




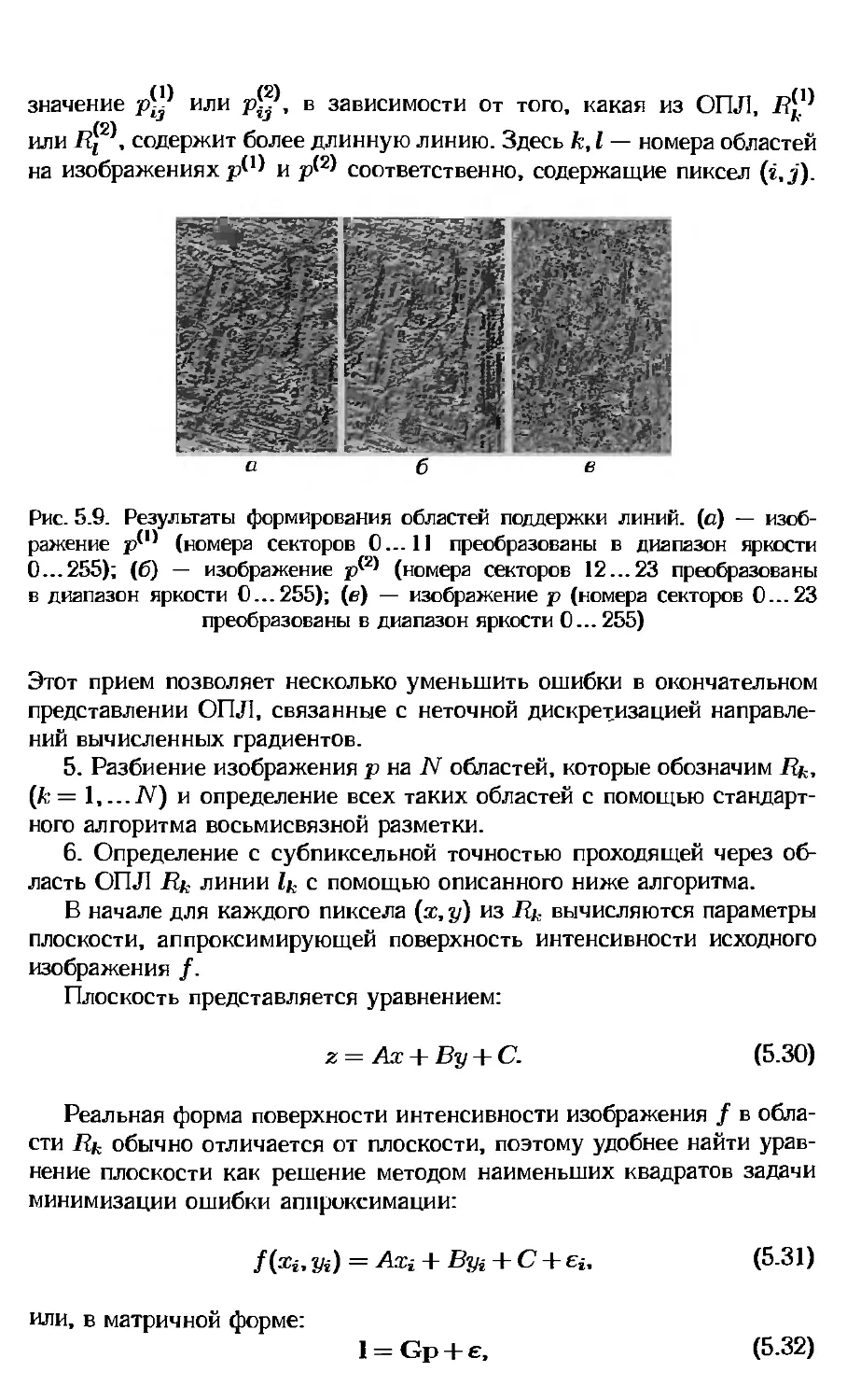
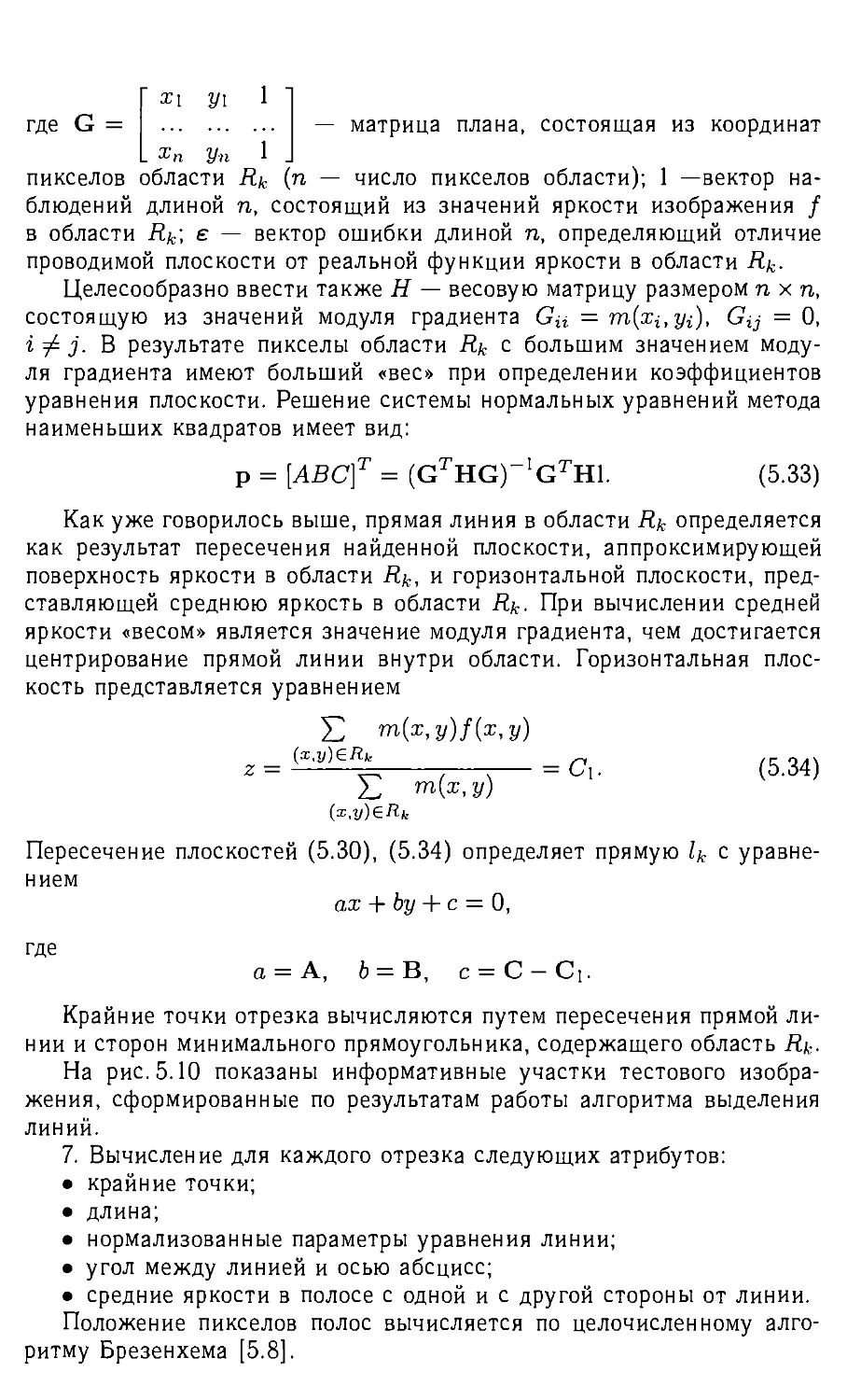
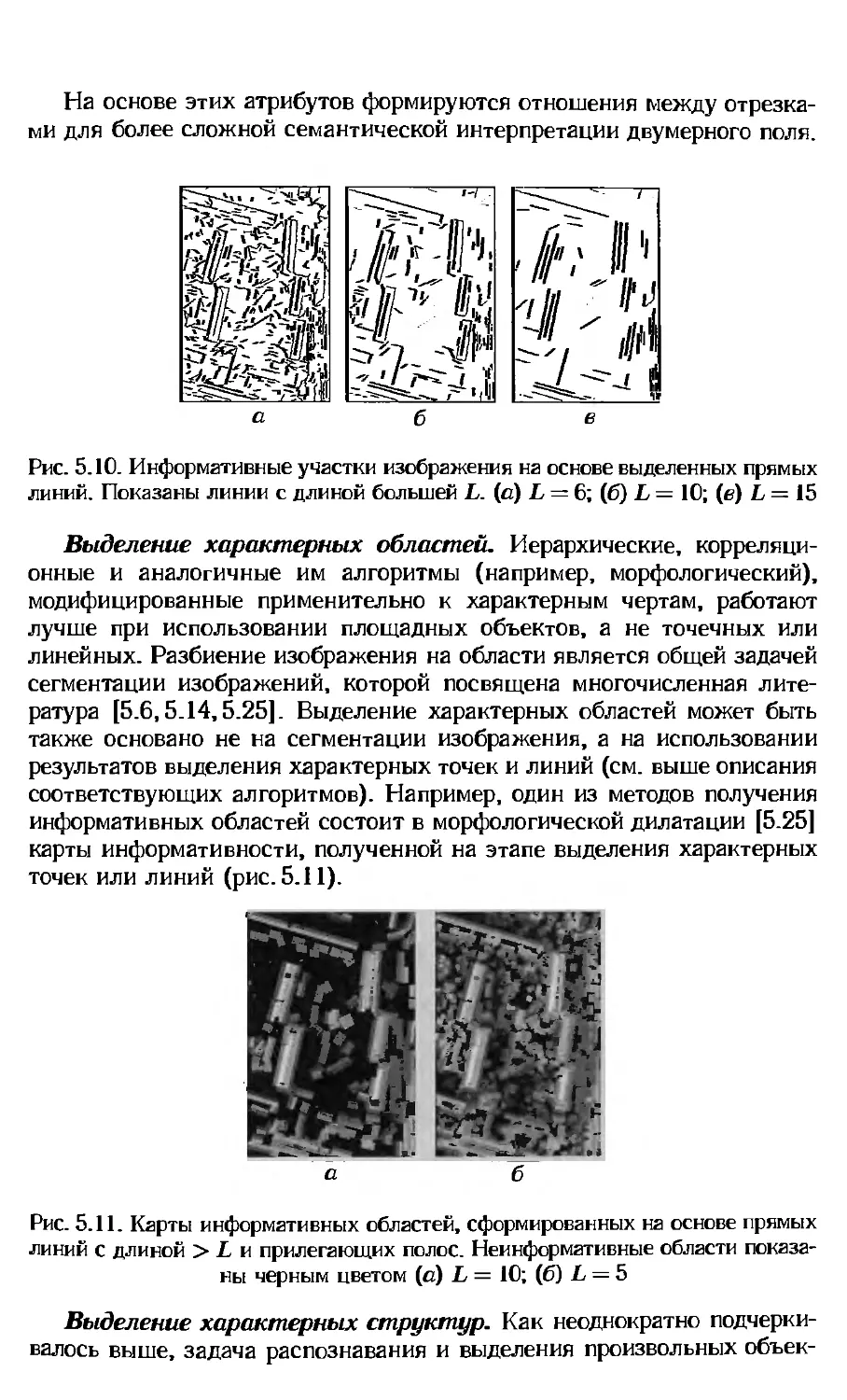
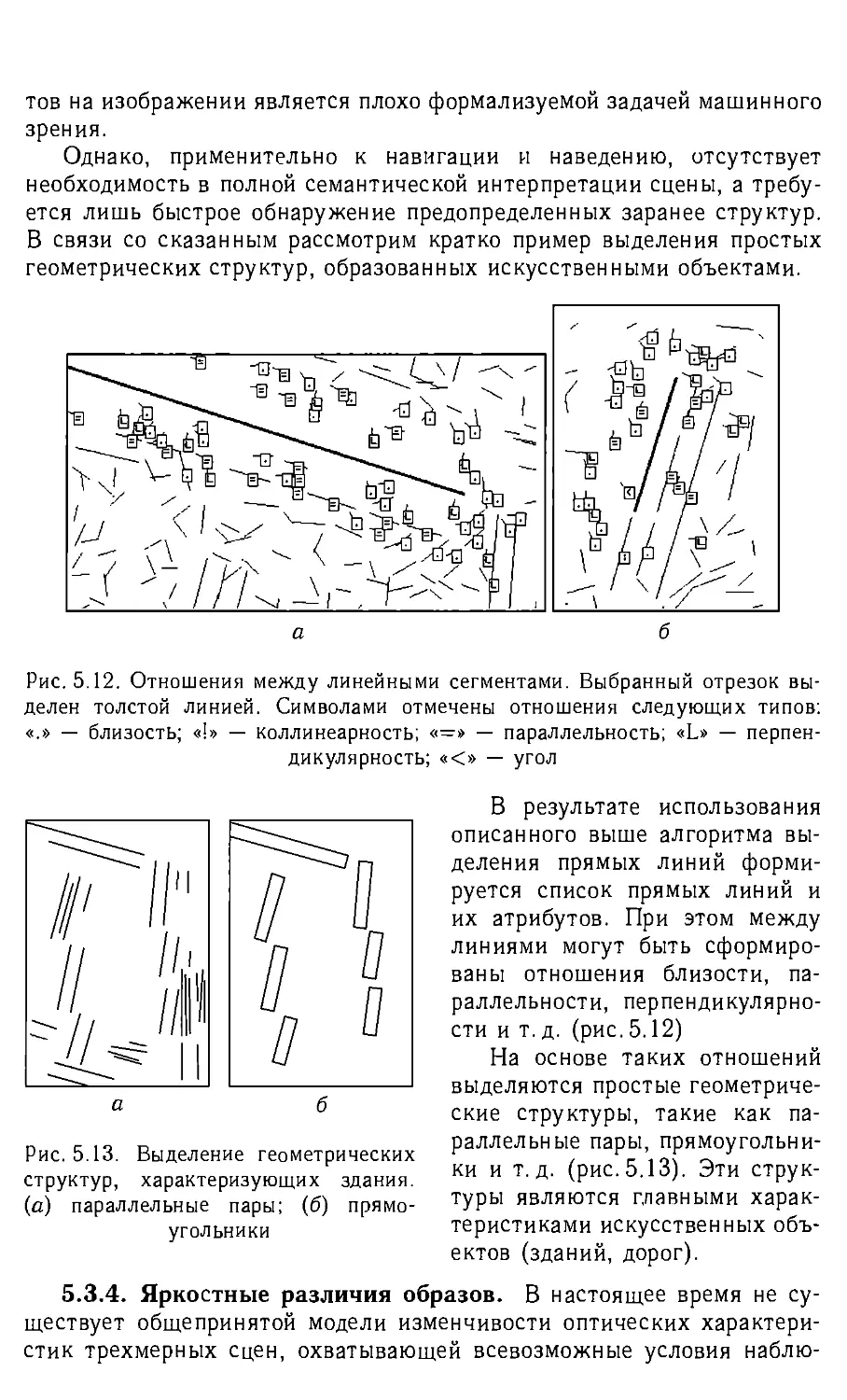

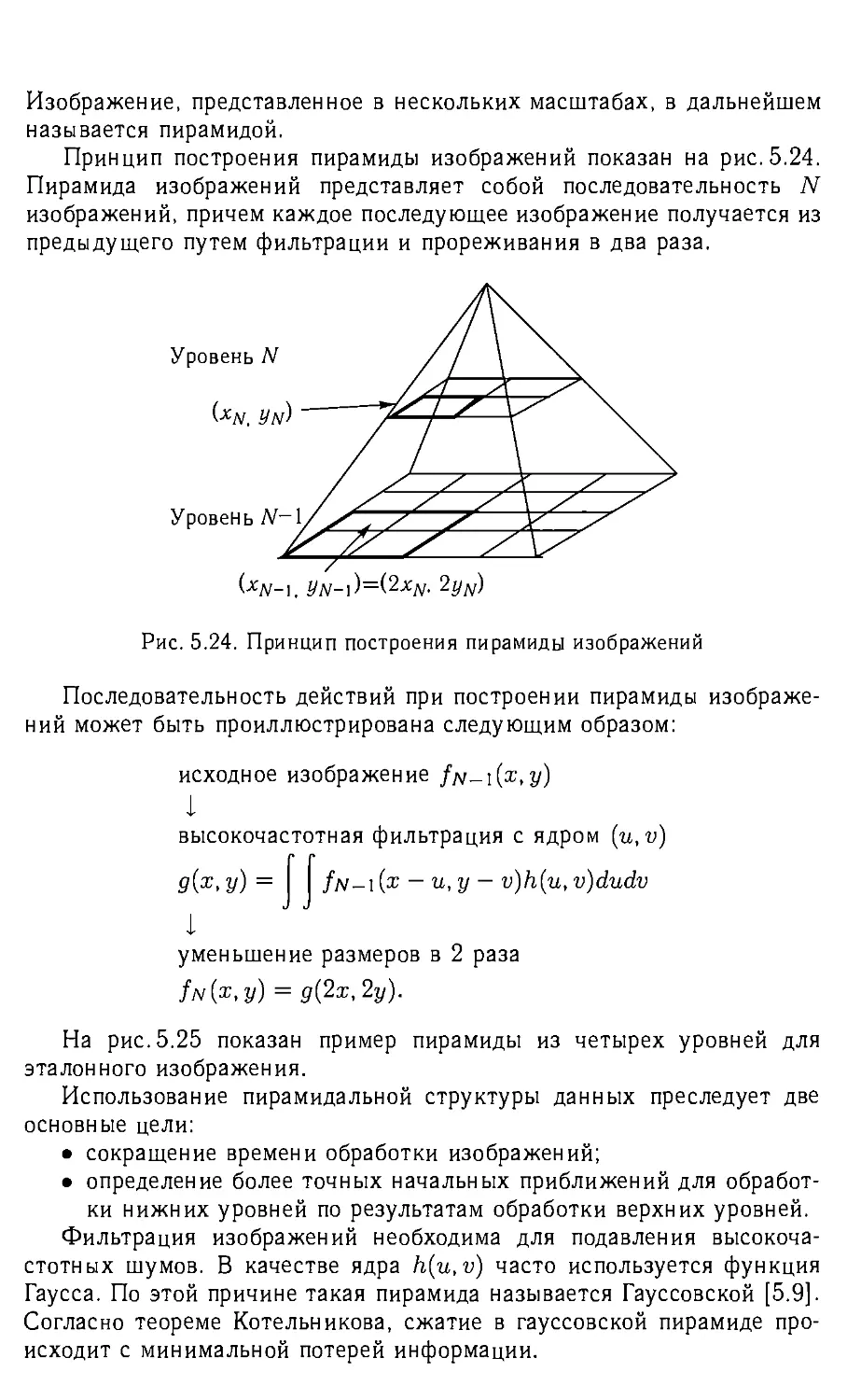
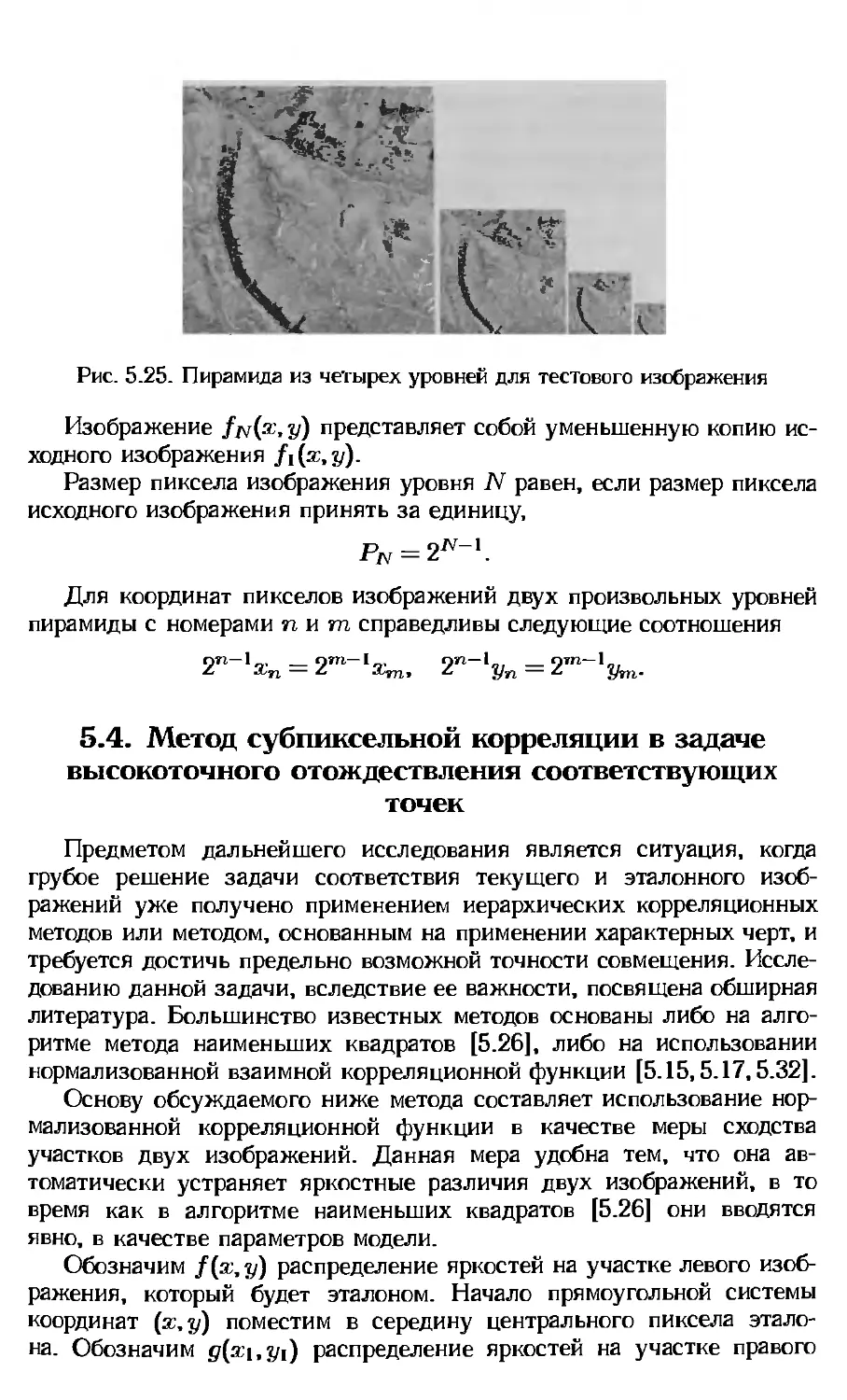
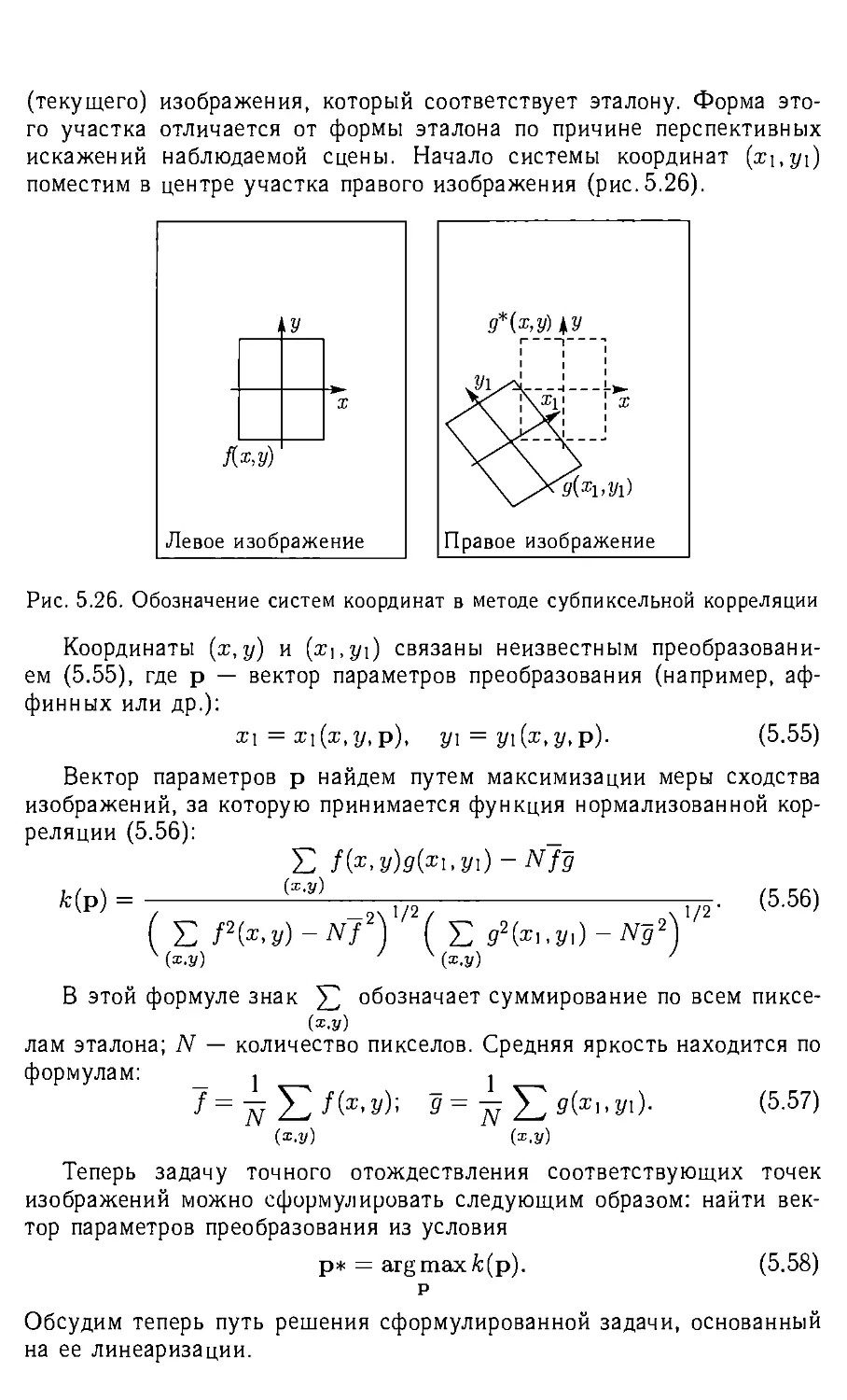


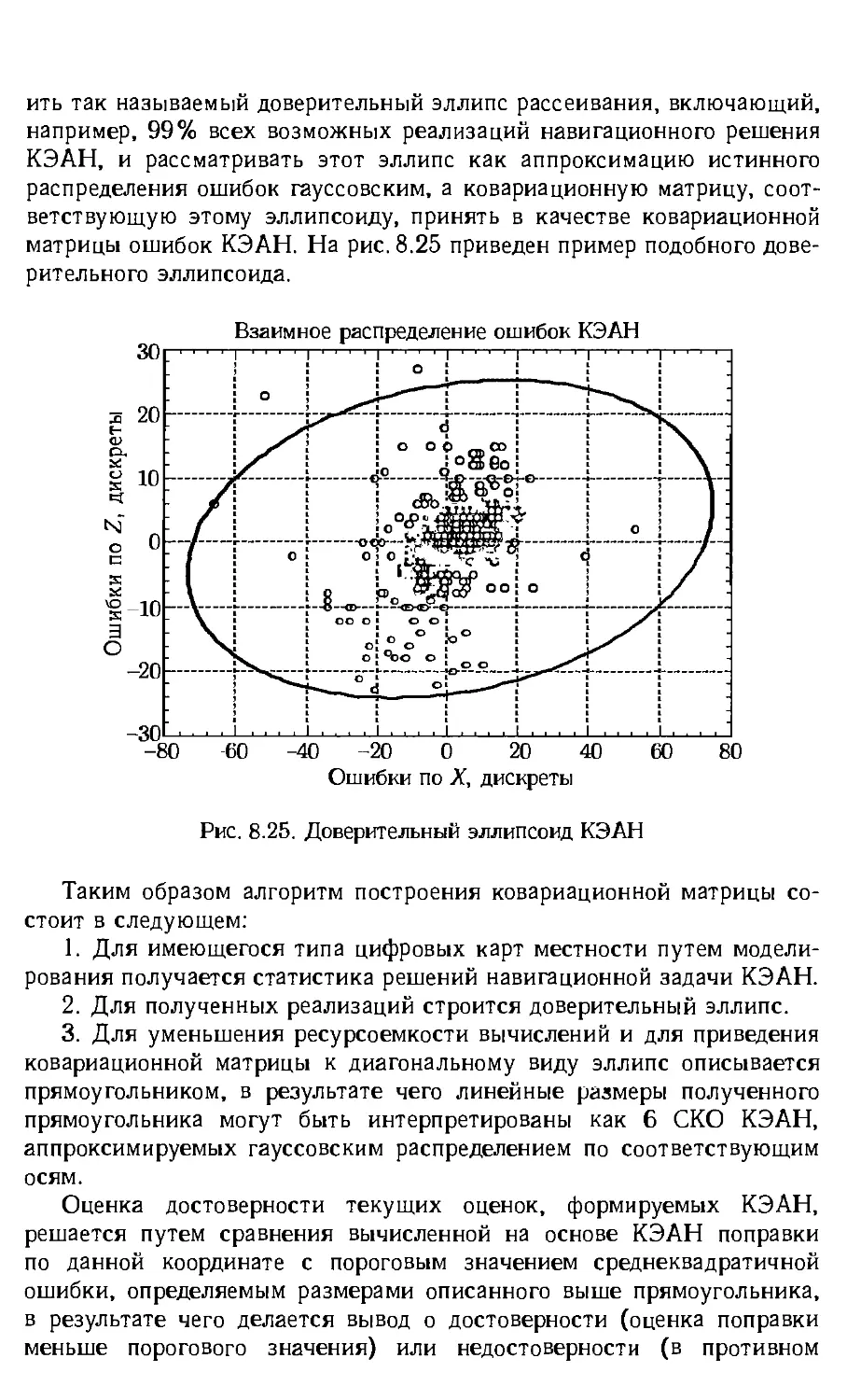

Автор: Красилыциков М.Н. Серебряков Г.Г.
Теги: военное дело военная наука информационные технологии летательные аппараты навигация издательство физматлит беспилотные маневры
ISBN: 978-5-9221-1168-3
Год: 2009




Посвящается 80-летию
Московского авиационного института (МАИ)
СОВРЕМЕННЫЕ
ИНФОРМАЦИОННЫЕ
ТЕХНОЛОГИИ
В ЗАДАЧАХ НАВИГАЦИИ И НАВЕДЕНИЯ
БЕСПИЛОТНЫХ МАНЕВРЕННЫХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Под редакцией
М. Н. Красилыцикова
Г. Г. Себрякова
МОСКВА @
ФИЗМАТЛИТ
2009
УДК о/У./ /·/· Издание осуществлено при поддержке
ББК 68.53 ρ 'Ч-Р и Российского фонда фундаментальных
С 56 ^ исследований по проекту 09-08-07004
Авторский коллектив:
Веремеенко К.К., Желтов С.Ю., Ким Н.В., Козорез Д.Α.,
Красильщиков М.Н., Себряков Г.Г., Сыпало К.И.,
Черноморский А. И.
Современные информационные технологии в задачах навигации и
наведения беспилотных маневренных летательных аппаратов / Под ред.
М. Н. Красилыдикова, Г. Г. Себрякова. - М.: ФИЗМАТЛИТ, 2009. - 556 с. -
ISBN 978-5-9221-1168-3.
Обсуждаются проблемы, возникающие при использовании современных
информационных технологий для решения задач навигации и управления
беспилотных маневренных летательных аппаратов различных классов и назначения.
Изложены методы и подходы, обеспечивающие реализацию упомянутых задач
интегрированными бортовыми системами беспилотных летательных аппаратов,
в состав которых входят бесплатформенные инерциальные системы,
многоканальные ГЛОНАСС/GPS приемники, РЛС миллиметрового диапазона, а также
приемники видовой информации. Приведены сведения о современной
элементной базе, используемой для создания подобных систем. Рассмотрена
технология создания объектно-ориентированных комплексов для моделирования
процессов функционирования бортовых интегрированных систем навигации
и управления. Приведены примеры моделирования бортовых интегрированных
систем беспилотных летательных аппаратов различных классов.
Для разработчиков бортовых систем летательных аппаратов, аспирантов и
студентов авиационных вузов.
© ФИЗМАТЛИТ, 2009
ISBN 978-5-9221-1168-3 © Коллектив авторов, 2009
ОГЛАВЛЕНИЕ
Введение 7
Список литературы к Введению 10
Глава 1. Современные и перспективные беспилотные летательные
аппараты как средства выполнения задач боевой авиации .... 11
1.1. Классификация беспилотных летательных аппаратов 11
1.2. Беспилотные летательные аппараты как средство решения задач
боевой авиации 34
Список литературы к главе 1 38
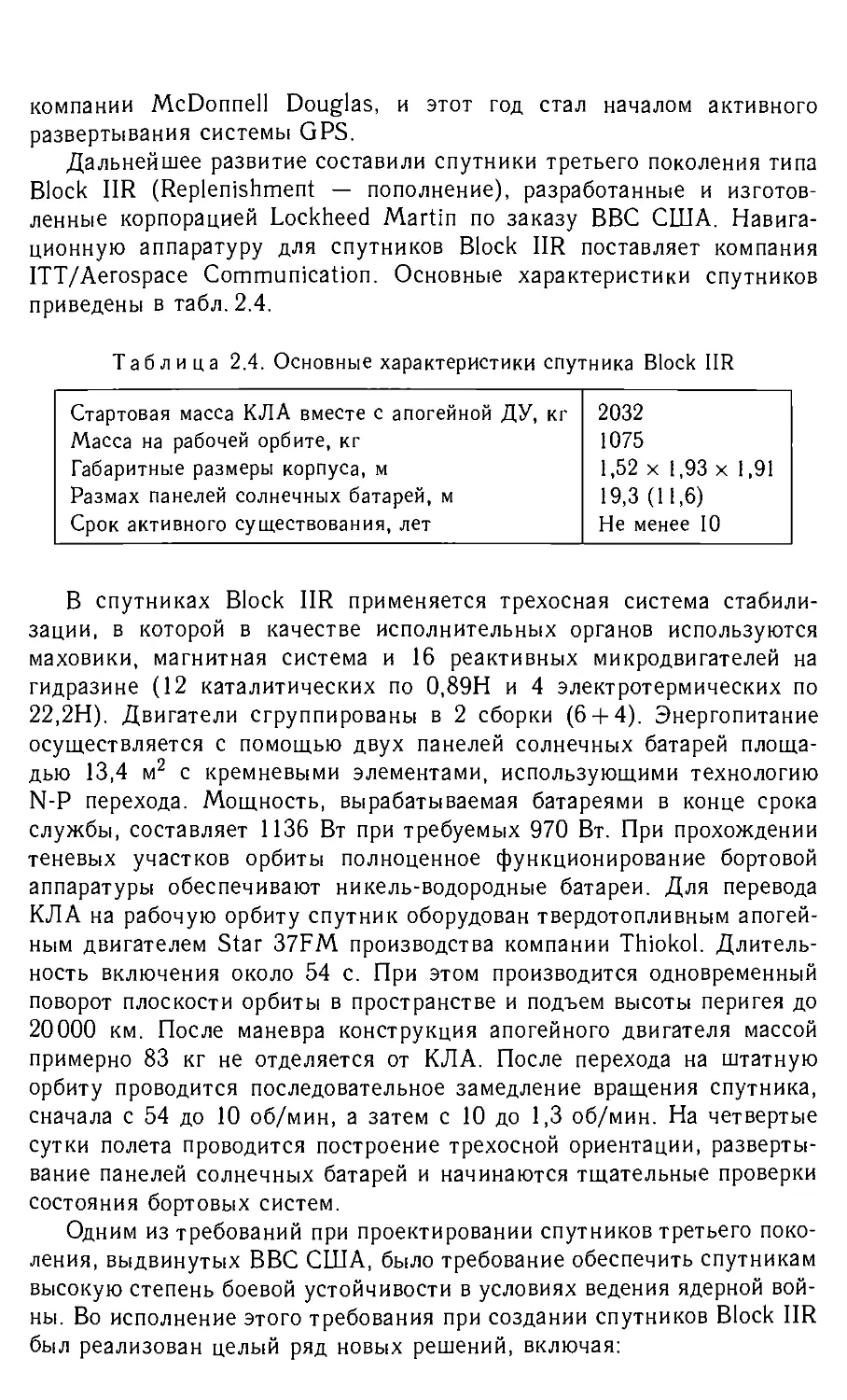
Глава 2. Глобальные навигационные спутниковые системы как
современное средство решения навигационных задач БПЛА ... 39
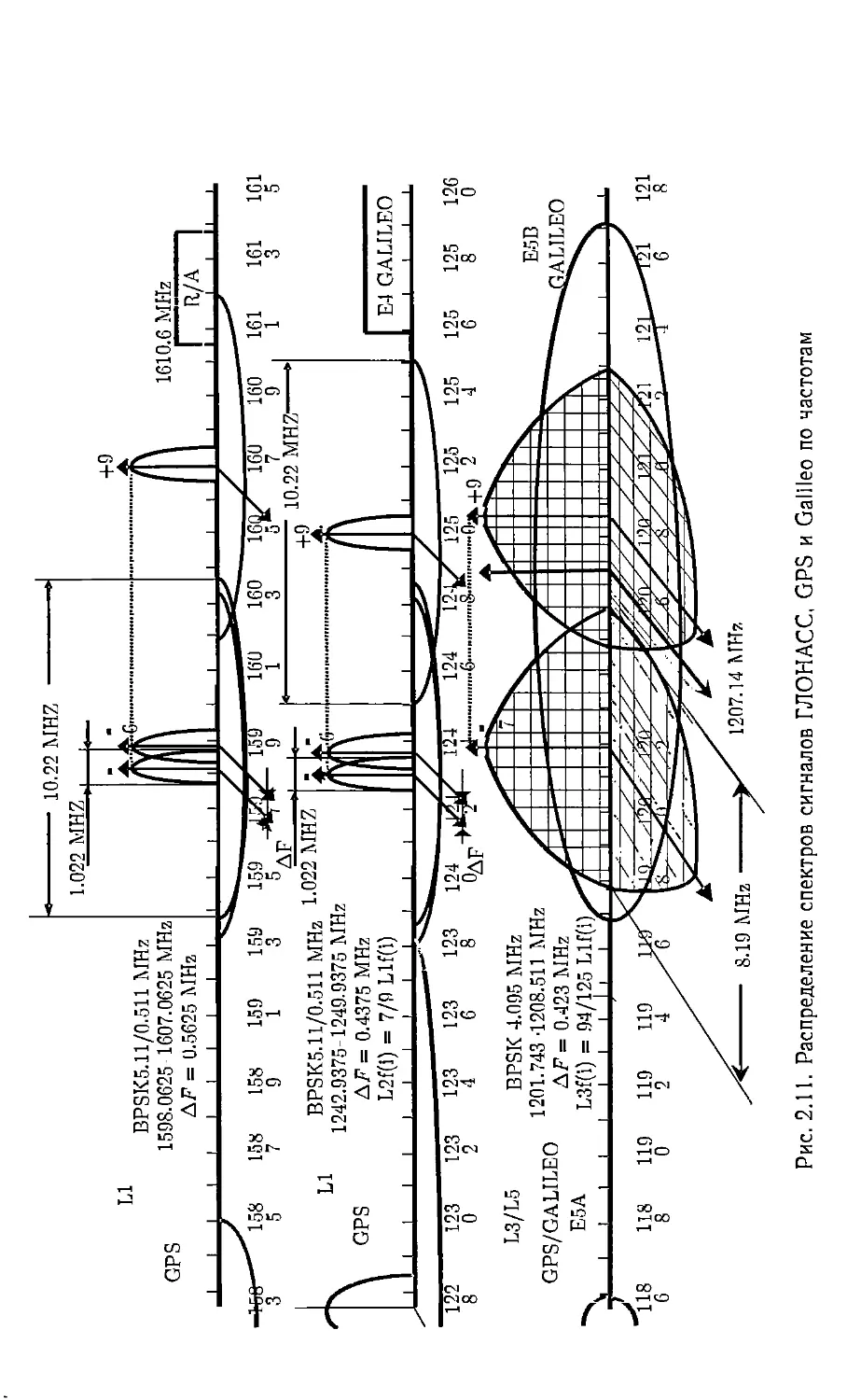
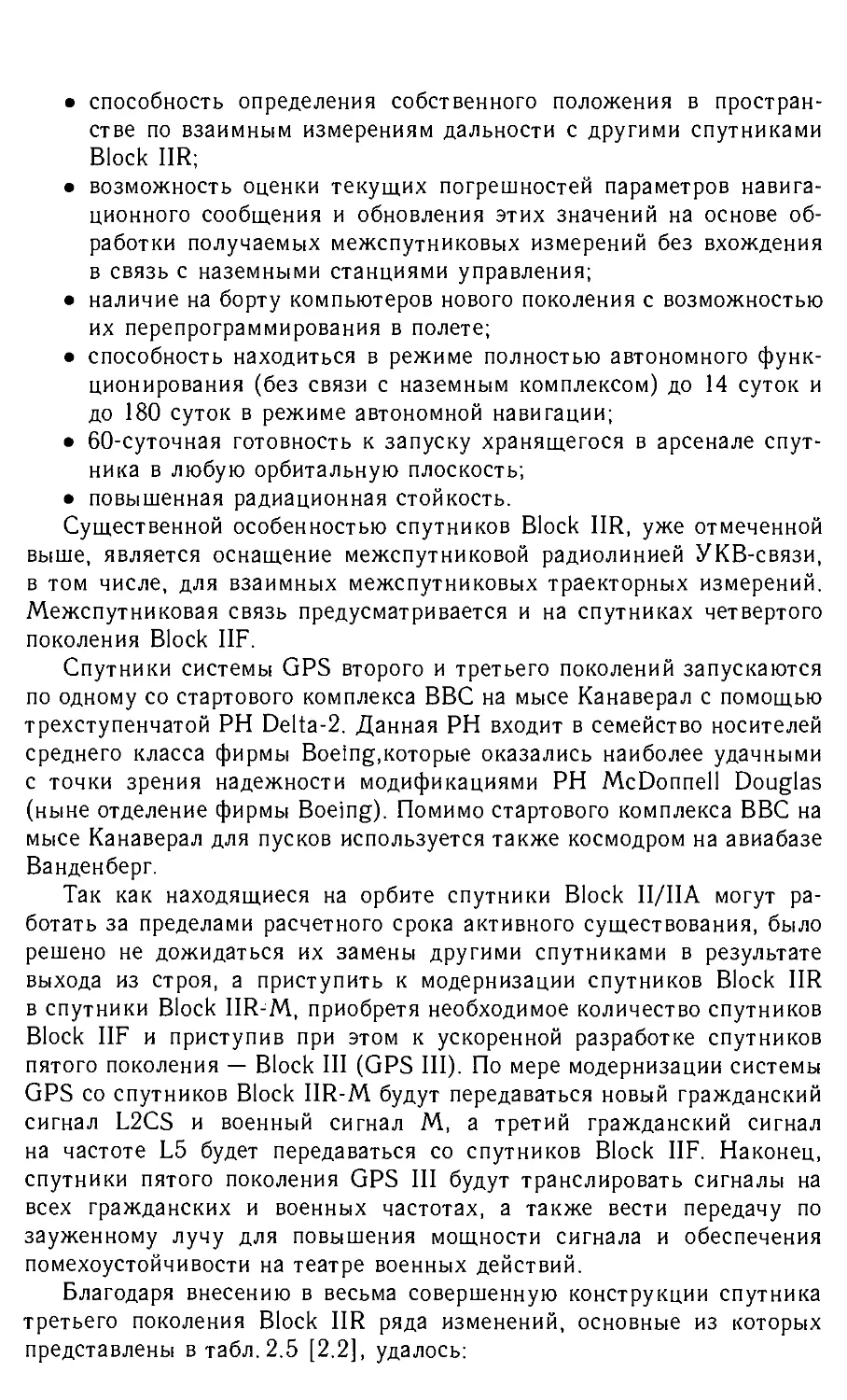
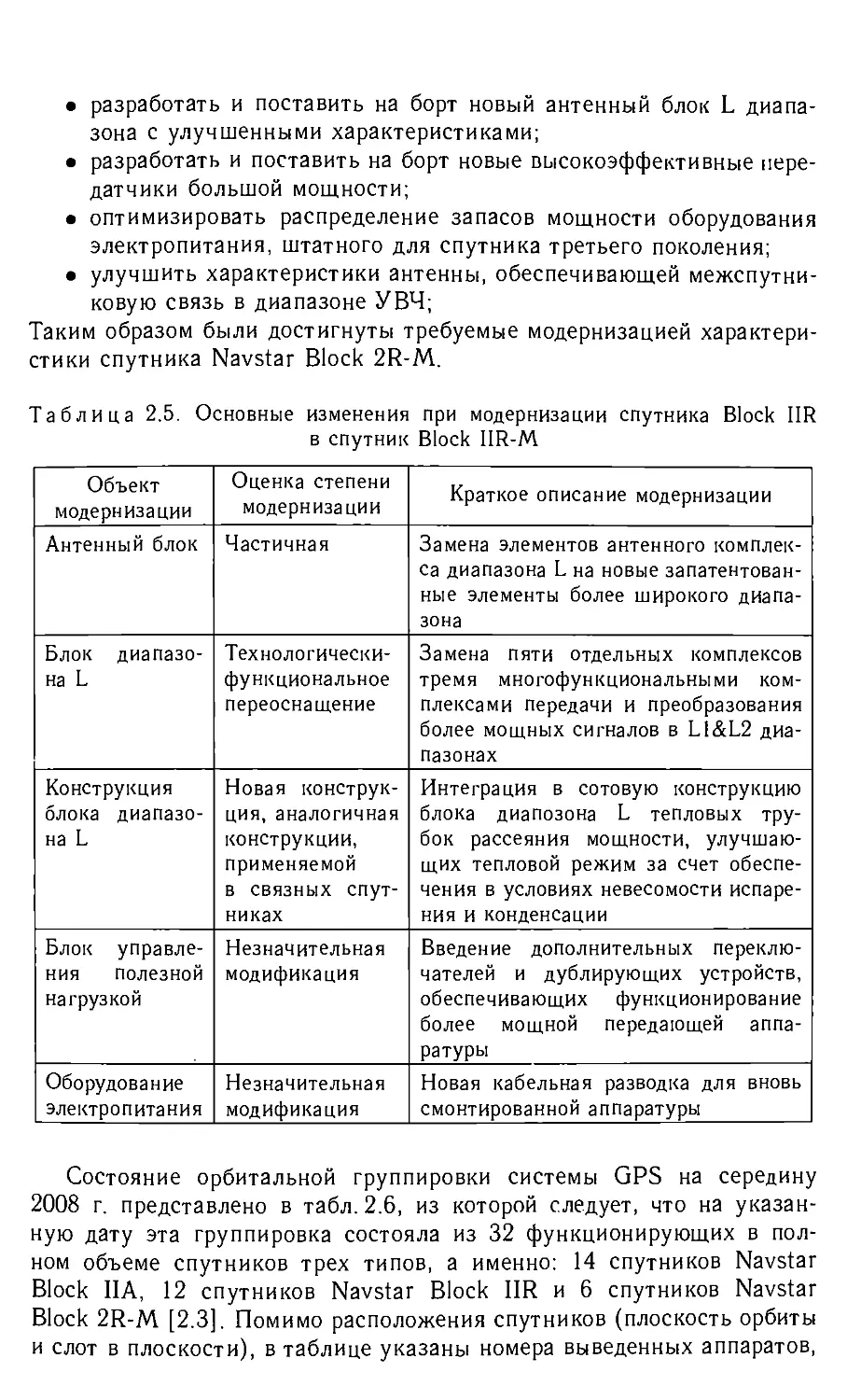
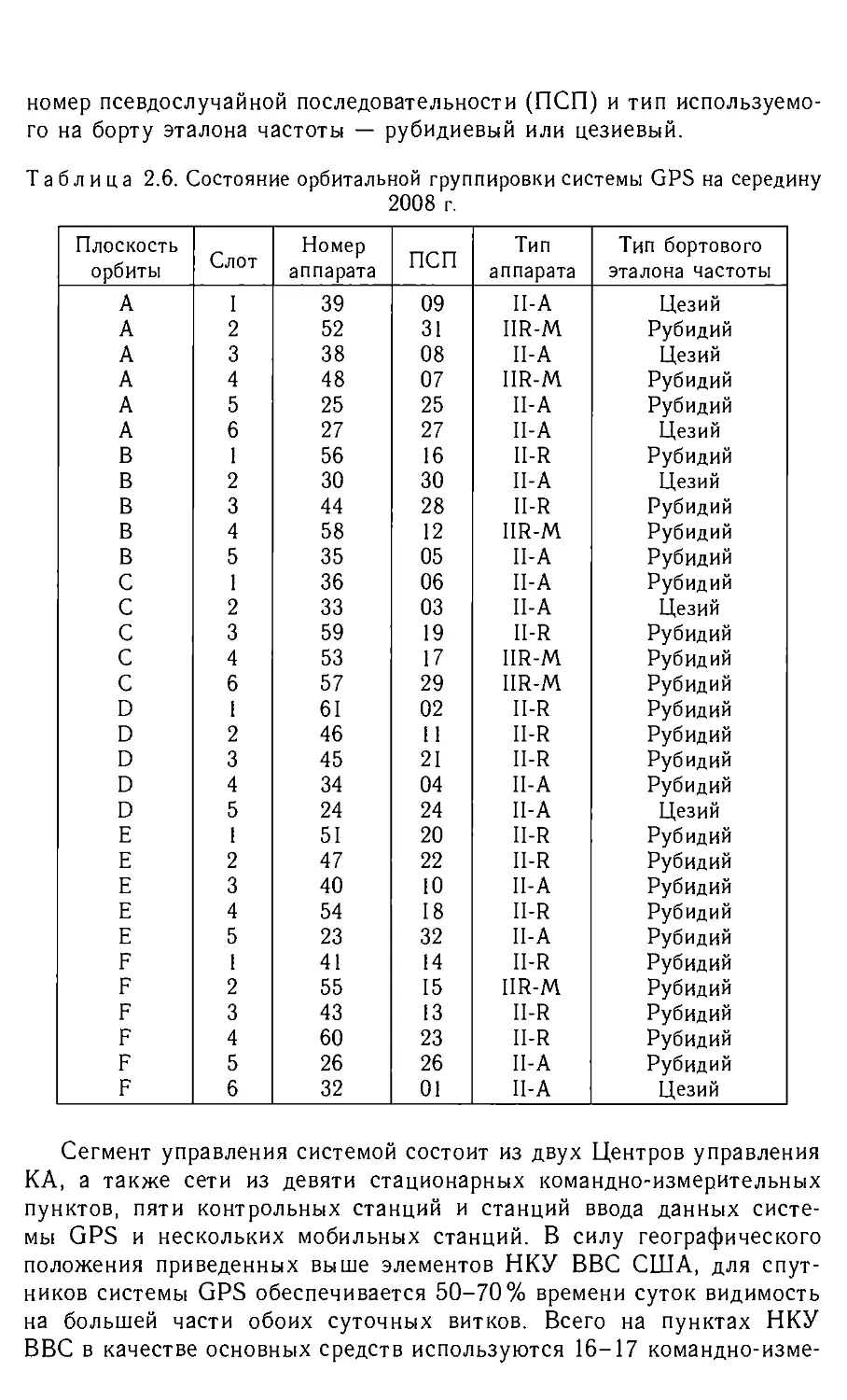
2.1. Современное состояние и перспективы развития ГНСС GPS, ГЛО-
НАСС и Galileo 39
2.1.1. Российская глобальная навигационная спутниковая система
ГЛОНАСС. Федеральная целевая программа поддержания и
развития ГЛОНАСС (39). 2.1.2. Глобальная навигационная система
GPS. Состояние и перспективы (47). 2.1.3. Европейская
спутниковая навигационная система Galileo (61).
2.2. Функциональная схема многоканального приемника ГНСС
GPS/raOHACC/Galileo 65
2.3. Модели ошибок кодовых и фазовых измерений ГНСС 70
2.3.1. Модель ошибок кодовых измерений ГНСС (70). 2.3.2.
Модель ошибок фазовых измерений ГНСС (76).
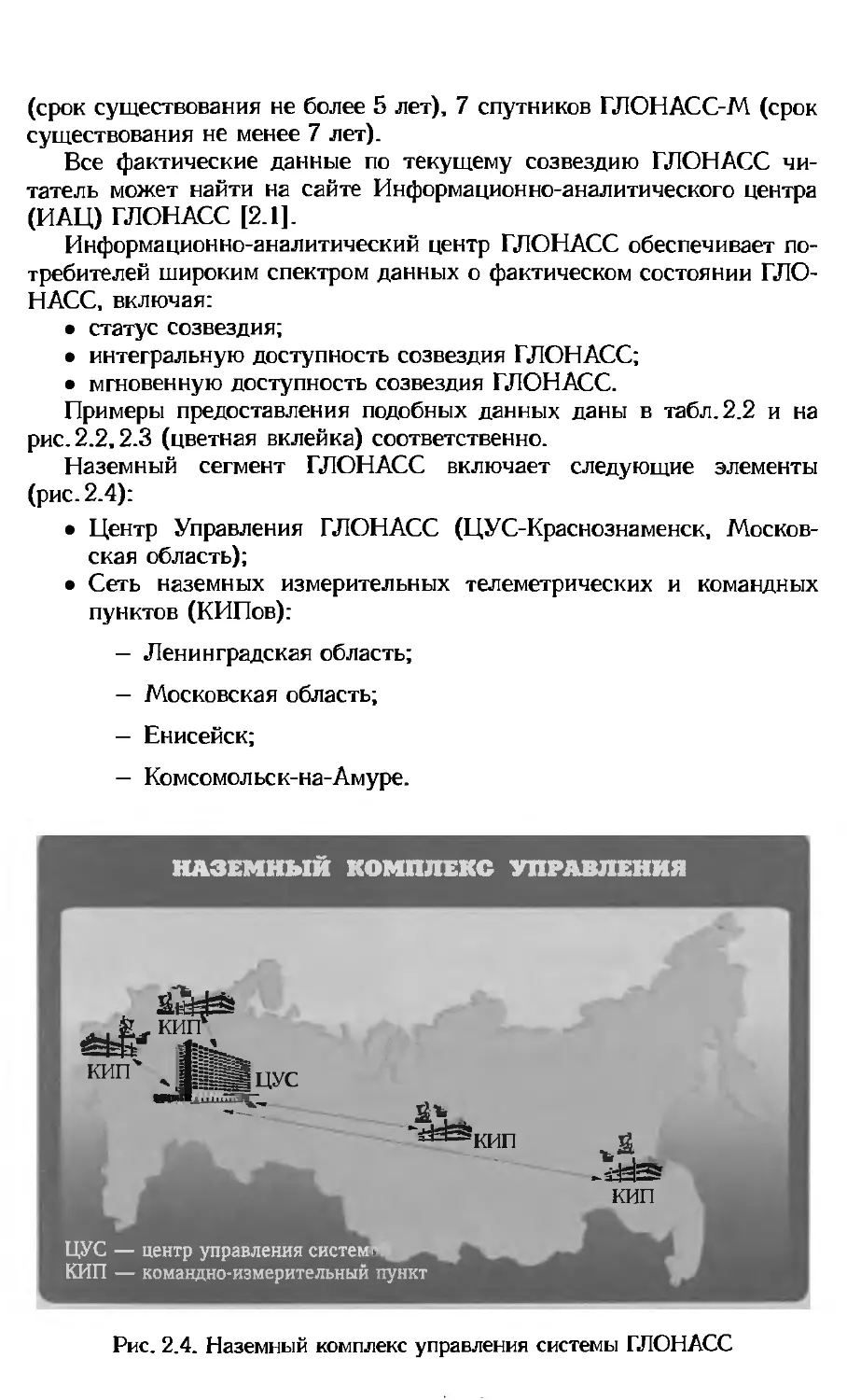
2.4. Определение положения, скорости и ориентации. Состав
неконтролируемых факторов. Влияние неконтролируемых факторов и
динамики БПЛА на функционирование GNSS-приемника (НАП) 78
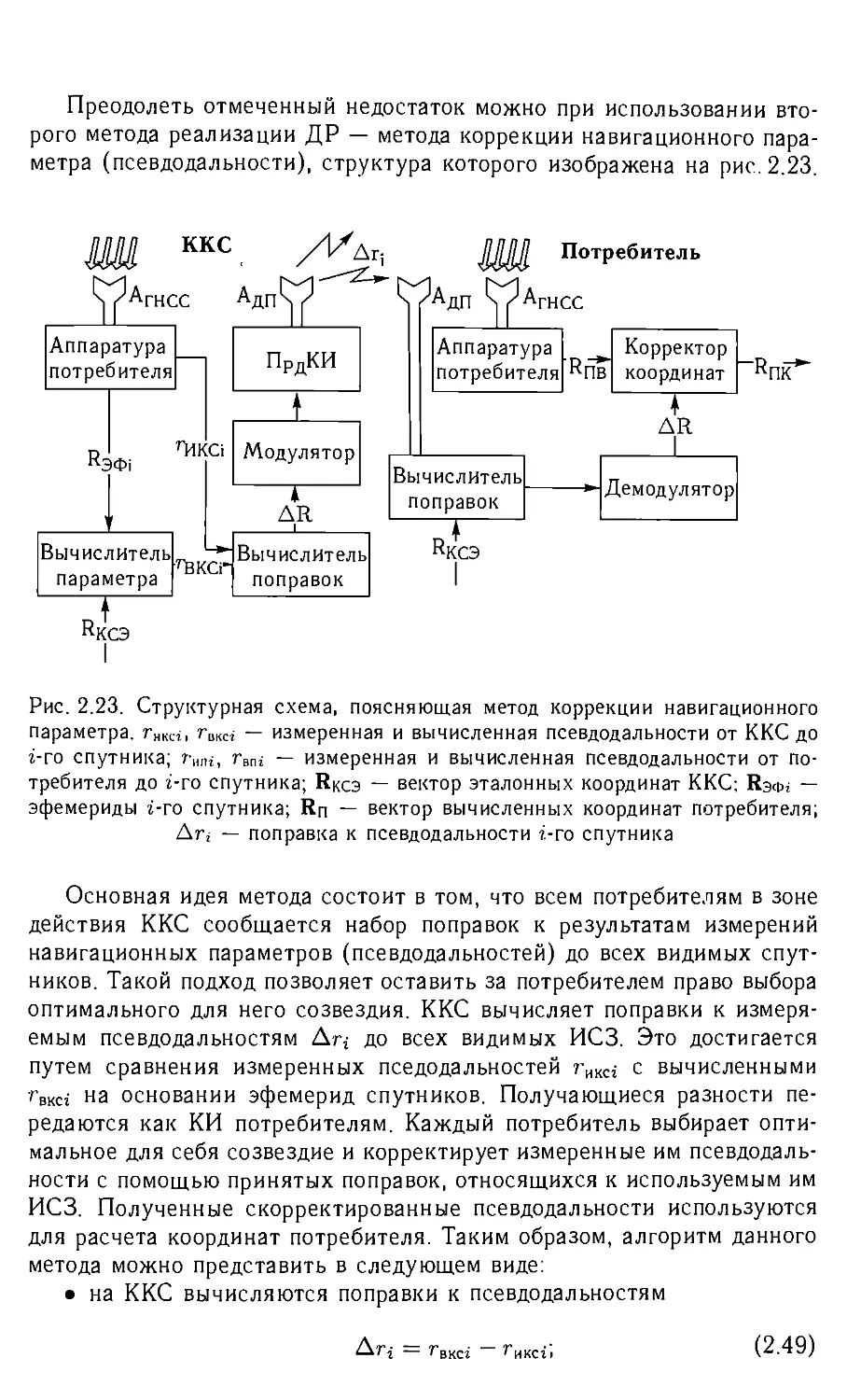
2.5. Дифференциальные режимы использования спутниковых
приемников глобальных навигационных систем 88
2.6. Функциональные схемы интегрированных систем навигации и
наведения беспилотного маневренного летательного аппарата 94
Список литературы к главе 2 102
Глава 3. Бесплатформенная инерциальная навигационная
система как информационное ядро интегрированного бортового
комплекса БПЛА 104
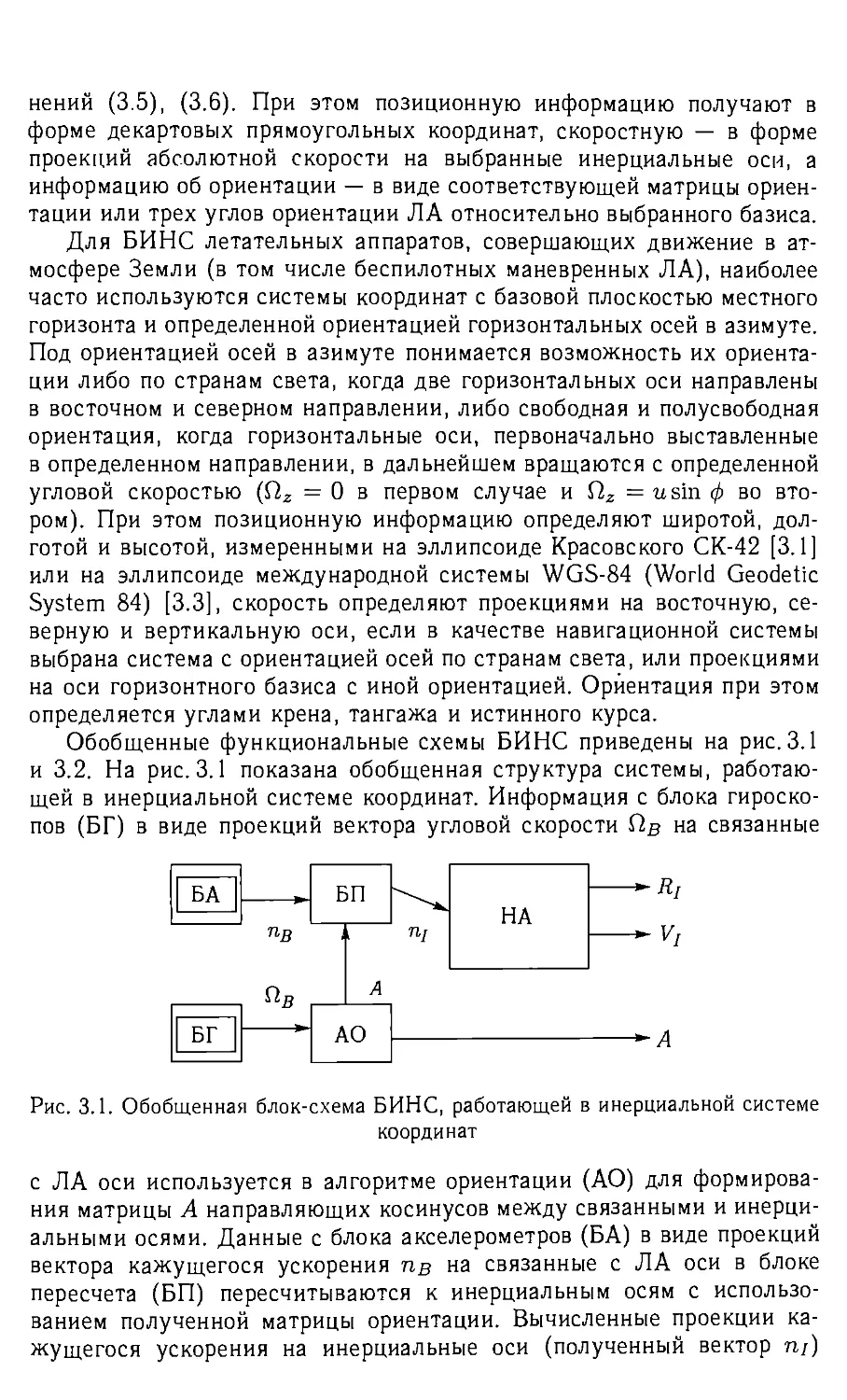
3.1. Принципы построения и функциональные схемы БИНС 104
4
Оглавление
3.2. Алгоритмы функционирования БИНС в различных системах
координат и в различных параметрических пространствах ПО
3.3. Модели ошибок БИНС 120
3.4. Особенности реализации численных алгоритмов БИНС 127
Список литературы к главе 3 134
Глава 4. Инерциальные чувствительные элементы
бесплатформенных инерциальных навигационных систем 136
4.1. Динамически настраиваемые гироскопы 138
4.2. Волновые оптические гироскопы 146
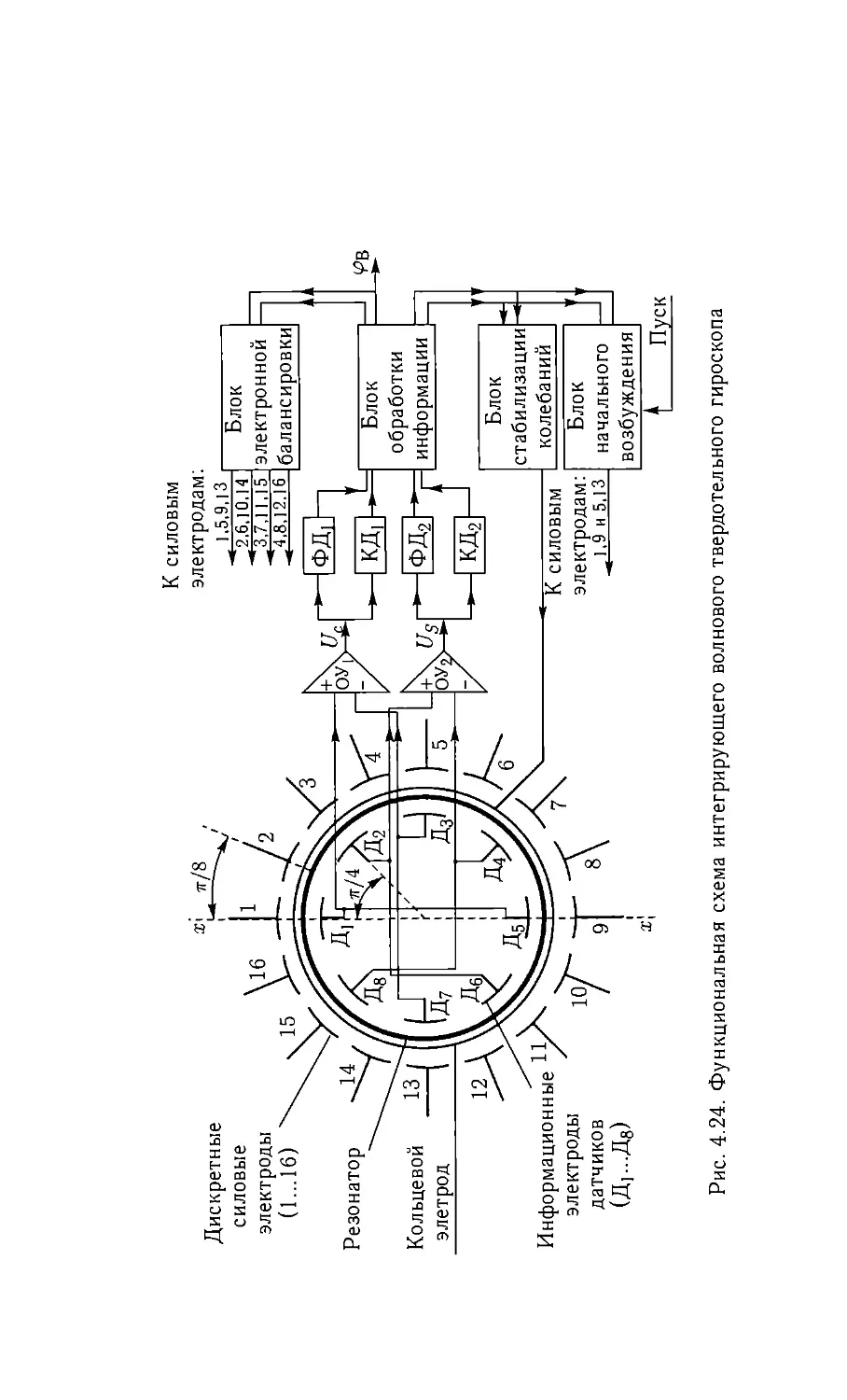
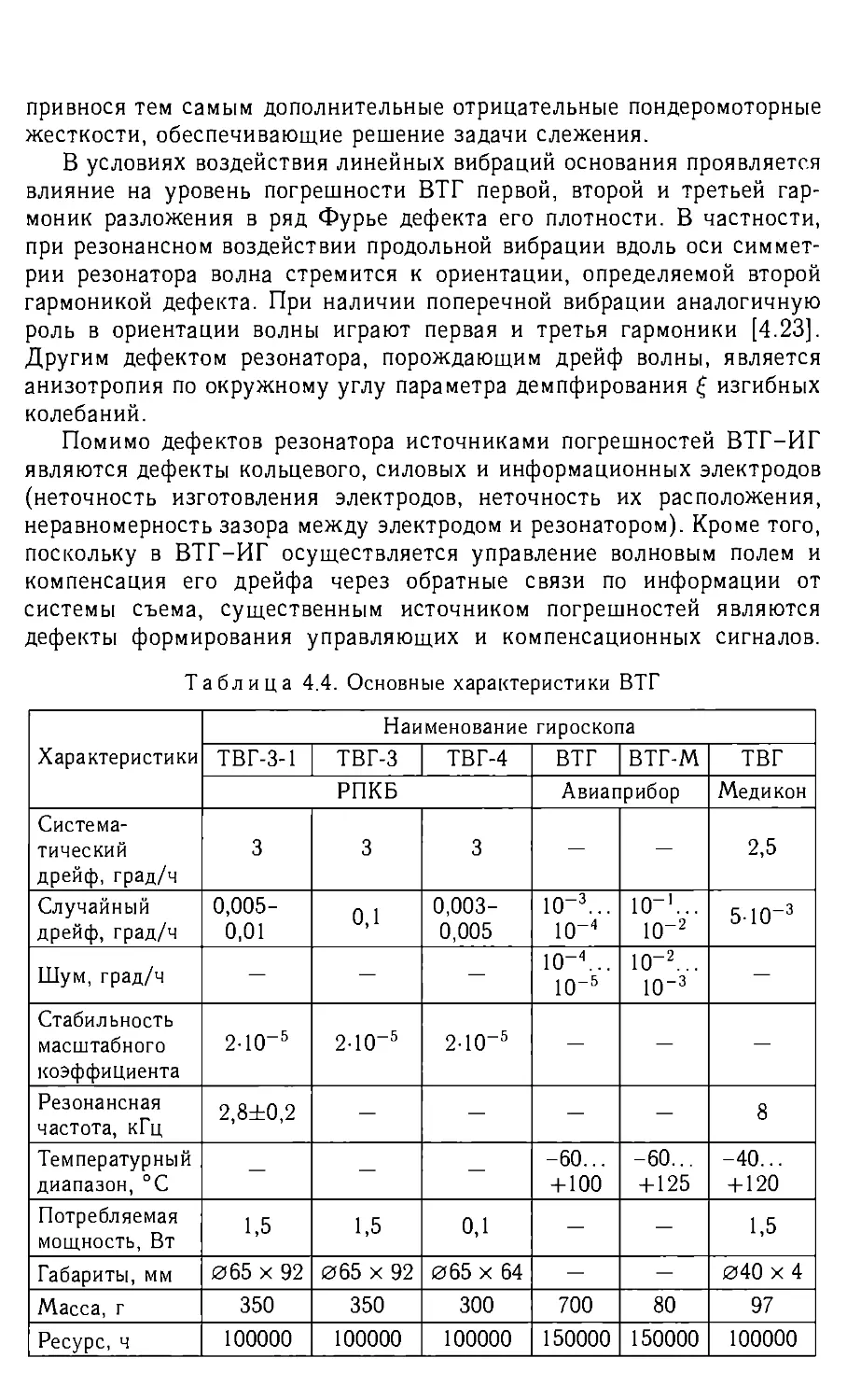
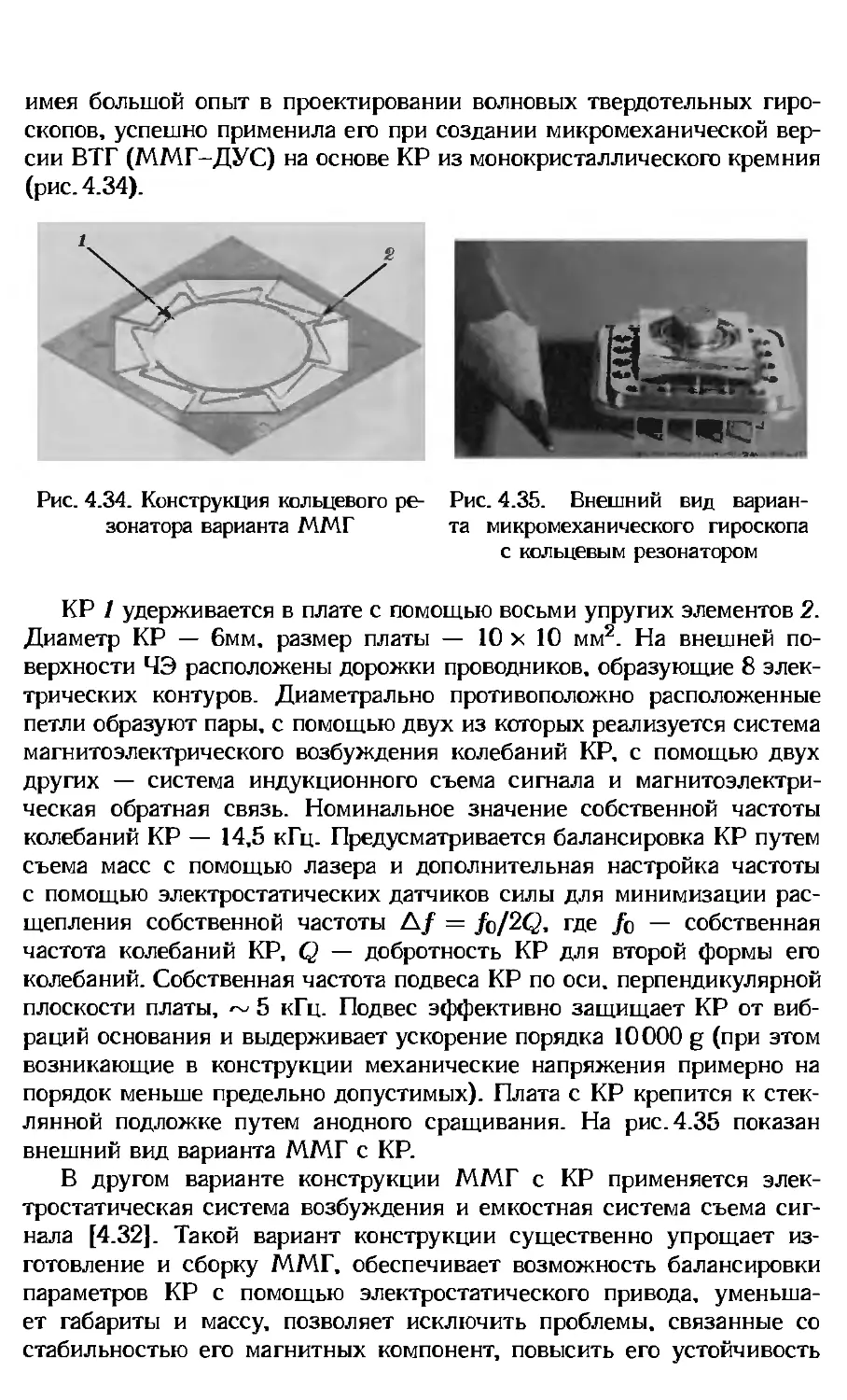
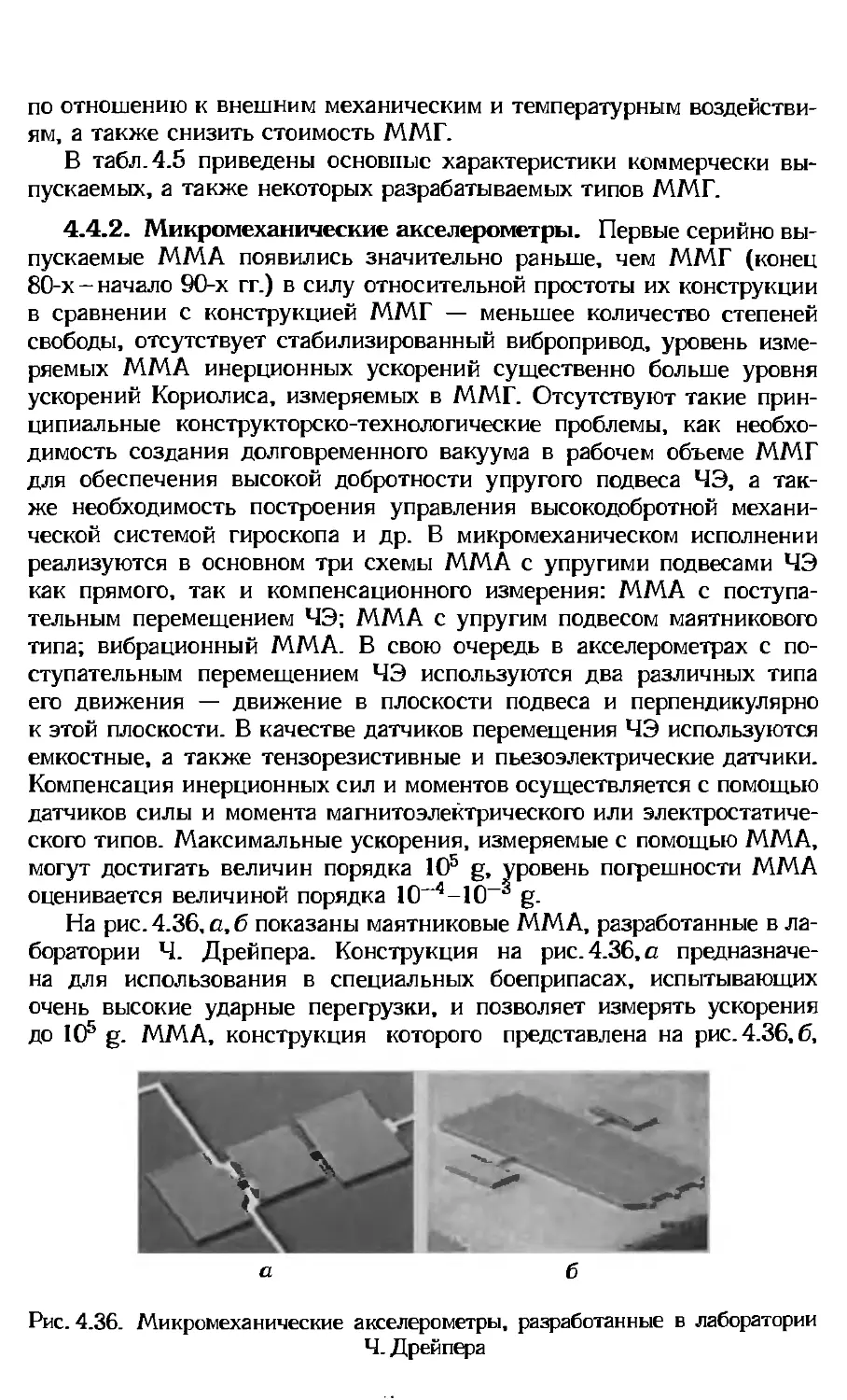
4.3. Волновой твердотельный гироскоп 166
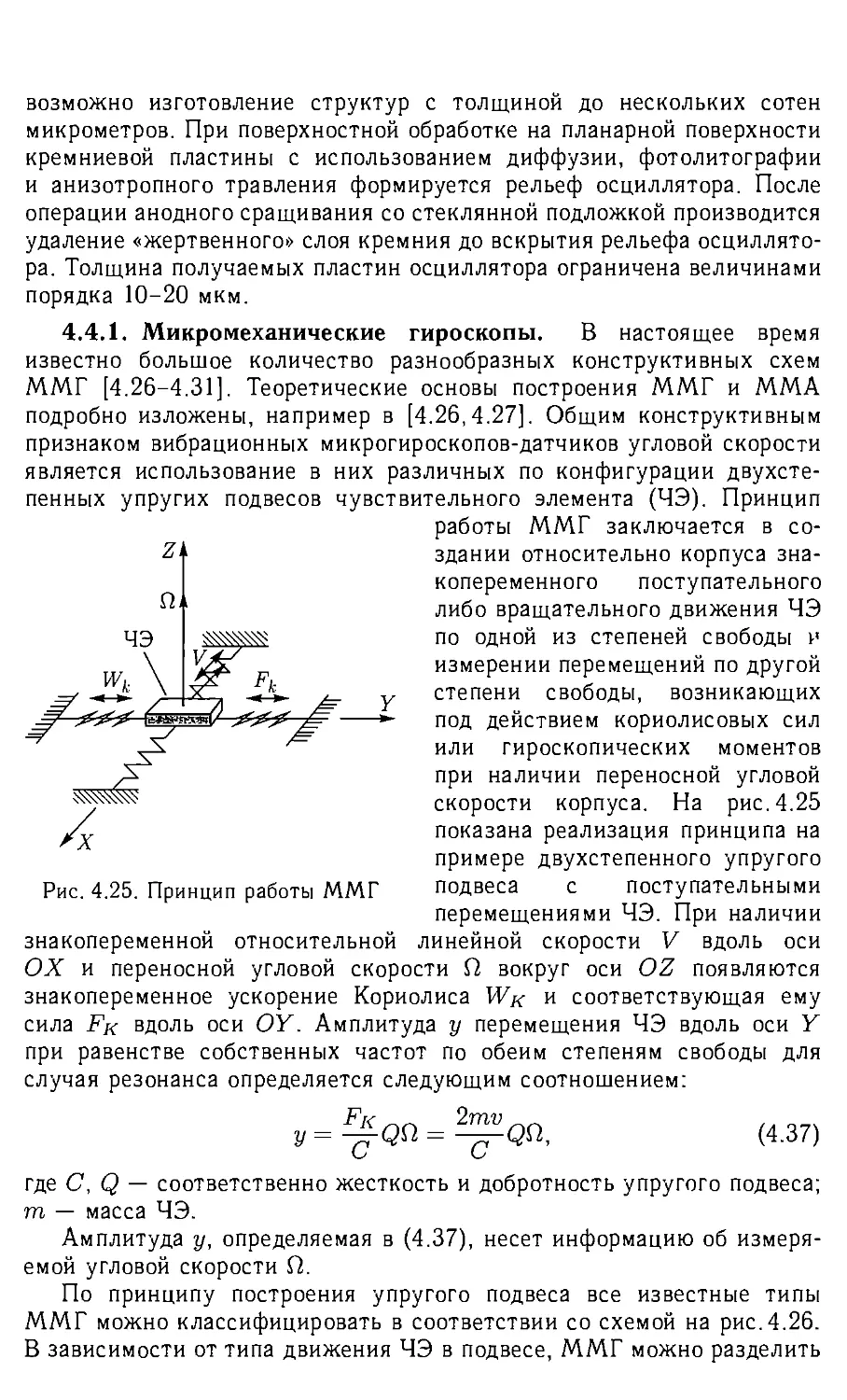
4.4. Микромеханические гироскопы и акселерометры 174
4.4.1. Микромеханические гироскопы (175). 4.4.2.
Микромеханические акселерометры (182).
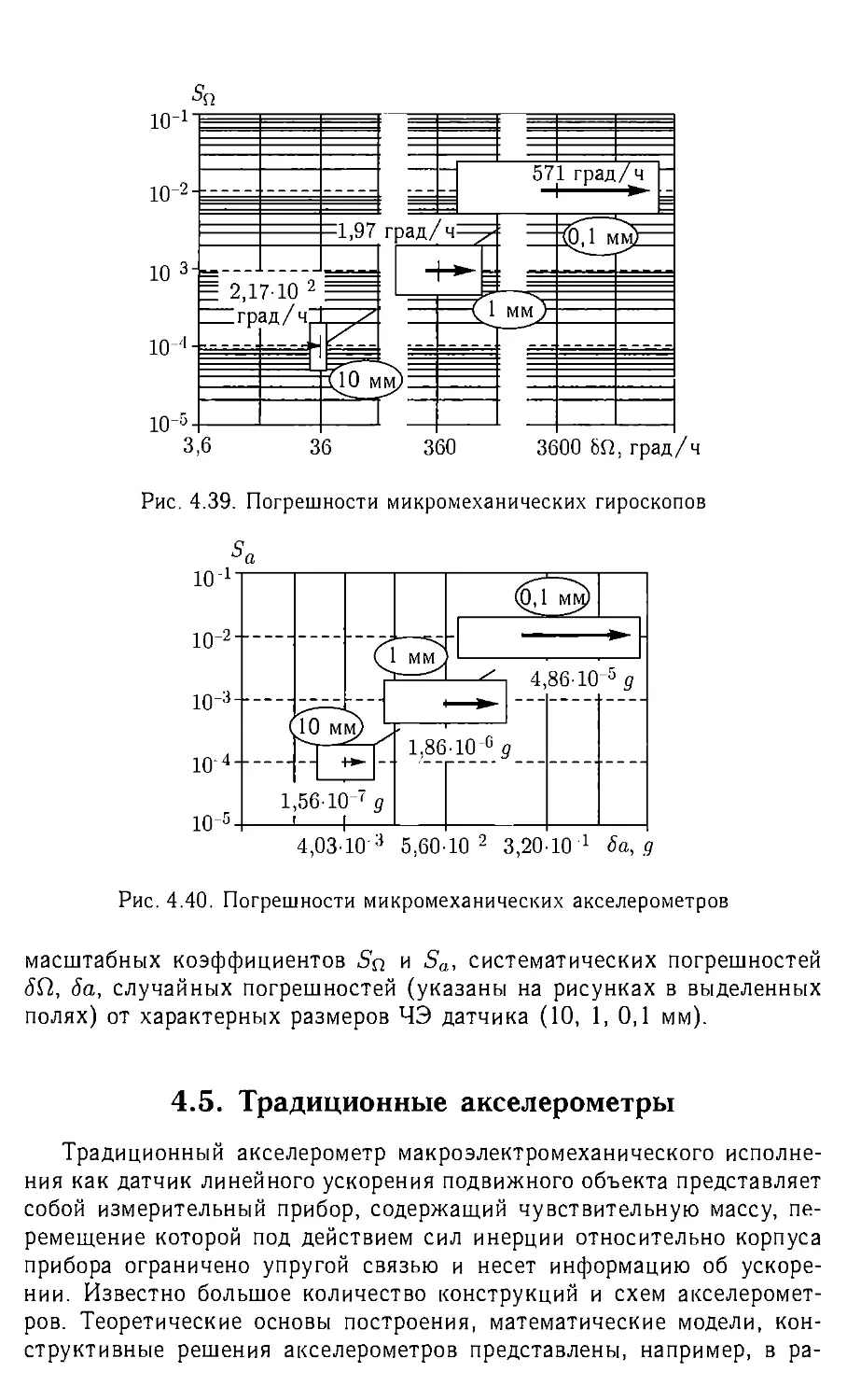
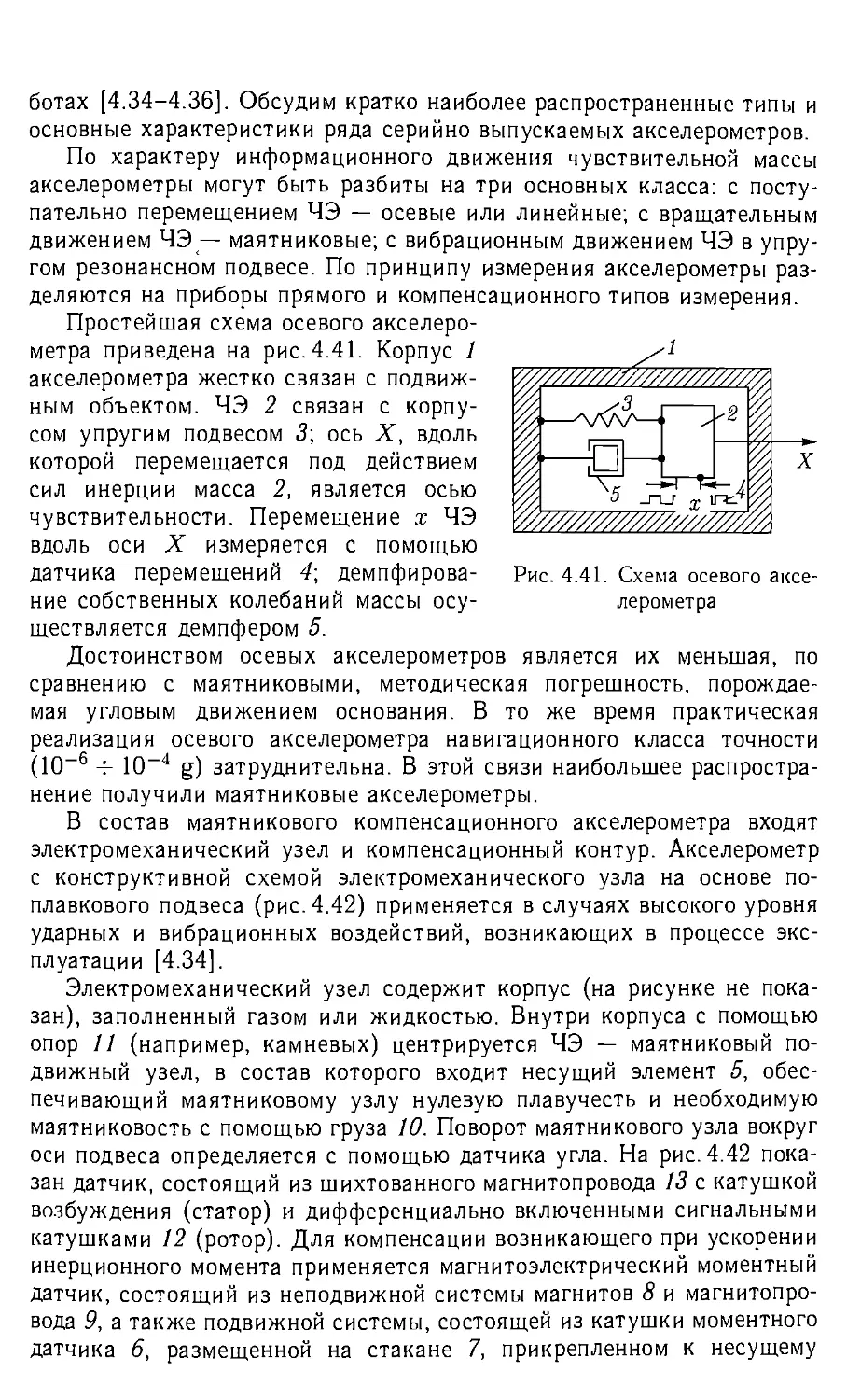
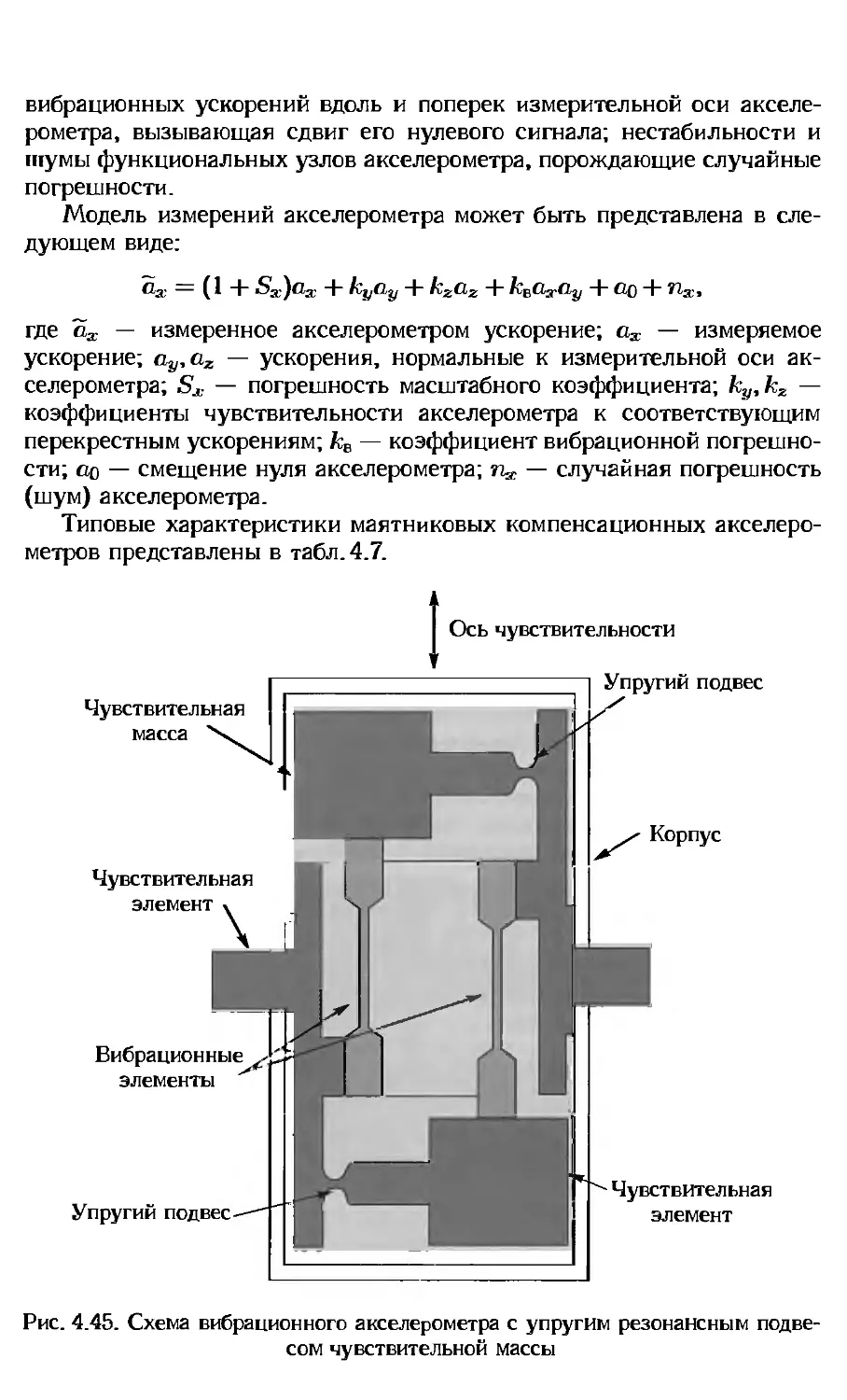
4.5. Традиционные акселерометры 189
Список литературы к главе 4 197
Глава 5. Использование технологий «машинного зрения» для
управления и наведения беспилотных маневренных
летательных аппаратов 199
5.1. Задача навигации и наведения с использованием изображений
местности 199
5.2. Использование эталонной информации различного типа в
перспективных системах наведения. Постановка технической задачи .... 204
5.3. Алгоритмическое обеспечение задач навигации и наведения по
двумерным полям 213
5.3.1. Основные требования к алгоритмам «машинного
зрения» (213). 5.3.2. Корреляционные методы сопоставления
текущего и эталонного изображений (215). 5.3.3. Методы
сопоставления текущего и эталонного изображений на основе
сравнения «характерных черт» (222). 5.3.4. Яркостные различия
образов (233). 5.3.5. Определение наиболее устойчивых
информативных участков изображения путем локального статистического
анализа (235).
5.4. Метод субпиксельной корреляции в задаче высокоточного
отождествления соответствующих точек 248
Список литературы к главе 5 264
Глава 6. Решение навигационной задачи БПЛА на основе
интеграции данных инерциальных навигационных систем и систем
наблюдения 266
6.1. Классификация методов решения навигационных задач БПЛА . . . 267
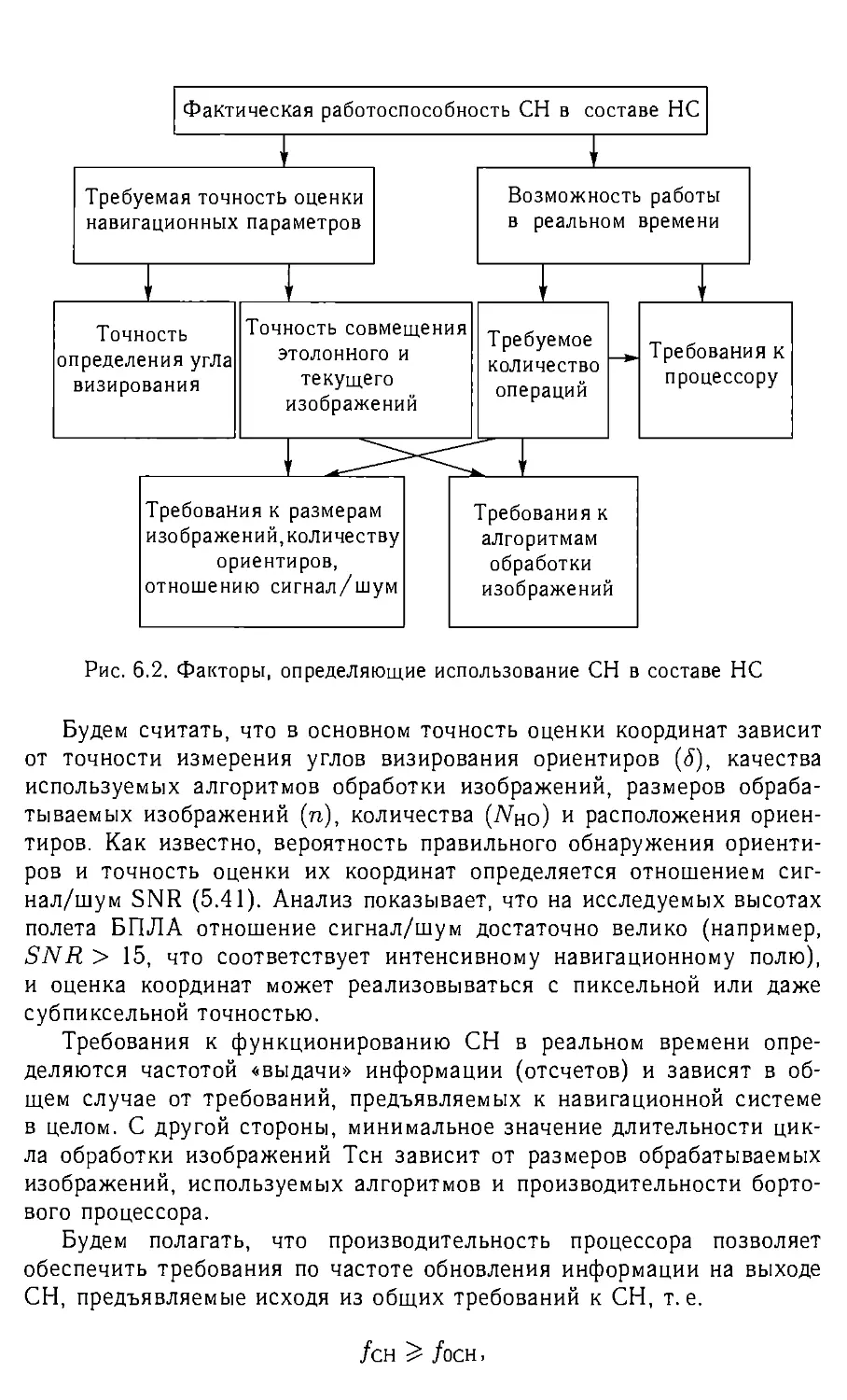
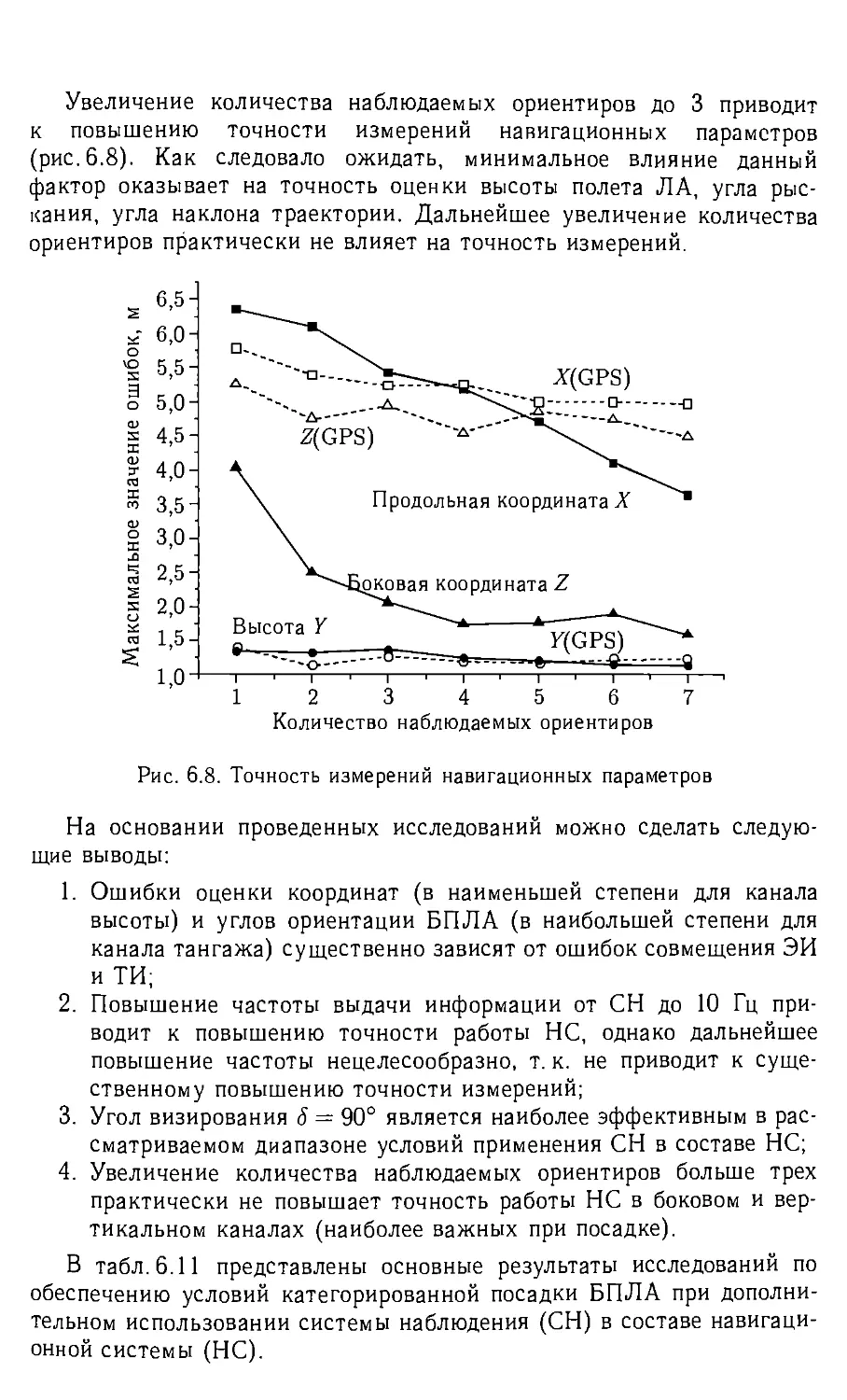
6.2. Обеспечение требуемой точности автономной посадки БПЛА на
необорудованный аэродром 269
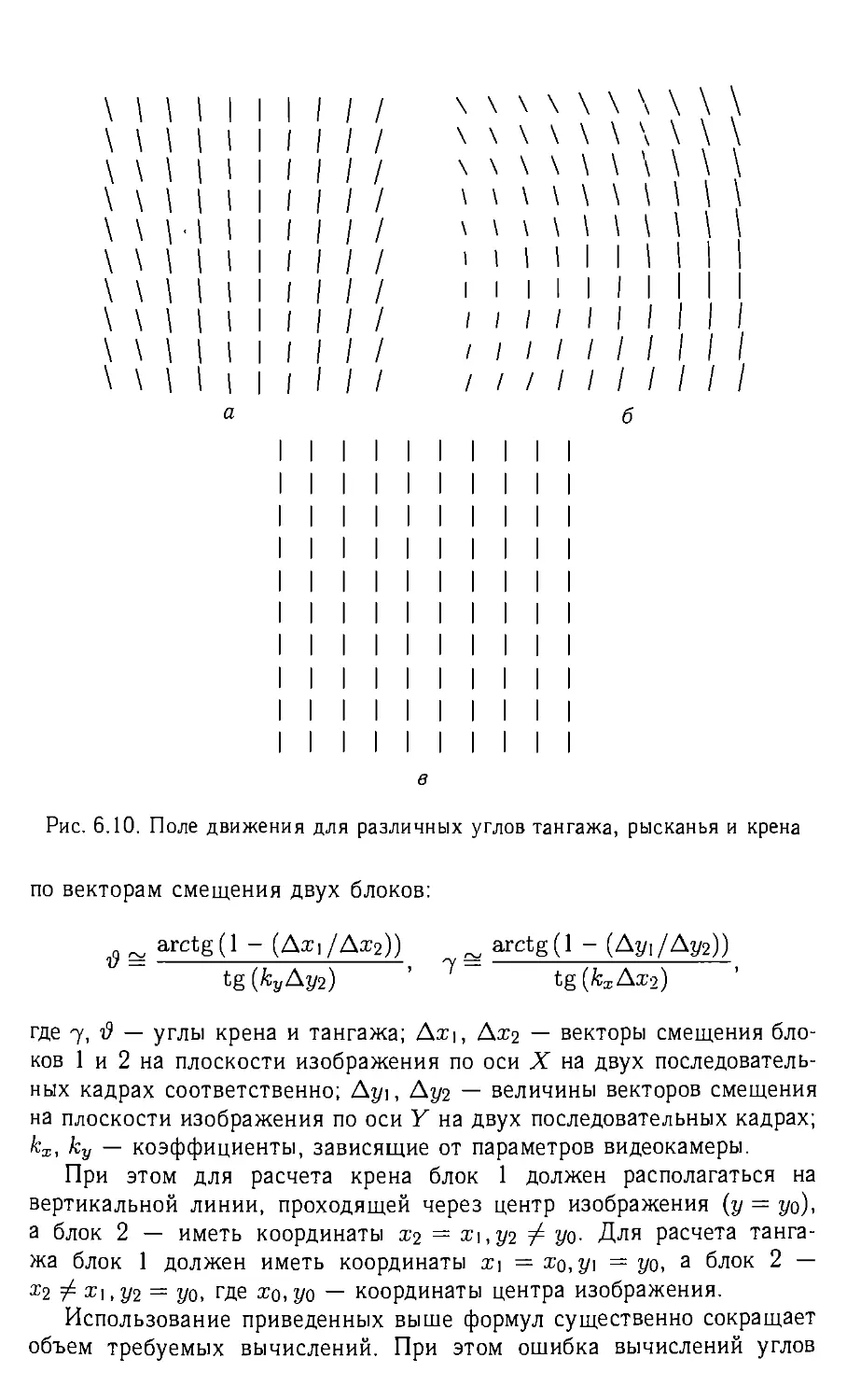
6.3. Определение углов ориентации БПЛА на основе анализа поля
движения 281
Оглавление
5
6.4. Использование методов оптического потока для оценки
навигационных параметров БПЛА 286
Список литературы к главе 6 298
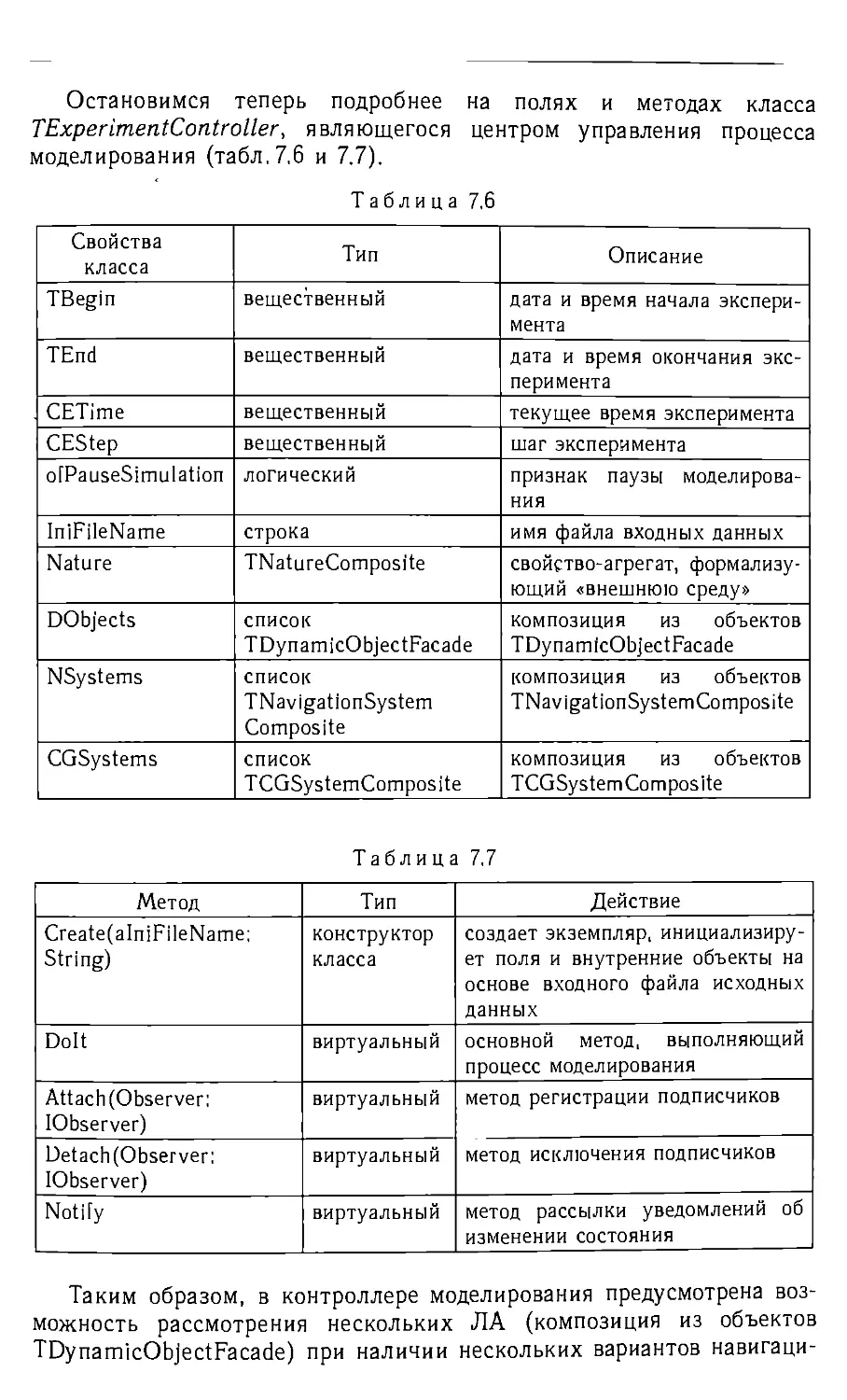
Глава 7. Моделирование процессов функционирования
интегрированных систем БПЛА на основе методологии
объектно-ориентированного анализа и проектирования 301
7.1. Объектно-ориентированный анализ и проектирование —
современная методология моделирования и проектирования
информационных систем 302
7.1.1. Особенности современного этапа развития технологии
математического моделирования (302). 7.1.2. Современная технология
математического моделирования интегрированных систем
навигации и наведения высокоманевренных ЛА (304). 7.1.3. Основные
принципы унифицированного подхода к проектированию
информационных систем на основе методики ООА/П (318).
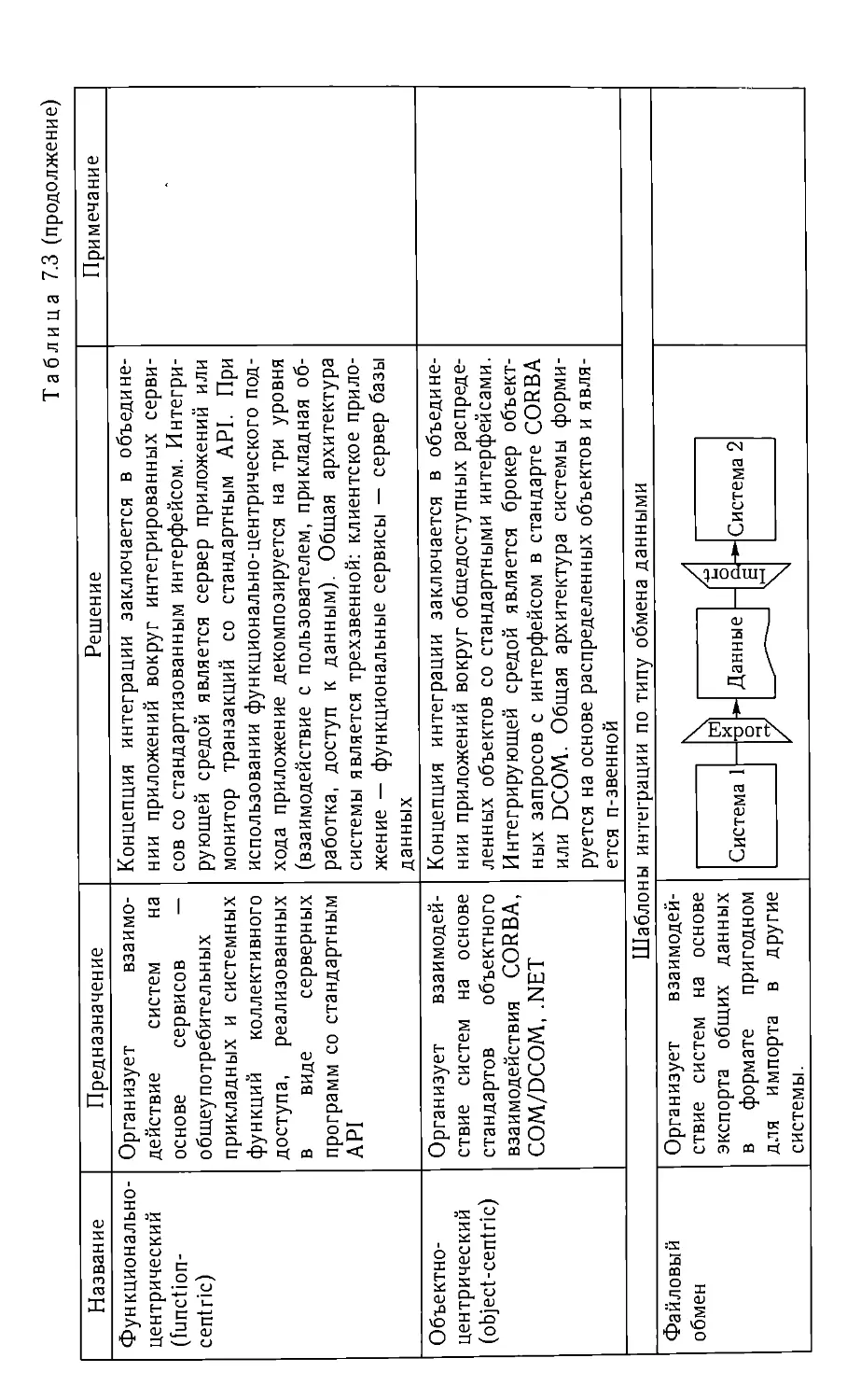
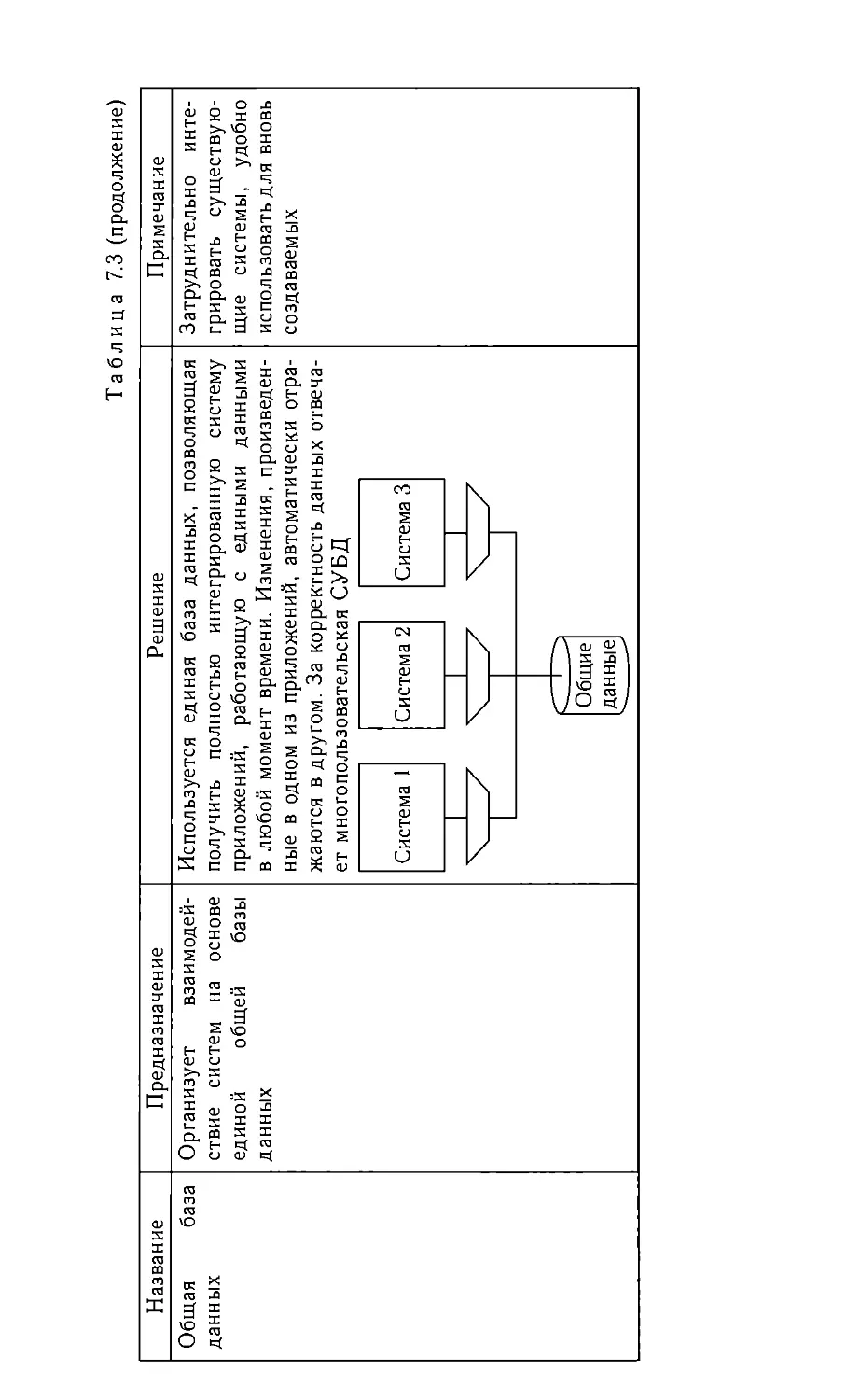
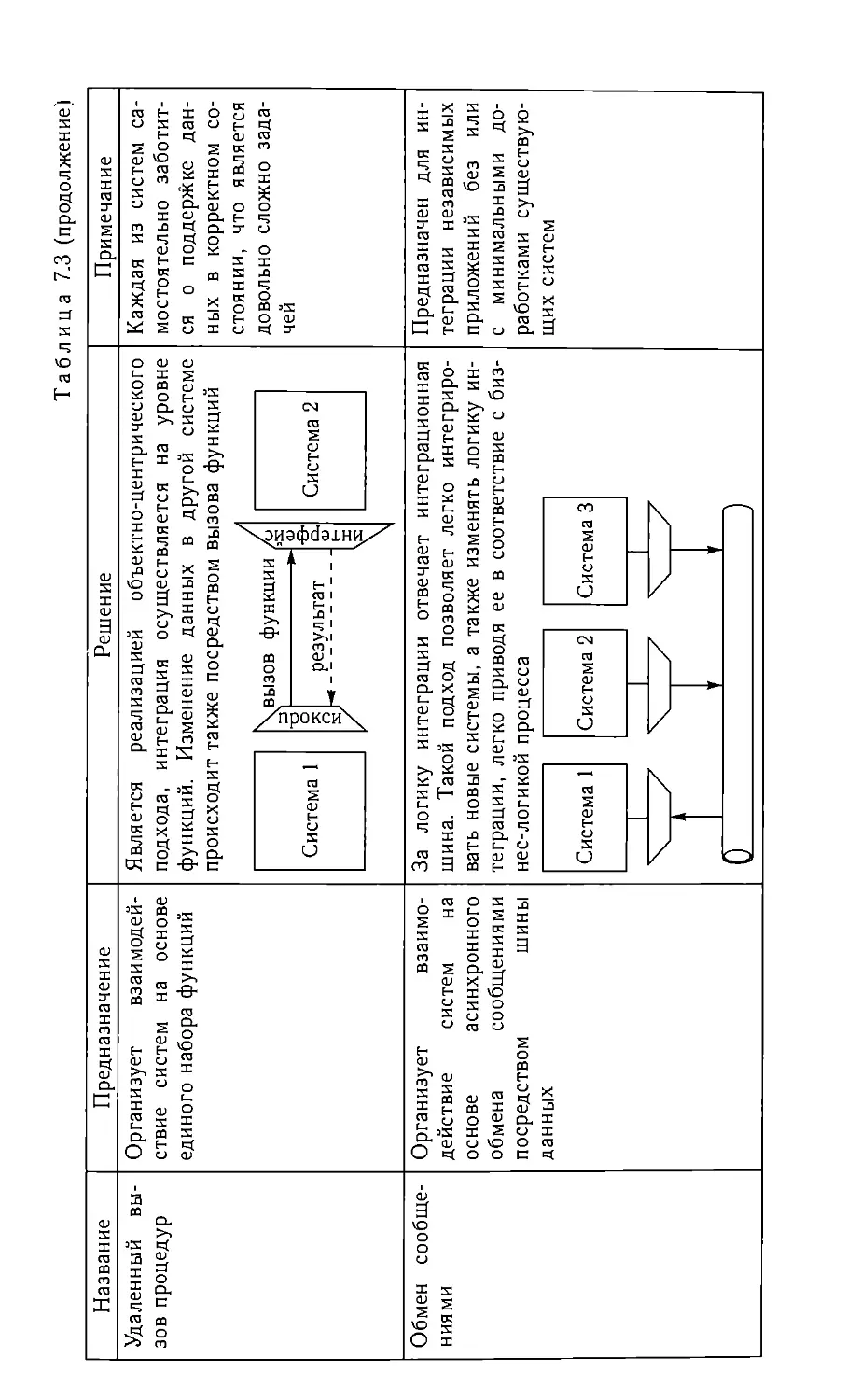
7.2. Применение ООА/П к проектированию ПМО для математического
моделирования интегрированных систем навигации и наведения
беспилотных маневренных ЛА 349
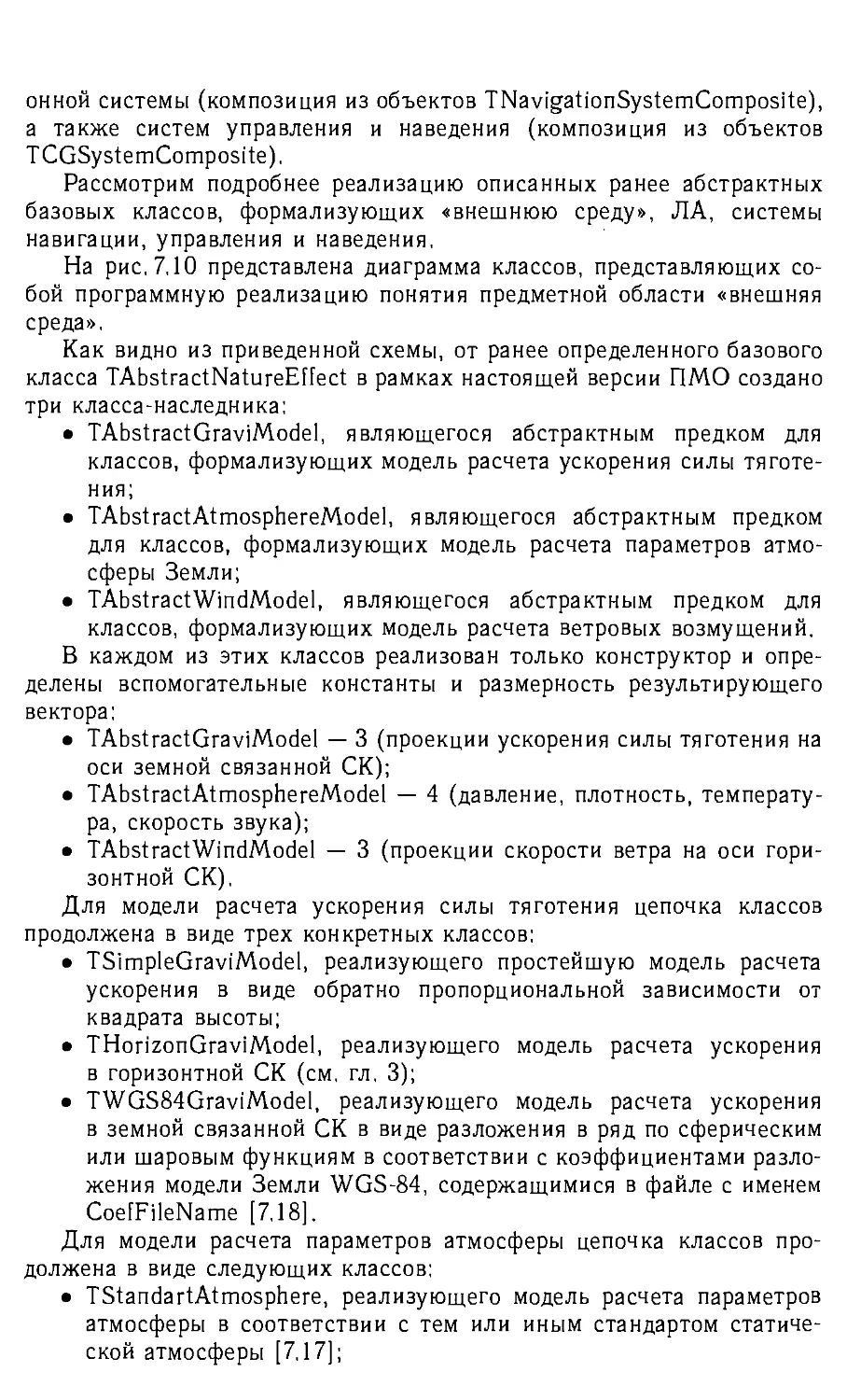
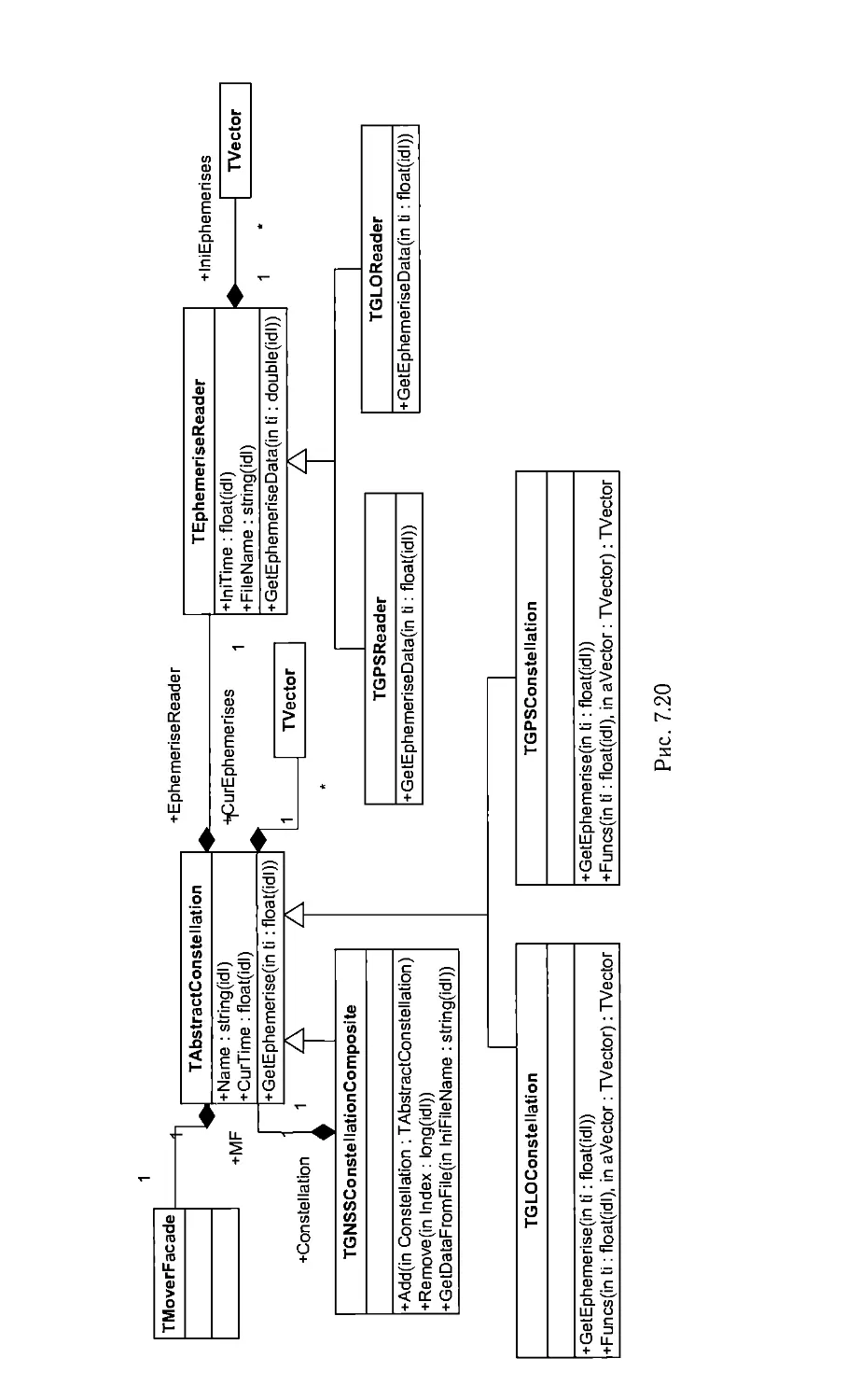
7.2.1. Описание предметной области задачи математического
моделирования глубоко интегрированной системы навигации
беспилотного маневренного ЛА (350).
Список литературы к главе 7 399
Глава 8. Интегрированная бортовая система перспективного
беспилотного вертолета в режиме маловысотного полета 401
8.1. Особенности маловысотного полета и требования к бортовому
комплексу 401
8.2. Функциональная схема интегрированной бортовой системы 405
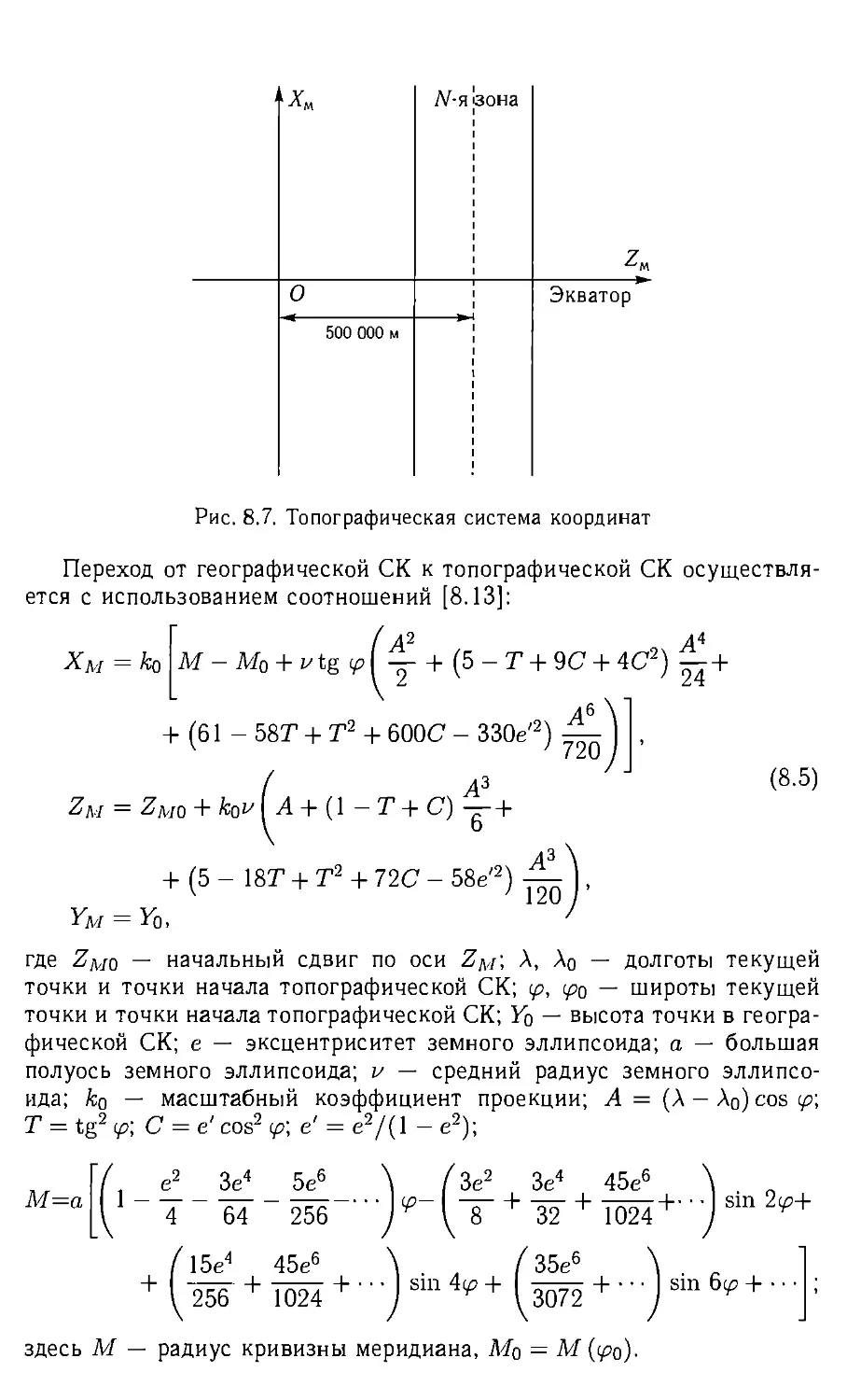
8.3. Математическая модель динамики управляемого движения
вертолета 407
8.3.1. Системы координат (408). 8.3.2. Модель движения
вертолета как объекта управления (417). 8.3.3. Система
стабилизации (424).
8.4. Алгоритм управления движением центра масс вертолета в режиме
огибания рельефа местности («идеальный пилот») 426
8.5. Основные элементы интегрированного навигационного комплекса 432
8.5.1. Чувствительные элементы БИНС (433). 8.5.2.
Навигационный алгоритм БИНС (435). 8.5.3. Радиобаровысотомер (435).
8.5.4. Многоканальный GNSS-приемник (436). 8.5.5. Модель
функционирования многоканального GNSS-приемника в условиях
воздействия помех (439). 8.5.6. Бортовая РЛС миллиметрового
диапазона (447). 8.5.7. Бортовой лазерный локатор (454).
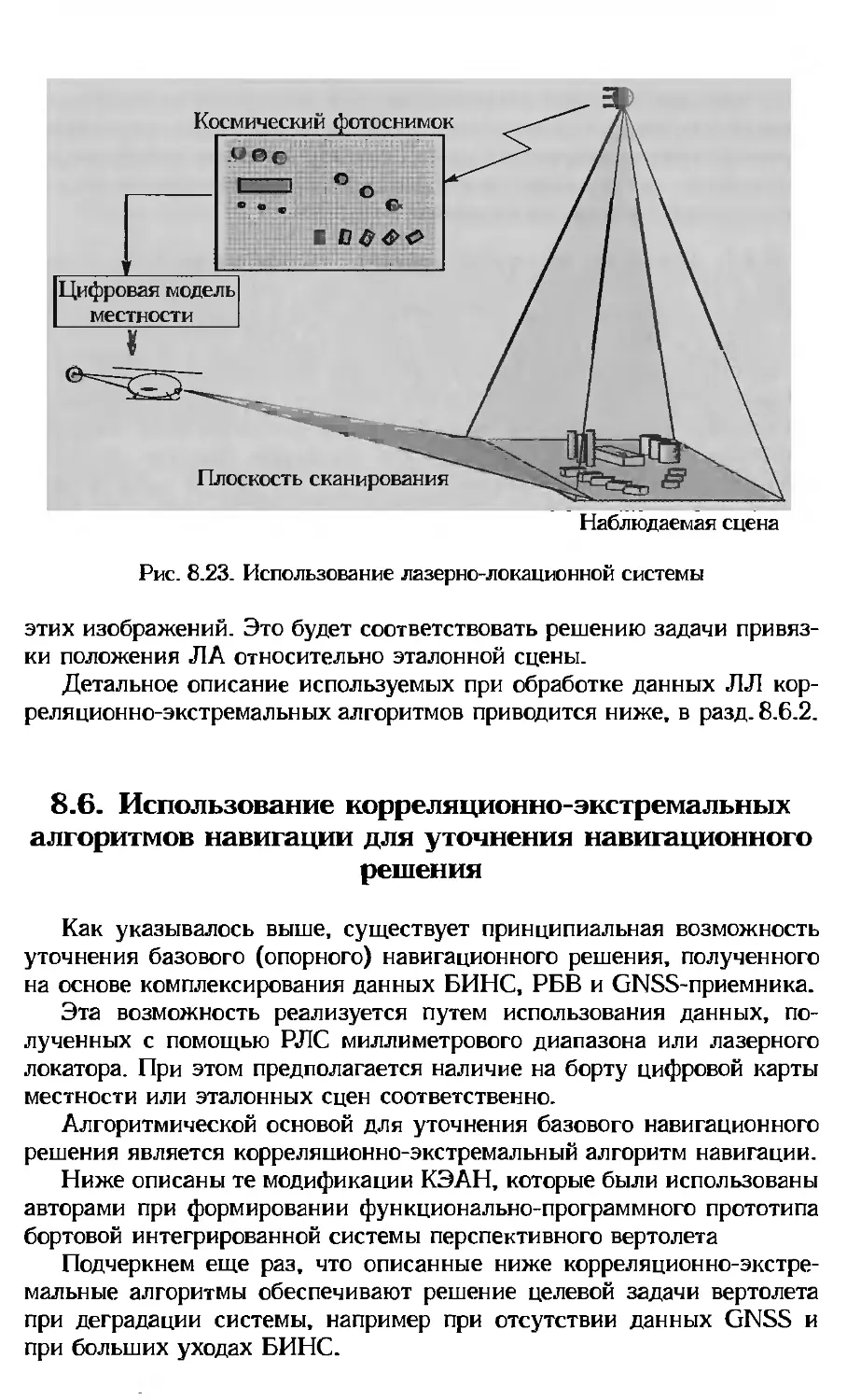
8.6. Использование корреляционно-экстремальных алгоритмов
навигации для уточнения навигационного решения 455
8.6.1. Корреляционно-экстремальный алгоритм навигации для
обработки данных бортовой РЛС (456). 8.6.2. Корреляционно-экс-
6
Оглавление
тремальный алгоритм навигации для обработки данных лазерного
локатора (460).
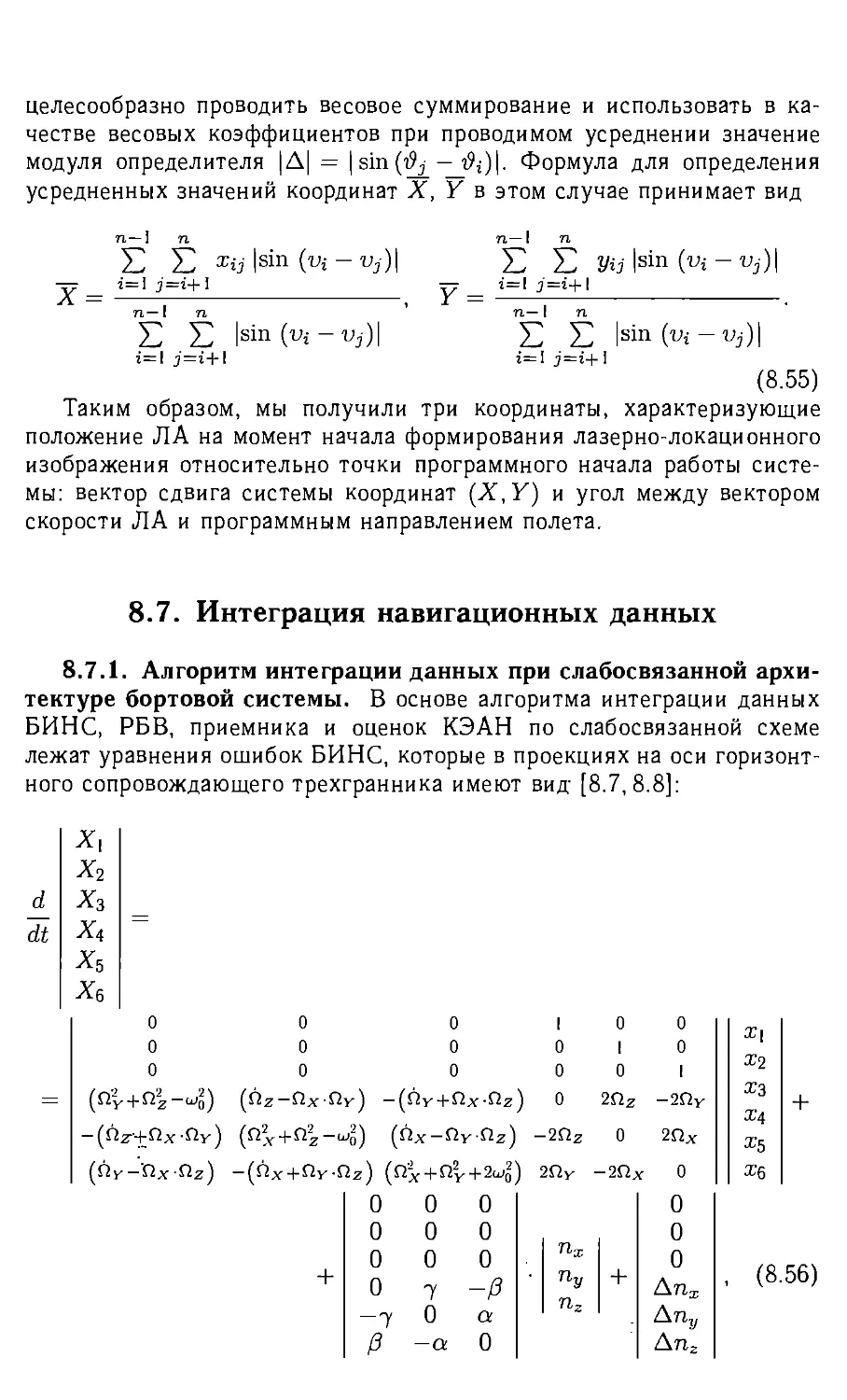
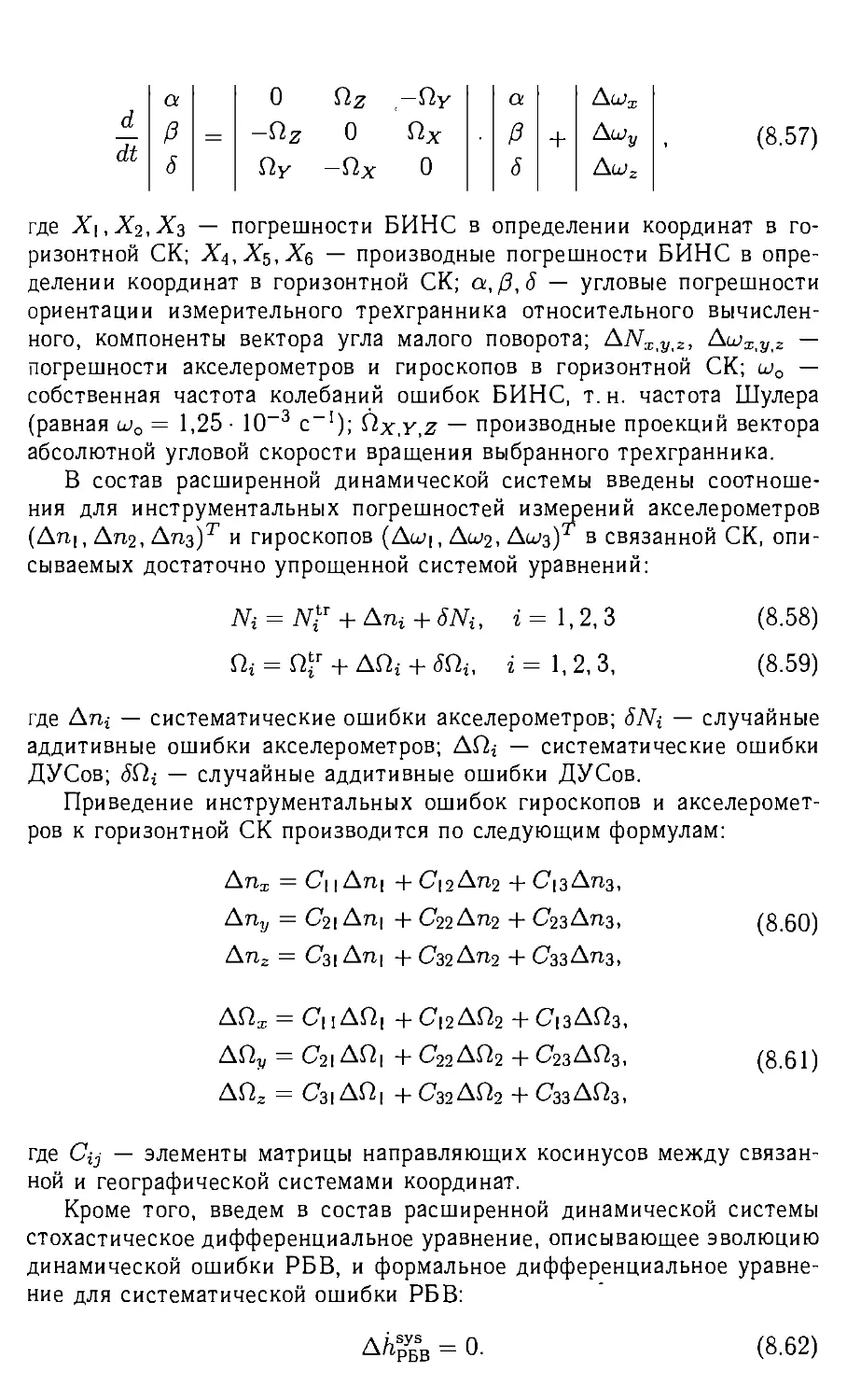
8.7. Интеграция навигационных данных 467
8.7.1. Алгоритм интеграции данных при слабосвязанной
архитектуре бортовой системы (467). 8.7.2. Интеграция данных при глубоко
интегрированной архитектуре (473).
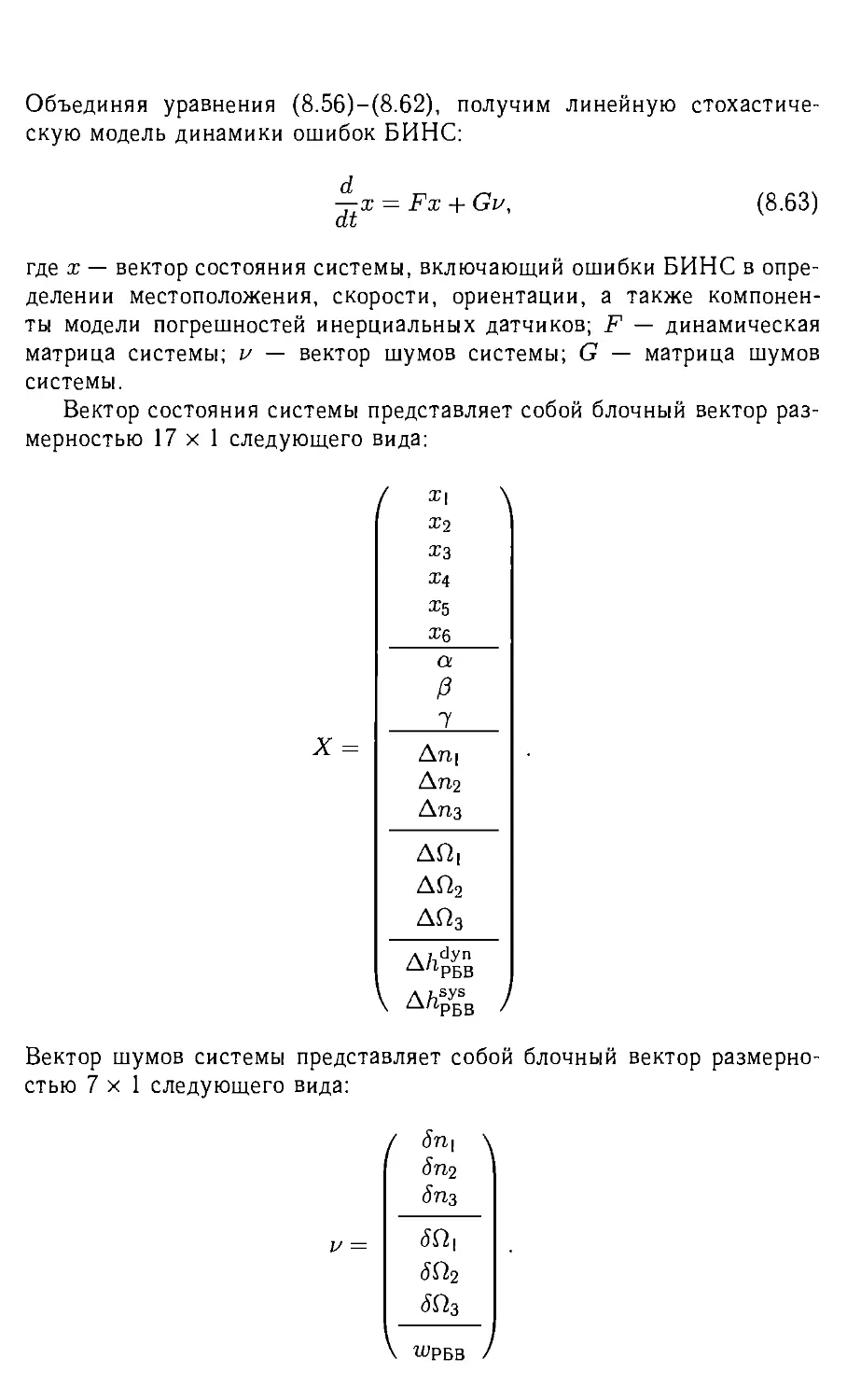
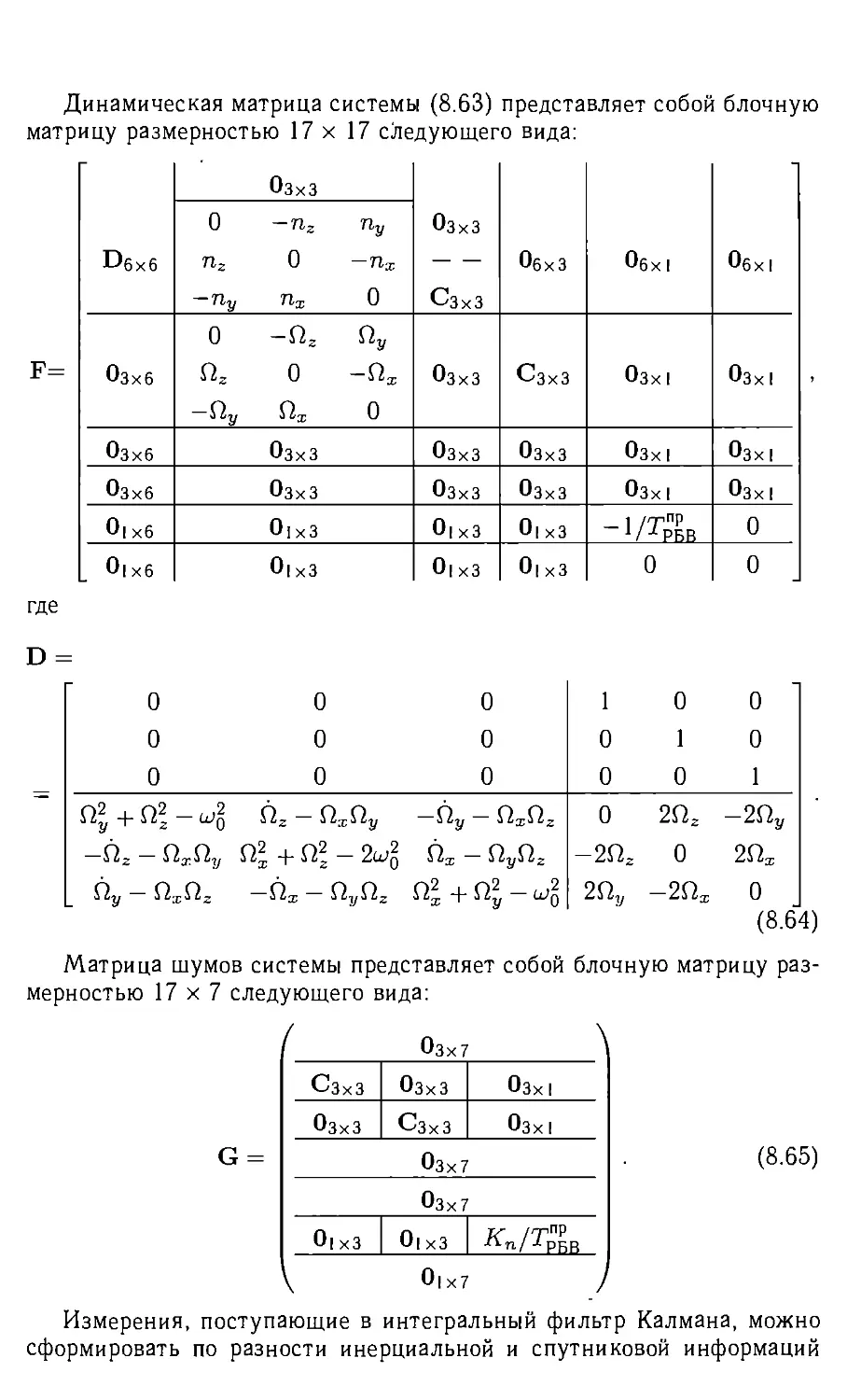
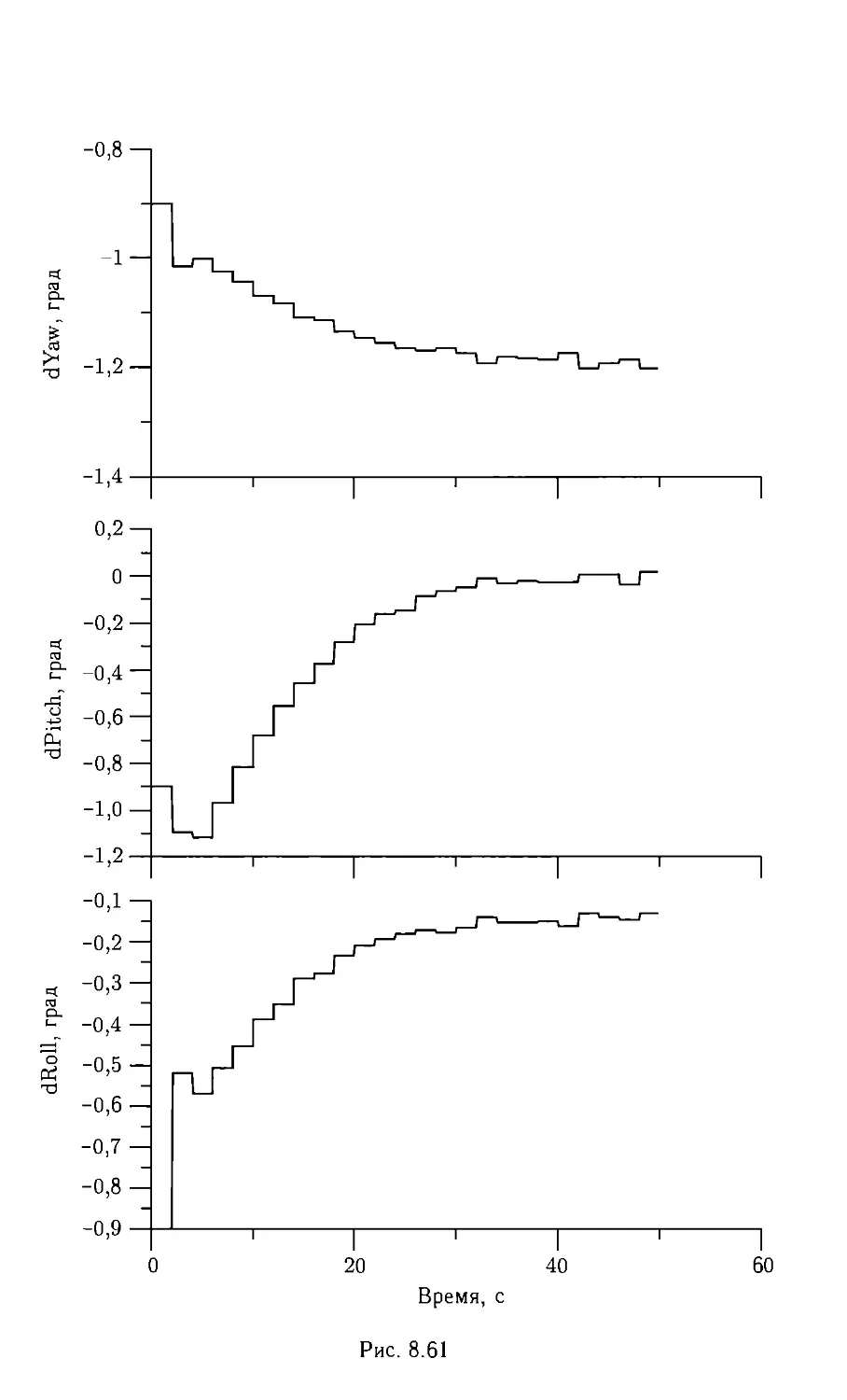
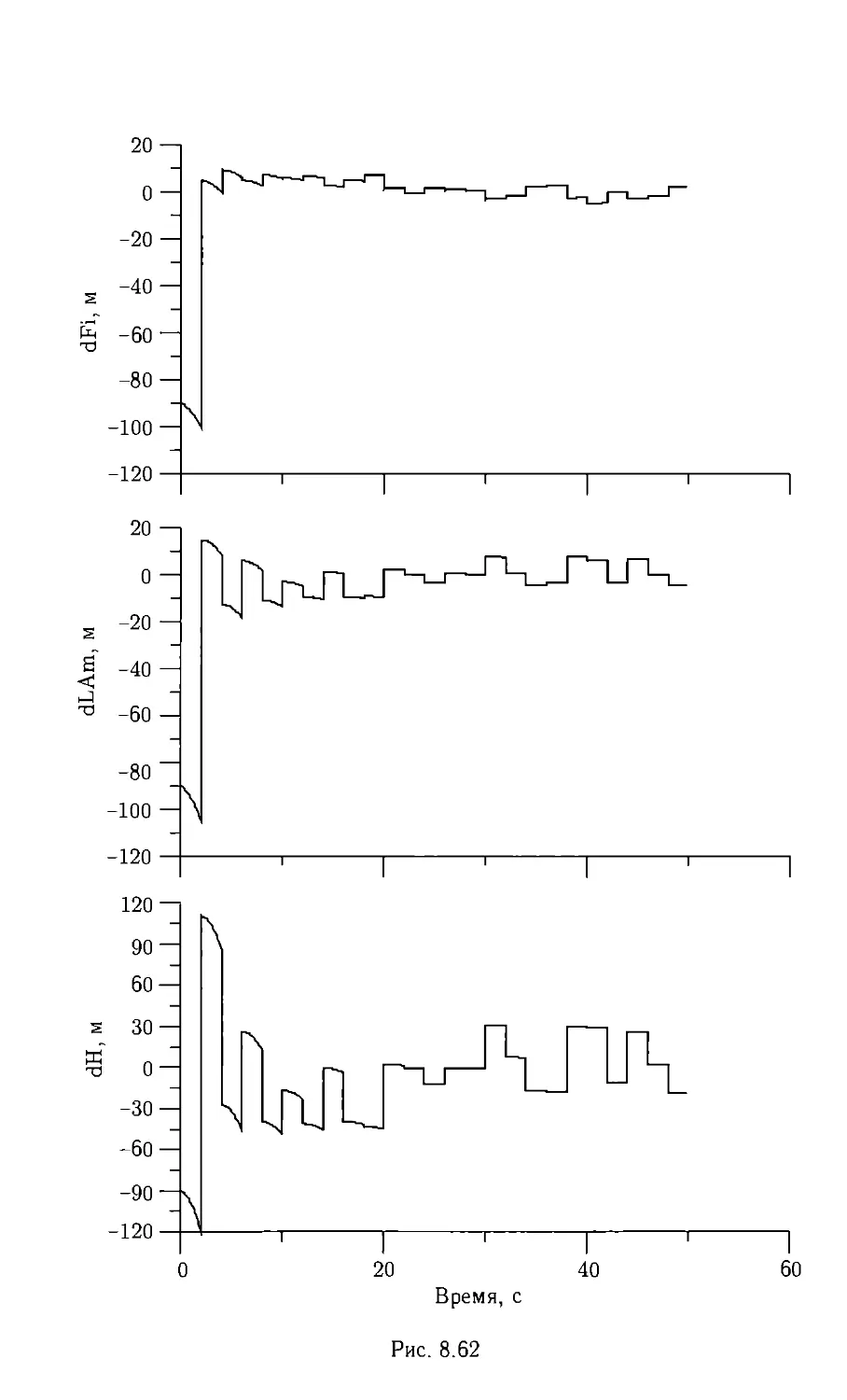
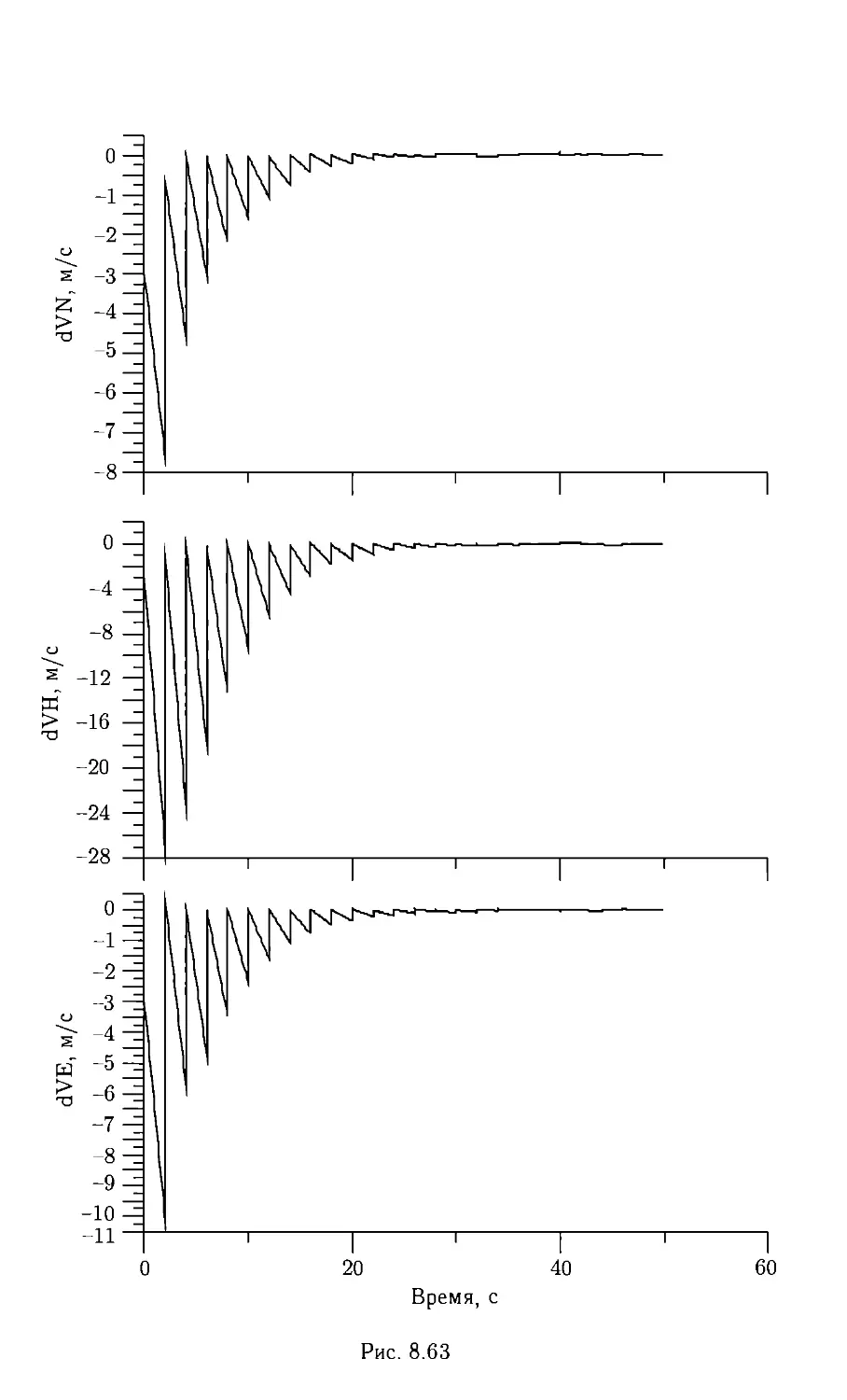
8.8. Имитационное моделирование маловысотного полета при
слабосвязанной архитектуре бортового контура 476
8.8.1. Исходные данные имитационного моделирования (476).
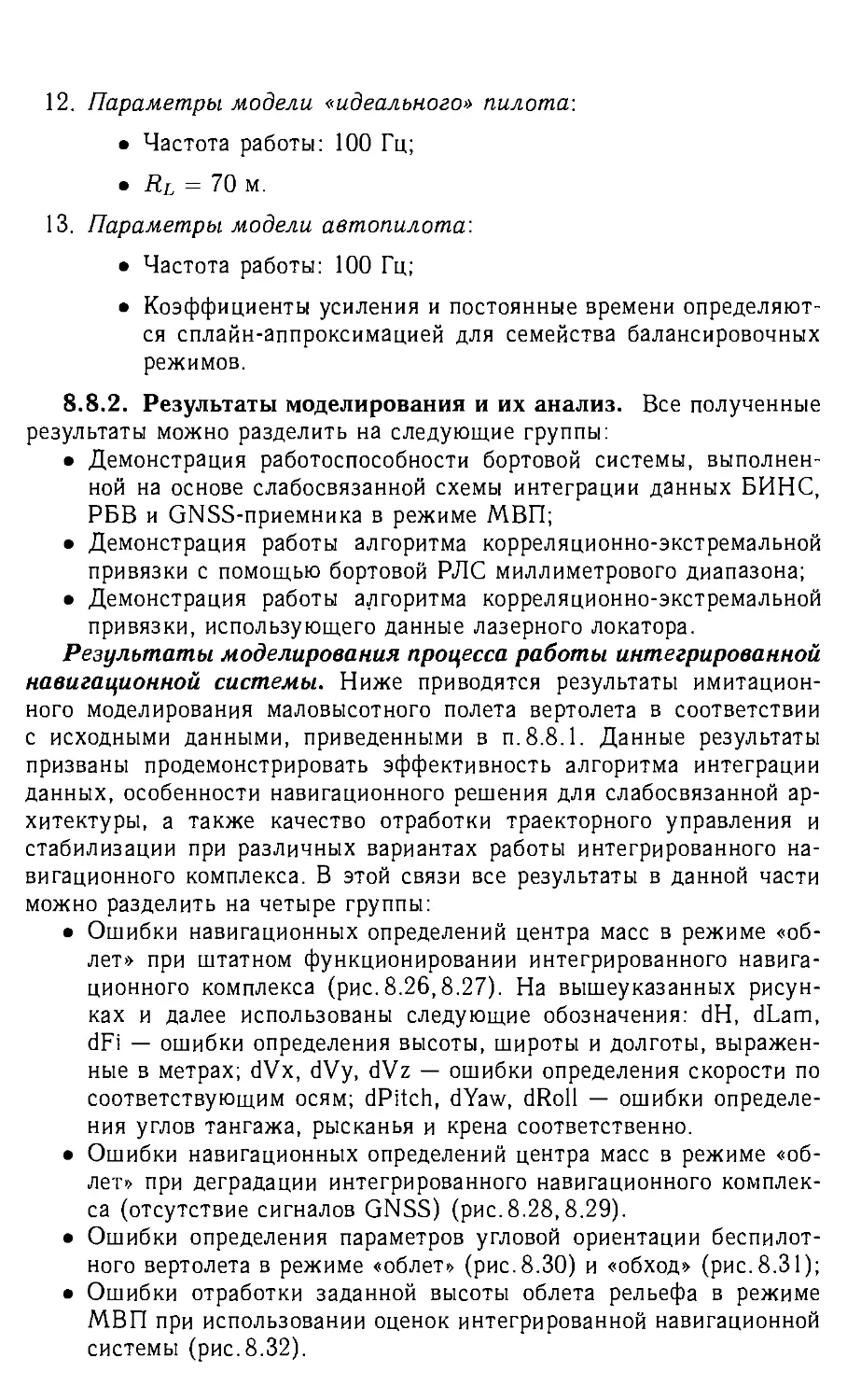
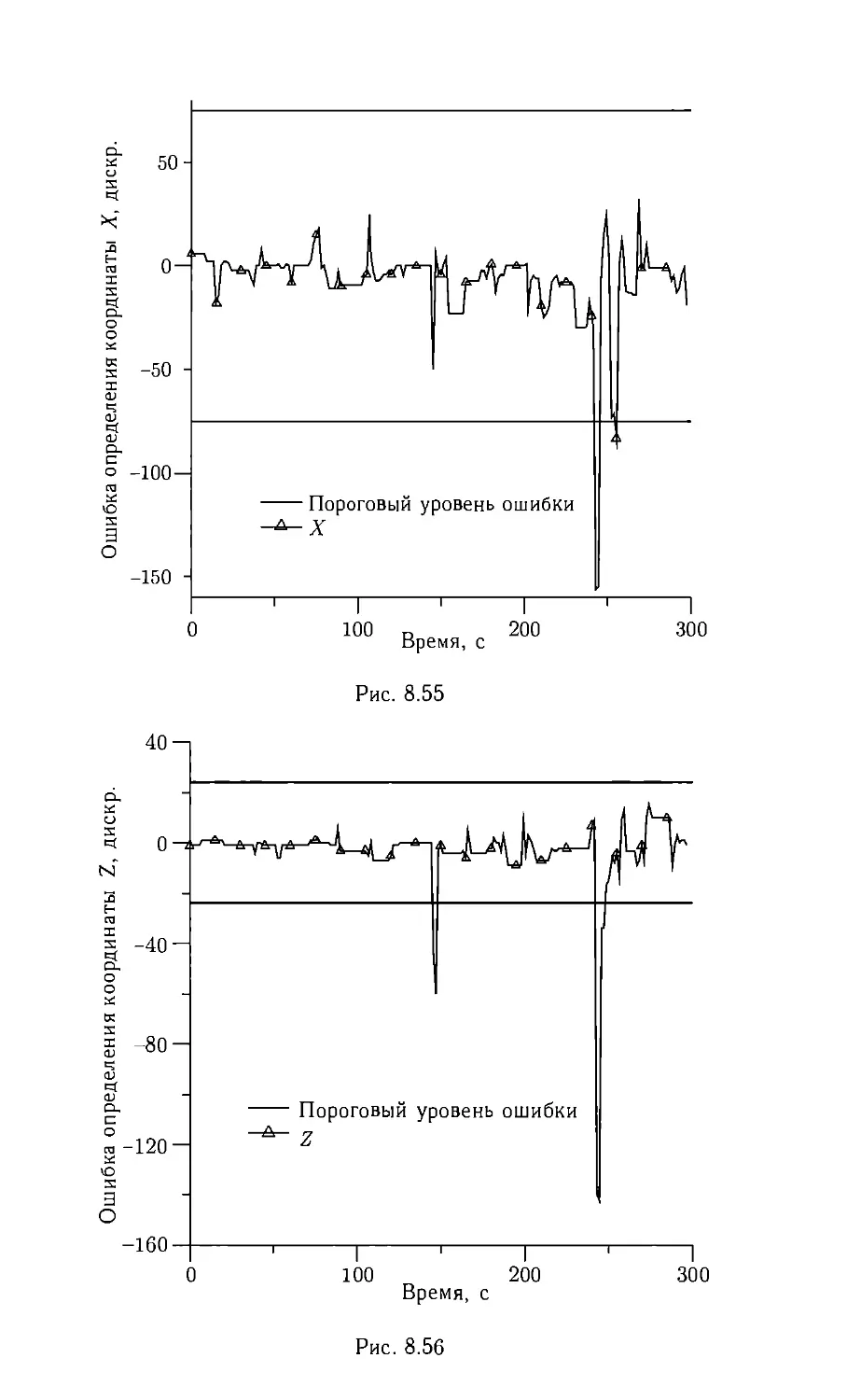
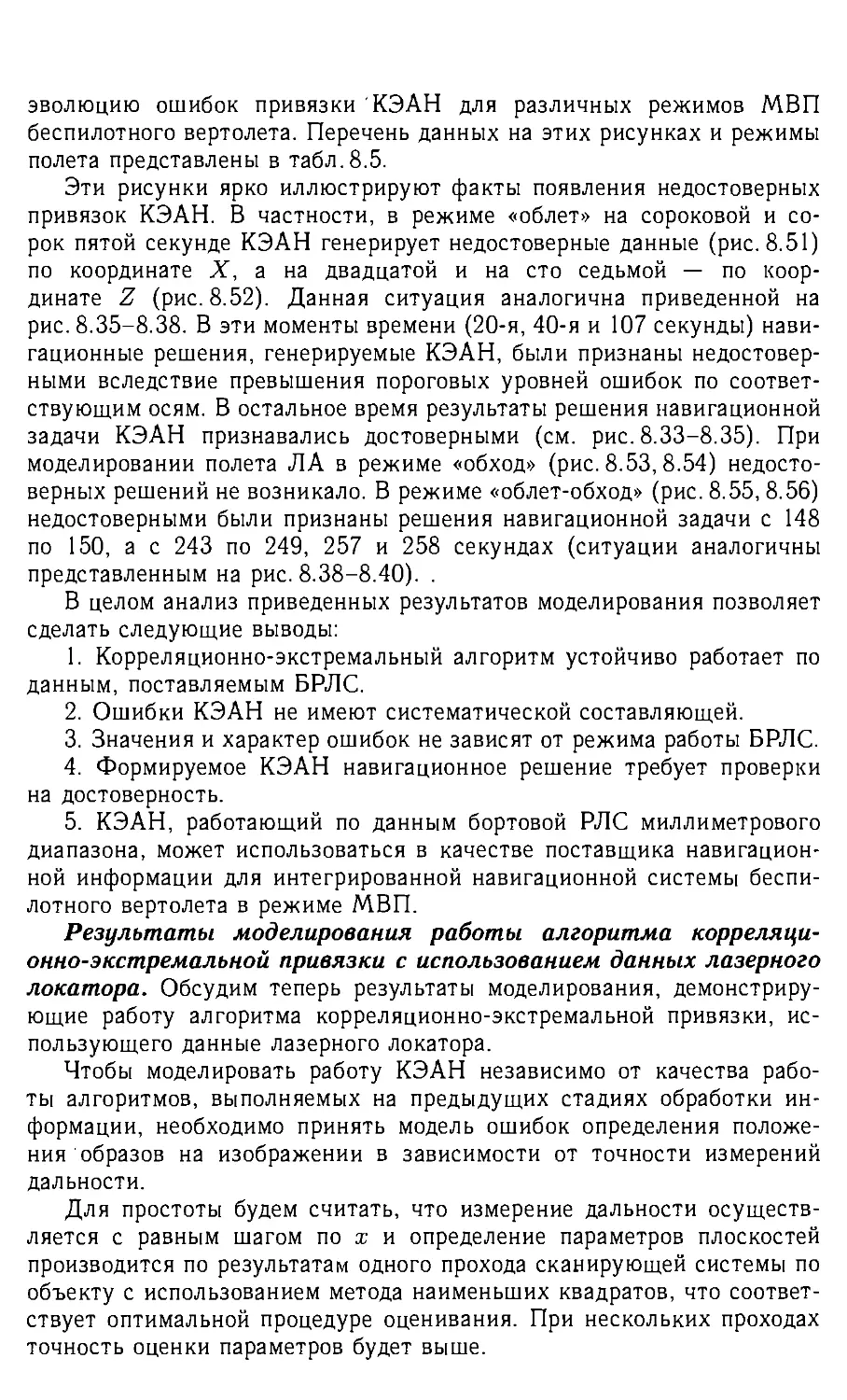
8.8.2. Результаты моделирования и их анализ (479).
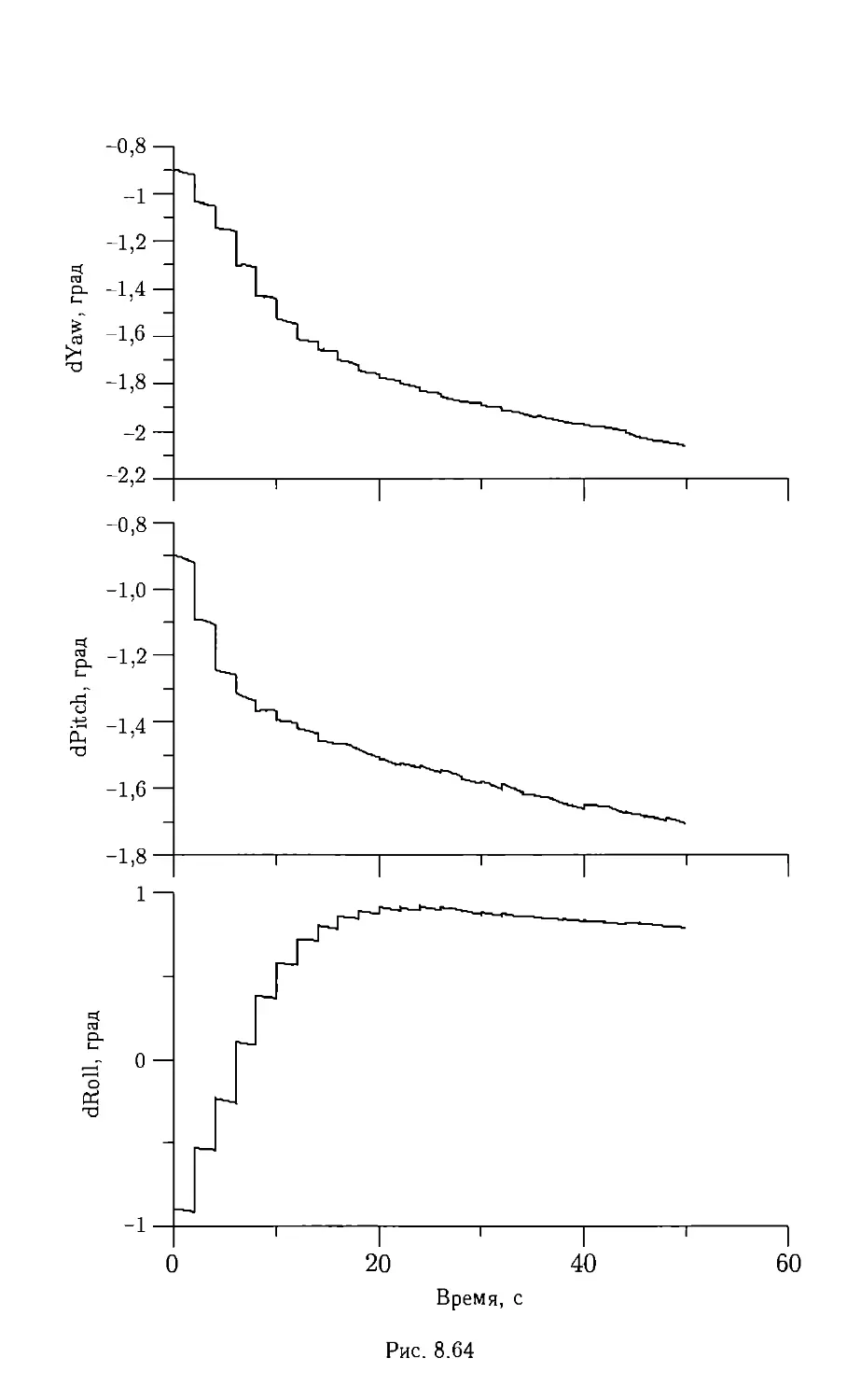
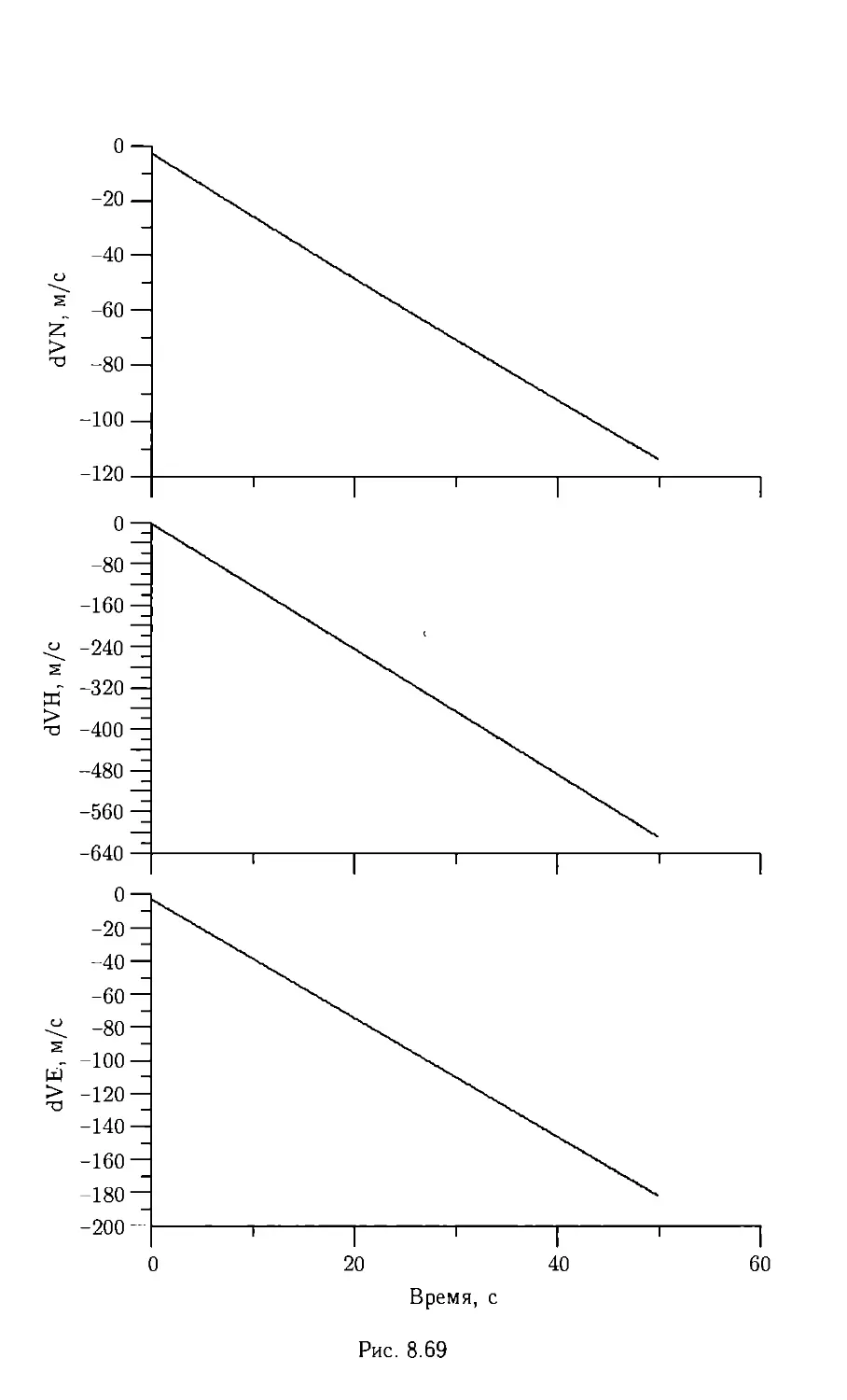
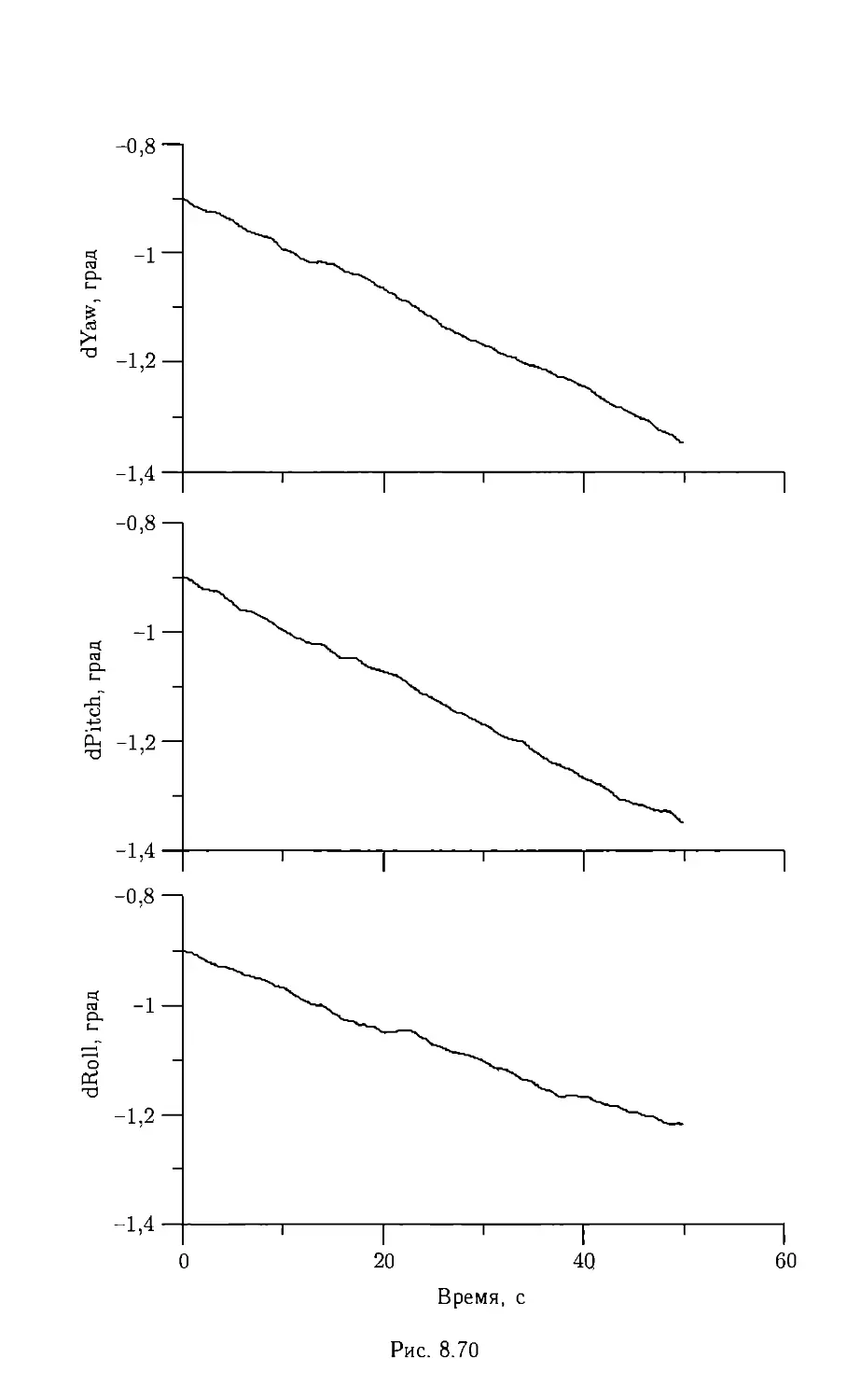
8.9. Имитационное моделирование маловысотного полета при глубоко
интегрированной архитектуре бортового контура 501
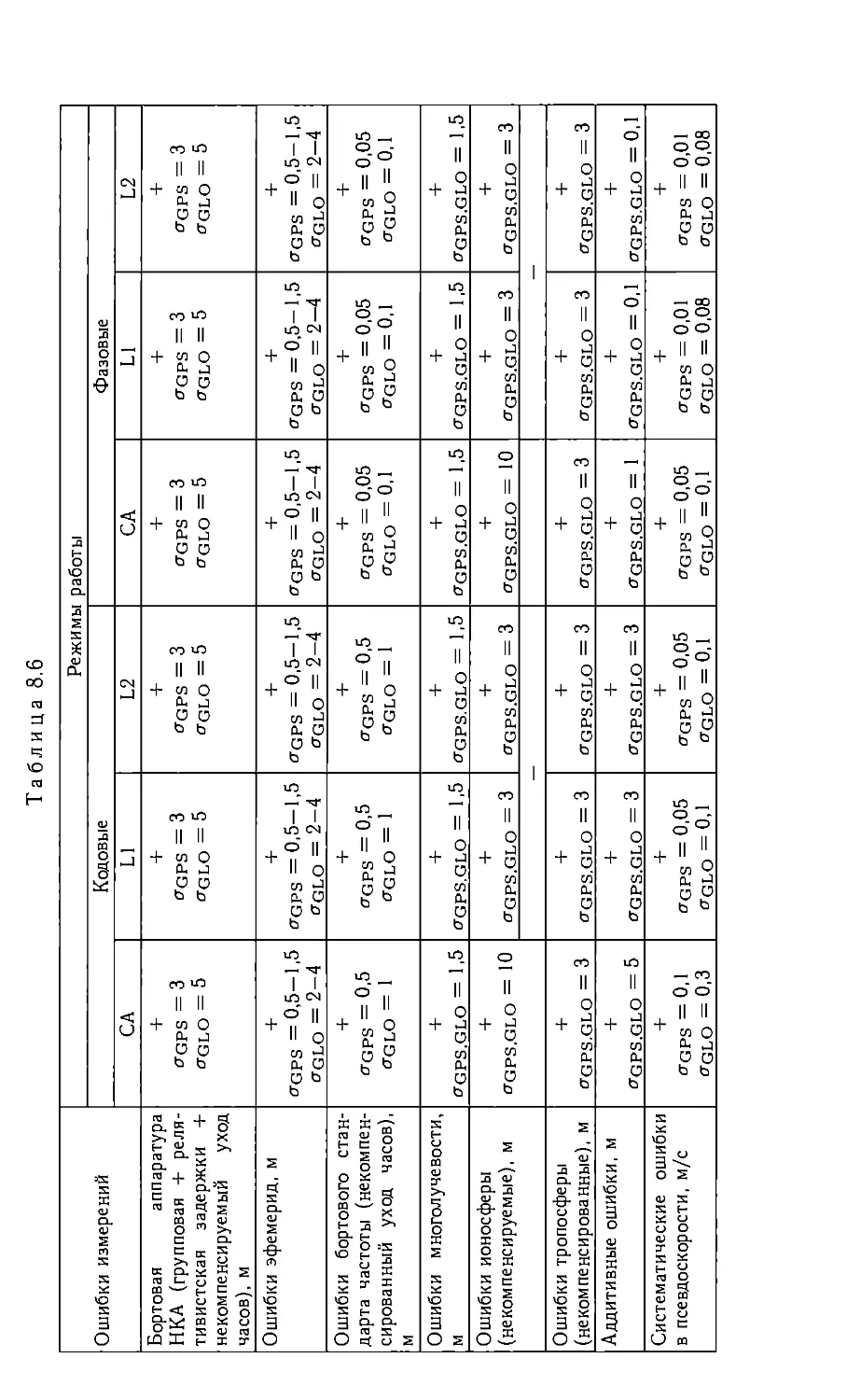
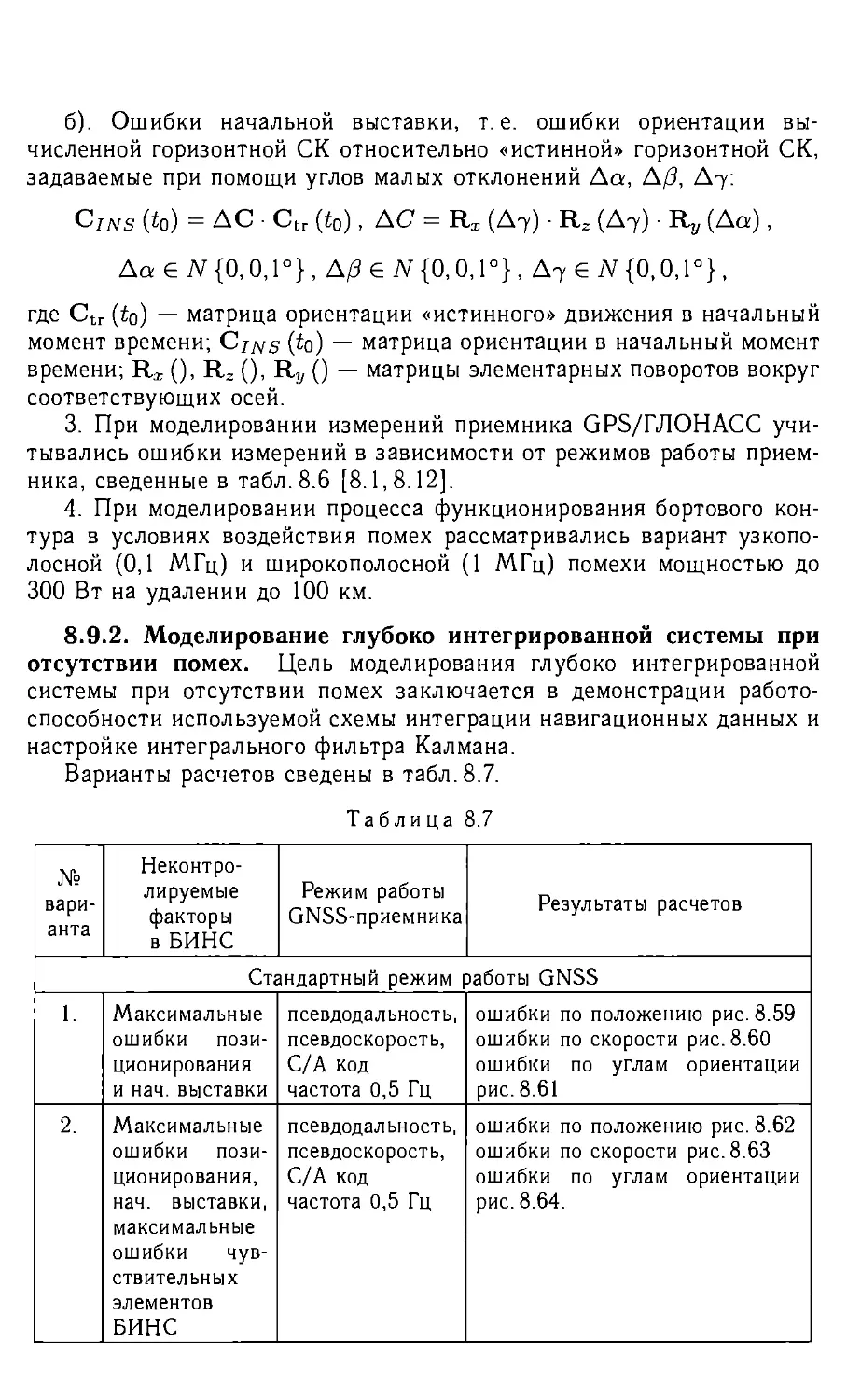
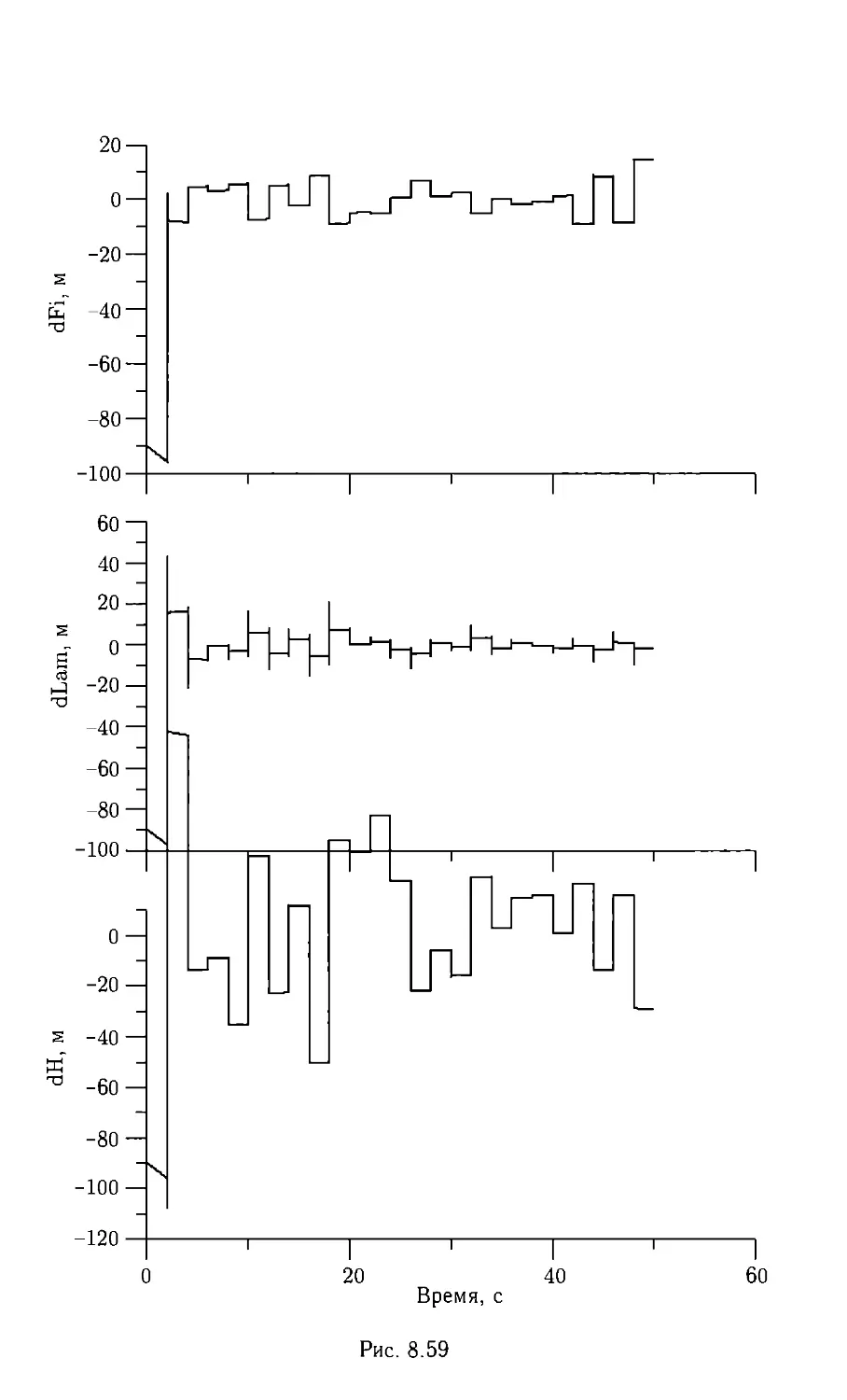
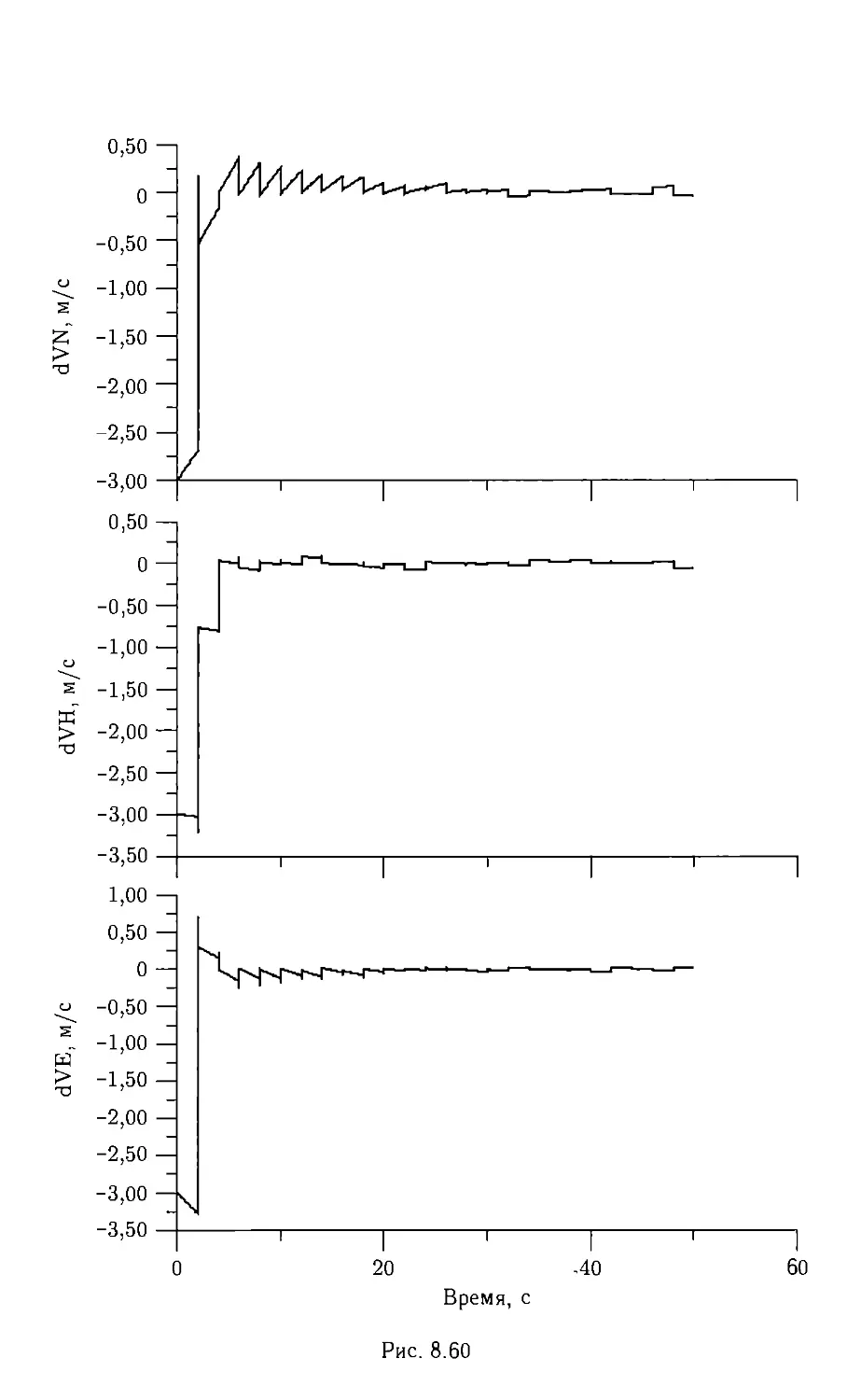
8.9.1. Исходные данные для моделирования (501). 8.9.2.
Моделирование глубоко интегрированной системы при отсутствии
помех (504). 8.9.3. Моделирование глубоко интегрированной
системы в условиях помех (517).
Список литературы к главе 8 517
Приложение к главе 1 519
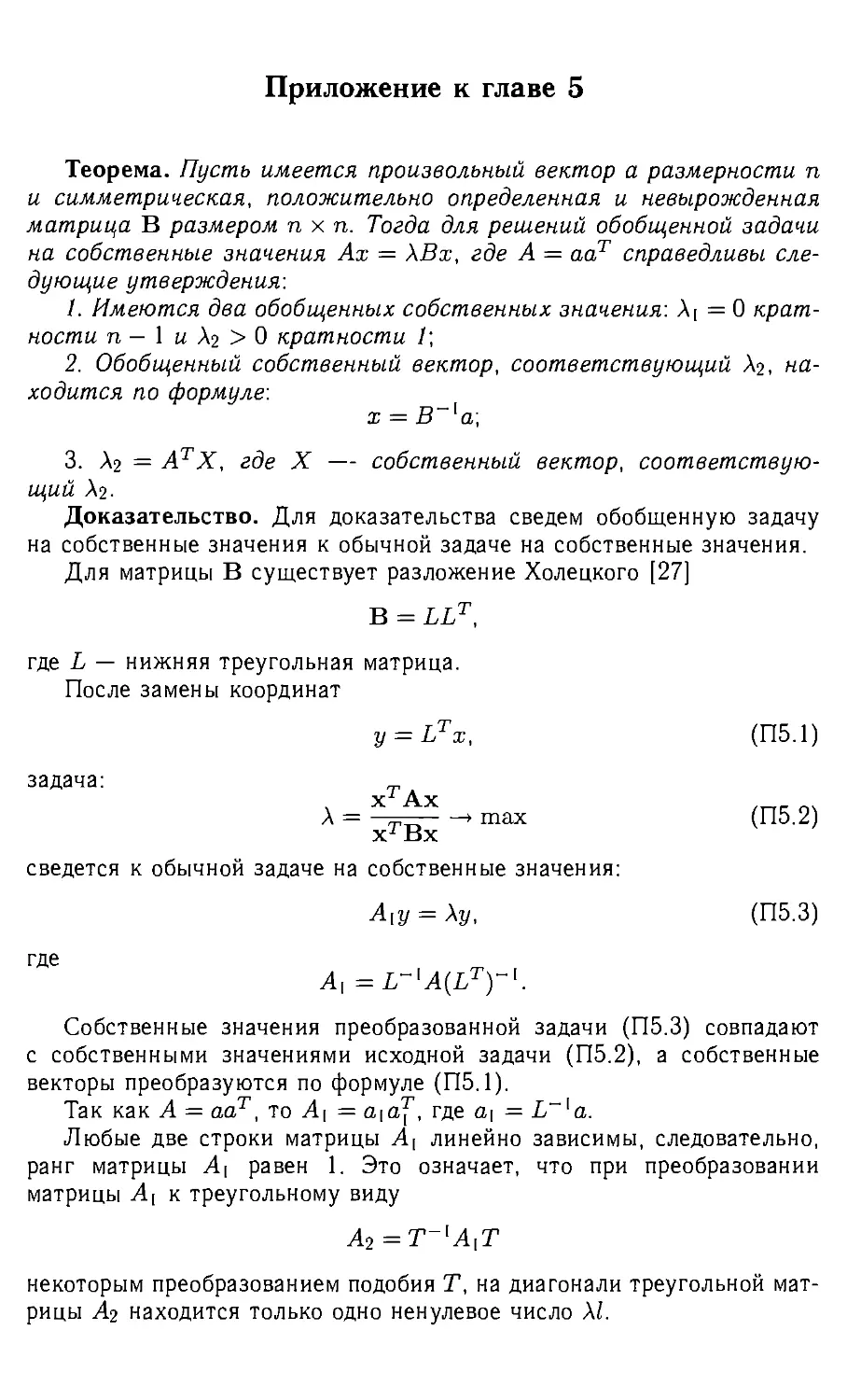
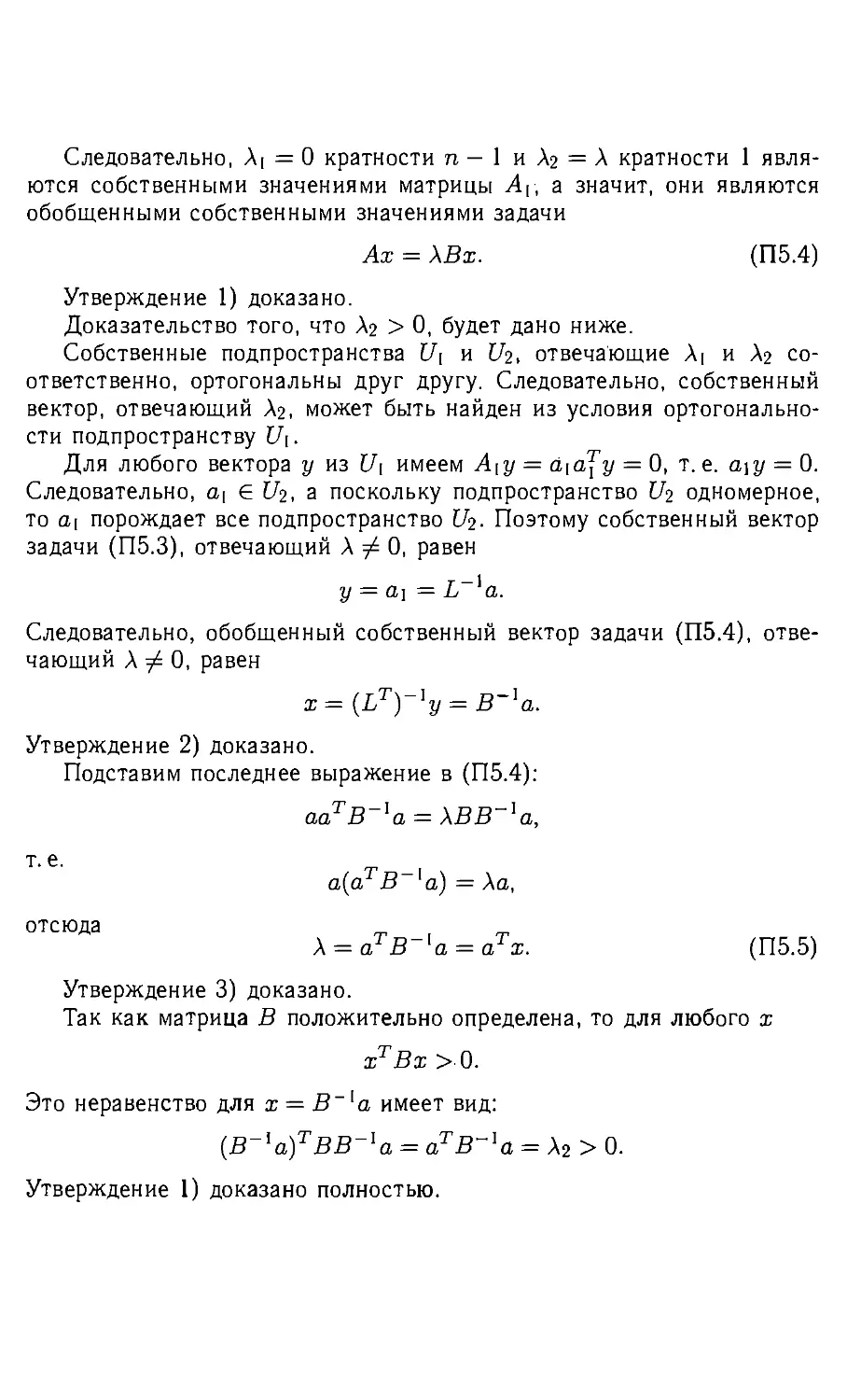
Приложение к главе 5 552
Введение
Как известно, процесс постоянного совершенствования
авиационных вооружений базируется, в том числе, на самых современных
достижениях в области информационных технологий.
При этом активно учитываются передовые тенденции в стратегии и
тактике решения целевых задач боевой авиации. Одной из важнейших
тенденций в этой области является активное привлечение беспилотных
летательных аппаратов (БПЛА) для реализации упомянутых выше
задач в самых различных формах и, в частности, создание так
называемых смешанных тактических групп ЛА, включающих как
пилотируемые, так и беспилотные ЛА.
Многообразие существующих и проектируемых БПЛА, множество
возможных вариантов их оснащения, разнообразие тактики их
применения приводят нас к необходимости осуществить классификацию
БПЛА, позволяющую проанализировать тенденции совершенствования
бортовых информационно-управляющих комплексов БПЛА и
предложить подход к формированию их облика.
Один из вариантов подобной классификации предложен в первой
главе настоящей монографии, где, кроме того, обсуждаются
возможности БПЛА как современного средства решения задач боевой авиации.
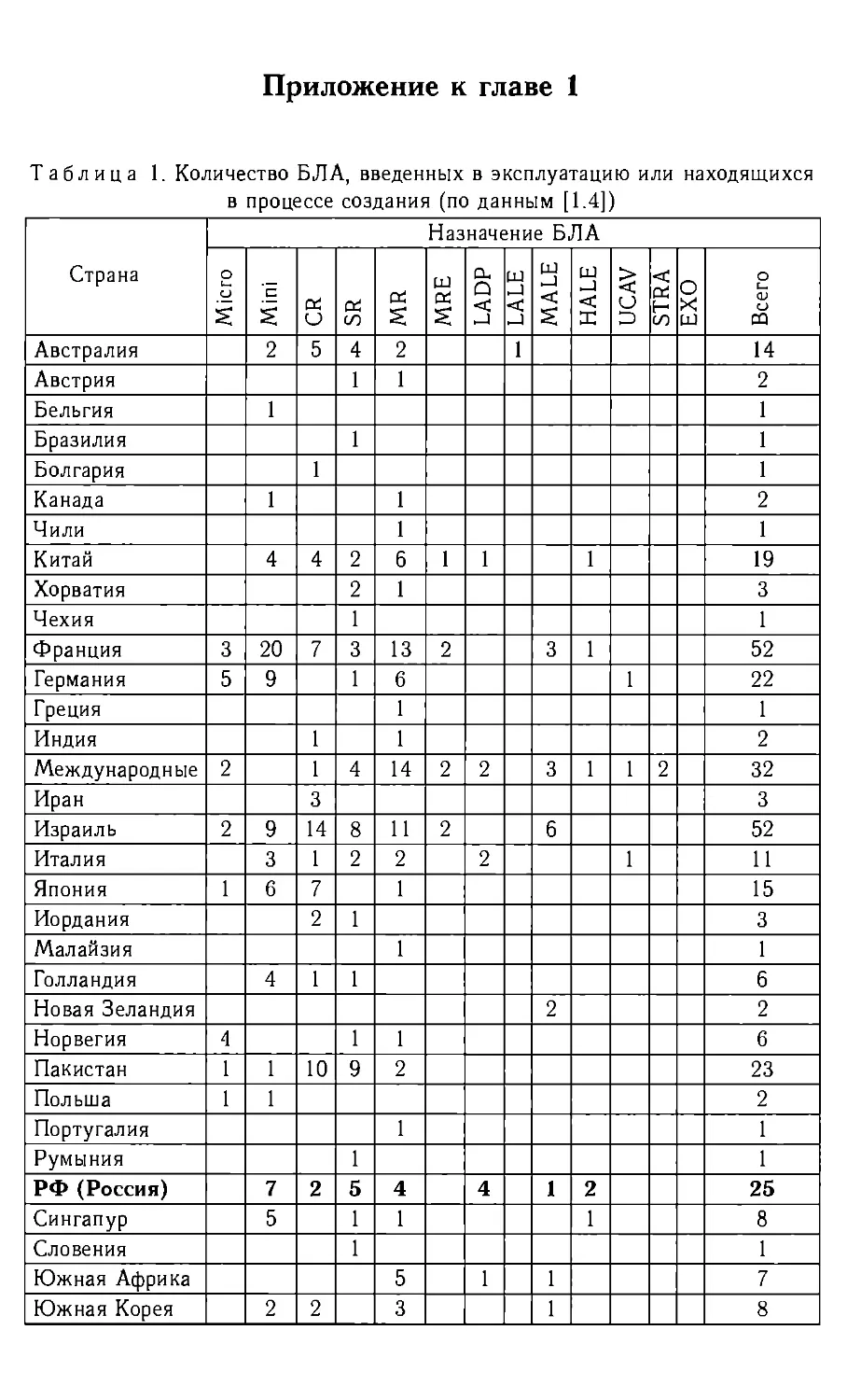
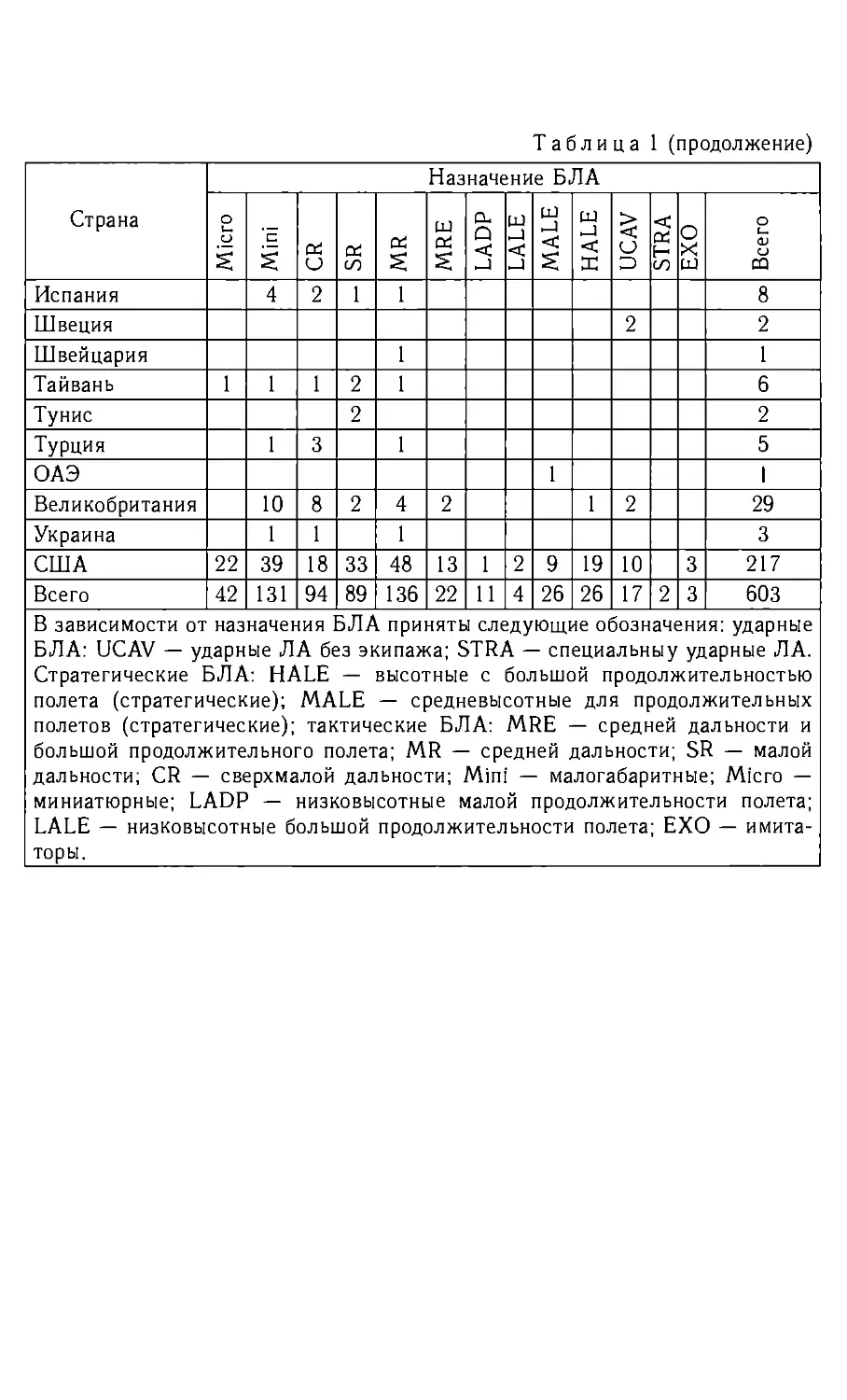
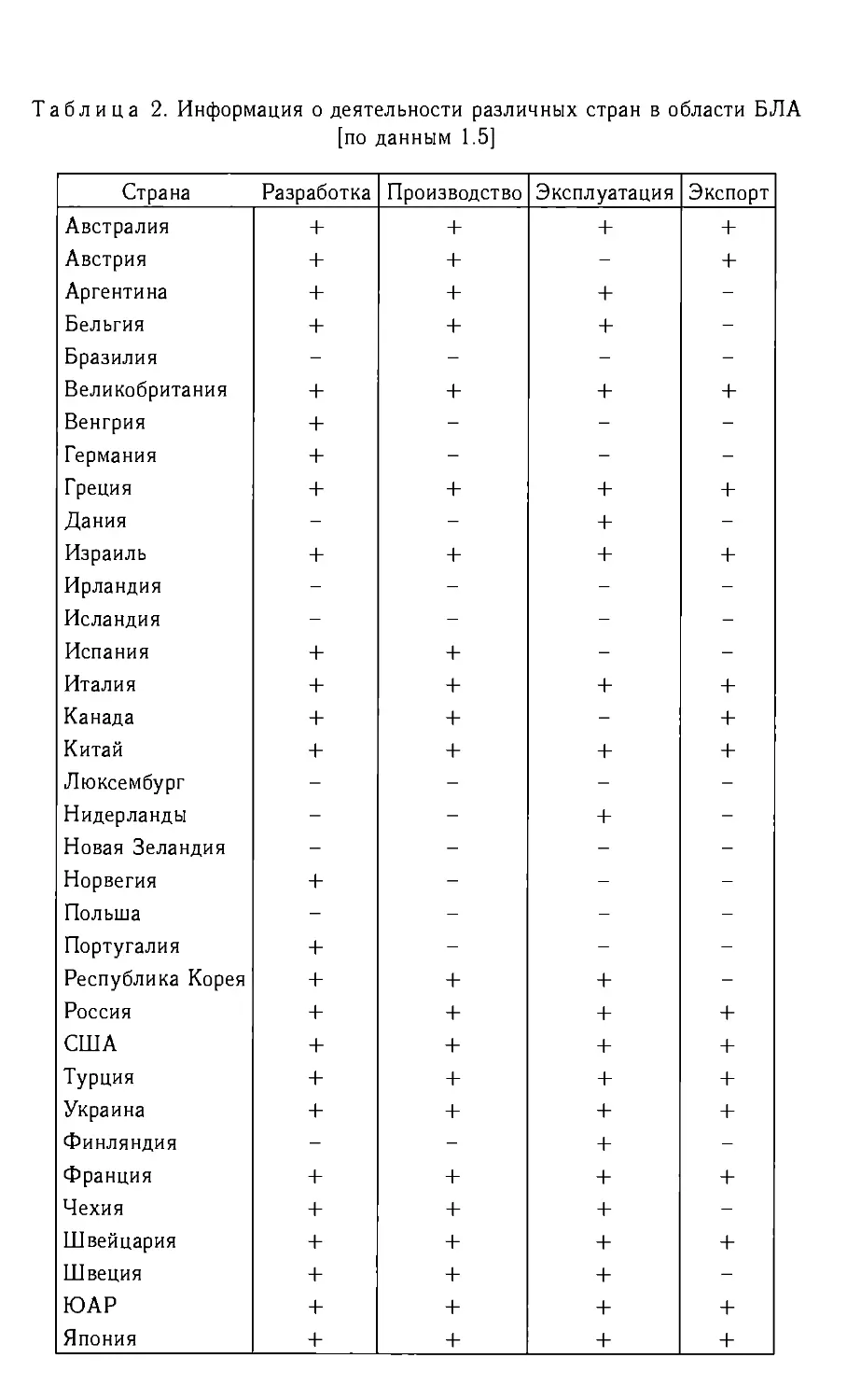
В приложении к этой главе приведены таблицы, содержащие
характеристики значительного числа отечественных и зарубежных БПЛА
различного назначения.
Анализ характеристик как самих БПЛА, так и их оснащения,
проведенный на основе предложенной классификации, приводит нас
к однозначному выводу о том, что наиболее приемлемым вариантом
оснащения существующих и перспективных БПЛА является
интегрированный информационно-управляющий комплекс, обеспечивающий
решение задач навигации, управления движением и наведения.
Именно этот комплекс является средоточием всех последних
достижений в области информационных технологий:
— надежных, компактных и высокоточных бесплатформенных инер-
циальных систем (БИНС), использующих перспективные инерци-
альные чувствительные элементы (ЧЭ);
— GNSS-приемников, способных работать с сигналами GPS,
ГЛОНАСС и Galileo;
— высокопроизводительных бортовых вычислителей;
— бортовых радиолокационных станций (БРЛС) миллиметрового
диапазона и лазерных локаторов (ЛЛ);
— аппаратно-программных решений, обеспечивающих
функционирование интегрированного информационно-управляющего
комплекса в условиях активных помех приему сигналов GNSS;
— современных методов обработки изображений;
8
Введение
— методов интеграции данных от различных источников
навигационной информации, обеспечивающих функционирование
интегрированного информационно-управляющего комплекса при
различных уровнях его деградации (отсутствие данных GNSS, БРЛС
или ЛЛ);
— алгоритмов навигации и наведения, использующих результаты
обработки и корелляционно-экстремальной привязки
изображений, полученных в различных диапазонах длин волн.
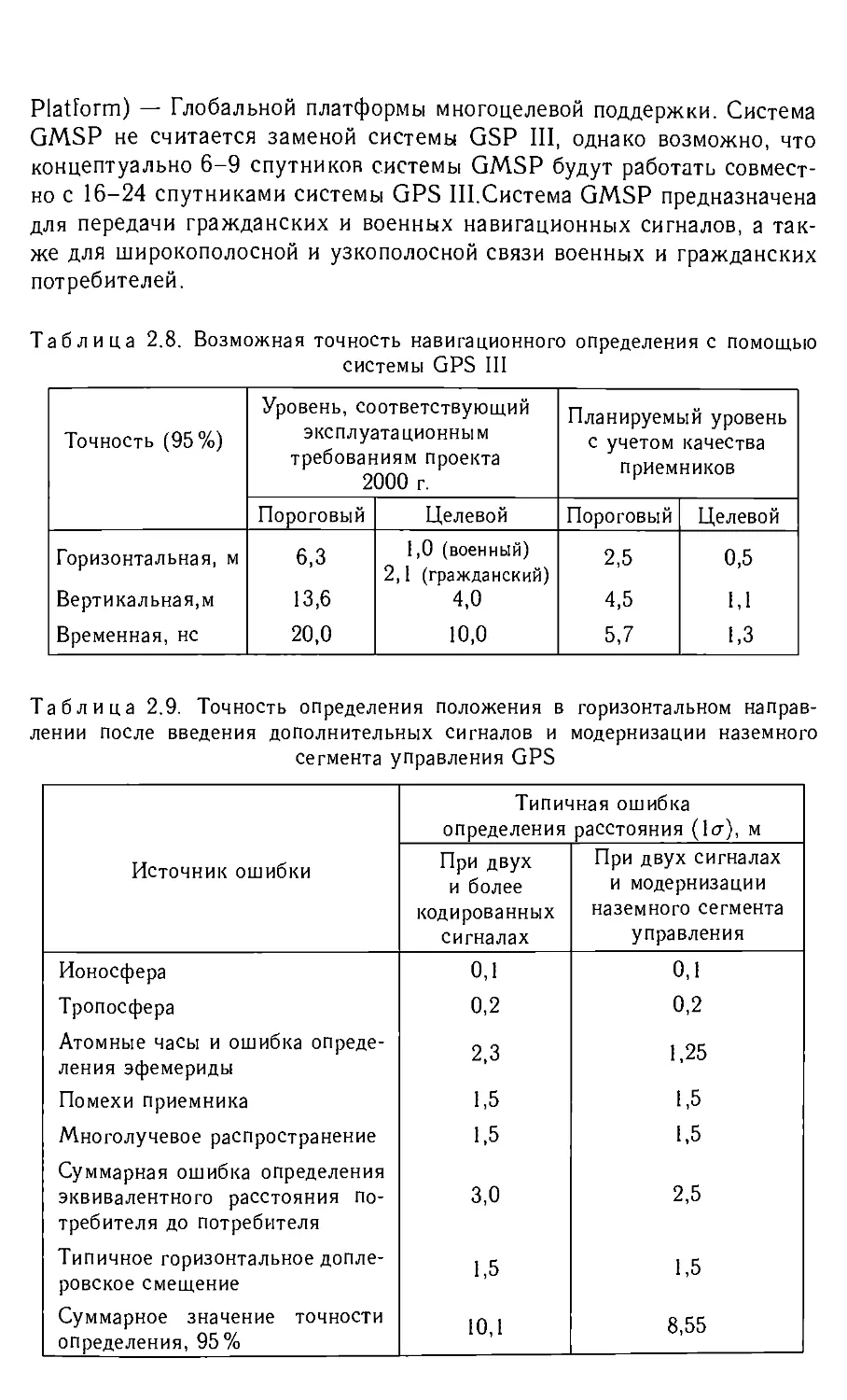
Анализ показывает, что многоканальный приемник сигналов
GNSS (GPS, ГЛОНАСС и Galileo) является необходимым элементом
всех существующих и проектируемых интегрированных
информационно-управляющий комплексов БПЛА различного назначения. В связи
со сказанным, во второй главе монографии приводятся сведения о
фактическом текущем статусе и планируемых усовершенствованиях
существующих (GPS и ГЛОНАСС) и создаваемой (Galileo) глобальных
спутниковых навигационных систем. При этом, учитывая широкую
осведомленность специалистов об этих системах в целом, основное
внимание уделяется процессам совершенствования характеристик
GPS и ГЛОНАСС и процедурам развертывания Galileo. В этой
же главе приведена типовая функциональная схема современного
GNSS-приемника, а также стандартные алгоритмы решения
навигационной задачи потребителя на основе обработки как кодовых, так
и фазовых измерений с учетом всего спектра ошибок, возникающих
при такой обработке. Здесь же даются математические модели
упомянутых ошибок и обсуждается вопрос влияния динамики
БПЛА на функционирование GNSS-приемника. Излагаются основные
принципы реализации дифференциальных режимов работы GNSS.
Третья глава монографии посвящена бесплатформенным инерци-
альным системам (БИНС). Этот материал в основном следует [1,2]
и содержит описание алгоритмов функционирования БИНС в
различных системах координат (инерциальной, географической, горизонтной),
а также описание математической модели ошибок БИНС. Новым по
сравнению с [1,2] является материал, касающийся численной
реализации алгоритмов функционирования БИНС и анализа возникающих
при этом трудностей.
Четвертая глава посвящена чувствительным элементам (ЧЭ)
БИНС: гироскопам и акселерометрам. Приводятся математические
модели процессов функционирования двухстепенных гироскопов (ДУ-
Сов) различных типов (динамически настраиваемых, лазерных,
волоконно-оптических, микромеханических вибрационных), фактически
используемых во все существующих и перспективных БИНС, а также
математические модели ошибок этих устройств. Аналогичные данные
приведены по существующим и перспективным акселерометрам.
Особое внимание уделяется анализу областей возможного применения
различных типов гироскопов и акселерометров на борту БПЛА
различного назначения. Приложение к этой главе содержит таблицы,
Введение
9
в которых приведены характеристики используемых для реализации
БИНС гироскопов и акселерометров.
Пятая глава содержит теоретический материал, посвященный
существующим и перспективным методам обработки изображений в
интересах использования этих результатов для решения задач навигации
и наведения БПЛА. Значительное внимание здесь уделяется
перспективным методам так называемой субпиксельной привязки объектов на
изображениях различной физической природы. Приводятся
многочисленные примеры, иллюстрирующие эффективность подобных методов.
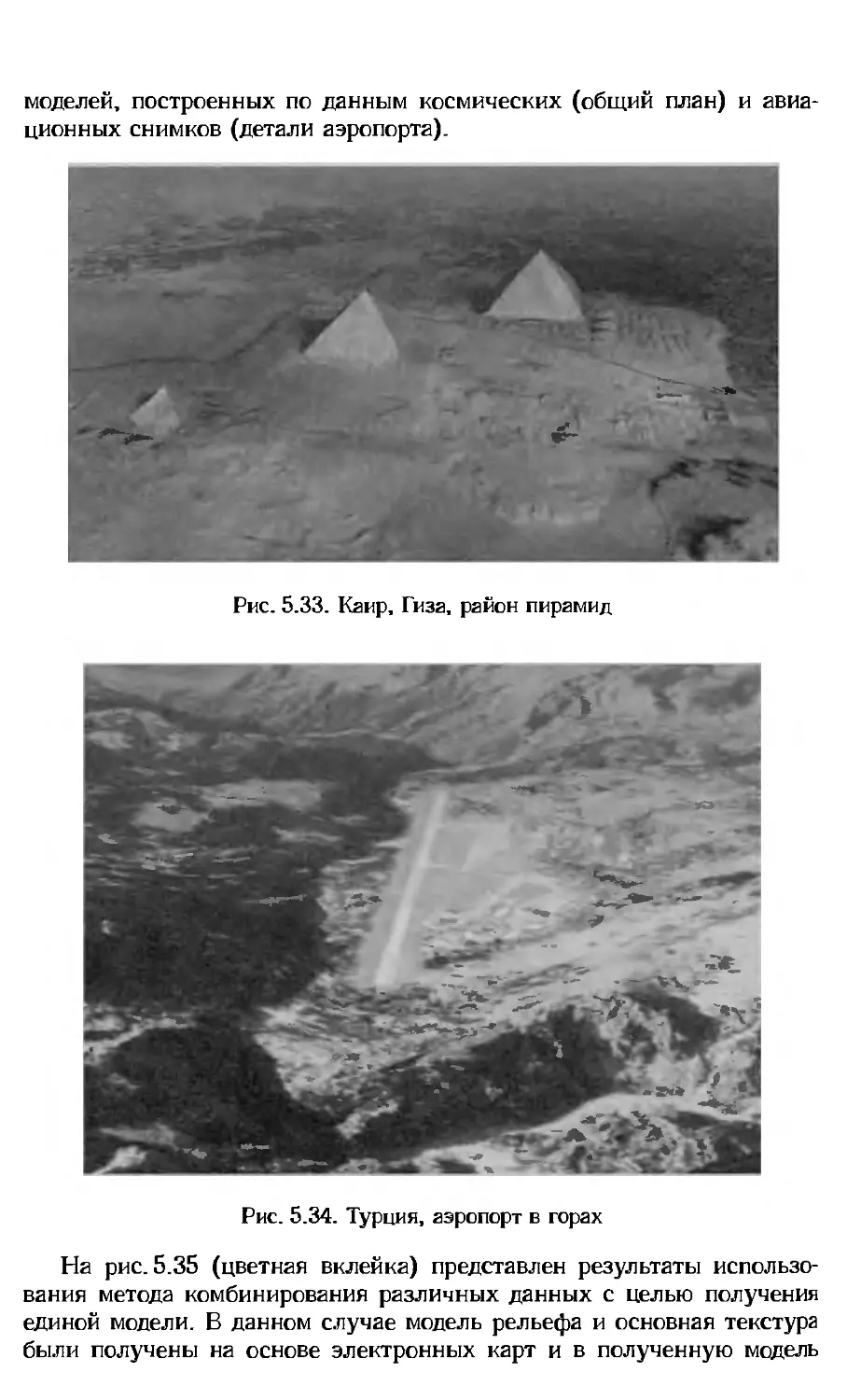
Шестая глава монографии посвящена примерам использования
результатов обработки изображений, полученных на основе методов и
алгоритмов, описанных в предыдущей главе, для решения задач
наведения-и навигации БПЛА с учетом возможности интеграции данных,
полученных путем обработки изображений, с данными, поставляемыми
БИНС. Рассматривается задача посадки БПЛА на необорудованный
аэродром, а также задачи определения положения, скорости и
ориентации БПЛА на основе обработки так называемого оптического потока.
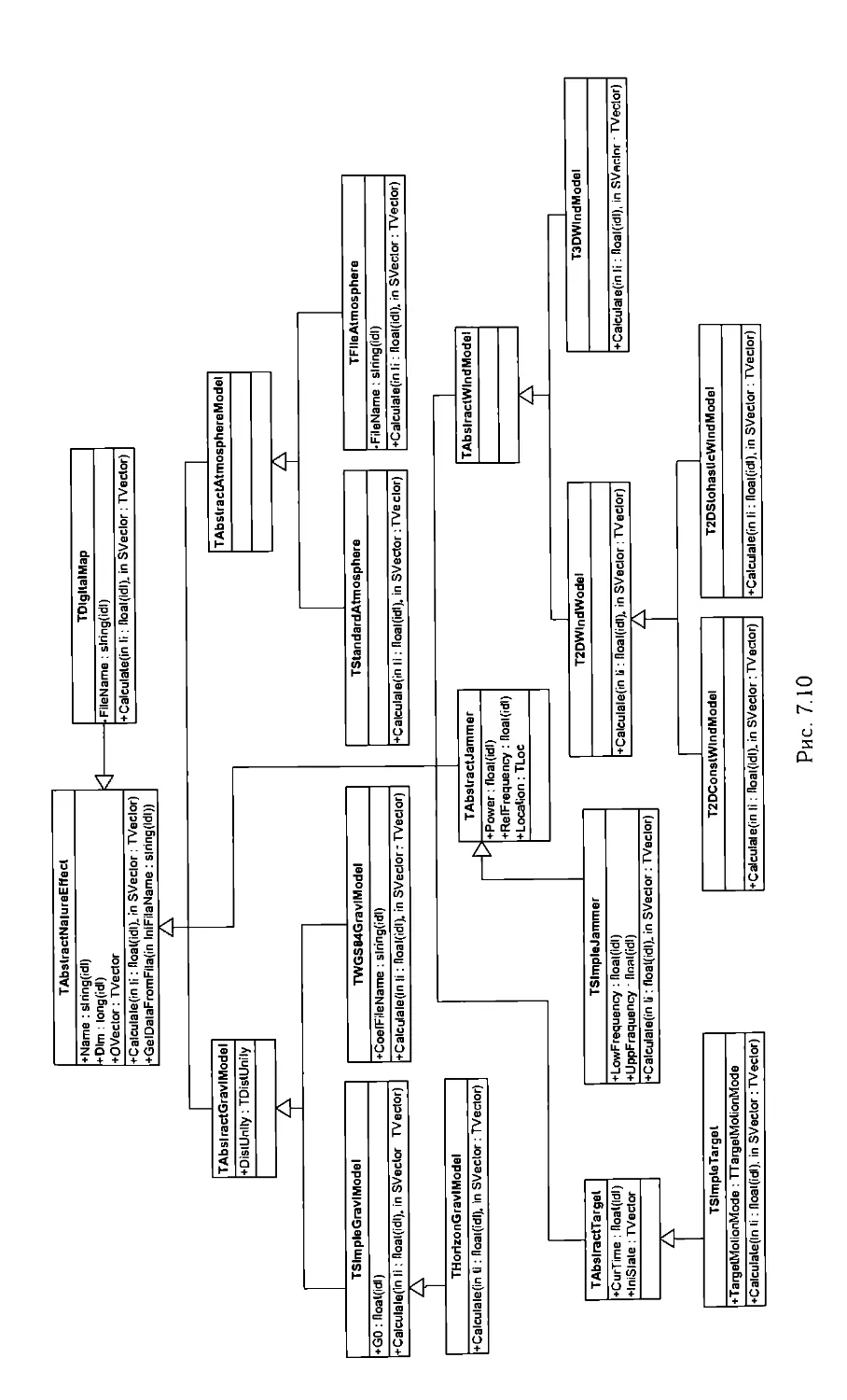
Седьмая глава содержит описание современных представлений об
объектно-ориентированном подходе к решению задачи имитационного
моделирования процесса функционирования интегрированных
информационно-управляющих комплексов БПЛА. Такое моделирование
рассматривается авторами как конструктивное средство для решения
задачи формирования облика интегрированного
информационно-управляющего комплекса, включая определение его архитектуры, программно-
аппаратного состава и алгоритмов функционирования, а также
предварительную оценку его возможностей.
Наконец, восьмая глава монографии посвящена формированию
интегрированного информационно-управляющего комплекса
перспективного беспилотного вертолета, решающего свои целевые задачи в
режиме маловысотного полета в условиях активных помех приему
сигналов GNSS. Глава содержит детальное описание различных вариантов
структуры такого комплекса, математических моделей и алгоритмов
функционирования его элементов (БИНС, GNSS-приемник, БРЛС,
ЛЛ) с учетом широкого спектра неконтролируемых факторов
различной физической природы и активных помех, а также многочисленные
результаты имитационного моделирования этого комплекса в режиме
маловысотного полета при различных уровнях его деградации и
влиянии активных помех.
Книга предназначена для специалистов, работающих в
промышленности в области создания соответствующих систем, аспирантов,
проходящих подготовку по специальности «Системный анализ, обработка
информации и управление» и «Математическое моделирование,
численные методы и программные комплексы». Она будет полезна также и для
студентов высших учебных заведений, обучающихся по специальности
«Прицельно-навигационные системы летательных аппаратов» в
рамках направления «Интегрированные системы летательных аппаратов»,
10
Список литературы к Введению
поскольку ее содержание соответствует программам дисциплин
«Статистическая динамика и оптимизация комплексных информационных
систем летательных аппаратов», «Комплексные системы наблюдения»,
«Компьютерные технологии».
Авторы выражают искреннюю благодарность с. н. с, к. т. н. В. В. Ше-
валю за материалы, включенные в главу 1 настоящего издания,
д.т.н. проф. В.А.Бартеневу за материалы, включенные в гл.2,
доценту, к.т.н. В.Е.Плеханову за материалы, включенные в главу 4,
к. т. н. Н. В. Удаловой и к. т. н. И. В. Ярковой за материалы, включенные
в главу 6, а также д. т.н. Ю.А.Соловьеву за ценные замечания,
сделанные им по содержанию главы 2.
Список литературы к Введению
1. Управление и наведение беспилотных маневренных летательных
аппаратов на основе современных информационных технологий / Под ред.
М. Н. Красилыдикова, Г. Г. Себрякова. М.: Физматлит, 2003.
2. Управление и наведение беспилотных маневренных летательных
аппаратов на основе современных информационных технологий / Под ред.
М. Н. Красилыдикова, Г. Г. Себрякова. 2-е изд. М.: Физматлит, 2005.
Глава 1
СОВРЕМЕННЫЕ И ПЕРСПЕКТИВНЫЕ
БЕСПИЛОТНЫЕ ЛЕТАТЕЛЬНЫЕ АППАРАТЫ
КАК СРЕДСТВА ВЫПОЛНЕНИЯ ЗАДАЧ
БОЕВОЙ АВИАЦИИ
1.1. Классификация беспилотных летательных
аппаратов
В условиях современного боевого противостояния чрезвычайно
сложно формировать адекватные ответы на быстроменяющиеся
обстоятельства и возникающие угрозы.
Одновременно ужесточаются требования к полноте
информационного обеспечения процессов управления боевыми действиями и, как
следствие, расширяются требования к авиационным системам как
поставщикам разведывательной информации в информационные сети
систем управления более высокого уровня [1.1].
В гражданских областях жесткие требования предъявляются к
оперативности и полноте получаемой информации о параметрах
антропогенного воздействия на природную среду с целью оперативной
выработки адекватных реакций. Учитывая пространственные характеристики
природной среды с внедренными в нее антропогенными объектами,
существенную роль в получении информации и в оперативном
реагировании на изменяющуюся ситуацию играют авиационные системы.
Принципиальным отличием данной области деятельности по
сравнению с военной является отсутствие целенаправленного
противодействия.
Реалии XXI века привели к формированию новой области
деятельности, в определенном смысле занимающей промежуточное место
между классической, военной и гражданской: борьба с терроризмом и
наркомафией, браконьерством и организованной преступностью. Здесь
также необходимы полнота оперативной информации и высокая
скорость реакции на возникающие угрозы. Противодействие в данной
области существует, но не столь всеобъемлющее, каким оно оказывается
в военной области.
Все вышесказанное приводит к усиливающемуся вниманию к
созданию беспилотных авиационных систем (БАС) на основе беспилотных
летательных аппаратов (БЛА — Unmanned aerial vehicle — UAV). Здесь
под термином «БАС» понимается взаимосвязанная совокупность БЛА,
наземной системы управления (НСУ) и технических средств
эксплуатации (ТСЭ), включающих в себя наземную аппаратуру радиосвязи,
оборудование взлета и посадки, транспортных средств перемещения
оборудования БАС [1.2].
В иностранной и отечественной литературе под термином «БЛА»
принято понимать дистанционно пилотируемые (ДПЛА) и
управляемые автоматически (БАЛА) ЛА. Различие между этими типами БЛА
связано лишь со степенью вмешательства оператора в выполнение
целевой задачи БАС (что, конечно, влияет на состав и технические
характеристики бортового оборудования). В дальнейшем все
рассматриваемые беспилотные летательные аппараты будем обозначать общим
термином «БЛА», вне зависимости от степени автоматизации их
функционирования.
Под термином «БЛА» будем понимать в дальнейшем летательный
аппарат без экипажа на борту, оснащенный двигателем, управляемый
автономно или дистанционно, способный нести нагрузку для
выполнения целевой функции [1.3].
Стремительный прогресс в создании БАС различного назначения
обусловлен, во многом, двумя факторами (экономическим и научно-
техническим):
• значительным ростом стоимости и затрат на эксплуатацию в
мирное и военное время пилотируемой авиационной техники;
• общим научно-технологическим прогрессом и развитием
компьютерных технологий.
К преимуществам БАС перед системами с пилотируемыми ЛА,
а, соответственно, и к преимуществам БЛА перед пилотируемыми ЛА
можно также отнести следующие:
1. Экономический показатель продукции. Если для пилотируемых
самолетов этот показатель, характеризуемый отношением «стоимость
разработки : производство: эксплуатация», равен 1 :3 : 6, то для БЛА он
равен 1:2,5:3. При этом в абсолютном выражении стоимость БЛА
существенно ниже пилотируемых ЛА, что позволяет применять их
в большем количестве;
2. Экономический показатель эксплуатации. Существенно меньшие
затраты на обучение операторов НСУ по сравнению с затратами на
обучение пилота, меньшие затраты на материально-техническое
обслуживание БЛА. Так, серийный беспилотный боевой вертолет должен
стоить в 2-5 раз меньше, чем, например, пилотируемый вертолет
«Команч» фирмы «Боинг-Сикорский», а затраты на его эксплуатацию
будут вдвое меньше;
3. Показатель эффективности затрат на решение целевой задачи.
Сравнительно высокий относительный вес полезной нагрузки: у
больших БЛА он равен 0,1, у малоразмерных — (0,25 4- 0,5);
4. Показатель оперативности применения. Более высокая степень
готовности и мобильности;
5. Летный показатель. Благодаря отсутствию ограничивающих
факторов, связанных с наличием на борту пилота, для БЛА допустимы
полеты продолжительностью более суток, перегрузки более 10 g,
длительные полеты в различных положениях (например, «вверх ногами»);
6. Показатель функциональных возможностей. Отсутствие
человека позволило использовать аэродинамическую компоновку «без
вертикального оперения» (БЛА имеет два равноправных рабочих
положения);
7. Показатель живучести авиационной системы. Сравнительно
небольшие размеры определяют низкую эффективную площадь
рассеяния (ЭПР), что позволяет преодолеть ПВО противника. БЛА
характеризуется также меньшей уязвимостью на стартовой позиции.
8. Эргатический показатель. Улучшенная комфортность
применения — оператор НСУ, в отличие от пилота, не подвергается
воздействиям вибраций, шума, бафтинга, а его жизни не угрожает
непосредственная опасность.
9. Экологический показатель. Существует возможность снизить
ущерб, причиняемый окружающей среде.
При этом БЛА присущи отдельные недостатки по сравнению с
пилотируемыми ЛА, в частности:
1. Меньшая гибкость при реализации заданной целевой функции.
2. Существенное повышение требований к информационной
составляющей бортового оборудования и к управлению комплексом бортового
оборудования БЛА при реализации целевой функции.
3. Трудности создания высокопроизводительных каналов связи
между оператором и БЛА (или между несколькими БЛА при выполнении
целевой задачи в групповом полете). Такая связь возможна пока на
расстоянии только почти прямой видимости. Для достижения большей
дальности возникает необходимость применения радиорелейных
станций или других воздушных (космических) платформ.
4. Трудности при полетах над густонаселенными районами в
мирное время, особенно в воздушном пространстве, серьезно насыщенном
гражданской авиацией.
В конечном счете перечисленные недостатки в значительной
мере компенсируются преимуществами БЛА. Поэтому практически все
развитые страны в той или иной степени занимаются разработкой
БЛА для военных и гражданских целей. Детальная информация о
разработках в данных предметных областях приведена в Приложении
к данной главе (табл. 1 и 2).
В настоящее время не существует единой общепринятой
классификации БЛА. Тем не менее, опираясь на отечественные и зарубежные
разработки, можно предложить их классификацию, основанную,
главным образом, на целевых функциях подобных аппаратов и технических
средствах выполнения этих функций.
При этом следует помнить, что классификация относится, в первую
очередь, к БАС, так как отдельный БЛА решение целевой задачи
обеспечить не может.
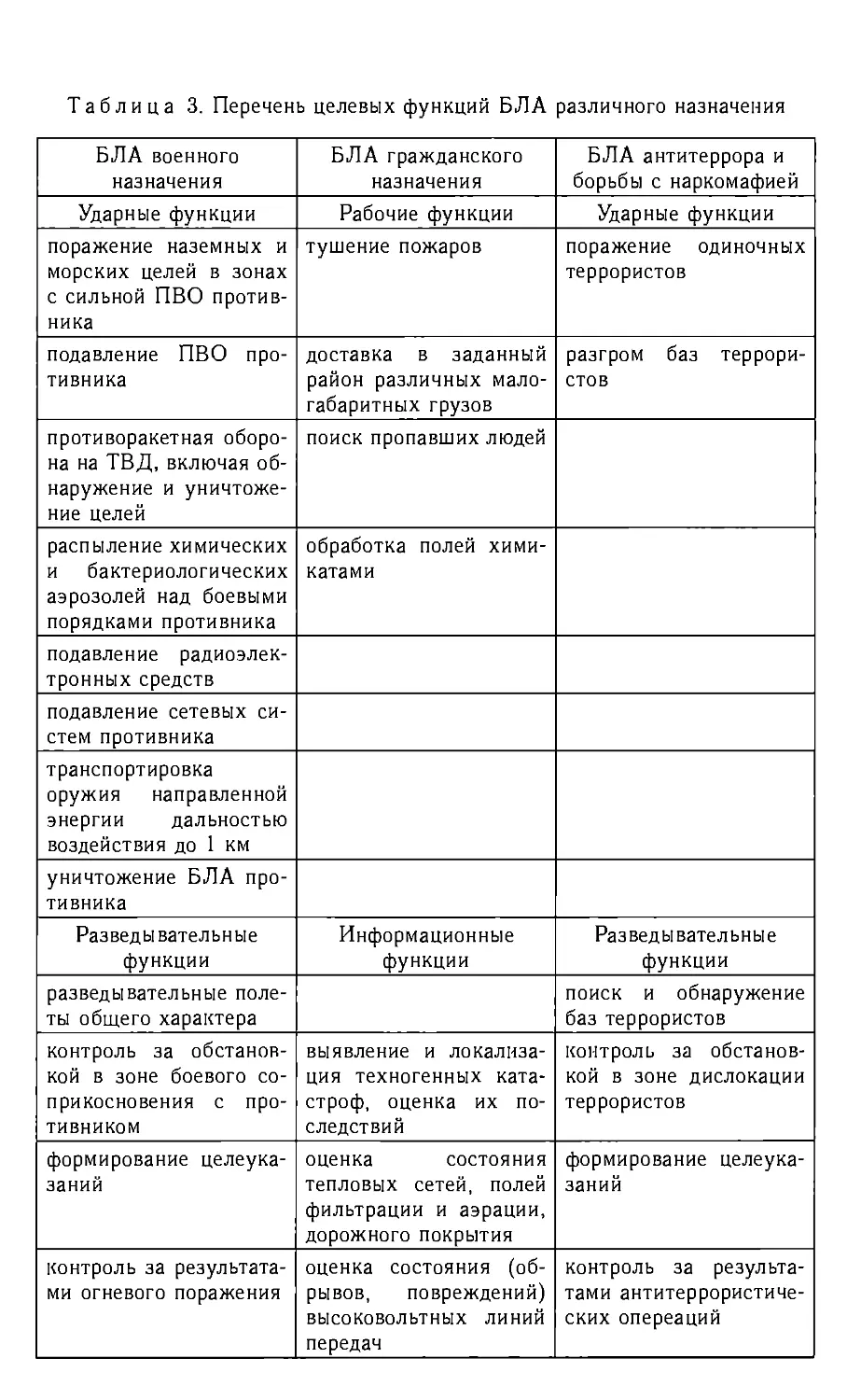
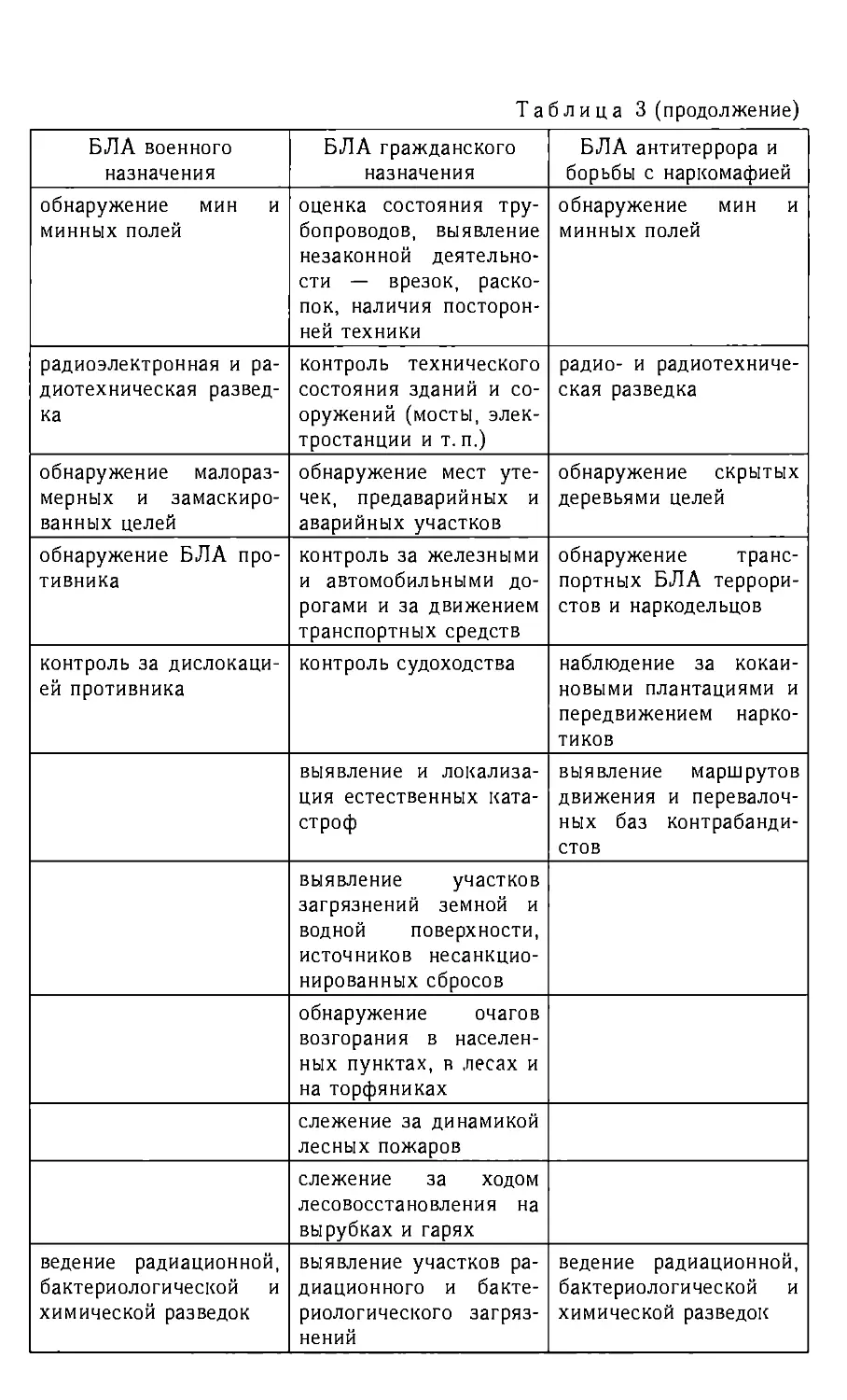
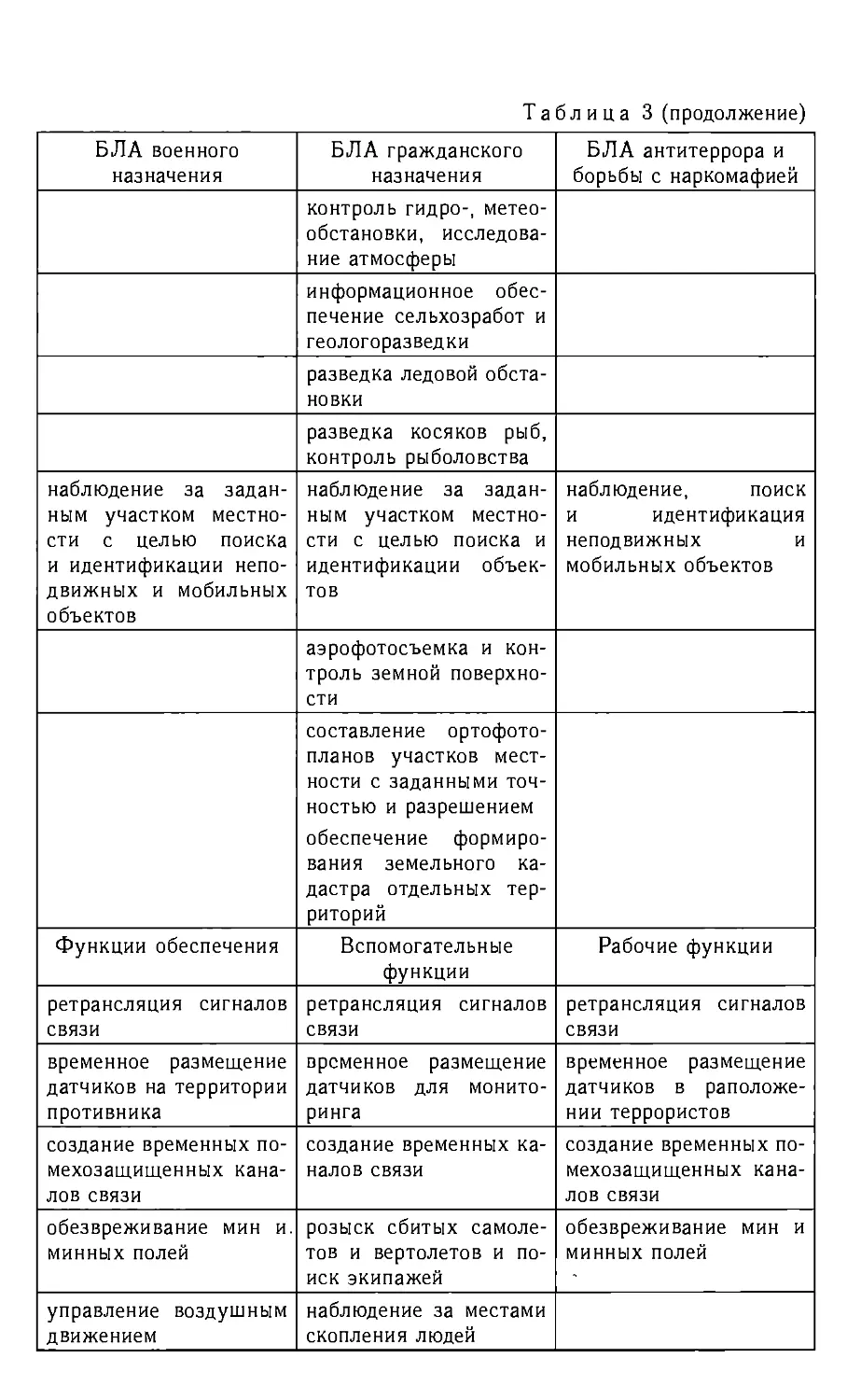
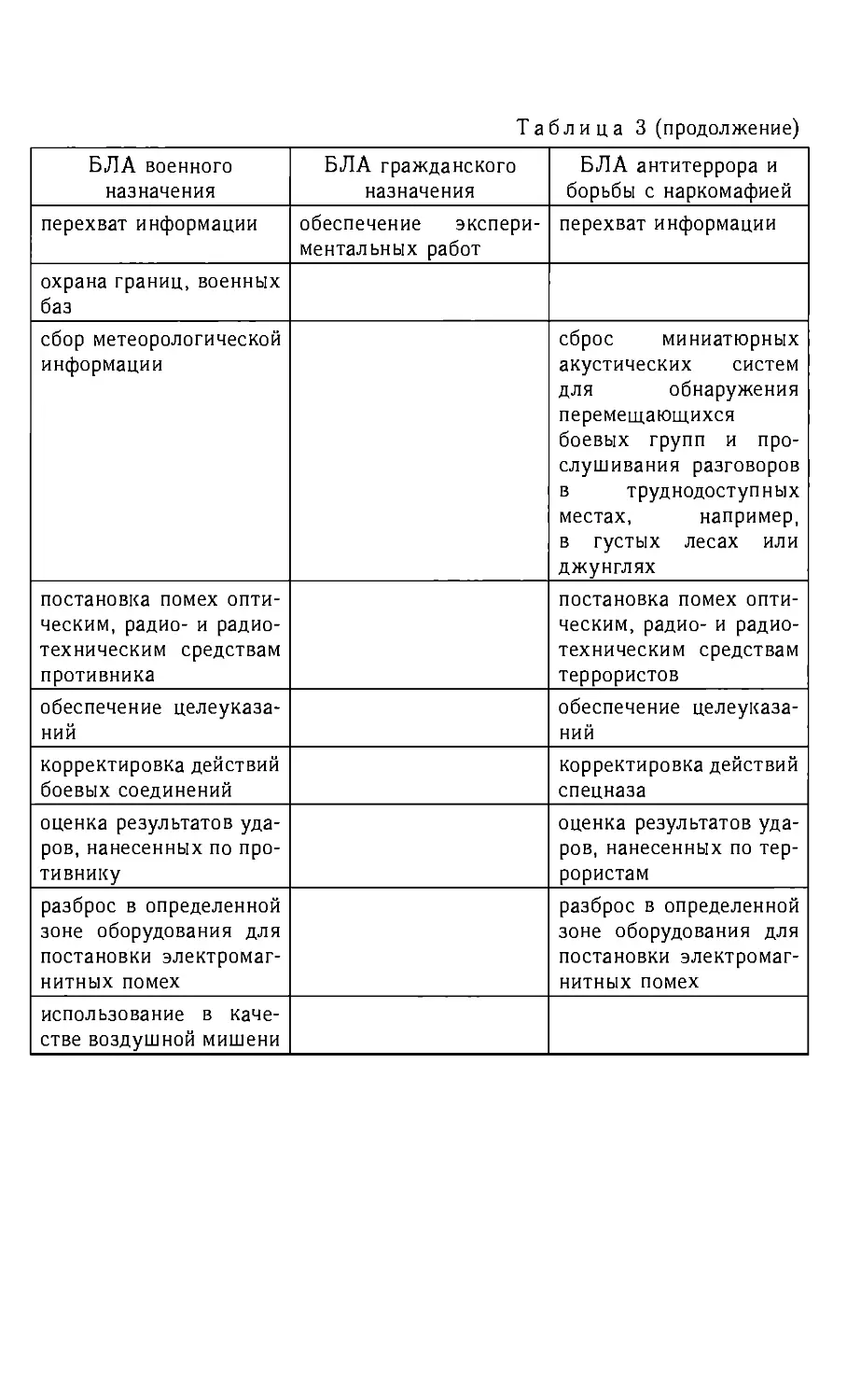
Современные БЛА делятся, как правило, по областям их
применения на три основные группы: военного, гражданского и
антитеррористического назначения. Основные функции, выполняемые БЛА в
каждой из перечисленных выше групп, приведены в Приложении (табл.3).
БЛА военного назначения создаются для выполнения следующих
боевых задач:
• поражение РЛС противника;
• поражение наземных целей (включая мобильные цели);
• радиоэлектронное противодействие (РПД), включающее
постановку помех, насыщение зон действия ПВО ложными целями,
беспокоящие действия, отвлечение противника, введение его в
заблуждение и подавление средств ПВО;
• подавление сетевых систем противника;
• транспортировка оружия направленной энергии — для решения
этих и подобных задач выделяется класс ударных БЛА;
• проведение разведывательных полетов;
• электронная разведка (разведка средств связи противника) для
сбора, анализа и оценки сигналов систем связи и передачи
данных;
• получение информации об оперативной обстановке на театре
военных действий (ТВД);
• определение местоположения целей и лазерное целеуказание
системам оружия с лазерным наведением, корректировка
артиллерийского огня — для решения этих и подобных задач выделяется
класс разведывательных БЛА;
• обеспечение радиорелейной связи;
• выполнение «узловых» функций для информационных сетей;
• выполнение функций воздушных мишеней, информационная
поддержка процессов обучения летчиков и операторов — для
решения этих и подобных задач выделяется класс БЛА обеспечения.
В результате применения БЛА военного назначения оказывается
возможным:
• значительно повысить боевую эффективность применения
военной техники;
• обеспечить экономию сил и средств при гарантированном
поражении объектов противника;
• создать условия для оперативного маневра ресурсами сил и
средств;
• обеспечить возможность быстрого сосредоточения необходимых
сил и средств на критических направлениях ведения боевых
действий;
• осуществить требуемую длительность наблюдения за
территорией противника с целью своевременного раскрытия его замысла и
определения имеющихся у него сил и средств;
• обеспечить устойчивую информационную поддержку боевых
действий войск в различных условиях.
Задачи, решаемые современными БЛА гражданского назначения,
можно классифицировать на три группы:
• БЛА обеспечения информацией различные системы контроля за
параметрами природной и антропогенной сред —
информационные (мониторинговые) БЛА;
• БЛА оказания физического воздействия на параметры состояния
контролируемых сред — рабочие БЛА;
• БЛА обеспечения функционирования двух предыдущих
классов — вспомогательные БЛА.
БЛА антитеррора и борьбы с наркомафией также можно
классифицировать на следующие три группы:
• информационно-разведывательные БЛА (поиск групп
террористов и прочих преступников, определение параметров природной
и антропогенной сред в районе действия этих групп и т.п.);
• боевые БЛА (нанесение ущерба личному составу и объектам
материального обеспечения групп террористов и прочих
преступников);
• связные БЛА (обеспечение закрытой связи со спецгруппами,
осуществляющими поиск и боевое взаимодействие с террористами).
Многие военные специалисты на Западе полагают [1.5], что
именно БЛА будут в скором времени незаменимы при выявлении очагов
терроризма и отслеживании террористических акций, в особенности,
если в результате терактов возникнут обширные зоны радиоактивного
заражения местности.
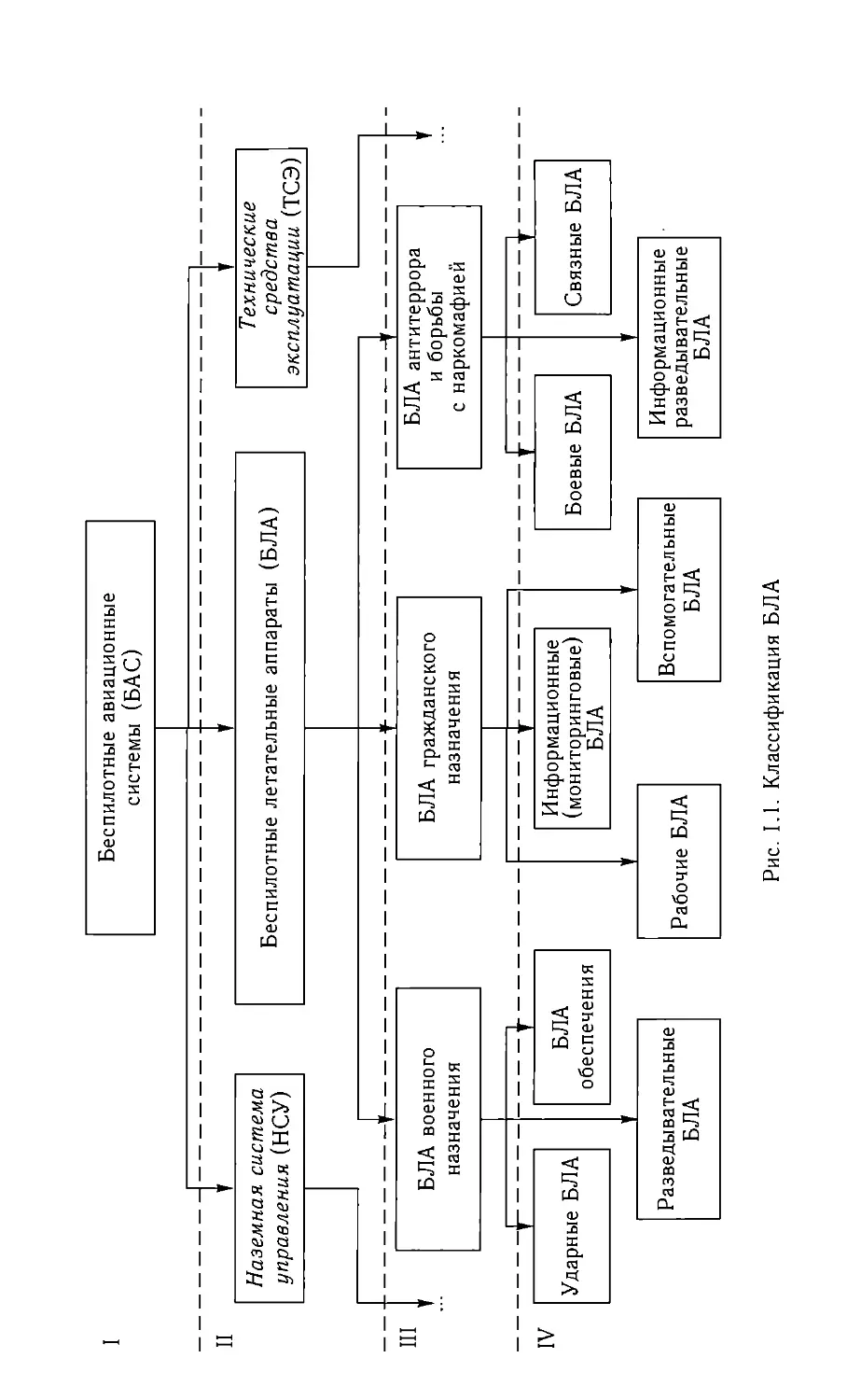
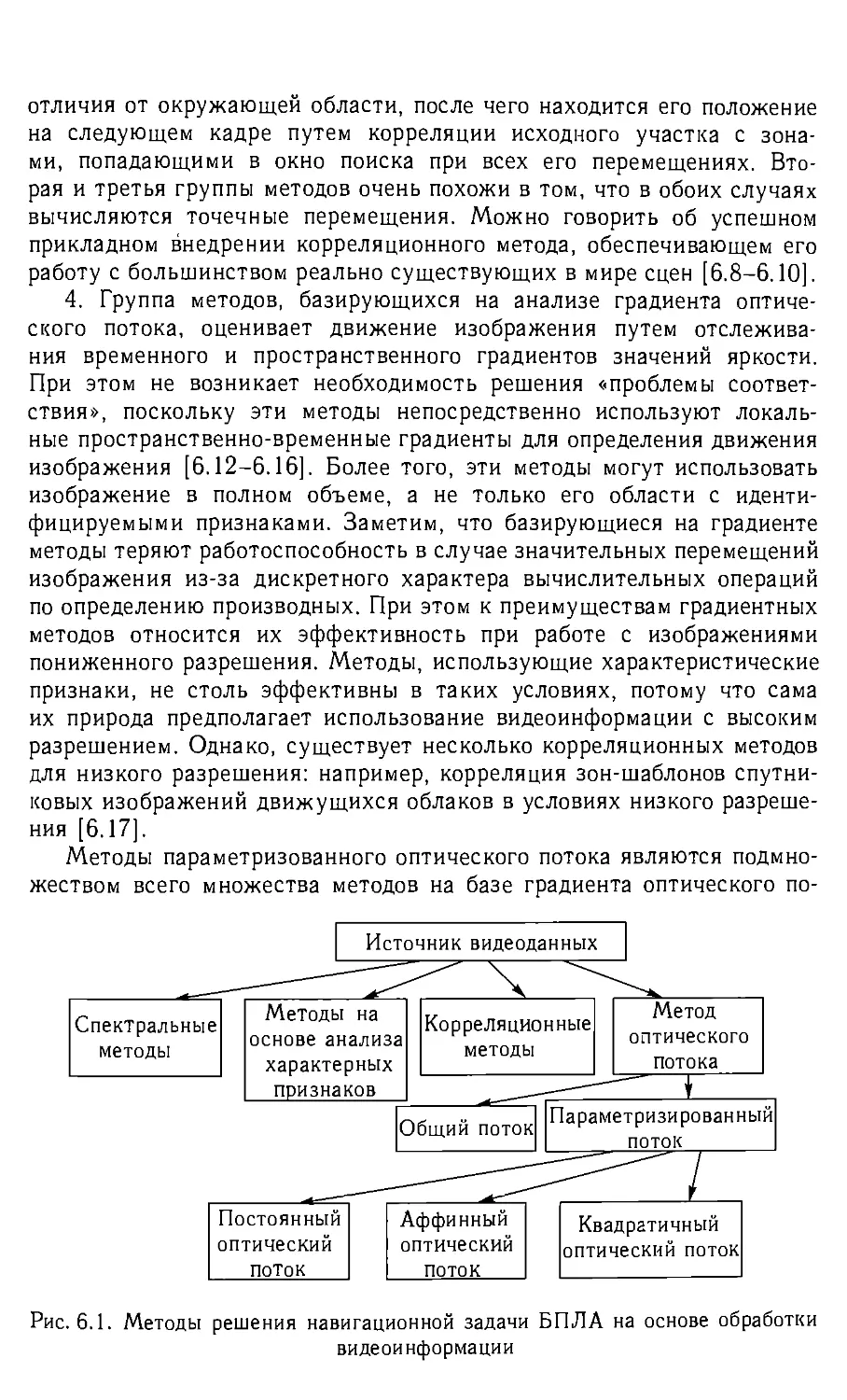
Приведенное деление БЛА на классы и группы по назначению и
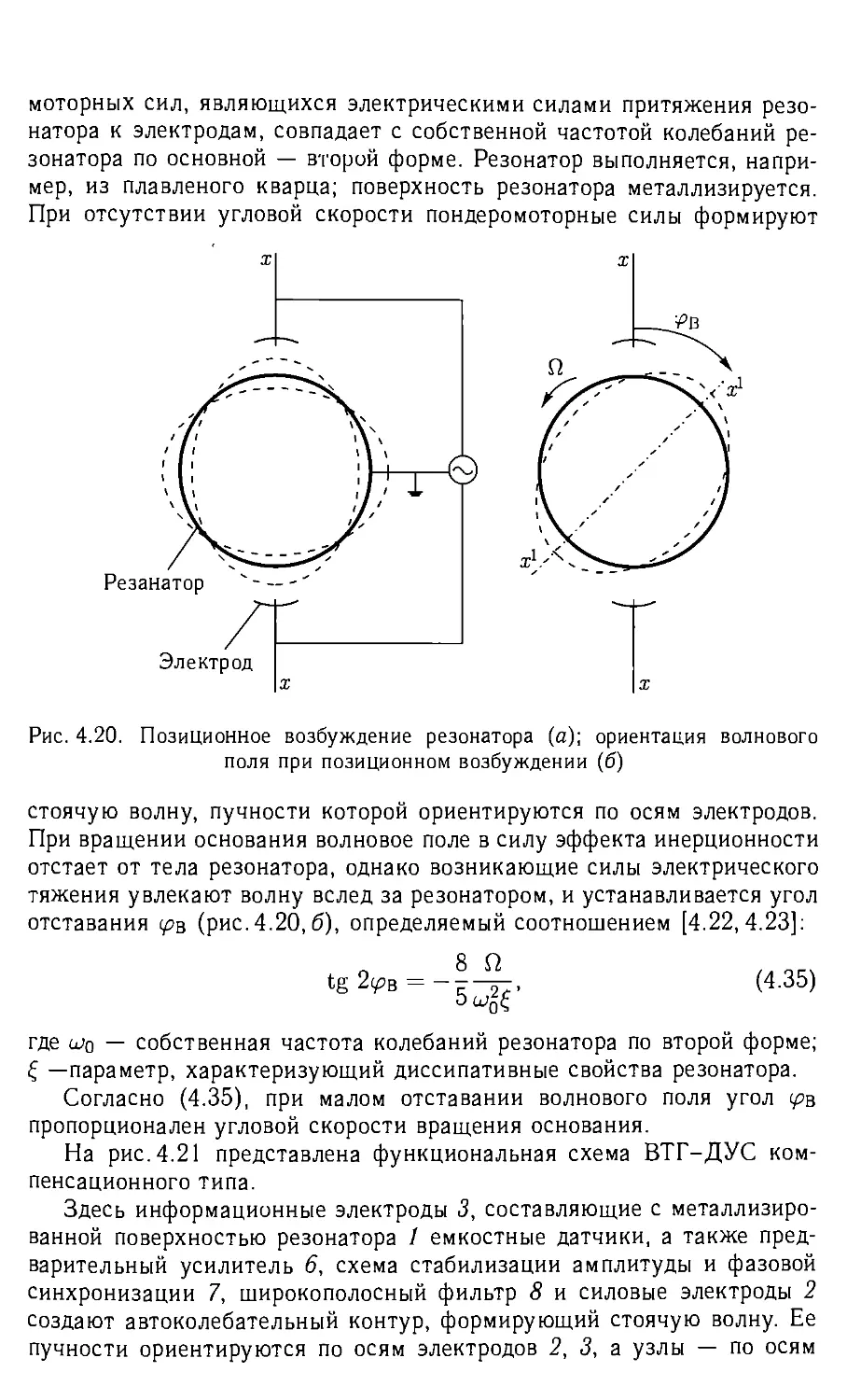
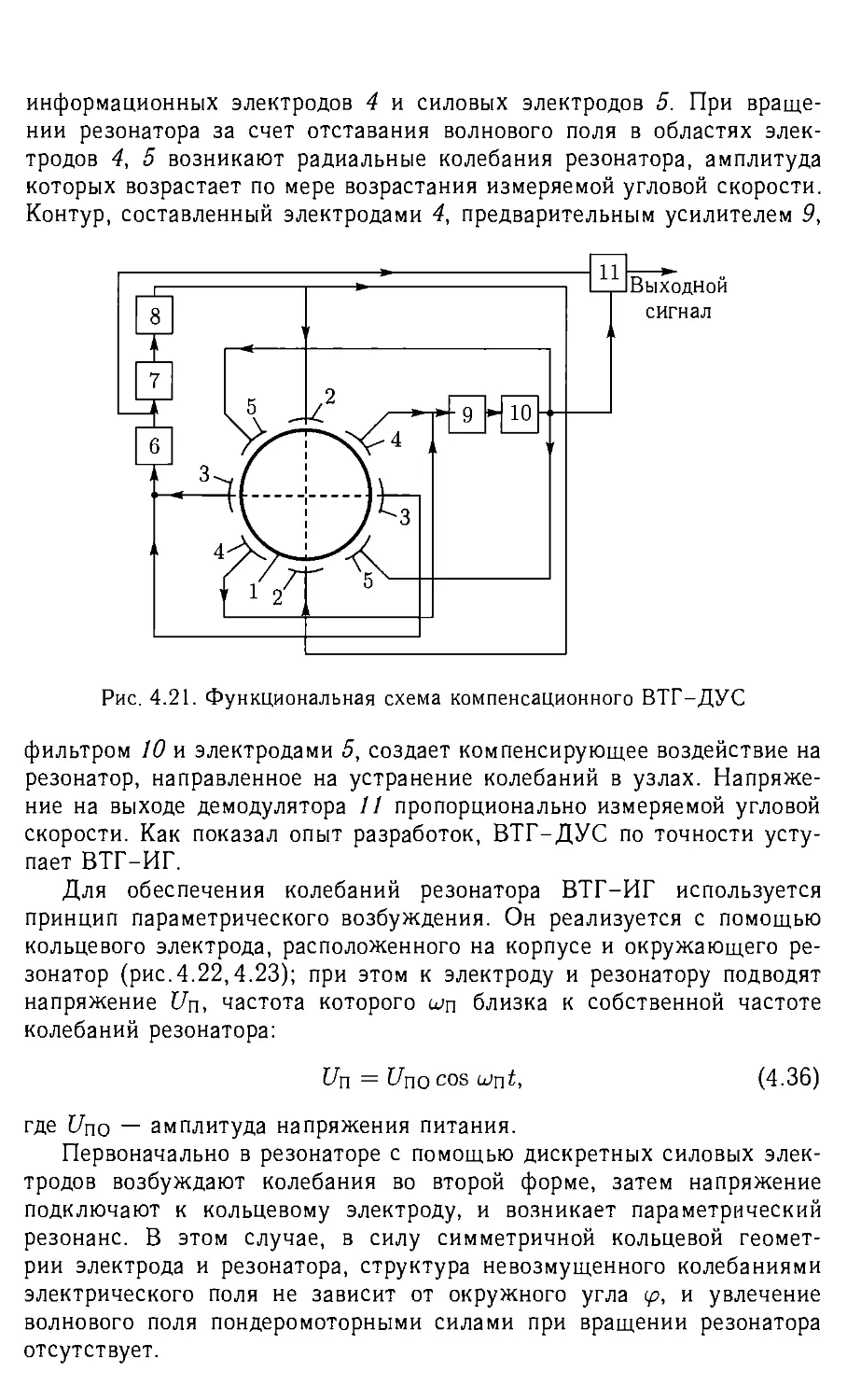
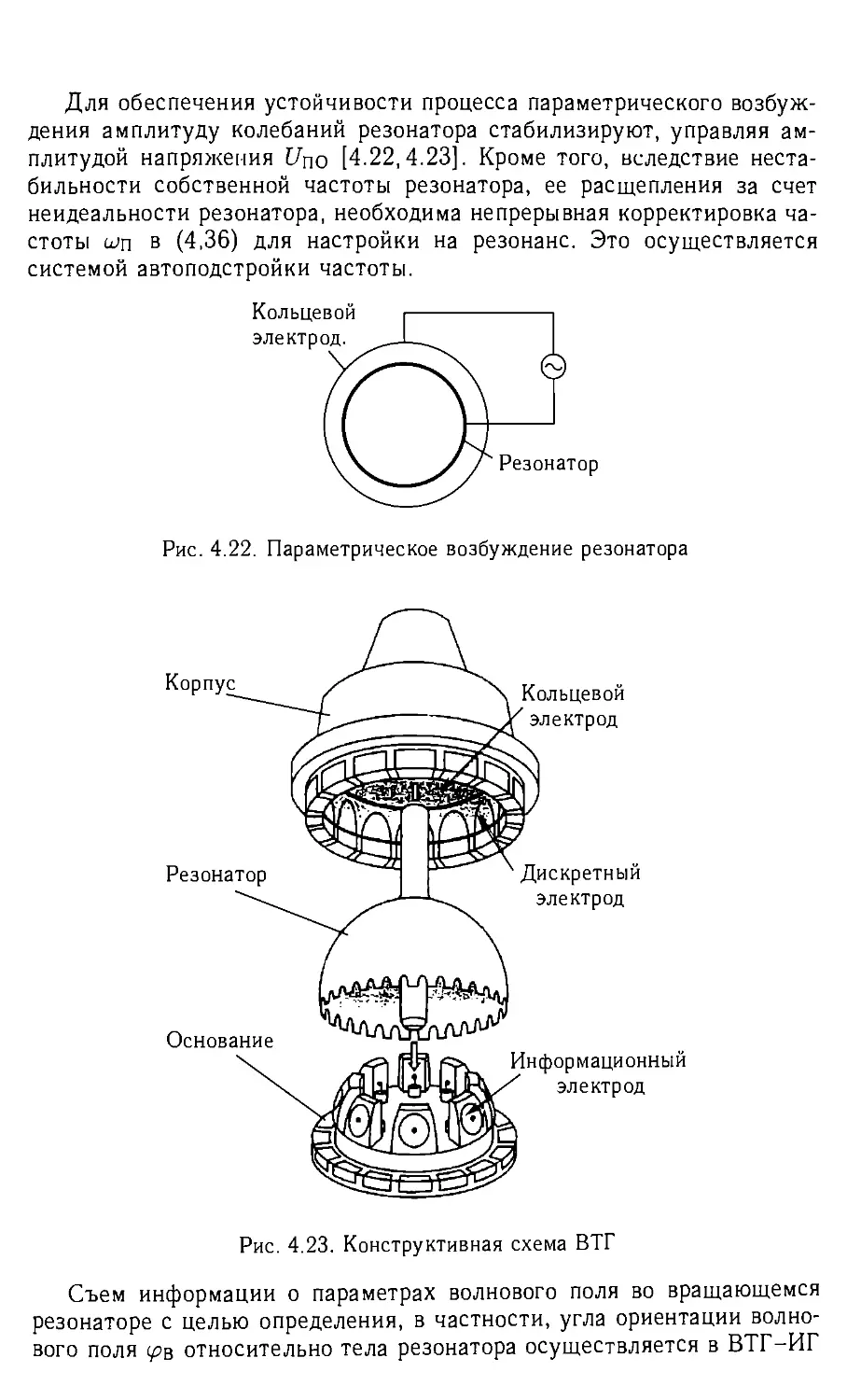
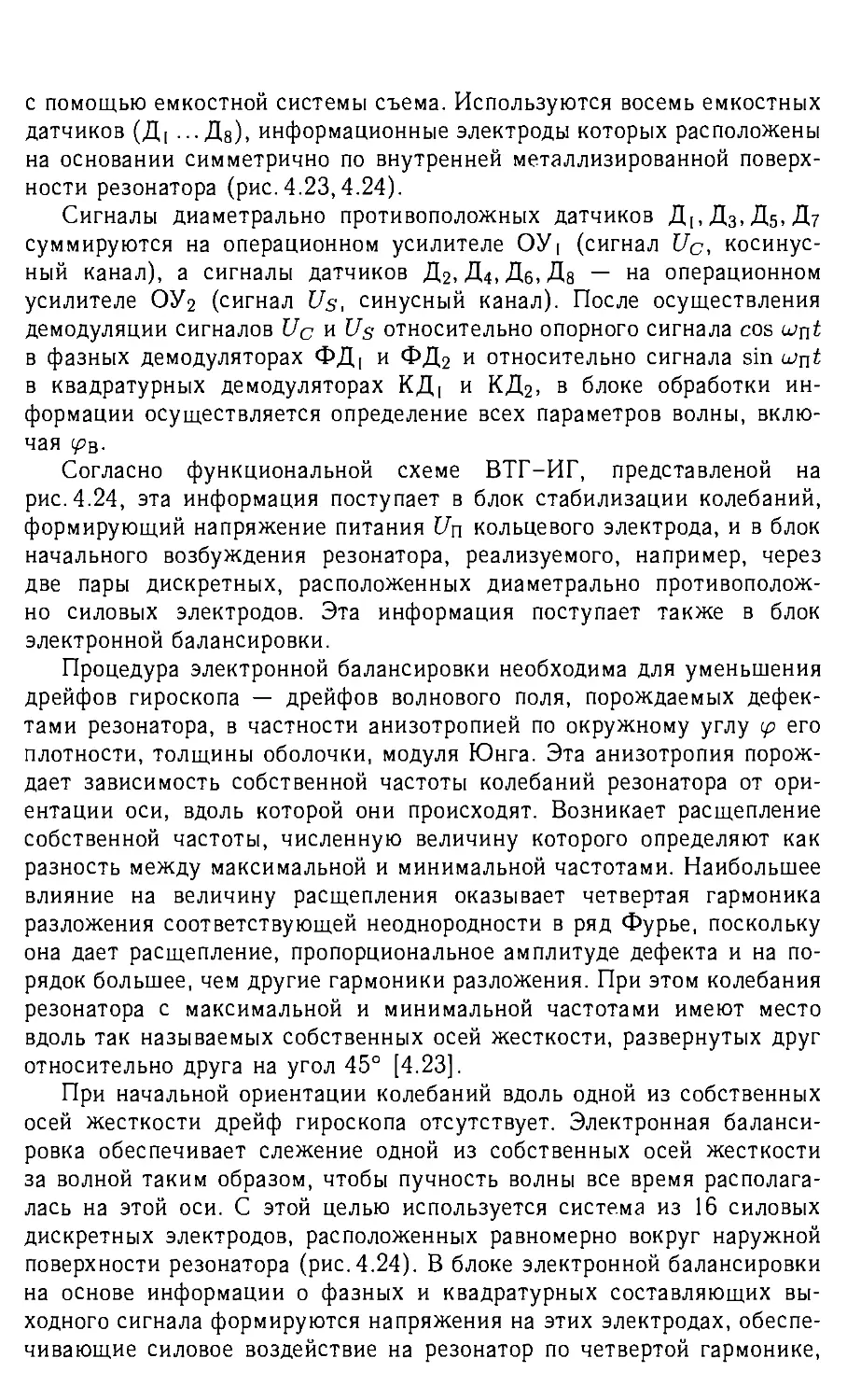
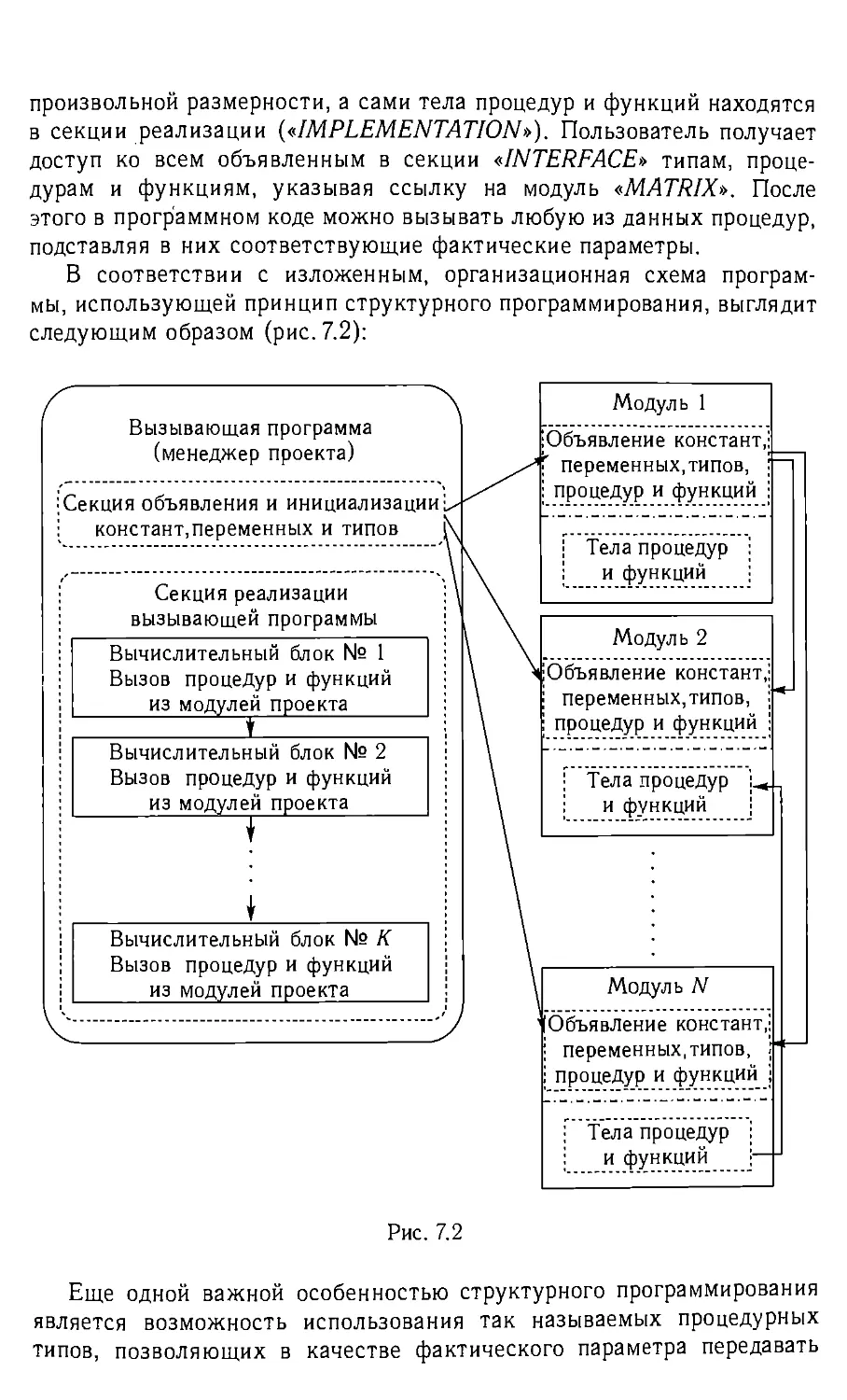
обобщенным решаемым задачам показано на рис. 1.1, где выделены
следующие уровни:
I — уровень беспилотных авиационных систем (БАС);
II — уровень подсистем БАС;
III — уровень назначения БЛА;
IV — уровень целевых задач, решаемых БЛА.
Первое место по количеству, сложности и разнообразию
внедренных и разрабатываемых БАС занимают боевые беспилотные системы
и, соответственно, БЛА военного назначения.
Для дальнейшей детализации классификации БЛА военного
назначения воспользуемся дополнительными признаками, в качестве
которых выступают тактические характеристики БЛА:
• повторяемость выполнения целевых функций ударными БЛА:
одноразовые и многоразовые;
• глубина решаемой задачи разведывательными БЛА:
стратегические (высота свыше 6100 м, длительность полета свыше 24 часов,
дальность полета свыше 550 км) и тактические (высота менее
6100 м, длительность полета менее 24 часов, дальность действия
менее 550 км);
• особенности функций обеспечения военных БЛА: целевые
платформы (задачи ретрансляции и связи), транспортные
платформы (задачи доставки непоражающих грузов), имитаторы (ложные
цели и мишени).
В качестве дополнительных классификационных признаков могут
быть использованы также тактико-технические характеристики (ТТХ)
БЛА:
• аэродинамические схемы — самолетного и вертолетного типа,
а также комбинированного типа — конвертопланы;
• высота применения:
- стратегические разведывательные высотные БЛА (по
американской классификации: HALE — High-Altitude
Long-Endurance): высота полета (12 200-=-19 800) м, длительность —
более 24 часов,
- стратегические разведывательные средневысотные БЛА (по
американской классификации: MALE — Medium-Altitude
Long-Endurance): высота полета (6 100ч-12 200) м,
длительность — более 24 часов;
• дальность действия:
- тактические разведывательные БЛА среднего радиуса
действия (MR — по американской классификации): дальность
действия — (70-4-550) км,
- тактические разведывательные БЛА малого радиуса
действия (SR — по американской классификации): дальность
действия — (ЗО-т-70) км,
- тактические разведывательные БЛА ближнего радиуса
действия (CR — по американской классификации): дальность
действия — менее 30 км;
• весовые и габаритные характеристики (для тактических
разведывательных БЛА ближнего радиуса действия):
- малогабаритные БЛА (МБЛА) ближнего радиуса
действия (mini — по американской классификации): дальность
действия — менее 30 км, вес — (1-М0) кг,
- миниатюрные БЛА (микро-БЛА) ближнего радиуса
действия (μ — по американской классификации): дальность
действия — менее 10 км, вес — (0,054-1) кг.
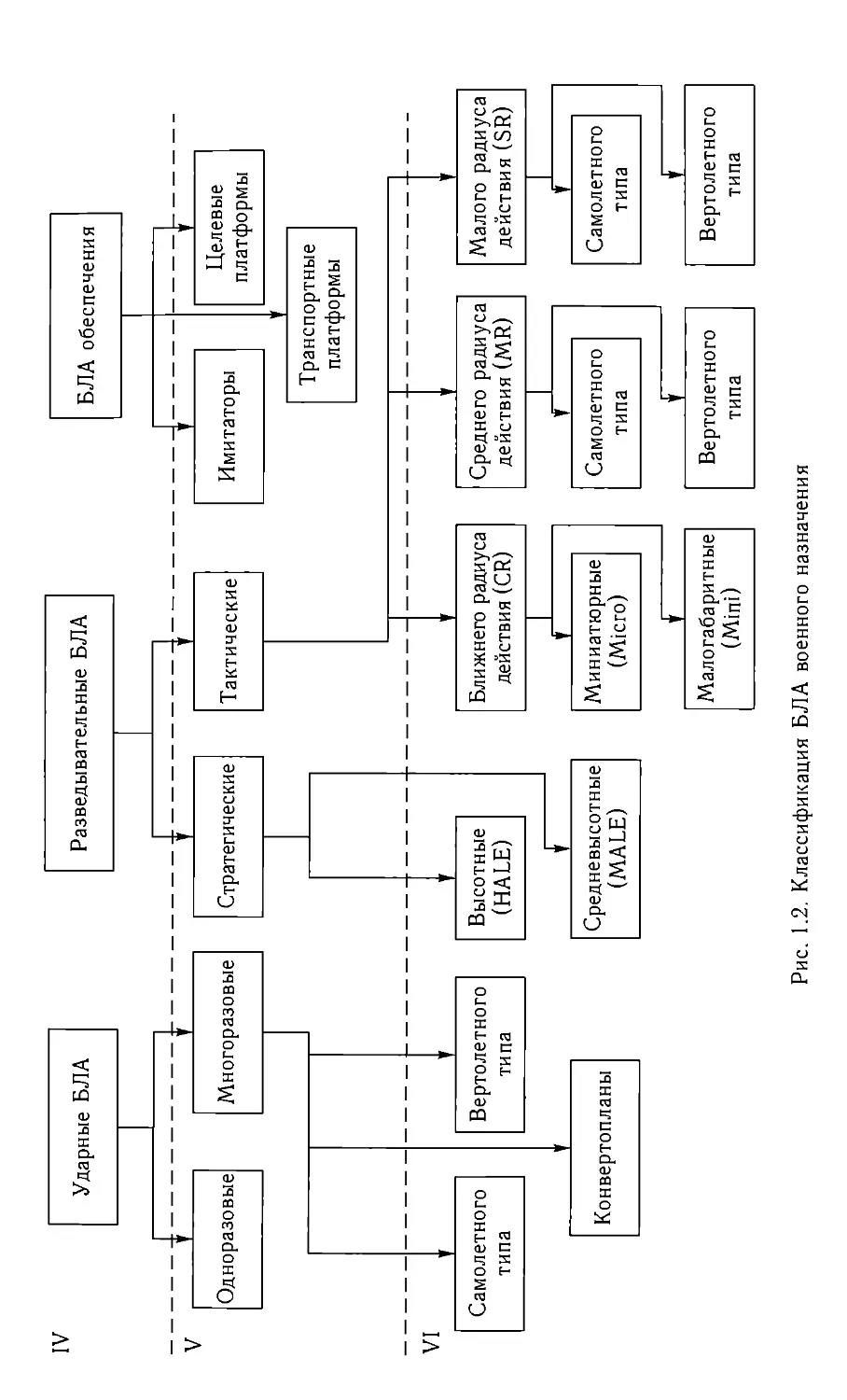
Получающаяся при этом детализированная классификация БЛА
военного назначения приведена на рис. 1.2, где в дополнение к рис. 1.1
введены следующие уровни классификационной иерархии:
V — уровень тактических характеристик;
VI — уровень технических характеристик.
В зависимости от технического уровня и степени интеграции
бортовых информационно-управляющих систем (ИУС) в
информационные сети централизованного управления, БЛА военного назначения
могут быть использованы в различных концепциях ведения боевых
действий [1.5].
Вне зависимости от концепции, для оценки качества выполнения
целевой задачи будем использовать традиционные для технических
систем, имеющих в своем составе ИУС, критерии: точность и
производительность. Для оценки эффективности эксплуатации будем
использовать также вполне очевидные критерии: ТТХ БЛА, стоимость БЛА
и его эксплуатации.
Ниже приведены примеры характеристик БЛА для различных
классификационных групп, где используются следующие
технико-экономические параметры: точность выполнения полетных операций, скорость
и длительность полета, высота полета, взлетная масса, масса и состав
целевой нагрузки, стоимость БЛА и его эксплуатации.
Ударные БЛА одноразового применения характеризуются
продолжительностью полета до 5 часов и радиусом боевого действия до
350 км, т.е. они относятся к классу тактических и оперативных ЛА.
Ударные БЛА одноразового применения могут поражать:
• радиоизлучающие цели, для этого они оснащаются пассивной
радиолокационной головкой самонаведения (ГСН), встроенной
боевой частью (БЧ) и автономной системой управления полетом;
• малоразмерные неизлучающие наземные цели, в том числе и
мобильные (разрабатываются одноразовые БЛА и для воздушных
целей).
Полет ударного БЛА одноразового применения выполняется по
заданной программе вплоть до захвата пассивной ГСН БЛА отраженного
излучения цели от собственного или внешнего подсвета (в
соответствующем диапазоне длин волн электромагнитного излучения), после чего
БЛА переходит в пикирование и поражает цель по схеме «камикадзе».
Другим алгоритмом работы одноразового БЛА является его наведение
по внешним целеуказаниям.
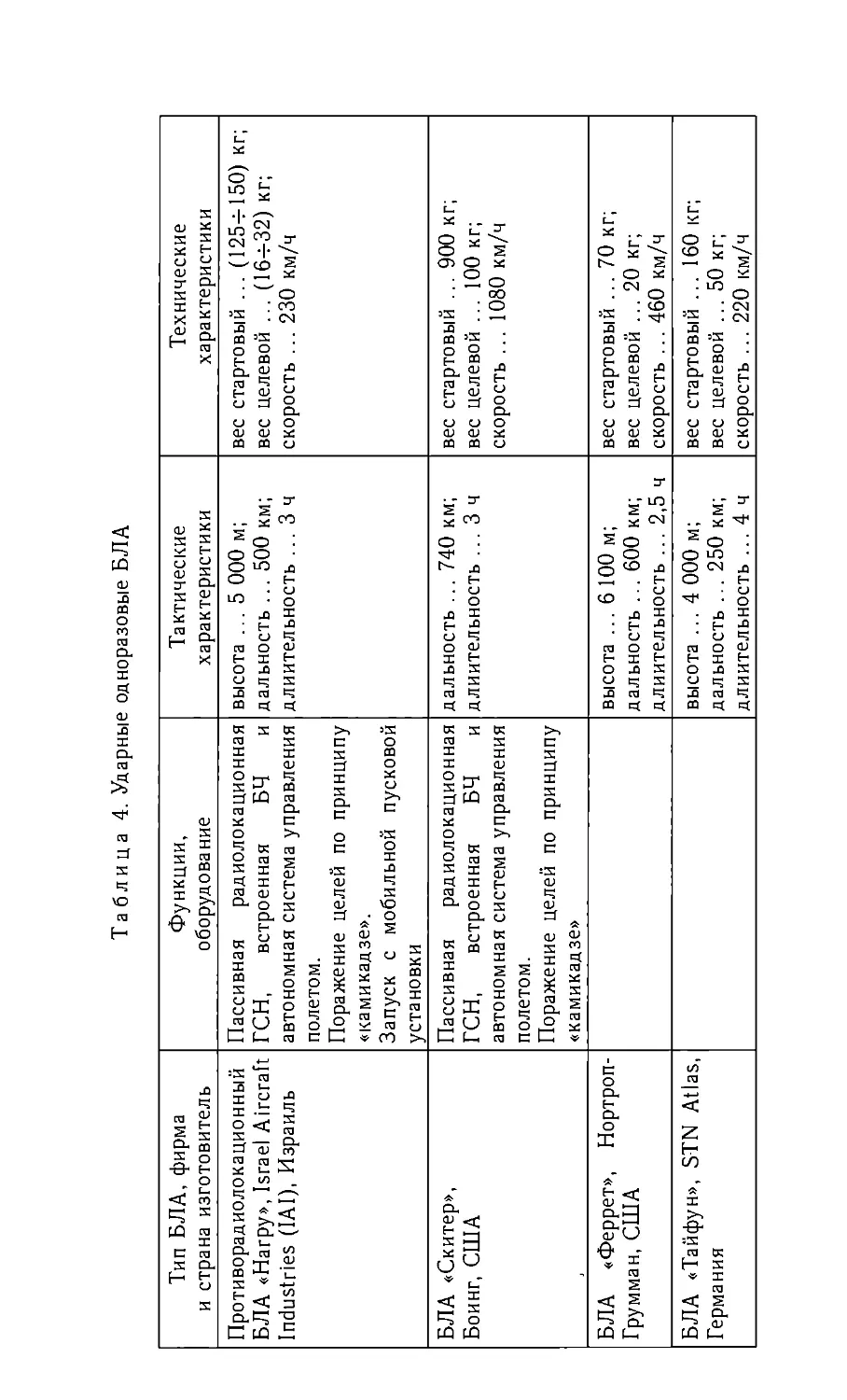
В Приложении (табл.4) приведены тактико-технические
характеристики (ТТХ) некоторых ударных БЛЛ одноразового применения.
Представителями ударных БЛА одноразового применения являются
также:
• БЛА CUTLASS, IAI (Израиль) и Рейтеон (США);
• БЛА LEWK, Advanced Technologies Inc., США;
• робототехнический БЛА-камикадзе «Брэйв-200», Боинг, США;
• робототехнический БЛА-камикадзе «Брэйв-3000», Боинг, США;
<
pa
• робототехнический БЛΑ-камикадзе «Ларк», IAI, Израиль;
• робототехнический БЛА-камикадзе «Вампир», Шорт, Англия и
т.д.
Однако большая часть ударных БЛА ввиду их довольно высокой
стоимости рассчитаны на многократное применение.
Ударные БЛА многоразового применения обладают радиусом
боевого действия вплоть до нескольких тысяч километров. Они могут
нести на борту кроме традиционных поражающих средств
высокоэнергетическое оружие направленного действия: лазерное, микроволновое
большой мощности, что в присутствии пилота не всегда возможно.
Ударные БЛА многоразового применения по своим массогабарит-
ным и тактико-техническим характеристикам приближаются к
современным тактическим истребителям. Поэтому основной
концепцией боевого применения БЛА является их комплексное использование
совместно с пилотируемыми средствами, что еще более ужесточает
требования к ИУС БЛА.
Ударные БЛА многоразового применения должны обеспечивать
обнаружение, идентификацию и поражение приоритетных наземных
стационарных и мобильных целей, огневое подавление активных средств
системы ПВО противника, а также ведение борьбы с воздушными
целями, в том числе с крылатыми и баллистическими ракетами, на
активном участке траектории их полета. Ударные БЛА должны иметь
низкую заметность в оптическом и радиолокационном диапазонах,
радиус действия до 2000 км, повышенную маневренность и прочность
конструкции, сравнительно невысокие стоимости производства и
эксплуатации.
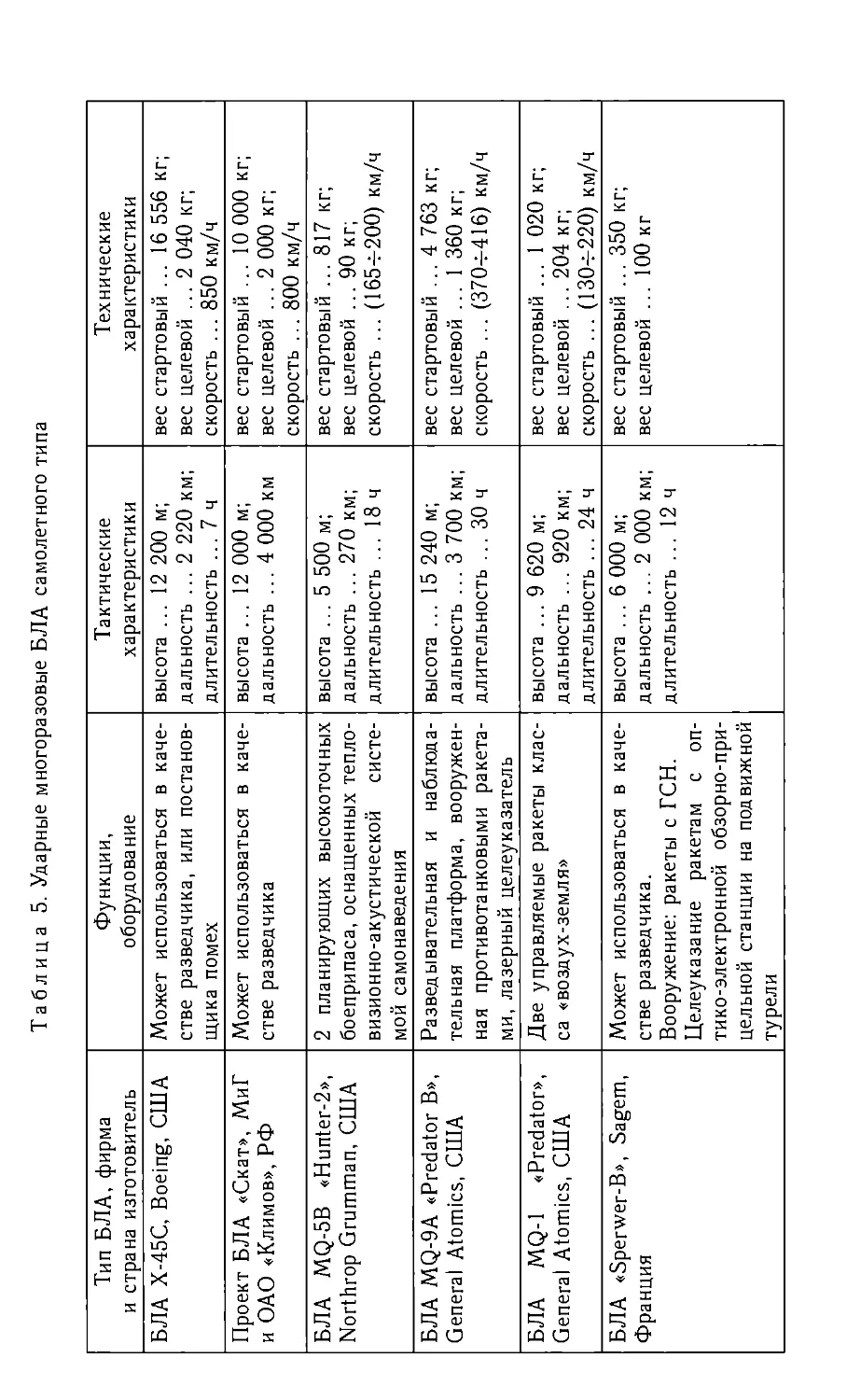
В Приложении (табл.5) приведены ТТХ некоторых ударных БЛА
многоразового применения самолетного типа.
Представителями ударных БЛА многоразового применения
самолетного типа являются также:
• проект БЛА «Нейрон», Дассо, Франция при участии SAAB
(Швеция), EADS/CASA (Испания), HAI (Греция), Аления (Италия),
PUAG (Швейцария);
• проект БЛА «Скай-Х», Аления, Италия;
• проект БЛА «URAV», германское отделение EADS;
• БЛА UCAV-N, Нортроп-Грумман, США;
• БЛА «Модель 395», Нортроп-Грумман, США;
• БЛА «Блэк UCAV», Локхид-Мартин, США;
• БЛА «Уорриор», Дженерал Атомикс, США;
• БЛА UCAV, общеевропейская корпорация «EADS»;
• БЛА «Грэн Дюк», Дассо, Франция;
• БЛА «Вооруженный Фалько», Метеор, Италия
• БЛА U-99, НИЦ Кронфильдского авиационного института,
Великобритания и т.д.
Особыми классами ударных ЛА являются БЛА вертолетного типа
и беспилотные конвертопланы. Использование БЛА таких типов суще-
ственно отличается от самолетного и требует другой инфраструктуры
обслуживания и применения.
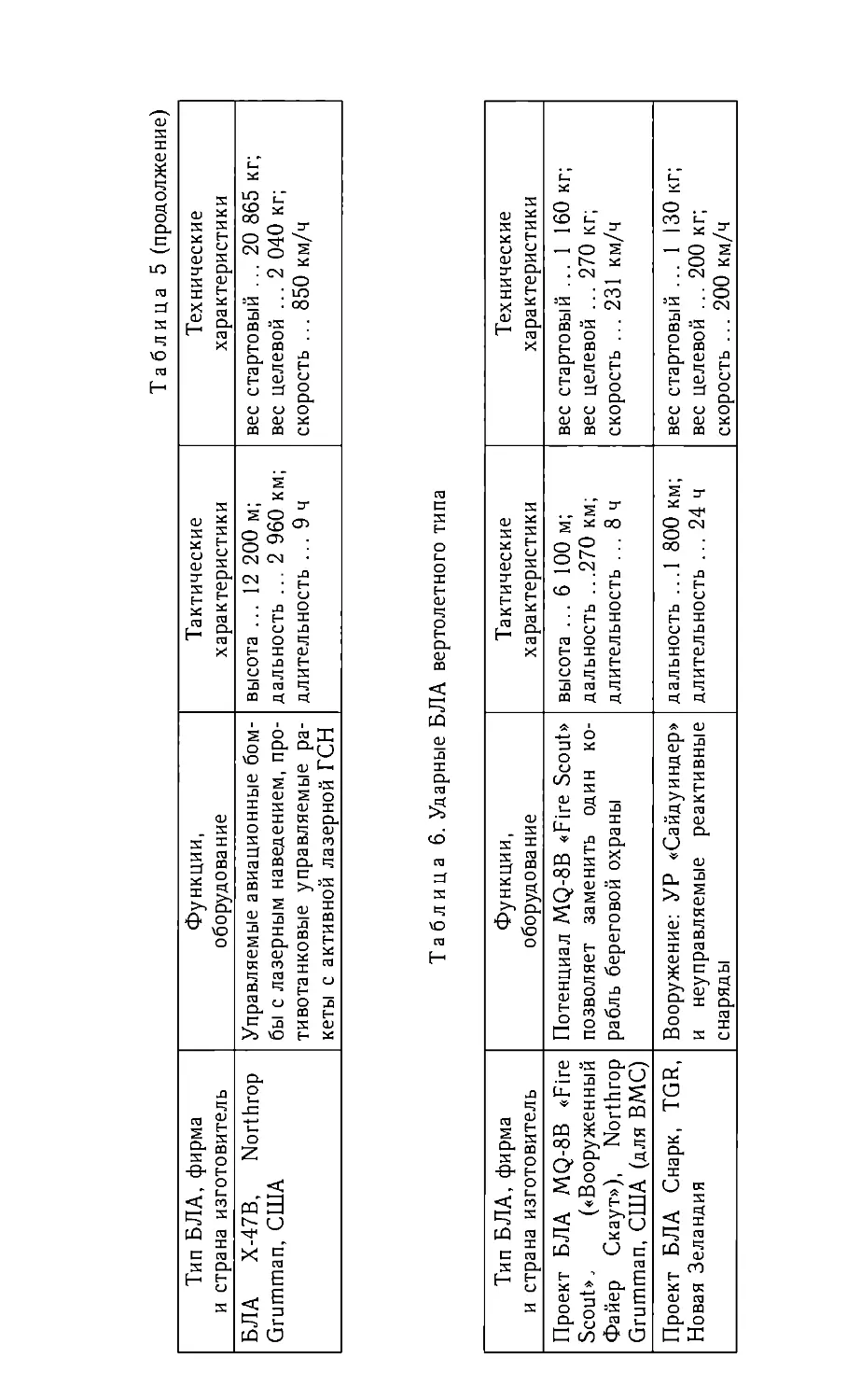
В Приложении (табл.6) приведены ТТХ некоторых ударных БЛА
многоразового применения вертолетного типа.
Представителем ударных БЛА многоразового применения
вертолетного типа является также:
• БЛА «Ка-117», «Камов», РФ;
• проект БЛА «UCAR», Локхид Мартин, США и т.д.
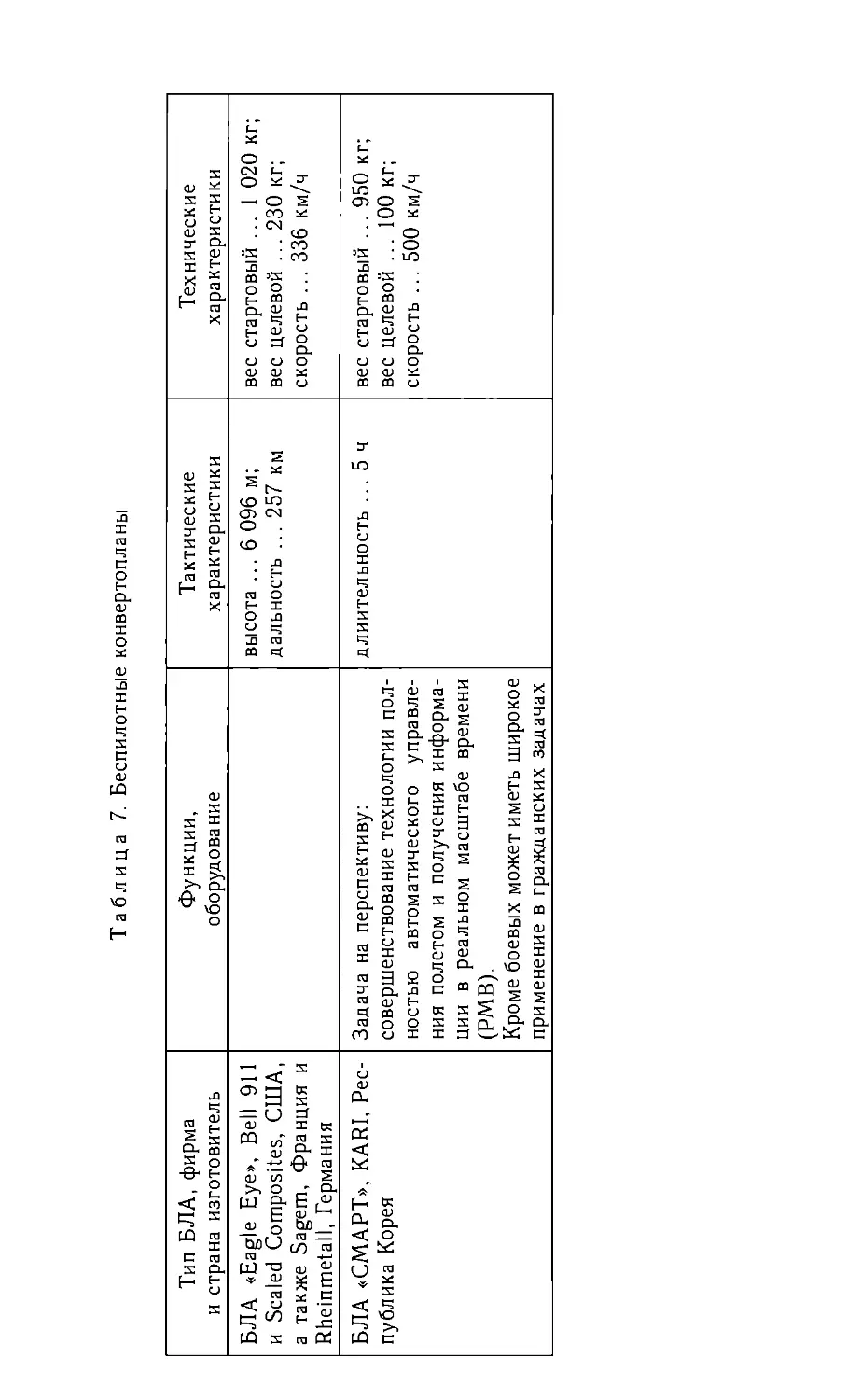
В Приложении (табл.7) приведены ТТХ некоторых ударных БЛА
многоразового применения комбинированного типа (конвертопланы).
Представителем ударных БЛА многоразового применения
комбинированного типа (конвертопланы) является также проект БЛА
«Штиль-3>>, ООО «Кванд», РФ и Республика Беларусь и т.д.
Во многом дальнейшее развитие БАС связано с совершенно новой
концепцией ведения боевых действий в XXI в., когда создается единое
информационное пространство проведения боевых операций от
отдельного солдата до системы управления фронтом.
Имеются сведения о результатах работы по созданию некоторых
типов программного обеспечения как составляющих будущего
глобального продукта:
• точное пространственное прицеливание;
• инструмент планирования маршрута БЛА;
• интегрирование датчиков;
• инициативная система прицеливания;
• система управления логистической информацией;
• папка планирования удара;
• рабочая станция точного прицеливания;
• тактический модуль распространения [1.6].
Другой составляющей реализации данной концепции является
созданная и разрабатываемая широкая номенклатура разведывательных
беспилотных систем.
Основными предпосылками для совершенствования
разведывательных БЛА военного назначения являются:
• сложность обеспечения оперативного взаимодействия родов войск
в условиях сложной информационной обстановки в районе
ведения боевых действий;
• высокая подвижность частей и подразделений при выполнении
боевой задачи;
• постоянно растущая потребность в контроле за обстановкой
в зоне боевого соприкосновения с противником, обусловленная
отсутствием четко выраженной полосы обороны или наступления.
При создании единого информационного поля управления боевыми
операциями должны быть учтены следующие ключевые вопросы:
• помехозащищенность и производительность каналов обмена
информацией между БЛА и пунктами управления;
• эффективность обработки информации на борту;
• высокая степень автоматизации задач, выполняемых на борту
БЛА и в пункте операторского управления БЛА;
• эффективность информационно-управляющего поля,
связывающего оператора БЛА с информационным процессом,
обеспечивающим боевое применение БАС.
В ИУС боевой беспилотной авиации ближайшего будущего
будут присутствовать две независимые компоненты: система «Интранет»,
связывающая группу боевых БЛА друг с другом и с боевым самолетом,
с борта которого ведется управление этой группой, и система
многоканальной дальней связи, работающая с использованием высотных или
космических ретрансляторов и связывающая боевые БЛА с
удаленными источниками информации или наземными пунктами управления.
С учетом сказанного, обсудим также возможную классификацию
разведывательных БЛА военного назначения.
Стратегические разведывательные БЛА предназначены для
обеспечения боевых действий авиации и других видов вооруженных сил на
театре военных действий (ТВД). Последовательное развитие идеи
барражирующего разведчика привело к созданию в США больших БЛА,
выполняющих оперативные и стратегические задачи. К ним относятся
выпускаемые серийно в США БЛА RQ-1 Predator и БЛА RQ-4 Global
Hawk.
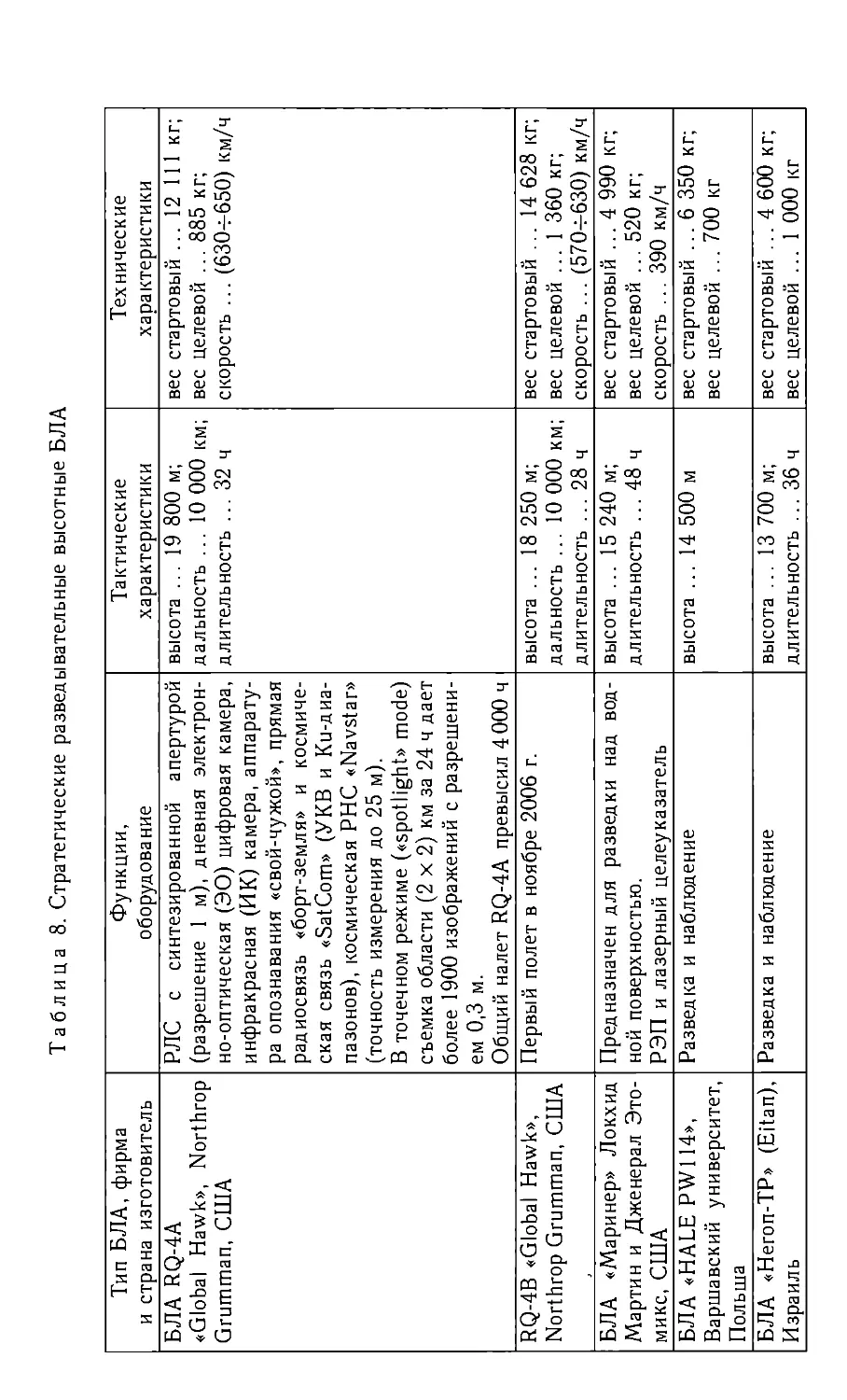
В Приложении (табл.8) приведены ТТХ некоторых стратегических
разведывательных высотных БЛА.
Представителями стратегических разведывательных высотных БЛА
являются также:
• БЛА 324 «Scarab», Teledyne Ryan Aeronautics, США (с 80-х гг.
20 в.);
• БЛА «Frigate», Aerospatiale Matra, Франция;
• БЛА «Gladan», SAAB Aerospace, Швеция;
• БЛА «Sensor Craft», США и т.д.
Стратегические разведывательные высотные БЛА имеют
следующие преимущества перед средневысотными:
• большая дальность прямой видимости, в пределах которой могут
работать разведывательная аппаратура и средства связи;
• меньшая вероятность летных происшествий, поскольку боевые
задания выполняются над зонами плохой погоды, а также над
зонами, отведенными для полетов других летательных аппаратов;
• меньшее количество взлетов и посадок, во время которых
происходит большинство аварий БЛА.
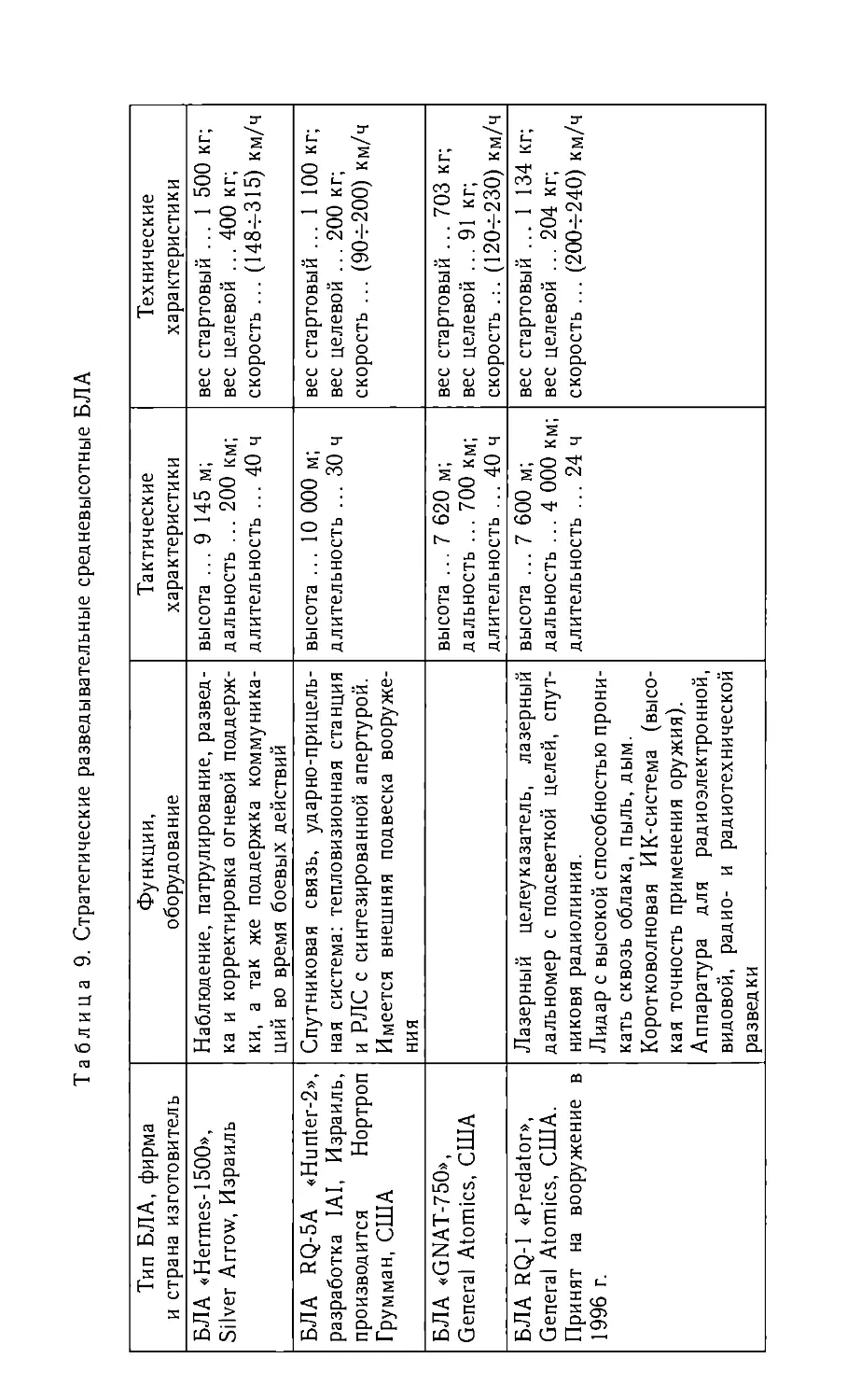
В Приложении (табл.9) приведены ТТХ некоторых стратегических
разведывательных средневысотных БЛА.
Представителями стратегических разведывательных
средневысотных БЛА являются также:
• БЛА «Тиха», Тусас Аэроспейс Индастриз, Турция;
• БЛА «Херон» (Eagle), IAI, Израиль;
• БЛА «Ε-Hunter», IAI и Malat, Израиль;
• БЛА «Спервер-Н\Л>, Сажем, Франция;
• БЛА «Игл-Ь, общеевропейская корпорация «EADS» и т.д.
Залогом успеха действия стратегических разведывательных БЛА
является эффективная организация оптимального процесса передачи
данных, особенно видеоразведки и совершенствование комплексного
управления БАС.
Так, для ускорения обмена информацией в состав наземного
комплекса, работающего с БЛА RQ-1A «Предатор», были введены
приемники, которые обеспечивали передачу видеоданных с БЛА RQ-1A
«Предатор» непосредственно в кабину экипажа самолета сил
специальных операций АС-130.
Однако, только полная интеграция данных, получаемых от всех
видов разведывательных средств, в единый информационный поток
позволит обеспечить согласованное управление различных БАС и
других боевых комплексов в режиме реального времени. При этом связь
между различными разведывательными средствами, объединенными
в единую сеть, должна осуществляться посредством интерфейса
«машина-машина».
Тактические разведывательные БЛА предназначены для
обеспечения разведывательной информацией частей и соединений сухопутных
войск и военно-морских сил от корпусного звена и ниже. Наиболее
ответственную зону (в районе 150 км от пункта вылета), где будут
вестись основные боевые действия, обслуживают относительно
скоростные тактические разведывательные БЛА средней дальности с
высокой степенью автономности [1.7]. Именно в этом классе разработано
и испытано наибольшее количество БЛА, и такие работы энергично
продолжаются.
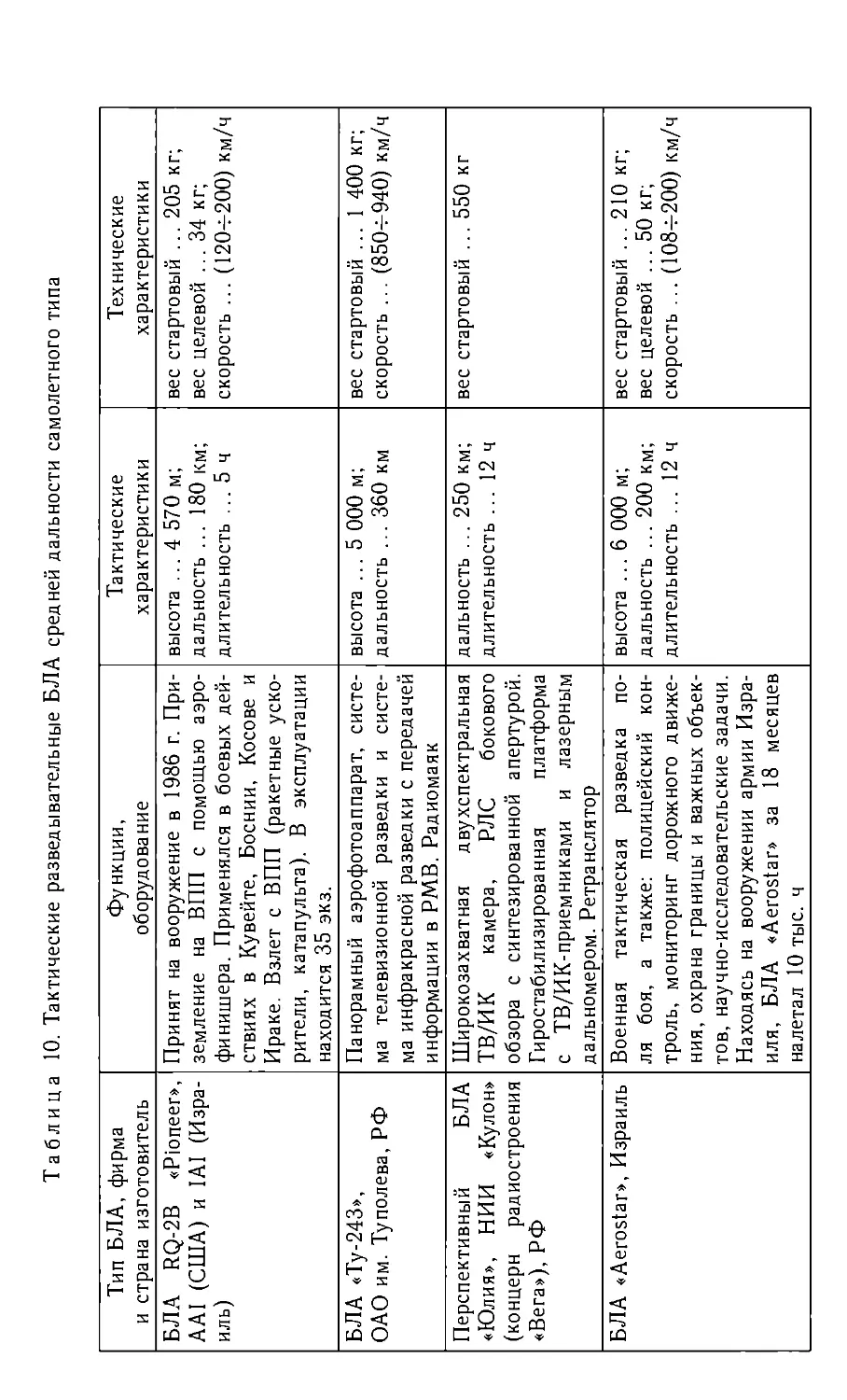
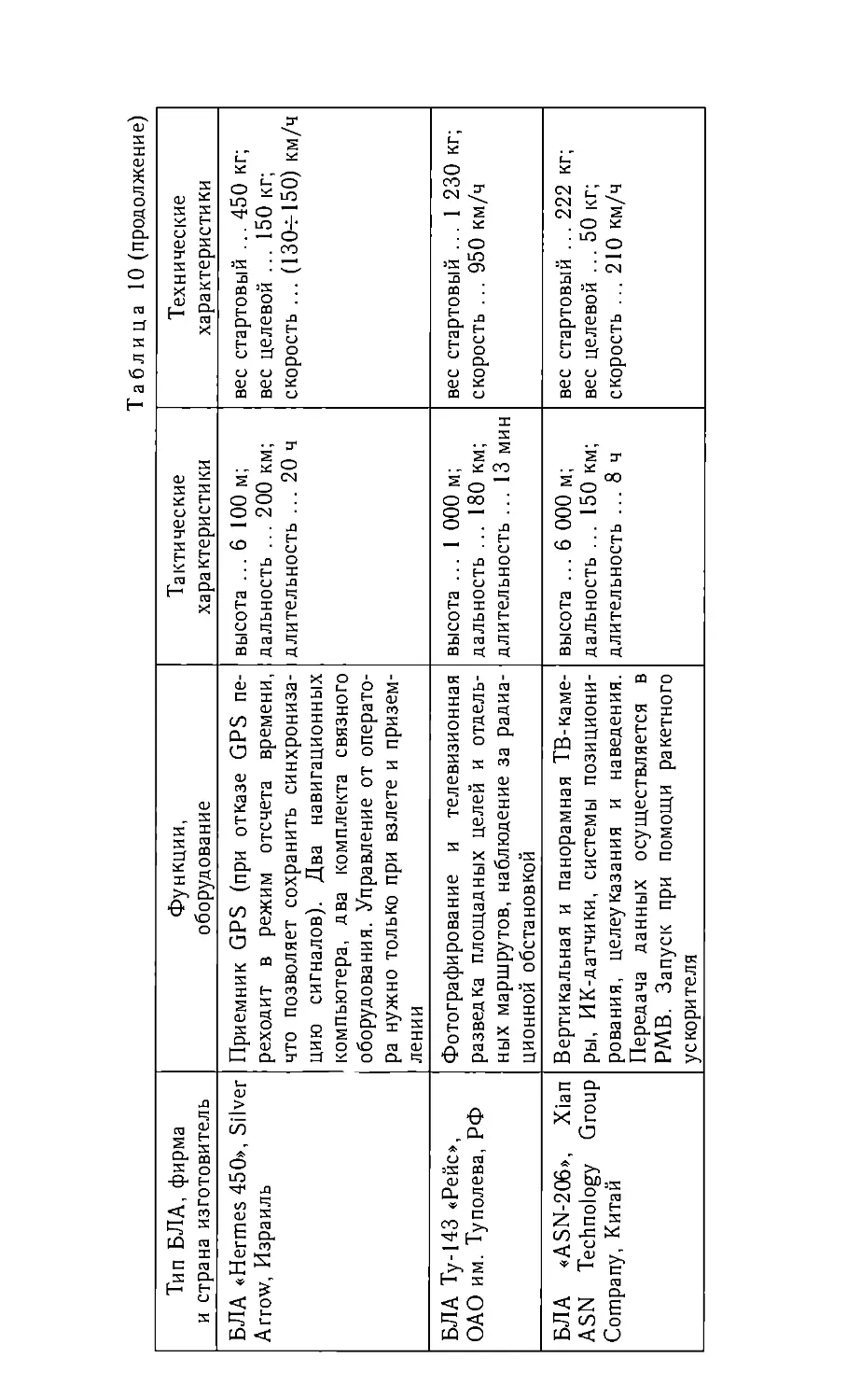
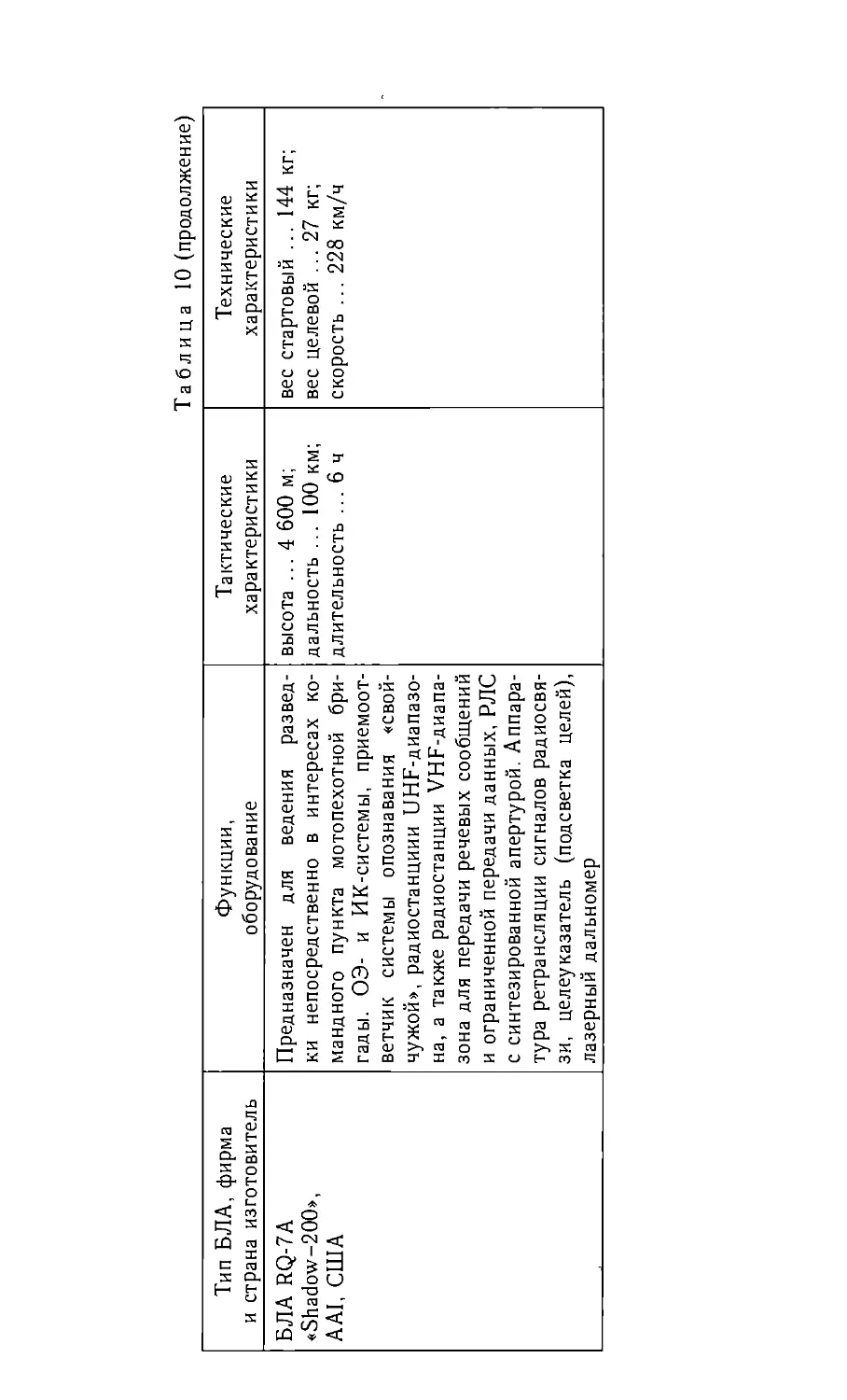
В Приложении (табл. 10) приведены ТТХ некоторых тактических
разведывательных БЛА самолетного типа средней дальности.
Представителями тактических разведывательных БЛА самолетного
типа средней дальности являются также:
• БЛА «Fox AT2», САС Systemes, Франция;
• БЛА «Searcher-Mk-II», IAI, Израиль;
• БЛА «PW-1», CPMIEC, Китай;
• БЛА «CL-289» (AN/USD-502), Bombardier Aerospace (Канада),
при участии Dornier (Германия) и Aerospatiale — Matra
(Франция);
• БЛА «Mohajer», HESA, Иран;
• БЛА «Scout», IAI, Израиль;
• БЛА «Sojka III», Технический институт ВВС и ПВО, Чехия;
• БЛА «CL-32», Canada Air, Канада;
• БЛА «Thomson-CSF», Бельгия;
• БЛА «Spectrum», Meggit Defense Systems, Великобритания;
• БЛА «Фокс AT», CAC Systems, Франция;
• БЛА «Cresserelle», Sagem, Франция;
• БЛА «Spervere», Sagem, Франция;
• БЛА «W-50», Нанкинский НИИ техники имитационного
моделирования, Китай;
• БЛА «Changkhong-1», Пекинский университет авиации и
космонавтики, Китай;
• БЛА «Nishant», Управление оборонных исследований, Индия;
• БЛА «Seeker-2>>, Centrone, ЮАР;
• БЛА BQM-155A «Hunter», IAI (Израиль) и TRW (США);
• БЛА «Seamos», общеевропейская корпорация «EADS»;
• БЛА «Рейнджер», Erlion (Швейцария) и IAI (Израиль) и т.д.
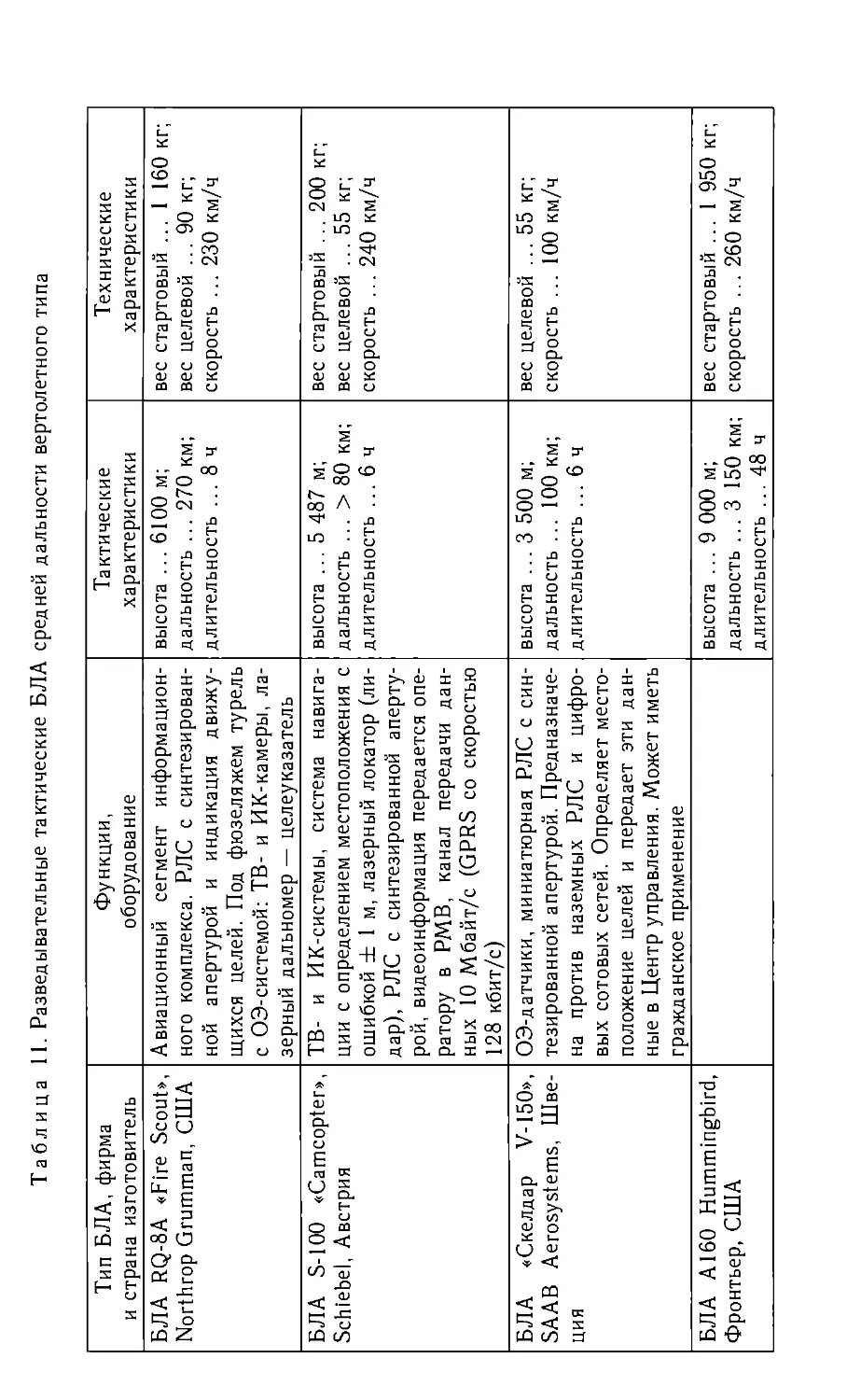
В Приложении (табл.11) приведены ТТХ некоторых тактических
разведывательных БЛА вертолетного типа средней дальности.
Представителями тактических разведывательных БЛА
вертолетного типа средней дальности являются также:
• БЛА «SARC», общеевропейская корпорация «EADS»;
• БЛА «Орка-1200», общеевропейская корпорация «EADS»;
• БЛА «Скорпио-30», общеевропейская корпорация «EADS»;
• БЛА «Хетэл», ЕСТ и ISNAV, Франция;
• БЛА «CL-327», Guardian, Канада;
• БЛА «Puma», Bombardier Services Corporation, Канада;
• БЛА 379 «Fire Scout», Northrop Grumman, США;
• БЛА «Сайфер-2», Sikorski Aircraft, США и т.д.
В настоящее время, как показал конфликт в Югославии,
разработчики БЛА стремятся сделать новые БЛА максимально
универсальными, модульными и взаимозаменяемыми как в стратегических, так
и тактических операциях, как при выполнении ударных, так и при
выполнении разведывательных функций. Это проявляется в
стремлении авиастроительных фирм свести воедино в беспилотный
разведывательно-ударный многоцелевой комплекс различное оборудование,
предназначенное для выполнения задач разведки (включая наблюдение
и обнаружение целей), создания помех радиотехническим средствам
противника, подавления его ПВО, нанесения ударов по наземным
целям и др. Иными словами, бортовая система управления должна
выполнять композицию следующих функций [1.1]:
• управление ресурсами — автоматическое управление работой
всех бортовых систем, включая датчики различных параметров и
оружие;
• управление операциями с информацией — получение и слияние
различного вида информации, а также обработка и отображение
информации;
• управление в критических ситуациях — поиск управленческих
решений в случае боевого повреждения или появления нарушения
в нормальной работе бортовых систем, реализация в критических
ситуациях возвращения БЛА на базу;
• сетевое управление — распределение частотных каналов для
реализации информационной связи БЛА, поддержание качественной
работы всех каналов связи.
Реализация такого обширного круга задач на одном аппарате
требует новых концепций построения бортовых ИУС, установки более
разнообразного бортового оборудования. Информационные и ударные
бортовые системы в этом случае могут иметь массогабаритные
характеристики, которые будут значительно превышать конструктивные
возможности БЛА.
Одним из наиболее реальных путей решения данной проблемы
является создание многоцелевых БЛА со сменными модулями
соответствующего назначения. Например, в разведывательном варианте
они оснащаются телекамерами, ИК-станциями, РЛС с синтезированной
апертурой и т. п., в варианте постановщиков помех — станциями
радиоэлектронной разведки, передатчиками активных помех, контейнерами
с автоматами сброса дипольных отражателей, а в ударном варианте —
оборудованием наведения оружия (ИК-станция переднего обзора, РЛС,
лазерный дальномер и т. п.) и средствами поражения целей.
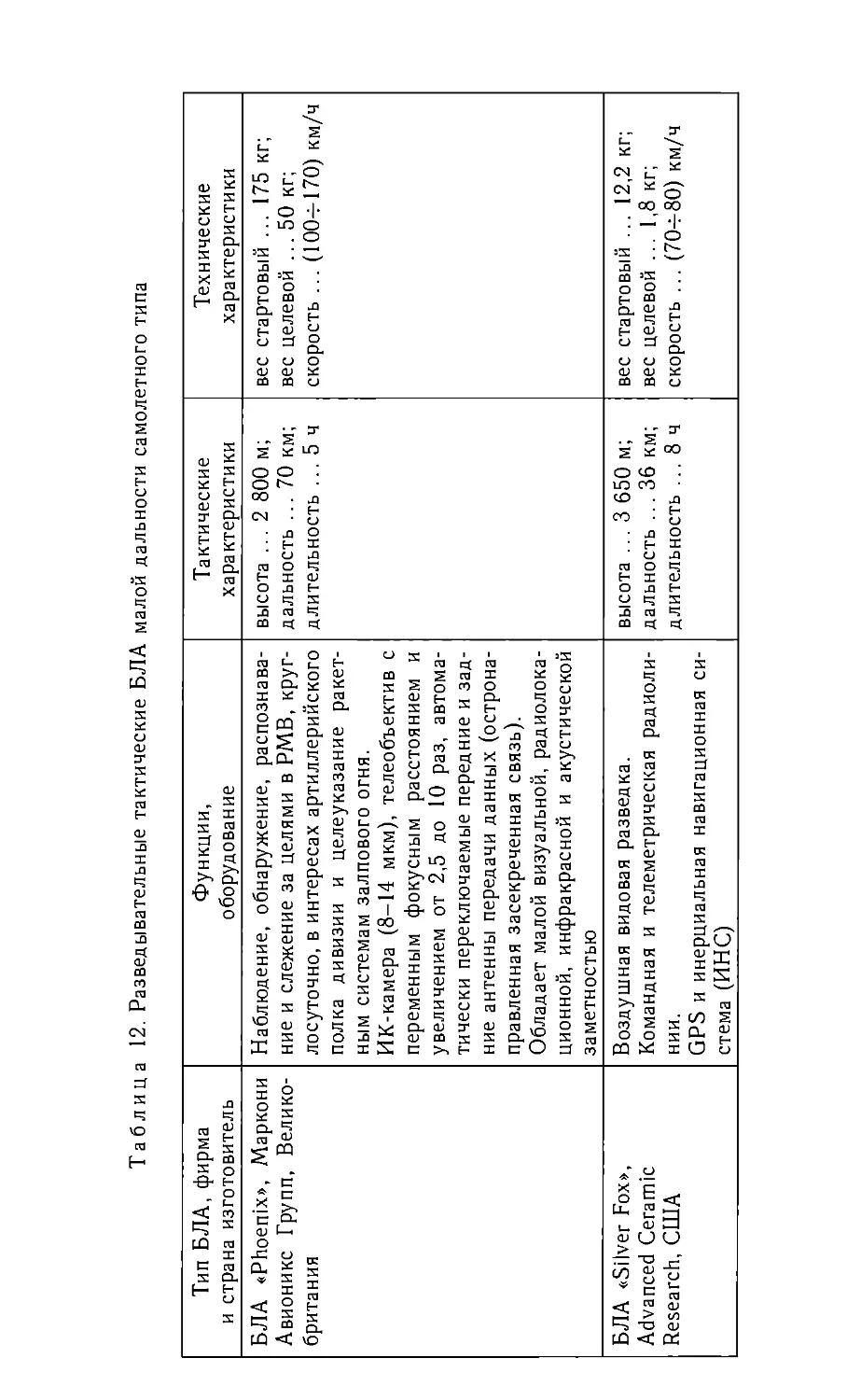
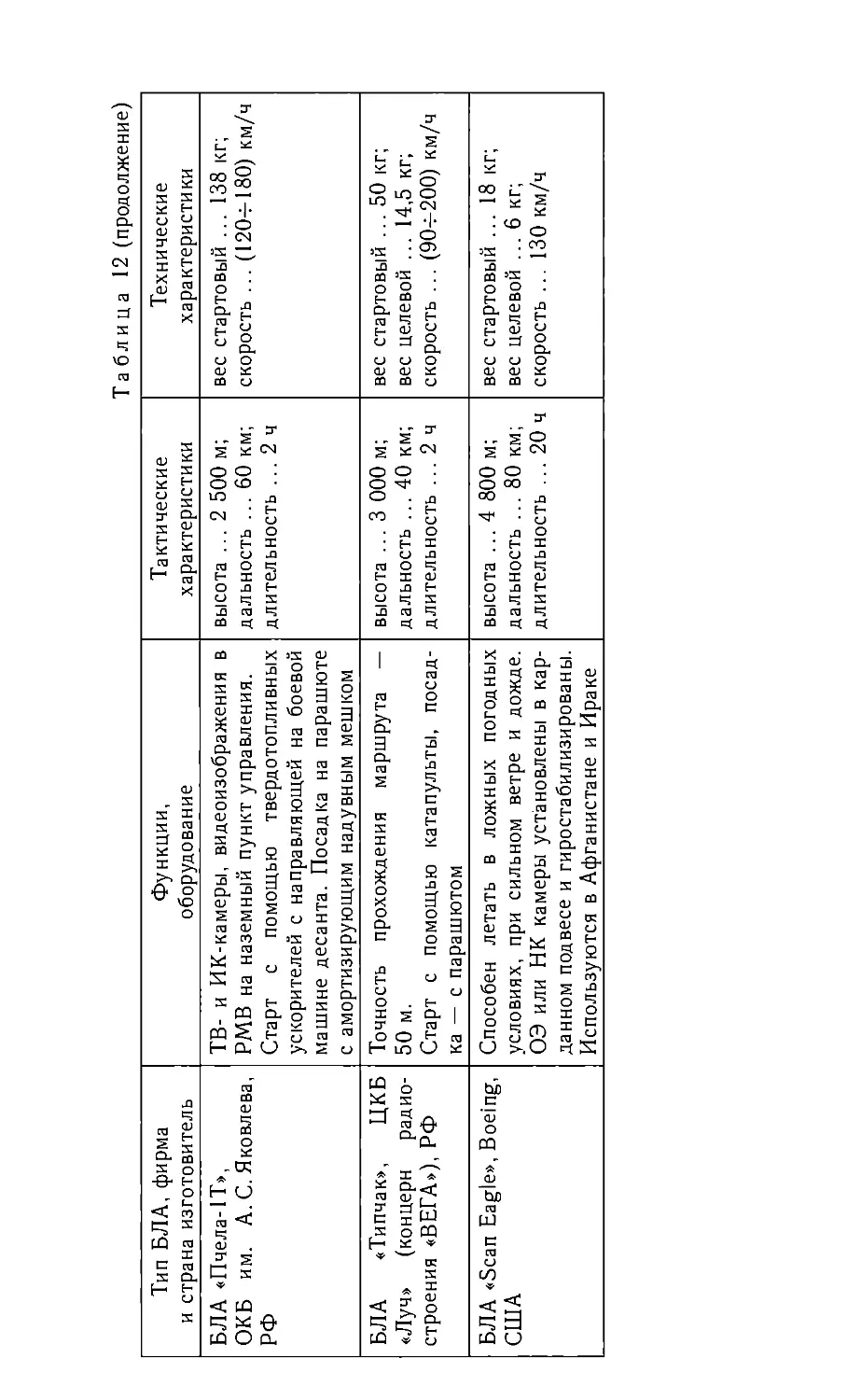
В Приложении (табл. 12) приведены ТТХ некоторых тактических
разведывательных БЛА самолетного типа малой дальности.
Представителями тактических разведывательных БЛА самолетного
типа малой дальности являются также:
• БЛА «Mirach-26», Италия;
• БЛА «Lipan M3», Аргентина;
• БЛА «Chacal-2», ALCORE Technologies SA, Франция;
• БЛА RZO «Бревел», STN Atlas Elekronik, Германия;
• БЛА «Z-2», Нанкинский НИИ техники имитационного
моделирования, Китай и т. д.
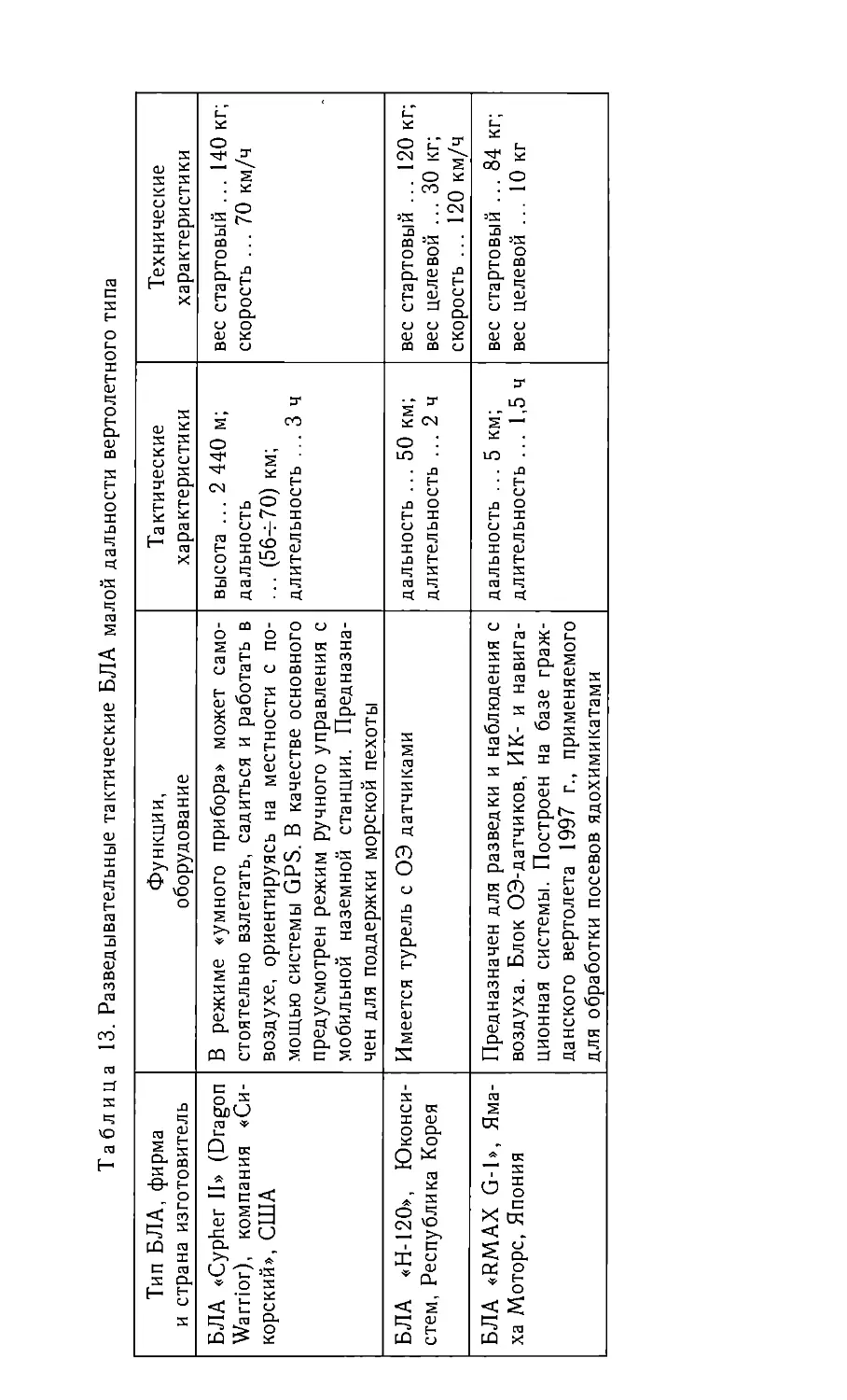
В Приложении (табл. 13) приведены ТТХ некоторых тактических
разведывательных БЛА вертолетного типа малой дальности.
В последнее время сформировался повышенный интерес к
малогабаритным БЛА (МБЛА), относящимся к разведывательным тактическим
БЛА ближней дальности. Это объясняется появлением новых
достижений в области миниатюризации бортовых компонентов БЛА и новых
военно-технических концепций применения таких аппаратов. Сказался
также опыт, полученный в боевых действиях в локальных конфликтах
(в миротворческих операциях), где выявились потребности повышения
информационной обеспеченности наземных войск тактического уровня.
Возникла необходимость функционирования БЛА в интересах
отдельных групп солдат как средства взводного уровня,
обеспечивающего локальную разведку по прямому требованию потребителя
информации. Решающим фактором успеха становится организация непрерывной
разведки, планирование и управление выполнением боевых действий
с привлечением минимально необходимых ударных средств. Основным
информационным звеном в такой ситуации становятся именно МБЛА,
которые предполагается оснащать телевизионными или тепловизион-
ными камерами, биохимическими, радиационными, акустическим
датчиками и т. п., и которые должны входить в состав индивидуального
снаряжения военнослужащих для использования при ведении
контртеррористических операций и боевых действий.
Возможность создания и применения МБЛА для выполнении
разведывательных задач объясняется следующими причинами:
• высокий уровень развития элементной базы радиоэлектроники и
миниатюризация датчиков, приборов и устройств, используемых
в комплексах бортового оборудования;
• снижение уровня специальных требований к бортовому
оборудованию для малых БЛА и, как следствие, расширение
номенклатуры применяемого оборудования;
• отсутствие необходимости в дорогостоящей
научно-производственной базе для разработки, производства и испытаний МБЛА.
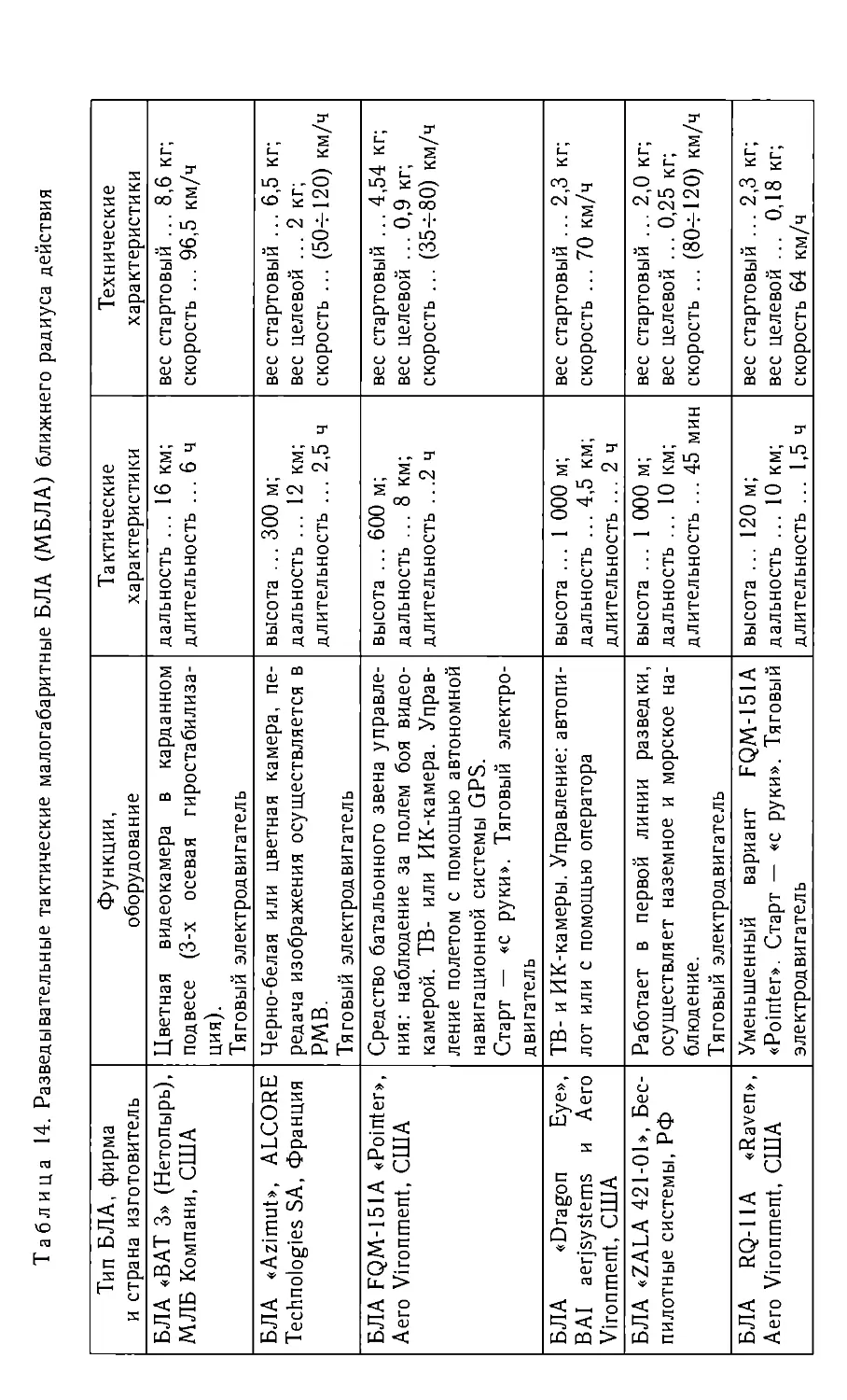
В Приложении (табл. 14) приведены ТТХ некоторых тактических
разведывательных малогабаритных БЛА ближнего радиуса действия.
Представителями тактических разведывательных малогабаритных
БЛА ближнего радиуса действия являются также:
• БЛА «Байрактар», Калебайкар, Турция;
• БЛА «Skylark», El bit, Израиль и т.д.
Дальнейшее развитие подобной техники практически доказало
возможность изготовления миниатюрных беспилотных летательных
аппаратов размером не более 150 мм (миниатюрные БЛА).
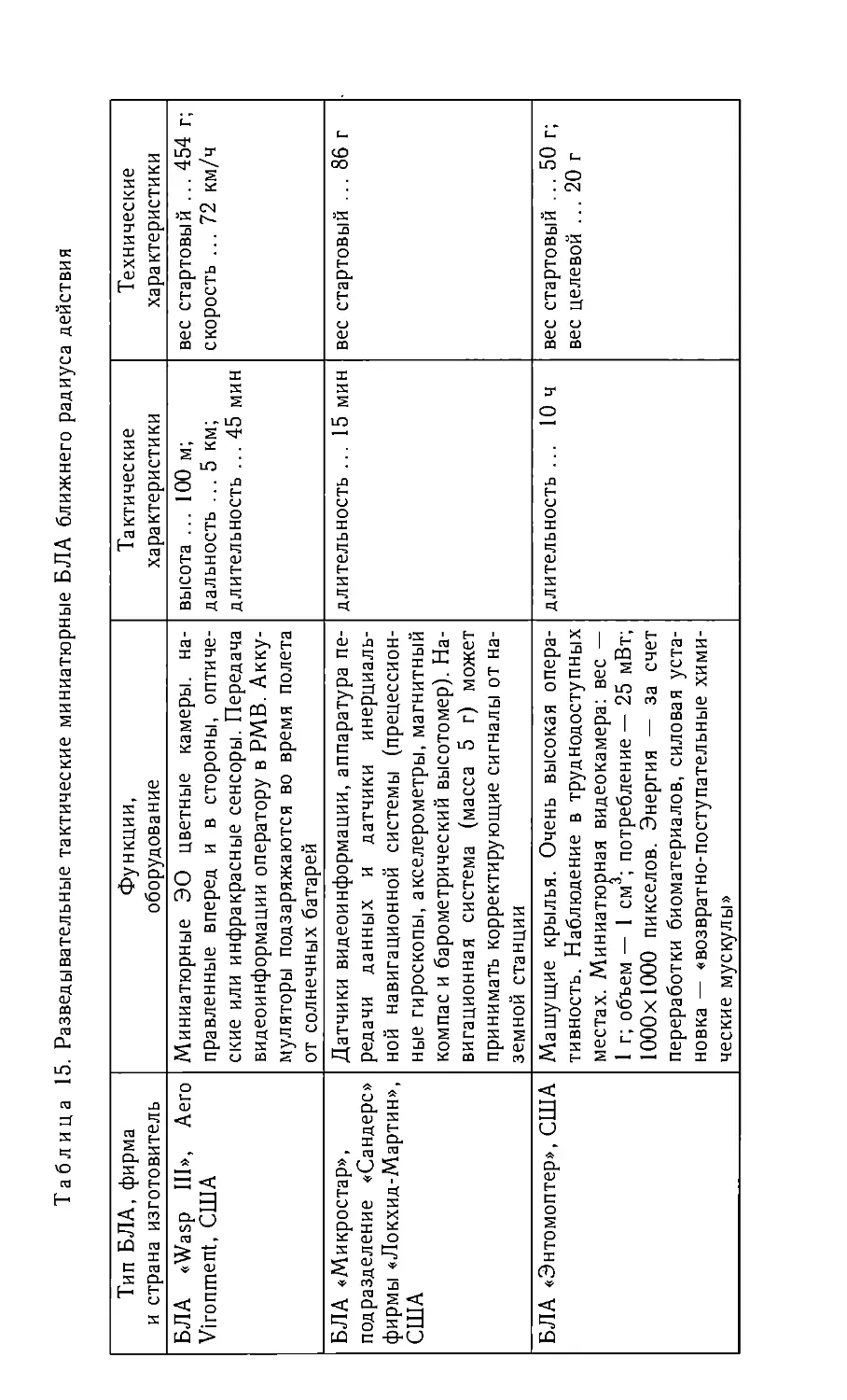
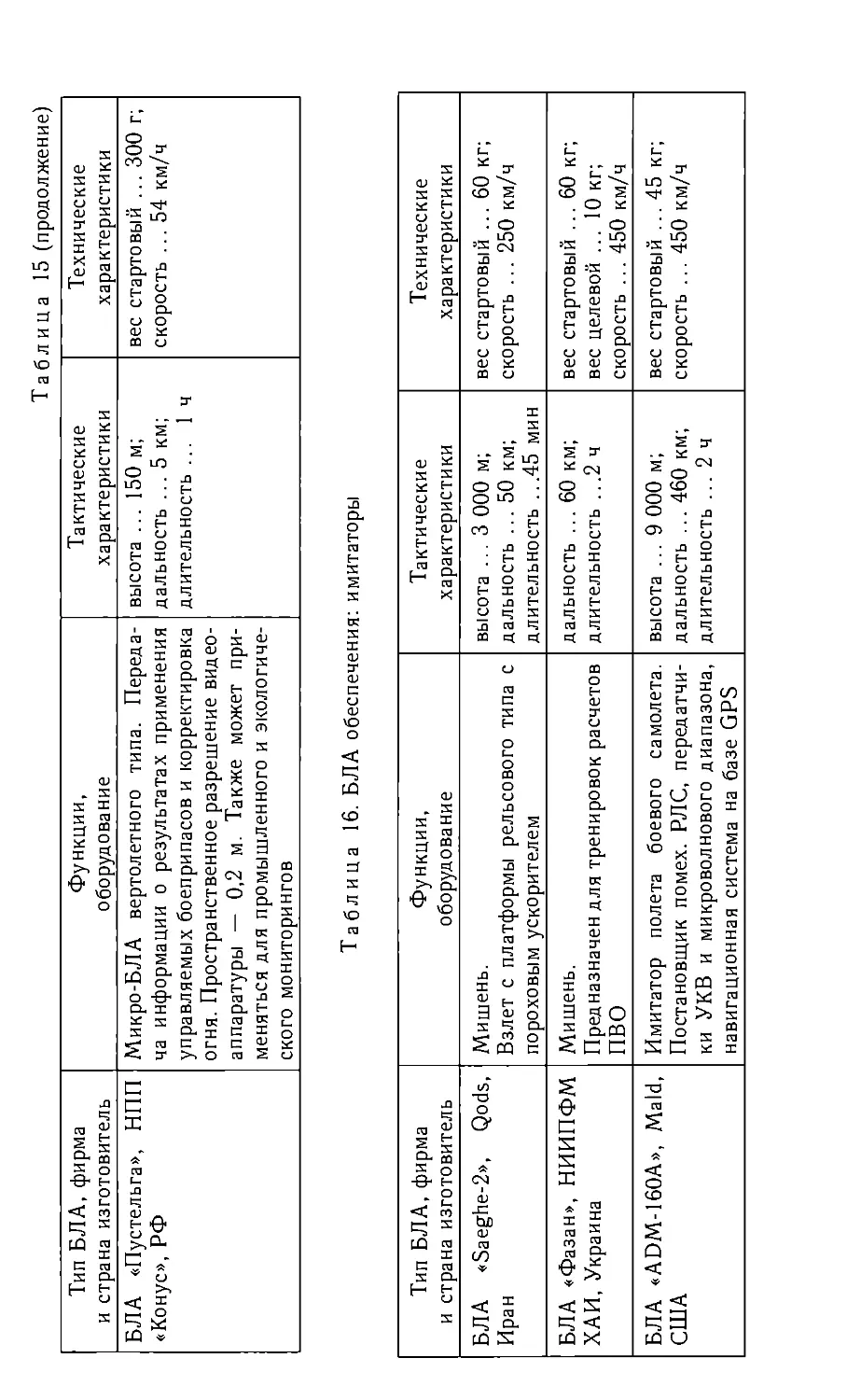
В приложении (табл. 15) приведены ТТХ некоторых тактических
разведывательных миниатюрных БЛА ближнего радиуса действия.
Представителями тактических разведывательных миниатюрных
БЛА ближнего радиуса действия являются также:
• БЛА «Lockheed», Sanders, США;
• БЛА «Black Widow», AeroVironment, США;
• БЛА «Mosquito 1.5», IAI, Израиль;
• БЛА «Carollo P 50», Технический университет Брауншвейга,
Германия;
• БЛА «Ровир», подразделения «Сандерс» и «Сканк Уоркс» фирмы
«Локхид-Мартин», США;
• БЛА «Колибри», Латроникс, США;
• БЛА «Колибри», ХАИ, Украина;
• БЛА «Микробат», Калифорнийский технологический институт и
фирма «AeroVironment», США;
• БЛА «SLADF», Майкрокрафт, США и т. д.
Достигнутые технические характеристики оборудования малых
БЛА не позволяют перейти к широкой замене более крупных БЛА
на БЛА мини- и микро-класса. Например, качество изображения,
получаемого при помощи аппаратуры малых БЛА, остается достаточно
низким — получаемое изображение часто нестабильно и дрожит.
Необходимо отметить, однако, что, в частности, компания
CONTROP Precision Technologies (Израиль) начала поставки
гиростабилизированной миниатюрной системы наблюдения D-STAMP
с тремя степенями свободы и массой всего около 650 г.
Прогнозируется появление «стай» БЛА-микророботов,
доминирующих над полем боя и над объектами противника. Время практического
появления таких «стай» будет зависеть от прогресса в создании
сверхмощных автоматических или автоматизированных ИУС и от
дальнейшего прогресса в нанотехнологии.
Как указывалось выше, БЛА обеспечения для БАС военного
назначения выполняют функции имитаторов и решают функциональные и
транспортные задачи.
В Приложении (табл. 16) приведены ТТХ некоторых имитаторов из
класса БЛА обеспечения.
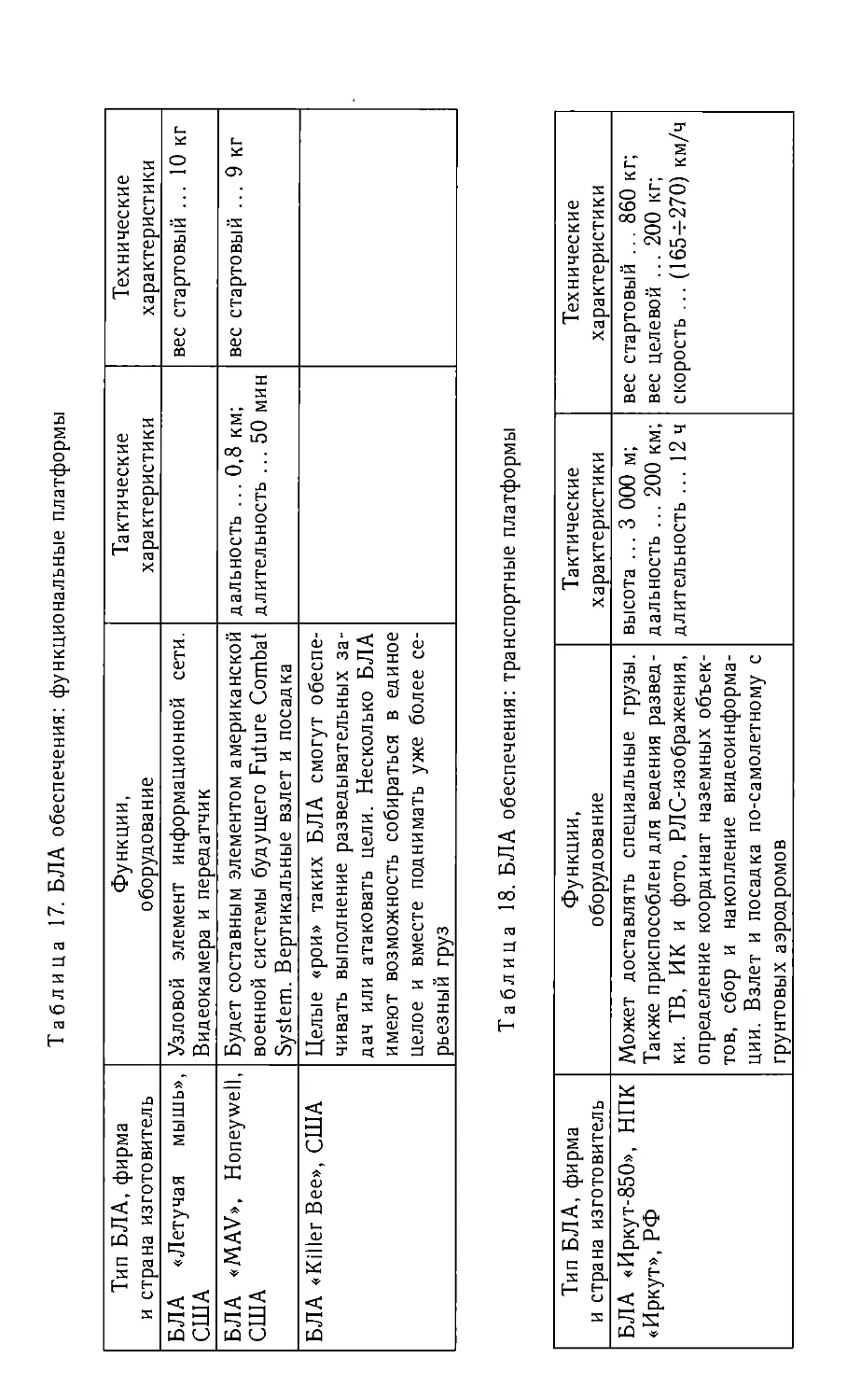
В табл. 17 Приложения приведены ТТХ некоторых функциональных
платформ из класса БЛА обеспечения.
Представителями функциональных платформ из класса БЛА
обеспечения являются также:
• БЛА «Dragon Eye», США (ретранслятор, постановщик помех);
• БЛА «BQM-53», Нортроп Грумман, США (постановщик помех);
• БЛА «Мошкара», Республика Беларусь (постановщик помех) и
т.д.
В Приложении (табл. 18) приведены ТТХ транспортной платформы
из класса БЛА обеспечения.
Перейдем теперь к обсуждению классификации и характеристик
БЛА гражданского назначения.
Круг задач, решаемых БЛА гражданского назначения, очень широк
и имеет тенденцию к дальнейшему быстрому расширению. Для данных
БЛА предпосылками развития являются:
• высокая потенциальная возможность развития катастрофических
ситуаций из-за нештатных и аварийных ситуаций на
многочисленных промышленных объектах технологической
инфраструктуры и на природных объектах, необходимость в связи с этим
оперативного реагирования и управления выходом из таких
ситуаций;
■·· протяженность естественных и технологических объектов, их
удаленность от развитых технологических центров;
• расширение сети технологических объектов и расширение
номенклатуры объектов контроля.
БАС гражданского применения являются, прежде всего,
информационными системами, где целевая функция заключается в
оперативном получении, накоплении и анализе информации для формирования
достоверных сведений о контролируемых процессах и объектах,
использовании получаемой информации для повышения эффективности
управления полетом БЛА при решении целевых задач. Поэтому
первоочередное значение для выбора технического облика БЛА имеет состав
и качество целевого оборудования, а также качественные
характеристики цифровой системы автоматического управления (ЦСАУ) полетом
БЛА как составной части бортовой ИУС.
Целевые функции определяют такие технические характеристики
БЛА, как взлетная масса, кратность применения, дальность и
длительность полета, способы старта и посадки, уровень
«интеллектуальности». Существенной ограничительной характеристикой является
стоимость БАС (в составе с БЛА), а также стоимость и простота
эксплуатационного обслуживания.
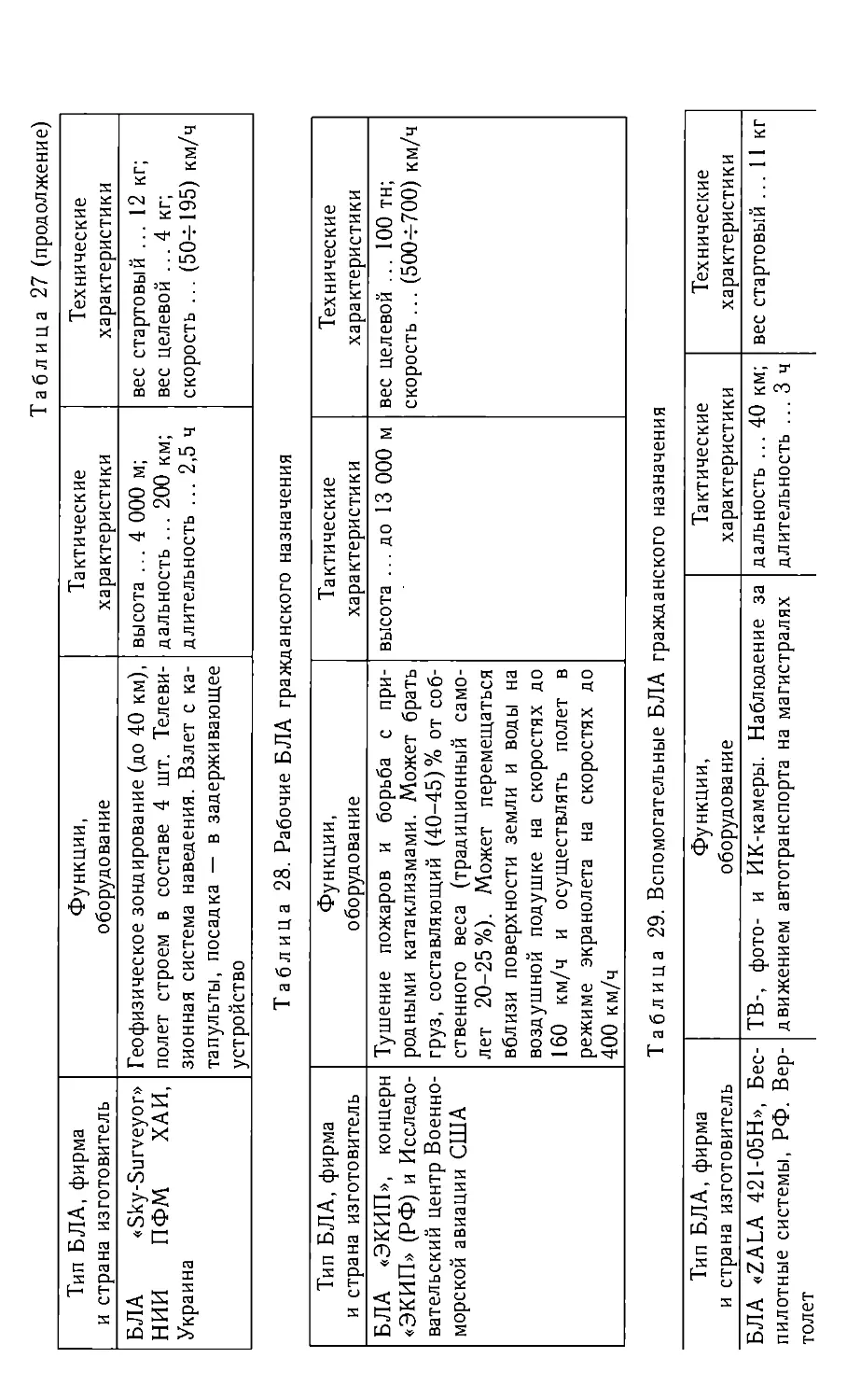
Применение БЛА гражданского назначения обеспечивает
получение следующих результатов:
• возможность получения всеобъемлющей информации о
параметрах состояния природной среды, промышленно-технологического
комплекса, созданного человеком, о состоянии урбанистической
(т.е. рукотворной) среды проживания современного человека;
• минимизация вероятности возникновения и сокращение сроков
ликвидации антропогенных и природных катастроф;
• повышение эффективности технологической деятельности
человека;
• создание условий для оперативного маневра ресурсами сил и
средств;
• устойчивость информационной поддержки промышленной
деятельности человека.
Достижение перечисленных выше результатов требует создания
разнообразных датчиков получения информации, действующих в
широких географических рамках и в разнообразных климатических и
эксплуатационных условиях.
Поэтому БАС на основе БЛА гражданского назначения должны
быть мобильными, их количество должно обеспечивать создание
плотной информационной сети. В этом случае требуется значительная
численность обслуживающего персонала. Заметим, что этот персонал
не обязательно должен обладать высокими профессиональными
качествами.
Таким образом, для максимального соответствия принципам
получения всеобъемлющей и своевременной информации целесообразно
создавать БЛА гражданского назначения в соответствии со следующими
критериями:
• высокая мобильность перемещения оборудования БАС на основе
БЛА гражданского назначения;
• высокая степень автоматизации целевого функционирования БАС
(БЛА);
• низкая стоимость БАС (БЛА) и его эксплуатации;
• возможность обеспечения функционирования БАС (БЛА)
специалистами средней и низкой квалификации;
• возможность доставки к месту организации работ на
малогабаритных и дешевых транспортных средствах высокой
проходимости;
• возможность работы в местах с полным отсутствием технических
и организационных средств обеспечения полетов (старт, полет,
посадка);
• простота эксплуатационного обслуживания БЛА на месте
проведения работ целевого характера;
• высокие надежность функционирования и ремонтопригодность.
Функции, выполняемы БЛА гражданского назначения
(Приложение, табл.3) могут быть классифицированы в соответствии с целевыми
функциями.
Так задачи БЛА гражданского назначения:
• выявление и локализация техногенных катастроф, оценка их
последствий;
• оценка состояния тепловых сетей, полей фильтрации и аэрации,
дорожного покрытия;
• оценка состояния высоковольтных линий передач;
• оценка состояния трубопроводов;
• контроль технического состояния зданий и сооружений;
• обнаружение мест утечек, предаварийных и аварийных участков;
• контроль за железными и автомобильными дорогами; контроль
судоходства — могут быть классифицированы как задача
осуществления мониторинга промышленных объектов.
Задачи БЛА гражданского назначения:
• выявление и локализация естественных катастроф;
• выявление участков загрязнений земной и водной поверхности;
• обнаружение очагов возгорания в населенных пунктах, в лесах и
на торфяниках;
• слежение за динамикой лесных пожаров; слежение за ходом лесо-
восстановления на вырубках и гарях — могут быть
классифицированы как задача осуществления экологического мониторинга.
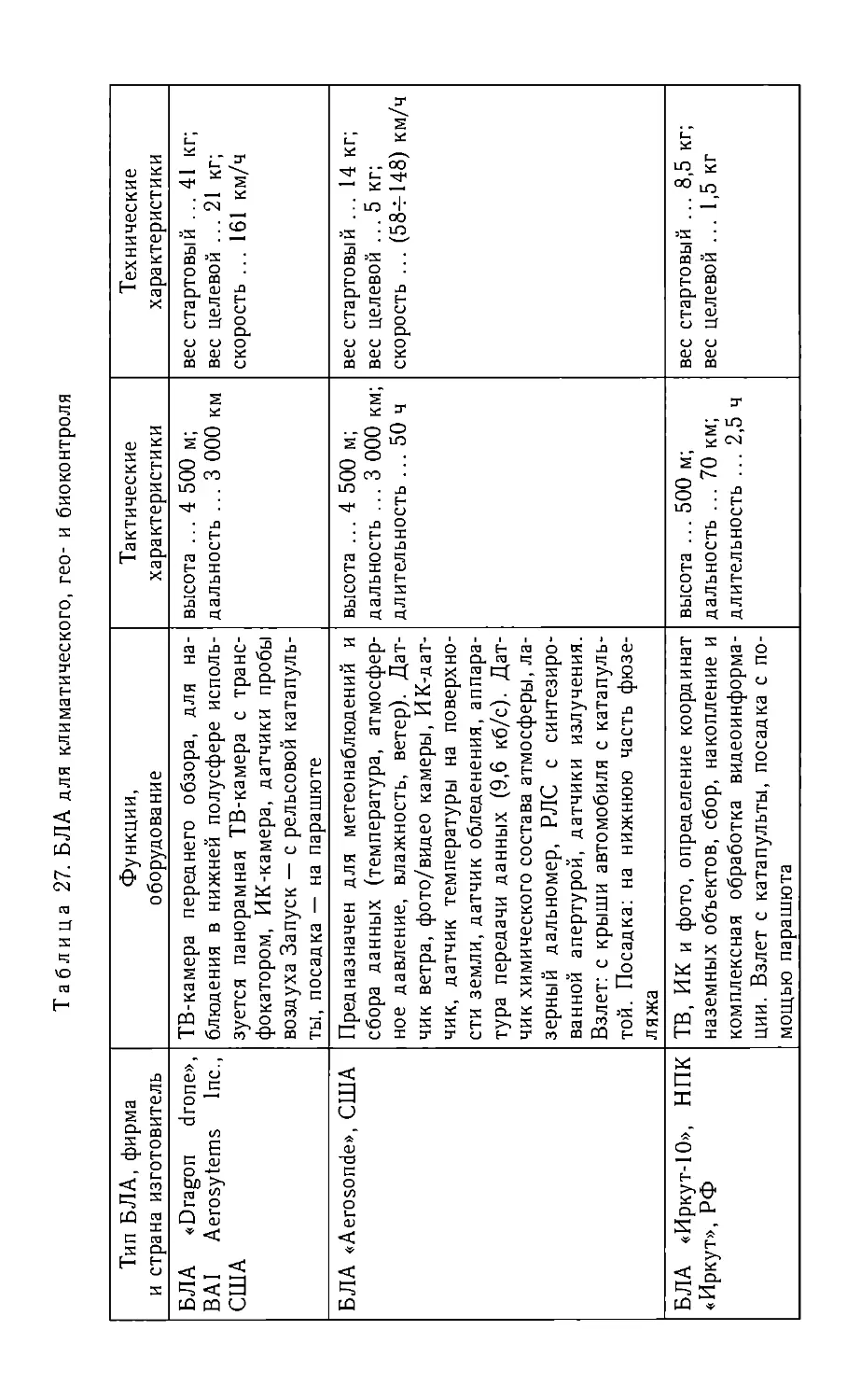
Задачи БЛА гражданского назначения:
• ведение радиационной, бактериологической и химической
разведок;
• контроль гидро-, метеообстановки, исследование атмосферы;
• информационное обеспечение сельскохозяйственных работ и
геологоразведки;
• разведка ледовой обстановки;
• разведка косяков рыб, контроль рыболовства — могут быть
классифицированы как задача осуществления климатического, гео- и
биоконтроля.
Задачи БЛА гражданского назначения:
• наблюдение за заданным участком местности с целью поиска и
идентификации объектов;
• аэрофотосъемка и контроль земной поверхности;
• составление ортофотопланов участков местности с заданными
точностью и разрешением;
• обеспечение формирования земельного кадастра отдельных
территорий — могут быть классифицированы как картографические
и топографические задачи.
Для дальнейшей конкретизации классификации БЛА
гражданского назначения воспользуемся дополнительными классификационными
признаками (по сути — параметрами технических характеристик БЛА):
• аэродинамические схемы — самолетного и вертолетного типа;
• весовые и габаритные параметры:
- крупногабаритные БЛА — вес более 250 кг;
- среднегабаритные БЛА — вес (30ч-250) кг;
- малогабаритные БЛА — вес менее 30 кг.
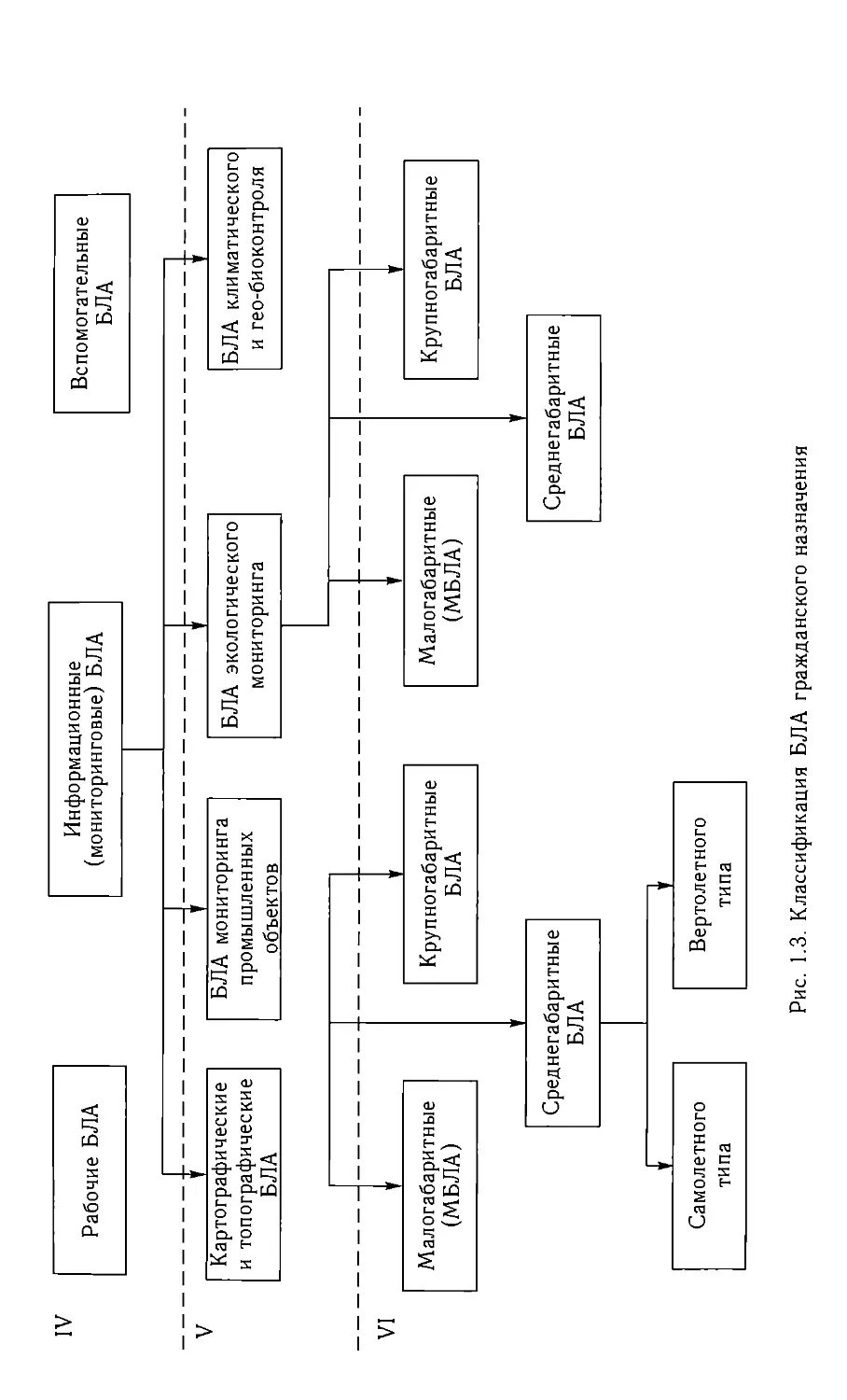
Получающаяся при этом структура классификации БЛА
гражданского назначения показана на рис. 1.3, где показаны следующие уровни
классификационной иерархии:
V — уровень целевых задач;
VI — уровень технических характеристик.
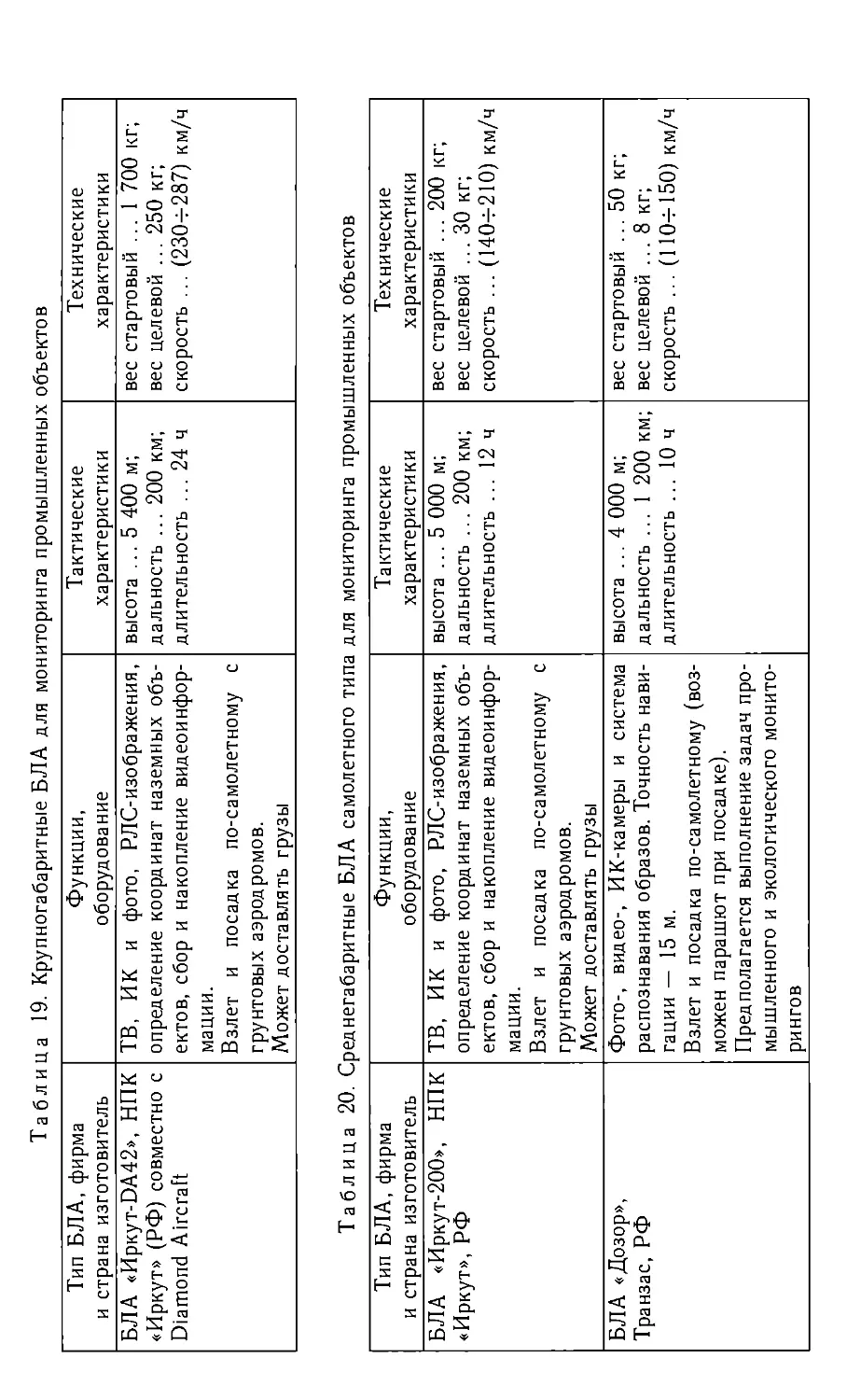
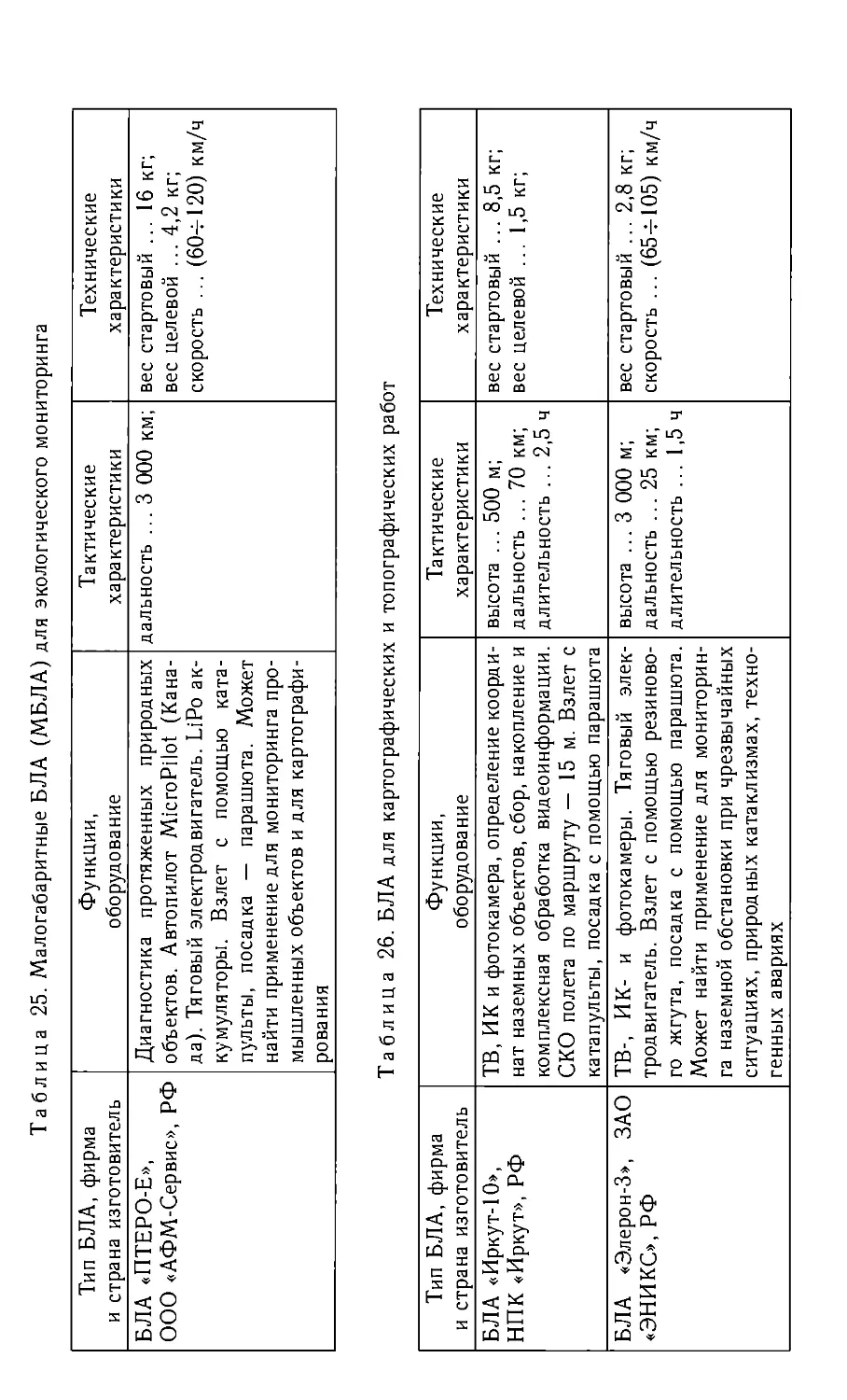
В Приложении (табл. 19) приведены ТТХ крупногабаритного БЛА
для мониторинга промышленных объектов.
В табл.20 приведены ТТХ некоторых среднегабаритных БЛА
самолетного типа для мониторинга промышленных объектов.
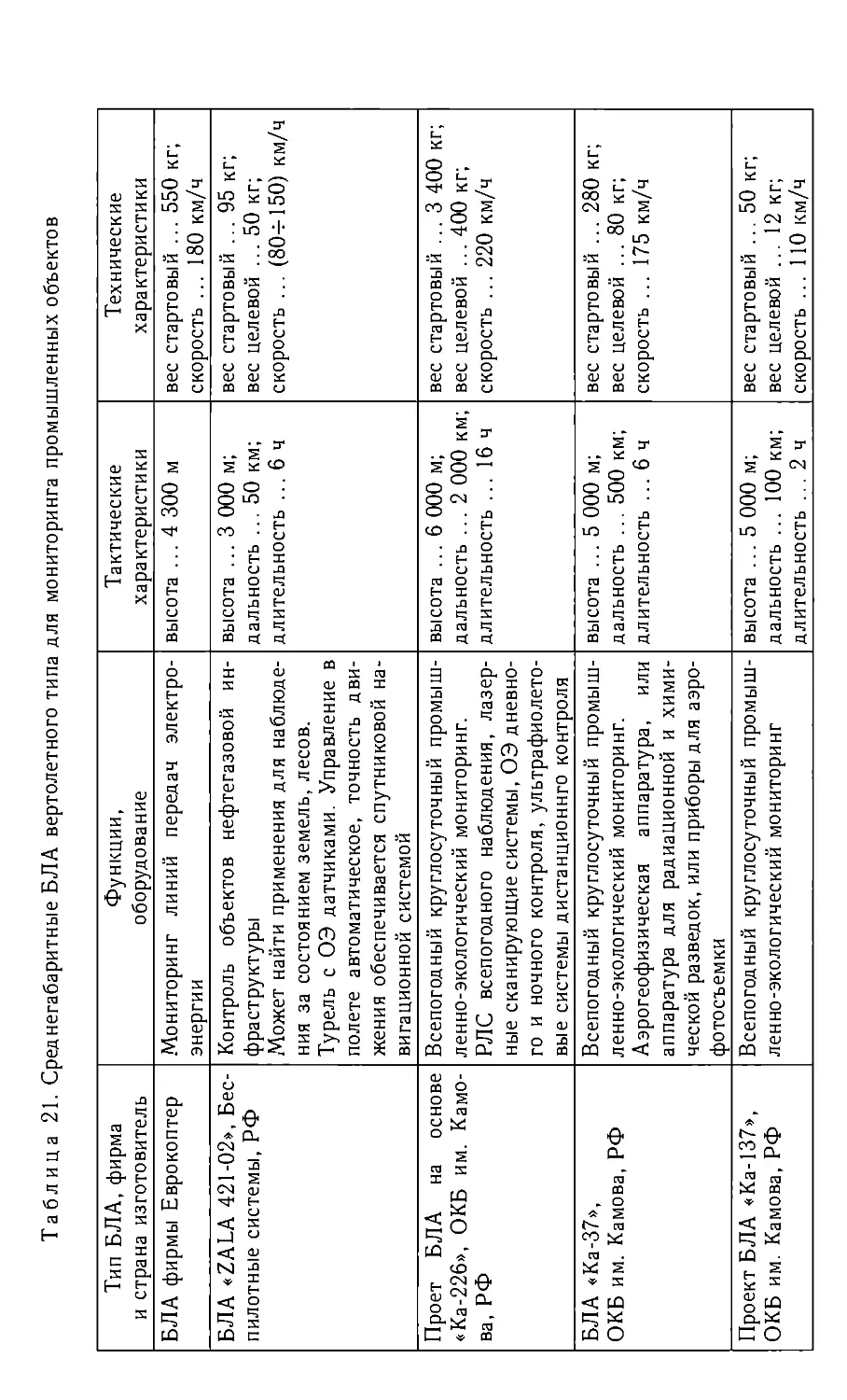
В Приложении (табл.21) приведены ТТХ некоторых
среднегабаритных БЛА вертолетного типа для мониторинга промышленных
объектов.
Представителями среднегабаритных БЛА вертолетного типа для
мониторинга промышленных объектов являются также:
• проект БЛА «Ка-37», ОКБ им. Камова, РФ и т. д.
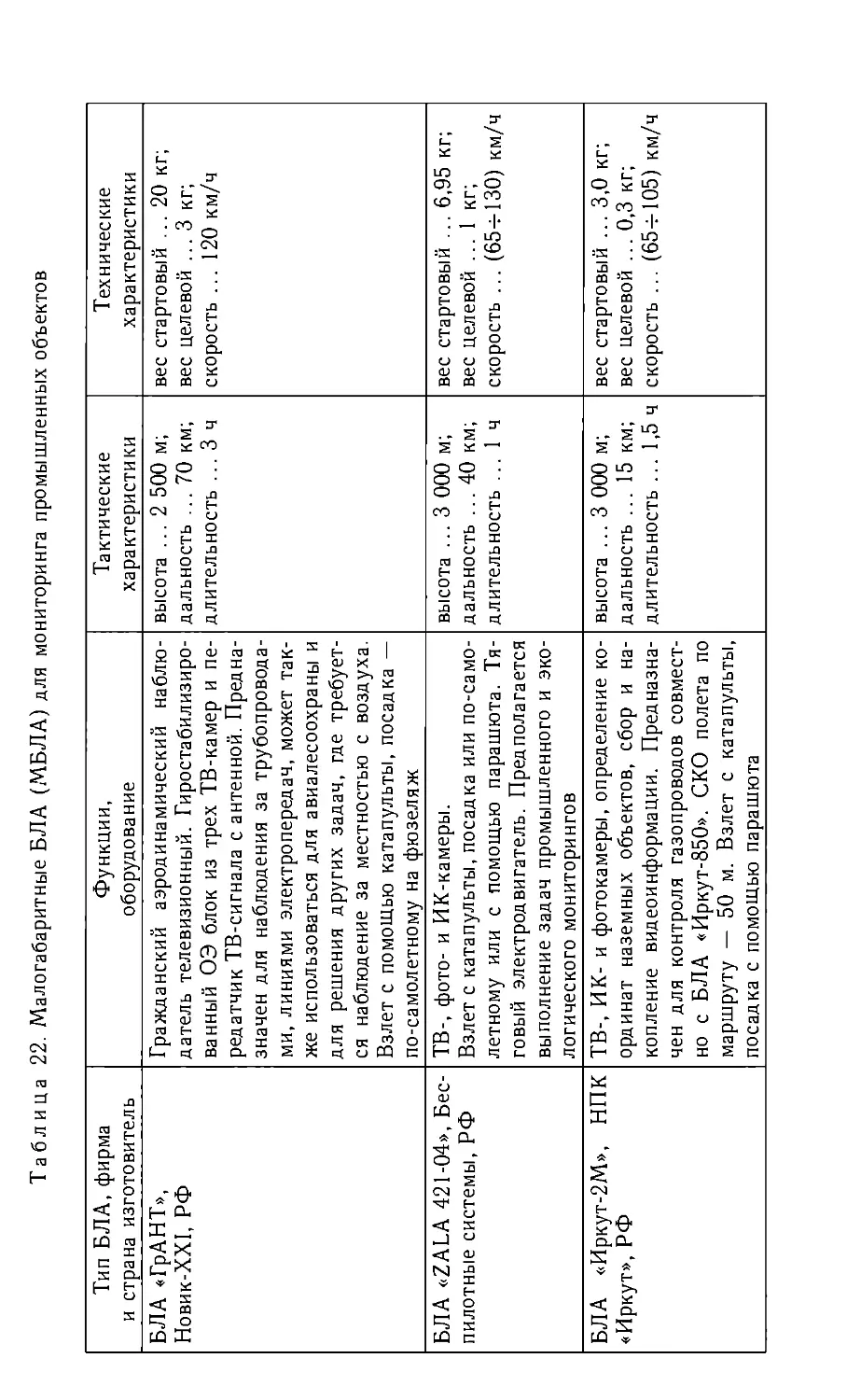
В Приложении (табл. 22) приведены ТТХ некоторых
малогабаритных БЛА для мониторинга промышленных объектов.
Представителями малогабаритных БЛА для мониторинга
промышленных объектов являются также:
• БЛА «ZALA 421-12», Беспилотные системы, РФ;
• БЛА «Локон», СКБ «Топаз», РФ;
• БЛА «Иркут-2Т/Ф», НПК «Иркут», РФ и т.д.
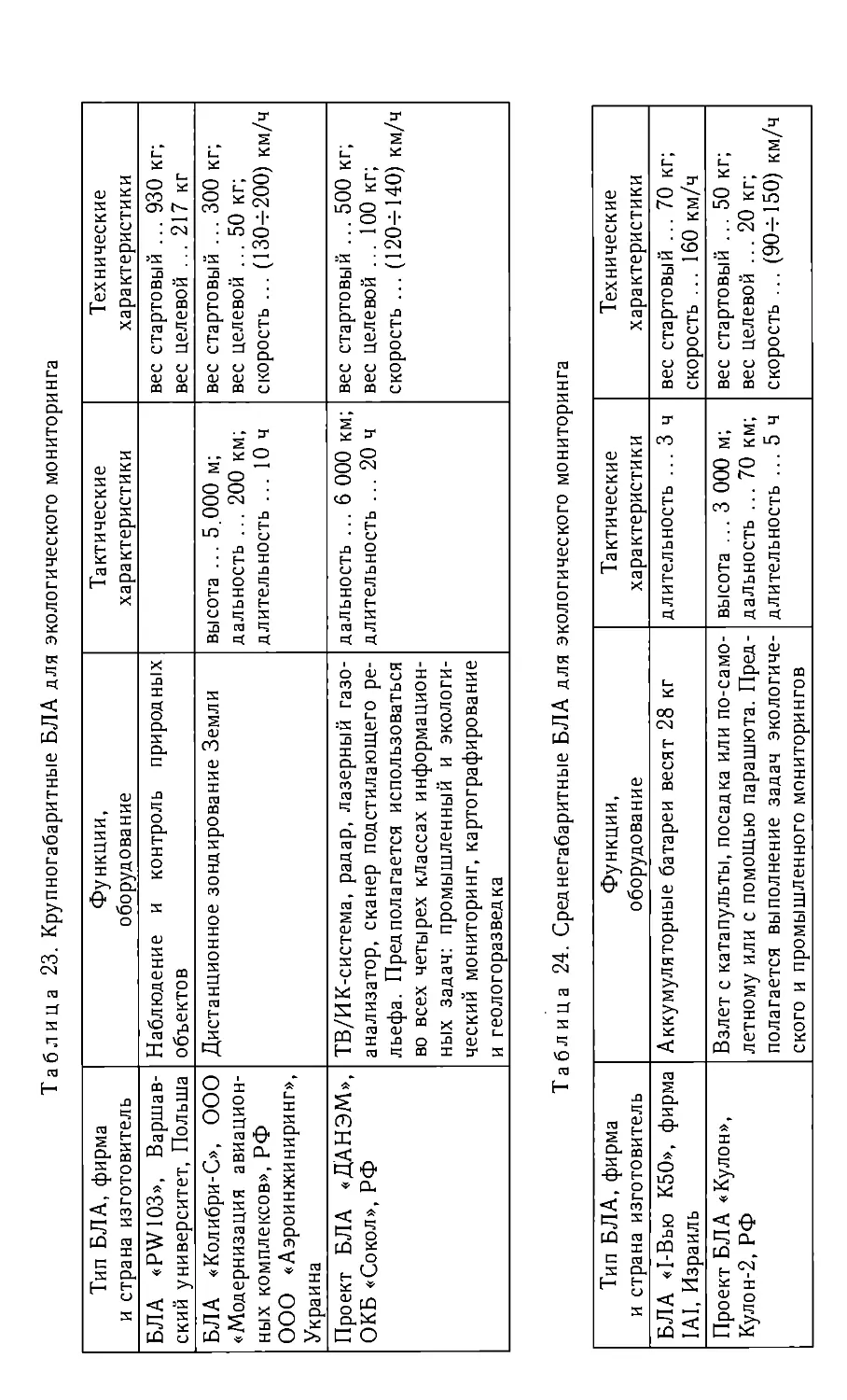
В Приложении (табл. 23-29) приведены ТТХ БЛА гражданского
назначения различных массогабаритных характеристик и различных
целевых функций.
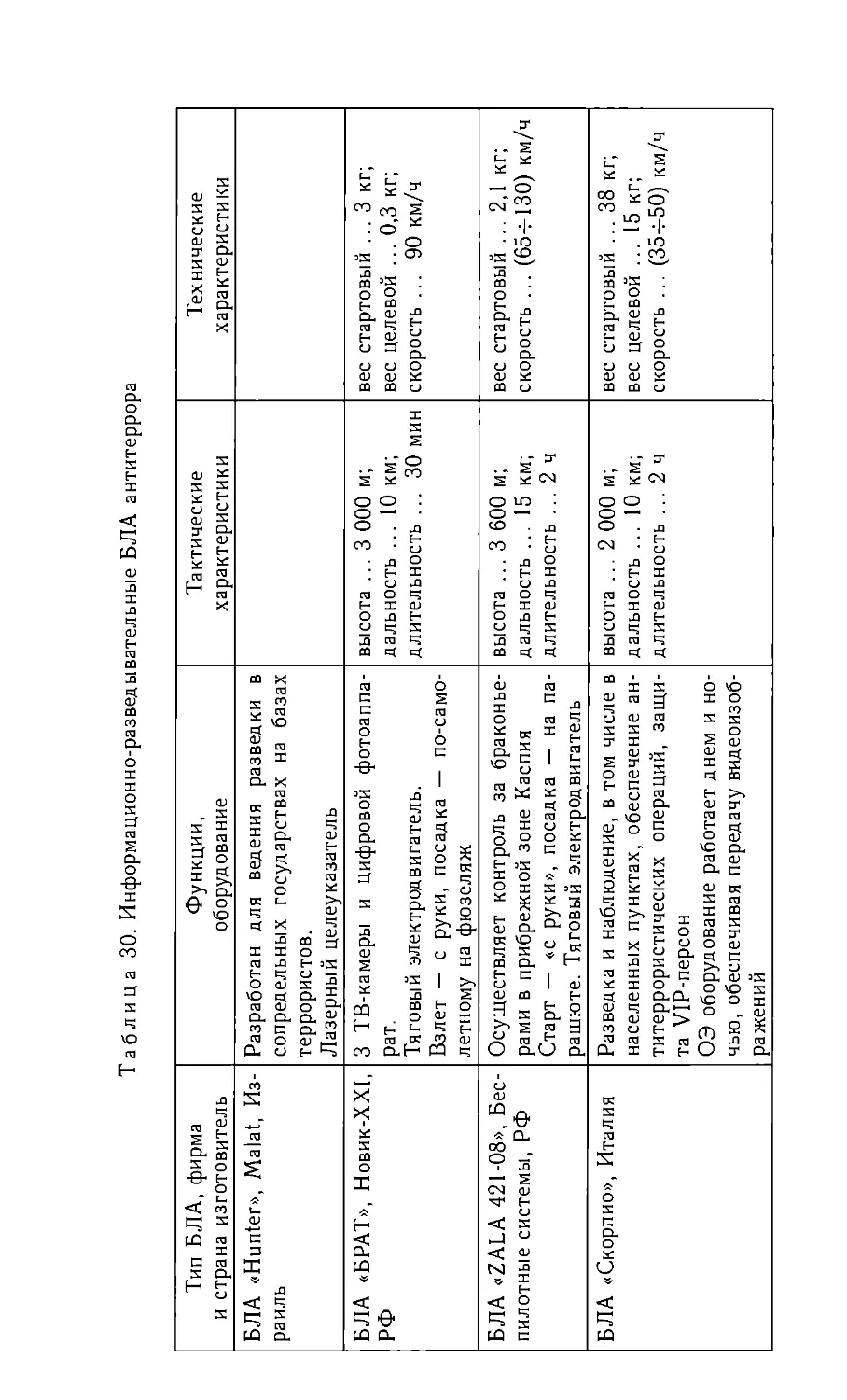
Использование БЛА в интересах борьбы с террористами,
наркомафией, браконьерами и прочей организованной преступностью пока
делает свои первые шаги, но эффективность БЛА в этой борьбе
демонстрируется и на этом начальном этапе.
В табл.30 Приложения приведены ТТХ некоторых информационно-
разведывательных БЛА антитеррора.
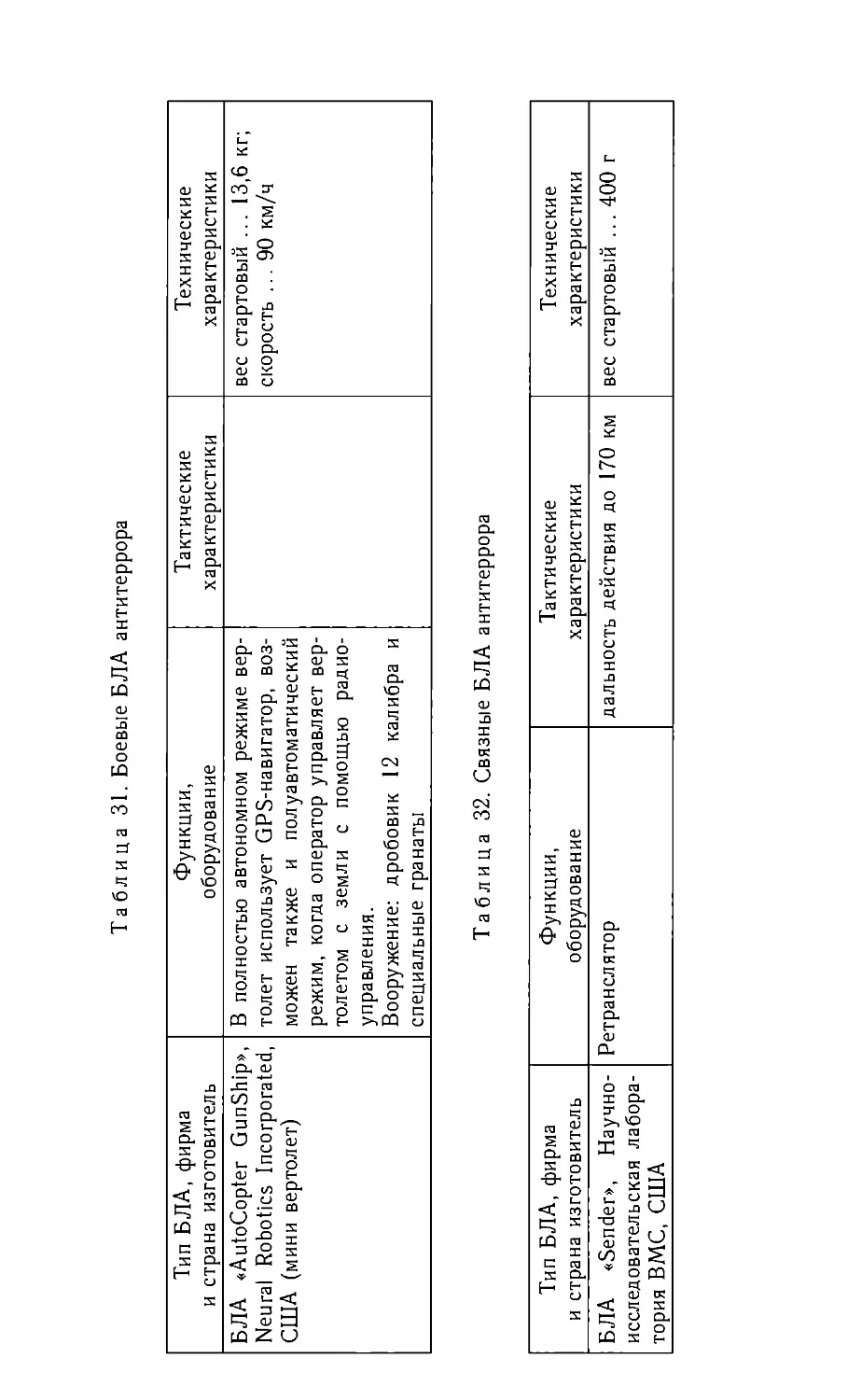
В табл.31 Приложения приведены ТТХ боевого БЛА антитеррора.
В табл.32 Приложения приведены ТТХ связного БЛА антитеррора.
ω
jQ
I
jQ
4
ω
то
о
Я
о
с
о
Ш
<
ς
pa
56
<
pa
>
>
Выше были перечислены функции, выполняемые комплексом
бортового оборудования БЛА, к которым следует добавить обеспечение
таких упоминавшихся выше качеств БЛА, как автономность,
независимость от человеческого фактора и устойчивость к внешним
воздействиям — это и многое другое достигается соответствующей работой
бортовой цифровой системы автоматического управления (ЦСАУ).
Возможность решения задач, которые ставятся на современном
этапе перед БЛА (в первую очередь перед информационными БЛА:
военными, гражданскими и антитеррористическими), требуют интеграции
автопилота с «интеллектуальным» оборудованием, занятым обработкой
целевой информации, например, видеоинформации. Такая интеграция
и должна достигаться ЦСАУ, но примеров столь глубоко
интегрированных ЦСАУ БЛА на настоящий момент неизвестно.
Можно отметить следующие ЦСАУ, применяемые в
отечественных БЛА:
1. Бортовой комплекс навигации и управления БЛА производства
ООО «ТеКнол», РФ, включает следующие элементы:
• инерциальная навигационная система;
• приемник спутниковой навигации (GPS/ГЛОНАСС);
• накопитель летных данных;
• модуль автопилота (алгоритмы замыкания контуров управления
полетом БЛА, формирование информации в накопитель летных
данных и в канал телеметрии);
• датчик воздушной скорости.
Технические характеристики: вес — 310 г; ошибки измерения:
координат БЛА — 6 м, высоты — 2 м, вертикальной скорости — 0,25 м/с,
углов ориентации — (1ч-1,3)°, путевого угла — 1°.
2. Система автоматического управления «Восток-228», Беспилотные
системы, РФ, в комплектации:
• блоки датчиков;
• вычислитель;
• накопитель данных;
Функции: стабилизация БЛА на траектории, стабилизация высоты,
управление маневрами ЛА и приведение его в горизонтальный полет,
измерение координат, углов ориентации и параметров движения БЛА.
Технические характеристики: вес — 22,5 г; ошибки измерения:
координат БЛА —5м, высоты —2м, вертикальной скорости —
0,2 м/с, углов ориентации: при прямолинейном полете — (0,2-4-0,3)° и
при маневрировании — 2°, путевого угла — 0,2°.
3. Бортовой комплекс управления АР-50, UAV Flight Systems Inc.,
США, включающий:
• антенна и приемник GPS;
• три встроенных датчика гировертикали и двухосевой
акселерометр;
• барометрический альтиметр;
• трубка Пито;
• два бортовых компьютера: один решает навигационные задачи,
другой — задачи управления.
Технические характеристики: вес — 50 г; ошибки измерения: координат
БЛА —15 м, высоты — 3 м, по скорости — 20% от заданного значения.
На отечественном рынке известны также:
• система автоматической стабилизации и пилотирования STA30,
группа компаний «Рисса» (РФ);
• AeRA autopilot (США);
• MicroPilot (Канада).
Перечень действующих БАС на основе БЛА, применяемых в
различных областях человеческой деятельности, и их ТТХ показывают,
что, несмотря на большое внимание и серьезную финансовую и
организационную поддержку работам по внедрению БЛА для решения задач
военного и гражданского характера, пока не произошел качественный
прорыв подобных сложных систем в практику решения перчисленных
выше целевых задач.
Одной из причин такого положения является неполное выполнение
требования существенного повышения степени автоматизации БЛА.
Для решения этой проблемы необходимы совершенно новые
подходы к синтезу и реализации управления всеми составляющими
полета и, соответственно, к информационному обеспечению управления,
необходимого для достижения высокой эффективности многократного
выполнения целевой задачи. Решать надо и фундаментальную задачу
создания новых методов измерения и управления, и задачу комплекси-
рования разнородного оборудования, и задачу создания
высокоэффективного программно-математического обеспечения.
Высочайшая сложность целевых задач, эффективно решаемых БЛА
только при выполнении весьма жестких тактико-технических
требований, оказалась причиной того, что пока не удалось преодолеть многие
фундаментальные, инженерные и технологические проблемы:
• не создана полномасштабная система автоматического
опознавания целевых объектов (на первом этапе предполагается решать
более простую задачу — автоматическое категорирование целей);
• отсутствуют адаптивные системы управления полетом БЛА,
способные автоматически гибко реагировать на нестационарность
объекта управления (изменяемые во времени коэффициенты
аэродинамических параметров);
• отсутствуют системы управления выполнением целевых функций,
учитывающие изменения в окружающей обстановке при
выполнении полетного задания в автоматическом режиме;
• не создана бортовая система комплексирования и анализа
больших потоков информации, которая может из всего потока
поступающих на боевой БЛА информационных данных выделять
наиболее важные сведения о целевых объектах, что позволяет
существенно сократить объем передаваемых данных;
• не отработаны способы навигации и согласованного управления
группой БЛА, которые могли бы позволить выполнять полеты
в составе группы БЛА, выбирать альтернативные маршруты и
осуществлять взаимодействие между собой;
• не решены в полной мере вопросы автоматической посадки на
необорудованные площадки и спасения БЛА;
• отсутствуют методы ускоренного, с минимальными финансовыми
и временными затратами процесса ввода в эксплуатацию широкой
номенклатуры БЛА.
Некоторые пути решения указанных фундаментальных задач
могут быть найдены за счет рационального комплексирования бортовых
ИУС с учетом их целостного функционирования во взаимодействии
с другими системами БАС (в том числе и с оператором, остающимся
на земле). Такое комплексирование должно учитывать современное
развитие информационных и управляющих технологий, достижения
в совершенствовании элементной базы, опыт создания и испытаний
различных классов и типов БЛА.
1.2. Беспилотные летательные аппараты как средство
решения задач боевой авиации
Стремительный прогресс технологий в области микропроцессорной
техники, коммуникаций, систем управления и навигации привел к
появлению концепции, суть которой состоит в реализации потенциальной
возможности боевых беспилотных летательных аппаратов (ББЛА)
выполнять в обозримом будущем отдельные задачи боевой авиации.
В связи со сказанным, наиболее перспективна следующая
системная концепция развития боевой авиации·. ББЛА эффективно дополнят
пилотируемые ЛА, возьмут на себя часть их задач, но полностью
заменить пилотируемые ЛА в доступной для анализа перспективе развития
не смогут. При этом сочетание беспилотных и пилотируемых ЛА ведет
к появлению комплекса боевой авиации, обладающего качественно
новыми свойствами и характеристиками.
В рамках создаваемых авиационных ударных групп ББЛА
занимают промежуточное положение между перспективными крылатыми
ракетами (КР) и боевыми самолетами нового поколения, т. е. там, где
ББЛА могут обладать существенно большими возможностями по
сравнению с КР и существенно меньшей стоимостью по сравнению с
боевыми самолетами. Нынешние разработки опытных и демонстрационных
образцов (прототипов), их летные испытания, в том числе и в боевых
условиях, позволяют определить перспективную конфигурацию систем
боевой авиации нового поколения, включающую:
• авиационные комплексы с КР нового поколения;
• пилотируемые боевые самолеты нового поколения с ударными
ракетами большой дальности;
• малозаметные ББЛА с высокоточными планирующими
бомбами [1.1].
В зависимости от целевых функций ББЛА могут быть разделены
на две группы:
• собственно боевые БЛА, способные поражать воздушные,
морские и наземные цели (по классификации, приведенной в 1.1, —
ударные беспилотные летательные аппараты);
• ББЛА боевого обеспечения (по классификации, приведенной
в 1.1, — разведывательные стратегические и тактические БЛА,
а также БЛА управления, ретрансляции и формирования
информационных сетей, БЛА воздушных перевозок личного состава,
дозаправки топливом в полете и прочих функций, необходимые
для эффективного нанесения боевого удара по противнику).
На ББЛА возлагаются задачи обнаружения, опознавания и
поражения хорошо защищенных стационарных и мобильных целей в глубине
обороны противника, радиоэлектронное и огневое подавление средств
противовоздушной обороны (ПВО), а также поражение воздушных
целей.
Концепция применения ББЛА предусматривает следующую
последовательность их действий: полет в заданный район, поиск объектов,
передача на пункты управления изображений для идентификации
целей, их поражение и последующее возвращение к месту базирования
(для ББЛА многоразового применения) [1.8].
Особенность применения ББЛА заключается в том, что после
нанесения ударов по целям противника они могут продолжить свой
полет уже в другой конфигурации авиационной группы или перейти
в режим длительного автономного барражирования. Иными словами,
ББЛА могут действовать как совместно с пилотируемыми ЛА, так и
отдельно от них.
Обладают ББЛА и более широкими возможностями по нанесению
поражающих ударов с относительно безопасных расстояний или с
минимальной дистанции в режиме «камикадзе».
Перспектива применения ББЛА рассматривается не только при их
участии в авиационных ударных группах при операциях по наземным
целям, но и в морских системах вооружения. В частности,
прорабатываются возможности создания «кораблей-арсеналов», представляющих
собой полностью самостоятельные единицы, способные применять
ракетное вооружение и ББЛА в любое время суток и в любых погодных
условиях по целям на дальностях, превышающих 1600 км [1.1]. Такие
«корабли-арсеналы» могут прийти на смену группировкам авианосцев
и кораблей сопровождения — достаточно громоздким и уязвимым
формированиям.
Многоразовость применения ББЛА также оказывает свое влияние
на их облик и, соответственно, на концепцию применения ББЛА в
составе ударных авиационных комплексов. Здесь следует отметить два
различных типа ББЛА:
• стационарного (аэродромного или палубного) базирования;
• мобильного базирования (воздушный или наземный старт и
парашютная посадка).
В настоящее время мобильное базирование часто связывается с
применением боевых вертолетов, поэтому столь заметен прогресс в
создании беспилотных боевых вертолетов.
Наиболее проработанными стратегиями комплексного применения
беспилотной и пилотируемой авиации в настоящее время являются
стратегии радиоэлектронного противодействия (РЭП) и огневого
подавления радиоэлектронных средств (РЭС) противовоздушной обороны
(ПВО) противника.
Эксперты полагают, что уже в период с 2005 по 2010 г. могут
появиться ББЛА, участвующие вместе с пилотируемыми ЛА в прорыве
многоэшелонированной и многослойной ПВО противника [1.9].
При этом тактика прорыва ПВО может быть следующей [1.10]:
• передовой эшелон тактического построения авиационной
группировки включает ББЛА, обеспечивающие РЭП и
«провоцирование» ПВО противника с целью вскрытия ее РЭС, а также
доразведку и обозначение объектов удара;
• ББЛА вызывают «огонь на себя» и сами ББЛА самостоятельно
наносят удары по объектам ПВО;
• осуществляется массовый вход ББЛА в зону ПВО с целью
дезорганизации системы управления ПВО, после чего пилотируемым
самолетам будет облегчена задача РЭП и огневого подавления
РЛС ПВО.
После прорыва ПВО противника ББЛА осуществляют доразведку и
обозначение наземных целей, до подхода пилотируемых ЛА с мощными
средствами поражения они наносят выборочные удары маломощными
боеприпасами.
Следующий этап расширения области применения ББЛА (с 2010 по
2015 г.) по мнению экспертов будет характеризоваться решением
задачи автономного преодоления многоэшелонированной и многослойной
ПВО и нанесением ударов по объектам в глубине обороны
противника [1.10]. Это станет возможным благодаря освоению технологий
малозаметности и потенциальных возможностей маневрирования ББЛА
при выполнении противоракетных и противозенитных маневров
Целями в глубине обороны противника станут стационарные
объекты с достоверно известными координатами. По мере развития систем
распознавания, систем управления и наведения возникнут условия для
поражения мобильных целей в автономном режиме полета ББЛА.
Возросшие возможности по преодолению ПВО противника и
усовершенствование бортовых систем позволят боевым БЛА данного этапа
решать задачи доразведки целей (в том числе мобильных),
формирования целеуказаний для высокоточных систем оружия и контроля
результатов поражающих ударов.
Наконец, в период с 2015 по 2020 г. на ББЛА могут быть
возложены боевые задачи с применением практически всего спектра средств
поражения совместно с пилотируемой авиацией, в едином
информационном поле [1.10].
Таким образом, наивысшей эффективности следует ожидать от
ББЛА, которые могут совмещать разведывательные и ударные
функции.
В Приложении приведены тактико-технические характеристики
подобных многофункциональных ББЛА: MQ-1 «Predator» (табл.5),
MQ-9A «Predator-B» (табл.5), MQ-5B «Hunter-2» (табл.5), Х-45С
(табл.5), Х-47В, (табл.5), MQ-8B «Fire Scout» (табл.6), а также
разведывательных ББЛА: RQ-1 «Predator» (табл.9), RQ-4A «Global Hawk»
(табл.8), RQ-8A «Fire Scout» (табл.11), прошедших всестороннюю
апробацию и задействованных в реальных боевых операциях.
Анализ показывает, что реализация концепции создания
высокоэффективной авиации комплексного применения ББЛА и пилотируемых
ЛА требует решения ряда фундаментальных и прикладных
технических проблем, освоения критических технологий, переводящих ББЛА
в класс «интеллектуальных» систем, а именно:
1. Обеспечение низкой заметности ББЛА для средств наблюдения
противника;
2. Повышение точности применения авиационных средств
поражения (АСП), размещаемых на ББЛА, переход к применению
оружия направленной энергии в качестве АСП, поскольку здесь
отсутствует опасность воздействия микроволнового или лазерного
излучения на экипаж;
3. Существенное снижение показателя аварийности ББЛА;
4. Обеспечение всепогодности ББЛА, поскольку сейчас они плохо
применимы в ветреную погоду: относительно большой размах
крыла, малая удельная нагрузка на крыло приводят к большой
«парусности» ББЛА, что существенно усложняет заход на
посадку, особенно при боковом ветре, и может привести к
повреждению аппарата;
5. Создание комплексной иерархической автоматизированной
системы управления ББЛА для всех видов боевых операций с
использованием единого информационного поля;
6. Автоматизация решения интеллектуальных задач с помощью
соответствующей экспертной системы поддержки летных экипажей
и операторов;
7. Дальнейшее совершенствование навигационных систем ББЛА
путем интеграции инерциальной навигационной системы (ИНС)
со спутниковыми навигационными системами, тепловизионными
и лазерными системами, а также РЛС с синтезированной
апертурой;
8. Выход на новый технологический уровень разработки
микропроцессоров и комплексов телекоммуникационной связи, так как
при операциях с мобильными целями для обработки информации
требуются процессоры с характеристиками скорости и объема
памяти, эквивалентными или превышающими возможности
человека.
Список литературы к главе 1
1.1. Развитие беспилотной боевой авиации и роль информационных
технологий в ее реализации. Аналитический обзор по материалам
зарубежных информационных источников / Под общей ред. академика РАН
Е. А. Федосова, ГосНИИАС, 2005.
1.2. Растопчин В. В. Современная классификация беспилотных авиационных
систем, ООО «Техкомтех», www.UAV.ru.
1.3. Мясников Е. Угроза терроризма с использованием беспилотных
летательных аппаратов: технические аспекты проблемы, МФТИ, 2004.
1.4. «UAV Systems Reference Phtsentation», UAV Systems, The Global
Perspective. 1006/2007.
1.5. Краснов А., Путилин А. Беспилотные летательные аппараты: от
разведки к боевым действиям // Зарубежное военное обозрение, 2004, №4.
1.6. Система подготовки полетной информации фирмы ВАЕ СИСТЕМЗ.
Аналитический обзор ГосНИИАС, 2005.
1.7. Попов В. Α., Ефремова Е.Н. «Потребности НАТО в разведывательных
беспилотных летательных аппаратах нового поколения и работы по их
созданию в Европе», www.UAV.ru «Беспилотная авиация».
1.8. Ануфриев О.Н., Герасимов Α. Α., Меркулов В. И., Самарин О.Ф.,
Чернов В. С. Ударные беспилотные летательные аппараты и их
радиолокационные системы // Успехи современной радиоэлектроники, 2007, №7.
1.9. Новичков Н., Барковский В. Основные направления развития
беспилотных авиационных комплексов // Рынки вооружений, 2008, Т. 8, № 1.
1.10. Моисеев С. Перспективы развития зарубежных боевых БЛА //
Аэрокосмическое обозрение, 2008, № 1.
Глава 2
ГЛОБАЛЬНЫЕ НАВИГАЦИОННЫЕ
СПУТНИКОВЫЕ СИСТЕМЫ КАК СОВРЕМЕННОЕ
СРЕДСТВО РЕШЕНИЯ НАВИГАЦИОННЫХ
ЗАДАЧ БПЛА
2.1. Современное состояние и перспективы развития
ГНСС GPS, ГЛОНАСС и Galileo
2.1.1. Российская глобальная навигационная спутниковая
система ГЛОНАСС. Федеральная целевая программа поддержания
и развития ГЛОНАСС. Мы полагаем здесь, что принцип работы и
основные характеристики системы ГЛОНАСС, такие, как ее
баллистическая структура, параметры орбит спутников и т.д., в настоящее
время известны и широко описаны в литературе. Тем не менее, мы
считаем необходимым привести табл. 2.1, в которой даны одновременно
соответствующие характеристики существующих (GPS и ГЛОНАСС)
и создаваемой (Galileo) глобальных навигационных систем.
В настоящем разделе основное внимание уделяется перспективам
развития системы ГЛОНАСС, способам совершенствования ее
характеристик, а также современным аспектам взаимодействия потребителей
с этой системой.
В настоящее время ГЛОНАСС рассматривается как система
двойного назначения, являющаяся стратегическим элементом Российской
доктрины национальной безопасности. В то же время обеспечивается
открытый доступ потребителей к гражданским сигналам ГЛОНАСС,
а также к производству и использованию соответствующей аппаратуры
потребителей.
Кроме того, благодаря тому, что обеспечена совместимость систем
ГЛОНАСС, GPS и создаваемой системы Galileo, на Российской
территории возможно использование соответствующих комбинированных
приемников. Таким образом, ГЛОНАСС может рассматриваться как
элемент глобального рынка соответствующих услуг.
Все перечисленные положения, связанные с созвездием ГЛОНАСС,
базируются на соответствующих Указах Президента РФ и Постановле-
Таблица 2.1. Основные характеристики глобальных спутниковых
навигационных систем (по состоянию на декабрь 2007 г.)
Характеристика
Количество спутников
в номинальном созвездии
Параметры орбит:
высота, км
наклонение, град,
период обращения,
ч, мин, с
Частоты несущей
излучаемых сигналов,
МГц
Максимальная точность
позиционирования
потребителей
положение, м
скорость, м/с
Система
ГЛОНАСС
24
19400
64,8
12,00,00
L1 1598,0625-
1607,0625
L2 1242,9375-
1249,9375
L3 1197,648-
1212,606
20-30
0,33
GPS
24
20200
55
12,00,00
L1 1575
L2 1227,60
L5 1176,45
5
0,05
Galileo
21-30
23000-24000
55-60
Е5 1164-1188
Е6 1260-1300
El 1587-1591;
Е2 1559-1563
4-6
0,05
ниях Правительства РФ, а также на Федеральной программе развития
ГЛОНАСС на 2002-2011 гг.
Основная особенность этой программы состоит в том, что в силу
двойного назначения системы ГЛОНАСС, ответственность за
упомянутую программу возложена как на Министерство обороны РФ, так и на
Роскосмос (Российское космическое агентство).
Фактическое состояние с реализацией программы определяется
новыми инициативами Президента РФ, основными из которых являются:
• развертывание созвездия ГЛОНАСС в полном объеме (24
спутника) до конца 2009 г.
• обеспечение потребительских свойств ГЛОНАСС, сравнимых
с GPS и Galileo, до 2010 г.
• развертывание массового производства аппаратуры потребителей
на территории РФ.
Остановимся теперь на технических аспектах, характеризующих
фактическое состояние системы ГЛОНАСС, и способах улучшения ее
потребительских свойств. Фактический статус ГЛОНАСС на конец
2008 г. характеризуется рис.2.1 (цветная вклейка). Всего в составе
орбитальной группировки 19 спутников ГЛОНАСС, в том числе 14
используются по целевому назначению, 3 — на этапе ввода в систему
и 2 — на этапе вывода из системы. Из общего числа спутников
орбитальной группировки 13 спутников ГЛОНАСС старой модификации
(срок существования не более 5 лет), 7 спутников ГЛОНАСС-М (срок
существования не менее 7 лет).
Все фактические данные по текущему созвездию ГЛОНАСС
читатель может найти на сайте Информационно-аналитического центра
(ИАЦ) ГЛОНАСС [2.1].
Информационно-аналитический центр ГЛОНАСС обеспечивает
потребителей широким спектром данных о фактическом состоянии
ГЛОНАСС, включая:
• статус созвездия;
• интегральную доступность созвездия ГЛОНАСС;
• мгновенную доступность созвездия ГЛОНАСС.
Примеры предоставления подобных данных даны в табл. 2.2 и на
рис. 2.2,2.3 (цветная вклейка) соответственно.
Наземный сегмент ГЛОНАСС включает следующие элементы
(рис. 2.4):
• Центр Управления ГЛОНАСС (ЦУС-Краснознаменск,
Московская область);
• Сеть наземных измерительных телеметрических и командных
пунктов (КИПов):
— Ленинградская область;
- Московская область;
— Енисейск;
- Комсомольск-на-Амуре.
кип
Рис. 2.4. Наземный комплекс управления системы ГЛОНАСС
КИП'
кип
ЦУС
■ ^ | | 1 ■ ίΤ^^^Γ"
центр управления систем
командно-измерительный пункт
Таблица 2.2. Состояние ΚΑ группировки КНС ГЛОНАСС на 17.03.2009 г.
№
пл.
1
11
111
№
точки
2
3
4
6
7
8
9
10
11
13
14
15
17
18
19
20
21
22
23
24
№
лит.
01
05
06
01
05
06
-2
-7
00
-2
-7
00
04
-3
03
02
04
-3
03
02
НКУ
728
727
795
701
712
729
722
717
723
721
715
716
718
724
720
719
725
726
714
713
Дата
запуска
25.12.08
25.12.08
10.12.03
10.12.03
26.12.04
25.12.08
25.12.07
25.12.06
25.12.07
25.12.07
25.12.06
25.12.06
26.10.07
25.09.08
26.10.07
26.10.07
25.09.08
25.09.08
25.12.05
25.12.05
Дата
ввода в
систему
20.01.09
17.01.09
29.01.04
08.12.04
07.10.05
12.02.09
25.01.08
03.04.07
22.01.08
08.02.08
03.04.07
12.10.07
04.12.07
26.10.08
25.11.07
2711.07
05.11.08
13.11.08
31.08.06
31.08.06
Факт.
сущ.,
мес
2.7
2.7
63.3
63.3
50.7
2.7
14.7
26.7
14.7
14.7
26.7
26.7
16.7
5.7
16.7
16.7
5.7
5.7
38.7
38.7
Пригодность КА
по сообщениям
альманаха
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
эфемерид
(UTC)
+ 07:57
17.03.09
+ 10:19
17.03.09
+ 11:36
17.03.09
+ 14:04
17.03.09
+ 14:05
1703.09
+ 14:05
17.03.09
+ 14:04
17.03.09
+ 14:07
17.03.09
+ 08:34
17.03.09
+ 10:42
17.03.09
+ 12:33
17.03.09
+ 14:07
17.03.09
+ 07:47
17.03.09
+ 20:43
15.03.09
+ 10:24
17.03.09
+ 11:46
17.03.09
+ 12:33
17.03.09
+ 13:24
17.03.09
+ 14:05
17.03.09
+ 14:04
17.03.09
Примечание
Используется
по ЦН
Используется
по ЦН
Используется
по ЦН
Используется
по ЦН
Используется
по ЦН
Используется
по ЦН
Используется
по ЦН на
частоте L1
Используется
по ЦН
Используется
по ЦН
Используется
по ЦН
Используется
по ЦН
Используется
по ЦН
Используется
по ЦН
Используется
по ЦН
Используется
по ЦН
Используется
по ЦН
Используется
по ЦН
Используется
по ЦН
Используется
по ЦН
Используется
по ЦН
Командно-измерительные пункты оборудованы крупногабаритными
полноповоротными антенными системами с узкой диаграммой
направленности, что обеспечивает надежную передачу команд управления и
прием телеметрической информации со спутника во всех режимах его
работы, в том числе в неориентированном состоянии и при больших
угловых скоростях вращения после отделения (рис. 2.5).
I
. ^.ч'
Рис. 2.5. Антенна командно-измерительного пункта
Общий вид стандартного спутника ГЛОНАСС (старой модифика-
Срок эксплуатации 3-5 лет
Масса 1415 кг
Мощность 1000 Вт
Навигационная система:
о Масса 180 кг
о Мощность 600 Вт
Уход часов на интервале (сут) —
5 - 10 13
Точность по углам ориентации —
0,5 градуса
Точность ориентации солнечных
батарей — 5 градусов
Рис. 2.6. Стандартный спутник ГЛОНАСС
Эта модификация спутника была разработана в конце 70-х гг. и
в целом уже не соответствует современным требованиям, в первую
очередь, по точности ориентации солнечных батарей, что, в свою очередь,
приводит к ошибкам в построении эфемерид этих спутников. Спутники
ГЛОНАСС оборудованы устройствами, позволяющими определять их
орбиты с весьма высокой точностью с помощью средств лазерной
дальнометрии.
Следующее поколение спутников ГЛОНАСС — ГЛОНАСС-М
призвано заменить спутники исходной модификации. Общий вид спутника
ГЛОНАСС-М показан на рис. 2.7,2.8.
ции) показан на рис. 2.6.
V,-
α
ι ι
■ «*
.s
Срок эксплуатации 7 лет
Масса 1415 кг
Мощность 1450 Вт
Навигационная система:
о Масса 250 кг
О Мощность 580 Вт
Уход часов на интервале (сут) —
5 - ΙΟ"13
Точность по углам ориентации —
0,5 градуса
Точность ориентации солнечных
батарей — 2 градуса
Чл
Рис. 2.7. Спутник ГЛОНАСС-М в транспортном положении
"Й
*А
II
Xi-
I
Wf
ι
J'
r- /
V
Рис. 2.8. Спутник ГЛОНАСС-М
Эти спутники имеют улучшенные характеристики:
• навигационные послания содержат данные о расхождении
системных временных шкал и систем координат GPS и ГЛОНАСС;
• установлены диапазоны, минимизирующие излучение вне полосы
частот, определяемых для сигнала ГЛОНАСС;
• в диапазонах L1 и L2 излучаются так называемые дуальные
сигналы, содержащие как служебную цифровую информацию,
так и дальномерный код;
• введены лишние связи, обеспечивающие обмен дальномерными
данными между спутниками, находящимися как в одной и той
же, так и в различных орбитальных плоскостях;
• обеспечена высокоточная температурная стабилизация бортового
стандарта частоты, в результате чего уход бортовых часов
уменьшен до уровня 5 - 10~13;
• уменьшена неопределенность в положении солнечных батарей,
благодаря чему уменьшена неопределенность в расчете
ускорения, вызванного влиянием давления Солнца;
• срок службы спутника увеличен до 7 лет;
• в стандартном режиме ориентации продольная ось спутника
ориентирована на Землю с точностью не хуже 0,5е, а две другие оси
спутника совпадают с плоскостью «Солнце — ц. м. спутника —
Земля» с точностью не хуже ±2С.
Перспектива дальнейшей модернизации спутников ГЛОНАСС
связана со следующим их поколением — спутниками ГЛОНАСС-К
(см. рис. 2.9).
По сравнению со спутником ГЛОНАСС-М, ГЛОНАСС-К имеет
следующие существенные отличия:
• введена частота L3 для повышения надежности и точности
навигационного решения потребителей;
Срок эксплуатации 10 лет
Масса 850 кг
Мощность 1270 Вт
Навигационная система:
о Масса 260 кг
о Мощность 750 Вт
Уход часов на интервале (сут) —
5 - ΙΟ"13
Точность го углам ориентации —
0,5 градуса
Точность ориентации солнечных
батарей — I градус
V
/
Рис. 2.9. Спутник ГЛОНАСС-К
• время жизни спутника увеличено до 10 лет;
• масса спутника уменьшена вдвое;
• установлена полезная нагрузка, обеспечивающая функции поиска
и спасения потребителей в чрезвычайных ситуациях.
Конструкция спутника ГЛОНАСС-К, в отличие от спутников ГЛО-
НАСС и ГЛОНАСС-М, не включает герметический контейнер и
разделена на два модуля: платформу и полезную нагрузку. Точность
ориентации продольной оси ГЛОНАСС-К на Землю составляет ±0,5°;
солнечные батареи ориентированы на Солнце с точностью порядка 1°.
Бортовой стандарт частоты стабилизирован по температуре с
точностью порядка ±0,5 °С; остальное оборудование работает в диапазоне
температур от -10 до +50°С. Совершенствование характеристик
системы ГЛОНАСС может быть проиллюстрировано следующим образом.
На рис.2.10 (цветная вклейка) показано, каким образом уменьшался
интервал отсутствия связи со спутниками ГЛОНАСС в зависимости
от их количества. В частности, за последние три года этот интервал
уменьшился с 4,6 до 0,6 часа.
Основные свойства сигналов спутников системы ГЛОНАСС
приведены на рис. 2.11. Здесь показаны спектры сигналов LI, L2
и предполагаемого сигнала L3. Полоса L2 соответствует
значениям 1242,94^-1247,75 МГц, полоса L1 соответствует значениям
1598н-1604,25 МГц. Диапазоны частот ±0,511 МГц и ±5,11 МГц
соответствуют стандартному и высокоточному сигналам в диапазонах
L1 и L2. На этом рисунке приведены данные, отражающие
предварительные соображения, относительно диапазона L3. Окончательное
решение о полосе L3 будет принято позднее.
Таким образом, основные направления дальнейшей модернизации и
совершенствования системы ГЛОНАСС в соответствии с Федеральной
программой таковы:
• модернизация спутников путем совершенствования бортового
стандарта частоты и длительности жизни (повышение точности
системы ориентации, повышение точности ориентации солнечных
батарей);
• модернизация и расширение сети наземных измерительных
пунктов путем их межведомственной и международной координации;
• совершенствование системы хранения времени путем
использования нового высокоточного стандарта частоты;
• модернизация алгоритмов и программно-математического
обеспечения для определения орбит спутников на базе использования
беззапросных измерений.
Рисунок 2.12 иллюстрирует динамику процесса улучшения
характеристик позиционирования, осуществляемого системой ГЛОНАСС по
сравнению с GPS.
Остановимся кратко на тех возможностях, которые
открываются при совместном использовании двух существующих систем —
GPS и ГЛОНАСС. Такая возможность, как уже указывалось выше,
-J
CO
-J
О
ω
-j
GAL
ГГ)
Ц<
О
S-
~
-*
/
ι—Ч
2Ю
оо
■»> !-ЧСО
V
о
со
α
О
и
и
<
о
о
Μ
Расчетная ошибка позиционирования ГЛОНАСС
35
30
25
20
15
10 "
i
5
0
2007 2008 2009 2010 2011
Рис. 2.12. Динамика расчетной ошибки позиционирования системы ГЛОНАСС
о*
bGPS
обеспечивается полной совместимостью систем GPS и ГЛОНАСС
в соответствии с соглашением, подписанным РФ и США в декабре
2004 г. В частности, эти преимущества применительно к
использованию СНС в городских и горных условиях иллюстрируются с помощью
рис. 2.13 и 2.14.
Рисунок 2.13 (цветная вклейка) показывает, в частности, что
совместное использование GPS и созвездия ГЛОНАСС, включающего
лишь 9 спутников, позволяет видеть 17 навигационных спутников на
большей части территории Земли.
Сравнение числа видимых навигационных спутников
11-
10
спутников
00 (О
при ограничении угла видимости над местным
1 '_'[__
к τ .
CQ
il " in
012345678
Время, часы
9
!
..
1 . .
ι
1 11
в Москве на 16.11.2004'
горизонтом 25°
....
1
I 1
1
10 11 12 13 14 15 16 17 18 19 20 21 22 23
■Только созвездие GPS .GPS+9nnOHACC|
Рис. 2.14. Суточная динамика количества видимых навигационных спутников
на территории Москвы в зависимости от используемого созвездия
Рис.2.14 иллюстрирует преимущества от совместного
использования GPS и ГЛОНАСС в задаче высокоточной навигации, например,
применительно к геодезии. В частности, в Московской области
достаточно привлечь созвездие из 9 спутников ГЛОНАСС, чтобы
использовать для высокоточного позиционирования в течение дня 8
навигационных спутников, в то время как использование только GPS позволяет
использовать данные лишь 5 спутников.
2.1.2. Глобальная навигационная система GPS. Состояние и
перспективы. За последние 15 лет система GPS получила настолько
широкое распространение и стала так хорошо известна, что основные
ее параметры знают даже не специалисты: это глобальная,
всепогодная космическая система позиционирования и навигации пассивного
типа, имеющая три главных сегмента — космический, управления и
потребителей. Космический сегмент системы GPS составляют 24
спутника, расположенные в шести орбитальных плоскостях. Значительное
число орбитальных плоскостей диктует необходимость одиночной
схемы выведения спутников при развертывании и восполнении системы.
Спутники функционируют на круговых орбитах высотой 20200 км,
с наклонением 55° и периодом обращения 12 ч (см. также табл. 2.1).
Учитывая высокий современный уровень информированности о
системе, в настоящей монографии приводятся лишь те данные, которые
характеризуют развитие системы за прошедшие годы и перспективы ее
дальнейшего использования. В случае необходимости информацию о
других общих характеристиках системы можно найти в
многочисленных публикациях, например, [2.2-2.5].
Ключевым звеном любой спутниковой навигационной системы
является группировка космических аппаратов, формирующих нави-
гационно-временное поле системы. В 1974 г. корпорация Rockwell
International заключила контракт на производство двенадцати
спутников Navstar первого поколения, которые получили название
Block I. В качестве носителя спутников была выбрана ракета-носитель
Atlas F. Спутники этого поколения были успешно выведены в период
1978-1980 гг. с космодрома на базе Ванденберг.
На основе этого типа спутников позже было разработано второе
поколение спутников Block II и Block IIA для серийного производства,
причем спутники типа Block IIA (Advanced — «усовершенствованный»)
отличались большей живучестью. Развитие спутников этого поколения
завершилось в 1982 г., при этом спутники достигли следующих
характеристик:
• габариты спутника увеличились на 30%;
• срок активного существования — до 7 лет (вместо 5 лет);
• мощность солнечных батарей — 710 Вт (каждая, вместо 410 Вт);
• емкость никель-кадмиевой батареи — 35 Амп-ч (каждая из трех,
вместо 15 Амп-ч).
Ряд других характеристик спутников этого поколения приведены
в табл. 2.3.
Важнейший элемент спутниковой навигационной системы —
бортовой стандарт частоты спутника — определяется блоком, составленным
из двух рубидиевых и двух цезиевых атомных часов. Стабилизация
КА осуществляется вращением, для чего используются 22 реактивных
Таблица 2.3. Основные характеристики спутников второго поколения
Block II/IIA
Стартовая масса Block II вместе с апогейной ДУ, кг
Начальная масса на орбите, кг
Block II
Block IIA
Размах панелей солнечных батарей, м
Мощность принимаемых сигналов, в диапазоне L1, дБВт
для стандартной точности С/А
для высокой точности Ρ
Мощность принимаемых сигналов, в диапазоне L2, дБВт
для стандартной точности С/А или для высокой точности Ρ
Мощность принимаемых сигналов, в диапазоне L3, дБВт
для стандартной точности С/А
микродвигателя на гидразине, запаса которого при штатных условиях
эксплуатации хватит более, чем на 10 лет. В целях резервирования
микродвигатели сгруппированы в 2 сборки. Для перевода КА на
рабочую орбиту используется апогейный двигатель Star 37FP с тягой
47,1 кН фирмы Morton-Thiokol. Энергопитание обеспечивается парой
солнечных батарей, в тени — тремя никель-кадмиевыми батареями.
Спутники Block II/IIA оборудованы бортовой интегрированной
системой оперативного обнаружения ядерного излучения IONDS. Эта
система включает оптическое устройство, датчики для регистрации
рентгеновского излучения и потока нейтронов, а также аппаратуру
для регистрации электромагнитных импульсов. Для калибровки
системы IONDS созданы специальные мобильные наземные установки,
генерирующие импульсы электромагнитного излучения. Помимо этого,
корпус спутников был защищен от ядерного облучения и на спутниках
размещались кольцевые UHF-антенны ультравысоких частот для
обмена между спутниками информацией от IONDS (Integrated Operational
Nuclear Detection System), предназначенной для обнаружения ядерных
взрывов и оценки ядерного нападения.
В 1983 г. компания Rockwell International заключила контракт с МО
США на производство 28 спутников типа Block II. Спутники второго
поколения в период 1983-1985 гг. выводились с помощью
ракет-носителей Atlas Ε и Atlas E/F с космодрома на базе Ванденберг. Начиная
с 1989 г., в качестве носителя стали использовать ракеты Delta 2
компании McDonnell Douglas, и этот год стал началом активного
развертывания системы GPS.
Дальнейшее развитие составили спутники третьего поколения типа
Block IIR (Replenishment — пополнение), разработанные и
изготовленные корпорацией Lockheed Martin по заказу ВВС США.
Навигационную аппаратуру для спутников Block IIR поставляет компания
ITT/Aerospace Communication. Основные характеристики спутников
приведены в табл. 2.4.
Таблица 2.4. Основные характеристики спутника Block IIR
Стартовая масса КЛА вместе с апогейной ДУ, кг
Масса на рабочей орбите, кг
Габаритные размеры корпуса, м
Размах панелей солнечных батарей, м
Срок активного существования, лет
2032
1075
1,52 χ 1,93 χ 1,91
19,3 (11,6)
Не менее 10
В спутниках Block IIR применяется трехосная система
стабилизации, в которой в качестве исполнительных органов используются
маховики, магнитная система и 16 реактивных микродвигателей на
гидразине (12 каталитических по 0.89Н и 4 электротермических по
22,2Н). Двигатели сгруппированы в 2 сборки (6 + 4). Энергопитание
осуществляется с помощью двух панелей солнечных батарей
площадью 13,4 м2 с кремневыми элементами, использующими технологию
N-P перехода. Мощность, вырабатываемая батареями в конце срока
службы, составляет 1136 Вт при требуемых 970 Вт. При прохождении
теневых участков орбиты полноценное функционирование бортовой
аппаратуры обеспечивают никель-водородные батареи. Для перевода
КЛА на рабочую орбиту спутник оборудован твердотопливным апогей-
ным двигателем Star 37FM производства компании Thiokol.
Длительность включения около 54 с. При этом производится одновременный
поворот плоскости орбиты в пространстве и подъем высоты перигея до
20000 км. После маневра конструкция апогейного двигателя массой
примерно 83 кг не отделяется от КЛА. После перехода на штатную
орбиту проводится последовательное замедление вращения спутника,
сначала с 54 до 10 об/мин, а затем с 10 до 1,3 об/мин. На четвертые
сутки полета проводится построение трехосной ориентации,
развертывание панелей солнечных батарей и начинаются тщательные проверки
состояния бортовых систем.
Одним из требований при проектировании спутников третьего
поколения, выдвинутых ВВС США, было требование обеспечить спутникам
высокую степень боевой устойчивости в условиях ведения ядерной
войны. Во исполнение этого требования при создании спутников Block IIR
был реализован целый ряд новых решений, включая:
• способность определения собственного положения в
пространстве по взаимным измерениям дальности с другими спутниками
Block IIR;
• возможность оценки текущих погрешностей параметров
навигационного сообщения и обновления этих значений на основе
обработки получаемых межспутниковых измерений без вхождения
в связь с наземными станциями управления;
• наличие на борту компьютеров нового поколения с возможностью
их перепрограммирования в полете;
• способность находиться в режиме полностью автономного
функционирования (без связи с наземным комплексом) до 14 суток и
до 180 суток в режиме автономной навигации;
• 60-суточная готовность к запуску хранящегося в арсенале
спутника в любую орбитальную плоскость;
• повышенная радиационная стойкость.
Существенной особенностью спутников Block IIR, уже отмеченной
выше, является оснащение межспутниковой радиолинией УКВ-связи,
в том числе, для взаимных межспутниковых траекторных измерений.
Межспутниковая связь предусматривается и на спутниках четвертого
поколения Block IIF.
Спутники системы GPS второго и третьего поколений запускаются
по одному со стартового комплекса ВВС на мысе Канаверал с помощью
трехступенчатой РН Delta-2. Данная РН входит в семейство носителей
среднего класса фирмы Boeing,которые оказались наиболее удачными
с точки зрения надежности модификациями РН McDonnell Douglas
(ныне отделение фирмы Boeing). Помимо стартового комплекса ВВС на
мысе Канаверал для пусков используется также космодром на авиабазе
Ванденберг.
Так как находящиеся на орбите спутники Block II/IIA могут
работать за пределами расчетного срока активного существования, было
решено не дожидаться их замены другими спутниками в результате
выхода из строя, а приступить к модернизации спутников Block IIR
в спутники Block IIR-M, приобретя необходимое количество спутников
Block IIF и приступив при этом к ускоренной разработке спутников
пятого поколения — Block III (GPS III). По мере модернизации системы
GPS со спутников Block IIR-M будут передаваться новый гражданский
сигнал L2CS и военный сигнал М, а третий гражданский сигнал
на частоте L5 будет передаваться со спутников Block IIF. Наконец,
спутники пятого поколения GPS III будут транслировать сигналы на
всех гражданских и военных частотах, а также вести передачу по
зауженному лучу для повышения мощности сигнала и обеспечения
помехоустойчивости на театре военных действий.
Благодаря внесению в весьма совершенную конструкции спутника
третьего поколения Block IIR ряда изменений, основные из которых
представлены в табл. 2.5 [2.2], удалось:
• разработать и поставить на борт новый антенный блок L
диапазона с улучшенными характеристиками;
• разработать и поставить на борт новые высокоэффективные
передатчики большой мощности;
• оптимизировать распределение запасов мощности оборудования
электропитания, штатного для спутника третьего поколения;
• улучшить характеристики антенны, обеспечивающей
межспутниковую связь в диапазоне УВЧ;
Таким образом были достигнуты требуемые модернизацией
характеристики спутника Navstar Block 2R-M.
Таблица 2.5. Основные изменения при модернизации спутника Block IIR
в спутник Block IIR-M
Объект
модернизации
Антенный блок
Блок
диапазона L
Конструкция
блока
диапазона L
Блок
управления полезной
нагрузкой
Оборудование
электропитания
Оценка степени
модернизации
Частичная
Технологически-
функциональное
переоснащение
Новая
конструкция, аналогичная
конструкции,
применяемой
в связных
спутниках
Незначительная
модификация
Незначительная
модификация
Краткое описание модернизации
Замена элементов антенного
комплекса диапазона L на новые
запатентованные элементы более широкого
диапазона
Замена пяти отдельных комплексов
тремя многофункциональными
комплексами передачи и преобразования
более мощных сигналов в L1&L2
диапазонах
Интеграция в сотовую конструкцию
блока диапозона L тепловых
трубок рассеяния мощности,
улучшающих тепловой режим за счет
обеспечения в условиях невесомости
испарения и конденсации
Введение дополнительных
переключателей и дублирующих устройств,
обеспечивающих функционирование
более мощной передающей
аппаратуры
Новая кабельная разводка для вновь
смонтированной аппаратуры
Состояние орбитальной группировки системы GPS на середину
2008 г. представлено в табл. 2.6, из которой следует, что на
указанную дату эта группировка состояла из 32 функционирующих в
полном объеме спутников трех типов, а именно: 14 спутников Navstar
Block ΠΑ, 12 спутников Navstar Block IIR и 6 спутников Navstar
Block 2R-M [2.3]. Помимо расположения спутников (плоскость орбиты
и слот в плоскости), в таблице указаны номера выведенных аппаратов,
номер псевдослучайной последовательности (ПСП) и тип
используемого на борту эталона частоты — рубидиевый или цезиевый.
Таблица 2.6. Состояние орбитальной группировки системы GPS на середину
2008 г.
Плоскость
орбиты
А
А
А
А
А
А
В
В
В
В
В
С
С
С
с
с
D
D
D
D
D
Ε
Ε
Ε
Ε
Ε
F
F
F
F
F
F
Слот
I
2
3
4
5
6
1
2
3
4
5
1
2
3
4
6
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
6
Номер
аппарата
39
52
38
48
25
27
56
30
44
58
35
36
33
59
53
57
61
46
45
34
24
51
47
40
54
23
41
55
43
60
26
32
ПСП
09
31
08
07
25
27
16
30
28
12
05
06
03
19
17
29
02
11
21
04
24
20
22
10
18
32
14
15
13
23
26
01
Тип
аппарата
П-А
IIR-M
П-А
IIR-M
П-А
П-А
II-R
П-А
II-R
IIR-M
П-А
П-А
П-А
II-R
IIR-M
IIR-M
II-R
II-R
II-R
П-А
П-А
II-R
II-R
П-А
II-R
П-А
II-R
IIR-M
II-R
II-R
П-А
П-А
Тип бортового
эталона частоты
Цезий
Рубидий
Цезий
Рубидий
Рубидий
Цезий
Рубидий
Цезий
Рубидий
Рубидий
Рубидий
Рубидий
Цезий
Рубидий
Рубидий
Рубидий
Рубидий
Рубидий
Рубидий
Рубидий
Цезий
Рубидий
Рубидий
Рубидий
Рубидий
Рубидий
Рубидий
Рубидий
Рубидий
Рубидий
Рубидий
Цезий
Сегмент управления системой состоит из двух Центров управления
КА, а также сети из девяти стационарных командно-измерительных
пунктов, пяти контрольных станций и станций ввода данных
системы GPS и нескольких мобильных станций. В силу географического
положения приведенных выше элементов НКУ ВВС США, для
спутников системы GPS обеспечивается 50-70% времени суток видимость
на большей части обоих суточных витков. Всего на пунктах НКУ
ВВС в качестве основных средств используются 16-17 командно-изме-
рительных станций, работающих в диапазонах S (1,7...2,2 ГГц) и
Ки (13...15 ГГц).
Объединенный центр космических испытаний осуществляет
планирование и управление работой средств пунктов НКУ ВВС,
обеспечивает управление разведывательными спутниками и некоторыми
экспериментальными военными спутниками. Объединенный центр
космических операций обеспечивает управление военными системами
навигации, метеообеспечения, связи и предупреждения о ракетном
нападении. Контрольные станции представляют собой автоматизированные
стационарные измерительные пункты, оснащенные многоканальными
навигационными приемниками, атомным стандартом частоты,
датчиками атмосферных параметров и компьютерами для первичной обработки
информации. Каждая контрольная станция осуществляет
круглосуточный прием сигналов со всех спутников системы GPS, а также
производит сбор местной метеоинформации, необходимой для последующего
расчета тропосферных поправок. Собранная информация оперативно
запоминается и по запросу передается в Центр управления системой
для последующей обработки.
2 мая 2000 г. Решением президента США был снят режим
искусственного ограничения точности сигналов (режим селективного
доступа к навигационному сигналу) для гражданских потребителей. Это
позволило гражданским потребителям довести точность определения
своего местоположения в горизонте до 6,3 м (в 95% случаев). Однако
точность навигационного обеспечения военных потребителей остается
выше за счет возможности устранять искажения при прохождении
сигнала через ионосферу и тропосферу путем сравнения сигналов на
частотах L1 и L2. США оставляют за собой право вводить режим
селективного доступа над отдельными районами земного шара, где, по
мнению руководства США, возникает угроза безопасности и
национальным интересам США.
В конце 90-х гг. по инициативе американского Федерального
авиационного управления (FAA) стали разрабатываться системы
функционального дополнения для применения в гражданской авиации:
широкозонная система навигационного обеспечения WAAS (Wide Area
Augmentation System) и локальная система навигационного
обеспечения LAAS (Local Area Augmentation System) (рис. 2.15,2.16).
Работа той и другой системы базируется на совместном
использовании системы GPS и геостационарных спутников, а также
дополнительных контрольных станций. Системы WAAS и LAAS должны
удовлетворять требованиям ICAO по постоянству доступа, целостности,
непрерывности и точности навигационного обеспечения.
Система WAAS призвана обеспечить навигационное обслуживание
в полете на маршрутах в пределах воздушного пространства,
контролируемого американской системой NAS (National Airspace System) и
при заходе на посадку в большинстве аэропортов США по
категории I. Систему LAAS предполагается использовать исключительно для
навигационного обеспечения посадки по категории II и III во всех
аэропортах США, а также по категории I, в тех аэропортах, где условия
посадки не могут быть обеспечены системой WAAS. Система LAAS
обеспечивает всепогодное навигационное обслуживание в приземной
зоне. Внедрение этих систем будет способствовать повышению
безопасности полетов, точности посадки в пределах ВПП, спрямлению
участков полета, более эффективному эшелонированию.
Предусмотренное модернизацией системы распределение
частотного ресурса потребовало поэтапной модернизации космического и
наземного сегментов системы GPS, а также средств ее функционального
дополнения. Предпосылками проведения модернизации стали три
мероприятия в области распределения частотного ресурса:
• решение вице-президента США от 30.03.98 о введении
второго сигнала для гражданских потребителей на частоте L2
1227,60 МГц с целью улучшения точности системы в целом
и обеспечения резервного сигнала для гражданских
потребителей, действующих в чрезвычайных ситуациях, и предусмотре-
нии третьего сигнала для гражданских потребителей, связанных
с обеспечением безопасной эксплуатации транспортных и иных
технических средств;
• решение о развертывании инициативы по модернизации
системы GPS от 25.01.99 путем введения третьей частоты L5
1176,45 МГц для гражданских радионавигационных служб ARNS
(Aeronautical Radio Navigation Services);
• решение президента США от 01.05.00 об отмене режима
селективного доступа С/А на частоте L1 1575 МГц.
Первым этапом модернизации системы GPS считается обеспечение
доступа гражданских потребителей к сигналам на двух частотах L1 и
L2, подготовка к введению сигнала L5 для потребителей гражданской
авиации и введение нового сигнала Μ на двух частотах L1 и L2 для
военных потребителей.
На этом этапе было принято решение о разработке нового сигнала
для гражданских потребителей, получившего обозначение L2CS. Этот
сигнал включает 2 кода: один с навигационными данными, а второй
без них. По структуре он аналогичен сигналу L5 и позволяет:
• упростить прием и отслеживание слабых излучений;
• декодировать навигационные сообщения при простом
сопровождении сигнала;
• снять проблему помех от сильного системного сигнала слабому;
• улучшить качество слежения примерно на 3 Дб по сравнению
с качеством слежения при сигнале L2 С/А;
• повысить перекрестно-корелляционную защищенность сигнала
благодаря более протяженным кодам (два кода могут быть
разнесены по времени, например, с помощью временного
уплотнения несущих частот связи с многостанционным доступом TDMA
(Time Division Multiple Access);
• улучшить структуру навигационной информации за счет
повышения качества демодуляции сигнала (на 5 Дб выше по сравнению
с L2 С/А);
• обеспечить когерентную составляющую фазонесущей, что
необходимо для потребителей с повышенными требованиями к
точности.
Введение сигнала L2CS даст возможность в будущем включать
дополнительные сигналы в эту полосу, повысить помехоустойчивость
и расширить динамический диапазон приемников, а также обеспечит
повышение мощности передаваемых спутниками сигналов в будущем.
Так как помимо сигнала L2CS частота L2 используется двумя
сигналами L2 P(Y) и новым Μ для военных потребителей, то к сигналу L2CS
предъявляется требование, исключающее его влияние на военные
сигналы.
Перспективы использования третьего гражданского сигнала на
частоте L5 для навигационного обеспечения безопасной эксплуатации
воздушного судна связаны с рядом его улучшенных характеристик,
включая более высокую мощность передаваемого сигнала по
отношению к мощности сигнала на L1, ширину полосы вещания не менее
20 МГц, более высокую скорость передачи элементов сигнала. Двух-
кодовый сигнал на частоте L5 будет более стойким по сравнению
с сигналами L1 С/А и L2 CS и обеспечит точность местоопределений
на уровне, характерном для военного сигнала L2 Ρ(Υ). Однако, так же
как в случае сигнала L2CS, возникает проблема совместимости сигнала
на частоте L5 с военными сигналами. Сигнал L5 будет передаваться
в той же полосе частот, где работают навигационные средства
космической системы непосредственных измерений DME (Direct Measuring
Explorer) и военная линия передачи данных Link 16. При этом
возникает вероятность создания помех, особенно в Европе и США. Влияние
сигнала на указанные системы ограничивается большими высотами,
и предполагается, что оно будет уменьшаться при переводе системы
DME на другие частоты.
Сигнал гражданских потребителей транслируется в середине
каждой полосы частот и пересекается с военным сигналом P(Y). Новый
закрытый сигнал Μ намечено передавать ближе к краям полосы и
при повышенной мощности. За счет повышения мощности возрастет
помехоустойчивость, а за счет спектрального разнесения будет проще
защищать систему GPS при воспрещении другим пользоваться ею.
Защищенность навигационных сигналов будет обеспечена
применением новых криптографических решений. Для дальнейшего разнесения
военных и гражданских сигналов на спутниках системы GPS нового
поколения будут реализованы отдельные радиочастотные трассы и
антенные участки для сигналов М. По мере совершенствования
спутников станет возможным передавать два сигнала кода Μ на одной
несущей частоте. При этом они будут различаться кодами, содержанием
и другими особенностями. Заметного повышения помехоустойчивости
можно будет добиться путем использования для модуляции сигнала
с двоичным смещением несущей на поднесущей частоте 10,23 МГц и
при скорости расширяющегося кода 5,115 · 10б бит/с.
Начало работы системы GPS с гражданским сигналом L2CS и с
военным сигналом Μ на частотах L1 и L2 первоначально было намечено
на 2008 г., а в полном объеме этот режим планировалось ввести
в 2010 г. В отношении гражданского сигнала на частоте L5 эти сроки
соответственно относили на 2012 г. и 2014 г. Однако, после событий
11 сентября 2001 г. сроки модернизации системы GPS были
сокращены. Темп модернизации системы GPS определяется требованиями
восполнения орбитальной группировки модернизированными
спутниками при необходимости увязки их эксплуатационных характеристик
с характеристиками функционирующих на орбите спутников, а также
имеющимся на земле резервом немодернизированных спутников
системы GPS. В табл. 2.7 представлен график модернизации системы GPS
с учетом указанного требования к восполнению орбитальной
группировки.
Общее число приобретаемых спутников пятого поколения GPS III
(табл. 2.8) предполагается равным 30, хотя возможно и сокращение
объема заказов, вызванного перспективой создания космической
системы, получившей название GMSP (Global Multi-mission Support
Таблица
Обновление
орбитальной группировки
и навигационного
потенциала
Navstar Block
2R(GPS IIR)
Navstar Block
2R-M(GPS IIR-M)
L2CS,
Μ на L1&L2
Navstar Block
2F(GPS IIF)
L2CS,
Μ на L1&L2,
L5
Navstar Block
3(GPS III)
L2CS,
Μ с усилением
мощности сигнала
на L1&L2,
L5
2.7.
График модернизации системы
3PS
Годы
2001
-
2002
-
2003
-
-
2004
-
-
2005
-
2006
-
2007
2008
2009
2010
2011
2012
2013
2014
2015
2016
2017
2018
2019
Platform) — Глобальной платформы многоцелевой поддержки. Система
GMSP не считается заменой системы GSP III, однако возможно, что
концептуально 6-9 спутников системы GMSP будут работать
совместно с 16-24 спутниками системы GPS III.Система GMSP предназначена
для передачи гражданских и военных навигационных сигналов, а
также для широкополосной и узкополосной связи военных и гражданских
потребителей.
Таблица 2.8. Возможная точность навигационного определения с помощью
системы GPS III
Точность (95%)
Горизонтальная, м
Вертикальная,м
Временная, не
Уровень, соответствующий
эксплуатационным
требованиям проекта
2000 г.
Пороговый
6,3
13,6
20,0
Целевой
1,0 (военный)
2,1 (гражданский)
4,0
10,0
Планируемый уровень
с учетом качества
приемников
Пороговый
2,5
4,5
5,7
Целевой
0,5
1,1
1,3
Таблица 2.9. Точность определения положения в горизонтальном
направлении после введения дополнительных сигналов и модернизации наземного
сегмента управления GPS
Источник ошибки
Ионосфера
Тропосфера
Атомные часы и ошибка
определения эфемериды
Помехи приемника
Многолучевое распространение
Суммарная ошибка определения
эквивалентного расстояния
потребителя до потребителя
Типичное горизонтальное допле-
ровское смещение
Суммарное значение точности
определения, 95%
Типичная ошибка
определения расстояния (1σ), м
При двух
и более
кодированных
сигналах
0,1
0,2
2,3
1,5
1,5
3,0
1,5
10,1
При двух сигналах
и модернизации
наземного сегмента
управления
0,1
0,2
1,25
1,5
1,5
2,5
1,5
8,55
Перспективы развития системы GPS связаны также с
модернизацией наземного комплекса управления по следующим направлениям:
• модернизация станций слежения и оснащение наземных
приемных пунктов новыми приемниками и компьютерами;
• замена крупной ЭВМ Главной станции управления на
систему с распределенной архитектурой, позволяющей
контролировать спутники системы GPS и управлять бортовой аппаратурой
с использованием улучшенных дисплеев при повышенном уровне
автоматизации;
• улучшение точности навигационного определения;
• постройка альтернативной Главной станции управления с
полномасштабной номенклатурой функций управления;
• пересмотр роли наземных опорных станций в интересах
обеспечения целостности системы и постоянства покрытия;
• обновление математического обеспечения управления с
учетом модернизации бортовых систем спутников третьего
поколения [2.6-2.9].
Улучшение точности определения положения в горизонтальном
направлении после модернизации наземного сегмента управления можно
проследить по данным табл. 2.9.
В результате модернизации можно ожидать дальнейшее расширение
областей применения системы GPS и резкое увеличение числа ее
потребителей за счет:
• оптимизации распределения частотного ресурса в интересах
военных потребителей;
• расширения частотного диапазона, доступного гражданским
потребителям;
• выделения специального частотного диапазона для обеспечения
безопасной эксплуатации самолетов гражданской авиации.
2.1.3. Европейская спутниковая навигационная система
Galileo. С 1993 г. по инициативе Европейского космического
агентства (ESA), Европейской комиссии (ЕС) и Европейской
организации по обеспечению безопасности самолетовождения
(Eurocontrol) начались работы по созданию спутниковой системы
функционального дополнения к системам ГЛОНАСС и GPS [2.10].
Эта система, получившая название EGNOS (European Geostatoinary
Navigation Overlay Service) — Европейская дополнительная
геостационарная навигационная служба, — послужила прологом
к созданию Европейской навигационной спутниковой системы Galileo.
Систему EGNOS называют иногда GNSS-1. С помощью системы
EGNOS с борта геостационарных спутников для потребителей
существующих спутниковых навигационных систем передаются
данные дифференциальной коррекции, информация о целостности
системы и т.д. Приемная аппаратура EGNOS, установленная на
борту подвижных потребителей, принимает с борта геостационарных
спутников телематическую информацию, обеспечивающую точное
навигационное определение [2.10-2.13].
В реализации программы EGNOS участвуют страны Европы,
включая Англию, Францию, Германию, Италию, Испанию, Португалию,
Норвегию, Голландию, Швейцарию и Австрию. Предполагается, что
в программе примут участие Канада, а также страны Восточной
Европы, Африки, Латинской Америки, Ближнего Востока и Азии, которые
получат значительную выгоду от расширения зоны покрытия, что и
подтвердит эффективность системы GNSS-1.
Несмотря на видимые успехи в развитии системы EGNOS, следует
считаться с тем, что с ее помощью Европе нельзя обеспечить
навигационный сигнал с гарантированной доступностью и требуемыми
потребительскими характеристиками. Поэтому по инициативе Европейского
Совета в 1999 г. параллельно с мероприятиями по развитию системы
EGNOS начались подготовительные работы по формированию облика
системы Galileo [2.10, 2.14].
В состав этой системы должна войти орбитальная группировка,
обеспечивающая глобальное покрытие и предлагаемая в качестве
европейского вклада в общемировую космическую навигационную систему,
получившую наименование GNSS-2.
Комбинированное использование. систем Galileo, EGNOS,
GPS/ГЛОНАСС приведет к общему повышению уровня характеристик,
обеспечит увеличение доступности и надежности обслуживания,
а также будет способствовать повсеместному применению спутниковой
навигации всеми потенциальными потребителями.
Европейское сообщество рассматривает систему Galileo как
глобальную навигационную систему, которая находится, в отличие от
американской GPS и российской ГЛОНАСС, имеющих двойное
назначение, только под гражданским управлением и гарантирует непрерывное
предоставление навигационных услуг.
В состав орбитальной группировки должны войти по крайней мере
21 спутник на орбитах наклонением 55-60° и высотой 23000-24000 км.
В случае привлечения партнеров, не входящих в Европейский Союз,
число спутников может быть доведено до 30, включая 27 рабочих и
3 запасных.
Согласно уточненным данным орбитальная группировка системы
Galileo будет состоять из 30 спутников при наличии 8 аппаратов на
земле в качестве резервных. Среднеорбитальную группировку могут
дополнять несколько геостационарных спутников [2.15, 2.16].
Орбитальная группировка обеспечивает адекватное покрытие при
поддержке системой Galileo навигационного обслуживания во
всемирном масштабе.
В состав оборудования каждого спутника входит навигационная
аппаратура и ретранслятор, обеспечивающий поиск и спасение.
Чувствительную часть бортового комплекса будут составлять дбэ
стандарта частоты — рубидиевый и на водородном мазере. Разработкой
и производством первого стандарта занимаются две компании:Тетех
Neuchatel Time и Astrium, второго — Невштательская обсерватория и
итальянская фирма Officine Galileo. В наземном сегменте для контроля
хода бортовых часов будет использоваться цезиевый стандарт частоты.
Точность бортового стандарта — порядка 2 · Ю-'6 [2.17].
Инфраструктура наземного сегмента системы Galileo состоит из
5 частей [2.10]:
• наземный комплекс управления и мониторинга,
• региональные комплексы функционального дополнения,
• локальные комплексы функционального дополнения,
• центры обслуживания,
• сегмент потребителей.
Наземный комплекс будет включать комплекс управления
орбитальной группировкой, а также примерно 14 станций, связанных
специальной сетью связи, для мониторинга положения спутников и точности
их бортовых часов и вычисления поправок. В настоящее время ведется
проработка концепции целостности в глобальном масштабе. Наземный
комплекс будет также обеспечивать совокупность интерфейсов для
центров обслуживания, которые оказывают платные услуги, и для
наземного сегмента системы COSPAS-SARSAT для поддержки
функционирования служб поиска и спасения.
Региональные комплексы функционального дополнения включают
неевропейские региональные комплексы системы Galileo, которые
применительно к определению целостности функционируют в
региональном режиме, не прибегая к услугам глобальной службы
целостности системы Galileo. Региональные данные о целостности могут идти
непосредственно из каждого региона по космическому каналу связи
на борт спутника, либо — идти по альтернативному пути через
наземный комплекс, а оттуда по космическому каналу связи на борт
спутника совместно с данными COSPAS-SARSAT и данными
провайдера системы обслуживания. Система EGNOS также входит в число
региональных комплексов функционального дополнения, обеспечивая
данные о целостности и дифференциальную коррекцию для систем
GPS и ГЛОНАСС через геостанционарные спутники.
Наличие локальных комплексов функционального дополнения
вызвано дополнительными требованиями со стороны некоторых групп
потребителей. Наряду с решением задач по удовлетворению этих
требований локальные комплексы функционального дополнения могут
оказывать такие услуги, как предоставление
• коммерческие данных (поправок, карт, баз данных);
• дополнительных навигационных сигналов (псевдолитов);
• улучшенных данных по определению местоположения в зонах
слабого приема сигналов, полученных на основе расчетов
местоположения с помощью глобальной системы мобильной связи
GSM и универсальной мобильной системы телекоммуникаций
UMTS,
• каналов мобильной связи.
Система Galileo будет обеспечивать совокупность интерфейсов для
потребителей и провайдеров платных услуг с помощью центров
обслуживания. В зависимости от функционального назначения,
определяемого категорией навигационного обслуживания, эти центры будут
обеспечивать:
• информацию и гарантию архивирования характеристик и других
данных;
• управление подпиской на платные услуги и доступом к системе
по паролю (access key);
• управление страхованием и ответственностью, разрешением
спорных вопросов;
• управление сертификационной и лицензионной информацией;
• коммерческие интерфейсы;
• техническую поддержку при расширении областей применения
системы и выработке новых подходов к развитию системы.
Сегмент потребителей предполагается оснащать аппаратурой,
совместимой с аппаратурой потребителей ГЛОНАСС и GPS, чтобы для
определения своего местоположения потребитель мог использовать
любую комбинацию спутников всех трех систем. К этому следует
добавить, что система Galileo полностью сопряжена с любой из
внешних дополняющих ее навигационных систем космического и наземного
базирования (ГЛОНАСС, GPS, LORAN-C и др.), обеспечивая
комбинированное обслуживание потребителей.
Аппаратура спутников системы Galileo будет осуществлять
навигационное обеспечение трех уровней с использованием для тех или иных
уровней 5 сигналов и гибкой системы кодирования информации.
Первый уровень предназначен для бесплатного общедоступного
обслуживания, второй — для платного обслуживания с обеспечением
повышенной точности, третий — для государственной службы
безопасности и управления системами транспорта с обеспечением высокой
точности. Заявленная погрешность определения положения для
первого уровня составляет 4 м, для третьего — 0,45 м, время оповещения
потребителя об отказе аппаратуры спутника — 6 с [2.10].
На спутниках системы Galileo будут установлены специальные
ретрансляторы по обеспечению службы COSPAS-SARSAT повышенного
качества. Когда потребитель посылает с радиомаяка системы COSPAS-
SARSAT сообщение о бедствии, ретранслятор спутника передает его
на наземную станцию COSPAS-SARSAT, которая в свою очередь
пересылает его в центр спасения для дальнейшей обработки.
Что касается частотного спектра, предназначенного для
использования в радионавигационных каналах спутников системы Galileo, то он
был обсужден и согласован с Международным союзом по радиосвязи
ITU (International Telecommunications Union). (См. табл. 2.1).
2.2. Функциональная схема многоканального
приемника ГНСС GPS/I\nOHACC/Galileo
Основные принципы построения архитектуры приемника. Ниже
будем полагать, что многоканальный GPS/TJTOHACC/Galileo приемник
должен обеспечивать выполнение следующих задач:
• измерение первых и вторых разностей псевдодальностей и
псевдоскоростей;
• измерение разности фаз несущих сигналов, принятых
различными антеннами;
• прием и декодирование служебной информации GPS/ГЛОНАСС/
Galileo.
Обмен данными между приемником и бортовой навигационной
системой и системой управления должен осуществляться по
стандартному каналу с последовательным интерфейсом.
Таким образом, архитектура типового приемника включает:
• антенно-фидерный блок;
• входные фильтры и малошумящие усилители мощности,
компенсирующие потери мощности навигационного сигнала в космосе
и в антенно-фидерном блоке. Эти фильтры и усилители должны
располагаться вне блока приема сигнала, сразу после антенны.
• многоканальные цифровые блоки приема сигнала,
обеспечивающие навигационные измерения, прием, декодирование служебной
информации и решение задач навигации и определения
параметров ориентации.
В том случае, если приемник предполагается использовать в
условиях влияния помех, к перечисленным выше элементам необходимо
добавить пеленгатор помехи и ФАР с цифровым управлением
диаграммой направленности, а также программно-аппаратные средства,
обеспечивающие адаптацию параметров следящих контуров приемника
к характеристикам помехи.
Рассмотрим более детально архитектуру одиночного канала GNSS-
приемника. Исходя из сегодняшних реалий, будем полагать, что
приемник рассчитан на использование сигналов GPS и ГЛОНАСС.
Возможность использования сигналов Galileo не приведет к принципиальным
изменениям архитектуры канала.
Каждый канал включает три последовательных блока
(рис. 2.17,2.18):
• радиочастотный блок (рис. 2.17);
• блок цифровой обработки данных (рис. 2.18);
• цифровой вычислительный блок (рис. 2.18).
Кроме того, каждый одиночный канал включает в себя канал
последовательного интерфейса.
Обсудим более детально работу и задачи перечисленных выше
блоков.
Сигнал ГЛОНАСС/GPS
Блок частотной
развязки
Радиочастотный блок
Антенный фильтр
ГЛОНАСС
Антенный фильтр
GPS
Усилитель мощности
ГЛОНАСС
Усилитель мощности
GPS
Распределитель
Распределитель
/G
PS
Смеситель
}д\
/ГЛОНАСС
Синтезатор
частоты
-и гетеродин
ГЛОНАСС/GPS
Полосовой фильтр
Первичный усилитель
Квадратурный
детектор
2-й гетеродин
ГЛОНАСС/GPS
/г2
Захват
Локальный
эталон частоты
/эталонная
Захват
-L Ci+jCi
к блоку цифровой
обработки данных
/выбо|
рки
Рис. 2.17. Радиочастотный блок приемника GNSS
Архитектура радиочастотного блока обеспечивает совместную
обработку сигналов ГЛОНАСС и GPS, используя одну антенну. Частота
первого гетеродина выбирается такой, чтобы минимизировать потери
мощности при последовательном приеме сигналов ГЛОНАСС и GPS.
Разница в модуляции сигналов ГЛОНАСС и GPS позволяет
последовательно усиливать и обрабатывать их без проявления
нежелательной интерференции.
Для формирования частоты первого гетеродина в качестве
эталонной может быть выбрана как частота 10,23 МГц, характерная для GPS,
так и частота 5,0 МГц, характерная для ГЛОНАСС.
Рассмотрим способы обработки навигационного сигнала ГЛОНАСС.
Как известно, несущие частоты навигационных сигналов
ГЛОНАСС модулируются соответствующей псевдослучайной
последовательностью (ПСП), цифровыми данными и сдвигаются вследствие
/выборк
Блок цифровой обработки данных
X
Ci+jC2
Триггер
Синтезатор пошаговой частоты
ГЛОНАСС/GPS
Цифровой
коррелятор
Генератор ПСП
ГЛОНАСС/GPS
Синтезатор пошаговой частоты
ГЛОНАСС/GPS
C\*+jC2*
Ά
выборки
Сумматор-интегратор
|К цифровому
обработчику
К цифровому I
К цифровому вычислителю Q-Bus обработчику
данных ι
Цифровой вычислитель
./пошаговая
Шина даннных Q-Bus
Процессор
ОЗУ
ППЗУ
Управляющее
устройство
Интерфейс
Рис. 2.18. Блоки цифровой обработки данных и цифрового вычислителя
проявления эффекта Доплера:
/глонасс = 1600,0 + 0,5625 ± fD ± 0,511 ± 50 · 10"6 МГц,
где η = 1, 2,..., 24 — индекс спутника ГЛОНАСС, fD — доплеровский
сдвиг частоты сигнала.
С целью подавления шумов и влияния «зеркального» канала
упомянутые сигналы подаются на антенный фильтр и усилитель мощности
радиочастотного блока. После предварительного усиления с помощью
первого гетеродина принятые сигналы преобразуются в
радиочастотные сигналы. Частота первого гетеродина генерируется от локального
эталона частоты радиочастотного блока. Радиочастотные сигналы, то
есть сигналы первой промежуточной частоты, подаются на полосовой
фильтр и усилитель мощности промежуточной частоты, где уровень
мощности повышается не менее, чем на 120 дБ. Чтобы преобразовать
сигнал первой промежуточной частоты в комплексный видеочастотный
сигнал C1+JC2 с двумя квадратурными компонентами, сигнал первой
промежуточной частоты и эталонный сигнал второго гетеродина
подаются на квадратурный детектор. После двухуровневого квантования
эти компоненты подаются в цифровой вычислительный блок. В этот
блок также поступает сигнал эталонной частоты 40 МГц. Эта частота
понижается в два раза для получения эталонной частоты выборки,
которая одновременно является максимальной частотой
переключения. Номинальная величина частоты первого гетеродина,
промежуточной частоты и частоты выборки выбираются таким образом, чтобы
избежать перекрытия спектров данного канала и сигналов других
каналов.
Для обеспечения требуемого уровня надежности, цифровой
вычислительный блок содержит два идентичных модуля. Каждый из модулей
содержит, в свою очередь, три идентичных устройства (канала)
цифровой обработки данных. Подобная архитектура каждого блока цифровой
обработки данных необходима для двух различных целей:
• обеспечить требуемый уровень надежности решения
навигационной задачи;
• обеспечить измерение разности фаз несущей сигналов, принятых
четырьмя различными антеннами, на случай, если с помощью
приемников с подобной архитектурой будет решаться задача
определения параметров ориентации.
Демодуляция сигналов С1 и С2 осуществляется цифровым
коррелятором с использованием соответствующей ГЛОНАСС/GPS
псевдослучайной последовательности (ПСП), которая создается генераторами
ПСП. ПСП формируется на базе пошагового датчика опорных частот,
использующего девятиразрядный регистр сдвига с обратной связью.
Процесс корреляции происходит следующим образом. Для
проверки сигналы поступают на цифровой умножитель, где
перемножаются с цифровым комплексным сигналом, который генерируется
цифровым синтезатором несущей частоты ГЛОНАСС или GPS. Фактически
синтезатор — это третий гетеродин. После умножения дальнейшее
преобразование навигационных сигналов происходит в цифровых
сумматорах.
После третьего гетеродина несущая частота сигналов
эквивалентна нулю и модулируется только информационными составляющими.
Следующий шаг — обработка полученных сигналов с помощью
накапливающих сумматоров-интеграторов в блоке цифровой обработки
данных. Внутренний обмен данными между этим блоком и цифровым
вычислительным блоком происходит по шине Q-bus. Чтобы достичь
требуемого уровня надежности процесса обработки, цифровой
вычислительный блок состоит из двух идентичных устройств. Каждое из
этих устройств включает в себя микропроцессор, программируемую
ROM-память, RAM-память и управляющий процессор. Каждое
устройство обрабатывает сигналы всех подблоков цифрового вычислительного
блока одновременно.
Каждым устройством решаются следующие задачи:
• поиск сигналов;
• отслеживание сигналов по частоте и задержке;
• синхронизация по символам;
• выборка цифровой информации;
• выборка текущей метки времени;
• вычисление псевдодальности и псевдоскорости;
• предварительное решение навигационной задачи;
• передача с помощью управляющего процессора цифровой
информации внешним пользователям по стандартному
последовательному интерфейсному каналу для последующей обработки
(например, для определения параметров ориентации).
Фактически плата процессора — это многоканальное устройство
цифровой обработки радиочастотных сигналов. Вход процессора — это
однобитовая выборка сигналов ГЛОНАСС, а также сигнал тактовой
частоты и модулирующий сигнал.
После оцифровывания однобитовый сигнал поступает на входы
корреляторов. Корреляторы обеспечивают проверку входных сигналов
согласно эталонной ПСП GPS и ГЛОНАСС и квадратурный перенос
спектров сигнала в область нулевых частот, а также интегрирование
умноженных сигналов на интервале 1 мс.
Каждый коррелятор может включать несколько идентичных
каналов, содержащих:
• генератор ПСП GPS и ГЛОНАСС;
• управляемый цифровой синтезатор сигналов несущей частоты;
• управляемый цифровой синтезатор тактовой частоты;
• квадратурные умножители;
• выходные сумматоры-интеграторы с буферным регистром для
запоминания результатов интегрирования;
• дискриминатор, работающий по времени задержки;
• интерфейс для обмена данными.
Контур работает в соответствии с управляющим сигналом, который
задается микросхемой цифровой обработки данных. Фактически —
это процессор для работы над числами с фиксированной точкой и
раздельными шинами данных и адресов.
Программное обеспечение здесь выполняет следующие задачи:
• обработка входных сигналов GPS/ГЛОНАСС, то есть поиск,
синхронизацию в соответствии с задержкой ПСП, частотой и фазой
несущей, демодуляцию, «распаковку» цифровой информации,
вычисление псевдодальностей и псевдоскоростей;
• решение навигационной задачи;
• обмен данными с внешними устройствами.
В ROM памяти сохраняются альманах системы и результаты
решения навигационной задачи.
Часы реального времени включают генератор сигналов и набор
делителей. Обмен данными с процессором происходит по шине данных.
Описанные выше структуры дают представление о спутниковом
приемнике, предназначенном для решения навигационной задачи. Для
того чтобы обеспечить работу в режиме определения параметров
ориентации, необходимо наличие четырех антенн и четырех малошумящих
антенных усилителей. Каждая антенна с помощью высокочастотного
кабеля должна быть соединена с собственным отдельным разъемом
высокочастотного входа. При этом радиочастотный блок, выполненный
по выше приведенной схеме, должен быть повторен четырежды, за
исключением кварцевого генератора, который должен быть единственным
для приемника.
Подчеркнем еще раз, что для работы в режиме определения
параметров ориентации необходимы следующие изменения в стандартной
схеме приемника:
• наличие четырех антенн и четырех малошумящих антенных
фильтров;
• наличие четырех отдельных высокочастотных входов;
• наличие четырех преобразователей и плат, за исключением
кварцевого генератора, который должен быть единственным для всего
приемника;
• наличие дополнительного 32-разрядного процессора для работы
с числами с плавающей точкой;
• наличие общей шины для 16- и 32-разрядного процессора;
• программное обеспечение, необходимое для определения
параметров ориентации.
2.3. Модели ошибок кодовых и фазовых измерений
гнсс
2.3.1. Модель ошибок кодовых измерений ГНСС. В
процессе проведения кодовых навигационных измерений приемник решает
задачу определения величин псевдодальностей до каждого из НИСЗ
систем GPS/ГЛОНАСС. Под временной псевдодальностью понимается
величина tit определяемая формулой [2.19, 2.20]:
Н = Inp.i — '•изл.г [С], \^·'-)
где г — номер наблюдаемого НИСЗ; ίΠρ,ί — момент приема
навигационного сигнала от г-го НИСЗ; £ИЗЛд — момент излучения навигационного
сигнала г-м НИСЗ.
Метрической псевдодальностью называется величина zit
определяемая как произведение U на скорость распространения световых волн
в вакууме [2.19, 2.20]:
Zi = c-un, (2.2)
где с = 299 792458 м/с.
Псевдодальность вводится как мера дальности от рассматриваемого
НИСЗ до принимающей антенны приемника, но, строго говоря, не
является таковой, так как процесс кодовых измерений сопровождается
рядом погрешностей, которые в целом могут быть разделены на
следующие группы:
• погрешности, вносимые бортовой аппаратурой НИСЗ;
• погрешности, накапливающиеся в процессе распространения
навигационного радиосигнала в атмосфере;
• погрешности, вносимые навигационной аппаратурой потребителя.
С целью параметризации модели псевдодальности (2.1) введем
понятие истинного времени распространения радиосигнала ipacnp,i,
равного разности моментов приема и излучения навигационного
радиосигнала в единой шкале времени, например, в шкале системного времени
спутниковой навигационной системы (СНС):
1распр,г = ^распр.г- (^.О)
(Здесь и далее верхний индекс относится к используемой шкале
времени)
В формуле (2.1) отсчеты £Иэл,г, очевидно, производятся по бортовой
шкале времени НИСЗ, а отсчеты ίΠρ,ί — по шкале времени приемника.
Таким образом:
«НИСЗ.г «СНС ι ДТ"* /^НИСЗ.гч /η л\
"-изл.г — ''изл.г "+" ^" НГизл,г J' \ΔΛ)
где t^\ — момент излучения навигационного радиосигнала г-м НИСЗ
по системной шкале времени СНС; *"3л^3,г — момент излучения
навигационного радиосигнала г-м НИСЗ по бортовой шкале времени
г-ro НИСЗ; ΔΓί(ί"3^3,1) — расхождение между бортовой шкалой
времени г—го НИСЗ и системной шкалой времени СНС в момент
времени i™
Далее, для момента приема навигационного радиосигнала имеем
.нап _ .сне , д_/^н/
"Tip.i — ''пр.г г '-*т\.1'пр.
С" = Cf + Μ«· (2.5)
где i{j-pHf — момент приема навигационного радиосигнала от г-го НИСЗ
по системной шкале времени СНС; *"ДП — момент приема
навигационного радиосигнала от г-го НИСЗ по шкале времени приемника
(навигационной аппаратуры потребителя (НАП)); Дт(*"Дп) — расхождение
между шкалой времени приемника и системной шкалой времени СНС
в момент времени t^p.
Таким образом для истинного времени распространения
радиосигнала i^pi получаем:
,СНС _ ^СНС _ .СНС _ ,ΗΑΠ _ .НИСЗ.г _ л /,ΗΑΠν ,дТ/.НИСЗ,гч ,9 к\
''pacnp.i Lnp,i |'изл,1 '"пр.г ""изл.г L1T\l'np,i J ""·" '-*-' П'-изл,! )■ \ΔΌ>
Заметим, что в качестве момента приема радионавигационного
сигнала t^f1, в приемнике принимается значение временной метки,
формируемой в приемнике псевдослучайной последовательности, в
окрестности которой произведено измерение. В общем случае положение
данной временной метки не соответствует истинному моменту регистрации
навигационного радиосигнала, что обуславливает введение
погрешности регистрации сигнала:
гнап _ +нап , а-г- /о 7\
где ΐ^π — значение момента времени приема навигационного
радиосигнала, сформированное приемником; Дтрег — погрешность
регистрации радиосигнала от г-го НИСЗ.
Окончательное выражение для i™ffpi принимает вид:
.СНС _ ^НАП _ ,HHC3,i _ д /.НАП-, , дг /.НИСЗ.гч _
''pacnp.i — ''пр.г 'изл.г LyrV'nf,i ) <~ '-" п'изл.г J ~
_ ГНАП .НИСЗД Λ^^ηΑΠν . д^/.НИСЗдч а /9 Я\
Введем понятие истинной псевдодальности *ИСт,г· Под истинной
псевдодальностью iHCT,i понимается истинное время распространения
навигационного радиосигнала от г-го НИСЗ в том случае, если бы
радиосигнал распространялся в вакууме. Иными словами, iHCTi; есть
истинное время распространения радиосигнала при отсутствии учета
погрешностей, накапливающихся при прохождении радиосигнала через
атмосферу. Связь между ij^ и ipa„Pii может быть задана в виде:
^pacnp.i = ^ист.г + Δ-/ион + Д-^троп + Д-^мл! (^У)
где ДГИ0Н — погрешность, вызванная ионосферной задержкой сигнала;
ΔΤ^τροπ — погрешность, вызванная тропосферной задержкой сигнала;
АТмл — погрешность, вызванная эффектом многолучевости (эффект
многократного персотражения навигационного радиосигнала от
естественных препятствий, находящихся в непосредственной близости от
принимающей антенны приемника).
Таким образом, выражение для ijj·^ может быть переписано в виде
.сне _ ,снс _ лТ _ Ατ _ дψ /о Ю)
'ист.г — ipacnp.i L^1 иои ^-ίτροπ £" мл \*-"J)
или
J.CHC _ ТНАП _ j.HHC3,i . дт /.НИСЗ,is _ дт _ дγι _ дгр _
ьистЛ ~ Lnp,i "-изл,! ~г '-*-Ч\1>ИЗЛщ1 ) ^-ί ион '-Ь-'трюп aJMa
-Δτ(ί^Π)_ΔτρβΓί. (2.Ц)
Вводя обозначения для каждой из групп погрешностей, получаем:
*ист,г = *пр,г _ *изл,г '* + А^НИСЗ ~ АГатм - ΔΓΗΑΠ> (2.12)
где АГнисз = ATi(tH3Jli ,l) — погрешность, вносимая бортовой
аппаратурой НИСЗ; ДГатм = ДГИ0И + ΔΓΤρ0Π + АТил — погрешность,
накапливающаяся в процессе распространения навигационного радиосигнала
в атмосфере; ΔΓΗαπ — Ат(*"Дп) + Атрег.г — погрешность, вносимая
навигационной аппаратурой потребителя.
Для метрической истинной псевдодальности имеем:
*„ст.г = с ■ (ί™π - С?'*) + с · АГнисз - с · ДГатм - с ■ ΔΓΗΑπ. (2.13)
Рассмотрим подробнее каждую из перечисленных погрешностей.
Погрешность, вносимая бортовой аппаратурой НИСЗ.
Погрешность бортовой аппаратуры НИСЗ, обуславливающая расхождение
между бортовой шкалой времени НИСЗ и системной шкалой времени
СНС, может быть записана в виде
АГнисз.г = АГдр,г + АТрелЛ + ДГгрз.г, (2.14)
где ДГдрд — погрешность, вызванная уходом бортовых часов НИСЗ
вследствие дрейфа бортового стандарта частоты НИСЗ; ДГреЛг —
погрешность, вызванная неучетом релятивистского эффекта замедления
хода бортовых часов НИСЗ в системе отсчета, связанной с
навигационной аппаратурой потребителя; ДТгрз,г — погрешность, вызванная
эффектом групповой задержки навигационного радиосигнала в
бортовой аппаратуре НИСЗ. Групповая задержка радиосигнала в бортовой
аппаратуре НИСЗ определяется как задержка между излучаемым
радиосигналом и выходным сигналом бортового стандарта частоты.
Величина ухода бортовых часов НИСЗ зависит от интервала
времени, прошедшего с момента синхронизации шкалы времени данного
НИСЗ и системной шкалы времени СНС. В качестве модели ATiPii
может быть использовано квадратичное приближение [2.20]:
ΔΓ.ρΛ = ао + а, (*££ - t™) + а2 (*££ _ ^ογ (2 15)
где ао.аьаг — коэффициенты квадратичной модели ухода бортовых
часов НИСЗ; t^c — значение некоторого опорного момента времени,
для которого известна величина ухода бортовых часов НИСЗ.
Величина релятивистской погрешности определяется
моделью [2.19]:
АГрел.г = F^y/ae. 8\п(ЕК), (2.16)
где Fpejl = -(2уД)/с2 = -4,442807633 · 10"10 с/м1/2 - константа для
вычисления релятивистской погрешности; μ = 3986005· 10s м3/с2 —
гравитационная постоянная Земли; а — большая полуось орбиты
НИСЗ; е — эксцентриситет орбиты НИСЗ; Εχ — эксцентрическая
аномалия НИСЗ на момент времени t^\.
Погрешность, накапливающаяся при распространении
навигационного радиосигнала в атмосфере Земли. Как указывалось выше,
погрешность ДГатм определяется формулой:
^-^атм = ^-ί ион τ ^-ίτροπ τ ^-'мл·
Ионосферная составляющая погрешности ДГИ0Н обусловлена
искажениями прямолинейности пути распространения радиосигнала, а
также изменением скорости распространения радиосигнала в пределах
ионосферы. Данный эффект объясняется тем, что ионосфера является
диспергирующей средой для радиосигнала, в связи с чем скорость
распространения радиосигнала в среде начинает зависеть от частоты
сигнала. В настоящее время известны такие методы определения и
учета ионосферной погрешности, как моделирование ионосферной
задержки и метод двухчастотных измерений [2.3].
В качестве примера первого подхода к решению задачи
определения и учета ионосферной задержки рассмотрим модель Клобуха-
ра [2.3, 2.4]:
Определяются значения ионосферной широты φ„ и ионосферной
долготы Аи:
Ψ, = ^нап + [ειΊΤιΙ ~ °'°22) C°S {Az)' (2·'7)
/ 0,0137 Asm(Az)
К = Анап + f, , η ι ι ~ °>022 ΤΊ—V' (Ζ1«)
\Е1 + 0,11 у cos (φ»)
где Αζ — азимутальный угол рассматриваемого НИСЗ, [рад]; El —
угол возвышения рассматриваемого НИСЗ, [рад]; ι^ηαπ и Анап —
географические широта и долгота приемника соответственно, [рад].
Определяется значение геометрической широты φπι точки
пересечения ионосферы:
ψτη = ψ„ + 0,064 · cos (λ„ - 1,617). (2.19)
Определяется местное время для точки в ионосфере:
Г™с = 4,32.104Аи + СлС· (2-20)
Вычисляются вспомогательные величины F,PER,AMP hi, а
также значение ионосферной задержки:
F= 1 + 16· (0,53-Е03, (2.21)
PER = 60 + 6,^ + 62^ + 63^, (2.22)
AMP = a0 + aiipm + α2ψ2Ύη + α3ψ37η, (2.23)
ΤΜ - 50400
Ж = РДД [рад'' (2·24)
где αο, аиа,2,аз, 6ο, 6ι, 62,63 — коэффициенты ионосферной модели Кло-
бухара, у /24
АТтн = F ( 5 · 10"а + ЛМР I 1 - - + — I 1 . (2.25)
Метод двухчастотных измерений в свою очередь основан на том
факте, что, в силу зависимости скорости распространения
радиосигнала в ионосфере от его частоты, ионосферные задержки метрических
псевдодальностей, измеренных на двух различных частотах /, и /г,
связаны соотношением [2.3]
Δ*„ο„.»(/ι) _ /| (2 26)
Агион.г(/2) /?·
Таким образом, величина ионосферной погрешности
псевдодальности, измеряемой на частоте /,, может быть вычислена по формуле
*(/2)-*(/l) iH
АГиоН,а=^ /»""(^-1) , (2.27)
гДе ζι(/ι) и ^(/2) — величины метрической псевдодальности,
измеренные на частотах /, и /г соответственно.
Тропосферная составляющая погрешности ΔΓτροπ обусловлена
наличием тропосферной рефракции навигационного радиосигнала ввиду
неоднородности показателя преломления среды в пределах
тропосферы. Метрическая запись тропосферной задержки радиосигнала может
быть записана как [3.4]
sTI
■"■троп
роп ~ ЩЩ
^^троп —
(n-l)ds, (2.28)
о
где η — показатель преломления среды распространения радиоволн;
■Ктроп — безразмерный параметр, характеризующий состояние
тропосферы; El — угол возвышения наблюдаемого НИСЗ, [рад]; 5троп —
протяженность тропосферного участка тропосферы, [м].
Величины /Строп и η в общем случае зависят от таких показателей,
как температура воздуха, атмосферное давление и давление водяных
паров. Приведем модель Хопфилда для определения тропосферной
задержки [2.3]:
Λ Kd Kw
sin(VEl2 + 1,904· Ю-3) sin(y/El2 + 0,6854 · 10"3)
(2.29)
где
^-,^.,ο-^.^χΓ·; «,зо,
_ -0,282 ·Ρ„ 8307,2 · P„
Κω-Γα + 273.16 + (Γα + 273,ΐ6)2' ( U
Γα — температура воздуха, [°С]; Ра — атмосферное давление, [Па];
Ρυ — давление водяных паров, [Па].
Погрешности, вызванные эффектом многолучевости, т.е. задержки
навигационного радиосигнала, обусловленные переотражением
радиосигнала от препятствий, находящихся в непосредственной близости от
принимающей антенны приемника, в общем случае трудно поддаются
параметризации. Однако, ввиду систематического характера данных
ошибок в рамках рассматриваемого сеанса навигационных измерений,
погрешности от многолучевости могут быть учтены путем построения
взаимной корреляционной функции по результатам кодовых измерений
от различных НИСЗ и поиска корреляционного минимума в пределах
наблюдаемых НИСЗ.
Погрешность, вносимая навигационной аппаратурой
потребителя. Погрешность ΔΓΗαπ> вносимая навигационной аппаратурой
потребителя, может быть задана линейной моделью ухода часов
приемника в виде:
ΔΓηαπ (С") = Λ + А · (С1 - йАП) + A^.i (2-32)
где βο,βι — коэффициенты линейной модели ухода часов приемника;
*шАП — значение некоторого опорного момента времени, для которого
известна величина ухода часов приемника.
Данная погрешность подлежит уточнению в процессе решения
навигационной задачи потребителя.
2.3.2. Модель ошибок фазовых измерений ГНСС. Как уже
указывалось выше, основным навигационным параметром, измеряемым
навигационной аппаратурой потребителя в режиме кодовых измерений,
является т.н. метрическая псевдодальность, т.е. величина
Zi = Д„ст.г + с ■ (ΔΓηαπ + АТтн + ΔΓτροπ + АТМЛ - АТНИСзл), (2-33)
где ДНст,г — «истинная» (геометрическая) дальность НИСЗ-НАП.
Соотношение (2.33) получено при использовании в качестве
радионавигационного параметра временной задержки формируемой в при-
емнике псевдослучайной последовательности, оцениваемой системой
слежения за задержкой сигнала приемника.
Режим фазовых измерений предполагает использование в качестве
радионавигационного параметра оценки фазы несущей сигнала,
формируемой системой слежения за фазой. Аналогом метрической
псевдодальности для данного режима выступает т.н. метрическая
псевдофаза, для которой, проводя вышеприведенные рассуждения, можно
записать:
Ψί = ^р + ft (ΔΓηαπ - ΔΓ„0Η + ΔΓτροπ + ΔΓΜΛ - ДГнисз..-) + #'■
(2.34)
где λ-7 — длина волны, соответствующая несущей частоте сигнала ft,
излучаемого j-м НИСЗ; У — целое число, характеризующее
неоднозначность фазовых измерений.
Традиционно [2.19] формат представления измерений
навигационной аппаратуры предполагает, что в качестве единицы измерения
псевдодальности используется метр, а единицы измерения псевдофазы —
цикл высокочастотного колебания соответствующей частоты.
Таким образом, измерение (2.34) содержит полезную
составляющую RmT.i/W, компоненты погрешностей, обусловленные условиями
излучения, распространения и приема сигнала, а также
неопределенную составляющую, обусловленную начальным рассогласованием ПСП
бортового генератора НИСЗ и генератора НАП.
Компоненты погрешностей, обусловленные условиями излучения,
распространения и приема сигнала, имеют тот же смысл, что и
в кодовых измерениях и могут быть оценены по приведенным выше
соотношениям (2.1-2.28). Отметим, что в отличие от
псевдодальности (2.33), псевдофаза (2.34) содержит составляющую погрешности
ΔΤ,,οη с обратным знаком. Это объясняется тем фактом, что ионосфера
является диспергирующей средой, знак задержки сигнала в которой
отличается для фазы огибающей и несущей. В первом случае (т. е.
при использовании кодовых измерений, где учитывается групповая
скорость распространения радиоволн) задержка ΔΤΗ0Η положительная
и измеренная дальность больше истинной, а во втором случае (т. е. при
использовании фазовых измерений, где учитывается фазовая скорость
распространения радиоволн) — отрицательная [2.21].
Компонента целочисленной неопределенности фазы № в случае
отсутствия срывов слежения остается постоянной во времени для
каждого канала слежения и может быть оценена методами вторичной
обработки [2.21].
Также отметим, что приведенные выше модели измерений
соответствующих навигационных параметров содержат
инструментальные ошибки, обусловленные в основном влиянием внутренних шумов
приемника:
Zi = Дист.г + с (ΔΓηαπ + АГИ0Н + ΔΓτροπ + АТМЛ - ДГнисз.,:) + ηΡ,
(2.35)
й = ^Г + fj (ΔΓηαπ ~ ΔΓ"°Η+ ΔΓ-ροπ+ ДГИЛ- ДГнисзд) + kj + η?,
(2.36)
где ту/3 и 7?f — дискретные белые гауссовские шумы с
соответствующими СКО. σΡ и af, аппроксимирующие шумы измерений в кодовом
и фазовом режимах.
Существенным здесь является тот факт, что (af) Х>2 <§; (σ^) , т. е.
потенциальная точность фазовых измерений (при исключении
методических погрешностей) находится на миллиметровом уровне.
Вместе с тем, к настоящему моменту не существует
соответствующих методик компенсации указанных методических погрешностей
в рамках псевдодальномерного способа определения навигационных
параметров и именно эти остаточные погрешности и определяют точность
навигационных определений как в кодовом, так и в фазовом режимах
работы.
Устранение указанных остаточных погрешностей
осуществляется в режимах т. н. функциональных дополнений, наиболее
перспективным из которых является дифференциальный режим (режим
относительных определений), использующий факт малости изменений
ДГИ0И, ΔΓτροπ, ДГнисз.г для двух приемников, работающих совместно.
2.4. Определение положения, скорости и ориентации.
Состав неконтролируемых факторов.
Влияние неконтролируемых факторов и динамики
БПЛА на функционирование GNSS-приемника (НАП)
Процесс определения положения, скорости и ориентации ЛА на
основе данных, поставляемых многоканальным ГЛОНАСС/GPS
приемником включает в себя фактически две принципиально разные
задачи, одна из которых — собственно навигационная, решаемая, как
правило, на основе обработки так называемых кодовых измерений
(псевдодальности и псевдоскорости), определяемых на основе
навигационного послания приемника, достаточно хорошо изучена и описана
в литературе [2.3]. Другая, а именно, определение углового положения
и угловых скоростей ЛА в той или иной системе координат, решается
на основе обработки так называемых фазовых измерений, получение
которых связано с необходимостью вычисления разности фаз несущей
частоты на различных антеннах приемника. При этом решение второй
задачи, вообще говоря, невозможно без предварительного решения
первой. В силу сказанного, в данной книге обсуждается решение обеих
перечисленных задач прежде всего с точки зрения анализа
потенциальной точности определения положения, скорости и ориентации ЛА
в конкретных условиях.
Заметим, что решение задачи определения положения, скорости и
ориентации БПЛА происходит с учетом влияния следующих
неконтролируемых факторов;
• ошибки определения эфемерид навигационных ИСЗ (НИСЗ)
ГЛОНАСС/GPS, возникающих в результате определения
эфемерид НИСЗ средствами наземного комплекса навигации и
управления этих спутниковых систем;
• систематические и случайные ошибки измерений
псевдодальности и псевдоскорости вследствие так называемой ионосферной и
тропосферной задержек, ухода часов приемника и его внутренних
шумов;
• систематические и случайные ошибки измерений разности фаз
несущей частоты вследствие так называемого эффекта многолу-
чевости, ухода часов приемника и его внутренних шумов;
• систематические и случайные ошибки инициализации системы
вследствие неточного знания начальных условий движения.
В качестве алгоритмов для обработки поступающей от приемной
аппаратуры информации могут быть использованы следующие:
• рекуррентный байесовский алгоритм (модификация фильтра Кал-
мана);
• метод наименьших квадратов по полной выборке.
Как уже указывалось выше, в самом общем случае задача
определения положения, скорости и ориентации ЛА с использованием
многоканального ГНСС приемника может быть решена лишь только в том
случае, если ЛА оснащен антенной системой, состоящей, в минимальном
случае, из 4 антенн, расположенных симметрично в горизонтальной
плоскости симметрии ЛА.
Задача об определении координат и компонент вектора скорости ЛА
решается на основе поступающих на вход приемника псевдодальностей
и псевдоскоростей от видимых в данный момент НИСЗ и имеющемся
альманахе. При этом, как правило, в зависимости от модели
приемника, для решения задачи используется либо метод наименьших
квадратов (МНК) [2.3], либо рекуррентный байесовский алгоритм
оценивания, [2.2].
Ниже будем полагать, что задача определения ориентации ЛА
решается на основе МНК по полной выборке, использующего в качестве
измерений разность фаз несущей частоты от каждого НИСЗ,
сформированную на двух основных базах антенной системы. Такое
предположение позволяет не использовать при решении этой задачи на борту
ЛА математическую модель углового движения ЛА или использовать
эту модель в предельно упрощенной форме.
При формировании ПМО бортовой интегрированной системы,
использующей ГЛОНАСС/GPS технологии не только для определения
положения и скорости, но и для определения ориентации ЛА, особое
значение приобретает выбор систем координат и описание всех
возможных связей между ними, которые необходимо «хранить» в памяти
БЦВМ.
Анализ показывает, что минимально необходимый для бортовой
реализации «набор» должен содержать следующие системы координат:
2000.0 Инерциальная система координат (IF2000)
Начало отсчета IF2000 находится в центре масс Земли. Основная
плоскость — средний экватор на 0/l00m00s 1 января 2000 г. (эпоха
J2000.0). Ось Xif направлена в среднюю на эпоху точку весеннего
равноденствия. Ось Zip направлена по оси вращения Земли,
соответствующей Международному Условному началу (МУН) на 1900-1905 гг.
Ось Yif дополняет систему координат до правой.
Земная связанная (гринвичская) система координат (UGF)
Начало отсчета UGF находится в центре масс Земли. Ось Zugf
направлена по оси вращения Земли, соответствующей Международному
Условному началу (МУН) на 1900-1905 гг. Ось Xugf проходит через
Гринвичский меридиан, соответствующий Международному Условному
началу. Ось Yugf дополняет систему координат до правой.
Орбитальная система координат (OF)
Начала отсчета OF находится в центре масс ЛА. Ось Xof
направлена по радиус-вектору ЛА (так называемая ось R). Ось Zof
направлена по вектору моменту количества движения ЛА (так
называемая ось N). Ось Y"of дополняет систему координат до правой (так
называемая ось L).
Связанная система координат (BF)
Начала отсчета BF находится в центре масс ЛА. Оси BF (Xq, Yq,
Zq) являются осями симметрии ЛА.
Координаты антенн задаются в связанной системе координат. Для
определения видимых НИСЗ и расчета векторов дальностей и
производных дальностей требуется пересчитать координаты и компоненты
вектора скорости каждой антенны в инерциальную систему координат.
Для этого приведем соотношения, описывающие переход между
используемыми СК.
Напомним, что стандартные матрицы-операторы вращения вокруг
каждой из осей на некоторый угол а имеют вид [2.2]:
/10 0 \
Кх(а) = 0 cos a sin a
V 0 — sin a cos a /
(cos α 0 - sin a \
0 10,
sin a 0 cos a )
cos a sin a 0
R2(a) = | -sin a cos a 0
0 0 1
Тогда матрица перехода от инерциальной к земной связанной СК
AfpGF записывается следующим образом:
A^F = RZ(GST), (2.37)
где GST — гринвичское звездное время.
Матрица перехода от инерциальной к орбитальной СК А^
записывается следующим образом:
Ар/ = Rx(u) χ Ry(i) χ RZ(Q), (2.38)
где Ω, г, и — долгота восходящего узла, наклонение и аргумент
широты.
Матрица перехода от орбитальной к связанной СК Лдр
записывается следующим образом:
4df = Rxh) х -ВД) х RzW) x Д*(тг) х Дг(тг/2), (2.39)
где ΰ, Ψ, 7 — эйлеровы углы ориентации.
Тогда координаты антенны в инерциальной СК будут записаны
следующим образом:
R]L = № х Α°?ΐ P°nt + Rs, (2.40)
где Rlnt — координаты антенны в связанной СК; Rs — координаты ц. м.
Вектор скорости антенны в инерциальной СК будет записан
следующим образом:
VZ = jt KFF x A?/f Д°п1 + V., (2.41)
где Rlnt — координаты антенны в связанной СК; Vs — вектор
скорости ц. м.
Полный вектор состояния антенны в инерциальной СК:
*£н = (Д& K'nFt)T. (2.42)
Перейдем теперь к описанию математических моделей измерений,
реализуемых при данном способе решения задачи навигации и
определения ориентации.
Измерение дальности:
ptr = (№ - Cnt) , № - *arnt))'/2 + <£" + С + '?Р. (2·43)
где ptr — дальность между антенной ЛА и НИСЗ; R)$s — радиус-
вектор НИСЗ; R^nt — радиус-вектор антенны в инерциальной СК;
Sphr — систематическая ошибка, вызванная разностью временных шкал
НИСЗ и приемника; δ'°π — систематическая ошибка, обусловленная
ионосферной задержкой сигнала; ηρ — случайная аддитивная ошибка,
обусловленная внутренними шумами приемника.
Более подробные математические модели перечисленных
систематических ошибок приведены в параграфе 2.3.
Измерение производной дальности:
Sptr = (№ - Ct) · Por) + δ?,* + VsP, (2.44)
где <5ptr — производная дальности между антенной ЛА и НИСЗ; V£rs —
вектор скорости НИСЗ; V^t — вектор скорости антенны ЛА в инерци-
альной СК; рцг — единичный вектор в направлении дальности между
антенной БПЛА и НИСЗ; Sfs — систематическая ошибка измерений
производной дальности; η^ρ — случайная аддитивная ошибка,
обусловленная внутренними шумами приемника.
Измерение разности фаз. Ниже, на рис. 2.19, представлена
принципиальная схема измерений разности фаз несущей частоты сигнала
НИСЗ, находящегося в зоне видимости обеих антенн навигационной
аппаратуры потребителя ЛА. Эти измерения позволяют с
сантиметровой точностью определять значения проекций антенной базы на
направления визирования видимых НИСЗ, что, в конечном счете, и
обеспечивает определение ориентации объекта в пространстве.
Непосредственно приемник
Измеряемая разность фаз Διρ i_itj(-o
измеряет не полные значения
проекций, а лишь доли их,
обозначенные как Αφ,
получающиеся после вычитания
целого числа длин волн несущей
частоты. Полные же значения
проекций определяются
алгоритмическим путем, базирующимся
на использовании избыточности
информации за счет большого
числа видимых НИСЗ и/или
априорной информации,
поставляемой инерциальной системой
БПЛА.
Антенна 1
О
Антенна 2
направление на НИСЗ
Рис. 2.19. Измерение разности фаз
несущей частоты
На рис. 2.19 введены следующие обозначения: т — полное число
длин волн несущей частоты в разности фаз сигнала А;-го НИСЗ,
принятого первой и второй антеннами г/-й базы (неопределенный
целочисленный параметр); Αφ — измеренная разность фазы сигнала НИСЗ;
Ife — единичный вектор линии визирования «БПЛА-НИСЗ»,
В качестве измеренного значения разности фаз на основных
базах антенной системы будем рассматривать эквивалентную линейную
величину
А1\г = (Bfr, pf°) + δΦ + щ, Ы$ = (ВГ, pf) +δφ + щ. (2.45)
где Δ/'1', ДД1 — разность фаз на первой и второй базах; В\г, В% —
векторы положения первой и второй базы в инерциальной системе
tr° tr°
координат; ρ) , р$ — единичные векторы направления дальностей
между 1 и 3 антенной и НИСЗ; δψ — систематическая ошибка,
обусловленная эффектом многократного переотражения сигнала (многолу-
чевостью) [2.3].
Систематическая ошибка, вызванная многолучевостью
принимаемого ГЛОНАСС/GPS приемником сигнала, δψ, имеет коэффициент
корреляции, зависящий от разности углов восхождения над местным
горизонтом НИСЗ, по которым последовательно производятся
измерения:
Κδφϊ = cos (ψί-ψί-ι), (2.46)
где ψί — угол восхождения ЛА, по которому производится измерение,
ψϊ-\ — угол восхождения ЛА, по которому производилось предыдущее
измерение, щ — случайная аддитивная ошибка, обусловленная
внутренними шумами приемника.
Напомним, что в зависимости от типа используемого приемника,
для обработки поступающей информации могут быть использованы два
вида алгоритмов: рекуррентный байесовский алгоритм, базирующийся
на модификации фильтра Калмана, либо традиционный метод
наименьших квадратов, работающий по полной выборке измерений [2.3].
В первом случае целесообразно использовать так называемую
«скалярную» модификацию фильтра Калмана [2.2], особенность которой
состоит в том, что компоненты вектора измерений обрабатываются
поочередно и тем самым удается избежать использования операции
обращения матрицы.
Для определения ориентации БПЛА при помощи многоканального
приемника ГНСС также может быть рекомендован метод наименьших
квадратов по полной выборке [2.2]. Здесь необходимо отметить лишь
следующие особенности реализации данного алгоритма:
• в качестве массива измерений используется совокупность
значений разностей фаз на двух главных антенных базах до каждого
из видимых НИСЗ;
• матрицы наблюдаемости для каждого измерения определяются
численно в силу сложности соотношений, связывающих
измеряемые и оцениваемые параметры.
Как известно [2.18, 2.19], поиск сигналов НИСЗ выполняется так
называемыми системами слежения за задержкой (ССЗ) и несущей
(ССН). ССН может работать как схема частотной автоподстройки
(АПЧ) или как схема фазовой автоподстройки частоты (ФАПЧ). Схема
с АПЧ используется в режиме захвата сигнала, слежения и измерений
в навигационном режиме. Схема ФАПЧ используется в режиме приема
информации.
Приемник последовательно осуществляет поиск и захват сигнала
каждого НИСЗ. При этом для каждого сигнала сначала производится,
вообще говоря, захват С/А кода, частоты и фазы несущей, а затем
синхронизация по битам и байтам.
Время поиска определяется как внутренними факторами — числом
каналов приемника, характеристиками используемой элементной базы
в основном быстродействием, способностью программного обеспечения
приемника к эффективному управлению им, так и внешними —
объемом априорной информации, имеющейся на момент начала поиска
в приемнике, вероятностью затенения антенн НАП элементами
конструкции объекта вследствие его угловых эволюции, маневренностью
объекта.
При этом в последнем случае главным фактором являются не
значения перегрузки или угловой скорости ЛА, которые он способен
развивать в процессе движения, а скорость их изменения. Именно эти
параметры в конечном счете определяют степень непредсказуемости
движения, мерой которой является минимальное время предсказуемого
поведения объекта. Под этим принято понимать тот минимальный
временной интервал, в течение которого можно считать, что
динамические параметры движения объекта — перегрузка, угловая скорость —
практически не меняют своего значения или меняют, но известным
образом. Этот временной интервал и определяет способность ССЗ и
ССН отслеживать меняющуюся в ходе полета ситуацию.
Наиболее критичным с точки зрения возникновения возможной
потери сигнала НИСЗ является этап отделения беспилотного
маневренного ЛА от носителя, т. к. именно начальный этап движения
характеризуется высокими значениями линейных перегрузок и высоким
темпом их изменения. Аналогичная картина имеет место и в отношении
угловых скоростей и угловых ускорений. Так, максимальное значение
углового ускорения по осям Υ и Ζ связанной системы координат может
достигать 1000 град/с2, а значения угловых скоростей по тем же осям
могут достигать значений 70 град/с и 60 град/с соответственно.
В описанных условиях в кварцевом генераторе НАП возникают
колебания, причем, если перегрузка действует по направлению оси
чувствительности кварца, то переходный процесс продолжается около
одной секунды.
Сокращения времени переходного процесса в кварцевом генераторе
НАП можно добиться путем;
• установки кварца на объекте по положению его оси
чувствительности по направлению максимальной перегрузки в начальной
стадии полета;
• проведения дополнительных мероприятий по установке кварца на
специальные амортизирующие опоры внутри корпуса приемника.
В этих условиях ограничивающим фактором начала поиска сигнала
будет являться взаимное движение носителя и беспилотного ЛА,
определяющее момент выхода последнего из тени.
Существующий опыт показывает, что возможные методы
уменьшения влияния динамики объекта на факт потери связи «НАП-НИСЗ»
сводятся к:
• применению пространственной селекции сигналов с помощью
антенн специального типа;
• применению специальной обработки сигнала с использованием
априорно известной цифровой служебной информации,
передаваемой со спутника, в сочетании со специальной организацией
сеансов связи с НИСЗ за счет избыточности каналов НАП;
• уменьшению величины динамических воздействий для сужения
полосы систем слежения путем использования данных о
динамике объекта, поступающих от инерциальной системы.
Обсудим перечисляемые методы подробно.
Традиционное требование к антеннам НАП состоит в обеспечении
равномерного перекрытия верхней полуплоскости, т. к. НИСЗ должны
просматриваться повсюду от горизонта до зенита.
Однако, высокая динамика объекта, глубокие и быстрые его
эволюции на первых секундах полета приводят к тому, что варианты
установки одной антенны на оси Υ связанной системы координат или
даже двух антенн, расположенных симметрично с двух сторон на оси Ζ
связанной системы координат, с конусообразной диаграммой
направленности с углом при вершине порядка 160 град, могут оказаться
малоэффективными. Действительно, в рассматриваемых условиях
применения один и тот же спутник вследствие эволюции объекта может
попадать в зону видимости то одной, то другой антенны. Вследствие
неидентичности частотно-фазовых характеристик этих антенн сигналы
от них, попадая в приемник, будут оказывать сильное возмущающее
воздействие скачкообразного типа на системы ССЗ и ССН, что
приведет к резкому уменьшению отношения сигнала/шум и, как следствие,
к возобновлению процесса поиска с начального состояния.
Разумеется, это может вызвать заметное замедление процесса вхождения
в связь.
Кроме того, следует иметь в виду, что различные варианты
маневров носителя перед отделением объекта приводят к тому, что объекты
будут оказываться под различными углами к горизонту в момент
отделения. Разумеется, и ориентация антенны по отношению к горизонту
при разных условиях сброса будет различной.
В этих условиях возможно, например, применение антенны
кольцевой формы, представляющей собой конструктивное объединение
нескольких антенн с вышеуказанными диаграммами направленности.
Ускоренный поиск сигнала можно организовать, воспользовавшись
избыточностью числа измерительных каналов приемника по сравнению
с минимально необходимым их числом, равным, как известно,
четырем. Это значение соответствует минимальному количеству НИСЗ,
сигналы которых требуется получить для формирования совокупности
измерений полного объема, т.е. такой совокупности, которая позволяет
решить задачу навигационных определений по разовой выборке.
Действительно, применительно к беспилотному маневренному ЛА,
от первого навигационного определения и даже от нескольких
последующих за ним, идущих с периодом 1 с, не требуется достижения
максимальной точности, поскольку на первом этапе полета требуется
лишь несколько снизить область неопределенности знания
кинематических параметров движения, обусловленную ошибками знания
начальных условий в момент отделения объекта от носителя и влиянием
погрешности начальной выставки беспилотной инерциальной системы
изделия. Именно эти факторы, как нетрудно предположить, оказывают
доминирующее влияние на погрешности навигации на первом этапе.
Указанное сужение области необходимо для того, чтобы, по
возможности, отдалить тот момент на траектории, когда погрешности БИНС
достигнут такого уровня, что они не смогут быть скомпенсированы
управлением на оставшейся части траектории из-за ограниченной
эффективности последнего.
Такой системный взгляд на решаемую проблему позволяет
обнаружить дополнительные резервы для ее успешного решения.
Для реализации перечисленных возможностей во время
предстартовой подготовки объекта в его систему управления вводится
информация, содержащая дополнительные данные об альманахах системы
ГЛОНАСС и GPS и эфемеридах тех НИСЗ, которые находятся в
момент старта в верхней полусфере.
Наличие точной эфемеридной информации всех рабочих НИСЗ
вплоть до момента отделения объекта от носителя позволяет
отказаться от ее приема во время полета.
Наличие этой информации позволяет из всей совокупности
находящихся в верхней полусфере навигационных спутников выделить
четверку спутников, вероятность которых на первом этапе
самостоятельного полета объекта оказаться вне области возможного затенения
антенн максимальна.
Процессор НАП БПЛА объекта формирует команды по
организации поиска сигналов только выбранной четверки спутников всеми
измерительными каналами аппаратуры. В результате при двенадцати-
канальном приемнике на поиске сигнала каждого спутника будет
сосредоточено три или четыре канала (при двацатичетырехканальном —
6 каналов). Благодаря этому в такое же число раз можно сократить
обследуемую область неопределенности в координатах.
Выше уже отмечалась необходимость ввода в бортовую систему
данных об альманахах и эфемеридах НИСЗ.
Первые необходимы для выбора первоначальной группировки
НИСЗ и организации оптимальной процедуры поиска их сигналов.
В этой же процедуре, а также процедурах слежения за сигналами
с целью минимизации вероятности срыва слежения, а следовательно, —
уменьшения вероятности возобновления поиска сигнала после его
потери, участвует и информация о текущих координатах и скоростях
движения объекта.
На основе этой информации, как следует из вышесказанного, в
приемнике осуществляется предварительная (предсеансная) подстройка
систем поиска и сопровождения сигнала на значения текущих
дальностей от объекта до соответствующих НИСЗ (отдельно для каждого
канала приемника) и скорости их изменения. Эта связь обеспечивает и
более устойчивое слежение за сигналами НИСЗ, уменьшая вероятность
их потери, что в условиях высокой динамики объекта и
кратковременности полета особенно важно.
Типовая функциональная схема интегрированной навигационной
системы, реализующей сформулированный подход, показана на
рис. 2.20.
Процессор БЦВМ
Интегральный фильтр
Калмана комплекса GNSS/INS
Датчик инерциальной
системы
Сигнал Оценка
^коррекции погрешностей
Ускорение
Процессор БИНС
БИНС
Скорость
потребителя
Оценка допплера
Высокочастотная
аппаратура НАП
Наведение по скорост!
Управление
Процессор приемника
НАП
Навигационное
решение
Измерения
Радионавигационный; Процессор НАП
сигнал. ''^'1'1'.1'.-.'-.'1'1'1'1'.1.'.-.-.1 J дальности и
скорости
Рис. 2.20. Типовая функциональная схема интегрированной навигационной
системы
Эфемериды участвующих в сеансах НИСЗ используются на этапе
решения задачи навигационных определений. В стандартных условиях
эфемериды, содержащиеся в цифровой части сигналов НИСЗ,
принимаются во время сеансов. Однако время полного «набора» эфемерид
даже в лучшем случае составляет десятки секунд. С другой стороны,
без получения полного их комплекта для всех участвующих в сеансе
НКА, от которых уже получены измерения псевдодальности и
псевдоскорости, обработка этих измерений невозможна.
Таким образом, предстартовый ввод точной эфемеридной
информации всех рабочих НИСЗ позволяет отказаться от ее приема во время
полета.
Наряду с упомянутыми выше текущими координатами и
компонентами скорости, с той же частотой в течение всего предстартового
периода в БЦВМ БПЛА из БЦВМ носителя с заданной
периодичностью (например, секунда) должны передаваться метки времени и
их оцифровка в шкале Госэталона Координированного всемирного
времени UTC(SU). Далее эти данные передаются в процессор НАП. Для
упрощения этого процедуры можно ограничиться передачей с борта
носителя только цифровой информации в виде упомянутых «оцифровок
секундных меток», но при этом необходимо обеспечить их посылку
и соответственно прием в НАП через строго детерминированный и
известный промежуток времени.
2.5. Дифференциальные режимы использования
спутниковых приемников глобальных навигационных
систем
Несмотря на относительно высокую точность спутниковых систем
навигации, в ряде приложений этой точности оказывается
недостаточно для надежного и безопасного решения специфических задач.
В практике использования беспилотных маневренных ЛА к таким
задачам относится прежде всего задачи наведения на заданную точку
(цель). В зависимости от условий поставленной задачи координаты ЛА
в этом случае должны быть определены с погрешностью от десятков
сантиметров до нескольких метров.
Существенное повышение точности навигационных определений
обеспечивается при использовании дифференциального режима (ДР)
измерений. Дифференциальный режим работы ГНСС позволяет
потребителям не только снизить погрешности местоопределения до
метрового или даже дециметрового уровня, но и контролировать доступность
сигналов спутников и целостность системы.
Дифференциальный режим базируется на хорошо известном в
навигации подходе, при котором списываются погрешности навигационных
определений в точках, координаты которых известны с высокой
точностью. ДР в ГНСС во многом аналогичен ДР в известных
радионавигационных системах, например «Омега», где сильно коррелированные
(практически постоянные на значительной территории) погрешности
измерений устраняются вводом поправок от специальных контрольных
станций (КС), точно привязанных к координатам с помощью
геодезических измерений.
Многочисленные исследования показали, что в структуре
погрешностей ГНСС имеются такие, которые слабо меняются внутри
достаточно обширных областей. Результаты этих исследований
подсказали путь к повышению точности ГНСС: нахождение систематических
погрешностей на КС и использование их как поправок в аппаратуре
потребителя (НАП). К этим погрешностям относятся такие, которые
вызываются неточностями, вносимыми информацией о
местоположении спутника, его бортовым опорным генератором, искажениями
сигнала в атмосфере. Действительно, учитывая большую высоту спутников
(около 20000 км), сигналы от них до корректирующей станции и до
потребителя, удаленного от КС на десятки и даже сотни километров,
проходят почти один и тот же путь через одни и те же слои
атмосферы. Искажения сигналов будут одинаковыми, что и позволяет
применить принцип дифференциальной коррекции. При этом оказывается
возможным скомпенсировать не только погрешности, обусловленные
естественными причинами, но и влияние искусственного загрубления
точности, если таковое будет создаваться.
Для реализации дифференциального режима ГНСС дополняется
дифференциальной подсистемой. Она состоит из
контрольно-корректирующей станции, добавленной к наземному сегменту ГНСС, и
размещенного в бортовой части специального устройства приема и обработки
дифференциальных поправок для спутникового приемника.
Дифференциальная подсистема не влияет на работу системы в стандартном
режиме, но позволяет потребителю при необходимости перейти на
работу в ДР.
В основе дифференциального метода определения координат лежит
формирование разности (difference) отсчетов, что и дало методу
название. Принцип реализации дифференциального метода поясняется
рис. 2.21, на котором изображено созвездие из четырех навигационных
спутников. Это созвездие выбирается потребителем как оптимальное
для работы в стандартном режиме. Наземная часть дифференциальной
подсистемы состоит из контрольно-корректирующей станции, которая
содержит точную аппаратуру потребителя геодезического класса,
формирователь корректирующей информации (КИ), вычисляющий
поправки на сильно коррелированные погрешности и формирующий кадр КИ,
а также передатчик КИ. Антенна НАП ККС привязывается на
местности с помощью геодезических измерений с точностью до нескольких
сантиметров. На борту потребителя размещаются аппаратура приема
КИ, декодирующее устройство и устройство ввода КИ в
стандартную АП.
Поправки, рассчитанные ККС, передаются по радиолинии связи
на борт потребителя. Полагается, что систематические погрешности
измерений в точке размещения ККС и в ее окрестности (до нескольких
сотен километров) изменяются мало. На этом основании принятые
поправки суммируются с показаниями обычного приемника,
работающего в стандартном режиме. Полученные величины представляют
собой скорректированные параметры.
Поскольку ККС могут обеспечить требуемую точность коррекции
в ограниченной области, то для реализации дифференциального метода
на обширных территориях должны быть размещены несколько таких
станций. При этом необходимо решить вопрос о своевременном
переходе НАП на прием КИ от очередной станции. Примером реализации
такой сети станций могут служить службы дифференциальных
поправок береговой охраны США, береговой службы Норвегии, а также
создающаяся в США для нужд Северной и Центральной Америки
сеть станций в рамках проекта широкозонной системы поддержки GPS
(WAAS — Wide Area Augmentation System).
Ιί
Передатчик
ККС
Формирователь
КИ
,
Точные
координать
И
Точная АП
I
антенны ККС
Рис. 2.21. Структура дифференциальной подсистемы СНС: ККС — контрольно-
корректирующая станция; АП — аппаратура потребителя (геодезическая);
КИ — корректирующая информация
Конкретную реализацию ДР можно осуществить несколькими
способами. Наиболее простым и наглядным является метод коррекции
координат, однако наиболее широкое применение, в силу ряда причин,
описанных ниже, нашел метод коррекции навигационного параметра
(псе вдо дальности).
На рис. 2.22 приведена структурная схема, поясняющая метод
коррекции координат.
Как следует из названия метода, предполагается, что
корректируются координаты потребителя, определенные им по сигналам спутников
в стандартном режиме работы системы. На ККС формируется КИ
путем сопоставления вычисленных в стандартном навигационном сеансе
координат с известными с высокой точностью координатами фазового
центра антенны GPS. Полученные таким образом поправки к
координатам передаются в составе КИ потребителю, который использует их для
уточнения своего местоположения, добавляя поправки к вычисленным
координатам.
ккс
/Var
^снс
Аппаратура
потребителя
^
ПрдКИ
RKCB
t
Вычислитель
поправок
~~Г"
кксэ
АВт
Модулятор
№
дп
Потребитель
Аснс
Аппаратура
потребителя
пв
Корректор
координат
I
AR
-R
ПК
Вычислитель
поправок
ККСЭ
I
Демодулятор
Рис. 2.22. Структурная схема, поясняющая метод коррекции координат: АСНс —
антенны GPS/ГЛОНАСС приемников; Прд КИ, Прм КИ — передатчик и
приемник корректирующей информации; Rkcb, Rkc3 — вектор вычисленных
и эталонных координат ККС; ΔΕ. — вектор поправок к координатам; Адп —
антенны радиотракта передачи дифференциальных поправок; Rne, RnK —
векторы вычисленных и скорректированных координат ККС
Алгоритм работы этого метода может быть описан следующими
соотношениями:
• на ККС формируются разности-поправки к координатам
Δϋ = Rkcb - Rkcb;
• на борту потребителя уточняются координаты
R-πκ = R-пв + ΔΚ··
(2.47)
(2.48)
Рассмотренный метод реализации ДР сравнительно прост, так как
не изменяет основного алгоритма навигационных определений
потребителя, но у него есть существенный недостаток. Дело в том, что
этот метод применим лишь при одном весьма сильном ограничении —
для реализации этого метода необходимо, чтобы ККС и все
потребители КИ вырабатывали координаты по одному и тому же созвездию
спутников. Реально же потребитель использует для вычисления
своих координат наивыгоднейшее по геометрии созвездие наблюдаемых
им спутников. Это созвездие при достаточном удалении от ККС или
в силу иных причин (перекрытие обзора элементами конструкции ЛА,
особенности алгоритмов выбора созвездий в приемнике и др.) может
не совпадать с тем, для которого выработаны поправки на ККС.
Преодолеть отмеченный недостаток можно при использовании
второго метода реализации ДР — метода коррекции навигационного
параметра (псевдодальности), структура которого изображена на рис. 2.23.
ккс
St
тнсс
Аппаратура
потребителя
*ЭФ1
гика
Вычислитель
параметра
ККСЭ
/V,
АГ;
λΛΠ
ПрдКИ
1
Модулятор
„ ^ Вычислитель
^вксп
поправок
Wa
дп
Потребитель
Агнсс
Аппаратура
потребителя
пв
Корректор
координат
AR
-R,
ПК
Вычислитель
поправок
ККСЭ
Демодулятор
Рис. 2.23. Структурная схема, поясняющая метод коррекции навигационного
параметра. r„KCii rmci — измеренная и вычисленная псевдодальности от ККС до
г-го спутника; тшн, rB„i — измеренная и вычисленная псевдодальности от
потребителя до г-го спутника; Rkc3 — вектор эталонных координат ККС; Raoi —
эфемериды г-го спутника; Rn — вектор вычисленных координат потребителя;
Δη — поправка к псевдодальности г-го спутника
Основная идея метода состоит в том, что всем потребителям в зоне
действия ККС сообщается набор поправок к результатам измерений
навигационных параметров (псевдодальностей) до всех видимых
спутников. Такой подход позволяет оставить за потребителем право выбора
оптимального для него созвездия. ККС вычисляет поправки к
измеряемым псевдодальностям Дг; до всех видимых ИСЗ. Это достигается
путем сравнения измеренных пседодальностей 7~икс; с вычисленными
rBKC; на основании эфемерид спутников. Получающиеся разности
передаются как КИ потребителям. Каждый потребитель выбирает
оптимальное для себя созвездие и корректирует измеренные им
псевдодальности с помощью принятых поправок, относящихся к используемым им
ИСЗ. Полученные скорректированные псевдодальности используются
для расчета координат потребителя. Таким образом, алгоритм данного
метода можно представить в следующем виде:
• на ККС вычисляются поправки к псевдодальностям
An =
(2.49)
• на борту потребителя вычисляются скорректированные
псевдодальности
гВПг = rttni + Δη; (2.50)
• вычисляются координаты потребителя с использованием не менее
четырех скорректированных псевдодальностей.·
[гвп1,Гвп2, ...,Гвпп] => R-Π, (2.51)
где rBKCj, rHKCj — вычисленная на ККС по эталонным
координатам и измеренная ККС псевдодальности до г-го спутника; гВПг,
гИП1 — вычисленная скорректированная и измеренная
потребителем псевдодальности.
Перечисленные выше способы организации ДР не являются
единственными, но в настоящее время они нашли наиболее широкое
применение и, кроме того, позволяют наиболее наглядно представить
особенности этого режима работы. Их использование снижает погрешность
измерения координат до 1-5 м, а высоты до 2-7 м.
Как отмечалось выше, ДР способен не только повысить точность
работы СНС, но и обеспечить контроль целостности системы и анализ
достоверности передачи КИ. Под целостностью понимается
способность СНС предоставлять потребителю полноценное навигационно-вре-
менное обеспечение. Целостность выражается в вероятности
обнаружения отказа системы и сигнализации об этом в течение заданного
интервала времени. Целостность системы — одно из ключевых понятий.
Лишь системы, обладающие высокой целостностью, способны
обеспечить надежное и безопасное выполнение полета или поставленной
задачи. Целостность подразумевает нормальную, штатную работу всех
спутников системы. Неисправные спутники должны быть исключены
из рабочего созвездия. В кадрах навигационных сигналов спутников
имеются параметры, характеризующие исправность отдельных
подсистем или интегральную исправность спутника. Однако такая
информация закладывается на спутники с Земли не чаще одного раза в 12
часов. Необходима более оперативная информация о состоянии СНС.
Эта задача решается в приемниках, имеющих сертификацию,
специальной функцией контроля целостности системы (RAIM — Receiver
Autonomous Integrity Monitoring). Однако ДР дает дополнительные
возможности контроля целостности и повышает надежность работы
с приемниками, не имеющими функции RAIM. Контроль целостности
ведется по всем видимым ККС спутникам, и если обнаруживается
нарушение целостности, то по каналам передачи КИ транслируется
соответствующее уведомление, которое потребитель использует при
выборе созвездия спутников.
Помимо целостности системы, потребитель должен быть уверен
в правильности принимаемых поправок. С этой целью контролируется
достоверность принимаемой КИ. Для контроля достоверности в поле
передатчика КИ можно расположить вынесенный приемный пункт,
координаты которого определяются заранее специальными точными
геодезическими замерами. Идея контроля достоверности заключается
в том, что на выносном пункте точной геодезической спутниковой
аппаратурой определяются координаты по сигналам ГНСС и в них
вносятся поправки на основе принятой КИ. Полученные
скорректированные координаты сравниваются с точно известными и делается
вывод о качестве КИ. Параметры, характеризующие качество КИ,
передаются на ККС, где закладываются в кадр дифференциального
сообщения.
2.6. Функциональные схемы интегрированных систем
навигации и наведения беспилотного маневренного
летательного аппарата
Развитие беспилотных ЛА, а также необходимость решения вновь
возникающих прикладных задач, связанных с высокоточным
определением параметров их движения, выдвигает комплекс новых
требований по точности и надежности получения информации о координатах,
скорости, ориентации БПЛА. Условия применения и
функционирования беспилотных маневренных ЛА требуют повышенной точности
и высокой частоты навигационных определений на всех этапах их
использования, начиная от момента включения бортовых систем или
старта аппарата и до окончания выполнения поставленной задачи.
Помимо требований к точности, в настоящее время предъявляются
требования по таким параметрам, как целостность, доступность и
непрерывность навигационного обеспечения [2.22]. Мерой
целостности является вероятность обнаружения выхода рабочих характеристик
системы (прежде всего точности) из требуемого предела и
сообщения о нем в течение заданного временного интервала. Доступность
определяется вероятностью получения потребителем достоверной
информации в заданный момент времени с требуемой точностью.
Непрерывность характеризуется вероятностью обеспечения системой
достоверной информацией на заданном интервале времени. Достоверность,
в свою очередь, определяется как способность навигационной системы
поддерживать с заданной вероятностью свои характеристики в
требуемых пределах на определенном промежутке времени в каком-либо
районе [2.19]. Обеспечение требуемого уровня этих показателей
зачастую является более сложной задачей, чем выдерживание необходимой
точности.
Обеспечение заданных уровней точности и указанных
качественных показателей надежности предъявляет особые требования к
современным и перспективным системам навигации БЛА. Опыт
эксплуатации ГНСС показал, что при многих положительных качествах такая
система не может удовлетворять всем предъявляемым сегодня тре-
бованиям, перечисленным выше. В табл.2.10 суммированы основные
свойства и недостатки ГНСС и ИНС.
Таблица 2.10. Основные свойства и недостатки ГНСС и ИНС
Тип
системы
ГНСС
ИНС
Основные свойства
Высокая точность.
Ошибки не имеют тенденции
к росту
Высокая скорость выдачи
информации (до 100 Гц).
Полный набор необходимой
информации для управления,
включая ориентацию.
Полная автономность.
Неподверженность внешним
помехам
Недостатки
Низкая скорость
обновления информации (1-10 Гц).
Подверженность помехам
Неограниченный рост
ошибок во времени.
Необходимость знания
модели гравитационного поля
Благодаря различной физической природе и различным принципам
формирования навигационного алгоритмического обеспечения,
спутниковые и инерциальные навигационные системы хорошо дополняют
друг друга. Их совместное использование позволяет, с одной стороны,
ограничить рост погрешностей ИНС, а, с другой стороны, снизить
шумовую составляющую ошибок ГНСС, повысить темп выдачи
информации бортовым потребителям, существенно поднять уровень
помехозащищенности. На современном этапе ядром интегрированной системы
является ИНС благодаря своей автономности и возможности с высокой
скоростью обновления давать потребителю как позиционную, так и
угловую информацию. В составе интегрированных инерциально-спут-
никовых систем чаще всего используются бесплатформенные
инерциальные навигационные системы (БИНС) [2.23]. Это объясняется их
повышенной надежностью, меньшим весом и габаритами, меньшим
потреблением энергии. Отсутствие платформы определяет, как
правило, и меньшее время выставки системы — обязательной процедуры
первоначального задания (для платформенных ИНС) или
определения (для БИНС) ориентации осей чувствительности акселерометров и
инициализации координат и скоростей. Эта процедура предшествует
переходу ИНС в рабочий режим и во многом определяет время ее
готовности к работе. Таким образом, основной задачей БИНС является
обеспечение навигационными параметрами (координаты и высота ЛА,
составляющие вектора скорости), а также параметрами ориентации
бортовых потребителей в реальном масштабе времени при наличии
коррекции от ГНСС.
В настоящее время сложилось представление о возможности ком-
плексирования этих систем в четырех основных вариантах [2.24]:
• раздельная схема;
• слабо связанная схема;
• жестко связанная схема;
• глубоко интегрированная схема.
Первый вариант — раздельная схема (рис.2.24) — это наиболее
простой вариант совместного использования ИНС и GNSS. Здесь обе
системы работают независимо друг от друга, но поскольку ошибки
ИНС возрастают со временем, то периодически необходимо проводить
Антенна GNSS
GNSS
приемник
ИНС
Выход GNSS приемника
Периодический
перезапуск системы
или коррекция
Выход ИНС
Выход GNSS/ИНС
Рис. 2.24. Раздельная схема интеграции данных GNSS-приемника и ИНС
коррекцию ИНС по данным GNSS. Коррекция заключается в
периодическом перезапуске алгоритма ИНС с новыми начальными условиями
по координатам и скорости, данные о которых поступают от
спутникового приемника. Процедурно это может быть оформлено и как
одновременная коррекция координат и скоростей ИНС. Такая архитектура
обеспечивает независимость систем (исключая моменты перезапуска
или коррекции) и информационную избыточность общей структуры.
В целом комплексная система имеет более высокую точность как по
координатам и скорости, так и по углам ориентации. При этом
сохраняется возможность получать позиционную, скоростную и угловую
информацию (в том числе и об угловой скорости), необходимую для
целей управления и наведения с высокой частотой, свойственной ИНС.
Кроме того, для создания такой архитектуры требуются минимальные
изменения в аппаратных средствах и программном обеспечении уже
существующих ЛА.
Следующей по глубине связи ИНС и GNSS является
слабосвязанная система. Здесь ИНС и GNSS по-прежнему вырабатывают
независимые решения, однако появляется связующий блок, в котором
так называемый интегральный фильтр Калмана на основании данных
GNSS-приемника формирует оценку вектора состояния, в результате
чего производится коррекция данных, полученных от ИНС (рис. 2.25).
ВЧ канал приема
и первичная
обработка
Координаты,
проекции
скорости
Слежение за
кодом и
доплеровским
сдвигом несущей
GNSS приемник'
Фильтр
Калмана
Компенсация
инструментальных
ошибок по
полученным оценкам
Акселерометры и
гироскопы
ИНС/GNSS'
Интегральный
фильтр Калмана
Компенсация
инструментальных
ошибок по
априорным данным
ИНС
Основной
алгоритм БИНС
Выход
приемника
Выход
'gnss/инс
-Выход ИНС
Рис. 2.25. Слабосвязанная схема интеграции данных ИНС и GNSS-приемника
В этой схеме функциональное разделение подсистем может также
сопровождаться их физическим разделением: приемник GNSS, ИНС
и вычислитель конструктивно оформляются в виде законченных
раздельных блоков, между которыми организованы соответствующие
информационные связи, не требующие, как правило, высоких скоростей
передачи данных. Разумеется, все три перечисленных компоненты
системы могут быть размещены и в едином модуле, если это желательно
по условиям функционирования комплекса.
На функциональной схеме 2.25 показано, что приемник GNSS
реализуется по стандартной схеме. В блоке высокочастотного приема
и первичной обработки обеспечивается прием сигнала, его частотное
преобразование и корреляционная обработка. Информация с
корреляторов передается в контур слежения за кодом и доплеровским сдвигом
несущей (более подробно эти аспекты изложены в разд. 2.2). В этом
контуре вырабатываются сигналы обратной связи для захвата сигнала
спутника. Выходом контура слежения является временной сдвиг кода и
доплеровский сдвиг частоты несущей или соответствующие им
псевдодальность и псевдоскорость. Еще раз подчеркнем, что детальное
описание процесса функционирования многоканального ГЛОНАСС/GPS
приемника приведено в разд. 2.2. Здесь обсуждаются лишь самые об-
щие принципы этого процесса: приемник должен обеспечить слежение
за необходимым числом спутников (не менее четырех) или за всеми
видимыми. Это достигается наложением нескольких каналов
слежения. Информация об измеренных псевдодальностях и псевдоскоростях
передается в фильтр Калмана приемника для получения
навигационного решения — координат, скорости, а, в ряде случаев, и ускорения,
а также поправок к эталону времени и частоты приемника.
Таким образом, здесь приемник GNSS использует информацию от
ИНС только для целей более надежного и быстрого восстановления
захвата сигнала в случае его потери. На схеме это отражено связью
выходного блока ИНС и ВЧ блока приемника. Передаваемая по этому
каналу информация о вычисленных местоположении и скорости в
случае потери слежения позволяет рассчитать оценки предполагаемого
сдвига кода и доплеровского сдвига частоты несущей, что существенно
снижает время поиска и захвата сигнала. В результате значительно
снижается время восстановления работы приемника после потери
сигнала.
Показанная на схеме структура ИНС предусматривает возможность
компенсации инструментальных ошибок измерительных элементов —
гироскопов и акселерометров — по априорным данным (например, по
паспортным данным системы или по запомненным значениям оценок
этих ошибок при предыдущем включении). В результате, в основной
алгоритм ИНС передаются корректированные показания гироскопов и
акселерометров.
Как уже отмечалось, основу связующего блока образует
интегральный фильтр Калмана, который получает информацию о координатах и
скорости от GNSS и ИНС, образует разности их показаний и на этой
основе вычисляет оценки ошибок ИНС, а иногда и оценки ошибок ее
чувствительных элементов. Последний факт отражен обратной связью
фильтра с блоком компенсации инструментальных погрешностей.
Как видно, в слабосвязанной системе навигационные параметры,
так же, как и в раздельной схеме, вырабатываются независимо как
в ИНС, так и в GNSS, причем, как уже отмечалось, в состав
приемника включен оцениватель (как правило, фильтр Калмана). Описанная
схема носит название «каскадной» в силу двух последовательно
включенных фильтров Калмана. Достоинством такой схемы является
высокая надежность интегрированной системы, а недостатком — взаимная
корреляция ошибок оценок первого фильтра (фильтра спутникового
приемника) и их отличие от белых шумов. Поступая с выхода
приемника на вход второго фильтра Калмана, и являясь по отношения к нему
шумами измерений, они нарушают условия оптимальной работы этого
фильтра. Кроме этого, в такой схеме необходимо предпринимать меры
синхронизации измерений ИНС и приемника.
В литературе можно найти подразделение слабосвязанных схем на
три типа: стандартную, «агрессивную» и так называемую MAGR-схему
(Military Airborne GPS Receiver). Отличие «агрессивной» схемы от
стандартной заключается в том, что в ней используется информация
БИНС об ускорении для экстраполяции навигационных местоопределе-
ний приемника в период между спутниковыми измерениями.
Упомянутая MAGR-схема фирмы Rockwell использует инерциальные измерения
в контуре слежения за кодом GNSS-приемника при пропадании
«захвата» в контуре слежения за несущей [2.24].
Третий вариант интеграции систем — жестко (сильно) связанная
схема (рис. 2.26). В таких системах роль ИНС сводится лишь к
измерению первичных параметров поступательного и вращательного
движений, например, проекций кажущегося ускорения и абсолютной угловой
скорости вращения объекта. По этой причине в схемах такого типа
ИНС представляют собой лишь блоки инерциальных измерителей
(акселерометры и гироскопы). В спутниковом навигационном приемнике
GNSS приемник
ВЧ канал приема
и первичная
обработка
Слежение за
кодом и
доплеровским
сдвигом несущей
; [Предсказанные значения
псевдодальности,
псевдоскорости.эфемерид
положение,
скорость
Компенсация
инструментальных
ошибок по
полученным
оценкам
Акселерометры и
гироскопы
Интегральный
фильтр Калмана
ИНС/GNSS
Выход
GNSS/ИНС
ИНС
ускорение,угловая скорость
Рис. 2.26. Жестко связанная схема интеграции данных ИНС и GNSS
по-прежнему присутствует ВЧ канал приема и первичной обработки
и блок слежения за кодом и доплеровским сдвигом несущей, которые
функционируют аналогично описанному выше варианту
слабосвязанной схемы. Отличием данной структуры от предыдущих является
отсутствие в составе приемника фильтра Калмана. В жестко связанной
схеме и ИНС и приемник лишь обеспечивают состав измерений для
общего вычислительного блока, в котором реализован единый фильтр
Калмана, Измерения для фильтра в жестко связанных системах
строятся по разности псевдодальностей или/и скоростей изменения
псевдодальностей, определенных, с одной стороны, в ИНС по вычисленным
координатам объекта и эфемеридам спутника, и измеренных GNSS
приемником, с другой стороны.
Другой отличительной особенностью жестко связанной схемы
является использование контурами слежения за кодом и доплеровским
сдвигом частоты несущей информации о расчетных псевдодальностях и
псевдоскоростях (или их приращений), поступающей от фильтра Кал-
мана. Использование этой информации позволяет существенно
улучшить устойчивость слежения и снизить время восстановления работы
приемника в случае потери сигналов спутников.
Жестко связанные системы обеспечивают большую точность
решения навигационной задачи по сравнению с предыдущими системами,
при этом фильтр Калмана позволяет оптимально использовать все
доступные спутники. Однако наличие лишь одного фильтра Калмана
приводит к потере избыточности системы, т, к, становится доступным
лишь одно совместное решение, К другим достоинствам такой схемы
можно отнести:
• отсутствие проблемы взаимной корреляции шумов измерений и
их отличий от белых шумов;
• отсутствие проблемы синхронизации измерений БИНС и GNSS,
т, к. используется один формирователь тактовых частот;
• возможность обнаружения и отбраковки «плохих» измерений
псевдодальностей по их предсказанным значениям, формируемым
с использованием данных от БИНС,
К недостаткам жестко связанных систем можно отнести:
• необходимость разработки специальной аппаратуры потребителя
(приемника);
• использование сложных соотношений для измерений;
• ухудшение надежности, т, к. отказ БИНС приводит к отказу
системы в целом.
Последний недостаток можно устранить, введя дополнительный
(параллельный) фильтр Калмана, предназначенный только для
приемника. Такое решение создает некоторый промежуточный вариант
между слабо и жестко связанными схемами.
Таким образом, основные отличия жестко связанной схемы от
слабосвязанной заключаются в следующем;
• использование выходной информации ИНС об ускорении в
контуре слежения за кодом и доплеровским сдвигом несущей. Это
позволяет сузить полосу пропускания контуров слежения и
повысить быстродействие и точность настройки;
• использование измерений псевдодальностей и псевдоскоростей
(а не координат и скоростей) для оценивания погрешностей ИНС,
Так называемые глубоко интегрированные схемы являются еще
более сложными и менее гибкими с точки зрения организации их
структуры, имеют жесткую организацию связей и единый выход (рис, 2,27),
Все оценки производятся в интегральном фильтре Калмана, a GNSS-
приемник еще более упрощается, В этой схеме он состоит только из
ВЧ канала приема и первичной обработки, который включает
высокочастотный приемный тракт, генератор кода, корреляторы и схему
захвата. Выходы корреляторов являются входами для интегрального
фильтра Калмана, где вычисляются не только ошибки ИНС, но и
оценки пседодальностей и псевдоскоростей, которые передаются в
приемник для улучшения характеристик захвата сигнала. Таким образом
традиционные контуры слежения за кодом и доплеровской частотой
сдвига несущей оказываются включенными в общий интегральный
фильтр комплексной системы, В такой схеме фильтр должен
обладать двадцатым-сороковым порядком, и для его реализации требуется
БЦВМ с высоким быстродействием.
V
GNSS приемник
ВЧ канал приема
и первичная обработка
Предсказанные
значения
псевдодальности и
псевдоскорости
Компенсация
инструментальных ошибок
Акселерометры и
гироскопы
Выход
iHHC/GNSSIGNSS/ИНС
L
Интегральный
фильтр Калмана
ИНС
Рис. 2.27. Функциональная схема глубоко интегрированной системы
Все перечисленные схемы комплексирования GNSS и ИНС (кроме
первой) получаемые на выходе фильтра Калмана оценки
инструментальных погрешностей ИНС (ошибки смещения нулей гироскопов и
акселерометров, ошибки масштабных коэффициентов и т.д.)
используют для коррекции инерциальных датчиков. Поэтому при перерывах
поступления данных с приемника полученные ранее оценки ошибок
ИНС и ее измерительных элементов позволяют улучшить точностные
характеристики ИНС в автономном режиме,
В табл. 2.11 суммированы основные особенности перечисленных
схем комплексных систем.
Первые три из приведенных структур интегрированных систем
могут быть реализованы с использованием существующих спутниковых
приемников, инерциальных систем и вычислителей. Вместе с тем,
слабо и, в первую очередь, жестко связанная схемы для более полного
использования открывающихся возможностей комплексирования требуют
создания специализированных датчиков инерциальных и спутниковых
Таблица 2.11. Сравнительные характеристики комплексных систем разной
архитектуры
Тип системы
Раздельная
Слабосвязанная
Жестко связанная
Глубоко
интегрированная
Основные качества
Избыточность, ограниченность ошибок оценок
местоположения и скорости, наличие информации об
ориентации и угловой скорости, высокая скорость
выдачи информации, минимальные изменения в
бортовой аппаратуре.
Все перечисленные качества раздельных систем
плюс более быстрое восстановление слежения за
кодом и фазой сигналов GNSS, выставка и калибровка
БИНС в полете, как следствие — повышенная
точность в отсутствии GNSS-сигнала.
Дальнейшее улучшение точности и калибровки,
повышенная устойчивость слежения за GNSS-сигнала-
ми при динамических маневрах, повышенная
помехозащищенность.
Достоинства: единый фильтр устраняет проблему
«каскадного» включения фильтров, компактность,
пониженные требования по энергообеспечению.
Недостаток: вектор состояния содержит до 40
компонент, и фильтр трудно реализуем; необходимость
разработки специальных датчиков.
систем, изготовленных на одной технологической и конструктивной
базе. Это позволяет получить БИСУ меньших габаритов, массы,
энергопотребления. Последняя из рассмотренных схем — глубоко
интегрированная — в обязательном порядке требует разработки специальных
приемников и вычислителей. При этом могут быть использованы самые
передовые технологии, например, микромеханические датчики.
Список литературы к главе 2
2.1. http://www.glonass-ianc.rsa.ru
2.2. Веремеенко К. К., Красильщиков М.Н. и др. Управление и наведение
беспилотных маневренных летательных аппаратов на основе
современных информационных технологий / Под ред. Μ. Η. Красильщикова и
Г. Г. Себрякова. - М.: Физматлит, 2003. - 280 с. - ISBN 5-9221-0409-8.
2.3. Шебшаевич В. С. и др. Сетевые спутниковые радионавигационные
системы // Радио и связь. — 1993.
2.4. Соловьев Ю.А. Системы спутниковой навигации. — М.: Эко-Трендз,
2000. 270 с.
2.5. Соловьев Ю.А. Спутниковая навигация и ее приложения. — М.: Эко-
Трендз, 2003. - 326 с: ил.
2.6. Turner D.A. Global Positioning System. Current status and modernization
efforts. UN/USA Workshop. Use and applications of GNSS. 1-5 April 2002,
Santiago, Chile.
2.7. GPS World, 2001, April. P. 48-53.
2.8. GPS World, 2001, July. P. 9,38-45.
2.9. PKT, 2001. 38. С 6
2.10. European Commission, Information note, 2002.
2.11. GPS World, 2001, September.
2.12. Spaceflight, 2000, May.
2.13. Spaceflight, 2001, January.
2.14. Space Policy, 2001, 16.
2.15. Financial Times, 2002, March 27.
2.16. High-lights in Space, 2001, UN, N.Y., 2002.
2.17. Новости космонавтики. 2001. 7.
2.18. Поваляев А. А. Спутниковые радионавигационные системы: время,
показания часов, формирование измерений и определение относительных
координат. М.: Радиотехника, 2008.
2.19. Глобальная спутниковая навигационная система ГЛОНАСС / Под ред.
В.Н.Харисова, А.И.Перова, В. А. Болдина. - М.: ИПРЖР, 1998
2.20. Голован Н.А., Парусников С. Α., Трубников Н.Б., Вавилова А. А.
Математические модели и алгоритмы обработки измерений спутниковой
навигационной системы GPS. Стандартный режим. М.: МГУ, 2001.
2.21. RTCM recommended standards for differential GNSS (Global Navigation
Satellite System) service, version 2.2, January 15, 1998. (RTCM PAPER
1198/SC104STD).
2.22. Federal Radionavigation Plan. MOT & MOD. USA, 1994.
2.23. Веремеенко К. К., Тихонов А. В. Навигационно-посадочный комплекс на
основе спутниковой навигационной системы // Радиотехника, 1996. № 1.
С. 94-99.
2.24. Phillips Я., Schmidt G. GPS/INS Integration/ - AGARD Lecture Series
on «System Implementations and Innovative Applications of Satellite
Navigation», Paris, France, 4-5 July, 1996. - LS-207. P. 9-1-9-18.
Глава 3
БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ
НАВИГАЦИОННАЯ СИСТЕМА
КАК ИНФОРМАЦИОННОЕ ЯДРО
ИНТЕГРИРОВАННОГО БОРТОВОГО
КОМПЛЕКСА БПЛА
В последние десятилетия инерциальные навигационные системы
(ИНС) стали одними из основных средств навигации на большинстве
видов подвижных объектов. Наиболее востребованными и
привлекательными для беспилотных летательных аппаратов являются
бесплатформенные инерциальные навигационные системы (БИНС). Вопросам
построения этих устройств посвящена обширная литература, как
отечественных авторов, так и зарубежных. Далеко не полный перечень
источников приведен в конце главы [3.1,3.8] Учитывая это и
принимая во внимание ограниченность объема настоящей монографии, цель
настоящей главы — дать уже подготовленному читателю необходимый
набор сведений для понимания роли бесплатформенных инерциальных
навигационных систем в составе бортовых комплексов и особенностей
функционирования самих комплексов с учетом специфики БИНС.
3.1. Принципы построения и функциональные
схемы БИНС
Перед другими навигационными системами ИНС имеет такие
преимущества, как:
• высокая информативность и универсальность применения (ИНС
определяет всю совокупность пилотажно-навигационных
параметров, необходимых для управления ЛА),
• полная автономность действия,
• высокая помехозащищенность,
• возможность высокоскоростной выдачи информации (до 100 Гц и
выше).
Так называемые бесплатформенные ИНС (БИНС), которые не
используют для стабилизации своих инерциальных датчиков таких
сложных и дорогостоящих технических устройств как гиростабилизирован-
ные платформы, особенно интенсивно развивались в последнее время.
К числу потенциальных преимуществ БИНС по сравнению с
платформенными ИНС можно отнести:
• меньшие размеры, массу и энергоемкость;
• существенное упрощение механической части системы и ее
компоновки и, как следствие, повышение надежности системы;
• отсутствие ограничений по углам разворота;
• сокращение времени начальной выставки;
• универсальность системы, поскольку переход к определению тех
или иных параметров навигации осуществляется алгоритмически;
• упрощение решения задачи резервирования и контроля
работоспособности системы и ее элементов.
В основе принципа функционирования любой ИНС лежит
использование законов Ньютона для определения координат, проекций скорости
и угловой ориентации объекта. Согласно второму закону Ньютона
абсолютное ускорение центра масс материального тела можно выразить
через равнодействующую всех приложенных к телу сил F и массу
этого тела т: ρ
о = —. (3.1)
т
Силу F можно представить в виде суммы двух сил: суммы всех
действующих на тело активных сил FaKT (силы тяги, аэродинамических
сил, сил, создаваемых органами управления, и пр.) и сил
гравитационного взаимодействия G тел. С учетом такого представления
уравнение (3.1) примет вид:
■Ракт + G
а = . (3.2)
т
Отношение FaKj/m, представляющее собой удельную активную
силу, называют кажущимся ускорением и в теории инерциальной
навигации обычно обозначают вектором η [3.1,3.2]. Отношение G/m
является гравитационным ускорением объекта grp(R), определяющимся
геопотенциалом в данной точке, величина которого, в свою очередь,
является функцией геоцентрического радиус-вектора местоположения.
Абсолютное ускорение объекта выражается через вторую производную
геоцентрического радиус-вектора местоположения R:
d2R η ъ
a=w. (3.3)
Подставляя соотношения (3.2), (3.3) в уравнение (3.1) с учетом
введенных выше обозначений получим:
^=n+grp(R). (3.4)
Полученное векторное уравнение (3.4) называется основным
уравнением инерциальной навигации и служит основой для разработки
функциональных алгоритмов всех типов ИНС. Это уравнение
позволяет определять радиус-вектор местоположения R (а, следовательно,
координаты объекта) и его производные (а, следовательно, скорости и
ускорения объекта) на основе информации о векторах η и grp(R).
Вектор кажущегося ускорения η может быть измерен тремя ортогонально
расположенными акселерометрами. Гравитационное ускорение grp(R)
обычно задается в виде известной функции от радиуса-вектора R для
конкретного вида используемой модели фигуры Земли.
Представляя уравнение (3.4) в форме Коши, можно записать:
■£ = η + дгр (R), (3.5)
где V — вектор абсолютной скорости движения летательного аппарата.
При рассмотрении векторных уравнений (3.5)-(3.6) в некоторой
системе координат, вращающейся с угловой скоростью Ω, производные
векторов V и R в можно представить в следующем виде:
dV dV Л
-ι- = -Τ- +Ωχ V.
dt dt (3.7)
dR dR „ n
где dR/dt и dV /dt — локальные производные от векторов R и V,
взятые в базисе, вращающемся с угловой скоростью Ω. Вектор Ω
абсолютной угловой скорости координатного трехгранника в общем случае
выбирается при проектировании системы в соответствии с
предъявляемыми к ней требованиями. Подставив производные (3.7) в систему (3.6)
получаем:
—- = -Ω χ V + η + дгр (R),
dt (3.8)
^=-QxR + V,
at
Если определять не вектор абсолютной скорости движения ЛА V,
а вектор относительной скорости U, то основное уравнение навигации
надо представлять с учетом следующего соотношения:
U = V - и χ R, (3.9)
где и — вектор угловой скорости вращения Земли, модуль которого
равен и = 15,0407 град/ч = 7,292116 · Ю-5 1/с; U - вектор,
определяющий скорость движения относительно Земли; V — вектор абсолютной
скорости движения ЛА; R — вектор положения объекта
(геоцентрический радиус-вектор точки места ЛА).
Подставляя это соотношение в (3.6), можно записать основное
уравнение инерциальной навигации в форме Коши в следующем виде:
dU
— = -uxU + n + g,
fR (3.10)
—- =и χ R + U,
at
где д = дГр{Я) — и χ (и χ R) — вектор градиента поля силы тяжести
(при выводе было принято du/dt = 0, т. к. вектор угловой скорости
вращения Земли известен с высокой точностью).
Система (3.10) позволяет определять местоположение и
относительную скорость в инерциальной системе координат. Для получения
этой информации во вращающемся базисе необходимо воспользоваться
соотношениями (3.7), как это было проделано выше. При этом
производная вектора U будет иметь вид:
dU dU TT . , ,
-dT = ^+QxU- (ЗЛ1)
где dU/dt — как и ранее, локальная производная от вектора U, взятая
в базисе, вращающемся с угловой скоростью Ω.
С учетом такого представления локальных производных
векторов U (3.11) и R (см. соотношения (3.7), второе выражение) основное
уравнение инерциальной навигации можно записать в форме,
обеспечивающей вычисление относительной скорости U и местоположения R
в системе координат, вращающейся с угловой скоростью Ω:
dU ._ . _.
— = - (Ω + и) χ U + η + д,
dt (3.12)
^ = (и - Ω) χ R + U.
dt
Приведенные здесь векторные системы уравнений (3.5), (3.6), (3.8),
(3.10), (3.12) могут служить основой для синтеза функциональных
алгоритмов БИНС различного назначения. Та или иная векторная форма
выбирается для получения скалярного эквивалента функциональных
алгоритмов, служащего для разработки численных алгоритмов БИНС.
Скалярный вид основного уравнения инерциальной навигации
определяется, прежде всего, выбранным навигационным базисом, т.е.
базисом, в котором определяются основные навигационные параметры —
координаты и проекции скорости. В свою очередь выбор
навигационного базиса определяется типом летательного аппарата, особенностями
его траекторного движения, характером решаемых задач.
Так, в космических приложениях, когда аппарат совершает
орбитальное движение, наиболее удобно вести решение в
инерциальной систем координат и в качестве основы для разработки
функциональных алгоритмов БИНС следует взять векторную систему урав-
нений (3.5), (3.6). При этом позиционную информацию получают в
форме декартовых прямоугольных координат, скоростную — в форме
проекций абсолютной скорости на выбранные инерциальные оси, а
информацию об ориентации — в виде соответствующей матрицы
ориентации или трех углов ориентации ЛА относительно выбранного базиса.
Для БИНС летательных аппаратов, совершающих движение в
атмосфере Земли (в том числе беспилотных маневренных ЛА), наиболее
часто используются системы координат с базовой плоскостью местного
горизонта и определенной ориентацией горизонтальных осей в азимуте.
Под ориентацией осей в азимуте понимается возможность их
ориентации либо по странам света, когда две горизонтальных оси направлены
в восточном и северном направлении, либо свободная и полусвободная
ориентация, когда горизонтальные оси, первоначально выставленные
в определенном направлении, в дальнейшем вращаются с определенной
угловой скоростью (Ωζ = 0 в первом случае и Ωζ = u sin φ во
втором). При этом позиционную информацию определяют широтой,
долготой и высотой, измеренными на эллипсоиде Красовского СК-42 [3.1]
или на эллипсоиде международной системы WGS-84 (World Geodetic
System 84) [3.3], скорость определяют проекциями на восточную,
северную и вертикальную оси, если в качестве навигационной системы
выбрана система с ориентацией осей по странам света, или проекциями
на оси горизонтного базиса с иной ориентацией. Ориентация при этом
определяется углами крена, тангажа и истинного курса.
Обобщенные функциональные схемы БИНС приведены на рис. 3.1
и 3.2. На рис. 3.1 показана обобщенная структура системы,
работающей в инерциальной системе координат. Информация с блока
гироскопов (БГ) в виде проекций вектора угловой скорости ΩΒ на связанные
БА
БГ
пв
пв
БП
,
1
А
АО
НА
Рис. 3.1. Обобщенная блок-схема БИНС, работающей в инерциальной системе
координат
с ЛА оси используется в алгоритме ориентации (АО) для
формирования матрицы А направляющих косинусов между связанными и инерци-
альными осями. Данные с блока акселерометров (БА) в виде проекций
вектора кажущегося ускорения пв на связанные с ЛА оси в блоке
пересчета (БП) пересчитываются к инерциальным осям с
использованием полученной матрицы ориентации. Вычисленные проекции
кажущегося ускорения на инерциальные оси (полученный вектор п;)
передаются в блок решения навигационного алгоритма (НА), векторная
форма которого задана системой (3.6). Выходные параметры БИНС
в этом случае представляются инерциальными декартовыми
координатами радиус-вектора местоположения Rj = [Xi,Yj,Zj]t, проекциями
абсолютной скорости движения Vj = [Vxi,Vyi,Vzi]t, а также
матрицей ориентации ЛА в выбранной инерциальной системе координат А.
Естественно, что при необходимости из матрицы ориентации А могут
быть получены углы ориентации ЛА относительно осей инерциальной
системы координат.
Вторая типовая схема построения БИНС представлена на рис. 3.2.
Этот вариант реализует алгоритм системы, работающей во
вращающейся (наиболее часто — горизонтальной) системе координат.
БА
БГ
nG
БП
,
Пп
С
АО
НА
С
'
ВУ
_
*
1
Rg
Vg
Углы
ориентации
Рис. 3.2. Обобщенная блок-схема БИНС, работающей во вращающейся системе
координат
Как и в предыдущем случае информация с БГ в виде проекций
вектора угловой скорости ΩΒ на связанные с ЛА оси используется
в АО. Однако на этот раз определяется матрица С направляющих
косинусов между связанными осями и осями, которые вращаются с
угловой скоростью Ωο. Это приводит к необходимости модифицировать
алгоритм ориентации и привлечь для его реализации вычисленные
в НА проекции вектора Ω<3, что отображено на схеме
дополнительной связью. Информация с БА в виде проекций вектора кажущегося
ускорения пв на связанные с ЛА оси передается в БП для приведения
к навигационным осям с использованием полученной матрицы
ориентации С. Вычисленные проекции (полученный вектор па) передаются
в блок решения НА, векторная форма которого задается системой (3.8)
или системой (3.12), в зависимости от вида определяемой скорости.
На выходе БИНС формируется радиус-вектор местоположения ЛА Rg,
вектор скорости Vg = [Vxg,Vyg,Vzg], a также углы ориентации ЛА.
В частном случае, когда в качестве навигационного базиса выбран го-
ризонтный ориентированный по странам света трехгранник, на выходе
системы будут сформированы географические координаты
радиус-вектора местоположения Rg = [φ,λ,Η], проекции относительной скорости
движения Ug = [Un,Ue,Uz], а также углы ориентации ЛА в
географической системе координат — истинный курс ψ, тангаж υ и крен -у.
В обоих рассмотренных вариантах, которые можно считать
типовыми, показания акселерометров предварительно приводились к осям
навигационного базиса (инерциального или вращающегося). Можно
предложить алгоритмы, когда ведется прямое интегрирование
показаний акселерометров в связанных с ЛА осях. Однако, в этом случае
потребуется большая скорость обработки навигационных данных,
поскольку угловое движение беспилотных маневренных ЛА
рассматриваемых классов является достаточно динамичным и, как следствие,
проекции вектора кажущегося ускорения η на связанные с ЛА оси
меняются быстро (угловые скорости могут достигать 360 °/с). В
приведенных выше схемах эта проблема в известной степени снимается
за счет проецирования вектора кажущегося ускорения на
навигационный базис, т. к. угловая скорость этого базиса существенно меньше,
чем связанного, и проекции вектора η на нем меняются с меньшей
скоростью. Тем не менее, учитывая бурное развитие вычислительных
средств, схема прямого интегрирования показаний акселерометров
может быть реализована, хотя в настоящее время серийно подобные
БИНС не выпускается.
3.2. Алгоритмы функционирования БИНС
в различных системах координат и в различных
параметрических пространствах
Учитывая сказанное выше, ниже приведены два варианта
построения алгоритмов БИНС. Первый соответствует схеме, представленной
на рис. 3.2, второй — схеме 3.1.
Алгоритм БИНС, работающей в географической системе
координат. Рассмотрим алгоритм БИНС, определяющей географические
координаты ЛА — широту ф, долготу λ, высоту h, северную Un,
восточную Ue и вертикальную Uz проекции его относительной скорости,
а также углы ориентации курс ψ, крен 7, тангаж υ. Алгоритмы такого
типа широко используются в БИНС авиационного применения, в том
числе и для беспилотных аппаратов.
Определим навигационный географический координатный
трехгранник Oxyz с ортами гв, jc, г, для которого ось Oz (ортг)
направлена по внешней нормали к поверхности эллипсоида Красовского,
ось Оу (opTjc) — по меридиану на север, и ось Ох (ортгв) — на
восток (рис. 3.3).
Учитывая предшествующие рассуждения и характер выходной
информации рассматриваемой БИНС, ниже приводится наиболее общий
алгоритм бесплатформенной инерциальной навигационной системы,
определяющей проекции относительной скорости на горизонтальную
(северная и восточная проекции) и вертикальную оси, широту, долготу,
высоту, углы крена, тангажа и истинного курса. Функциональный
алгоритм БИНС можно укрупнено разделить на две взаимозависи-
мые части: навигационный алгоритм, в котором определяются
проекции скоростей и координаты, и алгоритм определения параметров
ориентации, который вычисляет
матрицы ориентации
чувствительных элементов в пространстве и
углы ориентации ЛА в
горизонтальной системе координат.
Запишем векторные уравнения
системы (3.12) в осях выбранного
базиса is, jn, г. При этом
представим в координатной форме
векторы, входящие в первое
уравнение (3.12):
U = iBUE + jcUN + rUz
η = ienx + jcny + rnz,
(3.13)
Рис. 3.3. Географический навигаци
онный трехгранник
ется в виде:
Ωο = и + φ + λ,
где пх у.ζ — проекции вектора η на
оси базиса гв, jc, r.
Вектор абсолютной угловой
скорости выбранного
навигационного трехгранника Ωα представля-
(3.14)
где ф, λ — скорости изменения координат φ и λ.
В координатной форме соотношение (3.14) имеет вид:
Ωο = —ίβφ + jc (и+ λ J cos φ + г (и + λ J sin φ. (3.15)
Введем обозначения для относительных угловых скоростей и
проекций угловой скорости вращения Земли
(3.16)
<+>х = —ф, uiy = λ cos φ, ωζ = λ sin φ,
иу = и cos ψ, uz = и sin φ.
Тогда входящая в первое уравнение (3.12) векторная сумма Ω + и
может быть представлена в виде:
(Ω + и) = ίβωχ + jc (ujy + 2иу) + r (ωζ + 2uz)
(3.17)
Ось ζ выбранного базиса направлена по нормали, опущенной из
точки места объекта А к поверхности земного эллипсоида, и
пересекает эту поверхность в точке В. Определение ориентация этой оси
связано с необходимостью ввести представление о модели фигуры
Земли. В качестве такой модели в нашей стране используют двухосный
эллипсоид вращения с параметрами, полученными Φ. Η. Красовским.
К основным параметрам можно отнести большую полуось земного
эллипсоида (радиус земного экватора) а = 6378245 м; малую полуось
земного эллипсоида Ъ = 6356863 м; квадрат эксцентриситета
эллипсоида
2 ι 2
е2 = α ~ = 0,0066934216.
а1
Используя математическое описание этой модели, величины ωχυζ
можно выразить через линейные скорости движения точки А и радиусы
кривизны нормальных сечений эллипсоида [3.2]:
Uc UB
ωχ = гт> ων = ;—. ujz=uytgip, (3.18)
Ρι+h P2+P
где pi — радиус кривизны меридионального сечения эллипсоида
(плоскость сечения определена векторами г, jc)', Рч — радиус кривизны
сечения эллипсоида плоскостью, определяемой векторами г и %е
(плоскость первого вертикала); h — высота полета над поверхностью Земли.
Величины /Э|,2 выражаются следующим образом:
р, =а(1-е2)(1-е28тУГ3/2,
^ М ,/2 (3.19)
/ι 2-2 \~[/2
Р2 = а {1 — е sin φ)
При направлении оси ζ по нормали к поверхности эллипсоида
справедливо соотношение:
h = Uz. (3.20)
Для скалярной записи системы (3.12) представим в координатной
форме вектор д, входящий в первое уравнение системы (3.12):
9 = iB9x+Jc9y + rgz (3.21)
Детерминированная математическая модель существует только для
нормальной составляющей поля силы тяжести, которое соответствует
земному эллипсоиду с равномерным распределением масс в объеме
этой фигуры. Градиент этого поля в любой точке, принадлежащей
поверхности эллипсоида, направлен по нормали к ней и расположен
в плоскости меридионального сечения. Поскольку точка места ЛА
(точка А) не принадлежит поверхности Земли, то, строго говоря,
вектор градиента нормального поля силы тяжести в этой точке не
будет направлен по линии нормали, опущенной из нее к поверхности
земного эллипсоида (ось ζ). Вместе с этим этот вектор будет
расположен в плоскости меридиана точки А, т.е. в плоскости, определяемой
векторами и, г. Тогда соотношение (3.21) принимает следующий вид:
9 = Jc9y + rgz- (3.22)
ий дул с точностью до членов порядка е'
можно получить, используя потенциальную функцию нормального по
Выражения для проекций gy-z с точностью до членов порядка е5
ля тяготения земного эллипсода в виде [3.1]:
9угр
9ζτη
1
29с
+
— (е2 — 5q) + qp2 sin2 φ
a v '
sin 2φ,
\-2^-(e2 + 2q-3^)^+
а \ а/ а
'[-(5q-e2)-l-e* + ^qe4(3e>
■5?)
1 9.4 ^2/^2
-qe sin φ+-β 1-е
7cHsin22^l,
(3.23)
sin φ-
где де = 9,78049 м/с2 — ускорение силы тяжести на экваторе;
q = (и2а)/де = 0,00346775 — отношение центробежной силы от
вращения Земли к силе тяжести на экваторе; и = 15,0407 град/ч — угловая
скорость вращения Земли.
В формулах (3.23) принято, что h/a и е2, что соответствует
высотам, характерным для авиационных объектов и беспилотных ЛА. Эти
формулы могут быть упрощены, если в них сохранить лишь члены
порядка е2. Тогда ду = 0; gz = —де [l — 2(h/a) + (1/2) (5q — е2) sin2 φ].
Следует иметь в виду, что для перехода к проекциям ускорения
силы тяжести к выражениям (3.23) необходимо добавлять компоненту
от центростремительного ускорения, обусловленного вращением
Земли, в соответствии с (3.10).
Воспользовавшись (3.16) и (3.18), получим следующую систему
дифференциальных уравнений, решение которой позволяет найти
координаты φ и λ:
Ф=—,> к = 7 ^ · (З·24)
β: + η [р2 + п) cos φ
Функции \/{p\+h) и \/(p2 + h) с точностью до членов порядка е5
можно представить в следующем виде:
1
p{+h
h
а
° 2 · 2
-е sin φ
,h
>h
2e2- + 3e2-sin'</? +
a a
a
+ e4 ( 1—3 sin φ + — sin4 φ
(3.25)
p2 + h
h
a
'2-2
-e sin φ +
+ e — sin ψ+
a
4/1.2 3
+ e I 4 sm Ψ ~ g
sin2 ψ
Если в формулах (3.24) и (3.25) сохранить лишь члены порядка е2,
то они примут вид:
1
Pi+h
1
1
1
02
h
■ е"
а
h
а
3 2 . 2
— е sin φ
1 2 · 2
— е sin ^
(3.26)
pi + h
Стоит отметить, что использование упрощений (3.26) может
привести к погрешностям, соизмеримым с погрешностями
высококачественных гироскопических измерителей, используемых в БИНС.
С учетом приведенных выше соотношений скалярный эквивалент
векторной системы (3.12), позволяющий вычислять составляющие
вектора скорости ЛА в географической системе координат, можно
записать:
d
dt
Ub
UC
Uz
0 (ωζ + 2uz)
- (ωζ + 2uz) 0
(uiy + 2uy) —ωχ
- {wy + 2uy)
ux
0
UB
Uc
Uz
+
+
nx
Пу
nz
+
9χ
9y
9z
(3.27)
где wx.y.z — проекции вектора угловой скорости географического
базиса относительно Земли (3.18); uVtZ — компоненты вектора
угловой скорости Земли (3.16); ηΧΛιΖ — компоненты вектора кажущегося
ускорения, измеренные акселерометрами; gx.y,z — компоненты вектора
градиента нормального поля силы тяжести (3.23).
Входящие в выражения (3.18) радиусы кривизны земного
эллипсоида могут быть вычислены через свои обратные функции
по (3.25), (3.26) или непосредственно по формулам [3.2]:
Д,=
о(1 -е2)
(1
е2 sin
Ψ)
3/2
+ h, R2 =
ί(
e2 sin
+ h,
Ψ)
(3.28)
первый эксцен-
где α — большая полуось эллипсоида Красовского; е
триситет эллипсоида Красовского (см. выше).
Проекции угловых скоростей вращения географического базиса
относительно Земли в географической системе координат с учетом (3.28)
выразятся:
Uc
UB
ωζ
Ub
tg φ.
(3.29)
Я,' ~у R2' ~* Д2"07"
Проекции угловой скорости вращения Земли определены в
соответствии с (3.16):
иу — ucos φ, uz = usin ψ, (3.30)
модуль угловой скорости вращения
где и = 7,292116 · 10"5 с"'
Земли.
Алгоритм вычисления координат местоположения и высоты ЛА по
направлению нормали до поверхности земного эллипсоида
определяется уравнениями:
άφ d\
Έ~~ωχ' ~dl
COS φ
i="-
(3.31)
Алгоритм вычисления проекции ускорения силы тяжести Земли
можно представить в следующем виде (с точностью до величин
порядка е4) [3.1,3.2]:
9х = О,
ду = до sin(2^)
f[.+f'°2")+l(i-2'
-50
1 - — sin2 φ + q ί 1 + ^ sin2 φ ) +
+ e4 I -- sin2 φ + — sin2(2^)J + e2q
h 9 , 9 ,. hq , , „ 9 . 2h 2>h2
+ -e2(3sin2^- 1) + — (-1 -6sin2^) + —
(3.32)
^sin2^-Asin2(2^ +
где q — введенное ранее отношение центробежной силы,
возникающей вследствие вращения Земли, к силе тяжести на
экваторе (q = 0,00346775); до — ускорение силы тяжести на экваторе
{до = 9,78049 м/с2).
Совокупность соотношений (3.27)-(3.32) представляет собой
навигационный алгоритм БИНС. Для построения полного функционального
алгоритма БИНС алгоритм определения навигационных параметров
дополняется алгоритмом определения параметров ориентации. Алгоритм
определения ориентации служит для решения двух основных задач:
• определение взаимной ориентации ортогонального базиса,
образованного измерительными осями акселерометров, и базиса,
используемого в качестве навигационного (в нашем случае
географического), а также для пересчета показаний акселерометров
в навигационный базис (первая задача);
• определение угловых параметров ориентации — углов курса
(рыскания), тангажа, крена (вторая задача).
Без решения первой задачи невозможно определение
местоположения и скорости ЛА с помощью БИНС. В этом смысле этот алгоритм
является ключевым в структуре БИНС. Решение второй задачи
необходимо для управления ЛА и наведения его на цель в горизонтной
системе координат.
Алгоритм определения параметров ориентации БИНС можно
представить в виде четырех субалгоритмов:
/. Алгоритм определения начальной матрицы ориентации. Здесь
вычисляются начальные значения элементов матрицы направляющих
косинусов, определяющей взаимное положение связанной с ЛА и
географической систем координат. Алгоритм используется при начальной
выставке БИНС на Земле. Выставка осуществляется методом
векторного согласования по измерениям двух неколлинеарных векторов
измерительными элементами БИНС (акселерометрами, гироскопами) —
вектора абсолютной угловой скорости вращения ВС, равного угловой
скорости вращения Земли и, и вектора ускорения свободного падения д.
Выставка в условиях движения представляет собой существенно более
сложную задачу, поскольку два опорных вектора — угловой скорости
вращения Земли и и вектора ускорения свободного падения д, — в этом
случае не будут отражать условий движения аппарата. Учитывая
ограниченность объема книги, алгоритмы выставки, представляющие собой
самостоятельную большую задачу, здесь не рассматриваются,
заинтересованные читатели могут обратиться к специальной литературе,
например, [3.4].
2. Алгоритм вычисления матрицы взаимной ориентации базиса,
связанного с ЛА, и географического. Этот алгоритм может быть
построен несколькими существенно различными способами, выбор
которых определяется особенностями гироскопов БИНС и спецификой
конкретной навигационной задачи. Наиболее часто используются
следующие два способа.
Первый способ базируется на решении матричного
модифицированного уравнения вращения Пуассона:
dC_
~dt
0
Ωζ
-Ω„
-Ω2
0
Ω.
Ω,
-Ω,
0
C + C
0
Ω3
-Ω2
-Ω3
0
Ω,
Ω2
-Ω,
0
(3.33)
где ΩΙι3ΛΖ — проекции абсолютной угловой скорости вращения
географической системы координат, определяемые следующим образом:
Ώ,χ=ωχ, Qy — ων + иу< Ωζ =ωζ + ηζ, (3.34)
Ω|,2,3 — абсолютные угловые скорости ЛА, измеряемые гироскопами,
установленными жестко на его корпусе.
Второй подход при построении алгоритма ориентации базируется на
использовании промежуточных параметров ориентации. При создании
БИНС наиболее часто в качестве таковых используются параметры
Родрига-Гамильтона (кватернионы). Матрица пересчета из связанной
в географическую систему координат получается путем перемножения
двух матриц, из которых одна пересчитывает из связанных в инерци-
альные оси, вторая — из инерциальных в географические. Каждая из
двух матриц вычисляется на основе параметров Родрига-Гамильтона,
которые, в свою очередь, определяются численным алгоритмом второго
порядка, построенном на основе метода последовательных
приближений Пикара:
С = ВТА,
1 - 2(А| + А§) 2(λ,λ2-λολ3) 2(λ,λ3 + λ0λ2)
2(λ,λ2 + λολ3) 1 - 2(А? + А§) 2(λ2λ3-λ0λ,)
2(λ,λ3-λ0λ2) 2(λ2λ3 + λ0λ,) 1 - 2(Д2 + Α|)
(3.35)
где
Лк+0
Лк+0
Лк+0
Лк+l)
λ
(к)
i(k),
№.
iW.
Лк),
A^e/8 - 0,5(λ^ Δ& + \\ч Δβν + λ^Δ/?2),
Лк)
ли.
Лк)
(к),
v(fc).
λ^ - \\че/& " 0,5(\(0κΆβχ + \ГА0у + \\ЧΔβζ)
Лк)
Лк),
Лк)
\\ч - Xf'e/8 - 0,5(А^;А/?г + \κ0Άβυ + К'Δβζ)
(к),
Лк).
Лк)
Лк),
Лк)
(к).
Лк).
Ч ~ Ч е/8 - 0,5(4κ,Δβχ + \\>Δβν + λ^;Δ/?2)
е = Αβ2χ + Δ/?* + Δ/322,
ifc+i
Δβχ
Ω,ώ, Δβν
Q2dt, Αβζ
Q3dt,
Δ.βχ,Δ.βν,Δ.βζ — приращения интегралов от проекций абсолютной
угловой скорости поворота объекта на оси чувствительности
гироскопов (показания гироскопов БИНС, измеряющих не проекции угловых
скоростей, а приращения углов поворота вокруг своих осей
чувствительности),
В
\-2{μ\+μ\) 2(μ,μ2-μ0μ3) 2(μ]μ3+μομ2)
2(μιμ2+μομ3) 1 - 2(μ2 + μ\) 2(μ2μ3-μ0μ,)
2(μ,μ3-μ0μ2) 2(μ2μ3 + μ0μ,) 1 - 2(μ2 + μ|)
μ^
,,(k+l)
(к)
,,{к)
(к)
μ2
(к)
μ'3
0,5(μ^Ω, + μ? ]Пу + μ^η^άί,
Ο,δ^Ωζ + μ^ ]Пу + ^k)ilz)dt,
0,5(μ^Ω, + μ^Ω,, + μ^Ω2)ώ,
Ο,δ^Ω,+μ^Ω,,+μ^Ω^ί,
где Ω3.,Ω3/,ΩΖ — проекции абсолютной угловой скорости
географического базиса на его оси (3.33).
К преимуществам этого метода построения матрицы ориентации
относится гарантированная ортогональность матрицы ориентации,
вычисленной по соотношениям (3.35). Кроме этого, практика
показывает, что вычисление с использованием параметров Родрига-Гамильтона
дает наименьшие вычислительные затраты по сравнению с другими
методами при условии обеспечения одинаковых точностных
характеристик. Вместе с тем, определение матрицы С через параметры
Родрига-Гамильтона приводит к необходимости решения двух однотипных
систем линейных дифференциальных уравнений четвертого порядка
каждая.
3. Алгоритм вычисления угловых параметров ориентации ЛА
относительно географической системы координат (вычисление
истинного курса ф, крена -у, тангажа ϋ):
■в = arcsin (C31) = arccos I J \ - С|, ]
7 = arcsm
-сзз
.Ф
b3i
arccos
С32
^
-31
(3.36)
ψ = arcsin
-с\\
,\А^
arccos
C2I
,\/гг^Т
где Cij — элементы введенной выше матрицы С.
Следует отметить, что приведенные соотношения (3.36) для углов
курса ψ (изменяется в диапазоне от 0 до 360°) и крена 7 (изменяется
в диапазоне от -180° до +180°) дают лишь главные значения функций
«arcsin» (диапазон -90°.. .+90°) и «arccos» (диапазон 0.. .+180°), и для
получения истинных значений этих углов на основе (3.36) требуется
определить квадрант, в котором располагается значение
соответствующего угла.
4. Алгоритм пересчета сигналов, полученных с акселерометров,
в географическую систему координат для использования в
навигационном алгоритме (3.27):
Ν,
С\\
С1\
съ\
С12 С|3
С22 С23
С32 Сзз
iV,
Ν2
Ν3
(3.37)
Приведенная совокупность соотношений (3.27)-(3.37) представляет
собой замкнутую систему уравнений, достаточную для решения
навигационной задачи БИНС и определения параметров ориентации ЛА.
Совокупность любого из приведенных уравнений определения
матрицы С и углов курса, крена и тангажа образуют алгоритм ориентации
БИНС. Выбор конкретного алгоритма определения матрицы С зависит
от поставленной задачи и доступных ресурсов.
Алгоритм БИНС, работающей в инерциальной системе
координат. В этом варианте БИНС определяются координаты в
инерциальной системе координат OXYZ, ось OZ которой направлена по
полярной оси в сторону северного полюса, а оси ОХ и OY располагаются
в плоскости экватора. В этом случае для синтеза алгоритма БИНС
целесообразно воспользоваться векторными уравнениями (3.5), (3.6),
скалярный эквивалент которых принимает вид:
dVx
dt
пх + ffa
dRx
dVy
-ΊΓ=ην+9ν>
dVz
dt
nz + gz
(3.38)
dt
Vx
dJriy
~dT
Vy,
dRz
dt
Vz
где Rx,Ry,Rz — координаты в выбранной инерциальной системе
координат; пх, ny,nz£x, gy,gz — проекции кажущегося и гравитационного
ускорений на те же оси, причем:
пх
Пу
nz
9х
9У
9z
=
=
Аи А]2 Л,3
А2] Л 22 А2з
Аз\ А32 А3з
В[[ В2] Вз\
В [2 Вчч Вз2
В[3 В23 Взз
П]
п2
пз
ffxrp
9ур
9zrp
здесь gxrp, gyrp,gzrp — проекции вектора гравитационного
ускорения (3.23) на оси географического базиса; матрица А определяется,
например, из решения уравнений Пуассона
dA
~dl
АЩ,
где [Ω] — матрица измеренных гироскопами угловых скоростей ЛА, а
матрица В строится следующим образом:
[Ω]
О -Ω3 Ω2
Ω3 0 -Ω,
-Ω2 Ω, 0
Β
— sin Λ — cos Λ sin Φ cos Λ cos Φ
cos Λ — sin Λ sin Φ sin Λ cos Φ
0 cos Φ sin Φ
где
л j. Rz A · ^Ж R
Φ = arctg—— ·, Л = arcsin—, = arccos— ,j - —,
y/Rl+Rl y/Rl + Щ, ^Rl + R\
причем истинное значение координаты Л определяется в диапазоне
(-180°...+180°).
3.3. Модели ошибок БИНС
Алгоритмы, приведенные в предшествующем разделе, описывают
работу так называемой идеальной системы, когда начальные условия
введены в систему без ошибок, а гироскопы и акселерометры БИНС
не имеют инструментальных и методических погрешностей. В
реальных условиях невозможно задать начальные условия абсолютно точно,
инерциальные датчики всегда измеряют соответствующие величины
с погрешностями. По этой причине в реальных условиях система
работает в возмущенном режиме, и ее показания отличаются от
действительных параметров движения ЛА, т.е. инерциальная система
обладает, как и любой измеритель, ошибками.
Пусть БИНС имеет ошибку определения местоположения 5R =
= R' — R и ошибку определения скорости 5V = V — V, где R, R' —
радиус-векторы истинного и вычисленного БИНС местоположения
соответственно, V, V' — векторы истинной и вычисленной БИНС
абсолютной скорости движения ЛА. Выведем дифференциальные
уравнения, описывающие динамику ошибок БИНС SR, δν. Такие уравнения
позволят исследовать точность проектируемых систем на заданных
траекториях при выполнении поставленных полетных задач, изучить
возможность компенсации ошибок и построить соответствующие
процедуры для реализации такой возможности. Этот вопрос особенно
важен для интегрированных систем, т.к. в комплексе систем
возможности коррекции и компенсации ошибок многократно возрастают.
Вывод уравнений ошибок можно осуществить путем
формального варьирования основного уравнения инерциальной навигации.
Такой путь не является единственным. Известны другие подходы к
составлению уравнений ошибок. Например, вариацию можно проводить,
используя скалярную форму записи алгоритмов работы БИНС [3.5].
В этом случае получающиеся уравнения ошибок «привязаны» к
конкретной реализации системы, и, следовательно, могут быть применены
только для данного типа систем. Ниже предлагается более общий
подход, развитый, например, в работе [3.2] и основанный, как уже сказано
выше, на формальном варьировании исходного векторного основного
уравнения инерциальной навигации в форме (3.4). Получающиеся при
этом уравнения обладают большей общностью и могут быть с
минимальными изменениями применены практически к любому типу
систем. Следует упомянуть, что описываемый ниже подход, основанный
на формальном варьировании векторного основного уравнения инерци-
альной навигации, не является единственно возможной формой
такого варьирования. В фундаментальном труде [3.1] также предлагается
получать уравнения ошибок ИНС методом формального варьирования
основного уравнения инерциальной навигации. Однако используемые
при этом представления переменных отличаются от вводимых в
работе [3.2]. Большой практический опыт авторов по использованию
уравнений в форме, предложенной в работе [3.2], показал их
существенные достоинства и простоту адаптации к конкретным условиям
применения. Далее мы следуем методике вывода, приведенной в уже
упоминавшейся работе [3.2].
Итак, проводя формальное варьирование исходного уравнения (3.4),
получаем
d25R
dt2
= 5n + 5grp(R), (3.39)
где <Ш — вектор полной ошибки БИНС в определении местоположения;
г — единичный орт геоцентрического радиуса-вектора точки места
ЛА; δη — ошибка акселерометра в измерении вектора кажущегося
ускорения объекта п; 5grp(R) — ошибка в представлении вектора
гравитационного ускорения принятой в БИНС моделью поля.
Поскольку вектор гравитационного ускорения grp(R) задается
некоей математической моделью, то вариация этого вектора Sgrp(R) может
быть определена аналитически и выражена через параметры принятой
модели. Обычно в инерциальной навигации гравитационное поле
задается своей нормальной составляющей, которая представляет собой
поле эллипсоида вращения с заданными геометрическими параметрами.
Параметры эллипсоида Красовского, принятого в нашей стране, и вид
проекций вектора grp(R) приведены выше. В работе [3.1] показано, что
если в качестве уравнений ошибок рассматриваются уравнения первого
приближения, то нет необходимости в учете нецентральной
составляющей вектора grp(R). Поскольку предполагается, что предметом нашего
интереса являются линейные уравнения ошибок, хорошо встраиваемые
в процедуры оптимальной фильтрации, то в качестве модели вектора
grp(R) принимается только его часть, отвечающая центральному полю,
а именно: ,,
Мд) = -j$R· (3·4°)
С учетом модели (3.40) уравнение (3.39) может быть записано
в виде: 2
1Г+ &«-*&·«,-*,. <3-«)
где г — единичный орт геоцентрического радиуса-вектора точки места
ЛА; Д, — модуль геоцентрического радиуса-вектора точки места ЛА,
т.е. R = rR[.
Вариацию SR можно представить в виде суммы горизонтальной
и вертикальной составляющих путем формального варьирования при-
веденного выше представления для радиус-вектора R. Учитывая это
представление, записываем:
5R = r5Ri+ 6rR,
где 5R[ определяет ошибку в знании модуля радиус-вектора
местоположения; 5г — ошибка в вычислении орта геоцентрического радиус-
вектора местоположения.
Ошибку SR] можно трактовать как ошибку вертикального канала
БИНС или ошибку внешнего измерителя высоты полета. Вектор 5г
лежит в плоскости местного горизонта и определяет ошибки
горизонтальных каналов БИНС.
С учетом этого векторное уравнение ошибок БИНС (3.41) можно
записать в форме:
d?{5rR) μ cfjrSR,) μ
-ltF~ + Щ5гЕ + —d£- -2ЖШ[ = δη- (3·42)
Уравнение (3.42) содержит вертикальные и горизонтальные
составляем2 (SrR)
ющие: к горизонтальным составляющим относятся члены ——^— и
β с D d?(rSRi) μ
—огл, к вертикальным —^ и — 2—^roR\.
Вариацию δη в правой части уравнения (3.42) можно трактовать
как полную ошибку акселерометров в измерении вектора кажущегося
ускорения. При этом, как показано в работе [3.2], эту вариацию можно
представить в виде
δη = Αη + ηχΘ, (3.43)
где Δη — вектор инструментальных и методических ошибок
акселерометров; η — вектор измеряемого кажущегося ускорения объекта;
Θ — вектор малого углового поворота, характеризующего поворот так
называемого вычисленного базиса, ориентация которого в пространстве
определена по измеренным значениям параметров вращения
относительно базового трехгранника.
Таким образом, в соответствии с выражением (3.43) ошибка
определения вектора кажущегося ускорения складывается из двух компонент:
непосредственно ошибок акселерометров Δη и ошибки в знании
ориентации осей чувствительности акселерометров η χ θ. Вектор малого
углового поворота Θ определяется ошибками гироскопов системы и
может быть представлен в виде:
Θ = ΔΩ, (3.44)
где ΔΩ — вектор ошибок гироскопов БИНС в измерении абсолютной
угловой скорости вращения ЛА.
С учетом (3.43) и (3.44) векторное уравнение ошибок БИНС пред-
ставимо в виде системы уравнений:
d2(6rR) μ гп d^rSRi) „ μ Γη
-^ + Т*Ш + -^-2%гШ> = Ап + ПХЭ< (3.45)
Θ = ΔΩ.
Система (3.45) дает наиболее общее представление об ошибках
БИНС. Оно позволяет исследовать связь между инструментальными
погрешностями акселерометров, гироскопов, неточностями задания
начальных условий, с одной стороны, и ошибками БИНС в
определении навигационных параметров, с другой. Векторные уравнения
компактны, удобны при теоретическом исследовании. Для практического
использования систему (3.45) необходимо представить в некоторой
определенным образом выбранной системе координат. Круг
рассматриваемых в настоящем издании объектов предполагает траектории
вблизи поверхности Земли, в силу этого целесообразным
представляется получение скалярного эквивалента векторной системы (3.45) во
вращающейся системе координат, под которой в большинстве случаев
понимается горизонтальная система координат, определенным образом
ориентированная в азимуте в зависимости от условий решаемой ЛА
задачи. Сделанное предложение о рассмотрении ошибок БИНС в
горизонтальной системе координат не снижает общности рассмотрения,
т. к. полученные результаты могут быть распространены на случай и
других систем. Для этого достаточно придать иной смысл проекциям
угловой скорости трехгранника, в котором будет вестись рассмотрение
задачи.
Для перехода от векторной системы (3.45) к ее скалярному
эквиваленту в некоторой вращающейся системе координат необходимо
представить входящие в уравнения производные через их локальные
значения в выбранной вращающейся системе и провести проецирование
получившихся векторных уравнений на требуемые оси. Аналогичный
путь уже был проделан при выводе основного уравнения инерциальной
навигации. Опираясь на этот опыт, опуская промежуточные выкладки,
получаем в соответствии с [3.2]:
о о о ι η о
о о οοιο
0 0 0 0 0 1
(ίϊ\,+ίϊ2ζ-ωΙ) (Ωζ-ΩχΩϊ-) -(iV+ΩχΩζ) 0 2Ωζ -2Ων
-(Ωζ+ΩΑ-Ων) (Ω2χ+Ω%-ωΙ) (Ωχ-ΩνΩζ) -2ΩΖ 0 2ΩΧ
(ny-ΩχΩζ) -(ύχ+ηγηζ) (Ω2χ+Ω'^+2ω5) 2Пу -2ΩΧ 0
d
dt
Χι
Χ->
Хз
Χ4
Хъ
Хб
dt
X]
X2
хг
Xt,
хь
X6
0
-Ωζ
Ωγ
+
О
О
О
о
-7
β
Ωζ
О
-Ωχ
О
О
О
7
О
—а
О
О
О
-β
а
О
+
О
О
О
Апх
Апу
Αηζ
-fiy
Ωχ
О
а
β
7
+
Αωχ
Αωυ
Αωζ
(3.46)
(3.47)
в определении координат;
где Х\,Х2,хг — погрешности БИНС
Х4,хъ,Хб — производные компонент Х],Х2,хз', а,/3,7 ~ угловые
погрешности ориентации измерительного трехгранника относительно
вычисленного, компоненты вектора угла малого поворота Θ = [α,β,-у];
AnXjyiZ, ΑωΧΛ ζ — погрешности акселерометров и гироскопов,
приведенные к осям вращающейся системы координат, в которой
ведется решение уравнений ошибок; ω0 — собственная частота
колебаний ошибок БИНС, (частота Шулера) (ωα = 1,2510-3 с-1);
Ωχ,у,ζ — производные проекций вектора абсолютной угловой скорости
вращения выбранного трехгранника.
Приведение инструментальных ошибок гироскопов и
акселерометров производится по следующим формулам:
Апх = С[]Ап[ + С[2Ап2 + С]3Ап3,
Δη,,
Αηζ
Αωχ
Αωυ
Αωζ
C2\Ari] + С22^П2 + С23АЩ,
Сз[Ап] + Сз2&п2 + СззАпз,
С[[Аш[ + 0]2Αω2 + С[зАш3,
С2{АШ] + С22^2 + С2зАшз,
Сз\Аи>\ + Съ2^>г + СззАс^з,
(3.48)
(3.49)
где Ап],Ап2,Апз, Δωι,Δω2,Δω3 — инструментальные ошибки
акселерометров и гироскопов в проекциях на связанные оси; Су —
элементы матрицы направляющих косинусов между связанной с ЛА
системой координат и выбранной вращающейся системой координат.
Объединяя уравнения (3.46)-(3.49), получим математическую
модель ошибок БИНС. Для полноты картины в этих уравнениях надо
задаться также моделью ошибок гироскопов ΔΩι,ΔΩ2,ΔΩ3 и
акселерометров Ап\,Ап2,Апг. Строго говоря, каждый тип гироскопа или
акселерометра имеет свою модель с ее характерными компонентами и
численными значениями. Тем не менее, можно задаться некоей
обобщенной моделью, которая качественно учитывает зависимости ошибок
от того или иного возмущающего фактора. Для конкретного типа
гироскопов и акселерометров коэффициенты в этих моделях
должны получить соответствующие численные значения, а часть членов,
несущественных для приборов данного типа, могут принять нулевые
значения. Можно, однако, представить себе и иную ситуацию, когда
такая обобщенная модель для какого-то типа прибора не будет иметь
существенной для него составляющей. В таком случае приводимая
модель должна быть дополнена соответствующими компонентами.
Основываясь на таких рассуждениях, представим погрешности
акселерометров Ап],Ап2,Апз в следующем виде:
Δη, = μ,, + μΙ2 +η]μ[3 + η2μκ + η3μ]5 + ^?μΐ6,
Δη2 = μ2ι + μ22 + "ιμ23 + "2μ24 + "3μ25 + "1^26, (3.50)
Αη3 = μ3ΐ + μ32 + η]μ33 + "2μ34 + η3μ35 + ηΙμ36,
где μι ι (г = 1,2,3) — постоянные смещения нуля
акселерометров; μϊ2 (г = 1,2,3) — измерительные шумы акселерометров; μ»,ί+2
(г =1,2,3) — погрешности масштабных коэффициентов
акселерометров; μαα (г =1,2,3) — ошибка нелинейности акселерометров;
μΐ4,μΐ5.Μ23,μ25.Μ33,μ34 — погрешности из-за неортогональности и
перекоса осей чувствительности акселерометров.
Ошибки гироскопов ΔΩ[, ΔΩ2, ΔΩ3 могут быть также представлены
обобщенной моделью, например, в следующем виде:
ΔΩ[ =ΰ|ΐ +ΰ|2+ι?ΐ3 + ηιϋΗ+η2ϋι5+η3ϋι6 +
+ Ω,τ9,7 + Ω2ι9,8 + Ω3ι9,9 + Ω^,,,ο + Ω^,,,, + Ω^υ2,
Δω2 = ϋ2\ +1?22 +1?23 +η|ΐ924 + "2^25 +"3^26 +
+ Ω,^? + Ω2ι928 + Ω3ι929 + Ω^2,ιο + Ω^2,ιι + Ω^2,ΐ2,
ΔΩ3 = ϋ3ι + ϋ32 + ϋ33 + η 11?34 + n2tf35 + "3^36 +
+ Ω, ϋ37 + Ω2ι938 + Ω3ι939 + Ω?ι93.[0 + Ω|03,ΐ[ + Ω§03.ΐ2,
где ϋιΐ,ϋι2,ϋι3 (г = 1,2,3) — постоянные температурные дрейфы
гироскопов и их случайные измерительные шумы; ΰ,-j (г = 1, 2,3; j =
= 4,5,6) — удельные скорости дрейфа гироскопов, пропорциональные
перегрузкам (в разных типах гироскопов причины такой зависимости
могут быть разными; например, в механических гироскопах такая
зависимость объясняется небалансом гироскопов); ι9ΐ7, ^28,^39 —
погрешности МаСШТабнЫХ Коэффициентов ГИРОСКОПОВ; ϋ |8,^ 19,^27.^29,^37.^38 _
дрейфы из-за неортогональности и перекоса осей чувствительности
гироскопов.
Шумовые составляющие ошибок акселерометров μ& (г = 1,2,3) и
гироскопов ϋι2 (г= 1,2,3) представляются стационарными случайными
процессами с нулевым математическим ожиданием и корреляционными
функциями вида
К = σ2 е-Мт| (3-52)
где an,aw — среднеквадратические отклонения (СКО) переменных
μί2,ι9ϊ2 от их средних значений; hn,hw — коэффициенты затухания
корреляционных функций для случайных погрешностей
акселерометров и гироскопов соответственно.
Как известно, дифференциальные уравнения формирующих
фильтров для указанных случайных стационарных процессов с входными
сигналами типа белого шума имеют вид:
βϊ2 = —/ιημ»2 + \J1hn ап£ц, .
а , . /от— (3.53)
Vi2 — —ηυ]μΐ2 + V^tlw Сш£г2,
где ε,-j- (г = 1,1,3; j = 1,2) — белый шум единичной интенсивности.
В приведенных моделях ошибок гироскопов и акселерометров на
различных участках траектории ЛА вес отдельных компонент может
сильно варьироваться. Так, при рассмотрении движения ЛА со
скоростью, близкой к постоянной, по прямолинейным траекториям
наибольшее влияние будут оказывать постоянные погрешности измерителей.
Поэтому на таких участках траектории модели (3.50), (3.51) можно
существенно упрощать, облегчая решение задач бортового комплекса.
Кроме того, при относительной малости коэффициентов временной
корреляции h~l и h~] по сравнению с периодом Шулера (Тш = 5064 с)
процессы μα,νΐΐ (г = 1,2,3), приближаются к «белому» шуму с
определенной интенсивностью. С учетом этого модели погрешностей
акселерометров и гироскопов могут быть представлены в виде:
Ащ = μι + QiiEu, (3 54Ϊ
Αωι =Vi+ Qi2£i2,
где μ», υ,- — постоянные погрешности измерителей; Qn,Qi2 —
интенсивности случайных погрешностей измерителей.
Модель ошибок инерциальных измерителей (3.54) является
наиболее простой, однако во многих практических случаях достаточно
эффективной, позволяющей решать задачи повышения точности ИНС.
В заключение сделаем еще одно обобщающее замечание.
Приведенные в настоящем разделе уравнения ошибок ИНС являются достаточно
общими, применимыми и к платформенным системам. Отличие в этом
случае будет лишь в смысле матрицы С в выражениях (3.48), (3.49),
которая при этом будет определять связь платформенной системы
координат и системы, выбранной для решения уравнений ошибок. Таким
образом, приведенная модель погрешностей ИНС является
универсальной, но, как уже отмечалось выше, не единственно возможной. Выбор
той или иной формы уравнений ошибок может существенно упростить
или, напротив, затруднить решение стоящей задачи, поэтому к вопросу
выбора модели ошибок БИНС следует каждый раз подходить, хорошо
представляя условия работы ЛА и требования к бортовому комплексу.
3.4. Особенности реализации численных
алгоритмов БИНС
Любые функциональные алгоритмы БИНС, построенные на общих
соотношениях п. 3.1, в частности, предложенные в п. 3.2, должны быть
представлены в дискретной форме для их реализации в БЦВМ в форме
численных алгоритмов. Вопросам построения численных алгоритмов
БИНС посвящена чрезвычайно обширная литература, в частности,
в работах [3.6,3.7] представлена значительная библиография по
этому вопросу. Как показывают многочисленные исследования, точность
функционирования БИНС во многом определяется
вычислительными особенностями предлагаемых алгоритмов. Эти алгоритмы должны
учитывать динамику объекта, частоты съема первичной информации
с датчиков (эти частоты в общем случае могут быть разными для
гироскопов и акселерометров), требуемые периоды обновления информации
о параметрах ориентации и навигации (эти периоды, как правило,
различны), а также вычислительные особенности и возможности бортовых
вычислительных систем.
В соответствии с разработанной выше структурой функциональных
алгоритмов численные их модификации также можно представить в
виде навигационных алгоритмов и алгоритмов ориентации. Существует
большое разнообразие в подходах, позволяющих перейти к таким
алгоритмам, и формах их представления. Некоторые из их, в частности,
алгоритмы интегрирования с переменным шагом, и ряд других
обсуждаются в монографии [3.7]. В статье [3.8] приводится обзор некоторых
«нетрадиционных» методов синтеза численных алгоритмов БИНС и их
сравнительный анализ с классическими подходами. В данном разделе
будут представлены подходы к составлению численных алгоритмов
БИНС на основе традиционных подходов, представленных, например,
в фундаментальном двухтомном труде [3.6].
По сути интегрирование уравнений БИНС сводится к нахождению
угловых параметров ориентации, проекций скоростей и координат по
показаниям гироскопов и акселерометров, установленных жестко на
борту объекта. При этом основная проблема заключается в том, что оси
чувствительности этих датчиков описывают сложные эволюции вместе
с объектом, и простое прямое интегрирование измеренных проекций
угловых скоростей и ускорений в виде
OCi{tm)
Ωάάτ, Vi(tm) =
Tiddr, i= 1,2,3, (3.55)
ίτη~ Ι
где cei(tm),Vi(tm) — интегральные показания гироскопов и
акселерометров на такте съема информации (такте интегрирования), не
позволяет получать адекватное решение в общем случае движения.
В выражении (3.55) приняты те же обозначения, что и в пп. 3.1-3.3,
момент времени im_i соответствует началу такта интегрирования.
Алгоритм ориентации. Классическое интегральное решение для
системы (3.33), определяющей матрицу направляющих косинусов,
можно записать [3.6]:
Л|"т-| _ /-lNm-l^-rSi(m-l)
О D О г, О D ,
£>т £>т-| аЦт) '
Sm -Ni(m-I) Sm '
„Si(m_0 г , sin <ftm /T ^ч . (1 -COS Фт),-^ s2 (3·56)
CBf(m) = Л--^(*тх) + -^ (*mx).
где m, m — 1 — индексы цикла интегрирования; Csm — матрица
направляющих косинусов, пересчитывающая проекции векторов из
связанной («Body») в навигационную («Navigation») систему координат
на соответствующие циклы интегрирования; Csi(m_l),CN'{m)_ —
матрицы направляющих косинусов, пересчитывающих проекции векторов
из одного положения связанной или навигационной систем координат,
соответствующего моменту (т — 1), в другое, соответствующее
моменту т; I — единичная матрица; фт, ζτη — векторы углов поворота
связанной и навигационной систем координат; <рт, ζτη — модули векторов
поворотов.
Векторы фт и ζτη вычисляются как интегралы на интервале
{tm — tm-i) от производных этих векторов, задаваемых известными
соотношениями для углов поворота:
-τ я 1-7 η 1 ,, <i>sin φ .— ,-r в .
φ = ω*Β + -φ χ ω*Β + ψ(1- 2{1_созф))Ф χ (Φ χ ωΙΒ).
C = ^ + ^x^ + ^(i-^^Kx(Cx^).
(3.57)
С целью снижения объемов вычислений в условиях малых углов
поворота на такте интегрирования выражения (3.57) упрощают:
φ = ωγΒ + -α{ί) xwfs,
α(ί)
Ur, (3.58)
< = "&■
Можно отметить, что порядок точности таких упрощенных
уравнений соответствует второму порядку относительно a(t) [3.6]. Базируясь
на этих упрощенных формулах и используя трапециидальный алгоритм
интегрирования, интеграл уравнения (3.58) можно записать:
Фтп =~йт +β„ι,
α(ί)
ωΙΒάττη, ат = a(tm),
х u)jB)ar,
(3.59)
*т « dt- [^Em_t +ш?Ет + (pZNm-, + PzNm)u^p]Tm+
τΝ.
+ Д.,+^)ЙР^С),
ΔΉ
Ν
VNdr,
где Тт — период обновления информации (tm — tm-\)\ α(ί) —
интегральные показания гироскопов на интервале Тт; βτη — компонента
от конического движения; pzNm — вертикальная компонента
относительной угловой скорости; йцр — орт вертикали места, направленный
вверх (параллельно оси Ζ навигационного базиса); Fq _ — матрица
кривизны земной поверхности:
ttiJV _
Fcn FCl2 О
Fc2l Fcw 0
0 0 0
Fcn
Fc2l
Teh
0+C2[feh), Fcn = C2]C22feh,
TL TL
C2\C22feh, FCo2 = (1 +C22feh),
(1-е)2
tl = Ro ~jk + h,
{i+c|3[(i-e)2-i]}3/2
(1 -e)2 - 1
{1 +C223[(1 -e)2 - 1])}{1 +{h/R*)^\+Cl,[{\-ef - 1]}'
здесь: dj — элементы матрицы С^; е — эксцентриситет Земного
эллипсоида; Rq — экваториальный радиус Земли; tl — меридианальный
радиус кривизны; h — высота над эллипсоидом.
,-FiN
вычисляется в процессе определения место-
Значение АД„
положения. _
Компонента βπι обычно называется «конической» («coning»),
поскольку отражает факт конического движения самого вектора угловой
скорости.
Алгоритм определения скорости. Численный алгоритм
определения скорости можно получить путем применения одной из численных
процедур интегрирования к первому уравнению систем (3.8) или (3.12).
,τ-ρΝ
-Ν
Vi = V*_{+ AV'sFm + AVq/CORti
AV
N
—Ν
^G/COR^*
1 —Ν
2(3T/G/CORm_,
—Ν
v G/CORm.
G/CORm -
t-m— I
^g/cor = 9N - *ie x Pie x Д") - Pm + *ie) * V" ,
AVN
SFm
U<$ZL+*)*?£:'
/(m-l)
i(2C^(m-" - C^(m-2' + I)AV
JVm-,
SFm -
AV
—JVm-I
SFm — ^B
ТП— I
С
Nm-, л— Bm-I
SFm .
Δ^ΐ
(3.60)
AV
J3tti-I
SFm
С
J3i(m-i)_s
J3,(t) aSF
СЙ = Wm + AVR0tm + AVScuL·
o(t)
^•B
aSFdr, vm = v(tm),
t-m— I
.— (l-cosam)_ _ 1 sinam._ ,_ _ .
AVRotm = 2 Qm x Wm + τ'1 )Qm x (Qm x Wm^'
AVs,
cul„
-(α(τ) χ afF + w(r) χ ω^)άτ,
t-m — \
AVScuIm = AVscul(im),
где Вод — положение связанной системы координат относительно
инерциальной в момент t после момента im-j; A1^sf„, — изменение
скорости на цикле (tm—tm-\), вызванное кажущимся ускорением;
A^g/cor — изменение скорости на цикле {tm - tm-\), вызванное
ускорением силы тяжести и кориолисовым ускорением (показана
приближенная форма, основанная на экстраполяции по прошлым_
значениям скорости); AT^Rotm — компенсационная_компонента AVsf,„,
обусловленная вращением вектора скорости; AVscuu — компонента
AVsf,„, обусловленная влиянием совместного воздействия ускорения
и угловой скорости (именуемая как «sculling»); vm — интегральные
показания акселерометров на интервале (tm — tm-\).
Алгоритм определения координат. Интегральный алгоритм
определения местоположения можно получить путем применения одной
из численных процедур интегрирования ко второму уравнению
систем (3.8) или (3.12), принимая во внимание медленную скорость их
изменения. При этом получим:
hm = hm-{ + Δ/im,
с
Ν
Ν,
E(m-I)
E(m)
/ +
E(m)
sin im
rE
E(m-I)
JN,
E(m)
(ёх) + ° Ти(их)атх),
pNdt
\ г
'2
(3pzNm_, - PZNm-i))uUpTrn +
-if.
+ (3F»m_i-F$mJ(u»pxARZ)
AR"
vNdt.
Ahn
—N Д nW
Vm_{ + -AVG/COR) Tm+ARSF,
(3.61)
AR
N
.77N,
-I)AVs^Tm + C
Bm~'AR
В
SFrr,
\&<%2! - <::; - w?jcr.» + c£::;
A"RSF„
^S
&RSFm = svm + A-RRotm + ARS,
crl„
Δ-RRot
a£
sin ат\ r ,_}_(]_ _ (1 - cos am) , ._ .
x (Sam xvm+am χ Sv),
AR
Scrlr
(6A^Scui(i) - Sa(t) χ afF +
+ Sv{t) xujfB+a(t) xv(t)
dt,
Sa(t)
Sv(t)
ωΒΒάτ\άτ, Sam = Sa(tm),
*тп — I f'Tn— |
t τ
■^B
aSFdT\dr, SVm = Sv(tm),
ь-т— | ί-τη— |
здесь: NE(m) — индекс, характеризующий ориентацию навигационной
системы координат_относительно вращающейся земной системы
координат в момент tm\ £m — вектор угла поворота, эквивалентный матрице
направляющих косинусов CNE{m~l).
В вычислительной схеме (3.61) использован метод трапеций при
получении выражений для аппроксимирующих интегралов.
Компонента ARsCiim, именуемая как «scrolling», аналогична
компоненте «sculling» в алгоритме скорости и определяет вклад в общее
приращение координаты, создаваемый движением с угловой скоростью
и линейным ускорением.
Сводка основных формул интегральных алгоритмов.
Уравнения (3.55)—(3.61) представляют собой интегральное решение для
систем (3.8), (3.12). Ниже для удобства приведены основные
соотношения для всех трех категорий алгоритмов.
(a(t) χ u>fB)dt — «conning»,
ίτη- Ι
t
VSl
cu[„
-(α(τ) χ afF +ν(τ) χ ωΒΒ)άτ,
(3.62)
(3.63)
Al^scuu = &Vscui(tm) - «sculling»,
ARs,
Γ 1
crl„
- [(5AVScu](t) - Sa{t) χ ofF + Sv(t) χ ωγΒ +
+a(t) χ v(t)]dt — «scrolling»,
sa(t) =
Sv{t) =
-1 t-m
t
ωγβάτ[άτΎ
-I
г
Sa
ov
f^v\pm)i
(3.64)
(3.65)
(3.66)
t-m — \ t-m— I
α(ί) =
'IB
άτ,
α„
oc{tm),
(3.67)
v(t)
a,sFdr,
V(tm).
(3.68)
Окончательные дискретные алгоритмы БИНС получаются на
основе приведенных выше интегральных путем внесения некоторого
предположения о характере изменения угловой скорости и ускорения
на шаге интегрирования. Чаще всего предполагают полиномиальную
аппроксимацию этих векторов:
<DfB = Ao, +Au{t-tl-l) + A2i(t-tl-])2 + ...,
a§F = Во, + Bh(t - *,_,) + B2i{t - ί/-,)2 + ...,
где I — высокоскоростной цикл вычислений (внутри медленного
цикла т); Ац,Вц — коэффициенты векторов, выбранные из соображения
наилучшего приближения векторов wfB и afF от цикла I — \ до I.
При линейной аппроксимации
—.в
fB = Ao, +Au(t-tl-l)
(3.69)
для конического движения получаем:
1,- ! л- ν *-
χίαζ-ι + gAa/_,) χ Δα/
от im_, до tr,
и
α ι
Σ
Δα; от im_, до ί/, Δα/
da,
где Δα/ — сумма интегралов от датчика угловой скорости на интервале
от ί — 1 до I.
При рассмотрении движения типа «sculling» вычислительный
алгоритм, базирующийся на линейной аппроксимации угловой скорости
примет вид:
ufB = A0l+Ah(t-tl-l), a%F = Bol+Bil{t-ti-l), (3.70)
и в соответствии с [3.6],
AVscuim = AVscui, при tm,
AlAjcuu =^2[{αι~] + 5Δα'-ι) χ Δν'
+
+ (уι-1 + -Avi-ij χ Δα/
от im_[ до ί/, (3.71)
щ
^Δν;, Αν ι
άϋ.
и-,
где Αν ι — суммарные интегральные показания акселерометров на
быстром цикле от (I — 1) до I.
Для случая интегрирования координат при принятой линейной
аппроксимации первичных данных от гироскопов и акселерометров
алгоритм примет вид:
SRscrlBi
1
5V;-,+^(AVi-AVi_,)
χ Δα/-
Ά
Sai-\ + 94(Δα/ - Δα/-1)
+
Δα/_ι - -(Δα/ -Δα/_,)
χΔνί+
1
2160
Δ^_,--(Δ^-Δ^_,)
(Δα;-Δα;_,)χ(Δνί-Δνί_,),
Sal = Σ, Δι?αί ОТ tm-[ ДО ί/, 5Qm = Sal При ίη
(3.72)
Τ1
ASal = αι-{Τι + ^(5Δα; + Δα,_,),
5ν/ = ^ Δ5ν/ от im_[ до ί(, SVm = Svi при im,
/
ASyi = Ъ-М + ^(5АЦ + Δ^-ι).
где Т/ — такт быстрого цикла алгоритма.
Приведенные численные алгоритмы не гарантируют сохранения
фундаментальных свойств матриц ориентации. Учитывая это,
приведенные уравнения необходимо дополнить уравнениями нормировки
матриц.
Список литературы к главе 3
3.1. Андреев В. Д. Теория инерциальной навигации. Ч. 1. Автономные
системы. М.: Наука, 1966.
3.2. Помыкаев И. И., Селезнев В. П., Дмитроченко Л. А. Навигационные
приборы и системы. М.: Машиностроние, 1983.
3.3. Interface Control Document GPS 200C, Revision IRN-200C-002, AR1NC
Research Corporation.
3.4. Липтон Выставка инерциальных навигационных исстем на подвижном
основании.
3.5. Бромберг П.В. Теория инерциальных систем навигации. М.: Наука,
1979.
3.6. Savage P. G. Strapdown Analitics. StrapdownAssociatews. Inc., Maple
Plain, Minnesota, 2000.
3.7. Лебедев Д. В., Ткаченко А. И. Системы инерциального управления.
Алгоритмические аспекты / Отв. ред. В. В. Козорез. АН УССР. Ин-т
кибернетики им. В. М. Глушкова. — Киев: Наукова думка, 1991. — 208 с.
3.8. Литманнович Ю.А., Марк Дж.Г. Прогресс в разработке алгоритмов
БИНС на Западе и Востоке в материалах Санкт-петербургских
конференций: обзор за десятилетие // Гироскопия и навигация. 2003. №3 (42).
С. 52-67.
Глава 4
ИНЕРЦИАЛЬНЫЕ ЧУВСТВИТЕЛЬНЫЕ
ЭЛЕМЕНТЫ БЕСПЛАТФОРМЕННЫХ
ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ
Инерциальные чувствительные элементы (ИЧЭ) бесплатформенных
инерциальных навигационных систем (БИНС) включают
гироскопические измерители угловых скоростей и углов поворота основания, а
также акселерометры. Технико-экономические требования, предъявляемые
к ИЧЭ, в значительной мере определяются их объектной
ориентированностью. Это, в частности, требования к точностным характеристикам,
динамическому диапазону измерений, времени готовности,
энергопотреблению, надежности, массогабаритным и стоимостным показателям.
Специфическими условиями эксплуатации ИЧЭ БПЛА являются:
широкий динамический диапазон измеряемых угловых скоростей и
ускорений, воздействие высокодинамичных возмущений —
широкополосной случайной вибрации и больших линейных перегрузок;
специфическими являются также требования малых времени готовности,
энергопотребления, массогабаритных показателей.
На рис.4.1 представлены требования к точностным
характеристикам гироскопических ИЧЭ в зависимости от областей их применения,
включая применение в БПЛА [4.1].
Во всем потребном диапазоне точностей гироскопов принято
выделять поддиапазоны: сверхвысоких точностей (более 5· 10-4 град/ч),
высоких и средних точностей (5 · Ю-4 ... 10_| град/ч) и низких
точностей (менее Ю-1 град/ч). В инерциальных комплексах БПЛА
используются гироскопы высокой, средней и низкой точности: динамически
настраиваемые (ДНГ), в частности, роторные вибрационные (РВГ);
лазерные (ЛГ) и волоконно-оптические (ВОГ); волновые твердотельные
(ВТГ) и микромеханические (ММГ). На рис. 4.2 представлены
диапазоны точностных характеристик перечисленных гироскопов.
Анализ данных, приведенных на рис. 4.1 и 4.2, позволяет
утверждать, что современный уровень развития гироскопической техники
дает возможность обеспечить требуемый уровень точности измерения
параметров угловой ориентации несколькими типами гироскопов.
Аналогично, измерение линейных ускорений с необходимой точностью так-
ΙΟ"4 ΙΟ"3 ΙΟ"2 ΙΟ"1 1 10 ΙΟ2
Случайный дрейф, град/ч
Рис. 4.1. Требования к точностным характеристикам гироскопов
Случайный дрейф,град/ч.
Рис. 4.2. Диапазоны точностных характеристик гироскопов
же может осуществляться несколькими типами акселерометров. Таким
образом, выбор того или иного ИЧЭ для БИНС конкретного БПЛА
определяется требованиями к его эксплуатационным характеристикам,
стоимости, а также, в определенной мере, традициями преемственности
и разработки ИЧЭ на конкретном предприятии.
Ниже обсуждаются принципы построения, источники погрешностей
и основные характеристики ИЧЭ применительно к их использованию
в БИНС БПЛА.
4.1. Динамически настраиваемые гироскопы
ДНГ относятся к классу роторных вибрационных гироскопов
с упругим подвесом носителя кинетического момента, в которых
возможна реализация резонансной или динамической подстройки,
в значительной мере освобождающей ротор от упругой связи с
основанием. По сравнению с классическими, в частности с поплавковыми
гироскопами, ДНГ обладают рядом достоинств, к числу которых
следует отнести: сравнительно малые массогабаритные характеристики
и энергопотребление; более высокие надежность и технологичность
конструкции; стабильность основных параметров; сравнительно
низкий уровень шумов; малое время готовности; сравнительно низкая
стоимость.
Принципы построения разнообразных ДНГ, их теория и
конструктивные решения представлены, например, в [4.2-4.6]. Рассмотрим
здесь два характерных типа ДНГ, один из которых — двухстепенный
РВГ, относится к гироскопам низкой точности и может использоваться
в БИНС БПЛА с коротким сроком жизни, другой — трехстепенный
ДНГ с внутренним двухколечным подвесом ротора, относится к группе
гироскопов средней и высокой точности и может использоваться в
высокоточных БИНС БПЛА дальнего действия.
Двухстепенный роторный вибрационный гироскоп. Схема
двухстепенного РВГ с несимметричным внутренним торсионным
вращающимся подвесом представлена на рис. 4.3.
На основании / установлен приводной двигатель 2, на валу 3
которого с помощью торсионов 4 укреплен ротор 5. С основанием
связана система координат Οξηζ (начало О — в точке пересечения
осей вала и торсионов, ось ОС, — ось вращения вала); с ротором
связана система координат Oxyz (оси Ox,Oy,Oz — главные центральные
оси инерции, оси Ох и Оу расположены в экваториальной плоскости
ротора, ось Ох — ось торсионов). Основание вращается с абсолютной
угловой скоростью, проекции которой на его оси составляют ωξ,ωη,ως.
Торсионы 4, образующие подвес, имеют конечную жесткость на
кручение вокруг оси Ох и существенно большую, практически равную
бесконечности, жесткость на изгиб. Ротор 5 имеет две степени свободы
относительно основания — вращается вместе с валом приводного
двигателя с угловой скоростью Ω и может поворачиваться относительно
вала вокруг вращающейся оси торсионов Ох на угол а. При этом ротор
поворачивается и вокруг осей основания Οξ и Οη на углы 7 и ^
соответственно. Связь между углами а,"/ и δ определяется соотношением
в = ае>а\ 0=7+j5, (4.1)
где j — мнимая единица.
Рис. 4.3. Схема роторного вибрационного гироскопа — датчика угловой
скорости
Для реализации режима измерения компоненты ω^η угловой
скорости вращения основания, лежащей в плоскости осей Οξ, Οη и
имеющей на эти оси проекции ωξ, ωη, используются измерительные
преобразователи 6 углов η и δ, управляющие сигналы которых через
блоки усиления и обработки информации 7, включающие, в частности,
усилители, фильтры и корректирующие звенья, поступают на
преобразователи моментов S, формирующие компенсационные моменты по
осям Οξ и Οη. Выходными сигналами РВГ являются падения
напряжения на эталонных резисторах, включенных последовательно с
управляющими обмотками преобразователей моментов, или управляющие
напряжения U\, XJi этих преобразователей.
Сущность измерения РВГ угловой скорости основания заключается
в следующем. При вращении основания с абсолютной угловой скоро-
стью ω^η возникает гироскопический момент Μγ (рис. 4.3):
ΜΓ = Ηχωξη, Η = ΛΩ, (4.2)
где Jz — момент инерции ротора относительно оси Οζ; Η —
кинетический момент гироскопа. Мг гармонически проектируется на ось
торсионов Ох и· порождает гармонические колебания ротора по углу
а вокруг этой оси. В свою очередь в соответствии с (4.1) возникают
угловые движения ротора по углам η и δ, несущие информацию об
ωζ и ωη. Компенсационные моменты, развиваемые преобразователями
моментов 8, парируют соответствующие гироскопические моменты по
осям Οξ и Οη, а напряжения U\ и XJi на входе преобразователей
моментов пропорциональны соответственно ωξ и ωη:
Ut=—£-u>4, υ2 = -£-ωξ, (4.3)
•''■дм Л дм
где Кт — коэффициент передачи преобразователя моментов по
напряжению.
Этот режим измерения ωζ и ωη реализуется при выполнении
условия резонансной настройки РВГ, достигаемой выбором скорости
вращения вала, на основе соотношения
а^й^Т,· (44)
где с — угловая жесткость торсионов на кручение; Jx — главный
момент инерции ротора относительно экваториальной оси Ох(Оу).
Остановимся кратко на источниках основных погрешностей
РВГ [4.4-4.7]. К числу инструментальных погрешностей следует
отнести погрешности, порождаемые поступательными и линейными
вибрационными перегрузками основания при наличии у ротора
статической несбалансированности — смещения его центра масс
из неподвижной точки О вдоль осей Oz и Оу (рис. 4.3). Влияние
динамической неуравновешенности на погрешности РВГ проявляется
главным образом при неравножесткости опор главного вращения,
Инструментальные погрешности РВГ имеют место также при
нарушении условия резонансной настройки — при расстройке ИЧЭ
вследствие отклонения параметров РВГ от их номинальных величин.
Расстройка F РВГ определяется разностью между его собственной
динамической частотой
f^u^-fF**· (45)
где χ = [Jz/Jx) — 1, и угловой скоростью вращения вала Ω:
F = j£-+xW-n. (4.6)
Приращение расстройки AF при отклонении параметров РВГ от
номинальных значений можно приближенно представить в виде полного
дифференциала функции F
где Ас, ΔΩ, Δχ — вариации угловой жесткости торсионов на кручение,
угловой скорости вращения вала, параметра χ соответственно; индекс
«о» у частных производных означает, что их следует вычислять при
значениях с, Ω, χ, равных номинальным.
Подставляя (4.6) в (4.7) и учитывая тот факт, что при
номинальных с, Ω, χ выполняется условие (4.4), получим:
.(Ас ΔΩ\
(4.8)
Таким образом, для уменьшения расстройки следует обеспечивать
равенство χ = 1, однако точное выполнение этого условия
невозможно вследствие того, что Jz < 2JX. На практике параметр χ
достигает 0,97-=-0,98.
Существенным фактором, ограничивающим точностные
характеристики РВГ, является температурный дрейф его нулевого сигнала,
порождаемый при вариациях температуры относительно номинальной
не только расстройкой AF, но и смещением нулей измерительных
преобразователей углов и электронных блоков, изменением
крутизны измерительных преобразователей углов и преобразователей
моментов, а также другими факторами, обусловленными взаимосвязанными
механическими, теплообменными и термоупругими процессами [4.8].
Уменьшение температурных погрешностей РВГ достигается за счет
их алгоритмической компенсации, реализуемой на основе
предварительной калибровки параметров моделей погрешностей, а также путем
увеличения коэффициентов передачи гироскопа от моментов к углу а,
коэффициентов измерительных преобразователей и преобразователей
моментов [4.9].
Методические погрешности РВГ порождаются проекцией ως
абсолютной угловой скорости основания на ось вращения приводного
двигателя, а также проекциями угловых ускорений основания ώς,ώη
на его оси. Наиболее существенная методическая погрешность РВГ
порождается угловыми вибрациями основания вокруг осей Οξ,Οη на
частоте 2Ω. Ее исключение невозможно, так как это связано с
необходимостью выполнения указанного ранее недостижимого условия χ = 1.
Указанные факторы методического характера предопределяют
сравнительно невысокую точность РВГ. Характерные параметры РВГ,
работающего в режиме датчика угловой скорости (ДУС), представлены
в табл. 4.1.
χ
4
я
ироск
ваи
о
Ξ
Χ
03 -
ПИК
05-0
КИНД
05-089
КИНД
05-081
о
ю
о
MGLS
О
О
Ξ
СО
ы
τ
s:
h-
,
гвк
ЧЭ
гвк
о
ΒΚ-Ι
-
Γ-ΙΜ
03
о.
кинд
05-0549
<
ю
S
ϊέ
теристик
Харак
ПНППК
^
Μ (FRA
О
<
1Л
"fi
JO
РПКБ
Темп-
Авиа
С
S
S
X
±30
±300
±150
о
-Н
-Н
о
cn
-Н
о о
1£> О
-Н"
-Н
go
^5
±200
±50
±130
150
+1
±30
ю
-н
<L * о
ОН ИЗМ
угловь
ей, град/
Диапаз
ряемых
скорост
1
±60
±60
1
1
1
ю
cn
-н
ю
-Н
о
ю
-Н
±25
1
1
ие зав
от ускор
ад/ч
II ί
1
1
1
1
1
1
ю
cn
-н
ю
-Н
cn
-н
СО
-Н
1
1
CL
Дрейф, пропо
циоиальный
ускорению,
град/ч-g
0.3
0,15
0,15
2,1
(Г>
0,3
CM
о
' гм
0,05
0,
0,1
' CM
So'
о
Ш
0.15
ная
яющая
. град/ч
Случай
составл
дрейфа
1
1
1
1
1
I
1
I
о
I
i
о
■"Г
1
—
ильиость
бного
циеита
1st
1
1
1
1
1
|
1
о
см
о
1,2
~"
Потребляемая
мощность, Вт
τ
26x3
25x30
25x30
ιΛ
2lx
см
X
см
СП
X
со
СО
(Г>
χ
см
СО
X
СП
СО
Ш
СО
X
см
бхб
ю
о
СО
X
см
33x27
со
h-
ιΛ
_
Габариты:
диаметр, ми
о
со
о
со
о
со
СО
СО
о
см
о
см
см
460
о
о
со
о
τ
Масса,
Τ
1100
11000
11000
7500
000
СО
30000
Ресурс
о
атковремен
* - кр
Существенно более высокоточным ДНГ является ДНГ с
двухколенным упругим подвесом, в котором за счет динамической
настройки ротор освобождается от упругих связей с валом приводного
двигателя.
ДНГ с двухколенным упругим подвесом. Схема этого
прецессионного ДНГ, работающего в режиме измерения угловых скоростей,
представлена на рис. 4.4.
Рис. 4.4. Схема динамически настраиваемого гироскопа — датчика угловой
скорости
На основании / установлен приводной двигатель 2, на валу 3
которого с помощью внутреннего упругого карданного подвеса укреплен
ротор 4. Карданный подвес составлен идентичными кольцами 5, 6,
параллельно соединенными с валом и ротором упругими
элементами 7-10. При этом кольцо 5 соединено с валом упругим элементом 7,
а с ротором — элементом S; кольцо 6 соединено с валом упругим
элементом 9, а с ротором — элементом 10. С основанием связана
система координат Οξηζ (начало О — в точке пересечения осей вала и
упругих элементов, ось Οη — ось вращения вала); с ротором связана
система координат Oxyz (оси Οχ,Οζ расположены в экваториальной
плоскости ротора и направлены по осям закрутки упругих элементов 10
и 8 соответственно). Поворот ротора относительно вала вокруг оси Ох
на малый угол а осуществляется при закрутке упругих элементов 10
и 7, а поворот ротора на малый угол β вокруг оси Οζ — при закрутке
упругих элементов 8 и 9. При этом жесткость на изгиб упругих
элементов не бесконечно велика, поскольку в силу особенностей кинематики
схемы при одновременном движении ротора по углам а и β имеет место
угол поворота ротора вокруг оси Оу и, следовательно, изгиб упругих
элементов в плоскости χζ [4.5]. На рис. 4.4 обозначены измерительные
преобразователи //, 12, осуществляющие измерение углов η и δ
поворота ротора относительно основания соответственно вокруг осей Οξ и
Οζ, а также преобразователи моментов 13, 14, обеспечивающие
формирование перекрестных компенсационных моментов, воздействующих
на ротор соответственно вокруг осей Οξ и Οζ. Измерительные
преобразователи //, 12 осуществляют управление преобразователями 13, 14
соответственно через блоки усиления и обработки информации 15, 16.
Управляющие напряжения преобразователей моментов, являющиеся
выходными напряжениями ДНГ-ДУС, обозначены U],U2-
Отличительной особенностью этого гироскопа является
компенсация приложенных к ротору моментов сил упругости, создаваемых
упругими элементами, динамическими моментами сил инерции,
развиваемыми кольцами подвеса ротора. Это становится возможным при
выполнении условия динамической настройки:
c-(2JXk- JyK)Q,2 = 0, (4.9)
где Ω — угловая скорость вращения вала приводного двигателя; с —
приведенный коэффициент угловой жесткости упругих элементов на
кручение; JXK,JyK —главные экваториальный и осевой моменты
инерции колец относительно осей Ох, Оу соответственно.
При динамической настройке ротор ДНГ освобождается от упругих
связей с основанием и при вращении с угловыми скоростями ωξ, ως
прецессирует вслед за основанием под действием перекрестных
компенсационных моментов. Для выходных сигналов U\, Vi имеем:
С/, = -^ωξ, υ2 = -£-ως, (4.10)
■"■дм -"-дм
где Клм — коэффициент передачи преобразователя моментов по
напряжению; Η — кинетический момент гироскопа.
Укажем основные источники погрешностей ДНГ-ДУС [4.5,4.6].
Основные методические погрешности гироскопа определяются
приложенными к ротору диссипативными моментами, а также моментами
сил инерции, порождаемыми ускоренным вращением основания.
Инструментальные погрешности определяются динамической
расстройкой (нарушение условия (4.9)) и возмущающими моментами Μβξ
и Μβζ по осям Οξ и Οζ соответственно. Основными причинами
динамической расстройки являются нестабильность Ω, температурные
и временные нестабильности угловой жесткости упругих элементов,
температурные вариации моментов инерции колец JXf, Jyit. Структуру
возмущающих моментов Μβζ, Μβζ упрощенно можно представить
следующим образом:
ΜΒς = М9 + ηζπιξ + ηξ7ηΚΒξ + ηζηητηζη\
Μβζ = Μς+ης1ΎΙζ + ηζ1ΎΙΚΒζ + ηςηηπΐςη,
где ηζ,ηη,ηζ — компоненты перегрузок по осям основания ξ, η, ζ;
М9,М9 — моменты, не зависящие от перегрузок; τηζ,πΐζ —удельные,
отнесенные к единице перегрузки, весовые коэффициенты моментов,
пропорциональных первой степени перегрузки и нормальных к ней;
"τ-κΒξ,^τ-κβζ —удельные, отнесенные к единице перегрузки, весовые
коэффициенты квадратурных моментов, пропорциональных первой
степени перегрузки и коллинеарных ей; τη^η,τηζη —удельные, отнесенные
к произведению единичных перегрузок весовые коэффициенты
моментов, пропорциональных произведению перегрузок.
Моменты, не зависящие от перегрузки, порождаются пондеромотор-
ными силами воздействия сторонних магнитных полей на
ферромагнитные элементы ротора и силами воздействия электрических полей,
например, на элементы измерительных преобразователей, силами
газодинамической природы, воздействующими на ротор, влиянием привода.
Моменты, зависящие от первой степени перегрузки и нормальные
к ней, порождаются гравиинерциальными силами при наличии
смещения центра масс ротора относительно неподвижной точки подвеса.
Квадратурные моменты возникают вследствие технологического
несовершенства упругого подвеса, в частности вследствие непересечения
его осей; моменты, пропорциональные произведению перегрузок,
порождаются неравножесткостью конструкции подвеса ротора в осевом
и радиальном направлениях.
Отнесенные к кинетическому моменту Η гироскопа моменты (4.11)
определяют вариант модели дрейфов ДНГ-ДУС. Параметры этой
модели в свою очередь зависят от температуры. Вариации
температуры относительно номинальной порождают также изменение крутизны
измерительных преобразователей углов и, что весьма существенно,
крутизны Кт преобразователей моментов.
Высокий уровень метрологических характеристик ДНГ-ДУС
можно обеспечить на основе использования этой или других
адекватных моделей дрейфов [4.3,4.5,4.6] путем предварительной калибровки,
а также уточнения параметров дрейфов в процессе движения
объекта [4.10].
В табл.4.1 представлены основные характеристики ряда серийно
выпускаемых ДНГ-ДУС.
4.2. Волновые оптические гироскопы
Под термином «волновые оптические гироскопы» обычно понимают
два типа гироскопов — лазерный гироскоп (ЛГ) и
волоконно-оптический гироскоп (ВОГ). Носителем информации об угловой скорости
вращения основания в этих гироскопах являются электромагнитные
волны. В конструкциях ЛГ и ВОГ эти волны оптического
частотного диапазона распространяются по замкнутому оптическому контуру
в двух противоположных направлениях и при вращении контура в
процессе его полного обхода проходят разный путь. Разность оптических
путей волн в соответствии с эффектом Саньяка пропорциональна
угловой скорости вращения контура. В ЛГ эта разность трансформируется
в разность частот, а в ВОГ — в разность фаз волн; соответствующие
измерительные преобразователи этих параметров волн формируют
выходные сигналы гироскопов.
Достоинствами волновых оптических гироскопов являются
широкий динамический диапазон измерений, линейность и стабильность
выходной характеристики, малая чувствительность к перегрузкам и,
в частности, к ориентации входной измерительной оси относительно
направления силы тяжести, высокая надежность и малое время
готовности, малая потребляемая мощность. Все эти качества
предопределяют высокую эффективность использования ЛГ и ВОГ в БИНС.
В настоящее время ЛГ широко применяются в БИНС разнообразных
подвижных объектов, в частности БПЛА. В последние годы наметился
существенный прогресс и в построении БИНС на ВОГ в связи с
повышением качества оптического волокна и интегральной оптики, а также
в связи с совершенствованием компенсационных схем ВОГ.
Теоретические основы построения волновых оптических
гироскопов, особенности конструкций подсистем, их метрологические
характеристики представлены, например, в [4.11-4.21]. Ниже кратко
обсуждаются принципы построения ЛГ и ВОГ, а также основные источники
их погрешностей.
Кольцевой лазерный гироскоп. Основу ЛГ составляет кольцевой
оптический квантовый генератор (КОКГ) (рис. 4.5) на основе
моноблочного кольцевого резонатора оптического диапазона, в котором
генерируются волны λ| и Аг, распространяющиеся встречно по
замкнутому оптическому контуру, образованному оптическими каналами и
зеркалами (или призмами полного внутреннего отражения). Помимо
квадратной конфигурации резонатора, представленной на рис.4.5,
возможна и треугольная, однако квадратная представляется более
предпочтительной, особенно для ЛГ небольших размеров, вследствие
возможности достижения в этом случае меньшего случайного дрейфа [4.11].
Собственно генерация волн осуществляется в активной зоне
оптического канала, заполняемой смесью газов: рабочего — неона (Ne)
и примесного — гелия (Не). При подведении высокого напряжения
(порядка 2-3 кВ) от генератора накачки к симметрично расположен-
ным электродам в активной среде возникает электрический разряд и
электронные удары возбуждают атомы примесного Не, переводя их на
верхние энергетические уровни. Затем за счет неупругих столкновений
атомы Не передают свою энергию атомам Ne и обеспечивается
инверсная населенность верхних энергетических уровней Ne. При переходе
на нижние энергетические уровни атомы Ne излучают фотоны или
световые волны, частота которых зависит от разности энергетических
уровней, между которыми осуществляется переход. В КОКГ эти
переходы реализуются в режиме индуцированного излучения,
осуществляемого под действием внешнего поля. При этом индуцированные
кванты света неотличимы от квантов, порождающих излучение, по длине
волны, состоянию поляризации, направлению распространения и фазе.
В КОКГ качестве «внешнего» электромагнитного поля, воздействую-
Зеркало
Анод
Зеркало
Моноблок
резонатора
Призма
Интерференционная
картина
Оптический
канал
Анод
Зеркало
Активная
Катод сРеда
» Ме^\/лг х \Полупрозрачное
Двухэлементный-^-^ \ ^
фотоприемник —J
Рис. 4.5. Схема кольцевого оптического квантового генератора
щего на инверсную среду на резонансной частоте одного из переходов,
используются волны, порождаемые собственно Ne и возвращающиеся
в исходную точку активной среды после полного обхода оптического
контура КОКГ. Таким образом строится оптический генератор, в
котором оптические каналы с зеркалами составляют кольцевой оптический
резонатор (рис.4.5).
При достаточном уровне мощности накачки обеспечивается одно-
модовый режим, при котором в КОКГ генерируются когерентные
монохроматические бегущие волны λ| и Аг, распространяющиеся встречно
по замкнутому оптическому контуру (рис. 4.5) и в первом приближении
являющиеся независимыми. Длина генерируемой волны λ определяется
соотношением: т
λ=Ν' (4·12)
где L — оптический периметр резонатора; N — целое число.
При вращении КОКГ вокруг входной оси, нормальной плоскости
кольцевого резонатора, в процессе полного обхода его замкнутого
оптического контура встречные волны λ|, Аг проходят разные пути,
причем эта разность 2AL такова [4.11,4.15]:
4S
2Δ£ = —Ω, (4.13)
с
где Ω — абсолютная угловая скорость резонатора; S —площадь,
заключенная внутри замкнутого контура L; с — скорость света в вакууме.
Каждая из волн λ|, Аг, получая при вращении приращение
оптического пути ΔΙ/, независимо в соответствие с (4.12) изменяет свою
длину и частоту, а разность частот F = ν\ — νι равна:
ля
Р=-П, (4.14)
где i/[, U2 — частоты волн λ[, Аг соответственно.
Таким образом, в ЛГ разность частот F встречно
распространяющихся волн λ|, Аг пропорциональна угловой скорости Ω вращения
КОКГ, причем масштабный коэффициент ЛГ таков:
ля
К = -. (4.15)
В известных конструкциях ЛГ величина масштабного коэффициента
имеет порядок 105 Гц/(рад/с).
Измерение разностной частоты F осуществляется системой съема
информации ЛГ. Лучи А| и Аг через полупрозрачное зеркало и
смесительную призму выводятся из резонатора и поступают на
двухэлементный фотоприемник, где интерферируют (рис.4.5). Интерференционная
картина характеризуется распределением в плоскости фотоприемника,
например вдоль оси х, интенсивности света /, которая в
предположении, что волны плоские и имеют одинаковую поляризацию,
такова [4.14]:
I = Io (\ + cos(2nFt- -jxe + Aipj J, (4.16)
где I0 — амплитуда интенсивности Г, ε — малый угол расхождения
между падающими на фотоприемник лучами); Αφ — квазипостоянный
фазовый сдвиг.
При отсутствии вращения ЛГ (F — 0) интерференционная картина
стационарна и имеет пространственный период, составляющий λ/ε
(~ 3 мм); при вращении ЛГ интерференционные полосы
перемещаются по поверхности фотоприемника в направлении, определяемом
знаком Ω, а интенсивность света / в фиксированной точке
изменяется с частотой F. Фототок /ф на выходе фотоприемника,
имеющего размер чувствительной поверхности много меньший периода λ/ε,
пропорционален / и также изменяется с частотой F. Таким образом,
по частоте изменения фототока можно судить об измеряемой угловой
скорости вращения Ω. Используя два фотоприемника, разнесенные
вдоль оси χ на четверть периода интерференционной картины λ/4ε,
что обеспечивает сдвиг фаз соответствующих фототоков на π/2 со
знаком, определяемым направлением смещения интерференционных
полос, с помощью фазового детектора определяют знак измеряемой
угловой скорости Ω.
Заметим, что с позиций наблюдателя, связанного с резонатором,
интерпретация принципа работы ЛГ заключается в том, что λ| и Аг,
распространяющиеся навстречу друг другу, образуют по периметру
резонатора стоячую волну, узлы которой при вращении ЛГ сохраняют
свое положение в инерциальном пространстве, и в этом смысле стоячая
волна моделирует инерциальную систему отсчета. Можно показать,
что частота прохождения узлов или пучностей стоячей волны
относительно любой точки оптического контура совпадает с разностью
частот F.
На практике ЛГ обычно используют в качестве интегрирующего
гироскопа для определения приращения угла поворота КОКГ,
порождаемого Ω на измерительном интервале Т. В силу (4.14), (4.15) имеет
место соотношение:
Аат —
1 Δ,φτ
~К 2π
или Аат
_1_
~К
м.
(4.17)
где Аат, Αφτ — соответственно приращение угла поворота КОКГ и
фазы фототока на интервале времени Т\ Μ —реверсивная (с учетом
знака угловой скорости Ω = Αάτ) сумма периодов фототока на
интервале Т.
На рис. 4.6 представлена схема определения Аат по сигналам двух
фотоприемников ФП| и ФПг.
ФП1
ФП2
0082πΡί.
Фазовый
детектор
Формирователь
импульсов
cos^Ft±it/2)
Реверсивный
счетчик
Δα-ι
Рис. 4.6. Схема определения приращения угла поворота лазерного гироскопа
Каждому из Μ периодов ставится в соответствие импульс,
поступающий с формирователя импульсов на реверсивный счетчик; знак
импульса формируется фазовым детектором. В соответствии с (4.17)
цена импульса равна \/К (~ 1,5 угл.с.)· Реверсивная сумма импульсов
дает приращение угла поворота Ααχ.
Соотношение (4.14) определяет идеальную выходную
характеристику ЛГ. Реальная характеристика, существенно от нее отличающаяся,
представлена на рис. 4.7, где Fc — смещение нуля выходной
характеристики; 2ΔΩ3 — зона захвата (синхронизации частот), определяющая
зону нечувствительности ЛГ.
Идеальная
характеристика
Характеристика,
учитывающая
сдвиг нуля.
Реальная
характеристика
Характеристика,учитывающая
синхронизацию частот и сдвиг
нуля.
Рис. 4.7. Выходные характеристики лазерного гироскопа
Основным фактором, определяющим смещение нуля Fc, является
невзаимность резонатора, то есть неодинаковость условий
распространения встречных волн в нем, главным образом, за счет неодинаковости
коэффициентов преломления среды для волн. В этом случае разность
оптических путей для встречных волн порождает разность частот Fc-
Уменьшение смещения нуля обеспечивается в ЛГ
симметрированием расположения электродов, двухканальностью системы накачки со
стабилизацией токов газового разряда, симметричным расположением
диафрагмы по отношению к активной среде, магнитным
экранированием КОКГ, исключением температурных градиентов в резонаторе.
Существенным фактором искажения идеальной выходной
характеристики ЛГ является дисперсия активной среды. При этом активная
среда уменьшает расстройку частот F, особенно интенсивно в области
малых значений F, что вносит вклад в нелинейность реальной
выходной характеристики ЛГ, порождает вариации его масштабного
коэффициента К. Вариации масштабного коэффициента имеют место также за
счет температурных колебаний оптического периметра резонатора L.
Указанные обстоятельства определяют необходимость
стабилизации частоты генерации в ЛГ. Это достигается через стабилизацию
оптического периметра резонатора, для чего используется система
регулирования (стабилизации) периметра — экстремальная система
управления с активным поисковым сигналом, обеспечивающая
удержание частоты генерации и в точке, где достигается максимум пи-
ка кривой усиления и, следовательно, максимум амплитуды
фототока [4.13,4.16].
Зона захвата 2ΔΩ3 (~ 2 · 102 град/ч), имеющая место на реальной
выходной характеристике ЛГ (рис.4.7), обусловлена взаимной связью
встречных волн, возникающей, главным образом, вследствие
взаимного обратного рассеяния энергии каждого из лучей в направлении
другого за счет неидеальности поверхности зеркал оптического
контура резонатора. При этом существенный вклад в формирование ΔΩ3
вносят неоднородные потери в резонаторе [4.11,4.15]. Для исключения
влияния синхронизации частот и нелинейности характеристики ЛГ,
которые проявляются при работе в области малых измеряемых скоростей
вращения, помимо совершенствования технологии шлифовки зеркал
и качества изготовления оптических каналов резонатора, используют
несколько способов начального искусственного расщепления частот
встречных волн («подставку»). К их числу следует отнести, в
частности, подставку на основе принудительного вращения резонатора вокруг
измерительной оси с постоянной угловой скоростью Ωπ > ΔΩ3,
подставку на основе эффектов Фарадея и Френеля-Физо.
Одним из наиболее
распространенных типов подставки является
виброподставка на основе
гармонического принудительного
вращения (вибраций) резонатора вокруг
входной оси с угловой скоростью
Ωπ = ΩποδΐηωΒί, что
обеспечивает периодическое смещение рабочей
точки выходной характеристики ЛГ
из зоны нечувствительности 2ΔΩ3
(рис.4.8).
Угловые вибрационные
движения резонатора, устанавливаемого
в этом случае в упругом
виброподвесе, реализуются путем
гармонического силового воздействия на
резонатор через пьезоэлементы на
частоте подвеса ωΒ (ωβ/2π ~ 400 Гц).
При этом амплитуда вибраций составляет 2-3 угловые минуты, а
амплитуда их угловой скорости на несколько порядков превышает зону
нечувствительности (Ωπο 3> ΔΩ3).
Введение виброподставки обеспечивает ЛГ осуществление
измерений подавляющую часть времени на линейном участке выходной
характеристики; одновременно на один-два порядка уменьшается собственно
зона захвата.
Для исключения из выходного сигнала вклада, вносимого
виброподставкой, угловую скорость виброколебаний измеряют, например, с
помощью индукционного датчика скорости, формируют соответствую-
^ Ωπ=Ωπο sint^gi
Рис. 4.8. Угловая скорость
виброчастотной подставки Ωπ
щую ей последовательность импульсов, каждый из которых обозначает
эталонированное {\/К) приращение угла поворота за счет
виброколебаний, и на измерительном интервале Τ в реверсивном счетчике
осуществляется процедура вычета суммы этих импульсов из общей
суммы импульсов, формируемых по сигналам фотоприемников.
В целом функциональная схема ЛГ имеет вид, представленный на
рис. 4.9.
Потенциальная точность лазерного гироскопа определяется уровнем
естественных флуктуации ширины генерируемой спектральной линии
за счет спонтанного излучения и атомных колебаний длины
резонатора. Среднеквадратическое значение соответствующей случайной
ошибки измерения угла поворота резонатора Δα определяется
соотношением [4.15]:
XL А Пгй /— ,. . „ч
σΔα = ^Δ^— у/Т, (4.18)
где Τ — время измерения; Ρ —мощность потерь в резонаторе;
h —постоянная Планка; Δ^ρ — конечная ширина линии резонансного
пика резонатора.
Коэффициент при \/Т в правой части (4.18) носит название
коэффициента случайного дрейфа ЛГ, характеризует потенциально
достижимый уровень случайного дрейфа ЛГ и может составлять величину
порядка 10~4 град/^/ч.
Основными параметрами, определяющими точностные
характеристики ЛГ, являются нестабильность масштабного коэффициента и
дрейф нуля (дрейф ЛГ). Они формируются главным образом за счет
нестабильности оптического периметра КОКГ, источниками которой
являются в основном колебания температур окружающей и активной
сред, а также за счет нестабильности и несимметричности токов
разряда в двухканальной системе накачки. Вариации масштабного
коэффициента составляют относительную величину порядка 10~5 ч- 10~6.
В дрейфе ЛГ принято выделять [4.16]: систематическую
составляющую — усредненное по ансамблю реализаций значение средних
дрейфов, полученных в процессе одной реализации; нестабильность
дрейфа в течение одной реализации (в запуске) — максимальное либо
среднеквадратическое отклонение от систематической составляющей;
нестабильность дрейфа от запуска к запуску — максимальное
либо среднеквадратическое отклонение средних дрейфов в запуске от
систематической составляющей; коэффициент случайного дрейфа, на
порядок превышающий коэффициент при \/Т в (4.18) и определяемый
в значительной степени возмущениями, вносимыми виброчастотной
подставкой с ошумлением.
Следует отметить, что помимо рассмотренного варианта построения
ЛГ несомненный интерес представляют трехосные ЛГ с общим
механическим вибратором, многочастотные ЛГ, в частности с неплоским
резонатором и невзаимным фазовым устройством (фарадеевская
G
ft'
a
sS
J3
X
£
и
(D
CX
s
τ
(D
и
υ
•θ
•θ
Ч 2
π αϊ
χ s
CC-Θ-
Sjj
υ'
3 s
G
о
a:
ι
θ
m
υ
G
CM
Η
Я
о
:£
о
CL
X
ω
X
X
ова
имей
я
X
ГЛ-ЗД
П
ГЛ-2
| ГЛ-1Д
и·
^
ГЛ-2
•
ς
с
Г-2
ς
ύ.
ς
БЛГ-
<
M-ll-
ϊέ
о
_1
00
<
cn
•134
О
о
оо
G-802
_1
,.
СТИК
X
Cl
Характе|
тика»
о
CL
Элект|
Ы
С
X
ГО
с
о.
<
s
S
ОКБ
«Темп
НИИ
Полюс
*
>>
£
£
Honeywell
Litton
±180
о
±40
±250
400
-Η
[
I
300
-Η
[
±100
[
100
-Η
800
-Η
±600
изме-
гловых
>,
Диапазон
ряемых
и
•рад/
Ι скоростей
0.11
0,3
0,17
0,5
1.2
3.3
CO
со
О)
го
сть и
■ла.
Дискретно
мереиия yi
угл.с.
[
[
[
[
[
UD
о
-
О*
о
о
т
0,5-1,
0,6
—
о
о
о
,01-0,
о
и;
I,
з· н
= о
Системат
погрешио
град/ч
0,0008
(1σ)
0.01
(1σ
0,005
(1σ)
[
ο ^
Ю 'Γ'
о Ь
о ^
|
о
о
[
0,01
о
о
Q07
о
0,005
>.
X
ί
и
О Т
Стабильи
ля, град/'
0,0005
СО
0,00
0,002
005
о
[
1
О
О
003
о
[
0,003
т
о
о
003
о
0,003
л
„_
Ια: и
Случайна
погрешио
град/^
о
ю
1
О
о
[
ю
1
о
т
1
Τ
о
1
о
т
о
I
ю
|
о
1П
ta
I
О
in
о
I
о
in
л
н о
υ ~
о о
Стабильи
масштаби
| коэффициента
-20...
+70
; о
os
τ +
-40...
+70
±60
-49..
+75
: in
о ч^
7 +
: о
о <£>
Τ +
О ΙΛ
CN +
'
-20...
+50
[
[
-15...
+55
!и
Q.O
>, .
Температ
диапазон
о
о
о
о
I
1
о
[
чэ
сч
[
[
СО
2 ОЭ
Потребляе
мощность,
о
225x20
х125
о
о
150x1
χ 92
со
1200x15
х84,5
[
со
2x11
χ 145
оо
ЧЭ ЧЭ
оо
сч —
S) χ
5
со
о*
о_
280
перимет|
■—'
1,3 дм
2,5 дм
т
"S.
ч
1,23
h·-
— СО
xL3
^ Χ
0.9 дм
Ε
Габариты
[
[
[
000
о
[
1
I
[
о
о
500-10
10000
о
о
о
о
СО
Ό00
CD
СЧ
15000
| Ресурс, ч
чэ
2.0
3,8
ЧЭ
1.5
τ
|
00.
1,6
[
00.
СП
1.7
| Масса, к
-
—
-
СО
-
~
СО
-
_
-
ω
ИЭЭО
МЕИ
° ·>
m х
Количест
рительиы
ячейка, магнитное зеркало), а также ЛГ с частотной подставкой на
основе эффекта Зеемана [4.11, 4.12, 4.15].
В табл.4.2. представлены основные характеристики ряда серийно
выпускаемых ЛГ.
Волоконно-оптический гироскоп. Большинство конструкций ВОГ
реализуют схему кольцевого оптического гироскопа нерезонансного
типа с источником излучения, находящимся вне кольцевого многовит-
кового оптического контура, в котором проявляется вихревой эффект
Саньяка [4.18-4.21]. Это обстоятельство, а также технологические
достижения последних лет в области разработки
высококачественного оптоволокна, твердотельных полупроводниковых источников света,
элементов интегральной оптики и др. предопределяют ряд достоинств
ВОГ по сравнению с ЛГ. К ним следует отнести сравнительную
простоту конструкции в твердотельном выполнении (в перспективе полностью
на гибридных интегральных микроэлементах), меньшую массу,
габариты и стоимость. Современные конструкции ВОГ уже практически
сопоставимы по точности с ЛГ. Все это определяет большие
перспективы применения ВОГ в БИНС, в частности, для БПЛА.
На рис. 4.10 представлена принципиальная схема ВОГ.
Блок
обработки
Ω
Фотоприемник
Источник света
Катушка
оптического
волокна
Ω
Расщепитель
Рис. 4.10. Принципиальная схема волоконно-оптического гироскопа
Излучение источника света разделяется в расщепителе на две
волны λ| и Аг, которые поступают в противоположные концы катушки
оптического волокна, распространяются по ней в противоположных
направлениях, рекомбинируют на расщепителе и смешиваются в
фотоприемнике, где интерферируют. На выходе фотоприемника — фото-
ток /ф, линейно связанный с интенсивностью света / на его входе.
При отсутствии вращения оптического контура (Ω = 0) обе волны,
распространяясь по нему, проходят одинаковый путь, и разность фаз
волн λ| и Аг на фотоприемнике отсутствует. При вращении
оптического контура с угловой скоростью Ω эти волны проходят разные
оптические пути, причем разность путей 2AL на длине одного витка
катушки оптического волокна определяется соотношением (4.13). Раз-
ность путей порождает разность времен прихода волн на фотоприемник
и, следовательно, соответствующую разность фаз электромагнитных
колебаний А^с, пропорциональную угловой скорости Ω [4.18,4.19]:
SnSN- A-kRL^ , |ЛЧ
А^с = -т—Ω=——Ω, 4.19
Ac Ac
где индекс «с» означает, что разность фаз Aipc возникает за счет
эффекта Саньяка; N — число витков катушки оптического волокна;
S — площадь, охватываемая витком катушки; R — радиус витка; L —
длина волокна.
Из (4.19) следует выражение для масштабного коэффициента К
В0Г: к = 8π5ΛΓ
Ас
В известных конструкциях ВОГ величина К может составлять
(1...40) мрад/град/с.
Теперь на основе (4.16), имея в виду, что разность частот колебаний
F = 0, угол расхождения лучей ε = 0, получим для интенсивности
света I в фотоприемнике:
/ = /o(l+cosA^c), (4.20)
а для тока /ф на выходе фотоприемника:
/ф = /Фо(1+со8А0с), М, = £'о, (4.21)
где η — квантовая эффективность фотоприемника; е — заряд
электрона; h — постоянная Планка; и — частота излучения; /ф0 —амплитуда
фототока.
Согласно (4.19), (4.21) следует, что приращение фототока
определяет угловую скорость вращения основания Ω. Практическая
реализация этого принципа измерения Ω требует прежде всего таких
схемно-конструктивных решений ВОГ, в которых обеспечивается
свойство взаимности, при наличии которого встречные волны А|,Аг при
Ω = 0 проходят одинаковые оптические пути, сохраняя
определенное состояние поляризации и форму волнового фронта. С этой
целью в конструкциях катушки ВОГ часто используют одномодовое,
сохраняющее поляризацию волокно, а излучение в катушку вводят и
выводят из нее через одномодовый фильтр, включающий, в
частности, волоконный одномодовый пространственный фильтр и поляризатор
(рис.4.11) [4.12,4.18,4.20].
Следует отметить, что наличие в такой схеме ВОГ двух
расщепителей дополнительно выравнивает фазы волн А[,Аг, которые дважды
проходят через расщепители и дважды от них отражаются, в то время
как в невзаимной схеме ВОГ на рис. 4.10 волна А] проходит через
расщепитель дважды, а Аг дважды от него отражается с соответствующим
скачком фазы. Характерные параметры катушки одномодного оптиче-
ского волокна ВОГ следующие: диаметр сердцевины волокна — 7 мкм,
полный диаметр волокна с защитным покрытием — 250 мкм, длина
волокна — 1000 м и более, потери в волокне — 0,2 дБ/км при длине
волны 1,55 мкм. В качестве источников излучения используются
лазерные диоды, светодиоды и суперлюминисцентные диоды; в качестве
фотоприемников — полупроводниковые и лавинные фотодиоды [4.21].
Пространственный
волоконный
Расщепитель одномодовый фильтр
Катушка
оптического
Источник света
Рис. 4.11. Схема волоконно-оптического гироскопа минимальной конфигурации
Схема на рис. 4.11 — схема так называемой минимальной
взаимной конфигурации. В соответствии с (4.20), зависимость
интенсивности / от саньяковской разности фаз Aipc носит косинусои-
дальный характер (рис. 4.12), причем собственно Aipc весьма мала.
Так, например, применительно к ВОГ,
в котором используется катушка с
радиусом 0,1 м и длиной волокна 1000 м,
при скорости вращения Ω = 1 град/ч
разность фаз Aipc = Ю-5 рад.
Очевидно, в этом случае, когда рабочая
область на характеристике Ι (Αψο)
находится вблизи точки А(/?с = 0, крутизна
преобразования Αψο, а следовательно и
Ω, в информационный сигнал очень
мала. Кроме того, при вариациях /о, как
видно из (4.20), имеет место аддитивная
погрешность (дрейф нулевого сигнала).
Для повышения чувствительности
ВОГ между встречными волнами
искусственно вводят разность фаз Αφ = π/2; в этой точке крутизна
характеристики I (Aipc) — максимальна. На практике с учетом
минимизации отношения сигнал/шум величину смещения Αφ часто выбирают
в диапазоне π/2 < Αφ < (3/4)π [4.18]. Введение разности фаз
обычно осуществляют путем размещения на одном из входов в катушку
Рис. 4.12. Зависимость
интенсивности излучения /
от разности фаз Саньяка
фазового модулятора. Наибольшее распространение получила схема
с использованием взаимного фазового модулятора (рис. 4.13).
Собственно фазовый модулятор, например, представляет собой
несколько витков оптоволокна, намотанного на пьезокерамическую
трубку. Модулирующее напряжение, поступающее от задающего гене-
Источник света
Усилитель
фотоприемника
Демодулятор
Выходной
сигнал
Задающий
генератор
Фильтр
Фазовый L^2 \ I
модулятор|" /^/^\\\
Катушка
оптического
волокна
Ω
Рис. 4.13. Схема волоконно-оптического гироскопа минимальной конфигурации
с фазовым модулятором
ратора и деформирующее трубку, периодически изменяет длину
оптоволокна и его показатель преломления, в результате чего периодически
изменяется оптический путь волны, проходящей через модулятор, и
возникает искусственное приращение ее фазы. Это приращение
выбирается равным π/4. В соответствии с рис. 4.13, модуляция фазы
волны λ[, распространяющейся в катушке по часовой стрелке,
происходит с временным опережением то по отношению к модуляции фазы
волны Аг, где то — время обхода катушки. Выбирая то в качестве
полупериода модуляции, обеспечивают периодическое изменение разности
фаз Αφ с амплитудой π/2 [4.18,4.20].
Рис. 4.14 иллюстрирует процесс фазовой модуляции встречных волн
в ВОГ по прямоугольному закону и соответственно процесс модуляции
интенсивности света в фотоприемнике. При Ω = 0 модуляция
интенсивности света отсутствует.
При Ω^Ο она имеет место, причем для интенсивностей I\,h на
рис.4.14 справедливо:
J, = Io (\ +cos (-^ + ΔφΑ) = /(1 +sin Atpc),
I2 = Io(\ +cos (^ + Atpc)) =1(1 -sin A^c)·
/o^l +cos ^- + A^C
Глубина модуляции ΑΙ:
ΑΙ = /| - h = 2 Jo sin A^c-
(4.22)
Выходной сигнал, пропорциональный Δ/, формируется в демодуляторе
(рис.4.13). Существенно то, что помимо обеспечения максимальной
крутизны преобразования А^с в информационный сигнал, в этой схеме
ВОГ исключается аддитивная погрешность, порождаемая вариациями
/о, коэффициентами усиления в электронной цепи обработки сигнала
и амплитуды модуляции, но сохраняется мультипликативная
погрешность — вариации масштабного коэффициента и его нелинейность.
Рис. 4.14. Прямоугольная фазовая модуляция волн в волоконно-оптическом
гироскопе
С целью уменьшения уровня мультипликативных погрешностей,
обеспечения линейности его выходной характеристики в широком
диапазоне измеряемых угловых скоростей ВОГ выстраивают по
компенсационной схеме. Для этого в оптическом контуре распространения
встречных волн необходимо обеспечивать дополнительную
искусственную разность фаз Δ^μ («сигнал» обратной связи) таким образом,
чтобы выполнилось условие
А(/?с + А^м = 0.
(4.23)
Наиболее распространенный способ формирования переменной Δ^μ
заключается в использовании, например, пьезокерамического фазового
модулятора, как и ранее расположенного на входе в катушку
оптического волокна, на который, в рассматриваемом случае, поступает
пилообразное напряжение, скорость изменения которого
пропорциональна Δ^ο- На рис.4.15 представлены характерные законы модуляции
этим напряжением фаз ψμ,, Ψμ2 встречных волн λ|, Аг соответственно,
причем модуляция φΜΐ осуществляется с запаздыванием по отношению
к модуляции φΜι на время то распространения волны Аг по катушке
оптического волокна.
При достижении ψΜ, (ψμ,) максимального значения модулятором
осуществляется скачок фазы на величину 2π. Как видно на рис. 4.15,
необходимая разность фаз Δ^μ накапливается на интервалах то
AVM1.VM2
^м(кРУтизна)
ηΑψΜ
4
¥>МГ0
^^"^
\',2π t
Рис. 4.15. Пилообразная фазовая модуляция волн в волоконно-оптическом
гироскопе
и составляет фмто, где фм — крутизна пилообразного изменения
ΨΜ\ {ψμ3)- Из (4.23) с учетом (4.19) получим:
— ίί = ψΜ ,
Ас с
где L| — оптическая длина одного витка катушки.
Тогда крутизна фм такова:
Ψμ
8π5
' XL,
Ω.
(4.24)
Фактически формирование фм эквивалентно сдвигу круговой частоты
волн; сдвиг же циклической частоты Fn = — (4S/XL[)Q совпадает
по модулю с разностью частот F, определяемой согласно (4.14) как
разность частот встречных волн в резонаторе ЛГ.
Как видно из рис.4.15, в процессе формирования компенсирующей
разности фаз ΑψΜ = фмто за счет «сброса» фазы на интервалах то
возникают стробы, порождающие погрешности ВОГ в течение
времени то после каждого сброса, если высота этих строб отличается от 2π.
Следует отметить также, что подсчет числа «сбросов» (с учетом их
знака) обеспечивает измерение приращения угла Δα поворота ВОГ
на интервале измерения. Действительно, на основе (4.24) для ВОГ
с катушкой диаметром D из волокна с показателем преломления η
имеем:
ΨΜ
2-кР
Хп
Ω.
(4.25)
Интегрированием (4.25) на периоде пилообразной фазовой
модуляции, на котором достигается приращение фазы, равное 2π, для
соответствующего этому приращению угла поворота ΔαΜΗΗ получим
Ааы
15'
(4.26)
Соотношение (4.26) определяет минимальное приращение угла
поворота, регистрируемое при каждом скачке фазы на 2π. Так, при длине
волны λ = 1,55 мкм, диаметре катушки D = 0,1 м, показателе
преломления волокна п= 1,41 приращение ΔαΜΗΗ составляет 45,6 угл.с.
Схема компенсационного ВОГ с пилообразной фазовой модуляцией
представлена на рис.4.16.
Блок
обработки
Формирователь
крутизны фм
Фотоприемник
Источник света
X
Г
Фильтр
\^2 λι
Генератор
пилообраз
ного
напряжения^
Выходной
сигнал
Пьезокера-
мический
фазовый
модулятор
Катушка
оптического
волокна
Рис. 4.16. Схема волоконно-оптического гироскопа компенсационного типа
Современные конфигурации ВОГ характеризуются использованием
цифровой обработки информации в его замкнутом контуре и
широким применением интегральных оптических компонент
(светоделителей, поляризаторов, фазовых модуляторов и др.), выполняемых по
гибридной технологии, в частности на электрооптической подложке из
ниобата лития. Функциональная схема высокоточного ВОГ с
сохраняющим поляризацию волокном, в котором используются эти подходы,
представлена на рис.4.17.
Одним из перспективных направлений построения высокоточных
ВОГ является применение в катушке сравнительно недорогого одно-
модового оптического волокна с деполяризацией поступающего в него
оптического излучения [4.18,4.20]. Перспективными являются
трехосные архитектуры ВОГ с использованием ряда элементов для
одновременного обслуживания всех трех измерительных каналов [4.12].
Рассмотрим теперь кратко основные источники погрешностей ВОГ.
Фундаментальный порог чувствительности ВОГ регламентируется
дробовым (фотонным) шумом фотоприемника, уровень которого, в свою
очередь, зависит от мощности оптического излучения, поступающего
в фотоприемник. При этом среднеквадратическое значение соответ-
ствующего фазового шума фотоприемника σ^ψη определяется
соотношением [4.19]:
σΔν
IhvAf
0,5Pn '
(4.27)
где Pq — мощность входного излучения в ВОГ; Δ/ —полоса
пропускания системы обработки сигнала.
Источник света
Фотоприемник
Усилитель
фотоприемника
Ζ
АЦП
Интегральная
оптическая
система (поляриза-
тор,фильтр,фазовые
модуляторы)^
Генератор
периодической
модуляции
f\r"'h'"-J"'^7'|
Линейная
поляризация
Схема
управления
Блок цифровой
демодуляции
и обработки
Генератор
"пилы"
Выходной
сигнал
Формирователь
крутизны
"пилы"
Рис. 4.17. Схема высокоточного волоконно-оптического гироскопа
Из (4.27) с учетом (4.19) для среднеквадратического значения
порога чувствительности ВОГ σηπ как измерителя угловой скорости
получим
ση„ _ с / hv
^AJ ~ 2ttuLDV 0,5Po
(4.28)
Для ВОГ, имеющего D = 0,1 м, i = 1000 м, ν = 1,93 ■ 1014 Гц,
0,5Лз = ЮО мкВт, порог чувствительности (4.28) составляет
15-Ю-2 град/(чД/Гц").
Одним из основных источников погрешностей ВОГ, а также
основным механизмом потерь в волокне, является обратное рэлеевское
рассеяние. Оно представляет собой рассеяние волн на микронеодно-
родностях волокна, а также за счет их отражения от дискретных
оптических элементов в направлениях, противоположных основным
встречным волнам. При этом когерентная составляющая обратного
рассеяния интерферирует с основными волнами, что порождает
флуктуации разности фаз встречных волн. Соответствующая максимальная
погрешность измерения угловой скорости вращения δΩ,ρ определяется
соотношением [4.20]:
где β — угол ввода излучения в сердцевину волокна; as —
коэффициент рассеяния света в волокне.
Одним из эффективных способов уменьшения этой погрешности
является уменьшение степени когерентности между основными и
рассеянными волнами. Это может быть достигнуто, в частности, за счет
использования широкополосного источника света с малой длиной
когерентности. При этом, вследствие большой разницы оптических путей
основных и рассеянных волн, интерференционная картина,
порождаемая их взаимодействием, размывается. В качестве широкополосных
источников используют, в частности, суперлюминисцентные
источники света. Отметим, что уменьшению влияния обратного рэлеевского
рассеяния способствует и использование периодической фазовой
модуляции.
Погрешности ВОГ порождаются также за счет нелинейного
электрооптического эффекта Керра, заключающегося в изменении
показателя преломления оптической среды при изменении интенсивности
распространяющейся в ней световой волны. В этой связи различие
мощностей встречных волн за счет, например, температурной
нестабильности разветвителей приводит к невзаимности встречных волн и
к дополнительному сдвигу фаз между ними. Соответствующая
погрешность <Шк измерения угловой скорости такова [4.19]:
ЛПк.|„2Чо0_2м)(Ш_|р>!, (4.з„,
где «г — коэффициент Керра среды; г\с — импеданс среды; Μ —
коэффициент расщепления световой волны по мощности; I (t) —
интенсивность источника излучения; знак () обозначает осреднение по
времени.
Как следует из (4.30), при Μ = 0,5 погрешность, порождаемая
эффектом Керра, отсутствует. Она отсутствует также при выполнении
условия (/2 (ί)) = 2 {I (t)) , что достигается использованием, например,
суперлюминесцентных источников.
Другим невзаимным эффектом, который приводит к появлению
погрешности ВОГ, является магнитооптический эффект Фарадея,
сущность которого состоит в том, что во внешнем магнитном поле при
повороте плоскости поляризации излучения изменяется показатель
преломления волокна, и появляется дополнительная разность фаз
встречных волн. Этот эффект не столь выраженно проявляется в ВОГ с
волокном, сохраняющим поляризацию. Наиболее эффективный способ
уменьшения этих погрешностей — магнитное экранирование ВОГ.
Существенный вклад в погрешности ВОГ вносят также
зависящие от времени температурные градиенты вдоль оптического
волокна [4.19]. Они порождают нестационарные изменения показателя
преломления и длин участков волокна. Эти изменения приводят к
невзаимности, поскольку встречные волны проходят эти участки за различное
время. В предположении, что температура оптического волокна
катушки изменяется линейно от его внутреннего слоя намотки к наружному,
соответствующую погрешность δΩτ измерения угловой скорости
можно представить так:
nL2 fdn \ δΑΤ ίΛηι.
mT=24Ns{lr+an)-W> (4·31)
где Τ — температура в точке оптического волокна; AT — разность
температур по сечению катушки; а — линейный коэффициент теплового
расширения волокна; δΑΤ /δϋ — температурный градиент во времени.
Оценки показывают, что погрешность δΩτ является одной из
определяющих в ВОГ. Уменьшение δΩ,τ может быть достигнуто за счет
симметричной, относительно середины оптического контура, намотки
катушки. При этом части волокна, которые отстоят одинаково от
средней точки оптического контура, находятся рядом друг с другом. Это
приводит к симметричному распределению температуры относительно
средней точки и теоретически к исключению погрешности δΩτ-
Одновременно используется температурное циклирование катушки после
ее намотки для стабилизации размеров и относительного положения
витков, а также алгоритмическая компенсация остаточного
температурного дрейфа в процессе эксплуатации ВОГ.
Помимо указанных возмущающих факторов следует отметить
также вибрационные возмущения, которые порождают погрешности ВОГ
через возмущение параметров оптического волокна. Возникающая при
этом погрешность пропорциональна скорости изменения
вибрационного ускорения с коэффициентом порядка 0,5... 3 град/ч/g/c, где д —
ускорение силы тяжести. Существенно может быть также влияние
акустических шумов через пьезооптический эффект в частотной полосе
до нескольких кГц [4.18].
В целом погрешности ВОГ характеризуются уровнем
нестабильности масштабного коэффициента (главным образом температурной)
и его нелинейностью, систематической составляющей дрейфа
(смещение нуля) гироскопа, стабильностью дрейфа в запуске и от запуска
к запуску, шумовой составляющей выходного сигнала. Существенный
вклад в эти параметры вносят, естественно, не только оптические, но
и электронные компоненты ВОГ.
В табл.4.3 представлены основные характеристики ряда ВОГ
отечественных компаний.
о
CQ
со
Η
я
о
poci
же ги|
>ваи
еио
1
X
СО
о
CQ
951
03
α.
СП
СП
L_
OD
θ
о
Г91
03
0
о
(j
>>
4
ϊέ
С
u.
о
0D
о
о
ВОГ 06/
СО
о . =
Г-12
рех-
сиы
03 о
из
РС-501
и
о
о
о
PS-2
00
о
о
о
СРС
|
Η
Характер!
1тика
ИЗО
θ
ϊέ
Π
с
χ
с
:£
χ
χ
ПТОЛ
О
о
о
+Ϊ
о
00
-н
О
о
1П
-н
о
о
СО
-н
о
о
1П
-н
in
-Η
±800
ο ο
ο ο
1П
-Η-Η
250
-Η
CO
-Η
ο
ο
+i
зме-
)ВЫХ
= 5
>,
Диапазон
ряемых
Д/с
CL
1 скоростей
I
I
I
сч
|
о
сч
[
[
I
к
3" (-
χ о
Системат
погрешно
град/ч
СО_
о
о
СО
1П
о
CD
О
0,5
СО
о
°
—
о
1П
0,00
°.
о
i
ί1
о
о _
Стабильн
смещения
град/ч
—
о
CD
О
О
1П
О
о"
СО
о
о
CD
О
0.05
,003
о
о
о
СО
0,00
СО
о
о
о
Случайна
(шумовая
м
ΙΟ
погрешно
град/Уч
Ί
о
1
о
-
1
о
1П
т
О
1
о
1П
1
о
1
о
1
о
1П
1
о
h-
1
о
сч
1
о
сч
£ о
u Ь
о о
Стабнльн
масштабн
н
| коэффицие!
о
h-
+
-30.
о
h-
+
-30.
о
+
О
СО
1
.+70
о
СО
1
о
to
+
CD
to
I
о
tO
+
CD
in
1
о
(О
-40...+
o
to
+
CD
Τ
|
I
[
:S
ίυ
ClO
b-
Температ;
диапазон,
in
-
in
[
[
1П
(O
(O
(O
ra CQ
Ξ
<υ ·
Потребля
мощность
о
СО
X
о
013
о
СО
X
о
1П
5
о
(О
X
1П
СО
X
1П
о
χ
о
00
51
1П
h-
χ
"
Si
in
χ
(О
00
χ
130
in
in
X
CO
si
1П
СП oq
Xco
£ x
СП
о
ОхЗ
о
5
о
τ
ν
250:
si
о
τ
χ
о
015
Ξ
Габариты
о
in
C^l
о
о
h-
о
00
о
сч
о
о
1П
о
1П
in
[
000
ОО
о
о
τ
CD
120ι
о
о
00
| Масса, г
[
000
о
1
о
о
150
1
|
1
3000G
|
1
I
Ресурс, ч
4.3. Волновой твердотельный гироскоп
ВТГ относится к классу волновых электромеханических
гироскопов; принцип его работы основан на использовании инерционных
свойств стоячей волны, возбуждаемой в упругой осесимметричной
оболочке (резонаторе). Достоинствами ВТГ являются: высокая точность,
того же порядка, что у ЛГ и ВОГ, при несколько меньших размерах;
широкий динамический диапазон измерений; малая чувствительность
к линейным перегрузкам; устойчивость к ударным механическим
воздействиям и радиационному излучению; слабая зависимость
точностных характеристик от температуры; малое энергопотребление; высокая
надежность, в том числе возможность работы после кратковременных
перерывов электропитания; малое время готовности.
Рассмотрим здесь общие принципы построения ВТГ и основные
источники его погрешностей [4.22-4.25]. Особенности
микроэлектромеханического ВТГ изложены в параграфе 4.4.
Основу конструкции ВТГ составляет полусферический резонатор —
тонкая упругая оболочка вращения, укрепленная с помощью ножки
на основании (рис.4.18). Оболочка выполняется из высокодобротного
Рис. 4.18. Полусферический резона- Рис. 4.19. Ориентация волнового по-
тор ВТГ ля
материала, в частности, плавленого кварца, с уровнем добротности
порядка ΙΟ6... 107. Рабочей частью резонатора является свободный край
полусферы. Возбуждаемая в резонаторе упругая стоячая волна
представляет собой изгибные колебания, как правило, с номером формы
к = 2, и имеет четыре узла, а также четыре пучности, расположенные
первоначально на осях хх и уу. При вращении резонатора вокруг
оси симметрии с угловой скоростью Ω волновое поле проскальзывает
относительно тела резонатора, пучности располагаются на осях х'х'
и у'у1', и угол ψβ между осями хх и х'х' является мерой угла поворота
резонатора I /Ωώ) в инерциальном пространстве.
Выделим из тела резонатора кольцо — свободный край полусферы,
представленный на рис. 4.19, где обозначены: W (φ, t) — радиальное
перемещение текущей точки кольца в произвольный момент времени ί;
Wq — амплитуда колебаний в точке пучности; φ — окружной угол,
определяющий положение радиальной линии, на которой находится
текущая точка.
В работах [4.22,4.23] показано, что применительно к модели
идеального упругого нерастяжимого кольца, вращающегося с
квазипостоянной скоростью Ω, радиальное перемещение W (φ, t) можно
представить в виде:
W (ί, φ) = Wq cos
2k
cosrofcV1 + ^TT)l··
(4.32)
где χ — параметр, характеризующий упругие свойства кольца;
<+>ок = (хк (к2 — \))/\/к2 — 1 —собственная частота колебаний кольца
по к-й форме (при Ω равной нулю).
Из (4.32) для пучности, в частности, имеем:
2к 2
А^в + р—-Ωί = 0, ¥>в = -р—j-Ωί. (4.33)
В общем случае, когда Ω = Ω(ί), угол ориентации волнового поля
Ψβ относительно тела резонатора таков:
ΨΒ
к2+ 1
Qdt. (4.34)
Соотношение (4.34) определяет инерционные свойства волны и
измерительные свойства ВТГ. Коэффициент К — 2/(к2 + 1) — масштабный
коэффициент ВТГ; его величина при к = 2 равна 0,4. Для
полусферического резонатора масштабный коэффициент несколько отличается
от 0,4 [4.22,4.23]. Заметим, что согласно (4.32) частота колебаний
резонатора зависит от скорости его вращения Ω.
Рассмотренный эффект инерционности волнового поля
используется для построения ВТГ-ДУС (датчика угловой скорости) и
интегрирующего ВТГ-ИГ (измерителя угла поворота основания).
Для обеспечения колебаний резонатора ВТГ-ДУС применяется
позиционное возбуждение, которое реализуется с помощью пары
сосредоточенных электродов, подключенных к источнику переменного
напряжения (рис.4.20, а).
Частота этого напряжения составляет половину от резонансной
частоты колебаний резонатора; при этом частота возбуждающих пондеро-
моторных сил, являющихся электрическими силами притяжения
резонатора к электродам, совпадает с собственной частотой колебаний
резонатора по основной — второй форме. Резонатор выполняется,
например, из плавленого кварца; поверхность резонатора металлизируется.
При отсутствии угловой скорости пондеромоторные силы формируют
Резанатор
Электрод
Рис. 4.20. Позиционное возбуждение резонатора (а); ориентация волнового
поля при позиционном возбуждении (б)
стоячую волну, пучности которой ориентируются по осям электродов.
При вращении основания волновое поле в силу эффекта инерционности
отстает от тела резонатора, однако возникающие силы электрического
тяжения увлекают волну вслед за резонатором, и устанавливается угол
отставания φ& (рис.4.20,б), определяемый соотношением [4.22,4.23]:
tg2^:
в = —
8 Ω
(4.35)
где ωο — собственная частота колебаний резонатора по второй форме;
ξ —параметр, характеризующий диссипативные свойства резонатора.
Согласно (4.35), при малом отставании волнового поля угол ψβ
пропорционален угловой скорости вращения основания.
На рис. 4.21 представлена функциональная схема ВТГ-ДУС
компенсационного типа.
Здесь информационные электроды 3, составляющие с
металлизированной поверхностью резонатора / емкостные датчики, а также
предварительный усилитель 6, схема стабилизации амплитуды и фазовой
синхронизации 7, широкополосный фильтр 8 и силовые электроды 2
создают автоколебательный контур, формирующий стоячую волну. Ее
пучности ориентируются по осям электродов 2, 3, а узлы — по осям
информационных электродов 4 и силовых электродов 5. При
вращении резонатора за счет отставания волнового поля в областях
электродов 4, 5 возникают радиальные колебания резонатора, амплитуда
которых возрастает по мере возрастания измеряемой угловой скорости.
Контур, составленный электродами 4, предварительным усилителем 9,
1
8
—,— ι
7
ц
,
,
3^
'—*
»
»
1
\1 ^ s+
ι(____\___Χ
л \ ч
4/у-~
1 2У
ψ\
1
1*-9 «-10 —
— 11
;.
Рис. 4.21. Функциональная схема компенсационного ВТГ-ДУС
фильтром 10 и электродами 5, создает компенсирующее воздействие на
резонатор, направленное на устранение колебаний в узлах.
Напряжение на выходе демодулятора // пропорционально измеряемой угловой
скорости. Как показал опыт разработок, ВТГ-ДУС по точности
уступает ВТГ-ИГ.
Для обеспечения колебаний резонатора ВТГ-ИГ используется
принцип параметрического возбуждения. Он реализуется с помощью
кольцевого электрода, расположенного на корпусе и окружающего
резонатор (рис.4.22,4.23); при этом к электроду и резонатору подводят
напряжение Uu, частота которого ωη близка к собственной частоте
колебаний резонатора:
Un = Unocos ωπί, (4.36)
где !Упо — амплитуда напряжения питания.
Первоначально в резонаторе с помощью дискретных силовых
электродов возбуждают колебания во второй форме, затем напряжение
подключают к кольцевому электроду, и возникает параметрический
резонанс. В этом случае, в силу симметричной кольцевой
геометрии электрода и резонатора, структура невозмущенного колебаниями
электрического поля не зависит от окружного угла ψ, и увлечение
волнового поля пондеромоторными силами при вращении резонатора
отсутствует.
Для обеспечения устойчивости процесса параметрического
возбуждения амплитуду колебаний резонатора стабилизируют, управляя
амплитудой напряжения !Упо [4.22,4.23]. Кроме того, вследствие
нестабильности собственной частоты резонатора, ее расщепления за счет
неидеальности резонатора, необходима непрерывная корректировка
частоты ωχ\ в (4,36) для настройки на резонанс. Это осуществляется
системой автоподстройки частоты.
Кольцевой
электрод.
Резонатор
Рис. 4.22. Параметрическое возбуждение резонатора
Корпус
Резонатор
Основание
Кольцевой
электрод
Дискретный
электрод
Информационный
электрод
Рис. 4.23. Конструктивная схема ВТГ
Съем информации о параметрах волнового поля во вращающемся
резонаторе с целью определения, в частности, угла ориентации
волнового поля 1рв относительно тела резонатора осуществляется в ВТГ-ИГ
с помощью емкостной системы съема. Используются восемь емкостных
датчиков (Д, ... Д8), информационные электроды которых расположены
на основании симметрично по внутренней металлизированной
поверхности резонатора (рис. 4.23,4.24).
Сигналы диаметрально противоположных датчиков Д[,Дз,Д5,Д7
суммируются на операционном усилителе ОУ[ (сигнал Uc,
косинусный канал), а сигналы датчиков Д2,Д4,Дб,Д8 — на операционном
усилителе ОУг (сигнал 17s, синусный канал). После осуществления
демодуляции сигналов Uc и Us относительно опорного сигнала cos ωπί
в фазных демодуляторах ФД, и ФД2 и относительно сигнала sin ωπί
в квадратурных демодуляторах КД, и КД2, в блоке обработки
информации осуществляется определение всех параметров волны,
включая
Несогласно функциональной схеме ВТГ-ИГ, представленой на
рис. 4.24, эта информация поступает в блок стабилизации колебаний,
формирующий напряжение питания Uu кольцевого электрода, и в блок
начального возбуждения резонатора, реализуемого, например, через
две пары дискретных, расположенных диаметрально
противоположно силовых электродов. Эта информация поступает также в блок
электронной балансировки.
Процедура электронной балансировки необходима для уменьшения
дрейфов гироскопа — дрейфов волнового поля, порождаемых
дефектами резонатора, в частности анизотропией по окружному углу φ его
плотности, толщины оболочки, модуля Юнга. Эта анизотропия
порождает зависимость собственной частоты колебаний резонатора от
ориентации оси, вдоль которой они происходят. Возникает расщепление
собственной частоты, численную величину которого определяют как
разность между максимальной и минимальной частотами. Наибольшее
влияние на величину расщепления оказывает четвертая гармоника
разложения соответствующей неоднородности в ряд Фурье, поскольку
она дает расщепление, пропорциональное амплитуде дефекта и на
порядок большее, чем другие гармоники разложения. При этом колебания
резонатора с максимальной и минимальной частотами имеют место
вдоль так называемых собственных осей жесткости, развернутых друг
относительно друга на угол 45° [4.23].
При начальной ориентации колебаний вдоль одной из собственных
осей жесткости дрейф гироскопа отсутствует. Электронная
балансировка обеспечивает слежение одной из собственных осей жесткости
за волной таким образом, чтобы пучность волны все время
располагалась на этой оси. С этой целью используется система из 16 силовых
дискретных электродов, расположенных равномерно вокруг наружной
поверхности резонатора (рис. 4.24). В блоке электронной балансировки
на основе информации о фазных и квадратурных составляющих
выходного сигнала формируются напряжения на этих электродах,
обеспечивающие силовое воздействие на резонатор по четвертой гармонике,
Ы т
S Р
|
я
jS s:
о ш
I О
I О.
s: о я
о а. о
Ч Е- I
1С Ϊ И
ω Ч
Ч га
ω \ο
,
СО _
g^i
О- ю
Е- —
ω
'
Τ
~
О
чэ
CN
'
Ю
~
—
h-T
СО*
' '
чэ
~
сч
ОО
V
' '
'
о
3
я
а.
а:
θ
О)
-θ- ω ^
привнося тем самым дополнительные отрицательные пондеромоторные
жесткости, обеспечивающие решение задачи слежения.
В условиях воздействия линейных вибраций основания проявляется
влияние на уровень погрешности ВТГ первой, второй и третьей
гармоник разложения в ряд Фурье дефекта его плотности. В частности,
при резонансном воздействии продольной вибрации вдоль оси
симметрии резонатора волна стремится к ориентации, определяемой второй
гармоникой дефекта. При наличии поперечной вибрации аналогичную
роль в ориентации волны играют первая и третья гармоники [4.23].
Другим дефектом резонатора, порождающим дрейф волны, является
анизотропия по окружному углу параметра демпфирования ξ изгибных
колебаний.
Помимо дефектов резонатора источниками погрешностей ВТГ-ИГ
являются дефекты кольцевого, силовых и информационных электродов
(неточность изготовления электродов, неточность их расположения,
неравномерность зазора между электродом и резонатором). Кроме того,
поскольку в ВТГ-ИГ осуществляется управление волновым полем и
компенсация его дрейфа через обратные связи по информации от
системы съема, существенным источником погрешностей являются
дефекты формирования управляющих и компенсационных сигналов.
Таблица 4.4. Основные характеристики ВТГ
Характеристики
Систематический
дрейф, град/ч
Случайный
дрейф, град/ч
Шум, град/ч
Стабильность
масштабного
коэффициента
Резонансная
частота, кГц
Температурный
диапазон, °С
Потребляемая
мощность, Вт
Габариты, мм
Масса, г
Ресурс, ч
Наименование гироскопа
ТВГ-3-1
ТВГ-3
ТВГ-4
РПКБ
3
0,005-
0,01
-
2-10"5
2,8±0,2
-
1,5
065 χ 92
350
100000
3
0,1
-
2-Ю"5
-
-
1,5
065 χ 92
350
100000
3
0,003-
0,005
-
2-Ю"5
-
-
0,1
065 χ 64
300
100000
ВТГ
ВТГ-М
Авиаприбор
-
10"3...
Ю"4
Ю"4...
10"5
-
-
-60...
+ 100
-
-
700
150000
-
ю-1...
ΙΟ"2
ю-2...
10"3
-
-
-60...
+ 125
-
-
80
150000
ТВГ
Меди кон
2,5
5-Ю"3
-
-
8
-40...
+ 120
1,5
040 χ 4
97
100000
Имеет также место и тепловой дрейф ВТГ в значительной мере за
счет температурной нестабильности электроники. Интегрально
погрешности ВТГ можно охарактеризовать совокупностью параметров,
включающей систематическую и случайную составляющею дрейфа, шум,
нестабильность масштабного коэффициента. Эта совокупность может
быть детализирована путем учета параметров тепловых дрейфов.
Следует отметить, что ВТГ не получил пока широкого распространения,
что объясняется, по-видимому, в первую очередь технологическими
проблемами балансировки и интегрирования механической и
электронной компонент гироскопа [4.16].
Основные характеристики ряда отечественных ВТГ представлены
в табл. 4.4.
4.4. Микромеханические гироскопы и акселерометры
Одним из наиболее интенсивно развивающихся новых направлений
разработок ИЧЭ является направление микроэлектромеханических
систем (МЭМС). В рамках технологий МЭМС разрабатываются
микромеханические гироскопы (ММГ) и микромеханические
акселерометры (ММА). Применяемые при производстве ММА, ММГ технологии
современной твердотельной микроэлектроники, а также используемые
материалы позволяют обеспечить малые габариты, вес и
энергопотребление, высокую надежность и устойчивость к внешним воздействиям,
низкую стоимость датчиков. Технологическая совместимость
механической части датчика и сервисной электроники позволяет создавать
практически в единых технологических процессах интегральные
модули — чипы-гироскопы и чипы-акселерометры, а также сборки инер-
циальных элементов объемом 0,5-10 см3 с потребляемой мощностью
0,5-1 Вт. Выбор кремниевой технологии определяется возможностями
микроэлектронной промышленности, а также уникальными свойствами
кремния как конструкционного материала. Кремний, являясь дешевым
и доступным материалом, обладает высокой механической прочностью
(модуль Юнга ~ 10" н/м2), у него практически отсутствуют
гистерезис и пластические деформации, мал температурный коэффициент
линейного расширения, αχκρ = 2,6 ■ 10_б 1/°С; он отличается
большой временной стабильностью параметров; этот материал может
подвергаться длительным циклическим нагрузкам, не проявляя эффекта
усталости и накопления внутренних напряжений. Благодаря низким
внутренним потерям на трение в кремнии удается достичь добротности
осциллятора порядка 105.
В упругих подвесах ММГ и ММА в основном используются два
типа механических структур и им соответствуют два типа
технологических процессов обработки кремния — объемная (bulk-micromachined) и
поверхностная (surface-micromachined). При объемной обработке
происходит удаление материала путем химического травления в
соответствии с кристаллографической структурой материала. В этом случае
возможно изготовление структур с толщиной до нескольких сотен
микрометров. При поверхностной обработке на планарной поверхности
кремниевой пластины с использованием диффузии, фотолитографии
и анизотропного травления формируется рельеф осциллятора. После
операции анодного сращивания со стеклянной подложкой производится
удаление «жертвенного» слоя кремния до вскрытия рельефа
осциллятора. Толщина получаемых пластин осциллятора ограничена величинами
порядка 10-20 мкм.
4.4.1. Микромеханические гироскопы. В настоящее время
известно большое количество разнообразных конструктивных схем
ММГ [4.26-4.31]. Теоретические основы построения ММГ и ММА
подробно изложены, например в [4.26,4.27]. Общим конструктивным
признаком вибрационных микрогироскопов-датчиков угловой скорости
является использование в них различных по конфигурации
двухстепенных упругих подвесов чувствительного элемента (ЧЭ). Принцип
работы ММГ заключается в
создании относительно корпуса
знакопеременного поступательного
либо вращательного движения ЧЭ
по одной из степеней свободы и
измерении перемещений по другой
степени свободы, возникающих
под действием кориолисовых сил
или гироскопических моментов
при наличии переносной угловой
скорости корпуса. На рис.4.25
показана реализация принципа на
примере двухстепенного упругого
подвеса с поступательными
перемещениями ЧЭ. При наличии
знакопеременной относительной линейной скорости V вдоль оси
ОХ и переносной угловой скорости Ω вокруг оси ΟΖ появляются
знакопеременное ускорение Кориолиса Wk и соответствующая ему
сила Fk вдоль оси OY. Амплитуда у перемещения ЧЭ вдоль оси Υ
при равенстве собственных частот по обеим степеням свободы для
случая резонанса определяется следующим соотношением:
if If ■& 1вЦз
1β
Рис. 4.25. Принцип работы ММГ
У
^°Ω
2mv
Qtt,
(4.37)
где С, Q — соответственно жесткость и добротность упругого подвеса;
т — масса ЧЭ.
Амплитуда у, определяемая в (4.37), несет информацию об
измеряемой угловой скорости Ω.
По принципу построения упругого подвеса все известные типы
ММГ можно классифицировать в соответствии со схемой на рис. 4.26.
В зависимости от типа движения ЧЭ в подвесе, ММГ можно разделить
на три группы: ММГ RR-типа — с вращательным движением ЧЭ по
обеим степеням свободы; ММГ RL-типа — с вращательным движением
по одной степени свободы и с поступательным
LL-типа — с поступательными
движениями по обеим степеням
по другой; ММГ
|ммг|
-<Л-
гмп| |гкп
|гсм| |грм|
Рис. 4.26. Классификация типов мик-
ромеханических вибрационных
гироскопов
свободы.
В каждой из выделенных
групп количество возможных
вариантов схем ММГ может быть
весьма велико. На схеме указаны
наиболее известные и в той или
иной степени реализованные
варианты ММГ: ГМП — гироскоп
с маятниковым подвесом; ГКП —
гироскоп с карданным подвесом;
ГК — гироскоп камертонный; ГСМ — гироскоп с сосредоточенной
массой; ГРМ — гироскоп с распределенной массой. Рассмотрим кратко
принципы построения и типовые конструктивные схемы этих ММГ.
ММГ RL-tmina {гироскоп камертонный, ГК). Конструкция
ММГ камертонного типа, разработанная лабораторией Ч. Дрейпера,
представлена на рис. 4.27. В этом гироскопе вынужденное
движение ЧЭ, обеспечиваемое вибрационным двигателем, является
поступательным; другое движение, являющееся информационным —
вращательным.
/Z ^т _т
\Ч
О
?к\ Р-г[
<
Рис. 4.27. Конструкция
микромеханического гироскопа RL-типа
Рис. 4.28. «Гребенчатая»
структура электростатического
вибрационного двигателя
Конструкция выполнена из монокристаллического кремния и
представляет собой камертон, реализованный в виде двух инерционных
масс /, закрепленных с помощью упругих элементов 2 во внешней
рамке 3. Рамка связана с основанием также через упругие элементы 4,
обеспечивающие ей вращательное движение вокруг оси Ζ. С помощью
электростатического вибрационного двигателя, выполненного в виде
«гребенчатой» структуры (рис. 4.28), силами Fb возбуждаются
противофазные поступательные колебания масс.
При наличии измеряемой угловой скорости основания Ω, вектор
которой совпадает с осью вращения рамки Z, возникают силы Кориолиса
/к, создающие переменный момент сил, порождающий угловые
колебания рамки вокруг оси Ζ с частотой, равной частоте двигателя.
Амплитуда колебаний рамки является мерой измеряемой угловой скорости.
Измерение колебаний рамки осуществляется с помощью емкостного
датчика, электроды которого расположены на подложке под
инерционными массами. Номинальная величина емкостей между электродами и
инерционной массой ~ 1 пФ. Характерный размер инерционной массы
в плане ~ 1 мм. Толщина подвеса с целью увеличения жесткости
его конструкции и увеличения чувствительности ММГ доведена до
400 мкм. Добротность подвеса по оси возбуждения — 40000, по
измерительной оси — 5000 при уровне вакуума в подвесе — 100 Торр.
Меньшая величина добротности по оси измерения определяется малой
величиной зазора между инерционными массами и подложкой, а также
относительно большой величиной площади инерционных масс. Для
снижения коэффициента демпфирования в разряженной газовой
среде массы выполнены перфорированными. Для обеспечения потребной
частотной полосы пропускания в режиме прямого измерения подвес
имеет расстройку между собственными частотами колебаний масс и
рамки. Одна из основных погрешностей ММГ — квадратурная,
порождаемая вибрационным двигателем из-за неперпендикулярности оси
возбуждения и измерительной оси.
ММГ RR-muna {гироскоп с карданным подвесом, ГКП). В
конструкциях ММГ ГКП, впервые разработанных также в лаборатории
им. Ч. Дрейпера. реализован упругий карданный подвес ЧЭ. В первом
варианте ММГ используется внешний
двухрамочный карданный подвес ЧЭ,
£ расположенной симметрично относи-
■ , тельно плоскости механической струк-
ψ туры. Вокруг оси внутренней рамки
с помощью электростатического
вибрационного двигателя, реализованного
в виде пары электродов, расположен-
Рис. 4.29. ММГ с внешним ных на диэлектрической подложке под
упругим карданным подвесом внутренней рамкой, создаются угловые
колебания ЧЭ и тем самым —
кинетический момент ЧЭ по этой оси. При появлении угловой скорости,
перпендикулярной плоскости механической структуры подвеса,
возникает переменный гироскопический момент, приводящий к колебаниям
внешней рамки. Амплитуда ее колебаний пропорциональна измеряемой
угловой скорости. Съем колебаний осуществляется с помощью
емкостного датчика, пара электродов которого расположена под внешней
рамкой. На рис. 4.29 представлен выполненный по подобной схеме один
из вариантов ММГ.
В другом варианте ММГ ГКП используется внутренний упругий
карданный подвес ЧЭ — дискового ротора / (рис. 4.30). совершающего
с помощью вибрационного электростатического двигателя 2 с
«гребенчатой» структурой под действием момента Мв угловые колебания
на собственной частоте вокруг оси возбуждения Z, перпендикулярной
плоскости подложки.
/
■г-
\
ι Ротор
Электроды измерительного датчика
Рис. 4.30. ММГ с внутренним упругим карданным подвесом
При наличии измеряемой угловой скорости Ω возникает переменный
гироскопический момент Мк, вызывающий колебания ротора вокруг
оси, перпендикулярной плоскости, образованной вектором измеряемой
угловой скорости и осью возбуждения. Съем информации производится
по дифференциальной схеме с помощью емкостных датчиков
перемещений С. Одну из обкладок емкостного датчика составляет ротор,
а вторую — электрод в виде металлической пленки, напыленной на
диэлектрическое основание. В ММГ может быть реализован
компенсационный режим измерения с обратной связью по моменту с помощью
электростатического датчика момента. На рис. 4.31 показан еще один
вариант конструкции ММГ с внутренним упругим карданным
подвесом, разработанный в ЦНИИ «Электроприбор» [4.28-4.31].
**
*#
Рис. 4.31. ММГ ЦНИИ «Электроприбор» с внутренним упругим карданным
подвесом
ММГ LL-muna {гироскоп с сосредоточенной массой, ГСМ).
Компания Analog Devices Inc. одна из первых применила технологии
МЭМС для создания микромеханических акселерометров и
микромеханических гироскопов LL-типа. В основу конструктивной схемы ММГ
ГСМ положен выполненный из поликристаллического кремния
упругий подвес ЧЭ с двумя степенями свободы поступательного движения
в плоскости подвеса. ММГ работает в соответствии со схемой,
представленной на рис. 4.25. На рис. 4.32 показан вариант конструктивной
схемы ММГ с ЧЭ в виде сосредоточенной массы.
'J
\,
Рис. 4.32. ММГ LL-типа с сосредоточенной массой
С помощью гребенчатого электростатического вибрационного
двигателя / обеспечивается колебательное движение ЧЭ (инерционной
массы) вдоль оси X в упругом-подвесе 2. При наличии Ω возникающее
за счет сил Кориолиса перемещение ЧЭ по оси Υ является мерой
измеряемой угловой скорости Ω и определяется с помощью емкостного
датчика 3.
В другой конструкции гироскопа этого типа (рис. 4.33)
используются два независимых упругих подвеса двух ЧЭ на одной подложке,
объединенных дифференциальной системой емкостного съема,
образованной каждым из ЧЭ его системой гребенчатых электродов, а также
системой электродов, расположенных на подложке.
Такая конструкция ММГ обеспечивает снижение погрешности
гироскопа от линейных ускорений, а также от ударов и линейных
вибраций основания. Толщина механической структуры подвеса — бмкм.
Корпус ММГ не вакуумируется, поэтому, несмотря на невысокую
жесткость подвеса из-за его малой толщины и относительно большой
площади, достаточная устойчивость к воздействию ударов и вибраций
в направлении, перпендикулярном плоскости подложки,
обеспечивается воздушной «подушкой», возникающей в зазоре между подложкой и
поверхностью ЧЭ. Добротность подвеса по рабочим степеням свободы
вследствие воздушного демпфирования невысока (~ 45), однако это
обстоятельство позволяет реализовать в ММГ простую схему прямого
измерения путем введения достаточно большой величины расстройки
• · · ·
п«а
Рис. 4.33. ММГ компании Analog Devices
(~ 300 Гц) собственных частот колебаний ЧЭ по рабочим и
информационным степеням свободы. Собственная частота подвеса ~ 15 КГц.
Для работы двигателя используется напряжение с амплитудой 12В,
обеспечивающее в режиме резонанса амплитуду колебаний ЧЭ 10 мкм,
стабилизируемую с помощью контура обратной связи. Для регистрации
чрезвычайно малых, вследствие небольшой добротности подвеса,
перемещений разработана высокочувствительная емкостная система съема
сигнала, позволяющая при номинальной величине перемещения ЧЭ
порядка 10_1См измерять его с погрешностью порядка 16 - Ю-15 м.
Прибор размещается в керамическом корпусе размером 7 χ 7 χ 3 мм и
имеет массу менее 1 г.
Достоинством этого ММГ является расположение сервисной
электроники в интегральном исполнении на одной подложке с
механической структурой в одном чипе, что существенно снижает уровень
паразитных и шумовых сигналов в системе съема. В качестве
достоинства ММГ следует также отметить отсутствие необходимости
вакуумирования корпуса гироскопа.
ММГ LL-muna (гироскоп с кольцевым резонатором). В этом
гироскопе, принцип работы которого аналогичен принципу работы
макро ВТГ, в качестве ЧЭ используется кольцевой резонатор (КР).
Достоинством подобного ММГ является его устойчивость к внешним
механическим воздействиям, что достигается симметрированием
конструкции кольцевого резонатора и его подвеса. Конструкция
обеспечивает также минимизацию влияния паразитных степеней свободы на
точность гироскопа и температурную стабильность собственной
частоты и добротности его резонатора.
В известных ММГ с КР, как правило, реализуется схема датчика
угловой скорости (ДУС) компенсационного типа. Фирма BAE Systems,
имея большой опыт в проектировании волновых твердотельных
гироскопов, успешно применила его при создании микромеханической
версии ВТГ (ММГ-ДУС) на основе КР из монокристаллического кремния
(рис. 4.34).
т щ
Рис. 4.34. Конструкция кольцевого ре- Рис. 4.35. Внешний вид вариан-
зонатора варианта ММГ та микромеханического гироскопа
с кольцевым резонатором
КР / удерживается в плате с помощью восьми упругих элементов 2.
Диаметр КР — 6мм. размер платы — 10 χ 10 мм2. На внешней
поверхности ЧЭ расположены дорожки проводников, образующие 8
электрических контуров. Диаметрально противоположно расположенные
петли образуют пары, с помощью двух из которых реализуется система
магнитоэлектрического возбуждения колебаний КР, с помощью двух
других — система индукционного съема сигнала и
магнитоэлектрическая обратная связь. Номинальное значение собственной частоты
колебаний КР — 14,5 кГц. Предусматривается балансировка КР путем
съема масс с помощью лазера и дополнительная настройка частоты
с помощью электростатических датчиков силы для минимизации
расщепления собственной частоты Δ/ = /ο/2ζ), где /о — собственная
частота колебаний КР, Q — добротность КР для второй формы его
колебаний. Собственная частота подвеса КР по оси. перпендикулярной
плоскости платы, ~ 5 кГц. Подвес эффективно защищает КР от
вибраций основания и выдерживает ускорение порядка 10000 g (при этом
возникающие в конструкции механические напряжения примерно на
порядок меньше предельно допустимых). Плата с КР крепится к
стеклянной подложке путем анодного сращивания. На рис. 4.35 показан
внешний вид варианта ММГ с КР.
В другом варианте конструкции ММГ с КР применяется
электростатическая система возбуждения и емкостная система съема
сигнала [4.32]. Такой вариант конструкции существенно упрощает
изготовление и сборку ММГ, обеспечивает возможность балансировки
параметров КР с помощью электростатического привода,
уменьшает габариты и массу, позволяет исключить проблемы, связанные со
стабильностью его магнитных компонент, повысить его устойчивость
по отношению к внешним механическим и температурным
воздействиям, а также снизить стоимость ММГ.
В табл. 4.5 приведены основные характеристики коммерчески
выпускаемых, а также некоторых разрабатываемых типов ММГ.
4.4.2. Микромеханические акселерометры. Первые серийно
выпускаемые ММА появились значительно раньше, чем ММГ (конец
80-х-начало 90-х гг.) в силу относительной простоты их конструкции
в сравнении с конструкцией ММГ — меньшее количество степеней
свободы, отсутствует стабилизированный вибропривод, уровень
измеряемых ММА инерционных ускорений существенно больше уровня
ускорений Кориолиса, измеряемых в ММГ. Отсутствуют такие
принципиальные конструкторско-технологические проблемы, как
необходимость создания долговременного вакуума в рабочем объеме ММГ
для обеспечения высокой добротности упругого подвеса ЧЭ, а
также необходимость построения управления высокодобротной
механической системой гироскопа и др. В микромеханическом исполнении
реализуются в основном три схемы ММА с упругими подвесами ЧЭ
как прямого, так и компенсационного измерения: ММА с
поступательным перемещением ЧЭ; ММА с упругим подвесом маятникового
типа; вибрационный ММА. В свою очередь в акселерометрах с
поступательным перемещением ЧЭ используются два различных типа
его движения — движение в плоскости подвеса и перпендикулярно
к этой плоскости. В качестве датчиков перемещения ЧЭ используются
емкостные, а также тензорезистивные и пьезоэлектрические датчики.
Компенсация инерционных сил и моментов осуществляется с помощью
датчиков силы и момента магнитоэлектрического или
электростатического типов. Максимальные ускорения, измеряемые с помощью ММА,
могут достигать величин порядка 105 g, уровень погрешности ММА
оценивается величиной порядка 10~4-10 g.
На рис. 4.36, с, б показаны маятниковые ММА, разработанные в
лаборатории Ч. Дрейпера. Конструкция на рис. 4.36, с
предназначена для использования в специальных боеприпасах, испытывающих
очень высокие ударные перегрузки, и позволяет измерять ускорения
до I05 g. ММА, конструкция которого представлена на рис. 4.36, б,
а б
Рис. 4.36. Микромеханические акселерометры, разработанные в лаборатории
Ч. Дрейпера
ЦНИИ
«Электроприбор»
ОАО
«Элпа»
Systron
Donner
Inertial
BOSCH
Sensortec
Silicon
Sensing
BAE Systems
Analog
Devices
Фи рма
ММГ-2
МПГ-1
LCG50
SMG040
(60,61)
CRS10
SiRSSOl
AD1S16130
RR
Виутреикий
упругий карда-
новый подвес,
электростатический двигатель,
емкостной съем
Пьезокерамический
RL
Камертон
RR
Упругий карда-
иовый подвес,
электростатический двигатель,
емкостной съем
LL
Кольцевой
резонатор,
электростатический
двигатель,
емкостной съем
LL
Кольцевой
резонатор,
магнитоэлектрический
двигатель,
индукционный
съем
LL
Два
дифференциально включенных
независимых
упругих подвеса
электростатический двигатель,
емкостной съем
Тип гироскопа
±(50-1500)
±300
±500
±240
±300
±(50-1500)
±250
Диапазон
измерений,
град/с
20 мВ/град/с
(5±0,15) мВ/град/с
3,2 мВ/град/с
7 мВ/град/с
LSB/град/с
(32 бита на
диапазон)
18,2 мВ/град/с
LSB/град/с
(24 бита на
диапазон)
Масштабный
коэффициент
5?
0,05
0,5
0,25
-
0,04
Нелинейность,
о/
/о
±0,5
41
±0,3
±3 (1σ)
Смещение
нуля, град/с
0,06 (за 30 с)
0,0033
0,00083
0,0016
Стабильность
нуля в эапуске,
град/с
Ю
0,2
0,56
Случайное
угловое
блуждание, град/^/ч"
0,05
0,01
h-
0,05
Чувствительность к g,
град/c/g
«do
ID
S. ex
я: сх
—' a;
ОАО
«Элпа
Systron
Donner
Inertial
i|
si
Шсй
slf
«J tn
= С
зд
AE Systems
CO
Analog
Devices
Фирм:
CN
^
о
in
О
О
_1
о
ел
о
сЛ
cd
и
Ί
о
СЛ
ел
OS
V)
о
со
из
ел
о
<
£
>
га
сх
Щ
О
О
.В о
— а:
0,05 град/с
чувствитель
1=*
ц.
и
«3
га
сх
О
о
_ „
О
ы
О
и
-χ»
га
сх
Щ
о
κϊ
га
сх
in
с5
^^
О
S£
JJ
га
сх
in
о
l=*
ξ
0,0125 град/с/ι
S
>·>
3
§
g
CO
со
in
г-
g
1
Is
11
О
+
in
CN
in
CD
+
О
1
in
О
+
о
in
CN
+
О
I
in
+
о
43-
in
CD
+
О
exo
b- X
CX rn
<u ra
£ га
о χ:
и
Ε
CN
О
in
"о*
£
in
СП
и
Ε
О
со
о
из
,_.
in
о
О
О
CN
сх
га
£
О
X
о
CN
X
О
СО
г-
о
X
чЗ-
σι"
CN
Χ
σϊ
CN
О
χ
r-
X
CO
CN
CO
r-T
X
О
CO
X
О
CO
CO
CO
X
ID
из
CO
X
За
§-
CX
ra
XD
£
CN
CN
8
8-
2"
о
s
1
1
■3
ш
a:
X
3
<u
a:
m
*
1
V
i'
„»
IIs \
предназначен для использования в системах ориентации и навигации
различных типов подвижных объектов; погрешность этого ММА
составляет (10-4-10~3) g.
Больших успехов в разработке ММА добилась компания Analog
Devices, чьи микромеханические акселерометры (рис. 4.37) стали
практически первыми массово выпускаемыми инерциальными МЭМС-дат-
чиками.
Анкер
■ I1 '
Расгяжка
Неподвижная...
обкладка Ζ "^
Подвижная-»
обкладка X\
Неподвижная '-
обкладка Υ
чэ
Инерционная
*Анкер
Рис. 4.37. ММА компании Analog Devices
В основе этих ММА — одно- либо двухкомпонентный упругий
подвес инерционной массы со степенями свободы в плоскости
подложки (рис. 4.37, с). В качестве системы съема применяется емкостной
датчик, выполненный в виде гребенча-
.*.*.*.*.·«·. той структуры. Подвес выполнен методом
" . * *.■*·*,*-** поверхностной микромеханической обра-
*·*·",·*« ботки в поликремнии толщиной 2 мкм
·_■*..■ (рис. 4.37, б). В объеме кристалла кремния
. ·. *. ив поверхностных поликремниевых сло-
.*■.*., ях помимо ЧЭ размещены усилители сиг-
• " * " * * · налов с выхода первичного преобразова-
• · *·"■»." теля информации, аналогово-цифровые и
9 л* л *»*·"·* в·" цифроаналоговые преобразователи, демо-
• . * ·. * " * " дулятор, источник опорного напряжения,
схемы самодиагностики и подстройки схем
Рис. 4.38. Резонатор вибра- термостабилизации параметров,
циошюго ММА^ лаборато- Пример реализации механического ре-
рии Ч.Дреипера зонатора для вибрационного
микроакселерометра лаборатории Ч. Дрейпера показан
на рис. 4.38. Резонатор представляет собой изготовленную из
монокристаллического кремния камертонную структуру с двумя
массами, подвешенными в упругом подвесе, обеспечивающем им движение
в плоскости подложки. Вибрационный привод реализуется с помощью
электростатической структуры. Подвес располагается в вакуумиро-
ванном керамическом корпусе. При номинальной собственной частоте
подвеса 20 кГц и добротности порядка 105 достигается масштабный
коэффициент 100 Гц/g. Ожидаемая погрешность вибрационного ММА
составляет величину порядка 10_б g.
В табл. 4.6 представлены характеристики промышленно
выпускаемых зарубежных и отечественных ММА.
В заключение отметим, что при проектировании
микромеханических гироскопов и акселерометров возникает задача оценки их
предельно достижимых минимальных погрешностей, величина которых
определяется такими факторами, как термодинамические шумы
подвеса ЧЭ, шумы системы съема, включая шум усилителя, шумы
пассивных электрических элементов, шум источников питания. Известно,
что предельные погрешности ИЧЭ зависят от габаритов ЧЭ, поскольку
энергия полезного сигнала пропорциональна массе или моменту
инерции ЧЭ (т.е. кубу характерного габаритного размера ЧЭ или размера
в степени 5) и резко падает с уменьшением его габаритов. В то же
время энергия шумов системы съема (например, емкостной системы
съема (ЕСС)) пропорциональна квадрату характерного размера ЧЭ и
убывает медленнее с уменьшением его габаритов. При оценке
предельных погрешностей микродатчиков также следует учитывать
реактивное силовое воздействие шумов системы съема на ЧЭ, поскольку
величина пондеромоторных реактивных сил пропорциональна размеру
рабочей поверхности ЧЭ и также убывает пропорционально квадрату
его линейного размера, т.е. медленнее, чем измеряемые полезные силы
и моменты. Подобные эффекты в традиционных (макро) гироскопах
и акселерометрах незначительны и, как правило, не учитываются
в моделях погрешностей. Одним из существенных факторов, также
влияющих на величину погрешностей, порождаемых источниками
шумов системы съема, является величина электрического напряжения,
подаваемая на электроды емкостного датчика перемещений ЧЭ,
поскольку, с одной стороны, это напряжение определяет коэффициент
усиления ЕСС, с другой — является коэффициентом усиления
реактивных случайных пондеромоторных сил, действующих на ЧЭ со стороны
электродов ЕСС.
На рис.4.39, 4.40 представлены соответственно оценки
инструментальных погрешностей ММГ и ММА, порождаемых спектром
основных возмущающих факторов, включающих статические и
динамические небалансы подвеса, перекосы и несовпадение осей,
несимметричность элементов системы съема, ограниченность жесткостей торсионов
подвеса на изгиб и кручение по «паразитным» степеням свободы,
нестабильность параметров подвеса, двигателя, системы съема
сигнала. Учтены также собственные шумы подвеса и системы съема
сигнала [4.33]. Оценки представлены в виде зависимостей погрешностей
ОАО АНПП
«Темп-
Авиа»
Colibrys
Silicon
Designs,
Inc.
Motorola, Inc.
(Freescale
Semiconductor)
Robert Bosch
GmbH
Analog
Devices
Фирма
ATI 115
MS8000.D
Model 1210
MMA6231Q
SMB380
ADXL320
Тип акселерометра
одна
одна
одна
одна
три
две
Количество осей измерения
7
±(24-100)
±(54-400)
±10
±2, ±4, ±8
in
41
Диапазон, g
(25004-66)
cS
CM
•Ιο
о
о
(8004-10)
120
2g: 256 LSB/g
4g: 128 LSB/g
8g: 64 LSB/g
(10 битов на
диапазон)
174
Масштабный коэффициент,
мВ/g
см
+1
-
Погрешность масштабного
коэффициента, %
±50 мВ
<( 104-500) Mg
1 % от
диапазона
измерений
1,65±0,2В
s
о
CD
+1
1,5±0,2В
Смещение нуля
<(0,014-2,5) Mg
в течение 48 ч
Стабильность нуля в
запуске
< (0,154-7,5)
Стабильность нуля от
запуска к запуску, Mg
< (0,14-5)
0,25-20
см
-
±0,6
Чувствительность нуля к
температуре, Mg/°C
1
О
со
Нестабильность КВХ
1
О
сч
1
о
со
0,015
0,01
Чувствительность
масштабного коэффициента к
температуре, %/°С
•1·
00
о,
V
-
7
±0.5
±0,2
Нелинейность, %
с
CD I
X
X
о
s —
Z7
J=i
О
U
_ 1Л
C 1-
— 1Л ,
о
в
о
о
со
C/D
О
OJ
"5
-о
О
о
OJ
о
о
1П
—■
1
о
■—_
со
ь;
s
о
со
щ
см
о
о
о
ё
-Ί5 У -
π
га £ί со
ε s ё <
*ί CJ ^
*· CO
Is
φ
CDS
Г Е
шо
о
а
СО ID
СО — tib
=> ^ ■
(Л W ιο
О
о
X
*
g>8
_2 CJ
<а
«л со -^.
со
X
О
<
*?
оГ
1
"5.
о
in
CN
+
"
lO
1
§
О
—'
е
πυ ьо
cl га со чэ
с Э ч?г £ :>
со
ί
10-i-
10-2-
in 3-
10 J
10-"-
10-5-
ъ
1 2,17-10 2
грял /ч
—1,9 ί
У
У...
ЛШ,
—
571 град/ч
-ι—-—► =
град/ч^7
^
м
+► =
) —
/ 1 ιιιιιι Ί
{0,1 мм)—
3,6
36
360 3600 6Ω, град/ч
Рис. 4.39. Погрешности микромеханических гироскопов
4,0310 3 5,60-10 2 3,20-10л δα, д
Рис. 4.40. Погрешности микромеханических акселерометров
масштабных коэффициентов 5п и Sa, систематических погрешностей
<Ш, δα, случайных погрешностей (указаны на рисунках в выделенных
полях) от характерных размеров ЧЭ датчика (10, 1, 0,1 мм).
4.5. Традиционные акселерометры
Традиционный акселерометр макроэлектромеханического
исполнения как датчик линейного ускорения подвижного объекта представляет
собой измерительный прибор, содержащий чувствительную массу,
перемещение которой под действием сил инерции относительно корпуса
прибора ограничено упругой связью и несет информацию об
ускорении. Известно большое количество конструкций и схем
акселерометров. Теоретические основы построения, математические модели,
конструктивные решения акселерометров представлены, например, в ра-
Рис. 4.41. Схема осевого
акселерометра
ботах [4.34-4.36]. Обсудим кратко наиболее распространенные типы и
основные характеристики ряда серийно выпускаемых акселерометров.
По характеру информационного движения чувствительной массы
акселерометры могут быть разбиты на три основных класса: с
поступательно перемещением ЧЭ — осевые или линейные; с вращательным
движением ЧЭ — маятниковые; с вибрационным движением ЧЭ в
упругом резонансном подвесе. По принципу измерения акселерометры
разделяются на приборы прямого и компенсационного типов измерения.
Простейшая схема осевого
акселерометра приведена на рис.4.41. Корпус /
акселерометра жестко связан с
подвижным объектом. ЧЭ 2 связан с
корпусом упругим подвесом 3\ ось X, вдоль
которой перемещается под действием
сил инерции масса 2, является осью
чувствительности. Перемещение χ ЧЭ
вдоль оси X измеряется с помощью
датчика перемещений 4\
демпфирование собственных колебаний массы
осуществляется демпфером 5.
Достоинством осевых акселерометров является их меньшая, по
сравнению с маятниковыми, методическая погрешность,
порождаемая угловым движением основания. В то же время практическая
реализация осевого акселерометра навигационного класса точности
(Ю-6 -=- Ю-4 g) затруднительна. В этой связи наибольшее
распространение получили маятниковые акселерометры.
В состав маятникового компенсационного акселерометра входят
электромеханический узел и компенсационный контур. Акселерометр
с конструктивной схемой электромеханического узла на основе
поплавкового подвеса (рис. 4.42) применяется в случаях высокого уровня
ударных и вибрационных воздействий, возникающих в процессе
эксплуатации [4.34].
Электромеханический узел содержит корпус (на рисунке не
показан), заполненный газом или жидкостью. Внутри корпуса с помощью
опор // (например, камневых) центрируется ЧЭ — маятниковый
подвижный узел, в состав которого входит несущий элемент 5,
обеспечивающий маятниковому узлу нулевую плавучесть и необходимую
маятниковость с помощью груза 10. Поворот маятникового узла вокруг
оси подвеса определяется с помощью датчика угла. На рис. 4.42
показан датчик, состоящий из шихтованного магнитопровода 13 с катушкой
возбуждения (статор) и дифференциально включенными сигнальными
катушками 12 (ротор). Для компенсации возникающего при ускорении
инерционного момента применяется магнитоэлектрический моментный
датчик, состоящий из неподвижной системы магнитов 8 и
магнитопровода 9, а также подвижной системы, состоящей из катушки моментного
датчика 6, размещенной на стакане 7, прикрепленном к несущему
элементу 5. Питание обмоток датчика момента и съем сигнала
датчика угла обеспечивается токоподводами 2, соединяющими контактные
элементы подвижной 3 на кронштейне 4 и неподвижной / колодок.
В качестве центрирующих элементов кроме камневых опор могут ис-
1 13
Рис. 4.42. Конструктивная схема акселерометра с поплавковым подвесом
пользоваться виброопоры, растяжки и неконтактные магнитные
подвесы. В приборе могут применяться также датчики угла индуктивного и
емкостного типов.
Функциональная и конструктивные схемы электромеханического
узла маятникового акселерометра, более простого в технологическом
отношении, приведены на рис. 4.43,4.44 соответственно.
//////////////////Л OU. ' /
Датчик момента
Датчик угла
с(чу
ίΐϋ
вствительная масса
Усилитель
** U Упругий подвес
Выходной сигнал усилителя
Рис. 4.43. Функциональная схема маятникового акселерометра с упругим
подвесом ЧЭ
ЧЭ 10, упруго подвешен с помощью балки // на основании 2
(рис. 4.44). Упругий подвес, как правило, выполняется из единой
заготовки (плавленый кварц, монокристаллический кремний) методами фо-
толитографии, а также изотропного и анизотропного травления.
Приборы с кремниевыми или кварцевыми упругими подвесами, благодаря
отсутствию у этих материалов заметных гистерезисных свойств,
обладают высокой разрешающей способностью. Так как весь маятниковый
узел выполняется из единой заготовки,
то существенно уменьшаются
погрешности нулевого сигнала прибора, обычно
связанные с нестабильностью заделки
упругих подвесов. Измерение углового
перемещения массы осуществляется с помощью
емкостного датчика (электроды 4). В
акселерометре в качестве
компенсационного датчика применяется
магнитоэлектрический датчик момента, реализованный
в виде катушек 5 на подвижной части,
и магнитной системы, состоящей из
магнитов 6 и магнитопроводов (элементы /,
7-9, 14), на неподвижной части. Элементы
магнитопровода /, 8 одновременно
являются неподвижными электродами
емкостного датчика угла. С помощью выступов 3
на основании обеспечивается зазор между
подвижными и неподвижными
электродами емкостного датчика. Токоподводы 12
к катушкам датчика момента и
электродам датчика угла выполнены напылением
металла на поверхность балок. Газ в
зазоре между электродами емкостного
датчика обеспечивает эффективное
демпфирование чувствительного элемента. Все элементы акселерометра
крепятся с помощью кольца 13. Датчик момента подключен к датчику угла
через внешний компенсационный контур, обеспечивающий
отрицательную обратную связь. Компенсационный контур может выполняться как
аналоговым, так и цифровым.
Компенсационные акселерометры маятникового типа отличаются
высокими метрологическими характеристиками: большим
динамическим диапазоном порядка 104-105; высокой линейностью порядка
0,05%; высокой разрешающей способностью порядка Ю-6 g [4.35].
Основными источниками погрешностей являются: тяжения в
упругом подвесе и смещение нулевого сигнала в системе съема
перемещений ЧЭ, приводящие к смещению нулевого сигнала акселерометра;
нестабильности характеристик упругого подвеса и датчика момента
(в основном обусловленные температурными эффектами), вызывающие
изменение масштабного коэффициента акселерометра; несовершенство
подвеса, порождающее чувствительность акселерометра к
перекрестным по отношению к его измерительной оси ускорениям; комбинация
Рис. 4.44. Конструктивная
схема маятникового
акселерометра с упругим подвесом
ЧЭ
вибрационных ускорений вдоль и поперек измерительной оси
акселерометра, вызывающая сдвиг его нулевого сигнала; нестабильности и
шумы функциональных узлов акселерометра, порождающие случайные
погрешности.
Модель измерений акселерометра может быть представлена в
следующем виде:
ах = (1 + Ss;)ax + kytiy + kzaz + ква^ау + αο + η^,
где αχ — измеренное акселерометром ускорение; а^ — измеряемое
ускорение; ау,ах — ускорения, нормальные к измерительной оси
акселерометра; £х. — погрешность масштабного коэффициента; ку, kz —
коэффициенты чувствительности акселерометра к соответствующим
перекрестным ускорениям; кв — коэффициент вибрационной
погрешности; αο — смещение нуля акселерометра; п^ — случайная погрешность
(шум) акселерометра.
Типовые характеристики маятниковых компенсационных
акселерометров представлены в табл. 4.7.
Чувствительная
масса
Ось чувствительности
Упругий подвес
Чувствительная
элемент
\
Корпус
Вибрационные
элементы
Упругий подвес
- Чувствительная
элемент
Рис. 4.45. Схема вибрационного акселерометра с упругим резонансным
подвесом чувствительной массы
Таблица 4.7. Типовые характеристики маятниковых компенсационных
акселерометров
Характеристика
Диапазон измерений, g
Нестабильность масштабного коэффициента, %
Нелинейность -масштабного коэффициента, %
Стабильность смещения нуля, g
Повторяемость смещения нуля, g
Температурный коэффициент смещения нуля,^/°С
Гистерезис смещения нуля, g
Разрешение, g
Частотный диапазон, Гц
Численное значение
до ±100
-0,1
■- 0,05
0,0001-0,01
0,001-0,03
-0,001
< 0,002
-0,00001
до 400
Таблица 4.8. Типовые характеристики вибрационных акселерометров
Характеристика
Диапазон измерений, g
Нестабильность масштабного коэффициента, %
Нелинейность масштабного коэффициента, %
Стабильность смещения нуля, g
Разрешение, g
Частотный диапазон, Гц
Численное значение
до ±200
-0,01
-0,05
0,0001-0,001
-0,00001
до 100
Схема вибрационного акселерометра с упругим резонансным
подвесом ЧЭ представлена на рис. 4.45.
Измерительным узлом такого акселерометра является пара
идентичных подвесов чувствительных масс, состоящих собственно из массы,
упругого элемента, с помощью которого масса крепится к основанию
прибора, и вибрационного элемента (балка, мембрана, струна),
связанного с массой. Как правило, подвес выполняется из кварца или
монокристаллического кремния. Система возбуждения и съема
обеспечивает колебательное движение вибрационного элемента на его
собственной частоте. Для возбуждения применяются магнитоэлектрические,
электростатические и пьезоэлектрические датчики силы. Для съема
информации о перемещениях используются индукционные, емкостные,
пьезоэлектрические датчики. При наличии ускорения вдоль оси
чувствительности акселерометра за счет дифференциального
расположения подвесов происходит, как это видно на схеме, натяжение одного и
сжатие другого вибрационного элемента, что приводит соответственно
к увеличению частоты собственных колебаний одного из них и к
снижению частоты другого. Выходным сигналом вибрационного
акселерометра является разность собственных частот колебаний вибрационных
элементов. Дифференциальное включение идентичных подвесов
обеспечивает снижение чувствительности акселерометра к поперечным
о
α.
f-
ω
S
о
α.
СТ)
Honeywell Aerospace
ОАО Cepny-
ховский
завод
«Металлист»
ЗАО НПК
«Электрооптика»
ПНППК
ОАО АНПП
«Темп-Авиа»
РПКБ, РПЗ, ЗАО
«Исток»
Фирма
RBAA500
Вибрациоииый
ЧЭ-из кварца
Q-Flex„QA-3000
Маятниковый,
ЧЭ-из кварца,
емкостный
преобразователь,
компесацнонный
AT
Маятниковый,
трехосный
ВА.2.1
Маятниковый,
ЧЭ-из кварца,
емкостный
преобразователь,
компесацнонный
ДА-9
Маятниковый
металлический,
упругий подвес,
датчик угла
трансформаторного типа
компесацнонный
AT-1104
Маятниковый,
ЧЭ-из моио-
кристалличес-
кого кремния,
емкостный
преобразователь,
компесацнонный
А-17
Маятниковый,
ЧЭ-из
монокристаллического
кремния,
емкостный
преобразователь,
компесацнонный
Тип акселерометра
±70
±60
±10
±25
±12
(οι-ι)τ
±20
Диапазон, g
I
о
τ
V
< 4- 10"'
I
о
о
СО
-н
< 6- 10"'
Τ
о
-н
I
о
о
С-1
-н
±0,012
Смещение нуля, g
I
о
τ
V
1
о
ОО
±1 ■ 10"'
Τ
о
41
Повторяемость
смещения нуля (от запуска к
запуску), g
Ί
о
V
Τ
о
С-1
+1
1
о
СО
+1
±10- 10"' g
(в диапазоне
рабочих
температур)
1
о
Температурный
коэффициент смещения
нуля, g/°C
40 Гц/g
из
τ
~-
о
С-1
ω
0Q
С-1
СО
4
О
о
2,4±0,24
in <С
° С-1
о
о
1±0,15
1,2±0,2
Масштабный
коэффициент, мА/g
< 8 ■ 10"'
8- 10"'
0,2
±0,02
Стабильность
масштабного коэффициента, %
ω
1
о
V/
0,1%
Нелинейность
масштабного
коэффициента
I
о
С-1
V
1
о
С-1
41
±5 ■ 10"'
1.5 %
(в диапазоне
рабочих
температур)
I
о
С-1
41
Температурный коффи-
циеит нестабильности
масштабного
коэффициента, %/°С
Honeywell Aerospace
ОАО Серпу-
ховский
завод
«Металлист»
ЗАО НПК
«Электрооптика»
ПНППК
ОАО АНПП
«Темп-Авиа»
РПКБ, РПЗ, ЗАО
«Исток»
Фирма
RBAA500
Вибрациоииый
ЧЭ-из кварца
Q-Flex„QA-3000
Маятниковый, -
ЧЭ-из кварца,
емкостный
преобразователь,
компесациоииый
AT
Маятниковый,
трехосный
ВА.2.1
Маятниковый,
ЧЭ-из кварца,
емкостный
преобразователь,
компесациоииый
ДА-9
Маятниковый
металлический,
упругий подвес,
датчик угла
трансформаторного типа
компесациоииый
AT-1104
Маятниковый,
ЧЭ-из моио-
кристалличес-
кого кремния,
емкостный
преобразователь,
компесациоииый
А-17
Маятниковый,
ЧЭ-из моио-
кристаллического
кремния,
емкостный
преобразователь,
компесациоииый
Тип акселерометра
I
о
V
1
о
СО
+1
5,8· 10"5
(стабильность
погрешности
выставки)
1
о
СП
+1
Погрешность выставки
оси чувствительности,
g
1
о
V
о
1
О
V
1
о
С-1
V
1
о
Разрешение, g
> 400
> 300
о
о
ОО
Л\
100
Полоса пропускания,
Гц
-55... +105
-55... +95
-60...+ 70
-40...+70
-60...+85
-50... +120
-60... +80
Диапазон рабочих
температур, °С
250
100
ID
С-1
100
16 (30 мс)
d
20 (0-2000 Гц)
15 (20-2000 Гц)
6 (СКО)
Вибрация, g
я
Я
Я
Я
Компенсация
температурных погрешностей
ID
V
< 480
Потребляемая
мощность, мВт
С-1
7]±4
о
ID
О
ОО
СО
ID
СО
| Масса, г
0 20x11
025x15
0 40x26
0 24x18
29,5x28,5x16
24x24x20
Габариты, мм
*
1·
ш
§!
/5>
1
Внешний вид
ускорениям, снижает погрешности, связанные с дрейфом собственных
частот при изменении температуры, снижает погрешности,
возникающие при действии косой вибрации. Типовые характеристики
вибрационных акселерометров приведены в табл. 4.8.
В табл. 4.9 представлены основные характеристики промышленно
выпускаемых зарубежных и отечественных акселерометров
навигационного класса точности.
Список литературы к главе 4
4.1. Пешехонов В. Г. Гироскопы начала XXI века // Гироскопия и навигация.
2003. №4. С. 5-18.
4.2. Брозгуль Л. И., Смирнов Е.Л. Вибрационные гироскопы. М,:
Машиностроение; 1970. 214 с.
4.3. Новиков Л.З., Шаталов М.Ю. Механика динамически настраиваемых
гироскопов. М.: Наука, 1985. 245 с.
4.4. Власов Ю.Б,, Филонов О.М. Роторные вибрационные гироскопы в
системах навигации. Л.: Судостроение, 1980. 224 с.
4.5. Пельпор Д, С, Матвеев В. Α., Арсеньев В, Д. Динамически
настраиваемые гироскопы. М.: Машиностроение, 1988. 260 с.
4.6. Брозгуль Л.И. Динамически настраиваемые гироскопы. М.:
Машиностроение, 1989, 229 с.
4.7. Репников А. В., Сачков Г. П., Черноморский А. И, Гироскопические
системы. — М.: Машиностроение, 1983. 319 с.
4.8. Джашитов В.Э., Панкратов В.М, Датчики, приборы и системы
авиакосмического и морского приборостроения в условиях тепловых
воздействий / Под общей редакцией академика РАН В. Г. Пешехонова. — СПГ,:
ЦНИИ «Электроприбор», 2005. 401 с.
4.9. Полеткин К. В., Троицкий Н.Г., Черноморский А. И. Уменьшение
температурного дрейфа датчика угловых скоростей на базе роторного
вибрационного гироскопа компенсационного типа // Гироскопия и навигация.
2006. №3(54). С. 64-75.
4.10. Тихонов В. Α., Черноморский А. И. Автономное определение дрейфов
гироскопов бесплатформенной инерциальной навигационной системы //
Авиакосмическое приборостроение. 2004. № 1, С. 24-27.
4.11. Frederick Aronowitz. Fundamental of the ring laser gyro // Optical Gyros
and their Application / Eds. D. Loukianov, R. Rodloff, H.Sorg, B.Stieter.
RTO / NATO. 1999. P. 3-1-3-45
4.12. Лукьянов Д. П. Лазерные и волоконно-оптические гироскопы:
состояние и тенденция развития // Гироскопия и навигация. 1998. №4(23).
С. 20-45
4.13. Федоров Б.Ф., Шереметьев А.Г., Умников В.Н. Оптический квантовый
гироскоп.-М.: Машиностроение, 1973. 222 с.
4.14. Бычков СИ,, Лукьянов Д.П., Бакаляр А.И. Лазерный гироскоп. М.:
Советское радио, 1975. 421 с.
4.15. Бурнашов М.Н., Филатов Ю.В. Основы лазерной техники. — СПб,:
СПбГЭТУ «ЛЭТИ», 2000. 133 с.
4.16. Галкин В. И. Перспективные гироскопы летательных аппаратов и их
производство. — М.: МАТИ, 2005, 151 с.
4.17. Серегин ВВ., Кукулиев P.M. Лазерные гирометры и их применение. —
М.: Машиностроение, 1990. 228 с,
4.18. Lefevre Η. С. Fiber-Optic Gyros copes. — Boston, London.; Artech House
1993.
4.19. Шереметьев А. Г. Волоконный оптический гироскоп. — Μ.: Радио и
связь, 1983. 151 с.
4.20. Филатов Ю. В. Волоконно-оптический гироскоп, — СПб.: СПбГЭТУ
«ЛЭТИ», 2003. 51 с.
4.21. Окоси Т., Окамото К., Оцу М. и др. Волоконно-оптические датчики, —
Л.: Энергоатомиздат, 1991. 256 с.
4.22. Журавлев В. Ф., Климов Д. М. Волновой твердотельный гироскоп. — М,:
Наука, 1985. 125 с.
4.23. Матвеев В. Α., Липатников В. И., Алехин А. В. Проектирование
волнового твердотельного гироскопа. — М.: МГТУ им. Баумана, 1998. 166 с,
4.24. Северов Л. А. Механика гироскопических систем, — М.; МАИ, 1996,
211 с.
4.25. Басараб Μ. Α., Кравченко В. Ф., Матвеев В. А. Математическое
моделирование физических процессов в гироскопии. — М.: Радиотехника, 2005,
176 с.
4.26. Распопов В. Я. Микромеханические приборы. Тула: ТГУ, 2004, 475 с.
4.27. Неаполитанский А. С, Хромов Б. В. Мйкромеханические вибрационные
гироскопы. — М.: Когито-центр, 2002. 122 с
4.28. Пешехонов В. Г., Несенюк Л. П., Грязин Д. Г. и др. Микромеханический
гироскоп, разрабатываемый в ЦНИИ «Электроприбор» // Мехатроника,
автоматизация, управление. 2008. №2, С.29-31.
4.29. Пешехонов В. Г., Несенюк Л. П., Грязин Д. Г. и др. Инерциальные
модули на микромеханических датчиках. Разработка и результаты
испытаний // Материалы XV Международной конференции по
интегрированным навигационным системам. — СПб.: ЦНИИ «Электроприбор»,
2008. - С. 9-15.
4.30. Пешехонов В. Г., Несенюк Л. П., Грязин Д. Г. и др. Инерциальные
модули на микромеханических датчиках. Разработка и результаты
испытаний // Гироскопия и навигация. — 2008. — №3. С. 3-12,
4.31. Peshekhonov V.G., Nesenyuk L. P. Gryazln D.G. et al. lnertial
Measurement Units on Micromechanical Sensors // IEEE A&E Systems
Magazine. - October, 2008. - P. 26-31,
4.32. www.siliconsensing.com. Digital angular rate sensor CRS10.
4.33. Алешин B.C., Афонин Α. Α., Веремеенко К. К. и др. Ориентация и
навигация подвижных объектов: современные навигационные технологии /
Под ред. Алешина Б. С, Веремеенко К. К., Черноморского А. И. — М.:
Физматлит, 2006. 424 с.
4.34. Коновалов СФ. Теория вибро-устойчивости акселерометров. М,:
Машиностроение. 1991. 272 с.
4.35. Titterton Η., Weston J.L. Strapdown lnertial Navigation Technology,
Second Edition, Progress in Astronautics and Aeronautics Series, 207
Published by AIAA, © 2004, 2nd Edition, 574 p.
4.36. Анучин Ο. Η., Емелъянцев Г. И. Интегрированные системы ориентации и
навигации для морских подвижных объектов. —СПб.: ЦНИИ
«Электроприбор», 2003. 387 с.
Глава 5
ИСПОЛЬЗОВАНИЕ ТЕХНОЛОГИЙ
«МАШИННОГО ЗРЕНИЯ» ДЛЯ УПРАВЛЕНИЯ И
НАВЕДЕНИЯ БЕСПИЛОТНЫХ МАНЕВРЕННЫХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
5.1. Задача навигации и наведения с использованием
изображений местности
Использование технологий «машинного зрения», включая методы
теории обработки изображений и распознавания образов, являются
альтернативой GLONASS/GPS технологиям (а в некоторых случаях
и их дополнением) при формировании облика бортовых высокоточных
интегрированных систем навигации и наведения беспилотных
маневренных летательных аппаратов.
Практическая применимость технологий «машинного зрения» в
значительной степени основана на достижениях в области
микроэлектроники и разработках сенсорных бортовых технических устройств
в видимом, инфракрасном и радиолокационном диапазонах
излучения электромагнитного спектра, а также на возможности реализации
сложных алгоритмов комплексной обработки текущей информации от
нескольких источников в современных вычислительных архитектурах.
С технической точки зрения проблема использования технологий
«машинного зрения» для решения задач навигации и наведения
беспилотных маневренных летательных аппаратов формулируется
следующим образом.
Необходимо сопоставить текущее изображение и эталонное
модельное описание сцены наблюдения с последующей локализацией на
текущем изображении заданных объектов сцены и определением значений
текущих координат этих объектов с целью формирования сигналов
управления движением летательного аппарата по существующей
априорной и апостериорной информации о рассматриваемой сцене (участке
земной поверхности).
Априорная информация включает, как правило, следующие данные:
тип и количество объектов сцены, их взаимное расположение, гео-
метрические и яркостные характеристики, характеристики двумерных
полей (поля рельефа, оптического контраста и т.п.).
Апостериорная информация о наблюдаемой в процессе полета
сцене, заключенная в текущем изображении на выходе бортового
сенсора в том или ином спектральном диапазоне, включает данные об
условиях ее наблюдения, характеристиках сенсорных датчиков и т.п.
Понятие «эталонное описание» рассматривается здесь в самом
широком смысле. Это могут быть непосредственно изображения,
двух-(20) и трехмерные (3D) геометрические модели, векторы
признаков, другие формальные описания объектов и сцены и т. п.
Существенные ограничения, затрудняющие возможность
практического решения сформулированной технической задачи, состоят в
следующем:
• априорная неопределенность относительно объектов
распознавания и сцены в целом (неточность определения координат
объектов, изменчивость двумерных полей и т.д.);
• радиометрические (яркостные) и геометрические искажения
текущего изображения (изменения общего уровня яркости, масштаба,
сдвиг и поворот изображения относительно всех трех
ортогональных осей и т.д.), приводящие к его пространственно-временной
трансформации;
• помехи естественного и искусственного происхождения, включая
полное или частичное затенение (загораживание) объектов или
сцены в целом.
Исходя из сказанного, можно сформулировать три основных
направления исследований по преодолению перечисленных трудностей:
1. Разработка методов, технических средств и технологий
формирования эталонных изображений (эталонных описаний) на основе
использования аэро- и космоснимков заданных участков земной
поверхности, каталогов отражательных характеристик, описаний
характерных черт объектов естественного и искусственного происхождения,
априорной информации об условиях наблюдения рассматриваемых сцен
при получении текущих изображений и т.д.
2. Разработка бортовых алгоритмов совмещения эталонного и
текущего изображений, локализации и определения координат заданных
объектов, обеспечивающих робастность по отношению к изменению
априорной информации о характеристиках изображений наблюдаемых
сцен, оптимальную организацию вычислительного процесса в бортовых
вычислительных устройствах и т. д.
3. Создание системы управления, использующей бортовые
сенсорные устройства различного типа и бортовые вычислительные
устройства, реализующие алгоритмы совмещения эталонных и текущих
изображений и определения координат заданных объектов сцены для
наведения летательного аппарата на выбранную точку прицеливания.
Здесь можно выделить два практически реализуемых класса систем
управления и наведения беспилотных маневренных летательных
аппаратов:
• автоматизированные (в большей или меньшей степени) бортовые
системы обработки изображений и распознавания объектов
сцены, решающие весь комплекс задач (наблюдения сцены,
обнаружения, распознавания и целеуказания) с участием
человека-оператора на борту самолета-носителя;
• автоматические (автономные) бортовые системы обработки
изображений и распознавания объектов сцены, полностью решающие
весь комплекс аналогичных задач на борту беспилотного
маневренного летательного аппарата в процессе его полета.
В системах первого класса (автоматизированных) главным
действующим лицом при обработке информации и принятии решения является
человек-оператор. В этих случаях в качестве эталонного изображения
используются изображения сцены, полученные с помощью бортового
сенсорного датчика самолета-носителя или беспилотного маневренного
летательного аппарата с нанесенной на нем оператором меткой
(координатами) целеуказания непосредственно перед пуском. Дальнейшее
сопоставление эталонного и текущего изображений осуществляется
бортовой системой наведения беспилотного маневренного летательного
аппарата в процессе его полета.
Применительно к проблемам навигации и наведения беспилотных
маневренных летательных аппаратов предметом данной главы
являются системы второго класса (автономные). В таких системах подготовка
эталонной информации осуществляется заранее, до вылета самолета-
носителя, с помощью специализированного наземного комплекса
подготовки полетных заданий. Среди многочисленных задач, решаемых
таким комплексом, выделим следующие:
• выбор оптимального маршрута автономного полета беспилотного
летательного аппарата;
• выбор зон коррекции системы навигации, в том числе с
использованием характеристик физических полей Земли (поля рельефа,
поля оптического контраста, и т.п.);
• определение зоны обнаружения, распознавания и целеуказания
заданного объекта;
• формирование эталонного описания сцены и заданного объекта;
• нанесение точки прицеливания.
При этом обязательно учитываются свойства автономной системы
наведения беспилотного маневренного летательного аппарата,
структура алгоритмов обнаружения, распознавания и целеуказания,
характеристики текущего изображения. В тех случаях, когда исходной
информацией для эталонного описания являются фотоснимки, а бортовые
датчики, формирующие текущее изображение, работают в другом,
например, в инфракрасном или радиолокационном диапазонах, решается
также задача построения синтезированного эталонного описания
Функциональная схема такой автономной системы наведения,
представленная на рис.5.1, включает следующие основные блоки:
• систему обработки и распознавания изображений объектов на
земной поверхности (СОРИ), использующую датчик
изображения и специализированный вычислитель, реализующий бортовые
алгоритмы обнаружения, распознавания заданного объекта,
определения координат выбранной точки на поверхности объекта и
целеуказания;
• систему автоматического сопровождения измеренных координат
выбранной точки целеуказания (в непрерывном или дискретном
режиме) в процессе наведения беспилотного летательного
аппарата;
• инерциальную навигационную систему (ИНС), обеспечивающую
на этапах обнаружения, распознавания и целеуказания:
- позиционирование оптической оси датчика изображения
СОРИ в расчетном (заданном) положении,
- слежение датчика изображения за выбранной точкой
целеуказания,
- управление летательным аппаратом при срыве
автосопровождения,
• фильтрации (БФ), обеспечивающий оценку вектора фазовых
координат движущегося объекта с использованием алгоритмов
комплексной обработки информации от ИНС и датчика (датчиков),
формирующих текущие изображения;
• формирования сигналов управления движущимся объектом
(БФСУ).
При этом под «заданной» точкой целеуказания подразумевается
точка на сцене или объекте, координаты которой рассчитываются
заранее и задаются на эталонном изображении и в ИНС перед пуском
беспилотного летательного аппарата.
«Выбранная» точка целеуказания характеризуется определяемыми
в процессе распознавания и целеуказания измеренными в СОРИ
значениями координат точки прицеливания на текущем изображении. В эту
точку и осуществляется процесс наведения беспилотного летательного
аппарата.
Один из возможных вариантов функционирования рассматриваемой
системы приближенно может быть описан, например, следующей
последовательностью действий:
1. После выхода беспилотного летательного аппарата в заданный
район наблюдения участка земной поверхности по информации от ИНС
определяются расчетные значения углов ориентации и угловых
скоростей линии визирования в вертикальной и горизонтальной плоскостях,
наклонной дальности до заданного объекта (фрагмента изображения),
в соответствии с которыми осуществляется выставка оптической оси
1
α.
■ Χ
Χ
О
$
(Π
<u та ι
s Я 2
<7 47
1Z
ω
s
I
ω
*
>,
α.
га
I
*o
О
ω
s
χ
TO
m
TO
I
со
О
С
о
то
ω
s
I
то
со
ТО
:£
>,
ω
ς
ω
^f
ίο
ю
то
α.
ю
α.
ю
о
со
я
?%
л то ,
ч а.
ω то
Й с
2 с
ω
то
U
о
О-
С
ω
ч
о
а.
*о
3
m
ИИНЭЖЕС^ОЕИ
МИЫЕ1/
_S2_
о
U
ω о
X о
« fc
iz
о
ίο a:
ш ω
Я .о
о ю
а. о
то
то
Я «
5 о
датчика изображений в направлении расчетной (заданной) точки
целеуказания.
2. В расчетной точке траектории формируется текущее изображение
(ТИ) объекта и района его расположения в зависимости от
возможностей датчика изображений, скорости движения летательного аппарата
и его маневренных возможностей, поставленной задачи и т.д.
3. Осуществляются операции первичной обработки ТИ (фильтрация
и т.п.) и сопоставления его с записанным и хранящимся в памяти
вычислителя СОРИ эталонным модельным описанием цели; в
результате решаются задачи обнаружения, распознавания и целеуказания
заданного объекта. При этом по информации от ИНС
осуществляется программное управление датчиком изображений для непрерывной
ориентации его оптической оси в направлении выбранной точки
целеуказания.
4. После определения координат выбранной точки прицеливания
осуществляется переход в режим автосопровождения (АС) этой точки
по сигналам от СОРИ и формирование сигналов управления,
пропорциональных измеренным значениям угловых скоростей линии
визирования, углов и дальности. При этом допускается возможность повторения
процедур обработки ТИ и сопоставления его с эталонным описанием,
распознавания заданного объекта и определения его координат.
5. В случае срыва процесса АС управляющие сигналы формируются
по информации от ИНС с учетом оценок, получаемых в блоке
фильтрации (БФ).
Ниже в данной главе обсуждаются современные и перспективные
возможности решения задач первого из трех перечисленных в начале
параграфа направлений — разработка методов, технических средств и
технологий формирования эталонных изображений и описаний
применительно к системам управления беспилотных маневренных
летательных аппаратов типа систем самонаведения, осуществляющим поиск и
автоматический захват заданного объекта или его элемента с
последующим автосопровождением в процессе полета.
5.2. Использование эталонной информации
различного типа в перспективных системах наведения.
Постановка технической задачи
Как уже отмечалось выше, формирование эталонного и текущего
изображений, а также соответствующих этим изображениям
описаний и алгоритмов сравнения в значительной степени основывается
на использовании методов и технологий «машинного зрения» [5.11].
При таком подходе входная информация представляет собой
изображение рассматриваемой сцены (или несколько изображений, включая
стереопары), а выходная состоит из информации о сцене, породившей
это изображение (или изображения), например, выходная информация
может являться описанием сцены в какой-либо форме.
Такие описания должны соответствовать как эталонному, так и
текущему изображениям и быть представлены в форме,
обеспечивающей возможность последующего сопоставления этих описаний для
локализации объектов наблюдаемой (текущей) сцены и определения
необходимых для управления летательного аппарата координат.
Подчеркнем еще раз, что при формировании эталонного
обеспечения для систем рассматриваемого класса необходимо учитывать
следующее:
• возможность использования результатов аэро- и космофотосъем-
ки участков земной поверхности (плановых, наклонных,
стереоизображений) в качестве основного информационного материала;
• возможность затенения и загораживания отдельных поверхностей
и объектов в целом как на аэро- и космофотоснимках, так и на
текущих изображениях рассматриваемых сцен;
• возможность использования дополнительных материалов —
каталогов отражательных характеристик различных конструкций и
поверхностей, размеров типовых объектов и т.д.;
• объемность (трехмерность) рассматриваемых сцен, поскольку
точка прицеливания может задаваться на поверхности
пространственного объекта, при этом подразумевается известность
третьей координаты этой точки;
• относительно большие размеры наблюдаемых участков земной
поверхности на текущем изображении с линейными размерами на
местности до 1-2 км и высокая объектовая насыщенность этих
участков — до 10-15 объектов;
• наличие ошибок в определении относительных и собственных
координат объектов в процессе дешифрирования и локализации
различных объектов или характерных черт местности
естественного и искусственного происхождения на снимках;
• изменчивость характеристик участков земной поверхности —
изменение яркостных, геометрических, текстурных и т.п. свойств
объектов в зависимости от освещенности, времени суток, времени
года и т.д.
Остановимся кратко на анализе возможных походов к
формированию эталонных изображений с учетом перечисленных выше
обстоятельств.
Помимо методов построения трехмерных геометрических моделей
сцен по одному или нескольким изображениям возможны и другие
подходы к формированию эталонных изображений и эталонных описаний.
Один из возможных подходов основан на использовании в
качестве модели трехмерного объекта набора его двумерных изображений.
Процесс идентификации объекта в этом случае заключается не в
отыскании наиболее подходящего эталонного изображения среди набора
проекций, хранящихся в памяти бортовой вычислительной машины,
а в определении оптимальной комбинации этих проекций,
позволяющей использовать для идентификации достаточно малое число
проекций с целью учета трехмерного характера геометрии объектов и сцены.
Представляет определенный интерес и подход, характеризуемый
как «определение формы по тени». Этот подход связан, с одной
стороны, с возможным затенением изображений отдельных объектов на
исходных аэрокосмических снимках рассматриваемых сцен; с другой
стороны — с возможностью более точного определения координат
объектов на сцене по отбрасываемой тени (в основном — высот объектов).
Как уже указывалось ранее, в бортовой системе наведения
беспилотного маневренного летательного аппарата при решении задач
обнаружения, распознавания и целеуказания после предварительной
обработки эталонного и текущего изображений (фильтрации, выделения
однородных областей, границ, контуров и т.п.) могут использоваться
как сами двумерные изображения, так и их модельные описания.
Эталонное описание в этом случае представляет собой описание
в символьной форме характерных черт полученного 20-изображения
(или набора изображений) сцены и практически однозначно связано
с характером получаемого на борту текущего изображения и принятым
алгоритмом обнаружения и локализации объектов сцены.
Важнейшей характеристикой объектов искусственного
происхождения является их правильная геометрическая форма, что допускает
возможность представления их границ набором прямых линий, овалов,
и т.п., характеристики которых (длина, наклон, контурные точки и
т.д.) составляют характерные черты изображения.
Рассмотрим теперь возможную последовательность основных
этапов подготовки эталонного описания при формировании конкретного
полетного задания.
Исходными данными при этом являются:
• цифровая модель местности (ЦММ), подготовленная с
использованием аэро- и космофотоснимков и методов построения
трехмерных геометрических моделей, включающая цифровые модели
объектового состава;
• основные характеристики бортового датчика текущего
изображения, такие, как размер поля зрения, чувствительность,
число элементов разрешения изображения при его представлении
в цифровом виде и т.п.;
• значения координат точки визирования при получении текущего
изображения.
На первом этапе подготовки эталонного описания из ЦММ
удаляются те ее элементы, которые, возможно, не могут быть получены или
локализованы на текущем изображении; для заданных значений
пространственных координат точки наблюдения строится геометрическая
модель наблюдаемой сцены в цифровой форме с нанесенной точкой
прицеливания.
На втором этапе формируется описание эталонной модели
наблюдаемой сцены в форме программного файла, содержащего
информацию о координатах контуров объектов и их высотах вместе с
координатами точки прицеливания и точки наведения. Объекты сложной
формы, поверхности которых не могут быть представлены выпуклыми
многоугольниками, разбиваются на множество элементов с помощью
специальной программы.
На третьем этапе оператором реализуется экранное изображение
эталонной модели с последующими операциями выделения наиболее
информативных прямолинейных отрезков контуров объектов сцены —
эталонных элементов. К таким элементам относятся те, которые
должны с большой вероятностью присутствовать на текущем изображении,
обладать достаточной длиной и обеспечивать уникальность формы
образованного из них эталонного фрагмента — совокупности
непосредственно геометрически связанных эталонных элементов, за счет их
достаточного количества и разной ориентации для обеспечения привязки
по двум координатам плоскости кадра. Для объектов рассматриваемых
сцен указанным требованиям удовлетворяют в первую очередь
горизонтальные линии крыш зданий, верхние участки вертикальных линий
боковых ребер стен этих зданий, труб, градирен, нефтяных емкостей
и других построек, пересечения этих линий и т. п. Эти характерные
черты объектов изображения достаточно устойчивы в условиях
изменчивости.
Построенное таким образом эталонное изображение на четвертом
этапе используется для преобразования в файл, содержащий:
• описания эталонных элементов в виде информации о
прямолинейных отрезках контуров (координаты точек отрезка и его
ориентация);
• описания эталонных фрагментов (координаты центра фрагмента
и список включенных эталонных элементов);
• описания эталонных групп (координаты центра и список
включенных эталонных фрагментов), а также данные о взаимных
положениях и допусках на пространственные связи эталонных
фрагментов и групп.
Устойчивость пространственных связей оценивается с учетом
возможных изменений значений ракурса визирования сцены, вызванных
ошибками подготовки ЦММ и ошибками определения значений точки
визирования.
Как уже отмечалось выше, форма представления эталонного
описания однозначно связана с типом реализованного в бортовой системе
наведения алгоритма обнаружения и локализации объектов на
наблюдаемой сцене. Это особенно относится к операциям формирования
эталонного описания на указанных выше втором и третьем этапах.
Поскольку исходными данными при построении эталонного
описания, как уже отмечалось, являются цифровые модели местности,
рассмотрим основные особенности технологии построения этих моделей.
Оставляя в стороне общие вопросы технологии построения
цифровых карт рельефа местности (ЦКР), являющихся составной частью
цифровых моделей местности, остановимся лишь на рассмотрении
особенностей технологии построения цифровых моделей заданной сцены
и ее объектового состава (ОС). Функциональная схема процесса,
реализующего обсуждаемую технологию, представлена на рис. 5.2.
Входная информация в этом случае используется в виде космо-
фотоснимков (КФС), а также магнитных носителей записей сигналов
бортовых датчиков космических аппаратов при наблюдении заданных
районов земной поверхности в видимом (ТВ), инфракрасном (ИК) и
радиолокационном (Р/Л) диапазонах электромагнитного спектра,
работающих в сканирующем режиме.
В качестве носителей основной информации используются
детальные космофотоснимки заданных районов — кадровые с размером
30 χ 30 км, уточненные кадровые с размером кадра 10 χ 10 км или
5x5 км, с разрешением на местности и 3 м и и 1 м соответственно; а
также панорамные с шириной наблюдаемой полосы земной поверхности
100 ч- 150 км.
При получении уточненных космо- и фотоснимков используется
съемка земной поверхности с разных ракурсов и с временным сдвигом,
что позволяет в итоге получить набор стереоизображений заданной
сцены (блоки 1,2 рис. 5.2). Полученная таким образом информация о
наблюдаемом районе земной поверхности дополняется информацией,
получаемой с помощью сканирующих датчиков с разрешением 5-30 м и
1-2 м соответственно для различных ракурсов визирования (блоки 3,4
рис. 5.2).
Существенным дополнением к информации, получаемой при
дистанционном зондировании заданных районов земной поверхности
с помощью бортовой аппаратуры космических аппаратов, является
использование созданных и постоянно обновляемых каталогов
отражательных (излучательных) характеристик типовых районов и типовых
элементов объектового состава (блок 5 рис. 5.2).
Кроме того, широко используются также данные из каталога
геометрических характеристик типовых элементов объектового состава
(блок 6 рис. 5.2): промышленных зданий, нефтехранилищ, труб,
тепловых электростанций, трансформаторных подстанций, плотин
гидроэлектростанций, сборочных производств и т. п., особенно их высотные
размеры, информацию о которых далеко не всегда удается извлечь из
космофотоснимков.
С учетом суточной, сезонной и погодной изменчивости яркостных
и геометрических характеристик наблюдаемых районов земной
поверхности и элементов объектового состава, а также с использованием
источников дополнительной информации (каталогов отражающих и
геометрических характеристик) удается определить условия
проведения космофотосъемки (временные и ракурсные), а также минимально
необходимое количество космофотоснимков одного и того же района
m
α.
-πι J
X
χ
3"
о
CQ
1- m
о
CO X
о о
Cl. en
<U та
X С
та та
* ж
о ч
со £ζ
£\
Sa
/*
а. .-
о tr
π s
О I
ι ι- S
; £ S
= °-
Si
ο 0'
и О
о
A
О
X
ες
та
Ξ
s
s
. s
CO (jj
s
QJ
дел·
QJ
CL
3
h
s
ξ
о
ρ
"г
I
оди
χ
о
κ~
2
χ
χ
езо
и
О
X
раз
oU
с О
m s
о
:=s m
S о
Ϊ&
ных с
андша
1 ^
0J ^
и
Ш о
О ς
θ
„IJUl
со
ία νο
ω м
ч α.
§ °
α.
•θ-
£
а:
e
(блок 8 на рис. 5.2). Критерием определения минимума потребных КФС
является возможность выделения наиболее стабильных характерных
геометрических признаков элементов объектового состава с
вероятностью не менее 0,8, а также возможность определения направлений
подлета беспилотного маневренного летательного аппарата к заданному
району земной,поверхности, обеспечивающих наиболее эффективную
обработку исходной информации.
Описанная выше совокупность исходных данных позволяет в
комплексе подготовки полетных заданий осуществить операции первичной
обработки входной информации (блок 7 на рис. 5.2): геодезическую
«привязку» КФС, определение координат опорных точек и
дешифрирование изображений заданного района местности, формирование
моделей изменчивости яркостных и геометрических характеристик и т.д.
Остановимся теперь на технологии вторичной обработки исходной
информации, иллюстрируемой с помощью рис. 5.3.
Основные задачи вторичной обработки исходной информации
состоят в следующем:
• уточнение значений координат опорных точек заданного района
земной поверхности с использованием цифровых карт рельефа
местности (ЦКР); измерение значений трехмерных координат
(плановых и высотных) элементов объектового состава с учетом
ракурсов визирования местности аппаратурой космофотосъемки
и затененности отдельных элементов ОС при различном
положении Солнца в момент проведения космофотосъемки;
• выбор наиболее информативных участков земной поверхности
в заданном районе для формирования полетного задания,
реализации траектории полета беспилотного маневренного
летательного аппарата в горизонтальной плоскости; выделение стабильных
характерных геометрических признаков элементов объектового
состава с использованием построенной ранее модели
изменчивости этих характеристик;
• оцифровка прошедших указанные выше преобразования
изображений заданного района земной поверхности и элементов его
объектового состава; построение цифрового массива значений
координат совокупности точек трехмерной модели местности
(ЦММ).
При решении задачи выбора наиболее информативных участков
земной поверхности и характерных геометрических признаков
элементов объектового состава используются преобразования,
соответствующие алгоритмам обработки текущих изображений, реализуемых
в бортовой аппаратуре системы наведения беспилотного маневренного
летательного аппарата.
Например, при определении координат точек земной поверхности
с помощью алгоритмов сравнения эталонного и текущего
изображений корреляционного типа критерием информативности выбранного
α.
о
II
- ° з
Л о. >-,
™ ί £
Я * Η
CL Χ Ο
Ο CL Я
Щ ο α
а 2 ©
С « °
: 3 3
L. JJ X
3
=:
я
я
<
α
о
Ξ
S
Χ
о
о
ί-
Ο
■9-
о
CL
m
Я
β
Η
о
I
СО
s
о
=я
Я
CL
U
О
s
л \
со
о
Я
Η
тик
о
S
CL
<υ
н
^
я
CL
Я
X
X
ί о
/ <"
ι ="
Л s
4 CL
δ
Ξ
о
QJ
t_
tr
ИП
QJ
CL
Kop
ύ
о
^
H
Я
X
о
s
s
α
ΙΟ
ίτ,
QJ
CO ОТ Е
α
и
О
элементов
S
о
QJ
Э"
X
CL
н
QJ
еом
X
3
X
CL
QJ
(-
я
CL
Я
X
QJ
5
X
QJ
S
с<
3
СО
α
о
:£
я
X
СП
S
CL
7
н
я
5
s
<=t
CL
КОО
QJ
S
Χ
QJ
Χ
3"
о
(-
>>
0
Si
τ β
о я
Η CL
a
ί
я
CL
0Π0
X
л
я
ш к
я S
мат
руб;
с1-Ιο ^
■э-в
я я
= I
nj 0J
я ч
Я ffl
% g.
ч ;
0J Я
CL
С
О
>я
я
я
li
обр;
cue
2 аЯ
я о
я я
\с я
о Ч
Ш ™
Я
Z]
О
о
m
о
ю
о
ч а.
Й о
а.
-Θ-
е
со
ΙΟ
направления подлета может служить условие превышения значения
радиуса корреляции яркостного поля некоторого заданного значения.
Подводя итог сказанному выше, перечислим основные технические
задачи, возникающие при обеспечении систем наведения
беспилотных летательных аппаратов рассматриваемого класса эталонной
информацией:
• уменьшение ошибок целеуказания и увеличение разрешающей
способности бортовых датчиков космических аппаратов,
считывающих параметры яркостного (радиолокационного и т.д.) поля,
• снижение уровня систематических и случайных погрешностей
алгоритмов приведения информации к плоскости сличения
эталонного и текущего изображений;
• разработка методов и алгоритмов пересчета характеристик
изображений, полученных бортовой измерительной аппаратурой
космических аппаратов, к условиям применения бортовых сенсоров
беспилотных маневренных летательных аппаратов;
• создание алгоритмов предварительной обработки эталонных
изображений, минимизирующих влияние изменчивости,
геометрических и амплитудно-фазовых искажений;
• разработка принципов формирования эталонных изображений,
а именно:
- определение целесообразного уровня детализации исходной
картографической информации для создания цифровых
моделей местности;
- определения требуемого уровня соответствия данных
топографических карт и результатов космо- и аэросъемки
местности;
- уточнение допустимого времени устаревания информации,
используемой для построения цифровых моделей местности;
- уточнение каталогов отражательных свойств объектов и
анализ их зависимости от сезона;
- совершенствование методов прогнозирования
отражательных свойств объектов;
- совершенствование способов автоматизированного
выделения контуров объектов и других характерных
геометрических признаков на земной поверхности;
• разработка методов создания обобщенных эталонных описаний
(для различных диапазонов электромагнитного спектра)
наземных целей, их классификации и определения перечня
характерных признаков, необходимых для локализации объектов;
• разработка аппаратурных, алгоритмических и программных
средств, обеспечивающих:
- создание, хранение, обновление банка исходных
картографических данных и эталонных описаний типовых объектов;
- выбор информации из банка данных по запросам систем
подготовки и хранения полетных заданий (ПЗ);
- формирование адекватных критериев оценки
информативности и надежности эталонных описаний;
- автоматизация подготовки ПЗ;
• создание алгоритмов сжатия эталонной информации, а также
средств ее накопления и хранения (в том числе голографических)
для записи ПЗ на борту беспилотных летательных аппаратов и
их самолетов-носителей.
5.3. Алгоритмическое обеспечение задач навигации
и наведения по двумерным полям
5.3.1. Основные требования к алгоритмам «машинного
зрения». В качестве основных требований к алгоритмам обнаружения
объектов на изображении в задачах навигации и наведения обычно
рассматриваются следующие:
• робастность по отношению к факторам, влияющим на процесс
обнаружения;
• точная локализация заданных объектов;
• вычислительная реализуемость.
Остановимся на этих требованиях подробнее. Отсутствие
формализованного описания ключевых факторов, вносящих неопределенность
в процесс обработки, приводит к тому, что говорить о существовании
единственного оптимального в определенном смысле алгоритма для
решения той или иной задачи обработки изображений будет
невозможно еще многие годы. Представим себе, что существует
несколько алгоритмов, обеспечивающих примерно одинаковые результаты на
«идеальных» изображениях. При этом возникает естественный вопрос:
как сравнить эти алгоритмы по качеству их работы. При разработке
реальных алгоритмов в настоящее время стандарт «де факто» состоит
в проверке эффективности работы сконструированных алгоритмов на
значительных выборках реальных данных или изображениях,
полученных с учетом, по возможности, всех факторов, влияющих на процесс
обнаружения. Алгоритмы, обеспечивающие заданное качество
обработки изображений в условиях значительных искажений и влияния
меняющихся факторов, принято называть робастными. Робастность,
как уже указывалось, следует отнести к основному практическому
требованию при разработке алгоритмов обнаружения сложных объектов.
Важное отличие, присущее задаче сопоставления текущего и
эталонного изображений по сравнению с задачей распознавания,
заключается в том, что в практических задачах такое сопоставление всегда
связано с процедурой поиска.
Именно реализация процедуры поиска объекта связана с угрозой
взрывообразного роста необходимого числа вычислений. Проиллюстри-
руем это на примере простой задачи поиска объекта на основе
сравнения его изображения с растровым эталоном или шаблоном (template).
Если необходимо провести анализ соответствия между объектом
размером Μ χ Μ элементов и фрагментом Μ χ Μ элементов из
изображения Ν χ Ν элементов, то простой перебор фрагментов требует
количества вычислений не менее чем Μ2Ν2 операций, что составляет,
например, 10 миллиардов операций при размере объекта 50 χ 50
элементов, а изображения — 2000 χ 2000 элементов. Даже принимая во
внимание значительное увеличение возможностей современных
персональных компьютеров, такие объемы вычислений занимают секунды
или десятки секунд машинного времени, что может далеко выходить
за пределы требований систем реального времени.
К сожалению, в прикладных задачах обработки визуальной
информации искомая яркостно-геометрическая структура на изображении
может иметь не только произвольные положение, угловую ориентацию
и масштаб, но подвергаться преобразованиям, не только аффинным
или проективным, но и гораздо более сложным, таким, как различные
«резиновые» модели или коробление (warping — искажение,
напоминающее смятую бумагу). Наиболее общий подход к возможному решению
этой проблемы состоит в применении иерархической стратегии поиска,
т.е. декомпозиции объекта на более мелкие части с выраженными
особенностями — «характерных черты» — с последующим поиском
этих частей.
При этом бесконечно разнообразные виды зашумлений и
искажений, встречающиеся на изображениях, заставляют искать компромисс
между следующими альтернативами: обнаруживать малое число
наиболее «характерных» черт, рискуя при этом пропустить весь объект,
или же пытаться собирать информацию о многих менее значительных
чертах, детально анализируя эту информацию.
Второе важнейшее свойство, которым должны, как правило,
обладать алгоритмы обнаружения объектов на изображениях, можно
определить как «точная локализация». Это понятие означает, что
необходимо не только обнаружить объект, но и указать с требуемой
(заданной) точностью в системе координат изображения (или сцены) его
положение. В наиболее простой ситуации, например, при аналитически
заданной геометрии искажений, под «точной локализацией» можно
понимать факт определения положения какой-либо характерной точки
объекта вместе с параметрами геометрии искажения (угол поворота,
аффинные коэффициенты растяжений и др.). При этом встречающиеся
случаи ошибок локализации целесообразно разделить на две группы —
нормальные и аномальные ошибки.
Нормальная ошибка в обнаружении объекта — это его правильная
локализация с некоторой позиционной или параметрической
неточностью, характеризуемой количественными оценками. Для объектов,
характеризуемых габаритными размерами, большими 3 χ 3-=- 5 χ 5
элементов изображения, позиционные нормальные ошибки могут быть
значительно меньше размера элемента изображения, уменьшаясь с
увеличением размера объекта. В этом случае принято говорить о так
называемой субпикселы-юй локализации.
К аномальным ошибкам принято относить ситуацию перепутывания
или возникновения артефактов, что связано с фатальными
количественными ошибками позиционирования или просто ложным
обнаружением. Требования по исключению или ограничению уровня
аномальных ошибок составляют очень важную часть требований к
алгоритмам обнаружения. Однако анализ возможностей их возникновения на
основе теоретического исследования каких-либо статистических или
количественных свойств изображений является, как правило, крайне
сложной задачей, и потому в настоящее время редко производится.
Далее, можно констатировать, что, несмотря на создание
обширной специализированной процессорной базы для обработки
изображений, применительно к основной массе приложений реального времени
характеристики вычислителей все еще далеки от желаемых.
Можно достаточно легко получить приблизительные эмпирические оценки
объема потребных вычислений для реализации алгоритмов
машинного зрения. Если рассмотреть алгоритмы, реализуемые на простейшей
апертуре 3 χ 3, то даже в этом случае объем вычислений составляет
десятки операций на точку изображения. Как правило, необходимый
объем расчетов колеблется в пределах от сотен до тысяч операций
на один пиксел. Если размер изображения, предназначенного для
обработки, составляет, например, величину 1000 χ 1000 элементов,
что не является чем-то необычным для современных видеодатчиков
(можно вспомнить, что бытовые цифровые фотоаппараты к 2007 г.
давно перешли отметку 7 мегапикселов в ПЗС-матрице), получим
оценку количества потребных вычислений порядка нескольких гигабайтов
операций на кадр. Применительно к приложениям реального времени
это приводит к оценке быстродействия около 50 Gflop. Сами по себе
все эти оценки не являются запредельными для сверхмощных ЭВМ
последнего поколения, однако следует учесть, что прикладные задачи
машинного зрения применительно к навигации и наведению
беспилотных маневренных летательных аппаратов характеризуются весьма
жесткими ограничениями на массогабаритные и стоимостные
характеристики конструируемых устройств.
Таким образом, вычислительная реализуемость алгоритмов все еще
относится к числу важнейших требований, учитываемых при их
разработке.
5.3.2. Корреляционные методы сопоставления текущего и
эталонного изображений. Традиционная техника сравнения текущего
изображения с эталоном основывается на рассмотрении изображений
как двумерных функций яркости (дискретных двумерных матриц
интенсивности). При этом измеряется либо расстояние между
изображениями, либо мера их близости.
Как правило, для вычисления расстояний между изображениями
используется следующее соотношение:
Ρ (/.5) =
Σ \f(x'y)-a{x.y)\c
(х,у)ех
Ι/α
(5.1)
где f{x,y),g{x,y) — функции интенсивности; X — поле зрения.
Величина а £ [1,оо) в (5.1) определяет характеристики
используемой метрики.
Очевидно, что при а = 2 это выражение описывает обычное
евклидово расстояние между изображениями, рассматриваемыми как
векторы, принадлежащие пространству L2(x,y) на поле зрения X функций
интенсивностей с интегрируемым квадратом.
Пусть дано η эталонных изображений {/;}, г = Ι,.,.,η, каждое из
которых соответствует г-му классу. Отнесение вновь предъявляемого
фрагмента изображения д к некоторому классу j может
осуществляться, например, по методу минимального расстояния до
соответствующего эталона:
j = aigmm (p (g,fi)). (5.2)
г
Этот простейший метод имеет два основных недостатка:
1. Критерий обнаружения зависит от линейных размеров эталона и
изображения.
2. Критерий обнаружения не инвариантен даже к простейшим
фотографическим преобразованиям яркости вида /' = а/ + Ь.
Более приемлемым поэтому является использование
корреляционной метрики, а именно, нормированного коэффициента
корреляции [5.2,5.19]:
Σ {f(x,v)-f°)(g(x,v)-!?)
k{f,g)= , {χ'ν)ζΧ 2 , (5-3)
Σ (f(x,y)-f°) J Σ (g(x,y)-g°)
(x,y)ex V (χ·ν)εχ
где /°, д° — средние значения интенсивности для изображений fag
соответственно.
Нормированный коэффициент корреляции обладает следующими
хорошо известными свойствами:
l)-l<fe(/,5)<l,V/,5;
2) {k(f,g)=l)*=^(g = af + b,a>0,4b);
3) (fc(/.ff) О *=> (ff = о/ + 6,о < 0, Vb).
Последнее свойство, как правило, называют «обратным
контрастом».
Пусть, как и ранее, дано η эталонных изображений {/;}, г =
= 1,...,п, каждое из которых соответствует г-му классу. Обнаружение
фрагмента изображения д по методу максимальной корреляционной
связи осуществляется тогда по правилу:
j = argmax. (k (g,fi)). (5.4)
г
После этого на основании полученного значения максимальной
корреляции может проверяться достоверность детектирования. Если
^(ff'/i) ^ kmin, то обнаружение признается достоверным. В противном
случае объект считается нераспознанным. Теоретическим
обоснованием применения корреляционного метода обнаружения является его
строгая оптимальность для обнаружения детерминированного сигнала
в белом шуме с гауссовым распределением яркостей [5.3].
Важные недостатки корреляционных методов обнаружения
проявляются в присутствии радиометрических (яркостных) и особенно
геометрических искажений текущего изображения по сравнению с
эталонным. В частности, наблюдается быстрое уменьшение
корреляционной связи при так называемых ракурсных искажениях, например,
при поворотах изображений. Присутствие искажений типа «warping»
обычно уже не позволяет использовать корреляционные методы
обнаружения [5.3]. В то же время для этого класса алгоритмов предложено
большое число процедур, позволяющих либо повысить их
работоспособность, либо значительно ускорить процесс поиска. На этом пути
были разработаны иерархические корреляционные алгоритмы,
сохранившие значительную актуальность и на текущий момент. Конструктивная
идея уменьшения времени поиска лежит в основе метода амплитудного
ранжирования [5.1]. Согласно этому методу надлежит анализировать
скорость роста корреляции по мере обработки поля зрения и, если эта
скорость недостаточна, то прекращать обработку текущего фрагмента,
переходя к следующему. Для того чтобы добиться инвариантности
корреляционных алгоритмов хотя бы к аффинной группе преобразований,
были испробованы различные преобразования изображений, например,
преобразование Меллина [5.3]. К сожалению, в силу недостаточной
устойчивости корреляционных алгоритмов к возможным искажениям,
они не находят широкого применения при конструировании алгоритмов
обнаружения сложно структурированных объектов.
Отдельное направление, использующее корреляционные методы
обнаружения, это создание когерентных устройств обработки —
оптических корреляторов [5.3,5.16]. Исследования в этом направлении
активно продолжаются, так как, даже несмотря на значительные
конструктивные трудности борьбы с изменчивостью эталонов, реализуемая
здесь фантастическая скорость обработки (скорость света) привлекает
к себе пристальное внимание. Проблематика построения оптических
корреляционных устройств не является предметом рассмотрения
данной главы. Тем не менее, укажем, что практика использования
оптических корреляторов выявила неожиданно высокий уровень ошибок
аномального обнаружения объектов.
Дальнейшим развитием идей корреляционного обнаружения с
использованием эталонов является морфологический проекционный
подход, предложенный Ю. П. Пытьевым [5.10]. Суть этого подхода
заключается в следующем.
Пусть изображения являются элементами гильбертова пространства
/ е L*, где X· — поле зрения. Тогда можно говорить о норме
изображения II/H и расстоянии между изображениями, равном ||/, — /2||, где
норма понимается как
f2{x,y)dxdy. (5.5)
Далее, пусть задано некоторое выпуклое и замкнутое подмножество
изображений Ζ е L*. Тогда любому изображению д е L* может быть
поставлено в соответствие изображение /mjn e Z, такое, что
||5-/min||=min{||5-/||,/eZ}. (5.6)
Оказывается, такое отображение v(g) : д —► Ζ всегда будет
проектором, в том (алгебраическом) смысле, что v(v(g)) = v(g). Введем
обозначение /min = Prz(g), т.е. <ffmm есть проекция д на Z».
Используя введенное понятие проекции, можно определить
численную меру близости изображения д к множеству изображений Z,
а именно функцию К(д, Z) (морфологический коэффициент
корреляции), аналогичную обычной корреляционной мере близости двух
изображений:
K(g,Z) = \\Prz(g)\\/\\g\\.
Морфологический коэффициент корреляции обладает следующими
свойствами:
1. 0^K(g,Z)^\,geLX, Z e L*;
2. K(g,Z)=l)<=>(g€Z).
Преимущества морфологического коэффициента корреляции
связаны с возможностью более полного учета условий регистрации
изображений. Пусть процесс регистрации изображения описывается при
помощи некоторого преобразования Ъ е Τ эталонного изображения
f(x,y) G L*, где Г-некоторая группа преобразований, Определим
результат регистрации (форму) изображения / как Ζ = {/' = t(f),t e
G Г}. Тогда, используя морфологический коэффициент корреляции
Кт{д, /) = K(g,Z), можно сравнивать изображение с эталоном
инвариантно к любым преобразованиям группы Т.
Рассмотрим, например, общую модель яркостных преобразований
изображения. Пусть эталонное изображение / является двумерной
функцией интенсивности вида
f(x,y) = Yiai*Xi{x,y), X = {jAz, (5.7)
где Ai — непересекающиеся области, на которые разбито поле
зрения Χ, χι — индикаторная функция г-й области разбиения кадра, т.е.
, ч [О, (х,у)&Аг
ai — уровень яркости г-й области.
Множество изображений «той же формы» имеет вид:
Z = {f"{x,y) = YJblxXl{x,y)}. (5.8)
г
Тогда проекционное преобразование можно считать параметрическим
вида
Ьг = b(di),
где г = 0...С — 1, С — количество уровней яркости на изображении.
Для любого изображения д{х,у) проекция Рг,{д) определяется
в этом случае набором параметров Ь вида
g(x,y)Xi(x,y)dxdy
Ы =
0...С-1. (5.9)
Xi(x,y)dxdy
Χ
Вычисление этих параметров не сопряжено с трудностями и
сколько-нибудь значительными вычислительными затратами. После
вычисления проекции изображения д на форму эталона / коэффициент
морфологической корреляции K(g,f) вычисляется непосредственно.
По аналогии с обычным корреляционным обнаружением,
морфологическое обнаружение изображения / по принципу максимума
корреляционного коэффициента осуществляется по правилу
j = aigmax{KT(g,fi)). (5.10)
г
После этого на основании полученного значения максимальной
корреляции может проверяться достоверность классификации.
Если Кт(д, fi) ^ Kmin, то обнаружение признается достоверным.
В противном случае, объект считается нераспознанным.
Обладая робастностью по отношению к радиометрическим
преобразованиям и зашумлениям, морфологические алгоритмы обнаружения
не обеспечивают в то же время необходимой робастности при
геометрических искажениях. Это связано с их унаследованным от
корреляционных алгоритмов свойством сильного уменьшения корреляционной
связи, если площадные структуры эталона и текущего изображения
начинают заметно различаться.
Морфологический подход к обнаружению порождает новую
трудность — необходимость параллельного анализа так называемой инфор-
мативности изображения. Иными словами, для адекватного
использования морфологического коррелятора нужно следить чтобы яркостно —
геометрические свойства изображений были достаточно «богатыми».
По этим же причинам уровень аномальных ошибок морфологического
коррелятора может превосходить соответствующие показатели
обычных корреляционных алгоритмов.
Как уже говорилось, корреляционные схемы обнаружения объектов
на основе эталонных фрагментов изображений хорошо изучены и
нашли отражение в многочисленной литературе [5.1,5.3,5.4,5.21,5.29].
Обсудим теперь соотношения между классической корреляционной
мерой сходства и ее морфологическим аналогом.
Введенное выше понятие «формы» (по Пытьеву) значительно
обогащает радиометрические свойства «эталонного» изображения, давая
возможность строить более робастные алгоритмы обнаружения. При
этом может быть достигнута инвариантность процесса обнаружения
к условиям регистрации, то есть к изменениям характеристик
сенсорных устройств или условиям освещения. Корреляционная схема
обнаружения предполагает вычисление взаимной корреляционной функции
между полученным изображением объекта и его «эталонным»
изображением, в то время как морфологический коэффициент корреляции
есть мера сходства полученного изображения объекта с его наилучшим
изображением (проекцией) на множестве эталонных изображений.
Рассмотрим множество функций-изображений, интегрируемых на
поле зрения X со скалярным произведением
(/.1?) =
и нормой
f{x,y)u{x,y)dxdy (5.11)
||/|| = (/,/)1Х2- (5-12)
Следуя фасеточной модели Харалика [5.29,5.35], удобно снова
рассмотреть разбиение поля зрения X на непересекающиеся области Ait
такие, что
UAi = X; AinAj=0; i+j, i=\,m, (5.13)
г
где m-количество областей, и представить произвольную функцию
яркости изображения в виде:
т
1(х,у) = ^Сг(х,у)Хг(х,у), (5.14)
где Xi(x,y) есть индикаторная функция множества А{.
Без значительного ограничения общности эталонное изображение /
можно представить как такое разбиение X на Ait что с, = const
в пределах области А,,.
т
f{x,y) = ^2ciXi{x,y), (5.15)
ι=Ι
и тогда его форма V(f) получается как множество таких /, для
которых с; — произвольные числа:
т
V(f) = {/:/ = ^clXl(x,y);cz G (-00,00)}. (5.16)
В этом случае проекция произвольного изображения ϋ на V(f) есть
просто отрезок ряда Фурье по базисным функциям Xi(x,y):
P/tf = E^Wy). (5-17)
где μί = ||xi|| = {χί,Χί) есть мера (площадь) области Аг.
Теперь можно проанализировать
соотношение между обычной нормированной
взаимно корреляционной функцией ки,
k </■*) (5 18)
*-" ц/11 ИГ (5Л8)
и коэффициентом морфологической
корреляции km,
к _\\щП (519ч
кт- т . (5.19)
Рис. 5.4. Разница между Геометрическую разницу между эти-
обычнои и нормированной ..
^ ^ „ми двумя величинами иллюстрирует
взаимно корреляционной _ .J , ί
функцией и коэффициентом Ри^·5·4· ™е обозначено а = arccosfcu,
морфологической корреля- р —arccosft-m.
ции Отметим очевидные свойства
коэффициента морфологической корреляции.
1. О ^ km < 1, что следует из свойств проектора.
2. Коэффициент морфологической корреляции не зависит от
преобразования яркости F(f(x,y)), так как преобразование яркости влияет
только на яркости отдельных областей разбиения эталона, но не на
саму геометрию разбиения и, следовательно, F(f(x,y)) не «выходит»
из формы V(f).
5 L >> Ιί- I
и. Γυτη ^ |fl/lx|-
Докажем последнее утверждение. Рассмотрим «эталонное»
изображение / в форме (5.15) и сравним k\ и кт. Необходимо доказать, что
llp/WII2-?i >°· (5-2°)
Принимая во внимание (5.15) и (5.17), перепишем (5.20) в виде
2
>0. (5.21)
Это неравенство может быть получено из известного неравенства
Коши-Буняковского
5>*J <(Σ*?)(Σ>?)· (5-22)
если положить
1/2 , [ϋί,Χί) /г оо\
а,- = Cj/i/ , 6i = —-2~. (5.23)
/ν
Таким образом, при принятых выше допущениях коэффициент
морфологической корреляции, как правило, превышает норму взаимной
корреляционной функции текущего и эталонного изображений.
5.3.3. Методы сопоставления текущего и эталонного
изображений на основе сравнения «характерных черт». При составлении
яркостно-геометрических моделей объектов и разработке робастных
алгоритмов их обнаружения важнейшую роль играет иерархический
анализ «первичных» особенностей изображений — так называемых
«характерных черт» [5.6,5.21].
Такие «характерные черты» могут быть использованы для
сравнения текущего и эталонного изображений в большом числе методов,
например, при иерархической корреляционной обработке, методах
голосования, или схемах сравнения, базирующихся на мере близости Δ
текущего (ТИ) и эталонного (ЭИ) изображений, определяемой
следующим образом:
т.
где pi —мера близости между конструируемыми разработчиком
алгоритма векторными функциями Fi — г-й «характерной черты» текущего
изображения (ТИ) и эталонного изображения (ЭИ) соответственно;
сц —весовой коэффициент г-й «характерной черты» .
Ввиду высокой значимости «характерных черт» (ХЧ) для
разработки алгоритмического обеспечения задач обнаружения и
выделения объектов, ниже приводятся некоторые результаты исследований
свойств различных типов ХЧ применительно к типичным сюжетам —
авиационным снимкам местности.
На рис. 5.5 приведена классификация характерных черт (ХЧ),
которые могут присутствовать на изображениях.
Σ^
Σ
{tii.x)
Y^Ci{U,Xi)
Характерные черты на изображении имеют следующие виды
атрибутов:
1. Положение: концы отрезка, центр отрезка, центр тяжести
области, вершины многоугольников;
2. Геометрические атрибуты: ориентация, длина, кривизна,
площадь, периметр, ширина линии, минимальный и максимальный
диаметр области, оси симметрии, число и положение особых
точек, показатель компактности;
3. Радиометрические атрибуты: контраст, статистика
распределения яркости, знак и величина края, автокорреляция;
4. Текстурные атрибуты: матрица смежности, показатель
однородности, энергия, энтропия, статистика градиентов текстуры,
результаты применения текстурных фильтров, моменты;
5. Топологические атрибуты: связность, соседство, общие точки,
пересечение, параллельность, перекрытие, включение;
6. Цветовые/многозональные атрибуты: вектор атрибутов для
каждого канала;
7. Динамические атрибуты: атрибуты статических и движущихся
объектов;
8. Временные атрибуты: функции изменения атрибутов со временем.
ХЧ -
Точки
Линии
Области
Структуры
Углы, соединения линий, точки высокой кривизны
градиента яркости, центр тяжести области, концы линий
точки экстремальных значений признаков.
Прямые или криволинейные структуры, границы областей
Сегментированные области, специфические формы
(эллипсы, прямоугольники и т.д.)
Комбинации ХЧ
Рис. 5.5. Классификация характерных черт
Выбор конкретных ХЧ и их атрибутов для построения алгоритмов
обнаружения должен основываться на следующих основных критериях:
1. Присутствие/плотность: наличие данных ХЧ на всех
используемых изображениях, достаточная плотность ХЧ для покрытия
интересующего района;
2. Редкость/Уникальность: редкость конкретной ХЧ на
изображении, уникальность ХЧ в окрестности;
3. Инвариантность/Устойчивость: робастность по отношению
к геометрическим и радиометрическим искажениям,
нечувствительность к шуму;
4. Локализация: возможность точной локализации;
5. Интерпретация: возможность быстрого распознавания и
интерпретации;
6. Скорость: время выделения данного класса ХЧ из исходного
изображения.
При работе с реальными изображениями эти критерии являются
противоречивыми. Поэтому конкретный выбор ХЧ и их атрибутов
зависит от доступной вычислительной мощности и от минимальной
требуемой робастности описания ХЧ. В табл.5.1 показано качество
различных свойств характерных черт.
Данная таблица показывает противоречивость разных типов ХЧ
в смысле различных критериев.
Таблица 5.1. Качество ХЧ
Свойства ХЧ
Присутствие/
плотность
Редкость/
уникальность
Инвариантность
Устойчивость
к шуму
Локализация
Интерпретация
Скорость
Влияние
разрывов
Влияние
загораживания
Качество
Лучше —> Хуже
точки
области
точки
области
точки, особенно:
углы, центры
соединения,
замкнутые
контуры,
замкнутые области
точки
точки
области
линии
линии
линии
линии
линии
концевые точки
отрезков,
открытые контуры,
открытые области
линии
линии
линии
области
точки
области
точки
области
особые точки,
центры тяжести
области
области
точки
Рассмотрим ниже очень выборочно и конспективно примеры
современных подходов к выделению основных типов ХЧ (точки, линии,
области, структуры). Смысл этого рассмотрения в том, чтобы составить у
читателя представление о направлениях развития методов анализа ХЧ.
Выделение характерных точек. В литературе по машинному
зрению описаны многочисленные точечные операторы,
предназначенные для выделения особых (характерных) точек на изображе-
нии [5.12,5.16,5.21,5.22]. Точечные операторы могут выделять как
отдельные точки (особые точки в двумерной окрестности), так и точки,
принадлежащие краям (особые точки в одномерной окрестности). Все
точечные операторы основаны на вычислении некоторых атрибутов и
определении, превышают ли значения этих атрибутов порог.
Атрибуты для каждой точки обычно вычисляются в небольшой
локальной окрестности (3x3—11x11 пикселов). Порог определяет число
обнаруженных точек. Он может определяться адаптивно (например,
для порога градиента изображения можно использовать СКО яркости
изображения) или фиксироваться заранее. Альтернативным способом
(без использования порога) является сортировка значений атрибутов
и выбор η лучших точек. Эти способы выбора характерных точек не
гарантируют, что точки будут распределены по изображению
равномерно. Возможна ситуация, когда все точки будут сосредоточены в одной
части изображения. В алгоритмах обнаружения необходимых участков
местности в задачах наведения часто необходимо, чтобы распределение
характерных точек по изображению было как можно более
равномерным. В этом случае необходимо разделить изображение на блоки,
перекрывающиеся по краям, и к каждому блоку, рассматриваемому как
отдельное изображение, применить точечный оператор.
Выделение характерных точек оператором Ферстнера. В
качестве примера современных подходов к выделению характерных точек
рассмотрим точечный оператор Ферстнера [5.22], который обладает
следующими достоинствами:
• выделение характерных точек на изображении с субпиксельной
точностью;
• классификация точек, принадлежащих краям, углам,
соединениям, центрам круговых черт;
• достаточная плотность выделяемых точек;
• инвариантность к вращению;
• малая чувствительность к шуму;
• малая чувствительность к радиометрическим искажениям.
Алгоритм выделения характерных точек состоит из следующих
шагов:
вычисление градиента изображения оператором Робертса
•
(рис. 5.6, б, в);
Г
-1 О
О 1
*/. /"
0 -1
1 О
*/
здесь знаком * обозначена операция свертки изображения с
маской;
• для каждого пиксела изображения вычисление элементов
матрицы нормальных уравнений (рис. 5.6, г-е), возникающих из задачи
аппроксимации функции / ее рядом Тейлора. Вычисление проис-
ί- 4 5 су;
4ΐ/ί
,-/Cv*'J
Рис. 5.6- Применение оператора Ферстнера для вычисления характерных точек
изображения, (с) — исходное изображение, (б), (е) — градиент изображения,
(г)-(е) — элементы матрицы нормальных уравнений, (ж) —
характеристическое число w, (з) — определение характерных точек с помощью порогового
отсечения
ходит в выбранной окрестности пиксела:
ч2
ч
а Ъ
Ъ с
Σ (№.?/)) Σ Γ(χ.ν)Μχ.ν)
Σ Γ(χ.ν)Μχ.ν) Σ (/"(^.i/))2
(5.24)
вычисление характеристики локальной окрестности (рис. 5.6, ж):
А1А2 ас — Ь
w =
Х\ + Аг β + с '
(5.25)
где λι, Аг — собственные числа матрицы нормальных
уравнений. Характеристика w является результатом действия оператора
Ферстнера;
• выбор конкретных точек с помощью задания порога отсечения Т,
w^T (рис. 5.6,з).
Анализ полученных результатов свидетельствует об
удовлетворительных свойствах оператора Ферстнера для выбора характерных черт
на изображениях.
Выделение характерных точек с помощью локальных
признаков. Другим современным подходом служит подход к поиску
характерных точек изображения на основе локальных признаков.
Предполагается, что особые точки имеют выделяющиеся признаки. Для выделения
особых значений признаков разработана модификация известного в
машинном зрении сигма-фильтра.
Обозначим h(x,y) — результат применения к исходному
изображению f(x,y) оператора Η выделения признака:
h(x,y) = Я* f{x,y),
где * обозначает операцию применения оператора (свертка +
дополнительные вычисления).
Для каждого пиксела (х,у) рассматривается его окрестность R
размером Ν χ Ν, внутри которой вычисляется среднее т и СКО σ
значений признака h(x,y):
™=^Σΐι(χ,ν), а2=^^Н2(х,у)-т2. (5.26)
R R
Точка (х,у) считается особой, если h(x,y) не попадает в интервал,
образованный значениями т и σ:
h(x,y)<m — aa или h(x, у) > т + ασ,
где а — параметр алгоритма, определяющий коридор значений
признака.
При экспериментальных исследованиях рассматривались
следующие признаки:
• математическое ожидание;
• дисперсия;
• результаты сверток с различными масками;
• модуль и направление градиента.
Пример выделения особых точек на тестовом изображении показан
на рис. 5.7.
Выделение характерных линий. Наиболее информативными
участками изображения местности являются области, содержащие
изображения искусственных объектов (зданий, дорог и т.д.). Ниже
обсуждаются возможности реализации алгоритмов обнаружения
'Φ ?ч\Ш}
? ■ 4. ■ . ■ ι ·»·- '
с б е
Рис. 5.7. Выделение особых точек при помощи локальных признаков, (с)
тестовое изображение, (б) СКО яркости (N = 5), (е) характерные точки, полученные
С помощью модифицированного сигма-фильтра (N = 5, η = 1)
фрагментов местности, использующих информативные признаки
искусственных объектов.
Важнейшей характеристикой искусственных объектов является их
правильная геометрическая форма. Часто обоснованно предполагается,
что границы объектов на изображении являются прямыми линиями
(см., например, рис. 5.8, с). Отрезки прямых линий имеют такие
атрибуты, как длина, наклон и т.д.
Рис. 5.8. Результаты вычисления градиента изображения: (с) — модуль
градиента, (б) — направление градиента (значения углов по формуле (5.28)
преобразованы в диапазон яркости от 0 до 255)
Иллюстрацией современного подхода к выделению прямых линий
может, например, служить улучшенная модификация классического
метода [5.20], в котором сначала определяются края путем свертки
с двумя простыми 2x2 масками, затем пикселы группируются в так
называемые области поддержки линии (ОПЛ). Каждая ОПЛ
включает пикселы с одинаковой ориентацией градиента. Прямая линия на
ОПЛ определяется путем пересечения двух плоскостей: первая из них
аппроксимирует поверхность интенсивности, вторая, горизонтальная
плоскость, представляет средневзвешенную интенсивность.
Рассмотрим вариант этого метода, состоящий из следующих шагов:
1. Вычисление градиента исходного изображения. Обозначим: / —
исходное изображение; fx, fv — производные исходного изображения
по координатам хну соответственно; т — модуль градиента; а —
направление градиента.
Производные изображения вычисляются с помощью оператора Со-
бела [5.9]:
F =
-1
-2
-1
0
0
0
1
2
1
*/. f =
-1 -2 -1
0 0 0
1 2 1
*/·
(5.27)
В (5.27) знаком * обозначена операция свертки изображения с маской.
Выбор такого оператора обусловлен простотой его реализации,
а также тем, что он обладает свойством подавления шумов.
Затем вычисляются модуль и направление градиента:
™И = Л%)2 + {%)2, Oi^arctg^,
J i i
(5.28)
i,j = Ι...Ν, Ν — размер изображения.
В зависимости от знаков ffp Ά, направление градиента а^
преобразуется в диапазон от 0 до 2π. На рис. 5.8. показаны результаты
вычисления градиента исходного изображения.
2. Группировка пикселов в ОПЛ путем деления пространства
ориентации градиентов на секторы с углом φ. Из-за слабой чувствительности
оператора Собела к истинной ориентации градиента создаются два
варианта разбиений: рО и р(2\ которые далее объединяются. Разбиение
на секторы производится по формулам:
р<!> =
Ψ
(2)
Pij =
ац + 2-к+ {φ/2)
φ
(5.29)
здесь [...] — целая часть числа.
Экспериментально найдено, что значение ψ = 30° является
достаточным для представления ОПЛ, т.е. изображение рО содержит
номера секторов 0 11, а изображение р^ содержит номера секторов
12 23. На рис. 5.9, а, б показаны результаты такого разбиения.
3. Определение с помощью стандартного алгоритма восьмисвязной
разметки областей [5.8], которые образуются в результате выполнения
шага 2, а именно: изображения р'г\ (г = 1,2) разбиваются на Ni
W fir -
?W
областей, которые обозначим Щ' (k = l,...iV;). Каждая область R),
является ОПЛ и определяет проходящую через нее линию, которую
обозначим 1^'.
4. Создание путем слияния изображений рО и р^ нового
изображения ρ (рис. 5.9, β). Каждый пиксел \i,j) изображения ρ получает
значение р\? или р\), в зависимости от того, какая из ОПЛ, Е^
или Щ , содержит более длинную линию. Здесь к, I — номера областей
на изображениях р^ и р^ соответственно, содержащие пиксел (i,j).
Рис. 5.9. Результаты формирования областей поддержки линий, (с) —
изображение р*1' (номера секторов 0... 11 преобразованы в диапазон яркости
0...2Б5); (б) — изображение р*2) (номера секторов 12...23 преобразованы
в диапазон яркости О...255); (е) — изображение ρ (номера секторов О...23
преобразованы в диапазон яркости 0... 255)
Этот прием позволяет несколько уменьшить ошибки в окончательном
представлении ОПЛ, связанные с неточной дискретизацией
направлений вычисленных градиентов.
5. Разбиение изображения риг N областей, которые обозначим Вь,
(к= 1....JV) и определение всех таких областей с помощью
стандартного алгоритма восьмисвязной разметки.
6. Определение с субпиксельной точностью проходящей через
область ОПЛ i?£ линии ί^ с помощью описанного ниже алгоритма.
В начале для каждого пиксела (ж, у) из R^ вычисляются параметры
плоскости, аппроксимирующей поверхность интенсивности исходного
изображения /.
Плоскость представляется уравнением:
z = Ax + By + C. (5.30)
Реальная форма поверхности интенсивности изображения / в
области Rk обычно отличается от плоскости, поэтому удобнее найти
уравнение плоскости как решение методом наименьших квадратов задачи
минимизации ошибки аппроксимации:
ffa. Уг) = AXi + ВУг + С + Ei, (5-31)
или,в матричной форме:
l = Gp + e, (5.32)
где G
χι у] 1
матрица плана, состоящая из координат
Х>г Уп 1
пикселов области Rk (η — число пикселов области); 1 —вектор
наблюдений длиной п, состоящий из значений яркости изображения /
в области Rk\ ε — вектор ошибки длиной п, определяющий отличие
проводимой плоскости от реальной функции яркости в области Rk-
Целесообразно ввести также Η — весовую матрицу размером π χ π,
состоящую из значений модуля градиента Gu = m(xi,yi), Gij = О,
г φ j. В результате пикселы области Rk с большим значением
модуля градиента имеют больший «вес» при определении коэффициентов
уравнения плоскости. Решение системы нормальных уравнений метода
наименьших квадратов имеет вид:
ρ = [АВС}Т = (GTHG)_IGTH1. (5.33)
Как уже говорилось выше, прямая линия в области Rk определяется
как результат пересечения найденной плоскости, аппроксимирующей
поверхность яркости в области Rk, и горизонтальной плоскости,
представляющей среднюю яркость в области Rk. При вычислении средней
яркости «весом» является значение модуля градиента, чем достигается
центрирование прямой линии внутри области. Горизонтальная
плоскость представляется уравнением
Σ m{x,y)f{x,y)
ζ= = г =C\. (5.34)
Σ rn{x,y)
(x.v)eR-k
Пересечение плоскостей (5.30), (5.34) определяет прямую Ik с
уравнением
ах + by + с = 0,
где
а = А, 6 = В, с = С-С,.
Крайние точки отрезка вычисляются путем пересечения прямой
линии и сторон минимального прямоугольника, содержащего область Rk.
На рис. 5.10 показаны информативные участки тестового
изображения, сформированные по результатам работы алгоритма выделения
линий.
7. Вычисление для каждого отрезка следующих атрибутов:
• крайние точки;
• длина;
• нормализованные параметры уравнения линии;
• угол между линией и осью абсцисс;
• средние яркости в полосе с одной и с другой стороны от линии.
Положение пикселов полос вычисляется по целочисленному
алгоритму Брезенхема [5.8].
На основе этих атрибутов формируются отношения между
отрезками для более сложной семантической интерпретации двумерного поля.
88 PS
Pi ill '*■ ///'
Ψ III· ^Ч
% -#
ЩЩ
^--/^M
r// ι
U
flA
Рис. 5.10. Информативные участки изображения на основе выделенных прямых
линий. Показаны линии с длиной большей L. (с) L = 6; (б) L= 10; (е) L = 15
Выделение характерных областей. Иерархические,
корреляционные и аналогичные им алгоритмы (например, морфологический),
модифицированные применительно к характерным чертам, работают
лучше при использовании площадных объектов, а не точечных или
линейных. Разбиение изображения на области является общей задачей
сегментации изображений, которой посвящена многочисленная
литература [5.6,5.14,5.25]. Выделение характерных областей может быть
также основано не на сегментации изображения, а на использовании
результатов выделения характерных точек и линий (см. выше описания
соответствующих алгоритмов). Например, один из методов получения
информативных областей состоит в морфологической дилатации [5.25]
карты информативности, полученной на этапе выделения характерных
точек или линий (рис. 5.11).
**·
и
*. #■
Рис. 5.11. Карты информативных областей, сформированных на основе прямых
линий с длиной > L и прилегающих полос. Неинформативные области
показаны черным цветом (с) L = 10; (б) L = 5
Выделение характерных структур. Как неоднократно
подчеркивалось выше, задача распознавания и выделения произвольных объек-
тов на изображении является плохо формализуемой задачей машинного
зрения.
Однако, применительно к навигации и наведению, отсутствует
необходимость в полной семантической интерпретации сцены, а
требуется лишь быстрое обнаружение предопределенных заранее структур.
В связи со сказанным рассмотрим кратко пример выделения простых
геометрических структур, образованных искусственными объектами.
Рис. 5.12. Отношения между линейными сегментами. Выбранный отрезок
выделен толстой линией. Символами отмечены отношения следующих типов:
«.» — близость; «!» — коллинеарность; «=» — параллельность; «L» —
перпендикулярность; «<» — угол
В результате использования
описанного выше алгоритма
выделения прямых линий
формируется список прямых линий и
их атрибутов. При этом между
линиями могут быть
сформированы отношения близости,
параллельности,
перпендикулярности и т.д. (рис.5.12)
На основе таких отношений
выделяются простые
геометрические структуры, такие как
параллельные пары,
прямоугольники и т.д. (рис. 5.13). Эти
структуры являются главными
характеристиками искусственных
объектов (зданий, дорог).
5.3.4. Яркостные различия образов. В настоящее время не
существует общепринятой модели изменчивости оптических
характеристик трехмерных сцен, охватывающей всевозможные условия наблю-
Рис. 5.13. Выделение геометрических
структур, характеризующих здания,
(с) параллельные пары; (б)
прямоугольники
дения. Объясняется это, прежде всего, многообразием условий
наблюдения и характером изменчивости природных образований и объектов,
отсутствием достаточно полного объема экспериментальных данных о
характеристиках изменчивости.
Для сравнительно небольших участков сцены, когда угол
наблюдения и дальность можно считать постоянными, изменения наблюдаемой
на входе приемного устройства яркости текущего изображения F#
можно описать моделью вида
FH{x,y) = aF0{x,y) + b, (5.35)
где Fq(x, у) —зависимость яркости эталонного изображения от
координат х,у; аиЬ — коэффициенты, описывающие изменение наблюдаемой
яркости.
При этом всегда а > 0, b может быть больше или меньше О,
в зависимости от условий наблюдения.
Целесообразно представить все изображение совокупностью η
областей, в пределах каждой из которых коэффициенты яркости
изменяются пропорционально, а сами области не пересекаются и в сумме
образуют полное изображение, т.е.
η
F0(x,y) = ^2F0i{x,y)xi{x,y),
i-l
где Xi{x,y) индикаторная функция из (5.7).
Очевидно, что такое разбиение можно сделать всегда, уменьшая
размер соответствующих областей. Модель изменчивости в этом
случае можно представить в виде
η
FH(χ, ν) = Σ [aiF0i (х, у) + Ъг]Хг(х, у), (5.36)
i-l
где <ц, bi описывают изменение наблюдаемой яркости в г-й области.
Очевидно, что такая модель хороша лишь в тех случаях, когда
возможно представление изображения относительно небольшим числом
соответствующих областей.
Могут наблюдаться резкие вариации освещенности из-за наличия
теней от объектов. При этом перепады освещенности могут достигать
нескольких раз. В этом случае можно представить модель
изменчивости в виде
FH (χ, у) = а(х, y)F0 (x, у) + Ь(х, у), (5.37)
где а{х,у) и Ь(х,у) имеют тот же смысл, что и в приведенных выше
моделях изменчивости, но меняются в зависимости от изменения
пространственных координат х, у. Поведение этих коэффициентов
практически невозможно предсказать заранее, а характерные размеры на
изображении в этом случае часто соизмеримы с характерными
размерами природных образований. Случайный характер поведения коэффици-
ентов а(х, у), Ь(ж, у) и широкий диапазон изменения их статистических
характеристик приводит к большим трудностям практического
использования данной модели в аналитических исследованиях.
5.3.5. Определение наиболее устойчивых информативных
участков изображения путем локального статистического
анализа. При конструировании алгоритмов обработки изображений
часто возникает задача выбора участков эталонного изображения
с точки зрения их информативности. Критерием при этом, естественно,
являются показатели точности и вероятности правильной привязки.
Наиболее полным показателем информативности может служить
коэффициент корреляции между эталонным (ЭИ) и текущим (ТИ)
изображениями.
На рис. 5.14 показано изображение, на котором в виде уровня
яркости показан нормированный коэффициент корреляции, полученный
при стереоотождествлении стереопары города Каир (значения коэффи-
<· ■ --'-<JtJ£*»K.- -;
'л "" "" *L .' -*"
£,,/* .-·>■ t ..,* .
<■ 'r**- .■ ί * .·-*■!
«Г ' ·'- . " , -~* Ж'- < /"
fe -"' «.» -- 'ί*
№«. -
° -. - ■ ^ *: -.
б
Рис. 5.14. Коэффициент корреляции как апостериорная оценка
информативности, (с) тестовое изображение (г. Каир), (б) — карта коэффициента корреляции
циента от 0 до 1 преобразованы в диапазон яркости от 0 до 255). При
этом роль ТИ и ЭИ играют левое и правое изображения стереопары.
Видно, что коэффициент корреляции полностью отражает
информативность изображения. Участки с небольшой вариацией поля (пустыня,
река) имеют низкий коэффициент корреляции. И наоборот, наиболее
информативные участки (городская часть, дороги, берега реки) имеют
высокий коэффициент корреляции. Недостаток этого показателя в том,
что он вычисляется, как правило, в процессе сравнения ТИ и ЭИ, в то
время как показатель информативности должен вычисляться априорно,
указывая на те участки эталонного изображения, которые будут иметь
наиболее надежную метрику сходства.
Эталонный участок может быть выбран в любом месте области
перекрытия изображений. Неудачный выбор эталона может
существенно ухудшить результат меры сходства. Это бывает, если поместить
эталон в области, загороженной на другом изображении, в области
с линиями разрыва, в области с периодической текстурой или в области
с низким уровнем сигнала (с низкой информативностью). Последний
случай встречается наиболее часто.
Задача выбора информативных участков изображений для
надежного и точного сопоставления изображений не получила к
настоящему времени окончательного решения, хотя и достаточно исследована.
Основная проблема здесь кроется в выборе оптимального сочетания
противоречивых требований гибкого и адаптивного анализа
информативности и быстрых алгоритмов вычисления оценок.
Пусть необходимо найти соответствие некоторой точки (хо,уо) ТИ
с ЭИ. Обозначим f{x,y) — исходное эталонное изображение.
Рассмотрим некоторый фрагмент этого изображения с центром в (хо,уо) и
размером (2JV+ 1) χ (2Ν + 1) пикселов.
Введем функцию информативности данного фрагмента I(xo,yo,N),
для вычисления которой используются координаты фрагмента, его
размеры и распределение яркости внутри фрагмента.
Предстоит ответить на два вопроса:
1. Является ли данный фрагмент информативным.
2. Если фрагмент не является информативным, то можно ли
изменить его размеры так, чтобы он стал информативным.
Ответить на эти вопросы можно с помощью простого критерия,
основанного на сравнении функции информативности / с числовым
порогом Т. Если I < Т, то фрагмент считается неинформативным.
В этом случае размер фрагмента увеличивается на некоторую
константу η до тех пор, пока либо не выполнится обратное условие, либо
размер фрагмента не достигнет некоторого максимального значения
iVmax. В алгоритмическом виде это можно записать так:
N = Nmin,
пока (I(xo,yo,N) < Τ и N < Nmax) увеличивать N на п, если
I{xo,Vo,N) <Т и N > iVmax, то фрагмент неинформативный, иначе —
фрагмент информативный.
Основная трудность данного подхода состоит в выборе порога Т.
Как показано далее, порог зависит как от размера фрагмента, так и от
среднего значения яркости внутри фрагмента.
На рис. 5.15 показаны типичные фрагменты авиационных и
космических изображений, использованные для иллюстрации.
Обсудим теперь возможные априорные показатели
информативности фрагмента изображения.
Дисперсия сигнала. Точность привязки к эталонному изображению
тем выше, чем более неоднородным являются соответствующие
фрагменты изображения. Одним из вычислительно простых и эффективных
·*"" '-:·-.
— *
^ W
Рис. 5.15. Фрагменты изображений, использованных для тестирования метода
определения информативности участков изображений; а — авиационный
снимок города Уфа, б-г — космический снимок города Каир (б — городская часть,
е, г — район пустыни с большим количеством неинформативных участков)
показателей неоднородности фрагмента является дисперсия яркости
внутри фрагмента, которая определяется выражением
. ν ν
с2 {хс, 1», N) = ———-g V V (/ (ж + жо, у + yo)f ~
(
iV N
ш' 2 Σ Σ f& + **.V + Vo)) . (5-38)
l^iV -J- 1J sc=_Ny=_pj
где жо.^/о — точка изображения, для которой определяется
информативность, N —выбранный размер окрестности точки xq, уо-
Очевидно, чем выше дисперсия, тем более неоднородным
является фрагмент. Это соображение иллюстрирует рис. 5.16, на котором
показаны значения среднеквадратичного отклонения (СКО) σ для
фрагментов размером 15 χ 15 пикселов. Центры фрагментов расположены
на регулярной сетке.
На рис. 5.17 показаны графики функции σ(χο, уо, Ν) для двух
фрагментов с центрами вблизи сильных перепадов яркости, где размер
%
Рис. 5.16. Значение СКО яркости внутри фрагмента размером 15 χ 15 пикселов
для изображений на рис.5.7,е-е
70,00
52,50
35,00
17,50
10 20 30 40 50 60 70 80 90 100
122,50
105,00
87,50
70,00
52,50
35,00
17,50
10 20 30 40 50 60 70 80 90 100
Рис. 5.17. Примеры графиков роста СКО сигнала внутри фрагмента в
зависимости от размера фрагмента
фрагмента N меняется от 3 до 100 пикселов. Видно, что при некотором
значении Ν\ дисперсия начинает расти. Поэтому при размере
фрагмента, большем Ν\, фрагмент может считаться неоднородным. Таким
образом, наиболее простая функция информативности фрагмента имеет
вид:
/(ао, уо. Ν) = σ(χο. у0, Ν). (5.39)
Отношение сигнал/шум. Другим важным показателем
информативности является отношение сигнал шум (signal-to-noise ratio, SNR),
которое определяется следующим образом:
SNR(x0,yo,N)
где σε — СКО сигнала, στ
σε(χο,νο,Ν)
стп(яс,Уо,Щ'
СКО шума на фрагменте.
Смысл рассмотрения SNR в качестве показателя информативности
фрагмента состоит в следующем. Если фрагмент однородный, то есть
вариации сигнала в нем малы, то значение SNR тоже мало. Если
на фрагменте присутствуют сильные колебания яркости, то дисперсия
сигнала, как видно из предыдущего пункта, большая, следовательно, и
значение SNR большое.
Для вычисления отношения сигнал/шум необходимо функцию
яркости фрагмента разделить на сигнальную часть и шумовую часть и
вычислить их статистические характеристики. Наиболее простой и
эффективный метод вычисления СКО шума описан в [5.16] и заключается
в следующем.
Предположим, что отсчеты изображения и шума статистически
независимы.
Обозначим: Д,- — отсчеты исходного изображения, то есть без
влияния шумов, riij — отсчеты шума.
Тогда, в предположении, что шум аддитивный, gij = fij+riij —
отсчеты наблюдаемого изображения.
Для статистических моментов справедливы следующие
соотношения. (По-прежнему предполагается, что центр фрагмента расположен
в точке (хо,уо), а размер фрагмента равен N):
средние значения:
тд = mj + тп;
дисперсия:
o* = o*f + oi;
автокорреляционная функция:
Cg(x,y) = Cf(x,y) + Cn(x,y). (5.40)
Если предположить, что шум белый, то
Cn(x,y) = a2J(x,y), (5.41)
где 6(х,у) — дискретный аналог J-функции:
6(х,у)={°]> М + М'
v а/ 11, χ = у =
х\ + \у\ φ 0
0
Таким образом, автокорреляционная функция наблюдаемого
изображения
Cg(x,y) = Cf(x,y)+a2J(x,y) (5.42)
отличается от автокорреляционной функции исходного изображения
только в начале координат [х = у = 0), откуда
^ = С9(0,0)-С>(0,0).
Во всех остальных точках автокорреляционная функция
наблюдаемого изображения / служит оценкой автокорреляционной функции
исходного изображения д:
Cg(x,y) = Cf(x,y), \х\ + \у\фО.
Используем эту оценку автокорреляционной функции исходного
изображения при \х\ + \у\ φ 0 для интерполяции ее значения в
точке χ = у = 0. Тогда оценка отношения сигнал/шум определяется как
SNp- /g/(Q'Q) - / С/(0.0) ,.,οχ
Точность оценки SNR зависит от точности интерполяции
значения Cf (0,0) и выборочной ошибки вычисления Сд(х,у), зависящей от
объема выборки. Сд(х,у) вычисляется следующим образом:
Cg{x0,yo,N,x,y) =
. Ν Ν
= (2N+ Ι)2 Σ) Σ 9{i + xo,j + yo)g{i+xo + x,j + yo + y)~
i=-N j=-N
m(xo,yo)m(xo + x,yo + y), (5.44)
где
. Ν Ν
т{х0,у0)= 2 ^ ^ g{i+xo,j + yo),
•■=-Nj=-N (545)
(2iV+l)2
m(x0 + x,yo + y)= (9M n2 2^ 2^ 5 (*' + *()+ z,j + 2/o+ Ϊ/)·
Поскольку для реальных изображений предположение о
некоррелированности шума не выполняется, то оценка SNR (5.43) получается
завышенной. В результате целесообразно значение С/(0,0) получать
не интерполяцией, а усреднением значений Сд(0,0) по области
Md = {{х,у) \-d < χ < d, -d < χ < d, \x\ + \у\ φ 0}.
Этот способ позволяет получать немного заниженную, но более
правдоподобную оценку отношения сигнал/шум.
На рис.5.18 показаны значения отношения сигнал/шум для
фрагментов, центры которых расположены на регулярной сетке и N = 15.
Видно, что данный показатель является мерой неоднородности: на
более однородных фрагментах шум превалирует, поэтому отношение
сигнал/шум меньше. Таким образом, функция информативности
фрагмента, рассмотренная в данном пункте, имеет вид:
1{х0, уо, Ν) = SNR{x0, у0, N). (5.46)
,ι
ι-»
Si
*·*■■
Рис. 5.18. Отношение сигнал/шум для фрагментов размером 15 χ 15 пикселов
для изображении на рис. 5.15, с—е
Радиус корреляции сигнала. Радиус корреляции сигнала
показывает, на каком расстоянии отсчеты сигнала можно считать
статистически независимыми. Чем более однородной является область
изображения, тем больше для нее радиус корреляции. Радиус корреляции в
точке изображения может быть вычислен с помощью
автокорреляционной функции, например, го формуле
Σ cv(k,o)
ЪЫУ0.Ю = к=саЛ00) . (5.47)
где d — размер апертуры для вычисления радиуса корреляции,
Cv(k,l) — автокорреляционная функция фрагмента изображения,
которая вычисляется на области {(к, I) \— d^. к < d, I = 0}; параметры
xo,ya,N используются для вычисления автокорреляционной функции.
Радиус корреляции определяет ширину автокорреляционной
функции вблизи ее максимума. Поэтому наличие шума на изображении
искажает значение радиуса корреляции. Автокорреляционная функция
белого шума имеет вид ^-функции, поэтому при большом уровне шума
радиус корреляции уменьшается и на однородных областях
изображения становится равным радиусу корреляции шума (радиус корреляции
белого шума=0). Для устранения этого эффекта определение радиуса
корреляции целесообразно изменить следующим образом:
Ε G,(fc,0) + C(0,0)
Rdfa. Ус, Ν) = k=-dk*C , (5.48)
где С — интегрированное (осредненное) значение Cv вблизи
точки (0,0).
Рис. 5.19. Радиус корреляции для фрагментов размером 15 χ 15 пикселов для
изображений на рис. 5.15, а-е
На рис. 5.19 показаны значения радиуса корреляции Rd для
фрагментов размером 15 χ 15 пикселов; центры фрагментов расположены
на регулярной сетке. Из анализа рисунков видно, что функция:
Цяс, Уо, Ν) = Rd(a;c, уо, N) (5.49)
— является мерой информативности участков изображений.
Анализ наличия сигнала на фрагменте изображения. На
рис. 5.15, е, г показаны примеры изображений, на которых много
неинформативных участков. Ниже предлагается оригинальный метод,
который позволяет быстро определять такие участки.
Метод основан на анализе статистических свойств шума с
использованием изображения оптического клина, полученного исследуемым
сенсором. Например, изображения на рис. 5.15, е, г были получены
отечественной спутниковой камерой ТК-350, этой же камерой было
получено изображение клина (рис. 5.20). Клин представляет собой
изображение с плавным изменением яркости. Метод анализа шума
состоит в следующем.
Рис. 5.20. Изображение оптического клина
1) Изображение клина, которое обозначим к(х,у) было разбито
на Μ горизонтальных непересекающихся прямоугольных областей
высотой N пикселов и длиной, равной длине клина. Для г-й области
(г = 1,...,М) были получены функции среднего значения Bi(d) и СКО
ι."
В
Ϊ
яркости клина Di(d) вдоль области:
1 N
Bi(d)=-Y/k(d,y),
J/=l
Ν
Ν ί=\,...,Μ, (5.50)
DM) = ^Yj{k{d,y)f-{Bl{d)f,
здесь d = d(x) истинная неизвестная яркость клина вдоль
координаты х.
2) Так как яркость поперек клина должна быть постоянной, то СКО
яркости должно быть равно СКО шума. Фактически поперек клина
наблюдаются большие колебания яркости. Поэтому, чтобы сгладить эти
колебания, получены функции средней яркости B{d) и СКО яркости
клина D(d) усреднением по всем областям:
. м . м
SM = ¥^St(d), D(d) = -YiDi(d). (5.50')
i=\ i=l
На рис. 5.21, α, б показаны функции B{d) и D(d) соответственно.
3) Сглаживание функции D(d) (рис.5.21,б, п= 3):
»*(d)=^±u(d + k).
4) Получение функции зависимости СКО шума от яркости D{d)
с помощью обратной функции:
d=B~\B)
при помощи линейной интерполяции в недостающих точках.
Тогда
D{B{d)) = D*{B-\B{d))).
Функция D(B) показана на рис. 5.21, г.
Функция σ = D(B) позволяет проверить, есть ли сигнал на данном
фрагменте изображения, т.е. является ли он неоднородным.
Пусть fi — значение отсчетов сигнала внутри фрагмента, г =
= l,,..,(2iV+ l)(2N + 1). Необходимо проверить гипотезу Но о том,
что выборка fi однородная:
Н0 : fi = и + щ, щ£ Ν{0,σ2{ιι)),
где и — предполагаемое постоянное значение яркости на фрагменте;
щ — отсчеты шума; а{и) — зависимость СКО шума от яркости,
полученная из анализа шума по клину методом, описанным выше.
Гипотеза Но эквивалентна следующей:
Но: Д = 6, &ΕΝ{η,σ2{η)).
7,8
6,2
4,7
31
1,6
8,2
6,5
4,9
3,3
1,6
175.5
140,4
105,3
70,2
35,1
9,0
7,2
/
«♦ли^
уЧ<**^
D(d)
/
B(d)
/
420
840
1260
1680
2100
2520 2940
D(B) г
о
50
100
150
200
250
Рис. 5.21. Анализ статистических свойств шума по изображению оптического
клина, с — дисперсия шума вдоль клина; б — сглаженная дисперсия шума; в —
изменение яркости вдоль клина; г — зависимость дисперсии шума от яркости;
абсцисса на рис.с-е —расстояние вдоль клина, на рис. г — яркость
Для выборочной дисперсии σ2 имеем:
»2 = ^Σλ2
i=l
Ν
Σ λ
(5.51)
Известно, что величина (Ν — 1)σ2/σ2(ιι) удовлетворяет
^-распределению с (Ν — 1)-й степенями свободы. Поэтому гипотеза
Я0 эквивалентна следующей:
Но : з= у 2. G χ2{Ν - 1).
Оценка значения и получается усреднением по выборке
N
~N
Σλ·
(5.52)
(5.53)
Теперь, после вычисления статистических характеристик, критерий
наличия сигнала на фрагменте проверяется следующим образом: если
Ox2(iV-l),
то гипотеза Но отвергается.
Для N > 30 квантиль распределения χ£ находится по формуле
2
χ*(τη)= - (V2m - 1 + ар)
где αρ — квантиль нормального распределения.
В результате решающее правило имеет вид
что эквивалентно
σ > ' i4(V2(JV-l)-l+gp)«l+ "'
σ(«) v/2(iV-l) py ^/2(iV-l)'
Таким образом, если
σ^(1+ , Qp >(u),
л/2(А^-1)
то гипотеза /ίο отвергается.
Поскольку целесообразно использовать выборки с объемом N >
> 200, то данный критерий используется в виде
где С = αα995/\/2 и 2,4.
Таким образом, порог Т, о котором говорилось выше, зависит как
от объема выборки, так и от статистических свойств сигнала внутри
фрагмента.
Если используется функция информативности
1{хо, уо, Ν) = σ(χ0, у0, Ν),
то порог Τ находится по формуле
Т={\ + ^=)а{и). (5.54)
Рис. 5.22 показывает результат применения алгоритма адаптивного
выбора размера фрагмента. Алгоритм начинает работу с минимального
размера iVmjn = 9 пикселов. Если на каком-либо шаге удовлетворяется
критерий σ ^ Т, то считается, что необходимый размер фрагмента
найден. Если размер фрагмента увеличился до размеров iVmax = 45
пикселов, то считается, что фрагмент не содержит сигнала. На рис. 5.22
показаны размеры фрагмента в пикселах; центры фрагментов
находятся в узлах регулярной сетки.
Рисунок 5.23 показывает пример вычисления информативных
участков изображений, а соответствует изображению на рис. 5.15, в; б —
изображению на рис. 5.15, г.
13
■' -■*
9 Хл 9
9 гз *
» И
9 9
9 9
9
9
.
ϋ
13
•s
9
1 L
J
i
! 1
Рис. 5.22. Размеры фрагментов, содержащих сигнал, вычисленные на основе
критерия отношения СКО сигнала и шума (для изображений на рис. 5.15,6, е)
I
I
Рис. 5.23. Карта информативных участков изображений на рис. 5.15, в, г.
Информативные участки обозначены белым цветом
Каждый пиксел исходного изображения является центром
фрагмента размером 15 χ 15 пикселов. Для каждого фрагмента проверяется
критерий информативности. Бинарная карта информативности,
изображенная на рис. 5.23 получена следующим образом: Ь(х, у) = 255, если
1{х, у, 15) ^ Г; Ь(х, у) = О, 1(х, у, 15) < Г.
Изображение сцены может быть представлено в различных
пространственных масштабах. При этом крупные детали сцены лучше
видны на изображениях с мелким (грубым) разрешением. Мелкие детали
сцены проявляются только на изображениях с высоким разрешением.
Информативность участков изображения также зависит от разрешения.
Из анализа графиков дисперсии яркости на рис. 5.17 видно, что если
уменьшить масштаб по оси X (что означает использование
изображения с более грубым разрешением), то дисперсия растет сильнее
при неизменных размерах участка. Это позволяет использовать
изображения с грубым разрешением для выбора эталонов, обладающих
большой информативностью, для повышения качества сопоставления.
Изображение, представленное в нескольких масштабах, в дальнейшем
называется пирамидой.
Принцип построения пирамиды изображений показан на рис. 5.24.
Пирамида изображений представляет собой последовательность N
изображений, причем каждое последующее изображение получается из
предыдущего путем фильтрации и прореживания в два раза.
Уровень N
(xN. Ум)
Уровень N-
(*лм. #лм)=(2*№ 2г/лг)
Рис. 5.24. Принцип построения пирамиды изображений
Последовательность действий при построении пирамиды
изображений может быть проиллюстрирована следующим образом:
исходное изображение /yv_i(x, г/)
I
высокочастотная фильтрация с ядром (и, ν)
I
fN-i(x — и,у — v)h{u,v)dudv
уменьшение размеров в 2 раза
/м{х,у) = д{2х,2у).
На рис. 5.25 показан пример пирамиды из четырех уровней для
эталонного изображения.
Использование пирамидальной структуры данных преследует две
основные цели:
• сокращение времени обработки изображений;
• определение более точных начальных приближений для
обработки нижних уровней по результатам обработки верхних уровней.
Фильтрация изображений необходима для подавления
высокочастотных шумов. В качестве ядра h(u,v) часто используется функция
Гаусса. По этой причине такая пирамида называется Гауссовской [5.9].
Согласно теореме Котельникова, сжатие в гауссовской пирамиде
происходит с минимальной потерей информации.
Рис. 5-25. Пирамида из четырех уровней для тестового изображения
Изображение fn(x,y) представляет собой уменьшенную копию
исходного изображения /Ί (ж, у).
Размер пиксела изображения уровня N равен, если размер пиксела
исходного изображения принять за единицу,
Для координат пикселов изображений двух произвольных уровней
пирамиды с номерами пит справедливы следующие соотношения
^ ^п — ^ -^т· ^ Уп — ^ Ут·
5.4. Метод субпиксельной корреляции в задаче
высокоточного отождествления соответствующих
точек
Предметом дальнейшего исследования является ситуация, когда
грубое решение задачи соответствия текущего и эталонного
изображений уже получено применением иерархических корреляционных
методов или методом, основанным на применении характерных черт, и
требуется достичь предельно возможной точности совмещения.
Исследованию данной задачи, вследствие ее важности, посвящена обширная
литература. Большинство известных методов основаны либо на
алгоритме метода наименьших квадратов [5.26], либо на использовании
нормализованной взаимной корреляционной функции [5.15,5.17,5.32].
Основу обсуждаемого ниже метода составляет использование
нормализованной корреляционной функции в качестве меры сходства
участков двух изображений. Данная мера удобна тем, что она
автоматически устраняет яркостные различия двух изображений, в то
время как в алгоритме наименьших квадратов [5.26] они вводятся
явно, в качестве параметров модели.
Обозначим /(ж, у) распределение яркостей на участке левого
изображения, который будет эталоном. Начало прямоугольной системы
координат (ж, у) поместим в середину центрального пиксела
эталона. Обозначим д[х\,у{) распределение яркостей на участке правого
(текущего) изображения, который соответствует эталону. Форма
этого участка отличается от формы эталона по причине перспективных
искажений наблюдаемой сцены. Начало системы координат (xuyi)
поместим в центре участка правого изображения (рис. 5.26).
Л
Левое ι
х,У)
13θ6
\у
эаж<
X
?ние
д*(х,у)ЬУ
д{ч,У\)
Правое изображение
Рис. 5.26. Обозначение систем координат в методе субпиксельной корреляции
Координаты (х,у) и {х\,у\) связаны неизвестным
преобразованием (5.55), где ρ — вектор параметров преобразования (например,
аффинных или др.):
х\ = χι (х, у, р), у] = ух (х, у, р). (5.55)
Вектор параметров ρ найдем путем максимизации меры сходства
изображений, за которую принимается функция нормализованной
корреляции (5.56): _
Σ f{x,y)9ix\,yi) ~ NfS
*(р) = " {Х'У) -.,„, ГТТ^ (5-56)
;2\'/2,
( Σ f2&y)-Nf2) (Σ^ι,»ι)-^2)
Ч(*.У) ' Ч(г.У) '
1/2'
В этой формуле знак ^Z обозначает суммирование по всем
пикселу)
лам эталона; N — количество пикселов. Средняя яркость находится по
формулам: , ,
7=^^2f(x'y)' 9=^^2gixuy\)· (5.57)
(x.V) (Х-У)
Теперь задачу точного отождествления соответствующих точек
изображений можно сформулировать следующим образом: найти
вектор параметров преобразования из условия
р* = argmaxA;(p). (5.58)
ρ
Обсудим теперь путь решения сформулированной задачи, основанный
на ее линеаризации.
В дальнейшем для упрощения будем предполагать, что среднее
значение яркости эталона равно нулю / — 0. При этом яркости всех
пикселов эталона преобразуются следующим образом:
f{x>y) -> /(ζ,у) -/.
Преобразование (5.55) учитывает изменение формы участка
текущего изображения, соответствующего эталону. В качестве этого
преобразования могут быть выбраны различные модели с большим
количеством параметров. Однако следует учесть, что субпиксельная точность
оценивания может быть достигнута и в случае простых моделей
искажений, тогда как использование сложных и гибких моделей, например,
полиномиальных, приводит впоследствии к большим вычислительным
затратам и проблемам сходимости процедур оценки модельных
параметров. Поэтому будем, как в [5.26], использовать в качестве (5.55)
аффинное преобразование вида
х\ = а, + ачх + азу, у\ = Ь| + Ь2х + Ьзу, (5.59)
которое обладает достаточной гибкостью и, как правило, приводит
к хорошим результатам.
Таким образом, для решения задачи (5.58) необходимо найти вектор
параметров т
ρ = (а],а2,аз,0],02,оз) ·
Примем начальное приближение вектора параметров в виде
(а*, 1,0,6*, 0, 1)т, которое можно найти с помощью классического
корреляционного метода. Обозначим д*(х, у) распределение яркости на
участке правого изображения, положение которого задается начальным
вектором параметров.
Линеаризуем неизвестную функцию д(х\,у\) относительно g*{x,ij)
по параметрам преобразования (5.59). В форме приращений (5.59)
имеет вид: . . . .
Лх\ = Δα, + хАа2 + у/лаз, ,г сп\
Ду, =ДЬ, + хАЪ2 + уАЪ3. {·°υ>
Линеаризация д{х\,у\) дает
д(хиУ^д^^у) + д^^^ + д-^^АУ]. (5.61)
Для краткости в дальнейшем в выражениях вида g*(x,y), f(x,y) и т.д.
аргументы {х,у) опускаются. Обозначим также
* - ЁЕ1 п* = дд*
9х~ дх' 9у ду ■
Из (5.60) и (5.61) имеем:
5(ζι.2/ι) «
« [g* + ^Δα, + g*xxAa2 + д*хУАаз + <£ДЬ, + д^хАЬ + д^уАЪ] =
= егДр, (5.62)
где
ёт = \д*д:^;у9:9;х9*уУ9;1 (5.ез)
Δρτ = [1 Δα, Δα2 Δα3 Ab] Ab2 Δ63]· (5.64)
Производные функции д{х,у) вычисляются с помощью их дискретных
аппроксимаций: дх{х,у) = 0,5(д(х + 1,у) — д(х — 1,у)) для внутренних
точек изображения; дх{х,у) = д(х+ \,у) -д(х,у) — g(x,y) и дх{х,у) =
= д{х,у) — д(х — \,у) — на краях изображения.
Аналогичные формулы применяются для координаты у.
Выражение (5.57) для среднего значения яркости участка правого
изображения имеет вид:
а и Ι Σ егАр = ёгАр· (5.65)
(*.ν)
Подставим (5.62), (5.65) в выражение для коэффициента
корреляции (5.56):
Σ /εΓΔρ
(д.у)
Σ /2)"2(Σ ApTSSTAp-NApTWgTAPy/i
(x.y) (x.y)
Тогда исходная задача (5.58) сведется к задаче
*(ΔΡ) = ,^ «,„п,^ л-;--Тл- „л-ТдгА-ч.»- (5·66)
Δρ* = argmaxfc(Ap). (5.67)
Дисперсия яркости эталона
(г.у)
является константой. Поэтому задача (5.66) после равносильных
преобразований
Α'(Δρ) = (NDfk(Ap))2
имеет вид:
ΔΡΓ(Σ /ε)(Σ /gT)AP л _ л
;„//л„х_ ^-у) (*-у) Δρ^ΑΔρ
(ΔΡ) " Δρ^( Σ ggT " ΑΊ?ΙΓ)Δρ " Δρ^ΒΔρ" (568)
(г .у)
Окончательно, задача (5.58) принимает вид:
Δρ = argmaxk'(Ap), (5.69)
где А = гт — матрица размером 7 χ 7; г = Σ fs~ вектор
размерному)
сти 7; В = J2 ggT - iVggT — матрица размером 7x7.
(*.у)
Матрица В — симметрическая и положительно определенная.
Последнее следует из того, что знаменатель формулы (5.68) есть
величина, пропорциональная дисперсии яркости участка правого
изображения. Для реальных изображений матрицу В можно считать
невырожденной.
Из матричной алгебры известно [5.24], что задача максимизации
отношения квадратичных форм
χ Α.Χ
λ = -^— > max, (5.70)
xJ Bx χ
где χ — вектор неизвестных параметров, сводится к эквивалентной
задаче на обобщенные собственные значения:
Αχ = λΒχ. (5.71)
Это легко показать, векторно продифференцировав по χ обе части
выражения (5.70):
d хгАх _ (хгВ х) Ах - (хгАх)В х_Ах-АВх_
ώ^χ^Β^ ~ (χΓΒχ)2 хгВх
Таким образом, решением задачи (5.70) будет собственный вектор,
отвечающий максимальному собственному значению в задаче (5.71).
Рассмотрим теперь решение эквивалентной задачи методом Холец-
кого [5.24]. В основе такого решения лежит вспомогательная лемма,
подробное доказательство которой приводится в Приложении.
Из доказательства леммы следует эффективный метод нахождения
собственного вектора х, отвечающего единственному ненулевому
собственному значению задачи (5.72), а именно, вектор χ можно найти
как решение системы линейных уравнений
Вх= г,
которая может быть решена методом Холецкого, требующим примерно
п3/3 + 2п2 операций.
Последовательность действий при использовании этого метода
состоит в следующем.
1) Получаем разложение матрицы В = LLT. Обозначим В = ||Ьу||.
L = ||гу||. Тогда
(fe-l
bkk - 2__, t>kp
р=\
к-]
Ь%к — Σ hpbkp
hk = ■ ; , i = k+l,...,n.
tfefe
Этот шаг требует примерно п3/3 операций.
Ч'-
к= 1,
, п,
2) Решаем систему Вх = г, т. е. последовательно решаем две
системы уравнений с треугольными матрицами:
г,
LTX:
Этот шаг требует примерно 2т? операций.
Решением задачи (5.69) является любой вектор вида αΔρ, где
Δρ — найденный вектор поправок, α — константа, которая
управляет сходимостью метода. Поэтому является естественным выбирать
такое а, которое при данном векторе Δρ максимизирует коэффициент
корреляции (5.56), т.е. задача принимает вид:
λ; (αΔρ) —> max.
(5.72)
Умножение вектора параметров на константу соответствует изменению
масштаба исходного преобразования (5.55). В качестве
преобразования (5.55) используется следующее, зависящее от одного параметра а:
X2 = axi(x,y,p), у2 = ау]{х,у,р),
которое в форме приращений имеет вид:
Δ^2 = ζ ι Δα, уч = у\Аа. (5.73)
Обратимся вновь к линеаризованному выражению для g(x2,y2) (5.62):
д{х2,у2) ~д{х\,у\) + {дх{х\,у\)х\ + 9y{x\,vi)y\)&a = &ϊα,
где
α
1
Δα
ёа
S(zi. У\)
gxx\ +gyy\
Преобразованная задача максимизации коэффициента корреляции
имеет вид, аналогичный (5.69):
α
к" (Δα)
ΣΛ£ «
(х.У)
атАаа
"Т Σ SaSl ~ Ngagl a
\ (*,v) J
Δα = arg max к" (Δα),
α
ТВС
α
(5.74)
(5.75)
где
La — ΓαΓα·
Bc
/ уёаёа
(х.у)
(х-у)
NSaSl =
Ϊ —
Ьи
Ь\2
. Г2 J
Ь12
Ь22
По лемме решение (5.72) имеет вид:
L "2 J ~ " " ~ ЬпЬ22-Ь?2 I ^„ -г,Ь12 J ' (576)
Таким образом, решение задачи нахождения максимума
коэффициента корреляции сводится к двум шагам;
1. Нахождение вектора параметров Δρ аффинного
преобразования (5.59), определяющего направление в 6-мерном пространстве
параметров.
2. Нахождение оптимального шага аАр (5.76) вдоль этого вектора.
Коэффициент корреляции, соответствующий найденному вектору
поправок параметров Δρ, находится по формуле (5.74), которая следует
из (5.66), (П5.1) приложения, (5.59):
к^ = {-т;- (577>
Аналогично, коэффициент корреляции, соответствующий найденному
вектору а, находится по формуле:
fc(Ap) = V NDf ■ (578)
Поскольку исходная задача (5.56), была нелинейной, ее финальное
решение находится последовательными итерациями. На каждой
итерации решается линеаризованная задача и определяется очередное
приближение положения максимума коэффициента корреляции.
Начальным приближением является функция д*, определяемая начальным
вектором параметров, который находится одним из методов грубого
отождествления изображений. На m-й итерации сначала находится
вектор поправок аффинного преобразования ΔαΔρ^) и уточняется
само преобразование из (5.60):
х]=х + Ахи У]=у + Аух. (5.79)
Это преобразование дает смещение центра участка правого
изображения. На следующей итерации это смещение является новым
началом прямоугольной системы координат (х,у). Так как новая система
координат может быть сдвинута на нецелое число пикселов, то для
вычисления производных при линеаризации яркость в точках с
нецелыми координатами получается при помощи билинейной интерполяции
по значениям яркости в соседних точках с целыми координатами.
Процесс прекращается при достижении заданного количества
итераций или когда абсолютные значения поправок к параметрам сдвига
становятся меньше заданных констант:
|Aoi(m) -До|(т_|)| <С,, |ДЬ|(т)-ДЬ|(т_|)| <С2. (5.80)
Результаты использования метода субпиксельной корреляции
иллюстрируются многочисленными вычислительными экспериментами
(рис. 5.27-5.29) для различных d-начальных рассогласований в
пикселах.
Рис. 5.27. Траектории сходимости различных начальных приближений (d = 2)
Рис. 5.28. Траектории сходимости различных начальных приближений (d = 4)
На рис. 5.27, 5.28 показаны траектории сходимости восьми
начальных приближений. Показаны два случая: близкое (d = 2) и далекое
(d = 4) начальное приближение. На рис. 5.29 показан пример
ложной сходимости некоторых траекторий., Толстым пунктиром показан
пиксел, найденный классическим корреляционным алгоритмом, от
которого отсчитывались начальные приближения. Вид этих траекторий
наглядно демонстрирует более быструю сходимость метода с выбором
шага оптимизации (рис. 5.28, 5.29, б).
Рис. 5.29. Случай ложной сходимости некоторых траекторий (d = 5)
Метод субпиксельной корреляции может применяться с учетом
предварительной сегментации изображений.
Рассмотрим более усложненные исходные данные: кроме исходных
изображений имеется еще и результат сегментации одного из
изображений (для определенности — эталонного). Как уже упоминалось,
сегментация представляет собой разбиение изображения на
непересекающиеся области в результате яркостного или семантического
анализа изображения.
Введем обозначения, аналогичные использованным в предыдущих
разделах. Обозначим f{x,y) распределение яркостей на участке левого
изображения, который будет эталоном. Начало прямоугольной системы
координат (х,у) поместим в середину центрального пиксела эталона.
Обозначим д распределение яркостей на участке текущего
изображения, который соответствует эталону.
Пусть s — результат сегментации эталона, который представляет
собой объединение η непересекающихся областей с
характеристическими ФУНКЦИЯМИ χ,, ί = 1, ... , П\
η
Xif)xj = 0, гфз, s={Jxi.
i=l
Используемая модель, включающая в качестве примера три
области, схематично показана на рис.5.30. Для учета геометрических
искажений образов, вызванных перспективной проекцией и трехмерной
формой объектов сцены, для каждой области χ, введем свое аффинное
искажение:
Хг = аН + а2гХ + а3гУ, yi = bH + b2iX + b3iy- (5-81)
Преобразование (5.81) вводит в каждой области χ, свою
систему координат (хг,Уг), определяемую вектором параметров рг- =
= (а]г, а2г>азг,Ь|г,£>2г, Ь-ц)т. Как и в случае с единственной областью,
известно начальное приближение вектора параметров (а*, 1,0,6*,О, 1)т
и определяемое им начальное распределение яркостей на участке
правого изображения д*(х,у).
Рис. 5.30. Обозначение систем координат при известной предварительной
сегментации на примере трех областей
Проведем линеаризацию задачи аналогично тому, как это было
сделано выше.
Линеаризуем неизвестную функцию д(хг,уг) в области χ,
относительно д*(х,у) по параметрам преобразования (5.81). В форме
приращений (5.81) имеет вид
Axi = Aa,]i + xAa,2i + уАазг, Ay, = A6h- + zAfe + уАйз,. (5.82)
Линеаризация д(хг,Уг) в области χ, дает следующее выражение:
д{Хг,Уг) ~
~ \з* +9*χΔαη +д^хАа2г + д*уАа3г + g*AbH + g*xAb2i + g*yAb3i] =
= gfAP, (5.83)
где
gf = [0 ... 0 д* 5* хд*х уд*х д*у х9; у9;0...0], (5.84)
Арт = [1 Аа]]Аа2]Ааз|АЬ]]АЬ2|АЬ3| ···
... 1 АанАаггАазгАЬнАЬггАЬзг ···
... 1 Аа]ПАа2пАазпАЬ]пАЬ2пАЬзп]-
Вектор gi размерности 7тг имеет следующую структуру: первые
7(г — 1) компонентов равны нулю, далее следуют 7 коэффициентов
линеаризации, последние 7(тг — г) компонентов также равны нулю.
Вектор Δρ размерности Τη последовательно составлен из приращений
параметров преобразований всех областей.
Проведем теперь преобразование коэффициента взаимной
корреляции. С учетом введенного разбиения на области выражение для
коэффициента корреляции может быть преобразовано следующим
образом:
( Σ /2(*.ϊ/))'/2(Σ Σ g2(xi,yi)-Nf)]
к (др) = 1ττίΓ7 Γ772 · (5·85)
' (Х-У) г (x.y)i
Здесь знак двойного суммирования Σ Σ обозначает суммирование
' (x.y)i
по всем областям и по всем пикселам внутри каждой области эталона.
Линеаризация выражения (5.65) с учетом (5.83) имеет вид
ϊ^ΣΣ аТдр = ^Гдр· <5·86)
Аналогично тому, как это было сделано выше, подставим (5.83), (5.86)
в выражение для коэффициента корреляции (5.85), и после
равносильных преобразований
Α'(Δρ) = (Α(Δρ))2 £ f
(z.y)
оно принимает вид
Δργ Σ Σ f* Σ Σ fgT) Δρ
*'(ΔΡ) = \y-v)t JKl l'-v)t J =
\ i (*.У). /
ΔρΓΣί Σ /β.) (Σ /8tVP λ Τλλ
= J \(*.y)i ) \(*.y)i J = ApJ ΑΔρ g7
ΔρΓ(Σ Σ SiSf-NWsT)Ар Δρ^ΒΔρ'
i (*.y)i
где А = ΣΓίΓΓ — матрица размером Τη χ Τη; г» = Σ Σ /ε» —
г г (x.y)i
вектор размерности Τη; Β = J2 J2 g,gf - iVggT — матрица размером
* (х.У)г
Τη χ Τη.
Среднее равенство в (5.87) следует из того, что матрицы вида gigf,
г φ j — нулевые (см. выражение (5.84)).
Матрица В имеет следующую структуру:
Β = ΣΣ**Γ-^(ΣΣ*)(ΣΣβί')
(z.2/)i
(*.y)i
(x,y)i
Σ * Σ *3
О.у), O.y);
Таким образом, матрицы А и В имеют клеточную структуру вида
О
А,
О
О
О
о
о
о
Ац
в
в,
о
о
о
о
о
в„
(5.88)
где Аг-, В, — матрицы размера 7x7. Свойства матриц следуют из
анализа, проведенного выше. Матрица В — симметрическая,
положительно определенная и невырожденная. Ранг каждой из матриц А,
равен единице. Отсюда следует, что ранг матрицы А равен п.
Результаты, полученные выше, легко обобщаются на случай
морфологического коэффициента корреляции.
Как уже говорилось раньше, в отличие от рассмотренных выше
методов привязки, чувствительных в той или иной мере к изменению
контрастности изображений, алгоритмы, основанные на
морфологическом подходе Ю. П.Пытьева [5.10], позволяют решать задачу
сопоставления изображений в условиях сильной яркостной изменчивости
двумерного поля.
Выражение для морфологического коэффициента корреляции
имеет вид
к WW
В случае, когда известна сегментация изображений, оператор
проектирования
^ = Σ—*м
г = |
μ%
может быть записан в явной форме:
^ = Σ
(<ЛХг)
(Хг.Хг)
Из свойств оператора проектирования вытекает, что величина
\\Pfip — φ\\ есть мера различия изображений ψ и /, а величина
определяет меру сходства двух изображений.
Таким образом, введенный результат сегментации s(x,y) является
формой эталона f(x,y). Поэтому морфологический коэффициент
корреляции между f{x,y) и д{х,у) вычисляется следующим образом:
кт(р) = Цпг- (5.89)
\\9\\
Обозначим: Ni — количество пикселов в области %ь #г — средняя
яркость изображения д{х,у) в области χ,.
По определению оператора проектирования
' \(x.y)i I ' \(x.y)i ) \(x.y)i
ы\2 = EE^y,)-EE (&ΓΔρ)2 = дрГΣ Σ»^δρ·
' (x.y)i i (x.y)i l (x.y)i
Таким образом, выражение для квадрата морфологического
коэффициента корреляции имеет вид
*<*·> - ж (5-вд
где
« г (*.»),- « (z.y)i
Матрицы А и В имеют те же свойства, что и соответствующие
матрицы, введенные выше.
Решим теперь задачу максимизации коэффициента корреляции.
Задача максимизации коэффициента корреляции (5.87), (5.90) имеет вид
задачи (5.70), которая сводится к задаче на обобщенные собственные
значения (5.71). Клеточная структура матриц (5.88) позволяет для
каждой подматрицы записать свою задачу на обобщенные собственные
значения:
Aix = \Bx, г = l,...,n, (5.91)
где А4 = nrf.
Для задачи (5.91) справедлива теория, изложенная выше.
Ненулевое собственное значение λ, находится по формуле
Ai = г^В-Ч,
а соответствующий собственный вектор
х, = В_1г4.
Таким образом, каждая область χ; порождает собственный вектор и
собственное значение задачи (5.71), что аналогично применению
метода субпиксельной корреляции, изложенного в предыдущих разделах
данной главы, для одной конкретной области χ,. Для вычисления
корреляции всего набора областей составим вектор параметров Δρ из
собственных векторов для каждой области:
Δρ = ^Χ; = В_1^Гг.
i г
Тогда
АргААр _
ΔρΓΒΔρ~
(в-ч>4) аГв-'Ег,) ΣγΓβ-'Εγ,γΓβ-'Εγ,
\ г / \ г / г г г
(в-.?г<)^(в-.?Г1) = ?г^'5-
г г
Следует подчеркнуть, что метод субпиксельной корреляции,
описанный выше, полностью эквивалентен методу, изложенному для случая,
когда результатом сегментации является единственная область.
Наряду с построением систем навигации и наведения по
геофизическим полям и полям оптического контраста, изложенные выше методы
могут быть использованы создания трехмерных (3D) моделей реальных
местностей и объектов по их авиационным или космическим
снимкам. Такие технологии находятся сейчас под пристальным вниманием
многочисленных исследователей во всем мире [5.32,5.34]. В контексте
материала настоящей главы создание 3D моделей реальных местностей
важно как для получения эталонной информации (раздел 5.2), так и
для наглядной визуализации процессов навигации и наведения.
Автоматизированные средства обработки данных отечественной
аэрокосмической съемки для построения «виртуальных» моделей
реальных территорий рассмотрим на базе пакета «Z-Space» [5.34,5.36],
обеспечивающего:
• быструю генерацию цифровых моделей рельефа (ЦМР) в виде
регулярной матрицы высот по стереопарам космических снимков
или аэроснимков;
• создание цифровых орто-фотопланов;
• съемку векторных контуров по стереопарам и ортофото;
• визуализацию элементов рельефа с использованием
разнообразных возможностей компьютерной графики.
В составе пакета реализованы как стандартные
фотограмметрические процедуры ориентирования, геометрической и радиометрической
коррекции снимков, так и новые оригинальные процедуры
автоматического выделения объектного состава.
На рис.5.31 (цветная вклейка) представлен вид рабочего окна
разработчика ЦМР в пакете «Z-Space» при работе с космическими
фотоснимками.
Алгоритмическое и программное обеспечение для программ
трехмерной визуализации представляет собой законченные компьютерные
приложения, разработанные в операционной системе Windows, и
позволяет реализовать режимы интерактивной трехмерной визуализации
сложных сцен при использовании компьютеров персонального класса.
На рис. 5.32 показана типичная последовательность обработки данных
авиационной съемки для получения 3D модели местности с
объектовым составом с помощью пакета «Z-space».
Входные изображения
Процедуры
ориентирования
Автоматическое
построение ЦМР
I
Автоматическая
фильтрация ЦМР
Полуавтоматическое
редактирование ЦМР
X
Автоматическое
обнаружение объектов
Τ
Полуавтоматическое
выделение объектов
Σ
Генерация ортофото
Модель сцены
в заданном
графическом
формате
ЦЦМР
Список объектов
и другой
семантической
информации
Текстурированные
ортофото
Рис. 5.32. Последовательность обработки данных в пакете «Z-space»
На рис. 5.33 показан пример синтеза модели «Каир» (Египет) по
данным отечественной космической съемки камерами ТК350
(стереосъемка) и КВР1000 (панорамная съемка), а на рис. 5.34 — комбинация
моделей, построенных по данным космических (общий план) и
авиационных снимков (детали аэропорта).
Рис. 5.33. Каир, Гиза, район пирамид
л- *
-л. ».
Рис. 5.34. Турция, аэропорт в горах
На рис. 5.35 (цветная вклейка) представлен результаты
использования метода комбинирования различных данных с целью получения
единой модели. В данном случае модель рельефа и основная текстура
были получены на основе электронных карт и в полученную модель
были встроены фрагменты ортофотопланов, полученных на основе
авиационной съемки разных масштабов.
Список литературы к главе 5
5.1 Бочкарев A.M. Корреляционно-экстремальные системы навигации //
Зарубежная радиоэлектроника. 1981. №9. С. 28-53.
5.2 Ван Трис Г. Теория обнаружения, оценок и модуляции. — М.: Советское
радио, 1972. Т. 1. с.344.
5.3 Василенко Г. И., Цибулышн Л.М. Голографические распознающие
устройства. — М.: Радио и связь, 1985. 312 с.
5.4 Васильев В.И. Распознающие системы: Справочник. — Киев: Наукова
думка, 1983, с.424.
5.5 Горелик А. Г., Скрипкин В. А. Методы распознавания. — М.: Высшая
школа, 1984. 208 с.
5.6 Денисов Д. Α., Низовкин В. А. Сегментация изображений на ЭВМ //
Зарубежная радиоэлектроника. 1985. № 10.
5.7 Дуда P., Xapm П. Распознавание образов и анализ сцен: Пер. с анг. —
М.: Мир, 1976. 511 с.
5.8 Павлидис Т. Алгоритмы машинной графики и обработки изображений:
Пер. с анг. — М.: Радио и связь, 1986. 400 с.
5.9 Прэтт У. Цифровая обработка изображений: Пер. с анг. — М.: Мир,
1982. 1 кн. - 525 с, 2 кн. - 474 с.
5.10 Пытьев Ю.П. Морфологический 'анализ изображений // Докл. АН
СССР. 1983. Т. 269, №5. С. 1061-1064.
5.11 Розенфельд А. Машинное зрение: Основные принципы // ТИИЭР. 1988.
Т. 76. №8.
5.12 Розенфельд А. Распознавание и обработка изображений с помощью
вычислительных машин: Пер. с анг. — М.: Мир, 1972. 230 с.
5.13 Тихонов В. И., Хоменко В. И. Выбросы траекторий случайных
процессов. - М.: Наука, 1987. 304 с.
5.14 Хорн Б.К. Зрение роботов. - М.: Мир, 1989. 487 с.
5.15 Ярославский Л. П. Точность и достоверность измерения положения
двумерного объекта на плоскости // Радиотехника и электроника. 1972.
№4.
5.16 Ярославский Л. П. Цифровая обработка сигналов в оптике и голографии:
Введение в цифровую оптику. — М.: Радио и связь, 1987. 296 с.
5.17 Abbasi-Dezfould Μ.. Freeman T.G. Stereo-Image Registration Based of
Uniform Patches, International Archives of Photogrammetry and Remote
Sensing. V.XXX1. Part B2. Vienna. 1996.
5.18 Adrov V.N., Checkurin A.D., Sechin A.Yu., Smirnov A.N., Adam-
Guillaume J.-P., Qussette J.-A. Program PHOTOMOD: Digital
Photogrammetry and Stereoscopic Images Synthesis on a Personal
Computer, Digital Photogrammetry and Remote Sensing '95, 1SPRS
Proceedings. V. 2646. P. 81-96.
5.19 Ackerman F. High precision digital image correlation // 1PSUS. 1984. №9.
P. 231-243.
5.20 Burns J., Hanson Α., Riseman E. Extracting Straight Lines // IEEE Trans.
On Patt. Analysis and Machine Intel. 1986. V.8, №4. P. 425-455.
5.21 Davies E.R. Machine Vision: Theory, Algorithms, Practicalities. Academic
Press. 2-nd Edition, San Diego, 1997. P. 750.
5.22 Forstner W. Mid-level vision processes for automatic building extraction,
Automatic Extraction of Man-Made Objects from Aerial and Space
Images. - Birkhauser Verlag, Basel, 1995. P. 179-188.
5.23 Freeman H. and Chakravarty. The use jf characteristic views in the
recognition of three- dimensional objects. In E. Gelsema and Kanal (Eds.),
Pattern Recognition in Practice. Amsterdam: North-Holland, 1980.
5.24 Golub G.H., Van Loan Ch.F. Matrix computations. — John Hopkins
University Press, 1983.
5.25 Gonzalez R. and Woods R. Digital Image Processing (editors) — 2nd
edition, Prentice Hall, 2002.
5.26 Gruen A. Adaptive Least Squares Correlation: A powerful image matching
technique // South African Journal of photogrammetry, Remoute Sensing
and Cartography. 1985. V. 14, Part 3. June.
5.27 Gruen Α., Baltsavias E. Adaptive least squares correlation with geometrical
constraints. - SPIE. 1985. V. 595. P. 72-82.
5.28 Ни Μ. Κ. Visual pattern recognition by moment invariants // IRE Trans.
Information Theory. 1962. V. IT-8. February.
5.29 Haralick R.M. and Shapiro L. G. Machine vision. — Addison-Wesley, 1991.
5.30 Insarov V., Fedosov E. The structural and statistical algorithm for
recognition of images of 3D-Scenes. 1 International Conference on
Information Technologies for Images Analysis and Pattern Recognition.
ITIAPR-90 г., Львов.
5.31 Jain Α. Κ. Fundamentals of Digital Image Processing. — Prentice-Hall
International Editions. 1989.
5.32 Schenk, Automatic Generation of DEM's, Digital Photogrammetry: An
Addentum to the Manual of Photogrammetry. — American Society for
Photogrammetry & Remote Sensing, 1996. P. 145-150.
5.33 Walker E.L., Herman M. Geometric Reasoning for Constructing 3D Scene
Descriptions from Images // Artifical Intellgence. 1988. V. 37, № 1-3.
5.34 Zheltov S.Yu., Blochinov Yu.B., Stepanov Α.Α., Sibiryakov A.V.
Computer 3D Site Model Generation Based On Aerial Images. — SPIE
Proceedings. 1997. V. 3084. P. 336-345.
5.35 Zuniga O.A. and Haralick R.M. Corner detection using the facet model. —
Proc. IEEE Comput. Vision Pattern Recogn. Conf., 1983. P. 30-37.
5.36 Фомченко Μ. Μ., Чекалин В. Φ., Васькин В. Μ., Кудряшов В. Я.,
Головин Ю.В., Некрасов В. В. Обработка космических снимков с помощью
фотограмметрической системы «ORTHO/Z_SPACE» // ГИС обозрение.
1999. 2.
5.37 Zheltov S. Yu., Sibiryakov A. V. Adaptive Subpixel Cross-Correlation in a
Point Correspondence Problem, Optical 3D Measurement Techniques / Eds.
by A. Gruen, O.Kuhbler, Zurich, 29 September-2 October, 1997. P.86-95.
5.38 Методы компьютерной обработки изображений / Под ред. В. В.Сойфе-
ра. — 2-е изд. — М.: Физматгиз, 2003. 783 с.
Глава 6
РЕШЕНИЕ НАВИГАЦИОННОЙ ЗАДАЧИ БПЛА
НА ОСНОВЕ ИНТЕГРАЦИИ ДАННЫХ
ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ
И СИСТЕМ НАБЛЮДЕНИЯ
Настоящая глава содержит описание технологии решения
навигационной задачи применительно к беспилотным летательным аппаратам
на основе интеграции данных, получаемых от инерциальной
навигационной системы (как правило, это бесплатформенная инерциальная
система — БИНС) и данных, поставляемых бортовой аппаратурой
оптико-электронной визирной системы. При этом предполагается, что
используются технологии обработки изображений, описанные в
предыдущей главе и, как результат, достигается возможность высокоточного
решения специфических задач терминальных участков полета БПЛА:
посадка на необорудованные аэродромы, наведение на цель и т.д.
Предлагается классификация существующих методов решения
задачи навигации БПЛА как в зависимости от используемых аппаратных
средств, так и с учетом методов обработки информации.
Рассматриваются вопросы построения навигационной системы,
обеспечивающей категорированную автоматическую посадку БПЛА
на аэродром, не оборудованный радиомаячными системами.
Представлены результаты математического моделирования, подтверждающие
возможность повышения точности навигационной системы за счет
включения в ее состав обзорно-визирных устройств. Обсуждаются
вопросы определения угловой ориентации БПЛА на основе анализа
поля движения.
Таким образом, ниже приведены примеры решения прикладных
задач навигации БПЛА с использованием описанных в предыдущей
главе методов обработки изображений. При этом основное внимание
уделяется описанию конкретных приемов и алгоритмов,
обеспечивающих в рассматриваемых случаях требуемую точность
позиционирования и определения ориентации БПЛА.
6.1. Классификация методов решения навигационных
задач БПЛА
Согласно общепринятой классификации, на которую ссылаются и
отечественные, и зарубежные источники [6.1,6.2], можно выделить
четыре основные группы методов оценки параметров движения
приемника изображений по последовательности предъявляемых видеокадров,
а именно:
1. Методы на основе спектрального анализа;
2. Методы, базирующиеся на анализе характерных признаков
изображений;
3. Методы, основанные на корреляции областей изображений;
4. Методы оптического потока (работающие с его градиентом).
В работе [6.2] в результате проведенного анализа многочисленных
зарубежных научных источников была дана характеристика всех
перечисленных классов методов с указанием специфических достоинств и
недостатков каждого их них.
1. Первая группа методов использует трехмерный спектральный
анализ (где время служит третьим измерением) с целью создания
пространственно-временных фильтров для потока изображения [6.3].
Эти методы часто требуют некаузального анализа нескольких кадров
изображения и крайне интенсивных затрат компьютерных ресурсов,
что затрудняет их применение в прикладных разработках,
предполагающих функционирование в реальном масштабе времени.
2. Методы, основанные на анализе характерных
признаков [6.4-6.8], используют идентификацию конечного, обычно
малого, набора признаков в одном кадре для их дальнейшего
сравнения с соответствующими признаками в последующих кадрах.
Эффективность этих методов заключается в том, что они могут
справляться со значительными по величине движениями между
кадрами, однако с увеличением числа отслеживаемых признаков
возникает «комбинаторный взрыв» в процессе нахождения их
соответствия для рассматриваемой последовательности кадров (эта
проблема известна под названием «проблема соответствия»). Другая
трудность возникает при работе с изображениями специфических
реальных сцен (таких, например, как травяные поля), которые не
содержат граничных точек с достаточно высоким значением контраста.
В таких случаях нахождение и установление соответствия приемлемых
характерных признаков могут быть затруднены.
3. Группа методов, базирующихся на корреляции фрагментов
изображений, представляет собой попытку разрешить «проблему
соответствия» при сравнении отдельных признаков между изображениями
путем использования значений серого цвета непосредственно в
качестве описания (идентификатора) для данного признака. При этом
фиксируется малый участок изображения, имеющий высокую степень
отличия от окружающей области, после чего находится его положение
на следующем кадре путем корреляции исходного участка с
зонами, попадающими в окно поиска при всех его перемещениях.
Вторая и третья группы методов очень похожи в том, что в обоих случаях
вычисляются точечные перемещения. Можно говорить об успешном
прикладном внедрении корреляционного метода, обеспечивающем его
работу с большинством реально существующих в мире сцен [6.8-6.10].
4. Группа методов, базирующихся на анализе градиента
оптического потока, оценивает движение изображения путем
отслеживания временного и пространственного градиентов значений яркости.
При этом не возникает необходимость решения «проблемы
соответствия», поскольку эти методы непосредственно используют
локальные пространственно-временные градиенты для определения движения
изображения [6.12-6.16]. Более того, эти методы могут использовать
изображение в полном объеме, а не только его области с
идентифицируемыми признаками. Заметим, что базирующиеся на градиенте
методы теряют работоспособность в случае значительных перемещений
изображения из-за дискретного характера вычислительных операций
по определению производных. При этом к преимуществам градиентных
методов относится их эффективность при работе с изображениями
пониженного разрешения. Методы, использующие характеристические
признаки, не столь эффективны в таких условиях, потому что сама
их природа предполагает использование видеоинформации с высоким
разрешением. Однако, существует несколько корреляционных методов
для низкого разрешения: например, корреляция зон-шаблонов
спутниковых изображений движущихся облаков в условиях низкого
разрешения [6.17].
Методы параметризованного оптического потока являются
подмножеством всего множества методов на базе градиента оптического по-
Спектральные
методы
Методы на
основе анализа
характерных
признаков
Корреляционные
методы
Метод
оптического
потока
I
Параметризированный
поток
Постоянный
оптический
поток
Аффинный
оптический
поток
Квадратичный
оптический поток
Рис. 6.1. Методы решения навигационной задачи БПЛА на основе обработки
видеоинформации
тока, требуют значительных вычислительных ресурсов и представляют
собой способ уменьшения сложности проблемы обработки и анализа
оптического потока [6.16,6.18-6.22].
Все сказанное выше может быть проиллюстрировано с помощью
диаграммы, представленной на рис. 6.1.
6.2. Обеспечение требуемой точности автономной
посадки БПЛА на необорудованный аэродром
Одной из наиболее сложных задач, решаемых бортовыми системами
БПЛА, является автоматическая посадка на аэродромы, не
оборудованные радиомаячными системами [6.23-6.26].
Для обеспечения требуемых параметров полета при автоматической
посадке могут быть использованы в частности, системы высокоточных
внешнетраекторных измерений или дифференциальные и
относительные режимы работы спутниковых навигационных систем.
Ниже исследуется возможность реализации категорированной
посадки БПЛА в автоматическом режиме при включении в состав
навигационной системы (НС) системы наблюдения (СН).
Будем считать, что НС позволяет реализовать посадку по категории
К, если при этом она может обеспечить точность решения
навигационной задачи, характеризуемую условиями
σ£ρ(/0>σ/(Λ), σ£ρ(/ζ)>σ„.(/ι), (6.1)
где h — высота полета БПЛА; К — индекс категории посадки; σ/jf
σΛτρ — требуемые значения среднеквадратических отклонений
положения БПЛА в боковом и вертикальном направлениях в соответствии
с данными табл. 6.1, где в качестве примера приведены требования,
позволяющие обеспечить безопасную посадку БПЛА различных типов;
σι, σ)χ — среднеквадратические отклонения оценок ошибок
положения БПЛА.
Таблица 6.1
Категория
посадки
I
II
III
Высота, т
30
15
2,4
Требуемая точность
(2σ,τη) по отклонению
Боковому
2σ;τρ
±9,1
±4,6
±4,1
Вертикальному
2σ/ιτρ
±3,0
±1,4
±0,4
Высота т соответствует высоте полета БПЛА над земной
поверхностью в точке, для которой регламентирована точность.
Выполнение условий (6.1) является необходимым для обеспечения
категорированной посадки.
Будем считать, что БПЛА оснащен штатной НС, включающей:
1. Бесплатформенную инерциальную навигационную систему
(БИНС);
2. GNSS-приемник;
3. Радио-, лазерный или ультразвуковой высотомеры.
Как правило, точности перечисленных выше аппаратных
составляющих НС, представленных на рынке, при реализации автоматической
посадки БПЛА позволяют обеспечить только I категорию посадки.
С учетом сказанного, для повышения точности решения
навигационной задачи предлагается ввести в состав НС систему наблюдения
(СН), обычно включаемую в состав целевой аппаратуры БПЛА в
качестве необходимой составляющей.
В соответствии с технологией бортовых наблюдений, описанной
в гл. 5, видеокамера, входящая в состав СН, принимает текущие
изображения (ТИ) поверхности Земли, сопоставляемые в бортовом
процессоре с эталонными изображениями (ЭИ). ЭИ формируются из
набора исходных эталонных изображений (хранимых в бортовой памяти).
В реализуемом варианте СН в качестве ЭИ одновременно используются
изображения нескольких ориентиров, координаты которых известны.
Обнаружение искомых ориентиров позволяет рассчитывать как
координаты видеокамеры, так и ее ориентацию (направление линии
визирования) и, следовательно, определять координаты и ориентацию
БПЛА как носителя СН. При этом предполагается, что в поле зрения
видеокамеры находятся достаточно информативные (с точки зрения их
обнаружения и оценки координат) ориентиры.
Таким образом, целью исследований является оценка возможности
обеспечить требуемую (с точки зрения решения задачи посадки БПЛА)
корректировку НС с помощью СН.
Сложность реализации процессов решения навигационной задачи
на основе обработки изображений определяется рядом факторов,
которые обсуждались в гл. 5.
Здесь необходимо учитывать, что при приближении БПЛА к Земле
размер местности, которая входит в поле зрения камеры, уменьшается,
в связи с чем наблюдаемые ориентиры могут выйти за пределы поля
зрения приемной видеокамеры. В этом случае навигационные
измерения могут осуществляться радиовысотомером и БИНС,
корректируемой с использованием последних достоверных данных, полученных
отСН.
Таким образом техническая задача в данном контексте состоит
в анализе возможности повысить точность решения навигационной
задачи за счет включения в состав НС системы наблюдения в такой
мере, что может быть обеспечена безопасная автоматическая посадка
БПЛА на необорудованный аэродром.
Анализ возможности использования СН в составе НС определяется
рядом факторов, представленных в их первичной взаимосвязи с
помощью диаграммы на рис. 6.2.
Фактическая работоспособность СН в составе НС
Требуемая точность оценки
навигационных параметров
Точность
определения угла
визирования
Возможность работы
в реальном времени
Точность совмещения
этолонного и
текущего
изображений
Требуемое
количество
операций
Требования к размерам
изображений, количеству
ориентиров,
отношению сигнал/шум
Требования к
процессору
Требования к
алгоритмам
обработки
изображений
Рис. 6.2. Факторы, определяющие использование СН в составе НС
Будем считать, что в основном точность оценки координат зависит
от точности измерения углов визирования ориентиров (δ), качества
используемых алгоритмов обработки изображений, размеров
обрабатываемых изображений (п), количества (ΛΉο) и расположения
ориентиров. Как известно, вероятность правильного обнаружения
ориентиров и точность оценки их координат определяется отношением
сигнал/шум SNR (5.41). Анализ показывает, что на исследуемых высотах
полета БПЛА отношение сигнал/шум достаточно велико (например,
SNR > 15, что соответствует интенсивному навигационному полю),
и оценка координат может реализовываться с пиксельной или даже
субпиксельной точностью.
Требования к функционированию СН в реальном времени
определяются частотой «выдачи» информации (отсчетов) и зависят в
общем случае от требований, предъявляемых к навигационной системе
в целом. С другой стороны, минимальное значение длительности
цикла обработки изображений Тсн зависит от размеров обрабатываемых
изображений, используемых алгоритмов и производительности
бортового процессора.
Будем полагать, что производительность процессора позволяет
обеспечить требования по частоте обновления информации на выходе
СН, предъявляемые исходя из общих требований к СН, т.е.
/сн ^ /осн,
где /сн = 1Дсн — частота выдачи информации СН; /осн — требуемая
частота выдачи информации.
Далее анализ возможности использования СН для повышения
точности НС с учетом перечисленных выше факторов проводился путем
математического моделирования процесса автономной автоматической
посадки БПЛА. В процессе решения навигационной задачи
определялись:
• местоположение БПЛА относительно взлетно-посадочной полосы
(ВПП) и составляющие его скорости;
• углы рыскания, тангажа, крена;систематические ошибки
чувствительных элементов БИНС и радиовысотомера.
Математическая модель движения БПЛА, используемая при
моделировании процесса посадки, представляет собой систему
дифференциальных уравнений движения центра масс и относительно центра
масс с учетом вариации скорости и порывов ветра, а также включает
кинематические уравнения.
Модель навигационной системы учитывает ошибки акселерометров,
гироскопов, входящих в состав БИНС, ошибки радиовысотомера, а
также кодовых излучений GNSS-приемника.
Состав системы наблюдения включает:
• бортовую аппаратуру наблюдения (видеокамеру);
• память, в которой хранятся ЭИ;
• процессор.
Бортовой процессор (в соответствии с рис. 5.1, 5.2) реализует
работу следующих алгоритмов:
• предварительной обработки изображений, обеспечивающих
повышение качества принимаемых изображений;
• сравнения ЭИ с принятым ТИ с учетом параметров полета БПЛА;
• оценки координат ориентиров относительно БПЛА.
Для сравнения ЭИ и ТИ в процессе моделирования были
использованы:
• алгоритм модуля разности;
• классический корреляционный алгоритм (нормированный
коэффициент корреляции (5.3)).
Алгоритм модуля разности соответствует формуле (5.1), получаемой
при а = 1:
p(f,g)= E \ffav)-9(x.v)\, (6-2)
(χ.ν)£Χ
где f(x,y) — эталонное изображение, д(х,у) — текущее изображение
являются функциями интенсивности X — апертуры зоны поиска.
Для получения модели измерений СН, которая используется далее
в фильтре Калмана, необходимо согласовать координаты (в пикселах)
искомых ориентиров, полученные в плоскости наблюдения, с системой
координат, связанной с местоположением и ориентацией ЛА.
При этом необходимо использовать описанные ниже и показанные
на рис. 6.3 системы координат и модель бортовой аппаратуры
наблюдения, показанную на рис. 6.4.
Рис. 6.3. Используемые системы координат
Рис. 6.4. Модель бортовой аппаратуры наблюдения
Рассмотрим неподвижную систему координат NXNY^Z^r, начало
которой находится в начале взлетно-посадочной полосы (ВПП) (JV).
Ось NXpj направлена по осевой линии ВПП, ось NYpj направлена по
местной вертикали и ось JVZjv направлена вправо. Другой базовой
системой является стандартная связанная система координат ВХвУв^в,
начало которой, как обычно, находится в центре масс БПЛА (В).
Таким образом, вектор х^ = [ж^г] характеризует местоположение
БПЛА в неподвижной системе координат ВПП.
Примем, что начало системы координат бортовой аппаратуры
находится в точке С, расположенной в центре линзы объектива
видеокамеры и именуемой в дальнейшем «центром» бортовой аппаратуры
наблюдения. Будем считать, что вектор х^ = [L00] , характеризующий
положение СН в связанных осях, является постоянным, т. к. бортовая
аппаратура наблюдения жестко связана с БПЛА. Пусть координаты
некоторой точки Ρ представляют собой координаты наблюдаемого эле-
мента поверхности Земли, определяемые вектором Хр = [xpypzp]T
в неподвижной системе координат ВПП.
Используя введенные системы координат, можно определить
координаты наблюдаемого элемента поверхности Земли в системе
координат бортовой аппаратуры (вектор Хр = [хср yep zcp]T) следующим
образом:
„с _ ссС1
Хр — ^и^л
rN
-*S)
Γσνβ
(6.3)
где С§ — постоянная переходная матрица из связанной в систему
координат бортовой аппаратуры; Cjy —переходная матрица из системы
координат бортовой аппаратуры в неподвижную систему координат
ВПП;
cos δ — sin δ 0
^в
sin δ cos δ 0
О 0 1
cos φ cos i9 sin ι? —sin i^-cos ύ
sin φ sin 7 —cos φ sin i9 cos 7 cos i9 cos 7 cos ψ sin 7+sin ψ sin i9 cos 7
sin ψ cos 7+cos ΐ/> sin i9 sin 7 — cos i9 sin 7 cos φ cos 7—sin i/> sin Ό sin 7
Здесь 5 — угол визирования бортовой аппаратуры наблюдения;
η,ϋ,φ — углы крена, тангажа, рыскания.
Уравнение (6.3) показывает связь между координатами БПЛА и его
угловой ориентацией и координатами наблюдаемого элемента
поверхности Земли в системе координат бортовой аппаратуры. Переходя от
исходного векторного уравнения (6.3) к скалярной записи уравнений,
получим:
хср — (cos δ cos φ cos θ — sin δ sin φ sin 7 + sin δ cos ψ sin θ cos 7) χ
χ (χρ — χ) + +(cos δ sin 0 — sin δ cos #cos 7Χ2/Ρ - y)+
+ (—cos δ sin i^cos # — sin 5 cos i/jsin 7 — sin 5 sin ι/jsin #cos 7) χ
χ (zp — z) — cos 5L,
yep = (sin 5 cos ψ cos # + cos δ sin (/? sin 7 — cos δ cos ί/з sin θ cos 7) χ
χ (χρ — χ) + (sin 5sin θ + cos 5cos #cos j){yp — y)+ (6.4)
+ (—sin δ sin (/? cos θ + cos 5 cos φ sin 7 + cos 5 sin (/? sin # cos 7) χ
χ (zp — z) — sin 5L,
^cp = (sin ι/j cos 7 + cos ι/j sin θ sin 7) (ip — x) +
+ (- cos θ sin 7) (yp - у )+
+ (cos i/jcos 7 — sin (/?sin #sin 7)(zp — z).
В соответствии с рис. 6.4 составляющие вектора координат Хр
связаны с пиксельными координатами на плоскости наблюдения (up,vp)
следующим соотношением:
uP = -f^ + uc, (6.5)
хср
Vp = -f +VC, (6.6)
хср
где uc,vc — координаты (в пикселах) «центра» бортовой
аппаратуры наблюдения относительно начала координат бортовой аппаратуры;
/ —фокусное расстояние объектива видеокамеры.
Для комплексирования навигационных подсистем целесообразно
использовать интегрированный алгоритм оценки координат и
ориентации БПЛА, основанный на фильтре Калмана. При этом в фильтре Кал-
мана коррекция БИНС и оценка местоположения, скорости и угловой
ориентации ЛА выполняются на основе данных, получаемых от СН,
радиовысотомера и GNSS, работающей в дифференциальном режиме.
Точность работы НС может быть оценена статистически путем
сравнения «истинных значений» оцениваемых параметров с
результатами решения навигационной задачи, определяемыми интегрированным
алгоритмом, при:
• варьируемых углах визирования (δ =30...90°, при 5 = 90°
направление визирования перпендикулярно поверхности Земли);
• различных ошибках совмещения ЭИ и ТИ (ΔΠ < 10 пиксел);
• различном количестве наблюдаемых наземных ориентиров
(1 < Who < 7);
• различном времени работы алгоритма обработки изображений
с учетом времени получения и обработки изображений (Тсн =
= 1//сн, /сн = 1-ЮГц).
• Для каждой комбинации условий рассчитывались статистические
оценки навигационных параметров с использованием и без
использования данных от GNSS-приемника.
Начальные значения навигационных параметров БПЛА
представлены в табл. 6.2.
Таблица 6.2. Начальные значения навигационных параметров ЛА
Навигационный параметр
Скорость полета, м/с
Угол наклона траектории, град
Угол поворота траектории, град
Начальная дальность от ВПП, м
Высота полета, м
Боковое положение относительно ВПП, м
Угловые скорости ЛА, град/с
Угол крена, град
Угол тангажа, град
Угол рыскания, град
Начальное значение
80
2,5
0
1145
500
0
0
0
2,5
0
Используемые характеристики бортовой аппаратуры представлены
в табл. 6.3-6.6.
Таблица 6.3. Характеристики бортовой аппаратуры наблюдения
Характеристика
Относительное фокусное расстояние
бортовой аппаратуры, пиксел
Размер принимаемого изображения, пиксел
Угловое поле, град
Значение
600
512х 512
45
В табл. 6.4 и 6.5 представлены характеристики погрешностей,
используемые при моделировании гироскопов и акселерометров,
соответственно.
Таблица 6.4. Характеристики погрешности гироскопов
Вид погрешности
Постоянные погрешности (1σ), град/ч
Коэффициенты затухания корреляционных
функций для систематических погрешностей, 1/с
Среднеквадратические отклонения
измерительных шумов, град/ч
Величина погрешности
0,01
0,005
0,01
Таблица 6.5. Характеристики погрешности акселерометров
Вид погрешности
Постоянные погрешности (1σ), g (9,81 м/с2)
Коэффициенты затухания корреляционных
функций для систематических погрешностей, 1/с
Среднеквадратические отклонения
измерительных шумов, g
Погрешности масштабных коэффициентов
Величина погрешности
0,25 · ΙΟ""
0,05
ю-"
4· 10"5
Таблица 6.6. Характеристика погрешности радиовысотомера
Вид погрешности
Постоянная погрешность (1σ), м
Коэффициент затухания корреляционной
функции ошибки, 1/с
Среднеквадратическое отклонение
измерительного шума, м
Другие погрешности определения высоты
на основе радиовысотомера, м
Величина погреш
1,5
0,1
0,3
0,о
ности
При оценке параметров полета БПЛА с GNSS-приемником
в процессе посадки БПЛА учитывались погрешности, представленные
в табл. 6.7 (дифференциальный режим).
Таблица 6.7. Характеристики погрешностей измерения псевдодальности
Погрешности
измерения псевдодальности
Погрешность, вносимая навигационной
аппаратурой потребителя
Погрешность, вносимая бортовой
аппаратурой GNSS
Ошибки эфемерид
Погрешность, вызванная
ионосферной задержкой сигнала
Погрешность, вызванная
тропосферной задержкой сигнала
Погрешность, вызванная
эффектом многолучевости
Суммарная погрешйость (RMS)
Координаты контрольно-корректирующей
станции (ККС) относительно ВПП
Среднеквадратическая ошибка [м]
Постоянная
0,5
20,0
2,1
4,0
0,5
1,0
20,5
Случайная
0,2
0,7
0,0
0,5
0,5
1,0
1,4
Сумма
0,5
20,0
2,1
4,0
0,7
1,4
20,6
(-1000, 30, 3000 м)
Характеристики точности используемых навигационных подсистем
представлены в табл. 6.8.
Таблица 6.8. Характеристики точности навигационных подсистем
Навигационная подсистема
БИНС
Радиовысотомер
GPS-приемник (DGPS)
Система наблюдения
Характеристики точности
До 1,7 км/ч
Среднеквадратическая ошибка — 1,5 м
Среднеквадратическая ошибка — 5...10 м
Выбранная ошибка: 0...10 пиксел
При статистическом моделировании посадки БПЛА вводились
начальные ошибки навигационных параметров, представленные
в табл. 6.9.
Таблица 6.9. Начальные ошибки навигационных параметров
Навигационный параметр
Скорость, м/с
Координаты местоположения, м
Угловая ориентация, град
Начальная ошибка (σ)
1
10
0,5
В процессе моделирования было принято, что каждая
навигационная подсистема имеет собственную частоту выдачи полезной
информации (табл. 6.10).
Таблица 6.10. Частоты получения информации
Получение информации
БИНС
Радиовысотомер
Многоканальный GPS-приемник
Система наблюдения
Частота отсчетов
10 Гц
100 Гц
1 Гц
Выбранная частота: 1...10 Гц
При моделировании посадки БПЛА рассматривались варианты
с различными частотами приема информации от системы
наблюдения (СН).
Ниже представлены некоторые результаты моделирования процесса
посадки и решения навигационной задачи.
На рис. 6.5 приведены максимальные значения ошибок оценок
навигационных параметров в зависимости от ошибок совмещения ЭИ
и ТИ (в пикселах). Штриховыми линиями представлены аналогичные
данные, полученные при использовании GNSS-премника.
Ошибка совмещения ЭИ и ТИ .пиксель
Рис. 6.5. Максимальные значения ошибок оценок навигационных параметров
На рис. 6.6 представлены ошибки оценки углов тангажа (линии
с кружками), крена (с квадратами), рыскания (с треугольниками)
в зависимости от ошибок совмещения ЭИ и ТИ.
Ошибки оценки координат БПЛА в зависимости от частоты приема
информации от СН представлены на рис. 6.7.
0 1.4
1 1,2-
1 1,0-
э
о
s 0,8
X
(υ
I 0,6-1
СО
s у
§ 0,4
га
1 0,2-
га
S 0,0.
Угол
зыска
0 2 4 6 8 10
Ошибка совмещения ЭИ и ТИ ,пиксель
Рис. 6.6. Ошибки оценки углов тангажа
13
s 12
S" и
1 ю
° 9
I 7
о
5 5
ч
га 4
ξέ 3
:> 2
1
■
Гфодольная координата X
: x(gps)
Е-..
&Ч- — .
- Высота Υ
•~^^
y(GPS)~^
—
Люковая коорди
1 ■ 1 ■
Z(GPS)
пата Ζ
1 '
Г"
2 4 6 8 10
Частота отсчетов системы наблюдения, Гц
Рис. 6.7. Ошибки оценки координат БПЛА
Как и следовало ожидать, увеличение частоты выдачи информации
от СН до примерно 10 Гц увеличивает точность оценки навигационных
параметров. Очевидно, что максимальное увеличение точности
происходит в продольном канале, а минимальное — в канале оценки высоты.
Увеличение частоты выше 10 Гц практически не влияет на точность
измерений.
Увеличение количества наблюдаемых ориентиров до 3 приводит
к повышению точности измерений навигационных параметров
(рис. 6.8). Как следовало ожидать, минимальное влияние данный
фактор оказывает на точность оценки высоты полета ЛА, угла
рыскания, угла наклона траектории. Дальнейшее увеличение количества
ориентиров практически не влияет на точность измерений.
Количество наблюдаемых ориентиров
Рис. 6.8. Точность измерений навигационных параметров
На основании проведенных исследований можно сделать
следующие выводы:
1. Ошибки оценки координат (в наименьшей степени для канала
высоты) и углов ориентации БПЛА (в наибольшей степени для
канала тангажа) существенно зависят от ошибок совмещения ЭИ
и ТИ;
2. Повышение частоты выдачи информации от СН до 10 Гц
приводит к повышению точности работы НС, однако дальнейшее
повышение частоты нецелесообразно, т. к. не приводит к
существенному повышению точности измерений;
3. Угол визирования δ = 90° является наиболее эффективным в
рассматриваемом диапазоне условий применения СН в составе НС;
4. Увеличение количества наблюдаемых ориентиров больше трех
практически не повышает точность работы НС в боковом и
вертикальном каналах (наиболее важных при посадке).
В табл. 6.11 представлены основные результаты исследований по
обеспечению условий категорированной посадки БПЛА при
дополнительном использовании системы наблюдения (СН) в составе
навигационной системы (НС).
Таблица 6.11. Условия реализации автоматической посадки
Вариант
1
2
3
4
5
6
7
8
yMOBt
реализа
СН
ΔΠ
[п.]
0,5
5,5
Nm
5
3
1
3
ции
/сн
[Гц]
10
10
5
2
10
10
5
2
Высота, м
30
2σ;
[м]
0,12
0,13
0,23
0,69
0,20
0,30
0,44
0,76
2ah
[м]
0,30
0,35
0,64
1,43
0,35
0,52
0,75
1,53
15
2σ;
Μ
0,42
0,47
0,63
1,64
0,87
0,98
1,30
1,71
2ah
[Μ]
0,64
0,67
0,86
1,47
0,62
0,69
0,95
1,55
2,4
2σ;
[Μ]
1,04
1,22
1,53
3,56
2,24
2,41
2,91
3,59
2σΛ
[Μ]
0,64
0,68
0,86
1,54
0,70
0,68
0,91
1,55
Соответствие
требований
[Категория]
Бок.
Вер.
II
II
II
I
II
II
II
I
В табл. 6.11 показаны категории посадки в соответствии с табл. 6.1,
которые могут быть обеспечены выполнением условия (6.1). Здесь
ΔΠ — ошибки измерения координат ориентиров в пикселах.
Реализация вариантов 1-3, 5-7 работы СН обеспечивает
автоматическую посадку по категории III (практически до касания с
поверхностью) в боковом направлении и по категории II по высоте.
В частности, по варианту 1 при условиях, что обеспечивается
точность совмещения ЭИ и ТИ 0,5 пиксела, использованы 5 ориентиров
и бортовой процессор позволяет реализовать комплексный алгоритм
обработки изображений с частотой не менее 10 Гц, обеспечивается
оценка координат БПЛА в боковом направлении и по высоте,
соответственно, с ошибкой 2σ м:
• 0,12 и 0,30 (на высоте 30 м);
• 0,42 и 0,64 (на высоте 15 м);
• 1,04 и 0,64 (на высоте 2,4 м),
что соответствует категории III в боковом направлении и категории II
по высоте.
Необходимо отметить, что для некоторых типов малоразмерных
БПЛА данная точность оценки по высоте является достаточной для
обеспечения полностью автоматической посадки.
6.3. Определение углов ориентации БПЛА на основе
анализа поля движения
Важной проблемой при стабилизации малоразмерных БПЛА
является надежная оценка углов тангажа и крена в реальном времени.
В ряде целевых задач требуемая точность оценки углов составляет
3σ < 4—5 град (тангаж), 3σ < 3 град (крен).
Задача оценки параметров ориентации БПЛА с помощью системы
наблюдения (СН) может быть решена на основе известных методов
аналитической фотограмметрии, позволяющих решать задачи внешнего
и внутреннего ориентирования приемной камеры [6.27-6.30], в
частности, жестко устанавливаемой на борту БПЛА.
Для пояснения сказанного рассмотрим фрагменты 2-х кадров с
номерами /η_ι и 1п видеопоследовательности подстилающей
поверхности, моделируемой как случайное поле с заданным радиусом
корреляции (рис. 6.9).
Блок 1
'j 1
Блок 2
/
1
Кадр
Кадр
Рис. 6.9. Фрагменты 2-х кадров подстилающей поверхности
Эти изображения получены для случая прямолинейного,
горизонтального полета БПЛА с креном f фО при установочном угле
визирования δ = 90е.
При этом модель системы наблюдения соответствует описанной
выше в разд. 6.2 с помощью соотношений (6.3)-(6.5).
При отклонении линии визирования от вертикали дальность до
отдельных наблюдаемых точек поверхности меняется. Поэтому при
смещении БПЛА и установленной на нем приемной камеры
относительно подстилающей поверхности идентичные блоки изображений,
выделенные на двух последовательных кадрах, смещаются (как
показано на рис. 6.9) на разные расстояния, которые и позволяют вычислить
величину крена.
Необходимо отметить, что в рассматриваемом случае нет
необходимости хранить и использовать эталонные изображения наземных
ориентиров, как это было реализовано в разд. 6.2 для определения
ориентации БПЛА.
Существует несколько подходов к расчету параметров
относительного движения камеры, а, следовательно, и ее ориентирования:
дискретный, дифференциальный и метод наименьших квадратов [6.27].
Сложность использования дискретного и дифференциального
подходов в реальных условиях состоит в их высокой чувствительности
к шумам в принимаемой видеоинформации. В свою очередь,
использование метода наименьших квадратов требует вычислительных
ресурсов, не обеспечиваемых современными бортовыми процессорами.
Таким образом, как уже указывалось в гл. 5 и разд. 6.1, оценка
углов ориентации {крена, тангажа и рыскания) БПЛА в реальном
времени на основе анализа общего оптического потока и
соответствующего поля движения является чрезвычайно сложной задачей.
Один из возможных способов преодоления сформулированной
трудности, предлагаемый авторами в [6.30], состоит в использовании поля
движения, формируемого на основе оценок смещений не точек, а
отдельных блоков размером η χ η, на которые предварительно
разбивается изображение.
Относительные смещения блоков на двух кадрах
видеопоследовательности характеризуются векторами поля движения, которые
находятся на основании оценки положения соответствующих блоков на
каждом кадре с помощью корреляционных функций (5.1).
Поле движения для прямолинейного горизонтального полета БПЛА
при ненулевом угле тангажа представлено на рис. 6.10, α (векторы
не параллельны). При ненулевом угле рыскания и изменении курса
(рис. 6.10,б) векторы отклонены от вертикальной оси. При нулевых
углах тангажа, рыскания и крена векторы параллельны вертикальной
оси (рис. 6.10, в).
Исследование возможности использования данного подхода
проводилось с помощью математического моделирования процессов полета
малоразмерного БПЛА, приема и обработки изображений
подстилающей поверхности.
Полет БПЛА моделировался при следующих начальных данных:
• высота полета 100-400 м;
• перепад высот подстилающей поверхности ±5 м;
• угловое поле зрения 60 град.;
• размер ПЗС-матрицы 500 χ 500 пикселов;
• скорость полета 10 м/с;
• частота обработки кадров 1 и 2 кадр/с.
Подстилающая поверхность моделировалась случайным полем
(рис. 6.9). Расчеты проводились для 100 блоков размером 16 χ 16
пикселов, размещаемых последовательно слева направо, сверху вниз.
Расстояние между блоками — 24 пиксела.
Исследования показали, что при углах крена и тангажа БПЛА до
10 градусов можно использовать упрощенные формулы расчета углов
/ \ \ \ \ \ \ \ \ \ \
\ \ \ \ \ \ \ \ \ \
\ \ \ \ \ \ \
\ \ \
\ \ \
/ I I
/ / /
//III
\
Рис. 6.10. Поле движения для различных углов тангажа, рысканья и крена
по векторам смещения двух блоков:
ϋ9Ε arctg(l - {Αχ]/Αχ2))
tg {kyAy2)
Ί =
arctg(l -(Δΐ/,/Δΐ/2))
tg(kxAx2)
где 7, ϋ — углы крена и тангажа; Δι;ι, Ах2 — векторы смещения
блоков 1 и 2 на плоскости изображения по оси X на двух
последовательных кадрах соответственно; Ау\, Ау2 — величины векторов смещения
на плоскости изображения по оси Υ на двух последовательных кадрах;
кх, ку — коэффициенты, зависящие от параметров видеокамеры.
При этом для расчета крена блок 1 должен располагаться на
вертикальной линии, проходящей через центр изображения (у = уо),
а блок 2 — иметь координаты х2 = х\,у2 ^ уо· Для расчета
тангажа блок 1 должен иметь координаты х\ = хо,у\ = уо, а блок 2 —
χ2 Φ Х],у2 = уо, где хо,уо — координаты центра изображения.
Использование приведенных выше формул существенно сокращает
объем требуемых вычислений. При этом ошибка вычислений углов
крена и тангажа по сравнению с методом наименьших квадратов не
превышает 0,5 градусов.
На рис. 6.11 представлены результаты оценки (1 кадр/с) углов
тангажа и крена, полученные после моделирования процесса полета
БПЛА (по горизонтальной оси — время, по вертикальной оси — угол
в градусах).
истинный тангаж истинный крен
расчетный тангаж - расчетный крен
Рис. 6.11
Результаты моделирования процесса оценки углов ориентации
БПЛА были статистически обработаны. При этом были получены данные,
представленные в табл. 6.12.
Таблица 6.12
Высота,
м
100
200
400
Ошибка (3σ)
по крену, град
±1,30
±1,75
±2,41
Ошибка (3σ)
по тангажу, град
±2,10
±2,65
±3,41
Полученные точности оценки углов ориентации БПЛА на основе
анализа поля движения соизмеримы с характеристиками
соответствующих микромеханических устройств, используемых для реализации
систем стабилизации БПЛА данного класса.
Представленные данные подтверждают возможность использования
рассматриваемого подхода для реализации в каналах угловой
стабилизации малоразмерных БПЛА.
6.4. Использование методов оптического потока для
оценки навигационных параметров БПЛА
В настоящее время существуют различные методы решения задачи
определения параметров оптического потока (или двумерного
движения поля яркости) на основе принимаемой видеоинформации.
Один из методов, получивший широкое распространение [6.1,6.2,
6.24], исходит из основополагающего предположения, что общее
изменение яркости в потоке изображения равно нулю, т.е., полная яркость
изображения остается постоянной во времени. Тогда отношения между
пространственно-временными градиентами потока изображения и
параметрами этого потока могут быть определены из условия постоянной
яркости:
dl n
или
dl dx dl dy dl
dxTt + d^Tt + ml = 0> (67)
Ixu+Iyv + It = 0, (6.8)
h = -(IxJy)(u,v)T, (6.9)
где I = I(x,y,t) — значение яркости в точке изображения с
координатами {х,у); 1Х = д1/дх\1у = dl/dy\lt = dl/dt, — значения
пространственно-временных градиентов оптического потока в точке (х, у);
и = dx/dt; υ = dy/dt —скорости перемещения изображения в
точке (х,у).
Временной градиент It прямо пропорционален компонентам вектора
скорости изображения (и, υ) , совпадающими по направлению с
пространственными градиентами 1Х,1У.
Таким образом, полученное соотношение (6.9), которое
выполняется для каждого пиксела, явным образом определяет вектор искомых
параметров (и, υ) , описывающих скорость движения изображения.
Из-за дискретной природы данных изображения вычисление
временно-пространственных градиентов требует дискретной
аппроксимации операций дифференцирования.
Для расчета временного градиента в [6.1,6.2] предлагается
использовать разницу значений яркости на двух соседних кадрах:
It » 12-I., (6-Ю)
где Ιι,Ι2 — матрицы значений яркости последовательно поступивших
кадров размера т χ η; It — матрица временного градиента размера
т χ п.
Для определения матриц пространственных градиентов 1я:, 1у
используется оператор Собеля, осуществляющий свертку изображений
с помощью горизонтальной Η и вертикальной V градиентных масок.
Используемый в работе [6.2] оператор Собеля имеет следующий вид:
ΙΙ=(Ι,*Η + Ι2*Η)/2; ,-ш
I„ = (I, * V + I2 * V)/2, ^Λ1}
- -ι ο ι■
где Η = -2 0 2 и V = Нг.
L-ι о ι J
Алгоритм оценки навигационных параметров БПЛА на
основе анализа общего оптического потока. В общем случае скорости
перемещения изображения и,υ можно представить функциями вектора
параметров движения камеры Θ, подлежащего оценке:
и = и{в), υ = υ{θ). (6.12)
В работе [6.1] принята гипотеза о линейном характере
зависимости (6.11), т.е. для каждого j-το пиксела изображения выполняются
соотношения:
Uj = cje + {cu)f vj = dje + {d„)j, j=l,2,...,N, (6.13)
где Cj.dj — векторы размера к χ 1 коэффициентов соответствующих
линейных зависимостей, являющиеся, в общем случае, функциями
координат пиксела (х,у); {cu)j,(dv)j — свободные члены указанных
линейных зависимостей, являющиеся, в общем случае, функциями
координат пиксела (х,у); к — размерность вектора оцениваемых
параметров движения θ, Ν = т χ η — общее количество пикселов
изображения.
Тогда с учетом формулы (6.8) для каждого j-го (j = 1,2,...Ν)
пиксела изображения с координатами (х,у) имеют место следующие
соотношения:
{Ix)jcje + {Iy)jdje + {си + dv)j = {-It)j, j = 1, 2,..., Ν; (β и)
к
Σ {{Ιχ)ί^ + (ly)jdij)0i = -{h + Cu + dv)j, 3 = 1. 2,..., N.
i=]
Уравнения (6.14), записанные в матричной форме, примут вид:
A0 = It, (6.15)
где А —матрица размера Ν χ к, элементы которой имеют следующий
вид:
o-ij = {Ix)jCij + {Iy)j<kj, г = 1,2,...,к; j = 1,2,... ,Ν;
It — вектор размера JV χ 1, составленный из сумм значений временного
градиента и соответствующих свободных членов для каждого пиксела,
взятых со знаком минус:
(lt)j = -{It + cu + dv)j, 3= 1,2,...,JV.
Из соотношения (6.15) можно получить систему к линейных
уравнений для к компонент вектора Θ, подлежащих оценке:
(ATA)0 = ATIt. (6.16)
Эта система уравнений может быть решена стандартными методами
линейной алгебры.
В работе [6.1] дан конкретный пример использования предложенной
методики оценки 4-х параметров движения видеокамеры: ее координат
Χ,Υ,Ζ и угла φ поворота в фокальной плоскости.
Соотношения (6.13), записанные для указанных компонент вектора
θ (к = 4), имеют следующий вид:
и = 2] ~~ XV? ~~ yt'
V = 772 - г/773 + Χψ,
(6.17)
где
1 + 7?3 1 + 773 1 + 773 1+773
AXf AYf ΔΖ
ri\ = —Ζ~- m = —γ-. V3= -g-. (6.19)
/ —фокусное расстояние камеры; AX, AY, AZ — линейные смещения
камеры по соответствующим осям.
Тогда уравнение (6.14) для каждого пиксела изображения будет
иметь вид:
4^7ι + Л/772 - {х1х + у1у)щ + {xly - νΙχ)ψ = -h- (6.20)
Конечным результатом аналитического решения задачи оценки
параметров движения камеры, представленным в работе [6.1], можно
считать записанную в общем виде систему уравнений второго порядка
для компонент оцениваемого вектора движения Θ.
θτ · Н^■ · θ + dj · θ + Ч = 0, J = 1,2 L, (6.21)
где для каждого j-ro уравнения системы: Η — матрица квадратичной
части размера к χ к; d — вектор коэффициентов линейной части
размера к χ 1; с — свободный член.
Матрица Η и вектор d являются суммами смешанных
произведений значений координат, яркостей и пространственных градиентов для
точек первого кадра. Свободный член с является разностью сумм
смешанных произведений, вычисляемых отдельно для первого и второго
кадров.
Количество уравнений в системе (6.16) зависит от числа к
компонент вектора параметров движения θ
L=4k_i}} + 2k (622)
К недостаткам этого метода можно отнести необходимость
одновременной обработки двух кадров, что существенно увеличивает время,
необходимое для оценки искомых параметров и накладывает
дополнительные требования на размеры оперативной памяти используемых
вычислителей.
Очевидно, что для сокращения объема требуемых вычислений
необходимо формировать максимально компактные описания каждого
кадра (небольшим количеством параметров) с последующим их
сравнением для определения параметров движения камеры. Подобные методы
достаточно широко используются в промышленных системах
технического зрения [5.25,5.26], однако требуют для своей работы
знания априорной информации о характере освещения, возможных типах
изображения и т.п., что делает затруднительным их применение на
борту БПЛА.
Методы, основанные на сегментации изображения и выделении
границ объектов или других локальных характерных линий, также
требуют проведения больших объемов вычислений и при некоторых
условиях проявляют неустойчивость в функционировании. Поэтому
для методов, анализирующих оптический поток, предлагается
использовать в качестве параметров изображения не локальные, а глобальные
его характеристики как более устойчивые к случайным помехам, а
именно — элементы матрицы А^ · А.
Для приведенного выше примера 4-х компонентного движения
матрица (Ат · А) имеет размер 4x4, т.е. содержит 16 элементов, но
в силу симметричности этой матрицы различными будут лишь 10
элементов.
Вектор (Ат · It) имеет размер 4 χ 1. В результате полученная
система будет состоять из 14-ти уравнений (порядка не выше второго)
и содержать 4 неизвестных параметра. Эта система уравнений может
быть решена с помощью традиционных численных методов.
Алгоритм оценки параметров движения БПЛА с
использованием метода квадратичной параметризации оптического потока.
Методология применения квадратичной параметризации оптического
потока для оценки параметров движения видеокамеры была
разработана в Бостонском университете [6.2] в процессе решения задачи по
расширению возможностей автономной навигации малого беспилотного
вертолета за счет использования бортовой видеокамеры в качестве
дополнительного навигационного датчика.
Типичной навигационной системой для указанного класса
летательных аппаратов является комбинация инерциальной навигационной
системы (INS), выдающей информацию о движении с высокой часто-
той — порядка 50 Гц, и дифференциальной глобальной системы
навигации (DGPS), обновляющей навигационные оценки движения с
частотой порядка 5 Гц — для компенсации длиннопериодического дрейфа
в инерциальных измерениях. Но даже для рассматриваемого вертолета
гражданского назначения существуют определенные высокоточные
режимы полета, для которых использование спутниковой навигации
становится нежелательным ввиду возможной неопределенности ее оценок
вследствие временной потери сигнала, что, в конечном счете, может
привести к падению вертолета. К таким режимам относятся: полет
на низкой высоте, в городских условиях и, особенно, режим посадки.
Названные факты и послужили мотивацией зарубежного научного
исследования [6.2], основным теоретическим результатом которого
можно считать методологию решения задачи оценки параметров движения
камеры с помощью квадратичной параметризации оптического потока.
Основными этапами решения указанной задачи являются:
1. Оценка пространственно-временных градиентов оптического
потока (на основе обработки пары последовательных видеокадров).
2. Оценка двумерного движения изображения как
параметризованного оптического потока между двумя изображениями (на основе
пространственно-временных градиентов).
3. Преобразование параметров двумерного движения изображения
в векторы трехмерного движения камеры.
На заключительном этапе исследования [6.2] осуществлялась
интеграция полученных оценок движения, базирующихся на
видеоинформации, с выходами других навигационных датчиков (прежде всего
инерциальной навигационной системы) в обобщенном фильтре Кал-
мана. Также была реализована обратная связь между навигационной
системой и процессом обработки видеоинформации для улучшения
вычисления градиента изображения путем внесения изменений в поток
изображения на основе предсказанного движения.
Структурно-функциональная схема алгоритма оценки параметров
движения БПЛА, разработанного на основе указанной методологии и
предложенных в [6.2,6.20,6.28] аналитических решений, представлена
на рис. 6.12.
Алгоритм решения задачи представлен в виде совокупности
функциональных блоков, реализующих различные этапы процесса оценки
движения бортовой камеры на основе обработки видеоизображений:
• блока определения временного и пространственных градиентов
оптического потока (на основе обработки пары последовательных
видеокадров);
• блока квадратичной параметризации оптического потока и
оценки двумерного движения изображения (поля скоростей) — как
функции полученных параметров;
• блока оценки векторов трехмерного движения камеры
(поступательного и вращательного) на основе оценок квадратичных
Бортовая
видео—
V камера
О
i = 1
I
Формирование
последовательности
видео-кадров для
обработки
т
Определение градиентов видеоизображения
Вариант А:
без учета его сдвига.
k = 1
Вариант В:
без учета его сдвига.
k= О
Δ ж, Δ г/
Н< *х> К
Оценка параметров оптического потока и
скорости перемещения изображения
Блок
навигационной
информации
д, [и, υ]
нет
Прогноз сдвига
изображения:
Ах = и, Ау = υ.
Априорные
Оценка параметров трехмерного движения
объекта
Вариант С:
оценка скорости
на базе матрицы W.
ν,ω,ρ
Вариант D:
оценка перемещения
на базе матрицы А.
Схема CDIME
статистической
обработки оценок.
h, R,p
Схема IDIME
статистической
обработки оценок.
Рис. 6.12. Структурно-функциональная схема алгоритма обработки видеоизс
ражений методом квадратичной параметризации потока для оценки движен
камеры
параметров потока (с использованием матрицы W оптического
потока или матрицы перехода А);
• блока статистических схем (CDIME, IDIME) получения
обобщенных оценок параметров движения (на основе обработки
множественных последовательностей видеокадров);
• блока навигационной информации, формируемой на основе
показаний других располагаемых, помимо видеосистемы, бортовых
датчиков, например: ИНС, высотомера.
К отличительным особенностям предложенной структуры
алгоритма следует, прежде всего, отнести введение в целях повышения
точности и достоверности получаемых навигационных оценок двухэтапного
процесса определения скорректированных значений градиентов потока
на основе предварительной оценки сдвига изображения (его центра).
Речь идет о наличии обратной связи между блоком оценки градиентов
потока и блоком оценки движения изображения.
Другой особенностью описываемой структуры алгоритма является
включение в ее состав блока навигационной информации.
Поступающие от других бортовых датчиков текущие данные о движении
объекта играют исключительно важную роль в деле решения трехмерной
задачи оценки движения самой видеосистемой. Текущая
навигационная информация позволяет, во-первых, из получаемого двойственного
решения трехмерной задачи выбрать единственное и, во-вторых,
произвести правильное масштабирование выбранного пространственного
решения. Кроме того, текущая независимая информация от других
датчиков могла бы помочь и в деле коррекции градиентов потока на
основе прогнозируемого сдвига изображения.
Краткое описание функциональных блоков алгоритма оценки
представлено ниже.
Блок определения градиентов оптического потока (на основе
обработки пары последовательных видеокадров).
Процесс функционирования этого блока предполагает регулярную
подачу на его вход пары соседних видеоизображений подстилающей
поверхности из той формируемой с определенной частотой
последовательности кадров, которая поступает от бортовой видеокамеры.
Вариант А — без учета прогнозируемого сдвига изображения.
Временной градиент потока It определяется по формуле (6.10).
Пространственные градиенты рассчитываются по формулам (6.11).
Вариант В — с учетом прогнозируемого сдвига изображения.
Коррекция значений пространственно-временных градиентов потока
осуществляется на основе прогнозируемого сдвига изображения по
следующим формулам:
Iti = h{x,y) -I\{x- Ax,y- Ay),
1Х = 12 * Н/6,
1„ = 12 * Нг/6,
где Η =
" -1 О 1 -
-1 О 1
-1 О 1
It2 = —Δχ1χ - Ayly,
It = hi +It2.
где χ, у — координаты точки изображения в пиксельной системе
координат; Ах, Ау — значения сдвига изображения для рассматриваемой
точки по соответствующим координатам.
Как уже отмечалось выше, для достижения наилучшей точности
прогноза сдвига изображения необходимо использовать текущую
навигационную информацию от других датчиков. При отсутствии такой
возможности может быть использован вариант прогноза сдвига
изображения на основе ранее полученных оценок самой видеосистемы по
формулам:
Ах = round {q\x + q2y + qzf ~ ЧТ^Ιί - 4sxv/f)<
Ay = round {q4x + q5y + qef - q7xy/f - qsy2/f).
где qi, i = 1-8 — ранее полученные оценки квадратичных параметров
потока; / — фокусное расстояние видеокамеры.
Блок оценки параметров оптического потока и скорости
движения изображения.
1. Оценка квадратичных параметров оптического потока.
В случае детерминированной постановки задачи для каждой точки
(пиксела) изображения с координатами (х,у) выполняется
соотношение следующего вида:
Ixxq{ + Ixyq2 + Ixfq3 + IyXq^ + Iyyq5 + Iyfq6+
+ ((Ixx2 + Iyxy)/f)q7 + {{Ixxy + Iyy2)/f))qs = -h,
где Ix, Iy, It — значения пространственно-временных градиентов для
данного пиксела.
Совокупность таких соотношений для множества пикселов образует
замкнутую систему линейных уравнений для оценки квадратичных
параметров потока q= (q\,q2 qs)T'. которая может быть представлена
в векторно-матричной форме записи:
Cq = y.
При включении в процесс оценки глобальной параметризации всех
пикселов изображения полученная система будет состоять из m χ η
уравнений. Матрица С этой системы уравнений будет иметь размер
(пг χ η) χ 8, ее элементами являются коэффициенты при оцениваемых
параметрах потока в левой части уравнений. Вектор-столбец у правых
частей уравнений состоит из значений временного градиента It (со
знаком минус) для каждого пиксела изображения и имеет размер
(mxn)xl.
Решение полученной системы уравнений по методу наименьших
квадратов имеет вид: m
q=(CTC)-ICTy.
В случае стохастической постановки задачи система уравнений для
оценки параметров потока имеет вид:
Cq+R = y,
где R ~ N (0,(1/А;) 53) — аддитивный Гауссов шум наблюдения;
\/к — величина, характеризующая уровень интенсивности шума
наблюдения; 53у — матрица ковариаций шума наблюдения.
Решение стохастической задачи, обеспечивающее максимум
функции правдоподобия, имеет вид:
q=(CrSC)-'Cr5>
у у
(l/£)Hl/A0[(y-Cq)Tf>-Cq)],
у
где N — число наблюдений.
2. Определение скорости двумерного движения изображения
осуществляется на основе полученных оценок q квадратичных параметров
потока:
и = q\x + Я2У + qzf ~ Q7(x2/f) ~ q&{xy/f)\
v = qiX+ q5y + qef - qi{xy/f) - qs{y2/f),
где и, υ — полученные в точке (х,у) оценки горизонтальной и
вертикальной скорости перемещения изображения (в пиксельной системе
координат).
Блок оценки параметров трехмерного движения камеры (на
основе обработки пары последовательных видеокадров).
Для описания пространственного движения видеокамеры
относительно стационарной плоской поверхности вводится неподвижная
декартова система координат ΟΧΥΖ, пространственное положение
которой совпадает с положением связанной системы координат камеры
ОкХКуКгК в начальный момент времени. Связанная система координат
камеры 0KxKyKzK имеет следующую ориентацию осей:
ось Окук совпадает с продольной осью БПЛА;
ось Οκζκ направлена вниз к поверхности сцены;
ось Окхк дополняет систему координат до правой.
Система координат 0KxKyKzK может быть получена следующей
последовательностью поворотов связанной системы координат БПЛА
Ocxcyczc (при совпадении точек начала отсчета) — сначала вокруг оси
Oczc no часовой стрелке на угол 90 градусов; затем — вокруг нового
положения оси Осу* против часовой стрелки на угол 90 градусов.
Это относительное положение осей связанных систем координат
камеры и БПЛА учитывается при дальнейшей комплексной
обработке полученных от видеоинформационной системы оценок движения
БПЛА вместе с показаниями других бортовых датчиков для выработки
обобщенной навигационной информации.
Во введенной системе координат OXYZ пространственное движение
камеры (объекта) полностью описывается следующими параметрами:
R — ортогональной матрицей 3x3 углов поворота объекта; h —
трехмерным вектором поступательного перемещения объекта.
Для описания скорости пространственного движения объекта в
указанной системе координат используются следующие обозначения: ω —
вектор скорости углов поворота объекта; V — вектор поступательной
скорости объекта.
Уравнение самой плоскости сцены, над которой движется объект,
во введенной системе координат будет иметь вид:
аХ + bY + cZ = d,
где а,Ь,с — составляющие вектора η = (α, b, c)T, нормального к
плоскости сцены d, расстояние от объекта до плоскости.
Все вышеописанные параметры трехмерного движения объекта,
а также нормированный вектор-перпендикуляр к плоскости сцены
ρ = n/d являются оцениваемыми параметрами для описываемого
алгоритма.
В работе [6.2] рассмотрены два альтернативных варианта
алгоритма решения пространственной задачи движения объекта на основе
полученных оценок квадратичной параметризации оптического потока
(рис. 6.12):
Вариант С — оценка пространственной скорости объекта на основе
матрицы потока W.
Вариант D — оценка пространственного перемещения объекта на
основе матрицы перехода А.
Обе указанные ветви алгоритма описаны ниже.
1. Определение матрицы оптического потока W и матрицы
перехода А на основе полученных оценок параметров оптического потока q
осуществляется по следующим формулам:
(2<т1 - g5)/3 q4 ql
q2 (2g5-g1)/3 §8
qi qb -(gl+§5)/3
W = W(q)
Α(τ,ί) = e
wf:
Соотношение для матрицы перехода А выполняется при условии
постоянства W на рассматриваемом временном интервале.
2. Вариант С.
С помощью декомпозиция матрицы потока W определяются
следующие параметры скорости пространственного движения объекта: V —
вектор поступательной скорости объекта; ω — вектор скорости углов
поворота объекта; ρ — вектор-нормаль планарной сцены.
2.1. Для определения параметров ρ и V используется
математический аппарат собственных значений (СЗ: ?, < h < h) и собственных
векторов (СВ: q]t q2, дз) кососимметричной матрицы Wj = W + WT:
= k + h -2г2
/1+τ /1-τ
Последующее определение ω осуществляется по формуле:
О -ωζ шу \ j
ωζ 0 -ωχ = W + ρνΓ - χρτνΙ.
-ων ω, 0 / ό
2.2. Устранение двойственности полученной пары решений ρ и V.
В качестве критерия выбора единственного решения принято
минимальное значение синуса угла между получаемой видео-оценкой
вектора и его априорным значением, получаемым в текущий момент от
других датчиков — например, бортового высотомера:
е = mod (ρ χ po/mod (p)/mod (po);
г* = min (e), г = 1,2,
где р и ро — оценка вектора-нормали сцены и его априорное
(независимое) значение соответственно; mod (ρ χ ρο) — модуль векторного
произведения указанных векторов; е — значение минимизируемого
критерия; г* — номер выбранного решения, минимизирующего значение
критерия е.
В общем случае имеется возможность использовать с этой целью
как вектор-нормаль ро сцены (на основе текущих показаний
высотомера), так и вектор поступательной скорости объекта Vo (на основе
текущих показаний ИНС).
2.3. Масштабирование значений полученных оценок ρ и V также
производится с использованием располагаемой информации от других
датчиков навигационной системы.
Алгоритм масштабирования на основе априорного значения ро
имеет вид:
scale = у (р^ χ ро/(рг х р)) · sign (р^ χ ρ0);
ρ = ρ · scale;
V = V/scale.
3. Вариант D.
С помощью декомпозиции матрицы перехода А определяются
следующие параметры трехмерного движения объекта: h — вектор
поступательного перемещения; R — матрица углов поворота объекта; ρ —
вектор-нормаль сцены.
3.1. Для определения ρ и h используются собственные значения
(квадратные корни СЗ: s, > S2 > S3) и собственные вектора (СВ: qu щ,
«в) симметричной матрицы As = Α χ Ατ:
\Js]-s\ ±g2^/s2-s2
8\ -82\ ^VSI _S2 ±^VS2-S3
ч2
s3·
S\ + S2 J S2
h= -д/вз^ув2 - s\ ±S|®y.s2 - s\ S2\Js\ -
Последующее определение R осуществляется по формуле:
R = (i - slphT) A.
3.2. Устранение двойственности полученной пары решений ρ и
h и масштабирование их значений с использованием располагаемой
информации от других датчиков навигационной системы
осуществляется в соответствии с алгоритмами, аналогичными изложенным выше
в подразделах 2.2, 2.3.
Блок статистических схем (CDIME, IDIME) получения
обобщенных оценок параметров трехмерного движения (на основе
обработки множественных последовательностей видеокадров).
Естественным путем повышения стабильности производимых
оценок движения представляется вычисление обобщенного движения,
являющегося результатом обработки не одной пары кадров изображения
(как рассматривалось на предыдущих этапах), а множества таких пар
последовательных кадров.
В зависимости от уровня, на котором осуществляется обобщение
(интеграция) обрабатываемой информации, методы обобщенной оценки
реализуются по двум различным схемам: CDIME и IDIME.
Схема CDIME (Camera Domain Integrating Motion Estimate) —
обобщаются полученные оценки движения камеры.
Каждая оценка на шаге «г» — результат обработки одной пары
кадров по следующей схеме:
1. Определение матрицы оптического потока W;
2. Декомпозиция W для получения векторов поступательной
скорости и скорости углов поворота камеры с установлением
единственного решения и его масштаба на основе независимой
информации от других датчиков информации;
3. Вычисление обобщенной оценки указанных векторов скорости —
их средних значений для рассматриваемого интервала времени
В заключение отметим возможность преобразования полученных
оценок векторов скорости в вектор конечного перемещения и матрицу
углов поворота — для каждого временного интервала (ί^,,ί;) и
дальнейшего объединения полученных результатов в обобщенное движение
для любого рассматриваемого интервала обработки (t\,U).
Аналогичная оценка обобщенного перемещения может
производиться на основе уже вычисленной обобщенной скорости для этого же
интервала.
Схема IDIME (Image Domain Integrating Motion Estimate) —
обобщаются полученные оценки движения изображения по следующей
схеме:
1. Для каждой пары кадров определяется матрица оптического
потока W и на ее основе — соответствующая матрица перехода
Α(ίί,ί,+ι);
2. В результате обработки заданного множества кадров вычисляется
матрица перехода Α(ί],ί„) обобщенного изображения:
A(t„in)=A(t,,t2)A(t2,t3)...A(tn_i,tn).
3. Декомпозиция матрицы перехода A(ibin) обобщенного
изображения для определения вектора поступательного перемещения и
матрицы углов поворота, характеризующих обобщенное
движение камеры;
4. Установление единственного решения и масштаба
поступательного перемещения с помощью априорной информации;
5. Вычисление на основе оценки обобщенного движения
эквивалентной обобщенной скорости для рассматриваемого интервала
времени (ibin).
Список литературы к главе 6
6.1. Рубцов А. В., Ходкин А. С, Тришечкин СИ. Определение
параметров движения телевизионной камеры по интегральным характеристикам
изображений. М.: НИИ СМ МГТУ им. Баумана, 2005.
6.2. Michael Carsten Bosse. A Vision Augmented Navigation System for an
Autonomous Helicopter. Thesis. Boston University. College of Engineering.
1997.
6.3. Heeger D.J. Optical flow using spatiotemporal filters // International
Journal of Computer Vision. 1987. V 1(4). P. 279-302.
6.4. Shah M.A., Jain R. Detecting time-varying corners // Computer Vision,
Graphics, and Image Processing. December 1984. V. 28(3). P. 345-55.
6.5. Sethi I.K., Jain R. Finding trajectories of feature points in a monocular
image sequence // IEEE (Transactions on Pattern Analysis and Machine
Intelligence). January 1987. V.9(l). P. 56-73.
6.6. Lawn J, Cipolla R. Camera motion determination from dynamic perceptual
grouping of line segments. In Proceeding of the 5th British Machine Vision
Conference, V.812 of 2, pages 711-20, September 1994.
6.7. Qinfen Zheng and Chellappa R. Automatic feature point extraction and
tracking in image sequences for arbitrary camera motion // International
Journal of Computer Vision. June 1995. V. 15(1-2). P. 31-76.
6.8. Себряков Г. Г., Инсаров В. В. Высокоточное управление ЛА с
использованием технологий компьютерного зрения // Вестник компьютерных и
информационных технологий. М.: Машиностроение. 2004. № 1. С. 5-14.
6.9. Oertel С.-Η. Computer vision sensor for autonomous helicopter hover
stabilization. Number 3088.
6.10. Giachetti Α., Campani M., Torre V. The use of optical flow for the
autonomous navigation. In Proceedings of Third European Conference on
Computer Vision.
6.11. Yuntao Cui and Weng J. Reconstructing and visualizing dense global
visual maps for extended passive Navigation. In Proceedings of SPIE (The
International Society for Optical Engineering), volume 2410 of Visual Data
Exploration and Analysis II. February 1995. P. 192-199.
6.12. Horn B.K.P., Shunck B.G. Determining optical flow // Artificial
Intelligence. August 1981. V. 17(1-3). P. 185-203.
6.13. Prazdny K. On the information in optical flow // Computer Vision,
Graphics, and Image Processing. May 1983. V.22(2). P. 239-59.
6.14. Hildreth E.C. Computations underlying the measurement of visual
motion // Artificial Intelligence. August 1984. V. 23(3). P. 309-54.
6.15. Chin T.M., Karl W.C., Willsky A. S. Probabilistic and sequential
computation of optical flow using temporal coherence // IEEE Transactions
on Image Processing. 1994. V. 3(6). P. 773-88.
6.16. Walton J.M. Terrain mapping from a mobile platform through optical flow
techniques. Master's thesis, MIT. May 1995.
6.17. Wu Q. X. A correlation-relaxation-labeling framework for computing optical
flow-template matching from a new perspective // IEEE Transactions
on Pattern Analysis and machine Intelligence. September 1995. V. 17(9).
P. 843-53,
6.18. Bergen J.R., Anandan P., Hanna K.J., Hingorani R. Hierarchical model-
based motion estimation. In Second European Conference on Computer
Vision Proceedings, pages 237-252, May 1992.
6.19. Anandan P. Model based techniques for image registration and three-
dimensional scene analysis from image sequences. In Proc. of 27th Asilomar
Conf. on Signals, Systems and Computers. November 1993. V. 1, P. 90-94,
6.20. Kenichi Kanatani. Geometric Computation for Machine Vision. Oxford
Science Publications, 1993.
6.21. Shahriar Negahdaripour. Passive Navigation. PhD thesis, MIT Artificial
Intelligence Laboratory, 1986.
6.22. Srinivasan Μ. V. An image-interpolation technique [or the computation
of optic flow and egomotion // Biological Cybernetics. 1994. V. 71(5).
P. 401-15,
6.23. Управление и наведение беспилотных маневренных летательных
аппаратов на основе современных информационных технологий / Под ред. М.Н.
Красилыдикова и Г.Г. Себрякова. — М.: Физматлит, 2003. — 280 с. —
IBSN 5-9221-0409-8.
6.24. Системы автоматического управления самолетом / И. А. Михалев и
Б. Н. Окоемов, М.С. Чикулаев. 2-е изд., перераб. и доп. — М.:
Машиностроение, 1987. — 240 с, ил.
6.25. Ким Н. В., Ен Хюн Мок. Автоматическая посадка гражданского самолета
с использованием наземных ориентиров // Известия РАН. Теория и
системы управления. 2005, №3.
6.26. Хюн Ен Мок. Исследование точности работы навигационной системы
при автоматической посадке гражданского самолета на необорудованный
аэродром. Диссертация на соискание ученой степени кандидата
технических наук, Московский авиационный институт (технический
университет). 2004
6.27. Хорн Б. К. П. Зрение роботов: Пер. с англ. — М.: Мир, 1989. — 487 с,
ил.
6.28. Форсайт Дэвид Α., Понс Жан. Компьютерное зрение. Современный
подход.: Пер. с англ. — М.: Издательский дом «Вильяме», 2004. — 928 с:
ил. — Парал. тит. англ.
6.29. Ким Н. В. Обработка и анализ изображений в системах технического
зрения: Учеб. Пособие. — М.: Изд-во МАИ, 2001. — 164 с: ил.
6.30. Ким Н. В., Степанова Н. В. Комплексное решение навигационных и
прикладных задач с помощью системы наблюдения беспилотного
летательного аппарата. Сб. докл. VII-й Всероссийской юбилейной
научно-технической конференции «Проблема совершенствования робототехнических
и интеллектуальных систем летательных аппаратов», Москва. МАИ,
2005.
6.31. Бахвалов Н.С., Жидков Н.П., Кобельков Г. М. Численные методы. М.:
Наука, 1987.
Глава 7
МОДЕЛИРОВАНИЕ ПРОЦЕССОВ
ФУНКЦИОНИРОВАНИЯ ИНТЕГРИРОВАННЫХ
СИСТЕМ БПЛА НА ОСНОВЕ МЕТОДОЛОГИИ
ОБЪЕКТНО-ОРИЕНТИРОВАННОГО АНАЛИЗА
И ПРОЕКТИРОВАНИЯ
Анализ приведенных выше математических моделей движения
беспилотных маневренных ЛА, а также подсистем и устройств,
определяющих аппаратурный состав рассматриваемых интегрированных
систем навигации и наведения с учетом действующих возмущений и
неконтролируемых факторов, неизбежно приводит к выводу, что при
формировании облика таких систем, то есть определения необходимого
состава моделей и алгоритмов, обеспечивающих выполнение
заявленных тактико-технических характеристик соответствующей системы,
важное место отводится математическому моделированию процесса
функционирования системы в целом.
Действительно, применение традиционных методов анализа и
синтеза подобных систем не дает приемлемых результатов вследствие
нестационарности и нелинейности используемых моделей, а также
разнородной природы действующих возмущений (детерминированных,
стохастических, неконтролируемых, нечетких). Кроме того, изначально
предполагается наличие бортового вычислителя, а интегрированная
система проектируется как цифровая.
Таким образом, наиболее эффективным и дающим конструктивный
выход подходом, обеспечивающим необходимую точность и
надежность решения целевой задачи проектируемой интегрированной
бортовой системы, является математическое моделирование этой системы
с учетом всех особенностей внешней среды, в которой предполагается
использование этой системы.
Заметим, что в настоящее время на предэскизных этапах
проектирования обсуждаемых интегрированных систем возможно
рассматривать любые необходимые объемы моделирования, не ограничиваясь
изучением характерных режимов или условий эксплуатации, т.е.
варьируя весь диапазон возможных (и невозможных) состояний системы.
Далее, необходимо подчеркнуть, что использование методов
математического моделирования позволяет сократить сроки (и средства)
проектирования подобных систем, обеспечивая масштабируемость и
возможность повторного использования созданного
программно-математического обеспечения (ПМО) при решении аналогичных задач.
Современные методы реализации ПМО дают возможность в кратчайшие
сроки сформировать масштабируемую библиотеку моделей, численных
методов и алгоритмов навигации и наведения, позволяющую
оперативно изменять как структуру самого объекта, так и условия его
функционирования непосредственно во время проведения исследований.
Использование вышеупомянутой библиотеки дает возможность
формировать облик интегрированных систем навигации и наведения
на основе целевых критериев функционирования системы в целом.
Кроме того, в связи с наметившейся в настоящее время унификацией
промышленных и бортовых ЦВМ, возможно непосредственное
использование фрагментов разработанного ПМО в бортовом интегрированном
комплексе, что позволяет снизить стоимость его производства и
эксплуатации.
С учетом сказанного содержание данной главы включает
сравнительный анализ наиболее распространенных в настоящий момент
подходов к математическому моделированию сложных динамических
систем с учетом неконтролируемых факторов.
Кроме того, в главе излагаются основы развитой авторами
технологии создания ПМО, предназначенного для имитационного
математического моделирования процессов функционирования интегрированных
систем навигации и наведения высокоманевренных ЛА.
7.1. Объектно-ориентированный анализ
и проектирование — современная методология
моделирования и проектирования информационных
систем
7.1.1. Особенности современного этапа развития технологии
математического моделирования. В настоящее время технология
математического моделирования вышла на новый качественный
уровень. Такое качественное изменение было обусловлено следующими
обстоятельствами [7.1]:
• Необходимость удовлетворения постоянно возрастающим
требованиям к точности и надежности решения целевой задачи с
помощью математического моделирования приводит к необходимости
построения максимально полных моделей движения, бортовой
аппаратуры и т.п., учитывая все большое количество
неконтролируемых факторов различной природы. Это, в свою
очередь, неизбежно приводит к «тяжеловесности» соответствующего
программного обеспечения, использующего огромное количество
библиотек и имеющего сложную разветвленную структуру, что,
в конечном счете, усложняет отладку, эксплуатацию и
дальнейшее использование программного кода [7.2,7.3];
• Развитие информационных технологий и появление
принципиально новых операционных систем (OS/2, Windows),
ориентированных на события, привело к созданию соответствующих языков
программирования, обладающих развитой событийной гибкостью
и мощным механизмом корректной обработки и хранения данных.
Новое качество технологии математического моделирования
возникло с появлением парадигмы объектно-ориентированного
программирования [7.3,7.4]. Теоретическая суть данного подхода
заключается в использовании сложных информационных структур — объектов,
обладающих двумя принципиальными свойствами: во-первых,
объекты содержат данные, характеризующие свойства данного объекта и
методы (процедуры) работы с ними, и, во-вторых, объекты
обладают свойством наследования, т.е. от объекта может быть порождено
сколь угодно много объектов-наследников, расширяющих возможности
и свойства объекта-предка.
Такой подход позволил локализовать данные и методы работы с
ними в логически законченные структуры, допускающие сколь угодно
сложную логику управления и обеспечивающие одновременно с этим
корректное хранение и обработку данных. Кроме того, принцип
наследования позволил реализовать библиотеки численных алгоритмов и
математических моделей на качественно новом иерархическом уровне,
обеспечив тем самым возможность масштабирования и повторного
использования программного кода.
Описанные свойства объектов удачно соответствуют требованиям
и логике новейших операционных систем, что дало возможность
создавать интегрированные средства разработки
программно-математического обеспечения, обладающих разветвленным и функциональным
интерфейсом (Borland Delphi и C++ Builder реализованы на основе
самих же языков программирования Borland Pascal и C++
соответственно). Более того, на основе использования
объектно-ориентированного подхода удалось создать язык программирования, инвариантный
к используемой платформе (Java), что позволяет говорить об
определенной унификации и стандартизации используемого ПМО. В
качестве примера можно привести опыт команд Формулы-1, использующих
ПМО, созданное по технологии Java, как в своих стационарных
исследовательских центрах, так и в паддоке, и непосредственно на самих
автомобилях.
В настоящее время на базе объектно-ориентрованных языков
программирования создаются проблемно-ориентированные САПР,
обладающие высокой универсальностью и точностью решения технических
задач и позволяющие исследовать широкий спектр проблем той или
иной тематики [7.5]. О превосходстве объектно-ориентрованного
подхода говорит тот факт, что даже системы аналитических вычислений
(MathCad, Matematica), оперирующие с символьной математикой,
выполнены на основе традиционных объектно-ориентированных языков
программирования [7.5].
Однако к настоящему моменту не существует каких-либо
стандартных САПР, позволяющих исследовать процессы функционирования
бортовых интегрированных систем навигации и наведения
беспилотных высокоманевренных ЛА на приемлемом уровне детализации и
точности получаемого решения. Это объясняется, с одной стороны,
как уже отмечалось, особенностями моделей объекта и подсистем,
и, с другой стороны, большим количеством изучаемых подзадач и
режимов, необходимых исследователю. В результате возникает
необходимость создания уникального ПМО для каждого проекта,
базирующегося тем не менее на использовании ранее созданного объектного
инструментария.
Таким образом, современная методология математического
моделирования, базирующаяся на использовании объектно-ориентированного
подхода, позволяет создавать интегрированные средства
формирования облика сложных технических систем, обладающие высокой
гибкостью, масштабируемостью и детализованностью моделей, что делает
его незаменимым инструментом в проектно-исследовательских
работах [7.1,7.5].
7.1.2. Современная технология математического
моделирования интегрированных систем навигации и наведения
высокоманевренных ЛА. Накопленный в данной предметной области опыт
показывает, что методология математического моделирования
неразрывным образом связана с развитием информационных технологий и
философии программирования. Точнее говоря, эволюция парадигмы и
методологии программирования определяет в конечном итоге
методологию моделирования, позволяя формировать ту или иную
организационную структуру программно-математического обеспечения [7.3].
Здесь под парадигмой программирования будем понимать
некоторый законченный набор идей и рекомендаций, определяющих стиль
написания программ. По сути, парадигма программирования
определяет то, каким образом видится запись алгоритма, архитектура и процесс
выполнения программы. Так, например, в объектно-ориентированном
программировании программист рассматривает программу как набор
взаимодействующих объектов, в функциональном программировании
программа представляется в виде цепочки вычисления функций.
Необходимо отметить, что в современных языках программирования часто
присутствуют элементы нескольких парадигм, позволяя программисту
использовать преимущества и особенности различных подходов и
методологий. Вместе с тем можно указать несколько действительно
фундаментальных парадигм, возникновение которых существенным
образом повлияло на технологию математического моделирования сложных
технических систем.
Императивное программирование. Со времен появления первых
гипотетических последовательных вычислительных моделей,
реализующих функцию переходов некоторого автомата на множестве состоя-
Начало
τ
Вычислительный
блок № 1
т
Процедура № 1
ний (машине Тьюринга-Поста), получила развитие парадигма
императивного программирования, описывающая процесс вычисления в виде
инструкций, изменяющих состояние программы [7.3]. Императивная
программа представляет собой последовательность инструкций,
выражаемых повелительным наклонением в естественных языках, которые
должен выполнить компьютер. Состоянием вычислительного
устройства является указатель текущей инструкции, значения используемых
программой ячеек оперативной памяти и состояние стека возвратов
из подпрограмм. Выполнение каждого оператора представляет·собой
изменение «состояния вычислителя». Императивное программирование
наиболее пригодно для реализации
небольших подзадач, где очень важна скорость
исполнения. Кроме этого, работа с
внешними устройствами, как правило,
описывается в терминах последовательного исполнения
операций, что делает такие задачи
идеальными кандидатами на императивную
реализацию.
Одной из первых методологий
математического моделирования, основанной на
парадигме императивного программирования,
являлось последовательное или
неструктурированное моделирование, применявшееся
при использовании самых простейших языков
программирования [7.2,7.3], в которых
отсутствовала возможность работы с библиотеками
и модулями. В этом случае типичная
организационная структура программы,
предназначенной для математического моделирования,
имела так называемый линейный вид, т.е.
выглядела так, как это показано на рис. 7.1.
Таким образом, как правило, вся
программа находилась в одном файле, содержащем
как набор готовых процедур и функций, так
и основной исполняемый код, выступавший в качестве своеобразного
«менеджера» программы, обеспечивая строго определенный порядок
вызова функций и логику выполнения основного кода.
Очевидно, что такая методология не позволяла создавать большие
и мощные с алгоритмической точки зрения программные продукты
вследствие разрастания линейной структуры, обусловленной глубокой
детализацией моделей и учетом различного рода возмущений.
Кроме того, при необходимости изменения кода или при
создании новых программных продуктов в рамках такой структуры крайне
сложно или вообще невозможно использовать существовавший код
вследствие того, что программа представляет собой практически не
расчленяемый, единый фрагмент.
Вычислительный
блок № k
X
Процедура № /
}
Ϊ
Окончание
Рис. 7.1
Вследствие вышеперечисленных недостатков и ограничений
последовательного подхода к моделированию было возможно использовать
только простейшие численные методы и алгоритмы, что не позволяло
обеспечивать необходимую точность решения целевой задачи. Так,
например, среди методов численного интегрирования систем
обыкновенных дифференциальных уравнений вида
у = f (*. у) ; у (ίο) = уо
использовался практически только метод Эйлера [7.19]:
Уг+| = Уг+] +h-f(ti, Уг),
величина локальной погрешности которого прямо пропорциональна
шагу интегрирования h. Кроме того, данный метод обладает свойством
нарушения устойчивости численного решения при уменьшении шага,
что неприменимо для многих технических задач.
Парадигма процедурного или структурного программирования
появилась как следствие возрастания сложности решаемых на
компьютерах задач и соответственного усложнения программного
обеспечения, что потребовало систематизации процесса разработки и
структуры программ. Основа данной парадигмы, предложенной в 70-х
годах XX века Э. Дейкстрой и Н.Виртом, заключается в представлении
программы в виде иерархической структуры блоков и предполагает
следование следующим утверждениям [7.3]:
• Любая программа представляет собой структуру, построенную из
трех типов базовых конструкций:
- последовательное исполнение — однократное выполнение
операций в том порядке, в котором они записаны в тексте
программы;
- ветвление — однократное выполнение одной из двух или
более операций, в зависимости от выполнения некоторого
заданного условия;
- цикл — многократное исполнение одной и той же операции
до тех пор, пока выполняется некоторое заданное условие
(условие продолжения цикла).
• Повторяющиеся фрагменты программы (либо не повторяющиеся,
но представляющие собой логически целостные вычислительные
блоки) могут оформляться в виде т. н. подпрограмм (процедур
или функций). Процедуры (подпрограммы, методы или функции)
содержат параметризованную последовательность шагов
алгоритма. В ходе выполнения программы любая процедура может быть
вызвана из любой точки, включая саму данную процедуру.
• Разработка программы ведется пошагово, методом «сверху вниз».
По сравнению с предыдущим подходом имеется ряд существенных
преимуществ [7.12,7.13]:
• Возможность повторного использования одного и того же кода из
нескольких мест программы без его копирования.
• Возможность легкой трассировки программы вследствие
рекомендуемого отказа от инструкций безусловного перехода, что
позволяет избежать получения так называемого «спагетти-кода»,
характерного для последовательного подхода при реализации
больших проектов.
• Возможность поддержки модульности и структурности.
Основанное на парадигме процедурного программирования
структурное моделирование существенно расширило возможности
исследователя за счет использования модулей (библиотек) подпрограмм [7.14].
Типовой модуль содержит объявления констант, переменных и
типов, а также тела процедур и функций, объединяемых, в основном,
по функциональному признаку. Все объявленные в модуле структуры
становятся автоматически доступны при ссылке на имя модуля. При
этом модули также могут ссылаться на другие модули. Так, например,
реализованный на языке Borland Pascal модуль, реализующий операции
над матрицами произвольной размерности, может выглядеть
следующим образом:
Unit Matrix;
Interface
type
Float: Extended;
procedure
procedure
procedure
procedure
procedure
procedure
AxBINRows, NTerms, NCols: Integer;
var А, В, С: array of Float);
ATxBINRows, NTerms, NCols: Integer;
var А, В, С: array of Float);
ScaleINRows, NCols: Integer;
var A: array of Float; CScale :Float);
SublNRows, NCols: Integer;
var А, В, С: array of Float);
Add|NRows, NCols: Integer;
var А, В, С: array of Float);
Inverse[Dimen : integer;
var PD, PData, PInv: array of Float;
var Error : byte);
implementation
uses Mathem;
procedure
var
AddINRows, NCols: Integer;
var А, В, С: array of Float);
Row, Col: Integer;
Ind : Integer;
begin
for Row
=0 to NRows-1 do
for Col:=0 to NCols-l do
begin
Ind
:= FIndex[Row,Col,NCols);
C(Ind] := A(Ind] + B(Ind];
end;
end;
{Имя модуля}
[Секция объявлений}
[Объявления типов)
{Объявления процедур}
(Секция реализации)
(Ссылка на другой модуль)
{Тело процедуры}
Анализ приведенного фрагмента показывает, что в данном модуле
в секции описания («INTERFACE») объявлены необходимые типы и
процедуры, с помощью которых реализуются операции над матрицами
произвольной размерности, а сами тела процедур и функций находятся
в секции реализации («IMPLEMENTATION»), Пользователь получает
доступ ко всем объявленным в секции «INTERFACE» типам,
процедурам и функциям, указывая ссылку на модуль «MATRIX». После
этого в программном коде можно вызывать любую из данных процедур,
подставляя в них соответствующие фактические параметры.
В соответствии с изложенным, организационная схема
программы, использующей принцип структурного программирования, выглядит
следующим образом (рис. 7.2):
Вызывающая программа
(менеджер проекта)
Секция объявления и инициализации
констант,переменных и типов j\
Секция реализации
вызывающей программы
Вычислительный блок № 1
Вызов процедур и функций
из модулей проекта
Τ
Вычислительный блок № 2
Вызов процедур и функций
из модулей проекта
I
Вычислительный блок № К
Вызов процедур и функций
из модулей проекта
Модуль 1
Объявление констант,
переменных, типов,
процедур и функций
Тела процедур
и функций
Модуль 2
Объявление констант,
переменных, типов,
процедур и функций
Тела процедур
и функций
Модуль N
Объявление констант.
переменных, типов,
процедур и функций
Тела процедур
и функций
Рис. 7.2
Еще одной важной особенностью структурного программирования
является возможность использования так называемых процедурных
типов, позволяющих в качестве фактического параметра передавать
Гл. 7. Моделирование процессов функционирования систем БПЛА
в процедуру или функцию другую процедуру, удовлетворяющую
описанию процедурного типа.
Поясним сказанное на примере приведенного ниже фрагмента кода,
реализующего модуль методов интегрирования систем обыкновенных
дифференциальных уравнений на языке Borland Pascal:
Unit Integrator;
Interface
type
TFuncProc = procedure
Iti: Float; var Y, dY:
TOutPutProc = procedure
Procedure RungeKutta[TO
TFuncProc; OutPutProc:
Implementation
Procedure RungeKutta1 TO
TFuncProc; OutPutProc:
Begin
FuncProcIti+Step, CurY,
end;
array
Iti:
of Float); [\[(описание процедурных
Float;
, Tk, Step:
TOutPutProc)
, Tk, Step:
TOutPutProc)
var Υ
Float,
Float,
CurdY); |\l(вызов
array
var Y:
var Y:
of Float)
array of
array of
процедуры!\) )
-·
Float;
Float;
типов{\})
FuncProc:
FuncProc:
В секции описания модуля определены процедурные типы
TFuncProc и TOutPutProc, представляющие собой шаблоны для
функций правых частей и функций печати результатов при решении
задачи интегрирования систем обыкновенных дифференциальных
уравнений. Далее определена процедура RungeKutta, реализующая
непосредственно метод численного интегрирования Рунге-Кутты,
где в качестве формальных параметров, наряду с интервалом
интегрирования, шагом и начальными условиями, указаны процедуры
FuncProc и OutPutProc соответствующих процедурных типов.
В секции реализации в теле процедуры RungeKutta происходит вызов
данных процедур с подстановкой текущих фактических параметров.
Описанный механизм позволяет создавать унифицированные
программные модули, реализующие алгоритмы различных численных
методов, инвариантные к физической сути задачи, или, иными словами,
к используемым моделям. Это обстоятельство позволяет создавать,
с одной стороны, универсальные библиотеки алгоритмов, а с другой —
библиотеки моделей, объединяя их в рамках вызывающей программы
следующим образом: в качестве фактического процедурного параметра
в процедуру численного метода подставляется одна из процедур модуля
моделей, реализующих конкретную математическую модель
технической задачи.
Помимо этого, структурное моделирование дало возможность
реализовать современные численные методы, оперирующие большим
числом исходных данных, настроек и т.п., обеспечивающих
необходимый уровень инструментальных погрешностей. Возвращаясь к примеру
с методами численного интегрирования систем обыкновенных
дифференциальных уравнений по сравнению с линейным моделированием,
в данном случае могут быть использованы современные одношаговые
вложенные и экстраполяционные методы интегрирования, такие, как
метод Дормана-Принса, обладающие механизмом контроля локальной
погрешности и автоматического выбора шага интегрирования и
позволяющие достичь точности относительной локальной погрешности на
уровне Ю-20.
Таким образом, структурное программирование обеспечивает
возможность быстрой разработки и доработки проекта на основе
использования библиотек алгоритмов и моделей и оперативной замены
моделей и алгоритмов как на этапе разработки ПМО, так и на этапе
непосредственно математического моделирования.
Вместе с тем при создании больших программных комплексов,
реализующих сложные технические задачи проектирования бортовых
интегральных систем навигации и наведения, использование
структурной технологии моделирования сталкивается с проблемой обеспечения
корректности обращения к данным, используемым разными модулями
и процедурами, а также с «запутанностью» кода менеджера программы,
обеспечивающего реакцию комплекса на разного рода события. Кроме
того, в рамках данного подхода затруднена отладка и
документирование создаваемого ПМО.
Функциональное программирование. Функциональное
программирование как раздел дискретной математики и парадигма
программирования принципиально отличается от концепции императивного
программирования, основанного на описании последовательно
исполняемых операций с использованием понятий «текущего шага
исполнения» и «текущего состояния», которое меняется с течением шага
исполнения. В функциональном программировании программы
являются выражениями, а процесс вычисления трактуется как вычисление
значений функций в математическом понимании [7.3]. Способ
решения задачи при этом описывается при помощи зависимости
функций друг от друга без указания последовательности шагов. В
отличие от императивного программирования, основанного на машине
Тьюринга-Поста — абстрактном вычислительном устройстве,
функциональное программирование соответствует лямбда-исчислению Чер-
ча. Суть лямбда-исчисления Черча заключается в использовании т.н.
абстрактных лямбда-функций от одного аргумента и применениями
выражений к функциям [7.3].
Функциональное и логическое программирование являют собой
части т.н. «декларативного программирования», т.е. такого стиля
программирования, при использовании которого в программах
описывается способ решения поставленной задачи, а не предписываются шаги
для получения результата.
Функциональное программирование обладает следующими двумя
примечательными свойствами [7.3]:
1. Аппликативность: программа есть выражение, составленное из
применения функций к аргументам.
2. Настраиваемость: любой программный объект (в идеале)
является выражением, вследствие чего можно создавать новые
программные объекты по образцу как значения соответствующих
выражений.
Для обеспечения видовой корректности программ в
функциональные языки вводят специальные системы типов, ориентированные на
поддержку настраиваемости. Как правило, трансляторы
функциональных языков могут самостоятельно определять типы выражений без
каких-либо описаний типов вообще.
Функциональное программирование легко реализуется на
платформах, поддерживающих параллелизм. «Потоковая модель»
функционального программирования является естественным представлением
функциональных программ в терминах систем взаимодействующих
процессов.
Чаще всего функциональное программирование используется для
создания максимально универсальных библиотек, ориентированных на
решение часто встречающихся подзадач (обработка агрегатных
данных; потоковый ввод-вывод; взаимодействие между программами,
написанными на разных языках и различающихся в деталях семантики;
универсальные оконные библиотеки). Эти направления наиболее ярко
представлены в STL — стандартной библиотеке шаблонов
(контейнеров) языка Си++, а также в реализации платформы NET фирмы
Microsoft. Кроме того функциональное программирование, как и
другие модели «неимперативного» программирования, обычно
применяется для решения задач, которые трудно сформулировать в терминах
последовательных операций. К таковым относятся практически все
задачи, связанные с искусственным интеллектом, такие, как задачи
распознавания образов, общение с пользователем на естественном
языке, реализация экспертных систем, автоматизированное доказательство
теорем, символьные вычисления.
Логическое программирование. В парадигме логического
программирования программа представляет из себя некоторую теорию
(описанную на достаточно ограниченном языке) и утверждение, которое
нужно доказать [7.3]. В доказательстве этого утверждения и будет
заключаться исполнение программы. В языках логического
программирования теории задаются при помощи аксиом и правил вывода.
Логическое программирование допускает естественную параллельную
реализацию. Так же как и функциональное программирование,
парадигма логического программирования используется в области анализа
естественных языков и других задач искусственного интеллекта. Кроме
того, в последнее время логическое программирование используется
как средство'для описания сложных систем.
Автоматное программирование. Парадигма автоматного
программирования подразумевает проектирование и реализацию
программ, поведение которых описывается с использованием теории
конечных автоматов [7.3]. Основная идея автоматного программирования
состоит в том, что программы предлагается создавать так же, как
производится автоматизация технологических (и не только) процессов.
При этом на основе анализа предметной области выделяются
источники входных воздействий и автоматизированные объекты, каждый из
которых содержит систему управления (систему взаимодействующих
конечных автоматов) и объект управления, реализующий выходные
воздействия и формирующий значения второй разновидности
входных воздействий, которые передаются по обратным связям от объекта
управления к системе управления.
Чаще всего в обсуждаемой концепции автоматы, формализующие
поведение программ, описываются на основе модели, использующей
представление в виде графов переходов (диаграмм состояний) [7.3].
Для различения вершин в каждом графе переходов вводится понятие
«кодирование состояний». При использовании «многозначного
кодирования» с помощью одной переменной можно различать состояния
автомата, число которых определяет ее значность. Это позволяет ввести
в программирование понятие «наблюдаемость программ» (по значениям
переменных, кодирующих состояния автоматов) по аналогии с
понятием «наблюдаемость» в теории автоматического управления.
Наиболее просто подобный подход реализуется в языках
программирования высокого уровня с помощью конструкции switch языка С
либо ее аналогов в других языках программирования (т. н. «Switch-
технология»).
Автоматное программирование разрабатывается в нескольких
направлениях, различающихся как классами решаемых задач, так и
типами вычислительных устройств, на которых осуществляется
программирование.
Объектно-ориентированное моделирование основано на
использовании парадигмы объектно-ориентированного программирования и
заключается в проекции исходной технической задачи на уровень
логических структур языка программирования (объектов) и формировании
связей между ними [7.4,7.5].
В соответствии со сложившейся терминологией в дальнейшем будем
понимать под классом специальный тип данных языка, состоящий из
данных (полей) класса и методов работы с ними [7.4]. Объявление
класса не означает его использования — для этого должен быть создан
объект, иными словами, переменная этого типа, реально
существующая, т.е. явно созданная программистом.
Для понимания того, что же отличает объектно-ориентированное
моделирование, коротко остановимся на основных принципах,
составляющих суть объектно-ориентрованного подхода (ООП). Таких
принципов три — инкапсуляция, наследование и полиморфизм [7.4].
Классическое правило ООП утверждает, что для обеспечения
надежности программного кода нежелателен прямой доступ к полям
объекта (данным): чтение и обновление их содержимого должно
производиться посредством вызова соответствующих методов. Это правило
и называется инкапсуляцией, а данные, защищенные таким образом —
свойствами объекта.
Обычно свойство определяется тремя элементами: внутренним
полем объекта и двумя методами, которые осуществляют его
чтение/запись. Так, например, в следующем фрагменте кода определяется
свойство AProperty, доступ к которому осуществляется посредством
методов GetAProperty (на чтение) и SetAProperty (на запись).
type
TAObject = classITObject)
protected
function GetAProperty: TAPropertyType;
procedure SetAProperty[NewValue: TAProperty);
public
property AProperty: TAPropertyType read GetAProperty
write SetAProperty;
end;
В методах, входящих в состав свойств, может осуществляться целый
ряд предварительных действий, таких, как проверка на диапазон
допустимых значений, вызов других процедур и функций, зависящих от
вносимых изменений. Если свойство открыто только на чтение или
запись, в его описании может отсутствовать соответствующий метод.
При работе с объектом нет необходимости непосредственно вызывать
методы доступа к свойству, достаточно лишь оперировать с самим
свойством:
AObject.AProperty := A Value;
AVariable := AObject.AProperty;
Вызов необходимых методов компилятор произведет автоматически.
Таким образом, для пользователя свойство выглядит как обычное
поле, однако всякое обращение к нему будет гарантировано
вызывать необходимые, с точки зрения объекта, действия. Это позволяет,
с одной стороны, максимально защитить данные объекта, а с
другой, обеспечить максимальную гибкость и настраиваемость кода по
отношению к внешним событиям. Так, например, при создании
объекта, реализующего метод интегрирования, в качестве свойств можно
объявить размерность системы уравнений, начало и конец интервала
интегрирования, шаг, вектор состояния и т.п. Изменяя свойства та-
кого объекта непосредственно во время моделирования, можно быть
уверенным в корректности введенных изменений, а кроме того, можно
обеспечить необходимую реакцию на события в системе — изменение
вектора состояния или шага интегрирования приведет к приостановке
интегрирования и пересчету необходимых внутренних переменных.
Второй принцип ООП получил название «наследование» [7.4]. Этот
принцип означает возможность создания так называемых «потомков»
объекта, полностью наследующих всю внутреннюю структуру полей,
методов и свойств объекта-родителя, с добавлением новых полей,
методов и свойств, иными словами, то, что нужно при переходе от общего
к частному. Унаследованные от объекта-«предка» поля и методы
доступны в дочернем классе, если же имеет место совпадение имен полей
и методов, то они перекрываются.
Поясним сказанное на следующем примере:
type
TParentObject = class [TObject)
FField: Real;
procedure SetParentData [AValue: Real); virtual;
property ParentFleld: Real read FField
write SetParentData;
end;
TChildObject = class[TParentObject)
FChildField: Integer;
procedure SetParentData[AValue: Real);
override;
procedure SetChildData[AValue: Integer);
property ChildField: Integer read FChildField
write SetChildData;
end;
procedure TParentObject. SetParentData[AValue: Real);
begin
FField := Value;
end;
procedure TChildObject.SetParentData[AValue: Real);
begin
Value := Sqr[Value);
inherited[Value); вызов метода предка
end;
procedure TChildObject.SetChildData[AValue: Real);
begin
FChildField := Value;
end;
Необходимо заметить, что по тому, какие действия происходят при
вызове, методы делятся на два типа: статические и динамические.
Вообще говоря, в зависимости от реализации ООП в конкретном
языке программирования динамические методы могут подразделяться
на группы, так, в Borland Pascal различают виртуальные и собственно
динамические методы, различающиеся способами адресации в
процессе выполнения. Однако с точки зрения наследования, эти методы
одинаковы: они могут быть перекрыты только одноименными
методами, имеющими тот же тип. Статические же методы, а также поля
поле родителя
метод родителя
свойство родителя
поле потомка
перекрывающийся метод
метод потомка
свойство потомка
в объектах-потомках ведут себя одинаково: можно без ограничений
перекрывать старые имена и при этом изменять тип методов.
Различие методов можно показать на следующем примере:
type
TFirstClass = class[TObject)
StaticData: Integer;
DynamicData: Integer;
procedure Static[AValue:
Integer)/
function DataShow: string;
virtual;
end;
TSecondClass = class[TFirstClass)
StaticData: Real;
DynamicData: Real/
procedure Static[AValue: Real)
function DataShow: string;
override;
end;
TThirdClass = class[TFirstClass)
DynamicData: String;
function DataShow: string;
override;
end;
procedure TFirstClass.Static[AValue: Integer);
begin
StaticData := 2;
end;
function TFirstClass.DataShow: string;
begin
Result := IntToStr[DynamicData)/
end;
procedure TSecondClass.Static[AValue: Real);
begin
StaticData := 0.992;
end;
function TSecondClass.DataShow: string;
begin
Result := FloatToStr[DynamicData);
end;
function TThirdClass.DataShow: string;
begin
Result := DynamicData/
end;
procedure ShowField[aData: TFirstClass) [внешняя процедура}
begin
Label.Caption := aData.DataShow;
end;
В данном примере статическое поле и статический метод
(StaticData и Static) полностью перекрываются в потомках, т.е. по
сути представляют собой разные поля и методы. Перекрытое поле
недоступно в потомке, однако перекрытый метод можно вызвать
с использованием ключевого слова inherited. Там же описаны
[объявление класса предка}
[статическое поле - целое}
[динамическое поле - целое}
[статический метод}
[динамический метод}
[объявление класса потомка}
[статическое поле - вещественное}
[динамическое поле - вещественное}
[статический метод}
[динамический метод}
[объявление класса потомка)
[динамическое поле - строка}
{динамический метод}
разнотипные динамические переменные и методы работы с ними,
возвращающие текстовое представление этих данных. Внешняя
по отношению к ним процедура ShowField получает объект как
параметр и вызывает соответствующий метод. Правило подстановки
объектов позволяет использовать самый старший предок как общую
ссылку при передаче объектного типа в процедуру. Таким образом
в данную процедуру можно передать и объекты классов TFirstClass,
TSecondClass и TThirdClass.
Основное различие между статическими и динамическими
методами заключено в том, что адрес статического метода определяется
на стадии компиляции проекта, а адрес динамического — на стадии
выполнения (так называемое «позднее связывание»). В результате
такого способа адресации в описанном примере будет вызван метод
фактически переданного объекта. Этот принцип называется
полиморфизмом и представляет одно из самых главных преимуществ ООП [7.4].
Допустим, что разработчик имеет дело с некоторой совокупностью
явлений или процессов. Чтобы смоделировать их с помощью ООП,
нужно выделить их самые общие, типовые черты и построить
иерархию классов. Те методы и свойства объектов, которые не изменяют
своего содержания, должны быть реализованы в виде статических. Те
же, которые варьируются при переходе от общего к частному, лучше
облечь в форму динамических методов. Основные, «родовые» методы
необходимо описать в классе-предке и затем перекрывать их в
классах-потомках. Тогда можно разрабатывать и создавать динамические
библиотеки, работающие с динамическими методами классов, даже
тех, которые не были созданы на момент формирования библиотеки.
В соответствии с изложенным, организационная схема
программы, использующей принцип объектно-ориентированного
программирования, выглядит так, как показано на рис. 7.3.
Вообще говоря, существует несколько подходов к использованию
ООП в программировании, различающихся как непосредственной
реализацией языка программирования, так и предпочтениями
программистов. Так, среди современных языков программирования можно
выделить следующие наиболее распространенные в настоящий момент
версии ООП:
• Borland Pascal (Delphi для Windows, Cylix для Unix);
• Borland C++ (частично совместима с моделью Microsoft
Visual С);
• Sun Java;
• SmallTalk.
Первые две версии используют именно объектно-ориентированный
подход, дающий возможность использовать в программном коде
помимо объектов традиционные структуры — модули, процедуры и
функции. Две последние относятся к классу объектных языков
программирования, где все данные и процедуры должны быть оформлены в виде
классов. Практика показывает, что использование чисто объектных
структур не всегда оправдано как с точ
так и с точки зрения его сложности
слишком запутанной при реализации ч
ки зрения быстродействия кода,
— программа может выглядеть
исто объектной модели.
Вызывающая программа
(менеджер проекта)
Секция объявления и инициализации!
констант,переменных и объектов
и класса менеджера
Метод менеджера
Вычислительный блок № 1
Вызов методов классов
X
Вычислительный блок № 2
Вызов методов классов
Τ
±
Вычислительный блок № К
Вызов методов классов
Библиотека классов
^ Родительский класс № 1
Класс-потомок № 1
Класс-подпотомок № 1
Класс-подпотомок № /
Класс-потомок № k
Класс-подпотомок № 1
Класс-подпотомок № /
Родительский класс № η
\* Класс-потомок № 1
Класс-подпотомок № 1
ласс-подпотомок № /
Класс-потомок № k
Класс-подпотомок № 1
'ласс-подпотомок № /
Рис. 7.3
Некоторые языки предполагают так называемое множественное
наследование, позволяющее создавать потомка от нескольких родителей,
объединяя тем самым характерные особенности двух и более классов
в одном. Опыт показывает, что наряду с очевидными
преимуществами такого подхода при создании больших проектов, часто возникают
ситуации и неоднозначности, связанные с порождением класса от
взаимоисключающих или противоречивых классов-родителей.
Альтернативой описанному подходу является обеспечение
возможности наследования черт других классов посредством так называемых
интерфейсов, содержащих только определение абстрактных методов.
Это обеспечивается вызовов экземпляром класса метода,
принадлежащего требуемому интерфейсу, но физически реализованного в другой
иерархии классов, реализующей искомый интерфейс.
Опыт создания ПМО, предназначенного для моделирования
процессов функционирования бортовых интегрированных систем навигации
и наведения, накопленный к настоящему моменту, позволяет
рекомендовать использовать в качестве основной среды разработки и языка
программирования продукты фирм Borland и Microsoft, среди которых
отметим интегрированные среды разработки Borland Delphi, Borland
C++ Builder, Borland Java Builder, Microsoft Visual Studio.
Таким образом, использование ООП дает разработчику
возможность в кратчайшие сроки разрабатывать сложное, гибкое и
наращиваемое ПМО, позволяющее использовать иерархические структуры
наследуемых классов, оформленные в виде соответствующих библиотек,
и обеспечивать безопасность хранимых данных [7.4].
Необходимо отметить, что при проектировании программных
систем на основе объектно-ориентированной парадигмы в настоящее
время используют методику объектно-ориентированного анализа и
проектирования (ООА/П) [7.7], реализующую системный подход к
проектированию информационных систем. Основным принципам этой
методики и особенностям ее реализации применительно к системам
моделирования интегрированных бортовых систем БЛА и посвящена настоящая
глава.
7.1.3. Основные принципы унифицированного подхода
к проектированию информационных систем на основе методики
ООА/П. По мере накопления у программистов опыта
разработки информационных систем и их постепенного усложнения
формировались методики, позволявшие описать и упорядочить
процесс проектирования программных компонентов в соответствии
с традиционными подходами к проектированию систем в других
областях человеческой деятельности. Основная цель данных методик
заключается в стандартизации и автоматизации, а следовательно,
в убыстрении и удешевлении процесса проектирования; выработке
решений для типовых ситуаций; повышении качества исходного кода и
снижении общего количества ошибок; снижении затрат на поддержку
информационной системы в процессе эксплуатации [7.3].
Изначально методики проектирования программного обеспечения
появились в русле парадигмы императивного (или, точнее,
структурного) программирования. Существовало два наиболее известных
подхода [7.12,7.13]: т.н. проектирование «сверху-вниз», когда процесс
создания программного обеспечения представлялся как
последовательное уточнение и реализация фрагментов алгоритмов от более общих,
целевых задач к частным алгоритмам, оформляемым в виде
подпрограмм, объединяемых впоследствии в библиотеки; и проектирование
«снизу-вверх», когда программист разрабатывал или использовал уже
созданные библиотеки подпрограмм, создавая тем самым фундамент и
структуру решения целевой задачи.
Эти два подхода, существовавшие на начальном этапе
системного осмысления процесса проектирования программного обеспечения,
послужили основой для формирования первой формализованной
организационной методики проектирования, т. н. «каскадной» или водо-
падной модели жизненного цикла [7.7,7.14] информационной
системы (рис. 7.4).
Данная модель предусматривает четкую формализацию всех
этапов проектирования информационной системы, а именно: разработка
требований; собственное проектирование архитектуры системы;
реализация (т.е. программирование); тестирование и ввод в эксплуатацию
с последующей поддержкой.
Разработка требований
~1
Τ
Проектирование
Реализация
'
Тестирование
Ввод в
_*
действие
Рис. 7.4
К несомненным преимуществам такой методики стоит отнести:
• четкую стандартизацию и формализацию всех этапов
проектирования системы;
• стандартизованную процедуру разработки, доведенную до уровня
ГОСТов и международных стандартов [7.10,7.11];
• полноту и согласованность документации на каждом этапе;
• возможность планирования сроков завершения работ и
материально-технических затрат.
Вместе с тем практическое использование упомянутой методики
выявило ряд серьезных недостатков, среди которых прежде всего
выделим большой риск ошибки на начальных стадиях проектирования
и сложность адаптации каскадного процесса к меняющимся
функциональным и нефункциональным требованиям эксплуатанта
информационной системы. Последнее обстоятельство связано со специфическим
свойством информационного продукта, заключающимся в
невозможности заранее (до изготовления версии продукта) полностью
сформировать представление о его свойствах, сценариях работы, удобстве
использования и т.п., что приводит к перманентной коррекции исходной
модели системы.
Для устранения упомянутых недостатков была предложена модель
жизненного цикла с промежуточным контролем [7.14] (рис. 7.5.).
Как видно из приведенной схемы, отличие этой методики от
каскадной заключается в наличии обратных связей, позволяющих при
необходимости возвращаться к предыдущим стадиям проектирования в целях
учета сделанных коррекций. Стоит отметить, что использование
данной методики дает положительный эффект только в случае небольших
изменений в исходной постановке, по-прежнему оставляя высоким риск
архитектурной ошибки на начальных стадиях проектирования.
Разработка требований
UU,
~1
τ
Проектирование
. к к 1
Реализация
к к
Тестирование
Ввод в
♦
действие
Рис. 7.5
В настоящее время наиболее перспективной считается
методика спиральной или адаптивной разработки программного
обеспечения [7.7,7.15] (рис. 7.6.)
Разработка
требований
Версия 1 Вво'д в Действие
у прототипов системы
Версия 2
Рис. 7.6
Основная идея этой методики заключается в итерационном
процессе проектирования системы, на каждой стадии или итерации которого
создается работоспособная версия информационной системы в виде
соответствующего прототипа. Это позволяет уточнить требования, цели
и характеристики проекта, определить качество разработки,
спланировать работы следующего витка спирали. Таким образом углубляются
и последовательно конкретизируются детали проекта, и в результате
выбирается обоснованный вариант, который удовлетворяет
действительным требованиям заказчика и доводится до реализации.
Адаптивная разработка отражает объективно существующий
спиральный цикл создания сложных систем. Она позволяет переходить
на следующий этап, не дожидаясь полного завершения работы на
текущем, и решить главную задачу — как можно быстрее показать
пользователям системы работоспособный продукт, тем самым
активизируя процесс уточнения и дополнения требований.
Необходимо отметить, что все перечисленные выше
организационные методики с успехом применяются как в рамках императивного, так
и объектно-ориентированного программирования. Вместе с тем, при
создании информационных систем помимо организационного
технологического аспекта, охватывающего концептуальные вопросы
организации процесса проектирования, также рассматриваются архитектурный
и структурный аспекты, основное внимание в которых сосредоточено
на основных архитектурных решениях и вопросах описания
представления и взаимодействия потоков данных проектируемого приложения.
Очевидно, что для последних двух аспектов огромное значение имеет
используемая парадигма программирования и выразительные
возможности используемого языка программирования.
Для императивного программирования используется структурный
подход к проектированию информационных систем. Сущность
структурного подхода к разработке заключается в декомпозиции
(разбиении) информационной системы на автоматизируемые функции: система
разбивается на функциональные подсистемы, которые в свою очередь
делятся на подфункции, подразделяемые на задачи, и так далее.
Процесс разбиения продолжается вплоть до конкретных процедур. При
этом автоматизируемая система сохраняет целостное представление,
в котором все составляющие компоненты взаимоувязаны. Все наиболее
распространенные методологии структурного подхода [7.12-7.14]
базируются на следующих принципах:
• принципе декомпозиции системы;
• принципе иерархического упорядочивания составных частей
информационной системы в иерархические древовидные структуры
с добавлением новых деталей на каждом уровне;
• принципе абстрагирования — заключается в выделении
существенных аспектов системы и отвлечении от несущественных;
• принципе формализации — заключается в необходимости
строгого методического подхода к решению проблемы;
• принципе непротиворечивости — заключается в обоснованности
и согласованности элементов;
• принципе структурирования данных — заключается в том, что
данные должны быть структурированы и иерархически
организованы.
В данном подходе, получившем название структурного анализа,
используются в основном следующие группы моделей проектирования,
иллюстрирующих функции, выполняемые системой, и отношения
между данными [7.12-7.14]:
• SADT (Structured Analysis and Design Technique) — совокупность
методов, правил и процедур, предназначенных для построения
функциональной модели объекта какой-либо предметной области,
T4L6 <4fcL.H.... <*
701ЛГ^ 715 f* 726 Tl
■V? .Wl5 4Ц>'
Состояние на 17.03.09
Всего в системе — 20 КА
Штатная эксплуатация- 20 КА
<^t На стадии закрытия — 20 КА
·;>$► Профилактика — 20 КА
Ввод в эксплуатацию — 20 КА
В пределах САС — 20 КА
,80°' Г 721^ 725
I плоскость II плоскость III плоскость
*
КА «Глонасс»
КА «Глонасс-М»
Очередной запуск
блок №40-25.09.0!
Рис. 2.1. Состояние орбитальной группировки ГЛОНАСС на начало 2009 г.
1
г>-
'
20
jp
'
-—
160
80
60
40
20
0
-20
-10
60
-80
-160 - lzu -еи - 4и и ш 80
0,0 0,15 0,25 0,5 0,6 0,7 0,8 0,92 0,95 0,99 1,0
Рис. 2.2. Интегральная доступность навигации наземного потребителя по
системе ГЛОНАСС. (PDOP <= 6) на суточном интервале: угол места не менее
5 градусов. Дата: 17.03.2009 г. По целевому назначению используются 16 КА
(..4,.6,7,.9,Ю,11,-13,14,15,.17,18,19,20,21,.23,24)
Время: 17:50:59 17.03.2009 (декретное Московское время)
-160 -120 -80 -40 0 40 80 120 160
80 ι -&- ^~ 80
60 S~ *--> X. Ъ^ 60
40 ^~\ 40
20 Г _-*&& 20
О #w О
-20 Ш 20
-40 %&fi* -40
-60 -60
-80 80
-160 120 -80 -40 0 40 80 120 160
Количество кл в зоне видимости 0 1 2 3 4 > 4
Рис. 2.3. Мгновенная доступность навигации системы ГЛОНАСС. Количество
видимых КА системы ГЛОНАСС (используемых по целевому назначению)
на текущий момент времени по земной поверхности при минимальном угле
места 5
,-160-120 -80 -40
40 80 120 160
60
40
20
0
-20
-4С
-60
80
60
40
20
(
20
-4Г
-60
-80
-160 -120 -80-40 0 40 80 120 160
0 0,15 0,3 0,5 0,6 0,7 0,8 0,920,950,991
-160 -120 -80 -40 0 40 80 120 160
60
40
20
0
-20
-40
-60
Л
О 0,15 0,3 0,5 0.6 0,7 0,8 0,920,950,99 1
-160 -120 -80-40 0 40 »п 12Г 160
)
■г ■ ' '
60
40
20
0 А
-20
-4Г
*»
0 0,15 0,3 0,5 0.6 0.7 0,8 0,920,950.99 1
0 0,15 0.3 0,5 0.6 0,7 0.8 0.920,950.99 1
-160 -120 -80-40 0 40
120 160 -160 -120 -80 -40 0 40 80 120 180
80| ■
0 0,15 0,3 0,5 0,6 0,7 0.8 0,920,950,99 1
О 0,15 0,3 0,5 0,6 0,7 0,8 0,920,950,99 1
Рис. 2.10. Интервал отсутствия связи со спутниками ГЛОНАСС в зависимости
от их количества
-160-120 80 -40 0
80
60
40
20
0
-20
-40
-60
-80
40 80 120 160 -160 -120 -80 -40 0 40 80 120 160
8U v -- , ,
60 ν : Γ\? '"V^3* г-
40 V * .J 1 "''
•-40 \1
-60.
-80
0 0,15 0,3 0,5 0,6 0,7 0,8 0.02 0,05 и,80 1
160-1™ 80 -40 0 иг 80 120 160
80, _-- --^
60 -■ '-- - 60F¥Sr>>-
40' 40 \ У
О ^ О
-20 -20,
О 0,15 0,3 0,5 0,6 0,7 0,8 0,02 0,05 0,00 1
160-120 -80 -40 0 40 80 120 160
-40
-60
-80
-40]
-60'
-80^
0 0,15 0,3 0,5 0,6 0,7 0,8 0,02 0,05 0,90 1
О 0,15 0,3 0,5 0,6 0,7 0,8 0,92 0,95 0,09 J
Рис. 2.13. Динамика количества видимых спутников в зависимости от
используемых созвездий
I
л
V « '*■
^* Широкозонные референц-станции(ШРС)· Новые ШРС
Геостационарный I Геостационарный
спутник ирокозонные главные станции (ШГС) ι Наземные станции ( спутник
Рис. 2.15. Архитектура зональной системы навигационного обеспечения WAAS
( путнлк.
L GPS
Навигационные спутники
иерны
.Приемники*
референц-
ί станции
УКВ-антенна
для передачи
/тарфере, сальных поправок
сигналов целостности
и других данных
Информция
о состоянии
системы
Базовая
станции LAAS
Рис. 2.16. Архитектура зональной системы навигационного обеспечения LAAS
шшшпсйшшьапш
Preyed И MtlttOf j ρ ItetoUwOr ] ^ ErtwIwOr \ pteclBtWioft ||ffiftUk«PrM ]
"ISilalSlflAiMia «J fli^]*]'1
jouT~
4. --. . .
£ .ОТ " »ftftfc:1).
;J>--_--iDW;
► i
ц Д>ЯЙ№ Ям-ОТЩ) ten gtprao and «Д РГМ
Рис. 5.31. Рабочее окно в пакете «Z-space»
Рис. 5.35. Получение 3D модели местности путем интеграции данных из
различных источников
т.е. для отображения функциональной структуры объекта,
производимых им действия и связей между этими действиями;
• DFD (Data Flow Diagrams) диаграммы потоков данных,
описывающих асинхронный процесс преобразования информации от ее
ввода в систему до выдачи пользователю;
• ERD (Entity-Relationship Diagrams) диаграммы «сущность-
связь», определяющие важные для предметной области объекты
(сущности), их свойства (атрибуты) и отношения друг с другом
(связи).
Перечисленные модели в совокупности дают полное описание
информационной системы независимо от того, является ли она
существующей или вновь разрабатываемой. Состав диаграмм в каждом
конкретном случае зависит от необходимой полноты описания системы.
В отличие от структурной или функциональной методики
проектирования информационных систем в рамках традиционного
императивного программирования, объектные методики проектирования
рассматривают моделируемую систему как набор взаимодействующих объектов
предметной области и предназначены для реализации в рамках
объектно-ориентированной парадигмы программирования. Объект
определяется как осязаемая реальность — предмет или явление, имеющие
четко определяемое поведение. Целью применения данной методики
является выделение объектов предметной области и распределение
между ними ответственностей за выполняемые действия.
Таким образом, принципиальное отличие между структурным и
объектным подходами заключается в способе декомпозиции системы.
Объектно-ориентированный подход использует объектную
декомпозицию, при этом статическая структура описывается в терминах объектов
и связей между ними, а поведение системы описывается в терминах
обмена сообщениями между объектами. Целью объектных методик
является построение модели системы, позволяющей перейти от модели
сценариев использования к модели, определяющей отдельные объекты,
участвующие в реализации целевых функций.
Объектно-ориентированная методика обладает следующими
преимуществами [7.5]:
• Объектная декомпозиция дает возможность создавать модели
меньшего размера путем использования общих механизмов,
обеспечивающих необходимую экономию выразительных средств.
Использование объектного подхода существенно повышает уровень
унификации разработки и пригодность для повторного
использования, что ведет к созданию среды разработки и переходу
к сборочному созданию моделей.
• Объектная декомпозиция позволяет избежать создания сложных
моделей, так как она предполагает эволюционный путь развития
модели на базе относительно небольших подсистем.
• Объектная модель естественна, поскольку ориентированна на
человеческое восприятие мира.
Принципиально новым и важным качеством объектного подхода
является согласованность моделей предметной области и моделей
проектируемой информационной системы от стадии формирования
требований до стадии реализации. По объектным моделям может быть
прослежено отображение реальных сущностей моделируемой предметной
области в объекты и классы информационной системы.
К недостаткам же относятся высокие начальные затраты. Эффект от
применения данной методики сказывается после разработки двух-трех
проектов и накопления повторно используемых компонентов. Кроме
того, каждая из используемых в методике диаграмм отражает только
один аспект проектируемой системы (статическая структура,
взаимодействие, размещение и т. п.), вследствие чего они менее наглядны.
Большинство существующих методов объектно-ориентированного
подхода включают язык моделирования и описание процесса
моделирования. Процесс — это описание шагов, которые необходимо
выполнить при разработке проекта. В качестве языка моделирования
объектного подхода используется унифицированный язык
моделирования UML [7.6], который содержит стандартный набор диаграмм для
моделирования. Под диаграммой здесь понимают графическое
представление множества элементов, отображаемое в виде связного графа
с вершинами (сущностями) и ребрами (отношениями) и
представляющее собой некоторую проекцию системы.
В настоящее время наиболее перспективной организационной
методикой проектирования информационных систем в рамках объектно-
ориентированной парадигмы является т. н. унифицированный подход,
представляющий собой версию адаптивной модели разработки,
разработанную IBM и реализованную в семействе продуктов Rational Suite.
В рамках данного подхода осуществляется итеративная разработка
программного обеспечения на основе использования в качестве языка
моделирования UML и совокупности стандартных диаграмм,
позволяющих на каждой стадии итерации проектирования сформировать
унифицированную модель проектируемой системы [7.5].
Несмотря на наличие столь мощного инструментария и гибкой
организационной методики, искусство проектировщика проявляется в
решении задач архитектурного и структурного проектирования системы.
В настоящее время для этих целей используется подход,
получивший название «объектно-ориентированный анализ и проектирование»
и предназначенный для решения одной из самых важных задач
проектирования объектно-ориентированных систем — выделению объектов
предметной области и их обязанностей, а также установлению связей
между ними.
Согласно [7.7] под анализом в обсуждаемом подходе понимается
исследование системных требований и проблем, т.е. основное
внимание здесь уделяется определению и описанию объектов в терминах
предметной области. При этом различают анализ требований и
объектный анализ. Объектно-ориентированное проектирование заключается
в определении программных объектов и способов их взаимодействия
с целью выполнения системных требований. Кроме того, в данном
подходе выделяют этап реализации или объектно-ориентированного
программирования, на котором обеспечивается программная реализация
разработанных компонентов на каком-либо языке программирования.
В процессе объектно-ориентированного анализа и проектирования
можно выделить наиболее важные, с точки зрения проектировщика,
этапы [7.7]:
Этап определения прецедентов представляет собой форму
описания процессов предметной области. Как правило, результатом данного
этапа является т. н. диаграмма прецедентов и детальное описание
каждого из них.
Этап определения модели предметной области заключается
в определении и классификации объектов, составляющих основу
моделируемой системы, т.е. декомпозиции предметной области с
выделением понятий, атрибутов и ассоциаций из предметной области,
имеющих важное значение для решения задачи. Результатом данного
этапа является статическая диаграмма объектов предметной области.
Этап формирования программных объектов заключается в
определении конкретного программного представления объектов
предметной области в виде классов, представляемых в статическом
представлении диаграммой классов, а в динамическом представлении — в виде
диаграмм взаимодействия и состояния.
Заметим, что в рамках унифицированного подхода этапу ООА/П
предшествует этап анализа требований. Специфика проектирования
систем моделирования интегрированных систем БЛА, как, впрочем, и
любой другой технической системы, заключается в меньшей
значимости этапа анализа требований, так как в отличие от информационных
систем в сфере бизнеса, область требований к системам моделирования
технических систем значительно подробнее формализована и менее
динамична. Это позволяет нам в данной книге сконцентрировать свое
внимание именно на вопросах объектного анализа и проектирования.
Как уже отмечалось, одной из наиболее сложных и важных
задач, решаемых с помощью ООА/П, является задача выделения
объектов предметной области, назначения им обязанностей и
установление связей между ними. В рамках ООА/П сформулированы
принципы [7.7, 7.8] на основе которых определяется оптимальная совокупность
проектируемых классов, а именно:
• «высокое зацепление»;
• «низкое связывание»;
• полиморфизм;
• защита от изменений.
Для решения задач ООА/П предложена и постоянно
совершенствуется [7.8,7,9] методика проектирования классов на основе т.н.
шаблонов проектирования. Под шаблонами проектирования (паттерн,
pattern) понимаются эффективные способы решения характерных задач
проектирования программных систем в виде описания решения
типовой проблемы и рекомендаций по его использованию в различных
ситуациях. Объектно-ориентированные шаблоны показывают отношения и
взаимодействия между классами или объектами без определения того,
какие конечные классы или объекты приложения будут
использоваться. В настоящее время наиболее распространены шаблоны GRASP и
GoF [7.8]. Преимущества использования шаблонов заключаются в
следующем:
• Модель системы, построенная в терминах шаблонов
проектирования, фактически является структурированным выделением тех
элементов и связей, которые значимы при решении поставленной
задачи, и более наглядна, чем обычная модель.
• Архитектура модели на основе шаблонов построена с
использованием специального формального языка.
• Применение шаблонов проектирования повышает устойчивость
системы к изменению требований и упрощает неизбежную
последующую доработку системы.
• Совокупность шаблонов проектирования представляет собой
единый унифицированный словарь проектирования, единообразно
используемый командой разработчиков.
Сложные иерархированные структуры, так же, как и сложные
технические системы, представляются набором определенным образом
типологизированных элементов и связей между ними. При этом
традиционно используется многоуровневое представление структур. Низшим
уровнем представления программной системы является описание ее
в терминах классов (со своими атрибутами и операциями) и
соответствующих им обьектов, а также отношений между ними,
играющих роль связей. Слоем представления следующего уровня является
системная архитектура, представляющая собой базовую подструктуру
рассматриваемой системы. Самым высоким уровнем является
интеграция отдельных систем, которые в данном случае рассматриваются
в качестве базовых элементов.
Таким образом, приведенные ниже шаблоны проектирования
разделены на три большие группы [7.7,7.8]:
• шаблоны проектирования распределения обязанностей и
взаимодействия отдельных классов или обьектов информационных
систем;
• архитектурные шаблоны;
• шаблоны интегрирования информационных систем.
Шаблоны проектирования классов/объектов (табл. 7.1). При
моделировании системы на уровне классов/обьектов обычно проводят
дополнительную классификацию в двух аспектах, а именно, описывают
структуру системы в терминах классов и описывают способ
решения ими требуемой целевой задачи. Соответственно, среди шаблонов
проектирования можно выделить структурные шаблоны и шаблоны
распределения обязанностей между классами/объектами. Кроме того,
α.
.0
о
EL
С
Ч
ч
α.
\ο
m
ο
ο
ο
СЯ
ч
a;
Μ
ь
^
«J
ο
ο
ου
+4-
η.
я
χ ω со а с(
s з: s си о
α. <u
с S
.о Χ
κ ° =
S л ν „
■ μ 5 S
3*°
ο S <->
ода
χ ο ω
ι *-θ·
Я ю α·
2 ω ω
ω о- Ё
« *" s
2 βΓ ΐ
>. ο ■£
s-i
,0
προ
m
ο
4
α
СЯ
=1
ω
ο
α.
с
ГС
I
Μ
d
CO
О
и
я
F-
п.
m
ч
с(
ω d
ω >>
ся
ία. ϋ
с ω
м ,α
ι \ο
ω ο
с S
ч Я
о сь
ЬЙ
О О
(1)
m
о
ω S
Q Ε fc
-θα.
U >, -Θ· йй
и.
о
α
α. <-
!
>, ο
α. «
ι- ч
то α: κ
Ю Μ Ο
с( κ
ο ^
ω ο
S ω
РЭ >,ω
S 2 χ
Й 2
α. ся
ш α.
и
ο
ο α.
ω с
ч Si
α.
m
ся
χ
ω
о
:с
χ
η.
СЯ
α.
ω
Конкретный
Декоратор 2
Операция ()
Новая операция ()
Конкретный
компонент
Операция ()
О 1»
* е=1
^-^
О
Ч о
о о
С I
о а:
с( ся
со
к
СЕ Ю
к о
м X
со з
S *
ся с;
Q. е- >-. ся
о о^
Е- -^ О ш
« 2 Ю О.
о. 0 о сх
О о СЯ
Λα ξ ^
OJ
мечани
я
α.
ешение
α
OJ
ачени
I
СО
Пред на
OJ
£
ГО
Назв
f- О
а:
ία) OJ
-α
\0 СЕ
>, ч
о с(
та
3 ш
ссылку на реал
к нему, а та
то
Е- С
5 >■
I Е-
то о
а. о
X с(
«Заместитель»
для контроля
то
с
Е-
дос
к
лизаци
бъекту
га δ
OJ ^
α а:
ч
OJ
местит
roxy)
ТО ΓΛ
со it-
Субъект|
I
0J
ч
то
£
или
.дания
Клиент
Запрос ()
,
.меститель
СО
о
о
Запрос ()
1
Реальный
субъект
иГ
О
Е- О
го '—'
О О)
и Сурр
jrrogat
g£
>> ι" о Ч
о \о m 5
с о о
ТО О)
-* 3
I J Е- τ
вает и
о ест:
ользую
ые да hi
S Е- с τ
Поддерж
ляцию,
екты ис
собствен!
Λ JS
° 1
ig
■— X
\o
>, о
О OJ
Ο I
то
ч >,
некоему к
эбладающем
jQ
Е- .-Г
S
ΕΞ
ΟΙ <и
5 с
СО о
Ю СП
о та
>, О)
л S s
Назначит:
мационно
информаи
я обязанно-
зладению и
и над необ-
нформацией
лизаци
й по ι
ствиям
имой и
ТО и та с(
1J Е- О) О
а. о с( χ
оГ
цион-
ерт
ion
GRAS
Информа
ный эксп
(Informat
Expert) ['
I
О)
ч
m
то
Е-
шолнения пос
|х задач
^ ^
ω ι
X к
3 ч
о. ω
ТО jQ
о о
£ 2
то ·£
Ч
S ТО
О)
X О.
композитны
, чтобы они
с
к s '£
Ч о ω
r-f со -Θ-
ТО Q.
3 о. и
5 ЧЭ Е-
η Ο Ι
ть кла(
таким
τ же и
Определи
обьектов
один и то
К О.
ч >.
== Ё
1ая
рупп
стру
Φ ^
ι та
Одновреме
обработка
композици
обьектов
а:
МПОНОВЩИ
omposite)
oF]
»ва
α.
га oj
s * h
>. fc
Ξ ^ ο ι · J
D- h
а. ч
>, о
-θ· ω
Ш СО
о 5
о Ч
о то
га <и
ч а
а: »
ч ч
ω s
га с
>ι О)
S СГ)
га то
5 та
S о
та Х-
Е- СО
a: к
си ι
«S
- ч
о то
2 о
о "
с( О
О)
CL 3
С \о
О о
а. з"
а.
Ξ та о
I I га Ч
га то о
со с( о
к со то
ω о Ч
и и ϊ щ
! §
Ы> о
■а '—'
к о
Ί- Ч О
PQ = —
л -а
oj pa
Si
ι hi
га с
со ~
m -з
° о
U —
Q.
* ί *2
5 о 5 ей
ч
о
с(
о
CL
С
ч
Η
CL
3 S
4 „
TO -JO
<u
ία. s
ι 3
о S
t£ CO
II
CL <U
С S
= 3 о
о™
t^ CO
га с та
QJ О
.о X
\o о
0 =
ί x -н
ί- -- л
ο 5 ο
ο 3 та
1 Q QJ
i Is
2 m"
>, о
TO
CO
tE
О
m
re
:r
о
S
ΕΠΙ у
о
О
= ¥ Ε = h
s
со
о
се
Ξ
с( К
QJ 3
CL QJ
С С
О О
га QJ
CL\0
о
со со
ία
m со
о Ξ
CL 3·
= '5
^°
Я QJ
ί- Ι
Ι
Й ==
Χ s
>, QJ
a: ,ο
3 \o
о о
о c(
ОЖИ
ч
со
о
со
мои
QJ
QJ
QJ
S
ГС
со
ία
ct
о
fi
«j
о
та
слуя
ГС
ч
c-f
га
Ч-
о
X
ПОД
со
f-
т.
т.
о
с
S
о
то о
а >■
аИ1П
га о
ί- \0
о1 га
-θ-та
UJ ,
■=(
QJ
Clj==
Л О
О s
t§
I
то
о
то
е
га <и
Ч
: га
г QJ
о
I г « I
S га со "
со о s ,™
га ι о
ί- Ч О.
qj а:
S Ρ 5 Ξ
со
о
О.
CL f-
о о
<й Я ° з
со о 0 ί
3 g QJ ^ ^ QJ
~ s "Θ" со CO "Θ"
giuo = CL
,Χ = е- со й e-
^ ι ι га qj ι
J ΙΌ Ι/Γ,
3
та ^
О со
I s
.2 Co
га <С
■- ей
;ь^а
u.
■=(.—
I о
go
ч
α.
с
ч
Η
α.
ι га о
з- α. ι
SOI
4 \о <υ
to oj g
5 CL <D
С ω
о
Е- -Я I
О) л cf
га Ю 3
m о
== У >
&= ε
m
о
α.
о
tE О
о «э
о о
D-, О)
О) Q,
О)
О)
а. 5 £
-θ· 3
α. s
<υ со
о
о
I С
f.
то s ι
а. 3 ι
О) ТО I
Е- С
X >■
* о
с( О
Ά
ίο. то
с а.
О QJ
о ·
о о
а.
ч ч
О) -Θ-
то О-
с( О)
а.
о
< *
» О)
О) ТО Е-
J2L Ч га
О- О)
<" а. Е-
£ *Х
S Се
Е- Ξ Γ5
О) О)
>■ Ώ
а.
о
а. с
S О.
J5 Е- <С г? Е-
О- га
^ ^
о b b
a: a:
О) О)
о о
а.Х
а: ·
S о о та та
ЕГ ω fc = к
< s S3 3
г
тератор
S
о
£
о0|
ilfl
^S|&
ω с; л ω
CUCQH
Η
χ
at
з:
5
Η
Агре
>s
Л Q.
Ι Ο
els.
Кон к
нте
τ
,ρ
,
.'
,
;
о
Cl
Ο
Η
и
Cl
Χ
Η
Созда
Р
Is
он к ρ
arpei
11
Cl
Ο
Cl
at
t-
x
л
Созд;
о
ТО cj
•я s
Й.9
О)
О)
a.
<ч 5 °
h-Γ о
о_^
о
-Sou.
О) О- О
ГО
u.
*
то
т.
г°
\о
о
>.
cf
£
1 s § ч
== о == о
=J е- =f с
о * 2 а
* ш S в
g-ю о
Ξ ° -Θ- "
О то
4 ж
га »
Е- *
1°
V С Е-
£ S *
^ О) Е- О ^ QJ
га гД
2 Ю
о
га S ^ S
с S
Ν·
q-qjosoiqj:*:
α. s
и α.
s о
TO
ения
τ
ч
о
ПОЛ
а
ω
о"
-а
«)
о
га
Μ
га
S
I
о
¥
я
га
а:
объ
I
сС *
СО _
л о
Е- «
ГО ^
m
о
ία. а:
я <υ
ч ^
>,\о
о о
о
с «
ч
о
о. с
ё§-§
3 я ~
О го и >■
J (■ " ч
е- s: 2 2 ι
s <υ ч с
QJ ГО
ι ч
ч о
о с
о
го
,0
ч чэ
о о
с
Ч о ш
о «3 та ■Е
" ы ч ч
О) О) ^ О
^
^
^
то
Ξ
f)
Ъ£
Ч
Ч
QJ
tE
m
то
ω Εί
Ά а
оа я
го
S й-
s я
QJ Ш
? я
£ ==
о 3
S
I s
а: ч
ч
О)
го
3 ч
>■?
a. s iC
-θα.
' οι
"■ го ^
ТО ς э
I CL О
f'gc
? Si
* к -
Е- - Я Е-
l. QJ ГО го QJ
oj го о а. к
го со о о ς
с( 3 а. с ω
со со с о ее
ϋί
ч
_ о
го Π
а. о ·*
4 S
ϋί о
* СС s С
ТО JJ го Д го
I
QJ S
О. о
s: E-
о ω
Е- О
S ω з"
ТО
запро
=ч
са
Ξ
о
^-^
'—'
Выполн
к
я S
S ?
Конкр
кома
я
I
QJ
§ Ж
с
m
ч
■=(
X
CL·
циато
I
s
я
S
X
нео
Я
=
я
иент
ч
ш
ч
C1)
н
го
з·
>.
ч
о
С
р
τ
τ
Выпол
QJ
К
S
о
'S
<=3.
,
>-, _- =к к S
l· | о „ oj
ϋ: о ^; о ь-
5
I
QJ
J'
азна
Ι
г!
Пре
^
\о
о
е-
сыла
о
τ
со
рос,
ж
QJ
Я
I
0J
юлн
QJ
Η
п.
го
со
раци
Е-
ГО
3"
>,
ч
о
с
е-
QJ
буд
1—( со Ш
■=1
го
S
о
ε
с
о
U
S
£
3
С
cti
<
то со
со ι ;—■
1 га ^
то ρ, О
α.
s ω ο
* m Ε-
та ϋ a:
ο S <υ
о
е- -о а.
«и s t£
то и р
Ш Е- £
Zz?
5ίο
£ о к
О ω ι
о S
ι га
га |
m о
^ ЪС
СЕ
О
Е-
QJ
СЕ
1«
О- 5
Е- К
о а;
СО Я
S I
Ч О)
га Ч
о. ω
Е- га
ι а.
О) С
jQ
Ει*:
О)
μ»
VJ
О
нам
ч
С)
га
?
П.
о
-Θ-
Я
о
ч
Я
я
а
га
-θα.
μ>
>, я ι
ч о.
о с
ч
S
о
с
Q, С1-
о s \о
!■!
с з- о ч с
О) а
О- 3
С I
I
- О)
я s та
ч «и
га Q*
э
О) О
* ? S £
Л Ι Ο
ΕΙ ω а: га
Е- Я га с
О £ О)
е Ι1*
ε i"
«и χ *
со «i ^
я с \о
о
о * ,.
S я я
I з ι
с* о Л
о „ ^
ь> га «^
£ га о.
° Ч с
I с ι
си S
о =
S ϋ
о s \о
со о
m а;
о μι
Е- \о
£ О
о
а.
J° <υ ω b я
О ч S >, ι
Η S
CL О
С
ΕΞ >.
я S
"- О
5- ra
c( о
я S
CIJ
μ>
ю
CIJ
μ»
VJ
m
со
CIJ
μι
VJ
ω
я
ч
о о о я о а:
ω
о
Ει*:
<υ
е- ω °
си £
га Π
ω " га
Ξ 5 «
S g о
c S ν
!ri я *
«Si
Ο ω S
Ξ Я Е- О ТО
О Oil
е- jo ω
•^ О Е- t
α. ι a >■
с ι ο я P/
TO "^ О
s s ° 1 K
g.s Is
5 9 = 3 E-
« >,« x ; о
°-\0 га \0 4
ίο га \0 о л >>
-θ- ς со а) о O-
Г 1 Г 1 "V I С J Cf
о о
О с(
4 га
О) * Ш
Е- ^Г О
га си а:
5 > s
S ш ч
\о _а ><
га ,-. с
Ш ,
S ι ^
ТО JZ S ^ -^
С-> (Λ и- ГО
sz и ώυ
С J3 (Л и Ό
ω со _ си
os ra hiiT"
ι- си -" с*
о
а
I О
Э.™
а.-а
о а;
° S
3 I
У 8
о к
X к
9
m
5 "
со к
£
<υ
к
Ослабл
,0
\о
о
сть (
о
I
,.
нать»
со
ία;
работа
Ю
о
= -Θ-
ч а.
S s
Ё s
га га
О ™
га о
5 й
■=( ч
11 η
5 ч
о S
з* a: <υ о
Ε с ч
S- Я
5 ω
* ч
? I
О о
\о а.
Sr и
Ю со
О
со
η га
О Q.
г, Ш
а: ι
га ° S
о S.S-
юю с
S. ° u
\0 _ JO
О °5 со
ί_ с( ω
О)
с( О
>.« b
ω α. к
Ι ο ς
i- га
lieu
о я а.
Й S
з-
га
X
СО
га
ч
0J
а.
С
о
с
ία)
>,
а.
я
jQ
а.
га
Ш
■L-»
s
m
га
ГО
m
га
^
:£
О)
г°
\о
О
I
О)
а.
s-
m
о
U
0J
ίο
Si *
CO C(
я
5 <u
TO ~
OJ л
α s
uT
о
а
"——·
tE ^—s
L- hfl
QJ QJ
Ε- ι-·
TO TO
c^lz
CL·
О
u
^
TO
E-
TO
CL
E-
O
&
о
f-
0)
s?
CO
я
ч
Я
о
a:
о
О)
Ι
га
о
о
а.
с
Я
S
га
f-
a:
О)
гО
О- со О
00
О г")
га
со с ^-ч
\0 га -^
о J= ■—
О) О '
ι <Л
|- ь «л о
■ о
с
о
2
О
О
га
^
ЪС
О)
то
m
s
jQ
Ι
α.
О)
ч
с(
о
с
m
:пол
s
S
о
I
ч
X
то
ласе
подк
X
3
ίο
ч
\о
то
лизует Ш
то
О)
о.
я
Я
о.
о
U
ч
то
О)
ч
О)
а:
о
о
с
3
ш
τ
раци:
QJ
О
о
m
то
со
та
котор
S
о
\о
гае'
то
Ч
о
с
О.
с
о
о
то
ч
V
ч
о
с
m
f-
буду
ϊ
5
о та
£- 9 s S ч
ч ώ
то о
о.
ш о
ς as
ω Э Η:'
^
εΙ
4 ·
4
S
ο
= S £
то ο
^ то
ТО О)
α. α.
- ϋ а·
к о 9
Е- ^
I га
га О-
s
ία. <->
га «Э
ω «а;
m
Абстрактный Класс
Шаблонный метод ()
Операция О
Операция О
Конкретный
класс
Операция 0
Операция О
о.
о
о £
α. 8
са со та
2 J» си
а.
о m
Ч о
га о
3
с(
0?
а.
С
ч
О)
с(
О)
а.
с
О
ТО
О)
а.
s
Е-
О
О
о
s
а.
о
а.
о
с
m
О)
я
I
О)
з-
О)
с
о
О)
о
га
а.
я
S
го
Е-
а:
О)
,α
\о
о
Я
I
та
ы
Ί1
>,
-Θ·
X
jQ
I
g
а.
а:
-г
бЛ01
то
а. ц.
ε о
ίϊ a
^
^-^
£-. t)
э ^
li й
2 гоЮ
pa со ^-"—·
α.
In
к
s
m
^сло:
ι
jQ
ч
испо
m
о
ί-
энен
к
К
f-
:обы
-θα.
α.
о
Э с
з·
>> ■=(
QJ ГО О- S
jQ Ξ ТО то
ί- Ч f- ш
га о ι о
XQ О- о) со
га £ S л
α. ι <и ч
ю о ч о
- о ^ т с
о о
га ο-
α. s
о
of JJ
о C1-
c s
PQ Э
s 2 ч
О)
a. p
<υ о
Ч о
ч
о о
"^ га
. о.
°, о
-θα.
ϊίϊ
ч
aj та
ϊ Ϊ О « s
о.
ч о
h О ш
0J О-
с о
о
si
>. си
ω °
ч о
О). Е-
з а:
О ■=(
s га
О- Q.
га 0J
ω с
о
а к
3- I
== -θ-
ч a.
с к s ^
та о
ίο с( о
к ч
ч о
0J
о.
то
то
° У
О 'S
то си
ч -Θ-
* О.
си
αϊ та
ч
S.4
та г
£: о. .>
О О с(
о £ <υ
ι 9 a.
- х с
о о
S
о.
с
га
. ^
-. >,
к о -*
\о о
о га ее
4 Ξ
>. * £
с к 5
I_ 0J _
ч g
ί с о
i- 0J ϊ
== =i s
2 га oj
5 m S-
ι—Γ Λ
о =t
>, га
оват
a.
тези
ЫС01
m
ВИН
я
о
ш
о
При
о s
_Q TO
>, Е-
Ч *
О 0J
,0
>.\о
с( О
о.
о; 5 з
Ч £ ι
и h ш
оЪ S
OJ t-
ч id —
ι ОЙ
9
>,
а:
со
s
ι
m
о
ί-
а:
0J
^
\о
>° га
a.
с
то со
то
о.
с
о
\о
_ о- 1 о
га ω ™
r> i- S
>ο ί ο- „
ОЧ га «
ram
η с( г
о о о
ι с с а:
\о а: ί- ω
о oj о о
г Ε
т «
-θ- α.
о о a
s Ε ^2
ο"^ΐ
с α α
с
та .2
ι га
у ^ оо
0J
ч _
ω ΈΓ
с г; a
0.-0 ей
0J С ,п
ч
о
S
α.
с
ч
Η
α.
In
α.
in
ι <
I I О О О) ТО
g-^s
о -ч о.
У о \о
^; то
Ел з со ™
- ,-
Ο о
О со
си я
S °
is
' л ί- .
о га <-> Е-
га о- с о
Ч ί- га о
а: о а: ι
о
m то
о с(
о со
ш га
,0
о
Έ.
О
о.
m
о
о
о
га
ч
а:
^ о
га
О- к
ί- Ч
о с(
га о
J CU
£ -θ·
га о-
с( си
О S
5 ч
О)
га
Созд
о
S
взаи
си Q.
с ^
X о ι
I §
о 3 Χ ω
s so
m о
га ω _. о
ч о ? ;
= ^ =ί χ
га (θ Ξ? S
со Ю = л
ω ο -θ- ι
£ О
ϋ: то о .
га ^ га
о. s V:
О. (Л
L-
г- _ „, О
Ю га <£. и
ί- ~xl
О) CL)
S μι
,т о
я
ч
О)
с(
О)
о.
с
о
Я
асе
ч
а:
ίο
f-
m
>Я
я
3
9
TO
3
TO
p.
03B
m
то о \o
O) 5 TO
a. g -θ-
,0
Ю
о
ία)
га
c(
со
>Я
3
I
I
TO
m
о
CO
U ч
a.
о
I
я
(5
CD
hi
с
ki
0 JO «
I- О С
Ores
.> га f_
га =f о
°^°
к \о °·
к о С
1 »
Я ь л
5 а:
ίο cd га
о. ^ га
s \о о
I О О-
0 s
ω 5
к о '
5*s
ί- о
ο <d о
5 5ο.
« 3 с
-θ-ο га
α. о m
CD 0
1 ^ *
Я Ι >>
CD С
e_ к 5
ε ч g
S ~Д
£ ю *
OCL)
О Йй
с
я
ίο
ίο
CL
π
,.—ч
'
jQ
ί-
TO
m
ο
α.
я
Ι
ο
ч
ϋί
Конкретный прототип 2
Клонировать О
Конкретный прототип 1
Клонировать О
S Я CD
I
то
со
о
о
m
о
\о
ά.
с
я
Я
й
ш
m
о
а:
CD
(0
о
к
,= s е- <-» ь-
О со о й£ о
с
==
ί-
Р
U.
о
о_
^_^
CD
a.
>,
'о
g
, Q-1
с
ч
Η
3
о ч χ
Ч га <u
га D- \0
га о
Е- с( с(
0J со 0J
>, о
θα. о с
Е- Л
α. °
is <υ
TO —
о
а:
„
о
о
га
я
£
о.
OJ
с(
о
га ш
5 s
^ S" S *
[О.
υ
I >>
g
. α.
* ч
га ν
а*
га
α.
о
с
,0
л R - 5
Е- » « Ч
о >, ш
га 3 Е- *-
з- о a: к
2 а. с(
'Eg
b ш о
ι а.
С
J « j
о га
О- О- 0J
Е- Ю л
О о ш
-θ- JJ с *
I D- Л
О 5 9 Ч
~> * Е-
~ S, ==
S о Λ
рои
ает «Продукт» у «Ст
Строитель
Построить часть ()
Конкретный
строитель
Построить часть 0
получить результат ()
Директор
Создать ()
о.
1С
5 s
со го
О- \о
ω о с( s
га с oj з*
е- та а:
О О) го
о
Э 2
а. £
О- О)
С
о с ч л
s *
2 £
о
Е- Ч
О) О
к
о-чс ω *
со 2 е- л
Ч о
к l о з: \о
го о о ^ о
ω е- о о о
л а-^_
S Ч Q-
Е- С го <Л
S S о <
s u roS
50
а
о
υ
St
, α.
С
ч
Η
α.
ώ =
α. 0
* Ι
* 5
Ο) 4
ο
4
I J Ο
Ο)
га га
CO S
_ Ю
>, ο
π -θ·
га ω
3-
εκ a:
α.
\ο
га
е
о * =
ί ·° Β
ч о к
Ο) ς
Ε- та <υ
ra s c(
ч -г «J
со Э α.
о 9 с
U га о
а I у
га g-ra
ч д 5
а: о *
та ω 'Ξ
3 ^ -о
τ S ι
ί £ t
ϊ 5 ϊ
as s.
f- *■"
" '== Μ
< £ .2.
методо
ичным
ваемых фабр
Создатель
Фабричный
метод 0
Конкретный
создатель
Фабричный
метод ()
'
Продукт
Конкретный
продукт
са о га о S то
Е- га ϋ: ο, ι- со
a ς a
ι <u к
ч Й
* g
Е- С
И
m а;
_ .. о к
χ. ω cl ι
о <υ 4
о as;
S та .
о го о га
О)
*1г ?
_ >. s g; го 5
Е- tJ К liCg
<и го ч о > о О
о
α.
о
α.
с
о
ч
QJ
f-
α.
<
oi
г-:
то
τΐ
я
Ч
\o
о
ч
шаб
О)
JQ
I
α.
>,
f-
>,
α.
f-
( 1
Η
о о
о о
^ I
о
ч
о ,,
>=( ГО
ω си
к h с
" 5 *
>· О tE
QJ QJ
X e(
s " r=
l- a s
>-. J» I
Q. ι π
c( QJ ω
ω >, со
■=* h
>>
E-
CJ
О
IX,
£
a:
о
то
с
tE
О
Е-
QJ
tE
Ч
m
S ■=* J=
a.
о
a) ss о то
>, о с cl
» I « С
с a. S
a) a)
=i f-
s
с
S
то a)
a) a)
4 f-
СГ) О
4 S
_y α. ο ^ о
CO χ ω ι с
5Γ- aj c_>
CO S У
5 ч g
1 = С
2 I
a. 5 2
Jr* α. ч
Ο χ c(
§"
α. χ
s a.
S <o
g s
■Θ- >,
a) <d
4 о
5 3
о; щ
Ϊ й- ι
а £
sea
>.\o
a. 0
a:
E- qj о qj
s- о та о
ο ι <u к
то \о S °
* ° о я
'§ а ш 5
=С * QJ ^
^ ± QJ
^J-E-QJOQJZ:^
δ:
i|
a. °
·. - TO
ω Ι
о
α.-Ξ-
<υ S
m то
a. s
a) qj
О Е-
v О
о S I
Q· *
<-> о
I_ C(
а:
ее
S
QJ
Χ
к
о
я
m
a.
ч
ca
g
>.
_ a. ==
" S
3 4
ICO
η <u >, c(
s f- <υ
η Ч У
Fife Q.
_ о
TO
I f-
О S 3 TO
m о
a. ■=(
ο ι s s
4 οι
TO a; Kj-;
CL CL
OJ >,
О c( '
aj
- S.I
^S
S S о
то
m
a.
с
α.
ία) о
m aj
J> га д _г га a. £
,JJ f- О л I О) Я
D- о с о со о ч
ч ω
m о
га со
с( о
О) L^
CL О
С I
ч
га
с(
>.
ία)
га
m
s
з-
0J
с
I
си
S
5
с
>.
Е-
8
с(
S
га
О.
О)
m
m
a.
CM
QJ
TO
3*
QJ
S
s
CL
Π
О)
QJ
Э
О)
QJ
ачени>
Ι
CO
га
О)
о.
О)
Я
I
га
m
со
га
I
га га
г ι
qj га
ЬЕ--—·
υ о о
s ю i
С_) ТО Ш
О. К
СО Ег
к то то
га О- си
Щ о;
<Ч „ Е-
5 £ ==
да t —'
О л п
ΪΓ1 О
Ρ Ε- и.
Ь QJ ТО
g £ э
«— о о
< S с
« τ S 2 ϊ-i >>ί;
E-ram^SSoia.S-.
Ι ο ^5| 1 u 5
IsS_°TOE-
ra 3 <u == Ι 2 = *
емы op
связаннь
на ниж
службы
высоких
ри этом
происхо,
низу вве
ы сист
взаимо!
ι, чтобы
овневые
а более
ения. Π
ровней
ектов с
S ° й ° га § «« о
О) I .ir- П К * I ff
Ч « о s Ϊ с ™ s
£; S л з- я 3 га
'РуКТурН!
отдельны
стями та
сполагал
щего наз
овня лог
вие и ci
из. Связ
бегать.
ление
Представ,
,r:~ora\OCLE-ico
(Jmia.o>,oms
едметная
!С — логика)
Домен (пр
бласть.бизне
о
гг. -3
Источ]
данн
>, ω ,λ \ό <ύ !ί
Ε- ^ \5 Ο Q. £
^ о со Ι
архите
ы в
ИНЯЯ ι
|етной
очки
иональ
стемы
мирует
систем
объед
ι пред|к
ист
функц
КТОВ СИ'
О. .-" -° Е- О)
О S Е- О К с
rv >> о а: га я о
tr α. ч <υ ч ι га
вая
ers)
ная
<и >> С
I га ^
m J га
о _ р.
°- с^
οϊ| з
■- <υ га к
ое- з
ι о = а
«Ϊ s Ч то
■С. О Я 2.
ч
о
g
α.
с
ч
Η
α.
S S t
rn ly ·*-
Ϊ « Ш
S ο
ία. со ι
f- о m
■Θ- a.
a.
s &Ξ h
ι a) з* о о
m
X
о
i.§
о s
■Θ" a)
ι 4
я <d
га с о си о
° h *
== S Е- 2
; ш §
ι -ι -j
си я а:
4 \о ι
ω о >,
га .д.
о
5 ш S
C1J
ГС
τ
£
a.
то
m
о
^
с
2 ==
>, а:
S £
ϋξϊϊ
О) , J] ТО
ш и ι 2
g
S
о
ч
U
ω — s 2
то ■*- га
χ ι ff m
§-
s ω s о
Г Д И Й U ,_* ^
ouomojc(Sc
S =
га s
S τί
a.
ι_ ο «j
° Й S
e ° 1
m <u c
О ^ CQ
c c ro
К E-
л я Р
ω о.
со С
ч >s
о я
С I
о га
S У
СО
ι -Θ-
• -*- S3
1 ω я
' Ч I
' ω „
: га Я
'о о
! § га
ί α·
I о о
■ ш <ч
Е- СХ
о с
О О I
- ξ°
- со Л,
3S га
а; о- <и
Ч \о ·=.
>■ о £
S ш ΐ
0 о, а:
Sera
X s Ч
3 ϊ
1 QJ -a
J3 3 Ε
4 I S
га -г- О
ϊ го *
О _* ^=ϊ
га G-
— ιυ ^
S * ж
3. CD
=f <u
а: с( со
>, χ S
•Э- ω о
со
со го га
Я I О..
ю
£ Е- О
Я о
° го S
о J1 3
о >> о.
о ч о
„ °
ΕΞ с о
О) О) CD
О Е- Я
!.£-
Е- С
О
го »-
° S
го S
1 g.
Ξ си
с( С
Я г-, -° ^
О)
5 3 а.
си ρ
ё ё «
g £
ϊοβ
c_i -- ш
Л Ч О
!~ Я
к го а)
1^ч
с- Е- О
- О О
о
с
— 1\)
.a Q. is
ω Ю 3
>- ° £
5 s -° с
Я к си
о. = Ч >я
°· ι ч о
^ го го I
2 ω а. Е-
■о о го о;
ι со с а:
г;
ч со s «
ГО СО
О)
ГО с( О
Е- И I
υ а о.
Ϊ Е-
S s
CL О
-° >,
а.
ω ω Ε-
е
о си ι S
Ч S
О О)
о
о С
m
о
а.
s
Е-
а·
О)
J3 С Ш
Е- Ш £
о iii ^
о S та
3*с о
0J о)
Ч Е-
о
О)
о, ш
Э с
^ >.
о „
С Е-
а. о
с
Q.
CD
II
CD -u
Я О
|k
CL ro
со от
Q.
га <и
Ш » ι с
ч ι
га cd
а. ч
CD Q,
^ С S
>, S
Е- X
(V Q,
^ CD ГО
; 6 о·
я 5 <и
1 ι ==
го S
а. го с->
ω а. го
ЗОВ -
3
-л
енар:
о
ЦИИ
а:
и
1ЫЙ СЛ>
PQ
CL·
С
ο α, χ а: * о
S га
Е-
m
о
со
ч
Ό
С
L-
Τ
,Л
ч
OJ
π,
>>
з*
π,
-=
I
>.
QJ
α.
m
то
ь
m
ч—'
, QJ
QJ S Χ ■
X 3* CD TO
QJ Q, ГУ со
O, E- L- TO
m m о о а:
Ε- Ξ
ο α
s α.
о m
я
о
к
я
η
а:
то
QJ
а.
ГС
то
п.
ь
0J
Я
rr
«=1
О
X
о
ГС
о
о,
__
>-
ГС
о
СЕ
2
>>
ч
о
с
s
вре
о
ΙΟ
J3
ч
X
ι s S
" S к
™ ™ JJ м 1У
я з
■=< о
S §-
I
S ТО
— то
Iе
CL· J3
О "
I ^ О ТО
о о as a:
с >, QJ
S с == fe
о S _ S
^ fO J] U-
QJ
QJ
S о g
о α. "J
а. с П
ь га <"
Sot
3 X 3
2 ς ю
4 . о
а:
га
!li
QJ
о га
QJ
Ч У,
Ш «
га о
а. с
ч я
га QJ
Э 3
а.
о
QJ
а.
с
S
э
QJ
m
I
о
ч
\п
га
э
о
ΙΟ
т.
га
4
га
m
J3
а.
а.
с
S
а:
я
3
н
о
«J
га
а.
о
С)
Ην
а.
о
с
?
о
—
ным
S
о
Я
?
Я
I .
>,
П.
с(
ГС
о
2
I QJ X I
газ - _
X
ч
о.
с
m
с_>
?
QJ
ίο
Я
о
ч-
о
с
f-
rr
0J
m
н
о
. а.
я ω :
Π а.
, QJ ι
я я ι
4 ι й
га qj ω
CL· Ч *-
£ » Ϊ
£ S. я
^ с «
QJ
а.
С
QJ ТО
о то о о
m
QJ
2 § _
-« ^ J3 ■*" Τ
QJ ш ТО -
- -' QJ 0
CL· о
>, Ϊ Ш - м
>, S
&■ ω
S
QJ
-С CJ QJ -f
ι я ω Э
QJ О О \0
в§
о °
е- о ° га
qj £ ι m
со го £
Я CL· qj '0
га Я О с_| ;J
br qj \о га о
О Π о о ι =
я
S's
п э
3 СЕ
QJ I
СЕ ТО
^ m
ш 3
то о-
О-, QJ
^ °-
s
α.
ч
ч
Η
•ν
аци!
гегр
I
Я
3
I
е шабло
KTypHbli
Стру]
О)
Я
I
то
з-
О)
S
я
а.
С
О)
Я
шен
QJ
а
1чение
то
назн
Пред
О)
то
m
со
то
га ' я
ступ
при
раци]
OIl
Ч О «I
Ч Е-
к \0 ^
Ч га я
ейс д
ый ш
иной
-θ- ι я
α. ι χ
<и га Я
= .j я
E- S С
о си
О) Е- —*
s == S
:τί υ з:
<u m
ИЗ СИСТ
тивной
В 0СН01
одной
ней ак
няется,
стем
ν я
>> a: S о
А га я
О I с-
S 3
Я с(
га о
2 ., S
О)
я о
о m «
£ га
Е- S ¥
Организуе
действие
основе С'
«точка-точ
О)
я *.
действ
-точка·
О '
Взаим
«точка
GL
см
то
S
О)
Е-
Сис
—
^^
со
са
S
исте
υ
0-
Система
и
га
Систе
Примечание
Решение
Предназначение
Название
■
Интегрирующая среда имеет универсальный
интерфейс для доступа активных систем, может
использовать интерфейсы пассивных систем и
включает в себя реализацию основных уровней
интегрирующей среды. Содержит платформу для
исполнения сценариев транзакции, базовый
функционал по взаимодействию приложений, службы
протоколирования и мониторинга состояния инте-
грирующей среды
Система 2
"Л Г~
Система 1
Интегрирующая
среда
Система 3
Л
\
Система 4
Организует
взаимодействие систем на основе
центрального компонента
(интегрирующей среды),
управляющего
взаимодействием подсистем
в рамках
информационной системы в целом
Взаимодействие
«звезда»
(интегрирующая
среда)
[ание
О)
При]
си
:шени
!ние
азначе
I
Пред
О)
я
Я
азва
X
>б соче-
преиму-
лизации
спосс
:ебе
ентра
u =1
>я ^
•я ω га
Данн!
тает
ществ
га
S
О)
ίο
Я
и
ι \
А \
ν >
ι
CL
Система
ешанную
аимодей-
зованием
5 ^ Л )
5 ω ч
о
с
Ь S. =
Организуе
архитекту
ствия с
о
S
я
>я то
3 т
то \о m
Смеш
спосо
дейст
TJ
1)
=ί
о
=
Ε
s
г
ν
>·.
3
J
я
Э
r
r
η
s
ΰ
г
s
я
твия с:
о
аимоде]
со
m
я
S
ЖНОСТЬЮ
B03M0
я
i
ции и
TO
я
-Θ-
уни
s
О)
ίο
о
венног
F-
редс
о
о
с
О)
I
а также
использо-
интерфей-
£ О)
• о 3
фейсов
МОЖНО'
ь прям
о. со
ία) о то
ί- m m
ирующая
о.
И нте
ем друг
эдсист
с
>> >,
ί- О.
О с(
о
с( X
емами
ίο
о
жду
О)
S
J3
О
га
S
О)
ίο
я
и
еда
Си
О
0„
ема
Сист
я
"раци:
О)
Я
методов
Шаблоны
объеди
неси
о
ία)
то
за ключ
я
я
рац
я интег
!ПЦИ
онце
ЬЙ
аимодей-
со
m
ί-
шизуе
Оргг
я
о
к
я
-рац:
нте|
X
,ιχ данных
ей средой
авило, ре-
■" я а.
Ϊ 2 е
га >, ^
ш О. то
о я а:
Q. Q, '
Я I-
а. а) с^[
ω ι РЭ
S Х>>
я .U
lC[ к
вокру
СУБ
ленна
ожений
влением
промыш
Что-
я a. g
а. с У
ИИ П
од у
вляе
I С ГС
ι основе
базы
КТИВНОГО
ем нг
анной
колле
Г, ω
О о
я а.
°-з
О) I- J3
S « J
ш fc ι
ί- I то
О Я с(
S
J3
I ^-^
I О
га Ί_
ПО Д
cent
S 2
О) га
оЗ
м доступа
Все функ-
о
о ^
'£ J
11 гЧ>
■в-Ч
Q.W
<U m
ί- 2
I I
= с
ГНЫМ
досту
га" О
Эй
то о
о ^
о ю
о
га S
ЯЦИО
дан
ч а:
га
с
>,
ίο
о
с(
в клиент-
гс
о
н
2
га
Тпэ
азм
тки ρ
о
га
а.
рикладной о
программах
*я
я а:
τΐ о
ч
α.
in1
ч
α.
ic
ώ α.
α.
ία) QJ
* Κ
ч о- Я
If
S s з*
Ч £ s
s jo α.
α. ι f-
c fe I
a. oj
O. TO ;J
OJ C( ■
ω ι ο
α. то ι
a) f- ^
о о
ее ' то ,
ι \ο a.
ω ο >, '
S-то £ '
= 3 =
« s
ι ex к
С то
к - 3
9- ϊ _■
oj m
9 ex
ч 2
1 й-
QJ TO
^
и
1 » ί !
_ ra "Θ" :
S I i '
•^ то s
α; α. ι .
Ο. μ. TO
ο ω
та g-S
OJ О Л
3 £ ς
3 S о
2 i с
>. g о
a. S s
m
5 с °
I с πι
О S JO
4
о
с
5 oj
a. o
с S
то
то
та a.
о oj
ι о
5 ϋ
m jq
m ι
α. то
О ==
f- ^
qj X-
κ ι
4 >,
ω -θ-
£ S
1 "£
* S
ш S ω ι
ai Я л
Е- " Ч
о s oj
S ω
ίο α. я
OJ ίθ
[_ <-> OJ
ω ο-
s 5 „, с
τ ffl OJ s,
ε В S ц
гш ос
О с( о о
О. Е-
OJ Q,
й ™
о
то
^t -с та
ч ^ ξ,
s J о
S-л S
с -Θ- ·
с( ω
с <
^ К ·- о
QJ s
э ι
a-3
υ αϊ
§.-§■
CL
* OJ
■° I
£ *
- Ϊ
О £
О J3
■=( I
OJ f-
3 ^
<§!
L_ TO
.Is
та ω
Ξ
ει !£
qj οι
ο *ο
4 о
с α. Χ
^3
^ PQ
ο u
Q, QJ
η]
ία.
s 5
S Ρ
о та ε- qj
1-2
ο
-та
>= Λ
° ο
cf CL
a.
Ευ ΐ
3
2
&■ °
CL то
Ε- 4
а. ш
~ CL
га £·
к °
5 S.
« s
О о >я
ι о
ij QJ
■ О га ω
U 'г ~
QJ
СП
"^ О
ϋ ΐ ч S ι s
с
ill
2 m
(О '—' ш
vo Si
° к2:
s .
■_ ._ Е- <■
Е- Е- m о о
? то g\
2 S I S <
o^ ω га то О
О о о 3U
S
QJ
S3
jjoduiT/-
υ
QJ
II
Χ S
а о -
ι £ >,
^ s
χ с ш
de
ο αϊ Ε-
i.s
s s|
й ш ч u|
е
I
QJ
S
Ю
О
Η
О)
Я
ечан
Прим
:ние
QJ
Э
О)
α
1чение
то
СП
ТО
I
О)
а.
О)
Я
I
то
m
СП
то
I
1 Л О jQ
Ϊ 2 ι ш
Ξ ω ο ι
s е- с( ω
од- ■=;
I => -Г ■=(
Ч u S ί
QJ QJ TO
ДНИТ
вать
сист
ьзов
>, о ч
а. а. <и о
fc; = s с
га q. ώ о
т ι_ Э я
СС >, Я '
ных, позволяюща
рованную систем
едиными данным:
:нения, произведен
единая база дан
лностью интегри
работающую с
гнт времени. Изме
ко .5
Использует
получить
приложена
в любой мс
одей-
снове
базы
S о
1 3«
Ш -1- О)
, 3
S (О
О) о
Е-
ία) о
>, Я
СП О
эгани
вие
иной
иных
гТ !- Ч га
CJ о о) с(
га
СП
га
*о
к *
то -Q
Общ,
данн
X
л
ваем
га
с(
СП
о
о
,
тра
ски о
втоматиче
ии, а:
п:
из приложе
S
в одно
ные
,
еча
χ отв
сть данны
д
ектно
СУБ
О- к
том. За кор
зовательска
о. ,-
гея в д
ногопо.
2 S
га Е-
S; си
стема 3
υ
_
\
/
Система 2
V
\
/
гема 1
Сие
_
\
/
ание
ГГ
Приме1
Решение
QJ
S
1
значе
то
X
О)
о.
О)
я
I
то
m
СП
то
I
то
о
истем
о
Каждая из
о
ΙΟ
а:
о
иче
!нтр
ктно-це
ией объе
еализац
Является ρ
,
модей
я
то
СП
m
ία)
НИЗ
Орга
вы-
та
а
-г
лен!
Уда
^ ± ό
s г
забо
жке
ктном
О О- QJ
мостоятельн
ся о подде
ных в корр
О) О)
5 s
ω <ч та
О i- J±
α. о ==
l
вляется
в дру
вызова
ι осущест:
е данных
средством
подхода, интеграция
функций. Изменена
происходит также по
О)
основ
кций
X
истем на
набора фу
u о
ΙΟ) о
Я I
m s:
е- с(
О О)
о.
>.
с(
О)
^
о
о.
с
зов
5
S
явля
о
СТОЯНИИ, ЧТ1
то
то
ОЖНО 3
ДОВОЛЬНО СЛ'
чей
см
то
S
сте
я
υ
ч^иэфс1э1ни.
в функции
вызо
езультат
QJ
Τ
/прокси\
Система 1
i Ч
* I
ДЛЯ
ависи
X СП
Предназначе
теграции не
tE '
5 Ρ
ционн;
тегрир
О) _
ет инт
τ легко
,ии отвеча
. позволяе'
За логику интеграц
шина. Такой подход
~ то
1 *
я
то
СП
ω s
О)
СИСТ
ία)
<~· (1)
низ
ТВИ1
Орга
дейс
ще-
ю
о
о
о
X Я
Обме
ниям
я ■=<
приложений без
с минимальными
■ '
I сп
s5
>.,.
ц
§1
зменять
зоответс
а также и
зодя ее в ι
истем ы,
ГКО ПрИ1
вать новые с
теграции, ле
о я
онног
1НИЯМ
о. 2А
χ 3
асин:
сооб
О) ™
ω 9;
о ω
ι S
о ю
о о
ществую-
>-,
работками с
процесса
нес-логикои
шины
гвом
еде
о.
пос
щих систем
Система 3
см
то
Систем
.
\
/
\
/
Система 1
X
X
дан
"
\
/
О
сюда же обычно относят порождающие шаблоны проектирования,
которые служат для создания объектов.
Архитектурные шаблоны проектирования (табл. 7.2). Для
организации классов или объектов системы в базовые подструктуры (то
есть в подсистемы) используются структурные архитектурные
шаблоны. С другой стороны, для обеспечения требуемых целевых
функций первостепенное значение имеет адекватная организация
взаимодействия отдельных архитектурных элементов системы — этой цели
служат шаблоны управления. В свою очередь шаблоны управления
можно разделить на шаблоны централизованного управления (то есть
шаблоны, в которых одна из подсистем полностью отвечает за
управление, запускает и завершает работу остальных подсистем) и шаблоны
управления, подразумевающие децентрализованное реагирование на
события.
Шаблоны интеграции информационных систем (табл. 7.3).
Шаблоны интеграции информационных систем представляют собой верхний
уровень классификации шаблонов. Аналогично шаблонам более
низких уровней классификации, выделяют группа структурных шаблонов,
описывающих основные компоненты единой интегрированной
метасистемы, шаблоны методов интеграции, предназначенные для описания
взаимодействия отдельных подсистем, и шаблоны интеграции по типу
обмена данными, конкретизирующие способ обмена данными между
системами.
Таким образом, выше представлены и описаны основные
современные шаблоны проектирования, используемые в ООА/П и
сгруппированные по уровням проектирования информационных систем. Необходимо
отметить, что методика ООА/П и шаблоны проектирования
применяются в настоящее время в основном при проектировании
корпоративных информационных систем, предназначенных для автоматизации
бизнес-функций предприятий. Ниже будет представлено применение
ООА/П к задаче моделирования процесса функционирования сложных
технических систем на примере разработки специального
программного обеспечения для математического моделирования интегрированных
систем навигации и наведения беспилотных маневренных ЛА.
7.2. Применение ООА/П к проектированию ПМО для
математического моделирования интегрированных
систем навигации и наведения беспилотных
маневренных ЛА
Рассмотрим применение приведенного выше унифицированного
подхода к проектированию информационных систем с использованием
средств ООА/П по отношению к задаче проектирования ПМО для
математического моделирования интегрированных систем навигации и
наведения беспилотных маневренных ЛА. Математическое моделиро-
вание процесса функционирования интегрированных систем навигации
и наведения современных ЛА является сложной и актуальной
задачей, позволяющей решить целый комплекс задач эскизного анализа
и проектирования существующих и разрабатываемых систем, В
соответствии с изложенной выше методикой унифицированного подхода
остановимся прежде всего на описании предметной области
рассматриваемой информационной системы.
7.2.1. Описание предметной области задачи математического
моделирования глубоко интегрированной системы навигации
беспилотного маневренного ЛА. Выше было показано, что в настоящее
время наиболее эффективным подходом к разработке
программно-математического обеспечения для математического моделирования
интегрированных систем навигации и наведения высокоманевренных ЛА
является объектно-ориентированный подход (ООП) [7.4]. Этот подход
дает возможность разрабатывать гибкое и наращиваемое ПМО
необходимого уровня сложности, позволяющее использовать иерархические
структуры наследуемых классов, оформленные в виде
соответствующих библиотек, и обеспечивать безопасность хранимых данных,
Заметим, что при использовании ООП возникает проблема
определения так называемых базовых классов, т.е. выделение самых общих,
типовых черт исследуемых процессов и построение соответствующей
иерархии этих классов [7.5]. Этот этап исследований очень плохо
формализуется, тем не менее, на основании существующего опыта
можно сформулировать следующие рекомендации по формированию
объектной схемы программно-математического обеспечения:
1. Все реально существующие объекты исследования, такие, как
ЛА, система управления, блок измерителей и т.п., представляющие
собой системы с конечным количеством входов и выходов, должны быть
представлены своими аналогами-классами. Таким образом, с точки
зрения программиста соответствующий класс должен являться «черным
ящиком» с некоторым количеством свойств, но со скрытым механизмом
функционирования.
2. Построение иерархической цепочки таких классов целесообразно
начинать с самого общего, абстрактного класса, у которого определены
лишь наиболее общие, типовые для всей предполагаемой цепочки поля,
а методы объявлены как виртуальные и абстрактные. Иными словами,
в таких классах объявлены только структуры полей и шаблоны
методов, а сами тела методов отсутствуют, что требует их перекрытия
в классах-потомках.
3. Если при моделировании используются сложные численные
алгоритмы, требующие большого числа настроек и дополнительных
процедур, то необходимо построить библиотеки соответствующих
классов, реализующие упомянутые алгоритмы. При этом метод,
детализирующий исходную математическую задачу, должен быть объявлен
абстрактным с целью дальнейшего перекрытия в потомке уже непо-
средственно в рамках данного проекта (например, функция вычисления
правых частей системы обыкновенных дифференциальных уравнений).
4. Вспомогательные процедуры и простые алгоритмы целесообразно
оформить в виде отдельных модулей, не облекая их в классы, с
целью упрощения общей структуры и, как уже отмечалось выше, для
повышения быстродействия программы. Так, например, функции и
процедуры матричной алгебры, алгебры комплексных чисел, кватернионов,
тензоров и т.п. лучше всего заключить в отдельные модули, описав
предварительно соответствующие типы (матрица, комплексное число,
кватернион, тензор и т.п.).
5. Если исследуемые процессы обладают вложенностью, т.е. один
процесс связан непосредственно или косвенно с несколькими другими,
то в классе, реализующем данный процесс, необходимо предусмотреть
соответствующее поле под объект класса, реализующего вложенный
процесс. Необходимо отметить, что такие вложенные объекты должны
быть созданы извне, т.е. в вызывающей программе, а в
рассматриваемый класс передавался бы уже созданный объект. Это необходимо для
того, чтобы разными классами использовался только один экземпляр
такого класса и все обращения к его данным были бы согласованы.
Таким образом, при инициализации всей структуры сначала должны
быть созданы самые независимые, простые объекты, а уже затем
сложные, составные объекты.
Для проектирования архитектуры и структуры ПМО,
предназначенного для математического моделирования интегрированных бортовых
систем навигации и наведения высокоманевренных ЛА, необходимо
составить функциональную схему моделирования, содержащую все
объекты моделирования с указанием их назначения и взаимодействия
с другими объектами и внешней средой. Такая функциональная схема
приведена на рис. 7.7.
В соответствии с приведенными выше шаблонами проектирования
воспользуемся для проектирования архитектуры обсуждаемого ПМО
шаблоном «Многоуровневая система (Layers) или абстрактная
машина». Как следует из определения данного шаблона (см. п. 7.1.3),
выделим в рассматриваемом ПМО:
• слой предметной области — объединяющий классы,
формализующие основные понятия непосредственно имитационного
моделирования интегрированных бортовых систем навигации и
наведения высокомансврсппых ЛЛ;
• слой интерфейса пользователя — объединяющий классы форм
и диалоговых окон, используемых пользователем для задания
исходных данных, управления процессом моделирования и
отображения его результатов;
• низкоуровневую службу доступа к данным — объединяющий
классы, реализующие процесс сохранения и чтения данных из
базы данных проекта.
Возмущающие силы и моменты
I I
Внешняя среда
Органы
управления
ЛА
Управляющие
силы и
моменты
Летательный
аппарат
Вектор состояния ЛА
Команды
управления
Интегрированная система напвигации и управления
Формирование
команд
управления
Вектор
управления
Решение задач
навигации и управления
Вектор
измерении
Ошибки
измерителей
I
I
I
J_
Бортовой
измерительный
комплекс
Борт ЛА
Рис. 7.7
Ниже приведем программную реализацию обсуждаемого ПМО
в терминах стандарта универсального языка моделирования UML [7.6],
т. е. в виде соответствующих диаграмм классов (статических диаграмм,
описывающих распределение обязанностей между классами и
структурное построение системы) и диаграмм взаимодействия и состояния,
описывающих поведение и кооперацию классов составляющих основу
ПМО. На рис. 7.8. представлены основные (базовые) типы данных,
используемые в дальнейшем на всех обсуждаемых диаграммах.
TVector
Tensor
TDlstUnlty
TLoc
+X, Υ, Ζ : float(idl)
+Roll, Pitch, Yaw : fioat(idl)
+p, g, r: fioat(idl)
+Ro, Alpha, Delta : fioat(idl)
+Alp, Phi, Azim : fioat(idl)
+DPsi, DEps : float(idl)
+H, Lam, Fi: fioat(idl)
+Alpha, Betta, Gamma : fioat(idl)
TErrorMode
Quaternion
+L0: fioat(idl)
+L1 ; fioat(idl)
+L2: fioat(idl)
+L3; fioat(idl)
TMassGeom Inertia
+CurTime: float(idl)
+Mass : fioat(idl)
+MCPos : TLoc
+lnertiaTensor: Tensor
+L: fioat(idl)
+H : fioat(ldl)
+W: fioat(idl)
+Magnitude: float(idl)
TPhysicalVector
+Modulus : fioat(idl)
+Purchase : TLoc
+Direction: TLoc
TJolnt
+Purchase: TLoc
+Affinor: Tensor
Tlnfluence
+Force : TPhysicalVector
+Moment: TPhysicalVector
+CurTime: float(idl)
TTargetMotionMode
TGNSSFrequencyMode
TGNSSMeasureMode
TGNSSMeasureKind
TGNSSConstellationMode
Рис. 7.8
На данной схеме, отображены следующие базовые типы:
• TVector — открытый массив вещественных чисел;
• TDistUnity — перечисляемый тип данных для обозначения
размерности расстояний (км/м);
• TErrorMode — перечисляемый тип данных для задания режима
моделирования ошибок (случайный/максимальный);
• TTargetMotionMode — перечисляемый тип данных для задания
гипотезы о движении цели (неподвижная цель/ прямолинейное
движение с постоянной скоростью/ прямолинейное
равноускоренное движение/ движение по окружности /движение по спирали
и т. п.);
• TGNSSMeasureKind — перечисляемый тип данных для
задания типа измерений СРНС-приемника (псевдоаль-
ность/псевдодальность+псевдоскорость);
• TGNSSMeasureMode — перечисляемый тип данных для
задания режима измерений СРНС-приемника (кодовый СА/кодовый
Р/фазовый);
• TGNSSConstellationMode — перечисляемый тип данных для
выбора космической системы (GPS/ГЛОНАСС/совместно);
• TGNSSFrequencyMode — перечисляемый тип данных для
задания частоты работы (L1/L1&L2);
• Tensor — матрица 3x3 вещественных чисел для хранения
элементов тензора (матрицы направляющих косинусов);
• TLoc — структура из трех вещественных чисел для хранения
координат точки;
• Quaternion — структура из четырех вещественных чисел для
хранения кватерниона (параметров Родрига-Гамильтона);
• TPhysicalVector — структура для представления любого
физического вектора, состоящая из следующих полей:
- Modulus — абсолютное значение (длина) вектора;
- Purchase — координаты начала вектора (точки приложения)
в какой-либо (как правило, в связанной) СК;
- Direction — координаты орта данного вектора;
• TJoint — структура для представления соединения между
блоками (отсеками) конструкции, состоящая из следующих полей
- Purchase — координаты точки соединения в какой-либо (как
правило, в связанной) СК;
- Affinor — матрица направляющих косинусов между
связанными СК соединяемых отсеками;
• TInfluence — структура для представления влияния силового
воздействия, состоящая из следующих полей:
- Force — вектор силы в какой-либо (как правило, в
связанной) СК;
- Moment — вектор момента в какой-либо (как правило, в
связанной) СК;
- CurTime — момент времени;
• TMassGeomlnertia — структура для представления
массово-геометрических и инерционных параметров:
- CurTime — момент времени;
- Mass — масса;
- MCPos — координаты центра масс;
- InertiaTensor — тензор моментов инерции отсека;
- L — длина отсека;
- Η — высота отсека;
- W — ширина отсека;
- Magnitude — характерный размер отсека.
Вернемся к вопросу проектирования архитектуры ПМО. Для
сохранения робастности системы и обеспечения низкого связывания
основных классов взаимодействие между определенными выше «слоями»
реализуется на основе шаблона «Наблюдатель» (Observer),
обеспечивающего уведомление слоя интерфейса об изменениях в слое предметной
области приложения.
Для обеспечения централизованного управления моделированием
воспользуемся шаблоном «Контроллер» (Controller) [7.7], на который
возлагаются обязанности по обработке системных сообщений
(создание, реакция на событие, публикация сведений и т.п.). В рамках
рассматриваемого ПМО в соответствии с данным шаблоном реализован
класс TExperimentController (см. рис.7.9).
Для реализации основных компонент замкнутого контура,
представленного на рис. 7.7. воспользуемся шаблонами «Компоновщик»
(Composite) и «Фасад» (Facade).
С использованием шаблона «Фасад» в ПМО реализовано
понятие летательного аппарата. Причина введения дополнительного уровня
представления кроется в необходимости обеспечения защиты ПМО от
изменений при рассмотрении ЛА различных типов. Фасад,
поддерживая тот же интерфейс, что и сам класс (IDynamicObject),
обеспечивает неизменность структуры для различных моделей динамических
объектов, создавая реальный объект конкретного типа в процессе
инициализации и перенаправляя в дальнейшем к нему все запросы
системы и скрывая при этом детали реализации, Таким образом, даже
при моделировании движения объекта, модели которого изначально не
существовало, все, что необходимо сделать проектировщику — это
реализовать новый класс как наследник от интерфейса IDynamicObject,
предусматривающего расчет текущего вектора состояния на момент
времени ti с использованием вектора управления CVector (процедура
TExporlmenlConlroller
ΤBegm : Tloat(K)l)
+TEnd - noat(idl)
■СЕЛте : Поа1(к)1|
CEStep Поз|(к)1|
ofPause Simulation: Boolean
IniFileName : Stnng
croatefin IniFileName: stringfldl))
DoltfJ
Sb| Pause Simulation (in ao (Pa use Simulation : Boolean)
+G θ I Pause Simulation!): Boolean
+AUach(in Observer: IObserver|
Dotachfm Observer: lObserver)
♦WpliWI
+CGSystB( ts
♦NSystbmi
+Name :stnng(id/)
+Dim. Iang(idl|
+OVector: TVector
*Updata(in h: flaat(idl), m в Vector: TVeciorJ
-UpdBlBfin li - noai(idi), in aVector: TVector|
♦DDbjects
-&5
Τ Dy na m I c Db| ectFa ca de
■ interface ■
IDynamlcDb|ect
►Runfii» It: float(tdl). in CVoctor: TVociorJ: TVector
■GotDataFmmFilB(tn inififeWame: slnngfidiJJ
TNa vl gat I on Syst em Co m pos 11 e
+CurTime: float(idl)
+CurEVector: TVector
+NFrequency: float(kH|
-Add(m NSyslem : TAbstracl Navigation System)
-Removefin Index: tong(idl)|
Τ Abel rectNa vl gat I on Sy et e m
-Name : stnng(idl|
-Dim: long(idl)
CufTlma : floal(ldi|
•WFrequency: any(JdJ)
•EVector: TVector
-EstimeUonfin h: iloai(idi), щ SVector: TVector)
- GetDala F rom File (in IniFileName : stnng (idi|)
TCGSystemComposlle
Cur Time : floai(idi|
♦CurCVector: TVector
С G Frequency: float(idl)
Add(in CGSyslem: TAbslractConlroiGurdanceSyslori
+Remove (in index : long(idl|)
TAbalractControlGuldance System
«Name ' string(idl|
♦Dim: long(idi)
♦СигЛте : floal(idJ|
«WFrequency: floa|(idl|
♦CVector: TVector
'Catcula|B(in |i: noat(idl), in EVector: TVector |
>GeiDelaFromFite(in IniFileName; string(idl|)
Τ Aba IradNal игвЕгТес!
+Calculate(in |l: floal(idl|. in SVector - TVeclor|
*GelDalaFrornFile(in IniFileName : slrlng(ldl||
TNatureComposlle
fAdd(m Effect ΤAbstractNaiuroEffect|
'Remove(in Index : long(idl)|
Рис, 7,9
Run) и возможность считывания исходных данных из файла с помощью
метода GetDataFromFile, Для фасада динамического объекта, кроме
того, определены поле текущего времени (CurTime) и текущий вектор
состояния (CurSVector),
В соответствии с шаблоном «Компоновщик» (Composite) в
рамках рассматриваемого ПМО реализуется понятие предметной
области «внешняя среда», Для этого определен абстрактный класс
TAbstractNatureEffect, представляющий общего предка для всех
рассматриваемых далее факторов внешней среды (модели атмосферы,
гравитационного потенциала Земли, ветровых возмущений и т.п.),
Ниже в табл. 7,4 и 7.5 приведены названия и описания полей и
методов данного класса.
Таким образом, имеется некоторый абстрактный класс с основным
интерфейсом расчета параметров фактора. Впоследствии для каждого
из рассматриваемых в работе факторов будут созданы классы-наслед-
Таблица 7,4
Свойства
класса
Name
Dim
OVector
Тип
строка
целый
массив
веществен, чисел
Описание
уникальное имя «фактора» внешней среды
размерность результирующего вектора
результирующий вектор, содержащий
рассчитанные параметры
Таблица 7,5
Метод
procedure Calculate
(ti: Float;
SVector: array of Float);
virtual; abstract;
procedure
GetDataFromFile
(IniFileName: String)
Тип
виртуальный,
абстрактный
виртуальный,
абстрактный
Действие
определяет значения
(результирующий вектор) фактора для
требуемого момента времени и вектора
состояния потребителя; результат
сохраняется в массиве OVector
считывает исходные данные из
файла с именем IniFileName
ники, реализующие конкретную модель явления, Для обеспечения
одновременной и однотипной обработки таких классов
предусматривается класс-компоновщик, являющийся наследником от описанного
абстрактного класса TAbstractNatureEffect, одновременно содержащий
(агрегирующий) композицию структур объектов того же типа. Таким
образом, остальные классы предметной области (в первую очередь
наследники IDynamicObject) имеют дело не с произвольным количеством
разнородных факторов, а с одним объектом-компоновщиком,
обеспечивающим доступ ко всем имеющимся элементам композиции, При этом
необходимо понимать, что реальный доступ к элементу (конкретной
модели) из внешних классов подразумевает наличие сведений о
рассчитываемых параметрах и размерности результирующего вектора,
Традиционно в классе-компоновщике выделяют
свойство-композицию (в данном случае Effects), представляющее собой список
(возможно упорядоченный по какому-либо критерию) объектов базового
типа (в данном случае TAbstractNatureEffect), непосредственно
реализующих требуемую функциональность, Кроме того, в компоновщике
существуют два метода;
• Add(Effect; TAbstractNatureEffect), регистрирующий в
композиции новый элемент;
• Remove(Index: Long), удаляющий из композиции элемент с
заданным номером.
Применение шаблона «Компоновщик» (Composite) позволяет
достичь однотипности представления и обработки разнородных классов,
что обеспечивает реализацию принципа защиты от изменений и
увеличение робастности программного обеспечения,
На основе этого же шаблона в ПМО реализованы понятия
предметной области «навигационная система» и «система управления и
наведения»,
Иными словами, вся возможная совокупность
навигационных систем (включая бортовой измерительный комплекс),
реализованных как наследники от базового абстрактного класса
TAbstractNavigationSystem, компонуется в единственный класс
TNavigationSystemComposite, имеющий список активных
навигационных систем NavigationSystems и методы регистрации и удаления
элементов списка. При этом сам класс-композит также является
наследником базового абстрактного класса TAbstractNavigationSystem
и предназначен для формирования текущего вектора оценок
навигационных параметров EVector размерности Dim с частотой
WFrequency с помощью метода Estimation для текущего момента
времени ti и вектора состояния SVector, Для реализации моделей
навигационных систем базовый абстрактный класс имеет ссылку на
объект-компоновщик TNatureComposite, передаваемую при создании и
инициализации,
Отметим, что класс TNavigationSystemComposite имеет поле
NFrequency, формируемое как максимальное из всех полей WFrequency
активных навигационных систем NavigationSystems, Кроме того, метод
Estimation для объекта компоновщика может включать в себя помимо
вызова соответствующих методов элементов списка дополнительную
функциональность, связанную, например, с работой алгоритмов
комплексирования,
Аналогичным образом в ПМО реализовано понятие предметной
области «система управления и наведения», включая
функциональность органов управления ЛА, т, е, возможная совокупность систем
управления и наведения, реализованных как наследники от
базового абстрактного класса TAbstractControlGuidanceSystem,
компонуется в единственный класс TCGSystemComposite, имеющий список
активных систем управления и наведения CGSystems и методы
регистрации и удаления элементов списка, При этом сам
класс-композит также является наследником базового абстрактного класса
TAbstractControlGuidanceSystem и предназначен для формирования
текущего вектора управления CVector размерности Dim с помощью
метода Calculate для текущего момента времени ti и вектора оценок
навигационных параметров CVector,
Отметим также, что реализация моделей бортовых систем
посредством единых интерфейсов позволяет легко перейти к т. н,
полунатурному моделированию, когда часть моделей реализуется в виде
программно-аппаратных макетов, В этом случае разработчику достаточно
создать соответствующий адаптер для макетной системы,
поддерживающий тот же интерфейс, и подключить его в объект-композит.
Остановимся теперь подробнее на полях и методах класса
TExperimentController, являющегося центром управления процесса
моделирования (табл,7,6 и 7.7).
Таблица 7,6
Свойства
класса
TBegin
TEnd
CETime
CEStep
ofPauseSimulation
IniFileName
Nature
DObjects
NSystems
CGSystems
Тип
вещественный
вещественный
вещественный
вещественный
логический
строка
TNatureComposite
список
TDynamicObjectFacade
список
TNavigationSystem
Composite
список
TCGSystemComposite
Описание
дата и время начала
эксперимента
дата и время окончания
эксперимента
текущее время эксперимента
шаг эксперимента
признак паузы
моделирования
имя файла входных данных
свойство-агрегат,
формализующий «внешнюю среду»
композиция из объектов
TDynamicObjectFacade
композиция из объектов
TNavigationSystemComposite
композиция из объектов
TCGSystemComposite
Таблица 7,7
Метод
Create(aIniFileName;
String)
Dolt
Attach (Observer:
IObserver)
Detach(Observer:
IObserver)
Notify
Тип
конструктор
класса
виртуальный
виртуальный
виртуальный
виртуальный
Действие
создает экземпляр,
инициализирует поля и внутренние объекты на
основе входного файла исходных
данных
основной метод, выполняющий
процесс моделирования
метод регистрации подписчиков
метод исключения подписчиков
метод рассылки уведомлений об
изменении состояния
Таким образом, в контроллере моделирования предусмотрена
возможность рассмотрения нескольких ЛА (композиция из объектов
TDynamicObjectFacade) при наличии нескольких вариантов навигаци-
онной системы (композиция из объектов TNavigationSystemComposite),
а также систем управления и наведения (композиция из объектов
TCGSystemComposite),
Рассмотрим подробнее реализацию описанных ранее абстрактных
базовых классов, формализующих «внешнюю среду», ЛА, системы
навигации, управления и наведения,
На рис, 7,10 представлена диаграмма классов, представляющих
собой программную реализацию понятия предметной области «внешняя
среда»,
Как видно из приведенной схемы, от ранее определенного базового
класса TAbstractNatureEffect в рамках настоящей версии ПМО создано
три класса-наследника:
• TAbstractGraviModel, являющегося абстрактным предком для
классов, формализующих модель расчета ускорения силы
тяготения;
• TAbstractAtmosphereModel, являющегося абстрактным предком
для классов, формализующих модель расчета параметров
атмосферы Земли;
• TAbstractWindModel, являющегося абстрактным предком для
классов, формализующих модель расчета ветровых возмущений.
В каждом из этих классов реализован только конструктор и
определены вспомогательные константы и размерность результирующего
вектора;
• TAbstractGraviModel — 3 (проекции ускорения силы тяготения на
оси земной связанной СК);
• TAbstractAtmosphereModel — 4 (давление, плотность,
температура, скорость звука);
• TAbstractWindModel — 3 (проекции скорости ветра на оси гори-
зонтной СК),
Для модели расчета ускорения силы тяготения цепочка классов
продолжена в виде трех конкретных классов;
• TSimpleGraviModel, реализующего простейшую модель расчета
ускорения в виде обратно пропорциональной зависимости от
квадрата высоты;
• THorizonGraviModel, реализующего модель расчета ускорения
в горизонтной СК (см, гл, 3);
• TWGS84GraviModel, реализующего модель расчета ускорения
в земной связанной СК в виде разложения в ряд по сферическим
или шаровым функциям в соответствии с коэффициентами
разложения модели Земли WGS-84, содержащимися в файле с именем
CoefFileName [7,18].
Для модели расчета параметров атмосферы цепочка классов
продолжена в виде следующих классов;
• TStandartAtmosphere, реализующего модель расчета параметров
атмосферы в соответствии с тем или иным стандартом
статической атмосферы [7,17];
о.
η
Ε
σ>
ο
Υ-
Τ3
ng(l
'_C
f.
о
Ε
η
Ζ
ω
Lfii
ο
Τ)
ο
e
ο
υ
ω
>
И
Ε
'-ί
Ό
=·
Я
я
(in
lata
э
υ
η
Ο
5Ζ
U
ο
t
Ш
ο
Д
η
ζ
Ώ
η
TAbsIr
slring(idl)
mg(idl)
г: TVedor
■ ■ α ο
ame
Im : 1
Vecl·
л
о S
о =5
о =,
if
.. £
·- и
2 ■■
υ ω
-S Ε
ίϊ я
«Ζ
.= ™
_ιΕ
5Ϊ
ίί
л —
alcul;
alDa
ue
+ +
№
о
■π
о
Ε
о
о
£
О.
О)
о
Ε
и
η
л
<
У-
кн
are
£
О.
О
Ε
<
о
LL
h-
—.
Ό
Έ5
.^
ί".
Ε
η
Ζ
LL·
Ο
υ
Φ
e
ο
Vec
«
jg
ο
,-j
_c
Ж
η
D
ale
Щ
_
О
О
£
О.
(Я
о
Ε
<
■π
η
■π
с
3
W
h-
о
о
ω
е
о
ϋ
ω
>
«
.=
Kid!
-■
i
■π
о
Ε
>
η
О
TS
2
л
<
h-
>«
=
э
a
и
г·
ΐ
I
δ
+
кн
GSD4G
ϊ
Λ
ή
: slring(i
ame :
ζ
Ё
δ
о
о
ϋ
ω
Ё
L
о
и
ω
>
«
.Ε
-*
ί
£
S
—
л
■з
ale
о
+
а
Ή
о
Ε
>
Ε
Ο
ο
ο.
Im
W
h-
(idl
о
^.
о
О
о
TS
о
Ё
5
и
о
>
(Л
с
_1
Ό
е=
_с
η
3
л
о
къ
del
о
Ε
"D
С
S
Л
л
£
О
о
о
гч
Υ-
о
ϋ
ω
ί
SVe
pC
jg
π
о
с
of
η
D
и
η
О
+
Mode
Ind
s
«
Con
О
гч
h-
o
В
о
e
о
SVecl
.=-
"(IP
=-
I
1
_+_
о
1
J
ΐ
?
5
h-
iple
Ε
W
Ιο
в
I
о
о
S
о
Ε?
η
t
о
в
Ξ
с
о
о
§
о
Е?
л
h-
+
~
о
ed
ί
о
>
(Л
_с
(idl)
Л
<=
С
ω
lal
D
iJ
η
О
±J
• TFileAtmosphere, реализующего модель расчета параметров
атмосферы путем аппроксимации табличных данных, содержащихся
в файле с именем FileName.
Для модели расчета параметров ветровых возмущений цепочка
классов продолжена в виде следующих классов:
• T2DWindModel, являющегося предком для модели «плоского»
ветра, т.е. горизонтальных порывов;
- T2DConstWindModel, реализующего модель постоянного
«плоского» ветра;
- T2DStohasticWindModel, реализующего модель случайного
«плоского» ветра;
• T3DWindModel, являющегося предком для модели
«пространственного» ветра, включая вертикальные порывы;
- T3DConstWindModel, реализующего модель постоянного
«пространственного» ветра;
- T3DStohasticWindModel, реализующего модель случайного
«пространственного» ветра;
• TAbstractJammer, являющегося предком для модели
источника помех в канале радионавигационных систем и
включающего дополнительно свойства Power (мощность
источника помехи), RefFrequency (опорная частота), Location
(местоположение источника). От данного класса в ПМО
реализован класс TSimpleJammer, реализующий модель
источника немодулированной помехи в заданном диапазоне
(LowFrequency.. .UppFrequency) частот;
• TAbstractTarget, являющегося предком для модели определения
параметров цели (координат, скорости, положения и других
характеристик) и включающего дополнительно свойства IniState
(начальный вектор состояния), CurTime (текущее время). От
данного класса в ПМО реализован класс TSimpleTarget,
реализующий модель движения цели в соответствии с определенной
гипотезой (поле TargetMotionMode). Экземпляры этого класса
могут использоваться при моделировании работы систем
наведения.
Для модели рельефа подстилающей поверхности реализован класс
TDigitalMap, рассчитывающих параметры рельефа (высота, угол
наклона площадки, тип поверхности, коэффициент отражения для
заданных плановых координат).
Отметим, что в силу применения шаблона «Компоновщик»
(Composite), дальнейшее наращивание описанных цепочек будет
происходить уже без переделки существующего кода — необходимо
будет только реализовать требуемые классы и добавить недостающие
исходные данные в файл данных проекта.
Перейдем теперь к описанию иерархии классов, формализующих
понятие летательного аппарата (см. рис.7.11.)
( «interface»
iPynamlcOblect
+Run(in U: (loat(idl). in CVector: TVector): TVeclor
+GelDalaFromFile(in IniFiteName: slnng(idtf)
β interface ■
iFunca
*Funcs(in U: (Joal(idl). in aVector: TVoctor): TVector
Nature : TNalureComposile
+Run(in li: (loal(idl). in CVector: TVector): TVector
TAbslraclMover
Oim: long(idl)
. CurTime: noat(idl)
"Ρ +CurVector: TVeclor
fSeiSlate(in ti: floal(idl), in eSVedor: TVeclor)
κΜονβΤο(ίη tEnd r floal(idl)): TVeclor
>GelOalaFromFilc(in IniFiieName: string(idl))
TMoverFacade
TAbstracUnlegrDior
Τ An a lyt I ca IM ο νβ г
I
i-MoveTo(in (End : floalfidl)) ■ TVeclor
-0
TAbetrDClElement
■Prev: TAbsiraclElemeni
OulJoini :TJoini
+GetParameiere(in li: floal(idl), in SVector: TVector)
TElemenlComposlte
TADCoe FflclenlFacad в
+CurValue: foal(idl)
i-CurValue: TMassGeomlnertia
i-CurTime:iloal(idl)
TThrual Facade
+CurValue: TPhysicalVeclor
■t-CurTime: iToal(idl)
Рис. 7.11.
В основу иерархии, как уже отмечалось выше, положен
интерфейс IDynamicObject, формализующий динамику объекта как черного
ящика посредством метода Run, на вход которого поступает момент
времени ti и вектор управления CVector, а выходом является вектор
состояния объекта.
В составе ПМО реализован класс TMoverFacade, представляющий
собой шаблон «Фасад» для формализации метода расчета эволюции
объекта с помощью различных методов (аналитических, численных и
т.п.). Этот класс базируется на классе TAbstractMover,
представляющем собой абстрактного предка для классов, реализующих алгоритм
расчета эволюции, в качестве которого можно рассматривать:
• методы решения систем обыкновенных дифференциальных
уравнений [7.19];
• методы решения конечно-разностных уравнений [7.17];
• методы аппроксимации табличных данных;
• аналитические методы динамики [7.17].
Для обеспечения независимости метода вычисления, реализующего
тот или иной вычислительный алгоритм, от конкретной модели дви-
жения объекта в состав обсуждаемого класса TAbstraclMover введем
ссылку на объект, реализующий интерфейс IFuncs, предназначенный
для расчета некоторого вектора состояния на момент ti на основе
имеющихся сведений о текущем состоянии объекта. С точки зрения
физической реализации этот интерфейс может представлять собой
либо функцию расчета правых частей дифференциальных уравнений
(в том случае, когда движение описывается системой ОДУ), либо
функцию прогноза состояния объекта на основе априорных сведений
(в том случае, когда движение описывается конечно-разностными или
аналитическими уравнениями).
Таким образом, в табл. 7.8 и 7.9 представлены поля и методы класса
TAbstractMover.
Таблица 7.8
Свойства
класса
Dim
CurTime
CurVector
Funcs
Тип
целый
веществ.
TVector
IFuncs
Описание
размерность вектора состояния
текущий момент времени
текущий вектор состояния
экземпляр класса, реализующего
интерфейс IFuncs
Таблица 7.9
Метод
SetState (ti: Float; SVector)
GetDataFromFile(IniFileName:
String)
MoveTo(tEnd: Float): TVector
Тип
виртуальный,
абстрактный
виртуальный,
абстрактный
виртуальный,
абстрактный
Действие
устанавливает новое
состояние объекта движения
инициализирует поля и
внутренние объекты на
основе входного файла
исходных данных с именем
IniFileName
основной метод класса,
формализующий алгоритм
расчета вектора состояния на
момент времени tEnd
Дальнейшая детализация этого абстрактного класса будет
рассмотрена ниже в виде цепочки классов, реализующих методы численного
интегрирования систем ОДУ, используемых в рамках ПМО.
Для реализации модели движения ЛА, т.е. расчета сил и моментов,
действующих на ЛА в полете (интерфейса IFuncs), обычно
требуется вычислять его массово-геометрические и инерционные параметры,
аэродинамические характеристики и характеристики тяги
двигательной установки. Для обеспечения робастности этих вычислений в смыс-
ле устойчивости к различным способам расчета и к различным
геометрическим и аэродинамическим конфигурациям будем рассматривать
ЛА как совокупность соединенных отсеков. В каждом отсеке вводится
собственная1 связанная СК, направление осей которых совпадает с
осями связанной СК ЛА, а начало СК помещено в крайнюю носовую точку
на продольной оси симметрии отсека. При этом для каждого отсека
можно указать:
• ссылку на присоединяемый отсек;
• значения координат точки соединения с предшествующим
отсеком, выраженные в его связанной СК;
• набор аэродинамических коэффициентов (может быть пустым,
если отсек внутренний и не имеет внешних аэродинамических
поверхностей);
• массово-геометрические параметры (могут быть не определены,
если эти значения пренебрежимо малы);
• параметры тяги ДУ (могут быть нулевыми, если отсек не имеет
двигателей).
В связи с вышесказанным программная реализация понятия
«отсек» (класс TElementComposite) основана на шаблоне «Компоновщик»
(Composite), позволяющем достичь однородности представления и
обработки различных видов отсеков, скомпонованных в
соответствующую композитную структуру Elements. Каждым элементом этой струк-
Таблица 7.10
Свойства
класса
Prev
OutJoint
ADCoefficients
Thrusters
MGI
Тип
TAbstractElement
TJoint
список
TADCoefficientFacade
список
TThrustFacade
объект типа
TMGIFacade
Описание
ссылка на предшествующий отсек
точка соединения с
предшествующим отсеком
композитная структура из
объектов-контейнеров для
аэродинамических коэффициентов
композитная структура из
объектов-контейнеров для параметров
тяги ДУ
объект-контейнер для массово-
геометрических и инерционных
параметров
Таблица 7.11
Метод
GetParameters (ti: Float;
SVector: TVector)
Тип
виртуальный
Действие
вызывает расчет значений всех
имеющихся параметров на момент
времени ti для вектора состояния
SVector
туры является объект типа TAbstraclElement. В табл.7.10 и 7.11
представлены поля и методы этого класса.
Каждый из упомянутых классов основан на шаблоне «Фасад»,
позволяющем реализовать устойчивый к изменениям в конкретной модели
или способе вычисления компонент.
Так, на рис. 7.12 приведена диаграмма классов, иллюстрирующая
цепочку классов, формализующих расчет набора аэродинамических
коэффициентов.
В основе цепочки находится интерфейс IADCoefficient,
определяющий два метода, присущих любому классу, реализующему расчет
аэродинамических коэффициентов:
• процедура GetDataFromFile(IniFileName: String) —
инициализирует поля класса на основе входного файла исходных данных
с именем IniFileName;
• функция GetValue(Alpha, Beta, Delta, Mach: Float; aVector:
TVector): Float — рассчитывает аэродинамический коэффициент
для текущих значений угла атаки, скольжения, угла отклонения
рулевой поверхности и числа Маха.
На основе данного интерфейса и создан класс-фасад
TADCoefficientFacade, имеющий поле CurValue для хранения текущего
значения коэффициента и поле-агрегат типа IADCoefficient,
представляющее собой экземпляр реального класса, реализующего расчет
аэродинамического коэффициента. В составе ПМО имеется целый ряд
таких классов:
• TOneArgumentADCoefficient — предназначен для вычисления
значения аэродинамического коэффициента по табличным
данным, содержащимся в текстовом файле с именем FileName по
одному аргументу;
• TTwoArgumentADCoefficient — предназначен для вычисления
значения аэродинамического коэффициента по табличным
данным, содержащимся в текстовом файле с именем FileName по
двум аргументам;
• TOneArgumentChebyADCoefficient — предназначен для
вычисления значения аэродинамического коэффициента по
коэффициентам полинома Чебышева, содержащимся в типизованном файле
с именем FileName по одному аргументу;
• TTwoArgumentChebyADCoefficient — предназначен для
вычисления значения аэродинамического коэффициента по
коэффициентам полинома Чебышева, содержащимся в типизованном файле
с именем FileName по двум аргументам;
• TAnalyticalADCoefficient — предназначен для вычисления
значения аэродинамического коэффициента по аналитическим
соотношениям;
• TNullADCoefficient — реализует нулевое значение
аэродинамического коэффициента.
a
τι
η
υ
η
cl
ff
ω
ο
υ
α
ί
η
υ
ω
со
>
ο
+
τ-
-
с
а а
асе
ffici
•с ω
ω ο
с υ
<
Г
ω
о
ff
ω
о
О
D
<
(IP
<=-
CD
О
5=
^,
"^
έ
i:
о
о
CD
^
·- "В
Float
ring(i
■с δ
га о
s ε
л г-
"5 .Si
U ιι-
rn-^
CD С
со <=-
££
А Ь
3 ГО
го го
^ Q
CD CD
CD CD
+ +
<я
Ί<3-
TChebyFlleLoad
ΖΓ
<-
Χ7
~
с
0)
ο
ffi
ω
ο
υ
U
ntA
ω
Ε
3
σ>
<
ω
Ο
1-
τι
",
ring
CO
F
го
У
ω
Fi
+
<ь
На рис.7.13 приведена диаграмма классов, иллюстрирующая
цепочку классов, формализующих расчет параметров вектора тяги.
В основе цепочки находится интерфейс IThrust, определяющий два
метода, присущих любому классу, реализующему расчет параметров
тяги:
• процедура GetDataFromFile(IniFileName: String) —
инициализирует поля класса на основе входного файла исходных данных
с именем IniFileName;
• функция GetValue(ti, Ρ, Τ: Float; CVector: TVector):
TPhysicalVector — рассчитывает параметры тяги ДУ в виде
структуры данных TPhysicalVector для текущих значений
времени, давления и температуры и вектора управления CVector.
На основе данного интерфейса и создан класс-фасад TThrustFacade,
имеющий поля CurValue для хранения текущего вектора
параметров, текущего времени и композитное поле-агрегат Thrusters типа
IADCoefficient, представляющее собой список экземпляров реальных
классов, реализующих расчет параметров тяги ДУ. В составе ПМО
имеется целый ряд таких классов:
• TFileThruster — предназначен для вычисления параметров тяги
ДУ по табличным данным, содержащимся в текстовом файле
с именем FileName;
• TChebyFileThruster — предназначен для вычисления параметров
тяги ДУ по коэффициентам полинома Чебышева, содержащимся
в типизованном файле с именем FileName;
• TAnalyticalThruster — предназначен для вычисления параметров
тяги ДУ по аналитическим соотношениям;
• TNullThruster — реализует нулевое значение тяги ДУ.
На рис.7.14 приведена диаграмма классов, иллюстрирующая
цепочку классов, формализующих расчет массово-габаритных и
инерционных параметров. В основе цепочки находится интерфейс
IMGIParameter, определяющий два метода, присущих любому классу,
реализующему расчет этих параметров:
• процедура GetDataFromFile(IniFileName: String) —
инициализирует поля класса на основе входного файла исходных данных
с именем IniFileName;
• функция GetValue(ti): TMassGeomlnertia — рассчитывает
массово-габаритные и инерционные параметры в виде структуры
данных TMassGeomlnertia для текущего момента времени U.
На основе данного интерфейса создан класс-фасад TMGIFacade,
имеющий поля CurValue для хранения массово-габаритных и
инерционных параметров, текущего времени и поле-агрегат MGIParameter типа
IMGIParameter, представляющее собой экземпляр реального класса,
реализующего расчет массово-габаритных и инерционных параметров.
В составе ПМО имеется целый ряд таких классов:
φ
■D
та
υ
га
u_
ел
з
ь.
£
1=
j_
о
"о
ω
>
CD
(-> ^-v
'5,5
-С ΐ^
Q_ CD
I- °
7. c=
<u л·!
- Ε
ГО .Е
ID ID
О О
+ +
1-
+
о и
CD 3
1ί
№
If
5 ο>
кь
■-Й
.с
ω
^
"cd
^
CD
£
ε
о
it
■2
~Ъ
Q
ΐ)
CD CD
+
+
Ш
TChebyFlleLoad
ι—ι
_
ter
»
ρ
t
"ΞΠ
IP!
С
"55
ω
Ε
CD
|+FileN,
эре
υ
я
LJ.
СЭ
ε
Η
га
rti
ω
с
Ε
о
ω
О _
w =
га 5s-
Ξ га
Ь о
+CurValue
+CurTime :
ω
β>
+·*
ω
Ε
я я
|£
ΐ СЭ
ω
ω
Ε
га
га
£L
О
№
IIKt
ϊ|
of u.
5 -S
"со to
^ Q
ω ω
CD CD
+ +
Ш
TChebyFileLoad
b.
Φ
Φ
Ε
я
L·.
Я
α.
MGI
_0>
ii.
Η
~
idl
С
■d
10
ame
ile
Li.
• TFileMGIParameter — предназначен для вычисления массово-
габаритных и инерционных параметров по табличным данным,
содержащимся в текстовом файле с именем FileName;
• TChebyFileMGIParameter — предназначен для вычисления
массово-габаритных и инерционных параметров по коэффициентам
полинома Чебышева, содержащимся в типизованном файле с
именем FileName;
• TAnalyticalMGIParameter — предназначен для вычисления
массово-габаритных и инерционных параметров по аналитическим
соотношениям;
• TNullThruster — реализует нулевые значения массово-габаритных
и инерционных параметров.
Тогда класс TVehicle (см. рис. 7.11) уточняет специфику ЛА как
объекта движения за счет:
• добавления ссылки на объект типа TNatureComposite (для
расчета правых частей систем дифференциальных или
конечно-разностных уравнений движения ЛА);
• добавления свойства Structure типа TElementComposite,
реализующего процесс «построения» конструкции ЛА из отдельных
элементов и расчет массово-габаритных, инерционных и
аэродинамических параметров, а также параметров вектора тяги;
• реализации интерфейса IFuncs — т.е. реализация функции
правых частей уравнений движения ЛА;
• создания экземпляра MF объекта TMoverFacade,
формализующего метод расчета эволюции ЛА и передачи ему ссылки на себя
как объекта, реализующего интерфейс IFuncs.
Остановимся теперь подробнее на цепочке классов, реализующих
методы расчета эволюции объекта с помощью различных методов
(аналитических, численных и т.п.). В большинстве случаев движение ЛА
описывается с помощью системы обыкновенных дифференциальных
уравнений движения центра масс в той или иной системе координат,
а также углового движения, т.е. по своей сути моделирование
движения ЛА является задачей интегрирования системы обыкновенных
дифференциальных уравнений (ОДУ) первого порядка, т.е. в данном
случае под методом расчета эволюции понимается метод численного
интегрирования, имеющий ссылку на объект, реализующий функцию
расчета правых частей ОДУ (IFuncs). В библиотеке методов численного
интегрирования в рамках обсуждаемого ПМО разработаны следующие
методы [7.19]:
• метод Эйлера;
• «классический» метод (правило 2/6) Рунге-Кутты;
• вложенный метод Дормана-Принса 5(4);
• метод прогноза-коррекции Адамса-Мултона-Башфорта.
Все методы, кроме вложенного, используют постоянный шаг
интегрирования. Метод прогноза-коррекции является итерационным,
причем завершение итераций определяется либо по достижению заданной
точности невязки двух последних решений, либо по достижению
заданного количества итераций.
Основным классом-предком для всей цепочки будет являться
абстрактный класс TAbstractlntegrator (см. рис. 7.15), объединяющий
в себе самые общие черты данного дерева классов, однако содержащий
лишь объявления полей и шаблоны методов. Напомним также, что этот
класс является наследником класса TAbstractMover, формализующего
интерфейс некоторого абстрактного вычислителя эволюции
динамического объекта. Ниже в табл. 7.12 и 7.13 приведены названия и описания
полей и методов данного класса.
TAbstractlntegrator
То : floal(idl)
+Tk : float(idl)
dtRep : floal(idl)
+Tol: floal(idl)
Η : float(idl)
+HMax : floal(idl)
+W : TVeclor
+lniFileName; Siring
RepFileName: Siring
hOfPauseRun : Boolean
+ofReselCalc: Boolean
+ofEnableCalc: Boolean
KDutPul(in ti: floal(idl), in aY : TVeclor, in adY : TVector)
hSetFuncs^n aFuncs : IFuncs]
~zy
TSimpleAdams
#OldY: TVeclor
#CurF : TVeclor
#OldF : TVeclor
#NewF : TVeclor
+ofCorreclion : Boolean
Maxlleralion : Inleger
#tLasl: floal(idl)
#Prediclor()
#Correclor()
#Slep()
+Exlracl(in li: floal(idl)): TVeclor
+MoveTo(in lEnd : lloal(idl)): TVeclor
1
TOneStep
RejCount: long(idl)
+AccCounl: long(idl)
+FcnCounl: long(idl)
#lnilialSlep()
#ReselCalculalion()
J
TRungeKutta
TDormanPrince
TAdamsMoultonBashford
Рис. 7.15
Таблица 7.12
Свойства
класса
ТО
Тк
dtRep
Tol
Η
НМах
W
IniFileName
RepFileName
OfPauseRun
OfResetCalc
OfEnableCalc
Тип
вещественный
вещественный
вещественный
вещественный
вещественный
вещественный
массив
вещественных
чисел
строка
строка
логический
логический
логический
Описание
начало интервала прогнозирования
конец интервала прогнозирования
шаг вывода результатов интегрирования
локальная точность интегрирования
шаг интегрирования
максимальный шаг интегрирования
вектор весовых коэффициентов
имя ini-файла с настройками метода
имя файла результатов
флаг остановки вычислений
флаг сброса вычислений
флаг разрешения вычислений
Таблица 7.13
Метод
procedure OutPut(const
Ti: Float; const aY: array
of Float; var dY: array of
Float); virtual;
procedure
SetFuncs(aFuncs:
IFuncs)
Тип
виртуальный
виртуальный
Действие
выводит результаты
интегрирования на момент tj
присваивает агрегату Funcs
ссылку на существующий объект
aFuncs, реализующий интерфейс
расчета правых частей IFuncs
Таким образом в приведенном абстрактном классе представлены
основные «обобщенные» черты и методы всей иерархии классов,
реализующих численные методы интегрирования систем ОДУ. Как видно
из приведенных таблиц, в данном классе отсутствует непосредственно
численный алгоритм (метод MoveTo — абстрактный). Дальнейшим
развитием базового класса является класс-потомок TOneStep,
реализующий основные свойства группы одношаговых методов. Ниже,
в табл. 7.14 и 7.15 приведены названия и описания новых или
перекрытых по отношению к родительскому полей и методов данного класса.
Кроме того, непосредственно от класса TAbstractlntegrator
образован класс TSimpleAdams, реализующий простейший метод прогноза-
коррекции Адамса-Мултона-Башфорта первого порядка. В данном
методе прогноз осуществляется методом Эйлера (явный метод Адамса),
а коррекция — методом трапеций (неявный метод Адамса) [7.16].
Одним из ключевых свойств данного класса является логическое поле
Таблица 7.14
Свойства
класса
RejCount
AccCount
FcnCount
Тип
целый
целый
целый
Описание
счетчик отброшенных шагов
счетчик принятых шагов
счетчик сделанных вызовов функции правых частей
Таблица 7.15
Метод
procedure InitialStep;
virtual
procedure
ResetCalculation; virtual
Тип
виртуальный
виртуальный
Действие
устанавливает значение
начального шага интегрирования
процедура «сброса» вычислений
ofCorrection, позволяющее пользователю определять, будет ли
использоваться коррекция, или вычисления будут происходить только по
методу Эйлера. Очень часто, особенно в системах ОДУ, в правые
части которых входят результаты измерений, метод прогноза-коррекции
является единственным методом, не дающим эффекта «запаздывания»
численного решения, вследствие использования неявной коррекции.
Ниже, в табл.7.16 и 7.17 приведены названия и описания новых или
перекрытых по отношению к родительскому полей и методов данного
класса.
От класса TOneStep образованы два класса-потомка,
реализующих современные одношаговые методы интегрирования семейства
Рунге-Кутты. Наиболее простой из них — классический метод
Рунге-Кутты 4 порядка с постоянным шагом интегрирования (правило
2/6) представлен классом TRungeKutta26. Класс TDormanPrince5
реализует современный вложенный метод численного интегрирования,
позволяющий получать на одном и том же разбиении шага
интегрирования два численных решения 5 и 4 порядка, используя их
для вычисления локальной погрешности и определения длины нового
шага интегрирования [7.19]. Кроме того, для данного метода получены
так называемые непрерывные формулы, позволяющие использовать
полученные решения для интерполяции решения в пределах одного
шага интегрирования с 4 порядком точности, что существенно
лучше традиционной сплайн-интерполяции, используемой для других
методов. Подробная программная реализация этих методов приведена,
например, в [7.19].
Таким образом формируется библиотека численных методов
интегрирования, реализующая наиболее распространенные алгоритмы
данного класса и позволяющая создавать классы-наследники для
конкретных задач исследования динамики процессов и систем. Формализация
конкретной задачи состоит в передаче экземпляру конкретного инте-
Таблица 7.16
Свойства
класса
OldY
CurF
OldF
NewF
ofCorrection
Maxlteration
tLast
Тип
массив
вещественных чисел
массив
вещественных чисел
массив
вещественных чисел
массив
вещественных чисел
логический
целый
вещественный
Описание
массив, содержащий фазовый вектор на
предыдущей итерации
массив, содержащий значения функции
правых частей на текущей итерации
массив, содержащий значения функции
правых частей на предыдущей
итерации
массив, содержащий значения функции
правых частей на новой итерации
флаг использования коррекций
максимальное число итераций
время выдачи результатов
интегрирования
Таблица 7.17
Метод
procedure Predictor;
virtual
procedure Corrector;
virtual
procedure Step; override;
function MoveTo(tEnd
Float): TVector; override
function Extract(const ti:
Float):TVector; virtual
Тип
виртуальный
виртуальный
виртуальный
виртуальный
виртуальный
Действие
выполняет прогноз численного
решения на шаге
выполняет коррекцию численного
решения на шаге
организует вычисление в пределах
одного шага интегрирования
выполняет численное
интегрирование до моментана
интегрирования tEnd; результат возвращается
функцией
возвращает фазовый вектор для
значения переменной
интегрирования, равного tj; при этом t,-
принадлежит текущему шагу
интегрирования (интерполяция
результата интегрирования)
гратора ссылки на объект, реализующий интерфейс IFuncs,
детализирующий процесс вычисления правых частей системы ОДУ (модели
эволюции или движения системы).
Кроме методов численного интегрирования систем ОДУ в ПМО
реализован класс TKeplerSolver (см. рис.7.11), формализующий
процедуру расчета эволюции элементов орбиты КА на основе кеплеровских
соотношений [7.17,7.21] и используемый при прогнозе эфемерид
навигационных КА СНС GPS.
Перейдем теперь к обсуждению вопросов проектирования классов,
реализующих понятие навигационной системы, являющейся частью
замкнутого контура управления ЛА (см. рис. 7.7).
Как уже отмечалось выше, вся возможная совокупность
навигационных систем (включая бортовой измерительный комплекс) в составе
ПМО реализована как наследник от базового абстрактного класса
TAbstractNavigationSystem (см. рис. 7.9). Большинство навигационных
систем реализуют первичную и вторичную обработку информации,
полученной непосредственно от различных измерителей
навигационных параметров. Иными словами, любой бортовой измеритель можно
рассматривать как простейшую навигационную систему, а сложные
навигационные системы имеют в своем составе один или несколько
измерителей. В этой связи рассмотрим вначале программную реализацию
бортовых измерителей.
Бортовой измерительный комплекс маневренного ЛА включает в
себя, как правило, блок чувствительных элементов ориентации в
пространстве (инерциальные указатели направлений — гиростабилизиро-
ванная платформа на гироскопах, блок датчиков угловых скоростей),
блок инерциальных измерителей (акселерометры), высотомеры,
датчики угла атаки и т. п. Состав конкретной аппаратуры определяется
целевой функцией ЛА и алгоритмом интегрированной системы навигации
и управления.
Так или иначе, в рамках излагаемой объектно-ориентированной
технологии моделирования каждый из совокупности измерителей БИК
будем рассматривать как функциональный элемент, на вход которого
поступает расширенный вектор состояния динамической системы, а на
выходе формируется фактическое значение вектора измерений, прямым
или косвенным образом связанного с компонентами вектора
состояния. Одной из самых важных отличительных черт этого элемента
является учет ошибок измерений различной природы. Алгоритм учета
ошибок может быть сколь угодно сложным и определен в
соответствии с моделью функционирования конкретного измерителя, однако
в предлагаемой объектной структуре выделим группу наиболее часто
используемых моделей стохастических случайных факторов, которые
представляются в виде случайных величин (систематические ошибки)
и случайных процессов (случайные аддитивные ошибки), предусмотрев
соответствующие поля и алгоритмы их инициализации.
Опишем сначала программную реализацию понятия «случайных
факторов измерений» (см. рис. 7.16).
Как видно из приведенной схемы, в основе цепочки находится
интерфейс IError, определяющий абстрактный метод расчета случайного
фактора — функцию GetValue(ti, aVector: TVector): TVector —
рассчитывает вектор ошибок для текущего значения времени и некоторого
вектора состояния.
На основе данного интерфейса создан класс-фасад TErrorFacade,
имеющий поля ErrValue для хранения текущего вектора ошибок,
s -
.erfa
Ε гто
с ~
ι.
О
"и
φ
й
т>
о
"и
φ
й
φ
15
и
-Ε
=.
!
<=
.с
^=.
φ
а
Я
>
Ъ
ω
+
о
t
ΐ
+
4
Φ
"D
S
га
LL.
о
ш
о
idl)
:TVec
~ φ
Ρ э
J га
im :
ггог
α ш
+ +
-^
л
idl
σι
с
и
Φ
Ε
га
Ζ
ile
ϋ-
Ini
£
omFile
LL.
га
га
α
φ
о
_+_
о
»
1
2
j=
S
а
и
Φ
ί
len
5
_L
л
тз
oal
=
φ
iskr
α
+
,_
о
и
φ
ί
2
и
φ
Ε:
φ
га
со
га
_с
l(idl)
Поа1
Ε
Υ
3
га
I
о
+
и-
о ~.
и о
5 з
Μ
«>
В и
га и
•Е 5
φ з
I-
,
о
"и
5>
й
τ>
о
"и
-Р
£
ъ
Ό
φ
>
СО
.с
=>
тэ
ii
Π)
о
fe
с
ϊ=.
и
и
с
3
ц.
±_
,_
гто
ш
(Л
э
η
о
Η
lor
:lor
ode
TVec
TVec
rrorM
-■ Ш
£ ™ K
ra > --
rrMe
rrCo
ode
ш ш S
+ + +
,_
о
и
φ
ί
2
и
φ
ί
lal
со
га
с
jo
Поа1
inli:
э_
>
φ
О
_+_
II;
^11
h- h- ? h- ■
ϊ-Qr £ Щ
II
гто
ormE
u_
с
Э
Η
ΰ
φ
ί
Low
t
ш
±-
φ
■α
ο
°ξ
υ ο
Η
rrUp:
ode :
ш Ξ
+ +
,_
2
и
φ
ί
ο
ΰ
φ
ί
ale
inaSl
.
(idl
iVali
φ
О
+
Dim — размерности данного вектора и поле-агрегат Error типа
IError, представляющее собой экземпляр реального класса,
реализующего расчет ошибки. Кроме того, в этом классе определен метод
GetDataFromFile, осуществляющий создание и инициализацию
агрегата Error на основе файла исходных данных с именем IniFileName.
В составе ПМО имеется целый набор классов, непосредственно
реализующих расчет ошибки и предназначенных для использования в
агрегате Error:
• TUniFormError — предназначен для вычисления значения вектора
ошибки, распределенного по равномерному закону с
задаваемыми значениями нижнего (ErrLow) и верхнего (ErrUp) пределов
распределения в соответствии с определенным режимом
моделирования ошибки Mode;
• TGaussError — предназначен для вычисления значения вектора
ошибки, распределенного по нормальному закону с
задаваемыми значениями вектора математического ожидания (ЕггМеап) и
ковариационной матрицы (ErrCovar) в соответствии с
определенным режимом моделирования ошибки Mode;
• TWhiteNoise — предназначен для вычисления значения
векторного белого шума с задаваемыми значениями матрицы интенсив-
ностей (Intensity) и шага дискретизации (Diskret).
Класс TShapingFilter, являющийся потомком TWhiteNoise,
реализует случайный процесс, заданный формирующим фильтром
первого порядка, на вход которого подается белый шум. По отношению
к классу-предку в TShapingFilter существует внутренний объект
типа TAbstractfntegrator, интегрирующий дифференциальное уравнение
формирующего фильтра.
Вызов метода МоиеТо данного объекта производится в методе
GetValue до текущего момента ti. Ниже, в табл. 7.18 и 7.19 приведены
названия и описания новых или перекрытых по отношению к
родительскому полей и методов данного класса.
Рассмотрим цепочку классов, реализующих библиотеку моделей
измерительных устройств БИК [7.20] (рис. 7.17). С точки зрения
программной реализации все измерительные устройства имеют общего
абстрактного предка — класс TAbstractMeasChannel, объединяющего
самые общие родовые черты и методы все рассматриваемой группы.
Одним из таких важнейших свойств являются композитные
поля-агрегаты SysErrors и AddErrors. В табл. 7.20 даны названия и описания
полей данного класса.
Как видно из приведенных таблиц, основным свойством данного
класса является поле EVector, содержащее значения вектора измерений
размерности Dim на момент времени CurTime. В классе определены
внутренние объекты SysErrors и AddErrors типа TErrorFaca.de для
последующей инициализации в классах-потомках. Напомним, что
основной метод класса — Estimation, вычисляющий вектор измерений
на момент времени ti, в соответствии с вектором состояния SVector,
Таблица 7.18
Свойства
класса ,
CurTime
tCor
Integrator
Тип
вещественный
вещественный
TAbstractlntegrator
Описание
текущее время интегрирования
процесса
время корреляции случайного
процесса
объект типа TAbstractlntegrator,
осуществляющий процесс интегрирования
и формирования значений случайного
процесса
Таблица 7.19
Метод
function GetValue(ti,
a Vector: TVector): TVector;
override
function Funcs (const ti:
Float; aVector: TVector):
TVector; virtual
Тип
виртуальный
виртуальный
Действие
вызывает метод MoveTo(ti) для
интегратора Integrator
формирует вектор-функцию
правых частей для системы
ОДУ формирующего фильтра
первого порядка
Таблица 7.20
Свойства
класса
SysErrors
AddErrors
IsSysErr
IsAddErr
Тип
СПИСОК
TErrorFacade
список
TErrorFacade
логический
логический
Описание
композитная структура из объектов типа
TErrorFacade
композитная структура из объектов типа
TErrorFacade
флаг учета систематической ошибки
флаг учета случайной аддитивной ошибки
наследуется от предка (TAbstractNavigationSystem) и в данном классе
не перекрывается, т.е. остается абстрактным с целью последующего
перекрытия в классах-потомках.
В составе ПМО реализован целый ряд конкретных измерителей,
таких как:
• класс TRGMChannels — предназначен для моделирования
показаний блока ДУСов;
• класс TAccMChannels — предназначен для моделирования
показаний блока акселерометров;
• класс TRadioAltimetrMChannel - предназначен для
моделирования измерений радиовысотомера;
• класс TBaroAltimetrMChannel — предназначен для
моделирования измерений баровысотомера;
ω
о га
.§1
Ε
0)
>,
W
с
alii
avig
ζ
и
<
;-,
л5-
О Ό С
Name : siring (id
Dim : long (idl)
CurTlme: noal(i
WFrequeney : a
+ + + +
о
lor: TVecl
1
Ш
*
ου О
о -о
£1
2 "
и ■ ■
ω ω
Si
£.l
l(idl)
InlFI
Si
= О
alion(in li:
alaFromFil
Ε g
ш О
4- 4·
:1W-
4_±
Η
«
ft"
lie
ompos
(
:
h-
л
и
ω
к
ш
φ
slraclN
long(idl
л ..
.< χ
l·- о
.. и
U-Ξ
«У с
ш ω
.Ε ο
ΐΤ Ε
τι φ
nel
han
υ
Ε
Ε
<
"D
(Г
Υ-
Τ3
oal(i
f.
I
(0
о
(С
+
о
u
ί
о
υ
φ
>
СО
с
Ή
га
о
с
"с"
о
га
Ε
ш
+
о
с
с
га
£
υ
Ε
о
Ε
<
£
га
Ш
Υ-
л
|5
га
о
Ш
I
га
φ
(С
+
л
ь
"б
φ
е
о
φ
>
СО
.Е
га
о
с
on(i
mali
=
и
Ш
+
с
с
га
£
υ
Ε
W
_ι
ас
γ-
_g
υ
φ
ί
"D
га
*
S
tc
2
υ
φ
?
b
и
φ
>
СО
с
га
о
n(in
о
га
Ε
"й
ш
+
и
с
с
га
£
υ
Ε
υ
<
h-
Loc
h-
8
<
S
tc
+
о
u
φ
£
2
и
о
>
CO
s
Έ
w
Ρ
mallo
1
ш
*
И
о
с
с
га
£
υ
Ε
о
§
"й
с
Υ-
ΤΙ
га
,2
φ
σι
с
<
га
φ
(Г
л
b
υ
φ
ί
о
ϋ
φ
>
СО
с
"В
га
о
с
on(i
га
Ε
ш
+
о
с
с
га
£
υ
Ε
О
е
Loc
к
IRG
га
φ
tE
+
л
2
υ
φ
£
2
υ
φ
>
CO
_c
(idl
га
о
F
оп(
1
ш
+
о
с
с
га
MCh
0.
V)
О
Y-
8
8Fi
_1 ■
h- и
.. Φ
ΒΪ
<<
SS
(С (С
+ +
л
о
υ
φ
£
2
υ
φ
>
СО
_с
(idl).
3
~
с
с
га
Ε
ш
+
• класс TGSPMChannel — предназначен для моделирования
измерений трехосной гиростабилизированной платформы;
• класс TInclinometrMChannels — предназначен для моделирования
измерений датчика угла (инклинометра);
• класс TRLSMChannel — предназначен для моделирования
измерений бортовой РЛС.
Рассмотрим подробнее реализацию упомянутых измерителей. Так,
в классе TRGMChannels, формализующем модель блока датчиков
угловой скорости, предусмотрено поле RealRG типа TLoc, содержащее
истинные значения углового скорости, поступающие на вход
измерителя как параметр в методе Estimation. Размерность вектора измерений
(поле Meas) равна 3. Общая модель датчиков угловой скорости
содержит целый ряд систематических ошибок (нелинейности, коэффициента
усиления, углового дрейфа и т. п. — см. гл.З), для которых в процессе
создания экземпляра данного объекта создаются соответствующие
элементы списка SysErrors и происходит их инициализация. Аналогичным
образом происходит инициализация композитного поля AddErrors.
Перекрытый в данном классе метод Estimation обеспечивает вычисление
измеренных значений угловой скорости на основе приведенной в гл. 3
модели датчика, состава учитываемых возмущений и режима
моделирования ошибок.
Похожим образом спроектирован класс TAccMChannel,
реализующий описанную в гл. 3 модель измерений блока акселерометров.
Также в ПМО с использованием аналогичного принципа
реализованы классы, реализующие модели измерения радиовысотомера
(TRadioAltimetrMChannel), баровысотомера (TBaroAltimetrMChannel),
гиростабилизированной платформы (TGSPMChannel), инклинометра
(TInclinometrMChannels), РЛС (TRLSMChannel).
Здесь необходимо отметить, что классы, реализующие модели
измерителей, являются наследниками TAbstractNavigationSystem и в этой
связи имеют поле-ссылку на экземпляр класса TNatureComposite,
элементы которого могут быть использованы при формировании
модели измерений. Так, класс TBaroAltimetrMChannel использует
элемент TNatureComposite, отвечающий за расчет параметров
атмосферы (TAbstractAtmosphereModel), а классы TRadioAltimetrMChannel и
TRLSMChannel используют информацию о рельефе цифровой карты
местности (TDigitalMap).
С точки зрения процесса моделирования к группе измерителей
также относится блок многоканального приемника СНС ГЛОНАСС/GPS,
непосредственно осуществляющий измерения псевдодальности,
псевдоскорости и фазы навигационного сигнала (блок предварительной
обработки). Программная реализация этого измерителя будет изложена
ниже.
Особое место среди навигационных систем, входящих в
замкнутый контур управления ЛА, занимают инерциальные навигационные
системы вследствие свой полной автономности, помехозащищенности,
скрытности и возможности формирования непрерывных, относительно
точных оценок положения, скорости и параметров угловой ориентации
ЛА. В классе данных систем выделяют ИНС на гиростабилизиро-
ванной платформе (геометрического, полуаналитического и
аналитического типов [7.20]) и бесплатформенные ИНС (БИНС). Программная
реализация описанных видов ИНС приведена на рис.7.18.
TNat ureCom poslte
+Add(in Effect: TAbstractN a lure Effect)
+Re move (in index : long (id 1))
1
+Nalur<
1
♦Aecelerc
1
-♦
1
Gyos
♦
О
TAbs tract Na ν I gall о nSy ste m
+Name : string(idl)
+Dlm : tong(ldl)
+CurTime : floal(idl)
+WFrequency: any(idl)
♦EVeclor: TVector
+Eslimalion(m ti: Γ oat (id 1). In SVeclor: TVeclor)
+GetDalaFromFile(in Ini File Name : slring(idl))
ΐ
TAbslrncllNS
•IniTime :float(idl)
♦ IniPosError: TErrorFacsde
♦ IniVeiError: TErrorFacade
+tni Oriental ion Error: TErrorFacsde
♦ EAngles :Tloc
♦NavTensor: Tensor
+SetimSiate(in li: floal(idl), in EVeclor: TVeclor)
+Correclion(in ti: float(idl). in d EVeclor: TVeclor)
L
TVehlcieBINS
+ini Stale TVeaor
♦Weight: TVector
+Q : Quaternion
+SelimSlale(in II: floal(idl), in EVeclor - TVeclor)
+Correction(in li: float (Id I), m d Ε Vector: TVector)
+Eslimalion(in ΤΊ. floal(idl), in SVeclor: TVeclor): TVeclor
0Funcs(in li: floal(idl), in a Vector : TVeclor): TVeclor
TAccMChannais
+RealAcc: TLoc
+Esumalion(in Τι: Siring, in SVeclor: TVeclor)
1
\
ι
♦MF
φ iTMovarFacadal
11
TVehlciaGSPlNS
+Waighl: TVeclor
+lnlSlale: TVeclor
♦SeliniSlaiefln li: floal(idl). in EVeclor: TVeclor)
+Correclion(in li: foat(idl). in dEVeclor: TVeclor)
+Eslimalion(ln tl: floal(idl). in SVeclor: TVeclor)
0Func5(in tl: foal(idt), In aVeclor: TVeclor): TVeclor
^
■interface·
iFuncs
*Funcs(in ii: Паа1(Ш1),
η aVec/or; TVeciorJ: TVedor
TRGMChanneis
+ReaiRG : TLoc
♦Estimalion(in ΤΊ: Γ oat (id I), in SVeclor -
Рис. 7.18
TVeclor)
1
1
TGSPMChennal
+Rea!Acc: TLoc
+Rea!Angtes: TLoc
+EstimaUon(in ti: foal(idl), in SVeclor: TVeclor)
Как видно из приведенного рисунка, корневым классом этой
цепочки, реализующей функциональность ИНС, является абстрактный
класс TAbstractlNS, объединяющий в себе самые общие черты данного
дерева классов, однако содержащий лишь объявления полей и шаблоны
методов. Напомним также, что в свою очередь этот класс является
наследником от класса TAbstractNavigationSystem, описанного ранее и
содержащего ссылку на объект типа TNatureComposite,
объединяющего, в свою очередь, объекты, формализующие модели тех или иных
возмущающих факторов. Поскольку в навигационные уравнения любой
ИНС [7.20] входит ускорение силы тяжести, то в данной цепочке
классов будет использоваться экземпляр класса TAbstractGraviModel
(см. рис. 7.10).
Таким образом, в классе TAbstractlNS добавлены следующие поля
(см. табл. 7.21) и объявления методов (см. табл. 7.22).
Таблица 7.21
Свойства
класса
IniTime
IniPosError
IniVelError
IniOrientationError
EAgles
NavTensor
Тип
вещественный
TErrorFacade
TErrorFacade
TErrorFacade
TLoc
Tensor
Описание
время выставки ИНС
ошибки начального
позиционирования
ошибки начального
позиционирования по скорости
ошибки начальной выставки по
ориентации
текущие углы Эйлера
текущая матрица перехода от
навигационной к связанной СК
Таблица 7.22
Метод
SetlniState
(const ti: Float;
EVector: TVector)
Correction
(const ti: Float;
dEVector: TVector)
Тип
виртуальный,
абстрактный
виртуальный,
абстрактный
Действие
реализует выставку ИНС на момент
времени ti в соответствии с
вектором начальных условий EVector
осуществляет коррекцию ИНС на
момент времени ti в соответствии
с вектором dEVector
Отметим также, что класс TAbstractlNS имеет поле, указывающее
на объект типа TMoverFacade, предназначенный для решения
навигационных уравнений ИНС. В качестве данного объекта чаще всего
выступают экземпляры классов, реализующих тот или иной метод
численного интегрирования.
От указанного выше класса в ПМО реализовано два
класса-наследника - TVehicleBINS и TVehicleGSPINS.
Первый из упомянутых классов TVehicleBINS формализует
алгоритм работы бесплатформенной ИНС и отличается от базового
абстрактного класса прежде всего конкретизацией методов SetlniState,
Correction и собственно Estimation, в котором производится
формирование оценки положения и компонент вектора скорости ЛА в
навигационной СК, а также углов Эйлера (или элементов матрицы
направляющих косинусов между навигационной и связанной СК) на
основе измерений, генерируемых блоком акселерометров (поле типа
TAccMChannels) и блоком ДУСов (поле типа TRGMChannels).
Навигационные уравнения БИНС в выбранной навигационной СК
реализуются в методе Funcs, наследуемом от интерфейса IFuncs и
передаваемом объекту типа TMoverFacade для расчета эволюции оценок.
Сформированные оценки помещаются в векторное свойство класса
EVector. Для обеспечения интегрирования навигационных уравнений
в состав класса дополнительно введены поля IniState (для хранения
начального состояния системы), Weight (для хранения весовых
коэффициентов компонент вектора состояния при интегрировании
навигационных уравнений) и кватернион Q (для определения ориентации ЛА
в терминах параметров Родрига-Гамильтона).
Второй класс — TVehicleGSPINS — формализует алгоритм работы
платформенной ИНС в том или ином варианте реализации. Данный
класс дополняет базовый абстрактный предок полями IniState (для
хранения начального состояния системы) и Weight (для хранения
весовых коэффициентов компонентов вектора состояния при
интегрировании навигационных уравнений), а также конкретизирует методы
SetlniState, Correction и собственно Estimation, в котором
производится формирование оценки положения и компонент вектора
скорости ЛА в навигационной СК, а также углов Эйлера (или элементов
матрицы направляющих косинусов между навигационной и связанной
СК) на основе измерений, генерируемых гироплатформой (поле типа
TGSPMChannels).
Перейдем теперь к описанию классов, формализующих алгоритм
работы СРНС-приемника СНС ГЛОНАСС и GPS (см. рис. 7.19).
TAbslrnclMaaeChannel
+lsSysErr r booleen(idl)
isAddErr: boolean (idl)
Ξ
TAbstractGNSSReceiver
GNSSMeasureMode: TGNSSMeasureMode
GNSSConslBllationModo: TGNSSConsleilationMode
GNSSFrequencyMode: TGNSSFrequencyModa
GNSSMoasureKmd : TGNSSMeasureKind
Pseud о Ranges : TVactor
Pseud о Velocities : TVector
PosGF - TLoc
VeiGF : TLoc
EAngles: TLoc
+TruePosGF - TLoc
+TmeVeiGF:TLoc
TrueEAngies: TLoc
HVelAddErrors
Ύ.
TSlmpleGNSSRecelver
fEslimaliOn(in ti: floai(idl). in SVector: TVector)
flPosAdd Errors
TErrorFacade
■Dim : long(idl)
'ErrorValue : TVector
■GelDataFromFiie(in inlFneName: slring(idl))
TTrBCkingChannaiCompoaite
■Add(ln Constellation : TAbslrBClTrnckingChannei)
-Removo(in Index : long (id ι))
GelDelaFromFila(in IniFlleName LS|ring(idl))
TCompieiGNSSReceiver
-NChannel: long(idl)
■SysRanfleErrors: TErrorFacade
-SysVelasiryErrors: TErrorFacade
■CowarMaln'x: TVector
► Esiimalion(in ti: Hoal(idl), in SVector: TVector)
hTracklngjin tl: foal(ldi), in SVaclor: TVector)
►Correctioniin ti: Π oat (idl), in a Vector: TVector)
ffConsiellalions
TAntennaaFacada
TGNSSConalaiialloriCompoaita
■Add(in Consioilalion : TAbsirDdConstallation)
■Re move (in index -long(idl))
Ge|DaiaFromFila(in iniFileName: slring(idl))
Рис. 7.19
Таблица 7.23
Свойства
класса
GNSSMeasureMode
GNSSMeasureKind
GNSSConstellationMode
GNSSFrequencyMode
PseudoRanges
PseudoVelocities
PosGF
VelGF
EAngles
TruePosGF
TrueVelGF
TrueAngles
Тип
TGNSSMeasureMode
TGNSSMeasureKind
TGNSSConstellationMode
TGNSSFrequencyMode
массив вещественных
чисел
массив вещественных
чисел
TLoc
TLoc
TLoc
TLoc
TLoc
TLoc
Описание
режим измерений
СРНС-приемника
(кодовый СА/кодовый
Р/фазовый)
тип измерений СРНС-
приемника (псевдоаль-
ность/псевдодальность
+ псевдоскорость)
режим использования
СНС (GPS/ГЛОНАСС/
совместно)
режим используемой
частоты работы
(LI/L1&L2)
массив измеренных
псевдодальностей
массив измеренных
псевдоскоростей
текущая оценка
местоположения в
географической СК
текущая оценка
компонент вектора скорости
в географической СК
текущая оценка углов
Эйлера
истинные значения
местоположения в
географической СК
истинные значения
компонент вектора
скорости в географической
СК
истинные значения
углов Эйлера
Базовым абстрактным классом этой цепочки является
TAbstractGNSSReceiver, порожденный от класса TAbstractMeasChannel.
Данный класс только расширяет состав полей базового класса
(см. табл. 7.23), при этом не перекрывая и не используя новых методов.
От вышерассмотренного класса в ПМО создан класс-наследник
TSimpleGNSSReceiver, формализующий простейшую модель
приемника, основанную на зашумлении исходных («истинных» компонент
Таблица 7.24
Свойства
класса
NChannel
SysRangeErrors
SysVelocityErrors
CovarMatrix
Antennae
Constellation
TrackChannels
Тип
целый
TErrorFacade
TErrorFacade
TVector
TAntennaeFacade
TGNSSConstellationComposite
TTrackChannelComposite
Описание
количество каналов
приемника
систематические ошибки
в измерении
псевдодальности, не зависящие от
НКА
систематические ошибки
в измерении
псевдоскорости, не зависящие от
НКА
ковариационная матрица
компонент оцениваемого
вектора
экземпляр класса
TAntennaeFacade,
формализующего работу
антенны приемника
композитное поле,
содержащее экземпляры
классов, формализующих
понятие созвездий СНС
композитное поле,
содержащее экземпляры
классов, формализующих
понятие каналов
приемника
вектора состояния КА) систематическими (поля PosSysErrors и
VelSysErrors) и случайными (поля PosAddErrors и VelAddErrors)
ошибками. Процесс «зашумления» истинных значений реализован
в перекрытом методе Estimation. Отметим, что данная модель
приемника не подразумевает оценивания параметров угловой ориентации ЛА,
но статистические характеристики ошибок зависят от режимов работы
приемника (частота, кодовые/фазовые измерения, используемые
созвездия).
Помимо простейшей модели приемника в ПМО реализован более
сложный вариант модели, учитывающий в самых общих чертах процесс
поиска и сопровождения сигнала от навигационных КА
высокочастотной частью приемника, процесс первичной обработки и
формирования оценок местоположения, скорости и ориентации ЛА в условиях
воздействия помех [7.21]. Данная модель формализуется посредством
класса TComplexGNSSReceiver, являющегося наследником от
базового абстрактного класса TAbstractGNSSReceiver. Состав новых полей
Таблица 7.25
Метод
Estimation (const ti:
Float; SVector: TVector)
Tracking (const ti: Float;
SVector: TVector)
Correction (const ti:
Float; aVector: TVector)
Тип
перекрытый
виртуальный
виртуальный
Действие
реализует процесс вторичной
обработки в СРНС-приемнике —
т.е. формирование оценок
местоположения, скорости и параметров
ориентации ЛА
реализует процесс поиска и
слежения за сигналами НКА, а
также первичную обработку сигналов
в СРНС-приемнике
осуществляет коррекцию
параметров контуров слежения приемника
на момент времени ti в
соответствии с вектором aEVector
и перекрытых или добавленных методов данного класса приведен
в табл. 7.24 и 7.25.
Рассмотрим подробнее классы, реализующие понятия созвездия
СНС, антенны СРНС-приемника и канала СРНС приемника.
Диаграмма классов, реализующих расчет эволюции координат
НКА, входящих в созвездия той или иной СНС, приведена на рис. 7.20.
Как видно из приведенного рисунка, для формализации созвездия
НКА СНС вводится композитный класс TGNSSConstellationComposite,
являющийся наследником и содержащий список экземпляров класса
TAbstractConstellation. Последний класс характеризуется названием
системы (поле Name), текущим временем (поле CurTime), списком
текущих эфемерид созвездия (CurEphemerises), агрегатным полем типа
TMoverFacade, реализующим тот или иной метод расчета эволюции
параметров движения НКА, и агрегатным полем EphemeriseReader,
осуществляющим чтение эфемерид НКА СНС из файла исходных данных.
Основной метод класса, обеспечивающий расчет текущих эфемерид на
момент времени ti — GetEphemerise.
Класс, предназначенный для чтения эфемерид из файла
(TEphemeriseReader), предоставляет метод доступа к данным
(GetEphemeriseData), содержащимся либо в т. н. RINEX-файлах
с эфемеридами НКА СНС на определенные промежутки времени,
либо в т. н. SP3 файлах, содержащих ту же информацию, но в другом
формате. Данный класс имеет поле FileName, содержащее имя
текущего файла с эфемеридной информацией, композитное поле
текущих считанных из файла эфемерид НКА на момент времени
IniTime. Отметим, что процедуру обновления данных из файла
инициирует объект-владелец (экземпляр TAbstractConstellation),
вызывая метод GetEphemeriseData на требуемый момент времени
ti. В данном методе осуществляется проверка попадания момента
времени ti в текущий интервал эфемерид, и в случае истинности
якн
L·.
О)
■о
nj
ω
а.
о
_1
О
ь
^^
IP!
^>
"га
о
t^
~
(in
га
"га
Q
ω
ел
ш
ε
ω
л
О.
Ш
ω
О
+
L·.
0)
■о
η
ω
а.
т
о.
О
ь
IP!
^'
го
о
t^
с
ii
Q
8)
Ё
о
+
кн
ite
(Л
о
α
Ε
о
о
с
о
га
о
ons
и
т
т
ζ
ω
ь
^
с ^
о =■
= -о
го ^
tell
ing
w ^з
Я и
О
u ε
£ го
й sz
5 =5 =
ι- σ>~
■ · с с
с £ с
о .. —,
'»s^
ш ·σ"=
■s c ε
О ш го
d(in
mov
tDat
Ό Ш Ш
< α: о
+ + +
§
·—
(И
—
—
onste
и
и
о.
О
ь
,_
о
"о
ω
?
^
_Q
О
Ш
?
"-^ О
aat(idl
aVec
β .g
= ^
eS
+GetEphemerise(i
+Funcs(in ti: float
о
со
Ϊ!
О Li_
возвращается список эфемерид НКА на момент времени IniTime. Если
же проверка дала отрицательный результат, то метод осуществляет
поиск в файле эфемерид ближайшего к требуемому моменту времени
блока, его момент времени привязки записывается в поле IniTime, a
эфемериды копируются в CurEphemerises. Отметим также, что файлы
эфемерид для СНС ГЛОНАСС и GPS имеют различный формат и
содержат различную информацию, вследствие чего в ПМО созданы
два класса-наследника TGPSReader и TGLOReader, различающиеся
реализацией метода GetEphemeriseData и составом вектора эфемерид
в соответствии с ИКД соответствующих систем.
Вследствие различия для систем ГЛОНАСС и GPS не только
формата представления и состава начальных эфемерид, но и алгоритмов
расчета эфемерид на требуемый момент времени, в ПМО
реализованы классы TGLOConstellation и TGPSConstellation, реализующие
собственные методы GetEphemerise и Funcs. При этом для прогноза
эфемерид в классе TGLOConstellation используется метод численного
интегрирования (согласно ИКД — классический метод Рунге-Кутты,
реализуемый классом TRungeKutta), а в классе TGPSConstellation —
методика решения уравнений Кеплера для оскулирующих элементов
орбиты НКА, реализуемая классом TKeplerSolver.
Диаграмма классов, реализующих понятие антенны СРНС-прием-
ника, приведена на рис. 7.21.
Как видно из приведенного рисунка, для формализации различных
моделей антенн вводится класс TAntennaeFacade, реализованный на
основе шаблона «Фасад», являющийся наследником и содержащий
ссылку на экземпляр класса TAbstractAntennae.
Состав полей и методов данного класса приведен в табл. 7.26 и 7.27.
От описанного класса в ПМО создан класс-наследник
TSimpleAntennae, реализующий модель антенны с круговой
диаграммой направленности и обладающий дополнительно перекрытым
методом CheckVisible, рассчитывающем отношение сигнал/шум (поле
SNRatio). Для более детального рассмотрения процессов слежения
и обеспечения помехозащищенности (см. гл. 8) в ПМО от класса
TSimpleAntennae создан класс-наследник TPhasedArrayAntennae,
реализующий модель фазированной антенной решетки, состоящей
из нескольких управляемых лепестков (список объектов типа
TAntennaPetal) общим количеством NPetal и перекрытых методов
CheckVisible и PolarPatternControl. Каждый лепесток антенны (класс
TAntennaPetal) имеет направление оси ДНА (поле CurDirection)
и методы управления (SetPetal) и вычисления коэффициента
направленного действия антенны в направлении на наблюдаемый
НКА (EvalDirectiveGains). Методика расчета этих коэффициентов
приведена в гл. 8.
Рассмотрим теперь программную реализацию высокочастотной
части приемника в рамках ПМО, рассматриваемого как канал
(см. рис. 7.22).
τι
υ
га
ω
га
с
с
φ
<
Η
_^^
Ρ
Π)
с
W
ε
7
ω
ω
II
ε
ο
LL
т
"го
Q
ω
CD
+
ε
F
m
2
о
га
·-.
Abs
1-
^
Ό
О
^^ 5=
-I-J " О
~г?Ч
га с
ίο ω 7.
5= =J
ower:
efFreq
ocation
0- EH _i
+ + +
Ё <
_sz_
φ
га
с
с
с
<
3
Φ
га
.π
α.
Η
"™ч
UJ
m
&
7·
+
^
TD
С
га
ω
о
о ^
.. о
°3
ω *~
ί ω
о «
ω с
> -
со .^
.Е го
^ 5=
-ι
~ с
с о
Si О
ω ^
."> е
> Д°
ф ГО
■с о
О Q.
+ +
SL
ь
i^ ■— i^ ^^ ^ го
m ГО m ГО ГО -*i О
о ° о ° ° S =
4=1 tT ^ tT ТТ ч= ''
^ с ^ с с Ц ω
го го со >
'■= я '■= CD CD g f
5 > ζ ω m p t
ω «? ω .г ε Sr ω
ш^Щ о » го Ε
— го э ь Ρ ел j=
+ + + + + + +
οΈ >
l·-
u_
m
о
ω
boo
■Το
Sta
го
.с
CD
2 ^-ϊ
1SS =
■;ϋΟ
CO-
.1 а^
го 5 а
ΐ .й е
ω > го
■с -* Q-
Q ω го
а -R °
со О о.
+ + +
<Н
Ρ
г
л.
—
еАп
О.
ε
т
1-
ТЭ
ϋ
(^
О
Ra
7
СО
+
^
Ρ
г
m
ω
о
о
.о
^^
о
о
ω
ί
о
о
ω
>
О
со
.с
^
d
: float(
■-з
С
sib
>
eck
.с
о
+
φ
enna
<
ΙΟ
_ι
1-
c
ο
φ
η
ο
+
^
Ρ
ГО
ο
(^
^_^
ί
,_
ο
),in
Loc
■ο
Ιο α
(in ti: fl
(idl), in
с ra
= о
flf.
live
nti
о ^
!" ra
У ή"
> ω
ш со
+ +
=■£
т. ?
Ε _
b ш
II
Jl
II
°=ΞΪ!|5
l(idl)
га
о
(Л
S
Г£
^
SSMf
ζ
(J
Η
о
S
SMei
ел
1
H
TJ
с
*
NSSI
О
t-
ω
TJ
о
S
υ
TGNS
TJ
о
с
о
"га
is
Я.Й-
Ε
Et
"J ГЗ
: о
^ I f»s I ϊ
Э 0_ 0_ СЛ .!3 .!3 .i2
ill!
•i с с с с
— с с с с
т
ill
Ш
4
1
J
iann
υ
с
ck
l·-
"·
ь
£
TJ TJ TJ TJ
с с с £
o_o p_o
Q_ Q_ 0. 0-
o о о о
+ + + +
л
Ρ
bool
.
•о
¥
%
■!=
и
,'u
Η
+
CO
со
τ
=><-
£ f
I
Таблица 7.26
Свойства класса
ANTtoBF
MinElevation
MaxElevation
CurElevation
DirectiveGain
TransmitGain
SignalPower
JammerPower
Jammers
Тип
Tensor
вещественный
вещественный
вещественный
вещественный
вещественный
вещественный
вещественный
список объектов
типа TAbstractJammer
Описание
матрица направляющих
косинусов между антенной и
связанной СК — описывает
ориентацию антенны в связанных
осях
минимальный угол элевации
НКА
максимальный угол элевации
НКА
угол элевации наблюдаемого
НКА
текущий коэффициент
направленного действия
антенны в направлении на
наблюдаемый НКА
текущий коэффициент
передачи антенны
текущая мощность сигнала
с наблюдаемого НКА
мощность помехи в
направлении на выходе антенны
композитная структура из
объектов, формализующих
источники помех СРНС
Таблица 7.27
Метод
SetOrientation
(ti:float; GFtoBF)
CheckVisible
(SCVector: TVector): Boolean
PolarPatternControl
(const ti: Float;
aState: TVector)
Тип
виртуальный
виртуальный,
абстрактный
виртуальный
Действие
устанавливает текущую
ориентацию антенны на момент
времени ti
осуществляет проверку
видимости НКА с координатами
SCVector и вычисляет для него
текущие параметры (мощность,
коэффициенты усиления и т. п.)
управляет диаграммой
направленности антенны на момент
времени ti в соответствии с
вектором aState
Как видно из приведенного рисунка, для формализации
различных моделей каналов вводится композитный класс
TTrackingChannelComposite, реализованный на основе шаблона
«Композит», являющийся наследником и содержащий список экземпляров
класса TAbstractTrackingChannel.
Таблица 7.28
Свойства класса
Number
CurTime
USI
PseudoRange
PseudoVelocity
SNRatio
isTracking
isUsed
RAIMCode
EquivalentRangeRMS
EquivalentVelocityRMS
SysErrors
AddErrors
Тип
целый
вещественный
целый
вещественный
вещественный
вещественный
логический
логический
вещественный
вещественный
вещественный
список
объектов типа
TErrorFacade
список
объектов типа
TErrorFacade
Описание
номер канала
текущее время
номер обслуживаемого НКА
текущая псевдодальность
текущая псевдоскорость
текущее отношение сигнал/шум
для обслуживаемого НКА
признак наличия слежения за
обслуживаемым НКА
признак использования канала
код целостности для
обслуживаемого НКА
СКО эквивалентного шума
приемника для псевдодальности
СКО эквивалентного шума
приемника для псевдоскорости
композитная структура,
содержащая список объектов для
расчета систематических ошибок
в канале слежения
композитная структура,
содержащая список объектов для
расчета случайных ошибок в
канале слежения
Таблица 7.29
Метод
Tracking (tkfloat)
Тип
виртуальный,
абстрактный
Действие
реализует процесс слежения за
обслуживаемым НКА и получения первичных
измерений псевдодальности и
псевдоскорости
Состав полей и методов данного класса приведен в табл. 7.28 и 7.29.
От описанного класса в ПМО создан класс-наследник
TSimpleTrackingChannel, реализующий упрощенную модель канала
с подсчетом геометрического фактора для обслуживаемого НКА.
Для более детального рассмотрения процессов
слежения и обеспечения помехозащищенности (см. гл. 8) в ПМО
от класса TSimpleTrackingChannel создан класс-наследник
TComplexTrackingChannel, имеющий дополнительное агрегатное
поле типа TAntennaeFacade и композитную структуру из объектов,
формализующих источники помех СРНС (Jammers). Здесь же
реализован дополнительный метод частотной фильтрации помехи
(см. гл. 8.) и перекрыт метод слежения за обслуживаемым НКА и
получения первичных измерений псевдодальности и псевдоскорости
Tracking.
Рассмотрим теперь подробнее реализацию комплексированных
навигационных систем, интегрирующих навигационные данные
от нескольких подсистем в соответствии с той или иной схемой
комплексирования (см. гл. 3). Рисунок 7.23 иллюстрирует цепочку
классов, формализующих указанное понятие предметной области.
Как видно из приведенной диаграммы классов, абстрактный предок
всех интегрированных навигационных систем является наследником от
описанного выше класса TNavigationSystemComposite вследствие
объединения в своем составе нескольких подсистем (ИНС и спутниковая
навигация, РСБН и ИНС и т.п.).
У этого класса введено дополнительное поле, характеризующее
количество интегрируемых систем (NumSystems) и перекрыт метод
GetDataFromlniFile, осуществляющий инициализацию подсистем и
настройку алгоритма комплексирования.
Как известно, существует несколько методов комплексирования
данных навигационных систем, отличающихся как критерием
оптимальности результирующей оценки, так и алгоритмами
комплексирования. Для высокодинамичных систем наибольшее распространение
получили методы статического оценивания [7.20,7.21]. В этой связи для
их реализации в составе ПМО создан класс TAbstractStaticEstimation,
являющийся базовым абстрактным предком для указанной цепочки
классов. Состав полей и методов данного класса приведен в табл. 7.30
и 7.31.
От данного класса в составе ПМО создано два наследника: класс
TLeastSquaresMethod, реализующий метод наименьших квадратов, и
класс TKalmanFilter, реализующий рекуррентные байесовские
алгоритмы оценивания. У последнего классов перекрыт метод Eval,
формализующий уравнения дискретного фильтра Калмана и
добавлены поля: IniCovarMatrix (начальная ковариационная матрица
оценок), CurPrioriCovarMatrix (текущая априорная ковариационная
матрица), CurPosterioriCovarMatrix (текущая апостериорная
ковариационная матрица), DeltaCovarMatrix (добавочная ковариационная матрица,
входящая в уравнение прогноза в целях обеспечения устойчивости
работы алгоритма). Из диаграммы видно, что данный класс
требует наличия интерфейса IFundamentalMatrix, обеспечивающего расчет
фундаментальной матрицы для прогноза оценок и ковариационной
матрицы для интервала времени told...tnew для вектора состояния
RefSVector и интерфейса IMeasurelnformation, обеспечивающего
расчет матрицы наблюдаемости (функция HMatrix), вектора истинных
измерений (функция GetMeasure), вектора опорных измерений
(функция GetRefMeasure) и матрицы интенсивностей шумов измерений
η
ϊ
it
/у
с
о
о
Ε
ш
; tracts lal
TAbs
CurTjme: (loal(idl)
DlmSVecior; long(rdl)
DlmMVeclor: long(idi)
Expeclalbn: TVecior
CovarMalrix: TVecior
Meesures: TVector
RerMeasures : TVecio
+ + + + + + +
о
и
0)
£
о
В
0)
^
al(idl), in I
о
"га
>
ш
+
III
■
1
:=:
я
е
-?
Ε 5
о *□
■as
■? =
Sail
Ι*
У\
%ι
к
ш
>
ζ
О)
<
Η
Ή
J
Ε
3
>.
1
D
Ζ
-_.
ъ
*5>
0)
Ε
га
Ζ
J?
|Γ
Ж
т
Ε
8
LjL
2
О
0)
I
HI
к
i
га
= Ε
° 15
«inlerfa
damenl
с
э
U.
о
й
о
Ё
Юг
U
о»
ί
£
Ό
^
£2
"3
о:
.£
:э
Id: float
о
.с
=^
Ό
S-
га
о
е=
S
о
£
с
ϊ=.
.X
с
Ή
5
t
ω
О
+
CO
г ξ
Таблица 7,30
Свойства класса
CurTime
DimSVector
DimMVector
Expectation
CovarMatrix
Measures
RefMeasures
Тип
вещественный
целый
целый
TVector
TVector
TVector
TVector
Описание
текущее время
размерность вектора оценок
размерность вектора измерений
вектор математического ожидания
оцениваемых параметров
ковариационная матрица
оцениваемых параметров
вектор измерений
вектор «опорных» измерений
Таблица 7,31
Метод
Eval (ti:float; RefSVector)
Тип
виртуальный,
абстрактный
Действие
реализует процесс оценивания
для момента времени ti и
априорного («опорного») вектора
состояния RefSVector
(функция GetDMatrix) для требуемого момента времени ti и вектора
состояния RefSVector,
Непосредственная реализация приведенного выше алгоритма ком-
плексирования ИНС и СРНС на основе глубокоинтегрированной
схемы осуществляется классом TDCNaviBox, включающем
дополнительные поля FCurY и FCurYRef для хранения текущих истинных и
опорных измерений от приемника СРНС, а также перекрытые
методы GetDataFromlniFile и Estimation, Также отметим, что в
данном классе реализуются методы интерфейсов IMeasurelnformation и
IFundamentalMatrix, осуществляющих расчет соответствующих
векторов и матриц,
Обратимся теперь к решению задачи управления и наведения,
Необходимо отметить, что в зависимости от целевой задачи
конкретного ЛА и аппаратных требований могут использоваться системы
стабилизации, траекторного управления и наведения, отличающиеся
принципом действия, составом измеряемых параметров, алгоритмами
предварительной обработки информации и т.п. Кроме того, зачастую
практически невозможно разделить задачи наведения и навигации,
а также задачу управления, поскольку задача наведения тесно связана
с принятием решения и выработкой сигналов командного управления,
Именно в этой связи выше было предложено использовать для
формализации понятия системы управления и наведения класс-композит
TCGSystemComposite, объединяющий всю возможную совокупность
соответствующих подсистем на основе использования ссылок на потом-
ков базового класса TAbstractControlGuidanceSystem. В рамках
предлагаемого ПМО реализована следующая иерархическая цепочка классов,
реализующих алгоритмы системы управления и наведения (рис. 7,24),
Как видно из приведенного рисунка, в дополнение к сказанному
выше, класс TAbstractControlGuidanceSystem имеет ссылку на объект
типа TMoverFacade, предназначенный для расчета текущих значений
вектора управления, и метод, реализующий интерфейс IFunc — τ, е.
непосредственно «модель» системы в виде правых частей
дифференциальных или конечноразностных уравнений, Выше было указано, что
основным методом класса, вычисляющим вектор командного управления
CVector на текущий момент времени ti в соответствии с вектором
оценок состояния ЛА EVector, является процедура Calculate, Начальные
условия и параметры алгоритма задаются методом GetDataFromFile,
считывающим значения из ini-файла проекта, Отметим также, что
базовый класс имеет ссылку на объект типа TNatureComposite,
необходимую для доступа к модели движения цели, параметрам атмосферы
и т. п,
Необходимо отметить, что реальное наполнение вектора командного
управления и алгоритма наведения зависит от конкретной системы
и должно быть реализовано в классах-потомках. Так, на рис, 7,24
приведен пример класса TPointingAlgorithm, реализующего алгоритм
решения задачи наведения как краевой задачи управления
движущегося объекта [7,16], Данный класс формирует вектор требуемых
перегрузок в связанной СК, приближенно решая краевую задачу на
основе информации от БИНС и априорных сведений о координатах
цели, Помимо этого, при формировании требуемых перегрузок
учитывается ограничение на текущее значение вектора абсолютной угловой
скорости ЛА, поступающее с объекта RGMChannel, Сформированное
значение вектора командного управления подается на вход системы
управления (автопилота),
Для реализации подсистемы стабилизации в ПМО используется
класс TAutoPilot, реализующий алгоритм системы управления как
блок, осуществляющий сравнение сигналов командного управления,
полученных в результате решения задачи наведения, с текущими
параметрами движения ЛА и последующее формирование управляющих
сигналов для исполнительных органов (сервоприводы), а также
отработку этих сигналов в виде значений углов отклонения органов
управления (аэродинамические и газодинамические рули, отклоняющиеся
сопла и т,п,), Вообще говоря, для сложных авиационных систем
возможно и иногда целесообразно более детальное и глубокое разделение
данной системы на отдельные объекты (например, выделение
отдельных классов для каждого из управляющих органов) с последующим их
объединением в рамках класса TCGSystemComposite,
В заключении приведем диаграммы последовательностей,
поясняющие логику работы приложения, Так на рис. 7,25 показано взаимо-
0
ite
(Л
о.
Ε
ο
υ
L·.
3
13
ζ
Η
ω
^
ГО
2
+
κ
ο
ω
3=
ш
ω
_2
го 55
2 -σ
го "°>
ir с
β! ο
< κ
Ι- ω
ν,£
ω η
+Add(in Eff
+Remove(i
Ρ
«
Algor
σι
с
**
О
α.
Η
,_
ο
ο
ω
τ-£
ο ,,
TVe
ector
о?
in EVe
aVector
^".E
ss--~
ГО Ό
О !=.
+Calculate(in ti: fl
+Funcs(in ti: float
> s
ι- ω
o'£
ш g
,s >
ro
leu
ro
С
!-.
SOU
О U-
+
+
■*
СЧ
действие основных компонент приложения, осуществляющих процесс
моделирования замкнутого контура БЛА.
Как видно из приведенного рисунка, инициализация
моделирования осуществляется главным окном приложения путем создания
объекта Experiment — контроллера моделирования, Данный объект
в соответствии с файлом исходных данных проекта и именем
IniFileName осуществляет создание и инициализацию объектов Nature
(типа TNatureComposite), DObject (типа TDynamicObjectFacade),
NSystems (типа TNavigationSystemComposite) и CGSystems (типа
TCGSystemComposite),
Для старта моделирования главным окном приложения вызывается
метод Dolt контроллера моделирования, реализующий непосредственно
саму задачу моделирования, В данном методе в цикле организован
вызов основных выполняемых методов объектов имитирующих
функционирование всех подсистем, для текущего момента времени FCurTime;
1, Вызывается метод DObject,Run(FCurTime, CVector),
позволяющий спрогнозировать движение ЛА на момент FCurTime, τ, е,
формирующий вектор состояния SVector;
2, Вызывается метод NSystems,Estimation(FCurTime, SVector),
позволяющий получить оценку положения, скорости и ориентациии
ЛА на момент FCurTime в соответствии с текущим вектором
состояния — формирование вектора оценок EVector;
3, Вызывается метод CGSystems,Calculate(FCurTime, EVector),
рассчитывающий углы отклонения органов управления ЛА в
соответствии с командным управлением и измеренными параметрами
движения ЛА;
4, Вызывается метод Update, оповещающий подписчиков (т. е.
главное окно приложения) для визуализации процесса
моделирования.
Отметим также, что на приведенной диаграмме отражены
возможные обращения основных объектов приложения к объекту Nature для
расчета воздействий факторов окружающей среды.
Список литературы к главе 7
7.1. Михайлов А. П., Самарский А. А. Математическое моделирование. Идеи.
Методы. Примеры. М.: Изд-во физико-математической литературы, 2001.
7.2. Смирнов Ю.Н., Воробьев Т.Н. Перспективы развития вычислительной
техники: в 11 кн.: Справочное пособие. М.: Высшая школа, 1989.
7.3. Мейер Б., Бодуэн К. Методы программирования. М.: Мир, 1982.
7.4. Буч Г. Объектно-ориентированное проектирование с примерами
применения, Украина, Диалектика, 1993
7.5. Шлеер С, Меллор С. Объектно-ориентированный анализ: моделирование
мира в состояниях. Украина, Диалектика, 1993.
7.6. Фаулер М., Скотт К. UML. Основы. СПб.: Символ-Плюс, 2002.
7.7. Ларман К. Применение UML и шаблонов проектирования. 2-е изд. М.:
Издательский дом «Вильяме», 2004.
7.8. Гамма 3., Хелм Р., Дэонсон Р., Влиссидес Дж. Приемы объектно-
ориентированного программирования. Паттерны проектирования. СПб.;
Питер, 2001
7.9. Влиссидес Дж. Применение шаблонов проектирования. Дополнительные
штрихи. М.: Издательский дом «Вильяме», 2003.
7.10. Автоматизированные Системы. Стадии создания. ГОСТ 34.601-90.
Комплекс стандартов на автоматизированные системы ИПК. Изд-во
Стандартов, 1997.
7.11. ISO/IEC 12207:1995
7.12. Gane С, Sarson Т. Structured System Analysis. Prentice-Hall, 1979.
7.13. Yourdon Ε. Modern Structured Analysis. Prentice-Hall, 1989.
7.14. Марка Д. Α., МакГоуэн К. Методология структурного анализа и
проектирования. М.: «МетаТехнология», 1993.
7.15. Boehm В. W. A Spiral Model of Software Development and Enhancement //
ACM SIGSOFT Software Engineering Notes, Aug. 1986.
7.16. Malyshev V.V., Krasilshikov M.N., Bobronnikov V.T., Fedorov A.V.,
Nesterenko O. P. Software Toolbox for Space System Mission Analysis and
Control. Brazil, SPPH, 1999
7.17. Справочное руководство по небесной механике и астродинамике / Под
ред. Г. Н. Дубошина. М.: Наука, 1976. 864 с.
7.18. IERS Technical Note 13. IERS Standards (1992) / Ed. D. D. McCarthy, US
Naval Observatory. July 1992.
7.19. Hairer £., Norsett S. P., Wanner G. Solving Ordinary Differential Equations
I. Nonstiff Problems. Springer-Verlag, Berlin, Heidelberg, New York,
London, Paris, Tokyo, 1987.
7.20. Помыкаев И. И., Селезнев В. П., Дмитроченко Л. А. Навигационные
приборы и системы. М.: Машиностроние, 1983.
7.21. Глобальная спутниковая навигационная система ГЛОНАСС / Под ред.
В. Н.Харисова, А.И.Перова, В. А. Болдина. - М.: ИПРЖР, 1998.
Глава 8
ИНТЕГРИРОВАННАЯ БОРТОВАЯ СИСТЕМА
ПЕРСПЕКТИВНОГО БЕСПИЛОТНОГО
ВЕРТОЛЕТА В РЕЖИМЕ МАЛОВЫСОТНОГО
ПОЛЕТА
Настоящая глава содержит описание структуры, алгоритмов и
программно-математического обеспечения бортовой интегрированной
системы перспективного беспилотного вертолета, реализующего
возложенные на него задачи в режиме маловысотного полета (МВП).
Данный материал фактически представляет собой развернутый пример
реализации описанной в предыдущей главе технологии
объектно-ориентированного подхода к формированию облика подобных систем и анализа
их свойств путем имитационного математического моделирования.
Приведенные в данной главе результаты представляют
самостоятельный интерес, поскольку они включают анализ интегрированной
бортовой системы управления и навигации, построенной как по
слабосвязанной схеме, так и глубоко интегрированной. Последняя, по
мнению авторов, способна функционировать в условиях помех,
препятствующих штатной работе многоканального GPS/ГЛОНАСС
приемника. Самостоятельный интерес представляют также результаты решения
навигационной задачи, полученные путем включения в состав
интегрированной системы миллиметровой бортовой РЛС (БРЛС) или лазерного
локатора (ЛЛ).
8.1. Особенности маловысотного полета и требования
к бортовому комплексу
В настоящее время все большее внимание разработчиков
высокоманевренных летательных аппаратов (ЛА) уделяется возможности
осуществления маловысотного полета (МВП). МВП обеспечивает
скрытность действий ЛА, повышает эффективность преодоления средств
ПВО, позволяет вести разведку районов боевых действий,
увеличивает эффект внезапности. Для гражданского применения маловысотные
полеты повышают эффективность и точность воздушного мониторинга,
расширяют возможности спасательной авиации.
Маловысотным полетом принято называть полет на предельно
малой высоте при условии обеспечения необходимой безопасности.
В режиме МВП ЛА представляет собой так называемую
низколетящую цель (НЛЦ). С точки зрения обнаружения и
сопровождения НЛЦ является сложным объектом, что связано с различными
особенностями работы наземных радиолокационных станций (РЛС),
в частности:
• дальность прямой видимости НЛЦ значительно меньше, чем при
полете на больших высотах, так как ЛА значительное время
находится в так называемых «зонах ненаблюдаемости»,
обусловленных кривизной земли и наличием препятствий на пути
распространения сигнала РЛС;
• в силу уменьшения дальности обнаружения НЛЦ сокращается
время на подготовку и осуществление перехвата цели;
• периодически прерывается сопровождение НЛЦ при вхождении
ЛА в область радиолокационной тени — области пространства,
где не может распространиться сигнал РЛС;
• снижается вероятность правильного обнаружения НЛЦ за счет
так называемого эффекта антипода, проявление которого состоит
в «размытости» изображения цели или появлении двух и более
отметок целей из-за множественных переотражений сигнала ЛА
от земной поверхности.
При совершении МВП необходимо осуществлять огибание рельефа
местности, которое реализуется при помощи маневров «обхода»,
«облета» и их комбинации — «обхода-облета» препятствий, возвышающихся
над средним уровнем рельефа.
«Обходом» принято называть маневр ЛА, сопряженный с
изменением курса и крена при неизменной высоте. «Облетом» называется
маневр в вертикальной плоскости, позволяющий преодолеть препятствие
с заданной относительной высотой без изменения курса.
Возможность осуществления данных маневров сопряжена с рядом
технических проблем, в частности, при МВП происходит значительное
сужение потребного динамического диапазона ЛА, вызванного
близостью подстилающей поверхности, наличием препятствий, для
преодоления которых необходимы значительные эволюции ЛА. Данный
факт ужесточает требования к навигационному комплексу ЛА и
управлению его движением при реализации автоматического (беспилотного)
полета.
Как известно, основной задачей навигационного комплекса (НК)
ЛА является решение задач позиционирования и определения
ориентации. Типичные точностные характеристики НК для маневренного
ЛА по положению составляют 30-60 м, по скорости — 5-10 м/с, при
частоте выработки навигационного решения 1-10 Гц [8.1].
Анализ типовых задач, выполняемых в режиме МВП, с учетом
динамических свойств, перспективных вертолетов и требований без-
опасности полета, позволяет сформулировать следующие требования
к бортовому НК в режиме МВП:
• НК должен обеспечивать решение навигационной задачи в
процессе МВП с необходимой достоверностью, точностью и
частотой;
• точность определения 3D положения центра масс ЛА должна
характеризоваться величиной порядка единиц метров, по
составляющим скорости — величиной порядка единиц м/с, по углам
ориентации — величинами порядка 1 градуса;
• частота обновления информации должна быть порядка 100 Гц;
• решение должно формироваться в топографических системах
координат.
Вышеперечисленные требования позволяют сформировать облик
НК маневренного ЛА, способного осуществлять МВП. В качестве
основной подсистемы НК, обеспечивающей высокую частоту обновления
навигационного решения, целесообразно использовать
бесплатформенную инерциальную навигационную систему (БИНС). Такие системы
автономны, позволяют обеспечивать требуемую частоту
навигационного решения, его непрерывность и полноту; кроме того, БИНС
обладают высокой помехозащищенностью. Отсутствие платформы сокращает
время готовности к работе по сравнению с платформенными ИНС,
что также является немаловажной характеристикой НК. Однако БИНС
обладают рядом существенных недостатков, не позволяющих
ограничиться только их применением в НК, а именно: неограниченный рост
ошибок во времени, необходимость знания как можно более точной
модели гравитационного поля. Поэтому, в состав НК маневренного
ЛА необходимо включать дополнительные подсистемы, позволяющие
компенсировать недостатки БИНС.
В настоящее время в качестве дополнительной, корректирующей
БИНС широко используются глобальные спутниковые навигационные
системы (GNSS), так как БИНС и GNSS, генерируют различные по
своей физической природе навигационные сигналы. Таким образом,
совместное использование инерциальной и спутниковой
навигационных систем позволяет, с одной стороны, ограничить рост погрешностей
БИНС, а с другой, нивелировать основные недостатки GNSS —
низкую частоту выдачи навигационной информации (1-10 Гц) и слабую
помехозащищенность.
В НК перспективного беспилотного вертолета в режиме
маловысотного полета целесообразно использовать слабосвязанную схему ком-
плексирования, так как при данной схеме требуются минимальные
изменения в стандартном оборудовании. В то же время эта схема
в максимальной степени позволяет обеспечить достоверность
навигационного решения при потере сигнала GNSS.
При выполнении маловысотного полета в настоящее время важным
также является требование помехоустойчивости НК, что объясняется
низким уровнем мощности сигнала GNSS и высокой вероятностью
постановки помех. Принято различать следующие виды помех,
искусственно создаваемых с целью воспрепятствовать приему сигналов
GNSS:
• шумовые (узко и широкополосные);
• импульсные;
• модулированные;
• интеллектуальные, когда в качестве помехи с большой
мощностью переизлучается «собственный» сигнал GNSS; при этом
в навигационном послании искажаются некоторые данные.
Как показывают последние исследования в данной
области [8.11,8.12], помехозащищенный НК должен быть выполнен
на основе использования глубоко интегрированной архитектуры
обработки навигационных данных с привлечением
соответствующих программно-аппаратных средств: пеленгатор помехи, антенна
GNSS-приемника с управляемой диаграммой направленности,
пространственно-временное разделение сигналов навигационных
космических аппаратов (НКА), инерциальная поддержка системы
слежения за задержкой (ССЗ) и несущей (ССН). В этой связи ниже
приводится описание и результаты математического моделирования
НК на основе глубоко интегрированной схемы комплексирования.
Однако перечисленный выше состав бортового оборудования
недостаточен для навигационного обеспечения МВП. Это связано с тем,
что навигационное решение, получаемое путем использования БИНС
и сигналов GNSS, не отвечает требуемой точности определения
высоты (СКО составляет порядка 30 м), что является недопустимым
для реализации МВП. Поэтому необходимо дополнить НК радиоба-
ровысотомером (РБВ) — прибором, объединяющим в себе свойства
баро- и радиовысотомеров, обеспечивающим СКО определение высоты
менее 1 м.
Заметим, что для осуществления управления беспилотным
вертолетом в автоматическом режиме при выполнении МВП необходимо
непрерывно осуществлять высокоточную (единицы метров) привязку
ЛА к топографическим координатам местности. Это может быть
реализовано, например, путем включения в состав НК бортовой РЛС (БРЛС)
миллиметрового диапазона при наличии в памяти бортового
компьютера цифровой карты местности. Информация от БРЛС непосредственно
может быть использована в контуре автоматического управления и,
кроме того, позволяет реализовать МВП при отсутствии данных GNSS
с использованием корреляционно-экстремальных алгоритмов
навигации. Альтернативным вариантом может быть использование для этих
целей лазерного локатора (ЛЛ).
8.2. Функциональная схема интегрированной
бортовой системы
В соответствии с вышесказанным, на рис. 8.1. приведена
функциональная схема интегрированной бортовой системы вертолета,
основанной на использовании слабосвязанной схемы комплексирования
данных БИНС, GNSS, радиобаровысотомера и
корреляционно-экстремального алгоритма навигации (КЭАН), обрабатывающего данные РЛС
или ЛЛ.
се
н
ι>
ч
о
Η
α.
ι>
оз
я
я
*е
SS
о υ
Is
R "
ч °<
se
α.
с
>>
ев
я
ε
ев
χ
я
fct
Ν",Ώ"
Д".^
Я",(фД-0'
Измерители
Акселе-
рометры
ДУСы
JV^
_ffil
БИНС
Алгоритм определения
координат и скорости
Алгоритм определения
ориентации
Многоканальный
GNSS
приемник
у™
РБВ
ДСИНС U
Vf"HC ю
ОМл)"
Интегральный
фильтр
Калмана
(алгоритм интеграции
данных)
БРЛС
(ЛЛ)
кадр
\Х
кэан г^кэлн
КЭАН
f Навигационное решение Д""к, У"ж (Ф.Ал)"'
Цифровая
карта
(эталон сцен)
Τ
Рис. 8.1. Функциональная схема интегрированной бортовой системы вертолета
«Истинный» фазовый вектор состояния вертолета, включающий
координаты ц. м. вертолета Rtr, htr, компоненты вектора скорости Vй',
вектор абсолютной угловой скорости вертолета fitr, вектор кажущегося
ускорения Ntr, а также эйлеровы углы ориентации (-ψϋη) ' поступают
в НК в соответствии с частотой его работы. Блок чувствительных
элементов БИНС реализует измерения акселерометров и ДУСов,
являющиеся исходной информацией для навигационного алгоритма БИНС.
Результатом процесса функционирования БИНС являются оценки ко-
т-БИНС
ординат ц.м. вертолета RbMHL, компонент вектора скорости V
а также эйлеровых углов ориентации вертолета (■φϋ'γ) . Парал-
лельно с БИНС с требуемой частотой реализуются навигационные
решения РБВ - hpm и приемника GNSS - rGNSSVgnss
Полученная совокупность навигационных решений поступает в интегральный
фильтр Калмана, где происходит коррекция базового навигационного
решения и оценка параметров моделей ошибок чувствительных
элементов БИНС.
Одновременно с БИНС и приемником GNSS функционируют
бортовая РЛС (или ЛЛ), выходные данные которой поступают на вход
корреляционно-экстремального алгоритма навигации (КЭАН),
осуществляющего взаимную «привязку» текущего кадра БРЛС (ЛЛ) и
цифровой карты местности (эталон сцен), хранимой на борту вертолета.
Полученное навигационное решение поступает на вход интегрального
фильтра Калмана, использующего выход КЭАН в случае деградации
комплекса, т. е. при ухудшении точностных характеристик базового
навигационного решения, например, вследствие отсутствия сигналов
GNSS.
Навигационное решение бортового интегрированного комплекса
поступает на вход так называемого «идеального пилота»,
представляющего собой элемент контура управления, вырабатывающий на основе
данных бортового НК и бортовой цифровой карты местности (эталона
се
н
ι>
ч
о
Η
α.
ι>
оз
я
я
as
ο u
| κ
е- Си
η оз
α.
Ε
>>
(в
Μ
я
ε
ев
я
S
Я", V
У", Ω"
1я",(ф,-Эл)'
Многоканальный ГЛОНАСС/GPS приемник
Модель
канала слежения
Τ
Формирование
измерений
Измерители
Акселерометры
ДУСы
ч
Модель
антенны
Формирование
опорных измерений
Ν-
РБВ
Интегральный фильтр Калмана
(алгоритм комплексировання)
Блок прогноза
Определение ориентации,
положения и скорости
Блок коррекции
РЛС
(ЛЛ)
кадр
»■
Xе
КЭАН
Цифровая
карта
(эталон сцен)
X
Навигационное решение д""^т/'|"к (Ф,-Э.-()""к
Модель
динамики
созвездия СНС
Рис. 8.2. Функциональная схема бортового информационно-управляющего
комплекса вертолета
сцен) сигналы командного управления для реализации МВП и,
окончательно, команды на отклонение органов управления вертолета.
На рис. 8.2. представлена функциональная схема НК, выполненного
по глубоко интегрированной архитектуре. Основные отличия
данного варианта заключаются в отсутствии самостоятельного алгоритма
БИНС и усложненной структуре интегрального фильтра,
непосредственно обрабатывающего измерения акселерометров, ДУС, РБВ и
навигационные измерения, формируемые многоканальным GNSS
приемником. В отличие от предыдущего варианта, процесс
функционирования многоканального GNSS-приемника обсуждается здесь и более
подробно с целью моделирования влияния помехи на процесс слежения
за сигналами НКА и точность формируемых измерений навигационных
параметров. Кроме того, в модель GNSS-приемника введена обратная
связь от интегрального фильтра (т.н. «инерциальная поддержка»),
обеспечивающая предварительную настройку контуров слежения за
сигналами НКА и работу адаптивных фильтров каналов слежения,
обеспечивающих возможность приема сигналов GNSS при наличии
помех.
Ниже приводятся математические модели и алгоритмы,
образующие функционально-программный прототип бортовой
интегрированной системы перспективного беспилотного вертолета в режиме МВП
для обоих вариантов реализации (слабо и глубоко интегрированных
схем интеграции данных).
8.3. Математическая модель динамики управляемого
движения вертолета
В данном разделе приводится специальная математическая модель
динамики вертолета, включающая систему линеаризованных в окрест-
чости так называемых балансировочных траекторий
дифференциальных уравнений и уравнения обратных связей, обеспечивающих
режимы стабилизации и траекторного управления. Использование подобной
модели динамики объясняется следующими причинами [8.2,8.3]:
1. Более детальная модель движения вертолета, описывающая,
в частности, механизм создания аэродинамических сил и моментов
несущим винтом с учетом особенностей обтекания лопастей винта,
аэродинамического взаимодействия винтов и корпуса вертолета,
требует «привязки» к конкретной модификации вертолета и,
следовательно, не отвечает целям изучения особенностей маловысотного полета
с точки зрения динамических возможностей вертолета при маневрах,
осуществляемых при таком полете. Действительно, при изучении
особенностей движения вертолета при совершении маневров типа «обход»
и «облет» решающее значение имеют такие факторы, как точность
решения навигационной задачи и запаздывание, вносимое автопилотом
и алгоритмом траекторного управления, который мы в дальнейшем
будем называть «идеальный пилот» [8.1,8.6].
2. Использование стандартных обратных связей и «идеального
пилота» позволяет более отчетливо выявлять влияние навигационных
ошибок на динамику маневров вертолета при маловысотном полете.
Таким образом, специальная частично линеаризованная модель
обеспечивает:
• формирование траекторий вертолета в необходимом диапазоне
изменения скорости и высоты МВП;
• адекватную (с учетом ограничений на маневренные возможности)
реакцию вертолета на воздействия управляющих и возмущающих
факторов;
• формирование балансировочной траектории при отсутствии
управляющих воздействий.
8.3.1. Системы координат. В практике исследования динамики
полета ЛА в атмосфере традиционно используются три типа систем
координат [8.2,8.3]: инерциальные, связанные с землей, связанные
с ЛА, а также их модификации. Все системы декартовы, правые (знаки
угловых скоростей и ускорений, углов, моментов положительны при
вращении против часовой стрелки, если смотреть с положительного
направления оси вращения). При этом наиболее употребительны
следующие системы координат (рис. 8.3):
• Географическая (гринвичская) система координат
OeXgrYgrZgr\
• Абсолютная географическая (квазиинерциальная) система
координат OeXaYaZa;
• Горизонтныи сопровождающий трехгранник, ориентированный по
сторонам света (горизонтная система координат) OXneYneZne',
• Связанная система координат OXbfYbfZbf',
• Топографическая система координат OXmYmZm (рис. 8.7).
Начало географической [8.1] СК OeXgrXgrZgr расположено
в центре масс Земли (вернее, фигуры, аппроксимирующей геоид), ось
OeZqr направлена по вектору угловой скорости вращения Земли
(UEarth). ось OeXgr лежит в экваториальной плоскости и направлена
на гринвичский меридиан и ось OeYgr дополняет систему до правой.
Абсолютная географическая система координат представляет собой
«замороженную» в пространстве на момент начала движения
географическую СК (квазиинерциальная СК).
Начало горизонтной СК расположено в центре масс вертолета. Ось
ΟΥνε направлена по местной вертикали, оси ОХ^е и ΟΖ^ε
расположены в плоскости местного горизонта; ось ΟΧνε направлена на север
по местному меридиану и ось ΟΖ^ε направлена на восток по местной
параллели.
Начало связанной СК OXbfYbfZbf расположено в центре масс
вертолета, ось OYbf направляется параллельно оси вала несущего
,,ZGR YNE
Рис. 8.3. Используемые системы координат
винта (НВ) вверх, ось OXbf — вперед, в продольной плоскости
вертолета, ось OZbf — к правому борту.
Географическая СК используется для решения основного уравнения
инерциальной навигации и получения оценок движения центра масс
вертолета при использовании в спутниковой навигации. Параметры
ориентации определены по отношению к горизонтной СК.
Переход от абсолютной географической СК (квазиинерциальной)
к географической описывается с использованием матрицы перехода,
имеющей вид:
Δ-Τ = Rz(i - ίο), (8.1)
где t — текущее время моделирования, ίο = 0.
Переход от географической СК к горизонтной будет описан с
использованием матрицы перехода, формируемой следующим образом:
*gr = R*( - \) х Ry( " \ ~ Ψ) х R*(A), (8.2)
где φ, λ, h географическая широта, долгота и превышение над земным
эллипсоидом объекта [8.1].
Декартовы координаты точки О будут выражены в географической
СК с использованием соотношений [8.1]:
Хо — (N + ho) cos φο cos Xq,
Yo = (Ν + h0) cos φο sin X0, (s.3)
Z0 = [N(\ -e2)+h0]sm φ0.
где N = a/d\ — e^sin φ, e3 — эксцентриситет земного эллипсоида;
α — большая полуось эллипсоида; φο, λο, ho — высота точки О над
поверхностью земного эллипсоида в момент начала движения.
Переход от горизонтной СК к связанной описывается
последовательностью трех поворотов на углы Эйлера [8.1]:
А££ = R,(7) х RzO?) х RyM, (8.4)
где матрицы элементарных поворотов имеют вид:
(10 0 \ / cos a 0 — sin a \
0 cos a sin a , Ry(a) = I 0 1 0
0 — sin a cos a J \ sin a 0 cos a /
(cos a sin a 0
- sin a cos a 0
0 0 1
где угол рыскания ψ — угол между проекцией оси OXbf на плоскость
местного горизонта OXneZ^e и осью ΟΧνε горизонтной СК. Угол
тангажа θ — угол между осью OXbf и плоскостью местного горизонта
OXneZne, угол крена η — угол между осью OYbf и местной
вертикальной плоскостью, проходящей через ось OXbf-
Рассмотрим подробнее топографическую систему координат и ее
связь с географической СК. В силу того, что поверхность земного
эллипсоида невозможно развернуть на плоскость без разрывов и
искажений, при проецировании происходят нарушения одного или нескольких
свойств проекции: равномасштабности, равноугольности, равновелико-
сти [8.13]. Существуют различные виды картографических проекций,
каждому из них соответствуют определенная картографическая сетка и
присущие ей искажения. Картографические проекции классифицируют
по характеру искажений, виду изображения меридианов и параллелей
(географической сетке) и некоторым другим признакам.
По характеру искажений различают следующие картографические
проекции:
• Равноугольные — сохраняющие равенство углов между
направлениями на карте и в натуре. На рис. 8.4 показана карта мира, на
которой картографическая сетка сохраняет свойство
равноугольности. На карте сохранено подобие углов, но искажены размеры
площадей.
• Равновеликие — сохраняющие пропорциональность площадей на
карте соответствующим площадям на земном эллипсоиде. На
рис. 8.5 показана карта мира, составленная в равновеликой
проекции. На ней сохранена пропорциональность всех площадей, но
искажено подобие фигур, то есть отсутствует равноугольность.
Взаимная перпендикулярность меридианов и параллелей на такой
карте сохраняется только по среднему меридиану.
Рис. 8.4. Равноугольная проекция
Рис. 8.5. Равновеликая проекция
• Равнопромежуточные — сохраняющие постоянство масштаба по
какому-либо направлению.
• Произвольные — не сохраняющие ни равенства углов, ни
пропорциональности площадей, ни постоянства масштаба. Смысл
применения произвольных проекций заключается в более
равномерном распределении искажений на карте и удобстве решения
некоторых практических задач.
По виду изображения сетки меридианов и параллелей
картографические проекции подразделяются на конические, цилиндрические,
азимутальные и др. Причем в пределах каждой из этих групп могут
быть разные по характеру искажений проекции (равноугольные, равно-
великие и т.д.)· Геометрическая сущность конических и
цилиндрических проекций заключается в том, что сетка меридианов и параллелей
проектируется на боковую поверхность конуса или цилиндра с
последующим развертыванием этих поверхностей в плоскость. Геометрическая
сущность азимутальных проекций заключается в том, что сетка
меридианов и параллелей проектируется на плоскость, касательную к шару
в одном из полюсов или секущую по какой-либо параллели.
Выбор картографической проекции для топографических карт
зависит от размеров картографируемой территории и ее географического
положения. Большинство стран мира для составления топографических
карт используют равноугольные цилиндрические проекции (табл. 8.1).
В России для топографических карт масштабов 1 : 10 000 —
— 1 : 1000000 принята единая равноугольная
поперечно-цилиндрическая проекция Гаусса-Крюгера [8.13].
Таблица 8.1
Название
Юго-ориентированное
равноугольная
цилиндрическая
проекция
Универсальная
северная
равноугольная
цилиндрическая
проекция
Универсальная
южная
равноугольная
цилиндрическая
проекция
Проекция
Гаусса-
Крюгера
Проекция
Гаусса-Боага
Используется
Южная
Африка
Повсеместно
от экватора
до 84°
северной
широты
Повсеместно
от экватора
до 84°
южной
широты
Россия,
Югославия,
Германия,
Южная
Америка
Италия
Начальная
широта
0°
0°
0°
0°
Различный
Масштаб
центрального
мередиана
1,0
0,9996
0,9996
1
0,9996
Ширина
зоны
2°
6°
6°
6°
6°
Сдвиг
оси X,
м
0
-500000
500000
-500000
Различный
Сдвиг
оси Z,
м
0
0
106
Различный
0
Геометрическую сущность такой проекции можно представить
следующим образом. Весь земной эллипсоид делят на зоны и для
каждой зоны в отдельности составляют карты. При этом устанавливают
такие размеры зон, чтобы можно было каждую из них развернуть
в плоскость, то есть изобразить на карте практически без заметных
искажений. Для получения картографической сетки и составления по
ней карты в проекции Гаусса поверхность земного эллипсоида
разбивают по меридианам на 60 зон по 6° каждая (рис. 8.6). Максимальный
Рис. 8.6. Деление земного эллипсоида на 6-ти градусные зоны
масштаб карт, принятый в топографии — 1 : 1000000. Карта данного
масштаба является основой для системы деления карты на отдельные
листы — разграфки, и для нумерации листов — номенклатуры. Ряды
миллионной карты обозначаются заглавными буквами латинского
алфавита (от А до V) и счет их ведется от экватора к полюсам. Колонны
же листов нумеруются цифрами от 1 до 60. Счет колонн ведется от
меридиана 180 градусов с запада на восток (рис. 8.6).
Правила и порядок образования топографических карт всех
масштабов приведены в табл. 8.2.
На топографические карты наносится координатная сетка и
указывается привязка сетки к топографическим координатам.
Начало топографической СК OXmYmZm размещается на
поверхности Земли на экваторе, долгота точки начала координат определяется
серединным меридианом зоны карты минус 500 000 м (рис. 8.7).
Ось ΟΥμ системы направляется вверх по местной вертикали,
оси ОХм, ΟΖμ лежат в местной горизонтальной плоскости и
совпадают с осями горизонтной СК.
Таблица 8.2
Виды
карт
Оперативные
Тактические
Масштаб
карты
1 : 1 000000
1 : 500000
1 : 200000
1 : 100000
1 : 50000
1 : 25000
1 : 10000
Типы карт
Мелкомасштабные
Средне-
масштабные
Крупномасштабные
Порядок
образования
листа карты
Деление
земного
эллипсоида
параллелями,
меридианами
Деление
листа
миллионной
карты
на 4 части
Деление
листа
миллионной
карты
на 36 частей
Деление
листа
миллионной
карты
на 144 части
Деление
листа
карты
Ml : 100000
на 4 части
Деление
листа
карты
Ml : 50000
на 4 части
Деление
листа
карты
Μ 1 : 25 000
на 4 части
Схема
образования
листа
карты
6°
4°
А Б
В Г
XVI
56
А Б
В Г
а б
в г
1 2
3 4
Размер
листа
карты
4x6°
2x3°
40' χ 1°
20' χ 30'
10' χ 15'
5'х 7'30"
2'3"х 3'45"
Пример
номенклатуры
С-3
С-З-Б
C-3-XVI
С-3-56
С-3-56-А
С-3-56-А-6
С-3-56-А-6-4
Топографические СК определяются для каждой зоны; для связи
между зонами к значению координаты Ζμ слева приписывают
порядковый номер зоны. Топографическая СК ΟΧμΥμΖμ используется для
привязки вертолета к цифровой карте местности и работы КЭАН.
,
*м
0
500 000 м
yV-явона
ζκ
Экватор
Рис. 8.7. Топографическая система координат
Переход от географической СК к топографической СК
осуществляется с использованием соотношений [8.13]:
X
м
ко
Μ
(А2
Л4
М0 + ν tg φ I— + (5 - Τ + 9C + 4C2) — +
+ (61 - 58Γ + Γ2 + 600C - ЗЗОе'2) —-
720
/ А3
ΖΜ = ΖΜ0 + к0и I A + (1 - Τ + С) — +
(8.5)
+ (5- 18Г + Г2 + 72С-58е'2)
Ум = Уо,
120
где Zmo — начальный сдвиг по оси Ζμ\ λ, λο — долготы текущей
точки и точки начала топографической СК; φ, φο — широты текущей
точки и точки начала топографической СК; Ко — высота точки в
географической СК; е — эксцентриситет земного эллипсоида; а — большая
полуось земного эллипсоида; ν — средний радиус земного
эллипсоида; ко — масштабный коэффициент проекции; А = (λ — λο) cos φ;
Τ = tg2 φ; С = e' cos2 φ\ e' = e2/(l - e2);
M=a
64
5e6
256 "
+
15e" 45e6
"256" + 1024 +
. /3e2 3e4 45e6
\φ~ Χ + ^2~ + Ϊ024 +
• „ /35e6
Sm4^+ 3072 +
здесь Μ — радиус кривизны меридиана, Mo — Μ (φο).
Обратные преобразования производятся следующим образом [8.13]:
ι/, tg φ] (D2
Р\
Pi
24
φ = φο ~ —-— | \ ~ (5 + 3Γ, + 10C, - AC2 - 9e'2) ^- +
+ (61 + 90Γ, + 298C, + 45Γ,2 - 252C2 - 3C2)
λ = λ0+
(8.6)
+
[ρ - (1 + 2Γ, + C,)^- + (5 - 2C, + 28Γ, - ЗС2+ 8е'2+ 24Γ,2)^-)
где
V 1 — e2sin ψ\
cos ^]
Pi
α (1-е2)
(1 - e2sin2 φ\)
3/2'
Ψ\ = μ\ +
Je,
+
27e3
32
151e3
96
+
+
^21e2
sin 2μ, + [-^ ~
. /1097e[
55e{
U2~
Η sin 4μι +
sin 8μι +
ei =
i-(i-^2)
1 + (1 - e2)
Хм
2\'/2
M,
1/2 ·
Ml
e
Τ
3e4
о 1--г--=-г
e
6~4
5eb
256
Zjv/ — Zmo
Μι=Μ0+'ψ-; Γ, = tg2^,; С, =e'2cos2^,; £> =
ко г/|Ко
Те
Система координат
Географическая (гринвичская)
система координат
Горизонтный сопровождающий
трехгранник (горизонтная
система координат)
Связанная система координат
Топографическая система
координат
блица 8.3
Область применения
Расширенный фазовый вектор состояния,
оценки положения и скорости вертолета,
формируемые GNSS-приемником
Уравнения динамики вертолета,
компоненты вектора скорости, углы Эйлера
Вектор абсолютной угловой скорости,
вектор кажущегося ускорения
Оценка вектора положения, формируемая
КЭАН
Системы координат, используемые при формировании
функционально-программного прототипа интегрированного бортового НК в
режиме МВП приведены в табл. 8.3.
8.3.2. Модель движения вертолета как объекта управления.
В общем случае пространственное движение центра масс вертолета
описывается векторным уравнением сил в проекциях на оси
географической (по положению) и горизонтной (по скорости) СК [8.11]:
φ = —Ωχ,
λ
COS (φ)'
h = VyNE, (8.7)
V»Ε = (ω2 + 2E/*rth) VyNE - (Пу + 2£/Earth) VZNE + N?E + 9x,
VyNE = - (Ω2 + 2£/zEarth) VXNE + (nx + 2!7xEarth) VZNE + N»E + gy,
VZNE = (ily + 2£/Earth) VXNE - (Пх + 2t/|arlh) VyNE + N?E + 9z.
В этих уравнениях h , φ, λ — высота, широта и долгота ц. м.
вертолета; V^^ = ( VXNE I УуЕ I VZNE ) — вектор скорости вертолета
в горизонтной СК; Ω = ( Ωχ | Ω,υ \ Ω2 ) — вектор угловой скорости
вращения горизонтного трехгранника относительно Земли:
yNE yNE yGR
Ωχ = —|—, Ω3/ = ^—, Ωζ = ^— tg ρ;
Κ\ til tf-2
R\, R.2 — радиусы первого и второго главных сечений земного
эллипсоида в текущей точке:
α (1 — е2) α
Я] = туо + "■> -Й2 = —, + п,
(l-eWp) ' ^/(l-e2sin2^)
UEarih = ( ^xarlh I Uyarth | t/2Earth ) — вектор угловой скорости
вращения Земли в горизонтной СК:
U?nh = ^arth cos φ, £/Earlh = wEarth sin ρ, !7Earth = 0,
wEarih = 7,292116- 10_5c_l — модуль угловой скорости вращения
Земли, NNE = ( n£e I NyE | JV^S ) — вектор кажущегося ускорения
вертолета в горизонтной СК; g = ( дх \ ду \ дг ) — вектор
гравитационного ускорения, вычисляемый по формуле:
g = gNE (R) - UEarth x (UEarth χ R), (8.8)
TNE
{9™\9ΪΕ\9ΪΕΥ
где Ε = \ 9х \ 9у \ 9ζ ) ~~ вектор ускорения силы тяготения
в проекции на оси горизонтной СК [8.8]:
д2Е = д0ат(2<р)
. + ^) + 5(τ-*
ΝΕ
-до
, β2 · 2 Л 3 · 2
1 - — sin ιρ + ς Ι 1 + - sin ^
/1 1 \ /17 3
-4 ' sin2 φ - — sin2 (2φ) J - eq ί — sin2 ^ + — sin2 (2 φ) ) +
+ -ε2(3ήη2φ-\)
a
hq ,. r . ο , 2/ι 3/ι2
— (1 + 6sin2p) + —
N£
o,
UEarih x (UEarth x R) — слагаемое, обусловленное влиянием
центробежного потенциала; до = 9,78049 м/с2.
Пространственное угловое движение вертолета относительно
центра масс описывается следующими уравнениями в проекциях на оси
связанной СК:
ωχ
ΣΜχ
Ι χ '
{Ιζ ~ Ιχ)ωχωζ , ΣΜγ
ωγ = ■ ; Ь
Ιζ
Ιζ
(8.9)
ωζ —
-{Ιζ ~ Ιχ)ωχωγ ΣΜΖ
Ι ζ '
Ιζ
В этих уравнениях ωχ,ωγ,ωζ — составляющие вектора
абсолютной угловой скорости вертолета ω относительно осей связанной СК;
ΣΜχ, ΣΜγ, ΣΜΖ — составляющие суммарного вектора моментов
ΣΜ, действующего на вертолет в полете, в проекциях на оси
связанной СК.
Для расчета компонент кажущегося ускорения и абсолютного
углового ускорения вертолета в связанной СК была использована
приведенная ниже система (8.10) линеаризованных в окрестности так
называемых балансировочных траекторий уравнений, с коэффициентами,
зависящими от скорости полета [8.2], дополненная нелинейными
членами в уравнениях сил, учитывающими большие изменения значений
углов тангажа и крена (так называемая «частично линеаризованная
система»). Система уравнений записана в связанных осях и предназна-
чена, как уже указывалось выше, для исследования режимов полета
с изменениями значений скорости от 0 до максимального значения:
Nx = XVv (Vx) (Vy - Vy6) + Xй' (Vx) (ωζ - ωζ6) + Fx (ϋ, 7) +
+ Xх (Vx) (χ - χ6) + Хв°ш- (Vx) (0О.Ш. - вожб),
Ny = YVy (Vx) (Vy - Vy6) + Υω- (Vx) (ωζ - ωζ6) + Fy (ϋ, 7) +
+ ух (vx) (χ - X6) + ΥθθΜ· (vx) (в0.ш. - в0.шЛ),
Νζ = ~ZVv (Vx) (Vz - Vz6) + Τ* (Vx) (ωχ - ωχ5) + Tv (Vx) (ω„ - ojy6) +
+ Ρζ(ϋ,Ί)+Ίη(νχ)(η-η6) +
+ ~f>* (νχ) (врл. - 0ρ.Β.β) + ζθθΜ (νχ) (θ, - "
"о.ш. ^о.ш.б
i).
ώχ = MVX (Vx) (Vz - Vz6) + Ж; (Vx) (ωχ - ωχ6) +
+ Μχυ (Vx) (ων - ojy6) + Щ (Vx) (η - щ) +
+ lfxp° (Vx) (0p.B. - βρ.Β.β) + М^°ш- (Vx) (0О.Ш. - в0.шЛ), (8.10)
ώ„ = ~MVy (Vx) (Vz - Vz6) + Жу (Vx) (ωχ - ωχ6) + Жуу [Vx) {ωυ - wy6) +
+ Ml(Vx) (η - η6)+ΈΐΡ'(νχ) (0р.в.- *Р.в.б) +Μ°ν™(νχ) (0„.ш. - 0„.ш.в),
ώζ = ΉΥ; (Vx) (Vy - Vy6) + ~WZ (Vx) (ωζ - ωζ6) + ΈΧ (Vx) (χ - χ6) +
+Ήθ;α(νχ)(θ0.ίΏ. -в0.шЛ),
где Nx, Ny, Nz — проекции кажущегося ускорения на оси связанной
СК; Vx, Vy, Vz — проекции скорости вертолета на оси связанной СК;
VX6, Vy6, Vz6 — проекции скорости вертолета на оси связанной СК
для балансировочной траектории; ωχ, ων, ωζ — проекции абсолютной
угловой скорости вертолета на оси связанной СК; ωχ(,, шуб, ωζ(, —
проекции абсолютной угловой скорости вертолета на оси связанной СК
для балансировочной траектории; ι9,Ψ, η — эйлеровы углы ориентации
вертолета (тангаж, рысканье, крен); #0.ш. — общий шаг винта; #0.ш.б —
общий шаг винта для балансировочной траектории; ΘΡ.Β. — шаг
рулевого винта (в случае схемы с рулевым винтом); #р.в. — шаг рулевого
винта (в случае схемы с рулевым винтом) для балансировочной
траектории; χ — угол продольного отклонения автомата перекоса; χ(, —
угол продольного отклонения автомата перекоса для балансировочной
траектории; η — угол поперечного отклонения автомата перекоса; щ —
угол поперечного отклонения автомата перекоса для балансировочной
траектории; Χ ", Χ \ Χ , Χ °ш — производные проекции
аэродинамической силы на ось X связанной СК по параметрам движения и
управления; Υ ", Υω\ Υχ, Υ °'ш' — производные проекции
аэродинамической силы на ось Υ связанной СК по параметрам движения и
управления; Z*,ZX,ZV,Z,Z рв, Ζ °'ω — производные проекции
аэродинамической силы на ось Ζ связанной СК по параметрам движе-
ния и управления; Мх , Мх , Мя , Мх, Мх , Мх — производные
проекции аэродинамической момента на ось X связанной СК по пара-
г г 1/ , , , , л а г
метрам движения и управления; Му , Му , Му , Му, Му , Му —
производные проекции аэродинамической момента на ось Υ связанной
СК по параметрам движения и управления; Мгу, М^г, Мх, Μ°'1"' —
производные проекции аэродинамической момента на ось Ζ
связанной СК по параметрам движения и управления; Fx(u,j), Fy(u,j),
Fz(u,j) — нелинейные члены.
Уравнения (8.10) получаются при разложении в ряд Тейлора
соотношений для сил и моментов, действующих на вертолет в окрестности
балансировочных траекторий. Здесь под балансировочными понимается
совокупность траекторий, полученных в результате решения системы
уравнений статики, т.е. при нулевых аэродинамических моментах и
нулевом угле скольжения [8.2,8.4].
Для уменьшения динамических ошибок, возникающих при
использовании уравнений (8.10), т.е. ошибок, обусловленных наличием
перекрестных связей, в состав нелинейных членов Ρχ{ϋ,η), Fy(tf,7),
Fz(u,j) введены поправки, учитывающие влияние угла рысканья
•ф [8.2]. Для устранения динамических ошибок, обусловленных
переходными процессами при смене балансировочных режимов, при
интерполяции всех табличных данных используется сплайн-интерполяция,
аппроксимирующая исходную таблицу системой В-сплайнов [8.5].
При этом использовалась следующая технология аппроксимации.
Кривая, построенная на основе В-сплайн-базиса, описывается
следующим образом [8.5]: п _
p(t) = Y/PiNik(t), (8.11)
i=0 _
где p(t) — радиус-вектор точек на кривой; Р; — вершины
аппроксимируемой ломаной (всего вершин η + 1); Nik(t) — весовая функция г-й
нормализованной В-сплайн базисной кривой порядка к (т. е. степени
к — 1), задаваемая рекуррентными соотношениями:
Μί
Wifc =
если Х{ < t < Xi-\,
если t е (χί,χί — 1),
(t-Xi)Niik-i(t) (xi+k -t)Ni+],k-\(t)
^i+fc- I — %i Xi+k ~ xi+ I
Здесь Xi — элементы узлового вектора, at- параметр,
изменяющийся в диапазоне от 0 до imax = (η - к + 2).
Узловой вектор, длина которого (п + к + 1), вводится для учета
собственной кривизны В-сплайн-кривых и представляет собой
неубывающую последовательность целых чисел — параметрических узлов.
Узловой вектор определяется числом точек в аппроксимируемой
ломаной, порядком кривой, а также наличием сложных (кратных) узлов.
Известно [8.5], что В-сплайн-кривая является полиномом степени
(к- 1) на каждом интервале (xit χι+\) и что все ее производные до
(к — 2)-го порядка включительно непрерывны вдоль всей кривой, то
есть эта кривая представляет собой сплайн-функцию порядка к.
Таким образом, в результате использования системы В-сплайнов
при аппроксимации табличных данных удается обеспечить
непрерывный переход от одного балансировочного режима к другому и
практически исключить возникающие при этом динамические ошибки.
В состав возмущений, входящих в правую часть уравнений (8.10),
необходимо включить дополнительную аэродинамическую нагрузку,
возникающую вследствие воздействия ветра и являющуюся основным
неконтролируемым фактором при описании движения вертолета.
Возмущения, вносимые ветром, приводят к изменению вектора
воздушной скорости вертолета, и, следовательно, к изменению углов атаки
и скольжения. Это, в свою очередь, приводит к соответствующим
изменениям коэффициентов аэродинамических сил и моментов,
необходимых для расчета компонент кажущегося ускорения и абсолютного
углового ускорения вертолета в связанной СК. В приводимой модели
не рассматриваются эффекты, связанные с изгибами несущих лопастей
винта и изменениями их аэродинамической эффективности, а также
образованием дополнительных вихревых потоков, в силу сложности
описанного явления, требующего дополнительного изучения.
В общем случае, с учетом влияния ветра вектор воздушной
скорости запишется в виде __
VB = VB + WB, (8.12)
где VB — вектор воздушной скорости при невозмущенном движении
(для вертолета совпадает с вектором скорости в географической СК);
WB — вектор скорости ветра.
В рамках данной модели ветер рассматривается в виде
детерминированного горизонтального порыва, т.е. предполагается, что
отсутствуют вертикальные перемещения воздушных масс; при этом абсолютная
величина скорости зависит от высоты и географических координат
точки, а направление характеризуется углом азимута, т.е. направлением
ветра по отношению к направлению на север.
При исследовании управляемого маловысотного полета вертолета
используются два подхода к формированию требуемых характеристик
плоского ветра:
• постоянный ветер, при котором явно задаются модуль скорости
|WB| и направление ветра Az\
ветер по профилю, когда абсолютная величина скорости ветра и
угол азимута определяются посредством аппроксимации между
профилями скорости ветра, задаваемыми априорно (рис. 8.8, 8.9).
2500
2000-
1500
со
2500-,
2000-
1500 —
1000
500-
PQ
1000 —
500-
I ' I ' I ■ I ' I
-200-100 0 100 200 300 400
Азимут ветра,град
1 I ' I ' I
0 5 10 15
Скорость ветра, м/с
I ' I ' I
20 25 30
Рис. 8.8. Профиль азимута ветра Рис. 8.9. Профиль модуля скорости
ветра
Затем полученный вектор скорости ветра в географической СК
проецируется в связанную СК, где, суммируясь с полным вектором
скорости вертолета, образует вектор воздушной скорости (8.12).
Так как соотношения для расчета компонент кажущегося ускорения
и абсолютного углового ускорения вертолета записаны в связанной
СК, то учет возмущений, обусловленных воздействием ветра,
осуществляется за счет изменения коэффициентов аэродинамических сил
путем использования в качестве аргумента модуля воздушной скорости
в связанной СК:
• X " — производной проекции аэродинамической силы на ось X
связанной СК по воздушной скорости вертолета;
• Υ у — производной проекции аэродинамической силы на ось Υ
связанной СК по воздушной скорости вертолета;
• Ζ ζ — производной проекции аэродинамической силы на ось Ζ
связанной СК по воздушной скорости вертолета;
• Μχ — производной проекции аэродинамического момента на
ось X связанной СК по воздушной скорости вертолета;
• М° — производной проекции аэродинамического момента на
ось Υ связанной СК по воздушной скорости вертолета;
• Мгу — производной проекции аэродинамического момента на
ось Ζ связанной СК по воздушной скорости вертолета.
Для пересчета кажущегося ускорения в горизонтную СК
используется следующее соотношение:
NN£=(Af/xNflF, (8.13)
где №F = ( Nx I Ny\ Nz ) — вектор кажущегося ускорения
вертолета в связанной СК, рассчитываемый с помощью (8.10).
Матрица перехода от горизонтной СК к связанной определяется
с использованием параметров Родрига-Гамильтона [8.9,8.11]. Данный
подход базируется на представлении конечного поворота твердого тела
в терминах собственного кватерниона преобразования систем
координат, компоненты которого и получили название параметров
Родрига-Гамильтона.
По сравнению с классическими кинематическими уравнениями
использование кватернионов позволяет получать высокоточное
устойчивое численное решение, лишенное особых точек и обеспечивающее
взаимную ортогональность осей при пересчете координат:
(Чо+д] -<&-<& 2(9192+9093) 2(9ι93-<?ο<?2) \
IQI IQI IQI
aBF _ 2(<?1<?2 -<?0<?з) <?0 + 4% - <?| - <?з 2(92<?3 + <?0<?|)
NE~ —ш— —ioi— —ш—
2(9ι<?3 + <?ο<?2) 2(929з -9091) <?o + qj - <?, - q\
V IQI IQI IQI )
(8.14)
где 9i, 92, 93, 94, |Q| — компоненты и модуль кватерниона Q,
соответствующего переходу от горизонтной к связанной СК.
Кинематические уравнения в этом случае запишутся в векторной
форме [8.9,8.11]:
Q = ^[E]oQ, (8.15)
где «о» — символ кватернионного умножения; [Ξ] кососимметричная
матрица (ротор), сформированная на компонентах вектора Ξ = ω —
- ω - ТИнагш; ω (t) = ( ωχ (ί) ujy(t) ωζ (ί) ) — вектор абсолютной
угловой скорости вертолета в проекции на оси связанной СК.
Традиционные углы Эйлера (ψ, ΰ, j) можно определить на
основе матрицы перехода А^ в соответствии со знаками элементов
матрицы Ay^:
φ = arctg , (8.16)
7 =
где Aij — элементы матрицы Aj;
Таким образом, полная система дифференциальных уравнений,
частично линеаризованная в окрестности балансировочной траектории и
описывающая пространственное движение вертолета, включает 6
уравнений движения центра масс (8.7), уравнения расчета компонент
вектора кажущегося ускорения и углового ускорения вертолета,
образующие систему (8.10), уравнения пересчета кажущегося ускорения
в географическую СК (8.11) и 4 кинематических уравнения (8.15),
описывающие динамику изменения параметров Родрига-Гамильтона.
8.3.3. Система стабилизации. В рамках данной главы для
решения задач стабилизации и управления вертолетом относительно
центра масс используется стандартная модель автопилота вертолета
одновинтовой схемы, реализованная в виде четырех отдельных каналов
(контуров) управления [8.4, 8.6]:
• канал управления по высоте (Н);
• канал управления по направлению (ψ);
• канал управления по крену (7);
• канал управления по тангажу (ϋ).
Каждый канал рассматривается как отдельная замкнутая система
в предположении о том, что влияние отдельного канала на другие
отсутствует.
Коротко остановимся на особенностях работы автопилота в
различных каналах.
Режим стабилизации предназначен для компенсации воздействия
возмущающих факторов и стабилизации параметров движения
вертолета, соответствующих текущей балансировочной траектории.
Допустим, что вертолет совершает прямолинейный
горизонтальный полет. Под действием возмущающих факторов вертолет
начинает отклоняться по направлению. В автопилот управления поступают
2 сигнала из бортового интегрированного комплекса (БИК): с
навигационной системы — сигнал направления ф* — и с датчика угловой
скорости — сигнал угловой скорости ω* Эти сигналь: суммируются,
усиливаются и поступают на рулевой агрегат, который перемещает
орган управления (в данном случае изменяет шаг рулевого винта)
на величину #рв, пропорциональную входному сигналу. Под действи-
ем изменения шага рулевого винта вертолет начинает возвращаться
к первоначальному положению, следовательно, уменьшается сигнал φ*,
а вслед за ним и шаг рулевого винта #рв.. При возвращении вертолета
в первоначальное положение, если порции изменения шага рулевого
винта #р.в. выбраны правильно, в зависимости от сигналов ф* и ω*
(в случае отсутствия постоянно действующих возмущений), имеют
место равенства ф* = 0, ω* = О, ΘΡ.Β. = 0, т.е. автопилот возвращает
вертолет в первоначальное положение, и шаг рулевого винта
становится прежним.
Таким образом, стандартный закон стабилизации в данном канале
имеет следующий вид:
0р.в. = нФ* + Му^*, (8.17)
где ϊφ — передаточное число автопилота по углу направления
(коэффициент пропорциональности между величиной изменения шага
рулевого винта и сигналом угла φ); μν — передаточное число автопилота
по угловой скорости направления (коэффициент пропорциональности
между величиной изменения шага рулевого винта и сигналом угловой
скорости ωυ).
Для вертолета соосной схемы принцип работы автопилота остается
прежним, лишь в качестве управляющего воздействия выступает
разница угловых скоростей основных винтов вертолета.
В каналах крена и тангажа законы стабилизации аналогичны.
Режим стабилизации по высоте отличен от описанных выше
режимов и состоит в следующем. Вертолет совершает полет на
определенной высоте. Под действием каких-либо возмущений вертолет начинает
менять высоту. Электрический сигнал, пропорциональный изменению
барометрической высоты Н, поступает с корректора высоты
навигационной системы в автопилот. В автопилоте он усиливается и
воздействует на рулевой агрегат, который изменяет общий шаг на величину
#ош. пропорциональную сигналу изменения высоты, таким образом,
что вертолет начинает возвращаться на прежнюю высоту. Далее все
происходит аналогично тому, что описано для канала направления.
Стандартный закон стабилизации в канале высоты имеет
следующий вид:
0о.ш. = гнН, (8.18)
где iff — передаточное число автопилота по высоте (коэффициент
пропорциональности между величиной изменения общего шага несущего
винта и барометрическим изменением высоты).
Следует иметь в виду, что при действии на вертолет
постоянного возмущения для парирования его требуется какое-то перемещение
органов управления #°ш и, следовательно (в установившемся режиме
ω = 0), ц. м. вертолета отклоняется от стабилизируемого положения на
величину δΗ, являющуюся статической ошибкой стабилизации:
<УЯ=-Е±. (8.19)
г
В (8.19) г — передаточное число по углу (высоте) данного канала.
8.4. Алгоритм управления движением центра масс
вертолета в режиме огибания рельефа местности
(«идеальный пилот»)
Как отмечалось выше, управление движением центра масс
беспилотного вертолета в режиме МВП осуществляется с помощью
алгоритма «идеального пилота», обеспечивающего, в частности, облет и обход
препятствий в соответствии с данными интегрированной
навигационной системы.
Основные особенности описываемой ниже модели «идеального
пилота» сводятся к следующему:
• Использование для стабилизации траекторного управления
вертолетом в режимах облета и обхода препятствий канала
крена с целью исключения перекрестных связей между каналами
управления;
• Управление высотой полета посредством изменения шага
несущего винта;
• Наличие обратной связи по отклонению положения и скорости
вертолета от опорной (балансировочной) траектории;
• Формирование закона автоматического управления движением
центра масс вертолета на основе имеющейся навигационной
информации с учетом требований по располагаемому
динамическому ресурсу вертолета.
Модель «идеального пилота» позволяет осуществлять управление
вертолетом в следующих режимах: «облет препятствий», «обход
препятствий», комплексный режим «обход-облет препятствий», а также
режим автоматического выбора варианта управления вертолетом.
Рассмотрим детально основные особенности каждого из перечисленных
режимов управления маловысотным полетом вертолета.
Режим «облет препятствий» реализуется следующим образом:
• Управление полетом вертолета осуществляется изменением угла
тангажа и шага несущего винта вертолета, что приводит к
увеличению, либо уменьшению высоты полета над подстилающей
поверхностью;
• Составляющая скорости Vz в связанной системе координат
равна 0. Движение вертолета осуществляется без скольжения;
• Значение угла рысканья остается неизменным.
Режим «обход препятствий» реализуется следующим образом:
• Управление полетом вертолета осуществляется изменением угла
крена и шага несущего винта вертолета;
• Составляющая скорости Vy в горизонтной системе координат
равна 0. Таким образом, вертолет осуществляет полет без изменения
высоты полета в географической системе координат;
• Значение угла рысканья остается неизменным.
Режим «обход-облет препятствий» реализуется следующим образом:
• Управление полетом вертолета осуществляется изменением угла
тангажа и крена вертолета, а также изменением шага несущего
винта.
• Значение угла рысканья остается неизменным.
Режим автоматического выбора варианта управления маневром
вертолета реализуется с использованием специального «решающего
правила» с учетом располагаемого динамического ресурса по
управлению. Решение о выполнении того или иного маневра («облет препят-
ствий»/«обход препятствий») принимается из условия минимизации
используемого ресурса.
С этой целью в каналах управления вертолета (по тангажу и
рысканью) была использована передаточная функция «идеального пилота»,
коэффициенты которой подбирались таким образом, чтобы величина
среднеквадратического отклонения высоты полета над рельефом
принимала минимальное значение.
Рассмотрим подробнее упомянутую модель для вертикального
канала (канала тангажа). Передаточная функция «идеального пилота»
имеет вид [8.6]:
χ = ч (ϋ - ϋη) + ίωζ {ωΣ - ωζη), (8.20)
где χ — угол продольного отклонения автомата перекоса (канал
тангажа); ϋ — текущее значение угла тангажа; ϋη — требуемое значение
угла тангажа; ωζ — текущее значение угловой скорости вертолета
вокруг оси Ζ связанной СК; ωζη — требуемое значение угловой скорости
вертолета вокруг оси Ζ связанной СК; ί#, ίω — коэффициенты модели.
Режим «облет препятствия» характеризуется управлением
продольным каналом (канал тангажа), дополненным по сравнению с (8.20)
алгоритмом формирования управления несущего винта вертолета. Для
стабилизации траекторного положения вертолета в горизонтальной
плоскости (ось ΟΖ горизонтной системы координат) также
осуществляется управление боковым каналом (каналом крена).
Каналу крена соответствует передаточная функция «идеального
пилота», имеющая следующий вид:
η = ηδ + Ц (7 - In) + ίωχ (ωχ - ωχη), (8.21)
где η — угол поперечного отклонения автомата перекоса; ηβ —
балансировочное значение угла поперечного отклонения автомата перекоса;
7 — текущее значение угла крена; 7η — требуемое значение угла крена;
ωχ — текущее значение угловой скорости вертолета вокруг оси X
связанной СК; ωχη — требуемое значение угловой скорости вертолета
вокруг оси X связанной СК; г7, ίωχ — коэффициенты модели.
Каналу управления несущим винтом соответствует передаточная
функция «идеального пилота», имеющая следующий вид:
0о.ш. = би.г + ih (h - К) +ih(h- hn^ , (8.22)
где #о.ш. — общий шаг несущего винта; #0.ш.,5 — балансировочное
значение общего шага несущего винта; h — текущее значение высоты
в географической системе координат; hn — требуемое значение высоты
в географической системе координат; h — текущее значение скорости
изменения высоты (компонента Vy в горизонтной системе координат);
hn — требуемое значение скорости изменения высоты; ih, ih
—коэффициенты модели.
При МВП в режиме следования рельефу местности задача
управления величиной угла продольного отклонения автомата перекоса
заключается в том, чтобы Свести к минимуму ошибку рассогласования
между текущим значением угла тангажа вертолета и некоторым его
требуемым значением. Для определения последнего был использован
один из подходов, характерных при разработке алгоритмов работы
автоматических устройств управления облетом препятствий, когда сигнал
на облет препятствия поступает в соответствующий канал
автоматической системы на некотором фиксированном расстоянии до
последнего [8.6,8.11], которое назовем радиусом локации Rl. Варьирование
величины Rl меняет значение нормальной перегрузки Ny и
характеристики траектории полета. Большие значения Rl дают более пологую
траекторию и приводят к уменьшению Ny и увеличению высоты
полета над рельефом. Вместе с тем, при уменьшении Rl, одновременно
с увеличением перегрузки и уменьшением высоты облета, возможна
ситуация, когда принципиально невозможно совершить облет из-за
недостатка располагаемой перегрузки.
Направление от вертолета на точку пересечения дуги радиуса Rl
с границей сечения рельефа вертикальной плоскостью (см. рис.8.10)
определяет требуемый угол θη] траектории вертолета при выходе к
данной точке Μ рассматриваемого участка рельефа.
В осях топографической системы координат этот угол определяется
следующей системой уравнений:
Хр = X + RL cos θη\,
Yp = Y + RLsmenl, (8.23)
YP = F(XP),
где Xp, Yp — координаты точки М рельефа; Χ, Υ — координаты
вертолета; F(X) — функция, описывающая границу продольного разреза
рельефа.
В рамках данного раздела мы предполагаем, что на борту имеется
цифровая карта местности, где реализуется МВП, а в состав НК входит
бортовая РЛС, работающая в миллиметровом диапазоне, способная
воспроизводить режим картографирования.
^ X Тр *~
Рис. 8.10. Определение потребного угла тангажа
Угол #„| определяется путем решения системы (8.23) численно
с применением метода Мюллера [8.6]. Задание требуемой высоты
полета над рельефом Япотр. определяет дополнительно угол
0n2 = arcsin ί1^) , (8.24)
и тогда суммарный требуемый угол траектории θη определится как
сумма углов θη\ и θη2.
В качестве требуемого угла тангажа выбираем угол:
ϋη = (θ- θη) К,
где К — масштабный коэффициент.
Аналогичный подход был использован при маневре обхода
препятствия в горизонтальной плоскости: т.е. передаточная функция
«идеального пилота» удовлетворяет следующему соотношению:
η = ίψ (Φ - Φη) + ζω„ (ω„ - шуп), (8.25)
где η — угол поперечного отклонения автомата перекоса (канал
направления); ψ — текущее значение угла направления (рысканья); грп —
требуемое значение угла направления (рысканья); шу — текущее
значение угловой скорости вертолета вокруг оси Υ связанной СК; и>уп —
требуемое значение угловой скорости вертолета вокруг оси Υ
связанной СК; ίψ, ίω — коэффициенты модели.
Требуемое значение угла крена в режиме «облета препятствий»
определяется, исходя из условия, что боковое движение вертолета
необходимо свести к нулю (скорость Vz в связанной системе координат
равна нулю).
Тогда требуемое значение угла крена определится следующим
образом:
Ίη = Ίδ + ί* (Ζ - Ζη) + ivz (Vz - Vzn), (8.26)
где 7п — требуемое значение угла крена; 7<5 ~~ балансировочное
значение угла крена; Ζ — координата положения вертолета Ζ в
топографической системе координат; Ζη — требуемая координата положения
вертолета Ζ в топографической системе координат; Vz — скорость
вертолета Vz в горизонтной системе координат; Vzn — требуемая скорость
вертолета Vz в горизонтной системе координат; гг, ivz —
коэффициенты модели.
Требуемое значение угловой скорости вращения вертолета вокруг
оси X в связанной системе координат определяется по формуле
(8.27)
где tp — расчетное время полета вертолета до точки М.
Управление несущим винтом осуществляется с использованием
соотношения (8.22).
В режиме «обхода препятствий» управление вертолетом
осуществляется каналом крена и каналом несущего винта (см. рис. 8.11).
Рис. 8.11. Определение потребного угла направления
Определение требуемого значения крена осуществляется
аналогично каналу тангажа в режиме «облета препятствий» (см. выше), с той
лишь разницей, что получившийся угол отклонения траектории
умножается на масштабный коэффициент:
Ίη = Ίδ +гфи
(8.28)
где 7п — требуемое значение угла крена; js — балансировочное
значение угла крена; φ — угол отклонения траектории (φ = фп] + фП2); г —
масштабный коэффициент модели.
Требуемое значение угловой скорости вращения вертолета вокруг
оси X в связанной системе координат определяется по формуле:
ωχη = ^, (8.29)
tp
где tp — расчетное время полета вертолета до точки М.
Для формирования маневра обхода препятствия используются
следующие предположения:
1. В качестве невозмущенной (опорной) траектории
рассматривается балансировочная траектория с нулевым значением угла направления
(рысканья).
2. На текущей высоте полета строится срез рельефа, и так же
как и в продольном канале, определяются требуемые значения угла
направления для левой и правой полуплоскостей.
3. Маневр выполняется в сторону наименьшего значения угла
направления.
4. После завершения маневра продолжается полет по опорной
траектории.
Управление каналом несущего винта осуществляется с
использованием соотношения (8.22) с учетом условия стабилизации
вертикального перемещения вертолета (скорость Vy в горизонтной системе
координат должна быть равна нулю).
Комбинированный режим «обход-облет препятствий»
характеризуется управлением каналами тангажа, крена и шагом несущего винта
вертолета. Управление каналом тангажа и шагом несущего винта
осуществляется аналогично режиму «облет препятствий». Закон
управления каналом крена аналогичен случаю управления вертолетом в
режиме «обхода препятствий». Стабилизация траекторного положения
в горизонтальной и вертикальной плоскостях отсутствует.
Для всех трех режимов управления полетом вертолета закон
управления шагом рулевого винта (канал направления) имеет вид:
0р.в. = 0Ρ.Β.ί + Ч (Ф " Фп) + гШу К ~ ωνη) - (8-30)
где #рв. — шаг рулевого винта вертолета; 0р.в.г — балансировочное
значение шага рулевого винта вертолета; φ — текущее значение угла
направления (рысканья); фп — требуемое значение угла направления
(рысканья); шу — текущее значение угловой скорости вертолета вокруг
оси Υ связанной СК; шуп — требуемое значение угловой скорости
вертолета вокруг оси Υ связанной СК; ΐψ, ϊω — коэффициенты модели.
Требуемое значение угла направления постоянно и зависит от
начальных параметров полета вертолета.
Как уже указывалось выше, формирование закона автоматического
управления осуществляется на основе имеющейся навигационной ин-
формации (положения, скорости и углов ориентации вертолета, а также
сцены подстилающей поверхности) с учетом требований по
располагаемому динамическому ресурсу путем расчета и минимизации требуемых
ресурсов управления на совершение маневра облета и обхода и
осуществляется в соответствии со следующей процедурой:
1. При обнаружении с помощью бортовой РЛС препятствия (т.е.
перед началом маневра) вычисляется отдельно для предполагаемых
маневров «облет» и «обход» расчетное время достижения заданной
точки Μ (формирование засечки для системы стабилизации).
2. Принимается решение о маневре на основе минимизации
критерия на быстродействие, т.е. выбирается маневр, соответствующий
минимальному расчетному времени выполнения.
3. При выполнении маневра «облет» необходимо учитывать
невозможность его дальнейшего выполнения в силу ограничений на
располагаемые перегрузки и возможности несущего винта. Данный факт
формализуется в виде ограничения на минимально допустимую
продольную скорость движения V™,n. Таким образом, при нарушении
данного ограничения вертолет переводится в режим «обхода»
препятствия, требуемые характеристики которого определяются на основе
ранее сохраненной засечки системы стабилизации.
4. Вследствие ограниченной видимости бортовой РЛС
подстилающей поверхности, т.е. возможности появления новых препятствий
в процессе выполнения маневра пункты 1-3 выполняются на каждом
шаге работы системы автоматического управления. Иными словами,
траектория вертолета в режиме МВП представляет собой
последовательность маневров «облет/обход», обеспечивая следование рельефу
местности на заданной высоте за минимальное время.
8.5. Основные элементы интегрированного
навигационного комплекса
Перейдем теперь к описанию элементов интегрированной
навигационной подсистемы бортового комплекса перспективного беспилотного
вертолета. Варианты функциональных схем этой подсистемы
приведены выше на рис.8.1. и рис.8.2.
Первый вариант (рис. 8.1.) соответствует так называемой
слабосвязанной архитектуре интеграции навигационных данных. В [8.1] было
показано, что данный вариант является оптимальным с точки зрения
обеспечения высокой точности навигационных определений,
устойчивости навигационного решения при длительном времени операции и
эффективного использования вычислительных ресурсов.
В этом варианте интегрированная навигационная система включает:
• БИНС с собственным блоком измерителей (акселерометров и
датчиков угловых скоростей (ДУСов);
• Радиобаровысотомер;
• Многоканальный GNSS-приемник;
• Бортовую РЛС миллиметрового диапазона или лазерный локатор;
• Бортовую цифровую карту местности или набор эталонных сцен;
• Корреляционно-экстремальную навигационную систему;
• Интегральный фильтр Калмана.
Второй вариант соответствует глубоко интегрированной схеме ком-
плексирования, обеспечивающей устойчивую работу НК в условиях
воздействия помех в канале GNSS и отличается отсутствием
непосредственно БИНС (используется только блок ее чувствительных
элементов), более подробной моделью многоканального GNSS-приемника
(включая модель антенны, каналов слежения и блока формирования
измерений), а также усложненной структурой нелинейного фильтра
Калмана, формализующего метод комплексирования навигационных
данных.
Рассмотрим подробнее каждый из блоков, представленных на
функциональных схемах.
8.5.1. Чувствительные элементы БИНС. Как указывалось
выше, БИНС включает блок акселерометров, измеряющий вектор
кажущегося ускорения в связанной СК, и блок датчиков угловой скорости
(ДУСов), измеряющий вектор абсолютной угловой скорости ЛА в
связанной СК.
Строго говоря, каждый тип гироскопа или акселерометра имеет
свои особенности. В рамках данной главы рассмотрим обобщенные
чувствительные элементы, модели измерений которых включают
параметрические модели ошибок от типовых возмущающих факторов.
Ниже приведем описание таких обобщенных моделей измерений
акселерометров и датчиков угловых скоростей.
Измерения акселерометров. Измерения каждого из трех
акселерометров, установленных по осям связанной СК, формируются
следующим образом:
Ni = NlT + ANi} (8.31)
где JV/1 — реальное («истинное») значение кажущегося ускорения
вдоль г-й оси связанной СК; AJV; — погрешность акселерометра,
определяемая следующим образом:
ANi = μί] + μΆ + Ν\τμα + JV2trMi4 + Ν?μί5 + Ν^μχ, (8.32)
где μι^ (ί = X,Y,Z\j =1,2) — постоянные смещения нуля
акселерометров; μί^ (i = 1,2,3) — случайные аддитивные измерительные
шумы акселерометров; μί,ί+2 {ί = 1,2,3) — погрешности масштабных
коэффициентов акселерометров; μ^ (г = 1,2,3) — ошибка
нелинейности акселерометров, μ\4,μΐ5.Μ23>μ25>μζ3,βΖ4 — погрешности из-за не
ортогональности и перекоса осей чувствительности акселерометров.
Шумовые составляющие ошибок акселерометров μα{} = 1,2,3)
представляются стационарными случайными процессами с нулевым
математическим ожиданием и корреляционными функциями вида
Kn = a2ne-h^, (8.33)
где ση — среднеквадратическое отклонение (СКО) μ& от среднего
значения; hn — коэффициент затухания корреляционной функции для
случайных погрешностей акселерометров.
Как известно, дифференциальное уравнение формирующего
фильтра для указанного случайного стационарного процесса с входным
сигналом типа белого шума имеет вид
βί2 = ~Κμΐ2 + \/2h^anEiU (8.34)
где Eij (г = 1,2, 3;j = 1,2) — белый шум единичной интенсивности.
Измерения датчиков угловой скорости. Измерения каждого из
трех датчиков угловой скорости, установленных по осям связанной СК,
формируются следующим образом:
Ω; = Ω\τ + ΔΩ;, (8.35)
где Ω'Γ — реальное («истинное») значение проекции абсолютной
угловой скорости ЛА на г-ю ось связанной СК; ΔΩ; — погрешность датчика
угловой скорости, определяемая следующим образом:
ΔΩ; = 0i, + ϋα + ϋα + Nfuu + Ν?ϋί5 + iV3trtfi6+
+ Ω*Γ^7 + Ω$ϋα + Пз^гэ + Ω{γ4ιο + Ω'γ2^,, + Ω$2ϋί]2, (8.36)
где ϋϊ],ΰΐ2,ϋΐ3 (г = Χ,Υ,Ζ) — постоянные, температурные дрейфы
гироскопов и их случайные измерительные шумы; ΰ^ (г = Χ,Υ, Ζ;
j = 4,5,6) — удельные скорости дрейфа гироскопов,
пропорциональные перегрузкам (в разных типах гироскопов причины такой
зависимости могут быть разными; например, в механических
гироскопах такая зависимость объясняется небалансом гироскопов);
"βχ7,ϋγ&,ϋζ2 — погрешности масштабных коэффициентов гироскопов;
$Х8, ΰχ9, ΰγγ, ϋγ9, ΰζ?, ϋζΆ — дрейфы из-за не ортогональности и
перекоса осей чувствительности гироскопов; ^ш.^ш.^лг — погрешности,
обусловленные нелинейностью чувствительных элементов.
Шумовые составляющие ошибок гироскопов ϋα{ί = 1,2,3)
представляются стационарными случайными процессами с нулевым
математическим ожиданием и корреляционными функциями вида:
Kw=ale-h-W, (8.37)
где aw — среднеквадратическое отклонение (СКО) т9»з от среднего
значения; hw — коэффициент затухания корреляционной функции для
случайных погрешностей гироскопов.
Дифференциальное уравнение формирующего фильтра для
указанного случайного стационарного процесса с входным сигналом типа
белого шума имеет вид
tfi3 = -hwui3 + л/2/1ш awei2, (8.38)
где Eij (г = 1,2,3; j = 1,2) — белый шум единичной интенсивности.
8.5.2. Навигационный алгоритм БИНС. В главе 3 приведен
алгоритм работы БИНС, оперирующей в горизонтной системе координат.
В составе функционально-программного прототипа интегрированного
навигационного комплекса перспективного беспилотного вертолета
используется модификация данного алгоритма, заключающаяся в иной
ориентации осей горизонтной СК, а также использовании в алгоритме
определения ориентации только одного кватерниона, сразу
описывающего переход от горизонтной СК к связанной.
8.5.3. Радиобаровысотомер. Как известно [8.8, 8.10], радиобаро-
высотомер (РБВ) представляет собой достаточно сложное устройство,
объединяющее в себе радиовысотомер и баровысотомер. В силу
различных физических принципов работы измерителей (т. е. баровысотомера
и радиовысотомера), а также того факта, что ошибки баровысотомера
сосредоточены в низкочастотной части спектра, а ошибки
радиовысотомера в высокочастотной, как правило в комплексном РБВ существует
алгоритм первичной обработки измерений, позволяющий учесть
информацию от других навигационных подсистем и исключить ошибки
смещения высоты, а также часть ошибок, обусловленных динамикой
вертолета. Кроме того, стандартный (типовой) РБВ содержит
алгоритм вторичной обработки, представляющий собой простейший фильтр
Калмана, оценивающий измеренную высоту и параметры методических
ошибок радио- и баровысотомеров. Имитационное моделирование
блоков первичной и вторичной обработки комплексного РБВ выходит за
рамки данного описания в силу специфики, связанной с конкретной
аппаратной реализацией РБВ, и того факта, что, как правило, в
реальном РБВ не предусмотрен вывод первичной измерительной
информации для постобработки в интегральном алгоритме комплексирования
систем, т.е. РБВ рассматривается как «черный ящик» с известными
статистическими характеристиками измерений высоты.
В связи с вышесказанным представляется необходимым включить
в состав модели РБВ динамическую погрешность, не компенсируемую
блоком первичной обработки РБВ и обусловленную эволюциями
вертолета по крену и тангажу, а также инерционностью данного источника
навигационной информации.
Представим модель функционирования радиобаровысотомера в
следующем виде:
Нрбв = htT + Δ/ιρΒΒ, (8.39)
где /грев — высота полета над поверхностью, измеренная радиобаровы-
сотомером; htT — истинная высота полета вертолета; Δ/ιρββ — ошибки
измерения высоты, определенные следующим образом:
Δ/ιρββ = AhdPH + ΔΛ'£Β + (УЛрБв, (8.40)
где A/ip^sB — систематическая ошибка измерения высоты РБВ,
представляющая собой нормально распределенную случайную величину
с нулевым математическим ожиданием и заданным уровнем СКО as^s ;
Δ/ipgg — динамическая составляющая ошибки измерения высоты,
представляющая собой стационарный случайный процесс,
воспроизводимый стохастическим дифференциальным уравнением вида
Л^УП _ J_ ^Aidyn . (*» - ^БИНС) \
РБВ ~ Тр"Рв 1^ РБВ (cos (7tr - 7БИНС) + cos (ϋ* - tfBHHC))V I '
(8.41)
где ТрБВ — постоянная времени привода РВ;
(/itr - /1БИНС)
Кф~ (cos (7tr - 7БИНС) + cos (tftr - ^бинс))
— переменный коэффициент усиления фильтра, зависящий от разности
истинной высоты htT, оценки высоты БИНС Л.БИНС, разностей
истинного и измеренного значения крена (7tr — 7БИНС). а также истинного и
измеренного значения тангажа (ϋ1τ — i9BHHC); v — стандартный белый
шум с единичной интенсивностью; 5/г.рвв — случайная аддитивная
составляющая ошибки измерения высоты, представляющая собой
стационарный случайный процесс с нулевым математическим ожиданием
и корреляционной функцией вида
где а/г — среднеквадратическое отклонение (СКО) 5/г.рвв от среднего
значения; μπ — коэффициент затухания корреляционной функции для
случайной ошибки измерения высоты.
Таким образом, модель ошибок РБВ учитывает влияние динамики
вертолета на точность измерений, что позволяет включить в состав
оцениваемого вектора интегрального фильтра комплексированной
навигационной системы систематические ошибки РБВ.
8.5.4. Многоканальный GNSS-приемник. Как известно [8.12],
навигационные сигналы современных НКА, входящих в GNSS,
удовлетворяют следующим требованиям:
• пемехозащищенность;
• разделимость;
• контроль целостности;
• минимальная мощность, потребная для генерации сигнала.
Однако, в силу низкого уровня мощности излучаемого сигнала
и большой удаленности от навигационных потребителей существует
реальная опасность подавления сигнала GNSS источником помех
мощностью порядка 100 Вт на расстоянии до 100 км.
В связи со сказанным, в рамках данной работы приведены две
математические модели GNSS-приемника как источника навигационных
данных: стандартного GNSS-приемника в режиме кодовых измерений
и модель GNSS-приемника, способного функционировать в условиях
действия активных помех.
Наиболее общие математические модели кодовых измерений
приведены выше в главе 2. Здесь остановимся на более утилитарной модели
измерений, используемой при построении
функционально-программного прототипа бортового интегрированного комплекса беспилотного
вертолета, выполненной по слабосвязанной схеме (рис. 8.1).
Упрощенная модель функционирования многоканального
приемника GNSS. При формировании бортовой навигационной системы при
отсутствии помех, как уже указывалось выше, используется
слабосвязанная схема интеграции данных, в этом случае GNSS-приемник
рассматривается лишь как генератор решения навигационной задачи
на основе обработки кодовых измерений (псевдодальность,
псевдоскорость). Ниже приводится модель такого решения с учетом ошибок,
порождаемых влиянием разнородных по своей природе
неконтролируемых факторов с учетом того обстоятельства, что обсуждаемое решение
сформировано в географической системе координат:
-^GR = -^GR + ΔΧηΚΑ + ΔΧ;οη + ΔΛ^ι-ορ + ΔΧΜΛ + ΔΧΗΑΠ +&XgnSS.
FGGRNSS = Y& + ΔΚηκα + AFion + AYtTOp + А¥ыл + ΔΚΗΑπ + <%nss,
ZqrSS = Zqr + 'ΔΖηκα + ΔΖίοη + AZtrop + ΔΖΜΛ + ΔΖΗΑΠ + 5Zams,
V&T = V&h + AVf + 5VX, (8.42)
V?aT = V£R + AVyc + 6Vy,
VzaGNRss = V£R + AVzc + 6Vz,
где XqR, YqR, ZqR — «истинные» (полученные с помощью
моделирования) координаты вертолета в географической СК; V£qR, VqR, V^r —
компоненты вектора «истинной» скорости вертолета в географической
СК; ΔΧΗΚΑ, ΔΚηκαι ΔΖΗκα — погрешность в определении координат,
вносимая бортовой аппаратурой НКА, вызванная неучетом
релятивистского эффекта замедления хода бортовых часов НКА в системе
отсчета, связанной с навигационной аппаратурой потребителя;
погрешностью групповой задержки навигационного радиосигнала в бортовой
аппаратуре НКА, ошибками эфемерид и величиной ухода бортовых
часов НКА — моделируется случайной гауссовской величиной с
нулевым математическим ожиданием и заданным СКО σχΗΚΑ, σνΗΚΑ, σζΗΚΑί
ΔΧ\οη, Δν]0η, ΔΖίοη — погрешность в определении координат,
вызванная ионосферной задержкой сигнала — моделируется случайной
гауссовской величиной с нулевым математическим ожиданием и
заданным СКО σχ.ιηι1, σγίοη, σΖίο„; AXtTOp, AYtTOp, AZtTOp — погреш-
ность в определении координат, вызванная тропосферной задержкой
сигнала — моделируется случайной гауссовской величиной с нулевым
математическим ожиданием и заданным СКО σχ1νοί, σγ1ΐο , aztro ;
АХЫЛ, АКМЛ, AZMJ, — погрешность в определении координат,
вызванная эффектом многолучевости (эффект многократного переотражения
навигационного радиосигнала от естественных препятствий,
находящихся в непосредственной близости от принимающей антенны
приемника) — моделируется случайной гауссовской величиной с
нулевым математическим ожиданием и заданным СКО σχκρ, σνΜ,, σζΜ;
Δ-Χηαπ. Δ^ηαπ. ΔΖηαπ — погрешность в определении координат,
вносимая внутренними шумами приемника — моделируется
случайной гауссовской величиной с нулевым математическим ожиданием и
заданным СКО σχΗΑΠ, σγΜΠ, σΖΗΑΠ; AVf, AVf, AVf —
систематическая погрешность определения компонент вектора скорости вертолета,
вносимая высокочастотной частью приемника, моделируется
случайной гауссовской величиной с нулевым математическим ожиданием и
заданным СКО avc, су, cry', 5-Xgnssi (^gnss. ^Zgnss — случайные
аддитивные составляющие ошибок оценивания компонент положения,
представляющие собой стационарные случайные процессы с нулевым
математическим ожиданием и корреляционной функцией вида
где σχί — среднеквадратическое отклонение от среднего значения;
μ,Υ; — коэффициент затухания корреляционной функции для
случайной ошибки оценки г-й координаты; δΎχ, SVy, 5Vz — случайные
аддитивные составляющие ошибок оценивания компонент вектора скорости,
представляющие собой стационарные случайные процессы с нулевым
математическим ожиданием и корреляционной функцией вида
KVi = σ^β-^Η,
где σγί — среднеквадратическое отклонение от среднего значения;
μνί — коэффициент затухания корреляционной функции для
случайной ошибки оценки г-й компоненты;
Все перечисленные выше систематические и случайные ошибки
рассматриваются как случайные величины и процессы, т.е.
представляют собой результат влияния неучтенных возмущающих факторов и
использования упрощенных моделей измерений.
Процесс навигационных определений с помощью многоканального
GNSS-приемника предполагает вычисление географических координат
вертолета на основе высоты, долготы и широты вертолета. Такой
пересчет осуществляется с использованием формул (8.2) и (8.3).
Для использования навигационных определений, полученных с
помощью многоканального GNSS-приемника в интегральном фильтре
Калмана, необходимо пересчитать полученные оценки компонент по-
ложения в сферическую географическую СК и компонент скорости
вертолета в горизонтную СК:
/IGNSS = *GGNRSS) (рсис = (ро + ^ШШ, (8.43)
7GR
\ _ \ ι ^GNSS лгМЕ _ αΝΕ ν -it-GR /о /м\
Agnss=A0+ — , VGNSS = AGR x VGNSS, (8.44)
rt2 COS l^CHC
где Vq^s — вектор оценок скорости вертолета в горизонтной СК;
Vq^ss — вектор оценок скорости вертолета в географической СК;
A^jf — матрица перехода между географической и горизонтной СК,
определяемая с использованием (8.2).
8.5.5. Модель функционирования многоканального GNSS-при-
емника в условиях воздействия помех. Помимо описанной
простейшей модели GNSS-приемника приведем модель, ориентированную на
использование в глубоко интегрированном НК.
Обсудим предварительно постановку технической задачи, решаемой
при использовании глубоко интегрированного варианта НК
беспилотного вертолета. Предполагается, что в этом случае МВП выполняется
при наличии источника активных помех, препятствующих приему
сигналов GNSS. Будем полагать также, что помеха представляет собой
сигнал типа «белый шум» различного уровня мощности и в различных
диапазонах частот. Варианты параметров мощности и ширины полосы
приведены ниже, при обсуждении исходных данных для
моделирования. С целью обеспечения возможности приема сигналов GNSS в
условиях помех предполагается использование пеленгатора источника
помех, антенны с управляемой диаграммой направленности
(фазированной антенной решеткой), других дополнительных
программно-аппаратных мер, адаптивных порогового и полосового фильтров.
Важнейшим элементов исследования в этой части является также
математическая модель, описывающая функционирование
GNSS-приемника в условиях помех. Целью исследования является демонстрация
возможностей функционально-программного прототипа глубоко
интегрированной бортовой системы вертолета в режиме МВП в условиях
помех сигналам GNSS.
Такая демонстрация осуществляется путем имитационного
моделирования работы упомянутого источника, осуществляемого с
использованием комплекса открытой архитектуры, реализованного на основе
технологии, описанной в предыдущей главе.
Как уже отмечалось выше, в данном варианте нас интересуют
именно навигационные параметры, т.е. псевдодальности и
псевдорадиальные скорости, формируемые в процессе первичной обработки данных
GNSS-приемником. Для моделирования данных измерений в
условиях воздействия помех необходимо создать модель процесса слежения
за сигналами НКА с учетом воздействия помех и формирования из-
мерений псевдодальности и псевдорадиальной скорости до данного
НКА в соответствии с режимом работы приемника (С/А или Ρ код,
двухчастотные измерения, фазовые измерения). Для этого необходимо
получать истинные эфемериды НКА на основе имеющихся данных
эфемеридного обеспечения [8.12] и ИКД GPS/ГЛОНАСС.
Далее осуществляется проверка условий видимости НКА антенной
GNSS-приемника [8.11]:
cos7 = e£i,-eftsc, cos a = e°BF ■ et°g, (8.45)
где egF — единичный вектор оси антенны приемника; e^jSC —
единичный вектор в направлении линии визирования приемник-НКА; et° —
единичный вектор в направлении касательной к земной поверхности.
Тогда, НКА считается видимым, если выполнено следующее
условие [8.11] (рис.8.12.):
7>max(a,7max) (8.46)
где 7тах — максимальный угол раскрыва антенны приемника на
борту БЛА.
При моделировании кодовых измерений, как и ранее, будем
учитывать следующие неконтролируемые факторы:
• некомпенсированные задержки, вызванные работой аппаратуры
НКА (групповые задержки, задержки, вызванные релятивист-
"ygf <т^>
Рис. 8.12. Определение видимости НКА
ским эффектом и бортовым стандартом частоты) в соответствии
с международными стандартами;
• некомпенсированные задержки, вызванные влиянием ионосферы
и тропосферы в соответствии с моделью Клобукара [8.12] и
данными INTERNET;
• задержки, вызванные дрейфом бортовых часов НКА и
температурным шумом (в соответствии с международными стандартами).
При этом реализуются следующие процедуры:
• рассчитывается геометрическая псевдодальность в соответствии
с условиями видимости НКА;
• моделируется процесс слежения приемным каналом GNSS-прием-
ника за видимым НКА;
• GNSS-приемник генерирует «сырые» выходные данные с частотой
/tr с учетом параметров ошибок, приведенных ниже в табл. 8.4.
Предположим вначале для простоты, что параметры помехи
(ширина полосы пропускания и ее мощность) а также угловое положение
источника помех относительно антенны известны нам априори.
Вопросы оценки параметров помехи и углового положения источника помех
детально обсуждаются ниже.
Итак, при принятом сценарии решаются следующие задачи:
а) определяется мощность помехи (дБ) на входе в антенну в
предположении об известности «истинного» положения БЛА и источника
помех:
Pjam(Rtr,Rjam) = 101og,0 ( Pjam 2 · ΙΟ12) , (8.47)
\|Rtr ~~ Rjam| /
где Ρ? —мощность помех; Rjam — радиус-вектор источника помех;
Rtr — радиус-вектор БЛА;
б) средняя мощность помехи на выходе антенны:
(Rtr, Rjam) + Gtr {φ) + Grec(M) + ηρο\{μ), (8.48)
где Pj°^ — мощность помехи на выходе антенны; Gtr (φ) —
коэффициент направленного действия антенны постановщика помех по линии
визирования «постановщик помех — БЛА». При этом полагаем, что
угол между этой линией визирования и основным лепестком антенны
постановщика помехи равен нулю; 7?ρ0ι(μ) — коэффициент
поляризационных ошибок антенны GNSS-приемника вдоль линии визирования
«НКА-БЛА». Полагаем при этом, что угол между главным
лепестком антенны GNSS-приемника и линией визирования равен нулю;
Сгес(м) — коэффициент направленного действия антенны
GNSS-приемника вдоль линии визирования «БЛА — постановщик помех».
При этом рассматриваются:
• антенна с управляемой диаграммой направленности, где все
лепестки диаграммы направленности антенны ориентированы вдоль
линии визирования «НКА-БЛА» и коэффициент направленного
действия антенны равен:
GrecM = ODb - 7±, если \μ\ ^ 3°, 4
Grec(M) = -60Db - χ, если |μ| > 3°, χ G Ν (0,ίΧ);
• стандартная антенна с круговой поляризацией и коэффициентом
направленного действия:
GTecfr) = ODb - \2±. (8.50)
в) определяется соотношение сигнал/шум (Q-фактор) на выходе
полосового адаптивного фильтра для любого режима работы GNSS-
приемника:
4CA,L\,L2 (ω) = qCA,Ll,L2Ks, (8.51)
где Ks — мощность сигнала НКА на выходе полосового адаптивного
фильтра как доля от общей мощности сигнала НКА; <fcAL\Li ~
стандартный Q-фактор приемника для данного режима работы при
отсутствии шумов.
г) определяется значение мощности помехи (дБ) на выходе
полосового адаптивного фильтра для данного режима работы приемника:
Р{ат{ш) = Р££К3ат, (8.52)
где iYjam — мощность помехи на выходе адаптивного полосового
фильтра как доля исходной мощности помехи.
д) устанавливаем факт выполнения слежения данным каналом
GNSS-приемника за данным НКА:
8CA.LI.L2 = 4CA.U.L2 Η - Pj{m (ω) > q*CA,U,L2^ (8-53)
если это соотношение выполняется, то слежение происходит. Если не
выполняется, то слежения нет, и сигнал данного НКА в дальнейшем
не учитывается. qQAL] L2 — пороговое значение сигнал/шум,
соответствующий режиму слежения за НКА.
е) если условие слежения выполняется, вычисляем СКО
аддитивных шумов псевдодальности с учетом повышения эквивалентной
температуры шумов приемника:
арСА = 2т+^±, apLuL2 = 0,2m + 0,5^. (8.54)
ЧСА 4L],L2
Описанная процедура проиллюстрирована с помощью функциональной
схемы на рис. 8.13.
Обсудим теперь более детально процесс функционирования
антенны с управляемой диаграммой направленности, а также работу
адаптивных фильтров, используемых для подавления помех.
Цикл по подшагам GPS
приемника i = 1,20
Моделирование условий приема
сигнало антенной GPS-приемника
Моделирование диаграммы
направленности сигнала с НКА
Л
Моделирование шумов
Моделирование диаграммы
направленности антенны GPS приемника
Расчет суммарной мощности сигнала
с НКА + помеха и отношение сигнал/шум
Формирование спектральной плотности
сигнала НКА и помехи
Исходные данные для
моделирования шумов
Информация о
положении и скорости
Π объекта от ИНС
ΧΖ
Цикл по каналам GPS приемника
/ = l,Nvis
GPS приемник
Λ>
1 Г
Фильтр по уровню сигнала
с варьируемым коэффициентом усиления
И^
Полосовой фильтр с варьируемым
диапазоном частоты
Л
Расчет коэффициента сигнал/шум
Расчет значений ошибок отработки
слежения за сигналом ССН и ССЗ
Вхождение в связь и сопровождение
сигнала по данному каналу
Формирование аддитивных
ошибок дальности
Детектирование шумов
Управление фильтрами
Управление каналами
X
Формирование кодов
достоверности
Накопление измерительной
информации и аппроксимация
на момент выдачи измерений
Измерения
'ис. 8.13. Функциональная схема измерения GNSS-приемника при
воздействии помех
Основная задача антенны с управляемой диаграммой
направленности состоит в предварительном подавлении уровня сигнала
помехи до минимально возможного. Коэффициент направленного действия
антенны приведен на рис. 8.14. При этом необходимо подчеркнуть,
Диаграмма направленности антенны, дБ
-90 -70
-50 -30
-10 0 10
30 50 70 90
Апертура системы, град
Рис. 8.14. Диаграмма направленности антенны
что информация об угловом положении источника помех
относительно апертуры антенны должна быть предварительно получена от
пеленгатора.
Фактически антенна с управляемой диаграммой направленности
представляет собой фазированную антенную решетку, включающую
набор фазовращателей и коммутатора (рис. 8.15). Сдвиг лепестков
диаграммы направленности осуществляется дискретно в пространстве
в соответствии с командами блока управления. Управление лепестками
происходит на основе данных о взаимном положении БЛА и источника
помех, получаемых от пеленгатора. На рис. 8.15 показана антенна,
оборудованная 6-ю фазовращателями.
Действительно, фазовращатели изменяют фазу дискретно на
величину Δ = 360/М, где Μ = 2Р, Ρ — т. н. разрядность фазовращателя:
Р= 1,2,3,...
Если Ρ = 2, то Δ = 90°; если Ρ = 3, то Δ = 45° и т.д.
Максимальная ошибка сдвига фаз при этом равна Δ/2. При этом необходимо
установить фазовращатели на плоской решетке с шагом (0,5—0,7) λ,
где λ — длина волны сигнала. Таким образом, весьма сложно
разместить более шести фазовращателей при длине волны сигнала GNSS.
Перейдем теперь к обсуждению работы адаптивных фильтров,
обеспечивающих оценку параметров помехи, и адаптации к ней GNSS-при-
емника.
_ м. ч§
Блок управления
Преобразователь
К приемнику
Внешние данные
относительного положения
источника помех
Пеленгатор
LA- логарифмический усилитель
W- весовые коэффициенты
Рис. 8.15. Антенна с 6-ю фазовращателями
Как уже подчеркивалось выше, в реальной ситуации мы не
располагаем априорной информацией об угловом положении источника помех
относительно антенны GNSS-приемника, мощности помехи, а также
ширины ее полосы частот. Выше мы уже кратко обсуждали вопрос
об использовании пеленгатора для определения взаимного положения
БЛА и источника помех. Подчеркнем еще раз, что для оценки свойств
помехи необходимо иметь в структуре GNSS-приемника специальный
канал, работающий следующим образом. Оценка ширины полосы
помехи осуществляется при помощи специального узкополосного фильтра,
сканирующего выход каждого из каналов GNSS-приемника в
диапазонах L1 и L2 (рис. 8.16).
Точность оценки полосы частот помехи зависит от свойств
сканирующего фильтра: чем уже его полоса пропускания, тем точнее оценка.
S(f), дБ/Гц
Основная частота помехи
Мощность помехи
Спектральная плотность
помехи
Правая граница полосы
частот помехи
•/веРхипом
Рис. 8.16. Полоса частот помехи для диапазонов L1 и L2
Одновременно в процессе сканирования осуществляется оценка
мощности помехи. Суммарный сигнал (помеха + полезный сигнал НКА)
поступают на вход фильтра с адаптивным коэффициентом усиления,
который реализует процесс квантования сигнала по уровню с учетом
информации о мощностях сигнала НКА и помехи. Для
эффективной работы такого фильтра необходимо реализовывать как минимум
11-13 уровней квантования [8.12]. Далее используется адаптивный
полосовой фильтр, задачей которого является «извлечение» из
суммарного сигнала части, совпадающей с полосой частот помехи.
Упомянутый выше коэффициент Ks, входящий в (8.51), рассчитывается
путем численного интегрирования спектральной плотности сигнала
GNSS в диапазоне частот /, = [/ниж,/„c„*,,J и /2 =
(см. рис. 8.16) и вычисления соотношения:
СФ
верхнп
.·/.
верхн
к„
/оерхи
J S(f)df+ J S(f)df
/инж
J пеРХ||иом
/ocpxn
J S(f)df
/ииж
(8.55)
Здесь /£и*поч, /^*хн — нижняя и верхняя границы частот,
сканируемые узкополосным фильтром (рис. 8.15); /^иж /верхн — нижняя и
верхняя границы диапазонов сигналов GNSS (LI, L2 и т.д.).
Коэффициент Кпом в правой части (8.52) рассчитывается по
формуле:
КП1
max О,
/,
НИЖцом
f
J ι
/.
верхи,,,
7
+
/в,
СФ
НИЖ,щм , ■'веРхнпом
/•СФ
J верх
верхн„ом
ниж„ом
/верх
:рХН,1(
/ии
(8.56)
где /нижпо„7верхипом — «истинные» значения нижней и верхней частот
помехи. Процесс работы полосового фильтра иллюстрирует рис. 8.17.
A S(f), дБ/Гц
Итоговая спектральная
плотность сигнал+помеха
Спектральная плотность
помехи
Спектральная плот-юст!?
сигнала после фильтра:
Рис. 8.17. Процесс работы полосового фильтра
Окончательно отношение сигнал/шум вычисляется по
формуле (8.51), и мощность помехи на выходе приемника — по
формуле (8.52), в результате чего определяется возможность слежения
за НКА в данном канале GNSS-приемника, а также эквивалентное
значение СКО аддитивных шумов.
Вся описанная выше процедура моделируется, как уже
указывалось выше, в соответствии с функциональной схемой, показанной на
рис.8.13.
8.5.6. Бортовая РЛС миллиметрового диапазона. Как уже
отмечалось выше, интегрированная система навигации вертолета может
включать в себя бортовую радиолокационную станцию
миллиметрового диапазона, устанавливаемую, как правило, в носовой части ЛА
вдоль продольной оси вертолета под некоторым так называемым прива-
лочным углом μ к горизонтальной плоскости симметрии (см. рис. 8.18).
Рис. 8.18. Оси БРЛС относительно связанной СК
Рис. 8.19. Сканирование подстилающей поверхности
Бортовая РЛС (БРЛС) осуществляет сканирование подстилающей
поверхности в пределах тетраэдра, обусловленного максимальным
отклонением по азимуту и элевации луча антенны (рис. 8.19).
Текущий кадр радиоизображения подстилающей поверхности
формируется путем последовательной съемки в заданном диапазоне углов
азимута и элевации.
Приводимая ниже модель БРЛС обладает следующими
особенностями:
• Воспроизводятся три режима работы БРЛС: облет, обход, облет-
обход.
• Имитируется массив данных измерений, содержащий
информацию об «ярких» точках подстилающей поверхности.
• Предполагается наличие стабилизатора зоны обзора БРЛС,
препятствующего деформации зоны обзора в процессе измерений.
• Учитываются задержки при смене направления движения
антенны БРЛС и смене режима ее работы.
Остановимся вначале на общих принципах формирования
измерений бортовой РЛС. Полученный кадр рассматривается как
двумерный дискретный массив радиоизображения подстилающей
поверхности, причем величина дискрета по азимуту составляет ΔεΓ, а по
дальности — AD (рис. 8.20). Максимальное число дискретов по дальности
равно: Nd = Dmax/AD, а по направлению Νζ = (ε™αχ - ε{"'η) /ΔεΓ.
Рис. 8.20. Формирование кадра БРЛС
Для каждого дискрета кадра определяются следующие параметры:
• наклонная дальность — D;
• азимут в связанной с РЛС системой координат — εΓ;
• элевация в связанной с РЛС системой координат — εΒ;
• яркость дискрета.
Таким образом, обладая текущей измеренной информацией, можно
построить зависимости, отображающие профиль высот по наклонной
дальности в диапазоне изменения угла азимута, восстановив значение
высоты по наклонной дальности и углам элевации и азимута.
Обладая результатом решения навигационной задачи, полученным
на основе БИНС, РБВ и GNSS-приемника (так называемое
«базовое» или «опорное» навигационное решение), в частности, текущей
привязкой центра масс вертолета к цифровой карте района операции,
сохраненной в бортовом компьютере вертолета, возможно генерировать
так называемый «опорный» кадр, содержащий фактически наблюда-
емый фрагмент местности, построив профили высот по наклонной
дальности в диапазоне изменения угла азимута и восстановив значение
высоты непосредственно с цифровой карты. Дальнейшие действия по
уточнению «опорного» решения состоят в сопоставлении «опорного»
и «истинного» (т. е. полученного с помощью РЛС) кадров с помощью
корреляционно-экстремального алгоритма.
Бортовая модель цифровой карты местности представляет собой
файл, содержащий в себе информацию о районе проведения МВП.
Карта представляет собой стандартный нетипизованный файл, в
котором подряд записана информация о точках (дискретах) карты с
заданной дискретизацией.
Начало отсчета и направление осей системы координат карты
совпадает с топографической системой координат.
Каждый дискрет карты характеризуется следующими параметрами
(рис.8.21):
• координаты (Χ, Ζ) в топографической СК;
• высота дискрета (координата Υ топографической СК);
• тип поверхности;
• угол наклона площадки дискрета относительно местной
вертикали Θ;
• угол между проекцией нормали площадки дискрета на плоскость
ΧΖ и осью ΟΧ -β.
Рис. 8.21. Параметры дискрета карты Рис. 8.22. Порядок обхода
дискретов в кадре
Обход дискретов карты производится по возрастанию координат
оси ΟΖ, затем ОХ, т.е. слева направо и снизу вверх (рис. 8.22.)
Исходными данными для измерений являются:
• Координаты вертолета в топографической системе координат
Rq = (Хв, Ув< ZB)\
• Углы ориентации вертолета (-ψ,ϋ,η);
• Привалочный угол μ оси РЛС.
Процедура формирования реальных измерений РЛС реализуется
следующим образом:
1. Массив измерений строится циклически в диапазоне угла
изменения угла азимута εΓ. Для этого задается начальное значение угла
азимута сканирования РЛС в соответствии со следующим:
£ri = £min + 0,5ζΔεΓ; г = 1,
т.е. моделирование измерений осуществляется по центру полос
дискретизации кадра, где г — индекс азимута ε™'η =ζ εΓ =ζ ε™αχ.
2. Определяется единичный вектор в топографической СК,
соответствующий текущему углу азимута сканирования:
г еО _ л BFT (rRFT (rRF Τ Я°\ \
ьйМ — ΛΝΕ V-'BF V^LS ъг> )) ·
LS° — единичный вектор вдоль текущей линии визирования; LS°M —
единичный вектор текущей линии визирования в топографической
системе координат; C^s ~ матрица перехода между системой координат,
связанной с текущей линией визирования, и системой координат,
связанной с осью РЛС:
где Rx(a), Ry(a), Rz(a) — стандартные матрицы преобразования
систем координат, соответствующих повороту вокруг соответствующих
осей систем координат на некоторый угол а.
Οβρ — матрица перехода между системой координат, связанной
с осью РЛС, и связанной системой координат:
CBF — Яг (μ);
Aj^£ — матрица перехода между горизонтной и связанной системами
координат (8.4).
3. В соответствии с полученным единичным вектором текущей
линии визирования определяется проекция данного вектора на плоскость
OXZ (плоскость карты) в виде уравнения прямой, cooTBeTqTByfOiueft
текущему азимуту и проходящей через точку (Хв, ZB):
AD
Zt = ZB + (Хв - Xt)
τ я0
LSMX
где (Xt, Zt) — координаты текущей рассматриваемой точки кадра;
LS^^, LSaMZ — проекции единичного вектора, соответствующего
текущему углу азимута сканирования; j — индекс изменения
горизонтальной дальности вдоль направления по текущему углу азимута:
j = 1 ... оо
увеличение индекса j происходит до тех пор, пока наклонная дальность
не превысит максимальную -Dmax; dt — текущая наклонная дальность
вдоль линии визирования РЛС.
4. Для полученной точки на плоскости XOZ определяется дискрет
цифровой карты местности и его параметры:
• Η (Xt, Zt) — высота;
• stx(Xt, Zt) — тип поверхности;
• 6(Xt, Zt) — угол наклона площадки дискрета относительно
местной вертикали;
• 0{Xt, Zt) — угол между проекцией нормали площадки дискрета
на плоскость XZ и осью ОХ.
5. Для данной точки рассчитываются углы азимута и элевации
в системе координат, связанной с РЛС:
£r = arctg {-щг) · £в = arctg [τψ) ·
где [LSxF, LSyF, LS§F) — координаты текущей точки в системе
координат, связанной с РЛС:
LSRF = C«F(ABNF(LSNE-RB))
LSNE - (Xt, H (Xt, Zt), Zt) — координаты текущей точки в
топографической СК.
6. Для полученных углов проверяются условия
,-min ^ г ^ ,-гпах _min ^ _ ^ ,_тах
7. Вычисляются значения:
ι η 9
горизонтальной дальности Dr = у (Xt - Хв) + (Zt - ZB) ,
+ fYR-H(Xt,Zt)\
угла наклона линии дальности εο = arctg I,
\ DT J
DT
наклонной дальности D
cos (ed) '
яркости b.
8. Определяется индекс наклонной дальности:
,,_£>- Дшш
к~ AD
где к — индекс дальности Dm[n ^ D ^ Dmax.
8а) если D = DmaK, то происходит запись в массивы дальностей,
углов азимута, элевации и яркости и происходит увеличение
индекса горизонтальной дальности j с переходом к п. 3;
86) в противном случае увеличение индекса горизонтальной
дальности j прекращается и происходит расчет СКО ошибок измерений
и пересчет элементов массивов дальностей, углов азимута,
элевации и яркости.
Значения дальности, азимута и элевации зашумляются в
соответствии с нормальным законом распределения, характеризующимся
математическим ожиданием, равным полученному в массиве
значению параметра и соответствующим СКО.
После этого происходит увеличение индекса азимута г и переход
к п. 1
Таким образом, после завершения цикла по индексу азимута
окончательно формируются массивы дальностей, углов азимута, элевации
и яркости. Эти данные, как уже отмечалось выше, могут быть
использованы для построения профиля высот подстилающей поверхности
по наклонной дальности в диапазоне изменения угла азимута — т.е.
для моделирования «истинного» кадра РЛС, используемого в алгоритме
КЭАН.
Для этого необходимо восстановить значение высоты дискрета
цифровой карты в соответствии со следующим алгоритмом.
Кадр обрабатывается по строкам, т. е. в диапазоне сканирования
РЛС с шагом ΔεΓ формируется профиль высот в соответствии со
следующими соотношениями:
1. Имеющиеся измерения для текущего дискрета кадра
преобразуются в точку с координатами в системе координат, связанной
с РЛС.
2. Далее полученный вектор преобразуется в географическую
систему координат в соответствии со следующим:
LSRF = CgFT [C^TLSRF) + RB.
3. Полученное значение LSyF и будет представлять собой значение
высоты для текущего дискрета кадра.
Таким образом, в результате будет сформирован массив высот,
который используется для моделирования «истинного» кадра РЛС в
графической форме в диапазоне изменения азимута и наклонной дальности.
Выше были детально рассмотрены способы реализации режимов
«облет», «обход» и «облет-обход». Применительно к РЛС при облете
препятствий сканирование осуществляется в вертикальной плоскости,
при этом локатор фиксируется в центральном горизонтальном
положении.
В режиме «обход» сканирование осуществляется в горизонтальной
плоскости, вертикальное положение, в свою очередь, фиксируется.
В режиме «облет-обход» сканирование осуществляется в
небольшом диапазоне углов по вертикали и горизонтали.
Как уже отмечалось выше, модель бортовой РЛС, реализованная
в составе функционально-программного прототипа бортового
интегрированного комплекса беспилотного вертолета, включает стандартный
модуль стабилизатора зоны обзора РЛС, фиксирующий направление
линии визирования локатора РЛС на время проведения измерения
путем компенсации эволюции вертолета и препятствующий деформации
зоны обзора в процессе измерений [8.14,8.15]. Кроме того, в целях
адекватного моделирования измерений функционально-программный
прототип снабжен традиционным механизмом хранения измерительной
информации, накапливающим и обновляющим данные по мере
поступления в память бортового компьютера [8.14].
8.5.7. Бортовой лазерный локатор. Альтернативой
миллиметровой РЛС может рассматриваться лазерный локатор, который также
способен генерировать данные, необходимые для решения
навигационной задачи в МВП при отсутствии данных GNSS.
Использование высокоточной коррекции навигационной системы на
основе анализа объектового состава сцен, расположенных по маршруту
движения, в состав которых включены некоторые ориентиры, имеющие
известные географические координаты, позволяет повысить точность
решения навигационной задачи на порядок и более, и довести
максимальную ошибку определения горизонтальных координат до
величины 2-3 м.
Использование в качестве датчиков лазерно-локационных систем
предполагает формирование информации о зондируемой сцене в виде
матрицы дальностей, т.е. дальностных изображений. Дальностная
информация является наиболее устойчивым типом информации, которая
не зависит от времени года, погодных условий, рабочей длины волны
системы и пр. Индустриальные сцены обладают высокой
информативностью, что позволит при разработке соответствующих алгоритмов
осуществлять высокоточную привязку к местности и коррекцию
навигационной системы ЛА. [8.16]
Принципиальной особенностью информационного обеспечения
подобной навигационной системы является то, что описание
объектового состава сцены при формировании цифровой модели местности
производится на базе космофотоснимков, т.е. на основе планового
изображения местности, в то время как формирование изображения на
борту в условиях маловысотного полета производится под настильными
углами, что позволяет с помощью лазерного локатора зондировать
достаточно широкую полосу подстилающей поверхности.
Схема использования лазерно-локационной системы для коррекции
навигационной системы ЛА по объектовому составу наблюдаемой
сцены представлена на рис. 8.23.
Для решения навигационной задачи осуществляется построение
планового изображения сцены по дальностному изображению, которое
формируется лазерным локатором. Простейшим подходом к решению
поставленной задачи является использование корреляционных
алгоритмов. Например, могут быть построены плановые изображения
эталонной сцены с выделенными координатами вертикальных образований и
соответствующее плановое изображение наблюдаемой сцены с
координатами обнаруженных вертикалей. После чего на базе корреляционных
алгоритмов может быть найдено положение наилучшего соответствия
Космический фотоснимок
Уве
til ιτι:::ιιι::::ι:ι ϊ:ιι
Цифровая модель
местности
Плоскость сканирования
Наблюдаемая сцена
Рис. 8.23- Использование лазерно-локационной системы
этих изображений. Это будет соответствовать решению задачи
привязки положения ЛА относительно эталонной сцены.
Детальное описание используемых при обработке данных ЛЛ
корреляционно-экстремальных алгоритмов приводится ниже, в разд. 8.6.2.
8.6. Использование корреляционно-экстремальных
алгоритмов навигации для уточнения навигационного
решения
Как указывалось выше, существует принципиальная возможность
уточнения базового (опорного) навигационного решения, полученного
на основе комплексирования данных БИНС, РБВ и GNSS-приемника.
Эта возможность реализуется путем использования данных,
полученных с помощью РЛС миллиметрового диапазона или лазерного
локатора. При этом предполагается наличие на борту цифровой карты
местности или эталонных сцен соответственно.
Алгоритмической основой для уточнения базового навигационного
решения является корреляционно-экстремальный алгоритм навигации.
Ниже описаны те модификации КЭАН, которые были использованы
авторами при формировании функционально-программного прототипа
бортовой интегрированной системы перспективного вертолета
Подчеркнем еще раз, что описанные ниже
корреляционно-экстремальные алгоритмы обеспечивают решение целевой задачи вертолета
при деградации системы, например при отсутствии данных GNSS и
при больших уходах БИНС.
8.6.1. Корреляционно-экстремальный алгоритм навигации для
о'бработки данных бортовой РЛС. Как известно [8.10],
корреляционно-экстремальный алгоритм навигации основан на сопоставлении
полученного от сенсора «истинного» изображения участка
навигационного поля и эталонного изображения данного участка. Результатом
данного сопоставления является определение сдвига «истинного»
изображения относительно эталонного — так называемая «привязка».
Таким образом, необходимым условием для функционирования
корреляционно-экстремального алгоритма навигации является
существование в том или ином виде эталонного изображения, по которому
будет производиться поиск решения задачи навигации. При работе
корреляционно-экстремального алгоритма навигации (КЭАН) в составе
интегрированного НК основной проблемой при создании
эталонного изображения является сильная изменчивость навигационного поля
в зависимости от условий наблюдения, а именно:
• постоянно меняющийся угол обзора подстилающей поверхности;
• взаимное наложение и перекрытие объектов, расположенных на
карте местности;
• сильная деформация поля зрения, связанная с эволюциями в
пространстве динамичного объекта.
Формирование эталонных изображений без учета
вышеперечисленных факторов приводит к значительному снижению достоверности
данных изображений вплоть до полной потери их адекватности. Выходом
из сложившейся ситуации может служить алгоритм формирования
эталонных изображений на борту ЛА, т. е. непосредственно в процессе
измерений, при условии синхронизации изменений условий
наблюдения навигационного поля с маневрами динамического объекта. При
этом участки формируемого эталонного изображения будут
претерпевать те же деформации, что и наблюдаемые при помощи сенсора.
Использование данного алгоритма позволяет значительно увеличить
адекватность эталонного изображения, используемого при
корреляционно-экстремальной привязке, что, в свою очередь, положительно
сказывается на работоспособности корреляционно-экстремального
алгоритма навигации в целом.
С учетом вышесказанного, помимо изображения участка
подстилающей поверхности, полученного от бортовой РЛС, используется
изображение, полученное от «виртуальной» РЛС. При этом:
• «виртуальная» РЛС производит измерения по хранящейся на
борту цифровой карте местности, а реальная бортовая РЛС — по
истинной подстилающей поверхности;
• «виртуальная» РЛС производит измерения из опорного положения
ЛА, а реальная бортовая РЛС — из истинного положения;
• при работе «виртуальной» РЛС отсутствуют ошибка установки
привалочного угла и ошибки определения углового положения
локатора.
Существо используемого КЭАН состоит в следующем. На борту
вертолета параллельно формируются «истинный» и «эталонный»
кадры, после чего начинается подготовка исходных данных для
обработки. Для этого определяется область поиска КЭАН, линейные
размеры которой определяются, исходя из линейных размеров текущего
кадра БРЛС и значений ошибок оценки местоположения вертолета
(см. рис. 8.24):
Xsas = Xks + (2(3<τχ)), Zsas = ZKS + (2(3<τζ)),
где Xks, %ks — размеры «истинного» кадра местности по
соответствующим осям; Xsas, Zsas — размеры текущей области поиска по
соответствующим осям; σχ,σζ — СКО используемой оценки
местоположения вертолета (по данным интегрального фильтра Калмана).
XI
Λ
Текущий §
кадр ^
со
Область поиска
(опорный кадр)
Рис. 8.24. Формирование области поиска КЭАН
На этом этап подготовки данных заканчивается и начинает
работать непосредственно сам алгоритм корреляционно-экстремальной
привязки. При этом для каждой точки области поиска рассчитывается
значение нормированной корреляционной функции вида
K(XuZi)= 100+lOOx
Xks—' Xks—' ^ks_i
zks—' zks_i zks~ '
Σ U-Mtf)(g-Ms)- Ε {f-Mf) Ε (g-Ms)/NS
a:.z=0
a:.z=0
3:.z=0
N
Xks—>
zks~1
Ε (f-Mff-
a:.z=0
Ε U-Ms))
Ns
Μ
Xks—'
Zks—'
Ε (g-MsY-
a:.z=0
/ZkSs-1 Υ
ί TJs-Ms)j
Ns
(8.57)
где / = f(x,z) — сформированный кадр, представляющий собой
цифровой массив размером Xk's на Zks и прогнозируемой
точкой привязки Xlp, Zlp, рассчитанной на основе
предварительно полученной оценки местоположения вертолета; Mf —
математическое ожидание высот точек кадра, определяемое по формуле:
/Xks Ζ ks \
Mf = Σ Σ f(x*z))/Ns, где суммирование ведется по
«непустым» точкам кадра, т. е. f(x, ζ) φ 0; д = д{Хьр — {Xsas/2) + χ + х\,
Zlp — (Zsas/2) + ζ + z\) — исходное эталонное изображение в
области поиска, на котором ищется точка привязки; Мд —
математическое ожидание высот точек эталона, определяемое по формуле:
iXi<s Ζ ks \
Σ Σ 9{χ, ζ) ) /Ν9, где Ng количество точек в эталоне; Ns —
тво ненулевых элементов кадра.
На основе результатов вычислений корреляционной функции
формируется матрица значений, которая представляет собой массив
данных размером Xsas, Zsas по соответствующим осям.
Данная матрица значений корреляционной функции является
результатом работы алгоритма, причем ее максимальный элемент должен
указывать на истинную точку привязки кадра к электронной карте
местности.
Таким образом окончательное решение задачи привязки центра
масс ЛА к топографическим координатам состоит в поиске
упомянутого выше максимума матрицы значений корреляционной функции.
Стоит отметить, что алгоритм КЭАН всегда генерирует оценку
поправки к основному решению, даже в тех случаях, когда не
удалось осуществить привязку полученного изображения к эталону. Этот
факт и определяет основную-проблему использования решения КЭАН
в целях коррекции основного навигационного решения — отсутствие
сведений о достоверности и точности получаемых с помощью КЭАН
оценок.
Проблема оценки достоверности решения КЭАН может быть
решена, в частности, следующим образом. Оптимальная в среднеквад-
ратическом смысле «свертка» двух навигационных решений,
полученных соответственно от КЭАН и комплекса «БИНС + GNSS + РБВ»,
осуществляется с помощью интегрального фильтра Калмана,
которому в данном случае необходима информация о ковариационных
матрицах перечисленных решений. Таким образом проблема
фактически сводится к построению ковариационной матрицы решения,
поставляемого КЭАН, поскольку ковариационная матрица решения
«БИНС+ GNSS +РБВ» уже получена ранее.
Ковариационная матрица решения КЭАН может быть получена
следующим образом. Анализ результатов моделирования КЭАН
показывает, что в общем случае ошибки навигационного решения не
подчиняются нормальному закону и взаимно коррелированны. С другой стороны,
используя результаты моделирования, мы имеем возможность постро-
ить так называемый доверительный эллипс рассеивания, включающий,
например, 99% всех возможных реализаций навигационного решения
КЭАН, и рассматривать этот эллипс как аппроксимацию истинного
распределения ошибок гауссовским, а ковариационную матрицу,
соответствующую этому эллипсоиду, принять в качестве ковариационной
матрицы ошибок КЭАН. На рис. 8.25 приведен пример подобного
доверительного эллипсоида.
Взаимное распределение ошибок КЭАН
301 ' ' ' ' I " ' Ί " ' Ί " ' Ί " ' Ί " ' ' I ' ' '
-3QI" ■ ■ ■ ■ ι .... ι .... ι .... ι .... ι .... ι 1
-80 -60 -40 -20 0 20 40 60 80
Ошибки по X, дискреты
Рис. 8.25. Доверительный эллипсоид КЭАН
Таким образом алгоритм построения ковариационной матрицы
состоит в следующем:
1. Для имеющегося типа цифровых карт местности путем
моделирования получается статистика решений навигационной задачи КЭАН.
2. Для полученных реализаций строится доверительный эллипс.
3. Для уменьшения ресурсоемкости вычислений и для приведения
ковариационной матрицы к диагональному виду эллипс описывается
прямоугольником, в результате чего линейные размеры полученного
прямоугольника могут быть интерпретированы как 6 СКО КЭАН,
аппроксимируемых гауссовским распределением по соответствующим
осям.
Оценка достоверности текущих оценок, формируемых КЭАН,
решается путем сравнения вычисленной на основе КЭАН поправки
по данной координате с пороговым значением среднеквадратичной
ошибки, определяемым размерами описанного выше прямоугольника,
в результате чего делается вывод о достоверности (оценка поправки
меньше порогового значения) или недостоверности (в противном
случае) полученных оценок поправок к базовому навигационному
решению.
8.6.2. Корреляционно-экстремальный алгоритм навигации для
обработки данных лазерного локатора. Как уже указывалось
в разд. 8.5.6, основная трудность в реализации
корреляционно-экстремального алгоритма обработки данных ЛЛ состоит в том, что поиск
глобального максимума функции корреляции по крайней мере по трем
координатам (сдвиг по двум осям и поворот системы координат) с
мелким шагом в условиях некоторой неопределенности положения ЛА
относительно эталона является чрезвычайно трудоемкой задачей. На
существующих вычислительных системах такой подход не может быть
реализован в реальном времени.
Для эффективного решения задачи существующими средствами
необходимо использовать какие-либо интегральные признаки. В
частности может быть использовано сопоставление наблюдаемой сцены
с эталоном на основе определения взаимного положения стен зданий и
локально расположенных вертикальных объектов.
В основу описываемых ниже алгоритмов положено сопоставление
углов наклона следов плоских вертикальных поверхностей на плановом
изображении наблюдаемой сцены и эталона. Такой подход обеспечит
устойчивость работы алгоритмов в условиях помех, возможного
затенения частей объектов и неопределенности по высотам объектов и
рельефа местности.
Для использования предлагаемых алгоритмов необходима
предварительная обработка измерений дальности, получаемых лазерным
локатором. Поэтому рассматриваемая задача решается в несколько
этапов.
• Приведение дальностного изображения к неподвижной точке
наблюдения на момент начала формирования изображения. Этот
этап связан с тем, что скорость формирования лазерно-локаци-
онных изображений относительно невысока, и за это время ЛА
успевает пролететь значительное расстояние. При этом считается,
что величина собственной скорости и угол сноса ЛА известны.
• Преобразование изображения из центральной проекции к
декартовой системе координат.
• Сегментация дальностного изображения для выделения плоских
вертикальных образований, таких, как стены зданий.
• Построение планового изображения эталонной сцены и
наблюдаемой сцены по дальностному изображению.
• Нахождение соответствия между наблюдаемыми образами и
образами эталонного планового изображения.
• Нахождение матрицы преобразования из связанной системы
координат в эталонную;
• Определение собственного положения ЛА относительно
наблюдаемой сцены на момент начала формирования изображения.
Для выполнения первых двух этапов используются соотношения:
D* = Д meas COS a COS φ + AtiV COS /?, (8.48)
* _ 1 sin [Αφχ (χ — (1/2)хтах)] D
imeas
— AtiV sin β
x{ — ——arctg — ■■ , (ал?)
Αφχ Щ
Axi = int [x* — Xi + 0,5],
где .Dimeas — измеренная дальность г-го пиксела; Ό\ — дальность
г-го пиксела, приведенная к неподвижной точке; а — угол отклонения
линии визирования от средней точки в плоскости сканирования; ф —
угол места плоскости сканирования; β — угол скольжения ЛА (сноса);
AU — промежуток времени от начала формирования изображения до
г-го пиксела; V — собственная скорость ЛА (считается постоянной);
х* — пересчитанная координата χ г-го пиксела; Афх — угловое
разрешение системы по оси χ (величина угла поворота линии визирования
между двумя пикселами); хтах — количество пикселов в строке
изображения; Αχι — смещение г-го пиксела на приведенном изображении;
int — операция взятия целой части числа.
Сегментация дальностного изображения для выделения плоских
вертикальных образований, таких, как стены зданий, может быть
выполнена на основе алгоритмов, изложенных в [8.17]. После этого
очевидным образом может быть построено плановое изображение сцены
со следами сегментированных плоских поверхностей.
Используется система координат, связанная с ЛА Ог^г^г· За
начало координат естественно считать точку начала формирования
дальностного изображения, ось Хч направлена вперед по оси ЛА и центру
сканирующей системы на момент начала формирования изображения,
ось Υί — влево.
Аналогичное плановое изображение может быть получено на основе
цифровой модели местности (эталона). При этом система координат
эталонного изображения 0\Χ\Υ\ имеет вид: начало координат
эталонной сцены совпадает с точкой программного начала работы системы,
а ось Х\ — с прогнозируемым положением оси ЛА на момент
программного начала работы системы, ось Υ\ — влево. Поскольку точка
начала координат эталонной системы находится на некотором удалении
от анализируемой сцены, а ошибки навигации ЛА отнпсительно
невелики, то на эталонном плановом изображении должны быть выделены
следы только тех поверхностей, которые могут быть наблюдаемы при
работе лазерной системы при возможных вариациях реального
положения ЛА на момент начала работы системы.
В общем случае система координат, в которой построено плановое
изображение наблюдаемой сцены, имеет некоторый сдвиг и поворот
относительно системы координат, в которой построено эталонное
изображение. Таким образом, можно считать, что задачей алгоритма
является нахождение матрицы преобразования из одной системы координат
в другую.
Для того чтобы найти эту матрицу, необходимо найти
соответствие между наблюдаемыми образами и образами эталонного
планового изображения. Задача осложняется тем, что между этими
изображениями в общем случае нет полного соответствия. Это вызвано
следующими основными причинами:
• Цифровая модель местности, включенная в эталон, отражает
большую площадь, чем наблюдаемая сцена. Это связано с
вариабельностью возможных начальных положений ЛА на момент
начала зондирования сцены и относительно небольшими углами
прокачки сканирующей системы лазерного локатора.
• Некоторые объекты, как естественного, так и искусственного
происхождения, могут быть не включены в цифровую модель
местности.
• Описание объектов может быть недостаточно адекватным
реальной сцене.
• Цифровая модель местности недостаточно точно отражает
высоты зданий и рельеф местности.
• При сегментации дальностного изображения некоторые объекты
могут быть не выделены, но могут быть выделены объекты, не
включенные в эталон.
• Образы объектов наблюдаемого изображения формируются
с некоторыми ошибками, а достоверность оценки их параметров
при сегментации носит вероятностный характер.
• Вектор собственной скорости ЛА определен с некоторыми
ошибками.
Это создает определенные трудности для установления меры
близости при сопоставлении сцены с эталоном.
Сопоставление наблюдаемой сцены и эталона в общем случае
производится в два этапа:
• Сличение образов, у которых углы наклона на плановом
изображении не совпадают, т. е. непараллельных образов;
• Сличение параллельных образов.
Для решения задачи сличения непараллельных образов
производится преобразование Хафа [8.18] для обоих плановых изображений.
Иными словами, прямые линии, заданные в декартовой системе
координат, преобразуются в точки с координатами (ζ, ι9) в полярной системе
координат. Здесь ζ — расстояние, измеренное от начала координат по
нормали к прямой, а ΰ — угол наклона этой нормали относительно
оси х. Таким образом, все прямые на плановых изображениях
ранжируются по возрастанию угла $. Для определения соответствия образов
производится их сравнение по приращениям угла ϋ относительно
некоторого базового образа путем перебора. При этом вводится некоторая
мера различия, которая позволяет каждой конкретной ситуации
поставить в соответствие действительное положительное число. При
переборе нахождение минимального значения меры означает нахождение
наилучшего соответствия прямых на изображениях.
Данная часть алгоритма может быть представлена в следующем
виде.
1. Производятся выбор одного из образов эталонного изображения
за базовый и расчет разностей углов наклона между остальными
образами и базовым. Производится приведение всех разностей к диапазону
0-360°, при этом Δ|$; = #j — ι9|, 1 ^ ί ^ т. Здесь т — количество
образов на плановом изображении эталонной сцены.
2. Произвольный образ наблюдаемого изображения принимается за
образ, соответствующий базовому (гипотеза Ни) на эталонном
изображении.
3. Производится расчет разностей углов наклона между остальными
образами наблюдаемого изображения и образом, который соответствует
базовому. Выполняется приведение всех разностей к диапазону 0-360°,
Α2ϋί = bj — Ь\, 1 =ζ j =ζ п. Здесь η — количество образов на плановом
изображении наблюдаемой сцены.
4. Для каждого г-го из η — 1 образов наблюдаемого
изображения находится ближайший образ эталонного изображения. Под
ближайшим образом понимается такой образ, для которого гц =
= min (Δι$£ — Α2ϋΛ . Для упрощения алгоритма допускается си-
к=2 m \ /
туация, когда разным образам на наблюдаемом изображении ставится
в соответствие один образ эталонного изображения. Считается, что
если Ti ^ Q, где Q - некоторый порог, то для г-го образа на найдено
соответствия. Если количество образов d, для которых не установлено
соответствие, больше некоторого порога Р, то считается, что образ,
соответствующий базовому, выбран неверно (гипотеза Ни неверна).
Тогда за образ на наблюдаемом изображении, соответствующий
базовому образу на плановом изображении, выбирается следующий образ
(гипотеза Н|2). Цикл повторяется с п.З.
5. Для образов, по которым найдено соответствие, рассчитывается
п—d
сумма S[ = 53 Γϋ, которая является аналогом расстояния между мно-
жествами образов.
6. После этого за образ на наблюдаемом изображении,
соответствующий базовому образу на плановом изображении, выбирается
следующий образ (гипотеза H|j). Цикл повторяется с п.З.
7. После перебора всех возможных вариантов цикла пп. 3-6 за
базовый образ на эталонном изображении принимается следующий
образ (гипотеза Н21). Цикл повторяется по пп. 2-6.
8. По окончании двойного цикла из всех возможных Smn
выбирается наименьшее. Если min Smn < R, где R — некоторый порог, то
считается, что соответствие между необходимым количеством образов
установлено. В дальнейшем для расчетов используются только те
образы, для которых установлено соответствие. При этом параллельные
образы рассматриваются как один.
Рассмотренная часть алгоритма не позволяет различить образы,
расположенные на параллельных прямых.
Для сличения параллельных образов может быть использованы
расстояния от начала координат до прямых. При преобразовании
координат для всех параллельных образов расстояние до начала координат
изменяется на одинаковую величину, поскольку расстояние между
прямыми не изменяется. Поэтому для сличения параллельных образов
организуется поиск равных приращений расстояния р\, р2 от начал
координат до прямых линий, на которых расположены образы
соответственно эталонного или наблюдаемого изображений. Для каждой пары
групп параллельных образов наблюдаемого и эталонного изображений,
соответствующих друг другу, выполняются следующие действия.
Указанные образы эталонного и наблюдаемого изображений
располагаются в порядке возрастания расстояния р: р\\ < ри < ■■■ < Рш,
Ρΐ\ < ΡΊΊ < ■■■ < Plkl-
Составляются циклы (аналогично предыдущему этапу
алгоритма) для поиска равных приращений расстояния р.
Последовательности приращений имеют вид Δ|ρ;ι, •••Διρ^ι, &2Pji, ■ ■■&2Pjk2, где
ΔΙ/9ϋ = Рн - P\U 1 < l, I < &Ι, A2pjs = P2j - P2s, 1 < S,j < /C2.
Соответствие определяется путем минимизации величин
2 &
η = min (Διρϋ - A2pjS) . Определяется величина rm,n = X, л для
каждого цикла (здесь тип — номера образа, принятого за базовый на
эталонном изображении, и соответствующего образа на наблюдаемом
изображении). Аналогично этапу I после выполнения двойного цикла
выбирается mm(rmri), по которому и устанавливается соответствие
образов.
Для обеспечения надежности в максимально большом
разнообразии ситуаций, например, по сценам с образами, имеющими близкие
углы наклона, целесообразно использование априорной информации
о наблюдаемой сцене. Такой информацией является, например,
взаимное расположение стен объектов на сцене, длина стен, положение
обнаруженных ребер зданий, локально расположенных вертикальных
объектов и пр.
Рассмотренные атрибуты образов позволяют сократить время
перебора и повысить вероятность правильного сопоставления сцены с
эталоном. Кроме того, их можно использовать при назначении базовых
образов (например, не брать за базовые образы, имеющие длину
меньше заданной).
Определение соответствия между прямыми, на которых находятся
образы, позволяет найти угол поворота одной системы координат
относительно другой.
Поскольку система координат O2X2Y2 наблюдаемого изображения
относительно системы координат 0\Χ\Υ\ эталонного изображения
повернута на угол ΰ, матрица преобразования от системы координат
0\Χ\Υ\ κ системе координат Ο2Χ2Υ2 имеет вид:
cos ΰ sin ΰ
— sin ΰ cos ΰ
Некоторый образ на эталонном изображении, имеющий наклон $|В
системе координат 0\Χ\Υ\, может характеризоваться направляющим
( COS $| λ тт и £
вектором I о )■ Направляющий вектор соответствующего образа
в системе координат O2X2Y2 наблюдаемого изображения в силу
указанного преобразования получает выражение
cos ΰ sin ΰ λ / cos ϋι \ _ ( cos ($ι — ΰ)
— sin ϋ cos ϋ J у sin ϋ\ J ~ \ sin (ϋ\ - ΰ)
Однако, с учетом реальных ошибок измерения угол наклона
соответствующего образа в системе координат Ο2Χ2Υ2 наблюдаемого
изображения может быть представлен как $2 = $ι — # + £, где ξ —
некоторая ошибка измерения. При этом ошибка измерения
распределена по нормальному закону с характеристиками Μξ = 0, σξ — средне-
квадратическое отклонение, определяемое характеристиками образа и
настройками алгоритма сегментации.
Отсюда следует, что по образу эталонного изображения и
соответствующему ему образу наблюдаемого изображения угол ΰ поворота
системы координат Ο2Χ2Υ2 наблюдаемого изображения относительно
системы координат 0\Χ\Υ\ эталонного изображения определяется из
соотношения ϋ = ϋ\ — $2 +£> содержащего случайную ошибку со сред-
неквадратическим отклонением σξ. Для увеличения точности
определения угла поворота ΰ целесообразно использовать все образы, для
которых установлено соответствие. Путем суммирования и усреднения
рассматриваемых соотношений можно получить
71 71 71
ntf = 5^tf|i-5^tf2i+5^&, (8.50)
г=\ г=\ г = \
откуда
Σ(0ϋ-02θ Σ (6)
tf = i=J · + ^>—. (8.51)
η η
С учетом независимости и одинаковой распределенности ошибок £;
в полученном выражении для угла поворота ΰ среднеквадратическое
отклонение может быть оценено:
ς (ω
\
= 1
У
(8.52)
На последнем этапе определяется вектор смещения (Χ, Y) систем
координат.
С каким-либо произвольным г-м образом, для которого выявлено
соответствие на эталонном и наблюдаемом изображениях, можно
связать декартову систему координат OiXiY^ у которой ось OiXi
проходит вдоль образа, а начало координат зафиксировано в произвольной
точке образа. Система координат OiXiYi повернута относительно
системы координат эталонного изображения 0\Χ\Υ\ на угол $;. Матрица
преобразования из системы координат 0\Χ\Υ\ в систему координат
Л ν,, / cos di sin ϋ; λ ,.
OiXiYi имеет вид -о. я. ) ■ Можно записать векторное
V S1U l/j COS l/j J
соотношение OiO\ + 0\0^ = ΟχΟι. При проектировании на ось OjYj
этого векторного равенства с учетом, что yi-я координата вектора 0\Оч
может быть выражена с использованием нижней строки матрицы
преобразования, получается соотношение р\ — X sin ΰ{ + Υ cos $; = p\ .
(г) (г)
Обозначив Δρ; = р\ — р\ , можно записать —Xsin $; + Fcos $; =
= Api . Для определения координат Χ, Υ получаем аналогичное
выражение для другого j-ro образа: —Xsin i9j + Fcos dj — Apj.
Определитель полученной системы двух уравнений Δ = sin(#j — i?j). При
этом решение имеет вид
X = (Api cos $j — Apj cos M)/ sin ($j — ΰί),
Υ = (-Apj sin дг + Api sin uj)/ sin (tfj —ui).
Отсюда следует, что система не имеет однозначного решения при
параллельности выбранных образов, а определитель достигает
наибольшего по модулю значения при их перпендикулярности. Кроме того,
как было указано, угол наклона образа на наблюдаемом изображении
определяется с некоторой ошибкой. Это приводит к неточности
измерения расстояния до этого образа и ошибкам вычисления значений Χ, Υ.
Для уменьшения погрешности определения вектора (Χ, Υ) следует
произвести усреднение полученных координат по всем непараллельным
парам образов, для которых установлено соответствие на эталонном и
наблюдаемом изображениях. Если таких образов п, то количество пар
составляет N = п(п — 1)/2. Координаты Χ, F, найденные с
использованием г'-го и j-ro образов, Ι ίζ. г ίζ.η - 1, г -|- 1 ^ j ζ. п, удобно
обозначить соответственно Xij, yij с индексным указанием рассматриваемых
образов. Формула для определения усредненных значений координат
Χ, Υ принимает вид
η—! η η—! η
2 Σ Σ χα 2 Σ Σ να
χ= '-','-*; , 7= <=;j=<+' . (8.54)
η(η — 1) η(η — 1)
Однако, как уже отмечалось, чем меньше угол между выбранными
образами, тем больше ошибка определения вектора смещения. Поэтому
целесообразно проводить весовое суммирование и использовать в
качестве весовых коэффициентов при проводимом усреднении значение
модуля определителя |Δ| = | sin (i9j — $;)|. Формула для определения
усредненных значений координат Χ, Υ в этом случае принимает вид
X
τι—Ι η
Σ Σ ч
I Sin (Vi — Vj)\
Σ Σ να lsin ivi
— i=\ j=i+\
η—! η
Σ Σ lsin Ы
η—! η
Σ Σ |sin(ui-u,-)|
(8.55)
Таким образом, мы получили три координаты, характеризующие
положение ЛА на момент начала формирования лазерно-локационного
изображения относительно точки программного начала работы
системы: вектор сдвига системы координат (Χ,Υ) и угол между вектором
скорости ЛА и программным направлением полета.
8.7. Интеграция навигационных данных
8.7.1. Алгоритм интеграции данных при слабосвязанной
архитектуре бортовой системы. В основе алгоритма интеграции данных
БИНС, РБВ, приемника и оценок КЭАН по слабосвязанной схеме
лежат уравнения ошибок БИНС, которые в проекциях на оси горизонт-
ного сопровождающего трехгранника имеют вид [8.7,8.8]:
d
dt
Х\
Χι
Хъ
χ*
Хъ
Хе
о
о
о
-Ωχ-Ωγ]
(Ω'ν + Ω2ζ-ω^) (Ωζ-Ωχ-ςΐγ) -(Ων + Ωχ·Ωζ)
-(Ωζ-+Ωχ·Ων) (Ωχ + Ω%-ω%) (Ωχ-Ων-Ωζ) -2Ω·
(άγ-Ωχ-Ωζ) -(άχ + Ωγ.ςΐζ) (Ωχ + Ωγ + 2ωΙ) 2Ων
0 0 0
ο
ι
ο
2ΩΖ
0
-2Ωχ
0
0
Ι
-2Ων
2Ων
+
0
0
0
-7
β
0
0
7
0
—α
0
0
-/
α
0
β
Пу
ηζ
+
0
0
0
Αηχ
Апу
Δη2
χ2
Χ4
хе
+
(8.56)
d
d~t
a
β
δ
=
0
-Ωζ
Ωκ
Ωζ
0
-Ωχ
-Γίγ
Ωχ
0
α
β
δ
+
Αωχ
Αων
Αωζ
(8.57)
где Х[,Х2,Хз — погрешности БИНС в определении координат в го-
ризонтной СК; Χ^,Χ^,Χζ — производные погрешности БИНС в
определении координат в горизонтной СК; α, β, δ — угловые погрешности
ориентации измерительного трехгранника относительного
вычисленного, компоненты вектора угла малого поворота; ΑΝΧ^:Ζ, ΔωΧι3Λ2 —
погрешности акселерометров и гироскопов в горизонтной СК; ω0 —
собственная частота колебаний ошибок БИНС, т. н. частота Шулера
(равная ω0 = 1,25 · Ю-3 с-1); Ωχ,^ζ — производные проекций вектора
абсолютной угловой скорости вращения выбранного трехгранника.
В состав расширенной динамической системы введены
соотношения для инструментальных погрешностей измерений акселерометров
(Ап\, Δη2, Δη3)τ и гироскопов (Δωι, Δω2, Аи>з) в связанной СК,
описываемых достаточно упрощенной системой уравнений:
Ni = JVf + Ani+SNi, г =1,2,3
Ω; = Ω'Γ + ΔΩ; + 5Ω;, г =1,2,3,
(8.58)
(8.59)
где Δη; — систематические ошибки акселерометров; δΝί — случайные
аддитивные ошибки акселерометров; ΔΩ; — систематические ошибки
ДУСов; 5Ω; — случайные аддитивные ошибки ДУСов.
Приведение инструментальных ошибок гироскопов и
акселерометров к горизонтной СК производится по следующим формулам:
Апх = С\\Ащ +6Ί2Δη2 + (7|3Δη3,
Апу = Сч\ Ащ + (722Δη2 + (723Δη3,
Апг = С3\ Атц + (732Δη2 + (733Δη3,
(8.60)
AQx = CliAQl + 6Ί2ΔΩ2+6Ί3ΔΩ3,
ΔΩ„ = С2\ ΔΩ ι + (722ΔΩ2 + (723ΔΩ3,
ΔΩ2 = σ3|ΔΩ, + σ32ΔΩ2 + σ33ΔΩ3,
(8.61)
где Cij — элементы матрицы направляющих косинусов между
связанной и географической системами координат.
Кроме того, введем в состав расширенной динамической системы
стохастическое дифференциальное уравнение, описывающее эволюцию
динамической ошибки РБВ, и формальное дифференциальное
уравнение для систематической ошибки РБВ:
A/iSpyBB = 0.
(8.62)
Объединяя уравнения (8.56)-(8.62), получим линейную
стохастическую модель динамики ошибок БИНС:
dt"
Fx + Gv,
(8.63)
где χ — вектор состояния системы, включающий ошибки БИНС в
определении местоположения, скорости, ориентации, а также
компоненты модели погрешностей инерциальных датчиков; F — динамическая
матрица системы; и — вектор шумов системы; G — матрица шумов
системы.
Вектор состояния системы представляет собой блочный вектор
размерностью 17x1 следующего вида:
X
\ ΔΛΕ?,
РБВ
Вектор шумов системы представляет собой блочный вектор
размерностью 7 χ 1 следующего вида:
^РБВ
Динамическая матрица системы (8.63) представляет собой блочную
матрицу размерностью 17x17 следующего вида:
D6x6
Озхб
Озхб
Озхб
0|х6
0|хб
0
пг
-Пу
0
Ω2
—Ω,,
Озхз
-п2
0
пх
-Ω2
0
Пу
—ηχ
0
Ω?/
-Ω,
0
Озхз
Озхз
0ΐχ3
0|хз
Озхз
СзхЗ
Озхз
Озхз
Озхз
0|χ3
0|χ3
ОбхЗ
СзхЗ
Озхз
Озхз
0|χ3
0|χ3
Обх|
Озх|
Озх|
Озх|
-1/ТрЪ,
0
Обх|
Озх1
Озх|
0ЗХ|
0
0
где
D =
0
0
0
Ω2+Ω*-ω2
u 62 J Uq^ ύ и·}/
u иъ/ ϋ urjr J 6?
0
0
0
н2 *Jj
Ω2+Ω22-
J i-j- J I/
\ly
-4
y* bz
ily
i lx
&x +
0
0
0
iίχύLz
О и flu L2
tfy-ωΐ
1
0
0
0
-2Ω2
2Ω„
0
1
0
2Ω2
0
-2Ω,,
0
0
1
-2Qy
£b ίχ
0
(8.64)
Матрица шумов системы представляет собой блочную матрицу
размерностью 17x7 следующего вида:
/
Озх?
\
СзхЗ
Озхз
Озхз
СзхЗ
Озх|
0ЗХ|
03x7
03x7
0|χ3
0|χ3
Кп/Трт
\
о
(8.65)
1x7
У
Измерения, поступающие в интегральный фильтр Калмана, можно
сформировать по разности инерциальной и спутниковой информации
(позиционной и скоростной). Высотные измерения можно
сформировать также путем вычитания из показаний баровысотомера значения
высоты, вычисленной в БИНС. При наличии показаний
радиовысотомера возможно сравнение высоты, вычисленной в БИНС, с высотой от
радиовысотомера. В этом случае потребуется информация от бортовой
электронной карты местности (или из бортовой базы данных высот)
для получения высоты над общим земным эллипсоидом.
Полученные измерения по координатам и скоростям будут состоять
из ошибок БИНС и спутниковой системы, а измерение по высоте будет
состоять из ошибки БИНС, ошибки высотомера (в случае
радиовысотомера сюда войдет ошибка от необозначенных на карте объектов,
например, деревья, постройки) и ошибки карты (в нее войдет ошибка
от неточного определения координат в плане).
Таким образом, в штатном режиме работы, т.е. в режиме
интегрирования выходных данных БИНС, РБВ и GNSS-приемника,
расширенный вектор измерений Zk будет иметь вид:
/ h
БИНС
Zk
^БИНС.
дБИНС.
уБИНС
т/БИНС
УУ
БИНС
-hPm \
^GNSS
^GNSS
К
GNSS
\v2
rGNSS
У
/■GNSS
(8.66)
В том случае, если происходит деградация бортового комплекса
за счет отсутствия данных GNSS, в вектор измерений включаются
оценки положения от КЭАН, и размерность вектора измерений
составляет 3x1:
/1БИНС-/1РБВ
Zk
^БИНС.
дБИНС
^КЭАН
дКЭАН
(8.67)
Уравнение измерений записывается в следующем виде:
zk = Нхк +vk,
(8.68)
где Zk — расширенный вектор измерений; Я — матрица
наблюдаемости, представляющая собой матрицу частных производных измеряемых
параметров по компонентам вектора хк, вычисленных в некоторой
опорной точке, например, в точке, соответствующей прогнозируемой
оценке вектора Хк\ Vk — вектор шумов измерений.
Для штатного режима интеграции данных (т.е. для вектора Zk,
определяемого формулой (8.66)) матрица Η представляет собой матри-
цу размерности 6x17 следующего вида:
Η
0
1/Д2
0
0
0
0
1
0
0
0
0
0
0
0
l/(i?2 COS ψ)
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
1
ОбхЭ
1
0
0
0
0
0
1 \
0
0
0
0
о /
(8.69)
Для режима работы, использующего вектор измерений Zk,
определяемый формулой (7.63а), матрица Η представляет собой матрицу
размерности 3x17 следующего вида:
0
/д2
0
1
0
0
(8.70)
0
Н= | 1/д, 0 0 03х3 03χ9
1/(Д2 COS φ)
Измерения Zk поступают на вход фильтра Калмана, который при
плохой сходимости оценок работает в режиме ε-механизации [8.10]
(например, с коэффициентом ε = 1,025), что обеспечивает лучшие
характеристики сходимости оценок (см. гл. 7).
В результате работы фильтра вычисляется оценка текущих ошибок
БИНС в определении координат, скоростей, углов ориентации, а также
оценки погрешностей ее акселерометров и гироскопов. На основе
полученных оценок корректируются показания БИНС и ее измерительных
элементов.
Связь вектора состояния ошибок БИНС с поправками к вектору
выходных параметров БИНС дается формулами [8.8]:
х\ = d\R,2 cos φ,
Х2 = dipR\,
хз = dh,
{{Vz/R2)+nxsmtp)
X4 = dVz +
cos φ
ΥζΧ2
R\ '
X\ + ΩΣΧ2 — QyX3,
x5 = dVv + ννξχ3 +
Χς, = άνζ,
X7 = CllA1 + СпМ + С|зАч/> + ^-,
щ
Х8 = С2\ Δ7 + C22Atf + С2з&ф - —,
Λ2
(8.71)
хэ = С3| Δ7 + C32Ai9 + СззА-ф ■
χι_
R2
tg φ.
где Xi, ι
с 1 по
1 4- 9 — компоненты вектора состояния, причем компоненты
— ошибки определения координат, с 4 по 6 — ошибки
определения скорости, с 7 по 9 — ошибки ориентации вычисленной
в БИНС системы координат, связанные с ошибками в определении
углов курса, крена и тангажа.
Совокупность приведенных соотношений определяет алгоритм для
вычисления корректирующих поправок к вектору выходных параметров
БИНС.
Отметим, что в случае неполной деградации бортового
интегрированного комплекса, т.е. при отсутствии данных GNSS, интегральный
фильтр подключает данные КЭАН с использованием расширенного
вектора измерений (8.67) и матрицы наблюдаемости (8.70). В случае
отсутствия данных КЭАН, т.е. при полной деградации комплекса,
интегральный фильтр работает в режиме прогноза.
8.7.2. Интеграция данных при глубоко интегрированной
архитектуре. Основной принцип глубокой интеграции данных
спутниковой и инерциальной навигации в рамках данного исследования
заключается в специальном представлении интегрального фильтра Калмана,
основанного на оценивании ошибок БИНС по измерениям GNSS-при-
емника. Как обычно, алгоритм калмановской фильтрации представим
в виде двух процедур: прогноза состояния динамической системы и ее
коррекции за счет поступивших измерений.
Прогноз оценок состояния динамической системы осуществляется
путем численного интегрирования системы нелинейных
дифференциальных уравнений, представляющих собой, по сути, уравнения
пространственного движения вертолета, приведенные выше в разд. 8.3.2,
однако, для прогноза ковариационной матрицы оценок используются
эти же уравнения, линеаризованные в окрестности полученных оценок,
полученных на предыдущем шаге работы алгоритма.
Таким образом, выходом БИНС является вектор размерности 10 χ 1
XINS.
ΧΙΝ3=(φ λ h\V»E VyNE V»E\q0 qt q2 qzf-
Используя данный вектор, интегрированная навигационная система
определяет положение БЛА в географической СК (λ,ψ,Η), скорость
в горизонтной СК (V^E, VyNE, V^E) и ориентацию БЛА относительно
горизонтной СК (α,β, j).
Все перечисленные выше оценки должны быть скорректированы
с использованием интегрального фильтра Калмана, формирующего
поправки к оценкам БИНС, используя данные GNSS-приемни-
ка. Помимо этого, фильтр позволяет оценить систематические
ошибки акселерометров (AiVfYS, AN^YS, AiVfYS) и
систематические ошибки и ошибки масштабных коэффициентов ДУСов
(Ao>fYS, Ao^YS,Ao>fYS, Au>xC,AujyC, Αω^°) в целях последующей
компенсации ошибок измерений чувствительных элементов БИНС.
Соответствующие уравнения формирующих фильтров для данных
ошибок, представляемых в виде случайных центрированных гауссов-
ских величин, были представлены выше в настоящей главе.
Таким образом, расширенный фазовый вектор интегрального
фильтра Калмана включает 18 компонент:
ΔΧ = ( Αφ Δλ Ah I AVXNE AVyNE AVZNE \αβΊ\
Αω^Β Αω^Β Αω3/3 | ΔΛ^5 ΔΛ^5 ANS/S | Αω? Αω™ Awf \ .
Данный вектор АХ удовлетворяет следующему соотношению:
AX(ti+l) = F(ti)-AX(ti), (8.72)
где F(U) — матрица частных производных 18 χ 18 правых частей
уравнений (8.1), (8.2) по компонентам вектора ΔΧ, вычисляемая на
опорной траектории, соответствующей уравнениям прогноза оценок
с начальными условиями, корректируемыми на каждой итерации в
момент времени ί,.
Прогноз ковариационной матрицы поправок осуществляется в
соответствии со следующим соотношением:
К?+| = Ф*+мКГФГ+м + Фц.1ЛАК&7+1Л, (8.73)
где К?,| — априорная ковариационная матрица, используемая
в процедуре коррекции на первой итерации в момент времени U+\\
ΔΚί — матрица, обусловленная влиянием шумов в канале движения;
Φί+ι,ί — фундаментальная матрица, вычисляемая по следующему
соотношению:
*i+i.i = / + ii(ii+i-i»)· (8-74)
Опишем теперь процедуру коррекции в момент времени г. Основная
цель коррекции заключается в формировании оптимальных в
байесовском смысле поправок для вектора оценок БИНС X(ij) = X; в виде:
X; = X? + ΔΧί, (8.75)
где X; — вектор оценок БИНС; ΔΧ; — вектор поправок, формируемый
процедурой коррекции.
Процедура коррекции включает т итераций, где т — общее
число обрабатываемых измерений спутниковой навигационной системы.
Например, если приемник GPS/ГЛОНАСС сформировал в момент
времени г псевдодальности и псевдоскорости общим числом т, то
процедура коррекции будет содержать т итераций по обработке каждого
измерения друг за другом. Процедура коррекции стартует с итерации
с номером 0. Таким образом, процедура коррекции запишется в виде:
ΔΧ? = Ν?
у·?
J imeas
^(ХГ1)]· (8-76)
где г — текущий момент времени; j (j = 1 -τ- т) — номер итерации;
ΔΧ^,ΔΧ{~ векторы поправок к навигационному решению после j и
j — 1 итерации соответственно; У;теа5 — измерение, соответствующее
j-й, на момент времени U; yjTei — «опорное» измерение,
соответствующее истинному у\, являющееся функцией оценки на j — 1 итерации
Х^-'; X?- — вектор оценок БИНС после j— 1 итерации на момент
времени U\ Nf — коэффициент усиления фильтра Калмана,
определяемый соотношением:
Kj~lUjT
Ν·? = ——— (8 77)
где Hf — матрица наблюдаемости, т.е. матрица частных производных
измерений по расширенному фазовому вектору поправок на момент
времени U:
НК&)„-· (878)
если измеряется псевдодальность или
* = (&)„-■ (8J9)
если измеряется псевдоскорость; gj — настраиваемый коэффициент,
зависящий от точности обрабатываемых измерений, характера «истинно-
ί ° ■( ° \Т Л
го» движения и условий наблюдаемости; К|= Μ<ΔΧ| (ΔΧ:?
апостериорная ковариационная матрица поправок, определяемая
соотношением:
KJ = Kf'- { .7 ? '—2· (8·8°)
Аналитические формулы для вычисления матрицы Н; в силу их
громоздкости не приводятся.
Коррекция оценок БИНС с учетом вычисленных в фильтре
поправок осуществляется по следующим соотношениям [8.8]:
λ?+'=Α| + ΔΑ|+ι,
Μ+Ι =/ι| + Δ/ι|+ι,
V™*' =v£Ei + AV£El+\
yNEj+' _ yNE1 , \yNEi + l
vVi vVi "τ" L^vyi
yNEi+' _ уNEj , дуNEj+'
(8.81)
Матрица ориентации перевычисляется следующим образом:
дврт+' _ ддЯ-1 . д£>рт
ANEi - AAi ANEi -
гдеДА?+| =Rz(1)-Ry(P)-Rx(a).
Систематические ошибки чувствительных элементов БИНС, оценка
которых формируется в фильтре, накапливаются в алгоритме БИНС
и используются при коррекции измерений акселерометров и ДУСов
следующим образом:
8.8. Имитационное моделирование маловысотного
полета при слабосвязанной архитектуре бортового
контура
8.8.1. Исходные данные имитационного моделирования.
В целях подтверждения работоспособности разработанного
функционально-программного прототипа бортового интегрированного
комплекса беспилотного вертолета, построенного по слабосвязанной
архитектуре, а также для анализа его свойств в различных режимах
было проведено имитационное моделирование управляемого
маловысотного полета вертолета. Функциональная схема имитационного
моделирования соответствует рис. 8.1. При этом были использованы
следующие исходные данные:
1. Точка старта вертолета в географической СК:
превышение над земным эллипсоидом: 60 м;
широта: 56° с.ш.;
долгота: 37° в.д.
2. Начальные координаты вертолета в картографической СК:
• Хм(0) = 0 м;
• YM(0) = 300 м;
• ΖΜ(0) = 10000 м;
3. Начальная скорость вертолета в горизонтной СК:
. VXNE(0) = 70 м/с;
. 1^£(0) = 0м/с;
. ^(0) = 0м/с.
4. Начальная ориентация вертолета:
• Ф(0) = 0°;
• ϋ{0) = 0°;
• 7(0) = 0°;
• ωχ = О град/с;
• ω у = 0 град/с;
• ωζ = О град/с.
5. Время моделирования — 60 с.
6. Параметры модели акселерометров БИНС [8.19,8.20]:
• σμ; ι (* = 1. 2, 3) = Ю-3 g — СКО постоянных смещений нуля
акселерометров;
• °>;2 (* = 1,2, 3) = Ю-3 g — СКО случайных аддитивных
измерительных ошибок акселерометров;
• /ιη = 60 с — время корреляции случайных аддитивных
измерительных ошибок акселерометров;
• °>м+2 (г = 1.2, 3) = Ю-3 g — СКО погрешностей
масштабных коэффициентов акселерометров;
• °>i6 (* = 1 · 2, 3) = Ю-3 g — СКО ошибок нелинейности
акселерометров;
• σμΐ4ιμι5ιμ23,μ25,μ33,μ34 = Ю-4 g — СКО погрешностей из-за
неортогональности и перекоса осей чувствительности
акселерометров.
7. Параметры модели датчиков угловых скоростей БИНС [8.19,
8.20]:
• σ^ϋ.^ί2,^ί3(ί=ι.2.3) = Ю-5 град/с — СКО температурных
дрейфов гироскопов и случайных измерительные шумов;
• hw = 300 с — время корреляции случайных аддитивных
измерительных ошибок ДУСов;
• σΰίί (i=| ,2,3;j=4,5,6) = Ю-5 град/с - СКО удельных скоростей
дрейфа гироскопов, пропорциональные перегрузкам;
• Рвп.вм.вю — Ю-5 град/с — СКО погрешностей масштабных
коэффициентов гироскопов;
• σ0Ιβι0Ι9,027ι029ι037,ι93β- = Ю-5 гРад/с — СКО дрейфа из-за
неортогональности и перекоса осей чувствительности
гироскопов.
8. Параметры БИНС [8.19, 8.20]:
• Частота работы: 100 Гц;
• Ошибки начальной выставки (в момент старта БИНС
выставляется с использованием геодезического приемника
ГЛОНАСС/GPS):
- σχ(0) = 10 м;
- σγ{0) = 10 м;
- σζ(0) = 10 м;
- σνχ(0) = 0,1 м/с;
- aVy(0) = 0,1 м/с;
- σνζ(0) = 0,\ м/с;
- σΦ(0) = 0,01°;
- σΰ(0) = Ο,ΟΓ;
- σ7(0) = 0,01°;
• При моделировании все значения систематических ошибок
чувствительных элементов, а также ошибки начальной
выставки выбирались максимальными.
9. Параметры радиобаровысотомера [8.8,8.10]:
• Частота работы: 100 Гц;
• стлм: = 0,15 м — СКО систематической ошибки РБВ;
• σί/грвв = 0,3 м/с — СКО случайной ошибки РБВ;
• μΗ = 3 с — время корреляции случайной ошибки РБВ.
10. Параметры приемника ГЛОИАСС/GPS [8.12]:
• Частота работы: 0,5 Гц;
• стдХнка. ДУнка. δ^ηκα = 6 м — СКО погрешности в
определении координат, вносимой бортовой аппаратурой НКА;
• σΧΐοηΐ σζ-,0„ = 0 м, σγ.οη = 8 м — СКО погрешности в
определении координат, вызванной ионосферной задержкой
сигнала;
• σΧΐΓθρ, aZtrop = 0 м, aYtrop = 3 м - СКО погрешности в
определении координат, вызванной тропосферной задержкой
сигнала;
• σχ»«< σΥ«Λ< σζ„Λ = 1,5 м — СКО погрешности в определении
координат, вызванной эффектом многолучевости;
• стх"нап> σ>ΉΑπ> σ^ΗΑπ = 0,5 м — СКО погрешности в
определении координат, вносимой внутренними шумами приемника;
• σν,'ι σν<=, σν* = 0ι05 м/с — СКО систематической
погрешности определения компонент вектора скорости вертолета;
• <у&Хснс, sYchc. sZchc = 5 м — СКО случайных составляю-
щих ошибок оценивания компонент положения;
• μχί = 1 с — время корреляции случайной ошибки оценки
координат;
• <tsvx,svy,svz = Oil м/с ~~ СКО случайных составляющих
ошибок оценивания компонент вектора скорости;
• μνχ. = 1 с — время корреляции случайной ошибки оценки
компонент вектора скорости.
11. Параметры бортовой РЛС [8.15]:
• Частота работы: 200 Гц;
• Параметры зоны обзора, динамические характеристики
привода РЛС и бортового компьютера соответствуют
стандартным для РЛС миллиметрового диапазона.
12. Параметры модели «идеального» пилота:
• Частота работы: 100 Гц;
• RL = 70 м.
13. Параметры модели автопилота:
• Частота работы: 100 Гц;
• Коэффициенты усиления и постоянные времени
определяются сплайн-аппроксимацией для семейства балансировочных
режимов.
8.8.2. Результаты моделирования и их анализ. Все полученные
результаты можно разделить на следующие группы:
• Демонстрация работоспособности бортовой системы,
выполненной на основе слабосвязанной схемы интеграции данных БИНС,
РБВ и GNSS-приемника в режиме МВП;
• Демонстрация работы алгоритма корреляционно-экстремальной
привязки с помощью бортовой РЛС миллиметрового диапазона;
• Демонстрация работы алгоритма корреляционно-экстремальной
привязки, использующего данные лазерного локатора.
Результаты моделирования процесса работы интегрированной
навигационной системы. Ниже приводятся результаты
имитационного моделирования маловысотного полета вертолета в соответствии
с исходными данными, приведенными в п. 8.8.1. Данные результаты
призваны продемонстрировать эффективность алгоритма интеграции
данных, особенности навигационного решения для слабосвязанной
архитектуры, а также качество отработки траекторного управления и
стабилизации при различных вариантах работы интегрированного
навигационного комплекса. В этой связи все результаты в данной части
можно разделить на четыре группы:
• Ошибки навигационных определений центра масс в режиме
«облет» при штатном функционировании интегрированного
навигационного комплекса (рис. 8.26,8.27). На вышеуказанных
рисунках и далее использованы следующие обозначения: dH, dLam,
dFi — ошибки определения высоты, широты и долготы,
выраженные в метрах; dVx, dVy, dVz — ошибки определения скорости по
соответствующим осям; dPitch, dYaw, dRoll — ошибки
определения углов тангажа, рысканья и крена соответственно.
• Ошибки навигационных определений центра масс в режиме
«облет» при деградации интегрированного навигационного
комплекса (отсутствие сигналов GNSS) (рис.8.28,8.29).
• Ошибки определения параметров угловой ориентации
беспилотного вертолета в режиме «облет» (рис.8.30) и «обход» (рис. 8.31);
• Ошибки отработки заданной высоты облета рельефа в режиме
МВП при использовании оценок интегрированной навигационной
системы (рис.8.32).
_4_
-#-
~+~
ilH
N
d Lam
dFi
)
T
20 „ 30
Время, с
Рис. 8.26
^■<1М'«
20 30
Время, с
-d Vx
-d Vy
-d Vz
40
π
50
Рис. 8.27
Обсудим приведенные выше результаты моделирования.
Первая группа зависимостей (рис. 8.26,8.27) отражает эволюцию
ошибок навигационных определений ц. м. вертолета в штатном режиме
функционирования бортового интегрированного навигационного ком-
Ί ' Γ
20 30
Время, с
Рис. 8.28
α.-
о
α.
с -
о
а.
о
ι ' г
30 40
Время, с
Рис. 8.29
плекса, т.е. при интеграции данных БИНС, РБВ, GNSS-приемника и
решения КЭАН. Как видно из этих рисунков, РБВ обеспечивает
ошибку позиционирования по высоте на уровне единиц метров, в то время
как ошибки по координатам в плане составляют уже десятки метров.
3 Η ' ι ■ ι ■ ι ■ 1 1 1
° О 10 20 30 40 50
Время, с
Рис. 8.30
s _1'°П ' 1 ' 1 ' 1 ' 1 ' 1
Э 0 10 20 30 40 50
^ Время, с
Рис. 8.31
Оценки скорости вертолета сходятся значительно медленнее и ошибки
в установившемся режиме соответствуют точности GNSS-привязки.
Вторая группа зависимостей (рис. 8.28, 8.29) иллюстрирует
поведение навигационного решения интегрированного навигационного
комплекса в случае частичной деградации (потеря сигналов GNSS) на
20 секунде полета. Как видно из приведенных рисунков, только канал
высоты, обеспечиваемый РБВ, характеризуется высокой точностью
даже при деградации комплекса в силу своей независимости от сигналов
GNSS. Тем не менее, в течение еще 10 секунд ошибки в оценивании
координат в плане и компонент вектора скорости остаются на
приемлемом уровне вследствие учета в уравнениях прогноза систематических
ошибок чувствительных элементов БИНС и использования решения
КЭАН. Однако по истечении данного промежутка времени
накапливающиеся ошибки БИНС приводят к нарушению работы КЭАН
(формируются недостоверные привязки), после чего интегральное решение со
временем совпадает с решением БИНС, которое (вследствие
использования микромеханических чувствительных элементов) обладает низкой
точностью.
Третья группа зависимостей (рис. 8.30, 8.31) иллюстрирует влияние
маневра вертолета на ошибки определения углов его ориентации. Так,
на рис. 8.30 видно, что при совершении маневра в вертикальной
плоскости («облет») угол рысканья не уточняется, в то время как ошибка
по тангажу стремится к нулевому значению. Напротив, при
совершении маневра в горизонтальной плоскости («обход») быстрее других
(рис. 8.31) уточняется именно рысканье, однако в этом случае плохо
разделяются движения крена и рысканья, вследствие чего эволюция
ошибок по этим каналам носит периодический характер. Также можно
отметить тот факт, что быстрее всего уточняются координаты ц.м.,
затем компоненты вектора скорости и только после этого — параметры
угловой ориентации.
Рис.8.32 характеризует качество отработки траекторного
управления и стабилизации при различных вариантах настройки модели
«идеального» пилота. На нем приведены зависимости высоты полета
вертолета над подстилающей поверхностью при заданной высоте МВП 50 м
для различных значений «радиуса локации>>: 50-500 м и 30-200 м. Как
видно из приведенных зависимостей, использование больших значений
радиуса локации приводит к большим динамическим погрешностям
в отработке заданной высоты, однако обеспечивает при этом меньшие
вертикальные потребные перегрузки и лучшее качество переходных
процессов по высоте.
Анализ приведенных результатов моделирования позволяет сделать
следующие выводы:
1. При существенной деградации навигационной системы (работает
только БИНС) дрейф БИНС зависит от эволюции вертолета на
траектории. Использование радиобаровысотомера в составе навигационного
комплекса является необходимым условием безопасной отработки
маневра «облет». Однако при этом координаты вертолета в плане
определяются с недостаточно высокой точностью (рис. 8.28-8.29).
430 -г
410 -■
390-■
370-■
- 350 ■■
f-
У 330--
PQ
310·-
290"
270--
250-1 , , , , 1
0 20 40 60 80 100
Время, с
мин 50, макс 500 мин 30, макс 200"-™ Поверхность Земли|
Рис. 8.32
2. Ошибки определения параметров угловой ориентации
существенно зависят от маневров вертолета (рис. 8.30,8.31), однако для
получения приемлемой точности (< 0,1°) необходимо использовать
высокоточные чувствительные элементы БИНС.
3. Использование интегрированного навигационного комплекса
позволяет реализовать безопасные маневры «облет», «обход», «облет-
обход» и автоматическое траекторное управление (рис. 8.32) при
высотах полета над рельефом более 30 м.
Результаты моделирования работы алгоритма
корреляционно-экстремальной привязки с использованием данных бортовой
РЛС миллиметрового диапазона. Приведенные ниже результаты
характеризуют работоспособность корреляционно-экстремального
алгоритма привязки ц. м. вертолета к географическим координатам и
возможность уточнения с помощью этого алгоритма полученного ранее
базового (опорного) навигационного решения при различных свойствах
подстилающей поверхности. Для удобства анализа все приводимые
результаты, показанные на рис. 8.33-8.50, сведены в табл. 8.4, в которой
указан моделируемый режим и приведенные на рисунках данные.
Вид приведенных «опорных» и «истинных» кадров РЛС
характеризует влияние маневров на информативность кадров, а вид
корреляционной функции демонстрирует возможность получения как достоверных,
так и недостоверных решений, генерируемых КЭАН.
Таблица 8.4. Условия реализации автоматической посадки
№
варианта
1.
2.
3.
4.
5.
6.
Режим
МВП
Облет
Облет
Обход
Обход
Облет-
обход
Облет-
обход
Номер и содержание иллюстрации
Рис. 8.33, «истинный» кадр
Рис. 8.34, «опорный» кадр
Рис. 8.35, матрица значений взаимной
корреляционной функции «истинного» и
«опорного» кадров
Рис. 8.36, «истинный» кадр
Рис. 8.37, «опорный» кадр
Рис. 8.38, матрица значений взаимной
корреляционной функции «истинного» и
«опорного» кадров
Рис. 8.39, «истинный» кадр
Рис. 8.40, «опорный» кадр
Рис. 8.41, матрица значений взаимной
корреляционной функции «истинного» и
«опорного» кадров
Рис. 8.42, «истинный» кадр
Рис. 8.43, «опорный» кадр
Рис. 8.44, матрица значений взаимной
корреляционной функции «истинного» и
«опорного» кадров
Рис. 8.45, «истинный» кадр
Рис. 8.46, «опорный» кадр
Рис. 8.47, матрица значений взаимной
корреляционной функции «истинного» и
«опорного» кадров
Рис. 8.48, «истинный» кадр
Рис. 8.49, «опорный» кадр
Рис. 8.50, матрица значений взаимной
корреляционной функции «истинного» и
«опорного» кадров
Ошибка
привязки
в плане, м
ΔΧ=0
ΑΖ = -20
ΑΧ = 910
ΑΖ = -90
ΑΧ=ΰ
ΔΖ = -10
ΑΧ = 680
ΑΖ = 290
ΔΛ" = -10
ΑΖ = 10
ΑΧ = 1100
ΑΖ = -400
Приведенные результаты показывают, что форма и размеры кадра,
формируемого БРЛС, определяются как режимом работы бортовой
РЛС, так и условиями наблюдения.
Тем не менее, решающее влияние на возможность получения
недостоверных навигационных решений оказывает характер подстилающей
поверхности.
В частности, кадр БРЛС в режиме «облет» имеет вытянутую вдоль
оси X (OXbf) форму, а в силу «редкой» смены направления
движения локатора, при котором измерения не проводятся, и многократного
SlOC
χ ο ϋ
11111Ш
180
160
140
60
120
80 l*X
40
20
Рис. 8.33
140
160
180
200
Ё200-
^йоге
~ 1С
<*, о-о
*л
Ъ
^шШ\\\\\\\Ш^ж>
,=Л1 Р^о *\0*-
ιβΙΡτίο }U
flP^o
^20
Рис. 8.34
^
200
*
'60
Ю\
20
200
189
188
197
196
195
194
193
192
191
188
00
Рис. 8.35
200-
β
gl50
#
^ 100
<Г*10о~о
Ъо^
■tfv
Рис. 8.36
Рис. 8.37
-й
.^■*р
200
150
200л
150-
МП-
*5С
10>о
200
189
188
197
196
^95
194
193
192
191
188
Рис. 8.38
60
■г * 40"
<Ъ 0"0
Рис. 8.39
е40,
о 30
■—5
* 200
2&= щц.
100
« 20 "
■.'Ί 2С
0
Рис. 8.40
У ' 14С
I" 8° Л<Р·
111 60 т *Ф
40 >'
160
о "о
Рис. 8.41
,. ^Ш' '—_.
S200
Γ100
0
100
W Ι
ί
ΒΖ&έέϋ^^^ν^
ί'
80
!# *»
120
*?JiF 100
*ο
<й
20 ■". 20
(ТО
80
- 60 о
Рис. 8.42
езоо-
О250-
^200
>-~150
120 '
100 ., „,
80 ■
<Г *. 60 ι.
In ■' ,
°<& 40 'Ί,.
1
120
»-' 40
100
20 20
0 О
Рис. 8.43
200,
150
100
12.
100
80
200
199
198
1S7
1Θ6
1Θ5
1S4
1Θ3
120 1S2
191
188
Рис. 8.44
450
Рис. 8.45
_^ 350
t^-^300
^ 250 „^
I1»1»ji^-^200 . •V3
150 >'
LOO
Рис. 8.46
150-
100-
lcoNji1,,
50^"
00
Рис. 8.47
110
о с
Рис. 8.50
прохода по одним и тем же участкам подстилающей поверхности
практически не имеет пропусков (рис. 8.33, 8.34, 8.36,8.37), что повышает
вероятность корреляционной привязки.
В режиме «обход» важнейшей становится азимутальная
информация и, как следствие, кадр бортовой РЛС становится значительно
более развитым в направлении оси Ζ (OZBF) (рис. 8.39, 8.40,8.42, 8.43).
Кроме того, вследствие накопления измеренных точек и с учетом
скорости вертолета кадры РЛС в данном режиме становятся
практически квадратными. Пропуски в наблюдении подстилающей поверхности
также редки благодаря редкой смене направления движения локатора
и системе стабилизации направления луча РЛС.
Режим «облет-обход» является комбинированным и при его
реализации кадр РЛС имеет меньшую по сравнению с режимом «облет»
размерность в курсовом направлении и незначительно увеличивается
в азимутальном. В силу частой смены направлений движения локатора
кадры РЛС в этом режиме часто содержат значительные пропуски
(рис. 8.45,8.48), что снижает его информативность и, соответственно,
вероятность корреляционной привязки.
Ошибки навигационного решения КЭАН определяются,
главным образом, информативностью наблюдаемого участка
подстилающей поверхности. В том случае, когда кадр информативен
(рис. 8.33,8.34, 8.39, 8.40,8.55, 8.56) матрица значений корреляционной
функции имеет ярко выраженный максимум (рис. 8.35,8.41,8.50)
даже в условиях плохой наблюдаемости (рис. 8.45). При изотропности
наблюдаемого участка (рис. 8.36, 8.37, 8.42,8.43, 8.48, 8.49)
навигационные решения КЭАН становятся недостоверными в силу того,
что матрица значений корреляционной функции КЭАН приобретает
множественные максимумы (рис. 8.38, 8.44, 8.50).
Таблица 8.5. Условия реализации автоматического полета
№
варианта
1.
2.
3.
Режим МВП
Облет
Обход
Облет-обход
№ рисунка
Эволюции ошибок привязки ц. м. вертолета
Рис. 8.51 — ошибки определения координаты X;
рис. 8.52 — ошибки определения координаты Ζ
Рис. 8.53 — ошибки определения координаты X;
рис. 8.54 — ошибки определения координаты Ζ
Рис. 8.55 — ошибки определения координаты X;
рис. 8.56 — ошибки определения координаты Ζ
Таким образом, представленные выше рисунки иллюстрируют
характерные ситуации, встречающиеся при обработке сцен,
генерируемых КЭАН. Ниже, на рис. 8.51-8.56 представлены результаты
моделирования процесса навигационных определений, иллюстрирующие
lOO—i
α.
с
о
,^Μ
lAWfW
ё "10°Н
я
Э
О
Пороговый уровень ошибки
-Δ- Χ
100 200
Время, с
300
Рис. 8.51
э
о
Пороговый уропснь ошибки
ζ
Ί ' Г
100 200
Время, с
300
Рис. 8.52
80-
α.
Э
О
-40-
Пороговый уровень ошибки
X
-80-
"Ί ' Г~
100 _ 200
Время, с
300
Рис. 8.53
N
20-
Э
О
-20-
Пороговый уровень ошибки
Ζ
~Ί ' Г~
100 200
Время, с
300
Рис. 8.54
50
0-
э
о
-50
-100-
-150 -
>^hrVX^
1гПги
Пороговый уровень ошибки
1 1
1 1
\t
к
Ι ϊ
I
I
100 о 200
Время, с
300
Рис. 8.55
N
а.
о
о
Э
О
Ί ' Г
100 200
Время, с
300
Рис. 8.56
эволюцию ошибок привязки 'КЭАН для различных режимов МВП
беспилотного вертолета. Перечень данных на этих рисунках и режимы
полета представлены в табл. 8.5.
Эти рисунки ярко иллюстрируют факты появления недостоверных
привязок КЭАН. В частности, в режиме «облет» на сороковой и
сорок пятой секунде КЭАН генерирует недостоверные данные (рис. 8.51)
по координате X, а на двадцатой и на сто седьмой — по
координате Ζ (рис. 8.52). Данная ситуация аналогична приведенной на
рис. 8.35-8.38. В эти моменты времени (20-я, 40-я и 107 секунды)
навигационные решения, генерируемые КЭАН, были признаны
недостоверными вследствие превышения пороговых уровней ошибок по
соответствующим осям. В остальное время результаты решения навигационной
задачи КЭАН признавались достоверными (см. рис. 8.33-8.35). При
моделировании полета ЛА в режиме «обход» (рис. 8.53, 8.54)
недостоверных решений не возникало. В режиме «облет-обход» (рис. 8.55, 8.56)
недостоверными были признаны решения навигационной задачи с 148
по 150, а с 243 по 249, 257 и 258 секундах (ситуации аналогичны
представленным на рис. 8.38-8.40). .
В целом анализ приведенных результатов моделирования позволяет
сделать следующие выводы:
1. Корреляционно-экстремальный алгоритм устойчиво работает по
данным, поставляемым БРЛС.
2. Ошибки КЭАН не имеют систематической составляющей.
3. Значения и характер ошибок не зависят от режима работы БРЛС.
4. Формируемое КЭАН навигационное решение требует проверки
на достоверность.
5. КЭАН, работающий по данным бортовой РЛС миллиметрового
диапазона, может использоваться в качестве поставщика
навигационной информации для интегрированной навигационной системы
беспилотного вертолета в режиме МВП.
Результаты моделирования работы алгоритма
корреляционно-экстремальной привязки с использованием данных лазерного
локатора. Обсудим теперь результаты моделирования,
демонстрирующие работу алгоритма корреляционно-экстремальной привязки,
использующего данные лазерного локатора.
Чтобы моделировать работу КЭАН независимо от качества
работы алгоритмов, выполняемых на предыдущих стадиях обработки
информации, необходимо принять модель ошибок определения
положения образов на изображении в зависимости от точности измерений
дальности.
Для простоты будем считать, что измерение дальности
осуществляется с равным шагом по χ и определение параметров плоскостей
производится по результатам одного прохода сканирующей системы по
объекту с использованием метода наименьших квадратов, что
соответствует оптимальной процедуре оценивания. При нескольких проходах
точность оценки параметров будет выше.
Для набора статистики необходимо в зависимости от значений
инструментальной ошибки измерения дальности, размеров,
расстояния и угла наклона образа определять дисперсию оценки положения
образа на плановом изображении. Тогда, задаваясь значениями
инструментальной ошибки и расстоянием, можно для конкретной сцены
определить значения дисперсии оценки положения каждого образа,
затем разыграть конкретные реализации и оценить работу алгоритмов
сопоставления и привязки.
Пусть для проекции j-ro объекта на плановом изображении
справедливо выражение у = a,jx + bj. Получим выражения для дисперсий
σ\, σ\ оценки параметров а и b и взаимной корреляции гаь в
зависимости от дисперсии измерения дальности σ\ при г-м измерении.
Вектор наблюдений У,- для этого объекта
Ϋ0=Τ^0+Θ0, (8.82)
где Tj = (I,Xj) — матрица преобразования размерности rij χ 2; I —
единичный вектор; X — вектор координат измерений, Gj = (bj, a,j)T —
вектор параметров, задающих j-й образ; Qj — вектор ошибок
измерения; n,j — число измерений по j-му образу.
Вектор Gj может быть найден с помощью метода наименьших
квадратов для неравноточных измерений [8.14]. Для этого необходимо
решить систему линейных уравнений:
ьз Σ — + аз Σ хг— = Σ vi—>
1=1 Gi i=I Gi (8.83)
1 ^,1^1
bj Ε^ι + ^Σ Α— = Σ у-
Xj
Тогда α = Δ/Δα; b = А/Аь, где Δ, Δα, Аь — соответствующие
определители системы.
Найдем корреляционную матрицу ошибок оценок вектора Gj. В
соответствии с [5]
= (β)-' = (ΤΊΜ-[Τ) , (8.84)
rab σ\ )
где Τ = (Ι, Χ) — матрица размерности η χ 2, I — единичный вектор,
Χ — вектор координат измерений, Μ — корреляционная матрица
ошибок измерения. Поскольку ошибки измерения дальности в разных
пикселах некоррелированы [6], то корреляционная матрица Μ диаго-
нальна.
Тогда
Bi
ίΐ3· ι ηί χ-
Li ~~2 Li ~~2
■n-j T.
n* χ2
Τ —
^ π·2
(8.85)
Rgj =
- 1 ni χ2
L, ~~2 L, ~2
(2 %
Σ-
i=i σ:
"3 г ■
Σ
ι
(8.86)
/
где σ\ — дисперсия оценки дальности при г-м измерении.
Будем считать, что интенсивность отраженного сигнала
определяется мощностью излучения, коэффициентом и типом отражения от
зондируемой поверхности, дальности до объекта, углом наклона
зондируемой поверхности к линии визирования и не зависит от спекловой
структуры лазерно-локационного изображения. В этом случае можно
считать, что в пределах каждой зондируемой плоскости измерения
дальности равноточные.
Можно показать, что для любого j-ro объекта значения σ\, σ2, гаъ,
при условии равноточности σ\ = σ, для Vi, определяются следующими
выражениями:
12σ2
rij Αχ2 (η2 - 1)
°ι
12
χο +
η,- + 1
Αχ
Αχ2 (η2- 1)
+ 1
(8.87)
\2σ2χ° +
Κ + 1)
Αχ
таь = '- . 2, J Λ ■ (8.88)
rij Axz (rij — 1)
Здесь χ ι = χο + Αχ, где χο — некоторое число, и Xi — χ,-1 = Αχ для \/г.
Для моделирования зададимся некоторыми характеристиками
гипотетической лазерно-локационной системы. Примем угловую
расходимость лазерного луча Аф = 1', а минимально достижимое среднеквад-
ратическое оценки дальности при зондировании диффузной
поверхности, расположенной на заданной дальности перпендикулярно линии
визирования с коэффициентом отражения 0,1 в хороших метеоусловиях,
равной аННстр = 0,3 м. При зондировании наклонной поверхности
лазерное пятно имеет форму эллипса, и отраженный сигнал растягивается
во времени. Это приводит к появлению ошибки измерения, связанной
с наклоном зондируемой поверхности. Можно считать, что при угле
между нормалью к поверхности и линией визирования равном β,
данная составляющая ошибки измерения анаклон равномерно распределена
в диапазоне ΑΙ = A0.Dtg β, где D — дальность до зондируемой
поверхности, и равна
2 _(A0Dtg/J)2
Наклон - у} ' ^ '
Поскольку рассмотренные ошибки измерения не коррелированны, то
σΙ = -\/σΗΗθτρ + Наклон · (8·90)
При моделировании будем увеличивать аннст с некоторым шагом от
минимально возможного значения.
Из высказанного следует, что величины α и b коррелированны.
Поэтому для их моделирования необходимо определить декоррелирующее
преобразование, которое представляет собой линейное преобразование
и определяется смещением и поворотом первоначальной системы
координат.
Для рассматриваемых коррелированных случайных величин ξι и £г
(в предположении привязки их к первоначальной системе координат
0\Χ\Υ\) соответственно со значениями математических ожиданий т^
и πΐξ2, среднеквадратических отклонений σξι, σξ2 и взаимной
корреляции Γξ,ξ, начало новой системы координат О2Х2У2 переносится в точку
Ог с координатами (m^, mi2). Далее, при совершении поворота этой
системы координат на угол а значения этих случайных величин в
новой системе координат η\, 772 выражаются следующим образом:
77ι = (ξι - m^cos α+ (£2 — mb)s'm a,
V2 = - (ξι - ть) sin α + (ξ2 - πιξ2) cos a.
С использованием этих соотношений может быть получена
зависимость среднеквадратических отклонений σηι, ат и корреляции гщт
величин 77ι, туг от среднеквадратических отклонений σξι, σξ, и
корреляции Γξ,ξ, величин ξι, ξ2'.
σ2: = σ? cos2 α + Γξ,ξ2 sin 2α + σ\ sin α,
σ22 = σ? sin α — Γξ,ξ2 sin 2α + σ? cos2 α,
'"ilia = 9 (σί2 ~ σίι) sin 2α + ri'i2 cos 2α·
Для обеспечения некоррелированности величин 771, 772 требуется
выполнения условия rVim = 0. Для этого при σξι = σξ2 может быть
выбрано значение а = π/4, при σξι ^ σξ2 а определяется из соотношения
tg2a = 2rbb/(al-al).
С учетом вычисленных значений среднеквадратических отклонений
величин τ?!, 772 и угла а поворота системы координат О2Х2У2, в которой
они не коррелированы, проводится их моделирование в виде
Vim = Ρη,ζΐ, V2m = &т(,2, (8.91)
где ζ[, 6 — нормально распределенные независимые случайные
величины, получаемые с датчика случайных чисел, с математическими
ожиданиями πΐςι = πΐς2 = 0 и значениями среднеквадратических
отклонений σςί = σζ, = 1. Путем обратного поворота системы координат
( cos d — sin (У.
O2X2Y2 на угол (—а) с матрицей поворота I . | можно
получить промоделированные значения ξ[τη, £гт>
6т = ητξι + щт cos a - 772т sin a,
6т = ГПЬ + Г\\т sm О. + Г\2т COS О.
исходных коррелированных гауссовских случайных величин 6. 6
с математическими ожиданиями me,, mi2 и корреляционной матри-
. ( с2
цеи
гьь
Для исследования работы алгоритмов сопоставления сцены и
определения положения ЛА было проведено моделирование алгоритмов
по плановым изображениям. Использовались синтезированные
плановые изображения эталонной и наблюдаемой сцен с количеством
образов 7-15. При этом за основу брались реальные сцены индустриального
типа, расположенные на дальностях 4 км. На обоих изображениях
(наблюдаемой сцены и эталона) присутствовали образы, не имеющие
соответствующих образов на другом. В качестве варьируемого
параметра бралась инструментальная составляющая ошибки измерения
дальности при зондировании наблюдаемой сцены. Ошибки измерения
дальности зависят от погодных условий, мощности излучателя и
размеров апертура приемного канала лазерно-локационной системы,
дальности до сцены и отражательных характеристик поверхностей объектов.
Считалось, что в рамках одной сцены коэффициенты отражения и
инструментальная ошибка постоянны.
Рис. 8.57. Зависимости средних ошибок определения угла поворота от
инструментальной ошибки измерения дальности
Зависимости средних ошибок определения угла поворота ΑΘ и
вектора сдвига АХ и AY связанной и эталонной систем координат от
инструментальной ошибки измерения дальности лазерно-локационной
системой при усреднении по 4 сценам (50 реализаций на каждую
сцену) приведены на рис. 8.57.
Проведенное математическое моделирование подтверждает
работоспособность алгоритмов в условиях неполного соответствия
наблюдаемой сцены эталонному изображению местности и позволяет сделать
вывод, что использование лазерной локационной системы обеспечивает
точность навигационного решения не хуже 2-3 м по плановым
координатам и порядка 0,2-0,4 градуса по углам.
8.9. Имитационное моделирование маловысотного
полета при глубоко интегрированной архитектуре
бортового контура
Как уже отмечалось выше, для обеспечения функционирования НК
в условиях помех сигналам GNSS необходимо использовать глубоко
интегрированную архитектуру бортового контура (см. рис. 8.2).
Блок-схема процесса моделирования данного варианта приведена на
рис. 8.58.
8.9.1. Исходные данные для моделирования.
1. Исходные данные для моделирования «истинного» движения
БЛА соответствуют приведенным в п.8.8.1.
2. Дополнительно при моделировании учитывались следующие
ошибки:
а). Ошибки начальных условий определяются точностью GPS-при-
вязки, т. е.:
xNE{t0)=xtT{t0)+Sx, δχ&Ν {0,30т},
УМЕ (h) = Vtr (ίο) + δν, δν G Ν {0, 30m}
zNE{t0) = ztr{t0)+Sz, δζ e Ν {0, 30m} ,
VXNE (ί0) = Vxtr (ίο) + δνχ, δν,ΒΝ {0, \m/s} ,
VyNE (to) = Vytr (ίο) + δν„, δΥν G Ν {0, \m/s} ,
VZNE (ί0) = VZtr (ίο) + 5Vz, δν,ΕΝ {0, \m/s},
где χΝΕ (ί0), yNE (ίο), zNE(to) — оценки БИНС на начальный момент
времени в горизонтной СК; xtr(to), ytr(to), ztI (ίο) — начальные
координаты «истинного» движения в горизонтной СК; V£*E (ίο), V^E (to),
V^E (ίο) — начальные оценки компоненты вектора скорости БИНС
в горизонтной СК; VXtr (ίο), Vytr (ίο), VZtr (ίο) — компоненты начального
вектора скорости «истинного» движения в горизонтной СК.
<
3£
ж
s
с(
<υ
s
Ε
га
m
о
CL
χ
ci
СЛ
α-
о
tr
s
(3
СП
<υ
m
СП
о
о
и
и
st0
OJ
CJ
ail
III
OJ
Л
X
О
X
CJ
s
tr
4
ci
OJ
Μ
X
X
ra
ci
tr
s
X
ra
m
о
CL
X
4
ci
О
га
>ι
3
Ο) Ο)
Κ Ε-
χ <->
я 9
ο £
α. ч
== S
S s
=t Ε?
ι О Я
χ
з:
<и
дел'
On ре
<
>£
X
><
^
| ВНДН1
жж
U
>>
Ч ct
ω
<υ
я з
<υ
s
НЕН
О
CL
S
СП
О
X
ΙΟ
CL
Π
χ
л
Ε
Η
<υ
3"
CJ
га
CL
>S
5
Й
К
CL
Й
s
СП
S
<υ
χ
X
га
m
о
CL
S
г
CL
О
θ
эХ
X
X
<υ
CL
<υ
Ξ
СП
r 5П
χ "
<и о
ш О ь.
^ * ^
<и о д:
о. _ ю
с -с о
- се Ξ
ι о
Ξ ι ' -
е-§
^^г
I
а.
с
ОО
1П
° с? <£
|з.§
га F- о
g >·. CJ
о о Ξ
i3£
[мы работь
1
&
<υ
j5
m
О
СП
га
θ
<υ
л
m
о
s
см
J
<
см
-J
J
<
ени
а.
<υ
S
СП
S
S
bS
ю
S
3
О
CO U3
II II
+ и 0
Си J
О О
Ь Ь
СО U3
II II
+ и 0
Си J
ь ь
со из
II II
+ ел 0
Си J
Ь Ь
СО U3
II II
+ ел 0
Си J
Ь Ь
со из
II II
+ ел 0
о. j
о о
ь ь
со из
II II
+ и 0
о. j
ь ь
га ' л. с*
а. 5 т 3
аппарату
ован + рел
задержки
уемый ух
с а.
с к =
>. га Ы
к а. s: К s
га l- 0 <и
ш -^ t- с ,-;
° _ о 5 m
£ < 5 о о
cxO о s: u
g £: χ а) га
U3 X t- χ τ
U3
—" ~Т
1 1
U3 СМ
+ II о
Си О
b
ιΛ
—" ■"■•г
ι ι
U3 СМ
+ °~"
II о
ел J
Си О
о ь
ь
из_
—Г *3*
1 1
U3 СМ
+ °~ "
И о
ел J
Си О
О Ь
ь
из
—Г *з*
| 1
из см
+ °~ п
и о
Си О
b
ιΛ
—" "■3*
ι ι
U3 СМ
+ ° "
н о
ел J
Си О
о ь
ь
U3
—" ~т
I 1
U3 СМ
+ ° "
II о
ел J
Си О
о ь
ь
S
X
сх
S
■е-
m
X
bS
*о
X
3
О
+
+
+
+
+
+
X
га
ίο
О
о
m
о
ία.
о
X
bS
*о
X
3
О
U3 _
Soil υ
И 2
Си J
ь ь
U3 _
Soil υ
Он J
(JO
ь ь
U3 _
Soil "
ел О
Он J
(JO
ь ь
U3
a. ri
U3
я. ή
U3
χ a
S га
О τ
чЗ О
3 ^
ί-
Ο =5
и 5
га X
з- х
га
га ш
Ρ О
а. а.
га χ „
г=( о S
из_
II
+ 2
q
ел*
Он
О
ь
из_
II
+ 2
q
ел*
Он
ь
из_
—
II
+ 2
q
ел*
Он
о
ь
из_
II
+ 2
ел'
Он
О
ь
из
II
+ 2
о
ел'
Он
О
ь
из_
II
+ 2
ел*
Он
О
ь
X
ίο
О
m
о
о
X
S
X
bS
*о
X
3
О s
+
+
+
+
+
+
!д
а.
■е-
о
о
X
о
X
X
bS
\о
X
3
О
со
II
О
q
ел
Он
О
Ь
со
II
О
ч
ел
Он
О
Ь
О
—~*
II
О
J
q
ел*
Он
О
ь
со
II
О
ч
ел*
Он
О
ь
со
II
О
J
ч
ел*
Он
О
ь
1
1
о
II
о
J
Ч
ел*
Он
О
ь
S
'ОТ
А
S
сх
X
о
X
S
о
is
+
+
+
+
+
+
А
сх
■е-
о
о
о
а.
ί-
X
bS
ю
X
3
О
со
II
О
ч
ел
Он
О
ь
со
II
О
J
ч
ел
Он
О
Ь
со
II
О
ч
ел'
си
о
ь
СО
II
О
ч
ел*
Си
О
ь
со
II
О
J
Ч
ел'
Си
О
Ь
со
II
О
J
ч
ел"
Си
О
ь
S
"ОТ
А
X
X
га
m
О
сх
X
о
X
S
о
is
X
+
+
+
+
+
+
S
X
X
3
о
OJ
X
X
<
—
о
II
О
j
ч
ел"
Си
О
ь
_
О
II
О
J
Ч
ел*
Си
О
ь
II
О
J
Ч
ел*
Си
О
ь
со
II
О
ч
ел*
Си
О
ь
со
II
О
ч
ел*
Си
О
ь
из
II
О
J
ч
ел*
Си
О
ь
+
+
+
+
+
+
X
ю
X
3
о
X
о
X
f-
га
S
<и
f-
X
— QO
oo
o'o
II II
ел О
Си J
О О
ь ь
— QO
оо
о о
II II
ел О
Си J
О О
ь ь
из _
Soil υ
ел О
Си J
ь ь
из —
о о
и υ
ел О
Си J
oq
ь ь
из _
Soil II
ел О
си tJ
oq
ь ь
— со
о" о"
II II
ел О
Си J
О О
ь ь
о
S
х"
ίο
О
сх
о
о
о
3
с
m
б). Ошибки начальной выставки, т.е. ошибки ориентации
вычисленной горизонтной СК относительно «истинной» горизонтной СК,
задаваемые при помощи углов малых отклонений Δα, Αβ, Aj:
CINS (ίο) = AC ■ Ctr (ίο), AC = Rx (Δ7) ■ R2 (Δ7) ■ Ry (Δα),
Δα e Ν {0,0,1°} , Αβ &Ν {0,0,1°}, Δ7 € Ν {0,0,1°} ,
где Ctr (ίο) — матрица ориентации «истинного» движения в начальный
момент времени; Cins (ίο) — матрица ориентации в начальный момент
времени; Ra. (), R2 (), Ry () — матрицы элементарных поворотов вокруг
соответствующих осей.
3. При моделировании измерений приемника GPS/ГЛОНАСС
учитывались ошибки измерений в зависимости от режимов работы
приемника, сведенные в табл. 8.6 [8.1,8.12].
4. При моделировании процесса функционирования бортового
контура в условиях воздействия помех рассматривались вариант
узкополосной (0,1 МГц) и широкополосной (1 МГц) помехи мощностью до
300 Вт на удалении до 100 км.
8.9.2. Моделирование глубоко интегрированной системы при
отсутствии помех. Цель моделирования глубоко интегрированной
системы при отсутствии помех заключается в демонстрации
работоспособности используемой схемы интеграции навигационных данных и
настройке интегрального фильтра Калмана.
Варианты расчетов сведены в табл. 8.7.
Таблица 8.7
№
варианта
Неконтролируемые
факторы
в БИНС
Режим работы
GNSS-приемника
Результаты расчетов
Стандартный режим работы GNSS
1.
2.
Максимальные
ошибки
позиционирования
и нач. выставки
Максимальные
ошибки
позиционирования,
нач. выставки,
максимальные
ошибки
чувствительных
элементов
БИНС
псевдодальность,
псевдоскорость,
С/А код
частота 0,5 Гц
псевдодальность,
псевдоскорость,
С/А код
частота 0,5 Гц
ошибки по положению рис. 8.59
ошибки по скорости рис. 8.60
ошибки по углам ориентации
рис. 8.61
ошибки по положению рис. 8.62
ошибки по скорости рис.8.63
ошибки по углам ориентации
рис. 8.64.
20-
-20 —
fa -40-
тэ
-60-
-80-
-100-
60-
40-
20-
o —
j -20-
тэ
-40-
-60-
-80-
-100·
0
-20 —
s -40 —
К
"° -бон
-80
-юоч
-120
О
η
Д
№
LTU
20 40
Время, с
60
Рис. 8.59
0,50
0
-0,50
-1,00
-1,50
-2,00
-2,50
-3,00
0,50
0
-0,50
-1,00 ·
-1,50
-2,00
-2,50
-3,00
-3,50
1,00
0,50
0
-0,50 ■
-1,00 ■
-1,50 ■
-2,00 ■
-2,50 ■
-3,00 ·
-3,50 ■
Vp^^rs~-r-^
20
Время, с
Рис. 8.60
,40
60
-0,8-,
Рис. 8.61
fa
ТЭ
20
ОН
-20
-40—I
-60
-80
-100 —1^
-120
20—1
0
20 —I
40
■° -60
-80
-100
-120
Г\
:\
120 —ι
- [\
90
60 4
30
0
-30 —
-60-
-90
-120
r\
\
0
20
40
60
Время, с
Рис. 8.62
20 40
Время, с
60
Рис. 8.63
-г ОН
20 40
Время, с
Рис. 8.64
fa
ТЭ
20
о —
-20 —
-40-
-60-
-80-
-100-
-120-
20 40
Время, с
Рис. 8.65
Ν
20 40-
Время, с
60
Рис. 8.66
1,4 q
1,24
1-
0,8-
0,6 —
0,4-
0,2-
ο —
-0,2-
-0,4-
-0,6-
-0,8"
-1-
0
pj
20
40
60
Время, с
Рис. 8.67
-16000
O—i
-20 —
-40 —
-60 —
-80 —
-80^1
-160
O-i
-20 —
-40 —
-60 —
-ϋ. -80-
S- -100 —
w
£ -120-
-140 —
-160 —
-180 —
-200 - ■
' 1 ■ г
0 20 40
Время, с
60
Рис. 8.69
20 4Q
Время, с
Рис. 8.70
Необходимость такой настройки объясняется «расходимостью» или
неустойчивостью фильтра Калмана, вызывающей рост ошибок оценки
положения объекта даже в отсутствие шумов. Причина этого
явления состоит в использовании нелинейной модели движения объекта и
нелинейных моделей для измерений, а также наличии ненаблюдаемых
составляющих ошибок начальной выставки БИНС. При этом
апостериорная ковариационная матрица вектора состояния «схлопывается»
после обработки первых же четырех псевдодальностей. Эта
нестабильность частично может быть компенсирована за счет измерений
псевдодальности и псевдоскорости [9]. Тем не менее, даже в этом случае
ошибки оценки скорости возрастают со временем. Путем
соответствующей настройки фильтра Калмана удается добиться высокой точности
определения положения и скорости, как это показано на рис. 8.59-8.61.
Анализ перечисленных выше результатов моделирования позволяет
сделать вывод о том, что точностные характеристики чувствительных
элементов БИНС оказывают наибольшее влияние на уточнение
параметров движения БЛА, особенно углового движения.
8.9.3. Моделирование глубоко интегрированной системы
в условиях помех. Результаты, соответствующие данному варианту
моделирования, приведены на рис. 8.65-8.70.
На рис. 8.65-8.67 приведена ситуация, характеризующая
присутствие узкополосной помехи, действующей в условиях максимальных
значений начальных ошибок и ошибок выставки БИНС, а также
максимальных ошибок чувствительных элементов БИНС. Результаты
демонстрируют работоспособность интегрированной системы.
На рис. 8.68-8.70 приведены иллюстрации, характеризующие
влияние в этих же условиях широкополосной помехи. Оказывается, что
влияние такой помехи приводит к невозможности осуществления связи
с более чем двумя спутниками, что, в конечном счете, делает
интегрированную систему неработоспособной, т.е. работающей только
в режиме БИНС.
Приведенные выше результаты показывают работоспособность
предлагаемой глубоко интегрированной навигационной системы
БЛА. Кроме того, убедительно продемонстрировано преимущество
обсуждаемой в гл. 7 методологии разработки ПМО дли моделирования
замкнутого контура управления БЛА при решении современных и
перспективных проектирования бортовых интегрированных систем
навигации и управления.
Список литературы к главе 8
8.1. Управление и наведение беспилотных маневренных летательных
аппаратов на основе современных информационных технологий / Под ред.
М. Н. Красилыдикова, Г. Г. Себрякова. М.: Физматлит, 2003.
8.2. Вайнберг М.В. и др. Математическая модель для исследования
динамики движения вертолета при полете на предельно малых высотах. — М.:
МВЗ им. М. Л. Миля, 1988.
8.3. Бюшгенс Г.С, Студнев Р.В. Аэродинамика вертолета. Динамика
продольного и бокового движения. — М.: Машиностроение, 1979.
8.4. Gareth D. Padfield, Helicopter Flight Dynamics: The Theory and
Application of Flying Qualities and Simulation Modeling, AIAA Education
Series, 1999.
8.5. Роджерс Д., Адаме Дж. Математические основы машинной графики:
Пер. с англ. — М.: Мир, 2001.
8.6. Бородин В. Т., Рыльский Г. И. Управление полетом самолетов и
вертолетов. — М.: Машиностроение, 1972.
8.7. Андреев В. Д. Теория инерциальной навигации. Ч. 1. Автономные
системы. М.: Наука, 1966.
8.8. Помыкаев И. И., Селезнев В. П., Дмитроченко Л.А. Навигационные
приборы и системы. М.: Машиностроние, 1983.
8.9. Бромберг П. В. Теория инерциальных систем навигации. М.: Наука,
1979.
8.10. Жуковский А. П., Расторгуев В. В. Комплексные системы навигации и
управления самолетов. М.: МАИ, 1998.
8.11. Красильщиков М. Н., Козорез Д. Α., Сыпало К. И.
Функционально-программный прототип интегрированной бортовой системы перспективного
беспилотного вертолета в режиме маловысотного полета, XV Санкт-
Петербургская международная конференция по интегрированным
навигационным системам. СПб., 2008.
8.12. Глобальная спутниковая навигационная система ГЛОНАСС / Под ред.
В. Н.Харисова, А.И.Перова, В. А Болдина. - М.: ИПРЖР, 1998.
8.13. Военная топография. М.: Воениздат, 1977.
8.14. http://www.af.mil/factsheets/factsheet.asp?id=183 LOW-ALTITUDE
FLYING TRAINING.
8.15. http://lreri.tripod.com/products_catalog/CAR3mm.html — Твердотельная
импульсная РЛС предупреждения столкновений 3 мм диапазона.
8.16. Себряков Г. Г., Лисицын В.М., Орбосов К. В. Метод коррекции
навигационной системы ЛА в условиях маловысотного полета с использованием
лазерного локатора. Вестник компьютерных и информационных
технологий. М.: Машиностроение, 2006. №3. С. 21-27.
8.17. Лисицын В.М., Обросов К. В., Пасечный Н.Н., Стефанов В. А.
Итерационные алгоритмы сегментации многомерных изображений // Известия
РАН, Техническая кибернетика. 1993. №6. С. 103-113.
8.18. Прэтт У. Цифровая обработка изображений. М.: Мир, 1982.
8.19. Степанов О. А. / Под общей ред. академика РАН В. Г. Пешехонова. Сб.
статей и докладов. Интегрированные инерциально-спутниковые системы
навигации. ГНЦ РФ ЦНИИ Электроприбор. СПб., 2001.
8.20. Дмитриев СП., Степанов О. Α., Кошаев Д. А. Исследование способов
комплексирования данных при построении инерциально-спутниковых
систем // Гироскопия и навигация. 1999. №3. С. 36-52.
Приложение к главе 1
Таблица 1. Количество БЛА, введенных в эксплуатацию или находящихся
в процессе создания (по данным [1.4])
Страна
Австралия
Австрия
Бельгия
Бразилия
Болгария
Канада
Чили
Китай
Хорватия
Чехия
Франция
Германия
Греция
Индия
Международные
Иран
Израиль
Италия
Япония
Иордания
Малайзия
Голландия
Новая Зеландия
Норвегия
Пакистан
Польша
Португалия
Румыния
РФ (Россия)
Сингапур
Словения
Южная Африка
Южная Корея
Назначение БЛА
Micro
3
5
2
2
1
4
1
1
Mini
2
1
1
4
20
9
9
3
6
4
1
1
7
5
2
ей
υ
5
1
4
7
1
1
3
14
1
7
2
1
10
2
2
ей
00
4
1
1
2
2
1
3
1
4
8
2
1
1
1
9
1
5
1
1
ей
:>
2
1
1
1
6
1
13
6
1
1
14
11
2
1
1
1
2
1
4
1
5
3
MRE
1
2
2
2
LADP
1
2
2
4
1
LALE
1
MALE
3
3
6
2
1
1
1
HALE
1
1
1
2
1
UCAV
1
1
1
STRA
2
EXO
Всего
14
2
1
1
1
2
1
19
3
1
52
22
1
2
32
3
52
11
15
3
1
6
2
6
23
2
1
1
25
8
1
7
8
Таблица 1 (продолжение)
Страна
Испания
Швеция
Швейцария
Тайвань
Тунис
Турция
ОАЭ
Великобритания
Украина
США
Всего
Назначение БЛА
Micro
1
22
42
Mini
4
1
1
10
1
39
131
ей
υ
2
1
3
8
1
18
94
ей
00
1
2
2
2
33
89
ей
:>
1
1
1
1
4
1
48
136
MRE
2
13
22
LADP
1
11
LALE
2
4
MALE
1
9
26
HALE
1
19
26
UCAV
2
2
10
17
STRA
2
EXO
3
3
Всего
8
2
1
6
2
5
1
29
3
217
603
В зависимости от назначения БЛА приняты следующие обозначения: ударные
БЛА: UCAV — ударные ЛА без экипажа; STRA — специальныу ударные ЛА.
Стратегические БЛА: HALE — высотные с большой продолжительностью
полета (стратегические); MALE — средневысотные для продолжительных
полетов (стратегические); тактические БЛА: MRE — средней дальности и
большой продолжительного полета; MR — средней дальности; SR — малой
дальности; CR — сверхмалой дальности; Mini — малогабаритные; Micro —
миниатюрные; LADP — низковысотные малой продолжительности полета;
LALE — низковысотные большой продолжительности полета; ЕХО —
имитаторы.
Таблица 2. Информация о деятельности различных стран в области БЛА
[по данным 1.5]
Страна
Австралия
Австрия
Аргентина
Бельгия
Бразилия
Великобритания
Венгрия
Германия
Греция
Дания
Израиль
Ирландия
Исландия
Испания
Италия
Канада
Китай
Люксембург
Нидерланды
Новая Зеландия
Норвегия
Польша
Португалия
Республика Корея
Россия
США
Турция
Украина
Финляндия
Франция
Чехия
Швейцария
Швеция
ЮАР
Япония
Разработка
+
+
+
+
-
+
+
+
+
-
+
-
-
+
+
+
+
-
-
-
+
-
+
+
+
+
+
+
-
+
+
+
+
+
+
Производство
+
+
+
+
-
+
-
-
+
-
+
-
-
+
+
+
+
-
-
-
-
-
-
+
+
+
+
+
-
+
+
+
+
+
+
Эксплуатация
+
-
+
+
-
+
-
-
+
+
+
-
-
-
+
-
+
-
+
-
-
-
-
+
+
+
+
+
+
+
+
+
+
+
+
Экспорт
+
+
-
-
-
+
-
-
+
-
+
-
-
-
+
+
+
-
-
-
-
-
-
-
+
+
+
+
-
+
-
+
-
+
+
Таблица 3. Перечень целевых функций БЛА различного назначения
БЛА военного
назначения
Ударные функции
поражение наземных и
морских целей в зонах
с сильной ПВО
противника
подавление ПВО
противника
противоракетная
оборона на ТВД, включая
обнаружение и
уничтожение целей
распыление химических
и бактериологических
аэрозолей над боевыми
порядками противника
подавление
радиоэлектронных средств
подавление сетевых
систем противника
транспортировка
оружия направленной
энергии дальностью
воздействия до 1 км
уничтожение БЛА
противника
Разведывательные
функции
разведывательные
полеты общего характера
контроль за
обстановкой в зоне боевого
соприкосновения с
противником
формирование
целеуказаний
контроль за
результатами огневого поражения
БЛА гражданского
назначения
Рабочие функции
тушение пожаров
доставка в заданный
район различных
малогабаритных грузов
поиск пропавших людей
обработка полей
химикатами
Информационные
функции
выявление и
локализация техногенных
катастроф, оценка их
последствий
оценка состояния
тепловых сетей, полей
фильтрации и аэрации,
дорожного покрытия
оценка состояния
(обрывов, повреждений)
высоковольтных линий
передач
БЛА антитеррора и
борьбы с наркомафией
Ударные функции
поражение одиночных
террористов
разгром баз
террористов
Разведывательные
функции
поиск и обнаружение
баз террористов
контроль за
обстановкой в зоне дислокации
террористов
формирование
целеуказаний
контроль за
результатами
антитеррористических опереаций
Таблица 3 (продолжение)
БЛА военного
назначения
обнаружение мин и
минных полей
радиоэлектронная и
радиотехническая
разведка
обнаружение
малоразмерных и
замаскированных целей
обнаружение БЛА
противника
контроль за
дислокацией противника
ведение радиационной,
бактериологической и
химической разведок
БЛА гражданского
назначения
оценка состояния
трубопроводов, выявление
незаконной
деятельности — врезок,
раскопок, наличия
посторонней техники
контроль технического
состояния зданий и
сооружений (мосты,
электростанции и т. п.)
обнаружение мест
утечек, предаварийных и
аварийных участков
контроль за железными
и автомобильными
дорогами и за движением
транспортных средств
контроль судоходства
выявление и
локализация естественных
катастроф
выявление участков
загрязнений земной и
водной поверхности,
источников
несанкционированных сбросов
обнаружение очагов
возгорания в
населенных пунктах, в лесах и
на торфяниках
слежение за динамикой
лесных пожаров
слежение за ходом
лесовосстановления на
вырубках и гарях
выявление участков
радиационного и
бактериологического
загрязнений
БЛА антитеррора и
борьбы с наркомафией
обнаружение мин и
минных полей
радио- и
радиотехническая разведка
обнаружение скрытых
деревьями целей
обнаружение
транспортных БЛА
террористов и наркодельцов
наблюдение за
кокаиновыми плантациями и
передвижением
наркотиков
выявление маршрутов
движения и
перевалочных баз
контрабандистов
ведение радиационной,
бактериологической и
химической разведок
Таблица 3 (продолжение)
БЛА военного
назначения
наблюдение за
заданным участком
местности с целью поиска
и идентификации
неподвижных и мобильных
объектов
Функции обеспечения
ретрансляция сигналов
связи
временное размещение
датчиков на территории
противника
создание временных по-
мехозащищенных
каналов связи
обезвреживание мин и.
минных полей
управление воздушным
движением
БЛА гражданского
назначения
контроль гидро-,
метеообстановки,
исследование атмосферы
информационное
обеспечение сельхозработ и
геологоразведки
разведка ледовой
обстановки
разведка косяков рыб,
контроль рыболовства
наблюдение за
заданным участком
местности с целью поиска и
идентификации
объектов
аэрофотосъемка и
контроль земной
поверхности
составление ортофото-
планов участков
местности с заданными
точностью и разрешением
обеспечение
формирования земельного
кадастра отдельных
территорий
Вспомогательные
функции
ретрансляция сигналов
связи
прсменное размещение
датчиков для
мониторинга
создание временных
каналов связи
розыск сбитых
самолетов и вертолетов и
поиск экипажей
наблюдение за местами
скопления людей
БЛА антитеррора и
борьбы с наркомафией
наблюдение, поиск
и идентификация
неподвижных и
мобильных объектов
Рабочие функции
ретрансляция сигналов
связи
временное размещение
датчиков в раположе-
нии террористов
создание временных по-
мехозащищенных
каналов связи
обезвреживание мин и
минных полей
Таблица 3 (продолжение)
БЛА военного
назначения
перехват информации
охрана границ, военных
баз
сбор метеорологической
информации
постановка помех
оптическим, радио- и
радиотехническим средствам
противника
обеспечение
целеуказаний
корректировка действий
боевых соединений
оценка результатов
ударов, нанесенных по
противнику
разброс в определенной
зоне оборудования для
постановки
электромагнитных помех
использование в
качестве воздушной мишени
БЛА гражданского
назначения
обеспечение
экспериментальных работ
БЛА антитеррора и
борьбы с наркомафией
перехват информации
сброс миниатюрных
акустических систем
для обнаружения
перемещающихся
боевых групп и
прослушивания разговоров
в труднодоступных
местах, например,
в густых лесах или
джунглях
постановка помех
оптическим, радио- и
радиотехническим средствам
террористов
обеспечение
целеуказаний
корректировка действий
спецназа
оценка результатов
ударов, нанесенных по
террористам
разброс в определенной
зоне оборудования для
постановки
электромагнитных помех
Технические
характеристики
Тактические
характеристики
Функции,
оборудование
Тип БЛА, фирма
и страна изготовитель
вес стартовый ... (125-И50) кг;
вес целевой ... (16-^32) кг;
скорость ... 230 км/ч
высота ... 5 000 м;
дальность ... 500 км;
длиительность ... 3 ч
Пассивная радиолокационная
ГСН, встроенная БЧ и
автономная система управления
полетом.
Поражение целей по принципу
«камикадзе».
Запуск с мобильной пусковой
установки
Противорадиолокационный
БЛА «Harpy», Israel Aircraft
Industries (IAI), Израиль
вес стартовый ... 900 кг;
вес целевой ... 100 кг;
скорость ... 1080 км/ч
дальность ... 740 км;
длиительность ... 3 ч
Пассивная радиолокационная
ГСН, встроенная БЧ и
автономная система управления
полетом.
Поражение целей по принципу
«камикадзе»
БЛА «Скитер»,
Боинг, США
вес стартовый ... 70 кг;
вес целевой ... 20 кг;
скорость ... 460 км/ч
высота ... 6 100 м;
дальность ... 600 км;
длиительность ... 2,5 ч
БЛА «Феррет», Нортроп-
Грумман, США
вес стартовый ... 160 кг;
вес целевой ... 50 кг;
скорость ... 220 км/ч
высота ... 4 000 м;
дальность ... 250 км;
длиительность ...4 ч
БЛА «Тайфун», STN Atlas,
Германия
Технические
характеристики
Тактические
характеристики
Функции,
оборудование
Тип БЛА, фирма
и страна изготовитель
вес стартовый ... 16 556 кг;
вес целевой ... 2 040 кг;
скорость ... 850 км/ч
высота ... 12 200 м;
дальность ... 2 220 км;
длительность ...7ч
Может использоваться в
качестве разведчика, или
постановщика помех
БЛА Х-45С, Boeing, США
вес стартовый ... 10 000 кг;
вес целевой ... 2 000 кг;
скорость ... 800 км/ч
высота ... 12 000 м;
дальность ... 4 000 км
Может использоваться в
качестве разведчика
Проект БЛА «Скат», МиГ
и ОАО «Климов», РФ
вес стартовый ... 817 кг;
вес целевой ... 90 кг;
скорость ... (1654-200) км/ч
высота ... 5 500 м;
дальность ... 270 км;
длительность ... 18 ч
2 планирующих высокоточных
боеприпаса, оснащенных тепло-
визионно-акустической
системой самонаведения
БЛА MQ-5B «Hunter-2»,
Northrop Grumman, США
вес стартовый ... 4 763 кг;
вес целевой ... 1 360 кг;
скорость ... (3704-416) км/ч
высота ... 15 240 м;
дальность ... 3 700 км;
длительность ... 30 ч
Разведывательная и
наблюдательная платформа,
вооруженная противотанковыми
ракетами, лазерный целеуказатель
БЛА MQ-9A «Predator В»,
General Atomics, США
вес стартовый ... 1 020 кг;
вес целевой ... 204 кг;
скорость ... (1304-220) км/ч
высота ... 9 620 м;
дальность ... 920 км;
длительность ... 24 ч
Две управляемые ракеты
класса «воздух-земля»
БЛА MQ-1 «Predator»,
General Atomics, США
вес стартовый ... 350 кг;
вес целевой ... 100 кг
высота ... 6 000 м;
дальность ... 2 000 км;
длительность ... 12 ч
Может использоваться в
качестве разведчика.
Вооружение: ракеты с ГСН.
Целеуказание ракетам с
оптико-электронной
обзорно-прицельной станции на подвижной
турели
БЛА «Sperwer-B», Sagem,
Франция
ч
Η
CU
я
п:
о
О)
гг
Я
Я
Тех
эимэг
Тактич!
я
τΐ
О
га
S
α.
я
-θ·
..
<
pa
с
я
Η
я
η:
я
ίο
я
α.
CU
f-
ra
a.
ra
X
я
η:
я
ίο
я
a.
CU
ί-
•χ.
га
a.
га
Χ
CU
я
I
га
со
о
6:
о
о
J3
ч
О)
ί-
я
СО
о
ίο
со
я
га
га
а.
ίο
я
i-Г
•х.
ю
ОО
о
oq
=я
со
о
^-
CL
га
ίο
о
CU
со
S
О
О
сч
га
ίο
о
J3
со
S
о
CU
J3
Ί1
Ί1
О
я
τΐ
га
я
со
га
си
J3
S
си
к
ч
со
га
а.
с
>>
а.
о
Ο
2
pa"
r-~
Ί"
><
<
i-Г
η:
о
■sf
о
О]
=я
о
СО
си
ч
си
τΐ
о
си
со
S
п:
О
СП
σ>
J3
ίο
о
Ι
ja
ч
га
==(
о
а.
с
S
О)
я
I
О)
==(
си
СО
га
S
а.
О)
СО
га
Ч
о
5
\о
<
э
υ
с
га
ε
ε
3
pa о
гг
■~~-~.
S
О
ю
OO
J3
H
o
о
а.
о
•χ.
о
rr
σ>
J3
ίο
о
I
ja
Ч
О)
ί-
я
ч
==(
га X
а.и
^о щ
S о
CU I
К о-
Ч О)
СО со
га га
а. ч
с _
^ о
си х
■я я
СО Г"
о t
^ ΐ
I Я
га о
ί-
S 3
СО Е-
Я QJ
ί- :£
<
pa
£
ч
Η
ские
1СТИКИ
О) S
з- о.
я <и
я s-
Тех
арак
X
я
си *
■χ.
ίο У
Q1 3.
τ α.
Такти1
аракте
X
О)
. я
я ι
■нкци
удова
0 °
о
J3
фирма
товител
о
<Ц СО
ς ==
pa ξ
с га
я а.
^ о
я
i-Г
п:
О
<П
__
5Я
овь
^»
CL
га
ίο
о
си
со
S
О
о
—
<п
га
ίο
о
J3
СО
Л
"3
Sco
си
L-
Ц-,
*
pa
Q-8
:>
га
s
Поте
О)
t—
tZ
*
,Q-8B
:>
<
ς
pa
ί-
си
о
а.
Π
i-Г
О
г-~
ΟΙ
=я
о
со
си
ч
си
τΐ
о
си
со
S
п:
О
О]
J3
ίο
о
I
J3
ч
га
с«
,
о
я
с(
3
ИТЬ
мен
га
со
ία)
ОЛЯ
со
со
о
с
5Я
J3
I
О)
Вооруж
*
*
:out
00
з-
S
^
со
oq
J3
н
о
о
а.
о
п:
о
з-
ОО
J3
ίο
о
I
J3
ч
О)
ί-
я
ч
с«
J3
I
га
а.
X
о
=я
о
регов
си
J3
ч
га
а.
о.^
ои
Г pa
3
^<
ж:
О с
га
<υ ε
=я 3
д1 ί-
Ο о
LT
^;
О
со
^_
5Я
ОВЬ
^-
CL
га
ίο
о
си
со
S
п:
О
о
ОО
J3
ίο
о
I
J3
ч
га
==(
*
о.
си
ИНД
>.
==(
=я
га
U
ние:
си
О
О
pa
-
ей
О
н
нарк,
U
<
ς
pa
ί-
О)
о
о.
Ь'^
О S
О м:
см
О
: о
■ см
=я
о :
со
си ·ο
4 5",
ш У
=1 й
О О
си х.
со о
з-
■*
oq
J3
ίο
о
т.
J3
ч
О)
ί-
я
ч
==(
О)
тивны
>с
га
си
а.
си
J3
S
(11
1ЭВЛЯ1
CL·
С J3
ι а.
га
я о
к
я
га
ч
си
т
к
га
со
о
CI
Технические
характеристики
Тактические
характеристики
Функции,
оборудование
Тип БЛА, фирма
и страна изготовитель
вес стартовый ... 1 020 кг;
вес целевой ... 230 кг;
скорость ... 336 км/ч
высота ... 6 096 м;
дальность ... 257 км
БЛА «Eagle Eye», Bell 911
и Scaled Composites, США,
а также Sagem, Франция и
Rheinmetall, Германия
вес стартовый ... 950 кг;
вес целевой ... 100 кг;
скорость ... 500 км/ч
длиительность ...5 ч
Задача на перспективу:
совершенствование технологии
полностью автоматического
управления полетом и получения
информации в реальном масштабе времени
(РМВ).
Кроме боевых может иметь широкое
применение в гражданских задачах
БЛА «СМАРТ», KARI,
Республика Корея
<
pa
CL
Ευ
об
Ч
Η
Технические
характеристики
Тактические
характеристики
Функции,
оборудование
Тип БЛА, фирма
и страна изготовитель
вес стартовый ... 12 111 кг;
вес целевой ... 885 кг;
скорость ... (630-^650) км/ч
высота ... 19 800 м;
дальность ... 10 000 км;
длительность ... 32 ч
РЛС с синтезированной апертурой
(разрешение 1 м), дневная
электронно-оптическая (ЭО) цифровая камера,
инфракрасная (ИК) камера,
аппаратура опознавания «свой-чужой», прямая
радиосвязь «борт-земля» и
космическая связь «SatCom» (УКВ и Ки-диа-
пазонов), космическая РНС «Navstar»
(точность измерения до 25 м).
В точечном режиме («spotlight» mode)
съемка области (2 χ 2) км за 24 ч дает
более 1900 изображений с
разрешением 0,3 м.
Общий налет RQ-4A превысил 4000 ч
БЛА RQ-4A
«Global Hawk», Northrop
Grumman, США
вес стартовый ... 14 628 кг;
вес целевой ... 1 360 кг;
скорость ... (570-^630) км/ч
высота ... 18 250 м;
дальность ... 10 000 км;
длительность ... 28 ч
Первый полет в ноябре 2006 г.
RQ-4B «Global Hawk»,
Northrop Grumman, США
вес стартовый ... 4 990 кг;
вес целевой ... 520 кг;
скорость ... 390 км/ч
высота ... 15 240 м;
длительность ... 48 ч
Предназначен для разведки над
водной поверхностью.
РЭП и лазерный целеуказатель
БЛА «Маринер» Локхид
Мартин и Дженерал Это-
микс, США
вес стартовый ... 6 350 кг;
вес целевой ... 700 кг
высота ... 14 500 м
Разведка и наблюдение
БЛА «HALE PW114»,
Варшавский университет,
Польша
вес стартовый ... 4 600 кг;
вес целевой ... 1 000 кг
высота ... 13 700 м;
длительность ... 36 ч
Разведка и наблюдение
БЛА «Негоп-ТР» (Eitan),
Израиль
<
pa
CL
ία
ч
Η
Технические
характеристики
Тактические
характеристики
Функции,
оборудование
Тип БЛА, фирма
и страна изготовитель
вес стартовый ... 1 500 кг;
вес целевой ... 400 кг;
скорость ... (148-^315) км/ч
высота ... 9 145 м;
дальность ... 200 км;
длительность ... 40 ч
Наблюдение, патрулирование,
разведка и корректировка огневой
поддержки, а так же поддержка
коммуникаций во время боевых действий
БЛА «Hermes-1500»,
Silver Arrow, Израиль
вес стартовый ... 1 100 кг;
вес целевой ... 200 кг;
скорость ... (90-^200) км/ч
высота ... 10 000 м;
длительность ... 30 ч
Спутниковая связь,
ударно-прицельная система: тепловизионная станция
и РЛС с синтезированной апертурой.
Имеется внешняя подвеска
вооружения
БЛА RQ-5A «Hunter-2»,
разработка IAI, Израиль,
производится Нортроп
Грумман, США
вес стартовый ... 703 кг;
вес целевой ... 91 кг;
скорость .:. (120-^230) км/ч
высота ... 7 620 м;
дальность ... 700 км;
длительность ... 40 ч
БЛА «GNAT-750»,
General Atomics, США
вес стартовый ... 1 134 кг;
вес целевой ... 204 кг;
скорость ... (200-^240) км/ч
высота ... 7 600 м;
дальность ... 4 000 км;
длительность ... 24 ч
Лазерный целеуказатель, лазерный
дальномер с подсветкой целей, спут-
никовя радиолиния.
Лидар с высокой способностью
проникать сквозь облака, пыль, дым.
Коротковолновая ИК-система
(высокая точность применения оружия).
Аппаратура для радиоэлектронной,
видовой, радио- и радиотехнической
разведки
БЛА RQ-1 «Predator»,
General Atomics, США.
Принят на вооружение в
1996 г.
ч
о
S
<
pa
OJ
m
Η
ч
Η
Технические
характеристики
Тактические
характеристики
Функции,
оборудование
Тип БЛА, фирма
и страна изготовитель
вес стартовый ... 205 кг;
вес целевой ... 34 кг;
скорость ... (120-^200) км/ч
высота ... 4 570 м;
дальность ... 180 км;
длительность ...5ч
Принят на вооружение в 1986 г.
Приземление на ВПП с помощью
аэрофинишера. Применялся в боевых
действиях в Кувейте, Боснии, Косове и
Ираке. Взлет с ВПП (ракетные
ускорители, катапульта). В эксплуатации
находится 35 экз.
БЛА RQ-2B «Pioneer»,
AAI (США) и IAI
(Израиль)
вес стартовый ... 1 400 кг;
скорость ... (8504-940) км/ч
высота ... 5 000 м;
дальность ... 360 км
Панорамный аэрофотоаппарат,
система телевизионной разведки и
система инфракрасной разведки с передачей
информации в РМВ. Радиомаяк
БЛА «Ту-243»,
ОАО им. Туполева, РФ
вес стартовый ... 550 кг
дальность ... 250 км;
длительность ... 12 ч
Широкозахватная двухспектральная
ТВ/ИК камера, РЛС бокового
обзора с синтезированной апертурой.
Гиростабилизированная платформа
с ТВ/ИК-приемниками и лазерным
дальномером. Ретранслятор
Перспективный БЛА
«Юлия», НИИ «Кулон»
(концерн радиостроения
«Вега»), РФ
вес стартовый ... 210 кг;
вес целевой ... 50 кг;
скорость ... (108^200) км/ч
высота ... 6 000 м;
дальность ... 200 км;
длительность ... 12 ч
Военная тактическая разведка
поля боя, а также: полицейский
контроль, мониторинг дорожного
движения, охрана границы и важных
объектов, научно-исследовательские задачи.
Находясь на вооружении армии
Израиля, БЛА «Aerostar» за 18 месяцев
налетал 10 тыс. ч
БЛА «Aerostar», Израиль
Технические
характеристики
Тактические
характеристики
Функции,
оборудование
Тип БЛА, фирма
и страна изготовитель
вес стартовый ... 450 кг;
вес целевой ... 150 кг;
скорость ... (130-И50) км/ч
высота ... 6 100 м;
дальность ... 200 км;
длительность ... 20 ч
Приемник GPS (при отказе GPS
переходит в режим отсчета времени,
что позволяет сохранить
синхронизацию сигналов). Два навигационных
компьютера, два комплекта связного
оборудования. Управление от
оператора нужно только при взлете и
приземлении
БЛА «Hermes 450», Silver
Arrow, Израиль
вес стартовый ... 1 230 кг;
скорость ... 950 км/ч
высота ... 1 000 м;
дальность ... 180 км;
длительность ... 13 мин
Фотографирование и телевизионная
разведка площадных целей и
отдельных маршрутов, наблюдение за
радиационной обстановкой
БЛА Ту-143 «Рейс»,
ОАО им. Туполева, РФ
вес стартовый ... 222 кг;
вес целевой ... 50 кг;
скорость ... 210 км/ч
высота ... 6 000 м;
дальность ... 150 км;
длительность ...8ч
Вертикальная и панорамная
ТВ-камеры, ИК-датчики, системы
позиционирования, целеуказания и наведения.
Передача данных осуществляется в
РМВ. Запуск при помощи ракетного
ускорителя
БЛА «ASN-206», Xian
ASN Technology Group
Company, Китай
Η
О)
я
χ
о
О)
з
я
χ
£
О)
S
Йй
о
О)
3*
S
Е-
га
н
τ
ФуНКЦИ!
га
S
О.
Я
-Θ-
<
ς
pa
с
я
Η
£
=
h
о
5
α.
ё
^
хара
g
=
ίο
g.
2
Ё
хар;
О)
5
I
оборудова
J3
Ч
О)
е-
со
о
ίο
СО
Я
га
га
О.
Е-
о
Я
i-Γ
χ
*Ф
*Ф
3S
СО
вес старто
s
о
о
<о
■*
га
ίο
о
JQ
СО
с*
О)
СО
СО
га
О.
ее
О)
с*
О)
ен для в
3
га
I
СО
га
I
Пред
•-
;£
(*-
ΟΙ
3S
вес целево
км;
о
о
—
J3
ί-
нос
J3
ч
га
==(
о
χ
есах
интер'
цственно в
0)
о.
о
о
с
Й
I
=
i:
cS
< о
ιό"
ей
БЛА
CM
I
о
«Shad
з
s
X
со
CM
CM
скорость .
3
сть
о
I
ель
s
t^
^
я
α.
ю
тной
о
О)
о
ункта мот
с
о
ΙΟ
ί:
га
Ξ
<
Э
и
AAI, ι
ίο
ο
s
рие]
с
_-
S
О)
и ИК-сист
СП
О
J3
га
1—
«
о
ω
о
ее
==
га
Ξ
ι
темы опоз
о
к
о
¥.
тчи
О)
ш
о га
СО С
га га
с s
га d
S ι
ύ, X,
х>
D ==
.иостанциии
радиостанц!
Э 0)
га rj
α. S
_ т
*■ га
== !-
Iя.
>, га
3 I
общений
ых, РЛС
Аппара-
Я ϊ«
ЗЫХ 1
и да1
туро
η] 3 CL
редачи реч(
ной переда
ванной апе
О) I О
с <у о.
з* s
К К со
4 10)
г< га е-
m О. I
га и s
^ О о
о
со S О
ее
m
о
о
га
о.
m
о
ч
га
I
СЛЯЦИИ СИГ
I
га
ία)
α.
га
α.
>,
f-
^
SS
(U
Ч
О)
га
ία)
m
о
=«
казатель (по
дальномер
it1 Ώ
О) ±
Ч £
О) I
^ О.
О)
- со
Ж га
со Ч
<
pa
ч
Η
О)
S
а:
о
О)
3*
X
Техн]
О)
S
^
о
иче
н
ϋ
£
1КЦИИ,
χ
га
S
фир
ЛА,
ра
с
Я
Η
5
^
5
ίο
CL
<υ
Е-
ί£
хара
ими
ίο
ктери
га
CL
га
Χ
удование
обор
ель
Е-
0Т0В1
изг
га
га
CL
ίο
S
ί_Γ
χ
О
CD .„
^
~~1 о
. σ>
та ;
■я _
го та
старто
целево
о о
О) О)
m со
S
SO
_ t—
610С
... 2
• J3
' E-
' О
га о
Е- I
О л
О ES
J3 га
СО с*
i i
о га
мент информаци
ЛС с синтезиров
■_ α
си
о
га
о
та χ
3 ш
I Ч
О ?
.виаци
ого ко
<С ι
Scout»,
, США
A «Fire
rumman
оо о
гу а.
A R
-thro
1=3-5
pa Z
3
s
χ
о
со
см
рость .
о
X
о
3
ОО
сть
о
I
J3
ч
О)
Е-
ч
с«
>,
индикация движ
ертурой и
ои ап
I
J3
ч
(1)
фюзеляжем Typi
X
целей. По
щихся
га
ч
ОЭ-системой: ТВ- и ИК-камеры,
о
— целеуказатель
CL
дальноме]
ерныи
со
£_Г
χ
О
о
OJ
iS
3
со
старто:
о
О)
ГО
S
ΓΛ-
ОО
га
Е-
О
О
J3
со
га
и
ы, система нави
s
ИК-систе:
ώ
н
<(г
ipter
о
о
Cam
о
о
1
00
<
ς
^"<Г
^ —
s
Ю ·£
юо
: ■*
. OJ
та
целево
рость .
о о
CD ί£
СО О
S
* 3
О CD
ОО
Λ :
сть
л о
Е- I
О J3
о ч
I CD
J3 Е-
Ч =
га Ч
с« =«
о ■
о: ч
м местоположени
зерный локатор (.
(V га
пределени
й ± 1 м, л
ии с о
шибко
η о
встрия
<
-
CD
ι ieb
о
pa oo
>,
Е-
ЛС с синтезированной апер
ар), Р,
с«
i i?
щия передается оп
анал передачи да
GPRS со скорость
ой, видеоинформг
атору в РМВ, к
ых 10 Мбайт/с (
28 кбит/с)
α α ι -
L" з"
^ —
S
Ю ·£
юо
: о
. —
та :
целево
рость .
о о
CD ί£
СО О
S
so
о о
о —
со '■
• J3
• Е-
о
га о
Е- I
О л
о ч
J3 га
ГО С*
i ώ
Я 3*
атюрная РЛС с с:
турой. Предназна
К О.
чики, мин
.анной апе
ОЭ-дат
тезиров
« CD
О СО
123
> ,/Г
(Λ
ε
CL <U
га (Λ
5 >■
Ч со
(V о
Μ ι-
υ ω
• <
ς <
ра оо
3
CD
СТЬ
О
Ι
ja
Ч
CD
E-
4
c«
ό
CL
1ных РЛС и циф
тив Ha3eiv
а про
Ι
τΐ
ό
Ε-
. Определяет мес
та
'овых сете
ых сот
го
1 Е-
га cd
и передает эти д
ления. Может ИМ'
ГО
оложение целей
ые в Центр упра
С I
гнение
некое прим!
ражда
U
i-Γ
χ
О
—
та
J3
го
старто
о
(V
ГО
S
О
о
о
га
Е-
О
О
5
Г0
■о
gbir
с
ε
ε
3
1
о
CD
"^
<
<
С?
pa
3
s
ϊ:
О
CD
oq
рость .
о
χ
о
i"»
о °°
со :
сть
л о
Е- I
О J3
о ч
I CD
J3 Е-
ч =
га Ч
с« =«
<
э
и
CL,
CD
J3
онт
CL
ч
о
S
о
ч
<
pa
ч
Η
я
ничес
;терис
Texi
арак
X
a, i
= £
* h
1ктичес
зктерис
га л
г— Q"
1 га
X
О)
Функции,
оборудован
J3
Ч
™ О)
ipMi
ВИТ
= о
ип БЛА, φ
рана изгот
^ о
Я
кг;
175
0 кг;
1Й ...
J3
m та
рто:
ево
вес ста]
вес цел
.- s
s *
о о
о t~-
ОО
oq ;
■ J3
■
ίο
га о
Е- I
ВЫСО
даль
, ,
га I-
ω >,
га о.
ι ϊ:
СО
га^
O.D-
. m
я s
бнаружен
! за целям
О ш
[аблюдение,
ие и слежен
3G ι
они
1К0-
* 5
сь 5
«Phoenix»,
икс Групп
Ες m
pa <
з
S
a:
О
Το
о
J3
скорост
3
ю
сть
о
I
J3
ч
О)
длит
о
L.
о
а:
о
та
ери
ч
ч
я
ία.
iTepecax a
л.
Я
осуточно, в
ч
ритания
ю
,
Е-
О)
Χ
га
О.
О)
я
га
со
га
а:
и целеу
я
олка дивиз
с
о
залпового
S
ым система
I
о
СО
Я
Εε
бъе
о
О)
ч
О)
Е-
14 мкм),
1
оо
[К-камера (<
к
Я '
га
_ S
S о
01 Е=
я m
:стоян
раз, а
■^
о. о
окусным
τ 2,5 до
-Θ- о
еременным
величением
с >,
■ ' ' ЗЯ
гз га га 0
га I !й g
СО О О 0
_ О. Ч о)
s Е- О 3
0J О ^ я я
я З^Г ■=<
ει со га о
перед
1нных
я свя:
-10Й, ρ
и аку
ючаемые
федачи да
екреченна
й визуалы
акрасной
тически перекл
ние антенны пе
правленная зас
Обладает мало]
ционной, инфр,
заметностью
сч
12,
та
J3
СО
о
Е-
вес ста]
s
о
ю
CD
СО
га
Е-
высо
га
X
QJ
овая разв'
я
оздушная в
CQ
cSilver Fox»
ЛА «
3
s
• - χ
*0
оо_ оо
... 1
(704
та
о
СО
0J J3
вес цел
скорост
UT 3"
S
а: оо
CD
СО
сть
J3 О
Е- I
О J3
о ч
I О)
даль
ДЛИТ
,
Я
ч
о
Я
рад]
га
—
о
О)
елеметрич
Е-
омандная и
ИИ.
« I
о
ced Cerami
■ch, США
га ш
> (Λ
"U О)
pa < α
'
я
о
£
я
§
Ξ
5
льная нав
га
я
iPS и инерц
гема (ИНС)
О о
Технические
характеристики
Тактические
характеристики
Функции,
оборудование
Тип БЛА, фирма
и страна изготовитель
вес стартовый ... 138 кг;
скорость ... (120-И80) км/ч
высота ... 2 500 м;
дальность ... 60 км;
длительность ...2ч
ТВ- и ИК-камеры, видеоизображения в
РМВ на наземный пункт управления.
Старт с помощью твердотопливных
ускорителей с направляющей на боевой
машине десанта. Посадка на парашюте
с амортизирующим надувным мешком
БЛА «Пчела-IT»,
ОКБ им. А.С.Яковлева,
РФ
вес стартовый ... 50 кг;
вес целевой ... 14,5 кг;
скорость ... (90-^200) км/ч
высота ... 3 000 м;
дальность ... 40 км;
длительность ...2ч
Точность прохождения маршрута —
50 м.
Старт с помощью катапульты,
посадка—с парашютом
БЛА «Типчак», ЦКБ
«Луч» (концерн
радиостроения «ΒΕΓΑ»), РФ
вес стартовый ... 18 кг;
вес целевой ... 6 кг;
скорость ... 130 км/ч
высота ... 4 800 м;
дальность ... 80 км;
длительность ... 20 ч
Способен летать в ложных погодных
условиях, при сильном ветре и дожде.
ОЭ или НК камеры установлены в
карданном подвесе и гиростабилизированы.
Используются в Афганистане и Ираке
БЛА «Scan Eagle», Boeing,
США
<
pa
О)
m
ч
ю
Η
О)
я
о
О)
3
Я
Texh
О)
Я
о
(1)
КТИЧ1
га
Η
я"
я
Ε
фирм;
<
ς
pa
Тип
5
HI
Я
рист:
О)
харак'
£
сти
Я
о.
S
!й
га
О.
га
X
ование
боруд
о
ель
товит
о
изг
га
стра
я
i_"
*
О
—
•S
£
вес старто
s
о
**
см
га
ί-
высо
,
О
Ξ
га
о
Е-
QJ
рибора» мож
ого π
име «умн>
■ реж
PQ
с
о
3*
S
Ο
скорость .
ja
ίο
о
Ι
даль
СО
ja
ί-
ra
ίο
\ο
садиться и pa
льно взлетать,
гояте.
о
,
Я
I» (D
"—ι
ία)
χ:
α.
U
<
pa
ВИНЕ
С
S
о
ί£
rrior)
I
s
^
о"
t—
·|·
ю
Ю
,
о
с
о
я
ί-
ь на местное
3
СО
J3
ίο
о
I
J3
ч
О)
длит
о
U
о
I
СО
о
I
о
В качестве о
ёс/i
9-α
е, ориент!
оздух
m
<
Э
U
СКИЙ:
I к°р
ι системы
ощыс
я
<
о
ее
я
О)
ч
m
ручного упра
жим
мотрен ре
редус
с
,
га
I
СО
га
с«
О)
станции. Пр
мной
обильной назе]
?.
:ки морской пехоть
я поддерж
ен дл
3
L~
χ
О
см
та
J3
m
вес старто
s
χ
о
ю
J3
ίο
о
I
даль
датчиками
СП
О
о
:я турель
Имеет!
,
я
онс
Q
^
ό
см
Α
«Ης
pa
b"<C
- s
О *
... 3
120
та :
вес целево
скорость .
3
cn
J3
ίο
о
I
J3
ч
О)
длит
рея
ка Ко
я
ч
>,
с
о
О)
α
s
сте
U
S *
ОО
. О
,|Й ..
... 1
со та
вес старто
вес целево
3
ю
s —
. ja
• Е-
■ о
J3 О
ί- I
О J3
о ч
I О)
даль
длит
о ■
га
к is
= S
S 5
Й 1
Р _
[Я разведки и набл:
θ-датчиков, ИК- ν
3°
5 о
з" 5
га РЭ
I
Я я
Предн;
воздух
,
га
S
.X G-1»,
Япония
<с .
:> g.
* о
ра χ
,
граж
О)
СО
строен на ба
1Я системы. По
ИОННЕ
τΐ
о
U
о
S
ω я
ее „
I S
oj га
997 г., прим'
в ядохимикат
ета 1
осево
го вертол
работки π
анско
ля об
=f =f
ские
1СТИКИ
11
Тех н
характ
я
кие
тик
о у
I!
н |
X
Функции,
оборудование
ирма
овитель
-θ-
ίο
<С со
Тип Б Л
[ страна и
S
. ..
U
* з
.. 8,6
5 км/
та ел
J3
СО
о ·
старт
рость
о о
О) Μ
CD О
=«
« CD
CD
СТЬ
J3 О
Е- I
О J3
о ч
I О)
J3 Е-
Ч =
га Ч
==( е(
ИНОМ
лиза-
Ξ =
а^
га S
видеокамера в к
(3-х осевая гирос
Цветная
подвесе ι
Нетопырь),
США
ΤΙ
БЛА «ВАТ 2
МЛБ Компа
лектродвигатель
)·
овый э
се и
к ,се
аН
. -
ь
Ьй
.. 6,5
>я
J3
со
о
старт
о
О)
CD
S
о
о
со
га
ίο
о
3
ш
си
с
мерг
ая или цветная ка
1но-бел
UL
о;
D"
Ш
ей
О
υ
<
ut»
A «Azim
ς
2 кг;
'£
Ρ
целев
о
<υ
со
S
л
ίο
о
I
л
ч
га
Ч
со
се
о
Ευ
се
Ч
со
ача изображения осущест
3
3"
S
ί£
О
см
7-
(50
рость
о
ϊ£
о
3"
1П
(>ί
СТЬ
о
I
J3
Ч
си
ΕΚ
ч
с«
CQ
£
лектродвигатель
овый э
се
clCl Η
се
Я
анц
CL
-
<
00
hnologies
о
си
pa r-
L~
^
■* !_"
..4,5
0,9 κι
та :
J3
со та
о 2
Е- m
CL ω
га Ч
Е- И
О ^
о о
О) О)
Ш CD
„
S
_ оо
600
• J3
' Е-
' О
га о
Е- I
О м
О ES
jQ га
СО С*
си ό
Ч О)
СО с*
га s
CL СО
С
>ι се
о
з·
■^^,
S
^
OO
·ι·
(35
рость
о
X
о
3
°1
сть
о
I
J3
ч
о;
Е-
s
ч
с«
со
га
CL
с
>>
га
батальонного звена
юдение за полем б
ТВ- или ИК-камер
дство
: набл
ω ее
О. s
U ι
ίο;
в<
£3
51А
ent,
A FQM-1
о Vironm
ες и
pa <
ерои.
S
га
ϊ:
МНОЙ
о
о
Е-
етом с помощью ав
ие пол
О)
ч
о
CL
Е-
X
О)
Ч
иной системы GPS.
«с руки». Тяговый
игацио
рт —
гатель
ш га s
га Е- со
I U г(
. ..
<-
χ
.. 2,3
>я
л
со
о
старт
о
О)
ш
S
О
о
о
га
Е-
О
О
J3
со
s
с
о
Е-
Сй
га
(1)
камеры. Управлени!
и ИК-
cq
ία;
с
ago
A «Dr
км/ч
о
рость
о
X
о
,5 км
■*
J3
Е-
О
О
I
J3
ч
га
с«
га
помощью оператор;
или с
Е-
О
ч
его
<
я
(Λ
ε
О)
I aerjsys
ς<
3
см
сть
о
I
J3
ч
О)
Е-
Я
ч
с«
anment, США
L-
pa cq >
"-
^
О
СМ
>Я
Л
ш
о
старт
о
о;
ш
S
О
о
о
га
Е-
О
О
jQ
со
я
χ
с*
О)
со
со
га
CL
в первой линии
отает
га
α
ес-
ра
о
—
см
A «ZALA
ς
pa
. ..
ι—
ы
0,25 ι
>s
о
целев
о
О)
со
S
О
J3
Е-
О
О
I
J3
ч
га
==(
га
I
О)
о
о
CL
ществляет наземное и мо
о
о
Ы, РФ
S
сте]
ютные СИ'
^
S
с
3
S
X
о
см
(80
рость
о
X
о
НИИ
ю
■*
сть
о
I
J3
ч
о;
Е-
s
ч
с«
о;
I
о;
2
ч
ю
лектродвигатель
овый э
се
Η
...
"- L"
« χ
СОоо
oq -■
: ° з·
та ;1
J3
со та -^f
о о cd
Е- CD
CL ^ -f
" =f g.
О О О
QJ QJ bi
m m о
з*
giO
so :
см : |S
— · о
■ j] О
• Ε- Ι
О J3
га о Ч
Е- I QJ
О J] E-
О EJ S
л га ч
СО г=( г=(
< ™
—. J3
Ю CD
—. О
?Н
ГУ .
ный вариант Fi
Старт — «с руки»,
игатель
:ньшен
inter»,
ктродв
^ D- Ч
г>Э * СО
П»,
О)
га <С
ей а
< с"
— О)
A RQ-1
о Vironm
Е^ о;
ра <
Технические
характеристики
Тактические
характеристики
Функции,
оборудование
Тип БЛА, фирма
и страна изготовитель
вес стартовый ... 454 г;
скорость ... 72 км/ч
высота ... 100 м;
дальность ... 5 км;
длительность ... 45 мин
Миниатюрные ЭО цветные камеры,
направленные вперед и в стороны,
оптические или инфракрасные сенсоры. Передача
видеоинформации оператору в РМВ.
Аккумуляторы подзаряжаются во время полета
от солнечных батарей
БЛА «Wasp III», Aero
Vironment, США
вес стартовый ... 86 г
длительность ... 15 мин
Датчики видеоинформации, аппаратура
передачи данных и датчики инерциаль-
ной навигационной системы
(прецессионные гироскопы, акселерометры, магнитный
компас и барометрический высотомер).
Навигационная система (масса 5 г) может
принимать корректирующие сигналы от
наземной станции
БЛА «Микростар»,
подразделение «Сандерс»
фирмы «Локхид-Мартин»,
США
вес стартовый ... 50 г;
вес целевой ... 20 г
длительность ... 10 ч
Машущие крылья. Очень высокая
оперативность. Наблюдение в труднодоступных
местах. Миниатюрная видеокамера: вес —
1 г; объем — 1 см ; потребление — 25 мВт;
1000x1000 пикселов. Энергия — за счет
переработки биоматериалов, силовая
установка — «возвратно-поступательные
химические мускулы»
БЛА «Энтомоптер», США
Η
О)
о
О)
3
я
Техн
О)
я
^
о
О)
3
Такти
;ции
га
S
о.
я
-Θ-
<
ς
ра
с
я
Η
я
я
ίο
я
о.
О)
аракт
X
я
i:
я
ίο
я
о.
аракте
X
О)
я
эван
ci
эбору
Л
ч
О)
вит
о
ίο
со
я
га
Ί1
га
О.
ίο
я
С-Г
О
о
со
=я
л
со
:тарто
о
О)
со
S
О
ю
а ... 1
ί-
Ο
о
л
со
,
га
О)
Пер
о типа.
гног
О)
ертол
со
<
ς
ра
ό
α.
χ
я
•г-·
«i.
а
с
X
«~
га
J3
си
Е-
>>
С
*
БЛА
3
км/
■^
ю
сть .
о
о.
о
X
о
S
^
ю
ость .
I
л
ч
га
с«
гг
именени
о.
с
X
В1Е,
ульт
со
CL)
О.
О
Я
я
τΐ
га
форм
I
я
га
3
е
Q.
л"
6
«Кону
3
,
льность
О)
ί-
я
ч
с«
га
со
о
корректир!
я
асов
с
эепри
*о
X
^
S
ляе
со
га
О.
с
>,
,
о
О)
с«
ие ви
ешен
азр
о.
S
I
ствен
га
О-
ί-
Прос
к
I
ΙΟ
,
я
о.
с
жет
о
S
О)
*
χ
га
Η
5
0,2 ι
I
л
о.
ату
о.
га
с
с
га
,
О)
3
я
коло г
СГ)
я
о
НОГ
1лен1
a
ромы
[НГОВ
О.
К О
Ч Е-
г( Я
|ε
ί о
си g
S о
s
я
<
pa
ч
Η
я
0J *
Я Я
* ί-
Ο о
О) Я
3 О.
Я «J
-г Е-
Texi
харак
я
О) !й
я я
* h
о о
О) Я
3 О.
с^ га
X
О)
Функции,
оборудовани
J3
Ч
га Ϊ
s £
фир
Т0В1
о
Г с-
<С со
С? ==
ра я
с га
я О.
Η
ίο
я
L"
χ
О
CD
'Я
~л
со
о
старт
о
О)
со
. ..
S
О
О
о
со
га
ίο
о
л
со
л
Мише
ods,
СУ
•2»,
О)
х:
hi
О)
га
с/3
<
С?
3
"^
s
ϊ:
О
ю
см
рость
о
ϊ:
о
S
X
О
ю
л
ίο
о
I
л
ч
га
с«
о
га
с
я
ί-
Ο
С-
о
со
о
о
атформы рель
о
Взлет
I
о.
pa S
I
я
S
сть
о
I
л
ч
О)
ί-
я
ч
с«
скорителем
>,
пороховым
L"
X
о
CD
'Я
~л
со
о
старт
о
О)
со
S
ϊ:
О
CD
л
ίο
о
I
л
ч
га
с«
Л
Мише
X
X
X
X
W"
га
со
га
е
*
b"
о
'5
Q
целев
о
CU
со
3
см
сть
о
I
л
ч
CU
ί-
я
ч
ч
со
чето)
о
га
О.
in
о
со
о
ндля тренир
CU
азнач
3
"^
s
i:
О
ю
■*
рость
о
X
о
Предн,
ПВО
га
S
га
>>
<s
ς<
pa x
L"
* 3
ю ~>
^ S
. X
: о
- "^
'Я ^
J3
со
о
старт
рость
о о
о; а:
со о
£
. - ^
so
о со
о **
о
• л
•
ίο
га о
ί- ι
о л
о ч
J3 га
m c(
,
Е- -ρ
1 S
га Ο-
ο си
с
о
Ь О
олета боево
к помех. РЛ1
с s
ή
Имита
Поста!
.aid,
S
„
0А»
CD
Q
<
"^
ра υ
3
см
сть
о
I
л
ч
О)
ί-
я
ч
с«
^
га
со
ΡΕ °
га о)
Я со
сг га
Ю
о
с- га
икроволново
ая система н
S ι
я о
я
ки УК
навига
s
α.
-θ·
ю
о
<
pa
ч
Η
QJ
я
ы
о
QJ
з
Я
I
X
QJ
Η
О)
о
иче
ί-
£
я
Функци
[рма
-Θ-
<
ς
pa
с
я
Η
я
я
ίο
я
о.
QJ
ΕΙ»:
О.
га
X
я
χ
я
ίο
арактери
X
эин
дова
5->
о.
о
о
J3
ч
вите
'ОТО
СО
Я
га
га
ίο
я
и
X
О
~-·
=я
J3
m
о
ία.
га
вес с
s
е-
=я
Η НО
цио
га
S
1НфО|
s
ί-
й элеме!
о
лов
я
датч
QJ
о.
ё
;амера и
χ
о
QJ
со s
>> т
шь»,
J3
S
га
туч
«Ле
<
ς
<
pa υ
U
i:
σ>
=я
J3
m
о
ία.
га
ί-
вес с
I
я
.. S
Зо
* ю
ОО
о" '■
сть
J3 О
ί- I
О J3
О Ч
I О)
J3 S-
ч я
га ч
==( ==(
о га
ι о
α.
ίο; з
^S
Е- си
О) с(
4 >>
S *o
S 3
составны
ой систем
f- Ι
Fi QJ
pa m
well,
опеу
Χ
*"
>
<
:>
*
pa υ
адка
пос
я
зле'
m
QJ
J3
I
J3
Ч
га
. Вертик
stem
«й·
QJ
с
обес
&
А смо:
pa
Χ
я
га
«рои» т
QJ
Целы
<
а
υ
ее»,
0Q
ία;
Kil
·»'
<
ς
pa
га
со
НЫХ
ель
|ват
1еды
разв
выполнение
J3
ват
з=
<
ς
pa
о
олы
§
X
цели
J3
Й
и атаков
ч
я
3*
га
S
I
еди
m
ТЬС
га
О.
я
о
о
J3
Е-
В03М0ЖН0С
Е-
2
QJ
S
я
О)
о
е более
нимать
г=(
3
с
и вместе
й груз
л
QJ ι
О со
Ч О)
QJ .д
^ о.
S
о.
о
-Θ-
<
pa
ч
ю
Η
О)
я
X
чес
я
Тех
QJ
Я
^
О
QJ
3
я
Ει»:
га
Н
я"
я
га
S
О.
я
-Θ-
<
pa
с
я
Η
я
X
я
Е-
о
я
о.
QJ
Е-
^
га
о.
га
X
я
χ
я
ίο
я
о.
QJ
Е-
^
га
О.
га
X
QJ
я
I
га
m
о
5.
о.
о
*о
о
J3
ч
О)
Е-
Я
Ш
О
ίο
СО
Я
га
га
ίο
я
ί-Γ
X
О
СО
ОО
=я
J3
m
о
е-
о.
га
ίο
о
QJ
m
...
S
О
о
о
со
га
ίο
о
m
3
СО
>,
О.
ΙΟ)
J3
I
J3
ч
га
я
τΐ
QJ
С
О
J3
ί-
к
ч
m
га
ίο
о
ь-
QJ
О
S
«
X
X
ό
ю
ОО
α.
S
<
pa
u
—
О
О
CM
=я
о
m
QJ
ч
QJ
τΐ
о
QJ
m
S
^
О
о
CM
ja
E-
O
О
I
ja
4
ra
,
r=(
55
m
со
ra
O-
я
I
QJ
c«
QJ
m
к
4
Ί1
QJ
4
Ю
о
О
О
С
о
я
о.
QJ
X
X
га
Η
*"
о.
S
3
S
X
t ^
о
t*-
см
•1·
ю
со
;Ξ-
J3
Е-
О
О
о.
о
о
3
см
J3
ίο
о
I
J3
ч
QJ
S-
я
ч
^
К
я
I
QJ
^
га
О.
о
со
Я
О
ς
α
о
ίο
-θ·
я
S
OQ
Η
я
,
ί£
QJ
^
»ο
Ο
χ
Ι
S
QJ
CO
га
Ι
ί-
га
я
SL
ο
ο
QJ
я
QJ
4
QJ
S
α.
с
ο
1 Ο
га
S >,
Ο. S
Й °
-θ- ι
Ι Ε-
я ν
Ο ^
Ο) Ο
ri S
s ra
m о
QJ °
Я l_
I ra »
U Ϊ О
ч5з
с га о
S с 3
ι о.
Я СГ)
яга
о ^ л
о m о
Е-
ω == >,
о s о.
S- ^ 1-
ю
о
ч
Э
Л
S
о
CL
CL
О
ч
<
pa
CL
Χ
ч
Η
QJ
S
X
О
QJ
3*
S
χ
QJ
Η
:кие
QJ
3
S
i-
X
ra
H
ИИ,
I
>,
e
ca
a.
s
ЛА, ф
ра
с
s
Η
s
а:
s
h
Ι
iKTe
ара
X
s
тик
о
5
CL
Ϊ
t
^
Я
CL
Э
X
0J
1ЭНИ1
ш
О
0б0|
J3
-(тел
m
о
ИЗГОТ'
3
га
О.
h
о
S
i-T
О
о
t—
^^
вый
g
вес ста]
...
S
о
о
■*
ю
га
ί-
высо
.
ее
s
I
QJ
*
га
CL
Ю
О
ГО
S
лс-
о.
-
о
о
-Θ-
S
X
X
ТВ,
«
Π
Ι
cq
■<*
ут-DA·
CL
X
""'
<
pa
3
s
i:
. .. , ^
ι- f-
* oo
О <?
ίο ·Ι·
cq о
. CO
• cq
sS
о :
m
QJ Л
вес цел
скорост
• - з
s _^
ν; "^Γ
cq
О
О
cq
• Л
• t-
• о
Л О
ί- Ι
О Л
о ч
I QJ
даль
длит
, ,
t0 CL
\о о
о -Θ-
I
* я
J3 О
з: qj
Ξ ^
QJ S
CO CD
ra „,
1 £
ί- Ι
ra qj
ι 4
s с
г( О
CL ί£
о га
О I
s
QJ
S О.
I О
QJ Ю
Ч о
QJ
QJ о
)1МЭ
duo
о
о
естн
S
m
(РФ) со
Aircraft
« тэ
ί- с
>, о
«Ирк
Diam
о
>.
S
о
н
моле
ЕЭ-0
с
га
ы
посад
s
== s-
S QJ
τΐ ч
cq го
s pa
J3
. го
О CL
й ■"
cl e_
эрод
авля
га Е-
J о
X о
ω Г
О Е-
>, О
£-5
m
о
ί-
>ъек
4_J
о
X
J3
QJ
Ч
э
Л
S
о
CL
С
га
и
I
S
CL
О
ί-
S
I
о
S
се
Ч
с«
о типа
U
самолетне
БЛА
ритные
га
реднега
U
о
cq
га
s
ч
\о
га
Η
QJ
S
мээь
Тех ни1
QJ
S
о
QJ
3
S
ί-
га
Н
ИИ,
ункц
е
рма
s
-Θ-
<
Тип Б Л
S
^
£
1
а.
кте
хара
s
*
S
ίο
5
CL
£
t
^
Я
CL
s
ание
руд ов
обо
J3
вител
о
ίο
L-
ГО
ι страна и
S
t-T
•^
200
вый
арто]
ίο
о
QJ
m
„
S
О
о
о
ю
га
ίο
о
л
ω
се
s
QJ
*
га
CL
ЛС-изо
и фото, Ρ
X
X
ра"
н
X
с
X
л-
о
о
cq
ь-
А «Ирку
ς
ра
...
О
со
=s
лево
QJ
τΐ
о
QJ
m
км;
о
о
cq
л
ίο
о
I
л
ч
га
с«
гО
\о
о
X
л
S
ат назе
рдин;
ние коо
QJ
Ч
опреде
е
α
Ρ·
CL
s
3
s
X
, ^
о
cq
•Ιο
■*
-Ξ-
ICTb . .
о
CL
О
X
О
3
cq
—
л
ίο
о
Ι
ja
ч
QJ
ί-
S
ч
c«
ά.
о
-θ·
s
о
QJ
гние ви
К0ПЛ1
op и на
о
ектов,
о
s
о
Ί1
о-самолет
с
га
посад
s
мации.
Взлет
m
ромо
χ аэрод
л
m
грунто
узы
ть гр
оставля
с«
Может
L"
χ
О
ю
вый
арто
ίο
о
QJ
m
„
S
О
о
о
■sf
га
ίο
о
л
m
стема
==
о
S
а меры
ИК-к,
идео-, 1
m
Фото-,
^"
А «Дозор
ς
8 кг;
=S
лево
QJ
τΐ
о
QJ
m
S
χ
О
о
cq
—
л
ίο
о
I
л
ч
га
==(
s
m
га
л
ίο
о
IB. Точн
бразо
вания о
га
распоз
шзас, РФ
га
CL
ра н
3
S
X
, ^
О
ю
•Ιο
—
~^-
1СТЬ . .
о
CL
о
X
о
3
о
—-*
л
ίο
о
I
Л
Ч
QJ
ί-
S
ч
==(
S
1
гации ■
ГО О
2 CL
. 3
^i cq
S =3
0 · га
1 Т> го
амолет
тосадке
лнение
по-с
при ι
вы по.
Взлет и посадка
можен парашют
Предполагается
о
ί-
S
о
S
о
•ическо]
колог
:НН0Г0 И Э
мышле
рингов
ч
Э
S
о
а.
CL
о
ч
Η
X
о
ю
=s
со
о
старт
С)
C1J
со
3
S
χ
О
CJO
рость
о
X
о
и
ϊ:
σ>
=s
со
о
старт
С)
C1J
со
L"
*
О
ю
=s
о
целев
С)
01
со
S
ϊ:
г-Г
ю
•1·
η
ОО
рость
о
X
о
О
о
■*
го
со
тар
о
С)
01
со
„
S
С 3
о
о
и
X
О
о
■*
о
еле
=■
С)
C1J
со
?
i:
О
о
см
3
?
ϊ:
О
г»
см
СТЬ
о
χ
о
3
СО
~
J3
О L з
см S
. о χ
• °° „
тар
о
С)
C1J
со
S
О
о
о
о
еле
=■
С)
01
со
2
о
О
ю
сть
о
X
о
3
СО
J3
9 *>
ю s
СМ ^
со
тарт
о
С)
01
со
=s
о
елев
=■
С)
C1J
со
СТЬ
О.
о
X
о
S * «О
о о :
о ю
О . ja
S 3
о о
о —
о
Η
ч
га
==(
я
ч
==(
,
О
V
ч
«)
га
т.
к
Ч
с*
СО
О
01
ч
01
s
I
ч
га
а.
г:
>>
,
я
со
==г
,л
н
о
о
т.
3
о
Ч =
га ч
Ч =
га ч
Ч S
га Ч
0J I
со СО
га а)
Ч ι
JS Р.
-η Ρ
S
CL
OJ
0J Ч
4 о
О CL
5 Е-
га о
CL *
S
а. Ь га
а ар
-я Ρ га
<
pa
га
со
о
>i CL
~ О
s χ
е
S 3
aj <и
з* Я
ч s
CL ^
&
О.
U
ч
Η
5 >■
0 Q.
а. е_
ί- о
1 га
о а. '
Χ -Θ--
δω
ho
га о
о
ε <"
si
о сь
5 =f
й ι
ρ- _
ч 5 κ
u ^ ra
>■ °, ^
Ρ- 2J ο
ν; 3 a)
S3
s ч
β f
Ο J3
ι о.
I О
о >o
= 5
zl Ρ-
SS CL
-η Ρ
ч -^
CL ^
Ю
о
ra 2
К CL
S >,
ι Η
OQ 4
U a;
? 3
α- ι
-Θ-
? S
- g\
•r P.
о <u m
" ч <
OQ
ί
a.
ra
r=
ra
a.
j
-fc*
oa ч
ra
pa
Μ
5 о
-θ-
ίο
: "-
<С со
ς ==
pa я
с га
s P.
Η ί-
1 Γ 1
ш
3
s
P.
s
-θ·
<
pa
* а
— s
см a)
^
ίο
< s
J о
N1 £
< °
^ s
pa с
о
S
У Χ
Ρ-ν-
см А
е
со
. о
* S
t*~ га
<*? X
га
X S
» s
< pa
^Х
pa О
t~- A
2а
« со
X
X pa
Π О
Технические
характеристики
Тактические
характеристики
Функции,
оборудование
Тип БЛА, фирма
и страна изготовитель
вес стартовый ... 20 кг;
вес целевой ... 3 кг;
скорость ... 120 км/ч
высота ... 2 500 м;
дальность ... 70 км;
длительность ... 3 ч
Гражданский аэродинамический
наблюдатель телевизионный. Гиростабилизиро-
ванный ОЭ блок из трех ТВ-камер и
передатчик ТВ-сигнала с антенной.
Предназначен для наблюдения за
трубопроводами, линиями электропередач, может
также использоваться для авиалесоохраны и
для решения других задач, где
требуется наблюдение за местностью с воздуха.
Взлет с помощью катапульты, посадка —
по-самолетному на фюзеляж
БЛА «ГрАНТ»,
Новик-XXI, РФ
вес стартовый ... 6,95 кг;
вес целевой ... 1 кг;
скорость ... (65-е-130) км/ч
высота ... 3 000 м;
дальность ... 40 км;
длительность ...1ч
ТВ-, фото- и ИК-камеры.
Взлет с катапульты, посадка или
по-самолетному или с помощью парашюта.
Тяговый электродвигатель. Предполагается
выполнение задач промышленного и
экологического мониторингов
БЛА «ZALA 421-04»,
Беспилотные системы, РФ
вес стартовый ... 3,0 кг;
вес целевой ... 0,3 кг;
скорость ... (65-н 105) км/ч
высота ... 3 000 м;
дальность ... 15 км;
длительность ... 1,5 ч
ТВ-, ИК- и фотокамеры, определение
координат наземных объектов, сбор и
накопление видеоинформации.
Предназначен для контроля газопроводов
совместно с БЛА «Иркут-850». СКО полета по
маршруту — 50 м. Взлет с катапульты,
посадка с помощью парашюта
БЛА «Иркут-2М», НПК
«Иркут», РФ
α.
о
а:
m
к
ч
<
pa
α.
Η
Я
я =
ческ
рист
я ω
a: Ь
X ™
S Я
r" ra
X
я
OJ *
я =
έ
ίο u
О) Я
з* й-
s a
га Я
Η g-
X
О)
Функции,
оборудовани
рма
витель
£°
ип БЛА,
рана изг
*- 5",
о
Я
L"
!й
930
5S
J3
m
о
Е-
га
Е-
О
О
О)
m
X
I
природ
л
нтрол
§
S
си
?
Наблюде
ш
Варша
А"
W103
а.
<
ς
pa
u
~—
CM
=я
о
m
О)
ч
О)
^
о
О)
m
| объектов
Польша
гет,
вереи'
1
>>
=Я
СКИ
L"
a
300
=я
3
m
о
ί-
CL·
га
ίο
о
О)
m
„
S
О
о
о
ю
га
ί-
высо
Я
-ie Земл
τ
ирова!
онд
со
О)
о
τ
Дистанцион!
О
О
О
и-С
олибр
«
<
кг;
о
ю
=я
о
m
О)
ч
О)
^
о
О)
m
км;
о
о
см
Л
ίο
о
I
даль
i
виацио
рнизация ai
О)
g
4S
pa
*
3
"s
i£
_
■200
•ίο
со
Л
ίο
о
α.
о
о
3
о
—
Л
ίο
о
I
Л
ч
О)
длит
в»,
1лексо
S
о
X
J3
I
зг
ниринг
.эроинжи
-га
я
О га
о £·
о >>
i-T
« . -
ю о
. о
. —
£5 :
"л
Ш =Я
о о
α. <ч
га Ч
ί- ω
о ^
о о
О) О)
m m
S
* 3"
о о
о ^
о
CD
. л
• ί-
• о
Л О
ί- Ι
Ο J3
о ч
I OJ
даль
длит
, ,
Ο OJ
CO О.
га
ерный г
ающего
со 5
га я
.ар, л
π одет
Я °-
CL· О)
ема,
скан
ίο α.
ТВ/ИК-с
анализатс
л"
АНЭМ
tee
* о.
БЛА
кол»,
о
X »
X ра
8.»
X О
3
s
ϊ:
, ^
■140
•ίο
см
Л
ίο
о
о.
о
X
о
ее
о
Л
F-
ользова'
с
о
тся и
гае
пола
Я
О)
о.
льефа. Π
■
I
о
я
формац:
I
я
ссах
кла
ipex
л
Ё
во всех ч
ι О)
= Я
"- τ
И ЭКОЛО
•афирова!
5я °-
ленны
картог
а с
л ι η
S я *
О О. г=(
О. О О)
с f- ;
= Я
.. -с га
з· 5 9-
ных зада
ческий Μι
и геологе
о
ч
о
ϊ:
СГ)
к
Ч
<
pa
α.
U
ч
Η
О)
я
^
о
О)
3
я
-г
Texi
О)
я
^
о
О)
3
я
ί-
i:
га
Н
я"
я
^
>>
е
га
S
а.
А, фи
ς
pa
я
Η
я
я
ίο
я
а.
О)
ί-
х
га
а.
га
X
я
я
ίο
я
а.
О)
н
^
га
а.
га
X
О)
я
га
m
о
>;
а.
о
ю
о
J3
ч
О)
ί-
я
m
о
ίο
U
СО
Я
га
га
ίο
я
L"
О
t^
=я
л
m
о
ία.
га
ίο
о
О)
m
3
со
J3
ίο
о
I
J3
ч
О)
ί-
я
ч
с«
ОО
см
ί-
к
о
О)
m
я
О)
а.
га
ί-
га
Ю
О)
J3
I
а.
.ККуМуЛЯТ!
<
га
S
а.
я
-Θ·
А"
о
ю
X
S
л
"Т
<
pa
3
s
i:
О
CD
ίο
о
а.
о
χ
о
J3
Ч
я
га
а.
СО
|1А1, И
L"
О
1Г5
=я
J3
m
о
ία.
га
ίο
о
О)
m
S
О
о
о
со
га
ίο
о
J3
m
ό
S
га
о
о
с
я
ч
я
га
га
о
о
с
J3
ί-
Ч
>.
га
ί-
га
i:
о
ία)
Ч
СО
0Q
ΐ
о
ч
<
pa
ί-
О
см
=я
о
m
О)
ч
О)
о
О)
m
S
X
о
t^
J3
ίο
о
I
J3
ч
га
с«
S
а.
X
га
Е-
2
Э
га
а.
га
2
л
3
о
S
о
с
о
я
ч
я
>,
S
о
ία)
Ч
е
а
см"
Проек
Кулон·
3
S
ϊ:
с?
ΊΟ
2-
л
ίο
о
а.
о
χ
о
3
ю
J3
ίο
о
I
л
ч
О)
ί-
я
ч
==(
а)
3
Я ш
О [_
Ч τ
34 ЭКО
[итори
зад;
мпн
О) с
я ^
I g
¥ I
Ξ S
4 ч
° я
J] J3
ω s
ается
и прс
га и
Ч о
О ί£
С О
CL
О
HI
m
к
ч
<
pa
<
pa
о
ч
ч
Η
Я
s s
ί£ ί-
Ο у
О) S
з* й-
s <^
τ Е-
Тех ι
арак
X
я
О) *
к я
!й ί-
Ο у
си з«
"Г О-
- Ё
* „
га Я
Η CL
Н га
X
<ЦИИ,
ование
1&
>, а.
Φ
обо
J3
ч
И
CL со
= о
-θ-
ίο
J· "-
<С со
Ра га
с га
к о.
Η ί-
"^ о
я
L"
«Sb"
"- см
; ■*
та
3
ιοί та
g.i
вес ста
вес цел
s
χ
о
о
о
со
J3
ί-
дальнос
X '
Q га
ЭОДНЬ
(Кан
Я 1-1
а. о
а
х 2
женны
τ Mici
к о
ί- Ч
о s
а. с
с о
ί-
— со
га J?
S
ί- ω
2 ε-
Ξ *
га ω
e
а
о
я
л" ω
ω
δον
не
с <
<ο
pa о
з
s
i:
20)
„—
τ
о
to
ja
скорост
,
i£
iPo a
j
£
s
£
од вига
CL
E-
^
O)
4
Ж
m
о
с-
к
Η
га
c«
,
га
кат
2
J3
о
S
о
с
о
ί-
Ο)
ч
со
ра
3
CL
о
ί-
сс
ч
>*
S
i:
ί-
Ο)
о
:>
га
ί-
2
параш:
1
га
П.
га
о
о
с
3
f-
J3
Ч
С
, ,
О Я
га пр
граф
ϊ °
5.1-
2 *
я се
ДЛЯ МОН
;тов и дл
О) ^
= S
I (0
О) ЧЭ
I О
О) ^
S -
Я £
^ О) я
я ч ι
е- я га
та Ξ ω
га ^ о
I S О.
ч
<
pa
to
см
ч
Η
кие
тики
о у
О) Я
3 CL
я <u
τ E-
Texi
арак
χ
я
== 5
* h
о у
О) Я
3 CL
Э1МЕ
И1М1
1 га
Χ
О)
. я
я ι
= Я
=i 5
>i CL
A °
о
4
га ш
5 о
-θ·
ίο
J· "-
<C со
ς ==
ип Б
рана
Η ί-
"^ ο
я
"--
ί£ . .
. 8,5
,5 кг
та :
■£ ι-
£0 3S
° S
α. <y
га 5
ί_ α)
ο τΐ
ο ο
Ο) Ο)
со ш
s"
i:
SO
_ t—
о
о
ю .
• J3
'
ίο
га о
ί- Ι
о л
У Ч
J3 га
СО с(
i ==
a. s
О I
О О)
ра, определение к
;тов, сбор, накопл
ш S
ч О)
га ,х
о °
ί- X
й з
-θ· ι
s S
О)
« со
s 3
Р га
Η ι
.е
Iй.
11.
δ· ί1
ρ, D-,
< «
ςπ
pa I
3
Ю_
сметь
О
Ι
ja
ч
О)
ί-
s
ч
c«
s
s
^
ra
s
о
ί-
Ο)
ч
СО
o.pa
о
-θ· S
I
s ^
о
О)
c(
CO
ra
ί-
Ο
\o
ra
CL
О
cc
комплексна
|
ί-
CL
э
CL
га
S
о
с
га
0 полет
υ
[юта |
а
га
ью пар;
3
о
П0М1
о
га
X
га
ПОС
-
апульты
кат
3
.. s
"- ί£
ί£
ОО 1ГЭ
см'О
• ю
*=!£.
J3
СО
о
тарт
)СТЬ
" CL
о о
α) ϊ:
со о
.- S
S !й
о ю
О см
о
со :
• J3
•
ίο
га о
ί- I
о л
У Ч
J3 га
СО с(
i ό
О) СО
ч о
m ι
я
яговый
ью рез
Η 3
о
еры.
пом
-, ИК- и фотокам
двигатель. Взлет с
Η ί-
Ο
<
го
л-
со
±е
Q.Q.
БЛА «Эле]
«ЭНИКС»,
3
1Г5
—'
СТЬ
о
I
J3
ч
О)
ί-
S
ч
==(
га
ί-
2
Э
ю пара
J3
3
помо
о
осадка
с
жгута,
о
± ><
5 £
cl ;
о IS
Е- га
Я МОНИ
резвыч
ч т
==( s
енение
овки пр
S I
я га
О. Е-
fc та
га g
Е- 0J
О) со
* 3
О
:> ε
о
I
X
О)
ί-
измах,
ч
ϊ:
ката
J3
I
§
с о.
уациях,
ных ава
В 2
Технические
характеристики
Тактические
характеристики
Функции,
оборудование
Тип БЛА, фирма
и страна изготовитель
вес стартовый ... 41 кг;
вес целевой ... 21 кг;
скорость ... 161 км/ч
высота ... 4 500 м;
дальность ... 3 000 км
ТВ-камера переднего обзора, для
наблюдения в нижней полусфере
используется панорамная ТВ-камера с
трансфокатором, ИК-камера, датчики пробы
воздуха Запуск — с рельсовой
катапульты, посадка — на парашюте
БЛА «Dragon drone»,
BAI Aerosytems Inc.,
США
вес стартовый ... 14 кг;
вес целевой ... 5 кг;
скорость ... (58-Ξ-148) км/ч
высота ... 4 500 м;
дальность ... 3 000 км;
длительность ... 50 ч
Предназначен для метеонаблюдений и
сбора данных (температура,
атмосферное давление, влажность, ветер).
Датчик ветра, фото/видео камеры, ИК-дат-
чик, датчик температуры на
поверхности земли, датчик обледенения,
аппаратура передачи данных (9,6 кб/с).
Датчик химического состава атмосферы,
лазерный дальномер, РЛС с
синтезированной апертурой, датчики излучения.
Взлет: с крыши автомобиля с
катапультой. Посадка: на нижнюю часть
фюзеляжа
БЛА «Aerosonde», США
вес стартовый ... 8,5 кг;
вес целевой ... 1,5 кг
высота ... 500 м;
дальность ... 70 км;
длительность ... 2,5 ч
ТВ, ИК и фото, определение координат
наземных объектов, сбор, накопление и
комплексная обработка
видеоинформации. Взлет с катапульты, посадка с
помощью парашюта
БЛА «Иркут-10», НПК
«Иркут», РФ
CM
Η
я я
χ f-
o у
О) Я
з α.
я «J
S f-
Texi
арак
X
я
О) *
^
ίο <->
О) Я
3 CL
я Ϊ
!- t
* ™
га Я
Η £"
га
X
О)
. я
Я I
я га
ункц]
рудо в
А о
о
J3
ч
фирма
товите
о
<С со
ς ==
pa ra
I
с га
я CL
Н о
я
L"
см L-
— χ
'■ *Ф
™ :
^ ,~.
со ЭЯ
° 2
Е- ^
а. <и
га Ч
Е- <и
о ^
о о
О) О)
СО СО
S
• - X
S _
О
о о
О см
о
■^ ·
• J3
■ Е-
О
га о
Е- I
О J3
О ES
J3 га
СО с*
йй О)
о S
о
3 !"'
а, Э
га
о °°
О, га
§ S
:кое зо
ем в
^ о
1 ^
Я о
СО
S Е-
-Θ" <Ч
о ч
О) О
(_ с
А
00
_>.:>
to О
< s
e;S
3
s
i:
<7>
•Ιο
1Г5
ja
o
о
CL
О
X
О
3
ΙΟ
of
ja
E-
o
о
I
ja
4
O)
E-
Я
4
c«
ra
i:
о
E-
4
CO
pa
наведения
ra
S
O)
E-
O
Я
о
к
га
Ι
Ι
о
я
со
га
Ί1
Я
га
CL
(ΟΙ>>
О)
О)
3
2
га
со
я
CL
О)
га
со
со
1
га
га
о
о
о
- m
Л Е-
Е- О
J3 DS
Ч О
>> а.
С Е-
га о
Е- >>
<
pa
о
ч
Η
О)
я
ϊ:
о
О)
3*
Техни1
О)
я
О
иче
Е-
га
Η
Функции,
га
S
а.
я
-Θ-
ип БЛА,
н
я
χ
я
н
о
я
а.
кте
ара
X
я
χ
£
о
ери
хара
оборудование
J3
Ч
товите
о
рана изг
Е-
О
Я
3
S
X
. - ,.—ч
I О
!- О
о Τ
о ·Ι·
— о
. о
^Я
о :
со
О) J3
вес цел
скорост
S
о
о
о
со
"^
о
высота
л ·° .~
Я Е- Ю
CL га о
аров и борьба с π
клизмами. Может бр
ющий (40-45)% от с
* Ξ 5
о *- 5
г^ га со
^ м га
ΕΙ) я U
я g о
I — О
0J $ .
Я З- со
lTT 2 сх
I ' '
а. ° °
Ш =( I
=г 2 ι
τ Ч О)
a .£. ра
^ CL
- Я Е-
* τ
,ЛА «ЭКИП
ЭКИП» (РФ)
ательский u,ei
pa » ω
,
о
S
га
о
ЭЯ
J3
-г
а (традицион!
вес
о
ί-
Ο
I
О)
со
Е-
о
<
э
υ
я
я
ои авиац
OpCKi
s
к
о
J3
Е-
га
3"
О)
S
QJ
Может пер>
ю
см
|
о
см
Е-
О)
Ч
га о со
1 г=(
ОДЫ
ТЯХ
олет
со о с
о
я о.
ности земли ι
душке на ско
осуществлять
й °
0) =
й 'S
2 о τ
с ι Ъ
со Э -
? >■
ч Зо
ю οίο
со со —
о
с(
тях
о
о
CL
юлета на ско
га
CL
X
со
3
О
я *
*s
си о
а.-^
<
pa
pa
см
ч
Η
QJ
S
ν-
eci
з*
s
ΐ
Texi
кие
о
QJ
3*
S
f-
^
hS
я"
я
τΐ
χ
Ι
>,
е
рма
я
-θ·
<
ς
pa
с
я
Η
я
ϊ:
я
Е-
О
Я
CL
О)
Е-
X
га
CL
га
X
я
ТИК
о
я
CL
О)
Е-
X
га
CL
га
X
О)
я
I
га
со
руде
о
о
J3
ч
вите
о
ΓΟΤι
со
я
га
га
стр
я
U
X
_—
^Я
J3
СО
О
Е-
CL
га
Е-
вес с
_
г
^
о
J3
Е-
О
О
ч
га
==(
га
со
О)
я
I
О)
г<
2
ч
га
I
3
CL
О)
S
га
X
ώ
s
я
о
Е-
о
-Θ·
..
ώ
н
ό
О)
ра
X
о
см
■*
<
<
N1
<
С?
pa
3
со
ja
Е-
О
О
I
J3
ч
О)
Е-
Я
ч
с«
ч
га
CL
Е-
О
Я
U
га
S
га
I
га
CL
О
С
о
I
га
а.
тот
m
га
S
QJ
S
QJ
^
я
СО
с«
CL
О)
pa
-
си
Е-
О
О
QJ
3
I
|S
§ §
С Е-
α.
α.
<
pa
s
α.
ο
со
ч
Η
кие
ο
QJ
3*
-τ
Texi
QJ
HI
О
QJ
3*
E-
Η
_
я
•v
ункц|
e
фирм;
<
ς
pa
Тип
тики
о
я
α.
О)
н
х
га
хар
ики
ίο
я
α.
О)
ί-
х
га
α.
га
X
О)
я
I
га
эудов
0б0|
J3
Ч
О)
ί-
Я
отов
СО
Я
га
I
стра
я
СО
я
==(
разве
ведени:
для
I
га
зработ
га
со
S
га
га
ία)
"с
3
I
<
pa
Χ
СО
га
га
I
X
га
со
ίο
α.
осуда
£
I
J3
предел
о
о
J3
ч
рай
J3
Ч
О)
казат
елеу
ω ^
о
ί- та
террорис
Лазерны
. 3 кг;
,3 кг;
. о
та :
■д _
ш та
о о
старт
целев
о о
О) О)
m m
. - s
S Χ
о о
о —
о
со '■
■ J3
•
ίο
га о
ВЫСОТ
дальн
,
га
апп
о
φοτι
та
о
СО
о
о.
циф
я
3
о.
ё
ТВ-ка!
т.
га
со о.
__7
X
><
а:
я
Нов
А"
Η
<
α
pa
<
pa α
км/ч
о
σ>
рость
о
χ
о
I
я
S
О
со
J3
ίο
о
I
J3
ч
длите
J3
Ч
^-
га
:ктродвиг;
ш
Ч
СГ)
ГОВЫИ
,
о
сам
о
с
1
га
:£
==(
га
, ПОС
руки
о
лет —
К СО
еляж
фюз
га
I
тному
О)
ч
3
.. S
*л
— о*
ci^2
: ·Ι·
• ю
>=£.
3
m
о
старт
рость
о о
<υ χ
m о
.. is"
S X
о ю
о —
<П
со ·
• J3
•
ίο
га о
ВЫСОТ
дальн
,
О)
онь
а брак
Каспия
со ^
■α ϋ
ч 1
о °
а. т
t '==
I О
S 1
О)
ΟΙΕ \0
ч я
m а.
Осущест
рами в π
о
О)
ωο
* α
on
21-0;
емы,
■*
ίο
< F>
j °
<£ α)
" Ε-
< °
ра с
3
см
ja
ίο
о
I
ja
ч
длите
,
га
с
га
I
1
га
X
г=(
га
о
о
И», Π
рук
О
'арт —
г-
υ
J3
Ч
О)
вигат
g
о
о.
!-
X
и эле
Тяговы
шюте.
га
О.
кг;
ОО
со
та
J3
m
о
старт
о
О)
m
2
о
о
о
см
га
ВЫСОТ
со
еле
я
3
1
СО
0J
я
юден
чабл
я
зведка
га
к
я
ч
га
ί-
X
о
я
с
о.
о
а:
U
<
ра
—
та
о
целев
о
О)
СО
км;
о
—·*
л
ίο
о
дальн
,
I
га
О)
я
печен
о
О)
\о
о
ктах,
пун
X
л
селенн
га
I
3
---.
Ϊ
-50)
т
ю
со
рость
о
X
о
3
см
J3
ίο
о
I
Л
ч
длите
,
я
3
га
со
ЦИЙ,
га
О.
О)
с
о
:ких
1^»
О)
3 I
Я о
h <->
° о-
Я Q1
террор
VIP-π
я га
■
О
I
я
днем
ία)
Я
£
9
е раб
вани
о
ОЭ оборуд
,
ю
изо
о
виде
>,
3
га
г<
О)
я пер
чива
(1)
ю, обест
жений
л га
3 О.
CL
CL
<
pa
pa
4
Ю
Η
О)
я
m
о
О)
3
я
τ
Тех ι
О)
я
^
о
О)
з
Я
ί-
га
Η
ЦИИ,
>,
е
рма
я
-Θ-
<"
ς
pa
с
я
Η
я
ϊ:
я
ίο
я
CL
О)
ί-
га
CL
га
X
я
ϊ:
я
ίο
я
CL
О)
ί-
хара
0J
рудовани!
о
о
.Я
вител:
о
ίο
СО
Я
га
га
| и стр
L"
χ
<о
со" з
. S
. X
' о
'S σ>
-α
ей
о
:тарт
ость
CL
О О
О) ^
со о
CL CO ._.
О) О 5
m m g
режиме
1Вигатор,
томатиче
1Н0МН0М
GPS-на
полуав
f- m я
a Si
га еГ1
со о)
)СТЬЮ
:поль
такж
= S χ
5 ь S
S ш ¥
с ч 5
„ о °
И f- S
*" -σ"
О. О)
j= "га
GunS
:orpor
ет)
О) ί-
е-йй-
toCc
botii
ни в
3 Я =
БЛА «А
Neural R
США (mi
CL
О)
СО
ία)
ВЛЯ
пра
тор у:
га
CL
О)
С
о
га
и
О
ЖИМ,
О)
CL
О
Я
рад
2
.я
Тпо
: пом
1^»
я
ч
S
О)
СО
О
летом
о
н-
я
S.
S
кал
см
а:
я _
О Е-
\о га
о ι
Cl га
* е-
• <и ш
СС s ja
Я ι I
I tL) J3
Ш * Ч
Ч J га
со >. я
га Й- ^
О. о ш
с .2 с
>,т о
CL
О
CL
CL
<
pa
ч
Η
О)
S
^
о
О)
3*
т
Texi
О)
^
о
О)
:г
S
Е-
:*:
£
я"
я
'ункц:
θ
S
CL
А, фи
pa
с
я
Η
я
ϊ:
я
ίο
я
CL
О)
ί-
га
CL
га
X
ими
ίο
я
CL
О)
Н
^
ара
X
О)
я
I
га
рудо в
о
о
J3
Ч
0J
ВИТ1
3Γ0Τ0Ι
я
га
га
CL
ίο
я
U
о
О
■*
=я
J3
СО
о
ί-
CL
вес ста
s
χ
о
t^
о
ее
я
СО
ίο
=я
О)
J3
дальност
CL
°
Ретрансля
о га
I О.
3 О
>,*о
га га
ег»,
ьская
США
Ό Ч .
α) ί- ϋ
К? 2 Ξ
"от
О) ее
< Ч я
Е- О CL
~= О о
Приложение к главе 5
Теорема. Пусть имеется произвольный вектор а размерности η
и симметрическая, положительно определенная и невырожденная
матрица В размером η χ п. Тогда для решений обобщенной задачи
на собственные значения Ах = ХВх, где А = ааТ справедливы
следующие утверждения:
1. Имеются два обобщенных собственных значения: \\ = 0
кратности η — 1 и Аг > 0 кратности 1;
2. Обобщенный собственный вектор, соответствующий Аг,
находится по формуле:
х = В~[а;
3. Аг = АТХ, где X — собственный вектор,
соответствующий Аг.
Доказательство. Для доказательства сведем обобщенную задачу
на собственные значения к обычной задаче на собственные значения.
Для матрицы В существует разложение Холецкого [27]
В = LLT,
где L — нижняя треугольная матрица.
После замены координат
y = LTx, (П5.1)
λ = ί=-ί -» max (П5.2)
xJ Bx
сведется к обычной задаче на собственные значения:
А1У = \у, (П5.3)
где
Л, =L~[A(LT)~[.
Собственные значения преобразованной задачи (П5.3) совпадают
с собственными значениями исходной задачи (П5.2), а собственные
векторы преобразуются по формуле (П5.1).
Так как А = ааТ, то А\ = а\а\', где а\ = L~[a.
Любые две строки матрицы Л, линейно зависимы, следовательно,
ранг матрицы А\ равен 1. Это означает, что при преобразовании
матрицы Л, к треугольному виду
А2 = Т-1А{Т
некоторым преобразованием подобия Т, на диагонали треугольной
матрицы Лг находится только одно ненулевое число XI.
задача:
Следовательно, λ| = 0 кратности η - \ и Аг = А кратности 1
являются собственными значениями матрицы А{, а значит, они являются
обобщенными собственными значениями задачи
Ах = \Вх. (П5.4)
Утверждение 1) доказано.
Доказательство того, что Аг > 0, будет дано ниже.
Собственные подпространства U\ и £/г, отвечающие λ[ и Аг
соответственно, ортогональны друг другу. Следовательно, собственный
вектор, отвечающий Аг, может быть найден из условия
ортогональности подпространству U\.
Для любого вектора у из U\ имеем А\у = a[afy = 0, т. е. а\у = 0.
Следовательно, а,\ е ?7г, а поскольку подпространство !Уг одномерное,
то а\ порождает все подпространство 17г· Поэтому собственный вектор
задачи (П5.3), отвечающий λ φ 0, равен
у = а,\ = L~ a.
Следовательно, обобщенный собственный вектор задачи (П5.4),
отвечающий λ φ 0, равен
x=(LT)-ly = B-1a.
Утверждение 2) доказано.
Подставим последнее выражение в (П5.4):
аатВ~1а = \ВВ~1а,
т.е.
а(а Β~ια) = λα,
отсюда
\ = атВ-[а = атх. (П5.5)
Утверждение 3) доказано.
Так как матрица В положительно определена, то для любого χ
хтВх >0.
Это неравенство для χ = В~[а имеет вид:
{В-1а)тВВ-1а = атВ~1а = А2 > 0.
Утверждение 1) доказано полностью.
Modern information technique applying to maneuverable
unmanned vehicles guidance, navigation and control problems /
Edited by M. N. Krasilshchikov and G. G. Sebryakov.
Problems originating from modern IT application to various classes of
unmanned high maneuverable flight vehicle navigation and control design are
under consideration. Approaches and methods of IT solutions to onboard
integrated control and navigation problems with a strap-down inertial
system, a multi-channel GLONASS/GPS receiver, a millimeter waveband radar,
and imaging devices are expounded. Information on high-end hardware
for such a system design is given. An object-oriented software technology
for integrated onboard navigation and control system operation modeling
is considered. Simulation examples for various classes of unmanned flight
vehicles equipped with integrated control system are given.
ВЕРЕМЕЕНКО Константин Константинович
ЖЕЛТОВ Сергей Юрьевич
КИМ Николай Владимирович
К030РЕЗ Дмитрий Александрович
КРАСИЛЬЩИКОВ Михаил Наумович
СЕБРЯКОВ Герман Георгиевич
СЫПАЛО Кирилл Иванович
ЧЕРНОМОРСКИЙ Александр Исаевич
СОВРЕМЕННЫЕ ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ
В ЗАДАЧАХ НАВИГАЦИИ И НАВЕДЕНИЯ БЕСПИЛОТНЫХ
МАНЕВРЕННЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Редактор Е.С. Артоболевская
Оригинал-макет: Е.М. Граменицкая
Оформление переплета: Н.В. Гришина
Подписано в печать 20.10.09. Формат 60x90/16. Bymaia офсетная.
Печать офсетная. Усл. печ. л. 34,75. Уч.-изд. л. 38. Тираж 400 экз.
Заказ № 1384
Издательская фирма «Физико-математическая литература»
МАЙК «Наука/Интерпериодика»
117997, Москва, ул. Профсоюзная, 90
E-mail: fizmat@maik.ru, imlsale@maik.rn:
http://4vww.fml.ru
Отпечатано в ООО «Чебоксарская типография № 1»
428019, г. Чебоксары, пр. И. Яковлева. 15