











































































































Автор: Власов И.Б.
Теги: авиация и космонавтика летательные аппараты ракетная техника космическая техника радиолокация радиотехника авиационное оборудование навигация спутники
ISBN: 978-5-7038-3208-0
Год: 2008




Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
«Московский государственный технический университет
имени Н.Э. Баумана» — базовая организация
государств — участников СНГ
по профессиональной
переподготовке и повышению
квалификации кадров
по новым направлениям
развития техники и технологий
И.Б. Власов
Глобальные
навигационные
спутниковые
системы
Издательство МГТУ им. Н.Э. Баумана
И.Б. Власов
Глобальные
навигационные
спутниковые
системы
Допущено Учебно-методическим объединением вузов
по университетскому политехническому образованию
в качестве учебного пособия для студентов
высших учебных заведений, обучающихся по специальностям
«Радиотехника» и «Радиоэлектронные системы»
направления подготовки
дипломированных специалистов «Радиотехника»,
и слушателей программ профессиональной переподготовки
и повышения квалификации специалистов
Российской Федерации и стран СНГ
по новым направлениям развития техники и технологии
Москва 2008
УДК 629.783(075.8)
ББК 32.95;39.57;39.67
В58
Рецензенты: ректор МГТУ им. Н.Э. Баумана академик РАН И.Б. Федоров;
зам. начальника отделения Российского НИИ космического
приборостроения канд. техн. наук С.Н. Карутин
Власов И.Б.
В58 Глобальные навигационные спутниковые системы: Учеб,
пособие. — М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. - 182 с.: ил.
ISBN 978-5-7038-3208-0
Описаны особенности построения и функционирования средне
орбитальных глобальных навигационных спутниковых систем (ГНСС).
Дан краткий обзор сведений об основных элементах ГНСС: орби
тальной группировке навигационных космических аппаратов, назем
ной подсистеме контроля и управления, аппаратуре потребителя, функ
циональных дополнениях, применяемых в указанных системах. Изло
жены принципы навигационно-временных определений, применяемые
в ГНСС, проанализированы факторы, ограничивающие точность из
мерений. Приведены примеры современных образцов аппаратуры.
Содержание учебного пособия соответствует курсу лекций, кото
рый автор читает в МГТУ им. Н.Э. Баумана, а также в Межотрасле
вом институте повышения квалификации кадров (МИПК) по новым
направлениям развития техники и технологии МГТУ им. Н.Э. Бау
мана.
Учебное пособие подготовлено в соответствии с учебными пла
нами, утвержденными в МИПК МГТУ им. Н.Э. Баумана.
Для студентов высших технических учебных заведений, обучаю
щихся по направлению подготовки дипломированных специалистов
«Радиотехника». Может быть полезно аспирантам, работникам на
учно-исследовательских организаций и промышленности, занимаю
щимся вопросами разработки радиотехнических систем различного
назначения.
УДК 629.783(075.8)
ББК 32.95;39.57;39.67
© Власов И.Б., 2008
© МГТУ им. Н.Э. Баумана, 2008
© Оформление. Издательство
МГТУ им. Н.Э. Баумана, 2008
ISBN 978-5-7038-3208-0
ПРЕДИСЛОВИЕ
Настоящее издание входит в серию «Профессиональная переподго
товка и повышение квалификации специалистов по новым направлени
ям развития техники и технологии в МГТУ им. Н.Э. Баумана», которая
разработана в рамках реализации Федеральной целевой программы раз
вития образования на 2006-2010 годы, утвержденной постановлением
Правительства РФ от 23 декабря 2005 г. № 803.
Одной из основных стратегических задач Федеральной целевой про
граммы является совершенствование содержания и технологий образова
ния за счет внедрения моделей непрерывного профессионального образо
вания, предоставляющих каждому человеку возможность для дальнейше
го профессионального, карьерного и личностного роста, а также новых
образовательных технологий и принципов организации учебного процес
са, обеспечивающих эффективную реализацию новых моделей непрерыв
ного образования, в том числе с использованием современных информа
ционных и коммуникационных технологий.
В МГТУ им. Н.Э. Баумана, наряду с подготовкой высококвалифи
цированных инженерных и научно-педагогических кадров, существует
стройная система профессиональной переподготовки и повышения квали
фикации инженерно-технических кадров. Исторически сложилось так, что
профессора Универсшеза всегда были консультантами промышленных пред
приятий при разработке и освоении новой техники и технологий.
В 1988 г. на базе уже существовавших отдельных факультетов повы
шения квалификации был организован Межотраслевой институт повы
шения квалификации кадров по новым направлениям развития техники
и технологии (МИПК), где за истекшие 20 лет прошли профессиональ
ную переподготовку и повышение квалификации более 50 тыс. человек.
В основном это работники машино- и приборостроительных предприя
тий, государственные служащие, преподаватели начального, среднего и
высшего профессионального образования.
При каждом научно-учебном комплексе МГТУ им. Н.Э. Баумана име
ется факультет повышения квалификации МИПК. Благодаря такой эффек
тивной организационной структуре системы обучения новейшие дости
жения в области науки, техники и образования сразу же внедряются в
процесс профессиональной переподготовки и повышения квалификации.
3
В учебном процессе в МИПК ежегодно принимают участие более
600 преподавателей и научных работников Университета, обеспечивающих
все виды дополнительного профессионального образования, от повыше
ния квалификации (72 ч) до профессиональной переподготовки с присво
ением новой квалификации (более 1000 ч).
Очередным шагом в развитии общего образовательного пространства
является решение Совета глав правительств государств - участников Со
дружества Независимых Государств о придании Государственному обра
зовательному учреждению высшего профессионального образования «Мос
ковский государственный технический университет имени Н.Э. Баумана»
статуса базовой организации государств - участников СНГ, осуществляю
щей профессиональную переподготовку и повышение квалификации кад
ров по новым направлениям развития техники и технологий. Это свиде
тельствует о признании важности переподготовки национальных кадров
государств - участников СНГ на базе российских вузов для обеспечения
высококвалифицированными кадрами хозяйствующих субъектов этих го
сударств.
В современных условиях, характеризующихся ростом темпов экономи
ческого развития государств и международного экономического сотрудни
чества в рамках СНГ и интенсификацией международного перемещения
рабочей силы, процесс профессиональной переподготовки и повышения ква
лификации специалистов по новым направлениям развития техники и тех
нологий все в большей степени приобретает международный характер.
Специалисты, прошедшие профессиональную переподготовку и повы
шение квалификации в высших технических школах России, вносят су
щественный вклад в социально-экономическое развитие своих государств,
расширение и укрепление межгосударственных связей и дружбы между
народами.
Серия «Профессиональная переподготовка и повышение квалифика
ции специалистов по новым направлениям развития техники и техноло
гии в МГТУ им. Н.Э. Баумана», которая выходит в свет в 2008 г., включа
ет публикации по следующей тематике:
• ракетная и космическая техника и технологии;
• космические и геоинформационные технологии и системы;
• биотехнические и медицинские аппараты и системы;
• информационные системы и технологии;
• менеджмент организации.
ВВЕДЕНИЕ
Одним из наиболее заметных и практически важных научно-тех
нических достижений последней четверти XX в. стало создание
спутниковых радионавигационных систем (СРНС) второго поколе
ния - ГЛОНАСС (РФ) и GPS (США). В современной научно-тех
нической литературе ГЛОНАСС, GPS, а также сходные с ними по
параметром СРНС, создаваемые другими странами, объединяют
под общим названием «Глобальная навигационная спутниковая
система» (ГНСС), в англоязычной литературе - Global navigation
satellite system (GNSS). Далее это сокращение используется в учеб
ном пособии в тех случаях, когда конкретизация системы не тре
буется.
Введенные в эксплуатацию в начале 1990-х годов, эти системы
первоначально предназначались для решения задач точного место-
определения высокодинамичных объектов военного назначения.
Однако полученный в процессе испытаний и эксплуатации ГНСС
опыт показал, что создаваемое этими системами глобальное нави
гационно-временное поле позволяет обеспечивать не только высо
коточную навигацию подвижных средств, но и решать на принци
пиально новой основе широкий круг других прикладных задач, ко
торые при проектировании ГНСС не рассматривались.
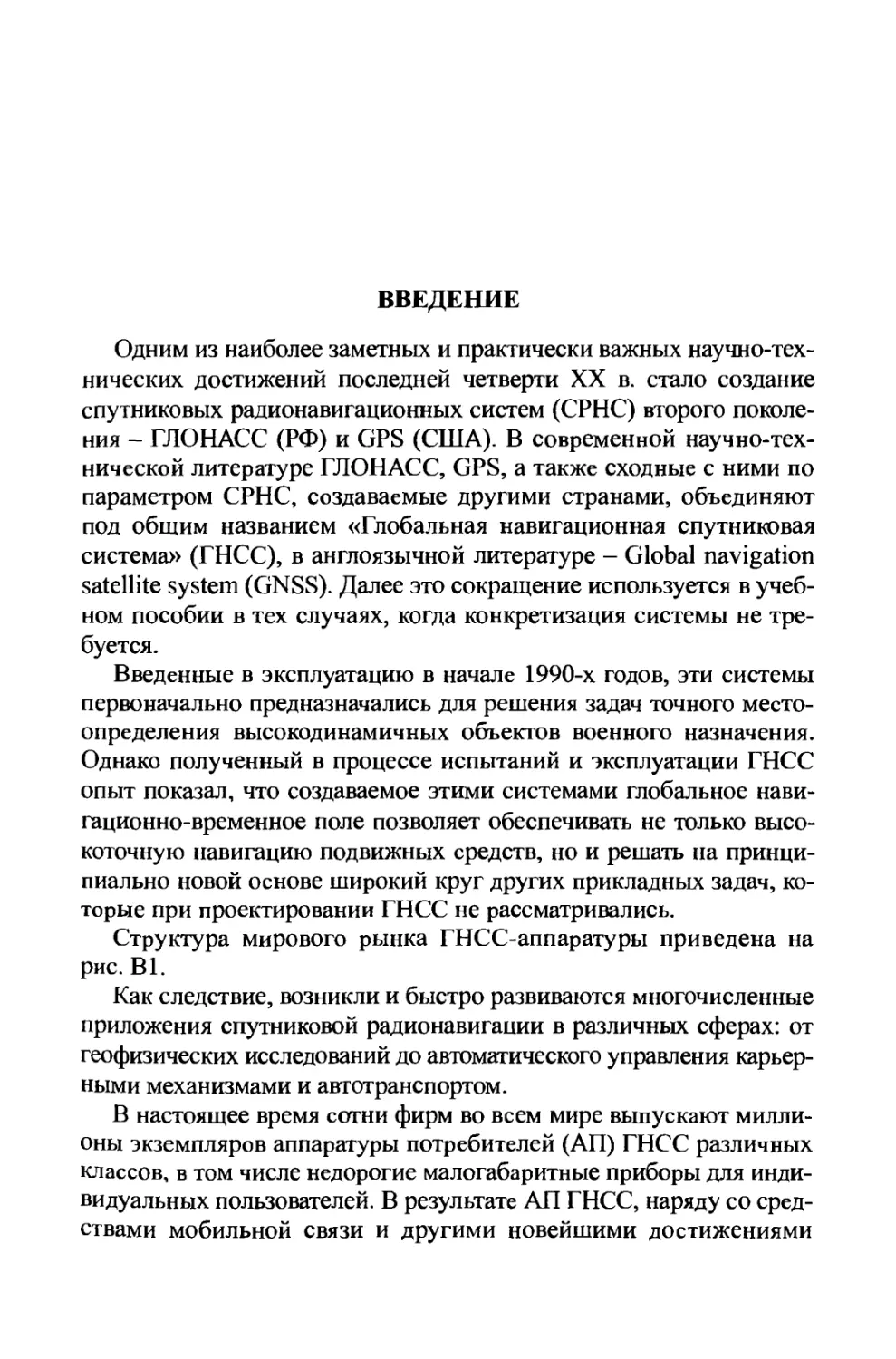
Структура мирового рынка ГНСС-аппаратуры приведена на
рис. В1.
Как следствие, возникли и быстро развиваются многочисленные
приложения спутниковой радионавигации в различных сферах: от
геофизических исследований до автоматического управления карьер
ными механизмами и автотранспортом.
В настоящее время сотни фирм во всем мире выпускают милли
оны экземпляров аппаратуры потребителей (АП) ГНСС различных
классов, в том числе недорогие малогабаритные приборы для инди
видуальных пользователей. В результате АП ГНСС, наряду со сред
ствами мобильной связи и другими новейшими достижениями
Индивидуальный —
—
туризм
М
27%
( 1
Я
Автомобильная навигация
35%
/
Прокладка
и отслеживание
маршрутов
10%
/
Геодезия/
картография
7%
OEM
5%
Авиация
4%
Мореплавание
2%
Военные
2%
Рис. В1. Структура мирового рынка ГНСС-аппаратуры
радиоэлектроники, стала не только средством сугубо профессио
нальной деятельности, но и предметом личного пользования, что
многократно расширяет круг ее потребителей.
В предлагаемом учебном пособии описаны основные особенно
сти построения и функционирования ГНСС.
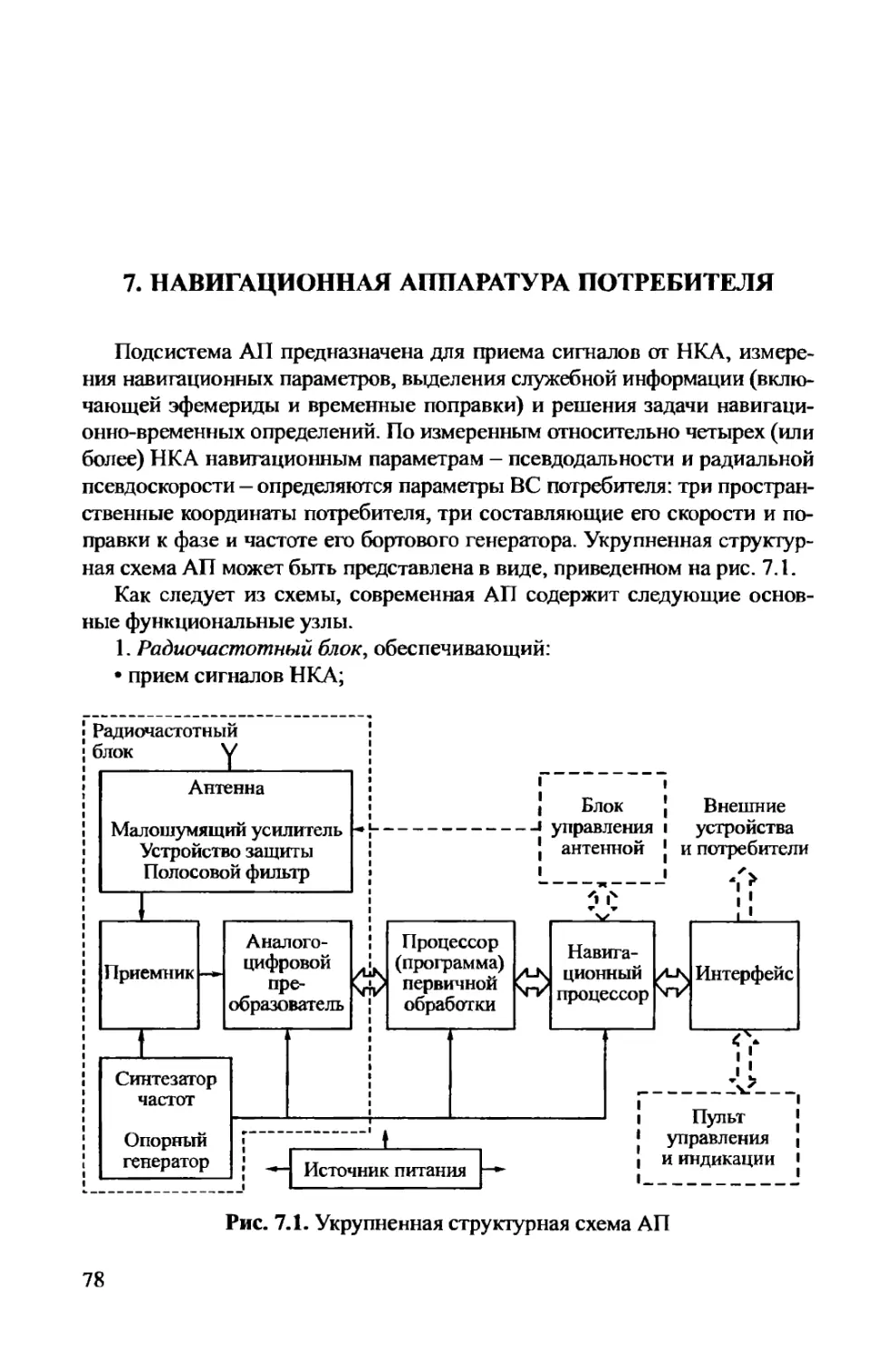
1. ПРИНЦИПЫ РАДИОНАВИГАЦИИ.
РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
НАЗЕМНОГО БАЗИРОВАНИЯ
Термин «навигация» (от лат. navigo — плыву на судне), появившийся в
русском языке в эпоху Петра I, первоначально относился к морскому су
довождению. В настоящее время этот термин охватывает широкий круг
видов деятельности человека, связанных с определением текущего место
положения различных подвижных объектов для обеспечения их движения
по заданным траекториям или контроля этих траекторий. Родственной на
вигации, как по составу решаемых задач и по составу используемых
средств, является проблема определения положения на местности непод
вижных объектов (топогеодезическая привязка).
Источниками информации при решении навигационных задач могут
быть различные события и явления естественного и искусственного про
исхождения: астрономические данные, параметры и законы изменения маг
нитного, гравитационного и электромагнитного полей, инерциальные яв
ления в движущихся массах и т. п.
Системы, использующие для решения навигационных задач искусст
венные поля и данные, созданные внешними (не бортовыми) источника
ми, относятся к классу неавтономных, в противном случае - к классу ав
тономных.
1.1. Основные понятия и определения
Радионавигационными называются методы, в которых для ре
шения задачи местоопределения (позиционирования) используют
ся радиосигналы внешнего искусственного источника с известны
ми координатами. Радионавигационная система (РНС) — совокуп
ность радиоустройств и вспомогательных технических средств,
расположенных на объекте и вне его, предназначенных для реше
ния задач навигации.
В соответствии с приведенной выше классификацией, РНС от
носятся к классу неавтономных. (Типичным примером автономных
систем являются системы инерциальной навигации.)
7
В зависимости от того, позволяет или нет рассматриваемый ме
тод навигации однозначно определить местоположение (позицию)
объекта без привлечения данных о его траектории в предшествую
щие моменты времени, различают методы позиционной и непози
ционной навигации [1]. В настоящее время наибольшее распростра
нение получили позиционные РНС, автономные системы, как пра
вило, являются непозиционными. Перспективным направлением
современной навигационной техники является комплексирование
автономных и неавтономных систем, что позволяет реализовать до
стоинства каждой из них и в значительной степени скомпенсиро
вать недостатки (подробнее об этом см. разд. 11).
Основным содержанием задачи навигационно-временных опре
делений (НВО) в радионавигации является определение вектора
состояния (ВС) потребителя (объекта). В качестве компонент это
го вектора обычно рассматривают пространственные координаты
х, у, ζ потребителя, временная поправка хп шкалы времени потре
бителя относительно системной шкалы, а также составляющие век
тора скорости x,y,z.
Перечисленные величины не могут быть непосредственно изме
рены радиотехническими методами. Поэтому в РНС реализован кос
венный метод: измеряются некоторые параметры принятого радио
сигнала -радионавигационные параметры (РНП): время его при
хода U фаза ф или разность фаз Δφ, доплеровский сдвиг частоты
Fjy, амплитуда сигнала^ и др. Измеренным РНП сопоставляются
функционально связанные с ними величины - навигационные пара
метры (НП), характеризующие положение потребителя относитель
но источников навигационных сигналов (<опорных радионавигаци
онных точек - ОРНТ): углы визирования ОРНТ, дальности R или
разности дальностей AR до нескольких ОРНТ, радиальные или уг
ловые скорости перемещения потребителя относительно ОРНТ
и т. п. Функциональные зависимости, связывающие РНП и НП, по
лучили название навигационных функций. В общем случае вид на
вигационных функций определяется многими факторами: видом НП,
параметрами движения ОРНТ и потребителя, выбранной системой
координат и т. д.
Навигационные параметры, рассчитанные с помощью навига
ционных функций, используются для определения искомых компо
нент ВС.
Геометрическое место точек пространства с одинаковым значе
нием навигационного параметра называют поверхностью положе
ния. Пересечение двух поверхностей положения определяет линию
8
положения, т. е. геометрическое место точек, соответствующих двум
значениям двух навигационных параметров. Местоположение по
требителя определяется координатами точки пересечения трех по
верхностей положения или двух линий положения. Если из-за неод
нозначности измерений линии положения пересекаются более чем
в одной точке, то необходимо использовать дополнительную по
верхность положения или априорную информацию, позволяющие
отселектировать истинное положение от ложных [2].
1.2. Принципы радионавигационных измерений
1.2.1. Угломерные методы
Фундаментальными свойствами радиоволн, лежащими в основе
всех радионавигационных (а также и радиолокационных) измере
ний, является прямолинейность и постоянство скорости их распро
странения в свободном пространстве.
Принципиальная возможность навигации с использованием ра
диосигналов стала очевидной практически одновременно с первы
ми удачными опытами А.С. Попова по радиосвязи, поскольку в ходе
этих опытов была установлена возможность определения направ
ления прихода радиоволн. Поэтому в первых нашедших практи
ческое применение РНС использовались угломерные методы мес-
тоопределения, в основе которых лежит свойство направленного
излучения и приема сигналов с помощью соответствующих антенн.
Различают два варианта угломерных методов: радиопеленгаторный
и радиомаячный [3].
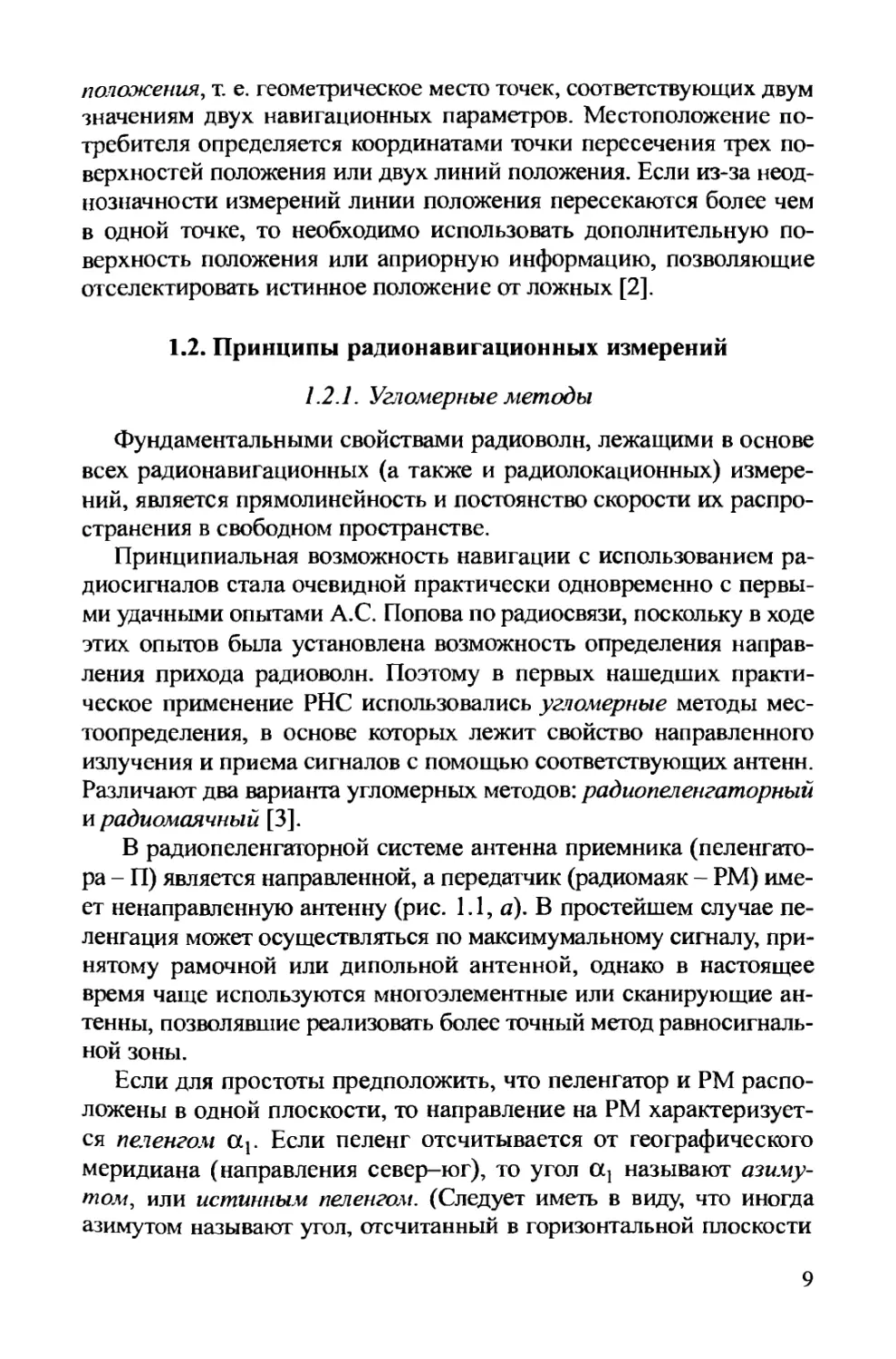
В радиопеленгаторной системе антенна приемника (пеленгато
ра - П) является направленной, а передатчик (радиомаяк - РМ) име
ет ненаправленную антенну (рис. 1.1, а). В простейшем случае пе
ленгация может осуществляться по максимумальному сигналу, при
нятому рамочной или дипольной антенной, однако в настоящее
время чаще используются многоэлементные или сканирующие ан
тенны, позволявшие реализовать более точный метод равносигналь
ной зоны.
Если для простоты предположить, что пеленгатор и РМ распо
ложены в одной плоскости, то направление на РМ характеризует
ся пеленгом оц. Если пеленг отсчитывается от географического
меридиана (направления север-юг), то угол оц называют азиму
том, или истинным пеленгом. (Следует иметь в виду, что иногда
азимутом называют угол, отсчитанный в горизонтальной плоскости
9
Рис. 1.1. Схемы радиопеленгаторного (а) и радиома-
ячного (б) методов навигационных измерений:
П - пеленгатор; РМ - радиомаяк
от любого направления, принятого за нулевое.) Очевидно, что ли
нией положения в данном случае является луч, совпадающий с
электрической осью диаграммы направленности антенны (ДНА)
пеленгатора и образующий угол щ с линией нулевого отсчета. На
практике при расположении пеленгатора и РМ на земной поверх
ности линией положения будет ортодромия - дуга большого кру
га, проходящего через точки их расположения. В трехмерном про
странстве поверхность положения представляет собой плоскость,
содержащую линию положения и перпендикулярную поверхно
сти Земли.
В радиомаячных системах направленной является антенна РМ,
потребитель использует ненаправленную антенну. В этом случае пе
ленгатор измеряет обратный пеленг а0 относительно нулевого на
правления, проходящего через точку нахождения РМ. Обычно ан
тенна РМ вращается (сканирует) с постоянной скоростью, известной
пеленгатору. В момент совпадения оси ДНА с нулевым (например,
северным) направлением дополнительная ненаправленная антенна
РМ излучает специальный короткий «нулевой» сигнал, принимае
мый пеленгатором и определяющий начало отсчета углов. Фикси
руя момент совпадения оси ДНА РМ с направлением на пеленга
тор П (например, по максимуму амплитуды принимаемого сигна
ла), можно вычислить обратный пеленг, который пропорционален
интервалу времени между временем приема нулевого и максималь
ного сигналов.
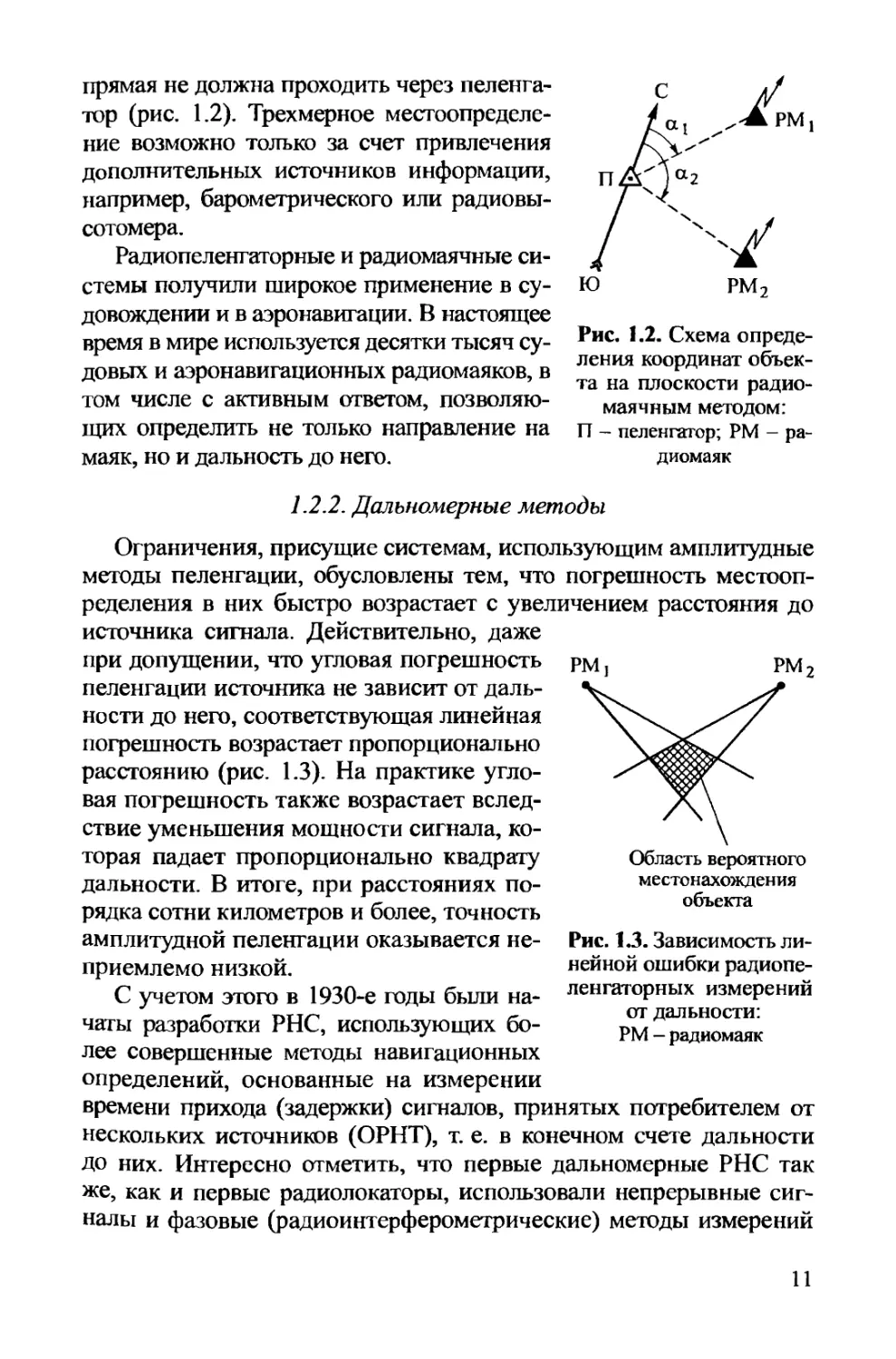
Очевидно, что для определения координат потребителя на плос
кости как радиопеленгаторным, так и радиомаячным способом, не
обходимо определить пеленги двух РМ, причем соединяющая их
10
прямая не должна проходить через пеленга
тор (рис. 1.2). Трехмерное местоопределе-
ние возможно только за счет привлечения
дополнительных источников информации,
например, барометрического или радиовы
сотомера.
Радиопеленгаторные и радиомаячные си
стемы получили широкое применение в су
довождении и в аэронавигации. В настоящее
время в мире используется десятки тысяч су
довых и аэронавигационных радиомаяков, в
том числе с активным ответом, позволяю
щих определить не только направление на
маяк, но и дальность до него.
Рис. 1.2. Схема опреде
ления координат объек
та на плоскости радио-
маячным методом:
П - пеленгатор; РМ - ра
диомаяк
1.2.2. Далъномерные методы
Ограничения, присущие системам, использующим амплитудные
методы пеленгации, обусловлены тем, что погрешность местооп-
ределения в них быстро возрастает с увеличением расстояния до
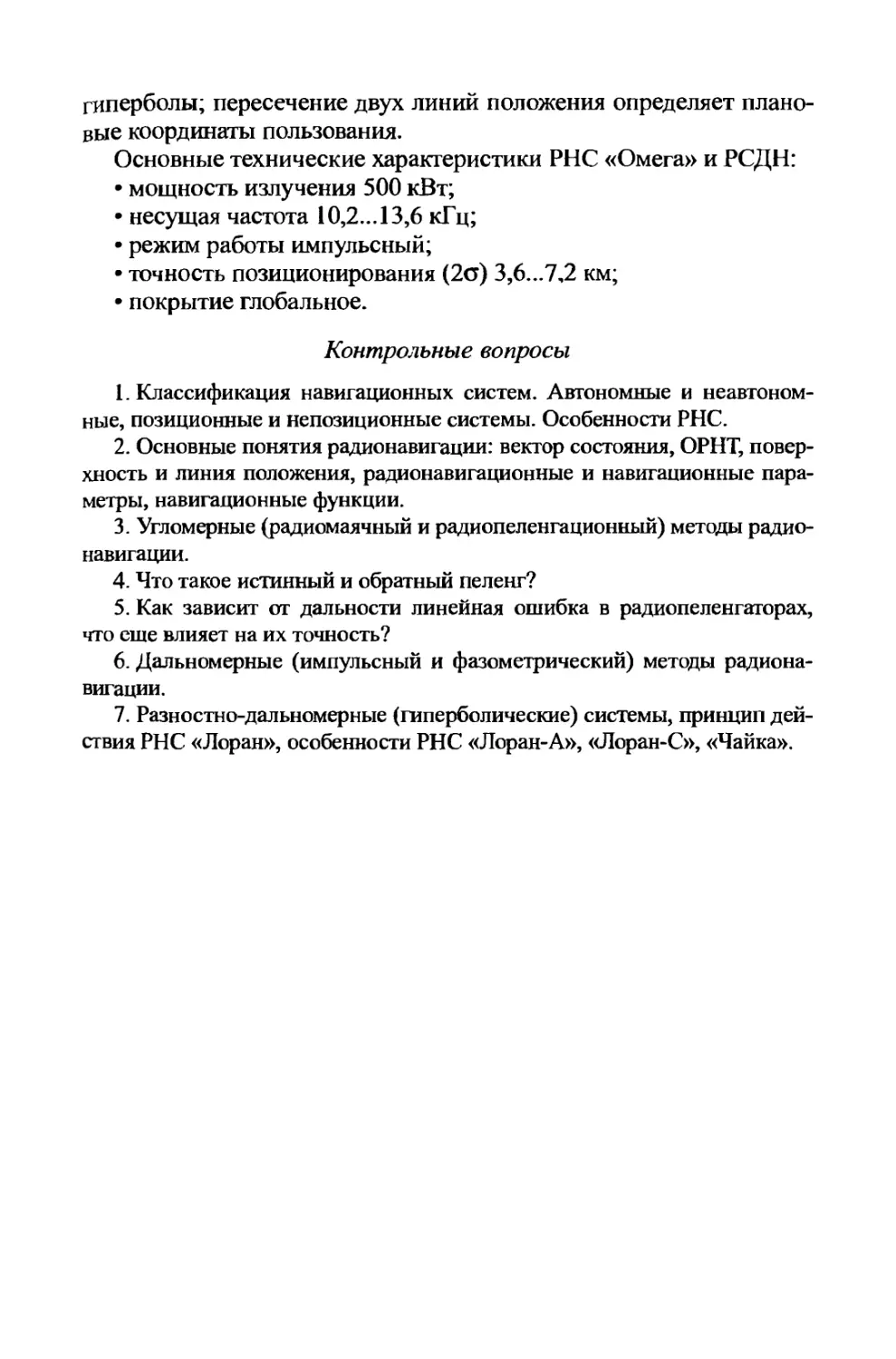
источника сигнала. Действительно, даже
при допущении, что угловая погрешность
пеленгации источника не зависит от даль
ности до него, соответствующая линейная
погрешность возрастает пропорционально
расстоянию (рис. 1.3). На практике угло
вая погрешность также возрастает вслед
ствие уменьшения мощности сигнала, ко
торая падает пропорционально квадрату
дальности. В итоге, при расстояниях по
рядка сотни километров и более, точность
амплитудной пеленгации оказывается не
приемлемо низкой.
С учетом этого в 1930-е годы были на
чаты разработки РНС, использующих бо
лее совершенные методы навигационных
определений, основанные на измерении
времени прихода (задержки) сигналов, принятых потребителем от
нескольких источников (ОРНТ), т. е. в конечном счете дальности
до них. Интересно отметить, что первые дальномерные РНС так
же, как и первые радиолокаторы, использовали непрерывные сиг
налы и фазовые (радиоинтерферометрические) методы измерений
РМ, РМ2
Область вероятного
местонахождения
объекта
Рис. 1.3. Зависимость ли
нейной ошибки радиопе-
ленгаторных измерений
от дальности:
РМ - радиомаяк
И
и лишь затем появились импульсные дальномеры, получившие наи
большее распространение.
Большой вклад в развитие дальномерных РНС и РЛС внесли со
ветские ученые Л.И. Мандельштам, Н.Д. Папалекси, Е.Я. Щеголев,
Ю.Б. Кобзарев и другие. Аппаратура, реализующая предложенный
и запатентованный Л.И. Мандельштамом, Н.Д. Папалекси и Е.Я. Ще
голевым «Способ определения расстояния между двумя пунктами
при помощи электромагнитных волн», который основан на измере
нии в точке наблюдения разности фаз сигналов, принимаемых от
двух источников, нашла практическое применение. Так, в Великоб
ритании была создана система «Дека», обеспечивавшая судовож
дение при удалении от берега до 500 км. В частности, эта система
использовалась для управления кораблями и судами, участвовав
шими в боевой операции по высадке десанта союзных войск в Нор
мандии.
Однако в полном смысле массовое применение РНС началось в
период Второй мировой войны с созданием в США разностно-даль-
номерной системы «Лоран» (LORAN - Long Range Aid to Navigation -
навигационное оборудование дальнего радиуса действия). В этот
же период в Германии была создана сходная по принципу действия
система «Консол». Однако после завершения войны ее функциони
рование и дальнейшее развитие были прекращены.
Принцип действия разностно-дальномерной РНС состоит в из
мерении в точке приема разности времени прихода импульсных ра
диосигналов, излучаемых двумя или более передающими станция
ми в синхронизированные моменты времени. Измерение разности
расстояний AR = R} - R2 до двух станций, пропорциональной вре
менному сдвигу Δτ принятых от них сигналов, позволяет найти по
верхность положения, имеющую вид гиперболоида вращения. Пе
ресечение поверхности положения с поверхностью Земли представ
ляет собой гиперболу AR = const, в фокусах которой расположены
передающие станции, поэтому РНС этого класса часто называют
гиперболическими. Поскольку координаты передающих станций из
вестны потребителю, для определения своего местоположения, он
должен, вычислив разность времени прихода сигнала от двух пар
передающих станций, найти точку пересечения соответствующих
двух гипербол (рис. 1.4). Потребительские приемоиндикаторы раз-
ностно-дальномерных РНС обычно снабжаются шаблонами, на ко
торых нанесены семейства гипербол, соответствующих различным
значениям параметра Δτ для используемой комбинации («цепочки»)
станций [3-5].
12
Принцип действия разностно-дальномерный
Измерение минимум двух разностей
дальностей относительно трех станций.
Линии положения: гиперболы. Пересечение
двух линий положения определяет плановые
координаты пользователя
Основные технические характеристики:
• мощность излучения 200...2000 кВт
• несущая частота 100 кГц
• режим работы импульсный
• точность позиционирования (2σ) 450 м
• покрытие зональное
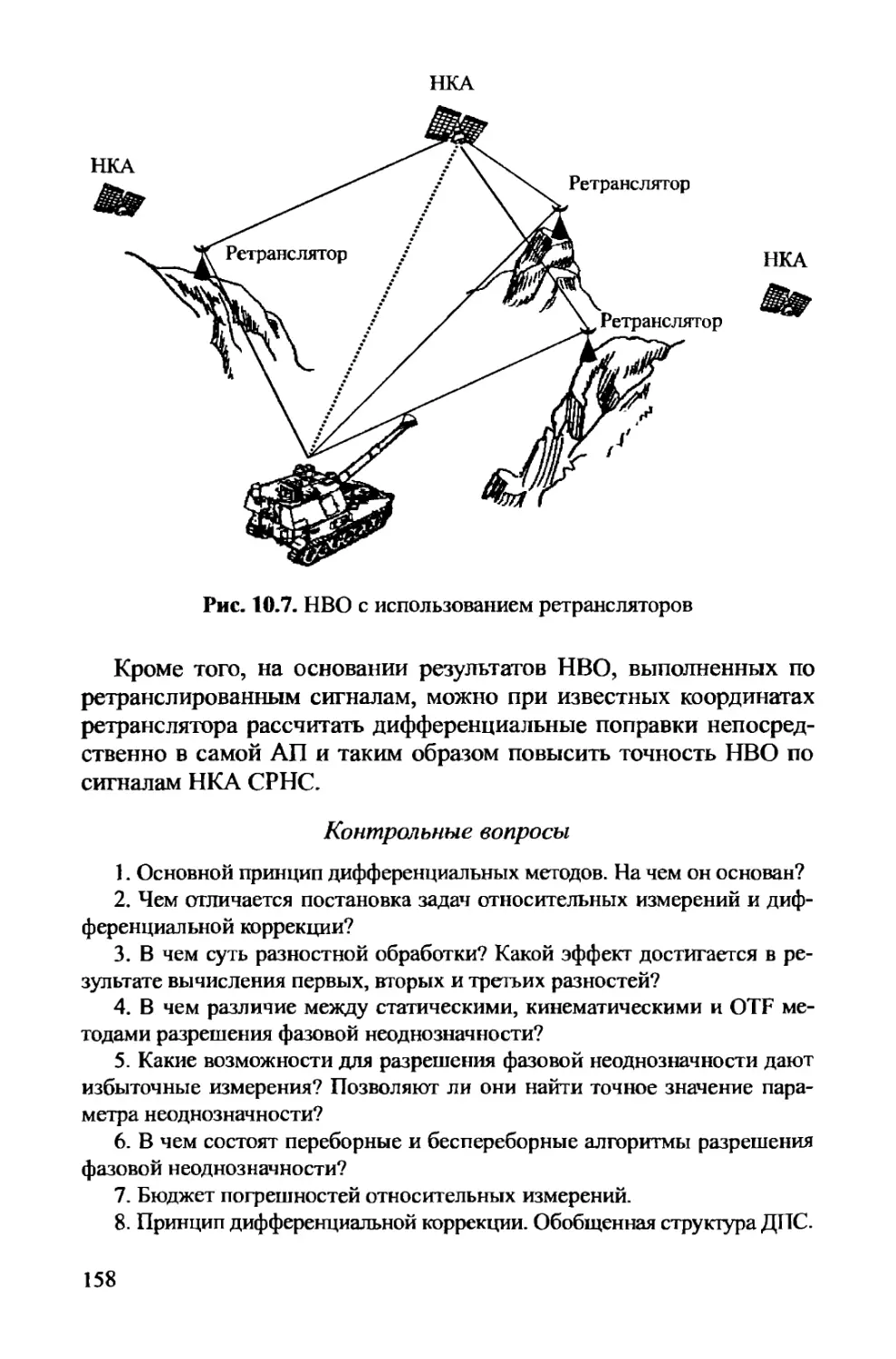
Рис. 1.4. РНС наземного базирования «Лоран-С» (США), «Чайка» (РФ):
П - потребитель
Система «Лоран» имела две основные модификации: «Лоран-А»
и «Лоран-С». Появившаяся первой, система «Лоран-А» использо
вала для измерения временных интервалов огибающую принятых
импульсных сигналов. Цепочка станций «Лоран-А» обычно состо
яла из трех передающих станций: ведущей и двух ведомых. Прин
цип синхронизации системы предусматривал, что ведомые станции
излучали сигналы в момент поступления на них импульса ведущей
станции. Таким способом устранялась неоднозначность измерений,
связанная с тем, что в общем случае гиперболы могут иметь не
сколько точек пересечения. Станции располагались на расстоянии
нескольких сотен километров и использовали пять фиксированных
частотных каналов в диапазоне средних волн 154... 172 м. Даль
ность действия системы «Лоран-А» в зависимости от времени су
ток составляла 1000...2500 км, а погрешность местоопределения -
1... 10 км. Для повышения точности использовался метод, основан
ный на приеме сигналов более чем двух пар станций и выборе ги
пербол, пересекающихся под углом, близким к прямому.
Дальнейшим развитием этого направления РНС явилась систе
ма «Лоран-С». Ее основное отличие от системы «Лоран-А» состо
ит в том, что для измерения разности времени прихода сигналов в
ней используется не только огибающая принятого импульсного сиг
нала, но и фаза колебаний его несущей частоты (100 кГц). Учет
фазовой информации позволил уменьшить погрешность местооп
ределения примерно до 100 м. Дальность действия системы «Ло
ран-С» при высоте подъема антенн около 200 м достигала 4000 км.
До появления спутниковой радионавигации система «Лоран» явля¬
AD 2= D В2~ Г>д= const
13
лась наиболее распространенным средством радионавигации.
В СССР была создана существующая до настоящего времени ги
перболическая система навигации «Чайка», аналогичная системе
«Лоран-С» (рис. 1.5).
Рис. 1.5. Зоны действия РНС «Лоран» и «Чайка»
Наряду с импульсными системами в послевоенные годы про
должали развиваться фазовые РНС: уже упоминавшаяся выше
«Дека» и разработанная в конце 1960-х годов глобальная система
«Омега». Особенность последней состояла в том, что синхрониза
ция всех передающих станций осуществлялась от единого эталона
всемирного времени, что обеспечило независимость их работы и
повысило точность фазовых измерений. В состав системы «Омега»
вошли восемь станций, расположенных в США, Японии, Норве
гии, Аргентине, Либерии, на Гавайских островах и о. Реюньон. Вы
сота мачт антенных систем этих станций составляла 350...400 м,
что обеспечило дальность действия системы до 10 тыс. км. В это
же время для обеспечения судовождения в арктических районах в
СССР была введена в строй фазовая РНС высокой точности РСВТ
с дальностью действия в пределах 1000 км, а также система даль
него действия РСДН-20 «Маршрут», работающая в сверхдлинно
волновом диапазоне.
Принцип действия РНС «Омега» (США) и РСДН (РФ) разност-
но-дальномерный: производится измерение минимум двух разно
стей дальностей относительно трех станций; линии положения -
14
гиперболы; пересечение двух линий положения определяет плано
вые координаты пользования.
Основные технические характеристики РНС «Омега» и РСДН:
• мощность излучения 500 кВт;
• несущая частота 10,2...13,6 кГц;
• режим работы импульсный;
• точность позиционирования (2σ) 3,6...7,2 км;
• покрытие глобальное.
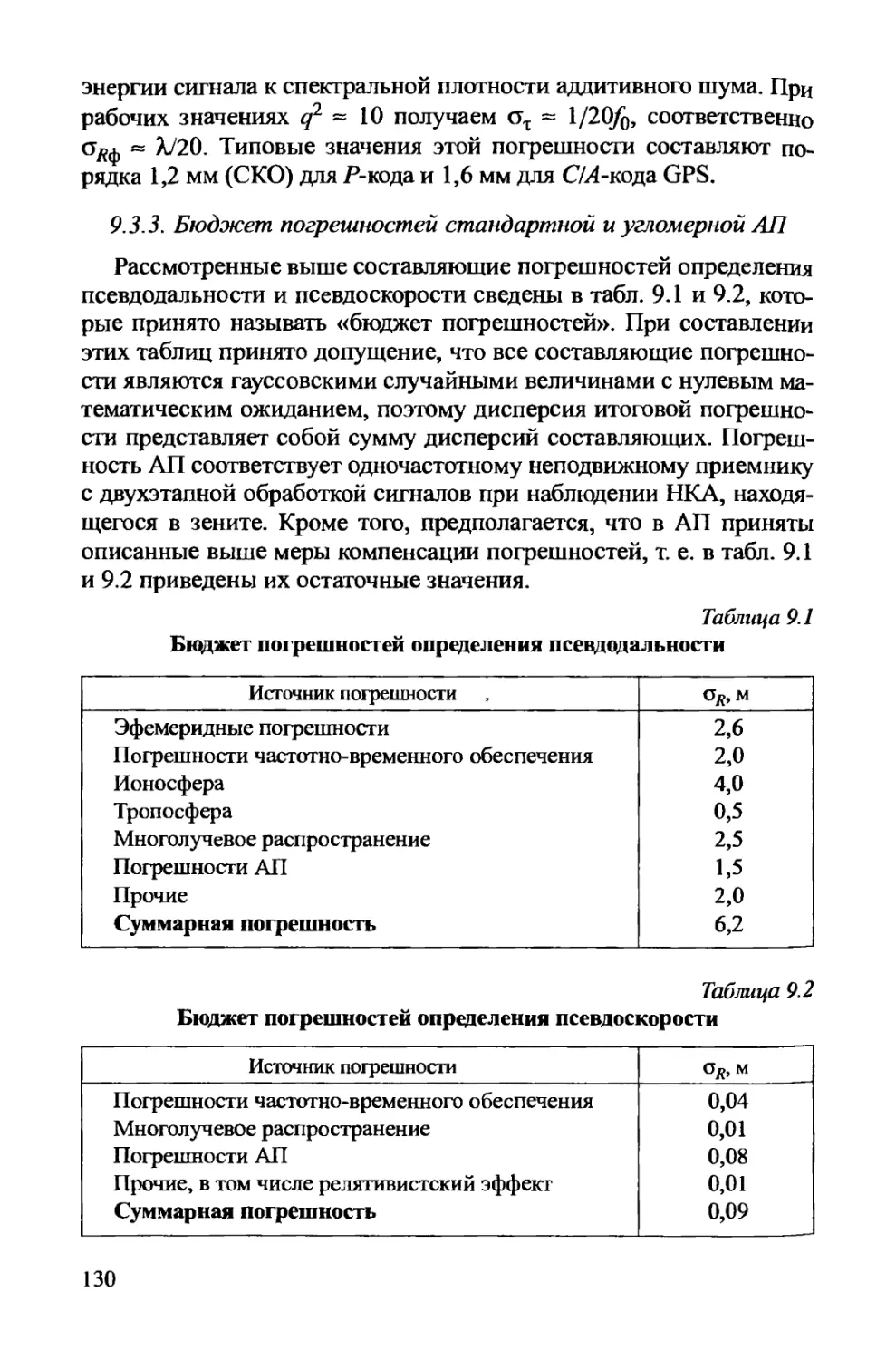
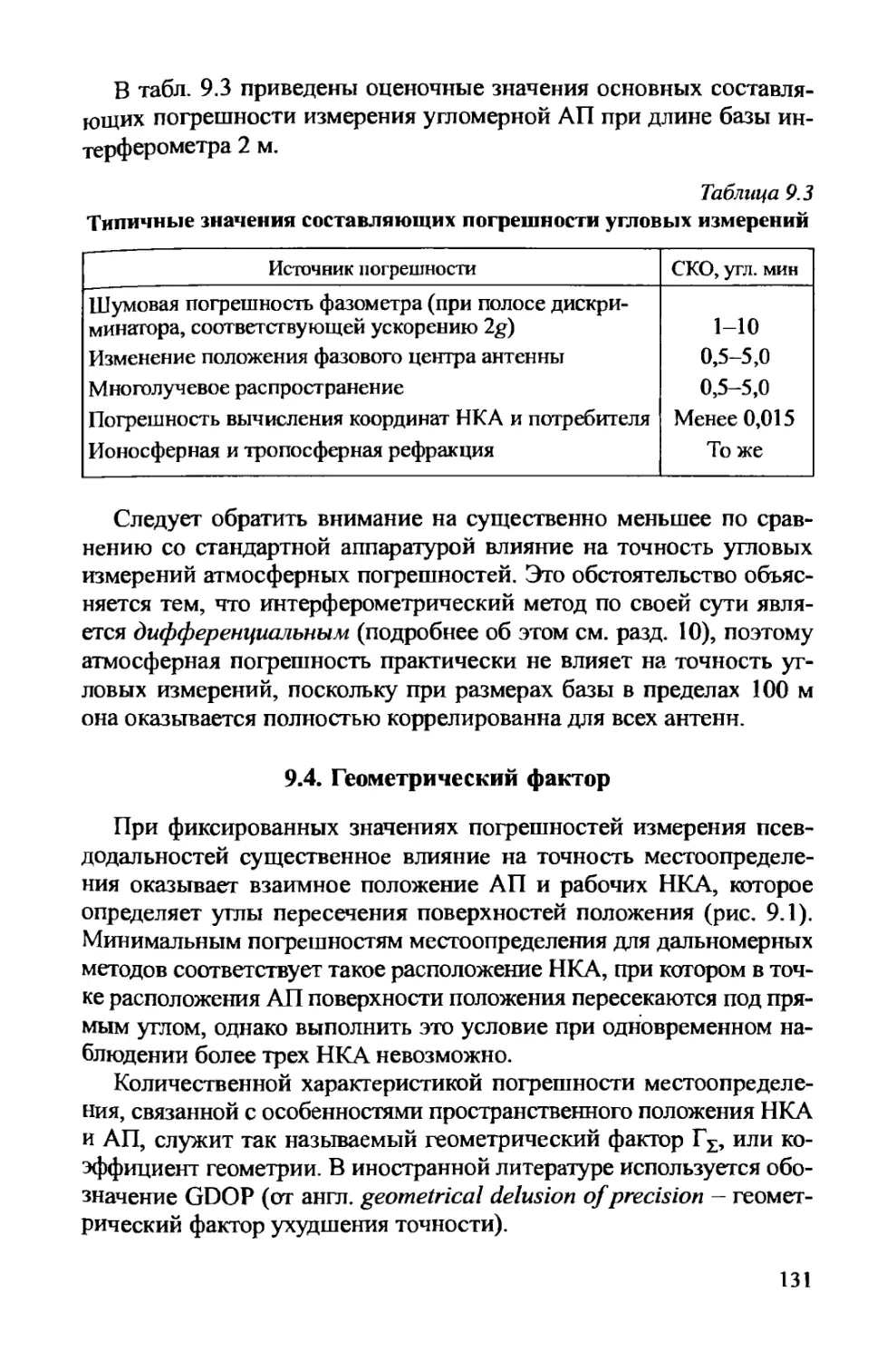
Контрольные вопросы
1. Классификация навигационных систем. Автономные и неавтоном
ные, позиционные и непозиционные системы. Особенности РНС.
2. Основные понятия радионавигации: вектор состояния, ОРНТ, повер
хность и линия положения, радионавигационные и навигационные пара
метры, навигационные функции.
3. Угломерные (радиомаячный и радиопеленгационный) методы радио
навигации.
4. Что такое истинный и обратный пеленг?
5. Как зависит от дальности линейная ошибка в радиопеленгаторах,
что еще влияет на их точность?
6. Дальномерные (импульсный и фазометрический) методы радиона
вигации.
7. Разностно-дальномерные (гиперболические) системы, принцип дей
ствия РНС «Лоран», особенности РНС «Лоран-А», «Лоран-С», «Чайка».
2. СПУТНИКОВЫЕ РНС. ИСТОРИЯ СОЗДАНИЯ,
ПРИНЦИПЫ ПОСТРОЕНИЯ И ФУНКЦИОНИРОВАНИЯ
Принципы навигационных измерений, статистические методы обработ
ки сигналов и другие решения, разработанные применительно к РНС на
земного базирования, явились научно-техническим фундаментом для про
ектирования спутниковых РНС (СРНС). Тем не менее существует ряд при
чин, позволяющих утверждать, что СРНС, по-существу, открыли новую
эру в радионавигации.
Во-первых, любая РНС наземного базирования оставалась локальной,
поскольку ее ОРНТ могли быть размещены только на территории своей
страны или дружественного государства, а огромные пространства океа
нов полностью не «покрывались» даже наиболее мощными передатчика
ми РНС «Лоран-С» и «Омега». При этом вблизи точек нахождения пере
датчиков их мощность представляла реальную опасность для людей и ок
ружающей среды.
Истинную глобальность радионавигационного поля могли обеспечить
только передатчики сигналов, размещенные на искусственных спутниках
Земли (ИСЗ).
Во-вторых, по мере роста интенсивности воздушного движения жиз
ненную важность приобретает информация об абсолютной высоте поле
та, в то время как традиционные бортовые средства радионавигации (ра
дио- и лазерные высотомеры) измеряют высоту относительно поверхнос
ти, находящейся под самолетом в данный момент. Следовательно, для двух
объектов, фактически летящих навстречу друг другу на одной абсолют
ной высоте, измерения текущей высоты могут отличаться, что создает ил
люзию безопасности полета со всеми вытекающими последствиями. От
метим, что навигационные измерения, проводимые по ОРНТ, расположен
ным на поверхности Земли, также не могут обеспечить требуемую точность
определения абсолютной высоты, поскольку для этого необходимо, чтобы
хотя бы одна ОРНТ располагалась над объектом (подробнее об этом см.
разд. 9).
Таким образом, к середине 1950-х годов сложилась насущная потреб
ность кардинального улучшения качества навигационного обеспечения раз
личных потребителей.
16
2.1. СРНС первого поколения
Общепризнанно, что для США толчком к началу практических
работ в области спутниковой радионавигации послужил успешный
запуск в СССР первого искусственного спутника Земли (ИСЗ) (ок
тябрь 1957 г.). В СССР работы в области навигационного исполь
зования ИСЗ были начаты в 1955 г., их результаты были опублико
ваны в 1957 г. одновременно с запуском первого ИСЗ. Ведущая роль
в создании основ теории систем навигации, в которых носителем
источника навигационного сигнала является ИСЗ (далее всюду -
навигационный космический аппарат - НКА), принадлежала науч
ному коллективу Ленинградской военно-воздушной инженерной ака
демии (ЛВВИА) им А.Ф. Можайского под руководством профессо
ра В.С. Шебшаевича [5, 6].
Важнейший постулат, обосновывающий возможность использо
вания в качестве ОРНТ объекта, движущегося со скоростью поряд
ка нескольких километров в секунду, состоит в том, что орбита НКА
и параметры его движения могут прогнозироваться и контролиро
ваться с высокой точностью, т. е. на момент проведения НВО счи
таются известными.
В 1957 г. под руководством академика В.А. Котельникова были
проведены исследования, подтвердив
шие возможность определения пара
метров движения ИСЗ по результатам
измерений доплеровского сдвига час
тоты сигнала ИСЗ, принимаемого по
требителем, координаты которого ап
риори известны. Одновременно была
доказана возможность решения обрат
ной задачи - определения координат
потребителя (приемника) по результа
там измерений доплеровского сдвига
сигнала ИСЗ, траектория движения ко
торого известна потребителю. Рассмот
рим два возможных варианта решения
этой задачи.
Пусть ИСЗ движется с постоянной
скоростью уисз по круговой орбите ра
диуса Лисз, лежащей в плоскости, про
ходящей через центр земной сферы
(рис. 2.1).
Рис. 2.1. Схема дифферен
циального доплеровского ме
тода радионавигации:
17
Потребителю, находящемуся на поверхности Земли, известно по
ложение ИСЗ на орбите в каждый момент времени, а также частота f0
гармонических колебаний, излучаемых передатчиком ИСЗ. Измеряя
доплеровский сдвиг принимаемого сигнала Гд “/(f) - />, можно
построить зависимость /*д(0 доплеровского сдвига от времени. В мо
мент f0, соответствующий кратчайшему расстоянию между ИСЗ и
потребителем, доплеровская частота становится равной нулю: /ц(/0) =
= 0и меняет знак. Наблюдатель, зафиксировав этот момент (в морс
кой навигации его называют моментом прохождения траверза, отсю
да название метода), может утверждать, что находится в плоскости,
нормальной к вектору скорости
ИСЗ. Зная координаты ИСЗ в мо
мент времени f0 и направление век
тора его скорости, можно постро
ить поверхность положения в виде
плоскости, а также линию пересе
чения этой плоскости с поверхно
стью Земли, т. е. линию положения.
Для определения на этой линии
точки, соответствующей положе
нию потребителя, можно восполь
зоваться тем фактом, что при задан
ных гисз, /?исз и /о производная
кривой Fftt) в точке t = t0 однознач
но зависит от расстояния D(t0) меж
ду ИСЗ и потребителем (рис. 2.2).
Определив таким способом D(tG\ строят поверхность положе
ния в виде сферы радиуса D(t0) с центром в точке нахождения ИСЗ
в момент t = f0. Местоположение потребителя соответствует точке
пересечения этой сферы с линией положения. Таким образом, коор
динаты потребителя определяются по результатам измерения време
ни f0 и расчета величины производной в точке t = f0, поэтому
этот метод называют дифференциальным доплеровским, или травер-
зным. Основной недостаток метода состоит в том, что для его реали
зации необходим значительный интервал времени, гарантированно
включающий в себя момент прохождения ИСЗ через траверз. С дру
гой стороны, при измерениях используется только энергия сигнала,
накопленная на коротком интервале времени, прилегающем к мо
менту t = /0- Очевидно, что такой режим энергетически невыгоден,
поскольку для получения приемлемой точности измерений требует
ся большое отношение сигнал/шум на входе измерителя. Это слож¬
Рис. 2.2. Зависимости доплеров
ского сдвига от времени и рассто
яния
18
но сделать, поскольку приемник должен быть широкополосным
(из-за необходимости выполнения операции дифференцирования).
Более эффективным с указанной точки зрения является другой
метод, основанный на интегрировании сигнала на конечных интер
валах времени. Суть этого метода, получившего название интег
рального доплеровского, сводится к следующему. Пусть в точке при
ема аппаратура потребителя определяет доплеровский сдвиг несу
щей частоты сигнала НКА и вычисляет интеграл
h
jFa(t)dt
— jv{t)dt=—[R(tl)-R(t2)\ =—AR,
С i С с
где t2-t\ — фиксированный интервал времени;^ - известная несу
щая частота сигнала НКА; с - скорость света; R - расстояние до
спутника.
Таким образом, значение интеграла от доплеровской частоты на
интервале At = t2- пропорционально разности дальностей до НКА
в моменты времени /j и t2. Поскольку (по условию) координаты
НКА на орбите в отсчетные моменты tx и t2 известны, по значени
ям Δ/?! можно рассчитать поверхности положения потребителя от
носительно НКА, имеющие вид гиперболоида. Определив второе
значение AR2, относящееся к интервалу времени Δ/ = /3 - t2 рас
считывают вторую аналогичную поверхность положения, при этом
положение наблюдателя определяется точкой пересечения этих ги
перболоидов и земной поверхности. Полученная точка, вообще го
воря, не является единственной, т. е. решение навигационной зада
чи не является однозначным. Для устранения этой неоднозначнос
ти можно использовать результаты измерений, полученные в другие
моменты времени, или имеющиеся у потребителя априорные дан
ные его местоположения.
Отметим, что интегральный доплеровский метод, так же, как и
дифференциальный, использует результаты измерений, полученные
на некотором интервале времени, т. е. не обеспечивают возможнос
ти одномоментных НВО.
Началом полномасштабных работ по созданию отечественной
СРНС послужил запуск первого НКА («Космос-192») в середине
1960-х годов [8]. Этот НКА и носитель для него были созданы НПО
прикладной механики (г. Красноярск) под руководством академика
М.Ф. Решетнева. (В настоящее время Красноярское НПО им. Ре-
шетнева является ведущим разработчиком НКА российской СРНС
ГЛОНАСС). НКА «Космос-192» излучал непрерывные сигналы на
19
частотах 150 и 400 МГц; средняя квадратическая погрешность мес-
тоопределения по этому спутнику составляла250...300 м.
Результаты исследований, проведенных в конце 1950-х - начале
1960-х годов, определили технический облик первого поколения СРНС,
который был реализован в советской низкоорбитальной системе
«Цикада», введенной в эксплуатацию в конце 1970-х годов (рис. 2.3).
Система «Цикада» состояла из четырех НКА, высота круговых
орбит которых составляла около 1000 км, период обращения - око
ло 100 мин, наклонение орбитальной плоскости относительно эк
ваториальной - 83°.
Принцип действия:
• 4-6 КА на круговых полярных орбитах, h = 1000 км
• на КА имеется атомный стандарт частоты и времени
• НКУ определяет орбиту КА, расхождение часов относительно
времени UTC и закладывает эти данные на борт каждого КА
• с борта КА излучается сигнал стабильной частоты, содержащий
данные о координатах КА и расхождении часов относительно
времени UTC
• потребитель в последовательные моменты времени измеряет
доплеровский сдвиг частоты сигнала, принимает передаваемую
информацию и использует эти данные для определения
собственных координат
Рис. 2.3. Спутниковые радионавигационные системы «Цикада» (РФ),
«Транзит» (США)
20
При таких параметрах зона радиовидимости НКА для наземно
го потребителя имела радиус порядка 2000 км, а время пребывания
НКА в этой зоне (длительность навигационного сеанса) составля
ла 5... 15 мин, перерыв между сеансами наблюдения различных
спутников составляла от 35 (в приполярных зонах) до 90 мин (вбли
зи экватора). Информацию о положении НКА потребитель получал
из навигационного сообщения, передаваемого с борта спутника в
составе навигационного сигнала. Поскольку длительность навига
ционного сообщения составляла 2 мин, имелась возможность за вре
мя одного навигационного сеанса получить дополнительные (из
быточные) измерения, которые затем усреднялись для повышения
точности местоопределения. В примоиндикаторах СРНС «Цикада»
используется интегральный доплеровский метод, погрешность мес
тоопределения (для морских судов) имеет порядок 100 м среднего
квадратического отклонения (СКО).
В США в конце 1960-х годов была создана низкоорбитальная
СРНС «Транзит», облик и основные параметры которой близки к
параметрам СРНС «Цикада» (рис. 2.4).
В дальнейшем НКА СРНС «Цикада» были дооборудованы ап
паратурой для приема и ретрансляции сигналов бедствия, переда
ваемых радиобуями системы «Коспас». Радиобуи, которыми осна
щаются различные морские суда, самолеты и другие объекты, ра
ботают на частотах 121 и 406 МГц . Их сигналы, ретранслированные
с НКА, принимаются специальными наземными станциями, где оп
ределяются координаты объекта, терпящего бедствие. «Коспас» со
вместно с американо-франко-канадской системой «Сарсат» образу
ют всемирную службу поиска и спасения. За более чем 20-летнюю
историю существования этой службы с ее помощью были спасены
несколько тысяч жизней.
Успешный опыт эксплуатации СРНС «Транзит» и «Цикада»
подтвердил перспективность спутниковой радионавигации как ос
новной линии развития радионавигации в целом. В то же время
стали очевидными принципиальные недостатки СРНС первого по
коления.
Первый недостаток состоял в том, что наличие перерывов меж
ду сеансами наблюдения НКА исключает возможность местоопре
деления в произвольный момент времени или непрерывного мес
тоопределения в течение длительного интервала времени. Умень
шить интервал между сеансами, увеличив количество НКА, было
нельзя, поскольку все НКА использовали идентичные сигналы и
при их одновременном наблюдении возникали взаимные помехи.
2]
Основные технические характеристики:
• точность навигации 2σ = 80...100 м в плане
• покрытие - глобальное
• доступность - перерыв в навигационных определениях
~ 30 мин на широтах 80° N, S и -110 мин на экваторе.
В менее 5% случаев перерыв может достигать
6...8 ч и никогда не превышает 24 ч
непрерывная доступность требует 45...70 КА
на подобных орбитах
• частоты навигационных радиосигналов
150 и 400 МГц
• мощность бортового передатчика 3...5 Вт
• стабильность бортового стандарта частоты
- 1<Г10 за су'пси
Преимущества и недостатки:
• наземная инфраструктура значительно проще
и во многом совмещена со стандартной инфраструктурой
обслуживания орбитальной группировки любых КА
• достаточно компактная аппаратура потребителя
• большая точность по сравнению с разностно-
дальномерными системами
• экологически «чистая» система
• отсутствие непрерывной доступности
• возможность определения только плановых координат
• недостаточная точность для многих гражданских
н военных приложений
Рис. 2.4. Основные технические характеристики СРНС первого поколения
Второй недостаток обусловлен тем, что при интегральном доп
леровском методе местоопределения необходимо результаты изме
рений, соответствующие различным моментам времени, приводить
к одному моменту. Технические средства, существовавшие на мо
мент создания СРНС первого поколения, обеспечивали точность
синхронизации бортового эталона времени НКА и опорного гене
ратора аппаратуры потребителя, соответствующую погрешности
местоопределения неподвижного объекта порядка 50 м (СКО). Для
движущихся объектов точность интегрального доплеровского ме
тода измерений существенно зависит от точности определения соб
ственной скорости движения потребителя. Так, погрешности изме-
22
рения собственной скорости, равной 0,5 м/с, соответствуют погреш
ности местоопределения порядка 500 м, т. е. по сравнению с непод
вижным потребителем погрешность возрастает примерно в 10 раз.
Таким образом, СРНС первого поколения не удовлетворяли тре
бованиям непрерывного высокоточного местоопределения динамич
ных объектов в любой точке Земли с выдачей результатов измере
ний в реальном масштабе времени. Рассматривавшиеся на опреде
ленном этапе варианты расширения возможностей этих систем за
счет увеличения числа спутников при одновременном увеличении
высоты орбиты, а также за счет добавления к доплеровскому каналу
дальномерного канала, не обеспечивали радикального улучшения си
туации, поскольку перспективная СРНС должна предоставлять по
требителю возможность в любой момент времени определять три
координаты, вектор скорости и точное время. Для реализации такой
возможности необходимо проводить измерения не менее чем по че
тырем спутникам, что накладывает соответствующее условие на
структуру орбитальной группировки НКА: в любой момент време
ни в любой точке земной поверхности должна быть обеспечена воз
можность наблюдения не менее четырех НКА, при этом общее число
НКА в группировке должно быть минимальным. Удовлетворить эти
и другие важные требования путем модернизации и СРНС первого
поколения было невозможно. Поэтому начиная с 1970-х годов в
СССР и США практически одновременно были начаты работы по
созданию СРНС второго поколения.
2.2. СРНС второго поколения
В основу концепции построения СРНС второго поколения
(ГЛОНАСС и GPS) был положен ряд принципиальных требований,
вытекающих из назначения систем. Согласно этим требованиям, соз
даваемое ими навигационное поле должно быть глобальным, не
прерывным в пространстве и времени, обеспечивать необходимую
кратность (не менее четырех) покрытия рабочей зоны, возможность
НВО независимо от метеоусловий, рельефа местности (при усло
вии радиовидимости необходимого числа НКА), а также от харак
тера движения объекта. Требовалось также обеспечить беззапрос-
ностъ и независимость НВО. Беззапросность системы означает, что
процесс формирования и излучения навигационных сигналов про
исходит автономно и не требует инициализации со стороны потре
бителя. Независимость подразумевает возможность определения
искомых навигационных параметров непосредственно в аппарату¬
23
ре потребителя без привлечения других средств. При этом аппара
тура потребителя должна быть максимально компактной и иметь
невысокую стоимость, поэтому максимум функциональной нагруз
ки перенесен на аппаратуру НКА и наземного комплекса управле
ния (НКУ).
В дальнейшем, по мере развития гражданских применений
СРНС, таких как управление воздушным движением и судовожде
нием, все большее значение приобретали следующие характерис
тики СРНС: доступность, целостность и непрерывность обслу
живания. Дадим определения этим терминам:
• доступность (готовность) - вероятность работоспособности
СРНС в момент обращения к ней и в процессе навигационного се
анса;
• целостность - вероятность выявления отказа системы в тече
ние заданного времени или быстрее;
• непрерывность - вероятность сохранения непрерывной рабо
тоспособности системы на заданном промежутке времени (Под за
данным, как правило, подразумевается наиболее важный с практи
ческой точки зрения отрезок времени, например, время захода на
посадку воздушного судна.)
Современные требования к указанным характеристикам весьма
высоки. Так, доступность при маршрутном полете должна быть не
ниже 0,999, а при полете в зоне аэродрома - не ниже 0,99999. Це
лостность, согласно требованиям Международной организации
гражданской авиации, должна быть не ниже 1 - 5-10 при допусти
мом времени предупреждения не более 1с.
Для решения поставленной задачи при проектировании СРНС
второго поколения были избраны среднеорбитальные НКА с высо
той орбиты порядка 20 тыс. км (дальнейшее увеличение высоты
орбиты нецелесообразно, так как практически не приводит к рас
ширению зоны видимости НКА). Период обращения НКА при та
кой высоте орбиты равен примерно 12 ч. В этом случае, чтобы га
рантировать в любой точке Земли одновременное наблюдение не
менее четырех НКА, в составе орбитальной группировки должно
быть не менее 18 НКА, однако для повышения точности и надеж
ности навигационных измерений было решено увеличить это чис
ло до 24. Кроме изменения структуры и геометрии орбитальной
группировки, в СРНС второго поколения с самого начала были за
ложены средства, обеспечивающие прецизионную взаимную синх
ронизацию бортовых шкал (эталонов) времени НКА. Большое вни
мание уделялось также развитию средств высокоточного определе¬
24
ния и прогнозирования параметров орбит (эфемерид) НКА. Реше
ние перечисленных, а также и многих других второстепенных за
дач позволило создать, ввести в эксплуатацию и предоставить в
пользование всему населению Земли две среднеорбитальные
СРНС второго поколения: российскую, получившую название
ГЛОНАСС (Глобальная навигационная спутниковая система), и
американскую, первоначально названную NAVSTAR (Navigation
Satellite Time and Ranging), а в настоящее время обычно именуе
мую GPS (Global Positioning System).
Первоначально эти системы проектировались как сугубо воен
ные и предназначались для решения задач навигации стратегичес
ких подводных лодок и авиации, а также для наведения ракетного
вооружения, прежде всего высокоточного оружия дальнего радиу
са действия. Это обстоятельство нашло свое отражение и в терми
нологии: СРНС, разработку которой ВВС США начали в 1973 г.,
получила название DNSS (Defense Navigation Satellite System — обо
ронительная система спутниковой навигации). Вплоть до 1991 г.
большая часть пользовательского оборудования GPS продавалась
только по лицензиям. На X конференции по радионавигации, со
стоявшейся в 1991 г., было объявлено, что, начиная с 1993 г. GPS
как минимум в ближайшие 10 лет будет доступна на уровне стан
дартной точности как бесплатная, непрерывная и всемирная. Впос
ледствии этот срок был распространен «на все обозримое будущее»,
однако военные приемники, антенны и другое специальное обору
дование запрещены для экспорта и в настоящее время.
На 1991-1992 гг. (кризис в Персидском заливе) пришлось и пер
вое крупномасштабное боевое применение GPS, причем, по мне
нию экспертов, спутниковая навигация стала одним из двух средств
(под вторым подразумевалась аппаратура ночного видения), без ко
торых победить в современной войне невозможно. Отметим, что
перед началом проведения операции «Буря в пустыне» США пред
приняли ряд специальных мер по расширению возможностей GPS:
была пополнена группировка НКА, а орбиты 16 НКА были изме
нены так, чтобы обеспечить максимальное покрытие зоны боевых
действий. В то же время отметим, что только 10 % общего числа
высокоточного оружия, примененного во время операции «Буря в
пустыне», использовало GPS в качестве средства наведения (во вре
мя боевых действий в Косово этот показатель составил 95 %).
Интересно, что конфликт в Персидском заливе дал сильный
толчок развитию коммерческого применения GPS: поскольку
25
военные приборы нужного класса в необходимом количестве аме
риканской промышленностью не выпускались, для сухопутных
войск были заказаны и приобретены 10 тыс. коммерческих (граж
данских) малогабаритных приемоиндикаторов, что стимулирова
ло расширение выпуска и применения таких устройств. Следует
признать, что финансовая политика США в данном вопросе ока
залась весьма дальновидной: быстрое развитие коммерческого
сектора спутниковой навигации позволило привлечь средства
гражданских потребителей, которые инвестировались в развитие
системы.
История применения российской СРНС ГЛОНАСС не так бога
та, но и в ней были заметные события. В частности, успешный во
всех отношениях, но, к сожалению, ставший первым и последним
полет советского космического челнока «Буран», включая эффект
ную автоматическую «самолетную» посадку корабля на аэродром,
контролировался спутниковой навигационной аппаратурой отече
ственного производства.
Контрольные вопросы
1. Ограничения, присущие РНС наземного базирования.
2. Основные постулаты спутниковой навигации.
3. Траверзный метод местоопределения.
4. Интегральный доплеровский метод местоопределения.
5. СРНС «Цикада» и «Транзит», параметры, принципы навигационных
измерений.
6. Факторы, определяющие достижимую точность СРНС первого по
коления.
7. Что ограничивало возможности развития и модернизации СРНС пер
вого поколения?
8. СРНС второго поколения (ГНСС). Концепция создания, их характе
ристики (доступность, целостность, непрерывность и др.).
9. Соображения, положенные в основу выбора состава и параметров
орбитальных группировок СРНС второго поколения.
10. Основные этапы создания СРНС второго поколения.
3. МЕТОДЫ ИЗМЕРЕНИЯ
НАВИГАЦИОННЫХ ПАРАМЕТРОВ
Напомним (см. разд. 1), что основным содержанием задачи НВО в
ГНСС является определение вектора состояния потребителя. В качестве
компонент этого вектора обычно рассматривают пространственные коор
динаты х, у, ζ потребителя временную поправку τπ шкалы времени потре
бителя относительно системной шкалы, а также составляющие вектора
скорости х, у, i. Указанные навигационные параметры определяются на
основании измерения РНП. В ГНСС ГЛОНАСС и GPS используются в ос
новном дальномерный и радиально-скоростной методы измерений.
В этом случае РНП являются время распространения (задержка) τ сигна
ла на трассе НКА - потребитель и доплеровское смещение несущей час
тоты Гд. Соответствующая им дальность НКА - потребитель R и ради
альная скорость потребителя относительно НКА vr являются навигаци
онными параметрами, а связывающие их навигационные функции в данном
случае имеют вид R = ci;vr = Гд/λ.
Рассмотрим основные виды НВО, базирующиеся на результатах изме
рений указанных РНП.
3.1. Методы НВО, основанные на измерении
времени прихода сигнала
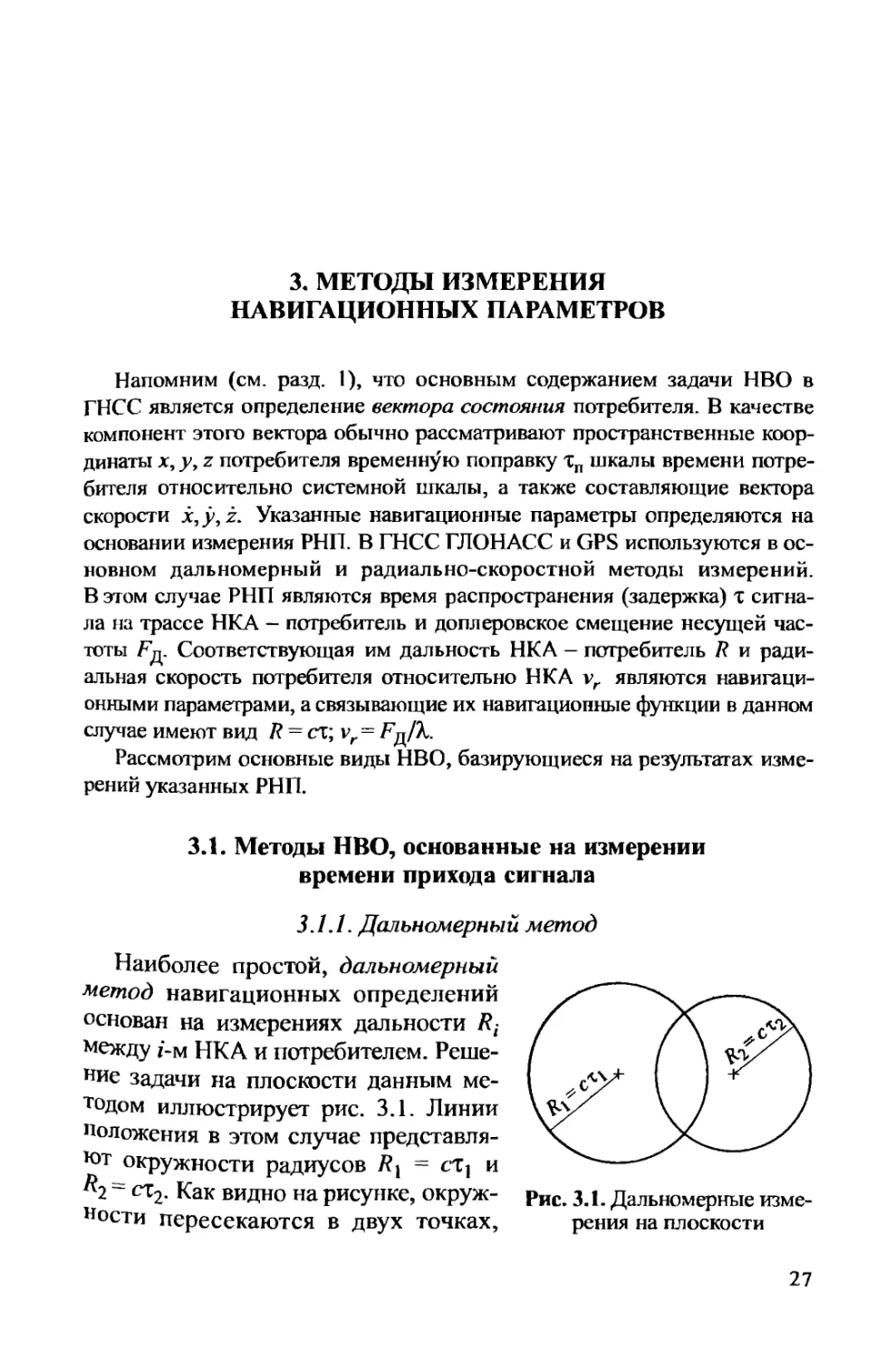
3.1.1. Дальномерный метод
Наиболее простой, дальномерный
метод навигационных определений
основан на измерениях дальности /?,·
между ι-м НКА и потребителем. Реше
ние задачи на плоскости данным ме
тодом иллюстрирует рис. 3.1. Линии
положения в этом случае представля-
Ют окружности радиусов Rx = схх и
^2 ~ сх2. Как видно на рисунке, окруж
ности пересекаются в двух точках,
Рис. 3.1. Дальномерные изме
рения на плоскости
27
т. е. при измерениях возникает неоднозначность, для устранения ко
торой необходима дополнительная информация.
При трехмерных измерениях поверхность положения для каж
дого z-ro НКА представляет сферу радиуса Rh центр которой рас
положен в центре масс НКА. Уравнение этой сферы имеет вид
Ri = V(*c/ - *)2 + (Ус, - У)2 + (*С / - *)2, 1 (3-1)
Здесь хС1, уф zci - известные на момент измерения координаты z-ro
НКА (данные, необходимые для расчета текущих координат НКА,
так называемая эфемеридная информация, передаются с НКА потре
бителю в составе навигационного сообщения, см. разд. 6); х, у9 z -
координаты потребителя, которые необходимо определить; ί - но
мер НКА
Местоположение потребителя, т. е. его координаты х, у, ζ, опре
деляют как координаты точки пересечения трех поверхностей по
ложения, другими словами, трех сфер (рис. 3.2). Поэтому для реа
лизации дальномерного метода необходимо измерить дальности до
трех НКА, т. e. i = 1, 2, 3.
Рис. 3.2. Поверхности положения для дальномерного метода
Таким образом, для дальномерного метода навигационная функ
ция представляет собой систему из трех квадратных уравнений вида
(3.1). Ввиду нелинейности такой системы уравнений возникает про
блема неоднозначности определения координат, устраняемая с помо
щью известной потребителю дополнительной информации (априор
ные координаты потребителя, его радиальная скорость и т. д.).
Принципиально важным с точки зрения практического исполь
зования дальномерного метода является следующее. Уравнение (3.1)
28
справедливо в предположении, что все входящие в это выражение
величины относятся к одному и тому же моменту времени. На са
мом деле момент наступления любого события, происходящего на
борту НКА (например, начало излучения сигнала), может быть оп
ределен только относительно бортовой шкалы времени (БШВ), фор
мируемой бортовым эталоном времени и частоты. При этом потре
битель П фиксирует момент приема этого сигнала в собственной
шкале времени потребителя (ШВП). Если БШВ и ШВП идеально
синхронизированы, то проблем не возникает, однако для этого необ
ходимо иметь в аппаратуре потребителя (АП) высокостабильный эта
лон времени (частоты) и периодически проводить его калибровку по
ШВ НКА, что технически сложно и экономически не оправдано. При
наличии смещения ШВП относительно БШВ δτ = /БШВ - /швп изме
ренная потребителем величина τπ задержки сигнала на трассе рас
пространения НКА-II будет отличаться от истинной задержки τ на
величину δτ, поэтому величина τπ фактически является псевдоза
держкой. (Более строгое определение понятия псевдозадержки см.
в [12].) Соответственно, рассчитанная на основании измеренного
потребителем значения τπ дальность до /-го НКА Rt = с τπ отлича
ется от истинной на величину δκ = сбт, т. е. представляет собой
псевдодалъностъ. Координаты потребителя x,y,z в этом случае так
же определяются с погрешностью, значение которой с учетом ре
альных значений смещения шкал δτ может достигать десятков и
сотен метров. Поэтому на практике дальномерный метод практи
чески не применяется, вместо него используют псевдодальномер-
ный метод.
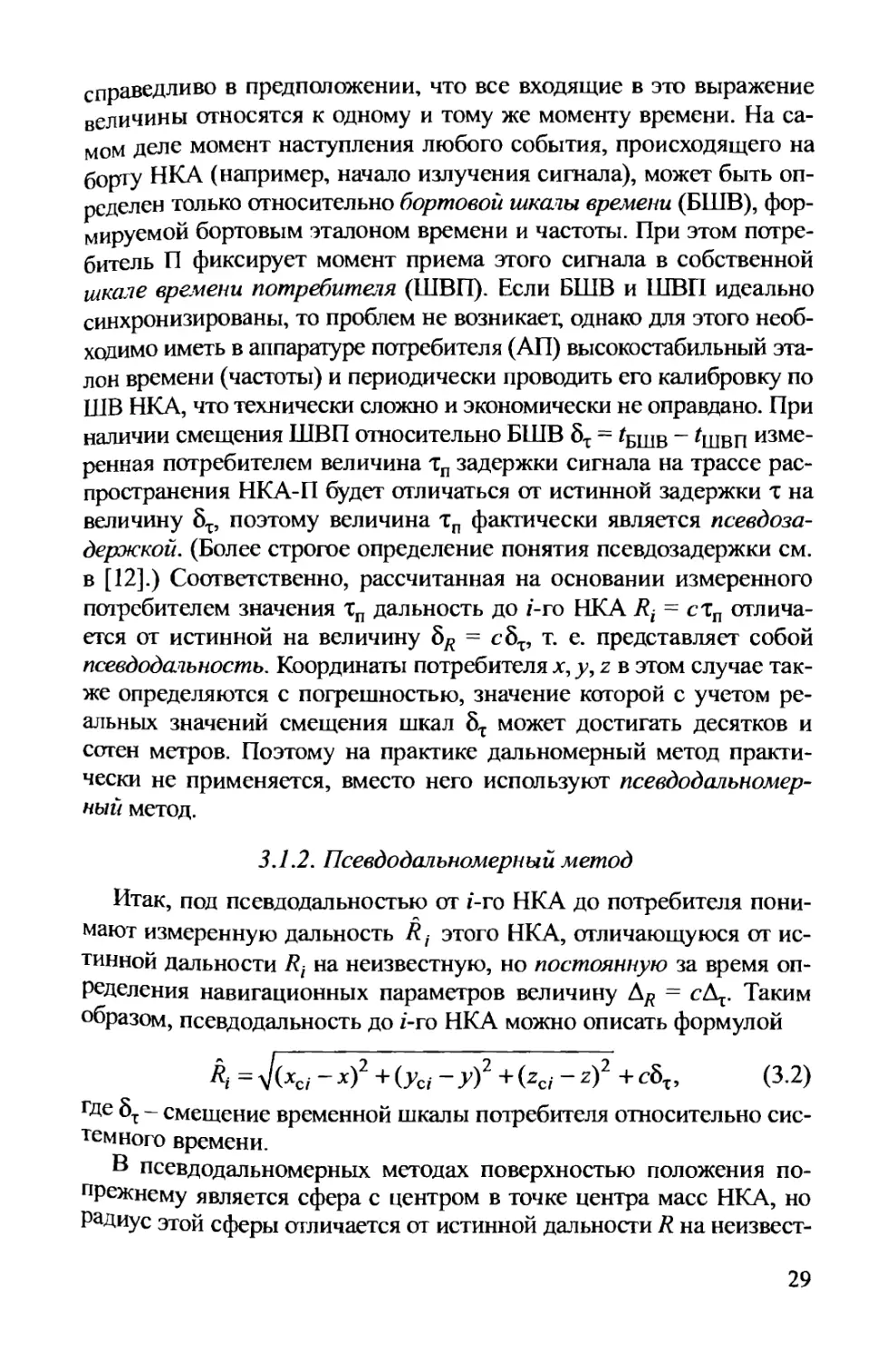
3.1.2. Псевдодальномерный метод
Итак, под псевдодальностью от /-го НКА до потребителя пони
мают измеренную дальность R, этого НКА, отличающуюся от ис
тинной дальности /?, на неизвестную, но постоянную за время оп
ределения навигационных параметров величину AR = cA^ Таким
образом, псевдодальность до /-го НКА можно описать формулой
А = \/(*с/ - *)2 + (Уа - У)2 + (2С/ - ζ)2 + (3.2)
Где δτ - смещение временной шкалы потребителя относительно сис
темного времени.
В псевдодальномерных методах поверхностью положения по-
прежнему является сфера с центром в точке центра масс НКА, но
Радиус этой сферы отличается от истинной дальности R на неизвест¬
29
ную величину AR = cbv Существенно, что поскольку БШВ всех
НКА синхронизированы с высокой точностью, величина задержки
считается одинаковой для всех НКА (рис. 3.3).
Измерение псевдодальностей до трех НКА приводит к системе
трех уравнений, содержащих четыре неизвестных - координаты по
требителя jc, уу z и задержку bR. Для устранения возникшей неопре
деленности необходимо провести дополнительное измерение, т. е.
измерить псевдодальность до четвертого спутника. Полученная та
ким образом система четырех уравнений имеет однозначное реше
ние и, следовательно, местоположение потребителя при измерени
ях псевдодальностей определяется как точка пересечения четырех
поверхностей положения. Именно необходимость обеспечить в лю
бой точки Земли возможность одновременного наблюдения как ми
нимум четырех НКА в значительной степени определяет структуру
и параметры орбитальной группировки ГНСС.
Рис. 3.3. Схема псевдодальномерных измерении
при определении положения на плоскости
Необходимо обратить внимание, что положенное в основу псев-
додальномерного метода допущение о том, что бортовые шкалы
всех НКА синхронизированы с высокой точностью, справедливо
только для каждой из ГНСС - ГЛОНАСС и GPS - по отдельности.
Если же в рабочее созвездие включены НКА обеих ГНСС, то, по
скольку их БВШ в настоящее время не синхронизированы, система
30
уравнений, которую необходимо решить при НЕЮ, содержит не че
тыре, а пять неизвестных - три псевдодальности и две величины
смещения шкал: бтГЛ0НАСС и 5tGPS. Соответственно возрастает не
обходимое число независимых измерений.
Псевдодальномерный метод не накладывает жестких ограниче
ний на значение погрешности ШВП, поскольку позволяет одновре
менно с определением местоположения вычислять эту погрешность
и при необходимости скорректировать ее.
3.13. Разностно-далъномерный метод
Метод основан на измерении разности дальностей от потреби
теля до одного или нескольких НКА. По своей сути этот метод ана
логичен псевдодальномерному, так как его целесообразно приме
нять только при наличии в дальномерных измерениях неизвестных
сдвигов δΛ, т. е. когда фактически проводятся измерения псевдо
дальностей. Разностно-дальномерный метод использует три разно
сти ΔRy = Ri — Rj до четырех НКА, которые не содержат величину
δ/г. Последняя, как и в псевдодальномерном методе, считается оди
наковой для всех НКА и постоянной за время навигационных опре
делений. Очевидно, что при этом допущении разности псевдодачь-
ностей равны разностям истинных дальностей, для определения
которых требуется лишь три независимых уравнения. Навигацион
ным параметром является AR^.
Поверхности положения в разностно-дальномерном методе оп
ределяются из условия ARjj = const и представляют собой поверх
ности двухполостного гиперболоида вращения, фокусами которого
являются координаты опорных точек i и j (центров масс /-го и у-го
НКА) (см. разд. 2). Расстояние между этими опорными точками
называют базой измерительной системы. Если расстояния от опор
ных точек (НКА) до потребителя велики по сравнению с размера
ми базы, то гиперболоид вращения в окрестности точки потреби
теля практически совпадает со своей асимптотой - конусом, вер
шина которого находится в середине базы.
В литературе показано, что разностно-далъномерный и псевдо
дальномерный методы обеспечивают одинаковую точность опреде
ления координат потребителя [7]. Недостатком разностно-дально-
МеРного метода является то, что в рамках этого метода нельзя из
мерить смещение δ/г, а следовательно, невозможна корректировка
ШВП.
31
3.2. Методы, основанные на измерении
доплеровского сдвига
3.2.1. Радиально-скоростной метод
Метод основан на измерении трех радиальных скоростей vri^Ri
перемещения потребителя относительно трех НКА. Физической ос
новой радиально-скоростного метода является зависимость ради
альной скорости точки относительно НКА от координат и относи
тельно скорости НКА. Дифференцируя уравнение (3.1) по време
ни, получаем
Rj = [К/ - *)(*с/ ~*) +Ос, - у)(Ус, - у)+Ос, - ООс/ - z)]/Ri. (3.3)
Здесь компоненты {(хС1 - х), (уы — у), (zci - z)} характеризуют век-
тор относительной скорости; Ri - относительные координаты по
требителя.
Из соотношения (3.3) следует, что для определения компонент
{jc,y,z} вектора скорости необходимо знать:
• векторы координат {*cf-,;yc/,zc/} трех (/ = 1, 2, 3) НКА;
•ихскорости {xci,yci,zci};
• координаты потребителя {x,y,z}.
Координаты НКА и их производные известны из эфемеридной
информации. Координаты потребителя, в принципе, можно полу
чить, если применить интегральный доплеровский метод (см.
разд. 2), т. е. измерить радиальные скорости Ri в течение некото
рого времени At, а затем вычислить интеграл
ί+Αί
Δ, = J Λ,.(ΟΛ=*/(ί + Δί)-Λ,(0· (3.4)
t
Недостатком этого метода измерения, как упоминалось в разд. 2,
является невозможность определения координат потребителя в ре
альном масштабе времени. В ГНСС этот недостаток особенно ощу
тим, поскольку из-за большой высоты орбиты НКА градиент ради
альной скорости мал, поэтому для достоверного измерения раз
ности Αί необходимо длительное наблюдение. Поэтому в ГНСС
доплеровские методы применяются только для определения состав
ляющих скорости потребителя, а для получения информации о коор
динатах {χ,γ,ζ} используется один из описанных выше вариантов
дальномерного метода.
Кроме того, при определении скорости потребителя радиально
скоростным методом любая нестабильность частоты его опорного
32
генератора приводит к неконтролируемому изменению доплеровс
кого смещения частоты, а следовательно, к дополнительным ошиб
кам измерения составляющих скорости потребителя. Иными сло
вами, этот метод так же, как и дальномерный, предполагает нали
чие в аппаратуре потребителя прецизионного стандарта частоты
(времени). Поэтому на практике применяется модификация этого
метода, описанная ниже.
3.2.2. Псевдорадиалыю-скоростной метод
Псевдорадиально-скоростной (псевдодоплеровский) метод позво
ляет определять вектор скорости потребителя в присутствии неизве
стного смещения частоты сигнала, например из-за нестабильности
эталона частоты. При наличии такого смещения bRi выражение для
радиальной скорости можно представить в виде двух слагаемых:
Ri=Rj +bRj = [(xci-x)(xci-x) + (yci-y)(yci-y) +
+ Ос i - z)Oc, - z)]/Ri + δΛ(. (3.5)
По своей сущности метод алогичен псевдодальномерному мето
ду определения координат потребителя. Для нахождения вектора
скорости потребителя {х, у, ζ} и поправки bR, = λΔ/^7 необходи
мо провести измерения по четырем НКА и решить систему четы
рех уравнений вида (3.5). Для ее решения необходимо знать даль
ность Ri и координаты {х,у, ζ) потребителя. Эта информация мо
жет быть получена из псевдодальномерных измерений (3.2).
3.2.3. Разностно-радиально-скоростной метод
Сущность этого метода заключается в определении разностей
радиальных скоростей НКА. Измерения необходи
мо провести не менее, чем по трем парам НКА. При этом один и
тот же НКА может входить в одну, две или три пары, т. е. мини
мально необходимое для однозначных измерений число НКА оста
лся равным четырем. По существу, при вычислении разностей мо
гут использоваться и псевдорадиальные скорости Riy так как при
таком вычитании компенсируется неизвестное смещение δ/?7 (в
предположении, что это смещение одинаковое для различных спут
ников). Навигационные параметры
= [(*ci - х)(*с/ - х) + (Vc< - У){Уа -Я + (zci - z)(zci - z)]/R, -
-[Ц, ~x)(xCJ -x) + (yCJ -y)(ycj-y) + (zcj — z)(zCJ — z)]/Rj■
33
Поверхности положения представляют собой поверхности тела
вращения, фокусами которого являются координаты центров масс
i-го и j-го НКА.
Так же, как и для «дальномерных» методов, точность определе
ния составляющих вектора скорости в разностно-радиально-ско
ростном методе совпадает с точностью определения тех же состав
ляющих в псевдорадиально-скоростном методе.
Достоинством разностно-радиально-скоростного метода являет
ся его нечувствительность к нестабильностям эталонов частоты и
другим неконтролируемым смещениям частоты, а его недостатком -
невозможность оценки нестабильности эталонов частоты.
3.3. Комбинированные методы
Помимо перечисленных основных методов определения компо
нент вектора потребителя существуют комбинированные методы,
использующие кроме АП ГНСС дополнительные измерители коор
динат, имеющиеся у потребителя. Так, в дальномерном методе при
наличии у потребителя измерителя высоты h можно вместо изме
рений трех дальностей до НКА ограничиться измерением двух даль
ностей. В этом случае навигационная функция будет включать два
уравнения вида (3.1), а третье уравнение составляется по результа
там измерения высотомера:
(R3 + h)2 = х2 + у2 + z2,
1де /?3 - радиус Земли.
Комплексирование спутниковой навигационной аппаратуры
с датчиками информации, использующими другие физические прин
ципы, является одним из быстроразвивающихся направлений разви
тия средств навигации. Некоторые варианты построения комплекси-
рования навигационной аппаратуры рассмотрены в разд. 11.
Другой аспект использования комбинированных методов заклю
чается в замене совокупности одновременных измерений на ком
бинацию одновременных и последовательных измерений или на со
вокупность только последовательных измерений, например опре
деление координат потребителя разностно-скоростным методом
(3.5). В качестве другого примера можно привести псевдодально-
мерный метод, который можно реализовать, заменив четыре одно
временных измерения по четырем НКА на два последовательных
измерения по двум НКА или на четыре последовательных измере
ний до одного НКА. Однако такая замена возможна только при ус¬
34
ловии, что за время получения измерений допустимо пренебречь
изменение координат потребителя пренебрежимо мало, т. е. для не
подвижных или низкодинамичных объектов.
Аналогичные комбинации возможны и для других методов.
Контрольные вопросы
1. В чем состоит дальномерный метод определения координат по сиг
налам НКА? Какое допущение относительно БШВ и ШВП лежит в осно-
ве дальномерного метода?
2. Какой вид имеет поверхность положения при дальномерных изме
рениях?
3. Какое минимальное число НКА необходимо наблюдать для одномо
ментного трехмерного местоопределения дальномерным методом? Явля
ются ли результаты местоопределения однозначными?
4. Какое допущение относительно шкал времени НКА и потребителя
лежит в основе псевдодальномерного метода НВО? Какой вид имеет по
верхность положения при псевдодальномерных измерениях?
5. Какое минимальное число НКА необходимо наблюдать для одномо
ментного трехмерного местоопределения псевдодальномерным методом?
Изменится ли это число при работе по совмещенному (ГЛОНАСС+GPS)
созвездию?
6. Чем отличаются уравнения для дальности и псевдодальности? Ка
кая величина называется псевдозадержкой?
7. Разностно-дальномерный метод определения координат по сигналам
НКА. Какой вид имеет поверхность положения при разностно-дальномер-
ных измерениях?
8. Какое минимальное число НКА необходимо наблюдать для трех
мерного одномоментного местоопределения разностно-дальномерным ме
тодом?
9. Возможна ли корректировка ШВП по результатам разностно-даль-
номерных измерений?
10. Отличается ли потенциальная точность НВО псевдодальномерным
и разностно-дальномерным методами?
11. Какие параметры ВС НКА и потребителя необходимо знать, чтобы
использовать радиально-скоростной метод? Какое допущение относительно
БШВ и ШВП лежит в его основе?
12. В чем суть псевдорадиально-скоростного и разностно-радиально
скоростного методов НВО?
13. Для решения каких задач и почему в СРНС второго поколения ис
пользуют доплеровские методы?
14. Какое минимальное число НКА необходимо для местоопределения
Неподвижного потребителя при отсутствии ограничений на время наблю
дения?
4. ОСНОВНЫЕ ПРИНЦИПЫ ПОСТРОЕНИЯ
И ФУНКЦИОНИРОВАНИЯ
ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ
СПУТНИКОВЫХ СИСТЕМ
Принципиальная особенность ГНСС состоит в том, что роль ОРНТ в
них играют НКА, совершающие автономное орбитальное движение По
этому в отличие от РНС наземного базирования, основными подсистема
ми которых являются аппаратура базовых станций и аппаратура потреби
теля, в составе ГНСС обязательно входит еще одна подсистема - назем
ный комплекс управления (НКУ). Эта подсистема обеспечивает контроль
и прогнозирование параметров орбиты НКА, контроль точности и кор
рекцию бортовых эталонов времени, дистанционный мониторинг исправ
ности бортовой аппаратуры и управление режимами ее работы, составом,
объемом и скоростью передачи служебной информации и пр.
4.1. Обобщенная структурная схема ГНСС
В настоящее время в структуру ГНСС входят три основные под
системы [13]:
• подсистема навигационных космических аппаратов;
• орбитальная группировка (ОГ);
• подсистема контроля и управления (НКУ);
• подсистема АП.
Кроме указанных подсистем в структуру ГНСС входят так на
зываемые средства функциональных дополнений, т. е. специальная
наземная аппаратура, используемая для обеспечения потребителям
в определенном регионе или локальной области дополнительных
возможностей, например повышения точности измерений за счет
использования дифференциальных методов измерений (подробнее
об этом см. разд. 10).
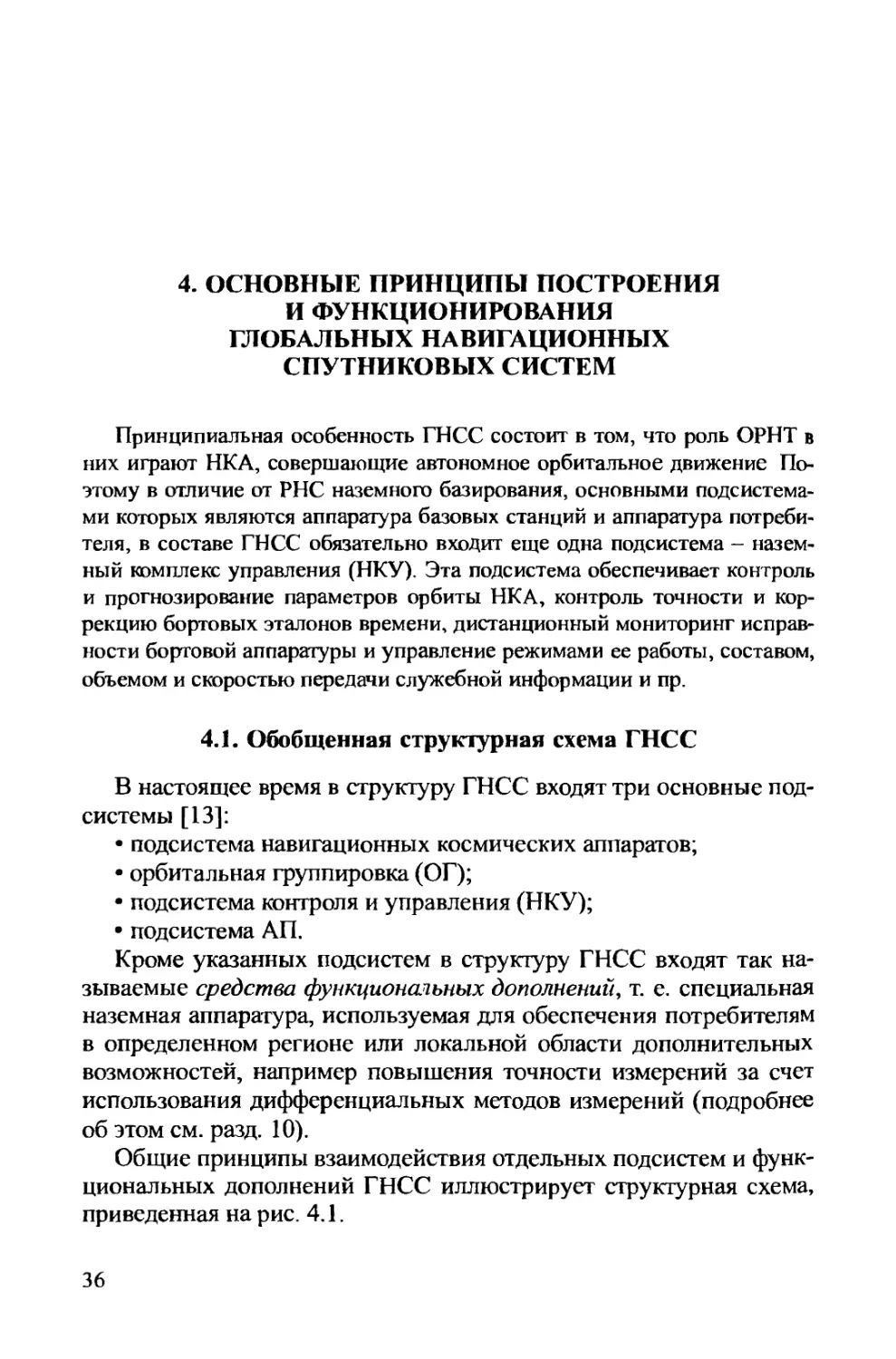
Общие принципы взаимодействия отдельных подсистем и функ
циональных дополнений ГНСС иллюстрирует структурная схема,
приведенная на рис. 4.1.
36
Рис. 4.1. Общая структура ГНСС
Принципы и особенности построения подсистем НКА и НКУ,
присущие ГНСС ГЛОНАСС и GPS, описаны ниже.
4.2. Подсистема НКА ГЛОНАСС
Основное назначение НКА - формирование и излучение жестко
синхронизированных сигналов, которые используются потребителя
ми для навигационных определений, а назначение НКЦ — контроль
функционирования бортовых систем и организация управления их
работой. Соответственно, в состав бортовой аппаратуры входят пе
редатчики и антенны навигационных сигналов и телеметрической
информации, антенны и приемники данных и команд, передаваемых
°т НКУ, бортовой эталон времени и частоты, блоки ориентирова
ния, источники питания и различное вспомогательное оборудова
ние. На НКА может также размещаться дополнительное оборудо
вание, например детекторы обнаружения ядерных взрывов и эле
менты систем боевого управления.
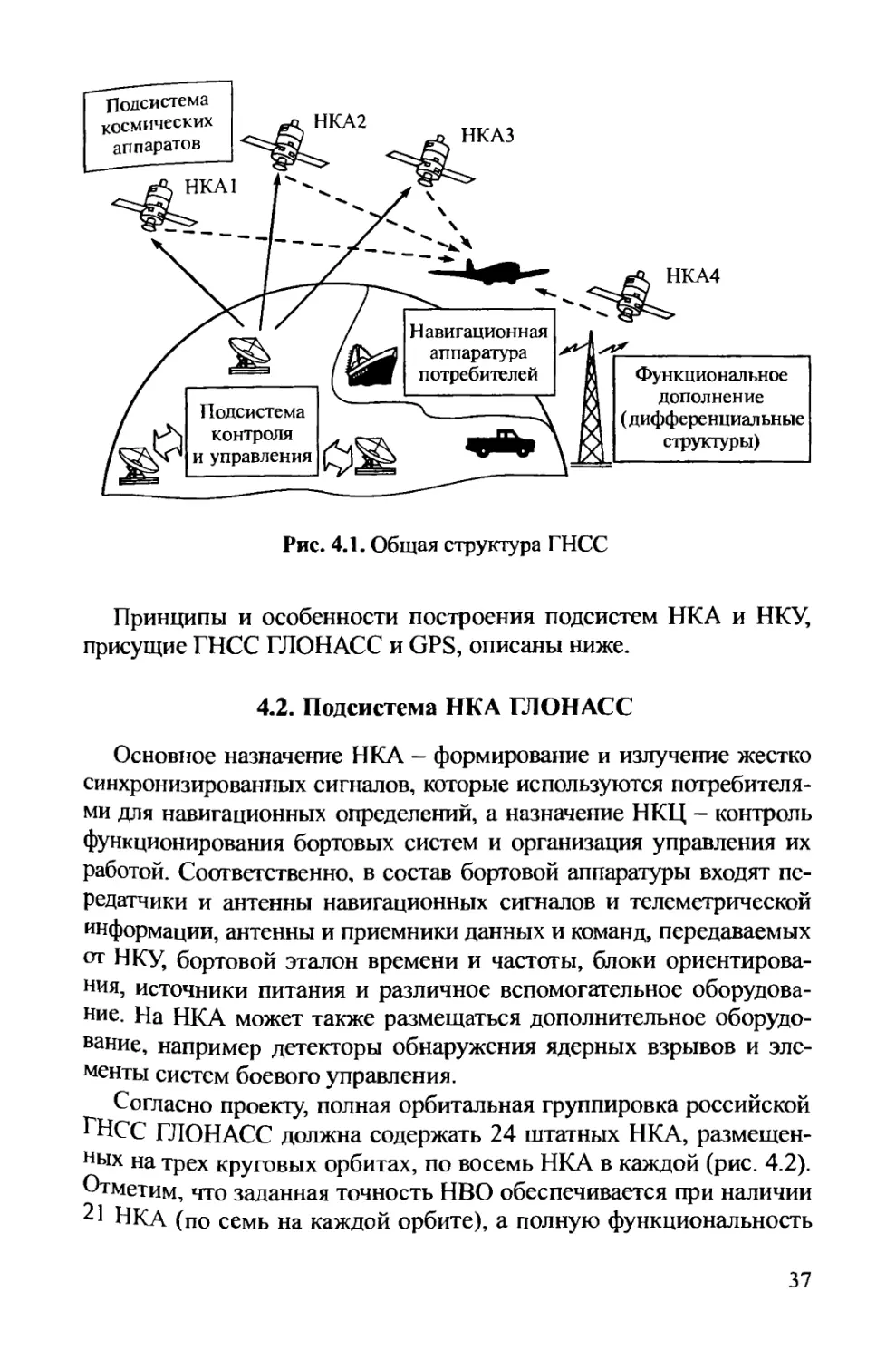
Согласно проекту, полная орбитальная группировка российской
ГНСС ГЛОНАСС должна содержать 24 штатных НКА, размещен
ных на трех круговых орбитах, по восемь НКА в каждой (рис. 4.2).
Отметим, что заданная точность НВО обеспечивается при наличии
21 НКА (по семь на каждой орбите), а полную функциональность
37
В группировке 16 КА
по целевому назначению 14 КА
на стадии ввода в систему О КА
на техобслуживании 2 КА
Блок 38 Блок 39
запуск - сентябрь 2008 г запуск - декабрь 2008 г.
й./
ImIWI.U Iwm.U IiumM
Ijwibl I mui Λ! 1 4.MR-V
V» VM
t Д · .1 С М'7 «η CM "> m
%JT .«n *>v
14 7*. 1Ч'*| 1 AT 1 «<
f
lil»К4 \ ИМ1.»
11л тех. (4Vjr>T»mMnhiM
Ψ vr v и
V га
law·** Я»*ге%
Jtfkt: Я- JMi»v i'.CJ*
wu» *> *
JM·.»· 2Ы*ЛГ
ГЛ 7« ГМ 'дп
U14« К1X1
Ьнст tamtK
>Ι»2*ν1· >*13***
< M 9mt l W *»ι
Рис. 4.2. Текущее состояние орбитальной группировки ГЛОНАСС
система сохраняет при выходе из строя до шести НКА (по два на
каждой орбите). Таким образом, полная группировка ГЛОНАСС со
держит «горячий резерв» от трех до шести НКА.
Полномасштабные летные испытания ГНСС ГЛОНАСС начались
в 1982 г. запуском спутника «Космос-1413». Первоначально разра
батывавшаяся как система военного назначения, ГНСС ГЛОНАСС
в 1999 г. получила статус системы двойного (военного и граждан
ского) применения, ответственными за использование, поддержа
ние и развитие которой являются Министерство обороны РФ и Рос
сийское космическое агентство. Соответствующими постановлени
ями Правительства РФ от 1995 и 1999 гг. определено, что ГНСС
ГЛОНАСС в стандартном режиме может бесплатно использоваться
в гражданских, коммерческих и научных целях любыми потреби
телями. Основным документом, устанавливающим взаимоотноше
ния потребителей с системой, является Интерфейсный контрольный
документ ГЛОНАСС [14]. Развертывание орбитальной группиров
ки до полного состава - 24 НКА - завершилось в 1995 г., однако
затем из-за выработки ресурса НКА и отсутствия средств на за
пуск новых аппаратов произошла существенная деградация систе¬
38
мы и в конце 1990-х годов число работоспособных НКА сократи
лось до 8-10 единиц. Для восстановления работоспособности систе
мы в начале XXI в. была принята Федеральная целевая программа
ГЛОНАСС, предусматривающая выделение необходимых средств на
глубокую модернизацию и дальнейшее развитие российской ГНСС.
Количественный состав ОГ ГЛОНАСС на момент написания дан
ного пособия и ближайшие перспективы ее наращивания иллюст
рирует рис. 4.2. Как видно на рисунке, НКА первого поколения
ГЛОНАСС, имевшие гарантированный срок активного существо
вания (САС) 3 года (фактический средний срок порядка 4,5 лет),
заменяются аппаратами ГЛОНАСС-М (САС 7 лет), а в дальнейшем
планируется переход на аппарат ГЛОНАСС-К (САС 10 лет). Основ
ные характеристики перечисленных модификаций КА приведены
на рис. 4.3.
Кроме замены устаревших НКА Федеральная целевая програм
ма ГЛОНАСС предусматривает комплекс мероприятий, направлен
ных на повышение всех основных характеристик системы, в том
числе на поэтапное повышение точности позиционирования до
2...3 м (СКО) (рис. 4.4). Для решения этой задачи потребуется це
лый ряд мероприятий:
снижение на порядок нестабильности бортового синхронизиру
ющего устройства (БСУ) (требуемое значение - не более 10“14; не
стабильность имеющегося БСУ ГЛОНАСС-М — 10-13);
переход на беззапросные средства измерений;
расширение сети измерительных станций;
использование межспутниковой радиолинии;
ввод в штатную эксплуатацию системы дифференциальных кор
рекций и мониторинга системы ГЛОНАСС (функциональное до
полнение).
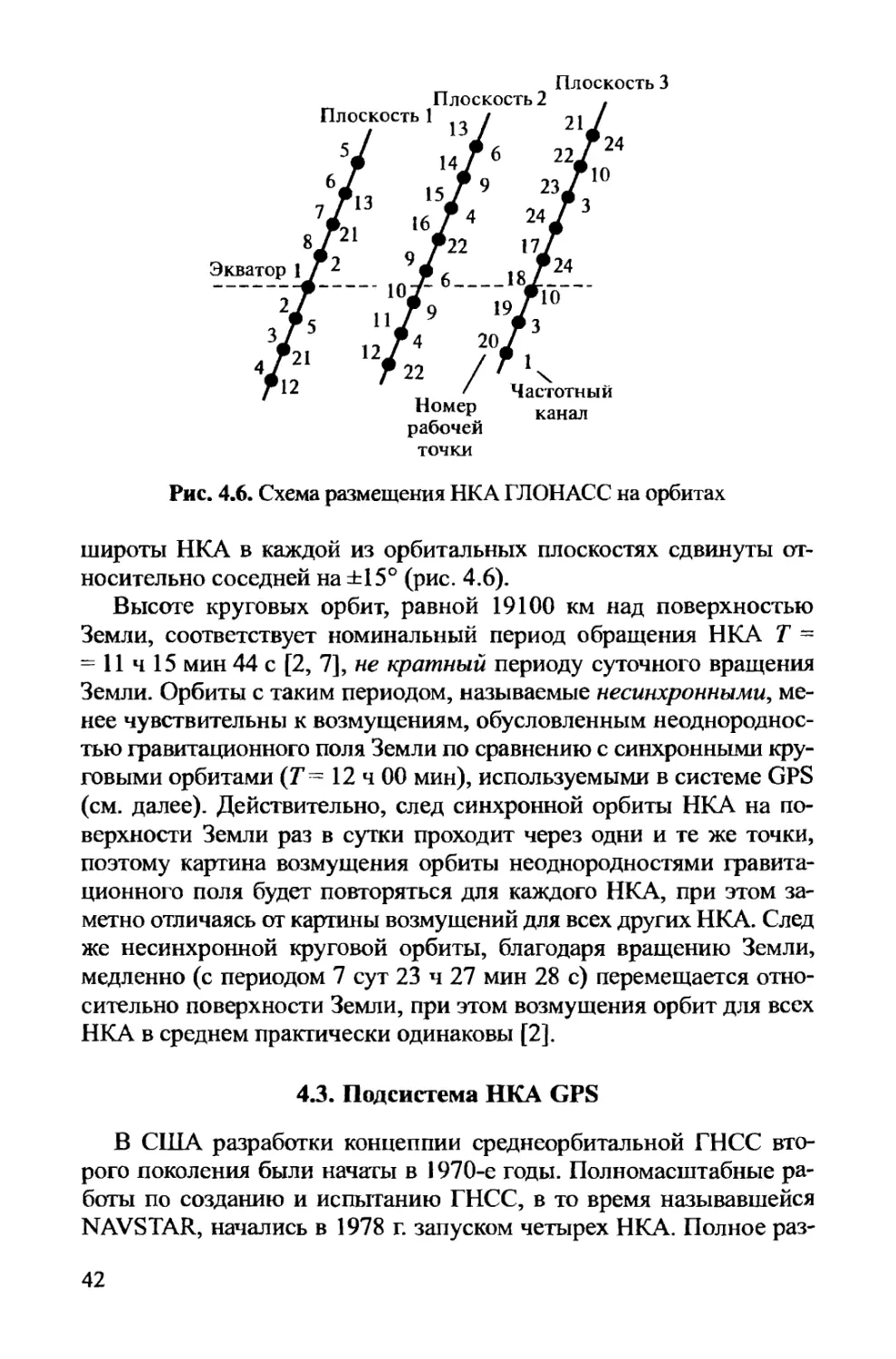
Среди перечисленных направлений развития системы новым яв
ляется реализация технологии автономной навигации. Для этого на
НКА размещается бортовая аппаратура межспутниковых измере-
НИи (БАМИ), осуществляющая измерения расстояний между НКА
и скоростей их относительного перемещения, а также средства меж
спутниковой связи и обмена данными. Результаты межспутнико-
вых измерений позволяют дополнять и корректировать информа
цию, «загружаемую» с наземных контрольных станций и сохранять
Работоспособность системы при ее отсутствии (рис. 4.5).
Приведенная на рис. 4.5 циклограмма показывает, что полный
^минутный цикл обмена данными разделен на четыре 5-минут-
ных интервала, в каждом из которых происходит обмен информа
цией между шестью НКА.
39
ГЛОНАСС 1982 ГЛОНАСС-М 2003 ГЛОНАСС-К 2009 ГЛОНАСС-КМ 2013-2015
\
•
•
•
и
X
Η
OQ
1_
н
-'Э-
IS}
о
о
о
8*
о
оо
X
о
о
О
’
чо
νΊ
ь?
к
>к
Q
9
о
X
э
s
о
СП
Ё
X
О
в-
а
в
S
ν§
QJ
>
U
W
Оч
2
о
<N
В
в-
£
о
£ н
Е о
E «=:
О
S
g <
s
03
о
5
EJ
03
о
с
ε
О
в
нР
о ^
о
о
S s
S
0>
03
(-.
о
о
&
к
X
5
S δ
g «
ί¬
ο
В
В
и
оЗ
03
S
s
VO
03
н
о. О
н
и S
U
X
и
•
•
•
•
•
•
<
&
К
К
э
X
о
к
&
е
о
о
Ё
и £
X CQ
ΐ/'Ί О
—
мю г- о
эВ
К
&i
S ^
§ ^
fi s
g s
X ^
f£ Д,
S 'λ
h
<L>
* 35:
О
xr £
H 9-
&й £ ^
я 4 2
'θ* S о
s δ40
о
PQ
03
Д S
tq. о
m
Ё ч
Λ i <
ё ! *
i g s
-E S η
ВГ CQ
SIIS
i: и u
S 03 br*
esi
Cr
<D tN
S '
S >·
vg LQ
<U
O.
ё
c
g.
i S
g <
i*
Ё ~
g S
о
s i
C_) Г0
О о
= u
<D
u x
ET
fc2 CQ
Рис. 4.3. История создания и программа модернизации орбитальной группировки ГЛОНАСС
20
S 2
S’*
Ξ *
О О
DC g
л й
о й
0) р-
г £
5 о
£ *
D- -С
SI
DC cd
SE f-
t=i к
0) Ш
D-
u 32
10
0
Запросная
технология в
существую
щем НКУ
Переход
на без-
запросную
технологию
9,8
Расширение
сети без-
запросных
станций
Доведение
беззапросных
средств
до штатного
состава
Использование БСУ в
с нестабильностью 10
7;8
системе ГЛОР
-14
4,9
1АСС
.2,4
Система GPS 2,3
до 2006 2006-2007 2007-2009 2009-2011
За счет модернизации
наземного комплекса
управления (НКУ)
и введения новых
сигналов
За счет
совершенствования
характеристик
бортового
синхронизирующего
устройства (БСУ)
Рис. 4.4. Программа повышения точности НВО ГЛОНАСС
• несущая частота ~ 2,2 ГГц;
• мощность передатчика ~ 70..Л00 Вт;
• кодовое разделение (6 кодов);
• скорость передачи
информации ~ 500 бит/с
Рис. 4.5. Межспутниковая линия связи
Спутники ГЛОНАСС-С размещены на трех круговых орбитах.
Наклонение орбитальных плоскостей ψ = 64,8°, долготы восходя
щих узлов (точек пересечения экваториальной плоскости с полу-
Плоскостями орбит, соответствующим движению НКА с юга на се-
ВеР) различаются на 120°. В каждой орбитальной плоскости во
семь НКА разнесены по аргументу широты через 45°, а аргументы
41
Плоскость 3
Рис. 4.6. Схема размещения НКА ГЛОНАСС на орбитах
широты НКА в каждой из орбитальных плоскостях сдвинуты от
носительно соседней на ±15° (рис. 4.6).
Высоте круговых орбит, равной 19100 км над поверхностью
Земли, соответствует номинальный период обращения НКА Т =
= 11 ч 15 мин 44 с [2, 7], не кратный периоду суточного вращения
Земли. Орбиты с таким периодом, называемые несинхронными, ме
нее чувствительны к возмущениям, обусловленным неоднороднос
тью гравитационного поля Земли по сравнению с синхронными кру
говыми орбитами (Т= 12 ч 00 мин), используемыми в системе GPS
(см. далее). Действительно, след синхронной орбиты НКА на по
верхности Земли раз в сутки проходит через одни и те же точки,
поэтому картина возмущения орбиты неоднородностями гравита
ционного поля будет повторяться для каждого НКА, при этом за
метно отличаясь от картины возмущений для всех других НКА. След
же несинхронной круговой орбиты, благодаря вращению Земли,
медленно (с периодом 7 сут 23 ч 27 мин 28 с) перемещается отно
сительно поверхности Земли, при этом возмущения орбит для всех
НКА в среднем практически одинаковы [2].
4.3. Подсистема НКА GPS
В США разработки концеппии среднеорбитальной ГНСС вто
рого поколения были начаты в 1970-е годы. Полномасштабные ра
боты по созданию и испытанию ГНСС, в то время называвшейся
NAVSTAR, начались в 1978 г. запуском четырех НКА. Полное раз-
42
вертывание ГНСС, в настоящее время официально именуемой GPS,
завершилось в 1995 г.
Так же, как и ГНСС ГЛОНАСС, GPS имеет статус системы двой
ного применения, за ее военное использование ответственность не
сет Министерство обороны, а за коммерческое - Министерство транс
порта США. Основным документом, регламентирующим использо
вание системы, является Интерфейсный контрольный документ GPS
[15], распространение которого возложено на компанию ARJNC.
Штатная орбитальная группировка ГНСС GPS состоит из 24 ос
новных НКА, расположенных на шести круговых орбитах. Допол
нительно на некоторых орбитах могут находиться резервные НКА,
предназначенные для сохранения параметров системы при выходе
из строя основных НКА (рис. 4.7). Наклонение орбитальных плос
костей ψ = 55°; долготы восходящих узлов различаются на 60°.
Высоте орбит около 20 000 км соответствует период обращения Т =
= 12 ч 00 мин, т. е. орбиты НКА GPS являются синхронными.
D E F Л ВС
Рис. 4.7. Орбитальная группировка GPS
В процессе создания эксплуатации ГНСС GPS НКА подвергались
неоднократной модернизации (рис. 4.8). Опытные НКА № 1-12
(Блок-1) были сконструированы так, чтобы поддерживать нормаль-
иуто работу без контакта с наземными средствами в течение 3-4 дней.
НКА, предназначенные для регулярной эксплуатации, получили
Наименование Блок-И, Блок-IIR. НКА Блок-Н (№ 13-40) обеспе
чивает местоопределение без контакта НКУ в течение 14 дней.
ВКА Блок-IIR (№ 41-66) должен обеспечивать местоопределение
&ез контакта с НКУ по крайней мере в течение 14 дней при работе
совместно с НКА Блок-П и в течение минимум 180 дней с работаю
щей системой автономной навигации Autonav.
43
Текущее состояние системы GPS на 19.01.07
© © © © дф А
© © © © Q в
® © © Ф© О с
В составе ОГ 30 КА.
• 15 КА GPS-H/IIA
• 12 КА GPS-MR
• 3 КА GPS-IIR-M
© © © © # Q © о
© © © © <d Q e
©©©©©-© F
Изготовлены, готовы к запуску
и будут модернизированы:
7 КА GPS-IIR
Программа модернизации системы GPS
Блок ИА/ HR
2005/2007
2012
• Один гралд»‘-кии сигнал (ив £1)
• Два военных сигнале (на £1 и 12)
• САС 7 лет (факт 11 лет)
• Точность стандартной
наеигаиии 16 24 м (без
cenerttoHorc доступа )
• Всефутцю! КА Блох-ПАЛЮ
• Два новых сюонных атна/ а на £1 и 12 с
поамиеином защитой а с изменяемой модностью
передачи (шсе»о 4 воеиюде cm капа по дм на
£1 и 12)
• Второй гражданский сигнал на частоте £2
• Трегий гражданский сигнал на частоте £5 (начи><ан
cHF. 2007 г)
• Всего 3 граждансиих сигнала (£1, £2, £5)
• Всего 4 всеннх отмаха (по два на £1 и £2)
• САС 10 ret
• Точность стандартной маеигацм* 5 .9 м
• Все функции КА Bnox-tV^/IF
• Новый гражданским сигнал £1С а
дияпезоне £1
• Всего 4 гражданских сигнала (два на
£1 по одному на £2, £5)
• Всего 4 военных сигнала (по два на £1
и £2)
• Точность стандартной на мигали 4 8
Рис. 4.8. Состояние и перспективы развития орбитальной группировки GPS
Для реализации технологии Autonav на НКА Блок-IIR размеща
ются средства межспутниковой связи, обмена данными и измере
ния взаимных дальностей, позволяющие проводить автономную
синхронизацию БШВ и автономное уточнение параметров орбит.
Именно эти средства и обеспечивают автономную работу ГНСС в
течение 180 дней без существенного ухудшения точности (СКО оп
ределения координат в течение указанного периода не более 16 м)
с сохранением характеристик по устойчивости функционирования.
При отсутствии системы Avtonav такая точность может быть со
хранена только в течение двух недель. Следует отметить, что эта
технология может быть реализована лишь при наличии на орбите
не менее 16 НКА типа II-R.
Перспективные НКА Блок-IIF, предназначенные для замены НКА
Блок-HR, предполагают увеличение срока службы до 14 и более
лет, а также совершенствование структуры сигнала и координатно
временного обеспечения НКА. В частности, на этих НКА будет ус
тановлена система межспутниковых измерений Crosslink Nav, яв
ляющаяся развитием технологии Avtonav. Рассматривается возмож
ность включения в систему наземных станций межспутниковых
44
измерений, аналогичных тем, что размещаются на НКА. Утверж
дается, что наличие даже одной такой станции позволяет существен
но повысить точность эфемеридных измерений в условиях ограни
чений на расположение наземных КС.
Контрольные вопросы
1. Обобщенная структурная схема СРНС. Чем и почему отличаются
структуры ГНСС и РНС наземного базирования?
2. Структура и параметры орбитальной группировки ГЛОНАСС.
3. При каком минимальном числе рабочих НКА система ГЛОНАСС
сохраняет расчетную точность, при каком - полную функциональность?
4. Какие модификации НКА используются в ГЛОНАСС в настоящее
время, какие являются перспективными? Их краткие характеристики.
5. Какие основные цели должны быть достигнуты в ходе выполнения
ФЦП ГЛОНАСС? Какие проблемы необходимо для этого решить?
6. Параметры орбит НКА ГЛОНАСС. Какого типа (синхронные или
несинхронные) эти орбиты? На чем основан такой выбор?
7. Структура и параметры орбитальной группировки. В чем основные
различия ОГ ГЛОНАСС и GPS?
8. Какие модификации НКА используются в GPS в настоящее время,
какие являются перспективными? Их краткие характеристики.
9. Какую задачу решает межспутниковая радиолиния и бортовая аппа
ратура межспутниковых измерений? Какие преимущества обеспечивает
технология автономной навигации?
10. Как называется документ, которым официально регулируются взаи
моотношения потребителя и ГНСС?
5. ПОДСИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ГНСС.
СИСТЕМЫ ВРЕМЕНИ, КООРДИНАТ И МОДЕЛИ ЗЕМЛИ,
ИСПОЛЬЗУЕМЫЕ В ГНСС
Круг задач, стоящих перед наземными комплексами контроля и управ
ления ГЛОНАСС и GPS, так же, как и базовые подходы к их решению,
имеют много общего. Соответственно, сходны структура и принципы функ
ционирования этих систем. Различия имеются в размещении средств на
поверхности Земли - НКУ ГЛОНАСС в настоящее время базируется только
на национальной территории; НКУ GPS изначально проектировался в рас
чете на глобальное размещение. Кроме того, существуют отличия также в
технических характеристиках используемых средств, некоторые различия
в используемых системах единого времени и координат. Далее приводят·^
ся краткие описания НКУ обеих ГНСС.
5.1. Подсистема контроля и управления ГЛОНАСС
Подсистема контроля и управления (НКУ) ГЛОНАСС включает
в себя ряд взаимосвязанных элементов, важнейшими из которых
являются:
• центр управления системой (ЦУС);
• центральный синхронизатор (ЦС);
• контрольные станции (КС).
НКУ решает следующие основные задачи.
1. Проводит траекторные измерения для контроля, уточнения и
прогнозирования параметров орбит (эфемерид) НКА.
2. Выполняет временные измерения для определения и прогноза
отклонений БШВ, формируемых синхронизаторами всех НКА, отно
сительно общесистемной шкалы времени (СШВ), формируемой ЦС.
3. Формирует массив служебной информации, содержащий прог
ноз эфемерид, поправки к БШВ НКА, альманах и другие данные.
4. Обеспечивает передачу («закладку») этих данных в бортовой
компьютер НКА для включения в навигационное сообщение, пере
даваемое потребителю, а также для коррекции БШВ (их синхрони
зации с СШВ).
46
5 Ведет радиотелеметрический контроль, диагностику и прог
ноз состояния бортовой аппаратуры НКА.
6 Выполняет мониторинг качества радионавигационных сигна
лов излучаемых НКА, с целью выявления возможных неисправно
стей и отклонений в работе бортовой аппаратуры; контролирует
сдвиг фазы дальномерного сигнала НКА относительно фазы сигна
ла Ц С.
7. Осуществляет планирование, программное и командное уп
равление полетом НКА и функционированием бортовых систем.
8. Планирует работу всех элементов НКУ, обработку и обмен
данными между его элементами.
Укрупненная схема подсистемы контроля и управления приве
дена на рис. 5.1 [2].
Рассмотрим основные функции, выполняемые составными час
тями НКУ.
На спутники
Рис. 5.1. Укрупненная схема подсистемы контроля и управления:
- измерения; - команды; ► - время; —- - телеметрия;
—► - измерения
Центр управления системой (ЦУС), соединенный каналами
связи различных типов со всеми элементами НКУ, осуществляет
планирование и координацию всех используемых в его работе
средств. В том числе, НКУ на основе полученных данных прогноза
эфемерид и частотно-временных поправок с помощью баллисти
ческого центра проводит расчет пространственно-временных харак
теристик группировки НКА. При этом используются данные сис
темы единого времени, системы определения параметров враще-
иия Земли, систем мониторинга гелио- и геофизической обстановки.
Необходимо отметить, что требования к точности контроля пара-
МетРов орбиты и синхронизации ШВ, которые должен обеспечи-
вать НКУ ГНСС, существенно выше, чем в любой другой области
космонавтики, поскольку погрешности в этих параметрах непос
редственно определяют итоговые погрешности НЕЮ. Погрешнос-
ти опРеделения и прогноза параметров орбиты не должны превы¬
47
шать 10... 15 м, поэтому при расчетах необходимо учитывать таки®,
факторы, как световое давление на НКА, влияние релятивистски*]
эффектов на гравитационное поле Земли, неравномерность враще^
ния Земли и ее полюсов, а также наличие реактивных сил, связан*»
ных с газоотделением материалов покрытия НКА (в большинстве
других приложений считается, что влияние этих факторов имеет
второй порядок малости). По результатам многолетних наблюде
ний при наименее благоприятных условиях средняя квадратичес
кая погрешность эфемеридных данных составляет по высоте 5 м
(СКО), вдоль орбиты 20 м (СКО), по нормали к плоскости орбиты
10 м (СКО). При благоприятных условиях погрешности по высоте
и вдоль орбиты приблизительно в 2 раза меньше.
Центральный синхронизатор использует цезиевые бортовые не
зависимые стандарты частоты с относительной нестабильностью
порядка 110-13, водородные наземные стандарты частоты с отно
сительной нестабильностью порядка 1-10-14, а также наземные сред
ства сличения шкал с погрешностью 3...5 нс. Эти требования обус
ловлены тем, что для ГНСС, обеспечивающей беззапросные нави
гационные определения одновременно по нескольким спутникам,
необходима синхронизация БШВ и СШВ с точностью до единиц
наносекунд, поскольку рассинхронизации в 10 нс соответствует
погрешность местоопределения порядка 10... 15 м. Шкала време
ни центрального синхронизатора (СШВ) «привязана» к националь
ной шкале времени России UTC (SU) (подробнее см. далее).
Контрольные станции (КС) осуществляют траекторные и вре
менные измерения, необходимые для формирования эфемеридной
информации и оценки расхождений БШВ относительно СШВ, а так
же ведут прием телеметрической информации и передачу («заклад
ку») информации на борт НКА. Отличие сети КС ГЛОНАСС от
GPS состоит в том, что ее структура полностью обеспечивает функ
ционирование системы с национальной территории. КС распреде
лены по всей территории России (рис. 5.2), кроме того, на основе
соответствующих договоренностей, могут использоваться КС, рас
положенные на территории СНГ. Размещение сети КС обеспечива
ет проведение в течение суток по каждому НКА 10-12 сеансов из
мерений; объем данных, получаемых в одном сеансе, составляет
примерно 1 Кбайт. В стандартном режиме закладка на НКА высо
коточных эфемерид и временных поправок производится 1 раз в
сутки, хотя имеющаяся сеть КС позволяет делать это 2 раза в сут
ки. Сеть КС обладает достаточной избыточностью, поэтому вы
ход из строя одной станции не приводит к ухудшению параметров
48
Рис. 5.2. Расположение КС на территории России
системы. В наихудшем случае работоспособность системы ГНСС
ГЛОНАСС может обеспечить ЦУС совместно с всего одной КС,
однако при это интенсивность работы КС будет близка к предельно
допустимой. При планировании работ на сутки определяются ос
новные и резервные станции, при этом аппаратура всех станций
имеет тройное резервирование (рабочий комплект, резервный ком
плект, комплект для регламентных и профилактических работ).
Для периодической юстировки радиотехнических КС использу
ются квантово-оптические станции (КОС) и лазерные дальномеры;
Для этого на НКА размещаются специальные оптические отража
тели. Всего используется около 20 таких комплексов трех видов:
лазерная дальномерная система «Гео-ИК», КОС «Эталон» и КОС
«Майданак» (Узбекистан).
Станция «Гео-ПК» является составной частью одноименной спут
никовой геодезической системы для определения земных координат-
ных систем и моделей гравитационного поля Земли. Эти модели ис
пользуются при высокоточных определениях орбит НКА ГЛОНАСС.
иС «Эталон» и «Майданак» применяются для корректировки ре
зультатов радиотехнических измерений и обеспечивают погреш-
иость измерения дальности на уровне 1...2 см, а угловую погреш-
ность-на уровне 0,5...2" («Майданак»); 2...3" («Эталон»),
Остановимся более подробно на методах решения задач эфеме-
Ридного и частотно-временного обеспечения, которые непосред¬
49
ственно влияют на точность навигационных измерений с помощь
сигналов ГНСС.
До последнего времени для определения поправок бортовой Щ
использовалась комбинированная «беззапросно-запросная» техно]
логия, принцип которой состоит в следующем [9]. На беззапрос
ной измерительной станции для /-.го НКА производится измерена
задержки тг принятого сигнала относительно системной (эталонной
ШВ. На основании этих измерений определяют псевдодальност
Rt =cZj этого НКА, отличающуюся от истинной дальности Rt н
неизвестную, но постоянную за время определения навигационные
параметров величину δ/?; = сбтг, где δτζ - сдвиг БШВ /-го НКА от
носительно СШВ (см. формулу (3.2)).
Запросная измерительная станция фактически представляет со
бой радиолокатор с активным ответом. Путем измерения интерва
ла времени ti3 между излучением запросного сигнала и приемом
сигнала, излученного бортовым ответчиком /-го НКА, она опреде
ляет дальность до НКА Ri3 = стгз, погрешность которой не зависит
от БШВ.
Результаты одновременных измерений беззапросной и запросной
измерительных станций поступают в баллистический центр, где оп
ределяется значение сдвига БШВ /-го НКА относительно СШВ:
δτι =(/?,.-Я13)/с.
Опыт эксплуатации ГНСС ГЛОНАСС показал, что при собствен
ной среднесуточной нестабильности БШВ порядка 3 · 10“13 погреш
ность (СКО) взаимной синхронизации БШВ любых двух НКА со
ставляет 20 нс [9].
В настоящее время в соответствии с ФЦП ГЛОНАСС осуществ
ляется переход на беззапросную технологию расчета поправок для
БШВ. При этом используются результаты одномоментных измере
ний псевдодальности до данного НКА, полученных с помощью не
скольких измерительных станций, составляется система уравнений
вида (3.2), решение которой при точно известных координатах из
мерительных станций позволяет вычислить параметры орбиты и
поправки БШВ данного НКА относительно СШВ.
Еще одной составной частью НКУ ГЛОНАСС является аппара
тура контроля поля (АКП) — высокоточная АП, располагаемая в
точках с эталонными координатами и оснащенная высокоточным
эталоном времени. Аппаратура обеспечивает контроль точности ре
шения навигационной задачи и качества информации, содержащихся
в навигационных сообщениях НКА.
50
Режим контроля точности предусматривает решение навигаци
онной задачи по каждому оптимальному созвездию спутников и
авнение результатов с эталонными координатами. В случае, если
точность решения задачи не соответствует расчетной, могут при
ниматься следующие меры:
• передача на борт НКА команды о включении в кадр навигаци
онной информации (НИ) признака непригодности сигнала НКА для
проведения НВО;
• поиск причины аномальной работы с использованием телемет¬
рической информации;
• пересчет и перезакладка на борт уточненной навигационной
информации (прогноза эфемерид, часов и др.).
Режим контроля навигационного сообщения предусматривает
сравнение измеренных значений псевдодальностей и псевдоскоро
стей со значениями, рассчитанными на основании прогнозов, со
держащихся в НС по всем НКА, находящимся в зоне радиовиди
мости АКП. Одновременно контролируется отсутствие в НС сиг
нала запроса, формируемого бортовым компьютером в случае
нештатной ситуации, выявленной в режиме самотестирования. Опыт
эксплуатации ГНСС ГЛОНАСС подтверждает, что перечисленных
мер достаточно для поддержания расчетных характеристик навига
ционного поля.
5.2. Наземный комплекс управления GPS
Наземный комплекс управления GPS состоит из сети наземных
станции слежения, расположенных по всему миру (рис. 5.3). Сеть
включает главную (ведущую) станцию, КС и земные станции ввода
данных на НКА (три). Главная станция контроля и управления нахо
дится на авиабазе Фалкон (Шривер) ВВС США в районе г. Колора
до-Спрингс, штат Колорадо. Ее основу составляет центр управления
с вычислительным комплексом и средства передачи данных на зем
ную станцию связи с НКА. Контрольные станции в настоящее время
размещены на атолле Диего-Гарсиа (архипелаг Чагос в Индийском
океане), на о. Вознесения (в Атлантическом океане), на Гавайях и
атолле Кваджалейн (в Тихом океане); одна КС совмещена с главной
станцией [9]. Тот факт, что станции расположены сравнительно рав
номерно по земному шару вблизи экватора, создает благоприятные
Условия для наблюдений НКА.
Эти станции принимают сигналы спутников GPS и осуществля-
^^нрсцизионные измерения дальности до НКА, по которым на глав-
Нои станции осуществляются точные расчеты параметров орбит,
51
Рис. 5.3. Схема расположения элементов НКУ GPS:
■ - главная станция; · - станция наблюдения; А - наземная антенна
ионосферной модели и корректирующих поправок для бортовых
часов. Для точного определения орбит НКА используется беззап-
росный метод. По соответствующим измерениям задержки дально-
мерных сигналов НКА осуществляется точное определение пара
метров орбит и параметров движения НКА. Через земные станции
связи (атолл Диего-Гарсиа, о. Вознесения, атолл Кваджалейн) глав
ная станция передает на борт каждого НКА эти параметры совмес
тно с данными обработки метеорологической информации, позво
ляющей уточнить параметры модели тропосферы. Производится
также мониторинг состояния НКА и управление их работой.
5.3. Системы времени, координат и модели Земли,
используемые в ГНСС
53.1. Единицы времени
Рассмотрение принципов построения и функционирования спут
никовых навигационных систем невозможно без предварительного
ознакомления с основными понятиями, относящимися к единицам
мер времени и системами отсчета времени, применяемыми в ГНСС.
Различают две основные группы единиц отсчета времени:
1) астрономические;
2) неастрономические.
52
Основной астрономической единицей времени являются сутки,
е интервал, за который Земля, с точки зрения наблюдателя, не
подвижно находящегося на поверхности Земли, делает один пол
ный оборот вокруг своей оси относительно некоторой точки отсчета
на небесной сфере. Сутки делятся на 86 400 интервалов, называе
мых секундами. Характерной особенностью астрономических суток
является зависимость их длительности от выбора точки отсчета
(центр видимого диска Солнца, точка весеннего равноденствия и т. п.).
Соответственно различают звездные и солнечные сутки. Длитель
ность солнечных суток зависит еще и от времени года, поэтому
вводится понятие средних солнечных суток Между звездным и сред
ним солнечным временем существует следующее соотношение: 24 ч
звездного времени равны 23 ч 56 мин 4,091с солнечного времени.
Поскольку скорость вращения Земли относительно своей оси не
является строго постоянной, продолжительность звездных и сол
нечных суток также меняется. Поэтому для точных расчетов было
введено равномерно текущее эфемеридное время - ЕТ, единицей
которого является эфемеридная секунда, рассчитываемая как 1/86400
доля средней продолжительности суток в определенный день 1900 г.
Система отсчета времени, основанная на среднем солнечном вре
мени, была введена в 1928 г. III Генеральной Ассамблеей междуна
родного астрономиического союза. Это время называется Всемир
ным UT (Universal Time), или гринвичским средним солнечным.
Очевидно, что системы отсчета, где в качестве эталона единицы
времени принят период вращения Земли, адекватны задачам астро
номии, а также для описания процессов, происходящих на Земле в
течение длительных исторических периодов. Применение этих сис
тем для высокоточных измерений кратковременных процессов со
пряжено с целым рядом трудностей. Поэтому после создания атом
ных стандартов частоты (времени) в научно-технических измерени
ях и расчетах перешли к неастрономическому базису мер времени.
В 1967 г. на XII Генеральной конференции по мерам и весам
бьща принята единица времени, не зависящая от вращения Земли -
«amaмная» секунда. «Атомная» секунда - интервал времени, в те
чение которого происходит 9 192 631 770 колебаний, соответству
ющих резонансной частоте энергетического перехода между уров-
сверхтонкой структуры основного состояния атома цезия-133
при отсутствии внешних воздействий. В настоящее время атомная
секунда принята за единицу времени в международной системе СИ
вместо ранее применявшейся эфемеридной секунды. Прибор, фор-
МиРУющий эталонную шкалу времени, получил название апгомно-
53
го {цезиевого) стандарта частоты. Шкала международного атом
ного времени ΤΑΙ формируется путем осреднения показаний не
скольких атомных эталонов.
5.3.2. Системы отсчета (шкалы) времени, используемые в ГНСС
Наиболее часто используется система отсчета времени, получив
шая названия Всемирного координированного времени (Universal
Coordinated Time — UTC). Эта система базируется на «атомной» се
кунде и именно ее сигналы передаются по радио, в составе телеви
зионных сигналов, в сетях Интернет. Шкала времени UTC перио
дически корректируется на 1 с таким образом, чтобы ее рассогла
сование со шкалой UT не превышало 0,9 с. Коррекцию шкалы UTC
на величину ±1 с, при которой происходит так называемый «секунд
ный скачок» (leap second), производит международное бюро вре
мени по рекомендациям Международной службы вращения Земли.
Коррекция UTC, как правило, производится один раз в год в пол
ночь с 31 декабря на 1 января, или с 31 марта на 1 апреля, или с
30 июня на 1 июля, или с 30 сентября на 1 октября.
Используемые в ГНСС атомные стандарты частоты также синх
ронизируются UTC.
Наиболее точным элементом систем единого времени ГНСС
ГЛОНАСС является Наземный центральный синхронизатор, базиру
ющийся на водородном стандарте частоты, суточная нестабильность
которого не превышает 5* 1014 с. Контролируемое расхождение меж
ду шкалой системного времени ГЛОНАСС и Государственным эта
лоном UTC (SU) не превышает 1 мс, а погрешность привязки — не
более 1 мкс. Кроме того, из-за особенностей функционирования на
земного комплекса управления между шкалами ГЛОНАСС и UTC
(SU) существует постоянный сдвиг, равный 3 ч 00 мин.
До настоящего времени навигационные сообщения НКА ГЛОНАСС
не содержали информации о коррекции системной шкалы; о ней
заблаговременно сообщалось в специальных бюллетенях. В НКА
ГЛОНАСС-М предусмотрена передача информации о факте, вели
чине и знаке секундной коррекции. Коррекция системной шкалы
ГЛОНАСС осуществляется путем совмещения метки времени в кад
ре навигационного сообщения с меткой времени UTC (SU).
Поскольку эфемеридная информация, передаваемая с НКА, отно
сится к определенному интервалу времени, программное обеспече
ние навигационного приемника должно учитывать факт и время кор
рекции, т. е. для эфемерид, переданных до момента коррекции, ис
пользовать старые значения UTS, а для эфемерид, переданных после
54
рекции, - скорректированное время. Алгоритм обработки эфе-
меридной информации в моменты секундных скачков описан в ин-
терфейсном контрольном документе ГЛОНАСС [14].
Кроме коррекции БШВ НКА на целое число секунд, проводи
мой при сдвигах СШВ, коррекция БШВ проводится в случаях, ког
да ее накопленная погрешность относительно системной превыша
ет допустимое значение. Эта коррекция, позволяющая совместить
шкалы с точностью до десятков наносекунд, проводится перио
дически. В интервалах между коррекциями НКУ на основании со
ответствующей математической модели рассчитывается прогноз
ухода БШВ. Поправки, полученные в результате такого прогноза,
во время сеансов связи закладываются в бортовой компьютер НКА,
а затем передаются потребителю в составе эфемеридной инфор
мации.
Шкала времени GPS также привязана к шкале времени UTC.
Начало отсчета времени установлено в полночь с 5 на 6 января
1980 г. Самой крупной единицей времени GPS является неделя, ко
торая, как определено, состоит из 604 800 с. Поскольку ШВ GPS
является непрерывной, а ШВ UTC периодически корректируется,
отсчет времени в GPS отличается от UTC на целое число секунд.
В результате между ними существует некоторое постоянно расту
щее расхождение, в настоящее время составляющее 14 с. Переда
ваемые с НКА навигационные данные содержат следующую ин
формацию о расхождениях шкал времени:
• накопленное расхождение в целых секундах между GPS и UTC;
• данные для вычисления текущих поправок к БШВ НКА.
Погрешность алгоритмической привязки шкалы времени GPS к
UTC не превышает 90 нс (СКО). В настоящее время ведутся пере
говоры о взаимной «привязке» ШВ ГЛОНАСС и GPS.
5.3.3. Системы координат, применяемые в ГНСС
Движение НКА происходит под действием сил инерции и гра
витационного поля Земли. Соответственно, его движение описы
вается в системе координат, центр которой совпадает с центром
масс Земли, т. е. геоцентрической системе (ГЦСК). Классичес
кой системой координат, в которой описывается траекторное дви
жение НКА, является инерциальная геоцентрическая система
°хоУо^ (рис. 5.4).
Ось Ох0 лежит в плоскости экватора и направлена в точку небес
ной сферы, называемую точкой весеннего равноденствия, точкой
есны или точкой Овна (обозначается знаком созвездия Овна: 'ψ).
55
Рис. 5.4. Геоцентрические системы координат
Ось Οζ0 направлена вдоль оси вращения Земли в сторону Северно
го полюса, а ось OyQ дополняет систему координат до правой.
Однако для потребителя более удобным является описание дви
жения НКА в геоцентрической подвижной (неинерциальной) сис
теме координат Oxyz, учитывающей суточное вращение Земли.
Центр этой системы также совпадает с центром масс Земли, ось
Oz совпадает с осью OzQ. Ось Ох лежит в плоскости экватора и
проходит через Гринвичский меридиан, ось Оу дополняет систе
му координат до правой. Плоскость Oxz определяет на поверхно
сти Земли линию сечения, от которой отсчитывается долгота.
В процессе вращения Земли ось Ох периодически совмещается с
осью Охq. Интервал между двумя такими последовательными мо
ментами соответствует одним звездным суткам. Угол между осями
Oxq и Ох соответствует гринвичскому звездному времени и рас
считывается с учетом звездной даты и времени на Гринвичском
меридиане.
Информация о движении НКА в геоцентрической подвижной
системе координат формируется на НКУ, а затем передается в со
ставе навигационного сообщения потребителю и используется пос
ледним для расчета собственных координат в этой же системе.
Однако для подавляющего большинства потребителей интерес
представляет их положение не относительно центра Земли, а от¬
56
Рис. 5.5. Геодезическая система координат:
П - потребитель
носительно ее поверхности. Для этого используется геодезическая
система координат (рис. 5.5).
Геодезические координаты - широта, долгота и высота - оп
ределяют положение точки относительно земной поверхности. Во
обще говоря, поверхность формы Земли описывается достаточно
сложной фигурой, называемой геоидом. Простейшая математичес
кая модель геоида — эллипсоид, большая полуось которого а лежит
в экваториальной плоскости и проходит через нулевой меридиан.
Геодезическая широта точки П - величина угла В между норма
лью к поверхности эллипсоида и плоскостью экватора. Геодезичес
кая долгота точки П - величина угла L между плоскостью нулево
го меридиана и плоскостью меридиана, проходящего через точку
П. Положительное направление отсчета долгот — от нулевого мери
диана к востоку. Геодезическая высота Н — расстояние по нормали
от точки П до поверхности эллипсоида.
Прямоугольные геоцентрические координаты {*, у, г}, вычис
ленные в ходе навигационных определений, подлежат преобразо
ванию в геодезические координаты {В9 L, Н} по соотношениям
х = (Ν + H)cosB cosL;
у - (N + Н) cos В sinL;
2^[(l-e2)N + H]sinB9
где N — кривизна поверхности в точке местной вертикали, N =
" e2 sin2 В; е- эксцентриситет эллипсоида, е = у]\-Ь2/а2 =
2
; ос - параметр сжатия эллипсоида, а = 1 — Ыа.
/2а—с2 -
57
Параметры эллипсоида (в общем случае геоида) определяются
выбранной моделью Земли. Следует иметь в виду, что ГЛОНАСС и
GPS используют различные модели: в ГЛОНАСС до недавнего
прошлого применялась российская модель ПЗ-90 («Параметры Зем
ли, версия 1990 г.»; в настоящее время разработана новая версия -
ПЗ-90.2). В GPS принята международная модель WGS-84 (World
Geodetic System, 1984 г.). Разница в координатах, рассчитанных с
помощью указанных моделей, может достигать единиц метров; ме
тоды пересчета координат из одной системы в другую описаны в
литературе.
Кроме геоцентрической и геодезической находят применение так
называемые локальные системы координат. За начало такой систе
мы может быть принята любая точка Ол земной поверхности или
околоземного пространства (рис. 5.6).
z А
Рис. 5.6. Локальная система координат
Декартовы локальные топоцентрические координаты определя
ются следующим образом: плоскость хлОдУл является касательной
к земному эллипсоиду, причем ось Олхл ориентирована на север, а
ось ОдУл - на восток. Ось Олгл совпадает с местной вертикалью и
при ориентации вверх дополняет систему до левосторонней, а при
ориентации вниз - до правосторонней. Топоцентрические коорди
наты удобно использовать для описания положения одного объекта
относительно другого. Декартовы координаты объекта в этом слу
чае равны разностям его геоцентрических координат и геоцентри
ческих координат точки, принятой за начало отсчета.
Топоцентрическая система может быть не только декартовой, но
и сферической; в этом случае координатами являются дальность d,
азимут β и зенитный угол Ф (рис. 5.7).
58
Рис. 5.7. Топоцентрическая сферическая система координат
Все перечисленные системы координат используются для опи
сания местоположения объекта, рассматриваемого в качестве ма
териальной точки.
В случае, когда объект рассматривается как протяженный, мо
жет представлять интерес его пространственная ориентация, обыч
но - относительно горизонта.
Для описания пространственной ориентации, как правило, ис
пользуют углы между осями топоцентрической системы коорди
нат, начало которой расположено в центре масс объекта и осями
так называемой объектовой системы. Нулевая точка этой системы
также находится в центре масс объекта, однако ее оси совпадают
со строительными осями или другими линиями, жестко связанны
ми с объектом (подробнее об этом см. разд. 8).
Контрольные вопросы
1. Какие элементы включает в себя НКУ ГЛОНАСС?
2. Какие задачи решает НКУ ГЛОНАСС?
3. Какие функции выполняет центр управления системой, централь
ный синхронизатор?
4. Какова среднесуточная нестабильность ШВ ЦС, какова точность вза
имной синхронизации ШВ НКА?
5. Какие функции выполняют радиотехнические и кванто-оптические
контрольные станции?
6. Принципы коррекции БШВ ГНСС.
?- Для чего нужна аппаратура контроля поля? Какие меры принимают-
Ся’ если точность решения навигационной задачи по какому-либо НКА не
соответствует расчетной?
59
8. В чем состоят различия между НКУ ГЛОНАСС и GPS?
9. Астрономические и неастрономические системы времени; системы
времени, используемые в ГНСС.
10. Что называется Всемирным координированным временем?
11. В каких случаях производится корректировка ШВ ЦС и НКА?
12. Чем отличаются системные ШВ ГЛОНАСС и GPS?
13. Системы координат и модели Земли, используемые в спутниковом
навигации.
6. СТРУКТУРА СИГНАЛОВ И СООБЩЕНИЙ ГНСС
При выборе типов и параметров сигналов, используемых в ГНСС, не
обходимо учитывать комплекс требований и условий, подчас противоре
чащих друг другу. Во-первых, с учетом используемых в ГНСС методов
навигационных измерений (пседодальномерный и псевдодоплеровский) эта
сигналы должны обеспечивать высокую точность измерения времени при
хода (задержки) сигнала и его доплеровской частоты и высокую вероят
ность правильного декодирования навигационного сообщения. Во-вторых,
чтобы сигналы разных НКА надежно различались АП, они должны иметь
низкий уровень взаимной корреляции. Кроме того, сигналы ГНСС долж
ны наилучшим образом использовать отведенную полосу частот при ма
лом уровне внеполосного излучения, обладать высокой устойчивостью
к преднамеренным и непреднамеренным помехам различных видов. Вы
полнить эти требования удается только при использовании сложных сиг
налов, база которых (произведение полосы на длительность) существен
но превышает единицу. В качестве таковых в обеих рассматриваемых
ГНСС используются сигналы с псевдослучайной фазовой манипуляци
ей. Имеющиеся различия в видах модулирующих ПСП, методе разделе
ния сигналов НКА и способах передачи навигационного сообщения опи
саны далее.
6.1. Физические параметры сигналов ГЛОНАСС
На этапе проектировании для ГНСС ГЛОНАСС был принят час-
пютный метод разделения сигналов различных НКА: каждый из них
использует свою пару литерных частот, одна из которых принадле
жит диапазону /Л, другая - диапазону L2 [14]. При этом способ
определения номинальных значений несущих частот в верхнем (ин
декс «1») и нижнем (индекс «2») диапазонах состоит в следующем:
■Α,*=/ι,ο+*Δ/ι; До= 1602,0000МГц; Δ/i = 0,5625 МГц;
h,k =До + М/2; /2 0 = 1246,0000 МГц; Д/2 = 0,4375 МГц;
/.λ//2Λ = 9/7>
61
где к — литера (условный порядковый номер) пары несущих частот
fxk^fik в диапазонах L\ и L2. При этом крайним значениям литер
к = 1 и А: = 24 соответствовали следующие значения несущих частот:
/м = 1602,5625 МГц; /, 24 = 1615,5000 МГц;
/2 , = 1246,4375 МГц; /2>24 - 1256,5000 МГц.
Однако, поскольку в непосредственной близости от рабочих час
тот ГЛОНАСС располагаются рабочие частоты систем спутнико
вой радиосвязи (полосы частот 1559,0...1610,0 МГц и 1215,0...
...1260,0 МГц), воздушной радионавигации (полоса частот 1559,0...
...1626,5 МГц), а также выделенная для нужд радиоастрономии по
лоса частот 1610,6... 1613,8 МГц, план использования радиочастот
в интересах ГЛОНАСС в конце 1990-х годов был пересмотрен.
В частности было учтено, что даже при полном составе орби
тальной группировки (24 НКА) для подавляющего большинства
потребителей (сухопутных, морских, воздушных) в зоне радиови
димости не может находиться более 12 НКА. Поэтому в целях
сокращения ширины диапазона было принято решение для вза
имно антиподных (находящихся в диаметрально противоположных
точках орбиты) НКА использовать одинаковые литерные частоты,
число которых в каждом диапазоне частот сокращено до 12. Кроме
того, используемая полоса частот была смещена «вниз»: с 2005 г.
на всех запускаемых НКА используются литеры несущих частот
к = —Т..А [И].
Совпадение литерных частот взаимно антиподных НКА должно
учитываться в тех случаях, когда АП устанавливается на других
КА, высота орбиты которых позволяет одновременно «видеть» ан
типодные НКА. Для разделения сигналов в этих ситуациях должна
использоваться пространственная (за счет формы диаграммы на
правленности антенны АП), а также доплеровская селекция сигна
лов. Возможность такой селекции следует из того, что для назем
ных объектов доплеровский сдвиг, обусловленный собственным дви
жением НКА, может иметь максимальные значения ±5 кГц, а для
низкоорбитальных космических объектов - до ±40 кГц, при этом
доплеровский сдвиг частоты для антиподных НКА всада имеет про
тивоположный знак.
Все сигналы, излучаемые НКА ГЛОНАСС, привязаны к следу
ющей сетке частот, формируемой общим синхронизатором, Гц:
F2 Ъ F5 ^6 ^7 ^8 Fl0 Fn
5-106 200-103 50-103 10 103 103 100 50 10 1 1/60 1/1800
62
Сигнал F] является синусоидальным, остальные сигналы - им
пульсные.
Чтобы для наземного наблюдателя частота опорного сигнала F{
составляла ровно 5 МГц, на борту для компенсации релятивист
ского «замедления» времени, возникающего при движении НКА по
орбите, эта частота смещена на величину ΔF= -2,18*10“3 Гц, т. е.
составляет 499999999,782 Гц.
Оцифровка отсчетов времени производится 32-разрядным пос
ледовательным кодом с тактовой частотой 100 Гц.
Эффективная излучаемая мощность сигнала в канале L1 состав
ляет 30 Вт, в канале L2 - 21 Вт. При этом мощность сигнала НКА,
принимаемого изотропной линейно поляризованной антенной с ко
эффициентом усиления +3 дБ, расположенной на земной поверх
ности, в наихудшем случае (угол места НКА менее 5°) составляет:
• не менее 161 дБ/Вт для диапазона L1;
• не менее 167 дБ/Вт для диапазона L2.
Суммарные потери, связанные с неидеальностью процедур мо
дуляции в передатчике НКА и согласованной фильтрации в прием
нике потребителя для частотных каналов с индексами -7 и +12,
т. е. на краях рабочего диапазона, не превышают 0,8 дБ.
Спектральная плотность фазовых шумов немодулированной не
сущей удовлетворяет следующему условию: схема слежения за фа
зой, имеющая одностороннюю шумовую полосу 10 Гц, обеспечи
вает погрешность слежения за фазой несущей не хуже 0,1 радиан
(СКО). Нетрудно рассчитать, что потенциальная точность далъно-
мерных фазовых измерений при этом составляет примерно 1,5 %
от длины волны, т. е. порядка 3 мм.
Мощность внеполосного (за пределами полос шириной 0,511 МГц)
излучения для диапазонов частот L1 и L2 не превышает -40 дБ
относительно мощности немодулированной несущей.
Нормальные условия работы ГНСС предполагают одновремен
ный прием сигналов от четырех и более НКА. Очевидно, что с точ
ки зрения оптимальной обработки сигнала каждого НКА, сигналы
всех других НКА образуют внутрисистемную помеху. В ГЛОНАСС
ширина спектра сигнала и разнос литерных частот каналов выбра
ны таким образом, что в рабочую полосу каждого канала могут
попасть только боковые лепестки спектра другого сигнала. Их уро
вень составляет -48 дБ относительно главного лепестка, что суще
ственно меньше, чем для ГНСС GPS (см. далее).
На точность измерений влияет групповая задержка сигнала в бор
товой аппаратуре НКА, т. е. задержка между сигналом на выходе
63
бортового стандарта частоты и излучаемым сигналом (измеряется
в фазовом центре антенны). Она включает в себя постоянную и
случайную составляющие. Данные о величине постоянной состав
ляющей передаются в составе НИ и она может быть устранена в
АП. Некомленсируемая случайная составляющая не превышает 8 нс.
Излучаемый сигнал имеет правую круговую поляризацию. В сек
торе ±19° относительно оси симметрии диаграммы направленнос
ти передающей антенны коэффициент эллиптичности по полю не
хуже 0,7.
6.2. Структура навигационных сигналов
и навигационных сообщений ГЛОНАСС
Спектр мощности навигационного радиосигнала практически
полностью определяется наивысшей тактовой частотой модулиру
ющей последовательности. Для используемых в ГЛОНАСС сигна
лов стандартной точности (СТ-код, подробнее см. далее) ширина
основного «лепестка» огибающей спектра мощности радиосигнала
равна 1,022 МГц, а для сигналов высокой точности ВТ-код -
10,22 МГц.
В процессе развития системы менялись и продолжают меняться
состав информации и структура навигационных сигналов ГЛОНАСС.
Рассмотрим основные этапы этого процесса.
Находящиеся в эксплуатации в настоящее время НКА ГЛОНАСС
и первые экземпляры ГЛОНАСС-М используют сигналы в диапа
зонах L1 и Ζ/2, структура и параметры которых несколько различа
ются, поэтому подробно рассмотрим сигналы диапазона 2,1, а за
тем коротко — отличия сигналов диапазона L2.
В диапазоне LI излучаемый сигнал подвергается относитель
ной фазовой манипуляции (ОФМ) на угол π двумя псевдослучай
ными последовательностями - ПСП1 и ПСП2. Ортогональность,
т. е. отсутствие взаимного влияния при передаче ПСП1 и ПСП2,
обеспечивается благодаря использованию фазовых квадратур, т. е.
двух компонент несущей, сдвинутых по фазе на 90°.
Первая ПСП образуется сложением по mod2 трех двоичных сиг
налов:
• далъномерного кода стандартной точности (СТ), представляю
щего собой последовательность максимальной длины (М-последо-
вательность) с тактовой частотой 511 кГц и периодом 1 мс (иногда
в литературе для обозначения этого кода используется аббревиату
ра ПТ-код, т. е. код пониженной точности);
64
• сигнала навигационной информации (НИ) с тактовой частотой
50 Гц, передаваемого с помощью ОФМ в виде строк длительно
стью 2 с;
• сигнала тактовой синхронизации в виде меандра с частотой
100 Гц.
Принцип формирования ПСП1 поясняется рис. 6.1.
Последовательность
символов МВ
(ГМв = 0,3 с, тс= 10 мс)
Рис. 6.1. Схема формирования модулирующей последовательности (ПСП1)
Рассмотрим более подробно принцип формирования каждой из
ее составляющих.
Дальномерный код представляет собой М-последовательность,
которая для СТ-кода имеет вид
вя(х) = 1@х5®х9.
Схема формирования дальномернош кода показана на рис. 6.2,
а временная диаграмма, поясняющая его работу, - на рис. 6.3.
Вторая ПСП формируется по аналогичному принципу, однако
в ней используется М-последовательность с тактовой частотой
5,11 МГц и периодом 1 мс, образующая дальномерный код высо
кой точности (ВТ). ПСП1 и ПСП2 формируются когерентно от
65
Эталонная частота 5,0 МГц
Рис. 6.2. Схема формирования дальномерного кода
Синхро¬
1с ^
импульсы
н
Г = 1 с
Время
10 мс
4 ►
1 f
Синхро
импульсы
Т = 10 мс
1 мс
J 11111111
JU „
1111 И 111
Время
Синхро
импульсы
периода ПСПД
Время
L = 511 символов; T=i мс
liMiMi
та
Код ПСПД
(511 символов)
«Ψ-·
-1
Время
τ =:
1,9569 мкс
Рис. 6.3. Временная диаграмма дальномерного кода ГЛОНАСС
общего стандарта частоты. Допустимый интервал между фронтами
символов не превышает 6 нс. Использование ВТ-кода регламенти
руется Министерством обороны РФ, поэтому его структура офици
ально не опубликована.
Навигационная информация структурирована в виде строк,
кадров и суперкадров. Рассмотрим сначала структуру одной стро
ки (структура кадра и суперкадра будет описана далее).
В каждой двухсекундной строке навигационного сообщения в
интервале времени 1,7 с передаются 85 двоичных символов дли
тельностью 20 мс каждый. Поскольку используется относительная
фазовая манипуляция, первый символ каждой строки начальный
(«холостой»). Последние восемь символов в каждой строке явля
ются проверочными символами кода Хемминга, позволяющими ис
правлять одиночный ошибочный символ и обнаруживать два оши
бочных символа в строке.
В конце двухсекундной строки передается метка времени (МВ)
Длительностью 0,3 с, позволяющая определять границы кодовых
слов и их комбинаций, т. е. обеспечивающая строчную (цикловую)
синхронизацию. МВ представляет собой укороченную на один сим¬
67
вол 31-символьную М-последовательность, порождающий полином
которой имеет вид g = 1 + х3 + jt5.
Меандр тактовой синхронизации добавляется в сигнал для ус
корения тактовой (символьной) синхронизации. В принципе, ин
формацию о тактовой частоте НИ можно извлечь из нее самой, фик
сируя моменты смены знака модулирующей последовательности,
Проблема состоит в том, что в реальных информационных посыл
ках символы 0 и 1 неравновероятны и может возникнуть ситуация,
когда знак посылки не меняется длительное время. При суммиро
вании по mod2 меандра с символами НИ образуют бидвоичный
код, для которого характерно равномерное чередование символов,
в том числе и при неизменном знаке информационных символов.
В приемнике потребителя из бидвоичного кода вновь выделяется
меандр, используемый в приемнике для символьной синхрониза
ции, а навигационное сообщение восстанавливается путем повтор
ного суммирования по mod2 выделенного меандра и бидвоичного
кода.
Фронты меандра синхронизированы с высокой точностью с гра
ницами символов МВ и НИ. В свою очередь, границы символов
НИ совпадают с передними фронтами дальномерной ПСП. Вре
менные диаграммы, поясняющие формирование символов НИ и МВ,
приведены на рис. 6.4.
Кадр (длительность 30 с) содержит 15 строк. В составе каждого
кадра передается полный объем оперативной НИ и часть альманаха
системы. Оперативная НИ в кадре относится к НКА, излучающему
навигационный радиосигнал, и содержит: признаки достоверности
НИ в кадре; время начала кадра гк; эфемеридную информацию (ЭИ) —
координаты и производные координат НКА в прямоугольной гео
центрической системе координат на момент времени ί0 (в литерату
ре по спутниковой навигации текущий момент времени часто на
зывают эпохой [2]), частотно-временные поправки (ЧВП) на момент
времени f0 в виде относительной поправки к несущей частоте на
вигационного радиосигнала и поправки к ШВ НКА; время /0, к ко
торому «привязаны» ЭИ и ЧВП, кратно 30 мин и отсчитывается от
начала суток. Оперативная НИ используется потребителем в про
цессе определения собственных координат и вектора скорости.
Альманах системы содержит:
• параметры орбиты, номер пары несущих частот и поправку к
бортовой ШВ для каждого штатного НКА орбитальной группиров
ки (24 НКА);
• время, к которому относится информация альманаха;
68
Синхроимпульсы (Тс - 10 мс)
1
1
1
1
1
Меандр (Тс= 10 мс)
1
0
1
0
0
1
0
1
0
Символы навигационной информации
в относительном коде (Гс = 20 мс)
0
0
0
Символы навигационной информации
в бидвоичном коде (Гс = Ю мс)
1
1
1
1
1
0
0
0
0
0
Символы кода
1
1
1
1
1
1
1
•
1
метки времени
ПСПМВ (Гс = 10 мс)
0
0
0
1/7с
85 символов в бидвоичном коде
4· — ч
30 символов кода ПСПМВ
Четные секунды шкалы времени НКА -
Рис. 6.4. Временные диаграммы формирования символов НИ и МВ
• поправку к ШВ системы относительно ШВ страны (погреш
ность поправки не более 1 мкс).
Альманах системы необходим в АП для планирования сеанса
навигации при выборе оптимального созвездия НКА и для прогно
за доплеровского сдвига несущей частоты. Полный альманах пере
дается в пределах суперкадра, который содержит 5 кадров. Объём
суперкадра составляет 7500 бит, длительность передачи — 2,5 мин.
В диапазоне 12 используемые в настоящее время НКА первой
модификации излучают однокомпонентный сигнал, образуемый по
средством фазовой манипуляции несущей М-последовательностъю
ВТ-кода, без передачи НИ.
69
L5R
ZJ
L2
L\RC
L\
_7 +9 _7 +9 -7 +9
1201,743...1208,511 МГц 12/(0 = 7/911/(0 1598,0625... 160/0625 МГц
AF = 0,423 МГц ΔF = 0,5625 МГц
Li /(О = 94/125 LI /(О
Рис. 6.5. Навигационные сигналы ГЛОНАСС-К
В НКА ГЛОНАСС-М, вводимых в строй в настоящее время, из
лучаемый в диапазоне L2 навигационный сигнал 1250 МГц так же,
как сигнал диапазона LI, содержит две ортогональных компонен
ты: М-последовательность с тактовой частотой 5,11 МГц (ВТ-код)
и М-последовательность с тактовой частотой 511 кГц (СТ-код). Это
позволит значительно повысить точность коммерческой АП за счет
использования двухчастотного метода компенсации ионосферной
погрешности.
Значительное расширение ансамбля используемых сигналов за
планировано в концепции модернизации сигналов ГЛОНАСС. Эта
концепция предусматривает введение еще одного широкополосно
го (тактовая частота 4,095 МГц) сигнала с частотным разделени
ем в диапазоне L3 (1,2 ГГц), а также двух сигналов с кодовым раз
делением на частотах 1575,5 МГц (диапазон LI) и 1176,5 МГц (ди
апазон L5). Эти сигналы состоят из двух компонент несущей
частоты, расположенных в фазовых квадратурах относительно друг
друга. Каждая компонента несущей модулируется отдельной бито
вой последовательностью по закону двоичной фазовой модуляции.
На рис. 6.5 приведен частотный план системы навигационных сиг
налов, планируемый для КА ГЛОНАСС-К. (Для наглядности спек
тры квадратурных компонент сигналов изображены в «ортогональ
ных» плоскостях.)
70
6.3. Физические параметры сигналов GPS
В отличие от ГЛОНАСС в ГНСС GPS изначально был заложен
кодовый метод разделения сигналов, излучаемых в пределах двух
полос шириной 20,46 МГц на общих для всех НКА несущих часто
тах Lv = 1572,42 МГц и Ь2 = 1227,6 МГц. Дальномерные коды для
каждого НКА являются индивидуальными
Несущие частоты обоих диапазонов формируются когерентно от
общего синхронизатора, номинальная частота которого для назем
ного наблюдателя равна 10,23 МГц. Релятивистская поправка (см.
выше) составляет-4,5674· 10-3 Гц.
Мощность бортовых передатчиков около 50 Вт (может несколько
различаться для разных модификаций НКА). При этом мощность при
нятого сигнала для условий, описанных в разд. 6.2 (изотропная ли
нейно поляризованная антенна с коэффициентом усиления +3 дБ, рас
положенная на земной поверхности, угол места НКА 5°), составляет
-166...-160 дБ. Многие параметры сигналов GPS - потери на не-
идеальность модуляции и фильтрации, мощность внеполосного из
лучения, фазовые шумы - практически совпадают с параметрами
ГЛОНАСС (см. разд. 6.1). Существенно различается лишь уровень
внутрисистемных помех: для используемых в сигналах стандарт
ной точности GPS кодов Голда длиной 1023 элемента уровень пер
вого бокового лепестка составляет —21,6 дБ относительно макси
мума АКФ. Иными словами, уровень внутрисистемной помехи в
GPS на 27 дБ выше, чем в ГЛОНАСС.
6.4. Структура навигационных сигналов
и навигационных сообщений GPS
Сигналы на частоте L{ модулируются двумя ортогональными
(сдвинутыми относительно фазы несущей на 90°) ПСП, образован
ными путем суммирования по mod2 дальномерного кода и инфор
мационной последовательностью, содержащей навигационное со
общение и другую служебную информацию. Принцип формирова
ния навигационного сигнала GPS приведен рис. 6.6.
Основным видом дальномерного кода GPS, согласно [15], явля
ется точный код (P-код), представляющий собой ПСП с тактовой
частотой 10,23 МГц и периодом 7 сут. Первоначально P-код GPS
был предназначен только для санкционированного доступа, однако
в 2002 г. его структура была опубликована. Для НКА модификации
Блок-11 и последующих предусмотрен режим дополнительной за-
71
Рис. 6.6. Принцип формирования сигнала GPS
щиты точного кода (AIS - antispoofing), при котором вместо Р-кода
используется закрытый Р(У)-код, получаемый дополнительным не
линейным преобразованием P-кода. Несанкционированное исполь
зование такого кода при отсутствии ключевой информации практи
чески невозможно, поскольку в настоящее время не существует вы
числительных средств, способных расшифровать его.
Для коммерческого несанкционированного использования пре
доставлен «короткий» код пониженной точности - С1А-ко)\ (Coarse/
Acquisition, «грубый захват»), первоначально предназначавшийся
для синхронизации аппаратуры потребителя, работающей по Р- или
Р(У)-кодам.
Принципы формирования дальномерных ПСП GPS удобнее все
го проиллюстрировать на примере СЛ4-кода. (рис. 6.7). Этот код
представляет собой 1023-битовую ПСП, тактируемую с частотой
1,023 МГц, т. е. имеющую период повторения, равный 1 мс.
Индивидуальный код, соответствующий г-му НКА, называемый
кодом Голда, формируется суммированием по mod2 двух 10-разряд-
ных ПСП Ct(;c) и G2(x), причем ПСП G2(x) имеет индивидуальный
72
Рис. 6.7. Схема формирования СЛ4-кода GPS
для данного НКА сдвиг на фиксированное число символов в диапа
зоне от 5 до 950. Образующие полиномы исходных ПСП имеют вид
q(*)=10JC3 ©х10; G2(x)=l©x2 Фх3 ©х6©/ Фх9Фх10.
Необходимо отметить, что с целью ограничения точности из
мерений с помощью коммерческой АП, на протяжении ряда лет
СМ-код подвергался дополнительному загрублению (так называе
мый режим S/А - Selective Availability - «ограниченный доступ»).
Режим SIA был отключен 01.05.2000 г., однако Министерство оборо
ны США оставляет за собой право по собственному усмотрению
вновь вводить его, чтобы исключить использование коммерческой
АП для высокоточных навигационных определений в военных целях.
Для формирования P-кода используется тот же принцип, однако
алгоритм оказывается более сложным (рис. 6.8). ПСП для Р-кода
формируется суммированием по mod2 двух тактируемых с часто-
73
10,23 МГц
С R
Регистр Х\ (Л)
1 6
12
©
6, 8, 11, 12
J
Начало эпохи Χγ (А)
г®
Л
Возобновить
Декодер
4092
Эпоха Х\ {А)
D—
-3750
Синхро¬
низатор
Остановить
R
г Регистр Х\ (В)
С
Начало
1 ,
©
1, 2, 5, 8,
9, 10,11, 12
-
iBJ
1
1
1
1
1
1 ,
* Декодер
- 4093 J
Сброс
7 дней
1
-г-3749
Ζ-счетчик
^403,200
Остановить
Синхро¬
низатор
ЮВИТЬ X [ L·
НЗМ
Конец недели
С Д
Регистр^ И)
7 1 12
-3750
©
1,3, 4, 5, 7,8,
9,10,11,12
1
U
Г0
Декодер Λ
4092
Назначение
входов
регистров:
С - тактирование
/— вход
R - установка
в начальное
состояние
по следующему
такту
Рис. 6.8. Схема формирования P-кода GPS
той 10,23 МГц ПСП: Xx(f) и X2(t -уТ), где Т- 1/1,023-107 - период
следования разрядов Р-кода,у - целое число в интервале от 1 до 37,
соответствующее номеру НКА. Таким образом, генерируется 37 уни
кальных последовательностей Pit). В свою очередь, X\(i) образует
ся сложением по mod2 двух ПСП Х\(А) и Ху(В\ формируемых на
74
выходе 12-разрядных регистров сдвига в соответствии с образую
щими полиномами вида
Х)(А) = \@хв ©х80хП ©х12;
ДГ, (β)=1 @ jc'Θ х2 Θ jc5 Θ jc8 Θ х9 Θ jc'0 Θ х11 Θ jc'2
При этом реинициализация (сброс в начальное состояние) реги
стра Х[(А) производится после выдачи 4092 бит, т. е. последние
три бита полной (4095-битной) последовательности отбрасывают
ся. Аналогично, реинициализация регистра Х{(В) производится пос
ле выдачи 4093 бит, т. е. с отбрасыванием двух последних бит. В ре
зультате для каждого укороченного таким образом кадра ПСП Хх
фаза последовательности Л7](Я) сдвигается на один бит относитель
но последовательности Х\(А). Этот процесс продолжается до тех
пор, пока число укороченных кадров не достигнет 3750, после чего
генерируется признак конца «эпохи» равной 1,5 с, и происхо
дит реинициализация регистров Х\(А) и Х\(В). За одну эпоху гене
рируется 15 345 000 разрядов ПСП Χλ(ί). Термин «эпоха» здесь ис
пользуется в смысле «период».
Аналогично формируется ПСП Хъ при этом образующие поли
номы для слагаемых XГ2{А) и Х2(В) имеют вид
Х2(А) = \@хХ ©х3 @х4©х5 ©х7 ©х8©х9 ®х10 θχ11 ®х12;
Λ'2(β)=1θχ2 ®х3 ©х40х8 ©х9 @х12.
Кадры ПСП Х2(А) и Х2{В) укорочены аналогично кадрам Х\{А) и
Х\(В\ соответственно эпоха Х2, так же, как эпоха Хь длится 1,5 с и
включает в себя 3750 кадров.
Дискретные «биения» (прецессии) сигналов на выходах регист
ров Х\(В\ Х2(А) и Х2(В) относительно регистра Х\(А) продолжают
ся до тех пор, пока не закончится последний кадр Х\(А) на интер
вале текущей недели GPS. В этот момент все четыре регистра ре-
инициализируются и формируется первый разряд новой недельной
последовательности Я-кода. Более детально процесс формирования
Я-кода описан в литературе [10].
Вспомогательная частота h2 модулируется только закрытым
Я-кодом.
Состав информации, передаваемой в навигационном сообщении
GPS, сходен с составом НИ ГЛОНАСС: в нем содержится инфор
мация об эфемеридах НКА, альманах созвездия НКА, частотно-вре
менные поправки, метки времени, параметры ионосферной моде-
пи, сведения о работоспособности бортовой аппаратуры НКА и др.
75
Блок-ΙΙΑ Блок-UR
-2201- „„„ I * 1990 1997
rs N CM Μ <NJ<N<NICN1
Ϊ1J /fjgtf ‘fUDOHftlTOW dLH9I£)
g
VO
ctf
o<
CQ
u
s
i>a
CN ^
<N
EJ
s
m
Nj-
Рис. 6.9. Спектры сигнала GPS
Однако общий объем передаваемой информации в 5 раз больше,
чем для ГЛОНАСС, и составляет 37 500 бит. Этот массив информа
ции называют суперкадром.
Информационная последовательность передается кадрами ем
костью 1500 бит и длительностью 30 с. Один кадр делится на
субкадры (строки) длительностью 6 с, содержащие 10 слов по
30 бит каждое. В одном кадре передается 1/25 всего альманаха.
Поэтому передача всей информации альманаха занимает 12,5 мин.
Соответственно, время «холодного» старта аппаратуры потребите
ля GPS оказывается больше, чем для ГЛОНАСС.
Более детально структура НИ и способы ее использования опи
саны в литературе.
Спектры существующих и перспективных сигналов GPS стан
дартной (С/Λ-код) и высокой (P-код) точности приведены на рис. 6.9.
В настоящее время ведется большая работа по согласованию час
тотных планов ГЛОНАСС и GPS, в ходе которой возможны коррек
тировки приведенных выше частотных планов.
Контрольные вопросы
1. Требования, предъявляемые к сигналам ГНСС.
2. Какой способ разделения сигналов НК А принят в ГЛОНАСС в на
стоящее время? Основные особенности его реализации.
3. Физические параметры сигналов ГЛОНАСС: спектр, мощность в точ
ках излучения и приема.
4. Структура навигационных сигналов и навигационных сообщений
ГЛОНАСС.
5. Принцип формирования и состав модулирующей последовательнос
ти ГЛОНАСС.
6. Какого типа сигнал используется в качестве дальномерного кода
ГЛОНАСС? Каковы параметры дальномерного кода стандартной точности?
7. Чему равна тактовая частота навигационного сообщения?
8. Что такое «метка времени»?
9. Для чего используется меандр тактовой синхронизации?
10. Какие объемы информации содержат строка, кадр и суперкадр на
вигационного сообщения? Какова длительность передачи каждого их этих
элементов?
11. Какую информацию содержит альманах, как она используется?
12. Способ разделения сигналов, принятый в GPS. Физические пара
метры сигналов GPS.
13. Структура навигационных сигналов и навигационных сообщений GPS.
14. Принцип формирования модулирующей последовательности GPS
(на примере С/Л-кода); параметры Р-кода.
7. НАВИГАЦИОННАЯ АППАРАТУРА ПОТРЕБИТЕЛЯ
Подсистема АП предназначена для приема сигналов от НКА, измере
ния навигационных параметров, выделения служебной информации (вклю
чающей эфемериды и временные поправки) и решения задачи навигаци
онно-временных определений. По измеренным относительно четырех (или
более) НКА навигационным параметрам - псевдодальности и радиальной
псевдоскорости - определяются параметры ВС потребителя: три простран
ственные координаты потребителя, три составляющие его скорости и по
правки к фазе и частоте его бортового генератора. Укрупненная структур
ная схема АП может быть представлена в виде, приведенном на рис. 7.1.
Как следует из схемы, современная АП содержит следующие основ
ные функциональные узлы.
1. Радиочастотный блок, обеспечивающий:
• прием сигналов НКА;
Радиочастотный
блок γ
Антенна
Малошумящий усилитель
Устройство защиты
Полосовой фильтр
Приемник
Аналого-
цифровой
пре¬
образователь
Синтезатор
частот
Опорный
генератор
&
Процессор
(программа)
первичной
обработки
I
I
--Ι управления
I
Блок
антенной
Внешние
устройства
и потребители
? К
Навига¬
ционный
процессор
L
Источник питания
Интерфейс
....А.
Пульт
управления
и индикации
Рис. 7.1. Укрупненная структурная схема АП
78
• их усиление и предварительную фильтрацию;
• аналого-цифровое преобразование сигналов на выходе приемника;
• формирование опорных, синхронизирующих и других сигналов.
2. Процессор первичной обработки, решающий следующие основные
задачи:
• оптимальную (согласованную) фильтрацию сигналов НКА, реализу
емую с помощью многоканальной корреляционной обработки;
• поиск и обнаружение сигналов выбранного созвездия НКА;
• слежение за сигналами и измерения РНП;
• демодуляцию навигационного сообщения.
3. Навигационный процессор, обеспечивающий:
• декодирование навигационного сообщения;
• решение основной навигационно-временной задачи - определение
параметров ВС потребителя;
• управление режимами работы и параметрами как собственными, так
и других узлов АП;
• контроль качества НВО и работоспособности аппаратуры;
• выполнение различных сервисных функций, зависящих от назначе
ния аппаратуры и режима ее работы.
Кроме того, в состав АП могут входить вспомогательные устройства:
интерфейсные, управления и индикации, питания и др.
Приведенное выше разделение вычислительных средств АП на пер
вичный и навигационный процессор отчасти является данью традиции и
используется в основном в методических целях. В настоящее время ак
тивно ведутся разработки полностью программных навигационных при
емников, в которых все функции первичного и навигационного процессо
ров реализуются в виде единого одноэтапного алгоритма (разд. 7.4).
Рассмотрим основные функции и принципы технической реализации
перечисленных элементов АП.
7.1. Радиочастотный блок
7.7.7. Антенна
Антенна АП решает две основные задачи:
• прием сигналов НКА (в идеале - всех радиовидимых в точке
приема);
• режекцию помеховых сигналов, возникающих при многолуче
вом распространении, а также помех от других источников.
Поскольку требования, предъявляемые к антенне с позиций наи
лучшего решения указанных задач, противоречат друг другу, на
практике используется следующий компромисс. ДН антенны фор
мируется исходя из того, что в рабочее созвездие целесообразно
79
включать НКА, наблюдаемые под углами места β > 5°. Меньшие
углы места (так называемые «углы маски») считаются нерабочими,
предполагается, что именно под этими углами находится большин
ство источников помех. Ниже приведена типовая зависимость от
угла места β коэффициента усиления антенны G (относительно изот
ропного излучателя с круговой поляризацией):
Угол места, β 0...5° 5...100 10.15° >15°
Коэффициент
усиления G, дБ -7,5..-5 > -4,5 >-2,5 > -2
При этом коэффициент усиления антенны не должен зависеть
от азимута - он должен оставаться постоянным во всем диапазоне
углов 0...3600.
Чаще всего в АП используют простые в изготовлении и недоро
гие микрополосковые антенны, обладающие минимальными мас
согабаритными параметрами. Такая антенна состоит из двух плос
ких проводников, разделенных слоем диэлектрика. Нижний про
водник заземлен (соединен с «массой» АП), верхний является
излучателем. Антенна рассчитывается для работы на нижней резо
нансной моде, которая излучается, в основном, в направлении вер
тикальной оси. Диаграмма направленности этой антенны обеспе
чивает в верхней полусфере всенаправленный прием правой круго
вой поляризации.
Кроме микрополосковых, в специальных видах АП нашли при
менение спиральные, кольцевые, щелевые и другие виды антенн, в
частности, фазированные антенные решетки. В последнем случае
навигационный процессор осуществляет функцию управления по
ложением ДН.
Примеры конструкций АП приведены на рис. 7.2.
Обычно антенный модуль АП - интегрированное устройство, в
которое кроме собственно антенны входят устройство защиты вхо
да (УЗ), малошумящий входной усилитель (МШУ) и полосовой
фильтр (ПФ).
Устройство защиты входа - нелинейный элемент, предотвращаю
щий воздействие на последующие каскады сигналов с пиковой плот
ностью мощности 69 кВт/м2 и более в течение 10 мс, или непре
рывного сигнала с плотностью мощности 348 Вт/м2. Потери сигна
ла в УЗ не должны превышать 1 дБ.
Коэффициент шума МШУ Кш не должен превышать 4 дБ (у со
временной аппаратуры обычно не более 2,5 дБ), коэффициент уси
ления составляет 26...30 дБ, что практически исключает влияние
80
Рис. 7.2. Примеры конструкций антенн АП:
а - пассивные микрополосковые антенны; б - антенна геодезической АП с пони
женным уровнем боковых лепестков; в - антенны систем наведения артиллерий
ских снарядов; г - спиральная антенна с приемником
Шумов последующих каскадов приемника на его итоговую чувстви
тельность.
Полосовой фильтр должен обеспечивать фильтрацию сигналов
в полосе порядка 60 МГц (относительно несущей) и подавление
Помех и шумов, действующих вне указанной полосы. Допустимые
потери в ПФ - не более 2 дБ, следовательно, общие потери в ан
тенном модуле не превышают 3 дБ.
81
7Λ.2. Приемное устройство
Приемники АП строятся исключительно по супергетеродинной
схеме, обычно с двухкратным преобразованием частоты. Первая
промежуточная частота выбирается равной 100.. .200 МГц, вторая -
10...40 МГц. Полоса пропускания тракта устройства преобразова
ния частоты (УПЧ) выбирается с учетом полной ширины спекгра
навигационного сигнала, которая для ГЛОНАСС составляет 14 МГц.
Сигналы всех НКА ГЛОНАСС усиливаются общим трактом, зада
ча частотного разделения сигналов решается не в приемнике, а пу
тем использования соответствующих опорных частот при оптималь
ной фильтрации.
Оценим общий коэффициент усиления, который должен обес
печивать приемник АП. Известно [2], что стандартное значение
мощности навигационного сигнала на входе приемника составляет
-161 дБВт. Спектральная плотность внутреннего шума приемника
при Кш = -2,5 дБ равна -201,5 дБВт/Гц, соответственно мощность
шума в полосе пропускания 14 МГц равна-131 дБВт, а отношение
сигнал/шум q = 10 log (Рс/Рш) = -31 дБ. Таким образом, в широко
полосном тракте приемника полезный сигнал имеет мощность в
1000 раз меньше, чем мощность собственною шума, на которую и
следует ориентироваться при выборе коэффициента усиления при
емника. При этом руководствуются следующими соображениями.
Сигнал с выхода приемника поступает на аналого-цифровой пре
образователь (АЦП), стандартное значение порога срабатывания
младшею разряда UAцП ~ 0,1...0,5 В; примем Е/Ацп ~ 0,25 В.
Из курса статистической радиотехники известно, что оптималь
ное значение порога квантования гауссовскою шума близко к зна
чению его среднею квадратического отклонения сш, поэтому при
мем сш = U= 0,25 В. Полагая, что мощность внутреннею шума,
равная -131 дБВт, рассеивается на нагрузке 50 Ом, нетрудно под
считать, что для выполнения последнею равенства необходим ко
эффициент усиления приемника порядка 100 дБ.
7.1.3. Аналого-цифровой преобразователь
Радиосигнал с выхода приемника поступает на вход АЦП, где
подвергается дискретизации по времени и квантованию по уров
ню. Для сигнала ГЛОНАСС, ширина спектра которою (по первым
нулям крайних сигналов) составляет 14 МГц, в соответствии с тео
ремой Котельникова для полосовых сигналов, минимальная часто
та дискретизации^ =14 МГц. На практике^ обычно выбирают
82
Пороги
Выходные
коды
01
00
Аналоговый сигнал
0
10
-L
11
Рис. 7.3. Принцип работы двухбитного АЦП
несколько большей - порядка 40 МГц (это значение примерно со
ответствует минимальной частоте дискретизации сигнала, модули
рованного P-кодом GPS).
Для квантования по уровню в стандартной АП обычно исполь
зуют одноуровневый (однобитный) или трехуровневый (двухбит
ный) АЦП. В однобитном АЦП на выходе фиксируется лишь знак
входного радиосигнала: (Увых = sign(t/BX). В двухбитном АЦП ис
пользуются три пороговых уровня - нулевой и расположенные сим
метрично относительно него уровни L и —Z,, величина которых, как
уже говорилось, выбирается из условия | L | « сш. Логику работы
АЦП иллюстрирует рис. 7.3 [2].
7.1.4. Опорный генератор и синтезатор частот
Опорный генератор вырабатывает сигнал, задающий шкалу вре
мени АП. Из этого сигнала формируется сетка опорных частот, необ
ходимых для работы различных узлов АП. Требования к стабиль
ности опорного генератора в последние годы значительно ужесто
чились. Если в конце 1990-х годов удовлетворительной считалась
относительная нестабильность частоты порядка 107, которая обес
печивается обычным кварцевым генератором с несложной схемой
термостабилизации, то в настоящее время для ряда приложений (АП
высокодинамичных объектов, интегрированных инерциально-спут
никовых систем навигации и т. п.) требуется кратковременная
относительная нестабильность порядка КГ9 и ниже, что достигает
ся применением генераторов со сложными системами частотной и
фазовой автоподстройки и, естественно, приводит к удорожанию
аппаратуры. (Количественной характеристикой кратковременной от-
83
носительной нестабильности опорного генератора является диспер
сия вторых приращений фазы; эта величина называется вариацией
Алана) [2].
Следует иметь в виду, что при детальном исследовании влияния
опорного генератора на правильную работу следящих систем АП
приходится учитывать не только относительную нестабильность
частоты, но и более детальную характеристику — спектральную
плотность фазовых шумов. Для современных стабилизирован
ных опорных генераторов эта величина на частоте 1 Гц составляет
-50..-80 дБ/Гц, на частоте 10 Гц -70..-125 дБ/Гц, на частоте 100 Гц
-100..-140 дБ/Гц.
Синтезатор частот на основе выбранного для данной АП час
тотного плана формирует из сигнала опорного генератора сетку
частот, используемых для синхронизации и тактирования различ
ных элементов программно-аппаратного комплекса АП. Поскольку
эта сетка формируется путем умножения и деления частоты гене
ратора на целые числа (коэффициенты), необходимо учитывать
происходящее при этом преобразование фазовых шумов. При раз
работке частотного плана необходимо также учитывать требова
ния к подавлению комбинационных помех, внешних помех, воз
действующих по зеркальному и другим каналам, а также другие
факторы.
7.2. Принципы и устройства первичной обработки
навигационной информации
7.27. Оценка параметров вектора состояния потребителя
как задача оптимальной фильтрации
С точки зрения современной теории оптимальной фильтрации
решаемая с помощью АП задача оценки вектора состояния потре
бителя рассматривается в следующей постановке [11].
Будем полагать, что информация, подлежащая обработке, пред
ставляет собой выборку л:* из сигнала на выходе приемника, кото
рый может быть представлен в виде
x(tk) = n{t,y)+aS{t, γ),
где η(ί, μ) - составляющая, обусловленная воздействием помех, ха-
растеризуемых вектором параметров μ; а — дискретный (индика
торный) параметр, ассоциируемый с наличием (а = 1) или отсут
ствием (а = 0) сигнала; S(t9 γ) - известная (сигнальная) функция,
зависящая от вектора параметров γ.
84
В нашем случае сигнальная функция
S(t) = AD(t - τ) cos [2π(/0 + )t + ϋ(ί - τ)π+φ(τ)].
Здесь А - амплитуда сигнала; D(t - τ) - ПСП дальномерного кода;
Рд - доплеровский сдвиг частоты НКА; Ф(/ - х) = 0; 1 - последо
вательность символов навигационной информации; φ(τ) — началь
ная фаза принятого сигнала относительно фазы опорного генера
тора АП.
Компоненты вектора γ, т. е. параметры сигнала, могут быть из
вестными или неизвестными. В свою очередь, неизвестные пара
метры можно трактовать как детерминированные или случайные и
рассматривать как информативные или мешающие. Информатив
ным будем называть параметр, значение которого представляет для
наблюдателя самостоятельный интерес; мешающий параметр тако
го интереса не представляет. Очевидно, что в зависимости от по
становки задачи один и тот же неизвестный параметр сигнала мо
жет рассматриваться и как информативный, и как мешающий.
Так, при использовании дальномерных методов измерений инфор
мативным параметром является задержка радионавигационного сиг
нала х, а мешающими - доплеровский сдвиг несущей частоты Рц и
начальная фаза сигнала ф(т). При переходе к радиально-скоростным
методам доплеровский сдвиг становится информативным парамет
ром, однако фаза сигнала остается мешающим параметром. Нако
нец, при реализации прецизионных относительных измерений (см.
далее) фаза несущей также становится информативным парамет
ром. Параметр — τ), с точки зрения всех перечисленных задач,
является мешающим, однако он является информативным с точки
зрения задачи декодирования НИ. Аналогично обстоит дело с амп
литудой сигнала А: при НВО этот параметр не используется, но при
выборе оптимального созвездия и контроле качества навигационных
сигналов он является информативным. Наконец, следует отметить,
что независимо от того, рассматривается неизвестный параметр как
информативный или мешающий, оптимальный (ιбайесовский) алго
ритм обработки сигнала в явном или неявном виде содержит про
цедуру оценки этого параметра.
В общем случае оптимальным является алгоритм совместного
обнаружения-оценивания, который состоит в фильтрации вектора
параметров γ, т. е. в получении массива текущих значений апосте
риорной вероятности (АВ\ соответствующих всем возможным со
четаниям параметров сигналов. Такой алгоритм является наилуч
шим в том смысле, что сохраняет всю информацию, содержащуюся
85
в наблюдаемом сигнале. Однако на практике такой алгоритм реа
лизовать не удается, по крайней мере на современном уровне вы
числительной техники, хотя работы в этом направлении ведутся.
Поэтому на практике используется ряд упрощений оптимального
алгоритма, которые рассмотрены ниже.
Первое упрощение оптимального алгоритма состоит в его раз
биении на ряд этапов, причем для обработки на каждый последую
щий этап передается только информация, относящаяся к тем облас
тям пространства параметров, где значения АВ превышают некото
рое заданное пороговое значение. Очевидно, что такая селекция, с
одной стороны, устраняет значительную часть информации, отно
сящейся к тем областям пространства параметров, где наличие сиг
нала маловероятно, но, с другой стороны, может привести к утере
части полезной информации (пропуску сигнала), что необходимо
учитывать при выборе значения порога и других параметров алго
ритма.
В отличие от радиолокации, где принято выделять три этапа:
первичную, вторичную и третичную обработку, в спутниковой ра
дионавигации задачу получения оценок вектора потребителя раз
бивают на два этапа: первичную и вторичную обработку. При этом
на этапе первичной обработки решаются задачи поиска и обнару
жения сигналов, слежения за ними, фильтрации (оценки) РНП сиг
нала, демодуляции служебной информации. На этапе вторичной об
работки с использованием полученных на первом этапе оценок РНП
с помощью соответствующих навигационных функций определя
ются НП и решается задача НВО, т. е. вычисляются оценки векто
ра состояния потребителя. В состав программного обеспечения вто
ричной обработки входят блоки управления первичной обработкой,
блоки для ввода и вывода необходимой информации и блоки для
решения сервисных задач.
7.2.2. Принцип построения алгоритмов поиска
и обнаружения сигнала
Сеанс НВО начинается с поиска сигнала в пространстве неизве
стных параметров: задержки τ и доплеровского сдвига Fjy. В пер
вых образцах АП, использовавших одноканальные приемники, за
дача поиска и обнаружения сигналов от необходимого числа НКА
(четырех и более), решалась путем последовательной настройки
приемника на соответствующие литерные частоты ГЛОНАСС либо
путем перебора опорных последовательностей дальномерных ко
дов GPS. Однако оперативность и точность таких измерений не
86
удовлетворяет современным требованиям. Поэтому в настоящее вре
мя приемники АП строятся исключительно как многоканальные,
причем число параллельных каналов, реализующих (на аппаратном
или программном уровне) процедуру поиска, обнаружения и оцен
ки параметров сигнала, колеблется от 12—16 в несложных GPS-при-
емниках, до нескольких сотен и более в совмещенных (ГЛОНАСС +
+ GPS + «Галилео») перспективных образцах АП. Обработка сиг
нала каждого НКА при этом осуществляется независимо, поэтому
далее ограничимся рассмотрением путей решения этой задачи по
одному НКА.
Задача поиска сигнала в АП СРНС полностью укладывается в
рамки описанной выше классической трактовки: оптимальная про
цедура состоит в поиске пары значений {/^д; х}, которой соответ
ствует максимум апостериорной вероятности (АВ). Неизвестные из
меряемые параметры Гдит считаются независимыми случайными
величинами, имеющими непрерывную плотность распределения.
Априорные распределения этих величин считаются равномерными
в интервалах соответственно 0 < Т^д < /^iax; 0 < х < Ахс. Фаза
принятого сигнала НКА на этапе поиска и обнаружения рассмат
ривается как мешающий параметр и считается равномерно распре
деленной в интервале 0...2π, поэтому обработка ведется в квадра
турах.
Однако реализация процедуры поиска максимума АВ по непре
рывному пространству параметров {/^д; х} требует больших вы
числительных мощностей. Поэтому на практике в АП обычно ис
пользуется квазиоптимальная процедура, получаемая из оптималь
ной путем перехода от непрерывного к дискретному множеству этих
параметров, т. е. считается, что параметры х и Fp могут принимать
только дискретные значения х, (i = 1, ..., Ντ) и Fj (j = 1, ..., Nj).
Поиск по дискретному множеству параметров {х,; Fj} при этом
состоит в проверке гипотез о наличии сигнала со всеми возможны
ми комбинациями параметров (xf, Fj). Процедура проводится (по
следовательно, параллельно или последовательно-параллельно) по
всему множеству параметров и реализуется путем сравнения с по
рогом решающей статистики (при оптимальной обработке - от
ношения правдоподобия или его логарифма), вычисленной при дан
ном сочетании параметров.
Превышение порога при некотором сочетании параметров
(Xf, Fj) позволяет утверждать, что параметры обнаруженного сиг
нала (х, Fp), принадлежат некоторой области (ячейке) простран¬
87
но с обнаружением сигнала получаем интервальную оценку его па
раметров. Однако на практике обычно полагают, что Δτ = х- х, * О,
AF = Fp — Fj ~ 0, т. е. значения (х,; Fj) принимают за точечную
оценку параметров обнаруженного сигнала: τ = τί; F — Fj. Отсюда
следует, что если строить первичную обработку в виде единого ал
горитма обнаружения-оценивания, то разбиение непрерывного мно
жества {т; Fp) на ячейки (xf; Fj) должно производиться исходя из
требуемой итоговой точности оценки параметров: размер ячейки
не должен превышать максимально допустимой погрешности из
мерений. С точки зрения минимизации затрат времени и вычисли
тельного ресурса, такой вариант далек от оптимального.
Проиллюстрируем сказанное следующим примером. Пусть тре
буется обеспечить измерения квазидальности с погрешностью по
рядка 15 м, а скорости - с погрешностью 0,1 м/с. Для этого необхо
димо измерять задержку х с погрешностью ΔΧ ~ 50 нс, а
погрешностью порядка AF= 1 Гц. Число дискретных значений за-
образом, общее число анализируемых комбинаций (ячеек) имеет
порядок NxNf= 2 108. Поиск и обнаружение единственного сигна
ла при таком размере области неопределенности требует неоправ
данно больших затрат вычислительных мощностей и времени.
Отсюда следует, что совмещение процедур поиска, обнаруже
ния и точной оценки параметров сигнала в едином алгоритме, с
технической точки зрения, не является оптимальным. Поэтому в
современной АП алгоритм первичной обработки, в свою очередь,
делится на два этапа. На первом этапе решается задача поиска и
обнаружения сигнала на дискретном множестве параметров, число
элементов которого определяется исходя из того, чтобы точность
получаемых на этом этапе оценок обеспечивала возможность «зах
вата» измеряемых параметров следящими фильтрами, с помощью
которых на втором этапе и производится их точная оценка (фильт
рация). Иными словами, на этапе поиска и обнаружения точность
держки х при этом составляет Ντ — - - =
Δχ 50 нс
= 2-104, а число
значений доплеровского сдвига N f ~
88
оценок задается существенно ниже, чем требуемая итоговая точ
ность. Рассмотрим более подробно схемотехнические решения, ис
пользуемые в АП, построенной по такому принципу.
7.2.3. Устройства поиска и обнаружения сигнала
Важнейшей операцией, выполняемой при поиске и обнаруже
нии сигнала, является его оптимальная (согласованная) фильтра
ция. В АП эта операция традиционно выполняется с помощью кор
реляционной обработки, поэтому базовым элементом устройства
поиска и обнаружения сигнала является многоканальный корреля
тор. В зависимости от того, какие сигналы поступают на входы
коррелятора, может быть реализована как когерентная, так и неко
герентная обработка.
Упрощенная схема некогерентного устройства поиска сигнала
НКА приведена на рис. 7.4. Сигнал с выхода устройства преобра
зования частоты (УПЧ) поступает на квадратурный коррелятор, со
стоящий из двух каналов Q и /, каждый из которых включает в себя
умножитель и накапливающий сумматор со сбросом. Время накоп
ления в сумматоре Тн чаще всего выбирается кратным периоду 7псп·
Входной
Рис. 7.4. Упрошенная схема устройства поиска сигнала
89
Процедура поиска сигнала НКА начинается с того, что на осно
вании прогноза положения и параметров движения НКА по данным
альманаха выбирается некоторая пара априорных значений (х,, Fj).
Соответственно, на синтезаторе частот устанавливается частота
опорного гармонического колебания удовлетворяющая соотно-
шениюУсну =fnp - Fp где^р ” промежуточная частота, Fj~ априор
ное значение доплеровского сдвига.
На выходе генератора кода ПСП формируется последователь
ность Dk(t - X,), соответствующая дальномерному коду £-го НКА,
задержанному на величину xf. Последовательность Dk(t - xf) умно
жается на сигнал с входа синтезатора. Полученное опорное колеба
ние y(t) = Dfrit-Xj)cos(2nfCHJt) поступает на перемножитель ка
нала /, а через фазовращатель - на перемножитель канала Q.
В перемножителях I и Q проиходит преобразование принятого
сигнала на нулевую промежуточную частоту и образуются видео
сигналы, пропорциональные произведению трех сомножителей:
• модулирующей функции принятого сигнала;
• модулирующей функции синфазной (в канале Q) или квадра
турной (в канале /) составляющей опорного сигнала;
• гармонических колебаний (биений) с частотой AF = Fn ~Fr
Эти видеосигналы накапливаются в сумматорах и затем посту
пают на устройство вычисления квадрата модуля U2 = Q2 +12. Сум
ма значений vl Щ, ul полученных на п периодах ПСП, некоге
рентно накопленная в сумматоре, поступает на пороговое устрой
ство, в котором принимается решение либо об обнаружении сигнала
с данными значениями (х/9 Fj), либо об его отсутствии*.
При обнаружении сигнала принимается решение о переходе в
режим фильтрации РНП и декодирования навигационной инфор
мации. При этом полученные оценки РНП (х; F) используются в
качестве начальных условий для соответствующих следящих фильт
ров. Если сигнал не обнаружен, принимается решение о продол
жении процедуры поиска для очередного сочетания параметров
(Vi. Fj+1), устанавливаемых соответственно блоком управления за
держкой и блоком управления сдвигом частоты.
Оценим количество комбинаций (ячеек) (xI9 Fj), которое целесо
образно анализировать в таком устройстве для того, чтобы обеспе¬
• Строго оптимальная решающая статистика для рассматриваемой задачи име
ет вид z(U) = InJq(U). Однако отношение Рс /Рш на выходе интегратора составляет
~ 0 дБ (см. ниже). При этом справедливо приближение 1п/0((У) ~ U‘, поэтому ве
личина и2 мажет непосредственно использоваться для принятия решения.
90
чить минимальное время обнаружения сигнала при допустимых по
терях в отношении сигнал/шум, обусловленных неидеальностью об
работки.
Как было показано выше, отношение сигал/шум на выходе при
емника имеет порядок —30 дБ. В то же время известно, что для
обнаружения сигнала с вероятностью D = 0,5 при вероятности лож
ной тревоги ос = 10 4 минимальное (пороговое) отношение Рс/Рш
составляет 7...8 дБ. Отсюда следует, что в процессе первичной об
работки сигнала в АП необходимо накопление сигнала, повышаю
щее отношение сигнал/шум примерно на 40 дБ. Идеальная фильт
рация (когерентное накопление) сигнала на интервале, равном
длительности дальномерной ПСП (1 мс), повышает это отношение
в Ν= 1023 раз, т. е. примерно до 0 дБ. Дальнейшее накопление до
требуемого отношения Рс/Рш обычно производится некогерентно,
что позволяет при приемлемых потерях существенно упростить
аппаратуру. Можно показать, что с учетом неидеальности проце
дур фильтрации для достижения вышеуказанного порогового от
ношения сигнал/шум, обычно достаточно некогерентно накопить
от трех до пяти ПСП, т. е. длительность некогерентного накопле
ния Тн ~ 3...5 мс.
Более сложная в реализации процедура когерентного накопле
ния используется в случаях, когда необходимо полностью исполь
зовать энергию полезного сигнала. Максимальная длительность ин
тервала, на котором фаза несущей остается постоянной, т. е. воз
можно когерентное накопление, для GPS равна длительности
символа НИ (20 мс), а для ГЛОНАСС - длительности символа би-
двоичного кода (10 мс). Однако с учетом того, что на этапе обнару
жения символьная синхронизация отсутствует, т. е. смена знака сим
вола (фазы несущей) равновероятна в любой момент, интервал ко
герентного накопления выбирается равным половине длительности
символа (для GPS - 10 мс, для ГЛОНАСС - 5 мс).
Будем считать, что поиск сигнала по времени осуществляется
путем последовательного дискретного сдвига опорной ПСП на ве
личину хс, равную длительности символа ПСП С/А-кода. GPS. Мак
симальное рассогласование принятой и опорной ПСП при этом не
превышает 0,5хс, соответственно потери на неидеально сть фильт
рации не превышают 3 дБ, что считается допустимым. Таким обра
зом, число дискретных значений задержки Λ/τ, при котором необхо
димо проводить поиск сигнала, равно длительности дальномерно-
го кода Ν.
91
Оценим число частотных полос (доплеровских каналов), на ко
торое необходимо разбить весь диапазон доплеровских частот А/^д
для того, чтобы реализовать близкую к когерентной обработку сиг
нала на интервале времени, равном длительности ПСП (1 мс).
Будем исходить из того, что для j-го доплеровского канала, цен
тральная частота которого Fj наиболее близка к истинному значе
нию сдвиг фазы сигнала за время накопления Тпсп не должен
превышать 60° (при таком фазовом сдвиге потери по сравнению с
идеальной когерентной обработкой не превышают 1,5 дБ). Следо
вательно, период колебаний (биений), обусловленных несовпаде
нием частот Fд и Fp должен быть не меньше Тд = 6ГПСП = 6 мс, а
частотная расстройка AF = | ^ — /^-| не должна превышать 165 Гц.
Соответственно, допустимая ширина полосы доплеровского кана
ла, равная удвоенной расстройке, составляет 330 Гц, и для пере
крытия диапазона доплеровских частот ΔFд = ±5 кГц необходимо
30 каналов. Общее число комбинаций (xi9 Fj) при этом составит
30· 1023 = 3 -104, т. е. по сравнению со случаем, рассмотренном в
первом примере, число анализируемых комбинаций сокращается
примерно в 104 раз.
Однако это число остается достаточно большим, поэтому для
ускорения процедура поиска организуется как параллельно-после
довательная, при этом число параллельно анализируемых комбина
ций значений (τί? Fj) зависит от требований к оперативности изме
рений и стоимости (сложности) АП.
Необходимо отметить, что до последнего времени согласован
ная фильтрация в АП в основном реализовывалась во временной
области путем корреляционной обработки, т. е. свертки на корре
ляторе принимаемого сигнала с эталонной ПСП дальномерного
кода. В настоящее время в качестве перспективного все чаще рас
сматривается вариант согласованной фильтрации в частотной
области с использованием алгоритмов быстрой свертки на базе
быстрого преобразования Фурье (БПФ). Достоинство последнего
варианта в том, что в отличие от коррелятора реализуемый с по
мощью БПФ согласованный фильтр, как известно, инвариантен к
задержке сигнала, т. е. поиск сигнала по задержке становится не
нужным.
Естественно, что для ускорения поиска и обнаружения сигнала
должна использоваться вся имеющаяся в распоряжении наблюда
теля априорная информация, например, значения параметров, по
лученные в ходе предыдущих сеансов.
92
7.2.4. Фильтрация радионавигационных параметров
и дешифрация навигационной информации
В отличие от этапа поиска сигнала, где используется некогерент
ный (квадратурный) метод обработки, при фильтрации информа
ционных параметров применяется режим квазикогерентного накоп
ления, реализуемый с помощью узкополосных следящих фильтров.
Оптимальное решение этой задачи состоит в совместной фильтра
ции двух непрерывных РНП - задержки τ и доплеровского сдвига
Fjy частоты несущей сигнала, а также одного дискретного парамет
ра - значения текущего символа НИ ΰ(ί — τ), которое определяет
фазу несущей. В литературе такую процедуру часто называют не
прерывно-дискретной фильтрацией. Существенно, что в оптималь
ной схеме совместной фильтрации в этом случае присутствуют пе
рекрестные связи каналов оценки задержки и фазы, т. е. указанные
оценки оказываются взаимосвязанными.
Однако для упрощения изложения взаимосвязью этих оценок в
первом приближении пренебрегают и полагают, что оценки задерж
ки х, доплеровского сдвига /<д и символа - т) формируются с
помощью независимых каналов, включающих в себя соответству
ющие дискриминаторы и фильтры. При синтезе таких дискрими
наторов используется допущение, что отношение энергии полезно
го сигнала к спектральной плотности шума в каналах оценки дос
таточно велико (при расчетах обычно используется стандартное
значение, равное +38 дБГц). Рассмотрим основные схемотехничес
кие подходы, используемые в этих каналах.
Канал оценки задержки сигнала. Этот канал включает в себя
дискриминатор задержки и сглаживающий фильтр (рис. 7.5). Диск
риминатор задержки должен вырабатывать напряжение, пропорци
ональное разности истинного значения задержки τ и ее оценки х.
Операция нахождения оценки х сводится к поиску максимума ин
теграла свертки (корреляционного интеграла) принятого сигнала x(t)
и опорной ПСП D(/- х):
'1
Я(х) -J x(t)D(t — x)dt — max(x = х),
_ - Э/?(х)
т. е. включает в себя операцию вычисления производной ——,
Эх
которая в силу независимости величин t их может выполняться
под знаком интеграла:
93
Рис. 7.5. Структурная схема слежения за задержкой
Эх J Эх
*0
На практике эту производную обычно заменяют конечной раз
ностью двух опорных последовательностей, сдвинутых относитель
но друг друга на величину Δτ, равную длительности символа ПСП:
В литературе последовательность D обычно обозна¬
чается буквой Е (от англ, early - раньше), а последовательность
Z)^f — х—^ j - буквой L (от англ, late - запаздывать). Из формулы
(7.1) следует, что дискриминатор задержки может быть реализован
в виде двух корреляторов, на опорные входы которых подаются пос
ледовательности Е и L На рис. 7.5 приведен пример схемы слеже
ния за задержкой (ССЗ), построенной по такому принципу.
Генератор опорного сигнала содержит формирователь ПСП, вы
ходной сигнал которого поступает на трехбитовый регистр сдвига,
тактируемый с частотой, в 2 раза превышающей тактовую частоту
ПСП. С крайних отводов этого регистра снимаются последователь
ности Е и L, которые поступают на опорные входы квадратурных
корреляторов, аналогичных рассмотренным выше. Полученные на
выходе накапливающих сумматоров квадратурные составляющие
IL, Ql, Ιε·> Qe последовательностей En L используются для расчета
сигнала рассогласования (ошибки) ит В некоторых типах дискри
минаторов используют третью последовательность, снимаемую со
среднего отвода регистра и обозначемую буквой Р (от англ, prompt -
в данный момент, незамедлительно).
На практике применяются различные алгоритмы вычисления сиг
нала их ошибки. Непосредственно из формулы (7.1) следует алго
ритм
Этот алгоритм обеспечивает хорошие характеристики в области
малых отклонений Δτ, но крутизна его дискриминаторной характе
ристики их= /(Δτ) зависит от амплитуды сигнала. Для устранения
этого недостатка вводится нормировка сигнала ошибки их\
dD(t - τ)
Эт
(7.1)
Δτ
(7.2)
95
(7.3)
и _ λ/71 + βί ~~ Ψϊ +
Φε + Qe +Ql
однако при этом возрастают вычислительные затраты. Поэтому на
практике предпочтение отдают трехканальному (Е, Р, L) алгоритму
ux=(Ie~1l)Jp + (Qe~Ql)Qp’ (7*4)
который практически не уступает (7.3) по характеристикам и при
этом требует минимальных вычислительных затрат Для реализа
ции этого алгоритма в схему, изображенную на рис. 7.5, добавляет
ся еще один квадратурный коррелятор, на который в качестве опор
ной подается Р-последовательность.
С выхода дискриминатора сигнал рассогласования их через сгла
живающий фильтр поступает на ГПСП для управления временным
положением опорной последовательности. Структура сглаживаю
щего фильтра определяется принятой моделью изменений задерж
ки, т. е. в конечном счете, принятой моделью движения потребите
ля. Обычно в АП используются сглаживающие фильтры не выше
третьего порядка.
Канал оценки доплеровской частоты и фазы сигнала. Алго
ритм слежения за частотой и фазой несущей в АП СРНС обычно
также имеет двухэтапную структуру, поскольку погрешность оце
нок Рд, получаемых на этапе обнаружения (порядка сотен герц,
см. выше), превышает полосу захвата фазовой автоподстройки час
тоты (ФАП), имеющую порядок 50 Гц. Поэтому первым этапом
доплеровской фильтрации является уточнение величины Рд, реа
лизуемое схемой частотной автоподстройки (ЧАП), а затем систе
ма переходит в режим слежения за фазой. При этом оценка допле
ровского сдвига Рд формируется уже не непосредственно путем сле
жения за частотой несущей, а дифференцированием оценки фазы
несущей ф, вычисляемой фазовым дискриминатором.
Известно, что частотный дискриминатор можно реализовать
путем соответсвующей обработки отсчетов синфазной и квадратур
ной составляющих / и g, полученных в смежные моменты време
ни tk_j; tfc Наиболее простой в вычислительном отношении и одно
временно близкий к оптимальному алгоритм частотного дискрими
натора имеет вид: Uf =Ik_xQk Схема ЧАП, реализующая
такой алгоритм, приведена на рис. 7.6.
Оптимальный алгоритм слежения за фазой в общем случае име
ет достаточно сложную структуру. Его упрощение возможно с уче-
96
Рис. 7.6. Структурная схема ЧАП
Рис. 7.7. Структурная схема ФАП
97
том того факта, что в момент перехода к слежению за фазой накоп
ленное отношение PJPm уже достаточно велико (порядка 10 дБ и
более). Известен ряд квазиоптимальных алгоритмов слежения за
фазой, полученных с учетом указанного условия: Костаса, аркган-
генсный и др. На рис 7.7 приведена используемая на практике схе
ма ФАЛ, реализующая алгоритм вида
«(Фа) = Qk sign (/*),
характеристики которого близки к оптимальным, а вычислитель
ные затраты минимальны.
Очевидно, что если исключить операцию sign, получим класси
ческий вариант схемы Костаса: π(φΛ )-Q^ (/* ).
Из сравнения рис. 7.6 и 7.7 следует, что алгоритмы ЧАН и ФАЛ
имеют много общего и могут быть реализованы с помощью единой
схемы. Переход от алгоритма ЧАП к ФАЛ при этом сводится к не
большому числу коммутаций.
Порядок и параметры сглаживающего фильтра в цепи обратной
связи, как и в ССЗ, определяются выбранной моделью динамики
потребителя. Отметим, что параметры (полоса пропускания и (или)
коэффициент усиления) цепи обратной связи могут в процессе на
блюдения изменяться в зависимости от полученных оценок, т. е.
процедура фильтрации может быть адаптивной.
Комплексная фильтрация оценок PHIL Описанные выше ал
горитмы фильтрации, как уже указывалось, получены при допуще
нии о независимости оценок псевдозадержки, доплеровского сдви
га и фазы навигационного сигнала. В современной АП все чаще
используются комплексные фильтры, учитывающие взаимосвязь
указанных параметров. Расчеты показывают, что комплексная (сов
местная) фильтрация измерений задержки огибающей и доплеров
ского сдвига в некогерентном приемнике позволяет в несколько раз
снизить шумовую погрешность измерений задержки. (В техничес
кой литературе такой прием получил название «доплеровской под
держки измерений по огибающей».) В когерентном приемнике су
ществует возможность фазовой «поддержки» указанных измерений,
однако непосредственное извлечение из фазы сигнала информации
об его задержке связано с проблемой неоднозначности фазовых из
мерений (подробно см. разд. 10). В то же время в системе слеже
ния за фазой формируется достаточно точная и однозначная оценка
доплеровского сдвига частоты, которую можно использовать в ком
плексном фильтре. В результате точность измерения задержки воз¬
98
растает в 10 и более раз по сравнению с автономной системой сле
жения [2].
Канал выделения навигационной информации. В канале вы
деления НИ, передаваемой путем низкочастотной относительной
фазовой манипуляции (ОФМ), используется сигнал на выходе од
ного из квадратурных корреляторов.
Алгоритм выделения НИ сводится к определению знака отсче
тов квадратурной составляющей:
Ьк = sign 4.
Полученные значения Ък затем поступают в схему демодуля
ции навигационной информации.
Пример структурной схемы канала дешифрации НИ для СРНС
ГЛОНАСС приведен на рис. 7.8.
На дешифратор
навигационных данных
Рис. 7.8. Схема канала дешифрации НИ для СРНС ГЛОНАСС
Блок выделения синхросимволов, фиксируя моменты смены по-
лярности сигнала выделяет импульсы символьной синхрони
зации бидвоичного кода частоты 100 Гц (см. разд. 5). Эти импуль
сы используются для символьной синхронизации блоков выделе
ния метки времени, блока формирования вспомогательного меандра
частоты 100 Гц и блока выделения бидвоичного кода.
В блоке выделения метки времени после свертки на коррелято
ре последовательности значений и опорной ПСП МВ, генери
руемой в АП, формируется импульс, синхронный с задним фрон¬
99
том 30-го символа кода МВ, совпадающий с двухсекундной мет
кой. В результате суммирования по mod2 вспомогательного меанд
ра и бидвоичного кода выделяются импульсы символьной частоты
50 Гц информационной последовательности (восстанавливаются
символы НИ), которые подвергаются дополнительному сглажива
нию на интервале 20 мс. Границы интервалов сглаживания опреде
ляются импульсами символьной частоты НИ (50 Гц), формируемых
соответствующим блоком.
После сглаживания символы НИ вместе с метками времени по
ступают на навигационный процессор.
7.3. Вторичная обработка навигационной информации
7.3.1. Оценка параметров вектора состояния потребителя
Основной целью этапа вторичной обработки является решение
задачи НВО, т. е. определение вектора состояния потребителя. Ис
ходными для решения этой задачи являются полученные на первом
этапе оценки РНП - псевдозадержки τπ и пседодоплеровского сме
щения скорости называемые первичными, или «сырыми», изме
рениями. С использованием соответствующих навигационных функ
ций и данных НИ по «сырым» измерениям рассчитываются оценки
НП, на основании которых и решается навигационная задача.
Обратим внимание, что первичные измерения есть результат на
блюдения на ограниченном интервале времени в присутствии шу
мов, т. е. они являются случайными величинами. Поэтому решение
навигационной задачи возможно только статистическими методами.
Наиболее простым решением этой задачи является так называе
мый одношаговый алгоритм [2], основанный на независимой обра
ботке совокупностей первичных измерений, получаемых в каждый
момент времени. Так как измерения псевдо дальности и псевдоско
рости считаются независимыми, рассмотрим для простоты одно
шаговый алгоритм обработки псевдодальномерных измерений.
Поскольку минимальное число НКА, при котором навигацион
но-временная задача имеет единственное решение, равно четырем,
одномоментную выборку измерений РНП, содержащую не менее
четырех независимых значений псевдодальностей, называют полной.
Координаты НКА и потребителя при решении навигационно-вре
менной задачи удобно описывать в геоцентрической экваториаль
ной прямоугольной системе с началом отсчета в центре масс Зем
ли. В этом случае определение координат в АП по данным полной
100
выборки измерений псевдодальностей сводится к решению систе
мы нелинейных уравнений вида (3.2).
Эта система линеаризуется в окрестностях априорных (предпо
лагаемых) значений неизвестных параметров Rj 0, R2 q, /?з о> /?4 о, в
результате формируется градиентная матрица (4x4) вида:
вде
ЭД
ЭЛ,
ЭЛ,
ЭЛ,
Эл:
Эу
dz
Эст„
ar2
ЭЛ2
эл2
эл2
<г =
Эх
Эу
dz
дсх„
ЭЛ3
эл3
ЭЛ3
ЭЛ3
Эх
ду
dz
э ст„
эл4
эл4
ЭЛ4
эл4
Эх
ду
dz
дсхп
х) Эл,
(•УНКА/
-у).
ЭЛ; _ 1
’ Эу
R.
·*
dz
(7.5)
Эл: Rt ду ’ dz Ri dczn
(Современная АП, как правило, использует результаты первич
ных измерений по всем видимым НКА, при этом число НКА пре
вышает число неизвестных, т. е. возникает избыточность системы
уравнений. При этом матрица (7.5) имеет размерность 4хДГ, где TV-
число независимых измерений РНП.)
Известно, что в гауссовском приближении оптимальное реше
ние системы линейных уравнений сводится к методу наименьших
квадратов [16], который, как правило, и используется в алгоритмах
решения навигационной задачи.
Если найденные оценки параметров сильно отличаются от ап
риорных значений, полученные решения используются как началь
ные условия для следующей итерации, т. е. применяется метод пос
ледовательных приближений.
Решение системы линеаризованных уравнений методом после
довательных приближений Ньютона производится по формуле
8к - 8к-1 + ,
тде g - вектор оцениваемых параметров, g = [Ах Ау Δζ сАтп]т;
AR - разница измеренных и расчетных дальностей от потребителя
доКА, AR = [r}-R} R2-R2 Л3-Л3 Λ4-Λ4]Τ; - обращен¬
ная матрица (7.5) (т - знак транспонирования матрицы).
101
Начальные условия итерационного алгоритма /?j 0, /?2д), /?зо>
как уже говорилось, определяются по имеющейся у потребителя
априорной информации; заканчивается итерационный процесс при
достижении заданной погрешности значений определяемых пара
метров.
Практические алгоритмы определения координат объекта по из
мерениям четырех псевдодальностей могут отличаться используе
мыми численными методами решения системы уравнений и, глав
ным образом, методами обращения матрицы (7.5).
7,3.2. Фильтрация НП при вторичной обработке
Рассмотренный выше одношаговый алгоритм не учитывает пре
дыстории наблюдений, т. е. оценок координат и составляющих век
тора скорости, данных об уходе частоты опорного генератора и сме
щении шкал времени, полученных на предыдущих этапах обработ
ки. Поэтому точность измерений с помощью этого алгоритма
невысока. В частности, в одношаговом (одномоментном) алгорит
ме нет возможности использовать оценку доплеровского сдвига для
повышения точности координатных оценок (например, с помощью
интегрального доплеровского метода).
Кроме того, одношаговый алгоритм получен в предположении,
что измерения по всем НКА приведены к одному моменту време
ни. На практике из-за конечной точности сведения шкал времени
НКА и АП это условие нарушается. Для низкодинамичных объек
тов возникающая по указанной причине погрешность может счи
таться пренебрежимо малой, однако в случае динамичного объекта
для высокоточного измерения и интерполяции координат необхо
дима фильтрация высокочастотных составляющих погрешностей.
Для устранения перечисленных недостатков используются филь
трационные алгоритмы, суть которых сводится к тому, что априо
ри задается некоторая модель изменения оцениваемых параметров
во времени, которая учитывает динамику объекта и позволяет прог
нозировать текущие значения скорости, ускорения, а также исполь
зовать разновременные измерения. По этой модели ведется обра
ботка последовательности оценок параметров ВС, т. е. реализуется
процедура слежения за изменениями ВС с использованием всех по
лученных за время наблюдения результатов.
В качестве навигационного фильтра, учитывающего модель ди
намики объекта, обычно используется дискретный фильтр Калма-
на или его модификации. Вектор состояния в этом случае включает
11 компонент: три пространственные координаты, две оценки по¬
102
грешностей опорного генератора АП (фазы и частоты), три состав
ляющие вектора скорости, три составляющие вектора ускорения.
Третьи производные перемещения объекта по времени и члены бо
лее высоких порядков трактуются как возмущающие силы в урав
нениях погрешностей.
7.3.3. Алгоритмы вторичного сглаживания НП
Поскольку полученные на основании первичных измерений
оценки параметров ВС представляют собой некоррелированные
между собой оценки функционально связанных величин (псевдо
дальности и псевдоскорости), можно использовать эти оценки для
дополнительного сглаживания (уточнения) на интервалах времени,
превышающих интервал между отдельными первичными измере
ниями. Алгоритмы вторичного сглаживания, использующие этог
принцип, строятся на базе калмановской фильтрации вектора состо
яния, компонентами которого являются оценки псевдодальности и
псевдоскорости, т. е. реализуют комплексную линейную следящую
систему. Результаты моделирования, приведенные в литературе [2],
показывают, что вторичное сглаживание в комплексном фильтре поз
воляет существенно повысить точность оценки псевдодальносги по
сравнению со случаем ее независимой фильтрации.
В то же время точность фильтрации псевдоскорости в данном
случае возрастает незначительно, поскольку информация о фазе и
доплеровском сдвиге достаточно полно и корректно извлекается в
следящих системах первичной обработки. Однако сказанное спра
ведливо только при условии, что закон изменения указанных пара
метров не отличается от модели, использованной при синтезе сис
тем. Если данное условие нарушается, то вторичное сглаживание
может дать значительный эффект, однако структура соответствую
щего комплексного фильтра усложняется.
Опыт построения АП на основе рассмотренных двухэтапных ал
горитмов показал, что обеспечиваемая с их использованием погреш
ность навигационных определений оказывается достаточной для
большинства приложений. В настоящее время в целях дальнейше
го повышения качества НВО разрабатываются более совершенные,
так называемые одноэтапные алгоритмы.
7.3.4. Одноэтапные алгоритмы обработки сигналов в АП
Напомним, что в двухэтапных алгоритмах НВО на этапе пер
вичной обработки осуществляется слежение за РНП сигналов НКА
независимыми каналами навигационного коррелятора (процессора
103
первичной обработки). При этом на выходе блока первичной обра
ботки получают первичные измерения - оценки РНП (псевдозадерж
ки и псевдодоплеровского сдвига частоты) сигнала по каждому об
рабатываемому НКА. На этапе вторичной обработки в навигацион
ном процессоре тем или иным способом (как правило, это либо
метод наименьших квадратов, либо фильтрационный алгоритм на
основе уравнений расширенного фильтра Калмана) осуществляет
ся оценка компонент ВС.
В последнее время в качестве альтернативы двухэтапным все чаще
рассматриваются одноэтапные алгоритмы. При одноэтапной обра
ботке процесс слежения за РНП сигнала в явном виде отсутствует,
поскольку осуществляется непосредственная фильтрация компонент
ВС из всей совокупности наблюдаемых сигналов НКА. При этом
необходимые для управления генераторами опорных сигналов оцен
ки РНП формируются непосредственно из оценок компонент ВС.
Синтез одноэтапных алгоритмов базируется на методах теории
оптимальной нелинейной фильтрации марковских процессов и
включает в себя решение двух основных задач: синтез многомер
ного дискриминатора и синтез интегрированного сглаживающего
фильтра. При этом дискриминатор по компонентам ВС состоит из
двух сомножителей: дискриминатора по РНП и матрицы связи РНП
и компонент ВС.
Рис. 7.9. Структурная схема некогерентного одноэтапного алгоритма НВО
104
На рис. 7.9. приведена структурная схема некогерентного одно
этапного алгоритма НЕЮ.
Когерентный режим работы НАП подразумевает слежение не
только за задержкой, но и за фазой навигационного сигнала. Ис
пользуя фазовые измерения, можно заметно снизить погрешность
оценки скорости и координат потребителя.
Рис. 7.10. Структурная схема когерентного одноэтапного алгоритма НВО
При реализации когерентного режима, как правило, осуществ
ляют комплексирование схемы слежения за фазой с каналами оценки
дальности и скорости. Такое комплексирование может осуществ
ляться различными методами [2]. Синтез одноэтапного когерент
ного алгоритма во многом аналогичен синтезу некогерентного ал
горитма, основные отличия заключаются в составе ВС и модели
его динамики. Структурная схема одноэтапного когерентного алго
ритма приведена на рис. 7.10.
7.4. Вспомогательные и сервисные функции
навигационного процессора
Кроме решения основной навигационной задачи программное
обеспечение навигационного процессора содержит блоки управле
ния первичной обработкой, вводом и выводом необходимой инфор¬
105
мации, а также программы для решения сервисных задач. Перечис
лим важнейшие из них.
1. Декодирование и обработка НИ. Задача обеспечивает форми
рование и обновление данных альманаха, эфемерид и других по
правок, передаваемых в кадре служебной информации на период
сеанса для каждого из рабочих НКА.
2. Выбор рабочих НКА, т. е. определение номеров радиовиди-
мых в течение ближайшего интервала времени НКА. В качестве
исходных данных используется информация альманаха.
3. Прогноз ожидаемых значений РНП и подготовка целеуказа
ния для поиска сигналов НКА. В качестве исходных данных ис
пользуются данные прогноза положения НКА, а при наличии тако
вых - априорные данные о положении потребителя.
4. Краткосрочный прогноз эфемерид для предельно точных рас
четов значений координат и составляющих вектора скорости НКА
на момент измерений. Исходными данными для задачи являются
номера рабочих НКА и моменты времени измерений, а также опе
ративная служебная информация по НКА на ближайший узловой
момент времени.
5. Коррекция результатов решения навигационной задачи с уче
том поправок из служебной информации НКА и данных двухчас
тотных измерений (компенсация ионосферной погрешности).
6. Выработка поправок к первичным или координатным измере
ниям на основании информации, полученной от систем дифферен
циальной коррекции (подробнее об этом см. разд. 10).
В состав сервисных задач вторичной обработки входят, как пра
вило, запись массивов измерений ЮТ и координат, вывод визуаль
ной информации о траектории объекта, расчет различных вспомога
тельных данных, например, времени входа в заданный район, конт
роль траектории в заданных пределах и т. п. Особо следует выделить
задачу априорной и апостериорной оценки точности полученных
определений, позволяющей оценить качество навигационного обес
печения сеанса измерений.
7.5. Интерфейс с внешними потребителями
Интерфейс с внешними потребителями в современной АП обыч
но осуществляется через универсальный последовательный порт
USB или (и) асинхронные СОМ порты. При этом используются раз
личные протоколы обмена. Наибольшее распространение получил
протокол NMEA 0183 (разработанный для корабельной АП, но в
106
настоящее время используемый как основной или дополнительный
в большинстве образцов АП). Современные версии протокола ΝΜΕΑ
предусматривают передачу потребителю не только результатов ИБО,
но и первичную информацию («сырые» измерения), что позволяет
реализовывать режимы относительных и дифференциальных изме
рений (см. разд. 10). Используются также протоколы RINEX (в гео
дезической АП), ГОСТ 18977-79, ARINC 429 (для авиационной АП),
бинарные (для межмашинного обмена) и ряд других.
7.6. Пример современной АП
Примером АП, в которой последние достижения в теории и про
граммно-алгоритмической области реализованы на самом современ
ном конструкторско-технологическом уровне, может служить при
емник «Триумф-1-G3T» фирмы JFVAD (рис. 7.11)
Приемник имеет по 16 каналов для измерений по каждому час
тотному каналу, включая: GPS Lly L2/L2C, L5, «Галилео» El, Е5А;
ГЛОНАССL\,L2. Приемник выполнен в небольшом изящном, гер-
Рис. 7.11. Приемник «Триумф-1-G3T»
107
метичном и ударопрочном корпусе, который объединяет GNSS-при-
емник, УВЧ-GSM, Bluetooth, WiFi модемы, антенны и аккумуля
торные батареи, обеспечивающие до 20 ч непрерывной работы при
емника. Заряд батарей может осуществляться от любого источника
с диапазоном выходных напряжений от 4,5 до 40 В. Приемник имеет
разъем для подключения внешней антенны. Допускается установка
двух SIM-карт, одна из которых доступна через герметичный слот,
установленный на корпусе.
Основным элементом, обеспечивающим высокие потребитель
ские характеристики приемника «Триумф-1-G3T», является одно
именная микросхема, разработанная с использованием 0,09-микрон
ной (90 нм) технологии. Эта микросхема, размещенная в корпусе
типа 352-TFBGA, размером 17x17 мм обеспечивает огромное ко
личество современных функций. Микросхема «Триумф» имеет
216 каналов, которые позволяют отследить все типы существую
щих GNSS-сигналов и все запланированные на будущее, включая
GPS, ГЛОНАСС, «Галилео», QZSS, WAAS, EGNOS, и сигналы
Compass/Beidou. Эти 216 каналов сгруппированы по трем катего
риям, одна часть из них имеет 5, а другая 10 корреляторов, опти
мизированных для слежения за всеми типами GNSS-сигналов.
По своей производительности эти 216 каналов эквивалентны
110 000 обычных каналов корреляционной обработки, которые обес
печивают быстрое восстановление слежения даже при очень сла
бом сигнале.
Каждый канал оптимизирован для высокоточных измерений по
коду, доплеровскому сдвигу и фазе сигнала для каждой спутнико
вой системы.
Канал имеет трехбитовый ВЧ-вход с 5-мм разрешением для из
мерений по коду и 0,005-мм разрешение для измерений по фазе
сигнала. Эти параметры обеспечивают возможность эффективного
подавления паразитных сигналов при многолучевом приеме.
Микросхема «Триумф» имеет очень мощный микропроцессор,
включая центральный процессор (CPU) с тактовой частотой 220 МГц
и обработкой данных с плавающей запятой (FPU), встроенную RAM
4 Мб для обработки данных, что уменьшает расход энергии и стои
мость.
Для защиты от помех в частотной полосе приема спутниковых
сигналов микросхема «Триумф» имеет пять сложных 64-уровневых
адаптивных фильтров, которые работают в пяти различных поло
сах сигнала, обеспечивающих подавление множественных интер
ференций до 60 дБ.
108
Для декодирования цифровых потоков сигналов GPS L5, «Гали
лео», WAAS, EGNOS и аналогичных систем используются схемы
дешифратора Viterbi, который является очень эффективным в вы
числительном отношении. В микросхеме «Триумф» предусмотрен
встроенный модуль декодера Viterbi с контролем циклического из
быточного кода (CRC). Встроенный декодер Viterbi имеет трехби
товое мягкое решение, глубину декодирования 64 и способен к рас
шифровке последовательностей до 512 бит со скоростью расшиф
ровки 1 Мб/с. Декодер может поддерживать потоковый и блочный
режим работы. CRC-модуль использует полином длиной до 32. Мик
росхема «Триумф» также имеет 40 гибко программируемых ВЧ вхо
дов, три выходных синхроимпульса 1PPS, три входа для внешних
меток и два встроенных входа колец ФАП.
Контрольные вопросы
1. Обобщенная структурная схема АП. Назначение основных узлов -
радиочастотного блока, первичного и навигационного процессоров.
2. Состав радиочастотного блока, назначение его основных узлов.
3. Параметры узлов антенного модуля.
4. Параметры приемного устройства и АЦП.
5. Параметры опорного генератора и синтезатора частот.
6. Оценка параметров вектора состояния потребителя как задача опти
мальной фильтрации.
7. Поиск и обнаружение сигнала. Принцип, структурная схема устрой
ства.
8. Оценка числа элементов разрешения при поиске сигнала.
9. Схемы слежения за задержкой: алгоритм работы, структура.
10. Канал оценки доплеровской частоты и фазы сигнала, алгоритмы и
схемы ЧАП и ФАП.
11. Комплексная фильтрация оценок РНП.
12. Канал выделения навигационной информации.
13. Вторичная обработка навигационной информации; цели и задачи.
Что такое «сырые» измерения?
14. Принцип решения навигационной задачи (на примере одношагово
го алгоритма).
15. Фильтрация НП при вторичной обработке.
16. Алгоритмы вторичного сглаживания НП.
17. Одноэтапные алгоритмы обработки сигналов в АП.
8. УГЛОМЕРНАЯ НАВИГАЦИОННАЯ АППАРАТУРА
ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ
ОРИЕНТАЦИИ ОБЪЕКТОВ
Выше описаны принципы, алгоритмы и аппаратура местоопределе-
ния объекта, рассматриваемого в качестве материальной точки. Именно
эта задача ставилась как основная на этапе разработки и создания ГНСС.
Однако опыт, накопленный в процессе их эксплуатации, показал, что
реальный круг задач, которые могут успешно решаться с использовани
ем сигналов НКА существенно шире. К их числу относится задача опре
деления пространственной (угловой) ориентации объектов, которые рас
сматриваются как протяженные, а не бесконечно малые. Аппаратура,
предназначенная для решения этой задачи, имеет ряд особенностей и
заметно сложнее по сравнению с рассмотренной выше стандартной АП.
Принципы построения и функционирования такой аппаратуры изложе
ны в этом разделе.
8.1. Параметры угловой ориентации объектов
Задача определения угловой ориентации некоторого объекта с по
мощью сигналов СРНС обычно рассматривается в следующей по
становке [11]. Пусть с объектом жестко связана прямоугольная сис
тема координат, которая далее называется объектовой (на практике
часто в качестве осей этой системы рассматриваются строительные
оси объекта: jc0 - продольная, у0 - поперечная, z0 - вверх, рис. 8.1).
110
Введем в рассмотрение топоцентрическую (локальную) систе
му координат (ТЦСК), начало которой совпадает с нулевой точкой
объектовой системы координат (ОСК) и движется вместе с ней, од
нако в отличие от объектовой системы оси ТЦСК сохраняют фик
сированную ориентацию относительно поверхности Земли: ось χτ
направлена на север (по истинному меридиану), ось ут — вверх по
местной вертикали, а ось ζτ, направленная на восток по горизонта
ли, дополняет систему до правой системы координат. Таким обра
зом, плоскость хτΟζΊ параллельна плоскости, касательной к поверх
ности Земли в точке пересечения с ней местной вертикали, т. е.
является местной горизонталью. Тогда пространственное положе
ние объекта относительно Земли однозначно определяется ориен
тацией осей ОСК относительно осей ТЦСК.
Ориентация ОСК относительно ТЦСК может описываться с по
мощью углов Эйлера или направляющих косинусов.
Углы Эйлера определяются следующим образом (рис. 8.2):
• азимут а - угол между осью ΟχΎ и проекцией продольной оси
Ох0 на горизонтальную плоскость, проходящую через начало ТЦСК
(диапазон значений: 0 < ос < 360°; отсчет по часовой стрелке);
• тангаж ψ - угол между продольной осью Охг0 и горизонталь
ной плоскостью, проходящей через начало ТЦСК (диапазон значе
ний ±90°, положительное направление - вверх);
• крен Θ - угол поворота объекта вокруг продольной оси Ох0
(диапазон значений ±180°, положительное направление - по часо
вой стрелке, если смотреть из начала ТЦСК вдоль оси Ох$).
Преимущество описания ориентации с помощью углов Эйлера
состоит в том, что указанные углы независимы и могут рассматри
ваться по отдельности. Это достоинство окупает некоторое услож-
Рис. 8.2. Топоцентрическая система координат и углы Эйлера
111
нение выражений, описывающих связь между системами коорди
нат. Поэтому для описания конечного результата определения про
странственной ориентации объекта на практике используются углы
Эйлера в ТЦСК: азимут, тангаж, крен.
Однако с точки зрения удобства промежуточных выкладок пред
почтительнее описание с помощью направляющих косинусов.
В этом случае ориентация ОСК относительно ТЦСК описывается
ортогональной матрицей, элементами которой являются девять зна
чений направляющих косинусов, и формулы перехода из одной си
стемы в другую предельно упрощаются.
8.2. Принцип определения угловой ориентации объектов
по сигналам СРНС
Общий принцип определения угловой ориентации объекта по
сигналам СРНС состоит в следующем. Пусть по результатам стан
дартного навигационного сеанса определены геоцентрические ко
ординаты jc0, у0, ζ0 нулевой точки ОСК, а из эфемеридной инфор
мации известны геоцентрические координаты фазового центра ан
тенны /-го НКА xci, уф Ζφ Этой информации достаточно для того,
чтобы рассчитать в геоцентрической системе координат (ГЦСК)
направляющие косинусы линии визирования /-го НКА из нулевой
точки ТЦСК, т. е. линии, соединяющей точки jt0, у0, z0 и хф Уф zci:
сх =
п _ Усг ~ Уо .
у~ * ’
(8.1)
где Rj - дальность от объекта до /-го НКА.
Затем необходимо радиотехническим способом измерить углы
между линией визирования НКА и осями ОСК, т. е. определить
значения направляющих косинусов этой линии в объектовой сис
теме. Сопоставляя значения направляющих косинусов линии визи
рования, рассчитанных в ГЦСК и измеренных в ОСК, можно полу
чить представление об ориентации осей ОСК относительно ГЦСК.
Однако определить однозначно все три угла Эйлера ОСК отно
сительно ГЦСК по данным визирования только одного НКА невоз
можно, поскольку остается еще одна степень свободы: возможность
поворота ОСК вокруг линии визирования НКА. Поэтому для одно
значного определения углов пространственной ориентации ОСК не
обходимо провести описанные расчеты и измерения не менее чем
по двум НКА. Значения направляющих косинусов двух неколлине-
арных векторов (линий визирования НКА), рассчитанные по ре¬
112
зультатам навигационного сеанса в ГЦСК и измеренные радиотех
ническим методом в ОСК, полностью определяют углы между ося
ми ОСК и ГЦСК. Затем углы ориентации, найденные в ГЦСК, мож
но пересчитать в ТЦСК и в ней определить интересующие нас углы
ориентации объекта: азимут, крен и тангаж.
8.3. Радиоинтерферометрический метод
измерения угловых координат
Как было показано выше, для определения угловой ориентации
объекта с использованием сигналов СРНС необходимо в ОСК оп
ределить радиотехническим методом углы визирования нескольких
(не менее двух) НКА. Эта задача может быть решена двумя мето
дами: радиопеленгационным и радиоинтерферометрическим.
Радиопеленгационный метод предполагает использование ост
ронаправленной антенны, позволяющей известными амплитудны
ми методами (пеленгация по максимуму сигнала или методом рав
носигнальной зоны) определить направление на источник сигнала
(НКА). Естественно, что точность измерения этим методом зави
сит от размера апертуры антенны. В частности, для того чтобы при
описанных выше параметрах СРНС ГЛОНАСС и GPS обеспечить
погрешность определения углов визирования источника сигнала
порядка 10 угловых минут необходима зеркальная антенна или ФАР
с апертурой порядка 3x3 м. Очевидно, что разместить антенное по
лотно с такими размерами на подвижном объекте обычно сложно,
а иногда и невозможно.
Поэтому все современные образцы угломерной АП применяют
интерферометрический (фазовый) принцип измерений. В этом слу
чае используется несколько (не
менее трех) слабонаправленных
и поэтому сравнительно неболь
ших (с линейным размером по
рядка λ) антенн, которые распо
лагаются на объекте таким об
разом, чтобы расстояние (база)
между ними было примерно
равно размеру апертуры антен
ны, обеспечивающей ту же точ
ность при амплитудном методе.
Как известно, интерферомет- рис Схема интерферометриче-
рический принцип определения Ских измерений
113
направления на источник сигнала основывается на том, что раз
ность фаз сигналов Δφ, принимаемых антеннами, разнесенными на
расстояние /, пропорциональна косинусу угла β между базой ин
терферометра и направлением на НКА (см. рис. 8.3).
Таким образом, радионавигационным параметром в данном слу-
, . 2πΔτ
чае является фазовый сдвиг Δφ =—-—, а навигационным пара
метром - угол β. Навигационная функция для однозначных фазо
вых измерений имеет вид
2л
Δφ =—/cosP, (8.2)
λ
где Δφ - измеренный фазовый сдвиг, лежащий в пределах 0 < Δφ < 2π;
/ - длина базовой линии интерферометра.
Принципиальная особенность интерферометрического метода
состоит в том, что поскольку интервал однозначного определения
фазы равен (-π, л), измерения разности фаз в интерферометре яв
ляются однозначными только при длине базовой линии I < λ/2. В об
щем случае косинус угла между базой интерферометра и направле
нием на ι-й НКА и измеряемая интерферометром разность фаз сиг
нала в разнесенных антеннах связаны соотношением
Здесь Λ/ζ - параметр фазовой неоднозначности, т. е. целое число
длин волн в разности расстояний от у-го НКА до антенн АП,
М(=]Аг/Ч-
Как следствие, результату фазовых измерений будет сопостав
лен ансамбль из 2+ 1 значений cos β/5 из которых лишь одно со
ответствует истинному. Поэтому обязательной составной частью
алгоритма функционирования угломерной АП является процедура
устранения (разрешения) неоднозначности фазовых измерений.
Для решения этой задачи могут использоваться различные ме
тоды: разностные; основанные на дополнительных (с точки зрения
«стандартной» навигационной задачи - избыточных) измерениях;
многошкальные (нониусные), основанные на результатах двухчас
тотных измерений или на использовании дополнительных антенн,
расстояние между которыми меньше половины длины волны (под
робнее см. разд. 10). Возможно также «привлечение» данных от
источников, использующих другие физические принципы опреде¬
114
ления угловой ориентации, например гироскопических или магнит
ных компасов.
Важно, что процедура устранения неоднозначности никак не вли
яет на структуру и характеристики процедуры собственно угловых
измерений, что позволяет рассматривать их независимо. Поэтому в
данном разделе при рассмотрении алгоритма определения угловой
ориентации будем полагать, что используемые фазовые измерения
приведены к однозначному интервалу.
Основное уравнение связи между направляющими косинусами
линии визирования /-го НКА, рассчитанными в ГЦСК, измерен
ным с помощью интерферометра косинусом угла между его базой
и линией визирования того же НКА, и искомыми направляющими
косинусами базы интерферометра в ГЦСК:
cosG = r010 = Сх cospx + Су cosp^ + Cz cospz,
где /0 - единичный вектор базы интерферометра; cospx, cos βν, cos β2 -
направляющие косинусы базы интерферометра в ГЦСК; г0 - еди
ничный вектор линии визирования НКА; Сх, CL С2 - направляю
щие косинусы вектора г0 в ГЦСК (см. формулу (8.1)).
Как уже говорилось, для однозначного определения углов про
странственной ориентации ОСК необходимо провести измерения
не менее чем по двум НКА. Кроме того, поскольку с помощью од
ного вектора невозможно задать все три угла пространственной ори
ентации, необходимо жестко связать с объектом, по меньшей мере,
два неколлинеарных вектора, т. е. использовать антенную систему из
двух интерферометров. Таким образом, система уравнений, опреде
ляющая параметры угловой ориентации объекта, будет иметь вид
Cxl cospj, + Су, cospvI + Czi cospz| = cos0n; ^
Cxi cosp*2 + Cy, cosp^ + Czi cospz2 = cos0l2.
Система (8.3) для ι = 1,2 содержит четыре уравнения с шестью
неизвестными - направляющими косинусами баз интерферометров
в ГЦСК. Чтобы найти однозначные решения, эту систему дополня
ют известным уравнением связи между направляющими косинуса
ми вектора
cos2 βχ + cos2 + cos2 βζ = 1
и выражением для утла γ между базами интерферометров ( эта ве
личина определяется конструкцией антенной системы и считается
известной)
COS$xl COSβχ2 COSβyy ΟΟββ^ +008βζ1 COS^z2 =COSy.
115
Решая известными методами систему (8.3), дополненную ука
занными уравнениями связи, можно однозначно определить ориен
тацию баз интерферометров в ГЦСК. Поскольку положение этих
баз относительно ОСК определяется конструкцией антенной сис
темы и считается известным, становится возможным найти ориен
тацию ОСК в ГЦСК.
Далее, используя полученные по результатам навигационного се
анса географические координаты объекта (широту В и долготу L)
при помощи известной матрицы преобразования координат
V
Jr
ζτ
можно пересчитать направляющие косинусы осей объектовой сис
темы координат из ГЦСК в ТЦСК, а затем определить углы Эйлера
(азимут а, крен Θ и тангаж ψ) с помощью следующих выражений:
COSPzTx0 .
JtT
—sin ficos L
sin fi sin fi
cos В
Jt
=
cosficosfi
cos fi sin fi
sin В
_ζτ _
-sin fi
cos fi
0
а = arctg
ψ = arctg
cospVo
cosKxo
\/cos%*o
+■ cos2 β
ΖΎΧ0
θ = arctg
cosP
УтУо
cosPxTy0 C0SP
ζτ*0
-cos3r _ COs3
T n
= arctg
cosp
УтУо
ζτΓθ
cosp
Утг0
8.4. Достижимая точность угловых измерений в АП ГНСС
Теоретически, как следует из формулы (8.2), при фиксирован
ном значении угла β фазовый сдвиг Δφ (угловая чувствительность
интерферометра) неограниченно возрастает пропорционально уве
личению базы /. Соответственно, возрастает и точность измерений
угла β. На практике точность угломерной АП определяется рядом
факторов, поэтому ее зависимость от длины базы имеет более слож
ный характер. В частности, существенными являются нарушения
фазовой структуры сигнала, возникающие в случаях многолучево
го распространения, когда сигнал в точке приема представляет со
бой суперпозицию колебаний, приходящих непосредственно с НКА,
и отраженных близлежащими объектами. Кроме того, на точность
116
измерений влияет зависимость положения фазового центра прием
ных антенн от угла падения и частоты сигнала (последняя проявля
ется при работе по сигналам ГЛОНАСС, использующей частотное
разделение), а также аппаратно-алгоритмический шум фазометри
ческого тракта приемника, который зависит от качества аппарату
ры, особенностей динамики объекта и способов ее учета в исполь
зуемых алгоритмах сглаживания.
Результаты отечественных и зарубежных исследований позво
ляют сделать вывод, что зависимость флуктуационной составляю
щей погрешности угловых измерений от базы достаточно близка к
теоретической (линейной) при длине базы в пределах 10 м:
Длина базовой линии, м ... 0,5 1,0 2,0 4,0 8,0
СКО единичного
измерения, упг мин 30...35 13...15 8...10 4...5 2...3
Дальнейшее увеличение базы при классической схеме, когда сиг
налы всех антенн передаются по кабелям в общий приемник (т. е.
используется единый опорный генератор), по-видимому, нецелесо
образно из-за увеличения влияния таких факторов, как многолуче
вое распространение, потери в кабелях, нестабильность их элект
рической длины и т. п. Более рациональным в этом случае является
метод «третьих разностей» (см. разд. 10), когда каждая антенна снаб
жается своим комплектом АП с автономным опорным генератором,
в которой определяются вторые разности фаз сигналов, принимае
мых от всех спутников. Значения вторых разностей передаются в
центральный процессор, где вычисляются третьи разности фаз, что
позволяет устранить ошибку от расхождения опорных генераторов
приемников. В литературе приводятся данные о том, что при мак
симальной длине базы порядка 30 м СКО угловых измерений по
методу «третьих разностей» составило несколько десятков угловых
секунд. Тот же порядок погрешностей получен в ходе испытаний
АП, построенной по классической схеме (с общим опорным гене
ратором) при длине базы 40 м [11].
По-видимому, величина погрешности порядка 30 утл. с является
предельно достижимой для угломерной аппаратуры, построенной
по рассмотренному выше принципу.
8.5. Пример реализации угломерной АП
Проиллюстрируем возможный вариант реализации рассмотрен
ных выше принципов измерения пространственной ориентации
объектов на примере серийной российской угломерной АП МРК-27.
117
Аппаратура МРК-27 представляет собой трехантенный интер
ферометр, рассчитанный на прием сигналов СРНС ГЛОНАСС и
GPS. Возможность работы по сигналам двух СРНС увеличивает
число одновременно наблюдаемых НКА, что позволяет применять
алгоритмы, использующие измерения по избыточным НКА. Кроме
того, повышается надежность измерений в условиях ограниченной
радиовидимости НКА. Технические характеристики приемника
МРК-27 приведены ниже:
Средняя квадратическая погрешность измерения:
географические координаты, м 30,0
высота, м 50,0
скорость, м/с 0,1
Угол азимута при базовом расстоянии между
антеннами 10 м, угл. мин 2,0
Угол крена и тангажа при базовом расстоянии
между антеннами 10 м, угл. мин 4,0
Погрешность привязки секундной аппаратной
метки времени к шкале ГЭВЧ, мкс 1,0
Долговременная стабильность выходного сигнала
10 МГц Ю~10
Внешний вид антенной системы МРК-27 приведен на рис. 8.4, а
структурная схема аппаратуры — на рис. 8.5.
Особенностью построения данной АП является использование
принципа кодового разделения сигналов НКА, поступающих с вы
ходов трех антенн. После объединения этих сигналов в сумматоре
вся их дальнейшая обработка осуществляется единым радиотрак
том, что позволяет исключить систематические погрешности, обус
ловленные неидентичностью приемных каналов. При этом преоб
разование сигналов на первую ПЧ и суммирование сигналов про
изводится в выносном блоке, конструктивно объединенном с
антенной платформой, что позволяет использовать для передачи
сигналов в приемно-вычислительный блок один общий фидер. Вся
последующая обработка: разделение литерных частот НКА ГЛО
НАСС, свертка ПСП, поиск и сопровождение сигналов НКА по ча
стоте и фазе производится в цифро
вой части АП. Производительность
тракта цифровой обработки обеспе
чивает возможность одновременных
измерений РНП по сигналам девяти
НКА.
Для разрешения начальной фазо-
Рис. 8.4. Антенна АП МРК-27 вой неоднозначности в МРК-11 при-
118
Суммарный
сигнал на ПЧ
АЦП
Выборки
суммарного сигнала
Тактовый
сигнал
дискретизации
Блок цифровой обработки
Канал обработки сигнала НКА 1
Согласованная фильтрация сигналов AI, А2, АЗ
&
Демодулятор кодов Р,
41 41 41
Обработка А1
Обработка А2 Обработка АЗ
тг Ч г4,
О О
ж
ж
N
<><>
ж
Навигационный алгоритм
Рис. 8.5. Структурная схема угломерной АП МРК-27
119
менен комбинированный метод, использующий избыточные изме
рения не менее чем по четырем НКА, причем учитывается их соб
ственное движение. Данный метод позволяет максимально сокра
тить время начальной калибровки аппаратуры на объекте.
При расстоянии между антеннами (базе интерферометра) не ме
нее 2 м СКО определения углов пространственной ориентации у
АП МРК-27 составляет менее 10 утл. мин.
Контрольные вопросы
1. Какие линии на объекте обычно выбирают в качестве осей ОСК?
2. Как ориентированы оси ТЦСК?
3. Какими параметрами можно описать пространственную ориентацию
объекта?
4. Какие параметры нужно знать, какие - рассчитать, а какие - изме
рить, чтобы определить пространственную ориентацию объекта по сигна
лам НКА?
5. Что такое «параметр фазовой неоднозначности»? Какие существуют
способы ее устранения?
6. Какое минимальное число НКА нужно наблюдать, чтобы опреде
лить угловую ориентацию и почему?
7. Какой вид имеет теоретическая зависимость точности измерений от
длины базы интерферометра? При каких длинах базы она справедлива?
8. Какие факторы ограничивают точность измерений при дальнейшем
увеличении длины базы?
9. Какие варианты схем построения аппаратуры используются при дли
не базы более 10 м?
10. Какую минимальную величину погрешности измерений может обес
печить современная угломерная АП?
9. ТОЧНОСТЬ НАВИГАЦИОННО-ВРЕМЕННЫХ
ОПРЕДЕЛЕНИЙ В СРНС
На точность навигационно-временных определений с помощью СРНС
влияет множество факторов. Они связаны с характеристиками используе
мых сигналов, среды распространения, с особенностями построения АП
и используемых в ней алгоритмов определения РНП и НП и т. д. В зави
симости от локализации источника составляющие дальномерной погреш
ности измерений СРНС можно подразделить на три категории:
1) системные погрешности, вносимые на НКА или КИК СРНС;
2) погрешности, возникающие на трассе распространения сигнала от
НКА до АП;
3) погрешности аппаратуры потребителя.
Для удобства анализа влияние различных факторов на качество НВО
оценивают через величину погрешности измерения дальности, обуслов
ленной тем или иным фактором. Эту величину называют эквивалентной
погрешностью дальности (ЭПД).
Кроме перечисленных погрешностей на точность НВО существенно
влияет взаимное расположение НКА и потребителя. Для количественной
оценки этого влияния вводится так называемый геометрический фактор.
Рассмотрим основные особенности погрешностей, относящихся к пе
речисленным категориям.
9.1. Погрешности, вносимые на НКА или КИК СРНС
Погрешности, связанные с функционированием бортовой аппа
ратуры НКА и КИК СРНС, обусловлены в основном несовершен
ством частотно-временного и эфемеридного обеспечения.
Погрешности частотно-временного обеспечения обусловлены
«уходами» бортового эталона, а также конечной точностью проце
дур сверки бортовой ШВ с системной. Как следствие, возникает
смещение фаз излучаемых дальномерных кодов и меток времени,
что приводит к погрешностям измерения РНП и в итоге - к сниже
нию точности НВО. В случаях, когда «уход» БШВ относительно
СЩВ превышает допустимые значения, проводится ее коррекция
121
либо путем фазирования (совмещения временных интервалов БШВ
и СШВ) на физическом уровне, либо путем изменения цифрово
го кода БШВ на целое число единиц времени. Коррекция БШВ
ГЛОНАСС производится таким образом, чтобы ее сдвиг отно
сительно системной ШВ не превосходил 10 нс, т. е. примерно со
ответствовал суточной нестабильности БШВ, которая для НКА
ГЛОНАСС-М составляет 110-13.
Однако проведение таких непосредственных коррекций возмож
но только эпизодически, в моменты нахождения НКА в зоне види
мости наземных средств наблюдения. В то же время максимальное
отклонение бортовой ШВ относительно СШВ уже через 2 ч после
коррекции составляет примерно 10 нс, а через сутки после коррек
ции он достигает примерно 25 нс для цезиевых и ПО нс для руби
диевых эталонов.
Поэтому наряду с непосредственной используется алгоритми
ческая коррекция, основанная на прогнозировании систематичес
кой составляющей «ухода» БШВ. Возможность такой коррекции
также базируется на результатах многолетних наблюдений, кото
рые показывают, что на интервалах времени порядка суток систе
матическая составляющая «ухода» БШВ изменяется по закону, близ
кому к линейному.
С учетом сказанного для данного НКА на каждом витке рассчи
тываются частотно-временные поправки, которые дважды в сутки
закладываются в бортовой компьютер НКА, а затем включаются в
навигационное сообщение и передаются потребителю. Поправки
представляют собой два параметра линейной модели смещения
БШВ относительно СШВ. Эта модель заложена в программном
обеспечении АП, что позволяет учитывать принятые поправки при
НВО. Для НКА ГЛОНАСС-М с цезиевым эталоном частоты при
такой коррекции погрешность прогноза «ухода» БШВ на 12 ч со
ставляет в среднем 5 нс (ЭПД = 1,5 м) [2, 7].
Существует еще одна составляющая погрешности времени —
фазовый сдвиг (групповая задержка) навигационного сигнала в ап
паратуре при его распространении от бортового эталона до переда
ющей антенны НКА [14]. Систематическая составляющей этой за
держки упитывается при расчете параметров коррекции БШВ, пе
редаваемых потребителю в составе НИ. Случайная составляющая
групповой задержки, не превышающая 3 нс (ЭПД =1,5 м), входит
в дальномерную погрешность.
Погрешности эфемеридного обеспечения вызваны неточнос
тью расчета параметров орбит НКА на КИК и непрогнозируемыми
122
отклонениями реальной орбиты НКА относительно экстраполи
рованной. Эфемеридная погрешность 5Э имеет три компоненты:
продольную 5/ (по касательной к траектории), радиальную δΓ (по
направлению к центру Земли) и нормальную Ьп (перпендикуляр
ную плоскости орбиты). Соответствующая эфемередной погреш
ности составляющая ЭПД 5Э представляет собой проекцию век
тора (δ/; δΓ; Ьп} на линию, соединяющую потребителя и НКА; ее
дисперсия может быть рассчитана по формуле
°2 (6Э ) = кг<з2 (8r )+kn [σ2 (δ„)+σ2 (δ/)],
где кп кп — коэффициенты, учитывающие взаимное положение НКА
и потребителя.
Значения этих коэффициентов, приводимые в литературе, не
сколько различаются, однако в целом имеющиеся данные позволя
ют сделать следующие выводы:
• продольная и поперечная составляющие, имеющие СКО =
= 3...6 м, входят в ЭПД с коэффициентом кп < 0,25;
• СКО радиальной составляющей лежит в пределах 0,6...2 м,
практически полностью (с коэффициентом кг ~ 0,95) входит в даль-
номерную погрешность.
С учетом приведенных оценок эфемеридная составляющая ЭПД
имеет СКО σ(δ3) =1,5...4м [2].
9.2. Погрешности, вносимые на трассе
распространения сигнала от НКА до АП
Погрешности, возникающие на трассе распространения, в ос
новном обусловлены отличием скорости распространения радио
сигналов в атмосфере Земли са от скорости их распространения в
вакууме с0, а также зависимостью значениия скорости са от
физических свойств различных слоев атмосферы. Очевидно, что
неопределенность скорости са и других параметров атмосферы
приводит к появлению в расчете псевдодальности погрешности
Δ/?а = (<с0 - са)та, где Та - время распространения сигнала через
атмосферу и соответствующим погрешностям НВО. Кроме того, на
точность НВО влияет интерференция сигналов в точке приема, воз
никающая при многолучевом распространении. Методы борьбы с
этими погрешностями рассматриваются далее.
При анализе атмосферных погрешностей следует иметь в виду,
что механизмы, влияющие на скорость распространения сигнала в
тропосфере (нижний слой атмосферы, расположенный на высотах
123
0...10 км) и ионосфере (верхние слои атмосферы, расположенные на
высотах 60... 1000 км), различны, соответственно отличаются мето
ды определения погрешностей и их компенсации.
Ионосферные погрешности. Ионосфера является диспергиру
ющей средой, т. е. групповая и фазовая скорости распространения
в них сигнала зависят от частоты последнего, что обусловлено вы
сокой концентрацией свободных электронов (более 103/см3). Раз
личия в диэлектрической проницаемости слоев, расположенных на
разных высотах, а также наличие локальных неоднородностей при
водят к тому, что задержка сигнала НКА в ионосфере (по сравне
нию с его распространением в вакууме) изменяется в широких пре
делах в зависимости от района Земли, где находится потребитель,
времени суток, года, солнечной и геомагнитной активности и т. д.
По данным, приведенным в литературе, для источника, находяще
гося в зените, ее значение составляет от 10 нс (ЭПД = 3 м) в ноч
ное время до 50 нс (ЭПД = 15 м) — в дневное. Для углов возвыше
ния менее 10° задержка может дополнительно возрастать до 3 раз,
ЭПД при этом составляет 9...45 м. Очевидно, что для многих при
ложений такие ошибки недопустимо велики.
Наиболее радикальным способом борьбы с ионосферной по
грешность является ее оценка и компенсация с помощью двухчас
тотного приемника. Этот метод основан на том, что из всех видов
погрешностей псевдозадержки только ионосферная составляющая
зависит от частоты сигнала. Поэтому разность значений псевдоза
держки т(/2) и τ(/ι), измеренных на частотах /2 и fa9 будет равна
разности ионосферных задержек:
где 5(ти1 2) - значение ионосферной задержки соответственно на
указанных частотах.
С другой стороны, известна теоретическая модель зависимости
величины ионосферной задержки от разности частот:
с помощью которой при известных значениях частот^ и fa можно
рассчитать значение ионосферной задержки
Δ(τ„ΟΗ) = τ(/2) - τ(/,) = δ(τ„,) - δ(τ„2),
124
которое используется в качестве поправки к измерениям псевдоза
держки на частоте /j. Как следует из литературных источников, с
помощью такой коррекции удается обеспечить остаточную (неском-
пенсированную) ионосферную погрешность около 2 м (СКО).
В одночастотном приемнике получить информацию о реальном
значении ионосферной задержки можно за счет избыточных изме
рений. В последнем случае, поскольку величина ионосферной за
держки сигнала от каждого НКА является независимой перемен
ной, для однозначных НВО необходимо решить систему не менее
чем из восьми уравнений, соответственно необходимо проводить
наблюдения по восьми и более спутникам. Однако в несложных
коммерческих GPS-приемниках чаще используется компенсация
этой погрешности на основе модельного прогноза состояния атмос
феры. Концентрация электронов в различных высотных слоях за
висит от очень многих факторов, поэтому предсказать ее с высокой
точностью невозможно. Тем не менее, как показал опыт эксплуата
ции GPS, использование даже относительно грубой (восьмипара
метрической) модели позволяет уменьшить значение ионосферной
погрешности на 75 %. Параметры этой модели рассчитываются на
НКУ GPS и затем закладываются в навигационное сообщение НКА
для передачи потребителю, который использует их в своей аппа
ратуре.
В навигационном сообщении ГЛОНАСС подобная информация
отсутствует, поэтому для реализации процедуры компенсации
ионосферной погрешности в одночастотном приемнике должна при
влекаться информация от других источников или результаты избы
точных измерений. Остаточная погрешность в этом случае состав
ляет 10.. Л 5 нс, что соответствует ЭПД ~ 3.. .4,5 м.
Тропосферные погрешности. На скорость распространения сиг
нала в тропосфере оказывают влияние нейтральные атомы и моле
кулы, различие концентрации которых приводит к появлению ло
кальных неоднородностей, отличающихся величиной диэлектричес
кой проницаемости и, соответственно, величиной тропосферной
задержки.
Поскольку в диапазоне СРНС величина задержки в тропосфере
не зависит от частоты (дисперсия сигнала отсутствует), измерить
эту задержку с помощью двухчастотного сигнала невозможно. По
этому оценка тропосферной задержки выполняется прогнозным ме
тодом. По данным теории и экспериментов для частот сигналов по
рядка нескольких гигагерц диэлектрическая проницаемость тропо
сферы, в основном, зависит от температуры, давления и влажности
125
воздуха, а также от взаимных координат НКА и АП [1]. Указанные
параметры обычно достаточно точно известны и хорошо прогнози
руются, поэтому в АП используется метод расчета тропосферной
задержки, позволяющий уменьшить остаточную погрешности до
единиц наносекунд. Как показывают расчеты, величина тропосфер
ной задержки может составлять от 7 нс (ЭПД ~ 2 м) для спутников,
расположенных вблизи зенита, до 85 нс (ЭПД ~ 28 м) для спутни
ков, расположенных под углами места менее 5°.
С учетом этого обстоятельства в рабочее созвездие, по которо
му проводятся НВО, рекомендуется включать только те НКА, угол
возвышения которых превышает некоторое значение («угол мас
ки»), устанавливаемое потребителем. Обычно этот угол составля
ет 5... 10°.
Многолучевое распространение. Многолучевой характер распро
странения сигналов НКА в точке расположения антенны АП обус
ловлен их отражением от земной и морской поверхностей и близле
жащих объектов, например, элементов конструкции носителя АП.
Уровень отраженного сигнала может быть соизмеримым с прямым
сигналом, а его задержка относительно прямого сигнала для НКА,
находящегося в зените, может составлять от единиц до сотен микро
секунд (при расположении АП на борту самолета); при небольших
углах возвышения НКА это значение уменьшается на порядок. Интер
ференционная картина, возникающая при многолучевом распрост
ранении, приводит к существенным искажениям параметров (задерж
ки, частоты и фазы) полезного сигнала и к соответствующим по
грешностям в схемах слежения. Очевидно, что поскольку для
ФМ-сигналов ширина пика автокорреляционной функции (АКФ) не
превышает длительности символа хс, влиянием переотраженных сиг
налов, задержанных на величину порядка хс и более, можно пре
небречь. Следовательно, оценка максимальной величины погрешно
сти, обусловленной многолучевым распространением, А(хмлр) < хсс.
Эта величина для СТ-кода ГЛОНАСС составляет Ахмлр = 2 мкс,
а для ВТ-кода Ахмлр = 0,2 мкс. Полагая погрешность гауссовской
случайной величиной, получаем следующие оценки СКО ЭПД:
<тМЛр = —< 100М-СТ-код и σΜπρ = —^<10м-ВТ-код.
Таким образом, для снижения влияния переотраженных сигна
лов желательно использовать широкополосные сигналы высокой
точности с узким главным пиком взаимнокорреляционной функци
ей (ВКФ) и низким уровнем ее боковых лепестков. При использо¬
126
вании в условиях многолучевого приема более узкополосных сиг
налов стандартной точности применяют методы коррекции импульс
ной характеристики коррелятора, а также дискриминаторы с узкой
апертурой дискриминационной характеристики, что позволяет сни
зить вероятность захвата схемами слежения пиков ВКФ, обуслов
ленных приемом отраженных сигналов.
Находят применение также методы поляризационной селекции,
основанные на том, что поляризация сигналов изменяется при от
ражении от местных предметов. Поэтому использование на приеме
антенн, согласованных с поляризацией спутникового сигнала (пра
вая круговая), позволяет уменьшить мощность переотраженного сиг
нала в пределах до 3 дБ.
Наконец, существенное влияние на уровень и структуру переот-
раженных сигналов оказывают углы, под которыми сигналы НКА
падают на местные предметы, а также взаимное расположение ан
тенны АП, отражателей и НКА. С этой точки зрения целесообраз
но при выборе рабочего созвездия использовать «углы маски», а
также внимательно относиться к выбору точки расположения ан
тенны, в частности, располагать ее по возможности над предмета
ми, которые могут сыграть роль отражателей. Применение пере
численных и других мер позволяет снизить величину ЭПД, обус
ловленной переотражениями, до значений порядка 2...3 м.
9.3. Погрешности АП
Основными источниками погрешностей в АП являются погреш
ности опорного генератора, а также шумы схем слежения за за
держкой, частотой, фазой и несущей сигналов НКА. Детальный
анализ влияния этих факторов на погрешности НВО приведен в
различных источниках [2, 7, 18], однако по своему объему этот' ма
териал выходит за рамки данного пособия. Поэтому ниже приво
дятся лишь основные формулы, позволяющие получить инженер
ную оценку достижимой точности измерений в стандартной и
угломерной АП.
9.3.1. Погрешности опорного генератора
На точность работы следящих систем приемника оказывает вли
яние, прежде всего, кратковременная нестабильность частоты опор
ного генератора, приводящая к сдвигам ШВП и флуктуациям фазы
опорных сигналов. Для современных кварцевых генераторов, обес
печивающих спадание спектральной мощности фазовых шумов
127
порядка 40 дБ на декаду, в работе [11] предложена следующая фор
мула для дисперсии погрешности слежения за задержкой Οτ [с2],
обусловленной нестабильностью опорного генератора в установив
шемся режиме:
г, °>05ΛΓν
Ur ~ Ί 9
(А/ссз)
где Nv — односторонняя спектральная плотность фазового шума
опорного генератора. Для современных кварцевых генераторов это
значение составляет 10~18... 10~21 Гц.
Если принять, что полоса пропускания ССЗ составляет 1 Гц, то
при Νν = 1 (Г18 Гц СКО погрешности στ = y[l\ Л О-20 с = 0,22 нс,
что соответствует погрешности измерения дальности порядка
0,066 м. Это значительно меньше погрешностей, обусловленных
другими факторами (см. далее, подразд. 9.3.3). Однако если попы
таться повысить точность позиционирования малоподвижного
объекта за счет дальнейшего сужения полосы пропускания, напри
мер до 0,2 Гц, тогда значение DT возрастет в 53 = 125 раз соответ
ственно, στ = Д\=0,22л/Г25«2,5 нс, линейная погрешности при
этом составит около 0,7 м, что уже сравнимо с другими составляю
щими погрешности АП.
Формула для дисперсии флуктуаций оценки доплеровского сдви
га £у [Гц2] в установившемся режиме схемы слежения за допле
ровским сдвигом некогерентного приемника имеет вид
В'.ыаА,
4/ссч
где^ - несущая частота; А/ссч — полоса пропускания системы сле
жения за частотой (ССЧ).
Расчет, аналогичный проведенному выше, приводит к следую
щему выводу: при ширине полосы пропускания AfCC4 = 2 Гц СКО
ошибки составляет порядка 0,5 Гц, соответственно СКО измерений
скорости - порядка 0,1 м/с. При сужении полосы Δ/ссч в Ю раз до
0,2 Гц эта ошибка составит уже 0,25 м/с, что сравнимо с флуктуа-
ционной ошибкой следящей системы.
Аналогичная формула для когерентного (следящего за фазой)
приемника имеет вид
^ или
А/ссф
128
Расчеты по этой формуле подтверждают ранее сделанный вы
вод: флуктуации частоты опорного генератора АП делают неэффек
тивными попытки повысить точность работы следящих систем за
счет неограниченного сужения их полосы пропускания.
9.3.2. Шумовые (<флуктуационные) ошибки следящих систем
Среднее квадратическое отклонение шумовой погрешности ти
повой некогерентной схемы слежения за задержкой описывается
следующим выражением [18]:
στ — τ3
^1ПССЗ ! ^2ПССЗППЧ
Рс/Щ (PJN0)2
где тэ - длительность элемента кода ПСП; к2 — постоянные ко
эффициенты, зависящие от выбранной схемы слежения; Пссз, Пл
одно сторонняя ширина полосы замкнутой схемы слежения за за
держкой (ССЗ) и тракта промежуточной частоты (ПЧ) соответствен
но; Pc/N0 - отношение мощности сигнала к спектральной плотнос
ти шума на входе АП.
Из последней формулы следует, что для кодов стандартной точ
ности ГНСС (тэ = 1...2 мкс) типичное значение флуктуационной
составляющей дальномерной погрешности АЛ (СКО) составляет
1,5... Юм; ддяР-кодаОР8-0,2...1 м.
Динамическую составляющую дальномерной погрешности АП
можно оценить формулой
°ЯД -
1,12 Ααλ
4П~
ССЗ
где Δа - скорость изменения доплеровского сдвига частоты.
Это соотношение справедливо для установившегося режима схе
мы слежения второго порядка при квадратичном законе изменения
задержки сигнала.
Для оценки точности измерения приращения дальности с ис
пользованием фазы несущей справедливо выражение
σΛφ -
λ2Π,
ССЗ
_(2 п)2Рс/Щ_
0,5
Потенциальная точность измерения задержки по фазе несущей
определяется соотношением στ = l/(2nqf()), где q2 — отношение
129
энергии сигнала к спектральной плотности аддитивного шума. При
рабочих значениях q2 ~ 10 получаем στ * Ι/20/q, соответственно
σ/?φ ~ ^20. Типовые значения этой погрешности составляют по
рядка 1,2 мм (СКО) для Р-кода и 1,6 мм для С/Л-кода GPS.
9.3.3. Бюджет погрешностей стандартной и угломерной АП
Рассмотренные выше составляющие погрешностей определения
псевдодальности и псевдоскорости сведены в табл. 9Л и 9.2, кото
рые принято называть «бюджет погрешностей». При составлении
этих таблиц принято допущение, что все составляющие погрешно
сти являются гауссовскими случайными величинами с нулевым ма
тематическим ожиданием, поэтому дисперсия итоговой погрешно
сти представляет собой сумму дисперсий составляющих. Погреш
ность АП соответствует одночастотному неподвижному приемнику
с двухэтапной обработкой сигналов при наблюдении НКА, находя
щегося в зените. Кроме того, предполагается, что в АП приняты
описанные выше меры компенсации погрешностей, т. е. в табл. 9.1
и 9.2 приведены их остаточные значения.
Таблица 9.1
Бюджет погрешностей определения псевдодальности
Источник погрешности
ол,м
Эфемеридные погрешности
2,6
Погрешности частотно-временного обеспечения
2,0
Ионосфера
4,0
Тропосфера
0,5
Многолучевое распространение
2,5
Погрешности АП
1,5
Прочие
2,0
Суммарная погрешность
6,2
Таблица 9.2
Бюджет погрешностей определения псевдоскорости
Источник погрешности
Or, м
Погрешности частотно-временного обеспечения
0,04
Многолучевое распространение
0,01
Погрешности АП
0,08
Прочие, в том числе релятивистский эффект
0,01
Суммарная погрешность
0,09
130
В табл. 9.3 приведены оценочные значения основных составля
ющих погрешности измерения угломерной АП при длине базы ин
терферометра 2 м.
Таблица 9.3
Типичные значения составляющих погрешности угловых измерений
Источник погрешности
СКО, угл. мин
Шумовая погрешность фазометра (при полосе дискри
минатора, соответствующей ускорению 2g)
Изменение положения фазового центра антенны
Многолучевое распространение
Погрешность вычисления координат НКА и потребителя
Ионосферная и тропосферная рефракция
1-10
0,5-5,0
0,5-5,0
Менее 0,015
То же
Следует обратить внимание на существенно меньшее по срав
нению со стандартной аппаратурой влияние на точность угловых
измерений атмосферных погрешностей. Это обстоятельство объяс
няется тем, что интерферометрический метод по своей сути явля
ется дифференциальным (подробнее об этом см. разд. 10), поэтому
атмосферная погрешность практически не влияет на точность уг
ловых измерений, поскольку при размерах базы в пределах 100 м
она оказывается полностью коррелированна для всех антенн.
9.4. Геометрический фактор
При фиксированных значениях погрешностей измерения псев-
додальностей существенное влияние на точность местоопределе-
ния оказывает взаимное положение АП и рабочих НКА, которое
определяет углы пересечения поверхностей положения (рис. 9.1).
Минимальным погрешностям местоопределения для дальномерных
методов соответствует такое расположение НКА, при котором в точ
ке расположения АП поверхности положения пересекаются под пря
мым углом, однако выполнить это условие при одновременном на
блюдении более трех НКА невозможно.
Количественной характеристикой погрешности местоопределе
ния, связанной с особенностями пространственного положения НКА
и АП, служит так называемый геометрический фактор ΓΣ, или ко
эффициент геометрии. В иностранной литературе используется обо
значение GDOP (от англ, geometrical delusion of precision - геомет
рический фактор ухудшения точности).
131
Рис. 9Л. Влияние геометрии созвездия НКА на точность месгоопределения
Чтобы уточнить математический смысл понятия геометрическо
го фактора, запишем зависимость вектора δ0 погрешности опреде
ляемых параметров от вектора 8И погрешности измеряемых НП
δ0 =& -8к-1=Ъ-1^-1=СГХ. (9.1)
С учетом формулы (9.1) найдем корреляционную матрицу оши
бок навигационных определений потребителя в виде
К0 =Λ/{(δ0 —#и0)(80 -w0)T} = G_1ArH (с_1)Т =(атк;с)~\ (9.2)
где Ки - корреляционная матрица погрешностей измерения НП
(псевдодальностей), АГИ = Λ/{(δΗ -^Η)(δΗ -ти)т}; m0, ти - соот
ветственно векторы математических ожиданий погрешностей δ0, δΗ.
Примем равными нулю составляющие вектора ти. Тогда mG = О
и дисперсии определяемых параметров (<&<£<& О?), т. е. диаго
нальные члены матрицы АГ0, полностью определяют погрешности
навигационного сеанса. Анализ выражения (9.2) показывает, что со
отношение погрешностей определения вектора потребителя и из
меряемых НП зависит только от вида матрицы градиентов G, т. е.
от геометрии взаимного положения НКА и АП.
Как правило, ΓΣ вводится для случая, когда погрешности изме
рения НП, т. е. элементы матрицы Ки, равновелики и некоррелиро-
ваны. В этом случае соотношение (9.2) можно представить в сле
дующем виде:
*0=(g^g)“,=o2(GtG)~1.
Тогда, выразив дисперсию сеанса навигационных определений
через след матрицы К0:
σΣ=(σΙ+σ^+<ή +ат)-1г(Яо),
132
можно представить геометрический фактор в виде коэффициента
I\=[tr(GTG) ‘J =(σ^+σ5+σ^ + σ^)0’5/σ„.
При выборе орбитальных параметров НКА на этапе разработки
СРНС, а также при выборе рабочего созвездия НКА в малоканаль
ной аппаратуре ГΣ является основным критерием.
Иногда удобно рассматривать раздельно значения геометричес
ких факторов, характеризующих точность определения различных
компонент вектора состояния: соответствующий геометрический
фактор для пространственных координат обозначают Гп (PDOP -
Position DOP), для плановых (горизонтальных) координат — Гг (англ.
HDOP - Horizontal DOP), для высоты (вертикальной составляю
щей) — Гв (от англ. VDOP - Vertical DOP), для временного парамет
ра - Γτ (англ. TDOP - Time DOP). Между этими коэффициентами и
суммарным геометрическим факторам существует простая связь:
Γ2Σ=Γ2η+Γ2=Γ2+Γ2+Γ2τ.
Известно, что минимальное значение Гп= 1,5 достигается в слу
чае, когда потребитель находится в центре правильного тетраэдра.
Соответственно для наземного потребителя с учетом кривизны зем
ной поверхности минимальное значение ΓΣ = 1,732 достигается тог
да, когда один НКА находится в зените, а три других равномерно
расположены в горизонтальной плоскости, т. е. когда объем тетра
эдра максимален.
Однако такая геометрия рабочего созвездия, как уже говорилось,
не оптимальна с точки зрения атмосферных ошибок, поэтому при
используемых на практике углах возвышения («углах маски») бо
лее 10° минимальное значение ΓΣ ~ 2.
Контрольные вопросы
1. Как классифицируются погрешности НВО по месту их возникно
вения?
2. Какую величину называют эквивалентной погрешностью дальности
(ЭПД)?
3. Чем обусловлены и какой порядок имеют погрешности частотно
временного обеспечения?
4. Чем обусловлены и какой порядок имеют погрешности эфемерид-
ного обеспечения?
5. Что такое ионосферные погрешности, их особенности, возможные
значения, методы компенсации?
133
6. Что такое тропосферные погрешности, их особенности, возможные
значения, методы компенсации?
7. Какое влияние на точность НВИ оказывает многолучевое распрост
ранение? Как снизить это влияние?
8. Какие факторы влияют на точность следящих систем АП? Что необ
ходимо учитывать при выборе полосы пропускания этих систем?
9. Какой порядок имеют флуктуационные ошибки измерений по оги
бающей и фазе?
10. Что такое бюджет погрешности, какие виды погрешностей он учи
тывает, каков их порядок?
11. Что такое геометрический фактор, каково его минимальное значе
ние, какие значения он принимает на практике?
10. ДИФФЕРЕНЦИАЛЬНАЯ КОРРЕКЦИЯ
И ОТНОСИТЕЛЬНЫЕ ИЗМЕРЕНИЯ В ГНСС
Как следует из материалов разд. 9, современная АП ГНСС в стандарт
ном режиме измерений может обеспечить ЭПД на уровне 5...10 м (СКО),
что позволяет потребителю при типовых значения геометрического фак
тора определять абсолютные координаты с точностью 10...30 м (СКО).
Для многих приложений: навигации в открытом море, полетов на высотах
более 1000 м, слежения за автотранспортными средствами и т. п., такая
точность вполне достаточна. Однако для решения таких задач, как судо
вождение в проливах, каналах, акваториях портов, автоматическая инст
рументальная посадка воздушных судов, геодезическая привязка различ
ных обьекгов ит. п., часто требуется более высокая точность местоопре-
деления (см. табл. 10.1).
Одним из наиболее эффективных путей решения указанных проблем
является применение методов относительных измерений (ОН) или мето
дов дифференциальной коррекции (ДК).
Основная идея указанных методов состоит в совместной обработке
результатов НВО, полученных, по меньшей мере, в двух разнесенных точ
ках рабочей зоны ГНСС. Принципиальная возможность повысить таким
способом точность НВО следует из того, что погрешности измерений,
выполненных в разных точках, содержат коррелированные во времени и
пространстве составляющие. При дифференциальной (разностной) об
работке эти составляющие компенсируются: при сильной корреляции -
практически полностью, при слабой — частично. Необходимо отметить,
что одновременно возрастает дисперсия некоррелированной (шумовой) со
ставляющей погрешности дифференциальных НВО, поскольку она равна
сумме дисперсий шумовых ошибок независимых измерений.
Различие методов ДК и ОН состоит в том, что при ДК по меньшей
мере одна из точек, в которых проводятся измерения, принимается за опор
ную, т. е. ее абсолютные координаты считаются априори известными, при
нимаются за эталонные и используются для вычисления поправок к ре
зультатам НВО. Эти поправки передаются потребителю и используются
им для уточнения собственных абсолютных координат в какой-либо гло
бальной (геоцентрической или геодезической) системе.
135
Таблица 10.1
Требования к навигационному обеспечению
различных групп потребителей
Потребители и решаемые ими задачи
Рабочая зона
Погрешность
Полеты по маршруту (трассе)
Глобальная, регио
нальная
0,25—5,8 км
Полеты в зоне аэродрома
Район аэродрома
200 м
Некатегорированный заход на посадку
Район аэродрома
50 м
Заход и посадка по категориям ИКАО
Зона средств посадки
2,0—8,5 м
Геодезические и геофизические
наблюдения
Локальная
1-10 м
Плавание в открытом море (океане)
Морская поверхность
Земли
1,8-3,7 км
Плавание в прибрежной зоне
Районы прибрежных
вод
100-400 м
Прохождение узкостей, заходы в порты
(гавани)
Районы подходов
к портам
20 м
Маневрирование в портах
Акватории портов
8 м
Исследовательские суда морских
ресурсов
Движение судов по внутренним вод
ным путям:
Глобальная
1-100 м
свободные реки
Районы рек
5-15 м
каналы
Районы каналов
3-5 м
расстановка знаков, картография
ит. д.
Районы рек, каналов
0,25—3,0 м
Движение наземного транспорта
по произвольным маршрутам (одиноч
ные средства и группы)
Региональная, локаль
ная
100 м
Решение специальных задач
Локальная
5-15 м
Картография и геодезия, землеустрой¬
Глобальная,
0,25-5,0 м
ство
региональная,
локальная
0,1-0,2 м
В отличие от ДК методом ОИ решается задача определение взаимного
положения двух объектов (например, воздушных или надводных судов).
Очевидно, что требование точной привязки (эталонирования) координат
по отношению к таким объектам теряет смысл, поэтому выбор системы, в
которой фиксируются координаты обоих объектов, не является принципи
альным. В частности, могут использоваться топоцентрические системы
координат (см. разд. 5) [11].
Ниже рассмотрены основные особенности и способы реализации ал
горитмов ДК и ОИ. (Отметим, что с учетом общности идеи и используе-
136
мого математического аппарата во многих работах ДК и ОИ описывают в
рамках единого дифференциального метода.)
10.1. Методы относительных измерений
Наиболее простой и наглядный вариант реализации метода ОИ
сводится к следующему. Пусть на двух объектах, разнесенных в про
странстве, установлены комплекты АП, которые по одним и тем же
созвездиям НКА в совпадающие моменты времени определяют свои
геоцентрические координаты {х\\у\\ ζ{}, {х^Уъ Ζ2Ϊ· Вычисленные
координаты по соответствующему каналу связи передаются с од
ного объекта на другой. На каждом объекте вычисляют разности
одноименных координат: Ах = х{ - jc2? АУ = У\ ~У2> Αζ = Ζγ- ζ2, τ. e.
проекции на соответствующие оси базовой линии, соединяющей
эти два объекта. Затем определяют длину базовой линии (расстоя-
I 9 о 9
ние между объектами) D - у]Ах + Ay + Az , а также углы сх, β, γ,
характеризующие направление базовой линии в пространстве:
Ах п Ay Az
a = arccos—: p = arccos—: v=arccos—.
D D D
Совокупность величин Д α, β и γ однозначно описывает взаимное
положение объектов в пространстве.
Однако в таком предельно упрощенном виде метод ОИ в насто
ящее время применяется редко, поскольку выигрыш в точности, по
лучаемый при использовании только координатной информации,
оказывается невелик. Причина в том, что координаты, вычисляе
мые АП, содержат погрешности, обусловленные расхождением меж
ду шкалой времени потребителя и системной шкалой времени тп;
задержками Туи, τ^ вызванными ионосферной и тропосферной реф
ракциями; задержкой сигнала в радиочастотном тракте приемника
АП тпрм; шумовыми ошибками измерений enj.
Современные системы ОИ работают по принципу совместной
обработки РНП, измеренных АП объектов, при этом наряду с даль-
номерными измерениями используются измерения фазы несущей
частоты сигналов НКА. Существует три варианта организации та
ких ОИ [2]:
1) потребители обмениваются результатами «сырых» измерений
псевдодальности и псевдоскорости для каждого НКА;
2) обрабатываются измерения псевдодальностей и псевдофаз
(последние используются для сглаживания псевдодальномерных из
мерений). Эти два метода образуют группу стандартных ОИ;
137
3) измеряются фазы несущей. Соответствующие методы носят
название высокоточных и используются для прецизионных изме
рений, например в геодезии.
Главная сложность в разработке и применении высокоточных ОИ
связана с упомянутой в разд. 8 проблемой неоднозначности фазо
вых измерений.
70.7.7. Разностные методы
Для исключения начального рассогласования и дрейфа шкалы
времени АП, атмосферных задержек, а также фазовой неоднознач
ности используются разностные методы. Рассмотрим применение
этих методов на примере обработки фазовых измерений.
Фаза сигнала у-го НКА, принятого потребителем в момент вре
мени τ, относительно фазы сигнала опорного генератора АП может
быть представлена в виде [11, 19]
ф(т)=Фп ~ +/j
г |%(τ)
V со
' τπ ^ ^/и ^/т ^прм
+ Л/пу+еП7·, (10.1)
где Фп> — начальные фазы сигналов генераторов АП и у-го НКА;
ή — несущая частоты сигнала у-го НКА; Rnj- — расстояние между
у-м НКА и П; Xj — расхождение между шкалой времениу-го НКА и
системной шкалой времени; τπ — расхождение между шкалой вре
мени потребителя и системной шкалой времени; т^и, XjT — задерж
ки, вызванные ионосферной и тропосферной рефракциями; тпрм -
задержка сигнала в радиочастотном тракте АП; Mnj -параметр фа
зовой неоднозначности (см. разд. 8); enj — шумовая ошибка измере
ния псевдодоплеровской фазы, которую будем для простоты счи
тать гауссовской случайной величиной с единичной дисперсией и
нулевым математическим ожиданием.
Если прием сигналов у-го НКА ведется одновременно двумя по
требителями Ux и П2, то для исключения начальной фазы сигнала
генератора у-го НКА и расхождения между шкалой времени у-го
НКА и системной шкалой времени сформируем первую разность
псевдодоплеровских фаз А{ 2 = Ψι - Ф2, используя выражение (10.1):
ΔΙ,2(τ) = δ1,2(τθ) + /7
'(
с0
Δ^π Δ^/τ Δ<^πρΜ
+ AMj +Δ e·,
(10.2)
138
где δ] 2(^0) - расхождение фаз сигналов генераторов потребителей
П] и П2; Δτπ - разность расхождений шкал времени потребителей
Πι и П2 и системной шкалы времени, Δτπ = τΏ\ - τπ2; ΔτΗ, ΔτΤ -
разности задержек сигналов, принятых потребителями П| и П2,
обусловленные ионосферной и тропосферной задержками, ΔτΗ =
- т1и — т2и; ΔτΤ = Т\т - τ2χ; ΔτπρΜ - разность задержки сигналов в
радиочастотных трактах потребителей П( и П2, ΔτπρΜ = тпрМ1 - тПрм2?
AMj - разность значений параметров фазовой неоднозначности,
AMj = М\ j - M2j\ Aej — разность шумовых ошибок измерения псев-
додоплеровской фазы, которая остается гауссовской случайной ве
личиной, однако ее дисперсия удвоится относительно дисперсии
первичных измерений, Δеу = еп1у - еп2 j.
В соотношении (10.2), кроме дальностей ЛщуС*); неиз¬
вестными являются значения δ(τ0) и Δτπ + Диу и - Атут - ΔτπρΜ, одина
ковые для первых разностей, вычисленных по всем НКА.
Исключить указанные неизвестные можно путем вычисления
вторых разностей, т. е. путем вычитания первой разности по любо
му НКА из всех остальных. При этом для сигналов ГЛОНАСС не
обходимо учитывать различие литерных частот разных НКА, т. е. в
общем случае вторые разности псевдодоплеровских фаз можно за
писать в следующем виде:
νΔ KijW-KyW , JU(t)-Wt)
jk ■'j r. r.
c0 c0
-(fj -Λ)(Δτπ -ΔτjR + Ατρ +ΔτπρΜ) ++ VAe. (10.3)
Здесь VAMj =AMj — AMk — вторая разность параметров фазовой
неоднозначности; ^ Ае - вторая разность гауссовской шумовой
ошибки, дисперсия которой теперь равна четырем.
Величины Δτπ + Дтуи - Дтут - ΔτπρΜ можно оценить по измерениям
псевдодальности [12], поэтому вторые разности фаз могут рассмат
риваться как функции только координат потребителей, параметра
фазовой неоднозначности и шумовой ошибки.
Аналогично методом первых и вторых разностей могут быть ус
транены расхождения шкал и неизвестные задержки при измере
ниях псевдодальностей.
Сохранившийся в формуле (10.3) параметр фазовой неоднознач
ности можно исключить, сформировав третьи разности на базе вто
рых разностей, относящихся к разным моментам времени. При этом
должно выполняться условие непрерывности слежения приемни
ками за сигналами НКА между этими моментами времени:
139
■fj
-fk
AVA'j (t!,t2) = VAjk (t2) - VA Jk (t,) =
'u\j^i)-Rny^2) Κπΐ;(τι)-/?π2>(τι)
c0 c0
Rnlk (X2 ) ~]*п2к(Ъ1 Rn\k(t\)~Rn2k(tl)^
(10.4)
В формуле (10.4) единственными неизвестными являются даль
ности /?п1у(т); RU2j(b)> т. е. погрешности, определяемые расхожде
нием фаз и частот генераторов потребителей и НКА, оказываются
скомпенсированными, устранена и фазовая неоднозначность. Вме
сте с тем число полученных таким образом измерений фазы в 4 раза
меньше первоначального числа независимых наблюдений, а дис
персия шумовой ошибки снова удвоится и в 8 раз превысит исход
ную. Отсюда прямо следует, что при высокоточных ОИ должна ис
пользоваться аппаратура с минимальным фазовым шумом.
Основным недостатком процедуры устранения фазовой неодноз
начности методом третьих разностей является необходимость дли
тельного наблюдения (для измерений с сантиметровой точностью
оно составляет около 20 мин).
Поэтому в последнее время предпочтение отдают более эффек
тивным методам разрешения фазовой неоднозначности путем оцен
ки параметра М.
10.1.2. Методы оценки параметра фазовой неоднозначности
Для оценки параметров фазовой неоднозначности может при
влекаться различная информация: априорные оценки координат, из
быточность измерений псевдодальности и псевдофазы за счет ис
пользования второго частотного канала, результаты совместной
оценки относительных координат при измерениях более, чем по
восьми НКА, и др. [2, 12].
В зависимости от условий, в которых решается задача разреше
ния неоднозначности, различают три вида методов: статические,
кинематические и «в движении» (от англ. On-the Fly - OTF). Ста
тические методы применяют, когда приемники неподвижны на про
тяжении всей процедуры измерений. В кинематических методах не
однозначность устраняется до начала движения, когда приемники
находятся в точках с известными координатами. Наконец, метод OTF
позволяет решать задачу разрешения неоднозначности непосред
ственно в процессе взаимного перемещения приемников.
140
Наиболее эффективными на настоящее время являются методы,
основанные на избыточных измерениях. В самых общих чертах этот
метод может быть пояснен следующим образом. Пусть аппаратура
находится в точке А (рис. 10.1), тогда полная фаза принятого сигна
ла Ψλι = Ψλι гДе Ψλι “ определяемая в процессе измерений
дробная часть полной фазы.
Рис. 10.1. Разрешение неоднозначности с помощью избыточных измерений
На рис. 10.1, а приведены линии положения, удовлетворяющие
условию φΑι = const при приеме одного сигнала, приходящего с
направления Л^.
На рис. 10.1, б изображены линии положения при приеме двух
сигналов с различными длинами волн, приходящими с различных
направлений N{ и N2. Решению системы уравнений вида (рА\ = const
и φΑ2 = const в этом случае соответствуют точки пересечения ли
ний положения, однако отдать предпочтение какой-либо из них при
неизвестных значениях МАХ и МА2 невозможно, поскольку с пози
ций фазовых измерений все эти точки равноправны. Ориентиро
вочные значения координат, полученные путем измерений по оги
бающей, позволяют ограничить область правдоподобных результа
тов фазовых измерений. Однако поскольку погрешности таких
измерений (5 м и более СКО) существенно превышают длину вол
ны несущей НКА (около 20 см), в указанную область попадает боль
шое количество точек, координаты которых могут считаться прав
доподобными.
Если теперь ввести дополнительное измерение по сигналу, при
ходящему с направления N3 (формально, с точки зрения основной
задачи определения координат точки на плоскости, оно является из
быточным), то точек, где одновременно пересекаются все три пинии
<рAi = const, окажется существенно меньше и расположатся они реже
141
(рис. 10.1, в). Иными словами, добавление избыточных измерений
не дает единственного точного решения проблемы неоднозначности,
поскольку каждое такое измерение содержит новое неизвестное -
свой параметр неоднозначности MAj-. Однако эти измерения расши
ряют область в окрестности искомого решения, в которой альтерна
тивные решения отсутствуют. В общем случае для реализации фазо
вого метода ОИ необходимы измерения по пяти и более НК А, что
может потребовать работы по совмещенному (ГЛОНАСС + GPS) со
звездию, либо использования второго частотного канала.
При двухчастотных измерениях возможен переход от измерения
пседофаз несущих к эквивалентным измерениям псевдозадержек
на частотах биений
/δ=(Λ”Λ)/2 и /ς=(/ι+/2)/2-
Условием допустимости такого перехода является пренебрежи
мо малая остаточная (после вычисления вторых разностей) вели
чина ионосферной погрешности. Кроме того, необходимо (но не
достаточно), чтобы ошибка вторых разностей измерений псевдо
дальностей была меньше половины длины волны биений полураз-
ностной частоты/^.
Существуют и другие подходы к проблеме разрешения неодноз
начности фазовых измерений. Один из них базируется на целочис
ленной максимизации некоторой функции неоднозначности, зави
сящей от вторых разностей измерений псевдодальности и псевдо
фазы [12,19]. С учетом высокой относительной точности измерений
псевдофазы в АП, каждый локальный пик АПВ указанной функ
ции может аппроксимироваться гауссовской плотностью вероятно
сти, что позволяет свести задачу разрешения неоднозначности к
целочисленной минимизации квадратичной формы вида
Ζ(Μ) = (Μ-Μ)τΛ^(Λ/-Μ), (10.5)
где М - предварительная оценка вектора параметров неоднозначно
сти; RM - матрица дисперсий оценки вектора параметров неодно
значности.
Решение описанной задачи целочисленной максимизации в об
щем случае возможно только переборными методами, при этом для
двухчастотной геодезической аппаратуры, работающей по 5-7 НКА,
процедура решения требует перебора 105—1010 целочисленных ком
бинаций.
Повысить достоверность решения и одновременно уменьшить
число перебираемых комбинаций возможно за счет сглаживания,
142
с использованием калмановской фильтрации, измерений псевдодаль
ности (или их разностей) по огибающей более точными фазовыми
измерениями. При этом удается существенно уменьшить шумовую
составляющую погрешности измерений по огибающей (от англ.
carrier {phase) smoothing).
Дальнейшее повышение эффективности алгоритмов разреше
ния неоднозначности может быть достигнуто беспереборными про
цедурами. Возможность реализации таких процедур базируется
на следующих соображениях [2]. Вероятность неправильного раз
решения неоднозначности монотонно снижается при уменьшении
определителя матрицы RM квадратичной формы (10.5). Наличие
избыточных измерений и тот факт, что точность фазовых измере
ний существенно (на порядок и более) превышает точность изме
рений по огибающей, приводит к тому, что часть собственных чи
сел матрицы RM будет существенно превышать остальные, т. е.
матрица будет слабо обусловленной. Отсюда следует, что точка
арифметического минимума находится внутри ограниченной об
ласти вблизи центра эллипсоида, соответствующего квадратичной
формы (10.5). Если принять допущение, что матрица RM диаго
нальная, то
L(M) = (М-муRJj (Μ-Μ) = Σ(Μ-М)2/(RM),-.
/=1
Поскольку каждое слагаемое суммы в последней формуле зави
сит только от одного параметра неоднозначности, минимум квад
ратичной формы достигается тогда, когда минимально значение каж
дого слагаемого. Поэтому точку целочисленного минимума квад
ратичной формы (10.5) можно найти округлением до ближайшего
целого составляющих вектора параметров неоднозначности.
В литературе [2, 12, 18] описан ряд беспереборных процедур,
предложенных на основании приведенных соображений. Основная
сложность при их разработке состоит в поиске такого преобразова
ния матрицы RM, которое обеспечивает максимум вероятности пра
вильного разрешения неоднозначности.
Еще один подход к синтезу алгоритмов НВО, основанных на
фазовых измерениях, связан с методом дополнительной перемен
ной [2]. Этот метод позволяет в значительной степени упростить
применение классических методов оптимальной фильтрации в си
туациях, когда АПВ фильтруемых параметров является полимодаль-
ной из-за наличия в наблюдениях периодической составляющей,
что и имеет место при обработке фазовых наблюдений.
143
10.1.3. Точность относительных измерений
Основными источниками погрешностей определения компонент
базовой линии являются погрешности измерения относительной
задержки сигналов, нестабильность генераторов, нескомпенсиро-
ванные остаточные погрешности, обусловленные ионосферной и
тропосферной рефракциями, а также погрешности, обусловлен
ные неточностью знания положения НКА. Бюджет случайных и
систематических компонент этих погрешностей характеризуется
данными, представленными в табл. 10.2.
Основной областью наземных применений методов ОИ является
определение положения пунктов с погрешностью менее 0,1 м (СКО)
для создания геодезических сетей различного назначения. Достигае
мая при этом точность слежения за фазой несущей на уровне единиц
миллиметров позволяет проводить измерения базовых линий до
1000 км с точностью на уровне нескольких единиц сантиметров.
До недавнего времени высокоточные геодезические измерения,
требующие использования сложных алгоритмов для обработки боль
ших массивов данных, выполнялись в режиме постобработки. Наи
более современным и перспективным из кинематических методов
ОИ является режим измерений и обработки их результатов в реаль
ном времени (от англ. Real Time Kinematic - RTK). Особенностями
этого режима являются наличие радиоканала для передачи результа
тов первичных измерений по дальномерному коду и фазе несущей
на пункт обработки со скоростью не менее 4,8 кбит/с и использова
ние специальных алгоритмов обработки, обеспечивающих разреше
ние фазовой неоднозначности за минимальное время (не более 5 с).
Таблица 10.2
Влияние различных источников
на точность относительных определений
Источник погрешностей
Погрешность определения
компонент базовой линии, см
СКО
систематическая
Измерение фазовой задержки на интервале 4 с
0,2-0,5
-
Относительная нестабильность генератора
НКА
0,3
0,3
Тропосферная задержка (после калибровки)
1,5
1.5
Ионосферная задержка (после калибровки)
1,0
1,0
Неточность знания положения НКА (эфеме-
ридная погрешность)
1,0
1,0
144
10.2. Дифференциальная коррекция
10.2.1. Принцип дифференциальной коррекции
Как уже отмечалось, основное отличие между системами ДК и
ОИ состоит в том, что при ДК одна из точек играет роль опорной и
оснащается специальной аппаратурой для выработки и передачи
потребителю корректируюгцей информации (КИ). Комплекс техни
ческих средств, реализующих режим ДК, принято называть диф
ференциальной подсистемой (ДПС), рассматриваемой как функци
ональное дополнение ГНСС. Принцип дифференциальной коррек
ции иллюстрирует рис. 10.2.
Основными составными частями подсистемы являются: конт-
рольно-корректирующая станция (ККС), канал передачи КИ, ап
паратура приема и обработки КИ в АП.
На ККС, собственные геодезические координаты *кко Укко 2ккс
которой известны с высокой точностью и используются в качестве
эталонных, размещается прецизионная АП с малым уровнем
случайной погрешности измерения НП. С помощью этой АП обыч
ным методом измеряется текущее значение НПИЗМ (например, псев
додальности Д4ккс)· Одновременно на основе известных коорди
нат ККС *кко Укко zkkc и полученных из эфемеридной информа-
Рис. 10.2. Структура подсистемы дифференциальной коррекции
145
ции координат НКА хс|, yci, zci вычисляется эталонное значение НП^
которое сравнивается с измеренным. Разница между текущими из
мерениями и эталонными значениями ΔΗΠ = НПИЗМ - НПЭТ исполь
зуется для формирования поправок, передаваемых потребителю в
составе КИ. Потребитель, на основании принятой КИ, вносит по
правки в значение НПИЗМ, измеренное его АП, а затем скорректиро
ванное значение НПкорр используется при расчете параметров его
вектора состояния.
Эффективность ДК определяется погрешностями АП эталонной
точки и объекта, расстоянием между ними, а также видом зависи
мости коэффициента корреляции ЭПД от расстояния и времени.
Хотя теоретический радиус корреляции большинства погрешнос
тей, определяющих ЭПД ГНСС, достигает 2000 км [9], на практике
эффективным считается использование ДК при удалениях АП от
ККС не более чем на 500 км.
10.2.2. Параметры корректирующей информации
По составу параметров корректируемой в АП информации мо
гут быть выделены два метода ДК:
1) метод ДК координат потребителя;
2) метод ДК измеряемых НП.
Метод ДК координат потребителя предусматривает, что КИ фор
мируется путем сопоставления эталонных координат ККС с коор
динатами, вычисленными в ее АП. Полученные дифференциаль
ные поправки (как разности эталонных и измеренных координат
ККС) передаются в составе КИ потребителям, которые могут уточ
нить по ним свои координаты. Этот метод наиболее прост, так как
не меняет основной алгоритм навигационных определений АП
объекта (поправки вводятся в уже вычисленные координаты), но
налагает существенные ограничения на состав рабочих созвездий
ККС и АП и используемых в них алгоритмов навигационных опре
делений. Действительно, поправки к координатам, вычисляемые на
ККС по ее рабочему созвездию, являются состоятельными только
при условии, что АП работает по этому же созвездию и использует
идентичные алгоритмы навигационных определений.
Переносить же поправки, найденные по одному созвездию, на
результаты определений, полученные по другому созвездию, недо
пустимо, поскольку в этом случае использование КИ приводит не к
уменьшению, а к увеличению погрешности навигационных опре
делений. Аналогично при использовании в аппаратуре ККС и по
требителя неидентичных алгоритмов могут возникнуть дополни¬
146
тельные некоррелированные составляющие алгоритмической по
грешности. По этим причинам в современной практике этот метод
фактически не используется.
Суть метода ДК навигационных параметров состоит в том, что
бы сообщать потребителям набор поправок к «сырым» измерени
ям НП по всем НКА, видимым на ККС, предоставив возможность
каждому потребителю выбирать рабочее созвездие и число исполь
зуемых для определения НКА. Чтобы выработать эти поправки на
ККС, одновременно с измерением псевдодальностей до всех НКА
на основании эфемеридной информации находят их расчетные зна
чения. Результаты расчетов принимают за истинные псевдодально
сти, поскольку их вычисления проводят по эталонным координа
там ККС. Разности расчетных и измеренных значений в качестве
поправок к псевдодальномерным измерениям передаются в соста
ве КИ всем потребителям. При этом отсутствуют ограничения на
выбор алгоритмов функционирования АП, поскольку потребитель
может выбрать оптимальное для него созвездие и число НКА в нем,
а измеренные в его АП псевдодальности корректируются с помо
щью поправок, относящихся к выбранным НКА.
10.2.3. Прямой и инверсный дифференциальные методы
В зависимости от места использования КИ в системе потребите
лей НИ различают прямой и инверсный дифференциальные методы.
Прямой метод предусматривает использование КИ непосред
ственно в навигационной АП для уточнения параметров его векто
ра состояния. Этот метод получил наибольшее распространение,
поэтому в большинстве типов АП имеется интерфейс для приема
КИ в соответствующем формате, определенном международными
или национальными стандартами.
Инверсный метод используется в тех случаях, когда требуется
уточнение вектора состояния объекта не в точке его нахождения, а
в некотором другом пункте, на котором осуществляется контроль
положения объекта или управление его движением. При этом с АП
контролируемого объекта на пункт управления (контроля) трансли
руются либо результаты первичных измерений, либо текущие ко
ординаты, дополненные информацией о составе рабочего созвез
дия, по которому они вычислены. В пункте управления (контроля)
полученные данные корректируются с использованием КИ, посту
пающей от ККС, которая может располагаться как в самом пункте
управления, так и находиться в другом месте. Уточненные в ре
зультате коррекции навигационные данные затем могут ретрансли¬
147
роваться на объект или использоваться на пункте управления как в
реальном времени, так и в режиме постобработки.
В зависимости от размера зоны покрытия дифференциальные
подсистемы (ДПС) разделяются на локальные (ЛДПС), региональ
ные (РДПС) и широкозонные (ШДПС). Рассмотрим принципы по
строения и особенности функционирования указанных подсистем.
10.2.4. Локальные дифференциальные подсистемы
Локальными в литературе обычно называют ДПС с максималь
ной дальностью действия передатчика КИ до 200 км. ДПС этого
класса широко используются для обеспечения мореплавания в при
брежных и проливных зонах, аэронавигации, системах контроля на¬
земного транспорта, а также для геодезических, землемерных и дру
гих работ (рис. 10.3).
ΗΚΛ
ГЛОНАСС
HOPS
Локальная
корректирующая
информация (КИ)
Ж в*
^.-**·*’ I Радионавигационные измерения
— ■ ■ 11 Щ9 ■ ■■ —
X >·***
Передача КИ
А—. Формирователь А—, невыделенной л
^ сигнала ^ телефонной линии ^
ТВ-иередатчик
и 1Р-сетям
ККС
Рис 10.3. Локальная ДПС
Задачей этой системы является обеспечение в заданном регионе
точности определения координат не хуже 2 см в плоскости и 4 см
по высоте на основе передачи данных посредством сигнала регио
нального ТВ либо в диапазоне УКВ на расстояниях до 200 км от
носительно опорной станции.
В составе КИ локальной ДПС для каждого НКА обычно передает:
• одну (скалярную) поправку для суммарной (учитывающей все
составляющие) погрешности измерений псевдодальности (иногда
сглаженную с учетом фазовых измерений);
148
• одну (скалярную) поправку для суммарной погрешности изме
рения псевдоскорости.
Рассмотрим основные особенности построения локальной ДПС
на примере морских систем (МДПС). Современные МДПС обеспе
чивают прием в диапазоне L\ сигналов стандартной точности всех
видимых НК А ГЛОНАСС и GPS, измерения псевдодальностей по
всем принимаемым НКА и выработку дифференциальных попра
вок ко всем измеренным псевдодальностям. Эти функции выпол
няет высокоточная многоканальная аппаратура, антенна которой
имеет геодезическую привязку и специальный вычислительный ком
плекс.
Для передачи КИ в МДПС обычно используют морские радио
маяки, работающие в диапазоне от 283,5 до 325,0 кГц, мощность
излучаемого сигнала 80... 100 Вт. Передача КИ в этих системах осу
ществляется путем фазовой манипуляция несущей радиомаяка с
минимальным фазовым сдвигом (MSK). Такой вид модуляции выб
ран по той причине, что он не создает помех приемникам, исполь
зующим традиционные методы пеленгации радиомаяка. Скорость
передачи данных в диапазоне средних волн составляет 50, 100,
200 бит/с. Поскольку сигнал радиомаяка распространяется в режи
ме поверхностной волны (с огибанием земной поверхности) на даль
ности, значительно превышающие радиошризонт, фактическая даль
ность действия радиомаяка обычно составляет от 200 до 300 мор
ских миль над морской поверхностью. Использование КИ на этих
дальностях обеспечивает снижение погрешности позиционирова
ния до величины приблизительно 0,5...5,0 м (СКО). Учитывая, что
антенны радиомаяков, как правило, ненаправленные, сигнал, рас
пространяющийся над поверхностью суши, может быть доступен
пользователям СРНС на земле, в воздухе и во внутренних водах.
Важным элементом МДПС является система интегрального кон
троля, следящая за правильностью передачи КИ потребителям, ка
чеством навигационных полей ГНСС, а также анализирующая точ
ность выработанных дифференциальных поправок путем расчета с
их помощью собственных координат На основании перечисленных
и других данных система контроля целостности RAIM (от англ.
Reseiver Inegrity Monitoring - автономный контроль целостности)
вырабатывает «рекомендации» о целесообразности использования
сигналов того или иного НКА, передаваемые потребителю в соста
ве КИ. Указанные системы входят в состав контрольной станции,
которая может располагаться как в непосредственной близости, так
и на значительном расстоянии от ККС. В последнем случае в со¬
149
став системы должны входить средства связи для обмена информа
цией между ее элементами. При передаче информации в МДПС
используется формат RTCM SC-104, принятый специальным коми
тетом 104 Морской Радиотехнической Комиссии США и поддер
жанный Международной ассоциацией маячных служб. Существует
несколько версий стандарта RTCM SC-104; в настоящее время наи
более широко используется версия 2.2, включающая в себя диффе
ренциальные поправки для измерений по сигналам ГЛОНАСС.
В авиации локальные ДПС используются для решения следую
щих задач:
• обеспечение в сложных метеоусловиях инструментального за
хода на посадку на дальностях порядка 50 км от начала взлетно-
посадочной полосы;
• аэронавигационное обеспечение местных авиалиний;
• навигационно-временное обеспечение систем автоматических
зависимых наблюдений [11].
Авиационные локальные ДПС используют для передачи КИ
У KB-диапазон частот (112... 118 МГц), с использованием восьми
кратной ОФМ. Формат передачи сообщений базируется на стан
дарте RTCA/DO-217. При передаче КИ по 12 НКА объем сообще
ния составляет 664 бита. Для обеспечения инструментальной по
садки в более сложных условиях (до третьей категории ИКАО)
рассматриваются другие варианты радиоканала, в том числе диапа
зона 5,0...5,25 ГГц, а также совместное использование локальной
ДПС и ШДПС. Работа в таких условиях регламентируется стан
дартами RTCA/DO-245 и RTCA/DO-246.
Еще одна область использования локальных ДПС - диспетчер
ский контроль и управление движением автотранспорта. КИ для этой
категории потребителей передается по УКВ радиовещательным ка
налам с использованием метода модуляции поднесущей. В настоя
щее время почти вся территория Западной Европы покрыта полем
локальных ДПС, использующих именно этот способ передачи КИ.
10.2.5. Региональные дифференциальные подсистемы
Региональные ДПС строятся на базе объединенных в общую сеть
локальных ДПС, что обеспечивает значительное увеличение ради
уса действия, который составляет 500...2000 км. В состав РДПС
входят несколько десятков ККС, объединенных в общую сеть, а так
же системы контроля целостности информации. КИ РДПС форми
руется путем дополнительного сглаживания скалярных ДП, выра
батываемых входящими в систему ККС.
150
Так, американские РДПС Starfix и SkyFix формируют КИ на ос
новании данных 60 наземных ККС, размещенных по всему миру.
Для передачи КИ используют четыре геостационарных ИСЗ
«Инмарсат», канал передачи данных которых работает в диапазо
не 1,6 ГГц, скорость передачи информации составляет от 600 до
2400 бит/с, формат сообщения соответствует стандарту RTCM
SC-104.
Согласно опубликованным данным, на расстояниях порядка
1000 км указанные региональные ДПС обеспечивают точность мес-
тоопределения порядка 1 м, а на расстояниях до 2000 км - порядка
3 м (СКО).
10.2.6. Широкозонные ДПС
Следующий шаг развития ДПС базируется на переходе от ска
лярных к векторным поправкам, компоненты которых соответству
ют отдельным составляющим погрешностей измерений (погреш
ности эфемериднош и временного обеспечения, ионосферные, тро
посферные). Этот принцип реализуется в широкозонных ДПС
(ШДПС) (рис 10.4).
Основное назначение широкозонных систем:
• передача потребителям поправок к эфемеридам и часам для
высокоточной навигации;
• передача потребителям сигналов целостности для повышения
надежности навигации.
151
В мире работают и создаются системы WAAS (США), EGNOS
(Евросоюз), MSAS (Япония), GAGAN (Индия). Последние три по
тенциально могут покрыть территорию России. В Российской Фе
дерации создается сходная по назначению система, названная «Си
стема дифференциальной коррекции и мониторинга» (СДКМ).
Широкозонная ДПС состоит из нескольких ККС и базовой стан
ции. Каждая ККС, принимая сигналы от всех видимых ей НКА,
определяет вектор поправок, включающий, например, поправки к
БШВ каждого НКА, три составляющие эфемеридных погрешнос
тей и параметры модели ионосферной задержки, соответствующие
местоположению данной ККС. Сформированная на ККС информа
ция передается на головную станцию, где рассчитывается итого
вый вектор ДП, включающий в себя трехмерные поправки к эфе
меридам всех НКАУ находящихся в зоне видимости всех ККС по
правки к их БШВ, и восемь коэффициентов модели ионосферной
задержки. Кроме того, на головной станции оцениваются сдвиги
шкал времени ШВ каждой ККС относительно СШВ. Сформиро
ванный вектор дифференциальных поправок передается потреби
телям по различным каналам связи.
Принципы, положенные в основу ШДПС, позволяют охватить
дифференциальным полем значительную территорию (существен
но превышающую суммарную зону действия отдельных ККС), про
тяженность рабочих зон существующих ШДПС составляет несколь
ко тысяч километров.
В настоящее время функционируют две ШДПС: WAAS (Wide
Area Augmentation System), созданная по заказу Федеральной авиа
ционной администрации над территорией США, и EGNOS (European
Geostationary Navigation Overlay Service) - над территорией Евро
пы. Рассмотрим основные принципы построения ШДПС на приме
ре системы WAAS.
Космический сегмент WAAS включает геостационарные КА GEO
(типа «Инмарсат» или аналогичные), предназначенные для передачи
на частоте L1 (1575,42 МГц) навигационного сигнала, аналогичного
GPS, а также ретрансляции сформированных на земле поправок эфе-
меридно-временного обеспечения (ЭВО) и ЧВП, коэффициентов
ионосферной модели и сообщений о целостности всех НКА GPS.
Указанная информация передается в составе навигационного сооб
щения, передаваемого КА GEO со скоростью 500 бит/с. Дально-
мерный код Голда для КА GEO выбирается из числа последова
тельностей, не занятых НКА GPS, поэтому он может использовать
ся как дополнительный навигационный сигнал.
152
Наземный сегмент включает в себя опорные станции, осуще
ствляющие мониторинг состояния навигационного поля, ведущие
станции, предназначенные для выработки корректирующей и иной
информации, и станции передачи данных, транслирующие вырабо
танную информацию на космический сегмент. Широкозонная ДПС
WAAS имеет собственную шкалу времени, привязанную к СШВ
GPS с погрешностью не хуже 50 нс.
При формировании дифференциальных поправок используются:
• оценки псевдодальностей для всех НКА GPS и НКА GEO;
• разностные измерения псевдодальностей в диапазонах Ни L2
и данные о смещении этих измерений;
• данные навигационных сообщений НКА GPS и GEO о пара
метрах их движения;
• данные о положении фазовых центров приемных антенн и о
текущих параметрах аппаратуры.
На основе полученных данных определяются:
• уточненные параметры орбитального движения НКА GPS и
GEO;
• параметры дрейфа БШВ НКА GPS и GEO относительно СШВ
WAAS;
• данные для альманахов НКА GPS и эфемеридные данные НКА
GEO.
По результатам расчета уточненных параметров орбитального
движения НКА GPS и GEO вычисляются поправки к их эфемери
дам, при этом поправки к быстро и медленно меняющимся состав
ляющим погрешностей эфемерид вычисляются отдельно. Указан
ная информация WAAS наряду с данными контроля целостности
доступна зарегистрированным пользователям.
10.2.7. Российская широкозонная система дифференциальной
коррекции и мониторинга
Создание национальной широкозонной системы ДК, обеспечи
вающей высокоточную навигацию не только на территории Рос
сии, но и во всей зоне экономических и других интересов государ
ства, является одной из приоритетных задач, решаемых в рамках
ФЦП ГЛОНАСС. Принятая концепция такой системы имеет ряд осо
бенностей, одной из которых является совмещение функций выра
ботки дифференциальных поправок и мониторинга целостности и
других параметров навигационных сигналов ГЛОНАСС, что и обус
ловило название «Система дифференциальной коррекции и мони
торинга (СДКМ) ГЛОНАСС». Планируемая структура системы при
ведена на рис. 10.5.
153
Геостационарный КЛ
Дифференциальные
поправки, инфор^ци* *
о целостности и состоянии
ионосферы
Точность
в дифференциальном
4?
Точносгь
в абсолютном режиме
Комплекс
закладки
ж
НКА
ГЛОНАСС
и GPS
Сспъ
станций
сбора
измерений
Центр обработки
данных
Рис. 10.5. Структура системы дифференциальной коррекции
и мониторинга
Концепция предполагает использовать:
• существующую орбитальную группировку НКА ГЛОНАСС сов
местно с геостационарными КА;
• сигналы как геостационарных КА, так и НКА ГЛОНАСС (диа
пазон Ζ3), для передачи широкозонных поправок и информации це
лостности;
• сеть из 10-20 автономных станций сбора информации (ССИ),
расположенных на территории России (рис. 10.6);
• новые методы обработки измерений и получения КИ, не тре
бующие точной синхронизации шкал времени и опорного генера
тора ССИ, что упрощает и удешевляет аппаратуру;
• действующие на территории страны инфраструктуру связи и
информационные технологии (в том числе Интернет) для передачи
КИ конечному пользователю;
• существующие локальные ДПС без изменения штатного рег
ламента их работы и ведомственной принадлежности.
Согласно концепции, на ССИ в отличие от традиционных ККС
не возлагается задача выработки КИ, они лишь проводят измере-
154
•22
Рис. 10.6. Подсистема сбора измерений:
1, 2, 3 - Москва; 4 — Норильск; 5 — Иркутск; б — Петропавловск-Камчатский;
7 - Новосибирск; 8 - Кисловодск; 9 - Геленджик; 10, 11 - Санкт-Петербург;
12 - Южно-Сахалинск; 13 - Якутск; 14 - Владивосток; 15 - Екатеринбург; 16 -
Ловозеро; 17 — Воронеж; 18 - Анапа; 19 - Печеры; 20 - Хабаровск; 21 - Тикси;
22 - Билибино; 23 - Магадан
ния псевдодальностей, псевдоскоростей и (при необходимости)
псевдофаз по всем видимым НКА. Точная привязка координат ССИ
при этом не требуется. Кроме ССИ в системе предусмотрены ба
зовые станции, расположенные в геодезически привязанных точ
ках и оснащенные собственными эталонами времени и частоты
(ЭВЧ).
Для коррекции погрешности НВО в СДКМ используются ска
лярно-векторные поправки* определяемые для каждого / го НКА в
виде
{ΔΧ,,Δ^.,Δρ,-,Δ^},
где ΔΛ'· = |Δχ„ Δyh Δζ-| - вектор поправок к координатам НКА;
AVj = \Avxl, Avyi, Δνζ·| - вектор поправок к априорным данным о
составляющих вектора скорости НКА; Δρ, — скалярная поправка к
оценке псевдодальности, ΔΓ, - скалярная поправка к оценке псев
доскорости.
Совокупность поправок {ΔΧ,, AVi9 Δρ,, Δ^} называют коррек
тирующей информацией. Эта информация совместно с информаци
ей базовых станций передается в Центр обработки. Туда же поступа
ют данные об отклонениях эталонов времени и частот (ЭВЧ) базо
вых станций относительно ЭВЧ НКА. Расчет поправок выполняется
155
разностным методом: сначала вычисляются первые разности оценок
псевдодальностей и псевдоскоростей, полученных от всех ССИ, от
носительно аналогичных оценок, полученных от базовых станций.
На основании первых разностей рассчитываются вторые разности
указанных оценок, полученных по разным НКА, в которых устраня
ется зависимость оценок от координат ССИ, что позволяет вычис
лить векторные поправки AXh AVt к погрешностям эфемерид НКА.
Используя поправки AXh AVi и измеренные на базовых станциях
отклонения их ЭВЧ относительно БЭВЧ НКА, вычисляют скаляр
ные поправки к псевдодальностям Ар, и псевдоскоростям AVL по
всем НКА. Усредненные значения этих поправок, по сути, являющи
еся поправками к эфемеридам и показаниям бортовых часов, пере
даются в Центр управления ГЛОНАСС для коррекции закладывае
мой на борта НКА информации, а также для передачи по соответ
ствующим каналам потребителям.
Предполагается предоставить массовому потребителю возмож
ность принимать ионосферные и тропосферные поправки в соста
ве принимаемой ими КИ, а не рассчитывать их в собственной АП,
что позволит повысить точность одночастотной аппаратуры. В то
же время сохраняется возможность автономной коррекции атмос
ферных погрешностей на основе двухчастотных измерений и стан
дартных моделей. Для потребителей, располагающих обычной (не
дифференциальной АП), появляется возможность производить кор
рекцию на уровне конечных измерений (координат и скорости).
Расчеты показывают, что с использованием описанного подхода
к формированию КИ при покрытии ССИ пространственной облас
ти 500x500 км, остаточные ЭПД не превышают:
• для эфемерид - 10 см;
• для ионосферы — 5 см;
• для тропосферы — 30 см.
Результирующая остаточная погрешность при этом составит
33 см (СКО), что позволит с учетом геометрического фактора и по
грешностей многолучевого распространения получить для области
500x500 км точность определения координат потребителя порядка
1...2 м (СКО).
10.2.8. Локальные дифференциальные подсистемы
на основе псевдоспутников и ретрансляторов сигналов НКА
При необходимости существенно повысить качество НВО в от
носительно небольшой локальной зоне наряду с традиционными
могут использоваться локальные ДПС на основе так называемых
156
псевдоспутников (Pseudolite). В настоящее время под этим терми
ном понимается комплекс технических средств, располагаемый в
эталонной точке на земной поверхности и обеспечивающий реали
зацию двух основных функций:
• функции собственно псевдоспутника, т. е. формирование и из
лучение дальномерных сигналов, структура и несущая частота ко
торых аналогичны сигналам НК А;
• функции ККС, т. е. формирование КИ и ее передачу потреби
телю.
Включение в состав рабочего созвездия бортовой АП псевдо
спутника, наблюдаемого под углами места, близкими к нулю, поз
воляет приблизить значение геометрического фактора к минималь
но возможному. Одновременно улучшаются и другие качества на
вигационных определений: повышается их надежность, целостность
и достоверность. Измерения по навигационному сигналу псевдо
спутника происходят при большом (из-за малой дальности) отно
шении сигнал/шум, что повышает их точность. Кроме того, для пе
редачи КИ с псевдо спутника не нужен дополнительный канал свя
зи, поскольку эта информация может быть включена в состав
навигационного сообщения, передаваемого потребителю. Наконец,
сам псевдоспутник, качество работы которого легко контролиро
вать, может играть роль локального средства контроля при оценке
работоспособности бортовой АП.
Еще одним перспективным вариантом обеспечения высокоточ
ной навигации в локальном районе, в том числе в случае отсут
ствия возможности одновременного наблюдения, необходимого для
трехмерных НВО числа НКА (не менее четырех), являются систе
мы, использующие принцип ретрансляции (переизлучения) сигна
лов НКА. Основным элементом такой системы является специаль
ное устройство - ретранслятор, осуществляющий прием сигналов
СРНС, их преобразование и излучение с полным или частичным
сохранением информации, содержащейся в сигналах НКА. Поэто
му ретранслятор, координаты которого известны с высокой точнос
тью, может играть роль псевдоспутника. Сеть таких ретранслято
ров позволяет дополнять (или даже в значительной степени заме
нять) в локальной зоне орбитальную группировку НКА, что весьма
важно в условиях ограниченной радиовидимости, например в гор
ных условиях (рис. 10.7). При этом стоимость, вес и габаритные
размеры комплекта аппаратуры ретранслятора в сотни раз меньше,
чем для псевдоспутника.
157
НКА
Кроме того, на основании результатов НВО, выполненных по
ретранслированным сигналам, можно при известных координатах
ретранслятора рассчитать дифференциальные поправки непосред
ственно в самой АП и таким образом повысить точность НВО по
сигналам НКА СРНС
Контрольные вопросы
1. Основной принцип дифференциальных методов. На чем он основан?
2. Чем отличается постановка задач относительных измерений и диф
ференциальной коррекции?
3. В чем суть разностной обработки? Какой эффект достигается в ре
зультате вычисления первых, вторых и третьих разностей?
4. В чем различие между статическими, кинематическими и OTF ме
тодами разрешения фазовой неоднозначности?
5. Какие возможности для разрешения фазовой неоднозначности дают
избыточные измерения? Позволяют ли они найти точное значение пара
метра неоднозначности?
6. В чем состоят переборные и беспереборные алгоритмы разрешения
фазовой неоднозначности?
7. Бюджет погрешностей относительных измерений.
8. Принцип дифференциальной коррекции. Обобщенная структура ДПС.
158
9. Какие задачи решаются на ККС?
10. Какие виды дифференциальных поправок могут передаваться по
требителю?
11. Особенности локальных ДПС.
12. Особенности региональных ДПС.
13. Особенности ШДПС.
14. Основные идеи, заложенные в проект российской СДКМ.
15. Особенности ЛДПС на базе псевдоспутников и ретрансляторов сиг
налов НКА.
11. КОМПЛЕКСИРОВАННЫЕ СИСТЕМЫ НАВИГАЦИИ
Типичным примером систем, использующих данные СРНС совместно
с данными, полученными от других источников, могут служить современ
ные интегрированные инерциально-спутниковые навигационные системы
(ИСНС).
До появления СРНС наиболее совершенными средствами навигации и
определения пространственной ориентации мобильных объектов самых
различных классов - от самолетов до подводных лодок - являлись гиро
скопические и инерциальные навигационные системы (ИНС). Ряд несом
ненных достоинств таких систем, важнейшим из которых является их
автономность (независимость от полей внешних источников), определяет
необходимость их дальнейшего развития и применения совместно
с АП СРНС.
Совместное применение (комплексироваяие) АП СРНС и ИНС не толь
ко обеспечивает необходимое резервирование источников информации, но
и позволяет значительно уменьшить итоговую погрешность измерений,
поскольку физическая природа, а соответственно, корреляционные свой
ства погрешностей для этих систем, существенно различаются.
Действительно, погрешности ИНС в основном связаны с внешними маг
нитными и гравитационными возмущениями, механическими характерис
тиками чувствительного элемента, потерями на трение и т. д. Как следствие,
высокочастотная составляющая этих погрешностей невелика по сравнению
с соответствующими погрешностями СРНС. Однако обусловленная накоп
лением систематических ошибок инфранизкочастотная составляющих по
грешностей ИНС (дрейф) с увеличением времени наблюдения нарастает,
что приводит к необходимости систематической юстировки (переустанов
ки) системы.
Напротив, погрешности НВО СРНС характеризуются относительно бо
лее высоким уровнем высокочастотного шума, однако этот шум имеет ну
левое среднее и эффект накопления низкочастотной составляющей погреш
ностей в АП СРНС практически отсутствует. Достоинства и недостатки
СРНС и ИНС приведены в табл. 11.1 [2].
Таким образом, совместная обработка результатов измерений ИНС и
АП СРНС позволяет реализовать высокоточную «бездрейфовую» систему
160
Таблица 11.1
Характеристики СРНС и ИНС
Характеристика
СРНС
ИНС
Автономность
Нет
Да
Необходимость начальной
выставки и калибровки
Нет
Да
Характер ошибок
Стационарный шум
относительно высо
кой интенсивности
Нестационарный шум
относительно низкой
интенсивности
Возможность перерывов на
вигационных определений
Да
Нет
Темп выдачи данных
1-50 Гц
10-100 Гц
Целесообразность резер
вирования
Неэффективно
Эффективно
навигации и пространственной ориентации объектов, в которой мгновен
ная погрешность почти полностью определяется ИНС, а долговременная -
АП СРНС. Такая ИСНС обладает рядом существенных достоинств по
сравнению с ИНС и СРНС по отдельности: высокой точностью опреде
ления координат, компонент вектора скорости, угловой ориентации и уг
ловой скорости; непрерывностью навигационных определений; повышен
ным темпом выдачи данных, повышенной надежностью. Отметим, что
комплексирование ИНС с АП СРНС позволяет существенно снизить тре
бования к долговременной погрешности ИНС, следовательно, и ее сто
имость, которая в значительной степени определяется именно величиной
дрейфа.
В зависимости от организации алгоритмов совместной фильтрации из
мерений ИНС и СРНС выделяют следующие схемы комплексирования [2]:
глубокоинтегрироеанную (deep integrated), тесносвязанную (tightly coupled),
слабосвязанную (loosely coupled) и разомкнутую (uncoupled). Кратко рас
смотрим основные особенности этих схем.
11 Л. Оптимальная (глубокоинтегрированная) ИСНС
Теоретической основой синтеза оптимальной структуры ИСНС
является одно из направлений теории оптимальной фильтрации, по
лучившее название комплексной фильтрации (комплексирование из
мерителей). Задача такого синтеза в самом общем виде формулиру
ется следующим образом. Пусть X* — относящийся к моменту ^
вектор состояния, включающий координаты потребителя, состав
ляющие его вектора скорости и ускорения, углы ориентации и
161
угловые скорости. Инерциальный датчик измеряет часть из компо
нент вектора Хк (обычно составляющие векторов ускорения и угло
вой скорости), другие компоненты измеряются с помощью СРНС.
Для простоты будем считать, что измерения обеих систем синхро
низированы, при этом измерения СРНС подвергнуты аналого-циф
ровому преобразованию.
При заданной модели динамики изменения вектора Хк задача
оптимального синтеза комплексной системы фильтрации сводится
к поиску наилучшей (например, по критерию минимума дисперсии
ошибки фильтрации) оценки вектора Хк. Решение этой задачи при
водит к схеме оптимальной ИСНС, изображенной на рис. 11.1.
Рис. 11.1. Схема оптимальной ИСНС (вариант 1)
Из анализа рисунка следует, что собственно АП СРНС в этом
случае включает в себя только радиочастотный блок и АЦП, вся
дальнейшая обработка ведется в интегрированной системе совмест
но с измерениями ИНС.
Известно [2], что вместо наблюдений на выходе АП СРНС
ycPHcih-Ui) Дм получения оптимальной оценки Хк может ис
пользоваться достаточная статистика
-Укорр* - Σ .Усрнс (h-xj )S(Xk-U > ^-1,,),
где S(Xk_i iytk_i j) — вектор опорных сигналов. Последнее выра
жение соответствует векторному коррелятору, т. е. схема оптималь
ной ИСНС может быть приведена к виду, изображенному на
рис. 11.2.
162
Рис. 11.2. Схема оптимальной ИСНС (вариант 2)
Отличие этой схемы от предыдущей в том, что операция кор
реляционной обработки сигналов СРНС выполняется соответству
ющим блоком, отнесенным к АП. Если в схеме, изображенной на
рис. 11.2, отключить выход ИНС, то оставшаяся часть реализует
одноэтапную обработку НС, описанную в разд. 7. Иными слова
ми, данная схема предусматривает комплексную обработку изме
рений ИНС и АП СРНС с одноэтапной обработкой, при этом в
ней отсутствуют отдельные каналы СРНС и ИНС, независимо фор
мирующие оценки ВС потребителя. Именно поэтому данная схе
ма названа глубокоинтегрированной (в отечественной литературе
ее иногда называют схемой с комплексированием по входам). Храк-
теристики точности и помехоустойчивости такой схемы близки к
потенциальным.
11.2. Тесносвязанная ИСНС
Реализация рассмотренного выше оптимального алгоритма тре
бует отказа от широко применяемой в настоящее время двухэтап
ной схемы обработки сигналов в АП СРНС. Рассмотрим упрощен
ные алгоритмы комплексирования ИНС с АП СРНС, построенной
по традиционной (двухэтапной) схеме. В этом случае на вход ком
плексного фильтра с АП СРНС могут подаваться либо оценки РНП,
либо оценки НП. Соответствующие схемы ИСНС приведены на
рис. 11.3 и 11.4.
163
»Антенна
иснс(
апсрнс
—
л
РЧ-канал
ссз.
и корреляторы
ССФ (ССЧ)
Первичная обработка
Урнш Фильтр вторичной
обработки АП
Комплексный
фильтр ИСНС
. ИСНС£
:инс
Акселерометры
и гироскопы
Компенсация
инструментальных
ошибок
^инс*
Алгоритм
счисления
инс
Рис. 11.3. Схема ИСНС с комплексированием по выходам оценок РНП
г Антенна
йене!
апсрнс”'
РЧ-канал
и корреляторы
ссз,
ССФ (ССЧ)
ffPHm фильтр вторичной
обработки АП
•I
Рис· 11.4. Схема ИСНС с комплекс ированием по выходам оценок НП
164
Следует обратить внимание на то, что в схемах, изображенных
на рис. 11.3 и П.4, имеется цепь обратной связи, по которой оцен
ка ^чиснсЛ5 сформированная в комплексном фильтре, вводится в
блок первичной обработки АП, что позволяет сузить полосы про
пускания следящих систем (ССЗ, ССФ, ССЧ) и таким образом повы
сить их помехоустойчивость. Принцип комплексирования, реализо
ванный в этих схемах, в отечественной литературе получил назва
ние «комплексирование на первичном уровне» или «комплексирование
по выходам». Характеристики точности и помехоустойчивости этих
схем несколько ниже, чем при комплексировании по входам.
11.3. Слабосвязанная и разомкнутая ИСНС
Для практической реализации схем, приведенных на рис. 11.3 и
11.4, требуется доработка блоков первичной обработки АП - орга
низация цепи ввода оценки ^иСНСЬ перестройка параметров ССЗ,
ССФ, ССЧ. Если это нежелательно, можно разорвать упомянутую
обратную связь, приняв В ξ 0. В результате получаются приведен
ные на рис. 11.5 и 11.6 слабосвязанные схемы, называемые также
, Антенна
ИСНС
АПСРНС !
РЧ-канал
и корреляторы
! Первичная обработка
к
ССЗ,
1
LFpHm
Фильтр вторичной
=У
ССФ (ССЧ) "
1
1
1
-V
обработки АП
Комплексный
фильтр ИСНС
!ИНС
Акселерометры
и гироскопы
Компенсация
инструментальных
ошибок
1Уинс*
1
• Λ
Алгоритм
счисления
ИНС
|Хинс*
-i ч
-] ✓
i
АШ
1 ИСНС/с
Рис. 11.5. Схема ИСНС с комплексированием на вторичном уровне
«сырых» измерений АП СРНС
165
.Антенна
иене!
АПСРНС”!
РЧ-канал
и корреляторы
ссз,
ССФ (ССЧ)
1УРНП* Фильтр вторичной
обработки АП
! Первичная обработка
JL
:1
Комплексный
фильтр ИСНС
1ИСНСА:
:инс
Акселерометры
и гироскопы
Компенсация
инструментальных
ошибок
\Уииск
Алгоритм
счисления
ИНС
. А
1*ИНС к
Рис. 11.6. Схема ИСНС с комплексированием на вторичном уровне
с использованием оценок координат АП СРНС
Рис. 11.7. Схема ИСНС с коррекцией ИНС
166
схемами комплексирования на вторичном уровне. Помехоустойчи
вость АП при этом не повышается по сравнению с автономной АП,
улучшается лишь точность оценок. В большинстве современных
ИСНС используется именно этот уровень комплексирования.
Наконец, самой простой является приведенная на рис. 11.7 ра
зомкнутая схема, предусматривающая только коррекцию данных
ИНС оценками НП ХАПк, сформированными в АП.
Сравнительные достоинства и недостатки описанных схем ИСНС
приведены в табл. 11.2.
Таблица 11.2
Особенности ИСНС различных типов
Тип коплексирования
Основные особенности
Разомкнутый
Ограниченность ошибок оценок координат и ско
рости, наличие информации об ориентации и угло
вой скорости, минимальные изменения в аппаратуре
Слабосвязанный
Все перечисленные качества разомкнутой системы
плюс возможность выставки и калибровки ИНС в
полете. Возможность использования в АП СРНС
оценок, полученных в ИНС, для сужения области
поиска по задержке и частоте
Тесно связанный
Более высокая по сравнению со слабосвязанной
ИСНС помехоустойчивость
Глу бокоинтегриро-
Точность и помехоустойчивость, близкие к опти¬
ванный
мальным. Высокие вычислительные затраты, необ
ходимость существенных изменений в АП СРНС
Первые три из приведенных в табл. 11.2 типов ИСНС могут
быть реализованы на базе существующих АП, ИНС и сигнальных
процессоров, однако более перспективной является разработка и
реализация спутниковых и инерциальных датчиков на единой кон
структивной и технологической базе. Реализация глубокоинтег
рированной схемы возможна только на основе единого комплекса
аппаратуры.
Контрольные вопросы
1. Какие физические причины делают целесообразным комплексиро-
вание СРНС и ИНС?
2. Какие недостатки указанных систем удается скомпенсировать в
ИСНС?
167
3. Какая ИСНС называется глубокоинтегрированной?
4. Какая ИСНС называется тесносвязанной, каковы ее достоинства и
недостатки?
5. Какая ИСНС называется слабосвязанной, каковы ее достоинства и
недостатки?
6. Какая ИСНС называется разомкнутой, каковы ее достоинства и не
достатки?
7. Какая из перечисленных схем получила наибольшее распростране
ние в настоящее время?
8. Что затрудняет практическую реализацию схем с более высоки уров
нем комплексирования?
12. ПРОЕКТ «ГАЛИЛЕО»
Несмотря на принятые правительствами России и США обязательства о
предоставлении коммерческих каналов СРНС ГЛОНАСС и GPS в безвоз
мездное пользование мировому сообществу, эти СРНС являются система
ми двойного применения и остаются собственностью создавших их госу
дарств. Поэтому начиная с середины 90-х годов XX в. по инициативе Евро
пейского сообщества (ЕС) и Европейского космического агентства, ведется
разработка проекта европейской спутниковой навигационной системы, по
лучившего название «Проект Галилео». Архитектура этого проекта являет
ся открытой и предполагает взаимодействие с другими СРНС — модернизи
рованной GPS и, возможно, ГЛОНАСС. В частности планируется, что
совместно с GPS система «Галилео» образует ГНСС, обеспечивающую бо
лее высокую точность местоопределения, чем коммерческий канал GPS.
В этих условиях ЕС и Европейское космическое агентство (ESA) при
ступили к созданию совершенно новой открытой СРНС проекта «Гали
лео», находящейся под управлением гражданской администрации ЕС и
ESA и имеющей кроме общедоступного бесплатного навигационного сиг
нала также ряд оплачиваемых (заказываемых по подписке) служб с га
рантированным качеством навигационного обеспечения. Одновременно
запланировано также освоение ряда новых частотных полос и специаль
ных широкополосных сигналов. Выбрана новая среднеорбитальная груп
пировка для НК А «Галилео» с лучшим геометрическим фактором их на
блюдения. Программа «Галилео» утверждена Президиумом Европейско
го совета в Барселоне 15-16 марта 2002 г.
12.1. Орбитальная группировка проекта «Галилео»
Модель орбитальной группировки СРНС «Галилео» предусмат
ривает группировку из 30 НКА на трех средних орбитах высотой
23 616 км с наклонением 56° [9]. Напомним, что наклонение шести
орбит группировки НКА СРНС GPS равно 55°, а трех орбит СРНС
ГЛОНАСС - 64,8°. Величина наклонения орбит СРНС «Галилео»
выбрана с точки зрения обеспечения лучшей наблюдаемости груп
пировки в северном полушарии.
169
Тип группировки СРНС «Галилео» условно обозначен Walker
27/3/1 по имени автора разработок моделей космических группи
ровок. Цифры означают количественное наполнение условных бук
венных обозначений моделей T/P/F: Т = 27 - число симметрично
размещенных в пространстве НКА; Р = 3 - число плоскостей ор
бит. Тогда Т/Р = 9 - число НКА, равноудаленных (симметричных) в
каждой орбитальной плоскости. В группировке используются так
же три дополнительных активных НКА (по одному на каждой ор
бите), размещенных в промежутках между равноудаленными НКА.
Значение F = 1 характеризует специфическую геометрию группи
ровки в части межплоскостной фазировки орбит через 360° по воз
вышениям узлов (ascending node). Группировка НКА «Галилео» при
данной геометрии и высоте орбит повторяется в небе примерно каж
дые 24 ч, в то время как движение каждого спутника относительно
Земли повторяется каждые трое суток.
Показано, что такое размещение НКА имеет преимущество по
геометрическому фактору (по сравнению с чисто симметричным
размещением тех же 30 НКА) при деградации созвездия в процес
се его эксплуатации, когда наблюдается вероятностный выход из
строя отдельных НКА. Плановый, так называемый «номинальный»
(гарантированный по параметрам), срок службы группировки в со
ставе 27 + 3 начинается через 2 г. после запуска и рассчитан на
10 лет безотказной эксплуатации. Через 13 лет после запуска груп
пировки наступает при вероятности 0,95 отказ одного НКА (режим
«Деградация 1»), через 6 месяцев после этого — вероятностный от
каз второго (режим «Деградация 2»). Пока будет подготовлено вос
полнение созвездия в точках вышедших из строя НКА, в эти точки
орбит переводятся активные аппараты из числа дополнительных.
Восполнение планируется с помощью зарекомендовавшей себя по
надежности ракетой «Союз», осуществляющей оптимизированный
по стоимости групповой запуск двух аппаратов.
На рис. 12.1 показана обобщенная структура СРНС «Галилео»,
состоящая из трех крупных частей:
1) космического сегмента группировки среднеорбитальных (МЕО)
и геостационарных (ГЕО) НКА;
2) наземной инфраструктуры, включая комплекс управления;
3) пользовательского сегмента в виде аппаратуры пользователей.
В первую очередь следует отметить открытый характер архи
тектуры системы. Имеется в виду, что в структуре предусмотрены
центры обслуживания пользователей, а также, кроме основного ком
понента системы, локальные и региональные подсистемы. Впер-
170
• Первый запуск экспериментального
спутника GSTB-V2a осуществлен
в декабре 2005 г.
• Запуск прототипа КА «Галилео» планировался
в начале 2007 г.
• Развертывание полной группировки -
в 2010-2012 гг.
• Дополнительно предоставляется информация
о целостности
* В составе ОГ 30 КА в трех плоскостях;
Н = 23 000 км. Из них три пассивных запасных КА
> Предоставление четырех видов услуг
• Открытый доступ (2 сигнала); 2σ = 15/35 (4/8) м
• Коммерческий доступ - еще один сигнал
(с дополнительной информацией
по целостности и юридическими гарантиями)
• Для критичных потребителей (авиация,
Морфлот, ж/д); 2σ = 4/8 м
• Для правительственных спецслужб
(фактически аналог военного сигнала); 2σ = 6,5/12 м
' Ал
Рис. 12.1. Планируемая структура СРНС «Галилео»
вые в системе «Галилео» в режиме S&R (Search and Rescue Service,
т. e. служба поиска и спасения) имеется возможность сопряжения с
существующей системой поиска и спасения терпящих бедствие на
море и в труднодоступных регионах Земли. Речь идет об известной
системе Cospas-Sarsat, радиомаяки-ответчики которой излучают в
диапазоне UHF. Космические аппараты СРНС «Галилео» будут ре
транслировать сигналы около 300 радиомаяков этой системы, зна
чительно расширяя их зону действия.
Предусмотрено также сопряжение с такими внешними навига
ционными системами, как наземная импульсно-фазовая радиона
вигационная система (ИФРНС) «Лоран-С» и мобильными система
ми связи Globalstar и Orbcomm, имеющими в своем составе нави
гационные встроенные услуги GPS.
Работу системы «Галилео» обеспечивают четыре ключевые
службы.
1. Открытая общедоступная служба Open Service (OS) по обес
печению навигации и определения координат подвижных объектов
с передачей данных по мобильной связи. Эти услуги предоставля
ются бесплатно.
2. Служба, связанная с обеспечением безопасности движения
Safety-of-Life Service (SLS), обеспечивает высокую вероятность
171
(до 0,999) определения координат с «холодного» старта (с перво
го включения) в соответствии с требованиями ряда международ
ных авиационных и морских организаций: ICAO, IMO и др.
3. Служба Public Regulated Service (PRS), в задачи которой вхо
дит предоставление навигационной информации госструктурам, по
лиции, гражданской обороне, экстренной помощи и т. п. Основным
требованием к этой службе является защита информации от вне
шних воздействий (помех) и несанкционированного доступа со сто
роны незарегистрированных пользователей.
4. Коммерческая служба Commercial Service (CS) будет предос
тавлять гарантированные платные услуги зарегистрированным
пользователям. В перечень услуг, кроме услуг службы OS, входит
передача дополнительных данных, используемых при управлении
движением (электронные карты и др.).
Как видно на рис 12.1, в состав СРНС «Галилео» входит также
европейская подсистема широкозонного дополнения к СРНС GPS
космического базирования EGNOS, разработанная ESA. Главны
ми предпосылками создания подсистем этого класса является улуч
шение условий использования открытого кода С/А гражданскими
пользователями СРНС GPS и ГЛОНАСС. Для этого через ре
трансляторы геостационарных спутников связи Inmarsat-З излу
чаются не только дополнительные навигационные сигналы типа
GPS, но и служебные сообщения о целостности созвездий СРНС
GPS и ГЛОНАСС.
12.2. Частотный план и сигналы системы «Галилео»
Для СРНС «Галилео» Международный союз электросвязи МСЭ
выделил частотный ресурс, которого не имеет ни одна из суще
ствующих систем: шесть пользовательских в диапазоне L и один
служебный в диапазоне С. Частоты всех трех СРНС («Галилео»,
GPS и ГЛОНАСС) расположены достаточно компактно, причем для
«Галилео» и GPS даже в перекрывающихся участках частотного
спектра, что позволяет принимать их все одним многоканальным
радионавигационным приемным устройством. Частотная многока-
нальность СРНС «Галилео», наряду с планируемыми широкополос
ными сигналами, гарантирует надежную помехоустойчивую рабо
ту системы, учет и компенсацию ионосферных погрешностей мес-
тоопределения и, в конечном итоге, высокую точность навигации.
Принципиальная возможность перекрытия частотных спектров
172
СРНС «Галилео» и GPS состоит в том, что обе эти системы ис
пользуют кодовое разделение сигналов CDMA.
Частотный план «Галилео» изображен на рис 12.2.
t176 120/ МГц 1270 МГц «7S МГц
Рис. 12.2. Частотный план системы «Галилео»
В соответствии с решением МСЭ на этот проект СРНС выделе
но уникальное число рабочих частот и сигналов: 10 навигацион
ных в общем диапазоне, обозначенном как RNSS (радионавигаци
онная спутниковая служба), и один (для системы S&R) в диапазоне
1544.. . 1545 МГц. Четыре сигнала под обозначением Е5а и Е5Ь (син-
фазно и в квадратуре) излучаются в диапазоне 1164... 1215 МГц. Из
них одна пара сигналов Е5а (см. рис. 12.2, сигналы 1 и 2) на цент
ральной частоте 1176,45 МГц, по сути, совместно с GPS использу
ет диапазон, выделенный для модернизации в последующих моди
фикациях НКА GPS под обозначением L5. Сигнал 1 несет навига
ционное сообщение с информационным объемом 25 бит/с, сигнал 2
в квадратуре не несет никакой информации, не модулирован и ис
пользуется в качестве пилот-сигнала. Еще одна пара сигналов Е5Ь
(3 и 4) расположена на центральной частоте 1207,14 МГц в полосе
1188.. . 1215 МГц, из них сигнал 3 несет навигационное сообщение
и данные 125 бит/с, включая сигналы целостности СРНС и S&R.
Сигнал 4 в квадратуре, как и сигнал 2, не модулирован и использу
ется в качестве пилот-сигнала.
Важно отметить, что сигналы Е5а и Е5Ь когерентны между со
бой. Их совместная обработка позволяет увеличить точность НВО
и избыточность системы, в частности, для смягчения влияния по
мех от авиационных приводных систем.
Три сигнала Е6 в диапазоне 1260... 1300 МГц с центральной час
тотой 1278,75 МГц (из них сигнал 5 с расщепленным спектром),
используются либо для сервиса по подписке, либо для правитель¬
173
ственной криптографической защиты для обеспечения безотказной
работы в особый период. Расщепленный спектр применяется для
уменьшения интерференции между сигналами других систем RNSS,
работающих на близких несущих частотах. Сигнал с расщеплен
ным спектром подобен спектру сигнала балансной модуляции с
подавленной несущей. Для навигации он принят как перспектив
ный для модернизации GPS под названием «сигнал типа М» и
прорабатывался к применению в НКА GPS новых проектов. Про
ектировщики СРНС «Галилео» использовали его в качестве рабо
чего сигнала.
Другой сигнал 6 этой пары защищен с помощью криптографии
для коммерческого применения и обеспечивает высокое разреше
ние при дифференциальных приложениях. Этот сигнал несет нави
гационное сообщение до 500 бит/с с добавленными данными для
заказчика. Сигнал 7, как и сигналы 2 и 4, является смодулирован
ным пилот-сигналом, что увеличивает его помехоустойчивость.
Наконец, три сигнала Е2, LI, Е1 излучаются в диапазоне 1559...
...1591 МГц с центральной частотой 1575,42 МГц (диапазон L1 ис
пользуется совместно с СРНС GPS). Из них один (сигнал 8), как и
сигнал 5, имеет криптографию для правительственного примене
ния в особый период, но в двух различных вариантах. Парный сиг
нал 9 несет объем данных 100 бит/с и совместно с сигналом SPS
(код P/Y) GPS обеспечивает возможность приема и обработки их
недорогим двухмодовым приемником. Сигнал 10 в квадратуре ана
логичен сигналам 7, 2 и 4, т. е. представляет собой смодулирован
ный пилот-сигнал. Пилот-сигналы могут также использоваться в
специальной аппаратуре для высокоточных геодезических опреде
лений по фазе несущей.
Данные всех информативных сигналов СРНС «Галилео» коди
руются избыточным кодом с исправлением ошибок по Витерби со
сверткой 1/2. Все сигналы НКА СРНС «Галилео» у поверхности
Земли, принимаемые на антенну без пространственного усиления,
имеют уровень —158 дБВт, кроме двух (5 и 8), для которых этот
уровень равен -155 дБВт. Эти уровни, как и для СРНС GPS, ниже
уровня тепловых шумов аппаратуры. Это означает, что сигналы
СРНС GPS и «Галилео» можно выделить только с помощью согла
сованной фильтрации. Всего при совместном использовании двух
СРНС - GPS и «Галилео» - двухсистемный приемник должен быть
рассчитан на корреляционный прием и демодуляцию кодовых сиг
налов 60 НКА. В разных комбинациях может одновременно наблю
даться до 20-25 НКА двух ГНСС
174
12.3. Общая оценка проекта «Галилео»
Спутниковая радионавигационная система «Галилео» представ
ляет собой выдающийся глобальный проект системы массового об
служивания XXI в. Ее параметры находятся на уровне или превос
ходят лучшие показатели, достигнутые к настоящему времени. Рас
четная точность системы при принятых модели группировки НКА
и параметрах сигналов составляет 4 м в горизонтальной плоскости
и 8 м в вертикальной при доверительном интервале 0,95. Для мно
гих применений на транспорте прогнозируемая точность системы «Га
лилео» будет достаточной для использования ее без дифференциаль
ных поправок, вырабатываемых локальными подсистемами. Точность
привязки к шкале времени системы UTC/TA1 прогнозируется на уров
не 50 нс. Комбинированный приемник пользователя, принимающий
сигналы трех независимых ГНСС - «Галилео», GPS и ГЛОНАСС -
может одновременно наблюдать и использовать для местоопределе-
ния и навигации более 30 НКА разных систем, что обеспечивает воз
можность НЕЮ практически в любых условиях затенения горизонта
в городах, горных и лесных массивах. В настоящее время ряд фирм
освоил серийный выпуск коммерческой и спепиальной АП, обеспе
чивающих такую возможность (см. разд. 7).
Большое внимание в проекте уделено контролю доступности.
Подсистема мониторинга позволит обнаруживать и оповещать
пользователей о сбоях в бортовом оборудовании спутников за вре
мя, не превышающее 6 с.
Наряду с безусловными техническими достоинствами системы
следует отметить трудности, в основном экономического характе
ра, с которыми столкнулась его реализация. Как следствие, плано
вые сроки выполнения тех или иных этапов работ часто задержи
ваются. В частности, запуск прототипа НКА «Галилео», планиро
вавшийся на начало 2007 г., был произведен лишь в апреле 2008 г
Контрольные вопросы
1. Основные параметры орбитальной группировки «Галилео».
2. Структура частотного плана системы «Галилео».
3. Сервисные возможности ГНСС «Галилео».
4. Как в ГНСС «Галилео» организовано обслуживание отдельных групп
потребителей?
СПИСОК ЛИТЕРАТУРЫ
1. Радиоэлектронные системы: основы построения и теория. Справоч
ник / Под ред. Я.Д. Ширмана. М: ЗАО «МАКВИС», 1998.
2. ГЛОНАСС. Принципы построения и функционирования / Под ред.
A. И. Перова, В.Н. Харисова. М.: Радиотехника, 2005.
3. Шкирятов В.В. Радионавигационные системы и устройства. М.: Ра
дио и связь, 1984.
4. Радиотехнические системы / Ю.П. Гришин, В.П. Ипатов, Ю.М. Ка
заринов и др.; Под ред. Ю.М. Казаринова. М.; Высшая школа, 1990.
5. Шебшаевич В.С. Основные возможности использования ИСЗ для
радионавигации самолетов: Докл. на семинаре ЛВВИА 25.12.57// Инфор
мационный сборник. Л., 1958. № 33.
6. Шебшаевич В, С. Развитие теоретических основ спутниковой радио
навигации ленинградской радиокосмической школой // Радионавигация и
время, РИРВ, 1992. № 1.
7. Сетевые спутниковые радионавигационные системы / Под ред.
П.П. Дмитриева, В.С. Шебшаевича. М.: Радио и связь, 1993.
8. Решетнев М.Ф. Развитие спутниковых радионавигационных систем //
Инф. бюллетень НТИ «Интернавигация», 1992.
9. Ю.А. Соловьев. Системы спутниковой навигации и их применения.
М.: Эко-Трендз, 2003.
10. Яценков В.С. Основы спутниковой навигации. Системы GPS
NAVSTAR и ГЛОНАСС. М.: Горячая линия - Телеком, 2005.
11. Информационные технологии в радиотехнических системах /
B. А. Васин, И.Б. Власов, Ю.М. Егоров и др.; Под ред. И.Б. Федорова. М.:
Изд-во МГТУ им. Н.Э. Баумана, 2004.
12. Поваляев А.А. Спутниковые радионавигационные системы: время,
показания часов, формирование измерений и определение относительных
координат. М.: Радиотехника, 2008.
13. Состав ГЛОНАСС // Компьютерный бюллетень ВВЦ КНИЦ ВКС
РФ, 1996.
14. Интерфейсный контрольный документ ГЛОНАСС. КНИЦ МО РФ,
2002.
15. The Global Positioning System Interface Control Document ICD-GPS-
200-C. (v. 1RN200C 2004).
176
16. Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радио
технических устройств и систем. М.: Радио и связь, 1991.
17. www.javad.com
18. Бортовые устройства спутниковой навигации / И.В. Кудрявцев,
И.Н. Мищенко, А.И. Волынкин и др.; Под. ред. В.С. Шебшаевича. М.:
Транспорт, 1988.
19. Генике А.А., Побединский ГГ Глобальная спутниковая система оп
ределения местоположения GPS и ее применения в геодезии. М.: Картгео-
центр-Геоиздат, 1999.
Оглавление
Предисловие 3
Введение 5
1. Принципы радионавигации. Радионавигационные системы
наземного базирования 7
1.1. Основные понятия и определения 7
1.2. Принципы радионавигационных измерений 9
1.2.1. Угломерные методы 9
1.2.2. Дальномерные методы 11
Контрольные вопросы 15
2. Спутниковые РНС. История создания, принципы построения
и функционирования 16
2.1. СРНС первого поколения 17
2.2. СРНС второго поколения 23
Контрольные вопросы 26
3. Методы измерения навигационных параметров 27
3.1. Методы НВО, основанные на измерении времени прихода
сигнала 27
3.1.1. Дальномерный метод 27
3.1.2. Псевдодальномерный метод 29
3.1.3. Разностно-дальномерный метод 31
3.2. Методы, основанные на измерении доплеровского сдвига 32
3.2.1. Радиально-скоростной метод 32
3.2.2. Псевдорадиально-скоростной метод 33
3.2.3. Разностно-радиально-скоростной метод 33
3.3. Комбинированные методы 34
Контрольные вопросы 35
4. Основные принципы построения и функционирования
глобальных навигационных спутниковых систем 36
4.1. Обобщенная структурная схема ГНСС 36
4.2. Подсистема НКА ГЛОНАСС 37
4.3. Подсистема НКА GPS 42
Контрольные вопросы 45
178
5. Подсистема контроля и управления ГНСС. Системы времени,
координат и модели Земли, используемые в ГНСС 46
5.1. Подсистема контроля и управления ГЛОНАСС 46
5.2. Наземный комплекс управления GPS 51
5.3. Системы времени, координат и модели Земли, используемые
в ГНСС 52
5.3.1- Единицы времени 52
5.3.2. Системы отсчета (шкалы) времени, используемые
в ГНСС 54
5.3.3. Системы координат, применяемые в ГНСС 55
Контрольные вопросы 59
6. Структура сигналов и сообщений ГНСС 61
6.1. Физические параметры сигналов ГЛОНАСС 61
6.2. Структура навигационных сигналов и навигационных
сообщений ГЛОНАСС 64
6.3. Физические параметры сигналов GPS 71
6.4. Структура навигационных сигналов и навигационных
сообщений GPS 71
Контрольные вопросы 77
7. Навигационная аппаратура потребителя 78
7.1. Радиочастотный блок 79
7.1.1. Антенна 79
7.1.2. Приемное устройство 82
7.1.3. Аналого-цифровой преобразователь 82
7.1.4. Опорный генератор и синтезатор частот 83
7.2. Принципы и устройства первичной обработки навигационной
информации 84
7.2.1. Оценка параметров вектора состояния потребителя
как задача оптимальной фильтрации 84
7.2.2. Принцип построения алгоритмов поиска и обнаружения
сигнала 86
7.2.3. Устройства поиска и обнаружения сигнала 89
7.2.4. Фильтрация радионавигационных параметров и дешиф
рация навигационной информации 93
7.3. Вторичная обработка навигационной информации 100
7.3.1. Оценка параметров вектора состояния потребителя 100
7.3.2. Фильтрация НП при вторичной обработке 102
7.3.3. Алгоритмы вторичного сглаживания НП 103
7.3.4. Одноэтапные алгоритмы обработки сигналов в АП ЮЗ
7.4. Вспомогательные и сервисные функции навигационного про
цессора 105
179
7.5. Интерфейс с внешними потребителями 106
7.6. Пример современной АП 107
Контрольные вопросы 109
8. Угломерная навигационная аппаратура для определения
угловой ориентации объектов 110
8.1. Параметры угловой ориентации объектов 110
8.2. Принцип определения угловой ориентации объектов по сиг
налам СРНС 112
8.3. Радиоинтерферометрический метод измерения угловых коор
динат 113
8.4. Достижимая точность угловых измерений в АП ГНСС 116
8.5. Пример реализации угломерной АП 117
Контрольные вопросы 120
9. Точность навигационно-временных определений в СРНС 121
9.1. Погрешности, вносимые на НКА или КИК СРНС 121
9.2. Погрешности, вносимые на трассе распространения сигнала
от НКА до АП 123
9.3. Погрешности АП 127
9.3.1. Погрешности опорного генератора 127
9.3.2. Шумовые (флуктуационные) ошибки следящих систем 129
9.3.3. Бюджет погрешностей стандартной и угломерной АП 130
9.4. Геометрический фактор 131
Контрольные вопросы 133
10. Дифференциальная коррекция и относительные измерения
в ГНСС 135
10.1. Методы относительных измерений 137
10.1.1. Разностные методы 138
10.1.2. Методы оценки параметра фазовой неоднозначности .... 140
10.1.3. Точность относительных измерений 144
10.2. Дифференциальная коррекция 145
10.2.1. Принцип дифференциальной коррекции 145
10.2.2. Параметры корректирующей информации 146
10.2.3. Прямой и инверсный дифференциальные методы 147
10.2.4. Локальные дифференциальные подсистемы 148
10.2.5. Региональные дифференциальные подсистемы 150
10.2.6. Широкозонные ДПС 151
10.2.7. Российская широкозонная система дифференциальной
коррекции и мониторинга 153
10.2.8. Локальные дифференциальные подсистемы на основе
псевдоспутников и ретрансляторов сигналов НКА 156
Контрольные вопросы 158
180
11. Комплектированные системы навигации 160
11.1. Оптимальная (глубокоинтегрированная) ИСНС 161
11.2. Тесносвязанная ИСНС 163
11.3. Слабосвязанная и разомкнутая ИСНС 165
Контрольные вопросы 167
12. Проект «Галилео» 169
12.1. Орбитальная группировка проекта «Галилео» 169
12.2. Частотный план и сигналы системы «Галилео» 172
12.3. Общая оценка проекта «Галилео» 175
Контрольные вопросы 175
Список литературы 176
Учебное издание
Власов Игорь Борисович
ГЛОБАЛЬНЫЕ НАВИГАЦИОННЫЕ
СПУТНИКОВЫЕ СИСТЕМЫ
Редактор Н.Е. Овчеренко
Технический редактор ЭЛ. Кулакова
Художники: С.С. Водчиц9Н.Г. Столярова
Компьютерная графика О.В. Левашовой
Корректор Л.Н. Петрова
Компьютерная верстка Н.Ф. Бердавцевой
Оригинал-макет подготовлен в Издательстве МГТУ им. Н.Э. Баумана
Санитарно-эпидемиологическое заключение
№ 77.99.60.953.Д.003961.04.08 от 22.04.2008 г.
Подписано в печать 20.08.2008.
Формат 60x84/16. Печать офсетная. Бумага офсетная.
Уел. печ. л. 11,5. Уч.-изд. л. 10,43. Тираж 500 экз. Заказ №453
Издательство МГТУ им. Н.Э. Баумана
e-mail: press@bmstu.ru
Типография МГТУ им. Н.Э. Баумана
105005, Москва, 2-я Бауманская ул., д. 5
ISBN 978-5-7038-3208-0
785703
832080