/






























































































































Автор: Осипов О.И.
Теги: электроника электротехника электрооборудование электропривод учебное пособие
Год: 2002




Текст
О.И. Осипов
ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД
УЧЕБНОЕ ПОСОБИЕ
к курсам
"Электропривод на основе преобразователей частоты серии Simovert Master Drives",
"Электропривод на основе преобразователей частоты серий Micromaster
Москва 2002
DjVu by aurton for http://www.infanata.org/
учебный курс
" ЭЛЕКТРОПРИВОД НА ОСНОВЕ ПРЕОБРАЗОВАТЕЛЕЙ ЧАСТОТЫ
СЕРИЙ MICROMASTER "
ПРЕДИСЛОВИЕ
Учебный курс предназначен для специалистов, занимающихся установкой, наладкой и
эксплуатацией асинхронных частотно-регулируемых электроприводов на основе
преобразователей частоты серии MICROMASTER (MICROMASTER Vektor (MMV),
MIDIMASTER Vektor (MDV), MICROMASTER -420, MICROMASTER -440) фирмы Siemens.
Цель курса - освоить основы теории и практики наладки и промышленной эксплуатации
асинхронных электроприводов на основе преобразователей частоты серии MICROMASTER.
Решение поставленной цели предполагает от слушателей курса знания основ
электротехники, промышленной электроники, теории электропривода и систем управления
электроприводами. В полной мере подобными знаниями владеют инженеры - электромеханики
специальности " Электропривод и автоматика промышленных установок и технологических
комплексов". Для них требуется лишь закрепление теоретических знаний на конкретных
технических решениях, в частности, на примере асинхронных электроприводов на основе
преобразователей частоты серии MICROMASTER.
Учебный курс для таких специалистов мог бы , и должен быть, скорректирован в сторону
более глубокого освоения практических особенностей и навыков наладки электроприводов.
Реально, как показывает опыт проведения данного курса, его слушателями чаще всего
оказываются инженеры - электрики, специализирующие в области промышленной электроники,
автоматики и телемеханики, электрических машин, электроснабжения и т.п., слабо знакомые с
основами электропривода и системами их управления. В подобной ситуации единственным
выходом, позволяющим квалифицированно подготовить слушателей курса, является ввод в ее
учебную программу разделов, связанных с изучением базовых основ электропривода - основ
механики электропривода, электромеханического преобразования энергии в машинах
переменного тока, частотного регулирования координат двигателей (потока, тока, момента,
скорости), выбора структур управления электроприводом в соответствии с технологическими
требованиями. Указанный учебный материал будет полезен и для специалистов в области
электропривода, тесно не связанных ранее по работе с электроприводами переменного тока.
Преобразователи MICROMASTER приспособлены для работы как с асинхронными, так и
синхронными электродвигателями. Последний вариант электропривода в настоящее время
встречается практически не часто. Поэтому для сокращения сроков и, соответственно,
стоимости обучения основное внимание при подготовке специалистов и программа основного
учебного курса обращены на асинхронный частотно-регулируемый электропривод. Тем не
менее, по заявке со стороны заказчика, возможно расширение программы курса на 16 учебных
часов с включением дополнительных разделов по изучению синхронного частотно-
регулируемого электропривода.
В программу курса не входят вопросы управления электроприводом от универсального
последовательного интерфейса с протоколом USS, поскольку существует отдельный
специализированный курс обучения.
Отличительной особенностью преобразователей MICROMASTER является простота их
программирования и ввода в эксплуатацию за счет заметного сокращения числа
параметрируемых функций электропривода. Последнее позволяет уменьшить время обучения
слушателей и снизить требования к их первоначальной теоретической подготовке.
Продолжительность основного учебного курса — 3 дня. Общее количество учебных часов
курса - 24 час. (учебный час равен 45мин.). В их числе: 8 час. - общий теоретический курс;
7 час. - практический курс по изучению преобразователей частоты MICROMASTER. 8 час. -
лабораторные занятия по наладке и исследованию режимов работы асинхронного
электропривода на основе преобразователей MICROMASTER Vektor и MIDIMASTER Vektor; 1
час. - индивидуальный экзамен по наладке и настройке режимов работы асинхронного
электропривода на основе преобразователей MICROMASTER. При положительном результате
экзамена слушателю выдается именной сертификат фирмы Siemens на право наладки и
эксплуатации электропривода на основе преобразователей серии MICROMASTER.
Максимальное число слушателей курса в одной группе не более 8 ..9 , минимальное - 3...4.
Слушатели курса обеспечиваются технической инструкцией на преобразователи серии
MICROMASTER (на русском языке), а также методическими пособиями по теоретическому и
практическому разделам учебного курса.
Занятия ведутся в учебных и лабораторных аудиториях кафедры Автоматизированного
электропривода Московского энергетического института (технического университета)
ведущими специалистами кафедры.
Организатор учебного курса - Общество с ограниченной ответственностью Сименс,
Департамент техники автоматизации и приводов, Обучение и маркетинг.
Адрес: 117071, Москва, ул. Малая Калужская, 17.
Тел. (095) 737 23 88; Факс (095) 737 24 83;
e-mail: katerina.sevieva @ mow.siemens.ru
ПРОГРАММА УЧЕБНОГО КУРСА
’’ ЭЛЕКТРОПРИВОД НА ОСНОВЕ ПРЕОБРАЗОВАТЕЛЕЙ ЧАСТОТЫ
СЕРНИ MICROMASTER "
№ СОДЕРЖАНИЕ уч. час.
Теоретический курс 8(15)
I Основы механики электроприво да 1
2 Электромеханические свойства асинхронно! о твита геля 3 (7)
2.1 Принцип работы асинхронного двигателя (АД). Электромеханическое преобразование энергии в АД. 1
2.2 Механические и электромеханические характеристики АД при питании ог источников напряжения Энергетические режимы работы АД- 1
2.3 Определение механических и электромеханических характеристик АД по его паспортным данным. Области допустимых нагрузок АД. 1
2.4* Принцип работы синхронного двигателя (СД). Механические и электромеханические характеристики СД. Векторное регулирование электромагнитного момента СД (4)
3 Часто гное ршулированне координат электропривода в системе преобразователь частоты - асинхронный двигатель (ПЧ-АД) 4 (8)
3.1 Преобразователи частоты. Принципы построения Области применения Особенности согласования силовых элементов электропривода (преобразователей частоты и двигателя) по напряжению, току и мощности. 1
32 Механические, электромеханические, регулировочные и энергетические характеристики разомкнутой системы 114-АД. Условия согласования частоты и напряжения питания АД 1
3.3 Замкнутые системы скалярного управления асинхронным частотно- регулируемым электроприводом 1
3.4 Системы векторного частотно-токового управления асинхронным электроприводом 1
3 5* Синхронный электропривод с частотно-токовым управлением Механические, регулировочные и энергетические характеристики электропривода. (4)
4 Час готпо-регу.тиру емый асинхронный электропривод на основе преобразователен серин MICROMASTER 7(12)
4.1 Назначение, основные функции, области применения и технические характеристики преобразователей. 1
4.2 Принцип построения, функциональная и электрическая схемы силовой части преобразователя. Подключение силовых цепей преобразователя. 1
4.3 Подключение цепей управления преобразователем. Электромагнитная совместимость силовых цепей и цепей управления. Программное обеспечение преобразователя. Панель управления преобразователем. Структура управления преобразователем при помощи панели управления PMU. 1
4.4 Функциональные схемы систем управления электроприводом. Разомкнутые и замкнутые структуры управления скоростью АД. Статические и динамические характеристики электропривода для различных структур управления. 2
4.5 Заводская установка параметров. Установка основных параметров АД, преобразователя, схем управления. Диагностические функции преобразователя. 1
4.6 Выбор структуры электропривода в соответствии с технологическими требованиями к объекту регулирования. Этапы пуска и наладки электропривода 1
4.7* Настройка основных параметров СД. Параметрирование структуры управления синхронным электроприводом, режимов его работы, установка параметров регуляторов. (5)
Лабораторный практикум 8(12)
5.1 Установка параметров асинхронного двигателя, преобразователей MICROMASTER, структуры и регуляторов электропривода на их основе с помощью панели управления. 1
5.2 Установка параметров асинхронного двигателя, преобразователей MICROMASTER, структуры и регуляторов электропривода на их основе через последовательный интерфейс от персонального компьютера. 3
5.3 Исследование статических (регулировочных, механических, электромеханических, энергетических) и динамических характеристик электропривода с разомкнутой системой управления. 1
5.4 Исследование статических (регулировочных, механических, электромеханических, энергетических) и динамических характеристик электропривода с замкнутой по скорости скалярной системой управления. 2
5.5 Исследование статических (регулировочных, механических, электромеханических, энергетических) и динамических характеристик электропривода с замкнутой по скорости векторной системой управления. 2
5.6* Исследование статических (регулировочных, механических, электромеханических, энергетических) и динамических характеристик электропривода при работе преобразователя MICROMASTER с синхронным электродвигателем. (4)
6 Настройка электропривода переменного тока на основе преобразователей MICROMASTER для заданной преподавателем структуры управления. 1
Примечание. Индексами * и () в таблице указаны дополнительные пункты и учебные
часы, касающиеся подготовки специалистов в области синхронного
частотно-регулируемого электропривода.
ОГЛАВЛЕНИЕ
Предисловие...........................................................4
1. Общая структура электропривода.....................................5
2. Основы механики электропривода.....................................8
2.1. Механическая часть электропривода..............................8
2.2. Механические характеристики электропривода ....................9
2.3. Уравнение движения электропривода. Статический режим и
устойчивость движения .............................................10
2.4. Механические переходные процессы..............................12
2.5. Регулирование механических координат электропривода...........1о
3. Электромеханические свойства асинхронного двигателя (АД)..........24
3.1. Электромеханическое преобразование энергии в АД...............24
3.2. Статические характеристики и энергетические режимы работы АД ... 28
4. Система преобразователь частоты - асинхронный двигатель...........45
4.1. Общие принципы частотного регулирования координат АД..........45
4.2. Статические преобразователи частоты...........................46
4.3. Схемы замещения АД при питании от преобразователей частоты
как источников напряжения и тока...................................54
4.4. Статические характеристики АД в разомкнутой системе ПЧ-АД.....59
4.4.1. Статические характеристики АД при U\- const и f\- const....... 59
4.4.2. Статические характеристики АД при UJf\ = const h?i = const... 61
4.4.3. Статические характеристики АД при Ч/м = const.................. 62
4.4.4. Статические характеристики АД при = const.................. 64
4.4.5. Статические характеристики АД при Д = const...............66
4.5. Электромагнитная мощность и момент АД........................ 67
5. Разомкнутые системы управления асинхронным частотно-регулируемым
электроприводом....................................................73
5.1. Принципы построения систем управления АД......................73
5.2. Разомкнутые системы со скалярным управлением..................75
6. Замкнутые системы скалярного управления асинхронным
частотно-регулируемым электроприводом..............................80
6.1. Системы скалярного управления с обратной связью по току статора. ' 81
2
6.2. Системы скалярного управления с обратной связью по
скорости двигателя...............................................85
7. Системы векторного частотно-токового управления асинхронным
электроприводом.....................................................91
7.1. Принципы построения систем векторного частотно-токового
управления.......................................................91
7.2. Система управления с прямой ориентацией по вектору
потокосцепления ротора АД........................................94
7.3. Системы управления с косвенной ориентацией по вектору
потокосцепления ротора АД........................................99
7.3.1. Системы управления скоростью АД..........................99
7.3.2. Система управления моментом АД..........................107
8. Сервисные функции в частотно-регулируемом асинхронном
электроприводе.................................................... 116
Список литературы................................................. 122
ПРЕДИСЛОВИЕ
Учебный курс предназначен для специалистов, занимающихся усгановкой, наладкой и
эксплуатацией регулируемых электроприводов переменного тока на основе
преобразователей частоты серий Simovert Master Drives VC и Micromaster" фирмы Siemens.
Цель данного курса - освоить лишь ту часть основ теории асинхронного частотно-
регулируемого электропривода, которая необходима и достаточна для квалифицированной
наладки и эксплуатации электроприводов с преобразователями частоты серий Simovert
Master Drives VC и Micromaster".
Решение поставленной цели предполагает от слушателей курса знания основ
электротехники, промышленной электроники, теории электропривода и систем управления
электроприводами. В полной мере подобными знаниями владеют инженеры -
электромеханики специальности " Электропривод и автоматика промышленных установок
и технологических комплексов". Реально слушателями курса чаще всего оказываются
инженеры - электрики, специализирующие в области промышленной электроники,
автоматики и телемеханики, электрических машин, электроснабжения и т.п., слабо
знакомые с основами электропривода и. системами их управления. В подобной ситуации
единственным вариантом, позволяющим обеспечить квалифицированную подготовку
слушателей курса, является ввод в программу курса разделов, связанных с изучением
базовых основ теории электропривода - основ механики электропривода,
электромеханического преобразования энергии в машинах переменного тока, частотного
регулирования координат двигателей (потока, тока, момента, скорости), выбора структур
управления электроприводом в соответствии с предъявляемыми к нему технологическими
требованиями. Указанный учебный материал будет полезен и для специалистов в облаете
электропривода, тесно не связанных ранее по работе с электроприводами переменного тока.
Учебное пособие включает в себя основной материал, жестко связанный с
программами теоретического курса по подготовке слушателей курсов, и дополнительный,
позволяющий закрепить ряд разделов курса (выделен в тексте меньшим шрифтом). Для
более глубокого изучения основ теории частотно-регулируемого электропривода
переменного тока слушателям курса рекомендуется обратиться к [1, 2, 5, 6,15, 16].
4
1 .ОБЩАЯ СТРУКТУРА ЭЛЕКТРОПРИВОДА
Электропривод - электромеханическая система, состоящая в общем случае из
взаимодействующих преобразователей электроэнергии, электромеханических и
механических преобразователей, управляющих и информационных устройств и устройств
сопряжения с внешними электрическими, механическими, управляющими и
информационными системами, предназначенная для приведения в движение
исполнительных органов рабочей машины и управления этим движением в целях
осуществления технологического процесса [1].
В соответствии с определением общая структура электропривода представлена на
рис. 1. Здесь толстыми сплошными линиями изображены силовые каналы передачи и
преобразования электрической энергии, двойными - каналы передачи и преобразования
механической энергии, а тонкими - каналы управления потоками энергии, передачи и
преобразования информации о состоянии и функционировании системы.
Потребляемая из системы электроснабжения ( шин промышленной электрической
сети, автономного электрического генератора, аккумуляторной батареи и т.п.)
электрическая энергия Ж, с нерегулируемыми напряжением U3 _ током 1Э и частотой f3
поступает к электрическому преобразователю ЭП ( электромашинному,
полупроводниковому и т.п.). Здесь энергия W3 преобразуется в энергию FT3n с другими
значениями параметров ( U3n /эп > fm ) , которые могут быть управляемы. В
электромеханическом преобразователе ЭМП (электрической машине ) подводимая
электрическая энергия преобразуется в механическую энергию WM вращательного
( поступательного ) движения ротора ( якоря ) с крутящим моментом М (силой F ), углом
поворота а, угловой скоростью со и угловым ускорением 8 ( линейным перемещением х,
линейной скоростью V и линейным ускорением а ). Механический преобразователь
МП (редуктор, кривошипно - шатунный механизм, грузоподъемный барабан и т.п. )
энергию 1FM преобразует в механическую энергию Жро рабочего (исполнительного) органа
технологической установки с иными крутящим моментом Л/ро ( силой ), углом
поворота аро, угловыми скоростью соро и ускорением ер0 ( линейным перемещением хр0,
линейными скоростью Кро и ускорением аро).
Преобразование энергии можег иметь и обратное направление, когда механическая
энергия со стороны рабочего органа преобразуется в электрическую энергию,
поступающую в систему электроснабжения (на рис.1 данное направление показано
штриховой стрелкой ).
Информационный преобразователь ИП обеспечивает измерение переменных
параметров электромеханической системы, их преобразование, хранение, обработку
полученной информации. На основе этой информации, а также в зависимости от сигналов
задания Х3, сигналов управления Хвн со стороны внешних взаимодействующих систем ИП
формирует законы управления координатами электромеханической системы.
К числу показателей, характеризующих требования к электроприводу, следует
отнести надежность электропривода, статическую и динамическую точность
реализуемого им движения исполнительного органа рабочей машины, энергетическую
эффективность потребления и преобразования энергии, электромагнитную
совместимость как с системой электроснабжения, так и с информационными
преобразователями электропривода, ресурсоемкостъ (материалоемкость и энергоемкость
устройств) эксплуатационную эффективность (эргономичность, комплектность,
ремонтопригодность, техническое диагностирование устройств электропривода и т.п.).
6
Внешние взаимодействующие системы
Рис. 1. Структура электропривода
7
2. ОСНОВЫ МЕХАНИКИ ЭЛЕКТРОПРИВОДА
2.1. Механическая часть электропривода
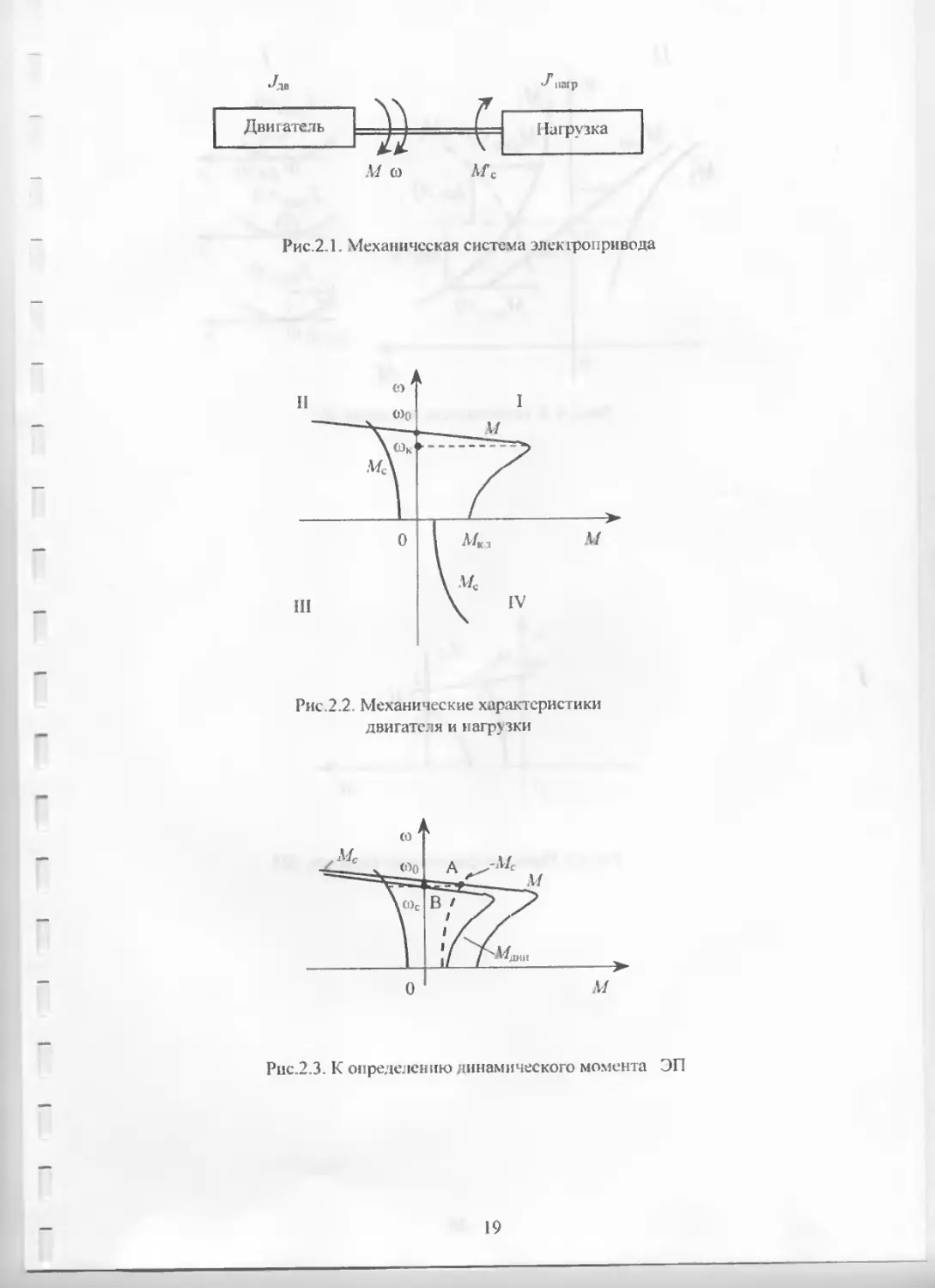
На рис. 2-1. дан обобщенный пример механической системы электропривода,
содержащей рогор двигателя с собственным моментом инерции и непосредственно
связанный с ним рабочий орган технологической установки (нагрузка на валу двигателя) с
приведенным к валу двигателя моментом инерции J натр К системе приложен
электромагнитный момент Л/, развиваемый двигателем, и приведенный к валу двигателя
момент сил сопротивления Л/ с . создаваемый нагрузкой. Результатом совместного
взаимодействия моментов Л/ и Л/ с является вращательное движение вала двигателя с
угловой скоростью со.
Приведение чо.чентов и сил со стороны рабочего органа к валу двшагеля осуществляется из
условия равенства элементарной работы всех действующих в механической системе электропривода
моментов и сил на возможных перемещениях ее элеме1гтов.
Мс = Л/,»(rrj); Л/е = Fpo р /1] - при прямом потоке механической энергии и
Л/€ = (Л/ре и ) / /; \t с - Fpo р п - при обратном потоке механической энергии.
Здесь- i = со / (Оро - передаточное число механического преобразователя (рис. 1), р • /о - радиус
приведения кинематической схемы между элементом, «смеющим поступательное движение, и валом
двигателя; г) - результирующее КПД механического нреобраювателя.
Значения передаточных чисел и радиусов приведения определяются по конструктивным параметрам
механических преобразователей.
Приведение иомечта инерции осуществляется из условия сохранения в реальной и приведенной
системах запаса кинетической энергии:
J НИР = Л/‘|.22; j МФ = »»Р2 -
Здесь: т - масса элемента, имеющего поступательное движение.
Результирующий момс«гт инерции механической системы электропривода определяется как
Уе — Jm + J iurp .
При отсутствии информации о конструктивных параметрах механического преобразователя и данных по
моментам инерции и массам элементов рабочего органа технологической установки часто (за исключением
электропривода с маховиком на валу двигателя) с достаточной для практики точное гью можно принять
Л=(1.2+1,4)Л,
8
2.2. Механические характеристики электропривода
В зависимости от свойств двигателя и рабочего органа технологической установки
силы и моменты, прикладываемые к элементам механической части электропривода, могут
быть как постоянными, так и зависимыми от времени или координат движения
( перемещения, скорости, ускорения ).
Особый интерес для вращательного движения элементов механической части
электропривода представляют зависимости моментов, прикладываемых к ним, от угловой
скорости движения элементов со - механические характеристики М (со) двигателя и Л£ (со)
нагрузки (индекс ’ приведения момента нагрузки к валу двигателя в дальнейшем исключен).
В общем случае направления их моментов и скорости могут быть различны, и потому
механические характеристики двигателя и нагрузки (рабочего органа) могут располагаться
в четырех квадрантах плоскости координат со - М. На рис. 2.2. дан пример механических
характеристик асинхронного двигателя ( (/) и центробежной машины (Л/с ). Знаки М и со
определяют, принимая одно из направлений движения за положительное, например + - при
вращении ваш двигателя по часовой стрелке или перемещении рабочего органа вверх и т.п.
Моменты, направленные по движению (движущие), имеют знак, совпадающий со знаком
скорости (участок coo - MKi характеристики двигателя), моменты, направленные против
движения (тормозящие) имеют знак, противоположный знаку скорости (остальные
участки характеристик) [15].
Одним из показателей механических характеристик является их жесткость,
определяемая как Р(<о) = t/.V/(co)/с/со . Характеристики могут быть абсолютно жесткими -
Р(со) = со , например, у синхронного двигателя, скорость которою с изменением момента
остается постоянной; абсолютно мягкими -р(со) - 0, когда момент нс зависит от скорости.
Они могут иметь отрицательную Р(со) < 0 (участок <Оо - ык характеристики двигателя на
рис. 2.2) или положительную Р(го) > 0 жесткость (участок <ок - 0 характеристики
двигателя).
Статические силы и моменты Moiyr как способствовать, гак и препятствовать
движению В зависимости от характера их действия принято силы и моменты делить на
активные и реактивные.
Активные силы и моменты обусловлены внешними по отношению к элементу'
источниками механической энергии и действуют независимо от движения элемента.
Отличительная особенность активных сил и моментов в том, что направление их действия
9
нс зависит от направления движения. Активные моменты и силы сопротивления со стороны
рабочих органов технологических установок создаются потенциальной энергией
перемещаемых по вертикали грузов, энергией сжатия, растяжения и скручивания упругих
тел. энергией ветра, потока воды и т.п Так, статический момент, обусловленный весом
груза, и при его подъеме и при спуске всегда направлен в одну сторону, способствуя
движению груза вниз и препятствуя ему при подъеме груза.
Реактивные силы и моменты возникают как реакция на .движение и всегда направлены
против этого движения, т. е. всегда тормозящие. Препятствуя движению, реактивные силы
и моменты меняют свой знак при изменении направления движения Примером реактивных
статических моментов сопротивления являются моменты трения, резания, пеупругой
деформации материала и т.п.
2.3. Уравнение движения электропривода. Статические режимы и
устойчивость движения.
Наибольший интерес ври анализе электропривода представляет определение законов
движения выходного вала двигателя, так как именно посредством его осуществляется
управление движением рабочего органа технологической установки. Для одномассовых
моделей механической системы элексроиривода с вращате п>ным движением (рис. 2.1) при
постоянстве их результирующего момента инерции уравнение движения выходного вала
двигателя в соответствии со вторым законом Ньютона:
\А/( со) = ± А/(со ) ± К(со) = A/juH, (со) = Л daidt, (2.1)
Моменты А/(со), А/С(со) могут иметь различные направления действия В наиболее
типичном для работы электропривода случае двигатель создает движущий момент,
совпадающий с направлением движения ст о выходного вала (принимается положительный
знак момента .Цсо)). При этом исполнительный орган рабочей машины имеет момент
сопротивления, направленный встречно движению вала двигателя (принимаемся
отрицательный знак момента Мс (со) ). Тогда уравнения движения вала двигателя:
£А/(со) = Л/(<в ) - Л<(со)= А/Яин(<о)= Л dm/dt, (2.2)
Уравнения движения позволяют решать множество практических задач, связанных с
динамическими режимами работы электропривода. Прежде всего отметим направление
движения электропривода в зависимости от знака динамического момента:
для Л/дцн (го) > 0 скорость движения увеличивается при со > 0 и уменыпае гея при ю < 0;
для Л/ан„ (со) < 0 скорость движения уменьшается при со > 0 и увеличивается при со < 0;
для A/jhh (со) = 0 имеет место установившаяся скорость движения со -const
10
Характер и закономерности движения электропривода наиболее наглядно можно
показать на примерах механических характеристик двигателя и нагрузки.
Статические режимы и устойчивость движения Пусть моменты Л/ и Л/с
механической системы (рис. 2.1) связаны с угловой скорость со гак. как показано па рис. 2.3.
Механическая характеристика Л/(со) принята активной, Л/С(со) - реактивной Определив дгя
каждого значения скорости динамический момент
Л/*,,,, (со) = Щсо) = I Л/(со) I - | Л/С(со) |,
отметим характер его изменения на рис 2.3 и оценим влияние на поведение движения
вала двигателя В соответствии с (2 2) при о < coCt где Мми (сос) > 0 вал двигателя совершает
движение с положительным ускорением в = dto/dt > 0 (скорость движения увеличивается).
При со > сос где Л/д,,,, (сос) < 0 движение элемента происходит с отрицательным ускорением
Е < 0 ( скорость движения снижается). В обоих случаях при движении элемент стремиться
к постоянной скорости сос, где при Л/дин (гос) = 0, имеет место установившийся
статический режим движения. Наглядно значение сос на рис. 2.3 определяется в точке В
пересечения кривой Л/д,,,, (to) с осью ординат со. Это же значение сос (без построения кривой
Л/дин (<о)) может быть определено как ордината точки Л пересечения кривых Л/(со) и
- Л/с (со). Последняя представлена на рис. 2.3 пунктирной линией как зеркальное отражение
кривой Л/с (со) относительно оси ординат, т.е. выполнена процедура переноса Л/с (со) из
второго квадранта механической характеристики в первый.
Подобный прием определения статического режима работы традиционно используется
в электроприводе, а процедуру переноса можно учесть при записи уравнения движения
(2.1) как
± Л/(со ) - [ ± Л/С(со)] = ./v duddt (2.3)
Установившийся статический режим движения может быть как устойчивым, так и
неустойчивым. Критерием устойчивости является условие возникновения таких
динамических сил и моментов при выведении механической системы из состояния
равновесия, при которых система возвращается в исходное состояние. Так, для
механических характеристик па рис. 2.4 любое случайное отклонение от статического
движения со скоростью сос вызовет появление динамического момента, снижающею
начальное отклонение. Пусть под воздействием кра современного возмущения скорость
сос снизилась ( Дсо < 0 ). Тогда активный момент Л/ (со с - Aw) станет больше момента
Л/с (сос - До) и динамический момент Л/д,,,, (cot - Дсо) > 0 вызовет увеличение скорости
движения до тех пор , пока динамический момент не станет равным нулю, т.е. при от = сос
При кратковременном увеличении скорости ( Дсо > 0 ) момент Л/(сос + Дсо) станет меньше
11
момента Л/с (сос + Дсо) и динамический момент 1/дии (о>с - Дсо) < 0 обусловит снижение
скорости движения до со = сос.
Аналог определения устойчивого состояния для поступательного движения дан с
правой стороны рис.2.4.
Для характеристик на рис. 2.5 движение со скоростью в точках 1 и 2 координат
устойчиво, а в точке 3 - неустойчиво Действительно, любое отклонение скорости в точке 3
вызовет динамический момент, увеличивающий начальное отклонение Так при Дсо < 0 под
действием момента Л/д,,,, (со с - Дсо) < 0 скорость движения будет продолжать снижаться, а
при Дсо > 0, где Л/дин (со с + До) > 0, будет увеличиваться. В итоге элемент не вернется в
свое статическое состояние движения в точке 3.
Необходимым и достаточным условием устойчивости установившеюся его движения является
противоположность знаков приращения скорости и обусловленного им динамического момента, т е
d Л/2НН(ш )/Ли < О
Используя понятия жесткости механических характеристик двигателя Р (ш) и нагрузки рс(<о), указанное
условие можно определить как
dM(a)id<a - dЛ/С(ш)/dw P(w)- pc(w)<0, или p(св) < РДю).
2.4. Механические переходные процессы
Движение электропривода при Л/(со ) = const, Мс(ы) = const. Пусть исходное
состояние электропривода характеризуется установившимся режимом движения с
постоянной начальной угловой скоростью со||ач под воздействием начальных значений
моментов двигателя и реактивных сил сопротивления нагрузки А/(со ) = Л/,|ЖЧ = Л/С(со) = Л/
I рис. 2.6, а). Если, начиная с момента времени I = 0 механическая характеристика двигателя
измениться скачком до Л/(со ) = М\, а момент сил сопротивления Л/С(со) = Мс останется
постоянным, то под воздействием постоянного динамического момента
Л/дин (ю) = АЛ - И = Л </со/ dt > 0 (2.4)
скорость движения вала двигателя будет равноускоренно увеличиваться, достигнув за
конечное время tn скорости сОкон (рис. 2.6, б). После скачкообразного уменьшения при г„
момента Л/(со ) с ЛА до Мс , когда Л/даи (со) вновь станет равным нулю, движение вала
двигателя будет установившимся со скоростью С0ко, Зависимость угловой скорости вала
двигателя от времени со (г) определится в результате решения дифференциального
уравнения первого порядка с разделяющимися переменными (2.4) как
А А
12
где постоянная интегрирования С = <оиач определяется из начального условия при / = 0, со =
СОцач-
Отсюда:
л/, - -Ч-
со со„ач + -----------/ (2.Э)
в/ V
Уравнение (2.5) справедливо в интервале времени 0 < t < t„ , где значение А/ЛИц (со)
постоянно и более нуля. В этом же временном интервале постоянно и ускорение движения
вала двигателя
е = da>/ dt = Мои» №>/ Л = (Mi - Л/J / Л
Таким образом, при постоянс1ве динамического момента скорость движения вала
двигателя будет меняться линейно во времени с темпом, определяемым стремясь к
Юконв«>при
Продолжительность переходного процесса t„ определится из соотношения (2.5) после
подстановки в него со = сокоц при t = t„:
/ц- coKOI| - сонач ) ( V/[ - Л/с). (2.6)
Аналогично можно получить характер и закономерности движения вала двигателя в
случае скачкообразного снижения момента двигателя до Л/(со ) = М\< Л/с, а также в случае
активного момента сил сопротивления В соотношениях (2.5), (2.6) следует лишь
правильно учесть знак динамического момента Л/Д11н (со)< 0 и направление изменения
скорости (С1)к01, < со11ач).
Движение электропривода при линейных зависимостях и Л/С(со). Пушь
механическая характеристика двигателя Л/(са) и реактивный момент Л/С(о) сил
сопротивления нагрузки имеют вид, представленный па рис. 2.7, а. Уравнения линейных
механических характеристик двигателя и нагрузки могут быть соответственно определены
как [ 16]
А/ = Л/к.э-₽со; Мг = М^+Рдв, (2.7)
где Мкз и Л/и - соответственно момент короткого замыкания двигателя и момент сил
сопротивления нагрузки при m = 0; р = dM / < 0 - жесткость механической
характеристики двигателя: рс = dMc / da> > 0 - жесткость механической характеристики
нагрузки.
Определяя в (2.3) значения Л/ и Л/Св соответствии с (2.7), получим
13
Jr dv>! dt + (p+ 0c)co = MK, - A/co. (2 8)
Поделив (2.8) почленно на (0 + 0C), получим после ряда преобразований линейное
неоднородное дифференциальное уравнение первого порядка
7Ч с/со/ dt + со = соуст, (2.9)
Здесь Ти - Jv /(0 рс) - электромеханическая постоянная времени двигателя, с. соуст =
(Mj- Л/соУ ip” Рс) - установившаяся скорость движения вала двигателя ( соответствует
точке 1 пересечения механических характеристик на рис. 2.7).
Общее решение уравнения (2.9) относительно скороеги даст
W (СО ,|ач “ СО усг) в СО уст- (2.10)
Поскольку скорость и момент двигателя связаны между собой линейно, то аналогично
уравнению (2.10) закон изменения момента будет
Л/= (Д/1ШЧ - Л/у,-,) е ',/П* + Л/уст. (2 11)
Соотношения (2.10), (2.11) позволяют определить время , изменения скорости или
момента от их начальных до каких либо текущих значений со , или М,:
С.-Т. = Т. In —<2' |2>
На рис. 2.7.6.B в соответствии с уравнениями (2.10), (2.11) приведен экспоненциальный
характер изменений скорости и момента двигателя во времени. Их конечные значения со кон
и Л/ КОц стремятся к установившимся значениям со уСт =со с и А/ уст = Л/с, соответствующих
статическому режиму работы двигателя. Теоретически, при подстановки в (2.10), (2.11) со ,
= со уст или Л/ , = М уст, время достижения установившегося движения вала двигателя тп>,
будет равно бесконечности. Действительно, если в начальный момент движения
динамический момент на валу двигателя был наибольшим и. соответственно, наибольшим
был темп изменения скорости движения, то по мере снижения Л/дШ| с ростом скорости темп
ее изменения заметно падает, стремясь к нулю при нулевом уровне Л/янн- Практически за
условное время /п окончания переходного процесса принимается время, за которое текущее
значение координаты движения изменится на 95% ...98% ее установившегося значения.
Подставляя в (2.12) значения со ,= (0.95 .. 0,98) со уСГ, получим tn = (3...4) Ги
Электромеханическая постоянная времени 7'ч, отражая как механические (.7), так и
электрические (0) свойства электропривода, имеет вполне определенный физический
смысл. Для его выяснения рассмотрим процесс разгона двигателя с линейной механической
характеристикой 1 на рис. 2.8, а при отсутствии сил сопротивления на его валу' (Л/с = 0).
14
Учитывая начальные (со„ач = 0, Л/,|ач = М<з) и конечные (wKf1H~wycr-со0, А/10Н-= О)
значения координат привода, а так же соотношение (2.10) получим
ш = со0(1-е^), (2.13)
где 7’м = Л /р = ЛДсо/ ДА/ = Л<Во, Л/К1 ; «>о - скорость идеального холостого хода
двигателя ( при А/с.= 0).
Характер изменения скорости двигателя по (2.13) показал на рис. 2.8.6
экспоненциальной кривой 1 Пересечение касательной 2 к кривой I в начале координат и
шнии со о = const на рис. 2.8.6 даст отрезок времени, равный Ти. Действительно, касательная
2 соответствует линии разгона двигателя, имеющего механическую характеристику 2 на
рис. 2.8, а. под действием постоянного динамического момента Mwn = М Нач = Л/кз При
этом время достижения скорости муст = йо в соответствии с (2.6) определится как Гп =
.А со о/ Л/кэ= 7'м- Таким образом, электромеханическая постоянная времени Тч представляет
собой время, в течение которого привод с неизменным моментом инерции разогнался бы
вхолостую (при Л/е = 0) от со „ан = 0 до со>Ст = too под действием постоянного динамического
момента, равного Мкз. При /11Л Тн скорое гь достигнет значения О.бЗсо о ( рис. 2.8).
При линейном законе (со) соотношения (2.10) ...(2.12) могут быть использованы
при оценки характера движения привода в случае любых линейных изменений его
механических характеристик
Движение электропривода при произвольной зависимости Млин{(д ).
Для нелинейных механических характеристик двигателя или рабочего органа, когда
динамический момент является нелинейной функцией скорости, времени или положения,
точное аналитическое определение закона движения электропривода связано с
интегрированием уравнения (2.3) и возможно лишь при известных .математических
зависимостях моментов от этих парамегров. При отсутствии этих зависимостей или их
сложности когда механические характеристики заданы графически или в виде таблиц,
используют методы численного интегрирования уравнения движения, например, метод
)й.тсра. Применительно к уравнению движения (2.3) метод связан с заменой бесконечно
малых приращений скорости Jw и времени dt малыми конечными приращениями Дсо, и Д/>.
В этих пределах текущие значения моментов двшагеля V(co) и сил сопротивления 1/с(а>)
заменяются их средними jV/cpi и А<хр , постоянными значениями дтя каждого i -го
интервала изменения скорости. При этом уравнение движения (2.3) будет иметь вид
А/ср । - Л/схр. 1 — Л/дии ср j - Jr Дсо । /Д/j . (2.14)
15
Значения Л/ср, и А/сср , находятся графически (или из таблиц) аппроксимацией
отдельных участков механических характерна ик двигателя и рабочего органа прямыми
линиями.
Рассмотрим применение метода на примере пуска асинхронного короткозамкнутого
двигателя ( механическая характеристика А/(«)) для привода вентилятора с механической
характеристикой Щсв) ( рис. 2.9.а ). Определение зависимостей со (/) и М (t) начинается с
этапа разбиения оси скорости механических характеристик на ряд интервалов
(приращений) Ло । - со , - со , Интервалы могут быть как одинаковыми, так и различными.
Последний 1 = п интервал соответствует достижению установившейся скорости движения.
На каждом выбранном интервале скорости по механическим характеристикам (рис 2.9.а)
определяются текущие значения АЛ. А/,. t момента двигателя и А/С.к Л/с । рабочего органа
( вен тидятора). а затем их средние значения: Л/ср. = (Л/1 + Л/i)/ 2 и АЛ ср, = (V/Cj + АЛ () / 2.
Подстановкой расчетных АЛрэ , АЛ ср - и выбранных значений Дсо i в соотношение (2.14),
определяется интервал времени А/ = Дед, / ЛЛР., - АЛ.ср. , за который двигатель
равноускоренно изменит скорость от со j. । до со , под сйствием постоянного динамического
момента Ср i ~ АЛрл - АЛ ср Сложение рассчитанных д ля каждого i - го приращения
скорости интервалов времени даст текущее время переходного процесса. Сопоставляя для
каждого i -го интервала времени значения скоростей св. сл роится зависимость св(/)
(рис. 2.9, б). Зная св(/) и определив из механической характеристики двигателя для каждого
значения скорости соответствующие значения момента, строят зависимость А/(/) (рис.
2.9. в).
2.5. Регулирование механических координат элект ропривода
Управление движением электропривода связано с принудительным, в соответствии с
технологическими требованиями, изменением (регулированием) одной или нескольких его
механических координат. Анализируя механическую часть электропривода (рис, 1), можно
отметить два возможных способа их регулирования:
1 - изменением параметров механического преобразователя, например, переда! очного
отношения или радиуса приведения кинематических звеньев:
2 - изменением механических характеристик э тектромеханического преобразователя,
например, за счет воздейслвия на параметры его питающей сети (напряжения, тока,
частоты).
16
Первый способ требует применения более сложных и менее надежных механических
устройств и трудно поддается автоматизации. Второй - отличается большей гибкостью в
управлении и лучшими технико-экономическими показателями Для ряда рабочих машин
(например, металлорежущих станков) технически обоснован комбинированный,
сочетающий оба способа, метод регулирования координат.
Регулирование координат характеризуется рядом обобщенных показателей, к числу
которых относятся направление регулирования, точность, плавность, диапазон,
ограничение нагрузок привода, динамические показатели качества и экономичность
регулирования
Направление регулирования определяется направлением изменения координаты х
относительно ее естественного состояния хе. Так. при увеличении координаты, речь идет о
регулировании вверх от основного (естественного) состояния, а при снижении - вниз от
основного Если возможно изменение в обоих направлениях, говорят о двухзонном
регулировании.
Точность регулирования определяется отношением изменения ретулирусмой
координаты при изменении возмущения в заданном диапазоне к се среднему значению.
Оценкой точности может быть отношение максимального отклонения координаты Дгтах к
ее среднему значению хср:
Дттал/-Тер ~~ (-'•max “ Хт1п)/(Лтах -^тт)-
где хтах и Xmin - максимальное и минимальное значения координа i ы при заданных пределах
изменения возмущений Гятах и Г„. Мп( рис. 2.10).
Плавность регулирования определяется коэффициентом плавности,
который представляет собой отношение текущего х, значения координаты к разности двух
Xi и Xj.| соседних ее значений.
Лид — X,' ( Xj- Xj.[).
Чем выше Аг1131те.м выше плавность регулирования.
Диапазон регулирования определяется отношением средних максимального х ср max и
минимального х cp.min значений регулируемой координаты электропривода ( рис. 2.11) при
заданном диапазоне изменения возмущающих воздействий и требуемой точности
регулирования:
£> = х
ср max' ср nun -
17
Ограничение нагрузок привода связано с допустимым (нормативным) нагревом
силовых элементов электропривода в процессе регулирования его координат. Так. для
двигателя возможны ограничения длительно допустимого момента Л/да1 или мощности Рми.
Динамические показатели качества регулирования оцениваются его быстродействием,
перерегулированием и колебательностью переходно! о процесса
Экономичность регулирования характеризуется эксплуатационными затратами,
сопровождающими процесс регулирования В их число входят потери энергии, связанные с
потерями мощности, изменением КПД и коэффициента мощности электропривода, а
также затраты на дополнительное оборудование, обслуживание привода и т.п. Технико-
экономическое обоснование регулируемого электропривода является наиболее
ответственным этапом его реализации
18
пагр
М co
Рис.2.1. Механическая система электропривода
Рис.2.2. Механические характеристики
двигателя и нагрузки
Рис.2.3. К определению динамического момента ЭП
19
Рис.2.4. К уст ойчивости движения ЭП
Рис.2.5. Примеры статических режимов ЭП
20
0)
WKOH
^нач
M M
Рис.2.6. Механические характеристики (а) и переходные
процессы (б) при М- const и Мс= const
wn;i4
Рис.2.7. Механические характеристики (а) и переходные
процессы скорости (б) и момента (в) ЭП
21
(!)
0)
Рис.2.8. К определению электромеханической постоянной времени
м
м0
Рис.2.9. Механические характерно т ики (а) и переходные процессы
скорости (б) и момента (.в) АД
22
X
Рис.2.10. К определению точности регулирования
Рис. 2.11. К опреде ichhio диапазона регулирования
23
3. ЭЛЕКТРОМЕХАНИЧЕСКИЕ СВОЙСТВА АСИНХРОННОГО
ДВИГАТЕЛЯ (АД)
3.1. Электромеханическое преобразование энергии в АД
Неподвижная часть (статор) и подвижная часть (ротор) АД выполнены в форме
цилиндрических сердечников из электро 1ехпической стали. На внутренней поверхности
статора и на внешней поверхности ротора имеются пазы для размещения проводников
обмоток статора и ротора. Обмотки статора выполняется т - фазными (обычно т = 3, реже
т - 2) и подключаются к сети т - фазного тока. Ротор выполняется либо в виде "беличьей
клетки" (короткозамкнутый ротор), либо в виде т - фазных обмоток аналогично обмоткам
статора и с icm же числом полюсов магнитого поля (фазный ротор). Концы фаз обмоток
ротора соединяются между собой, а начала выведены на кольца на валу АД и с помощью
ско ьзящих по ним щеток могут быть замкнуты на внешние резисторы или другие цепи.
Принцип действия асинхронного двигателя заключается во взаимодействии
вращающегося магнитного поля, создаваемого обмотками статора, с токами, протекающими
в обмотках ротора под действием ЭДС. индуктируемых в обмотках этим полем.
В общем случае для создания вращающегося магнитного потя необходимо в т -
фазную систему обмоток статора (т>2). конструктивно расположенных со сдвигом между
собой на угол 2 л/m в про ।ранстве статора, подать синусоидальные токи, сдвинутые во
времени на угол 2 п/т. Создание обмотками статора АД вращающегося магнитно! о ноля
при их зн ании от трехфазной и двухфазной сети переменного тока часготы/поясняется
рис. 3.1 и 3.2.
В соответствии со схемой подключения статора зрехфазного АД (рис. 3.1,а) каждая из
его обмоток А-Х, В-У, C-Z питается синусоидальны ми токами 7А, /ц, 1с с угловой частотой
со =2л/ , сдвину!ыми между собой во времени на угол 2 л/3 (рис 3 I,б). На рис. 3 I, в и
рис. 3.1,г показано конструктивное расположение обмоток А-Х, В-У, C-Z статора, когда
каждая фаза состоит из одного витка (катушки) проводников. 11ачала обмоток фаз А. В, С
сдвинуты относительно друг друга на 2 л/3 ( 120° эд.). На рис. 3.1,в и рис. 3.1,г показаны
направления токов в проводниках обмотки статора для моментов времени,
24
соответствующих углам со/: = тт/2 (90' эл.) и со/з = 5л/6 (150° эл.). Токи фаз считаются
положительными , когда они в началах фаз А. В, С направлены за плоскость рисунка (знак
+) и отрицательными - из его плоскости (знак -). Токи проводников обмотки статора
создают результирующую магнитодвижущую силу (МДС) F и соответствующий ему
магнитный поток статора Ф\, проходящий через статор, ротор и воздушный зазор между
ними. Из сравнения рис. 3.1.в и г видно, что при изменении фазы токов на п/3 (60° эл.)
вектор F и поток Ф\ поворачиваются в направлении следования фаз также на 60° эл.
Аналогично, если фаза токов изменится на угол п. то на этот же угол изменится и
положение вектора F и потока Ф, Так и создается вращающееся магнитное поле статора.
Вращающееся поле статора для двухфазного АД формируется аналогично при
условии, что начала обмоток его фаз А и В сдвинуты относительно друг друга на угол л/2
(90 эл.), и обмотки питаются синусоидальными токами /л и /в • сдвинутыми между собой во
времени на п/2 (рис. 3.2.а.б). Из рис. 3.2,в и рис. 3.2,г видно, что при изменении фазы токов
па л/2 (90' эл.) результирующий вектор F и поток Ф\ поворачиваются в направлении
следования фаз также на 90е эл.
В общем случае для АД. имеющего р нар полюсов (р “I, 2, 3 ...), угловая скорость
вращения поля, рад/с
(0| =2л/|/р, (3.1)
или частота вращения, об/мин
щ .
При питании от промышленной сети с номинальной час го гой /1Н = 50 Гц угловая
скорость вращения поля
(Df н = Infyjp, (3.2)
а частота вращения поля а зависимости от конструкции АД может быть 3000. 1500,
100, 750 ... об/мин. Направление вращения поля связано с чередованием фаз обмотки
статора.
Вращающийся магнитный поток Ф\ , пересекая проводники обмотки ротора,
индуктирует в них ЭДС £; . При замкнутой обмотке ротора в ней под действием £2
25
возникают токи 12, частота f2 которых при неподвижном роторе (угловая скорость ротора
со - 0) равна частоте питания статора/j. Гели обмотка ротора трехфазная (двухфазная), то в
ней инцуктиру ется и трехфазный (двухфазный) ток, создающий вращающийся поток ротора
Ф2, число пар полюсов р, направление и скорость вращения которого при оз - 0
со? = 2п^/р = 2л/1 'р = озь
т.е такие же. как и у потока статора. Вращаясь синхронно, потоки Ф1 и Ф2 создают
результирующий вращающийся поток двигателя Ф„.
Как результат взаимодейс гвия токов ротора с потоком Фо возникают действующие на
проводники ротора механические силы и вращающий электромагнитный момент Л/. При
этом момент М создается только активной составляющей тока ротора 12, = /2 cosqn , где
ф2 - угол сдвига между ЭДС Е2 и током 12 рогора.
Поскольку цепь ротора АД всегда имеет определенное активное сопротивление, то
при пуске двигателя 0 «р2 < 90 ’ и М> 0. Если при этом он больше статического момента на
валу АД. то ротор двигателя начнет вращаться в направление вращения поля со скоростью
со < (О], Относительная разность скоростей магнитного поля и ротора АД характеризуется
его скольжением
s = (СО|-со)/<О) (3.3)
Отсюда скорость ротора, выраженная через скольжение
co = (l-s)co|. (3.4)
При пуске АД (со = 0) s = 1, а при вращении ротора со скоростью поля статора
(синхронно с полем статора, т.е. при оз = оз।) s = 0.
При со = coi магнитное поле статора относительно рогора неподвижно и токи в роторе
не индуктируются, поэтому М = 0 (режим идеального холостого хода АД) Схема
замещения фазы грехфазного АД для энного случая в установившемся режиме
соответствует рис. З.З.а. Здесь:
- вектор напряжения на обмотке фазы статора АД, вращающийся с частотой С0| =
ci3qh= 'i-itfxJp (напряжение между точками а и 0 схемы замещения);
26
= c, - напряжения, определяемый вектором полного
потокосцепленияТ, = + IvJ.t статора и частотой его изменения <лон (напряжение между
точками б и 0 схемы замещения;
7 -вектор тока обмотки статора;
R\ - активное сопротивление обмотки статора;
Чу , = L т I - вектор основного потокосцепления АД. определяемый взаимной
индуктивностью Lm его обмоток статора и ротора и током намагничивания 4* ;
Г\ = - .. = -(/,' + JJixi = ““ вектор ЭДС самоиндукции, определяемой
основным потокосцеплением обмоток статора и ротора и частотой «о,. изменения этого
потокосцепления (ЭДС между точками « и 0 схемы замещения);
jq = «он Lio - индуктивное сопротивление рассеяния обмотки статора при (0он ;
L\„- индуктивность рассеяния статорной обмотки;
~ too,, Lm - индуктивное сопротивление цепи намагничивания АД при cdqh .
Для приближенной схемы замещения при нс учете сопротивлений обмоток_сгатора
можно считать, что приложенное напряжение Ц будет уравновешиваться ЭДС Г\
(рис. 3.3,6, в). Учитывая, что Е\ ~ (7|* кФ]\ , где к - конструктивный коэффициент АД,
зависимый от выполнения его обмоток статора, можно считать, чго магнитный ноток
определяется приложенным к статору напряжением и частотой:
Ф-Uxff. (3.5)
Магнитный поток при этом определяется током холостого хода Цо в обмотке статора -
током намагничивания /,= Цо = и характеристикой намагничивания АД (рис. 3.3,в.г). В
серийный машинах при номинальном их питании (1Ц - CjH ,/i =/ih ) ток холостого хода
обычно Цо = (0,3 ...0,4) /|Н -
27
При вращении ротора в сторону поля частота пересечения полем проводников ротора
будет пропорциональна разности скоростей (оц -w) и в ригорной цепи по закону
электромагнитной индукции появится ЭДС
£'2=£iS (3.6)
с частотой
/2=/|S. (3.7)
Знак ' отмечает в дальнейшем приведенные к обмотке статора параметры и
переменные ротора с учетом соотношения числа их обмоток (ко (ффициента трансформации
между ними).
При частоте тока ротора fa скорость вращения поля ротора относительно самого
ротора оз ~ scoi, а относительно статора аь. - w + (1)2 - (1-s) <01 + stm = о-, т.е. поля статора
и ротора при вращающемся роторе вращаются всегда синхронно и образуют общее
вращающееся поле.
3.2. Статические характеристики и энер1егические режимы работы
АД
Схема включения трехфазного короткозамкнутого АД и соответствующая ей Г-
образная эквивалентная схема замещения с намагничивающим контуром, вынесенным на
зажимы первичной цепи, представлены на рис. 3.4 а, б. Здесь U , U\ • действующие
значения линейного и фазного напряжения питающей сети; Ц, , А - фазные токи статора,
намагничивания и приведенный ротора; хо), хц. хо2 - индуктивные сопротивления рассеяния
фазы статора, контура нама> ничивания и приведенное ротора: R\ - активное сопротивления
обмотки фазы статора ; Л2 - активное сопротивление фазы обмотки ротора, приведенное к
обмотке статора.
Эквивалентная схема на рис. 3-4б справедлива при следующих допущениях.
- параметры всех цепей двигателя постоянны, т.е. вторичное приведенное активное сопротивление
Я/ не зависит от частоты и вытеснения тока в роторе, а насыщение нс влияет иа реактивное сопротивление
обмоток статора хс1 и ротора ;
28
- полная проводимость намагничивающего контура неизменна и намагничивающий ток независимо
от натрузки всегда пропорционален приложенному напряжению;
- добавочные потери и паразитные моменты, создаваемые высшими гармониками МДС н токов
двигателя, нс j читываются;
В соответствии со схемой рис. рис. 3.4,6 электромеханическая со (А ) и механическая со
(Л/) характеристики АД определятся как
2 7(/г, + /?;/.о2 + (хк)2 (3.8)
/1 = 4 +4 ; (3.9)
0^(7?, + /?J /5) ' +х2] (З.Ю)
где хк = хО| + хо2 - фазное инду ктивное сопротивление рассеяния короткого замыкания
двигателя; т - число фаз двигателя.
На рис. 3.5 в соответствии с (3.8) - (3.10) представлены механическая (рцу, 3.5,а) и
электромеханическая (рис. 3.5.6) характеристики АД. По оси ордина! для наглядности и
простоты анализа характеристик двигателя совмещены скорость и скольжение Отметим
характерные точки и энергетические режимы рабо гы АД [16].
11ри 0 < $ < I, 0 < со< соо имеет место двш ательный режим работы например в точке
А. В режиме двигателя подводимая к нему элекгрическая мощность Р\ за вычетом потерь на
нагрев обмоток статора Д/?М| = т // и магнитных потерь в стали статора Дрс|
преобразуется в электромагнитную мощность Р^ = А/соо . передаваемую через воздушный
зазор на ротор Полная механическая мощность, развиваемая двигателем, определится как
/’мех = /’эм - ЛРмЗ ~^Рс2- где Арч * = т /< /?2 - пот ери на нагрев обмоток ротора двигателя. -
магнитные потери в стали ротора. Полезная механическая мощность на валу двигателя Рв~
Л/в со меньше мощности Л,сх на суммарные механические потери Дрмех создающие
тормозной момент двигателя. В соответствии с энергетической диаграммой (рис.3.6 а) для
двигательного режима работы
Р,~ Р\ - с | " I • ДРс2 ” " ДРмсх-
29
Ко Лфипиент полезного действия двигателя для данного режима г) = Ра, Р\.
При 5 = О, W - coo. h = 0, /| = , М - 0 имеет место режим идея 1ьного холостого хода
АД. Для реализации этого режима к валу двигателя со стороны рабочею органа необходимо
приложить мощность Ре компенсирующую мощность суммарных механических потерь в
двигателе Дрчсх . При этом электромагнит пая мощность двигателя PJit -=0. Энергетическая
диаграмма двигателя для данного режима дана рис. 3.6, б.
При .s' = 1, го = 0 h' = /2 к» Л = /К1 - Л/ = Л4з - Мп двигатель работает в режиме
короткого замыкания АД (точка С). Поскольку механическая мощность на валу двигателя
при этом равна нулю, то энергетическая диаграмма на рис.3.6, б преобразуется для режима
короткого замыкания в диаграмму лис,3.6, в. При этом вся электрическая мощность Р, со
стороны источника питания тратится на HaipeB цепей двигателя.
При л- = .sK = я, со - сок. М = Мк д = Л/тах ( точка К) имеет место двигательный режим
работы при максимальном (критическом) моменте Значение Мтак и соответствующее ему
критическое скольжение определяются из соотношения (3.10), если приравнять нулю его
производную dMIds : тц1
Л/, = Мк = — -f-----/ s
2<oo[/?, ±7/?,2 + х2] (3.11)
Здесь знак «+» относится к области скольжения s >0. а знак «-» - к области
скольжения л< 0.
Г 1ри л* < 0 , со > со© , например в точке Е характеристик, имеет место генераторный
режим работы (режим рекуперативного торможения). Для генераторного режима при
V,, = .vKг<0 кри।ический момент МКТ>МКЯ. При.?! = ->л’Кг. од = соо(1 -si), h ~hms^
Ui / хк - точка F соответствует максимальному току ротора в режиме рекупера гивного
торможения. При s > 1 , со < 0 , например в точке Д характеристик, имеет место
генераторный режим (противовключения). При s—> ± со, о —> +' со /2 —> /2 ®= + х2 -
максимальный ток ротора при бесконечно большом увеличении скольжения и скорости
двигателя.
30
Механические и электромеханические характеристики АД имеют нелинейную и
зависимую от скольжения (скорости) связь, которую грубо можно оценить с помощью
соотношения-
А/ = кФ /2 а - кФ A cos ф2, (3.13)
где к - обобщенный конструктивный коэффициент двигателя; Ф - магнитный поюк
машины, не зависимый в первом приближении от скольжения; /2а - акзнвная составляющая
тока ротора; cos ф2 - косинус угла между приведенной к цени статора ЭДС, наведенной в
обмотке ротора, и током ротора /2 :
K/s
cosq>, =
При .к -> 0 cos <р2 ± 1 и асимптотически стремиться к нулю при s -> ± со (рис. 3.5,6).
Анализируя (3.13), (3.14) в функции скольжения легко получить и зависимое! ь
момента от токов АД при различных значениях его скорости. Так при пуске двигателя (в
режиме короткого замыкания) при достаточно большом пусковом токе /„ = за счет
малого значения cos ф2 электромагнитный момент Л/п = М., весьма ограничен. За'ем по
мере разгона двигателя cos ф2 увеличивается в большей степени, чем снижается юк
двигателя, и как результат возрастает момент двигателя, достигая при хк своего
максимального значения. При s < л\. снижение тока более интенсивно, чем увеличение cos ф2
и момент двигателя начинает уменьшаться до нуля при х= 0.
В практике электропривода широко пользуются иным, чем в формуле (3.10).
выражением механической характеристики АД:
2И(1 + asK)
А/ =---------------------, (3.14)
s/sK + sK/s+2asK
где а = Rj/ R? Соотношение (20.95) может быть получено несложным
преобразованием результата деления (20.89) на (20.91).
31
Пренебрегая активным сопротивлением обмоток статора, что допустимо при
номинальной мощности АД ишше 5 Квт. (3 14), (3 II) и (3 12) при а = 0 могут быть
заметно упрощены:
2И
Л/= ---------------
5/5к + .VK/.V
(3 15)
Л/к = т U2 / (2<оо хк ) ; (3.16)
5К = R2 '/хк .
(3.17)
При подстановке в (3.15) номинальных значений момента Л/ном и скольжения
двигателя можно получить выражение связывающее критическое и номинальное
скольжения АД;
5t=a1wm(AWk± з/А.1Л2-1). (3 18)
где Лл/к ~ М* / Л/ном - кратность максимального момента АД.
/Номинальные данные асинхронного двигателя определяют область допустимых
интервалов изменения его координат. В паспортных данных для АД принято указывать'
номинальные линейное напряжение низания статора (Дном . частоту /,ом, ток статора /|И0Н,
выходную мощность (мощность на валу) Рноч . час готу вращения ином ( скольжение .s110V),
КПД т|ном, cos <рном При возможности включения обмотки статора как звездой, так и
треугольником, приводятся два значения номинальных линейных напряжения и тока
(Л»юм / (Лиом а и Дном /Аномд- Для короткозамкнутых двигателей дополнительно
указываются кратности пускового тока к/п = /„ //ном , пускового момента = Мп Л/ном . а
также кратность максимального момента ку* . Для двигателей с фазным ротором
указываются ЭДС на разомкнутых кольцах заторможенного ротора £зном и номинальный
ток ротора Дном В каталогах можно найти момент инерции двигателя.
32
Естественные механические характерце гики АД с достаточной для практики
точностью могут быть определены по паспортным номинальным данным из (3.15), (3 18) с
учетом соотношений:
Мним ном ТО|Юм , СОпом 2л /7цом /60 , Л/к ^Мк Л/пом ,
^ном (С^О “СОцом )/С)ном * «о 2л_/||;ом р. (3.19)
Естественные электромеханические характеристики АД определяются как
ц ном* (Лном "/циом ) Л/5 А/1|ОМ 5нон
ц ном -Л ном ( Sin(p,(Oi. - Хцом COS(pHi,u / SK ,
/? Лном Л/ -Т / Л/Иом Лим ,
(3.20)
(3.21)
(3.22|
Значения скольжений s в выражениях (3.15), (3.18). (3.20) - (3.22) выбираются в
пределах <х> > s > - оо . При отсутствии данных о номинальном токе статора его значение
может быть определено как
Лном — Е ном Л| 3 (Дном Ином СОЬфцом .
Механические и электромеханические характеристики АД при питании от источника
тока могут быть рассмотрены на примере схемы питания АД от источника тока и
соответствующей ей эквивалентной схеме замещения фазы двигателя (рис. 3.7, а. б).
Поскольку при питании от источника тока Е - const, сопротивления статорной обмотки в
схемах не учитываются Тогда ток ротора /2 будет
/2 = Л (R2 'X ) + ( Хм+хО2 )2 • (3.23)
33
Отсюда, аналогично выводу уравнений механических характеристик АД при питании
от источника напряжения, можно получить:
2Л/кт
Л7Т =----------
X 1 SK т т
(3.24)
Мкл = W (/| хи)2 / 2соо (Хц + Хо2 ) ; (3.25)
1 ^2 < Х|1 + Хо2 ) .
(3.26)
На рис. 3.8 в соответствии с (3.23) и (3.24) представлены электромеханические и
механические характеристики АД при питании от источника тока. Сравнительный их
анализ с подобными характеристиками АД при пи гании от источника напряжения (рис. 3.5)
показывает ряд следующих существенных отличий:
1. Индуктивное сопротивление намагничивания АДхи при питании от источника тока
может сильно изменяться в зависимости от тока Д, снижаясь по мере насыщения магнитной
цепи двигателя. При питании от источника напряжения намагничивающий ток /и машины и,
соответственно хц остаются практически неизменными Однако и для ненасыщенной
машины хй „ом » хО2 ном » вследствие чего хК1 « $к и жесткость механической
характеристики на ее рабочих участках при питании АД от источника тока заметно выше,
чем при питании от источника напряжения;
2. При Л Лион вследствие xgl|0„ »xoi„ом+ хо2 .юм критический И т и пусковой А/пт
моменты АД при питании от источника тока меньше аналогичных моментов при питании от
источника напряжения. Поэтому для получения требуемой пере1рузочной способности,
близкой естественной механической характеристики АД при питании от источника
напряжения, в режиме питания АД от источника гока требуется кра ‘ковременно
увеличивать значение /|;
34
3. Зависимость Л/, (л) инвариантна относительно частоты f\ Поэтому с ее изменением
изменяется только скорость идеального холостого хода <оо а форма механических
характеристик остается без изменений (рис. 3.9) В соответствии с (3.25) критический
момент Л4Т остается независимым аг частоты.
Торможение асинхронного двигателя может быть обеспечено переводом ею работы в
режимы противовключения , рекуперативного торможения, или динамического
торможения. Все режимы принципиально применимы как для двигателей с фазным
ротором, так и к короткозамкнутым.
В режим торможения противовключением перевод короткозамкнутого АД может
быть выполнен за счет и вменения чередования двух фаз напряжения питания АД. На
рис. 3.10 стрелками показан переход АД из двигательною режима работы при прямом
чередовании фаз напряжения (механическая характеристика 1, установившееся значение
скорости <оС| реактивный момент нагрузки Л/, ) в режим противовключения на участке аб
механической характеристики 2, соответствующей обратному чередованию фаз
напряжения. Новое установившееся значение скорости АД при том же уровне Л< будет
соответствовать - соС2 . При реализации подобного режима торможения следует учитывать
значительное увеличение тока двигателя и необходимость принимать меры по его
ограничению, например включением добавочных резисторов в цепь статора.
Энергетическая диаграмма для АД в режиме противовключения представлена на
рис. 3.11. Здесь механическая мощность с вала двигателя Ра направлена встречно
электрической мощности Pi, потребляемой двигателем о г источника его питания. В
результате все потери в цепях двигателя расходуются на его нагрев, что является
значительным недостатком режима противовключения. И все же простота технической
реализации режима противовключения обеспечила широкое его использование во многих
реверсивных приводах, в частности подъемно-транспортных механизмов.
Переход АД в режим рекуперативного торможения осуществляется в случае, когда
скорость ротора АД оказывается выше синхронной Подобный режим (рис 3.12, а) может
возникать, например при переключении числа пар полюсов АД с меньшего значения р{
( механическая характеристика 1. имеющая синхронную скорость cooi '= 2л/ /р\ ) на большее
рг (характеристика 2), когда из-за механической инерции текущее значение скорости oci
35
оказывается выше нового значения синхронной скорости двигателя <Оог = 2л/ / pi (участок
де характеристики 2 ). Аналогичный режим будет и при снижении частоты напряжения
питания АД. например, в системах с преобразователями частоты.
Рекуперативное торможение возможно также при работе двигателя с активной
нагрузкой, когда под се действием текущее значение скорости АД возрастает до уровня,
превышающего синхронную скорость. Так, для привода грузоподъемных механизмов, когда
двигатель переключается в направлении спуска груза (характеристика 2 на рис. 3.12 б),
после окончания разгона он будет работать со скоростью | <осз > <0о , обеспечивая спуск
груза с отдачей активной энергии в сеть. Реактивная энергия, необходимая для создания
магнитного поля машины, будет при этом потребляться из сети.
Энергетическая диаграмма АД в режиме рекуперативного торможения представлена
на рис 3 13 Механическая мощность с вала двигателя Рь за вычетом механических потерь
ЛДмсх преобразуется в полезную механическую мощность Рмех . Последняя тратится на
компенсацию потерь ApV2 и Ара в роторной цепи, создавая электромагнитную мощность
Рэм, передаваемую через зазор в статор двигателя Генерируемая в питающую сеть полезная
мощность Pi за вычетом потерь Арц и Apv\ в статорной цепи двигателя определится как
Pl “ Рв ' АР с2 " АРм2 ” ДРс! “ ДРм1
Коэффициент полезного действия двигателя для данного режима Г| = Pi / Рв.
Рекуперативное торможение отличается высокой экономичностью и потому
оправдано для многих приводов, хотя и требует более сложного технического решения на
его реализацию, например, применения управляемых преобразователей частоты или
многополюсных машин. При питании от промышленной сети и работе АД с активной
нагрузкой рекуперативное торможение лишь ограничивает скорость движения привода и нс
может быть использовано Д1Я полной остановки двигателя.
Динамическое торможение АД реализуется отключением его статорных обмогок от
сети переменного тока и подключением к ним источника постоянного тока (рис.3.14,а). Для
АД с фазным ротором его обмотки могут быть включены через добавочные резисторы /?2Д.
Постоянный ток /г в обмотках сгатора создает неподвижное в пространстве магнитное поле.
При вращении ротора в его обмотках наводится ЭДС, обуславливающая ток в обмотках
36
ротора. Последний создаст магнитный погок также неподвижный в пространстве.
Взаимодействие тока ротора с результирующим магнитным полем двигателя создает
тормозной момент. При этом двшатель работает в режиме генератора независимо от сети
переменного тока преобразовывая механическую энергию вращения вата двигателя в
электрическую рассеиваемую в виде тепла в роторной цепи.
Поскольку постоянный ток /п не зависит от тока ротора, режим динамического
торможения является частным случаем питания АД от источника тока и для него
справедлива эквивалентная схема замещения на рис. 3.7. б. В последней необходимо лишь
установить связь между трехфазным током 1\ и током /„ в схеме динамического торможения.
Условием их эквивалентности является равенство МДС, создаваемых постоянным током /„
в принятой схеме соединения обмоток статора и переменным током / в симметричной
трехфазной цепи этих обмоток [16].
Подставляя в (3.23) ч- (3.26) вместо тока Л эквивалентное значение /экв получим
уравнения электромеханической и механической характеристик АД в режиме
динамического торможения:
h' - - (А. 7s )2 + (хц + хо2 )2 ; (3.27)
-Ч дт = т(1тх^ 2 / 2соо ( хц + хо2 ) ; (3.28)
•Укдт = Ri 7(хм + хо2 ); (3.29)
2 4 лт
Здесь абсо. :ютное скольжение для режима динамического торможения s= -са/сао.
В соответствии с (3.27) + (3.28) на рис 3.15 представлены электромеханические и во
втором квадран те механические характеристики АД в режиме динамического торможения,
37
соответствующие различным значениям постоянного тока в статорной обмотке /пг Ад и
добавочных сопротивлений в роторной цепи /?2д|. /?212 для АД с фазным ротором При
скорости и скольжении АД, равных нулю, /2 = О, Л/ лт = 0, а соответствует
максимальному намагничивающему току. По мере увеличения скорости и скольжения ток
/2 увеличивается до /экв при $ —> « . Максимальный момент динамического торможения
двигателя A/KJ1 при критическом скольжении л>дт пропорционален квадрату тока /п
(характеристики 1, 2) и не зависит от сопротивления роторной цепи ( характеристики 2. 3).
При изменении изменяется лишь скольжение $клт. Варьируя значениями /п и Rn можно
получить желаемый вид механических характеристик АД в режиме динамического
торможения.
Энергетическая диаграмма для АД в режиме динамического торможения представлена
на рис. 3.16 Здесь механическая мощность Ри со стороны вала двигателя и электрическая
мощность постоянного тока Pi„ , создающая магнитный поток двигателя, направлены
встречно и полностью тратятся на нагрев машины.
Динамическое торможение обеспечивает полную остановку двигателя и более
экономично, чем торможение противовключением. Недостаток динамического торможения
состоит в необходимости дополнительного источника постоянного тока, включаемого в
статорную цепь АД. Режим динамического торможения часто используется в приводах
механизмов, требующих повышенную точность остановки, например, в электроприводе
лифтов
38
Рио 3 1 Схема включения (а) фазные токи (б) и диаграммы положений вектора
МДС (в,г) трехфазного АД
Рис. 3.2. Схема включения (а), фазные токи (б) и диаграммы положений вектора
МДС (в,г) двухфазного АД
39
Рис.З,3,Схемы замещения фазы АД (а, б), векторные диаграммы (в) и кривая
намагничивания (г) АД в режиме идеального хо. сотого хода
Рис 3.4.Схемы включения (а) и замещения (б) АД
40
Рис. 3.5. Механическая (а) и электромеханическая (б) характеристика АД
^Pcl Ps.il ^Рс2 ^Рм2 ^Рмех
r-ifU>uiUU'L
а) 1 рэм рмех — рв
Рис 3 б.Энсргетическая диаграмма АД для двигательного режима (а),
режима идеального холостого хода (б) и короткого замыкания (в)
41
а) б)
Рис. 3.7. Схемы подключения (а) и замещения фазы АД (б)
при питании от источника гока
Рис. 3.9. Механические
характеристики АД при питании от
источника тока раз. (ичной частоты
Рис. 3.8. Механические и электромеханические
характеристики АД при питании от
ис1 очника тока
Рис. 3.10. К торможению АД в режиме противовключения
42
Лрс\ Zl/7M1 J/?m2 ^Pc2 ЛРмех
ни>и>ич jf/
Рис. 3.11
Рис.3.12. К режиму реку лера гивного торможения АД
^Дм1 ДРс! Лруя! ^Рс2 ^Рмсх
_« р — мех ** в
1 эм
Рис.3.13. Энергетическая диаграмма АД в режиме
рекуперативного торможения
43
Рис.3.14 Схема включения АД при режиме динамического торможения
Рис. 3 15. Механические и электромеханические характеристики
АД в режиме динамического торможения
/1Дм1 ^Рс2 ^Рм2 ^Рмех
-J'U'U'U'l—
Рщ ___________27 Рв
Рис-3.16. Энергетическая диа! рамма АД в режиме
динамического торможения
44
4. СИСТЕМА ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ - АСИНХРОННЫЙ
ДВИГАТЕЛЬ
4.1. Общие принципы частотного регулирования координат АД
Принципиальная возможность регулирования скорости АД изменением частоты
питающей сети / следует из соотношения о =2п/((1- s)/р. При неизменном напряжении
питания U\ по мере изменения частоты / будет также изменяться и магнитный поток
двигателя Ф . поскольку, как уже отмечалось, Ф - U । / f. Так при снижении частоты f и
неизменном U i поток возрастет. Это приведет к насыщению стали двигателя и как
следствие к резкому увеличению тока и его перегреву. Увеличение / вызовет снижение
потока и соответственно допустимого момента АД Поэтому для сохранения высоких
энергетических показателей регулирования необходимо с регулированием f одновременно
в функции частоты и нагрузки двигателя изменять и напряжение пи гания АД.
Выбор соотношения между частотой и напряжением питания АД основан на
сохранении постоянства его перегрузочной способност и = Л/к/ Л/< при работе на разных
скоростях Если принять активное сопротивлением статора равным нулю, а индуктивное
фазное сопротивление рассеяния короткого замыкания хк и скорость ©о
пропорциональными частоте f\, то согласно (3 16)
Хм = Мк / И = т t/|~ / (2соо хк ) Ч = С U2 ift Мс, (4 1)
где С - постоянная, не зависящая от f.
Из (4.1) следует, что для любых выбранных значений частот fi\ и /ц должно
соблюдаться условие
=(/ik2//Ik2A/ek,
где Mct, Mdi - статические моменты нагрузки АД при скоростях, соответствующих
частотам /, и /к. Отсюда следует, что при частотном способе регулирования скорост и АД
и постоянстве его перегрузочной способности по моменту изменение напряжения должно
отвечать условию
Ult / (/lk = (/i, //k W / Mk (4.2)
В соответствии с (4.2) при постоянном моменте нагрузки A/Ci, = Л/ск = ЛЛ- напряжение
на статоре должно изменяться пропорционально его частоте, т.е.
Ui,/t7ik= /ii//jk , или Ut //i = const. (4 3)
45
Для вентиляторной нагрузки, имеющей зависимое гь М- = к со2 = с [\ , напряжение на
статоре должно меняться как
t/i Af\ const. (4 4)
Для ншрузки с постоянной мощностью и зависимостью А/с = в / со. напряжение на
статоре должно меняться как
Ц/д/Д = const. (4.5)
На рие. 4.1 представлено семейство механических характеристик АД с
короткозамкнутым ротором при частотном регулировании его скорости и различных видах
нагрузок. При Мс = const и выполнении соотношения (4.3) в пределах частот f\ < /ном
критический момент двигателя сохраняется практически постоянным (рис. 4.1, а). Лишь
при достаточно малых частотах, когда сказывается влияние акт явного сопротивления
статора, момент уменьшается. Поэтому для сохранения ею на том же уровне следует по
мере снижения частоты уменьшать напряжение статора в меньшей степени, чем по (4.3).
При частотах/ > /11ЮЧ, когда напряжение статора не может превышать его номинального
значения по условиям электрической прочности изоляции обмоток АД, критический
момент двигателя будет уменьшаться.
Для вентиляторной нагрузки (рис. 4.1.6) и при выполнении соотношения (4.4)
критический момент в пределах частот / <, /|И1М уменьшается, сохраняя при этом
перетру зочнуто способность АД по моменту
Для нагрузки, требующей постоянства мощности (рис. 4.1.в) и при сохранении
соотношения (4.5) критический момент в пределах часют / £ /ном соответственно
увеличивается.
*
4.2. Статические преобразователи частоты
Базовыми элементами асинхронного частотно-регулируемого электропривода
являются управляемый преобразователь частоты ПЧ (UZF), питающийся от
промышленной сети напряжением (7С и частотой / и асинхронный двигатель АД (М),
питающийся от ПЧ (рис. 4.2). При необходимости согласования мощности и входных
напряжений питания собственно ПЧ с сетью между ними может устанавливаться
согласующий трансформатор TV 1. Для ограничения токов короткого замыкания и
перенапряжений на входе ПЧ могут устанавливаться токоограничивающие реакторы L1 и
дополнительные RC - фильтры Ф1 При необходимости согласования выходного
напряжения 114 и цепи питания М (например, для высоковольтных электрических машин)
46
между ними могут устанавливаться согласующие трансформаторы TV2. При значительном
удалении двигателя от преобразователя (при длине кабельной связи между ними более 50
м, а для ряда преобразователей допускается и более 200 м) на выходе ПЧ для ограничения
перенапряжений на его силовых полупроводниковых хтементах устанавливаются
фильтрующие дроссели L2, а также помехоподавляющис RC-фильтры Ф2.
Выходные частота f и фазное напряжение U\ (или ток //) ПЧ определяются
соответственно сигналами управления г? и w„. Регулирование частоты fi и напряжения Uj
(или гока //) обеспечивают регулирование основных координат АД (тока,
электромагнитного момента Л/, угловой скорости СО ).
11аибольшее распространение получили две группы управляемых полупроводниковых
ПЧ 1) преобразователи со звеном постоянного тока и автономным инвертором АН
(инвертором напряжения АИН или тока АИТ); 2) преобразователи с непосредственной
связью питающей сети и нагрузки ПЧПС (без и с широтно-импульсной модуляцией
выходного напряжения).
Преобразователь по системе ПЧ-АИ состоит из трех силовых блоков' управляемого
или неуправляемого выпрямителя UZ1, силового фильтра Ф (С или LC типа) в звене
постоянного тока и автономного инвертора UZ2 (рис. 4.3.а, рис. 4 4,а). АИ может быть
выполнен либо на основе однооперационных тиристоров с искусственной их коммутацией,
либо на запираемых (GTO) тиристорах, либо па полностью управляемых силовых
транзисторах (чаще всего на базе IGBT-модулях, содержащих транзистор с изолированных!
затвором и шунтирующий его силовой диод).
АИП (рис. 4.3, а) является источником напряжения Благодаря емкости С фильтра Ф и
обратным диодам VDI-VD6. подключенным параллельно силовым ключам VTI-VT6, при
работе АИН па активно-индуктивную нагрузку, к числу которой относится АД
обеспечивается обмен реактивной энергией между АД и звеном постоянного тока. Они
обеспечивают непрерывность цепи тока в обмотках М при отключении их от источника
питания в процессе коммутации и возврат запасенной магнитной энергии в конденсатор
фильтра.
Выходное напряжение АИН может регулироваться двумя способами: 1) при
управляемом выпрямителе U71 - изменением напряжения в звене постоянного тока, когда
инвертору отводится роль лишь коммутатора фаз, формирующего требуемую частоту
(АИН с амплитудно-импульсной модуляцией АИМ); 2) при неуправляемом выпрямителе -
широтно-импульсным регулированием напряжения в инверторе за счет модуляции
напряжения несущей частоты (частоты коммутации силовых ключей) сигналом требуемой
частоты (АИН с широтно-импульсной модуляцией ШИМ). Диаграммы выходных фазных
47
напряжений U и первых их гармоник U\ для АИН с АИМ и с ШИМ показаны
соответст венно на рис. 4.3, б и рис. 4.3, в.
В ПЧ с АИН отсутствует рекуперация энергии в питающую сеть. При необходимости
во<врата энергии в сеть питания входной выпрямитель в ПЧ с АИН должен быть
реверсивным и управляемым (на рис, 4.3, а, изображен пунктиром). При отсутствии
подобного выпрямителя для обеспечения режима динамического торможения АД
параллельно фильтру ф устанавливае ся узел сброса энер!ии на основе ключа VT7 и
силового резистора R. При превышении доиус гимого напряжения на выходе фильтра ключ
VT7 открывается и обеспечивает разряд конденсатора па резистор R.
В ПЧ с АИТ (рис. 4.4. а) управляемый преобразователь U71 работает в режиме
источника тока, а инвертор UZ2 обеспечивает коммутацию обмоток статора АД силовыми
ключами VT1-VT6. Главное техническое отличие ПЧ с АИТ от ПЧ с АИН в наличии
индуктивного L - фильтра и отсутствии емкостного фильтра на выходе выпрямителя,
отсутствии обратных диодов, шунтирующих силовые ключи, и наличии конденсаторов С1,
С2, СЗ на выходе инвертора являющихся источником реактивной энергии для нагрузки
преобразователя частоты.
При переходе АД в генераторный режим изменяется направление его ЭДС и
инвертор, который переходит в режим выпрямителя стремиться увеличить ток Ij в звене
постоянного тока. Однако за счет отрицательной обратной связи по току 4/ [датчик тока UA
на рис. 4.4, а) преобразователь UZ1 переводи гся в режим инвертора, ведомого сетью,
сохраняя прежнее направление и значение 4/ и обеспечивая тем самым режим
рекуперативного торможения АД Диаграммы выходного фазного тока / АИТ и первой его
гармоники 1\ даны на рис. 4.4. б.
К достоинствам преобразователей по системе ПЧ-АИ относятся.
- высокий диапазон частот выходного напряжения АИН (практически от 0 до 1500 Гц),
ограничиваемый лишь частотой коммутации и коммутационными потерями в силовых
ключах автономного инвертора (для АИ1 максимальная выходная частота тока до 100 -125
Гц);
- низкий уровень гармонических составляющих напряжения или тока статора двигателя и
тока, потребляемого из сети титання;
- высокий коэффициент мощности (до 0 05 0,98) в преобразователях с неуправляемым
выпрямителем. В случае применения управляемого выпрямителя коэффициент мощности
меньше и близок коэффициенту мощности в системах тиристорный преобразователь -
двигатель постоянного тока,
48
- относительно небольшое число силовых ключей преобразователя (по сравнению с J1ЧНС)
и более простая схема их управления, не требующая синхронизации с питающей сетью,
- для АЙТ возможность рекуперации энергии в сеть и безаварийность режима коре гкого
замыкания по выходу.
К недостаткам подобных преобразователей следует отнести:
- двукратное преобразование энергии (с переменного напряжения питающей сети на
постоянное выпрямителя, а затем с постоянного - на переменное выходное напряжение
инвертора), что снижает результирующий КПД преобразователя частоты (до 0.94 3,96;;
- зависимость (для тиристорных ключей АН) условии их искусственной коммутации от cos
<р и уровня нагрузки двиг а те тя;
- для АЙН отсутствие (без дополнительной управляемой инверторной группы в блоке
выпрямителя UZ1) возврата энергии в питающую сеть преобразователя, что ограничивает
быстродействие регулирования скорости АД в тормозных его режимах высокие требуемые
значения емкости фильтра Ф и, соответственно, большие габариты конденсаторной
батареи;
- для Ай Г невозможность работы на групповую нагрузку, существенные масса и габариты
реактора фильтра Ф. наличие коммутационных перенапряжений на силовых ключах, более
низкий cos (р по сравнению с АИН с ШИМ и неуправляемым входным выпрямителем.
Основу ПЧНС составляют управляемые реверсивные выпрямители в каждой из фаз
АД. На рис. 4.5,а дан пример трехфазного с нулевой схемой выпрямления ПЧНС
Силовыми ключами выпрямителей K1.I - КЗ.З могут быть встречно включенные
тиристоры VS, запираемые (GTO) тиристоры, либо полностью управляемые силовые
транзисторы VT (IGBT-.модули) (рис 4.5, б. в). Формирование выходного напряжения или
тока ПЧНС производится из отрезков кривых напряжения питающей сети за счет
циклического подключения нагрузки на определенные интервалы времени к различным
фазам питающей сети.
Для тиристорных ключей ПЧНС воздействуя сигналом управления иу на уровень и
частоту изменения углов управления выпрямителей гак, чтобы средние за полупериод
питающей сети значения напряжений выпрямителей С'изменялись в течение полупериода
выходного напряжения по синусоидальному закону, можно регулировать част оту и
амплитуду их средних выходных напряжений 1!\ (рис. 4.5, г). При полностью управляемых
ключах ПЧНС возможна широт но-импульсная модуляция выходного напряжения или тока
/1 (при наличии обратной связи по току) каж, юго из выпрямителей (рис. 4.5. д).
К досгоииствам ПЧНС от носятся:
- однократное преобразование энергии и, следовательно, высокий КПД 0,95 Д-0.97);
49
- реверсивный режим работы выпрямите left и. соответственно, свободный обмен
реактивной и активной энергией из сети к электрической машине и обратно. В итоге с
помощью ПЧНС обеспечиваются все возможные энергетические режимы работы машин
переменного тока, включая и режим рекуперативного торможения;
- для одноопсрационных тиристоров естественный режим коммутации за счет напряжения
питающей сети, что повышает надежность работы подобных ПЧНС;
- устойчивый режим работы на нагрузку с любым cos ср;
- возможность реализации весьма низких частот выходного напряжения ПЧНС;
- возможность за счет параллельного соединения вентильных групп при технической
реализации преобразователей частоты большой мощности (до мгВт).
К недостаткам ПЧНС следует отнести:
- ухудшение формы выходного напряжения при увеличении частоты, и тем самым
заметное, особенно для ПЧНС на основе однооперационных тиристоров, ограничение
верхнего диапазона час юты выходного напряжения, обусловленное дискретностью и
несущей частотой выходного напряжения до/та!С < mfc / (8-г10), где т - иульсность
выпрямления преобразователя. Для ПЧНС с ШИМ возможна реализация более высоких
частот выходного тока;
- сравнительно большое число силовых полупроводниковых элементов и для
однооперационных тиристоров необходимость жесткой синхронизации схемы управления
ими с питающей сетью;
- низкий (по сравнению с ЛИН) коэффициент мощности, и особенно при уменьшении
амплитуды выходного напряжения преобразователя в области малых частот
Применение ПЧНС наиболее рационально в высокодннамичных электроприводах с
тяжелыми технологическими режимами (в горно- добывающей, металлург ической,
строительной промышленности и т.п.), а также в приводах большой мощности.
Характеристики системы ПЧ-АД в большой мере связаны с применяемым видом ПЧ,
хотя и имеют ряд общих показателей. Чтобы оценить последние пользуются понятием
управляемого идеализированного ПЧ со следующими свойствами:
- это источник синусоидального напряжения или тока, число фаз которого равно числу фаз
АД;
- обеспечивается двусторонний обмен энергией между питающей сетью и АД;
- внутреннее сопротивление выходной цепи одной фазы ПЧ, реально включающее в себя
активное сопротивление R„ и индуктивность L,,. за счет отрицательных обратных связей по
напряжению или току ПЧ стремиться к нулю (для источников напряжения) или к
бесконечности (для источников тока);
50
- по цепям управления это безинерционное звено с линейным коэффициентом усиления по
напряжению (току) и частоте.
51
TV1
(7с/с
L1
Рис.4.1. Механические характеристики АД при частотном регулировании
TV2
L2
-Ш-
Ф20
I
Рис. 4.2. Состав силовой части системы ПЧ-АД
52
Рис.4.3 Схема силовой части АИН (al и диаграммы его выходных напряжений при ЛИМ
Гб) и ШИМ ( в)
53
Рис.4.4. Схема силовой части АНТ (а) и диа! раммы его выходного тока (б)
Рис.4.5. Схема силовой части ПЧНС (а), варианты его силовых ключей (б, в) и диаграммы
выходных напряжений (г) и тока (д)
54
4.3. Схемы замещения АД при питании от преобразователей частоты как
источников напряжения и тока
Статические режимы работы АД при его питании от источников напряжения и ока с
номинальной частотой /1н принято анализировать на основе уравнений электрического
равновесия для любой фазы АД, представленных в комплексной форме, а также
соответствующих им схем замещения и векторных диаграмм (гл.З.1,) [3].
При питании от управляемого ПЧ в традиционных уравнениях электрического
равновесия, в схемах замещения и векторных диаграммах фазы АД при частотном его
регулировании следует дополнительно учесть лишь изменение индуктивных
сопротивлений обмоток АД при изменении частоты f напряжения или тока статора. Так,
при питании от ПЧ, как идеализированного ист очника трехфазною симметричного
напряжения, схема замещения фазы АД в установившемся режиме будет соответствовать
рис 4 6 [2, 4]. Здесь:
вектор напряжения на обмотке фазы статора АД, вращающийся с частотой w1 =сои„а
(напряжение между точками о и 0 схемы замещения);
озон = 2n/iM ip - синхронная узловая скорость вращения магнитного поля при номинальной
частоте напряжения питания /|ни числе пар полюсовр статора АД;
а =/|//iii - от постельная частота напряжения статора;
= /KF|woK°t = - вектор напряжения, определяемый вектором полного
потокосцепления Ф = 4^ + Lai статора и частотой его изменения coi (напряжение
между точками б и 0 схемы замещения);
7 - вектор тока обмо тки статора;
- активное сопротивление обмотки статора:
ц7 _ Г 7
- вектор основного потокосцепления АД, определяемый взаимной
индуктивностью Lm его обмоток статора и ротора и током намагничивания 7(1 :
Ёх - Ё* - -/Ч\ су0 а ~~ V + fl\ х\а =_ flх„а ~ вектор ЭДС самоиндукции, определяемой
основным потокосцеплением обмоток статора и ротора и частотой со, изменения этого
потокосцепления (ЭДС между точками в и 0 схемы замещения);
54
х/ -<Оои Lia-индуктивное сопротивление рассеяния обмотки статора при соо»;
L\„ - индуктивность рассеяния статорной обмотки;
хм = о>он 1-т~ индуктивное сопротивление цепи намагничивания АД при («он;
^2 ~ J А' *2а = У = - А' Л2' /-S’ - вектор напряжения между точками г и О
схемы замещения;
Ц - вектор юка обмотки ротора, приведенного к цепи статора;
R', - активное сопротивление обмотки ротора, приведенное к цепи с татора;
х2 = - индуктивное сопротивление рассеяния обмотки ротора, приведенное к цепи
статора при а>о„;
L2n - индуктивность рассеяния роторной обмотки;
% F - вектор полного потокосцепления ротора;
.у = (<*>0,1 - со )/ соон - скольжение вала АД. вращающегося с угловой скоростью со.
В соответствии с рис. 4.6 и приведенными для схемы замещения соотношениями
переменных векторные диа!раммы напряжений, токов и потокосцсплсний АД при его
работе в двигательном режиме и режиме рекуперативного торможения приведены на рис.
4.7, а б В качесше вещественной оси принята осьх, совпадающая с направлением вектора
намагничивающего тока 7 [3]. При этом активной состав тяющей сопротивления цепи
намагничивания ввиду се малости пренебрегают.
Диаграммы наглядно отражают связь между переменными АД: напряжения на
отдельных участках схемы замещения ( Ц»^2' ) характеризуют соответствующие
потокосцепления (Ц,4j' ) и опережаю! их на 90 эл. град, а ЭДС самоиндукции/i, отстает
от потокосцепления на 90 эл. град.; ток статора?! отстает от напряжения Ц на угол
трь ток ротора ] ' отстает на угол <р; от ЭДСА7' ; намагничива4щий ток/ определяется
суммой токов статора 7, и ротора /2 ; векторы с гипотенузой образуют
прямоугольный треугольник; вектор тока ротора /2 ориентирован перпендикулярно
вектору ; при переходе АД из двигательного в режим рекуперативного торможения
меняется фаза токов ротора и статора по от ношению к вектору £,.
При питании от управляемого ПЧ. как источника трехфазного симметричного тока,
схема замещения фазы АД в установившемся режиме при частотном регулировании
соотвегствуег рис.4.8 [4]. Здесь по сравнению с рис. 4.6 за счет бесконечно большого
внутреннего сопротивления источника тока сопротивлением обмоток статора
55
пренебрегают. Если ввести в рассмотрение фиктивный ток статора Л* = х'2 ,
отличающийся от реального только значением ею модуля, то схема замещения фазы АД
может быть преобразована к виду рис 4.8, б. При этом вектор полного потокосцепления
ротора
% = Гпх2а = l‘x2a + 12х2а = Цх^а + 12х2а
как и вектор напряжения между точками г и 0 схемы замещения
Щ = J К = J = -72R'2/s
совпадают с их определениями в схеме замещения рис.4.6.
Вектор 7Н* = % / ах'2 на рис. 4.9 совпадает по направлению с вектором
потокосцепления Т, , а вектор Ц перпендикулярен им.
Схемы замещения и векторные диаграммы на рис. 4 6-49 отражают все основные
процессы, происходящие в АД. и представляют собой основу для изучения режимов его
работы при питании от преобразователей частоты. Они позволяют выявить основные
соотношения параметров и переменных, определяющие статические характерно гики АД и
обеспечивающие рациональные способы его частотною управления. акими
соотношениями являются зависимости основного потокосцепления Ч' , потокосцеплений
статораЧ7, , ротора Ч2 , токов намагничивания /р . статора Л, ротора 1г , соответствующих
им магнитных потоков , Ф\ , Ф2 , электромагнитного момента Л/ АД от параметров его
схемы замещения при различных соотношениях питающих обмотки статора напряжения
или тока и их частот fi . Ниже рассматриваются варианты формирования статических
характеристик АД за счет различных воздействий на параметры и переменные схем
замещения АД.
56
Рис.4.6. Схема замещения фазы АД при частотном регулировании ог источника
напряжения
Рис.4.7. Векторные диаграммы АД при частотном регулировании для двигательного
режима (а) и режима рекуперативного торможения (б)
57
Рис.4.8. Исходная (а) и преобразованная [б) схемы замещения фазы АД при частотно-
токовом регулировании
Рис.4.9.Векторная диаграмма АД при
питании от источника тока
58
4.4. Статические характеристики АД в разомкнутой системе ПЧ-АД
Изучение замкнутых систем ПЧ-АД базируется на четком представлении статических
электромеханических свойств собственно ЛД при различных законах регулирования его
координат [1.2.4]
4.4 1 Статические характеристики АД при = const п f = const.
При питании АД от идеализированного ПЧ, как источника напряжения, его
статическая механическая характеристика при U\ = const и f - const , определяется в
соответствии со схемой замещения на рис. 4.6 как
3/;2Д' _______________________________________
а>он*а [(Rt + сtR'2 /s)2 + (сос, + с}ах2)]
(4. 6)
Здесь: Cj ~ 1 + Х|/хм = U\!EW - .модуль коэффициента, характеризующего рассеяние статора
АД и учитывающего падение напряжения на сопротивлениях обмогки статора от
намагничивающего тока /и при переходе от исходной Т-образной схемы замещения
(рис. 4.6) к расчетной Г- образной схеме замещения АД (для общепромышленных АД ст =
1.02 ч- 1,08) [3]; U\ - действующее значения напряжения на обмотках статора: Е\а
индуктированное результирующим потоком в обмотках статора действующее значение
ЭДС идеального холостого хода; so = (со0 - со) / 6у0я = as - абсолютное скольжение,
равное отношению отклонения скорости двигателя <о от скорости поля ыо при любой
частоте f. к скорости поля ®ои при частоте f ha = f f\„ .
На рис 4.10,а по (4.6) качественно представлены механические характеристики АД
при U] = 171н >/|=/1цИ /| =1,5ДН (а=1,5). Поскольку электромагнитный момент АД
Л/ = кФ„4, (4 7)
возникает в результате взаимодействия результирующего магнитного потока
ф Ut I _______
' \(Kts + clR',)' + (х, +c,x;j a s,’
и активной составляющей тока ротора (• - j’ Cos<p,> гле
Z2 \R2+(x'2Sa)2
(4.8)
(4.9)
59
C0S(p2 = R'2R'l + x2Sg ;
(4.Ю)
Ф2 - yi ол между ЭДС E' = кФ ы „ so ротора и током ротора; к -3mviki/y2 -
конструктивный коэффициент АД. определяемый числом пар полюсов р, витков >vi и
обмоточным коэффициентом ki статора АД. го зависимость момента от скорости
определяется характером изменений результирующего магнитного потока , тока ротора
Г2 и cos<p2 . качественно представленных в соответствии с (4.6) + (4.10) на рис. 4,10, а, б -
для а = 1 и а = 1,5. Здесь же показаны зависимости от скорости ЭДС Е'2 и активной
составляющей тока ротора двигателя ha
Характеристики, представленные на рис. 4.10, позволяют наглядно оценить физику и
степень взаимовлияния параметров и координат АД при их частотном регулировании. Так,
механическая характеристика АД со (Л/) качественно повторяет кривую активной
составляющей тока ротора с учетом изменения потока намагничивания от скольжения
Фр (т) При постоянстве Ui и / нелинейность (s) вызвана падением напряжения на
сопротивлениях Л1 и Xia (рис. 1.5) статорной цепи АД ( Д(7 = Д/, ) При $ -> ± со
минимальное значение потока намагничивания стремиться к
Ф
pinin
= - ,, « 0.5Ф 0
(4.П)
где
фл
(4-12)
- поток намагничивания при скорости идеального холостого хода АД. При критическом
скольжении (5 = ,vK ) за счет большего значения Ф^ максимальный (критический) момент Л/кг
в генераторном режиме больше, чем Мм в двигательном.
Нелинейность кривой I'2(s) вызвана как нелинейностью Ф» ($), так и изменением
индуктивного сопротивления рассеяния роторах^ (v) При больших скольжениях х'2» R2
и ток ротора асимптотически стремиться к своему предельному значению
^га„ = К<^ттюо> Г2 Максимум в генераторном режиме определил в этом же режиме и
максимум в кривой тока ротора.
За счет х'2» R‘i в области больших скольжений cos ф2 и, соответственно, активная
составляющая тока ротора невелики. По мерс увеличения скорости (уменьшения
скольжения) cos ф? за счет уменьшения х 2 увеличивается, стремясь к единице при з= 0. При
изменении знака скольжения меняется фаза тока ротора (рнс.4.7, б). При этом активная
60
составляющая тока ротора меняет свой знак, а реактивная составляющая - сохраняет свое
направление. Меняется и фаза тока статора относительно питающего напряжения.
Двигатель переходит в режим рекуперативного торможения, где активная энергия
передается в источник питания ЛД а реактивная - потребляется от источника и идет на
создание магнитных нолей в АД.
Поскольку и поток и ток Г2 пропорциональны напряжению питания U\ ,
электромагнитный момент двигателя при постоянном скольжении пропорционален (Л2
При L?i = const частотное регулирование скорости АД находит применение лишь при
а > 1 (д > fin ), т.е в зоне скоростей выше основной (при двухзонном регулировании
скорости). В этой зоне с ростом частоты уменьшается магнитный поток (4.8) и
перегрузочная способность АД по моменту (рис.4.10, а).
Частотное регулирование скорости ниже основной при 6Д = const связано с
насыщением магнитной системы (4 12) и, как следствие, с резким увеличением тока статора
даже при идеальном холостом ходе Поэтому при скоростях ниже основной одновременно с
частотой следует менять и напряжение питания АД.
4.4.2. Статические характеристики АД при U\ / f = const и ЧЛ = const.
В соответствии с (4.8) и (4.12) частотное регулирование скорости АД при U\ If = const
обеспечивает постоянство магнитного потока Фу лишь при идеальном холостом ходе. 1ри
увеличении нагрузки на валу АД из-за падения напряжения в цени статора и уменьшения
ЭДС Ei (рис.4.6) магнитный поток Фу уменьшается и тем заметнее, чем меньше а
(рнс.4.11). Как и при (Лн, /ш зависимости Фу (со) для иных Ui =а(7|ц, /|= а/ш (при U\ If -
const) из-за падения напряжения на активном сопротивлении статора несимметричны и
неоднозначны относительно линии скорости идеального холостого хода. В результате
уменьшения Фу по мере снижения скорости уменьшается и максимальный
электромагнитный момент АД (рис.4.11).
Если при регулировании по закону Ui If = const обеспечить полную компенсацию
падения напряжения на активном сопротивлении статорной цепи ДЦ = Л Л, , например за
счет положительной обратной свяш по току статора АД, то для (4.8) при = 0 [2]
* } (<\R'2У + (х, + с}х2У sa2 ’ (4ЛЗ)
61
где U'i - напряжение за активным сопротивлением статора (между точками б и 0 на
рис.4.10), которое можно связать с потокосцеплением статора как
t/>= 2^^ (4-14)
По (4.13) при t/'i ffi = const реализуется частотное регулирование АД при Чу| = const.
При этом зависимость Фи (о ) симметрична относительно линии скорости идеального
холостого хода, максимальные электромагнитные моменты, сохраняя свои значения при
различных "астатах, в генераторном и двигательном режимах становятся равными и
большими (за счет увеличения при одних и тех же скольжениях) по значению
критических моментов для двигательного режима при регулировании по закону Ui f =
const (рис 4.12). При постоянстве U\ /f уменьшение Фи по мере снижения скорости АД
связано с влиянием реактивностей рассеяния статора (влиянием падения напряжения на
рсакзявном сопротивлении xja схемы замещения на рис. 4.6).
4 4,3. Статические характеристики АД при 4^ = const.
Ес ти при регулировании по закону U\ / f = const обеспечить компенсацию падения
напряжения на полном сопротивлении статорной цепи ДЦ = /lZl , то для (1.3) при Z\ = О
KG)0.act кш^а ’
т.е. поток намагничивания будет постоянным и равным потоку при скорости идеального
холостого хода АД и его питании номинальным напряжением с номинальной частотой. В
(4 15) U'm - напряжение за полным сопротивлением статора (между точками в и 0 на
рис. 4.6), которое можно связать с полным потокосцеплением как
(416)
В cootbctcibhh со схемой замещения на рис. 4.6 и соотношением (4.16)
Г2 =-------------, (4.17)
J^F+ЙлУ
; = 4>Zt?o +(A'u (4.18)
62
По (4.17) и (4.18) потокосцепления ротора и статора
% ='4*.
(4.19)
=ч, (*„ + X. ) + (*М Sa
7Л22+(хЧ)'
(4.20)
где а - 1 - ---—— - - полный коэффициент рассеяния АД
(*1 + Хр>' Х2 + Хц)
Па рис. 4,13 качественно отражены статические характеристики переменных АД в
ф> нкции скорости при различных значениях а < 1.
При линейной зависимости ЭДС вращения роторной цепи от скольжения
Е2 - (рис. 4.13.6) определяемый ею ток ротора из-за влияния реактивного
сопротивления рассеяния ротора х'г не линеен (4.17). стремясь при s -> ±оо к предельному
значению Z^p = ' х'г - По (4.18) ток статора при s -> ±оо стремится к предельному
значению Zlnp = Т <i^(xp+ хП х^х‘2 .
Зависимости Zj, Г- , 43 и Ч-'г от скорости симметричны относительно скорости
идеального холостого хода (рис. 4.13) и не зависят от частоты питающей сети. При s = 0
потокосцепления Ч72 (4 19) и (4.20) характеризуются как 4J2 = 4Jk ; Ч7, = vPp (хм + xj)Z хм
'Ч7М При s -> ±oo предельные значения потокоеценлений Ч/2„р- ->0. oxi Zx 2
Поскольку постоянство обеспечивается компенсацией падения напряжения па
полном сопротивлении цепи статора и ЭДС вращения АД, то приложенное напряжение U\
к обмотке статора по мерс увеличения скольжения и частоты должно увеличиваться
(рис. 4.13.6). При идеальном холостом ходе
ц=ч'л 2+°2 +Ч У /х>
а при s —> ±оо
*4₽ = + a=cr(x>, +xj’/х^ (421)
Асимметрия Z'i(co) относительно скорости идеального холостого хода обусловлена
падением напряжения на активном сопротивлении статора, а нелинейность - влиянием
реактивности рассеяния статора. Влияния ЭДС вращения и ЭДС самоиндукции статора
определяют неоднозначность U\(со) от частоты питания АД (от а).
63
Электромагнитный момент АД при Ч/м= const
3 3 Ч/’<оо5лЛ-
Л/ = ± P^r2 eos^2 = -р~^ ~~ (4.22)
2 2 R2 + x2so
принимает максимальное значение
ч
з
= 4ГТ
(4.23)
при скольжении
R2
s* Момент
Л/к одинаков для двигательного и генераторного
режимов работы АД. За счет постоянства Ч'м по абсолютному значению он превышает
максимальный момент при Ч7] = const и не зависит от частоты питания (рис. 4.13-а). При
различных частотах механические характеристики перемещаются вдоль оси скорости
параллельно друг дрхгу (рис. 4.13.а).
4 4.4 Статические характеристики АД при % = const.
Если при час годном регулировании обеспечить компенсацию падения напряжения на
полном сопротивлении статорной цепи и скомпенсировать влияние реактивностей
рассеяния ротора АД. то по схеме замещения рис. 4.6 напряжение U'i между точками г и О
будет поддерживаться постоянным. Поскольку это напряжение связано с
потокосцеплением ротора 4S как
(4-24)
(4.25)
U'2 = r2R\ls=^^a
го при этом
% = U’2 /аыОи = 1Щ / <Ц)„5О
будет также ноддержива! ься постоянным
В соо1ветствии со схемой замещения на рис. 4.6 действующие значения тока,
потокосцепления статора и контура намагничивания АД. а также ЭДС вращения ротора при
4S = const определяются как [2]
64
/'='ТкА"+(^+хО;г»- <4-26’
(4-27)
ХАЛ2
% (4.28)
Ei - = % ' + *?5 . (4.29)
Для обеспечения Чу2 = const напряжение питания АД должно изменяться в
соответствии с соотношением [2]
где
к{ = 2аЛ((хр +Х|)(-гр + л-;)( 1 - ст);/ R',
к. = +« (хр + х«)
На рис. 4.14 в соответствии с (4 24) т (4.30) качественно показаны зависимости Ui,
E'i, Ii, 1*2, %. Ч'р , Тг от скольжения двигателя.
Напряжение С/| имеет минимальное значение в области генераторного режима работы
ЛД и, являясь нелинейной и достаточно сложной функцией скольжения и частоты,
асимметрично увеличивается при sa -> ± а> . Характер Ui (s) определяется падениями
напряжений на полном сопротивлении статорной цепи и индуктивном сопротивлении
рассеяния цени ротора.
Зависимости £%. Д, ЧД и симметричны относительно оси нулевого скольжения, а
ток ротора 1'2 по (4.24) является линейной функцией скольжения (рис 4.14,6). Активная
составляющая тока ротора
Л:’+х'25а2
(431)
65
при sa —> i оо асимптотически стремиться к предельному значению Р1ап{, = / х'2 .
Электромагнитный момент АД при = const
3 3 3
Л/ = 2 Р^Л. = 2 1Ri = S’ Р^'г (432)
пропорционален скольжению. О' сюда при переходе от скольжения к угловой скорости вала
АД
и=а‘°”--зЙЛ/;
R'
(4.33)
(4Э4;
Жесткость механической характеристики АД зависит от потокосцепления Ч'г и
сопротивления /?Ч ротора. При их постоянстве механические характеристики АД при
различных частотах параллельны друг другу (рис. 4.14, а). Соотношения (4.33) и (4 34)
подобны механическим и электромеханическим характеристикам двигателя постоянного
тока независимого возбуждения т е. при Ч'г = const АД приобретает свойства машины
постоянного тока.
4 4 5 Статические харак.еристики АД при I\ = const
В соответствии со схемой замещения и векторной диаграммой АД при его питании от
источника тока (рис. 4.8, рис. 4.9) основные соотношения для токов. ЭДС ,
погокосцеплений и электромагнитного момента АД имеют вид [2, 4]:
/' = I Х^а = | R?+
yR? + (хд + Л-; )2s2 " \Ri' + (х„ + )2^
R2 — А*
(4.35)
т2 = д----- —
^JR2 +К+^)25о2
66
,где Мкя = 3f'x' ,2<Vxp+x9 ; ^ = ^ 'Цл+х;).
На рис. 4.15 в соответствии с приведенными соотношениями качественно
представлены зависимое! и Ц , /'2, F.'i, и Uot угловой скорости АД при а = 1 и а = 0.5.
Существенным отличием режима литания АД от источника тока (по сравнению с
питанием от источника напряжения) являе.ся заметное изменение /и и от
абсо потною скольжения sa за счет размагничивающею тока ротора /2. Как следствие, при
sa —> 0 намагничивающий поток возрастает и может достичь у ровня насыщения. За счет Л <
Ли критический момент АД при питании от источника тока Л/^ заметно меньше
критического момента АД при питании от источника напряжения. В соответствии с (1.30)
момент Л/кг не зависит от частоты тока (рис. 4,15. а).
4.5. Электромагнитная мощность и момент АД
Базируясь на теории обобщенной электрической машины [1], можно показать, что при
вращении осей плоскости координат х , у (рис.4 7). расположенной перпендику лярно оси
вала АД. с синхронной скоростью асоон относительно его статора, фазовые сдвиги между
напряжениями, токами и потокосцепления ми двигателя будут определять
пространственные углы между их векторами. В подобной системе координат оси
двухфазных обмоток статора и рогора обобщенной электрической машины представляются
взаимно неподвижными и совпадают с осями системы координат х , у. При этом
коэффициенты взаимной индукции и потокосцепления обмоток за счет их взаимной
неподвижности становятся независимы от положения осей реальных обмоток, а
дифференциальные уравнения, характеризующие их взаимосвязи, будут иметь постоянные
коэффициенты.
Основываясь на векторной диаграмме (рис.4,7). где оси плоскости координат х , у
вращаются со скоростью скопи относите, тьно его статора, среднюю за период вращения
потребляемую мощность АД можно ‘представить как скалярное произведение векторов тока
и напряжения статора
Р=2^17’). (4.36)
67
Здесь коэффициент 3/2 учитывает число фаз т = 3 АД и равенство модуля каждой
переменной одной фазы АД их амп яитудному значению
В соо гветстзии с рис.4.7
U^Ut+lR^jaw^ + 7,/?,=-£,'+//?, • (4-37)
где [ - ЭДС, наводимая в статоре потокосцеплением
Подставляя (4.37J в (4,36) получим
*7 _ О
i«s)
Если принять ф | = const , то при вращении осей х , у со скоростью а(оР|1
приращение электромагнитной энергии, запасаемой в индуктивностях статора будет
отсутствовать Тогда первый член (4.38) будет представлять собой электромагнитную
мощность Р)М. передаваемую со стороны статора в воздушный зазор, второй - мощность
тепловых потерь в обмотках статора АД.
С учетом (4.37) электромагнитная мощность
=|(- ^’1)=^1- а)=^аоо«ч>1/1 sinl^i а)=х /.](4,39)
определится как векторное произведение потокосцепления и тока статора, где отсчет угла
между ними выполняется против часовой стрелки от вектора ф к вектору /, .
Электромагнитный момент АД с учетом (4.39)
м = J?”- = *>. /.) = ’ И'1', * ']
(4.40)
определяясь векторным произведением потокосцепления и юка статора, представляет
собой также вектор, направленный в плоское! и координат х , у, перпендикулярной оси
вращения, вдоль оси вала АД.
Из векторной диаграммы на рис.4.7 следует, что
Ф, - % + V. - V. ♦ М. • <4-4.Р
где L] = £,о + = 1^д + L - полные индуктивное ги цепей статора и ротора АД. Если в
(4.40) учесть (4.41), то для АД можно дополнительно получить ряд соотношений,
определяющих его электромагнитный момент через различные переменные АД [2]:
1) Л/ = |р[ч; X /,]. 2) м = -\р у[ф х /2] ; 3) = -(/^2 х А];
4) я. = -|р[фм х А]; 5) = -|ру-[ф х А]; б) л/ = -|рЛ.[А х А]; (4.42)
-- 3 /-Ц Г- - ]
68
Таким образом электромагнитный момент определяется взаимодействием
оргоюнальных составляющих потокосцеплений и токов АД Модуль вектора момента
численно равен площади параллелограмма, построенного на векторах его образующих, и не
зависит о г выбора системы коорщнаг. Различные знаки векторных произведений (4.42)
согласовывают результирующее направление вектора .момента АД. перпендикулярное
и носкости упомянутого параллелограмма, т.е плоскости системы координат х . у,
перпендикулярной оси вращения АД.
Если электромагнитный момент рассматривать относительно самой оси вращения, го
он становится скалярной величиной [4]. Тогда, используя проекции векторов токов и
потокосцеплений АД на координатные оси х, у, вращающиеся со скоростью асоон
относительно его статора, в соответствии с (4.40) и (4 42) можно получить следующие
определения электромагнитного момента АД [2]:
1) ; 2)
3) л/ = |р7'Нл.-'т1а) 4> л/=|Р(ч'!,/1,-ч'1лх):
5) ; 6) И-|р-£(ч',,/1,-Ч-,(4.43)
7> 8)
Методику получения приведенных уравнений можно показать на примере
определения зависимое! и 1) соотношения (4.43) по векторной диаграмме на рис. 4,16. Здесь
hx, и ту]* , проекции векторов тока Jt и потока1^ . В соответствии с определением
векторного прои {ведения двух BeKiopoe [12]
Здесь i,j,k - единичные орты пространственной системы координат на рис. 4,16. где
орта к направлена вдоль оси вала АД.
69
Рис.4.10. Статические характеристики АД при t/i=const,/i-const
Рис.4.11. Статические характеристики АД при (Д//1= const
Рис 4 12 Статические характеристики АД при ip г const
71
Рис.4.13. Статические характеристики АД при const
Рис.4.14. Статические характеристики АД при V2= const
Рис.4.15. Статические характеристики АД при Л= const
72
Рис.4.16. Векторные диаграммы тока и потокосцепления
статора АД по единичным орт^м
73
5. РАЗОМКНУТЫЕ СИСТЕМЫ УПРАВЛЕНИЯ АСИНХРОННЫМ
ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ
5.1. Принципы построения систем управления АД
В соответствии с векторными диаграммами и соотношениями между основными
переменными АД (гл. 4) его эдек громеханическис свойства при фиксированной частоте
питания однозначно определяются как абсолютными значениями магнитных потоков,
потокосцеплений и токов цепей машины, так и их векторными взаимосвязями в функции
абсолютного скольжения АД. Отсюда и различные принципы управления АД. скалярный,
при котором оау ществляегся регулирование лишь абсолютных значений переменных АД. и
векторный, при котором одновременно осуществляется принудительная взаимная
ориентация векторов переменных АД в соответствии с принятым законом управления. При
этом управляемость АД может обеспечиваться совместным регулированием либо часготы/i
и напряжения U\ , либо частоты Д и тока /, статорной обмотки Первый способ управления
принято трактовать как частотное управление, второй - как частотно-токовое
управление [4, 8, 9].
Поскольку выбор способа и принципа управления определяется совокупностью
стличсских. динамических, энергетических и затратных требований к асинхронному
э.т гктроприводу. следует дать их сравнительную оценку.
Скалярный принцип частотного управления является наиболее распространенным в
электроприводе. Ему свойственна техническая просто га измерения и регулирования
абсолютных значений переменных АД. Однако реализация желаемых законов
регулирования скорости и момента АД. их стабилизация и ограничение, при которых
обеспечивалось бы постоянство или ограничение в допустимых пределах внутренних
переменных АД (токов статора и ротора, их потокосцеплений, основного магнитного
потока), из-за сложных функциональных зависимостей между ними весьма отраничсна. И
если в статических режимах за счет комбинаций обратных связей по переменным АД в
замкнутых системах частотного регулирования и можно добиться желаемых или близких к
ним свойств электропривода, то в динамических режимах эта задача трудно выполнима.
Связано это с весьма сложными электромагнитными процессами, протекающими в АД.
Действительно, при любых динамических возмущениях в АД происходит взаимное
изменение токов и связанных с ними магнитных потоков машины. При этом скорость
изменения магнитных потоков заметно отстает от темпа изменения токов АД В результате
в переходном процессе нарушается взаимосвязь не только абсолютных значений токов и
73
потоков, но и возникает фазовый сдвиг между их векторами. Последний носит свободный и
не управляемый в динамике характер. Поскольку и абсолютные значения и взаимные
фазовые сдвиги векторов токов и потоков цепей статора и ротора изменяются
одновременно, то при наличии взаимосвязанных звеньев, содержащих электромагнитные
постоянные времени цепей статора, контура намагничивания, ротора и механическую
постоянную времени ротора, изменение переменных АД во времени будет носить
затухающий колебательный харак i ер. Период колебаний и коэффициент их демпфирования
зависят от соотношений постоянных времени и абсолютного скольжения АД. После
окончания переходного процесса абсолютные значения токов и потоков и фазовые сдвиги
между их векторами взаимно сориентируются в пространстве и определятся уже в
соответствии с заданным установившимся режимом работы АД.
Скалярное частотно-токовое управление АД характеризуется малым критическим
скольжением и постоянством критического момента при постоянстве питающего АД тока
и изменении его частоты (п. 4.4.5). Однако в разомкнутых системах подобное управление
практически исключено, поскольку с увеличением нагрузки (скольжения) резко падает
магнитный поток АД и для обеспечения желаемых перегрузочных способностей АД по
моменту потребуется заметное превышение номинальных значений напряжения питания и
тока статора.
Векторный принцип управления базируется на принудительной взаимной ориентации
векторов потокосцеплении и токов АД в полярной или декартовой системах координат
(4.42), (4.43) в соответствии с заданным законом регулирования. В замкнутых системах
векторного управления по цепям обратных связей наряду с абсолютными значениями
регулируемых переменные поступает информация о текущем прос1ранственном
положении их векторов. За счет регулирования модулей переменных и углов .между их
векторами обеспечивается полное управление АД как в статике, так и в динамике,
обеспечивая тем самым заметное улучшение качества переходных процессов по сравнению
со скалярным управлением. Именно этот факт н является определяющим при выборе
систем с векторным управлением.
Информация о теку щих значениях модуля и пространственного положения векторов
переменных АД может быть получена как прямым их измерением с помощью
соответствующих датчиков, так и косвенно на основе математической модели АД.
Конфигурация и сложность такой модели определяются техническими требованиями к
электроприводу. В общем случае подобные системы с косвенный регулированием
координат электропривода из-за нестабильности параметров АД и сложной их взаимосвязи
уступают но своим статическим и динамическим показателям системам с прямым
векторным управлением. При сложности вычислительных операций и алгоритмов
74
управления электроприводом достоинство систем с косвенным регулированием в простоте
технических решений и, соответственно, в практической надежности.
При векторном управлении регулирование электромагнитного момента АД может
ос} шести ягься формированием мгновенных значений как напряжений, так и токов в
обмотках статора. Вариант частотно-токового векторного управления является наиболее
распространенным, поскольк) при регулировании тока обеспечивается регулирование
момента не зависимого от частоты питания АД (п. 4.4.5), что упрощает схему управления, а
также одновременно достаточно просто обеспечивается О(раничепие перегрева двигателя.
11ри этом напряжения на обмотках статора АД, образуются автоматически в зависимости от
его режима работы.
5.2. Разомкнутые системы со скалярным управлением
При невысокой точности и ограниченном диапазоне регулирования скорости АД
наиболее целесообразным является его скалярное частотное управление в разомкнутой
системе электропривода (рис 5 I) В подобных системах частота Д и напряжение
питания двигателя М формируются в преобразователе частоты UZF пропорционально
сигналу управления wy электроприводом. Для компенсации падения напряжения во
внутренних сопротивлениях преобразователя UZF и возможных колебаний напряжения его
питающей сети в преобразователях частоты, как источниках напряжения, принято
использовать внутренние контуры стабилизации выходного напряжения преобразователя.
При этом выходное напряжение преобразователя не будет зависеть от его на<рузки и
регулировочные свойства асинхронного электропривода будут определяться свойствами
собственно АД при питании его от управляемого источника напряжения.
Как следует из (п. 4.4.2) при заметном снижении частоты преобразователя
уменьшаются поток и абсолютное критическое скольжение АД, вызывая падение
максимального момента и жесткости механической характеристики. В итоге падает
nepeiрузочная способность АД по моменту, снижаются точность и диапазон регулирования
скорости АД
Для сохранения постоянства перегрузочной способности АД по моменту во всем
диапазоне регулирования его скорости при различном характере изменения статической
нагрузки Л/С(<о) на ваду АД между сигналами задания частоты Uj и напряжения ии па входе
UZF предусматривается функциональный преобразователь UF
При Л/с = const и в пределах изменения относительной частоты 1> а > (0,2 - 0,3)
статическая характеристика преобразователя UF должна быть линейной, обеспечивая
75
постоянство соотношения Ui/fi. При меньших значениях а за счет уменьшения мшнитного
потока Фр , вызванного падением напряжения Д(/ на активном сопротивлении обмоток
статора (п. 4.4.2). критический момент АД при сохранении постоянства (Д//1 уменьшается.
Поэтому для сохранения постоянства першрузочной способности АД по момент)' в зоне
низких частот в преобразователе UF предусматривают такое соотношение между и/ и иы ,
при котором обеспечивается компенсация Д(/. Теоретически это соотношение, при
котором ии снижается в мсныпей степени, чем м/, характеризуется нелинейной функцией
[6]. практическое определение которой часто ограничено отсутствием потных паспортных
данных АД.
Для большинства серийных преобразователей частоты эта функция линеаризуется
путем выбора в статической характеристике преобразователя UF двух базовых координат:
ни| при »/] и 140 при и/\ = 0 (рис. 5.1). Первая координата определяет задание минимального
значения частоты f\ и соответствующего ему напряжения U\ на выходе преобраювагеля
UZF, при которых еще сохраняется постоянство соотношений U\ I f\ = Uin/ f\H . Для АД
общего назначения при диапазоне регулирования скорости в разомкнутой системе
частотного управления до (8 - 10) . 1 значение минимальной частоты практически
выбирается в пределах (0,3 - 0,4)/iH.
Вторая координата выбирается с учетом уменьшения теплоотвода заторможенного
двигателя (в режиме динамического торможения) из условий ограничения тока статора на
уровне (0,7 - 0.8) /|Н. При известном активном сопротивлении статорной обмотки АД это
соответствует установке выходного напряжения преобразователя частоты при uj\ = 0 на
уровне U\ = (0,7 - 0.8) /|„ R\.
Реально наименьшее значение выходной частоты преобразователя и соответствующее
ему значение uj\ полезно выбирать из условия /imm = со<Л1рлс 2л , при котором пусковой
момент АД будет близок .моменту' сил сопротивления на валу двигателя. Здесь 5С
скольжение АД при его статической нагрузке. При подобном выборе зона
нечувствительности по сигналу управления скоростью АД будет минимальной и движение
электропривода начнется практически одновременно с началом увеличения сигнала
управления.
При вентиля горной нагрузке па валу АД, для которой Л/е = со2, соотношение между itf
и ии должно обеспечива гь закон управления близкий к постоянству U\i f\2 На рис. 5.1 это
соотношение качественно отражено в UF штриховой линией. Начальные значения частоты
и напряжения на выходе преобразователя UZF, которые выбираются из тех же
соображений, что и при ЛД = const, при этом будут заметно меньше за счет меныних
значений пусковых моментов.
76
Для нагрузки с постоянной мощностью соотношение между н/ и н„ должно
обеспечивать постоянство соотношения U2/f\. Применение подобного соотношения при
регулировании скорости АД выше основной, где наиболее часто используется режим
постоянства мощности, требует превышения напряжения питания АД выше номинального
значения и. соответственно, завышения установленной мощности преобразователя частоты
пропорционально Ча. Практически это исключено и частотное регулирование скорости
выше основной выполняется при U\ = = const. При этом допустимый момент АД
убывает в первом приближении обратно пропорционально увеличению частоты, что
соответствует статической на1рузке, a neperрузочная способность АД по моменту
уменьшается обратно пропорционально .а
При скачкообразном изменении сигнала управления преобразователем частоты в АД.
подобно режиму его прямого пуска от сети, за счет переходных электромагнитных
процессов возникают колебания токов и моментов АД с заметным превышением их
номинальных значений Для их ограничения на допустимом уровне принято ограничивать
темп изменения сигнала упрсв.тения иу за счет включения в цепь управления специального
устройства - задатчика интенсивности. Для тех же целей, а также учитывая возможность
подачи сигнала управления скачком, например при пуске АД на первоначальную
минимальную скорость с частотой f\ min (рис. 5.1) или в толчковых режимах работы
электропривода, в ряде преобразователей частоты, в частности фирмы Siemens,
дополнительно между выходом функционального блока и входом UZF, определяющим его
выходное напряжение, устанавливается множительное устройство с коэффициентом
умножения, плавно меняющимся во времени от 0 до I (рис. 5.2). Подобное решение
используется для плавного пуска АД при питании его и от регулируемых преобразователей
напряжения.
В статическом режиме разомкнутая система частотного управления но рис. 5.1. с
приведенными выше соотношениями U\!f\ практически обеспечивает сохранение
номинальной перегрузочной способности АД в диапазоне изменения частоты не более (8-
10): 1 при постоянной нагрузке и (10-25): 1 при вентиляторной [6]. При сохранении же
заданной точности регулирования скорости АД диапазон ее регулирования в разомкнутой
системе частотного управления значительно меньше, не превышая при постоянной
нагрузке и точности регулирования 10% диапазона 3:1. Недостатком разомкнутой системы
частотною управления является и отсутствие ограничений преобразователя и АД от
возможных при регулировании статических и динамических перегрузок по току
Разомкнутая система скалярного частотно-токового управления АД. обеспечивающая
постоянство абсолютного значения тока статора при изменении его частоты, из-за низкой
77
перегрузочной способности по моменту практически! о применения, как уже отмечалось, не
нашла.
1 аким образом, при скалярном управлении для регулировании скорости АД с высокой
точностью при заметном изменении момента нагрузки на его валу, необходимо применять
замкнутую систему управления. в которой частота и напряжение питания АД будут
автоматически регулироваться в функции скорости и ншрузки.
78
Рис.5.1. Разомкнутая система скалярного управления асинхронны и электроприводом
Гис.5.2. Разомкну гая система скалярного управ зения асинхронным Элекгропривс дом с
плавным пуском АД
79
6. ЗАМКНУТЫЕ СИСТЕМЫ СКАЛЯРНОГО УПРАВЛЕНИЯ
АСИНХРОННЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ
ЭЛЕКТРОПРИВОДОМ
Формирование требуемых статических и динамических свойств асинхронного
частотно-регулируемого электропривода возможно лишь в замкнутой системе
регулирования его координат. Обобщенная функциональная схема подобной системы,
кроме асинхронного двигателя М и управляемого преобразователя частоты LZF, содержит
регуляторы А и датчики U переменных электропривода (рис. 6.1.) Управляющими
воздействиями и. на входе регуляторов могут быть сигналы задания любых координат
электропривода: скорости, момента, тока, магнитного потока, угла поворота ротора АД.
Возмущающими воздействиями на электропривод могут быть моменты сил сопротивления
Л/с на валу АД или колебания напряжения пигающей электропривод сети (/с- Входными
сиг налами датчиков U являются переменные АД, доступные для непосредственного их
измерения (частота, напряжения и токи статора, скорость, магнитный поток в воздушном
зазоре АД) или определяемые расчетным путем с помощью математической модели АД
(ЭДС, потокосцепления статора и ротора, углы фазовего сдвига между их векторами и
т.п.). Выходные сигналы А в зависимости от управляющих воздействий, сигналов
обратных связей и принятых алгоритмов регулирования формируют сигналы
управления частотой м/, выходным напряжением uu , током и, преобразователя частоты, а
также (при векторном управлении) углами <р между векторами напряжений, токов и
потокосцеплении АД.
В асинхронных частотно-регулируемых электроприводах применяются как
аналоговые, так и цифровые системы управления Их выбор обосновываемся технико-
экономическими и эксплуатационными соображениями. В наиболее совершенных
электроприводах, отличающихся высокими показателями регулирования, системы
управления выполняются на основе устройств микропроцессорной техники, где алгоритмы
управления реализуются программным путем. При этом функции регуляторов и для
аналоговых и для цифровых систем управления аналогичны. 11оэтому основные свойства и
показатели замкнутых систем с рахтичными регуляторами координат электропривода
можно анализировать, абстрагируясь от их технической реализации. Ниже
80
рассматриваются системы скалярного 'правления, наиболее распространенные в
промышленных электроприводах, в частности, в элек |роз.риводах Simovcrt Masterdiives
фирмы Siemens [14]
6.1. Системы скалярного управления с обратной связью по току статора
Вариант функциональной схемы системы скалярного управления асинхронным
частосно-peiу.шрусмым электроприводом с обратной связью по току статора представлен
па рис.6.2. Здесь ст налы и isc , пропорциональные мгновенному' значению токов
обмоток статора фаз А и С, с выхода датчиков тока L'A* и UAV поступают на
функциональный преобразователь U1, где формируются выходные сигналы /. и / ia .
пропорциональные соответственно модулю абсолютного значения тока ©гатора и активной
составляющей этого тока. Выделение активной составляющей тока статора связано либо с
векторным преобразованием токовых сигналов в UI. либо с измерением тока выпрямителя
в преобразователях частоты с промежуточным звеном постоянного тока. Наиболее часто в
ска(ярных системах частотного управления для простоты технических решений вместо
активной составляющей тока статора на функциональные устройства А1 и А2 подается
сит вал действующего значения тока статора 1\. Вуз. iax St , S2, S3 фу нкциональной схемы
выполняется суммирование сигналов управления и сигналов обра ных связей
поступающих с функциональных устройств Al, А2 и АЗ. Вентиль V условно отражает
прохождение сит нала I h I па вход АЗ лишь при его превышении сигнала | /|твх .
соответствующего модулю максимально попу стимого тока статора АД.
Оценим раздельно назначение каждого из контлров обратных связей и их влияние тта
свойства электропривода. Рис, 6.3, а поясняет влияние положительной обратной связи с
пропорциональным коэффициентом усиления ю устройства А1 по действующему
значению тока статора на переменные и механическую характеристику АД. Пусть при
скорости идеального холостого хода сооо, частоте f 1.0 и напряжении б’ о питания АД его
магнитный поток намагничивания • В разомкнутой системе управления при
постоянстве частоты и напряжения питания по мере увеличения нагрузки на валу АД
скорость со и поток намагничивания дви.ателя уменьшаются (п. 4.3). На рис.6.3, а
соответствующие характеристики отражены тонкими линиями В замкнутой системе по
81
мере увеличения моментов статической ншрузки (М\ , V/ на рис. 6.3, а) АД и
соответствующему увеличению тока статора на вход сумматора У? со стороны А1
поступает дополнительный сигнал, увеличивающий сигнал ии. В итоге по мере увеличения
тока статора увеличивается и выходное напряжение преобразователя частоты (линия U\).
При этом выходная частота UZF. определяемая сигналом и/, остается постоянной (линия
/|). Увеличение напряжения на обмотках статора АД способствует компенсации падения
напряжения на полном их сопротивлении и, в результате, увеличению потока
намагничивания АД (линия Фи ).
Степень компенсации определяется ко ффициентом усиления к> цепи положительной
обратной связи по тою, Очевидно, чем больше хд , тем больше будет поток при том же
абсолютном скольжении Следовательно, по мере увеличения хч увеличивается как
абсолютное критическое скольжение, так и максимальный момент АД. Предел увеличения
Ki ограничен условиями устойчивости замкнутой системы управления и допустимыми
значениями потока намагничивания и напряжения питания АД. По мере снижения частоты
питания полное сопротивление цепи намагничивания и, соответственно, падение
напряжения в статоре АД уменьшается. Поэтому для стабилизации и ограничения потока
намагничивания в замкнутой потоку системе степень компенсации падения напряжения и
отсюда коэффициент Kt необходимо уменьшать в соответствии с уменьшением полного
сопротивления статорной цепи АД. Если это не предусмотрено, то максимально
допустимый х-| должен выбира>ься для режима работы АД при минимальной частоте,
определяемой диапазоном регулирования скорости в замкнутой системе. При этом следуе!
учесть, что даже при идеальном холостом ходе АД за счет заметных токов намагничивания
в сгаторной цепи, обратная связь по полному току уже действует.
Подобный недостаток отсутствует при использовании обратной связи по активной
составляющей тока статора. Ее можно выделить как при векторном преобразовании токов
статора, так и измерением тока выпрямителя в преобразователях частоты с
промежуточным звеном постоянного тока. Если в качестве сигнала обратной связи принять
активную составляющую тока статора, как отражено на рис. 6.2, то регулирование
скорости будет выполняться при постоянстве потокосцепления статора (4.4.2). При этим
обеспечение гой же перегрузочной способност и АД по моменту, что и при обратной связи
по полному току, потребует мепыпей доли компенсации падения напряжения в статорной
82
цепи и, соответственно, меньшего запаса по выходном}' напряжению преобразователя
частоты.
В системе с подобными обратными связями по току возможна реализация
механических характеристик АД с повышенной перегрузочной способностью по моменту
и жесткостью, близкой к естественной в диапазоне регулирования скорости вниз от
номинальной при постоянной статической нагрузке до 7 : I [6].
Влияние положительной обратной связи по току с пропорциональным
коэффициентом усиления № устройства А2 связано с одновременным возаействием на
выходные частоту и напряжение преобразоваге-я UZF. За счет увеличения частоты
питания АД при увеличении нагрузки на его валу (V/t , Л/2 на рис. 6.3, б) соответственно
увеличиваются скорости идеального холостого хода АД (<Дц , соО2), обеспечивая тем самым
лишь стабилизацию скорости АД. За счет одновременного и т ротюрционалытого частоте
увеличения напряжения питания АД при А/с = const сохраняется постоянство и
перегрузочной способности АД по моменту (Л/к = const). При это поток намагничивания
АД остается постоянным лишь на идеальном холостом ходу и снижается по мере
увеличения нагрузки. Увеличением коэффициента к2 можно добиться заметного
увеличения жесткости механической характеристики АД. вплоть до абсолютного ее
значения. Однако выбор к; ограничен условиями устойчивости замкнутой системы
управления и допустимыми значениями частоты и напряжения питания АД.
Совокупность положительных обратных связей по току с использованием устройств
А1 и А2. а сче г стабилизации скорое ги последним позволяет заметно повысить жесткость
механических характеристик АД (рис. 6.3, в) и при постоянной статической нагрузке
увеличить диапазон регулирования скорости вниз от номинальной до 10 : 1 [6].
Дтя зашиты преобразовать тя частоты и двигателя от перегрузок по току
испо тьзуется режим его ограничения с помотцыо устройства токовой отсечки. На рис. 6.2
это устройство включает в себя узел суммирования У? текущего I /]. и максимально
допустимого /|mnx I модулей тока статора с разными знаками (узел сравнения), вентиль V
и пропорционально-интегральный регулятор тока АЗ.При I /j I > I /|mux I вентиль V
пропускает сигнал превышения тока статора выше допустимого на вход АЗ. выходной
сигнал которого может воздействовать как одновременно на частоту и выхозное
83
напряжение преобразователя (узел Si ), так и лишь на напряжение преобразователя (узел
ъл
При воздейс гвии только на выходное напряжение преобразователя, при условии, что
регулятор АЗ имеет интегральный канал регулирования, за счет отрицательной обратной
связи по току преобразователь из источника напряжения переходит в режим источника
тока. Тогда при постоянстве тока статора АД, задаваемого со стороны преобразователя UF
независимо от установленной со стороны управляющего сигнала иу частоты, действие
регулятора АЗ отсечки ио току за счет се большего коэффициента обратной связи (для ИИ-
регулятора бесконечно большого), чем устройства А1, будет сопровождаться уменьшением
потока и момента двигателя, вызывая эффект опрокидывания механической
характеристики АД На рис. 6.3. а жирным пунктиром условно показана линия 1
механической характеристики АД в зоне работы отсечки при токе статора,
соответствующего моменту нагрузки М2 Подобный режим работы отсечки с
воздействием на выходное напряжение преобразователя частоты практически ограничен и
используется лишь совместно с одновременным воздействием на выходную частоту
преобразователя
За счет поступаюше! о па су ммагор Si сигнала отрицате. шной обратной связи по току
статора (более сильной, чем со стороны устройства А2) совместно со стабилизацией гока
осуществляется снижение его частоты и. соответственно, скорости идеального холостого
хода АД. Тем самым обеспечивается постоянство магнитного потока, абсолютного
скольжения и в итоге момента двигателя Па рис. 6.3, в жирным пунктиром условно
показана линия 2 механической характеристики АД в зоне работы отсечки при гоке
статора, соответствующего моменту нагрузки Л/г . Статическая и динамическая точности
их стабилизации при скалярном управлении офаничены сложными и нелинейными
связями между переменными АД и условиями устойчивости замкнутых контуров
регулирования.
84
6.2. Системы скалярного управления с обратной связью по скорости
двнга геля
Увеличение диапазона регулирования по скорости АД возможно за счет применения
в системах управления электроприводом отрицательной обратной связи по скорости.
Функциональная схема подобной системы дана на рис. 6.4. Здесь, дополнительно к ранее
рассмотренным каналам обратных связей по току АД, используется канал отрицательной
обратной связи по скорости. Он включает в себя тахогенератор BV. как датчик обратной
связи, узел суммирования £$ сигналов управления скоростью АД иу и обратной
отрицательной связи по скорости иж , регулятор абсолютного скольжения А4, блок
ограничения AQ его выходного сигнала ирс. а так же узел суммирования Ej сигнала «рс и
результирующего сигнала иу1 с выхода суммат ора Lb
По мере увеличения нагрузки на валу АД (моменты V/i, Л/2 на рис. 6.5) за счет
уменьшения скорости АД и. соответственно сигнала иж , увеличивается сигнал
рассогласования 5, = иу - = Woo - ю => sa • пропорциональный абсолютному скольжению
двигателя. Здесь Oq.o - заданная скорость идеального холостого хода АД. соответствующая
исходному сигналу управления иу; и - реальная скорость АД при заданной нагрузке на его
валу. При 5S * 0 сигнал ирс на выходе регулятора скольжения, суммируясь с сигналом иу\ =
иу (при /| < 11пах ). за счет интегральной составляющей передаточной функции регулятора
А4 обеспечивает такое приращение сигнала управления ut преобразователем частоты при
котором частота его выходного напряжения становится равной/1и(1Ъа). Одновременно с
изменением частоты за счет функционального преобразователя UF меняется по сравнению
с начальным U\ о и выходное напряжение преобразователя L\ (рис. 6.5, б). При этом
скорость двигателя восстанавливается до заданного значения Woe , т. с. обеспечивается
абсолютная жесткость механической характеристики АД (линия 1 на рис. 6.5, а). Для
увеличения перегрузочной способности АД по моменту дополнительно к основному
контуру стабилизации скорости может быть использован и канал положительной обра гной
связи но току статора (устройство А1 на рис. 6.4).
При превышении максимально допустимого тока статора АД (при /, й /1т<„ и,
соответственно. Л/ > Л/ mat), регулятор скольжения должен быть исключен из работы,
85
например ограничением его выходного сигнала на уровне upt:max (рис 6.5, в). При этом
вступают в работу отрицательные обратные связи ио току статора с регулятором АЗ,
обеспечивая за счет одновременного уменьшения частоты и напряжения статора АД до их
минимальных значений /т1п и ограничение момента АД при со = 0 на уровне М та
(линия 2 на рис. 6.5,а). При этом минима1ьная синхронная скорость двигателя сй.и,„ будет
cootbci ствовать значениямfim,„ и С\т„. а механическая характеристика линии 3 (рис 6.5,а).
Устойчивость и динамические показатели качества регулирования скорости АД
определяются выбором коэффициента пропорциональной и постоянной времени
интегра шной составляющих передаточных функций регуля1 оров А4 и АЗ.
86
Рис.6.1. Замкнутая система скалярного управления асинхронным
электроприводом
Рис.6.2. Система скалярного управления с обратной связью потоку статора АД
87
Рис.6.3. Изменение переменных электропривода при различных обратных связях по гоку АД
88
Рис.6.4. Система скалярного частотного управления с обратной связью по скорое и
89
Рис.6.5. Статические зависимости переменных электропривода
в системе управления по рис. 3.4.
90
7. СИСТЕМЫ ВЕКТОРНОГО ЧАСТОТНО-ТОКОВОГО УПРАВЛЕНИЯ
АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ
7.1. Принципы построения систем векторного частотно-токового
управления
Система векторного управления асинхронным электроприводом в наиболее общем
случае должна решать задачи регулирования и стабилизации момента и скорости
двигателя.
Формирование момента АД в соответствии с (4.40), (4.42) возможно за счег
воздействий на абсолютные значения векторов потокосцеплений , токов/,,7? и
фазовых сдвигов между ними От того, какие вектора выбраны в качестве регулируемых
будет зависеть принцип лос!роеиия и техническая реализация системы управления
электроприводом.
Если воспользоваться уравнением 1 соотношения (4 42). то в качестве регулируемых
6}дут выбраны вектора Ч^ i? . Их диаграммы в соответствии с рис 4 7 выделены на
рис, 7,1, а . Здесь же приведены вектора токов намагничивания /и , ротора /S и даны
проекции векторов тока с гатора и ротора на оси х, у. Анализ рис. 7.1. а позволяет
интерпретирова гь АД как эквивалентную машину постоянного тока
Если ротор АД сопоставить якорю двигателя постоянного тока (ДПТ), а статорные
обмотки - обмоткам возбуждения ДТП, то составляющая тока статора //, , синфазная
потокосцеплению 4J , может интерпретироваться как ток возбуждения ДП1, составляющая
/д. - как ток его компенсационной обмотки, составляющая /^ - как поперечная
составляющая поля якоря ДПТ . составляющая - как размагничивающая продольная
реакция якоря Из рис. 4.1, а видно, что потокосцепление определяется током А, = /(+ Д
и. следовательно, в системе координат х, у, связанной с вектором потокосцепления Ч^ ,
составляющие 1/у и />л равны и имеют разные знаки, а встречно направленные
составляющие /д и 12х определяют модуль потокосцепления
|Т.|= МГ> + 6.)
В приведенной интерпретации отличительные особенности АД ог ДПТ в том. что на
статоре АД нет отдельно эквивалентной обмотки возбуждения и компенсации поперечной
реакции якоря (эти o6moikh как бы совмещены), а ось х, связанная с потокосцеплением 'Р
вращается относительно статора со скоростью а© fi
Эти особенности формирования момента по (4,42) определяют основные положения
при технической реализации системы векторного управления. Так вектор Ч^ может быть
91
определен измерением с помощью датчиков Холла ею составляющих Ч^а и Тмр на
неподвижные относительно статора оси аир (рис. 4,1). как% = Н'ЛГ£Г + 4^ При этом
модуль потокосцепления
N = V4'i+4'i .
а угол между осями а, р неподвижной системы координат и осями х,у системы координат,
вращающейся со скоростью а(°о
фо эл = arc cos (Ч'иа /1^ ).
Составляющие вектора / в системе координат а, 0 могут быть определены через
токи фаз статора /д. /в, /с как [ 1 ]
4» =Л-|(4 + /с) • = ~2~^/в ~ /с •
В системе координат х,у проекции вектора тока /|<х и Лр определяются как [8]
/!< = /Iocos<p0j.+/ly,sin<p0.J . = —/|в sin (ос_ + ZIjS cos фОэ.. (7.1)
Они представляются сигналами постоянного тока и не зависят от частоты питания
АД Учитывая это, система векторного управления может строиться аналогично системам
управления двигателями постоянного тока, где составляющая Z|» тока статора определяет
потокосцепление фр АД (магнитный поток ДНТ), а составляющая 1\у является моментной
составляющей тока статора (подобна току якоря ДПТ).
Таким образом система векторного управления с опорным вектором потокосцепления
должна иметь два канала управления: канал управления модулем фр и канал
управления угловой скорости ротора АД. Но аналогии с ДПТ канал управления скоростью
должен содержать внутренний контур управления составляющей тока статора 1\у,
эквивалентной току якоря ДПТ. и внешний кон гур управления угловой скоростью ротора.
Канал управления модулем потокосцепления фр должен содержать контур управления
составляющей тока статора 11х , эквивалентной току возбуждения ДПТ Хотя по своей
функции этот канал и подобен каналу управления магнитным потоком ДПТ, он более
сложен, поскольку взаимосвязь модуля фй , составляющих тока и напряжения статора по
оси X характеризуется дифференциальными уравнениями второго порядка На этот канал
оказывает влияние и составляющая тока статора в виде фансформаторных ЭДС,
пропорциональных рассеяниям статора и ротора [8J.
Важной особенностью системы управления с опорным вектором потокосцепления фм
является возможность его прямого измерения с помощью датчиков, установленных в
воздушном зазоре АД. Подобные системы имеют более высокие показатели качества
управления по сравнению с системами, где используется косвенный (расчетный ) путь
определения сигналов обратных связей.
92
При стабилизации потокосцепления ротора (при 4'2 ’const) механические
характеристики АД подобны характеристикам ДПТ независимого возбуждения (4 4 4).
Поскольку теория и технические решения замкнутых систем управления электроприводом
с ДП Г независимого возбуждения достаточно апробированы, то понятна привлекательность
применения систем векторного управления с управлением по потоку ротора.
Векторная диаграмма токов и потокосцеплении АД при стабилизации
потокосцепления ротора приведена на рис. 7.1, б. Здесь ось х совмещена с вектором % .
При этом 4^ = Д/ь+; Т2>, = £./2> +£ц/|, = 0 ; /^ = 0; /2> = - 4>2 со0яsa/ R'?, т.е. в
установившемся режиме вектор тока ротора 7j перпендикулярен вектору кР2 > а
составляющие тока статора
Т 4'
4=7^ ; А.-^А^Л , (7.2)
где Т2 = Ьг / R\ - электромагнитная постоянная времени цепи ротора
В двигательном режиме (.v!; >0) вектор тока статора
- Ф, . X (7 3)
А - г и+
Ч
опережает вектор на угол 0 = агсгк(Т2<w01,.7) . (7 4)
При этом вектор тока ротора f. отстает от'Р2 на угол 90 эл. град, и при Т2 = const модуль
тока ротора меняется пропорционально абсолютному скольжению
Из (7.2) - (7 4) следует, что конец вектора / скользит вдоль прямой 2.
перпендикулярной вектору ф, (рис. 7,1, б). При этом составляющая 1\х определяет
потокосцепление 4^ , а 11у компепсирус г влияние на пего реакции ротора.
Результирующая составляющая токов статора и ротора по оси у создает
составляющую потокосцепления %; . При этом конец вектора ф. будет скользить по
прямой 3, перпендикулярной вектору 4* Аналогично годограф вектораЧ2 характеризуется
прямой 4 (рис. 7.1, б).
В соответствии с уравнением 5 системы (4.36) электромагнитный момент АД
определяется взаимодействием ортогональных составляющих потокосцепления ротора Ч'2 =
4S = Ах и тока статора /1у . Таким образом, при стабилизации 4*2 , как и при
стабилизации 4^ , система векторного управления будет подобна системам управ 1ения
двигателями постоянного тока, где составляющая 1\х тока статора определяет
потокосцепление 4'2 АД (магнитный ноток ДПТ). а составляющая 1\у является моментной
составляющей тока статора (подобна гоку якоря ДПТ)
93
7.2. Система управления с прямой ориентацией по вектору
потокосцепления ротора АД
Функциональная схема системы регулирования скорости асинхронного двигателя с
короткозамкнутым ротором Л/ при питании его от преобразователя частоты UZF с
управлением по вектору потокосцепления ротора двигателя представлена на рис. 7.2 [8].
Подобная система векторного управления (система Transveklor) впервые предложена
фирмой Siemens (Ф1’1Э Система имеет два внешних контура регулирования - модулем
вектора потокосцепления ротора T.J и угловой скорости от ротора, а также два
подчиненных им внутренних контура регулирования составляющих тока статора /|х и Цу в
осях .гиг орт огональной системы координат, вращающейся с синхронной скорост ьюсзам
поля двигателя. Система осуществляет независимое регулирование модуля вектора
потокосцепления ротора и скорости ротора при сохранении прямой пропорциональности
между моментом двигателя и составляющей намагничивающей силы статора, находящейся
в квадратуре с волной потокосцепления ротора. Сигнал задания потокосцепления
ритора Тг । формируется в специальном вычислительном устройстве ВУ, использующим
математическую модель АД и вводимые в нее реальные параметры двигателя активные и
реактивные сопротивления цепей статора и ротора, число пар полюсов, номинальные
значения мощности, скорости напряжения и тока статора, их частоту, коэффициенты
полезного действия и мощности. На рис. 7.2 вводимые параметры двигателя условно
изображены совокупностью внешних сигналов ХВц на входе ВУ. Внешний сигнал задания
скорости двигателя со г подается на вход задатчика интенсивности ЗИ. формирующего темп
изменения скорости двигателя в соответствии с требуемыми гехнологическими
ограничениями
Измерение текущих значений скорости, потокосцепления ротора и токов стагора АД
производится с помощью датчиков скорости (тахогенератор BV), потокосцепления (ДП) и
тока (ДТ).
ДП преобразует измеренные с помощью датчиков Холла трехфазныс мгновенные
значения потокосцеплений в воздушном зазоре Ч'до, Ч^в составляющие потока
94
в осях а , р ортогональной системы координат, жестко связанной с неподвижным статором
двигателя, причем осьа совмещается с магнитной осью статорной обмотки фазы А:
Тд«= ). (7.5)
Кроме того, в ДП осуществляется вычисление составляющих потокосцепления ротора
согласно соотношениям
Ъа = у* - (Z-2 -Ац) /1а 1 Тад = -^ - (Л2-ЛД Z1₽ ,
где Lz н L» - соответственно собственная индуктивность обмотки ротора и взаимная
индуктивность между обмотками статора и ротора, приведенные к цепи статора
ДТ измеряет мгновенные значения фазных токов статора /io, 1\ъ и аналогично (7.5)
преобразует их в двухфазную систему переменных Да, Zip.
Преобразование переменных из неподвижной системы координат ос, Р в систему
коордичатх.у', связанную с потокосцеплением ротора и вращающуюся со скоростью со о м,
осуществляется вектор-филыром (ВФ) и координатным преобразователем КП1 Вектор-
фильтр выделяет модуль вектора потокосцепления ротора
1^1= М
и тригонометрические функции
cost? ом = Ч'га/ I % I, sintp 01Л = Т2р/ IТ21.
где ф on - со ом/ - электрический угол поворота ротора относительно статора в осях х,у.
Преобразователь КП2 осуществляет поворот вектора намагничивающей силы статора
на угол фоэл в соответствии с соотношениями (7.1), определенными через составляющие
тока статора по осям х, у вращающейся системы координат
Напомним, что вектор потокосцепления ротора в системе координат х, у совмещен с
осью х. т.е | *P2 I =Ч'21, T2v = 0, и составляющая тока определяет магнитный поток
двигателя. При этом составляющая тока . подобная току в якорной цепи двигателя
постоянного тока, определяет электромагнитный момент двигателя (4.36).
Задание на электромагнитный момент двигателя формируется выходным сигналом
регулятора скорости PC. на входе которого сравниваются сигнал задания скорости о И1 с
выхода ЗИ и сигнал, пропорциональный реальной скорости <о двигателя. Для поддержания
95
постоянства электромагнитного момента при изменениях модуля потокосцепления ротора
введен по (4.36) блок деления БД сигнала с выхода регулятора скорости на Ч^ На
выходе блока деления формируется сигнал задания 1\п составляющей тока статора Iу по
оси у.
Сигнал задания 1\„ составляющей тока статора Л, по оси х формируется на выходе
регулятора потока РП, на входе которого сравниваются сигналы задания и реального
значения модуля потокосцепления ротора.
Сигналы задания /1М и /]я сравниваются с текущими состав пяющими токов статора /цн
1\у на входах соответствующих регуляторов токов РТХ и РТр, выходные сигналы которых
определяют задания составляющих напряжений статора w1T и в системе координат х, у.
Система дифференциальных уравнений, характеризующих динамические процессы в
асинхронном двигателе при его векторном управлении в системе координатх,у имеет вид
[8В
(со о эл-р W) % =krR’2hy,
dl\y R. + к? R1 kr 1
<т+ ~ ‘ “ Олл u+/7Wai; I 2 + сД и,у;
J-L = ^ркг IЧ7 211\у - М
где R\,L\- активное сопротивление и собственная индуктивность фазы обмотки стаюра, R 2
- активное сопротивление фазы обмотки ротора, приведенное к статорной цени; kr = Ьц11.2;
kg I-kf kg.
При компенсации следующих составляющих в правых частях уравнений (7 6) за счет
их умножения на ctLj
СТ/ 'СО ОэлЛу 1 Z 1^2 » ” <т/< (О оэп/|х
96
и без учета внутренней обратной связи по ЭДС двигателя (составляющей /?а> кг |ч<!),
подобно электроприводам постоянного тока, уравнение (7.6) может быть преобразовано к
виду:
dt
R1
+ у-|%1 = krR2hx,
dlt R.+k;R’ _ I .
~T- +----~---/1л - ~~ Wia »
dt aLy o£.
(7 7)
di,. R. fk;R': r _ 1
dt aL, lv o£]
На рис.7.2 роль подобной компенсации выполняет блок БК. в который вводятся
переменные Iix, , w и где производятся соответствующие функциональные
преобразования
Преобразование составляющих напряжения статора м1х. щу с выхода БК в
сосщвляющие н1а, щр в осях а , р осуществляется блоком координат ных преобразований
К1!\ в соответствии с соотношениями
Mla~//l.rCOS(poM-«lySin<p 011|; Wip = H|Tsin<Pori + «l>COS(poM;
В преобразователе фаз ПФ по соотношениям
II ч II
Ula= «!«: «!/> = ^^"^3 И‘“+МШ)’ И|‘-= ^2 ^'^3 Wla'“ip)
формируются трехфазные синусоидальные сигналы wlo, w^. определяющие на выходе
преобразователя частоты UZF амплитуду и частоту напряжений (Л. t/в, Сс питания
обмоток статора двигателя
Представив передаточную функцию преобразователя частоты по напряжению
совместно с блоками нреобразозания координат в виде инерционного звена
^пч (/?) = Ulx(p)/ulx(p) = Ui}(p)/ui}(p) = KJ(Tnp + 1),
где Л‘„ - эквивалентный статический коэффициент передачи между сос гавляющи.ми
напряжений и\х, и1у управления преобразователем и составляющими в осях х, у выходных
напряжений преобразователя Cix U\y; Тп - эквивалентная постоянная времени цепи
управления преобразователем, уравнения (7.7) могут быть приведены к виду
97
|%кр) = *Л
А,(р) А,р+1’
/,.(р) _ 1
«ь(Р) т.Р+} RJT^p+V’
-------------; (7.8)
S(p) Ap+i /?,.(^р+1)
л/(/2)=|рЛг|'р21о^)Л>(Р);
<о(р) _ _!_
л/(р)-л<(р) Лр-
Здесь: /?£= Rt + k^R'i - результирующее сопротивление обмотки статора двигателя: Tij
= ct£i - электромагнитная постоянная статорной цепи двтйтАеля; 7г? = I.IRi ~
электромагнитная постоянная роторной цепи двигателя.
Упрощенная структурная схема системы векторного управления частотно-
регулируемого асинхронного электропривода в соответствии е (7.8) приведена на рис.7.3.
Схема содержит два одинаковых по параметрам внутренних контура регулирования
составляющих 1\х, 1\у тока статора с коэффициентом обратной связи но tokv Кот, внешний
контур регулирования потокосцепления ротора с коэффициентом обратной связи по
потокосцеплению Коп и внешний контур роллирования скорости двигателя с
коэффициентом обратной связи по скорости Кос. Структурная схема подобна структурной
схеме системы двухзонного регулирования скорости двигателя постоянного тока. Поэтому
при настройке контуров регулирования на модульный оптимум определение параметров
передаточных функций регуляторов тока И'рт (р), потокосцепления ИЛР„ (р) и скорости
Ир:(р) выполняется ана.<01 ично:
ИЛр,т (р) ~ Рр т р п (р) = Кр п + ~Z. J. И р г (р) — Кр.с>
Л./Р L.P
к к
где Гь/ = ” а- Тп - постоянная времени интегрирования ПИ - регулятора тока: Kpt - Pi»
Rj.
!Ги> - коэффициент передачи пропорциональной части регулятора тока, а/ = 2 т4; Тщ, =
К К Ц
>л ап ai Тп постоянная времени интегрирования ПИ-регулятора потокосцепления
А,,
98
poiopa; Арп = А», /Тип - коэффициент передачи пропорциональной части регулятора
потокосцепления ротора; а„ - 2 <-4; Арс - к‘пт/ 3 рП кг Ко<: аь> at Тп - коэффициент
передачи пропорционального регулятора скорости; аы = 2 -5-4.
7.3. Системы управления с косвенной ориентацией по вектору
потокосцепления ротора АД
Установка дат чиков магнитного поля в воздушном зазоре АД в системах прямого
управления векторами его потокосцеплспий требует дополнительных изменений в
конструктивных решениях серийно выпускаемых АД и сопровождается снижением
надежности электропривода. Поэтому в современных и наиболее совершенных частотно-
ре гулиру с мых электроприводах, где системы программного управления реализованы на
основе микропроцессорной техники, информация о векторах потокосцеплении
электрической машины получается косвенным путем на основе ее математических
моделей.
Так, в электроприводах серии Simovert Masterdrives VC фирмы Siemens наиболее
развиты системы управления скоростью АД с косвенной ориентацией по вектору
потокосцепления его ротора [14]. Модульный принцип построения их систем управления
создает возможность комбинаций различных структур управления моментом и
скоростью АД, включая как прямое (с помощью тахогенератора), так и косвенное (по
модели) определение реальной скорости двигателя Выбор структур управления
определяется технологическими требованиями к электроприводу и его
эксп луатацион ны м и особен ностями
7 3.1. Системы управления скоростью АД
На рис 7.4 представлена функциональная схема системы управления
электроприводом серии Simovert Masterdrives VC с отрицательной обратной связью но
реальной скорости АД Система имеет два основных канала управления - угловой
скорое 1ью со и модулем потокосцепления ротора I 'Pj' АД. а также два подчиненных
нм
99
внутренних контура регулирования составляющих тока статора Iix и /\у в осях х и у
ортогональной системы координат, вращающейся с синхронной скоростью (Ооэл
Mai нитного поля двигате. 1Я.
Сигнал задания скорости АД ы, предварительно поступает на вчоа задатчика
интенсивности ЗИ, формирующего на выходе два сигнала управления. Основной со,
определяет задание скорости АД с темпом, обеспечивающим ограничение рывков и
ускорений в соответствии с технологическими требованиями к электроприводу и
максимально допустимыми динамическими перегрузками по току и электромагнитному
моменту АД. Дополнительный сипит с/со !dt определяет с учетом коэффициента переда ти
Ач, пропорционального приведенному к вал) АД результирующему его моменту инерции,
задание динамической составляющей электромапшнюго момента V/ ш • Результат его
суммирования на £.< с сигналом Л/о пропорциональным статическому моменту сил
сопротивления на валу АД, формирует задание электромагнитного момента АД При
этом определение реального сигнала и, соответственно, практическая реашзация
задания электромагнитного момента требуют наличия датчика статического момента на
eaiy АД. Однако техническая сложность, заметные метрологические погрешности
существующих датчиков статического момента на вращающихся вадах электрических
машин и отсутствие серийного их выпуска, как правило, ограничивают их применение в
системах электропривода
Сигнал рассогласования па выходе сумматора Zi основного сигнала управления
to, и сигнала со реальной скорости .АД с выхода тахогенератора BV, пропорциональный
абсолютному скольжению АД, поступает на вход пропорционально-интегрального
регулятора скорости PC. Его выходной синая Wpc формирует сигнал задания Л/,
электромагнитного момента, необходимого для полной компенсации скольжения АД. На
выходе сумматора У,? результирующий сигнал Л/,т определяет полное задание
электромагнит ного момента с учетом возможных изменений статической и динамической
составляющих нагрузок на валу АД
Подобная комбинированная система задания момента (но возмущению и
отклонению) применяется в основном для электроприводов, где требуются повышенные
динамические показатели качества регулирования. В наиболее распространенных
электроприводах канал управления по возмущению, как правило, используется редко,
100
поскольку требует дополнительной и не всегда точно и местной информации о реальных
значениях статической нагрузки и моментов инерции на валу двигателя. К тому же два
параллельно действующих канала управления по от^сюнению и возмущению требуют
более тщательной их настройки и взаимною согласования. С учетом этого в структуре
у правления электроприводом серии Simovert Vlastcrdrives VC предусмотрена возможность
отключения либо всего дополнительного канала по возмущению, либо сохранения канала
коррекции лишь по динамической составляющей момента.
Результирующий сигнал Л/.£ ограничивается блоком БО1 на уровне задания,
соответствующего выбранному максимальному значению электромагнитного момента
АД Задание этого значения определяется внешними сигналами управления A/ma>i и '/max.
В зависимости от энергетических режимов работы электропривода предусмотрена
коррекция по ограничению максимально допустимых моментов АД (блоки M1N и МАХ)
Так, при отсутствии дополнительного блока рекуперативного торможения в силовой
цепи выпрями геля па входе автономного инвертора напряжения UZF для ограничения
максимально допустимой рекуперируемой axiявной мощности Ра„ и, соответственно,
ограничения перенапряжения на емкостном фщьтре выпрямителя, в режиме
рекуперативного торможения АД в блоке А2 в функции ол скорости АД или частоты его
питания fi формируются сигналы Л/О1 и Л/02 . уменьшающие уровень задания
электромагнитного момента АД. Функциональная связь между Р,„ , частотой/1 с учего**
ее максимального значения/imax , качес гвенно отраженная в блоке А2, в электроприводах
серии Simovert Masterdrives VC определена их математической моделью и корректируется
при автоматической идентификации параметров электропривода.
Ограничение электромагнитного момента АД связано и с выбором максимально
допустимого тока статора Лтах- С этой целью в блоке АЗ с учетом максимального
значения напряжения питания АД U\nu и реального значения составляющей тока статора
1\х по оси х определяется вектор максимально допуст имой составляющей тока статора Iiy
пи . Выхо ной сигнал блока произведения Д у тач на потокосцепление ротора 4*» ,
пропорциональный реальному максимально допустимому электромагнитному моменту
АД и контролирует ограничение выходного сигнала A/,v .
Для постоянства задания электромагнитного момента при изменении
потокосцепления роюра в соответствии с определением момента по (4.42) используется
101
блок деления БД сигнала Л/*,£ на выходе БО1 на сигнал, пропорциональный - Выход
БД формирует сигнал задания /1у, составляющей тока статора по оси у.
Для коррекции по динамической составляющей момента на валу АД в структуре
управления электроприводом предусмотрена возможность подключения на вход
сумматора Zi сигнала отрицательней обратной связи, пропорционального производной по
скорости АД (ус1ройстьо Al). Ограничение рывков по моменту АД за счет ограничения
темпа изменения составляющей тока статора обеспечивается задатчиком
интенсивности ЗИТ. Его выходной сигнал, суммирующий на Ze с сигналом
отрицательной обратной связью с выхода пропорционально-интеграяьно-
чифференцирующего регулятора PID определяет задание на составляющую тока статора
Ку-
Входом P1D является выходной сигнал сумматора Zs . где сравниваются сигналы,
пропорциональные текущему и установленному максимально допустимому C4jmai
напряжениям на выходе выпрямителя IJZF. Рассматриваемый узел способствует
управлению моментом \Д во время кратковременных отключений или возможных
уменьшений напряжения питающей сети преобразователя частоты. При кратковременных
отключений сети управление может быть продолжено за счет рекуперации кинетической
энергии вращающегося вата АД в цепь выпрямителя UZF. При нагрузках с большим
момен гом инерции и высокой рабочей скоростью могут быть весьма заметные периоды
поддержки рабочего сос гояния преобразователя.
Сишал задания потокосцепления ротора ку;, формируется в блоке А5.
Функциональная связь между реальной частотой f е ыходного напряжения
преобразователя и потокосцеплением ротора АД определяет постоянство тргз на уровне
задания номинального потокосцепления ротора при f\ £ = /j "|ОМ и уменьшение
У2т при f\ > fimax- Последний вариант обеспечивает работу АД в зоне регулирования
скорости выше номинальной при посгоянсгве номинашною напряжения питания
статора.
Сигнал /imax , корректирующий допустимую максимальную частоту выходного
напряжения преобразователя UZF, формируется расчетным путем по модели АД в блоке
А4 в зависимости от заданного максимально допустимого напряжения питания статора
t'lmax • Значение f/imax определяется напряжением Ude на выходе силового фильтра
102
выпрямителя UZF с коррекцией по сигналу мд. пропорционального максимально
возможной глубине модуляции выходного напряжения UZF.
Сигнал уь, задания потокосцепления ротора с выхода блока А5 в результате
перемножения на выходной сигнал блока А7 преобразуется в сигнал , изменяющийся
во времени с темном, определяющим время возбуждения АД. Лишь по истечению этого
времени, когда возбуждение АД достигнет установившегося значения, в системе
управления преобразователем частоты появляется логический сигнал на разрешение
управления преобразователем со стороны сигнала ит управления электроприводом
Отметим здесь полное подобие условию подключения к питающему напряжению якорной
цепи двигателя постоянного тока независимого возбуждения лишь при наличии его
магнитного потока. Значение времени возбуждения АД может быть задано как внешним
сигналом 1в блока А7, так и определено при автоматической идентификации параметров
АД.
В структуре управления прсдус.мо1рсна возможность адаптации потока ротора к
нагрузке АД, способствующая снижению суммарных магнитных потерь в машине при
уменьшении нагрузки. С этой целью сигнал /|>3 задания составляющей тока статора по осн
у поступает на блок А8, где при заданном минимально допустимом значении потока
ротора Vzmin и заданном коэффициенте адаптации ка формируется сигнал, определяющий
поток ротора в зависимости от нагрузки АД. При включенном контуре адаптации потока
ротора блок А9 выделяет минимальное значение сигнала задания гр 2» •
В соответствии с (7.2) и заданием потокосцепления ротора в блоке А6 но
математической модели АД определяется сигнал задания составляющей тока статора Zix .
Каждая из с оставляющих I iv. и 11х тока статора сравнивается на Z и Хл со своими
текущими значениями I isl и I |х ш , которые выделяются в блоке UVF векторного
преобразования токов /га и /гс в цепи обмоток фаз А и С статора АД. Угод (poM поворота
осей координат х и у, вращающихся со скоростью электромагнитного поля АД.
формируется в блоке Al I согласно частоте
Сигналы рассогласования задающих и реальных значений составляющих тока
статора поступают на входы их соответствующих регуляторов РГ, и РГ, .Выходные
сигналы регуляторов после суммирования гга Х9 и Хго с сигналами компенсации
составляющих но (7.6) и учета внутренней обратной связи по ”)ДС двигателя.
103
сформированными в блоке А12, поступают на координатный преобразователь К/P. В
зависимости от его входных сигналов, пропорциональных заданию составляющих
выходного напряжения преобразователя в осяхх ,у на выходе К/P формируются сигналы
Mi, и ф, определяющие соответственно амплитуду и фазу вектора напряжены в
двухфазной системе координат о., 0 , неподвижной относительно статора АД. Регулятор
напряжения PH, на входе которого сравниваются сигналы задания щ, и реального
значения напряжения и\ 1SI на выходе выпрямителя UZF, обеспечивает стабилизацию его
выходных напряжений. Сигналы задания выходного напряжения преобразователя Hi и ф
совместно с сигналомД, определяющим частоту выходного напряжения преобразователя
частоты, трансформируются в преобразователе координат ПК в эквивалентные сигналы
Kia, «I», П(С трехфазной системы координат, определяющие выходные напряжения UZF.
Формирование сигнала f задания частоты выходных напряжений UZF
обеспечивается суммированием на Еп и Х12 сигнала со реального значения скорости АД,
поступающего с тахогенерат ора ВV, и сигналов/i ./о. определяющих частоту скольжения
АД соответственно в функции тока и ЭДС двигателя. Вычисление^! осуществляется в
блоке 1М математической модели двигателя по току, на вход которого совместно с
текущими значениями / ц и 11х lst составляющих тока статора в осях х , у подается
сигнал /?2, пропорциональный сопрел ивлению рогора АД
В блоке ЭФМ математической модели АД. на вход которого кроме текущих
значений /1у js) и 11х |Я составляющих тока статора поступает сигнал R\, пропорциональный
результирующему сопротивлению цели статора, формируются два выходных сигнала фг
- определяющий потокосцепление ротора, и Ei - пропорциональный ЭДС двигателя.
В серии Simovert Masterdrives VC реализована тогика управления, обеспечивающая
раздельное подключение сигналов^! и fa на вход Zu и S12 в зависимости от заданной
частоты выходного напряжения UZF . При малых частотах действует контур коррекции
по току, обеспечивая компенсацию падения напряжения на сопротивлении статора ; при
больших частотах - по ЭДС двигателя, обеспечивая коррекцию скорости АД. Выбор
частоты, при которой переключаются контура коррекции, определяется экспериментально
по анаюгии с настройкой соотношений U\f\ в разомкнутых структурах скалярного
управления АД (раздел 5.2) Максимально допустимая частота выходного напряжения
LZr 01 раничивается сигналом fap блока 1>О2.
104
Значения сигналов и Ri формируются в блоке А10 тепловой модели АД, куда
поступает совокупность сигналов/^ , включающих в себя информацию о сопротивлениях
цепи статора и ротора, определенных при автоматической идентификации параметров
двигателя, степени влияния на них температуры собственно двигателя и окружающей
среды, условий охлаждения двигателя, о наличие выходных фильтров преобразователя.
В соответствии с принципом работы рассматриваемой системы управления на
рис.7.5 приведены качественные зависимости се основных переменных в функции от
момент АД при постоянном сигнале задания скорости (рис. 7.5, а) и в функции от
сигнала управления скоростью при постоянном статическом моменте V/c* 0 (рис.7.5, б).
Как результат действия ПИ-регулятора скорости механическая характеристика АД
имеет в области нагрузок Мс < Л/гтах абсолют ную статическую жесткость (пиния 1 на
рис.7.5, al). а при Л<2 Мспиа механическая характеристика за счет ограничения выходного
сигнала регулятора скорости и ПИ-регу.тя торов составляющих тока статора в осях х , у
дбеолю'но мягкая (линия 2-3 на рис.7.5, al). Стабилизация скорости связана с
увеличением выходною сшнала регулятора скорости Пре и соответствующим
увеличением сигнала задания Л/*,£ электромагнитного момента АД (рис 7.5, а7).
Последнее приводит к увеличению напряжения и частоты Д на выходе l.'ZF по мере
увеличения статической нагрузки Л/Г| (рис.7.5. а2, аЗ) и, соответственно, увеличению по
сравнению с исходной соо, скорости идеального холостого хода Woi (при Л/с[) двигателя.
Ill гриховыс линии механических характеристик АД на рис.7.5, al отражают перемещение
исходной характеристики Л/Опри увеличении нагрузки.
При Мс ~ Л/c.max» когда произойдет ограничение выходного си Tiana и1>с на уровне
максимального значения A/*,v тлх блока БО1, и при абсолютной скорости АД, равной
нулю, напряжение U\ и частота/; буду г соответствовать значениям (‘очки 3 на рис 7,5, а2,
аЗ). при которых скорость идеальною холостого хода АД равной С)Ос (рис.7.5, al).
По мере увеличения нагрузки составляющая Iтока статора, определяющая момент
АД. также увеличивается (рис.7.5, а4), а составляющая I u . как и опреде 1яемое ею
потокосцепление ротора туг сохраняются постоянны ми (рис.7.5, а5. аб).
При отсутствии сигнала задания скорости АД (w, ~0) и наличии па его валу
постоянного реактивного момента сил сопротивления Л/£ # 0 начальные выходное
105
напряжение [/10 и частота /ю преобразователя равны нулю. Если же момент сил
сопротивления активен, то выходное напряжение Ui.o и частота До преооразователя
соответствую г значениям, при которых начальная скорость идеального хода АД «и- * 0 и
механическая характеристика двигателя обеспечивает при ш = 0 момент М< (рис.7.5, 62,
63). Соответственно этому моменту огре юляются и начальные сигналы ь , 1i, i
(рис.7.5. об. 67). При этом сигналы I \хл и i определяют номинальное потокосцепление
ритора (рис.7.5,65,. 66).
По мере увеличения сигнала w, напряжение U\ и частота f\ на выходе
преобразователя LZ.F также увеличиваются. При = wJH выходное напряжение UZF и его
частота достигают номинальных значений Uf>IOM и /i„o.«- В соответствии с ними
устанавливается номинальное значение скорости идеальною холостого хода АД (oo«au.
Дальнейшее увеличение и, и частоты /j сопровождается пос гоянством напряжения C/j =
G.w па выходе UZF и переходом работы АД в зону уменьшения потокосцепления ротора
за счет снижения составляющей I \х тока статора (рис.7.5, 65, 66). Максима 1ьный момент
АД при этом также уменьшается.
При и, = u-mtx скорость идеального холосто'о хода АД устанавливается на
максимально заданном уровне Wo.max , соответствующем (точка 2 на гис.7.5, б).
Составляющая тока статора и соответствующее ей потокосцепление ротора
устанавливаются при этом на минимальном уровне /и (рис.7.5,65,66).
В приведенной системе управления диапазон регулирования скорости АД при
номинальной нагрузке и точности регулирования скорости на уровне 5% с учетом
двухзонного регулирования практически достигает 1:50 при использовании аналогового
тахогенератора и 1:200 при применении цифрового датчика скорости.
Возможность избежать применения тахогенератора как элемента, требующего
дополнительной, точной и надежной его установки на валу АД, реализуется в системах,
где обратная связь по скорости заменяется обратной связью по ЭДС двигателя. В серии
Simovert Masterdrives VC сигнал обратной связи по ЭДС двигателя <£>э поступает на
сумматор Si с выхода блока ЭФМ математической модели АД. а формирование часто ibi/j
выходною напряжения UZF осуществляется суммированием на Ен и S12 сигнала задания
скорости со, и сигналов /41 и /^э с выхода блока IM математической модели двигателя по
106
току и регулятора ЭДС двигателя (рис. 7.6 ). Все осгатьные блоки схемы управления
электроприводом (на рис. 7,6 сгруппированы в блоке СУЭ) и функциональные связи
между ними остаются при этом без изменения.
Качество регулирования скорости в подобных системах управления завися, от
степени соответствия математической модели ЭФМ и установленных в ней параметров
реальной электрической машине и, как нравн то, заметно уступает системам с датчиками
скорости.
7.3.2. Система управления моментом АД
Ряд технологических объектов (натяжные, намоточно-размоточные механизмы и
т.п.) требуют регулирования и ст абилизации момента на валу двигателя при постоянстве
сто заданной скорости. В электроприводах серии Simovert Masterdrives VC решение
подобной задачи реализуется в ст ру л’>ре управления с датчиком скорости на валу АД за
счет включения между сигналом управления скоростью и и сш налом управления
моментом блока РБ с релейной характерно гикой (рис.7.7). Остальные блоки и их
функциональные связи остаются в структуре управления электроприводом СУЭ
неизменными.
Задание постоянной максимальной или минимальной скорости АД обеспечивается
внешними сигналами <omiu и comin, oi раничивающими уровень сигнала и3 на входе
регулятора скорости. Сигнал uw определяет направление скорости и ограничение сигнала
за [ания момента Л/*э£ на уровне Л/тах i и Л/иах2 • Предельно допустимые моменты АД
ограничиваются при этом сигналами Ммр\ и Mo?pi
Механическая характерист ика электропривода в подобной системе при Мс< Л/тах
имеет абсолютную статическую жесткость при скорости, соответству ющей заданию
сигнагами <отвх ими <о1Т| п . При Л/с= V4,,ax механическая характеристика имеет абсолютно
мягкий характер, стабилизируя заданный сигналом иы злектромагнитный момент АД.
107
Рис.7.1. Векторные диаграммы ЛД при ориентации по потокосцспдениям (а) и 4/2 (6)
108
I I I I I I I 1 I
Рис.7.2. Функциональная схема системы управления с прямой ориентацией по вею ору потокосцепления ротора АД
109
Рис.7.3. Структурная схема системы управления с с прямой ориентацией по вектору потокосцепления ротора АД
НО
1 !
I 1
I
Wj
Рис.7.4. Функциональная схема системы управления с косвенной ориентацией по вектору потокосцепления ротора АД
Рис.7.4. Функциональная схема системы управления с косвенной ориентацией по вектору потокосцепления рогора АД
(продолжение)
112
Рис. 7.5. Зависимости переменных системы управления электроприводом при w,- const,
Л/ = var (а) и при м3 = var, Л/с max * 0 = const (б)
113
Рис.7.6. Система управления электроприводом без дагшка скорости
114
I | I 1 1 I I 1 1 1 I I I > ' '
Рис. 7.7. Система управления моментом АД
<0
115
«.СЕРВИСНЫЕ ФУНКЦИИ В ЧАСТОТНО-РЕГУЛИРУЕМОМ
АСИНХРОННОМ ЭЛЕКТРОПРИВОДЕ
Практически все современные частотно-регулируемые электропривода имеют
базовую совокупность сервисных функций, связанных с управлением, программированием
и диагностированием технического состояния электропривода.
Управление электроприводом реализуется с помощью блоков ввода и вывода,
встроенных пультов панелей управления и внутреннего микропроцессорного блока.
Блок ввода обеспечивает согласование по уровню и аналого-цифровое преобразование
сигналов, поступающих с клемм управления. Как правило, предусматривается два
аналоговых входа, запрограммированных для сигналов по напряжению или но току. По
одному из них поступает основной сишал управления электроприводом, ио другому -
сигналы с датчиков регулируемых технологических переменных (скорости, перемещения,
давления, температуры и тп) Питание датчиков возможно от источника постоянного
напряжения, дополнительно встроенного в преобразователь частоты. Предусматриваются
также цифровые и релейные входы для управления от внешних реле или контакторов, а
также от внешнего промышленного контро.шера через один из портов дискретных входов
или по последовательному каналу связи RS-485.
Блок вывода обеспечивает цифро-аналоговое преобразование и вывод на внешние
клеммы, как правило, двух программно выбранных сигналов системы управления
электроприводом для их индикации и измерения. Блок имеет также релейные выходы для
управления внешними реле и контакторами
Пульты панели управления могут быть как стационарной, лак и съемной конструкций.
Обычно они содержит две группы клавиш: программирования и вь.бора индицируемых
параметров, а также клавиш управления приводом - ' Пуск", "Стоп", "Реверс", "Толчок". В
простейших пультах используются светодиодные и знаковые челырехразрядные дисплеи на
семисегментных индикаторах в наиболее совершенных пультах - индикаторы
дисплейного типа с 2 — 6 строками (до 21 символа в строке), отражающие не только
символы, но и текстовую информацию. Как правило, пульты управления имеют
последовательный порт для подключения внешнего персонального компьютера.
116
Внутренний микропроцессорный блок, содержащий специализированные
высокопроизводительные микроконтроллеры, обеспечивает программирование и
реализацию основных функций \правления электроприводом. К их числу относятся:
формирование управляющих воздействий. обеспечивающих задание частоты и амплитуды
напряжения на обмотках статора АД плавный пуск и торможение двигателя с заданным
темпом; реверс скорости электродвигателя; стабилизация скорости, регулирование и
ограничение момента электродвигачеля; oi раничение максимального значения выходной
частоты напряжения и заданного тока преобразователя частоты; регулирование и
стабилизация технологической переменной (перемещения, давления, уровня, температуры
и т.п.) при наличии ее датчика; самозачуск преобразователя после кратковременного
снижения или отключения напряжения пи тающей сети электропривода; диагностирование
технического состояния электропривода; предупреди i ельная сигнализация и защита
электропривода при превышении максимальных тока, напряжения, температурного
перегрева его элементов; экстренное торможение двигателя при аварийных режимах в
электроприводе.
На рис 8 L представлены функциональные блоки системы управления
электроприводом серии Simovert Masterdrives VC, обеспечивающие формирование
сигналов задания скорое.и элекчро^вигагеля (сшнача ит на рис. 7.4>. Здесь внешний
аналоговый сигнал управления х1з с выхода аналого-цифрового преобразователя АЭС
поступает на вход цифрового инерционного фильтра DT, обеспечивающего фильтрацию
возможных помех в управляющем сицзаяс. Постоянная времени фильтра устанавливается
программно.
Выходной сигнал DT после суммирования с ст налом коррекции ± х(,
обеспечивающим при необходимости смещение по уровню входного сигнала управления
хи , поступает на вход переключателя SI. С его помощью выбирается канал управления по
основному либо полностью аналоч ичному ему второму аналоговому входу сигнала
управления х2з. Переключателем S2 определяется сигнал, по ко орому будет управляться
электропривод: либо от внешнего аналогового входа (сигналов Х|3 , х2з ), либо ол клавиш
встроенного пульта управления, когда сигнал управления х2 буде г задаваться от цифрового
молор-потенциомегра с ограниченным темпом изменения сшназа или ко1да сигнал
управления хд будет задаваться со стороны специальных программных команд. Выбранный
117
сигнал на выходе S2 может корректироваться умножением на коэффициент к (1/3 < к < 3) и
дополнительным суммированием с постоянным сигналом ± хз . Результирующий сигнал
может вновь суммироваться с сигналом д-6. поступающим с дополнительного канала
управления, куда могут поступать как сигналы управления х(, , хг, , так и другие
npoiраммно установленные постоянные сигналы yi |равления.
В блоке U1 кодом логических сигналов хл выбирается тип регулировочной
характеристики, обеспечивающей перетачу сигнала управления без изменения, либо
выделяющей его модуль. В блоке U2 возможно исключить задание тех часто। выходного
напряжения i реобразователя частоты/,, при которых в технологических установках MOiyr
возникать резонансные явления.
В задатчике интенсивности LJ набором команд xj формируется теми линейного или
S- образного изменения сигнала управления электроприводом во времени.
Предусматривается независимый выбор темпа при увеличении и уменьшении сигнала
управления. Выходной сигнал U.I суммируется с сигналом хт, обеспечивающим толчковый
режим задания сигнала управления электроприводом. Максимальный уровень
результирующего сигната управления Xf ограничивается сигналами 91 и qz блока
ограничения UQ.
Для контроля прохождения сигналов по канату управления в нем предусматриваются
дополнительные ключи, размыкающие цепи управления и позволяющие корректировать
значения сигналов без опасения, что они попадут на вход управления силовой части
электропривода и вызовут неблагоприятные режимы его работы.
Программирование режимов работы электропривода связано, как прави. ю, с
применением специальных программных блоков с набором параметров, ориентированных
на стандартные функции электропривода. Выбор уровня меню параметров определяется на
стадии ввода электропривода в эксплуатацию. Macro он ограничен лишь выходом в меню,
где вводятся номинальные данные (напряжение, частота, ток, скорость, число пар полюсов,
к.п.д., cos <р ) ЛД и необходимые ограничения переменных электропривода при
эксплуатации. Если заводские установки в программном обеспечении не соответствуют
технологическим требованиям и условиям работы электропривода, то используются меню,
где программируются каналы управляющих воздействий, структуры управления
(замкнутые по току, скорости, с векторным управлением скоростью или момента и т.п.).
118
параметры регуляторов системы управления, выполняется подключение дополнительных
функциональных блоков и т.п.
Высокая процессорная мощность микроконтроллеров, применяемых в сисл мах
управления электроприво юм, обеспечила реализацию функций диагностики ею
техническою состояния и защиты элементов при аварийных режимах в электроприводе.
При этом в качестве диагностических признаков, характеризующих неисправность
электропривода. определяются не дефекты отдельных его элементов, а вызванные ими
функциональные отклонения в работе электропривода.
Ниже дан перечень функциональных дефектов в силовых цепях и цепях управления,
регистрируемых в наиболее совершенны: час гот ио-регулируемых электроприводах.
В силовых цепях электропривода фиксируются:
- отсутствие в любой из трех фаз сетевого напряжения питания электропривода
- недопустимая асимметрия напряжений питания электропривода;
- превышение по отношению к допустимому сетевого напряжения питания
электропривода
- недопустимо низкий уровень сопротивления изоляции силовых цепей
электропривода о1 носительно земли;
- превышение максимально допустимого тока в сети питания и цепях нагрузки
преобразователя частоты;
- перенапряжение в промежуточном звене постоянного тока т.на входе инвертора)
преобразователя частоты;
- низкое напряженке в промежуточном звене постоянного тока преобразователя
част оты.
- превышение времени под наряда конденсатора выходного фильтра звена постоянного
тока преобразователя частоты до минимально допустимого на его выходе напряжения;
- недопустимая асимметрия токов по фазам двигателя;
- уменьшение ниже допустимого магнитного потока двигателя (для систем с
векторным управлением);
- превышение критического скольжения асинхронного двигателя;
119
- отсутствие "бе» лого" включения двшатсля, когда после кратковременного
отключения напряжения питания преобразователя двигатель с вращающимся валом (без
датчика скорости) повторно до полной осгаповки не включается;
- модулирующая частота коммутации силовых полупроводниковых ключей
преобразователя частоты не соответствует инициализированным параметрам двигателя;
- пробой силового полупроводникового элемента преобразователя;
- превышение максимально допустимого напряжения на силовом по лупроводниковом
элементе преобразователя;
- превышение допустимой температуры перехода силового полупроводникового
элемента (тиристора, транзистора) преобразователя;
- превышение допустимой температуры электродвигателя;
- превышение допустимого температурного интеграла I2l в силовых цепях двигателя
(превышение времени стоянки двигателя иод током):
- превышение допустимой частоты вращения электродвигателя;
- несоответствие между заданным и действительным значениями частоты вращения
элект родвигатетя.
В системе управления электроприводом фиксируются:
- отклонение от допустимых напряжений питания элементов управления
( превышение или снижение напряжений);
- обрыв входных цепей управления:
- ошибка при определении действительного значения контролируемых переменных
электропривода;
- наличие внешней помехи на входах системы управления (превышение допустимых
значений сигналов управления, появление бинарных сигналов на аналоговых входах );
- ошибка при записи номинальных и предельно допустимых параметров
электропривода;
- несовпадение версий программного обеспечения микропроцессорной системы
управления электроприводом и внешних программируемых контроллеров:
- превышение времени расчета команд управления (ограничено модулирующей
частотой системы управления);
120
- ошибка при инициализации внешних микроконтроллеров, подключаемых к системе
управления;
- ошибка при передаче или приеме информации со стороны внешней
микропроцессорной системы управления;
- прерывание измерений переменных электропривода из-за внешнего недопустимого
вмешательства в систему управления;
- ошибка при оптимизации параметров регуляторов системы управления (появление
неустойчивости системы регулирования, несоответствие между реальными и
выставленными ограничениями переменных).
- ошибка в инициализации тина датчика скорости (аналогового или импульсного);
- ошибка в сигнале обратной связи от импульсного датчика скорости (отсутствие
сигнала, отсутствие сигнала одного шага, ошибочная настройка коэффициента усиления,
несоответствие числа импульсов на оборот)
- превышено максимально допустимое значение производной скорости двигателя по
времени (ограничено временем обработки информации в контурах регулирования,
отнесенным к частоте выходного напряжения преобразователя);
- ошибки в определении параметров двигателя при его идентификации в состоянии
покоя или вращения
- ошибка при записи в намять устройства индикации технического состояния
электропривода (дефект ячейки диагнос гирования);
В зависимости or степени влияния отмеченных функциональных отклонений па
работоспособность электропривода сигнал об их появлении может иметь либо
предупреждающий характер, либо действует на устройства защиты и аварийное
отключение электропривода.
121
Xi х? к xs
Рис 8.1. Управляющие воздействия системы ПЧ-ЛД
122
СПИСОК ЛИТЕРАТУРЫ
1. Ключей В.И. Теория электропривода: Учебник ля ву юв. -2-е изд., перераб и дон. М.:
Энергоатомиздат. 1998. 704 с.
2. Суптель А.А. Асинхронный частотно-регулируемый электропривод: Учеб, пособие.
Чебоксары: Изд-во Чуваш, ун-та, 2ОС0. 164 с.
3 Вольдск А.И. Электрические машины-Учебник для вузов Л. Энергия 1974.840 с.
4. Поздеев А.Д. Электромагнитные и электромеханические процессы в частотно-
регулируемых асинхронных электроприводах - Чебоксары: Изд-во Чуваш, ун-та, 1998.
172 с.
5. Ковчин С.А., Сабинин 10.А. Теория электропривода: Учебник для вузов. -СПб.:
Эиергоато.миздат. Санкт-Петербургское ota-ние, 1994. 496 с
6. Сандлср А.1 ., Сарбатов Р.С. Автоматическое часгопюе управление асинхронными
двигателями. М. Энергия, 1974. 328 с.
7. Башарин А В., Новиков В. А., Соколовский I’. Г. Управление электроприводами
Учебное пособие для вузов. - Л.; Энерюиздат. Ленингр. отд-нис, 1982. 392 с.
8. Рудаков В.В , Столяров И.М, Дартау В.А. Асинхронные электроприводы с векторным
управлением. Л.: Энергоатомиздат, Ленингр. отд-нис. 1987 136 с.
9. Бродовский В.Н., Иванов Е.С. Приводы с частотно-токовым управлением / Под ред.
В.Н Бродовского. М.: Энергия. 1974. 168 с.
10. Чехе > Э.М. Млрдач В.П., Собе тев В П. Непосредственные преобразователи час го гы
для электропривода. - Киев- Наук, думка, 1988. 223 с.
11 .Современное состояние и тенденции в асинхронном частотно-регулируемом
электроприводе (краткий аналитический обзор) / Л X Дацковский, В.И. Роговой, В.А.
Абрамов и др.//Электротехника. 1996. №10. С 18-28.
12. Выгодский М.Я. Справочник по высшей .математике. М.: Физматгиз, 1963. 872 с.
13. Преобразователи частоты в современном электроприводе Доклады научно-
иракгического семинара. М.: Издательство МЭИ. 1988. 82 с.
14. Simovert Masterdrives. Vector Control (VC). Bctriebsanlcitung. Toil 2. Siemens, 1998.
15. Ильинский Н.Ф. Основы электропривода: Учеб, пособие для вузов. М.. Издательство МЭИ.
2000. 164 с.
16. Москаленко В.В. Автоматизированный электропривод: Учебник для вузов. М.:
Энергоатомиздат. 1986. 416 с.
123