/
















Автор: Бекетов В.Ф.
Теги: электроника электротехника инженерия электропривод учебное пособие электромеханика
Год: 1997




Текст
Министерство общего и профессионального образования
Российской Федерации
УРАЛЬСКАЯ ГОСУДАРСТВЕННАЯ
ГОРНО-ГЕОЛОГИЧЕСКАЯ АКАДЕМИЯ
В.Ф.Бекетов
ОСНОВЫ ЭЛЕКТРОПРИВОДА
учебно-методическое пособие по курсовому
проектированию
ЕКАТЕРИНБУРГ
1997
УРАЛЬСКАЯ ГОСУДАРСТВЕННАЯ ГОРНО-ГЕОЛОГИЧЕСКАЯ АКАДЕМИЯ
ОДОБРЕНО
Методической комиссией
горномеханического
факультета
"ОТ' 1097 г.
Председатель комиссии
*х^доц. А. Я. Комаров
ОСНОВЫ ЭЛЕКТРОПРИВОДА
• Учебно-методическое пособие
по выполнение курсового проектирования, для студентов
профилиза<ии "Электропривод и автоматика промышленных
установок и технологических комплексов" ( ЗГП )
направления 551300 - "Электротехника, электромеханика и
электротехнологии"
Издание УГГГА
Екатеринбург,1997
Основы электропривода.
Учебно-методическое пособие по выполнению курсового про-
ектирования для студентов профилизации "Электропривод и автомати-
ка промышленных установок и технологических комплексов" (ЗГП)
направления 551300 -"Электротехника, электромеханика и электро-
технологии"/ В.Ф.Бекетов;Уральская Государственная горно-геологи-
ческая академия. Кафедра Электрификации горных предприятий.- Ека-
теринбург: Изд.УГГГА, 1997 .*52 с.
Учебно-методическое пособие по курсовому проектированию
содержит методические указания по выполнению курсового проекта по
"Основам электропривода, структуру, содержание пояснительной за-
писки и демонстрационного листа, варианты гаданий на курсовой
проект, список рекомендуемой литературы.
Разделы курсового проекта составлены в соответствии с прог-
раммой изучаемого курса "Основы электропривода" и имеют целью
глубокой самостоятельной проработки теоретического материала,
приобретения навыков и умения проектирования электроприводов с
разомкнутыми системами управления.
Изложены типовые решения задач проектирования электроприво-
да, схемы и графики.
Автор выражает глубокую благодарность за техническую помощь
инженеру каф.ЭГП Юнусовой Л.В. и студенту гр.ЭГП-93 Скудицкому
Сергею.
Учебно-методическое пособие рассмотрено на заседании кафедры
ЭГП 25 марта 1997 г. ( протокол N 4 ) и рекомендовано для издания
в УГГГА.
Рецензент: доцент кафедры электротехники
канд. техн.наук В.Н.Полузадов
Уральская государственная
горно-геологическая академия,1997
СОДЕРЖАНИЕ
1. Цель и задачи выполнения курсового проекта ........4
2. Организация выполнения курсового проекта .......... 4
3. Требования по оформлению курсового проекта.........5
4. Структура и содержание курсового проекта...........6
5. Методические указания для выполнения курсового
проекта...................................................7
6. Решение типовых задач разделов курсового проекта . . jq
6.1. Общие сведения по выбору ЭД.......................Ю
6.2. Выбор ЭД при продолжительном режиме ..............
6.3. Выбор передаточного устройства ...................
6.4. Определение приведенных моментов сопротивления и
инерции................................................15
6.5. Расчет естественной характеристики ЭД ............ 17
6.6. Расчет и построение пусковой диаграммы ЭД ........ 19
6.7. Расчет пускового устройства.................... . щ
6 б Расчет ТОРМОЬНЫ* УСТРОЙСТВ .......................
7.1. Методика расчета естественной характеристики АД . 2 6
7.2. Методика расчета и построения пусковой
! диаграммы АД............................................ 29
7.3. Расчет пусковых сопротивлений АД..................
7.4. Торможение противовключением двигателя............ 31
7.5. Электродинамическое торможение ................... 34
8. Переходные режимы в электроприводах.............. 3g
8.1. Общие сведения.................................... 35
8.2. Расчет переходных электромеханических процессов
при реостатном пуске электроприводов.................. 3-7
8.3. Расчет переходных процессов при торможении
противовключением.................................... 4 {
8.4. Расчет переходных процессов электродинамического
торможения........................................... 4
9. Проверка выбранного двигателя.................... 4 g
Приложение......................................... 45
Литература....................................... 50
- z -
1. ЦЕЛЬ И ЗАДАЧИ ВЫПОЛНЕНИЯ КУРСОВОГО ПРОЕКТА
Курсовой проект по дисциплине”Основы электропривода"выполня-
ется студентами очного обучения специальности 180400-бакалавр в
седьмом семестре после изучения теоретического курса "Основы
электропривода".Курсовой проект содержит разделы курса"Основы
электропривода" и ставит своей целью глубокую проработку теорети-
ческого материала, практическое закрепление теоретического курса.
В процессе выполнения курсового проекта студент приобретает
умение самостоятельно решать вопросы проектирования простых
электроприводов (электродвигатель-передаточное устройство-рабо-
чий механизм),правильного выбора электрического двигателя для ра-
бочего механизма, выбора передаточного устройства, проверки элект-
родвигателя по условиям допустимого нагрева и перегрузочной спо-
собности, проектирования разомкнутых систем электроприводов.
В курсовом проекте студент разрабатывает вопросы автомати-
ческого управления пуском,реверсом,электрическим торможением
электродвигателя,получает практические навыки построения схем ав-
томатического управления,закрепляет знания действующих ГОСТов на
условные буквенные обозначения и графическое изображение элемен-
тов схем управления электроприводами, чтения принципиальных элект-
рических схем электроприводов.При выполнении курсового проекта
студент решает вопросы регулирования скорости вращения в разомк-
нутых схемах управления,получает практические навыки графического
выполнения электротехнических схем электроприводов,необходимых
для получения квалификации бакалавра по проектированию и эксплуа-
тации автоматизированных электроприводов и комплексов горнорудной
промышленности.
2.ОРГАНИЗАЦИЯ ВЫПОЛНЕНИЯ КУРСОВОГО ПРОЕКТА
Задание на курсовой проект выдается по окончании шестого се-
местра перед выездом студентов на технологическую практику и кор-
ректируется вначале занятий (первая неделя) седьмого семестра.В
сетке расписания на первой ступени ( шесть недель)предусмотрены
практические занятия по курсовому проектированию,на которых реша-
ются типовые примеры по проектированию электропривода,консульта-
ция студентов по вопросам выполнения курсового проекта,уточнение
отдельных вопросов и решений при проектировании в отношении ха-
- 5 -
рактера момента статического сопротивления,способа электрического
торможения,способа регулирования скорости вращения и др.
По окончании курсового проекта руководитель оценивает выпол-
ненный проект,учитывая правильность расчетов,качество выполнения
графической части проекта и соблюдение сроков выполнения разделов
и в целом курсового проекта,дает рекомендацию по использованию
результатов проектирования в выпускной работе бакалавра.
3.ТРЕБОВАНИЯ ПО ОФОРМЛЕНИЮ КУРСОВОГО ПРОЕКТА
Курсовой проект сдается на проверку в виде пояснительной за-
писки(в переплетенном виде).выполненной на листах писчей бумаги
формата А4 и одного демонстрационного листа на ватмане формата А1,
Пояснительная записка пишется четко,аккуратно и разборчиво,
черными или синими чернилами или пастой и оформляется в соответс-
твии с требованиями ЕСКД.Допускается печатание текста на машинке.
Общими требованиями к пояснительной записке являются:логи-
ческая последовательность изложения материала, краткость и точ-
ность формулировок,пояснение расчетных величин.Титульный лист об-
щепринятой формы с надписями карандашом или черной тушью о ис-
пользованием соответствующего чертежного шрифта.
Все разделы и подразделы (параграфы)пояснительной записки
должны быть пронумерованы арабскими цифрами в пределах всей за-
писки, например: 3.2 (название)-второй подраздел третьего разде-
ла,3.2.2-второй пункт второго подраздела третьего раздела.
Название разделов,подразделов,пунктов выносятся в оглавление
(содержание)курсового проекта с указанием страниц,на которых они
размещены. Нумерация страниц сквозная-.первая страница - титульный
лист (не обложка пояснительной записки),вторая - задание на кур-
совой проект,третья - оглавление (содержание пояснительной запис-
ки) и далее по разделам.
В результате расчетных и схемных решений производятся ил-
люстрации - схемы,графики,нагрузочные,пусковые и тормозные диаг-
раммы. Основные иллюстрации,кроме того,выносятся на демонстрацион-
ный лист (по согласованию с руководителем).Рисунки,графики,схе-
мы, занимающие отдельный лист пояснительной записки,включаются в
общую нумерацию страниц.Рисункам,графикам,схемам присваивается
нумерация раздела с обязательным названием,например:рис.5.2.Пус-
- 6 -
ковая диаграмма двигателя.Ссылка на рисунки,графики в тексте по-
яснительной записки обязательна.
Обозначения и названия,термины должны соответствовать ГОСТ,
а их размерность - международной системе единиц СИ.
В пояснительной записке не допускается изложение фраз сокра-
щенными словами,за исключением общепринятых.
Демонстрационный чертежный лист компонуется равномерно гра-
фиками и схемами с их названиями,выполняется черной тушью или ка-
рандашом с соблюдением ГОСТа по оформлению схем и графиков.
Пояснительная записка и чертежный лист должны быть подписаны
исполнителем, с указанием даты выполнения,руководителем проекта и
заведующим кафедрой.
Курсовые проекты,выполненные с отступлением от требований
инструкции по оформлению и требований ГОСТа к проверке и защите
не допускаются.
4.СТРУКТУРА И СОДЕРЖАНИЕ КУРСОВОГО ПРОЕКТА
Курсовой проект состоит иэ пояснительной записки с расчетами
и графиками,нагрузочными диаграммами рабочего мезанизма и двига-
теля,схем автоматического управления пуском,торможением и ревер-
сированием привода и одного демонстрационного чертежного листа
формата А1.
Тема курсового проекта определяется руководителем.Обкем и
структура,содержание курсового проекта определяется в соответс-
твии с таблицей 4.1. Всгрисгнты заданий приведены 8 табл. п1.
Таблица 4.1
Содержание пояснительной записки
NN 1Наименоване разделов и подразделов!Ориентировочное
разделов! 1 кол-во страниц
1 1
1. ' 1 Задание на курсовой проект 1 1
2. IВведение 1 1
3. [Механика электропривода 1 2
- 7 -
Те <-> ц a Z . / /7 р о 9 о л е ,
4. (Выбор электрического двигателя 1 2 5. (Пуск и торможение электропривода 1 5.1 (Расчет и построение естественной 1 1 механической характеристики 1 2 5.2 (Расчет и построение пусковой 1 (диаграммы 1 3 5.3 (Расчет и построение тормозной 1 (диаграммы 1 1 5.4 (Расчет пускового и тормозного 1 (устройств 1 1 6. (Переходные процессы в электро- 1 (приводе 1 6.1 (Расчет переходных процессов при 1 (пуске электропривода 1 6 6.2 (Расчет переходных процессов при I (торможении электропривода 1 2 6.3 (Проверка электродвигателя I 7. (Автоматическое управление пуском, 1 (торможением и реверсированием 1 (электродвигателя 1 4 8. (Регулирование скорости вращения 1 1 электродвигателя 1 3 9. (Список использовнной литературы 1 1 10. (Содержание(оглавление) 1 1
1 Всего 1 30
5. МЕТОДИЧЕСКИЕ УКАЗАНИЯ ДЛЯ ВЫПОЛНЕНИЯ
КУРСОВОГО ПРОЕКТА
Курсовой проект является самостоятельной работой студен-
та, при выполнении которой студент использует теоретические зна-
ния, полученные при изучении курса "Основы электропривода",а также
развивает навыки и умения самостоятельной работы с технической и
справочной литературой по электроприводу,закрепляет знания по
действующим буквенным обозначениям элементов электротехнических
схем и их графическим условным изображениям,развивает умение чте-
-<3 -
ния электротехнических схем-получает необходимые качества для
квалификации бакалавра по автоматизированному электроприводу ма-
шин, установок и комплексов горнорудной промышленности.
В пояснительной записке приводится полный текст задания на
курсовое проектирование с исходными техническими данными рабочего
механизма.
В введении в курсовой проект показывается роль электроприво-
да, тенденция развития .достоинства и преимущества электропривода
в сравнении с другими видами электроприводов рабочих механиз-
мов, рассматривается оценка различных видов электроприводов рабо-
чих механизмов и основные положения, в результате которых принят
конкретный привод в курсовом проекте.
В разделе механика электропривода выбирается передаточное
устройство,его назначение,вид,определяется предварительно переда-
точное отношение,оптимальное передаточное число.По предварительно
выбранному электродвигателю определяются приведенные значения мо-
мента сопротивления привода и момента инерции привода.
Основополагающим этапом курсового проектирования является
выбор электрического двигателя для заданного рабочего механиз-
ма. Правильный выбор электродвигателя позволяет нормально эксплуа-
тировать электродвигатель,не превышая допустимого нагрева и иск-
лючая работу ЭД на заниженной нагрузке.Студент должен пояснить
оба случая неправильного выбора двигателя и их последствия.Необ-
ходимо также рассмотреть все условия и признаки,по которым выбира-
ется электродвигатель.
Выбранный электродвигатель должен обеспечить нормальную ра-
боту при пуске и торможении.При решении этой проблемы необходимо
пояснить,как она решается.Расчитать и построить естественную ха-
рактеристику, пусковую и тормозную диаграммы,расчитать пусковое и
тормозное устройства (секции пускового и тормозного реостата).
Предварительно выбранный электродвигатель проверяется по ус-
ловиям нагрева и допустимой перегрузочной способности.Для провер-
ки необходимо определить эквивалентный момент,действующий на валу
электродвигателя и сравнить его с допустимым,номинальным момен-
том. При определении фактической перегрузочной способности опреде-
ляется максимальный момент на валу ЭД.Для определения эквивалент-
ного и максимального моментов расчитываются переходные электроме-
ханические процессы при пуске и торможении привода.
- д -
Перходные процессы расчитываются на каждой ступени разгона
привода и при торможении в одну ступень.При переходных процессах
возникают динамические моменты.не учитывать которые при проекти-
ровании привода недопустимо.Это может привести к выходу из строя
ЭД, измерительной и защитной токовой аппаратуры, поломке механичес-
ких частей электропривода.
После расчетов переходных процессов строится нагрузочная ди-
аграмма на валу электродвигателя с учетом динамических нагрузок
при пуске и торможении электропривода, по которой определяется
среднеквадратичное или эквивалентное значение момента на валу
двигателя.Эквивалентный момент должен быть чуть меньше или равен
допустимому (номинальному)моменту ЭД. При соблюдении этого условия
считается,что двигатель по условиям нагрева выбран правиль-
но, т.е. он будет работать сколь угодно долго и температура его
нагрева не будет превышать допустимого значения.
Из нагрузочной диаграммы на валу ЭД берется максимальное
значение момента,действующее на валу ЭД.Его отношение к номиналь-
ному моменту дает фактическую перегрузку,которая должна быть рав-
на или чуть меньше допустимого(паспортного)значения перегрузочной
способности.При выполнении этого условия считается,что по перег-
рузочной способности ЭД выбран верно.При соблюдении обоих условий
ЭД окончательно принимается для заданного рабочего механизма.
Автоматическое управление пуском,реверсом и торможением
электропривода имеет важное значение.Оно позволяет избежать воз-
можных ошибок при управлении,которые могут привести к аварийным
ситуациям и выходу из строя измерительной,коммутационной.пускоре-
гулирующей аппаратуры привода,а также электродвигателя и механи-
ческих частей привода.
Автоматическое управление пуском,реверсом в приводах,где
приходится часто риверсировать привод.позволяет сэкономить время
на этих операциях.
При выполнении курсового проекта студент выбирает типовую
схему автоматического управления,приводимых в рекомендованной ли-
тературе и приводит схему управления в соответствие с выполненной
работой.В схеме должны соответствовать:
1.В ид привода-переменного или постоянного тока
2.Ч исло ступеней разгона при пуске привода.
3 .Способ электрического торможения
- 1й -
4 .Способы регулирования скорости вращения
5 .Соответствие условных буквенных и графических обозначе-
ний действующим ГОСТам.
Принципиальная схема приводится в пояснительной записке и
дается ее подробное описание.
В разделе"Регулирование скорости вращения" необходимо дать
сравнительную оценку существующих способов регулирования скорости
вращения на основе технике-экономических показателей регулирова-
ния и,по согласованию с руководителем,принять способ регулирова-
ния, дать подробнее описание способа и схемы регулирования скорос-
ти.
6 .РЕШЕНИЕ ТИПОВЫХ ЗАДАЧ РАЗДЕЛОВ КУРСОВОГО ПРОЕКТА
6 .1.Общие сведения по выбору ЭД
Задание на курсовое проектирование выдается в ввде техничес-
ких данных рабочего механизма,для которого необходимо спроектиро-
вать электропривод (ЗП).В работе привода рабочего механизма необ-
ходимо учесть условия работы механизма,температуру окружающей
среды.Эти условия повлияют на выбор ЭД по исполнению.Требования
технологического процесса также влияют на выбор ЭД:
- степень защиты от попадания частиц и влаги в ЭД,
- скорость вращения
- величина напряжения питающей сети,
- род тока (переменный,постоянный),
- исполнение,
- конструктивные особенности,
- способ охлаждения,
- климатическое исполнение,
- режим работы ЭД по продолжительности включения,
- характер статической нагрузки и др.
Особо важным и основополагающим признаком при выборе ЭД яв-
ляется правильно расчитанная потребная мощность рабочего механиз-
ма, по которой принимается мощность ЭД.
Применение двигателя заниженной мощности вызывает нарушение
нормальной работы механизма,снижает его производительность,приво-
- н-
дит к аварии и выходу его ив строя.Использование двигателя завы-
шенной мощности приводит к увеличению капитальных затрат,снижению
КПД.Кроме того,на двигателях переменного тока снижается коэффици-
ент мощности cosy ,чтс приводит к увеличению мощности трансформа-
тора, потерь энергии в ЛЭП и др.
Мощность ЭД принимается по расчетной мощности рабочего меха-
низма с учетом потерь в передаточном устройстве (редукторе).Необ-
ходимо учитывать режим работы двигателя по продолжительности
включения.Необходимо отметить,что на мощность ЭД существенное
влияние оказывают переходные процессы,возникающие при пуске,тор-
можении и регулировании скорости вращения привода,а также при из-
менении статической нагрузки.ЭД по мощности принимают предвари-
тельно, далее расчитывают переходные процессы и динамические наг-
рузки J(d^ /dt) ,т.е.
M=Mc+J(d<J/dt), (6.1)
М - вращающий момент на валу ЭД;
Мс-приведенный момент статического сопротивления,создаваемый
рабочим механизмом;
J(dw/dt)-динамический момент,возникающий в переходных про-
цессах.
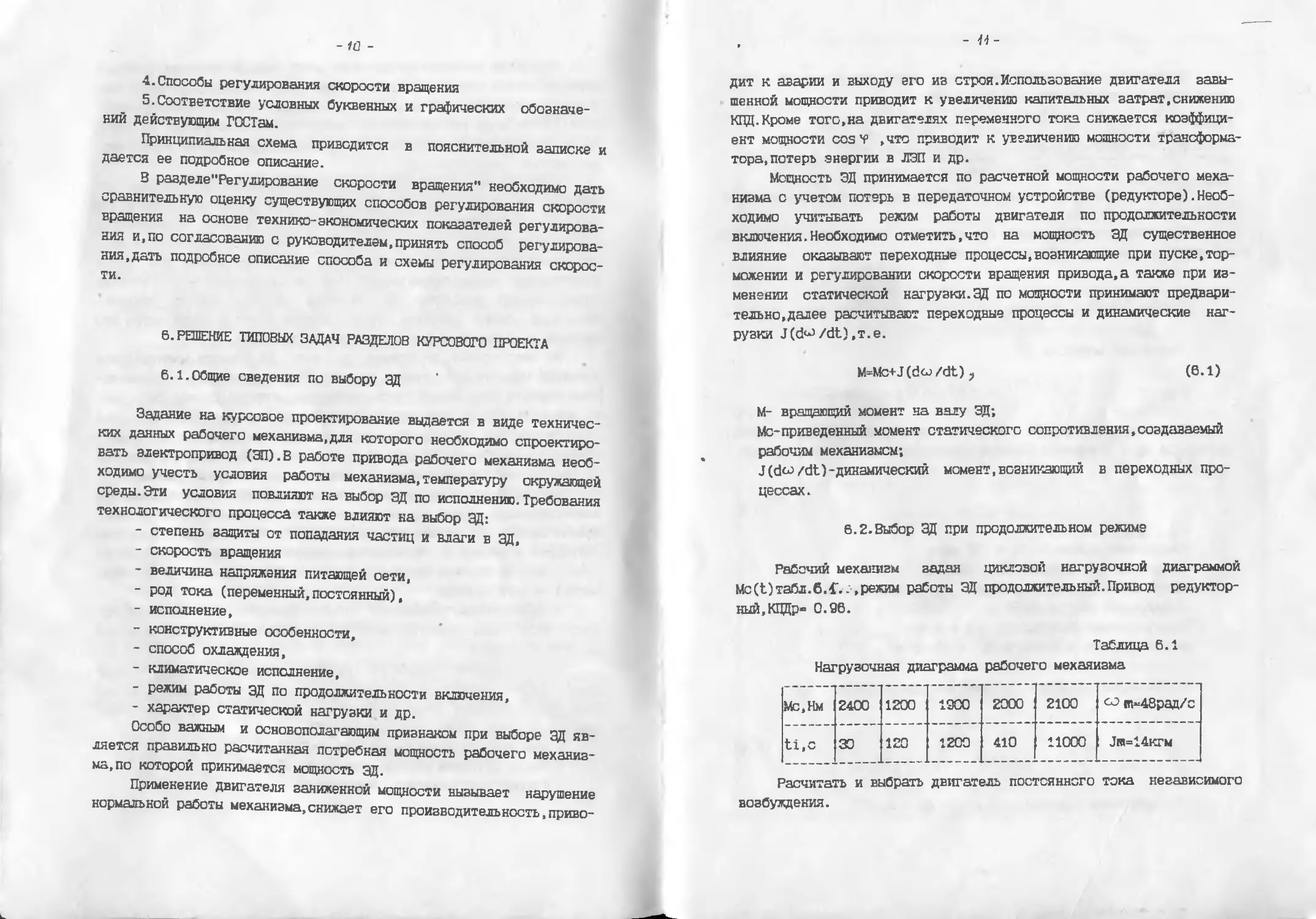
6.2.Выбор ЭД при продолжительном режиме
Рабочий механизм задан цикловой нагрузочной диаграммой
Мс(1)табл.бЛ'.;,режим работы ЭД продолжительный.Привод редуктор-
ный, КПДР” 0.96.
Таблица 6.1
Нагрузочная диаграмма рабочего механизма
Мс.Нм 2400 1200 1900 2000 2100 <^> ги=48рад/с
ti,c 30 120 1200 410 11000 Jk=14ktm
Насчитать и выбрать двигатель постоянного тока независимого
возбуждения.
- ,2 -
Предварительно мощность двигателя можно определить по сред-
нему моменту статического сопротивления:
IMct • t+Л4сз'ij_
Jv!_c.c₽>----7—, 7-----7 ~7---7----------- ~
Xr -+• ta + tj + i-ts
_ Stea-30 -u 1ffOQ l$Q-^igOQ fSOO^SloO$lQ+BIOQ 110QO 1 i _
~ . -3° iso i2aa -i-s/Q-r tfoao
— 2£7 f H-м,•
где:Ka-коэффициент,учитывающий неравномерность нагрузочной
диаграммы,Кз=1,1-1,3.
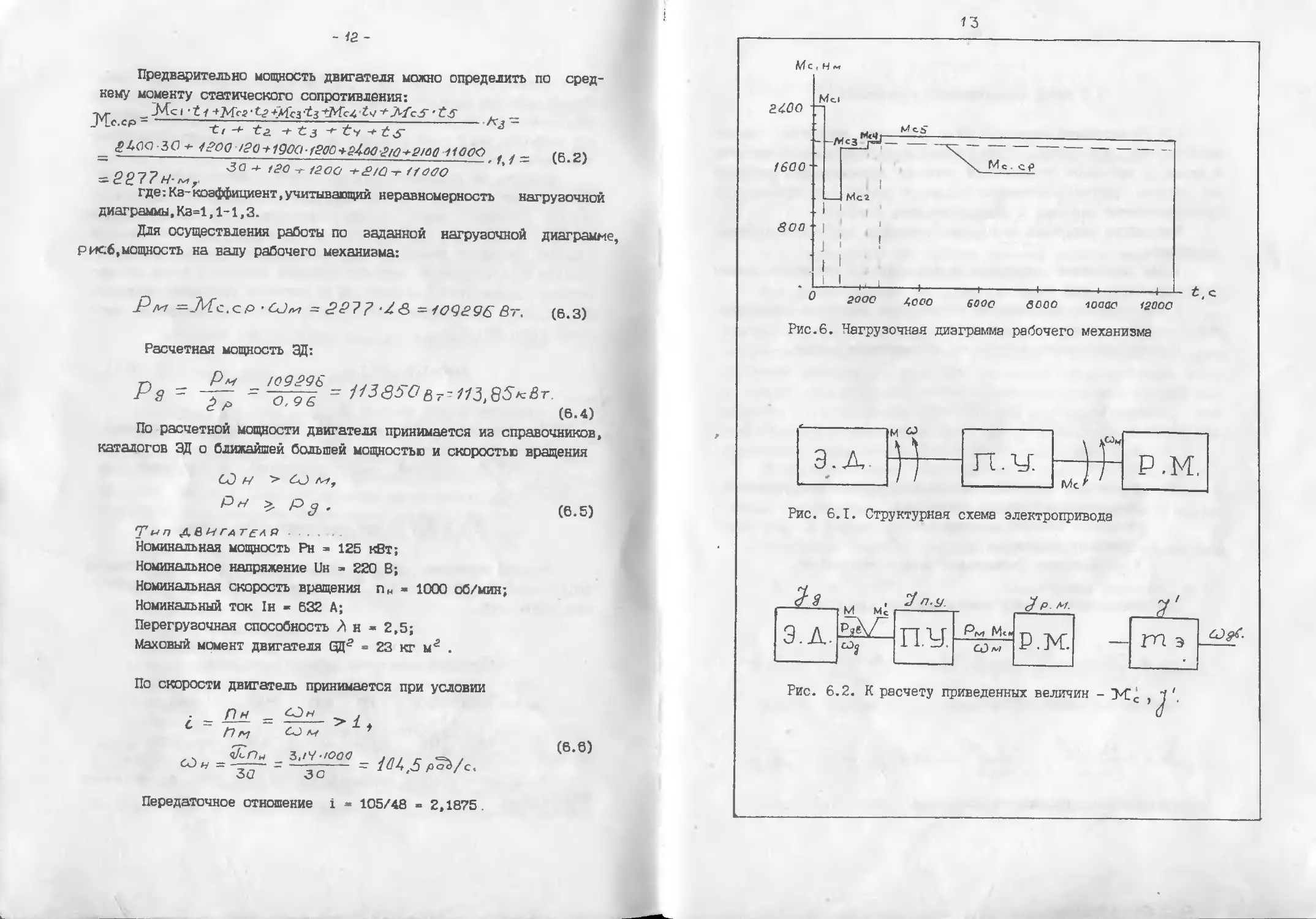
Для осуществления работы по заданной нагрузочной диаграмме
рис.6,мощность на валу рабочего механизма:
(6.2)
Рм =JVfc.cP = £??? -Z<3 = 109296 fir. (6.3)
Расчетная мощность ЭД:
PS = = 1^850
2 (6.4)
По расчетной мощности двигателя принимается из справочников,
каталогов ЭД о ближайшей большей мощностью и скоростью вращения
СО н > 6U м,
Рн >, р д , (6.5)
Тип Д6ЧГА тел Я
Номинальная мощность Рн - 125 кВт;
Номинальное напряжение Пн = 220 В;
Номинальная скорость вращения пн » 1000 об/мин;
Номинальный ток 1н « 632 А;
Перегрузочная способность Л н • 2,5;
Маховый момент двигателя ЭДг » 23 кг мг .
По скорости двигатель принимается при условии
д/<-Г7* _ 3,i4-iooo
30 “ 30
(6.6)
- РА ,S раЪ/с.
Передаточное отношение 1 « 105/48 - 2,1875.
J3
Рис. 6.1. Структурная схема электропривода
Рис. 6.2. К расчету приведенных величин - Кс ,
- /4 -
6.3.Выбор передаточного устройства
Для согласования скоростей ЗД и рабочего механизма служит
передаточное устройство (ПУ)с расчетным передаточным отношением
1.Кроме согласования скоростей,ПУ снижает механические нагрузки
со стороны рабочего механизма в 1 раз.В качестве ПУ принимается
одноступенчатый редуктор с цилиндрическими колесами.
При выборе редуктора необходимо учитывать два противоречивых
положения:
1 .Для уменьшения габаритов ПУ передаточное отношение должно
быть наименьшим, при 1>1.
2 .Для снижения механических нагрузок на двигатель,передаточ-
ное отношение должно быть наибольшим.
Поэтому определяют оптимальное передаточное число:
(6.7)
где: Мс-среднее значение статического момента сопротивления;
Мн-номинальный момент двигателя;
Jm-момент инерции механизма;
Лд-момент инерции ЗД;
К -коэффициент,учитывающий момент инерции ПУ.
Для предыдущего примера момент инерции двигателя:
- 4^- = 5, 7S^r. м3. (6.8)
Номинальный момент ЭД на валу:
Р* Ю3 _ 125 •/(Р
Pt К —------- ——--------- — 11 Н м. Сб 9)
СО и 1 '
Оптимальное передаточное отношение:
- fO
_ 22?? \ /~2277& - L 02
С°пт ц<)2. 11422 3-5,75 ’
С учетом 1опт принимается одноступенчатый редуктор о
КПД Ъ = 0,96; 1 - 2,24.
с р
6.4. Определение приведенных значений момента сопротивления
и момента инерции
При работе привода его различные части обладают различными
массами, скоростями вращения - вал двигателя, передаточное уст-
ройство (например, цилиндрические зубчатые колеса ), движущиеся и
вращающиеся элементы рабочего механизма и др.Решение основного
уравнения движения при этом было бы весьма затруднительным. Поэто-
му момент сопротивления рабочего механизма и момент инерции вра-
щающихся и поступательно перемещающихся масс пересчитывают, при-
водят к одной скорости вращения ( обычно к скорости вращения вала
двигателя ), представляя привод одной эквивалентной массой.
Приведение момента сопротивлений и момента инерции осущест-
вляется на основании равенства мощностей ЗД и ИИ,а также баланса
запаса кинетических энергий в эквивалентной массе и отдельных
движущихся и вращающихся массах привода.
Приведение моментов сопротивления выполняется по выражениям:
"W' = с Л1.-.. -вращательное движение . (6.10)
ъ-6
Ге • I/
-поступательное движение механизма(6.11)
Моменты инерции для вращающихся масс:
<7=^ —Ляг •
(в. 12)
Приведенный момент инерции для поступательно движущейся
массы:
- 1G -
(6.13)
Привод с вращательным и поступательным движением:
3
(6.14)
В структурной схеме (рис.6.2) и выражениях (6.10-6.14)
приняты обозначения:
со -скорость вращения вала двигателя,рад/с;
скорость вращения рабочего органа механизма,рад/с;
Мсм-момент статического сопротивления механизма,Нм;
Мс'-приведенный момент сопротивления,Нм;
шз-эквивалентная масса вращающихся частей;
m-масса с поступательным движением;
5д-момент инерции ЗД,кг м;
Jm-момент инерции механизма,кг м ;
J'-приведенный момент инерции;
V-скорость поступательного движения;
£ р -КОД передачи;
1-передаточное отношение;
Рдв.Вк-мсщности на валу двигателя и механизма,Вт;
Fc-оила сопротивления,Н.
Приведенные значения моментов сопротивления и моментов инер-
ции используются в расчетах переходных процессов при определении
динамических нагрузок ЗП.В одноступенчатом редукторе с малым пе-
редаточным отношением моментом инерции зубчатых колес можно при-
небречь.Для примера 6.2 приведенный момент сопротивления,его
среднее значение:
, = ЛГс.ср = = /02S Н- м . (6.15)
7 - с £p-i
MoMfwT инерции:
З'’З^З-hкг"‘- (влв)
Вращающий момент на валу ЭД (пример 6.2):
т. г Р 3 <0* • /О'* . j q q .
Mh.S = —- - —7T7-7— = 1132 H (6.17)
CJ ч 7<jh , о
Уравнение движения имеет вид:
У'/9<? = 102.5 * 8,5^~ •
(6.18)
6.5. Расчет естественной характеристики ЭД, пусковой
диаграммы,пусковых устройств
6.5.1.Общие положения
Электрические двигатели постоянного и переменного тока обла-
дают различными механическими свойствами,механическими характе-
ристиками. Расчет естественных характеристик по паспортным данным
электродвигателей ведут по их уравнениям.Методика расчета зависит
от вида уравнения и механической характеристики. Для ДПТ НВ харак-
теристика линейна,поэтому определяются координаты двух точек;
1 . = • /и-о. 2.£0«,Мн.
Расчет и построение сводится к определению координат этих
точек.
Для асинхронного двигателя уравнение и механическая характе-
ристика имеют сложную зависимость.При некоторых допущениях харак-
теристику можно представить из двух областей:
S-0-Sk-рабочий участок характеристики в виде прямой;
S=Sk-1-нерабочий участок-сложная кривая(гипербола).
Поэтому механическая характеристика строится по множеству
точек.
Для ДПТ НВ (пример 6.2 ) расчитать и построить естественную
- 18 -
механическую характеристику, пусковую диаграмму, пусковые, тор-
мозные сопротивления.
6.5.2. Номинальная скорость вращения:
5Г- Пи _3,l£ -/ООО _ 10^,5 рад/<г.
30 30
(6.19)
6.5.3, Номинальный вращающий момент на валу двигателя:
М„.е = = К9г „
CJ/v 1QS.t>
Для расчета электромагнитного момента двигателя определяются
сопротивления обмотки якоря двигателя и коэффициент пропорцио-
нальности "С".
6.5.4. Сопротивление обмотки якоря:
= = -0,д)-О,0/7^ ом . (6.21)
6.5.5, Коэффициент "С":
uh-jh Ro _ ёёо-63S o.a/?4_ &
~ /04, S' ~
(6.22)
6.5.6. Электромагнитный момент:
Мэ ^1 = г .0 -632 Н М. (6.23)
6.5.7. Скорость идеального холостого хода:
- /9 -
<Jo=^=^-=//0 Ро7/С.
(6.24)
Координаты точек для построения естественной характеристики:
I.CJh-104,5 рад/; Мнэ=1251,4 нм;
2.6)0=110,0 рад/О; М»0.
6.6. Расчет и построение пусковой диаграммы двигателя
постоянного тока независимого возбуждения
рис. Б.з
Для пусковой диаграммьМнгсбходимо расчитать пусковые значения
токов и моментов;токов и моментов переключения.
Пусковой ток двигателя ограничивают до величины Ii=In= 2,51н
включением добавочного сопротивления Кд.
6.6.1. Пусковой ток Ii и момент двигателя Mi:
С/1 =Л № = 2.5-632^ 4580 А; (6-25)
М, = С = <2 • /5SO -<3/60 (6.26)
6.6.2. Переключающие значения тока и момента двигателя
0%=^ ; Мг = с-3а.
Сопротивления в цепи якоря при пуске Rn:
D Uh 22 О — q qp п
2п - ---- — ----— — и/ 7 J ° лэ j (к 271
1530 J
Кратность пускового тока О г к току переключения 0s :
_ — =\П / ^п' =\3 / °> '3 42 _ о
1s у У 0,0 7
(6.28)
n-число ступеней пускового реостата.
Переключающий ток О г :
- 20-
- £/ -
(6.29)
^-y5<9Z7— = 790 4.
У
Переключающий момент Мг:
_М= = С =£ 790 = J5&0 .
(6.30)
После определения Ml и М2 строится пусковая диаграмма на
графике естественной характеристики ( рис. 6.3 )
6.7. Расчет пускового устройства
При проектировании привода для ограничения пускового тока
расчитывается и выбирается пусковое устройство.В простых приво-
дах (редукторных) пуск ЭД осуществляется с помощью пусковых сопро-
тивлений (реостатный пуск),включаемых в цепь якоря ДИТ и в цепь
ротора-асинхронных двигателей с фазным ротором.По мере разгона ЭД
пусковые сопротивления по секциям.вручную иди автоматически.иск-
лючаются. В замкнутых системах управления и регулирования пуск
осуществляют изменением подводимого напряжения к якорю двигате-
ля .ограничивая тем самым пусковой ток якоря до допустимого значе-
ния. рис. 6.4
Секции пускового реостата^расчитываются по пусковым диаграм-
мам, построенных с учетом числа ступеней разгона привода при пус-
ке. ’
Для расчета используют графоаналитический метод по пусковой
диаграмме и проверяют аналитическим методом.
Ив пусковой диаграммы (рис.6.3) определяется масштаб сопро-
тивления. На пусковой диаграмме отрезок af соответствует номиналь-
ному сопротивлению двигателя Rh:
I-1* _ _ о, 37.31 Ом.
Уч
(6.31)
Масштаб сопротивления «по рн •
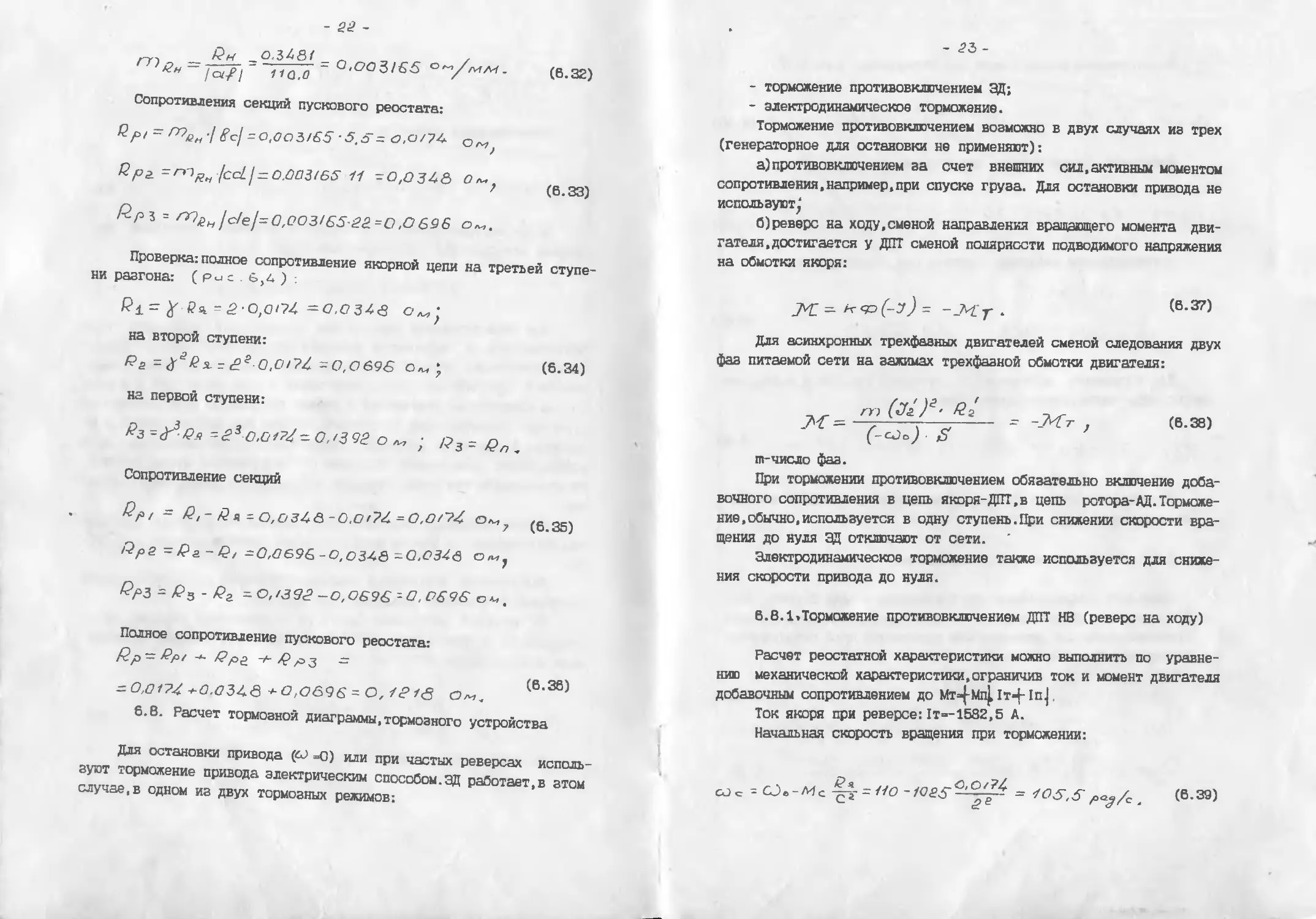
- 22 -
^^=I^I=97^=Q‘00^I€5 (6.32)
Сопротивления секций пускового реостата:
£/>/ - -°?е„7 <?с/ = 0,00 3/65 -5, о = о,о/7-6
Ярц ^гП^ /ссЦ =0.003/65 11 -0,0366 о~? (в
/Зрз = 7Г)^Нlc/el=O,OO3/55-2&=Cl,о696 о„.
Проверка:полное сопротивление якорной цепи на третьей ступе-
ни разгона: (рис. 6,4 )
Q±= у = 2-0,0/74 — О,0366 О~>'
на второй ступени:
/?г = ~^S 0,0/7/ = 0,0696 О<м J (6.34)
на первой ступени:
/₽3=сН>Рл -2*0.017/= О,/392. ом !/3-Qn^
Сопротивление секций
~ в,-&л=о,03/&-0.Сн7/=0,Об?4 о^7 (6.35)
RpS = Pa-Q, = 0,0696-0,0346 --0.037,6 o,Mj
Qp3 = 4>3 - P2 -O,/392-0,0696-0,0696 ом.
Полное сопротивление пускового реостата:
Rp- ^р/ -*• &PS. -+ QРЗ =
(6.36)
= 0,017/ +Q.Q3/.6 ^-0,0696-0, 161<3
6.8. Расчет тормозной диаграммы,тормозного устройства
Для остановки привода (о) =0) или при частых реверсах исполь-
зуют торможение привода электрическим способом.ЭД работает,в этом
случае,в одном из двух тормозных режимов:
-25-
- торможение противовключением ЭД;
- электродинамическое торможение.
Торможение противовключением возможно в двух случаях из трех
(генераторное для остановки не применяют):
а)противовключением за счет внешних сил.активным моментом
сопротивления,например,при спуске груза. Для остановки привода не
используют,'
б)реверс на ходу,сменой направления вращающего момента дви-
гателя, достигается у ДПТ сменой полярности подводимого напряжения
на обмотки якоря:
= hcqo(-y) = .
(6.37)
Для асинхронных трехфазных двигателей сменой следования двух
фаз питаемой сети на зажимах трехфазной обмотки двигателя:
m-число фаа.
При торможении противовключением обязательно включение доба-
вочного сопротивления в цепь якоря-ДПТ,в цепь ротора-АД.Торможе-
ние, обычно, используется в одну ступень.При снижении скорости вра-
щения до нуля ЭД отключают от сети.
Электродинамическое торможение также используется для сниже-
ния скорости привода до нуля.
6.8.1.Торможение противовключением ДПТ НВ (реверс на ходу)
Расчет реостатной характеристики можно выполнить по уравне-
нию механической характеристики,ограничив ток и момент двигателя
добавочным сопротивлением до Мт^-Мпрт-f-In],
Ток якоря при реверсе:1т=-1582,5 А.
Начальная скорость вращения при торможении:
сис = 110-1085 —= 105.5 . (6.39)
- 20 -
Сопротивление якорной цепи при торможении^ рис. 6.5:
п 2$а +2 -Ю5,5 _
рт = ^я+-е»=—v— = -—-—- - o,<??ee о„. (6 40)
3 От Н8О
Добавочное сопротивление при торможении:
Rg = /?т-£я. - о,8?га~о,аr?4. - o.sssO ом,
Установившееся значение скорости при реверсировании:
Рт
CJc л = — СОа + Мс ^2 -
= -НО + 10 25 -
<2а
(6.41)
(6.42)
ра^с> /с ,
Для торможения используется пусковой реостат и добавляется
секция тормозного сопротивления Rpr; рис. 6.5:
Q рт= £т -рп - 0,8726- О,/Ъ92 = О, /356 см, (6.43)
Тормозную диаграмму размещают совместно с пусковой или по-
казывают отдельным рисунком, рис. е. б .
6.В.2.Электродинамическое торможение.
Тормозное сопротивление при торможении в одну ступень мож-
но определить различными способами.Из уравнения механической
характеристики при динамическом торможении ^доб определяется
из выражения(Рис. 6.?):
С3с = МТ -fj- = Mr ; (6.44)
Рт= "я:_£.г= =о,/ззл~ ом; f/мт/^мл);
3/go ' ’
^3 - Q-/33S-0,0170, = О, HG! ом. (6.45)
-25-
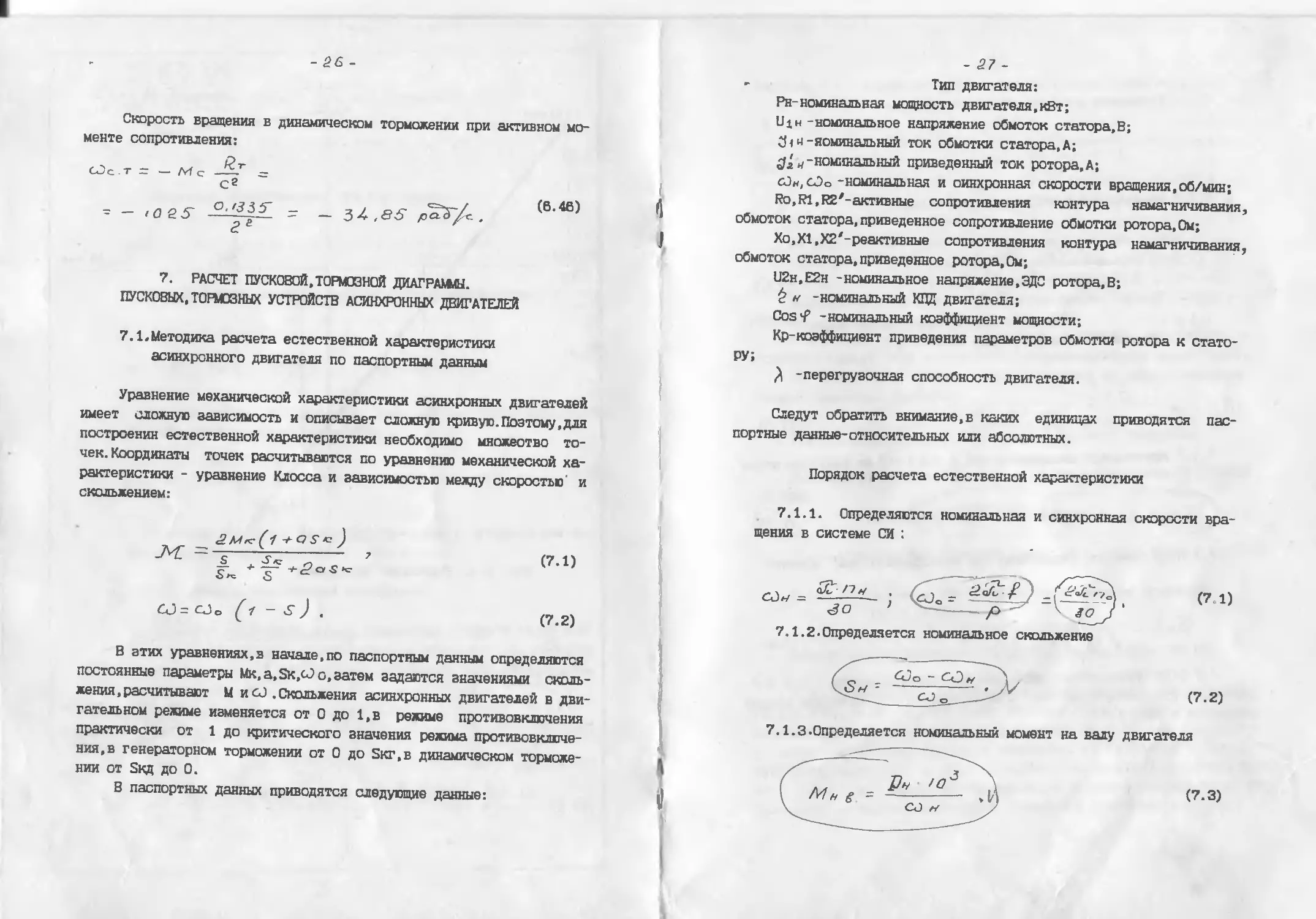
-26-
Скорость вращения в динамическом торможении при активном мо-
менте сопротивления:
О 2 ~ — 3 Z , 85 .
ге
7. РАСЧЕТ ПУСКОВОЙ,ТОРМОЗНОЙ ДИАГРАММЫ.
ПУСКОВЫХ,ТОРМОЗНЫХ УСТРОЙСТВ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
7.1,Методика расчета естественной характеристики
асинхронного двигателя по паспортным данным
Уравнение механической характеристики асинхронных двигателей
имеет сложную зависимость и описывает сложную кривую.Поэтому,для
построении естественной характеристики необходимо множество то-
чек. Координаты точек расчитываются по уравнению механической ха-
рактеристики - уравнение Клосса и зависимостью между скоростью' и
скольжением:
~ 03 О 1 5 а
(7.1)
(7.2)
В этих уравнениях,в начале,по паспортным данным определяются
постоянные параметры Мк,а,Зк,сЭо,затем задаются значениями сколь-
жения, расчитывают М исо .Скольжения асинхронных двигателей в дви-
гательном режиме изменяется от 0 до 1,в режиме противовключения
практически от 1 до критического значения режима противовключе-
ния, в генераторном торможении от 0 до 2кг,в динамическом торможе-
нии от 2кд до 0.
В паспортных данных приводятся следующие данные:
- 27 -
Тип двигателя:
Рн-номинальная мощность двигателя,кВт;
Ujh -номинальное напряжение обмоток статора,В;
-номинальный ток обмотки статора,А;
номинальный приведенный ток ротора,А;
cJh,c2)o -номинальная и синхронная скорости вращения,об/мин;
Ro, R1,R2X-активные сопротивления контура намагничивания,
обмоток статора, приведенное сопротивление обмотки ротора,Ом;
Хо,XI,Х2'-реактивные сопротивления контура намагничивания,
обмоток статора, приведенное ротора,Ом;
U2h,E2h -номинальное напряжение,ЭДС ротора,В;
£ л- -номинальный КПД двигателя;
Cos‘Г -номинальный коэффициент мощности;
Кр-коэффициент приведения параметров обмотки ротора к стато-
ру;
Д -перегрузочная способность двигателя.
Следут обратить внимание,в каких единицах приводятся пас-
портные данные-относительных или абсолютных.
Порядок расчета естественной характеристики
7.1.1. Определяются номинальная и синхронная скорости вра-
щения в системе СИ :
do ' р х зо
7.1.2.Определяется номинальное скольжение
7.1.3.Определяется номинальный момент на валу двигателя
- 23 -
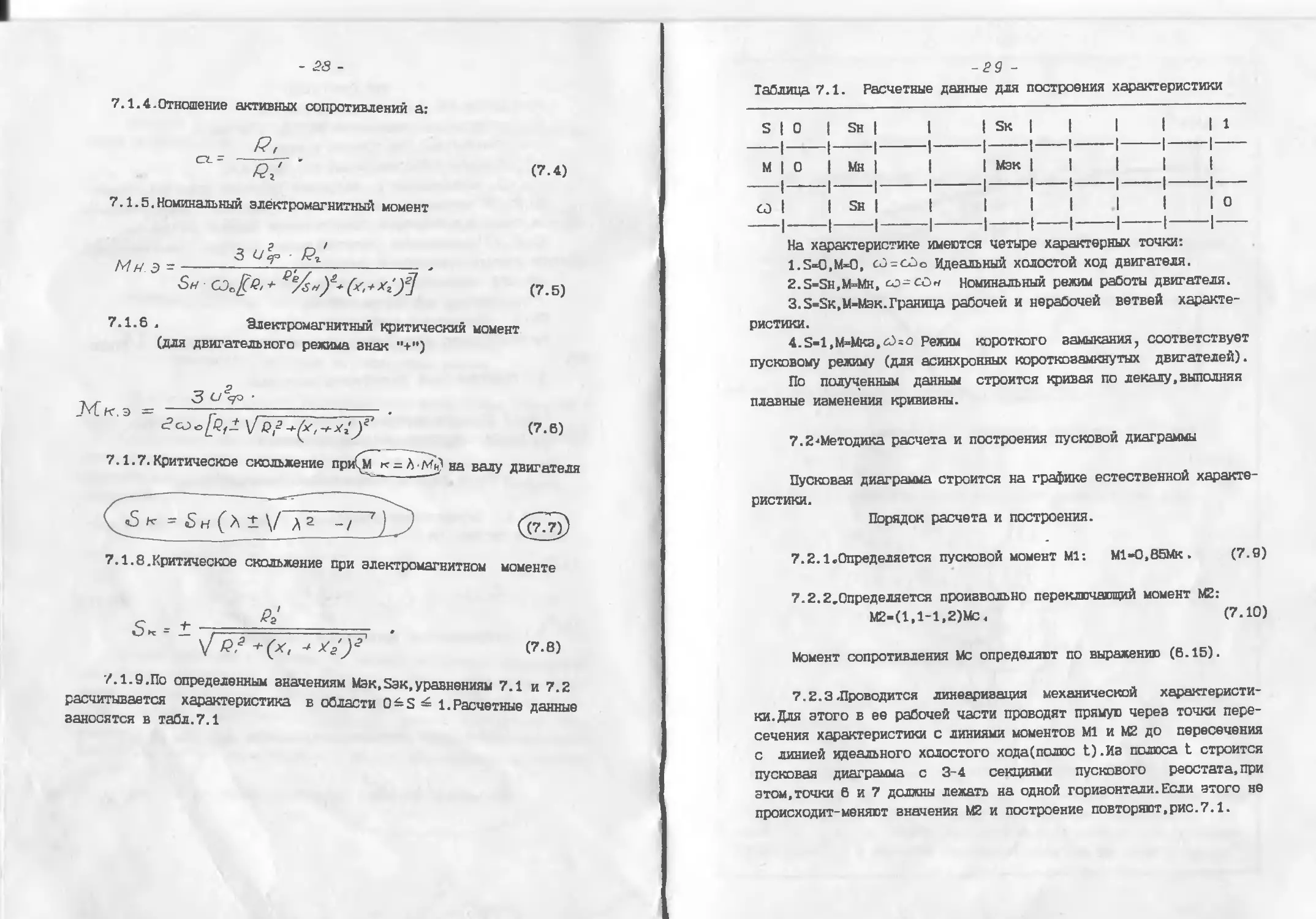
7.1.4.Отношение активных сопротивлений а:
X?/
(7.4)
7.1.5.Номинальный электромагнитный момент
(7.5)
7.1. 6 . Электромагнитный критический момент
(для двигательного режима знак "+'•)
3 ______
K J ~ <3co0[Qfl\/(7.6)
7.1. 7. Критическое скольжение при\М~^к — Л на валу двигателя
7.1. 8.Критическое скольжение при электромагнитном моменте
(7.В)
7.1. 9.По определенным значениям Мак,Бэк,уравнениям 7.1 и 7.2
расчитывается характеристика в области О^Б 1.Расчетные данные
заносятся в табл.7.1
-29 -
Таблица 7.1. Расчетные данные для построения характеристики
S 1 0 1 SH | 1 1 SK | | | 1 1 1
м I 0 1 Мн | 1 I Мэк | | | 1 1 1 1
СО 1 —1 1 SH | -1—1- 1 1111 1 1 0
На характеристике имеются четыре характерных точки:
1.S- 0.M-0, сз=сдо Идеальный холостой ход двигателя.
2.S- Sh,M=Mh, со-сс.г/ Номинальный режим работы двигателя.
3.5- 5к,М-Мэк.Граница рабочей и нерабочей ветвей характе-
ристики.
4.5- 1,М=Мкз,бЗ=г: Режим короткого замыкания, соответствует
пусковому режиму (для асинхронных короткозамкнутых двигателей).
По полученным данным строится кривая по лекалу,выполняя
плавные изменения кривизны.
7.2• ‘Методика расчета и построения пусковой диаграммы
Пусковая диаграмма строится на графике естественной характе-
ристики.
Порядок расчета и построения.
7.2. 1.Определяется пусковой момент Ml: М1«О,В5Мк. (7.9)
7.2. 2.Определяется произвольно переключающий момент М2:
М2-(1,1-1,2)Мс< (7.10)
Момент сопротивления Мс определяют по выражению (6.15).
7.2. 3-Проводится линеаризация механической характеристи-
ки. Для этого в ее рабочей части проводят прямую через точки пере-
сечения характеристики с линиями моментов Ml и М2 до пересечения
с линией идеального холостого хода(полюс t).H3 полюса t строится
пусковая диаграмма с 3-4 секциями пускового реостата,при
этом,точки 6 и 7 должны лежать на одной горизонтали.Если этого не
происходит-меняют значения М2 и построение повторяют,рис.7.1.
~30-
Рис. 7.2. К расчету пусковых и тормозного сопротивлений
7.3 .Расчет пусковых сопротивлений
Для расчета используется графический метод,аналогичный для
ДПТ.
На графике,рис.7.1,отрезок af соответствует активному сопротивлению обмотки ротора R2H. номинальному
7.3.1,Определяется номинальное сопротивление обмотки ротора
- Езн (7.11)
7.3.2.Определяется масштаб сопротивления
- 3 s н 7.3.3.Определяются секции пускового реостата (7.12) (рис.7.2)
Rf = ’ /<^с/ z (7.13)
led./f
/edI
7.3.4.Пусковое сопротивление
R п - + Rp3 , (7.14)
7.4 Торможение противовключением
Торможение АД до скорости си «О возможно противовключением
двигателя-реверс на ходу и электродинамическим способом.Для ре-
верса на ходу в цепь ротора включают добавочное сопротивление
Рп+Крт(рис.7.2) и меняется следование двух фаз на обмотку стато-
- т -
pa.Торможение до to »0 идет по реостатной характеристике во втором
квадранте.
Приел О двигатель отключают от сети.Для реверсирования дви-
гатель переходит работать в двигательный режим, cj<C и разгоняется
до скорости CJст,соответствующей моменту сопротивления Мс,рис.7.3
7.4.1, Расчет характеристики противовключения
Характеристика расчитывается по уравнению Клосса и зависи-
мостью между скоростью и скольжением (7.1,7.2).
В выражениях для (фитического момента,(7.6),скорости
(7.2),скорость идеального холостого хода необходимо принять со
знаком ".Мкдв=1Мкт1.
7.4.2, Критическое скольжение в режиме противовключения
GJ о -t- СЗ
(7.15)
Так как характеристика при реверсе соответствует большому
добавочному сопротивлению (активному) в цепи ротора,то можно пре-
небречь коэффициентом "а" в уравнении Клосса (7.1) и расчет вести
по уравнениям:
(7.16)
си = сОо ~S) .
(7.17)
Скольжением S задаются в пределах 2>=S>-0.Данные расчетов
заносятся в таблицу.По данным строится характеристика (рис.7.3).
7.4.3. Расчет тормозного сопротивления
Расчет тормозного сопротивления ведется графическим мето-
дом. Его можно расчитать черев внутреннее активное сопротивление
R2,которому соответствует отрезок аб.Масштаб сопротивления из
-33 -
Рис.7.3. Характеристика торможения противовключением
АД для расчета тормозного сопротивления
Рис.7.4.Схема включения Рис.7.5. Характеристика
АД при динамическом динамического торможения
торможении асинхронного двигателя
-34 .
графика^ Р <-> с, 7.3
/гг
~ (а в!
Тормозное сопротивление Кт:
/?7 = (8с! .
(7.1В)
(7-19)
Секция сопротивления противовключения (рис.7.2)
8рТ, — &т R И ,
(7.20)
7.5.Электродинамическое торможение асинхронным двигателем
Этот вид торможения получают отключением обмотки статора ра-
ботающего двигателя от сети переменного тока и включением ее на
постоянный ток,обметка ротора замыкается на добавочное сопротив-
ление ^д(рис.7.4].
Постоянный ток In в обмотке статора обеспечивает тс же зна-
чение магнитодвижущей силы,что и переменный.
(7.21)
К-коэффициент.учитывающий схемы соединений обмоток статора
(Чидикин,1981 г.,стр.85).Для соединения обмоток статора звездой
КО,82,треугольником К-1,23.Напряжение источника постоянного тока
необходимо уменьшить,так как реактивная составляющая полного
сопротивления обмотки статора на постоянном токе равна нулю.
п - к & * •
(7.22)
Переменный эквивалентный ток 1эк:
С/э ~ п •
(7.23)
-35 -
7.5.1, Критическое скольжение в динамическом торможении:
(7.24)
7.5.2. Реактивное сопротивление намагничивающего контура:
(7.25)
tSi г> CoSS 'f* *
(7.2S)
Ixx-ток холостого хода;
Cos ’f’x.x.-коэффициент мощности холостого хода.
7.5.3. Критическое скольжение в динамическом торможении
можно определить из выражения :
CJo + д 6j
Полное активное сопроти 8->ение
Раторнои L.J, е. г><~/ : (7.27)
/2г = 8К^(Xju + Хл ) .
7.5.4. Критический момент при динамическом торможении:
Мк.ди". —
5 ( Хл' • Узь ) S
2 (Хр -е Хг)
(7.28)
7.5.5. Расчет характеристики динамического торможения
ведется по уравнениям:
5 -р 'Sv 9НН
(7.29)
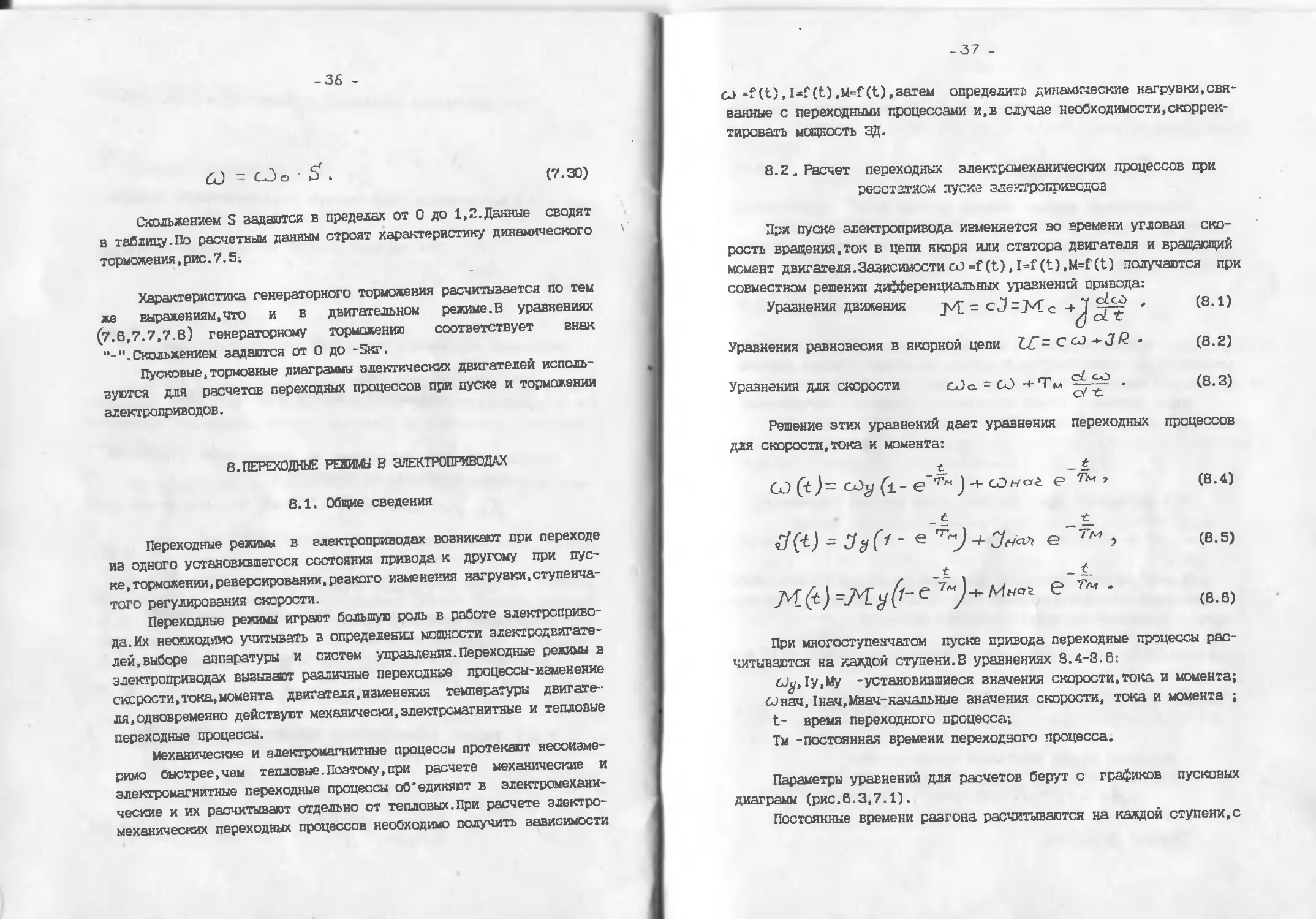
-36 -
6J - g3o S' .
(7.30)
Скольжением S задаются в пределах от 0 до 1,2.Данные сводят
в таблицу.По расчетным данным строят характеристику динамического
торможения,рис.7.5;
Характеристика генераторного торможения расчитывается по тем
же выражениям,что и в двигательном режиме.В уравнениях
(7.6,7.7,7.В) генераторному торможению соответствует знак
"-".Скольжением задаются от 0 до -Skt.
Пусковые.тормозные диаграммы злектических двигателей исполь-
зуются для расчетов переходных процессов при пуске и торможении
электроприводов.
>?. ПЕРЕХОДНЫЕ РЕЖИМЫ В ЭЛЕКТРОПРИВОДАХ
В.1. Общие сведения
Переходные режимы в электроприводах возникают при переходе
из одного установившегося состояния привода к другому при пус-
ке ,торможении,реверсировании,резкого изменения нагрузки,ступенча-
того регулирования скорости.
Переходные режимы играют большую роль в работе электроприво-
да. Их необходимо учитывать в определении мощности электродвигате-
лей, выборе аппаратуры и систем управления.Переходные режимы в
электроприводах вызывают различные переходные процессы-изменение
скорости,тока,момента двигателя,изменения температуры двигате-
ля, одновременно действуют механически,электромагнитные и тепловые
переходные процессы.
Механические и электромагнитные процессы протекают несоизме-
римо быстрее,чем тепловые.Поэтому,при расчете механические и
электромагнитные переходные процессы об'единяют в электромехани-
ческие и их расчитывают отдельно от тепловых.При расчете электро-
механических переходных процессов необходимо получить зависимости
-37
CJ *f(t),I=f(t),M^f(t),затем определить динамические нагрузки,свя-
занные с переходными процессами и,в случае необходимости,скоррек-
тировать мощность ЭД.
8.2. Расчет переходных электромеханических процессов при
реостзтясм пуске электроприводов
При пуске электропривода изменяется во времени угловая ско-
рость вращения,ток в цепи якоря или статора двигателя и вращающий
момент двигателя.Зависимости со =f(t),I=f(t),M=f(t) получаются при
совместном решении дифференциальных уравнений пртасда:
Уравнения движения _ с J - X с -+J ’ (8.1)
Уравнения равновесия в якорной цепи LZ7= с cJ * JA? - (6.2)
Уравнения для скорости сОс. - СО -+-ТМ . (8.3)
Ст С
Решение этих уравнений дает уравнения переходных процессов
для скорости,тока и момента:
t _ *
CD (-t) = - е"Тм J -ь со Тм > (8.4)
$(£) е' t Тм ? (8.5)
. С. Тм ♦ (8.6)
При многоступенчатом пуске привода переходные процессы рас-
читываются на каждой ступени.В уравнениях 9.4-3.6:
СОу, Гу,Му -установившиеся значения скорости,тока и момента;
С1нач,1нач,Мнач-качальные значения скорости, тока и момента ;
t- время переходного процесса;
Тм -постоянная времени переходного процесса.
Параметры уравнений для расчетов берут с графиков пусковых
диаграмм (рис.6.3,7.1).
Постоянные времени разгона расчитываются на каждой ступени,с
-3<S -
учетом жесткости механических характеристик двигателя и рабочего
механизма.
J-приведенный момент инерции привода,кг ма .определяется
по выражениям 6.12,6.14,6.16;
jj3c -модули жесткости механических характеристик рабочего
механзма и двигателя:
лМ
й сО
(8.8)
дМ, лсо -приращение момента и скорости,определяются о графиков
механических характеристик двигателя на каждой ступени разгона
и рабочего механизма.При Mc=const, Jge - О.
Время разгона tl(время переходного процесса) определяется
на каждой ступени по выражению:
5L 1 - _Afc i
55Q. ~ JMLc L
/ с — 7л«с •
(8.9)
На естественной характеристике время разгона принимается:
~t е - (3 г-4^ Тм.е
(8.10)
Пример расчета переходных процессов на второй ступени разго-
на двигателя, пусковая диаграмма (рис.6.3).С пусковой диаграммы
находим параметры уравнений переходных процессов.
с^иаг& = 56с ; GJ у = 93 с"г; Н м >Мс - 1025 Нм >
; PQ& ~ 1564 H-м', COt-SSc''-, с^в2с'',
1.Жесткость второй реостатной характеристики:
й /и ЗГ60 - >56А _ /б~98 _
г ~ а О SS -35 -30
(берется по модулю)
-39
Поскольку Mc=const с - О .
Постоянная времени разгона на второй характеристике (второй
ступени)
п-7 -У ' — Я —— = С, -/Б^с .
Время разгона на второй характеристике (второй ступени)
- ,р = Q 0gs4
^2 — 1мг Со ^г-Мс iS6i.-ici25 '
Составляется уравнения переходных процессов:
_ t _е
для скорости: c<J = 93 (f - в °',6У С °'f6Y? (8.11)
V _£7
для момента: JVf - )G25 (l-e°'ieyj-+ 31&Q e°',6V • (8.12)
Для скорости и момента расчитываются кривые переходных про-
цессов, задаваясь значением времени от 0 до 0,224с.Данные расчетов
заносят в таблицу.
Таблица 8.1
Данные расчетов переходных процессов на второй ступени
< t,c | 0 I 0,05 1 0,1 1 0,15 | 1 1 0,2 | 0,224
м,Ня i I i i : i
61>рад/с{ Illi 1 . 1 1 1 1 1
П^результатам расчетов переходных процессов на всех ступенях
разгона и на естественной характеристике строятся графики пере-
ходных процессов при пуске привода,рис.8.1.
По окончании расчетов переходных процессов определяется
полное время разгона (пуска) привода:
-'Ll -
(8.13)
8.S. Расчет переходных процессов при торможении противовключением.
Уравнения переходных процессов при торможении имеют тот же
вид (8.4,8.5,8.б).
Параметры уравнений берутся с тормозной диаграммы (рис.в,в)•
При составлении уравнений переходных процессов необходимо
учитывать характер момента статического сопротивления.
При реактивном Мс двигатель будет работать после торможения
в двигательном режиме с установившейся скоростью -оЭст! и при ак-
тивном Мс - перейдет в режим генераторного торможения с устано-
вившейся скоростью - <Jct2 (рис.6,6>).
Переходные процессы расчитываются на участке характеристики
от СО нач до СО ст1 (реактивные момент сопротивления) или от СО нач
до сОегг при активном Мс.
Порядок расчета такой же,как в двигательном режиме:определя-
ется жесткость характеристикjgc иjS г (8.8) .постоянная времени тор-
можения Тт(8.7),время торможения tT(8.9).Переходные процессы не-
обходимо расчитать в интервале времени от нуля до окончания пере-
ходного процесса. Полное время торможения принять равным
t-(3-4)TT.B результате расчетов отроятся графики переходных про-
цессов при торможении,рис.8.2.
8.4. Расчет переходных процессов электродинамического
торможения
Для динамического торможения по статической характеристике
составляются уравнения переходных процессов:
- ДС2)+ДС^с) , (8-14)
}- + . (8.15)
Постоянная времени Тм расчитывается по выражению (8.7),время
переходного процесса:
L MT &П
COo -+ Zl CJ
(8.16)
По результатам расчетов переходных процессов строятся графи-
ки и M=f (1),рис. <Э. 3 .
Графики переходных процессов используют для расчета динами-
ческих нагрузок двигателя при торможении.
9. ПРОВЕРКА ВЫБРАННОГО ДВИГАТЕЛЯ
Выбранный ЭД должен быть проверен по нагреву и перегрузочной
способности.Для этой цели расчитывается и строится нагрузочная
диаграмма привода с учетом динамических нагрузок,зависимость вра-
щающего момента двигателя от времени.
Моменты статического сопротивления с вала рабочей машины на
каждом участке нагрузочной диаграммы приводятся к скоростим вра-
щения вала двигателя. В установившемся режиме М=Мс. ~
При пуске и торможении возникают динамические нагрузки (мо-
менты) .которые определяются с помощью графиков переходных процес-
сов при пуске и торможении.
При пуске момент двигателя определяется по уравнению движения:
И^.п=Нс1 у
(9.1)
где:Мс1-приведенное значение момента статического сопротив-
ления на первом участке нагрузочной диаграммы,
^2^-динамический момент при пуске двигателя;
J-приведенный момент инерции.
Производную скорости по времени заменяют конечными прираще-
ниями, которые берут с графика переходного процесса при пус-
ке,рис.8.1. Для этого кривую линеаризуют.
При торможении момент двигателя определяется по выражению:
(9.2)
- 43-
-zz-
где:М -момент сопротивления на последнем участке нагру-
зочной диаграммы;
JJrf -динамический момент при торможении.
Производная заменяется отношением приращений >
которые берутся с графиков переходных процессов при тормо-
жении (рис.8.2 или рис.8.3).
При знакопеременной нагрузке двигатель проверяют методом эк-
вивалентного момента.
(9.3)
Проверка двигателя по нагреву выполняется сравнением экви-
валентного момента двигателя и его номинального значении:
Мн^Мэ (9.4)
Если условие выполняется,то ЭД при работе с данным механиз-
мом, при заданной нагрузке,в продолжительном режиме будет работать
не перегреваясь. Его установившаяся температура перегрева 'Т'у не
будет превышать допустимого значения 'С.определяемой классом
нагревостойкости изоляции: — 'Сд
Второе условие проверки двигателя-не превышение допустимой
перегрузочной способности:
(9.5)
где: Л -паспортное значение перегрузочной способности;
Ммах-максимальное значение момента двигателя,взятое с нагру-
зочной диаграммы привода (на валу двигателя).
Если оба условия проверки двигателя удовлетворяют требовани-
ям- двигатель окончательно принимается.Если нет-то выбирается сле-
дующий больший по мощности и расчеты повторяются.
- 45'
Приложения
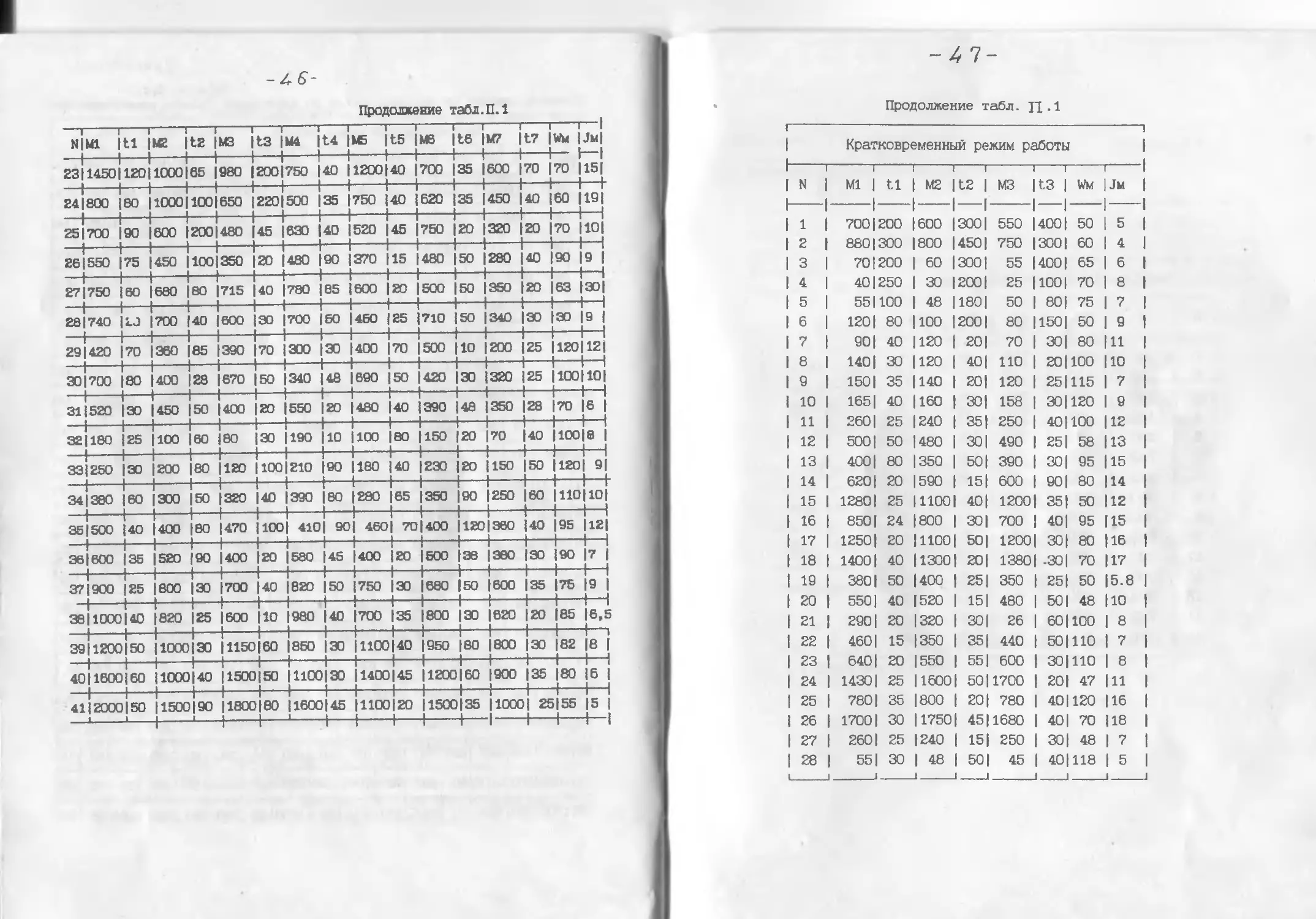
Таблица П. 1
Варианты ведений на курсовой проект по дисциплине "Основы электропривода'
I Продолжительный режим работы 1
< I । । । I N|M1 |tl |М2 |t2 |МЗ |t3 If I M4 |t4 |M5 |t5 1 t L. 1 M6 |t6 Г 1 1 II M7 |tT |WM |Jm| 1 1 1 1
1 1600 12001400 (4001500 |30 I 1 II II llll 200 Ц001400 | 200|450 11501300 |45 |62 1181
1 1 1 1 I 1 1 1 1 1 1 1 2 |650 |100|400 | 300|500 12001300 J40 |200 11001600 |20 11 * 11 i i i i i i i 1 1 f l 100 |300|35 |15| i i ।
। II liil 11 II 1 3 |Э00 |60 НТО 11201220 11001250 12001100 12001350 |50 1 1 . । i ।i j । । । । Г 1 I I I 80 |250|110|12|
1 II II II II II II Illi 4 | 420 | 600|280 13001400 11501200 |60 | 200 11501300 |2001100 |80 |90 |8 |
1 II 11 if II II If llll 5 | 800 |50 | 500 |180|200 11001600 12001490 13001650 12501180 |100|125|7 | 1 । 1 ।। । 1 1_ _t 1 _ .. । 1 1 । j 1 1
6 '|900 |45 | 400 |125|Э00 |70 Il I I II llll 600 11001450 1250)725 12001350 |50 |65 |5 |
7 |980 |48 |500 |200|850 |190|550 |250|400 |125|750 |120|350 |60 |100|22|
8 |500 |60 |300 ]240|250 |125 1 1 1 L - . . 1 L_ ii I I ii iiii 180 |50 |325 | 200|260 11401200 1200)50 1121
1 11 II II II II II fill 9 | 400 150 | 300 |150|180 11501380 12201250 11901380 12401150 |70 |40 1161 1 I I 1 1 - t 1 1 1 iiit 1 , । 1
1 II 11 г 1 II It It lltl 10|600 |30 |170 |80 |440 12201340 150 | 240 11701200 1100)160 | 200|60 |10| 1 1 1 1 1 1 1 L 1 . 1 1 _ 1 .1.1 1 1
11| 1200 H00I800 | 200]125 |40 । । । । 1 1 I 1 1 360 |40 11000)20 t ... 1 L . J Il llll 700 |300|200 |50 |50 |12|
। Il II II II II II llll 12113001100)800 |200)ТОО 11000120011001400 11201120011001360 160 | 65 1251
> II if II II II II llll 13|820 |40 |500 |125|600 |140|690 |210|900 |100|700 |190|300 |140|60 |22|
14|1600|60 |900 |15011000|19011200|30 |700 |250 li llll 130011901400 |80 163 1191
1 II II II II 1 1511100150 |800 |1401900 | 200|600 120011000140 1 1 llll 1200)180)370 |60 |25 |18|
1611200)80 |700 1160)850 122011200160 |750 1190 । 1 1 i 1 1 I i । i . Г I ill) 1000|200|340 |80 |100|17| 1— 1 1 1 J 1 1
17)300 118 |220 |60 jl70 j15 i i i i i i 1 1 1 85 |100|90 |10 i i i 1 120 |50 1 llll 80 |40 )75 |8 |
181880 1190)650 11801850 |130|250 |30 |420 |80 i i i i i i । i i i 1 300 |40 t "'I 1 11 150 |120|100|5 |
19|1100|50 |600 1120(800 |130|700 |120|950 |170|600 |180|400 j60 |60 |20|
20|830 |125|500 |320|750 1э00|375 |85 |500 |6O 1 350 |30 I 1 1 I 240 |55 |80 |12|
21118001200(1400160 | 800 |20 1300|200|800 |90 1 1000150 700 |80 175 |20|
1 I 1 I 1 I 1 III 2211700115011200|70 1130011801900 |50 11200135 1 850 |50 fill 750 | 85|8S |24|
-46-
Продолжение табл.ПЛ
N|M1 itl |№ its (мз II Its |М4 I 1" 1 |t4 |16 |t5 [MB J 1 1 |t6 |M7 Illi |t7 |WM |Jm|
1 11 II । j i |. | J j I I
23Ц450 Ц2011000165 [980 1200)750 |40 |1200|40 I j j. 1700 j। |35 |600 । j 170 l 1 I [70 |15| 1 j 1
1 1 1 1 1 241800 |8О |1000|100|650 ]220|500 J ] |35 |750 |40 1620 j— |35 |450 [ j |40 I |60 1191
S II II 251700 190 1600 12001480 [45 [630 |40 |520 |45 |750 1 |20 |320 120 1 i*7o iioi i it
1 1 1 ’ 1 Г " 261550 |75 |450 |100|350 |20 |480 1 I I |90 1*370 |15 i j I 1480 -j— 1 1 |50 |280 Г 140 4 । । । 190 |9 |
27|750 |60 |680 |80 |715 1 1 |40 |780 |85 |600 |20 j —j _ । |500 1 j । |50 1350 120 L 1 I I les isoi ♦ -—।— ।
1 II II 28)740 |LJ |700 |40 |600 1 1 |Э0 |700 150 |450 |25 1 |710 j [50 |340 ISO -i ! * i 130 |9 | 1 1 I
29|420 |70 |360 [85 |390 |70 |300 1 1 1 |30 |400 |70 l i I 1500 110 |200 |25 Г Г 1 |120|12| । j j
1 '1 1 1 1 30|700 |80 |400 |28 |670 [50 1340 |48 |690 |50 i 4 1— 1420 130 [320 125 1 1 i 1100Ц01 1 - i 1
II II ЗЦ520 |Э0 1450 |50 |400 1 1 1 1 1 1 1 |20 |550 1 1 1 120 |480 |40 1390 -i. |48 |350 । j |28 l 1 1 1 170 |6 | • 1.. i
1 II II 32Ц80 |25 |100 |60 |80 1 11 1 L |30 |190 1 1 1 ЦО Ц00 |80 1 1 1150 |20 |70 1 140 1 1 r 1 1100| 8 |
33|250 |30 |200 |80 |120 । । I 1001210 190 |180 |40 I 1 1 1230 i |20 |150 150 |120| 9|
Г Г I I 1 34|380 |60 [300 |50 |320 1 1 I * 1 |40 |390 । 1 * 180 |280 |65 j i i 1350 4- 1 1 190 |250 |60 1 I110|10|
1 1 1 1 1 35|500 |40 |400 |80 |470 1 1 1 1 1 iiooi 410| ooi 460| 7С i 1 i 1 1 )|400 1 |1201360 1 140 i- |95 |12| i j i
I II II Э6|6ОО |35 |520 |90 |400 1 1 i 1 i i 120 |580 j _ 145 |400 |20 1 1 1 |500 i 1 i |36 |380 1 1 I SO 4 i । 1 190 |7 | ill
I । 1 If 371900 |25 |800 |30 |700 1 1 |40 |820 1 1 |50 |750 |30 1 |680 i |50 |600 135 i 1 Г 1 175 |9 | > [J
1 1 II 38Ц000140 |820 |25 |600 1 1_ 1 1 1 |10 |980 i 1 t 1 |40 |700 |35 1800 j 1 1 |30 |620 j j 1 120 j Г ! 1 |85 |6,5
39|1200|50 110001*30 |1150|60 I860 1 I I |30 11100140 । i 1950 |80 |800 ISO I I ' I 182 |8 |
4011600160 |1000|40 |1500|50 |1100|30 |1400|45 (1200160 |900 -1 i I 135 i I I 1 [80 [6 | I 1 1
1 II I I I I I I 1 41|2000|50 |1500|90 |1800|80 [1600145 |И00|20 —1 ‘ 1 1 1 1 * 1 1 1— 11500135 [10001 И H—1—i—i— J. -j 5|55 |5 | H 1—1
-Al-
Продолжение табл. П-1
Кратковременный режим работы
1 N | Ml 1 tl М2 It2 | М3 |t3 |
1 1 1 1 1 700 |200 600 |300| 550 |400|
1 2 | 880 1300 800 1450| 750 13001
1 3 | 70 1200 60 |300| 55 1400|
1 4 | 40 1250 30 |200| 25 |100|
1 5 | 55 1100 48 |180| 50 1 801
1 6 | 120 I 80 100 |200| 80 |150|
1 7 | 90 | 40 120 1 20| 70 1 30|
1 8 | 140 | 30 120 1 40| 110 1 20|
1 9 1 150 I 35 140 1 20| 120 1 25|
Wm
Jm
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
165
260
500
400
620
1280
850
1250
1400
380
550
290
460
640
1430
780
1700
260
55
40
25
50
80
20
25
24
20
40
50
40
20
15
20
25
30
25
30
160
240
480
350
590
1100
800
1100
1300
400
520
320
350
550
1600
800
1750
240
48
30
35
30
50
15
40
30
50
20
25
15
30
35
55
50
20
45
15
50
158
250
490
390
600
1200
700
1200
1380
350
480
26
440
600
1700
780
1680
250
45
30
40
25
30
90
35
40
30
-30
25
50
60
50
30
20
40
40
30
40
50
60
65
70
75
50
80
100
115
120
100
58
95
80
50
95
80
70
50
48
100
110
110
47
120
70
48
118
5
4
6
8
7
9
11
10
7
9
12
13
15
14
12
15
16
17
5.8
10
8
7
8
11
16
18
7
5
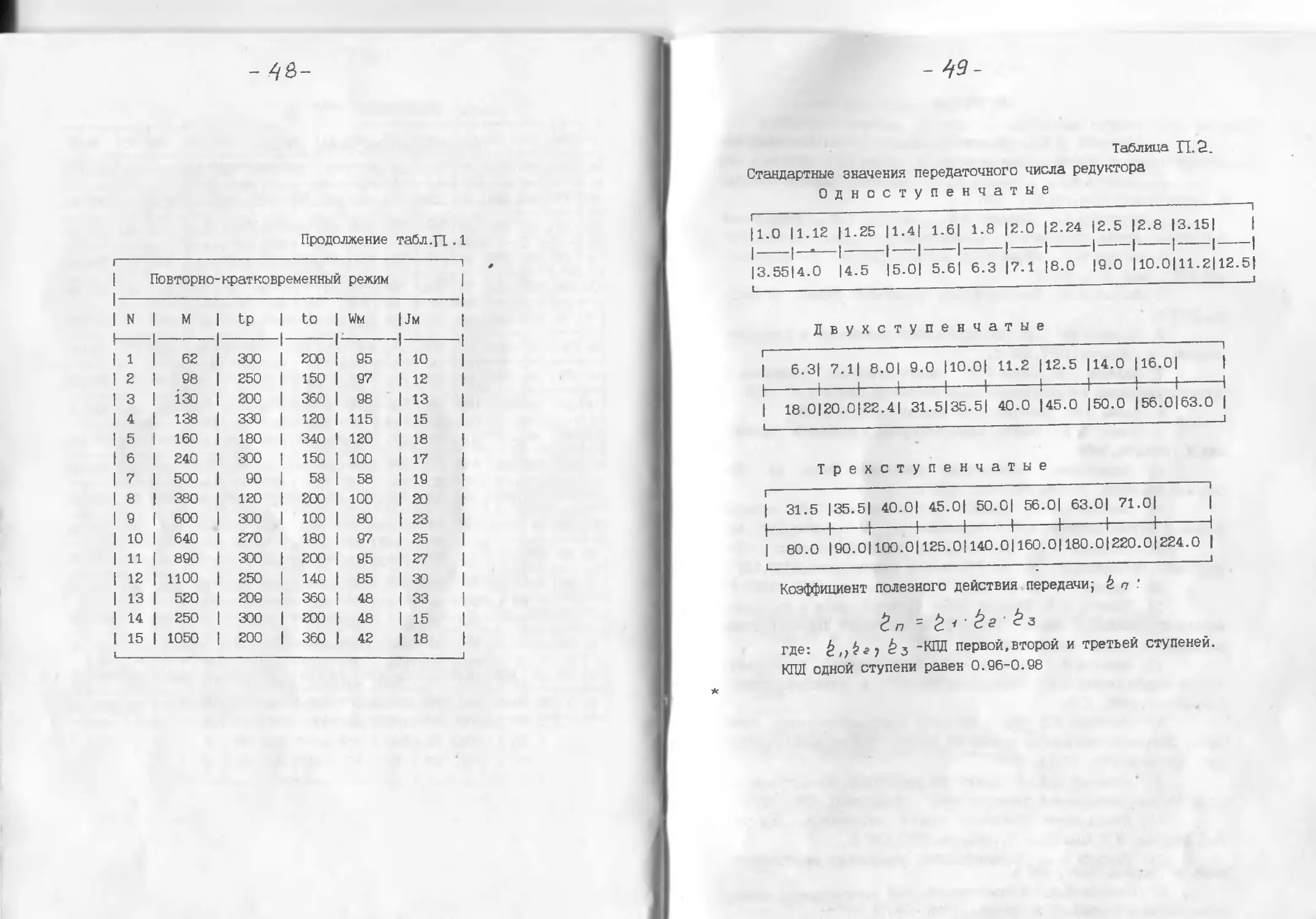
Продолжение табл.П-1
Г ] Повторно-кратковременный режим |
N 1 м | -1 1 tp I to I | Wm |Jm 1 -1 f
1 1 1 1 62 1 300 1 I 200 1 I 95 1 | 1 io |
2 1 S8 | 250 I 150 1 97 1 12 I
3 1 130 | 200 I 360 I 98 1 13 |
4 1 138 | 330 I 120 1 115 1 15 I
5 1 160 | 180 I 340 I 120 1 18 |
6 1 240 | 300 | 150 1 100 1 17 1
7 | 500 | 90 I 58 I 58 1 19 |
8 | 380 | 120 I 200 I 100 1 20 |
9 | 600 | 300 I 100 | 80 1 23 |
10 I 640 | 270 I 180 I 97 1 25 |
11 | 890 | 300 | 200 I 95 1 27 |
12 I 1100 | 250 I 140 | 85 1 30 |
13 | 520 | 200 | 360 | 48 1 33 |
14 | 250 | 300 I 200 | 48 1 15 |
L 15 I 1050 | 200 I 360 1 42 1 18 | i
- 49-
Таблица П.2.
Стандартные значения передаточного числа редуктора
Одноступенчатые
।-----------------------------------------------------------
Ц.О 11.12 |1.25 |1.4| 1.6| 1.8 |2 0 |2.24 |2.5 |2.8 |3.15| |
I 1—1--------1 — 1-1----1 1------1 1 1 1 1
13.5514.0 |4.5 15.01 5.6| 6.3 |7.1 |8.0 |9.0 I10.0|11.2|12.5|
Двухступенчатые
I | 6.3| 7.1| 8.0| 1 111 9.0 110.01 11.2 |12.5 i |14.0 |16.0| | 1 11
1 III | 18.0|20.0|22.4| । 31.5135.51 1 40.0 |45.0 150.0 1 1 1 |56.0|б3.0 |
Трехступенчатые
। ।
| 31.5 |35.5| 40.01 45.01 50.0| 56.0| 63.0| 71.0| |
।------1---]-----(----1-----!----1----1----1------1
| 80.0 |90.0|100.0|125.01140.01160.0|180.0|220.0|224.О |
i_______________________________________________।
Коэффициент полезного действия передачи; £ п ‘
£п = $ 1 '’с'з
где: "КПД первой,второй и третьей ступеней.
КПД одной ступени равен 0.96-0.98
ЛИТЕРАТУРА
1. Мартынов М.В., Переслегин Н.Г. Автоматизированный
электропривод в горной промышленности. М.-.Недра, 1977 , 375 с.
.2 , Чиликин М.Г., Сандлер А.С. Общий курс электропривода.
М.:Энергоиздат,1981,изд.6-е, 575 с.
3. Чиликин М.Г., Соколов М.М., Терехов В.В., Шияновский
А.В.Основы автоматизированного электропривода.М.-.Энергия, 1974,567 с.
. 4.Чиликин М.Г. Общий курс электропривода. М.:Энергоиз-
дат,1971, изд. 5-е, 432 о.
5. Фотиев М.М. Электропривод рудничных машин. М.:Нед-
ра, 1972 г.
6. Вешеневский С.Н. Характеристики двигателей в электроп-
риводах. М.:Энергия,1977,432 с.
7. Халиэев Г.П..Серов в.И. Расчет пусковых, тормозных и
пускорегулирующих сопротивлений электропривода.Минск В.Ш. ,1966.
8. ВАсин В.М. Электрический привод. М.:В.Ш.,1984.
9. Комар М.А. Основы электропривода и аппараты управле-
ния. М. :Энергия,1968.
10. Справочник. Асинхронные двигатели серии 4А. Под
ред.л.Э.Кравчика. М.:Энергия,1982, 504 с.
11. Башарин А.В., Голубев Ф.Н..Кепперман В.Г. Примеры
расчетов автоматизированного электропривода, М.:Энергия,1972,440 с.
.12 . Ситников Н.Б. Электропривод геологоразведочного обо-
рудования. Екатеринбург. Изд-во Уральского университета,1993,240 с.
13. Термины и определения. Электроприводы. ГОСТ 16593-79.
14. Бекетов В.Ф. Решение задач электропривода с использо-
ванием персональных машин. Раздел: Механические характеристики
электродвигателей. Свердловск, СГИ, 1987.
15. Бекетов В.Ф. Решение задач электропривода с использо-
ванием персональных ЭВМ. Переходные процессы в электроприводах.
Свердловск,1988, СГИ.
16. Ситников Н.Б. Выбор мощности электродвигателей. Учеб-
но-методическое пособие по курсовому проекту"Основы электроприво-
да". Екатеринбург, УПТА, 1995 .
17. Ситников Н.Б. Методические разработки по курсовой ра-
боте "Автоматизированный электропривод". Свердловск, СГИ, 1979.
18. Асинхронные двигатели общего назначения. Под ред.
В.М.Петрова, А.Э.Кравчика. М.:Энергия,1980,488 с.
19. Сиротин А.А. Автоматическое управление электроприво-
дами. М.:Энергия,1969, 560с.
20. Соколов М.М. Автоматизированный электропривод общеп-
ромышленных механизмов. М.:Энергия,1976. 488 с.
Основы электропривода.
Учебно-методическое пособие по выполнению курсового проектирова-
ния для студентов профилизации "Электропривод и автоматика промышлен-
ных установок и технологических комплексов" ( ЭГП ), направления
551300 - "Электротехника, электромеханика и электротеханологии*'.
Составил: Валентин Федорович Бекетов,старший преподаватель
каф. ЭГП
КорреКТура кафедры Электрификации горных предприятий
Подписано к печати: 21.04.97г,
Формат бумаги 60 х 84 1/16
Печ.л. 3,2 Тираж 100 экз, Закаа2£
Цена С
Лаборатория множительной техники УНТА
620144, Екатеринбург, Куйбышева,30