/






























Автор: Свечарник Д.В.
Теги: электрические машины и аппараты электронно-и аппаратостроение электротехника электрооборудование
Год: 1979



Текст
Д.В. Свечарник
ЛИНЕЙНЫЙ
= ЭЛЕКТРОПРИВОД
Д. В. СВЕЧАРНИК
ЛИНЕЙНЫЙ
ЭЛЕКТРОПРИВОД
МОСКВА «ЭНЕРГИЯ 1979
1.1.к II >iit I
< .4
X Ik (i? N.I
Свсчарник Д. В.
С 21 Линейный электропривод.—М.: Энергия, 1979.—
152 с., ил.
15 к.
В книге излагаются основы построения линейных электроприводов
постоянного и переменного тока для транспортных и промышленных
устройств, рассматриваются принципиальные преимущества и характе-
ристики этих приводов, состояние их разработки и внедрения, призо-
дятся элементы теории и расчета линейных электродвигателей и экспе-
риментальные материалы их исследований, указываются рекомендуемые
области применения и перспективы развития такой системы электро
приводов.
Книга предназначена для инженеров и научных работников, заня-
тых в области электрического привода и электрических мэшни. Опэ
может быть также полезна студентам и аспирантам соответствующих
специальностей.
30307-322
С -г» <32-79. 2302030000
051(01)-79
ББК 31.261.3
6 П2.1.081
Давид Вениаминович Свсчарник
ЛИН ЕЛ11Ы П э,11ЕКТРОПР11 ВОД
Редактор Ю. М. Келим
Редактор издательства Л. А Реиишна
Обложка художника В П Осипова
Технический редактор Н. М. Пушкарева
Корректор Г. ,4. Полонская
ИБ № 1210
Сдано в набор 22.02.79 Подписано в печать 14.0i.79 Т-09885
Формат 84Х1081/Э2 Бумага типографская .№ 2 Гари, шрифта литературная
Печать высокая Усл. печ. л. 7,98 Уч.-изд. . 8,93
Тираж 7000 экз. Заказ 54 Цена 45 к.
Издательство «Энергия». 113114. Москва. М 114. Шлюзовая наб., 10
Московская типография № 10 Союзполиграфпрома при Государственном
комитете СССР по делам издательств, полиграфии и книжной торгов-
ли, 113111, Москва. М-Ч-1, Шлюзовая наб.. 10
© Издательство «Энергия», Ю79 г
ПРЕДИСЛОВИЕ
Важным конкретным проявлением полезной деятель-
ности человека является целенаправленное перемещение
масс в пространстве, в том числе и массы собственного
1ела. Этой цели служат электропривод, системы при-
вода автомобилей, самолетов, ракет, а также мускуль-
ная сила человека и используемых нм животных При
лом человек отнюдь пе бессилен— даже в прямом смыс-
ле— в сравнении с созданными им энергетическими ги-
гантами. Если принять, что, перемещая массы в прост-
ранстве, человек в среднем совершает работу примерно
1,2 кВт-ч (1000 ккал) в сутки, то примерно четырех-
миллиардное население земли выполняет за год работу
1,75-Ю12 кВт-ч. В мире сейчас производится 7Х
Х1012 кВт-ч электроэнергии. Если учесть, что на долю
шсктропривода при этом приходится примерно 0,6—0,7
всей электроэнергии, причем примерно 70% идет на
)лектропривод перемещения масс, и что к. п. д. преобра-
юваний (от шин генератора до рабочего органа, совер-
шающего полезную работу) не выше, чем 0,5—0,6, то
получаем работу по перемещению масс в пространстве,
совершаемую электроприводом в год, примерно (1,3—
1,4)-1012 кВт-ч, что несколько меньше работы, выпол-
ненной нашими мускулами.
Мы бы охотно передали большую часть своей работы
ио перемещению масс в пространстве электричеству, но
современные электродвигатели в подавляющем боль-
шинстве осуществляют лишь вращательное движение,
мускулы же обеспечивают непосредственно и поступа-
юльное движение. Как известно, движение строго по
окружности встречается в природе неизмеримо реже,
чем по произвольной кривой либо по дуге очень боль-
шого радиуса, достаточно близкой к прямой. Конечно,
привод с двигателем вращательного типа в большинстве
случаев обеспечивает выполнение и таких движений, но
с помощью ряда вспомогательных устройств — чаще все-
3
го используются элементы сцепления вращающихся
деталей с невращающимися (шестерня — рейка, коле-
со— рельс и т. п.). Перемещать непосредственно элек-
тромагнитными силами то, что надо, и туда, куда нуж-
но,— естественная задача, встающая перед разработчи-
ками электропривода. Широкое распространение чисто
механического способа осуществления поступательного
движения с помощью сцепления макровыступамп (ше-
стерня— репка) или микровыступами (колесо локомо-
тива — рельс; колесо автомобиля — шоссе; подошва но-
ги— земля) привело к неточному представлению
о невозможности движения без трения. Правильнее раз-
личать два проявления трения: препятствующее движе-
нию вредное трение и полезное трение, участвующее
в создании движения при использовании механического
взаимодействия тел, перемещающихся друг относительно
друга. Утверждать же, как это иногда делается, что без
трения нет движения, неправильно.
Один из способов осуществления поступательного
движения, не требующий участия в этом полезного тре-
ния, широко известен — это реактивное движение; созда-
ние поступательного движения непосредственно элек-
тромагнитными силами без всякого использования по-
лезного трения —другое решение задачи.
Еще недавно сама идея широкого применения линей-
ного электроприводе! отнюдь не являлась бесспорной.
Двадцать лет прошло с выдачи патента на линейный
асинхронный двигатель (Зеден, 1902 г.) до попытки ши-
рокой реализации одною из относительно простых ва-
риантов этой машины инженером Тромбетта («Джеие-
рал электрик»). Эта попытка вызвала скептические
замечания Штейнметца, который в краевом эффекте,
свойственном асинхронному двигателю с длинной вто-
ричной токопроводящей шиной, видел органический по-
рок этой машины, с ним полностью согласился один из
первых отечественных исследователей таких машин
Г. И. Штурман. Еще почти полвека прошло, прежде чем
были предприняты первые серьезные попытки использо-
вать линейный двигатель для транспорта, а не только
для развлекательных целей в парках, где такие двига-
тели применялись и ранее.
В предлагаемой читателю кише детально разбира-
ются принципиальные достоинства линейного электро-
привода, подробно рассматриваются и трудности, вознн-
т
кающие при его применении на транспорте. Лнализпру-
Ю1ся возникающие проблемы и намечаются некоторые
ну in их решения. Выбирается наиболее экономичное ре-
шение задачи — использование безобмоточной вторичной
час in двигателя. Рассматриваются как оригинальные
системы, не имеющие вращающихся предшественников
(laKiie, как цилиндрические гребенчатые машины, пред-
ложенные автором в 50-х годах и успешно реализован-
ные, в частности, в химической промышленности; двп-
ннелп с так называемой двухфункцнопальной обмоткой,
секции которой поочередно выполняют роль обмотки
якоря и возбуждения), так и системы линейных двига-
1СЛСЙ, представляющих собой развернутые в линию вра-
щающиеся электрические машины.
Удачной основой для создания линейных машин со
шорпчной частью, несущей безобмоточные возбужден-
ные полюсы, служат бесконтактный сельсин ВЭИ н осо-
111 uno более поздние модификации этой машины — одно-
полюсные сельсины. Подробный теоретический анализ
1<1кпх машин, исследование сложной картины поля
и большом зазоре, характерном для линейного двигате-
ля, особенно у транспортного электропривода, позволя-
ют установить рациональные соотношения при проекти-
ровании подобных машин. Приводимый эксперименталь-
ный материал подтверждает возможность использования
разработанной методики расчета.
Отдельные интересные конструкции, только упомяиу-
1ые в книге, в частности оригинальная система явнопо-
люсных асинхронных двигателей со вторичной обмоткой,
расположенной вместе с первичными фазными обмотка-
ми, по-видимому, заслуживают внимания и развития не
только в качестве линейного двигателя, но и в виде вра-
щающейся машины.
В книге намечаются дальнейшие пути развития ли-
нейного электропривода, особенно «обращенной» моди-
фикации. Здесь наибольшее внимание могут привлечь
иу in решения двух весьма важных транспортных задач:
1) создание транспортного конвейера для участков
i большой плотноегыо движения, где вполне оправдано
размещение на пути, питаемом извне, первичной части
машины, и максимальное упрощение вторичной части,
размещаемой на движущихся вагонах;
2) создание электрострады—пути, у которого разме-
таемые в земле обмотки благодаря электромагнитному
5
взаимодействию с полюсной системой, размещенной на
дв! жущпхея экипажах, обеспечивают необходимые тяго-
вые усилия для пуска, движения, торможения экипа-
жей.
Ограниченный объем книги не позволил коснуться
многих других вопросов, связанных с конструированием
и использованием линейных двигателей.
В работе над книгой автор пользовался неоценимой
помощью своих ближайших соратников по разработкам
в области линейных двигателей: А. Г. Ангелова,
Г. К Гетьмана, А. М. Григоровича, А. А. Горбунова,
О. Н. Матеранской, В. В. Ростовцева, 'М. А. Сухановой,
Т. А. Таракановой, А. X. Френкеля.
Большую помощь своими замечаниями и советами
оказали автору В. А. Винокуров, Б. Д. Никифоров,
Л. И. Скиба и особенно Ю. М. Келим, взявший на себя
труд по редактированию рукописи.
Автор выражает всем им, а также своей помощнице
в оформлении рукописи Е. Л. Абрамовой искреннюю
благодарность.
Автор будет весьма признателен читателям, которые
пришлют свои замечания по адресу: 113114, Москва,
М-114, Шлюзовая наб., 10, изд-во «Энергия».
Автор
I Ч\ВЛ ПЕРВАЯ
ПРИНЦИПИАЛЬНЫЕ ОСОБЕННОСТИ
ЛИНЕЙНОГО ЭЛЕКТРОПРИВОДА
I I. ПОСТУПАТЕЛЬНОЕ ПЕРЕМЕЩЕНИЕ И ЛИНЕЙНЫЙ
>Л ЕКТРОПРИВОД
Линейным электроприводом будем называть электро-
магнитное устройство, создающее поступательное (в том
числе и возвратно-поступательное) движение переме-
щаемой приводом массы непосредственно за счет элек-
тромагнитных взаимодействий между перемещающимися
друг относительно друга элементами и обеспечивающее
>.'1сктрическое управление этим движением.
В этом смысле нельзя говорить о наличии линейного
>лектропривода, например, у первого электровоза Пей-
джа (Page). Это двигатель возвратно-поступательного
тижения, у которого попеременно подключаются к ак-
кумулятору правая и левая катушки и соответственно
плунжер перемещается вправо и влево, вращая через
шатунно-кривошипный механизм колеса локомотива.
Вместо парового возвратно-поступательного двигате-
ля у привода паровоза здесь возвратно-поступательный
->лектродвигатель. Но способ осуществления поступатель-
ного движения локомотива и поезда остался традицион-
ным: тяговое усилие создает сцепление вращающегося
колеса с неподвижным рельсом; электромагнитные взаи-
модействия между катушкой и плунжером не создают
непосредственно поступательного движения перемещае-
мой приводом массы поезда. Как видим, наличие в си-
стеме привода двигателя возврзгно-поступателыюго ти-
па еще не позволяет считать такой привод «линейным»
и указанном выше смысле.
В основных типах транспортных средств (тепловозах,
электровозах и т. п.) вращающиеся элементы электро-
привода перемещаются вместе с самим транспортным
средством. Такой тип привода («подвижный в подвиж-
7
ном») имеет свои специфические особенности и приме-
няется в основном для больших поступательных переме-
щений. При проводимом ниже сравнительном рассмот-
рении характеристик ему больше всего соответствует
линейный электропривод с размещением па транспорт-
ном средстве (экипаже) элементов, потребляющих от
внешнего источника энергию, преобразуемую в механи-
ческую, условно называемый дальше прямой лпиеннып
электропривод или просто линейный электропривод.
Обращенный линейный электропривод, у которого
указанные элементы не перемещаются вместе с транс-
портируемыми массами, а расположены неподвижно иа
пути, представляется правильным сравнивать с сущест-
вующим электроприводом поступательно перемещаю-
щихся лент конвейеров, с многодвигательными привода-
ми рольгангов прокатного стапа для поступательного
движения прокатываемых изделий, с приводом лебедок,
шахтных подъемников, а также с приводами, обеспечи-
вающими малые поступательные перемещения кареток
самопишущих приборов, дверей лифтов и т. п. В этом
случае двигатель, вызывающий поступательное движение
каких-либо масс, сам неподвижен.
Следующему типу современного электропривода
с циклическим возвратно-поступательным движением —
приводу строгальных или долбежных станйов, компрес-
соров, электромолотков и т. п. — соответствует линейный
электропривод с двигателем возвратно-поступательного
движения, ротор которого непосредственно связан с пе-
ремещаемыми массами. Если бы упоминаемый выше
двигатель Пейджа приводил в движение поршень насо-
са, он по праву мог бы быть назван первым линейным
электроприводом этого типа в точном соответствии
с принятым нами определением. Именно циклический
характер возвратно-поступательного движения является
определяющим при выделении этого типа электропри-
вода. В противном случае к устройствам с возвратно-
поступательным движением могли бы быть причислены
не только, например, открывающаяся и закрывающаяся
дверь лифта, но и электропоезд, отправляющийся из
Москвы п затем в нее возвращающийся.
Еще одно замечание классификационного характера.
Хотя в приведенном выше определении линейного
электропривода речь идет о поступательном или воз-
вратно-поступательном движении, известные дуговые
8
। ii мркприноды [76, 77] по своим характерным особен-
на 1ям (наличию разомкнутого магнитопровода, «крае-
H1.I' >ффектов» и др.) могут также рассматриваться как
ин« ними электропривод. «Линейный двигатель есть ду-
шной разомкнутый двигатель в том частном случае, ког-
1.1 радиус дуги стремится к бесконечности» — имеется и
iiikoi'i подход, например, в статье Г. II. Штурмана [86].
Основное внимание уделим первым двум видам ли-
ik Иных электроприводов — возвратно-поступательный
ми'мроиривод был рассмотрен подробно в [41]. Хотя
। момента ее опубликования в этой области появилось
много интересного и нового, объем данной книги не по-
толчет рассмотреть и эти материалы.
I ФИЗИЧЕСКИЕ И ТЕХНИЧЕСКИЕ ПРЕДЕЛЫ
111*1 ОБРАЗОВАНИЯ ДВИЖЕНИЯ С ПОМОЩЬЮ
Ml ХАНИЧЕСКОГО СЦЕПЛЕНИЯ
В настоящее время у транспортных приводов сила,
кидающая поступательное движение (сила тяги), обра-
|уе!ся почти исключительно за счет сцепления колес
<• микровыступами. «Почти» потому, что движение гу-
сеничного транспортного средства по заметно деформи-
рованному грунту занимает, по-видимому, промежуточ-
ное положение между движением колес локомотива по
рельсам (или колос автомобиля по шоссе с твердым
покрытием) и движением зубчатого колеса по зубчатой
рейке.
Будем дальше рассматривать только вид сцепления,
характерный для локомотива, автомобиля и т. п. Сила
гиги в этом случае определяется простым соотноше-
нием
(1-1)
где Гт — сила тяги, реализуемая при сцеплении данно-
к> колеса (колесной пары, всех колес локомотива и т. п.)
с путем; т—масса транспортного средства, приходя-
щаяся на данное колесо (колесную пару и т. п.), mg
обычно называется сцепной вес; g— ускорение свобод-
ною падения, g=9,81 м/с2; ф— коэффициент сцепления
Елиного колеса с данным путем (или средний коэффи-
циент сцепления данной колесной пары и т. п. с путем).
Цля преодоления сопротивления трения колес ваго-
нов (прицепов и т. п.) приходится затрачивать силу
9
ГЯГ11
Fr=Pf, (1-2)
где P — сила давления на трущиеся поверхности; f —
коэффициент трения.
Если привести все сопротивление трения колес (в том
числе и трение в подшипниках) к трению качения пары
колесо — путь, получим:
FT=gml', (1-3)
где f' — приведенный коэффициент трения, например
для пары колесо рельс/'^0,002.
Формула (1 3) вполне идентична (1-1), но ф в (1 1)
может достигать значений 0,4—0,45 для пары колесо
локомотива — рельс (и еще больших значений для пары
колесо автомобиля — шоссе), а максимальное значение
У для такой же пары — 0,005—0,01.
Природа коэффициентов трения и сцепления одна
п та же, а предельные их значения в сотни раз отли-
чаются друг от друга. Далее, как У, так и предельное
критическое значение ф=фк определяются большим
числом случайных параметров: состоянием поверхностей
колеса и данного участка рельса; наличием влаги, сма-
зочных материалов и т. п. Однако данное, реально
используемое при движении поезда значение ф<фк
определяется совсем другими обстоятельствами.
Разберем простейший случай. Пусть локомотив со
сцепным весом inng везет по горизонтальному пути
поезд общей массой mti с установившейся малой ско-
ростью, при которой сопротивлением воздуха можно
пренебречь.
Тогда имеет место равенство
gm^^gmnf', (1-4)
откуда при заданных тл, шп и У имеем:
Ф = (1-5)
Отцепите вагон, и ф уменьшится. А вот прицеплять
вагоны надо с оглядкой: как бы не получилось шпГ>
>тлфк, так как тогда колеса локомотива начнут про-
скальзывать и не смогут обеспечивать движении поезда,
как бы ни была велика мощность двигателей локомоти-
ва. При ф^фк эта мощность равна.
Р дв—рTV/т]п,
(1-6)
10
। ir v — скорость движения; т]ц— к. п. д передачи вал
инн ателя — колесо,
или
PnB=g'nnipu/T]n, (1-7)
откуда
Яр—Р двТ]п / S
(1-8)
Читателю-электрику полезной окажется аналогия с системен
. ппхрониых машин, где значение угла 0 определяется нагрузкой, но
имеется верхний предел нагрузки, соответствующий 0пр.д—л/2;
О Оппед — ограничение такого же характера, как ф<3фк.
По если в определении текущих значений 6 и яр, однозначно свя-
4.1IIIIIJX с нагрузкой, имеется аналогия, то в установлении их пре
тельных значений разница весь-
ма существенная.
Предельное значение sin О
неизменно, а предельные зна-
чения яр,, определяются лишь
вероятностными характеристи-
ками [1]. Вероятностные ха-
рактеристики коэффициен п
сцепления (везде имеются в
виду вероятности реализации
в данных условиях предельно-
го коэффициента сцепления
1|>к) подробно рассмотрены в
[29]. Приведенные там харак-
теристики распределения ф„
имеют большой разброс: так по
японским данным для ti = 0
фк = 0.23^-0.38; для v= 10 км/ч
i|'„ = 0.13-т-0,19; для п = 20 км/ч
hmm. распределение
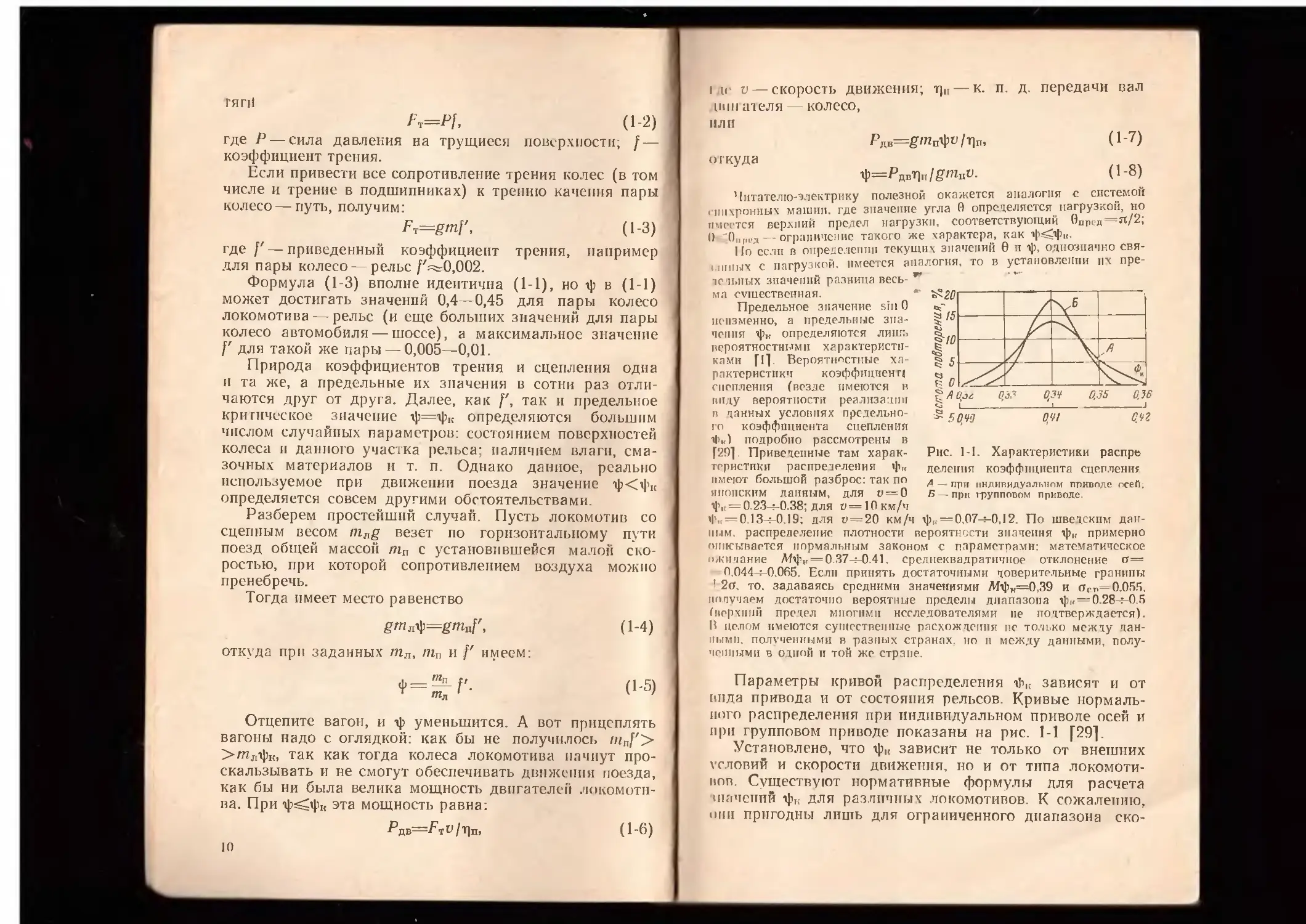
Рис. 1 I Характеристики распре
деления коэффициента сцепления
Д — при индивидуальном приводе осей
Б — при групповом приводе.
ф,< = 0,07-^0,12. По шведским дан-
плотности вероятности значения ф„ примерно
описывается нормальным законом с параметрами: математическое
ожидание Мфк = 0.37-=-0.41, среднеквадратичное отклонение о=
0,044^-0,065, Если принять достаточными доверительные границы
1 2(Т. то, задаваясь средними значениями Мф„=0 39 и аГР= 0 055.
получаем достаточно вероятные пределы диапазона ф,<=0.28-s-0.5
(верхний предел многими исследователями не подтверждается)
В целом имеются существенные расхождения нс только между чан-
ными. полученными в разных странах но и между данными, полу-
ченными в одной и тон же стране.
Параметры кривой распределения Фи зависят и от
вида привода и от состояния рельсов. Кривые нормаль-
ного распределения при индивидуальном приводе осей и
при групповом приводе показаны на рис. 1-1 [29].
Установлено, что ф1( зависит не только от внешних
условий и скорости движения, но и от типа локомоти-
вов. Существуют нормативные формулы для расчета
значений i|iI( для различных локомотивов. К сожалению,
они пригодны лишь для ограниченного диапазона ско-
ростеи (до скоростей 100 -150 км/ч) и без указания
параметров закона распределения и доверительных гра-
ниц. Для иллюстрации характера зависимости фк от ско-
рости приведем самую простую формулу, относящуюся,
правда, не к самым современным локомотивам:
фк—30/ (100—и), (19)
где v — скорость движения локомотива, км/ч.
Для современных отечественных электровозов часто
пользуются формулами, полученными по опытным дан-
ным Б. Н. Тихмепевым':
для и^45 км/ч
ф„(о) =0,2354 10/(95+11 и); (1-10)
для 45 км/ч^о^150 км/ч
фк=0,08+95/(418+30. (1-11)
л го означает, что, например, при скорости в 150 км/ч расчетное
значение фк берется равным 0.19, и тяга современного электровоза
со сцепной массой 184 г пи при какой мощности электродвига-
телей не может превысить значение
Гт^£нп|ж~3.5- 105 Н;
а при скорости о=100 км/ч ф„ = 0,21 и сила тяги /'T=g3,85 1 05 II.
В [48] приводится ряд нормативных формул для
определения сопротивления движению разного вида со-
ставов при трогании и для современных скоростей дви-
жения. Примем для нашего иллюстративного расчета
близкое к одной из таких формул выражение
^т=[Г !++a]g/nn, (1 12)
где а — угол подъема; f„ — коэффициент составляющей
сопротивления движению, зависящей от скорости.
Для реально осуществляемых подъемов (несколько
метров па 1 км пути) sin a^a^tg а; обычно a=0,005-r-
0,015. На малых скоростях — это определяющая состав-
ляющая нагрузки, так как f'^0,001-4-0,003. Формула
(1-12) соответствует сопротивлению нагрузки при уста-
новившемся движении. Для создания ускорения тре-
буется дополнительная сила Fa—maa, где а — создавае-
мое ускорение. Для режима движения с ускорением
(1-12) примет вид:
^rMr+M-a+a/gJgmn. (1-13)
1 Близкие по типу формулы получены также для различных ло-
комотивов Г. В Фоминским. О. Л. Некрасовым и другими сотрудни-
ками ЦНИИ МПС.
12
Используем для дальнейшего анализа понятие коэф-
фициента полезной нагрузки ka=malm„.
Тогда из (1-13) с учетом (1-5) имеем:
£B[/4-k>+a+a/g] =ф^фк-
Наибольшее значение этой основной оценки исполь-
ювапия транспортного устройства
ktvnax f'+fv+^A-a/g (1 ’1
становится в такой же мерс случайным значением, опре-
деленным лишь вероятностными характеристиками, как
и значения фк, f' и fv. Но решающим фактором является
разброс значений фк, ибо f', как уже указывалось, со-
ставляет лишь небольшую часть суммы в знаменателе
выражения (1-14) и разброс его значений также мень-
ше, чем фк; то же в определенной мере относится и к fv.
Какое выбрать йитаж, как загрузить данное транс-
портное устройство, как максимально использовать элек-
тропривод, имеющий промежуточное звено типа сцепле-
ние микровыступами — весьма важные для практики во-
просы.
Можно дать нагрузку, исходя из фктак (например,
принимая фк=0,38 для режима трогания), но тогда воз-
никает совершенно определенная вероятность того, что
при какой-нибудь попытке тронуться с места поезд не
пойдет. Эта вероятность равна
Ф1(=0.38
У Р(^^к
Фк=0
п существенно отлична от нуля.
В зависимости от коэффициента нагрузки будет из-
меняться и экономическая эффективность транспортной
работы, которая определяется как разность между по-
лезным результатом этой работы и возможными расхо-
дами при необходимости присылки дополнительного
локомотива, в случае приостановки движения и в иных
случаях, когда значение фк оказалось меньше, чем при-
нятое при расчетах. Эти возможные расходы представ-
ляют собой произведение интегральной функции веро-
Фк
ятпости Р(фк)г/фк на цену отказа. По экономическим
о
13
соображениям чем больше цена отказа, тем дальше от
предельного значения надо брать расчетное значение фк.
При высокой цене отказа его следует принимать су-
щественно меньше и математического ожидания фк.
Необходимые расчетные соотношения могут быть получены при
использовании метода «оптимума поминала», рассмотренного в [56].
Результаты выполненных по этому методу расчетов нашли отраже
ине на рис 1-2. На рис 1-2 по осп ординат отложены значения три,
принимая которые можно обеспечить максимальную экономическую
эффективность. Расчеты выполнены при следующих параметрах рас-
пределения ф„: математическое ожидание Л1ф„ = 0,39; о=0,06,
фкт<п=0,21 фКтах=0,51. Как видно из графика, рабочее значение
фи невелико.
Казалось бы, есть простое средство увеличивать силу
тяги — повышать значения тп, но в реальных транс-
портных системах существенно ограничена еще одна ве-
ЦЧ
Ч3
О Ю 20 30 W 50 60 ю so зо too
Ценя, отказа'Отн ед
Рпс. 1-2. График для определения
оптимальной величины расчетного ко-
эффициента сцепления.
личина—допустимая нагрузка на путь. В настоящее
время допустимая нагрузка для отечественных магист-
ральных железных дорог не должна превышать 23—25 т
на колесную пару. Нагрузка в 30 т на колесную пару
допускается лишь при весьма больших ограничениях,
накладываемых на динамические воздействия, и, по дан-
ным службы пути, при этом существенно ускоряется
износ рельсов и всего верхнего строения пути.
Таким образом, как само по себе небольшое значе-
ние ipIt, так и его вероятностный характер при значи-
тельной «цене отказа» серьезно ограничивают возможно-
сти привода, использующего сцепление колесо — рельс,
колесо — шоссе и т. д.
Для приближенной количественной оценки этих огра-
ничений условимся считать, что значение фк определяет-
ся по (1 9) в широком диапазоне скоростей, а в процессе
разгона принимаем фК|=0,25.
При определении коэффициента нагрузки для случая
движения с малой скоростью на участке с углом подъ-
ема а имеем:
ЛН1=фк1/(Г+а), (1-15)
И
и, ii.iпример, при а—0,01 (10'Уоо) и /'—0,01)2 получаем
/.•„I <20 Важно отметить физическое ограничение угла а,
при ко юром возможно движение вообще, накладывае-
мое данным значением фкь При /г„ = 1 имеем.
sin а=фК1—}', (1-16)
। е. в пашем случае sin <1^0,248.
Никакой локомотив при принятом реальном ф1(=0,25
иг сможет двигать самого себя на подъеме в 14—15°
при любом сцепном весе (массе) и любой мощности
своих двигателей. Этот физический предел может по-
гнаться далеким для специалистов в области магист-
рального железнодорожною транспорта, где в настоя-
щее время эксплуатируются на порядок менее крутые
подъемы, по для промышленного, особенно карьерного,
гранспорта это насущная задача ближайшего будуще-
го Добыча полезных ископаемых из глубоких карьеров
<нкрытым способом получает все большее распростране-
ние, и возможность использовать уклон вывозной траи-
тен, например, в 15° и еще круче (вместо существую-
щих сейчас предельных 2—3°) имеет кардинальное зна-
чение.
Экономически это означает многомиллионную эконо-
мию только на вскрышных работах, так как объем вы-
нутого грунта фактически обратно пропорционален зна-
чению а, и возрастание а в 5—6 раз во столько же раз
удешевит и ускорит работы по созданию траншеи.
Экологически это означает соответствующее умень-
шение длины рубцов от карьеров на теле планеты.
Но и для магистрального железнодорожного транс-
порта анализируемое ограничение по сцеплению на рас-
четных подъемах (по транспортной терминологии — ру-
ководящих подъемах) существенно снижает па ряде
участков допустимый коэффициент нагрузки. При не-
обходимости посылать на подъем большегрузные поезда
приходится проходить подъем двойной, а иногда и трой-
ной тягой, что требует содержания в депо лишних локо-
мотивов, бригад и занятия перегонов дополнительными
локомотивами-толкачами. Существенное ограничение до-
пустимых подъемов при строительстве новых железных
дорог весьма повышает их стоимость, особенно при про-
хождении сложного рельефа.
Именно учет этих обстоятельств привел автора со-
вместно с А. Т. Головатым, Б. Д Никифоровым,
15
Л. И. Скиба, В. Е. Доценко, Б. А. Метелкиным и
А. М. Григоровичем к предложению о первоочередном
использовании линейных двигателей на железнодорож-
ном транспорте в качестве приводов для создания «уси-
лителей тяги» на подъемах с использованием линейного
электропривода, подробно описанного в § 3-3.
При определении коэффициента нагрузки, допусти-
мого для обеспечения заданного ускорения а на горизон-
тальном участке при небольшой скорости, имеем из
(1-1'1) при и а=0:
Ф
• (Ы7)
“ * /' + a g v '
Для получения минимального пути разгона следует
добиваться наибольшего ускорения а, допустимого из
соображений прочности, безопасности или комфорта —
в случае пассажирского поезда. Но легко показать, что,
как и в случае с предельным подъемом, существует
физическое ограничение и для ускорения. Никакой локо-
мотив с любым сцепным весом и любой мощностью дви-
гателей не может превысить ускорения
f')g, (1-18)
что непосредственно следует из (1-17) при /ен=1.
Для принятых данных и Ли=1 <1^2,43 м/с2. При /г„ = 20 пре-
дельное значение ускорения около 0,1 м/с2. Это означает, что для
разгона до у = 30 м/с (108 км/ч) потребуется время /=300 с и
участок разгона £.=4500 м (фактически и значения I и L будут
намного большими, ибо с ростом скорости будет возрастать f„ и
снижаться ф„). Это ограничение, таким образом, также снижает
эффективность транспортной операции, пропускную способность же-
лезных дорог. Задавшись более высоким значением ускорения а (на-
пример, <1 = 0,03g при Д = 0 и а=0), для принятых значений фк
и Г получим /гпг=5:7,8; в 2.5—3 раза меньше нагрузка па тот же
локомотив, чем при /гН| = 20, что соответственно снижает эффектив-
ность работы транспорта, хотя при этом уже имеем меныпее время
разгона />100 с и меньший участок разгона L>1500 м. Правда, при
этом расчетном случае вероятность застревания в пути, в гом числе
и па подъеме, близка к нулю.
Приведем для сравнения из [21] значения максимальных уско-
рений для автомобилей: 2,0- 2,5 м/с2 — для легковых машин, 1.7—
2,0 м/с2 — для грузовых и 1,8—2,4 м/с2 — для автобусов (в 8 раз
больше, чем принято в нашем последнем примере для поезда), по
все же a/g^0 25, так как и здесь лимитирует значение ф„. Возмож-
ность создания больших ускорений у линейного электропривода (осо-
бенно у второго типа — обращенного линейного электропривода),
в том числе a>g. и, следовательно, возможность обеспечения как
малых времен н участков разгона, так и движения па любых подъ-
емах, вплоть до вертикали, является серьезным принципиальным
преимуществом линейного электропривода.
16
I me более существенны oi рапичепия, вносимый
in ш> и. низанием трепня в процессе торможения Уверен-
!< и быстрое торможение — основное условие безопас-
I in движения. Малый коэффициент сцепления при
|црм1)жении и существенное снижение его при нагреве
|рущихся поверхностей соответственно увеличивают тор-
luiiioH путь, а случайный характер коэффициента сцеп-
|| пня (большая его дисперсия) вносит опасную неопре-
н в ппость при оценке возможной реализации процесса
|прможеиия.
Выше приведены данные о возможных ускорениях
и 11><>1ветствующих возможных путях разгона для же-
н шодорожного состава с данным коэффициентом на-
ip\ iKii /гн. Если бы такими же были параметры замед-
11'11114 и пути торможения, безопасность движения была
«пл явно неудовлетворительной. Но при разгоне ускоре-
ние создают лишь колеса локомотива, при торможении
ымедлепие создают все колеса состава и тормозящее
усилие больше разгонного в несколько раз. Изменяется
сим характер трения: вместо качения колеса по рельсу'
дожатые тормозными колодками колеса тормозятся тре-
нием скольжения, а при этом коэффициент трения стали
но стали достигает уже значения 0,15, близкого к ко-
>||к|шциенту сцепления. Можно приближенно принять,
что предельное относительное замедление a3/g при этом
p.iniio коэффициенту трения скольжения f'ci! (при замед-
лении па горизонтальном пути), так как тормозящее
\< плие
Еторм=ёИ1п? ск=:ЯзН1п’, ^3/g=^fcK-
Оптимальное значение можно определить методами статп-
1пчсской оптимизации (оптимума номинала), введя зависимость ре-
I» плата транспортной операции от (h/g. При этом необходимо
учесть как вероятность повреждения какой-то части груза при Дан-
ни \ значениях a/g, затраты на обеспечение прочности транспортного
упройства, сумму произведении ущерба от аварий разного вида на
их вероятность, связанную с путем торможения АТорм = Ц2/2а.,, так
и 1||>1|>сктивность от транспортной операции, зависящую от скоро-
< in v диализ этот не слишком прост даже для грузового трапспор-
। .1 н должен использовать методы, близкие к «исследованию опе-
р । iiiii». для пассажирского транспорта. Можно полагать, исходя из
ПЧ1Ч1ПДПЫХ логических предпосылок, что это значение должно быть
существенно больше, чем a3/g— 0.15 Вероятно, для экстренного тор-
можения подошло бы значение a3/g^Q,§ аналогично ускорению са-
молет.! при взлете [75] Если бы это удалось осуществить на элек-
1 рос граде с гарантированным интервалом между машинами, с такой
ле организацией движения, как на железных дорогах, нли лучшей.
Можно было бы резко уменьшить ужасающий список жертв автомо-
141 in: в настоящее время он, по данным статистики США, насчиты-
Бает ежегодно свыше 54 000 убитых, более 2 000 000 раненых и по-
лучивших тяжелые увечья
В [94], по данным статистики США, указывается, что на
100 млрд, пассажиро-километров имеют место за 1940 1960 гг.
76 смертей на железнодорожном транспорте против 2270 па автомо-
бильном транспорте — автомобиль «убивает» примерно в 30 раз
чаще поезда. С ростом скорости автомобиля доля аварий со смер-
тельным исходом резко возрастает — более чем в 6 раз (от 8 до
50 на каждую тысячу аварий) при росте скорости лишь в 2 раза
(от 50 до 100 км/ч). По-видимому, будет действовать и обратная
зависимость: если на электростраде (см. § 4-2) при скорости
100 км/ч иметь замедление в 4 раза больше, чем сейчас па шоссе,
то благодаря этому истребительные последствия автомобильной ско-
рости уменьшились бы в 5—6 раз. Далее, при уменьшившемся ко-
эффициенте трения пары колесо — шоссе (мокрое шоссе, ледяная
корка и т. д.) водитель уменьшает скорость автомобиля, а маши-
нист при соответствующей ситуации па железной дороге — скорость
поезда. При этом снижается эффективность использования транспор-
та по сравнению с режимом более благоприятного коэффициента
трения пли тем более с режимом гарантированного короткого тор
мозного пути, который мог бы быть обеспечен на электростраде или
железной дороге с электромагнитным взаимодействием между по-
движным составом и путем. Реверс, легко достижимый у линейного
электропривода, проявляется здесь как существенное преимущество
линейного электропривода перед линейным приводом с реактивным
двигателем. Следует также заметить, что если для создания тяги
использование взаимодействия с рельсами как путевой структурой
(вторичным элементом) линейного двигателя практически не нашло
существенного применения, то использование ферромагнитных
свойств рельса для создания электромагнитного тормоза оказалось
достаточно эффективным и в настоящее время широко применяется
значительно снижая тормозной путь и повышая безопасность дви-
жения
Для общего случая движения со скоростью V,
наклона а и ускорением а коэффициент нагрузки
целяем по формуле
ъ __ Д (г)__________________________________
“ f' + fv + a + arg ~ (100 + 3,6t>) (/„+ a -j-a/g) '
углом
опре-
30
(1-19)
Используя нормативную формулу из [48]
[„=3,6 -10-5и( 1,2+0,108ц), (1-20)
получаем кубическое уравнение относительно скорости
+ 72- 10s (а + —")— 22 10= 4- = 0. (1-21)
\ g J
Результаты решения этого уравнения (значения един-
ственных действительных корней) для различных зна-
чений параметров а и kB при а=0 даны в табл. 1-1.
18
Таблица 1 1
lni'ieinm предельных скоростей
1 1 1 5 5 10
</, м/с2 0 1 2 0 0,1 0
V, км ч 425 165 50 230 45 170
Как видно из табл. 1-1, при /г„=1 а=0, а=0, пре-
дельная скорость довольно велика. Возможно, здесь
сказалось допущение о приемлемости выражения (1-9)
для высоких скоростей: при сколько-нибудь заметной
нагрузке (£„=5) и а=0, а=0, п^230 км/ч
Таким образом, создание высокоскоростного транс-
порта (п=450-^500 км/ч) невозможно на базе исполь-
ювапия сцепления колесо — рельс. При увеличении по-
ле нюй нагрузки физически реализуемая предельная
скорость резко падает. Так, если при /ги=5 о=230 км/ч,
то при £„=10 предельное значение установившейся ско-
рости па горизонтальном пути составит лишь 170 км/ч.
Высокоскоростной наземный транспорт может опираться
на рельсы, но двигаться по ним он может только с ли-
ik иным тяговым приводом.
Более категоричное утверх<дение, нередко высказы-
ваемое, что такой транспорт и опираться на рельсы не
может, представляется нам менее точным. Главным
является бесконтактное создание тягового усилия, и
можно вполне согласиться с Г. В. Алексенко [4], кото-
рый утверждает, что для движения со скоростями 350 —
500 км/ч наиболее приемлемым признан линейный тя-
говый электродвигатель переменного или постоянного
1пка, позволяющий реализовать тяговое усилие без не-
посредственного контакта с рельсом Здесь можно со-
слаться также на [75], где утверждается, что общепри-
нято считать птах^320^-480 км/ч для экипажа на сталь-
ных колесах и стальных рельсах, и на [96], где указано,
1-го направляющие и опорные свойства колеса могли бы
быть использованы до скоростей 400—450 км/ч1.
' В [75] показано, что при соблюдении многих весьма строгих
Vi loniiii скорость колесных экипажей может быть в перспективе по-
вышена до 960 км/ч; во Франции реально была достигнута скорость
Г'О км/ч.
19
Из изложенного выше ясны большие возможности
линейного электропривода для работы на крутых подъ-
емах, со значительными ускорениями, на высоких ско-
ростях. Но есть еще одно обстоятельство, которое де-
лает целесообразным применение линейного электропри-
вода и в тех пределах углов, скоростей, ускорений, где
электропривод со сцеплением колесо — рельс вполне нор-
мально работает. Это факт значительного истирания
рельсов (и колес), необходимость в их частой замене,
особенно под воздействием ведущего, набегающего ко-
леса локомотива. Износ трущихся поверхностей зависит
от работы сил трения [68. 74], а эта работа во много
раз больше у ведущих колес. Учет износа заставляет
ограничивать, как уже указывалось выше, и сцепной
вес. В [79] приводятся данные, показывающие, что
увеличение статической нагрузки на ось от 20,5 до 23 т
(па 11%) может увеличить одиночный выход рельсов по
контактно-усталостным дефектам в 2 раза.
Весьма значительную экономию истирающегося ме-
талла может дать также использование линейного элек-
тропривода в режиме тормоза. Взаимодействие тормоз-
ных колодок и бандажей колес при торможении в на-
стоящее время превращает в металлическую пыль
миллионы тони металла. Но если в режиме торможения
работа «по обдирке микрочастиц» трущихся поверхно-
стей является полезной для поглощения кинетической
энергии движущегося транспортного средства, то в ре-
жиме тягп эта «обдирка» поверхности рельса и бандажа
колеса идет за счет энергии тягового электропривода.
Обычно определяют к. п. д такого электропривода
в виде
Тр)п=Т]прТ)двТ)ред, (1-22)
где т]цр —к. п. д. преобразователя, включенного между
источником питания (например, контактной сетью) и
электродвигателем; здесь учитываются и потери в устрой-
ствах управления и регулирования; r]nR — к. и. д. двига-
теля; для тяговых двигателей локомотивов он довольно
высок (например, для двигателя НБ406А — около
0,92); т)Рсл — к п д. редуктора, г)рсД—0,95-0,96
При таком расчете к. п. д. системы привода от кон-
тактного провода до обола ведущего колеса не учиты-
ваются потерн как па нагревание трущихся поверхно-
стей вследствие упругих деформаций в слоях сцепления,
так и на создание остаточных деформаций в этих слоях
20
п особенно па отрыв механических частиц. Эти потерн
можно оценить (по исследованиям, проведенным под
руководством проф. И. П. Исаева) в 10—15% полной
мощности локомотива.
Выше в основном анализировали данные по сцепле-
нию и трению колеса о рельс, характерные для совре-
менного железнодорожного транспорта. Для автомо-
бильного транспорта возникают лишь количественные
отличия; ограничения, вносимые коэффициентом сцеп-
1ГПНЯ, имеют место и здесь. Для количественного апа-
лта этих ограничений можно воспользоваться данными,
приведенными в [94].
Значения коэффициента сцепления ф и коэффициента
। рения /, принимаются для бетонного сухого шоссе
(автострады) фк=0,69, fi=0,01; мокрого шоссе фи—0,5,
fi=0,05; щебеночного мокрого шоссе фи=0,3; /|=0,03
Весьма существенный разброс этих значений опре-
деляется состоянием самого шоссе (наличие выбоин, на-
пример, может повысить коэффициент трения до значе-
ния /=0,13) и, конечно, состоянием поверхности коле-
са на гладкой резине лучше не предпринимать
путешествий по горным дорогам. В целом разброс дан-
ных для пары колесо автомобиля шоссе еще больше,
чем для пары колесо локомотива (вагона) — рельс.
Расчеты для случая автомобиль — шоссе ведутся по
формулам, аналогичным приведенным выше, с учетом
ин о обстоятельства, что здесь gtnn есть нагрузка, при-
ходящаяся на ведущие колеса, a gm„— общий вес авто-
поезда. Образование дорожной пыли — бетонной, асфаль-
тной (и «резиновой» — от истирания колес), осколков
щебенки п т. п. — не только снижает срок эксплуатации
шоссе и автомобиля и ухудшает условия на дороге, но
н является видимым свидетельством снижения реаль-
ного к. п. д. тягового привода автомобиля.
Существенным является также воздействие моментов
инерции вращающихся элементов на динамические свой-
стиа транспортируемых тяговых приводов с вращаю-
щимися двигателями. В суммарную массу поступатель-
ного перемещающегося транспортного средства входит
масса привода во всех видах систем с транспортируемы-
ми двигателями, как с вращающимися, так и с линей-
ными приводными двигателями. Однако в первом слу-
ч ie, когда в режиме разгона hj жно еще раскрутить ро-
к>ры двигателей и шестерни редукторов, к фактической
21
суммарной массе тл нужно добавить эквивалентную
массу
k k
где /г число вращающихся элементов; J—полярный
момент инерции, приведенный к колесу с радиусом ката-
ния R.
Если обозначить через безразмерный коэффициент
у=тл[т отношение дополнительной эквивалентной мас-
сы к массе транспортного средства (включающей также
фактическую массу вращающихся элементов привода),
то реальное ускорение для привода с вращающимися
двигателями
FT — Д . Fr — F..,
J1 т (1 + у) т • л|"1'
(1-23)
Для приближенного определения значения у при тя-
говых расчетах в [7] рекомендуется формула вида
Y = 0,6^, (1-24)
где /пв —масса вращающихся элементов: т— масса
данного типа подвижного состава.
Для оценки варианта линейного электропривода,
использующего опору вращающегося колеса на рельсы,
воспользуемся опытными данными по определению зна-
чения у, приведенными в [7] для груженых вагонов и
электровозов.
Tfa блица 1-2
Опытные значения коэффициента инерции вращающихся
масс для различных типов подвижного состава
Тип подвижного состава 71 (.как повозки") Та („как машины") Т -=ъ —Т1
Двухосный грузовой вагон,
груженый Четырехосный грузовой ва- 0,042 — —
гон, груженый Четырехосный пассажи ский 0,028 — —
вагон . 0,042 —
Электровоз" ВЛ-22 . 0.054 0,188 0,131
Электровоз ВЛ-23 . 0,048 0.178 0,13
22
Можно приближенно принять, что для создания рай-
ион силы тяги па автосцепке электровоза потребуется
примерно одинаковая масса электропривода с линейны-
ми двигателями и электропривода с вращающимися двп-
1.1 гелями. Ниже будет показано, что при учете массы
редуктора это вполне выполнимо.
Основной динамический параметр привода реали-
ivvMoe ускоренно — будет для линейного привода элек-
тровоза, не использующего опоры па рельсы (с магнит-
ной пли воздушной подушкой), примерно па 18%. а для
линейного привода электровоза, использующего опору па
рельсы (с. вращающимися колесами), примерно па 13%
больше, чем для привода электровоза с вращающимися
ппп ателями. Нас чаще интересуют динамические свойст-
ва самого привода — ускорение па единицу силы тяги,
отнесенное к массе привода. Если учесть, что масса эле-
ментов привода составляет примерно 25% массы локо-
мотива, то можно сделать вывод, что динамические
(пойства самого привода за счет исключения его вра-
щающихся элементов могут быть улучшены в 1,5 раза
и более.
Накапливаемая вращающимися элементами кинети-
ческая энергия при рекуперативном торможении частич-
но возвращается в сеть, при реостатном — теряется в ре-
опитах, при торможении противотоком — требует еще
пополнительной энергии из сети для компенсации.
Использование линейного электродвигателя позволя-
ет построить принципиально более падежный электро-
привод, чем это возможно при использовании вращаю-
щиеся электродвигателя.
Анализ неисправностей электропоездов и электрово-
1ов свидетельствует о том, что от четверти до половины
отказов приходится на узел тягового привода. Весьма
серьезным фактором снижения эксплуатационной надеж-
ности современных тяговых электродвигателей является
попадание в зазор пыли и мелких твердых частиц, за-
сорение ими системы вентиляции, а создание полностью
нрметпчных вращающихся двигателей большой мощ-
ности затруднено. Кроме того, при этом ухудшается
ш пользование их полезного объема.
Линейный двигатель, как будет далее показано, лег-
ко может быть выполнен герметичным. Герметичность
конструкции, значительные зазоры между перемещаю-
щимися друг относительно друга частями машины сти-
23
Мулируют поиски применения в линейных машинах особо
форсированных способов охлаждения. Ведется большая
работа по применению криогенной техники в системах
линейных электродвигателей, особенно при использова-
нии их совместно с магнитной подвеской.
На этом закончим рассмотрение принципиальных
преимуществ линейных электродвигателей и новых воз-
можностей, открывающихся при их использовании.
1-3. ОСНОВНЫЕ ТРУДНОСТИ И ПРОБЛЕМЫ
Рассмотрим следующие основные проблемы.
1. Экономическая (связана с появлением повой части
привода — путевой структуры). В рассматриваемых при-
водах первого типа это понятие совпадает с часто при-
меняемым понятием «вторичная часть» двигателя. Путе-
вая структура для приводов данного типа — это либо
укрепленная между рельсами или опорными полосами
продольная алюминиевая шипа высотой около 0,5 м и
толщиной 20 мм, либо биметаллическая шина из токо
проводной и ферромагнитной прокладок («сэндвич»), ли-
бо чисто ферромагнитная шипа. Делались попытки
использования в качестве ферромагнитных шин самих
рельсов. Если бы удалось получить технически приемле-
мые результаты, то такое решение во многих случаях
снимало бы экономическую часть проблемы. Пока, как
показывает практика, это не так. Стоимость же спе-
циальной шины н ее установки в среднем вполне соизме-
рима со стоимостью обычной железнодорожной колеи.
Если же ее выполнять из высококоэрцитпвпых магнит-
ных' сплавов или ферромагнитных полюсов с обмоткой
и системой электропитания, как это намечается в от-
дельных проектах электроприводов с линейными двига-
телями, стоимость «путевой структуры» весьма сущест-
венно возрастет. При огромной протяженности путевой
структуры для электропривода первого типа использова-
ние наиболее дешевой ее модификации, позволяющей
обеспечить необходимые технические характеристики, яв-
ляется важнейшим условием создания экономически эф-
фективного линейного электропривода, в частности для
транспорта.
2. Проблема начальных капиталовложений. Наибо-
лее распространенный сейчас вариант линейного двига-
теля— двусторонний линейный асинхронный двигатель
использует в качестве путевой структуры вертикальную
24
пишу. Но установка даже метра такой шипы на сущест-
чующем железнодорожном пути пли шоссе приведет
К гому, что по такому пути смогут проходить только
специальные экипажи. Применение одного и того же пу-
III для прохождения как обычных, так и специальных
кнпажей исключено. А это означает создание повой жс-
н шодорожпой или соответственно шоссейной сети. Та-
кие попытки делаются давно, например, в виде создания
монорельсового транспорта.
Монорельсовая дорога существенно дешевле, чем
Meipo, ио намного дороже обычной железной дороги. И
хотя первая монорельсовая дооога была построена
в России в 1820 г. (дорога на столбах Ивана Эльманова
|83] в селе Мягково под Москвой),- раньше, чем пер-
вая железная дорога обычного типа, — она не приобре-
ла еще народнохозяйственного значения в нашей стране.
Тот факт, что монорельсовая дорога в Вупертале
(липой примерно в 15 км успешно работает с 1901 г.,
п сочетании с фактом огромного развития рядом с этой
юрогой сети обычных железных дорог скорей говорит
против убедительности этого примера, чем за пего.
Успешная эксплуатация дороги нового типа доказы-
вает техническую осуществимость данного решения. Рас-
пространение пли нераспространение этого опыта зави-
сит в конечном счете от наличия пли отсутствия у повой
сороги технико-экономических преимуществ. Реалистич-
ный подход к внедрению линейного электропривода тре
бус-г, по-видимому, технических решений, позволяющих
in пользование с частичной реконструкцией существую-
щей сети железных дорог (в соответственно автодорог),
in ода в действие транспортных устройств с линейным
1лектроприводом на отдельных участках с сохранением
во смежности движения по этим участкам и обычных
транспортных средств.
3. Проблема механического воздействия на путь. При
<> (постороннем линейном двигателе может быть удовлет-
ворено сформулированное в предыдущем пункте требо-
вание возможности использования одного и того же пути
к.не для специального, так и для обычного подвижного
состава. При этом возникают трудности, связанные с су-
щественным притяжением специального транспортного
гредсгва к путевой структуре («первичной части» линей
шло двигателя к его «вторичной части») Дополнитель-
ное давление ла рельсы при этом может в несколько
25
раз превышать тяговое усилие. Соотношения параметров
двигателя, при которых возникают левитационные (от-
талкивающие, уменьшающие давление) силы, как прави-
ло, не являются оптимальными. Вопросам создания сил
левитации у некоторых новых линейных двигателей по-
священ § 3-5.
С другой стороны, возможны случаи, когда наличие
притяжения оказывается в известных пределах полез-
ным. Примером может служить электропривод комби-
нированного типа для усилителя тяги, когда для восьмн-
осного электровоза требуется примерно 12 т (120 кН)
дополнительной тяги (15 кН на ось) и по расчету па
каждой колесной парс появляется дополнительное уси-
лие около Р')П=45 кН. Если при этом остается все штат-
ное оборудование электровоза, создающее давление на
рельсы, равное 230 кН на колесную пару, суммарное
давление 275 кН можно считать допустимым и полезным
для некоторого (в 275/230=1,2 раза) увеличения тяги,
создаваемой обычными двигателями электровоза. Таким
образом, при создании электропривода с односторонним
линейным электродвигателем необходимо иметь возмож-
ность управлять отношением силы притяжения к силе
тяги; обычно требуется снижать это отношение
4. Децентрпрующне силы. При наличии в электро-
магнитной системе вдоль какой-нибудь осп (например,
вертикальной оси у) силы, создающей взаимное оттал-
кивание двух частей системы, в перпендикулярной этой
осн плоскости xz возникают силы, стремящиеся вывести
систему из положения наибольшего взаимодействия,—
децентрнрующие силы. И в двусторонних асинхронных
машинах при смещении от среднего положения возни-
кают децентрирующие силы. Во всех подобных случаях
требуется введение особых центрирующих систем—-ро-
ликов, опирающихся на путевую шину, либо специаль-
ных следящих систем.
При использовании дчя опоры рельсового пути обыч-
ного типа роль центрирующих систем играют реборды
колес.
5. Большой воздушный зазор в машине. Для линей-
ных электродвигателей, особенно предназначенных для
применения на транспорте, характерны большие зазоры
между подвижной и неподвижной частями. Для односто-
ронних линейных двигателей этот зазор должен превы-
шать допустимый клиренс экипажа, предусматривать воз-
26
Мо кпость прохождения над сооружениями, располагае-
мыми па пути (например, стрелочными переводами при
р.п положении вторичной части двигателя между рельса-
ми па уровне их головок). При вторичной части типа
• сшдвпч» зазор между ферромагнитными участками
м.внятной цепи включает еще толщину иеферромагнпт-
iiofi электропроводной полосы. Обычно зазор j транс-
портных линейных двигателей односторонней конструк
iiiiii должен быть 50 120 мм. Для двусторонних линей-
ных двигателей с немагнитной шиной толщиной Д общий
hi юр между двумя первичными ферромагнитными час-
ами равен:
6=26i—)—A—|—/(Z, г, с'пред) > (1’25)
tic ft|—минимально допустимый конструктивный воз-
(ушный зазор между первичной и вторичной частями
(обычно 6(>5 мм); Д — толщина электропроводной ши
цы (обычно Д^=20 мм); / — длина машины; г—радиус
кривизны пути; пПред — предельная скорость.
Например, при /=ыЗ м и г=300 м зазор с каждой сто-
роны должен быть еще увеличен на 3—4 мм, а при боль-
ших скоростях — еще примерно в 1,5 раза. Таким обра-
юм, общий зазор б равен примерно 50 мм. Зазоры
V вращающихся асинхронных машин в 50—100 раз
меньше.
I рудиости еще более возрастают, и техника стабпли
mini положения индуктора относительно шины еще бо
в । осложняется при применении новых видов опоры
кнпажей (воздушная подушка, магнитное подвешпва-
inn ). Все это приводит к необходимости выбирать доста-
1ОЧП0 большие зазоры б в магнитной системе индуктора,
когда речь идет о тяговых линейных двигателях для ре-
чных скоростных экипажей, отрицательные последст-
nii» лого очевидны. Большой зазор существенно увеличи-
< г потерн холостого хода, уменьшает использование
машины, заметно снижает ее к. п. д., особенно при асин-
ропиом исполнении линейного двигателя, когда сни-
leicn и cosip. Это уже фундаметалышй недостаток ли-
нейных электрических машин с подобными зазорами.
1 in к ипхроииой машины это положение может быть
и первом п| пблпжсиип рассмотрено следующим образом.
Увеличение зазора при малом насыщении стали и боль-
ших шзорах приводит к увеличению намагничивающего
I pi им 1ШНО1 о) тока /р практически в линейной зависи-
мо! in or зазора (7г,=&/гб). При данных габаритах и спо
27
собе охлаждения в машине ограничены допустимые по-
терн, пропорциональные квадрату тока в обмотках 1-\—
= (//г)2+/2р. Но именно (/'2)2— квадрат приведенного
вторичного тока — и создает при данном скольжении и
данном значении вторичного сопротивления г'2 полезную
мощность:
Рг = т(Ггуг'.^ = к.л (1-26)
Если /2i=const=C, то
P2=/?2(C—fe262)=Ci—С262, (1-27)
а к. п. д.
WW=C'i cz262. (1-28)
Слагаемое, пропорциональное квадрату зазора, при-
водит к уменьшению к. п. д. машины.
6. Влияние краевых эффектов. Эти вопросы много-
кратно рассматривались, и мы дадим здесь им лишь
качественную оценку. Поперечный краевой эффект у ли-
нейных асинхронных двигателей, вызванный особеннос-
тями замыкания токов в токоироводной вторичной части
над или под активной частью индуктора (при вертикаль-
ной шине) либо справа или слева (при горизонтальной
шипе) от активной части индуктора, в определенной ме-
ре имеется и у вращающихся асинхронных машин с по-
лым цилиндрическим стаканом, лишенным замыкающе-
го дна [38J. Специфическим для линейных двигателей
является продольный краевой эффект. Его наличие свя-
зано с основной особенностью линейных машин —ра-
зомкнутостыо магнитопровотд, общей для всех видов
подобных машин (а также для дуговых), но характер
его проявления существенно различен для разных типов
машин. Так, у машин со вторичной частью, не являю-
щейся токонесущей (с безобмоточными полюсами), этот
эффект связан лишь с изменением магнитного потока
в набегающем и сбегающем полюсах. Приближенный
анализ этого явления и оценка возникающего при этом
тормозящего усилия приводятся при рассмотрении по-
добных двигателей. Для линейных асинхронных двигате-
лей со вторичной токопроводящей частью определяющи-
ми являются эффекты распространения токов впереди и
сзади рабочей зоны машины — тормозящие эффекты
пульсирующих по- *й, возникающие у краев машины,
вторичный продольный краевой эффект. Как указано
в [86], речь идет о переходных процессах во вторичных
28
i.ouiypax, непрерывно входящих в область активном зо-
ны машины, и аналогичных контурах, эту зону покида-
ющих, — этот эффект не менее важен, чем процессы, про
и ходящие в самом разомкнутом магнитопроводе первич-
ной части машины.
В опубликованной в 1922 г. статье [113] о разработ-
ках «Дженерал электрик» по применению асинхронной
пшенной машины для привода кузнечного молота прп-
ш) in гея замечание известного ученого Штейнметца
<> юм, что последствия краевого эффекта оказались
основным затруднением на пути практического приме
ш пня таких машин в электрооборудовании железных до-
pni Приводя это соображение, Г. И. Штурман [86] от-
мечает его исключительное значение и называет краевой
эффект органическим пороком, приобретенным асни
роппон машиной при развертывании ее статора в плос-
I !•< I ь.
При возрастании скорости возрастает и влияние крас-
ных эффектов. По [69] мощность потерь от вихревых
и ни.в в реактивной шине, связанных со входом и выхо-
ium ее отдельных участков из магнитного поля иидукто-
р пропорциональна квадрату индукции магнитного по-
|>| индуктора и квадрату скорости:
PBX=B20v2. (1-29)
Приводя ряд экспериментальных данных и высказы
пиний других авторов, автор статьи [69] приходит к до-
iiiin.no пессимистическому заключению, которое, по-вн-
.1нмом\, стоит привести полностью:
В течение многих лет линейный асинхронный элек-
।ро'цшгатель с реактивной шиной, уложенной вдоль пу-
IH пшженпя экипажа, рассматривался как тяговый дви-
। н< чь будущего, способный работать при весьма высо-
ких ( коростях движения экипажей нового типа.
Сейчас, по-видимому, следует признать, что эти воз-
можности линейного двигателя указанного исполнения
ныли несколько переоценены. Существует некоторый пре-
к л скорости движения экипажа, за которым применение
i.iiuno тягового линейного двигателя становится нецело-
। оиоразпым из-за низких значений коэффициента мощ-
н<>1 hi пли даже просто невозможным ввиду малой силы
। hi и >.
1 I кобелсв В. Е. Возможность применения тягового линейного
iiiHi.iic.Hi для скоростного транспорта.—Железные дороги мира,
!'• ' 5, с. 9.
29
Даже для асинхронного двигателя такое заключение!
представляется нам чрезмерно мрачным, но оно должно
стимулировать изыскания в направлении создания ли-
нейных машин, в том числе асинхронных (например, по
[53]), у которых краевые эффекты имели бы принципи-
ально другой характер. Если учесть ряд дополнительных
достоинств линейного асинхронного двигателя, конструк-
тивную приспособляемость, надежность и т. п., можно
намного оптимистичнее смотреть на перспективы приме-
нения этого двигателя.
7. Неудобства безредукторного привода. Отсутствие
редуктора — достоинство привода, если рассматривать
его надежность, металлоемкость и ряд других характе-
ристик. Но отсутствие редуктора вводит более жесткую
однозначность в соотношение скоростей движения транс-
портного средства и взаимного перемещения подвижной
и неподвижной частей машины. Действительно, при вра-
щающемся тяговом двигателе линейная скорость пере-
мещения какой-либо образующей дуги ротора равна:
'р •
UPOT-V Гк ZpeR>
где v — поступательная скорость движения транспортно-
го средства; rp, гк — соответственно радиусы ротора и
колеса; /реД — передаточное число редуктора.
Наличие редуктора позволяет выбрать наиболее под-
ходящее (обычно наибольшее, ограничиваемое лишь со-
ображениями прочности и удобства изготовления) зна-
чение иРот, так как удельные характеристики использо-
вания машины в большой степени зависят от скорости:
высокоскоростные машины, как правило, более исполь-
зованы.
У линейных машин apoT=u и отсутствуют дополни-
тельные степени свободы для выбора оптимальных соот-
ношений. То же относится и к частоте перемагничивания
в спинке машины и соответственно к частоте питания
в случае, например, синхронной машины. Для линейной
машины уменьшена в сравнении с обычной зона свобод-
ного выбора числа пар полюсов, что вместе с жестко
определенной скоростью движения приводит к вынуж-
денным значениям частоты питания. Так, для 2т—1 м
при движении в пределах скоростей от 10 до 360 км/ч
частота должна меняться от 2,8 до 100 Гц.
Асинхронная машина при этом, особенно для дости-i
жения нужных характеристик пуска и регулирования,
30
ыкже требует применения преобразователя частоты с
широкими пределами регулирования.
8. Трудности пуска и регулирования. Однозначная
< ня н> между Орот и v экипажа у линейного электропри-
ПОЛ..1 не позволяет использовать возможности редуктора,
(и обеппо редуктора с переменным числом 1рРД, для пус-
111 и регулирования, как это, например, широко приме-
нимся в приводе автомобилей и аналогичных приводах.
Использование в качестве вторичной части электро-
проводной шины в транспортных применениях затрудня-
ет осуществление пуска путем воздействия па г'г, осо-
ь< нпо если не исключена ситуация, при которой окажет-
. и необходимым осуществить пуск с любой точки пути.
'I hi случая, когда пуск совершается всегда с одной и топ
। 1 точки пути, можно в этой точке делать в шипе про-
pi ibi, выполнять ее более тонкой и т. п„ как это было
«• к шпо для наклонного разгонного устройства па аме-
риканском авианосце (см. [82]), где в случае песостояв-
1ПС1ОСЯ запуска самолет под действием силы тяжести
опускался снова к точке пуска. На магистральном пути
н> сделать нельзя, если не допускать случаев застрева-
нии н пути. Нельзя использовать и методы регулирова-
нии скорости, основанные на изменении г'2, как это де-
' и гея у обычных асинхронных двигателей с фазным ро-
tnpoM; это, впрочем, не исключено в отдельных
примышленных асинхронных линейных приводах.
Практика сегодняшнего дня показывает, что основ-
ными системами управления, пуска и регулирования ли-
нейных электроприводов являются системы с преобразо-
<| целями частоты, получающие все большее распростра-
|п пне и для приводов с вращающимися двигателями.
Подробнее разбираемый ниже асинхронный линейный
п-мропривод, эффективно управляемый по методу ми-
нимума тока, включает в свой состав тиристорный пре-
nnp.i шпатель частоты, создающий при пуске требуемое
iii.piciiire максимального (критического) скольжения
„ за счет уменьшения x,t—2nfLK при малом
пусковом значении f н малое значение sK^tO,05-s—О,1
и рабочих режимах за счет увеличения хк путем соот-
нс।с।вующего увеличения f при автоматическом поддер-
। пппп режима минимального тока. Такие методы, эф-
фективно и для обычных приводов, просто необходимы
I in питейного электродвигателя при шине с неуправляе-
мым г'2.
31
Здесь уместно сделать замечание, что подобные прЛ
образователн столь близки по выполнению, габаритам,
надежности (в подобных системах уровень надежности
преобразователя больше влияет на уровень надежности
комплектного привода, чем надежность самого двигать
ля), что деление электроприводов такого типа на традм
цпониые (асинхронный, синхронный, постоянного тока
шаговый) становится несколько искусственным.
Рассмотрение в настоящей главе общих вопросов ль-
пенного электропривода завершим изложением пашей
точки зрения на степень взаимосвязи магнитной подвея
кп и линейного двигателя. Работают они в разных плоя
костях и принцип действия у них разный, по почему то
во многих статьях их соединяют вместе.
Полноценное решение каждой из этих двух задя|
встречает большие трудности, о которых мы говори hi
выше. О проблемах магнитной подвески говорится, на
пример, в [37], основные выводы которой мы приводим]
«Железная дорога почти не требует расхода энергии
па направление экипажей. Рельсы и бандажи колес с п<>
мощью гребней удерживают вагоны на пути без помощи
рулевой системы- Механика взаимодействия железподо.
рожного колеса н рельса разработана довольно тщатсль-;
ио, и в ней отсутствуют неразрешенные фундаменталь-
ные проблемы Бесконтактное же движение является
совершенно новым и связано с массой нерешенных во]
просов, относящихся к области эксплуатации на урогн/
земли с высокими скоростями.
Высокие стоимости экипажей, пути и устройств энер-
госнабжения нельзя сравнить с этими же показателями
существующих железнодорожных устройств. Пока нс
ясно, пригоден ли для эксплуатации трехфазный ток или
же целесообразнее ввиду взаимного влияния токов маг-'
питиых опорных направляющих устройств и тяговых
применить раздельный подвод тока, что приведет к не-
обходимости иметь па трассе шесть шин» ’.
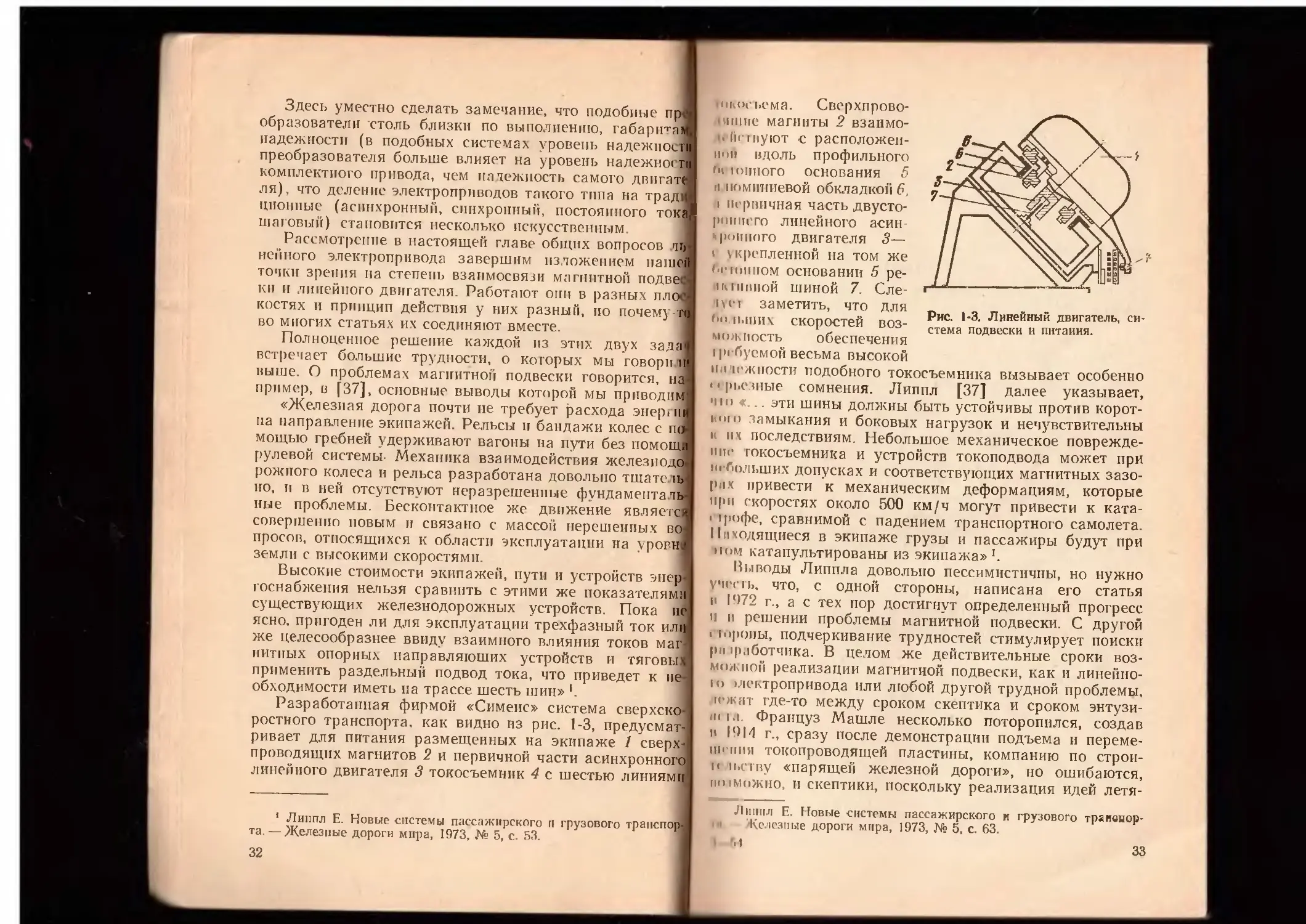
Разработанная фирмой «Сименс» система сверхско-
ростного транспорта, как видно из рис. 1-3, предусмат-
ривает для питания размещенных на экипаже 1 сверх-]
проводящих магнитов 2 и первичной части асинхронного
линейного двигателя 3 токосъемник 4 с шестью линиями
1 Липпл Е. Новые системы пассажирского и грузового транспор-
та.— Железные дороги мира, 1973, № 5, с. 53.
32
Рис. 1-3. Линейный двигатель, си-
стема подвески и питания.
шкосьема. Сверхпрово-
днике магниты 2 взанмо-
Лпчпуют с расположеп-
ш >п вдоль профильного
fit юиного основания 5
и помппиевой обкладкой 6
। lit рвичная часть двусто-
роннего линейного асин
роппого двигателя 3—
। укрепленной на том же
Оппином основании 5 pe-
in hi иной шиной 7. Сле
i\i'i заметить, что для
(•о ii.iiihx скоростей воз-
можность обеспечения
|ргбусмой весьма высокой
к । шжпости подобного токосъемника вызывает особенно
1«р|.еи1ые сомнения. Липпл [37] далее указывает,
‘но «... эти шины должны быть устойчивы против корот-
ки о замыкания и боковых нагрузок и нечувствительны
к их последствиям Небольшое механическое поврежде-
ние токосъемника и устройств токоподвода может при
небольших допусках и соответствующих магнитных зазо-
рах привести к механическим деформациям, которые
при скоростях около 500 км/ч могут привести к ката-
1рофе, сравнимой с падением транспортного самолета.
Плодящиеся в экипаже грузы и пассажиры будут при
• юм катапультированы из экипажа»1.
Выводы Липпла довольно пессимистичны, но нужно
учесть, что, с одной стороны, написана его статья
и 1972 г., а с тех пор достигнут определенный прогресс
н и решении проблемы магнитной подвески. С другой
юроиы, подчеркивание трудностей стимулирует поиски
ри |р,|ботчика. В целом же действительные сроки воз-
можной реализации магнитной подвески, как и линейно-
к> >лектропривода или любой другой трудной проблемы,
н-жат где-то между сроком скептика и сроком энтузи-
1п । । Француз Машле несколько поторопился, создав
и I911 г., сразу после демонстрации подъема и переме-
пи пия токопроводящей пластины, компанию по строи-
к п.ству «парящей железной дороги», по ошибаются,
1ИЫМОЖН0. п скептики, поскольку реализация идей летя-
Липпл Е. Новые системы пассажирского и грузового транопор-
Келсзпые дороги мира, 1973, № 5, с. 63.
И
33
щего поезда вполне вероятна и в течение последней чет-1
верти нашего века.
В настоящей монографии мы касаемся вопросов маг
нитной подвески лишь в тех случаях, когда эффект под 1
вески достигается у линейного электропривода и можег!
быть получен одновременно с реализацией тягового усп-1
ЛИЯ-
ГЛАВА ВТОРАЯ
ЛИНЕЙНЫЙ ЭЛЕКТРОПРИВОД
С НЕЯВНОПОЛЮСНОИ БЕЗОБМОТОЧНОИ
ПУТЕВОЙ СТРУКТУРОЙ
2-1. ЛИНЕЙНЫЙ ЭЛЕКТРОПРИВОД С БЕЗОБМОТОЧНОИ
ВТОРИЧНОЙ ЧАСТЬЮ
Естественным выводом из рассмотрения проблем, воз-
никающих при использовании линейного электроприво-1
да с перемещающейся первичной частью, является стрем-1
ление снизить стоимость и облегчить эксплуатацию
вторичной части двигателя, путевой структуры системы,
протяженность которой, например для магистрального
транспорта, может достигать сотен и тысяч километров.
Сам выбор типа электродвигателя, прямого или об-
ращенного, в основном зависит от соотношения стоимос-
ти единицы длины первичной и вторичной частей приво-1
да, а также от предполагаемой интенсивности движения
на проектируемом участке.
В настоящей главе рассмотрим прямой электропри-
вод с первичной частью, размещаемой на подвижном
составе, и безобмоточной вторичной частью, размещае-
мой на пути и являющейся в этом случае частью путевой
структуры (такую вторичную часть будем называть да-
лее просто путевой структурой). Линейный электропри-
вод с возвратно-поступательным циклом движения
исследуется подробно в [41, 71] и здесь детально не рас-
сматривается. Такой своеобразный линейный электро-
привод, как система, обеспечивающая поступательное
перемещение жидкого металла, нами вообще не рассмат-
ривается. По этому вопросу имеются глубокие исследо-
вания А. И. Вольдека, Н. М. Охременко, X. И. Янеса и
др- [14, 45].
В соответствии со сформулированными выше положе-
ниями рассмотрим только системы линейного электро-
34
ii|‘iiiHi с безобмоточноп вторичной частью. К ним отно-
fliiiii электроприводы с линейными асинхронными
шпигелями с электропроводной вторичной частью (не-
пппполюсиой путевой структурой) —линейный асин-
|||>||цый двигатель двусторонний и односторонний. Нас
I и ii.iiie привлекает при этом односторонняя конструк-
ции, которая позволяет использовать существующий
и п< п ш какую-либо его часть без прекращения движе-
нии пи этому пути обычного подвижного состава.
I < пс теме линейного электропривода с бсзобмоточной
iiiopii'iiioii частью относится и рассматриваемый в гл. 3
। н । |ропривод, использующий линейные электродвигате-
III (><• । электропроводной шипы, ио с явнополюспой маг-
ии ишроводящей вторичной частью.
Мы уже указывали па определенную условность под-
p.। i п лгния линейных электродвигателей на асинхронные,
। ничронные и постоянного тока при комплектации при-
IUI inn близкими по типу коммутаторами — преобразова-
п тми, питающими близкие по типу обмотки, располо-
Iiиные в одинаковых пазах и охватываемые
проходящим по малоразлпчающимся магнитопроводам
м шинным потоком. Будем далее относить это различие
। режимам работы системы. Электроприводом с линей-
ным двигателем постоянного тока будем называть при-
ппд, механическая и регулировочная характеристики
i iiiuporo идентичны характеристикам коллекторной ма-
шины постоянного тока. Например, при постоянной на-
ipv 1ке можно увеличивать скорость уменьшением потока
||п|б\ждения или автоматически получать снижение ско-
р(и hi при повышении нагрузки и т. п.
1‘пнхронным будем называть привод, у которого по-
1С nine усилие имеет место только при заданной частоте
П111.111ИЯ /=ц/2т, где v — скорость линейного движения;
। длина полюсного деления. Асинхронным будем на-
н.1к.1Г1> привод, у которого именно при этом соотноше-
нии (пли вытекающем из него i> = 2-tf) вовсе нет полез-
II'и и усилия. Тип машины не связан с тем, подается ли
и । пход преобразователя системы постоянный или пере-
Mt ппын ток и имеются ли во вторичной части замкну-
|ы< контуры с током или явно выраженные полюсы.
11 качестве основы для анализа будем применять фун-
iiimcii сальные положения электротехники, избегая по
шнможпости широкого использования готовых формул
। элегической теории обычных электрических машин.
I*
35
2-2. ЭЛЕКТРОПРИВОД С ЛИНЕЙНЫМИ АСИНХРОННЫМИ
ДВИГАТЕЛЯМИ
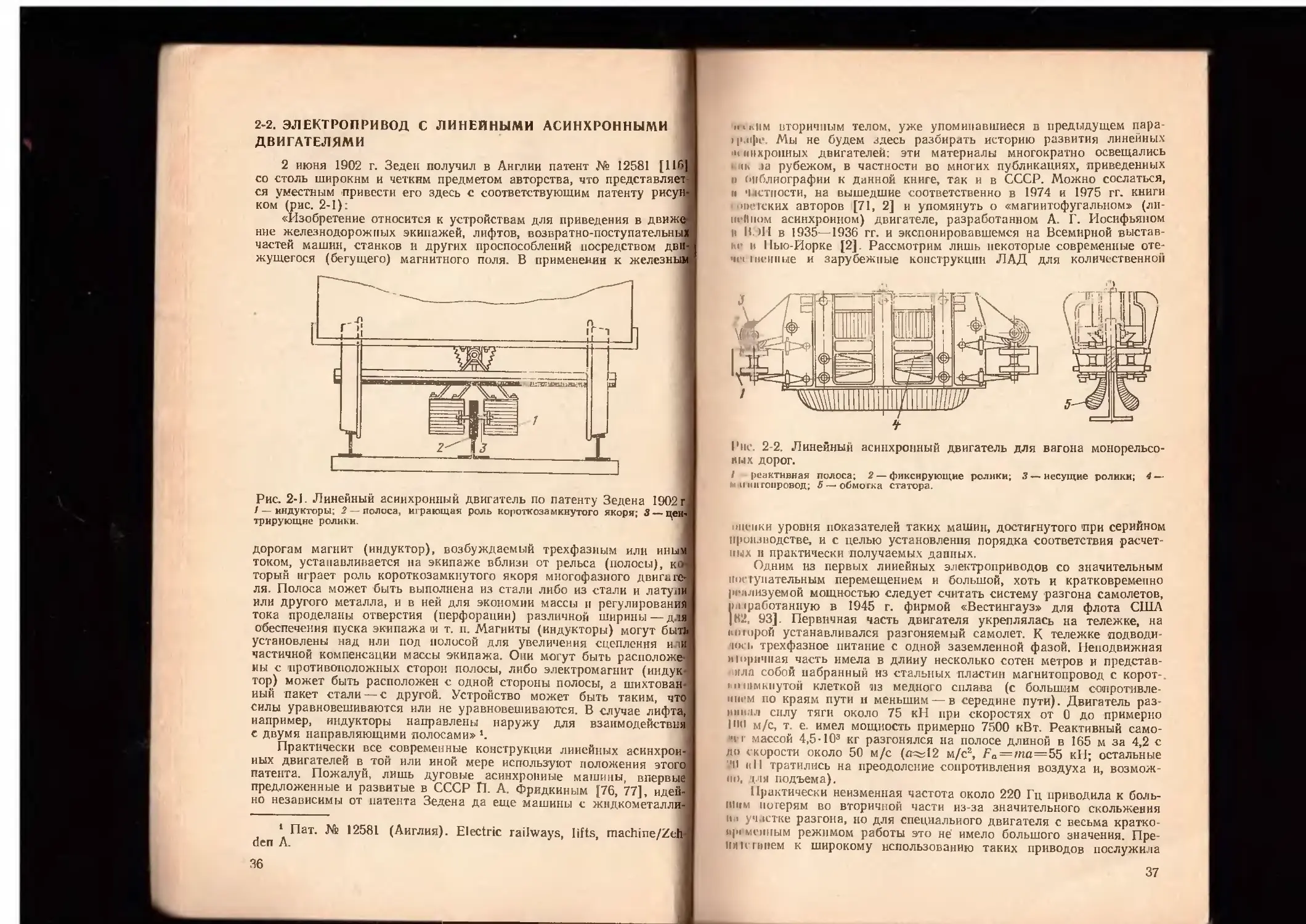
2 июня 1902 г. Зеден получил в Англии патент № 12581 [116
со столь широким и четким предметом авторства, что представляв!
ся уместным привести его здесь с соответствующим патенту рисуг
ком (рис. 2-1):
«Изобретение относится к устройствам для приведения в движ<
нне железнодорожных экипажей, лифтов, возвратно-поступательны
частей машин, станков и других проспособлений посредством двг
жущегося (бегущего) магнитного поля. В применении к железны
Рис. 2-1. Линейный асинхронный двигатель по патенту Зедена 1902
1 — индукторы; 2 — полоса, играющая роль короткозамкнутого якоря; 3 — це1
трирующне ролики.
дорогам магнит (индуктор), возбуждаемый трехфазным или ины
током, устанавливается на экипаже вблизи от рельса (полосы), кс
торын играет роль короткозамкнутого якоря многофазного двигай
ля. Полоса может быть выполнена из стали либо из стали и латул
или другого металла, и в ней для экономии массы и регулнровани
тока проделаны отверстия (перфорации) различной ширины — дл
обеспечения пуска экипажа ш т. п. Магниты (индукторы) могут бьп
установлены над или под полосой для увеличения сцепления ил
частичной компенсации массы экипажа. Они могут быть расположе
мы с противоположных сторон полосы, либо электромагнит (индуи
тор) может быть расположен с одной стороны полосы, а шихтовав
иый пакет стали — с другой. Устройство может быть таким, чт
силы уравновешиваются или не уравновешиваются. В случае лифт!
например, индукторы направлены наружу для взаимодействн
с двумя направляющими полосами»
Практически все современные конструкции линейных асинхрои
иых двигателей в той или иной мере используют положения этот
патента. Пожалуй, лишь дуговые асинхронные машины, впервы
предложенные и развитые в СССР П. А. Фридкиным [76, 77], идей
но независимы от патента Зедена да еще машины с жндкометалли
1 Пат. № 12581 (Англия). Electric railways, lifts,
den A.
36
н । isIim вторичным телом, уже упоминавшиеся в предыдущем пара-
1||,н|1е Мы не будем здесь разбирать историю развития линейных
>и иихроииых двигателей: эти материалы многократно освещались
। <к эа рубежом, в частности во многих публикациях, приведенных
> опблиографии к данной книге, так и в СССР. Можно сослаться,
I ч । тпости, на вышедшие соответственно в 1974 и 1975 гг. книги
Ч1С1СКИХ авторов [71, 2] и упомянуть о «магиитофугальном» (ли-
III Ином асинхронном) двигателе, разработанном А. Г. Иосифьяпом
и II .>14 в 1935—1936 гг. и экспонировавшемся на Всемирной выстав-
111’ и Ныо-Иорке [2]. Рассмотрим лишь некоторые современные оте-
ч|’| шсипые и зарубежные конструкции ЛАД для количественной
Рис 2-2. Линейный асинхронный двигатель для вагона монорельсо-
них дорог.
I реактивная полоса; 2 — фиксирующие ролики; 3 — несущие ролики; 4 —
Mill нигопровод; 5 — обмотка статора.
щенки уровня показателей таких машин, достигнутого 'при серийном
производстве, и с целью установления порядка соответствия расчет-
ных п практически получаемых данных.
Одним из первых линейных электроприводов со значительным
шн-туиательным перемещением и большой, хоть и кратковременно
реализуемой мощностью следует считать систему разгона самолетов,
и । |работанную в 1945 г. фирмой «Вестингауз» для флота США
|Н2 93] Первичная часть двигателя укреплялась на тележке, на
которой устанавливался разгоняемый самолет. К тележке подводи-
>1<к 1> трехфазное питание с одной заземленной фазой. Неподвижная
шоричиая часть имела в длину несколько сотен метров и представ-
|>1ла собой набранный из стальных пластин магнитопровод с корот-
ки шмкпутой клеткой из медного сплава (с большим сопротивле-
нием по краям пути и меньшим — в середине пути). Двигатель раз-
ит 1л силу тяги около 75 кН при скоростях от 0 до примерно
|п<1 м/с, т. е. имел мощность примерно 7500 кВт. Реактивный само-
"|-г массой 4,5-103 кг разгонялся на полосе длиной в 165 м за 4,2 с
до скорости около 50 м/с (<«Д2 м/с2, Fo=ma=55 кН; остальные
i'll кН тратились на преодоление сопротивления воздуха и, возмож-
но, для подъема).
Практически неизменная частота около 220 Гц приводила к боль-
шим потерям во вторичной части из-за значительного скольжения
и 1 участке разгона, но для специального двигателя с весьма кратко-
»р| мсиным режимом работы это не имело большого значения. Пре-
пи lei пнем к широкому использованию таких приводов послужила
37
скорее стоимосгь установки, чем энергетические потери при эксплуа-
тации.
Усовершенствованные конструкции линейного асинхронного дви-
гателя подробно описаны в [25]. На рис. 2-2 показан построенный
на Киевском заводе электротранспорта им. Дзержинского тяговый
линейный электродвигатель, предназначенный для вагона монорель-
совой дороги. Этот двусторонний линейный электродвигатель имеет
следующие технические данные:
Напряжение питания U, В................................. 380
Номинальный ток / А................................... 200
Частота /, Гц............................................ 50
Максимальная сила гяги F, Н ........................... 3800
Скорость двигателя v, м/с.............................. 10,2
Коэффициент полезного действия т]....................... 0,5
Коэффициент мощности cosy............................... 0,4
Коэффициент использования подводимой полной мощности
т] cos у................................................ 0,2
Размеры индуктора,
длина /и, мм....................................... 1260
ширина Ьп, мм..................................... 210
Реактивная полоса с размерами, мм...................... 210X45
Воздушный зазор между индуктором и реактивной поло-
сой, мм................................................... 3
Количество пазов ........................................ 60
Размеры паза:
высота, мм........................................... 50
ширина, мм......................................... 11,6
По приведенным данным можно оценить еще один характерный
параметр использования линейных двигателей — отношение силы
тяги к полной площади рабочего зазора, kF = F/sofjUl. Считая
зОбщ = 2/и6н=5,3-103 см2, имеем Ар тох=3800/5300^0,7 П/см2.
Рис. 2-3. Конструктивная схема линейных элек-
тродвигателей, выпускаемых в НРБ.
Выпускаются мелкими и средними сериями линейные асинхрон-
ные двигатели и в странах СЭВ. На рис. 2-3 показана конструктив-
ная схема линейных электродвигателей (типы ЛИД-ММ 14/3,8 и
ЛИД-ТС 150/8,4), выпускаемых в НРБ [102]. Это односторонние
машины со вторичной частью типа «сэндвич»: на обращенной
к индуктору 1 поверхности массивной стальной полосы 2 закреплена
алюминиевая полоса 3 Индуктор обладает повышенной надежно-
стью — он залит силиконо-каучуковой смолой, предохраняющей
обмотку и от механических повреждений. Технические данные дви-
гателей приведены в табл. 2-1.
38
Таблица 2-1
I им । пческие данные двигателей, выпускаемых в НРБ
Наименование ЛИД ММ 14/3,8 лид тс 1S0/8.4
1 п тог усилие при пуске FT, Н . . . . 140 1500
1 InMitii.iльное напряжение U, В 380 3S0
II |мпнл 'п.иый ток /, А 5,0 49
'1 ь mi । f, Гц ... 50 50
Потребляемая мощность IT, кВт .... 1.4 20
1|пн<’Пн1я синхронная скорость рс, м/с 3,8 8,4
Мнгсп индуктора т, кг 14 43
/(ли двигателей типов ЛИД-ММ, ЛИД-ТС приближенно опреде-
|нм к п. д. и cos гр. Будем исходить из предположения линейности
м>'чп11П|1еской характеристики и неизменности потребляемой активной
и полной мощностей при пуске и движении. Тогда для типа
III (ММ 14/3,8 Pmax=fnVc/2-2=133 Вт, и к^п. д. i)mOx=tftl.
I< in считать полную подведенную мощность У^З///=3.3 кВ-А, то
Hip-=0,38 и г] cos <р=к0,04. Машина малой мощности, конечно, усту-
пке i по энергетическим показателям мощным машинам.
Ч чя типа ЛИД-ТС 150/8,4_прн тех же предположениях имеем:
/•... - 3150 Вт, т]т„х = 0,16;Кз/7/ 32 кВ А; cos <р=0,625; т) cos <р=
I) I Показатели этой машины уже ближе к рассмотренной выше
“ шише мощностью 25 кВт. Удельные значения мощности на едини-
|| массы индуктора невысоки: Р/т—0,0\ кВт/кг для типа
111/IMM 14/3,8 и Р/т—0,073 кВт/кг для ЛИД-ТС 150/8,4. При
• him следует еще учесть и то, что машины эти предназначены для
в । повременной работы (например, для типа ЛИД-ММ 13/3,8
1111% 15% при 30 включениях в час).
1’я I полезных расчетных соотношений дли относительно тихо-
•IIIII4X машин приводится в [9]. Из условия половинного заполне-
нии пазов крайних полюсов и пропорциональности между силой и
•ii.iip.iTOM индукции (или квадратом числа витков а?) выводится
• пичепие коэффициента снижения эффективности индуктора а: а=
(2/| 1,5)/2р. Снижение эффективности при четырехполюсиой ма-
шине 37.5%. при шестиполюсной — 25%. при десятиполюсной—15%.
I Ьи кильку увеличение числа полюсов при одном и том же большом
iiiiupe уменьшает весьма существенное для использования машины
питиепне т/б. возможности выбора числа полюсов довольно огра-
..... Исследовании на большом числе выполненных машин пока-
। in существенное снижение коэффициента использования полезной
н пинали воздушного зазора (при данных электромагнитных нагруз-
и 1ч, определяемых произведением линейной нагрузки А на индукцию
и 11 юре Д8) при увеличении этого зазора, особенно для малых син-
хронных скоростей (малых значений т/б).
Ил рис. 2 4 зазор б, соответствует базовому значению 10 мм.
I I ли учесть, что при /=50 Гц значения синхронных скоростей Ос =
3 (»; 9; 12 м/с достигаются соответственно при т=30; 60; 90;
I .41 мм. то неудивительно, что для б=4б| машина при синхронной
39
скорости t'c=3 м/с используется в 2,5 раза хуже, чем при пс = (
= 12 м/с.
На рис. 2-5 из [9] приведены кривые максимальных значений
к. п. д. двигателей для разных зазоров при различных синхронных ,
скоростях. При не очень большом зазоре в 10—12 мм (выше указы-
валась необходимость и в за-
зорах около 50—100 мм) уже
при ис=6 м/с Т] = <0,4,
а т) cos ср<0,1.
Следует принять во внима-
ние также мнение видных спе-
циалистов в области линейных
двигателей Насара и Дел Снда
[42], что максимальный к. п. д.
односторонних асинхронных
линейных двигателей, который
примерно на 10% выше, чем
к. п. д. двусторонних, ие мо-
жет превысить 65% для высо-
коскоростных машин и много
меньше для низкоскоростных.
Анализу влияния краевого
эффекта посвящен ряд теоре-
тических работ. Используя ме-
тодику [17], можно получить
влияния продольных краевых
Рис. 2-4. Относительный коэф-
фициент использования двига-
теля в зависимости от синхрон-
ной скорости.
необходимые выражения для учета ............... ,ШЛ
эффектов на работу машины. Рассмотрим снижение силы тяги, обу-
словленное продольным краевым эффектом, у линейного двигателя
со следующими данными:
Активная длина, м................................ 3
Число пар полюсов, р.............. ' \ з
Полюсное деление, м .................0 5
Высота шихтованного пакета сердечника индуктора, м . . 0,33
Высота реактивной шины, м......................’ д'б
Толшнна реактивной шины, мм...................... jg
Удельное электрическое сопротивление материала вторич-
ного контура, Ом м................................ 5.10-е
Обмоточный коэффициент.........................' 0 95
Рис. 2-5. Зависимость к. п. д. Рис. 2-6. Зависимость силы тяги
двигателя от зазора от скорости
' лишено 116] в крупных асинхронных машинах линейная на-
ipvm.i находится в пределах 400—600 А/см. Принимая А=2Х
ИО \/см (обмотки обоих сердечников индуктора рассматриваются
к < 1нная обмотка), можно определить /иусК=^30 кН.
Полученная зависимость силы тяги от скорости F(y) с учетом
и шипим продольных краевых эффектов приведена на рис. 2-6.
I ели при скорости и=10 м/с тяговое усилие уменьшается до
(н кН то уже при и=40 м/с оно падает еще в 2 раза, а при ско-
I m i и 90 м/с еще вдвое, до значения 5 кН. Площадь полного ра-
ин i ) зазора у этой машины s=2-300-33 = 2-104 см3. При п=0
имеем вполне удовлетворительное значение удельной тяги F/s=
»!,.> 11/см3, но при о=90 м/с удельная тяга в 6 раз меньше.
I МЕТОДИКА И НЕКОТОРЫЕ РЕЗУЛЬТАТЫ
1К( ПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ
Экспериментальные исследования линейных машин для относи-
iit пню малых скоростей движении проводятся, как правило, на иа
। урпых образцах или линейных моделях с размещенной на соответ -
। пенно небольшом прямолинейном отрезке пути вторичной частью
инн а геля. Для сколько-нибудь высоких скоростей приходится
|р|>и1ъ полигоны с укладкой пути по замкнутой кривой. При этом
п> шикают серьезные трудности, связанные с малыми радиусами
крнпизны. Длина L прямоугольного участка определяется длитель-
но two проведения испытания /Исп на предельной скорости vmax
при допустимых положительных и отрицательных ускорениях а:
F^^Vtnaxtllcn-Fv21nax^£l^=Vmax (^max/^~j~tncs) •
Гак, при /исв=Ю с, Omai=100 м/с, а—1 м/с3 имеем LJSsll км.
I акую испытательную установку строить очень дорого.
В рекламных материалах фирм МВБ (Messerschmitt-Bolkow-
lllolnii) и «Краус-Маффей» (Krauss Maffei) по скоростному наземно-
му транспорту имеется лишь краткая информация об асинхронных
лит иных электроприводах для экипажей, испытывавшихся на спе-
ки in,пых путях от 660 м для первой установки в 1971 г. до 2400 м
и последней из моделей («Трансрапид-04»). У первой модели экипаж
миссий 5800 кг на пути длиной 660 м разгонялся до скорости
ш) км/ч (25 м/с) асинхронным двигателем с максимальной тягой
10 кН. Элементарный подсчет показывает, что если иметь время
lint кеиия с постоянной скоростью /исп=г;6-=-8 с, то на разгон и тор-
можение остается по 200—250 м. При движении с постоянным уско-
р пнем (1,5 м/с3) сила тяги равна А^9 кН, т. е. ненамного меньше
ук । шиной выше максимальной тяги. Модель типа «Трансрапид-02»
. м шеой в 11 300 кг разгонялась до скорости 164 км/ч (45,5 м/с)
ни пути длиной 930 м асинхронным электроприводом с максималь-
I1IHI гягой /'=31 кН. Если принять, что 90% силы тяги идет на со-
। шипе постоянного ускорения, то получим значение этого ускорения
« 1>,9/-/т =5=2,5 м/с2. Суммарный путь разгона и торможения будет
ниш 850 м и время движения с постоянной скоростью будет всего
ни о 2 с.
Следующая модель «Трапсрапид-03» в части электропривода
мили отличается от предыдущей. Существенное развитие эта система
получает в модели «Траисрапнд-04». На пути длиной /.=2400 м
niidzK массой т=16 500 кг, приводимый в движение линейным
41
асинхронным приводом с максимальной тягой Г = 50 кН, достигал
скорости и=250 км/ч (70 м/с). При тех же предположениях, что и
выше, имеем a=0,9f/zn=t2,75 м/с2, суммарный путь разгона и тор-
можений Ап = о2/а=г;1800 м, и время движения с постоянной скоро-
стью /Исп~(7-—7-п) /п=8,5 с. Фактически это время будет еще мень-
ше, так как, принимая для коротких экипажей сопротивление воз-
духа 7а«;2у2, имеем, например, при о=50 м/с Га=5 кН, а при
о = 70 м/с Гал=10 кН. 90% тяги уже не удается использовать для
ускорения: на это остается лишь 70—80%. При fa = 0,75F имеем
а=0,75Г/т^;2,25 м/с2, La — v2/a=^22lti0 м и /Исп=г=3 с.
Приведенные материалы иллюстрируют состояние разработок и
исследований по транспортным средствам с линейным электроприво-
дом и подтверждают заключение о целесообразности исследований
скоростных режимов подобных электроприводов на вращающихся
моделях. Действительно, обычно строят для испытаний так называе-
мые «круглые модели», на которых можно исследовать скоростные
режимы с достаточным приближением к реальности при существенно
меньших затратах на эксперимент. Для рассматриваемых в настоя-
щей главе ЛАД такие исследования проводятся как в СССР [70],
так и за рубежом.
Подробное описание испытательной установки и интересные дан-
ные по результатам испытаний даны в [99]. Испытательная уста-
новка состоит из двух дугообразных статоров, установленных в па-
раллельных плоскостях с зазором 38,1 мм. Треть зазора занимает
пластина вторичной части, по трети — воздушные промежутки меж-
ду пластиной и внутренней поверхностью соответствующего стато-
ра. Конструкция установки позволяет изменять как общий зазор,
так и толщину пластины и ее положение. Пластина представляет
собой обод диска, набираемый из алюминиевых листов толщиной
по 6,35 мм (два листа при толщине пластины 12,7 мм). Внешний
диаметр диска составляет 2032 мм, радиус центральной части дуго-
образных статоров — 863,6 мм, а кривизна подобрана таким образом,
чтобы синхронная скорость в любой точке радиуса внутри воздуш-
ного зазора была бы одной и той же.
Обмотки статора трехфазные, четырехполюспые с шестью выво-
дами. Обмотка расположена в 43 пазах, ио статоры выполнены
с 45 пазами с целью возможности укладки других вариантов обмот-
ки. Выводы обмоток обоих статоров соединены параллельно и вы-
полнены так, что их м. д. с. смещены на угол 180°.
Зубцы обоих статоров расположены напротив друг друга (воз-
можен и вариант: зубец — паз). Каждый сердечник статора состоит
из шихтованных пакетов длиной 101,6 мм. Пакеты набраны из лис-
тов электротехнической стали толщиной 0,483 мм с неорганическим
покрытием. Эти пакеты собраны в секторы с дугой 60° и укреплены
на стальиой плате толщиной 10,16 мм для придания механической
прочности всей конструкции и удобства ее крепления. Пазы — откры-
тые, прямоугольные, шириной 3,7 мм и высотой 63 мм. Ширина зуб-
ца 2 мм. Размеры статора: высота ярма 23,9 мм, длина сердечника
856,7 мм, полная длина 918,2 мм. Обмотка статора состоит из 36 ка-
тушек с четырьмя витками в каждой. Удельное сопротивление пла-
стины вторичной части 4,84-10“6 Ом-см (60°С), индуктивность
обмотки статора (из опыта) при 60 и 150 Гц соответственно 0,831
и 0,630 мГн (без нагрузки), 0,411 и 0,378 мГн (с заторможенным
диском) и 1,061 мГн (без диска), активное сопротивление обмотки
статора 0,0150 Ом (25°С).
42
В.1Л диска непосредственно связан с электронным датчиком мо-
м< ни н нагрузочной машиной постоянного тока. Напряжение пере-
Mi'iiiioro тока подается на двигатель от генератора, скорость которо-
н| можно регулировать в широких пределах для изменения частоты
НН1.Н1ПЯ двигателя. Мощность генератора равна 1000 кВ Л при
' «О Гн и 1250 кВ А при 400 Гц. Система питания двигателя обеспе-
'iihi.ют рекуперацию энергии в сеть при любом скольжении. Испыта-
п-л1.пая установка позволяет измерять напряжение, ток, мощность
и частоту питания, тяговое усилие, скорость и нормальные состав-
шюшне сил, а также магнитную индукцию и температуру. Полная
нходпая мощность измеряется трехфазным датчиком мощности, ра-
пгшощнм на эффекте Холла. Полезное тяговое усилие вычисляется
< учетом аэродинамических потерь и трения. Определяются потери
и обмотках статора, пластине вторичной части, сердечнике, а также
потери, вызываемые краевыми эффектами. Результаты измерений
подаются на вход автоматической системы обработки п накопления
I шпых. В этой системе используется ЭВМ для записи, накопления
п обработки данных в любом режиме работы. Все необходимые дан-
ные считываются за 1 с, записываются подряд 3 раза и затем
усредняются. За время считывания следующей серии данных обра
боданные результаты испытаний предыдущей серии печатаются.
В установке предусмотрено создание потока охлаждающего воз-
духа у сбегающего края диска. Температура определялась с по-
мощью термопар, размещенных на обмотке и сердечнике, и фикси-
ровалась на самописце. Данные по температуре в некоторых харак-
терных точках считывались непосредственно указанной выше
ттоматической системой. При низкой скорости, низкой частоте и
большом скольжении работа двигателя ограничивалась допустимой
температурой диска, а при высоких скоростях и высокой частоте —
допустимой температурой статоров. Температура диска определялась
i помощью инфракрасного термографа.
Нормальные составляющие сил измерялись с помощью четырех
|ензометров, установленных и соединенных таким образом, чтобы
исключить влияние тангенциальных сил. Указанные силы измерялись
у набегающего и сбегающего краев двигателя с целью получения
информации о распределении силы вдоль статора. Для исследования
распределения индукции на статоре двигателя помещалось 40 изме-
рительных катушек, из них 26 катушек были расположены на по-
верхности статора. Эти катушки толщиной 3,17 мм выполнены из
(И) витков эмалированного медного 'провода и приклеены на поверх-
ности зубцов и на вынесенных за пределы статора пластмассовых
и 1лтах для измерения индукции вне сердечника. Остальные 14 ка-
|ушек из двух витков намотаны вокруг сердечника и служат для
определения потока в ярме. Выводы всех катушек подключены
к шаговому переключателю, который обеспечивает последовательное
считывание данных.
Измерения индукции в различных точках двигателя проводились
при наличии пластины вторичной части в зазоре и без нее с по-
мощью измерительных катушек, а также непосредственным измере-
нием веберметром с датчиками Холла. Указанные измерения прове-
дены в широком диапазоне режимов динамических испытаний дви
г.1теля.
Развиваемое двигателем тяговое усилие измерялось в широком
диапазоне скоростей от 0 до 480 км/ч при частотах питающего на-
пряжения 60, 150, 300 и 400 Гц и при постоянном отношении на-
43
пряжения к частоте, равном 2/3В/Гц. Механические характеристики
при различных частотах питания приведены на рис. 2-7, Расчет про-
изведен по обычной эквивалентной электрической схеме замещения
асинхронной машины при пренебрежении краевыми эффектами. Из
рис. 2-7 видно резкое уменьшение тягового усилия при малых сколь-
жениях, что обусловлено указанными эффектами. Существенная раз-
ница между расчетными и опытными кривыми при высоких скоро-
стях связана с допущением неизменности параметров схемы заме-
щения.
На рис. 2-8 показаны рабочие характеристики двигателя при не-
изменном напряжении питания 100 В и частоте 150 Гц. Нормальная
составляющая силы (перпендикуляр-
ная к пластине вторичной части)
определялась во всем диапазоне ско-
ростей от 21,5 м/с (60 Гц) до
133,3 м/с (400 Гц), а также при по-
стоянной силе сопротивления при-
Рис. 2-7. Механические характери-
стики двигателя при различных
частотах
-------расчет: -------опкт
Рис. 2-8. Рабочие характе
ристикп двигателя при ча-
стоте 150 Гц.
/ — тяговая сила; 2 —ток; 3 -
cos <р; 4 — нормальная состав
ляющая силы; 5 — к. п. д.
мерно 25 И. Нормальная сила, как видно из рис. 2-8, может быть
положительной (отталкивающей) ппн отрицательной (притягиваю-
щей) и зависит от условий работы. Характер ее зависимости от ре-
жима работы линейного двигателя осложняется тем фактом, что по
длине двигателя эта сила распределена неравномерно. Связано это
с тем, что индукция в воздушном зазоре смещена к сбегающему
концу двигателя, поэтому в большинстве режимов работы можно
получить отталкивающую силу у набегающего конца двигателя и
притягивающую у сбегающего конца.
Потери рассчитывались по данным измерения потребляемой и
полезной мощностей. Полезная мощность была найдена по тяговому
усилию и скорости (с поправкой на аэродинамические потерн и тре-
ние). Затем определялись потери в меди статора (с температурной
поправкой). Электрические потери в пластине вторичной части рас-
считывались по полезной мощности и скольжению, а потери в ста-
ли — по результатам отдельных испытаний. Остальные потери отно-
сились за счет краевых эффектов, поскольку потери в пластине вто-
ричной части н сердечнике статора определялись на основе обычной
44
I*»|i'iii ксктрпческих машин. Распределение тока в пластине и поте-
рн и 1М1'пя1отся с изменением скорости и скольжения.
111 приведенных зависимостей видно, что потери, обусловленнне
!•<•• иымн эффектами, быстро увеличиваются с увеличением син-
«I'ltiHi'Hi скорости (частоты) и уменьшаются с увеличением сколь-
пни пли уменьшением скорости.
Внимательное рассмотрение материалов испытаний заставляет
и-помнить (см. § 1-3) расхождение в мнениях между Штейнметцем,
111'р>кд,1вшим, что краевой эффект — основное затруднение в при-
uiinriiiiii линейных асинхронных двигателей, и Тромбетта, полагав-
шим, что можно вообще не решать проблемы краевого эффекта,
•in расхождение между электриком-теоретиком, еще в 20-е годы
1И11111МППШНМ суть проблемы, и инженером, видевшим лишь ее кон-
Hpi'riioe применение в сугубо частном случае.
Кик следует из рис. 2-7, реальная сила тяги под воздействием
и iii iiiiiiiiom краевых эффектов на устойчивой части расчетной меха-
ппч<< кип характеристики при скоростях около 50 м/с в 2—3, а при
нпрпстях 100—150 м/с в 3—4 раза меньше, чем соответствующая
• и 1.1, рассчитанная без учета краевого эффекта. Сколько-нибудь
...... кчиые усилия возникают лишь при скольжениях примерно
п 0,35. Реальный к. п. д. скоростного (даже ие слишком высоко-
• । орпспюго) электропривода не более 0,6. Это подтверждается экс-
|ц рпмснтальной кривой 5 на рис. 2-8. И совсем невысокие значения
имеет основной энергетический показатель rj cos'<р — в лучших
uriiuix он около 0,15, что выше данных, приведенных в § 2-2
in небольших машин, но ниже данных, приводимых во многих
in iii'iiiiiKax для крупных машин того же порядка мощности, что я
к п*дованиная. Значительный интерес представляют и эксперимен-
. п.пыс данные по изменению как значения, так и знака нормаль-
iiiid гп 1ы и ее исключительная неравномерность вдоль машины. Нор-
4 1 П.П1Я составляющая силы может достигать значений, в несколько
р 11 превышающих тяговую силу. Это обстоятельство должно при-
п и-п. пристальное внимание как расчетчиков, так и конструкто-
ров ЛАД.
I ЛИНЕЙНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ
< ЯИНОПОЛЮСНОЙ ПЕРВИЧНОЙ ЧАСТЬЮ
Линейный электропривод по самому принципу по-
। (роения весьма надежен. Надежность линейного асин-
хронного двигателя вполне могла бы соответствовать Ha-
iti жпости трансформатора — да обмотки не те. У рас-
। могренных выше ЛАД, как правило, распределенная
обмотка размещена в глубоких и узких пазах — надо же
|i.i (мостить в пазах достаточно тока для того, чтобы
кидать в большом зазоре приемлемую индукцию.
У трансформаторов же, как известно, обмотка сосре-
доточенная. А разница в надежности у этих обмоток
iicei.Ma большая. Распределение отказов по элементам
машины показано в табл. 2-2 [56, 72].
45
я о л и ц a
Распределение отказов, °/о, по элементам машин
Элемент машины Тип машины
Асинхронный двигатель Машины постои! него тока 1
Обмотка статора 91,0* 16,3**
Обмотка ротора 0 7*** 64,0*
Коллектор — 9,1
Подшипники 1,3 1,2
Механические 1,0 9,2
* Распределенная обмотка.
** Сосредоточенная обмотка
*** Короткозамкнутая обмотка.
Эти данные подтверждаются и материалами по ра
пределению отказов по узлам и деталям асинхронны
электродвигателей малой мощности:
Обмотка статора............................. 80,6%
Ротор ...................................... 0,35%
Подшипниковые узлы........................... 15%
Вал......................................... 3,5%
Вентилятор............................... 0,55%
Разработчики машин стали учитывать результат:
этих исследований, в частности тот факт, что у распреде
ленных обмоток интенсивность отказов примерно в 4 ра
Рис. 2-9. Двухстаторный асинхронный
двигатель типа ДРД
46
<<i bn ii.ine, чем у сосредоточенных обмоток (причем чем
шпыне машина, тем больше это соотношение). Это при-
in in к созданию ряда модификаций машин, особенно
|Ц||ц|Дн111’ателей [6], в том числе многостаторных, име-
r inn нин.ко сосредоточенные обмотки.
11 ) рис. 2-9 изображена конструкция двухстаторного
...... исполнительного двигателя, разработанно-
। । 1 йооксарским заводом исполнительных механизмов
I | 1дссь у каждой фазы свой магнитопровод, свои
и in кос in расположения листов пакета статора, смещен-
iiMi и юль оси машины относительно плоскостей распо-
Рис. 2-11. Линейный асин-
хронный двигатель с попе-
речным полем.
I'iii 2 10. Линейный асинхронный
•unit .11сль с сосредоточенными об-
Miiih.iMii зубцов-нолюсов.
лишения листов пакета стато-
р । другой фазы; оси потоков
ф | । смещены на свободно уста-
пн вливаемый угол — изменение
кино угла позволяет бескон-
i.ikimo регулировать скорость
н реверсировать двигатель.
11пдробно этот принцип регу-
шрпвания описан в [55] и
и применении к линейным
ii'inixpoHHbiM двигателям ко-
ри I ко излагается в § 3-2.
11звестно применение раз-
вернутой асинхронной явнопо-
•11<1гной машины, близкой по
ищу к электродвигателю РД-09, в качестве линейного
пспихронного двигателя. Основные процессы, происходя-
щие в двигателе с сосредоточенными обмотками зубцов-
|||| носов фаз А и X, В и Y, С и Z (рис. 2-10), рассмот-
рены в [20].
Широко популяризуются в последнее время работы
но созданию линейных асинхронных двигателей с сосре-
оточенными обмотками фаз, не соединенных общим
47
ма гн итоп р о водом 1Ю7]. У такого двигателя (рис. 2-11
каждая фаза индуктора автономна п имеет своп замык.
ющии магнптопровод, расположенный перпендикуляр!
направлению движения («поперек» движения). Ток
созданные в токопроводящей вторичной части потока
одной фазы, распространяясь в зону действия пото,
другой фазы, создают, взаимодействуя с ним, усплп
сумма которых образует силу тяги двигателя. Така|
конструкция обеспечивает машине ряд положительны
качеств. Не последним из них является повышенная па
дежность вследствие использования сосредоточенных ой
моток.
ГЛАВА ТРЕТЬЯ
ЛИНЕЙНЫЙ ЭЛЕКТРОПРИВОД
С ЯВНОПОЛЮСНОЙ ПУТЕВОЙ СТРУКТУРОЙ
3-1. ЦИЛИНДРИЧЕСКИЕ ЛИНЕЙНЫЕ ДВИГАТЕЛИ
ГРЕБЕНЧАТОЙ СИСТЕМЫ
Анализ обширной патентной литературы и других
публикаций по линейным двигателям позволяет сделап.
вывод, что большинство типов линейных машин имеет
соответствующий аналог — базовую конструкцию вра-
щающейся машины- Общепринято излагать принцип
действия, например асинхронной линейной машины
используя понятие «развертывание в плоскость» асин
хроипой машины с вращающимся ротором. Этот подхо;
хорошо иллюстрирует рис. 3-1 [114]. II
В ряде последующих параграфов будет показано, что
многие на первый взгляд кажущиеся совершенно ориги-
нальными системы линейных двигателей имеют «стар-
ших братьев» среди вращающихся машин. Много линей-
ных аналогов породили сельсины, особенно бесконтакт-
ные. Наличие аналога среди вращающихся машин,
по-видимому, не лишает патентоспособности линейную!
конструкцию. Приводя ниже данные по аналогам, базо-
вым конструкциям, отправным идеям, мы не пытаемся
этим поставить под сомнение положительные решения со-
ответствующих патентных ведомств. Наоборот, мы хоте-
ли бы направить поиск конструкторов линейных машин
в сторону творческой переработки ряда идей, реализо-
ванных во вращающихся машинах.
48
Рис. 3-1. «Развертывание в (плоскость» асинхронной машины.
/ — статор; 2 — ротор.
Существует группа линейных машин, для которых
I рудно найти непосредственных предшественников средн
нращающихся машин. Это так называемые цилиндриче-
< кие линейные двигатели. Даже для цилиндрических
in иихронных линейных машин попытка создания этой
конструкции из обычной вращающейся асинхронной ма-
шины приводит к не слишком убедительным искусствен-
ным построениям типа: разрежем по образующей, раз-
мерном в плоскость, а затем свернем в трубку с осью,
направленной вдоль плоскости перпендикулярно обра-
|ующей, и т. д- Еще менее оправдано приведение к вра-
щающейся машине линейного двигателя цилиндрического
। рсбеичатого типа. Линейный сельсин по отношению
К »той группе машин не может рассматриваться как про-
шит— он сам полностью принадлежит к группе линей-
ных машин. Линейный сельсин занимает такое же место
обобщенной машины среди линейных машин, какое
4 >4
49
Рис. 3-2. Цилиндрические линейные двигатели.
а —с броневым индуктором; б — со стержневым индуктором.
обычный сельсин занимает среди вращающихся элек-
трических машин.
Цилиндрические линейные машины гребенчатой кон-
струкции были реализованы в СССР как для чисто по-
ступательного, так и для возвратно-поступательного дви-
жения, и их применение и развитие в настоящее время
представляются вполне целесообразными, особенно для
электропривода с точной остановкой в заданном месте
[54, 60]. Многие конструкции цилиндрических линейных
машин близки по принципу построения к линейному
сельсину, описанному, например, в [55]. Это сходство
можно увидеть из сравнения рис. 3-2,а и б, где изобра-
жены конструктивные схемы линейных двигателей [100,
101], и рис. 3-3, где показана схема линейного сельсина
с цилиндрическим магнитопроводом из [55].
Сельсин (рис. 3-3) состоит из неподвижного цилинд-
рического стержня 1 с пазами, куда укладываются три
обмотки синхронизации 2, распределенные вдоль магни-
Рпс. 3-3. Линейный сельсин.
50
i пировода таким образом, что число витков каждой из
«скций обмоток синхронизации изменяется по ступенча-
। о-синусоидальному закону-
Подвижным элементом служит ферромагнитный сер-
дечник 3 в форме кольца с П-образным радиальным се-
чением, охватывающий неподвижный магнитопровод
имеете с неподвижными обмотками синхронизации. Об-
мотка возбуждения 4 расположена внутри подвижного
кольца. При подаче однофазного напряжения к обмотке
побуждения создается магнитный поток, который замы-
кается по пути, показанному штриховыми линиями на
рис. 3-3. При этом рабочий поток охватыват определен-
ное число витков обмотки синхронизации. В результате
к этих обмотках наводятся э. д. с. Так как обмотки сии
хроипзации распределены по длине магпитопровода по
( ппусоидальному закону, то при перемещении подвиж-
ного элемента э. д. с. в обмотках синхронизации также
п 1меняется по синусоидальному закону и их амплитуды
(мощены вдоль магнитопровода на 1/3 шага намотки
< ппхронизирующей обмотки
Как показано в [55], такая конструкция обладает
рядом недостатков, особенно при малых полюсных деле-
ниях, при малом отношении т/б. Действительно, если
принять полный период, на котором должны быть раз-
М( щены три пары катушек и магнитопроводящих колец,
р шиым 3,6 мм, то толщина катушки будет примерно
p.iniia 0,6 мм и путь для потока рассеяния (не завися-
щего от положения плунжера) между двумя соседними
м п питопроводящими кольцами будет проходить через
। । юр около 0,6 мм. В то же время на пути рабочего
потока, зависящего от положения плунжера, будет в не-
сколько раз больший зазор, состоящий из двойной тол-
..ны разделительной трубки и двойного зазора между
плунжером и трубкой.
Для существенного снижения относительного значе-
ния потока рассеяния при малых т/б разработана новая
i.iK называемая гребенчатая многофазная (например,
рехфазная) машина, создающая наибольшую в данных
р । iMcpax модуляцию индуктивностей трех катушек при
малых перемещениях плунжера. Максимумы индук-
нншостей в этих катушках наступают при поло-
жениях плунжера, отличающихся на 1/3 (при трех
ингушках) перемещения, принимаемого за полный пе-
риод 2т [60].
4
51
Рис. 3-4. Гребенчатая конструкция линейной машины с тремя пара-
ми гребенок.
/ — крышка верхняя; 2 — крышка нижняи; 3 — полюс верхний; 4— полюс
средний; 5— полюс нижний; 6 — обмотка; 7 -- плунжер; 8— разделительная
трубка; 9 — колыю.
В трех парах секторов (части кольца примерно по
60° каждая) из ферромагнитного материала внутренняя
поверхность выполняется в виде гребенки (рис. 3-4) с ши-
риной зубьев, несколько меньшей 1 /3 величины, прини-
маемой за полный период, и расстоянием между центра-
ми этих зубьев, равным этому периоду. При установке
на разделительную трубку гребенки смещаются так, что.
например, зубья первой пары гребенок занимают ниж-
нюю, зубья второй пары — среднюю и зубья третьей па-
ры—верхнюю треть периода (соответственно каждые
в своем секторе). Катушки наматываются вокруг каждой
секторной гребенки аналогично катушкам статорных по-
люсов электрических машин. На плунжере делаются
проточки так, что каждый кольцевой зубец плунжера
52
I'm 3-5. Схема гребенчатой конструкции без обмотки на плун-
жере.
। шпмает по высоте несколько меньше, чем половина,
триода. Уменьшение высоты зубца плунжера относи-
г и.по половины периода, как и высоты зубца гребенок
..пшептельно трети периода, связано с явлением расшн-
р> пня потока в кольцевом зазоре. Индуктивность каж-
•tiii катушки при движении плунжера изменяется, причем
полный период изменения соответствует прохождению
II того зубца и одного паза плунжера-
Максимумы индуктивностей катушек смещены на
।реп. периода. Поэтому физическая картина изменений
|1н||'1косцеплений по перемещениям dty/dx или изменений
ншричных напряжений в случае системы синхронного
। н ювания совершенно аналогична той, что имеет место
и ipex соленоидных системах с большим ходом плун-
। • ра.
Применение гребенки с магнитно-эквипотенциальны-
ми пбьямп устраняет рассеяние между ними. Рассеяние
ИМ) ( г место лишь между одной гребенкой и другой по
и1, in, длина которого вполне может быть установлена
I" । । точно большой и не зависит от длины периода пе
ргмещенпя плунжера. Значительное количество зубцов,
к in гвующих параллельно, позволяет получить большое
। синие для рабочего потока.
Наружное ферромагнитное кольцо обеспечивает прак
притки замкнутую магнитную цепь, в которой основным
магнитным сопротивлением будет рабочий зазор При
ним, хотя сечение зазора для каждой гребенки модули-
руется плунжером при его движении по периодической
53
кривой, суммарное сечение зазора для всего потока ма
меняется. Поток лишь перераспределяется по гребенка
•по создает оптимальную в данном объеме и при зада
пой толщине разделительной трубки магнитную систем
Рассмотрим решение этой же задачи в коиструкти
ном варианте с модуляцией взаимной индуктивности б
обмотки на плунжере путем подведения потока к ко.п
цевым полюсам плунжера извне через часть боковой и |
верхности разделительной трубки (рис. 3-5). В этой ко
струкции часть окружности плунжера занята полюса!
/ и 2 и обмотки возбуждения 3. Для гребенок с обмо
ками синхронизации (вторичные обмотки) остается лиц]
дуга примерно в 270° Угол между каждой парой Mai
нитно и электрически соединенных катушек синхронизм
ции составляет 135°, что никак не сказывается па p<i
' боте системы, кроме некоторого уменьшения объема к I
тушек при том же объеме устройства.
Увеличение количества зазоров на пути потока bq
буждения в известной мере компенсируется увеличением
объема меди в этой катушке. На полюсах возбуждении
зубьев делать не надо. Полюсы служат для наилучшегг
перехода потока возбуждения к полюсам плунжера.
В тех случаях, koi да диаметр плунжера невелик, раз
мещение вокруг него шести гребенок для вторичных ка
тушек и двух иегребенчатых полюсов возбуждения ока
зывается нежелательным. Для таких случаев разработан
вариант бесконтактной линейной гребенчатой машины
с аксиальным вводом потока (рис. 3-6).
Поток, создаваемый обмоткой возбуждения /, npoxoj
дит практически через всю боковую поверхность плунже-
ра 2 (на участке, расположенном вне гребенок 3 с об
мотками синхронизации 4), входит аксиально в плунже!
через все кольцевые выступы распределяется по треп
(для трехфазной вторичной обмотки) гребенкам обмо
ток синхронизации и замыкается через три внешних маг
нитопровода 5.
Вторичные напряжения модулируются пс по обычным
сельсинным формулам для обычных сельсинов тип!
а=ап,ах sin а, а по формулам оцнополгоспых систем («го
мополярных») a=a0-j-«?„nx sin а, как и в синхронной ма
шине [109], или в бесконтактном сельсине [61]. Это об
стоятельство отрицательно сказывается лишь на излпш
ней нагрузке потоками и токами, пропорциональными аи,
но не влияет на работу машины. ।
54
Риг. 3-6. Линейная гребенчатая машина с аксиальным вводом
in пока.
Указанный недостаток представляется менее значи-
п- п.ным, чем получаемые преимущества: два зазора на
। н потока возбуждения вместо четырех, большее се-
'н пне зазора для рабочего потока, большее место (в том
|>е данном объеме) для обмотки возбуждения и т п.
Отрицательно влияет на работу рассмотренной кон-
। |рукции короткозамкнутый виток, который будет созда-
I'.in. на пути потока возбуждения разделительная труб-
i> । Эта конструкция рекомендуется для тех случаев,
1мпда разделительную трубку можно выполнить из ма-
ii риалов с достаточно большим удельным сопротивле-
нием.
Рассмотренные выше бесконтактные гребенчатые Ma-
in ины позволяют получить многофазную и, в частности,
1ргхфазную систему токов (или вращение фазы одно-
i|i.i нюго тока) в функции перемещения явнополюсного
и п\ пжера.
Как показывают сравнительные расчеты, эти своеоб-
рл шые электрические машины, используемые в качестве
laiчиков синхронной связи, в данном объеме и при за-
55
Рис. 3-7. Линейный цилиндрический элек1родвигагель.
данных зазорах между гребенками статора и подвижным
плунжером (если учитывать толщину разделительно»
трубки) создают наибольшую модуляцию потока в фа
зах статора.
Все это позволяет считать целесообразным разрабсЛ
ку на этой основе электрического синхронного привое
для решения задачи силового линейного перемещения
поступательного, возвратно-поступательного, синхропЛ
следящего за управляющим механизмом, выполняющего
перемещение с точной остановкой в заданной точке и
т. п. (в том числе в герметически закрытых объемах,
в средах с высоким давлением, большой агрессивность™
и др.). Подобные задачи в большом количестве возни ,
кают при управлении современными технологическими
процессами.
На рис. 3-7 показан электродвигатель типа реактив*
ного синхронного электродвигателя с явнополюсиьп
плунжером без обмотки- При массе 5 кг плунжер создаст
усилие 150—180 Н и работает со скоростью (6*
8)-10~2 м/с, т. е. отдает механическую мощность 12 Вт
при потребляемой мощности около 100 Вт. Таким обра
зом, двигатель работает с к. п. д. около 0,12, вполй»
приемлемым для малого электродвигателя со столь боль-*
шими зазорами в магнитной цепи (напомним, что дви-
гатель с выходной мощностью 40 Вт имел к. п. д. также
около 0,12 [100]).
56
Выполнение плунжера наборным из постоянных маг-
ии ит с высокой коэрцитивной силой позволит получить
..... значительную составляющую усилия и
»<•< лимит к. п. д. такой своеобразной электрической ма-
шины.
При использовании подобного двигателя в автосин-
рониом режиме импульсы тока в многофазовые обмот-
। п подаются от коммутатора, управляемого системой
ну и ных датчиков, подробно разбираемых ниже.
11ри программном управлении подобным приводом
н|ц>| раммирующее устройство (например, шаговый иска-
• и., связанный с системой функциональных реле и реле
примени) подает в заданной последовательности импуль-
...... в фазы электродвигателя, определяя тем самым
<п( лсдовательность тех или иных перемещений плунже
|i.i и функции времени и действия функциональных реле.
Двигатель может использоваться и как возвратно-по-
п нательный привод с задаваемыми в широких преде-
амплитудой и частотой возвратно-поступательного
|||||>кепия, как синхронный привод, а также как прием-
ник синхронной передачи или программной системы по-
। 1 ияппого тока. Наконец, при питании многофазной об-
ит кн синхронизации системой переменных токов, полу-
чнгмой от сельсина или аналогичного датчика, можно
ii'iii реактивного электродвигателя и особенно для элек-
|рпдппгателя с однофазной обмоткой возбуждения до-
йн i вся синхронного следования или выполнения задан-
ной программы с точностью не 1/3 периода, как при
и» пользовании задающего шагового коммутатора,
и и десятки раз больше, т. е. в несколько градусов (что,
нлпрнмер, при периоде 7,5 мм составит лишь несколько
п-сягков микрометров).
Дальнейшее развитие гребенчатых систем позволяет
пне лучше использовать магнитную цепь этой машины
при сохранении такой же разделительной системы между
пнучрепним объемом и наружным пространством. Для
юн цели разделительные стенки привариваются к по-
чинам гребенки (рис. 3-8) и лишь немного уменьшают
|| ченпе окна катушек гребенок. Зазор же между зубья-
ми гребенок и зубьями плунжера может быть установ-
н и >схпологически минимальным (например, по 0,25 мм
in сторону)- Такпм образом, можно для датчика, пере-
iiniiiiiero перемещение пз объема с давлением в несколь-
||| тысяч килопаскалей или для приемного элсктродви-
57
гателя, обеспечивающего перемещение рабочих органо!
внутри такого изолированного объема, получить линей
ную электрическую машину, имеющую магнитную цеш
с зазорами, не превышающими зазоры в современны!
электрических машинах.
Одной из наиболее сложных задач теоретического
анализа работы гребенчатых конструкций двигателей ян
ляется определение мяг
нитной проводимости за
зора между зубчатым]
ротором и статором прг
их различных взаимны)
положениях. Зависимое!!
магнитной проводимое!!1
от перемещения ротор!
относительно статора он
ределяет усилие в двига
телях.
в
н
в
Z=0
Рис. 3-8. Схема гребенчатой
конструкции с дугами раздели-
тельной трубки, приваренными
к полюсам гребенки.
м
~л
Г5
к
с
о
, Р,
a+ix
Рис. 3-9. Взаимное располо-
жение двух гребенчатых по-
верхностей.
Рассмотрим воздушный зазор между двумя поверх-
ностями ферромагнитного материала: ABCDE— поверх-
ность гребенки и LKHQP — поверхность плунжера
(рис. 3-9). Принимаем магнитный потенциал <р на по-
верхности ABCDE равным пулю, а на поверхности
LKHQP равным <ро=О,8Рь. Введем безразмерную функ-
цию £/=чр/фо. Тогда UАвсоЕ—0; Ulkhqp=1-
58
Ооошачая период гребенки через /, имеем для любо-
»н и пределах длины гребенки (при пренебрежении
11 и ным эффектом, считая гребенку достаточно длинной
•I i>i шипении периода /):
у, z-\-l)=U(x, у, г), (3-1)
I 111КЖС
dUfdz(x, у, z)=dU/dz(x, у, z-\-l) (3-2)
( читая зуб гребенки достаточно широким (в отноше-
нии шлора между плунжером и гребенкой), рассматри-
। и м плоскую задачу изменения проводимости на едини-
|ц ширины зуба в соответствии со схематичным рис. 3-9.
I in лого случая уравнение Лапласа имеет вид;
дхг'дгг
Энергия магнитного поля
E = -L^H‘dV.
V
(3-3)
(3-4)
Удельная энергия магнитного поля на единицу ширины
। ,6.1
1 г
е = —W о
dxdz.
(3-5)
Удельная магнитная проводимость, приведенная к р.,,
<3'6>
Истинная функция поля U есть именно та функция,
кшорая дает минимум функционала G Поэтому будем
|к тать нашу задачу вариационными методами. Для наи-
нучшего выбора пробных функций используем тот факт,
mid для прямоугольных областей (в нашем случае, на-
пример, BCDE) можно решить задачу выбора функции
(идача Дирихле) методом разделения переменных.
Если бы были известны значения функции U на ли-
ниях BE (и соответственно МК и HN или в силу пери-
одичности линии НЕ'), то, приняв эти значения в качест-
ве краевого условия задачи Дирихле, можно было бы
получить решение для упомянутых прямоугольников,
и 1акже, как будет показано ниже (если использовать
равенство функции U и ее производных на линиях AS и
59
EF), в области ABENHKM, т. е. на всей интересующей
нас плоскости. I
Найдем функцию I/(x, z), которая удовлетворяв
уравнению (3-3) и условиям:
U(x, 0)=0; (3-7)1
U(x, Ь)=0; (3-Я)
Z7(0, z)=0; (3-9)
U(а, z)=<p,(z). (3-10)
Элементарные решения (3-3) и (3-7) — (3-10) ищем
в виде
U=X(x)Z(z).
Подставляя (3-11) в (3-3), имеем:
ахг 1 az1
(3-11)
или
Х"(х) Z”(z) ,
Х(х) - Z(z) —А-
По условиям (3-7) — (3-9)
X(x)Z(0)=0; Z(0)=0;
X(x)Z(t)=0; Z(6)=0;
X(0)Z(z)=0; X(0)^=0.
Функция Z(z) должна удовлетворять
(3-12) и условиям (3-13) и (3-14), т. е.
Z"(z)4-A’Z(z) = 0; |
Z(0); Z(b) = 0. )
Общее решение уравнения (3-16)
Z (z) =А cos X (z) -\-В sin Zz; A=Z (0) =0
и из (3-14)
(3-12)
(3-18)
(3-14)
(3-15)
уравнению
(3-16J
В sin ХЬ=О
Для того чтобы В не было тождественно равно нулю,
необходимо, чтобы sin Xt=O, т. е.
Х=£л/Ь; й=0; ±1; ±2... |
Решения, таким образом, имеют вид:
^fe=^fe(A-)sin^-z,
где функции Xk(x) должны удовлетворять
X"h—(kn/b)2x=0.
(3-17)
условию
(3-18)
60
Найдем решение в виде
оо
t/=^^fe(x)sin ^г, (3-19)
k=0
uiK как, если каждое элементарное решение (3-17) удов-
л< гноряет уравнению (3-3) и условиям (3-7) и (3-8), то
и сумма их удовлетворяет тому же уравнению и тем же
условиям. Для этого необходимо подобрать функции
\/(х) из условий (3-9) и (3-10), т. е. использовать
у равнения:
£/(0; г) = У Xft(0)sin^-z = 0; Xk(0) = 0; (3-20)
k
U(a, A'Ar(a)sinfe"-2 = <p1(z). (3 21)
k
Функцию (z) на отрезке a, b можно представить
н виде
CO
<P> (z) = a>fe sin z. (3-22)
k-i
Из ортогональности функции sin^- z следует:
b
9 Г Ья
rJ<p,(z)sin^-zdz. (3-23)
о
Общее решение (3-18) имеет вид:
Xk (-v) = A sli х Вк ch .г.
Подробно это уравнение рассмотрено в [55]. Его ре-
шение приводит к следующему уравнению:
__________у
и й 9л2й2 24
f 2 4 „ 1 „ 2 28л 16Л2 х
(2Г„+д 7„—3 7U+FS3+ 9 — 3 £I3 + д 0n2g у
Д 16Л2\ / 16ft21 7 8ft2?2 ’
^Зл+2733+ F33-|- 9jl.2gj ^’'+27'11-|-Дп+ n£g J ^2713-|-F13-|-
(3-24)
61
где значения и Fmm> вычисляются для различных
h и 8, причем достаточно ограничиться значениями
Л=1/2; 2/3; 3/4; 1* и 6 = 0,05; 0,1; 0,15; 0,25.
Для 8Ь> 0,3 коэффициенты Tmitni и Fmm^ определяют-
ся по упрощенным выражениям:
(3-25)
F^m. -= ттаcos 2^° ' °? <т)> (3 2б)
где
ат ГтЛ- 1) COSrM zo Q_,
И7!) 7){4fe’— |(2W£— 1)Л)]2}* Р~7)|
При анализе полученных результатов нас будет ин-
тересовать вид кривой G=f(g) при различных значе-
ниях h п 6.
По семейству таких кривых можно сделать выбор
параметров для получения максимального значения мо-
дуляции (Gmax— Gmin)/Gmax и максимального значения
dG/d^, определяющего максимальное электромагнитное
усилие. Такой анализ может быть произведен и без
предварительного построения кривых G=/(g).
Для упрощения записи введем дополнительные обо-
значения:
5ц=л + 2Ти + Гц; 5зз=3л + 2T33+F33; 5|з=27’|з+^|з;
f=•s„+4 S„ - 4 s=- (SJ\
тогда (3-24) примет вид:
г— 1
16Л= f ’
й + —~ —
S' g
df ._°g
dG __ Ci di. g* g"z ' 16Й2
U fe2 t?
* Размер Л = 1 не означает отсутствия зубца, а лишь столь ма-
лую ширину его, что ею можно пренебречь по сравнению с шириной
паза.
62
I nr
elf <fSJ3 1 б/S,, 2 . dg dS33 с I
Jt di Г ~di Г ~dT'- dtT~ d$ ”'+’
dS„ q n dS13 «
+ °’3
Используя (3-25), (3-27) при ’8 = oo (практически для
Л 0,3), определяем значения для конкретных /г
и k Эти значения приведены в табл. 3-1.
Таблица 3-1
Коэффициенты для расчета проводимости
т I h — ~2~ CN |сО С 3 h= 1
у(оо) I 2к 2 2^-6,33 ^•5.93
г(оо) ' 33 3 2V9’16 2^-9,11 2Г-9.07 2Г’8-44
Г(Г) _3 2_ 2п ’ 3 — 2-0,751 2п & ’8М _L 4 2п 3
При 8 <0,3 для расчета Т (и соответственно ’$) при-
ходится пользоваться полной формулой
т„, «-S 4-k cth °? w.
k
но и здесь достаточно взять лишь небольшое число чле
ион, так как с ростом k функция с№2лЛб быстро стре-
ми |ся к 1; соответственно быстро стремится к нулю и
l/sh2n&6 в полном выражении для определения Fm^
„ 2fe о l fh — Ь
F — > , —. о .г- cos2it£ I —я—
7j тс sh 2пйй 2
k
Таким образом, реальный объем расчета по (3-25)
и (3-26) для определения коэффициентов, входящих
и (3-28) и (3-29), для вычисления G и dG/d^ относи-
ц'льно невелик.
63
Для /z=3/4 II 6 = 0,05 имеем:
Si|=9,24 + 5,75 cos 2л|+
SI3=—2,55—3,2 cos 2л£—...;
S33=25,27+ 1,77 cos 2л£+10,54 cos 4л|+0,56 cos 6л£;
соответственно для производных:
dSji/d^ = —-2n-5,75sin 2л|;
rZSI3/irflj=2n-3,2 sin 2л£;
dS33/d^=— 2л (1,77 sin 2лЕ +
+2-10,54 sin 4л£ + 3-0,56 sin 6л£ + .
Таблица 3-2
Значения коэффициента С для расчета параметров линейных
двигателей
г
0 1/12 2/12 3/12 4/12 5/12 6/12
0,05 0 8,10 11,4 13,2 13,3 10,95 0
0,15 0 1,215 2,17 2,56 2,58 1,66 0
0,25 0 0,39 0,71 0,87 0,77 0,515 0
Рис. 3-10. Изменение проводи-
мости в зависимости от взаим-
ного смещения гребенок.
по программе, составленной
мулам.
Далее составляем таб-
лицу коэффициентов G
для разных заданных 6
и h (табл. 3-2).
По данным расчета по-
строены кривые на рис,
3-10. Зная функцию G(g),
нетрудно получить и все
остальные параметры ли-
нейных машин — усилие
(мощность), а после ана-
лиза потерь — к. п. д. и
другие параметры. Расчет
можно провести на ЭВМ
по приведенным выше фор-
3-2. ЛИНЕЙНЫЕ ДВИГАТЕЛИ С ЯВНОПОЛЮСНОЙ
ВТОРИЧНОЙ ЧАСТЬЮ И ИХ ПРОТОТИПЫ
Во многих статьях утверждается, что линейный двп-
гатсль есть не что иное, как развернутый в линию вра-
щающийся двигатель. Отвергая чрезмерную категории-
•их и. этого утверждения, можно тем не менее согла-
нп.ся с тем, что в целом ряде случаев — не только для
ишхронной машины — такая операция «развертывания
I ппппо» действительно имеет место.
Можно показать, что для многих линейных синхрон-
•П1 машин (включая в это понятие и машины постоян-
но! о тока, рассматриваемые как «автосинхронные»)
(><-юбмоточной явиополюсной вторичной частью таким
прототипом является хорошо известный бесконтактный
н.сип ВЭИ, изобретенный в 1938 г. [27] и запатенто-
hniiibiH в промышленно развитых странах мира в 1940 г.
Пн 3-11. Бесконтактный сельсин с односторонним вводом потока.
Сравним бесконтактный сельсин с односторонним
Пиотом потока [54] с линейной синхронной машиной
|10>]. У бесконтактного сельсина (рис. 3-11) магнитный
поток, созданный катушкой возбуждения 7, расположен-
ной па первичной части и неподвижной относительно
икорной обмотки 4 («обмотки синхронизации» в сель-
и и ной модификации), поступают через дополнительные
। юры 2 в чередующиеся полюсы 5 и 5', разделенные
немагнитной прослойкой 6 друг от друга.
При питании обмотки возбуждения 7 постоянным
током «первые» полюсы 5, в которые поток поступает
и pi । дополнительный зазор 2 из тороида 1 (здесь и
ни кг тороидом называется кольцевой пакет магнитной
। п< 1емы), будут, например, южными полюсами S, а «вто-
р|.н полюсы 5', из которых поток через дополнительный
юр 2 идет в тороид 1' (замыкаясь через внешний
M.Ei ннтопровод 8),— северными полюсами N. При пере-
Mi щеиии друг относительно друга полюсов ротоэд и якор-
|юц обмотки 4 статора против каждой заданной обра-
уинцей липин внутреннего цилиндра статора будут
попеременно находиться то полюс S, то полюс N, обес-
Л—Г14 65
печивая работу синхронной машины с возбужденными
но безобмоточными полюсами. Якорную обмотку перс
секает поток возбуждения, переходящий из полюса в по
люс через рабочий зазор 3, зубцы, спинку статора ।
снова рабочий зазор 3, совершенно аналогично маши»
с обмоткой возбуждения на полюсах ротора.
Линейная синхронная машина, показанная и.
рис. 3-12, не что иное, как развернутая в линию оппсач
ная выше машина. Здесь магнитный поток, создаваемы!
обмоткой возбуждения /, из левой (верхней) полосу
«развернутого тороида» 6 через дополнительный зазор)
идет в полюсы 3, отделенные немагнитной прослойкой А
*.л
Рис. 3-12. Линейная синхронная машина — развернутый бесконтакт
ный сельснн.
от полюса 3' (т. е. это «развернутый» ротор бесконтакт
ного сельсина). Из полюса 3 (S) через рабочий за
зор 8 магнитный поток возбуждения, взаимодействуя
с якорной обмоткой 4, проходит в зубцы, затем в спин
ку статора, снова через зубцы и рабочий зазор 8 в по
люсы 3' (/V), оттуда через дополнительный зазор 2
в правую (нижнюю) полосу — второй «развернутый тя
роид» 7.
Конечно, «развернутая» линейная машина имеет,
свойства, отличающие ее от кругового прототипа. Глав
ным образом это связано с разомкнутостью магнитной
цепи, входом во взаимодействие с первичной частью ра-
нее не возбужденных полюсов и выходом из режима
взаимодействия ранее возбужденных полюсов (в § 3-3
это будет подробно рассмотрено). Но основной принцип
действия линейной машины по рис. 3-12 и бесконтакт-
ного сельсина по рис. 3-11 один и тот же.
Аналогичное совпадение основного принципа дейст-
вия можно проследить у так называемой гомополярной
6(5
инейной машины [109] при сравнении с однополюсным
(неконтактным сельсином [54, 61].
При создании бесконтактного сельсина был исполь-
iiiii.iii метод синтеза, рассмотренный в [|54, 55]. Было
пик нано, что для создания сельсина с синхронизирую-
щим моментом, пропорциональным sin 0 (где 0 — угол
Р и югласования между осями датчика и приемника),
можно использовать устройства, у которых изменяю-
нпшся в функции угла параметр, например напряжение
ни фазе вторичной обмотки, может ‘изменяться не только
и ин io t/2=t/osin а, но и в виде U2= Uo+ sin а, вооб-
iii< модулируемый параметр а=а0+а{ sin а.
Рис. 3-13. Однополюсный бесконтактный сельсин.
Это обстоятельство позволяет применить в качестве
(и < контактного сельсина машину, принципиальная схема
кчк>рой показана на рис. 3-13. Поток, создаваемый об-
мн| кой возбуждения 5, через тороид 6 и зазор переходит
и пакет ротора 2, занимающий почти все сечение ротора,
нем через пакет полуколец 3 и через второй (рабочий)
। юр поступает в статор 4, проходит через зубцы, меж-
tv которыми заложена вторичная обмотка, в спинку
। uiopa. Из последней поток непосредственно переходит
пакеты внешнего магнитопровода /, замыкая путь
вокруг катушки возбуждения 5 и лобовых частей кату-
пн к статора. Каждая из вторичных катушек занимает
и шу в 120°, а наивыгоднейшая дуга полуколец ротора
। нс (являет 0,55-2т~200п. Поток, входящий во внутрен-
пкно поверхность сердечника статора, больше чем вдвое
превышает поток, который можно было бы ввести во
внутреннюю поверхность сердечника при обычной двух-
(,» 67
полюсной конструкции, так как, кроме сечения, которой
занималось обоими полюсами, используется еще и сече!
ние немагнитной прослойки между ними. У такой кон-
струкции ао=а[ и переменная составляющая потока
примерно равна половине полного потока, а сннхронп
зирующий момент пропорционален-^-a,sin 6(где т — чис-
ло модулирующих фаз). При т=3 момент пропорцио]
нален — Cj sin 0.
Статор и тороиды
аналогично соответствующим
Рис. 3-14. Гомополярная линейная
синхронная машина.
технологически -выполняютс:!
элементам обычного бес-1
контактного сельсина. I
Сравним с этой маши-
ной (при питании ее об*
мотки возбуждения посто-1
янным током и обмотки
синхронизации трехфаз-1
ным переменным током)
линейный синхроннып
двигатель с униполярным
возбуждением (или гомо-
полярный), показанный
на рис. 3-14 [109]. Полю
сы 1 путевой структуры («ротора») могут также занима гь
200° и более; поток в эти полюсы (между их осями 3601
или 2т) поступает из ярма 2 магнитной системы обмотки
возбуждения 3 через листы пакета статора 4 и рабочий
зазор —совершенно аналогично тому, как это происхо-
дит в правой части однополюсного бесконтактного сель-
сина, рассмотренного выше. Если бы у этого сельсина
в левой части у тороида была предусмотрена обмотка
(как это сделано, например, у разбираемых ниже сель
сипов), аналогия была бы полной.
Конкретной конструкции рассмотренного выше одно-
полюсного бесконтактного сельсина (см. рис. 3-13) точ-
нее соответствует односторонний вариант конструкции
гомополярного синхронного линейного двигателя, кон
структивная схема которого представлена на рис. 3-15
Магнитный поток, создаваемый обмоткой 3, из ярма j
справа проходит через листы статора 4 и рабочий зазор!
в полюсы 1 путевой структуры, аналогичные полюсам'
двусторонней конструкции на рис. 3-14, и, пройдя по-
перек пути в непрерывную полосу 5, замыкается в яр-
68
Ь аналогично замыканию потока через аксиальный
nine! ротора и тороид у рассмотренного выше однопо-
ччгного сельсина.
На рис. 3-16 показан поперечный разрез макетного
образца тихоходного линейного синхронного двигателя
। магнитной редукцией [12]. Подвижная часть двига-
кля состоит из стального П-образного магнитопровода
обмоткой возбуждения, создающей униполярный маг-
ии |ный поток, и двух пакетов из электротехнической
। 1али, в открытых пазах которых уложена трехфазная
обмотка, создающая вдоль воздушного зазора бегущее
магнитное поле. Вторичный элемент представляет собой
Рис. 3-15. Односторонний вариант гомополярной линейной
синхронной машины.
неподвижно закрепленный пакет из электротехнической
пали, выполненный с открытыми пазами. Фиксирование
i.i.iopa между неподвижной и подвижной частями осу-
ществляется направляющими роликами, установленными
и.। первичном элементе. Взаимодейст-
вие униполярного магнитного потока,
который замыкается через воздушные
•а юры, пакеты якоря, магнитопровод
и вторичный элемент, с токами якоря
при определенных геометрических co-
ni ношениях обеспечивает линейное
ннжение с требуемой скоростью.
1’пс. 3-16. Линейный синхронный двигатель
। магнитной редукцией.
69
Макетный образец имел следующие данные:
Напряжение якоря U, В................................ 36
Ток якоря /ф, А..................................... 8,5
Ток возбуждения /в, А................................. 1
Частота /, Гц........................................ 50
Скорость подвижной части v, м/с..................... 0,3
Максимальное усилие тяги FTmax, Н................... 330
Удельное тяговое усилие FT/sa, Н/смг................ 1,2
Полюсное деление якорной обмотки г,, мм........ 0,039
Ход подвижной части Хп, м........................... 0,6
Масса подвижной части Gn, кг......................... 18
Охлаждение двигателя............................ Естественное
Режим работы................................... Длительный
На рис. 3-17 приведены рабочие характеристики:
^=/(^т); P\=f(Fr); cos (FT); для номи-
нальной скорости движения подвижной части двигателя
£)=0,3 м/с.
/, cos Г 77
Л -Вт -Вт - V - op
78 -450 - 30 -0,45 -0,45
15 -400 - 80 -0,4 - °,V
!4 -350 - 70 -0,35 -035
12 -300 - 60 -о,з -0,3
10 -250 - 50 -0,25 -025
8 -200 - 40 -0,2 -0,2
8 -150 - 30 ~0,!5 -0,15
4 -100 - 20 - 0,!
2 - 50 - 10 -ops -0,05
0 L о L о L о L о
Рис. 3-17. Рабочие характеристики линейного синхронного двигателя
с магнитной редукцией.
Существенным улучшением магнитной цепи бескон-
тактных сельсинов явилось введение в этих машинах об-
моток возбуждения, расположенных между статором и
наружным магнитопроводом. На рис. 3-18 показана кон-
струкция такой машины, а на рис. 3-19 эксперименталь-
ные кривые синхронизирующего момента базовой и мо-
дифицированной машины, снятые на машинах совершенно
одинаковых габаритов при одной и той же потребляемой
мощности.
70
Обмотка синхрониза-
ции размещена на стато-
ре вдоль всей рабочей
длины ротора. Пакеты ро-
тора расположены вдоль
его оси таким образом,
чго при каждом пересе-
чении магнитным потоком
воздушного зазора (ос-
новного 6| и дополнитель-
ного 62) обеспечивается
взаимодействие потока
возбуждения с обмоткой
синхронизации.
Магнитный поток, со-
|Даваемый обмоткой воз-
буждения 5 (рис. 3-18),
проходит по пакетам
внешнего магнитопрово-
да 3, крайней (например,
левой) части статора /,
через дополнительный за-
зор (пересекая обмотку
синхронизации 2), магни-
топроводящий пакет ро-
тора 4, основной зазор,
зубцы и спинку среднего
пакета статора 1 (еще
раз дважды пересекая
обмотку синхронизации
.?), второй магнитопрово-
1ЯШИЙ пакет ротора 4,
юполнительный зазор бз
(опять пересекая обмот-
ку синхронизации 2), че-
рез третью часть пакета
с га гора 1 (крайнюю пра-
вую) и замыкается в па-
кетах внешнего магнито-
нровода 3.
При заданном значе-
нии фазной э. д. с синх
можно примерно вдвое у
обмотки и, следовательно, снизить со активное и пн-
5 1 2
Рис 3-18. Конструктивная схема
бесконтактного сельсина с дву-
кратным потокосцеплением.
/ — статор, состоящий из трех аксиаль-
но-смещенных частей; 2 — трехфазная
или двухфазная обмотка синхрониза-
ции; 3 — пакеты внешнего магнитопро-
вода; 4 — безобмоточный ротор; 5 — об-
мотка; б и 6' — основной и дополни-
тельный немагнитные промежутки ро-
тора.
Рис. 3-19. Зависимости синхрони-
зирующего момента у сельсинной
пары.
-------БС-500Ф (по рнс. 3-18);
----— — БС-500 (базовый бесконтакт-
ный сельсин); —• — — — БС-500Ф при
работе от мощного датчика;...—
БС-500 при работе от мощного дат-
чика.
ронизирующей обмотки воз-
меныпить число витков этой
71
дуктивное сопротивление по поперечной оси, что явля-
ется необходимым условием увеличения удельного син-
хронизирующего момента сельсина и удельной мощ-
ности в поперечной оси Рд.
Теоретический анализ и расчеты, приведенные
в [55], полностью подтвердились на выполненных об-
разцах. Как видно из рис. 3-19, где приводятся харак-
теристики синхронизирующего момента нового сельсина
БС-500Ф и базового сельсина БС-500, при работе от
одного и того же мощного датчика удельный синхрони-
зирующий момент нового сельсина примерно в 1,8 раза
больше, чем у базового, а при работе от идентичного
датчика — в 2,2—2,5 раза больше. Хорошо известная
в целом конструкция с многократным потокосцеплением
оказалась удачной и для линейных двигателей.
Для линейного двигателя со вторичной частью протя-
женностью в десятки и сотни километров особое значе-
ние имеет при этом тот факт, что при использовании кон-
струкции подобного типа существенно перераспределяет-
ся металлоемкость между основными частями машины.
Длина проводника в пазах якоря увеличивается пропор-
ционально кратности потокосцеплений п, равной числу
пар полюсов поперек пути. Количество меди обмоток
возбуждения у первичной части растет незначительно,
так как хотя возрастает общий рабочий зазор, равный
2пб, но (при не слишком большом общем увеличении
потокосцеплений) почти во столько же раз падает индук-
ция в зазоре. Уменьшение индукции в путевой структуре
ведет к уменьшению высоты (толщины) магнитопрово-
дящих элементов на пути, и при сохранении примерно
такой же общей ширины вторичной части ее активная
масса уменьшается, а это основная составляющая за-
трат при создании машины с протяженной вторичной
частью. Работа этой машины подробно разбирается
ниже.
Легко можно проследить аналогию между однофаз-
ным двигателем с вентильной коммутацией [58, 65] г
линейным двигателем [67]. Устройство наиболее просто-
го варианта (с вентилями выпрямительного типа) вра-
щающегося прототипа этого линейного двигателя ясне
из рис. 3-20. На полюсах 1 и 2 внешнего статора распо
ложены катушки 3 и 4, питаемые однофазным перемен
ных током. Возбуждаемый этими полюсами пульсирую
щий переменный поток Ф проходит через воздушный за
зор в ферромагнитный полый ротор 5, разветвляясь
72
Рис. 3-20. Однофазный бесколлекторный электродвигатель.
вправо и влево от оси и замыкаясь от полюса 1 к полю-
су 2.
Ротор выполнен одпопакетным в виде полого ферро-
магнитного цилиндра с двумя активными поверхностями.
Па внешней поверхности размещены обмотки перемен-
ного тока 6—9, имеющие диаметральный шаг и выпол-
ненные (в зависимости от мощности машины) либо в па-
зах, либо по типу печатных обмоток. В лобовые части
каждой из обмоток 6—9 по
мостовой схеме включены вы-
прямители 10, к выходам ко-
торых подключены обмотки по-
стоянного тока 11—14, распо-
ложенные на внутренней по-
верхности ротора и соединен-
ные по схеме рис. 3-20,6.
Постоянный магнитный по-
ток полюсов 15—18 внутренне-
го статора, возбуждаемый ка-
тушками 19—22 постоянного
тока или от постоянных магни-
тов, замыкается также вдоль
дуги полого ротора, как пока-
зано на рис. 3-20,а. Взаимодей-
Рис. 3-21. Моменты враще-
ния двигателя.
/ — асинхронный момент; 2 —
момент, создаваемый статорной
обмоткой постоянного тока при
шунтовом включении обмотки
возбуждения; 3 — результирую-
щая механическая характери-
стика двигателя.
73
Ствйе этого Потока с постоянным током обмоток И—14
создает на внутренней поверхности ротора однонаправ-
ленный вращающий момент. По мере разгона возникает
также момент на внешней поверхности ротора аналогич-
но однофазному асинхронному двигателю.
На рис. 3-21 показаны зависимости моментов, созда-
ваемых на поверхностях, и общего момента ротора от
частоты вращения.
В зависимости от типа возбуждения на стороне по-
стоянного тока могут быть получены и комбинированные
механические характеристики: сериесно-однофазная или
компаундно-однофазная. Регулирование частоты враще-
Рис. 3-22. Линейная модифика-
ция двигателя.
шить габариты и снизить
ния и реверсирование элек-
тродвигателя осуществля-
ются изменением тока воз-
буждения в катушках 19 —
22 (рис. 3-20) полюсов вну-
треннего статора и прост-
ранственным смещением
внутреннего статора относи-
тельно внешнего механиче-
ским путем.
Ротор может быть вы-
полнен и в виде ферромаг-
нитного диска с размещени-
ем указанных обмоток по-
стоянного и переменного то-
ка на различных поверхно-
стях. В этом случае стато-
ры расположены по обеим
сторонам параллельно пло-
скости ротора. Такая конст-
рукция позволяет умень-
ассу двигателя.
Возможно выполнение двигателя и многороторным
с несколькими концентрически расположенными полыми
роторами или с несколькими дисковыми роторами, за-
крепленными на общем валу, а также двигателя с рас-
положением обоих типов роторных обмоток и соответст-
вующих им полюсов на одной и той же стороне ротора.
Вместо выпрямителей могут быть использованы усили-
тели-демодуляторы (например, транзисторные или тири-
сторные, управляемые напряжением роторных обмоток
переменного тока), выходы которых подключены к об-
74
моткам постоянного тока. Линейная модификация этого
двигателя показана на рис. 3-22,а (поперечный разрез)
и рис. 3-22,6 (вид сверху полюсной системы).
Двигатель имеет обмотку возбуждения /, укреплен-
ную на магнитопроводе 2, которым в данном случае,
например, является ось колесной пары и колеса 3 дви-
жущейся тележки. На тележке также укреплен развер-
нутый статор 4 с обмоткой 5. Вдоль пути перпендикуляр-
но направлению движения между рельсами 6 установ-
лены полюсы развернутого ротора 7, выполненные в ви-
де ферромагнитных брусков. Вдоль пути расположен
профилированный швеллер 8. На тележке укреплены
магнитопровод датчика положения полюсов индуктора
с управляющей катушкой 9 переменного тока (малой
управляющей мощности) и полупроводниковый комму-
татор 10.
Двигатель работает следующим образом. Рабочий
ноток, возникающий при подключении обмотки возбуж-
дения 1 к источнику питания, взаимодействует с токами,
протекающими в проводах обмотки 5. При этом созда-
ется тяговое усилие, значение которого и знак определя-
ются как знаком и током катушки возбуждения /, так и
током, зависящим от напряжения на управляющей ка-
тушке 9 и характеристики коммутатора 10. Тяговое уси-
лие зависит также от положения системы, питаемой
переменным током, относительно системы, питаемой по-
стоянным током (эффект «сдвига щеток»). При этом
возникает возможность регулирования или остановки
тележки как путем сдвига системы проводов переменно-
го тока по отношению к системе проводов постоянного
тока на тележке, так и смещением «швеллера» по от-
ношению к системе полюсов постоянного тока на
пути.
Применение неподвижного швеллера 8 с выступами
позволяет также, используя какую-нибудь вспомогатель-
ную измерительную катушку на тележке, получить при
помощи счетчика импульсов точную информацию о прой-
денном пути, а при помощи частотомера — информацию
о текущей скорости движения тележки.
Разумеется, и для этой модификации вполне возмож-
но применить систему с многократным потокосцеплени-
ем, упомянутую выше. При этом машина и путевая
структура приобретают вид, показанный на рис. 3-23.
Магнитный поток, создаваемый обмоткой возбужде-
73
ния 1, из ярма 2 через допол-
нительный зазор 3 попадает в
приемную полосу 4 и поступа-
ет в полюсы 5 (N), затем че-
рез рабочий зазор 6 — в зубцы
и спинку, пересекая якорную
обмотку 7 аналогично рассмот-
ренной выше магнитной систе-
ме линейной машины [67],
представляющей собой развер-
нутый бесконтактный сельсин
с однократным потокосцепле-
нием.
Применяя к линейной ма-
шине принцип многократного
Рис. 3-23. Линейный двига- потокосцепления, лроиллюст-
тель с многократным ноте- рированный для бесконтакт-
косцеплением. пого сельсина БС-500Ф (см.
рис. 3-18), строим соответст-
вующим образом видоизмененную магнитную си-
стему.
'Магнитный поток из спинки и зубцов первого пакета
якоря 8 через рабочий зазор 6 попадает в полюсы 9
(S), отделенные от первого ряда полюсов 5 (7V) не-
магнитным промежутком, и по магнитопроводящим
участкам 10 идет в следующий ряд полюсов 11 (снова
Л’), через рабочий зазор 12 попадает в зубцы и спинку
второго пакета статора 13, пересекая на другом участке,
но те же провода якорной обмотки 7, что и при первом
пересечении обмотки, и т. д. пока поток не попадет
в зубцы и спинку третьего пакета 14, затем в ряд полю-
сов 17 (S) и через правую приемную полосу 15 и правый
дополнительный зазор 16 замкнется в ярме 2.
Прежде чем перейти к теоретическому анализу, рас-
чету и результатам моделирования этой системы, рас-
смотрим весьма своеобразную асинхронную машину,
линейная модификация которой имеет путевую структу-
ру, вполне аналогичную рассмотренной выше.
Именно метод управления перемещением рабочего
потока по дуге статора путем поворота пакета ротора
по отношению к тороиду привел к интересной конструк-
ции вращающейся (и соответственно линейной) асин-
хронной машины, у которой как первичная, так и вто-
ричная обмотки расположены на статоре, а на роторе
76
имеются только смещенные друг относительно друга
м.п пнтопроводящие пакеты.
Конструктивная схема (продольный разрез) вращаю-
щейся машины [64] показана на рис. 3-24. Питаемые
hi разных фаз сети сосредоточенные обмотки 1, 1' и 1"
• чщают магнитные потоки — каждая в своей магнитной
ш ип. Так, обмотка 1 создает магнитный поток в цепи:
пакет статорного магнитопровода 2, пакет статорных ко-
п ц (толщина которых уменьшается по мере удаления
Рис. 3-24. Асинхронная машина с расположением первичной и вто
рижной обмоток па статоре (2р—4).
си магнитопровода) 3, рабочий зазор 4, полюсы ротора
> (пересекает только те провода расположенной в пазах
пакета статорных колец вторичной обмотки 6, которые
окажутся против полюса ротора 5), осевой пакет рото-
ра 7, второй пакет роторных полюсов 8 (смещенный
и । одно полюсное деление относительно положения пер-
ши о пакета 5), зазор 4, второй пакет статорных колец 9
(пересекает в обратном направлении только те провода
общей вторичной обмотки 6, которые расположены на-
против полюсов 8, т. е. смещены на 180° относительно
проводов, которые поток фазы пересек в прямом на-
правлении), статорный магнитопровод 2.
Аналогично замыкаются потоки второй и третьей фаз,
созданные соответственно обмотками Г и 1", но пакеты
роторных полюсов смещены относительно пакета 5 на
120 и 300° соответственно для первого и второго пакетов
полюсов второй фазы и аналогично для третьей фазы.
Вторичная обмотка 6, как указывалось, общая для всех
77
трех фаз, для всех шести статорных и роторных паке-
тов. Взаимодействие токов, индуцируемых в проводах
вторичной обмотки потоками всех фаз, с соответствую-
щими потоками приводит к появлению момента анало-
гично тому, как это происходит в асинхронной машине
со вторичной обмоткой на круглом роторе. Ближе всего
подходит аналогия с двухстаторной (вообще многостатор-
ной) машиной (см. рис. 2-9), рассмотренной в § 2-5,
также обладающей размещенными вдоль оси длинного
ротора фазами статора с автономной магнитной цепью
для каждой фазы и общей на всю длину активной части
машины вторичной обмоткой.
Наглядной моделью двухфазной двухполюсной асин-
хронной машины со вторичной обмоткой на статоре и
явнополюсной системой возбуждения может явиться мо-
дифицированный сдвоенный бесконтактный сельсин (на-
пример, типа ДБС-500 [54]), у которого оси обоих рото-
ров соединены друг с другом со сдвигом на 90°, обмотки
возбуждения подключены к источнику двухфазного тока,
а обмотки синхронизации соединены друг с другом.
Разберем назначение, построение и работу наиболее
интересной линейной модификации этого двигателя. Это
электрическая машина поступательного движения с со-
средоточенными первичными обмотками и расположен-
ным вдоль пути ферромагнитным рельсом или полосой.
Для повышения надежности, введения возможности ре-
гулирования скорости и момента, существенного умень-
шения вредных краевых эффектов и снижения расхода
токопроводящих материалов магнитопроводы, распола-
гаемые вдоль пути, выполняются переменно-полюсными,
а фазные обмотки статора укреплены на тележке со сме-
щением друг относительно друга приблизительно на
90° — для двухфазной, 120° — для трехфазной и вообще
Иа 360°/т для машины с любым числом фаз т, большим
двух. За 360° принимается расстояние вдоль пути, со-
ответствующее расстоянию между осями одноименных
полюсов магнитопровода пути. Вторичная Обмотка рас-
полагается в пакетах стали упомянутых фаз на тележ-
ках и соединяется зо всех фазах последовательно.
На рис. 3-25,а представлен продольный разрез маши-
ны в трехфазном варианте. Магнитный поток, возникаю-
щий при подаче питания в обмотку возбуждения /, про-
ходит по магнитопроводу 2 в левую часть статора 3,
через воздушный зазор попадает в левый полюс пути 6,
73
Рис. 3-25. Линейная асинхронная машина с расположением первич-
ной и вторичной обмоток на подвижной тележке.
затем —в соединенный с ним средний полюс пути 7,
1 нова через воздушный зазор попадает в среднюю часть
< гатора 4, из нее через воздушный зазор в другой сред-
ний полюс пути 8, соединенный с ним правый полюс
пути 9 и снова через воздушный зазор проходит в пра-
пую часть статора 5 и замыкается через магнитопровод
сгатора 2, четыре раза пересекая вторичную обмотку
10. В других фазах магнитный поток проходит тот же
путь.
Взаимодействие магнитного потока с током, возни-
кающим в статорных обмотках, создает тяговое усилие,
|.!ставляющее тележку двигаться.
На рис. 3-25,6 представлен вид сверху магнитопрово-
дов пути. В этом варианте магнитопроводы пути не свя-
79
зайы магнитно с рельсами, и их размеры зависят Только
от конструкции машины.
На рис. 3-25,в дана схема выведения статорных вто-
ричных обмоток на пускорегулирующие реостаты.
На рис. 3-25,а приведена схема статорных вторичных
обмоток. По-видимому, в целях удешевления магнито-
проводы пути практически могут выполняться нешихто-
ванными. Как для этого варианта, так и для других ма-
шин с безообмоточными полюсами на пути представляет
также интерес использование для путевых магнитопро-
водов соответствующих пресс-порошков.
В качестве «левой» и «правой» частей магнитопрово-
дов пути можно использовать существующие рельсы.
В этом случае вторичная обмотка на тележке будет за-
нимать только среднюю часть статора, а рабочая часть
магнитопроводов пути будет представлять собой пере-
менно-полюсную структуру, левая часть которой магнит-
но связана с левым рельсом, а правая часть — с правым
рельсом аналогично структуре на рис. 3-22.
Не имеющая вторичной обмотки левая часть статора
магнитно связана с левым рельсом, а правая часть—
с правым.
Выполнение магнитопроводов по рис. 3-25,а и нали-
чие возможности переключения вторичных проводов на
тележке и смещения статора поперек тележки позволяют
также (при различном сочетании поднятых и опущенных
участков левой и правой частей полюсов пути) получить
эффект изменения числа полюсов. Это позволяет исполь-
зовать наиболее экономичный способ регулирования ско-
рости, особенно подходящий при наличии неизменных
сосредоточенных первичных обмоток.
Такую машину можно использовать и в генераторном
или тормозном режимах, но особенно ценным представ-
ляется использование ее в качестве двигателя для тяги
при однофазном питании и обеспечении временного сдви-
га фаз с помощью известных высоковольтных фазосдви-
гающих устройств, так как сосредоточенные обмотки
предлагаемой машины можно выполнить практически на
любое напряжение, в том числе в кожухе с трансфор-
маторным маслом. Следует отметить, что выполнение
путевой структуры по рис. 3-25 или при многократном
потокосцеплении по рис. 3-23 позволяет взаимодейство-
вать с ней как первичным системам синхронного (в том
числе автосинхронного постоянного тока) типа, так и
80
первичным системам асинхронного типа. Это обстоятель-
• 1 во может существенно удешевить работы на этапах
•и работки, сравнения в эксплуатационных условиях и
выбора окончательного варианта или вариантов систем
линейного электропривода, особенно для тяги на же-
.н шодорожном транспорте.
Проведем анализ основных модификаций рассмотрен-
ных машин. При исследовании новой электрической ма-
шины наиболее естественно обратиться к фундаменталь-
ным представлениям о взаимодействиях в электромаг-
нитном поле.
Рис. 3-26. Взаимодействие подвижною витка с полюсами.
Рассмотрим основные соотношения для машины
с многократным потокосцеплением. На рис. 3-26,а изо-
бражено положение витка abed, по которому протекает
юк /. Виток охватывается потоком п (Фв—Ф/v), где п —
число полос на пути; Фа — магнитный поток, входящий
и виток в одном направлении; Фг^ — магнитный поток,
входящий в противоположном направлении. Потоки, обо-
шаченные стрелками, проходят на пути в плоскости
нитка и с ним не взаимодействуют. При перемещении
контура abed сцепляющийся с ним поток Ф=ФВ—Флг
изменяется в пределах от + Фтах до — Фтах совершенно
юк же, как это имеет место для обычного типа пере-
менно-полюсной машины, получаемой из машины по
рис. 3-26, если, например, полюсы S передвинуть в поло-
жение S', показанное на рис. 3-26,6 пунктирной линией.
Но имеются и определенные различия между рассматри-
ваемой и обычной переменно-полюсной машинами.
и—54 81
1. В- создании э. д. с. и полезной работы участвует
длина проводов якоря, определяемая по формуле
йтол — пЬ\,
а в образовании потерь
^сопр=(и 4" 1) bi+nbz
(если не считать лобовых частей, отводов к коммутирую-
щему устройству и т. п., характерных и для обычных ма-
шин,— специфических особенностей здесь меньше).
2. Длина паза увеличивается в (п+1)/п раз, что не-
благоприятно сказывается на условиях коммутации.
3. Имеют место определенные колебательные переме-
щения потока в потокоподводящих пакетах статора, во-
обще характерные для машин с разомкнутым магнито-
проводом.
Все перечисленные пункты находят отражение в со-
ответствующих местах расчета рассматриваемой линей-
ной машины.
Основной задачей при рассмотрении линейных машин
является определение горизонтальной и вертикальной
составляющих электромагнитной силы.
Обозначим горизонтальную составляющую усилия Fr.
Ограничимся случаем, когда
Вв при 0 < x 0 при 2т/3 < 0 при 0 < х <2т/3 'х< 2т » (3-30)
5w(x)= Въ при z < х < 0 при 5т/3 < С5т/3 А*< 2т
Наиболее простым и наглядным будет рассмотрение
взаимодействия тока /, А, или линейной нагрузки А,
А/м, с индукцией В(х). При этом взаимодействии созда-
ется тяга Ft:
(2т/3 5т/3 \
Дх-j- j dx\=^-Anbfiv
О т '
Для машины длиной L имеем:
FT = FT2t ^=^-AnbtBbL. (3-31)
82
Удельное усилие
F'=±.AB..
3 6
Определение вертикальной составляющей усилия FB
проведем из рассмотрения уравнения /ду:
(3-32)
При постоянном токе и ненасыщенной магнитной цепи
имеем:
Л/= 1Ъ = EAW = — Въ Ь0-2п — const;
Р-о
=-J-/1 дф“у~ ; а>=въ (у)ъ.
^Лу)^ь^въ -L;
дф 2т Sc
г-
(з-зз)
В интересующей нас области у^Ьо- Тогда для маши-
ны длиной L имеем:
(3-34)
Определим отношение горизонтальной составляющей
силы к вертикальной составляющей:
FBIF^±BJ^A= 4 НЪ1А. (3-35)
Важной величиной, которая может стать определяю-
щей при широком применении двигателя на протяжен-
ных путях, является масса стали т, укладываемой на
единицу длины пути. Выведем зависимость этой величи-
ны в кг/м от индукции в зазоре Въ, в стали ВСт и пара-
метров пути п\ Ьг, а также от числа пар полюсов на
1 м пути; изометрия элемента магнитопровода пути и
вид в плане для п=6 представлены на рис. 3-27.
6* 83
Рис. 3-27. Элемент магпнтопровода пути.
а — изометрия; б — вид в плане при п=6.
Масса стали на единицу длины пути (на 1 м) равна:
т = 7,8- 10+’ц = 7,8- 10+э
г 1 в. /
Г , , / 1 \2\1 2,6-103 Г /------------~Г~\
+р+И г р +/ +(зг) ]\
При ВСТ=1,ЗГ будем иметь:
т = 2 • Ю’/гб, [6, + Vb\ 4- (1 /Зр)2] В6. (3-36)
Выведем еще весьма характерное соотношение —
условное ускорение а', которое мог бы получить подвиж-
ный элемент пути при неподвижной машине:
F А
а’=—=----------------------10 ”. (3-37)
т з [Ь. + Гь\ + (10/3p)2J v '
Представляет интерес рассмотреть воздействие п при
определении реактивной э. д. с. [28].
При п— 1
ep=8-10-MMiy, (3-38)
где X — магнитная проводимость паза, а для любого п
ер = 4 IO’4 дыр. (3-39)
Можно выразить реактивную э. д. с. через удельную
полезную мощность Р'110Л (мощность, приходящаяся на
1 м), кВт/м, и удельную массу т, кг/м. Из (3-31) имеем:
Abi^3FT/2Bt;
F ти=РП0П,
84
I'нс. 3-28. К определению рассеяния полюсов.
После преобразований получим:
= (3-40)
где /г — коэффициент, т. е. реактивная э. д. с. возрастает
при весьма выгодном уменьшении удельной массы путе-
п<)ii структуры. Это соображение явилось одной из при-
чин предпочтительного использования полупроводнико-
вых коммутаторов для таких машин (см. § 3-4).
Далее рассмотрим такой специфический для рассма-
|рпваемого двигателя теоретический вопрос, как опреде-
ление рассеяния полюсов на пути.
При предположениях, принимаемых при исследова-
нии подобных полей, допустим, что имеется эквипотен-
циальная полоса П (рис. 3-28,а) — пакет статора и два
разноименных полюса Т+ и Т_, между которыми обра-
«уется магнитный поток. Центры полюсов отстоят от по-
лосы П на равное расстряние b и друг от друга на рас-
сеяние 2а. Требуется найти отношение магнитного по-
кжа, проходящего через полосу П (полезный поток
й'од), к полному потоку между Т+ и Т_ (ФПолп=Фоа +
I Фос). Распределение магнитного поля находим из ре-
шения следующей задачи Дирихле на плоскости (так как
/>,= 5-^-86, первое приближение). Найти функцию фм
(магнитный потенциал), удовлетворяющую уравнению
. 1;тласа
Д <рм=52<р / дх2+<32<р / ду2=0
и граничным условиям:
срм=+1 на контуре Т+;
<рм=—1 на контуре Т-,
ф=0 на контуре АВ (полосе П).
Магнитный поток через ОА (или ОВ)
о
0
J дУ
1®ОА
85
Магнитный поток че]
%с=
эез ОС
о
—оо
Искомое отношение
5
Фра
(ФрА + Фрс)
Ввиду симметрии эту задачу удобнее представить гр
фически несколько иначе (рис. 3-28, б).
По-прежнему
ДО
™ дх2^дуг
Но граничные условия другие:
фм=+1 на контуре Т+;
Фм=0 па ливни Ох;
фм=0 на линии Оу.
В этом случае
О
5 =
00
О
|жг<о.
о
Для решения подобных задач Дирихле на ЭВМ раз
работаны стандартные программы. Но для нашего при
ближенного расчета, используя, например, методы, при
веденные в [30], и принимая малые размеры полюсов
Т+ и 7L (рис. 3-28,а), можно получить простое выраже-
ние для определения фм: |Г
'3'2
где r2i=(x—Xi)2+(y—гд)2; значения i, х; и yi приведены
в таблице.
i 1 2 3 4
l —а а —а а
Vi —ь —ь ь ь
86
Тогда искомое отношение равно: |
00 I
t _ 2b Г I r/x dx 1 2 d
2r. U(x-c)2+b2 (х+оГ + И— ~arCtgV-
Фактически надо сравнивать рабочий поток от полю-
1 i.i /+ к полосе П с двумя потоками рассеяния — вправо i
и плево от полосы (или сравнивать половину рабочего |
потока, проходящего в одном направлении через ОА и I
обратно через ОВ, с полным потоком, проходящим через
<>('). С учетом этого имеем искомое отношение рабоче-
г<1 потока к потоку рассеяния: н
2 а а 1 I
Е_ Е Е -TarctS-F arctg у-
E + 2(l -£)-2- 5-----2------a-----------Г'
2~Tarct4' п-arctg — |
Обратную величину — отношение полного потока <
к рабочему — принято обозначать 1 + о;
Фполюса=( 1 +о) Фраб!
14-о=----?-----1; |
‘а I
arctg -у
с = -^4--2. (3-41)
arctg V
В предельном случае при Ь—0 имеем: arctg оо=д/2;
п о. L 1
В дальнейшем надо ввести следующее приближе-
ние— учесть и боковое рассеяние по направлениям, вы-
ходящим за плоскость рис. 3-28,6. В данном прибли-
женном расчете учтем это рассеяние поправочным коэф-
фициентом. Окончательно расчетное значение
с' = Л ^_-2\ (3-42)
\ arctg -у J
причем для конструкции с поперечными переходами, при-
ближенными к противоположным полюсам (например,
у модели), ^=1,3-5-1,5, для более удаленных (например,
у конструкции натурного макета) ft=I,2-5-1,3. №1
87 I. ;
II
и
Для сравнительного рассмотрения теоретических
данных и экспериментальных материалов по модели при
нимаем:
с’ = ,-1'5п-?_ 3. (3-43)
arcts
Сравнение данных, получаемых по (3-43), с экспери-
ментальными, замеренными с помощью теслаамперметра
на модели, позволяет рекомендовать для первого при-
ближения при расчете рассеяния полюсов пути формулу
(3-42) с учетом некоторого изменения коэффициента /г,
т. е. формулу
о' = --,25тст--2,5. (3-44)
arctg 2g-
С'учетом (3-44) уточним формулу расчета м. д. с. в
зазоре нашей машины.
1. Индукция^в первом’(одноименнополюсном) и послед
нем (одноименнополюсном) зазорахравна Вь, в остальных
2 (я—1) зазорах равна В6/(1-{-о). Итак, вместо обычного
выражения ЕДЦ75'== 1,6В68 имеем 2L41F5'== 1,бВ8 [ 1 -ф- (п —
—Д)/(1 .С учетом этого формулу (3-31) для опреде
ления силыатяги следует записать в виде
(3-45)
2. При заданной длине машины уменьшение числа
полюсов под машиной увеличивает удельный вес воздей-
ствия на работу двигателя переходного процесса в «на
езжающих» и «съезжающих» полюсах. Выведем некото-
рые приближенные формулы для оценки потерь в этих
полюсах (краевой эффект нашей машины) при измене-
нии потока на пути перехода из полюса в полюс и воз-
растания в нем потока от нуля до Фте за время т; нс
учитываем («в запас») встречное поле возникающих ин-
дукционных токов. Тогда распределение напряженности
электрического поля определится из уравнений:
, „ дН
Г01£==-^бг:
div £ = 0;
88
Hill
дЕх dEg й//а1 _
ду дх 'Л dt
дЕх дЕ
-^-4-^=0,
ох ' оу
(3-46)
lie — напряженность магнитного поля внутри маг-
шиопровода.
Ищем решение в виде Ex=dq>]dy, Ev=—д(р/дх. Тогда
niopoe уравнение (3-46) удовлетворяется тождественно,
,1 па первого уравнения (3-46) получаем;
। । дНпп._ п
дх2 ' ity2 ' ,dt • и>
При равномерном движении имеем:
HaV.x) = ^X(x.y),
{1 — внутри сечения магнитопровода;
п
О — вне этого сечения;
.V— площадь сечения магнитопровода.
После преобразований
<32f I Й2У |_Фт
дх2 * ду2s
±Х(х, у) = 0
получаем уравнение Пуассона:
—— — внутри сечения магнитопровода;
О— вне его.
Мощность потерь в магнитопроводе:
P=\cE’dV = l^ (y?Yds =
V s
(3-47)
89
где I — длина участка магнитопровода;
J- JL j in /(х- х')2+ (У ~ У'Г dx’ dy'. I
Решение получается достаточно сложным и может
быть осуществлено на ЭВМ по программам, приняты»
для решения уравнения Пуассона.
Принятая форма магнитопровода с поперечным при
моугольным сечением ab и длиной I при а^>Ь позволя
ет провести приближенный аналитический расчет и вы
вести относительно простую расчетную формулу для этих
потерь (для машин, показанных на рис. 3-27 и 3-35).
В этом случае для любой линии, отстоящей на рас
стоянии х от центра сечения ab, можно записать:
Ех—р//ж/2=Фх/2сгйт.
Мощность потерь в магнитопроводе полюса, вызывл
емая краевым эффектом — наездом на полюс, равна:
6/2 6/2
PK9 = °al f E\dx=o/zZ -L f x2dx=
-6/2 -Ы2
1 , b ф2 ....
= 7q-oZ----г, (3-4S)
48 a x2 v 4
Но Ф ^Bbsn=Btal; t — ajv\ (Ф/тУ — В2^2, и после
преобразований получим:
рк.=4-о/*—в>2- (3-49)
Так, для стали с проводимостью сг=6- 10е 1/(Ом-м)
при длине полюса (ширина активной части машины)
0,25 м, отношении толщины полюса к его ширине (раз-
меру вдоль движения) 6/а=0,1 имеем (например, для
Bt =&0,3 Тл) мощность потерь на один полюс Рк.э=чк
=fcl7,5 о2. Наибольшее значение имеет длина полюса /
Если, например, разрезать полюс на пять частей по 5 см
каждый, получим:
рк 9=as- ° 5 (4-Y—в>2=°>7^-
к-э 48 5 I а о
В общем случае при разрезании полюса на п частей
имеем:
РК8 = 4- Т^-С/3— B\V\
к.э tj2 4р а о
9Q
<дссь дают определенный запас.
л) насыщение половинного сечения магпигопровода
ргчгние ab рассчитано на пропускание потока Ф/2 при
/Ц= 1,3 Тл, реально магнитопровод из стали марки
2
< । 3 уже при — Ф, когда Вст=1,73 Тл, существенно
ч иыщен, и дальнейший рост потока замедляется до
•подключения» второй половины магнитопровода);
б) встречный поток, создаваемый возникающими то-
ымп, также существенно уменьшает результирующее
иычсние Ех. Поэтому, например, для двух полюсов
!• наезжающего» и «съезжающего») можем приближен-
но принять совместные потери лишь раза в полтора
Польше, чем для одного полюса.
Для нашего примера Pk.b=25ii2, и при п=20 м/с Рк.э=10 кВт
1<|же при неразрезных полюсах.
Если учесть, что сила тяги
Fr = 2palBbA,
и полезная мощность Рпол —FTv, получаем для общего
глучая, когда суммарные потерн в «наезжающем» и
• сьезжающем» полюсах пути
ДР = 2РК 8 = cl3 — В2 .и2,
кэ 24п2 а 6
и ношение потерь к полезной мощности
ДР 1 Ь оР В.
о— — ------' ~TV- (3-50)
Рпол 48п2 а ра А ' '
Для разбираемого примера в случае трехметровой машины при
н, 2/3 имеем 2ри=2 м и при Z=0,25 м,В5 =0,3 Тл, А = 105 А/м
по iyчаем Рт = 15-103 Н; Рс(>л = 15-103п.
При ДР^1,7Р,,.э==30ч2 и ДР/Рпол =2- 103щ ДР, %=0,2п. При
<• 150 м/с это составило бы 30% при неразрезных полюсах и толь-
ко примерно 2% при полюсах, разделенных на четыре части.
Работоспособность предложенной системы линейного
пшгателя была проверена на модели, проведены экспе-
риментальные исследования по распределению индукции
и »азорах, по определению силы тяги и притяжения
к рельсам, по проверке магнитных цепей, учету потока
рассеяния.
Модель состоит из ферромагнитного пути, выполнен-
ного из фигурных полос, и тележки с размещенными на
ней якорем, системой возбуждения и коллектором с вра-
щающимися вокруг него щетками.
91
Конструктивиые^данные модели: £=0,36 и; Ь, = 27 мм; п = Я
тр= 30 мм; ='С; Ь2 = 9 мм; £, = 5 [мм; апол=.“з~ т = 20 мм;
ЛПаза = 20 мм; Лспянки=3 мм. Длина магнитопровода пути 4,8 м
Обмотка якоря кольцевая, щлаза= Ю0, провод ПЭВ диаметром 0,57 -
0,59 мм, сечение </ = 0,25 мм2. Суммарная масса модели 21,8 кг.
На рис. 3-29,а показана зависимость FB=f(JB). Пл
рис. 3-29,6 представлена зависимость FT=f(/n) при раз-
личных значениях тока якоря /п. На рис. 3-29,в пред-
ставлены зависимости для различных зазо-
ров б.
Рис. 3-29. Экспериментальные характеристики модели.
Сила тяги Ст и действующая в вертикальном направ-
лении сила притяжения FB измерялись динамометром,
магнитная индукция — теслаамперметром. Скорости,
ускорения (и соответствующая сила тяги), токи и дру-
гие параметры определялись с помощью осциллограмм
тока якоря 1П в различных режимах движения модели
при различных уклонах пути от 60 до 125%о- Получено
удовлетворительное совпадение экспериментальных и
расчетных данных.
Так, при работе на подъеме а=125°/оо на участке разгона на
подъем были установлены токи /в=7,5 А; /я=9,2 A (В5 ~0,05 T.i
и /1=460 А/см) н получено ускорение с—0,6 м/с2, что соответство-1
вало с учетом трепня и составляющей силы тяжести силе тяги FT=
=40 Н. Это значение несколько меньше расчетного FT=43,6 И, что.
ни видимому, объясняется опрокидыванием поля на некотором
.чнегке полюса (наблюдаемом и при прямых измерениях теслаам-
игрметром), ибо необходимый зазор при Л = 460 А/см и Вь =
4С0-2
5,25-10 2 Тл 6^0,4 g25 —0,7 см=7 мм, а эксперименты прово-
кп-'шсь при 6~4 мм.
В целом экспериментальные исследования на моде-
ли подтвердили теоретические выводы, но один из суще-
ственных параметров расчета — влияние набегающих и
сбегающих полюсов на модели с длиной пути около 15
длин модели — не мог быть количественно оценен. На
малых достигнутых скоростях (примерно 1 м/с) этот эф-
фект практически не наблюдался.
3-3. ЛИНЕЙНЫЙ ДВИГАТЕЛЬ С ДВУХФУНКЦИОНАЛЬНОЙ
ОБМОТКОЙ
Одной из перспективных конструкций линейного дви-
гателя, не имеющей явных аналогов средн вращающихся
машин, является двигатель с двухфункциональной об-
моткой на статоре и безобмогочными полюсами, выпол-
ненными из ферромагнитного материала. Такой двига-
тель частично напоминает по конструкции синхронные
реактивные машины, однако наличие двухфункциональ-
пой обмотки и обеспечение коммутации секций обмоток
напряжением разного уровня в зависимости от их поло-
жения относительно ферромагнитных полос позволяют
получить машину с возбужденными полюсами и иметь
характеристики, близкие к характеристикам машин по-
стоянного тока.
Применение подобных двигателей наиболее перспек-
тивно в линейном электроприводе для промышленного
карьерного, конвейерного и другого транспорта, где тре-
буется реализация больших тяговых усилий при значи-
тельных воздушных зазорах.
Двигатели такого типа могут работать от существую-
щих систем энергоснабжения как па постоянном, так и
па переменном однофазном или трехфазном токе. Раз-
личие при этом лишь в схеме построения преобразовате-
ля, предназначенного для питания и управления линей-
ным двигателем при топ или иной системе энергоснаб-
жения. На постоянном токе преобразователь, обычно
выполняемый на тиристорах, должен всегда иметь прину-
дительную коммутацию независимо от способа управле-
93
йия. Это усложняет преобразователь, так как в этом
случае необходимы дополнительные коммутирующие
тиристоры и элементы для гашения основных тиристо-
ров.
Более простой схемой преобразователя является схе-
ма на так называемых управляемых реверсивных выпря-
мителях. Система энергоснабжения переменного тока по-
зволяет осуществить естественную коммутацию тиристо-
ров и существенно упростить схему преобразователя.
Рис. 3-30. Линейный двигатель с двухфункциональной обмоткой.
Рассмотрим принципиальную конструкцию и особен-
ности построения двигателей с двухфункциональной об-
моткой. Наиболее перспективным и простым представ-
ляется линейный двигатель с двухфункциональной об-
моткой на однопакетном статоре и с ротором в виде
поперечных ферромагнитных брусьев, имеющих пере-
мычки для замыкания магнитного потока. Исключитель-
но простое выполнение обмотки на первичной и вторич-
ной частях в виде рифленой стенки позволяет создать
надежную машину. Так, если стенки думпкара карьер-
ного транспорта выполнить рифлеными, а вдоль пути
движения в вертикальных стенках траншеи уложить об-
мотки статора (подробнее см. § 4-1), то получим обра-
щенный вариант машины, где стенки думпкара исполь-
зованы и как элемент конструкции коробки для перевоз-
ки груза, и как вторичный элемент линейного двигателя.
В этой системе возможно выполнить и вариант двигате-
ля, позволяющего при необходимости создать составля-
ющую силы тяги, перпендикулярную к направлению дви-
жения, например, для уменьшения давления колес
думпкаров на рельсы. Конструктивно возможны прямой
и обращенный варианты двигателя (рис. 3-30).
В первом варианте (прямом) подвижная часть содер-
жит однопакетную первичную часть 2 с развернутой
двухслойной обмоткой 3, а вторичная часть 1, выпол-
ненная в виде поперечных ферромагнитных брусьев, со-
94
Секции.
8 'J 10 I,
с
Двухфупкциональная
упрощенной коммута-
Рис. 3-31.
обмотка
цией.
а
все концы секций
с'пшенных между собой продольными перемычками 4,
расположена неподвижно вдоль направления движения.
Во втором варианте (обращенном) неподвижной
частью является первичная часть 2 с обмоткой 3, а вто-
ричная часть выполнена подвижной, например, это мо-
жет быть, как уже указывалось, несущая часть конст-
рукции экипажа.
Отметим также своеобразное выполнение обмотки 3.
Вариантно она может быть выполнена как с неполным
использованием меди (рис. 3-31), так и с полным (рис,
3-30). В первом решении
упрощается схема комму-
татора, а во втором —
лучше использованы ак-
тивные материалы собст-
венно двигателя.
В варианте по рве.
3-31 обмотка 3 разделена
па секции 4—11, сдвину-
тые на половину полюс-
ного деления. Все начала
секций обмотки 3 подклю-
чены к тиристорному коммутатору,
присоединены к общей шине. В общем случае источники
тока возбуждения и тока якоря по напряжению разные,
но их минусы объединены в общую шину. Секции об-
мотки поочередно подключаются к цепи возбуждения и
цепи питания якоря синхронизированно с положением
обмотки относительно магнитопровода 1. Синхронизация
переключения секций осуществляется посредством дат-
чиков положения и схемы управления.
Схема управления двигателем осуществляет пере-
ключение секций таким образом, чтобы полярность по-
люсов магнитопровода всегда оставалась одной и той
же. Пусть, например, в первый момент в «нижней» части
4-й секции (рис. 3-31) ток якоря проходит «от нас».
Затем ток, проходя по лобовым частям, приходит
«к нам» в «верхней» части 6-й секции и замкнется на
общую шину обмоток. Ток возбуждения отходит «от нас»
и «нижней» части 5-й секции, проходит по лобовым ча-
стям и возвращается «к нам» и на общую шину «по
«верхней» части 7-й секции. Секции укладываются с про-
странственным сдвигом т. При подаче в обмотку тока
возбуждения возникает магнитный поток, который будет
95
замыкаться по пути, показанному пунктиром на рис.
3-31: спинка статора 2, зубцы статора, рабочий воздуш-
ный зазор, магнитопровод 1, рабочий воздушный зазор,
спинка якоря.
Таким образом, одновременно работает только поло-
вина секций обмотки, причем обмотка двигателя являет-
ся двухфункциональной, т. е. секции попеременно слу-
жат элементами и обмотки возбуждения и обмотки
якоря.
Движение в обратном направлении или торможение
осуществляется с помощью схемы управления, например,
путем сдвига на т в кольцевой схеме датчиков (см. §3-5)
сигналов, подаваемых на коммутатор. При полном ис-
пользовании обмотки общий принцип работы двигателя
не изменяется.
Различие в том, что как начала, так и концы каждой
секции подключены к преобразователю, управляемому
датчиками положения. К началу и концу каждой секции
(рис. 3-32) подключено по три тиристора (при наличии
общей шины) или по четыре тиристора (при отсутствии
Рис. 3-32. Обмотка линейного двигателя с питанием от раздельных
источников.
общей шины), а в последнем случае — по два встречно-
параллельно включенных тиристора, попарно подключен-
ных к противоположным полюсам источников питания
якоря и возбуждения.
96
. I инейный двигатель состоит из первичной части с об
'НИКОЙ, секции которой уложены в пазы 3—20. Начала
। концы секции подключены к тиристорам 21—38.
Как показано на рис, 3-32, группа тиристоров 22, 23,
26, 31, 32 и т. д. своими анодами подключена к ис-
ючиику питания якоря и возбуждения 1, а катоды этих
тристоров подключены соответственно к началам и кон-
цам секций обмотки 3, 4, 5, 18, 19, 20. Вторая группа
триггеров 21, 24, 27 и т. д. подключена встречно упо-
мянутым выше тиристорам так, что катоды подключены
и.। общую инну источников питания якоря и возбужде-
ния, а аноды подключены к началам и концам секций
опмоток. Обмотка такого двигателя в данном варианте
выполнена открытой волновой, причем в крайних пазах,
например, лежат w проводников, а в средних 2w— 1
проводник, что благоприятно сказывается на снижении
влияния краевого эффекта. Если рассмотреть положе-
ние полюсов 2, указанное на рис. 3-32, то видно, что
и качестве обмотки возбуждения работают секции 5, 8,
II, 14, 17, 20, переключаемы!
мн 29, 36. Остальные сек-
ции, подключенные к соот-
ветствующим тиристорам,
работают в качестве обмот-
ки якоря.
Последовательное пере-
ключение обмоток с возбуж-
дения на якорные, как и
в предыдущих двигателях,
осуществляется по сигналу
датчиков положения.
Представляет интерес ли-
нейный двигатель, питание
у которого осуществляется с
жения постоянного или переменного тока. Для двигате-
лей с двухфункциональной обмоткой характерным явля-
ется то, чго питающее напряжение в пределах полюсно-
го деления имеет ступенчатую форму (рис. 3-33), а при
переходе на следующий полюс изменяется полярность
тока в обмотках. Секции, которые в данный момент вре-
мени находятся над полюсами и являются якорными,
должны быть под высоким напряжением Ult а секции,
которые работают в режиме возбуждения, находятся под
более низким напряжением U2, так как ток в них в от-
соотвегственно тиристора-
Рис. 3-33. Напряжения на «ак-
циях двухфункционалкной об-
мотки.
одного источника нанря-
7—54
97
лйчие от якорных, где имеется э. д. с. движения, по Су-
ществу ограничивается только активным сопротивлением
этих секций (при небольшой скорости движения; при
значительной скорости нужно учитывать и э. д. с. пере
ключения). Поэтому представляется возможным упро
стить коммутатор с заменой двух источников питания
одним. В этом случае па каждую фазу двигателя прихо
дится меныпее количество переключающих элементов.
Рис. 3-34. Двухфункциональная машина с одним источником пи-
тания.
а — принципиальная схема машины; б — схема коммутации обмоток.
Линейный электрический двигатель с одним источни-
ком питания (рис. 3-34,а, б) состоит из расположенного
на движущейся тележке статора 1 с секциями обмоток
2—7. Ротор 9 может быть выполнен гребенчатой формы.
Концы обмоток (рис. 3-34,6) подключены к тиристорам
11—34, которые соединены по схеме регуляторов напря-
жения. На каждой секции 2—7 размещены датчики по-
ложения 8 и датчики скорости 10. Посредством сигна-
лов с датчиков 8 и 10 через схему управления включа-
98
имея тиристоры коммутатора
> Каждая секция (фаза) ли
пенного двигателя подключена
к । иристсрам и через них соот-
1и гственно к одному источнику
постоянного или переменного
напряжения. Например, сек-
ция 2 подключена к источнику
напряжения через тиристоры
//, 12, 23, 24, которые соеди-
нены, допустим, по мостовой
схеме регулятора напряжения
при питании от сети постоян-
ного напряжения или как ре-
гулируемые реверсивные вы-
прямители при питании от сети
переменного напряжения.
Двигатель работает сле-
дующим образом. Если секции
2—4 в первый момент времени
находятся над выступом гре-
бенки, а секции 5—7 над ее
Рис. 3-35. Двухпакетный ли-
нейный двигатель с двух-
функциональной обмоткой.
впадиной, то при протекании
юка в секциях 5—7 будет создаваться магнитный поток
возбуждения, который замыкается через два соседних
выступа гребенки, впадину, два воздушных зазора и
пакет статора, как показано на рис. 3-34,а. От взаимо-
действия тока, протекающего в секциях 2—4, с потоком,
создаваемым секциями 5—7, возникает тяговое усилие,
перемещающее тележку вдоль пути. Секции обмоток при
тгом чередуются. Если они над полюсом (выступом), то
являются якорными, а если они в межполюсном про-
странстве, то являются секциями возбуждения. На-
пряжение в секциях изменяется по сигналу датчиков
положения, т. е. производится его регулирование с высо-
кого (якорного) до более низкого уровня для секций
возбуждения. Это регулирование осуществляется неза-
висимо для каждой фазы посредством указанных регу-
ляторов напряжения.
При питании от сети переменного напряжения тири-
сторы в коммутаторах соединены по схеме реверсивных
управляемых выпрямителей, управление которыми осу-
ществляется также по сигналу датчиков положения и
скорости. Изменение напряжения при переходе от якор-
7*
99
Ной секции к секциям возбуждения осуществляется пу-
тем сдвига фазы питающего напряжения.
Рассмотрим линейный двигатель с двухфункциональ
ной обмоткой, у которого в первичной части имеются
два пакета, а вторичная часть выполнена из отдельных
разомкнутых в магнитном отношении ферромагнитных
брусьев (рис. 3-35,и, б).
Подвижная часть двигателя включает пакеты первич-
ной части 1 и 4, набранные из шихтованного железа
В их пазах уложены секции кольцевой обмотки 2 и 3.
К подвижной первичной части двигателя отнесем также
подвеску двигателя 8, коммутатор 5 со схемой управле-
ния и датчики положения 7. Неподвижная вторичная
часть состоит из отдельных не соединенных между собой
ферромагнитных полос 6, уложенных на пути между
рельсами 9 перпендикулярно направлению движения.
Работает двигатель следующим образом. Двигатель
подключают к сети, например, постоянного тока. Основ-
ным условием для пуска двигателя является определе-
ние положения его подвижной части относительно непо-
движной, т. е. определение положения секций обмоток и
пакетов первичной части относительно ферромагнитных
полос вторичной части. При этом, как и у всех машин
с двухфункциснальной обмоткой, те секции, которые на-
ходятся между ферромагнитными полосами, подключа-
ются к цепи возбуждения, а секции, которые находятся
над ферромагнитными полосами (выполняющими роль
полюсов), подключаются к якорной цепи.
Рассмотрим некоторые дополнительные преимущества
рассматриваемых двигателей. Известно, что в линейных
двигателях существует децентрирующее усилие. Это име-
ет место как у линейных асинхронных двигателей с дву-
сторонним индуктором и вертикальной шиной, так и
у линейных двигателей с двухфункциональной обмоткой,
у которых магнитопровод выполнен в виде поперечных
ферромагнитных брусьев, соединенных между собой про-
дольными перемычками, причем децентрирование имеет
место при любом варианте выполнения двигателя, т. е.
при размещении полюсов в виде рифленой стенки на бо-
ковых поверхностях какого-либо направляющего пути,
а первичной части с обмоткой — на боковой поверхности
подвижной части транспортного средства либо, наоборот,
при размещении первичной части неподвижно на пути,
а полюсов в виде рифленой стенки — на транспортном
100
1
редстве. В обычных транспортных средствах центриро-
uiiinie обеспечивается схемой рельс — реборда колеса.
При бесколесных видах транспорта иногда применя-
п>| центрирующие ролики. Однако центрирование меха-
ническим путем имеет существенное неудобство, а при
высоких скоростях и небезопасно.
Для получения центрирующего усилия необходимо
иметь электромагнитную систему, состоящую из двух
частей, одна из которых расположена на транспортном
। рсдстве, а вторая (неподвижная) часть состоит из фер-
ромагнитных замыкателей потока, причем ширина ак-
шнных частей (поперек направления движения) этих
। нс гем должна быть примерно одинаковой. Наиболее ин-
тересно решение центрирующего
устройства в его комбинации с
линейным двигателем, в том чис-
ле для двигателей с двухфунк-
циональной обмоткой.
При совмещении линейного
двигателя и центрирующей систе-
мы, как показано на рис. 3-36,
продольные полосы замыкателя
потока на пути выполняются
рифлеными с выступами, создаю-
щими центрирующее взаимодей-
ствие при взаимодействи с полю-
сами 1 и тяговое усилие при взаи-
модействии с двухфункциональ-
пой обмоткой, размещенной в па-
зах полюсов 1. При выполнении
обмотки кольцевой другие сторо-
ны этой обмотки могут взаимо-
действовать с полюсами 3 стен-
ки 2, создавать тяговое усилие и
при выполнении полюсов 3 ориентированными в направ-
лении, близком к горизонтальному, получить составляю-
щую усилия в вертикальной плоскости, достаточную для
движения транспортного средства без опоры на рельсы,
т. е. получить электромагнитный подвес. Таким образом,
для двигателей с двухфункциональной обмоткой при
размещении полюсов и обмоток под определенным углом
можно получить тяговое усилие в горизонтальной или на-
клонной плоскости, подъемное—в вертикальной плоско-
Рис. 3-36. Конструктив-
ная схема линейного дви-
гателя с тяговым, подъ-
емным и центрирующими
усилиями.
сги и центрирующее — вдоль оси движения экипажа.
101
Диапазон намечаемых мощностей, рабочих усилий
у проектируемых в настоящее время электроприводоп
описанной системы весьма велик — от долей ньютон!
у приборных систем до 7-106 Н у «судовозов»-ч
устройств дня перевозки судов в обход плотины, разра-
батываемых вместо многокамерных шлюзов.
Привлекают внимание исследователей и линейные
синхронные двигатели с безобмоточной путевой струн
турой. В [95] рассматривается линейный синхронный
реактивный двигатель, вторичная (неподвижная) часть
которого выполнена в виде ферромагнитных сегментов,
вмонтированных в немагнитную (бетонную) основу,
а трехфазная якорная об- ?
мотка расположена на дви-
жущемся экипаже (рис.
3-37). Такая схема двига-
теля является улучшенным
вариантом синхронного дви-
Рис. 3-38. Линейный реактив
ный двигатель с «гребенчаты-
ми» полюсами.
/ — первичная часть; 2 — вторичная
часть.
Рис. 3-37. Линейный реактив-
ный двигатель с сегментными
полюсами.
/ — первичная часть; 2 — ферромаг-
нитные элементы.
гателя с рифленой вторичной частью (рис. 3-38), по кон-
струкции напоминающего расмотренный выше линейный
двигатель с двухфункциональной обмоткой и магнито-
проводом, выполненным в виде «гребенки» (см. рис.
3-30). Анализ линейного двигателя с сегментным рото
ром проводился с использованием обычной теории явно-
полюсных синхронных машин. В результате анализа по-
лучены выражения для FT, Fn, ц и cos ф.
Характеристики, полученные при расчете двигателя мощностью
Р=4000 кВт и напряжением {/=7000 В и частотой /=100 Гн,
с 2р=12, и=90 м/с, приведены на рис. 3-39, 3-40. Как показали
расчеты, при угле нагрузки 0=24° двигатель может обеспечить тя-
говое усилие /4=42 620 Н при силе притяжения FB=214 000 II.
к. п. д. двигателя при этом д=0,975 cos<p=0,4.
Для проверки и исследований изложенного выше
принципа построения линейных электрических машин
102
двухфункциональной обмоткой статора был изготов-
н,п ряд моделей.
I. Модель линейного двигателя с одним пакетом ста-
lopa и магнитопроводом в виде профилированной конст-
рчкции. Конструктивно модель линейного двигателя со-
I Iопт из следующих основных частей: статор, обмотка,
магнитопровод пути, коллекторный узел, тележка. Ста-
iop ЛД — однопакетный, выполнен из цельного бруска,
и котором выфрезерованы пазы, материал — сталь марки
Рис. 3-39. Зависимости силы
тяги и притяжения от угла
нагрузки.
Рис. 3-40 Рабочие характе-
ристики линейного реактив-
ного двигателя.
Ст. 3. Обмотка ЛД —барабанная, разомкнутая, двух-
слойная, выполнена из медного провода диаметром: 0,9 мм.
Крайние секции лежат в крайних пазах машины только
одной активной стороной, а вторая — размещена вне
паза.
Коллекторный узел состоит из цилиндрического кол-
лектора с 12 пластинами, устройства для подвода энер-
гии, траверсы со щетками и синхронизирующего устрой-
ства.
Синхронизирующее устройство обеспечивает поворот
щеток по коллектору в зависимости от положения моде-
ли линейного двигателя относигельно магнитопровода
пути. Такая синхронизация на данной модели была до-
стигнута с помощью калиброванного барабана, один
оборот которого соответствует прохождению моделью
пути длиной 2т.
Магнитопровод пути выполнен из стали марки Ст. 3
п представляет собой профилированную конструкцию,
имеющую выступы и впадины равной ширины. Общая
длина магнитопровода 2 м.
103
Тележка является не-
Рис. 3-41. Электрическая схема об-
мотки и развертка коллектора мо-
сущим экипажем, коп»
рый обеспечивает пост»
янство зазора б между
статором линейного двп
гателя и магнитопроводом
пути и обеспечивает перс
мещение их друг относи
тельно друга. Копструк
тивно тележка состоит in
двух колесных пар, свя
занных между собой угол-
ковой рамой. Кроме ста-
тора с обмоткой, на те-
дели. лежке установлен кол лек
торный узел.
Электрическая схема обмотки и развертка коллекто-
ра представлены на рис. 3 41. Как видно из схемы, на
возбуждение работает один паз на каждое полюсное де
ление, а ча якорь — соответственно три паза. Щетки
коллектора подключены к источнику якорного питания
(точки я и.з рис. 3-41), перекрывают сразу три коллек-
торные плчмипы, поэтому секции, являющиеся в данный
Та блица 3-3
Параметры модели
Параметр Расчет Эксперимент
Длина статора L, м . , . . 0,36 0,36
IМирина статора Ь, м . • . 1,25 1,25
Число пазов г 24 24
Полюсное деление т, мм 90 90
Воздушный зазор 5, мм . 4,5 4,5(10)
Число витков секции w ....... 65 65
Число па сот на полюсное деление q т 6 6
Полюсный коэффициент а; — агол/х . . . 0.5 0,5
Линейная нагрузка 4. А м 4-10’ 4,34-10'
Индукция в зазоре R . Тт 0,25 0,23(0,145)
Число полюсов 2 р 4 4
Масса активных материалов иг, кг . . . 17.44 18
Общая масса модели, кг 29,7
Ток якоря 1 , А 4,62 5
Ток возбуждения I , А 16.2 15
Сила тяги F,, Н 225 200(100)
Прям’чаиге. В сксб>ах iKrmr д.-eei.e -.кглериыснтя при увеличения
зазоре.
104
момент якоиными, подключаются к источнику парал-
лельно. Щетка коллектора, подключенная к источнику
питания возбуждения (точки в на рис. 3-41), перекры-
вает только одну пластину коллектора.
Основные расчетные параметры модели приведены
и табл. 3-3. Для сравнения в этой же таблице даны ре-
зультаты экспериментальных исследований.
При исследовании распределения индукции в за-
зоре модели линейного двигателя при Zn=10 А, /я=8 А
Рис. 3-42. Кривая распределения индукции при сдвинутых щетках.
----— измерения при одной системе возбуждения; —---— — ври одной
якорной системе;-------при совместной работе обеих систем
и 6=4,5 мм для щеток коллектора, стоящих на геомет-
рической нейтрали, было обнаружено опрокидывание
суммарного поля на полюсах в рабочем зазоре модели.
Для устранения этого явления щетки были сдвинуты
с геометрической нейтрали и снова измерялось распре-
деление индукции. Результаты представлены на рис.
3-42. Как ьидно из рисунка, опрокидывание поля было
устранено сдвигом щеток, как это делается и у вращаю-
щихся машин постоянного тока.
Существенным является экспериментальная оценка зависимости
распределения индукции В^ в рабочем зазоре модели линейного дви-
гателя от самого зазора 6. Были измерены значения индукций в за-
зоре машины при работе одной системы возбуждения, при работе
одной якорной системы (реакция якоря) и при совместной работе
обеих систем. Были установлены значения зазоров С|=4.5 мм и
62=Ю мм. Значения токов в обоих случаях /я=/я = 15 А. Ток
якоря дан с учетом параллельного включения трех секций. Динамо-
метрами замерялись усилия, развиваемые моделью в обоих случаях.
Сила тяги при зазоре б( = 4,5 мм получилась равной /?т=200 Н
(что близко к расчетной), а при зазоре 62=10 мм FT2=100 Н.
При зазоре 6|=4,5 мм и токах /я=/в = 15 А модель преодолевала
уклеи a=t.600%0. При сохранении зазора С и увеличении тока яко-
ря и тока возбуждения в 1,5 раза модель преодолевала уклон
105
2ООО%о (64°). Может быть обеспечено усилие, достаточное и для
движения модели по вертикальному пути.
Следующие модели являются модификациями опи-
санной выше, и поэтому будут приведены только их кон-
структивные параметры и результаты эксперименталь
ных исследований.
2. Модель линейного двигателя с одним пакетом ста-
тора, магнитопроводом в виде профилированной гребен-
ки и линейным коллектором. Основные расчетные па-
раметры модели и результаты экспериментальных иссле-
дований приведены в табл. 3-4.
Таблица 3-4
Параметры модели с линейным коллектором
Параметр Расчет Эксперимент
Длина статора L, м 0.6 0,6
Ширина статора Ь, м 1 1
Число пазов г .............. 36 36
Полюсное деление т, мм 100 100
Воздушный зазор 8, мм 5 5
Полюсный коэффициент а, 0,5 0,5
Число витков секции w 80 80
Число пазов на полюсное деление q/z . . . 6 6
Линейная нагрузка А, А/м 3,2- 104 3,210*
Индукция в зазоре Въ, Тл 0,15 0,11
Число полюсов 2 р 6 6
Тип обмотки Кольцевая Кольцевая
Ток якоря (секции) /я, А 6,5 (на три секции 19,5) 6,5
Ток возбуждения 1в, А 7,5 (на две секции 15) 7,5
Сила тяги Fr, Н 144 (105 для = 0,П) 107,5
Эта модель отличается от описанной выше коллек-
торным узлом: коллектор развернут вдоль магнитопро-
вода (аналогично шине питания в метро, но шине сек-
ционированной). Питание подведено к развернутому
коллектору таким образом, что пластины, находящиеся
над выступами магнитопровода — полюсами, подключе-
ны к источнику якорного питания, а пластины коллекто-
ра, находящиеся над междуполюсным пространством,
подключены к источнику возбуждения. Съем питания
с коллектора происходит при помощи траверсы со щет-
ками, укрепленной на тележке. Концы фаз обмотки при-
106
Илины к щеткам. На возбуждение работают в каждый
момент времени два паза, на якорь — три паза.
Модель экспонировалась на ВДНХ в 1975 г. и удо-
i юена медали.
3. Модель линейного двигателя с двумя пакетами
I гатора и магнитопроводом в виде отдельных ферромаг-
нитных брусков, расположенных примерно перпендику-
шрно направлению движения. Модель конструктивно
состоит из следующих основных узлов: статор двухпа-
кетный, обмотка, магнитопровод, коллекторный узел,
। слежка. Кроме чисто конструктивных отличий — нали-
чия двух пакетов статора и магнитопровода в виде от-
дельных ферромагнитных брусков, данная модель имеет,
как уже указывалось выше, иной путь замыкания маг-
нитного потока, чем у приведенных выше моделей.
Коллекторный узел представляет собой развернутый
вдоль магнитопровода коллектор и щеточную траверсу,
закрепленную на тележке. Основные расчетные и экспе-
риментальные параметры приведены в табл. 3-5.
Таблица 3-5
Параметры двухпакетной модели
Параметр Расчет Эксперимент
Длина статора L, м 0,36 0,36
Ширина статора м 0,5-2 0,5-2
Число пазов г 24 24
Полюсное деление т, мм 90 90
Воздушный зазор 8, мм 5 5
Число витков секции w 200 200
Число пазов на полюсное деление q/t 6 6
Масса активных материалов т. кг . . . 16 16
Число полюсов 2 р 4 4
Тип обмотки Кольцевая Кольцевая
Полюсный коэффициент а; 0,5 0,5
Линейная нагрузка .4, А/м 2,67-10* 2,67-I04
Индукция в зазоре В,, Тл 0,21 0,18
Ток якоря (секции) А 2 (иа три секции 6 А) 2
Ток возбуждения 1в, А 5 (на две секции 10 А) 5
Сила тяги Fr ............. 100 95
На данной модели было определено распределение
индукции в воздушном зазоре и получены опытные зна-
чения развиваемой моделью силы тяги Кт.
107
Рис. 3-43. Линейный двигатель на испытательной тележке.
4. Натурный образец линейного двигателя. Наиболее
интересным представляется макет линейного двигателя
с двухфункциональной обмоткой статора, изготовленный
в натуральную величину. Двигатель был размещен на
экипаже и испытан на реальном участке пути. В качест-
ве экипажа, на котором укреплена первичная часть дви-
гателя, выбрана специальная тележка.
Линейный двигатель с двухфункциональной обмот-
кой, установленный на испытательной тележке, показан
на рис. 3-43.
Эксперимент был проведен на образце со следующи-
ми параметрами:
Длина статора L, м.................. 3,28
Ширина статора Ь,, м................ 0,25-2
Число пасов z......................... 72
Дотюсное деление г, мм.... 547
Число витков секции w ........... 60
Число пазов на полюсное деление q t ... . 12
ЧИСЛО ПОНОСОВ 2/7...................... 6
Результаты расчета и эксперимента приведены
в табл. 3-6.
Статор двигателя набирается из листов электротехни-
ческой стали. Зубцы статора приставные. Из технологи-
Таблица 3-6
Параметр Воздушный зазор Ь, мм
Расчет эксперимент
60 60 50 30
11о поеный коэффициент
“I Линейная нагрузка А, 0,5 0,5 0.5 0,5
А м Индукция в зазоре fi6, 1,07 - 10s 1,08-105 1,03-10ь 0,95- Ю6
Тл Масса активных мате- 0,294 0,25 0,27 0,29
риалов /па, кг . . . . 1280 1280 1280 1280
• 'лла тяги Ет-П, Н . . . . 2-5,4.10’ 2-4,2-Ю3 2-5.5-Ю3 2-6,5-10
ческих соображений статор выполнен из двух пакетов
шириной 0,25 м каждый, работающих совместно.
Каждая секция кольцевой обмотки выполнена в ви-
де отдельных монолитных катушек. При сборке катушки
одеваются на спинку статора (после каждой катушки
к спинке статора крепится соответствующий зубец
н т. д.) и образуют при их соединении обмотку линей-
ного двигателя. Магнитопровод выполнен из стали и
представляет собой в основной модификации решетча-
тую конструкцию, образующую полюсы и межполюсные
пространства.
Бесконтактный тиристорный коммутатор управляется
от датчиков положения, размещенных на экипаже и сиг-
нализирующих о положении статора линейного двигате-
ля относительно магнитопровода в каждый момент вре-
мени.
3-4. СИСТЕМЫ ПРЕОБРАЗОВАТЕЛЕЙ-КОММУТАТОРОВ
Рассмотрим некоторые общие вопросы синхрониза-
ции линейного двигателя автосинхронного типа (линей-
ного двигателя постоянного тока). Наиболее перспек-
тивно выполнять двигатель с бесконтактной коммутаци-
ей: не только из-за невысокой надежности коллекторно-
ю узла, но и из-за повышенного значения реактивной
э. д. с. и трудности выполнения у таких машин добавоч-
ных полюсов.
Такая машина состоит из синхронного бесконтактно-
го линейного двигателя, датчика положения и коммута-
тора — формирователя импульсов и усилителя мощности.
109
Датчик положения является логическим элементом
системы управления двигателем. Он служит для опре-
деления относительного расположения первичной и вто-
ричной частей и управления схемой коммутатора Одним
из важных требований, предъявляемых к датчику поло-
жения, является хорошее согласование его выходных
параметров с входными цепями полупроводникового
коммутатора. Желательно получение возможно большей
кратности максимального (соответствующего положению
секция над полюсом) и минимального (секция между
полюсами) выходных сигналов, а также значительной
крутизны нарастания и спада сигнала, что позволило бы
без дополнительных усложнений схемы коммутатора
обеспечить работу полупроводниковых приборов в наи-
более надежном и экономичном режиме переключения.
Для работы в качестве датчиков положения в систе-
ме синхронизации линейного двигателя могут использо-
ваться индукционные, магнитомодуляционные, гальвано-
магнитные и другие датчики.
При больших воздушных зазорах, свойственных ли-
нейным двигателям, применение двух- и трехполюсных
(П- и Ш-образных) индуктивных датчиков нецелесооб-
разно, так как они достигают при этом значительных
размеров.
Если в рабочем зазоре линейного двигателя располо-
жить датчики положения (датчики Холла, индукцион-
ные, магнитомодуляционные), которые будут давать ин-
формацию о значении и направлении вектора магнитной
индукции, то этой информации будет достаточно для
подачи команд на включение тех или иных секций об-
мотки линейного двигателя. Но в связи с наличием крае-
вых эффектов и искажением магнитного поля в рабочем
воздушном зазоре датчики положения лучше размещать
вне зоны действия рабочего магнитного поля машин,
например на специальном индукторе, отнесенном на не-
которое расстояние по ходу движения. На этом индук-
торе датчики размещаются соответственно расположе-
нию пазов первичной части над выступами и впадинами
вторичной части. Например, при применении датчиков
Холла в качестве датчиков положения в 12-фазном ли-
нейном двигателе с безобмоточной путевой структурой
в виде рифленого бруса три датчика Холла размещаются
с расстоянием между ними в над выступом и три дат-
чика Холла над впадиной бруса.
ПО
Для линейного двигателя постоянного тока е рифле-
ной безобмоточной путевой структурой был также раз-
работан [62] дифференциальный индукционный датчик
(рис. 3-44). Датчик содержит основной сердечник 1 и
дополнительный сердечник 2, на каждом из которых
расположены распределенные по длине обмотки 3 и 4
переменного тока, соединенные между собой параллель-
но и имеющие одинаковое количество витков. На вит-
ках каждой обмотки выполнены отпайки с одинаковым
шагом (расстояние между отпайками равно /z), при-
чем между отпайками ос-
новной и дополнительной
обмоток включены изме-
рительные элементы 5. На
основном сердечнике 1
расположена дополни-
тельная подмагничиваю-
щая обмотка 6 постоянно-
го тока.
Коммутация секций
обмотки осуществляется
J 6
JlmMHuiiiiiiEj
/
5
iiiiMiMMiM
\ г
коммутатором, управляе-
мым сигналами с датчи-
ка положения. Одновре-
менно с переключением
секций схема коммутато-
ра должна наиболее про-
стым способом управлять
двигателем: регулировать
скорость, осуществлять
реверс, пуск и остановку,
причем с возможно мень-
Рнс. 3-44. Дифференциальный ин-
дукционный датчик.
Рис. 3-45. Структурная схема си-
стемы синхронизации.
шими потерями энергии.
На рис. 3-45 представлена схема системы синхрони-
зации линейного двигателя постоянного тока с двух-
функциональной обмоткой. На схеме приняты следую-
щие обозначения: ОУ — объект управления (первичная
часть), выходным параметром которого является линей-
ное перемещение; ДП — датчик положения первичной
части относительно полюсов вторичной части; ЗУ—-за-
дающее устройство; ФОП — фазоопределитель, состоит
из узлов, которые в зависимости от входных сигналов
определяют фазовое состояние (положение) линейного
двигателя и формируют сигналы управления по двум
111
независимым каналам — возбуждения и якоря; БР\ и
БР2— блоки разложения сигналов по фазам I (воз-
буждения) и II (якоря).
Наиболее экономичным является тиристорный преоб-
разователь, выполненный без явно выраженного звена
постоянного тока. Такой преобразователь при подсоеди-
нении к однофазной сети переменного тока постоянной
частоты может создавать напряжение регулируемой
переменной частоты для управления тихоходными линей-
ными двигателями.
Рис. 3-46. Принципиальная схема двухфазного преобразователя ча-
стоты без явно выраженного звена постоянного тока.
Как видно из схемы (рис. 3-46), каждая фазная
обмотка индуктора двухфазного двигателя питается от
двух управляемых вентилей Д21 Д3, Д< (если следо-
вать описанию, приведенному в [25]). Каждый вентиль
получает отпирающие импульсы Uyi—Uyi от своей систе-
мы фазоимпульсного управления СИФУ1—СИФУ4. На
вход каждой системы управления подается однополу-
периодно выпрямленное задающее напряжение U'al, U"al,
U'si, и"з2, получаемое через вентили Д$—Д\2 от двух
фаз источника напряжения £731, U32 с частотой f3.
112
Фаза импульсов отпирающего напряжения Uyl—Uyi
определяется задающим напряжением в заданный полу-
период напряжения питающей сети Un- При увеличении
напряжения положительной полуволны U3\ угол отпира-
ния вентиля Д1 уменьшается, что ускоряет его отпира-
ние и увеличивает выпрямленное напряжение по-
даваемое на обмотку первой фазы индуктора линейного
двигателя.
После перехода напряжения U3t через положитель-
ный максимум угол отпирания вентиля Д\ начнет воз-
растать, а напряжение U\ соответственно уменьшается.
Таким образом, формируется положительная волна на-
пряжения t/i на обмотке первой фазы линейного двига-
теля.
Во время отрицательного полупериода напряжения
(Ли работает вентиль Д2, получающий отпирающие им-
пульсы от СИФУ2. Итак, поочередным изменением угла
зажигания соединенных встречно-параллельно вентилей
можно получить на обмотках индуктора линейного дви-
гателя напряжение, периодически изменяющееся по зна-
чению и направлению. Для сглаживания пульсаций на-
пряжения с частотой fn служат конденсаторы С| и С2.
Описанная схема дает возможность при частоте питаю-
щего напряжения fn=50 Гц получить частоты от 162/s
до 0,5 Гц.
В машине с двухфункциональной обмоткой и общей
шиной все начала секций подключены к коммутатору
(рис. 3-47) и поочередно че-
рез управляемые вентили
присоединяются к одному
полюсу сети. Концы же сек-
ций присоединены к общей
шине и постоянно подклю-
чены ко второму полюсу се-
ти. Включение и выключе-
ние управляемых вентилей
осуществляются схемой уп-
равления от датчика поло-
жения. Пусть в период вре-
мени to включены тиристоры
Т\ и 7\ (рис. 3-48). Ток воз-
буждения проходит по об-
мотке через Т\, а ток якоря
через Т4, как показано стрел-
8—54
Рис. 3-47. Однополюсная ком-
мутация машины с двухфунк-
цнональиой обмоткой.
113
Рис. 3-48. Диаграммы вклю-
чения тиристоров.
Ками На рис. 3-47, и оба тока
замыкаются на общую шину.
В момент /| включаются ги
ристоры Т2 и Тз, которые оста-
ются открытыми до момента /2.
Токи протекают, как показано
на рис. 3-47. В следующий по-
лупериод при отрицательной
полуволне в момент /2 включа
ются тиристоры Тъ и Тй и оста-
ются открытыми до момента t3.
В момент t3 включаются тири-
сторы Т6 и Т7 и остаются от-
крытыми до момента /4. В сле-
дующий период работа маши-
ны проходит аналогичным об-
разом.
При использовании только
одного источника питания ре-
гулирование производится ча-
стотно-импульсным. или ши-
ротно-импульсным методом при изменении углов вклю-
чения тиристоров [10]. Структурная схема с полупро-
водниковым коммутатором для указанной машины
с двухфункциональной обмоткой и общей шиной пока-
зана на рис. 3-49.
Использование общей шины по сравнению со схемой
с раздельными шинами вдвое уменьшает количество ти-
ристоров, но снижает использование обмотки.
Система синхронизации состоит из четырех основных
блоков: блока формирования синхронизирующего им-
пульса БФСИ, блока определения рабочего канала
БОРК., блока распределения импульсов БРИ и блока
силовых тиристоров БСТ.
Блок формирования синхронизирующего импульса
БФСИ состоит из шести датчиков положения (в данном
случае датчиков Холла), сигналы которых усиливаются,
преобразуются и поступают на выходной трансформа-
тор. Датчики Холла ДХ\—ДХе питаются от сети пере-
менного тока через трансформатор Тр\ и выпрямители
В]—В6 стабилизированным напряжением. С выхода ДХ\,
например, сигнал поступает на функциональный преоб-
разователь ФП\. Сформированный в ФП} сигнал через
операционный усилитель пороговое логическое
114
устройство ПУ 1 и эмиттерный повторитель ЭПХ посту-
пает на первичную обмотку трансформатора Тр2.
При движении линейного двигателя ЛД изменяется
выходной параметр лишь одного из шести датчиков по-
ложения, что соответствует моменту перемещения пер-
вичной части относительно вторичной на tz. Это изме-
нение приводит к срабатыванию порогового устройства,
гак как в каждый данный момент времени только один
Рис. 3-49. Структурная схема системы синхронизации.
из шести датчиков впервые наезжает на выступ вторич-
ной части. Поэтому при перемещении двигателя на t2 со
вторичной обмотки выходного трансформатора Тр2 сни-
мается импульс, при помощи которого синхронизируется
работа датчика положения с переключением силовых
тиристоров. Этот импульс поступает в блок определения
рабочего канала БОРК. Блок осуществляет распределе-
ние сформированного сигнала управления по двум элек-
трически не связанным цепям —цепям управления сило-
выми тиристорами якоря и возбуждения Блок представ-
ляет собой реверсивный логический счетчик, выполнен-
8* 115
ный на маломощных тиристорах. Этот счетчик может
рассматриваться как устройство, в котором одна натрут
ка за другой последовательно подключаются к источим
ку питания. Переключение осуществляется всегда в од
ном и том же направлении (в зависимости от подавае
мой команды), и каждое такое переключение происходит
под действием импульса, подаваемого на общий входном
вывод.
После определения рабочего канала, т. е. после по
явления сигнала на одном из выходов счетчика, этот
сигнал поступает через усилитель и эмиттерный повто
ритель па один из 12 входов блока распределения им
пульсов БРИ. Этот блок представляет собой кольцевую
диодную матрицу и содержит пять колец. Каждое коль-
цо схемы состоит из 24 диодов, соединенных поочередно
катодами и анодами, причем точки соединения анодов
диодов каждого внутреннего кольца присоединены пере-
мычками к точкам соединения катодов диодов наруж-
ного кольца.
Такое построение схемы, состоящей из одних диодов,
позволяет произвести развязку цепей управления сило-
вых тиристоров простыми средствами — без использо-
вания обычно применяемых в подобных случаях им-
пульсных трансформаторов со сложными соединениями
обмоток.
С шести выходов блока распределения импульсов
БРИ сигналы поступают на управляющие электроды
силовых тиристоров, три из которых подключаются
к источнику возбуждения, а другие три—к источнику
питания якоря. В качестве ключей постоянного тока
тиристоры обладают свойствами почти идеальных при-
боров, так как они сами имеют характеристики ключе-
вого типа. Для тиристорного ключа необходимо обес-
печить соответствующее детектирование сигнала управ-
ления, что обеспечивается, в частности, параллельной
емкостной коммутацией. Этот метод наиболее эффекти-
вен, так как все процессы в многофазной системе про-
исходят циклически, и включение одних тиристоров
должно привести к отключению других [22].
К основным достоинствам описанной системы син-
хронизации относятся принудительная пошаговая син-
хронизация (аналогично телемеханическим и телеметри-
ческим системам), возможность выполнения схемы
в модульном, кассетном исполнении и сравнительно ма-
116
лая масса модулей и блоков; возможность применения
системы синхронизации в различных типах линейного
двигателя постоянного тока (круглом, линейном, воз-
вратно-поступательном); возможность применения схемы
как в приводах постоянного, так и в приводах перемен-
ного тока разных мощностей; относительно большие
Рис. 3-50. Схема преобразователя.
допустимые уровни помех в блоке датчиков. Недостат-
ком данной системы является повышенная чувствитель-
ность к любым сбоям в системе управления и регулиро-
вания.
Для относительно больших скоростей была разрабо-
тана схема преобразователя (рис. 3-50). Эта система
коммутации линейного двигателя постоянного тока со-
стоит из двух основных частей; силовой тиристорной
117
схемы и схемы управления. Информация о переключе
нии секции двигателя поступает на схему управления
с датчика положения. Сигнал датчика определяет зону
взаимного расположения полюса и секций якоря, в ко-
торой ток в секции не меняет своего значения и направ-
ления. Схема управления включает в себя элементы за-
держки сигнала на время закрывания тиристора — блок
памяти и диодные ячейки дешифратора. Обработанные
в схеме логики сигналы передаются в силовую часть,
выполненную по мостовой схеме.
Допустим, что в некоторый момент времени t через
секцию обмотки электродвигателя L (рис. 3-50) про-
текает ток в направлении: шина ( + ) —Тх—L—Т5——
шина (—), т. е. тиристоры Т\ н Т5 открыты, а осталь-
ные закрыты. Тогда конденсатор Ci заряжается по
цепочке Т\—С\—Rx таким образом, что в точке а по-
является положительный заряд, а в точке б — отрица-
тельный.
В момент времени 6, соответствующий началу следу-
ющей зоны, срабатывает датчик Д2, сигнал с которого
поступает на линию задержки Л31, а также через логи-
ческую схему ИЛИ на управляющий электрод тиристора
1Г1. Тиристор 1Т1 откроется, и ток пойдет по сопротив-
лению 7?i. Одновременно отрицательный потенциал
с конденсатора С! через открытый тиристор 1Тi окажет-
ся на аноде тиристора Т\ (точка б на рис. 3-50). В ре-
зультате этого тиристор Т\ закроется, что повлечет за
собой и закрывание тиристора Т5, и снятие напряжения
с секции.
Сигнал с датчика Д[ через линию задержки Л3\
с задержкой, равной или несколько большей времени
закрывания тиристора Ть поступает на вход логической
схемы «Память» /71, выход которой через диодную раз-
вязку связан с управляющими электродами тиристоров
Т\ и Те- Тиристоры откроются, и ток пойдет по
цепи: шина ( + ) — Т\—L—Ts—Д4 —шина (—). Отрица-
тельный потенциал с конденсатора С} через открытый
тиристор Т\ окажется на аноде тиристора 17\ (точка а
на рис. 3-50) и закроет его.
Схема находится в таком состоянии до тех пор, пока
не сработает датчик следующей зоны Дз. Сигнал с дат-
чика Д3 через логическую схему ИЛИ сбросит «Память»
логической схемы ГЦ, откроет тиристор lTt, обесточит
тем самым секцию L и через линию задержки ЛЗг и
118
логическую схему «Память» /72 включит тиристоры 7'2
и Т3. Датчик Д4 уже при помощи тиристора 1Т2 обесто-
чит секцию L (отрицательный потенциал с конденсатора
С2 окажется на аноде тиристора Г2) и включит тиристо-
ры Т2 и Г4 и т. д.
Надежность открывания тиристоров в пределах каж-
дой зоны обеспечивается логическими цепями «Память».
Диодная развязка обеспечивает логику срабатывания
и не допускает неправильное включение тиристоров. Ли-
нии задержки Л3{—ЛЗ^ разрешают включение очеред-
ной пары тиристоров лишь после приведения схемы
в исходное состояние, исключая тем самым короткое за-
мыкание.
Рис. 3-51. Экспериментальная диаграмма напряжения секции.
При помощи резисторов /?3 и /?4 можно регулировать
скорость электродвигателя.
Следует также отметить, что скорость перемещения
электродвигателя или интенсивность его торможения
может эффективно регулироваться задержкой сигналов
с датчиков Д\—Д3 в линиях задержки ЛЗ1—ЛЗ/>. При
этом не требуется применения отдельного тиристорного
преобразователя, поскольку описанный коммутатор вы-
полняет и эти функции. На рис. 3-51 представлена экс-
периментальная диаграмма напряжения одной секции
с индуктивностью 0,1 Гн (что значительно превышает
индуктивность реальной секции), снятая при подаче на
секцию напряжений одного значения, но разных по-
лярностей (самая трудная точка коммутации тока якоря
или возбуждения на обратный ток).
Из диаграммы видно, что длительность переходного
процесса в секции /п~7,5-10'4 с, что обусловливается
большой индуктивностью секции. При этом перенапря-
жения, возникающие в секции, не превышают значения
277Н1>м, что учтено при выборе типа тиристоров.
119
Элементарный расчет показывает, что при Помощи данного пр«
образователя коммутатора даже при /и=ь7,6 10 4 с можно обеспе
чить значительную скорость движения экипажа с линейным двнга
телем. Так, пусть (с запасом) время прохождения зоны <э=3/п=
=2,25-10 3 с н ширина зоны 63=т/2; тогда
/а=бз/о=т/2и=2,25-10-3 с,
откуда
с'=т/4,5-10-8,
и при вполне реальном т=0,65 м имеем о=&145 м/с=520 км/ч.
Линейный двигатель постоянного тока с возвратно-
поступательным движением часто выполняется с ком-
мутацией посредством ме-
ханического коллектора
[108]. Такой двигатель
показан на рис. 3-52. Яко-
рем двигателя служит
стержень / круглого или
прямоугольного сечения,
несущий обмотку 2. Ста-
тор 3 имеет полюсные на-
конечники 4 и катушки
возбуждения 5, питаемые
постоянным током. С маг-
Рис. 3-52. Двигатель с механиче-
ским коллектором.
нитной системой связаны щетки 6, скользящие по ого-
ленной поверхности изолированной якорной обмотки.
В зависимости от конструкции привода подвижными мо-
гут быть якорь, движущий нагрузку 7, или система воз-
буждения. Во втором случае необходим подвижный то-
коподвод для питания катушек возбуждения.
Группу линейных двигателей постоянного тока посту-
пательного движения с развернутым вдоль направления
движения механическим коллектором представляют дви-
гатели по японским патентам [|39, 40, 44].
Линейный двигатель постоянного тока, описанный
в [39], предназначен для использования в качестве
тягового двигателя сверхскоростных железнодорожных
экспрессов с магнитным подвесом. Двигатель (рис. 3-53)
состоит из неподвижной первичной части, представляю-
щей собой монорельс 1 с обмоткой 2, по которому дви-
жется экспресс 3, и узла возбуждения, установленного
на экспрессе и состоящего из магнитопровода 4 и об-
мотки возбуждения 5, которая питается от находящегося
на экспрессе независимого источника постоянного тока.
120
Рис. 3-53. Линейный двигатель постоянного тока с роликовым ком-
мутатором.
Обмотка первичной части 2 разделена на секции, присо-
единенные к коллекторным шинам 6. Вдоль коллектор-
ных шин и монорельса проходит силовая шина 7, под-
ключенная к наземному источнику постоянного тока 8.
Прикрепленный к экспрессу роликовый коммутатор 9
соединяет соответствующую шину с силовой шиной, по
обмотке 2 течет ток, в результате взаимодействия кото-
рого с магнитным полем обмотки возбуждения возни-
кает сила, горизонтальная составляющая которой яв-
пяется силой тяги двигателя, а вертикальная составля-
ющая приподнимает экспресс над монорельсом.
9-54 ‘21
Описанная в [|40] система управления тяговым
линейным двигателем постоянного тока (рис. 3-54) ли
рактеризуется тем, что неподвижная первичная часть /
имеет обмотку, секционированную таким образом, чти
в каждый данный момент несколько смежных секций
Рнс. 3-54. Линейный двигатель постоянного тока с направляющим
рельсом.
замыкаются с помощью контактных роликов 2 и 3, кото
рые перемещаются одновременно с подвижной вторичной
частью 4. Ролики 2 и 3 во время движения соединяю!
питающие провода 5 и 6 с соответствующими секциями
обмотки первичной части. При подключении обмотки
первичной части к источнику тока на вторичную часть,
находящуюся в магнитном поле этой обмотки, действует
сила, заставляющая поезд перемещаться.
Линейный двигатель постоянного тока, предложен
ный в [63], также имеет щеточный контакт с разверну-
тым на пути коллектором (рис. 3-55). Уложенная вдоль
пути первичная часть двигателя представляет собой
ферромагнитную полосу, на которой закреплены токо
проводящие полоски 1, изолированные друг от друга и
образующие ряд параллельных разомкнутых обмоток,
включенных между собой последовательно и создающих
разомкнутую волновую обмотку. По обмотке переме-
щается токоподводящий контакт 2 в виде ролика или
щетки, укрепленной на подвижной вторичной части дви
12?
Рис. 3-55. Линейный двигатель по-
стоянного тока с развернутым кол-
лектором.
1ителя, состоящей из маг-
нитопровода 3 гребенча-
юго устройства (анало-
гично рассмотренному в
§ 3-1) и катушки возбуж-
дения 4. Взаимодействие
магнитного потока полю-
сов гребенчатого устрой-
ства с токами, протекаю-
щими в полюсах 1, созда-
ет тяговое усилие, застав-
ляющее тележку двигать-
ся поступательно в ту
или иную сторону.
Основной трудностью
выполнения механическо-
го коммутатора — линей-
ного коллектора является
значительная реактивная
э. д. с. при коммутации.
В настоящее время прово-
дятся работы, целью кото-
рых является уменьшить
влияние указанного недо-
статка и расширить диа-
пазон возможного применения этого самого простого,
дешевого и при надлежащем выполнении довольно на-
дежного коммутатора путем рационального выбора ще-
ток, режима, а также использования метода так назы-
ваемой вентильно-механической коммутации.
Исследования линейного двигателя с двухфункцио-
нальной обмоткой и тиристорным коммутатором,
разработанным в НИИХИММАШ, проведены на модели
кругового типа. Конструктивно модель состоит из следу-
ющих основных частей: статор с кольцевой обмоткой
(2р=8); путевая структура в виде необмотанного явно-
полюсного ротора; блок коммутатора и нагрузочное
устройство.
Датчики положения представляют собой бесконтакт-
ные путевые переключатели типа БВК, с выхода кото-
рых снимается сигнал напряжения до 15 В при введении
в рабочий зазор датчика металлической пластины.
Исследование проводилось до птах—850 об/мин, что
при т=0,8 м соответствовало бы линейной скорости v=
9* 123
= 90 м/с=320 км/ч. Полученное для этой относительна
маломощной (P2=fc250 В) модели значение к. п. д. при
мерно 0,5 можно считать вполне удовлетворительным.
Из рассмотрения семейства рабочих характеристик
(рис. 3-56), снятых при значениях якорного напряжения
б’я=65 В, напряжения возбуждения £7в=40 В, можно
сделать вывод, что эти характеристики соответствуют
Рис. 3-56. Рабочие характеристики круговой модели линейного двп
гателя постоянного тока.
аналогичным характеристикам машины постоянного то-
ка; мягкая механическая характеристика получена в свя-
зи с введением (по условиям эксперимента) значитель-
ных дополнительных сопротивлений в цепи якоря н воз-
буждения.
Интересно рассмотреть также осциллограмму токов
и напряжений в секции (рнс. 3-57). Видно, что переклю-
чение секции происходит строго в соответствии с сиг-
налами от датчика положения. Токи якоря и возбужде-
ния сдвинуты друг относительно друга на половину
полюсного деления, что соответствует алгоритму работы
124
Рис. 3-57. Осциллограмма токов и напряжений в секции линейного
двигателя постоянного тока с тиристорным коммутатором.
линейного двигателя с двухфункциональной обмоткой.
Из сравнения осциллограмм тока и напряжения на сек-
ции видно, что между ними практически нет фазового
сдвига, что соответствует cos(p~l, как и в двигателях
постоянного тока.
3-5. УСИЛИЯ ПРИТЯЖЕНИЯ И ОТТАЛКИВАНИЯ
В ЛИНЕЙНЫХ ДВИГАТЕЛЯХ
Системы линейного электропривода, как правило,
обладают наряду с тяговым усилием также и усилием
взаимного притяжения первичной и вторичной частей.
Это обстоятельство может оказаться полезным, напри-
мер, в комбинированных системах так называемых уси-
лителей тяги или вредным, например, в карьерном ли-
нейном электроприводе или аналогичной транспортной
125
системе, где основное ограничение накладывают опор-
ные возможности рельсов. Для асинхронных двигателей
одностороннего типа с двухслойной вторичной частью
при заданной толщине токопроводящей части и опреде-
ленных соотношениях частоты питания и режима работы
возможно получение как усилия притяжения, так и уси-
лия отталкивания (левитация) между первичной и вто-
ричной частями двигателя.
У транспортных средств, использующих линейный
автосинхронный двигатель, сила притяжения обычно
существенно (в 1,5—3 раза) превышает силу тяги. Дей-
ствительно, из условия устойчивости поля у такой ма-
шины отношение магнитной индукции в зазоре В
к линейной нагрузке якоря А не может быть меньше
определенного значения:
а '
(3-51)
где щт — эффективная ширина полюса; б — рабочий воз-
душный зазор.
С другой стороны, отношение силы притяжения
к силе тяги Л. равно:
FB * В.
= (3-52)
При соблюдении условия устойчивости поля (3-51)
получаем:
^^сит/ 46.
Для принятых значений а, = 0,5 и т/б 2>10 имеем:
&в>1,25. Это может создать ряд серьезных неудобств.
При использовании таких транспортных средств на весь-
ма крутых подъемах, где сила тяги должна составлять
значительную долю от веса транспортируемой единицы
подвижного состава, ограниченные опорные возможности
рельсов заставляют резко снижать перевозимый полез-
ный груз — транспортное средство становится малоэф-
фективным.
В ряде случаев (в частности, для высокоскоростного
движения) желательна полная компенсация давления
экипажа на рельсы, которые остаются для центрирова-
ния экипажа относительно оси пути. Оптимальным пред-
ставляется вариант, при котором компенсация веса эки-
пажа достаточна для того, чтобы небольшие неровности,
характерные для поверхности рельсов, не вызывали не-
126
желательной тряски экипажа, но недостаточна для того,
чтобы экипаж повис над путем с опасностью серьезного
удара при исчезновении по какой-либо причине компен-
сирующего усилия. Вообще механическая система рель-
сы— реборды колес весьма простая и надежная система
удержания экипажа на пути.
Таким образом, нужна управляемая, действующая
одинаково как при движении, так и на остановках, про-
стая, дешевая (особенно при размещении на длинном
пути) и безусловно надежная система компенсации дав-
ления на рельсы со стороны экипажа.
х;
Рис. 3-58. Обращенный двигатель
с компенсационной обмоткой.
Рнс. 3-59. Линейный двигатель
постоянного тока с компенса-
ционной обмоткой.
Как уже указывалось, мы не рассматриваем здесь
специальных систем левитации и излагаем лишь те ре-
шения задачи, которые могут быть осуществлены с по-
мощью самого двигателя. Покажем, что относительно
несложное усовершенствование линейного автосинхрон-
ного двигателя может обеспечить функционирование
транспортных средств с ограниченным давлением на
рельсы. Принцип действия такого усовершенствованного
линейного двигателя для транспортного средства иллю-
стрируется рис. 3-58, 3-59. На рис. 3-58 изображена
упрощенная схема линейного двигателя для случая его
использования в карьерном транспорте с размещением
первичной части вдоль пути, а вторичной — на экипаже.
На рис. 3-59 показана упрощенная схема линейного
двигателя для случая размещения первичной части на
127
экипаже, а вторичной части — на пути. На рис. 3-58 и
3-59 приняты одинаковые обозначения.
В варианте исполнения по рис. 3-58 первичная часть
линейного двигателя 4 укреплена на путевой структу-
ре 1, где на изоляционной прокладке 2 установлены и
рельсы 3 (на изображенном в аксонометрии рисунке
показаны только один рельс 3 и одно колесо 5). Вторич-
ная часть двигателя 5 укреплена с помощью элементов
крепления 13 на экипаже 9. Сквозь полюсы вторичной
части 14 в поперечном движению направлении пропу-
щены компенсационные провода 15, питаемые постоян-
ным током от источника 12 через регулятор 11, управ-
ляемый датчиком давления 7 (измеряющим, например,
силовое взаимодействие между колесом 6 и подшипни-
ком 8) и задающим устройством 10.
Первичная часть двигателя никаким изменениям не
подвергается. Провода якоря, как и в обычном исполне-
нии двухфункциональной обмотки по § 3-3, коммути-
руются таким образом, что при нахождении под одним
полюсом секций вторичной обмотки через них протекает
постоянный ток одного направления, а при переходе
к соседнему полюсу — противоположного направления;
под данным полюсом 14 всегда протекает в проводах
якоря 16 первичной части 4 ток одного и того же на-
правления.
Если необходим реверс, он осуществляется измене-
нением направления тока в проводах возбуждения 17.
Направление тока в компенсационных проводах 15 по-
стоянное. Это направление всегда противоположно на-
правлению тока в проводах якоря 16, что и создает
усилия взаимного отталкивания систем, в которых укреп-
лены провода, несущие эти токи.
Усилие отталкивания пропорционально произведению
токов, протекающих в компенсационных проводах 15 и
проводах якоря 16. Поэтому регулятор 11, изменяющий
ток в компенсационных проводах 15 в функции несоот-
ветствия сигналов, поступающих от задатчика 10 и дат-
чика давления 7, во многих случаях может быть исклю-
чен из системы — при меньшей загрузке ток в проводах
якоря 16 будет меньше и компенсирующее усилие также
уменьшится, как п требуется при меньшей загрузке.
Система с первичной частью 4 на экипаже 9 (так
называемая прямая система) могла бы работать точно
так же, как уже разобранная обращенная система. Но
128
при протяженном пути необходимо было бы снабжаю
длинные участки многочисленными источниками тока,
вводить устройства для их подключения по мере про-
движения экипажа и т. д. Вариант, схематично изобра-
женный на рис, 3-59, не требует этого.
Ток якорной цепи первичной части замыкается через
колесо и рельс на землю (этот участок на рис. 3-59 не
показан). Между рельсами 3 (разделенными вдоль пути
на отдельные отрезки) и землей имеется изоляционный
промежуток 2. Ток левого рельса 3 идет вправо через
компенсационные провода 15, например, нечетных по-
люсов 14 вторичной части 5, а затем — через заземле-
ние 18 в землю (возможно и последовательное прохож-
дение в чередующихся направлениях через несколько
полюсов 14, показанное пунктиром на рис. 3-59, или,
например, кольцевой обмотки вместо проводов 15). Ана-
логично из правого рельса 3 ток идет влево через ком-
пенсационные провода 15 соответственно четных полю-
сов 14 вторичной части 5 через заземление 18 в землю.
При соблюдении указанного выше условия (встреч-
ного направления тока в компенсационных проводах 15
и проводах якоря 16) создается, как и в варианте по
рис. 3-58, усилие отталкивания между экипажем и путе-
вой структурой. Нужно отметить, что при этом сущест-
венно улучшаются и условия работы первичной части:
ток в компенсационных проводах 15 обеспечивает и
компенсацию реакции якоря. Это практически снимает
ограничение по устойчивости поля: отношение BJA мо-
жет быть существенно уменьшено. Соответственно может
быть уменьшено и значение kD — например, до значения
0,3—0,4. Наличие (в варианте по рис. 3-58) автономного
источника питания, питающего компенсационные прово-
да 15 независимо от состояния сети, питающей первич-
ную часть двигателя, весьма полезно для осуществления
эффективного динамического торможения, особенно
аварийного при прекращении питания первичной части,
когда достаточно закоротить ее обмотки.
Наличие токов во вторичной части позволяет, уста-
новив между основными полюсами против коммутируе-
мой секции дополнительные полюсы, использовать эти
токи для существенного улучшения коммутации, запи-
тав ими обмотки упомянутых дополнительных полюсов.
Наконец, если почему-либо у машиниста экипажа воз-
никла необходимость вместо отталкивания получить
129
Притяжение, ему достаточно будет поменять направле-
ние тока цепи якоря и для сохранения направления дви-
жения также и цепи возбуждения.
В линейном автосинхронном двигателе с компенса-
ционной обмоткой сила тяги определяется как сумма
сил, возникающих от следующих причин.
1. Сила взаимодействия основного магнитного потока
Фг обмотки возбуждения с током якоря /я
~ b.L (3-53)
где —линейная нагрузка якоря; Л2 —линейная на-
грузка возбуждения; т — полюсное деление; bt— шири-
на активной части машины; L — длина машины; Х| —
удельная магнитная проводимость воздушного зазора
в области полюса на единицу ширины машины.
2. Сила взаимодействия потока Фя обмотки якоря,
замыкающегося по поперечной оси (оси межполюсных
впадин), с током обмотки возбуждения 1В
F^-^-b.L^-^A,^ (3-54)
где Л2 — удельная магнитная проводимость по попереч-
ной оси.
3. Сила взаимодействия потока компенсационной
обмотки Фк с током возбуждения /в
(3-55)
где Дк — линейная нагрузка компенсационной обмотки.
Таким образом, действующее в линейном автосин-
хронном двигателе с компенсационной обмоткой тяговое
усилие определяется как
FT K O= FT - Fп.т + FK=-LbtL ~ Я. [ДА +
+АИА-ЛЛ)]. (3-56)
где
При равенстве линейных нагрузок якоря и возбуж-
дения А1=А2—А выражение (3-56) для силы тяги за-
пишется в виде
Л.к.о= 4- Я. [Л2 + А (А - Л) *], (3-57)
130
тогда как для линейного автосинхронного двигателя без
компенсационной обмотки сила тяги
Гтз=-1-61£^-Я1Д!(1 —Л). (3-58)
Из сравнения (3-57) и (3-58) видно, что включение ||
компенсационной обмотки приводит к увеличению тяго-
д ь I
вого усилия двигателя в £к = 1 -|- -у -т-—т,— раз.
Так, при £=0,3 (что соответствует случаю т/6~ 10,
cti=0,5) и ДК=Д имеем увеличение тяги в 1,43 раза.
Сила FB, действующая в вертикальном направлении
при компенсационной обмотке, равна сумме составляю-
щих притяжения Fnp и отталкивания F0T. Сила притяже-
ния Fnp между вторичной и первичной частями машины
действует на всей длине двигателя и при аг=0,5 равна:
[л^«(1+А24-)+л^(Аг+4-)]- <3-59)
Усилие отталкивания, возникающее в системе про-
водников с токами противоположного направления, рас-
положенными па статоре (обмотка якоря) и на вторич-
ной части (компенсационная обмотка), на один полюс
F0T=fiK/H6|, (3-60)
где BK=p0Iv/lCf>— средняя индукция магнитного поля,
возбуждаемого током компенсационной обмотки, на ли-
нии расположения обмотки якоря; /к— полный ток
компенсационной обмотки на один полюс; 7„=Д11а1т;
/ср — длина средней силовой линии магнитного поля ком-
пенсационной обмотки, для практических расчетов с до-
статочной степенью точности можно считать /С11,~3б.
Тогда сила отталкивания машины, имеющей 2 р по-
люсов, будет равна:
fot=h0-^AA- (3-61)
II
Результирующая сила, перпендикулярная направлению
движения,
F.=F4-F„=^{.4M-,(l+*’4-)+
+ Л-,л!,(л-+4)}-Л-Т5ГлА- (3-62) J
131
При равенстве линейных нагрузок А, — Аг = А имеем:
F = P + 2fe2 + 3fe’\| Lb^ Л Л ZOfiOT
8 64[л0 -----з----)( ^12ГаЛ- (3-63)
Чтобы в этом случае получить нулевое значение вер-
тикального усилия, необходимо выполнить условие
л _ тХ\38 . /3+ 2k1 + 3^\
А -----з----J • <3’64>
Если в качестве примера взять машину, у которой т/б=10;
«~0,3; я5 = 1,2, то Дк~1,39 А. При этом тяговое усилие увеличи-
вается в 1,6 раза.
Был произведен сравнительный расчет нескольких
вариантов: варианты I и IV — без компенсационной
обмотки; II и V — с компенсационной обмоткой и нуле-
вым притяжением; вариант III — с компенсационной
обмоткой и левитацией. Общими для рассматриваемых
вариантов являются следующие параметры:
,4 ” Сила"тяги Fr, Н.................... 600-103
Длина машин I, м...................... 15
Ширина машины Ь, м................... 0,8
Скорость V, м/с........................ 8
Напряжение U, В..................... 1000
Число пар полюсов 2 р ........... 60
Результаты расчета приведены в табл. 3-7.
При подсчете весовых соотношений принято, что каж-
дому экипажу (например, думпкару, несущему 15 м ак-
тивной вторичной части) отводится 100 м статора —
первичной части, уложенной в путь.
Как видно из табл. 3-7, использование компенсаци-
онной обмотки позволяет уменьшить силу притяжения
и даже иметь левитацию, однако при этом увеличи-
вается расход меди и несколько снижается коэффициент
полезного действия.
Для двигателя мощностью Р2=4800 кВт с компенсационной
обмоткой получение отталкивающего усилия в 900-103 Н приводит
(по сравнению с двигателем той же мощности, но без компенсацион-
ной обмотки) к снижению расчетного к. п. д. с 0,775 до 0,7 при
повышении отношения тяги к массе всей машины от 7,9 до
13,45 Н/кг (на 75%). При увеличении .плотности тока в компенса-
ционной обмотке от 5-10е до 10-10® А/м2 это отношение может быть
поднято до 14,5 Н/кг, т. е. на 80% по отношению к машине без
компенсационной обмотки, однако расчетный к. п. д. упадет еще на
7% и составит 0,63.
При введении компенсации только силы притяжения имеем со-
ответственно снижение к. п. д. с 0 775 до 0,75, т. е. относительное
снижение на 3,5% и повышение отношения тяги к массе машины от
7,9 до 11,2 — на 42%. Существенное для оценки использования мас-
132
Таблица 3-7
Результаты расчетов вариантов обращенного двигателя
Параметр Варианты
I II III IV V
Воздушный зазор б, м .... 0,02 0.02 0.02 0,06 0,05
Коэффициент kB Линейная нагрузка якорной об- 0,3 0.3 0.3 0Л5 0,55
мотки А, А/м. Линейная нагрузка обмотки 200 10’ 159-10’ 251-10» 353-10’ 222-10»
возбуждения А» А/м . . . . Линейная нагрузка коМпенса- 200-10’ 157,5-10» 101-10» 353-10» 200-10»
ционной обмотки Ак, А/м . . Ивдукцня в возд\шном зазоре — 221-10» 332-10’ — 280-10’
^8 • Тл 0,504 0.472 0,3 0,547 0,344
Вертикальная сила Н . . . Плотность тока в обмотке яко- 1380-10» 0 -900-10» 1390 10» 0
ря /я, А/м’ Плотность тока в обмотке воз- 15 10» 15-10» 20-10» 15-10» 15-10»
Суждения 1в, А/м’ Плотность тока в компенса- 15-10» 15-10» 8,1-10» 15-10» 15-10»
ционной обмотке /к» А/м® Коэффициент полезного дейст- — 5-10» 10-10» — 5-10»
ВИЯ Масса меди двигагеля на I м. 0,775 0.75 0.63 0,629 0.658
кг Масса меди компенсационной 145 239 228 301 392
обмотан на 1 м, кг — 124 91 .— 221
Масса статора иа I м GCT, кг Масса магнитопровода на 1 м, 685 428 340 1070 495
кг Масса машины на I м Миш кг Удельное тяговое усилие f> 494 698 485 539 811
1180 1120 825 1610 1257
П/м’ 5 10* 5-10* 5-10* 5-10* 5-10*
Отношение - , кВт/кг . . °маш гт 0,272 0,284 0,388 0,199 0.254
Отношение -— , И/кг .... °ст F 8.76 13,95 17,65 5,6 12.1
Отношение . Н/кг . . . ° маш 7,9 И,2 14.5 5.2 9,65
сы машины отношение приведенной массы к полезной мощности со-
ставляет у машины без компенсационной обмотки 15,7 кг/кВт,
у машины с компенсированным притяжением —11,25 кг/кВт (на
25% лучше) и у машины с левитацией при плотности тока в ком-
пенсационной обмотке 5 А/мм2 —9,3 кг/кВт (на 40% лучше), а при
плотности тока в компенсационной обмотке 10 А/мм2 — 8,6 кг/кВт
(на 45% лучше). Таким образом, можно считать введение компенса-
ционной обмотки полезным.
ГЛАВА ЧЕТВЕРТАЯ
ЭЛЕКТРОПРИВОД С ОБРАЩЕННЫМ
ЛИНЕЙНЫМ ДВИГАТЕЛЕМ
4-1. РАЦИОНАЛЬНЫЕ ОБЛАСТИ ПРИМЕНЕНИЯ
ОБРАЩЕННЫХ ЛИНЕЙНЫХ ДВИГАТЕЛЕЙ
Асинхронный линейный двигатель еще в первом патенте Зелена
Г116] предлагался в варианте как с короткой первичной н длинной
вторичной частями (прямой вариант), так и с длинной первичной и
короткой вторичной частями (обращенный вариант). Практически
любая из рассмотренных выше линейных машин может быть выпол-
нена в обращенной модификации. В § 1-1 при классификации ли-
нейных машин такой модификации соответствует электропривод с не-
транспортируемыми двигателями. Это в известной мере предопреде-
ляет области преимущественного применения обращенных линейных
машин. Однако полной аналогии нет, ведь у обращенной линейной
машины «транспортируется» одна часть машины (вторичная),
а у прямой — другая часть (первичная). Точнее будет считать, что
в отличие от прямого линейного электропривода обращенная систе-
ма не имеет транспортируемой первичной части двигателя; опреде-
ление «не имеет на подвижной части устройств, к которым подклю-
чаются источники электроэнергии» представляется слишком узким.
Бсзобмоточные полюсы на подвижном составе создают при
обращенной системе самую простую и надежную, но не самую эко-
номичную систему. Поэтому можно считать полезным рассмотрение
как варианта с безобмоточной вторичной частью, точнее соответст-
вующей исследованному выше прямому линейному двигателю,
в частности с двухфункциональной обмоткой, так и обращенной ма-
шины с якорной обмоткой, расположенной вдоль пути, и обмоткой
возбуждения, расположенной на экипаже. Вариант с короткой пер-
вичной и длинной вторичной частями не требует дополнительного
описания; приведем здесь результаты расчета такой машины для
применения на открытых горных разработках.
Для промышленного карьерного транспорта в качестве отправ-
ных были сформулированы следующие технические требования для
обращенного варианта линейного электропривода.
Масса груженого поезда шл=5-105 кг; наклонный участок
с углом наклона а=15° (270%0); скорость о=10 м/с (36 км/ч);
/ h
длина поезда £, = 140 м; глубина разреза /г=250 м I £ = -д =
1000 м ^минимальный интервал между поездами Д/=300 с; вре-
мя движения по наклонному участку f=£/t> = 100 с; относительное
время нахождения под током каждой секции длиной 120 м ПВ, % =
= 4%, ширина колен 1520 м.
Найдем силу тяги и мощность:
Гт =1250 кН;
Р=ГтЦ=12,5-103 кВт (намного больше мощности современных
электровозов).
134
Расчет показывает возможность создания обращенной машины,
удовлетворяющей техническим требованиям, близким к рассмотрен-
ным выше.
Были рассчитаны два варианта машины: с обмоткой из медного
провода и с обмоткой из алюминиевого провода. Для обоих вариан-
тов масса магнитопровода на 1 м составила 545 кг и удельная тяга
2-Ю4 Н/м2. Сила притяжения 65-104 Н. Масса обмотки из медиого
провода составила 110 кг на 1 м, а из алюминиевого провода —
33,6 кг. Отношение мощности к массе машины — 0,31 кВт/кг (для
медного провода) и 0,364 кВт/кг (для алюминиевого провода).
Отношение силы тяги к массе машины — 38,7 Н/кг (для медного
провода) и 45,5 Н/кг (для алюминиевого провода); к. п. д. маши-
ны с медной обмоткой 0,566, с алюминиевой обмоткой 0,464. При
менее ннтенснвном использовании обмоточных материалов (и соот-
ветственно нх большей массе) можно существенно повысить к. п. д.
Так, при вдвое меньшей плотности тока к. п. д. машины с медной
обмоткой составит уже 0,715. Однако технико-экономический анализ
показывает преимущество решения с меньшей энергетической эффек-
тивностью, но зато с существенно меньшими первоначальными за-
тратами.
Технико-экономическим критерием рациональности применения
обращенного варианта линейного двигателя является выражение
SizL~l-S2i^^-}Se2<ZSnNl-}~Sz2^-}Sett (4-1)
где Sn и S]2 — стоимости 1 м первичной части, устанавливаемой со-
ответственно на подвижном составе и на пути; S2i и S22— стоимо-
сти 1 м вторичной части, устанавливаемой соответственно на по-
движном составе и на пути; S3i и SB2— эксплуатационные расходы
соответственно прямого и обращенного вариантов; L — общая рабо-
чая длина пути; N — количество подвижных единиц, взаимодей-
ствующих с путем; I — рабочая длина подвижной единицы.
Принимая в первом приближении Siz=Sn; S22=.S21 и Sa2=S8i,
имеем:
(Sl2-S22)(£-M)<0. (4-2)
Так как удельная стоимость первичной части Stz всегда больше
удельной стоимости вторичной части S22, достаточным условием ра-
циональности применения обращенного варианта является неравен-
ство L<Nl. При £=1000-^1200 м систему выгоднее выполнить
обращенной, если в ней действует более 50—60 подвижных единиц
с активной длиной в 20 м и более на каждой единице. Реально
одновременно взаимодействуют с путем JVj подвижных единиц:
Nt=kN,
где k^.0,25=0,3.
Расстояние между движущимися единицами составляет (2—3)/.
Это позволяет рассчитывать обращенную машину на среднюю эффек-
тивность (прн основном ограничении по тепловой нагрузке), в V~k
раз меньшую, чем действительно реализуемая, ибо k играет роль
относительной продолжительности включения. Прн £=0,25 обращен-
ная система может быть выполнена вдвое менее мощной на единицу
длины (и соответственно примерно вдвое дешевле), чем прямая си-
стема.
Наконец, сама по себе стоимость установки первичной части
на подвижном составе существенно дороже установки первичной
части такой же мощности на пути. В первом случае нужно учесть
135
стоимость обеспечения надежности энергоснабжения, размещения па
транспортном средстве отдельного преобразователя-коммутатора, не
которое ухудшение его характеристик (например, транспортируемы!!
преобразователь трудно пнтагь многофазным напряжением, а при
однофазном питании его характеристики ниже). Дороже н эксплуа-
тация подвижных устройств с первичной частью на борту. Практи-
чески исключено использование их без поездной бригады, что вполне
допустимо, например, при оснащении транспортных единиц только
рифлеными стальными участками корпуса для обращенного линейно-
го двигателя с двухфуикцнональной обмоткой. Количественная оцен-
ка здесь требует подробного технико-экономического анализа, ио
если принять для разбираемого случая при fe=0,25 примерно двой-
ную стоимость установки при прямом варианте и равные эксплуа-
тационные расходы, т. е. 51г=0,бИ* Si[=0,25Sn; S^—0,25Szt;
S82=S»i, то получим из (4-1)
(8ц—S2,)(L-4M)<0.
Уже при условии 4Nl>L становится экономически целесообраз-
ным применение обращенного варианта. Экономичнее уложить
в путь 1,5—2 км первичной части линейного двигателя, чем при ра-
бочем парке в 25 транспортных единиц уложить на каждом из них
15—20 м первичных частей.
Принятое в данном приближенном расчете равенство эксплуата-
тационных расходов SBz=SBI дает значительный запас в пользу
обращенного варианта лишь в случае отсутствия каких-либо обмо-
ток и систем питания и управления на подвижных объектах. В ряде
случаев такой вариант технически и экономически не оптимален. На-
пример, при работе на крутых подъемах при аварийном прекраще-
нии питания подвижной части в случае двухфункциональиой обмот
кн полюсы окажутся невозбужденными и не сможет быть использо-
вано динамическое торможение, которое имело бы место при
возбуждении полюсов от постороннего источника (аккумуляторной
батареи, размещенной на подвижном объекте).
Существенным является также вопрос об использовании обмот-
ки: при полюсах, возбужденных от постороннего источника, может
быть использована большая полюсная дуга, что дает соответственно'
большую тягу при прочих равных условиях; преобразователь-комму-
татор может обеспечивать питание только тех секций, которые
в данный момент времени находятся над полюсом, что позволяет
увеличить плотность тока в них.
Наконец, некоммутнруемая обмотка возбуждения может выпол-
няться для синхронных и автосинхронных машин сверхпроводящей
[2, 73], что позволяет при относительно небольших ее размерах и
ничтожных энергетических потерях обеспечивать необходимую
индукцию и при больших зазорах, характерных для этих машин.
Можно ожидать, что и к. п. д. у таких машин окажется более вы-
соким, чем у подробно разобранных выше машин с двухфункцио-
иальиой обмоткой. В других случаях, например для транспортного
конвейера с необслуживаемыми подвижными единицами, по-внднмо-
му, больше подойдет обращенная машина с безобмоточнымн полю-
сами. Для транспортных объектов, перемещаемых по электростраде,
целесообразнее, как показано в § 4-2, использование полюсной си-
стемы, возбуждаемой от постороннего источника. Мы не рассматри-
ваем здесь еще одно соображение в пользу обращенной машины при
больших скоростях: пока не отработана система энергоспабже-
136
ния подвижного экипажа, применение прямого линейного двигателя'
здесь ограничено лишь экипажами с автономным энергоснабжением.
Обращенные машины для высокоскоростного наземного транспор-
та (ВСНТ) часто рассматриваются с учетом совместного действия
тяги и магнитного подвешивания [2, 73, 109]. В нашу задачу не
входит рассмотрение систем магнитной подвески (наши машины мы
бы скорей назвали «магневозамн», чем «магнепланами»), и мы при-
ведем лишь некоторые оценки, относящиеся к синхронной машине,
совмещающей функции тягн н подвески.
Авторы [44] приходят к выводу, что при системе активного
пути (обращенная машина в нашей терминологии) применение син-
хронного линейного двигателя 'предпочтительнее асинхронного. Этот
вывод подтверждается таблицей качественного сравнения синхронно-
го н асинхронного линейных двигателей (табл. 4-1).
Таблица 4-1
Качественное сравнение синхронного и асинхронного
линейных двигателей
Часть электро- привода Сравниваемый параметр Синхронный двигатель Асинхронный двигатель
Двигатель Железный сер- дечник Воздушный зазор Коэффициент Мощности Коэффициент по- лезного действия Краевой эффект Сверхпровод ящий электромагнит Не нужен Большой Высокий Высокий Небольшой Необходим Необходим Малый Низкий Ниже среднего Большой Не нужен
Система регу- лирования Питание Длина питаемого участка пути Через преобразова- тель с регулировани- ем напряжения и часто- ты Длинный (последо- вательное соединение конт\роа путевой це- пи) Через инвертор с ре- гулированием напряже- ния и частоты Короткий (парал- лельное соединение контуров путевой цепи)
Определяющий параметр ВСНТ — скорость требует тщательного
обоснования. Ведущий специалист в этой области Торнтон писал:
«Мы все больше и больше сомневаемся в том, что столь высокой
скоростью стоит оперировать при первоначальной реализации этой
системы. Прн скоростях выше, чем 60 м/с (215 км/ч), затраты в за-
висимости от скорости возрастают очень быстро, и мало вероятно,
что доходы будут расти так же быстро. При скорости 120 м/с
(430 км/ч) потребление мощности на аэродинамическое сопротивле-
ние превышает 60% полных потерь мощности, а около 60% затрат
на путевое полотно связано с системами энергоснабжения и тягн.
Для сравнения отметим, что при скорости 90 м/с (320 км/ч) полные
потери мощности можно снизить наполовину, а минимальный радиус
кривизны путевого полотна—почти наполовину. Если уменьшение
скорости движения сопровождается увеличением затрат на стан-
ционные устройства, то, вероятно, общее время поездки (от начала
10—54 137
До конца маршрута) сможет поддерживаться почти постоянным, но
с полной экономичностью системы. Поэтому в будущем рекомен-
дуется обсудить те выгоды, которые может дать эксплуатация си-
стемы при скорости 90 м/с» *. Для таких скоростей уже отработаны
системы энергоснабжения, и выбор прямой или обращенной системы
может опираться «а технико-экономические критерии.
Промежуточное положение между прямым и обращенным линей-
ными электроприводами занимает привод конвейеров. Применение
линейного двигателя для привода конвейеров позволяет осуществить
непосредственную передачу тягового усилия поступательно движу-
щимся тяговым и грузонесущим элементам конвейера. При этом
возможна установка вдоль трассы конвейера нескольких линейных
двигателей, что дает возможность создать многолриводные конвейе-
ры без перегрузочных устройств, т. е. увеличить длину конвейера,
Рис. 4-2. Конвейер с линейны-
ми двигателями, установленны-
ми по кромкам ленты.
Рис. 4-1. Конвейер с линейны-
ми двигателями, установленны-
ми на нерабочих участках.
что трудно обеспечить при обычном вращательном приводе. Кон-
вейеры основных типов имеют непрерывный режим работы 8—16 ч,
частоту пуска не более 1 раза в час, большую протяженность трас-
сы сложной конфигурации.
Скоростной диапазон конвейеров также различен: ленточные
конвейеры, например, имеют скорость движения ленты от 1 до 6 м/с
и усилие тяги до 5-Ю5 Н, а подвесные — скорости 0,1—0,4 м/с и
тяговое усилие— (0,5—5) -104 Н.
В настоящее время как в СССР, так и за рубежом созданы кон-
струкции конвейеров с приводом от линейных двигателей (главным
образом с линейными асинхронными двигателями), но в основном
на уровне макетов или в лучшем случае на уровне эксперименталь-
но-лабораторных нлн опытно-промышленных установок.
Один из первых ленточных конвейеров с линейными двигателем
[21, 34] показан на рис. 4-1. Грузонесущая тканая леита имеет мед-
ную проволочную сетку, которая представляет собой подвижную
вторичную часть двигателя. Первичная часть двигателя 2 устанавли-
вается на нерабочих участках конвейера 1 (рис. 4-1), что сильно
усложняет конструкцию, и поэтому такой вид конвейера не получил
распространения.
1 Торнтон Р. Д. Принципы проектирования системы магнитного
подвешивания.— В кн.: Наземный транспорт 80-х годов. М.: Мир,
1974, с. 113.
138
Рис. 4-3. Система ленточных поездов с линейны-
ми двигателями,
В [ЮЗ] предложена конструкция линейного
конвейера (рис. 4-2), у которого линейные дви
гатели 1 установлены по кромкам рабочей ветви
грузонесущей ленты 2, в которой закреплены
металлические полосы 3. Однако и этой кон-
струкции присущи серьезные недостатки: приме-
нение специальной ленты, сложность поддержа-
ния постоянного зазора между лентой и первич-
ной частью линейного двигателя из-за провисания
ленты между направляющими роликами и т. д.
В ФРГ разработана система специального
конвейерного поезда с подвижной лентой и при-
приводом от линейного двигателя [ПО]. Конвейер
состоит из отдельных транспортных секций — со-
ставов поездов, движущихся по направляющим путям (рис. 4-3).
Грузонесущим элементом служит прорезиненная лента 3, свернутая
в виде желоба, подвешенного к тележкам 2, соединенным между
собой продольными балками 4 и движущимся по путям 5 Пути
располагаются в галереях, установленных на колоннах. Статоры 5
линейного двигателя крепятся к поперечным балкам галереи,
а вторичная часть в виде вертикального листа 1 толщиной 10 мм
устанавливается на продольной балке ходовой части состава поезда.
Положение ленты вторичной части относительно статора н под-
держание постоянным воздушного зазора (по 6 мм) обеспечиваются
специальными роликами, установленными на ходовой части.
Линейный двигатель имеет следующие параметры: номинальное
тяговое усилие 12 кН, номинальная мощность 260 кВт, напряжение
питания 1000 В, синхронная скорость поля 24 м/с. Состав поезда
имеет длину 420 м в номинальном исполнении (максимум 2500 м)
с полезной нагрузкой 693 т (1,65 т/м). Производительность системы
35 000 т/ч, скорость транспортирования 20—22,1 м/с (72—80 км/ч).
Загрузка и разгрузка состава конвейерного поезда производятся
в концевых пунктах обычными методами. Движение поездов — пе-
риодическое: двигатели на трассе включаются по мере подхода
к ним состава.
В [112] приведены данные по промышленной установке кон-
вейерного поезда на угольной шахте «Гордан» (Франция). Длина
трассы 5 км, по ней перемещаются четыре поезда длиной по 225 м
и грузоподъемностью 30 т. На трассе установлено 28 линейных дви-
гателей. включаемых при приближении поезда.
Из рассмотрения принципиальных схем построения конвейеров
видно, что с точки зрения выполнения конструкции привода — это
обращенные машины. Однако, если рассматривать физические процес-
сы в линейных двигателях, явление краевых эффектов и т. д., то
можно сказать, что в конвейерах применяются линейные приводы
необращенной конструкции, так как закрепленная первичная часть
имеет ограниченную протяженность, а вторичная часть имеет су-
щественно большую протяженность. Но в прямых линейных приво-
дах требуется контактная сеть для подвода питания к первичной
части, а в рассматриваемых электроприводах конвейеров система
энергоснабжения может быть выполнена в виде стационарных транс-
10*
139
Рис. 4-4. Схема электрострады.
форматорных подстанций, расположенных вдоль трассы конвейера,
как и у любой обращенной линейной машины.
4-2. ПЕРСПЕКТИВЫ ПРИМЕНЕНИЯ ОБРАЩЕННОГО
ЛИНЕЙНОГО ЭЛЕКТРОПРИВОДА
Для перевозки людей и грузов безрельсовым транспортом пред-
ставляет интерес использование обращенного варианта линейного
двигателя в так называемой электростраде.
Безрельсовая многолинейпая трасса (рис. 4 4) оборудуется уло-
женными внутри твердого покрытия первичными частями линейного
двигателя с обмотками и расположенными вдоль трассы преобразо-
вателями-коммутаторами (или другими источниками энергоснабже-
ния). Экипажи оборудуются полюсной системой, возбуждаемой от
автономного источника питания (например, аккумуляторных ба-
тарей).
Поскольку грузовые и легковые транспортные средства, как пра-
вило, двигаются с различными скоростями, электрострада в каждом
направлении должна иметь несколько, например три, полос для дви-
жения в каждом направлении. Одна, крайняя левая, — для скорост-
ного движения, средняя — для движения грузового транспорта и
крайняя правая — для съезда и въезда на элскгросграду. Для изме-
нения направления движения на электростраде необходимо преду-
смотреть развязки по типу обычных для автострад. Каждая полоса
140
движения представляет собой отдельную уложенную в твердом по-
крытии первичную часть с секционированной обмоткой, питаемой
синхронным генератором или отдельным преобразователем частоты,
фактически задающими скорость движения экипажа. Подключение
секции к проложенным вдоль пути питающим шипам или шине осу-
ществляется от датчиков, расположенных так, что управляющий
включением какой-либо секции датчик срабатывает несколько ранее,
чем экипаж наезжает па эту секцию. Отключение производится от
реле времени или датчиком, расположенным на одну-две секции
впереди по ходу движения.
Для перехода экипажа с одной полосы движения на другую
отключается система возбуждения полюсов, и экипаж переводится на
режим движения от автономных двигателей, связанных с валом ко-
лес экипажа, и переходит на другую полосу движения пли съезжает
с электрострады на другое шоссе. Поскольку все транспортные еди-
ницы, находящиеся на одной полосе движения и двигающиеся
в одном направлении, синхронизируются магнитным полем от одной
системы управления, то практически исключается возможность на-
езда одного экипажа на другой. С другой стороны, так как каждый
экипаж является самоходной единицей, имеется возможность пере-
мещать экипажи на достаточные расстояния от электрострады и
затем возвращать их на нее за счет энергии аккумуляторов. При
движении по электростраде автономный двигатель может перево-
диться в генераторный режим для подзарядки аккумулятора. Вся
электрострада в целом может быть оборудована управляющей систе-
мой с применением ЭВМ. с помощью которой выбираются оптималь-
ная скорость движения на каждой полосе электрострады и безопас-
ные интервалы между отдельными экипажами. Применение такой
системы должно резко повысить пропускную способность электро-
страды и безопасность движения на ней. Возникающие между эки-
пажами и путем центрирующие силы гарантируют устойчивость по-
движной единицы на полосе движения независимо от погодных
условий.
Принципиальное решение электрострады основано на примене-
нии линейного синхронного двигателя. В обмотках первичной части
протекают токи заданной частоты, причем где ft— часто-
та тока в первичной части крайней правой полосы движения. Эки-
паж в режиме автономного движения ускоряется на крайней правой
полосе движения до тех пор, пока его скорость не станет синхрон-
ной для дайной частоты тока первичной части ft (о чем сигнализи-
рует специальное индикационное устройство на экипаже выполнен
ное. например, по типу синхронизаторов па электростанциях) После
входа в синхронизм движение экипажа происходит с заданной ско-
ростью, определяемой частотой ft, экипаж переходит с автономного
движения на синхронное, определяемое линейным синхронным дви-
гателем полосы.
Для перехода на новую полосу снова включаются автономные
двигатели, и экипаж ускоряется до новой синхронной частоты f2
или f3 и т. д.
Возможно также на отдельных участках иметь комбинацию
принципов синхронного п автосинхронпого («постоянного тока») ли-
нейных двигателей. При создании электрострады на основных участ-
ках, имеющих большие протяженности и не требующих маневриро-
вания, очевидно, предпочтительнее будет использовать линейный син-
хронный двигатель; там, где требуется иметь возможность широкого
141
маневра по скорости, работать в старт-стопных режимах, лучше
будет использовать линейный двигатель постоянного тока.
Приведем приближенную оценку параметров такой системы.
Мощность двигателя современной легковой машины в среднем рав-
на 50 кВт; при этом обычно исходят из скорости 90—100 км/ч,
т. е. расчетной тяги 2000 Н. Можно считать, что мощность легкового
экипажа электрострады должна находиться в этих же пределах до
той же скорости. Скорости движения по полосам электрострады
примем равными:
Полоса I..................12,5 м/с (45 км/ч), Гт=%=2000Н
Полоса II.................. 25 м/с (90 км/ч), Гт^2000Н
Полоса III................. 50 м/с (180 км/ч), FT800011
Для последнего сличая сила тяги увеличивается, так как основ-
ным преодолеваемым сопротивлением будет сопротивление воздуха,
пропорциональное квадрату скорости.
Зададимся активной шириной возбужденных полюсов bi=
= 0,62 м; их числом 2р = 4; полюсным коэффициентом а,=2/3; ли-
нейной нагрузкой Л=5-104 А/м; индукцией в воздушном зазоре
=0,2 Тл.
Зазор между подвижным экипажем и электрострадой, т. е. меж-
ду первичной и вторичной частями линейного двигателя, примем
равным 6=60 мм (20 мм — заглубление первичной части в твердом
покрытии и 40 мм — воздушного зазора между путем и выдвинутой
вниз до рабочего положения вторичной частью на экипаже). Сле-
дует отметить, что при съезде с электрострады и переходе экипажа
в автономный режим движения зазор (клиренс) целесообразно уве-
личивать до 200—250 мм, что может быть достигнуто переводом
вторичной части в верхнее, «транспортное» положение.
Из соотношения, определяющего силу тяги экипажа,
FT = AB^biL
определим длину вторичной части L—2 м.
Зная вышеприведенные параметры машины, можно определить
полюсное деление т=0,5 м, ширину полюса а11Ол = 0,33 м, суммар-
ную м. д. с., равную 22 000 А. При отношении т/б>8, что имеет
место в настоящем расчете, реальные результаты достаточно близки
к расчетным. Частоты переключения тока в секциях обмотки пер-
вичной части для каждой полосы движения:
Полоса I ......................
Полоса II......................
Полоса III.....................
12,5 Гц
25 Гц
50 Гц
Эти частоты удобны при использовании сети.
Приведем результаты расчета системы возбуждения, устанавли-
ваемой на экипаже:
Ток возбуждения /в, А........................... 10
Плотность тока J, А/ммг....................... 3
/ F \
Число витков катушки возбуждения w I -j—j . . . 2200
Масса меди катушки тм, кг....................... 90
Масса магнитопровода тст, кг................... 150
142
Для оценки параметров грузового экипажа примем его Мощ-
ность около 110 кВт. Так как частоты июлос движения электростра-
ды одинаковы для легковых и грузовых экипажей, то сохраним без
изменения т и Ь\, чтобы 'использовать одни и те же полосы для
грузового и легкового движения. Тогда сила тяги грузового экипа-
жа Frp~4400 Н, и при о=180 км/ч сила тяги увеличивается до
значения FT=s;17 500 Н. Оставляя линейную нагрузку и индукцию
в зазоре -#г=0,2 Тл без изменений, можем оставить для Frp=
= 4400 Н число полюсов 2р = 4 и Т=0,5 м. При fT = 17 500 Н
потребуются 2р=8 и £=4 м. Для создания индукции Вг =0,2 Тл
необходима та же м. д. с. 22 000 А.
Массы меди катушки и магнитопроводов будут соответственно
составлять:
тм~180 кг, тСт~300 кг.
Сила, с которой будет притягиваться подвижная часть машины
к неподвижной, для легковой машины равна 6400 Н (для полосы
III — 25 600 Н), для грузовой машины 14 000 Н (для полосы III —
56 000 Н).
Альтернативой системы, обеспечивающей непосредственное со-
здание тягового усилия бесконтактным электромагнитным взаимо-
действием, является система бесконтактного питания подвижного
экипажа от размещенных на пути устройств энергоснабжения. Одной
из первых систем бесконтактного энергоснабжения подвижных эки-
пажей была предложена в 40-х годах Г. И. Бабатом высокочастот-
ная система передачи энергии. Такой ВЧ-воз питался от установлен-
ной на экипаже приемной антенны, получающей энергию от излу-
чающих контуров, размещенных на пути под твердым покрытием
(на электростраде). Электропривод такого ВЧ-воза не был линей-
ным— энергия от приемной антенны после надлежащего преобразо-
вания поступала на обычные вращающиеся электродвигатели.
В [2] системы бесконтактного энергоснабжения такого типа рассма-
триваются как способ питания экипажей для высокоскоростного
наземного транспорта, следовательно, закономерно их сравнение
с обращенным линейным электроприводом, рассмотренным выше.
В обоих случаях решается одна и та же задача — обеспечение дви-
жения при скоростях, превышающих допустимые для современного
контактного энергоснабжения типа троллей-пантограф.
Из рассмотренных в [2] индукционной, емкостной и волновой
систем передачи энергии к движущемуся экипажу для нас наиболее
приемлема индукционная.
На рис. 4-5,а, б показаны варианты индукционной передачи
энергии высокоскоростному экипажу.
Можно согласиться с приводимым в [2] мнением, что описан-
ные методы имеют следующие недостатки: а) индукционный (маг-
нитный)— низкий к. п. д., большие размеры и низкие механические
ограничения; б) емкостный — множество технических и экономиче-
ских проблем, обусловленных применением высокого напряжения
частотой 100 кГц; в) волновой — высокая стоимость материалов для
производства и передачи энергии, увеличенная масса экипажа. Ведь
системы (например, по рис. 4-5,а, б) только передают мощность на
первичную часть двигателя, размещенную на экипаже. При исполь-
зовании этой энергив в линейном электроприводе должна быть еще
одна система силового взаимодействия со вторичной частью, разме-
щенной на пути. Но вдоль всего пути должна быть размещена и
143
форматора питания и первичную
Рис. 4-5. Индукционная система
бесконтактного энергоснабжения.
а — с центральным токопроводящим
рельсом; б —с боковым токопроводя-
щим рельсом; /— шихтованное ярмо;
2 —• передающие проводники; 3 — при-
емные проводники; 4 — рельс.
питаемая от соответствующих подстанции система первичных обмо-
ток трансформаторов, ие слишком экономичных из-за больших за-
зоров на пути рабочего магнитною потока. Эта система обмоток
довольно близка по своим параметрам (затратам материалов, стои-
мости установки на пути, системе подключения участков к первич-
ной части) соответствующей системе обращенной машины. Итак,
в случае питания прямого линейного двигателя от бесконтактной си-
стемы питания, размещенной вдоль пути, имеем схему, показанную
па рис. 4-6,а, а для обращенной машины—более простую схему на
рис. 4-6,6.
Если считать примерно равноценными первичную часть транс-
форматора питания и первичную часть двигателя у обеих схем, то
первая проигрывает в суммар-
ной стоимости первичных ча-
стей двигателей н вторичных
частей трансфоматоров на всех
экипажах; технико-экономиче-
ские преимущества, по-видимо-
му, на стороне рассматривае-
мых нами магневозов (магне-
ходов? магпемобилей?). Конеч-
но, если на экипаж нужно по-
дать значительную энергию при
большой скорости движения в
отсутствие генераторов, полу-
чающих механическую энергию
от самого движения (по типу,
например, генераторов экипа-
жей электрострады), использо-
вание бесконтактной передачи
энергии представляет сущест-
венный интерес. Однако при на-
личии обращенного линейного
электропривода как источника
большая доля энергии (на воз-
а)
движения необходимая не слишком большая доля энергии (на воз-
буждение, освещение, подзарядку аккумулятора и т. п.) может быть
получена при наличии колес и связанных с ними электрических машин
от этих машин, используемых в режиме генераторов; при отсутствии
последних или вообще при отсутствии колес — от генераторов, ра-
ботающих от встречного потока воздуха, от токов в проводах, уло-
женных во вторичную часть, например, при обращенном линейном
асинхронном двигателе, у которого во вторичной части имеется
обмотка, выведенная на выводы внутри экипажа, и т. п.
Электромобили уже созданы. Разработаны и применяются для
различных целей обращенные линейные двигатели. Можно полагать,
что создание электрострад, при которых огромное скопление транс-
портных средств не будет отравлять атмосферу, а их движение бу-
дет быстрым, более безопасным, экономичным, удобным для авто-
матизации с помощью современных средств управления, а экипажи
будут возить с собой лишь небольшой запас энергии, легко возоб-
новляемый на ходу, — дело вполне обозримого будущего.
Время безраздельного господства способа осуществ-
ления поступательного движения путем механического
сцепления трущихся поверхностей окончилось. Вслед за
144
На пути
Зазор
11а а кип аж а
Зазор
Па пути
Па пути на э1(ипа;4в
б)
Рис. 4-6. Схемы литания линейных электродвигателей.
реактивным двигателем появился новый бесконтактный
источник поступательного движения — линейный элек-
тропривод. Появление линейного электропривода в ар-
сенале основных средств технического прогресса ставит
новые проблемы на разных уровнях: непосредственно
для электропривода — выбор целесообразных схем ком-
мутации, вида обмоток, систем охлаждения, формы и
относительных размеров полюсов, устройств регулиро-
вания и управления; для энергоснабжения — подвод зна-
чительных мощностей к движущемуся объекту, опреде-
ление преимущественных областей использования раз-
ного рода тока, исследование технических и экономиче-
ских аспектов бесконтактной передачи энергии на дви-
жущийся объект, распределение энергии в уложенных
на протяженном пути обмотках обращенного линейного
электропривода; для физики и электротехники — ис-
следование поля в больших зазорах линейных двигате-
лей и у краев машин, анализ рационального применения
криогенных устройств, новых материалов в таких дви-
гателях, магнитной подвески.
Наряду с рассмотренными проблемами имеют место
и комплексные транспортные проблемы: исследование
генеральной проблемы определения областей преиму-
щественного применения транспортных средств основ-
ных двух типов:
1) везущих с собой все количество энергии (обычно
в виде топлива), необходимое тля выполнения рейса;
145
2) получающих необходимую энергию извне электри-
ческим путем (электровозы, прямой линейный электро-
привод) или электромагнитным путем (обращенный ли-
нейный электропривод).
При таком анализе существенное значение имеет
экономический результат того факта, что с ростом ско-
рости движения, например вдвое, количество топлива на
тот же рейс увеличивается примерно в 4 раза (мощ-
ность, определяемая в основном сопротивлением воздуха,
пропорциональна кубу скорости, но время на рейс об-
ратно пропорционально скорости) и, кроме того, воз-
растает стоимость перевозки каждого килограмма топ-
лива, уменьшается коэффициент использования транс-
портного средства и т. п.
Еще более важным является учет экологических
факторов — первый вид транспортных средств продук-
тами сгорания отравляет окружающую среду, создает
большой шум (одна из важных причин того факта, на-
пример, что реактивный двигатель не нашел себе широ-
кого применения в наземном транспорте); второй вид
транспортных средств практически не оказывает вред-
ного влияния на окружающую среду, применение его
позволило бы и шум существенно снизить.
Можно полагать, что глубокий и всесторонний анализ
поставленных проблем привел бы к существенному уско-
рению широкой постановки и развития таких на первый
взгляд кажущихся далекой перспективой работ, как
намеченная выше электрострада, магистральный трубо-
проводный высокоскоростной транспорт с поддержанием
в трубе относительно неглубокого вакуума и другие ва-
рианты высокоскоростного наземного транспорта, транс-
портные конвейеры с централизованным управлением.
Разработки в области линейного электропривода об-
ладают ценным качеством, которое можно было бы
назвать «возможностью поэтапной самоокупаемости»:
быстрое завершение и широкое внедрение таких техни-
ческих решений, как система для карьерного транспор-
та, сухое «шлюзование» судов на гидроузлах, ряд
промышленных приводов для относительно небольших
скоростей и т. п. позволило бы не только окупить уже
сделанные затраты, но и использовать полностью или
частично для разработки перспективных проектов как
научные, так и экономические результаты реализован
ных работ.
J4B
СПИСОК ЛИТЕРАТУРЫ
1. Справочник по вероятностным расчетам/ Абезгауз Г. Г. и др.
М.: Воениздат, 1970.
2. Аватков Е. С. Высокоскоростной электротранспорт. М.:
ВИНИТИ, 1975.
3. Агарвал П. Д., Ван Цзи. Оценка систем асинхронных линей-
ных двигателей с неподвижными и движущимися первичными
обмотками.— В кн.: Наземный транспорт 80 х годов. М.: Мир, 1974.
4. Алексенко Г. В. На магнитной подвеске. — Правда, 1974,
19 октября.
5. Андреев А. М. Исследование продольного краевого эффекта
в первичной цепи линейной МГД-машины.— Магнитная гидродина-
мика, 1968, Ns 4, с. 103—108.
6. Армейский Е. В., Фалк Г. Б. Электрические микромашины.
М.: Высшая школа, 1975.
7. Справочник по тяговым расчетам. Астахов П. Н. и др. М.:
Транспорт, 1973.
8. Браташ В. А. Оптимизация параметров электроподвпжного
состава для открытых горных разработок: Автореф. дис. на сонск.
учен, степени канд. техн, наук/ РИИЖТ, 1975.
9. Будиг П. К. Некоторые замечания по расчету трехфазных
линейных электродвигателей с малыми синхронными скоростями. —
В кн.: Электродвигатели с разомкнутым магнитопроводом. Ново-
сибирск: НЭТИ, 1975, с. 9—24.
10. Булгаков А. А. Частотное управление асинхронными элек-
тродвигателями. М.: Наука, 1966.
11. Валдманис Я- Я. Продольный краевой эффект в линейных
индукционных МГД-машинах. — В кн.: Движение проводящих тел
в магнитном поле. Рига: Зипатне, 1966, с. 95—108.
12. Веселовский О. Н., Полевский В. И. Линейные синхронные
двигатели с электромагнитной редукцией скорости движения. —
В кн.: Электродвигатели с разомкнутым магнитопроводом. Ново-
сибирск: НЭТИ, 1973.
13. Витохин В. И. Исследование магнитного поля в немагнит-
ном зазоре и ярме моделей индукционных машин с разомкнутым
магнитопроводом: Автореф. дне. на сонск. учен, степени канд. техн,
наук/ АН УССР, Киев: 1970.
14. Вольдек А. И. Индукционные магннтогидродннамические
машины с жидкометаллическпм рабочим телом Л.: Энергия, 1970.
15. Вольдек А. И. Электрические машины. Л.: Энергия, 1974.
16. Экспериментальное и расчетное исследование продольного
краевого эффекта индукционной МГД-машины/ Вольдек А. И.
и др.-—Магнитная гидродинамика, 1974, № 1, с. 107—111.
17. Вольдек А. И,, Толвинская Е. В. Метод расчета характе-
ристик линейных и дуговых индукционных машин с учетом влияния
147
продольного краевого эффекта. — Магнитная гидродинамика, 1971,
№ 1, с. 84—90.
18. Гетьман Г. К. Исследование оптимальных соотношений в ча-
стотно-регулируемом тяговом линейном асинхронном двигателе:
Автореф. дне. на соиск. учен, степени каид. техн. наук. Днепропет-
ровский институт инженеров железнодорожного транспорта, 1974.
19. Вентильные преобразователи в цепях электрических машин/
Глебов А. И. и др. Л.: Наука, 1971.
20. Годкин М. Н. Исследование явнополюсных линейных индук-
ционных микродвигателей: Автореф. дис. на соиск. учен, степени
канд. техн, наук/ НЭТИ. Новосибирск: 1975.
21. Дудник М. 3. Ленточный конвейер с линейным односторон-
ним индукционным приводом. — В кн.: Транспорт шахт и карьеров.
М.: Недра, 1972, с. 34—38.
22. Управляемые полупроводниковые вентили/ Джентри Ф. и др.
М.: Мир, 1967.
23. Захаров А. М. Исследование частотно-управляемого линей-
ного асинхронного двигателя. — В кн.. Усовершенствование н авто-
матизация промышленных электроприводов и электроустановок. Ива
ново: ИЭИ, 1972, выл. 2, с. 116—123.
24. Основы теории автомобиля и трактора/ Иванов В. В. и др.
М.: Высшая школа, 1970.
25. Ижеля Г. И., Ребров С. А., Шаповаленко А. Г. Линейные
асинхронные двигатели. Киев: Техн1ка, 1975.
26 Пат. № 527946 (Англия). Бесконтактный сельсин/ Иосифь-
ян А. Г., Свечарник Д. В.
27. А. с. № 56432 {СССР). Бесконтактный сельсин/ Иосифь
ян А. Г., Свечарник Д В. Опубл, в бюл. Изобретения и товарные
знаки, 1940, Ns 1.
28. Иоффе А. Б. Тяговые электрические машины. М.—Л.; Гос-
энергоиздат, 1967.
29. Исаев И. П. Случайные факторы и коэффициент сцепления.
М.: Транспорт, 1970.
30. Канторович Л. В., Крылов В. И. Приближенные методы
высшего анализа. М.—Л.: Физматгиз, 1962.
31. Конт А. В., Янес X. И. Комбинированный расчет главных
индуктивностей электрической машины с разомкнутым магнитопро-
водом при недиаметральной обмотке. — Труды ТПИ, 1966, серия А,
№ 239, с. 3—14.
32. Корепанов Г. Я., Гетьман Г. К. Расчет характеристик ча-
стотно-управляемых линейных асинхронных двигателей. — Труды
Днепропетровского института инженеров железнодорожного транс-
порта. 1972, вып. 135, с. 135—136.
33. Корепанов Г. Я., Гетьман Г. К. Оптимизация частотно-
управляемого линейного двигателя по минимуму тока. — Тезисы
докладов Всесоюзной научной конференции по электроприводам
с линейными двигателями. Киев: КПП, 1973, с. 84—85.
34. Криушип В. И. Исследование приводов с гибким ротором
для ленточных конвейеров. — В кн.: Транспорт шахт и карьеров. М.:
Недра, с. 104—110.
35. Куцевалов В. Н. Вопросы теории и расчета асинхронных
машин с массивными роторами. М.—Л.: Энергия, 1966.
36. Лиелпетер Я- Я- Жидкометаллические индукционные МГД-
машнны. Рига: Зпнатне, 1969.
148
37. Липпл Е. Новые системы пассажирского н грузового транс-
порта.— Железные дороги мира, 1973, № 5, с. 53 63.
38. Лопухина Е, М., Сомихина Г, С. Асинхронные микромашины
с полым ротором. М.: Энергия, 1967.
39. Пат. № 48-29243. (Япония). Роликовый коммутатор для ли-
нейного двигателя постоянного тока. Мацун И. и др.
40. Пат. № 48-6724 (Япония). Линейный двигатель постоянного
тока с направляющим рельсом. Мицуи И. и др.
41. Москвитин А. И. Электрические машины возвратно-поступа-
тельного движения. М.: Изд-во АН СССР, 1950
42. Насар С. А., Дел Сид Л. Тяговые и подъемные усилия,
развиваемые односторонним асинхронным линейным двигателем, для
высокоскоростного наземного транспорта. — В кн.: Наземный транс-
порт 80-х годов. М.: Мир, 1974.
43. Нейман Л. Р. Поверхностный эффект в ферромагнитных
телах. М.: Госэнергоиздат, 1949.
44 Оно, Ивамото, Ямада. Характеристики системы магнитного
подвешивания и тяги с использованием сверхпроводящих магнитов
для высокоскоростных поездов. В кн.: Наземный транспорт
80 х годов. М.: Мир, 1974, с. 89—98.
45. Охремеико Н. М. Основы теории и проектирования линей-
ных индукционных насосов для жидких металлов. М.: Атомиздат,
1968.
46. Постников И. М. Проектирование электрических машин
Киев: Гостехиздат УССР, 1960.
47. Полевский В. И. Экспериментальное исследование макетного
образца тихоходного линейного синхронного двигателя. — В кн.:
Электродвигатели с разомкнутым магнитопроводом. Новосибирск'
НЭТИ, 1975, с. 132—137.
48. Правила тяговых расчетов для поездной работы. М.: Транс-
порт, 1969.
49. Резин М. Г. Эффект реакции ротора и механические харак-
оистики двигателя с дуговым статором.—Электричество, 1950,
Як2, с. 25—29.
50. Рудаков Б. В., Пармас Я. Ю. Расчет характеристик асин-
хронного тягового двигателя при частотном регулировании. — Труды
ЛИИЖТ, 1967, вып. 271, с. 52—62.
51. Сарапулов Ф. И., Коняев А. Ю„ Бегалов В. А. Некоторые
вопросы рационального проектирования линейных асинхронных дви-
гателей.— Тезисы докладов Всесоюзной научной конференции по
электроприводам с линейными электродвигателями. Киев: КПП,
1973, с. 42—43.
52. Свечарник Д. В. Сельсины и их применение в автоматизации
производственных процессов М.—Л.: Госэнергоиздат, 1962
53. А. с. № 511656 (СССР). Линейный электродвигатель/ Све
чарник Д. В.— Опубл, в бюл. Открытия. Изобретения. Пром, об-
разцы. Товарные знаки, 1976, № 15.
54. Свечарник Д. В. Дистанционные передачи. М.: Госэнерго-
издат, 1959.
55. Свечарник Д. В. Дистанционные передачи. М.: Энергия, 1974.
56. Свечарник Д. В. Надежность и эффективность действия
сложных автоматических систем. М.: Знание, 1971.
57. А. с. № 307466 (СССР). Асинхронный двухфазный электро-
двигатель/ Свечарник Д. В, Кацман М. М. — Опубл, в бюл. Откры
тия Изобретения. Пром, образцы. Товарные знаки, 1971, № 20.
149
58. А. с. № 268538 (СССР). Бесколлекторный электродвигатель,
питаемый однофазным переменным током/ Свечарник Д. В. —
Опубл, в бюл. Открытия. Изобретения. Пром, образцы. Товарные
знаки, 1970, № 14.
59. Пат. № 1613673 (ФРГ). Электродвигатель с полым ротором/
Свечарник Д. В.
60. А. с. № 116599 (СССР). Бесконтактный электрический датчик
линейных перемещений/ Свечарник Д. В. — Опубл, в Бюл. изобре-
тений и товарных знаков, 1960, № 8.
61. А. с. № 116512 (СССР). Однополюсный бесконтактный сель-
син/ Свечарник Д. В. — Опубл, в Бюл. изобретений и товарных зна-
ков, 1958, № 12.
62. А. с. № 497688 (СССР). Дифференциальный индукционный
датчик для намагниченного объекта/ Свечарник Д. В., Френ-
кель А. X. Опубл, в бюл. Открытия. Изобретения Пром, образцы.
Товарные знаки, 1975, № 48.
63. А. с. № 418943 (СССР). Линейный двигатель постоянного
тока/ Свечарник Д. В. — Опубл, в бюл. Открытия. Изобретения.
Пром, образцы. Товарные знаки, 1974, № 9.
64. А. с. № 432637 (СССР). Многофазная многополюсная элек-
трическая машина/ Свечарник Д. В. — Опубл, в бюл. Открытия. Изо-
бретения. Пром, образцы. Товарные знаки, 1974, Ns 22.
65. Пат. № 3555330 (США). Бесколлекторный электродвига-
тель/ Свечарник Д. В.
66. А. с. № 433603 (СССР). Линейный электродвигатель пере-
менного тока/ Свечарник Д. В. — Опубл, в бюл. Открытия. Изо-
бретения. Пром, образцы. Товарные знаки, 1974, № 23.
67. А. с. № 433601 (СССР). Бесколлекторная машина перемен-
ного тока/ Свечарник Д. В. — Опубл, в бюл. Открытия. Изобре-
тения. Пром, образцы. Товарные знаки, 1974, № 23.
68. Свирский Г. Э. Вопросы трения и износа. Кишиневский
сельскохозяйственный ин-т им. М. В. Фрунзе, 1966.
69. Скобелев В. Е. Возможность применения тягового линей-
ного двигателя для скоростного транспорта. — Железные дороги
мира, 1972, № 5, с. 3—9.
70. Исследование физических процессов в тяговом линейном
двигателе/ Скобелев В. Е. и др. — Электротехническая промышлен-
ность. Тяговое и подъемно-транспортное оборудование, 1973, вып. 9,
с. 9—12.
71. Соколов М. М., Сорокин Л. К. Электропривод с линейными
асинхронными двигателями. М.: Энергия, 1974.
72. Тищенко Н. А. Проблемы надежности электродвигателей. —
Электричество, 1961, Ns 11, а 7—12; № 12, с. 16—19.
73. Торнтон Р. Д. Принципы проектирования системы магнит-
ного подвешивания. — В кн.: Наземный транспорт 80-х годов М:
Мир, 1974, с. 98—113.
74. Флейшер Г. К. Связи между трением и износом. В кн.: —
Контактное взаимодействие твердых тел п расчет сил трения и
износа. М.: Наука, 1971, с. 163—168.
75. Форгач Р. Л. Скоростной вакуумный трубопроводный транс-
порт— конкурент реактивной авиации. — В кн.: Наземный транспорт
80-х годов. М.: Мир, 1974, с. 121—137.
76. Фридкин П. А. Дуговые статоры как электрические аппа-
раты для вращения рабочих машин. — Электричество, 1937, № 7
с. 26—31; № 8, с. 28—34.
150
77. Фридкин П. А. Безредукторный дугостаторный электропри-
вод. Л.. Энергия, 1970, с. 138.
78. Фридкин П. А. Дополнительные потери электропривода
с дуговым статором и методы их снижения. — Изв. АН СССР, 1951,
№ 9, с. 1288—1305.
79. Цуканов П. П., Меленьтьев Л. П. Улучшение использования
железнодорожных рельсов. — Труды ВНИИЖТ, 1967, вып. 334,
с. 144.
80. Регулирование скорости линейных асинхронных двигателей
изменением напряжения и частоты/ Чесонис В. И. и др. — Тезисы
докладов Всесоюзной научной конференции по электроприводам
с линейными двигателями. Киев: КПИ, 1973, с. 63—64.
81. Чечет Ю. С. Управляемый асинхронный двигатель с полым
ротором. М.—Л.: Госэнергоиздат, 1955.
82. Чергвин К. М. Исследование в области линейных асинхрон-
ных двигателей в США. — Ежемесячный бюллетень Международной
ассоциации ж.-д. конгрессов, 1968, № 4, с. 27—38.
83. Пассажирские монорельсовые дороги/ Чиркин В. В. и др.—
М. Машиностроение, 1969.
84. Шибер Д. Принципы работы асинхронных линейных двига
телей. — В кп.: Наземный транспорт 80 х годов. М.: Мир, 1974,
с. 174—183.
85. Штокман И. Г. Основы создания магнитных транспортных
установок. М.: Недра. 1972.
86. Штурман Г. И. Индукционные машины с дуговыми и пло-
скими статорами. — В кн.: Научно-технические статьи ХЭТИ. М.—
Л.: Госэнергоиздат. 1948, вып. 7, с. 178—200.
87. Штурман Г. И. Индукционные машины с разомкнутым маг-
нитопровотом. — Электричество, 1946, № 10, с. 43—50.
88. Штурман Г. И., Аронов Р. Л. «Краевой эффект» в индук-
ционных машинах с разомкнутым магнитопроводом. Электричество,
1947, № 2, с. 54—59.
89. Шубеико В. А., Шрейпер Р. Т., Мищенко В. А. Оптимиза-
ция частотно-управляемого асинхронного электропривода по мини-
муму тока. — Электричество, 1970, № 9, с. 23—26.
90. Янес X. И. Главные индуктивности электрической машины
с разомкнутым магннтопроводом. — Труды ТПИ, 1962, серия А,
с. 63—84.
91. Япольский Я- С. Магнитофугальные ударные машины.—
Электричество, 1925, № 11, с. 646—653.
92. Autruffe Н. Le moteur lineaire.— Rev. gen. chemis fer., 1971,
№ 90, p. 438—450.
93. A wound rotor motor 1400 ft. long.— Westinghouse Engineer,
1946, vol. 5, p. 191.
94. Bahke E. Transport system Heute und Morgen. Mainz, Kraus-
skopf Verlag, 1973.
95. Boldea I., Nasar S. A. Thrust and normal forces in a segmen-
ted-secondary linear reluctance motor. — Elect. Power Control.—IEEE,
1975, vol. 122, № 9, p. 922--924.
96. Bopp K-, Hachtruck I., Marten F. Entwicklungen auf dem
Gebiet der unkonventionellen Tag-Antriebs- und Fiihrungskomponenten
in der Bundesrepublik Deutschland. — El. Bahnen, 1972, Bd 43, № 5,
S. 98—106.
97. Budig P. K. Theoretische Ergebnisse der gemcinsamer Fors-
chungsarbeiten. UdSSR-DDR zur Bemessung von Drehstromlinearmo-
151
toren fur kleine synchrone Geschwindigkeiten.— Elektrie, 1975, № 5,
S. 245—251.
98. Пат. № 69646 (ГДР). Zum Ferscheinengestaltung fur lineare
elektrische Induktionsmaschinen/ Budig P. K., Tummel H.
99. Coho О. C., Kliinans G. B., Robinson J. T. Experimental eva-
luation of a high speed double sided linear induction motor. — IEEE
Trans. Power Appar. and Syst., 1975, vol. 94, № 1, p. 10—17.
100. Green G. W., Paul R. J. A. Performance of d. c. linear ma-
chines bassed on an assessment of flux distributions. — Proc. IEEE,
1971, vol. 118, № 10, p. 1413—1420.
101. Green C. W., Paul R. J. A. Application of d. c. linear machi-
nes as short-stroke and static actuators. — Proc. IEE, 1969, vol. 116,
№ 4, p. 599—604.
102. Линейни електродвигатели тип ЛИД. Електроимпекс. Со-
фия, ДСО Елпром.
103. Goevgen Н., Luber L., Zollnev G. Neues Transportmittel ftir
Massenschuttgiiter.— Fordern und Hebeu, 1973, Bd 23, S. 296—302.
104. Iwainoto M. End-effect of high speed linear induction mo-
tor.—IEEE Conf. Rec. 7-th Annu. Meet. — IEEE Ind. Appl. Soc. Phi-
ladelphia, New York, 1972, № 4, p. 323—330.
105. Пат. № 2033037 (Франция). Un moteur synchrone lineaire/
Inagaki.
106. Laithwalte E. R. More about the jumping ring. — Electrical
Review, 1973, vol. 27, p. 603—604.
107. Laithwaite E. R. Linear motors with transverse flux. — Proc.
IEEE, 1971, vol. 118, № 12, p. 1761—1767.
108. Пат. № 1199480 (Англия). Direct current linear motor/ Ra-
tcliff G., Griffith J.
109. Rutnmich E. Synchrone Linearmaschinen. — Bull. SEV, 1972,
Bd 63, № 23, S. 1338—1344.
110. Schmitz Erhard. Steuerung und Antrieb langer Bandsys-
teme. — Fordern und Heben, 1973, Bd 23, S. 769—774.
111. Timmel H. Beitrag zum Quereffekt bei kurz linearmotoren.—
Elektrie, 1973, № 5, S. 341—343.
112. Timmel H. Geschwindigkeitstellmoglichkeiten bei Wanderfeld-
linearmotoren. — Elektrie, 1972, № 8, S. 228—231.
113. Trombetta P. The electric hammer.— I. A. IEEE, 1922,
vol. 41, № 4, p. 297—305.
114. Voxan P. Linearni motor v kolesove doprave. — Zeleznicni
doprava a technica. 1970, 18, № 10, s. 299—303.
115. Yamamura S., Ishikawa Y., Ito H. Theories of the linear in-
duction motor. — IEEE Trans. Power Appar. and Syst., 1972, vol. 91,
№ 4, p. 1700—1708.
116. Пат. № 12581 (Англия). Electric railways, lifts, machine/
Zehden A,
ОГЛАВЛЕНИЕ
Предисловие - 3
Глава первая. Принципиальные особенности линейного
электропривода ... • '
1 1. Поступательное перемещение и линейный электро-
привод .............................. ?
1 2. Физические и технические пределы преобразования
движения с помошыо механического сцепления . 9
1-3. Основные трудности и проблемы 24
Глава вторая Линейный электропривод с неявнополюс-
ной безобмоточной путевой структурой 34
2 1 Линейный электропривод с безобмоточной вторичной
частью ............................................. 34
2-2. Электропривод с линейными асинхронными двигате-
лями .................................................35
2 3 Методика и некоторые результаты экспериментальных
исследований . . . . . . 41
2-4. Линейный асинхронный двигатель с явнополюсноп
первичной частью . . 45
Глава третья. Линейный электропривод с явнополюсной
путевей структурой ... . .48
3-1. Цилиндрические линейные двигатели гребенчатой
системы ..................................- 48
3-2. Линейные двигатели с явнополюсной вторичной
частью и их про го тины . . . 64
3 3. Линейный двтнатсль с двухфушпшоиалыюй обмоткой 93
3 1 Системы преобразователен коммутаторов 169
3 5 Усилия притяжения н отталкивания в линейных дви-
гателях . 125
Г л а в и четвертая Электропривод с обращенным линей-
ным днит а гелем '34
4 1 Рлп11<пт:1лт>иые .6.4.тент применения обращенных ли-
тий пых гвтн .пелен ...............
I 2 lie снек питы применении обращенного линейного
>лек т ронр|ЦИ1Д.|
Список ликр.ттхры
134
140
147
'"Т