ay
Тогда
^(у) “ = + W^X =
tyjay
Пусть на входе КД гауссовский СП x(Z) с нулевым средним значением
и дисперсией а2. Тогда ПРВ его одномерного сечения
ИДа:)=—^=е-х2/2^. (21.1)
<тху27г
Поэтому
IVfa; = <pi = \/у/а\ — W[x = <р2 = х/у/а]-
С учетом этого свойства получаем ПРВ отклика
W(y) = =--1=е^/2^ при у > 0 (21.2)
^л/2тг 2 (гху/2тгау
Вывод. При нулевом среднем значении входного воздействия отклик
НЭ y(t) имеет ненулевое значение гау > 0 (рис. 20.2 при ах = 1, а - 1);
ЛОО ЛОО I
ту - / yW(y)dy = / у------------,е-у/'аа^ dy.
Jo Jo <rxy/2iray
Это среднее значение необходимо вычислять методом интегрирования
по частям Его можно вычислить проще, если воспользоваться фор'
мулой прямого метода:
*»оо
гпу = Е(у) = £?(ах2) = аЕ(х2) = а / x2W(x)dx — аЦ,
— ОО
Прямой метод анализа нелинейных систем
195
где Ii — x2W(x) dx — дисперсия СВ х, распределенной по закону
Гаусса (21.1), а это значит, что
Е
Поэтому сразу находим
гпу = аа2. (21.3)
Вывод. По формуле (21.3) определяется постоянная составляющая
СП на выходе НЭ
Найдем мощность СП y(t) на выходе НЭ:
<Ту - т2у -т2; (21.4)
т2у = #(у2) — а2 Е(х4) = а2 [ x4W(x)dx.
J — OQ
При гауссовском распределении справедлива формула (5.3) для цен-
тральных моментов. В данном случае п = 4 тогда
ц4 = i?[(x - mx)4] |mi=0 = £(:t4) |n=4 = За4.
Поэтому
m.2y = а2Е(х4) = За2 а4. (215)
Вывод, По формуле (21.5) находится полная мощность процесса
на выходе НЭ а по формуле (21.4) — мощность флуктуацион-
ной составляющей
Таким образом, мощность флуктуационной составлящей СП на вы-
ходе НЭ имеет значение
а2 = За2а4 - а2<т4 = 2а2а4. (21.6)
Заметим, что а2 = 2m2, т.е. мощность флуктуационной составля-
ющей на выходе НЭ (двухполупериодного квадрирующего устройства)
Равна удвоенной мощности постоянной составляющей.
196
Лекция Si
Рассмотрим теперь статистические характеристики отклика ФНЧ z(f)
или напряжение на выходе КД
Пусть x(t) — узкополосный СП и по-прежнему гауссовский. Его мож-
но записать в виде
x(t) = V(t) cos[w07 + у>(7)].
(21.7)
Известно, что огибающая V(i) = V) имеет распределение Релея
(6.11). Фаза у>(7) распределена равномерно (см. (6.12)). Отклик НЭ
y(t) = ax2(t), тогда
y(t) - ax2(t) = aV2 cos2(w07 + = aVt21 + cos^2^0< + -
aV?' aV?
— —------1—— cos(2a>o7 + 2y?t). (21-8)
Итак, напряжение на выходе НЭ имеет вид (21.8) и состоит из двух
слагаемых: низкочастотного и высокочастотного. Поскольку огибающая
узкополосного СП является низкочастотным СП, то полагаем справед-
ливым допущение: НЧ процесс аЦ2/2 проходит ФНЧ без искажений а
второе слагаемое с двойной радиочастотой не проходит ФНЧ. Следова-
тельно, можно полагать, что отклик ФНЧ имеет вид
z(t) = aV\t)/2.
Найдем ПРВ z(t), зная, что z(t) 0:
<i) = Jz(V) = ^;=>V = ±y^.
Так как V 0, то полагаем
Используя распределение F7(v) огибающей — закон Релея (6.11).
получим
IV(r) =
2z/(2ag?) 1
О’2 V a yflaz
1
---2е
a erf
Таким образом,
W(z) =
1 е-г/(да^)
a<ZX
о
при z 0;
при z < 0.
Драмой метод анализа нелинейных систем
197
Вывод. Распределение lV(z) отклика z(t) КД -— показательное
РИ(г)-Ае-Л2, А
1
Найдем среднее значение отклика
Таким образом, как и можно было предположить, среднее значе-
ние СП z(t) на выходе ФНЧ равно среднему значению СП y(t) на его
входе тпг = ту.
Какой должна быть мощность переменной (флуктуационной) соста-
вляющей СП z[t) на выходе ФНЧ, если на входе ФНЧ СП y(t] имеет
вид двух слагаемых (21.8)?
Очевидно, мощность должна удовлетворять равенству
а2 = а2/2. (21.9)
Покажем, что это равенство удовлетворяется. Для этого вычислим
9 2
дисперсию а* = m^z —
m2z — — 2а2 — полная мощность СП на выходе КД.
А А-1/(^)
Мощность флуктуационной составляющей
2 2 1 2 4 _ 2 /9
az - m2z - mz = — - — = = а - ау/2.
Следовательно, равенство (21.9) выполняется.
Инерционное преобразование
Найдем КФ отклика НЭ Ry(r) и отклика КД Rz(r).
Согласно прямого метода КФ отклика НЭ имеет вид
Ry(ti,t2) = E(ytlyt2) = a2E(x\x2tJ.
Положим a?i = а?2 = a;tl; = ®t2, тогда по (5 15) получим
E(xtlxt3)E(xtlxt,) + Efx^XtJEtxi'Xt,) =
= £«)£«) + 2 Я.2(й,<2).
II II
198 Лекция gj
__—
Допустим что СП ®(t) стационарный, тогда
ЗД, *2) = Ях(т); E(x2JE(x2J = 4.
Следовательно,
*э) = ^(r) = а2ах + 2a2R2(r). (21 Ю)
Вывод. Формула (21 10) выражает КФ отклика НЭ через КФ вход-
ного воздействия
Покажем, что по (21.10) может быть найден полученный ранее ре-
зультат
По свойству КФ
Яу(0) = т2 + о-2. (21 Ц)
Ранее получено ту — at?2; tr2 = 2а2ах. Тогда 7^(0) = а2 а4 + 2а2а*
За2а^. С другой стороны, Д2(0) = (а2)2 = а4, поэтому 2«27?2(0)
2«2^ =
Вывод Из формулы (21.10) следует формула (21.11), полученная
другим способом
Найдем энергетический спектр отклика НЭ и отклика КД По тео-
реме Винера-Хинчина
ЛОО лОО
5У (/) = / Ry(T)e~t2*JT dr= [а2 а4 + 2а2Я2(т)] e"i2’7r dr= Д + I2-
J—CX> J—CQ
/ОО -i yCO
e-i2%/r = a2ax--- I dx.
По второму определению дельта функции
-- / e-iux dx - %),
J—<х>
поэтому Д — а2<т^(/)
Таким образом, Д — т26(/) —спектр постоянной составляющей.
12 = 2а2 Г R2x(ry~i2^T dr = 2а213,
J — оо
Д = Г R2x(r^-'2^T dr = Г Rx(r)Rx(r)e-i2^T dr.
J —oo оо
По теореме Винера-Хинчина
/ОО
Sx{fy2^'Tdf'.
оо
Прямой метод анализа нелинейных систем
199
Тогда
лес г со t
In= I Sx(f') df / Rx(r)^i2^~f dr .
J — co J co
S,(/-/')
В результате получим
Zoo
Sx(f)Sx(f - f) df (свертка).
_ -co
Таким образом ЭС отклика НЭ имеет вид
/ОО
Sx{f}Sx{f-f)df. (2112)
СО
Вывод. При наличии гауссовского шума на входе ЭС на выходе НЭ
состоит из двух слагаемых.
постоянной составляющей
S, - а2д^(/); (21.13)
переменной составляющей
/оо
Sx(f)Sx(f-f)df, (21.14)
-СО
причем переменная составляющая представляет собой свертку ЭС вход
него шума с самим собой.
Для получения наглядных результатов необходимо задаться видом
ЭС входного шума (рис. 21.3).
Этапы получения составляющих ЭС:
1. Вычисление дисперсии входного шума х(1)
<т2 = [ Sx(f)df — АВ + АВ = 2АВ
Joo
2 Расчет постоянной составляющей ЭС. Ранее получено Шу = асг2,
Поэтому
т2 = а2 сг* = а\2АВ)2 = 4а2 А2 В2; S= = m2<5(/) = 4a2A2B26(f).
3 Формирование свертки двух импульсов При выполнении свертки
прямоугольного импульса длительностью Т и амплитудой А с самим
собой максимум был равен Э — А2Т, где Т = В (см. рис 17.1,в). За
счет свертки двух импульсов в максимуме должно получиться 2А2В,
а если учесть множитель 2а2 перед сверткой (21.14), то получим в
максимуме 4а2А2В
4 Два боковых треугольных импульса ЭС в два раза меньше
200
Лекция 21
Площадь импульса
-ВОВ
Рис. 21.3
Аналитическая запись ЭС:
Sx(f) ~ < А ПРИ А “ f < 1/1 < А + ?-
v (0 при других f,
Sv=(f) = 4а2 А2 В2 6(f),
( 4а2А2(В - |/|) при 0 < |/К В.
Sy = 1а2 А2 (В - ||/| - 2/с|) при 2/с - В < |/| < 2/с + В.
I 0 при других f ;
sz(f) = Sz=(f) + s,M.
Sz=(f) = Sy=(f) = 4a2 A2 B2 6(f)\
g _ ( 4a2A2(B — |/|) при 0 < |/| ^ B,
z [0 при других /.
Задачи
21.1. Найти среднее значение и КФ на выходе квадратичного детектора
(рис. 21.1, первый блок, выход y(t)), если на его вход подается гауссовский СП Л (О
с ПРВ N(0,<Tx) при независимых сечениях
Лекция 22
Прямой метод анализа (продолжение).
Прохождение сигнала и шума через
квадратичный детектор
Общий случаи
На вход квадратичного детектора (КД) (рис. 21.1) подается сумма
сигнала и шума
x(t) = s(t) + n(i),
где s(t) и n(t) — независимые СП с равными нулю средними значениями;
форма сигнала не оговаривается. Схема исследования та же что и при
s(t) — 0: сначала исследуются характеристики СП y(t) на выходе НЭ,
затем находятся характеристики СП z(<) на выходе КД
Отклик НЭ
y(t) — ах2 — a(st + nt)2 = <z(s2 + 2stnt + n2). (22.1)
| Случайные процессы независимы, поэтому корреляционный момент
E(stnt) = 0. (22.2)
Следовательно, среднее значение СП y(f) на выходе НЭ
ту = E(yt) - a[E(s%') + £?(n2)].
Если СП s(i) и п(<) стационарны, то
ту = а(<т2 + ст2) (22.3)
Аналогично с учетом равенства (22.2) получаем второй начальный
Момент СП на выходе НЭ
E{y2t) = a2[E(s^ + .бЯ(з2)Дп2) + Е(п?)].
L В случае стационарных СП
= a2[E(st) + 6<т2ст2 + Е(п?)].
Найдем КФ Ry(t\,t2) СП у(<) на выходе НЭ:
ад.М - = <iZl?[(si + ni)2(s2 + n2)2].
ГДе S1 = s(h); «2 — 5(^2): «1 - n(ii), П2 = n(t2).
202
Лекция 22
После перемножения и усреднения получим
Ку(<1,<2) = «2[^(sis2) + ^E(s1s2)E(nln2) + £^(sj)E(n|)+
+E(s2)E(n2) + E(n2n2)].
При стационарных СП находим, что отклик y(f) НЭ является стаци
онарным СП, тогда его КФ
Еу(т) = a2[R,2(r) + 4R,(r)Rn(r) + ?а2а2 + Я^т)], (22.4)
где 773(т) и /?п(т) — КФ сигнала и КФ шума,
Ej3(r) — и /£„2(7-) = Е^п^п^)-
Таким образом КФ СП y(t) на выходе НЭ содержит слагаемые трех
типов.
Яэ(т) = Я„(т) + R™(t) + Я,„(т). (22 5)
Первое слагаемое 7733(т) — а2Т?3г(т) обусловлено взаимодействием
сигнала с самим собой
Второе слагаемое Лпп(т) — a2Rni(r) обусловлено взаимодействием
шума с самим собой
Третье слагаемое
Rsn(r) = 4а2/гз(т)/гп(т) + 1а2<т2<т2 (22.6)
обусловлено взаимодействием сигнала и шума
Замечание. Полезным сигналом на выходе НЭ является лишь пер-
вое слагаемое Я„(т). Остальные два слагаемых в (22.5) образуют шумо-
вую составляющую на выходе НЭ. Согласно (22.5) получаем по теореме
Винера-Хинчина три слагаемых ЭС.
Sytf) = + Snn(f) + SM (22.7)
где
/СО ЛОО
Яз2(т)е ‘2т^ dr; Snn(f) — а2 I 1Цт)'-а'Е dr,
-DO J — OO
ZOO
R^Wj)e~'2*fT dr + 2a2cr2cr26[f) =
OO
/OO
Sn(f)Ss(f - /') df + 2a2<7^(/). (18.8)
CO
Замечание Наличие слагаемого S3n(/) на выходе НЭ указывает на
то, что из-за наличия сигнала на выходе НЭ возрастает шумовая соста-
вляющая. помимо собственной составляющей шума Snn(f) возникает
дополнительно взаимная составляющая S’3n(/)-
Прохождение сигнала и шума через квадратичный детектор 203
Гармонический сигнал
Пусть сигнал представляет собой немодулированную несущую [1]
s(i) = Р COs(cJct + 0),
где Р =const; в — СВ, равномерно распределенная в интервале [0; 2тг),
причем 6 не зависит от шума п(£)
Шум п(/) по-прежнему гауссовский, его КФ на выходе НЭ такая же,
как и в первом случае (когда s(t) = 0):
/Ъ„(т) = 2а2/г2(т) + а2<
(22.9)
Тогда
/ОО
fl2(T)ei2^TdT + a2^6(/) =
-со
Zoo
Sn (HSn (f-n df +
-oo
Остается расмотреть другие составляющие энергетического спектра
Sy(f) на выходе НЭ. Рассмотрим вначале сигнальную составляющую.
На входе НЭ КФ сигнала имеет вид
/2,(<1,<2) = P(«is2) — P2F[cos(cjc/i + 0)cos(wcZ2 + #)] =
р2 р2 АР2
= —E{[cosgjc(/1-Z2) + cos[<jc(Z1+<2) + 2(?]} = —coswe-rd-----—,
где
г2тг
А = £7{cos[<jc(ti 4- <2) + 20]} — / cos[a + 20]iu(0) d6\
Jo
a = wc(<i +12); w(0 - 1/2тг, e e [o, 2%];
л2тг £ л2тг
I cos[a + 20]w(0) d0 = — / cos[a + 20] d6 = 0.
Jo 27r Jo
Поэтому
p2 p2
Rsftitz) = Лз(г) = -у coscjct = a2 cosuct; a2 - —. (22.10)
Найдем ЭС входного сигнала:
Zoo р2 [О®
Rs(T)et2^Tdr = — / со5шсте-*2^^т =
-оо J— ОО
= — е’2^тdr + [°° е-’2,гЛте-,'2’г/т(/т| =
204
Лекция 9^
Р2
4
1 f°° 1 г°°
— I e~'^~^udu+— I e~'lf+^u(ht
J—oo J(X)
=*(f+/c)
U = 2тГГ.
Отсюда
p2
W) = —[5(/-A) + 5(/ + A)], A = ^
4 Z7T
Взаимная
нимает вид
КФ с учетом формулы (22.6) и КФ сигнала (22.10) при-
Rsn(j) — 4а2/?п(т)/?5(т) + 2а2Р2<т2<т2 — 2а2Р2/?п(т) coswcr + а2Р2гт~.
Найдем взаимный энергетический спектр-
S,n(f) = 2а2Р2
= а2Р2
е^ст + е
оо
йп(т)е-£2^-Р)т(/т +
e-la,Tdr 4-а2Р2<т26(/) =
«2</+Д)Чт +
=«п(/-Л) =S„(/+/C)
+а2Р2г26(/)
Окончательно запишем
San(f) = а2Р2[5„(/ - А) + £’„(/ + Л)] + а2Р2сг26(/).
Вывод. Взаимная составляющая помимо постояной составляющей
содержит слагаемые за счет гетеродинирования (сдвига по частоте шу
мового ЭС).
Найдем сигнальную составляющую КФ Р3,(т) (первое слагаемое в
формуле (22 5))
£(sfs2) — P4E[cos2(w!;<i + 0)cos2(wcf2 + 6)] —
Р4 г, Р4 2
— — F+ — cos2wcr;
4 4
F — E{2 coswcr cos[wc(ii + t2) + 20] + cos2[wc(t] + t2) + 20]} =
= 2 coswcrE[cos(a + 20)] + ^£{1 + cos[2wc(<i +12) + 40]} —
_o
- j + j E[cos(ai + 40)] = |.
-0
Прохождение сигнала и шума через квадратичный детектор 205
Тогда
E(s2s2) ~
F4 1 + cos2gjct-
~4 2
Р4
р4 р4
Ч-----=-------1----coscjrT;
8 4 8
, ч 2ri , ч 2 2ч а2Р4 а2Р4
R„(r) = a 2Rsz(r) = a 2E(s2s2) = . +—т—cos2wcr.
4 о
ЭС сигнальной составляющей на выходе НЭ
а2 Р^ а2 Р^
sa,(f) = — *(/) + пг[5(/ "2Л)+6(/ + 2/е)]'
Просумируем все составляющие КФ Ry(r), в результате получим
Ry(r) = (22 11)
/ р2 X 2 п2Р4
= а2 ( —- + о-2 ) + 2a2R2(r) + 2a2P2Rn(r) cosier Ч-— cos2wcr.
к 2 / о
В результате получим ЭС
5у(/) а2 (^- +a2) 6(f) + 2а2 Г Sn(f')Sn(f - f) df'+
\ ) J—оо
а2Р4
+ a2P2[Sn(f - /с) + Sn(f + Л)] + -^-[6(7 - 2/с) + 6(f + 2Д)].
Квадрат постоянной составляющей т2 — это первое слагаемое в фор-
муле (22.11), тогда
ту — а
Эта формула следует также из формулы (22.3) где а2 — Р2/2.
Выражение для дисперсии <т2 получим из трех последних слагае-
мых при т = 0:
_2 р4 / р4 \
гг2 = 2а2 ^(0)+2д2Р2 ^(0) + “ = 2а2 ( Е- + Р2а2 + <т4п ) .
°*
Для получения конкретного результата необходимо задать ЭС на вхо-
«« НЭ:
Р2
S^f} =TlKf~fc) + 6(f + fc)] +
S.U)
206
Лекция 22
при fc - В/2 < |/| < /с + В/2;
при других /
$„(/), как в первом случае при j(t)=O
Результат рассмотрения составляющих спектра (ЭС) в частном слу-
чае, когда на входе КД х(/) = s(t) + n(Z), s(t) = Р cos(wct + д'), n(t)
— гауссовский стационарный СП 6 — СВ независимая от n(t). Это
частный случай узкополосного шума n(t) с прямоугольным ЭС
Замечание к рис. 22.1. ЭС Snn(f) такой же, как и в первом случае
(когда на вход КД воздействует один шум и s(t) = 0)
Snn(f) = 4а2 А2 В2 6(f)+
f 4а2Л2(В — |/|) при 0 < |/| ^ В,
+ 2а2А\В - 11/| - 2/с|) при 2fc~ В < |/| < 2/с + В,
I 0 при других /;
{2а2Р2А при 0 < |/| $ В/2;
а2Р2А при 2/с — у <|/|<2/с + у;
0 .при других /.
Прохождение сигнала и шума через квадратичный детектор 207
После прохождения идеального ФНЧ (с прямоугольной АЧХ) полу-
чаем
Z О \ 2 X X
&(/) = «' (^ + ’Н W + ( о "р" ° < 1/К В/2; 1 +
\ 2 / Q при других f J
+ f 4а2А2(В — |f |) при 0 < |f| В; 1
( 0 при других /. J
Расчет ОСШ на входе и на выходе КД
На входе КД имеем ОСШ
(С/ШД =
Р2/2
2АВ’
так как в примере <г2 = АВ.
Мощность флуктуационной составляющей на выходе НЭ
/ Р4 \
^2 _ о„2 / Г . р2_2 , 4 |
- 2а l"16+^ ^n + ^nJ
Здесь сигнальная составляющая
,Р4 ,1
Рс = 2а2—— = 2а2 —
16 4
шумовая составляющая
/ В2!
Рш = 2а2(Р2а2 + а4) = 2а2<т4 1 + — -
\ ап.
= 2а2а4 (1 + 2^Д) = 2а2а2[1 + 2(С/Ш)х],
V J
гДе (С/ШД — ОСШ на входе КД
ОСШ на выходе КД
(С/Ш)2 =
Рс _ 2а2|(Р2/2)2
Рш 2аМ[1 + 2(С/Ш)!]
1 (Р2/2)2 = 1 = 1 (С/Ш)2
4 а£[1 + 2(С/Ш)1] 41 + 2(С/Ш)х 4 1 + 2(0^)/
Рассмотрим два предельных случая (рис 22.2) [1].
1- ОСШ на входе велико: (С/Ш)х Э* 1, тогда ОСШ на выходе
(С/Ш)2=1(С/Ш)1.
208
Лекция 22
Вывод. При большом ОСШ на входе ОСШ на выходе прямопропор-
ционально OCLU на входе (линейная зависимость).
2. ОСШ на входе мало: (С/Ш) 1, тогда
(С/Ш)2 = |(С/Ш)Г
Вывод. При малом ОСШ на входе в КД реализуется эффект пода-
вления сигнала шумом. При малом ОСШ на входе, на выходе ОСШ
и подавно мало.
Лекция 23
Прохождение сигнала и шума через
частотный детектор
Линейная модель узкополосного
колебания
В данной лекции будем рассматривать поведение частотного детекто-
ра (ЧД), когда на его вход воздействует фазомодулированныи сигнал
s(t) = A cosjwj/ + 6c(t)], (23.1)
где А — амплитуда сигнала; / — сщ/2тг — несущая частота; 6c(t)
= f)ct — закон фазовой модуляции
В дальнейшем будем интересоваться информационным процессом в
форме колебания частоты сигнала — d6c/dt.
Наряду с сигналом, по предположению, на вход ЧД подается узко-
полосный шум
n(t) — a(t) coswi(<) — (23.2)
причем среднее значение шума равно нулю, а корреляционные моменты
квадратурных составляющих a(t) — щи b(t) — bt имеют вид
Я[щщ+т] = Wt+т] = ^К(т); Я[а'Л+г] = F[btat+r] = 0 (23.3)
Таким образом, колебание u(t) на входе ЧД имеет вид суммы сиг
нала s(t) и шума n(t):
v(t) = s(t) + n(t). (23 4)
Запишем дисперсию (мощность) шума л(/.)
1 Г°° 1 Г00 1 г°°
ап = г- Sn(w)du = —- 2Sn(u)du = — S*(u)du,
2тг 2тг Jo 2тг JG
(23.5)
Де Sn(u) — двусторонний энергетический спектр (ЭС) шума n(t);
S+(W) = 2Sn(w) — односторонний ЭС шума.
Полагая для простоты ЭС шума S+fcj) постоянным те S+(w) —
= А’о в пределах полосы Д/ — 1F, находим по (23.5)
Г fl+F
= Nodf = 2FN0. (23.6)
71 -F
210 Лекция 2$
При этом справедлива прямоугольная аппроксимация ЭС шума
с s+fH- /Л'о при Л - F</</j+F;
при f<fl _F и f>fl +F (23.7)
Вычислим ОСШ на входе демодулятора. Запишем мощность шуИа
Рп — <Тп = 2FN0 и мощность сигнала (несущей) Ра = А2/7, тогда
ОСШ s на входе демодулятора
s = Ра/Рп = A2/4NOF- (23.8)
Обозначим ОСШ на выходе демодулятора
Ч = Pc/Pnd, (23 9)
где Рс и Pnd — соответственно мощности сигнала и шума на выходе
демодулятора.
Для вычисления составляющих Рс и Pnd необходимо задаться моде-
лями частотного демодулятора, шума на его выходе, а также формой
колебания 6С(<) Для простоты полагаем, что демодулятор моделирует-
ся дифференцирующим устройством, тогда мощность сигнала на выходе
Рс = [ёстах]2/2. (23.10)
Определим мощность гауссовской составляющей шума на выходе де-
модулятора. Запишем (23.2) в форме
n(t) = Р(0 cos(wjt + 0nt), (23.11)
где p(t) — pt —огибающая; 0nt — 6n(t) — фаза шумовой составляющей;
Pt = y/at+ bt- = it/at- (23.12)
Результирующее колебание (23.4) можно записать в виде
w(t) = щ — Ие[(Л + ptelfi"')e*“‘] — v(t) cos[cj]t + ifa], (23-13)
где
A + pteie"< = v(t) = щ(7)е^‘; (23.14)
f(t) = Vt = т/(л cosset 4- aty + (j4sin0ct + bt)2. IgV’t — c/d; c =
= A sin 6ct + bt; d = Л cos 0ct + at.
Результирующему колебанию (23.13) соответствует векторная Диа
грамма на рис 23 1 (при f)ct = 0)
По диаграмме видим, что at является сиН'
bt фазной, a bt — квадратурной составляющим1'
/ шума по отношению к сигнальному колеб3'
нию.
/ При 0ct — 0 Для расчета гауссовской сосТа
A <tt вляющей шума на выходе демодулятора 60е
пользуемся соотношением
Рис 23 1 „ч fil
tg = bt/(A + at). (23 1
ЦрОХОЖ HUE
сигнала и шума через частотный детектор
211
При малых значениях угла 0, когда V’ = arctgtt, a + а(),
подучим
Л = Al = ₽3.16)
1 + Olt (.14 + <2()“ + fet
Мал< е значение угла V’t определяется большим ОСШ s, когда спра-
вед иво неравенство s 1 или сг2 Л2/2, поэтому по (23.16) находим
- bt/A. (23.17)
Найдем ЭС производной квадратурной составляющей, положив одно-
сторонний ЭС этой составляющей S*(u) = "2.Sn(f + fl)
Частотная характеристика дифференцирующего устройства имеет вид
Н(>ш) = mi. Используя известную формулу, получаем ЭС на выходе
этого устройства Sffw) — ш23п(ш) или
W) - (2я/)Ч(Л = (2^f)22S+(f + Л). (23.18)
В результате ЭС производной фазы (частоты)
S,^) - (27rf)22S'+(f + Л)/Л2. (23.19)
Следовательно, при наличии на входе демодулятора шума с ЭС (f)
прямоугольной формы (23.7) на выходе демодулятора спектр имеет па-
раболическую форму, причем 5'^(0) = 0
Предположим, что на выходе демодулятора стоит ФНЧ с частотой
среза fm, тогда мощность гауссовской составляющей шума на его выходе
Рпп = <т2п = Л" Sn„(f) df. (23 20)
Jo
Вычислим мощность гауссовской составляющей шума по (23.20) с
Учетом (23.7) и (23.19), когда S'„n(f) = 25'n(f + fi) = 2Л’О. После
ин егрирования получим
Рпп - 8тг2Ло/А/ЗЛ2.
Используя выражение для ОСШ (23.8), находим
Рпп = 2тг2/2 /3sF.
При вычислении мощности Рс сигнала на выходе демодулятора пред
Положим, что модуляция осуществляется по гармоническому закону, т е
6ct — msin(QcZ + у?с),
Де 771 — индекс модуляции; Fc = О.с/2тг — модулирующая частота
ОгДа f?CImax = mfic и по (23.10) находим Рс = (mfic)2/2
На выходе демодулятора ОСШ qo(s) в линейном приближении (при
6X6 только гауссовской составляющей выходного шума) выражается
212
Лекция 23
в форме
, , Рс „ F ( тПс \2
= ) - (23.21)
г пп Jm
Из (23.21) могут быть получены две более простые формулы Если
принять Пс — 2тг/т, т.е. положить частоту модуляции Fc равной частоте
среза ФНЧ, то максимальное значение
q0(s) — 'ism2Fjfm
если принять максимальное значение индекса модуляции т — F/fm то
9о(«) = Зет3, (23.22)
Эти соотношения справедливы тогда, когда распределения фазы V» и
ее производной близки к гауссовским Это, в свою очередь, означает
что вектор vt (см. рис 23 1) совершает только колебательные движения
относительно вектора А при малых углах что определяется боль
шим значением ОСШ s (s > 1).
Расчет аномального (импульсного)
шума на выходе ЧД
Рассмотрим модель Райса аномального (импульсного) шума на вы
ходе демодулятора [9].
В том случае, когда фазовый угол Vt (рис. 23.1) в соответствии с
моделью Райса получает приращение 2тг, то в колебании V(^) форми-
руется импульс (рис. 23.2) [9]. Это событие может отождествляться с
другим, а именно с пересечением случайным процессом V(0 фазового
порога Vo = ±тг (последнее является необходимым условием «прово
рота» фазы VG) на 2тг).
Последовательность указанных импульсов частоты V(0 составляет
импульсную составляющую шума на выходе демодулятора, причем при
пересечении порога Vo = як, k = = 1,2..., формируются импульсы
положительной и отрицательной полярностей. Из за разной скорости
перехода с одного фазового уровня на соседний, отличающийся на 2г,
длительность импульсов частоты различна. (Как показано позднее в ра
Рис. 23.2
ботах Хесса (Hess), после пересече-
ния уровня ±irk существует веро
ятность возвратного движения.)
Покажем, что площадь импуль-
са частоты одинакова и равна 2тг,
а, следовательно, с увеличением
длительности импульса уменьша-
ется его амплитуда (рис. 23.2)-
Действительно, приращение фазе
вогоугла AV при «провороте» рав
но 2тг, т.е. 2тг = AV — Vk — V'h
Прохождение сигнала и шума через частотный детектор 213
-----
где Фн и V’k — соответственно начальное и конечное значения фазово-
го угла ПРИ провороте. Обозначим длительность аномального им-
пульса частоты Тогда
V'k — V'n — [ ^(t)dt — f A(t)dt — 2тг,
Jo Jo
где A(t) — закон изменения импульса частоты, а значение интеграла
авно площади импульса. С.О. Райс предложил аппроксимировать ано-
мальный импульс й-функцией, при этом импульсный шум представляет
собой последовательность импульсов
A(t) = 2тгй(4 - ti), (23.23)
где ti — момент возникновения аномального импульса.
В результате импульсный шум [V’Jh записывается в виде суммы по-
следовательностей [9]
ОО оо
№1и - £ 2тгй(Л - ti) + £ (-2тг)й(/, - tfc). (23 24)
1 = —OO fc = —CO
Остается найти частоту следования положительных N+ и отрицатель-
ных AL импульсов. При отсутствии расстройки между несущей часто-
той fi и центральной частотой шумового спектра справедливо равенство
7V+ = N_. Согласно модели Райса в этом случае имеем
АГ+ - - (i//2)(l - erf v^), (23.25)
где erf х = (2/y/ir) f* е~у2 dy; 1 - erf y/s — (2/у/я) dy; v -
~ ыг/2тт; w2 = — R"(0)/Rn(0); Лп(т) — корреляционная функция (23.4)
составляющих yt(xt) узкополосного шума.
Назовем 1/ показательной частотой шумового спектра, эта частота мо-
жет быть выражена через ЭС S+(/) = 25n(w), те
у - (1/2%)^/^, (23.26)
где Ьо = г2 = S+(f)df ; b2 = (2тг)2 f0°° (f - Л)2 S+ (/) df.
Частота следования импульсов
FK = 2N+ =1/(1-erf >A).
Выражение (23.25) вытекает из общей формулы для частоты AT.f.(V'o)
Пересечения фазовым случайным процессом ф(1) произвольного фазо-
вого уровня фо [5].
М+(Фо) = (l/27r)V=^e-<o2/2)^2^F(acos^)
гДе -тг $ ф0 < -л-, F(x) - (1/л/2тг) е“у2/2 dy; а = А/<тп; р0(т) =
- Rn(r)/rt; (% = -d2p!dr2 = —(2tti/)2.
214
Лекция 33
С учетом равенств а — у/т7 и F(x) = 0,5[1 + erf (а:/^)] имеем
TV+fV’o) = (^/2)е-,2®1п2’/'°[1 + erf(x/scos^0)]-
Замечая, что erf(—а;) = — erf х, при — получаем форму-
лу (23.25).
Полагая, что моменты возникновения аномальных дельта-импульсов
независимы, С.О. Райс получил формулу ЭС импульсной составляющей
шума на выходе демодулятора [10]:
5пи(/) = 8тг2(77+ + AL), (23.27)
причем при произвольной форме A(t) аномального импульса справед
ливы соотношения
5ПИ(/) = 2|Л(/)|2(Я+ + ЛГ-); (23.28)
Л(/)= [ (23.29)
J — оо
Тогда при Л(7) = 2тг<5(/ - ti) находим (23.27).
Рабочая характеристика ЧМ-приемника
Определим ОСШ на выходе демодулятора с учетом импульсного шу-
ма. Полная мощность шума на выходе демодулятора равна сумме Рпл
мощностей нормальной Рпп и импульсной составляющей Рпи, т.е Pnd =
— Рпп + Рпн- Таким образом, на выходе демодулятора ОСШ имеет вид
q(s) = Pc/Pnd = Рс/(Рпп + Р„и) = 9о(«)/[1 + Д(з)]> (23-30)
где <j>o(s) — Рс/Рпп'. Д — Рпп/Рпп- Функцию q(s) назовем рабочей ха
рактеристикой ЧМ-приемника.
Вычислим полную мощность Pnd шума на выходе демодулятора для
двух видов ЭС шума на его входе:
для прямоугольного ЭС [см. (23.7)]
Sn(f) =
для гауссовского ЭС
Sn(f) = Sr(f) = (23.31)
где b0 = а2.
В последнем случае эффективная ширина Д/э = ахЛП Полагая, что
ширина полосы ЭС на уровне 0,5 его максимального значения составляет
Д/ = 2F, получаем равенство Д/э — 1,065Д/= 2,13F — эффективная
ширина энергетического спектра. В табл. 23.1 приведены сравнительны*
параметры двух разновидностей ЭС и параметров bo, b%, и.
При условии N+ = N- приближенное выражение Snd(f) Для
Прохождение сигнала и шума -через частотный детектор 215
Таблица 23.1
So (У) bo bi I/
5пр(/) &(/) 2N0F bo 8tt2N0F3/3 4эт<72Ь0 F/УЗ
5П<1(/) производном фазы (ЭС частоты) имеет вид
SM - Snn(f) + S„„(f) - (27rf)22S’+(/ + А)/Л2 + 4|Л(/)|2Я±,
(23.32)
где Sn(f) = 2Sn(/) — односторонний ЭС входного шума.
При Л(/) = 2тг£(£) и частоте ЛГ+ = N-, определяемой по (23.25),
получаем
Snd(f) = 8тг2^(1 - erf Vs) + (2тг/)225’+(/ + f^/A2. (23.33)
Отсюда при f —+ 0 имеем Snj(0) = Snn(0), причем с учетом соотношения
1 — erf Vs « е~’/у/кё находим
зЗ>1
5nd(0) ~ 5пи(0) = 8тг2г/(1 — erf Vs) ~ 8тг2ре"’/л/втг- (23.34)
Из (23.34) следует Snj(0) —> 0 при s —► 0. Соответственно для прямо-
угольного 5Пр(/) и гауссовского ST(f) спектров [9]
Snd(f)/4Л - 2(1 - erf V?) + (f/FfV3/2s, (23.35)
Snd(f)/^2cr = 2(1 - erf Vi) + (//£r)2e-^/2o7sv^. (23.36)
Выражение (23.35) справедливо при 0 < / F, и в этом случае
Snd(f) — 0 при f > F.
Таким образом, суммарный ЭС Snd(f) состоит из двух слагаемых,
первое не зависит от частоты и стремится к нулю, если s —> оо; вто-
рое стремится к нулю при f —> 0.
Приведем результаты точного вычисления ЭС Snd(f) производной фа-
зы (ЭС частоты) при условии, что ЭС входного шума имеет гауссов-
скую форму, те Sn(f) = ST(f). В табл 23.2 приведены значения
XZ) = 5„<1(/)/47г2£7 [10].
Графики функций 7(/) — 5пй(/)/4тг2сг приведены на рис. 23.3 [10].
Семейство ЭС ограничено сверху кривой при s = 0. При f —* оо спра-
ведливо соотношение [10]
7//г = S„d(f)/47r2£7 к a/f. (23.37)
5—*0, J—ЮО
Например, по табл 23.2 при f/cr = 5тг/3 находим 75тг/3 — 0,1908,
а По (23.37) получаем 75тг/3 = 0,19098. При s —> оо справедлива
асимптотическая формула [9]
?(//<?) « (f/a)2e-^2ffysx/^. (23.38)
Приближенные значения практически совпадают с соответствующими
216
Лекция 23
Таблица 23.2
Вычисленные значения -у(/)
/6 S
0 0,5 1.0 2,0 5,0 ~
0 0,7369 0,4118 0,2322 0,0753 0,00302
1 0,7098 0,4294 0,2672 0,1134 0,02342
2 0,6439 0,4516 0,3231 0,1784 0,05828
3 0,5542 0.4225 0,3225 0,1947 0,06852
4 0,4623 0.3496 0,2654 0,1580 0,01590
6 0,3195 0,2178 0,1508 0,0755 0,01540
8 0,2390 0,1553 0,1019 0,0451 0,00533
10 0,1908 0,1215 0,0777 0,0321 0,00273
12 0,1595 0,1003 0,0631 0,0251 0,00172
точными значениями последнего столбца табл. 23.2 при s = 5,0
При / —» 0 находим
Snd(f) =
2тг2/2
trsy/l-n
(23.39)
Если учесть равенство Д/э = — 2,13F, то окончательно по
лучим приближенную формулу
Sndtf) « 4тг2/2/5Д/э = 47r2/2/2,13Fs а 5„„(/). (23.40)
Вычисляемое по (23.38) значение
snd(f) - 4ir2<77— - (23-41)
О’ сгву2тг
совпадает с линеинои аппроксимацией (23.19), если положить в (23 19)
25„(/+Л) = (2bo/<rV^)e-l2/2(72 и 26О/Л2 = 1/s.
Прохождение сигнала и шума через частотный детектор
217
Таблица 23.3
Сравнение значений т(/). полученных по точным
и приближенным формулам
|£6 I / ’Г S = 1 s _ ! s = 5
т(7) *(/) -v(T) T'(f) т(7) -т(/)
0 0,2322 0,315 0,0753 0,0911 0,00302 0,00314
1 1 0,2672 0,410 0,1134 0,139 0,02342 0,0222
1 2 0,3231 0,567 0,1784 0,217 0,05828 0,0537
Сравним точные данные ?(/). взятые из табл. 23.2, и приближенные
значения т(/) = Snd(f)/4ir2cr, вычисленные по (23.38) [10]
(табл 23.3). Точность приближенной формулы (23.38) возрастает с
уменьшением частоты и ростом ОСШ s.
Можно повысить точность вычисления ЭС, если не ограничиваться
линейным приближением ip(t) = bs(t)/A, а учесть второе слагаемое в
разложении фазового угла*
= arctg[at/(X + at)] » bt/A - atbt/A2.
I Тогда при s = 5 можно получить [9] вместо 0,0222 и 0,0537 соответ-
ственно значения 0,0237 и 0,0584, которые служат уже оценкой сверху
для точных значений 0,0234 и 0,05828.
Вычислим мощность аномальной составляющей шума на выходе де-
модулятора
cfm
Рпн- SnK(f)df,
Jo
где 5’пи(/) определяется по (23.27).
При = N_ получим
rfm rx 2
Р„и - 4N+ / / A(t)e i2^‘ dt
Jo J — оо
df.
(23.42)
Полагая A(t) = 2тг6(<), находим Рпи = 4N+fm = 2^/то(1 — erf y/s).
Используя значения показательной частоты v — F/y/З для прямоуголь-
ного ЭС на входе и v = ст для гауссовского ЭС, соответственно получим
(Л1И)пр — 8тг2(Р/т/л/3)(1 erf v/s). (Рпи)г — 8тг2(т/т(1--erf^/s).
Гауссовскую составляющую мощности (Рпп)пр вычислим по (23.21); зна-
чение (Рпп)г определим с учетом (23.41) на основе разложения
Snn(f) « Snd(f) -
^2f2 c-f2/2a2 и ^2f2 A _ f2 \
ctsa/Stt asy/lb V 2cr2/
сПраведливого при fm er-
(0, fm) получим
После интегрирования no f в пределах
Рпп- Snn(f)df =
Jo
4тг2 f3
3<r2sy/2K
А - МА
V 10<72 J
218
Лекция 23
(23.43)
3f2
1 °Jrn
10a2
+ 8тг2ст/то(1 erf у/s')
(23.44)
Суммарная мощность выходного шума
(Pnd)np - + 8тг2Г/т(1 - erf Т^/у/з,
4тг2
В результате с учетом (23 21) находим
, . F ( mfic \
9о(«) - 3s— —— I ;
Jm \^Jm/
fi(s) — PnK/Pnn = 4sV^(F//m)2i
(23.45)
(23.46)
если ЭС Sn(f) имеет прямоугольную форму, т.е. 5„(/) = S’np(f). При
гауссовской ЭС Sn(f) = Sr(f), тогда
mOc \ 2
9o(s) = p
•* T
Рс _ (mQc)2 а /
2F„„ Sfm к
f у _ 6sy/2%<r2l
/3(1-3/Д/1О^) •
з/А
10<Т2
Графики рабочей (поро свои) характеристики ЧД рассчитанные по
(23.30) при при т — F/fm, а/fm = 1 изображены на рис 23.4 а— при
наличии прямоугольного спектра, б— при гауссовском спектре шума
Штриховые линии соответствуют зависимости qo(s) При этом рабочая
характеристика рассчитывается по формуле ддв — (?о)дБ — 10 lg 1 + д)
Из рис 23.4 заметно наличие порога s = sn при приеме ЧМ сигнала и
возрастание порога приема с увеличием индекса модуляции.
Замечание Величина sn определяется значением ОСШ s, при ко-
тором разность 9o(s) — q(s) = 10 lg(l + д) равна 10 дБ.
е к ц и я
Прохождение сигнала и шума через
фазовый детектор
В данной лекции рассмотрено воздействие на фазовый детектор (ФД)
гармонического сигнала в смеси с гауссовским шумом Показано, что с
ростом интенсивности шума характеристика ФД приближается к сину-
соидальной, независимо от ее вида в детерминированном случае. Вычи-
сляется отношение сигнал/шум (ОСШ) на выходе ФД в зависимости от
ОСШ на входе и от значения начального фазового рассогласования ме-
жду сигнальным и опорным колебаниями. Результаты анализа полезны
при рассмотрении работы системы фазовой автоподстройки, неотъемле-
мой частью которой является ФД. Схема ФД изображена на рис. 24 1.
Предположим, что на вход фазового детектора (ФД) воздействует ад-
дитивная смесь x(t) гармонического сигнала s(t) — A coswot и узкопо-
лосного гауссовского шума n(t) = a(t) coscjot — b(t) sin
Таким образом, на входе ФД имеется колебание
a?(t) — A coscd0t + а(/) cosgjq/ — b(t) sin u:Dt. (24-1)
Отклик ФД запишем в виде
у- f(0o,s, д),
(24 2)
где д = д(0о) — характеристика ФД; Оо — разность фаз опорного и
входного колебаний при п(1) 0; s — А2 3/2<т2 — ОСШ; <т2 — дис-
персия входного шума.
Характеристика ФД обладает свойством нечетности </(—0) — — д(0)
периодичности — д(0 + 2тг) = д[0) и нормированное™ — тах<7(0) =
= — minjyff?) - 1
Четыре вида характеристик ФД, используемых на практике, изобра
Жены на рис 24 2
1 <7s(0) = sm0
2 Уп(0) = х/ х\ —я < х < тг;
3- 0к(0) = х/тг, |х| < тг;
x(t) ----
фд фнч >
4. £т(а;) - <
-^х-2
при тг х — тг/2;
^х при |х| тг/2;
-^• + 2
при тг/2 х si тг.
Опорное
напряжение
Рис. 24.1
220
Лекция 2
Характеристика ФД может быть разложена в ряд Фурье. Из-за не-
четности g(ff) ее ряд Фурье записывается в виде
ff(0) = 5? ck sin №, (24.3)
t=l
где cfc = 1 f** g(0) sin k0d0.
Коэффициенты Фурье с* для четырех характеристик ФД нетрудно
вычислить. Так, например, при д(в) = sin а; сразу находим ci = 1:
При д(6) - дп(0), д(6) = д*(0) и д(0) = <ут(0) получим
4/тг& при нечетном к;
0 при к четном;
= 72FsinA:2’
Амплитуды первых гармоник
Д п о
(ci)„ = ^; (С1)к = -; (С1)т = -2- (24-4)
7Г 7Г 7Г
При n(t) = 0 получим
<у(0о) - 57 ск sin кво- (24.5)
П=1
При наличии шума на входе ФД разность фаз опорного и входного
колебаний флуктуирует, тогда отклик ФД может быть записан в виДе
некоторой случайной функции
У = д(0о + 0), (24.6)
9 Г
(cfc)n--r[l-(-l)fc] =
7ГКГ
прохождение сигнала и шума через фазовый детектор
221
где О — СВ, распределенная по известному закону РИ(0).
Среднее значение отклика находитися по формуле
оо Л7Г
y(e)w(e)M = / sin[fc(0 + 0o)]iv(0)d0-
t=i J-*
E(y) = Д
Полагая ПРВ 1У(0) четной функцией, получим
ОО
^(у) = y^cUfcsingp,
fc=i
Где Ik = f^cosk0lV(0)de = E(cosk0).
Здесь IV (0) = W(y,(t)dv, где 1У(и,0) — двумерная ПРВ огиба-
ющей и фазы суммы гармонического сигнала и узкополосного гауссов-
ского шума. Известно соотношение (6.17)
V
W(V^)=Q 2 exp
27T<TZ
и2 + Л2 — 2At) cos 0
2^
при —тг < 0
При этом
< ТГ, 0 V < -f-oo.
E(cosm
cos т01У(г), 0)d0
du.
Таким образом, чтобы наити среднее значение отклика ФД, необ-
ходимо найти среднее значение E(cosm0) при известной совместной
ПРВ 1У(г),0).
Вначале воспользуемся соотношением [20]
У ed cos в cos твдв = 2тгД„ (d),
Где 4n(d) — модифицированная функция Бесселя порядка т, d =
= Аи/а2.
I Воспользуемся соотношением [20, стр. 725, ф-ла 6.618]
/•ОО ,
/ еГах2 lv(J3x)dx - -У^е^/8“7,/2(/32/8а).
Jo
И Для того чтобы воспользоваться этой формулой, следует вначале до-
г ать соотношение
ЛОО
Л ^-qx2Iv(^) dx = у°° 4- 7„+1(/Ь)] dx. (24.7)
Лекция ИЦ
Учтем равенство
4- Jv+ifz) — 2 dz -
Тогда интегрируя по частям в правой части предыдущего соотношения,
получим искомую формулу (24.7).
В результате окончательно находим среднее значение
7?(cosm0) - iVwse_s/2[7(tn_i)/2(s/2)+ ^(m+ijM5/2)]-
Среднее значение отклика ФД принимает вид
Е{у) “ (л/тг5/2)е~д/2 y^cn[Z(n_1)/2(s/2) + Z(n+1)/2(V2)]sin n^o-
n—1
При наличии таблиц модифицированных функций Бесселя среднее
значение отклика ФД может быть вычислено при любой из четырех ха-
рактеристик д(&) (рис. 24.3), если предварительно вычислить коэффи
циенты сп и оценить сходимость ряда (на рис. 24.3: 1 — s — 0,01; -
— 0,1; 5—1; 4 — Ю)-
Рассмотрим предельные случаи ОСШ s; s < 1 и 1.
В первом случае для функции Бесселя справедлива асимптотиче-
ская формула
7„(^0 «/72-Т(1 + ^),
где Г(1 + у) — гамма-функция. Поэтому
7,(0) = Цу > 0); 7о(О) = 1 (Г(1) = 1).
[прохождение сигнала и шума через фазовый детектор
223
Тогда ряд для Е(у) вырождается в одно слагаемое (при п = 1) и при
s 1 получим приближенное соотношение
-ч/TTS
Е(у) = ~2~ cisin/?0-
Это соотношение справедливо для любой характеристики ФД g(ff).
Таким образом, независимо от вида функции g(ff) при малом ОСШ
среднее значение отклика ФД имеет вид синусоидальной характеристи
ки с амплитудой, определяемой амплитудой первой гармоники Ci при
разложении д(х) в ряд Фурье
sin 0О.
При s > 1 справедлива асимптотическая формула
« 2—ег, тогда Iv(s/2) к. —L=e’/2.
у/2тг^ a/tts
Поэтому при s -> оо
Е(у) = sin кво =
I fc=i
т.е. среднее значение отклика в этом случае, как и следовало ожидать,
совпадает с детерминированной характеристикой ФД д(6о}-
Следует отметить, что при д(&) = sin 6 при любом ОСШ а справед-
лива аналитическая формула
ту = Е(у) = ^y/Kscie~sf2[I0(s/2) + 7i(«/2)]sin0o = ^(sjsinflo,
где Л($) = (c1/2)-v/iree_,/2[/0(s/2) + li(s/2)] при q = 1.
При s -С 1 Е(у) — 2Л/’г^5'Г| #о-
Среднее значение отклика Е(у) при д(во) — sin Oq и различных ОСШ
® (0,01; 0,1; 1; 10) изображено на рис. 24.3
Найдем ОСШ г на выходе ФД. Определим величину г соотношением
т2
Г =------—2 , ТП2У - Е(у2). (24.9)
т2у - тп2
Найдем вначале второй начальный момент при д(&) — sin О'.
ё(у2)-j y\e)w(e)de - cl j sin2(0o + 0)iy(0)d0-
= I - | f cos 2(00 + 0)Wr(0)d0 - | [ cos20iy(0)d0.
J — 7Г J —TV
224
Лекция
По доказанному
S(cos 20) _ У cos 26W(6)dO = 1^е-’/2[/1/2(5/2) + Z3/2(s/2)]
Воспользуемся соотношением для функции Бесселя
Iv—i(z) — 7v^z).
z
Отсюда при v — 1/2 получим
2
/_1/2(s/2) - 73/2(s/2) = -Л/2^/2).
Тогда
2
<з/2(5/2) = ^-1/г(«/2) - —А/гС»/2)-
Окончательно находим
Л1(з) = Л/г(5/2) + /з/г(«/2) = (1 — 2/s)/i/2(s/2) + 1/г(«/2)
Воспользуемся известными равенствами [20]
В результате получим
Л1 (з) - (1 - 2/3)^7477ESSh(s/2) + x/477Г5Сh(s/2).
Поэтому вторая форма для среднего значения Е[ао$26) принимает вид
E(cos20) = е-’/2[(1 - 2/s)sh(s/2) + ch(.s/2)] = 1 --~е *
s
С учетом этого соотношения получим второй начальный момент от-
клика ФД
•>- 1 cos20о г 1„ 1 — е'
Е<Л) = -------5—[1 - -(1 - е )] = sin2 0о + —-
2 2 s 2s
1 е"\ . 1 — е-л 2л
= (1---------) Sin2 00 + —---cos2 0О.
2s 2s
На выходе ФД при д(0) ~ sin 0 получим ОСШ
Г = Г1/Г2 = ... №)]2
1/2 ад-[адр’
где Г1 = (Trs/4)e-s[7o(s/2) + 7i(.s/2)]2sn 0О — B(r)sin2 0О; ’’г
= £?(у2) - п - [1 - 1^-^- - В(г)] sin2 0о + 1-^- cos2 0о.
cos20o =
(24 .Ю)
2s
Прохождение сигнала и шума через фазовый детектор
225
Рис. 24.4
При малых ОСШ на входе (s 1)
7T.S -> I 1 TT.S \ _ 1 9 . 1
П « —- sin2 в\ га ~ ( 1 — х-— I sin2 в0 + - cos2 0q «
4 \ 2 4 / 2 2
Тогда г — го — (?rs/2)sin2 ^о-
При больших значениях ОСШ. s 1
В 1-Ц^1;В(гЬ1.
Поэтому при S 3> 1
Г « Гоо - 2stg20O- (24.11)
Отсюда при малых во г « 2s#2.
В том и другом случаях предельных значений ОСШ s на выходе ФД
ОСШ прямо пропорционально ОСШ на входе Кроме того максимум
г0 как и следовало ожидать реализуется при во = тг/2 а г = г„
Равно своему максимальному значению также при во = тг/2 причем
гоо —* оо. Последнее можно ассоциировать с полным подавлени-
eo-»ir/2
еМ шума при во — тг/2.
Зависимость ОСШ г от ОСШ s на входе при g(x) = sin х изображена
На рис. 24.4 при различных значениях во (1 — л/Ь; 2— тг/З; 3—
тг/2 — £, £ — 0,01). Штриховыми прямыми отмечены асимптоты
Рабочих характеристик при больших и малых ОСШ s.
Найденное среднее значение E{cosm0) позволяет вычислить началь-
226
Лекция
ные моменты СВ cosfc 0. Например при k = 2 E(cos2 О') — 1
l£'(cos26») = | + Ш - у(1 - е“3)] = 1 - i(l - е-3) Полученная
формула для jE{cos2(?) значительно проще той формулы, которая при-
водится в литературе (В.И Тихонов, 1966)
E(cos2 0) = 4- 3, -,s),
где iFi(a,[3, — ж) — вырожденная гиперболическая функция.
Однако эту последнюю формулу можно привести к более простой,
если воспользоваться соотношением
iFl(a;0+ 1; —ж) —
= a(/-a)W~1)1F1(a:/?~1: +/?(!-/?+ /?;-«)]
Положив (3 — 2; а = 1, ж — s, получим
2
1 Fi(l; 3; -5) = -[jЛ(1; 1; -s) + (s - 1)^(1; 2; -s)].
Учтем известные соотношения [20]
1F1(1;1;-S) = e-’; ^(1; 2; -s) = -(1 - е’*).
X
Тогда придем к равенству
1Л(1; 3; -s) = 2/.s - (2/S2)(l - е“3).
В результате окончательно получим искомую формулу
«(“* «) = 1 + J [| - |(1 - .-)] = 1 - 1(1 - «-),
которая совпадает с формулой, найденной другим способом
Таким образом, приведенные результаты анализа ФД позволяют рас
считывать его характеристики, зависящие как от ОСШ на входе, так
и от разности фаз сигнального и опорного колебаний в детерминиро-
ванном случае.
Задачи
1. Найти напряжение на выходе ФНЧ ФД при воздействии на входе ФД гар-
монического колебания и узкополосного шума, принять опорное колебание такЖе
гармоническим и пренебречь второй гармоникой входного напряжения.
2. Провести анализ ФД при других его характеристиках д(б)
Лекция 25
Метод характеристических функций
Метод характеристических функций назь вается также методом пре-
образований, иногда методом Райса, методом контурных интегралов
[1, 3]
Рассматривается пара преобразовании Фурье
/ОО 1 zoo
g(x)e~lvxdx; д(х) = — / f(jv)elxv dv,
ОО J —оо
где д(х) — характеристика НЭ; /(it)) — переходная функция НЭ, кото-
рая может быть получена как одностороннее преобразование Лапласа
от характеристики д(х):
лей
f(w) = / g(x)e~wxdx.
Jo
Тогда отклик у = д(х) НЭ находится из обратного преобразования
Лапласа
1 [С+гоо । г
д{х) = / f(w^dw - — / f(w)exwdw. (25.1)
2тп Jc-too 27Г| Jc
Пусть справедливы неравенства
|<?(а;)| М2^х при х > 0; |ff(^)| С Мзе~изХ при х < 0,
Де М^, U2, Мз, из — постоянные. В этом случае можно определить
однополупериодные характеристики
г \ f д(х) при ж > 0; г х Г о при ® 0;
= t 0 при ж $ 0; f ff(x) при х < 0.
Тогда
ff(®) = ff+(®) + ff-(®)>
пРИчем односторонние преобразования Лапласа f+(w). f-(w) (w =
и + iv) имеют вид:
poo гО
/+(го) - / д+(х)е wxdx\ I g_.(x)e~wxdx>
Jo J —OQ
^еРвыи интеграл сходится при и > U2, второй при и < из. Полная
228
Лекция 25
характеристика д(х)
определяется равенством
где за контур С+ можно взять линию w — и' + iv, и' > Ua, а за контур
<7_ — линию w — и" 4- iv, и" < из.
Важный класс нелинейных устройств составляют те, которые образо-
ваны на основе НЭ с однополупериодной характеристикой р-й степени
7(*)={о
при х > 0;
при х 0,
(25.3)
где а — масштабный множитель; I/ — неотрицательное число.
Примерами таких устройств являются однополупериодное устройство
р-й степени с характеристикой д(х) = 7(ж) (рис. 25 1,а), двухполупери-
одное (четное) устройство р-й степени с характеристикой (рис. 25.1,6):
17ч(^) = + у(-х) =
axv
0
«( х) v
при х > 0;
при х = 0;
при х < 0
(25.4)
и двухполупериодное (нечетное) устройство р-й степени с характеристи-
кой
(рис. 25.1,в):
<7н(ж) = 7(ж) - 7(-®) -
axv
0
-«(-а;)-"
при х > 0;
при х = 0;
при х < 0.
(25.5)
Одно- и двухполупериодные четные устройства у й степени часто ис-
пользуются в качестве детекторов; двухполупериодные нечетные устрой-
ства у-й степени описывают некоторые нелинейные усилители
Пример 25.1. Найти переходную функцию /(w) однополупериодного устрой-
ства iz-й степени.
Решениеа Введем преобразование Лапласа
— а [ xl'e~w:rda:, (25-б)
Jo
причем интеграл сходится при Rew > 0= Следовательно, контур для обратного
Метод характеристических функций
229
преобразования должен лежать вправо от оси w = if
Полагая t — wx, получим
f<x>
<25-7)
где Г(г) = f e-ttz-1 dt гамма функция при
Rez > 0.
Таким образом, переходная функция однополупери-
одного устройства r-й степени f(w) = v(w). Посколь-
ку справедливо соотношение
Плоскость
w = и + in
Рис. 25.2
0 е
то переходная функция двухполупериодных устройств имеет вид
/ч+(ш) - V’(w);
/к+(ад) = ^(™);
/4_(w) = v(-w);
/н-(ш) -
(25.8)
Интеграл для <р(—го) сходится при Rew < 0. Тогда соответствую-
щий контур для обратного преобразования С- должен лежать слева
от оси w = io (рис. 25.2).
В дальнейшем в качестве контура С+ выбирается линия w = e-Rit), а
в качестве контура С_ — линия w — — £ + it), где е > 0, —сю < v < оо.
Из определения КФ /?j,(/i,/2) — £{?/1У2) = E[g(xi)ff(^2)] отклика
y(t) НЭ получим
Лу(<1><2) -
.Л2 / /(wi)</wi / /(w2)dw2 / / w(x1,x2)ew,:i:i+w:iX'J‘dx1dx2.
(2tti) Jc Jc J M
Учтем определение характеристической функции (tx(wi,w2) (wi =
= it»i, w2 — iv2). В результате получим
^(*b*2)- (2iri)2
У f(w2)0a;(wI, w2)dw2. (25 9)
Это выражение является основной формулой при анализе случайных
Воздействии на нелинейные системы методом характеристических функ-
ций (методом преобразовании).
Во многих задачах воздействие x(t) на входе системы имеет вид сум-
мы x(t) = s(t) + n(t) при выполнении допущения о независимости сла-
гаемых. В этом случае совместная характеристическая функция воз-
действия 0T(wi,w2) равна произведению характеристических функций
сигнала 0s(wi,w2) и шума 0n(wi,W2)- В результате получим
1Ч2 / /(wi)dwi / f(w2)6s(wl,w2)en(wi,w2)dw2.
(2тпГ Jc Jc
(25.10)
230
Лекция 25
Пример 25.2. Определить КФ отклика НЭ и его ЭС Sb(iu), если на
входе НЭ имеется аддитивная смесь дт(£) сигнала s(f) и шума n(t)» причем
S(t) - Р(4) COS0(t) — P(t)cos(u/Ct 4- ip),
где-P(t) — низкочастотный процесс, у которого эффективная ширина Л/э энерге-
тического спектра значительно меньше частоты /с = Сб»с/(2эт), фаза tp распределена
равномерно в .интервале tp £ [0,2тг) и не зависит от модулирующего сигнала P(t) и
шума. Шум n(t) на входе является гауссовским случайным процессом с нулевым
средним значением (£?(тге) — О)
Решение Характеристическая функция 6n(wi, W2) гауссовского шума имеет вид
, W2) = ехр(| [ст1™1 +2fi„(ti, t2)w1w2 + <^2w2] J • (25.11)
Воспользуемся разложением экспоненты
ехр[Кп(й, t2) wi w2] — > ------—-------.
k\
k=0
В результате КФ отклика
K»(fl>f2) = 57 ^(2^)2^ J fMw! exP x
//9 9 \
, I CT^wZ \
/(^2)^2 exP I —“— 1 (25.12)
C
По определению, характеристическая функция сигнала
#s(wi, W2) = £[exp(wj Pi cos &i 4- «?2 P2 cos 02)]
Разложим экспоненту в ряд [20]
оо
ег см ® _ 57 (г) cos тв-> (25.13)
га=0
где — множитель Неймана; со = 1, = 2 (тп = 1,2...); Zm(z) модифици-
рованная функция Бесселя первого рода В результате найдем
es(iui, ш2) = 57 57emenE[Zm(w2P2)Z„(w„P„)] - E(cosm01 cosn02).
m=0 n= О
Учтем соотношение
Z?(cosm0i cosn02) = £[cosm(curti 4-v) cos(u'ct2 4-V’)] = / ? / П^И П
v 1 1 v \ [1/БтСО5ПШ'сТ прип=тп.
где т = ti - t2.
Тогда характеристическая функция AM сигнала
оо
6s(wiw2) = 5 e»nfi[Zm(wiF1)Zm(w2P2)]cosmu><:T. (25 Н)
771 = 0
После подстановки (25 14) в (25 12) найдем КФ отклика НЭ.
Определим функцию
hmk(tr) — —- I f(w)wkIm(wPr) exp I — ) dw, (25-15)
27Г1 \ 2 /
Метод характеристических функций 231
где Рг - P(tr), ar = a(n(tr)).
Введем КФ
Rmkthitz)
гДе усреднение производится по модулирующему сигналу
КФ отклика принимает вид
со оо
Ry(ti,t2)=53 53 COS TTlWcT.
m—Q k—O
Пусть шум и модулирующий сигнал стационарны тогда
ОО оо
Я»(т) = 53 У? совтгш^т. (25.116)
тп=О к=0
Если входной сигнал представляет собой нсмодулированное колебание Ц#) =
= Pcosfu'et + где Р ~ const, то
оо оо 2
ад=ЕЕ-(т) cosmwcT, (25 17)
m О к О
так как в этом случае коэффициенты hmk(ti) и постоянны м равны. За-
пишем предыдущее соотношение в виде
ОО “ /12 °° °° ^2
Яу(т) = hQQ 4- 2 /i^o cos mivCT + + 2 -==—-Л*(т) cosmosт.
пъ=1 к=1 тп=1 к—1
(25.18)
I Энергетический спектр отклика найдем преобразованием Фурье
Sa(f) = Ж,(т)]:
оо °° h2
Ss(f) = h?006(J) + ^0[5(/ + m/c) + S(f - m/c)] + -^fcS„(/)+
m=l k~l
oooo^2
+ 5353 w. + + (25.19)
m=l
где
/cd
R*(T)e-i2-/TdT
’C*3
Первое слагаемое соответствует постоянной составляющей на выходе НЭ, следу-
ющая группа слагаемых представляет собой совокупность импульсов, расположен-
ных на частотах ±т/С1 и соответствует периодическим составляющим отклика (что
I обусловлено взаимодействием сигнала с самим собой), остальные слагаемые опре
Деляют выходной шум
i о
Заметим, что приведенные соотношения справедливы для произволь-
j Пых нелинейностей «/(к) и переходной функции /(w), которые входят в
выражения для коэффициентов
I В частности, когда на вход НЭ воздействует лишь гауссовский шум с
нулевым средним значением, формула КФ (25.12) принимает вид
(25.20)
fc=o
где
1 [ . (<т?го?\
dki =2riJc ^Wj^Wi еХр ( ^2^ / dWj’ 3 = 112' (25 21)
При стационарном случайном процессе на входе, когда Rn(ti,t-2) =
= Rn(T) и Ф.-1 = Фь2 = dfc, следует формула прямого метода
П
ад (25-22)
п=0
где
СП — —7= [ д(ах)е~х f2Hen(x)dx, (25.23)
VZTT У —оо
где Неп(х) — полином Эрмита.
Подставляя в сп значение нелинейности д(х~), которое выражается
через переходную функцию f(iv) НЭ
£'('7г:)- 7- [ f(ivyoxvdv,
Jc
получим
сп = 2^ У f(iv)In(v)dv,
где
1 Г00 „2 ( — 1\п Г00 J’1 / _ а\
I„(v) = / е— Hen(u)e'™vdu = / -1- [ е~Ь ) ^dv.
Лоо J^cod‘un V )
Используя теорему о дифференцировании в теории преобразования
Фурье, найдем
/n=(-l)n(-i^)"/0(v),
При вычислении интеграла 1о(у) используется формула преобразова
ния Фурье. В результате выражение для коэффициента сп, не зависящее
от полиномов Эрмита, имеет вид
сп f vnf(tv)e-v2aQ^dv (25 24)
2тг Jc
С учетом равенства w — iv, q- = ad^ отсюда следует формула (25 21)
По (25 20) при этих условиях и условии стационарности СП с учетов
равенства /?.п(т) = cr2p(c:) получим (25.22).
Лекция 26
Анализ нелинейных систем методом
характеристических функций
(примеры)
Пример 26.1 Непосредственным вычислением контурного интеграла пока-
зать что
1 /'<+* Г“Г(1/ + 1)1 х (ах1' при х > О
2^/ I W-+1 Je (/W=io при^о,
(26.1)
где е > О; а — действительное число, ь — действительное неотрицательное чи-
сло Г(.т) — гамма-функция.
Решение. Согласно лемме Жордана получаем
“r(" + 1)c^rfw =
^±21e^dw
wl'+1
при х > О,
при х О.
Здесь контур С выбирается слева от прямой w = и + и' при и = е > О и охватывает
полюс порядка v -f- 1 в начале координат
По теореме о вычетах
[ eIW Г егю 1 . 1 d" Г exw 1
/ 7 dw = 2tt1Rcs — ;0 — 2я1—г Ьт — w + ———
/ I1 ] ь! w—о dw1' L w,'+1 J
„ - 1 , 2Й
— 2tti—-------- urn —-е — —----------х -
Г(1/ 4-1) tu—о dw1' Г(1/4-1)
Отсюда приходим к формуле (26.1).
Пример 26.2. Пусть воздействие на нелинейное устройство имеет вид
®(t) = s(i) + n(t),
где -s(t) и n(t) — выборочные функции независимых действительных гауссовских про-
Цессов с нулевыми математическими ожиданиями и с дисперсиями, равными соот-
ветственно a2(st} и а2(гц}. Показать, что корреляционная функция отклика устрой-
ства может быть пердставлена в виде v
оо оо
Ry(h,t2) - У У 12)^(41,12). (26.2)
к=0 пг=О
гДе коэффициенты Ь^т(1г} равны
/»km(lr)= A? / J (w)wfc+,n ехр ( ) dw. (26.3)
Здесь /(ш) — переходная функция нелинейного устройства,
<7^ = a2(sr) — a2(nr), (sr = s(tr)> nr — n(t,)).
Решение Корреляционная функция 7?s,(ti,t2) отклика нелинейного устройства
L
234
Лекция 26
имеет вид (25.9)
f(w2)6x(wi ,W2) dw2-
(26.5)
^(<1’t2) (^ip
По условию задачи входное воздействие x(t{) = xi = s(ti) + n(t{) = s, + «', где
и n, (t - 1,2) — независимые гауссовские случайные величины, поэтому
От (™1 > w2) — Os(wi, w2) - On(wi, w2).
(26.5)
где
6s(wi,W2) = exp
При
этом
' 2 2
anlWI
+ 2Rn(tl,t2)-WlW2
' 2 2
4" 2/Ja:(ti, t-2)wl W2
(26.6)
где aj = 4- a2j; <т2 — a?2 +an2: Яж(41Л2) = ЯД*1>*2) + Кп(<1><2)-
Используя разложение экспоненты
exp[R(ti,t2hui«>2] = 2*3 R (fc]’ 2^wiw2
fc=O
с учетом (26 4) и (26.6) найдем
exp
I °2W2
eXP( "Г"
X
R*(tl. R^(ti,t2)u>Y‘w^1
----------------------------------аи>2 =
fc=O 771—0
fc!
fc=0 m=0
fc!m!
, t2}R~(tl, fe)>
где
/(w)w*f+Tn exp
2w2\
---- | dw, t = 1,2,
2 J
что соответствует формулам (26.2), (26.3).
Пример 26.3. Воздействие на нелинейное устройство имеет вид
= cos(pf 4- 0) 4- Л cos(qt 4- V*)» (2^ )
где |g _ р| pt 0 1л tp — независимые случайные величины, каждая из которых
равномерно распределена на интервале [0,2тг); А — постоянная Показать, что кор
реляционная функция отклика устройства может быть представлена в виде
оо оо
Ла(т)= em^k cos ягрг cos kqr, (26.8)
m=0 fc=0
где Em и в* — числа Неймана; коэффициент
3 . [ f(w)Irn(w)Ik(wA')dw. (
2ят
Диализ
нелинейных систем
235
Здесь /(-ш) переходная функция нелинейного устройства; /m(iu) — модифици-
рованная функция Бесселя первого рода.
решение Воспользуемся представлением корреляционной функции в виде
(26.4). причем в данном случае характеристическая функция ^(шт.тиз) из-за не-
зависимости слагаемых имеет вид
Sxfwi.Wi) = ei(TUi,w2)e2(wi,W2), (26.10)
где
61 (wiW2) = JS{exp[wi cos(p£ + 0) + W2 cos(p(t — r) -f- 6)]};
62 (W1W2 ) — £{exp[wi A cos(<ji + <p) + W2 A cos(p(t — r) + <p)]}.
Раскладывая экспоненту в ряд (25.13) по функциям Бесселя, получим
СО оо
61 (wi , w2) = SmCfe 1т.(иц )£?{cos[m(pt + 6)] cos[fc(p(t - т) + 6) }.
m=0 fe=0
После усреденения найдем
Г О при к ф т;
£{cos[m(pt+6)]co8[fc(p(t-T) + 6)]}=| lcosmpr npMfc = m. (26.11)
Учитывая, что ет — ек = 2 при к, т > О. придем к равенству
оо
0i(wi,w2) = У em/т(toi)/m(wz) cosmp-r.
га—О
Аналогично найдем
со
#2 (^1 > W2 ) = Zfc (Л-wi) Ik (Aw2 ) cos kqr. (26.12)
fc=o
Поэтому из (26.4) с учетом соотношений (26.10) и (26.11) получим корреляцион-
ную функцию отклика нелинейного устройства с переходной функцией f(w):
(2тг1)2
X
га—О fc=0
KlTn(w2)Ik(Awi)If;(Aw2) cosmpT-coskqr = У У cosmpi
m—О к О
гДе Коэффициенты вычисляются по формуле (26.9).
Пример 26.4. Пусть на вход полосового усилителя с характеристикой
при x > О,
при х = О,
при х < О.
f ах”
= S °
l-af-T)1'
(26.13)
®ОзДействует аддитивная смесь x(t) = s(t) 4- n(t) статистически независимых ампли-
ПДно-модулированного сигнала
s(t) = P(t) cos6(t) = P(t) cos(wct + <p)
И r*r
tTauMOHapHoro узкополосного гауссовского шума
n(t) = V(i) cos[wct — V'(t)] -
Показать, что на выходе усилителя шумовые составляющие корреляционной функ-
236
Лекция 26
ции имеют вид
о о , I -V МД£Ь~) cosier + g(r)]
где k — нечетное число,
ул у> (fc+ l)Rmfc(i1.£2)K^(-r)cos[wCT + e(T)]
•Х-"’ ”’’ (t±^±2Yf4^±lW=T-
(26.14)
(26.15)
где (m 4-1) — нечетное число.
В (26.14) и (26.15)
W = Л/В1(т) + В?5(т);
Rmk(tiih) =
В (26.16)
ЯДт) = 2 f S„(/)cos2k(/ - fc)rdf,
Jo
S„(/)sin2er(/ - fc)rdf.
(26.16)
(26.17)
где fc — центральная частота шумового энергетического спектра Sn(J) = Зг[Лп(т)]:
J^i(r) — /?!/(т) cos[q/ct 4- 0(^)] — корреляционная функция шума
В (26.17)
h>nfc(tr)= ’ / /(w)wfc7m(wPr)exp
2ттт К
dw,
где Лп(гс) — модифицированная функция Бесселя; Рг = P(tr) — значение огибаю-
щей входного сигнала; аг — <r[n(fr)] = <т(пг ) - у/Е(п^-
Решение Воспользуемся общим видом корреляционной функции Ry(t\.tz),
определяемой (26.4).
Двумерная характеристическая функция 0x(wj,W2) в данном случае имеет вид
(265)
₽i(wi,w2) — 0s(wi,W2)6n(wi,W2)1 (26.18)
где 6s(wi, W2) = E{exp[wiPi cos(wcti + Si) + ш2Р2 cos(wct2 + б2)]}.
Раскладывая экспоненту в ряд (25.12) и используя (26.12), получим
ОО
6S (wj , W2 )= emjE[/m(wiFi)/m(w2F2)] cosmu/cT. (26.19)
771 — 0
Для гауссовского случайного процесса
6n{wx,w2) = exp-^|[<TjWj + 2R„(t)w]W2 + ct2w2])-
Раскладывая экспоненту в степенной ряд, найдем
Л falwl +<72w24 V-1 Rn(T) fc fc 90)
®п(ш], Wz) = exp I -----------j —W1W2 - (26 "
' ' fc=o
В результате корреляционная функция отклика согласно (26 4) с учетом (26.1^)
237
Анализ нелинейных систем
И6.20) примет вид
оо . оо р z 2 2 \
fc=O m=0 JC x 7
Г / 2 2 \
x I f(w2)w^ exp I -2— ] E[7m(™iPi)7m(w2P2)]cosmwcr dw2 =
Jc \ 2 7
= 57 57 ^Elh’nk(ti)hmk(t2)]R^(T)cos-mMcT,
fc=O 771=0
ГПе f fa^X
<^{1,)=^- I f(w)wkIm(wPi)exp I * ) dw. (26.21)
12™Jc X 2 /
Используя (26 17), получим
Ку(«1.М = 57 57 ^R^fe(h. <?) Дп(т) cosmu,cT, (26.22)
1771=0 k=0
Произведем разбиение корреляционной функции Pj/(ti,t2) на составляющие:
Py(tl, = ^Хв(*Ь ^2) + Rnx.n(tl * i?) + ^$хп(й j ^2)? (26.23)
где
oo °° 1
R3Xl(tl,t2) = 57£,"ДтО(<д 32)c°S»nwcT; Rnx»(tl.t2) — 52-'Rofc(tl t2)fin(T):
771=0 k=l
co co
RsXn(tl,t2)-2 Rmk(h, ti)Rn(t) cosmcucr.
k—1 771=1
По условию задачи требуется найти вид (s х п)- и (n X «^-составляющих
Предварительно упростим их вид С этой целью рассмотрим коэффициенты йтк с
Учетом характеристики усилителя д(х) (26.13); ввиду ее нечетности имеем f—(w) =
= — /+(—w). Поэтому согласно равенству
/(w) = f+ (w) + f-(w), (26.24)
^Раведливому для двухполупериодных (нечетных) устройств, и формуле (26.21)
п°Лучим
n -
2%i
ехр
2 9 X
----- j WKIm.(^Pt) dw+
2?ri
/ a2w2
expl 2-
Wk Im (wPi ) dw =
exp
2W2
2
Wk ImfwPi) dw~
1 [ I 02W2
-^Jc+Mw}^p{—
3«b ПослеДнем случае использовалось, во-первых, тоа что перемена контура С
"Элентна перестановке пределов интегрирования, и во-вторых, свойство бессе-
238
Лекция 26
левой функции
Из последнего выражения для вытекает
к = f ПРИ нечетном т + к.
I О при четном т + к.
(26.25)
(26.26)
-
Птк —
Следовательно0 при вычислении (n X п)-составляющей
(26 23) суммирование происходит по нечетным к, а в случае
(s х п)-составляющей — по нечетным т 4- к.
Коэффициент в (26.26) определяется выражением
r2W2 \ JL
~— I du/
ехр
(26.27)
и соответствует
гласно (26.24) и (25.7)
коэффициенту однополупериодному устройству iz-й степени. Со-
, t , , , аГ(а+1)
/+(w) = ¥>(w) = ——
поэтому из (26.27) следует
(о) _ аГ(а+ 1)
тпк
.2.„2
2tti
Im(wPi)exp
2
d'ID.
Рассматривая интеграл от
2„.2
£?2(^) —
lm(wFt) ехр
2
по контуру, изображенному на и 26.1, придем к равенству [1]
р2 \ т/2
2о?
аГ(г/ 4- 1)
(k v)/21F1
7YI -J- k V
---------------; т
2
2а?
Используя соотношение (26.16), найдем
(26.28)
(26.29)
причем при нечетных к справедливо разложение [20]
(fc-l)/2
cosfc А — \
Jt!
-- cos(fc — 2г)А.
(к — r)!r!2fc—1
(26.30)
г=0
Учитывая, что усилитель полосовой, пропускающий лишь первую гармонику в
(26.29) и (26.30) к — 2г — 1, или г — (к — 1)/2. Поэтому из (26.29) следует
Н£(т) к\ cos[u/cr + в(т)]
2fc-l (к + IX (к - 1\
Rkn
(26.31)
В результате из (26.23) с учетом (26.31) получим выражение (26.14) для (и х п)
составляющей корреляционной функции
Днализ нелинейных систем
239
Учитывая полосовое свойство усилителя и рассматривая спектральную плотность,
соответствующую Hsxn(ti,i2). заметим, что составляющие на частоте /с отсутству-
ют если т > 1’4-1 Поэтому во внутренней сумме (n х s)-составляющей (26 23)
суммирование можно осуществлять по т от 1 до к 4- 1 Отсюда
ос к 4-1
^3 Хп (h,t2) - 2 ЕЕ (26.32)
к=1 пг=1
Учтем равенства (26.29) и (26.30), однако при этом в (26.30) следует оставить
лишь те слагаемые, которые после подстановке их в (26.32) сохраняют первую гар-
монику на частоте /с.
Из этого условия вычисляются номер (номера) слагаемых т, остающихся в сумме
(26.30). Чтобы вычислить этот номер, рассмотрим произведение
cos{(fc — 2r)[aicT + б(т)]} cosc<7ct = — {cos[(fc — 2т — т)о/ст-|-
+ (fc — 2т)б(т)] + cos[(/: — 2т + этг)ыст + (fc — 2т)0(т)]}.
Отсюда следует, что номера слагаемых (26.30) т = tjf2 находятся из условий
к — т — 1 к + т + 1
к 2tj — т - 1: т, = ----------: к — Т1 — -----------;
2 2
к -f- т — 1 к — т + 1
к — 2т2 + т = 1; т2 j= -------------; к — т2 = ------------
Поэтому из (26.32) получим
оо к 4-1
Rsxn(tl> t2) = Е£ 21 > t2)H£(r)Mfcm COS[WCT + в(т)],
к— 1
к + m — нечетное, (26.33)
где
11
I Преобразуем выражение для коэффицента Мкт'-
где
Мкт
ni±f)+Hl±i)=a;+z = Jt+1,
Г(х)
Та* Как X = (к т 4- 1)/2; z = (к 4- т 4- 1)/2
В результате из (26 33) следует (26.26).
Пример 26.5. Пусть воздействие на двухполупериодное (нечетное) устройство
^й степени является суммой амплитудно-модулированного синусоидального сигна
240
Лекция %
ла и стационарного узкополосного дейтвительного гаусовского шума. Показать, ЧТо
корреляционная функция отклика устройства имеет вид
ОО оо
ftn(T)cos(mwcT)
т=0 k=0
при нечетных т + к, (26.34)
где ет — множитель Неймана; R„(r) — корреляционная функция шума на входе
шс — несущая частота сигнала; коэффициенты определяются равенством
= ~~+ ^/mfwP^exp Г ’ dw. (26.35)
Z7TI / \ 2 /
(контур С± — это линия w = з: + гу).
Решение. В общем случае для корреляционной функции отклика двухполупери-
одного (нечетного) устройства м-й степени получено выражение (26.35), в котором
^mfc(tli*2) = £[/imfc(ii)>^mfc(ML где определяется равенством (26.35). Ис-
пользуя это равенство, а также равенство (26.26), из (26.22) найдем соотношение
(26.34) в котором /^*(0 вычисляется по формуле (26.29). Из (26.26) следует, что
суммирование в (26.34) производится по нечетным т + к
Пример 26.6. Пусть за двухполупериодным (нечетным) устройством м и степени
(см. пример 26.5) следует идеальный полосовой фильтр, настроенный на частоту
/с и образующий совместно с нелинейным устройством нелинейный усилитель н-й
степени. Показать, что ОСШ на входе s и на выходе g связаны равенством
g(t,) = C0(i/)s(fi) при s(t.) <С 1, (26.36)
где постоянная
и, следовательно, ОСШ на выходе г нелинейного усилителя м-й степени при малом
ОСШ s на входе и всех значениях и прямо пропорционально этому отношению.
Решение. Обозначим ОСШ на входе усилителя через s, а ОСШ на выходе —
через д. При этом сразу получим s — Е(Р?)/2сг2.
Чтобы вычислить ОСШ д на выходе усилителя, рассмотрим отдельно сигнальную
и шумовую составляющие корреляционной функции -Rj/fti, £2) отклика усилителя.
Учитывая равенство (26.26), вычислим мощность сигнала Рс на выходе усилителя
из выражения для /?,х«(*1»*2) (26.23);
ОО
= 4 ^2£T'>£'[/lmo(Zl)/lmo(Z2)]cOS’>TWcT, (26 3S)
m=0
где согласно (26.28)
Сигнальную мощность Рс на выходе полосового усилителя найдем из (26.38) лри
условии т = 1 (тп/с = /с); <1 = £1 = 2; Рс = 8£(Л.2О).
Диализ нелинейных систем
241
Используя (26.39), при т = 1 получим
2а2Г2(1 + |/)<721' Г*?
Тс = -------Z. . х--
2Т2
2а? F1
р?
----;2;----—
2 2сг2
(26140)
Отсюда при s < 1 с учетом соотношения
получим
а2Г2(|/+1)
2'
(26.41)
(26.42)
, Шумовая составляющая на выходе усилителя определяется суммой xn(ti, *2) +
+/lnxn(iij *2). причем каждая из корреляционных функций вычисляется по (26.23)
с учетом того, что в соответствии с (26.26)
Hmfc(h,i2) =
где годится по (26.28).
Таким образом, общая мощность шума на выходе усилителя No = Nr.xr.
Мощность составляющей Nnxn с учетом (26.14) и равенства 7?*(0) = сг2к
2к
Nnx„ = Rnxn(«i,i2) -4Уе[(/$)21----------
2к~г
fc=l
где находится из (26.28) при т = 0:
аГ(|/+ 1)2<* "'V2 „ (k-v Pf
„L к-и\ i.,1 1\ 2 ,1’ 2а2
М -
П0к ~
, (А: — нечетное),
(26.43)
(26 44)
Поскольку рассматривается случай, когда ОСШ на входе s < 1, то используя
(26.40) при т = 0, из (26.42) найдем
Г(1 + v)2<fc—/)/2
д(°)
пок
к — v
2
В результате из (26.43) следует
а2<г2"
Nnxn—
Г2
ч_1м-
(26.45)
гДе C0(i/) определяется равенством (26.36).
Вычислим мощность шумовой составляющей Nsxn, исходя из вида корреляцион-
функции RSXn(tj, t2)- При t j = t2 с учетом Я£(0) — <r2fc из (26.15) получим
(Н1)4/<)г]Л
Ной
2
к — т + 1
2
!2fc—1
где
при нечетном к + т,
находится из (26.28).
(26 46)
242
Лекция S6
Поскольку множитель ^[(^m*)2] пропорционален величине
jE(F2m)/(2<r2)m, а по условию s = Е(Р?)/(2<т2) «С 1, то доминирующим слагаемым
в сумме оказывается слагаемое при т = 1. Поэтому из (26.46) при т = 1 найдем
а2Г2(|/ + 1)дсг2-' fc + 1
2-' МЧЧ (!)•(•Ч
при четном к,
Сравнивая по мощности составляющие Nnxn (26.45) и Nsxn (26.46), получим,
что при s < 1 7VSXn «С А’пхп- Поэтому искомое ОСШ д на выходе усилителя с
учетом (26 42) и (26 46) примет вид
5 - - Со (м)«,
/’ПХП
где Со (и) определяется согласно (26.36).
Пример 26.7. Показать, что для нелинейного усилителя м-й степени, описанного
в примере 26.6, справедливо соотношение
g(t,) = Ko(^)s(ii) при s(i.) 1, (2G.47)
где постоянная
2 E(P?V)
~ 1 + м2 E(P?)E(P2v~2)'
и, следовательно, ОСШ д на выходе нелинейного устройства м и степени при боль
шом ОСШ s на входе и при всех значениях м прямо пропорционально этому от-
ношению
Решение. В данной задаче рассматривается случай большого ОСШ s на вхо-
де усилителя, когда s 1
Мощность сигнальной составляющей при произвольном з определяется равен-
ством (26.40). При s Э» 1 воспользуемся асимптотическим представлением выро-
жденной гипергеометрической функции
1Г1(а,/3;-х) = прио:»1. (26.48)
Г(«) х
В результате преобразований найдем
Поэтому из (26.39) вытекает
_ В(Р?-) 9)
Мощность шума на выходе усилителя
No = Nnxn + Nnx3- (26S0)
Первое слагаемое JVnXri определяется выражением (26.43) с учетом (26.44)
диализ нелинейных систем
243
Учитывая асимптотическое разложение вырожденной гипергеометирческой функ-
ции (26 48) и условие s — jE(P2)/(2ct2) 3» 1, заметим, что доминирующим в (26.43)
будет пеРвое слагаемое, соответствующее минимальному значению к — 1, так как
В результате при s >> 1
N„xn « 4сг2£?[(/1(001))2] =
а2Г2(р + 1)<т2р Е(Р^-2)
2- 1Г4 е-ЧЛ2)s
(26.51)
учитывая что при s Э* 1
^[(4т’)21
а2Г2(р + 1)а2-+2 E(P?V~2)
2,+1г4 (2а2)1'"1
Вторая составляющая NnXs мощности шума (26.50) в общем случае определя-
ется выражением (26.46).
Снова, используя асимптотическое разложение (26.48), справедливое при s 1,
получим
a^^ + lj^-^EfP2-'-2^2)^
тк ~ 4Г2 (1 m ~ 2и-к (т fe+^2 Г2 (m- fc + iz)
Поэтому в сумме (26.46) будет доминировать слагаемое, соответствующее значе-
нию /с = 1 и следовательно, m = 2 (так как т + к — нечетное и тп к + I) В
результате из (26 46) следует при к = 1, тп = 2
№хп^4Р[(К(2°1))2]<г2.
Используя (26.51) при к — 1, т = 2, получим
а2Г2(1/ + l)o2t,(i/ - l)2E(P?v~2) ,
(ф) (41)>-(,?)'
(26.52)
Сравнивая интенсивность составляющих NnXn (26.51) и Naxn (26.52), заметим
ИХ соизмеримость. Общая мощность шума находится в результате суммирования
(26.50). После преобразований получим
N0 - NnXn 4* —
g2r2(i/ + 1)гг2>2 + 1)E(P2v 2) t,_1
2^-2Г4 (^il) (n- ijV'-^pf)
И окончательно после деления q = Pc/Nq, где Fc определяется из (26.49), при
Чем к равенству (26 47).
Лекция 27
Нелинейные преобразования
случайных сигналов. Метод Прайса
Исследование прохождения случайных сигналов через нелинейные си-
стемы., как было уже показано, представляет собой в общем случае труд
ную задачу Однако, если входной сигнал является гауссовским слу-
чайным процессом, возможны определенные упрощения. В частности,
метод Прайса [23]* позволяет находить непосредственную зависимость
корреляционных характеристик выходного сигнала от соответствующих
корреляционных характеристик входного сигнала, не используя громозд-
ких преобразований ПРВ
Пусть на вход некоторого НЭ поступает реализация x(t) СП X(t)
причем:
1) X(t) представляет собой стационарный гауссовский случайный про-
цесс с нулевым средним и единичной дисперсией, так что совместная
ПРВ имеет вид
lV(xi, х2) =
1 Г-xf + гхгх2 - х?
-----у ехр !—------------------— -=
2тгх/1 — х2 2(1 — г2)
(27.1)
где Xi — x(ti); х2 = x(t2); г = r(t2 — ti) — г(т) — коэффициент
корреляции;
2) нелинейная зависимость отклика у от входного воздействия
у = <?(х) является однозначной и удовлетворяет необходимым услови-
ям для того, чтобы существовали прямое и обратное преобразования
Лапласа (25.1). (25.2).
Будем интересоваться зависимостью КФ Ry{ti,t2) отклика от коэф-
фициента корреляции г По определению,
~ E(XtlXt:s) - [ f g(xi)g(x2)W(xi,x2)dxldx2,
J—co J — oo
(27.2)
Изменяя порядок интегрирования, с учетом (25.1) получим
Ду(<1,<г) = ,9\2 ^2 / / (27-3)
Jc± Jc±
где ^2 означает суммирование по всевозможным комбинациям знаков
+ и —;
* Методу Прайса, кроме [23], посвящены также работы [37 40].
Метод Прайса
245
9(si,s2)= j j e’1X1+’2X:2W(x1,X2)dxidx2 = eyip f1-t2r** *2-.t£? j ;
— co
(27-4)
.— двумерная характеристическая функция СП Х(£)
Не трудно проверить, что дкВ/дгк — {s\S2)kd{si, S2). поэтому из
(27.3) следует, что
^=7^2^ f /[4<7±(^)]Н<7±(^)М^^2)^1^2. (27 5)
5г* (2тп)2 J J
с±
Поскольку преобразование Лапласа от dkg(x')/dxk есть sfc/(s), то,
снова изменяя порядок интегрирования, из (27 5) получим
= У У У g(k\x1)g(k\x2)W(x1,X2)dxidx2-
ОО
2 I-------2// g(fc)(^i)g(fc)(^)exp [~Ж1 ti™1*)"*2 ^1^2,
2тгу1 — j J A1 r J
— оо
(27.6)
где д(к\х) — к-я производная функции д(х\
Как правило, коэффициент корреляции входного сигнала г =
= r(t2 — /1) = г(т) является известным Равенство (27.6) позволяет
получить и решить ДУ к-го порядка, в результате чего определяется
явная зависимость Пу(т) = 'U[r(7-)] для важнейшей статистической ха-
рактеристики выходного сигнала. Это особенно просто сделать, если
у = <?(х) представляет собой кусочно-полиномиальную функцию. То-
гда для достаточно большого к имеет место суперпозиция 6-функций
различных порядков, и интеграл в (27.6) легко бере ся
Очевидно, имеются нелинейности, для которых зависимость Ryfr') не
выражается через элементарные функции и, следовательно ДУ (27.6)
невозможно проинтегрировать ни при каком к. В подобной ситуации
необходимо прибегать к разложению искомой функции в ряд Маклорена:
где
(27.7)
(27-8)
и взять столько членов ряда, сколько необходимо для достижения за-
данной точности.
246
Лекция 27
Пример 27.1. Рассмотрим устройство, называемое не-
четным квантователем (рис. 27.1) и определим зависимость
Ry{r)z
где к — целое число; N положительное четное целое
число=
Воспользуемся формулой (27.7). Очевидно,
2
= О в силу нечетности ^(а;).
может быть представлена в виде суперпозиции 6-функций
•=п/2
i=—n/2
Поэтому
где Ф(а?) — интеграл Лапласа (5 6)
Аналогично
п/2
</2)(о:) = = 6'(х - г)
«=—п/2
— суперпозиция 6-функций второго порядка, поэтому
и тд.
Результат запишем в виде
Н„(т)(г)
ф(*)(0
В заключение отметим, что исходную задачу можно было бы решить
в более общей постановке, рассматривая не одно, а два нелинейны*
устройства, на вход которых воздействует гауссовский СП. При этоЫ
247
Метод Прайса
--------
снова вводятся преобразования Лапласа (для простоты односторонние):
<71(*)=Л/ fi^yXdS. g2(x) = ± [ f2(sy*ds. (27.9)
где
f 9i(x)e sx dx,
о
( </2(ж)е ,х dx;
о
Ст и Сг — контуры интегрирования.
Тогда для взаимной КФ процессов Y(t) и Z(t) получено соотноше-
ние, обобщающее (26.6):
(27.10)
СО
1 f [ Wf ч (к), Ч [-х'{ + 2гх1х2-х%1
= 2^1 -r J J ’ (’» -----2[Г~^)------- ‘l’:idX2
— ОО
Приложение метода Прайса с позиций
кумулянтного анализа. Случай
произвольного входного процесса
Важные с практической точки зрения соотношения (27.6) и (27.10),
выведенные в предыдущем разделе, можно получить совершенно иным
путем, отказавшись от понятия случайного процесса и рассматривая об-
щую задачу о нелинейном преобразовании Т) — <7(£1,£2,£з, • • -) много-
мерной случайной величины £ = (£i, xi2,..-,£п). Для простоты возь-
мем двумерную совокупность £ = (£i,£2) (не обязательно гауссовскую)
и применим к ней основные положения кумулянтного анализа
Как известно (см. (2.20), (2.21)), кумулянтами (семиинвариантами)
Распределения называются коэффициенты разложения в ряд Маклорена
Логарифма характеристической функции
ОО оо
(2711)
п—0 т— О
гДе
dn+"‘ln0(si,s2)
Хт1ГП fKnfKn
oslos2 „_,2=0
Кумулянт двумерного распределения порядка п + тп
Первые пять кумулянтов имеют ясный физический смысл. Жщ и Жо1
Это математические ожидания маргинальных распределений, х2о и
g°2 их дисперсии, а 31ц — ковариация случайных величин и £2.
CJ1H ряд (27.11) сходится в соответствующей области, то распределение
248
Лекция
вероятностей И^ЖцЖг) однозначно определяется набором кумулянтов;
РИ(жьж2) = [ [ J_e'-^exp
Jct Jc3 (2tti)2
sl«2
dxidx2
(27 12)
Пусть теперь i) = <7(£1,£г) — некоторое нелинейное преобразование
случайных величин fi и f2. Очевидно,
J7l,j
5(ж1,Ж2)И/(ж1,ж2)с/ж1 dx2.
(27.13)
Дифференцируя (27.13) по какому-либо из первых кумулянтов, ска
жем по аец, с учетом (27.12) получим
дкпц
Ml
=/.«) {Д Д “Р
—оо 4
г л л I j j [ [ 1 . (xi, »
х($1$2) d$i d$2 > dxi dx2 = J J g(xi,x2)—Qxkdxk—~ ^X1 ^2*
—00 1 2
(27.14)
Многократное интегрирование по частям дает
сю
поскольку плотность распределения вероятностей и все ее производные
обращаются в нуль на границах интегрирования Если теперь положить
ff(€i,Cz) = Р1(Ъ)32(^г) и считать W(xltx2) плотностью распределения
вида (27.1), то мы придем к формуле (27.10), поскольку при единичной
дисперсии fi и f2 справедливо.
жц — R( — f(/i)f(Z2) — г,
где Rf — R((t2 — Zi) — КФ входного СП.
Таким образом получены обобщения формул (27.7) и (27.10): они
справедливы для любых входных случайных процессов, если под г по
нимать КФ входного СП. Однако из всех распределений вероятностей
только гауссовское явно выражается через кумулянты жю, ж01, ж2о, Ж02
и Жц (остальные равны нулю), поэтому только при гауссовском входном
сигнале f(i) возможны существенные упрощения при вычислениях.
Пример 27.2. Пусть д(х) = а?. При условии (27.1) найти КФ отлика НЭ
квадратичного детектора.
Метод Прайса
249
Решение g(2) — константа: </2) = 2;
1
дт2 2тт \/1 — т2
— OO
—x2 + 2rxi X2 — a?2
2(1 — r2)
поскольку в скобках стоит вероятность достоверного события {—оо < {1 < оо} П
{-оо < & < оо}.
Ясно, что R„ = 2т2 + Cjr + со-
Начальные условия
в силу нечетности подынтегральной функции.
Так как с] = О и q; = 1, то Rj = 1 + 2т2 (ср. с формулой (21.10)).
Пример 27.3. Пусть д(х) = аоеаз:. При условии (27.1) найти КФ отклика НЭ.
Решение. Поскольку д(х) инвариантная функция относительно дифферен-
цирования
Л*+М*) = Xdkg(x)
dxk+* dx^
то Ry(r) — тоже инвариантная по дифференцированию функция:
Постоянная с легко определяется при г — О:
„ А:г —гс2 /2 т
аое е 1 ах
e“(^-A)2/2d(2;_ А)
2 А-
0
Таким образом, с = аде*2 и Ry = a2e*2'1+r\
Лекция 28
Метод статистической линеаризации
Статистическая линеаризация
безынерционных НЭ
Определение 1. Методом статистической линеаризации (МСЛ)
называют метод замены истинной зависимости между входным и вы
ходным случайными сигналами безынерционного НЭ такой зависимо-
стью (линейной относительно центрированного СП) которая в стати
стическом смысле является эквивалентной исходной нелинейной зави-
симости
Определение 2. Звено, обладающее такой приближенной зависи
мостью между входным и выходным СП, называют эквивалентным дан
ному нелинейному звену (НЭ)
Итак, пусть задан НЭ (рис. 28.1) и X = X — тпх; Y — Y — ту —
центрированные СП
Закон преобразования в НЭ
У = fl(®)- (28.1)
Для эквивалентного звена (ЭЗ) (рис. 28.2) зависимость (28.1) заме-
няется зависимостью вида
Z = д0 + kiX (28-2)
Остается найти характеристики до и ki ЭЗ
Величина до представляет собой математическое ожидание выходно-
го сигнала ЭЗ, и эту величину до называют статистической средней
характеристикой ЭЗ.
Величину до выбирают так, чтобы средние значения выходных сиг-
налов ЭЗ и НЭ были равны
до = mz - ту. (28 3)
X — тпх + X
НЭ у = д(х)
Рис. 28.1
X = тх + X
ЭЗ до,
Z — до + kiX
Рис. 28.2
Метод статистической линеаризации 251
Для НЭ с нечетными характеристиками [когда <?( -ж) = — «/(ж)] стати-
стический параметр д0 удобно записать в виде
до = котх. (28.4)
Коэффициент fc0 называют статистическим коэффициентом усиления
ЭЗ по средней составляющей.
По (28 3) и (28.4) следует
к0=^. (28 5)
ТПх
Определение 3 Характеристику кг ЭЗ называют статистическим
коэффициентом усиления ЭЗ по случайной (флуктуационной) соста-
вляющей.
Коэффициент fc] выбирают двумя способами.
Первый способ — выбор из условия равенства дисперсий выходных
сигналов ЭЗ и НЭ
Dy - Dz = k2DT.
Тогда fci = ±сту/<тх, причем
кг > 0 при dff(x)/dxU=m3C > 0;
кг < 0 при dg{x)fdx\x_m:c < 0.
Второй способ — когда кг выбирают из условия минимума среднего
квадрата ошибки при замене нелинейной зависимости у — д(х) прибли-
женной зависимостью (28 2). Это условие —
Е[(У - У)2] - min . (28.6)
Подставим в (28 6) Z — до + кгх — ту + к\£ и получим
Д(У -ту- kiX)2] = Ь[(У - АцХ)2] =
= ДУ2) - 2kiE(XY) + fc2 ДХ2) -= Dy - 2кгКху + k2Dx = min .
Возьмем производную по кг и приравняем ее нулю Получим
-2Кху+2кгОх = 0.
Отсюда
ki=KXy/Dx. (28 7)
Все полученные формулы справедливы при известном законе ИД)
ПРВ входного СП) Тогда
до — rriy — f yW(y)dy= f g(x)W(x)dx; (28.8)
J—оо J—<х>
1 /*°°
fc0 =— / g(x)W(x)dx-, (28.9)
У—оо
252
Лекция
тх ~ коТПх
Z - кгХ
2/ — komx -к к^Х
Рис. 28.3
«,<>=
my ~ i—
ГТ
rnl-
,1 - - 1
kl= E(XY) = -
ОО
(х — mx)g(x)dx.
(28 10)
(28.11)
Замечание к формуле (28 11)
E(XY) = £{Х[<?(х) - mJ} = E[Xff(x)] - myE(X) =
х — mx')g(x')W(x)dx.
Для нелинейного звена с нечетной характеристикой ЭЗ можно пред-
ставить как усилительное звено с двумя каналами' один для средней
составляющей тпх, другой для флуктуационной составляющей X вход
ного сигнала данного НЭ (рис. 28.3).
Замечание. Обычно ПРВ входного СП IV(x) неизвестна и в качестве
w(x) обычно применяется гауссовская ПРВ
IV(x) - N(mx, ах) = 1 е-(^-^х)2/2а-
СГх-у/Ъе
(2)
При этом можно найти связь между до и . Возьмем производную
= — Г д(х)—^=е m^l2a^dx -
dmx dmx сху/7.те
= Г g(x) =
J-oo сг^у/2тгах
(28.12)
1 f°° 1
~2 / g(x)(x - mx)W{x)dx - -^-E[sr(x)X].
st- J — i-VT CT'r
Получим величину
(2) _ dg0
dmx
(28-13)
Таким образом, рассмотрен стационарный случаи МСЛ.
статистической линеаризации
Нестационарный случай МСЛ
253
(28.14)
g этом случае рассматривается ДУ нелинейной системы в целом (НЭ
й фильтр) Пусть это ДУ первого порядка
dx Г X г^х
37 + ~ ”(0,
at
где п(0 — гауссовский БШ его КФ Rn — (2/г)6(1.2 — й)-
По (28.14) сразу получаем систему ДУ относительно среднего зна-
чения гп~ и дисперсии Dx-
dmx
— = -2 (г - т,)<;(х)И'(г, I)* + - = -2Е[Х9(Х)] + - =
I dt r r
- —2[sciz(xc) - mrj(i)] + 2/r. (28.15)
Здесь снова используется величина 2?[Xfl(X)] с той разницей, что
fc2 и зависят от времени. Снова принимая приближенно 17(х,i) за
гауссовскую ПРВ и задаваясь видом функции д(х), получаем прибли-
женное ДУ относительно mx(t) и Dx(t).
Рассмотрим стохастическое ДУ в форме
dx —
dWt,
где Wt — стандартный винеровский случайный процесс Найдем урав-
нения относительно математического ожидания и дисперсии случайно-
го процесса xt.
E{dx} = E{ h(x)}dt +
dmx = —E{h(x)} dt +
Поэтому
Получим уравнения относительно дисперсии случайного процесса
*U) Положим /i(x) — х2. Согласно правилу Ито замены переменной в
^Хаотическом дифференциале сложной функции (Приложение 5)
dh = h'xdx + dt.
(28.16)
254 Лекция 28
Поэтому находим
dx'2 = 2хdx + 2| 0) Л = 2ж|Ал(«)Й+У|</И^| + 2</«
Отсюда получим
dx2 = 2хЛ(ж) + — dt + ^-2ж dWt.
Вычисляя математическое ожидание левой и правой частей уравне-
ния найдем
2
dm2 = —2E{xh(x)) dt Ч— dt.
Тогда
= -2ЕМ»)} + 7-
Поскольку D — а2 — тп? — т2, то dD — dm? — 2mxdmx. Отсю-
да следует ДУ
dDx dm2 _ dmx 2 , , ,,
—— - —------2mx—— = —2E{xh(x)} + - + 2mxE{h(x)} =
CLl dv CLl T*
2
= —2E{(x — mx)h(x)} +
r
Следовательно,
= ~2E{(x - mx)h(x)} +
at r
Получен результат (2815)
Пример 28.1. Пусть h(x) — х, найти зависимости mx(t) и Dx(t).
Решение.
- -£-{2:} = -тпх-,
= ~2Е{(х - тх)х} +- = -2[Е(з?) - 2тп2] +- = -2DX +
dt т т т
Таким образом,
dm^ _ . dDx _ on и. 2
’ - — j. — —ZLJX +
at at т
Последнее ДУ является частным случаем ДУ (19.6).
Решения приведенных ДУ имеют вид:
mx(t) = mz(O)e-t;
Dx(t) £^(0) е“2‘ - Дя(0)е-2‘ + - (1 - е“2‘) .
Метод статистической линеаризации
255
Установившееся значение
lim тД!) = О; lim Dx(t) —
t—оо t—*00 T
Анализ ФАП n-ro порядка методом
кумулянтов в нормальном приближении
Рассмотрим систему ФАП zi-ro порядка в предположении что со-
вместная ПРВ переменных состояния системы является гауссовской
Система ДУ, описывающая динамику ФАП n-го порядка имеет вид
dX = [АХ +/г(Х)С]Л-Ь i/2/rCdwj, (28.17)
где X = [®i(i)> ®2(*)> - - • > Ж"(0Г>
'-Bi Во"1 -ВъВё1 В3в^ ВП — 1 Bq 0 '
1 0 0 0 0
А = 0 1 0 0 0
0 0 0 1 0 .
Л(Х) = у(Х) — /?,/? — нормированная частотная расстройка; <?(Х) =
= ?(жп). С = [—Cn-i, — Сп-2, Со]т. Со — Cj — Во
j = ТДП; V - [0>0,...>0,1]T; A,, B3 — ко-
эффициенты фильтра с передаточной функцией F(s) — R(s)/Q{sy,
= ЕГ о QGO = E?=o ВгРп-{; m < n -1.
Пусть функция y(a:) может быть представлена в виде
«/(я) ~ sin (28.18) Jb=l
Используя процедуру нахождения уравнения относительно кумулянт-
Ной функции ШДз, <) (з — [si, з2,. -., ЗпГ) с учетом выражения (28.18)
Получим gyx(s;t)_ „ dt Aawz(s,t) 1STCCTS _ i/3sTC + (28.19) ds r +-sTC^ak _ e*-(—. Jt=i
Из уравнения (28.19) могут быть получены уравнения относительно век
т°ра средних значений М и матрицы дисперсий R векторного случай-
ного процесса Х(<).
= AM - /ЗС + С ~ ; (28.20)
Г *=i
256
Лекция 9g
~ = AR+RAT + -ССТ-С
dt r 21
'dW^fcV;/)
5Vx(0;t)
dsT
e*.(fcV;t)
dWx(-kV;B) dWx(O,t)'
dsT 5sT
e»x(-feV,t)
a^(AV.Z)
ds
dWx(O;t)
ds
e»«(fcV,0
~dVz(-feV; t)
ds
WT(O;t)'
ds
e*’<
JtV;t) I (j?
В случае гауссовского приближения имеем W(s; t) = iM s -
—(l/2)sTRs и уравнения (28.20) примут вид
= AM рС + С У ake~^k^RV sin(fcMT V);
91 Ь
от) О
— = AR+ RAT 4- -ССТ+
ot г
+(RVCT + СVTR) kake-WW2™'' cos(fcM V).
fe=i
В частном случае g(x) — sin х получаем (гц = 1, ат — 0 при т > 1)
= AM - рС + Ce-(1/2>VXRV sin(MT V), (28.21)
dt
= AR + RAT + -CCT 4- (RVC + С V R)e-(1/2)VIRV Cos(M V).
dt r
Определим стационарное решение системы ДУ (28.21)
AM -PC + e-(1/2>vTRVsin(MTV)C = 0; (28.22)
AR + RAT + -CCT + (RVCT + CVTR)e-(1/2)VTRV cos(MTV) - 0.
r
Учитывая выражение для матрицы А, из первого уравнения систе-
мы (28 22) находим
-Ву В^1т1 - В2Во1т2 - ... -
+Cn-i(P - e~Dnf2 sin m„) = °'
mk = -pCn-k-i + Cn_fe_ie-1?’*/2sinmn; Ar = l,n- 1, (28.23)
где mk — к ая компонента вектора М; Dn — дисперсия сигнала раС'
согласования [случайного процесса хп(/)1
Из второго уравнения системы (28.22) имеем
R = -(l/r)(A + CVTe-D”/2 cosmn)-1CCT - 0. (2.8.20
257
ffemod статистической линеаризации
Подставляя выражения для mjt (fc — 1, п 1) в первое уравнение си-
стемы (28.23), получим
п—1
j-i
-j + Сп~\
sinning — 0.
1
) (ft - е
Но поскольку Во 1 BjCn-i-j = Во xAn. 1 - Сп-1 и А„_! / О,
то должно выполняться равенство
Р - e“D"/2 sin тп - 0, (28.25)
при этом mk — 0 при к = l,n— 1.
Преобразуем уравнение (28.24) для того, чтобы получить второе урав-
нение, связывающее величины тп и Dn- Для этого представим матрицу
А + CVTe-D"'2 cos mn в блочном виде:
A + CVTe-£>"/2cosmn
(28.26)
С = С' = [ С„_ i;-С„_2>...,-Ci]T; V =
= [0,0,..., 1]т; а — —Сце Pn/2cosm„. Матрица А является невыро-
жденной поэтому к блочной матрице (28.26) можно применить фор
мулу обращения блочной матрицы
(А + CVTe-c"/2 cosmn)-1 =
(A CVVr1)’1 А-^ЛСА-^С-Й)-1]
.(ГА^С-а)’1^1 (5- V^A^C)-1 J
Применяя к матрице (A —CVTa-1)-1 формулу обращения матрицы при
Малоранговой модификации находим
(А — CVTa-1)-1 = А-1 — А *С(-Й+ VTA-1C)-1 VTA—х.
Таким образом
R=-J(e-VTA"1C)-1x
Г А-1(й - V’A^C) - A-^WA’1 —А-1С
-VTA 1 1
^Куда
Dn - -(l/r)(C0e-D"<2cosm„ - VTA~lC) ’F,
258 Лекция 28
где F - [-V'rA“1][Cn_iC'o,C'n-2C'o, - --,С'^]Т. Учитывая, что С
— е_£>"^2 cos тпС, окончательно получаем
rDn cos тп 4- b" 1е7?п^2 = 0 (28 27)
где 6-1 = (Со — VTA_1C')-1F — коэффициент, определяемый пара-
метрами фильтра в контуре ФАП.
Формулы (28.25), (28.26) приводят к искомым уравнениям относи-
тельно среднего значения тп и дисперсии Dn сигнала рассогласования
в установившемся режиме при изменении параметра /3 внутри полосы
синхронизации.
Выражая из (28.15) и (28.16) функции sinmn и cos тп по формулам
sinmn = /3eD"^2; cos тп — — ер"^2/(г6Оп),
а также используя тождество sin m2 + cosm2 = 1, получаем трансцен-
дентное уравнение относительно дисперсии сигнала рассогласования
eI>’*/32 + eI>"/(r262Z)2) = 1.
Графическое решение этого уравнения показывает, что независимо от
порядка п не может быть более двух решений. Этот вывод справедлив
в том случае, если справедливо предположение о близости к гауссов-
скому распределению вектора X
Лекция 29
Анализ воздействия шума на
однополупериодный линейный
детектор
Прямой метод анализа
Рассмотрим однополупериодный линейный детектор (ЛД) с харак-
теристикой НЭ (рис. 29.1)
_ Г Ьх при х О,
— t 0 при х < О,
при условии, что за НЭ следует ФНЧ (см. рис. 21.1).
Снова воспользуемся прямым методом анализа.
Сразу получим ПРВ отклика НЭ
1
W{y) = Р(х < 0)6(у) + -W(x = y\ 6)1(У).
Начальные моменты отклика НЭ определяются по формуле
тпу — Е(уп) — bn [ xnW(x)dx.
Jo
При четной ПРВ входного воздействия, когда 1У(—х) = W(x), от-
сюда получим
h2n Г°° />2п
Etfn) - 2 J x2nW(x)dx - —Е(х2п)
г Согласно прямому методу КФ отклика НЭ имеет вид
ЗДЛ) = b2 [ [ x^zWfxijX^dxidx-j,
Jo Jo
гДе «j = xpi), х2 = жр2)-
Рис. 29.1
260
Рассмотрим частный случай, когда на вход детектора воздействует
гауссовский СП при ПРВ РУ(ж) = N(0, <т). При этом ПРВ отклика НЭ
имеет вид (рис. 29.2, 6 = 1, ах = 1)
И^(У) = |*(У) +
2 у/2тгЬах
Используя свойство четных центральных моментов гаусовского распре-
деления
E'fx2’1) = 1 - 3 - 5 -... • (2п - 1)<т2п, п = 1,2,...,
получим
г2п
т2пу = Е(у2п) = 2 1 3 5 ...-(2п-1)а2п.
Моменты E(y2m+l) нечетных порядков находятся по формуле
12т+1 гсо
Etf™+1) = Ь / х2-+1 е~х dx,
где т = 0,1,2,....
После подстановки z = ж2 получим
I.2m+1 ГСО
Е(у2т+1) =------=/ zme~z^2a^dz.
J 2аху/2^ Jo
Используя табличный интеграл [20], находим
ду2т+1) = 2т’21ь2т+1<т2тп+1.
2у2?г
Отсюда в частном случае получим среднее значение
ту = Е(у) = ~J==
диализ воздействия шума на детектор 261
и дисперсию
а2 = FQ/2) - m2 - (1 - 1) fc2<r2 « 0, 340862<т2,
которые можно вычислить и непосредственно, взяв последний интеграл
по частям или используя формулу (6.13)
При гауссовском входном воздействии КФ отклика НЭ проще всего
найти методом Прайса (лекция 27, пример 29 1) Эта КФ имеет вид
/?у(т) = -“-^[(1 - />2)1/2 + parccos(—/>)], (29.2)
Z7T
Где р = />ж(т) — коэффициент корреляции входного воздействия |/>| =
= |ад|/^ < 1-
Очевидно, найти ЭС Sy(f') отклика НЭ можно только численно. Одна-
ко, если воспользоваться разложением функций (1 —р)1/2 и arccos( р),
то используя отрезок ряда при малых значениях коэффициента корре-
ляции, можно найти приближенную формулу /?у(т) рз где
>9 9 >9 .2
Здесь первое слагаемое равно квадрату среднего значения у2, где
У = Е(у), поэтому величина
>22/ -j \
Я/0) - у2 = (1 + i j и 0, 329562<т2
определяет приближенное значение дисперсии <т2 с точностью
(0,3408 — 0,3295)/0,3408 рз 0,03
Найдем ЭС отклика НЭ, используя приближеное значение jRj,(t) КФ
1.2— 2 l2 l2 f00
s„(f) = / s^ns^f ~ n df,
2тг 4 4тг<7- J _то
гДе Sx(f) — ЭС входного воздействия.
Сравним результаты исследования КД и ЛД Для этого будем пола-
ять ЭС входного воздействия прямоугольным, узкополосным
SJf) = I А при Л “ f < 1/1 < Л + f
*' ' (0 при других /.
При этом ст2 = 2АВ, а ЭС отклика принимает вид (рис. 29.3)
5//) = ^^(/) + [ ПРИ /о - f < |/| < /о + f Л +
7Г 1 0 при других / (
262
Лекция ?>9
PA (1- AII/I-2IAII)
о
при О < |f | < В,
при 2/о - В < |f | < 2f0 + В
при других f
По условию за НЭ ЛД следует ФНЧ, тогда ЭС на выходе фильтра
примыкает к нулевой частоте и содержит постоянную составляющую
^(f) =
—6(f) +
при If I < В,
при |f| В.
Энергетические спектры в разных точках детектора изображены на
рис 29 3
Сравним спектры в точках КД и ЛД. Форма спектров одинакова,
за исключением наличия ЭС на выходе НЭ ЛД при центральной ча-
стоте f — f0, причем ширина его полосы такая же, как и у спектра
на входе (равна В).
Исследование ЛД с большей точностью можно провести другими ме-
тодами.
Метод Прайса
Пример 29.1. Пусть характеристика ЛД задается по (29.1) при b — 1. Двумерна*
гауссовская ПРВ входного воздействия имеет вид (27.1). Найти КФ отклика.
Решение. д^2Дх) есть 5-функция' S$ — 1; х — О. Поэтому
а2 _ 1
Зт2 2W1 - г2
^пализ воздействия шума на детектор
263
Первое интегрирование дает
8Ry 1
= — arcsinr 4- ci .
дт 2тг
После второго интегрирования получим
Ry - —
у 2тг
Начальные условия
2
^(0) =
9^(0)
дт
Очевидно, что
2
1е-х3/2
ГСО
= 1 / e-“/2du
*2/0
2
\е~х2/2 dx — —
2
е x2'2dx
со = 0 и ci = 1/4. Поэтому
хе х dx
1
2тг
е х2/2 dx
Ry = 1/(2тг)[т(агс$тт + ^/2) + yl — г2] (29.3)
Отсюда с учетом равенства тг/2 4- arcsmar — arccos(—х) приходим к (29.2).
Пример 29 2 Пусть характеристика ЛД имеет вид (рис. 29 1,6)
х х’о) при х 0,
при х < XQ,
На вход ЛД подается гауссовский СП с ПРВ (27.1). Найти коэффициенты Ак
(27.8) в разложении КФ Ки(т) отклика ЛД (27.7).
Решение. По формуле (27.8) получим
гоо Т 2 г /се
s(^)
(29.4)
Ло =
А2 -
е х !2(х — xq) dx
| е 37 dx
J е х l2xdx
хо
J LV ^о'4
= b2[FW(xo)-*oF( зд)]2;
<T*3l2dx
^7Г
_ bV^o)]2;
е х f~b(x — х0) dx
- 2
; =ь2[М,)(2;о)р
Здесь F(x) — интеграл вероятности (5.5).
Очевидно, что
Ак =
2
[х — xq) dx
= b2[F^k 1>(аго)]2-
=
2
е
2
4
2
264
Лекция од
Окончательно получим
Пу=Ь2
к
[F^txo) - гсоЛ-^о)]2 + [F(-Xo)]2r +
fc=2
(29.5)
Метод характеристических функций
Пример 29.3. Пусть воздействие на однополупериодный линейный детектор
является суммой немодулированного синусоидального сигнала и узкополосного ста-
ционарного гауссовского шума n(t). Показать, что математическое ожидание отклика
детектора приблизительно равно
г
ту = тп0 - <
при^- < ст2;
при-^- > <г2.
(29.6)
где а — масштабный множитель, Р — амплитуда синусоидального сигнала с2
— дисперсия шума
Решение Воспользуемся выражением для корреляционной функции на выхо-
де нелинейного устройства в виде (26.22) Поскольку модуляция отсутствует, то
Pi = Р2, а в силу стационарности случайного процесса n(t) at = 02. поэтому в
(26.22) hmfc(ti) =
Fmfc(tl, t2) = F[hmfc(*l)bmfe(t2)] = h
mk ’
Тогда, согласно (26,22), корреляционная функция на выходе детектора примет вид
оо оо
ад-ЕЕ h^kR’^ c°sm^T-
m=0 к=0
(28.7)
Отсюда следует, что мощность постоянной составляющей определяется из (26.22)
при т = О и к — О: Rs(oo) = Лр0 = m2. Следовательно, постоянная составля-
ющая на выходе детектора ту — Лоо-
По условию задачи детектор однополупериодный, поэтому коэффициент
Лт* — Л<т°). где Л^£, вычисляется согласно (26.28). Кроме того, детектор линейный,
что означает v = 1. Поэтому из равенства (26.28) при л = 1 получим
Отсюда при т = к = О с учетом равенств
Г(2) = Г(1) = 1;
(29.8)
следует, что
ао ,
Лоо = - ,— 1'1
х/2тг
1
2’1' 2а2 ) '
Используя приближенное равенство
при X 1,
'Диализ воздействия шума на детектор 265
при Р2/2 ari Получим (26.9)
.. tt<7
Лоо = 77г1/ = ,---
С ДРУГОЙ стороны, при Р2/2 ст2 справедливо
, г(/?) 1 „ / 1 р2 А 2 р
iFi (о: ft —аг) ~ ; — или 1 /' ( ( ; 1;------— I ~ ,
Т>1 Г(Д - а) т“ У 2 2<т2 у yfv
Отсюда следует ms = Лоо = оР/аг.
Пример 29.4 Показать, что применительно к детектору и воздействию на него,
описанным в примере 29.3, мощность шума Wo на выходе с достаточным прибли-
жением может быть представлена в виде
где 1 Fi (а,, Ь, х) — вырожденная гипергеометрическая функция.
Решение Согласно общему представлению корреляционой функции (26.23) пол-
ная мощность шума на выходе детектора равна сумме мощностей
Wo — Fn X п 4" Nf X п.
Первая составляющая соответствует корреляционной функции Нпхп(£1 > <з). вто-
рая — R3xn(tl,t2)-
Можно показать, что около нулевой частоты сосредоточены лишь те составляю-
щие спектральной плотности, для которых к четно Рассматривая детектор совместно
с идеальным фильтром, стоящим за ним, по (26.23) найдем
ОО
^Во*:(*1,‘2)Н*(т),Л—четно.
к=2,к
Рассмотрим согласно (26.23) и используем разложение при четных к
(fc-2)/2
Г СО?А= Е (к - г£12*-1 COs(fe ~ 2г)Л + рГрГ (2910)
В результате ограничения частотами спектральной плотности близкими к нуле-
вой получим следующий вид корреляционной функции Я^хпОп^г) на выходе де-
тектора (взятого вместе с идеальным фильтром низкой частоты)
ОО
R«xn(ti, t2) = 2-fiok(tl, <2)К*(т) к —четные.
(!')
ГДе *ofc(ti,t2) = Е[Кок(^)Кок(12)].
Учитывая отсутствие модуляции, когда hofc(fi) = Лод(12) = hok» а также равен-
J?v(0) = Rn(0) — &2, получим
Яол(Ъ,«2)Л» = ^Л^.
Воспользуемся коэффициентом = [Л^?]2 согласно (26 28). Коэффицент
соответствует однополупериодному устройству 1/-Й степени. В результате по
266
Лекция 29
(29 8) получим
По условию задачи детектор линейный, поэтому положив i/ = 1, найдем
Л-1 F2
2 ,1’ 2^2
Пренебрегая в (26 7)
положив в (3.62) ii —
слагаемыми при k > 2, с учетом (29 4) получим 7VnXn
i2:
Для вычисления составляющей Л^хп необходимо воспользоваться выражением
Для Rsx»(il,«2) из (26.23)
Здесь, аналогично предыдущему случаю, спектральные плотности, группирующи<
вокруг нулевой частоты, соответствуют четным тп + к и m < к, поэтому из (26 23)
на выходе детектора (с учетом идеального ФНЧ) найдем
оо к
= 2У £ -Rmfc(ti,t2)R*(r) cosmucr (при четных к + тп).
к 1 771=1
Используя формулы (26.29) и (26.9) и выделяя низкочастотные составляющие
как и в случае t2), получим
оо к
fc=l m=l
/к + тп'* \ 2 J | !2*-1
(при четных m + к),
где ввиду отсутствия модуляции R7n*(t1,t2) = к-™).- С учетом выражения для hmk
(26.28), полагая R*(0) — а2к, определим значение мощности 7VSX„ в виде, анало-
гичном (29.9). Учитывая, что детектор линейный (v = 1), и ограничиваясь первым
(наибольшим) слагаемым (при к = m = 1), найдем
2 2<г2
откуда мощность
В результате мощность шума 1VO можно представить в виде (29 8).
Задачи
29.1. Найти среднее значение СП на выходе ЛД с характеристикой (29.4) (рис
29.1,6) при b — 1, если на вход ЛД подается гауссовский СП с ПРВ Ил(а:) = N(O,cr)
29.2. Найти ПРВ И (у), среднее значение и дисперсию отклика ЛД с харак
теристикой (29.4) при b = 1, если на вход ЛД подается СП a;(t) с ПРВ сечения
Hz(x) — хе~х /2 х О. [ПРВ И7 (г) — закон Релея (6.11) при параметре, рав-
ном 1 (рис. 6.3)]
Лекция 30
Прохождение случайных процессов
через ограничитель
Неотъемлемой частью многих радиотехнических устройств (РТУ яв-
ляется ограничитель*. Характеристики ограничителей используемых
на практике изображены на рис. 30.1.
Соответственно этим рисункам аналитиче-
ская запись характеристик имеет вид.
у - !?(*)
а
ff(z) =
</(*) =
а при х Z > 0;
0 при X - 0
—а при X < с о,
а при ж J
аж/жо при |ж|
а при X
—а
«о;
$ ж0;
ж0;
ff(z) - 1 х/2тг . гх / е“и2/2 /о du —
( а при X > жо;
»(ж) = 1 ° При |х| 5 $ ж0;
1 ~а при X > ж0.
Для всех характеристик выполняется
их нечетности: (/(—ж) = — д(ж)
Анализ ограничителей проведем неск<
методами: прямым, методом Прайса и
характеристических функций
(30.1)
X
Рис. 30.1
Прямой метод
Ф(х)‘;
о
Пример 30 = 1. Пусть на вход ограничителя с характеристикой (30.1) подается
случайный процесс Х(£), ПРВ сечения которого симметрична относительно оси асб-
Цисс. Требуется найти среднее значение и дисперсию отклика ограничителя.
Решение. По условию сечение СП K(t) есть случайная величина принимающая
два значения —а и а с вероятностями
/о
-ОО
* Воздействие случайных процессов на ограничитель рассмотрено в рабо-
тах [2, 34, 36, 41-46 и др.].
268
Лекция 3q
Р2 = P{Y(t) = а} = F{X(t) > 0} = / lV(a.) dx = -
Jo 2
сооответственно. Поэтому
~ “) + + “)-
Тогда среднее значение отклика
/ОО 1
dy = -а + -(—о) = О;
ОО
/оо
y2W(y)dy--a2 + -ia2 = a2i
-ОО
г-) _ _2 _ _Л2 __ 2
*Sy — <Уу — ^^'у — '
Пример 30 2. На вход ограничителя с характеристикой (30 2) воздействует гаус-
совский СП X(t) с ПРВ одномерного сечения
N(0, о) = ИДа:) = ’ —е”*2/2^.
(TxVZtt
Найти одномерную функцию распределения F(y) и ПРВ W(j/) на выходе огра-
ничителя.
Решение Пусть у < а, тогда событие {У < у} невозможное, F(y) = P(Y <
у) = О. Событие Y — —а эквивалентно событию X ~ Х'о. следовательно,
И'(х) dx =
•оо
^о
N(0,a)di= +Ф (-—) - — — Ф (—,
где Ф(аг) — функция Лапласа (30.3).
Пусть —а у < а, тогда
F(s/) = P(Y < у) = P(Y = -а) + Р(-а <Y < у) =
=
Наконец, пусть у > —а. Событие {У < j/} достоверное, поэтому F(y) = Р(У <
у) — 1. В результате получим
при у < —а;
х0 \ .
----у ) при —а <С у < а; (30.б)
анх }
при у > а.
График функции распределения изображен на рис. 30.2.
Найдем ПРВ W(j/) = dF(y)/dy. По (30.6) получим
IV(i/) = ai 6(у + а) + а26(у — а) + (хоу/аа^),
где Q.J = а2 = — Ф(а?о/<гх) — величина скачка соответственно в точках у =
и у = а.
Таким образом, окончательно находим
И7(з/) ~ а 1 [6(j/ 4- а) 4- 6(j/ — а)] 4- (х0/аах\/27г)е~^ /2сг?)(то/а)
Ррохождение. случайных процессов через ограничитель
269
Пример 30.3. На вход ограничителя с характеристкой (30.4) поступает СП X (t)
с одномерной ПРВ РУ(а:).
Найти одномерный закон распределения, среднее значение и дисперсию откли-
ка У(<) = s[X(t)] ограничителя.
I Решение По условию, любое сечение СП Y t) есть случайная величина, прини-
мающая три значения —а. О, а соответственно с вероятностями
РУ(о:) dx;
Z^o
РУ(т) dx;
РЗ - 1 -Р1 -Р2-
Таким образом, получен одномерный закон распределения, приведенный в та-
бл. 30.1.
[Этот закон можно записать в виде РУ у) — рт6(у + а) + Р2^(у) + рз$(у — а). Тогда
/оо а
yW(y) dy — ^~^у,р, — — api + Орг + “Рз — “(рз — Р1);
»=1
Dy = т2у — т? = а2(рз +Р1) — а2(рз -pi)2 = “2[р2 +Р1 — (рз — Р1)2]
При вычислении КФ отклика ограничителя можно восполь-
зоваться значением коэффициентов сп (табл. 21.1), входящих в раз-
ложение КФ
^(г) = 12
п=0
(30.7)
Пример 30.4. Пусть характеристика ограничителя имеет вид более общий,
чем (30.3):
/7 /’1/ям 2
д(х) = ay — J е “ ^2Лл, (30.8)
ГД о2 = г2 — дисперсия гауссовского СП, поступающего на вход ограничителя
I Найти КФ Ry(r) отклика ограничителя.
Решение. Найдем вначале коэффициенты с„
Сп -
1 у*00
.— / s(<ry)e~® ^2Hen(y) dy =
чЪк J oo
270
Лекция Зо
где
Не„Ы = (-1)"е’2/2 £ге“'2/2 = ( 1)"2"/2Н„ ; (30.9)
ахп у /
— полином Эрмита
После однократного интегрирования по частям получим
Сп = (-1)"— Г (е-*2/2) dy.
ЦК J-оо \ )
Заметим, что при нечетном п п я производная от ехр(—у2 /2) является нечетной
функцией у, поэтому коэффициенты сп с четными индексами равны нулю. Таким
образом, при четном п — 1 — 2k и после замены под интегралом
^-е~У2/2 = e-«2/2He2fc(j/)
dy2k ' '
с последующей подстановкой х = ау, а = ^/1 + р2 jу.у/2 получим
/°° , ч
_ 2 / X \
е “ He2fc I — ) dx.
оо \а /
Используем соотношение [20, ф-ла 7.373.2]
Г е-*2!^^) dx = - 1)*.
J-OO fc!
Тогда с учетом (30.9), получим
c2)t+i = у==----2~fc [ е х H2Ji Г Э dx =
7Г0 + р2 J-oo \ay/2j
I 2 (2fc)7 П* 1
У Тг(1 +д2) 2kk\ 1 ’ (1 + д2)*'
Преобразуем отношение (2/с)!/(2fcfc!) на основе известных равенств
(2п)!! _ [(2п)!!]2 _ 22"(п!)2
(2п- 1)1! " (2п)! “ (2п)!
По второму равенству находим (2п)!! — 2"п!, тогда
(2п)! (2п)!
2"п! ~ (2п)!!‘
По первому равенству (2п — 1)!! = (2п)!/[(2п)!!]. Таким образом, (2п)!/(2"п!)
= (2п - 1)!! = 1 - 3 - 5 ... (2п - 1).
Окончательно получим
„ (2fc-l)!!
2*+1 V ТГ (1 + й2)(2к+1)/2
случайных процессов через ограничитель
271
/•дедовател о,
2 _ 2 2 [(2^ ' I)-1]2
С2к+! - „ ц + M2)2fc+1 ‘
Тогда по (30.7) находим КФ отклика ограничителя
R М - V К^-О»]2 Г 4т) 12*+1
тг 2_> (2*4-1)! 1 4-д2 J
к=0
Воспользуемся известным разложением
x2fc+l “ ^2^+1
L arcsin.-2;+£[(2A-l)!-]2^^ = £[(2fc-l)!!]2^T^ (30.10)
к=1 fc=0
В предположении (2fc — 1)1! = 1 при к — 0. В результате получим
2о.^ Г р(т) 1
^(т) = arcsin . (30.11)
ТГ 11 + Д J
Отсюда находим коэффициент корреляции ру(т) = /^(rJ/RyfO):
Р^ = {arcsin [—Л_]} arcsin [^] .
При д = О получим КФ отклика идеального ограничителя
Лв(т) — ---arcsin р(т). (30.12)
Пример 30.5. Пусть характеристика ограничителя имеет вид [2, 42]
д(а;) — -----------------------— f е“£ /2'r dt, (30.13)
<^fV2ir Jo
где c,y = const
На ограничитель воздействует гауссовский СП с нулевым редним значением и
КФ Rx[t) = сг^р(т). Найти КФ отклика ограничителя.
Решение.
1-й способ. Сделаем подстановку и = t/-y, тогда по (30.13) получим
В^=Гс\/^] е u2/2<iu (30.14)
По (30.14) замечаем, что при у —> О ограничитель вырождается в идеальный;
величина 1/(2с) характеризует уровень ограничения
lim д(х) = ±^~.
|я;|—»оо 2с
величина у характеризует значение производной р'(0) (рис. 30.3). Характеристику
(30 14) можно привести к (30 8), если положить 1/(2с) = а; у = тогда по
(30.10) сразу получим ответ [2, 42]
Ка(г)= а = = <3015>
р„(т) = {arcsin [^-1-] ) arcsin . (30.16)
При а = 0
2
Pa(r) = — arcsinp(r),
272
Лекция;^
что соответствует идеальному ограничителю (-у ~ О)
При о=1
M-)=^csin(P(2T)).
Наконец, при а —» оо Рц(т) fa р(т)
Отвлекаясь от вычисления КФ отклика ограничителя вторым способом, найдем
ПРВ отклика по формуле
"Ч») = W[x = ^)] |^1| - ИфО-2-; = —‘-*2/2Л
1 dy 1 |2|| dx суу/2к
В результате получим
W(j/) — су/аехр
х = 4>(у), а=
Очевидно, область определения ПРВ IV(у) характеризуется неравенствами —1
$ 2су 1 и при а = 1 ПРВ lV(j/) — равномерная W(y)/c = 1 при у g (—1/(2с):
1/(2с)) [СВ У равномерно распределена в интервале у G (—1/(2с);1/(2с))[.
При а ф 1 IV(O) = ст/а; IV(O)/c — yja, тогда lV(O)/c > 1 при а > 1 и
PV(O) < 1 при а < 1 (рис. 30.4).
При а = О ПРВ lV(j/) вырождается в сумму двух дельта функций (рис 30.4) На
концах интервала |ip(s/)| = |а:| —» оо при у —> 1/(2с), поэтому при а > 1
при а < 1
lim IV(?;) = оо.
М-1 /(2с)
Метод Прайса
Пример 30.5 (продолжение). Запишем производную дНу(т)/др. По формул6
(27.6) после преобразований получим [2]
д Ли 1 lb2 — d2 [Г 1 6а:2 — 2da?i Х2 + bx%
др 2тгс2у2 у 1 — р2 J J 2тгу/Ь2 — d2 ₽ 2(Ь2 — <Р)
— ОО
dxi dxi;
где
abp _ <т2'у2(1 +ог — р2)
1 + а —р2’ 1 + а — <т2р2
Прохождение случайных процессов через ограничитель
273
I П0Дынтегральная ФункЧия представляет собой двумерное гауссовское распреде-
ление при jE(a^i) = S(2?2) = О; — аХ2 — y/b; рХ1х2 = d/b. Поэтому двухкрат
НЫЙ интеграл равен единице. Тогда
L = 1 /&-&__ 1_____[j_B21-1/2 в= Р
др 2тгс2'у2 у 1 — р1 2тгс2(1 + а) * ’ 1 + а
Отсюда следует равенство
ГВ
/ ах 1
Л„(т) — ----— I . = ----arcsinB + С,
’ 2тгс2 Jo /FF2 2тгс
где С — произвольная постоянная, которая находится из условий
lim р(т) = О; lim Ry(r) = С — — О.
В результате приходим к формуле (30.15).
Пример 30.6. Пусть ограничитель имеет характеристику (30.1) (рис. 30.1,а) при
а = 1. Шум на входе ограничителя гауссовский с двумерной ПРВ (27 1). Требуется
найти КФ Ли(т) отклика ограничителя.
Решение. Воспользуемся формулой (27.6) при к — 1. В данном случае ка-
ждая из производных представляет собой дельта-функцию с площадью 5$ = 2 в
точке х = 0.
По формуле (27.6) находим
ОО
1г=2^/Г^/
— оо
х* — 2тх^Х2 + а?2
2(1 г2)
2
dx±dx2 — —..
7Г\/1 — Г2
При т = 0 двукратный интеграл (27.6) распадается на произведение двух одно-
кратных интегралов, причем при к = 0 и г = 0 получим
—
так как функция д(х) является нечетной.
Решая ДУ
dRy _ 4
dr 2тгх/1 — г2
пРи нулевой начальном условии, находим
/*Г 2 2
Д.(г) = / — . dr — — arcsinr. (30.17)
Jo ’TVl-r2 7Г
Пример 30.7. Пусть ограничитель имеет характеристику (30.3) (рис. 30.1,8).
Найти КФ отклика ограничителя при гауссовском шуме на входе с ПРВ (27.1).
Решение. Согласно (27.6),
.2
.2
+ ^1 Х-z
dx^dx2,
Под интегралом стоит совместная гауссовская плотность распределения вероят-
В°стей двух случайных величин и £2. Сравнивая подынтегральное выражение с
2Л4
Лекция 3q
канонической формой распределения.
1 ___ (^1 ~ £1)2^ + 2(^1 — £1)(^2 — £2) — (^2 £г)2<72 ,
/-------ехр —- ~ —— —------------------
27ГО1О2 у/1 - д2 2о1а2(1 - д2)
заключаем, что £1 = — О; р = т/(2 — т2).
В знаменателе использовано преобразование
(2 - т2)2 - т2 = [(1 - т2) + I]2 т2 = (1 - г2)2 + 3(1 - т2) - (1 - т2)(4 - т2).
Ввиду нечетности д(х) Ry(O) = О. Интегрируя, получим
Rv — — arcsin
* 2тг
Этот же результат находится по (30.11) при а — 1/2, р = 1.
Пример 30.8, Пусть линейный ограничитель имеет характеристику (30.2)
(рис 30.1,6) и на его вход воздействует гауссовский СП с ПРВ (27.1). Найти КФ
/?л(т) отклика ограничителя
Решение. По формуле (27.10) определим коэффициенты
•Ао
- 2
д(х)е~1 72 dx
— 0 ввиду нечетности д(х}\
2
д(х)е~х ^2 dx
= [ф(жо) - Ф(—о)]2,
поскольку очевидно, что
= [1(г 4- э?о) — 1(а; — а?0)1—;
а?о
х + а?о) dx —
- 2
е—X /2^^ _ xo}dx
-)2[Ф(1)^о)-Ф(1)(-^о)]2
И Т-Д Ясно, что
е-^2/2 + XQ)dx-
е х l)(a? — xq) dx
—00
—00
Прохождение случайных процессов через ограничитель 275
= [^)2[Ф(л-1)(2;о)-Ф(*:-1)(-^)]2.
Поэтому
2 °° к
«»(’•)= (^) ^[Ф^М-Ф^-1^)]2^- (30.18)
fc=l
Метод характеристических функций
Пример 30.9. Пусть ограничитель имеет характеристику (30 1) (рис. 30.1,а)
и справедливы условия задачи 26.2. Показать, что при этом коэффициенты
принимают вид
при нечетном к + т;
при четном к + т.
Решение. Ограничитель относится к классу двухполупериодных (нечетных)
устройств, поэтому его переходную характеристику /(ш) можно представить в ви-
де суммы
/(w)-/+(w) + /_(w), (30.19)
где = v’(ti'); f—(w) = — v>(—w)', v>(w) — —Г(е) — гамма функция.
При и = 0 отсюда найдем
W W
В результате интеграл (26.3) распадается на разность двух интегралов'
/ifem(li) =
Производя во втором интеграле подстановку z — —w, по-
лучим
Обозначим подынтегральную функцию через D(w) и рас-
смотрим интеграл
(30.20)
I Чтобы вычислить коэффициенты /ijjm(ti), найдем внача
Ле интеграл от D(w), взятый по контуру, изображенному на
₽Ис 30.5.
276
Лекция Зо
Положим w — а: + ij/ и введем обозначения
rO+i/3
А = I D(w) dw при w = с 4- iy; Z2 “ / D(w) dw при w = x 4- i(3-
J c—if} JC4-i^
/+i0 re—i/3
D(w) dw при w — iy- A — I D(w) dw при w — x — i/3.
-10 Jo-i/3
Используя аналитичность функции D(w) внутри контура (рис. 30.5) согласи©
теореме Коши, получим
Л + А — А + Ц = О. (30 21
Можно показать, что при (3 —> оо Z2 —* 0, Д —> О, поэтому из (30.21) май-
дем Zi = /3
Тогда для Afcm(tt) с учетом (30,20) получим
Отсюда следует, что /bfcm(t«) = 0 при четном к 4- тп, а при нечетном к + тп
. ЛОО / •у 9 \
2а fc+m-l / Ь . 1 / & W* \
= —(-1) 2 / wfc+m exp I-------i-— ) dw.
* Jo \ 2 J
Произведя подстановку у = (cr2w2)/2, придем к (30.18)
Г сю
а , к-\-тп— 1 fc+m » / fc+тп—2
— -(-1) 2 2 2 at I у 2 е *dy =
Jo
(при к + m нечетном)
Пример 30.10. Пусть нелинейным устройством, описанным в примере 26.3.
является идеальный ограничитель с характеристикой (30.1) Показать, что коэф-
фициент hmk принимает вид
тп 4- к тп к 1
——,---------, ТП + 1. —
2 ’ 2 ’ Л2
тгД’7,г(1 + -“”-)т!
при нечетном m + к и А > 1;
при нечетном тп 4- к и А — 1;
при нечетном тп 4- к и А < 1;
* 0 при четном m 4- к
где 2^1 (<Ъ Ь3 с, d) — гипергеометрическая функция
Прохождение случайных процессов через ограничитель
277
Решение Рассмотрим выражение для коэффициента hmk (2619), получен-
ного в примере 26.3:
^mk —
dw.
Для ограничителя, используя выражение (30.19), найдем
hmk —
dw —
-----7m(w)/fc(wJ4) dw (30.23)
Для бесселевых функций /т(^) справедливо равенство
(30.24)
Поэтому из (30 22) следует
hmk ~ т—г
2тп
I W 1 dw — I w 1 (—l)fc+mImfw^If^Aw) dw
JC+ Jc+
- —----^*4 w~4m(w)Ik(Aw)dw =
2m Jc+
{0 при к 4- m четном,
Л€-Н OO
a /
— I w 1 Im(w)Ik(Aw) dw при к + m нечетном.
7Г1 I
•J e—loo
•Обозначая подынтегральное выражение через Di(w) _ w~1 Im(w) X
xZfc(Xw), придем к интегралу /р вида (30.20). И в этом случае функция Z?i(w)
являет я аналитической внутри контура и на нем (см. рис. 30.5), в связи с чем со-
гласно теореме Коши для справедливо равенство вида (30.21)
Можно показать, что при (3 —* оо /2» Л —»• 0. поэтому из (30.21) получим
7з = 11. Отсюда следует
4-1OO
w~ /m(w)/fc(/lw) dw. (30.25)
-100
w 1 ITn(w)Iii(Aw') dw —
Воспользуемся свойством [20]
An(iw) = i
Тогда из (30.25) найдем
!di
w 1 Jrri{w]Ji-(Aw) dw ~
w~ _1ЛД w)Jk(Aw) dw,
о
Так как функция Jm(w)Jk(Aw) — четная, что следует из свойства (30 24) и
Нечетности к + ТП.
В результате
I _ 2ат _
hrnk ~ . * £>1 —
7Г1
/ w 1 Jm(w)J^(Awy dw
0
(nPi
/ w 1 Jm^yj^Aw) dw
0
и 4- k нечетном).
278
Лекция 3Q
Интеграл
Io
W 1 Jm (w)J^(Aw) dw
вычислен Ватсоном* для трех случаев А > 1, А = 1, А <
при нечетном т + к
1. Соответственно
при А — 1;
при А < 1,
при А > 1.
Отсюда с учетом свойств Г(1 + а.-) = 2?Г(а;) и Г(1 + тп) = тп! придем к реше-
нию (30.22).
Пример 30.11. Пусть за нелинейным устройством, описанным в примерах 26.3
и 30.10, следует идеальный полосовой фильтр, настроенный на частоту р/2тг и обра-
зующий совместно с нелинейным устройством идеальный полосовой ограничитель.
Показать, что отклик фильтра z(t) имеет корреляционную функцию
Мт) =
2а2
тг2
cospr + 4cosqr -j-— cos(2g — p)
при А 1 и
2a2
Rz(t) = [4 cospr + Л2 cosqr + A2 cos(2p — g)r]
7Г2 L
(30.26)
(30 27)
при A < 1.
Решение. При решении данной задачи используем результаты, полученные в
примерах 26.3 и 30 10. Учитывая наличие полосового фильтра в соответствии с
условием данной задачи, по (26.8) найдем вид корреляционной функции откли
ка фильтра z(t):
Mt)-C1C0 /i20 cospr + eoei ^oi cos9т + — eie2/ii2 cos(2q — p)r+
+ T2ei/i21 c°s(2p - g)r.
По условию So = 1; El — C2 = 2, поэтому
Яг(т) = 2[/iio cos рт + /lot cos qr + /ij2 cos(2q - p)r + k21 cos(2p - q)r. (30 28)
При вычислении коэффицентов /im;; по (30.12) учтем условия задачи: 1) А > 1
и 2) А < 1. Соответственно воспользуемся приближенными равенствами
2Fi (а, 0,7, w I при А > 1- и 2F1(a,(3,-y, A2) as 1 при Л < 1.
* Ватсон Г Н. Теория бесселевых функций. — М: ИЛ 1949
Прохождение случайных процессов через ограничитель
279
Поэтому при этих условиях из (30.22) получим
fcio — ’ аА 1 ТГ 2а ь 7Г при 1; при А 1; fcoi — 2а < 1 аА V 7Г при 4>1; при А < 1;
Д12 = аД1 ТГ аД2 4тг при Д > 1; при Д < 1, ^21 = S а 4тгД аА тг - при А > 1 при А -С 1
В результате из (30.28) найдем:
а) при А > 1
7?z(t) = cospr + 4 cosgr + cos(2g - р)т+
I A*
----- cos(2p — g)r|
16 A4 V ' J
—-----[cospr + 4A2 cosqr + cos(2g — p)r],
7T2j42
что совпадает с (30.26);
6) при А *С 1
Д4
cospr 4- Д2 cosqr 4----cos(2q — p)r4-
16
+A2 cos(2p - g)rj
2ц2
—— [4 cospr 4- Д2 cos qr 4* A2 cos(2p — q)t],
ТГ2
что совпадает с (30.27).
Пример 30.12. Нелинейный усилитель о-й степени (см. примеры 26.11 и 26.12)
при v = 0 превращается в идеальный полосовой ограничитель. На его вход подается
сумма немодулированного синусоидального сигнала и стационарного узкополосного
Действительного гауссовского шума. Показать, что
<7
TVS
— — при s< 1;
4
(30.29)
q = 2s при s> 1,
(30.30)
гДе g и s ОСШ соответственно на выходе и входе
Решение. Вначале рассмотрим случай s 1, когда в соответствии с услови-
ем задачи v = 0. Используем равенство (26.47), причем при v = 0 А”о(О) = 2,
|отсюда придем к соотношению (30.30).
При s 1 воспользуемся равенством (26.36), предварительно вычислив коэф-
Фицент Со (0):
СЮ
(при нечетном к),
(30.31)
*ак как Г2 (1/2) - тг.
Заменим индекс суммирования fc = 2n + 1 (п = 0,1, 2,...) Из (30.31) получим
СЮ
(о) - - Е —4-----------------
„=0 г ( -п + -J (п + 1)!п!
280
Лекция 30
Воспользуемся равенством [20]
В результате
(п + 1)!п!
тг
4'
(30.32)
Отсюда придем к соотношению (30.29)
Пример 30.13. Найти КФ отклика ограничителя (см. пример 30.9) при отсут
ствии сигнала на входе в случае стационарного шума n(t).
Решение. КФ KB(ti,t2) отклика ограничителя находится по формуле (26.2)
при к = 0:
ОО
^(h. М = У t2), (зо.зз)
* J ml
m=0
где
, 2т/2Г(этг/2)
(—1Г " а------------- при нечетном т,
тг™
0 при четном т.
^Ош(^г) —
В стационарном случае /гОт(*1) — Лот(М = hm, т — t2 — t-y. Поэтому, пола-
гая т — 2s + 1, по (30.33) получим
х—л ГД2*+1)12 „
Ks(t)=12 (2a+i)! k^p2s+1’ <30-34)
5 = 0 -
где
Учтем известное соотношение
r(s + l) =1F(2s”1)!!
Тогда /i2i+i = (—l)sa-y/2/x(2s — l)!!/cr2s+1. Подставляя это значение коэффи-
цента /12,4-1 в РЯД (30.34), запишем выражение
f 2a2 \ V—"v
Лв(т) - ( --- I У [(2s- I)!!]2 —-----.
' \ я J ’ J (2з+ 1)!
' s=0
Воспользуемся известным разложением (30.10) В результате получим
2a2
J^s/(T) — ~—arcsinp(r). (30.36)
7Г
Отсюда приходим к формуле (30 12), полученной прямым методом, а при а — 1
— к формуле (30 17), полученной методом Прайса,
Декция 31
Перемножитель и коррелятор
Перемножитель
Рассмотрим произведение двух СП. Пусть £i(t) и CzG) — Два СП
с совместной ПРВ VV(a;i,X2). Найдем ПРВ их произведения =
= C1GX2O) Для этого рассмотрим преобразование
z — Х1Х2; а = ®i-
Обратное преобразование имет вид
Х2 = zja\ xi = а.
Якобиан преобразования
Зжг/бг dx-Jdz _ \./а О
дхъ/да дх^/да ~ —z/a 1
Таким образом, по правилу нелинейного преобразования
1
1 ( Z
W^z.a} = 1Уе1ь(х1 - а х2 = г/а)-г-~ = 1У€1б2 I
|ct| \ / 1*'1|
Отсюда получим ПРВ произведения
(31-1)
В частном случае, когда СП £i(i) и £г(0 независимы, находим
Пример 31.1. Найти ПРВ произведения двух совместно гауссовских коррелиро-
ЬаНных СП С1(0 и €2(0 с равными нулю средними значениями,
282
Лекция 3]
Решение Полагая в совместной гауссовской ПРВ W(xi,X2) mi = то я о
получим
1У41 ?2 - -----------1 ,-------еХР
2ТГ(Г1 <Т2 V 1 — (Г
—<^2 Г1 + 2 рот 022:1X2 — сг^х^
2о2о2(1 - р2)
(31.3)
Отсюда
ИТ;а(2,а) =
[--------------1
lo1o‘2(l - P2)J
ехр
2o2(l - p2)
Функция Wna(z,xi) — четная по переменной a?i, следовательно, ПРВ произ-
ведения
ТГСГ!^
pz
<Г1<Г2(1 - Р2)
ехр
х2 + о^г2/а^х2
2О](1 —р2)
В интеграле используем подстановку xf — t; тогда dxY/x\ = dt/2t, кроме того,
обозначим х = 1/а2(1-р2) ; и = aiz/02 В результате получим [20, ф-ла 8.432.7]
1 7°° х ( u2\ dt , [ z 1
2 Л ехр Г 2 V ~л V {хи} = - Р2)1 ’
где Ко(у) — функция Макдональда нулевого порядка.
ПРВ произведения запишется в виде
Wr>^ =--------~7=- 'ехр [---и"—2?1 К° [------77—7771 (31 4)
^1^2 х/1 - Р2 1^2(1-P2)J 1<Г1<72(1 - p2)J
В частном случае, когда гауссовские сомножители независимы (р = О), полу-
чим ПРВ произведения
ИТ; (2) = —Ко (— 'j (31.5)
\ О] <Т2 /
Т) = £i£2, если £1 и £2 — незави-
Xi € (—оо,оо);
при Х2 О,
При Х2 < 0.
т.е. первый сомножитель распределен по закону Гаусса, второй — по закону Ре-
лея при а = 1 [(6.11), рис 6.3].
Решение. По формуле (31.2) получим
ИТ,(г)= [ ге-^^-^яе-13/21— =
Jo У?* х
e-i(l3 + ^/l2)da;= ’ = 1е-|г|.
т/2тГ 2 2
ЗТ<7 j <72
Пример 31.2. Найти ПРВ произведения
симые СВ,
ПРВ которых
-х?/2
'2л
При вычислениях использовалось значение интеграла [20, 3.325]
^,(Х1)= 1
»^(^2) = j о2е
при а г- 1/2, 6 — г2/2.
Деремноэ/сителъ и коррелятор
283
Найдем ковариационную функцию и ЭС СП на выходе перемножите-
ЛЯ при условии, что перемножаются два гауссовских стационарных СП
% = XY, причем Е(Х) — тх, E(Y) = ту, Dx — <7^; Dy = <г2;
р= рху - Мп/о^; Мп = - mx)(Y - my)].
Воспользуемся соотношением (5 16). Обозначим х\ — Х(/); х2 =
= X(t + т); = Y(t); х4 = Y(t + т).
Тогда
Е(Х1Х2ХзХ4) = E(XtYtX,£^ТУ<4-Т) = E(ZtZt+r) —
В результате по (5.16) получим
7?г(т) = Е(х1х3х2х4') — £’(ziz2)£’(a:3a:4) + E(xix3)E(x2x4) +
+ E{xix4)E{x2x3) - 2т2ту =
= /Zi(t)7?„(-t) + Rxy{Q)Rxy{Q) + Rxy{r)Ryx{T) - =
= Rx(r)Ry(r) + RXy{r)Ryx{r) + m2 - 2m2m2.
Учтем соотношения /?.(т) = K(r) + mf, тогда найдем
ДЦт) + = [Кх(т) + ^][Л'у(т) + ™y] + +
+ l^y(r) + nl*’Tly]IXy4T) + ^zmy] - 2т2т2.
После перемножения и приведения подобных членов получим КВФ
Kz(r) отклика перемножителя
Л'2(т) - Кх(т)Ку(т) + Кху(т)Кух(т) +
Т 771д; 7Пу (/1. Х у ( 7”) + /<„х(т)] + тп2хКу{т') + тп2Кх(т). (31.6)
Найдем среднее значение mz — Е(ху) и дисперсию а2: = ZC2(0) от-
клика перемножителя. Очевидно, среднее значение отклика является
Корреляционным моментом перемножаемых СВ, поэтому
mz — Е(ху) — р-ц + mxmy — р<хх<ту +
Дисперсия отклика
<r2z = Kz(0) - ff2xa2 + p2crxa2 + 2mxmyp(rxcry + + m2<jx =
= 0’®°'y(1 + p2) + 2mxmypax(Ty + m2a2 + m2a2.
По (31.6) получим ЭС отклика перемножителя
Sz{u) = ~ [ sx(u - i/)Sy(i>)di/ + [ Sxy(u - i/^Sy^p'jdi/ +
J—oa J — oo
+ пг^тпДЙ^ы) + ЗуДш)] + + »riySx(w).
В частном случае, когда
У(1) = X(t); Sy(w) = Sxy(u} = Sx(u), Z = X2(t),
284
Лекция 3]
получим
1 7°°
Sz(w) — 5х(ы - ^)Sa;(i/)<fi/ + 477i^Sa;(w),
Я" J-оо
причем здесь
ЭД = №(т)] = 3[7?г(т) - т2] = ЖН - (cr* + т2)2].
Нг(т) = 7R2(t) + <т*-т* + . (31.7)
При тх — 0 приходим к формуле Rx(t) = ?R2(t) + crj, которая
использовалась при анализе квадратичного детектора.
Корреляторы*
Модель Купера [47]. Рассмотрим коррелятор на схеме рис 31 1.
Согласно рис 31 1 поступающие на вход перемножителя колебания
«1 = «1(1) и «2 = и2(1) предварительно проходят узкополосные полосо-
вые фильтры (ПФ) и после перемножения колебание у(1) = ae«i(t)u2(/)
(ае — коэффициент передачи перемножителя) подается на фильтр низ-
кой частоты (ФНЧ), "срезающий" колебания частот, значительно пре
восходящих величину полосы пропускания ПФ.
Колебания «i(t) и а2(1) содержат как сигнальную, так и шумовую
составляющие, причем
«1(1) - si(t) + rii(t); uzft) — s2(t) + тг2(1) (318)
где
81(1) — j4j cosw0f; s2(t) — _A2 cos(cj01 — 0),
ni(t) = ai созыв! + 6i sinwoi; (319)
Ti2(t) = (a2 + fcai)cosw0t + (62 + k6i)sina>ol.
Фазовые диаграммы для каждого из каналов изображены на
рис. 31 2
Найдем вначале корреляционный момент £(711712) СВ Tii и п2.
£(711712) =
= £{(ai cosw0t 4- fci sinw0i)[(a2 + fcai)cosw0l + (62 + l:6i)sin woi]}.
Phc. 31.1 Рис. 31.2
Анализ коррелятора при наличии помех рассмотрен в работах [47-57 и др 1
[[еремноэкителъ и коррелятор
285
Будем полагать СВ Gj, bj, а2, b2 гауссовскими независимыми с ну-
левыми средними значениями и дисперсиями erf (для СВ aj и 61) и
trf (для СВ а2 и 62), тогда
E(ai) = E(bi) = Е(а2) = E(b2} = 0, (31.10)
E(al) = Е(Ь?) = а2; E(crf) = E(b%) = <rf. (31.11)
г Тогда после перемножения и усреднения получим
E(njn2) = kerf. (31.12)
Таким образом, при к — 0 напряжения nj и н2 ортогональны и не-
коррелированы
Рассмотрим напряжения y(t) на выходе перемножителя
у = ге«1«2 = аг[«1в2 + nin2 + Sin2 + s2ni]. (31.13)
I После перемножения и исключения вторых гармоник на выходе ФНЧ
толучим напряжение
X = (ге/2)[Л!А2 cos# + Л1Я2 + Л26] sin0+
— Д1(Л2 cos0 + kA\) + aia2 + kerf + 6i#2 + Mj]. (31.14)
Отсюда сразу находим среднее значение отклика коррелятора
I тпх — Е(Х) — — [j4ij42cos0 + kicrf + fcicr2] = [Л1Л2соз0 + 2fci<r2].
I После соответствующих преобразований может Быть найдена диспе-
рсия отклика коррелятора
Dx = Е[(Х тх)2] =
= (ге/2)2[4А:2<г? + <т((Л^ + Р + 2ЛХ A2k cos 0) + A erf + 2<т2<т|].(31.15)
Найдем характеристическую функцию 0х(\и) и ПРВ 1У(а;) отклика
коррелятора. По определению характеристической функции, имеем
0х(|и)
ешХ iy(a1,a2,fe1,fe2)<lai da2 dbi db2
— OO
В этом случае совместная ПРВ гауссовская
(31 16)
Wta^a^b^b^ = lV(ai)lV(a2)lV(6i)iV(62) =
i J 1 [ f ai А2 , / а'Л2, f61 V , f fc2 А
2 • 2 ~2 exP ( ~X I --- I +1 ----- +1 ------ + I ------ )
ATT-'o’icr.j I 2 \<7] / \<r2) \e\ J \a2/
i Запишем показатель экспоненты с неслучайным слагаемым
Л1Л2соз0 отклика коррелятора в виде
ii«j4i.A2 cos0 = iuTli(Л2 cos0 + A^k — Л1&) = iua(b — ak),
286
Лекция 3]
где а = Ль b = Л2сов0 + Агк
Тогда произведение под знаком интеграла (31.16) можно предста.
вить в виде
j^W^ai^bi) = —l^^-^F^a^F^bi),
где
f \ f I \ аа\
ri(ai,a2) — ехр iw(aa2 + Ьщ + aia2)------
ТгС»!, Ь2) = ехр iw(c6j + 6j62) -
Ра2 .
2
2 2
Здесь
с=Л2в!п0; a = Дт — 2iuk; в = -Д.
/ТГ z-r2
Характеристическая функция (31.16) принимает вид
где
А(«) — У J Fi(ai.a2)dai da2;
Сравнивая интегралы 7i(u) и Z2(u), замечаем что первый интеграл
является более общим и из него может быть получен второй интеграл,
если положить а — 0, b = с, aj — 1ц, а2 = 62. Рассмотрим первый
интеграл. Запишем его в виде
Pal
,21
ехр iw(6 + a2)ai----—- ехр i«aa2--------— dai da2.
aaf
2
2
Выделим интеграл от первого сомножителя
(31-17)
qx“
РХ~ —
dx,
(31.18)
где р — iw(6 + a2); q = а, х = aj.
Дополняя до полного квадрата показатель степени и интегрируя, по-
лучим
(31.19)
или
|-я2)2/2а _
/7Г c-u2b2/2ac-«a0;/2»-«2ta2/a
тремножителъ и коррелятор
287
В результате по (31.17) находим
Снова используем интеграл вида (31.18) при р = \иа ФЬ/а-
4 = 0 + «2/а-
Тогда по (31.19) получим
2тг w2(/?62 + 2iuab + аа2)
'оф + и2 еХ₽ 2(а/? + и2)
Полагая а — О, b = с, получим интеграл
Ь(«) =
2тг
у/а0 + и2
ехр
ы2/?с2
2(а/? + и2)
В результате характеристическая функция отклика коррелятора при-
нимает вид
0i(ia) =
= 2 2/ \ 21 еХР ,иЯ(Ь ак)
о^аЦоф + и )
(31.20)
аа2 + 0(Ь2 + с2) + 2iabu 2
2(а/3 + и2)
Пример 31.2. Сигналы в том и другом канале идентичны: Л1 — Дг = А;
в = О; /: = 1 и /3 - оо (<?2 = О)
I Решение. В этом случае в первой задаче а = А; Ь = 2Д, с = О; а = 1/<т| — 2iu;
0 => оо.
Тогда по (31.20) получим
0х(>«) =
—1 iua2-2a2u2/a _ 1____exr
1 2iucr2 1 — 2га<Т1
iua2
1 — 2iizcrj
Без потери общности можно положить 04 = 1. Преобразуем показатель степени:
iua2 2iua2 а2 4- а2
1 2ш ~ 2(1 - 2ш) ~ 2 '2(1 — 2iu)
Тогда получим ХФ в виде
1 f а2 \ [ а2 \
d^fiu) = -------ехр I — -— | ехр I —------—- I *
V } 1-2117 2 J у2)1 —2ru) J
Найдем ПРВ
W(x) = —[ ех([и)е-™х<& - — е-“2/2 [ -------e2U-2'“)e-iu:Id«.
V ’ 2тг I V ' 2тг I 1 - 21U
J — оо «/—оо
Вначале сделаем подстановку v = 2и, du = dv/2, тогда получим
ИЧя:) - le-02/2/^),
гДе
if00 1 , Р2.
1(х) — — I -----------— 2 dv. (31.21)
2тг / 1 — ги
288
Лекция 3i
Далее используем подстановку 1 — ги = з, так что dv = —ds
ii> = 1 — s, и преобразуем интеграл 1(х) к виду
1(Х) = е~*'2 L) Л 1°Ole“2/2se-/2d3 = e—/2l1.
Jl+ioo S
Контур интегрирования изображен на рис. 31.3.
Рис. 31.3
где t = х/2.
Сравним этот
TV(s) -
интеграл с табличным [58]
/.I+1CO
1= --- / -е ь3?*3е*'аз = J0(by/t), t>0, (31.23)
2rri I . s
J 1—100
где Jo (г) функция Бесселя нулевого порядка
Сравнивая (31.22) и (31.23), находим b = ia\/2; t = а?/2. Тогда получим
h — Jo(tay/x) =• Io(ay/x)t
где /0 (z) модифицированная функция Бесселя нулевого порядка, причем здесь
использовано равенство [20]
Мг) = i"Jn(iz)
при п = 0, п — порядок функции Бесселя (целое число).
В результате получим ПРВ
^ч~^+х^!210(ау/х), при х 0, (31.2-1)
О, при х < О.
Распределению (31.24) соответствует ПРВ квадрата огибающей суммы гауссовско
го СП и гармонического колебания В данном случае это распределение соответствует
сильно коррелированным перемножаемым колебаниям (р ~ О).
Пример 31.3. Найти характеристическую функцию и ПРВ отклика коррелятора
в случае, когда шум во втором канале отсутствует- с —» 0.
Замечание Этот случай соответствует воздействию на синхронный детектор,
в котором колебание местного генератора не синхронизировано (по фазе) с прихо-
дящим на вход детектора колебанием.
Решение Необходимо положить к —* 0, /3 —► оо, к/3 —► 0. В результате по
(31.20) получим
(Ь2 -р с2)^'
(га) = ехрГшаЬ--------------------------------=—
или
<9^(iu) - е1“Л1Л2<:°^-и2Л^?/2
Сравнивая с характеристической функцией гауссовской СВ (5 1)
приходим к гауссовскому распределению отклика коррелятора
1У(г) = --------------------------l^c-C1-^)2/2^,
ax\f2b
где тх — Л1Д2СО8®; - cri-^2-
[[еремножителъ и коррелятор
289
Пример 31.4 Найти характеристическую функцию и ПРВ отклика коррелятора
рри одинаковых сигнальных составляющих на его входе и некоррелированных шумах
(Z) и П2(^) с равными дисперсиями = <т2 = ст2
решение Необходимо положить Д1 _ А2 — а~, О — О, к — О. Тогда b = a cos в —
fl. с = 0; а = /3 = 1/а2. По (31.20) получим
Без потери общности можно положить aj — 1. Тогда ХФ имеет вид
0х(1и) = e°2/(1+i“) = e-“2V(u).
1 + и2
Представим функцию <р(и) в форме произведения
--= ———L-e1*2 /(“+*) = ^(iz)^^), (31.25)
1+tz2 и — i и+ i
где
¥>l(iz) - -^eia2/(u+i); V2(u) - —.
и + I и — г
Введем преобразование Фурье от этих функций
j Г°° . eia2/(u+i) if00 1
<М‘)=, / е du- Ф2(0 = / е-“‘ .du
2тг / и +1 2тг / и — 1
«/ оо J —со
Тогда произведению (31.25) будет соответствовать свертка функций $i(l) и Фг(0
и ПРВ ИЛ(А) запишется в виде
lV(t)-e~°2 [ Ф2 (т)Ф1 (1 — т) с?т (31.26)
о —ОО
ИЛИ
W(t) = е-°2 / Ф1(т)Ф2(«-т)сгт. (31.27)
J -со
Выразим Ф2(<) в форме
Г°° 1
Ф2(г)=— / ---- е lutdtz.
2?Г J-oo Ш + 1
Сделаем подстановку itz + 1 — s, так что du — (l/i)ds; iu = s — 1. В ре-
зультате получим
1 Г1+1°° 1
Ф2(г) = 1е‘- / -e-stds - ie‘l0, t < 0,
27riJi-ioo s
Где
1 f1+i°° 1
Io=^ L -s°ds=u^
J I ICO
— единичный скачок; в = — t > 0.
Окончательно находим
Ф2(()—il/( 0е'> (31.28)
Представим функцию Ф1(1) в виде
1 Г°° 1 -о2 • Г°° 1 2
^1(0= - / e-lut:-----------eiu_1 du —-----I e-‘“(---------e1-"1 du — —iloi,
2zr / iu — 1 2?r / 1 — iu
290
Лекция 3]
где
Ди
— iu
Этот интеграл совпадает с интегралом (31.21) при t = х/2 и если вместо а2/2
положить а2.
После подстановки s — 1 — iu, так что —iu _ s — 1, du = t/s/(—i), получим
rl+ioo /-1+ioo
I01=—— e(‘-^Lea3hds=e-tJL е<“2/^.
2’ГН) Л-ioo S *
Сравнивая этот интеграл с интегралом (31.23), находим а2 = —62/4s Ъ — 2а.
Тогда
Ди = е“*Io(2ay/t) = Io(2ay/a2t)t t 0.
Следовательно,
Ф1 (t) = -ie-t/0(2Va2i), t 0.
Остается вычислить ПРВ №(х) по формулам (3126) и (31.27). По (31.27) при
х < О получим
PFfa;) — е а [ $1 (у)^2 — у) ^-У = е<* f е~У /о(2д/а2г/)ех—уdy =
J—оо Jo
/•ОО
= e-“2+l / e-2Klo(2X42?),d!/ = e-“2+l/o2-
Jo
Используя соотношение [20, 6.614.3], можно показать справедливость равенства
тогда
Следовательно,
1-Т(г) = ® < 0,
где s — а2/2 — ОСШ на входе коррелятора
Согласно формуле (31.26) найдем ПРВ PVfa;) при х 0:
/°
е—у) Iq [2у/а2(х — у)еу dy =
оо
/°
е2у1о(у/&з(х-уУ)Лу
-ОО
(31.29)
Сделаем замену переменной и — yj4(х — у), так что и2 = 4(аг — j/); 2udu = —4 dy'.
dy = —[u/2)du\ 2y = —u2/2 + 2x. Тогда no (31.29) получим
1 f 3
W(x)=-ex-21l u^~"3f2I0(uV2^}du = *
1
2
uer^^2s)l2I0(uV2i)du - 2y/Z),
Дерс.множитель и коррелятор
291
где Q(a,b) — Q функция (табулированная) причем Q(a, О) = 1, Q(0, Ь) = е ь /2.
Таким образом, получили ПРВ отклика коррелятора
1У(х) - <
je1 SQ (721,275)
при х < О,
при х > 0.
(31.30)
Графики ПРВ по (31.30) при различных значениях ОСШ s изображены на
рис. 31.4 Эти графики соответствуют случаю Л1 — Л2, в = 0; <xi — гг2 = сг = 1
Ро — 0 (ро — коэффициент корреляции перемножаемых шумов).
Модель Эндрюса [48]. В альтернативной постановке задачи сиг-
нальные составляющие напряжении гц — и = «г(^) в соотно-
шениях (31.8) остаются Без изменения. Однако изменяются шумовые
составляющие rij = n\{f) и п? — п2^). а именно, во-первых, полага-
ется k — 0, во-вторых, квадратурные составляющие становятся корре-
лированными. При этом по-прежнему их средние значения полагаются
равными нулю те выполняются условия (31.10) кроме того, выпол
няется условие (31 11).
Вместе с тем вводятся условия коррелированности квадратурных со-
ставляющих
^(щаг) — Efbibz) ~ po<Ti(T2. E(a\bi) = — E^bi) = A0<tio-2, (31.31)
причем
£/(gj6 ) — £?(61П1) — £'(02^2) — 1^(^2а2) — О
Поэтому корреляционная матрица квадратурных составляющих име-
ет вид
А - cov[ai(f), a2(t), f>i(l), 62(t)] =
’O-1/O-2 Po 0 Ao
= O-1O-2 Po 0 О-2/o-l Ao —Ao o-i /0-2 0 Po (31.32)
0 Po О-г/o-l .
292
Лекция 31
При этом отклик коррелятора X находится по (31 13) при к — О
X — (ae/2)(Ai-42 cos0 4- Л]а2 4- Л261 sin 0 4- сц A2cos 0 4- ata2 + t»ib2).
(31-33)
Отсюда сразу находим среднее значение отклика коррелятора
тпх — Е(х) — (ае/2)[Л1 Л2 c°s 0 + 2росгг <т2].
Найдем
(31.33).
характеристическую
функцию отклика коррелятора Д'
Введем вектор-столбец
г’1
«2
т’з
Л’4.
ai 4- Xj
а2 + А2 cos 0
61
62 4- А2 sin О
при этом среднее значение вектора V
E[V] = V =
«1
v2
й3
^41
А2 cos 0
О
А2 sin О
Ковариационная матрица Л с элементами Лтп — — t>rn)(vn —
—йп)] имеет вид (31.32).
Тогда совместная ПРВ является гауссовской и может быть записа-
на в векторной форме (5.12):
^Ь^.^.^)=27г2|А|1/2ехр
J(V-V)TA 1(V—V)
Обратная матрица Л 1 находится по (31.32):
<Т1<г2(1 - р-)
Tra/o-i
~Ро
. —Ао
—Ра 0 —До
<Ti/cr2 Ао О
О -pa o-i/<Т2
где р2 = Ро + Ао !. причем [А] = <т2(1 - pg - A2)2 = <r?<^(l - р2)2
Запишем отклик коррелятора X в виде квадратичной формы
X = VTQV,
где Q — матрица размерности 4x4
'0 1/4 0 О'
1/4 0 0 0
0001/4
0 01/40
К[еремножителъ и коррелятор
293
В результате характеристическая функция (31.16) записывается в виде
= (2тг)2|Лр/2 Х
1
(31.34)
х//// ехр paVTQV
-(V- V)TA * (V-V) dvi dv2dv3dv4.
2
Интегрирование приводит характеристическую функцию к следующе-
му виду [48]. (Приложение 1)
1
0j;(iu) = ------------
x/|I-2i«AQ|
где I — единичная матрица.
ехр---VT(A — Q-1/2i«)-1V ,
(31 35)
В скалярном виде характеристическая функция отклика коррелятора
приводится к следующей форме записи [48]:
7 — 2(ас + 6d)(wi2 — iaeu/2)
Л г. Л е(А 1, А2) еХР 2(|17| + iaewi2w +ве2и2/4
i'x V^/
|Л|>/2
|1У| + iaew?i2tz + ae2u2/4
(31.36)
где
Ai
a =
Л2(р0 cos 0 + Ар sin 0)
А2 cos О
^(l-P2) 0-10-2(1 -02)
b Ai(Ap cosd — ppsind)
0-10-2(1 - р2)
А2 sin в
^(1-Р2)
Ро At
с —------------------' " ---• d —
<72(1-02) 0'1<Т2(1-р2)
а2 + 62 с2 + d2
ApAi
<ti<t2(1 -p2)'
-Po
W12 <Т1<Т2(1 -р2)’
2Ap(ad — 6с)
e(Ai,A2) = ехр
^(1 — p2) ' <r2(l — p2) o-1cr2(l p2) ’
a2 A2 — 2(pp cos0 + Ao sin 0)<7ja2Ai A2 + сг'^А^
Рассмотрим факторизацию суммы, входящей в выражение для ха-
рактеристической функции:
| W\ + iaei«i2t + as2Z2/4 — (t — ti)(< — Z2)se2/4,
где t _ 2?(po ~ x/1 ~ Ao). i _ 2<0o + x/1 ~ Ло)
• 2 aecri<T2(l — p2)
setri<r2(l - р2)
294
Лекция J]
После преобразования находится ХФ в форме [48]
С(7) = Со
ехр(л)
t -t2
Co<pi(t)<p2(t), (31 37)
где
7<tict2(1 — р2) ас + bd
2se(l — Ац)1/2 + ае
7<71<т2(1 р2) ac + bd _4е(А1,Л2)
Д “ 2ае(1 - А2)1/2 ге ’ ° " ае2^/^ '
Заметим, что при р0 — Ао ~ р = 0, ai = а2 = <т — 1, ае — 2
0 = 0, Aj — Л2 — а приходим к (31.25), так как при этом ti = —il
t2 = г; а — а2, /3 — 0 Со = е-"2.
Введем преобразования Фурье
1 ГОС 1 лею 1
Фг(Ж) - Sb(t)] - \ У е-^—е^ГЙ;
1 Г°° If00 1 ie
Ф2(*) = 8М)1 = 9 / ^^dt - — / е^—-е--> dt.
J—oo J—оо -
Тогда свертки, аналогичные (31.26) и (31 27), имеют вид
Ж(х) = Со Ф1(х - у)Ф2(у) dy,
W(x) = Col Ф1(1/)Ф2(а: y)dy.
J оо
Преобразуем интегральные выражения для функций Ф1(к) и Ф2(х)
Сделаем подстановку в первом случае is — t — 7], во втором is =
= (t — <2). В результате получим
Ф1(х) = -!е;и‘а:71(а:);
1 yiti+ioo a/t
/ е^— ds-
Jitj —ioo
Ф2(х) = ie ,t2XI2(x),
1 /.ita+ioo e-P/s
^) = y-/ e51------
2tti Jit2-loo s
Контуры интегрирования на s плоское
ти (s — и + iw) показаны на рис. 31.5 (с
для 71 (х), б— для /2(ж))
Оба интеграла сводятся к формуй®
(31 23), поэтому находим
Puc. 31.5
Ф,(х) - -ie ltlXIa(2у/ах)
Ф2(х) = 1е lt2X =
= ie-^ Jo(2y/^)
при X ? О'
при х <- О'
Деремножитпелъ и коррелятор
295
и^О) = *
Подставляя эти функции в интегралы свертки, получим
гО
/ e-itia;e-.-((2-h)v ^[2^(3; _ y)]Jo(2\/^)<fy
— оо
При X ;
аОО
I е->^e«(«s-‘ih/0(27oy)Jo[2i//?(a; - уУ)Лу
о
при X *
О,
0.
Рассмотрим
при х > О
случай х > 0 Подставляя значения ii и t2,
найдем
PF(x) - Со ехр
2(ро ~\Л "-^ок
аео-1<т2(1 р2)
(31 38)
[°
X / ехр
4?/у/1 - Ag
ае<Г1<т2(1 - р2)
С другой стороны, при х < 0
2(ро + \/1 — А2)ж
ае<Г1<т2(1 - р2)
4у\Л А2
ае<Т1<г2(1 - р2)
I0[2y/a(x - y)po(2\/ft/)dt/.
(31.39)
х I ехр
Jo
1о(2л/ау)7о[2\/^ ?/)W
РК(ж) — Со ехр
х
При р = ро = Ао = 0; ае — 2, <71 = <т2 — <т — 1 а = Alj — Л2;
0 = 0 находим а — a2, ft = 0, Со — е~“ и из этих формул полу-
чим частный случай (31 30).
С другой стороны, если только ро ф 0, остальные параметры те же,
то Со = [1/(1 - р2)]ехр[—2s/(l +ро)] и в результате получим
W^z) -
’ 1е-»+®/(1-Ро)
2
1
2s(l ро)
1 + ро
и при ро — 0 снова приходим к (31.30).
при х < 0
при х > 0
(31.40)
При получении Q функции в интеграле произведена подстановка и =
— ^4(х — у)/(1 — Ро), так что в подынтегральном выражении аргу-
мент 2у/ау бесселевой функции принимает вид двух сомножителей
^(1-ро)/(1 + рО)-
Графики функций (31.40) изображены на рис. 31.6 при р = 0,5.
При р — 1 ПРВ отклика коррелятора при <71 = сг2 — сг = 1; /11 —
296
Лекция 31
ГИ(х) =
Л2 — \/2s; Ao = 0. 0 = 0 имеет вид
— ехр(—s — x/ae)Io(y/4sx/ee) при х 0,
О при х < 0.
Графики функций (31.41) изображены на рис. 31.7.
Рассмотрим частный случай отсутствия сигналов: Ai — А% = 0, по-
этому V — 0. В этом случае ХФ имеет вид
"<"> - h-JaqpA <ЗМ2>
Раскрывая определитель, получим
/ж2\
|I — 2iwAQ|1'2 = 1 — (веро«г1«г2)|и + ( — j о'1о'2(1 — Р2)^- (31.43)
Учтем, что |Л V2 — <т2<72(1 — р2), поэтому по (31.43) находим
|I-2iwAQ|1/2= |Л|1/2
где N = -р0/[о-1о-2(1 - р2)].
Представим выражение в скобках в виде произведения
|Л|-1/2 + aejViu + аг2<72/4 — (и — щ)(и — ii2)se2/4.
|A|-1/2 + aeM«+
где
_ 2г(ро — у/1 — Aq) ________ 2г(ро + л/1 — Aq)
геа!(т2(1 — р2) ’ " аео-1сг2(1 - р2)
Тогда ХФ можно записать в виде
4 1
0x(iu)= ------гт--------- (31.44)
ае^Л!1/2 (и — «i)(u — и2)
Церемнсокителъ и коррелятор
297
Рис. 31.8
Отсюда ПРВ находится из выражения
1 /•«> 4 1 г°°
kzfx') —— / (ZJiule Ш1 du — ,, — / 7-------77-------г du.
Г'- ' 2тг 1 ' ае2|М|1/-2тг J_00 (и щ)(и - и2)
Г По определнию щ и и2, полюс и2 находится в верхней полуплос-
кости w-плоскости, щ — в нижней полуплоскости Поэтому на осно-
ве леммы Жордана и теоремы о вычетах с учетом направления обхо-
да контура получим:
I при х > О
lV(z) =
4(—i) е-Ш1Х
as2y/|Af I к 1 — «2
при х < О
1 2(ро ~ VI — -^о)
________ —- ехр --------------------- j
ае<Т1<т2ХЛ Ч ае<т1<т2(1-р2) ’
(31.45)
40) е“^ 1 Г2(ро + VI - Ао)‘
I (Ш - -------------------- = --------. exp --------------7-----тт- -
&\/\М\«2 - «1 аео-1СГ2\/1 - >о - Рz)
(31.46)
I Этот же результат следует из формул (31.38) и (31.39) при а = /3 — 0;
е(Л!,Л2) = е(0,0) - 1.
При Ао ’ 0 и tri — <72 — <7, ае = 1 отсюда находим
Г (1/<72)е21/^20-₽)
t (1/<72)е-2а:/(а3(1+р)
при х < 0,
при х > 0.
(31.47)
? Этот результат был получен Лезиным Ю.С. [50] при рассмотрении
Ьхемы коррелятора согласно рис. 31.8.
При ге = 2 и <71 = <72 = 1; Aq = 0 графики функций (31.47) изображе-
ны на рис. 31.9 при различных значениях коэффициента корреляции р.
Отношение сигнал/шум на выходе
коррелятора
Введем ОСШ на входах коррелятора
«1 - Л2/2сГ1; s2 = ^2/2бг2-
Определим мощность сигнала на выходе коррелятора (при отсутствии
HjyMOB на входе) в виде
<7 = So.
298
Лекция 31
Рис 31 9
где So = 2геЛ1Лг cos 0 = setri<72\/si«2 cos О
Мощность шума на выходе коррелятора определяется соотношением
2 2
<т0 = ш2 - т1,
где mi = Е(Х), лг2 — Е[Х2]
Среднее значение ntj отклика коррелятора определяется по (31.19)
nil = Eea1a2(y/s1s2 cos в + ро).
Второй начальный момент
т2 - Е(Х2) =
j гт2 cos2 0 + "2—Ь — Р Зро j 52 cos О--s2 sin 6
4 + 2r C7 [Е(ж1Ж2)+Е'(а;1У‘3'2)]+
+ '/2c%cr" 0[^(Х1Х2У1)+ Е(у1у2)] + £[(:ча;2 + У1Уг)2]}-
В частном случае, когда Ао = р0 — 0 все величины при усреднении за
исключением последнего слагаемого, равны нулю; последнее слагаемое
равно 1/2, так как при р0 — Ао = 0 Е(ххх2уру2) = 0, Е(х^х2) ~ cr'^at
^(УгУг) = €Г1£Г2- Поэтому ОСШ на выходе коррелятора
_ 3e2o-?<rfsiS2Cos20 _ 2siS2cos2P .
9 9 1 । । О
т2 - т[ 1 + si + s2
Рассмотрим другой класс корреляторов, а именно, так называемые
корреляторы совпадений полярности (знаковые корреляторы — ЗК) [54-
57] которые работают по схеме рис. 31 10
Сигналы на выходе полосовых фильтров (ПФ являются узкополос
ными и могут быть записаны в форме
Xi(t) — Al coscjQt + ni = Vi cos(wot + 0]);
Деремножшпелъ и коррелятор
299
Рис. 31.10
x^{t} — А2 cos(w0f + <р) + П2 — V2 cos(w0Z + 02), (31.49)
где Vi и V2 — огибающие суммы гармонического колебания и узкопо-
лосного шума, 0i и 02 — случайные фазы Огибающая и фаза — ме
дленно меняющиеся функции времени Ограничители (на рис. 31 10
«Огр») являются идеальными, их отклик принимает значение +1, когда
колебание на входе ограничителя образует положительный выброс над
осью времени, и —1 — при отрицательном выбросе.
Запишем отклик ограничителя в форме ряда Фурье
ук = -У[(-1)’7(2«+1)]со5[(2п+1)(^ + ^)], к = 1,2. (31.50)
Отклик перемножителя запишется в виде произведения
оо оо ,__. у»+п
г = м = {(2т+ ! (;„ + !) - п)"°!+
т—0 п=0 7 г
+(2m+l)0i (2n + l)02] + cos[2(m4-n+l)woZ + (2m+l)0i + (2n+l)02] .
После фильтра низкой частоты (ФНЧ) остается лишь низкочастотная
составляющая, соответствующая слагаемому, при котором т = п. В
результате откликом ФНЧ будет колебание
о 00 I
x(t) = 2 Е 75-----пг cosK2n + W* - (3151)
7TZ ( 2П + 1)
n=0 z
Сумма ряда выражается в виде функции [20, ф ла 1.444.6]
Sc- |01-02|^7Г.
Поэтому отклик ФНЧ имеет вид
</.) = 1 - (2/77)10! -02|, |01-02Ктт. (3152)
Таким образом, отклик ФНЧ является линейной функцией абсолют
Ного значения разности фаз
В работе [54] найдены среднее значение mi и второй начальный мо-
300
Лекция
301
мент отклика ФНЧ:
8 .°°А fl 1
= ~2 521 (in-iy^2n ~1; Si)/(2n -1: S2} г -
1 4 °° f 1 1
1112 = 3 + ^2 52 { ^2 Л2”: Sl)/(2n- s2) f > (31.53)
п—1
где
/(п; s) = («"/2/л!)Г(1 + n/2)iFi(n/2; 1 + n; -s). (31.54)
«1 = Л2/2<т2 —ОСШ в первом канале; s2 — A't/2a% — ОСШ во втором
канале; iFi(a; b; с) — вырожденная гипергеометрическая функция.
Определим мощность сигнала на выходе соотношением
S'o — [?Л1(«1,52) 7«1(0,0)]2.
Мощность шума No на выходе коррелятора
No = т2 — т^.
Таким образом, может быть найдено ОСШ на выходе коррелято-
ра в виде
q = So/No — [mi(si,s2) — 7«1(0,0)]2/(7п2 - m2). (31.55)
Для коррелятора непрерывных сигналов (обычного коррелятора —
ОК) [см. (31.48) при 0 = 0] ОСШ на выходе имеет вид
Отсюда при малом ОСШ на входе
gss2sis2, si,s2<Cl- (3157)
Если в одном из двух каналов (например, во втором) ОСШ велико, то
q “ 2s, при s2»s!; s2» 1. (31.58)
Рассмотрим коррелятор совпадений полярностей (знаковый корреля-
тор — ЗК). В выражения для моментов mi и т2 входит функция
/(„,s) = ^r(i + 2),r,(=;i + „;-s).
Преобразуем вначале вырожденную гипергеометрическую функцию
1 7*1 (п/2; п + 1; — s). Воспользуемся соотношением [59, ф-ла 3.4.13]
(Ь— 1)]Т1(а,6- 1,ж) = (6— l)iFi(a, b, ж)+ iF\(a+ l;fe+ 1;х).
При а = п/2', b = п + 1 получим
1F1 Q;« + i;z
^еремножителъ и коррелятор
Отсюда находим соотношение для исходной функции в виде разности
~[2(^M)]1F1G + 1:r,+2:a:)-
(31.59)
Далее используем равенство [59, ф-ла 13.6.3]
1^1 ^i/ + |;2i/+l;2z^ = Г(1 + г/)ег
где Iv(z) — модифицированная функция Бесселя. Полагая для первого
слагаемого в (31.59) v - (п. - 1)/2 = п/2 - 1/2, по (7) получим
/п \ _ (п 1\ . ________ . , п _ 1
2 2
(31 60)
; n; 2z
При z - —1/2
Воспользуемся соотношением [20, ф-ла 8.431.2]
= (-iyx(z).
Тогда получим
I Л (=; -«) = г +1) (!), ,=2Z1 (31.61)
и после умножения на величину [$П/2Г(1 + п/2)]/п! найдем
Используем формулу удвоения для гамма-функции [20, ф-ла 8.335 1]
22г-1 ( 1
r(2z)=-^r(z)r(z+-
и равенства
Тогда при z — п/2 получим
302 Лекция 3]
и^ремножителъ и коррелятор
303
Отсюда следует равенство
Поэтому по (31.61) получим
Тогда функция f(n, s) может быть записана в виде
f(n, s) = + Д2,
где
Для того чтобы воспользоваться формулой (31.60), введем v = п/2т
= 1/2. Тогда по (31.60) получаем
1F1 (^ +1; п + 2; 2z) = Ге? р = | + 1
ИЛИ
С учетом (31.62) найдем
д2 - (0 .
В результате функция /(n, s) примет вид
f(njS) = Д1+Д, = |т^е-’/2 [/(„_1)/2 (|) + /(п+1)/2 (|)] . (31.63)
В работе [54] установлена быстрая сходимость ряда для среднего зна
чения 1Щ, поэтому возможно ограничение одним (первым) членом рЯ'
да. Тогда получим
_ 8 ^[/(гп-мрлгп-мг)]
ГП1 тг2 (2n - I)2 ~
п = 1 к '
« /»[,„ (i) + „ £)] [„ (|) +(£)]. (31.м).
По (31.53) замечаем, что в выражение для второго начального момен-
та ТП2 входит произведение функций /(2n, $i)/(2zi; s2). при этом соглас-
но (31.63) необходимо использовать функции Бесселя вида
(|), гДе — целое число. В [54] приводится ряд для функ
ции /(2n,s):
/(2n, s) =
I ™ а - -•) + Е - (-D-ь-].
Tl.S k G Кj 8
Ограничиваясь одним членом ряда (при к = 0, п = 1), получим
/(2n,s)»i(e-'-l) + l= J(s + e-*-l)
Тогда приближенное выражение для второго начального момента
принимает вид
I ’ »«2 ~ — (S1 + е-*1 — 1) (s2 + е-*2 — 1) - (31.65)
3 ТГ“«1«2 v '
По (31.64) и (31.65) при малых ОСШ si$2 -С 1 получим
2 ,____ 1
mi rj —y/SiS2, т2 ~ -.
7Г 3
Тогда ОСШ на выходе коррелятора
12
q — — «1«2, «1«2 1- (31.66)
7Г“
1я Когда в одном из каналов ОСШ мало (например, S] < 1), а в другом
велико (s2 » 1), то на выходе ОСШ имеет приближенное значение
48
«I С 1, S2 > 1
тг1
При вычислении использовалось значение f(n, s) = 1 при s 1,
так как при этом
Лекция 32
Выбросы случайных процессов
Постановка задачи
Рассмотрим реализацию x(t) непрерывного и дифференцируемого
стационарного СП Х(1) длительностью Т (рис. 32.1). Такая реали-
зация на конечном интервале Т имеет конечное число максимумов
минимумов с различными значениями локальных экстремумов Н, при-
чем в момент времени tm реализация имеет глобальный (наибольший
максимум Нт.
Реализация x(Z) может несколько раз пересекать фиксированный уро-
вень С снизу вверх (с положительной производной) причем в момент
времени Tq'впервые происходит такое пересечение (те первый раз сни-
зу достигается граница С) Когда случайный процесс Х(<) пересекает
уровень С снизу вверх, будем говорить, что имеет место положитель-
ный выброс Если же уровень С пересекается сверху вниз, то можем
говорить об отрицательном выбросе. Тогда можно сказать, что реали-
зация х{1) длительностью Т имеет п положительных (отрицательных)
выбросов на уровне С, причем указанные на рисунке величины т и
можно назвать соответственно длительностями положительных и отри-
цательных выбросов Часто величину 9 называют длительностью ин-
тервалов между выбросами.
Величины т, 9 и Н в пределах одной реализации могут принимать
несколько значений (в зависимости от уровня С и интервала Т) и вме-
сте с величинами п, Tq и Нт изменяются случайным образом от од-
ной реализации к другой.
При статистическом описании этих случайных величин можно интере-
соваться их средними значениями, дисперсиями, плотностями вероятно-
сти и другими характеристиками. В данной лекции приведены формулы
в основном для средних значений, так как вычисление других характери-
стик, как правило, связано с выполнением численного интегрирования,
что выходит за пределы целевого назначения данной книги Другие
Рис. 32.1
1ыбросы случайных процессов
305
Рис. 32.2
характеристики рассматриваются тогда, когда они могут быть найдены
без сложных математических вычислений
I Рассмотрим выбросы случайного процесса A’(t), т е превышение этим
процессом некоторого уровня С (рис. 32.2,в) Математически выбросы
определяются выражением
х+(1) = (ж - С)1(х - С), (32.1)
где 1(а;) — единичный скачок
Заметим, что
^1(а:) = 6(х), = Кх)х- (32.2)
I Преобразование х —» х+, может осуществляться в нелинейном устрой
стве типа детектора, характеристика которого показана на
Рис. 32.3,а. Нелинейное преобразование х —> 1(а; — С) реализует иде-
альный ограничитель (рис. 32.3,6).
I Как функция времени процесс 1(а: —G) представляет собой случайную
Последовательность прямоугольных импульсов единичном амплитуды
Рис. 32.2,в) Они синхронны с переходами функции х через уровень
С. те. имеют ту же длительность, что и импульсы неправильной фор-
на рис 32.1,6, из которых состоит процесс x+(t).
Найдем выражения для некоторых характеристик выбросов на ин-
тервале времени (0,7).
306
Лекция 32
l(x-C)
1
ОС х
б)
Рис. 32.3
Длительность выбросов. Под длительностью г-го выброса по
нимается величина интервала Дт; — между последователь-
ными пересечениями кривой х(<) уровня С с положительной и отри-
цательной производной. Суммарная длительностть всех выбросов на
интервале (О Т), равная т = Дт;, совпадает с временем пребыва-
i
ния процесса x(t) в области х > С Ту же суммарную длительность т
имеют, очевидно, и импульсы 1(а: — С) (рйс 32.2,в), причем она равна
просто их площади, поскольку эти импульсы неотрицательны и имеют
единичные амплитуды. Таким образом, длительность выбросов опре-
деляется выражением
(32.3)
Число выбросов. Дифференцирование по времени функции 1(з; —
С) дает ряд 5-импульсов положительных при х > 0 и отрицательных
при х < 0 (рис. 32.2, г)
Функция
|i(x - С)| = |5(а: - C)i| = Ь{х - С)|£| (32.5)
представляет собой временную последовательность £(t) положительных
5-импульсов, каждый из которых совпадает по времени с пересечени-
ем уровня С (рис. 32.2,5).
Этот СП
(32 5)
является стационарным
Площадь каждого 5-импульса равна единице и число импульсов в
интервале (О, Т) равно пс(Т)
fT
пс(Т) = / / 5(х - C)|i| dt.
Jo Jo
Выбросы случайных процессов 307
Число пс(Т) определяет полное число пересечений уровня С как с
положительной, так и с отрицательной производной
Учитывая стационарность СП £(<), получим среднее значение числа
пересечений уровня С
£[nc(T)] = m(t)] - ТЯ[И(*Ж(* - С)]. (32.6)
Эта же формула может быть получена аналитически, если восполь-
зоваться соотношением [18, 60]
(32.7)
[где у?(С) = #(<») — С = 0; = x'(t).
Формулу (32.7) иллюстрирует рис. 32 4, согласно которому заклю-
чаем, что функция 5[9?(i)] представляет собой последовательность 6-
функций, площадь каждой из которых равна величине, обратной значе-
нию производной в точке t — lt, где <p(ti) — 0
Теорема 32.1. Пусть известна одномерная ПРВ Wx(a:) сечения СП
X(t) и условное среднее производной СП Тогда
Е[пс(Т)] - 7IV^C)E[|X'(*)l|*(t) = С] (32.8)
Доказательство. По (32 6) замечаем, что пс(Т) является функцией
СВ А'(1) и X'(t), которые характеризуются совместной ПРВ W(x,x')
Поэтому из (32.6) следует соотношение
|®'|0(а: - C)W(a;, х’) dxdx' = Т [ |а/|W(C, х') dx'.
J—оо
(32.9)
Используя соотношение IV(C, х') = Wx(C)W{x'/С), получим (32.8).
Замечание. Если рассматриваются только положительные (отри
Цательные) выбросы, то формулы (32 8), (32 9) записываются соответ
ственно в виде
Е[п+(Т)]=Т [ x'W(C,x')dx', (32.10)
Jo
/о
x'W(C,x')dx'. (32.11)
•оо
На основании приведенных формул может быть найдена средняя ча
стота пересечения уровня С СП X(t) [10, 18]
Ас = ^Г[лс(Т)].
E[nc(T)]-rJ J
308
Лекция 32
Тогда по (32.8) получим
Ас = И^(С)£[|Х'(*)1|ад = Cl-
Следовательно,
Хе= f \x'\W(C,x')dx'.
J—оо
А+ = [ \x'\W(C,x')dx'-.
Jo
/о
|хг|1У(С, я') dx'.
-оо
(32.12)
(32 13)
(32 14)
(32.15)
Максимумы и минимумы СП Х(<) совпадают с нулями СП V(t) =
= X'(t). Тогда частота экстремальных точек
Am - 1^(0)Е[|Х"(7)||Х'(*) = 0]. (32.16)
При этом частота максимумов (минимумов) равна Ат/2
Выбросы гауссовского СП
Пусть X(t) — стационарный гауссовский СП с нулевым средним зна
чением mx(t) = тх = 0 Последнее ограничение не является суще-
ственным, так как пересечения процессом X(t) С-уровня эквивалентно
пересечению центрированным процессом Х{1) — тх уровня (С — mr).
Теорема 32.2. Если Х(7) — стационарный гауссовский дифферен-
цируемый СП с КФ /?(т), тогда
Ас = И4(С)Е[|Х'(7)|]; (32.17)
(32.18)
7Г у jTCyOJ
Доказательство. При рассмотрении характеристик производной
СП были получены соотношения
Ям<(т) = -7?'(т); /^(т) = -7?"(т).
В силу четности КФ 7?(т) R'(0) = 0, следовательно,
E[x(t)x'(01 = -я'(о) = о.
Таким образом, получено условие ортогональности гауссовских СВ
X(t) и Х'(1). Поскольку их средние значения равны нулю, то эти СВ
независимы, а это означает справедливость равенства
Е[|Х'(7)||Х(7) = С] = E[A"(t)].
Таким образом, соотношение (32 17) доказано.
Выбросы случайных процессов
309
При доказательстве соотношения (32.18) учтем, что
иас)= *_____________________________е-с2/2«(°).
У2тг/?(0)
Кроме того, воспользуемся соотношением (5 4) (вторая строка) при
известной дисперсии производной ст-, _ —7?"(0). Тогда получим
E[\X'(t)\] = J 2Й"(О).
V 7Г
После вычисления произведения (32 17) приходим к (32.18)
Обозначим через Aq частоту пересечения нулевого уровня (среднюю
частоту) СП X(t), тогда по (32.18) при С = 0 найдем
2_ R'\0) = f2<>u2S(u)du
(32.19)
Пример 32.1 Пусть ЭС имеет прямоугольную форму
S(co) = (f°’ (32 20)
' 10, при |ш| > wi. '
Найти среднюю частоту СП X(t)
Решени
д2 — )/3 _
° 2Sotdi ^г2 Зтг2
к Отсюда
Ао = -^=-
тгу/З
Пример 32.2 Пусть СП X(t) имеет вид
X(t) = acoscaot + bsmcuot.
где а и Ь независимь е СВ с нулевыми средними значениями и равными дисперсиями
Р(“2) = Е(Ь2) = <т2 Найти среднюю частоту СП A'(t)
Решение Как было показано в примере 2 4
К,(т) — a2 cosw0r,
При этом /?х(0) = а2- К"(0) = —ai2<r2, тогда по (32 19) получим
А0 = — = 2/о,
7Г
гДе fa — центральная частота ЭС СП X(t).
Пример 32.3 Пусть СП X(t) имеет вид
X{t) — a coswot + bsinwot + л(1),
гДе а и Ъ те же, что в примере 32.3, и не зависят от СП n(t).
Найти среднюю частоту СП X(t).
Решение.
Лх(т) = a2 cosw0r + R„(r).
310
Лекция 32
Тогда
1 /wgo2-J?"(0)
0 jrV <72+«п(0)
Пример 32 4 Пусть X(t) — узкополосный СП,
х (О = a(t) COSWQ t ~ b(t) sin wot.
Найти среднюю частоту СП x(t).
Решение Согласно (6.9)
Кх(т) = На(т) COSW0T,
где /?а(т) — КФ СП a(t) (СП b(t)) Очевидно, Rx(0) — /?а(0). В силу четности КФ
Ка(т) производная fta(o) = О. После дифференцирования КФ Rx(r) получим
Я^(О) = К'(0) - «ЛОХ
Тогда по (32 19) находим
2 / 2
А02-^ + ^; >o = V^+^>
ТГ^ у ТГ
где
— средняя частота СП a(t).
Найдем среднюю частоту экстремумов гауссовского СП. Для этого
в соотношении (32.19) необходимо заменить КФ й(т) СП X(t) на КФ
—Я"(т) СП В результате получим
2 я<4)(0) _ , 2 21,
m ~ тг2Я"(0) 1 1
Пример 32.5. Пусть ЭС S(w) имеет вид (32 20). Найти среднюю частоту экс-
тремумов Ат
Решение По (32.21) получим
2 2Sow|/5 3w2 _ wi [з
171 2tt2S()Wi/3 5тг2 ’ тг у 5
Пример 32 6. Пусть
х _ J 50i при Wj < |w| < W2,
1 ’ (О, при других W.
Найти среднюю частоту экстремумов.
Решение По (32.21)
2 3 W®-W® 1 /з(<4 - wf)
Am“ TT22S0 f“2w3dw “ 5ТГ2 w3-wf 7tV5(w3-wJ)-
J Li? I
Лекция 33
Шумы в радиотехнических
устройствах (РТУ)
Известно много видов шумов. Рассмотрим два наиболее часто встре-
чающихся — тепловой и дробовый шумы.
Тепловые шумы резисторов
Одной из главных причин возникновения шума являются флуктуации
объемной плотности электрического заряда в проводниках, вызываемые
хаотическим тепловым движением носителей заряда
У резистора, который находится в тепловом равновесии со своим окру
жением на концах появляются флуктуации либо напряжения, либо то-
ка Это явление аналогично броуновскому движению, моделью которого
служит модель случайного блуждания (марковская модель)
Электроны в резисторе обладают тепловой энергией. Они передвига-
ются в проводнике случайным образом, испытывая в процессе движе-
ния соударения с атомами кристалла Случайные движения вызывают
тепловой шум. Флуктуации можно толковать как результат очень боль-
шого числа независимых случайных событии. Каждое событие состоит
из начальной стадии, когда происходит отклонение от состояния равно
Весия и из возврата (релаксации) к этому состоянию. Начальная стадия
— это пробег электрона между столкновениями которое порождает не-
равновесное распределение заряда в проводнике, а релаксация — это
последующее изменение заряда, восстанавливающее состояние равнове-
сия. Отсюда — флуктуации объемной плотности электрического заряда.
Случайное событие (отклонение-релаксация) приводит к возникновению
импульса тока или напряжения, а суперпозиция (наложение) всех таких
импульсов и представляет собой флуктуации (тепловой шум).
Средняя тепловая скорость электронов большая а следовательно,
Длительность импульса тока весьма мала
Отсюда вывод; тепловой шум резистора достаточно точно модели-
руется белым шумом.
Для теплового шума ЭС .5'ш(/) шума резистора определяется фор-
мулой Найквиста
So = IkTR В2/Гц, (33.1)
Де — сопротивление резистора, Ом; Т — температура резистора К
= 1,38 10-23 Дж/К — постоянная Больцмана.
Замечание. По формуле (33.1) вычисляется двусторонний ЭС So
(Рис 33.1,а).
jffyMui в радиотехнических устройствах (РТУ)
313
Прак ически при расчетах используют односторонний ЭС No = ?$о
(рис 33 1,6), тогда
No - AkTR. (33.2)
По (33.1) и (33.2) определяется ЭС шумового напряжения на концах
резистора в разомкнутом контуре. Тогда при любом сопротивлении R
при температуре Т существует шумовое напряжение со средним квадра
том в полосе частот df:
Vf = 4kTRdf. (33.3)
Пример 33 1 Пусть R = 106 Ом, df — 106 Гц, Т = 293 К (комнатная тем-
пература), тогда — 127 мкВ
Пусть шумящий резистор представлен в виде эквивалентной схемы
генератора тока (рис. 33.2). Тогда ЭС тока по формуле Найквиста опре-
деляется соотношением. TVoi — AkTG, где G = 1/R — проводимость
Максимально возможная мощность на сопротивлении в интервале ча-
стот df не зависит от величины R.
Для доказательства утверждения рассмотрим рис. 33.3, на котором Ru
бесшумовая согласованная нагрузка Как известно, мощность, пере-
даваемая в нагрузку максимальна при Rn = R (условие согласования^
Тогда максимальная мощность, создаваемое сопротивлением, имеет вид
dP = Ц2/4Л = kTdf.
Пример 31.2. В интервале частот 1 Гц максимально возможная мощность при
комнатной температуре (Т = 293 К) равна
1сТ = (1,38 10-23 Дж/К) 293 К • 10е = 4 10“15 Вт.
Вывод. Тепловой шум — это внутреннее присущее и неустранимое
свойство резистивных материалов. Его интенсивность —это тот придел,
ниже которого нельзя ослабить шумы в РТУ
Единственным радикальным средством борьбы с тепловыми шума-
ми является глубокое охлаждение (уменьшение температуры) входных
цепей чувствительных радиоприемных устройств, применяемых в ра-
диотехнике.
I Замечание. очное выражение для ЭС теплового шума определя-
ется формулой
SM - UTR^ (е^ - 1) -1, (33.4)
где f = ufTic, h — 6,62 10-34 Дж/с — постоянная Планка.
В области частот, для которых справедливо неравенство hf/kT <С 1,
полу им (еА — 1) л; hf /кТ и тогда по (33 4) приходим к (33.2).
Верхнюю частоту /тах, для которой справедлива аппроксимация
(33.2) можно найти из условия Sm(0) — S,u(/max) = 0,15^(0), откуда
hfmax/kT ~ 2; при Т = 300 К получим /тах — 6,25 1012 Гц =
= 6,25 • 106 МГц - 6,25 - 103 ГГц = 6,25 ТГц
Таким образом, для всех частот радиодиапазона аппроксимация спек
тра теплового шума формулой Найквиста (33.2) оправдана.
Дробовым шум (ДШ)
Природу ДШ можно пояснить на примере диода, в котором злектро
ны эмитируются из катода случайным образом и затем перемещаются к
’аноду под действием электрического поля. Ток, создаваемый потоком
электронов, флуктуирует около среднего уровня, причем эти флуктуа
Ции (т.е. ДШ) возникают из-за дискретного характера эмиссии.
Дробовой шум — неотъемлемое свойство электронных приборов
(ламп, транзисторов и т.д.).
Физическая природа теплового и дробового шумов различна, однако
структура шумовых сигналов в том и другом случаев похожа. Оба сигна-
ла можно представить в виде последовательности случайных импульсов,
похожих по форме и случайно распределенных во времени.
I В том и другом случае — это поток импульсов вида
x(t) = ^akf(t-tk), (33.5)
гДе ак — амплитуда к го импульса; tk — момент времени возникнове-
ния импульса; /(f) — форма отдельного импульса, по предположению
одинаковая для всех видов импульсов потока
[ Пусть F(icv) — J[/(/)], тогда ЭС б'Дщ) такого потока имеет вид
= 2i/a2|F(iw)|2, (33.6)
^Де й2 = F(a2) — среднее значение квадрата амплитуды, F(zw) =
= ®[/(^)]. 17 — средняя частота следования импульсов.
Если f(t) = то F(zw) = 1, тогда
Sx (w) = 2i/a2. (33.7)
314
Лекция 33
0]умы в радиотехнических устройствах (РТУ)
315
(33.8)
Пусть q — абсолютное значение заряда электрона; I — средний ток
в диоде, тогда и = I/q, щ = q = const; а2 = g2, тогда по (33.7) на-
ходим ЭС дробового шума
Si(u) = 2ql.
Это соотношение назь вается формулой Шоттки.
Замечание 1. Формула (33.8) используется для моделирования дро-
бового шума белым шумом.
Поток импульсов ДШ является пуассоновским потоком с вероятно-
стью появления п импульсов за время Т:
Рп(Т) =
п!
где и — среднее число электронов в единицу времени (средняя интенсив-
ность потока электронов). Сравним с распределением Пуассона в форме
А"
Рп = —те
71!
Следовательно, среднее число импульсов за время Т
nq — vT\
т - А;
Рис. 33 5
-О
Ru =Т= Cn |w
Пример 33.4 Транзисторному УНЧ соответствует электрическая схема на
рис 33.4 и эквивалентная схема рис. 33.5;
Ru = 5,1 кОм; Си = 45 пФ; Rt — 20 кОм;
точка) соответствует постоянному току коллектора
pT (рабочая
к = мА
Вычислить эффективное шумовое напряжение на выходе, обусловленное дробо-
вым шумом транзистора.
Решение По формуле Шоттки
NOt = 2eI0k = 2 • 1.6 - 10-1э -1,5 -10~3 = 4,8 -10~22 А2/Гц.
I Дисперсию напряжения на выходе находим из соотношения ст2 — /?в(0), где
Ну(т) = S0Rh(r). (33.9)
К Для того чтобы найти R/,(t), необходимо найти сопротивление цепи
дисперсия числа импульсов
Z = R,||RH||CH = R,||CH;
1 .
+ R;
= иТ.
Пусть за время Т на анод поступило п электронов, тогда iq = еп/Т —
величина тока, отнесенная к интервалу наблюдения, ее среднее значение
I — /0 - = (е/Р)^Т — ei/.
Дисперсия этого тока
.2
2
а2 = ~1,Т=^(ео) = ~10.
Мерой интенсивности дробового шума может служить отношение
1о
Следовательно, относительный уровень флуктуаций тока диода
уменьшается с ростом среднего значения тока и с увеличением вре'
Мени наблюдения Т.
Пример 33.3. Пусть /0 = 10~2 А и время наблюдения Т = 1 с, тогда
а2 = 16 -10“22 А: СКО = 4 - 10-11,
тогда ток диода
I = Io ±°, = 10“2 ± 4 10~1 11 А.
Относительные флуктуации очень малы.
z- ------------ ——------
ZCdCff 1 “Ь ‘^Сь’Сц R-^
^9
1 + ш7\ '
|Я(,Ъ)|2 =
= Tk = cuR3-
лк
В /?h(T) = ^|e-bkl. ь=-±—,
Z Лэ о и
так как /£А(т) - (Ь/2)е — СКФ ИЦ.
В формуле (33.9) Sq двусторонний ЭС, а в формуле Шотки No — односто-
ронний ЭС, следовательно Sq — No/2, тогда
«4T)=^V*M = <,2e-bH
где
о2 _ МоЛз ь _ No,Rs _ г -в В2 _ 08 4 10“12 в2;
4 4СН
у/а* = = 104 -10~6 В = 104 мкВ.
I Вычислим предельную чувствительность {7т1п УНЧ из условия
--7=~ — °вх>
д/2
Г^е °вх = <7»ыХ/Л; Л' — коэффициент усиления УНЧ; К — SR3.
Пусть S = 20 мА/B, тогда К = SR-, = 81,2; овх = 104/81,2 - 1,28 мкВ. При
3т°М минимальная амплитуда усиливаемого сигнала
14т» = 1,28\/2 = 1,81 и 2 мкВ.
Лекция 34
Анализ стохастических
квазилинейных уравнений
Пусть имеется квазилинейное стохастическое ДУ [24]
х + х- €fi(x, х) + /z/2(a:, (34.1)
где £ — белый шум с единичной интенсивностью; е, ц = const; Д и
/2 — некоторые функции; х = dx/dr.
Введем фазовую плоскость (ж, у), у — х и, учитывая, что df-fdr
запишем ДУ второго порядка в форме системы ДУ
dx = ydi".
(34.2)
dy = [-х + e/i(x, y)]dr + pf2(x, y)d£(r),
где f(r) — стандартный винеровский случайный процесс с дисперсией
равной т; Е(£т) = 0; E(f2) = т.
Запишем систему ДУ в векторной форме:
dz — fdr + ud£,
где zT = (х,у)\ fT = (/1,/2)т = (у;— х + Efi); сгт - (0; /г/2). Тогда
по (П5.4) и (П5 5) получим ДУ
dtp — L<pdr 4- {уz<p'fa'dw.
Здесь (Vz9?)T — ин — ai2 = a21 = 0; a22 = p2/2, поэтому
*.3 J
1 d2<p _ 1 д2<р p2/2 d2p
2 frf*’ dzidzj ~ 2a22'd4 ~ 2 dy2'
Найдем величину
rv,₽ = (/',r)(^//?)=/'^ + /2^.
\oy>/oyj ox dy
Диализ стохастических квазилинейных уравнений 317
В результате уравнение (П! 4) принимает вид
V dr+f дх+^ ду + 2 ду2 ’
I Воспользуемся подстановкой Ван-дер-Поля
a: = asin0; y — acosO, 0 ~ т +
И получим стандартную систему стохастических ДУ относительно ам-
плитуды а и фазы 0.
Обозначим а = \/а;2 4~ у2 = <£>; (а:, у); 0 = arctg(x/y) = 9?2(а:,у)
Тогда для амплитуды
- (dpi/дх; dtpi/dy) - (х/а, у/а),
_ / д1<р\1дх2 d2<pi/dxdy\ _ ( у2/а3 —ху/а3\
уд2р\/дудх д2<р\/ду2 J ~ у—ху/а3 х2/а3 J ’
для фазы
V’z = (др?fdx\ dtp2/dy) - (у/a2; -х/а2)\
( д2<р!дх2 д2<р2/дхду\ _ / —2а:у/а4 (х2 — у2)/а4 \
\^д2р/дудх д2р2/ду2 J ~ у (a:2 — у2)/а4 2ху/а4 J
Полагая параметры колебания медленно меняющимися функциями, по
лучаем д<р/дт = 0. В результате по (34 3) находим стандартную систему
стохастических ДУ в форме Ито-
da ~ (syfi ja + р2х2 fl/2a3)dT + (/zyf2/a)d^(r); (34.4)
d0 = (1 - ex fi/a2 + p2xyfl/a4)dT - (fixf2/a2)df(T). (34 5)
При x — a sin 0, у = acosO эта система принимает вид
da = [e/j cosO 4- (p2/2 sin2 0)/2a]dr 4- (p/2 cos^)d^(r);
d6 = [1 (еД sin 0)/a 4- sin 0 cos 0)/a2]dr — [(p/2 sin ^)/a]d^(r).
L (34.6)
Г Запишем систему ДУ (34 6) в виде
da = е[/] cos 0 4- (р2/2аг)/2 sin2 0]dr 4- //(/2 cos 0)df(r);
I d^> = —E[(/j/a)sin 0 — {p2/ea2)f2 sin 0 cos 0]dr — /z[(/2/a)sin 0]d£(r),
(34-7)
r**e /1 = /i(asin0,acos<7); f2 = /2(asin 0, a cosd)
318 Лекция fU
Стохастическое ДУ Ван-дер-Поля
Частным случаем рассмотренного стохастического ДУ является урав
нение Ван-дер-Поля [24]
х + х = е(1 — х2)х + р£(г),
которому соответствует система ДУ
dx — ydr;
dy=[ х + е(1 - x2)y]dr + fid^(r).
Здесь /j — (1 — x2)y = (1 — a2sin20)acos0; /2 = 1 и уравнения (34.6)
принимают вид
da — [ea(l a2 sin2 O') cos2 0 + (/12 sin2 0)/2a]dr + p cos 0d£;
d0 —[1 — e(l — a2 sin2 0) sin 0 cos 0 + (p2/a2) sin 0 cos 0]dr— (34.8)
— (p/а) sin 0d£.
Если записать эти ДУ в форме (34 7) то получим
da “E.[a(l — a2 sin2 0) cos2 0 + (р2/2ае) sin2 0]dr + cos 0d£;
di/> — ~ e[(1 — a2 sin2 0) sin 0 cos 0 — (p2/ea2) sin в cos 0]dr— (34.9)
— (p/a)sm 0d£,
Амплитудные и фазовые уравнения запишем в виде
da = £y>i(a, 0)dr + ^2(а,0)d£(r); (34.10)
dip = Е^1(а> 0)dx 4- ^2(0, 0)d£(r). (34.11)
Систему (34.8) в форме Ито можно записать в форме Стратоновича.
С этой целью систему ДУ (34 8) выразим в векторной форме
dz — g(z)dr+ F(z)d£, (34.12)
где zT — (a, O'); FT(z) = (Fi,F2) = (^2.^2) — (p cos 0, —(/i/a) sin 0)',
gT(z) - (^1,E^>1).
Тогда ДУ (34 8) в форме Ито будет соответствовать уравнение в ф°Р'
ме Стратоновича
dz — [g(z) — 0,5Ac]d-r-|- F(z)df (34 13)
где A — (Д1.Д2); Ac/2 — корректирующая добавка Стратоновича,
причем в общем случае
^Гкдгк'
Jt=i К
(34 I4)
Дналыз стохастических квазилинейных уравнений
—--------------------------
dFi п dFi . о 3F2
В рассматриваемом случае -— = 0, = /j.sin0; ---
дТ = _Fcos0
а
Отсюда следует
Д1=г№+Р№=^,1п,й;
да д& а
Д2 = F1+ F2 — - -2^2 sin 6cosе
да дО а2
-Л* — ( —sin2 0; — ~ sin 0 cos /А
2 с \2а а2 )
Тогда система ДУ в форме Стратоновича принимает вид
da — ea(l — a sin2 0) cos2 0dr + р cos 0d£
d0 = [1 — е(1 — a2 sin2 0)sin 0 cos 0]dr — (p/a) sin 0d£.
Уравнение
Фоккера-Планка-Колмогорова (ФПК)
Рассмотрим систему ДУ (34.7) в стандартной форме. Этой
соответствует уравнение ФПК.
I Т = - +
дт да dip
+ V [Д(СИ0 + + ^2 ’
2 [да2 дадтр очр2
а2
2
319
-^7 sin 0;
а2
(34.15)
системе
(34.16)
• \ г J о
где А — fi(a sin 0, a cos 0) cos 0 + ——— sin~0;
2ar
1 Г 2
В —-----fi (a sin 0, a cos 0) sin 0———fy sin 20 ;
а I/ V ' 2ae 2
I 1 f2
C = cos2 0, D = -—f2 sin 0 cos 0 —-----fy sin 20; E — sin" 0.
22 a ~ 2a 2 a2
Полученное уравнение (34 16) является параболическим, его называ
•От также уравнением в стандартной форме Его операторная запись
Имеет вид
а
dW
„ = cLW,
От
гДе L — дифференциальный оператор второго порядка и параболи-
ческого типа.
Для амплитудного уравнения (34.10) уравнение ФПК имеет вид
dVV
дт ~£
(34.17)
(34.18)
320
Лекция 34
Сравнивая с (34 17) находим оператор
UQ 2.С, Ud"
(34.19)
Принципы усреднения для систем
стохастических ДУ
Уравнение ФПК (общий случай). В качестве примера рассмо-
трим квазилинейную колебательную систему.
Система ДУ в стандартной форме (34.7) описывает двумерный мар
ковский процесс. Усредняя правые части системы ДУ, получим усред
ненную систему стохастических ДУ [24]
da = Е,
„2 f 2 -)
E /j(a sin 0, a cos 0) cos 0 + ——— sin2 0 dr + pf2 cos 0d£ >
2as 1
Д/г
dil>=ETl--/i (a sin 0, a cos 0} cos 0 — 2 sin2 20 dr——f2s\n0d(\,
la л 1
2ea2
где ET — оператор усреднения по времени.
Запишем систему ДУ в виде
da = eA(a)dr + Fj(^);
= EB(a)dr - F2(^,
где
f2[a sin(s + V’),« cos(.$ + V1)] cos(.$ + V=) d£(s) ds;
„ r+T
= — J f2[as\n(s + $),acos(s + $)]sin(s+ ^)d£(s)ds;
’ - Д2/2
E fda sin 0. a cos 0) cos 0 -J-2 sin2 0
2ae
Е f
2тг In
и2Р
a sin 0, a cos 0) cos 0 + 2 sin2 0 d0 = ЕсрЛа),
2ae
E-B(a) = E,
---/i(asin 0, a cos0) sin в —
a
P2fl - nn
2As,nM
In
„2 f2
a sin 0, a cos 0)sin 0 — sin 20 d0 = E<p2(a)
2a2E
Заметим, что усреднение в правых частях уравнений нефлуктуационных
членов в первом приближении проводят согласно правилам для детер
минированной системы при усреднении амплитуду а и фазу 0 счита
ют постоянными параметрами Таким образом, в нефлуктуационных
sAfE) = E,
а
Анализ стохастических квазилинейных уравнений
321
членах правых частей системы ДУ остаются лишь медленно изменя
ющиеся параметры.
Решение полученной усредненной системы ДУ совпадает с решением
следующей системы интегральных уравнений:
а — а0 + в [ X[a(s)]</s— [ Fi [f(s)] ds;
Jo Jo
в = 0O + £ [ 5[a(s)] ds— i F2K(s)] ds,
Jo Jo
причем данные стохастические интегралы понимаются в смысле Ито
В общем случае для уравнений ФПК установлен принцип усреднения
[24], согласно которому решение задачи Коши для уравнения (34.17)
при в —» 0 на отрезке времени длиной О(е-1) можно представить в виде
решения задании Коши для аппроксимирующего уравнения
= eLoG^Wo, (34.20)
где Lo — дифференциальный оператор, коэффициенты которого явля
ются средними по времени значениями коэффициентов оператора L
(34.17).
В данном случае по (34.16) получаем уравнение ФПК в виде
9W д - д-
и2 ( д2 - д2 - д2 - )
+t[^c^+^dw^+^ew^}-
где
Л =
В =
a sin 0, a cos 0) cos 0 + ——— sin20 </0;
2as
p2 y2
/1 (a sin 0, a cos 0) sin 0 — a- sin 20 dip;
2azs
1 Г2* >
С=— I f2 (asin ip, a cos-0) cos“ ip dip;
2™ Jo
1 f2*
D = —-— I f2(a sin 0, a cos 0) sin ip cos 0 dip;
Jo
1 Г2*
E= I /v(asin 0, a cos0) sin2 0 </0.
2тга Jq
Уравнение ФПК для генератора Вап-дер-Поля. Рассмотрим
стохастическое ДУ Ван-дер-Поля. Усредненные коэффициенты уравне-
322
Лекция 34
ния ФПК в этом случае принимают вид
1 г2* и2 [2*
— a2sin20) cos2 OdO + -- / sin2 6 d6 —
2тгЕа Jo
i--Vp2.
4 J 4ae
, zz2 P*
a2 sin* 0) sin 20 dO + -—— / sin20cft? = O,
2тга2с Jo
cos2 0 dO — ,
2
2тг Jo
а
2
-В= — [
4тг Jo
2т
(1-
2т
D =
О,
E — sin2 0 dO — —.
a2ir 2a
Следовательно, уравнение ФПК можно записать в виде
а ( а2\ и2 1 1
о 1 Т +Г“ ЖГ +
2 \ 4 ) 4ае I
51У д
dt да
(3422)
4 да2 4а dip
После усреднения коэффициентов оператора L (34.19) уравнения ФПК
(34 18) получим
г \ Р2' 2/дч д2
L”=-sto)+^('’fe'
где
•2т
¥>1 -
п2 . , 1
cos#-}--—sin“0 dO = —
2еа
2?г Jo
^?(6>) = cos2 0 -
Усредненное уравнение ФПК принимает вид
а р d2w'
8W
дт ~~£
2тг 2
/1 cos 0 dO Ч-----
4еа
—(^IV)-
да 4е да-
Для уравнения Ван-дер-Поля получим
г2т
Z7r Jo
Уравнение ФПК при этом Будет иметь вид
a a3 и2
2 Т+ V
(2
1 — —
dW
дт ~£
д
да
2521У
И" +P
oa~
(34 24)
Анализ стохастических квазилинейных уравнений
323
где z/2 = р2/4е.
Это же уравнение может быть получено по (34 22) после интегри-
рования 1У(а,0) по О'.
l¥(a) = [ W(a,e)de.
Jo
Решение усредненных уравнений. Найдем решение уравнения
ФПК (34 24) в стационарном режиме, когда dW/dr — О,
При условии нулевого потока вероятности будем иметь уравнение пер
вого порядка
z/2 — = (- - — + — W (34 27)
da \2 8 а /
Разделяя переменные, получим решение W = Ж(а) в виде
I¥(a) = C0ae^ai-8a^32v\
где z/' — р2/4е, Со — постоянная интегрирования которую определяют
по условию нормировки f™lV(a)da — 1
Преобразуем ПРВ 1У(а) к виду
1У(а) = Сае“<°2 4>2/2<7о,
где
Од = 16V2; С — (зе/т/тг)(1 — erfae)"1;
2 узе ।
erfзе — —7= / е~х dx; эе — —7=.
аЛ Jo »V2
Характеристики стационарных режимов. Стационарные зна-
чения параметров системы находят по условию максимума ПРВ. Опре-
делим стационарное значение амплитуды колебания шума в уравнении
Ван-дер Поля. Дифференцируя ПРВ IY(a) (34 26) и приравнивая нулю
производную dW(a)/da (или используя уравнение (34 25)), получаем
а
2
а3 и2 „
Отсюда стационарное значение амплитуды
ас = у/2(1 + \/1 + 2г/2)1/2; р 2 = /12/4е.
При I/ —г 0 ас —» к - 2 (а - 2 — амплитуда стационарного решения
детерминированного уравнения Ван-дер-Поля)
Лекция 35
Анализ генератора при воздействии
шума
В данной лекции рассматривается воздействие шума на генераторы с
мягким и жестким возбуждением. Используются результаты предыду-
щей лекции, а также ДУ генераторов в детерминированном случае (при
отсутствии шума) (см. приложение 9).
Воздействие шума на генератор
с мягким возбуждением
Запишем ДУ генератора с трансформаторной обратной связью в ви-
де (34.1)
х + х = £if(x, х) + р/2(ж, i)C(r), (35.1)
где Ei — 1/Q, Q — добротность колебательного контура; f(x,i) =
= х -|- Ry(di/dT), Ry — kiR?. ki = M/L — коэффициент обратной
связи, /?э — эквивалентное сопротивление контура.
Полагая зависимость г(гс) в виде кубического полинома
г = *о + Su — -уи3, S,y > О,
где S — крутизна характеристики, получим
c/i di du di
— - —— - —и ~{S- Зуи2)и.
dx du dr du
В результате при x = и, находим
/(ж, ж) = x(SRy — 1 — Зу^ж2) = Зу Ry(q — ж2)ж,
где q — qo/3yRy', qo = SR.y — 1 — запас по самовозбуждению.
Если ввести новый малый параметр е = 3yRvEi и положить /2 — 1.
то получим стохастическое ДУ автогенератора с мягким возбуждением
находящегося под воздействием шума £(т)
ж + ж = ЕД (ж, ж) + Х(т)
(35.2)
где Д(ж. ж) = (с/ — ж2)ж.
Система ДУ в стандартной форме имеет вид (34.7); при /2 = 1
получим
da = е ( fi cos в + sin2 в ) dr + (р cos/?) dc(xY
\ 2as /
Анализ генератора при воздействии шума
325
dip = — e (— sin 0 —sin 0 cos (A dr — — sin 0 dtfr')
\ a ) a
где /i — /i(asin0, acosf?) = (g — a2 sin2 0)a cos 0.
Системе ДУ (35.3) соответствует уравнение ФПК
™ = -e-^-(AW) -d(BW) +
от да dip
+ v + 2^т(£,и/) + ’
2 (oa2 dadip dip
(35.3)
(35.4)
где
А = /i(asin в, a cos0) + (/i2/2ae)sin2 0;
В — —(l/a)[/i(asin 0, a cos в) sin 0 — (p2/2aE')sin 20],
1 .
— sin
a“
2 е.
С = cos2 0', D—------sin 0cos 0 — — — sin 20; Е —
а 2а
Усредняя коэффициенты уравнения ФПК, получим
и2
— a2 sin2 0) cos2 0d0 + --- / sin2 0d0 =
2тгео Jo
a ( a2\ u2
~ 2 V ~ Т/ + 4^e‘
г2тг
I sin2 0dO = 0.
о
A-u
2тг
—В = — / (q — a2 sin2 0) sin 20d0 4-7—
4тг Jo 2-iras .
-If2*, 1 -if
C — —I cos20rf0= D=-------------- /
2?r Jo 2 4тга Jo
1 /’2,r 1
/ sin20rf0=—.
2тгб1 J q 2 ci
Следовательно, «укороченное» уравнение ФПК принимает вид
dW
дт ~ £
a ( a2\ p2
9 I Q ~ . I + .
2 \ 4 ) 4ae
= 0;
w\ + ^dJW j^d^W
J + 4 da2 + 4a2 дф2 ’ 1 }
где W ~ W(a, ф, г).
Это же уравнение может быть получено из системы стохастических
уравнений, определяемых по системе ДУ в стандартной форме (35.3).
Эти укороченные стохастические уравнения имеют вид
da — zAdr + р V cos2 0dfA,
dip — —eBdr + (p/a)y sin2 0d£2.
(35.6)
где £i и ^2 — независимые винеровские СП.
326
Лекция 35
Анализ генератора при воздействии шума
327
„ т aq ал v ц2 - _ --— 1 —х—
При А = — — ——р —, и2 = —; В = 0; cos2 в — — = sin“0
2 8 а 4е 2
приходим к уравнению (35.5).
Таким образом, укороченное уравнение ФПК может быть получено
двумя способами либо после усреднения коэффициентов исходного
уравнения ФПК, либо непосредственно по укороченным стохастическим
уравнениям вида (35 6)
Интегрируя обе части уравнения по ф, получим уравнение ФПК для
«амплитудной» ПРВ W(a, i)
aiv
dt
-^~(AW) + v2
ua
a2 iv
За2
(35.7)
где t — ет; А = а?/2 — а3/8 + р2/а.
Заметим что уравнение (35.7) с точностью до коэффициентов совпа-
дает с уравнением, полученным Стратоновичем [8] другим методом.
В стационарном режиме dW/Ot — 0, поэтому по (35.7) приходим
к обыкновенному ДУ
Интегрируя
d2W d f aq a3 i 1
da2 da \2r/2 8p2 ' a
это ДУ, получим
dW / aq «3 , 1\
da \ 2z/2 8p2 a)
= G,
W
- 0.
(35.8)
(35 9)
где G = const.
Поток вероятности G равен нулю [8],
поэтому по (35.9)
dW / aq da \2p2 a3 1\ - —+ - Ж = 0. 8i/~ a)
Разделяя переменные, после интегрирования получим
W(a) — Ciaexp — ^^(о4 ^а2?)
(35.10)
или
1Т(а) = Са ехр{—(a2 — 4q)2/2сго}, (35.11)
где <т2 = 16iA С — постоянная, которая находится из условия нор
мировки
[ W(a)da = 1.
Jo
После интегрирования получим
С-1 = рл/2тг(1 + erfae), зе — qjv'J'i, (35 12)
где erf а; = fx e~u du
Найдем значение амплитуды, соответствующее максимуму ПРВ IV(a)
Из (35.9) при dW/da = 0 следует уравнение
aq а3 1
^“ёГ2 + а~
или
a4 - 4ga2 81/2 — 0.
Решение этого уравнения имеет вид
а — ат — \flq\j 1 + \/1 + 2р2^. (35.13)
При малых отношениях v/q (малой относительной интенсивности
шума)
ат ~ асу/1 + iz2/2g2 и ac(l + iz2/4q2), ас = y/4q q^v (35.14)
Рассмотрим другой предельный случай, когда
зеС—1 или q << — (35.15)
_хз
Тогда, используя приближенное соотношение [20] erfa: — 1 — и
нечетность функции erfi, получим
е х 2р2
erf^) = -1 + ___ С'1 = |д|е_дз/21/з (35.16)
Пренебрегая в показателе экспоненты ПРВ (35.11) четвертой степе-
нью амплитуды а4, найдем, что в результате ПРВ IV(a) вырождает-
ся в закон Релея
l¥(a) = -4e-a2/2a2, a 0, (35.17)
где а2 — 2р2/|д|.
Максимум ПРВ соответствует амплитуде
ат = а = рх/2/т/М-
В первом случае неравенство q 3* У, означает, что генератор до-
статочно сильно возбужден (запас самовозбуждения qc велик) Тогда
полагая а = ас + р, ограничиваясь квадратом величины р в показа-
теле экспоненты (35.11) и приравнивая множитель перед экспонентой
к величине ac (a ~ ас), при С-1 = 2р\72тг получим гауссовское рас-
пределение отклика р
W(p) = —1=е-₽2/2< а = — =^-. (35.18)
<ту2тг ас q
328
Лекция 35
Покажем, что величина ас = y/^q — амплитуда стационарного ре-
жима генератора при отсутствии шума
В этом случае система ДУ в стандартной форме находится по (35.3)
при р = 0:
da dil> efi .
— = e/icos0; — =-----------sin в; j\ = (q — a2 sin" 6)a cos 0.
dr dr a
Усредняя за период колебания, получим укороченные уравнения ге-
нератора в детерминированном случае:
а = е(а/2)(</ а2/4), ip — 0.
Из первого ДУ в стационарном режиме получим уравнения
V’(a) = a(<? - a2/4) = °’ v'(a) = Q~ (3/4)a2.
Стационарные режимы определяются значением амплитуды
(11 — 0, d2 — &с
4?-
(35.19)
Анализ генератора при воздействии шума
329
Рис. 35.2
Второй режим устойчив:
<р'(ас') = —2g < 0 (при q > 0 или
SFl-y > 1) и соответствует устойчи- 2
вому предельному циклу, при этом
состояние ai — 0 неустойчиво: । j
д/(0) — q > 0. С другой стороны,
при q < 0 д?'(0) = 9 < 0 и состоя- ।
ние равновесия а — ct i = 0 устойчи
во, но предельный цикл отсутству-
ет: генератор недовозбужден, усло-
вие возбуждения не выполнено.
Таким образом, амплитуда мак- 0
симума ПРВ 1¥(а) при условии
v/q <§; 1 находится вблизи стаци-
онарной амплитуды устойчивого
предельного цикла, что следует, в частности, из соотношения (35.14).
Стационарное распределение амплитуды показано на рис. 35.1 при
q — — 1 (рис. 35 l,a); q = 0 (рис. 35.1,6); q — 1/4 (рис. 35.1,в); q = 2
Ирис. 35.1,г) при значениях <7q = 1/4 (кривая 1)\ 1/2 (кривая 2); 1
(кривая 5); 2 (кривая ^).
На рис. 35.2 изображен переходной процесс W(z,/) при ао = 1/2
= 1/2, q — и значениях t — 1/2 (кривая 1); 1 (кривая 2); 5
(кривая 3); оо (кривая ^).
Воздействие шума на генератор
с жестким возбуждением
При /2 = 1 по (34.7) получаем систему ДУ в форме Ито
da = е fi cos 0 + —— sin2 в
2ае
dr + р cos 9d(/,
—fi sin 9—sin 0 cos 0 dr — — sin 9d£.
a a~E a
(35.20)
Для получения системы ДУ в форме Стратоновича введем в ампли-
тудное и фазовое уравнения соответствующие корректирующие добав-
ки (см. приложение 5)
Да = (р2/2а) sin2 9; = (2p2/a)sin#cos0.
В результате получим систему ДУ в форме Стратоновича
da — efi cos 9dr + и cos9d£;
M (35.21)
d$ = — (e/a)/i s\n9dr — (p/a)sin#</£.
Исходя из системы ДУ (35.20), (35.21) можно записать следующее
330
Лекция 35
2
уравнение ФПК
dW д д
дт да ' ду
д^ д^ д^
+ v аТ(СИЛ) + 2^лт(£,ИЛ) + ^й(^) >
2 [5a2 дад'ф dip2
где А, В — коэффициенты сноса; С, D, Е — коэффициенты диф-
фузии W — ИДа,-0, т); А = fi(asin в, асозб) cos0 + (p2/2ae)sin2 0
В — — (1/a) [fi(asin в, acos0)sin 6 + (p2/2ae)sin 20]; С = cos20
D = —(l/2a) sin 20; E — —(1/a2) sin2 0.
Усредняя коэффициенты уравнения ФПК (35 22), получим
А=^-[ Ade^h^e+^\ В = -^^; С=^;Ё = 0;Ё=~.
2т Jo 2ае а 2 2а-
Для генератора с жестким возбуждением функция fi(x,x) может
быть записана в виде /Дж, ж) = ^(ж)0. гДе ^(z) = 1 ~ Т^2 + 6ж4. Тогда
fi(asin 0, a cos0) — (1 — ya2 sin2 0 + ба4 cos4 0)a cos 0.
Усредняя, получим
(35.22)
—----- a ( ya2 <5a4\ -----
fi cos 0 = - ( 1 —J- ] ; Д sin в — 0;
*4
4 8
ya2 6a4 \
~4~ + "8/
т~' B - °-
4ae
В результате укороченное уравнение ФПК принимает вид
dW р2 52l¥ 1 d2W д ггЧ
Та — Т я 2 + о- я / 2 £а (^'Ю-
дт 4 да2 2a dip2 да
В стационарном режиме dW/дт = 0 находим
Р252И/ , 1 d2W д -f- п
4 да2 + 2а2 дф2 £да^^ ~ °'
Статистические характеристики
генератора с жестким возбуждением
Полагая независимыми амплитуду и фазу при нулевом потоке веро
ятности получаем «амплитудное» уравнение ФПК
dW fi2d2W(a) д г- z V1
Я- = л' а 2 “ £Л~ РИа - (35.23)
дт 4 да* да
Анализ генератора при воздействии шума
331
Отсюда получаем уравнение для стационарной ПРВ (dW(a)/dr — 0)
/? d217(g) _ д
4 да'2 £ да
plV(g)]
или
да ц-
Отсюда следует
17(a) = Сае~и^а\
(35.24)
где С — постоянная интегрирования, которая находится из условия нор-
мировки f W(a)da = 1; [7(g) — потенциальная функция:
[/(а)
Da2 ( -ya2 6а4\
I 1 — -------1-----I
2 V 8 24 J
(35.25)
где D = p2/2ae; as = — £
’ Заметим, что равенство зе = -е обусловлено существованием двух
циклов (устойчивого и неустойчивого) в детерминированной системе ДУ
генератора с жестким возбуждением (см. приложение 6).
На рис. 35.3, 35.4 представлены графики стационарной ПРВ 17(a) при
различных значениях относительной интенсивности шума при следую-
щих параметрах генератора 7 — 9,24 10-3В 2 и 6 = 8 • 10-65-4
Рис. 35.3
332
Лекция
Аналитическое нахождение
решении нестационарного уравне
ния ФПК (35.23) проблематично
однако используя численный
тод, можно вычислить ПРВ ам-
плитуды в переходном режиме
На рис. 35.5 и рис. 35.6 приве-
дены результаты таких расчетов
Рис. 35.5 отражает динамику ПРВ
на начальном временном интер-
вале в моменты времени т ~ ]
2, 5. ему соответствуют следую-
щие условия: начальное значение
амплитуды do = 3; D = 50 (Ближайшая стационарная амплитуда
ас = 7,6), Рис. 35.6 отражает динамику ПРВ на продолжительном ин
тервале наблюдения в моменты времени т = 1, 100, 2000, (а0 — 5,
D — 50). Штриховой линией показана стационарная ПРВ вычислен-
ная аналитически
Экстремумы ПРВ соответствуют предельным циклам нелинейной си-
стемы; значения соответствующих амплитуд колебания определяются
условиями dWjda — 0 или А = 0 что эквивалентно уравнению
F(a) = D
или
4 8 2ае
где Г(а) = а2 (1 -
На рис 35.7 приведен график зависимости F(a) для стационарно-
го режима (/х — 0) при значениях параметров 7 = 9,24 - 10~3В * и
<5 — 8 • 10“6В-4.
В табл 35.1 представлены значения постоянной нормировки.
Анализ генератора при воздействии шума
333
Таблица 35 1
По (35.26) при р = 0 приходим к урав
нениям
, ab уЬ2
‘ = °' 1-Т + 2Г = 0’
определяющим амплитуды автоколебаний
в стационарном режиме
На рис 35 8 изображены зависимости
значений корней уравнения (35.26) от па-
раметра D. По рисунку замечаем, что
кор и ао и О] перестают быть веществен-
ными при некотором пороговом значении
D = Dn « 121 4.
Полученные результаты подтверждаются численным решением ам-
плитудного стохастического уравнения (35.21). На рис. 35.9 приведены
реализации амплитуды колебаний при D = 10 при одинаковом началь-
ном значении амплитуды, взятом в районе минимума ПРВ. Вычисление
Проводилось методом Рунге-Кутта четвертого порядка. Из полученных
графиков видно что с течением времени амплитуда колебаний стано-
вйтся стационарной в области малых или больших значений.
Среднее время перехода из области
возбужденных состояний в область
невозбужденных и обратно
Известно, что неустойчивый и устойчивый предельные циклы выде-
ляют на плоскости [х,у] две области, область вблизи неустойчивого
334
Лекция 35
предельного цикла, соответствующую невозбужденному состоянию ге-
нератора и область между циклами, которая соответствует возбужден-
ному состоянию. Эти области соответствуют наибольшей вероятности
состояния генератора. Между этими областями лежит область малой
вероятности состояния генератора
Представляет интерес нахождение среднего времени перехода или
средних частот перехода генератора из одного стационарного состоя-
ния в другое
Решим эту задачу, используя уравнение Понтрягина для среднего вре-
мени достижения энергетического уровня. Для этого введем энергию
Г Ш \ У2 a2 cos26 a2 sin2# a2
2 2 2 2 2
В результате получим ДУ для энергии
(
dE = е I fiy+ j dr + yiydw,
где w — стандартный винеровский процесс
Укороченное ДУ для энергии имеет вид
/______________________ CZ
dE = е \j\y+dr +pyjy2 dw. (35.27)
Усредняя на периоде 2тг, получим
fiy = [ (1 — 7a2 sin2 в + 6а4 sin4 #)a2 cos2 в d6 = —-——|- —
4 Jo 2 8 16
/ уЕ 8Е2\
Запишем укороченное уравнение (35.27) в виде
dE = е
Ф(Е) + у- dT+p.y/Ed
w,
где Ф(£) = £(1 - 7Е/2 + Й£2/2)
Для решения задачи о достижении границы приведем уравнение Пон-
трягина для среднего времени Т
где b(z) — р?Е; a(z) = еф(г) + д2/2.
Обычно уравнение Понтрягина (35.28) решается при граничных усло-
виях T(z2) = T(z\) = 0. Однако, в данном случае будем пола-
гать T(zi) = 0, а вместо второго граничного условия будем исполь
зовать условие ограниченности T(z). Решение уравнения (35.28) при
Диализ генератора при воздействии шума 335
Tfzi) — 0 имеет вид
/Z1 Г Ги 9 1 fZ1
|У —eWdvje-'H“)du + cJ e~^du,
(35.29)
где V>(z) = 2 /[а(^)/6(г)] dz = (2e//z2) f[®(E)/z] dz + In Е = (2е//?)(z -
—7Z2/4+5z3/6)+ln Е С учетом ограниченности T(z) постоянная С = О
Рассмотрим отдельно вычисление среднего времени достижения
границы изображающей точкой первоначально Бывшей в области не-
возбужденных состояний, и — для точки, находящейся вначале в
области возбужденных состояний.
I Разбивая двойной интеграл (35.29) на два однократных, находим
9 1 _ ГЕ>
тр) = — / dE [ dE-
Р2 Jo Е Jo
П лОО -1 [*ОС>
И2) = 4- / dE / е-^^) dE,
с P2JEl Е JEt
(35.30)
(35 31)
где Ei — энергия неустойчивого предельного цикла. Заметим что
приведение (35.29) к форме произведения интегралов справедливо при
малом шуме
Используя выражение для функции ip(z') по (35.30), (35 31) находим
9 Г&1
= e-U^dE
Д2 Jo Jo
^eU^dE-
п Л СО ЛОО -1
г(2) = Д . / е~^) dE I Де^» dE,
P2JEl JEl E
(35.32)
(35.33)
где U(E) = —(2e//z2)(7? — yE2/4 + ftE^/fi) — потенциальная функция.
Полагая E — A2/2, dE = AdA, no (35.32), (35.33) можно полу-
чить следующий результат:
(О = —
С Р2
ГА1/2 ]
e~U(A> dA / -е^ dA-
Jo А
тр)= 4, Г e-u^dA Г dA,
Р JAI/2 JAl/2 А
гДе <7(А) = (аеА2/р2)(1 - у А2/В + 6 А3 /24); ге — —е; Ai — ампли-
туда колебании, соответствующая неустойчивому предельному циклу в
Детерминированном случае
Пусть Аз — амплитуда колебаний соответствующая устойчивому
предельному циклу
Известно, что амплитуды Ai и А^ удовлетворяют равенству
а1.2 = (7/0(1 ± л/1-8£/72).
336
Л е к ц и я 35
Вычислим вначале величину
г'1’ = ^1Л.
/42
Для этого разложим потенциальную функцию (7(A) в первом интеграле
вблизи точки А = 0, и во втором интеграле вблизи А — Л] (в первом
случае в окрестности минимума потенциальной функции (7(A) во вто-
ром — в окрестности максимума), учтем равенство (7'(0) — (7'(Ai) =
(7(0). В результате получим (при (7"(0) = 2ae//z 2с)
71 = / Ае~ А dA = — / е dx » 1/2с = /z2/2as.
Jo 1 Jo
Вычислим второй интеграл Для этого воспользуемся отрезком ряда
(7(A) = (7(Aj) - И^(А - Ai)2, получим
.2 _
12 = — / ea(A1)e-t/"(Al)(A-A1)’/2 dA =
Al Jo
-СДА1) и А,) /-ОО
e-(A-A*)WdA,
2Ai J-A^in 2Ai J.po
1
1^"(А)Г
Отсюда
1 „(А1)
2А‘ х/|Г"М.)|
В результате находим
2®
-1/2
3 о 5 Л
4 о
-1/2
3 п 5
1__7л? + -5А?
г(*) = —7,7, = -— ег(А*) (—
/z2 аеА] \?r/z2
Поскольку с равной вероятностью изображающая точка может либо
перейти через границу, либо вернуться обратно то средняя частота I/
перехода через границу равна = 1/тс, тс = 2тр\ Поэтому находим
р(1) =
с- 2
1 — —7А2 +-6А? е-^А‘)
тг/z2 4 1 8 1
Полагая эе = /z, /z2/2 = TV получим известную формулу [75, фор
мула (10.5 17)]
Аналогично вычисляется частота — 1/2тР^ с той лишь разницей
что в точке минимума А — A-j U"(A2) > 0
Анализ генератора при воздействии шума
337
В этом случае
г<!> =
где
1-00
h = / Ae-u^dA^
JA2J2
1ЯД2)
A^A~A^/^dA
J—oo
» (Л2/2)\/27Г<Г1е-и(Аг\
crl = l/U"(A2y
fOO ,
72= /
J Al/2 A
oU(Ai) f<x>
- / e-(A-A>)a/4dAR
2Aj J.№
Ri (l/2Ai)>/2w<T2etr^A1\
= l/|t/"(A)|-
В результате
т(2) _ Лг2тг 1 „^(At)-r(AA
с Р2А1 л/Г/"(А2)|(7"И1)|
Поэтому частота
= 1/2тс2 - ^ф-\/|^"(^1)1^"(^2)е-[17(А*)-р(Аз)1.
47Г712
Окончательно
получаем
„(2) _ Ziae
С 27гА2
3 5
4 о
1 _ 1уА1 +
4 2 8 г)
Следует заметить, что в соответствии с рис. 35.8 необходимо учиты-
вать в полученных формулах зависимость амплитуд Л[ и Д2 от уров
Ня шума. Зависимости средней частоты перехода из одного состояния
в другое от относительного уровня шума представлены на рис. 35.10
Штриховыми линиями приведены те же зависимости при постоянных
41 и А-i.
Оптимальная
У а с m ь IK фильтрация
сигналов и помех
Лекция 36
Основы оптимальной фильтрации
В основе многих процедур оптимальной фильтрации лежит извест-
ный в математической статистике байесовский критерий — минимум
байесовского риска
В статистике ставится задача оценить значения неизвестных (йена
блюдаемых) параметров х по ряду наблюдаемых значений у СВ У, со
держащих информацию относительно СВ X со значениями х.
Критерием оптимальной оценки и является минимум байесовского
риска.
Допустим, что имеются две СВ X и У с известной совместной ПРВ
1У(х, у) и в некотором эксперименте наблюдается значение у СВ У. Воз-
никает вопрос, что можно сказать при этом о ненаблюдаемом значении
х СВ X, иначе говоря, как оценить это ненаблюдаемое значение х.
Пусть величина х является такой оценкой СВ X, при условии, что
У = у, и существует зависимость
х = Л(у), (36.1)
в то время как истинным значением ненаблюдаемой СВ X является
величина х при У — у. Функция h может быть как линейной так
и нелинейной.
Обозначим через разность
е — х — х = х — h(y) (36.2)
ошибку оценки.
Желательно функцию h выбрать так, чтобы она минимизировала
среднее значение некоторой случайной величины — функции ошибки,
которая называется стоимостью ошибки или функцией потерь. Обозна-
чим функцию потерь через L[x, Л(у)].
Определение. Байесовским риском называется функция C(/i).
представляющая собой усредненное значение функции потерь
B(h) = E{L[x,h(y)]} — [ [ L[x,h(y)]W(x,y)dx,dy. (36.3)
Jdx Jdv
Основы оптимальной фильтрации
339
Ще)
.Vе
-е/2 0 е/2 е
В)
Замечание. В случае дискретных СВ X и Y
B(h) = 52 52 LlXi’ h(yi)]P(Xi’ Уд'
X. у.
Критерием оптимальности оценки является минимум байесовского
риска.
Наиболее распространенными являются следующие функции потерь
(рис. 36.1):
квадратичная L(x, х) = е2;
абсолютная по величине ошибки L(x,x) — |е|;
равномерная в интервале
т! = Г ° ПрИ 1С1 < £/2’
' ' ( 1/е при |е| е/2.
Предпочтение отдается квадратичной функции потерь, так как при
Ьтом меньшим ошибкам придается существенно меньший вес, большим
ошибкам — большие потери. В этом случае критерий минимума бай-
есовского риска совпадает с критерием минимума среднего квадрата
ошибки (СКО)
ОД - [ [ I® - h(y)]2W(x,y)dxdy.
JdxJd„
По теореме умножения
рад у) = w(y)w(x । у),
где W(x | у) — условная ПРВ Тогда
В(Л) = f 1У(у) | / W(x | у)[ж - Л(у)]2dx| dy.
JDV kJD* J
P По свойству ПРВ РИ(у) 0, поэтому минимум В(Л) совпадает с ми-
нимумом интеграла в фигурных скобках.
Назовем этот интеграл апостериорным байесовским риском
Ba(h) = [ [ж - ft(y)]2W(x | y)dx = [ (x-x)2W(x y)dx =
Jd* Jd„
= E[(X - £)2 | Y = у]. (36.4)
340
Лекция за
Взяв производную dBa/dx, получим
dBa/dx = — 2 I (ж — x)lV(x | y)dx = —2 / ж!У(ж | y)dx + 2ж,
Jd, Jdi
так как fD W(x | y)dx = 1
Из условия dBa/dx = 0 получим
% — J xW(x | у) = Е(х | у). (36 5)
что соответствует минимуму функции Ba(h) = Ва(х), так как
d2Ba/dx2 = 2 > 0.
Таким образом, оптимальная оценка является условным средним зна-
чением СВ X при условии что Y — у. Эта функция является в общем
случае нелинейной, как и устройство оценки.
Оптимальные оценки по критерию минимума байесовского риска при
квадратичной функции потерь (по критерию минимума СКО) обладают
рядом полезных на практике свойств.
1 Устройство оценки х представляется достаточно простой функци-
ей условного среднего.
2 В простейшем случае по данному критерию может быть построе-
на квазиоптимальная, но достаточно простая линейная система оценки
средний квадрат ошибки которой, естественно, больше, чем для опти
мального устройства при h(y) = Е(х | у), но зато для ее построения
требуется знание лишь простейших статистических характеристик СВ
(среднего значения и ковариации). Имея все это в виду, в дальней-
шем такую систему оценки также будем называть оптимальной, так как
она в действительности является оптимальной в классе линейных си-
стем, тем более, что
3 В случае гауссовской совместной ПРВ W(x, у) оптимальное уст-
ройство оценки является в принципе линейным, тогда
£ - h(y) = a + by — Е(х | у),
т.е. оценка является линейной функцией наблюдаемых величин.
Рассмотрим утверждения 2 и 3 более подробно.
Пусть h(y) = by + а (система оценки линейная), найдем значения
коэффициентов а и 6 из условия минимума величины
На, Ь) = W* - ЧУ)]2} = £{[х - (by + а)]2}.
Для этого необходимо решить уравнения
= 2Е(х - by - а)(-у) - 0;
- 2Е(х -by- а)(—1) = 0.
оа
Основы оптимальной фильтрации
341
Отсюда находим
I _ Е(яу) - Е(х)Е(у) _ а _ Е(х')Е(у2) - Е(у)Е(ху)
ау
где ри — ковариация, ри = Е(ху) — Е(х)Е(уУ
Таким образом, действительно, оказывается достаточным значения
д к первых начальных моментов и смешаного начального момента
Е(ху) или ковариации рц. Система оценки является оптимальной в
классе линейных систем оценки при значениях коэффициентов а и 6
определенных выше.
Далее пусть совместная ПРВ СВ X и Y является гауссовской
Л _ 1 ( 1 [(ж-т,.)2
„ г----2 еХР ] 9(1 — п2) гт2
2тг<тхауу/1 — р2 I Д1 h)L °х
(х - т^Ху - т„) (у - ту)21 1 .
-2р---------------—++------->, р = рп/<тх(Ту
&j;&y &у _ J
Условная ПРВ W(x | у) = 1У(х, у)/1У(у) Тогда
1 Г 1 Г а I2)
1У(х|у) =---./хр ~ on х~т^~ Р—(У~ту) (•
а1Х/2тг(1-р2) ( 2(1—р2)<г2 <Ту J
Отсюда получим
Е(Х | У) = тг + /?—(у-ту) (36.7)
<7у
и минимум среднего квадрата ошибки (остаточная ошибка)
<т2(х | у) =<т2(1-р2)= <т2 - ^1/<г2. (36.8)
Таким образом, действительно, устройство оценки является линей-
ным Л(у) = Е(Х | У) = тх +р^(у — тПу) и оптимальным как в классе
линейных, так и нелинейных систем.
Вь воды, сделанные для скалярного случая остаются справедливыми
и Для многомерных СВ X и Y
Пусть X и Y — совместно распределенные случайные векторы, при-
чем измеряемой СВ является Y и измеренное значение равно у То-
гда справедлива
Теорема 1 Оценкой х, минимизирующей апостериорный байесов-
ский риск при квадратичной функции потерь (иначе оценкой, миними-
зирующей условный средний квадрат ошибки)
Ва&) - Е{||Х-х||2 I Y = у) (36.9)
342
Лекция 36
является условное среднее СВ X при том, что Y = у, т е.
х = ДХ | Y = у] = [ х1У(х|у)«/ж.
J — OQ
Доказательство. Во-первых, заметим, что для оценки х с миниму
мом среднего квадрата ошибки должно выполняться неравенство
Е{| X - х||2 | Y - у} Е{||Х - z||2 | Y = у),
для всех векторов z, зависящих только от у и не зависящих от х. За-
дача сводится к нахождению такого вектора z, который обращал бы
это неравенство в равенство
Рассмотрим правую часть неравенства
B0(z) = Е{||Х - z||2 | Y = у} = Е{[Х - z]T[X - z] | Y = у} =
= £{(ХТХ - 2z' X + zTz) I Y = у} -
- £{||X||2 | Y = у} - 2zT£{X | Y = y) + zTz.
Дополняя последние два слагаемых до полного квадрата среднего зна
чения нормы вектора £{||z - ДХ | Y — у]||2} величиной ||£7{Х
Y = у}||2 получим
£{||Х - z||2 | Y = у} = E{||z - ДХ | Y = у]||2}+
+Е{||Х||2 | Y = у} — || ДХ | Y = у][|2.
Выражение в правой части, рассматриваемое как функция z имеет
единственный минимум, если
Z = ДХ I Y = у]
Теорема 1 доказана.
С учетом последнего равенства получаем остаточную ошибку оценки
[минимальное значение величины £Д|[Х — z||2 Y = у}) = Д(х)]
Д (х) = Е{||Х - x||2Y = у} = Е{||Х||2 | Y = у} - ||Е{Х | Y - у } ||2 =
-Е{ |Х||2 | Y — у) — ]|х||2.
В дальнейшем понадобится дифференцирование по вектору, поэтому
целесообразно доказать приведенную теорему иначе. Рассмотрим про-
изводную dBa^/dt, (по вектору z) (см Приложение 4)
= Я«1Х«2 I Y = у] - 2Е[Х | Y = у]^ + A(z’s) =
= -2ДХ| Y-y)I+2Iz,
где I — единичная матрица
Приравнивая производную нулевому вектору, получим искомое соот
Основы оптимальной фильтрации
343
ношение для вектора z
z-E(X Y = y).
Найдем вторую производную
= 211 2I2 = 21
az2
Таким образом, экстремум определяемый из условия dBa(z)/dz —
— О, является глобальным минимумом.
Для линейных устройств оценки, оптимальных по критерию мини-
мума байесовского риска (минимума апостериорного байесовского рис-
ка) при квадратичной функции потерь или что тоже самое по крите-
рию минимума среднего квадрата ошибки справедлив принцип орто-
гональности.
Теорема 2 (принцип ортогональности) Пусть наблюдается
вектор Y — [yi, уч, -Ут]т, содержащий информацию относительно од
номерного параметра х. Для того чтобы линейное устройство оцен-
ки с функцией
A0(Y) = а0 + bJY
давало оценку по критерию минимума среднего квадрата ошибки (в
классе линейных систем) необходимо и достаточно выполнение следу-
ющих двух условий:
1) несмещенность оценки, когда
Е[х - (а0 4- bJY)] = 0 или Е(х) - £7[A0 (Y)]; (36.10)
2) ошибка оценки ортогональна наблюдаемому вектору
Е{[х - ft0(Y)]Y) = Е{[х - (а0 + bTY)]Y) = 0тох1. (36.11)
Доказательство. Необходимость Возьмем некоторую линейную
функцию
h(Y) - а + bTY
в качестве произвольной линеинои оценки и пусть В Е) — байесов-
ский риск с квадратичной функцией потерь. Если fto(Y) — an + bpY
— линейная оценка по критерию минимума среднего квадрата ошиб-
ки тогда величина
B(h) - £[(ж - а - bTY)2]
достигает минимума при а — ao, b = Ьо, причем
dB(h)
да
dB(h)
2E(x — ao — bJjY) = 0;
До,Ъо
- —2Е{[х - (а0 + b,Y)]Y} = 0mxl.
a0jb0
344 Лекция 36
Таким образом, из условия минимума среднего квадрата ошибки вы-
текают условия 1 и 2
Достаточность Пусть выполняются условия 1 и 2 для некоторой ли
нейной оценки h(Y) — а + bTY тогда
£{[z-A0(Y)]ft(Y)} = аЕ[х /l0(Y)]+bT£?{[x-/i0(Y)]Y} - 0. (36.12)
Это означает, что произвольная линейная оценка ортогональна ошиб-
ке во = ж —/ic(Y) оптимального оценивающего устройства Найдем дис-
персию ошибки е — х — /i(Y) для произвольного линейного устройства
B(h) = E{[z - fc(Y)]2} = £{[ж - h0(Y) + ft0(Y) fc(Y)]2} =
= E{[^»0(Y)]2}+2E{x-/l0(Y)][h0(Y) - h(Y)]} + Е{[Л0 (Y) - A(Y)]2}.
С учетом соотношения (36 12) получим
B(h)~E{[x-h o(Y)]2}+E{[/zo(Y)-/l(Y)]2}^l?{[a;-/Jo(Y)]2} = 5(/lo).
Таким образом, доказано что /iq(Y) (линейная оценка) является
оптимальной (в классе линейных систем) по критерию минимума сред-
него квадрата ошибки (минимума апостериорного байесовского риска
при квадратичной функции потерь).
Следствие из принципа ортогональности. Ошибка оптималь-
ной оценки ортогональна самой оценке, т.е
Е{[Ж - /io(Y)]/t0(Y)} = 0.
Этот результат вытекает из соотношения (36.12), справедливого при
любой функции /i(Y) в том числе и при /i(Y) = /i0(Y).
Таким образом для синтеза линейной системы, оптимальной по кри-
терию минимума среднего квадрата ошибки не требуются ограничения
на совместную ПРВ СВ Y и X (наблюдаемую и ненаблюдаемую),а тре-
буется знание лишь моментов первого и второго порядка.
Из принципа ортогональности следует, что, если оценку х рассматри
вать как линейную комбинацию т + 1 векторов {1, у\,.. .ут}
х - а + Ъ^У - а + biyi + . + bmym
с тем, чтобы расстояние у/Е[(х — я?)2] было минимальным то геоме-
трически это будет означать ортогональность ошибки е = х — х под-
пространству Sm+i, натянутому на эти векторы {1,...ут}> так как
согласно принципу ортогональности ошибка е ортогональна (перпенди
кулярна) каждому из этих векторов. Сама оценка х при этом является
ортогональной проекцией наблюдаемого параметра на подпространство
.Sm+i (рис 36 2).
Все представленные соображения применимы и в теории СП. Если на-
блюдаемым СП ж(/) является аддитивная смесь сигнала s(Z) и шума п(<)
x(t) — s(t) + n(i), то формирование оценки .?(£) — y(t) = £[a?(i)] (L —
линейный оператор) и ошибки c(t) фильтрации иллюстрирует рис. 36 3
Основы оптимальной фильтрации
345
Рис. 36.2
•<0
е(<) =s(0— s(f)
Рис. 36.3
Согласно принципу ортогональности ошибка ортогональна входному
воздействию, т.е. E(etx^ = 0 0 < £ < оо, иначе
Е{х£- s(f)]} - 0, (36.14)
где s(t) = y(t) = /0°° x(t — a)ft(a)d&; h(a) — ИХ системы.
Отсюда получим уравнение Винера—Хопфа, используемое в теории
фильтров Винера и Калмана.
При рассмотрении оптимальных систем необходимо учитывать харак-
теристику входного воздействия (вид сигнала и помехи); критерий опти-
мальности системы а также ограничения на систему в частности, фи-
зическую реализуемость фильтра, его стоимость, сложность и т.д.)
В дальнейшем рассматривается три типа линейных оптимальных
фильтров, различающихся видом уравнения наблюдения и критерием
оптимальности.
1. Фильтр, оптимальный по критерию максимума отношения сиг-
нал/шум (ОСШ) на выходе
где s0 — so(f) — сигнал на выходе фильтра <т/о — мощность шума
на выходе фильтра.
2. Фильтр Винера (ФВ), для которого критерием оптимальности слу-
жит минимум среднего квадрата ошибки (CKO) (min Е(е%)).
В том и другом случае уравнением наблюдения служит аддитив-
ная смесь
»(t) — s(l) + n(t)
сигнала s[t) и шума n(t).
В первом случае сигнал считается детерминированным во втором —
случайным с заданной КФ, причем рассматривается как непрерывная
версия уравнения наблюдения, так и цифровая
Замечание: При рассмотрении цифровой версии уравнения наблюде-
ния и в первом случае сигнал может быть принят в виде случайной
последовательности.
3. Третий тип оптимального линейного фильтра — фильтр Калмана
ФК), для которого критерием оптимальности является также как и в
случае фильтра Винера, минимум СКО. В отличие от процедуры синтеза
фильтра Винера здесь оцениваемый СП задается в виде стохастического
346
Лекция 36
ДУ, а уравнение наблюдения имеет вид
а?(/.) = + n(t),
где H(t) — известная функция; A(Z) — некоторый информационный
СП, который задается упомянутым ДУ, а ошибка e(t) = A(Z) — A(i)
Оценка A(t) определяется ДУ ФК, которое может быть получено из
уравнения Винера-Хопфа, поскольку критерием оптимальности ФВ и
ФК одинаковы
Наконец, возможен особый нелинейный тип оптимального фильтра,
вытекающий из теории нелинейной оптимальной фильтрации Уравне-
ние наблюдения в этом случае может быть записано в виде
x(t) — s(t, А) + n(t),
где А = A(t) — некоторое сообщение (СП с известными статистиче-
скими свойствами).
В общем случае здесь критерием оптимальности фильтра служит мак
симум апостериорной ПРВ (АПРВ) 1Уа(А,/) В качестве оценки А(<)
используется такое значение А — A(t), которое соответствует максиму-
му АПРВ lVa(A,i) (А является оценкой по критерию максимума АПРВ)
Результатом синтеза по этому критерию является в общем случае опти-
мальный нелинейный фильтр, который синтезируется на основе метода
оптимальной нелинейной фильтрации, предложенного Стратоновичем
Лекция 37
Максимизация отношения
сигнал шум. Согласованный фильтр
Синтез согласованного фильтра
во временной области
Пусть на вход линейной системы воздействуют аддитивная смесь x(i)
сигнала s(t) и шума пр),
жр) = «р) + пр), (37.1)
причем сигнал s(t) является известной фунцией времени, шум пр) пред-
ставляет собой стационарный случайный процесс в виде белого шума с
постоянной (двусторонней) спектральной плотностью So Заким обра-
зом, по условию, КФ шума 7?п(т) = <Sd^(t) 7?(п<) — 0- Определим
отношение сигнал/шум q(t) на выходе линейной системы в виде
9(0 = ^р)/<> (37.2)
где Sop) — сигнал на выходе фильтра <т2о — дисперсия шума Пор)
на выходе линейной системы.
Требуется найти ИХ /гр) линейного фильтра, обрабатывающего ад
дитивную смесь (37.1) так чтобы отношение сигнал/шум др) на выходе
фильтра в некоторый момент времени t = to было максимальным. Тако
ва задача синтеза линейного фильтра по критерию максимума отноше-
ния сигнал/шум (ОСШ) в момент времени to- Перейдем к ее решению
Сигнал sop) на выходе фильтра выражается в виде свертки
Sop) = [ h(r)s(t — г) dr. (37.3)
Jo
Дисперсия шума на выходе определяется по формуле
причем при переходе к последнему соотношению использовалась тео
Рема Парсеваля
(37.4)
348
Лекция 37
Рис. 37.1
и условие физической реализуемости фильтра
Л(т) = 0 при г < 0.
(37.5)
Таким образом ОСШ на выходе
?(io) =
h2(r)dr. (37.6)
Воспользуемся неравенством Коши-Буняковского
Л0р(0
dt
(37.7)
Равенство обеспечивается, если /(t) = fcg(t), где k — const. Применяя
неравенство (37.7) к соотношению (37.6), получим
s2(to — г) dr.
(37.8)
Равенство в (37.8) обеспечивается только в случае выполнения соот-
ношения
h(t) = aes(t0 -t)l(t), (37.9)
где ээ = const- l(t) — единичный скачок (функция Хевисайда).
Итак ИХ /г(1) оптимального фильтра имеет форму сигнала, распро-
страняющегося в обратную сторону, начиная с фиксированного момента
времени to (рис. 37 1). Фильтр, обладающий такой характеристикой,
называется согласованным (СФ).
Максимальное ОСШ на выходе
qm = maxg(to) = Р0^0-] = [ «2(*о ~ T)dr-
L J max ' О JO
Воспользуемся равенством
/ s2(/-0 - т) dr = f s2(t) dt = Э(<о),
Jq J —oo
(37.10)
(37.11)
где Э — энергия сигнала, накопленная к моменту времени to, для кото
Максимизация отношения сигнал/шум. Согласованный фильтр 349
рого должна быть осуществлена максимизация
ОСШ. Тогда
<Zrn — 3(to)/Sfl.
Положим t = to/2+r и по (37.5) получим равен- рИС 372
ство Л(<о/2 + т) = 32s(fo/2 — г) Это означает, что
ИХ СФ представляет собой сигнальную функцию aes(t), зеркально отра-
женную относительно оси t = t0/2 (рис. 37 2). Значение to определяется
из условия физической реализуемости фильтра и необходимости дости-
жения максимально возможного ОСШ на выходе фильтра. Пусть сигнал
имеет длительность Т (см. рис. 37.1). Тогда при to <Т ИХ ti(t) форми
руется при t < 0 (/i(t) / 0 при t < 0), что противоречит физической ре-
ализуемости фильтра. Из формулы (37.11) следует, что если to < Т, то
Э(7о) < Э(Т) = Э = Jo s'2(t)dt. Энергия сигнала при этом используется
не полностью, в связи с чем не обеспечивается равенство qm = maxg(io),
где qm = Э/So- Следовательно, должно выполняться равенство to — Т-
Для простоты рассмотрим отклик фильтра y(t) в виде свертки при
35 — 1
y(t) — [ hfrjxft — т) dr = f s(to — т)х(1 — т) dr = I s(u)x(u+
J — 00 J — 00 J — 00
+ to —t)du =
Первое слагаемое совпадает с сигналом so(t) на выходе СФ второе
характеризует шум no(t) на выходе СФ При i = to so(to) = Э. Вве
дем КФ сигнала
s(u)s(u +r)dr =
(37.12)
Тогда видно, что при т = to t Sq(t) совпадает с КФ сигнала Ве(т)
Ф функционирует как коррелятор
Пусть на входе фильтра имеется сигнал конечной длительности, рав-
ной Т, следовательно,
ft(t) =
s(T t), при 0 < t С Т
0, при t < 0, t > Т
На выходе СФ имеет отклик
y(t) = [ /i(r)a?(t —г) — [ s{T—r)x(t—T)dr— f s[u)x(u+t—T)du.
Jo Jo Jo
(37.12)
При этом схема обработки входного колебания a;(t) =. s(t) + n(t) име-
ет вид представленный на рис. 37.3,а (ПУ — пороговое устройство, т/п
350
Лекция 37
— пороговое значение отклика) и операция согласованной фильтрации
соответствует корреляционной обработке (момент отсчета t = Т), ко
гда (рис. 37 4)
у(Т) = [ s(u)x(u) du — G. (37.13)
Jo
Рассмотрим КФ шума no(t) на выходе СФ согласно (18.7)’
Rn0 = [ Rh(y)Rn(r — v) dv; Rh(r) = [ h(u)h(u + r)du; (37.15)
J —co J—co
Rh(e) — системная КФ (СКФ).
При белом шуме на входе Rn(r) = So6(t), тогда
тгпо(т) = S0Rh(r).
Подставив в (37.15) /i(i) = s(/0 — t), получим
/?л(т) = [ s(u)s(u + г) du =
J — оо
Таким образом,
ЯпоМ = S0Bs(t),
т.е. КФ шума на выходе совпадает по форме с КФ сигнала (рис. 37 4)
Отсюда дисперсия шума на выходе СФ <т„о = SbBs(0) — Sq3.
Синтез СФ в частотной области
Пусть аэ = 1, тогда с помощью соотношения (37.9) найдем ЧХ СФ
= 3[/>(t)] = / - t)e~iut dt = е-,ъ‘о [ s(x)e^x dx =
J —CO ’ J —OO
= Г1(-гы)е-ъ*°,
где Fi(iw) = 3[s(i)] — комплексный Спектр входного сигнала. Исполь^
Максимизация отношения сигнал/шум. Согласованный фильтр 351
эуя соотношение Fi(—iw) — Fffiw), получим ЧХ СФ
H(iw) = e~iut°F*(iw) (37.16)
и его передаточную функцию
H(s) = e~st°Fi[—s).
Отсюда следует, что
Н(и>) - |Я(гш)| - IFificv)! - Fj(W). (37.17)
В Итак амлитудно-частотная характеристика (АЧХ) СФ совпадает с
амплитудно-частотным спектром (АЧС) сигнала В этом проявляется
[свойство согласованности фильтра с сигналом. СФ подавляет спек-
тральные составляющие шума в соответствии с формулой
sno(w) - |H(^)|2Sb - |Д(^)|2.9о,
т.е. подавляет тем больше, чем меньше значение АЧС сигнала Это при-
водит к подавлению шума на выходе СФ. Сигнал из-за неравномерности
АЧХ ослабляется меньше, чем шум, в связи с чем происходит подавле-
ние шума относительно сигнала.
По (37.16) найдем фазочастотную характеристику (ФЧХ) СФ
^я(^) - агё Н(гсо) - -[wt0 + <pi (w)], (37.18)
где ^i(w) — arg Fi(iw) — фазово-частотный спектр (ФЧС) входного
сигнала. Найдем ФЧС у’о(^) = argFo(iw) сигнала на выходе СФ где
Fo(iw) — Fi(ia>)H(iw)',
^o(w) = pi(w) -I- у?н(ш) - ^i(w) — [$?i(w) + wto] = -eot0. (37.19)
Таким образом, ФЧС выходного сигнала линейно зависит от частоты
Равенства (37.18), (37.19) указывают на то, что ФЧХ СФ обеспечива-
ет компенсацию фазовых сдвигов спектральных составляющих сигнала.
В результате прохождения сигнала через СФ с ФЧХ сложение всех его
спектральных составляющих, скорректированных по фазе, образует пик
выходного сигнала so (to)- Слагаемое wt.o ФЧХ <рн(ы) характеризует за-
держку указанного пика относительно начала сигнала на время t^.
Воспользуемся соотношением Fofico) = $[*'o(t)], где Fo(iw) —
~ F^(iw)H(iw) = |Г1(гш)|2е-£а"°
Тогда
1 1 Г00
so(t) - — / |^(^)|2е^-‘°) dw=— |F (гЪ)|2 cosW(t -10) dw,
J — OO J — oo
так как функция |F(iw)| является четной
При t — to, как и следовало ожидать, получим
so(fo) = у- f |F(iw)|2dw= f s2(t)dt = Э = maxs0(t).
J—оо J — со
352
Лекция 37
Синтез оптимального фильтра
при коррелированном шуме на входе
Рассмотрим случай, когда помеха n(t) не является белым шумом, а
имеет ЭС .Sn(w) 56 const. Здесь по-прежнему ОСШ
НО
1 уОО л СО
< = / Sne^)dw = /
— оо «/со
Сигнал so(t) на выходе фильтра в точке t = t0 запишем в виде ПФ
if00 If00
*о(*о) = тг / = - / Fs(iw)H(iuyutodcj =
«/—ОО J—OO
= У [я(^)Т^) e^dw.
Тогда согласно неравенству Коши-Буняковского получим
[ [|явМ1754“)] Г \H(iu>)\2sn&)du>.
х2-71/ J — оо J—оо
Следовательно,
1 7°°
q Чт = 2к J du~
Неравенство обращается в равенство при
^Fs(-iu)/y/sn^) - е£"‘°.
В результате получим ЧХ фильтра, оптимального по критерию мак-
симума ОСШ
Яопт(«ш) - 3e[Fs(-iw)/S'n(w)]e_Iix'‘o.
Оптимальный фильтр можно представить в виде последовательного со-
единения
Яопт(5) = Hx(s)H2(s),
где Hfc) - [б'о/.ЭД]1/2, So — const, Я2(з) = aefF^-iwJ/^/Xfw)! х
х ехр(—го4о), при этом ае = kSo, причем фильтр с передаточной функ-
цией Я1(«) является обеляющим, на его выходе шум имеет ЭС S(cS) —
•§п(^)|Я1(5)|2 = .So = const, второй фильтр является согласованным
для сигнала на выходе первого фильтра.
При Sn(w) = So = const, при ae/So — 1 приходим к (37.16).
Максимизация отношения сигнал/шум. Согласованный фильтр 353
Синтез оптимального фильтра
при конечном времени наблюдения
На входе фильтра имеется воздействие x(t) = s(t) + n(t) в течение
конечного интервала времени Т Сигнал и шум на выходе описыва-
ются выражениями
so(/o)= / h(r)s(t0 - r)dr; по(*о) = / h(r)n(t0 - г) dr,
Jo Jo
КФ шума на выходе фильтра может быть записана в виде
Л
/г(;и)Л(р)7?.п(т + р v)dpulv = I Rh(u)Rn(T — u)du,
J-T
где Rn(r) — КФ шума на входе; Rh{u) — системная КФ Найдем
дисперсию <7по шума на выходе при условии что шум на входе име-
ет нулевое среднее значение:
Л fT fT
апо — / / h(p)h(v)R{p, — v)dpdv — I Rh(u)Rn(u) du.
Jo Jo J т
Пусть 1/Aj = q,n — максимальное отношение сигнал/шум на выхо-
де фильтра Тогда для любого линейного фильтра справедливо нера
венство q qm, где q — отношение сигнал/шум на выходе фильтра,
определяемое формулой (37.2).
Таким образом, должно выполняться неравенство cr^o — AiSqOo) 0.
причем знак равенства достигается только для выхода оптимального
фильтра.
В результате процедуры оптимизации находится интегральное уравне-
ние, которому должна удовлетворять ИХ h(t) оптимального фильтра [1],
/ h(u)Rn(r — и) du — as(to — т), 0 < т < Т. (37.20)
Jo
Если подставить s(to — г) в правую часть (37.20), то получим а =
= °’n0/so(*o)-
Пусть на вход фильтра воздействует белый шум с КФ R./t) =
= ,So6(t), /?.,.( т — и) = — и), тогда по (37.20)
h(t) — ees(io — it), ве — а/So-
Пример 37.1 Пусть шум на входе фильтра имеет КФ
Лп(т) = О„е ‘К
Найти ИХ A(t) оптимального фильтра при конечном времени наблюдения.
Решение интегральное уравнение (37.20) запишем в виде
[ h(u)e-b\T-^du = г(т), О < т < Т, (37.21)
Jo
где z(r) = aos(tQ - т)
354
Лекция 37
Найдем ЭС Sn(u>) входного шума
&(«) = ЖИ] = [е-ь'т1] = —Q = 2bD„.
1 J 4-
Отсюда следует, что £п(иг) = <?/(i2 - з2) , = iw. Сравнивая это выражение с
(П6.3), заметим, что N(p2) — 1
Ъ2-р2
Q
Поэтому по (П6.7) сразу найдем ИХ h(t) в виде
h(u) = Q-1 [l>2z(u) - z"(«)] + а8(и) + (38(и - Т).
Подставим эту функцию в уравнение (37.21). В результате получим
Ь 1
-h - —Io + DnI( = z(r), (37.22)
Z jtt)
[T fT
где Л = / з(«)е b>r "Idu; Io = z"(u)e~b^-^du;
Jo Jo
Ie = a [ S(u}e~b^-^du + /? / 6(u - = -ае“Ьт + l/?e‘<’-T).
Jo Jo
Найдем выражение для интеграла
Io = г"(и)е-г<т ^du + J = е~Ьт10г + еЬт/02-
Интегрируя по частям, получим
Zo = -2Ьг(т) + [Ьг(О) - У(О)]е-^ + [Ьг(Т) + (Т)]еь(т т> + Ъ21х.
После подстановки в (37 22) и приведения подобных членов получим выраже-
ния для коэффициентов а и /3:
а = - г'(°)Ь V = ТТГ^-7"* + 2'(т>1
ЫУ п VJL'n
Положив z(r) = as(to т), найдем окончательно ИХ оптимального фильтра
/ J2 \
/i(t) — a0Q 1 ( Ь2--— ) s(t0 - т) + ce£(t) + (38(1 - T),
\ /
где a = b“-[6s(t0) + s'(i0)]; (3 = ~ T) - s'(t0 - T)J.
Если для сигнала выполняются условия bs(to)4-s'Oo) = О. s(to—T]—s'(t0—T) = О
то ИХ h(t) оптимального фильтра упрощается:
A(t) = а0<3-1 ( i2 - ) «(«о - т).
\ “i /
Пример 37.2. Найти импульсный отклик линейного фильтра, обеспечивающего
максимально возможное отношение сигнал/шум при условии, что сигнал имеет вид
s(t) = 1 - 1 [е2<е“т) + е-2’*] + [е4^((-г) - , О < t Т. (37.23)
а ЭС шума
Sn(/) " (1+/2)(4 + /2) ’
Максимизация отношения сигнал/шум. Согласованны!! фильтр 355
Решение. В рассматриваемом случае необходимо решить интегральное урав-
нение:
ГТ
/ Л(г»)Яп(т - u) du = s(ti - т), О т $ Т, (37.24)
Jo
где ti = Т. По условию
S (Л = 1 = __________1_____
Ш (1+/2)(4 + /2) 3(1+ /2) 4(4 + /2)’
поэтому КФ Я„(т) = 3“1[5„(ы)] имеет вид
Rn(r) = ^е-2’И -
3 ь
Запишем Sn(f) в виде Sn = ?7(р2)/О(р2), гДе N(p2) = 1.
Я(р2) = ? + 5/2 + 4|/2=_р2/(4„2) = Ь4 ~ 5(2я)2р2 + 4(2тг)4].
Решение интегрального уравнения (37.24) сводится к решению ДУ (Пб.З) при
z(v) = s(T — т), это ДУ в данном случае приводит к соотношению
л(О = с^(т-т).
По условию сигнал s(t) определяется формулой (37.23). Тогда
s(T - t) = 1 - 1 [е”2”' + е21Г<‘-т)] + [е **' + е47Г<‘-т)] .
Известны соотношения р4 (eat) = a4e“f; р2 (е“‘) = a2eat. Следовательно,
р4 (е—27Г*) = (2тг)4е-2я,; р2 (е-2”‘) = (йтг)^2’4;
р* - (4ir)4e'"4srt; р2 (е 4’г‘) = (4тт)2е-4’ге;
Поэтому
(р4 5(2к)2р2 + 4(2тт)4]е±2,г‘ = [(2тг)4 - 5(27с)2(2тг)2 + 4(2тг)4]е±2,г‘ = О;
[р4 - 5(2тт)2р2 + 4(2тг)4]е±4ж‘ = [(4тг)4 - 5(4тг)2(4тт)2 + 4(4тт)4]е±47г‘ = О.
Тогда
Л(0 = ^4 [р4 - 5(2я)2р2 + 4(2тс)4] = 1, О t Т.
HiaK, ИХ оптимального фильтра имеет форму видеоимпульса единичной ампли-
туды с длительностью, равной Т. Оптимальный фильтр представляет собой ин-
тегратор со сбросом.
Для проверки подставим ИХ h(t) и Rn(t) в интегральное уравнение (37.24) В
Результате найдем
Гт fT fT
h= к„(т - -u) du = - / e-2’T|’-“ldu - " / e-M—=
Jo 3 Jo 6 Jo
[ e-2<T-u^du+- [ e-2<“-T)<iu-- / e-^-^du-
3Jo 3Л 6 Jo
Интегрируя, получим
Il = 1 - 1 [e-2"1' + e2’<’-T)] + ~ [e-4’7’’ - e4^7-1”’] = s(T - t),
Что и требовалось доказать.
Лекция 38
Примеры согласованных фильтров
Пример 38.1 Найти структуру СФ, если на вход фильтра воздействует сиг-
нал s(t) в форме единичного прямоугольного видеоимпульса с амплитудой А и
длительностью ти.
s(t) = AuQ(t) = Л[1(«) - 1 (i - ru)J.
(38.1)
Решение Прежде чем устанавливать значение времени io. рассмотрим сверт
ку двух прямоугольных видеоимпульсов ^i(i) и U2(t) разной амплитуды и А2
(Дг > .41) с длительностями соответственно rj и тг (тг > тг)_ Свертку запи-
шем в форме
Д1Л2 = -41 ^21,
О t Tj.
(38.2)
Пусть t = О, тогда Л (О) = О (рис. 38.1,а) При t > О получим (38.2) (рис. 38.1,б,в).
Таким образом, при О t п происходит линейный рост функции I(t), причем
максимальное значение Z(t), равное AiA2tj принимается в точке t = п (рис. 38 1,г).
Значение функции 1(f) остается неизменным вплоть до точки t = Т2 (см. рис. 38 1,г),
при t > 72 наблюдается уменьшение напряжения, при этом свертка
АгА2 dv = AiA2(t2 + ti — t).
72 i 71 +т2.
И ак, при 7г t 71 + 7г значения функции уменьшаются с ростом t (см.
рис. 38.1,г), при t = 7] + 72 /(71 4- т2) = О.
Если сигнал имеет вид одиночного видеоимпульса и 36 — 1, то
s(t0 - t) = Д[1(4о - t) - l(to - ти - t)h = 5(t0 -
Рис. 38.1
Примеры согласованных фильтров
357
, ,s(to—t)
to—Tu 0 to t
0 to t 0 to Tu /q+Tu '(
•s(to—t)
Kt)
Очевидно, что в данном случае (при to = т„)
!т = Э/So = AZ-Tv/Sq- (38.3)
Сигнал на выходе СФ
ГТМ Гтч
s0(t) = / s(v)h(t — и) dv = I s(v )s(t - to + •u) dv.
Jo Jo
Запишем изображение входного импульса
Fi(S)-(^/s)(l-e^“).
Передаточную функцию СФ представим в виде
H(s) = Fi(—s)e~3t° ~ (A/s)(l - е-"-)с-»(‘о-’’«) = (5)е-3<‘°-’’А
Таким образом, ИХ СФ h(t) = £“1[/Z(s)] представляет собой задержанный на
величину to — ти входной импульс, если to — ти 0 (t0 Ти)-
Зависящие от соотношения между моментом to принятия решения и длитель-
ностью сигнала ти формы напряжения показаны на рис. 38 2,3—в соответственно
при to < ти, f0 = Ти и t0 > ти.
Пусть to = Ти Структура СФ определяется по его передаточной функции
H(s) = ^(s) = (Л/в)(1 - е~зт“).
СФ включает усилитель с коэффициентом усиления Ао интегратор с передаточной
функцией H«(s) = 1/s, линию задержки на время ти, соответствующую оператору
задержки е“4г«1 инвертор и сумматор.
Пусть А = 1 Найдем вначале изображение сигнала на выходе СФ
Fo(«) = ^(5)Я(5) = Ff(s) = (l/s2)(l - с-"")2.
Запишем t'b(s) в форме двух слагаемых:
F0(s) = <70(s) - J7o(s)e—ВД = (1 /«2)(1 - e~ST«).
Оригинал uc(t), соответствующий Uo(s), представляет собой линейную ступень-
Ку (рис. 38.3,а), получаемую интегрированием прямоугольного импульса (J7o(s) =
358
Лекция 38
(l/s)Fi(s)] Функция Fq(s) представляет собой результат преобразования этой сту
пеньки (рис. 38.3,6).
Структурная схема СФ изображена на рис. 38.4. Напряжение сигнала на выходе
СФ может быть определено по свертке (при t = ти, А 1) (см. (17.14) рис. 17 1 6)
SO(t) = Г s(o)s(t - „) dv = ( Э J1 - -Ч~] "Ри ‘ е [°’ 2т“] (38.4)
Л (0 при t £ (0, 2ти),
Пример 38 2. Найти структуру СФ, если на вход фильтра воздействует сигнал
s(t) в форме единичного радиоимпульса с амплитудой А и длительностью ти:
A cos wq t при 0 t iC ти
0 при других t
Представим радиоимпульс в виде
Л-1 Up(t) — l(t) cos coot — l(t — ru) cosco0(t — Tu).
s(t) - Up
Решение
Воспользуемся
s
соответствиями
-у = l(t)coscoot; -5-----5-е s7“ — l(t — ru)coscoo(t — т„).
'о »2 + “о
Тогда получим изображение радиоимпульса
s д
Найдем передаточную функцию СФ
rjz I ( ®)Д , — 3
H(s) - —-----7” “ e
S2 + co2
При to — Ти получим
= H(s) = -7^-7
S2 +co2
СФ включает усилитель с коэффициентом усиления А, инерционное звено с пере
даточной функцией Hkfs) = s/(s2 + coq), линию задержки на интервал ти, инвертор
и сумматор. Передаточной функции инерционного звена соответствует его ЧХ
Tfo(ico) = ico/fco^ -со2).
(38.5)
Сравним с ЧХ параллельного колебательного контура в форме его ком
где Э = j42t«.
Примеры согласованных фильтров
359
плексного сопротивления
Hfc(icu) = Zfdiw) — а = Qe, е = —-------Кэ - pQ
' ’ ’ 1 + ia w0 w
где p = y^L/C — волновое сопротивление контура: wq — резонансная частота;
Q — добротность контура.
После преобразований получим
= шор------ 'Ш --------jr.
iuwo/Q + (% - ы2)
Таким образом, ЧХ Ho(iw) с точность до постоянной pwo, которую можно вклю-
чить в коэффициент усиления усилителя, совпадает с ЧХ высокодобротного контура.
Поэтому структура СФ принимает вид, представленный на рис. 38.5, где Л] = А/ршо-
Найдем форму сигнала so(t) на выходе СФ. Для простоты предположим, что
число периодов колебания с частотой /о = wo/(2?r) за длительность импульса ти
является целым числом. Пусть а>о — 2%/То, тогда wqtu = 2тгт«/7Ь = 2кк, где
к — тп/7Ь — целое число,
С учетом равенства woru = 2тг/г получим
up(t) = Auo(t) COStAj0i, Ti0(t) = s(t) — s(t — TU).
Напряжение на выходе СФ
ZOO
s(r)h(t — r) dr = li cosw0t + h sinwot,
-oo
где
ЛОО ЛОО
/1 = / uo("r)uo(t — r) cos2 wor dr; h. — — / no (r)«o(t — r) sin 2wor dr.
J —oo -J —<30
Пренебрегая интегралами с функциями, осциллирующими с двойной частотой шо,
получим so(0 = cosu/Qt, гце
гоо
ит(0 = / ио(т)гго(* — т) dr
</—оо
'— КФ видеоимпульса-
Таким образом, на выходе СФ формируется радиоимпульс, огибающей которого
служит (уменьшенное в два раза) напряжение на выходе СФ для прямоугольного
360
Лекция 38
видеоимпульса (рис. 38.6).
Пример 38.3. Найти ИХ A(t), структурную схему СФ и напряжение сигнала
на выходе, если сигналом s(t) на входе является пара видеоимпульсов единичной
амплитуды (рис. 38.7,а):
s(t) - м0 (t) + «о (t - ЗУ), (38.6)
где u0(t) = l(t) l(t T).
Решение. Нетрудно показать, что при to = 4Т
honi(t) — s(t0 - t) = s(4T - t) = s(t),
Обозначив H(s) — L[/i(t)], no (38.6) получим
H(s) = Uc(s) + <7o(s)e-3Ti = l/o(s) (1 + e-3j,T) - Us(s),
где
Uq(s) = - (1 — e-sT) = L[txo(*)fco(*)•
s 4 7
Изображение выходного сигнала
U30(s) = Ua(s) - H(s) = U2(s) (1 + e“3"T)2 = (1 + 2e“3sT + e“6*T) ,
где Uq(s) = L[My(t)], и?(1) — сигнал на выходе СФ при наличии единичного ви-
деоимпульса на входе. Напряжение soft) = L~'U,O(S).
Таким образом, напряжение на выходе СФ имеет вид (рис. 38.7,6)
so(t) — M71(t) + 2ti7i(t — ЗУ) + wp (t — 6У).
Структурная схема СФ приведена на рис. 38.8. СФ состоит из СФ под еди-
ничный видеоимпульс (рис. 38.8, СФ]), схемы задержки с оператором задержки
e-3sT и сумматора.
Примеры согласованных фильтров
361
Ь Пример 38.4. Найти структуру СФ для пачки одинаковых видеоимпульсов
(ри 38 9).
Решение. Пусть Uo(s) — изображение первого импульса последовательности.
Тогда, используя теорему запаздывания, получаем изображение импульсной пачки
U(s) = Uo(s) (1 + e“sT1 + e-eTa + .. .е-*7’"-1) .
Рассмотрим случаи различных и равных интервалов между импульсами пачки.
1. Пусть интервалы Ti неодинаковые и Fi(iu') = lA)(s)|s=JO) — частотный спектр
(ЧС) первого импульса, тогда ЧС второго импульса F2(iw) — Fo(s)e—sT1 |s=iw =
Fi (iu>)e—и т.д. до п—ого импульса, ЧС которого F„(iw) = Fi (iw)e— 1.
В результате ЧС пачки
► км = щ.*)|з=к. = Fi^ = F> 0+e-i“Tl + • • • +
»=1
При этом длительность пачки (см. рис. 38.11,а)
— Тп-1 + Ти — io-
Частотная характеристика СФ имеет вид
= aeF*(iw)e-ia"" = seF* iw)e“1“(T"-1+T“) =
= BeF;(iw)e-i“r’‘e-i“T"-> (1 + eiwTl +... + eiu,T—’ + e^T— ) -
= Hi(iw) (e“ + e-M'Tn-i-Ti) + + 1) =
= fir1(icu)-H2(M,
гДе W](iw) = aeFj*e_,“'r“ — ЧХ СФ для одиночного видеоимпульса.
2- Пусть импульсы в пачке одинаковы и отстоят друг от друга на постоянный
Интерв л Ti = Т. Тогда Ti = Т. Т2 = 2T,...,T„_i = (п - 1)7.
ЧХ СФ имеет вид
Я(кэ) = [l + e-ia,T+ ... + e“,“<n“1>T] =H1(iu2)H2(M-
362
Лекция 38
Рис. 38.12
Сигнальная составляющая на выходе СФ1 имеет вид последовательности тре
угольных импульсов, определяемых соотношением (38.4) (при этом t0 = тп, где
тп — длительность пачки импульсов).
После задержки и суммирования получим на выходе СФ последовательность игл
пульсов (рис. 38 11,6). При этом амплитуда треугольного импульса в точке t = 10
равна — ngmi — пЭ/Sq — 2n3/7Vo, а разность амплитуд соседних импульсов
-- 9ml = э/5о.
Таким образом, СФ состоит из последовательного соединения СФ1, блока, вклю-
чающего элементы задержки на такт, и сумматора Этот блок имеет ЧХ Нг(1^) =
= 1 + e~iwT + ... +
При достаточно больших п можно приближенно принять
- 1-'e"-iu>T-
Заменив е~г^т = г-1, получим системную функцию второго блока Сг(<г) =
= 1/(1 —Она соответствует цифровому интегратору, осуществляющему ин
тегрирование методом прямоугольников:
Уп = Уп~1 +а?л-
Структурная схема интегратора изображена на рис. 38.10. Интегратор является
рекурсивным цифровым фильтром (ЦФ). В реальных линиях задержки имеется за-
тухание d < 1, поэтому схема рекурсивного ЦФ принимает вид (рис. 38.12), который
соответствует разностному уравнению
Уп — dyn—i 4- а?п.
Тогда ЧХ второго блока принимает вид
W2(iw) = -———1
1 — аехр(—icoT)
Заметим, что второй блок представляет собой дискретный аналог интегрирующей
цепи. Фильтр с такой АЧХ называется гребенчатым.
Лекция 39
Цифровой оптимальный фильтр по
критерию максимума ОСШ
Пусть наблюдается величина ж[&]
х [Л] = *[£] + п[Л] (39.1)
— аддитивная смесь сигнала s[fc] и шума n[fc].
Обе эти величины дискретные, зависящие от интервала дискретиза-
ции Т, представляют собой дискретную версию уравнения наблюдения
x(t) = s(t) + n(t),
причем х[А:] = x(kT), s[fc] = s(kT'), n[fc] = п\кТ), к — 0,1,2...
Найдем линейный ЦФ, оптимальный по критерию максимума ОСШ
на его выходе.
Замечание. Предварительно требуется определить понятие ОСШ
и понятие синтеза применительно к ЦФ по выбранному критерию, а
также выбрать тип ЦФ
В качестве ЦФ выберем нерекурсивный его тип и будем искать набор
оптимальных весовых коэффициетов его ИХ у[т]
Рассмотрим дискретную свертку при числе отсчетов, равном N. Тогда
отклик ЦФ y[fc] выражается в форме конечной суммы
N-1
У[&] =£>[*]*[*-*] (39-2)
t—О
Введем вектор ИХ
G ~ - -.PpV - 1]}Т = {ffo,yi ..-SW-1}T — вектор-столбец.
Рассмотрим N отсчетов второго множителя свертки при i = 0,1,..
N - 1:
х* — {ж[£], ~ 1], — N + 1]}т — вектор-столбец
sfc = {s[fc], s[A: - 1],.. s[fc — N + 1]}T — вектор-столбец,
гц — {n[fc], n[fc 1]... .n[fc — N + 1]}T — вектор-столбец
Тогда вектор наблюдения запишется в виде суммы векторов
xk~sk + nk. (39.3)
Замечание. Помеховая составляющая гц может включать собствен
Ный шум приемника который обычно идеализируется в форме БШ и
364
Лекция 39
небелую помеху (отражение от поверхности при ее облучении РЛС, а
также воздействие средств радиоэлектронной борьбы (РЭБ) и тд ). В
том случае, если пц — БШ то синтез оптимального фильтра (ЦОФ) —
это синтез ЦСФ (цифрового согласованного фильтра).
Дискретная свертка в векторной форме примет вид
уН = GTxfc = xjG
Определение ОСШ на выходе ЦФ
Обозначим через Рс и Рп — соответственно мощность сигнала и по-
мехи на выходе ЦФ тогда ОСШ
<1 = Рс/Рп- (39.4)
Предположим, что сигнал st на входе и на выходе — случайные
последовательнсти, тогда Рс = jE[|sofc|2], причем sot = GTsjt.
Из курса линейной алгебры известно соотношение
|sofc|2 = |GTsfc|2 = (GTsfc)(GTsfc)T = GTsfcS£(GT)T = GTSjfc^G.
После усреднения получим
Рс = £7(|sofc|2) = GTE(sfcs’)G = GTRSG,
где R; = R [fc] — корреляционная матрица сигнала
R, =
*2И
s[fc]s[fc — 1]
s[fc]s[fc — 1]
s2[fc - 1]
s[£]s[£ — N + 1]
s[fc — l]s[fc — N + 1]
s2[fc - N + 1]
s[fc]s[fc - N + 1]
где черта сверху — признак статистического усреднения.
Мощность шума на выходе ЦФ
Рп = E[|noi I2] = M|GTnfc|2] = G’RnG, (39.5)
где — корреляционная матрица помехи имеющая тот же вид, что
и корреляционная матрица сигнала.
Заметим что обе матрицы R* = Rs[fc] и Rn = Rn[fc] — симме-
трические, поэтому
RJ-R,.; R; = R.
В результате ОСШ на выходе ЦФ записывается в виде
GTR<G
4 GTRnG
Рассмотрим процедуру максимизации ОСШ на выходе ЦФ.
максимальное значение ОСШ q — qm на выходе ЦФ за счет
вания вектора ИХ G (матрицы R, и R„ считаются заданными) Для
(39.6)
Найдем
варьиро-
110Ф по критерию максимума ОСШ
365
этого вычислим производную по вектору dq/dG и приравняем ее ну-
лю. Из условия
А = 0
dG
найдем выражение для G = GonT. Заметим, что в числителе и в зна-
менателе ОСШ стоят квадратичные формы. Известны следующие про
изводные по вектору х от квадратичных форм вида х Ах (А — сим-
метрическая матрица) (см. Приложение 4):
4-(хтАх) = хтА1 + хтАт1 = 2хтА
ах
где I — единичная матрица
Учитывая, что значением квадратичной формы является скалярная
величина после дифференцирования получаем производную отноше-
ния квадратичных форм
— -------) = . (хтАхтВх - хтВхт Ах).
dx \х'гВх/ (хтВх)2' 7
В результате находим производную ОСШ q
dG (GTRIlG)2t " J
Отсюда находим уравнение dq/dG — 0 или
GTRsGTRnG - GTRnGTR.sG = О
Тогда
gtreg
G
После транспонирования левой и правой частей с учетом симметрич-
ности матриц Rs и Rn получим соотношение
RSG — gR„G
Умножим слева на обратную матрицу R~ (Rn — невырожденная
Матрица). Тогда окончательно найдем уравнение для определения
G = GonT
AG = qG или (А - gI)G = О, (39.7)
где А - R“XRS
Таким образом, пришли к задаче на собственные векторы и собствен-
ные значения матрицы А
Умножим уравнение AG = qG слева на GT и выразим ОСШ
9 =
GTAG
GTG
(39.8)
366
Лекция 39
Замечание. Отношение gi Z = (ZTAZ)/(ZTZ) называется отно-
шением Релея. Известно, что для собственных чисел А матрицы Д
справедливы неравенства
Amin "С 9 Атах*
Таким образом, при известной матрице А = Rn1RJ можно найти ОСШ
qm -= Атах Решая однородную систему уравнений
(А - gmI)G = 0, (39.9)
находим оптимальную ИХ G = GonT.
Следовательно, задача синтеза оптимального по критерию максимума
ОСШ ЦФ (ЦОФ) решена при случайном сигнале на его входе.
Рассмотрим частный случай Пусть сигнал s*, известен полностью,
т е детерминирован Тогда его корреляционная матрица вырождает-
ся в произведение
Rs[fc] = jE’(sfcSfc) = sfcSfc.
В этом случае
A-R^R^R^s^.
Однородное уравнение для ИХ G принимает вид
1<„ SjfcSfcG = 9g-
Введем обозначение для скалярной величины ае = s^G/g. Тогда
сразу находим (результат синтеза)
GonT = asR^Sfc. (39.10)
Этой формулой определяется ИХ ЦОФ при полностью известном сиг-
нале. При ае = 1 получаем отклик оптимального фильтра
уН = GOHT = XfeR-n lsfc- (39.11)
Замечание. Эта же величина входит составной частью в отношение
правдоподобия Л(х) используемого при проверке гипотезы о наличии
или отсутствии сигнала (при обнаружении сигнала) и гауссовской вы-
борке (см. примеры 39.3, 39.4).
Найдем ОСШ q — qm при полностью известном сигнале. Заменяя в
общей формуле для ОСШ q = (GTRSG)/(G RnG) в числителе Bs
на Sfcs£ получим
_ GonTsfesfcGOnT _ aetR-^fc^SfcS^aeR-^fc _ s^(R-1)Tsfcs^R~1 s*
G2nTRnGonT ae(R„'sj^RnaeRn lSfc s£(R„ )TRnRn1SA:
Учтем свойства RnR”1 = I, (R“1)T = R-1 (R„ — симметрическая
дОФ по критерию максимума ОСШ 367
матрица). В результате находим
Qm - sI.R;1sfc. (39.12)
Этой формулой определяется максимум ОСШ для полностью извест
ного (детерминированного) сигнала
Частный случай. Найдем ИХ ЦФ GonT. если на его вход наряду
с полностью известным сигналом воздействует БШ п[&] (белая после-
довательность) с дисперсией c'j.
Замечание. Корреляционная матрица БШ n[fc] имеет вид
Rn = ^I
Найдем вначале оптимальную ИХ
к
GonT - fcR^Sjt = Ara“2I_1Sjb - = aes*,
где ae = = const.
Таким образом, при БШ на входе и полностью известном сигнале
GonT = 3esfc, (39.13)
где ае = const; Sjt = {s[fc], s[fc — 1],.. .s[fc — N + 1]}T
Возьмем число отсчетов из условия к — N — 1, тогда
Sfc = {S[JV - 1], з[ЛГ - 2],.. - s[0]}T. (39.14)
Следовательно, оптимальная ИХ ЦОФ с точностью до константы
представляет собой зеркально отраженный дискретный сигнал. Фильтр
с такой ИХ называется согласованным (ЦСФ). В этом случае вектор
оптимальной ИХ согласован с вектором сигнала (рис. 39.1).
Найдем максимум ОСШ qm в случае ЦСФ Подставим значение
Rn - <т~21 в выражение для ОСШ qm = sJ.R“1S/; = sjan Is* =
- CTn2SfcSfc = Рс/р'п- Получим
Qm Pc/^n-
Пусть ае = 1, тогда используя дискретную свертку получим отклик
ЦСФ, состоящий из сигнальной и шумовой составляющих
J/И = XjfcSfc = sj.Sk + s^njt.
• Структурные схемы ЦСФ изображены на рис. 39.2 и рис. 39.3. Таким
образом, ЦСФ работает как коррелятор.
При к — 7V — 1 отклик y[N — 1] поступает на пороговое устрой-
ство приемника.
к Пример 39.1. Пусть сигнал имеет вид двух отсчетов
... _ f Л при к — 0,1,
L J — ( О при других к.
Найдем вид сигнальной составляющей S [ с] на выходе ЦСФ.
368
Лекция 39
Рис. 39.2
г/И
ым
Рис. 39.3
Рис. 39.5
Решение. В данном случае N — 2;
so[fc] = s£sfc = {sM.sffc - 1]}( ® k ) = + s2[fc - 1];
— 1]
so[O] = s2[0] + s2[ 1] = з2[0] = Л2;
s0[l ] = s2[l] + S2[O] = 2Л2; s0[2] = s2[2] + s2[l] = A2.
Таким образом, на выходе ЦСФ сигнальная составляющая имеет вид (рис. 39.4)
Sofc = А2(1,2,1)\
Можно показать, что, как и для непрерывного оптимального филь-
тра по критерию максимума ОСШ при коррелированном шуме на входе,
ЦОФ можно представить в виде последовательного соединения отбели-
вающего фильтра (первый блок) и блока ЦСФ для сигнала на выходе
отбеливающего фильтра.
Докажем это утверждение, основываясь на следующей теореме
Теорема. Всякую симметрическую матрицу А можно представить
в виде произведения
A -LL ,
где L - нижняя треугольная матрица, у которой все элементы выше
ЦОФ по критерию максимума OCUI
369
главной диагонали равны нулю; L — верхняя треугольная матрица:
'/и 0 ... О'
£ _ hi h-j. О
_ hl .......... hn _
Такое разложение А = LU (U — LT) называют LU разложением
матрицы А
Используем полученные ранее соотношения
2/И = xfcG. G = GonT = asR“’sfc.
Тогда с учетом факторизации R-1 = LLT получим
j/[fc] - aexJJR^Sfc - aexj.EE 'sfc.
Пусть ae = 1, тогда это соотноше ие можно записать в виде
уИ - x;fcsu..,
где хц = LTxj.; Sjj.. = L sfc
Таким образом, отклик ?/[&] представлен как отклик ЦСФ (ЦФ2), на
вход которого подается аддитивная смесь хць — Sit +пц, где как будет
показано пц. — вектор дискретного БШ, a хць и Si& — отклики (в
векторном виде) некоторого ЦФ1 имеющего ИХ LT.
I Приведенному алгоритму соответствует структурная схема (ЦОФ)
изображенная на рис. 39.5.
j Найдем корреляционую матрицу шума на выходе ЦФ1 На его вы-
ходе шум имеет вид
nu- - Е
где iij. — вектор шума на входе ЦФ1, тогда
Rni = E'(ninj) = E(L гцп L — E’R E =
-ET(LLT) L = ETETL-1L = n = I
Здесь использовано свойство матриц
(EL J"1 =L-TL1.
Таким образом, на выходе ЦФ1 формируется шумовая составляющая
в виде дискретного БШ с единичной дисперсией
I Пример 39.2. Пусть входная последовательность состоит из двух отсчетов
** = ki,a--2]T, сигнал sfc = [si,s2]T, где si = sfO] = A; s2 = «[1] = А (см. при-
мер 39 1) Шум n[fe] имеет ЭС S(w)
ПрИ 'I й>с’
1 (О при других а> = отГ.
Найти ИХ оптимального ЦФ и максимум ОСШ д = дт.
370
Лекция 89
Решение Вначале найдем КФ шума
ГЦ„]=—[ S(w)e.iandw= — [ eiandw= ^csmC,cn
2тг J_v 2-тг J тг о>сл
П О л л г 7 г ч SIH Сс/^77*
Дисперсия шума <т~ — 2NqJc. коэффициент корреляции р[п] = —------.
Корреляционная матрица шума
Обратная матрица
Матрица L LU-разложения матрицы RTt имеет элементы (ц - R}'2; i21 -
= R12/R1J2; ^22 = (R22 — ^i)1^2- где — элемент матрицы Rn1.
Следовательно получим
Таким образом,
Алгоритм работы (ЦОФ) можно упростить, если величину
(fn^/l — Р2)-1 отнести к порогу, с которым сравнивается величина Тогда
структурная схема оптимального фильтра принимает вид рис. 39.6, на котором
ai — р; аг = у/1 — р2. Структурная схема реализует алгоритм
2/[fc] = Xjfcs2fc = (Ki - а1Х2;а2з:2) (S1 °'52 'j .
Оптимальная ИХ ЦОФ имеет вид
где fci = 1/<72 (1 - р2)
В данном случае s, — s2 — А, тогда
Gout — ^*2[Ц 1]Тт ^2 = ^1.4/<72(1 + р).
Максимум ОСШ
Л11 7] [1] = ч [! -'1 =
В случае БШ когда р = 0,
Цтптп — 2j4 /^п,-
ЦОФ по критерию максимума ОСШ
371
Рис. 39.6
При увеличении корреляции между отсчетами ОСШ на выходе ЦОФ
уменьшается по сравнению с qmm-
Пример 39.3 Использование ЦОФ для оптимального обнаружения сигнала со
случайной начальной фазой на фоне гауссовской помехи.
Запишем узкополосный сигнал
s(f) = Лсо5(а*о^ + V’Jj
где 99 — случайная начальная фаза, равномерно распределенная в интервале (О; 2г).
После дискретизации и использовании формулы косинуса суммы двух углов получим
s[Zr] = Д cos 9? cos u>o & — sin 99 sin Do/с = sc[fc] cos 99 — [&] sin <pt
где u>o = ojqT, T — интервал дискретизации. sc[/c] и ss[/c] — отсчеты квадратурных
доставляющих. Приведенное соотношение можно записать в векторной форме
вд. — s£ cos v? — s£ sin
где
s* = {s[fc], s[k - 1],..s[A; - N 4- 1]}T;
- {*<M *c[k - 1], - ., sc[fc - N + I]}’;
Sk — — 1], - • - N + I]}’-
Г Дальнейший ход решения следующий. Сначала методом максимального правдо-
подобия находятся оценки cos^? и sin^ квадратурных функций затем при их исполь-
зовании ищутся отсчеты ^[/с] на выходе ЦОФ.
Функция правдоподобия L(cos99tsin9p) равна условной вероятности
I Sjt) = (27r)-W/2(detRrl)_1/2exp{-|(x/: - Sfc)TR-1 (xfc - Sfc)},
гДе S(. = s* (cost/,, sin v>).
Оценки cosy; и siny> находятся из решения системы уравнений
31nL dlnL
---------- 0; -----= о,
dcosys dsiny;
Вы = С - l(xfc - SfcPR-Цхк - Sfc). С = ln[(2x)-^(detR„)-’/2],
I После дифференцирования получаем систему уравнений, решая которую, нахо-
372
Лекция 39
дим оценки
SSV= fciiXfcR„1s= fc12xJRn1s’
shiv - -fc22XfcR„ls£ +
где k{j i,'j — 1,2 — априорно известные коэффициенты:
fcn= »ii/A; ^12 = Qi2/A; ^21 = ^12; ^22 = a22 / A;
«11 - (s£)TR;;4; «12 = (s^R^; «22 = (s^R-4.
A 2
A ~ «22 <*11 - o]2.
Здесь XjR^Sj^ и XJR^S* — отклики ЦОФ на одно и то же входное воздей
ствие Хд. при опорных сигналах s£ и s®
Следовательно, для получения оценок cos(/> и sine/? необходимы два ЦОФ и три
усилителя с коэффициентами усиления Агц, fci2r ^22-
Отклик ЦОФ имеет вид = XjR”1®^, где Sj. = Sjcosc/? — S^sini/?. Производя
преобразования, получим отклик ЦОФ в виде
S#] - м (xJR-’s^)2 + fc^R^s*)2 +
где k — —2fci2.
Структурная схема ЦОФ изображена на рис. 39.7, где <J>i и Ф2 — ЦОФ1 и ЦОФ2
с оптимальными ИХ соответственно
Gj _ R-ls= и G2 _ R-’s£.
В общем случае ЦОФ содержит три канала, два из которых квадратурные. В
частном случае, когда шум на выходе белый R”1 = <т“21 коэффициент
fc - -Ц^Г(Ч)/<ГпА - О,
так как и — ортогональные векторы. В этом случае ЦОФ содержит лишь
два квадратурных канала и сумматор.
Пример 39 4 Оценка амплитуды сигнала известной формы, принимаемого на
фоне аддитивного гауссовского шума»
Пусть задана смесь сигнала .4s[fc] и шума n[fc]
X[fc] = As[fc] + n[fc].
Векторы Xfc и Sfc те же, что и в предыдущих случаях.
Найдем оценку Л амплитуды методом максимального правдоподобия. Здесь
функция правдоподобия и ее логарифм те же, что и в предыдущем примере, при
условии
1пЦЛ) - С - |(xfc - Xs^’R-’fXfc - >lsfc).
Уравнение правдоподобия принимает вид
<ПпЛ(Д) d rz z .. t
—XSfc) R- (x'= Лв*)} =
dA dA
UОФ по критерию максимума ОСШ 373
“ _'4s*R"1Xfc -xkRnls^ + A2s^Rrl,sJ} =
-5[-sfcR^,xk x^R,, sfc + 2XsJR-1s’]_
I Учтем равенства Sj(R“1xfc) = (R“1xfc)Tsfc = x^R~1Sfc в силу симметричности
матрицы R,,1 (RJT1)1 - Rn1.
Приравнивая производную к нулю получим
х^Ч = .4»^-^.
I Отсюда оценка амплитуды
Л = (xTR“1sfc)/(sJR~1sfe).
I Следовательно, оценка амплитуды формируется ЦОФ с коэффициентом усиления
^=l/(SfcRn sk) = l/<lm-
I Учтем равенство Xj. _ _4sfc 4- П;_ и подставим xj в соотношение для оценки А,
тогда оценка Л = А + (n^R“1sfc)/9m -» А при дт -► оо.
Ошибка оценки е = А - А — -(nJR“1sfc)/QTn, ее дисперсия
п* = = -HnnJR-^)2] - 4-£;[(nJR,71sfc)I(n]'R-’sfe)] =
9тп
= = 4-(^R"’sfc) - — •
9m 9m 9m
Таким образом, ошибка оценки обратно пропорциональна ОСШ на выходе ЦОФ.
Лекция 40
Расчет цифрового оптимального
фильтра
Условие задачи На вход линейного цифрового фильтра (ЦФ) по-
ступают отсчеты
хь — x[fcT], k = 1,2,3,...,
стационарного случайного процесса x(t), представляющего собой адди
тивную смесь сигнала s(t) и шума n(t):
x(t) — s(t) 4- n(t),
T — интервал дискретизации. Корреляционная функция (КФ) сигна-
ла имеет вид
ед = ^е-“Н,
причем jE[s(<)] = 0, £?[s2(t)] = ст?, а > 0. Корреляционная функция
шума записывается в виде
Rn(r) - ^е-^1,
причем E[w(i)] = 0, E’fn2^)] = <т2, (3 > а; а = е~“7, Ь = е_/ЗТ
Требуется
1) определить ИХ фильтра, оптимального по критерию максимума
ОСШ, а также значение ОСШ на выходе этого фильтра;
2) проделать расчеты пункта 1, предполагая, что а = 1, <т2 — А1
(детерминированный и постоянный сигнал: s(t) = Л), проверить пра-
вильность вычислений по формулам:
<7опт — S Н. S Сгопт — aeR-n^,
где s — Л[1,1,1]т — вектор отсчетов сигнала; R.n — корреляционная
матрица шума; ае — произвольная константа;
3) определить коэффициент потерь Кп фильтра, согласованного с
сигналом s(t) = А на фоне белого шума, если на вход фильтра поступает
сигнал s(t) = А в смеси с небелым шумом n(t), корреляционная функция
которого Rn(r) задана в пункте 1 (параметр Ь прежний).
Примечание. При вычислении ИХ значение первого отсчета не
обходимо принять равным единице G’nT = ci[l,«2, аз], ci — произ-
вольная постоянная.
Этапы решения задачи
Этап 1 Значение ОСШ на выходе ЦФ в общем случае определя-
Расчет цифрового оптимального фильтра
375
ется соотношением (39.6)
GTRSG
9опт - GTRnG’
(40.1)
где G = С1[1,а2» <*з]т — ИХ фильтра, q — значение ОСШ
1 а а2'
R, = а2 а 1 а , Д’/ = E’[s(iT)s(jT)], = 1,2,3, (40.2)
а2 а 1 .
— корреляционная матрица сигнала;
Rn = Сп
’ 1 Ь
b 1
62 ь
fc21
ь
1.
W = £[n(,T)n(jT)],
г, j—1,2,3, (40.3)
— корреляционная матрица шума.
Оптимальным из всех возможных ЦФ будет такой фильтр, для кото-
рого ИХ удовлетворяет соотношению (39.7)
R
(40.4)
гДе 9опт — максимально возможное ОСШ на выходе фильтра, G пт =
= едтахг 9опт = Атах и еХтах — максимальное собственное число и
соответствующий собственный вектор матрицы В = Rn Rs Учиты
вая (40.2) и (40.3), находим.
^(1-Н
-Ь 0 ‘
1 + Ъ2 -Ь ;
-Ъ 1 .
(40.5)
В — R,. 'R.<
^(1-62)Х
(1 — ab)
(1 — а6)(а — 6)
а(а — Ь)
х
(а — b) а(а — 6)
(1 — ab) — (а — b)b (1 — а6)(а — 6)
(а — 6) (1 — ab)
Таким образом, задача заключается в том, чтобы наити собственные
Числа и собственые векторы матрицы В
Из теории линейных операторов известно, что
[В — А,1]е, = 0, г = 1,2,3,
(40.6)
гДе А,- — собственные числа матрицы В е, — собственные векторы
Матрицы В, I — единичная матрица, 0 — нуль-вектор. Чтобы значения
были отличны от нуля, необходимо приравнять нулю определитель
(1-аЬ) А*
(1 — а6)(а — 6)
а(а — 6)
(а-6)
(1 — ab) — (а — 6)6 — А*
(а-6)
а(а — 6)
(1 — а6)(а — 6)
(1 - аб) - А*
= 0, (40.7)
376
Лекция Jt0
откуда
А*3 - А*2[3 - 4ab]b2 + А*[1 - а2][3 - tab + а2] - [1 - а2]2[1 - Ь2] - О,
( А* = 1 а2,
1 А*2 - А*[(а - Ь)2 + 2(1 - ab)] + (1 - Ь2)(1 - а2) = О,
где А* — А<т2(1 — Ь2)/<г2 — нормированная переменная.
Решая (40.7) находим собственные числа матрицы В:
< а2 = “ аЬ> - (а -ь^' (4° 8>
I Аз - - Ь2) + 2(1 - ab) - (а - b)y/D].
D = (а + Ь)2 + 8(1 - ab). (40.9)
Для определения собственных векторов Cj, соответствующих собствен-
ным числам Ai, необходимо решить систему линейных однородных ал-
гебраических уравнений (40 6) при г = 1,2,3. Проделывая эту про-
цедуру и предполагая, что
первый отсчет каждого из векторов равен
единице, имеем:
г -- 1:
2/ _ гч G 1а
(1-а0 (1-оЬ) (1-аЬ)
W -6 ) L а 1а
Д)
,(2)
.(3)
1
.(1)
,(2)
.(3)
2
1
— 1/2[(а + 6) +
-1
1(1)
,(2)
,(3)
1
’О'
0
.0.
расчет цифрового оптимального фильтра
377
Ге(1)1
ез
е(2)
е3
е(3)
Le3 J
1
-1/2[(« + 6) - /D]
-1
(40.10)
где D определяется выражением (40.9); с2, сз, С4 — произвольные по-
стоянные.
Таким образом, получены три решения задачи синтеза ЦФ’ [A], ej,
[Аг, ег]. [Аз, ез]. Из этих решении, очевидно, надо выбрать то, которое
соответствует максимальному значению допт. Поскольку по условию
а > Ь, то Ai < 1, Аз < Аз и, следовательно, искомыми характеристиками
фильтра являются значения A3 и ез т.е.
2 1 __________________
gonT - ,2<[(а Ь)2 + 2(1 - ab) + (а - 6)У(а + 6)3 + 8(1 - аб)],
ап А1 - ь )
G*OHT — ^4
1___________________
[(а + Ь) — \/(а + 6)2 + 8(1 - ab)
1
(40.11)
Этап 2. Рассмотрим частный случай ранее вь веденных соотношений,
когда сигнал s(t) является детерминированным и постоянным s(Z) — А.
Введем вектор отсчетов сигнала: sT — Л[1,1,1], и вычислим его кор-
реляционную матрицу
Rs = E[ssT] = А2
'1 1
1 1
1 1
Г
1
1.
Как видим, искомые значения GonT и 9опт могут быть найдены путем
точно таких же вычислений как и в предыдущем пункте, надо только
[положить в формулах (40.2), (40.5) и (40.7) а — 1, а2 = Л2. Так, матри-
ца В = RnJRs в случае полностью известного сигнала принимает вид
А2
^(1 + 0
1
1-6
1
1
1-6
1
1
1-6
1
И, следовательно, является вырожденной. Единственное не равное нулю
собственное число Aq этой матрицы определяется из уравнения, ана-
логичного (40.7):
1----— 1
1 i-ь х
1 1----—
1 1 1-Ь
1 1
1
= 0;
А*3-А*2(3-46+ 62) = 0 =>А* =3-46 Тб2,
378
Лекция JO
следовательно, имеет вид
Л..л2(з-б)
^(1 + 6)'
Наконец, для поиска собственного вектора ео, соответсвующего соб-
ственному числу Aq, необходимо применить общее соотношение (40.6)
[В — Aoljeo = 0;
откуда получаем
А2
^(1 + Ь)
.(О
,(2)
.(3)
о
О'
о
0.
ео —
.(1)
.(2)
.(3)
О
(1-6)
1
где под св понимается произвольная константа.
Таким образом, задача синтеза ЦФ в случае полностью известного
сигнала имеет единственное решение-
А3 (з-ь).
(1-6)
(40.12)
Заметим, что точно такой же результат чисто формально следует из
формул (40.8) и (40 10) при подстановке в них значений а — 1, а2 = А2.
i = 1:
Al
А2 (1 — а2)
(1-ь2)
е1 = С2
о
-1
^опт — с5
= 0
0=1
Г 1
i = 2:
ур 1
А2 = 2(1^Р)[(1 - 6)2 + - 6) - (1 - W(l + fc)2 + 8(1- 6)] = 0,
«2 = С3
1
| [(1 + 6) + 5/(1 + 6)2 + 8(1 - 6)]
1
= с3
' 1 '
-2
. 1.
i = 3:
Аз = 2(Г^62)[(1 " Ь? + -*) + (!- 6)/(1 +О2+ 8(1-6)] =
Расчет цифрового оптимального фильтра
379
е3 = ci
_ Л2(3 - 6)
" ^(1 + 6)’
1_____________
[(1+ 6) - У(1 + Ь)2 + 8(1 - 6)]
(1-0
1
При этом определяются все три собственных вектора матрицы В а
he только ео = е3. Это дает возможность проверить точность избран-
ного способа определения собственных чисел и векторов матрицы В
если отыскиваются численно.
Известно также, что в случае детерминированного сигнала допт = дт
и Сопт могут быть найдены непосредственно, без привлечения аппарата
собственных значении. Для этого случая справедливы формулы-
Qm — ® R 8, -^опт К 8
(40.13)
(см. условие задачи). При расчетах указанные соотношения должны
быть использованы для контроля правильности расчетов по методу соб-
ственных значений Нетрудно убедиться, что они дают те же самые
выражения для gonTl СОпт. что и формулы (40.12) [см. (39.12)]:
Л2
9опт — 2(1 1 Ч
<Т2(1-62)
с0Л
'JTonT
' 1
<^(1 - Ь) Q
-Ь
1 + Ъ2 -Ь
-Ь
-Ь
1 + Ь2
-Ь
0 '
-Ь
1
Г
1
1 Li.
гг
1
Li.
= с6
1
(1-6) ,(40.15)
1
' 1
b
. 0
0
где с6 — аеЛ/сг2(1 + 6).
Этап 3. Пусть синтезируемый ЦФ настроен на прием детерминиро-
ванного сигнала s(t) = Л на фоне белого шума n(f), причем
£7[п(*)] - 0,
я[п2(01 = ^;
Г1
о
0 О'
1 о
о 1.
Величина допт для этого случая равно отношению мощности сигнала
и шума:
9опт = sTs/<r2 = ЗЛ2/<т2. (40 16)
Вектор GonT зеркально копирует сигнал'
GonT = с7[1,1,1], (40.17)
где с7 — произвольная константа. (Отметим, что результаты (40.16)
и (40 17) могут быть получены из ранее выведенных формул (40.12) и
(40.13), если положить в них b = 0.)
Пусть теперь условия приема изменились, и на вход ЦФ поступа
ет смесь x(t) = s(f) + n(i) сигнала s(t) = Л с небелым шумом п(<).
380
для которого
Лекция ^0
М"2(*)1 = о,
7?[п(/)] = 0,
Ь Ь2'
1 ь
Ь 1
Максимальное значение ОСШ, которое можно получить после филь-
трации для шума n(t), было определено в расчетах на этапе 2"
А2(3 - Ь)
9°ПТ~ <72(1+6)- (4018)
Значение ОСШ на выходе фильтра с ИХ (40.17) при поступлении на
его вход шума n(Z) определяется по общей формуле (40.1)
е2А2[1 1 1] * _ GonT^G'onT Т 1 г 1 1 1 .1 1 1. "Г 1 .1. 9Л2
^ОПТ^-Л ^опт cjcr^1 1 1] 1 6 62’ 6 1 6 62 6 1 1 1 .1 <т2[3 + 46 + 262] (40.19)
Теперь можно вычислить коэффициент потерь 7СП1 который равен
отношению максимально возможного ОСШ к реальному, наблюдаемому
на выходе фильтра' Кп = qam/q*. Учитывая (40.18) и (40 19), находим
„ _ (3-*>)(3 + 46 +262)
— тгтз : гт-------------
(40.20)
Заметим, что коэффициент потерь Кп является однозначной функци-
ей полосы входного шума. В самом деле, по теореме Винера-Хинчина:
W - Г
J оо Р +ш
где 5п(ш) — энергетический спектр (ЭС) шума n(t). Введем эффек-
тивную ширину спектра Sn(cv)
еЛ + р2
аш — —
2 ’
а также граничную частоту дискретизации по Котельникову: — -njT.
Тогда
b = Ki = К£(Д^Э).
При Дшэ —» 0 (узкий спектр, сильно коррелированные отсчеты)
(3 - 6)(3 + 46 + 262)
9(1 + 6)
расчет цифрового оптимального фильтра
381
= 1,
t=o
Т.е ЦФ фактически работает по одному отсчету, вид корреляционной
функции шума несущественен При Дщэ —> оо (широкий спектр не-
коррелированные отсчеты)
(3 — 6)(3 + 46 + 261 2)
п 9(1 + 6)
— шум аналогичен белому, потерь нет.
Таким образом, при b — 0 и b — 1 КП достигает минимального зна-
чения, равного единице. При b б]0,1[ функция /(6) =
имеет вид плавной кривой с единственным максимумом, который соот-
ветствует максимальным потерям при фильтрации Координата макси-
мума 6тах определяется из условия
1 = о, бе]о,1[»
ab
отсюда 6max — |[л/5 —1] « 0,618. Следовательно 7<п максимален, если
(т^) = ,П\/^Т ~ °.241’ пРичем ^п[0,241] « 1,02.
Таким образом получены оценки сверху и снизу для всех возмож-
ных значений коэффициента потерь /\п, оно долно удовлетворять не-
равенству:
1 $ 7<п $ 1,02 (40.21)
। Заметим что формула (40 21) показывает необходимость достаточно
высокой точности при вычислении Кп (как минимум, три верных знака).
Лекция
Фильтр Винера
Данный фильтр оптимален по критерию минимума среднего квадра-
та ошибки *
Характеристика входного воздействия
На вход фильтра поступает аддитивная смесь x(t) сигнала s(i) и
шума n(t)
x(t~) = s(t~) + n(t). (41.1)
Предполагается, что и сигнал и шум являются стационарными слу
чайными процессами с нулевыми средними значениями и заданнь ми
КФ и взаимными КФ
Л,(г), /?п(т), Rsn(r), Rn^r),
так что КФ смеси
Rt(t~) — + Rn(.T) + й»п(т) + Rn3(r\ (41 2)
Ошибка фильтрации и критерий
оптимальности
Цель фильтрации сигнала — выделить его из смеси сигнала и шу
ма, в качестве оценки s(l) сигнала принимается отклик стационарно-
го линейного фильтра
ь
s(f) - у(*) = У Л.(т)а:(/ - т) dr, (41.3)
а
где h(t) — ИХ фильтра
Ошибкой фильтрации является величина
е = e(i) — s(t) — s(t) = s(t) — y(t) = s(t) — / h(r)x(t — r)dr. (41 4)
* Исторически более справедливо было бы назвать расматриваемый фильтр
фильтром Колмогорова-Винера, имея в виду, что работа Колмогорова [64] пред
шествовала работе Винера [65]. Однако, поскольку при изложении материала в
этой лекции автор придерживается трактовки Винера, и учитывая устоявшийся
термин, в далнейшем данный фильтр будем называть фильтром Винера (ФВ)
фильтр Винера
383
Критерием оптимальности является
Е — т'п Е(е{)
(41.5)
При выводе уравнения фильтрации используется принцип ортого-
нальности (ошибка фильтрации ортогональна входному воздействию
= 0). Согласно этому принципу
Отсюда следует уравнение фильтрации
6
Rxs(t — £) — J Rx(t (. a^h^a^da
а
После подстановки t £ — т получим
F ь
Rx.'(t) = J Rx(t — a)h(a)da. (41-6)
а
Это /равнение называется уравнением Винера-Хопфа, его решением
является h(t) ~
Выражение для минимальной ошибки Е фильтрации находится при
условии ортогональности (см. следствие к теореме 2 лекции 36)
E(etst) — 0.
Средний квадрат ошибки фильтрации
£(et) = Met(st - «t)l = E(.etst) - E(etst).
Второе слагаемое на основании условия ортогональности равно ну
ЛЮ поэтому
Е — min E(et') = E[etstJ.
Отсюда получим
гДе R,(0) = сг, — априорно известная дисперсия сигнала.
Подставим в выражение для величины е значение Rxs(t) из уравнения
^инера-Хопфа В результате получим
s = R,(0)-B,
(41.7)
384
Лекция
где
ь ь
D~ .1.1 h^a)h(r)Rx[a — r)da dr.
a a
Заметим, что задача фильтрации может решаться как при конечном
времени наблюдения (a,fc) = (0,Т), так и при неограниченном времени
наблюдения (бесконечной предыстории) когда а — —со, b = +оо.
Рассмотрим вначале последний случай. Уравнение Винера-Хопфа в
этом случае принимает вид свертки
ОО
Rxs(r) = J h(a)Rx(r — a) da. (41.8)
— ОО
По теореме Винера-Хинчина
SM = №,(т)]; Sx(u) - МЛДт)],
поэтому уравнению Винера-Хопфа в частотной области соответствует
следующее уравнение
SXI(co) =
где Я(гЪ) = (?[/i(t)] — ЧХ фильтра
Отсюда
Яопт(гЪ) - Sxs(uj)/Sx(w}, (41.9)
что является решением уравнения Винера-Хопфа в частотной области
Задача синтеза фильтра Винера таким образом решена, при этом прене
брегалось условием физической реализуемости фильтра: /i(f) = 0 при
t < 0. Осталось вычислить минимальную ошибку фильтрации.
Но перед этим рассмотрим частный случай, когда сигнал s(t) и шум
л(/) некоррелированы Япа(т) — Я[л(5<+т] — 0 тогда
SM = ЭД и ЭД = ЭД + ЭД;
(41.10)
ЯОЭД) = Sx(u)/[Ss(u) + .ЭД].
Вернемся к вычислению минимальной ошибки фильтрации
£ = Яа(0) — [ [ h(a')h(T')Rx(a — т) da dr = / h(r)W(r) dr,
J—oo J—OO J — OO
где Ф(т) = h(a)Rx(r — a) da — интеграл свертки. По теореме
Парсеваля
[ h(r)y(r)dT — [ H(iw)W*(iu)dw, (41.11)
J — оо J—oq
r
фильтр Винера
385
где W(iw) — SIVC7")] По теореме о свертке
VU(wj) =
Следовательно,
1 Г°° 1 У“
В=— / tf(iwW*(iw)dw = — / Sx(w)\H(гы) I 2 dw. (41.12)
2ТГ J-ОО 2ТГ J-OO
Тогда ошибка фильтрации
£ = ео = Я,(О)-Я=^ Г dw. (4113)
2Я" J-oo £>X(W) .
Эта ошибка называется остаточной (неустранимой)
£о = min е = min min Е(е2). (41.14)
При некоррелированности сигнала и шума
J_ Г S,(w)Sn(w)
2тг /_ о. Ss (w) + Sn (w)
(41.14)
Если выполняется равенство Sn(w) - .S’3(w) = 0, т е ЭС сигнала и шу-
ма не пересекаются, то ошибка фильтрации £о — 0, а ЧХ ФВ равен
нулю вне частотного диапазона существования Ssfw) и равна единице
внутри этого диапазона
При учете физической реализуемости фильтра оптимальная ЧХ
фильтра Винера имеет вид [1]
<41лб>
где функция б(гси) определяется из условия факторизации
Sx(w) = G(iw)G*(iw) = |G(icv)|2. (41.17)
Если отношение S’rs(w)/G*(iw) представляет собой дробно-рацио-
нальную функцию, то оптимальная ЧХ ФВ находится из условия
1 [S’ssfw)
Яопт(^) —
G’(iw) [C?*(iw)J +
G(tw)
(41.18)
I Оператор Ф = [»]+ означает, во-первых, разложение отношения, сто-
ящего в скобках, на простые дроби и, во-вторых, сохранение при этом
только тех простых дробей, у которых полюсы лежат в верхней полу-
плоскости W— плоскости.
Минимальная ошибка фильтрации при этом находится по формуле
£ = RS(Q) - В,
(41.19)
386
Лекция /
Рис. 41.1
где
1 Г00 1 /“
В = — J 5я:(ш)|Яопт(»ш)|2 dw = — J |<t>(w)|2dw (41 20)
Замечание. Если сигнал и шум некоррелированы, то ST3(w) =
Ss(w).
Частный случай. Шум на входе фильтра белый и 5п(ш) — So —
const (см. приложение 3),
//опт = 1 S^/G(iu). (41 21)
Ошибка фильтрации [66]
£ = ^Г J1+S£)U. («.22)
2^7-00 L So J
Отсюда при So —> оо е —* erf
Пример 41.1 Вычислить передаточную функцию ФВ, если шум на входе белый
при Sn(w) — So, и ЭС сигнала <S's(w) — аг/(а2 + си2)
Решение.
о / v с / \ . с Л2 + cu2 2 ai + S0a2
Sx(cu) — S3(cu) + Sq = So —-h = --------—----,
a2 + w2 So
h + iu r— h-ш r—
L.(tcu) = -—GS&, G (ecu) — -------—a/Sq-,
a + ш a — iw
и . '/S~ a + icu h — u.
//опт(’си) — 1 — .
O(«u) h + nu h + гы
Следовательно, передаточная функция
H(s) = k/(l +7s); T-l/h; k — l — a/h, (41.23)
что соответствует последовательному соединению усилителя с коэффициентом уси
ления к и апериодического звена (интегрирующей цепи, рис 41.1).
Заметим, что ЭС Ss(ui) = ai/(a2 4- си2) соответствует КФ Rs(r) = (ai/2a)e—“lTL
следовательно, <r2 = ai/2a; обозначим ai — Dsa2, тогда <т2 = Dsa/2. В этом случае
h = а\/1 + Л, Л — Ds/Sq —ОСШ, к = 1 — l/\/l + Л. При Л —» оо fc —» 1; Т = 1/Л. —>
О и ФВ выражается в звено с коэффициентом передачи, равном единице. При Л —► О
к —г 0; Т —> 1/а, в этом случае ФВ подавляет все составляющие, воздействующие
на его вход. Вычислим минимальную ошибку фильтрации
1
е = ст2 — В; В— — I BonI(ilu)|2.S2(w) dw =
— СЮ
фильтр Винера
387
^(fe_a)2=
2a ' 2
= (vzl + Л - 1)2/Л.
В результате получим
в - 2а2 pl +Л - 1) /Л.
Отсюда при Л —> О е —> а2, т.е. при малом ОСШ ошибка фильтрации равна априорно
известной дисперсии сигнала С другой стороны при Л —г оо е —г О.
Пример 41.2. Пусть на вход фильтра воздействует аддитивная смесь некорре-
лированных сигнала и шума, имеющих соответствующие КФ
КДт) - Лп(т) = ^е-ьН,
где а2 = Dsa/2 = aj/2a; а2^ = 6оЬ/2 = а2/2Ь.
Най и передаточную функцию ФВ и ошибку фильтрации е.
Решение Найдем вначале ЭС сигнала и шума
°2
b2 + w’
«1
счцы; — —- “
a2 +
где aj = £>0a2; аг = Sob2. Тогда получим
- ЭД + Sn(w) = < 2 (q2+w2^2+w2)
где d2 = aj + a2 c2 = (ait>2 + a2a2)/(ai + a2)
В результате факторизации 5x(w) = G(t’w)G*(iw), тогда находим
G(M = d_______+ я'-.G* J) 1 d-----------£_-------
(a + iw)(b + tw) (a — гы)(Ь — iw)
Sx-(w) _ Ss(w) aj b — iw
G‘(tw) ~ G(-iw) “
I I 1
гиг с — J
E] = e2= ь-Л
a + с a + c
В верхней полуплоскости w-плоскости лишь первое слагаемое имеет особую точ-
ку (полюс) шп = ai; поэтому
[б'Ды) 1 _ ai а + b 1
G(—гы)d а + с а + iw
В результате частотная характеристика ФВ
_ 1 Г Ss(w) 1 _ ai (a + b) b+iw
°nT G(»’w) lG(—iw)]| (ai + a2)(a + c) c + iw
Можно показать, что справедливо равенство
ai ai а —
г . d2 ai + аг °2 “ Ь2
Тогда
а — cb + iw 1 + iwTi
“опт (»ы) — —г -т— — -----------------------—.
a — о с + гы 1+ гшТг
Где
к=С-^-^; ^ = 1; Т2=1
v — а с v с
388
Лекция 41
Передаточная функция ФВ
,,1+Tie .
^опт(з) — к ——. (41.24)
1 +T2s ' '
Фильтр с такой передаточной функцией называется пропорционально интегриру
ющим (ПИФ) (рис. 41.2). Справедливы соотношения
с= о(1 Ч- Л)1^2/(1 + ^Л)1/2; Л = Ds/So — ОСШ
к - Л(1 + -у)/(1 + а/с)(1 + Л).
Введем также величину -у = а/Ь = где и Да>эп — эффективная
ширина энергетического спектра соответственно, сигнала и шума. При Ь —» оо т —» О,
Т1 —► О, тогда передаточная функция ФВ принимает вид
где
1 1
J = lim — = ----------.. , ;
с а(1 4- Л)1/2
, ,. , .. (с— а)Ь ( а\ 1
ki - lim к = hm у---------— = lim 11--------I = 1------ - .
b—-co b—-oo (d — а)с b—oo \ C J Vl+A
Заметим, что при Ь —> oo <Sn(u;) —> So ~ const, т.е. условие Ь —> oo означа-
ет, что на вход фильтра воздействует БШ вместе с сигналом. Это соответствует
условию примера 41 1. Таким образом, при Ь —> оо ПИФ выраждается в интегри-
рующий фильтр (ИЦ) (рис 41.1).
Найдем ошибку фильтрации. В данном случае функция
|Ф(сэ)|2 =
Ss(a’) ] _ ai a + Ь 1
J d а + с а + гы
[ai(a + Ь)]2______1 _ fep
(ai + Иг)(a + с)2 а2 + ш2 а2 + о2
После интегрирования получим
где
h0 _ (Саа/2)Л(1 +-у)2
2а [(1 + Л)1/2 +(1 + -у2Л)1/2]2
ИЛИ
е-<г2 (1-/ц), Ы (41-25)
Отсюда при Ь —> оо приходим к величине ошибки е в первом примере.
Лекция 4%
Расчет фильтра Винера
(продолжение)
Пример 42.1. Пусть
4
S's(w) = —----2 ; Sn(w) = 1.
az* — и, + 1
Сигнал и помеха некоррелированны. Найти HaEi и ошибку фильтрации е.
Решение.
4 иЛ — 4- 5
Sr (<v) = Ss(w) + S„(u-) = —-----—— +1 = —-------——
CV* — + 1 W* — + 1
Факторизация ЭС 5x(w) предусматривает равенство
Sx(az) = G(iw)G*(iaz) = |G(iw)|2.
(42.1)
k Для вычисления функции G(iaz) необходимо найти нули числителя и знамена-
теля входного ЭС Sr М (42.1).
Найдем вначале нули знаменателя:
<7 — az2 + 1 = О или (ш2 1 + - = О.
\ 2/ 4
Отсюда
Рассмотрим комплексное число zj = * + 1 2 = e'V1; = arctgi/3 = тг/3, тогда
7®Г = е1*11/2 = cos + isin " = Анало ично при Z2 = 5 — 17- = e’V2;
V2 - — тогда yfz2 — — Ц; следовательно.
Запишем знаменатель в виде Q(az) = (a; — cvi)(cz — ы2)(си — uz3)(uz — az<). Най-
дем нули числителя:
2 / 2 1\2 19
— az2 + 5 = О или I uz2-) 4--= О.
\ 2/ 4
Отсюда
1 ,.719 /1 719
- = ±!—— ИЛИ Wl,2,3,4 = ±V - ± 1
Здесь
Z! = - + i^—^ = T5e‘vi = 2.236eivi;
2 2
= arctg719 Ri arctg4,3589 Ri 1,345;
0,5v = 0,6725; соб(0,5^>) = 0, 782; sin(0,5V) = 0,623;
Jz{ = T5eiv/2 = l,4953e**’/2 = 1,1698 + iO, 9316.
390
Лекция
Запишем числитель в виде
f'(oz) = (и/ — ozj)(uz — Ь'зХ'4' — и'з)(и' ~ )>
где Wi,2,3,4 = ±1,169 ± Ю, 9316 ozj 2 = 1,169 ± 10,9316: az'4 =
= -1,169 ± iO, 9316.
Замечание Корни с нечетными индексами — это полюсы и нули в верхней
полуплоскости а>-плоскости. В результате получим
(w — wi)(w — o^Jfoz — oz3)(oz — W4)'
- (и,~1 2‘4)(и,-и'2)(‘>'-ь'з)(и,-с4)
(uZ — oZj )(uz — OZ2)(oZ — OZ3)(az —
У функции G(iuz) все нули и полюсы должны быть в верхней полуплоскости и>-
плоскости. Это означает, что
ий-ь-м—а, с-м, hr (<2.4)
(oz — ozi) (az — oz3) (oz — oz2)(oz — oz4)
Найдем отношение Ss M/G*(w), по которому определяется оптимальная ЧХ ФВ
Ss(cJ) _ ___________________4__________________
G*(iaz) (az — azj )(az — az3)(az — az')(az — az4)
(оц — az3)(az£ — az^) [(ai - azj)(az — az') (az — az3)(az — az')
Следовательно,
___________4____________
(w, - az3)(az' -az^)
(az - azi)
___________4____________
(az! - az3)(az' - az;)
1___________^2 ~ ^4 j 1_________________________~ 4
az — azj (az! - az')(azj — az^) (ц? - az3) (uz3 - az;)(az3 - az')
4 1_____________1_______________1____________1_________
(azi-az3) [(az — aij) (azj — az')(az! - az^) az - uz3 (az3 - a<;)(az3 - az^)
Здесь — u>3 — л/З;
t a/3 1
OZ! - az' =----H- 1,169+10,9316= -0,303 + 11,4316;
2 2
Расчет фильтра Винера (продолжение)
391
, v3 1
и, - ш'. = — 4-i- + 1,169 4-гО,9316= 2,035 4-»1,4316;
2 2
(wi -cv2)(wi -wj) = -0,61664-*2,913-i0,4338 - 2,049= -2,666+ г2,4792;
л/З 1
а>з-^ = -—4-i- - (-1,169- iO, 9316) = -0,866 4- il, 169 4-il,4316 =
= 0,303 + il, 4316;
\/3 1
ыз - w' = - -^- 4- i- - (1,169 - io, 9316) = -0,866 - il, 169 4- i(0, 5 4-0, 9316) =
= -2,035 4-11,4316;
(u;3 - wj)(to3 - cJ,) = (0,3034-il, 4316)(-2,035 4-il, 4316) =
= -0,6166 - 2,049 4-i(-2,91334-0,4338)= -2,666 - i2,4792
Тогда
5s(w) ] _ 2,31 -2,666-i2,4792 2,31 2,666-12,4792
G’(iw) J + ~ w -a/j 13,253 + u> - шз 13,253
0, 464 4- iO, 432 0,464 - iO, 432
bJ — U> — Ct^3
(0/3 — )0,464 — iO, 432(l6i — W3 ) — iO, 432(u — ) ____
(<v- W|)(cv — cv3)
-0,464V§ - iwO, 864 - iO, 432(10] + cv3) iwO, 864 4-1,235
(w — OJ])(w — O/3) (az — <x>])(w — W3)
Найдем оптимальную ЧХ ФВ
1 f 5s(w) 1 _ (w — wi)(uz — <v3)[—(1,235 4-iw0,864)]
°пт G(iw) LG*(iw)]^ (w — a>])(a» — w')(o> — wi)(uz — o>3)
1,235 4- icvO, 864 _ 1,2.35 + iozO, 864
(oz — o^)(w — cug) (icv — iuzj )(iuz — icvj)
1,235 4-0,862s _ 1,235 4-0,862s
~ (s - iwj)(s - w') (s2 - is(w; 4- w3) - wjw' ’
Окончательно получим
A:(l + Ts)
s2 4- 2£s 4- w2
(42.5)
где к = 1,235; T = 0,698, w2 = = |wj|2 - 2,2345; wo = 1,495 « 1,5;
2^ = i(u,' 4- w') = —i • 11,863 = 1,863 £ = 0,9315.
Найдем ошибку фильтрации
OO
e = <72-^- / |Ф(ы)|2сЬ = СГ2 -В,
Z7T f
—00
где
Г53(ы) 1 1,235 4-iwO, 864 1,235 4-1^0,864
ф(ш) = —— =------------------- = ------------;-------.
L (7* (iw) J + (ог — <x>i)(cu — w3) (iw — iwi )(iw — iw3)
1,235 4-0,864s ci s 4- co
(s — iu/j )(s — iiv3) d2S2 + dj s + do
где ci = 0,864; c0 = 1, 235; do = —u»icv3 = |wj |2 = 1, dj = —i(wi 4- w3) = 1; d2 = 1
392 Лекция
Тогда
С В= - со = / S3 (uz) cZw : 2% J —оо (w - Wj)(td - О>з) = —(s2 + S + -(s2 - s + 1) — —d(-s). Следовательно, ^=4; Поэтому ошибка фильтрации i tdo+cidi 2,27 \ °— = —— = 1,136; 2dodjcZ2 2 оэ f du> 2тг J (cv — wj)(w — из)(ш — u>2)(w — w4) ’ — DO 1) = ' ^(S)r (^0 — ^1 — ^2 ~ 1), (w — CV2)(w — W4) i<x> 1 f ds 1 / — 4_ — 2. livi J d(s)d(—s) 2 —ioa r = 2 - 1,136 = 0,864.
Лекция ^.3
Цифровой фильтр Винера
Пусть д[п, Jt] — импульсная характеристика (ИХ) дискретной линей
ной системы; ДА:] — входное воздействие, а?[к] = ДА’] + ДА:]; ДА:] —
сигнал; ДА] — дискретный шум, причем, как и в непрерывном случае,
предполагаются известными КФ сигнала ЯДА:, г], шума ЯДА:, г] и вза
имные КФ ЯЛДА,г] и Я„ДА:,г] Для простоты предположим, что все
случайные процессы имеют нулевые средние значения.
Допустим, что все случайные процессы и линейная система стацио-
нарны, тогда справедливы соотношения
ЯДА, г] = ЯДА: — г], ЯДА:, г] = ЯДА: — г], ЯЛДА, г] = ЯЛДА — г].
Отклик линейной системы Дп] является оценкой Дп] сигнала Дп] и
представляет собой дискретную свертку
п п
уЫ = 52 - А:] = _ (431)
fe=O fc=o
Ошибка фильтрации
Дп] = Дп] — Дп] = Дп] — 5[п]. (43.2)
Согласно принципу ортогональности, Е(епхт) = 0, где еп = е[п],
хт — Дт], тогда E[zm(s„ xn-k9k)] = 0. Отсюда следует урав
нение Винера—Хопфа для цифрового фильтра Винера (ЦФВ)
п
ЯгДп — т] — У2 А?ДП — А: —
fc=o
которое аналогично интегральному уравнению предыдущей лекции.
Введем переменную г = п — т, тогда получим
п
= 52 лДг - Qgk- (43.з)
k=0
здесь справа дискретная свертка КФ Яг[Д й ИХ дь-
При бесконечном интервале наблюдения найдем
ОО
ЯгДг] = 52 - k]gk. (43.4)
к—О
Задача синтеза цифрового фильтра Винера (ЦФВ) заключается в ре-
шении уравнений (43.3), (43 4) и получении оптимальной ИХ дапТ =
394
Лекция /,3
= <7опт[&]. а также в вычислении ошибки фильтрации.
В нестационарном случае получим соотношение
п
ТАДп, тп] = g[n, fcjflgffc, т].
fc=n0
Справедливо также равенство
ЯД*] — Rj[!] + Дгф] + Яги[г] + /?vs[t] (43.5)
Введем ЭС
оо
Sx(z') = У'' z fcAx[fc], z = e*“, — тг w < тг. (43.6)
fc=—oo
Тогда
Sx(w) = S,(w) + St,(w) + Ssv (w) + S„,(w) (43.7)
Найдем величину минимальной ошибки е — m'n £?(е^) = E(ekskR или
е-Е
п \ п
^n- fefffc I 5n — Rs[0] ^Raraffclfffc-
Jt=O / Jt=O
(43 8)
Подставим сюда выражение для КФ Rxs[fc] из уравнения Винера—Хопфа
тогда получим
е = - Вд,
п п
где Ва = 5? - тп], <т] = Я5[0]
m=0 fc=O
Запишем величину Ва с учетом теоремы Парсеваля
(43 9)
ОО
Вэ - —
k=0
1 Г
— / Я(!ш)Г*(!ш)</ш,
(43.10)
где fk = Z^=o ~ т1- С другой стороны,
А = /И = £ F^eiayak dw, 9k = ff[fc] - f G(yayak dw.
F(iaj) = H(iw')Sx(w'), что соответствует свертке Д и R^:
Н(й) = G(e,di); F(iw) = Fi(eitD).
Тогда
BS = ^- Г \H(iwysx(w) dw= 1. / G(z)G f Sx{z)z-1 dz.
t-'Kj—n 2.TV\ У|2|=] j
(43 11)
При бесконечной предыстории наблюдения x[fc] уравнение Винера-
ШифровоИ фильтр Винера
395
Хопфа имеет вид свертки
ОО
/7а: [i А‘](Д;.
fc——оо
(43.12)
Отсюда
^(w) — S®(w)/Z(iw).
Тогда, как и в непрерывном случае, получим ЧХ оптимального ЦФВ
//опт(^)=ф^.’ (43.13)
При некоррелированных сигнале и шуме
Ssa(u) — Ss(u); Sx(u) = Ss(u>) + ^(w).
Тогда
ЯОпт(|^) = HonT(cD) — . (43.14)
Os (u) + Ow (w)
Остаточная ошибка фильтрации
X fr 1 Г*
€=(T^-B=—J Ss(u)da> J IHonTfiw)!2^^)^ =
1 г Ss(d>)Sv(d>)
2тг J_n S,(u>) + Sv(w)
(43.15)
Здесь могут быть рассмотрены те же случаи, что в непрерывном ФВ
Рассмотрим случай физически реализуемого ЦФ. Введем факториза-
цию входного ЭС
ST(w) = VU(i^)V*(iw) (43.16)
где функция W(ico) имеет полюсы и нули в левой полуполосе s-плоскости
(s — а + '|ш), a W*(iw) имеет полюсы и нули в правой полуполосе s-
Плоскости (—тг w < тг, сг > 0). Заметим, что при отображении z = еш
Левая полуполоса отображается в единичный круг, а правая — в область
вне единичного круга z-плоскости
В z-форме факторизация входного ЭС S^fz) имеет вид
S*(z) = Ф0(г)Ф0(г-1), (43.17)
гДе V0(z) имеет полюсы в круге единичного радиуса |z| < 1, a V0(z )
вне этого круга; Wq(z) = Vo(e,a) — V(iu>)
I Если отношение Sxs(d>) j W* (iw) не является рациональной функцией,
то сначала находится обратное преобразование Фурье от этого отноше-
Ия, а затем вычисляется прямое ДПФ от этого результата В результате
После деления на vU(icZ?) получим
//опт(^) —
1 -inO Г 'S’rs(^) Ш(х, ,
2?rW(iw)^ Ш*(Й)
(43.18)
396
Лекция 43
Заметим, что H(iw) = G(e'w), тогда
=да)£-‘”°£ <««)
где ^(е1") = Ф(|ш).
Отсюда при замене z = е1ш получим оптимальную системную функ-
цию ЦФВ
1
C™tW = W,£
5^(г) п-1 J
1г /_ixz ®z'
(43.20)
где Vo(z) и Wo(z имеют полюсы соответственно внутри и вне еди
ничного круга в z-плоскости
В случае дробно-рационального отношения в квадратных скобках
GonT(2) -
Sxs(z)
L^o(1£)J +
«м-0
Wo(z) ’
(43.21)
где оператор »]+ означает разложение отношения в скобках на эле-
ментарные дроби и сохранение тех слагаемых, полюсы и нули которых
расположены в круге z| < 1
Рассмотрим частный случай, когда сигнал и шум на входе фильтра
некоррелированы Тогда
S„(<D) - Ss(w) + Sv(w) и S,(cD) = V0(eie)V0(e-to) S„(w)
В результате найдем
- IW
Сопт(е") = 1“й^)Е
u' ' n=0
eina dw,
(43.22)
z
или
GonT(e’°) - 1 -
1
^(e^’)
Sv[w) 1
V0(e--)] +
(43.23)
В z-форме отсюда получим
1 _ 1 Г
Goiit(z)
'J'o(z) I'M1/*)
(43.24)
Здесь оператор •] . означает, во-первых, разложение отношения в
квадратных скобках на элементарные дроби, во-вторых, сохранение
только тех дробей, у которых нули, полюса и константы лежат внутри
круга |z| < 1. При БШ на входе Sv{z) = Dv = const, поэтому
Сопт(г) — 1
Dv 1
<о(*) V0(l/z)
(43.25)
r
д-ифровой фильтр Винера_________________________397
В этом случае
1 03 1 г л Уп—1
11 («“)
или „
GonT(z) — 1 — 7n(z)z ,
п=о
W = fc"1 /4/0(z-1)]dz = £ResF(2fc).
✓ TTI / *
Здесь F(z) = zn 1 /W0(z 1).
Очевидно, при n = 0 в единичном круге существует единственный
полюс z = 0, так как по условию функция Шо(2-1) в этом круге не
имеет нулей и полюсов. Отсюда
^2 Res F(zfc) = Res F(z) = lirn zn /Фо(г-1) = j
I
где 1/Vco = hm,_0 1 /Ф(г-1).
I В результате получим
GonT(efc) = 1 - DV/WMWO(^°).
при n ф 0,
при n = 0,
(43.27)
или
Сопт(Ю= l-^/VooVofc).
(43 28)
I Следует отметить, что эта формула справедлива в том случае, если
V 1/z)является дробно—рациональной функцией с одинаковыми степе-
нями 1/z в числителе и в знаменателе, в противном случае необходимо
пользоваться оператором [1/Фо(2)]+ (см. пример 44 3)
Вычислим минимальную ошибку фильтрации в общем случае небе-
лого шума
е = <т2-Вй. (43.29)
Поскольку по условию факторизации Sz(a>) — |Ф(|щ)|' и кроме того
то при Фо(^) =
получим
ф(“)= «.[,„)
Фо(г)Фо (z ’) z 1 dz.
2tti J|^[_ j
(43.30)
Расчет цифрового рекурсивного
фильтра Винера
Пример 44.1. Пусть на вход ЦФ поступает аддитивная смесь сигнала и шума
2-п —
причем шум 1>п является белой последовательностью с постоянной дисперсией, рае
ной Dv, и не зависит от сигнала sn, который имеет вид - НХп, где —
сообщение, имеющее КФ
Лл[тп] = £)де~с,'т7>11\ Т -— интервал дискретизации.
Требуется найти системную функцию G — Goai (и частотную характеристику) ЦФВ
а также вычислить ошибку фильрации
Решение. Найдем вначале ЭС сообщения
5л(ёй) = 5л(е^) = ЗД = £2 Сле-«ТМ2
Да(1-^)
где г = eto; w — ыТ; d
Запишем ЭС сигнала
____ С.
.-^)(e-^ad) ^^а-а2),
Ds = H2Dx.
(44.1)
По условию
Sr(w) = Ss (w) + Sv(w) = Ss(w) + Dv.
Таким образом,
"-^1)
_ Dc + D^-d^e-^-d)
Sx(“> ~ -------(^-d)(e--- d)-
Произведем факторизацию ЭС S'i(ai) в виде
с г. л C2(elc-<il)(«
I w 1 — А.-1 . ;--------
* ’ 1 (е1* - d)(e-^ - d)
Найдем неизвестные коэффициенты и dlt Для этого сравним числители со-
отношений (44.2) и (44.1) для ЭС SX(D):
+ £>v(l + ^2) “ 2Dvdcosu> = (1 ф dj — 2t?i cosd>).
(44.2)
(44.3)
Отсюда следует, что
kl=d/d!Dv, (44.4)
а величина d1 находится из соотношения
fc?(l + d?) = O<: + C„(l+</2).
После преобразований получим квадратное уравнение для определения коэффи
цента di:
di - 2aodi + 1 = 0,
(44.5)
расчет цифрового рекурсивного фильтра Винера
399
И его решение + = а0 - — 1, где 2а0 = (g + 1 + d2)/d, q = Dc/Dv =
= РД1 - £?)/!>« — ОСШ.
Величина Dc может быть выражена через коэффициенты fci, d, di:
Ос = fciU + ~ O„(l + d2) = A-?(l
(44.6)
Тогда
Г Ос d I d \
•“ в; “ +‘ -“’(*--)• <«•’>
I Рассмотрим два предельных вида квадратного уравнения: а) при g —г 0, б)
при g —> оо.
В первом случае 2а0 = (1 4- d?)/d и квадратное уравнение принимает вид
? 14- d2 с о
— —di + 1 = 0 или d^d ~'d.2di — 0.
d
Отсюда следует, что при g —> 0 di -> d.
При g —г оо получим — (q/d)di +1=0. Отсюда
di = ±
2d
(44.8)
Поэтому при q —> сю di Й d/q —> 0.
В результате фактризации находим
SX(O) = Ф(ш>)Ф(-ка) = Фо (е‘“) Фо (e-ia) ,
где Фо (е1*) = fci(ete - di )/(<?“ - d).
Таким образом.
Фо (z) = ki г ~ dl; Фо (z"1) = kt (44 9)
z — d z~l — d
При z —> 0 следует Фоо — ki, поэтому придем к формуле оптимального ЦФВ
К c“""“'=1-£w
Обозначим ЧХ H(icD) = G^1"), тогда после преобразований с учетом равенства
— dl/d получим
^<>m (гга) —
Покажем, что этот же результат получается по упрощенной формуле
I_______ ________________~d)
Фо(х) (z — d)(z-1 — d)ki (z 1 — di
dtZ 1 Dcz
1 [ ^(O) 1
Фо(е‘“) 1 [ф0(е-ltS) J
Фо(г) fci (1 — ddi)
Используя найденное выше равенство, получим Dc/k2 (1 — dd\) — 1 — dijd. В
₽63Ультате приходим к полученному выше соотношению для ЧХ HOOT(iw). Наконец,
Пользуемся общей формулой для функции
1 — zdi J + fc^(l - ddj)(z — di)
п=0
Ф0(г-1)гП dZ
D
1
400
Лекция
Рис. 44.1
_ у Z--L / _____________D^dz________-
2тп Jpi-j (г ~ <0(1 — zd>)
Де z-nd" = Рс_______________1
ki (1 — ddi) ki (1 — ddy) 1 — z~1 d
n=C
Тогда окончательно находим
Сопт(г) = _ . . $(z) = ,2, ТТ'
Ф0(г) fcf(l - ddi)(z - dj)
Отсюда снова приходим к полученной ранее формуле для ЧХ
ИОцт(ю>). которой соответствует системная функция
GonT(г) = к° _±, (44.11)
1 — d^z 1 d
Отсюда находим Лопт[п] — ИХ ЦФВ:
ЛоптЫ = А„ ~ Ф G(z)zn-1 dz — к0-±- (Г) ------— dz = ко lim zn — k^df.
2ТП Jj2|=1 2тп Jj2|=1z - di z-d,
Таким образом,
hn = kodf, n = 0,1,2,... (44.12)
Следовательно, ЦФВ представляе собой последовательное соединение усилителя
с коэффициентом усиления ко и рекурсивного ЦФ — цифрового аналога интегри-
рующей цепи (ИЦ) (рис. 44.1).
Нормированная АЧХ имеет вид
Но(1й>) = * - = Н0(й). (44.13)
|е’^ - di |
Отсюда следует, что при q —* О, di —> О Hq(Q) —► 1 (ЦФВ пропускает составляю-
щие всех частот, которые поступают на его вход.) При q —* О, di —> d
Zdo(w) = — = Ял(ы). (44.14)
]e,w — а]
Данная АЧХ представляет собой нормированную АЧХ сообщения (АЧХ форми-
рующего фильтра), так как
Найдем ошибку фильтрации по формуле (43.29) е = <т2 — Вд или с учетом (43.30)
где
2 1 Г с 1- 1 Г Dc du
а* = — I аы — — / ——-----———----— —
2jr J 2тг J - d)(e->“ - d)
расчет цифрового рекурсивного фильтра Винера
401
De / dz 1 Dc
Ф . . . , — Dc hm ------- = -----—
2тп (2 — d)(l — dz) z—d 1 — dz 1 — d2
л , V _ Г S,(z) ] _ De
[ф0(г-1)]+ ^(l-ddoa-z-id)"
в результате находим
<72 - —51— 1 / dZ -
‘ ^1(1 ~ ddi)2 2—i ф^_г (z ~ <0(1 — zd)
___ 2 __ De 1 __ 2 DsDe
*J(1 — ddi)2 1-d2 “ °s “ fe2(l-ddi)2’
Учтем соотношение (44.6). Тогда получим
2 Г, 1-di/dl 2 (1 - d2)(dj /d)
C — C - 1 — ---- — _ -----------
L i - ddi J s i-ddt
При q —f 0 (dj -»<(),£-► cr2. При этом минимальная ошибка фильтрации равна
априорно известной дисперсии сигнала.
С другой стороны, при q —t оо (di ks djq —♦ О), e —► О
Пример 44.2 Найти ЧХ ЦФВ, если
о 3,3 с -I
oslo) = ---------; 8„(o) = 1.
1,8-cosw v ’
при условии, что сигнал s[n] и помеха -у[п] некоррелированы Вычислить ошиб-
ку фильтрации.
Решение. По условию
о < -1 _ а I \ , о 1-х 313 , , 5.1 - c°s<L
^(w) — Ssfw) + Sv (cd) — ——---— + 1 — — -------—.
1,8 -cosw 1,8 —coso
I Запишем ЭС входного воздействия в z—форме с учетом равенства
coso — -(е1" + е-1а,)1е‘“=г = 0,5(z ф z~х).
Тогда
5,1 — О, 5z — О, 5z—1 10,2z- z2 - 1 z2-10,2z + l
Ollzl = --------------—— = -------------- — ------------
1,8-0,Sz-0,5г-1 3,6z-z2-l z2-3,6z + l
I Найдем корни числителя и знаменателя zij2 и zj 2
zli2 - 5,1 ± у/26,01 - 1 - 5,1 ± 5,001, Z! = 10,101; z2 = 0 099 к. 0,1;
z{ 2 - 1,8± ^/З, 24- 1 = 1,8± 1,4967; z\ = 3,2967; z' = 0, 303 к 0,3.
Таким образом,
s , , _ (г - 0.1)0* - Ю, 1) _ 10,1 (z - 0, l)(z-* - 0,1)
~ (z — 0,3)(z — 3,3) “ 3,3 (z — 0,3)(z~1 — 0,3)
Согласно факторизации
&:(z) = Ф0(г)4'о(1Д),
рледовательно,
I ф°(г) = 1’75ВЙ =
I Проверка: Ф0(г—х) не имеет нулей и полюсов в круге |z < 1
402
Лекция 4 J
Преобразуем вначале ЭС сигнала
3,3 -6,6г
53(г) - ----------------= -------------
1,8 0,5(г + г-1) г2-3,6г + 1
_ -6,6г 2
“ (г - 0,3)(г —3,3) “ (г - 0,3)(г-1 - 0,3)‘
Найдем отношение
(44.1')
-Ухз(г) _ _£s(z) _ ____________2(г~! - 0,3)__________
Ф0(1/г) “ Ф0(1/г) ” (г — 0,3)(г-1 — 0,3)1,75(г-1 — 0,1)
1,14 _ 11,4г
“ (г -0,3)(г-1 0,1)“ (г — 0,3)(г — 10)
Выделим элементарные дроби
_______1___________________________М
(г —0,3)(г— 10) 9,7 кг-10 г-0,3?
Тогда отношение
а оптимальная системная функция
„ , , 1 [ Ss(z) 1 1,18г(г —0,3) 0,674г
Фо(г) 1Фо(1/г))+ (г — 0,3)1.75(г — 0,1) г - 0,1
Оптимальная ЧХ
Эту же формулу получим, используя результат примера 44.1: с!] = 0,099; d =
0,303; di/d = 0,3267; 1 - d1/d = 0,673.
Вычислим ошибку фильтрации по формуле (43.9)
е - сг® - В8,
где
г 1 dz
(z — 0,3)(г—1
0,3)
- 21;
. / ™ , ч -1 , 1 I ’-18г 1,18г-1 , ,
Фо(^)Фо(1/г)г 1 dz = — ф--------------------г 1 dz =
2тт Г г - 0,3 г-* - 0,3
= 1.182-L/ ------
2,71 J]*I=1 (г-°-3)(г-1
------ - 1,182/= 1,39241.
0,3)
Следовательно,
е - (2-1,3924)1 = 0,60761;
1 f dz
I = --- ф -------------------- — Res F =
2я1 J|.|=1 (г 0,3)(l —0,3г) z=o,3
lim (г — 0,3)-----------------= ---------—
X--0,3 (г-0,3)(l - 0,3г) 1 -0,09 0,91
расчет цифрового рекурсивного фильтра Винера
403
Окончательно,
0,6076
0,91
- 0,6677» 0,67.
Аналогичный результат получим по формуле (44 16) примера 44.1. Сравнивая
(44 1) (44.17), находим Dc = 2, тогда
, (1 tPUdt/d) DM/d) 2-0,3267
е-а2---------М = ' ' ’ - ----- = 0,6736 » 0,67.
* 1 dd-L 1 - ddi 0,97
Пример 44.3.
мехи имеют вид
Найти ЧХ ЦФВ и ошибку фильтрации, если ЭС сигнала и по-
1,25 — cos ы
2,6 + cos
причем сигнал s[n] и помеха u[n] некоррелированы.
Решение. Найдем ЭС б'г(й) входного воздействия
1,25 — cosw + 2,6 + cosw 3,85
O^(ci?) — <J^(lvl + 1 = — —•
2,6 + coscj 2,6 + cosiv
Найдем ЭС входного воздействия z-форме с учетом соотношения cosw|eiO=2. =
= 0,5(z + 1/z) = 0,5z~*(z2 + 1), тогда
„ , . 3,85 3,85 • 2z 7,7z
Sx(z) = --------------= ----:----- = ------------ =
v З.б + О.Бг-Цг2 +1) z2 + 5,2z + l z2+5,2z + l
7,7z 1, a4 Tz\TZ-l\
“ (z~+0, 2)(z + 5) ~ (z + 0,2)(j"I + 0,2) ~ ° ’’
, , . 1,24 , , 1,24
M2) = —ф°(г ) = -i ~no-
z + 0, 2 z ‘ + 0,2
Оптимальная системная функция находится по формуле (43.24):
С /-А — 1 _ 1 Г £ц(г) ] _ . _ 1 [ 1
°пт( } Фо W 1Фо(1/г)1+ Фо (г) I Фо (1/z)
1 1 + 0,2z 0, 2 1
= ---- = Ч---------.
Фо(1/г) l,24z 1,24 l,24z
Следовательно.
[ф0(1/г)] + = Фо(1Л) ’
Тогда
Г -1 1
°“Т Фо(г)Фо(1/г)‘
Поэтому
G = 1 — * = ~ 1 = _
опт Sx(z) Sx(z) Sx(z)
(1. 25 — cosu>)(2,6 + cosш) / 1\
= - -------- = 0,32 - 0,129 ( z + - ] .
(2,6 + cos w)3,85 \ z)
Оптимальная ЧХ ЦФВ
H(iw) = 0,32 - 2, 58 cosw - -0,129е’“ - 0, Г29е“‘“ + 0,32.
(44.18)
404
Лекция ц
Найдем ошибку фильтрации
Фо(г)Фо z-1 dz.
Поскольку
Сопт(г) - Ф^) [®Ш)]+ - %^)Фо(г)’
то с учетом (44.18)
».(.) = c„,W».W = [1. ,оМ^(1/0]».(.) = *.(•) - 5^!
ф.Мф.(1л)=»oW»0(,M - 2+,Мг|,;;7Т7И =
— S'z(z) — 2 + — Ss(z) — 1 + .
Тогда ошибка фильтрации
e = 1__Ll d* =i._L/ (5 + о,2)(1Д + о;2)г/г
/|г|=1 zSx(z) 27п/|г|=1 l,54z
Ilf 1,04z + 0.2 + 0,2z2
= 1---------Ф -----------------------dz —
1,54 2тп z2
, 1 1 / /'1,04 0 2 \ 1,04
= 1-——— ф -------------- + -z- +0,2 I dz = 1 — — =1- 0,67f
1,54 2?n T. । \ z z2 J 1,54
J M=1
Д е к ц и я 45
Нерекурсивный (трансверсальный)
цифровой фильтр Винера
На вход нерекурсивного ЦФ поступает аддитивная смесь сигнала s[fc]
и БШ v[fc]
аз[/г] = s[fc] + v[fc].
Представим оценку сигнала s[n] = у[п] = уп в форме дискретной
свертки
N-1
уп = 52
Jt=O
где хп — а:[п], — отсчеты ИХ фильтра с конечной ИХ (КИХ), по-
казанного на рис. 45.1.
Запишем свертку в векторной форме
sn = = Х£Н — НТХП; (45.1)
где X’ - (хп,хп^1,... ,азп_«+1); Нт = (h0,hi,.. .,hN_i). Средний
квадрат ошибки еп — sn — sn
E(C2)-E[(Sn-HTX„)2]. (45.2)
Дифференцируя по Н , найдем (см приложение 4)
Х[я(е;)] = -2М(зп - нтх„)х;]
С/±1
При этом используется правило дифференцирования скалярного произ-
Н ---- "ЖУТ тг
ведения ——— - Л — X I = X , где I — единичная матрица.
(?НТ <7НГ
Приравнивая прозводную нулю, получим соотношение
E(SnX£) = £(НТХПХ*) = НТЕ(Х„Х^).
Рис. 45.1
406
Лекция
По определению £(snXJ) — RJ3C — взаимная КФ сигнала и входно
го воздействия; f(XnXJ) — R^ —- корреляционная матрица входной
последовательности.
В результате получим дискретный аналог уравнения Винера-Хопфа
RJE — HTRr, или
RiX = RXH. (45.3)
Его решение
Н = НОП =R/R5X. (45.4)
Вычислим минимальное значение среднего квадрата ошибки с уче-
том (45 1)
E(e^) = £{en(sn - sn)] - E(ensn) - £?(enX£)HOIIT.
Согласно принципу ортогональности
ДепХ’)-0.
Тогда ошибка фильтрации с учетом (45 2) принимает вид
£ = min Е(4) = Е(^) - E(snsn) = Е(& - Н^Е(зпХп).
Отсюда
Е = - HonTRJx. (45.5)
Пример 45 1 Пусть п = N — 1, тогда ХдТ_1 = , я:дг_2;... .а;©)'1', матрица
входного воздействия Rx = £(Хдг_1Х^_1) = Хдг_iXJ^ j, т.е.
Г rr2 .. x-jv—ia-'o
Rx = XN—1^N~2 ^N-2 -- ^N-2^C xo J
Вектор взаимной КФ
RS2C — 137ДГ—и $дг—1ЯдГ—2; • - SN—i*c]T-
Допустим что сигнал является гауссовско марковским с нулевым средним значе
нием E(sn) = О и КФ экспоненциального вида
Rs[fc - m] = E(sfcsm) = =
где a = e—а шум v[fc] по условию белый такой, что
\ г» г/ \ f ПРИ к = т«
E(vfc) = 0; £(дот) = 5 н ,
1 IО при к ф т,
те. Rv — — символ Кронекера
Тогда элементами матрицы Rx с учетом независимости сигнала и шума будут
величины
---- г-*/ \ сгг/ I \/ I f I» при к — тп,
з:кХт = Е(яъхта) = b[(sfc + vfc)(sm + < 9 nnM ь
де k.m = 0,1,2....,! — 1
Нерекурсивным (трансверсальный) цифровой фильтр Винера 407
В результате матрица КФ входного воздействия и вектор взаимной КФ прини-
мают вид
-1 + ст а а2 .
а 1 + о а .. о"-2
Ra; — (7^ а2 а 1+о .. а^~3
-а^'1 aN"2 .. 14-0-
Rsa: = <7j[l а а2 ... 1]т,
где о = о2/о2 — величина, обратная ОСШ на выходе фильтра.
По (45.3) получим
14-о а а2
а 14-о а
а2 а 14-о
-Л"1 а^-З
(45.6)
Введем корреляционную матрицу
сигнала
гДе S£ — .E[s(A:7’)], EfsfcSjn) _ cr2 ехр[—a|fc — m|7], fc,m = 0,1,. ., N- 1
Умножим равенство (45.6) слева на матрицу
1
- °2)
—а
1 + а2
—а
О
О
а
1 + а2
О
О -
О
О
1 -
О
L о
408
Лекция
Соотношение для НОПт принимает вид
Поскольку матрица RJ-1 R^ является трехдиагональной, то соотношение (45.7)
можно рассматривать как одну из возможных форм представления однородного раз
ностного уравнения второго порядка для последовательности /io, hi, /г2. - -. /гдг_]
—<7aft.fc_j + [1 + <z — а2(1 — <r)]b.fc — = О, (45.8)
к — 1,2,../V — 2, с граничными условиями:
(1 + <7 — o2)Aq — crahi = 1 — <г2;
(45-9)
— <7а/гдг_г + (1 + <7 — а )/тдг_1 = О.
Решение данного разностного уравнения имеет вид
hk =C]>i +с2>2> fc = 0,1,2,;,N—1, (45.10)
где А] = /3 — д//З2 — 1, А2 " Р + \/Р2 — 1, /3 = [1 + <7 — а2(1 — <т)]/2а<7 — кор-
ни характеристического уравнения
-<7аА2 + [1 + <7 - а2(1 - <г)]> - <70 = О. (45.11)
Оба корня Ai и А2 действительны и положительны, поскольку
Р = (1+<7)-о2(1^о) =1+£1-°2) + ^(1-а)2 > ъ [<Д]
2аа 2ас v
В (45.10) константы cj и с2 определяются из граничных условий
А- ~ а X--а
(Aj-a)Af-1 (А2 2а)А^ 1
Тогда
(1 - о2)(А2 - ajA^-1
oafA^-^Aj - a)2 - Af-^Ai - a)2] ’
(1 - а2)(Ат - a)Af 1
агфА^-^Аг - a)2 - Af”1^ - a)2] ’
(45.12)
Таким образом, задача синтеза нерекурсивного ЦФВ сводится к решению раз-
ностного уравнения (45.8). Подставив константы cj, е2, а также Л; и Аг в фор-
мулу (45.10) находим ИХ фильтра:
= ____________1 — а2____________х
* “ aatAj'-^Aa - a)2 - A('-1(AI - a)2] *
x[(A2-a)A^-1Af-(A1-a)Af-1A^], k = 0,1,2,..., N - 1. (45.13)
Нерекурсивный (трансверсальный) цифровой фильтр Винера 409
Системную функцию G(z) определим как z-преобразование от ИХ:
ZV 1
к-0
X [(>2 - а)^^-11 ~ (^1/г)
1 — а2
(Д2 ~)2 _ Af^A, - ар] Х
р рN- 11 “ (лг/г)М
1-(А1/г) ---------
(45.14)
1 - (Л2/г)
Вычислим ошибку фильтрации по формуле (45.5). С учетом скалярного про
мзведения
векторов HJnTRSJ получим
N-1
.2
Учитывая
fc=o
hk в виде (45 13), найдем
.2
(А2 - а)А2 —--------—
1 — Ла а
____________1 а2____________
- а)2 - А?"1 (Ат - а)2] *
-(А1“а)А1 1-а2О
Рассмотрим два предельных случая.
1. Пусть ОСШ на входе фильтра велико: 1/сг
„ 1 - а2 1 + а2
0~ —----+ —----- > 1.
2аа 2а
*2=0+у/02-1
и ошибка фильтрации близка к нулю:
Г i _„2 1
О. Тогда
.2
Аг — /3 — з/д2 -1 » О,
1 — л2
аа
.2
= У?Л*2
X
2
1
сга(А2 — а)
1 -
Помимо этого, можно утверждать, что фильтр будет пропускать без искажения
все составляющие входного сигнала, если ОСШ достаточно велико уже на входе
ЦФ, то оптимальной системной функцией, очевидно, будет такая системная функ-
ция, которая вносит минимальные искажения при фильтрации, т е. G(z) — const.
Действительно, при г -» О, Aj -t О из формулы (45 14) следует, что
I — а2 1
G(^) „-о К —---------7--- « ——— » 1 - const.
Aj—о сга(А2 — а)сг—О 1 + t_Q2
Данной системной функции соответствует ИХ
, 1 — 0.2 ь 1 Л к у к
hk <г—о ~ ~ А3 ~ р. Аа ~ А1}
оа(А2-а) 1 +
к-0,1,2....^
или Нопт = [100 .. 0]т, которая свидетельствует о мгновенной реакции филь-
тра на внешние воздействия.
2. Пусть ОСШ на входе фильтра мало: а2/и2 <; 1, а —> оо. Тогда
2а 2а
2аи
410
Лекция J5
x2 = 0+\/p2-i^x-
а
и ошибка фильтрации практически равна дисперсии сигнала-
1 — а2 (1 — Aia)^
<та(Л2 — а) (1 — Ма)
1 (1-*2N)1 „2
<7 (1 — а2) 3
Системная функция фильтра будет близка к нулю:
ед _ « -1" “2_ к 0
Ai—° аа(А2 “ а) 1 “ (Ai/z) ~ (a/z)]
т.е. фильтр, чтобы исключить попадание мощного шума на выход, подавляет все
составляющие входной смеси
Наконец, ИХ фильтра запишется в виде:
hk ~ я —-—-Af ~ -ak, k —0,1,2................Л' - 1
xi—lfl <7а(Л2 — а) <7
или ЩП1 = [1 а а2 . aN Ч/с. Таким образом, при малом входном ОСШ ИХ
Винера повторяет по форме взаимную КФ Rcx, однако множитель 1/<т свидетель-
ствует о том, что каково бы ни было воздействие, отклик фильтра все равно будет
много слабее, чем входной сигнал.
Найдем теперь характеристики рекурсивного фильтра, осуществляя предельный
переход при N —> оо в соотношениях (45.13)-(45.15). Пусть р — < 1, тогда
для ИХ фильтра имеем:
1 — 2
=,a[(A2 _ а)2 _;г_1(Л1 _^2 - - (Ах -
к = 0,1,2,....N - 1.
Поскольку lim pN—1 = О, то
N—оо
. 1 — а2 . fc
Inn hk =-----------А,, к — 0,1,2,..., оо.
iv—<х> cafAa — а)
Сравним полученный результат с ИХ рекурсивного ЦФВ (44.12)
h-k — &о^1» — 1 — di/А. (45.16)
Сначала преобразуем величину Аг:
Л1 = 0 - у/02 - 1,
где р _ 1 +<т-«2(1 - g) _ (1 а2) + g(l +а2) _ (1 — a2)tr2 + <т2(1 + а2)
2а<т 2аа 2а<г2
— (? + !+ а2)/2а, где q = Dc/Dv = ff2(l - а2)/сг2.
Таким образом, 0 = а0 [см. (44.5)], так как по определению параметр а не-
рекурсивного ЦФВ равен параметру d рекурсивного ЦФВ (а = d = е~а7 ). Сле-
довательно, >1 = ф.
По квадратному уравнению (44.11) получим A]AZ = 1. отсюда Х2 = 1/Ai — 1/cfi-
Тогда с учетом ОСШ (44.7)
Рс = d(l-dd,) Г di \
Dv di \ d )
Нерекурсивный (трансверсальный) цифровой филыпр Винера 411
получим
1 - о2 yk _ (1 ~ ^2)o,scii _ _
cra()i2 — а) 1 cr2d(l —ddj) Dvd(l — ddi)
Следовательно, предельное значение отсчета ИХ
lim hk = (1 — dy/d)dy =
что совпадает со значением hk для рекурсивного ЦФВ (45.16).
Аналогичным образом может быть получено предельное соотношение для си-
стемной функции фильтра:
G(,x = _________1 °2__________x
саЦАг a)2 pN~ 1(Ai a)2]
i (A1/.)K n_1i-(a2/2)n'|
(a2 _ —1\ I \_ >p ---------------------
i (M*)
1 - a2 1 Г
1 - (Л2/г)
1 ——
J 1 — aj /z
сга(А2 — а) 1 — Ai/z
Это соотношение также совпадает с системной функцией рекурсивного ЦФВ
(44.11).
Ошибка фильтрации
2 (1 ~ d2)di
s d(l — did)'
(44.16)
что также совпадает с ошибкой фильтрации рекурсивного ЦФВ.
Таким образом, характеристики нерекурсивного фильтра Винера переходят в ха-
рактеристики рекурсивного фильтра, если считать, что число отсчетов N бесконечно
велико. Этот факт может быть использован для приближенного вычисления па-
раметров нерекурсивного фильтра, если аппроксимировать нерекурсивный фильтр
рекурсивным и вместо точных формул (45 8) (45 10) использовать более простые
соотношения рекурсивного ЦФВ (44.11).
Пример 45 2 Пусть на вход фильтра воздейс вует сумма отсчетов синусоиды
и белой последовательности v„ с дисперсией 2?(т»2) = <т2 = <т2 и равным нулю
средним значением [Е(ип) — 0]. Эта сумма имеет вид
яп = sin(nff/4 + v) + vn.
где <р — случайная величина, равномерно распределенная в интервале (0,2тг) и не
зависящая от шума оп
Требуется найти Ноцт и ошибку е — min Е(с2 ), используя четыре отсчета ИХ
hk (fc = 0.1,2,3).
Решение Заметим, что полезный сигнал можно записать в виде sinwot =
2™ ... г~
sin —пТ, где Т — интервал дискретизации Сравнивая это выражение для отсчетов
То
получим Т/То = 1/8 или То — 87.
412
Лекция 45
Корреляционная матрица Rx при четырех отсчетах ИХ имеет вид
З'П^'Г!- 1
2
—3
^’п^'п— 3
—1хп—3
хп—2хп—3
£п%п-1
Хп—2
^п-1^п-2
9
п — 2
2^'п-З
*£п—1-^'п— 2
-^n—1 З'П—3
Найдем элементы главной диагонали матрицы, которые представляют собой сум-
9
му дисперсии <г и слагаемого вида
£[sin2(a + ¥>)] — — + —E[cos(2a + 2<р)] — (45.17)
где а = кт/Л (к = п,п — 1,п — 2,п — 3).
Учтем, что КФ Rv последовательности un имеет вид Rv = cr26mk, где Smjt —
символ Кронекера, поэтому элементы матрицы Rx вне главной диагонали, когда
m jt к, имеют вид
J?(sinasin/?) = —E[cos(/? — а) — cos(fi + or)] = — £/[cos(/3 — a)],
где a = тгк/4; fi = itm[\ (k,m = n,n l,n 2,n 3); /i[cos(/3 + a)] = 0.
Вычисляя элементы матрицы Rj, получим
R
1/2+<z2
1/2^2
0
l/2\/2
1/2
1/2 + a2
1/2^2
0
0
1/2V*2
1/2 +a2
1/2-У2
-1/2\/2
0
1/2V^
1/2 + <z2
Запишем матрицу в виде
Rx
v р 0 — р
р v р 0
0 р р р
—р 0 р v
Определитель матрицы detR^ = р2(р2 — 2р2). Вычисляя обратную матрицу R^1,
находим
/ р ~р \
ip2 - Р2 "Ip^ — 2р2 - v2
р —V р 0
2р2 - и2 2р2 — р2 2р2 - V2
Р —V р
2р2 — и2- 2р2 — р2 2р2 - V2
-р 0 Р —и
\ 2р2 - р2 2р2 — р2 2р2 - Р2 /
Вектор взаимной КФ
Rsx — Е
sn
а?п
хп— 1
хп—2
хп—3
Нерекурсивный (трансверсальный) цифровой фильтр Винера
413
Далее получим
—
После перемножения окончательно находим
Ност - R/R„ _ 2(1^2)
Вычислим ошибку фильтрации по (45.5)
е - F(4) - H^TRSI - 1/2 - HJnTR.
После перемножения найдем е = ст2/2(1 + <г2). Отсюда видно, что при <т2 = О и
ошибка е = О При ОСШ E(s2)/<z2 = 1, когда по (45.17) E(s2) - 1/2, получим
а2 = 1/2 и е =. 1/6. Априорная ошибка равна величине Rs(0) — £(s2) — 1/2.
Лекция 46
Расчет цифрового нерекурсивного
фильтра Винера
Постановка задачи
На вход ЦФ подается аддитивная смесь
x(t) = s(t) + n(t),
где £7[s(Z)] = 0; Rs(r) = <rfe-alTl;
E[n(/)] = 0,
Efafc,n,n] ~ |
при k = m
при k m;
nt — n[17], rim = n[mT] — отсчеты шума, k, m = 0,1, 2,..., N — 1.
Смесь дискретизируется с постоянным интервалом дискретизации Т'
Хк — з:[11Г] = st + nt = sflTJ + n[fc7J, k — 0,1, 2,..., N — 1,
где N — число отсчетов используеммых при фильтрации; а = е~аТ =
= 0,85; сг = = 0,5; /V = 3.
Определить ИХ, системную функцию и ошибку фильтрации ЦФ Вине-
ра, предназначенного для выделения сигнала из смеси з:(1), если число
отсчетов равно N, ОСШ на входе фильтра равно 1/<т, а интервал дис-
кретизации Т и величина а заданы обобщенным параметром а = е~аТ.
Решение. Импульсная характеристика ЦФВ находится из уравнения
ГСсНопт - R-S3,
где Н = [fto,hi,..., Л/v—i]T — вектор ИХ фильтра; 7V = 3; Нопт =
= [Ло > , Лг]т;
В.х-Е
Х2Х1
.х22:0
2:22:1 a:22:o
2
xj XtX0
xix0 «О
Xk = 2:[/i'7_J k — 0,1,2,
— корреляционная матрица входной смеси x(t); Rsx = E[s2X2, «2X1,
S2Xo]T — вектор взаимной КФ сигнала s(t) и его смеси с БШ (st — 8(17],
к = 0,1,2).
Учитывая независимость сигнала и шума, находим
z 2 2
Е[игт] = 7[(sfc + + Пт)] — Т 2
при к — пг
при к ф тп,
Расчет цифрового нерекурсивного фильтра Винера
415
где к,т = 0,1, 2;
'1 + <7 а а~ ’ 1,5 0,85 0,722'
Rx — а'2 а 1 + <7 а — ст2 0,85 1,5 0,85 ;
а2 а 1 + <7. 10,722 0,85 1,5 .
- 4[1 0,85 0,722]т, а — е“ аТ.
1 5 0,85 0, 722' Ло Г1 ‘ 1 '
2 0,85 1,5 0,85 h\ — a а2 - 0,85 а2. (46.1)
.0,722 0 85 1,5 . 1Л2. а2 ~ 0,722.
Введем корреляционную матрицу сигнала s(t)
' «2 S2S1 S2S0 1 a a2'
R. = S2S1 »1 sls0 = 4 a 1 a
. ct2 a 1 _
-S2S0 SjS-2 Sg J
' 1 0,85 0,722'
<7; 0,85 1 0,85 j
L0,722 0,85 1
где st = s[A.7), F[sjt,sm] = <72е “'fc ml k,m — 0 1,2
Умножим матрицу (46.1) слева на матрицу R71 получим
R 1 1 ' 1 —a i J 0 '
’ ’^(1 a2) Cv . 0 1 T G a 1 + a2.
1 1 -0,85 0 -
~ <7? 0,278 -0,85 0 1,722 -0,85 -0,85 = 1,722.
1 1 -0,85 0 -1
= 3,597—^ 0,85 1,722 -0,85 .
0 -0,85 1,722
Получим равенство
Rj R®HonT — R, Rs:c>
или в развернутом виде
1 ‘ 1 —a —a 1 + a2 0 —a 1 + (7 a a 14- a (Г a ho Л1
1 — a2 L 0 —a l + a2J a2 a 1 + <7. [ft, J
1 1 ~a 0 1 1
- —a - + a2 —a a ;
1 — a . 0 —a . + a2. 9
1 -0,85 0 1 Г 1,5 0,85 0,722) ho
3,597 -0,85 1,722 -0,85 0,85 1,5 0,85 hi —
- 0 -0,85 1,722 J Lo, 722 0,85 1,5 J h->
416
Лекция
’ 1 -0,85 0 ’
- 3,597 -0,85 1,722 -0,85
0 -0,85 1,722
Окончательно находим
’ 0.778 -0,425 0 ho г
3,597 -6,425 1,139 -0,425 hi — 0
0 -0,425 1,139 h-i. 0
Поскольку матрица R5 lRr известна, то можно записать однородное
разностное уравнение второго порядка для последовательности
ho, hi, h.2,.... Лл'-i-
-0,425/ifc_i + 1,139/ijt - 0,425/ifc+i = 0, k = 1,2,3,
с граничными условиями
0,778/i0 - 0,425/ц = 0,278; -0,425/ц + 0, 778/i2 = 0.
Решение данного разностного уравнения имеет вид
hk = ci Ai + С2А2, к — 0,1,2,..., N — 1,
где Aj = /? — у//?2 — 1, А2 = /3 + у/Р~ — 1 — корни характеристиче
ского уравнения. Здесь
1 + <т - а2(1 - а) = 1 + 0,5- 0,722(1- 0,5) _
1 2аа ~ 2 0,85-0,5 ~ '
V/32 - 1 = х/1,342- 1 - 0,8919.
Характеристическое уравнение 0,425А2 — 1,139А+ 0,425 = 0 имеет
корни Ai - 1,34 - 0,8919 = 0,4481; А2 = 1,34 + 0,8919 = 2,2319.
Постоянные Ci и с2 находим из граничных условий
1/А, - а 1/А2 - a Cj
(Ai-а)Al (А,-а)А?] [с2
1 — а2
0
(1 - а2)(А2 - а)А?
С1 ~ <та[А2(А2 а)2 А2(а/ а)2] ~
0,278(2,2319 - 0,85) 2,23192
0,5-0,85[2,23192[(2,2319 - 0,85)2 - 0,44812(0,4481 - 0,85)2]
_ (1 - a2)(Ai - а)А? _ -0,023 _
<та[А2(А2 — а)2 — Af(Aj — а)2] 4,028
Расчет цифрового нерекурсивного фильтра Винера 417
Отсчеты ИХ фильтра
Ль - [(А, - а)А?А? - (0,4481 - 0,85) • 0,44812А*] =
4 028
= 0,069[6, 8837А* + 0,0806А£],
где Ai = 0,4481, А2 = 2,2319, к - 0,1,2.
Системную функцию G(z) определим как z-преобразование от ИХ:
G(z) = 5? hkz-1 = 0,069 • [6,8837^~-^yj) + 0,0806].
" 1-Aj/z l-A2/z
Необходимо вычислить ошибку фильтрации е для нерекурсивного
фильтра.
где F[s^_i] = ftj(0) - <72;
N-l
1- J2[C1(Aia)fc+C2(A2a)fc
fc=o
1-0,069
+0,8066
6,8837
1 — (0,4481 0, 85)3
1-0,4481-0,85
1 — (2,2319 - 0,85)31
1-2,2319-0,85 J
= 0,2379a2.
Итак, £ = 0,2379a2.
Рассмотрим два предельных случая.
1. Пусть ОСШ на входе фильтра велико
а —> 0;
1 — а~
—z----Ь
2аа
Р =
Ai = /3 - \//32 - 1 « 0, А2 =/3+ V/?277!- ——+
асг а
и остаточная ошибка фильтрации близка к нулю
Е«т-»О,Л1—О ~ a's
1 + а/(1 — а2)
При а —> 0, А] —» 0, поэтому
G(x)e,_>0Al_0 я;
1 -а2
<7а(А2 — а)
1
1 । /гт 2\ 1 const.
1 + <7/(1 — а2)
418
Лекция J6
Данной системной функции соответствует ИХ
А а~ 1
-.0 « аа(А2_а)Л1—0.А.-.0 ~ 1 + а/(1_а2)Л1 ЛоА1’
к = 0,1,2
или Н =[100 .. .]т, которая свидетельствует о реакции филь-
тра на все внешние воздействия.
2 Пусть ОСШ на входе фильтра мало:
<77 , „
— С 1, а —► оо; /3 —
Ai = 0 - \//72 - 1 « а,
1 — а2 1 + а2 1 + а2
2а<т 2а 2а
Аг = Д + \/Д2 — 1 ~ —
а
и остаточная ошибка фильтрации практически равна дисперсии сигнала:
£<7—*oq,Ai—*а ~ з
1 — а2 (1 — Aja)w
<та(А9 — а) 1 —Aja
1 1-а2Л"
а 1 — а2
Системная функция фильтра будет близка к нулю:
1_а2 l_(A1/z)^ 1.1 -(аДГ 0_
<та(А2-а) 1-Aj/z ~ а 1 - (a/z)
т.е фильтр, чтобы исключить попадание мощного сигнала (шума) на
входе, подавляет все составляющие входного сигнала x(t).
Отсчеты ИХ запишем в виде
ftfc^oo.A^a^ !г°2 ЛяЛа*. £ = 0,1,2.
<та(Л2 ~ а) <т
Тогда Нопт = 1[1, а, а2].
Таким образом, при малом входном ОСШ ИХ Винера повторяет по
форме взаимную КФ Rjr.
Лекция
Фильтр Калмана
На вход линейного фильтра в данном случае воздействует аддитивная
смесь сигнала s(t, А) и БШ n(t)
x(t) = s(t, А) + n(t), s(t, A) — c(t)X(t). (47.1)
Это соотношение называется уравнением наблюдения (измерения).
Здесь A(t) — информационный процесс, который образуется прохожде-
нием порождающего БШ через формирующий фильтр (ФФ), ДУ ко-
торого имеет вид
— - a(t)X(t) + v(t), А(0) = Ао. (47.2)
м
В этих уравнениях а(<) и c(t) — некоторые функции зависящие от
времени, поэтому следует ожидать, что фильтр Калмана (ФК) в общем
случае будет нестационарной системой
Предположим, что СП А(<), v(t), п(<) взаимно независимы и цен
трированы
2?(А«) — E(vt) — — 0; E(XtnT) — E(XtvT) — E(ntvT) — 0, (47.3)
а КФ входного и порождающего шумов имеет вид
7?п(С т) = E(ntnT) = S0(t)6(t - т); Ru(t, т) — E(ytvT) — - т).
(47.4)
Очевидно, справедливы также равенства
E(ntxT) — 0;
E[ytXT) = 0.
(47-5)
По ДУ ФФ находим его структуру (рис. 47.1).
Очевидно, ФФ — нестационарная ли-
нейная система. Формируемая на выходе
фильтра оценка А(£) процеса A(t) связана
с входным воздействием ж(7) интегралом
о
h(t, т)а:(т) Фг
«(*).
a(t)A(t)
А(4)
Задачей синтеза фильтра Кадмана (ФК)
является получение уравнения оценки А
(или уравнения ФК)
Рис 47.1
420
Лекция Jfl
Уравнение фильтра Калмана
Критерием оптимальности ФК является минимум среднего квадра-
та ошибки
< = М[А(0 - W}. Ф) - A(i) - А(0-
В этом случае согласно принципу ортогональности ИХ ФК должна
удовлетворять интегральному уравнению Винера-Хопфа
ЛАх(«,а)= [ h(t,-r)Rx(r,a)dr, 0<а<1, (47.7)
Jo
где
Rxx(t,a) = £(Аггт),
Кг(т, а) = Е(хтха).
На основе приведенных данных получим ДУ оценки А процесса А(7)
и на его основе — структуру ФК. С этой целью возьмем производную
по времени t от левой и правой частей уравнения Винера-Хопфа (47.7)
Производная от левой части этого уравнения
[ад*,а)] = £W>(*)] = Е [Яг(а)
аг аг аг
F </A
E ^(«)
-f'
dt Jo
Воспользуемся ДУ ФФ, тогда получим
= E{[a(QA(t) + v(Z)]x(a)} = а(7)Е[А(7)г(а)] = a(t)Rxx(t, а),
так как по условию £7[ti(Z)x(a')] 0.
Таким образом, после дифференцирования из уравнения Винера-
Хопфа находим
д [1
a(t)Rxx(t,a) — I h(t,T)Rx(r,a)dT.
иг Jo
Используем правило Лейбница дифференцирования интеграла с пе-
ременным верхним пределом
p(t,T)dr= ^[<Z>G,t)]</t+р(М) (47.8)
Тогда получим
a(t)Rxx(t,a) = J Rx(r, a) dr + h(t, t)Rx(t, а).
Преобразуем КФ Rx(t,a) во втором слагаемом правой части этого
соотношения с учетом уравнения наблюдения, условия E(ntxa) — 0 и
правой части уравнения Винера-Хопфа
Rx(t,a) - Е(х1ха) - £{[c(f)A(Z) + n(/)]x(a)} = c(t)Rxx(t, a) =
фильтр Калмана
421
ft(t, a)Rx(r, a) dr.
В результате окончательно получим соотношение
dh(t,r)
dt
4- h(t, t)c(t)h(t, т) — ah(t, т) Rx(t, a) dr = 0.
Интеграл с переменным верхним пределом при заданной КФ Rx(t,a)
равен нулю только в том случае, если равно нулю выражение в квадрат-
ных скобках. Из этого следует соотношение
—) = a(f)h(t, т) — h(t, г) = [a(f) — c(<)h(t, t)]A(t, г).
Возьмем производную от оценки A(t) по правилу Лейбница (47.8),
тогда получим
Подставим под интеграл найденное значение производной
dh(t,T)/dt и. используя выражение для оценки A(f), получим ДУ ФК
— — [a(Z) — c(t)h(t,t)]A(t) +
Запишем это ДУ в окончательной форме
= a(t)A(t) + <7(0[x(Z) - c(i)A(t)], А(0) = А0) (47.9)
где g(t) — /i(t,Z) — коэффициент усиления ФК.
Найденному ДУ соответствует структурная схема ФК (рис 47 2)
Таким образом, ФК представляет собой нестационарную систему с
обратной связью. ФК включает в себя как составную часть, формиру-
ющий фильтр (ФФ) (на рис. 47.2 обведен штриховой линией).
Рис. 47.2
422
Лекция 47
Коэффициент усиления ФК,
уравнение дисперсии ошибки
Согласно принципу ортогональности (ошибка ортогональна входно
му воздействию)
77[e(t)x(a)] = 0, тогда £(eta:Q) = EfXtxa) — EfXtxa) = О
Следовательно, справедливо равенство
F[A(t)a:(f)] = Е[А(г)а:(г)].
В левой части этого равенства используем уравнение наблюдения, а в
правой — выражение для оценки A(i) в форме интеграла, в результате
с учетом условия 7?(Atnt) — 0 получим
с(/)Е{А2(£)] = i hft, t)F[x(Z)x(t)] dr =
Jo
= hft, r)E{[cft)Xft) + п(<)][с(т)А(т) + n(r)]} dr =
- [ hft, t){c(Z)c(A)£[A(OA(t)] + ,S'o(t)5(t - t)} dr.
Jo
Используя фильтрующее свойство дельта функции и равенство
с(т)А(т) = xfr) nfr), находим
c(0E[A2(t)] = Soft)hft, t)+ [ hft, r)E{cft)Xft)[xfr) - n(r)]} dr =
Jo
= Soft)hft,t) + E c(f)A(f) I hft,r)xfr) dr =
Jo
- Soft)hft,t) + ф)Е[А(£)А(0].
Таким образом, получили соотношение
c(t)E[A2(Z)] = cft)E[Xft )A(t)] + Soft)hft, Z).
Подставим в левую и правую части этого равенства A(Z) = e(t) + A(Z)
и воспользуемся условием ортогональности EfetXt) = 0. В результа-
те находим
c(t)S(e2) + eft )£[A(t)]2 = c(Z)E[A(/)]2 + Soft)hft,t)
cft)Dft) = Soft)gft),
где Dft) - E(et); g(t) = h(t,t)
Тогда искомый коэффициент усиления находится по формуле
g(t) = D(t)c(t) I S0(t). (47.10)
фильтр Калмана 423
Остается найти уравнения дисперсии ошибки. Найдем вначале ДУ
ошибки
de dX dX
dt dt dt
где dX/dt = a{t)X 4- v(t) — уравнеие ФФ.
По уравнению ФК находим
= а(<)А(<) + р(0[®(*) - с(0А(0] = «( W) -
+ ^(t)[c(i)A(t) + n(7)] - a(f)A(f) + <7(0c(Z)e(Z) + fir(t)n(t).
В результате получим ДУ ошибки
de
— = [a(t) - g(t)c(t)]e(t) + v(t) - g(t)n(t).
Воспользуемся известным уравнением для дисперсии решения сто-
хастического ДУ
х — Ах + Fv(t) + Gn(Z),
где n(Z) и n(Z) — СП F,G = const; А = A(t).
Rv(t г) = qv(t)8(t r); Rnft, г) = Sa(F)8(t - г).
Дисперсия СП x(t) имеет вид
dDx /dt = lADx(t) + F2qv(t) + G2So(O-
По аналогии с ДУ ошибки находим А = a(t) — g(t)c(t), тогда
= 2[а(/) - g(t)c(t)]D + qv(t) + g2(t)S0(t).
После преобразования с учетом значения коэффициента усиления g(t)
окончательно получим ДУ
= 2.a(t)D - c2(t)^- + qv(t). (47.11)
at
Это нелинейное уравнение Риккати В общем случае оно интегрируется
численно. Решение D(t) этого уравнения позволяет вычислить коэффи-
циент усиления g(t) и полностью определить структуру ДУ ФК.
Лекция J^8
Расчет непрерывного фильтра
Калмаиа
Пример 48.1. Пусть задана КФ сообщения КА(т) — <r2e“l7'l. Требуется найти
коэффициент a(t) формирующего фильтра.
Решение. По условию задачи ФФ — стационарная система, порождающий шум
T>(t) — стационарный случайный процесс, при этом — const. Найдем передаточную
функцию ФФ Л(«), исходя из формулы
SA - 5„(w)H(s)H(-s) = д„|Я(з)|2.
Используя соответствие
S[e-“M]-2a/(a2+oz2),
находим Ss(tv) ~ 2<г$а/(а2 + tv2).
Представим знаменатель S3(tv) в виде произведения
Ss(tv) = 2crja/[(a — icv)(a J- itv)] — 2<7^af/[(a — s)(a -f~ $)]
Если положить H(s) — l/(a + s), то при замене s на p = d/dt и использо
вании соотношения
(„+jL)A = „(t)
получим ДУ ФФ
dA
—--«A + 4t). (48.1)
ас
Таким образом, а — —а — const. qv — 2аа2.
Параметр а определяет эффективную ширину полосы До»э энергетического спек-
тра сообщения, поэтому коэффициент передачи ФФ, спектральная плотность qv по
рождающего шума v(t) определяются дисперсией сообщения и коэффициентом а.
Пример 48.2. Решить уравнение Риккати (47.11) при dD/dt = 0 (фильтр Калма-
на стационарный), найти параметры фильтра Калмана и его передаточную функцию
с учетом результата, полученного в примере 48.1
Решение. При dD/dt = 0 уравнение Риккати вырождается в алгебраическое
уравнение (при а — —а) с2£>2 + 2ctSqD — Sqqv — 0.
Пусть с = 1, тогда
D = aSq + у/+ Sbgv = aSq (-\/1 + А] — 1).
где Л, = qv/atSq.
При этом выражение для коэффициента усиления д из (48.1) имеет вид
9 = = “(а/1 +Л1 - 1).
Преобразуем соотношение = qv/a2So. Согласно примеру 48.1 gv — 2сха^.
а — -о, тогда Л1 — qv/a2So — 2u^/g:Sq.
Запишем ДУ оценки (47.9) в виде [d/dt + (5 + а)]А = дх. Отсюда найдем пе-
Расчет непрерывного фильтра Калмана
425
редаточную функцию фильтра Калмана
Н(з) - ------------- k° ,
s + (д + а) 1 + sT
где ко = д/(д + <х); Т - 1/(д + а)
Таким образом, стационарный фильтр Калмана эквивалентен ИЦ с постоянной
времени Т, выполненой последовательно с усилителем, имеющим коэффициент уси-
ления ко-
Преобразуем параметры Т и ко- Вычислим
д + а = а\/1 + Ai
Тогда
кд = (л/1 + л1 - +Л1-
Сравнивая эти параметры с параметрами фильтра Винера, находим 2<72 = Dsa и
Л1 Л = Ds/Sq.
Как и следовало ожидать, передаточные функции стационарных фильтров Ви-
нера и Калмана совпадают. Разница заключается в том, что второй структурно
реализуется в виде системы с обратной связью и легче алгоритмизуется с целью
моделирования на ЭВМ.
Пример 48.3. Пусть наблюдается смесь сигнала и шума в виде
— A(t) bino/ot + Tl(t),
а модель сообщения определяется уравнением = — аА + ^(0-
Найти схему непрерывного фильтра Калмана.
Решение. Сравнивая модель наблюдения с (47.1) и модель сообщения с (47.2),
замечаем, что в данном случае c(t) — sinwot,
a(t) = — а = const, 5v(0 = qv = const, So(f) ~ Sg — const.
Уравнение для оценки огибающей определяется по (47.9), где g(l) = c(t)D/So =
= (D/Sb) sina>ot. В произведении
<?(t)c(t)A(t) = (P/So)A(t) sin2 wot
отбро им вторую гармонику Тогда получим приближенный вид ДУ оценки (при
условии выполнения неравенства — 1/а <С Т — 2тг/ыд)
dX
dt
= — аХ Ч--------[2a:(t) sinivot — А].
2 Sb
Уравнение (47.11) при игнорировании второй гармоники принимает вид
dD „ D2
— = -2оО + qv - —, (48.2)
dt 2Sq
где согласно данным примера 48.1 qv — 2скТд.
Запишем уравнение фильтрации в виде
dX / D V Dz.-
37 + (a + ) Л=
dt \ zoq / *->0
Таким образом, фильтр Калмана представляет собой последовательное соеди-
нение синхронного детектора (перемножителя колебаний a(t) и 2siriu>o£), фильтра
Низкой частоты (ФНЧ) в виде ИЦ с постоянной времени Т = 1/пф, Оф = q + D/2Sq
и усилителя с коэффициентом усиления д — D/2S0 (рис. 48 1)
Пример 48 4 Пусть модель сообщения и модель наблюдения заданы урав-
нениями
dX
— = —сгА + T)(t), a;(t) — A(t) + n(t),
426
Лекция J8
где г?(<) и n(i) — независимые стационарные
> gS I-1 т_____о белые шумы с постоянными спектральными
Нг* I/ I q X(tj плотностями gv и Sb. которые не зависят от
2sinu>ot Т 9 случайной гауссовской величины Ао = А(0)
имеющей нулевое среднее значение и диспе-
2
__ __ _ рсию
Рис. 4В. 1 ,. , 0
Найти структурную схему оптимального
приемника.
Решение. По условию задачи имеем c(t) — 1, а(7) — —а, 0(0) — <rg.
Уравнение (48 2) для дисперсии ошибки принимает вид
dP/dt=-2aP-P2/S0+q„, 0(0) - ag.
Это уравнение Риккати, которое решается методом разделения переменных:
dP 1 ,
—..---------------=----dt.
О2 + 2aSqP — Soqv So
Обозначим через pj и рз корни квадратного уравнения
О2
тогда
dP _
(О — pi)(O — рз)
+ 2aSoD — Sqqv = О,
1 [ dP _ dP 1 1_
pi — Рз L о — pi о — Р2 J sb
где Pl,2 = (—° ± о2 + 9v/So)Sq _ o:Sb(—1 ± т/1 + Ai). Здесь Л = qv/oPSo, причем
Pl — P2 = 2oSbVl + A = 2pS0, a p -— ccy/1 + Ai.
В результате
dP
D - pi
<70
—------= -2pdt
P — Рз
откуда найдем решение 0(7) в форме
= Сое-2**,
— Р2
где Со — произвольная постоянная которая определяется начальными условиями
0(0) - ао- Тогда Со = (erg - Р1)/(<г2 - Рз).
Дисперсию ошибки можно записать в виде
Р1 - Р2Сое~2м* t
1 - С0е-2мг ’ '
По (47.9) найдем ДУ фильтра Калмана
dX/dt = аХ + д (7)[г:(7) — A(t)J, А(0) — До.
где коэффициент усиления g(t) находится по (47.10). g(t) — 0(7)/So.
Асимптотически при больших значениях t
0(7) * Ооо — Pi; р(0 “* Рсо — Pl/So,
t *ОО t —ОО
где Ооо — orSo[(l + Ai)1/2 - 1]; дт = <х[(1 + Л1)1/2 1]. Эти параметры совпа-
дают с дисперсией и коэффициентом усиления стационарной системы, найденной
в примере 48.2.
Таким образом, ДУ фильтра принимает вид
dX/dt = —рХ + (pi/So)x(t).
Рассмотрим частные случаи: а) при Ai < 1 Pl и aSoAi/2 = qv/2a,
g„/o2S0 «С 1; 6) при Ai « 1: pi И 0,414So; в) при Ai > 1: pi » (q^So)1!'2.
Лекция
Векторно-матричный (многомерный)
непрерывный фильтр Калмана
Пусть модель сообщения (объекта) А = (А^Аг, ^Ап)1 и модель
наблюдения х = (xj, х%, -., xm)T описываются уравнениями
L (491)
x(Z) — H(Z)A(Z) ч- v(Z),
где w(Z) — порождающий шум (вектор размерности г х 1) F(Z) — ма-
трица формирующего фильтра (ФФ) размерности пхп, G( ) — матрица
входа ФФ размерности п х г; H(Z) — матрица наблюдения тп х п.
Пусть, кроме того, справедливы соотношения
E(wt) = 0; E(w(wf) - - т);
E{vt) = 0; E(ytvJ) ~ S0(t)8(t - г),
где 6{t т) — 5-функция; Q(Z) и S0(Z) — симметрические положительно
определенные матрицы размерности г х г и т х т соответственно.
Шумы w(Z) и v(t) некоррелированы.
RwlJ(Z,'r) - £7(wtv£) — О
Кроме того, по предположению некоррелированы СВ А(0) — Ао
(Е(А0) - 0), wt и vt.
£(Aow*) = O; £(Aov?) = O,
а также СП A(Z), w(t), v(t).
Требуется найти оптимальный многомерный фильтр, который давал
бы несмещенную оценку сообщения A(Z) и минимизировал бы при этом
средний квадрат ошибки et = A(Z) — A(Z).
Процедура синтеза векторно-матричного ФК аналогична процедуре
скалярного случая
В результате получим ДУ ФК (ДУ оценки)
= F(Z)A(Z) + K(Z)[x(Z) - H(Z)A(Z)], A(Z0) = Xo,
гДе К Z) = K(Z,Z) — матрица коэффициента усиления, K(Z,r) — ма-
трица весовых функций матричного фильтра. Структурная схема ФК
428
Лекция 49
Рис. 49.1
изображена на рис. 49.1. Матрица K(t) находится из соотношения
K(O=D(OHT(/)So-1(Z), (49.2)
где Sq 1(/) — матрица, обратная для S0(t); D 7) — матрица дисперсий
ошибки измерения, для нее справедливо ДУ
= F(0D(t) + D(i)FT(Z) + G(f)Q(f)GT(t)—
D(f)HT(f)So D(0) - Do. (49.3)
Это матричное уравнение Риккати. В стационарном случае (в уста
новившемся режиме) dD/dt = 0, тогда матрица дисперсий D нахо-
дится из уравнения
FD + DFT + GQGT - DHTS“*HD = 0.
Пример 49 1. Пусть требуется одновременно измерить координату Ai(t) движу
щегося объекта и его скорость Л2 ~ dX^/dt. Система измерения задана уравнениями
4Ai . dX2
dt dt v '
где w(t) — БШ, КФ которого имеет вид Kw(t, т) — Q (t — т), Q — С — постоянная
матрица. По второму ДУ ФФ замечаем, что Аг(4) — винеровский СП, его среднее
значение и дисперсия линейно зависят от времени.
Модель измерения имеет вид
a?l(t) = Ai(t) + x2(t) = >2(<) + v2(t),
где vi(l) и v2(t) — независимые БШ (ошибки измерений) такие, что S (t) = So =
— С — постоянная матрица. Приведенные уравнения можно записать в векторно-
матричной форме, при этом
I — единичная матрица.
Матричный коэффициент усиления имеет вид
__П/Л1ДО-1 Г4ц ^12 1 1 О) Г d 11 / Sr <fl2/sv 1
K(t) D(t)HS0 _^21 d2J — [0 s,.J-[d21/sr d22/.,J-
где dj-fc (i,k = 1,2) — элементы матрицы дисперсий, причем dj2 = ^21 (матри
ца D симметрическая).
РектС’рно-матричный непрерывный фильтр Калмана
429
Таким образом,
> 4ц , 4j2 </12 с/22
fcn — ---; 4'2 = ---; К21 = ----; К22 — --•
Sr Su Sr Sy
В результате получим ДУ ФК в матричной форме
— = [° 1 1 Г 1 + Г к12 1 (Х1 ~ А
4t [° °] L>2J [&21 ^22] \ГГ2 — А2/’
или в скалярном виде
dXi -
—- А2 + fcn (xi — Ai) + fci2(x2 — >2);
dt.
dA2
—7— — ^2i(®i — Ai) + £22(^2 — A2).
dt
Найдем матрицу дисперсий в стационарном режиме. Для этого необходимо ре-
шить матричное уравнение (при dD/dt = 0)
FD + DF1 + Q - DS~ D - О,
причем
СП — [° 1 1 Г 411 412 1 _ Г</]2 422 1 .
[0 0 J [</12 </22 ] [о о J
DFT =: Н11 412 1 Г о 01 _ Г <712 01
L 412 422 J [ 1 0 J [ <122 о J ’
FD+DFT = [2/12 d22l; FD + DFT + Q= [2?12 1 -
L <<22 ° J [ d22 q J
□S-1D= 1 dl2l Г®” 0 412 1 _
SrSv [412 422 J [0 srj [</12 d22 J
. 1 [4nsv 4i2.sr 1 Г</ц di21 _
srsv [412S„ d22sr J [</]2 422 J
411®" + 4]25r 4ц<1125г, + 4i2422Sr
4ц412в„ + 412 422«г 422s„ + d%2sr
В результате получим уравнения для коэффициентов d,;; (г, к = 1,2) в скаляр-
ной форме
4?i 422
-Т2. + _22 _ 2</i2 = 0;
Sr sv
, /4ii , 4гг \
di2 (-----1---I
\ Sr Sv /
— d'2'2 = 0;
d2 d2
^12 + 222 _ g = 0.
Sy Sv
Нетрудно проверить, что решением этих уравнений являются коэффициенты
411 = (l/A)y/sry/qsrB; di2 = (1/21)^/537; d22 = (l/A)y/qy/qsPB,
где A — 1 + y/qsT/sv, В = 2 + y/qsr/sv.
В частном случае, если измеряется только местоположение объекта (шумы в ка-
нале измерения скорости велики tv —< 00), то система уравнений для коэффици-
ентов упрощается:
^l_2dI2=0; ^lL_d22=0; ^- = q.
ST Sr sr
Из последнего уравнения сразу находим 4*2 — y/qsr, при этом из первого урав-
430
Лекция J9
нения получим c/Jj = y/2dy2sr = y/2sry/qsr, тогда из второго уравнения d?2 s
= di2du/sr = yj2qy/q^. Эти же соотношения получаются из общего решения
при А = 1, В = 2. В данном случае при г„ —► оо уравнения ФК принимают
вид (при ki2 = £22 = °)
—77-= Аг + £ц(®1 - At); —= £21(34 — >i). (49.1)
at dt
Если ввести параметр -у — sv!yjqsr и нормировать коэффициенты dt^ в виде
£tJc ~ dik/d*k, то получим
г \А(т + 0,5) у д/тЬ + О, S) с
*11 =-----—------; *12 = ——; *22 =-----------------— *и-
1 + -у 1+-у 1 + "У
Если раньше коэффициенты зависили от трех параметров q, вг, sv, то после
нормировки остается их зависимость от одного параметра -у.
Найдем матричную передаточную функцию
Уравнение ФК
----- [F — КН]Х+Кх, Н-1.
Тогда в изображениях
six = [F - К]Х + Кх
или
[К - F + sl]X = Кх.
Матричная передаточная функция ФК определяется из соотношения
X = Ф(э)Х; Ф(э) = [К- F + sl]-1K-
K_Mn *12); K-F+sl-(fc» +® t12?1), так как F_
\£21 £22/ \ £21 £22 + s J [О O]
[K- F + Sl]-1 _ ± [J22 + ’ fcii^s] , Д _ (£11 + s)(£22 + s) + (I - fci2)£2I;
[K-F+sl]-1^ 1 P22 ts ,~k21 1 [*» M =
Д L1 — £12 £11 + S J 1 £21 £22 J
_ 1 Г (£22 + s)£n — £2i (£22 + s) £12 — £21^22
Д [ (1 — £12)£11 + (£11 + s)£21 (1 — £l2)£12 + (£11 + s)£22 J
Рассмотрим вначале определитель
Д — s2 + (£ц + £22)» + £11 £22 — £1г£21 + £21 •
Нормируем коэффиценты £,ь (£ — 1,2):
Г -?11- к* к- -^2..
Кп — ----, «12 - ---, К21 ----• *22 ~ -
т S rV Т s rv
Векторно-матричный непрерывный фильтр Калмана
431
В результате получим
Подставляя в определитель Д найденные значения k,f_ (i,k — 1,2), получим
км + к-2-2 =
С V2
Аналогично находим свободный член
кцк-22 — куъкъ! +1=21 — —---V1'('»+ 0,5)-^—--— v/-v(l + о, 5)—
1 + т т(1+т)
-V Г~Г~ ( 1 Л 2\Л7^7Ь + О,5) 1 -у2 /-г-
~ гт-V 5/®г I гт—11 --------т—«---------+ /т . л? V ч1Т1> -
1+-у 41+т / (1 + т)2 у (1 + у)2
- 12 Efr + °’ 5) +'1'2] = \/ч/Тг = Ш0-
(1+пО
Таким образом,
Д = S2 + 2£u?0S -f- CJq,
В результате матричная передаточная функция принимает вид
гДе
s2 + 2(cuos + о>2
s + Ь '
aby
s + с
с(1 + .
Ь = 2£о’о;
Если измеряется только местоположение, то получим
Г Ат 1 = “о
L А2 J s2+2£w0s + u^
Wn
Пример 49.2. Найти уравнения для оценки А вектора состояния А
432
Лекция Jg
системы, если заданы уравнения системы в виде
t/А J ч , Z.4
“dF^ ~dT = ~X2 + w^
ж(0 = ^i(0 + 40.
где w(f) и v(t) — независимые БШ с интенсивностями = 1, Vtl ^2
Решение. В данном случае
F = 0 1 ’ 0 -1 ; G = 1 0 0 1 = 1; Q = 0 o' -° 9.
q = Ч rw = 1; н-[1 о], S0=V„; 50- 1 _ J_ Vv
Для нахождения элементов dti матрицы дисперсий D необходимо
решить матричное уравнение
FD + DFT 4- GQGT - DHtSq *HD - 0.
Здесь
GQGT = Q;
iFSo1!! •? H’H = 0,5
Уравнение относительно элементов d,jt [i,k = 1,2) матрицы диспе-
рсии имеет вид
ИЛИ
0 1 d и di2 dn di2 0 0
0 -1 d 21 d22 -r d2i d22 1 -1
_ 1 du ^12 T o' 'd 11 di2 + 'o o' 0 o'
“ 2 dzi d-> 0 0 d 21 d22 0 1 0 0
diz + d2i d22 di2 1 df. dn d 12 J 0 '
d22 - d2i -2d 22 2 d nd2i du d 21 J -1
В результате получим систему уравнений (при di2 = d2i)
2d12 - ф = 0; d22 - di2 - = 0; 2d22 + = 1.
Отсюда находим
du — 1,1; di2 — d2i — 0,3025, d22 0. 470-
Вектор коэффициента усиления
К ^ПГГф-1
1 1,1
2 0,3025
0,3025] Г1
0,470
0,55
0,151
0
.ректорно-матричный непрерывный филътр Калмана 433
Уравнения ФК принимают вид
^--А2 + 0,55(2: -Al);
(49.5)
^ = -А2 + 0, 151(ж — Ат).
at
Пример 49.3. Найти уравнение для оценки вектора А, если уравнеие
объекта и наблюдения имеют вид
a:(t)= At(t) + v(t),
где w(t) и v(t) — независмые БШ с интенсивностями = 1; = 0, 5
Решение. Данный пример является частным случаем примера 49.1,
когда отсутствует второе уравнение наблюдения (игнорируется измере-
ние скорости), когда rv —> оо; sr — — 0, 5. Уравнение ФК следует из
общего уравнения при rv —> оо и имеет вид системы ДУ (49.4). Остается
вычислить значения коэффициентов и fc2i при q = = 1.
ku = = 2dn; fc2j = = 2di2;
dn = d*n = y/2Vfvy/^wVfv = l/v'Z
Тогда
fcn — v^8; di2 — — ~2~-
Тогда fc2i — ki2 = y/2
Уранения ФК запишутся в виде
^^(z-Ai). (49.6)
at at
Лекция 50
Цифровой фильтр Калмана
Модель сообщения и модель наблюдения формируются в виде урав-
нений
Ап = ФП_1АП_1 + ГП_11ДП_1, Aq = А(0), (50 1)
хп - НпХп + vn (50 2)
Формирующий шум wn = гфг] и шум измерений vn = г>[п] — стацио-
нарные белые последовательности (БШ) с нулевыми средними значе-
ниями и КФ вида
Rw [?i] — bin । bly [я] — Uv bin i
где bin — символ Кронекера
Шумы wn и vn по предположению некоррелированны, начальное зна-
чение Aq — А(0) может быть либо детерминированной величиной, либо
случайной; Яп — Я(£п), Фп - Ф(£п), — T(tn) — известные функции
времени при интервале дискретизации Т — t„+i — tn
Требуется найти алгоритм цифрового фильтра Калмана (ЦФК) и его
структурную схему.
Запишем рекуррентную формулу для оценки Ап сообщения А в фор
ме линейной комбинации оценки An_i на предыдущем шаге и наблю-
дения хп.
Ап “ fcnAn-i + кпхп. (50 3)
Найдем дисперсию Dn ошибки еп = Ап Ап и из условия ее минимума
вычислим значения коэффициентов Ьп и кп
Dn — Я[(АП — Ап)“] — Я[(АП — ЬПАП_1 — кпхп) ]•
Вычислим производные
= 2Я[(А„ - bnXn-i - кпХп^Лп 1)];
д^п = 2Я[(АП - bnXn-i - кпхп)(-хп)].
ОКп
Приравнивая нулю первую производную, найдем соотношение междУ
коэффициентами Ьп и кп.
Я[(АП ~ fcn^n)An_i] — Я[(^пАп_i)An—i] — 0,
Цифровой фильтр Калмана 435
Рис. 50 1
Запишем произведение 6nAn-i во втором слагаемом в виде
Ьп^п — 1 — Ьп^п — 1 ^n(-^n —1 ^П 1) — f'n-^n-l ^пеп —I»
и для хп в первом слагаемом возьмем уравнение наблюдения. В ре-
зультате получим
(1 — кпНп)Е(АпХп— i) кп E(vn Ап _ 1) = 6n[E(An_i An_ i) £7(en_i An_i)].
Используя условия ортогональности £J(en_iAn_i) = 0 и некоррели-
рованности F(t>nAn i) = 0, получим соотношение
6пЕ(А„_Дп-1) = (1 - fcnb'n)E(AnAn_i).
Выразив An_i с учетом линейной комбинации (50.3), уравнений ФФ
и наблюдения и умножив An i на wn-i, после усреднения получим ра
венство (ортогональность СВ An-i и wn_j)
ДАп-iWn-i) - 0.
Преобразуем правую часть предыдущего соотношения, подставив вме-
сто Ап правую часть уравнения сообщения (уравнение ФФ) и воспользу-
емся ортогональностью Ап_1 и wn_i. В результате получим
6njE(An iA„ i) = (1 — кпНп)Фп !£?(An_iAn-i).
Следовательно, искомое соотношение между коэффициентами Ьп и кп
принимает вид
— (1 А.’,. //,,)Ф,; „ | Фп— 1 ^пЕПФП— 1.
На основе исходной линейной комбинации для оценки А„ находим
РУ Цфк
Ап — Фп—i-^n—i кп(хп /7пФп—i^n—1)-
Структурная схема ЦФК изображена на рис. 50.1.
На этом заканчивается первый этап синтеза ЦФК Остается найти
выражение для коэффициента усиления кп.
436
Лекция 50
По определению дисперсии ошибки
Dn = Е(е^) = Е[е„(Ап - Ап)] = Е(епХп),
так как по условию ортогональности Е(еГ1Хп) = О
Используем принцип ортогональности (ошибка ортогональна входно-
му воздействию): 7?(епа:п) = 0 и воспользуемся при этом уравнением
наблюдения, тогда получим соотношение
Е(епхп) - НпЕ(епХп) 4- £7(eni?n) = HnDn 4- E(envn) = 0.
Подставим во второе слагаемое выражение для ошибки
— Ап Ап — Хп ЬпХп~1 кпхп.
Тогда получим соотношение
Еп ~7т М(^«Ап-1 + knxn Ап)г>п] —
— tj [^п 1 vn) “Ь ^nE(xnvn^ -
По условию некоррелированности E(Xnvn) = 0, EfAn-i^n) = 0, поэтому
Dn = ^E(xnVn) = ^Е[(ПпХп + ь„>„] = Dv,
Еп П п
где Dv - Е(^)
Следовательно, искомый коэффициент усиления ЦФК имеет вид
DnEn
. (50.4)
На этом заканчивается второй этап синтеза ЦФК.
Остается найти уравнение для дисперсии ошибки Dn = Е[(АП —
—Ап)2]. Подставим в это выражение Ап из РУ ЦФК и получим
Еп — Е'{[ФАП j + кп(хп — НпФп_\Хп_х) — Ап]“).
Используем соотношение Хп — Ф„ 1АП_Г + Гп-jWn-l, а также хп =
НпАп + ип — ЯП(Ф„_1АП j 4- Гп_1 w,,-]) 4- vn и преобразуем выраже-
ние в квадратных скобках.
Фп— 1А„_j 4 кпХп кпЕпФп— 1 Arl j Ап —
= Фп—1 Ап 1 Т кпНпФп^ 1Ап_ 1 + кпНпГ„_ 1 wn^ 1 4" кпип —
кп НпФп^ 1 Ап_ 1 Фп—iAr[ 1 Гп_]Шп— । —
— Ф« 1еп 1 4" кпНпФп_i^n— 1 (1 fcn^n)rn-iwn i 4- knvn =
— “ кпНп^Фп_ jcrl_] (1 &n^n)Fn—iWn—i I knvn.
Цифровой фильтр Калмана 437
Таким образом,
Dn = £"{[(1 — £п/7п)Фп_1вп_1 + (1 £ПЯП)ГП. iwn_j 4-£n^n] }.
Учитывая некоррелированность слагаемых в квадратных скобках, по-
лучим среднее от суммы квадратов слагаемых
Dn - - кпНп)2Оп_1 + [(1 - кпНп)Гп-1]2От + k2Dv.
Из выражения для коэффициента усиления (50 4) следует равенство
knDv = DnHn или к2К>„ = knHnDn. Тогда РУ для дисперсии при-
нимает вид
Dn k2Dv = (1 - knHn)Dn =
= Ф„_1(1 - knHn)2Dn-i + (1 - knHn)2V2n_lDw.
Отсюда получим РУ в форме
Dn = Ф^_1(1 - knHn)Dn-, + (1 - knHn)V2n^Dw -
= (1 - knHnWt^Dn-i +
Таким образом, найдено РУ дисперсии ошибки — синтез ЦФК за-
вершен!
Преобразуем последнее РУ, обозначим
РП_1 = Ф* !£>„-! +Г* !Dw.
Тогда РУ дисперсии примет вид
Dn = (1 - кпНп)Рп-1 = РП-1 - кпНпРп-1 - Рп-1 (DnnH~) Рп-1
\ Щ /
или г н2
Pn-l = Dn l+-^F„_i .
Отсюда находим другую форму РУ дисперсии
№
В стационарном режиме Dn — Dn-i — D, Фп_1 Ф; Гп-1 = Г
Нп — Н Тогда РУ дисперсии вырождается в квадратное уравнение
D2+AD В = 0
где
D„(l + Г2Я2О№/О„ - Ф2)
ф2Д2 <j>2//2
Лекция 51
Расчет цифрового фильтра Калмана
(ЦФК)
Пусть модель наблюдения имеет вид
Х„ — Н.\п 4“ ^п — НХп. (51-1)
где Ап и vn — некоррелированные СП, имеющие нулевые средние значе-
ния, причем КФ ЯА[п—тп] сообщения и КФ /^[п — тп] помехи имеют вид
тп] = DAe-"'n“m'T; JZ„[n — тп] — Dv8nm,
где 8тп — символ Кронекера.
Найти уравнение сообщения (уравнение ФФ), уравнение ЦФК, систем-
ную функцию ЦФК G(z) и его ЧХ в стационарном режиме.
Решение. Найдем вначале уравнение ФФ. Для этого вычислим
ЭС сообщения
ОО
5А(й>) = DAe~almlTeicifc
m—— оо
Ра(1 ~ <?)
(е“ - d)(e"fe -</)’
где d = е аТ < I; и — ыТ
Таким образом, системная функция имеет вид
z d
Этой функции соответствует РУ ФФ
А„ = ФА„ + Гшп 1,
где Ф = d; Г = у/£)А(1 - d2); wn — стационарный БШ с интенсивностью
Dw и не зависящий от БШ vn.
В результате запишем уравнение сообщения и наблюдения вместе:
Ап — Ф^п—1 4*
(51.2)
Хп — 81 Ап Т т>п -
Отсюда находим нормированные ЧХ и АЧХ ФФ-
я«(в)=1н»<й)|=я«₽)=
Расчет цифрового фильтра Калмана (ЦФК)
439
Уравнение ЦФК (РУ ЦФК) имеет вид
А„ — ФАЛ_1 4“ ^п(^п НФАп_i)
кп - HP/PVy
или
1-
РН2\
~dTJ
ФАп-i+
РН\
Dv )
где D — дисперсия оценки.
По данной форме РУ ЦФК находим его системную функцию
где dk - (1 - DH2/Dvyb = (1 - PH2/Pv)d'y dk/d - 1 - DH2/DV;
go = PH/PV, тогда коэфициент go можно записать в виде
до = (1 dk/d)H.
По отношению к величине sn = НАп найдем
Нк(^)^-^—, дс = доН = 1-^-. (51.3)
е1ш — dk d
Заметим, что ЧХ ЦФК совпадает с ЧХ (44.13) ЦФВ; при dk = dk
Нормированные ЧХ и АЧХ ЦФК:
и (l~dk)etbJ l-dk
я°*0*) = ^-dr' = (5L4)
Уравнение дисперсии ошибки имеет вид
D2 + AoD-Bo=0, (51.5)
где
А _ Dv + V2DW Н2 - ФР„ = Dv + Z?A(1 - Р)Н2 - d2Pv
° - Ф2Я2 “ PH2
r2DwD„ _ DA(1 - </2)DB
° Ф2Я2 PH2
Учтем равенство Ps = H2D\ и найдем
(1 - d2){Dv + Ds) = (1 - </2)D„(l + gi)
° d2H2 PH2
(l-d2)Dvql = (l-d2)D2ql
° d2H4 PH4
41 = ^ -ОСШ
440
Лекция 51
Решение квадратного уравнения имеет вид
° ~ ~ [^РЯ2^ Dv^ + 91^+
+ ^2 - ^)2^(1 + 91 )2 + 4(1 - d2)D2qid2 = А + D2.
По определению параметра dt (см. системную функцию Gjt(z))
/ DH2\ DH2 DrH\ D2H2
dh — I 1--— ) d = d--—d = d---—d-------d.
\ Dv J D„ Dv Dv
Введем обозначение Cj — d — £>i H2d/D„ и подставим сюда значение
Dy. Тогда получим
1 — d2
•ci - dd-------(1 + gi);
Рассмотрим величину
d2H4 „ d2H4 1 ,
С2~ D2 2~ D2 4с?4Я4^1 “ d ) + 91) Pu +
+4(l-d2)D2qid2] =
(1-<72)(1 + д1)12
------------ +9i(l-d)-C1
- 1.
Таким образом, величина dk может быть представлена в виде
dk = ci — у/с^ — С1—у/с%- 1.
Сравнивая с величиной dj (44 5), находим при q = (1 d2)gi, что
со = <>о. так как q — [(1 - d2)qi + 1 + d2]/(2d). Пусть <д —► 0
(ОСШ мало), тогда
, 1-d2 1 + d2 2 , (1-d2)2
C'~J+-2d- = ~bT' =
dk = ci — у/с^ —>
1 + d2
2d
1 — d2
2d
= d,
те dk —> d. Отсюда следует вывод: при малом ОСШ нормированная
АЧХ ЦФК вырождается в нормированную АЧХ ФФ. При этом коэф-
фициент усиления
dk
Яс = 1 - - 0.
а
Следовательно, ЦФК при малом ОСШ подавляет как шум, так и
сигнал.
Расчет цифрового филътра Калмана (ЦФК)
441
Рис. 51.1
Пусть </! —> оо (ОСШ велико), тогда
1-<72
C1 -
dk = ci- yc2-l = C1 fl - 0 - 1/сЛ w 7- = d -+ 0.
V \ V 7 7cj (1—u )q
Следовательно, dk —> 0. При этом
9c —> 1, ^jt(iw) 1.
и ЦФК пропускает все частоты сигнала и шума.
Введем отношение у = Т/7), Т — интервал дискретизации, Т\ =
27t/gj, тогда й — и>Т — (2тг/Т1)Т = 2тг7. При этом ЧХ ЦФК запи-
сывается в виде
g0e12^
ei2^T _ dk ’
Отсюда получим нормированную АЧХ ЦФК
и(г) = 1«»07)| =
Положим d = 0.9 и рассмотрим три значения параметра dk (рис. 51.1).
dk = 0,0084 (кривая 1) (большое ОСШ); dk = 0,36 (кривая 2) (умерен-
ное ОСШ); dk = 0,899 (кривая 3) (малое ОСШ).
442 Лекция 5/
Введем параметр Л — DH2(D„ > 0, тогда 1 — dk/d = Л и dk/d =
- 1 — Л. Отсюда получим при qi —> 0, Jjt —»• d, Л —» 0; при qt
оо? dfr —» 0; Л —♦ 1; 0 < Л < 1 при 0 < qi < оо. Трем случаям
на рис. 51.1 соответствуют Л = 0,9907 (<7д. = 0,0084); Л = 0,6 (</;. =
— 0,36); Л — 0.0011 (dk — 0,899). Найдем ОСШ qlt соответствующее
трем случаям рис 51.1. Для этого в квадратное уравнение дисперсии
подставим D — NDV/H2, в результате получим
2 (1 <Г2)(1 + д1) 1-dP
Л +--------------к~~& 91-°-
Отсюда выразим величину ОСШ q\:
\ d2 J
91 1-d2 /dk\
d2 \d J
Вычисляя, находим qi = 550 (кривая J рис. 51.1), gi = 5 (кривая
S), qi = 0,001 (кривая 5). Найдем частоты среза АЧХ ЦФК, исхо-
дя из условия
|7f(i7)|2 = 0,5, или
1 1 ’ ’ je1" - dj-.|2 2
После преобразовании приходим к формуле для частоты среза
о - 1 - dk
шс — 1 arcsin----==.
'i-yfdk
При dk = d = 0,9 fc = 7с — 1 arcsin - 1 arcsin ~ 0,0167.
При dk = 0,899 7с = 0,02; при dk — 0,36 ус = 0,179 к* 0,2, при
dk = 0,0084; частота среза не существует. Критическое значение dt
определяется условием
1 dk _
2л/4
ИЗ КОТОРОГО ПОЛуЧИМ (<fjb)Kp Ri 0,17
Лекция 52
Многомерный цифровой фильтр
Калмана
Получим уравнения дискретного многомерного фильтра Калмана.
Пусть модели сообщения и наблюдения имеют вид матричных разност-
ных стохастических уравнений вида
X(n +1) - Ф(»)Х(п) + U(n) + Г(п) W(n) Y(n) = H(n)X(n) + V(n),
где Ф(п) G U(n) G A4jv,i; Г(и) G -Mn,k W(n) G Mk,i,
H(n) G Мц,к'. V(n) G Мм д', W(n), V(n) — белье дискретные
векторные шумы.
Пусть, кроме того, справедливы равенства
£?{W(n)}~0, £{W(n)WT(fc)}-5nJtQ(n);
£{V(n)} - 0, £{V(n)VT(fc)} -
£{X(n)VT(fc)} - 0, E'{W(n)VT(A:)} - 0,
£?{X(0)WT(0)} = 0, £{X(0)} - MXo;
E{pC(O) - MXo][X(0) - MxoD = DXo.
Будем искать оптимальный фильтр в классе линейных фильтров, да-
ющих несмещенную оценку в виде линейной комбинации оценки пред-
сказания Х(п + 1) и вектора наблюдения Y(n + 1).
X i + 1) = Ln + 1)Х + 1) + К n + l)Y(n +1).
В соответствии с уравнением сообщения оценка предсказания
Х(п + 1) - (n)X(n) + U(n).
I Запишем уравнение для ошибки оценивания
е(п + 1) = X(n + 1) - Х(п + 1) = L(n + 1)Х(п + 1)+
+ K(n + l)Y(n + 1) Х(п+1).
Считывая уравнение наблюдения и вводя ошибку предсказания ё(п+
Х) = Х( п + 1) — Х(п + 1), получим
Чп + 1) = L(n + 1)ё(п + 1) + [L(n + 1) + (52.1)
+К(п + 1)Н(п + 1) - I]X(n + 1) + K(n + l)V(n + 1).
Из этого уравнения следует, что если оценка предсказания X(n + 1)
444
Лекция 52
является несмещенной (£?{ё(л)) = 0), то и оценка X(n + 1) будет также
несмещенной (£'{е(л)} = 0) в том случае, если выполняется равенство
L(n + 1) = I - K(n + l)H(n + 1)
Таким образом, уравнение фильтрации можно записать в виде
X(n + 1) = Х(п + 1) + K(n + l)[Y(zi + 1) - H(n + l)X(n + 1)].
Определим значение матрицы усиления K(n + 1) фильтра из уело
вия получения минимальной дисперсии ошибки фильтрации. Уравне-
ние для ошибки принимает вид
е(п + 1 ) [1 — К(п + 1)Н(п + 1)]ё(л + 1) + K(n + l)V(n + 1).
Запишем уравнение относительно матрицы дисперсий Р(п) для
ошибки фильтрации
P(n + l)=F{e(n + l)eT(n+l)}= (52.2)
- [I - К(п + 1)Н(п + 1)]Р(п + 1)[1 К(п + 1)Н(п + 1)]т+
+ К(п + 1)R(« + l)KT(n + 1).
где Р(п) ~ £'{ё(п)ёт(п)}. Здесь учтено, что Е{ё{п + l)VT(n + 1)} = 0,
так как оценка предсказания не зависит от шума наблюдения в следую
щий момент времени. Выберем матрицу K(n + 1) таким образом, чтобы
минимизировать скалярную функцию trP(n + 1), представляющую со-
бой сумму дисперсий ошибок оценивания координат вектора состояния
Дифференцируя trP(n + 1) по матрице K(n + 1) и приравнивая про
изводную нулевой матрице, получим
5Р(п + 1)/Ж(п + 1) = 2Р(п + 1)Нт(п + 1)+
+2К(л + 1)Нт(л + 1)Р(л + 1)Н(п + 1) + 2K(n + l)R(n + 1) = 0.
откуда следует, что
K(n +1) - Р(тг + l)HT(n + l)[R(n +1) + HT(n + l)P(n + l)H(n +1)]-1
Полученное значение K(n + 1) является точкой минимума функции
trP(zi + 1) в силу положительной определенности матрицы P(n + 1)
Подставляя выражение для коэффицента усиления в соотношения
для матрицы дисперсий, находим
Р(п + 1) = P(n + 1) - K(n + l)H(n + l)P(n + 1) (52.3)
- Р(п + 1)Нт(л + 1)Кт(л + 1)+
+ К(п + 1)[Н(л + 1)Р(п + 1)Нт(л + 1) + R(n + l)]KT(n + 1) =
= P(n + 1) - P(n + l)HT(n + l)[R(n + 1)+
+ Нт(л + 1)Р(п + 1)Н(п + 1)]~1 H(n + l)P(n +1) -
Многомерный цифровой фильтр Калмана 445
- [I - K(n + l)H(n + l)]P(n + 1)
Запишем соотношение для коэффициента усиления в виде
K(n + l)[R(n + 1) + HT(n + l)P(n + l)H(n + 1) - P(n + l)HT(n + 1).
Группируя слагаемые и учитывая выражение для матрицы диспе-
рсий, получим
К(« + l)R(n + 1) = -[K(n + l)HT(n + 1) - Г|Р(п + l)HT(n + 1) =
= Р(п -ь l)HT(n + 1),
отсюда следует, что
К(п + 1) = P(n + l)HT(n + 1)R \п + 1).
Остается найти соотношение связывающее априорную Р(п) и апо-
стериорную Р(п) матрицы. Вычтем из уравнения наблюдения урав-
нение сообщения, тогда
ё(л + 1) — Ф(п)е(п) — r(n)W(n).
С учетом этого уравнение для матрицы дисперсий ошибки предска
зания
P(n + 1) = Е{ё(п + 1)ёт(п +1)} = Ф(п)Р(п)Фт(п) + r(n)Q(n)rT(n).
Приведенные уравнения описывают изменение матрицы усиления
фильтра и матриц дисперсий Р(л) и Р(п) от времени
Остается доказать, что предположение о несмещенности оценки спра-
ведливо. Подставим выражение для величины е(п) значение e(n + 1),
тогда
ё(п + 1) = Ф(п)[1 - К(п)Н(п)]ё(п) + ®(n)K(n)V(n) - T(n)W(n)
Усреднив правую и левую части полученного РУ, можно записать
Уравнение относительно среднего значения ошибки предсказания
ё(п + 1):
Мё(п + 1) - Ф(п)[1 - К(п)Н(п)]Мё(п).
Отсюда следует, что Мё(п) — О только в том случае, если М,.(0) = О
те. Е{Х(0)} = £{Х(0)} = МХо
Алгоритм дискретного многомерного фильтра Калмана представлен
нйЖе
Алгоритм цифрового фильтра Калмана
Модель сообщения
X(n + 1) = Ф(п)Х(п) + F(n)W(n).
446 Лекция 52
Модель наблюдения
Y(n)- H(n)X(n) + V(n).
Априорные данные
£?{W(n)} = 0, £{W(n)WT(Jt)J = 5(n - Jb)Q(n);
E{V(n)} = 0. E{V(n)VT(A:)} = 6(n - к)Щп);
E{W(n')V\k')} = 0, £?{X(0)WT(fc)} = 0, E{X(0)VT(fc)} - 0;
£{X(0)} = MXo; E{[X(0) - MXo][X(0) - MXo]T} = DXo.
Алгоритм фильтрации
уравнение ФК"
X(n + 1) - (n)X(n) + K(n + l)[Y(n + 1) - H(n + l)(n + l)X(n)];
коэффициент усиления"
K(n + 1) = P(n + l)HT(n + l)R-!(n + 1);
апостериорная матрица дисперсий"
PCn + lJ^tP-^n + lJ + H’fn+ljR-^n + ljHfn + l)] (52.4)
априорная матрица дисперсии
P(n + 1) = Ф(л)Р(л)Фт(п) + r(n)Q(n)rT(n). (52.5)
Начальные условия
Х(0) = £{Х(0)} = МХо;
Ро = Р(0) - Е{[Х(0) - Х(0)][Х(0) - Х(0)]т} - DXo.
Лекция 53
Расчет многомерного ЦФК
Пример 53 1. Пусть даны уравнения наблюдения и сообщения:
Aj[n + 1] = Мта] + Ы”]
а2[л +1] = ^2 И + М”]; (53
х[п] = А1[л] + А2[п] + р[п],
где ш[п] и v[n] — стационарные независимые БШ, Dw = 2, Dv — 1. Найти PV
и структурную схему ЦФК
Решение По условию Ф = J Г _ Н — [] 1].
Обозначим матрицу дисперсий Р = ^>11 ^12 при условии pi2 = Р21
[Р21 Р22 J
Элементы матрицы Р будем искать из уравнения
P[l + HR1 HP] = Р, (53.2)
где
фрфт -
РП Р12
Р21 Р22
ГРП Р12 1 .
1Р21 Р22 J ’
+ Р22 1 , [ 1 С1
>2 + 2 ] + [О ij
Р = ФРФТ+ГО,Г; rDwr = D^[°j[0 1]= [° °];
hir-1h-hth= []][i i]=[| { ;
1 0 1 Грц + 2р12 + Р22 Р12 + Р22
11] L Р12+Р22 Р22
[Р11 + 2Р12 + Р22 Р12 + Р22
Р12 + Р22 Р22 + 2
HP Р Ч Р11 “* 2pi2 +Р22
[1 1 ] L Р12 + Р22
РП + 3pi2 + 2Р22 + 1 Р12 + 2р22 + 2
РП + 3pi2 + 2Р22 Р12 + 2Р22 + 3
P[l + HTR-1HP] =
РП Р12 1 ГРП + Зр12 + 2Р22 + 1 Р12 + 2Р22 + 2
Р21 Р22 J I РП + Зр12 + 2Р22 Р12 + 2Р22 + 3
1Р11 Р12
Pl 2 Р22
Решая три уравнения с тремя неизвестными, получим pj ] =0,4853, Р22 = 0,8284,
Р12 = Р21 = —0.24664.
Коэффициент усиления имеет координаты
К — PH R-1 — [Рп Р12 1 Г1 1 _ ’ll + Р12 1 fcl 1 Г19581
“ [р12 р22] PJ ~ 1.Р12+Р22Г Иг] [0,477з] ’
Уравнение ЦФК (НФА = А] + 2А2)
Aj[n] = Ат[п - 1] + А2[п - 1] + 11(тН — Ai[n — 1] - 2A2[n - 1]);
А2[л] = А2[п - 1] + Ai[n - 1] — 2А2[п — 1]). (53.3)
448
Лекция 53
Схема ЦФК имеет вид рис. 53.1.
Пример 53.2. Рассмотрим получение дискретной модели ФК из непрерывной
двумерной модели и затем проанализируем дискретную модель.
Пусть задана непрерывная модель сообщения и наблюдения
—-FA + wc(t);
at
x(t) = н A(t) + v(t)
(53 4)
где
H = t> Oh Л=[£],
dX,
= ~1
Wc(t) и v(t) — независимые БШ.
Общее решение ДУ сообщения имеет вид
A(t)=eF(‘-‘<>)A(to)+ f ^-^Vtctrjdr.
Jto
Положим t — (fc + 1)7; to = kT, T — интервал дискретизации. После преобразо
вания интеграла при замене переменной и = т — кТ получим РУ ФФ
А„+1 = ФА» + W„, (53 5)
где
А» = А(пТ); Wn
eF(7-“) Wc(u + п7) du.
Рассмотрим матричную экспоненту Ф — eFT. Разложим матричную экспонен
ту в ряд
eFT = 1+ F7+ 1(FT)2 + .... (53.6)
Очевидно, F2 = О, поэтому в разложении остаются лишь первые два слагаемых
ф = ." = >+гт=[' Т].
В дискретной форме уравнение наблюдения имеет вид
х„ — НА» + v„, (53.7)
где хп = х(кТ); v„ = v(kt).
Обозначим через Ао = (Хю.Аго)1 — начальное значение вектора сообщения и
зададим его среднее значение и матрицу дисперсий
£(Ло)=[1о]’ Ро = [о° io]’
Расчет многомерного ПФК
449
Кроме того, положим
Qn = E(w„w’) = [ J J ] = I, nv„ = E(v2n) = 1.
Выпишем основные соотношения калмановской фильтрации. Уравнение ФК
= Jq I ] + К„ — [1 0] q j j А„_, J- —
= [о Г] A„-i + Kn {хп - [1 Т^п-т}-
Соотношения для дисперсий и коэффициента усиления ФК:
Рп = {1 К„[1 0]}Р„,
Стационарные значения элементов матрицы дисперсий Р находятся из матрич-
ного уравнения
(53.8)
P{I+H‘R-]HP} . Р или Р Jl+ °] Р =Р,
где
Р = ФРФ + ГОГ - ФРФ’ + Q =
[1 11 [Pll Plzl [1 01 [1 01 _ [рп + 2pi2 + Р22 + 1
~ 0 ill Р17 Р22 1 1 о 1 | Р12 + Р22
Р12 + Р22 I
Р22 + 1 J '
Обозначим элементы матрицы Р через р,^ (i, к = 1,2). Тогда матричное урав
нение принимает вид
[ри(Р11 + 1) P11P12+P12I _ [pil P12I
[р1г(Р11 + 1) Р12Р12+Р22] [р21 P22J ’
где Р21 = Pl 2-
При Р — Ро на первом шаге получим
D Г 21 101 v Г 21/221 ~ [0,9951
Р’ - [10 11]’ 1 [10/22] ~ [0,455] '
[21/22 10/22 ~ [0,995 0,4551
1 “ [10/22 142/22J ~ [о,455 6,455] '
На втором шаге
р _ [9,318 6,9091 „ _ [0,9031 _ [0,903 0,67 1
Р2-[б,909 7,455]’ 2— [о,67о]’ 2 “ [ 0,67 2,82в]'
На третьем шаге
р _ [ 6,07 3,4981 „ _ [0,8591 _ [0,859 0,4951
3 [ 3,498 3,828]’ ~ [0,496] ’ 2 [о,495 2,098]'
На четвертом шаге
р _ [4,946 2,5931 к _ [0,8321 _ [0,832 0,4361
Р* ~ [2,593 3,09в] ’ 2 ~ [о,43б] ’ 2 ~ [о,436 1,967]
Уже на четвертом шаге все значения близки к установившимся.
Графики функций р[/ = /з[п] (кривая /); р22 = /<[п] (кривая 2); к^' = /,[n]
(кривая 1); к\2^ = /гН (кривая 2), имеют вид рис. 53.2,а,б соответственно.
450
Лекция 53
Пример 53.3, Рассмотрим двумерную модель сообщения
^«+1 = Ф.\п 4" wn, (53.9)
где
♦=[; ;ь °-[s ?i= r=[i :)•
Таким образом, формирующий шум является стационарным.
Наблюдение осуществляется по скалярной модели
Жп -- ^ln Т .
Отсюда Н — [1 0]. Кроме того, шум измерения полагаем нестационарным, его
КФ имеет вид
Следовательно, измерение при нечетном п осуществляется более точно, чем при
четном. Матрица начальных ошибок пусть задана
Ро
[»
»].
10 J ’
Требуется вычислить значения вектора коэффициента усиления К'„ = Л [п] для
п — 1.10.
Решение. Вычисление будем производить используя формулы
Р„+1 = ФР, Ф' + ГОГ _ ФР„Ф + О
К„ = P„HT[R, „ + НР„НТ]-1; Р„ = [I - К„Н]Р„.
На первом шаге находим К = К 1], предварительно вычислив.
ш :]-» »]={[; ?]-и ш
Г 1/21 01 [20 101 _ [20/21 10/21 1 _ [0,952 0,4761
’ [ —10/21 1] [10 11] ~ [10/21 131/21] ~ [о, 476 6, 238] '
На втором шаге вычисления К[2] найдем вначале
- _ [I 1] [0,952 0,4761 [1 01 , [О 01 _
Р2-Ф₽1Ф+° [0 1] [0,476 6.238J [1 1 ] + [О 1]
Г 1,428 6,7141 Г 1
[0,476 6,238] [1
01 Г° 01 [8,142
1 ] + [О 1 J - [6,714
6,7141
7,238] ’
[8, ! 12
~ [6,714
К[2] - PH' [Rv2 + НР2НТ] 1 -
SIO+i1
-[S] О “Ifc™]}”=[S]<3«.«2>-‘=[S]=
Л2
к(2)
Сравнивая R'j1’ » 0,952 и R'^\ K’J2^ я» 0,476 и замечаем уменьшение
первой координаты вектора коэффициента усиления и увеличение второй коорди-
наты (рис. 53.3).
Пример 53 4. Пусть формирующий фильтр описывается ДУ второго порядка
-т-^-+ 26—- + s(t) — N(t), (53.11)
diz at
гДе 7V(1) — шум на входе колебательной системы.
Записать модель сообщения в матричной форме. При и>оТ > т осуществить
ДИскрети ацию s„ — s(nT), где Т — интервал дискретизации Найти модель со-
общения в форме системь разностных уравнений, дискретный аналог ДУ второго
Порядка и ЭС сигнала.
Решение Введем новые переменные Aj(t) — s(t), A2(t) = dXijdt = ds/dt.
Теперь можно записать уравнение s(t) — СЛ(1), где Лт = (>i, Л2)т; ® — [1 0]
На основе ДУ второго порядка запишем
~— + ^(0 — — t^o А1 +
at dt dt
В результате получаем систему
dAl/dt-A2, 1 (53.12)
dX2/dt = А, - 2ЬА2 + W(t) J
452
Лекция 53
или в матричной форме
Л(4) - HA(t) + G7V(t), (53.13)
где Н =- ( °£ G = Объединив первое и второе уравнение, най-
дем модель сообщения
s(t) = cA(t), 1
. > (53.1 -11
A(t) - HA(t) + GN(t) J
Перейдем от непрерывной системы уравнений к системе разностных уравнений
Для этого положим Л„ = Л(пТ) и найдем решение второго уравнения системы
(53.14) в точке t = пТ, полагая в качестве начального значения Л„ = Л[пЭ ]
[см. (53.5)]:
— АЛП 4" ^п,
где
А = е«^: С
eH<TGN[(n + 1)Т — сг] dcr.
Предположим, что N(t) — стационарный случайный процесс с нулевым средним
значением, т.е. E[N(t)] — 0, тогда
£(С) = О
Ковариационная матрица имеет вид
R<h,m] = E«„C)= [ [ + a r]GTeH^ dvdr,
Jo Jo
причем R,v(^2 — ti) = E[N(ti)NT (ta)l — О#6(т2 — tj); Qr; — симметрическая
матрица.
Полагая n = m, находим матрицу дисперсий
r-T
Dc=R([n,n]= eH“GQJVGTeHI“d«,
Jo
Полагая Од = Koi (I — единичная матрица), получим
Гт
D< = Ко / eH“GGTeHl“d«.
Jo
Разлагая в ряд матричные экспоненты и ограничиваясь одним слагаемым (при
Т — х/сио — 1//о) находим
D _ K<>7GG'
В результате найдем Q = y/'l K0GN„, N — белая последовательность с единич-
ной дисперсией. Окончательно получим дискретный аналог модели сообщения
®п — гЛГ1, 1
Лп4-1 = АЛП 4“ РА',, J
где А = <:НТ; F = y/Tf^G
Найдем вид матрицы А в предположении, что величина п — Ь/ш0 < 1, когда
частота 1 —
Расчет многомерного ЦФК
453
Воспользуемся теоремой Сильвестра:
2
еВ = ^V-ZoCA,), (53.15)
»=1
ГЯе х В-А21 , . В —Ajl
*о(А1) = т----х-’ Z°(A2) — х-----X-’
>1 — Л2 *1 — л?
Здесь I — единичная матрица; В _ Н7. Aj (г — 1,2) — корни характеристического
уравнения |В — А1| = О которое можно записать в виде
А2 + 267А + (ш07)2 = О
Отсюда при ч < 1 найдем корни
>1,2 ~ Т[—Ь ± ia>o~\/1 ‘ Ч2] = Т(—Ъ ± io>fc) = Т>*,2,
и разность >i — Aj = 2iwoT\/1 — Ч2 = 2»7wjt, где wj, = ыо\/1 — Ч2-
Тогда
(>i - >2)еНГ = (НТ - T>JI)eA> - (НТ 7>П)еАз,
ИЛИ
2iu>fceHTebT = e1WfcT(H XJI) — е—1WfcT(H — A*l) = H2isincufcT + l2icufc cos щТ
Окончательно получим
Аеьт = ентеьт =
(coswfc7 4---- sin gift 7 —sincvfcT \
y/1 - Ч2 Шк
-----—---sini.'A-T cosWfcT--------sinw^T I
д/1 -Ч2 хЛ-ч /
Найдем характеристический многочлен A — >l| матрицы А
А2 - 2>e“bTcoswfc7 + е“2Ьт.
Тогда по теореме Кэли-Гамильтона матрица А удовлетворяет собственному ха-
рактеристическому уравнению, т.е.
А2 - «А + е“2ЬТ1 = О, (53.16)
где а — 2e~bjS cosw^T.
Используя это уравнение, найдем разностное уравнение сигнальной соответству-
ющей sn. Учтем, что
s„+2 = СЛ„+2 = С[А2Л„ + AFNn + FNn+1] = СА2>„ + CAFNn;
asn+i = асЛп-j-i = с сАЛ t + с CFN — с САЛ х.
Так как CF — 0 кроме того, sne~2bT = е—2<>тСЛп В результате получим иско-
мое разностное уравнение
sn+2 — 1 + e~2bTsn — о/^’1е“ЬТ sincu^T у/(53.17)
Так как CAFN - = си”1 е“ьг sin^Ty/RoTNn-
По разностному уравнению (53.17) сразу найдем ЭС сигнала
5с(сй) = |H(i^|2S0, (53.18)
гДе So — ст2 — u/^'2e”2bT7io7sin2 cuj^7,
W(iw) = G(z)| ю = —-------1 I , w = <^T
z1 — az + e2b2 । 2=eio
454
Л е к ц и я 53
Запишем полином в знаменателе G(z) в виде произведения:
г2 _ „г + е-2»Т = (z _ е-ьте'^7) (г - е-ЬТе-^*Т) .
Отсюда
|z2 _ аг + е-2Ь7р _ |е-ЬТ _ ге-^к7|2 |е-ЬТ _ г-1(; ^7|2 И2
Положим z = е,ал, тогда |z| = 1, (^e”lfc'fcT)* = В результате окон-
чательно получим
Sc(u>) = So |е-ЬТ - е-(“-"*7) | -2 |е-ЬТ _ е-.(й,+шкТ) | ~2
Запишем квадрат модуля в виде
V1(S)) = [e-b7_e-4“+"*7)J [е-ЬТ _ e.(s+^fcT)j = 1_2e-i>Tcos(a> + a,feT)+e-2M'.
Аналогично
^2(й) = |е-ЬТ - е—|2 _ j _ 2е-ЬТ tos(dj _ WfcT) + е-2ЬТ
Таким образом,
Sc(w) = S0/v>1((L)v>2(w).
Функция Sc(w) достигает максимума при й = или w — ±wfc, причем, чем
меньше затухание Ъ, тем острее максимум и больше его величина.
Функции <^>1(й) и <₽г(^) симетричны относительно iw^T, причем
Scma, = 5С(±^Т) = So/ (1 - е-ЬТ)2 (1 - 2е~ЬТcos2wkT + е“2ьт) .
Соотношение (53.18) можно также получить, используя известную формулу
5с(й) = с (I - е^А) -1 Р5„(й)Г (I - ст.
где Sn(u?) — ЭС белой последовательности Nn, имеющей единичную дисперсию
Поэтому
5„(й) = 1, FR = Rot(°
Обозначим элементы матрицы Аеьт через А, (а = 1,2. к = 1,2) Тогда не-
трудно показать, что
5с(й). = Д07’-422е-2ЬТ/О1О2 _ S0/DiD2,
где Di = |1 - е^А| Z>2 _ || - e-toAT|.
Раскрывая определители Dy и Dz, находим
Dy D? = |z2 — az T e~ , г — e’*5, DyD% = V?l(^)v?2(^)-
Найдем РУ ЦФК при -q — О (Ь — О) и u/fc _ и>кТ — u»o = = тг/2. При
этом матрица А = Ф = ент упрощается:
ф Г о 1М1
[ —Шо О J
Уравнения сообщения и наблюдения имеют вид
Лп.4-1 — Фо An + Twn:
— НА + vn,
где wn и vn — БШ, имеющие интенсивность соответственно единичную и равную т,
так что R = т; R1 = г-1 Г = [0, \/Ту]т; матрица Q — I Н = [1:0], q = Rq
Матрицу Р дисперсий найдем из соотношения
P[l+ HR1 HP] = Р,
расчет многомерного U<T>K
455
где р “ ф РФТ + ГОГ' = ФРФ' + ГГ R 1 - г 1 причем
форфг = [ °
L —
~Р2\]
Тогда
Р = Ф0РФ5 + ГГ _ Р22^
L -Р12
-Р21
Р11“о + Tq
Далее получим
H R ;Н г’1
Следовательно,
О
О
о
HR HP
г/^о
Р12
Р22/(г^о)
О
1+ H'R !НР
-Р21
Pll^o + Tq
Гргг/Сг^2) + 1 -P2i/r|
[ 0 1 J ’
Р22/(’’^о) + 1 “Р21/т
0 1
—Р21Р11/Т + Р12 1
-Р21 /' + Р22 ] '
Р21
о
РГ1+ Н'ГГ’НР] _ к11 Р12]
LP2J Р22 J
_ ГР11Р22/(Г^)+P1J
[Р22Р21/(гш^) + Р21
Приравнивая эту матрицу матрице Р получим четыре уравнения с четырьмя не-
известными:
Р11Р22
'о
. Р22
+ Р11 = —
Р11Р21 ,
--------f“ Р12 — Р21‘
Р22Р21
Вычитая из третьего
+ Р21 = — P12J
— --- + Р22 — PI 1 + Tq.
уравнения второе, приходим к уравнению
-1 О
О О
Р22Р21 , Р11Р21 „ Р21 I Р22 ,
----,--1-------= О ИЛИ ---- — + рц
ГШ2 Г г
- О.
Учитывая положительность суммы в скобках, сразу получим = °, тогда из
второго уравнения следует, что р12 = 0.
Остаются первое и четвертое уравнения
Р11Р22 , Р22 2 . г
----5--F Р11 = ~о"? Р22 = Pll^O + 1 Ч-
После преобразований приходим к квадратному уравнению
Т2Г-0.
%
2 Tq
Р„ + ^-Ри
Отсюда получим
Рп
Тд /(T9)2 Tgr _ Tq I 4о>2г
2ш2 у ш2 2w2 У Tq
456
Лекция 53
и следовательно,
Р22 = Р11шс + ?Ч =
Тч
2
диагональной Р —
О
Р22
K = PHTR
Р11Л
0
Таким образом, матрица дисперсий является
Вычислим коэффициент усиления ЦФК
Ри О 1 Г1 ]
О P22J [о]
В результате получим уравнение ЦФК
Л„+1 = ФОЛП + К[НХ„ - НФоЛп],
Это уравнение в скалярной форме принимает вид
[n + 1] = ш”1 Л2[п] + fci {гу[n]
+ 1] = —О>0А1[п].
Передаточная z-матрица G(z) (системная функция) ЦФК находится
ния (53.19)
Н = [1 0]
'о ^гЫ};
(53,19)
из уравне-
где Я - Фо — КНФ0 =
G(z) = (zl Фо + КНФо)-’К,
Г Z (М - 1)/с^о | „
. Отсюда следует
L^o г J
[-wofci/(z2 + 1 - fcj) ]
Частотная характеристика ЦФК по координате Aj удовлетворяет соотношению
H(iw) = ——1----------.
V ' е2*“ + 1 - fcj
Отсюда получим АЧХ ЦФК
|Н(М1 =
fcl
Введем обозначение
. , . Pl 1
а _ 1 — fcj =1---------------
Тч
2o.gr
Тч
и нормируем ЧХ в точке и = О
но(М=^.+ °) = ^ + °).
а + е,2“ а + е*1”/
Нормированная АЧХ имеет вид
|Яо(«/)|= 1+4а.-,-
|а 4- eti7rf |
Отсюда находим
max|H0(i/)|= |Ho(ij)|f-_+1/4 =
1 I/ —±1/1 1 — а
Введем ОСШ сх = g/т, тогда при а —> оо а —> 0, при а —► 0 а —+ 1. Кроме того
Рп —»ос г (дисперсия переменной равна интенсивности шума наблюдения).
Лекция 5Jf.
Основные соотношения нелинейной
оптимальной фильтрации
Пусть задана система, которая описывается стохастическими ДУ в
форме Ито
dX = F(X,t)dt + G(X, t)dW(, £?{X(t0)} = Xo; . л
(54.1)
dY = H(X, t)dt + dV(,
где X - X(t) — n-мерный вектор состояния системы, F(X,t) —
n-мерный вектор, G(X,t) — матрица п х г; W — г мерный вине-
ровский процесс; Y Y(t) — m-мерный вектор, реализация которого
доступна наблюдению; Н X t) — m мерный вектор; Vt — m-мерный
винеровский процесс.
По реализации вектора Y(r) (to т t) требуется найти несме-
щенную оценку X = X(t) вектора X = X(t), которая доставляла бы
минимальное значение функционалу
J(t) = E'{ET(t)E(t)}1
где El) — X(t) X(t) — ошибка оценки состояния системы.
Исходные уравнения можно представить в виде
= F(X.t) + G(X, t)N(t); E{X(t0)} = Хо; (и 2)
Z(t) = Н(Х t) + dut,
где Z(t) = dY/di', N ) и v(t) — гауссовские процессы типа белого
шума с нулевыми средними значениями
E{N(t)} = 0, £?{v(t)} = О
и корреляционными матрицами
£?{N(t)NT(t)J = R(t)6(t - т); F{v(t)vT(t)} - Q(t)6(t - г),
гДе R ’)— симметрическая неотрицательно определенная матрица гхг;
Q(t) — симметрическая положительно определенная матрица m х т.
Введем корреляционную матрицу ошибки Е ) оценки состояния си
стемы
D(t) = D(t,t) = £{E(t)Er(t)}.
458
Лекция 5Jf
Эту матрицу называют также дисперсионной матрицей. Ее значение в
начальный момент времени D(f0) = Do
Апостериорную ПРВ векторного случайного процесса X(t), определи
емую на основе наблюдений Y(r), Zo т t, обозначим
W(X># | Y(f)), где Y(t) = {Y(r),t0 С г <Z О-
Условное среднее значение X(t) 71-мерного векторного случайного
процесса X(t) (оптимальная оценка) имеет вид
X(t) - I XW(X, t | Y(t)) dX.
Аналогично определяется условное среднее значение Н(Х /) тг-мерного
векторного случайного процесса H(X(t),f)
Н(Х, t) - £?{Н(Х, t) | Y(t)} - Н(Х, Z)W(X t | Y(i)) dX
dnx
Апостериорная ПРВ W(X t | Y(l)) определяется модифицирован-
ным уравнением ФПК, полученным в работах Р.Л. Стратоновича и
Кушнера. Это уравнение называется уравнением Стратоновича-Куш
нера (СК) и имеет вид
dW = E+(W)dZ + [Н(Х i) - H(X,/.)]TQ1[dY - d/H(X 0]W,
где W - W(X,t | Y(t)). L+ — прямой диффузионный оператор про
цесса X(Z), определяемого стохастическим ДУ (54.1),
1—1
Уравнение СК является интегро дифференциальным уравнением с
частными производными, построение точного решения этого уравнения
не представляется возможным
Получим на основе уравнения СК стохастические ДУ относительно
оценки гладкой функции уз(Х). При этом
d£(X) = d [ p(X)W(X, t | Y(t)) dX =
= [ !^(X)dW(X,t | Y(t))dX
Jnx
Подставляя в этот интеграл выражение для dW(X,f | Y(/)) из урав
Основные соотношения нелинейной оптимальной фильтрации 459
нения Стратоновича-Кушнера, получим
d£(X) = dt [ <р(Х)ЬЛ W(X, t | Y(0) <ж+
Jcix
+ [ p(X)[H(X 0-H(X,0]TQ~1[dY сЙН(Х,0]х
'ctx
x W(X, t | Y(0) dX = dt I L*(p(X))W(X, t | Y(0) dX+
Jnx
+[<p(X)H(X,0 #X)H(X,/)]TQ-1 [<fY - <ЙН(Х,0],
где L* — оператор, сопряженный к оператору L+
Если положить у?(Х) = xt, то L*(xi) — /t(X 0, где /г(Х,0 — ?-й
элемент вектора F(X, 0. Таким образом, приходим к уравнению
dxt = /,(Х, t) dt + [х£Н(Х,0 - ®jH(X,0]TQ-1[dY dt H(X,0]
Записывая это уравнение в векторной форме, получим окончательный
вид уравнения фильтрации
dX = F(X, 0 dt + (X — X)HT(X, 0Q“1 [cZY - dt H(X,0].
Найдем уравнение относительно элементов матрицы дисперсии D —
= (X — Х)(Х — Х)т. Заметим, что Dij = (а:, — хг){х3 — х3) — xtx3
—XiXj. Положим %>(Х) — X{Xj и учтем, что
L*MX)) = L\xiXj) = fi(X,t)x3 + Л(Х,0^ +Pij,
где f (X, t] — i-й элемент вектора F(X, t), рг] — элемент с индексом
(i,j) матрицы GRG Р Тогда
dxixj — [/, (X, t)xj + fj (X, t)xi + Ру]
+[ж;а:;Н(Х,г) ^jH(X1/)]TQ^1[f/Y - H(X, 0 dt].
В матричной форме записи это уравнение имеет вид
dXXJ = [F(X, 0ХТ + XFT(X, t) + Р] dt+
+[ХХ' НТ(Х./) - ХХТНТ(Х,Г)]Q-1 [</Y - H(X, 0 dt].
Уравнение относительно x;Xj получим из уравнения фильтрации с
учетом правила замены переменных в ДУ в форме Ито (приложение
5). Для этого запишем ДУ фильтрации с учетом уравнения наблю-
дения в форме
dX^ F(X,0dZ + (X-X)HT(X 0Q ^HfX^Jdi + dV; Н(Х,0Й].
460
Лекция 54
Введем переменную z = x,Xj. При этом
dz dz
dx, Xj'- dxj Xi
dz
dxk
d2z d2z _
dxidxj ' dxf
d2z dz
dx2 ’ dxi
d2z
я=-а- = 0
&Я'к&Хтп
= 2x,
Таким образом.
+ |tr[(X
d2z
d^~ '
при i / j;
при k / i, j;
при i — j;
при k, m i.
= Xjdx, + Xidxj +
-=------- -----------------=__Л2 '
X)HT(X,/)Q-1QQ_1H(X,f)(X - X)T~
dt =
= Xjdxi + xidxj + 2 tr
~=------- ---------------d2z
X)HT(X,t)Q~1H(X i)(X-X)T^ dt
Заметим, что при i ф j матрица Гессе является матрицей с двумя
единичными элементами с индексами (i,j) и (j, г), а при г = j с одним
ненулевым элементом с индексом (г,г), равным 2
Таким образом,
1
2U
(х - х)нт(х, t)Q-1H(x, t)(X - X)’—j
(7Л.
= (х£ - 5i)H (X,i)Q ^(X.iXarj - Xj).
С учетом этого имеем
d(XXT) =- XdXT + dXX j-(X
Тогда
X)HT(X OQ-’HfX^XX-XXdi.
dD = d(XXT) - d(XXT) = [F(X,t)XT + XFT(X t) + P] dt+
+[(XXTHT(X 7) - (XXT HT(X, i)]Q-![dY - H(X t)dt]~
-XdXT - dXXT - (X - X)HT(X t)Q LH(X t)(X-Xy dt.
Подставляя в это уравнение выражение для X из уравнения филь-
трации, находим
dD [F(X i)XT + XFT(X, t) + P] dt+
Основные соотношения нелинейной оптимальной фильтрации 461
+[(XXTHT(X,t) - (XXTlF(X, t)]Q-1[dY - Н(Х, t) dt]-
-(X Х)НТ(Х t)Q 1 Н(Х,7)(Х - X)V dt-
X{[F (X, t) dt + (X X)THT(X t)Q-1[dY H(X, t) dt]}-
—{F(X t) dt + (X — X)HT(X, t)Q-1[dY - H(X, t) dt])Xr =
= [F(X, t)(X — X)T + (X - X)FT(X t) + P-
-(X - X)HT(X, OQ^HfX.tXX - X)T] dt+
+[(X X)(X X)TH(X t)
-(X - X)(X - X)T HT(X,t)Q-1[dY - H(X, Z) dt].
Окончательно уравнение для дисперсии примет вид
dD = [F(X, t)(X — Х)т + (X —X)FT(X, t) + P - (54.4)
(X X)HT(X,t)Q-1 H(X,t)(X X)T] dt+
+[(X - X)(X - X)TH(X t)-
-(X - X)(X - X)T HT(X, t)Q 1 [dY - H(X, t) dt].
Уравнение для матрицы дисперсии можно записать также в скаляр-
ной форме
dDij =[(xifj(X t)-Xifj(X. + t)xj - fi(X tfoMGRG ),,-
-(x,H(XJt)-S1H(X t))TQ_1(H(X,t)a?j - H(X, t)£y)] dt+
+(яг,-ягуH(X t) — x,x} H(X, t) — жга?;Н(Х, t) — aya\H(X, t)+
+2x,xiH(X,t))TQ-1[dY H(Xt)dt], = £>o(t0) - (Do)0.
Запишем алгоритм расширенного фильтра Калмана. Для этого для
т мерной векторной функции Н X) от n-мерного векторного аргумен
та X
h2(xi,x2, ...,хп)
_ ^m(^l j X2j . - - у З^п) _
введем якобиан (матрицу Якоби — матрицу т х п)
Л2(Х)
Н(Х) =
Л,
г dhr dhr dhi 1
1 II
dxi дх2 дхп
dh2 dh2 dh2
Н% - dxi dx2 dxn (54.5)
dhm dhm dhm
- dxi dx2 dxn -
462
Лекция 54
Таким образом, элементами матрицы Якоби являются dhj/dxl (?' — но
мер столбца, j — номер строки).
Аналогично введем матрицу Якоби для n-мерной векторной функции
F(X) от л-мерного векторного аргумента X
-ад ад ад-
дхц дх2 дх„
dfo. df? df2
dxi дх2 дхп
dfn dfn dfn
-dxi dx2 dxn -
Получим на основе уравнений нелинейной фильтрации алгоритм рас-
ширенного фильтра Калмана. Пусть модели сообщения и наблюде-
ния имеют вид
dX^F(X,t) + GdW,;
dN - Н(Х,<) + QdVt,
где Wt и V( — векторы стандартных независимых винеровских процес
сов размерностей п и m соответственно.
Раскладывая векторные функции F(X,/) и Н(Х. t) в ряд Тейлора в
окрестности точки X — X, получим
F(X,t) = F(X,f)+№g!<)(X X) + о||Х — Х||;
H(X,t) = Н(Х t) + (9НМ(Х X) + О||Х- Х||.
оХ
Здесь под производной векторной функции Ф R —> R понимает
ся матрица вида
5Ф(Х) 'dpi(X) ^2(Х) Зу>1(Х) дх2 ^2(X) ЭУ1(Х)- dxt ад2(х)
9Х dxi дх2 дхк
ад'(х) ад((х) 5^(Х)
dxi дх2 дхк .
Подставляя эти выражения в уравнение фильтрации и уравнение для
матрицы дисперсий и учитывая члены до второго порядка малости
F(X,i) = F(X,t); (X X) X Х~0
(Х-Х)(Х-Х)* - D; (Х-Х)(Х-Х)ТН(Х,О = DH(X,t);
(x-x)HT(x,t) = (х- х)(х-= D
Основные соотношения нелинейной оптимальной фильтрации 463
F(X,i)(X-X)T = ^M
найдем
dD =
(54 6)
(54.7)
матри-
dX = F(X, t) dt + D R~1 [dY - H(X, t) dt],
ax ax
5HT(X,t) ^(X,/) 1
дХ _ дХ I
+[DHT(X,i) — DHT(X, <)]R-1[d¥ H(X,f)dt]
где P = GGT; R = QQT
Поскольку D — симметрическая матрица, то уравнение для
цы дисперсий примет вид
dD = 0F(X,t)D dZ?FF(X,4) D9HT(X,f)R_19H(X,/)D
dt дХ дХ дХ дХ
В том случае если уравнения сообщения и наблюдения линейные
dX- AXA + GdW(
dY = BXdt + QdVf
то Н(Х «) = АВ dF(X,t)/dX = А 5Н(Х,*)/<ЗХ - В и уравнения
dX = AXdt + DBR-1[dY BXdZ];
^ = AD + DAT + P DBTR-1BD
dt
совпадают с уравнениями фильтра Калмана
Рассмотрим пример Пусть исходные уравнения имеют вид
dX = AXdt + BdWr,
dy — s(X(t) t) dt + dlV2,
где q — const; В — постоянный вектор.
Таким образом, модель сообщения (54 8) описывается системой ли
нейных уравнений, а модель наблюдения (54.9) является нелинейной и
описывается стохастическим ДУ в скалярной форме; IVi и — одно
мерные винеровские процессы jE{dWi(Z)dl4zi(’t + т)} = 6(r]dT.
Схема формирования наблюдаемой переменной z — dy/dt приведе-
на на рис. 54.1. Штриховой линией на этом рисунке обведен генера-
тор сигнала (ГС)
Уравнение СК принимает вид
(54.8)
(54.9)
2
dW = L+(W) dt + [s(X, t) - s(X, t)][dy - dtsCX, t)] -W.
9
464
Лекция 5Jf
Рис. 54.1
В более общем случае, когда и уравнение сообщения и уравнение на-
блюдения заданы в векторной форме
dX = А(Х, t) dt + В(Х, t)dWi;
dY = S(X(t),t)dt + dW2,
уравнение СК имеет вид
dW = L+(W)dt + [S(X,t) - S(X, t)]TQ-1[dY - S(X,t)dt]W,
где X(t) и A — n мерные векторы; В — матрица п х г; Wi — г мерный
вектор винеровских независимых процессов такой, что
EiWu^W^t)} = Г Rij^ds. R(t) -
Jo
Y и S — m-мерные векторы; W2 — m-мерный вектор винеровских не
зависимых процессов такой, что
^2,-(t)W2j(/)} - Г Q0(s) ds. Q(t) = {Q0-(t)}-
Jo
Уравнение оценки записывается в виде
dxi - Ai(X, t) dt + fcS - x, S]TQX [cfY - S dt]
Уравнения для элементов Dij матрицы дисперсий имеют вид
dDij = [scjAj — x,Aj + XjAi - XjЛ,- + dij — (54.12)
-fcS - £,S)'rQ1 (t)(^JS - x} S)] dt+
-(-[a^a^S — Xix}S - XiXjS — XjX{S + 2iJsCjS]TQ-1(t)[dY(i) — S dt],
где аг} — элементы матрицы а — BRB
Лекция 55
Расширенный фильтр Калмана
Рассмотрим использование алгоритма нелинейной фильтрации при
синтезе квазиоптимальной системы фазовой автоподстройки частоты.
Будем считать, что модель сообщения описывается системой линей-
ных уравнений
dX = AX4-GdWt
где X — вектор сообщения размерностью п, причем n-я координата а:п
вектора X имеет смысл фазы сигнала, А и G — некоторые матрицы,
Wt — вектор стандартных винеровских независимых процессов.
Наблюдается смесь белого шума и сигнала 1Ао«(шо< + а?п), где
Aq, u>o = const; s(a:) — периодическая функция с периодом 2тг; sg =
= —J?* s2[x)dx — мощность сигнала s(x). Модель наблюдения, та-
ким образом, можно записать в виде
dy = «о 1Aos(woi + xn)dt + qdvt,
где q — const; vt — стандартный винеровский процесс.
Согласно уравнениям нелинейной фильтрации (см лекцию 54) имеем
dX = AXdZ + Sq 1 A0g-2(X— X.)s(wot + a;n)[dy - s01 Aos(u>oZ + xn)dt],
dD = [AX(X X)T + (X - X)XT AT + GGT (55.1)
-So 2AqQ-2(X X)s(w0< + a?n)(X - X)Ts(wot + xn)dt+
+So 1 Aog~2[(X - X)(X - ХДфо* + xn)-
—(X - X)(X — X)Ts(wot + a?n)][dy — Sq Aos(uot + xn) dt].
Получим алгоритм расширенного фильтра Калмана для выбранных
моделей сообщения и наблюдения. Для этого воспользуемся результа-
тами лекции 54. В нашем случае F(X. Z) = АХ, 3F(X,t)/5X = X
H(X,Z) = Sg’Aos(woZ + xn) = s^1Aos(a>oi + H0X), где Ho = [0; 0 ...,
0; 1]; c?H(X,Z)/<9X = Sg 1 Aos'(woZ + a,-n)H0; s' — ds(x)/sx. Тогда урав
нения расширенного фильтра Калмана принимают вид
dX = AXdZ + sg 1 A0g“2s'(w0Z + £„)DHJ[dy - s~1 A0s(w0t + xn) dt];
dD/dt = AD + DAT 4 GGT - sr; 2A^“2DHJH0D6-2(w0t + xn).
В том случае, если функцию s(x] можно представить в виде раз-
466 Лекция 55
ложения в ряд Фурье
ОО
s(a,-) = 5дП|1 cos пх + Ьп sin па:);
* п=0
оо
s'{x) = пап sin пх + nbn cos па:),
П —I
ТО
«2(ж) — «о + 53 ( 2 °" C°S ^ПХ 2 S'n ^ПХ + а”^” s'n ^пх ) ’
П=1 '
| оо оо
s(x)s'(z) - - 57 53 { "ianam[sin(m + п)ж sin(n - m)x]+
n=0 m=l
n/m
+man6m [cos(m— n)a:+cos(m+n)a:] — m6nam[cos(n —m)x— cos(n+m)a:]+
+m6„6fn[sin(n. — m)x + sin(n + m)a:]}
Пренебрегая в полученных уравнениях фильтра Калмана слагаемыми
кратных частот kuot; к 1, получим
dX. - AXtft + s0 1 Zog“2s/(woi + zn)DHJ dy;
dD/dt = AD + DAT + GGT - ^^DHJHoD.
Заметим что в этих уравнениях DH0 = Dn — n-й столбец матрицы D
В частном случае, когда s(ar) — cosx; Oq — 0, щ = 1; ап = 0 при
п 2, Ьт — 0 при т 0, Sq = cos2(x) dx = | и уравнения
(55.2) принимают вид
dX — AXdt — Sq 1Ао9 2 sin(wo< + £n)DHJ dy;
dD/dt =- AD + DAT + GGT - A29“2DHJH0D.
В частном случае, когда частота передаваемого сообщения является
нормальным случайным процессом с экспоненциальной корреляционной
функцией. модель сообщения имеет вид
dxi — —кх\ dt + д dwt; dx2 = xi dt. (55.4)
Тогда A = -к 0‘ 1 0 L J ; GGT = 92 0 0 0
и уравнения, описывающие квазиоптимальный алгоритм фильтрации
Расширенный фильтр Калмана
467
Рис. 55.1
принимают вид
dxi — — kxi — л/2Лод 2d12sin(w0i + x2)dy;
dx2 = xi — V2A0q~2d22s\n(w0t + x2)dy;
ddn/dt — -2kdn+g'2 A$q 2d22,
dd\2/dl = —kdiz + dii — 9 2A2di2d22;
dd22/dt — 2c?i2 — 9 ~^o^22*
(55 5)
Получим модель ФАП второго порядка Для этого в приведенные
уравнения фильтрации подставим
dy — a/2cos(u>o7 + J’2) dt + q dvt \
dxi = — k$i dt — V2Aoq~~2di2 sin(w0< + £2)[\/2Ло cos(w0t + X2) dt + q rf«{],
dx2 = xi — \/2Aoq~2d22 sin(wot + £2)[-y^Ao cos(w0t + x2) dt + q dut].
Пренебрегая членами с удвоенной частотой в правой части уравнении и
полагая приближенно, что sin(u>ot + х2) dvt является дифференциалом
винеровского процесса — £f/\/2, получим
dxt =—kxi dt — A^q~2di2s\n(x2 — x2)dt + A0q~ldi2d^t-
(55 6)
dx2 = xidt — /42g-2rf22sin(£2 — x2) dt + A0q~ld22d£t-
На рис. 55.1 изображена структурная схема, соответствующая полу-
ченной модели ФАП На этом рисунке e(t) = x2(t)— —£2(t) — сигнал
рассогласования, dw^/dt и df^/dt— независимые белые шумы с единич-
ной интенсивностью в канале сообщения и наблюдения соответственно,
Р ~ . Л^д 2 — ОСШ в канале наблюдения
Рассмотрим оцениваемые фильтром элементы матрицы дисперсий
ошибок фильтрации, зависимость которых от времени описывается тре-
мя последними уравнениями (55.5). В установившемся режиме, пола-
гая ddu/dt = ddi2/dt = dd22/dt — 0, получаем систему алгебраиче-
468
Лекция 55
ских уравнений
- 2Ыц + д2 — pd22 = 0;
— Kdi2 + du — pdi2d22 = 0;
2di2 — pd22 — 0,
где p = A2/q2.
Выражая из последнего уравнения di2
di2 = ptf22/2,
а из первого уравнения du
и подставляя полученные выражения во второе уравнение, получим
(Kd22+pd22/2)2 = g2/p.
Поскольку d22 > 0, то
Kd22 + pd22/2 = glyfp-
Решая это квадратное уравнение, находим
К 2лГ
d22___ + ^_+ _
Вводя обозначения [6] г — р/К — ОСШ в полосе частот сообщения;
Р = y/Dn/K - индекс частотной модуляции, где On = = д2/1К
— дисперсия частоты в установившемся режиме, полученные форму-
лы можно записать в виде
, 1 Д /- р
d22~ г + V г2 + г3/2’ (55.7)
dn = Г»п(1 - г/8Д2).
На рис. 55.2,а изображены зависимости a?i(Z) (жирная линия) и Xi(t)
(тонкая линия) при К — 0,1, д = 100, g = 1, Ло = 10, на рис. 55.2,6
— ошибка фильтрации en(6) — a?i(t) — a?i(i) для одной реализации На
рис. 55.3,а изображены зависимости агэ(<) (жирная линия) и x2(t) (тон-
кая линия) при тех же значениях параметров, на рис. 55.3,С— фазовое
рассогласование е^>(7) = а-’з^) — ah(7)-
Рис. 55.4 и 55.5 построены при К = 10, д = 1000, q = 1, Ло — 50. Из
рисунков видны моменты срыва слежения — перескоки фазы.
На рис. 55.6 изображены зависимости 6ц(7) и оценка дисперсии ча-
стоты, полученная методом статистического моделирования при К —
0,1, д - 100, q = 1, Ло = 10 (а) и К - 10, д - 1000, q = 1, Ло = 50 (б).
Расширенный фильтр Калмана
469
Рис. 55.5
470
Лекция 55
0 2 4 6 8 Z 0 2 4 6 8 i
а) б)
Рис. 55.6
б)
На рис 55 7 изображены рабочие характеристики приемника (зави-
симости у — Dn/dn и 1/с?12 от ОСШ г), рассчитанные по формулам
(55.7) при различных значениях индекса модуляции /?.
Добавление
Лекция 56
Элементы теории надежности
Теория надежности в настоящее время представляет собой раздел те-
ории случайных процессов и имеет большое прикладное значение [70]
Перечислим некоторые показатели надежности.
Вероятность безотказной работы R(t). Это вероятность того,
что в пределах заданной наработки отказ системы (объекта) не возни-
кает (наработка продолжительность или объем работы):
/?(/) _ Р(х > t), (56.1)
где г —случайное время работы системы до отказа, t — заданная нара-
ботка. Величи! а 7? 7) может быть названа также надежностью системы
Вероятное ь i гт аз i '(/ вероятность того, что в пределах за-
данной наработки возникает отказ системы
F(i) - F(.r f ) = 1 - Р(х > t) = 1 - (56.2)
Интенсивность отказов невосстанавливаемой системы
A(i). Это условная плотность вероятности возникновения отказа невос-
станавливаемой системы, определяемая для рассматриваемого момента
време и (а: > t при условии, что до этого момента отказ не возник.
A(/) = W(t\x>t)=^, (56.3)
где
— ПРВ отказа в момент времени I.
Произведение A(t)dt — это вероятность того, что система функцио-
нирующая на момент I, откажет в интервале (i,i + dZ).
Покажем справедливость соотношения (56.3). Сначала вычислим
условную вероятность
I п - Р^Х>£>Ъ __ р6 <£ < *) _
1 К 4 P^>t) >t) 1 - F(Z)
472
Лекция 56
Рис. 56.1
(а:, х + dx\
Пример 56.1
Решение.
Пусть ИДа:) =
Дифференцируя по х, получим
(56.4)
Отсюда следует (56.3). Произведение
W(x | £ > t)dt равно вероятности то-
го, что система, функционирующая на мо-
мент времени t, откажет в интервале
се сх. Найти условную ПРВ IV (х | f > t).
dx = 1 - e~ct
тогда по (56 4)
w(x I £ > 0 = ——г = w(x-1).
e”
Таким образом, вероятность того, что система, функционирующая на момент I,
откажет в интервале (а:; а: + dx) зависит только от разности х — t (рис. 56.1). Зако-
номерность (56.5) справедлива для показательного закона
Пример 56.2. Пусть W7(a?) = ее-сх, найти интенсивность отказов A(t).
Решение. F(t) = 1 - e~ct, R(t) = е-се. Тогда по (56.3)
се~с*
A(t) = --- = с = const.
е ct
Пример 56.3. Пусть lV(a:) = с2 хе CI. найти A(t)
Решение. F(x) = 1 - cze~cx - е-сх; Л(4) = cte~ct + e-ct, тогда по (56.3)
c2te-ct с21
Х(1) = ---С_Л---- = _LL_
cte ct 4- e ct 1 4- ct
Существует связь между функциями A(t) и R(t). По (56 3)
-Ш-
1 } R(t) R(t) ’
Отсюда
О
и, следовательно,
R(t) = exp
(56.5)
В частном случае при А — const
R(t) = e~Xt
Элементы теории надежности
473
По (56.5) находим в общем случае
F(x) = 1 — exp (— f A(t) dt\ ,
\ Jo /
тогда
W(aj) = = A(a:)exp J . (56.6)
Средняя наработка до отказа
Ti= / tW(t)dt- [ R(t)dt. (56.7)
Jo Jo
Можно показать, что среднее значение СВ, имеющей функцию рас-
пределения F(x), имеет вид [18]
7?(а?) = / xW(x)dx = i R(x)dx — f F(x)dx, 7?(a?) — 1 — F(x).
Jo Jo J—<x>
(56.8)
Поскольку F(x) = 0 при x < 0, to no (56.8) находим (56.7).
Пример 56.4. Пусть
A(t) = ctb-1.
Найти ПРВ Ж(а).
Решение. По (56.6) получим
VV'(j:) _ схь~1 ехр (-] .
\ Ь /
Эта ПРВ называется законом Вейбулла, который часто используется в теории на-
дежности
Рассмотрим две подсистемы Si и S?, время отказа которых соответ
ственно £1 и ^2 (СВ). Пусть эти системы связаны в систему S параллель-
ными, последовательными соединениями или соединены в схему резер-
вирования замещением (рис. 56.2).
474
Лекция 56
Рис. 56.3
Рассмотрим характеристики этих систем
1. Параллельное соединение (рис. 56.2,а) подсистем Si и So в систему
S. Очевидно, система S отказывает, когда отказывают обе системы Si и
S%. Обозначим через £ — время отказа системы S. Тогда £ = t (отказ S'),
когда наибольшая из СВ 6i и £2 равна t. Следовательно, в этом случае
С = тах(СьС2).
(56.10)
2. Последовательное соединение подсистем Si и ,S2 (рис. 56.2,6). Оче
видно, сложная система S отказывает, когда отказывает по крайней мере
одна из подсистем S\ или So. Пусть t — время отказа системы S, тогда
Г) = t (отказ), если наименьшее из СВ 6\ или £> равна t Таким образом
Т] — min(fi,f3). (56.11
3. Система с резервированным замещением (рис. 56.2,б). Пусть функ
ционирует подсистема S\, а подсистема S2 находится в резерве Когда
отказывает подсистема Si, вступает в действие подсистема ,S2. Таким
образом, система S отказывает, когда откажет подсистема So. Если t\
и — время действия соответственно подсистем S\ и S2, то t\ + to
— время безотказной работы системы S. Пусть у (СВ) — время от
каза системы S, тогда
Т - 6 + 6- (56.12)
Остановимся более детально на характеристиках надежности приве-
денных соединений.
1. При £ = max(£j,£2) область Dz плоскости ху, в которой выполня-
ется неравенство max(£i,£2) z, состоит из точек (£i,£2). для которых
справедливо совместное выполнение неравенств {£i z) и {£> z}
(рис. 56.3, а). Следовательно,
z) = Pfmax^j,^) 5$ г) -
= P((.O,GO) = Wm)-
Если СВ £i и 6,2 независимы то
PfW = Wz{z) = W^F^z) + ^(2)^(4 (56.14)
Учитывая, что Ff(z) — 0 при z < 0, получим, что область D,
(рис. 56.3,а) вырождается в квадрат £>' (рис. 56.2,г).
Элементы теории надежности
475
2. При 7] — minffi.fa) область Dw плоскости ху, в которой выпол-
няется неравенство min(£i,£2) состоит из точек (рис 56.3,6), для
которых выполнятся либо неравенство {£] < го} (случайное событие А),
либо неравенство {£2 < го} (случайное событие В) По теореме сло-
жения для двух совместных событий
Р(А или В) = Р(Л) + Р(В) Р(АВ),
что эквивалентно соотношению
F{m n(£i,f2) < го} = Р(^ го) + Р(£2 го) - F(Ci < w,& го)
Гч(го) = Г€1(го) + Ff2(w) - Fflfa(io, го). (56.15)
Запишем это соотношение в виде
1 Fv(w) — 1 — F^(w) + 1 — F{2(w) + ^^2(го,го) 1 (56.15)
В предположении независимости отказов в подсистемах >Si и S2, когда
Г?1^2(го,го) ~ Г?1(го)^е2(го) — [1 - ^,(го)][1 - Л<2(го)] получим
Я/w) = Я6(ги)Ле2(гу), (56.16)
тогда
Ж,;(го) - 1Уе1(го)/?.?2(го)+ ITG(w)/?.G (ш).
(56.17)
Область Dw (рис. 56.3,6) вырождается в обасть D'w заштрихованную
на рис. 56.2, д.
3 Системы с резервированием: СВ 7 = £1 + со значениями со-
ответственно s, х, у. В случае зависимости слагаемых ПРВ I4^(s)
имеет вид [2]
Тогда
Wfif2(s ~ ж2) •
W7(u) du
Wf^2(u ~ х2,хт}Лх2
(56.18)
После замены переменных и — х2 = sci; х2 = а получим
г сю яга
F7(s) = / / Wf1f2(xi,x2)dxldx2. (56.19)
J —ОО J—оо
Область интегрирования в (56.18) и
(56.19) изображены соответственно на
рис. 56 4 а и б
В случае независимости СВ 61 и
и с учетом равенства (а?) = 0 при
а-' < 0 и W(2(у) = 0 при у < 0, по-
лучаем область интегрирования, изо-
браженную на рис. 56.2, е. Тогда по
Рис 564
476
Лекция 56
(56.19) находим свертку
1У7(«)= [ W(l(t)Wb(s-t)dt. (56.20)
Jo
Рассмотрим частный случай, когда отказы подсистем S\ и S2 незави
симы и описываются пуассоновскими потоками отказов с параметрами
соответственно Ai = const и А2 = const [2].
Вероятность к отказов за время t
Pk^~^e~Xt-
Вероятность безотказной работы
F0(t) - /?.(/) = e“A1
При последовательном соединении элементов согласно (56.16) веро
ятность безотказной работы
Rv(t) = R(1(t)R.b(t) = e-Alte-A21 = e-(Ai+A*)f.
При Л] — Аз — А
/?,(*) = е"2А1
Среднее время безотказной работы соответсвенно имеет вид
Тг = (Ai + Аг)"1 и 71 = 1/(2А)
При параллельном соединении элементов согласно (56.14)
ЗД = = [1 - ft€1(t)][l - Яь(1)1 = (1 е-А*‘) (1 - е~А=()
Тогда вероятность безотказной работы
R^t) = 1 - F((t) - 1 - (1 - е-А‘‘) (1 - е"А2‘) =
— | е“^2* е~(Л1+А3)<
При Ai — Аз = А
7?.e(i) = (2 — e-Af) е-А£.
Среднее время безотказной работы соответсвенно имеет вид
71 = (А2 + А, А2 + А?)/[А1А,(А1 + А2)] и 7) = 3/(2А).
Чтобы вычислить время безотказной работы для схемы резервирова
ния с замещением, положим в (56.20)
1У€1(*) = Aie-A1‘; ITf2(i) = А2е-А2‘,
тогда
^(s) = £ -t)dt = (e-A” - e-A2S) ,
s 0.
Элементы теории надежности
477
Вероятность безотказной работы
ft g—Ait д g—A^t
Я7Ю = 1 - F^t) = 1-Jo Wy(s) ds = Aa .
При Ai = A2 — A
/t/f) = (1 + Ai)e"At.
Среднее время безотказной работы соответственно имеет вид Т\ =
= (Ai + A2)/(Ai А2), Т\ = 2/А. Результаты расчета R^t), R((t), Ry
изображены на рис. 56.5 [2] при At = А2 — А
Как видно из рис. 56.5 и формул для среднего времени 71 безотказной
работы и, как следовало ожидать, наиболее надежной является схема с
резервированием замещением наименее надежной — схема последова-
тельного соединения элементов. Со временем все схемы отказывают:
Я>(А) —>г-*оо 0; R((t) —*t-»oo 0; Ry(t) —’1-+00 0.
Приложение 1
Характеристическая функция
квадратичной формы гауссовских СВ
Рассмотрим величину (показатель степени)
iwVTQV - 1 (V V)TA-1(V - V) =
it/VTQV — 1vtA-!V+ -V A-LV + ivTA ЦГ-^лГА"1^
= -|VT (A"1 - 2iwQ) V + |vT(A"! - 2iwQ)(A-1 - 2i«Q) *A V+
A-,(A-1 -2h/Q)^(Д-1 -2iwQ)V- |vTA~1V+
+ |vrA~r(A 1 - 2iuQ)"1(A-1 - 2i«Q)(A 1 - ^nQ)-^"1 V-
“V’A^fA-1 — 2i«Q)-*(A-1 — 2iwQ)(A-1 fluQj^A^V =
-jfV-CA-1 2iwQ)-1A-1VjT(A 1 — 2i«Q)[V — (A-1 (A-1 —
—2itzQ) !Д 1=V] + ; V^A '(A-1 - 2iuQ)-1A-1V —f IVa^V
Введем величину
С = (A-1 -2iuQ)_1A-1V
Тогда получим
iuVTQV —i(V —V)TA-1(V —V) = -|(V-C)T(A-1-2i«Q)(V-V)
-|vT[A-1 - A-!(A-' -
причем последнее слагаемое не зависит от пределов интегрирования.
Используем формулу обращения матриц
(М^1 + N-1)-1 — М — М(М + N)-1M (ПИ)
Полагая М = Л; N 1 = —2iizQ, получим
/ j \-1
(Д-1 -2iwQ)-’ - А-Л Л- — Q-1 Д
\ 2ш /
Характеристическая функция квадратичной формы ГСВ 479
Тогда
Л-1—Л-1(Л ^rcQ) ;Л' = (Л- Q1
Следовательно,
iwVTQV - |(V - V)TA 1 (V - V) =
_-l(V-CHA-1-2i«Q)(V-C)--VT Д-Aq-Л у.
В результате характеристическая функция вида 0x(itz) (31.34) при-
нимает вид
фДш) = ехр
-V (Л - ^-Q
2 V 2ш
1
Х(2тг)2|Л|1/2
-2i«Q)(V-C) dV.
Используя условие нормировки для многомерной гауссовской ПРВ,
окончательно получим формулу (31.35)
Л , 1
^(iti) = . , = ехр
y|I-2i«AQ|
(П1.2)
Снова используя формулу (П1-1) при М 1 = Л N 1 = —Q 1/(2i«),
N = —2inQ, получим [51]
МЧ = /Т ™ ехр /-Va^I - (I - 2iwAQ)-1]V
д/I- 2iuAQ| I
(П1.3)
где I — единичная матрица.
Приложение 2
Виды сходимости
последовательностей случайных
величин
Определение 1 Пусть Fn(x) и F(x) — функции распределения А„
и X соответственно. Случайная последовательность {Ап}, п = 1,2,...,
сходится по распределению к СВ X, если последовательность функции
распределения Fn(x) СВ Хп сходится к функции распределения F(x)
СВ X в каждой точке непрерывности функции F{x), т.е. Fn(a:) —» F(®)
при п —» +оо. Этот вид сходимости будем обозначать Хп => X.
Определение 2 Случайная последовательность {Ап} л = 1,2,...
сходится почти наверное (п.н.) к СВ X, если
P{w : lim An(w) = A(w)} — 1,
что записывается Хп X.
Замечание 1. Легко убедится в том что сходимость Хп —А
равносильна тому, что для всех £ > О имеет место равенство
lim P{sup \Xm- Х\ <е} = 1.
П-.+ОО m^n
Определение 3 Случайная последовательность {Ап}, л = 1,2. ..
р
сходится по вероятности к СВ X, что записывается как Ап —* А, если
для всех Е > 0 справедливо
lim Р{|А„ - А| < е} = 1 или lim Р{|А„ - А| > s} = О
П—‘4-00 П—*4"СЮ
Замечание 2 Очевидно, что сходимость почти наверное для слу
чайной последовательности влечет за собой и сходимость по вероят-
ности. Действительно,
{|АП - А| > е} Э { sup |А,П - А| е}.
m^>n
Поэтому имеем
lim Р{|АП — А| $ ё} lim Р{ sup |Xm — А'| < t} = 1
П—+ОО n-.-1-oo m>n
Но из сходимости по вероятности не следует сходимость почти наверное.
Замечание 3. Если А„ А, то можно показать, что Хп => А
Обратное утверждение не верно.
Определение 4 Случайная последовательность {Х„}, п = 1,2 . .
сходится к СВ X в среднем квадратическом, что записывается как
Виды сходимости последовательностей случайных величин 481
Хп X, если Ml-^n — Х| ] —► 0 при п —» 4-оо.
Теорема 1. (Неравенство Чебышева). Пусть r-й абсолютный мо-
мент СВ X, конечен, т.е. £/[|А'|г] < 4-оо. Тогда для всех е > 0 вы-
полняется неравенство:
р{|%| > е) да п/е1-.
Замечание 4 Рассмотрим СВ Y — X — тх, где тх = -ЕрС] Тогда
из неравенства Чебышева следует, что
Р{|Х - пгх| е) $ да - mx|2]/e2 - D[X]/c2.
Данное неравенство, позволяющее оценить сверху вероятность отклоне-
ния СВ от ее среднего значения на основе информации лишь о ее дис-
персии, широко используется в теории оценивания и управления сто-
хастическими системами
Замечание 5 Если Хп ——> X, то Хп —* X Действительно рас-
смотрим СВ Yn ~ Хп — X. По неравенству Чебышева для этой СВ имеем.
Т{|УП| > е} Р{|УП| е}$ Я[|УП2Ц/E2 - Д|Х„ - Х|2]/е2.
Поэтому если Хп —♦ X, те Е[|ХП — Х|2] —» 0 при n —t 4-оог то
для любого £ > 0 выполняется Р{|К1| > е) —»• 0 при п —» 4-оо, те
Хп^Х Отметим, что из сходимости по вероятности не следует схо-
димость в среднем квадратическом
Связь между различными видами сходимости удобно представить в
виде логической схемы (рис. П2.1)
Рис. П2.1
Приложение 3
Вывод формулы ЧХ фильтра Винера
при белом шуме на входе
Общая формула ЧХ фильтра Винера при некоррелированных сигна-
ле и помехе имеет вид
Л) - Г е ( Г
Ф(^)2тг/0 U-<x> *( "М J
где 0(iw) и Ф(—iw) находятся из соотношения Ф(|о>)Ф( iw) = Sx(a>).
Sx(u) — ЭС входного колебания, Sx(u) = Ss(u) + Sn(w), St(u) —
ЭС сигнала; Sn(u) — ЭС помехи.
Следовательно, St(u) — S^fw) - Sn(u) = Ф(к<>)Ф( iw) — Sn(u).
Подставим эту разность в формулу для 7/onT(iw) и введем обозначение
1 Г°°
<p(t) = du,
J — оо
причем известно, что <p(t) — 0 при t < 0, поэтому
[ dt = Ф(iw).
Jo
Таким образом, из формулы для Нопт получим
Яотт(м = 1 1 * Г'--“(Г «.
Ф(|Ш) 2тг Jo XJ^ Ф(-кУ) J
Пусть помеха является белым шумом, тогда S'n(w) — So = const и
формула для ЯОПт(^) принимает вид
77onT(iw) = 1 - - — / e--'‘
Ф(^) 2тг Jo
^-elw‘dw^ dt.
-iw) J
Допустим, что Ф(—iw) — дробно-рациональная функция тогда
^опт(,'х?) 1
Ф^) Ф( iw)
Функция Ф(—iw) будет дробно-рациональной только в том случае
если дробно-рациональным является ЭС Ss(u), так как
Ф^)Ф(—iw) = ^(w) + So.
Вывод формулы ЧХ фильтра Випера
483
Пусть сигнальный ЭС имеет вид
=
D(u2)’
где знаменатель является многочленом по степеням о>2, причем порядок
его по крайней мере на единицу больше, чем порядок многочлена
Преобразуем отношение Sx(iu)/So [66]
Ss(w) + S0 = So'NtfS) + D(cv2)
So D(w2)
Справа степени многочленов в числителе и в знаменателе совпадают,
поэтому это отношение можно представить в виде
Ss(u>) + So __тт w2 + а2 Sx(i3) Ф(|ш) Ф(—iu>)
So ~ Al w2 + /?? ~ So ~ vs^ '
Отсюда получаем [66]
y/Sp __ тт —iui + Pi _ TT A । Pi — Ctj \
Ф(—iu>) H _jcj а,- \ —iw + &i J
Полюсы всех сомножителей в правой части этого соотношения при
положительных о, и Pi лежат в нижней полуплоскости ш-плоскости,
кроме единицы, поэтому после применения оператора [• + к левой и
правой частям этого соотношения получаем
VS~o
Ф(- iw)
Следовательно, формула для ЧХ /7Oirr(ia’) принимает вид
#опт(М - 1 - - S\ .
Ф(|ш)
Приложение
Правила дифференцирования
Обычные правила дифференцирования по скалярному аргументу лег
ко распространить на случай произведения матричных функции. Следу-
ет иметь ввиду, что результат такого дифференцирования существенно
зависит от порядка сомножителей
d(uTv) duT T dv
= v + u
dt dt dt
d(Az) dA dz = z + A —;
dt dt dt'
d(AB) dA„ ж dB - — В + A—
dt dt dt
Прежде чем перейти к правилам дифференцирования по векторно-
му аргументу, заметим что
dx d
—— = х ,— — I.
dxT dxT
Элементы г го столбца якобиана, соответствующего производной
df[g(x)J
—, определяются равенством
rfffe(x)J _ df Sg
---i---- — n—1 г— I,2,---,71,
axi dgT oxi
отсюда получим цепное правило дифференцирования сложной функ-
ции:
<ff[g(x)] _ df dg
dxT dgT <9xT
Этот же результат можно получить если рассматривать производную
по векторному аргументу
^_ = df3
dxT dgT <9хт ’
которая соответствует j-й вектору-строке якобиана df/dxT.
Разумеется, правило дифференцирования сложной функции приме-
нимо также и в случае, когда некоторые векторы f, g, х обращают
ся в скаляры.
Правила дифференцирования
485
Найдем производную скалярного произведения хтс — стх и произ-
водную вектора Ах
de х т dx
—--— с —— — с I = с ;
dxT dxT
dAx dx
—— — A,— = AI = A.
dxT dxT
Эти формулы получены умножением справа дифференциального опе-
ратора d/dxT на матрицу-строку при условии, что вектор-строка с и
матрица А не зависит от вектора х
Применяя цепное правило, можно найти производную квадратичной
формы Q - Q(x) = хтАх. Пусть у = Ах, а /(х,у) = хту = утх Тогда
^2 = ЛС+
dxT <9хт бут dxT'
Используя приведенные формулы, получим
df dyTx
dxT с?хт
df _ dxTy
dyT дут
Согласно правилу дифференцирования.
dy dAx
dxT dxT
Таким образом,
X Ах т , Т Л Т А Т , ТА Т Г А Т I Л1
---=------ = у 4- х А = х А + х А — х А + А .
dxT dxT
Кроме того если А = I то
—-2х’
dxT ’
Пользуясь правилом дифференцирования сложной функции, легко най-
ти производную квадратичной формы Q(u) = uT(x)Ru(x):
duTRu Su Ru du du
dxT duT dxT J dxT
Производная билинейной формы uT(x)Rv(x) запишется в виде
du'Rv
dxT
Su’Rv dv 5vTRu du
dvT dxT duT dxT
dv
dxT
du
dx1'
486
Приложение
Полагая R = I, получим
</uTv „ </v -du
—---= u -—v -—
dxT dxT dx!
Умножая слева дифференциальный оператор d/dx на матрицу столбец
получим формулы дифференцирования по векторному аргументу х
dx1
dx
dfT[g(x)] = dgdr
dx dx dg '
dxTc
~dx “ C;
dxTj4
^r=A:
du'Ru
dx
<7uTRv
dx
duT’
dx dx
^ = 1A' + A*
dxTx
dx
</uT
= [R + R]u;
dx
duT dvT __
— —-—Rv 4—-—R u
dx dx
7 duT . dvT
Приложение 5
Формула Ито
Пусть zt — единственное решение стохастического уравнения ДУ в
форме Ито [82]
dzt — f(zt,t)dt + G(zt,i)<7/?(; t to, (П5.1)
где zt, f — п-векторы; G — матрица n x m; {/3t, (t io}) — т-вектор
— процесс броуновского движения, причем E{d/3tdffl} = Q(t)dt.
Пусть p(zt t) — скалярная вещественная функция, непрерывно диф
ференцируемая по t и имеющая непрерывные смешанные частные про-
изводные по координатам вектора zt Тогда стохастический дифферен-
циал dip функции р будет иметь вид
dp = ptdt + <f>zdzt + (1/2) tr GQGTp>zzdt, (П5.2)
Op T где pt - —; = eV dp, ’dzj'
d’p d2p o2p '
dzl dzidz2 dzidzn
P>zz = •
d2p dip d2p
dzndzi dzn dz2 ^zn .
Ча тный случаи: пусть стохастическое ДУ задано в векторной
форме [83]
dz — f dt + <jdw,
(П5.3)
где w — [wi(i), u>2(i) w„(t)]T — вектор независимых стандартных
винеровских процессов; cr(z,i) — п х n-матрица, f(x, /) — [/i(x,i),
Л(х,/). ./n(x,i)]T; z = [zj, z2 ... zn]T.
Стохастическое ДУ (П5 3) отличается от (П5 1) матрицей Q для
(П5 3) Q — I, где I единичная матрица.
Формула Ито принимает вид [83]
dp~ Lpdt +(Vzp)'ud'w; (П5 4)
£y> = yt+fTVzy>+- ^2 а0 - = -£ + Mp, (П5.5)
2 uztdz. ul
i7 = 1 * J
где aij — (aorr)v; V
гамильтониан.
488
Приложение 5
Уравнение ФПК записывается в виде
(П56)
М-1 1
Обратное уравнение Колмогорова имеет вид
^ + Л/Р = 0; (П5.7)
MP = fTVj,F + | V а0- (П5.8)
2 dVidyj
Пусть имеется квазилинейное стохастическое ДУ [24]
х + х = е/i(ж, х) + p/zf®, (П5 9)
где £ — белый шум с единичной интерсивностью; е, у = const; Д и
/2 — некоторые функции; х = dx/dr.
Введем фазовую плоскость (ж, у), у = х и, учитывая, что = £dr,
запишем ДУ второго порядка в форме системы ДУ
dx = ydr;
dy = [~® + y)]dr + /1/2(2:, y)d$(r),
где £(т) — стандартный винеровский случайный процесс с дисперсией,
равной т; Е(£т) = О, Е(^) — т.
Запишем систему ДУ в векторной форме (П5.3):
dz = fdr+ ad£, (П5.11)
где fT - (у,-х + e/i); стт = (0; yf2), zT - (x.y).
Здесь (Vzy?)T = yf2^; an - aw = a2i - 0; a22 = поэтому
1
LV = P, + rV.V+^all^.
J
1 A _ 1 d'1^ _ д2<р
2,J dzidzj 1 22 2 dy1
Найдем величину
rv (fl г^(д^/дх\ _ fid<P , _cf „
формула Ито
489
В результате уравнение (П5.4) принимает вид
д<р
dip = Lipdr + pif-i—dw-,
оу
г , f , р2 fl д2<р
Llp~d7+£fiy + ~^W
(П5 12)
Воспользуемся подстановкой Ван дер-Поля
х = a cos 0; у — a cos О
и получим стандартную систему стохастических ДУ относительно ам-
плитуды а и фазы О в форме Ито.
Обозначим а — л/ж2 + у2 = <pi(x,y); в = arctgfz/j/) — <р-/(х,у).
Тогда для амплитуды
<Pz - (dipi/дх; dipi/dy) - (х/а; у/a);
_ f d2<pi/dx'2 d'2ip\/dxdy
4>zz - уэ^/дудх d2ipi/dy2
y2/a3
-xy/a3
-xy/a3
x2/a3
для фазы
<p? = (dipi/дх; dipi/dy) = (y2/a2; -x/a2);
/ д2<р/дх2 д2<рз/дхду\ f 'Ixy/a4
4>zz — уд2<р/дудХ д21рз/ду2 J ~ \(x2 — y2)/a4
(x2-y2)/a4\
T.xy/a4 j
Полагая параметры колебания медленно меняющимися функциями,
получаем dip/dr = 0. В результате по (П5.12) находим стандартную
систему стохастических ДУ в форме Ито
da = (eyfi/a + {ц2х2 fl/1a3)dT + {nyh/a)d^{r);
d0 = (1 — cxfi/a2 + ii2xyf^/a4)dr — (pLxf2/a2)d£,(r).
При x = asin0, у = acosO эта система принимает вид
da = [еД cos 0 + svn20)/'2.a\dr + (p/2 cos 0)d£(r),
d0 = [1 — (еД sin 0)/a + (p2/2 sin 0 cos 0)/a2]dr — [(p/2 sin 0)/а]<7^(т).
(П5.13)
Частным случаем рассмотренного стохастического ДУ является урав-
нение Ван-дер-Поля
х + х = е(1 — х2)х + р£(т-),
которому соответствует система ДУ
dx — ydr;
dy = [-ж + s(l - x2)y)]dr + Ltd£(r).
490
Приложение 5
Здесь /] = (1 — х2)у = (1 — a2sin20)a cos 0; /2 = 1, и уравнения (П5.13)
принимают вид
da (еа(1 — a2sin20)cos20 + (/i2sin20)/2a]c/r +/xcos0d£; (П5.14)
d0 = 1 e(1 a2sin20) sin 0 cos 0 + sin 0 cos 0
dr — —sin 0d£.
a
Систему (П5.14) в форме Ито запишем в форме Стратоновича. С этой
целью систему ДУ (П5.14) выразим в векторной форме
dz = g(z)dr + F(z)d£, (П5.15)
где zT = (a,0); FT(z) — (F1.F2) — (pcos 0, —(p/a)sin 0).
Тогда ДУ (П5.14) в форме Ито соответствует уравнение в форме
Стратоновича
dz = [.?(z) — 0,5Дс]</т + F(z)d£,
где Д£ — (Д],Д2), Дс/2 — корректирующая добавка Стратоновича
причем в общем случае
5F;
dzk'
В рассматриваемом случае
<?Ft dFi . 9F2
Отсюда следует
d п
— — sin 0;
a2
dF2
dO
---cos 0.
a
Л dFi „ dFi д2 .
Д1 = /'1-7:--b = —sin20;
oa oO a
n dF2 _ dF2 ti2
: — Fl ,.--h ^2'^7’ ~ 2—^-sin 0cos0;
da dO a2
—Д1 — ( ^-sin20; sin 0 cos 0 ) .
2 \ 2(i a1 /
Тогда система ДУ (П5 14) в форме Стратоновича принимает вид
da — ео(1 — a2sin20)cos20</r + у cos 0d£,
d0 — 1 — е(1 — a2sin20)sin 0cos Odr — (/z/a)sin 0d£.
Приложение 6
Решение интегральных уравнений
В теории линейных систем приходится решать интегральные урав-
нения вида
I h(u)R(y — u)du = z(v), 0 v Т, (П6.1)
Jo
где h(u) — ИХ линейной системы; /?(т) — КФ входного воздействия
или, в частном случае, КФ входного шума. Если — 3V?(r)j может
быть представлена в виде дробно-рациональной функции
5(а,)=5(Я' (пб2)
где N и D — полиномы степеней п и d, то решение интегрального
уравнения (П6.1) можно записать в виде
N (A(v) = D ( 4П г(*>). О < V < Т, (П6.3)
\dvl J \avz j
причем в общем случае к общему решению этого уравнения добавля-
ется сумма
2а—2п—2
Д = Е + -Л1; (П6.4)
1=0
Здесь а,- и Ь, — неизвестные определяемые после подстановки решения
+ Д (Пб.5)
в интегральное уравнение (П6.1); — i-я производная дельта-
функции 8(х).
Наличие дельта функций в решении (в ИХ системы) означает присут-
ствие резистивных элементов в схеме, а если в состав ИХ /i(tz) входят
производные от дельта-функций, это означает наличие дифференци-
рования в линейной системе.
Пример П6.1. Пусть
2b b* + u>z
492
Приложение б
Интегральное уравнение (П6.1) примет вид
1 гт
— / h(u)e~Ь1Т-“I du = z(r), О^т^Т. (П6.6)
26 Jo
Здесь W(s2) — 1; Z)(s2) — b2 — s2. Тогда дифференциальное уравнение (П6.6)
вырождается в решение h(t). Добавляя линейную комбинацию Д, при п = О,
ot = 1 получаем
A(t) = (b2 - z(t) + a«(t) + p6{t - Г),
где а = а0, (3 = Ьо.
Представим интегральное уравнение (П6.6) в виде
j A(a)e-'<’-“)da + J Л(И)е~ du = 2bz(r).
Для нахождения коэффициентов ос и /3 подставим в него решение
h(u) = Ъ2 z(u) — z,r(u) + aS (и) + pS(u — 7). (П6.7)
Введем обозначения
[ fc(a)e-I>|r-“ld« = e-bT/1; / h(u)e~b<-''-'r'> du ~ еЬт 12.
Jo Jr
Тогда
= |«e~br - *'(°)e_bT + Ь2(0)е-Ьг;
еЬт12 = i/7eb<’-T) - z'(T)eb<-r-T) + bz(T)^<-r Т> + bz(r).
Суммируя и приравнивая сумму величине 2Ьг(т), получим выражение
[ia + /(О) - Ьг(О)] + z'(T) - bz(T)j е^-Т) = о.
Отсюда
а 2[Ьг(О) - г'(О)]; (3 = 2[bz(T) - z'(7)].
Если для функции z(t) выполняются условия
i>z(O) — jzz(O) = О, bz(T) - 2'(Т) = о,
то решением h(t) является
h(t)-b2z(t)-z”(t).
В общем случае решение имеет вид
h(t) - b2z(t) - z"(t) + 2[bz(0) - 2'(O)]S(t) + 2[bz(T) + 2'(T)]6(t- T).
Приложение 7
Корреляционная функция огибающей
узкополосного гауссовского
стационарного случайного процесса
Гауссовский СП запишем в виде
x(t) = a(Z) coscvqZ b(t) sin a>ot,
где a(Z) и b(t) квадратурные компоненты СП, причем их КФ и взаим-
ная КФ имеют вид:
Е(аат) = Е(ЬЬТ) = <т'*р(т), Е(а2) = E(b2) = а2 = Е(х2),
E(abT) = —E(aTb) =
Корреляционная функция СП x(t)
— с2р(т) coscvot — <r2q(r) sin cjqT = <т2р(т),
где
р(т) = р(т) cosa>oT — q(r) sin а?от = r(r) cos[wqT + ^>(т)]
— коэффициент корреляции СП x(t)-f
г(т) - а/р2(т) + 52(т); = arctg[?(T)/p(r)].
Запишем двумерную ПРВ огибающей V(t)
MZH/I/A- VV- i rVV- v2 + v2
( ’ «^(l-r2/0 [(l-r2)a2]exp [ 2<t2(1 — r2)_ '
Используя принятые обозначения, запишем КФ огибающей
ОО
Rv(r) = E{VVT) = У У VVTW{V,VT)dVdVT =
О
= «УУ V2V2I0(VVrP)e-^v2+v^dVdVT,
о
где
1 Л г 1 в
ст4(1 —г2)’ Р (1-г2>2, 7 2<т2(1 —г2)’ 7~
494
Приложение 7
Известно разложение функции Бесселя
Тогда
/о(М)
“ 02пу2пу2п
(2пп!)2
п=0 ' '
Подставляя этот ряд в формулу для КФ /?г(т) и меняя местами опера-
ции интегрирования и дифференцирования, получим
00 ?э2п
Rv{f\ = а V , Р ~
v (2пп')2
n=0 v 7
2
e-^dV .
Воспользуемся соотношением [20, ф-ла 3.461.2]
[ s2(n+i)e-TT-aj£ _ P?1 + I)-
'о ' - 2(27)"+1
Тогда получим выражение
R + W = ^[(2п + 1)!!]2 Л5\2”
14 J \47/ (2"п!)2(27)2(п+1) 1673 ^ 24n(n!)2 ^7J
Отсюда с учетом принятых обозначений следует
п=0 1 '
Воспользуемся соотношением [20]
л-1/2 /3\ тг1/2
Г(А- + 1/2) = —(21- - 1)!!; Г (2) = V
Тогда при k — п + 1
где принято обозначение
(А)п — Г(А + п)/Г(А), причем (1)п — п!
В принятых обозначениях получим
z п_ 0 1^пП-
Корреляционная функция огибающей ...
495
Сравним полученный ряд с рядом для гипергеометрической функции
ОО
2Fi(a,/?,7,x) =
п—О
(а)п(/?)п ,
(т)пп!
В результате приходим к соотношению
Rv(r) - |<г2(1 - г2)2-^ (|; 1; г 'j .
Преобразуя это выражение на основе функционального соотношения
2Fi(a,/3,y,x') — (l-x)'1 а P2Fi(y - а,у - /3,у,х).
Тогда при х = г2, а = —1/2, /3 = —1/2, 7 — 1 находим
,f, (Ц 4 I'7'2) (1,4.4
Следовательно, одной из форм КФ огибающей является соотношение
Rv(t) = 1, г2) .
Выразим КФ Rv(t) через полные эллиптические интегралы E(z), B(z),
K(z). Для этого воспользуемся функциональным соотношением
(7 — а — Д)2^(а, Д, 7, х) + а(1 - x)2Fi(a + 1; Д 7; х) -
- (7 - Д)г Fi(a, /3 - 1,7, х) - 0.
Примем а — — 1/2, (3 — 1/2, 7 = 1, тогда находим
/11 \ 1 /11 \ 1 /11 \
2^ 1; х j - 0.
Отсюда
2^1 1; г2) - 2Л\ (-i; 1; Г2) - (1 - r2)2F, Q; 1; г2) .
Известны соотношения
2F, f|;|;l;x2>) = -Х(х); а2/\ 1; х2\ = |е(х).
\2 2 / тг у тг
Следовательно,
Ку(т-) = <т2[2£(г) - (1 - ?’2)/<(г)]
Используем соотношение
E{k) - (1 - к2)К{к} = к2В(к),
496
Приложение 7
Тогда окончательно получим выражение для КФ огибающей
Rv(r) = <т2[ВД + В(г)] = <т2[2Е(г) - (1 - г2)К(г)]
Если использовать соотношение [20, ф-ла 8.126 4]
2Е(г) - (1 г2)/<(г) = (14- г)Е
то получим КФ огибающей в виде
/?у(т) = <т2(1 + г)Е
2-^/г
1 + г
1Г(Т2
(2п —3)!!1
2п!!
Приложение 8
Синхронизация генератора на
основном тоне при наличии шума
В своей работе [8] Стратонович Р.Л. рассмотрел воздействие на ге-
нератор с трансформаторной обратной связью синусоидального сихро-
низирующего колебания с частотой и>о и широкополосного шума. При
кубической аппроксимации тока [8, ф-ла (13.22)] и подстановке Ван-
дер-Поля [8, ф-ла (18.2)]
х — A cos(a>ct + <р); х = — A sin(a>ct + <р) (П8.1)
посредством перехода от исходного ДУ второго порядка получена систе-
ма ДУ в стандартной форме [8, ф-ла (18.3)] и после усреднения найдена
система укороченных уравнений [8, ф ла (18.9)]
Л = е(1 - А2/А2)А + у! cosy? + fi; (П8.2)
= Д - Дс sin у? 4-^2/Л, (П8.3)
где е = Uq(MS — RC); 71 — wcE/'l-, Е — (M/L)Vq; Vo — амплиту-
да синхронизирующего колебания; Дс = 71/2Л0; Ло — стационарное
значение амплитуды; Д = а>о — о>с -— расстройка по частоте; о?о — ре-
зонансная частота колебательного контура; £1 и £2 — широкополосные
стационарные независимые гауссовские случайные процессы с нулевы-
ми средними и корреляционной функцией
ад) = ^(г),
где 6(т) — дельта-функция.
При достаточно малой интенсивности шума выполняется условие [8,
ф-ла (18.42)]
Е[(Л- Л0)2] < А2. (П8.4)
Это значит, что при достаточно большой вероятности выполняется
неравенство Л — Ло С Ло, поэтому в фазовом уравнении (П8.3) точное
значение амплитуды можно заменить на ее приближенное значение Ло-
После преобразования фазовое уравнение (П8.3) можно записать в
виде [25]
</к = (Д — sin x~)dt + у/2/гс/£, (П8.5)
где х = ip, [3 — О = — полоса синхронизации (односторонняя);
t = Qf; г = 4Aq/NqQ — отношение сигнал/шум (ОСШ); £ = £(/) —
стандартный винеровский процесс с дисперсией, равной I.
498
Приложение 8
Стохастическое ДУ (П8.5) описывает поведение фазы не только гене
ратора, но и фазовое рассогласование фазовой автоподстройки [25, 26]
Для нахождения статистических характеристик фазового рассогласо-
вания = <p(t) необходимо найти и решить уравнения ФПК и Пон
трягина
Уравнение ФПК
Уравнение ФПК для ПРВ W = W(x,t) имеет вид (7.11)
dW(x,t) д .. ld2W(x,t)
= S['‘(*)lV(l 1)1 + г ~ ’ (П8-6’
где /i(e) = sin х /3.
В стационарном режиме при OW/dl — 0 получим
d2lV(x} d
— , 2 ' + г— [h(x]РИ(х)] — 0. (П8.7)
Сс сЪ
Поскольку уравнения (П8.6) и (П8 7) впервые получены Стратонови-
чем Р.Л. и Тихоновым В И , то назовем их уравнениями Стратоновича-
Тихонова.
Получить аналитические решения уравнения (П8.6) затруднительно:
решение уравнения (П8.7) найдено в работах [8, 30] и имеет вид
г-х+2-
1Т(гг) = 71(i/,r)e'/r+rcosr / e^~rcosvdy (П8.8)
J X
где
/- rx+2*
e^+rcosr / e-l,y~rcosv dydx. (П8.9)
7Г J X
Величина T-1(v,r) может быть записана в форме [8, 30]
А~\п,г) = 4тг2е~’г1'|71Р(г)|2, (П8 10)
где 71Р(г) — модифицированная функция Бесселя мнимого порядка
// — (dr.
Автором получены две другие формы стационарной ПРВ. Одна из
них в форме неполного ряда Фурье
И'(х) = С(р, r)ercosx где ^о(г) + 2 у - г—(г/cos пх — 2—‘ п2 + п= 1 nsin пх) ГП8
11)
р™ 9тг2
с (П812>
/п(г) — модифицированная функция Бесселя n-го порядка.
Синхронизация генератора на основном тоне
499
На рис. П8 1 ПРВ IV(r) изображена сплошными линиями, кружками
обозначено гауссовское приближение крестиками — данные расчета по
асимптотической формуле [25, ф-ла (2.16)].
Величина |/„,(/)р имеет вид ряда
I/„(’•) 2 =
бптгг/
4“ (''')’ 53
?г—I
(П8.13)
Тогда величину G(p, г) находим из соотношения
С 3(р г) =
2тг
л2(г)+2^53
п~ I
п2 + Р2
(П8.14)
Графики функции (П8 13) изображены на рис П8.2 (кружки на ри-
сунке соответствуют значениям в — 1 (о = г)) Штриховыми линиями
изображены зависимости, полученные на основе асимптотического раз-
ложения Лангера [25, 26]. В точке г = 0 справедливо равенство
|/iI/(0)|2 = av = (тл/) 1 зЬтп/
В табл. П8.1 представлены значения at, и |7!Р|2 при I/ = г (в последней
строке приближенные значения вычисляемые по разложению Лангера,
в предпоследней строке — точные значения по (П8 13)).
Решение (П8.8) уравнения Стратоновича—Тихонова можно записать в
виде полного ряда Фурье [25, 26]
ОО
И7(а) = а0/2 + У; ап
П —1
cos пх + bn sin пх,
(П8.15)
500
Приложение 8
Таблица П8.1
1/ 2 4 6 8 10
Giz 4,2613-101 1.1409-104 4.0731 - 106 1,6358 - 109 7.0078- 10i0
lit, (^г) 6,8015 -101 2.2829 -104 9,3182-106 4,1170 - 109 1,8994- Ю10
6,7468- 10’ 2,2759 10* 9,3008 -106 4,1113 - 10э 1,8973- Ю10
где
ап = — / Wlx) cos пх dx — — cos пх, п = 0,1,2 ..
7Г 7Г
Ьп = — / lWz)sin пх dx = — sin пх, я = 1,2...
’г Jтг
Интегрируя, получим
»- = 2,-'с(^, r)fo(r) { ад + S :
Ь„ = 2С(-,г)£ tL~-^4r)[f>tn(r) _ (П8.16)
Значения коэффициентов ап и Ьп, рассчитанные по формулам
(П8 16), приведены в табл. П8 2 при /? — 0,4 и различных г.
Коэффициенты Фурье ап и Ьп в разложении (П8.15) можно получить
в рекурретной и интегральной формах. Подставим функцию 1У(г) из
(П8.15) в уравнение Стратоновича-Тихонова при условии dW/dt = 0.
В результате преобразований получим рекуррентные соотношения —
Синхронизация генератора на основном тоне
501
Таблица П8 2
п г = 1,0 г = 2,5
Gn Ьп Gn Ьп
1 0,1279 0,4335-101 0,2019 0,1023
2 0,2781 • 101 0,1563-101 0,7489 • 101 0,7966
3 0 4146-102 0,3080- 102 0,1837- 101 0,3481 101
4 0 4702 -103 0,4271 -103 0,2967 -102 0,1080 101
5 0,4303- 104 0,4575 • 104 0,2275 • 103 0,2616- 102
6 0,3300-105 0,4008 10s -0,3560- 104 0,5207- 103
7 0,2178-10® 0,2973 10® -0,1817 -104 0,8808-104
8 01262-107 0,1915-107 0,4337-10s 0,1296 -104
9 0,6508- 109 0,1090 108 -0,7738-106 0,1686- 105
ю. 0,3025 -1010 0,5556 - 109 —0,1146-10® 0,1967-10®
п т = 4,0 Г = 6,0
Gn ь„ Gn Ьгг
1 0,2342 0,1204 0,2554 0,1261
2 0,1048 0.1272 0,1323 0,1622
3 0,2766- 101 0,7716 • 101 0,3739 101 0,1238
4 0.1619- 102 0,3354 • 101 -0,4155- 102 0,6836-101
5 -0,2409 102 0.1138-101 -0,1176 -101 0,2933-101
6 -0 1464 102 0,3158-102 -0,8019 - 102 0,1007-102
7 -0,5422 -103 0,7364 103 -0.3777- 102 0,2771 103
8 0,1556- 103 0,1467 • 103 0,1422-102 0,5840-103
9 -0,3732 104 0,2514 - 104 -0,4525 103 0,7574 • 104
10 -0,7767-105 0,3695 - 10® -0,1253-103 -0,5153 - 10s
разностные уравнения (РУ)
йп-н — u-n-i + 2/ЗЬп + 2яап/г — 0;
6,.+i -bn-i- 2/?ап + 1пЬп/г = 0.
(П8.17)
Эти уравнения решаются при начальных условиях ац — 1/тг, Ьо 0.
На рис. П8.3 и П8.4 изображены зависимости первых гармоник от па
раметров г и /?. На рис П8 3 cos а: = д} — ttoj = при г = const
на рис П8.4 irbi — д — sin х — /г(/?) при г — const. На рис. П8.3
и П84 крестиками при г — 0,5 (рис П8.3) и г — 0,5 и г = 1 0
(рис П8 4) изображены данные расчета по асимптотическим форму-
лам, справедливым при малых значениях г [25, 26] тгау « а; тг61 к,
Рга\ а — (г/2) [1 + г2(0,5 +/?2)] При малых /3 тга\ ~ Го(г),
тг61 ~ р [1 — Т^2(г)]. Кружками на рис П8 4 отмечены значения тг&т,
рассчитанные на основе разложения Лангера [25].
При р = 0 по (П8.17) получаем два независимых РУ
fln+i - a,i-i + 1пап/г = 0; 6„+i - fcn_i + 2nbn/r — 0.
При этом находим Ьп — 0; ап — 7„(г)/тг7о(г). В результате ПРВ
принимает вид
cos пх.
502
П р и л о ж е и и е 8
Рис. П8 3
Отсюда приходим к формуле Стратоновича—Тихонова
И7(а:) = [1/2тг/о(г)] exp(r cosz). (П8.18)
Решение системы РУ (П8 17) можно получить в компактной форме
если ввести коэффициент cn — an ibn Тогда система РУ приводится
к одному уравнению в комплексной форме
Сп+1 — Сп-i - 2(п - iv)cn/r.
Сравнивая это РУ с рекурретной формулой для функций Бесселя,
находим его решение cn = причем постоянная С нахо-
дится из начального условия с0 = — 1/тг. Отсюда сп —
- In-iv(r)/ИЛИ
7ГСП = = cos nx + isin па:.
Наконец, найдем выражение для коэффициентов ап и Ьп в инте-
гральной форме
Воспользуемся соотношением [20, (6.681.3)], из которого получим
равенство
Г’/2
/ cos(n — 2гТ)г/п(2г cos г) dx = (тг/2)7„_,-1/(г)7,1,(г).
Jo
Отсюда находим выражения для коэффициентов Фурье в интеграль-
ной форме
,тг/2
тгап = cos па: = D I 1п(2т cos х)cos nxchZvx dx;
Jo
____ ут/2
irbn = sin nx = D I ln(2r cosx) sin nxshlvx dx,
Jo
Синхронизация генератора на основном тоне
503
где D = (2/7г)|/п/(г)| 2
Решение lVr(a:./) уравнения Стратоновича-Тихонова в нестационарном
режиме при нулевой начальной расстройке может Быть найдено также
и на основе разложения в ряд Фурье (П8.15). Подставляя IV (г, <) по
(П8.15) в уравнение Стратоновича-Тихонова, получим систему обыкно-
венных ДУ относительно коэффициентов ап = ап(0 и Ьп = i»n(0
с/а„ _ , п. \ п~
—— = —/3nb„ - -(an+i - an-i)---------an;
dt 2 г
Л Г . Г \ I
—— — рпап — -(6„+i - t>„_ J--------Ьп.
at 2 г
Решая эту систему ДУ, получим эволюцию ПРВ VP(a:,Z) во време-
504
П р и л о ж е н и е 8
ни (рис. П8.5) при начальном равномерном распределении ИЛ(г:,0) =
= 1/2тг. При вычислении графиков рис. П8 5 при г — 4 и р = 0,1
использовалось 20 слагаемых отрезка ряда Фурье. Уже при t = 40 вы
численные значения ПРВ И’(ж,40) полностью совпадали со стационар
ной ПРВ, вычисленной по формулам (П8.11), (П8.15), а в переходном
режиме значения ПРВ lV(z. /) практически совпали с ее значениями вы
численными по разностной схеме. Эта схема получается по ДУ (П8.6
при замене производных конечными разностями
dW(x,t) _ И7+Дг - Wl 0М\х, t) _ И/+д -w;x
dt Ат ' дх 2Ах
d2W(x,t) _ И7+1 - 2И7 + И7_!
дх2 ~ Zu?5 ’
где Ах — 2ir/Ar; г = 1. N + 1; т = тпАр m — 0, 1,2...,
При /i(x) = sin х — р получаем разностную задачу вида
( \V,t+At = AiW?_ 1 + BiWt-+CiИ?+1; i - 1, N + 1;
l^ = ^+P l^+2
(П8.19)
где Ai = + B, = 1 + ^-2-^; c
2Ax rAx- rAx-
hi = sin z,- — p\ h’i = cos ж,-; Xi — —тг + (i — l)Aa:.
At At
2 Ax rAx2'
Для аппроксимации начального условия можно, в частности, поло-
жить 1Т(ж,) = 0; i 5^ М; W(xm) = AjAx, где М — номер узла, бли-
жайшего к начальному значению х0. При г <J 5, N = 200, At = 0,0005
решение разностной задачи устойчиво и практически не изменяется при
увеличении N и уменьшении At
Результаты вычисления ПРВ И’(г,<) по разностной схеме (П8.19) при-
ведены на рис П8 6 при Wb(®) = 1Т(г:0 = l,t — 0) = 8(х — ж0) при
а?о - 1; Р = 0,6; г = 2,5.
При Р — 0 можно воспользоваться численно-аналитическим методом
[26, 29] Тогда необходимо решать ДУ
Д(и) = — Апи,
где L — самосопряженный оператор, имеющий счетное множество дей
ствительных собственных значений Ап. Каждому Ап соответствуют две
собственные функции- четная une(x) и нечетная 12,10(2:). Тогда решение
И7(2:, Z) уравнения Стратоновича-Тихонова запишем в виде
оо
VV(a:, t) — 11^(2:) + 52[anUne(z) + Ьп«по(а‘)]е"(А"/г)‘. (П8 20)
П = 1
где an = {une(x),W0(x)}; bn = {uno(x),W0{x')}.
Синхронизация генератора на основном тоне
505
Собственные значения и собственные
функции удовлетворяют ДУ
«"(а;) + г sin хи'(х')-\-
+(АП + гсо5г)«(г) = 0 (П8.21)
с граничными условиями
^по( Тг) - Г1ПО(0) - «„о(тг) - 0,
(П8.22)
<е(-’Г) = «пе(°) = «neW = °’
(П8.23)
Для решения задачи (П8.21)-(П8.23)
может быть применен численный метод.
Поскольку решение задачи (П8.21),
(П8.22) определяется с точностью до по-
стоянного множителя, который затем на
ходится из условия нормировки то можно
Рис. П8.7
положить и'по(—тг) — 1. Ис-
пользуя это условие совместно с iznc( -тг) — 0, с помощью численно-
го интегрирования ДУ (П8.21) при фиксированном значении Ап можно
найти значение uno(0) и, изменяя затем значение Ап, добиться выпол-
нения равенства uno(0) — 0.
В качестве начального приближения для An (n — 1, 2, ...) может
служить асимптотическая формула [29]
Ап = п2 + еп(г) + о(г4),
(П8.24)
где е(г) = п2г2/2(4п2 — 1).
При определенном значении Ап решение задачи (П8.21)-(П8.23) без
труда находится численным интегрированием [табл. П8.3, на рис. П8.7
сплошные линии, штриховые — начальное приближение (П8.24)].
Собственные функции ипе(х), ипо(г) изображены соответственно на
рис П8.8,а и б при Д — 0, г — 2,5 и значениях п — 1, 2, 3.
Таблица П8.3
п Г
1 2 4 6 8 10
I 1.1655 1.6474 3,3342 5.3901 7,4328 9,4515
2 4.1338 4.5406 6, 2706 9, 3941 13,4539 17, 6369
3 9,1288 9.5176 11 1119 13, 9287 18,2524 24,0515
4 16,1271 16,5098 18,0623 20, 7295 24, 6476 30,0669
5 25,1263 25, 5063 27,0399 29,6458 33,4025 38,4317
6 36, 1259 36.5044 38,0277 40,6012 44,2777 49,1345
7 49,1257 49,5032 51,0204 53, 5744 57,2036 61,9633
8 64,1255 64,5024 66,0156 68, 5570 72,1558 76, 8539
9 81.1254 81,5019 83,0123 85, 5450 89, 1231 93,7793
10 100,1253 100,5016 102,0100 104,5365 108,0998 112,7262
11 121,1253 121,5013 123,0083 125,5302 129,0825 133,6869
12 144,1252 144,5011 146, 0069 148,5253 152,0693 156,6571
506
Приложение 8
Результаты расчетов W — 1У(х,/) по вышеизложенной методике при
И’о(г) = — а,-0), х0 = 1; в — 0; д(х) = sin а; приведены на рис. П8.9 а
при г = 2,5 и на рис П8.9,<7при г — 5. На рисунке штриховыми линиями
отмечено линейное приближение — гауссовский закон.
Следует отметить, что в случае нулевой начальной расстройки (при
/3 = 0) как аналитический, так и численный (по приведенной разностной
схеме) методы дают одинаковые результаты.
Синхронизация генератора на основном тоне
507
Остаточное частотное рассогласование
В работах Стратоновича Р.Л. и Тихонова В.И вычислена величина
среднего частотного рассогласования = dx/dt (черта сверху — знак
усреднения). Величина /Зс согласно [8, 30] рассчитывается по формуле
shin/
ят|Д„(г)|2‘
(П8.25)
Автором найдена другая форма записи этой величины
& = (27г/г)С(р, г) = Д/ЯБ, (П8.26)
причем C(i/, г) вычисляется здесь по (П8.14).
Кроме того, используя разложение Лангера [25] можно получить рав-
номерное относительно г и и асимптотическое разложение для функции
7£1/(г) и в результате найти асимптотическую формулу для величины Д.
Рс\
/Зс2
при /3 1;
при /? 1,
где
1
&i = (l
Z7T/1]
< Л/з(Л1)+-^7Л1/з(Л1) + ;
(П8.27)
де2 = (i - е-2™)^/^,)^2 -1 [л2/3(<а) + ^Ш)] 1; (П8-28)
hi = г 1 — /?2 — /3 arccospj ; — г (/?Arsh у/(З2 — 1 — у//З2 — 1^ ;
71/з(г) и Л/зС^) — функции Бесселя (71/з(ж) — модифицированная
функция Бесселя); 7<i/3(a:) и У1/3(г) — модифицированная функция
Ганкеля и функция Неймана соответственно.
Результаты расчетов по формуле (П8 26) представлены в табл. П8.4
Зависимость остаточного частотного рассогласования (Зс от параме-
тров г и /3 изображена на рис П8 10 и рис. П8.11. На рис. П8.10 сплош-
ными кривыми изображены функции (3ci = <Pi(r) и Д,о = </3а(г) при
/3 = const. Кружками и штриховой линией справа отмечены точные
значения величины /Зс. График функции /Зс(г) при /3=1 рассчитан
по формуле [25]
Д. = 0,796^r V3
' e’ri/
(П8.29)
При г » 1 отсюда получим формулу Стратоновича [8] Д, ~
и 0,796г-1/3
Для расчета Дс при (3 < 1 можно наити простую приближенную фор-
мулу, справедливую при больших значениях параметра, если восполь-
508
Приложение 8
Рис. П8.11
Таблица П8.4
Г 0
0,10 0,20 0,40 0,60 0,80 0,90 1,00 1,10 1,20 1,40
0.1 0,0995 0,1990 0,3980 0,5970 0,7960 0,8955 0.9951 1.0946 1,1941 1,3932
0,2 0,0980 0,1961 0,3921 0,5883 0,7846 0,8828 0.9810 1,0793 1,1776 1,3743
0,3 0.0956 0,1913 0,3827 0,5745 0,7668 0,8632 0,9597 1,0564 1,1553 1,3476
0,4 0,0924 0,1849 0,3702 0,5566 0,7444 0,8388 0,9337 1.0290 1,1248 1,3175
0,5 0,0884 0,1770 0,3553 0,5357 0,7190 0,8118 0 9054 0.9998 1,0949 1,2874
0,6 0,0839 0,1681 0,3384 0,5128 0,6921 0,7837 0.8766 0,9706 1,0659 1,2592
0,7 0,0789 0,1583 0,3204 0,4888 0,6649 0,7559 0.8485 0,9429 1,0386 1,2339
0,8 0,0736 0,1480 0,3016 0,4646 0,6384 0,7291 0,8221 0,9171 1,0138 1,2115
0.9 0,0681 0,1374 0,2826 0,4407 0,6129 0,7038 0,7974 0,8934 0,9914 1,1918
1,0 0,0626 0,1267 0,2638 0,4176 0,5888 0,6802 0,7747 0,8719 0.9712 1,1746
1.5 0,0374 0,0782 0,1802 0,3180 0,4899 0,5857 0,6863 0,7905 0,8971 1,1146
2,0 0.0200 0,0441 0,1195 0,2450 0,4191 0,5198 0,6265 0,7373 0,8504 1,0796
2,5 0.0099 0,0236 0,0785 0,1910 0,3658 0,4707 0,5829 0,6996 0,8184 1,0571
3,0 0,0047 0,0123 0,0512 0,1502 0,3236 0,4321 0.5493 0,6712 0,7950 1,0417
3,5 0,0021 0.0063 0,0333 0,1187 0,2890 0,4006 0,5222 0,6489 0,7771 1,0305
4,0 0,0010 0,0032 0,0216 0,0940 0,2600 0,3740 0,4998 0,6309 0,7631 1,0221
5,0 0,0002 0,0008 0,0090 0,0592 0,2134 0,3312 0,4643 0,6033 0,7423 1,0106
6,0 -— 0,0002 0,0037 0,0372 0,1774 0,2977 0,4371 0,5830 0,7278 1,0032
7,0 — 0,0015 0,0233 0,1487 0,2702 0,4153 0,5675 0,7171 0,9982
8,0 — — 0,0006 0.0146 0,1253 0.2472 0,3973 0,5551 0,7089 0,9946
зоваться неравенством
К„(х) С lv(x); х —> оо.
Заменяя в (П8.27) сумму /1/з(а?) + (\/3/27г)Л'1/з(а:) на Ц/^х), уже при
х = 2 приходим к относительной погрешности не более 0,02, поэто-
му можно принять
Синхронизация генератора на основном тоне
509
При малых /3 и больших г, используя соотношение Л/з(Л) =
= eh/х/2тгЛ, получаем следующую приближенную формулу:
рс « /?са = 2sh7rI/x/l-/?2e-2r«-’r‘/, (П8.30)
где q = д/1 — /З2 — /3arccos/3. Отсюда, полагая /3-^1, находим
/?с ~ /?са — 2e-2rshTrp. (П8.31)
Тогда (П8.30) можно представить в виде
Дса - ЗзЬтгг/ТГ^^е-2^^/*7^(П8.32)
Если использовать равенство 2shTn//e’r" = 1 — е~27Г" rj 1, то из (П8.32)
получаем формулу Стратоновича ([8], формула (18.58)).
Из условия вывода формулы (П8.32) ясно, что ее погрешность должна
падать с уменьшением р и с ростом ОСШ г. Приближение по (П8.30)
служит оценкой истинного значения /?с сверху (см. табл. П8.4).
। Если v —г 0, то /^(г) —* Jq(f). поэтому при р —► 0 имеем
С'(р, г) ~ 1//^1(г)/2тг; A(t/, г) » /^"1(г)/4тг2.
Тогда, если I/ —> 0, то
Рс » /?//02(г). (П8.33)
Отсюда при г —» оо и малых v приходим к формуле /Зс рз 2тп/е~2г,
которая следует из (П8.31) при тп/ 1 или г/ С 1/тг.
Если I/ и г малы, то по (П8.33) определяем /Зс = /?(1 — г2/2), бо-
лее точной является формула
рс = Р[1+(г*/2)1(1 + ^}~\
которая находится по (П8.26).
Рассмотрим зависимость остаточной расстройки рс от параметров Р
и г при Р > 1. Используем равенство Ну3(у) = Л/з(т)_ — г^1/з(т)-
Функции Ji/3(t) и У1/з(т) находим по таблицам. По (П8.28) получаем
Ре ~ /?са2 = (4/тггА)е—sh7u/[J2/3(7) + У2^)]"1- (П8.34)
Зависимость /?с(г) при Р — 1> 32; А = 0,1955; у = 0,1686 изображена на
рис. 3.10. Штриховая линия (прямая) справа соответствует значениям
Рс = /?са. получаемым по (П8.34) при у > 1.
Воспользуемся асимптотическими формулами
Jv(x) рз у/'ll тех cos(x — пи/’! — тг/4);
х—юо '
Yv{x} w у/Цтсх^т^х — тп//2 — тг/4),
X—►оо
510
Приложение 8
Таблица П8 5
/3 Г
1 2 3 4 6 8
0.1 0,0626 0,0702 0,0852 0,0200 0,0212 0,0239 0,0047 0,0048 0.0052 0,0010 0,0010 0,0010 0,0000 4-Ю-5 4 • 10—' 0,0000 1.2-10-6 1.3-10 6
0,2 0,1267 0,1398 0,1708 0,0441 0,0463 0,0535 0.0123 0,0126 0,0139 0,0032 0,0032 0,0034 0,0002 0,0002 0,0002 0,0000 1,2-10-5 1,2-10 5
0,4 0,2638 0,2833 0,3405 0,1195 0,1231 0,1488 0,0512 0.0522 0.0605 0.0216 0,0219 0,0245 0.0037 0,0037 0.0040 6.0-10-4 6,2-10-4 6,5-10 4
0.6 0,4176 0,4389 0,4801 0,2450 0,2495 0.3017 0.1502 0,1519 0,1855 0.0940 0.0948 0,1139 0,0372 0.0374 0,0430 0,0146 0,0146 0,0162
0,8 0,5888 0,6096 0,5027 0,4191 0,4241 0,4267 0,3236 0,3258 0,3599 0.2600 0.2612 0,3035 0,1774 0.1779 0,2158 0,1253 0,1256 0,1535
1,0 0,7747 0,7940 0,6265 0.6313 0.5493 0,5515 0,4998 0,5011 0,4371 0,4377 0,3973 0,3977
1,2 0,9712 0,9886 0.8504 0,8549 0,7950 0,7971 0,7631 0,7643 0.7278 0,7283 0,7089 0.7093
Примечание. 1 я строка точные значения (П8.26), 2-я и 3-я строки — асим-
птотические значения: 2-я — по формуле (П8.27), (П8.28) 3-я — по формуле (По.29)
из которых, в частности, следует J'i{x) + Y„(x) = |Н^\х)|2 = 2/ttj-
х оо. Асимптотическая формула (П8.34) принимает вид
/Зс ss (27/rA)e~’rl/sh^i/ = 2e-!r'/sh7ri/-\//?2 — 1.
При у —> оо и г —> оо справедливо приближенное равенство
e-’r,/2sh7rt' — e-*r^2sh7rr/? ~ 1 (при Р = const).
Тогда
& ~ /?са = Т/гА - а/^2 - 1-
Таким образом, все значения /Зс заключены между двумя пределами
л-1-a A2}=t°/r-i (пезь)
( у/— 1 при 1 < Р < оо. 4
Первый из них Р„^ достигается при г —- 0 и любом Р, а второй Р„^
— при Г —> оо (см. рис. П8.11).
Заметим, что функция pt~ — Рс = у/Р2 — 1 характеризует частоту
колебаний (биения) в детерминированной фазовой АПЧ первого поряд-
ка; в этом случае рс — 2тг/Q.TC; QTC — 2тг/с; Ic — = f~* dx/[p — gp’)]
При «/(х) — sin х получаем рс — у/р2 — 1.
Рассмотрим зависимость частоты срывов синхронизации от параме-
Синхронизация генератора на основном тоне
511
трое г и /?. Запишем
7+ = [2тг(1 - е-2™)]- l/?c = e’r,//?c/(47rsh7ri/).
На основе асимптотических формул для /?с имеем
7+ рз [47г2г1п(г)]-1 ; 7+ ~ (1/2тг)е’г‘'е_ 1г.
и~>0 г—*оо
r=const
Отсюда 7+ рз (1/2тг)е 2г при v — 0.
Г—‘СО
Используя (П8.30), получаем
7+ - (l^y/T^e-2^
Рассмотрим формулу для дисперсии <т“ частотного рассогласования,
приведенную в [30]. Эту формулу можно записать в виде
(сгш/О)2 = +<т2,
где ст,2 — дисперсия остаточного шума; <т2 = sin2 а; — (sin ж)2 = 1/2—
—тга2/2 — (arfcj)2 = иа\/г + тг&1(/? — abi); «1, а2, 61 — коэффициен-
ты Фурье (П8.16).
Примем тгЬ\ = 0 — 0с, где 0С = sh7rp/[7rr|/II/(r)|2]. При 0 — 0 находим
а2 = Tiai/r - Л(г)/[г10(г)] = [1 - /2(г)/70(г)]/2.
При /3 = 0,4 и г — 1, 2,5; 4 значения <т2 составляют 0,4377; 0,2791;
0,1923, соответственно.
Зависимость среднего значения д = ubi — sin а: — /? — /Зс от пара-
метров 0 и г изображена на рис. П8.4 сплошными линиями, кружка-
ми обозначены результаты расчета с учетом асимптотических формул
(П8.27), (П8.28).
512
Приложение 8
Зависимость среднего значения cos а: — araj от параметров г и р
изображена на рис, П8.3. На рис. П8.12 и П8.13 приведены графики
функций <rs — г) и <гс — /г(/^, л), причем а2 — (cos2 г) — (cos г)2.
Расчеты производились с учетом значений коэффициентов ап и Ьп в
форме рядов.
Для сравнения точных и приближенных значений величины при-
водятся в табл. П8.5
Среднее время до срыва синхронизации
Среднее время Ti = Ti(x,xo) до срыва синхронизации находит-
ся из решения уравнения Понтрягина относительно моментов времени
Тп - Т*
<РТп(х0') dTn(xo)
— , - rh(x0)—-------F nrTn_px0) - О (П8.36)
uXg CIXq
при — 1; 7^ (г:-) — 7j,(a:+), где х~ и а:+ — границы для коорди
наты х = x(t) при начальном условии а:(/.о) = аго, выход за которые
сопровождается срывом синхронизации
Формула для среднего времени до срыва слежения (Тс = Т)) име-
ет вид
7с = 27r2r|Ztl,(r)|2/ch7ri/
при х = х0 — 2тг; х+ = xq + 2тг. Сравнивая эту формулу и формулу
(П8.26) для величины находим
7с = rC l(i/,r)thTri/= (2тг/Рс)1Ьтп/. (П8.37)
Отсюда следуют соотношения
7с = ПТС = (27r//?)7?sth7ri/; (П8.38)
7с = ®ТС -
у/1 — /?2сЬтп/
* Л/з(/*1)+ 2?г /<1/з(/*1)
+ 4^2К12/з(Л1) ►
(П8.39)
где Л.1 = ’’(хЛ ~ Р2 ~ Р arccos Д).
Из (П8.16), если воспользоваться формулой (П8.32) для /Зс, получим
^2г (у/1 ~0^+ 0 arcsin /?)
у/1 - Д2сЬтгр
(П8.40)
Эта формула вытекает также из (П8.39), и она справедлива при ма
лых Р и больших г.
Зависимость ус — &ТС от параметров г и р изображены на рис. П8.14
с точностью е < 10“4 в диапазоне расстроек 0 sC Р 0,8, штрихпунк
тирными линиями изображены данные расчета 7С на основе разложения
Синхронизация генератора на основном тоне
513
Рис П8.15
Лангера штриховыми данные расчета
по формуле (П8.40), крестиками обозна-
чены значения 12<гт — У 1 ~ Ус < 72 —
- О2Т2.
Значения функции ус — пред
ставлены в табл П8.6. На рис П8.15
сплошными линиями изображены зависи-
мости 7i = tp(s') при /? - О и г - const,
s — порог. Штриховой линией изображе
на зависимость 7i(s) = 7i(-s, а-’о 0) »
« rs2/2 — 2r2(coss — 1) srsins, штрих-
пунктирнои линией слева изображена за-
висимость [25]
71 («) - 71 (s> «о = 0) =
= V'^7^(sins)-1e(1"coss)r
Горизонтальными линиями справа пред-
ставлены штриховой — точное значение
71(2тг) — 75, штрихпунктирной — величи-
на у,. = тге2г.
Зависимость 7i(s) = 7с(х) —
изображена на рис. П8 16,а (при /3 = 0)
Рис. П8.16
и на рис П8.16, £Г (при /3 = 0 4) (кривые 1), кривыми S обозначены
зависимости Q<rT. Расчеты проводились при ОСШ г = 0 5 1,0; 1,5
(пары кривых снизу вверх) Значения величин 7,- (г = 1,4), 0<тТ1 SkT,
ЕХт при /3—0 представлены в табл. П8.7 (s = тг) и П8.8 (s — 2тг)
Таблица П8.6
Т £
0,10 0,20 0,40 0,60 0,80 0,90 1,00 1,10 1,20 1,40
0,10 1,9832 1,9812 1,9734 1,9606 1,9430 1,9325 1,9209 1,9083 1,8947 1,8649
0,20 4,0221 4,0062 3,9442 3,8458 3,7175 3,6445 3,5669 3,4856 3,4016 3,2288
0,30 6,1743 6,1195 5,9115 5,5997 5,2237 5,0236 4,8209 4,6189 4,4203 4,0407
0,40 8,5008 8 3670 7,8777 7,1962 6,4473 6,0773 5,7207 5,3822 5,0643 4,4944
0,50 11,0683 10 7967 9,8490 8,6369 7,4296 6,8754 6,3649 5,9000 5,4798 4,7620
0,60 13,9510 13,4596 11,8357 9,9418 8,2306 7,4961 6,8449 6,2716 5,7685 4,9390
0,70 17,2328 16,4105 13,8516 11,1386 8,9052 8,0012 7,2247 6,5591 5,9880 5,0707
0,80 21,0104 19,7093 15,9129 12,2597 9,4957 8,4330 7,5436 6,7973 6,1680 5,1773
0,90 25,3958 23,4215 18,0382 13,3286 10,0314 8 8183 7,8244 7,0049 6.3236 5,2680
1,00 30,5199 27,6201 20,2473 14,3683 10,5317 9,1730 8,0800 7,1920 6,4624 5,3475
1,50 73,6953 59 1626 33,2982 19,6183 12,8112 10,7224 9,1532 7,9482 7,0040 5,6374
2,00 175,3344 121,0802 51,8876 25,6222 14,9903 12 0873 10,0286 8,5223 7,3883 5,8199
2,50 417,2005 244,0359 79,7819 32,8844 17,1772 13,3484 10,7785 8,9814 7,6773 5,9436
3,00 992,2335 489,4184 122,4850 41,8256 19,4160 14 5407 11,4388 9,3610 7,9032 6,0318
3,50 2354,5392 980,7445 188,4451 52,9352 21,7380 15 6862 12,0317 9,6822 8,0849 6,0972
4,00 5570,0959 1966,9041 290,8202 66,8210 24,1687 16 7999 12,5720 9,9590 8,2342 6,1471
5,00 30894,836 7942,4598 698,7979 106,1920 29,4455 18,9705 13,5328 10,4146 8,4647 6,2172
6,00 169831,49 32223,197 1694,6058 168,8828 35,4160 21,1090 14,3743 10,7766 8,6337 6,2630
7,00 928628,71 131160 82 4134,7563 269 3402 42,2515 23,2502 15,1278 11,0725 8,7623 6,2946
8,00 5063506,2 535023 23 10128,596 430,9591 50,1389 25 4182 15,8132 11,3197 8,8629 6,3173
Таблица П8.7
т 71 72 73 74 П<тт Sb Ex?
0 01 4,9750-Ю-2 4,1309-Ю-3 5,0236-Ю-4 8,1217-Ю-5 4,0692-Ю-2 1,96035 5,83188
0,10 0,55361 0,4856 0,6465 0,1145 0,4453 1,96670 5,8595
0,50 0,8671 2,6598-Ю1 2,7181-Ю2 3.7010-Ю3 3,4122 1,98587 5,9414
1,00 1,3258.1g1 3,2866-Ю2 1,2185-Ю4 6.0222-Ю5 1,2365-Ю1 1,99597 5,9836
2,00 9,9216-Ю1 1,9367-Ю4 5,6697-Ю6 2.2131-Ю9 9,7587-Ю1 1,99981 5,9992
3,00 7,0157-Ю2 9,8140-Ю5 2,0592-Ю9 5,7611-Ю12 6,9943-Ю2 1,999995 5,99998
4,00 5,0386'Ю3 5,0751-Ю7 7,6676-Ю11 1 5446-Ю16 5,0361-Ю3 2,00000 6,00000
5,00 3,6612-Ю4 2,6807-Ю9 2,9442-Ю14 4,3115-Ю19 3,6610-Ю4 2,00000 6,00000
5,00 3,4599-Ю4 2,3942 Ю9 2,4851-Ю14 4,4392-Ю19 3,4599-Ю4 2,00000 6,00000
Таблица П8.8
т 71 72 73 74 QcrT Sk?
0,01 0,1974 0,6495-Ю-1 0,3128-Ю-1 0,2003-Ю-1 0,1612 1 9696 5,8286
0,10 0,9838 6,5671 3,1938-Ю-1 2,0520-Ю2 1,6222 1,9604 5,8319
0,50 1,1162-Ю1 2,1343-Ю2 6,0185-Ю3 2,2591-Ю5 9,4250 1,9744 5,8928
1,00 3,1640-Ю1 1,8134-Ю3 1,5489-Ю6 1,7634-Ю7 2,8500-Ю1 1,9921 5,9676
2,00 2,0515-Ю2 8,2183-Ю4 4,9367-Ю7 3,9540-Ю10 2,0024-Ю2 1,9997 5,9989
3,00 1,4107-Ю3 3,9635-Ю6 1.67O4-1O10 9,3861-Ю13 1,4048-Ю3 1,99999 5,99997
4,00 1,0086-Ю4 2,0330-Ю8 6,1472-Ю12 2,4783-Ю17 1,0079-Ю4 2,00000 6,00000
5,00 7,3235-Ю4 1,0726-Ю10 2,3562 1015 6,9016-Ю20 7,3228-Ю4 2,00000 6,00000
5,00 6,9197-Ю4 0,9576-Ю10 1,9880-Ю15 5,5025-Ю20 6 9197-Ю4 2,00000 6,00000
Примечание. Данные последних строк в таблицах рассчитаны по асимптотической формуле.
Приложение 8 I Синхронизация генератора на основном тоне 515
516
Приложение 8
Вероятность срыва сихронизации
Вероятность P(i) достижения границ интервала (г“,г+) и вероят
ность Q(/) того, что процессом a:(Z) эти границы не достигаются, свя-
заны соотношением
P(t) = 1 - Q(Z), (П8.41)
где t = Q/.; Q — полоса синхронизации; t в секундах. Вероятность
Q(t) удовлетворяет равенству [26] Q(t)= 1 q(x,t\x0)dx. j X (П8.42)
Пусть д(х) — характеристика фазового детектора (ФД); Л.(г) —
= sin х — (3. Тогда g-функция q(x,t | го) при известном диффузион-
r d .. 1 d2
ном операторе L = — И1(г)1 Ч—является решением задачи
ох г dx2
= Lqfat'),
(П8.43)
где g(x.O | г0) = 8(х — г0); д(го ± s, t | х0) = 0 при любом t;
g(x, оо | г0) = 0 при |х - г0| < з. Здесь g(f ,t | г0) — вероятность того
что х < x(t) < х + dx при |г — г0| < s и всех t < i и г(0) = г0.
Графики g-функции q(x,t) изображены на рис. П8.17 при г = 1 (а —
s = 2тг; б— s — тг) при хо = 0, /3 0. Графики получены с использо
ванием неявной разностной схемы краевой задачи (П8.43)
5g _ дГ+Дт-д,т. 5д = дД*?' - q^T
dt Д.т ' дх 1Ах
д\ g^T-2gJ+^+g;+^
dx2 &x2
(П8.44)
Рис. П8.17
Синхронизация генератора на основном тоне
517
которая приводит к системе ли
нейных алгебраических уравне-
ний:
-ь^Т +ciqT^T =
= -di-, i = 1, ЛГ - 1;
лт+Лт — лт+^т — П
9о — ад —и-
Здесь
а; — 1/гДг: — hr/2/\j:
Ь{ = 2/гДа:2 + l/kr — h'i,
с,- = 1/гДг2+ +Л,/2Дг,
di =
hi — h{xi)\ — h'(xi)',
Xi — — s + i Да:; i — 0,N
Да: — 1s[N\ = q(xi,t | x0).
Начальное условие аппроксимируется следующим образом:
,9 = j0
* [ 1/Дг,
при г NXo; г = О, 7V;
при i = NXo,
где NXo — номер ближайшего к xq узла а:,-. Система линейных алгебра-
ических уравнений решается методом прогонки.
На рис. П8.18 представлены зависимости вероятности срыва слеже-
ния Р(<) = P(a:o,t), определенные по (П8.41) с учетом (П8 42) при
р(а:) — sin х и значениях хц = 0; s = 2тг; /3 = 0 и г = 1,4, полученные
численным решением задачи (П8.43). Штриховыми линиями показаны
результаты расчетов по приближенной формуле
P(t) = l-e-*/'»1, (П8.45)
причем значения Т1 = ус взяты из табл. П8.7 и могут быть вычисле-
ны по формуле 7С = 27Г2г/ц(г).
При известной функции Р(а:0,7) находим ПРВ
ыу м rfF(a:o,Z) dQ dfx+
w^°' '>=—JT-=--di = -di J,-5(I' ‘1 г”>
Тогда начальные моменты времени до выхода за интервал (а: ,а:+)
находятся по формуле
E(tn) = y„-[ tnW(x0,i)dt = - [ tn^-dt (П8 46)
Jo Jo dt
Известно, что при больших ОСШ справедлива рекуррентная фор-
мула [26]
Тп = «TiTn-1 или уп = п>Т1 .
(П8.47)
518 П р иломсение 8
Используя метод разделения переменных, запишем
q(x, f) =
Тогда по (П8.43) получим
r'(t)v(x) — г(1")Ьи[х).
Полагая г'(/.)/г(/.) — —А, находим
r(Z) = е-А‘; Lv(x) = — Xv(x).
Используя выражение для диффузионного оператора, приходим к
краевой задаче
(1/г)?/'(ж) + h(x)v'(x) + g'(x')v(x') = —Xv(x); (П8.48)
v(x0 - s) = v(x0 + s) — 0. (П8.49)
В результате решение краевой задачи (П8.43) принимает вид
ОО
q(x,t) = '£ake-*l‘t, (П8.50)
к=0
где ак(х) = ъ'к(х) — собственные функции; А* — собствен-
ные значения оператора L, причем коэффициенты Ск определяются из
начального условия
ОО
о) = y~}ckVk(z)-
к-0
Используя (П8.42), находим
ОО
Q(/) = E^e“At£>
fc-o
(П8.51)
(П8.52)
rx+ [Xo+s dQ 5° x
где dt = / ak(x)dx= I йк(х) dx. Тогда —— = — Afcdfce-Afct.
Jxo-s di
По (П8.46) получаем yn = £?(/") — ^^Xkdkl, где I — I tne А*‘ dt.
'o
k=0
По [20] I = n!/A£+1.
В результате находим окончательно
7n = = n
(П8.53)
k=0
Синхронизация генератора на основном тоне 519
| Запишем ДУ (П8.48) в форме
v" +pi(x)v' +p2(x)v = О,
где pi(x) = rh[x); р2(х) — rh'(x) + Аг.
Тогда после подстановки [79] и — vec^x^2; Pi(a;) — dC/dx это ДУ
преобразуется в самосопряженную форму [79]
I и" + В(х)и = 0; В = + р2.
Таким образом подстановкой [79]
v(x) — а(х)и(х),
где а(х) = ехр [- £ f^h(x) da:j = ехр {-^[G(a?) - G(x0) Д(г - г0)]};
h(x) = «/(г) — Д; G(a:) = f* g(u)du, краевая задача (П8.48) (П8.49)
приводится к задаче Штурма -Лиувилля
Liufx) — Хги(хУ,
и(ха — s) = u(xq + s) = 0, (П8.54)
где Lt — & + Qo{x) — самосопряженный дифференциальный опе-
ратор; г;(1(г) = — ^cosa:.
В этом случае собственные функции ортогональны с весом г и по-
скольку они определены с точностью до постоянного множителя, по-
сле их нормировки можно получить единственную ортонормированную
с весом г систему функций, обладающую свойством
I (пв.55)
В результате ряд (П8.50) принимает вид
q(x,t) — ^2а(х)с>м/;(а:)е_А':‘. (П8 56)
k=0
Коэффициенты q определяются из начального условия (П8.51) при
9(г.О) = Ь(х — а,-0). Вводя скалярное произведение [80] (Л(ж),
Ь(х — х0У) - Л(х’и), где A(x) — run(x)a~1(x)-, А(х0) — ги„(хо)а-1(го) =
= гиТ1(хо) по (П8.56) с учетом (П8.55) получим равенство [80]
Сп - ^ ^гг(^-о)-
Поскольку u,t(a;o) ~ то по (П8.55) находим
</(!,/) = ^аке-Хк‘, (П8.57)
1-=о
520
Приложение 8
где ак = rvk(xo)vk(x) — га(х)ик(х0)ик(х)
По условию задачи Штурма-Лиувилля все собственные значения по
крайней мере неотрицательны и образуют возрастающую последователь-
ность Ао < А] < Аг < - - - < Afc < .. ., а система собственных функций
«*:(г) является полной, более того, собственные функции гг^-(г) в интер
вале (rco — s; х0 + s) имеют ровно k нулей [79].
Рассмотрим функцию [81]
Qo(z) = [ q(x,t)dt, (П8.58)
Jo
тогда среднее время -ft до выхода за интервал [х_,г+] удовлетворя-
ет соотношению [81]
r^o+s
Ъ— Q0(x)dx= / Q0(x)dx,
J Х~ 'fxQ — s
которое находится после интегрирования по частям с последующим ис-
пользованием равенства (П8.42).
Тогда с учетом (П8.58)
e«w=f
fc=0 к
Отсюда получаем представление среднего времени 71 в форме ряда
A dk
71 = Er- <П8 59)
Заметим, что (П8 59) является частным случаем (П8 53) при п = 1.
Функция Qo(r) удовлетворяет ДУ [81]
^ + sinzQ0(a;)-C-l(a;), (П8.60)
где С = const; 1(г) — единичный скачок
Решение ДУ (П8.60) при граничных условиях
Qo(-s) = Qo(s) = 0 (П8.61)
и при zq — 0 (С = 1/2) имеет вид [89]
Т
2
Qo(x) = rercosx / е-гсов®
- — 1(г) dx, х 6 [— s, *]
Функцию <Эо(ж) можно записать иначе, если использовать четность
функции фо(ж), которая вытекает из ее положительности и граничных
Синхронизация генератора на основном тоне
521
условий (П8 61)
Отсюда находим среднее время до выхода за границы интервала
Отсюда следует [25]
71 = г e-rcos® (J ercosudi?| dx. (П8.62)
Воспользуемся разложениями
e±rc"e=c = 70(r) + 2^(±l)nZn(r)cosna;. (П8 63)
n=l
Тогда получим
rH iyi
/ e~rcosudu = Zo(r)|x| + 2 ---—Zn(r)sin n|x|. (П8 64)
n=l П
В результате при s — тг и s — 2тг находим соответственно выражения
для функций Qo{x) = Qt(x) и Qo(®) = С2я(г):
Используя (П8 63) и (П8 64), получим
71 = 7<
У Qn(x)dx = тг2г/о(г) - г!п,
522
Приложение 8
где
= - Г е’™ ( Ге'™» du\ dx - н212(г) - (l/r)7jr;
Jo Vo /
г2тг
71 — Тс = / Qn^dx = 4тГг/(2(г) - rl-2n;
J-2*
/*2тг / >>x x
/2.= / ercos« ( / e-rcosud \ dx — 2ц3 Ig(r).
Jo \Jo /
Таким образом, приходим к известной формуле
7с = 2ir2r/o(r). (П8.65)
Отсюда при г 1 следует
7с кгтге2г.
С другой стороны, при г >1 по (П8.62) может быть получена прибли-
женная формула для величины 7>.
Для внутреннего интеграла (П8 62) находим
[ ercosu du « 1 Г ere ”^2D du * -erVbrD; D =
Jo ? 2 r
Аналогично получаем выражение для интеграла
/ e-rcos* dx = J Г e-rcosE dx » [ ° e-(r-<?/2D (lx =
Jo ? J-„ 2 J_x 2
Следовательно,
7>r Rs (тг/2)е2г - 7c/2 (r » 1)
Таким образом, справедливы неравенства
2 7с/7. < 4.
Правый предел достигается при г 0, так как по (П8.62) при г —> О
получаем [25]
71 и rs2/2.
Найдем первое приближение для собственного значения А^- Положим
в (П8.54) qt>(x) = 0, тогда при з;0 - 0 придем к краевой задаче
и"(г) + А'н(г) — 0; w(—s) = u(s) = 0.
Синхронизация генератора на основном тоне
523
Общим решением этого ДУ является
и(х) — Ci cos хуГХ' + С’2 sin x\fX'.
Используя однородные граничные условия, приходим к системе урав-
нений
Ci cos sy/У — С2 sin sW = 0;
Cj cos sx/V + C-> sin sW — 0;
Определитель этой системы Д должен быть равен нулю Д =
— sin lsy/У = 0. Отсюда находим 'lsy/У — kir 1л
А„ 1 — (7itt)2/4s2, п = 1,2.... (П8.66)
Отсюда следует, что Aq = 1/4гт2, т — s/тг, является первым при
ближением для собственного значения Ао, а малые Ао позволяют огра-
ничиться одним слагаемым ряда (П8.57), если A] Ао-
В [82] при s — тг методом возмущения найдены корректирующие до-
бавки к первому приближению (П8.66), зависящие от ОСШ г.
Методом возмущения можно показать, что собственные значения А^
удовлетворяют соотношениям
тг2 тг2г2 п2т2(п2 — 5ттг2)г4
4tti2 + 8(тг2 — т2) 128(тг2 — т2)3 ’
если тг ф т, п ф Зт;
l + + Аг2_|_( П™ 3 г3---------1_г4 +
4 V 7 4 32 7 256 2048
если п — тп\
9 9 2 / пт г3 75 4
4 64 ' 7 512 16384
, если тг — Зт,
(П8.67)
где т — s/тг; s — порог, причем первые слагаемые каждой строки
совпадают с (П8 66).
Собственные числа Аг (г — 0, 4) при s = 2тг; г0 = 0 = /3 при различных
значениях ОСШ г представлены в таблице П8.8. Вторыми строчками
при г — 2; 1; 0,5 представлены значения А,-.
С учетом равенства А^ — гАп при s — тг, m — 1 находим
1 _ i Зг _ Зт2 _ Зт3
47 ~ 4 + 32 ~ 256 ~ 2048’
9 9г г2 75г3
- 47 + 64 ~ 512 “ 16384'
тг2 п2г п2(п2 - 5)г3
4г 8(тг2 — 1) "1" 128(тг2 — I)3 ’
71 2; п ^4 3,
где подчеркнутые слагаемые совпадают с [82].
524
Приложение 8
Таблица П8.8
г = 4 г -3 г- 2 г = 1 г = 0,5
Ао 0,99224-Ю-4 0,71185-Ю- 3 0,49942-Ю-2 0,124 0,35136-Ю-1 0,0428 0,106582 0,1257
Ai 0,75091 0,66842 0,59463 0,609 0,60376 0,6054 0,79960 0.7969
А2 0,77224 0,70213 0,65541 0,533 0,77056 0,7628 1,23474 1,234
Аз 0.83355 0,79939 0,82368 0,833 1.16549 1,1656 2,08318 2,083
А< 0,92288 0,94960 1,07739 1,082 1,71155 1,7117 3,19944 3,1994
Таблица П8.9
г = 4 т-3 г = 2 г = 1 г = 0,5
Ао 1,98564-10“4 1.98568 10“4 1,42970-Ю-3 1,4253-10—3 1,02474-Ю-2 0,391-10—2 1,0079-Ю-2 0,80929-10“1 0,8056-Ю-1 0,75426-Ю-1 0,29378 0,29541 0,25859
Ai 0,83355 0,79940 0,82368 0,82407 1.16549 1,1655 2,08317 2,125
Аг 1,26913 1,26560 1,45228 1,3618 2,40258 2,3665 4,57324 4 5692
Аз 1.56763 1,74682 2,27027 2,2699 4,13370 4,1337 8,06662 8,0667
Ai 2.08494 2,47606 3,38650 3,3877 6.38034 6,3805 12,56498 12.5651
В табл П8 10 приведены собственные значения Ап (тг — 0,4) зада-
чи Штурма-Лиувилля (первые строчки) при = (3 = 0; s = тг. Во
вторых строчках приведены значения А,-, найденные методом возмуще-
ния; в третьей строчке приводится оценка Aq для величины Aq, причем
значения yi взято по табл. П8.7.
На рис. П8.19—П8.22 изображены собственные функции иь(ж) при к —
0,4 и {3 = 0, х0 = 0, при г _ 1 (рис. П8.19 (s = тг), рис. П8.20 (s — 2тг))
и при г — 3 (рис П8.21 (s = тг), рис. П8.22 (s = 2тг))
Из доказанного приближенного равенства (П8.47) был сделан вывод
об экспоненциальном распределении W(Z) времени до срыва слежения
при большом ОСШ г [25]. Это, в свою очередь, доказывает справед-
ливость приближенной формулы (П8.45) (при г > 1) (рис. П8.18). С
другой стороны, эта же формула (П8.45) получается из (П8.41), если
ограничиться первым слагаемым ряда (П8.52) и, кроме того, прирав-
нять коэффициент t/0 единице. Отсюда следует, что при большом ОСШ
г должно выполняться неравенство Aq Aj. Это означает, что постоян-
ные времени 7} = 1/А,-, i 1, парциальных экспонент е-А,£ значительно
меньше постоянной времени Tq = 1/Aq, при этом оказывается справед-
ливым приближенное равенство То ~ 71 или
71 ~ 1/А0.
(П8.68)
Синхронизация генератора на основном тоне
525
ик
О 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 x/s
Соотношение (П8 68) вытекает из предположения об экспоненциаль
ном характере ПРВ Ил(7) [25]
W(t) = (1/Т1)е‘/'1'1 = A0e~Aot = —dQ/dt. (П8 69)
Пренебрегая в (П8.57) быстрозатухающими парциальными экспонен-
тами, приходим к приближенной формуле
ц{ху1)Рзао{х)е~Хо\ 1/А0 > t > 1/Ai (П8 70)
При малом Aq (большом ОСШ) можно воспользоваться начальным
значением q(x,t) ~ 6(х — го) при 7—0, тогда по (П8.70) снова при-
ходим к равенству do кг 1 [80]
526
Приложение 8
По (П8.59) при do =
(П8.68).
Тогда по (П8.53)
1, ограничиваем одним слагаемым, получаем
уп - п!/А£,
что совпадает с (П8.47)
Пусть г — 4; s = 2тг, Xq — 0, тогда по табл П8 8 или вычисляя ус по
формуле 7с = 2тг2г/о(г), находим ус = 1,0085 • 104, с другой стороны,
по табл П8.10 Ао — 0,99224- 10-4 (Aj = 0,7509 Aq), отсюда ус =
1,0078 104, следовательно, ошибка приближенного равенства (П8.68)
при г — 4 меньше 0,1 %, что означает быструю сходимость ряда (П8.59)
Приложение, 9
Элементы теории одноконтурных
автогенераторов
Автономный автогенератор
Прежде чем исследовать воздействие шума на автоколебательные си-
стемы, напомним основные сведения из теории автономного одноконтур-
ного автогенератора [78] На рис. П9 1 представлена в качестве типово-
го примера схема автогенератора с трансформаторной обратной связью
(эта схема справедлива для высокочастотных составляющих колебании,
цепи питания и пути постоянных постоянных составляющих здесь не
рассматриваются).
Для мгновенных значений управляющего напряжения w(i) и выход
ного тока активного элемента г(и) с учетом выбранных положительных
направлений тока справедливо следующее ДУ в символической запи-
си (р d/dt).
(p2LC + prC + l)w(i) — pMi(u) — 0. (П9 1)
Входным током активного элемента мы здесь пренебрегаем
Важно отметить, что величина выходного тока i(u) определяется не
тем напряжением u^[t) на контуре, которое приложено к выходным за-
жимам активного элемента, а напряжением it(Z) на управляющем входе
В случае узкополосного колебательного контура решение исходного
уравнения (П9.1) ищется в виде суммы медленно меняющейся нуле-
вой составляющей Ug(t) и колебания с меняющейся амплитудой U(t)
и фазой <p(t)'-
u(t) = Uo(t) 4- [7(i)cos[wo/ + y?(i)], (П9.2)
где wq — собственная частота контура.
Высшие гармоники и комбинационные
Частоты здесь не учитываются. Если по-
ложение рабочей точки на вольт-амперной
(проходной)
характеристике активного
элемента фиксировано (постоянное внеш-
нее смещение во входной его цепи), то ве-
личина Uoft') = const и далее не учитыва
ется, т.е.
u(t) = U(t) cos [си о Z + y>(t)] (П9.3)
Рис. П9.1
528
Приложение 9
Ток i(u) в (П9.1) при w(f), определенном выражением (П9.3), можно
представить в виде ряда Фурье:
i[U cos(wq^ + у)] — (П9.4)
= I0(U) + IC(U) cos(w0 + у) — Л(%) sin(wof + <р) + высшие гармоники
Из всего ряда Фурье в (П9.4) удерживается лишь первая гармо
ника для амплитуд косинусоидальной 1C(U) и синусоидальной /,(У)
компонент, которой справедливы известные выражения коэффициен
тов Фурье:
1
IC(U) ~ / г(С/ cos чр') cos чр dtp-,
7Г J—n
IS(U) = — [ i(U cos чр) sin чр dip.
я J-*
(П9.5)
(П9.6)
Если входное напряжение чисто гармоническое, активный элемент бе-
зынерционный и входной ток отсутствует, то зависимость г[и) алгебра
ическая. Тогда под интегралом в (П9.6) стоит нечетная функция и этот
интеграл равен нулю (другими словами, фаза первой гармоники выход
ного тока повторяет фазу входного напряжения) Однако для общности
будем считать IS{U) 0, поскольку небольшое усложнение исходно
го уравнения (П9.1) может потребовать учета квадратурной компоненты
IS(U) наряду с синфазной /с([/)
Применив процедуру метода медленно меняющихся амплитуд Ван
дер Поля, т.е. полагая
dU d2U dU d3U d2U
dt dt2 dt dt3 dt2 zpg jx
dp dPp dip dPp d2<p
~dF^W(,lu •
и используя в (П9.1) для мгновенных значений напряжения «(/) и тока
г(«) их представления в форме (П9.3) и (П9 4), получим после при
равнивания коэффициентов при синусоидальных и косинусоидальных
соста вля ющих
2 ^ = /?.y4(L/)-C/; (П9.8)
ыоо dt
—U^- = RyI,{U), (П9.9)
coqO dt
где 8 — rjyjLjC — затухание; Ry — KrtcRK — управляющее сопроти
вление; Кос = M/L — коэффициент обратной связи; RK = (L/C)/r —
сопротивление контура на собственной частоте.
Уравнения (П9.8), (П9.9) для медленно меняющихся амплитуды и
фазы называют укороченными в отличие от полного уравнения (П9.1)
для мгновенных значений.
Элементы теории одноконтурных автогенераторов
529
’ Если квадратурная составляющая первой гармоники тока активного
элемента Ц = 0, то фаза колебания (П9.3) не зависит от времени,
т.е. автоколебания идут на собственной частоте контура а>о = 1/VLC.
Тогда остается лишь укороченное уравнение для амплитуды, которое
можно представим в виде
Т— = 7?УЛ(17) - и,
at
(П9.10)
где Т — 2/(и>о6') — постоянная времени контура
Это уравнение является исходным в теории автономного одноконтур
него автогенератора с безынерционным активным элементом. Оно опи-
сывает переходный процесс установления амплитуды t/(Z), начиная с
некоторого его начального значения (7нач
t Ги dU
Т Ju™ ЯуЛ(^) - U
(П9.11)
Кроме того, из (П9.10) получим установившееся значение 1/° =
= lim (/(£) = const в виде решения уравнения стационарного режима
t—►ОО
которое можно представить в двух равносильных вариантов — через
колебательную характеристику и прямую обратной связи U / Ry:
= U°/Ry, (П9.12)
или через среднюю крутизну Si(U) = I](U)/U и управляющую про-
водимость 1/7?у:
^(С/0) = 1/Яу. (П9.13)
Чтобы воспользоваться этими выражениями, необходимо знать, как
меняется амплитуда первой первой гармоники выходного тока от
изменения амплитуды управляющего напряжения U. Это связано с вы-
бором способа аппроксимации вольт-амперной характеристики г(и) ак-
тивного элемента Если характеристика гладкая, то в общем случае
произвольного закона tz(Z) естественно аппроксимировать ее степенным
рядом. Пусть управляющее напряжение tt(Z) отсчитывается от некото-
рого фиксированного напряжения смещения Е те
г(и) — 1.АЭ(Е + и), (П9.14)
где г'дэ(^) — несмещенная характеристика активного элемента. Разла-
гая ?(и) в степенной ряд, получим
г(«) — г0 + siu + s2u2 4- s3u3 + s^u4 + s5uz + , (П9.15)
где г0 = гдэ(-Е-) — постоянная составляющая.
Величина »о для расчета колебаний интереса не представляет. Во-
прос об удержании необходимых членов ряда (15) обусловлен формой
колебательного напряжения w(Z) на входе активного элемента Если
530
Приложение 9
оно строго гармоническое а сама аппроксимация нужна для вычисления
лишь первой гармоники выходного тока г(м), то достаточно аппрокси-
мировать не саму характеристику i(u), а лишь ее нечетную часть:
, ч i(u) — г(—и)
~ —----------L (П9.16)
поскольку четная часть
. . г(гг) + ?(—и)
гЧетн(«)- У 2 -------- (П9.10
не дает вклада в первую гармонику тока активного элемента Следо
вательно, в такой задаче в аппроксимации (П9 15) играют роль лишь
слагаемые с нечетными степенями напряжения и(1):
'неч(м) = $1« + s3tz3 + s5u5 + .... (П9.18)
Нужно подчеркнуть, во избежание часто встречающейся ошибки, что
выражение (П9.18) вовсе не является вольт-амперной характеристикой
а представляет лишь ее нечетную часть. Следует иметь также в виду, что
изменение величины напряжения смещения Е, т е выбор той или иной
рабочей точки на истинной вольт амперной характеристике, существен-
но влияет на величину а иногда и на знак) коэффициентов si, s3, s5
В некоторых задачах необходимо знать зависимость от U не только
первой гармоники тока /1(Д), но например, постоянной составляющей
при расчете автосмещения) или четных гармоник (в умножителе часто
ты). Тогда недостаточно аппроксимировать только нечетную часть ис-
ходной нелинейной характеристики нужно учитывать и слагаемые ряда
(П9.12) с четными степенями. Так же следует поступать и при анали-
зе воздействия на вход активного элемента нескольких напряжении с
кратными частотами или при расчете комбинационных частот.
Найдем выражение колебательной характеристики Ii(U) при полино-
миальной аппроксимации вольт-амперной характеристики нелинейного
элемента Приняв для мгновенного значения управляющего напряже
ния iz(l) — U cos(tv-0l + <р) получим при подстановке его в (П9 15) [так
же как и в (П9.18)]
3 5
Д(Д)“ S1U + -SaU3 + -soUz + (П9.19)
4 о
Это нечетная функция амплитуды колебаний U.
Для средней крутизны Si([/) = I\{U)/U Получается четная функ-
ция амплитуды
3 5
Si(U)~si +-s3V2 + gS5l/4 + . (П9.20)
Вид графиков /1(Д) и S\{U) определяется величиной и знаком каждо-
го из коэффициентов разложения si, s3, S5, .. , а это зависит от выбора
величины смещения Е на вольт-амперной характеристике (П9 14). Все
Элементы теории одноконтурных автогенераторов
531
возможные варианты целесообразно разделить на два основных класса
— в первом из них средняя крутизна 5’i(J7) монотонно спадает с ростом
амплитуды колебаний U, а во втором она возрастает от небольшой вели-
чины до некоторого максимума а затем спадает. Чтобы получить моно-
тонное спадание графика 5\([/), достаточно сохранить лишь два коэф-
фициента Si > 0 и S3 < 0. Для реализации графика 5i(t/) с немонотон
ним изменением нужно взять три коэффициента. Si > 0, s3 > 0, s5 < 0.
В соответствии с таким делением режимов на рис. П9 2,а,<> даны гра-
фики колебательных характеристик а на рис П9.2,в,г— средних
крутизн 5'i(t/) для двух указанных классов
Жирными штриховыми линиями на рис. П9 2 показаны аппроксима-
ции истинных характеристик двумя (рис П9 2,а, в) и тремя (рис. П9.2,б,г)
членами ряда.
При непрерывном увеличении управляющего сопротивления Пу в слу
чае монотонного уменьшения средней крутизны (рис. П9 2,е), соглас-
но уравнению стационарного режима (П9.13), автоколебания возника-
ют при выполнении условия самовозбуждения S\Ry 1 и далее их
амплитуда {7° плавно нарастает от нулевого значения, как показано
на рис П9 3,а.
Такой режим возникновения автоколебаний называют «мягким» са-
мовозбуждением — по характеру графика нагрузочной характеристи
532
Приложение 9
ки U°(Ry)
Если график Si(U) немонотонен (как на рис. П9 2,г), то для воз
никновения автоколебаний при SiRv 1 требуется большее значение
управляющего сопротивления, причем колебания возникают и срыва-
ются скачком при плавном изменении 7?у. Эта ситуация отражена в
наличии зоны гистерезиса в нагрузочной характеристике рис П9.3.6, а
режим возникновения колебаний с гистерезисом называют «жестким».
Представление о переходном процессе при установлении автоколеба-
нии и влиянии на его ход начальных условий дают фазовые портре-
ты рис. П9 4 при мягком («) и жестком (б) режимах самовозбужде-
ния, построенные согласно ДУ (П9.10), которое связывает через коле-
бательную характеристику Ii(U) текущее значение t/(t) со скоростью
его изменения dU(t)/dt.
Как видно из этих портретов при мягком режиме самовозбуждения
начало координат U0 = 0 неустойчиво; при любых начальных услови-
ях устанавливается устойчивый стационарный режим с амплитудой U®.
Если самовозбуждение жесткое, для реализации устойчивого равнове-
сия U® начальная амплитуда 1/Нач Должна превышать уровень U^, в
противном случае процесс завершается при U° = 0.
К тем же выводам можно придти, рассматривая фазовые портре-
ты рис. П9.5; они построены не по укороченному ДУ (П9.10) для ам
плитуды U(t), а для мгновенного значения и(<) и скорости du(t)/dt
с использованием исходного уравнения (П9.1). Если ввести затухание
6 — rfy/LjC, коэффициент обратной связи Л'ос = М/L, сопротивле
ние контура 1?к = \jLjCfb и функцию /(u) = di[u)/u, то из (П9.1)
получается
й + б[1 - RyJ(u)]u + и - 0. (П9.21)
Здесь Ry = RCCRK1 а точками над и обозначено дифференцирование
Элементы теории одноконтурных автогенераторов 533
по безразмерному времени t — Ify/LC.
Записав (П9.21) в форме Коши
й = у, у - — 6[1 - Ry/(u)]j/ и, (П9 22)
перейдем к «сопровождающему» ДУ для углового коэффициента
dV = -д[1- Ryf{u)]y -и пд 23
du у
С помощью (П9.23) можно построить поле траекторий y(w) на фа-
зовой плоскости и, у = й. В зависимости от вида функции /(и) =
— di(u)/du получаются разные структуры фазовых траекторий для мяг-
кого и жесткого режимов самовозбуждения Если при аппроксимации
вольт амперной характеристики г(и) пользоваться по прежнему ее не-
четной частью (П9.18), то получаем
—si + 3«з«2 + б«5гг4 + . , (П9.24)
du
т.е. вид графика локальной крутизны f(u) такой же, что и у графи-
ка средней крутизны Si(U).
На рис. П9.5 построены типичные фазовые портреты для мгновенных
значений при мягком (а) и жестком (б) режимах самовозбуждения. В
случае мягкого самовозбуждения при SiRy > 1 возникает устойчивый
предельный цикл, начало координат — особая точка типа неустойчи-
вый фокус"; все траектории приходят к устойчивому предельному ци
клу (рис. П9.5,а)
Если рассмотреть жесткий режим самовозбуждения и выбрать вели-
чину Ry в интервале, соответствующем гистерезисной зоне рис. П9.3.6
то получим фазовый портрет рис П9 5,6. Здесь неустойчивый предель-
ный цикл разделяет области притяжения устойчивого фокуса в нача-
ле координат и устойчивого предельного цикла При стремлении Ry
к правой границе зоны гистерезиса (где stRy — 1) неустойчивый пре-
дельный цикл рис. П9.5,бстягивается к точке в начале координат, делая
ее неустойчивой. На левой границе гистерезисной зоны рис. П9 З.боба
предельных цикла сливаются и исчезают с фазовой плоскости; остает-
ся единственная устойчивая точка в начале координат, те колебания
срываются скачком
Перейдем теперь к рассмотрению основных эффектов, возникающих
при внешнем воздействии в виде гармонического сигнала Поскольку
имеется в виду в дальнейшем провести параллель со случаем шумово-
го воздействия, мы ограничимся здесь лишь напоминанием сведений
Из теории внешнего асинхронного воздействия на автогенератор [78],
а явления при синхронизации автогенератора гармоническим сигналом
рассматривать не станем
Внешнее асинхронное воздействие
на автогенератор
534
Приложение 9
Под асинхронным воздействием понимают частный случай внешнего
воздействия, когда соотношение частоты внешнего сигнала U? cosuM
и собственной частоты wq колебательной системы таково, что при дан
нои нелинейности активного элемента не возникает гармоник или ком
бинационных частот, попадающих в полосу пропускания колебательной
системы и вызывающих эффект синхронизации колебаний автогенера
тора (другими словами, отношение частот w2/wq нельзя представить в
виде отношения mln, где т и п — достаточно небольшие целые чи
ела 1 2, 3,
В отсутствие синхронизации внешнее воздействие влияет лишь на ре-
жим автогенератора, т.е. на амплитуду U\ его колебаний ui —
= l/j cos(u>ot + V’) Здесь индекс 1 указывает на отличие амплитуды
автоколебаний при внешнем асинхронном воздействии от амплитуды f
колебаний свободного автогенератора tt(i) = U cos(lj()Z + ip).
Эффект асинхронного воздействия зависит от свойств нелинейности
?(«) активного элемента. При мягком самовозбуждении свободного ав-
тогенератора возможно асинхронное «тушение» автоколебаний, когда с
ростом амплитуды (/2 их амплитуда уменьшается вплоть до полного
исчезновения колебаний на частоте uzq. При жесткой нелинейности, на-
оборот, возможно в определенных пределах асинхронное возбуждение
колебаний, сменяемые с ростом U? асинхронным тушением
Поскольку при шумовом внешнем воздействии в полосу контура ав
тогенератора попадает лишь узкая часть шумового спектра, то основная
его часть, лежащая вне полосы контура, может играть роль, подобную
асинхронному внешнему воздействию т.е. можно ожидать шумового ту
шения и шумового возбуждения автоколебаний
Рассмотрим эффекты асинхронного внешнего воздействия на примере
одноконтурного автогенератора по схеме с трансформаторной обратной
связью (рис. П9.1), а внешнее воздействие ы2 = £72со5ш2£ подается во
внешнюю цепь активного элемента и вместе с напряжением обратной
связи и.! = Ui cosfcjo^ + V’] действует на ток активного элемента, т.е.
z(w) — Цщ + w2). (П9.25)
Если контур узкополосный, то укороченные ДУ автогенератора имеют
тот же вид, что и уравнения (П9 8), (П9.9) свободного автогенератора
с той лишь разницей, что синфазная 1С и квадратурная Is компоненты
первой гармоники тока станут функцией обеих амплитуд U\ и С/2.
= RyIc(Ui, U.) - Ui. (П9.26)
at
= (П9.27)
coqo at
Таким образом задача сводится к вычислению этих компонент. Для
этого рассмотрим вначале аппроксимацию нечетной характеристики то
Элементы теории одноконтурных автогенераторов 535
ка (П9 25) двумя членами ряда
z’(w) = S]« + S3 it3, (П9.28)
где S| > О, S3 < О т.е. случай мягкого самовозбуждения свободно-
го автогенератора.
Подставим в (П9.28) сумму
и = Ui cost} + U2cost2 (П9.29)
где Ту = а/yt + -ф. То — w-pt и выделим в ней составляющие лишь с
аргументом 7j, попадающие в полосу пропускания контура.
Линейный член (П9.28) дает составляющую тока, равную SyUy cost},
а после подстановки суммы (П9.29) во второе слагаемое (П9 28), воз-
ведения в куб и простейших тригонометрических преобразовании, по
лучаем для тока
3 3
Ic(Ul,U2)-s1U1 + -s3Uf+-s3U1Ul, Is(Uy,U2) = 0. (П9.30)
Использование (П9 30) в (П9.26), (П9.27) дает укороченные ДУ одно-
контурного автогенератора с внешним асинхронным воздействием.
Поскольку активный элемент безынерционный те зависимость
(П9 25) — алгебраическая то в первой гармонике тока нет реактивной
сос авляющей R(Uy, U2) — 0. Значит автоколебания идут на собствен-
ной частоте контура а?о как и в автономном автогенераторе, а влияние
внешнего воздействия на амплитуду Uy получаем из (П9 26) в виде
= + Ry-Uy. (П9.31)
woo dt \ 4 2 /
Поскольку Si > 0, S3 < 0, то за счет третьего слагаемого в выраже-
нии пеовои гармоники тока Ic(Uy,Uo) действие амплитуды U2 сводится
к уменьшению этого тока, т.е. уменьшению запаса в условии самовоз
буждения Эффект асинхронного тушения становится более нагляд
ным, если обратиться к выражению средней крутизны Sy(Uy,U2) =
— Ic(Uy,U2)/Uy при асинхронном воздействии для мягкой нелинеи
ности
3 3
Sy(U\, Uo) — S] + ~s3Uy + ~вз(/|. si 0, s.3 < 0. (П9.32)
График по (П9 32) в зависимости от Uy для различных фиксирован-
ных U2 — const построен на рис П9.6, стрелкой показано увеличение U2
Рост U2 ведет к уменьшению средней крутизны, автоколебания исче-
зают (асинхронное тушение) при условии
Sy (0, Дгтушения)-
Если U2 y4^/3)si/Ы, то график S\(Uy,U2) стягивается к точке в
536
Приложение 9
начале координат; автоколебания становятся невозможными при сколь
угодно большом управляющем сопротивлении Iiy.
Аналогичным образом можно рассмотреть и случай жесткой харак-
теристики нелинейности
г(«) — «1 и + s3u3 + s5u5, si >0, s3 > 0, s5 > 0.
Оказывается, что в определенном интервале значений амплитуды Е/г
наблюдается рост амплитуды автоколебаний Ui — асинхронное возбу
ждение колебаний за счет вклада члена s3tt3 при s3 > 0. Характери-
стика из жесткой превращается в мягкую, а затем, с дальнейшим ро-
стом U2, происходит асинхронное тушение по сценарию, представлен
ному на рис П9.6.
Приложение 10
Стационарные характеристики
марковской цепи
Допустим, что стационарная переходная матрица Р размерности пхп
может быть диагонализирована посредством трансформирующей матри-
цы U т.е. возможно представление
U-1PU = A, (П10.1)
где матрица U состоит из собственных векторов матрицы Р Л - диа-
гональная матрица на диагонали которой стоят собственные значения
матрицы Р [Л = diagfAuA:, . ..,АЛ)].
По (П10.1) получим
PU — UA (П10.2)
Пусть ei — собственный вектор матрицы Р, соответствующий соб-
ственному ее значению Ai = 1 Тогда (П10.2) можно записать в виде
Р[еь U2] = [ei, U2]
1 О
О G ’
(П10.3)
где U? и G — матрицы размерности (л —l)x(n—1), причем собственные
значения Aj матрицы G удовлетворяют неравенству |Aj| < 1.
Введем матрицу V — U"1 так что VU = I (I — единичная матри
ца). Тогда справедливо равенство
Р1 р _
V, - О G
Т>1
V2
(П10.4)
где pi — вектор-строка — левый собственный вектор, соответствующий
собственному значению Ai — 1, ~V2 —- матрица, состоящая из остальных
векторов-строк В силу свойства VU = I получим
[ei U2] = I
(П10.5)
Среднее значение марковской цепи
тп — £7{ж[тг]} = 5гР(жп = $0, (П10.6)
t
где Si — значение отсчета процесса хп = з;[п], когда он находится в
состоянии St.
538
Приложение 10
По (П10.6) получим [76]
т — pSe, (П10.7)
где р = pt; е = е!, 0 0 '
S = 0 s2 ... 0 (П10.8)
. 0 0 ... $ri
Корреляционная функция стационарного СП хп имеет вид
77[£] — Хп ) — Р(жп ^-Д,. — «Д — Sj'j —
i 3
— sisj -P^Xn+k — Si | Xn = Sj')P(xn — Sj).
• 3
Отсюда находим [76]
Ж] = EE?^(P*)^ = pSPfcSe. (П10 9)
• з
По (П10 2) находим P = UAU 1 = UAV тогда [76]
Pl - (UAV)fe - UAkV = [e U2] J
0 p
G; V2
Окончательно по (П10.9) получим ковариационную функцию 7C[fc] =
= /?[&] — m2 или [76]
A'[*]_pS[e U2] J P
Se — 7/1.2 =
= (pSe)2 + pSU2Gfc V,Se - zn2 = (pSU2)GA(U2Se). (П10.10)
Пример П10 1. Пусть матрица P имеет вид
Г1 — а
L О
Р -
0< а + /3 < 1.
Найти среднее значение и КВФ СП ж„.
Решение. Собственные значения матрицы Р имеют вид Aj = 1; А2 = 1 — о — (3.
Следовательно. G = Х2 — 1 — а — 0 < 1-
Найдем транформирующую матрицу U Для того, чтобы найти собственные век-
торы матрицы Р о = [vi,i?2]T. соответствующие каждому из собственных значений
>1 и Л21 необходимо решить систему линейных уравнение Р-и — Аи. или
[’Г 1-^[S]-^[S] = [2]
Стационарные характеристики марковской цепи
В скалярной форме система уравнений имеет вид
1 — а А)гц + GV2 — О;
/?1<1 +(!-/?- А)г^ — О.
Отсюда находим, что собственные векторы матрицы Р имеют вид ет
е2 = U2 — [«; -Л]7
Таким образом трансформирующая матрица U и матрица V имею
и
-d=
Теперь по (П10 7) получим среднее значение СП хп
т - (/3*i + as2)/(a + Р).
По (П10.10) находим ковариационную функцию СП хп
К[Л “ G\ = A’MGfe- k
(а + РУ
Учитывая четность КВФ /£[&], получим
K'[fc] = /<[O]Glfcl = D^G1*1, G < 1,
Энергетический спектр СП хп имеет вид (см лекцию 19)
539
= е=[1: ]-
вид
(П10.11)
(П10.12)
(П10.13)
(П10.14)
UV - I.
S(z) - D;
(1 — Gz-1)(l - Gz)
540
Приложение 11
Корреляционная функция
АРСС-процесса
В общем случае, если АРСС-процесс задан РУ в форме (19 81), где
ЯиДт] ф 0 при п < 0 и -Ruajm] — 0 при п > 0, то получим
Rx[иг] Ч- CiЛг[т - 1] + ... + CpR^m - р] =
= Ч- ЬхЯцДпг — 1] Ч- - - Ч~ - ?], (П11.1)
причем для взаимных КФ справедливо РУ (при E?{u2[n]} = А2)
Яит[-т] Ч- ст Ч-1] Ч- - - - Ч- CpR^l-m Ч- р] =
= ^2[^m,0 + 1,0 + - • • + (П11.2)
Если т > q, то справедливо соотношение (19.104).
Пример П11.1. Пусть задан АРСС-процесс в форме РУ первого порядка
а,’[п] Ч- ах[п — 1] = и[тг] + си[п — 1]. Е{и2[п]} — А2.
Найти КФ их[т].
Решение В данном случае р = q = 1. По (19.104) получим РУ
7?х[тп] I а/(т[?/< — 1] = О, т > 1.
Запишем (П11.1) в векторной форме одновременно при т = О и т = I:
Г1 al ГКх[0]1 _ Г1 cl Г КиДо] 1
[a 1J [RX[1]J - (с 1] UUI[-1]J •
Аналогичная форма записи справедлива и для РУ (П11.2):
Г1 О] Г KUI[0] 1 _ 2 Г11
[a 1] [Rui[-1]J [с] •
Вычисляя, получим
Яих[о] = А2: Я„х[- 1] = А2(с - а);
А2 А2
Кх[0] = т---2 (1 4- С2 - 2ас); Яг[1] — --т-(с - а)(1 - ас).
1 — а* 1 — а
Поэтому окончательно находим
А2
Дх[ттг] = ---— (с — a)U ~ ос)(—а)”*—1, тп > 1.
1 — а2
Частным случаем АР-процесса является модель случайного блуждания хп —
—хп ! = vjn, где vj-ri — белый шум. Отсюда
п
к=1
Приложение 12
Применение теории марковских и
полумарковских цепей для анализа
цифровых систем синхронизации
Рассмотрим математические модели цифровых систем синхронизации
(ЦСС) (рис. П12.1 — схема Холмса, рис. П12.2 - два варианта схемы
Кессны-Леви и рис. П12.3 — схема Осатаки-Огавы; УУ—усредняющее
устройство; УДИ — устройство добавления и исключения; УГИ -— упра-
вляемый генератор импульсов; С —• селектор сдвига). Предположим,
что входной сигнал имеет прямоугольную форму и известный период.
В каждый момент времени kTo система может находиться в одном из
N — п — 2m состояний, соответствующих отсчетам полезного сигнала
(рис. П12.4) Сигнал управления может перевести систему из состояния
г либо в состояние ? + 1 (положительное управление), либо в состояние
г — 1 (отрицательное управление). Поскольку полезный сигнал явля
ется периодическим, то переход из состояния 2m в состояние 2m + 1
равносилен переходу в состояние 1, и наоборот
I Пусть входной сигнал имеет вид меандра с амплитудой А, а шум
распределен нормально с нулевым средним значением и дисперсией
Рассмотрим математическую модель системы, построенной по схеме
Холмса (см. рис П12 1) В этой системе усредняющее устройство пред-
ставляет собой последовательное соединение сумматора отсчетов вход-
ного сигнала и релейного устройства. Сумма М отсчетов входного сиг-
М
нала 52 y(kTo + распределена нормально со средним значением
j=i
Ms(kTo) и дисперсией В этом случае вероятность правильного
регулирования р (переход из состояния i в состояние i + 1 при i sC m и
переход из состояния i в состояние г — 1 при т < i: 2m) и вероятность
ошибочного регулирования q будут [86]
р - ф(7р); <7 = 1- р,
где Ф(г) — -^=1^ е-1 dt — интеграл вероятности; р = МА^/а^ —
отношение сигнал/шум на выходе сумматора.
Таким образом, система Холмса описывается цепью Маркова с гра-
фом, изображенным на рис. П12.5, и матрицей переходных вероятно-
стей тг, элементы которой ttjj равны вероятностям перехода за один
шаг из состояния k в состояние /:
f р при k m; _ _ f q при k m;
TTfc.fc+i — | g при j. > m. “к,к—г — при fc •> m-
= Яп,! = q,
542
При л о э/с с н и е 12
б)
Рис. П12.1
Рис. П12.2
а) б)
Рис. П12.4
Применение теории марковских и полумарковских цепей
543
где п = 2гп, остальные элементы матрицы -п нулевые.
Матрица, составленная из вероятностей переходов из состояния к в
состояние / (k.l — 1,п) за г шагов равна матрице -пг [22] Время ме-
жду переходами для данной системы постоянно и равно МТа Т аким
образом, производящая функция распределения времени до первого ре-
гулирования есть P(s) — s.
Рассмотрим математическую модель системы Кессны и Леви со счет-
чиком на N отсчетов со сбросом (фильтр «Лг-перед-М»). Счетчик на N
отсчетов со сбросом работает следующим образом Пусть заданы числа
N и М (N < М < 2ЛГ). Если на выходе релейного элемента среди
п. отсчетов имеется к положительных отсчетов и (n, — к) отрицатель-
ных, то при к = N и п < А/ происходит положительное регулирование
и сброс счетчика, если п — к — N и п < М происходит отрицатель-
ное регулирование и сброс счетчика если п = М происходит сброс
счетчика в нулевое состояние.
Обозначим через ро и q$ вероятности появления на выходе релейного
элемента соответственно +1 и —1, ро — 9о = Ро. ро =
Пусть 'Р(п., Л*) — вероятность того что в выборке из п отсчетов на выходе
релейного элемента появилось к «4-1» (n к «—1»). Вероятность Р(п, k')
вычисляется по биномиальному закону [22]
Р(п,к) = Скр^~к,
где Ск — п\[к\[п — к)1 — биномиальный коэффициент.
Для определения вероятности отсутствия регулирования Рд(л) после
п отсчетов необходимо просуммировать вероятности P(n, Р) по к в пре-
делах л — N < к < N
р0(р) = £ скМ-к.
к =max(n — /V+1.0 )
Полагая п — М 1, получим вероятность сброса счетчика после М
544
Приложение 12
отсчетов
Ро(л/)= £ ckM_Mf-k-'-
k=M-N
Вероятность того, что на n-ом шаге (n < А4) произойдет положительное
или отрицательное регулирование равны соответственно
р ( \ / О ПРИ п <
р(п _ y, JV — 1)р0 при 7V тг < М,
р z ч _ J 0 при тг < N,
— [ Р(п — 1, 71 — 7V)g0 при N <С п < М.
Вероятности р и q определяются по формулам
оо М—1 М — 1
Р = £ £ P(n — 1,N l)PoPom(M)^ -g* /Ер(п-1^-1)
М—l M—l
_ Ро n-l-N+1 — Ро V <-N-l„n-Ar
1-Р0(М)^ п~'Р° 90 l_p0(M) 2_> 9«
' ’ n=N ' ’ n—N
q — 1 — p. (П12.1)
Вероятность того, что после I сбросов счетчика на тг-ом шаге (тг < Л/)
произойдет регулирование,
P(l,n) = (P(n-l,N l)po + P(n-l,n-N)qo)Po(M); N^n<M
Производящая функция этого распределения равна
Л/— 1 оо
°(^= £ £®Tl+,M[c£1,P^QrN + c£11PrN</o№n =
п—N I—о
дт M— N— 1 г,
= 1 - sMРо(М) (W - 1)!Jt! sk(p”go + (П12 2)
Счетчик на N отсчетов без сброса (фильтр случайных блужданий)
работает следующим образом. Счетчик суммирует значения «Ч-l» и
«— 1», приходящие на его вход после релейного элемента. Если сум-
ма достигла значения /V, то происходит положительное регулирование
и сброс счетчика в нулевое состояние, если сумма достигла значения
то происходит отрицательное регулирование и сброс счетчика в
нулевое состояние.
Определим вероятности р и q, а также характеристическую функцию
распределения времени до первого регулирования. Обозначим Рп г —
вероятность того, что за п шагов будет достигнуто состояние N при
условии, что в начальный момент времени система находилась в состо
Применение теории марковских и полумарковских цепей 545
янии Z. В этом случае справедливо уравнение
Pn-f-ltz — РОРп,г+1 “Ь qoPn,z-1» 1 N
с граничными условиями
P0.-N = 0; P0,N — 1; Pn-N = Pn,N — 0 при П 1-
Решая это уравнение, находим вероятность
ОО
р=£рп,о = (^+^Г1. (шг.з)
п—О
где = ^—± 4ро?о- Вероятность q = 1 - р.
zpo ^Ро
Определим характеристическую функцию времени до первого регу-
лирования Обозначим pn>z — вероятность того, что за п шагов будет
достигнуто либо состояние —ЛГ, либо состояние N при условии, что в
начальный момент времени система находилась в состоянии z. В этом
случае можно записать уравнение
Pn+I,z - РоРп.г+1 + qopn,z-r, z = 1 - 7V../V-1; (П12.4)
с граничными условиями
Po,-N = P0,N — Il Pn,-N — Pn,N — 0 при П 1.
Найдем уравнение для характеристической функции распределения
р„г. Для этого умножим правую и левую части уравнения (П12 4) на
s"+1 и просуммируем-
Oz = PosOz+i + qos0z-i; z — — (N - 1), (N - 1),
где 0z = s"Pn,z-
n — 0
Для точек z = —N и z — N имеем с учетом граничных условий
0_дг = £ зпрП)_^ = 1; On = £snPn,w ~ 1-
n=0 n=0
Известно, что решение этого уравнения имеет вид
0z(s) = Л(в)А1 (з) + В(з)А^з),
где Ai ->(s) — —— ± —1 -\/1 — 4pogps2; -^(з) и B(s) — произвольные
2pps 2р0з
функции, определяемые из граничных условии:
= 1;
^(s)Af(s) + B(s)X”(s) = 1.
Применение теории марковских и полумарковских цепей 547
546
Приложение ]2
Отсюда
= Af(s)A^(s)-Af(.s)
1 } A^(S) - АГ (з) ’
_ A^(s)-Ar«(5)
U А^И-АТО -
Поскольку Aj(s)A2(s) — qo/po, то
и<£>_ Ыро)^(л)-А^).
1 > A^(S) - A,JV(s) ’
_ AHs) - (gO/po)wAf (s)
A^(s) - Ws) ‘
Поскольку интерес представляет начальное состояние z = 0, то
W = #(s) - Al(s) + B(s)
или
_ 1 + (go/po)N
U~Af(S) + A"(S)-
(П12.5)
Таким образом, математическая модель системы Кессны и Леви пред
ставляет собой полумарковскую цепь, для которой вложенная цепь Мар-
кова описывается матрицей переходных вероятностей ir, а производящая
функция распределения вероятности времени перехода между состояни-
ями определяется формулой (П12.2) для счетчика со сбросом и (П12.5)
для счетчика без сброса. Вероятности р и q рассчитываются для этих
счетчиков по (П12.1) и (П12.3) соответственно.
В системе Осатаки и Огавы фильтр представляет собой последователь-
ное соединение реле с зоной нечувствительности [ ДЛ, ДЛ] и счетчика
на N отсчетов без сброса. Если набирается N положительных отсчетов,
то происходит положительное регулирование и обнуление счетчика, если
N отрицательных, то отрицательное регулирование и обнуление счетчи-
ка. Вероятности положительного и отрицательного регулирований на
n-ом шаге равны соответственно
min(n — N,N — 1)
/’+(«) = Е P(n-l-.N-l-,l)p;
1=0
min(n— 1)
P_(n)= 52 P(n- l;k;N — l)q,
Jt—о
где Р(п; k; I) = СкпС1п_кр^^~к~1, р = Ф
; q = 1 — Ф
р0 = 1 — р — q. Тогда вероятности р и q равны
оо
р = 52 ^+(п)- 7=1-р. (П12.6)
n=N
Производящая функция распределения вероятности времени до перво-
го регулирования
оо
6(S) = £ ь"[Р+(п) + Р-(п)]- (П12.7)
n-N
Таким образом, математическая модель системы Осатаки и Огавы
представляет собой полумарковскую цепь, вложенная цепь Маркова ко-
торой описывается матрицей тг с вероятностями р и q, задаваемыми
формулами (П12.6), а производящая функция распределения времени
до первого регулирования имеет вид (П12.7)
Статистические характеристики ЦСС
с прямоугольной нелинейностью
В данном разделе рассмотрены статистические характеристики четы-
рех разновидностей ЦСС: схема Холмса (рис. П12.1), двух вариантов
схемы Кессны—Леви (рис. П12.2) и схема Осатаки—Огавы (рис. П12.3).
Выше было установлено, что рассматриваемые типы цифровых ФАС
с прямоугольной нелинейностью описываются полумарковской цепью,
при этом вложенная цепь Маркова характеризуется матрицей вероят-
ностей переходов тг, а время между переходами — распределением ве-
роятности Р(п) или производящей функцией этого распределения 0(s).
Обозначим через v(n) матрицу переходных вероятностей полумарков-
ской цепи (вложенная цепь Маркова которой определяется матрицей
тг, а распределение времени до первого регулирования функцией Р(п))
при условии что начальный и конечный моменты времени являются
моментами перехода. 3 огда [22]
СО
v(n) = 52'кГр(г)(л)-
г-0
где Р(г>(п) — 7-мерная свертка распределений Р(п), а матрица пере-
(ходных вероятностей полумарковской цепи за п шагов находится по
формуле
Д(п) =
{со со оо со |
52 ?(т+я)1 + 52 52 52 +кМп - (k+р))9(р) ? >
m=0 Ip O J
co
где q(p) — 52 + m +1) — вероятность того, что за р шагов не
гп=0
548
Приложение 12
£ тР(т)
.т=О
dG(s)
ds
произойдет перехода, Рр
ность того, что произвольно выбранный момент времени окажется мо-
— вероят-
ментом перехода.
Чтобы найти аналитическое выражение для элементов матрицы ттг,
необходимо выполнить следующие действия рассчитать собственные
числа матрицы тг, построить ее жорданову каноническую форму J [1]
и определить линейное преобразование, задаваемое матрицей S, та
кое, что
к - SJS-1.
В этом случае матрицу тгг можно записать в виде
кг = SJrS-1.
Выполним эти действия Можно показать, что характеристическое
уравнение для определения собственных значений А матрицы тг будет
выглядеть так
det(ir - AI) = (П12.8)
(1 ~ А2){[-А/2 + V(A/2)^ - pq]TO - [-А/2 - у/(А/2)^ - ру]™}2
4[(А/2)2 Р9]
где I = diag(l, 1,..1) — единичная матрица; т — п/2.
Числитель в (П12.8) имеет два корня А = ±1, и т корней двойной
кратности Ajt ly/pq cosfak/m); к = 0, т — 1. Заметим, что корни
А = -ply/pq совпадают с корнями знаменателя. Следовательно, матрица
чг имеет (m — 1) корней двойной кратности A*. = 2^/рд cos(7rfc/m); к —
l,m 1 и два корня одинарной кратности Am = 1, Am+; — —1.
Найдем правые собственные векторы V = [vi,V2,...,vn]T системы
линейных уравнении
(тг - AI)V = О,
где 0 — [0 0; . 0]т — нулевой вектор При I п/2 + 1 элементы vi
правого собственного вектора, соответствующего собственному значению
А* = (А: = 1, т — 1), находят как решение разностного уравнения
vi = (l/p)(At)j_ 1 - <zv/_2) (П12.9)
при известных начальных условиях i>i и v2.
При 1 > п/2 4- 1 элементы собственного вектора определяют как ре-
шение разностного уравнения
vl ~ (V«XA®l-i - Рг’1-2)
при начальных условиях ип/2-1 и ^п/2. получаемых из решения урав-
нения (П12.9) Можно показать, что найденный вектор V является
Применение теории марковских и полумарковских цепей 549
собственным вектором матрицы тг при любых значениях vj и v^. Сле-
довательно каждому кратному собственному значению соответствуют
два линейно независимых собственных вектора. Можно выбрать посто-
янные D] и V2 таким образом, что эти векторы будут ортогональными
Нетрудно убедиться что собственному значению А,п — 1 соответствует
правый собственный вектор V = [1; 1;...; 1]т, а собственному значению
A,n+1 = 1 — собственный вектор V = — [1; —1; 1' —1 ...; 1, — 1]т.
Из приведенных рассуждений видно, что размерность собственно
го пространства матрицы тг совпадает с размерностью п самой матри-
цы. Следовательно жорданова каноническая форма J матрицы тг бу
дет иметь вид
J — d ag Ai , Ai, А2, А2,..., Am—1, Am—1, Am А,п+1), (П12.10)
а столбцами матрицы будут правые собственные векторы матрицы тг.
Элементы матрицы S могут быть записаны в форме
при j — 2fc—1<п — 1,
41)
при j — 2k < п — 1, I
при j — 2k — 1 < п 1,
* <
п
2*
/ >
(П12.11)
п+1-l n+1-l , п 1х
- zik z2k + р^1к 2k '
при j — 2k < п — 1, I > —;
1 при j = п — 1;
при j = n,
= k =
Непосредственное обращение матрицы S затруднено поэтому вое
пользуемся следующим способом Известно [84], что левые и правые
собственные векторы матрицы, соответствующие различным собствен-
ным значениям, ортогональны. Если удастся получить ортогональные
левые и правые собственные векторы, соответствующие кратным соб-
ственным значениям, то матрица, строками которой будут левые соб
ственные векторы, нормированные относительно скалярного произведе-
ния левого и правого собственных векторов, будет матрицей S“ Най-
550
Приложение 12
дем такие левые собственные векторы, тогда элементы матрицы S-1
можно записать в виде
о/ 1 ; п
при j — 2к < п — 1, I ;
п
при j — 2 k < п — 1, I > ,
(П12.12)
где /и = -2(?/р)п(1 - зи)(1 - z2k), lik ~ ~Кч/р)п{^ + г1*)(1 + ^2fc).
'з = 2[(р/9)- - 1]/[р/7 - 1].
Таким образом, учитывая соотношения для матриц J из (П12.10), S
из (П12 11) и S-1 из (П12.12), получаем искомую матрицу ттг, элементы
которой можно записать в следующей форме:
l + (-l)r+'+fc
1+(-1)г+'+*
2
1 + (- 1)’’+'+к
2
1 + (-iy+»+‘
2
(aik + cfc)
(6n+I-1 + ck)
— к 4" Cn + 1— fc)
(an+i-/,n+i-Jt + Cn+i-jt)
при I < n 2’ к п 2
n 71
при 1> > r к 2
n п
при I« . 2 • к > 2
n п
при I > > Г к 2
Применение теории марковских и полумарковских цепей
551
где
aik
1 (PY1\г Г г,> Z2^ I Z*^ i
4t(1 + ^J) z^(l-zb)
1 + Zij 1 + z2j
-2(44j +гЬ4)}-
- p/g~1 (p\k 1
\ \q)
где ]p[ — целая часть числа p.
Так как |A,I < 1 при j — l.m— 1, то lim an- — lim Ьц. = 0 и
J r—+oo г—юо
установившиеся значения матрицы тг при г-* оо будут
1+(-1)г+^ p/g-l
2 (р/9)«‘ l\qj
1 + ( !/+'+* р/д —1 (р\п+1~к
2 (р/ч)т -1 \ч)
при k п/2;
при к > п/2.
В установившемся режиме распределение состояний полумарковской
цепи как показано в [85] задается формулой
2т >
fc=l
где Vj — вероятность пребывания системы в состоянии j, тг// —-элемен-
ты матрицы тг00, Tj — среднее время пребывания системы в состоянии
j (среднее время до первого перехода)
Поскольку в расматриваемой цепи среднее время пребывания систе-
мы в состоянии j не зависит от этого состояния (распределение времени
между регулированиями Р(п) не зависит от состояния, в котором нахо-
дится система в данный момент времени), то
Сопоставим каждому состоянию i марковской цепи значение марков-
ского случайного процесса <pi = — Тс/2 + т(г — тп). Найдем статические
моменты полученного случайного процесса.
Определим математическое ожидание и дисперсию сигнала рассогла-
552
Приложение 12
сования в установившемся режиме Математическое ожидание сигна-
ла рассогласования
----— (П12.13)
i= 1 ' '
_ (-iy+'То 1 - 1 ~ ~ 11
I P/? + 1 (p/?)m - 1 2 (p/g + I)2 (p/q)m - 1 J
Из этого выражения видно, что среднее значение сигнала рассогласо-
вания в установившемся режиме колеблется с течением времени около
нуля. С уменьшением шага коррекции То (увеличением л) эти коле-
бания уменьшаются
В установившемся режиме дисперсия сигнала рассогласования
а _ \~^ 'гр . гр п +1 V оо p/q-i
Т° 1 (p/q)™ _ Х Х
тп+1 V (Р\к 1 1 + (~1)г+'+/: .
х ( 2 тх) I q ) 2-------
n + l V/pV’1! ( iy+'+И
/ , Ток— То—----l-mxJ ^-J —-----------J.
Учитывая формулы для сумм
тп
«1 - У2 как — -—^-r-r{ma’n+1 (m + 1)ат + 1};
z—j (а — 1)--
fc=l v 1
fc=l
37л(ш — 1)(а — 1)3ат“2 - 2(а - l)[(m - 1)ат - mam-1 + 1]
-° +
3<12 пт — 1
+7-21Гр - (то + 1)«т + 1] + --Г
а — I
имеем:
Н?)
/л + 2
+ ( - j-) То2 - 2ТО7лх(-1)’-+'
- (п + 1)«1
- I
Л/.
-1 ( Р\ Т'о
-----si I -- + 4
71 - 1 \ q) 4
z 1 у-Н р/9) ~ 1
4 } -p/q-k
(П12.14)
553
Применение теории марковских и полумарковских цепей
При больших ОСШ р —> оо и р/g 1 из (П12.13) и (П12.14) получаем
lim тх = (-l)r+'+m+IT0/2; lim а* = 0.
р—>оо р-*оо
При малых ОСШ когда р —*• 0, р/g —» 1, для математического ожи-
дания и дисперсии справедливы соотношения
lim тх - (-1)г+'Т0/2; lim = Т2(т2 - 1)/3.
/<-♦0 р-»оэ
Рассмотрим энергетический спектр сигнала фазовой ошибки. Учиты
вая, что производящая матрица матрицы v(n) определяется формулой
ОО
F(S) = ^3"v(n) = (I-fl(s»-1,
п=0
где I — diag(l, 1,..., 1); t?(s) — производящая функция распределения
Р(п) и применяя теоремы о z-преобразовании, получим производящую
матрицу распределения А(п)
СО
D(s) = £s'lA(n) =
п~ 0
1 1
Г-1 Рр
<1 -0(s))
(l-s)2 .
I + irF(s)
s(l~0(s))2
(1 -О2
где I = diag(l, 1,. .., 1).
Если матрица тг имеет каноническую форму тг — WAW \ где Л
— диагональная матрица, то
D(s) - WA(s)W^1,
где
A(S) = Рр
з(1-0(з))'
(1-.S)2 .
1 +A(I —0(s)A)-1
(1 *)2 J
1 1
1 - s Рр
Рассмотрим корреляционную матрицу состоянии системы в устано-
вившемся режиме, которую можно записать в форме
2m 2m
R(n) = 57 У»УУ (п) = XTvnA(n)X
i=0
(П12.15)
где v0 = diag(i/b r-2, • -, "2m); X = diag(g>i, g>2, - , <P2m), Vi = -To/2+
+7o(? — m) — состояния фазовой ошибки. Применяя к корреляцией
ной функции дискретное преобразование Фурье, получим окончатель-
ную формулу для энергетического спектра сигнала ошибки
Gx(w) = XTv0W(A(e^) + А(е ‘"JJW^X - XTv0X w = Tw,
(П12.16)
554
Приложение 12
где матрица
+A(1-W'q;:ff))a}
является диагональной, что существенно упрощает вычисления
Перейдем к непосредственному моделированию сигнала ошибки
Зная, что в каждом из состояний система характеризуется своим зна-
чением фазовой ошибки и вычисляя распределение вероятностей фа-
зовой ошибки в установившемся режиме, можно в начальный момент
времени разыграть начальное состояние системы с данным установив-
шимся распределением вероятности, моделировать последовательность
фазовой ошибки и найти оценку ее энергетического спектра
Оценка энергетического спектра проводилась следующим образом.
После генерации последовательности фазовой ошибки вычислялся ква-
драт модуля ее быстрого преобразования Фурье. Полученные данные
усреднялись. При этом доверительный интервал для оценки энерге-
тического спектра имеет вид
(1 - 2/71)^^) $ Gx&) (1 + 2/х/Г)Сх(й), (П12.18)
где I — длина обрабатываемой реализации. Тогда при 95 % довери-
тельном интервале 1 — о = 0.95 получим I = 1600
На рис П12.6-П12.10 приведены графики энергетических спектров
.S’o(w) [S'o — ТО lg67((cu>)] фазовой ошибки полученных аналитически
по формулам (П12.16), (П12 17) (кривые отмечены крестиками), и их
оценок, найденные методом математического моделирования. Вычи-
сления проводились при т. — 8 и использовании 512-точечного БПФ
При моделировании выполнялось усреднение по 5 (рисунки а) и 100
(рисунки о) реализациям
Спектрам на рис. П12 6-П12.10 соответствуют следующие схемы:
рис. П12 б — схема Холмса при Л/ — 8 и вероятности правильно-
го приема р — —0,95
рис. П12.7 — схема Кессны и Леви с фильтром случайных блужда-
ний при Л' = 8;
рис П12.8 — схема Кессны и Леви с фильтром на N = 8 отсчетов
со сбросом при Л/ = 12 (фильтр «Л'-перед-Л/») и рп — 0,9;
рис. П12 9 — та же схема, что и на рис. П12.20, но при ро = 0,6;
рис. П12.10— модифицированная схема Осатаки и Огавы при Лг = 4
и р = 0 8, q = 0,1
В заключение рассмотрим сравнительную характеристику цифровых
систем по критерию дисперсии ошибки синхронизации, зависимость ко-
торой от параметров системы и ОСШ р изображены на рис. П12.11-
П12.14 соответственно для схемы Холмса [25], Осатака и Огавы [152]
Применение теории марковских и полумарковских цепей
555
556
Приложение 12
Применение теории марковских и полумарковских цепей
557
Рис. П12.9
Применение теории марковских и полумарковских цепей
559
Рис. П12.1О
560
Приложение 12
Кесны и Леви [150] (с фильтром случайного блуждания) и схемы «N-
перед-Л/». При вычислениях принималось т — 20, период Т = 1,
шаг То = 1/40; для рис. П12.12 половина зоны нечувствительности
ДЛ — 0,1. Во всех указанных случаях асимптотическое значение дис-
персии равно 0,625 10-3.
Среднее время до срыва слежения
Рассмотрим четыре системы ЦСС, показанные на рис П12.1—П12.3
Используя свойство симметрии и независимость смены состояний, мо-
дель с 2(тп 4- 1) возможным состоянием (см. рис. П12.5) можно све-
сти к модели с (т + 1) состоянием, диаграмма которой изображена
на рис. П12.15.
Обозначим Nt среднее число шагов до срыва синхронизации при усло-
вии, что в начальный момент времени система находилась в состоя
нии к. Среднее число шагов до срыва синхронизации при условии, что
на первом шаге система перейдет в состояние к + 1, равно N^+i + 1.
Если система перейдет в состояние к - 1, то среднее число шагов будет
Применение теории марковских и полумарковских цепей
561
к РУ
Nk-i + 1- Тогда приходим
№ — 7Гк Jt+1№+1 + Ц,4-Л-1 + 1 I
с граничными условиями + 1; №п+1 — 0.
Решение уравнения (П12.19) в общем случае может Быть записано
в виде
(П12.19)
(П 12.20)
l=k
Чтобы доказать справедливость (П12.20), введем новую переменную
А* = №+1 - Ж тогда
—Д* + №+1 = Як,к+1(Ак + Nk) + ”Jt,jt-i( Afc-1 + Nk) + 1-
Учитывая, что тг^к-н + ”>,fc-i — 1. получаем уравнение
Ajt i + 1 = 0 (П12 21)
Поскольку 1 7Гц — ТГ12 то первое граничное условие
1V2 — 1V1 = —1/тГ12 — Д1
Общее решение однородного уравнения, соответствующего РУ
(П12 21), имеет вид
•k
*
ГТ *з,з-1
j_2 *3,3 +1
где Ci — произвольная постоянная.
Частное решение неоднородного РУ (П 12.21) при
Д1 = 0 можно записать в форме
к-2
начальном условии
lfc
З^к—j,k+l —j
l-k+l j
1
wJ,i+i
1
1
к
”4,14-1
Таким образом, общее решение
к , fc—2
Л _ / ’ ТТ *з,з-'
к
л —
я-*Л+1 ^fc-j,fc+i-j /=4i-> 5Г,-'+1
1
1
1-2
562
Приложение 12
Произвольную постоянную Ci находим из условий Ai — — 1/тг12
— — 1/1Г23 — ”21/(7г127г2з)-
Первое условие выполняется автоматически, из второго получаем
Cj — — 1/тГ12- Следовательно,
Д* = _ J_ ГГ _________________1_____у__________1_____ ТТ
7Г12 j=2 7Г>->+1 7l’t.fc+1 + l=t+\-j 7Г'-'+1
Это выражение можно записать в более компактной форме:
Afc =
1
TTfc.fc + l
j=l
к
п
1=1+1—J
TTI'l-l
”Ч,<+1
(П12.22)
1
’Tfc-j.jt+l-j
Итак, решение задачи (П12.19) можно представить в виде
к
№+i ~ +
t-1
где Ог = — Д fe — произвольная постоянная, удовлетворяющая
условию ЛГт + 1 — 0.
Окончательно для среднего числа шагов до срыва слежения выра
жение принимает вид
или, вводя в сумме в скобках переменную суммирования п = i — j,
что эквивалентно (П12.20).
В случае знаковой нелинейности фазового детектора имеем
”1,1 = ^к,к-1 — р: 5Tfc,fc+I = q ”m+l,m+l — Г TTkl — О
при других к и I
Тогда, проводя перемножение и суммирование в формуле для сред
него числа шагов до срыва синхронизации, находим
к~тz1 + + 1/(р~?) f ЛЛ"1 _ ЛЛ* Ч
p-q р/q-i (и/ \qJ J
Поскольку интервалы времени между моментами регулирования явля
ются случайными и не зависят от вида применяемого счетчика, то для
Применение теории марковских и полумарковских цепей
563
среднего времени до срыва слежения в системе со знаковой нелиней-
ностью справедлива формула
Тк
I к — т —
= rnt S------------Ь
Р-
1/д + 1/(р - д}
р/д - 1
где mt — E{t} — среднее время между моментами регулирования, при
чем 7Л( — МТ для схемы Холмса и 7nt определяется по по формулам
(П12 2) для системы Кессны и Леви с фильтром случайных блужданий,
(П12.5) для системы Кессны и Леви с фильтром типа «ДГ-перед-М»
и (П12.7) для модифицированной системы Осатаки и Огавы с филь-
тром на N отсчетов без сброса.
Результаты расчета и моделирования среднего времени у = 1g уо
(уо = 1’С/Тм для схемы Холмса, уо = Тс/Т для других схем) до сры-
ва синхронизации в зависимости от параметров схемы ЦСС тп, N, М
и ОСШ р изображены на рис П12.16 П12.20, им соответствуют сле-
дующие схемы.
рис П12.16 — схема Холмса со следующими значениями тп: 1 — 8,
2 — 16, 3 — 24; — 48; 5 — 100;
рис. П12.17 — схема Кессны и Леви с фильтром случайных блужда-
ний с парой значений А7 и /V: 1 — 8 2; 2 — 16; 2 3 — 8; 4; J,
— 16, 4, 5—8; 8;
рис. П12 18-— схема Кессны и Леви с фильтром /V-перед-А/: а при
7V = 3 А7 — 5 и следующими значениями т: 1 — 8 2 — 16, 3 — 24; б с
парой значении 77, М I — 3; 5 2— 4; 7, 3— 3; 4; J, — 4; 6; 5— 4; 5;
рис. П12.20— модифицированная схема Осатаки и Огавы с фильтром
на N отсчетов без сброса при А — 0,05 и парой значений N, М: 1 —
564
Приложение 12
8, 2, 2 — 8; 4; 3 — 8; 8; J, — 6; 2; 5 — 16; 4.
На рисунках квадратами отмечены результаты моделирования.
На рис. П 12.20 изображена зависимость вероятности срыва слежения
от времени при т — 8 (сплошные кривые) 1 — схема Холмса с пара-
метрами р — 0,4, 7о = 12224; 2— схема Кессны-Леви с фильтром типа
«N перед-М» и параметрами р — 0,01, N = 3, М = 4, уо = 6920; 3 —
схема Кессны-Леви с фильтром случайных блужданий и параметрами
р — 0,01, N = 3, уо — 4165; 4 — схема Осатаки-Огавы с параметрами
Применение теории марковских и полумарковских цепей
565
р = 0,05, N - 2, ДА = 0,1, 7о = 1695.
Вероятность срыва вычислялась на основе возведения в степень пе-
реходных матриц так, что Р(/) = Рп = где pi>tn+i эле-
мент матрицы тгп.
Крестиками на рис. П 12.20 обозначены результаты, вычисляемые по
формуле
Р(/)_ 1-е-1/7°,
где t = t/mt = t/MT для схемы Холмса, t — t/T для других схем.
Квадратиками отмечены результаты моделирования.
Приложение 13
Решение матричного уравнения
Риккати
Матрица дисперсий D — Р ошибки удовлетворяет ДУ (49 3)
Р = FP + PFT - PHTRr'HP + Ф, (П13.1
где Ф _ GQGT, R — So, причем D(0) — Dq.
Запишем матрицу Р в виде Р = АВ С(0) = I или
РВ - А
Дифференцируя последнее равенство, получим
РВ + РВ = А
Подставим сюда производную Р по (П13.1), тогда с учетом (П13.2)
придем к соотношению
FA + PFTB -PHTR ‘HA +ФВ + РВ = А
или
P(FTB - HTR4HA + В) + (FA + ФВ - А) = О.
Приравнивая нулевой матрице каждое из слагаемых, с учетом уело
вия Р 0 получим систему ДУ
А = FA + ФВ
В - HTR-*HA -F B
(П13.3)
(П13.4)
или в матричной форме однородное ДУ
При постоянных матрицах F Н, R Ф решение ДУ имеет вид
в(о] = е^[Р1О)]’ (П136)
где еУ’*) — матрица 2n х 2п
Пример 13.1. Скалярный случай.
В данном случае ДУ (П13.1) имеет вид
Р - FP+ PF- PHR~1HP + Ф. (П13.7)
Решение матричного уравнения Риккати
567
Система уравнений (П13.5) упрощается:
[в] = [ня-»н Л] [в(?)] •
Решение (П13.6) принимает вид
[«и]АА ЛЬ
Решение ДУ (П13.7) может быть записано в форме
Р(,\ _ лЮ -
U B(t)
где
7Vp(t) = B{F(O) [у, + F] + Ф} + В {F(0)[V - F] - Ф} е-2**;
Dp(t) = {Я2Р(0) + R[V - F]} - {Н2Р(0) - R[F + у>]} e~2vt;
V>= y/F2 + Я2Ф/В
(П13.8)
(П13.9)
Установившееся значение дисперсии
lim Pit) = .В[Ро(Ф + F) + Ф] _ Л----_ R(F + ) (П13.10)
(> H2Po + R&-F) H2R[tp—F)/H2 И2
Это же соотношение получим, если в (П13.7) положим dP/dt = 0 и найдем ре-
шение алгебраического уравнения
P2H2R’~1 — 2FF — Ф =0,
тогда
Отсюда
F „ ]F2R2 <!> FR^y/F^R2 + ФЯЯ2
Pi'2~1pr±]I н* +1pr~ н2
Роо = ^2 (Р + ф)-
При вычисленной матрице Р = P(t) матрица коэффициента усилений К ФК
находится по (49.2):
К- PH7R-’. (П1311)
Пример 13.2. Пусть уравнение ФФ и наблюдения имеют вид
А = -А + \/2и; а. = А + щ (Ш3.12)
где и и v — БШ с единичной интенсивностью; R^.(t) — Rv(-r) — 6(г). Сравни
вая (П13 12) и (49 1) находим что
F=-l; G = x/2: <2 = 1; H=l; 17 = 1: Ф - 2.
По (П13.3), (П13.4) получим систему ДУ
Л = -Лф2В; В = А + В. (П13.13)
причем Л(0) = Ро, В(0) = 1.
Решим систему ДУ операционным методом. Учтем, что А sA — Ро;
В => sB — 1. Тогда получим уравнение в операторной форме
(s+ 1)Л- 2В = Ро;
-А + (s- 1)В = 1.
568 П р и л ожени е 13
Определитель системы Д = з2 - 3; ДА = Ро (з - 1) 4- 2; Дв =: s 4-1 4- Ро • Решение
в операторной форме (изображение) имеет вид
__ А* __ Pps 4-2 Pp , __ s -р 1 + Ро
~ Д ~ s2 -3 ' ~ s2 -3 ’
По изображениям находим оригиналы:
Л(4) = Рос1гУ34 + -—-JPhV3t:
V3
р (П13.Ы)
S(t) — ch-y/Si 4-——sh\/3t.
у/з
В результате по формуле Р = АВ~Л найдем зависимость
Р = Р( Д -
1 «W ЗД’
где A(t) _ В(t) = ^e^Dp(t); Np(t) = [Р0(у/3 - 1) + 2] 4-
+[Лэ(д/3 + 1) — 2]е Dp(t) = [Ро + д/з + 1] — [Ро + 1 — у/3]е~2у^*, причем
значение Np и Pp(t) являются частным случаем формул (П13.9) при Р —1,
R = 1; Н = 1; Ф = 2; <р - у/з.
Коэффициент усиления К = PHR1 = P(t). В стационарном режиме
Р= п.рщР^-^2
t-oo Ро 4- 1 + л/3
При Ро = 1 и Р = у/з — 1 = к уравнение ФК (47.9) принимает вид
^ = -А(0 + *М*)-А], А(О) = Ао.
Отсюда находим передаточную функцию ФК в стационарном режиме
к у-
H(s) = HOht(s)= ---—; fe = V3-l. (П13.15)
s 4* v3
Покажем, что эту же передаточную функцию имеет и фильтр Винера (ФВ).
В этом случае
— е h ’ я-(т) — £(т); <£>n(w) = So = 1,
тогда
е /, л Q ( \ 1 с ( \ 3 4- wz (х/з 4- iw)(х/з — iw)
Sx(cv) - 5e(w) + 5„(w) = —— = -• . —~-
1 4- w2 (14- iw)(l — iu>)
Следовательно,
x V*3 4- iw . у/з — iw
G(iw) = —--;-----; G (iw) = G(—iw) = ---.
1 4- iw 1 — iw
_ 2 1-iw _ 2 _ / 1 1
G*(iu>) w24-lx/3 —iw (14-iw)(\/3 iw) \14-iw y/3 — iw/ '
_ Г Ss(w) 1 y/3- 1
Яопт(м = _L_ [ЭД1
G(iw) IG* (iw) J y/3 4. iw G(iw)
Таким образом, передаточная функция ФВ H(s) = k/(s 4- д/З) совпадает с пере
Решение матричного уравнения Риккати 569
даточной функцией ФК (П13.15). Импульсная характеристика ФВ имеет вид
_ Г (\/3 1)е-^‘ при I О, (П13.16)
t О при t < О.
^ОПТ (1
Найдем ошибку фильтрации по (41 19) е — Rs(0) — В, причем Р3(О) = 1:
Г°° dw _ (л/з-1)2
'о 14-w2'- 2
В = — / |$(w)|2dw =
2тг /
Следовательно,
t (75-1)2
® 2
Как и следовало ожидать, ошибка фильтрации ФВ совпала с ошибкой филь
трации D = у/3 — 1 ФК.
Найдем ошибку фильтрации ео = mine и ИХ физически нереализуемого ФВ
По (41.14)
е = _L [ S‘‘(u)Sn(w)_llu - 2 [ = -L »0,577.
2-тг J_oo s,(w) 4- Sn(w) Ту/з Jo 1 + и2 у/3
Как и следовало ожидать, ошибка ео = 0,577 меньше ошибки е — \/3— 1 » 0,732.
Оптимальная ЧХ физически нереализуемого ФВ определяется соотношением
(419)
S.(w) 2
Honi(iw) = Ss(w)/Sx(w) = Si(a,) + Sn(u;) - -
(T3 4-M(T3-iw) a=iu y/3 \s4-x/3 — s4-V5.
Следовательно, ИХ физически нереализуемого ФВ
npntSiO; i
или honT = —^е 1 1
при t < О у/3
(П13.17)
Таким образом, ИХ h*(t) существует и при t < 0, причем Л(0) = 0,732 >
> h* (О) 0,577.
Рассмотрим дискретный многомерный (векторно-матричный) ФК Априорная ма-
трица дисперсий здесь определяется по (52.5):
Р„+1 =Ф„Р,Ж 4-Т„,
(П13.18)
где Тп = ГпРпП,: Рп — апостериорная матрица дисперсий.
Как и в непрерывном ФК, здесь можно выразить матрицу P„+i в виде
Р*+1 = Ak+iB-j,, (П13.19)
причем для матриц А/.+] и В^+1 справедлива система разностных уравнений
[£:И* ж :.][h:r?'h* »н::1=
Пример П13 3. Пусть уравнения ФК и наблюдения заданы в скалярной (од=
номерной) форме, тогда переходная матрица Ф 2 X 2 при постоянных значениях
5‘Q П р и л о ж е н и е 13
Ф, II, R, Т имеет вид
Эта матрица имеет собственные значения
>1 =. [И2Т + Я(Ф2 +1) + <7]/2ФК; а2 - [Н2Т + Н(Ф2 + 1) - а]/2ФН,
где а = ст<г2. = у/н2Т +«(ф + 1)2; а2 = д//727’+ Н(Ф - 1)2.
При этом отношение
р - Х2/Х1 = {Ч-! [IPT + /?(Ф2 + 1 )]<,}/2Ф2/?2 1,
Ф1 - [Н2Т + Й(Ф2 + I)]2 - 2/72Ф2 =
- НАТ2 + 2H2TR + 2II2$2TR + R2 + ф'/?2.
Собственные векторы матрицы Ф являются вектор-столбцами трансформирую
щей матрицы М такой, что
м ‘™ = [Ао “J ‘
м _ [ -27Я/[№ТЛ(Ф2 - 1) + <т] -2ТЛ/[Я27К(Ф2 - 1) - <г] 1
м-1 _ [-/72Л (И2Т-Н+Ф2Н + <7)/2<7 1 1 Г т1Т2 2TRt, 1
L И2/о (-Н2Т + R - Ф27? + £7)/2о ] ATRa-l-^Ti -2TRr2 ]
где ti = Н2Т + Н(Ф2 - 1) + о. т2 - Н2Т + 7?(Ф2 - 1) - а.
В результате получим Р^ — А^В^ \ причем справедливо соотношение
[«:]=**[?]=“[ о 41 “-[?]•
Тогда получим
р _ (Pon + 2TR) - (Ррп + 2TR)pk
к (2№Р0 - Т1) - (2Н2Р0 - Т2)рк)
П р и л о 'Ж е н и е 14
Предельный переход от дискретного
к непрерывному фильтру Калмана
Запишем стохастическое ДУ, описывающее модели сообщения и на-
блюдения в форме Ито:
rfX(i) - F(/)X(Z)dZ + G(/)dWt Y(t) = H(t)X(Z) + V(t)> (П14.1)
где W — винеровский процесс с интенсивностью Sw((); V(/) — белый
гауссовский шум с корреляционной матрицей Ву^т) = K{VVTT] =
(= Sv(05(z - т)
Заменим ДУ (П14.1) разностной задачей, получаемой с использова-
нием метода Эйлера'
Х[(п + 1)П = [TF(nT) + I]X(nT) + G(nT)W(nT);
Y(nT) = H(nT)X(nT) + V'(nT),
1где W(nl’) — приращение винеровского процесса Wt за время Т —
= tr,+, - V ъТ — дискретный белый шум с корреляционной ма-
трицей rt.v'(n. ш) — S v(nT)^n-m/7 .
Случайный процесс W(nT) имеет нулевое значение и корреляциог
ную матрицу Rw(n,m) = TSjv(njf)6n_m.
Из сравнения формул (П14.2) с уравнениями сообщения и наблюдения
для дискретного фильтра Калмана видно, что при синтезе дискретного
аналога непрерывного фильтра Калмана следует принять
Ф(п) - TF(n7 ) +1 Г(п) = G(?1T),
Q(n) = TSw(nT) R(n) = Sv(nT)/T.
Покажем что при таких обозначениях формулы непрерывного филь-
тра Калмана получаются предельным переходом из формул дискретного
фильтра. Вначале рассмотрим уравнение относительно матрицы диспе-
рсий ошибки фильтрации. Из формул алгоритма дискретного филь-
тра Калмана следует
Р[(л + 1)Т] = Р(пТ)
- Р[(п + 1)7']Нт[(п. + IjrjR-1^ + 1)Т]Н[(п + 1)Т]Р(пТ);
Р(лТ) - Ф(пТ)Р(пГ)Фт(я7’) + r(7iT)Q(nT)rT(nT).
Подставив Р(пТ) из второго уравнения в первое, получим
Р[(л + 1)Т] = Ф(пТ)Р(пТ)Фт(пТ) + Г(п7)р(пТ)Гт(пТ) - (П14.4)
(П14 3)
572
Приложение 14
-P[(n + 1)ЛНТ[(» + 1)ЛВ--1[(« + 1)ЛН[(п + 1)7]х
х{Ф(п7)Р(п7)Фт(п7) + r(n7)Q(n7)FT(n7)};
С учетом обозначения (Г114 3) находим
Р[(п + 1)7] = [I + 7Ffn7)]P(n7)[I + TE(nT)]T + TG(nT)Sw(nT)x
xGT(n7) - 7P[(n + l)7]HT[(n + 1№^[(п + l)7]H[(n + ОДх
x {[I + 7F(n7)]P(n7)[I + TE(nT)]T + TG(nT)S w(n7)GT(n7)};
Вычитая из правой и левой частей этого уравнения матрицу Р(п7),
определяем
Р[(п + 1)7] - Р(п7) = 7P(n7)FT(n7) + 7F(n7)P(n7)+
+72F(n7)P(n7)FT(n7) + 7G(n7)S w(n7)GT(n7) - 7P[(n + 1)7] x
xHT[(n + 1)7]8^[(п + l)7]H[(n + l)7][P(n7) + 7F(n7)P(n7)+
+7P(n7)FT(n7) + 72F(n7)P(n7)FT(n7) + 7G(n7)Sw(n7)GT(n7)].
Разделив левую и правую части полученного уравнения на Т, перей
дем к пределу при Т 0, nT —> t:
Km {P[(n + 1)7 - P(n7)}/7 - lim {P(n7)FT(n7) + F(n7)P(n7)+
+G(n7)Sw(n7)GT(n7) - P[(n + l)7]HT[(n + + l)7]x
xH[(n + l)7]P(n7) + 72F(n7)P(n7)FT(n7) + 72P[(n + l)T]x
xH[(n + 1)I1Sv [(n + l)7|H[(n + l)7][F(nT)P(n7) + P(n7)x
xFT(n7) + G(n7)Sw(n7)GT(nT)] + T3P[(n + l)T]HT[(n + l)T]x
xSy'[(n + l)T]HT[(n + l)T]F(n7)P(nT)F'r(nT)}.
В итоге получаем ДУ вида
dP(t)/dt = F(t)FT(t) + F(t)P(t)-
-P(t)HT(t)Svl(t)H(/)P(Z) + G(t)Sw(/)GT(Z),
которое совпадает с ДУ относительно матрицы Р(£), приведенным в в
алгоритме для непрерывного фильтра Калмана
Рассмотрим теперь уравнение фильтрации
Х[(п + 1)7] = Ф(п7)Х(п7)+
+K[(n + l)7]{Y[(n + 1)7] - Н[(п + 1)7)Ф(п7)Х(п7)},
которое с учетом обозначений (П14.3) примет вид
Х[(л, + 1)7] = [1 + 7F(n7)]X(n7)+
+K[(n + l)71{Y[(n + 1)7] - H[(n + 1)7][I + 7F(n7)]X(n7)}.
Предельный переход от дискретного к непрерывному ФК 573
Вычтем из правой и левой частей этого уравнения Х(пТ'), разделим
на Т и перейдем к пределу при Т —+ 0, пТ —» t. тогда
lim {Х[(п+1)Т-Х(пТ)}/Т = lim F(nT)X(nT)+(l/T)K[(n-|-l)7]x
x{Y[(n + 1)7] - H[(n + 1)Т]Х(пТ) - 7H[(n + l)7]F(nT)X(nT)}}.
Окончательно имеем
dX(t)/dt _ F(Z)XG) + - Н(ОВД],
где JC(Z) = K(nT)/T.
Это уравнение совпадает с уравнением фильтрации, приведенным в в
алгоритме для непрерывного фильтра Калмана.
Остается найти выражение для коэффициента усиления fCtjiT). Для
этого учтем, что
К(пТ) = Р[(п + 1)7]Нт[(п + l)7]R-1[(n + 1)7],
или в обозначениях (П14.3)
К(пГ) = ТР[(п + 1)7]Нт[(п + + 1)7].
Таким образом, имеем
fC(t) = jim KfaTJ/T* -- PfOH’fOSv1^),
что совпадает с уравнением для коэффициента усиления, приведенным
в лекции 49.
Обобщая вышесказанное, заметим, что для получения из соотно-
шений для дискретного фильтра Калмана формул для непрерывного
фильтра Калмана необходимо сделать замены Ф(п) — ТТ'(пТ) + I,
Г(п) = G(nT); Q(n) — TSw(n71); R(n) = 71-ISv(«7n) и затем вы-
полнить предельный переход при Т —► 0, пТ —> t
Приложен и е 15
Вычисление матрицы переходных
вероятностей полумарковского
процесса
Рассмотрим полумарковский процесс с вложенной цепью Маркова
описываемой матрицей переходных вероятностей тг Пусть v(n) — ма-
трица переходных вероятнстей полумарковского процесса за п шагов
при условии, что начальный и конечный моменты времени являют
ся моментами перехода из состояния в состояние Будем предпола
гать, что распределение времени ожидания не зависит от состояния,
в котором находится процесс, и определяется функцией Р(п). Тогда
п
v(?i) = Р(г\п), где Р^(п) — г мерная свертка распределения
г=0
Р(п). При этих предположениях определим матрицу переходных веро
ятностей полуарковского процесса за п шагов, которую обозначим А(п)
Введем обозначение для дискретного времени tn = пТ. Пусть в не
который момент времени t_m произошел переход из одного состояния в
другое На рис. П15.1 моменты перехода обозначены крестиками. Счи-
таем, что за период времени (t~m, to) переходов не было Состояние
процесса в момент времени tn останется тем же, что и в момент време-
ни to, если в интервале (t_,n,tn] переходов не было. Если обозначить
через д(р) вероятность того, что в течение времени р состояние про-
то
цесса не изменится q(p) = 5? Р(р + пг + 1), то вероятность такого
тп—О
события есть q(m + п). Если же в течение времени [t0,tn] возмож
ны переходы из состояния в состояние, то обозначим через Ц время
первого перехода в интервале [t0, tn], а через tn_p — время последне-
го перехода. Моменты времени Ц и tn_p могут совпасть, что означает
наличие одного перехода в интервале [to,tn]. При фиксированных зна
чениях к, р и m матрица переходных вероятностей, соответствующая
рассмотренному событию, равна
тгР(т + к)и{п - (к + p))q(p).
t—m to tk tn—p tn
Рис. П15.1
Вероятность того, что момент времени t_m является моментом пе-
рехода, определяется соотношением
Вычисление матрицы переходных вероятностей
575
Таким образом, рассматривая всевозможные комбинации чисел к, р
и т, получим
оо оо оо оо
д(п) _ рр | +«)! + 52 52521тр(т+- (*+р))?(р)} >
rn—0 т—Ок—1р—О
где положим v(n) — 0 при п < О, I — diag(l; 1;...; 1)
Список литературы
1. Давенпорт В.Б., Рут В.Л, Введение в теорию случайных сигналов
и шумов. — М ИЛ, 1960. — 462 с.
2. Тихонов В.И. Статистическая радиотехника. — М : Радио и связь,
1982 — 623 с.
3. Тихонов В И. Нелинейные преобразования случайных процесов
М_: Радио и связь, 1986 — 296 с.
4 Тихонов В И. Оптимальный прием сигналов. — М Радио и связь,
1983. — 320 с.
5. Тихонов В.И. Выбросы случайных процессов. М : Наука, 1970
— 392 с.
6. Тихонов В И.. Харисов В.Н. Статистический анализ и синтез ра-
диотехнических устройств и систем- Учебн. пособие для вузов — М.: Ра-
дио и связь, 1991 — 608 с.
7. Стратонович Р.Л. Условные марковские процессы и их применение в
теории оптимального управления — М : Изд во МГУ, 1996.
8. Стратонович Р.Л. Избранные вопросы теории флуктуаций в радио-
технике — М Сов. радио, 1961. — 558 с.
9. Rice S.O. Noise in FM receivers // Proc symp «Time series analysis».
Ch. 25 / Ed. M. Rosenblatt. — NY. Wiley, 1963. — P 395-422.
10. Rice S.O. Mathematical analysis of random noise // BSTJ. 1944 V 23,
№ 3; 1945. V. 24, № 1 (перевод в сб. "Теория передачи электрических сиг-
налов при наличии помех" под ред. Н.А. Железнова. — М.. Изд во ИЛ,
1953. — с. 88 238).
11. Баскаков С.И Радиотехнические цепи и сигналы- Учебник для вузов
по спец «Радиотехника». 3-е изд — М : Высш. шк_, 2000 — 462 с.
12. Кибзун А.И.. Панков А.Р., Сиротин А.Н. Учебное пособие по
теории вероятностей. — М.: Изд МАИ, 1993. — 189 с.
13. Ахманов С.А.. Дьяков Ю.Е., Чиркин А.С. Введение в статисти-
ческую радиофизику и оптику. — М.. Наука, 1981. — 640 с.
14 Миддлтон Д. Введение в статистическую теорию связи. — М.. Сов.
радио, 1961. Т. 1. — 782 с.; Т. 2, 1962. — 831 с.
15 Евсиков Ю.А.. Обрезков Г.В.. Разевиг В.Д. и др Прикладные
математические методы анализа в радиотехнике Учебн. пособие для радио
техн, спец вузов — М. Высш, шк., 1985 — 343 с.
16 Davenport W В Probability and random processes. An introduction for
applied scientiets and engineers — NY' McGraw Hill, 1970. — 542 p.
17 McDonough R.N.. Whalen A.D. Detection of signals in noise 2nd ed.
— N.Y.. Academic Press, 1995. — 485 p
18 Papoulis A. Probability, random variables and stochastic presses 3nd ed.
— N.Y. McGraw-Hill, 1991 — 666 p.
19. Бендат Дж. Основы теории случайных шумов и её применение. —
М.: Наука, 1965. — 463 с.
20. Градштейн И.С.. Рыжик И.М. Таблицы интегралов, сумм, рядов
и произведений. — М Физматгиз, 1962. — 1100 с.
21 Вентцель Е.С. Исследование операций. — М : Сов радио 1972.
— 552 с.
Список литературы 577
22. Феллер В. Введение в теорию вероятностей и её приложения. —
М. Мир, 1964 — 498 с.
23 Price R.A. A useful theorem for nonlinear devices having gaussian inputs
// IRE Trans. 1958 V. IT-4, № 2 P. 69-72; 1964 V. IT-10, № 2. pp. 171.
24. Митропольский Ю.А. Лекции по методу усреднения в нелинейной
механике — Киев: Наукова думка, 1966.
25. Шахтарин Б.И. Анализ систем синхронизации при наличии помех.
М ИПРЖР, 1996 — 251 с.
26 Шахтарин Б.И. Статистическая динамика систем синхронизации
— М.: Радио и связь, 1998 — 488 с.
27 Шахтарин Б.И. Анализ систем синхронизации методом усреднения
— М.. Радио и связь, 1999. -— 496 с.
28 Шахтарин Б.И. Оптимальная фильтрация и прогнозирование слу
чайных процессов — М Изд-во МГТУ, 1991. — 210 с.
29 Линдсей В Системы синхронизации в связи и управлении. — М
Сов. радио, 1977.
30 Тихонов В.И. Влияние шумов на работу схемы фазовой автопод-
стройки частоты // Автоматика и телемеханика. 1959. № 9. С. 1188-1196.
31. Лебедев В.Л. Случайные процессы в электрических и механических
системах — М : Физматгиз, 1958. — 176 с.
32 Ван Камней Н.Г. Стохастические процессы в физике и химии —
М.. Высш шк., 1990. — 376 с
33 Ван Трис Г. Теория обнаруженния оценок и модуляции. Т. 1. —
М.. Сов. радио, 1972. — 744 с.
34 Дёч Р. Нелинейные преобразования случайных процессов. — М '
Сов. радио, 1965. — 207 с.
35 Пугачев В.С. Синицын И.Н. Стохастические дифференциальные
системы Анализ и фильтрация. — М.; Наука, 1990. — 632 с.
36 Евсиков Ю.А., Чапурский В.В. Преобразование случайных про
цессов. — М : Высш, школа, 1977. -— 264 с.
37 McMahon E.L. An extension of Price's theorem // IEEE Trans, on IT.
1964. V IT-10, № 2 P. 168.
38 Papoulis A. Comment on «An extention of Price's theorem». // IEEE
Trans, on IT 1965. V. IT-11, № 1. P. 154
39 Brown J.L. A generalized form of Price’s theorem and it’s converse //
IEEE Trans on IT. 1967 V IT 13, № 1 P 27-30.
40 Pawula R.F. A modified version of Price's theorem // IEEE Trans, on
IT. 1967 V IT 13, № 2. P. 285-288.
41 Davenport W.B. Signal to-noise ratios in band pass limiters // Journal
of applied physics 1953. V. 23, № 6. P. 720-727.
42 Baum R.F. The correlation function of smoothly limited Gaussian noise
// IRE Trans on IT 1957, V. IT-3, № 3. P. 193-197
43 Galey J. Signal-to-noise ratios in smooth limiters // // IRE Trans, on
IT. 1959, V. IT-5. № 5 P. 77-79
44. Данилов Б.В.. Михайлов Ю.П. Воздействие флюктуаций на си-
стему ограничитель — инерционная RC-цепь // Известия вузов Сер. «Ра-
диотехника». 1965. Т. 8, № 6. С 668-675.
578
Список литературы
45 Горяйнов В.Т., Журавлев А.Г., Тихонов В И Статистическая
радиотехника Примеры и задачи: Учебн. пособие для вузов / Под ред
В.И. Тихонова 2-е изд. — М : Сов. радио, 1980. — 544 с.
46 Шахтарин Б И. Нелинейные преобразования случайных процессов
— М.: Изд-во МГТУ, 1990. — 76 с.
47 Cooper D.C. The probability density function for the output of a correlator
with band-pass input waveforms // IEEE Trans. 1965. V. IT-11, № 2. P 190-195.
48. Andrews L C. The probability density function for the output of a cross
correlator with band-pass inputs // IEEE Trans. 1973 V IT 19, № 1 P. 13-19
49 Brice C.S., Andrews L.C. New expression for the pdf and cdf of the
filtered output of an analog cross correlator // IEEE Trans 1982 V. IT-28,
N* 4 P. 668-677.
50 Лёзин Ю.С. О распределении шума на выходе автокорреляционного
устройства // Радиотехника. 1965. № 3. С. 60-65
51 Brown J.L. Piper H.S. Output characteristic function for an analog
crosscorrelator with bandpass input // IEEE Trans. 1967 V. IT-7, N- 1. P. 6-10
52. Murarka N.P. The probability density function for correlators with corre-
lated noisy reference inputs // IEEE Trans 1971. V COM-19, hl’ 10 P. 711 714
53 Andrews L.C. The output pdf of a polarity coincidence correlation detecto
// IEEE Trans, on AES. 1974. V. AES-10, M- 1 P. 78-81.
54. Gopani S.G.. Phillips R.L.. Andrews L.C. A theoretical and expert
mental comparison of the three types of cross correlators // IEEE Trans 1983
V ASSP-31, № 1. P 202-205.
55. Kanefsky M. Defection of weak signals with polarity coincidence arrays
// IEEE Trans, on IT. 1966 V. IT 12, hl’ 2 P. 260-268.
56. Ekre H. Polarity coincidence correlation detection of weak noise source //
IEEE Trans on IT 1963. V. IT-9, M 1. P. 18 23.
57. Вейцель B.A., Жданов А В., Жодзижскии М.И. Стробовые
корреляторы в навигационных приемниках с псевдошумовыми сигналами //
Радиотехника. 1977 № 8. С. 11-18
58. Доч Г. Руководство к практическому применению пеобразования Ла-
пласа и z преобразования — М_. Наука, 1971 — 288 с.
59. Справочник по специальным функциям / Под. ред М Абрамовича
И. Стигана — М. Наука, 1979 — 830 с.
60. Папулис А. Теория систем и преобразований в оптике. — М.. Мир,
1971. — 495 с.
61. Snyder D L. Random point processes — NY' Wiley, 1975.
62. Солодов A.B., Солодов A.A. Статистическая динамика систем с
точечными процессами. — М.: Наука. 1988. — 256 с
63. Большаков И.А. Выделение потока сигналов из шума. — М : Сов
радио, 1969. — 464 с.
64 Колмогоров А.Н Интерполирование и экстраполирование стацио-
нарных случайных последовательностей // Изв АН СССР сер. «Математи-
ка». 1941. № 5. С 3-14.
65. Wiener Н.Е. Extrapolation, interpolation, and smoothing of stationary
time series. — N Y. Wiley, 1949.
66. Ван Трис Г. Теория обнаружения, оценок и модуляции Пер. с англ,
под ред Тихонова В.И Т 1. — М ' Сов. радио, 1972. - 744 с.
Список литературы
579
67. Гельфонд А.О. Исчисление конечных разностей. - М Наука,
1967. - 375 с.
68 Левин Б.Р., Шварц В. Вероятностные модели и методы в системах
связи и управления — М.: Радио и связь, 1985. — 312 с.
69. Левин Б.Р. Теоретические основы статистической радиотехники. 3-е
изд. М.: Радио и связь, 1989. — 656 с.
70. Голинкевич Т.А. Прикладная теория надежности. Учебник для ву-
зов. 2-е изд — М • Высш, школа, 1985. — 168 с.
71. Иванов В.А., Голованов М.А., Крутько П.Д. Теория автомати-
ческого управления. Ч 4 Статистическая динамика автоматических систем
(семинары). — М Изд-во МГТУ, 1995. — 100 с.
72. Рытов С.М. Введение в статистическую радиофизику Ч 1 Случай
ные процессы. — М Наука, 1976. — 494 с.
73. Рытов С.М., Кравцов Ю.А., Татарский В.И. Введение в стати-
стическую радиофизику. 4.2. Случайные поля. М.: Наука, 1978. —464 с.
74. Казаков В.А. Введение в теорию марковских процессов и некоторые
радиотехнические задачи — М.. Сов. Радио, 1977 — 408 с
75. Ланда П.С. Автоколебания в системах с конечным числом степеней
свободы — М Наука, 1980. — 359 с.
76. Кемени Д., Снелл Д., Кнелл К Счетные цепи Маркова.
М Наука, 1987 — 414 с.
77. Soderstrom Т. Discrete-time stochastic systems (estimation and control).
— NY Prentice Hall, 1994 — 335 pp.
78. Капранов M.B., Кулешов B.H. Уткин Г.М. Теория колебаний
в радиотехнике. — М Наука, 1984. — 320 с
79. Magnus W., Winkler S. Hill's equation — N Y.: Wiley 1966. —
127 pp
80. Meyr H-, Asheid G. Synchronisation in digital communications Vol. 1
— N.Y.. Wiley, 1990. — 510 pp
81. Витерби А. Исследование динамики систем фазовой автоподстрой-
ки частоты в присутствии шумов с помощью уравнения Фоккера-Планка //
ТИИЭР 1963. Т. 51, № 12. С. 1704 1722.
82 LaFrieda J.R. On the probability of cycle-slipping in first-order phase-
locked loops // Proc, of the 5th Hawaii Intern Conf, on system sciences
1972. P. 57-59.
83. Schuss Z. Theory and applications of stochastic differential equations. —
NY J Willey, 1980. — 382 p.
84 Хорн P., Джонсон Ч Матричный анализ: Пер с англ М.:
Мир, 1989. — 655 с.
85. Тихонов В И., Миронов М.А. Марковские процессы — М Сов
радио, 1977. — 488 с.
86. Holmes J К. Performance of a first-order transition sampling digital phase-
locked loop using random-walk models // IEEE Trans. 1972. Vol COM-20,
№ 2. P. 119-131.
87 Miller K.S. Multidimensional Gaussian Distributions. — N.Y . J. Wiley,
1964 — 129 pp.
Список сокращений
АД — амплитудный детектор
АПРВ апостериорная ПРВ
АР — процесс авторегрессивный
АРСС — авторегрессионый скользящего среднего процесс.
АЧС — амплитудно-частотный спектр
АЧХ — амплитудно-частотная характеристика (модуль ЧХ)
БШ — белый шум
ВСП — винеровский случайный процесс
ГБШ гауссовский белый шум
ГСП — гаусссовский случайный процесс
ДУ — дифференциальное уравнение
ИЦ — интегрирующая цепь (апериодическое звено)
ИХ — импульсная характеристика
КВМ — ковариационная матрица
КВФ — ковариационная функция
КФ — корреляционная функция
МСП — марковский случайный процесс
ЛС — линейная система
МЦ — марковская цепь
ОСШ отношение сигнал/шум
ПБШ пуассоновский белый шум
ПИФ -— пропорционально-интегрирующий фильтр
ПРВ — плотность распределения вероятностей
ПСП — пуассоновский случайный процесс
ПФ преобразование Фурье
РТУ — радиотехническое устройство
РУ — разностное уравнение
СКО — средний квадрат ошибки (среднеквадратическое отклонение)
СКФ — системная корреляционная функция
СП случайный процесс
СС — процесс скользящего среднего
СФ -— согласованный фильтр
УНЧ — усилитель низкой частоты
ФВ -— фильтр Винера
ФД фазовый детектор
ФК — фильтр Калмана
ФНЧ — фильтр низких частот
ФЧС — фазочастотный спектр
ФЧХ — фазочастотная характеристика (аргумент ЧХ)
ФФ — формирующий фильтр
ХФ — характеристическая функция
ЦОФ — цифровой оптимальный фильтр (по критерию максимума ОСШ)
ЦСФ — цифровой согласованный фильтр
ЦФВ — цифровой фильтр Винера
ЧД — частотный детектор
ЧС — частотный спектр
ЭС — энергетический спектр (спектральная плотность)
Оглавление
Предисловие автора...................................... 3
Введение.............................................. 6
Часть I. Анализ случайных процессов ......................... 9
Лекция 1. Определение случайного процесса...................... 9
Лекция 2. Характеристики случайных процессов.................. 19
Лекция 3. Теорема Винера-Хинчина для непрерывных случайных про-
цессов ......................................................... 35
Лекция 4. Теорема Винера-Хинчина для дискретных случайных про-
цессов ......................................................... 44
Лекция 5. Гауссовские случайные процессы.................... 50
Лекция 6. Узкополосные случайные процессы .. 60
Лекция 7. Марковские процессы.............................-..... 69
Лекция 8. Марковские процессы (продолжение)................. 74
Лекция 9. Марковские цепи................................. 84
Лекция 10. Марковские цепи (продолжение).................... 91
Лекция 11. Пуассоновские процессы, потоки событий............ 96
Лекция 12. Импульсные случайные процессы.................... 108
Лекция 13. Ортогональное разложение случайных процессов......115
Лекция 14 Преобразование Гильберта Аналитический сигнал Огиба-
ющая и фаза сигнала............................................ 123
Лекция 15. Статистика энергетического спектра случайных процессов.. 130
Лекция 16. Случайные поля. Определения, характеристики......... 135
Часть II. Линейные преобразования случайных процессов 145
Лекция 17. Интегральные характеристики стационарных случайных про-
цессов и линейных систем .................................... 145
Лекция 18. Линейные преобразования случайных процессов........ . 152
Лекция 19. Задание линейных одномерных и многомерных систем в фор
ме стохастических ДУ и РУ...................................... 162
Лекция 20. Воздействие случайных процессов на линейные системы (не-
стационарные режимы)........................................... 184
Часть III Прохождение сигнала и шума через нелинейные
устройства ........... 190
Лекция 21. Прямой метод анализа нелинейных систем. Воздействие шу-
ма на квадратичный детектор ................................... 190
Лекция 22. Прямой метод анализа (продолжение). Прохождение сигна-
ла и шума через квадратичный детектор.......................... 201
Лекция 23. Прохождение сигнала и шума через частотный детектор ... 209
Лекция 24. Прохождение сигнала и шума через фазовый детектор.... 219
Лекция 25. Метод характеристических функций.................... 227
Лекция 26. Анализ нелинейных систем методом характеристических
функций (примеры).............................................. 233
Лекция 27. Нелинейные преобразования случайных сигналов Метод
Прайса.............................................. 244
582
Оглавление
Лекция 28. Метод статистической линеаризации.................. 250
Лекция 29. Анализ воздействия шума на однополупериодный линейный
детектор....................-............................. ... 259
Лекция 30. Прохождение случайных процессов через ограничитель 267
Лекция 31. Перемножитель и коррелятор....................... 281
Лекция 32. Выбросы случайных процессов .................... 304
Лекция 33. Шумы в радиотехнических устройствах (РТУ).......... 311
Лекция 34. Анализ стохастических квазилинейных уравнений ... 316
Лекция 35. Анализ генератора при воздействии шума............ 324
Часть IV Оптимальная фильтрация сигналов и помех
Лекция 36. Основы оптимальной фильтрации...................... 338
Лекция 37. Максимизация отношения сигнал-шуы. Согласованный
фильтр..................................................... 347
Лекция 38. Примеры согласованных фильтров.. ..... .. 356
Лекция 39. Цифровой оптимальный фильтр по критерию максимума
ОСШ ................................................... 363
Лекция 40. Расчет цифрового оптимального фильтра .... 374
Лекция 41. Фильтр Винера ...................... . . 382
Лекция 42. Расчет фильтра Винера (продолжение) ................389
Лекция 43. Цифровой фильтр Винера....... . ___...___________393
Лекция 44. Расчет цифрового рекурсивного фильтра Винера ... . 398
Лекция 45. Нерекурсивный (трансверсальный) цифровой фильтр Винера 405
Лекция 46. Расчет цифрового нерекурсивного фильтра Винера ... 414
Лекция 47. Фильтр Калмана............................. 419
Лекция 48. Расчет непрерывного фильтра Калмана ............... 424
Лекция 49. Векторно-матричный (многомерный) непрерывный фильтр
Калмана.... ................. ... . 427
Лекция 50. Цифровой фильтр Калмана.......................... 434
Лекция 51 Расчет цифрового фильтра Калмана (ЦФК).............. 438
Лекция 52. Многомерный цифровой фильтр Калмана................ 443
Лекция 53. Расчет многомерного ЦФК ......................... 447
Лекция 54. Основные соотношения нелинейной оптимальной фильтра-
ции ................................................ 457
Лекция 55. Расширенный фильтр Калмана ... ........ 465
Добавление _____________ ... .............. 471
Лекция 56. Элементы теории надежности...... .. .. ........ 471
Приложения .. ........... .. 478
Приложение 1. Характеристическая функция квадратичной формы
гауссовских СВ...................................... . ___ 478
Приложение 2. Виды сходимости последовательностей случайных ве-
личин 480
Приложение 3 Вывод формулы ЧХ фильтра Винера при белом шуме
на входе..................................................... 482
Приложение 4 Правила дифференцирования ................... 484
Оглавление
583
Приложение 5. Формула 1/1 то.................................. 487
Приложение б. Решение интегральных уравнений.................. 491
Приложение 7. Корреляционная функция огибающей узкополосного
гауссовского стационарного случайного процесса............ 493
Приложение 8. Синхронизация генератора на основном тоне при нали-
чии шума...................................................... 497
Приложение 9. Элементы теории одноконтурных автогенераторов .... 527
Приложение 10. Стационарные характеристики марковской цепи 537
Приложение 11. Корреляционная функция АРСС-процесса . ........ 540
Приложение 12. Применение теории марковских и полумарковских це-
пей для анализа цифровых систем синхронизации .... 541
Приложение 13. Решение матричного уравнения Рикатти........... 566
Приложение 14. Предельный переход от дискретного к непрерывному
фильтру Калмана .............................................. 571
Приложение 15. Вычисление матрицы переходных вероятностей полу-
марковского процесса ......................................... 574
Литература 576
Список сокращений ................................... 580
Учебное издание
Шахтарин Борис Ильич
Случайные процессы в радиотехнике. Цикл лекций
Учебное пособие
Редактор Ю.Н. Чернышов
Корректура авторская
Компьютерный набор С.В. Артюшин, Ю В Соболев
ИБ № 2989
ЛР 010164 от 29.01.97
Сдано в набор 12.01.2000. Подписано в печать 20.12.2000. Заказное издание.
Формат 60x90/16. Гарнитура Helvetica. Печать офсетная.
Усл. печ. л. 36,5. Тираж 1000 экз. Изд. № 24281. Заказ № 62.
Издательство «Радио и связь», 103473 Москва, 2-й Щемиловский пер., д. 4/5
Типография издательства «Радио и связь», 103473 Москва, 2-й Щемилов-
ский пер., д. 4/5
ISBN 5-256-01571-0
785256
Шахтарин Борис Ильич
окончил Ленинградскую Краснознаменную
Военно-воздушную инженерную академию
им. А.Ф.Можайского (1958 г.) и
Ленинградский государственный университет
(по специальности "Математика") (1968г.),
доктор технических наук, профессор,
заслуженный деятель науки и техники РФ
(1994 г.), лауреат Государственной премии
СССР (1986 г.). Академик РАЕН, Почетный
работник высшего профессионального
образования России, Почетный радист,автор
более 250 научных работ и изобретений,в
том числе 30 учебных пособий и следующих
книг: "Квазигармонический метод и его
применение к анализу нелинейных фазовых
систем",Энергоатомиздат, 1987 г.,
"Анализ кусочно-линейных систем с фазовым
регулированием". Машиностроение, 1991 г.,
"Анализ систем синхронизации при наличии
помех", 14IIРЖР, 1996 г.,
"Статистическая динамика систем
синхронизации" Радио и связь 1998,
"Анализ систем синхронизации методом
усреднения",Радио и связь, 1999 г.
Принимал участие в разработке,
испытаниях и эксплуатации средств
радиосвязи и радиолокации.