/























































































Текст
Международный научно-технический журнал
Radioengineering
ISSN 0033-8486
Выходит с февраля 1937 года
Включен в перечень ВАК
----------к--------XXI век
РЕДАКЦИОННАЯ КОЛЛЕГИЯ:
Л.П. Андрианова, д.т.н. проф. П.А.Бакулев, д.ф.-м.н., проф. О.В. Бецкий, д.т.н., проф. А.В. Богословский, д.т.н., проф. Р.П. Быстров, д.т.н., проф. В.С. Верба, д.т.н., проф. Э.А. Засовин, д.т.н., доцент А.В. Иванов, д.т.н., проф. В.А. Каплун, д.т.н., проф. Ю.Л. Козирацкий, к.ф.-м.н., с.н.с. В.В. Колесов (зам. главного редактора), д.ф.-м.н., проф. И.Н. Компанец, д.т.н., проф. Г.С. Кондратенков, д.т.н., проф. А.В. Коренной, д.ф.-м.н., проф. В.Ф. Кравченко, д.ф.-м.н., проф. Б.Г. Кутуза, д.т.н., проф. И.В. Лебедев, Н.П. Майкова, д.т.н., проф. В.И. Меркулов, д.т.н., проф. В.П. Мещанов, д.т.н., проф. В.А. Обуховец, д.т.н., проф. А.И. Перов, д.ф.-м.н., проф. В.В. Проклов, акад. РАН В.И. Пустовойт, д.т.н., проф. В.Г. Радзиевский, Л.А. Разум, д.т.н., проф. В.М. Сидорин, д.т.н., проф. Е.М. Сухарев, д.т.н., проф. Е.Ф. Толстов, д.т.н., проф. В.Н. Ушаков, д.т.н., проф. В.Е. Фарбер, акад. РАН И.Б. Фёдоров, д.т.н., проф. Ю.С. Шинаков, д.т.н., проф. С.В. Ягольников, д.т.н., проф. М.С. Ярлыков.
Главный редактор академик РАН
Ю. В. Гуляев
Содержание
№ 5 май 2013 г.
ПРОБЛЕМЫ И ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ
. - Повышение точности определения координат цели при реализации кооперативной обработки в многопозиционной радиолокационной системе.
Машков Г.М., Борисов Е.Г., Турнецкий Л.С. 4
МАТЕМАТИЧЕСКИЕ МЕТОДЫ В РАДИОТЕХНИКЕ
с Идентификация модели при пеленговании цели с частично известными параметрами движения.
Булычев Ю.Г., Булычев В.Ю., Ивакина С.С., Николас П.И. 10
СИНТЕЗ И АНАЛИЗ РАДИОТЕХНИЧЕСКИХ СИСТЕМ И УСТРОЙСТВ
* Комплексный инерциально-спутниковый алгоритм вторичной обработки на основе метода «unscented» фильтрации.
Нагин И.А. 17
” Анализ методов формирования квадратурных сигналов.
С.И. Зиатдинов 23
АНТЕННЫ, РАСПРОСТРАНЕНИЕ РАДИОВОЛН И ТЕХНИКА СВЧ
Исследование одномерных поляризационных решеток в терагерцевом диапазоне частот.
Кабанов И.Н. 27
НАНОТЕХНОЛОГИИ: РАЗРАБОТКА, ПРИМЕНЕНИЕ
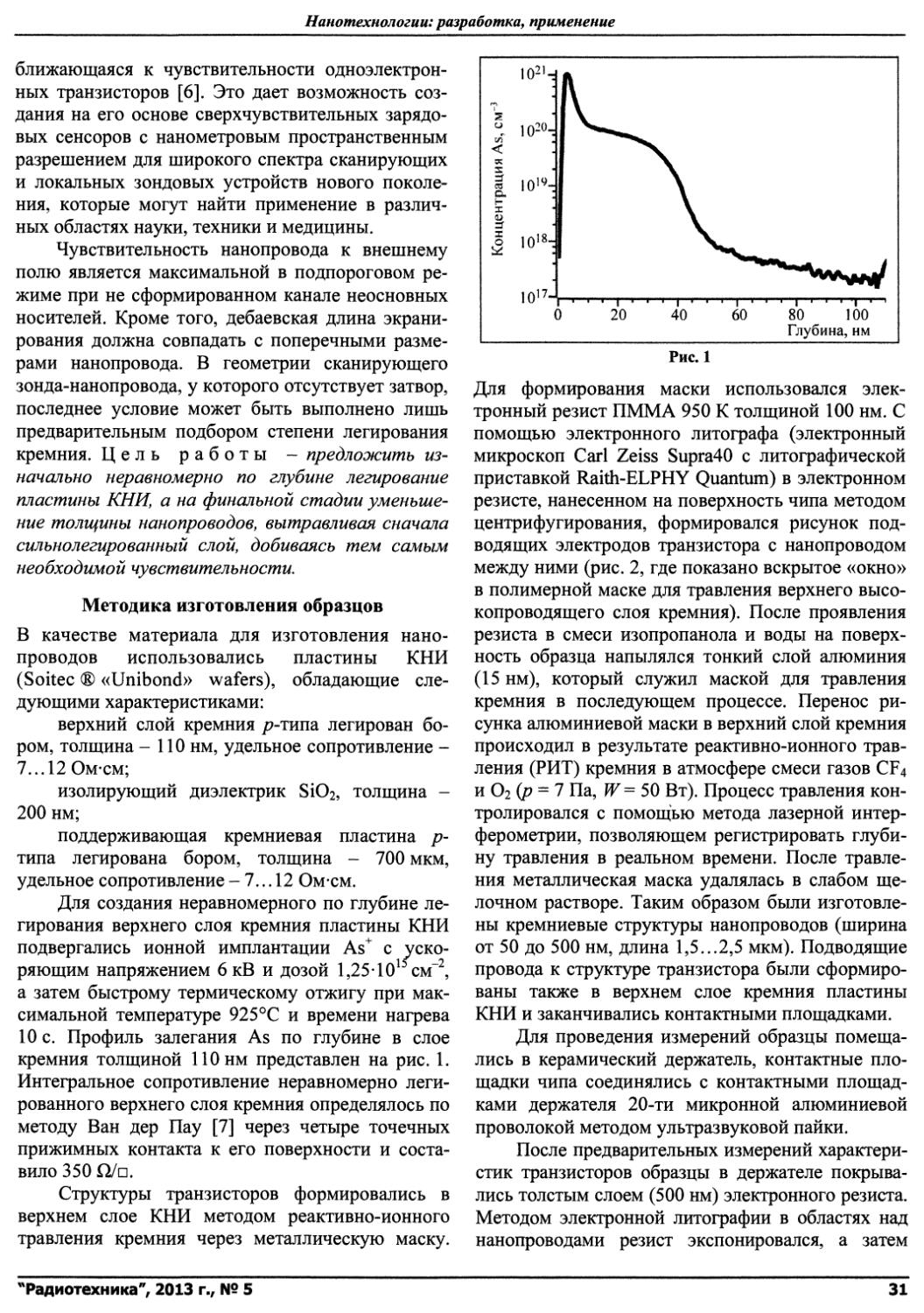
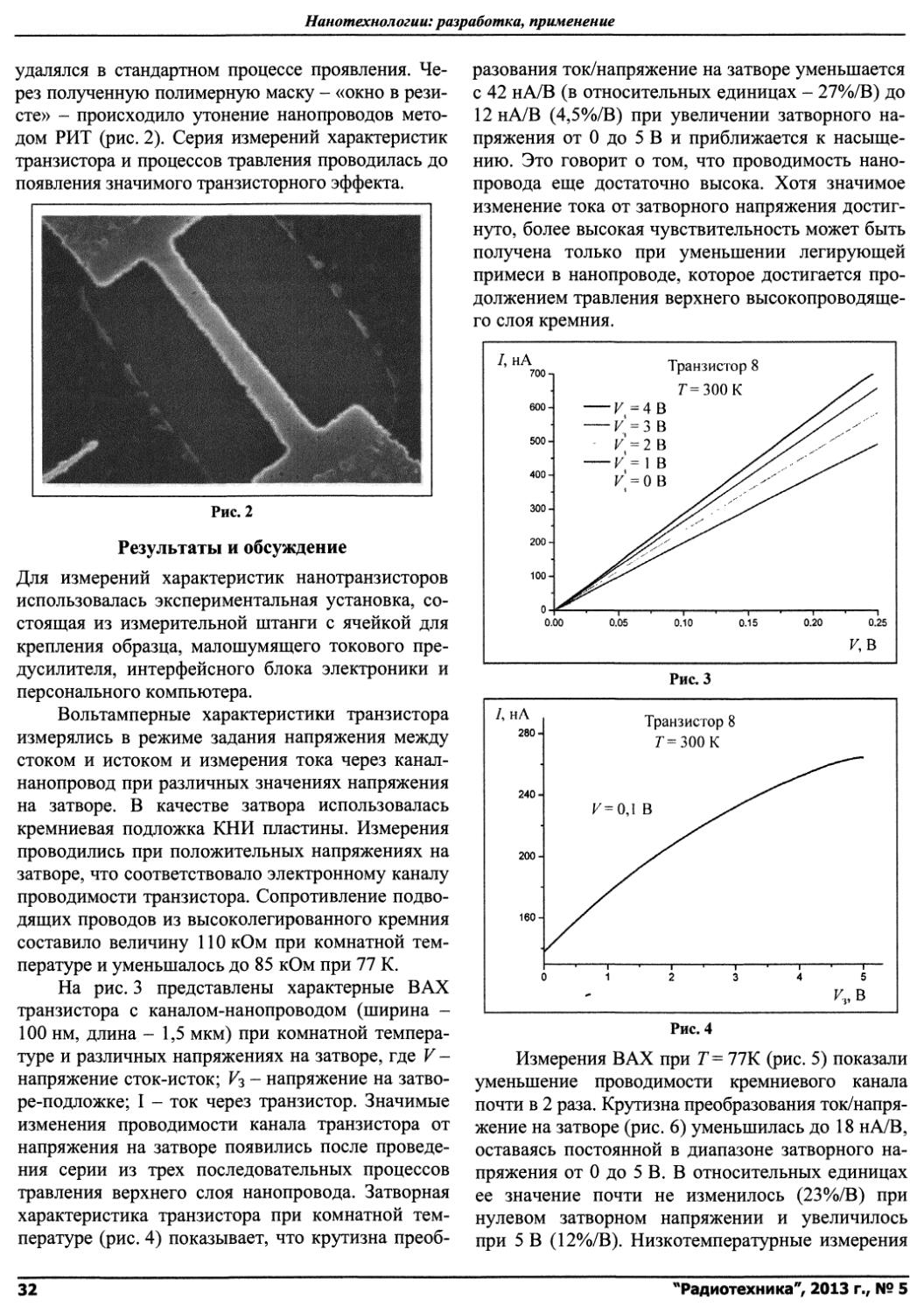
Кремниевый транзистор с каналом-нанопроводом из неравномерно легированного кремния на изоляторе.
Амитонов С.В., Преснов Д.Е., Крупенин В.А. 30
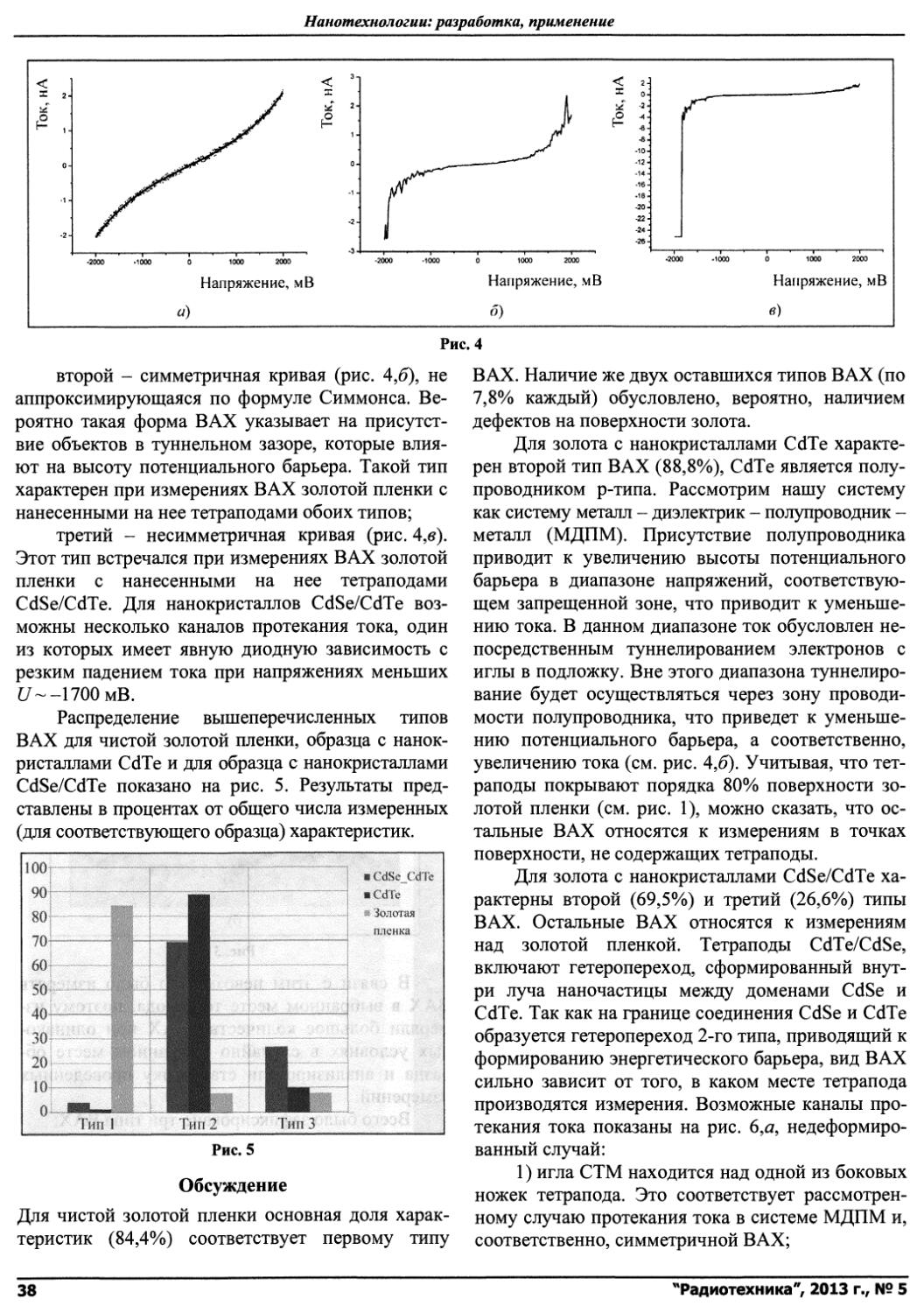
Исследование электронных свойств одиночных нанокристаллов CdTe и CdTe/CdSe в сканирующем туннельном микроскопе.
Трифонов А.С., Васильев Р.Б., Езубченко И.С., Соколикова М.С., Бритов Д.Р., Преснов Д.Е., Снигирев О.В. 35
ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ, РАДИОТЕХНИЧЕСКИЕ ЦЕПИ И ЭЛЕМЕНТНАЯ БАЗА
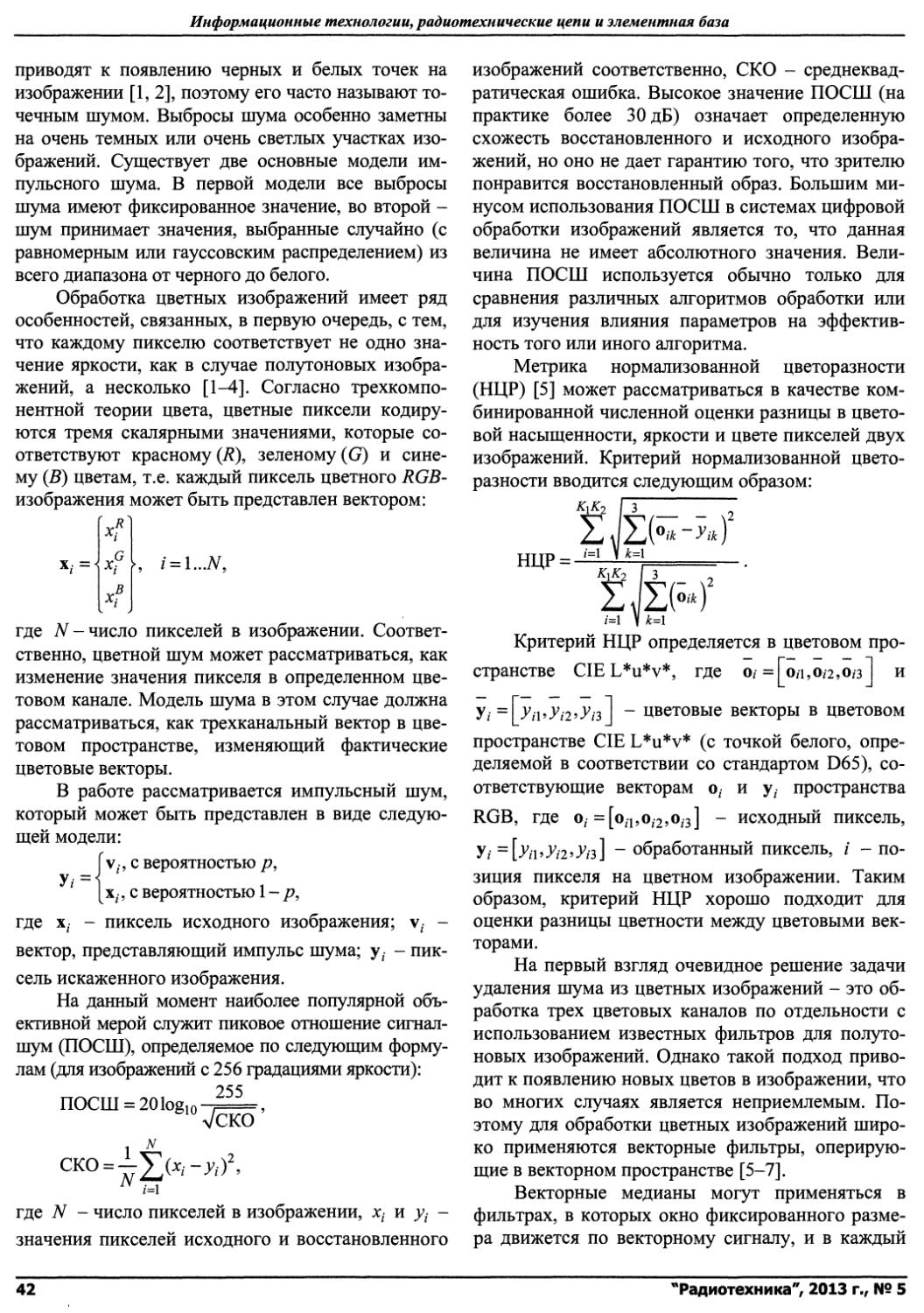
Оценка качества цветных изображений при подавлении импульсного шума.
Приоров А.Л., Хрящев В.В., Павлов Е.А., Герасимов Н.Б., Шемяков А.М. 41
РАДИОТЕХНИЧЕСКАЯ АППАРАТУРА И ЕЕ ПРИМЕНЕНИЕ
Метод экспресс-определения местоположения воздушного судна с использованием неполного состава глобальной навигационной системы.
Бейнарович В.В., Морковкин В.А., Нечаенко А.Г., Обуховец В.А. 50
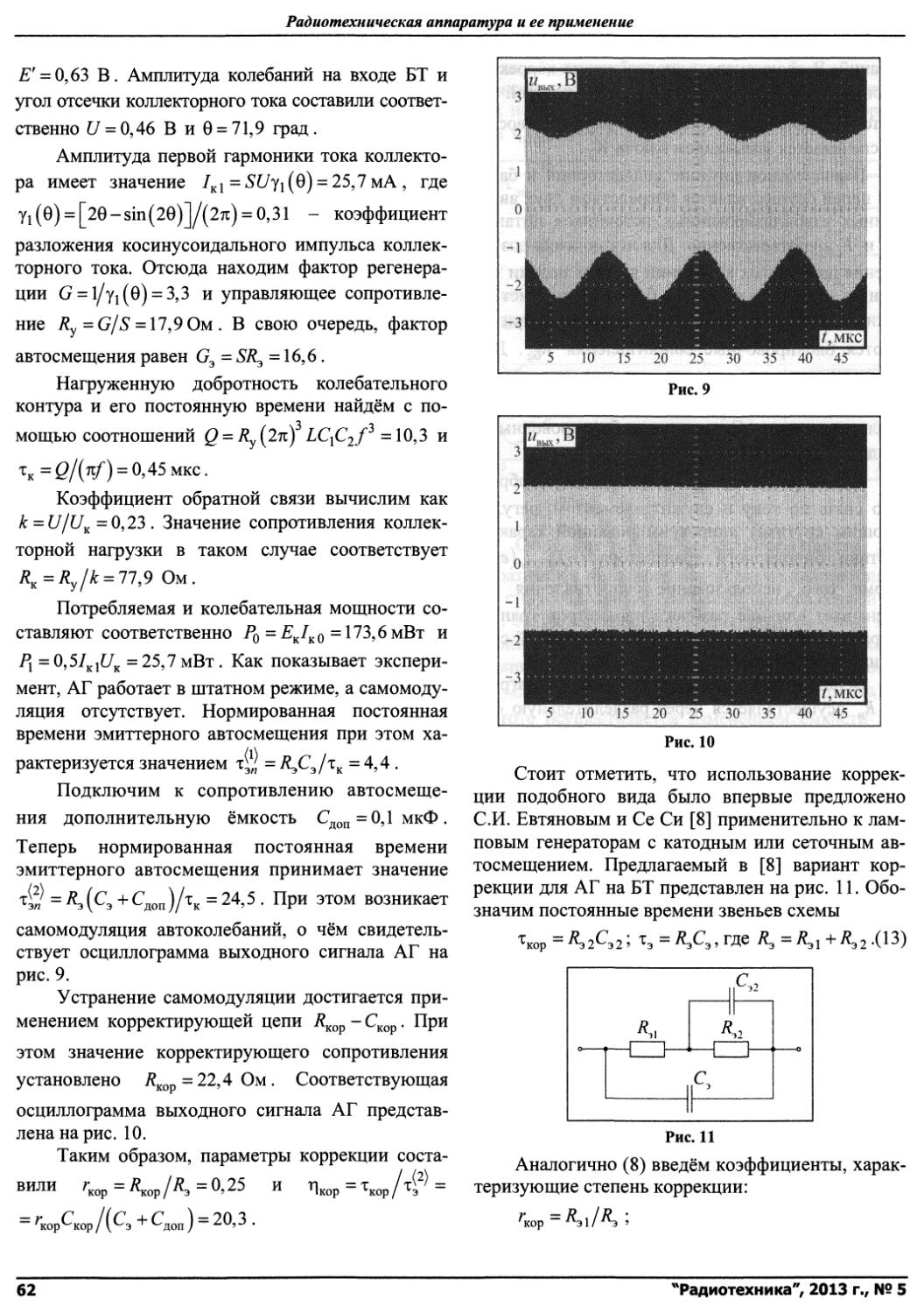
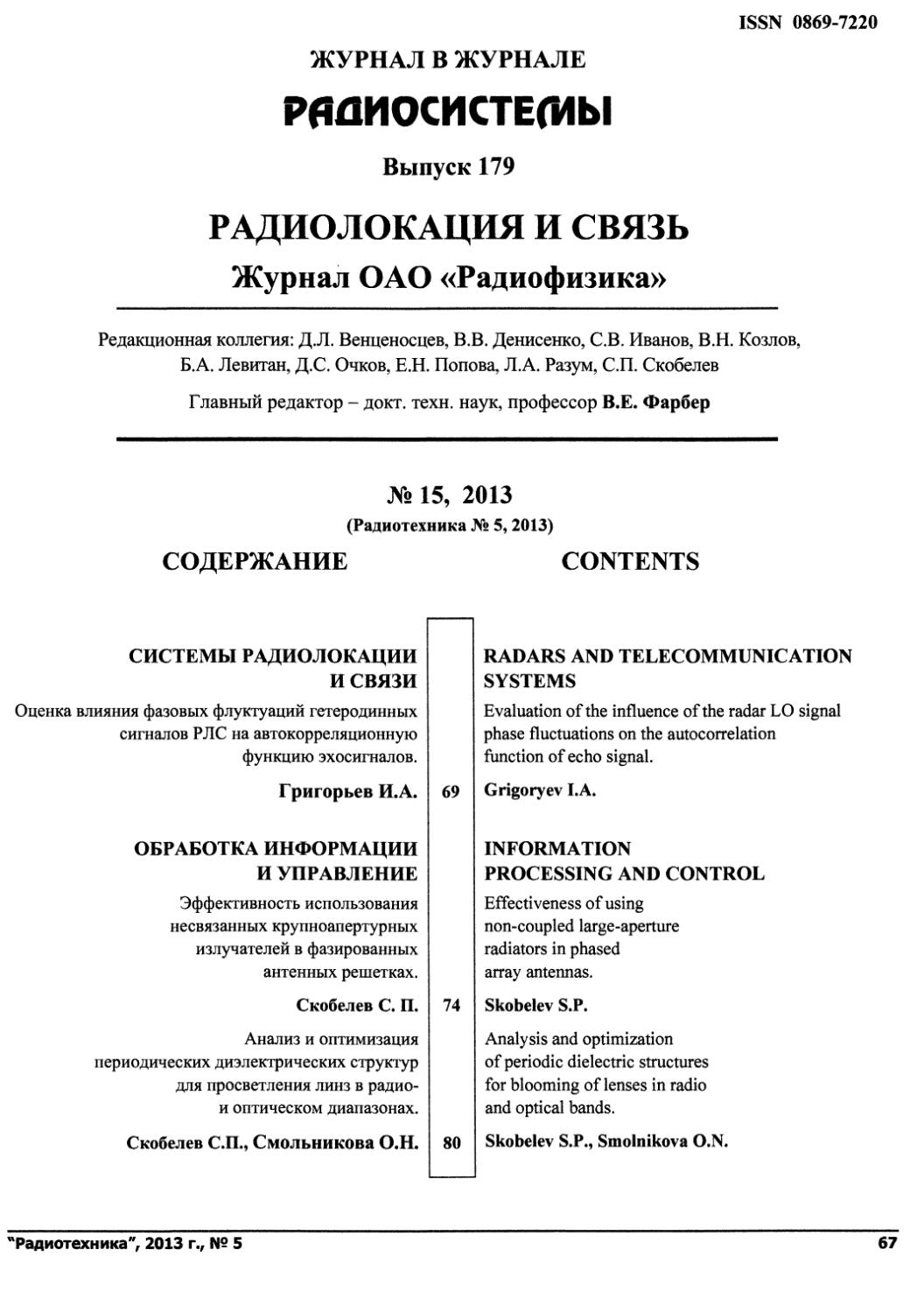
* Метод повышения запаса устойчивости стационарного режима транзисторного автогенератора.
Кононов А.В. 57
В ПОМОЩЬ ИНЖЕНЕРУ
Аналоговый фазовый дискриминатор с линейной характеристикой на интервале ±<р.
Бессонов В.В., Пономарев С.В. 64
К 75-летию со дня рождения Рудольфа Петровича Быстрова 2 стр. обл.
РАДИОЛОКАЦИЯ И СВЯЗЬ
Журнал в журнале «Радиосистемы»
СИСТЕМЫ РАДИОЛОКАЦИИ И СВЯЗИ
ь Оценка влияния фазовых флуктуаций гетеродинных сигналов РЛС на автокорреляционную функцию эхосигналов.
Григорьев И.А. 69
ОБРАБОТКА ИНФОРМАЦИИ И УПРАВЛЕНИЕ
~ * Эффективность использования несвязанных крупноапертурных излучателей в фазированных антенных решетках. Скобелев С. П. 74
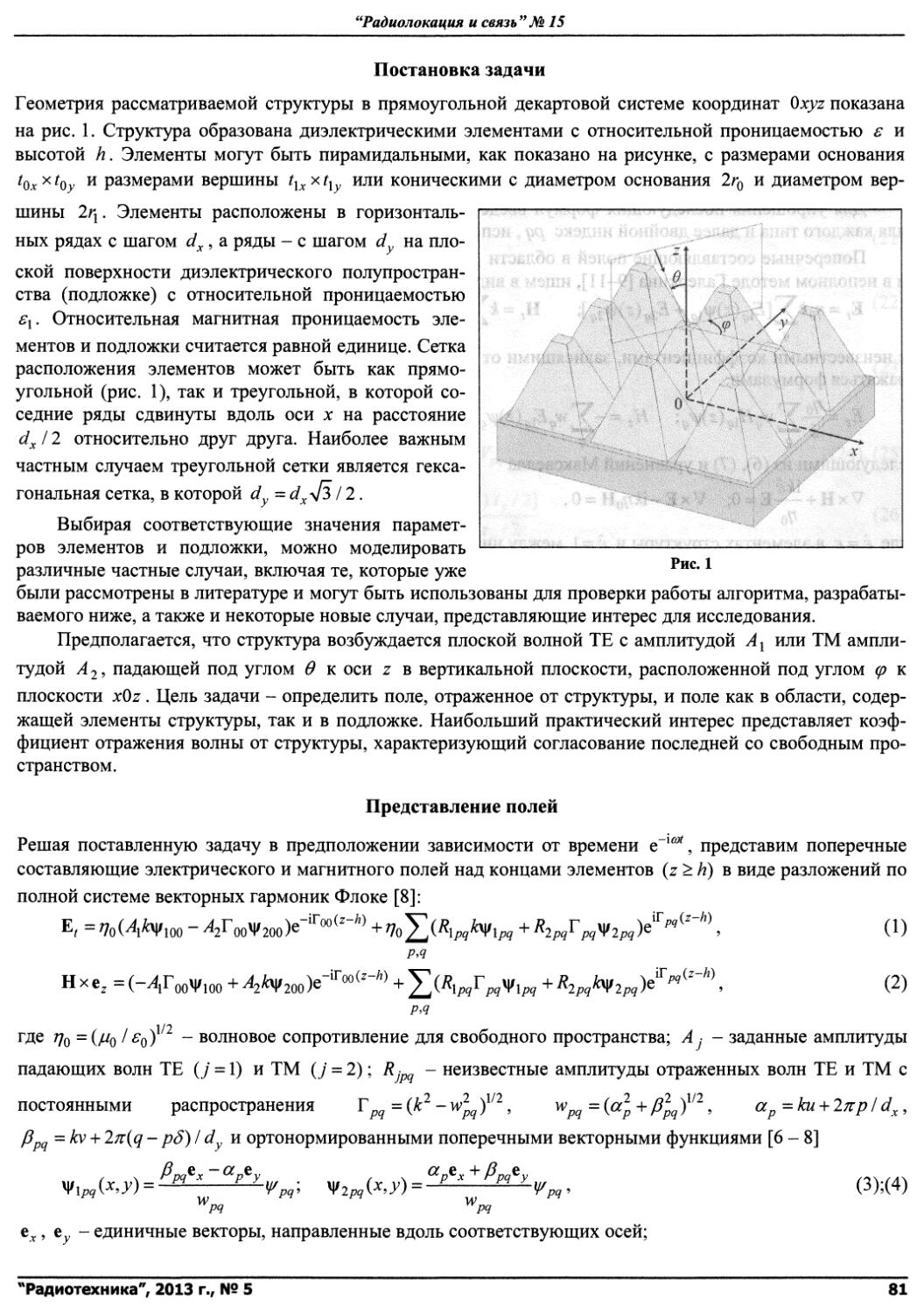
Анализ и оптимизация периодических диэлектрических структур для просветления линз в радио- и оптическом диапазонах.
Скобелев С.П., Смольникова О.Н. 80
АППАРАТУРА И ИСПЫТАНИЯ
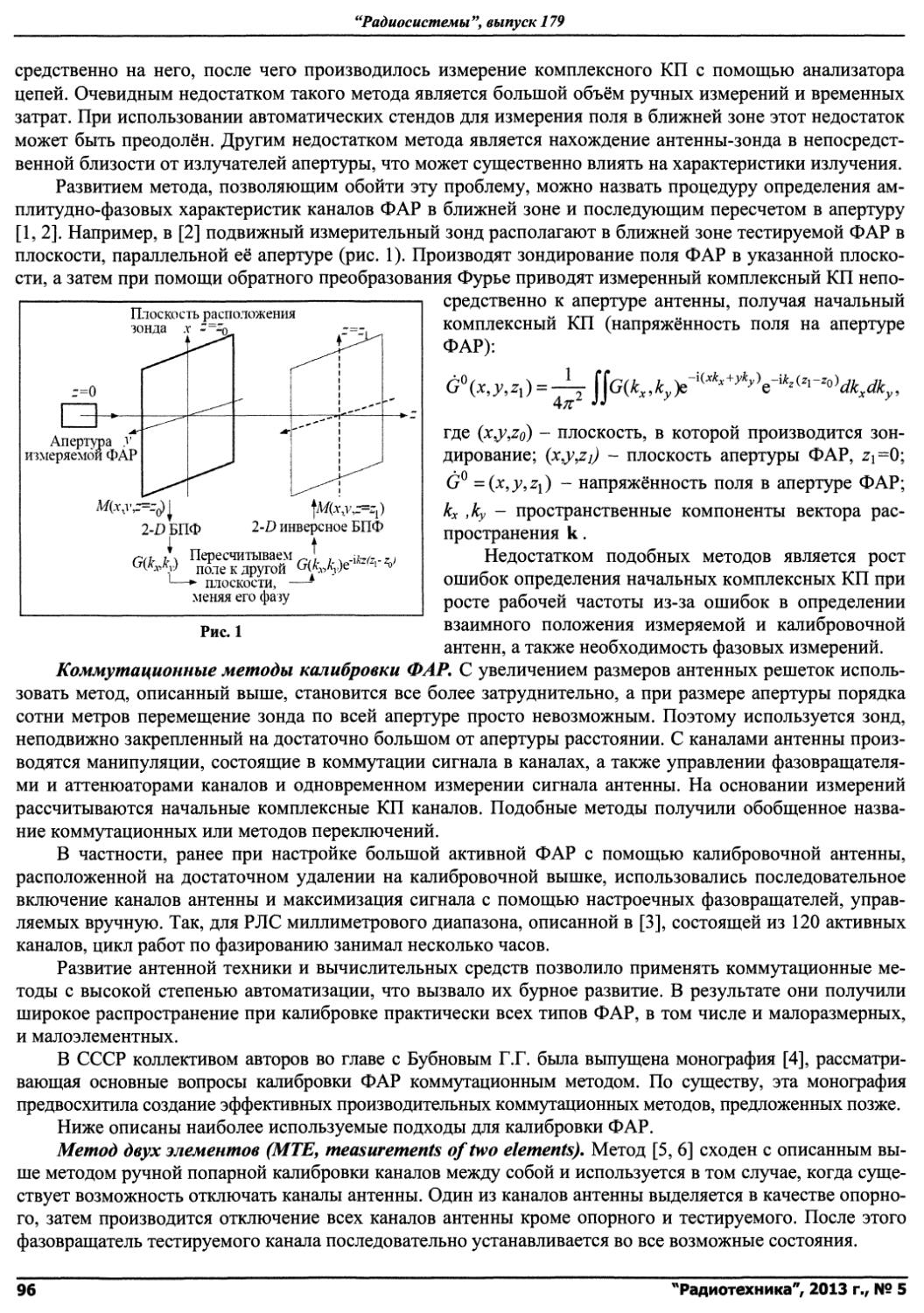
Влияние ошибки установки юстировочной антенны на фазовую ошибку в апертуре при формировании луча и калибровке в ближней зоне.
Коротецкий Е.В., Шитиков А.М., Денисенко В.В. 89
4 Методы калибровки фазированных антенных решеток.
Коротецкий Е.В., Шитиков А.М., Денисенко В.В. 95
* Селектор для частотного и поляризационного разделения сигналов в облучателе антенны К- и Ка- диапазонов.
Корчемкин Ю.Б., Уруков М.В. 105
Contents № 5 Мау 2013
PROBLEMS AND CONSTRUCTION PRINCIPLES OF SYSTEMS
Increase of accuracy of determination of coordinates of the purpose at realization of cooperative processing in the multiitem radar-tracking system.
Mashkov G.M., Borisov E.G., Tournetsky L.S. 9
MATHEMATICAL METHODS IN RADIO ENGINEERING
The model identification in bearing target with the partially known parameters of motion.
Bulychev Y.G., Bulychev V.Y., Ivakina S.S., Nikolas P.I. 16
SYNTHESIS AND ANALYSIS OF RADIO ENGINEERING SYSTEMS AND DEVICES
GNSS/IMU Unscented Integration Algorithm.
Nagin LA. 22
Analysis of methods of the formulation square signals.
Ziatdinov S.I. 26
...“
Investigation of one dimensional polarization gratings in terahertz frequency range.
Kabanov LN. 29
NANOTECHNOLOGY: DEVELOPMENT AND APPLICATIONS
Silicon transistor with the nanowire channel from non-uniformly doped silicon on insulator.
Amitonov S.V., Presnov D.E., Krupenin V.A. 34
STM study of electronic properties of single CdTe and CdTe/CdSe nanocrystals.
Trifonov A.S., Vasiliev R.B., Ezubchenko I.S., Sokolikova M.S., Britov D.R., Presnov D.E., Snigirev O.V. 40
INFORMATION TECHNOLOGIES, RADIO ENGINEERING CIRCUITS AND CIRCUIT-ELEMENT BASE
Color image quality evaluation for impulse noise suppressing.
Priorov A.L., Khryashchev V.V., Pavlov E.A., Gerasimov N.B., Shemyakov A.M. 49
RADIO ENGINEERING EQUIPMENT AND ITS APPLICATION
Method of express-defining place airlift by using of the incomplete russian satellite radio-navigation system.
Beinarovich V.V., Morkovkin V.A., Nechaenko A.G., Obuhovetc V.F. 56
Stability margin increase of transistor oscillator steady-state regime method.
Kononov A.V. 63
HELP FOR ENGINEER
Analogue phase discriminator with linear characteristic within +(p interval.
Bessonov V.V., Ponomaryov S.V. 66
RADIOLOCATION AND TELECOMMUNICATION
Journal in Journal «Radiosystems»
RADARS AND TELECOMMUNICATION SYSTEMS
Evaluation of the influence of the radar LO signal phase fluctuations on the autocorrelation function of echo signal.
Grigoryev LA. 69
INFORMATION PROCESSING AND CONTROL
Effectiveness of using non-coupled large-aperture radiators in phased array antennas.
Skobelev S.P. 74
Analysis and optimization of periodic dielectric structures for blooming of lenses in radio and optical bands.
Skobelev S.P., Smolnikova O.N. 80
HARDWARE AND TESTING
Influence of calibration probe positioning error on the aperture phase error when calibration and beam forming in near-field region.
Korotetskiy Y.V., Shitikov A.M., Denisenko V.V. 94
Methods of phased array antenna calibration.
Korotetskiy Y.V., Shitikov A.M., Denisenko V.V. 104
The orthomode transducer for frequency and polarization separation of K- and A/z-band signals at antenna feed.
Korchemkin Yu.B., Urukov M.V. 108
"Radiotekhnika” (Radioengineering) is the leading scientific and technical journal in Russia. It covers wide spectrum of problems in priority areas of the development in communication, radar, navigation, and radioelectronics. Established in 1937.
Полный список опубликованных статей, а также аннотации к ним Вы найдете на нашем сайте: http://www.radiotec.ni
Свидетельство о регистрации ПИ № ФС77-25036 от 12 июля 2006 г.
Сдано в набор 30.04.2013. Подписано в печать 31.05.2013. Формат 60x88 1/8. Бумага офсетная. Гарнитура «Times New Roman».
Печ.л. 14. Уч.издл. 23,25. Тираж 600 экз. Изд. № 5.
ЗАО «Издательство «Радиотехника»: 107031, Москва, К-31, Кузнецкий мост, д. 20/6.
Тел./факс: (7-495)625-92-41, (7-495)625-78-72.
E-mail: info@radiotec.ru
Дизайн и допечатная подготовка ЗАО «САЙНС-ПРЕСС».
Отпечатано в ФГУП Издательство «Известия» УД ПРФ. 127254, ул. Добролюбова, д. 6. Контактные телефоны: 650-38-80. Заказ №1524.
ISSN 0033-8486 © ЗАО «Издательство «Радиотехника», 2013 г.
Незаконное тиражирование и перевод статей, включенных в журнал, в электронном и любом другом виде запрещено и карается административной и уголовной ответственностью по закону РФ «Об авторском праве и смежных правах»
Проблемы и принципы построения
систем
УДК 621.396.96
Повышение точности определения координат цели при реализации кооперативной обработки
в многопозиционной радиолокационной системе
© Авторы, 2013
Г. М. Машков- д.т.н., профессор, первый проректор - проректор по учебной работе Санкт-Петербургского госуниверситета телекоммуникаций им. проф. М. А. Бонч-Бруевича. E-mail: MashkovGM@sut.ru
Е. Г. Борисов- к.т.н. доцент, профессор Санкт-Петербургского госуниверситета телекоммуникаций
им. проф. М. А. Бонч-Бруевича. E-mail: begspbl967@mail.ru
Л. С. Турнецкий - к.т.н. доцент, начальник отдела ОАО «Научно-производственное предприятие
«Радар-ммс», Санкт-Петербург. E-mail: tls7@rambler.ru
Рассмотрена оценка эффективности кооперативной обработки дальномерных измерений в многопозиционных радиолокационных системах. Показано, что использование избыточности измерительной информации приводит к повышению точности определения координату
Ключевые слова: многопозиционная радиолокационная система, дальномерные измерения, избыточность информации, кооперативная обработка.
In article the variant of cooperative processing of measurements of range is considered. It is shown that use of redundancy of the measuring information leads to increase of accuracy of estimation of coordinates.
Keywords: the multistate radar-tracking system, range measurements, redundancy of the information, cooperative processing.
Введение
Высокоточное определение координат целей в многопозиционных радиолокационных системах (МПРЛС), состоящих из отдельных пространственно-разнесенных станций, нашло широкое применение в системах противовоздушной обороны, управления воздушным движением, освещения надводной обстановки и относится к существенно важным задачам обработки радиолокационной информации.
В настоящее время в отечественной и зарубежной литературе имеется большое количество работ, посвященных данной проблематике [1-4].
Традиционно на практике задача высокоточного определения координат цели в РЛС решается путем увеличения отношения сигнал-шум, например, расширением спектра зондирующего сигнала при реализации первичной обработки радиолокационной информации.
Другой метод повышения точности определения координат цели в РЛС - применение при вторичной обработке радиолокационной информации а, /3-фильтра
ции или различных модификаций фильтра Калмана -Бьюси [5,6]. Оба эти направления имеют свои ограничения и недостатки.
Увеличение энергетического потенциала РЛС, особенно размещенных на движущихся носителях, в ряде случаев проблематично по конструктивным соображениям. Применение в РЛС сложных и широкополосных сигналов также имеет ограничения, вызванные конструктивными исполнениями устройств их формирования и обработки.
В работе [7] рассмотрен алгоритм управления и фильтрации, включающий градиентный алгоритм траекторного управления самолетом информационной поддержки и алгоритм адаптивной а,Р-фильтрации, который позволяет минимизировать ошибки определения местоположения источников излучения в угломерной двухпозиционной радиолокационной системе.
Процедуры фильтрации параметров траектории цели при вторичной обработке информации в РЛС имеют ряд недостатков, а именно: последовательное
4
"Радиотехника", 2013 г., № 5
Проблемы и принципы построения систем
накопление данных требует соответствующего времени, кроме того, эти алгоритмы нуждаются в априорной информации о характере движения цели, что накладывает ограничения на их применимость.
Постановка задачи
Повышение точности определения координат целей является важной и актуальной задачей для МПРЛС при выполнении функций целеуказания, целераспределения, слежения, оценки достижения целью заданного рубежа и т.д., при этом точность определения координат целей зависит от ошибок измерений отдельных РЛС.
В [1] показано, что кооперативная обработка локационной информации в МПРЛС является функционально наиболее полной и позволяет извлечь из сигнальной информации потенциально наибольший объем данных.
Кооперативность обработки информации при приеме отраженных сигналов в МПРЛС заключается в том, что все позиции системы способны принимать отраженные сигналы от целей в зоне ответственности при их облучении любой передающей позицией МПРЛС, вследствие чего существенно увеличивается объем сигнальной и координатной информации [1,2] при формировании системой окончательной оценки текущих координат цели.
Известно, что процедура кооперативной обработки информации дает существенный выигрыш в вероятности обнаружения целей [1], однако задача эффективности кооперативной обработки информации в МПРЛС с точки зрения точности оценивания фазовых координат цели в известной литературе в явном виде не рассматривалась.
Решение задачи
Кооперативная обработка информации в системе с избыточными измерениями фазовых координат цели создает объективные физические предпосылки для повышения точности определения координат целей. Под избыточностью измерений фазовых координат цели будем понимать одновременное измерение нескольких однородных физических величин (например, обычно используемых в МПРЛС прямых измерений наклонных дальностей до цели, их сумм и разностей [1,2]), которые связаны между собой какой-либо функциональной зависимостью. При этом искомое значение определяемой фазовой координаты (например, дальность до цели) получают с повышенной точностью путем алгоритмической обработки результатов измерений отдельных РЛС системы
Рассмотрим целесообразность и возможность кооперативной обработки информации в МПРЛС при ее обработке в центральном пункте обработки информации (ЦПОИ), который может быть совмещен, например, с РЛС 1 в МПРЛС.
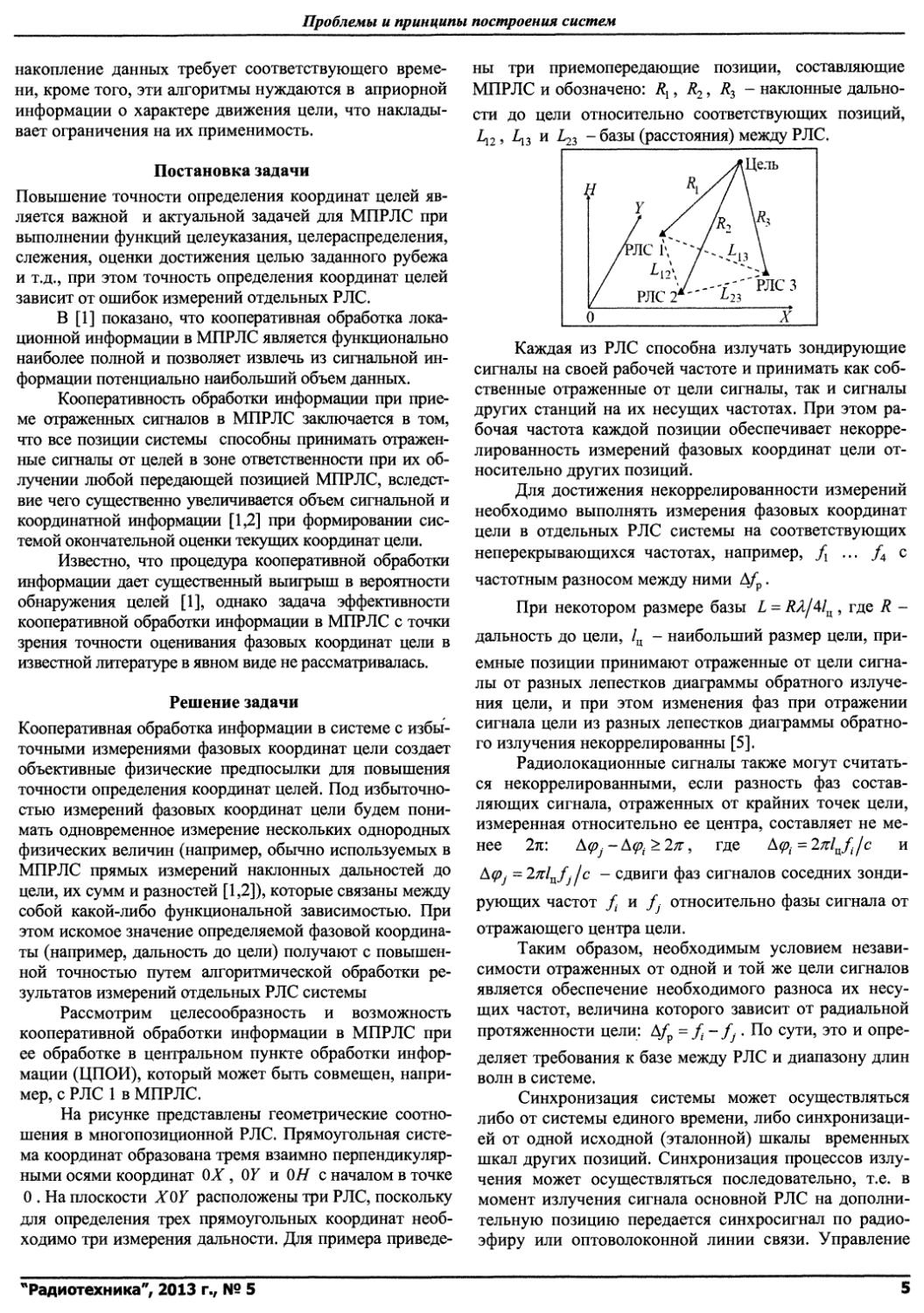
На рисунке представлены геометрические соотношения в многопозиционной РЛС. Прямоугольная система координат образована тремя взаимно перпендикулярными осями координат OX , 0Y и ОН с началом в точке О . На плоскости X0Y расположены три РЛС, поскольку для определения трех прямоугольных координат необходимо три измерения дальности. Для примера приведе
ны три приемопередающие позиции, составляющие МПРЛС и обозначено: , Т?2 , 7?3 - наклонные дальности до цели относительно соответствующих позиций, Д2, Zi3 и L23 - базы (расстояния) между РЛС.
Каждая из РЛС способна излучать зондирующие сигналы на своей рабочей частоте и принимать как собственные отраженные от цели сигналы, так и сигналы других станций на их несущих частотах. При этом рабочая частота каждой позиции обеспечивает некоррелированность измерений фазовых координат цели относительно других позиций.
Для достижения некоррелированности измерений необходимо выполнять измерения фазовых координат цели в отдельных РЛС системы на соответствующих неперекрывающихся частотах, например, ... /4 с частотным разносом между ними Д/р.
При некотором размере базы L = 9 где R -
дальность до цели, /ц - наибольший размер цели, приемные позиции принимают отраженные от цели сигналы от разных лепестков диаграммы обратного излучения цели, и при этом изменения фаз при отражении сигнала цели из разных лепестков диаграммы обратного излучения некоррелированны [5].
Радиолокационные сигналы также могут считаться некоррелированными, если разность фаз составляющих сигнала, отраженных от крайних точек цели, измеренная относительно ее центра, составляет не менее 2л: Д^у - Д^. > 2л*, где Д^- = /с и Д^у = 2я7ц/7 /с - сдвиги фаз сигналов соседних зондирующих частот и fj относительно фазы сигнала от отражающего центра цели.
Таким образом, необходимым условием независимости отраженных от одной и той же цели сигналов является обеспечение необходимого разноса их несущих частот, величина которого зависит от радиальной протяженности цели: Д/р = f.- fj . По сути, это и определяет требования к базе между РЛС и диапазону длин волн в системе.
Синхронизация системы может осуществляться либо от системы единого времени, либо синхронизацией от одной исходной (эталонной) шкалы временных шкал других позиций. Синхронизация процессов излучения может осуществляться последовательно, т.е. в момент излучения сигнала основной РЛС на дополнительную позицию передается синхросигнал по радиоэфиру или оптоволоконной линии связи. Управление
"Радиотехника", 2013 г., № 5
5
Проблемы и принципы построения систем
положением диаграмм направленности антенн РЛС в пространстве может осуществляться путем синхронного и синфазного вращения антенных систем или согласованным управлением многолучевыми фазированными антенными решетками.
Сначала рассмотрим технически реализуемые варианты измерений наклонных дальностей, сумм и разностей дальностей до цели при работе двух позиций, такой случай является простейшим частным случаем МПРЛС. Затем распространим полученные результаты на более общий вариант МПРЛС.
Физической основой измерения наклонных дальностей Rx и R2 до цели относительно первой и второй позиции является оценка временных интервалов между излучением и приемом отраженного сигнала относительно соответствующих позиций РЛС:
Ri = 0,5ct} j, R2 = 0,5ct22 ,
(1)
где tn, t22 - время от момента излучения сигнала до его приема при отражении зондирующих сигналов от цели на первой и второй позиций соответственно.
Другим оцениваемым параметром являются разности времен распространения зондирующего сигнала [4]:
^12 =(Г1ц +Гц2)“Г£12 , Д*21 = (Г2ц +*ц1)“Л12 , (2)
где г1(2)ц ~ время распространения сигнала от первой (второй) передающей позиции к цели; гц1(2) - время распространения сигнала от цели до первой (второй) приемной позиции; г£12 - время распространения сигнала вдоль линии базы, величина L которой известна.
Умножением составляющих (2) на скорость света получим выражения для соответствующих разностей расстояний ДЯ12 = (^ + Я2) - Д2 , ДЯ21 = (Я2 + R{) - Z12, откуда выразим суммы расстояний (суммарные дальности) как:
^112 = Д^12 + Д2 > ^Е21 = А^21 + Д2 • (3)
В двухпозиционной системе на каждой из позиций производится измерение следующих величин: наклонных дальностей и R22 относительно собственных точек расположения, сумм расстояний, образованных длинами путей: Я112 - вторая передающая позиция -цель - первая приемная позиция и ЯЕ21 - первая передающая позиция - цель - вторая приемная позиция.
Достижения некоррелированности измерений достигается тем, что измеряется на частоте /1? R22 -на частоте /2, а ЯЕ12 и Я221 - на частотах /3 и /4 соответственно.
На основании выражений (1) и (3) составим систему алгебраических уравнений:
+ 0 • R2 = R^ ।
О • R} +1 • R2 = R22
1- R{ + 1- R2= R^2
1 • R{ +1 • R2 = T?E21
(4)
(5)
(6)
А'
(7)
В выражении (4) содержатся избыточное количество измерений, поскольку для измерения дальностей относительно каждой из позиций необходимо два измерения, а в (4) - их четыре.
Введем векторы в матричной форме:
н=|МГ
- вектор неизвестных дальностей;
S =11^11 >^22>^Е12>^Е21 II
- вектор измеренных длин путей (индексы при соответствующих частотах).
Выражение (4) представим в виде матрицы постоянных коэффициентов: 1 0 1 ill ° i i
На основании (4) - (7) составим матричное уравнение:
AH = S. (8)
Сформулируем задачу статистического оценивания траекторных параметров целей в МПРЛС на основе дальномерной информации РЛС следующим образом.
Модель дальномерных измерений представим векторно-матричным уравнением в виде
AH + AS = S, (9)
где AS - вектор ошибок дальномерных измерений; Н - оценки соответствующих координат; S - измеренные (косвенно) значения соответствующей величины.
Суммарная ошибка модели измерений (9) является [9,10] независимой, несмещенной и нормальной с корреляционной матрицей , т.е.
A/(AS) = 0, K§=ct?WJ', (10)
где М (AS) - математическое ожидание вектора оши-бок измерений; гг| - дисперсия измерения параметра с единичным весом; Ws = diag () = diag ( ,
m = 1,У2 , - весовая диагональная матрица ошибок измерений размера N2 х N2 .
Выбор алгоритма оценивания координат цели производится из условия несмещенности, минимума дисперсии и состоятельности оценки с учетом переменного состава вектора S, поскольку ряд измерений дальностей и суммарных дальностей в цикле могут отсутствовать т.е.
= = min при S =var. (11)
Требуется найти оценку Н, оптимальную в смысле критерия (11). При таких исходных данных наиболее приемлемым для решения уравнения (И) является известный в математической статистике метод наименьших квадратов (МНК), поскольку (4) содержит информационно-избыточные измерения [9].
Для учета переменного состава вектора S введем диагональную стохастическую матрицу =
6
"Радиотехника", 2013 г., № 5
Проблемы и принципы построения систем
= diag(Л, 1, Л12,2^ )s = var = {0,1}, учиты
вающую наличие или отсутствие того или иного изме
рения, и, применяя классическую процедуру оценки по МНК, окончательно из (7) и (8) получаем:
(a^cWcAV1 ata5w5 s.
(12)
Н =
Из (12) следует, что оценки неизвестных, получаемые при решении исходного векторно-матричного уравнения МНК, являются линейными функциями вектора дальномерных измерений, зависящими от его количественного и качественного состава.
В работах [8-10] доказано, что оценки Н для параметров (неизвестных), полученные статистической обработкой по МНК результатов измерений отдельных РЛС в МПРЛС, ошибки которых случайны и имеют нормальные распределения с нулевыми математическими ожиданиями и конечными дисперсиями, т.е. AS g (o,cr^2Ws1'j, являются несмещенными.
В [9] (теорема Гаусса ~ Маркова о наилучших линейных оценках), показано, что для любого закона распределения случайных ошибок измерений и при линейной зависимости измерений от неизвестных параметров оценка для произвольной системы линейных параметров, получаемая по МНК, имеет минимальные дисперсии среди множества линейных несмещенных оценок.
На основании теоремы Гаусса - Маркова, а также свойства состоятельности оценки по МНК [9, 10], можно утверждать, что при любом составе вектора измерений оценка (13) является несмещенной, эффективной и состоятельной, т.е. наилучшей в смысле выбранного критерия оптимальности (12).
В случае, когда все измерения дальностей и их сумм равноточные, веса всех измерений равны 1, а весовая матрица ошибок измерений есть единичная матрица W = 1, формула (12) упрощается:
(ата а
)~’ата
(13)
Н =
Если к тому же в векторе S присутствуют все измерения (А) = 1, то
(И)
В рамках рассматриваемой задачи с учетом (4) - (8) и (13), (14) получим выражения для наклонных дальностей до цели относительно соответствующих РЛС.
Подставив (6) и (7) в (14), запишем выражения для определения наклонных дальностей до цели:
Д? = ^(3^22 + ^221)- (15)
Значение результирующей дисперсии определения наклонной дальности относительно каждой позиции, с учетом предположения равноточности измерений на каждой позиции с дисперсией сг\, равно:
3 2
сг2(Л1,Л2) = (ата) ’^=diag
(16)
5 5
таким образом, СКО определения координат составляет 0,775сгЛ, т.е. точность результирующей оценки повы
силась в 1,29 раза.
Получим соответствующие зависимости для трехпозиционной РЛС. Применительно к трехпозиционной РЛС формулу (7) матрицы постоянных коэффициентов
представим как:
10 0 1
Ат = 0 1 0 1
1110 0
10 0 11
0 1111
(17)
0 0 10
Вектор измеряемых параметров запишем в виде:
S - Иц R22 R33 ^221 ^Е13 Ле31 ^223 ^132 > (18)
при векторе неизвестных дальностей Н = ||7?1,7?2,7?3||т, а выражения наклонной дальности до цели относительно каждой из позиции примут вид:
Л = ~ 2R22 ~ 2^зз + 5^12 + 5^221 +
+5^пз + ”-4/?223 — 4/?S32), (19)
^2 = ~(™22 ~ 2Д! - 2Я33 + 57?z12 + 5ЯЕ21 -
“4^£]3 -4/?Z31 + 5/?Z23 + 5Я132), (20)
^з = (?^зз ~ - 2R22 - 4AZ12 - 4ЯЕ21 +
+57?Z13 +5^S31 +5/?S23 +57?е32У (21)
Выражения для ковариационной матрицы относительно каждой позиции, с учетом предположения равноточности измерений на каждой позиции с дисперсией ctr , имеют вид:
ст2(Л1,7?2,Л3) = (ата)'<г2 =
7 27 __2_ 27 2 27
= diag 2 27 __2_ 27 7 27 __2 27 27 7 27 2 СГд.
(22)
Таким образом, СКО определения координат составляет 0,509сгЛ, т.е. точность результирующей оценки по
высилась в 1,96 раза.
В трехпозиционной РЛС можно дополнительно реализовать измерения еще трех независимых разностей расстояний, образованных путем излучения сигнала одной позицией и приема отраженного сигнала двумя другими позициями с вычислением разности расстояний между ними. Так, при излучении сигнала с третьей позиции и приеме его на первой и второй полу
"Радиотехника", 2013 г., № 5
7
Проблемы и принципы построения систем
чим: Яд12 = (Я3 + Rx) - (Я3 + R2) = Rx - R2, при излучении со второй позиции и приеме сигнала на первой и третьей ЯЛ13 = (7?2+7?1)-(7?2 + 7?3) = 7?1-7?3 и, наконец, при
излучении с первой позиции получим ^423 ~ (^1 + ^2 ) “ (^1 + ^3 ) = ^2 “ ^3 *
~(R2 + R\) = R3 - R2, разность расстояний между треть
ей и первой позицией при измерении их на второй ^4231 ~ ^з+ ^2 ~ (^i + ^2) - Лз “ ь разность расстояний
между первой и второй позицией при измерении их на третьей ЯЛЗ]2 = + R3~(R2 + Я3) = Rx -R2.
В этом случае матрица (7) будет представлена в
Матрица постоянных
коэффициентов состояния
виде:
примет вид:
10 0 1111
Ат=:0 1 0 1 1 0 0
0 0 1 0 0 1 1
0 0 1
1 1 -1
1 1 0
1
0
-1
0
1 • (23)
-1
Ат
1 0 0
0 1 о
1
1
0 0 10
1 1 1
1 о о
0 1 1
0 0 11
11-10
110-1
0 0-1
1 -1 о
-1 1 1
-1
1 ,(29)
о
Значение вектора измеренных данных будет расширено дополнительными измерениями разности расстояний между первой и второй РЛС - Яд12, первой и третьей РЛС - ЯД13 и второй и третьей РЛС - ЯЛ23:
ST - р?п R22 R33 R1x2 R12a R1X3 R13x R123 RZ32 R^2 *413 ^423 •
(24) Выражения для определения наклонной дальности до цели относительно каждой из позиции запишем как:
А ~ ~ &22 ~ Лз + 7^212 + 7^221 + 7^13 +
+7^ез1 -2/?S23 -2/?S32 +9/?д12 +9/?д13), (25)
^2 ~ ~(8Я22 - R\ i - R33 + 7/?z12 + 7/?Z21 - 2ЯХ13 + +2^S3j +7/?S23 +77?S32 +9/?д12 -9^д13), (26)
Л ~ ^(в^зз “ &22 “ 4 “ 2j?zl2 - 27?Z21 + 7^Z13 + +7^31 +7^223 +7/?S32 -9Ял12 — 9^д13). (27)
Значение результирующей дисперсии определения наклонной дальности относительно каждой позиции, с учетом предположения равноточности измерений на каждой позиции с дисперсией <Tr, представим зависимостью:
<т2(л1Л2Л3) = (ата)~1^ =
4 1 1
*» . ——
27 54 54
= diag _J_ 4 _J_ (28)
54 27 54
1 1 4
М ИМ. 1 —
54 54 27
Таким образом, СКО определения координат составляет 0,385сгЛ, т.е. точность результирующей оценки повысилась в 2,59 раза.
Избыточность измерений можно расширить за счет измерения еще трех разностей расстояний, принимая излучения двух позиций на третьей позиции, т.е. разность расстояний между третьей и второй позиции при вычислении их на первой Яд123 = R3 + Rx -
а вектор измерений:
S = R22 7?33 T?Z217?Z13 7?Z31 T?Z23 R132
^412 ^413 ^423 ^4123 ^4231 ^4312
при векторе неизвестных дальностей Н = ||Я1,Я2,Я3||Т.
Тогда наклонные дальности до цели относительно каждой из позиции запишем в виде:
А - 9 (^11 + ^212 + ^221 + ^213 +
+ j^S31 + ^412 + ^413 “ ^4231 + Л\312 ), (30)
^2 = ^(^22 + ^212 + ^221 + ^223 +
+^232 ~ ^412 +^423 “ ^4123 ~ ^4312 ), (31)
= g (Л33 + Дпз + ^S3i + ЛХ23 +
+^Г32 ~ ^Д12 ~Ад23 + ^Д123 + ^Д312 ), (32)
а результирующая дисперсия определения наклонной дальности относительно каждой позиции, с учетом предположения равноточности измерений на каждой позиции с дисперсией <Tr , запишем как:
Таким образом, СКО определения координат составляет О,333сгд, т.е. точность результирующей оценки по
высилась в 3 раза.
Выражения (15), (19) - (21), (25) - (27), (30) - (32) с соответствующими весовыми коэффициентами определяют оптимальную оценку наклонных дальностей при учете различного по составу вектора первичных измерений.
Особенность сформированного выражения для оценки дальностей (12) заключается в наличии в его решении матрицы Л5, адаптирующейся к составу измерительной локационной информации в зависимости от складывающейся обстановки. Сущность данного решения заключается в преобразовании вектора пер
8
"Радиотехника", 2013 г., № 5
Проблемы и принципы построения систем
вичных измерений S в вектор траекторных параметров объекта Н посредством многомерного матричного оператора ^ATA5Aj ATAS .
Полученное решение (12) переопределенной системы, в которой число уравнений больше числа неизвестных, называется в теории матриц псевдорешением или обобщенным решением системы и обеспечивает минимальность длины вектора невязки |АН - 5|, а, следовательно, и наивысшую точность оценки.
ф Показано, что в результате совместной обработки координатной информации можно получить высокоточные оценки наклонных дальностей до цели (15), (19) - (21), (25) - (27), (30) - (32) относительно каждой из РЛС, дисперсии ошибок измерений которых определяются формулами (16), (22), (28) и (33). Рассматриваемые процедуры обработки дальномерной информации не накладывают ограничений на алгоритмы оптимальной фильтрации параметров траекторий, что позволяет использовать их при фильтрации измерений дальностей, суммарных дальностей и разности расстояний.
Принципиальное отличие рассмотренного подхода - использование избыточности данных в МПРЛС -заключается в том, что высокоточная оценка формируется за один цикл проведения измерений, т.е. за время получения измерений от первой РЛС до обработки данных от последней РЛС системы.
Введение дополнительных позиций в МПРЛС или увеличение количества измеряемых сумм расстояний (или разностей) расстояний также улучшает точность определения дальностей до цели за счет кооперативной оптимальной обработки избыточных измерений по МНК.
Уменьшение СКО ошибки определения дальности приводит к повышению точности определения прямоугольных координат в дальномерных системах.
Платой за повышение точности определения координат является усложнение МПРЛС за счет увеличения числа позиций, увеличение количества приемопередающих трактов, необходимости межпозиционной синхронизации процессов излучения, приема сигналов и управление режимами обзора, а также усложнение алгоритмов отождествления целей на каждой позиции.
Литература
1. Черняк В. С. Многопозиционная радиолокация. М.: Радио и связь. 1993. 416 с.
2. Кондратьев В. С., Котов А. Ф., Марков ЛИ. Многопозиционные радиотехнические системы. М.: Радио и связь. 1986. 264 с.
3. Зайцев Д.В. Многопозиционные радиолокационные системы. Методы и алгоритмы обработки информации в условиях помех. М.: Радиотехника. 2007. 96 с.
4. Аверьянов В.Я. Разнесенные радиолокационные станции и системы. Минск.: Техника. 1978. 148 с.
5. Ширман ЯД. Теоретические основы радиолокации. Учебное пособие для вузов. М.: Сов. радио. 1970. 560 с.
6. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. Радио. 1974. 432 с.
7. Меркулов В. И., Суворов Н. Н, Чернов В. С. Алгоритмы управления и адаптивной фильтрации в угломерной двухпозиционной радиолокационной системе И Радиотехника. 2006. № 7. С. 48 - 52.
8. Борисов Е.Г., Касавцев М.Ю., Калуга В.М., Машков Г,М., Турнецкий Л. С. Оптимизация управления траекторными наблюдениями в многопозиционной радиолокационной системе / Труды XIV Всероссийской НТК «Актуальные проблемы защиты и безопасности. ВМФ России». Т. 4. C/Пб. НПО Специальных материалов. 2011. С. 407 - 413.
9. Элъясберг Л.Е. Определение движения по результатам измерений. М.: Наука. 1976. 416 с.
10. Жданюк Б.Ф. Основы статистической обработки траекторных измерений. М.: Сов. радио. 1978. 384 с.
Поступила 15 июля 2012 г.
Increase of accuracy of determination of coordinates of the purpose at realization of cooperative processing in the multiitem radar-tracking system
© Authors, 2013
G.M. Mashkov, E.G. Borisov, LS. Tournetsky
High-precision measurement of coordinates is more whole in the multiitem radar-tracking systems (MPRLS) consisting of separate radar stations, carried relatively each other on certain base distances, is the most important problem of processing of radar-tracking information.
Cooperative processing of information in system with superfluous measurements of phase coordinates of the purpose, in our opinion, is the fullest and physical basis of increase of accuracy of determination of coordinates of the purposes. Using superfluous dalnomer-ny measurements in MPRLS (for example, measurements of inclined ranges to the purpose, total ranges and differences of distances), by means of the offered mathematical transformations it is possible to receive high-precision estimates of inclined ranges concerning each of positions. Thus, depending on number of estimated parameters, the error of determination of range decreases three times.
"Радиотехника", 2013 г., № 5
9
Математические методы в радиотехнике
УДК 629.197
Идентификация модели при пеленговании цели с частично известными параметрами движения
© Авторы, 2013
Ю.Г. Булычев - д.т.н., профессор, гл. науч, сотрудник, ОАО «ВНИИ «Градиент»
E-mail: ProfBulychev@yandex.ru
В.Ю. Булычев - инженер 2-й категории, ОАО «ВНИИ «Градиент»
С.С. Ивакина - инженер-программист, ОАО «ВНИИ «Градиент»
П.И. Николас - вед. инженер-программист, ОАО «ВНИИ «Градиент»
E-mail: gradient@aaanet.ru
Развит метод определения дальности до цели с полиномиальным законом движения по измерениям пеленга и единичному замеру наклонной дальности, который в линейном или квадратическом случаях обеспечивает полную компенсацию постоянной азимутальной ошибки.
Ключевые слова: пеленгатор, наклонная дальность, азимут, угол места, частично известные параметры движения.
The method of determining of distance till target with polynomial law of motion as to measurements of bearing and single measurement slant distance which in linear or square cases provides the complete compensation of permanent azimuthal mistake was developed.
Keywords: azimuth sight, slant distance, azimuth, elevation, partially known parameters of motion.
Вопросы, связанные с решением задачи определения дальности до цели с частично известными параметрами движения (ЧИПД) на базе одного стационарного или подвижного пеленгатора, не потеряли актуальности и по настоящее время [1-7]. В работах [1-6] дан подробный обзор и анализ существующих методов решения данной задачи с привлечением в качестве ЧИПД сведений о скорости, курсе, начальной или конечной точке траектории движения и т.д. Однако применение данных методов ограничено случаем прямолинейного равномерного движения с известной или неизвестной скоростью, что зачастую является достаточно жестким ограничением при наблюдении за маневрирующими целями.
В работе [7] рассматривается возможность определения дальности для случая криволинейного движения по измерениям стационарного пеленгатора и начальной дальности до цели. Предлагаемый в [7] метод относится к классу интегро-дифференциальных методов (ИДМ), поскольку сводится к составлению и интегрированию соот
ветствующего дифференциального уравнения. Практическая реализация данного ИДМ сопряжена со значительными вычислительными затратами и некоторой потерей точности в ходе приближенного интегрирования. При некоторых условиях наблюдения за целью ИДМ [7] становится некорректным с вычислительной точки зрения, особенно при наличии в измерениях систематических ошибок.
Как показывают результаты численного и натурного экспериментов, отмеченные выше методы [1-7] зарекомендовали себя хорошо в условиях высокоточных угловых измерений и достоверных априорных данных о ЧИПД. При наличии же различных неучитываемых факторов, приводящих к всевозможным ошибкам случайной и неслучайной природы, эти методы становятся неработоспособными.
Цель работы - применительно к цели с полиномиальным законом движения и ЧИПД развить конечно-аналитический метод определения текущей наклонной дальности по результатам угловых измерений стационарного пеленгатора, не относящийся к классу ИДМ, и обосно
10
"Радиотехника", 2013 г., № 5
Математические методы в радиотехнике
вать случаи, при которых метод инвариантен к постоянной азимутальной ошибке (ПАО).
В центре декартовой системы координат XYZ (рис. 1) расположен пеленгатор (П), который измеряет азимут а и угол места р цели (Ц). Обозначения: Ц,, Ц j и Цк - положения цели для трех произвольных моментов времени , tj и tk соответственно (i, j, к 6 О, N, tj, tj,, tk е [О, Г] - интервал наблюдения); Rj, Rj и Rk - наклонные дальности.
Предположим, что измерения азимута могут содержать ПАО, т.е. dj=aj+Sj, где Sj = const V j е О, N, при этом как в азимутальном, так и в угломестном каналах присутствует флуктуационная ошибка, которая характеризуется нулевым математическим ожиданием и соответствующей корреляционной матрицей. Считаем также, что известно одно значение наклонной дальности (например, R,, Rj или Rk), которое выдается пеленгатору некоторой внешней высокоточной системой (например, навигационной) или известно заранее (например, при старте ракеты).
ности до цели и других параметров движения с учетом имеющихся измерений. Для этого запишем очевидные соотношения: sina = y/r, cosa = x/r, r = y]x2 + у2 , sin/? = z/R, cosP = r/R, R = \/r2 + z2 . Используя измерения, относящиеся к моментам времени г, и tj, сформируем выражения (для ^tj):
= sin (otj - a j) cos Д cos Pj.
С другой стороны
==[(ьЧ)(аЧ)-(ЬЧ)(аЧ)]/(л,Л), (2) где q, =q(z,), q7=q(ry).
Формируя по аналогии с (1), (2) величину x¥jk (для случая tj * tk ), составим соотношение
X¥ijl^jk={RklRi)x
Воспользуемся полиномиальной моделью
* [(bTq; )(aTqy) - (bTqy )(aTq,.)] [(bTqy)(aTq,)-(bTqA)(aTqy)]
С учетом (1) и (3) получаем
движения цели:
x = aTq, Rk[i,j], z = cTq,
(3)
(4)
Введем объединенный вектор коэффициентов d = [dj, i = l,2(Af+ 1)J =[aT,bTj и выберем в нем любую ненулевую компоненту (нормировочный коэффициент), например, dr, г е 1,2(Л/ +1).
Разделим числитель и знаменатель формулы (4) на d2. Тогда
где а = [ат, т = O,A/J , b = p>m, т = 0, Л/J , с = -------------“]Т
ст, т = 0,М - неизвестные коэффициенты мо-
дели, q = ^m,/M = O,A/J - базисная функция модели.
Получим конечные аналитические выражения для определения текущей наклонной даль-
sin (а, - Uj j cos Д х ->
= Rj —--------г----------
sin(ay -aHcos/^x —>
-> x[(b*qy )(а^ ) - (b?q,- )(a?qt)]
-> x[(b^q;- )(a*q* ) - (b*qy )(afo)]
"Радиотехника", 2013 г., № 5
11
Математические методы в радиотехнике
где яг = a/dr = [ат / dr,m = O,M]T, br=b/dr = = [Ьт/dr,m = O,MY - нормированные векторные коэффициенты.
В работе [7] предложен метод нахождения нормированных векторных коэффициентов по результатам одних лишь угловых измерений стационарного пеленгатора для полиномиальной модели движения произвольного порядка М. Показано, что минимально необходимый массив измерений должен иметь размерность 2М +1. Для случая, когда имеются избыточные угловые измерения, приводится алгоритм оптимальной обработки, позволяющий повысить точность оценивания нормированных векторных коэффициентов.
Развитый метод оценивания наклонной дальности, основанный на формуле (5), является двухэтапным. На первом этапе по массиву угловых измерений (с учетом [7]) находятся нормированные векторные коэффициенты модели движения, а на втором этапе, с привлечением единичного замера наклонной дальности , по формуле (5) определяется текущая дальность Rk. Следует отметить, что угловые измерения, привлекаемые в формуле (5), могут быть использованы и на первом этапе.
Зная Rk и нормированные векторные коэффициенты а,, Ьг и сг, можно полностью идентифицировать исходную полиномиальную модель движения цели. Действительно, полагая dr > 0, имеем
/?(r) = ^^(a^q)2+(bjq)2+(c^q)2 =
=7*2(0+/(0+г2(0-
Поскольку ar, Ьг и сг были найдены на пер
вом этапе, a Rk - на втором (по формуле (5)), то
искомый нормировочный коэффициент
dr =Rk
-1-1/2
где q^ =q(/J.
Таким образом, a = drar, b = <7rbr и c = drcr, т.е. исходная модель движения полностью идентифицирована.
Можно показать, что при некоторых ограничениях на полиномиальную модель движения необходимость в первом этапе отпадает. Пусть М = 1, т.е. рассматривается модель прямолинейного равномерного движения, в которой
а = [л0,л1]т, b = [60,Z>[]T, c = [c0,q]T, q = [l,z]T. Тогда, с учетом (2), имеем
^=(0-?/)(йо«1-^о)/(^Л)- (6)
Далее, по аналогии с (3) и (4), получаем (^-Zy)sin(az-ay)cos/?,.
Rk - Ki 7 гт~7-------\, (7)
^-/^sm^-ajcos/^
где t( *tj,
На практике величины а,- - и - ак за
частую достаточно малы, что дает возможность вместо (7) использовать приближенную формулу:
R -R.
к 1 (^-^)(а}-ак)с<к0к
(8)
Формулы (7) и (8) позволяют по трем угловым замерам стационарного пеленгатора и единичному значению дальности /?, вычислять теку
щую дальность Rk. Видно, что результат вычислений не изменится, если в формулы (7) и (8) вместо точных азимутов а,, и ак подставить измеренные азимуты щ = а, + Sa, dj = (Xj +Sa и ak = ak + Sa , содержащие ПАО Sa . Таким образом, алгоритмы (7) и (8) инвариантны к ошибкам указанного класса.
Формула (7) упрощается, если применяется равномерная временная сетка и используются соседние моменты времени zz, tj =ti+l =tt + Az,
(9)
случая
^=^+2=C+2AZ:
D _D sin(az-az+1)cos$ 7 7-------•
sin(az+1-az+2)cos/?z+2
Соответственно для плоского
( = 0 V t <= [0, Г]) и указанных ограничений по-
лучаем известную формулу [6] sin(az-az+1)
Ri+2 ~ Ki ~Г~( Г •
sm(a/+i -az+2)
(10)
В качестве единичного замера наклонной дальности можно выбирать не только начальный /?,, но и средний и конечный Rk замеры. При этом формулы (7)—(Ю) несколько видоизменяются. Так, при использовании замера необходимо сформировать отношение . Если же извес-
тен замер Rt, то наклонная дальность Rk находится из формулы (7).
12
"Радиотехника", 2013 г., № 5
Математические методы в радиотехнике
Необходимость в первом этапе не возникает и во многих практически важных нелинейных случаях. Так, при М = 2 и ао=6о=О
= '6 ('/ ~ ‘‘ )(Ь1а2 ~ b2al)/(RiRJ ) •
По аналогии с (6) и (7) имеем
Kk ~ Ki —( \~7~7 \ ~ ’ (11)
-f,Jsin(ay -ajcosрк
т.е. алгоритм определения дальности на основе формулы (11) не требует знания не только ненормированных, но и нормированных коэффициентов полиномиальной модели. Из формулы (11) также следует, что алгоритм инвариантен к ПАО.
В случае, когда М > 2, необходимо рассматривать общую формулу (5) и пользоваться двухэтапной процедурой нахождения дальности. При этом не гарантируется инвариантность соответствующего алгоритма к ПАО.
Для случая прямолинейного равномерного движения цели (рис. 2) скорость V = ||v|| может быть найдена следующим образом.
Из треугольников ПЦД^ и Ц{ЦкЦ\ следуют соотношения: sinAtt =||Ц/Ц'||/Я/, sin^ = = ||Ц;ц;-||/(КД^), где Atik =ф* откуда вытекает формула V = sinAa.7?1 (Atik sin^). Величина курсового угла 0к в данной формуле находится с учетом теоремы синусов применительно к треугольникам 11Ц Д] и ПЦ -Дь:
КД^./sin А = 2?;/[sin(^ - А^)],
V Atik /sin Aik = Д/fsin (0,- - A,*)].
С учетом данных равенств получаем
Д/^тДй/(Д/йзтД..) =
= 8т(0,-Дй)/зт(0,.-дД
Искомая величина может быть найдена в явном виде из равенства
(tg^cosA;i -sinArt)A^sinA,y =
= cos Д,у - sin Д,7) At у sin Aik.
Величины Ay и Aik находятся так (рис. 2): А у=arccos(e,, еу), Aik =arccos(e;,ei), где (•, •) -символ скалярного произведения двух векторов, е„ = [cosa„ cos fin, sina„ cos/?„, sin/?„]T, n e{z, J, k].
В дальнейшем остановимся на одном важном для практики случае [6, 7], когда флуктуационные ошибки используемых измерений являются нормально распределенными случайными величинами с нулевыми математическими ожиданиями и соот-2 2 2 2
ветствующими дисперсиями ,
= aPj = • Для вы’
сокоточных измерений (в дальнейшем рассматривается именно этот случай [6, 7]) случайную величину R k=Rk +ARk можно также считать распределенной по нормальному закону, имеющей математическое ожидание = Rk и дисперсию
аАк = Mjk°R + Я? { (дАук]да$ +
,2
Kt/s«)2+(гл!11/г>^)2
(12)
.2 р ’
++(d^ijkl^Pkf
где Аук - выражение, стоящее после /?, в формуле (7).
После раскрытия частных производных формула (12) примет следующий вид (для плоскостного случая = Q и равномерной временной сетки с соседними замерами)
=Sil1 ! -«Z+2){sin2(«Z “«/+1)^ +
+/?2[cos2(a,-а;+1)+ (13)
, sin2 (а,- -q,.+2) + sin2(q,. -«;+1)cos2(a,+1 ~«,+2)1 2.
+ • 2 / \ J a ’ ‘
sin (а,+1-а1+2)
"Радиотехника", 2013 г., № 5
13
Математические методы в радиотехнике
Если разности а, -а(+1 и ai+i-ai+2 малы, то формулу (13) можно упростить:
°^+2 ~ (ai+l ~ ®/+2) {(.ai~ai+l) *"
+/??[! +~а,+2)2 (14)
(15)
(16)
(ан1-«,+2)2
Если, кроме того, принять |аг- -»|а;+1 - а(+2| = А, то имеем
2 2
<Тй »СГя+— ^1+2 к
Если задаться ограничением ст? < £$ (где £о - константа, характеризующая требуемую точность определения наклонной дальности), то непосредственно из (15) вытекает условие
A = Kl~ai+2|^-&=-
В тех задачах, когда начальная дальность А, известна точно (например, для аэродромов, портов, стартовых позиций и т.д.), можно принять сгд = 0, что с учетом (15) позволяет записать
2 .. 6R^a
Л+2 ~ Д2 •
Рассмотрим случай, когда движение описывается прямолинейным равномерным ном в XOY (/3(t) = 0, С - 0). Пусть цель в начальный момент времени находится на расстоянии 100 км от пеленгатора и движется со скоростью 200 м/с. Выберем три направления полёта: 315°, 330° и 0° (угол между осью ОХ и вектором скорости). Количество замеров N = 100.
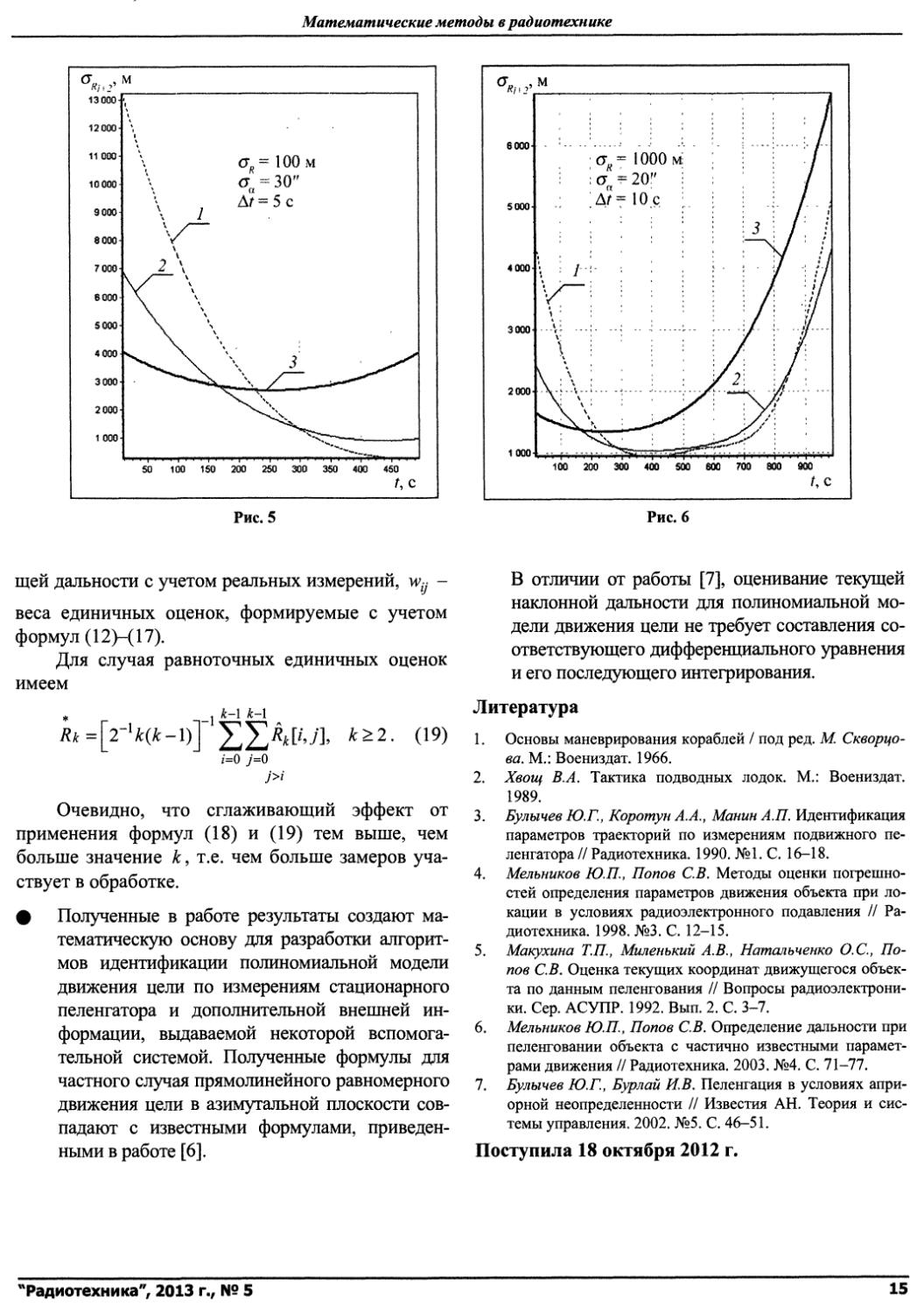
На рис. 3-6 представлены графики зависимости сг^ (t) для различных значений СКО сгд, оа и параметра А/ (кривая 1 - для угла 315°, 2-330°, 3 - 0°).
Из формул (13)—(15) и графиков на рис. 3-6 следует, что чем точнее первичные измерения, выше азимутальная скорость перемещения цели и больше разнос между моментами замеров пеленга, тем выше результирующая точность определения наклонной дальности.
Для нелинейного алгоритма (11) с учетом сделанных выше ограничений имеем
+ 2 At
цели зако-
1.W,
(17)
(Та
Лг+2
Рис. 3
17000-
16000
15000
14 000
13000
12000
11 000-
10000
9000
8000
7000
6000
5000 4 000
3000
2000
50 100 150 200 250 300 350 400 450
Г, С
Рис. 4
При наличии избыточной информации результирующая оценка наклонной дальности, получаемая методом взвешенного суммирования, имеет вид
* izl
(18)
/=0 7=0 j>i
где Rk[iJ] - единичная оценка, определяемая по одной из полученных формул нахождения теку-
14
"Радиотехника", 2013 г., № 5
Математические методы в радиотехнике
Рис. 5
Рис. 6
щей дальности с учетом реальных измерений, -веса единичных оценок, формируемые с учетом формул (12)-(17).
Для случая равноточных единичных оценок имеем
* _j £-1 &-1
к^2. (19)
/=0 /=0
j>i
Очевидно, что сглаживающий эффект от применения формул (18) и (19) тем выше, чем больше значение к, т.е. чем больше замеров участвует в обработке.
• Полученные в работе результаты создают математическую основу для разработки алгоритмов идентификации полиномиальной модели движения цели по измерениям стационарного пеленгатора и дополнительной внешней информации, выдаваемой некоторой вспомогательной системой. Полученные формулы дня частного случая прямолинейного равномерного движения цели в азимутальной плоскости совпадают с известными формулами, приведенными в работе [6].
В отличии от работы [7], оценивание текущей наклонной дальности для полиномиальной модели движения цели не требует составления соответствующего дифференциального уравнения и его последующего интегрирования.
Литература
1. Основы маневрирования кораблей / под ред. М Скворцова. М.: Воениздат. 1966.
2. Хвощ В.А. Тактика подводных лодок. М.: Воениздат. 1989.
3. Булычев Ю.Г., Коротун А.А., Манин А.П. Идентификация параметров траекторий по измерениям подвижного пеленгатора//Радиотехника. 1990. №1. С. 16-18.
4. Мельников Ю.П, Попов С.В. Методы оценки погрешностей определения параметров движения объекта при локации в условиях радиоэлектронного подавления И Радиотехника. 1998. №3. С. 12-15.
5. Макухина Т.П., Миленький А.В., Натпальченко О.С., Попов С.В. Оценка текущих координат движущегося объекта по данным пеленгования И Вопросы радиоэлектроники. Сер. АСУПР. 1992. Вып. 2. С. 3-7.
6. Мельников Ю.П., Попов С.В. Определение дальности при пеленговании объекта с частично известными параметрами движения И Радиотехника. 2003. №4. С. 71-77.
7. Булычев Ю.Г., Бурлай И.В. Пеленгация в условиях априорной неопределенности И Известия АН. Теория и системы управления. 2002. №5. С. 46-51.
Поступила 18 октября 2012 г.
"Радиотехника", 2013 г., № 5
15
Математические методы в радиотехнике
The model identification in bearing target with the partially known parameters of motion
© Authors, 2013
Y.G. Bulychev, V.Y. Bulychev, S.S. Ivakina, P.I. Nikolas
Questions connected with deciding the tasks of determining of distance till target with partially known parameters motions (PKPM) on basis of one stationary or mobile azimuth sight did not lose actualities and as to present time. In known works is given to detailed review and the analysis of existing solution procedures of this task with attraction as PKPM data on the value of speed, course, to the initial or final point of the trajectory of motion etc. However applying of this methods is limited the case of straightforward uniform motion with the known or unknown value of speed which often is fairly active constraint in observation of maneuvering targets.
The method of determining of distance for the case of curvilinear motion as to the measurements of stationary azimuth sight and initial distance till target is known. This method relates to the class of integro-differential methods (IDM), since adds up to composing and integrating of fitting differential equation. Associated with significant computational expenditures and some loss of accuracy in the process of approximate integration is practical implementation this IMD. In some conditions of observation for target IDM becomes incorrect from computational point of view, especially in presence in the measurements of systematic mistakes.
As show results of digital and full-scale experiments, known methods recommended itself well in circumstances of the highly-precise angular measurements and credible antecedent data on PKPM. In the presence of various untaken into account factors bringing to various mistakes of casual and nonrandom nature, these methods become invalid.
Described in the article is the method of determining of current slant distance as to the results of the angular measurements of stationary azimuth sight in respect to target with polynomial law and the partially known parameters of motion. Been suggested method does not relate to class integro-differential and in some indicated cases invariant to permanent azimuthal mistake.
Result researches are analytical estimation formulas allowing to identify the model of the motion of target and to calculate current slant distance as to it to single measurement and the selection of angular measurements. Also simplified estimation formulas for cases linear and nonlinear motion are received.
The assessment of the error of method with allowance for mistakes of measurements is illustrated on test example. Draw conclusions about the influence of the accuracy of basic data, frequencies of measurements and the speeds of target on estimated distance.
Внимание!
В Издательстве «Радиотехника» вышла в свет книга
Устройства поляризации радиоволн в терагерцевом диапазоне частот
Под ред. А.С. Якунина
Проведен анализ особенностей распространения электромагнитных волн в поляризационных устройствах те-рагерцового диапазона. Дан обзор современного состояния электронно-компонентой базы, исследований и разработок многофункциональных терагерцевых устройств; рассмотрены вопросы, касающиеся теоретических основ поляризации электромагнитных волн, и представлены результаты численного моделирования электродинамических характеристик и полей сеточных поляризаторов нового типа, предназначенных для использования в антенных системах.
Для специалистов в области радиолокации, связи, радиофизики, а также для преподавателей, студентов и аспирантов приборостроительных, радиоэлектронных и телекоммуникационных специальностей вузов.
По вопросам заказа и приобретения книг обращаться по адресу:
107031 г. Москва, Кузнецкий мост, 20/6.
Тел./факс: (495) 625-92-41, тел.: (495) 625-78-72, 621-48-37
Полный перечень книг, выпускаемых Издательством «Радиотехника», размещен на сайте http://www. radiotec.ru, e-mail: info@radiotec.ru
16
"Радиотехника", 2013 г., № 5
Синтез и анализ радиотехнических систем и устройств
УДК 621.396
Комплексный инерциально-спутниковый алгоритм вторичной обработки на основе метода «unscented» фильтрации
© Авторы, 2013
И.А. Нагин - аспирант, кафедра радиотехнических систем, Национальный исследовательский университет «МЭИ»
Представлен алгоритм комплексирования навигационной аппаратуры потребителей (НАП) спутниковых радионавигационных систем (СРНС) и инерциальной навигационной системы (ИНС). В алгоритме использован альтернативный подход к оптимальной нелинейной фильтрации - Unscented Kalman Filter. Проведено сравнение с аналогичным алгоритмом комплексирования, но использующим классический подход - расширенный фильтр Калмана (РФК). Приведены результаты моделирования работы обоих алгоритмов при использовании модели ИНС, основанной на микромеханических датчиках.
Ключевые слова: спутниковые радионавигационные системы, интегрированные системы, инерциальные системы, оптимальная фильтрация, расширенный фильтр Калмана.
A GNSS/INS integration algorithm has been introduced. It uses an alternative to classical extended Kalman filter (EKF), known as Unscented Kalman Filter (UKF). UKF algorithm was compared with the similar EKF-based algorithm. Model results for both algorithms were presented for the MEMS-based INS.
Keywords: global navigation satellite systems, integrated systems, inertial systems, optima! filtration, extended Kalman filter, unscented filter.
Введение
Комплексная обработка информации, поступающей от приемника сигналов спутниковых радионавигационных систем и инерциальных навигационных систем - актуальная для многих динамичных объектов задача [1]. До последнего времени синтез комплексных алгоритмов обработки проводился на базе теории оптимальной фильтрации [2]. Применительно к задаче вторичной обработки в навигационной аппаратуре потребителей (НАП) СРНС комплексной обработке подвергаются измерения координат и составляющих вектора скорости, проведенные в НАП, и измерения ускорений и угловых скоростей вращения в ИНС. Так как динамические уравнения, определяющие изменения оцениваемого вектора состояния, описываются нелинейными уравнениями, то для синтеза, как правило, используется гауссовское приближение теории нелинейной оптимальной фильтрации.
Соответствующий алгоритм квазиоптимальной фильтрации часто называют расширенным фильтром Калмана. Применение РФК к задаче комплексной обработки информации, поступающей от НАП СРНС и ИНС рассматривалось, например, в [3]. Использование РФК в существенно нелинейных задачах фильтрации не гарантирует получение хороших характеристик точности фильтрации, что отмечалось в работах многих исследователей, например, в [4]. В связи с этим в последнее десятилетие интенсивно развивались альтернативные подходы к задачам фильтрации при нелинейных моделях динамики изменения процессов и наблюдений. Один из таких подходов получил название Unscented Kalman Filter. Буквальный перевод слова Unscented - «беззапаховый» плохо вписывается в техническую терминологию, поэтому в дальнейшем будем использовать терминологию «Unscented фильтр Калмана» или сокращенно UKF.
"Радиотехника", 2013 г., № 5
17
Синтез и анализ радиотехнических систем и устройств
В [5] методология UKF применена к задаче вторичной обработки в НАП СРНС, что позволило улучшить точностные характеристики обработки. Цель работы- исследование эффективности использования технологии UKF в задаче комплексной обработки данных НАП и ИНС.
Постановка задачи
Рассмотрим постановку задачи комплексной фильтрации, описанную в [3]. Модель датчиков ИНС - триады гироскопов и акселерометров инерциального измерительного блока (ИИБ) в связанной системе координат (ССК) описываются следующими выражениями:
^rpy,k ~®*g,i^^rpy,k + ’ (О
где k - номер отсчета; - истинный вектор угловых скоростей в ССК; mg t - матрица перекоса осей и масштабных коэффициентов; bgk -вектор смещения нулей гироскопов; ng>* - вектор независимых белых гауссовских шумов с СКО crg;
^rpy.k ~ (l *" ®а,к ) ^гру.к ^а,к ’ (2)
где к - номер отсчета; А.гру к - истинное ускорение в ССК; так - матрица перекоса осей и погрешностей масштабных коэффициентов; Ьо к -вектор смещений нулей акселерометров; пак -вектор независимых белых гауссовских шумов с среднеквадратической ошибкой (СКО) аа .
Модель динамики смещений нулей датчиков описывается винеровскими процессами:
~ + &Ьа ’ ^Ьа.к ’
bg,A ~ bg;£-i + <T^g ’ ^bg.k ’ (3)
где nbaк, nbgk - векторы с гауссовскими шумами с нулевыми математическими ожиданием и единичным СКО.
При синтезе алгоритма будем считать погрешности, связанные с перекосами осей и масштабными коэффициентами датчиков (шя, m ), нулевыми. В дальнейшем при моделировании измерений будем использовать полные модели погрешностей датчиков (1), (2).
На выходе НАП СРНС формируются измерения скорости и координат потребителя в прямоугольной связанной системе координат ECEF:
^gnss.i
^gnss.i ~ ecef ,i ’ (^)
где i - номер отсчета; Хесгу; - вектор истинных координат потребителя; 8Х ( - вектор ошибок по координатам с матрицей ковариаций R-истинный вектор скорости; пг • - вектор белых гауссовских шумов с матрицей ковариаций RF ,; Rjr f, RF)/ считаются известными по результатам решения приемником СРНС навигационной задачи.
Измерения от ИИБ поступают с гораздо большей частотой, нежели измерения от приемника СРНС, и это учитывается в алгоритме. При моделировании будем полагать, что измерения от гироскопов и акселерометров поступают с частотой 400 Гц, а с выхода приемника СРНС - с частотой 5 Гц.
Введем оцениваемый вектор состояния из следующих компонент
х= (vra/)' (q^)' (bj' (ЬО)Т , (5)
где q^f - кватернион, представляющий собой вращение от ССК к земной геоцентрической системе координат (ECEF).
Модель динамики описывается уравнениями [1]:
Qrpy.k = ® ® ^.RPY.k ’
tCE =|cos(%7’/2) 0 0 -sin(<y£7’/2)|T, (6)
где <у£= 7,292115Е-5 рад/с - скорость вращения Земли;
^RPY,k
cos(||pJ|/2)
Ksin(W/2)
(7)
- вектор вращения.
18
"Радиотехника", 2013 г., № 5
Синтез и анализ радиотехнических систем и устройств
Модель динамики Vecey следует из основного уравнения навигации [1], которое запишем в дискретном виде
^ecef,k “ (I “ /ту ) ^ecef,k-\ + +g(Xece/,A ) Т+c(q^_,) • А^т,
где Агру - ускорение в ССК; c(q^j - матрица вращения от ССК к ECEF системе координат, собранная из компонент кватерниона q^f [1]:
С(Ч) =
2 2 2 2
+?2-7з-^
2(адз+ад4) 2(?274-адз)
2(^3-ад4) 2(ад3+^4) + я1 -Я2-Я4 АЯзЯа, ~ ЯхЯг )
2(71^2 + ЯзЯь) Я^ + я1 - Я2з ~ я\
(9) g(Xecey(r)j - «кажущееся» ускорение (учитываю
щее центростремительное ускорение из-за вращения Земли) в ECEF системе координат;
(Ю)
- матричное представление вектора вращения Земли.
Вектор гравитации g(Xecey) меняется медленно и его можно считать известной функцией.
Ставится задача оценки вектора состояния (5) по наблюдениям (1), (2), (4).
В [3] при синтезе комплексного алгоритма фильтрации использовался модифицированный метод комплексирования [2], суть которого в рассматриваемой задаче сводится к тому, что наблюдения (1), (2) полагаются известными функциями времени, а переменные , А^, t, входящие в данные наблюдения, выражаются из (1), (2) в виде
^“rpy,k ~ ~ bg,k ~ Rg,k ) ’ (11)
A/py,k ~(&rpy,k ~ba>k ~ (12)
Соотношения (11), (12) совместно с (6)—(10) описывают динамику изменения вектора состояния (5).
Таким образом, динамика изменения вектора состояния в итоге описывается уравнениями (6), (7), (9),(10Н12).
Так как наблюдения (1), (2) вошли в уравнения динамики (11)-(12), то при дальнейшем синте
зе вектор наблюдений ук представляет собой измерения скорости в НАП СРНС (4), т.е.
Уk Vgnssj ^ecef.i + ' (12)
Комплексный алгоритм UKF
Структура фильтра UKF в общем виде задается следующими уравнениями [4]:
**=**+КА(У*-У*)’ (14)
Хд=Рху,А (®yy,fc) ’ (15)
= ^XX,t ~ — КдРуу^К^ , (16)
в которых используются только математические ожидания вектора состояния (5) хА , хк и матрицы дисперсий тех или иных плотностей вероятностей (ПВ), которые определяют весовую матрицу Kt.
Суть работы фильтра UKF состоит в следующем. Пусть в момент времени к-\ имеем математическое ожидание и матрицу дисперсий ПВ p^Y*-1), т.е. ^^[х^У*4] и Ра-i =^[(х*-1 К*] • Тогда
для реализации алгоритма фильтрации (5) необходимо прежде всего вычислить экстраполированные оценки хк и у к, а также матрицы дисперсий Руу;А, Рххк. Другими словами, необходимо вычислить математические ожидания и матрицы дисперсий двух плотностей вероятностей р(хк |Y*-1 j
(l-z£_1 \
ydYj I, располагая математическим ожида-нием и матрицей дисперсий ПВ р^хА_] Jy*-1) и известными зависимостями нелинейных преобразований x^Fjx^), y*=SA(x4).
Для решения этой задачи в [6] предложен следующий подход, получивший название Unscented Transformation (UT).
Пусть х - «-мерный случайный вектор с ПВ, характеризующейся математическим ожиданием х и матрицей дисперсий Рхх. Рассматривается нелинейное преобразование у = f (х) и ставится задача нахождения математического ожидания и матрицы дисперсий случайного вектора у.
Суть Unscented Transformation заключается в следующем:
1)в выборе набора фиксированных 2« + 1 значений (S-точек) вектора х^ (которые обозна-
"Радиотехника", 2013 г., № 5
19
Синтез и анализ радиотехнических систем и устройств
чим х0, Х2«+1)> так чт°бы их выбороч-
ные средние значения и матрица дисперсий были равны х и Ра соответственно:
Х0=х, ^0=2/(п + Л),
X,=x + (7(« + >9Pxx),
^.=1/[2(и + Л)], / = 1^,
^+„=1/[2(»+л)],/=м; (17)
2/?+1
£ », = !;
z=0
2) для каждого значения %z, z = 0,2и, вычисляется
(18)
3) вычисляется взвешенное среднее значение случайных величин г];
2и+1
(19) z=0
4) вычисляется взвешенная матрица дисперсий случайных величин ц z
2л+1
РУУ = -пХп,-п)Т (20)
<=о
Для вычисления матрицы весовых коэффициентов в соответствии с (15), (16) необходимо вычислить матрицу взаимных дисперсий Рху^, для которой определяется следующее выражение:
2п+1
РхуЛ = £ (п i,*" к* )(?,•,*-£*)’ • (21)
1=о
Параметр Л в весовых коэффициентах выбирается из дополнительных соображений снижения итоговой ошибки аппроксимации. В частности показано, что для гауссовского вектора х рекомендуемое значение п + Л = 3 [6].
Применительно к рассматриваемой задаче алгоритм UKF с использованием описанного выше UT преобразования имеет следующий вид.
Инициализация. Вектор состояния фильтра X и матрицу дисперсий оценок Dx необходимо инициализировать до начала работы алгоритма. Инициализация вектора состояния производится следующими величинами:
x0 = (Vg^()T (q^(/?o,Po,yo))T 0...0 ,
где Ngnss i - текущее измерение скорости приемником СНС, (/?0,Р0,У0) - кватернион ориентации, который может быть получен при начальной выставке ИНС (гирокомпасировании) и координаты XgraM, измеренных приемником СНС.
Если ориентация неизвестна, то кватернион должен быть инициализирован следующим вектором: Ч^(7?о,Ро,Го) = |1 0 0 0|т.
Начальные значения для матрицы ковариаций (записаны блоками):
Dx0(1...3,1...3) = RK/,
DX;0(4...7,4...7) = o-J-I4, DXj0(8...10,8...10) = 4g.I3, Dx>0(11...13,11...13) = <4i3, Dx 0 (все остальные) = 0,
где Rr ( - матрица ковариаций скорости по СРНС;
1У - единичная матрица размером Nx/у; cyiq - погрешность выставки, СКО, равная 1, если ориентация неизвестна, или aiq * (погрешность начальной выставки в радианах); aibg - нестабильность смещения нуля от запуска к запуску (СКО) в рад/с; <т/6а - нестабильность смещения нуля от запуска к запуску (СКО) в м/с2.
Экстраполяция вектора состояния и матрицы дисперсий. Экстраполяция производится согласно:
= F_UT(xt_1,Dxt_1,G),
где F_UT() - UT преобразование с функцией F(x), выполняемое согласно (17)-(19). Функция F(x) описывает динамику вектора состояния и определяется соотношениями (6), (7), (9) - (12).
Этап корректировки UKF. При отсутствии измерений приемника СРНС на текущий такт работы алгоритма корректировки не происходит, т.е.
~%к> ®х,А ~ ®х,Л '
При наличии измерений приемника СРНС (Vgras^, Xgnss,k) производится корректировка UKF. Вычисляется прогноз измерений
[Vecef,k’Dr/cJ = 8_иТ(хА,6хА,Нг>Л),
20
"Радиотехника", 2013 г., № 5
Синтез и анализ радиотехнических систем и устройств
где S_UT() - UT преобразование с функцией S(x), выполняемое согласно (17)-(19). Функция S(x) описывает связь вектора измерений (13) с
вектором состояний и равна S(x) =
Вычисляются взаимная матрица дисперсий согласно (21), коэффициент усиления фильтра
К* = 6XYA •(би,а) »
и оцениваются вектор состояния и матрица дисперсий:
*к ^к gnss,k ^ecef,k\
бх,£ -Dx>a-КА (DXYji) .
Результаты моделирования
Описанный алгоритм комплексного UKF фильтра моделировался на ЭВМ. Одновременно с этим фильтром моделировался комплексный фильтр, полученный по методологии [3]. Параметры моде
Компоненты матрицы формирующих шумов: ст2 = (1-10-8)2 (м/с)2, ст2 =(1-10~5)2, a2bg =(2-10’6)2Т (рад)2, сг^й =(2-1(Г6)2-Т (м/с2)2.
На рис. 1 и 2 приведены реализации ошибок оценивания углов ориентации в UKF и РФК соответственно, а на рис. 3 и 4 - реализации ошибок оценивания составляющих скорости в UKF и РФК соответственно.
В таблице представлены сравнительные характеристики СКО оценивания скоростей и углов в РФК и UKF (поле «СКО оценки»).
Параметры СКО оценки РФК СКО оценки UKF
Углы крена, угл. мин. 9Д 9,9
Углы тангажа, угл. мин. 8,6 7,2
Углы курса, угл. мин. 10,1 10,8
Скорость Vx, м/с 0,046 0,052
Скорость Vy, м/с 0,053 0,055
Скорость V2, м/с 0,049 0,063
лирования следующие: максимальное ускорение -5 м/с2, максимальная скорость - 10 м/с.
Измерения инерциальных датчиков моделировались согласно (1), (2). Использованные параметры погрешностей для гироскопов и акселеро-
метров следующие:
0,005
mg=I3 +
9е-4
9е-4
0 0
0,005 9е-4
9е-4 0,005
0,05
bg
0,05
0,05
рад, ag =0,016 рад.
0,0063 0 0
тй=13 + 0,0035 0,0063 9е-4
0,0035 0,0035 0,0035
Ь«
0,49
0,49
0,49
м ~ -ппяя м
7 s &а 0,088 _ . с с
Данные параметры соответствуют датчикам MEMS класса (IMU ADIS 16400);
Модель ошибок измерений скорости приемником СРНС - аддитивный БГШ с вектором дисперсий:
ИКЛ=|о,12 0,12 0,12| [м2/с2].
"Радиотехника", 2013 г., № 5
21
Синтез и анализ радиотехнических систем и устройств
О 0 25
О -0 25 L. • __________________। :_____1________с
200 220 240 260 280 300
Время, с
По результатам моделирования работы двух систем можно сделать следующие выводы: СКО оценивания углов ориентации в обоих алгоритмах одинаковы; СКО оценивания составляющих скорости в РФК несколько ниже.
• Разработан алгоритм комплексной фильтрации данных, поступающих навигационной аппаратуры потребителей СРНС и инерциальной навигационной системы, основанный на технологии UKF. В алгоритме оцениваются погрешности инерциальных датчиков - смещения нулей гироскопов и акселерометров.
Проведено моделирование комплексного алгоритма фильтрации и сравнение его характеристик с аналогичными характеристиками комплексного фильтра, построенного по методологии РФК. Показано, что среднеквадратические ошибки оценивания углов ориентации в обоих алгоритмах примерно одинаковы, а среднеквадратические ошибки оценивания составляющих скорости в расширенном фильтре Калмана несколько меньше. При этом следует отметить, что реализация алгоритма с UKF значительно более ресурсоемка, чем реализация с РФК.
Статья подготовлена при проведении НИР в рамках реализации ФЦП «Научные и научнопедагогические кадры инновационной России» на 2009-2013 годы.
Литература
1. ГЛОНАСС. Принципы построения и функционирования / под ред. А.И. Перова, В.Н. Харисова. М.: Радиотехника. 2010.
2. Перов А.И. Статистический синтез радиотехнических систем. М.: Радиотехника. 2003.
3. Шатилов А.Ю., Нагин И.А. Тесносвязанный алгоритм комплектования НАП СРНС и многоцелевой ИНС // Радиотехника. 2012. № 6.
4. Ristic В., Arulampalam S., Gordon N. Beoynd the Kalman Filter. Artech Hause. 2004.
5. Capua R., Bottaro A. Implementation of the Unscented Kalman Filter and a simple Augmentation System for GNSS SDR receivers // 5th International Technical Meeting of the Satellite Division of The Institute of Navigation. Nashville TN. 2012.
6. Julier S.J., Uhlmann J.K. and Durrant-Whyte H.F. A New Approach for the Nonlinear Transformation of Means and Covariances in Linear Filters // IEEE Transactions on Automatic Control, Accepted for publication as a Technical Note. 1996.
Поступила 11 апреля 2013 г.
GNSS/IMU Unscented Integration Algorithm
© Authors, 2013
LA. Nagin
GNSS/IMU integration is the typical solution for highly dynamic objects navigation. However, the use of a Gaussian approximation of the theory of optimal filtering (leading to EKF) in an highly nonlinear problems does not guarantee a good performance. Therefore, in the last decade intensively developed alternative approaches to the problem of filtration of system process and/or observations described by highly nonlinear models. One of these approaches is named as the Unscented Kalman Filter (UKF). In this paper we investigate the efficiency of the UKF approach in the integration problem by comparing it with the classical EKF algorithm.
22
"Радиотехника", 2013 г., № 5
Синтез и анализ радиотехнических систем и устройств
УДК 681.514
Анализ методов формирования квадратурных сигналов
© Авторы, 2013
С.И. Зиатдинов - д.т.н., профессор, Санкт-Петербургский государственный университет аэрокосмического приборостроения
E-mail: kaf53@GUAP.ru
Рассмотрено формирование квадратурных сигналов преобразователем Гильберта, линией задержки и преобразователями частоты. Показано, что преобразователь Гильберта и линия задержки вносят погрешности при формировании квадратурных сигналов. В то же время преобразователи частоты обеспечивают точное формирование квадратур сигнала и позволяют однозначно определять амплитуду, частоту и фазу как узкополосного, так и широкополосного сигналов.
Ключевые слова: квадратурные сигналы, преобразователь ГАльберта, линия задержки, преобразователи частоты, ошибки.
It examined the formulation square signals by Gilbert formulation, line of delay and frequency formulation. It showed that Gilbert formulation and line of delay give the mistakes when formulation square signals. At the same time frequency formulation provide exact formulation square signals and allow only one road of amplitude, phase and frequency of signal with narrow and broad strip.
Keywords: square signals, Gilbert formulation, delay line, frequency formulation, mistakes.
Наиболее распространенным в радиосистемах является квазигармонический сигнал, который представляется в форме [1]
х(7) = Л(г)соз[го0? + (1)
где J(/),<w0,^(f) - огибающая, средняя частота и начальная фаза сигнала.
Вместе с тем (1) не дает однозначного определения амплитуды A(t), флуктуирующих фазы (p(t) и мгновенной частоты m(t) = <у0 + <p(t). Существует определенная степень произвола в нахождении основных характеристик сигнала, так как при любой функции <p(t) всегда можно найти функцию A(t), удовлетворяющую уравнению (1).
Для преодоления данных трудностей необходимо иметь пару квадратурных (сдвинутых по фазе на 90°) сигналов
x(f) = A(t) cos[d)0f + <р(0],
y(t) = A(t) sin[o0f +
которые однозначно определяют амплитуду A(t), начальную фазу p(t) и мгновенную частоту m(t): Л(0 = >/x2(0 + /(f); P(t) = arctgO(f) / x(f)) - mot;
d)(t) =
y(t)x(t)~ y(t)x(t) A2(t)
Существует ряд методов формирования сигнала у(г). Цель работы - сравнитель
ный анализ существующих методов получения квадратурных сигналов.
Формирование квадратурных сигналов на основе преобразователя Гильберта
В данном случае случайный х(г) и сопряженный yr(f) сигналы связаны друг с другом парой преобразований Гильберта [1]
Л J t-l
—00
00
x(f) = _l (3)
л J t-l
—оо
Преобразователь Гильберта является фильтром с частотной передаточной функцией вида [2]
\ fexp(-i^/2), гу>0
^гО«>)=Ч г ... . (4)
[ехр(1я/2), гу<0.
Для гармонического сигнала x(t) = = Acos[a>0t + <р0] преобразователь Гильберта дает сопряженный сигнал уг(г) = Лзт[щ0г + ^0], который в соответствии с алгоритмами
A = Jx2(t) + y2(t),
y/(t) = arctg^ = <o0t + ,
x(f)
_ y(t)x(t)~ y(t)x(f)
° A2 позволяет получить точные значения амплитуды, фазы и средней частоты сигнала. Вместе с тем в случае квазигармонического сигнала вида (1) квадратурный сигнал yr(t), полученный с помо
"Радиотехника", 2013 г., № 5
23
Синтез и анализ радиотехнических систем и устройств
щью преобразования Гильберта, дает приближенный характер вычисления основных параметров A(t), <у0 и y/(t).
В работе [1] показано, что для квазигармони-ческого сигнала (1) сопряженный по Гильберту сигнал имеет вид
Уг (0 = A0sin[«V + <К0] + — Л(0. (5)
<у0
где ДбУ - ширина спектральной плотности сигнала х(Г).
Данное выражение вызывает сомнения. Поскольку преобразователь Гильберта является фильтром, модуль коэффициента передачи которого равен единице, среднее значение сигнала уг(7) должно быть равно нулю так же, как и исходного сигнала x(t). Более того, дисперсии сигналов уг(г) и х(г) тоже должны быть равны. Из формулы (5) следует, что среднее значение
уг(/)^0 и дисперсия ст2 *<т2. При этом пред-
Уг
ставляет интерес определить погрешность в формировании квадратурного сигнала преобразователем Гильберта. Для этого запишем первое уравнение в (3) в виде
оо
уТ (/) = J h(a)x(t - a)da, (6)
где /г(а) - импульсная характеристика преобразователя Гильберта.
Пусть мерой погрешности преобразования Гильберта служит отклонение коэффициента взаимной корреляции при нулевом временном сдвиге квадратурной составляющей y(t) и полученной путем преобразования Гильберта yT(t) от единицы. Очевидно, что в случае точного формирования квадратуры уг{7) = у0)- Тогда коэффициент взаимной корреляции сигналов уг(7) и y(t) при нулевом взаимном временном сдвиге равен единице. В противной случае - меньше единицы.
Для стационарного случайного сигнала с учетом формулы (6) взаимная корреляционная функция сигналов yr(t) и у(г) будет иметь вид
00
Д-(г) = Уг(ОЯ'-г) = (7)
где ВдуСт) - взаимная корреляционная функция квадратурных сигналов, определяемых соотношением (2).
Запишем взаимную корреляционную функцию B*y(r) через взаимную спектральную плотность Gxy(<y):
оо
Вху(г)=
—оо
После подстановки данного выражения в (7) получим оо
Вг(т)= -L (8)
Известно [1], что взаимная корреляционная функция квадратур записывается следующим образом:
1 00
B^(r) = — jG(6?)sin(oT)t7ft>,
(9)
где G(<y) - спектральная плотность исходного комплексного сигнала z(t) = х(/) + iy(t).
Возьмем от выражения (9) обратное преобразование Фурье и, опуская промежуточные выкладки, запишем
оо
G^(®)= ^Bxy{a))Q-^d(O =
(П)
(12)
(10)
-00 где £(<») - дельта-функция. После подстановки (10) и (4) в (8) получим
Вт (г) = — j[G(<y) - G(-<d)]eia>Td<o. 71 о
При 7 = 0
Вт (0) = — j[G(fi>) - G(-a>)]da>. о
Пусть спектральная плотность комплексного сигнала z(t) = x(t) + iy(t) имеет вид
. 2Дйхт2 G(ft>) =--з---------у,
А<у +(<у-й>0)
где сг2, <и0, Д&» - дисперсия, средняя частота и ширина спектральной плотности сигнала.
После подстановки (12) в (11) получим следующее выражение для нормированной взаимной корреляционной функции при т = 0:
В_(0) 2 <у0
Рт (°) = =—arctg-2-.
ст л Д<и
(13)
24
"Радиотехника", 2013 г., № 5
Синтез и анализ радиотехнических систем и устройств
Из выражения (13) видно, что для широкопо-лосного исходного сигнала x(t) (—— «I, Д&» /?г(0)®0) преобразователь Гильберта вносит большие искажения при формировании квадратурного сигнала. И лишь для узкополосного сигнала рг(0)»1) преобразователь Гиль-
Дй) берта позволяет получить практически точное значение квадратурного сигнала, соответствующего выражению (2).
Формирование квадратурного сигнала на основе линии задержки
Пусть, как и ранее, мерой погрешности формирования квадратурного сигнала служит отклонение коэффициента взаимной корреляции при нулевом временном сдвиге квадратурной составляющей y(t), определяемой выражением (2) и полученной путем задержки улз(0 = x(t-T) от единицы. Здесь Т - время задержки исходного сигнала. Тогда для стационарного сигнала x(t) запишем 5лз(г)= Улз(ОХ'-г) =Вху^-'Г')-
Известно [1], что Влу(т) = <т2рл?,(т)5тй>0т, где а2, Рху(т), й)0 - дисперсия, коэффициент корреляции и средняя частота сигнала x(f).
В результате имеем
5лз W = °2рху (г - sin (г - Г) .
Для получения квадратурного сигнала необходимо, чтобы а>0Т = л/2 или 7’ = л'/2й>0. При этом коэффициент взаимной корреляции квадратур Улз(0 и ХО имеет вид
, ч 5лз(г) / п ч Рлз (7) = = рху (т - —) COS Й>ОТ.
СТ2 2й>0
Воспользуемся выражением (12) для спек-
тральной плотности исходного сигнала. Тогда
лД<у л л ------Дй>т]со8й?0т. 2й)0
/?лз(г) = ехр[-
При 7 = 0
... . лДй). ..
Рлз(0) = ехр(—-—). (14)
По-прежнему, как и в случае с преобразователем Гильберта, лишь для узкополосного сигнала
х(г) (»1, рлз(0) ® 1) линия задержки позволяло»
ет получит практически точное значение квадратурного сигнала, соответствующего выражению (2).
На рис. 1 представлены рассчитанные с помощью выражения (14) зависимости коэффициентов взаимной корреляции точной квадратурной составляющей и полученной путем преобразования Гильберта (кривая 1) и задержкой сигнала (кривая 2) от отношения й)0 / Дй) при т = 0. Из представленных графиков видно, что преобразователь Гильберта и линия задержки вносят значительные ошибки при формировании квадратурных сигналов. При этом преобразователь Гильберта превосходит в точности линию задержки.
Формирование квадратурных сигналов на основе преобразователей частоты
В состав устройства входят два идентичных канала (преобразователи частоты), в каждом из которых имеется перемножитель входного £(t) и опор
"Радиотехника", 2013 г., № 5
25
Синтез и анализ радиотехнических систем и устройств
ного £(t) сигналов, фильтр нижних частот ФНЧ, Опорные гармонические сигналы вырабатываются гетеродином и сдвинуты в каналах по фазе на я- / 2.
Входной и опорный сигналы представим в виде:
£(0 = A(f) cosl/ц/ +
^(0=4r COS^r+ «?„],
где A(t), A^, <p(t), <p„ - амплитуды, средние
частоты и начальные фазы входного и опорного сигналов соответственно. Далее для простоты примем А^ = 2.
С помощью ФНЧ выделяются спектральные составляющие разностных частот входного и опорного сигналов на выходе перемножителей. При этом частота опорного сигнала выбирается больше наивысшей частоты в спектре входного сигнала.
В результате для выходных сигналов преобразователей можно записать
х(г) = J(Ocos[(®rr - (o^yt + - ^(г)],
ЯО = - a>o)t + <р„ - <p(ty\.
Данные соотношения позволяют однозначно определить амплитуду A(t), полную фазу ух (г) = - (p(t) и мгновенную часто-
ту (ox(t') = i/f(ty сигналаx(t):
A{ty = ^x2(t) + y1(t)-,
у/х(г) = arctg^l = (й^г ~ + Pn - Я0; (15)
^(„,^(0-^0
л 2(0
Поскольку параметры опорного сигнала в)п, <рп известны, соотношения (15) однозначно определяют амплитуду A(t), фазу <p(t) и мгновенную частоту й)0 + <p(t) сигнала £(t) независимо от того, является сигнал узкополосным или широкополосным.
• Преобразование Гильберта и задержка сигнала вносят большие погрешности при формировании квадратурных сигналов. Причем величина погрешности возрастает по мере уменьшения отношения <«0 / Д<у.
Задержка сигнала как метод формирования квадратурной составляющей значительно уступает в точности преобразованию Гильберта.
Для получения удовлетворительных результатов при формировании квадратурных сигналов преобразованием Гильберта или задержкой сигнала необходимо обеспечить соотношение
—— > 10, что справедливо лишь для узкополос-Д<у
ных сигналов.
Использование преобразователей частоты для получения квадратурных сигналов обеспечивает однозначное измерение основных параметров как узкополосного, так и широкополосного сигналов.
Литература
1. Тихонов В. И. Статистическая радиотехника. М.: Радио и связь. 1966.
2. Гоноровский И.С. Радиотехнические цепи и сигналы. М.: Радио и связь. 1986.
Поступила после доработки 15 июля 2012 г.
Analysis of methods of the formulation square signals
© Authors, 2013
S.L Ziatdinov
It gives compared analysis of methods of the formulation square signals by Gilbert formulation, line of delay line and frequency formulation. It cites the expressions for function of mutual correlation the exact square signal and received by one of methods. It proves that Gilbert formulation and line of delay give the mistakes when formulation square signals and be able to use for only signal with narrow stripe. In this time frequency formulations give exact calculation of amplitudey, phase and frequency of signal with narrow and broad stripe.
26
"Радиотехника", 2013 г., № 5
Антенны, распространение радиоволн и техника СВЧ
УДК 621.396
Исследование одномерных поляризационных решеток в терагерцевом диапазоне частот
© Авторы, 2013 И.Н. Кабанов - к.т.н., ст. науч, сотрудник, начальник отдела ФГУП «Мытищинский НИИ радиоизмерительных приборов». E-mail: mr.kin63@mail.ru
Проведен с помощью математического моделирования анализ передаточных характеристик и распределений электромагнитного поля в ближней зоне поляризационных решеток с прямоугольными металлическими перемычками. Данные решетки являются базовыми элементами сеточных поляризаторов, используемых в радиолокационных станциях терагерцевого диапазона. Полученные результаты позволяют сформулировать важные практические рекомендации по конструированию таких устройств.
Ключевые слова: сеточный поляризатор, терагерцевый диапазон, численное моделирование, электромагнитное поле.
Transmission characteristics and electromagnetic field patterns in the near zone of polarization gratings with rectangular metal bars are analyzed using mathematical modeling. Given grating are the basic units of mesh polarizes used in terahertz range radar stations. Obtained results allow formulating important practical recommendations to design of such devices.
Keywords; mesh polarizer, terahertz range, numerical modeling, electromagnetic field.
Введение
Поляризационные решетки различной конфигурации, обладающие свойством интерференционного суммирования полей рассеяния отдельных элементов, широко применяются в различных инженерно-физических системах микроволнового, терагерцевого и оптического диапазонов. В частности, они используются в радиоастрономии для изучения фонового космического излучения, в ядерной физике для исследования свойств плазмы [1], в радиоэлектронике в качестве ключевых компонентов аттенюаторов [2], полосовых фильтров, интерферометров и т.д., а также в измерительной и радиолокационной технике.
Одно из перспективных направлений развития современной радиоэлектроники и радиолокации связано с освоением терагерцевой области спектра электромагнитного (ЭМ) излучения. Уникальные свойства терагерцевых волн определяют привлекательность их практического применения для создания высокоскоростных линий связи и высокоточных радиолокационных станций (РЛС), способных работать в сложной электромагнитной обстановке.
Важнейшим компонентом таких РЛС являются сеточные поляризаторы, обеспечивающие их основные параметры: дальность и точность обнаружения цели, развязка, рабочая мощность и т.д. В основе функционирования данных устройств поляризации лежат сложные физические процессы рассеяния ЭМ волн на одномерных периодических структурах (дифракционных решетках) [3].
За последние десять лет наблюдаются активизация усилий ведущих мировых компаний и научных групп по созданию сеточных поляризаторов терагерцевого диапазона с высокими значениями коэффициента качества (отношения переходного ослабления при Е- и 77-поляризации). Однако большинство таких устройств могут функционировать только в ограниченных температурных интервалах и не обладают необходимой жесткостью конструкции, что делает их уязвимыми в условиях вибрации, высокой влажности и больших перепадах температур.
В работах [4, 5] были представлены устройства поляризации нового поколения, выполненные по технологии химико-технологического (струйного) травления, демонстрирующие уровни пропускания в парал-
"Радиотехника", 2013 г., № 5
27
Антенны, распространение радиоволн и техника СВЧ
дельном и перпендикулярном направлениях относительно плоскости поляризации вектора напряжённости электрического поля -35...-43 дБ и 0,2...-0,6 дБ соответственно. Данные приборы работают в условиях значительного перепада температур и удовлетворяют самым жестким требованиям по виброустойчивости и ударопрочности. Создание конструкций поляризаторов подобного типа стало возможным благодаря исследованиям в области математического моделирования процессов взаимодействия ЭМ волн терагерцевого диапазона с поляризационными решетками [6].
В настоящее время исследования в этом научном направлении не потеряли своей актуальности. В частности, в работе [6] был проведен численный анализ влияния величины металлизации сеточных поляризаторов на его передаточные характеристики для достаточно тонких (и' = 7 мкм) перемычек. Цель работы - моделирование поляризационных решеток с прямоугольными перемычками большего размера.
Модель поляризационной решетки
Геометрическая модель исследуемой поляризационной решетки представлена на рис. 1, где показан участок решетки в плоскости XZ, ортогональной векторам напряженности поля падающей на решетку ТЕМ-волны. Базовые размеры прибора: толщина перемычек ж их ширина t и период решетки s определяют его электродинамические и механические характеристики. Очевидно, что жесткость конструкции возрастает, когда значения параметров w и t максимальны, а значения параметра s-минимальны. Однако вариации всех трех размеров в широких пределах оказывают значительное влияние на передаточные характеристики при ^-поляризации.
Рис. 1
Используя тот факт, что решетка размещается в квадратном или цилиндрическом сверхразмерном волноводе и одноволновое приближение, была построена численная модель участка электродинамической системы (волновода с поляризатором), базирующаяся на методе дискретизации уравнений ЭМ поля, описанном в работе [6]. Предварительное тестирование такой модели показало хорошее согласование с результатами измерений коэффициента передачи для решеток с разной толщиной перемычек (w = var).
Результаты численного моделирования
Одним из наиболее важных технических параметров анализируемого поляризационного устройства, как указывалось ранее, является коэффициент передачи (переходное ослабление) для двух вариантов направления вектора напряженности электрического поля Е относительно перемычек. Из классической теории дифракционных решеток известно [3], что если вектор Е падающей на решетку волны параллелен металлическим перемычкам, то в них возбуждаются токи, создающие сильное ЭМ поле. Это приводит к тому, что падающая волна практически полностью отражается. Когда вектор Е перпендикулярен перемычкам, то возбуждаемые в них токи значительно слабее и создаваемое ими поле мало. При этом падающая волна проходит через решетку практически без затухания. В первом случае принято говорить о ^-поляризации (индуктивная решетка), во втором о //-поляризации (емкостная решетка).
На рис.2 приведены частотные зависимости модуля коэффициента передачи решетки с фиксированными значениями толщины перемычек и периода решетки для различных величин ширины перемычек (50 мкм < t < 125 мкм), полученные в данной работе. Из этих данных видно, что увеличение геометрического размера t приводит к снижению переходного ослабления исследуемой решетки в несколько раз в частотном диапазоне 0,1 ТГц </< 2 ТГц. При /> 2 ТГц зависимость коэффициента передачи от частоты носит сложный осциллирующий характер.
Для более детального анализа процессов вблизи переходной частоты 2 ТГц с помощью метода конечных элементов (МКЭ) были установлены структуры ЭМ поля в ближней зоне решетки с размерами: w = 20 мкм, t = =100 мкм, s = 100 мкм. На рис. 3 представлен небольшой участок между двумя соседними перемычками в плоскости XZ и показано распределение электрического поля в ближней зоне поляризационной решетки на частотах: 1,877 ТГц - а, 1,969 ТГц - б, 2,061 ТГц - в, 2,153 ТГц - г. При этом ЭМ энергия распространяется слева направо вдоль оси Z. Эти данные позволяют проследить динамику проникновения терагерцевых ЭМ волн сквозь решетку в диапазоне 1,877 ТГц</< 2,153 ТГц.
28
"Радиотехника", 2013 г., № 5
Антенны, распространение радиоволн и техника СВЧ
Рис. 3
Таким образом, в данной работе двумя методами математического моделирования был проведен численный анализ поляризационных решеток с прямоугольными перемычками толщиной w = 20 мкм. Установленные электродинамические характеристики устройства подтвердили сделанное ранее пред-
положение [6] о перспективности дальнейшего увеличения размеров поляризационной решетки, что позволяет не только сделать конструкцию прибора более жесткой, но и снизить величину переходного ослабления для ^-поляризации ЭМ волн, рассеиваемых решеткой.
Литература
1. Кузнецов С. А., Голъденберг Б.Г., Калинин П.В., Елисеев В. С., Петрова Е.В. Разработка медных сеточных структур для частотной и пространственной селекции ТГц-излучения Новосибирского лазера на свободных электронах // Поверхность. Рентгеновские, синхротронные и нейтронные исследования. 2009. № 9. С. 38 - 49.
2. Безбородов В.И., Киселев В.К, Кулешов Е.М., Яновский М. С. Квазиоптические поляризационные аттенюаторы в терагерцевом диапазоне частот // Радиофизика и электроника. 2007. Т. 12. № 2. С. 451 - 455.
3. Шестопалов В.П, Литвиненко Л. Н., Масалов С.А., Сологуб В.Г. Дифракция волн на решетках. Харьков: Изд-во Харьковского ун-та. 1973.
4. Креницкий А.П., Алавердян С.А., Мещанов В.П. Квазиоптические и волноводные компоненты на основе пленочных структур для диапазона СВЧ, КВЧ и ТГЧ // Антенны. 2012. №3. С. 15-17.
5. Алавердян С.А., Боков СИ., Зайцев Н.А., Исаев В.М., Кабанов И.Н., Креницкий А.П., Мещанов В.П. Сеточные структуры поляризации электромагнитных волн в тера-герцовом диапазоне частот // Электромагнитные волны и электронные системы. 2012. Т. 17. № 12. С. 47 - 50.
6. Алавердян С.А., Боков С.И., Исаев В.М., Кабанов И.Н., Комаров В.В., Креницкий А.П., Мещанов В.П., Савушкин С. А., Якунин А. С. Передаточные характеристики сеточных поляризаторов терагерцового диапазона // Динамика сложных систем - XXI век. 2012. № 4. С. 89 - 94.
Поступила 21 мая 2013 г.
Investigation of one dimensional polarization gratings in terahertz frequency range
© Authors, 2013
LN. Kabanov
Polarization devices and in particular various type diffraction gratings are widely utilized in radio engineering systems for control of electromagnetic signals parameters. Either experimental approaches or methods of mathematical modeling are applied for study of complicated physical processes of dissipation of electromagnetic waves on such one-dimensional periodic structures. Frequency dependences of transmission coefficient of polarization gratings with rectangular bars are determined using numerical method of analysis in resent work. Distributions of electromagnetic fields near grating bars at frequencies 1,877...2.153 THz were also obtained. Found sizes of given structures provide set mechanical and electrodynamic properties of metal gratings which can be made using technology of chemical etching.
"Радиотехника", 2013 г., № 5
29
Нанотехнологии: разработка, применение
УДК 621.315.592.3
Кремниевый транзистор с каналом-нанопроводом из неравномерно легированного кремния на изоляторе
© Авторы, 2013
С.В. Амитонов - аспирант, физический факультет, МГУ
E-mail: sam-msu@yandex.ru
Д.Е. Преснов - к.ф.-м.н.. ст. науч, сотрудник, отдел микроэлектроники, НИИЯФ, МГУ
E-mail: denis.presnov@phys.msu.ru
В.А. Крупеник - к.ф.-м.н.. ст. науч, сотрудник, физический факультет, МГУ
E-mail: vladimir.krupenin@phys.msu.ru
Разработан метод изготовления полевого транзистора с кремниевым каналом-нанопроводом из неравномерно легированного мышьяком кремния на изоляторе (КНИ). Концентрация легирующей примеси изменялась по глубине кремниевого слоя толщиной 100 нм от величины более Ю20 см"3 до значений порядка 1017 см"3. Верхняя высокопроводящая часть слоя служила основой для подводящих электродов с омическими контактами к каналу-нанопроводу. Нижний подслой использовался для формирования полупроводникового канала-нанопровода. Измерены вольтамперные и затворные характеристики экспериментальных структур при температурах 77 и 300 К. Дан анализ возможности использования полевого транзистора на основе кремниевого нанопровода в качестве локального полевого сенсора с нанометровым пространственным разрешением.
Ключевые слова: полевой транзистор, нанопровод, КНИ-технология, имплантация, нанолитография, вольтамперные и затворные характеристики, сканирующая туннельная микроскопия.
Fabrication method of FET with silicon nanowire channel from silicon on insulator (SOI) of non-uniformly doped by As was developed. Concentration of alloying impurity decreased in the depths of the silicon layer with thickness of 100 nm from the value of more than IO20 cm"3 to values of less than 1017 cm"3. Upper high conductive part of the layer serves as the basis for the supply of electrodes with ohmic contacts to the nanowire channel. Lower part of the layer was used for the formation of semiconductor nanowire channel. Current-voltage and gate characteristics of experimental structures at temperatures of 77 and 300 К were measured. Analyzed the opportunity of use of FET with silicon nanowire channel as a local field sensor with nanometer spatial resolution.
Keywords: FET, nanowire, SOI-technoiogy, implantation, nanoiithography, current-voltage and gate characteristics, scanning tunneling microscopy.
Введение
Развитие технологий микроэлектроники в последнее десятилетие позволило перешагнуть рубеж 100 нм и изготавливать оригинальные нанораз-мерные устройства. Одним из таких устройств является полевой транзистор, в котором полупроводниковый канал выполнен в форме нанопровода -структуры с поперечными размерами меньше 100 нм и продольными в несколько микрон. Проводимость такого нанопровода зависит от напряженности электрического поля, в котором он находится. Даже небольшие локальные изменения поля вблизи тела нанопровода способны существенно изменить его проводимость. Примером та
ких локальных возмущений поля могут быть поверхностные заряды или наноразмерные заряженные частицы, приближающиеся к поверхности нанопровода. Возможность регистрации с помощью такого устройства малых заряженных частиц привела к интенсивной разработке биосенсоров на его основе для определения предельно низких концентраций специфических биомолекул и частиц (белков, ДНК, вирусов) [1-5] вплоть до регистрации единичных актов их присоединения к специально подготовленной поверхности нанопровода. Безусловным достижением исследователей является продемонстрированная зарядовая чувствительность транзистора на основе нанопровода, при
30
"Радиотехника", 2013 г., № 5
Нанотехнологии: разработка, применение
ближающаяся к чувствительности одноэлектронных транзисторов [6]. Это дает возможность создания на его основе сверхчувствительных зарядовых сенсоров с нанометровым пространственным разрешением для широкого спектра сканирующих и локальных зондовых устройств нового поколения, которые могут найти применение в различных областях науки, техники и медицины.
Чувствительность нанопровода к внешнему полю является максимальной в подпороговом режиме при не сформированном канале неосновных носителей. Кроме того, дебаевская длина экранирования должна совпадать с поперечными размерами нанопровода. В геометрии сканирующего зонда-нанопровода, у которого отсутствует затвор, последнее условие может быть выполнено лишь предварительным подбором степени легирования кремния. Цель работы - предложить изначально неравномерно по глубине легирование пластины КНИ, а на финальной стадии уменьшение толщины нанопроводов, вытравливая сначала сильнолегированный слой, добиваясь тем самым необходимой чувствительности.
Методика изготовления образцов
В качестве материала для изготовления нанопроводов использовались пластины КНИ (Soitec ® «Unibond» wafers), обладающие следующими характеристиками:
верхний слой кремния p-типа легирован бором, толщина - ПО нм, удельное сопротивление -7... 12 Ом-см;
изолирующий диэлектрик SiO2. толщина -200 нм;
поддерживающая кремниевая пластина р-типа легирована бором, толщина - 700 мкм, удельное сопротивление - 7... 12 Ом-см.
Для создания неравномерного по глубине легирования верхнего слоя кремния пластины КНИ подвергались ионной имплантации As+ с ускоряющим напряжением 6 кВ и дозой 1,25-1015см~2, а затем быстрому термическому отжигу при максимальной температуре 925°С и времени нагрева 10 с. Профиль залегания As по глубине в слое кремния толщиной ПО нм представлен на рис. 1. Интегральное сопротивление неравномерно легированного верхнего слоя кремния определялось по методу Ван дер Пау [7] через четыре точечных прижимных контакта к его поверхности и составило 350 й/п.
Структуры транзисторов формировались в верхнем слое КНИ методом реактивно-ионного травления кремния через металлическую маску.
Для формирования маски использовался электронный резист ПММА 950 К толщиной 100 нм. С помощью электронного литографа (электронный микроскоп Carl Zeiss Supra40 с литографической приставкой Raith-ELPHY Quantum) в электронном резисте, нанесенном на поверхность чипа методом центрифугирования, формировался рисунок подводящих электродов транзистора с нанопроводом между ними (рис. 2, где показано вскрытое «окно» в полимерной маске для травления верхнего высо-копроводящего слоя кремния). После проявления резиста в смеси изопропанола и воды на поверхность образца напылялся тонкий слой алюминия (15 нм), который служил маской для травления кремния в последующем процессе. Перенос рисунка алюминиевой маски в верхний слой кремния происходил в результате реактивно-ионного травления (РИТ) кремния в атмосфере смеси газов CF4 и О2 (р = 7 Па, W= 50 Вт). Процесс травления контролировался с помощью метода лазерной интерферометрии, позволяющем регистрировать глубину травления в реальном времени. После травления металлическая маска удалялась в слабом щелочном растворе. Таким образом были изготовлены кремниевые структуры нанопроводов (ширина от 50 до 500 нм, длина 1,5...2,5 мкм). Подводящие провода к структуре транзистора были сформированы также в верхнем слое кремния пластины КНИ и заканчивались контактными площадками.
Для проведения измерений образцы помещались в керамический держатель, контактные площадки чипа соединялись с контактными площадками держателя 20-ти микронной алюминиевой проволокой методом ультразвуковой пайки.
После предварительных измерений характеристик транзисторов образцы в держателе покрывались толстым слоем (500 нм) электронного резиста. Методом электронной литографии в областях над нанопроводами резист экспонировался, а затем
"Радиотехника", 2013 г., № 5
31
Нанотехнологии: разработка, применение
удалялся в стандартном процессе проявления. Через полученную полимерную маску - «окно в резисте» - происходило утонение нанопроводов методом РИТ (рис. 2). Серия измерений характеристик транзистора и процессов травления проводилась до появления значимого транзисторного эффекта.
Рис. 2
Результаты и обсуждение
Для измерений характеристик нанотранзисторов использовалась экспериментальная установка, состоящая из измерительной штанги с ячейкой для крепления образца, малошумящего токового предусилителя, интерфейсного блока электроники и персонального компьютера.
Вольтамперные характеристики транзистора измерялись в режиме задания напряжения между стоком и истоком и измерения тока через канал-нанопровод при различных значениях напряжения на затворе. В качестве затвора использовалась кремниевая подложка КНИ пластины. Измерения проводились при положительных напряжениях на затворе, что соответствовало электронному каналу проводимости транзистора. Сопротивление подводящих проводов из высоколегированного кремния составило величину 110 кОм при комнатной температуре и уменьшалось до 85 кОм при 77 К.
На рис. 3 представлены характерные ВАХ транзистора с каналом-нанопроводом (ширина -100 нм, длина - 1,5 мкм) при комнатной температуре и различных напряжениях на затворе, где V -напряжение сток-исток; V3 - напряжение на затворе-подложке; I - ток через транзистор. Значимые изменения проводимости канала транзистора от напряжения на затворе появились после проведения серии из трех последовательных процессов травления верхнего слоя нанопровода. Затворная характеристика транзистора при комнатной температуре (рис. 4) показывает, что крутизна преоб
разования ток/напряжение на затворе уменьшается с 42 нА/B (в относительных единицах - 27%/В) до 12нА/В (4,5%/В) при увеличении затворного напряжения от 0 до 5 В и приближается к насыщению. Это говорит о том, что проводимость нанопровода еще достаточно высока. Хотя значимое изменение тока от затворного напряжения достигнуто, более высокая чувствительность может быть получена только при уменьшении легирующей примеси в нанопроводе, которое достигается продолжением травления верхнего высокопроводяще-го слоя кремния.
Измерения ВАХ при Т= 77К (рис. 5) показали уменьшение проводимости кремниевого канала почти в 2 раза. Крутизна преобразования ток/напряжение на затворе (рис. 6) уменьшилась до 18 нА/В, оставаясь постоянной в диапазоне затворного напряжения от 0 до 5 В. В относительных единицах ее значение почти не изменилось (23%/В) при нулевом затворном напряжении и увеличилось при 5 В (12%/В). Низкотемпературные измерения
32
"Радиотехника", 2013 г., № 5
Нанотехнологии: разработка, применение
подтверждают предположение о достаточно высоком уровне концентрации легирующей примеси в нанопроводе, поскольку уменьшение проводимости легированного донорной примесью (As) полупроводника /?-типа при понижении температуры до 77 К наблюдается при концентрациях As выше чем 1017 [8].
Неравномерно легированный слой кремния нанопровод позволяет с одной стороны обеспечить омические контакты к каналу-нанопроводу, с другой стороны дает возможность достичь оптимального значения его проводимости методом последовательных травлений верхнего слоя кремния нанопровода с промежуточными контролями его проводимости.
• Представленный метод изготовления наноструктур полевых транзисторов с каналом-нанопроводом отличается простотой и позволя
ет контролировать и изменять в процессе изготовления основной параметр устройства - проводимость канала транзистора, а также обеспечить омический контакт нанопровода к подводящим электродам. Транзистор с каналом-нанопроводом может стать основой для создания высокочувствительных полевых/зарядовых сенсоров с нанометровым пространственным разрешением как для сканирующих, так и для локальных зондовых систем нового поколения. Высокое пространственное разрешение сенсора на основе нанопровода может быть достигнуто изменением его геометрии: изгибом провода под острым углом и изоляцией его от подложки (подвешиванием). Кантилевер с таким нанопроводом на конце может служить активным высокочувствительным зондом, пространственное разрешение которого будет определяться диаметром нанопровода. Привязка к поверхности нанопровода специфических молекулярных комплексов позволит создать на его основе локальный биосенсор с высокой избирательной чувствительностью.
Работа проводилась при поддержке проектов Министерства науки и образования № 16.513,11.3063 и РФФИ (11-07-00748, 11-02-12122-офи-м-2011).
Литература
1. Cui Y. et al. Nanowire nanosensors for highly sensitive and selective detection of biological and chemical species // Science. 2001. V. 293. № 5533. P. 1289-1292.
2. Patolsky F. et al. Electrical detection of single viruses // Proceedings of the National Academy of Sciences of the United States of America. 2004. V. 101. № 39. P. 14017.
3. Stern E. et al. Label-free immunodetection with CMOS-compatible semiconducting nanowires I I Nature. 2007. V. 445. №7127. P. 519-522.
4. Stern E., Vacic A., Reed M.A. Semiconducting nano wire field-effect transistor biomolecular sensors H Electron Devices, IEEE Transactions on. 2008. V. 55. № 11. P. 3119-3130.
5. Curreli M. et al. Real-time, label-free detection of biological entities using nanowire-based FETs // IEEE Transactions on Nanotechnology. 2008. V. 7. P. 651-667.
6. Salfi J. et al. Direct observation of single-charge-detection capability of nanowire field-effect transistors II Nature Nanotech. 2010. V. 5. № 10. P. 737-741.
7. Van der Pauw L. A method of measuring the resistivity and Hall coefficient on lamellae of arbitrary shape // Philips Technical Review. 1958. V. 20. № 8. P. 220-224.
8. Morin F.J, Maita J.P. Electrical Properties of Silicon Containing Arsenic and Boron I I Phys. Rev. 1954. V. 96. № 1. P. 28-35.
Поступила 12 декабря 2012 г.
"Радиотехника", 2013 г., № 5
33
Нанотехнологии: разработка, применение
Silicon transistor with the nanowire channel from non-uniformly doped silicon on insulator
© Authors, 2013
S.V. Amitonov, D.E. Presnov, V.A. Krupenin
Development of microelectronics technology in the last decade allowed to cross 100 nm barrier and produce original nanoscale devices. One of such devices is a field effect transistor in which the semiconductor channel is made in the form of a nanowire - a structure with transversial dimensions less than 100 nm and length about few microns. The conductivity of the nanowires depends on the electric field in which it is located. Even small changes in the local field near the body of the nanowire can dramatically change its conductivity. Examples of such local perturbations are surface charges or nanoscale charged particles approaching the surface of the nanowires. Ability to register with such a device small charged particles led to intensive development of biosensors based on the NWFET to determine the extremely low concentrations of specific biomolecules and particles (proteins, DNA, viruses) up to the registration of individual acts of their connection to a specially prepared surface of the nanowire. Undoubted achievement of researchers is a demonstrated charge sensitivity of the NWFET, which approaches to the sensitivity of single-electron transistors. This allows to create on its basis ultrasensitive charge sensor with nanometer spatial resolution for a wide range of scanning probe and local devices of the new generation, which can be used in various fields of science, engineering and medicine.
The sensitivity of the NWFET to the external field is maximum in the subthreshold regime, when it begins to form a conducting channel. Furthermore Debye screening length must be equal to the transverse dimensions of the nanowire or exceed them. As a rule, there is no gate in the construction of local scanning-probe NWFET, and the last condition can be satisfied only to the preliminary selection of the degree of doping of silicon. This paper proposes a non-uniform doping of the depth of the top layer of SOI wafers (dopant concentration varied from IO20 cm 3 to 1017 cm'3 on 110 nm) to form an integrated structure of the NW and source-drain electrodes. The upper part of the inhomogeneously doped layer with metallic conductivity is used to form the source, drain, leads and pads structure, the nanowire is formed in the lower part of the semiconductor layer.
The presented method of manufacture nanostructures FET with a channel-nanowires is simple and allows to control and change during fabrication the main parameter of the device - the conductivity of the channel of the transistor, as well as provide an ohmic contact to the supply nanowire electrodes. Channel transistors, nanowires can be the basis for the creation of highly sensitive field/charge sensor with nanometer spatial resolution for scanning and for the local probe systems of the new generation. The high spatial resolution of the sensor-based nanowires can be achieved by changing its geometry, bend the wire at a sharp angle, and isolate it from the substrate (suspension). Cantilever with nanowires at the end can serve as a highly sensitive active probe, the spatial resolution of which will be determined by the diameter of the nanowires. Binding to the surface of the nanowires of specific molecular complexes will allow to create on its basis a local biosensor with high selective sensitivity.
Внимание!
В издательстве «Радиотехника» вышла в свет книга «Автоматизация моделирования радиоэлектронных средств на внешние воздействия с помощью системы АСОНИКА»
Под ред. проф. А.С. Шалумова
В монографии представлены труды научной школы моделирования, информационных технологий и автоматизированных систем (НШ МИТАС) профессора Шалумова А. С. Рассмотрен комплекс вопросов, связанных с созданием аппаратура АСОНИКА, обеспечением виртуализации испытаний и стойкости к воздействию дестабилизирующих факторов при эксплуатации радиоэлектронных средств на базе автоматизированной системы АСОНИКА. Это вопросы обеспечения электромагнитной совместимости, конечноэлементного моделирования механических процессов и оптимизации, обеспечения стойкости радиоэлектронных средств на виброизоляторах к механическим воздействиям, оценки времени до усталостного разрушения выводов радиоэлементов, обеспечения показателей безотказности и долговечности, анализа и обеспечения тепловых характеристик конструкций, развития базы даннных системы АСОНИКА
По вопросам заказа и приобретения книг обращаться по адресу: 107031 г. Москва, Кузнецкий мост, 20/6.
Тел./факс: (495) 625-92-41, тел.: (495) 625-78-72,621-48-37
Полный перечень книг, выпускаемых Издательством «Радиотехника», размещен на сайте http://www. radiotec.ru; e-mail: info@radiotec.ru
34
"Радиотехника", 2013 г., № 5
Нанотехнологии: разработка, применение
УДК 537.31
Исследование электронных свойств
одиночных нанокристаллов CdTe и CdTe/CdSe в сканирующем туннельном микроскопе
© Авторы, 2013
А.С. Трифонов - к.ф.-м.н., ст. науч, сотрудник, отдел электроники, НИИЯФ, МГУ
E-mail: artemt73@gmail.com
Р.Б. Васильев - к.х.н., доцент, факультет наук о материалах, МГУ
E-mail: romvas@inorg.chem.msu.ru
И.С. Езубченко - аспирант, Национальный исследовательский центр «Курчатовский институт»
E-mail: ezivan9@gmail.com
М.С. Соколикова - студент, факультет наук о материалах, МГУ
E-mail: msokolikova@gmail.com
Д.Р. Бритов - студент, физический факультет, МГУ
E-mail: britov.denis@physics.msu.ru
Д.Е. Преснов - к.ф.-м.н., ст. науч, сотрудник, отдел микроэлектроники, НИИЯФ, МГУ
E-mail: denis.presnov@phys.msu.ru
О.В. Снигирев - профессор, гл. науч, сотрудник, физический факультет, МГУ
E-mail: oleg.snigirev@phys.msu.ru
Измерены в сканирующем туннельном микроскопе электронные (вольтамперные) характеристики одиночных нанокристаллов CdTe и нанакристаллов CdTe/CdSe, имеющих форму тетраподов. Обнаружены различные типы вольтамперных характеристик в зависимости от пути протекания тока в нанокристалле. Предложен механизм протекания тока через различные участки тетрапода в туннельном зазоре СТМ, учитывающий деформацию тетрапода электростатическим полем.
Ключевые слова: нанокрисгаллы, просвечивающая электронная микроскопия, напыление, вольтамперная характеристика, сканирующая туннельная микроскопия.
Electronic (current-voltage) characteristics of single CdTe and CdTe/CdSe tetrapod-shaped nanocrystals were measured in scanning tunneling microscope. It were found different types of current-voltage characteristics depends on channel of possible electron transport in nanocrystal. Mechanism of such possible Chanels was proposed, which take Into account a possible deformation of nanocrystal under electrostatic field.
Keywords: nanocrystals, transmission electron microscopy, current-voltage characteristic, sputtering, scanning tunneling microscopy.
Введение
В последнее время интенсивно изучаются размерно-зависимые электронные свойства полупроводниковых наночастиц. Высококачественные наночастицы, полученные методами коллоидной химии, могут быть использованы для создания электронных устройств, таких как светоизлучающие диоды [1, 2] и солнечные батареи [3]. Одним из новых классов полупроводниковых наноструктур являются разветвленные наночастицы, например, тетраподы [4, 5]. Наночастицы с формой тетрапода состоят из четырех лучей, соединенных под тетраэдрическим углом в центральной точке. Благодаря своей форме тетраподы могут быть использованы как функциональный материал для оптоэлектронных устройств, например, солнечных батарей [6, 7] или одноэлектронных транзисторов [8].
Явление переноса заряда через одиночную наночастицу представляет как фундаментальный, так и практический интерес [8-10]. Цель
работы - методом сканирующей туннельной микроскопии изучить одиночные наночастицы с формой тетрапода, иммобилизованные на поверхности золота. В качестве наночастиц использованы тетраподы CdTe и CdTe/CdSe, включающие гетеропереход, сформированный внутри наночастицы.
Методика изготовления образцов
Тетраподы CdTe/CdSe синтезированы двухстадийным методом с использованием роста на затравочных наночастицах аналогично работе [11]. Смесь ацетата кадмия (0,5 mmol), олеиновой кислоты (1,5 mmol) и октадецена (5 мл) нагревалась в токе аргона при 140°С в течение 60 мин для формирования прекурсора олеата кадмия с молярным отношением [кадмий]: [олеиновая кислота] 1:3. Данный раствор был нагрет до 250°С и прекурсор теллура (0,5 мл свежеприготовленного 1М раствора теллура в триоктилфосфине) был быстро
"Радиотехника", 2013 г., № 5
35
Нанотехнологии: разработка, применение
инжектирован. Рост тетраподов CdTe продолжался 5 мин. После охлаждения реакционного раствора до комнатной температуры был добавлен равный объем ацетона для осаждения наночастиц. Осадок наночастиц CdTe был отделен центрифугированием, промыт ацетоном и растворен в гексане. Для синтеза наночастиц CdTe/CdSe полученный раствор тетраподов CdTe в гексане был добавлен к раствору прекурсора олеата кадмия с молярным отношением [кадмий]: [олеиновая кислота] 1:2 в октадецене, приготовленному как описано выше, но с другим молярным содержанием олеиновой кислоты. Смесь была нагрета под аргоном для удаления гексана. Затем раствор был нагрет до 240°С и прекурсор селена (0,5 мл свежеприготовленного 1 М раствора селена в триоктилфосфине) был добавлен по каплям в течение двух часов для роста тетраподов CdTe/CdSe. После окончания роста тетраподы CdTe/CdSe выделялись из реакционного раствора как описано выше.
Морфология полученных тетраподов изучена методом просвечивающей электронной микроскопии (ПЭМ) на микроскопе LEO912 АВ OMEGA. Согласно изображениям ПЭМ (рис. 1,а), средняя длина луча тетрапода CdTe составила 12 нм, средняя толщина луча 3 нм с дисперсией размеров порядка 10...20%. Рост домена CdSe в случае тетраподов CdTe/CdSe приводит к удлинению луча в 2 раза без заметного утолщения. Таким образом, для тетраподов CdTe/CdSe каждый луч состоит из двух доменов: центральный участок CdTe длиной 12 нм и наконечник CdSe, выращенный на конце луча CdTe в кристаллографическом направлении
[0001]. Вследствие малого диаметра луча (3 нм) для тетраподов CdTe в спектрах оптического поглощения наблюдались выраженные полосы размерных переходов со спектральным положением порядка 670 нм [И]. В случае тетраподов CdTe/CdSe наблюдалась дополнительная полоса поглощения с переносом заряда.
Электронные свойства одиночных CdSe/CdTe и CdTe тетраподов исследовались в сканирующем туннельном микроскопе (СТМ). Тетраподы закреплялись на золотой пленке толщиной 100 нм, напыленной на кремниевую подложку (1x1 мм) методом магнетронного распыления на установке LEYBOLD-HERAEUS Z400. Для улучшения адгезии золотой пленки дополнительно напылялся слой титана толщиной 60 нм. Оба металла напылялись в плазме аргона под давлением (1,2x1 (Г2 мбар, золото: при 50 Вт, Ti: при 400 Вт). Тетраподы CdTe и CdTe/CdSe были иммобилизованы на поверхности золота с использованием гександитиола как линкера, аналогично методике, описанной в работе [6]. Кремниевая пластина с нанесенным слоем золота выдерживалась в растворе гександитиола в толуле в течение 24 ч, затем в растворе наночастиц CdTe или CdTe/CdSe в толуоле в течение 24 ч, промывалась чистым толуолом и сушилась в токе аргона. Приготовленный образец помещался в вакуумную камеру (ИГ1 мбар) для удаления остатков растворителя с поверхности золотой пленки (время высушивания в камере составляло 24 ч). Контроль закрепления тетраподов на золоте, перед измерениями в СТМ, производился путем измерения топографии поверхности подложки в скани
100 пт
б)
Рис. 1
36
"Радиотехника" 2013 г., № 5
Нанотехнологии: разработка, применение
рующем электронном микроскопе (СЭМ) Carl Zeiss Supra 40. В центральной части подложки, в отличие от края, образуется система тетраподов с высокой концентрацией (рис. 1 ,6).
Эксперимент
Схема эксперимента и эквивалентная электрическая цепь представлены на рис. 2,а,б соответственно. В работе использовался СТМ «Nanoscope» (Digital Instruments Inc) с электроникой и программным обеспечением, разработанным в лаборатории криоэлектроники физического факультета МГУ. Во всех измерениях использовались Ptlr иглы, заостренные механическим отрезанием. При механическом отрезании на конце Ptlr проволоки формируется множество отростков, наиболее длинный из которых и используется в качестве иглы. Все измерения проводились в режиме постоянного тока, при комнатной температуре и естественном незначительном дрейфе иглы СТМ относительно образца.
Рис. 2
Топографии в СТМ золотой пленки до (а) и после (б) нанесения тетраподов представлены на рис. 3. Размер скана 200 нм, диапазон по высоте 10 нм и 470 нм, туннельное напряжение 300 мВ и 500 мВ, туннельный ток 0,15 нА и 0,3 нА соответственно. Как видно из рис. 3,6, топография золотой пленки с нанесенными тетраподами сущест
венно отличается от топографии, измеренной в электронном микроскопе. Отдельных тетраподов не видно. Это связано с тем, что изображение в СТМ (в приведенном масштабе измерений) представляет собой свертку рельефа поверхности и формы Ptlr иглы.
б)
Рис. 3
В связи с этим невозможно было измерять ВАХ в выбранном месте тетрапода, поэтому измеряли большое количество ВАХ при одинаковых условиях в случайно выбранном месте образца и анализировали статистику проведенных измерений.
Всего было зафиксировано три типа ВАХ:
первый - кривая, характерная для золотой пленки (точки) [12], с большой точностью аппроксимируется кривой, вычисленной по формуле Симмонса (сплошная линия) [13] для системы металл - диэлектрик - металл (МДМ) (рис. 4,а);
Радиотехника", 2013 г., № 5
37
Нанотехнологии: разработка, применение
Рис. 4
второй - симметричная кривая (рис. 4,6), не аппроксимирующаяся по формуле Симмонса. Вероятно такая форма ВАХ указывает на присутствие объектов в туннельном зазоре, которые влияют на высоту потенциального барьера. Такой тип характерен при измерениях ВАХ золотой пленки с нанесенными на нее тетраподами обоих типов;
третий - несимметричная кривая (рис. 4,в). Этот тип встречался при измерениях ВАХ золотой пленки с нанесенными на нее тетраподами CdSe/CdTe. Для нанокристаллов CdSe/CdTe возможны несколько каналов протекания тока, один из которых имеет явную диодную зависимость с резким падением тока при напряжениях меньших U- -1700 мВ.
Распределение вышеперечисленных типов ВАХ для чистой золотой пленки, образца с нанокристаллами CdTe и для образца с нанокристаллами CdSe/CdTe показано на рис. 5. Результаты представлены в процентах от общего числа измеренных (д ля соответствующего образца) характеристик.
Рис. 5
Обсуждение
Для чистой золотой пленки основная доля характеристик (84,4%) соответствует первому типу
ВАХ. Наличие же двух оставшихся типов ВАХ (по 7,8% каждый) обусловлено, вероятно, наличием дефектов на поверхности золота.
Для золота с нанокристаллами CdTe характерен второй тип ВАХ (88,8%), CdTe является полупроводником p-типа. Рассмотрим нашу систему как систему металл - диэлектрик - полупроводник -металл (МДПМ). Присутствие полупроводника приводит к увеличению высоты потенциального барьера в диапазоне напряжений, соответствующем запрещенной зоне, что приводит к уменьшению тока. В данном диапазоне ток обусловлен непосредственным туннелированием электронов с иглы в подложку. Вне этого диапазона туннелирование будет осуществляться через зону проводимости полупроводника, что приведет к уменьшению потенциального барьера, а соответственно, увеличению тока (см. рис. 4,6). Учитывая, что тетраподы покрывают порядка 80% поверхности золотой пленки (см. рис. 1), можно сказать, что остальные ВАХ относятся к измерениям в точках поверхности, не содержащих тетраподы.
Для золота с нанокристаллами CdSe/CdTe характерны второй (69,5%) и третий (26,6%) типы ВАХ. Остальные ВАХ относятся к измерениям над золотой пленкой. Тетраподы CdTe/CdSe, включают гетеропереход, сформированный внутри луча наночастицы между доменами CdSe и CdTe. Так как на границе соединения CdSe и CdTe образуется гетеропереход 2-го типа, приводящий к формированию энергетического барьера, вид ВАХ сильно зависит от того, в каком месте тетрапода производятся измерения. Возможные каналы протекания тока показаны на рис. 6,а, недеформиро-ванный случай:
1) игла СТМ находится над одной из боковых ножек тетрапода. Это соответствует рассмотренному случаю протекания тока в системе МДПМ и, соответственно, симметричной ВАХ;
38
"Радиотехника", 2013 г., № 5
Нанотехнологии: разработка, применение
2) игла СТМ находится над сердцевиной тет-рапода. В этом случае ток в тетраподе течет через один гетеропереход. Он будет протекать при положительных значениях напряжения;
3) игла СТМ находится над верхней ножкой тетрапода. В этом случае ток будет протекать через два гетероперехода. Если учитывать симметричность расположения гетеропереходов в системе, то в независимости от полярности напряжения один из переходов будет в запертом состоянии, следовательно, будет наблюдаться подавление протекания тока в обоих направлениях.
Как видно из рис. 4, второй и третий каналы в эксперименте не зарегистрированы. Возможно это связано с существованием значительного электростатического поля в зазоре СТМ, что приводит к проседанию тетрапода под действием силы (напряженность электрического поля в зазоре СТМ составляет величину порядка 109 В/м). Вследствие этого сердцевина тетрапода (как и ножки) будет касаться золотой подложки. Очевидно, что тогда первый и второй каналы будут представлять из себя одно и тоже, только для разных полупроводников. А вот третий канал преобразуется во второй, только возрастание тока будет уже при положительных напряжениях (рис. 6,6, деформированный случай).
• Синтезированы нанокристаллы CdTe и CdTe/CdSe, имеющие форму тетрапода. Проведены исследования электронных свойств таких нанокристаллов. Обнаружены два типа вольтамперных характеристик при расположении иглы СТМ над одиночным тетраподом: симметричная и не симметричная. Предложен механизм протекания тока через различные участки тетрапода в туннельном зазоре СТМ, учитывающий формирование энергетического
барьера в луче тетрапода и деформацию тетрапода электростатическим полем сканирующего туннельного микроскопа. Предложенный механизм качественно объясняет формы экспериментальных вольтамперных характеристик.
Работа проводилась при поддержке проектов Министерства науки и образования №№ 16.513.11.3063, 11.519.11.6047 и РФФИ (12-07-00236-а, 11-07-00748 и 11-02-12122-офи-м-2011).
Литература
1. Сое S, Woo W.-K., Bawendi М., Bulovic V. Electroluminescence from single monolayers of nanociystals in molecular organic devices //Nature. 2002. V. 420. P. 800-803.
2. Anikeeva P.O., Halpert J.E., Bawendi M.G. and Bulovic V. Electroluminescence from a Mixed Red-Green-Blue Colloidal Quantum Dot Monolayer I I Nano Lett. 2007. V. 7. P. 2196.
3. Gur I., Fromer N.A., Geier M.L. and Alivisatos A.P. AirStable All-Inorganic Nanocrystal Solar Cells Processed from Solution I I Science. 2005. V. 310. P. 462.
4. Manna L., Milliron D.J., Meisel A., Scher E.C., Alivisatos A.P. Controlled growth of tetrapod-branched inorganic nanocrystals //Nat. Mater. 2003. V. 2. P. 382-385.
5. Milliron D.J., Hughes S.M., Cui Y, Manna L., Li J., Wang L.-W., Alivisatos A.P. Colloidal nanociystal heterostructures with linear and branched topology //Nature. 2004. V. 430. P. 190-195.
6. Gur 1., Fromer N.A., Alivisatos A.P. Controlled assembly of hybrid bulk-heterojunction solar cells by sequential deposition ll J. Phys. Chem. B. 2006. V. 110. P. 25543-25546.
7. Sun B., Marx E., Greenham N.C. Photovoltaic Devices Using Blends of Branched CdSe Nanoparticles and Conjugated Polymers //Nano Lett. 2003. V. 3. P. 961-963.
8. Cui Y., Banin U., BjorkM.T., Alivisatos A.P. Electrical transport through a single nanoscale semiconductor branch point I I Nano Lett. 2005. V. 5. P. 1519-1523.
9. Steinberg H., Lilach Y, Salant A., Wolf O., Faust A., Millo O., Banin U. Anomalous-Temperature Dependent Transport through Single Colloidal Nanorods Strongly Coupled to Metallic Leads //Nano Lett. 2009. V. 9. P. 3671-3675.
"Радиотехника", 2013 г-, № 5
39
Нанотехнологии: разработка, применение
10. Steinberg Н., Wolf О., Faust A., Salant A., Lilach Y., Millo О., Banin U. Electrical Current Switching in Single CdSe Nanorods //Nano Lett. 2010. V. 10. P. 2416-2420.
11. Vasiliev R.B., et. al. Facet-selective growth and optical properties of CdTe/CdSe tetrapod-shaped nanocrystal heterostructures // J. Mater. Res. 2011. V. 26. P. 1621-1626.
12. Scott JH, White HS. Electric field induced phenomena in scanning tunneling microscopy: tip deformations and gold(l 11) sur
face phase transitions during tunneling spectroscopy experiments // Langmuir. 1993. №9. P. 3471-3477.
13. Simmons J.G. Generalized Formula for the Electric Tunnel Effect between Similar Electrodes Separated by a Thin Insulating Film // Journal of applied physics. 1963. №34. P.1793-1803.
Поступила 12 ноября 2012 г.
STM study of electronic properties of single CdTe and CdTe/CdSe nanocrystals
© Authors, 2013
A.S. Trifonov, R.B. Vasiliev, I.S. Ezubchenko, M.S. Sokolikova, D.R. Britov, D.E. Presnov, O.V. Snigirev
Size-dependent electronic properties of semiconductor nanocrystals have been intensively studied over the last decades. The methods of colloidal chemistry for high-quality nanocrystals production provide an opportunity to design nanoelectronic devices such as light-emitting diodes and solar cells. Branched nanocrystals, for example tetrapods, represent a new class of nanostructures. A tetrapod-shaped nanocrystal is formed with four arms that branch out at tetrahedral angles from a central region. Due to their shape tetrapods are attractive for electronic and opto-electronic devices, for example solar cell and single-electron transistor.
A charge transport phenomenon through a single nanocrystal is of both significant fundamental and practical interest. In present work we studied a monolayer of tetrapod-shaped nanocrystals immobilized on gold surface by scanning tunneling microscopy. We use a CdTe and CdTe/CdSe heterostructured tetrapods with heterojunction formed within single nanocrystal.
CdTe/CdSe tetrapods were synthesized by a two-step seed-mediated approach. Monolayers of CdTe and CdTe/CdSe tetrapods were immobilized on gold substrate. According to ТЕМ measurements, the average length of CdTe tetrapod arms was found to be 12 nm and arm width was about 3 nm with size precision of about 10-20%.
We investigated electronic properties of single CdTe and CdTe/CdSe heterostructured tetrapods using scanning tunneling microscope (STM). In particular we measured and analyzed a large number of current-voltage characteristics (CVC) recorded under the same conditions in a random place of the CdTe, CdTe/CdSe and pure gold samples. 3 different types of CVC shapes were detected.
The first type curve is one typical for gold films and is well fitted by Simmons formula for metal-dielectric-metal (MDM) systems.
The second type is a symmetrical curve, which could not be fitted by Simmons formula. Apparently this kind of curve indicates the presence of objects in the tunneling gap, which affects the height of the potential barrier. This shape of CVC is typical for a gold film with CdTe or CdTe/CdSe tetrapods, immobilized on it.
The third type is an asymmetrical curve with sharp increase in current at negative voltage. It can be observed in CVCs of a gold film with monolayer of CdTe/CdSe tetrapods. CdTe/CdSe nanocrystals produce multiple channels of current flow, one of which has clear diode dependence with the sharp decline of current on voltage lower than U ~ -1700 mV.
The mechanism of current flow through various parts of tetrapod which takes into consideration the deformation of the tetrapod by electrostatic field of a scanning tunneling microscope is proposed. It explains the average shape of the experimental current-voltage characteristics.
40
Радиотехника", 2013 г., № 5
Информационные технологии, радиотехнические цепи и элементная база
УДК 621.391
Оценка качества цветных изображений при подавлении импульсного шума
© Авторы, 2013
АЛ. Приоров - д.т.н., доцент кафедры динамики электронных систем, Ярославский государственный университет им. П.Г. Демидова E-mail: andcat@yandex.ru
В.В. Хрящев - к.т.н., доцент кафедры динамики электронных систем, Ярославский государственный университет им. П.Г. Демидова
E-mail: vhr@yandex.ru
Е.А. Павлов - аспирант кафедры динамики электронных систем, Ярославский государственный университет им. П.Г. Демидова E-mail: evgeny@pavlov.name
Н.Б. Герасимов - аспирант кафедры динамики электронных систем, Ярославский государственный университет им. П.Г. Демидова E-mail: chegeras@gmail.com
А.М. Шемяков - магистрант кафедры динамики электронных систем, Ярославский государственный университет им. П.Г. Демидова E-mail: andrey.shemiakov@gmail.com
Описан алгоритм восстановления изображений, использующий совместно переключающуюся схему и аппарат векторной медианной фильтрации. Проведён анализ использования предложенного алгоритма в задачах подавления импульсного шума со случайными значениями импульсов в цветных RGB-изображениях. Приведены визуальные примеры результатов восстановления тестовых изображений.
Ключевые слова: подавление шума, оценка качества изображений.
In this paper an image recovery algorithm with the use of switching scheme and vector median filtration is described. Analysis of the algorithm usage for removal of random-valued impulse nose in color RGB images was done. Visual examples of restored test images provided. Keywords: noise removal, image quality assessment
Введение
Работа сенсоров в устройствах получения изображений зависит от различных факторов, таких как внешние условия в процессе съемки и качество сенсоров. Например, в процессе получения изображения с помощью фотокамеры с ПЗС-матрицей основными факторами, влияющими на величину шума, являются уровень освещенности и температура сенсоров. В процессе передачи изображения могут искажаться помехами, возникаю
щими в каналах связи. Например, при передаче изображения с использованием беспроводной связи оно может быть искажено в результате разряда молнии или других возмущений в атмосфере.
Под импульсным шумом понимается искажение сигнала импульсами, т.е. выбросами с очень большими положительными или отрицательными значениями и малой длительностью. При обработке изображений импульсный шум возникает, например, вследствие ошибок декодирования, которые
"Радиотехника", 2013 г., № 5
41
Информационные технологии, радиотехнические цепи и элементная база
приводят к появлению черных и белых точек на изображении [1, 2], поэтому его часто называют точечным шумом. Выбросы шума особенно заметны
на очень темных или очень светлых участках изображений. Существует две основные модели импульсного шума. В первой модели все выбросы шума имеют фиксированное значение, во второй -шум принимает значения, выбранные случайно (с равномерным или гауссовским распределением) из всего диапазона от черного до белого.
Обработка цветных изображений имеет ряд особенностей, связанных, в первую очередь, с тем,
что каждому пикселю соответствует не одно значение яркости, как в случае полутоновых изображений, а несколько [1-4]. Согласно трехкомпонентной теории цвета, цветные пиксели кодиру
ются тремя скалярными значениями, которые соответствуют красному (7?), зеленому (G) и синему (В) цветам, т.е. каждый пиксель цветного RGB-изображения может быть представлен вектором:
где N- число пикселей в изображении. Соответственно, цветной шум может рассматриваться, как изменение значения пикселя в определенном цветовом канале. Модель шума в этом случае должна рассматриваться, как трехканальный вектор в цветовом пространстве, изменяющий фактические цветовые векторы.
В работе рассматривается импульсный шум, который может быть представлен в виде следующей модели:
fv,*, с вероятностью р,
У/=) 1
[х; , с вероятностью 1 - р,
где х, - пиксель исходного изображения; у,- -
вектор, представляющий импульс шума; у(. - пиксель искаженного изображения.
На данный момент наиболее популярной объективной мерой служит пиковое отношение сигнал-шум (ПОСШ), определяемое по следующим формулам (для изображений с 256 градациями яркости):
ПОСШ = 201og10
255
Jcko ’
где N - число пикселей в изображении, х, и у, -значения пикселей исходного и восстановленного
изображений соответственно, СКО - среднеквадратическая ошибка. Высокое значение ПОСШ (на практике более 30 дБ) означает определенную схожесть восстановленного и исходного изображений, но оно не дает гарантию того, что зрителю понравится восстановленный образ. Большим минусом использования ПОСШ в системах цифровой обработки изображений является то, что данная величина не имеет абсолютного значения. Величина ПОСШ используется обычно только для сравнения различных алгоритмов обработки или для изучения влияния параметров на эффектив
ность того или иного алгоритма.
Метрика нормализованной цветоразности (НЦР) [5] может рассматриваться в качестве комбинированной численной оценки разницы в цветовой насыщенности, яркости и цвете пикселей двух изображений. Критерий нормализованной цветоразности вводится следующим образом:
НЦР =
Критерий НЦР определяется в цветовом про
странстве CIEL*u*v*, где о< = о/ьо^о/з и
У1=\_Уц’У12’Уа] ~ цветовые векторы в цветовом пространстве CIE L*u*v* (с точкой белого, определяемой в соответствии со стандартом D65), со
ответствующие векторам о, и уг пространства RGB, где о( =[о;1,ог2,о(3] - исходный пиксель, У,: =[Ун>У12’У1з] ~ обработанный пиксель, i - позиция пикселя на цветном изображении. Таким образом, критерий НЦР хорошо подходит для оценки разницы цветности между цветовыми векторами.
На первый взгляд очевидное решение задачи удаления шума из цветных изображений - это обработка трех цветовых каналов по отдельности с использованием известных фильтров для полутоновых изображений. Однако такой подход приводит к появлению новых цветов в изображении, что во многих случаях является неприемлемым. Поэтому для обработки цветных изображений широко применяются векторные фильтры, оперирующие в векторном пространстве [5-7].
Векторные медианы могут применяться в фильтрах, в которых окно фиксированного размера движется по векторному сигналу, и в каждый
42
"Радиотехника", 2013 г., № 5
Информационные технологии, радиотехнические цепи и элементная база
момент времени выход фильтра - это векторная медиана отсчетов сигнала внутри этого окна. Обычно в векторных медианных фильтрах требуется, чтобы можно было связать выходное значение с центральным значением окна фильтра.
Существует большое количество алгоритмов фильтрации полноцветных RGB-изображений, не использующих детекторную схему [8]. Такой подход, как правило, обеспечивает выигрыш по времени обработки по сравнению с использованием переключающейся схемы. Но, как показывает ряд исследований [9, 10], в задачах подавления импульсного шума эффективность восстановления может существенно возрастать при переходе от рассмотрения алгоритмов без детекторов к алгоритмам, использующим детектирование шума.
Среди известных алгоритмов подавления импульсного шума в цветных изображениях с предварительным детектированием важное место занимает равногрупповой фильтр (РГФ) [7]. Это метод, основанный на сопоставлении каждому пикселю агрегированного расстояния от данного пикселя до соседних, вычисленного с помощью какой-либо метрики. Для классификации зашумленных и не-зашумленных пикселей агрегированные расстояния должны быть разделены на два класса. Для решения этой задачи можно использовать линейный дискриминант Фишера. Это метод классификации, который в общем случае отображает многомерные данные в одномерные и далее осуществляет классификацию в одномерном пространстве.
Алгоритм работы направленного взвешенного медианного фильтра (НВМФ) основан на нахождении незашумленных пикселей в окрестности данного элемента изображения путем выбора направления, на котором расположены неискаженные пиксели в этой окрестности. Во внимание принимаются только четыре главных направления [10-12].
Другим из наиболее эффективных алгоритмов удаления импульсного шума из цветных изображений является взвешенный векторный направленный фильтр (ВВНФ) [6], использующий метод скользящего окна для обработки изображения и угол между векторами в качестве меры расстояния между пикселями.
Алгоритм ВВНФ использует неотрицательные вещественные весовые коэффициенты w’1,w2,...,wAr, связанные с входными векторами х1,х2,...,хлг. Каждый из входных векторов ХрХ^.^Хд, содержит координаты соответствующего пикселя обрабатываемого изображения в цветовом пространстве RGB. На выходе фильтра фор
мируется вектор у = X;, е W, соответствующий одному из пикселей внутри окна фильтра, такому, что для него взвешенная сумма угловых расстояний до остальных пикселей внутри окна минимальна:
N
у = argminYw Л(х,-,х ),
J=1
где
( A
x/?xy
( A
= arc cos .. .........
Jxfi + 4 + 4 + ХУ2 + *73 ,
Набор весовых коэффициентов w = {w],w2,...,w7V] определяет конкретную реализацию фильтра, которая может быть использована для определенных целей, например, для удаления определенного вида шума [13-17].
Цель работы - улучшение характеристик методов фильтрации импульсного шума со случайными значениями импульсов в цветных RGB-изображениях, для чего предлагается новый высокоэффективный алгоритм восстановления цветных изображений, искаженных импульсным шумом со случайными значениями импульсов, использующий совместно переключающуюся схему и аппарат векторной медианной фильтрации. Проводится сравнительный анализ результатов работы предложенного алгоритма с рядом известных алгоритмов подавления импульсного шума в изображениях, при этом рассматриваются объективные численные критерии качества восстановления - ПОСШ, НЦР и визуальный анализ результатов восстановления тестовых изображений.
Векторный медианный фильтр с направленным детектором
С целью эффективного удаления импульсного шума предлагаемый алгоритм использует переключающуюся схему. В соответствии с ней обработка каждого пикселя состоит из двух этапов: детектирование импульса и его фильтрация. Схема алгоритма представлена на рис. 1, где Ху - обрабатываемый пиксель зашумленного изображения с координатами (z, у), У у ~ соответствующий пиксель восстановленного изображения, dLy - сумма разностей значений яркости, dAy - сумма угловых расстояний.
"Радиотехника", 2013 г., № 5
43
Информационные технологии, радиотехнические цепи и элементная база
Рис. 1
Алгоритм детектирования векторного медианного фильтра с направленным детектором (ВМФ-НД) работает следующим образом. На этапе детектирования внутри окна фильтрации выбираются четыре основных направления, проходящие через центральный пиксель Ху . Обозначим их индексами Л = 1,...,4. Для каждого направления рассчитываются две суммы:
сумма разностей значений яркости dLy (к = между пикселями, лежащими на
данном направлении Ху , и центральным пиксе-
лем х,7; и
сумма угловых расстояний dAy (& = 1,...,4) между пикселями, лежащими на данном направлении Ху , и центральным пикселем Ху .
Угловое расстояние между двумя пикселями определяется, как угол между соответствующими трехкомпонентными векторами значений цвета
пикселя:
= arccos
*11*21 + *12*22 + *13*23
ч V*H + *П + *В VX21 + *22 + *23
Яркость пикселя рассчитывается, исходя из значений цветовых компонент следующим образом:
Цх) = 0,37?+ 0,596 +0,11В,
где R,G,B - красная, зеленая и синяя компоненты пикселя х соответственно.
44
"Радиотехника", 2013 г., № 5
Информационные технологии, радиотехнические цепи и элементная база
Из всех вычисленных сумм выбирается
минимальная: rL = min<7Zi | k = 1,...,4 . Также нахо-к J
дится минимальная сумма из всех dAg: г А = min dA\. | к = 1,...,4. Полученные значения rL и к J
гА сравниваются со значениями порогов - TL и ТА соответственно. Если rL<TL и гА<ТА, тогда в пиксель Хд изменения не вносятся. В противном случае данный пиксель считается зашумленным, и его значение заменяется взвешенной векторной медианой, рассчитанной, исходя из значений всех пикселей внутри окна фильтрации [18-20].
Тестирование детекторов шума
Применение алгоритма фильтрации к пикселям обрабатываемого изображения неизбежно приводит к появлению на нем дополнительных искажений, вызванных воздействием фильтра. Одной из особенностей рассматриваемого в данной работе импульсного шума является то, что не все пиксели исходного изображения подвергаются искажению шумом. Поэтому важная задача - выявление на изображении зашумленных пикселей и применение алгоритма фильтрации только к этим пикселям. Для решения этой задачи служит процедура детектирования импульсов. Очевидно, что от эффективности процедуры детектирования в общем случае зависит конечный результат обработки зашумлен
ного изображения алгоритмом восстановления. Поэтому возникает задача проведения сравнительного анализа различных алгоритмов восстановления, использующих переключающуюся схему, с точки зрения эффективности их детекторов.
Эффективность детектирования представляется в виде количества ошибок I и II рода. Количество ошибок I рода означает число пропущенных при детектировании шумовых пикселей, количество ошибок II рода - число неискаженных пикселей, ошибочно идентифицированных как шум. Значения количества ошибок детектирования получены путем повторения эксперимента (число экспериментов N = 10 ) и усреднения результатов.
Исследование выполнялось для пяти тестовых RGB-изображений с различной степенью детализации. Проводилось сравнение трех различных типов детекторов, входящих в состав алгоритмов восстановления НВМФ, РГФ и ВМФ-НД. Значения количества ошибок I и II рода для RGB-изображения «Кепки» приведены в табл. 1, а результаты, усредненные по всему набору тестовых изображений, - в табл. 2, где р - вероятность появления импульса (0 < р < 1).
Представленные результаты моделирования показывают, что наименьшее количество ошибок I рода среди всех рассмотренных детекторов, обеспечивает процедура детектирования алгоритма НВМФ: количество ошибок I рода для нее в среднем в 1,5-2 раза меньше, чем для детекторов РГФ
Таблица 1
р Количество ошибок детектирования (изображение «Кепки»)
НВМФ РГФ ВМФ-НД
I II I II I II
0 0 66203 0 5463 0 1312
0,05 1746 63988 2235 12334 2374 1704
0,10 3524 61818 4666 15467 4795 2236
0,15 5274 59958 7804 16246 7204 3200
0,20 7042 58353 12067 15491 9618 4821
0,25 8739 57302 17496 14045 11955 7427
Таблица 2
Р Количество ошибок детектирования для разных алгоритмов (усреднение по 5 изображениям)
НВМФ РГФ ВМФ-НД
I II I II I II
0 0 81561 0 4161 0 4077
0,05 1390 78720 2238 9361 2368 4780
0,10 2793 75938 4632 11742 4747 5592
0,15 4186 73301 7632 12335 7132 6687
0,20 5576 70915 11566 11823 9462 8336
0,25 6933 68942 16515 10720 11730 10686
"Радиотехника", 2013 г., № 5
45
Информационные технологии, радиотехнические цепи и элементная база
и ВМФ-НД. В то же время количество ошибок II рода для детектора НВМФ является очень большим относительно других рассмотренных алгоритмов (приблизительно на порядок больше), что говорит о большом количестве ложных срабатываний этого детектора.
С точки зрения количества ошибок II рода, наиболее эффективным оказывается детектор предложенного алгоритма ВМФ-НД. Для данного алгоритма количество таких ошибок в среднем на 10-30% ниже, чем для алгоритма РГФ.
Моделирование алгоритмов фильтрации
Проведем сравнительный анализ предложенного алгоритма ВМФ-НД с другими алгоритмами восстановления цветных изображений, искаженных импульсным шумом со случайными значениями импульсов.
Сравнение производится со следующими алгоритмами фильтрации:
векторный медианный фильтр с маской 3x3 (ВМФ);
взвешенный векторный направленный фильтр с маской 3x3 (ВВМФ);
равногрупповой фильтр с маской 3x3 (РГФ).
При анализе используются следующие критерии:
объективная оценка качества восстановленного изображения - ПОСШ;
объективная оценка качества восстановленного цветного изображения - НЦР;
визуальное качество изображений, полученных после фильтрации;
относительные временные затраты на выполнение алгоритмов фильтрации.
Результаты восстановления трех тестовых цветных изображений с разной степенью детализации, искаженных импульсным шумом со случайными значениями импульсов, представлены в терминах критерия ПОСШ на рис. 2, где а - для изображения «Цветок», б - для изображения «Кепки».
Из зависимостей на рис. 2 видно, что для модели импульсного шума со случайными значениями импульсов предложенный алгоритм ВМФ-НД демонстрирует хорошие результаты при всех рассматриваемых значениях вероятности шума (р = 0...0,3), превосходя ближайший к нему равногрупповой фильтр на 1...4дБ по критерию ПОСШ. В случае изображения с низкой степенью детализации «Кепки» преимущество ВМФ-НД над РГФ составляет порядка 3...4дБ на всем рассматриваемом интервале значений вероятности шума. Для изображения с более высокой степенью детализации «Цветок» превосходство составляет, примерно 1...2 дБ. Сравнительный анализ проведен на большом числе других тестовых изображений, где получены похожие зависимости.
Результаты восстановления трех тестовых цветных изображений с разной степенью детализации, искаженных импульсным шумом со случайными значениями импульсов, представлены в терминах критерия НЦР на рис. 3. Из них можно заключить, что предложенный алгоритм ВМФ-НД показывает существенно лучшие результаты, чем другие рассматриваемые алгоритмы удаления импульсного шума для всех исследуемых степеней шума с точки зрения критерия НЦР. Наиболее близкие к ВМФ-НД результаты демонстрирует алгоритм РГФ, но он уступает предложенному фильтру на 20-50% для различных степеней зашумления изображения. При этом превосходство растет при увеличении вероят
46
"Радиотехника", 2013 г., № 5
Информационные технологии, радиотехнические цепи и элементная база
ности вносимого импульсного шума со случайными значениями импульсов.
Результаты восстановления различными алгоритмами фрагментов изображений «Кепки» с разной степенью детализации, зашумленных 30 % импульсным шумом со случайными значениями импульсов, приведены на рис. 4, где а - ВМФ (ПОСШ = 32,6 дБ, НЦР = 29); б - ВВМФ (ПОСШ = = 27,3 дБ, НЦР = 39); в - РГФ (ПОСШ = 30,6 дБ, НЦР = 33); г - ВМФ-НД (ПОСШ = 33 дБ, НЦР = 22).
Из приведенных рисунков видно, что применение медианного фильтра к каждому цветовому каналу хотя и приводит к удалению почти всего шума, но вносит существенное размытие в изображение. Кроме того, на восстановленном изображении заметны артефакты в виде бледных цветных пятен. После применения ВМФ изображение также получается существенно размытым.
Среди алгоритмов, не включающих в себя детектор шума, высокое качество восстановленного изображения демонстрирует алгоритм ВВМФ. Но после его применения на изображении остаются отдельные импульсы шума, заметные при визуальном восприятии. Более качественные результаты восстановления обеспечивает применение алгоритма РГФ, который, сохраняя детали изображения, почти не оставляет импульсов на изображении.
Предложенный алгоритм ВМФ-НД демонстрирует схожие с РГФ визуальные результаты, превосходя РГФ в том, что пропускает меньше импульсов шума и лучше сохраняет границы на изображении. Приведенные на рисунках значения критерия качества НЦР подтверждают выводы, сделанные из анализа визуальных данных.
В качестве критерия для эмпирической оценки вычислительной сложности алгоритмов вы-
45
40
45
40
&25
х 20
15
10
5
0
- ВМФ
- / ' ВВМФ РГФ
' ВМФ-НД
0,05 ОД ОД 5 02
а)
Х 20 „ 2
'lillllllllOllflO
0,05 ОД 0/15 02
б)
ВМФ
ВВМФ РГФ ВМФ-НД
0,25 03
025 03
"Радиотехника", 2013 г., № 5
47
Информационные технологии, радиотехнические цепи и элементная база
Таблица 3
p Относительные временные затраты алгоритмов удаления импульсного шума (изображение «Кепки»)
МФ ВМФ ВВМФ РГФ ВМФ-НД
0,05 1 2,7 7,1 6,4 7,0
0,10 1 2,5 6,7 5,9 6,4
0,15 1 2,5 6,5 5,9 6,3
0,20 1 2,7 7,2 6,4 6,9
0,25 1 2,4 6,6 5,9 6,4
брано время их выполнения. При этом время, затраченное на выполнение каждого алгоритма, нормировано на время работы классического медианного фильтра (МФ) с размером окна 3x3 применительно к цветному RGB-изображению. Зависимости относительного времени выполнения t различных алгоритмов восстановления от плотности импульсного шума р для изображения «Кепки» приведены в табл. 3.
Из анализа результатов моделирования можно заключить, что наиболее быстрым среди всех рассматриваемых алгоритмов удаления импульсного шума из цветных изображений является классический медианный фильтр, применяемый к каждому цветовому каналу. Среди алгоритмов векторной фильтрации наименьшее время работы показывает алгоритм ВМФ, уступая по этому показателю классическому медианному фильтру в среднем в 2-3 раза. Скорость работы алгоритмов с детекторной частью РГФ и ВМФ-НД уступает скорости алгоритма ВМФ в среднем в 2 раза, что объясняется временными затратами на детектирование шума.
• Совместное использование разработанной схемы детектирования импульсного шума со случайными значениями импульсов в цветных изображениях и векторного взвешенного медианного фильтра позволяет получить новый алгоритм восстановления цветных изображений ВМФ-НД, позволяющий эффективно восстанавливать цифровые изображения, искаженные импульсным шумом со случайными значениями импульсов.
Результаты восстановления цветных изображений, поврежденных импульсным шумом со случайными значениями импульсов, демонстрируют преимущество разработанного алгоритма ВМФ-НД над алгоритмом РГФ на 1...2дБ.
Сравнительный анализ временных затрат на выполнение алгоритмов позволяет заключить, что среднее время, затраченное алгоритмом
ВМФ-НД на удаление гауссовского шума, примерно сравнимо со временем алгоритма РГФ и в 3 раза больше времени классического медианного фильтра, примененного поканально.
Литература
1. Pratt W. Digital Image Processing H Third Edition. Wiley. 2001.
2. Jahne B. Practical Handbook on Image Processing for Scientific and Technical Applications I I Second edition. CRC. 2004.
3. Lukac R. Computational Photography: Methods and Applications. CRC Press / Taylor & Francis. 2010.
4. Гонсалес P., Вудс P. Цифровая обработка изображений. M.: Техносфера. 2005.
5. Plataniotis K.N., Androutsos D., Venetsanopoulos A.N. Adaptive Fuzzy Systems for Multichannel Signal Processing // Proceedings of the IEEE. 1999. V. 87. №9. P. 1601-1622.
6. Plataniotis K.N., Androutsos D., Venetsanopoulos A.N. Colour Image Filter: The Vector Directional Approach H Optical Engineering Journal. 1997. V. 36(9). P. 2375-2383.
7. Smolka B. Peer Group Filter for Impulsive Noise Removal in Color Images H Lecture Notes in Computer Science. Springer Berlin. 2008. P. 699-707.
8. Russ J. The image processing handbook И CRC. 1995.
9. Abreu E., Lightstone M., Mitra S., Arakawa K. A New Efficient Approach for the Removal of Impulse Noise from Highly Corrupted Images П IEEE Trans, on Image Processing. 1996. V. 5. №6. P. 1012-1025.
10. Wang Z., Zhang D. Progressive switching median filter for the removal of impulse noise from highly corrupted images // IEEE Trans. Circuits Systems - II. 1999. V. 46. №1. P. 78-80.
11. Mitra S., Sicuranza G. Nonlinear Image Processing. Academic Press. 2000.
12. Plataniotis K.N., Androutsos D., Venetsanopoulos A.N. Multichannel filters for image processing И Signal Processing: Image Communications. 1997. V. 9. №2. P. 143-158.
13. Plataniotis K.N., Venetsanopoulos A.N. Color Image Processing and Applications. Springer, Berlin. 2000.
14. Lukac R, Smolka B., Martin K., Plataniotis K.N., Venetsanopoulos A.N. Vector Filtering for Color Imaging П IEEE Signal Processing Magazine. 2005. V. 22(1). P. 74-86.
15. Barni M., Cappellini V., Mecocci A. Fast Vector Median Filter Based on Euclidean Norm Approximation I I IEEE Signal Processing Letters. 1994. V. 1(6). P. 92-94.
16. Бухтояров C.C., Приоров А.Л., Апальков ИВ., Хрящев В.В. Переключающийся медианный фильтр с блоком предварительного детектирования И Цифровая обработка сигналов. 2006. №4. С. 2-8.
17. Signal and Image Processing Image Database (http ://sipi .use. edu/database).
48
"Радиотехника" 2013 г., № 5
Информационные технологии, радиотехнические цепи и элементная база
18. Приоров AJL, Хрящев В.В., Куйкин Д.К. Удаление импульсного шума из изображений на основе ранжирующих фильтров // Электросвязь. 2010. №3. С. 31-34.
19. Приоров А.Л., Хрящев В.В., Голубев М.Н. Удаление импульсного шума со случайными значениями импульсов из изображений И Радиотехника. 2010. №5. С. 72-79.
20. Khryashchev V.V., Kuykin D.K., Studenova А.А. Vector median filter with directional detector for color image denoising H Proc. World Congress on Engineering 2011. London. 2011. V. 2. P. 1699-1704.
Поступила 8 октября 2012 г.
Color image quality evaluation for impulse noise suppressing
© Authors, 2013
A.L. Priorov, V.V. Khryashchev, E.A. Pavlov, N.B. Gerasimov, A.M. Shemyakov
In many practical applications images are corrupted by noise caused either by faulty image sensors or due to transmissions corruption resulting from artificial or natural phenomena. Transmission noise, also known as salt-and-pepper noise in grey-scale imaging, is modeled by an impulsive distribution. However, a problem in the study of the effect of the noise in the image processing community is the lack of commonly accepted multivariate impulse noise model. A number of simplified models have been introduced recently, to assist the performance evaluation of the different color image filters.
Based on trichromatic color theory, color pixels are encoded as three scalar values, namely, red, green and blue (RGB color space). Since each individual channel of a color image can be considered as a monochrome image, traditional nonlinear image filtering techniques have involved the application of scalar filters on each channel separately. However, this disrupts the correlation that exists between the color components of natural images. As such the color noise model should be considered as a 3-channel perturbation vector in color space.
The main approach for impulse noise removing is to use median-based filters. However, these nonlinear filters also tend to modify pixels that are not affected by the noise. In addition, when impulse noise probability is high, they are prone to edge jitter, so that details and edges of the original image are usually blurred by the filter.
In order to improve performance of median-based filter approach, various decision-based filters have been proposed, where possible impulse noise pixels are first identified and then replaced by using median filter. The examples of decision-based filters for randomvalued impulse noise removal from grayscale images are: adaptive center-weighted median filter and directional weighted median filter. These filters are good in locating the noise even in the case of high noise probability.
In this paper authors introduce a novel filter for the purpose of random-valued impulse noise removal from RGB-color images which utilizes the advantages of both weighted vector median and decision-making filtration schemes.
Уважаемые читатели!
В Издательстве «Радиотехника» вышли в свет книги
Гринев А.Ю,, Темченко В.С., Багно Д.В.
Радары подповерхностного зондирования. Мониторинг и диагностика сред и объектов
Рассмотрены актуальные вопросы диагностики подповерхностных сред и объектов инфраструктуры (дорожных покрытий, кабелей, трубопроводов) радарами подповерхностного зондирования (РПЗ). Впервые комплексно исследованы все этапы реконструкции электрофизических и геометрических параметров подповерхностных сред и объектов, а также алгоритмы формирования трехмерных радиоизображений объектов многоканальными РПЗ. Исследованы особенности решения прямой и обратной задачи реконструкции с учетом характеристик РПЗ. Использована электродинамическая модель реальной системы «передающая антенна - слоистая среда (объект) - приемная антенна» для повышения точности реконструкции. Показано применение методов и технологий в многоканальных многофункциональных радарах подповерхностного зондирования. Приведена структура программного обеспечения многоканального РПЗ и представлены результаты натурных испытаний.
Для научных сотрудников, аспирантов и инженеров, специализирующихся в области разработки и использования радаров подповерхностного зондирования. Может быть полезна специалистам-практикам для расширения сферы приложений РПЗ, преподавателям и студентам.
По вопросам заказа и приобретения книг обращаться по адресу: 107031 г. Москва, Кузнецкий мост, 20/6.
Тел./факс: (495) 625-92-41, тел.: (495) 625-78-72,621-48-37
Полный перечень книг, выпускаемых Издательством «Радиотехника», размещен на сайте http://www.radiotec.ru;
e-mail: info@radiotec.ru
"Радиотехника", 2013 г., № 5 49
Радиотехническая аппаратура
и ее применение
УДК 621.396
Метод экспресс-определения местоположения воздушного судна с использованием неполного состава глобальной навигационной системы
© Авторы, 2013
В.В. Бейнарович - к.т.н., ст. науч, сотрудник, ст. преподаватель авиационных радиолокационных и радионавигационных систем, Южный филиал Московского института аэронавигации
В.А. Морковкин - к.т.н., доцент, кафедра информационных технологий, Ростовский технологический институт сервиса и туризма ЮРГУЭС E-mail: morkovkinva@mail.ru
А.Г. Нечаенко - аспирант, кафедра информационных технологий, Ростовский технологический институт сервиса и туризма ЮРГУЭС
В.А. Обуховец - д.т.н., профессор, первый зам. руководителя, Технологический институт Южного федерального университета (г. Таганрог)
Рассмотрена проблема экстренного определения местоположения воздушных судов с использованием одного навигационного спутника СРНС ГЛОНАСС. Проведенные исследования показывают высокую эффективность рассматриваемого дифференциально-геометрического метода в решении задач концепции CNS/ ATM Международной организации гражданской авиации (ИКАО). Дана оценка эффективности метода, приведен иллюстративный пример.
Ключевые слова: ИКАО, спутник и радионавигация.
This article is dedicated to the problems of express defining place airlift by using the one spaceship of Russian satellite radionavigation system. The results of research made in this article and its metrological basis prove higt effectiveness of differential -geometric method of complexing in solving of the problem realization conception CNS/ATM International civil aviation organization (ICAO). Mere has been given an estimation of the method efficiency and presented an illustrative example.
Keywords: ICAO, satellite and radio-navigation.
Концепция CNS/ATM (связь, навигация и организация воздушного движения), разработанная Международной организацией гражданской авиации (ИКАО), предполагает ряд принципиальных структурных новаций. К ним, прежде всего, относятся спрямление воздушных трасс между аэропортами, пролегающими через северный и южный полюса, а также реализация принципа «свободного полёта» в рамках глобальной авиации. Указанные новации требуют от экипажа полного владения информации о воздушной обстановке на трассе и нивелируют роль наземных средств сопровождения воздушных судов (ВС).
В основу реализация стратегии ИКАО заложена интеграция возможностей спутниковых ра
дионавигационных систем (СРНС) глобального позиционирования GPS (в основном американской NAVSTAR и отечественной ГЛОНАСС, обеспечивающая высокую точность определения местоположения воздушных судов (ВС) во всем воздушном пространстве (ВП) планеты.
Существующее состояние указанных СРНС не в полной мере отвечает концептуальным требованиям ИКАО, имея недостатки навигационных измерений на кроссполярных и трансполярных маршрутах [1].
К этим недостаткам относятся:
недостаточный уровень развития группировки навигационных космических аппаратов (НКА) в указанных районах;
50
"Радиотехника", 2013 г., № 5
Радиотехническая аппаратура и ее применение
необходимость для определения местоположения ВС не менее четырёх НКА СРНС;
проведение периодической коррекции накапливаемых погрешностей измерения инерциальными и радиотехническими навигационными средствами ВС [2].
Перечисленные недостатки не позволяют эффективно решить поставленную ИКАО задачу.
Известен угломерно-доплеровский способ, определения текущих координат местоположения транспортного средства при измерении ускорения силы тяжести в движении, использующий подвижные визирные цели, запущенные по известным траекториям с известными параметрами движения [3, 4].
Основным недостатком этого метода является его территориальная ограниченность и необходимость создания сложной и дорогой системы континентальных и межконтинентальных подвижных целей, обеспечивающих решение навигационной задачи для ВС, совершающих длительные полёты в мировом воздушном пространстве.
Цель работы - привести результаты развития дифференциально-геометрического
подхода к экстренному определению местоположения ВС, включающие анализ его точностных характеристик с учетом основных случайных факторов в рамках нормального закона распределения.
Исследование предполагает решение задачи экспресс - определения местоположения ВС, коррекции его бортовых инерциальных и радиотехнических навигационных средств, включая бортовую шкалу времени. Решение задачи предполагается в ситуации, обусловленной потерей радиосвязи с диспетчерским пунктом и отсутствием технической возможности обнаружения достаточного количества НКА СРНС на кроссполярных и трансполярных маршрутах.
Рассмотрен случай реализации решения задачи экстренного определения местоположения ВС при обнаружении им хотя бы одного НКА СРНС, представляющий собой актуальную задачу радионавигации при неполном составе космической группировки НКА.
Геометрия решаемой задачи представлена на рис. 1, где ВС стартует с аэродрома, имеющего точную геодезическую привязку, и совершает длительный полёт со сложной траекторией. При
"Радиотехника", 2013 г., № 5
51
Радиотехническая аппаратура и ее применение
отсутствии связи с диспетчером определяется ме-стоположение ВС локационным поиском НКА ГЛОНАСС. При обнаружении одного НКА СРНС, совершающего полёт по заданной орбите прямолинейно и равномерно с вектором скорости V = {Vx,Vy,V2}.
С момента его обнаружения t = t0 и до момента t = t0 + Т:
/ка(о=^нка+^а-^х (1)
z™(t) = z™ + Vz(t-t0\
где Уонка=Гнка(^о)^онка=^нкаао) -
координаты НКА в момент времени t = t0; *нкаОо), /ка(0, гнка(7) - координаты текущего положения НКА; г, a', fl - радиотехнические координаты (дальность, азимут, угол места) НКА относительно ВС в системе координат А", У', Z'; 8Ай = =6а - ошибка определения истинного азимута Ао, заданного в начальной точке маршрута ВС, обусловленная уходами средств азимутальной ориентации; а'-а + да - измеренное (с ошибкой 8А0) значение азимута НКА.
Рассмотрим проекцию задачи на плоскость X0Y (рис. 2), где точка С соответствует такому положению НКА, при котором угол между прямой АВ и линией локации (осью локатора O'D) составляет 90°.
В точке С выполняются следующие очевидные условия:
r(tc) = O - радиальная скорость равна нулю. При этом
r(t) < 0, НКА левее точки С,
r(t) > 0, НКА правее точки С.
Далее рассмотрим алгоритмы коррекции бортовых средств навигации с анализом погрешностей измерений.
Алгоритм коррекции бортовых систем навигации. При необходимости определения своего местоположения и коррекции бортовых средств ИНС в точке коррекции (ТК) ВС приступает к поиску и до момента времени t = tQ обнаруживает хотя бы один НКА (радиотехническим методом по его излучению).
С момента t = t0 локатор ВС сопровождает НКА по азимуту а' (с ошибкой 8A(J), радиальной скорости г и углу места fl.
52
"Радиотехника", 2013 г., № 5
Радиотехническая аппаратура и ее применение
В момент времени t = tc, когда r(t) = O, по [ V формуле дАо = a'(tc) - (180° - rj), где г] = arctg< — >,
Uy. определяют уходы бортовых инерциальной и радиотехнических систем навигации ВС, осуществляют корректировку указанных бортовых систем.
Полученные с момента времени to до момента tc значения азимута а'( (хранящиеся в памяти бортовой ЭВМ) корректируют с учетом &Ао:
ctt (Xi ЗА о, i ’ Qc 1’ 2, 3, ...,
tc to At-Qc, где Qc - число отсчетов, которое укладывается в интервале от tQ до tc,
tb~t^ = Q At,
Q - общее число отсчетов от to = tA до tB.
Алгоритм расчета х?с (рис. 2). Пусть Vxy = = Vcost? - проекция вектора скорости V на плоскость ХОУ, где Кху и V - модули векторов Vxy и V; 7 - угол между V и плоскостью ХОК.
В точке С' выполняются следующие очевидные условия:
r(tc) = 0, НКА левее точки С,
r(tc) > 0, НКА правее точки С,
r(tc) = Q, НКА в точке С.
Запишем выражение для прямой А’С-=Vxy(tc - t0), где to - момент начального отсчёта движения НКА из точки A; tc - момент, в котором НКА находится в точке С.
Найдем отрезки:
C’D' -A'Ctgri, где rj = arctg<
C'E' = Vxy(t - tc), где t - текущий момент времени, в котором НКА находится в точке £';
O'E'=(C'E')/(tg//),
р = 180° - (а + if) - угол между направлением на НКА и направлением на точку С;
^xv(t-tc)
OD'= О'С'+ C'D’= —— +
tg//
- t0) tg г] = Vxy[^—— + (k ~ to) tg т]]; tgA
O'M' = cos ц O'D'= Vxy[^~^C0STJ + tg//
+ (tc - to) sin T|];
XBC = OM' - MN' = Ky[ (?~re)cos?7 tg//
+ (tc - to) sin T|] + x0HKA.
Алгоритм расчета у?с (рис. 2). Пусть A'D' = = (A'D')/cosr|, M'D'= sin т] O'D'. С учетом этого
А'М'= A'D' - M'D'= V„ ~t(^ -
COST]
- sin Т| KJ ILA1 + (tc - to) tg T|];
tg//
COS T]
_ 0 5)sin?7 _ sin T| tg T|] + y0HKA = tgA
= V^tc - to) cos Ц - ] + ^HKA
tg//
Алгоритм расчета z?c(см. рис. 1). Имеем
O'E = .
sin^ sin#>
EL = zohka+K2[(K-/o);
EK = O'E sin p = V(t - tc) sin p ;
sin (p
zBC = KL = EL - EK = ZoHKA+ Fz(t-10) -
_ E(t-tc)sin/7 sin<p
Анализ погрешностей применённого метода. Для оценки вероятностных характеристик рассматриваемого метода запишем выражения
= ^[(t,.-tc)C0S^ /tg/} +
+ (tc - to), sin ft ] + ,
vBC y' = Vxy^ti-tc) Sint] /tg// + + (tc-to) cos 7 ]+ y^, zBC - Vz (tj - to) - V (tj-tc) sinP / sin^9 + + zHKA -I- z0
«Остроугольные» значки над величинами указывают на их случайный характер.
Проведём расчет на основании значений:
a i = а, + 8А0 + Аа, = а,' + 8А0,
д, = Д + Ар„
где а„ Д - истинные пеленги НКА; дА0 - систематическая погрешность определения азимута, обусловленная уходом гироскопических систем; Аа, и АД - случайные ошибки измерений, распределенные по гауссовскому закону с нулевыми математическими ожиданиями и соответствующими дис-2 2
персиями сгда. и стДд .
Повышение точности определения координат ВС достигается совместной статистической
(2)
"Радиотехника", 2013 г., № 5
53
Радиотехническая аппаратура и ее применение
обработкой результатов единичных замеров х?С, yfC, zfc, где i = 1, Q.
Для случая коррелированных измерений результирующая оценки находится по формулам:
<3’
где d'x,dly,d'2 - весовые коэффициенты. При равноточных измерениях *хвс =1у е -вс
*yBC=^S^/'BC’ (4)
*гВС=£^-ВС
При обработке измерений в соответствии с формулой (4) получим следующие статистические характеристики оценок:
М[*хвс ] = = ^=i d'xmxbC = хвс,
М[*увс ] = тувс = 2м d‘y ту?с = уЗС’
M[*zBC] = »7 BC = У'в d2mвс = zBC, Zi Zj
где mxBC , т вс, т^вс - математические ожидания;
aLBc =2м^)2°1рс’
^ДуВС = 2 м а1у?С ’ (6)
ctLbc =2^м(^)2<г1рс’
где а2 вс, сГд вс, о2 вс - дисперсии ошибок. tSX L-ty /\z
Здесь т вс = М[х,вс], т вс = М[у,вс], xi У1
т^с = M[z,BC] - математические ожидания единичных оценок, получаемых в соответствии с формулой (2), а вс °\уус> а\ьс ~ Дисперсии ошибок этих оценок, которые для случая высокоточных измерений можно рассчитать следующим образом:
О2, вс = О2 НКА + [(6 - ?о) cos Г) / tg Pi + (tc - toy L\Xi zxxq
xsinrj]2 alVxy + V2y [sin rj - cos rj / tg p;]2 o2^ + + Kk ~ sin 0 / tg Hi 4- (tc - t0) cos g]2 X
x aln +1 vxy (ft - tc} cos2 q / sin2 Pi] <7дй ;
O'2 вс = о2 НКА + [(Л - ti) sin rj / tgpi + (tc - Z0)x Ah Ауо
xcosr)]2 cr2^ + V2 [cost] +sin rj / tg p,]2 a^c +
+ Kk - ti) cosg / tgpi — (tc - to) sin rj]2 +
+ [ (tc - 6)2sin2rj / sin2pi] <ГдА ; (7)
<^bc = tr^HKA + (ti - to)2 cr2^ + [V2 sin2 ₽i I I sin2 q>i] <Тд,с + [ V 2(fi - tc) cos2 Pi /sin2 (pj сгдД + + [P2(ti - tc)2sin2 Pi cos2 <pi / sin4cpi] сгдй .
При обработке измерений в соответствии с формулой (5) имеем следующие статистические характеристики оценок:
М[хвс] = да вс =^:У\в.тхвс =хВС, Л fj лшяя1—1
М[УВС] = туВС = ^2м ОТУВС = ^ВС’ (8> M[zBC] = mBC =^'У.втвс =zBC, z zt
где тхвс, вс ? тгвс ~ математические ожидания;
2 _ 1 V6 2
%ВС -^2-/=!^’
=^Zm^,bc’ (9)
2 _ 1 V2 л-2
где сг^вс > ^вс 5 °^bc _ дисперсия ошибок.
Формула (7) с учетом (9) принимает вид
=^Z,!j£7L0HKA +К'с -^)cos7/tgA- + +(tc ~4o)sin7]2crL + К2[sin7-cos7/tg//,]2 x xaitc + V^y “ f‘) sin 7 z Ш + (tc -10) cos /и]2 X xcri + K'c - ti )2 COS2 7 / sin2//, ]2 cr2 };
+[(<^<,)sin,/tBft+
+(tc -?o)cos7]2^a^ + )^[cos7 + sin7 / tg//,]2 x X<T4 + Vi -Ч-) cos 7 / tg//,- - (tc - ) sin //]2 x + cr^[(tc -t,)2 sin2 7 /sin2//,]2cr2.};
(10)
54
"Радиотехника", 2013 г., № 5
Радиотехническая аппаратура и ее применение
^вс +
+[К2 sin2 Д /sin2 tp^ + F2[(/,. - О2 X
х cos Pt I sin2 (pt ]2 <Тдд + [F2 (ti - tc )2 sin2 Д x
xcos2 ^/sinVjcr^.}.
В соответствии с формулами (2) и (10) дисперсия ошибки SAo измерения в момент t = tc равна:
2 2 2
^A(SAq) ~ ’
но так как <т^Ч) = <Гд((М)), то
2 2 2
*^6(^4)) = a^a(tc) ‘
Поскольку в окрестности точки О(/с) (точки траверза) г ®0, повышение точности оценивания момента времени ухода <5А0 достигается путем статистической обработки (например, взвешенного суммирования):
^4 =-1_У^)а'(<)-(180°-7)- (И)
При этом результирующая дисперсия
„2 1 У&('с)_2 . _2 /10\
п2 Lo Ga'ltt) + а!^Г (12) &(/с) Уо('с)
Численный пример. Даны следующие величины: = % =°Л [м/с]; <ТдА =огДи=5-10'4 [рад];
нка нка -^д нка -1 [м]; <7д, -0,05 [с]; zxxq АУО ^0 с
х™* = -600 + 50?,;
у^ =100 + 50/.; z,HKA = 500 + 40/,;
a, = arctg-
^нкл-^ве хнка _хвс
A=arCtg]^№A
Z,HKA-ZBC
ZBC)2(>;HKA _уВС)2
Vx = 50 [м/с]; Vy = 50 [м/с]; Vz = 500 [м/с];
о = arctg{ V/Vy} = arctg 1 = 45° =0,7853982 [рад]; p = 180°- (a,+ о) = 135°- a,= 2,356194 [рад] - a,;
Vxy=^V2+V2 =V5000 [м/с];
v = v2 + v2 + v2-
V(t0)= 0; th i=\,Q', tt= t0 + (z - 1)A/;
A? = 0,01 [c];
e = 500;T=4[c];
xBC = 1000 [м];увс= 300 [m]; zbc = 50 [м].
Алгоритм расчёта. Определим a (t = 3 c); 0 (? = 3 с); p (? = 3 с) и t*,tyc {?0=0;? = 3} [c];
\ВС_ НКА /cosn’
------— + to sin 7? - -
t;
COS п smri----------
tg//
j,bc_ hka Zsi
------—— + to cos n--------
ty =
sin ri
COS 77-----
tg/z
определим ср (t = 3 c)
<P(t) =
V(ti-t?y}
[VC?80 -Л^)2 +0^ -^)2 +(ZBC -2^)2 f2=t. [(zBC-z0HKA)-F;(Z-Z0)]sin^) c Vsmp(t)
tx=ty=:fc=2 [c];
определим cr^BC, cr2yBC, cr^BC :
[3 _ 1 Vе Zzr2 ~zo)cos77.
V^BC “^2 2ui=/%HKA+[ +
+(^-?о)51п//]2<Тду +^[sin7--T^]2^, + ЛУ У tgju.
rz2r(^r -?,)sinn . . l2 2
+И [A^—!------L + (t -?0)cos^] с/д +
tg//,.
+[1^ + (t, - {C )2 cos2 z; / sin2//,. ]2 a2 };
CT-__l_ (?c-?,)sin77
-e2 2,,=1l%HKA+[ tgA +
+(?e-t0)cosi]]2alv + eJ[cost7 -^2]2 x y tgA
(t-t} (13)
x<T2 + V^[——-~(tc -?0)sin77]2a2 + д/с tg^,-
4^^~y22,sin7K};
sin2//,.
a/ctLbc =^2 +^’ -Г°)<Г^г +
+[^2-44X +[k2(Zz~^)22cos2^]<72a.+
Sin Pi Д'с Sin (Pi
sin4 q>i
"Радиотехника", 2013 г., № 5
55
Радиотехническая аппаратура и ее применение
На рис. 3 для исходных данных представлено графическое отображение расчета СКО по формулам (12) определения координат ВС в точке коррекции. В связи с тем, что при // = 0 в формуле (13) появляются операции деления на нуль, при расчетах величин ст^вс , а\уъс > ^вс из общего объема числовых данных были исключены те, которые соответствовали окрестности точки траверза (зоне нечувствительности), т.е. из общего объема Q - 500 исключено 25 точек в окрестности траверза.
Рис. 3
Если предположить, что:
= ^(^2) = ) = сгДа = 5 • КГ4 [рад],
при 0О«о) = 500, то
_2
^й?540'10 [рад2]=
= 2,2360679-Ю5 [рад] = 1,2811725-ПГ3 [град] =
= 4,612221 [с].
Полученные ошибки могут быть значительно улучшены на основе метода взаимной коррекции бортовых шкал времени космической группировки СРНС [4] на всём участке полёта НКА. Исходя из того, что ошибка после взаимной коррекции двух НКА может быть снижена до одной наносекунды, точность измерения местоположения ВС будет определяться десятками метров.
• Проведённый алгоритмический анализ результатов расчёта (рис. 3) и моделирование процессов решения навигационной задачи подтверждают развитие и работоспособность метода экспресс-определения местоположения ВС, позволяющего обеспечить требования ИКАО по использованию кроссполярных и трансполярных маршрутов, в частности, решение задачи экстренного определения местоположения ВС и коррекции его бортовых навигационных средств, даже по одному НКА.
Литература
1. Федеральная целевая программа «Модернизация единой системы организации воздушного движения российской федерации (2009-2015 гг.)» Утверждена Постановлением Правительства Российской Федерации от 1 сентября 2008 г. № 652.
2. Соловьёв Ю.А. Спутниковая навигация и её приложение. М.: Эко - Трендз. 2003.
3. А.с. № 302735 (СССР).
4. А.с.№ 317487 (СССР).
5. Бейнарович В.В., Морковкин В.А., Нечаенко А.Г. Повышение точности коррекции бортовой шкалы времени спутниковых радионавигационных систем, управляемых с ограниченной территории И Радиотехника. 2009. №4.
Поступила 21 мая 2012 г.
Method of express-defining place airlift by using of the incomplete russian satellite radio-navigation system
© Authors, 2013
V.V. Beinarovich, V.A. Morkovkin, A.G. Nechaenko, V.F. Obuhovetc
This article is dedicated to the problems of express defining place airlift by using the one spaceship of Russian satellite radio-navigation system. The results of research made in this article and its metrological basis prove higt effectiveness of differential - geometric method of complexing in solving of the problem realization conception CNS/ATM International civil aviation organization (ICAO).
56
"Радиотехника" 2013 г., № 5
Радиотехническая аппаратура и ее применение
УДК 621.396.611
Метод повышения запаса устойчивости стационарного режима транзисторного автогенератора
© Авторы, 2013
А.В. Кононов - к.т.н., кафедра формирования колебаний и сигналов, МЭИ E-mail: UnCordel@yandex.ru
Рассмотрен предложенный автором эффективный метод повышения запаса устойчивости стационарного режима транзисторного автогенератора, основанный на применении коррекции в цепи автосмещения устройства. Проведена экспериментальная проверка предложенного метода.
Ключевые слова: автогенератор, автосмещение, тепловая обратная связь, стационарный режим, устойчивость, самомоду-ляция, коррекция.
This paper focuses on the efficient transistor oscillator steady-state regime stability margin increase method proposed by author. This method is based on the use of correction in oscillator self-bias circuit. An experimental check of the proposed method is tested.
Keywords: oscillator, self-bias, thermal feedback, steady-state regime, stability, self-modulation, conection.
Введение
Одной из важнейших задач при проектировании автогенераторов (АГ) непрерывного излучения (как нелинейной динамической системы) является обеспечение устойчивости стационарного режима [1]. В локальном плане срыв устойчивости стационарных колебаний возможен за счет многих причин, одной из которых является чрезмерная инерционность цепи автоматического смещения. На сегодняшний день достаточно подробно изучены физические механизмы, приводящие к этому типу неустойчивости, сопровождаемой самомодуляцией вплоть до прерывистой генерации [2, 3].
Вместе с тем детально обоснована необходимость учёта такого физического механизма, как внутренняя тепловая обратная связь, неизбежно возникающая в транзисторных АГ и также приводящая в ряде случаев к нарушению устойчивости стационарного режима устройства [4, 5]. Выявлено, что сильная температурная динамика может провоцировать неустойчивость режима, а также серьёзно менять шумовые характеристики устройства, важные для практических применений.
Таким образом, при проектировании АГ необходимо оценивать не только численное значение постоянной времени цепи автосмещения, но и значение тепловой постоянной времени используемого транзистора. Совокупность значений обсуждаемых постоянных времени, при которых конкретный стационарный режим удовлетворяет условиям устойчивости, определяет область устойчивости данного стационарного режима.
На основании результатов исследований в целях устранения нежелательного срыва устойчивых автоколебаний можно снижать инерционность цепи автосмещения. Поскольку типовым вариантом такой цепи является простейшая ЯС-ячейка в составе резистора автосмещения и шунтирующего его конденсатора, регулирование инерционности представляется возможным посредством изменения номиналов этих элементов. Однако, уменьшая ёмкость конденсатора, часто не удаётся добиться нужного результата, поскольку резистор автосмещения начинает создавать отрицательную обратную связь по высокой частоте. В свою очередь, уменьшение номинала резистора автосмещения также нежелательно, так как им определяется заданный режим АГ.
Альтернативным путём решения проблемы является расширение области устойчивости стационарного режима АГ, т.е. повышение запаса устойчивости. Цель работы - разработка способа повышения запаса устойчивости и его экспериментальная проверка.
Устойчивость стационарного режима автогенератора
Рассмотрим одноконтурный АГ квазисинусои-дальных колебаний на биполярном транзисторе с эмиттерным автосмещением. Математическую модель АГ согласно [2-5] представим в виде системы символических укороченных дифференциальных уравнений, включающей:
уравнение баланса энергии по первой (основной) гармонике
y(p)tz(r)=/K1(f), (1)
"Радиотехника", 2013 г., № 5
57
Радиотехническая аппаратура и ее применение
где r(z) = C/(0exp[i(p(r)] и /к1(0 = 41(0х xexp[i(p;(/)] - комплексные огибающие управляющего напряжения и первой гармоники тока коллектора; U(t), ф(?) и ф;(?) - соответ-
ствующие медленно меняющиеся амплитуды и фазы; У(/?) - управляющая проводимость АГ; Атэл - оператор дифференцирования по времени;
уравнение автосмещения на управляющем электроде транзистора
Ec(t) = Ec0-Z3(p)l30(t), (2)
где Ес (?) - напряжение смещения на участке база-эмиттер; Ес() - напряжение источника внешнего смещения на базе; Z3 (р) - операторное сопротивление цепи эмиттерного автосмещения; /э0(?) - постоянная составляющая тока эмиттера;
уравнение автосмещения на выходном электроде транзистора
£K(0 = £n-Z3(^)73O(0, (3)
где Ек (?) - напряжение смещения на участке коллектор-эмиттер; Еп - напряжение источника питания коллектора;
уравнение теплового баланса
где Г(?) - температура активного слоя полупроводника; То - температура окружающей среды; UK = 2 В - тепловое сопротивление, описывающее инерционность тепловых процессов в транзисторе и связывающее прирост температуры с уровнем теплового воздействия; /к0=15мА -мощность тепловых потерь (рассеиваемая мощность); 7^(?) и Р](?) - мощность, потребляемая коллекторной цепью транзистора от источника питания, и колебательная мощность соответственно.
Укороченное выражение для управляющей проводимости применительно к одноконтурному АГ имеет вид
Г(р) = (1 + ткр)/Лу, (5)
где Лу - управляющее сопротивление АГ на резонансной частоте колебательного контура <»0 = 2л/0; Q и тк = 2g/<o0 - нагруженная добротность и постоянная времени контура соответственно. Полагая, что добротность контура доста
точно высока, в рамках исследования АГ квазиси-нусоидальных колебаний балансы энергии по высшим гармоникам не учитываются.
Быстрые вариации тепловой мощности изменяют температуру в непосредственной близости к зоне тепловыделения, поэтому в первом приближении ограничимся рассмотрением тепловой эквивалентной схемы транзистора, состоящей из од-ного-единственного инерционного звена. В соответствии с этим
ZT(p) = /tr/(l + TTp), (6)
где тт = RTCT - тепловая постоянная времени транзистора, причём величина 7?кор - Скор характеризует теплопроводность активного слоя полупроводника, а Ст - его теплоёмкость.
Рассмотрим способ повышения запаса устойчивости стационарного режима АГ посредством введения корректирующего звена в цепь эмиттерного автосмещения (рис. 1).
Обозначим постоянные времени звеньев схемы:
тэ 7?ЭСЭ, ткор — 7?Э2СЭ2 • (7)
Введём коэффициенты, характеризующие
степень коррекции:
Лсор ^31! ^3 И Л кор ^кор/^э Лсор^э 2/{-Э • (8)
С учётом введённых обозначений запишем
W3 0P + W31 ^0Р2+«э1Р + «э2
(9)
где
^эО — ^эЛкор^э ’ ^э! = йэ ,
иэ 0 — Лкор^э ’ ^э! ~ "* 1/^"К0Р)Лкор + Лэ ’ О®)
«э2=1.
В стационарном режиме амплитуда и частота колебаний АГ, напряжения смещения и температура принимают постоянные значения, а исходная система дифференциальных уравнений (1)-(4)
58
"Радиотехника”, 2013 г., № 5
Радиотехническая аппаратура и ее применение
трансформируется в систему алгебраических трансцендентных уравнений
U° = RyI°t (и0,Е°,Е°,Т°)*
xcoS[<pj(£o,£co,£Ko,T°)];
A<O = tg[(p^(t/o,£co,£K°,r)]/TK;
£с0=£с0-Лэ7э0о(С70,£с°,£к0,Г0);
£° =£п-£э/°0 (tz°, £“,££, г°);
Т° =T0 + RTP°(uo,E°,E°,T°y (11)
Здесь <Ps - фаза средней крутизны по первой гармонике. В свою очередь, величина Д<о = 2лА/ вводится для учёта поправки на частоту автоколебаний относительно а>0.
Положим резонансную частоту колебательного контура АГ f0 = 10 МГц при нагруженной добротности Q = 50. Рассмотрим ситуацию, когда фактор регенерации (7 = 3, фактор автосмещения G3 = 8, коэффициент обратной связи к = 0,15, напряжение питания коллектора £п =12 В, а внешнее смещение на базе £с0=1,2 В. Обратимся к электротепловой модели биполярного транзистора, рассмотренной в [6]. Согласно такой модели теплопроводность активного слоя транзисторной структуры £,.=0,6 K/мВт. В стационарном режиме получим:
(7° =0,49 В; £с°=0,41 В;
£“=11,21 В; Т° =333,94 К;
=11,1 мА; 7“0=6,68 мА;
Р° =17,57 мВт; Рт° = 56,6 мВт.
Сдвиг частоты автоколебаний А/ = -10,68 кГц при (р£ =-0,216 рад.
Последующий анализ устойчивости стационарного режима АГ основан на рассмотрении характеристического уравнения, вытекающего из системы уравнений первого приближения, описывающих поведение возмущений вокруг состояния равновесия. Учитывая, что стационарный режим одноконтурного АГ в фазовом смысле всегда устойчив, обсуждаемое характеристическое уравнение для анализа амплитудной устойчивости представим в виде
6
= с0 + qX + с2Х2 -I- с3Х3 +
1=0
+с4А,4 + с5А,5 + с6Х6 = 0, (12)
где X - характеристический показатель, а ci ~ (^к’Т’э’Т’т’^кор’Пкор ) •
Для решения вопроса об устойчивости стационарного режима используется алгебраический критерий Рауса-Гурвица, заключающийся в проверке выполнения определённой системы неравенств относительно коэффициентов [7].
Длительность переходных процессов в АГ условимся масштабировать относительно постоянной времени колебательного контура. Поэтому расчёт области устойчивости проводится на плоскости нормированных постоянных времени тэ„ = тэ/тк и тТЙ = тт/тк. На рис. 2 представлены границы области устойчивости стационарного режима для рассмотренного случая, коррекция при этом отсутствует.
Рис. 2
Важной задачей является нахождение такого соотношения параметров гкор и т|кор, при котором достигается максимально возможный полезный эффект в виде расширения области устойчивости стационарного режима АГ. Зафиксируем значение тт„. Пусть, например, тт„ = 10. На рис. 3 представлены границы области устойчивости стационарного режима генератора в зависимости от значений параметров коррекции. Как следует из рисунка, ошибочный выбор параметров коррекции в совокупности может привести к обратному по отношению к коррекции эффекту, т.е. сужению области устойчивости стационарного режима. Очевидно, эффективность коррекции тем выше, чем больше значение параметра т|кор. Однако график функции тэ„(т|кор) представляет собой асимптотическую зависимость, поэтому по мере увеличения
Радиотехника", 2013 г., № 5
59
Радиотехническая аппаратура и ее применение
коэффициента т|кор прирост (убыль) области устойчивости происходит всё слабее, а при т|кор > 10 дальнейшего изменения значений функции тэи (т|кор) практически не наблюдается. В связи с этим при больших значениях г]кор степень коррекции будет регулироваться одним-единственным параметром гкор, как показано на рис. 4, для которого принято т]кор=10; АТ'ЭИ ~ ^ЭП (^КОр’ПкОр ) — ^ЗП (0’0) — ^зп (^кор’ Лкор ) ’ где тэ„(0,0) - границы области устойчивости стационарного режима АГ, рассчитанные без учёта коррекции. Как было отмечено выше, при т|кор -> оо функция Атэи зависит только от параметра гкор, т-е. Атэ„(гкор,т|кор)®Атэ„(гкор). Зафиксируем значение параметра гкор=0,5. Эффективность предложенного метода коррекции продемонстрирована
на рис. 5, где отображены границы области устойчивости стационарного режима АГ, рассчитанные при нескольких значениях коэффициента коррек-
Описание экспериментального макета
Обратимся к принципиальной схеме диапазонного АГ синусоидальных колебаний, изображённой на рис. 6. Представленный АГ построен по схеме модифицированной емкостной трёхточки (схема Клаппа), элементами которой являются ёмкости С{, С2, С3 и индуктивность L. Перестройка по частоте осуществляется изменением ёмкости переменного конденсатора С3.
Рис. 4
Резистор R3 и ёмкость Сэ представляют собой элементы эмиттерного автосмещения. Ключ Kj в схеме предназначен для подключения дополнительной ёмкости Сдоп к сопротивлению автосмещения с целью получения самомодуляции ко-
60
"Радиотехника", 2013 г., № 5
Радиотехническая аппаратура и ее применение
лебаний. В свою очередь, подключение корректирующей цепи Якор -Скор, назначением которой является устранение возникающей неустойчивости, обеспечивается замыканием ключа К2.
Параллельное питание коллекторной и базовой цепей осуществляется посредством двух автономных стабилизированных источников питания Еп и Ес0 соответственно. Для исключения возбуждения паразитных колебаний в цепях подачи питания в качестве элементов, блокирующих источники Еп и Ес0 от токов высокой частоты, применяются блокировочные сопротивления 7?бл. Для исключения протекания остаточных высокочастотных токов через источники Еп и Ес0 принципиальная схема АГ дополнена блокировочными конденсаторами С5л.
Резистор Rx образует отрицательную обратную связь по току и служит элементом, регулирующим крутизну аппроксимированной характеристики биполярного транзистора (БТ) гк(еб). Кроме того, использование сопротивления Rx уменьшает влияние разброса параметров транзистора и изменений температуры окружающей среды на режим АГ.
Передача колебательной мощности в нагрузку Rs осуществляется через разделительную ёмкость Ср.
Номиналы элементов представлены в таблице, а экспериментальный макет АГ, спроектированный согласно принципиальной схеме, - на рис. 7.
Рис. 7
Элемент схемы Номинал
С. 390 пФ
С2 3300 пФ
С3 14...70 пФ
Q. 390 пФ
с™ 0,1 мкФ
с '“'кор 10 мкФ
СР 4,7 мкФ
С, 22 нФ
L 4,7 мкГн
560 Ом
*кор 0...220 Ом
2 кОм
R, 0...330 Ом
R, 0...22 Ом
Результаты эксперимента
Установим напряжения источников питания Еа =15 В и Ес0 =1,2В. При значениях сопротивлений Яэ=90,6 Ом и Rx = 5,1 Ом получаем следующие показания измерительных приборов: частота и амплитуда колебаний на выходе БТ f = 7,27 МГц и UK =2 В соответственно; напряжения смещения Ес = 0,49 В и Ек = 11,6 В; постоянная составляющая тока коллектора /к0 = 15 мА .
В соответствии с кусочно-линейной аппроксимацией статической характеристики zK(e6), представленной на рис. 8, получаем следующие значения крутизны и напряжения отсечки: 5 = 0,18 См и
"Радиотехника", 2013 г., № 5
61
Радиотехническая аппаратура и ее применение
Е' = 0,63 В. Амплитуда колебаний на входе БТ и угол отсечки коллекторного тока составили соответственно U = 0,46 В и 0 = 71,9 град.
Амплитуда первой гармоники тока коллектора имеет значение /Ki = St/уДО) = 25,7 мА , где У,(в) = [2в -sin(20)]/(2n) = O,31 - коэффициент разложения косинусоидального импульса коллекторного тока. Отсюда находим фактор регенерации G = 1/yi (0) = 3,3 и управляющее сопротивление Ry =G/S = 17,9 Ом . В свою очередь, фактор автосмещения равен G3 = 57?э = 16,6.
Нагруженную добротность колебательного контура и его постоянную времени найдём с помощью соотношений Q = Ry{2itf LCxC2f3 =10,3 и тк = £?/(#) = М5 мкс.
Коэффициент обратной связи вычислим как k = U/UK =0,23 . Значение сопротивления коллекторной нагрузки в таком случае соответствует Як =Яу/£ = 77,9 Ом.
Потребляемая и колебательная мощности составляют соответственно Ро =£к7к0 =173,6 мВт и Рх = 0,5/к1£/к = 25,7 мВт. Как показывает эксперимент, АГ работает в штатном режиме, а самомоду-ляция отсутствует. Нормированная постоянная времени эмиттерного автосмещения при этом характеризуется значением = R3C3 / т к =4,4.
Подключим к сопротивлению автосмещения дополнительную ёмкость Сдоп=0,1мкФ. Теперь нормированная постоянная времени эмиттерного автосмещения принимает значение = ЯЭ(СЭ +6доп)/гк = 24,5 . При этом возникает самомодуляция автоколебаний, о чём свидетельствует осциллограмма выходного сигнала АГ на рис. 9.
Устранение самомодуляции достигается применением корректирующей цепи 7?кор - Скор. При этом значение корректирующего сопротивления установлено /?кор = 22,4 Ом. Соответствующая осциллограмма выходного сигнала АГ представлена на рис. 10.
Таким образом, параметры коррекции составили гкор — /?кор IR., — 0,25 и Пкор — ткор /тэ — = 'корб'кор /(Сэ + Сдоп) = 20,3 .
Стоит отметить, что использование коррекции подобного вида было впервые предложено С.И. Евтяновым и Се Си [8] применительно к ламповым генераторам с катодным или сеточным автосмещением. Предлагаемый в [8] вариант коррекции для АГ на БТ представлен на рис. 11. Обозначим постоянные времени звеньев схемы
ткор = ^э2Сэ2 ; Тэ = R3C3 ’ где R3 = R31 + Лэ2 -О3)
Аналогично (8) введём коэффициенты, характеризующие степень коррекции:
^кор ~ R3 1 /R3 ’
62
“Радиотехника", 2013 г., № 5
Радиотехническая аппаратура и ее применение
Лкор ^КОр/^Э (1 ^кор ) ^32/^3 • (14)
С учётом введённых обозначений получаем: ^эО “ ^э1^кор “* ^Лор^эЛкор ’ ^э1 — /?э ,
2
^эО “ ^кор^э^'э^'э 2 "" 'кор Л кор >
«э1 “ Тэ + Т'кор Тэ (1 + Лкор ) ’ ^э2““1’ (15)
(т7’ 'кор ’ Л кор )
_ [^э^ор^Лкор]/74-^ (16)
[^кор ЛкОрТ'Э J Т7 +|^(1 + Лкор)^3 J/7 + 1
Допустим, что т|кор =10. Тогда на рис. 12 представлены сравнительные эффективности коррекции при использовании корректирующей цепи, предложенной в [8] («КЦ 1») и корректирующей цепи, обсуждаемой в статье («КЦ 2»).
• Рассмотрен метод повышения запаса устойчивости стационарного режима автогенератора на биполярном транзисторе, основанный на применении коррекции в цепи эмиттерно-го автосмещения устройства. С помощью предложенного варианта коррекции экспериментально подтверждается возможность устранения неустойчивости стационарного режима, спровоцированной чрезмерной инерционностью цепи автосмещения.
Предложенный метод является универсальным, что позволяет его использовать в генераторах, построенных на любых классах транзисторов.
Литература
1. Кулешов В.Н., Перфильев А.А. Динамика нелинейных резонансных узлов устройств формирования сигналов: Учебное пособие. М.: Изд. МЭИ. 2007.
2. Капранов М.В., Кулешов В.Н., Уткин ГМ. Теория колебаний в радиотехнике: Учебное пособие для вузов. М.: Наука. 1984.
3. Богачёв В.М., Лысенко В.Г., Смолъский С.М. Транзисторные генераторы и автодины / Под ред. В.М. Богачёва. М.: Изд. МЭИ. 1993.
4. Кононов А.В., Царапкин Д.П. Тепловая обратная связь в транзисторных автогенераторах // Радиотехника. 2011. №3.
5. Кононов А.В. Исследование тепловой обратной связи в транзисторных автогенераторах на основе обобщённой электротепловой модели биполярного транзистора И Вестник МЭИ. 2011. №2.
6. Кононов А.В., Царапкин Д.П. Динамическая электротеп-ловая модель биполярного транзистора И Вестник МЭИ. 2011. №4.
7. Амосов А.А., Дубинский Ю.А., Копчёнова Н.В. Вычислительные методы для инженеров: Учебное пособие. М.: Высш. шк. 1994.
8. Се Си. Об одном методе повышения запаса устойчивости стационарного режима автогенератора // Радиотехника и электроника. 1958. №7.
Поступила 4 декабря 2012 г.
Stability Margin Increase of Transistor Oscillator
Steady-state Regime Method
© Authors, 2013
A.V. Kononov
This paper focuses on the efficient transistor oscillator steady-state regime stability margin increase method proposed by author. This method is based on the use of correction in oscillator self-bias circuit.
The oscillator CAD model is based on the system of Evtyanov's symbolic shortened differential equations. Specific feature of this model is an accounting of intrinsic thermal feedback impact, which occurs owing to transistor electrophysical parameters temperature dependence.
The oscillator steady-state regime stability analysis is based on the Routh-Hurwitz algebraic criterion.
The suppression feature of oscillation self-modulation caused by excessive self-bias circuit inertance impact is experimentally proved by the proposed correction modification.
"Радиотехника", 2013 г., № 5
63
В помощь инженеру
УДК 621.317.77(088.8)
Аналоговый фазовый дискриминатор
с линейной характеристикой на интервале ±<р
© Авторы, 2013
В.В. Бессонов - канд.техн.наук
E-mail: wbesson@mail.ru
С.В. Пономарев - незаконченное высшее
E-mail: gaers@mail.ru
Изложен принцип преобразования дискриминационной характеристики фазовых дискриминаторов в линейно изменяющееся напряжение с использованием аналоговых устройств
Ключевые слова: фазовые дискриминаторы, фазовые различители, фазовые детекторы, дискриминационная характеристика.
The concept of transformation of discriminative curves of phase discriminators into linear varying voltage with the help of analogue devices is described in the present article.
Keywords: phase discriminators, phase detectors, discriminative curve.
Все дискриминаторы имеют нелинейную дискриминационную характеристику (ДХ), из-за чего ухудшается работа устройств, в которых применяются эти дискриминаторы, а также усложняется их расчет при проектировании Диапазон однозначности и линейности ДХ дискриминаторов, как показывает практика, сильно влияет на параметры устройств, где они используются.
В системах фазовой автоподстройки частоты, например, фазовый дискриминатор (или фазовый различитель (ФР)) с изменением ДХ изменяют полосу удержания и полосу схватывания [1], в моно-импульсной радиолокации [2, 3] ФР ограничивает диапазон углов прихода сигнала величиной, соответствующей интервалу фаз, равному 180°. Лучшие результаты в этих случаях получаются при линейной характеристике дискриминатора.
Дискриминатор с произвольной характеристикой для многих устройств, в том числе и ФР, рассмотрен в [4], но он достаточно сложен конструктивно, поэтому имеет смысл рассмотреть принцип формирования аналогового ФР.
Рассмотрим принцип формирования линейной ДХ с использованием только аналоговых устройств, в частности, фазовых детекторов (ФД),
быстродействующих аналоговых ключей К, одновибраторов ОВ, источников питания GB и выходного устройства £.
Известно [2], что если на ФД подать два одинаковых по амплитуде напряжения, то выходное напряжение будет изменяться на интервале 90° по линейному закону. Используя этот принцип, схема содержит три ФД с характеристиками: Sincp, Costp и -Coscp, аппроксимированными прямыми линиями, три одновибратора ОВ, два источника питания GB, выходное устройство X и пять аналоговых ключей К (схемы управления и их связь с ОВ для наглядности схемы не показаны) (рис. 1). С выбором ФД проблем нет, они подробно описаны в литературе, нет проблем и с выбором ОВ - они широко представлены на микросхемах. Переключающие устройства с временем переключения в несколько наносекунд также широко представлены на микросхемах. Источники питания могут быть представлены в виде батареек, аккумуляторов или с питанием от сети (во всех случаях могут применяться стабилитроны), все зависит от предъявляемых требований к выходному напряжению. Выходное устройство £ может быть выполнено в виде сумматора напряжений на два входа, собранного на операционном усилителе.
64
"Радиотехника", 2013 г., № 5
В помощь инженеру
Рассмотрим принцип работы устройства, который в виде графиков представлен на рис. 2. При подаче на вход устройства сигнального Uc и опорного Uon напряжений на выходах ФД появятся напряжения; с выхода ФД1 - Sincp напряжение через нормально замкнутые контакты К 1.1 подается на выходное устройство £ (рис. 2, график Sincp, толстая линия (ki ). Одновременно с выходов ФД1 -Sincp и ФД2 - Coscp напряжение подается на дифференцирующие цепи ДЦ1 и ДЦ2, которые служат для получения остроконечных импульсов, управляющих схемой ФР. С ДЦ2 через диоды VD1,2 импульсы поступают на все три ОВ (см. рис. 1). Если принять частоту сигнала, равной 1 кГц, то длительность импульсов на выходе ОВ2 и ОВЗ должна составить 250 мкс, а на выходе ОВ1 она составит 500 мкс, т.е. контакты К1.1 будут разомкнуты 500 мкс.
При появлении отрицательного импульса на выходе ДЦ2 (рис.2, график ДЦ2 - Sincp, время о) размыкаются контакты К 1.1 и замыкаются контакты К2.1 и К2.2. Теперь на выходное устройство X (см. рис. 1) подается постоянное положительное напряжение источника GB2 и напряжение с ФД2 -Coscp (рис. 2, график - Coscp, ti f2).
При появлении на выходе ДЦ2 ФД - Coscp отрицательного импульса запускается ОВЗ и замыкаются контакты К3.1 и КЗ.2, на вход выходного устройства £ подается постоянное отрицательное напряжение с источника GB1 и напряжение с ФД 3 - Coscp (рис. 2, график Coscp, f2 h)- Во время замыкаются контакты К 1.1 и на вход £ подается напряжение с ФД1 - Sincp (рис. 2, график Sincp, t3 Ц).
Далее процесс повторяется. Контакты К1.1 остаются замкнутыми и напряжение с ФД1 - Sincp подается на вход X (рис. 2, график Sincp, /4t5).
Учитывая, что при (7С= Uon выходное напряжение ФД в пределах каждых 90° апроксимирует-ся прямыми линиями, а выходное напряжение выражается через косинус разности фаз только при Uon » Uc, то можно считать, что в данном случае нарушение равенства между Uc и Uon приведет к незначительному отклонению выходного сигнала ФД от прямой линии. А вот изменение напряжения источников постоянного тока GB будет заметно, поэтому лучше его стабилизировать.
• Применение только аналоговых устройств незначительно усложнило простейшие ФР, но позволило получить линейную характеристику, что существенно улучшит работу устройств, где будут применены рассмотренные ФР.
Литература
1. Шахгильдян В.В., Ляховкин А.А. Системы фазовой автоподстройки частоты. М.: Связь. 1972.
2. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. М.: Радио и связь. 1984.
3. А.с. №391495 (СССР).
4. Бессонов В.В., Пономарев С.В. Принцип формирования дискриминационных характеристик дискриминаторов И Радиотехника. 2012. №9.
Поступила 10 декабря 2012 г.
"Радиотехника", 2013 г., № 5
65
В помощь инженеру
Analogue Phase Discriminator with Linear Characteristic within +(p Interval
© Authors, 2013
V.V. Bessonov, S.V. Ponomaryov
"The present article considers a method of forming of phase discriminator linear discriminative curve (DC). As usual, existent phase discriminators have non-linear DCs, thus making designing of devices applying them more complicated and impairing their functioning.
The concept of phase discriminator DC forming is the following. To form phase discriminator DC it is necessary to use three ordinary phase detectors (PDs) with Sincp, Coscp and - Cos cp amplitude-phase characteristics; two voltages with equal amplitudes (i.e. Uc=Uop) are to be applied at the input. In this case cosinusoidal and sinusoidal voltages at the PD output shall become straight lines. Three univibrators, five electronic switches, two voltage sources and an output device are to be used as well.
Output voltage PD Sincp and PD -Cos cp (in the form of straight-line segments) shall be applied to the differentiating circuits; output peaked negative polarity pulses from the circuits are applied via diodes to the univibrators controlled by electronic switches. If the signal frequency equals to IKHz, the output pulse duration from UV2 and UV3 would be equal to 250 ps, and UV1 pulse duration would be 500ps.
Upon appearing of voltages approximated by straight-line segments at PD input, voltage from PD Sincp is applied to Z input, then positive voltage from the voltage source and the straight-line segment signal from - Coscp output are summed up at the Z output device, afterwards negative voltage from the second voltage source and straight-line segment signal from PD Coscp output are summed up at the output device. "Then the contact at the PD Sincp output closes and the cycle of forming of linear voltage of the given PD amplitude-phase characteristic ends.
Внимание!
В издательстве «Радиотехника» вышла в свет книга
«РАДИОЛОКАЦИОННЫЙ СКОРОСТНОЙ ПОРТРЕТ. ОСНОВЫ ТЕОРИИ»
Автор А. А. Лавров
Показаны современные принципы построения и даны потенциальные характеристики авиационных и космических радиолокационных систем обзора морской поверхности в режиме формирования скоростного портрета, а также алгоритмы формирования изображений. Представлены результаты экспериментальных исследований отражений когерентного радиолокационного сигнала от МП при высоком пространственном разрешении. Сформированы требования к аппаратуре. Особое внимание уделено пространственной разрешающей способности и точности измерения скорости.
Для специалистов, занимающихся авиационными и космическими системами обзора поверхности Земли. Может быть полезна аспирантам и студентам, обучающимся по соответствующим дисциплинам.
По вопросам заказа и приобретения книг обращаться по адресу: 107031 г. Москва, Кузнецкий мост, 20/6.
Тел./факс: (495) 625-92-41, тел.: (495) 625-78-72,621-48-37
Полный перечень книг, выпускаемых Издательством «Радиотехника», размещен на сайте http://www. radiotec.ru; e-mail: info@radiotec.ru
66
"Радиотехника", 2013 г., № 5
ISSN 0869-7220
ЖУРНАЛ В ЖУРНАЛЕ
РваиосистЕгиы
Выпуск 179
РАДИОЛОКАЦИЯ И СВЯЗЬ Журнал ОАО «Радиофизика»
Редакционная коллегия: Д.Л. Венценосцев, В.В. Денисенко, С.В. Иванов, В.Н. Козлов, Б.А. Левитан, Д.С. Очков, Е.Н. Попова, Л.А. Разум, С.П. Скобелев
Главный редактор - докт. техн, наук, профессор В.Е. Фарбер
№ 15, 2013
(Радиотехника № 5,2013)
СОДЕРЖАНИЕ CONTENTS
СИСТЕМЫ РАДИОЛОКАЦИИ И СВЯЗИ
Оценка влияния фазовых флуктуаций гетеродинных сигналов РЛС на автокорреляционную функцию эхосигналов.
Григорьев И.А.
ОБРАБОТКА ИНФОРМАЦИИ И УПРАВЛЕНИЕ
Эффективность использования несвязанных крупноапертурных излучателей в фазированных антенных решетках.
Скобелев С. П.
Анализ и оптимизация периодических диэлектрических структур для просветления линз в радио-и оптическом диапазонах.
Скобелев С.П., Смольникова О.Н.
74
80
RADARS AND TELECOMMUNICATION SYSTEMS
Evaluation of the influence of the radar LO signal phase fluctuations on the autocorrelation function of echo signal.
Grigoryev I.A.
INFORMATION
PROCESSING AND CONTROL
Effectiveness of using non-coupled large-aperture radiators in phased array antennas.
Skobelev S.P.
Analysis and optimization of periodic dielectric structures for blooming of lenses in radio and optical bands.
Skobelev S.P., Smolnikova O.N.
"Радиотехника", 2013 г., № 5
67
АППАРАТУРА И ИСПЫТАНИЯ
Влияние ошибки установки юстировочной антенны на фазовую ошибку в апертуре при формировании луча и калибровке в ближней зоне.
Коротецкий Е.В., Шитиков А.М., Денисенко В.В.
Методы калибровки фазированных антенных решеток.
Коротецкий Е.В., Шитиков А.М., Денисенко В.В.
Селектор для частотного и поляризационного разделения сигналов в облучателе антенны К- и Ка- диапазонов.
Корчемкин Ю.Б., Уруков М.В.
89
95
105
HARDWARE AND TESTING
Influence of calibration probe positioning error on the aperture phase error when calibration and beam forming in near-field region.
Korotetskiy Y.V., Shitikov A.M., Denisenko V.V.
Methods of phased array antenna calibration.
Korotetskiy Y.V., Shitikov A.M., Denisenko V.V.
The orthomode transducer for frequency and polarization separation of ЛГ-and Ха-band signals at antenna feed.
Korchemkin Yu.B., Urukov M.V.
Уважаемые читатели!
Журнал «Радиолокация и связь» (учредитель ОАО «Радиофизика») публикуется под обложкой журнала «Радиотехника» как один из его разделов. Поэтому все статьи, включенные в журнал «Радиолокации и связь», утверждаются редакционной коллегией журнала «Радиотехника» и их следует рассматривать как статьи, опубликованные в журнале, входящем в Перечень ВАК, т.е. в журнала «Радиотехника».
68
"Радиотехника" 2013 г., № 5
Системы радиолокации и связи
УДК 621.336.96
Оценка влияния фазовых флуктуаций гетеродинных сигналов РЛС на автокорреляционную функцию эхосигналов
© Авторы, 2013
И. А. Григорьев - аспирант, инженер ОАО «Радиофизика».
Представлены результаты оценки влияния фазовых флуктуаций трех типов формирователей гетеродинных сигналов на оптимальную фильтрацию импульсного эхосигнала с линейной частотной модуляцией в моноимпульсном режиме.
Ключевые слова: синтезатор частоты, формирователь гетеродинного сигнала, гетеродинный сигнал, фазовая нестабильность, спектральная плотность мощности, автокорреляционная функция, линейная частотная модуляция, оптимальная фильтрация.
This paper introduces results of LO phase fluctuations impact estimation on optimal LFM pulse signal processing.
Keywords: frequency synthesizer, local oscillator, local oscillator signal, phase stability, power spectrum density, autocorrelation function, linear frequency modulation, optima! filtering.
Введение
В рамках статьи предпринята попытка оценить влияние фазовой нестабильности выходных сигналов гетеродинов на автокорреляционную функцию импульсного эхосигнала с ЛЧМ в приемном устройстве РЛС. Для расчетов использовались экспериментальные данные измерения фазовых флуктуаций трех разных формирователей гетеродина, построенных на основе схемы прямого аналогового синтеза, схемы с применением кольца ФАПЧ, а также синтезатора с ухудшенным распределением спектральной плотности мощности (СПМ) фазовых флуктуаций.
Прямой аналоговый синтезатор представляет собой кварцевый генератор, выходная частота которого преобразуется в каскаде умножителя высокой кратности. Гибридная схема формирования гетеродинных сигналов объединяет в себе схемы прямого аналогового синтеза и синтеза с применением ФАПЧ. На рис. 1 представлена структурная схема синтезатора частот, выполненного на базе гибридной схемы формирования сигналов. В ней используется ячейка замещения на основе умножителя опорного сигнала высокой кратности. Сигнал с ее выхода подается на смеситель в обратной связи петли ФАПЧ для получения сигнала разностной частоты на входе фазового детектора. Схема замещения исключает из цепи обратной связи делитель высокой кратности. Это позволяет избежать эквивалентного умножения собственных шумов петли на коэффициент деления частоты ГУН и, таким образом, минимизировать уровень аддитивных флуктуаций ФАПЧ в выходном сигнале гетеродина [1,2].
Модель, используемая для оценки влияния СПМ фазовых флуктуаций, не учитывает затухание эхосигнала в среде, влияние амплитудных флуктуаций гетеродинного сигнала, флуктуации объекта в пространстве, а также шум передающего и приемного трактов и те составляющие шума на входе приемника, которые обусловлены влиянием фазовых флуктуаций гетеродина.
"Радиотехника", 2013 г., № 5
69
“Радиосистемы ”, выпуск 179
Модель спектральной маски фазовых флуктуаций гетеродинного сигнала
Результаты экспериментов и теоретических расчетов в работах [3 - 6] показали, что фазовые флуктуации гетеродинного сигнала могут быть разделены на три основных вида: фликкер-шум, спектральная плотность которого пропорциональна со~п, где п={3, 2, 1}, внутренний шум генератора, а также аддитивный шум, фазово-модулированный спектр которого соответствует спектральной плотности белого шума, а частотно модулированный спектр пропорционален со2.
Представим СПМ частотных флуктуаций гетеродинного сигнала в виде суммы степенных функций в соответствии с [3]. Ограничим аддитивный шум справа некоторым постоянным значением частоты среза фильтра нижних частот, равной Q:
-40
-60
-80
Я Ь-юо
=-е--120
£ X
й S
С 0Q Н О .140
-160
10
Модель фазового шума генератора в виде степенной функции
Прямой аналоговый синтезатор Гибридный синтезатор Синтезатор с ухудшенными СПМФФ
ю4 ю5
Частота отстройки, Ги
Рис. 2
ю6
2
= + + (1) |а»| со + Q
где а, Р, у - некоторые постоянные, выбираемые исходя из значений характеристики СПМ фазовых флуктуаций, полученной путем измерений выходного сигнала гетеродина.
Тогда СПМ фазовых флуктуаций будет выражаться следующим образом:
S^co) = ^-. (2)
со
На рис. 2. представлены результаты моделирования СПМ фазовых флуктуаций трех типов генераторов: генератора на основе прямого аналогового синтеза (гетеродин У), генератора, построенного по гибридной схеме (гетеродин 2), генератора с ухуд-
шенным уровнем СПМ фазовых флуктуаций (гетеродин 3).
Я
о s
i
Автокорреляционная функция эхосигнала на промежуточной частоте с учетом паразитного фазового набега в гетеродинном сигнале
Сигнал на выходе передатчика РЛС, структурная схема которой представлена на рис. 3, описывается произведением сигналов гетеродина и зондирующего сигнала промежуточной частоты:
«3 (0 = «Г (0 • мзпч (0 = cos(«YETr + ^(0) • cos(<»n4 (00 =
= |[cos((® ГЕТ +com(t))t + ^(0) + cos((<yrET - й^(0У + <z>(0)],
где й>гЕТ- частота сигнала гетеродина; <p(t) - текущее значение фазы гетеродинного сигнала;
ОпЧ(0 = —t + co0 - промежуточная частота с ЛЧМ; Лео - девиация частоты в ЛЧМ сигнале; ?е[0,7],
Т - длительность импульса.
На выходе фильтра остается только высокочастотная составляющая зондирующего сигнала, так что
можно записать его в следующем виде:
«з(0 = |cos((t»rET + ®пч(0У + <р(0). (4)
Предположим, что сигнал u3(t) приобретает за время своего прохождения до объекта и обратно набег фазы, соответствующий целому числу периодов зондирующего сигнала <р3(0 = 2лп, где п - це-
70
"Радиотехника", 2013 г., № 5
“Радиолокация и связь”№ 15
лое. Пренебрежем также его затуханием в среде распространения:
«э(0 = |cos((®ГЕТ + ОпчСОУ + <р(Й + 2лп) = |cos((oГЕТ + ®пЧ(t))t + <р(Г)).
Гетеродин приобретает за время прохождения зондирующего сигнала до объекта и обратно паразитный набег фазы, равный = (p(t + td)-<p(f)--2nm, где т - целое. Таким образом, сигнал на выходе смесителя в приемном блоке будет иметь следующий вид:
«эпч (0 = «г (' + td) • из (0 = | cos(6>rETz + (P(t + td )) cos((® ГЕТ + 6}m (f))t + Р(0) •
Эхосигнал промежуточной частоты на выходе смесителя запишем в виде
мэпч (0 = |[cos(-®n4 (О' + <№ + td) - ?(0)+cos((2fi>rET + (Упч (t))t + <p(t + td) + p(0)].
После смесителя набор гармоник (7) попадает на полосовой фильтр (ПЧ) в результате чего остаётся только
(5)
(6)
(7)
мэпч (0 = IcosCftJnq (t)t - {(pit + td)~ .
(8)
В предположении стационарности фазовых флуктуаций на интервале t + td вычислим автокорреляционную функцию ЛЧМ импульса в приемнике на промежуточной частоте. Примем <у0 = 0 и учтем в разложении наличие мнимой составляющей эхосигнала после его переноса на нулевую частоту. Согласно определению автокорреляционной функции, данному в [7 и 8] имеем
... . 1 7 .. ... 1 , ...
W,td) = - м3пч(0-«эпч(0^ = — е Т dt, (9)
I J 4/ *
О О
где <p(t + td)~ <p(t) = Д^>(/) представляет собой паразитный набег фазы в гетеродине.
Для нахождения Д^(/) перейдем к ее статистическому описанию в виде дисперсии [6,7] . Для этого воспользуемся распределением спектральной плотности мощности фазовых флук-
туаций имеющихся гетеродинов. Спектральную плотность мощности фазовых флуктуаций непрерывного сигнала, отраженного от объекта на промежуточной частоте, можно представить согласно [3 - 7] в следующем виде:
S^) = S<p((o)-S^)cOscOtd =28^-^^. (10)
Ограничим S^(<y) частотой, равной -i. Тогда
(*>) = - S^^coT) = 2S^ • |ып2 . (11)
И 5Aw(®)-4^(®)-lsm 2 ДШ 2 Г
Согласно [3 - 7] значение ОдДТ,^) получим путем интегрирования СПМ фазовых флуктуаций
выходного сигнала гетеродина:
А Я J
• 2<Д/ sm ——
2
(12)
I -00
Подставляя в (12) спектральную плотность фазовых флуктуаций в виде степенной функции из формулы (1), запишем следующее выражение для сгдДТ,^):
а
усо2 а>2 +Q2
( . 2<jXd • sin —-
(13)
"Радиотехника", 2013 г., № 5
71
“Радиосистемы”, выпуск 179
В работе [3] показано, что решение интеграла (13) в приближенном виде будет иметь следующий вид:
я ( T/td)2-l \ fid» 1 7 >td <ld. > +
+(//О) | Q~^d4- — g 2 ,-(itde-Qtd\T/ld\ +le-<! 2 2
(14)
Результаты оценки
На рис. 4-6 представлены результаты расчета автокорреляционной функции для одиночного импульса при параметрах, указанных в таблице. Была произведена нормировка полученных результатов на пиковое значение основного лепестка АКФ эхосигнала без учета фазовых флуктуаций гетеродина.
Тип модуляции Рисунок Длительность импульса Девиация частоты Расстояние до объекта
ЛЧМ 4 10 мкс 10 МГц 300250 м
5 100 мкс
6 1 мс
На рис. 7 приведена зависимость уровня автокорреляционной функции эхосигнала с учетом фазовых флуктуаций гетеродина от длительности зондирующих импульсов для трех типов гетеродинных сигналов. За единицу взято пиковое значение основного лепестка АКФ эхосигнала без учета фазовых
флуктуаций гетеродина.
Результат оптимальной фильтрации ЛЧМ импульса
0,9 -
0,8 -
0,7 -
—Прямой аналоговый синтезатор
— -Гибридный синтезатор
...Синтезатор с ухудшенными
СПМФФ
Результат оптимальной фильтрации ЛЧМ импульса
|о,5 -
2 0,4 -0,3 -0,2 0,1
°300 300,2 300,4 300,6 300,8 301
Дальность, км
1
0,9
0,8
0,7
S 0,6 |о,5 О £0,4
0,3
0,2
0,1
0
— Прямой аналоговый синтезатор
_... Гибридный синтезатор
Синтезатор с ухудшенными — СПМФФ
300 300,2 300,4 300,6 300,8 301
Дальность, км
Рис. 4
Рис. 5
Результат оптимальной фильтрации ЛЧМ импульса
Йрямой аналоговый синтезатор Гибридный синтезатор Синтезатор с ухудшенными “СПМФФ
1 0,9 0,8 0,7 Ь 0,6 Н 0,5 2 0,4 0,3 0,2 0,1
0
300 300,2 300,4 300,6 300,8 301
Дальность, км
Рис. 6
Рис. 7
72
"Радиотехника", 2013 г., № 5
“Радиолокация и связь”№ 15
• Оценка влияния фазовых флуктуаций на оптимальную фильтрацию одиночных импульсов длительностями 10 мкс, 100 мкс и 1 мс с ЛЧМ показала, что фазовая нестабильность синтезаторов, построенных на основе схем прямого аналогового синтеза и гибридной схемы, не оказывает существенного влияния на результат обработки. Так, уровень АКФ для генераторов 1 и 2 соответствует уровню АКФ, полученной без учета фазовых флуктуаций гетеродинного сигнала. Значительных ошибок в определении дальности для гетеродинов 7 и 2 выявлено не было.
Применение генератора 3 с ухудшенной СПМ фазовых флуктуаций оказывает влияние на результат оптимальной обработки импульса, что выражается в ослаблении уровня основного лепестка на 3 дБ и увеличении ошибки до 30 м в определении дальности до объекта при длительности импульса 1 мс. Полученные результаты объясняются тем, что увеличение длительности импульса для модели генератора 3 способствует увеличению дисперсии частотно-зависимых флуктуаций.
Литература
1. Alenander Chenakin Building a Microwave Frequency Synthesizer - Part 5: Advanced Techniques, High Frequency Electronics 2008. URL: http://www.highfrequencyelectronics.com/Archives/Sep08/HFE0908_Chenakin5.pdf
2. Григорьев И. А Методы минимизации фазовых шумов в гибридном синтезаторе частот Ки-диапазона с режимом быстрой перестройки частоты // Радиотехника. 2012. № 3.
3. Raven R. S. «Requirements on Master Oscillators for Coherent Radar», Proceedings of the IEEE, Publication Year: 1966. Page(s): P. 237-243.
4. Baghdady E. J. «Short-Term Frequency Stability: Characterization, Theory, and Measurement» // IEEE-NASA Simposium on Short-Term Frequency Stability. 1965.
5. BoileauE. and PicinbonoB. Statistical study of phase fluctuations and oscillator stability I I IEEE Trans. Instrum. Meas. 1976. V. IM-25. № 1. P. 66 - 75, March.
6. Cutler L. S. Some aspects of the theory and measurement of frequency fluctuations in frequency standards. In [1]. 1966. P. 89 - 100. 7. Cutler L. S. and Searle C. L. Some aspects of the theory and measurement of frequency fluctuations in frequency standards. In [2]. P. 136-154.
8. Middleton D. An Introduction to Statistical Communication Theory, Wiley // IEEE Press, 1996.
9. Scheer James A., Kurtz James L. Coherent Radar Performance Estimation, Artech House, 1993. http://www.ebooks-share.net/coherent-radar-performance-estimation-artech-house-radar-library/
10. Очков Д.С., Силаев E.A., Формальное И.С. Оценка интервалов когерентности радиотракта РЛС. И Радиотехника. 2006. № 4.
11. LeeJ*, Byun Y. S. Analysis of Clutter Cancellation Capability Considering Radar System Phase Noise Effects / Antennas and Propagation Society International Symposium, 1997 //IEEE. 1997. Digest.
12. Walls F. L. PM and AM noise of combined signal sources, Frequency Control Symposium and PDA Exhibition Jointly with the 17th European Frequency and Time Forum // 2003. Proceedings of the 2003 IEEE International
Поступила 4 апреля 2013 г.
Evaluation of the influence of the radar LO signal phase fluctuations on the autocorrelation function of echo signal
© Authors, 2013
I. A. Grigoryev
This paper introduces phase noise impact estimation results on coherent LFM echo pulse processing in coherent radar receiver. These results have been obtained under conducting of three LO schemes based on direct analog synthesis, hybrid technology and scheme which has been obtained after synthesis worst case PM phase noise scenario.
Phase noise estimation on optimal processing of one pulse with LFM leads us with results that main challenge in develop LOs is to decrease frequency depended phase fluctuations, which are mainly come up in reference stages of local oscillators. Increasing of flicker phase noise leads to increasing of range measurement uncertainty.
"Радиотехника", 2013 г., № 5
73
Обработка информации и управление
УДК 621.396.677
Эффективность использования несвязанных крупноапертурных излучателей в фазированных антенных решетках
© Авторы, 2013
С. П. Скобелев - к. т. н., вед. науч, сотрудник, ОАО «Радиофизика», преподаватель МФТИ
E-mail: s.p.skobelev@mail.ru
Проведен количественный анализ эффективности использования несвязанных крупноапертурных излучающих элементов в плоских одномерно- и двумерно-периодических фазированных антенных решетках (ФАР). Указанная эффективность определяется как отношение минимального числа элементов, необходимого для удовлетворения заданных требований на коэффициент усиления ФАР в заданной области сканирования, к фактическому числу крупноапертурных элементов. Показано, что в каждом случае существует оптимальное отношение фактического периода решетки к максимальному периоду, соответствующему ширине заданной области сканирования, при котором эффективность использования достигает максимального значения. Установлено, что более высокая (на 4-5%) эффективность получается при использовании раскрывов со спадающим амплитудным распределением.
Ключевые слова: крупноапертурные излучатели, фазированные антенные решетки, эффективность использования элемента ФАР.
Quantitative analysis of effectiveness of using non-coupled large-aperture radiating elements in planar singly and doubly periodic phased antenna arrays is carried out. The indicated effectiveness is defined as a ratio of the minimum number of elements necessary for satisfying requirements specified for the array gain within a specified field of view to the actual number of the large-aperture elements. It is shown that in each case there exists an optimal relation of the actual array element spacing to the maximum possible element spacing corresponding to the specified field-of-view width providing maximum of element use effectiveness. It is found that a higher (by 4-to-5%) effectiveness is achieved when using apertures with tapered amplitude distributions.
Keywords: large-aperture radiators, phased antenna arrays, array element use effectiveness.
Введение
Одним из хорошо известных простых способов минимизации числа дорогостоящих управляемых элементов (фазовращателей или активных приемопередающих модулей) в остронаправленных фазированных антенных решетках, предназначенных для сканирования в малых секторах углов (единицы градусов или даже доли градуса), является применение неперекрывающихся синфазных подрешеток простых излучателей малых поперечных размеров [1] или крупноапертурных излучающих элементов [2, 3]. Применение крупноапертурных рупорных излучателей в ФАР рассматривалось в [4, 5], а примеры ФАР крупноапертурных двухзеркальных излучателей имеются в [6, 7]. Хорошо известно также [1], что указанные излучатели позволяют эффективно подавлять побочные максимумы множителя решетки только при установке главного луча по нормали к раскрыву. Отклонение луча от нормали приводит к быстрому росту уровня побочных максимумов и, как следствие, к быстрому снижению коэффициента усиления (КУ) решетки в соответствии с формой диаграммы направленности (ДН) крупноапертурного элемента. Последняя существенно отличается от идеальной амплитудной ДН элемента, изменяющейся по закону cos1/2f? в заданной области сканирования, где в - угол отклонения луча от нормали, и равной нулю вне области сканирования [8]. Чтобы скомпенсировать снижение КУ на краю сектора по сравнению с идеальным случаем, требуется наращивание площади раскрыва решетки, т.е. увеличение числа элементов по сравнению с минимальным числом, необходимым для обеспечения заданного КУ в заданной области сканирования. Подобные качественные рассуждения приведены в [8], где также рассмотрен один пример количествен
74
"Радиотехника", 2013 г., № 5
“Радиолокация и связь”ЛЬ 15
ной оценки увеличения числа крупноапертурных элементов. Насколько известно автору статьи, никаких других количественных исследований по этому вопросу в литературе до сих пор не проводилось.
Количественным параметром, характеризующим превышение фактического числа применяемых элементов N над минимальным числом элементов является эффективность использования управляемых элементов £ введенная в [9] и равная £=Nmm/N, или введенный позже в [10] коэффициент использования управляемых элементов £ обратный к £ т.е. £=1/£
Цель работы - проведение количественного анализа эффективности использования крупноапертурных излучающих элементов различной формы и с равномерным и спадающим амплитудными распределениями поля по раскрыву в плоских одномерно- и двумерно-периодических решетках.
Одномерно-периодические решетки
Рассмотрим плоскую одномерно-периодическую решетку, расположенную в плоскости z=0 прямоугольной декартовой системы координат Oxyz с периодом b вдоль оси х и однородную вдоль оси у. В общем случае эффективность использования элемента ФАР зависит от заданных требований, предъявляемых к КУ решетки G(ff), где 0 - угол, отмеряемый от нормали к раскрыву в плоскости сканирования, в заданном секторе, например, для |0|<0тах и #тах«1. Представляется, что наиболее естественным требованием является то, чтобы КУ решетки в секторе сканирования был не ниже некоторого заданного значения Go. Считая размер раскрыва и число элементов N решетки достаточно большими, чтобы можно было пренебречь краевыми эффектами, КУ решетки можно записать в виде произведения G(0)=Ng(0), где g(ff) - КУ элемента в решетке. В идеальном случае КУ элемента в секторе сканирования определяется формулой [8]
gjW(6’) = ^maxcos6', (1)
где к=2М - волновое число, 2 - рабочая длина волны;
h - 2
"max ~ Л 2sin#m
- максимальный период решетки, соответствующий заданной ширине сектора сканирования . Идеальный КУ (1) является максимальным возможным КУ в заданном секторе и поэтому ему соответствует минимальное количество элементов решетки
N =-^— 1 ’ min ! 1 ’
*Апах
записанное в предположении, что для малых углов cos# »1.
В общем случае КУ элемента в решетке можно определить как
g{0) = kbpF2{0), (4)
где - коэффициент использования поверхности (КИП) ячейки решетки, учитывающий вид амплитудного распределения поля по периоду; F(0) - нормированная амплитудная ДН элемента в решетке. Если распределение поля на периоде является равномерным, то г/=1 и
F(0) = ^,
(2)
(3)
(5)
где
“ 2
Минимальное значение КУ элемента (4) в рассматриваемом случае достигается на краю сектора, т.е. при |0|= 0т. Поэтому число элементов решетки, необходимое для удовлетворения требования по КУ, будет определяться как Go - G° g(0m) kbF2(0m)
Рассматривая отношения (3) и (7) и учитывая связь (2) между максимальным периодом и шириной сектора, получаем эффективность использования элемента решетки в виде b sin2 Um ^~1 Ц2~
^тах и т
(6)
(7)
(8)
"Радиотехника", 2013 г., № 5
75
“Радиосистемы”, выпуск 179
где
т Oh
Zf7max
(9)
Зависимость (8) от ЫЬтях. показана на рис. 1, кривая 1. Как видно, эффективность использования элемента в рассматриваемом случае имеет максимум, равный ~46,1%, достигаемый при Z>^0,745Z)max.
Если амплитудное распределение на периоде решетки спадает до нуля по закону косинуса, т.е. А(х) = cos(^x/Z>), то, как известно [1], 7=8/яМ),81. Повторяя все выкладки, приведенные выше, получаем
= (Ю)
^тах 7Г
где
-значение нормированной ДН элемента на краю сектора сканирования при указанном косинусоидальном распределении. Зависимость (10) от ЫЬтт показана на рис. 1, кривая 2. В этом случае максимум эффективности элемента, достигаемый при b=bmax, равен 50%, т.е. он несколько выше, чем при равномерном распределении.
Представляет интерес сравнить полученные результаты с результатами, достигаемыми в решетках, где формируется секторная ДН элемента. В качестве примера рассмотрим решетку с так называемой "шах
матной" схемой формирования секторной ДН [8,11]. Диаграмма направленности элемента на краю сектора, соответствующая однокаскадному варианту шахматной схемы, определяется формулой
F2(Um) = W 14 cos(0,5C/OT) + 4 cos(l,5t/m) + 4 cos(2,5t/m) |,
(Н)
где А 1=0,605+0,665/, 4=0,295/, Лз=-0,324 - комплексные амплитуды, соответствующие оптимальным параметрам схемы,
Fe(UJ = Sl^,5U^ (12)
Q,5Um v
- ДН половины периода решетки с равномерным распределением поля. Зависимость эффективности использования таких элементов с ^=1, определяемой формулой
5 = -^М), (13)
^max
от ЫЬтях представлена на рис. 1, кривая 3. Максимум этой кривой, равный 61,3 %, достигается при й«0,745йтах.
Скорость спадания ДН элемента (11) можно несколько снизить путем повторного использования шахматной схемы, но с периодом вдвое меньше, чем исходный [8]. В этом случае ДН (12) принимает вид
Fe(Um) = 1 4cos(0,25(/m) + 4cos(0,75(/m) + 4cos(l,2577ffi)|. (14)
Эффективность элемента решетки с двойной однокаскадной шахматной схемой, определяемая формулой (13) с учетом (12) и (14), приведена на рис. 1, кривая 4. Максимум эффективности элемента в этом случае, равный 65,6%, имеет место при 6=4),77Z>max.
Таким образом, даже при использовании только трех ячеек решетки, связанных с помощью однокаскадной "шахматной" схемы для формирования секторной ДН элемента, оказывается заметно более эффективным с точки зрения минимизации числа управляемых элементов, чем при использовании несвязанных крупноапертурных излучателей.
76
"Радиотехника", 2013 г., № 5
“Радиолокация и связь”№ 15
Двумерно-периодические решетки
Эффективность использования крупноапертурных элементов в больших многоэлементных плоских двумерно-периодических ФАР рассматривается аналогично. Пусть Go - заданное минимальное значение КУ решетки в конической области сканирования с максимальным углом отклонения луча 0т«Л. Так же как и в случае одномерно-периодической решетки, КУ решетки G(0,<p) равен произведению КУ элемента в решетке g(0,<p) на число элементов N. В идеальном случае, соответствующем гексагональной сетке с максимальным периодом [8] h *
~ л/з ’
коэффициент усиления элемента в области сканирования определяется как Дя-С gid(0,<p)=^^COS0,
где Smax = - площадь ячейки, приходящейся на один узел сетки, например, в форме правильно-
го шестиугольника, показанного на рис. 2.
Коэффициент усиления элемента (16) является максимально возможным, и поэтому он соответствует минимальному числу элементов, необходимому для удовлетворения требования на КУ решетки, которое с учетом малости угла отклонения находим по формуле
N. =-^2 ’ min 7 2
(15)
(16)
(17)
(18)
Коэффициент усиления элемента в общем случае двумерно-периодической решетки можно представить в виде
g(0,(p) = ——t]F2(0,(p),
Л
где S - площадь, приходящаяся на один узел сетки, которая может быть как гексагональной (рис. 2), так и квадратной (рис. 3); - КИП ячейки решетки; F(0,ip) - нормированная амплитудная ДН элемента в решетке.
Число элементов решетки, необходимое для удовлетворения требования по КУ, определим как
Gp = G022
<§min 4^7^min
(19)
где и Fmin - минимальные значения КУ и ДН элемента в области сканирования, а соответствующая эффективность использования элемента решетки
N
Если элементом гексагональной решетки с периодом b является шестиугольный раскрыв с равномерным амплитудным распределением (см. рис. 2), то 5-62л/з/2, ^=1, а минимум нормированной ДН раскрыва, достигаемый на краю области сканирования,
_2 cosUm -cos(2t/m)
Лпт- ’ 2 ’ (211
3 т
получен с использованием выражения, имеющегося в [8, 12], где ^sing, =
з*т„
Эффективность использования элемента (20), рассчитанная как функция ЫЬтт, представлена на рис. 4, кривая 1. В этом случае максимум эффективности ~37% достигается при ^/^тах~0,96.
"Радиотехника", 2013 г., № 5
77
“Рад ио системы”, выпуск 179
Если элементом решетки с квадратной сеткой и периодом Ь является квадратный раскрыв с равномерным амплитудным распределением, то S=b2 и В этом случае ДН определяется хорошо известной формулой
F(0,<p) = ^-^, (23)
где t/=0,5£6sin#cos^ и K=0,5AFsin#sin^. Минимум (23) достигается на краю области сканирования в диагональной плоскости, т.е. при <р=я74. Поэтому
Д’ _ s*n т min тт2
(24)
где Ит = лЫ (йтах-Уб). Эффективность (20) для такого квадратного элемента в квадратной сетке, как функция ЫЬт^, представлена на рис. 4, кривой 2. Максимум эффективности в этом случае «36,86% достигается при Штахг0,91.
Представляет интерес рассмотрение элементов с круглым раскрывом, используемых в практических решетках [6, 7]. Такие раскрывы могут быть расположены в узлах как гексагональной сетки (см. рис. 2), так и квадратной (см. рис. 3). Коэффициент использования поверхности ячейки гексагональной сетки, по узлам которой располагаются круглые раскрывы радиуса а=Ы2 с равномерным амплитудным распределением, равен г) = л-/ (2-^3), т.е. отношению площади круга S=itb2l4 к площади шестиугольника. Нормированная ДН раскрыва определяется формулой [1] F(6,<p)=2J\(lJ)IU, где Ji - функция Бесселя первого порядка, U=kasin0. Поэтому Fmin=2Ji((/m)/(/m, где Um = O,5kbsin0m = яЫ (6тах>/з). Эффективность (20) для рассматриваемого элемента в зависимости от ЫЬт!зх представлена на рис. 4, кривая 3. Максимум эффективности, равный здесь -37,33%, достигается при Жтах«1,02. Заметим, что эффективность использования элемента с круглым раскрывом для квадратной сетки будет точно такой же, т.е. не зависит от типа сетки.
Если осесимметричное распределение поля по круглому раскрыву спадает как Л(г)=1-(г/а)2, то КИП ячейки, указанный выше, следует еще дополнительно умножить на КИП самого раскрыва, равный 0,75 [1]. Используя известную формулу для нормированной ДН круглого раскрыва с указанным спадающим распределением [1], получим Fmin =8J2(t/m)/(/2 , где J2 -функция Бесселя второго порядка. Эффективность (20), рассчитанная для рассматриваемого случая, показана на рис. 4, кривая 4. Как видим, здесь эффективность имеет максимум «42,85%, что более чем на 5% выше, чем в предыдущих случаях. Кроме того, указанный максимум достигается при Z>/6max«l,27, что также заметно больше, чем предыдущие оптимальные
отношения периодов решетки.
• Проведен количественный анализ эффективности использования несвязанных крупноапертурных излучающих элементов в плоских одномерно- и двумерно-периодических фазированных антенных решетках (ФАР).
В случае одномерно-периодических решеток рассмотрены элементы с равномерным и косинусоидальным амплитудными распределениями по раскрыву. Показано, что в каждом случае существует оптимальное отношение фактического периода решетки к максимальному периоду, соответствующему ширине заданной области сканирования, при котором эффективность использования достигает максимального значения. Установлено, что максимальная эффективность использования элементов с косинусоидальным распределением приблизительно на 4% выше максимальной эффективности элементов с равномерным распределением.
78
“Радиотехника", 2013 г., № 5
“Радиолокация и связь”Ns 15
Проведено сравнение с решетками, в которых однокаскадная ’'шахматная” схема используется для формирования секторной ДН элемента решетки. Показано, что максимальная эффективность использования таких элементов примерно на 12—16% выше максимальной эффективности использования несвязанных элементов с косинусоидальным распределением.
В двумерно-периодических решетках рассмотрены элементы с гексагональным и круглым раскрывами, расположенными в гексагональной сетке, а также элементы с квадратным и круглым раскрывами, расположенными в квадратной сетке. Показано, что эффективность использования указанных элементов с равномерным распределение по раскрыву не превышает 37,5%, а также, что применение спадающего квадратичного распределения в элементе с круглым раскрывом позволяет довести эффективность использования элемента решетки до 42,85% независимо от типа сетки.
Литература
1. Марков Г. Т., Сазонов Д. М. Антенны. М.: Энергия. 1975.
2. Полухин Г. А. Анализ диаграммы направленности фазированной антенной решетки из крупноапертурных модулей И Радиотехника. 1989. № 2. С. 53 - 55.
3. Ганин С. А., Полухин Г. А. Антенная решетка из крупноапертурных модулей с круглыми апертурами // Радиотехника. 1991. №4. С. 58-60.
4. Amitay N., Gans М. J. Design of rectangular horn arrays with oversized aperture elements // IEEE Transactions on Antennas and Propagation. 1981. V. AP-29. № 6. P. 871 - 884.
5. Egorov E. N., Epshtein A. L, Guskov G. Ya., Levitan B. A., Sbitnev G. V., Shishlov A. V, New technology in multibeam and scanning antennas H Proceedings of APSCC’94 Workshop. Seoul, Korea. October 26-28, 1994. P. 211 - 221.
6. Толкачев А. А., Макота В. А., Павлова M. П, Николаев А. М., Денисенко В. В., Соловьев Г. К. Большая радиолокационная ФАР миллиметрового диапазона волн И Антенны. 1999. № 1. С. 4 - 11.
7. Кривошеев Ю. В., Денисенко В. В., Шишлов А. В. Подавление интерференционных максимумов в апериодических фазированных антенных решетках, составленных из периодических подрешеток // Антенны. 2011. № 2. С. 26 - 39.
8. Скобелев С. П. Фазированные антенные решетки с секторными парциальными диаграммами направленности. М.: Физмат-лит. 2010.
9. Вендик О. Г. Антенны с немеханическим движением луча. М.: Сов. радио. 1965.
10. Patton W. Limited scan arrays // Phased Array Antennas: Proc. 1970 Phased Array Symp., Eds.: A. A. Oliner and G. A. Knittel. Dedham, MA. 1972. P. 254 - 270.
11. Скобелев С. П. Анализ и синтез антенной решетки с секторными парциальными диаграммами направленности И Радиотехника. 1990. №10. С. 44-47.
12. Скобелев С. П. Формирование ортогональных лучей плоскими раскрывами // Радиотехника. 2008. № 4. С. 37 - 40.
Поступила 4 апреля 2013 г.
Effectiveness of using non-coupled large-aperture radiators in phased array antennas
© Authors, 2013
S. P. Skobelev
Radiating elements in the form of large-aperture horn and reflector antennas find important application in highly directive phased antenna array designed for scanning in narrow angular regions of space. In the present paper, a quantitative analysis of the effectiveness of using similar antenna elements in planar singly and doubly periodic phased arrays is carried out. The indicated effectiveness is defined as a ratio of the minimum number of elements necessary for satisfying requirements specified for the array gain within a specified field of view to the actual number of the large-aperture elements.
In case of singly periodic arrays, the elements with uniform and cosine-tapered amplitude distributions over aperture are considered. It is shown that in each case there exists an optimal relation of the actual array element spacing to the maximum possible element spacing corresponding to the specified field-of-view width providing maximum of element use effectiveness. It is found that the maximum element use effectiveness corresponding to the cosine distribution is approximately 40% higher than the maximum efficiency corresponding to the uniform distribution.
The indicated arrays are compared to the arrays where the known single-cascaded chess-board circuit is used for forming a sector element pattern. It is shown that the maximum element use effectiveness in case of the arrays with the sector element patterns is by 12-to-16% higher than the maxim effectiveness corresponding to the non-coupled elements with cosine distribution.
In the doubly periodic arrays, there are considered elements with hexagonal and circular apertures arranged in a hexagonal lattice, as well as elements with square and circular apertures arranged in a square lattice. It is shown that the element use effectiveness for the indicated elements with uniform aperture distribution does not exceed 37.5%. It is also shown that the use of a quadratic tapered distribution over a circular aperture element allows increasing the element use effectiveness up to 42.85% independently of the lattice type.
"Радиотехника", 2013 г., № 5
79
“Радиосистемы”, выпуск 179
УДК 537.874.6:621.396.677
Анализ и оптимизация периодических диэлектрических структур для просветления линз в радио- и оптическом диапазонах
© Авторы, 2013
С. П. Скобелев - к. т. н., вед. науч, сотрудник, ОАО «Радиофизика», преподаватель МИФИ
E-mail: s.p.skobelev@mail.ru
О. Н. Смольникова - к. т. н., доцент, Московский авиационный институт; начальник отдела ОАО «Радиофизика» E-mail: smon2012@mail.ru
Рассмотрена задача рассеяния плоских электромагнитных волн на двумерно-периодических структурах с коническими и пирамидальными диэлектрическими элементами, расположенными на однородной диэлектрической подложке, моделирующей поверхность линзовой антенны. Предложен гибридный проекционный метод решения, включающий применение метода связанных волн (неполного метода Галеркина), метода проекционного сшивания полей на границах областей и одномерного метода конечных элементов. Предложенный метод позволяет избежать использования избыточного числа неизвестных коэффициентов разложения, имеющего место в предыдущих версиях. Приведены и обсуждены численные результаты, характеризующие как эффективность самого метода, так и свойства периодических диэлектрических структур с элементами, оптимизированными для просветления поверхностей линзовых антенн.
Ключевые слова: диэлектрические линзы, периодические структуры, согласующие структуры, электромагнитное рассеяние, численные методы.
The problem of plane electromagnetic wave scattering by doubly periodic structures with pyramidal and conical dielectric elements arranged on a homogeneous dielectric substrate modeling the surface of a lens antenna is considered. A hybrid projective method involving the method of coupled waves (incomplete Galerkin method), method of projective mathing of fields on the boundaries of partial regions, and one-dimentional method of finite elements is proposed. The method proposed avoids using excessive number of unknown coefficients of expansion taking place in the previous versions. Some numerical results characterizing both the effectiveness of the method itself and the properties of periodic dielectric structures with elements optimized for providing match of lens surfaces to free space are presented and discussed.
Keywords: dielectric lenses, periodic structures, matching structures, electromagnetic scattering, numerical methods.
Введение
Задача анализа рассеяния электромагнитных волн на периодических диэлектрических структурах вызывает большой интерес для многих практических применений. Одним из таких приложений являются согласующие слои искусственного диэлектрика на поверхностях диэлектрических линз как в радио-, так и в оптическом диапазонах [1-3]. Этот интерес проявляется как в направлении создания новых структур путем оптимизации формы их элементов, так и в направлении повышения эффективности методов их численного анализа.
В работе [4] сделан обзор различных методов анализа электромагнитного рассеяния на периодических диэлектрических структурах и предложен гибридный проекционный метод решения двумерных задач для одномерно-периодических структур с клиновидными элементами. Кроме того, в [4, 5] приведен ряд результатов, характеризующих эффективность применения клиновидных элементов в одномерно-периодических структурах для согласования плоской поверхности диэлектрического полупространства.
Цель работы- разработка метода решения более важной для практики трехмерной задачи об электромагнитном рассеянии на двумерно-периодических структурах с коническими и пирамидальными элементами. Указанные элементы представляют интерес, так как обладают дополнительными возможностями по оптимизации по сравнению с продольно однородными согласующими элементами, рассмотренными в [1, 2].
Гибридный метод, разрабатываемый ниже, основан на подходе, примененном в [6, 7] для анализа волноводных фазированных решеток с выступающими диэлектрическими элементами. Предлагаемый метод будет применен для оптимизации геометрии элементов структуры с целью ее согласования со свободным пространством, как это требуется делать, например, в линзовых антеннах.
80
"Радиотехника", 2013 г., № 5
“Радиолокация и связь”№ 15
Постановка задачи
Геометрия рассматриваемой структуры в прямоугольной декартовой системе координат Oxyz показана на рис. 1. Структура образована диэлектрическими элементами с относительной проницаемостью £ и высотой h. Элементы могут быть пирамидальными, как показано на рисунке, с размерами основания р)х х f0y и размерами вершины tlx х tly или коническими с диаметром основания 2г0 и диаметром вер
шины 2t\. Элементы расположены в горизонтальных рядах с шагом dx, а ряды - с шагом dy на плоской поверхности диэлектрического полупространства (подложке) с относительной проницаемостью Относительная магнитная проницаемость элементов и подложки считается равной единице. Сетка расположения элементов может быть как прямоугольной (рис. 1), так и треугольной, в которой соседние ряды сдвинуты вдоль оси х на расстояние dx / 2 относительно друг друга. Наиболее важным частным случаем треугольной сетки является гексагональная сетка, в которой dy=dxj5 / 2.
Выбирая соответствующие значения параметров элементов и подложки, можно моделировать различные частные случаи, включая те, которые уже
были рассмотрены в литературе и могут быть использованы для проверки работы алгоритма, разрабатываемого ниже, а также и некоторые новые случаи, представляющие интерес для исследования.
Предполагается, что структура возбуждается плоской волной ТЕ с амплитудой Ах или ТМ амплитудой А 2, падающей под углом в к оси z в вертикальной плоскости, расположенной под углом <р к плоскости xOz. Цель задачи - определить поле, отраженное от структуры, и поле как в области, содержащей элементы структуры, так и в подложке. Наибольший практический интерес представляет коэффициент отражения волны от структуры, характеризующий согласование последней со свободным пространством.
Рис. 1
Представление полей
Решая поставленную задачу в предположении зависимости от времени e"lft*, представим поперечные составляющие электрического и магнитного полей над концами элементов (z > h) в виде разложений по полной системе векторных гармоник Флоке [8]:
Ег = - ЛГоо'И20о)еЧГ°о(г-й) + ^(R^pq + R^T^y^, (1)
p,q
Нхег =(-4Г001|/100 + A2k^200)Q-ir^ + £>^4/^ + R2Pq^2Pq)^pg{"h\ (2)
p,q
где % =(//(> / ^о)12 ~ волновое сопротивление для свободного пространства; A j - заданные амплитуды падающих волн ТЕ (у = 1) и ТМ (у = 2); Rj - неизвестные амплитуды отраженных волн ТЕ и ТМ с постоянными распространения rpq = (k2 - wpq )1/2, wpq = (а2 + 0pq )1/2, ар=ки + 2лр1 dx,
Ppq ~ kv + 2я’(<7 - рд) / dy и ортонормированными поперечными векторными функциями [6 - 8]
- a„ev апех + Вп,у,,
W\Pq{x,y) = ~S3----~^Pq> W2Pq(X^y) = —---------(3)X4)
wp<? wpq
e v, e v - единичные векторы, направленные вдоль соответствующих осей;
"Радиотехника", 2013 г., № 5
81
“Радиосистемы”, выпуск 179
(5)
IM (rv) = —1____
v^ 'y}
- ортонормированная скалярная функция; u = sin0cos<p и v = sin#sin^ - направляющие косинусы для падающей волны; д = 0 для прямоугольной сетки и 5 = 1 / 2 для треугольной сетки; к = 2я/Л - волновое
число, Л - длина волны в свободном пространстве.
Для упрощения последующих формул введем сквозную порядковую нумерацию гармоник Флоке для каждого типа и далее двойной индекс pq, используемый в (1) - (5), заменим одиночным.
Поперечные составляющие полей в области 0 < z < h, содержащей диэлектрические элементы, как и в неполном методе Галеркина [9-11], ищем в виде разложений по поперечным функциям (3) и (4):
Е, + E2q(z^2q\, Н, =^[Я19(г)ч/19 + H2q{z^2q}, (6); (7)
q q
с неизвестными коэффициентами, зависящими от z. Тогда продольные составляющие полей будут выражаться формулами:
> (8); (9)
5 <? Ч
следующими из (6), (7) и уравнений Максвелла
VxH + —Е = 0; VxE-i^oH = O, (10); (11)
%
где ё = £ в элементах структуры и £ = 1 между ними.
Поперечные составляющие полей в подложке (z < 0) представляем также в виде разложений по поперечным функциям (3) и (4):
Er = -T^2q)^-, Hxez =^~TXqriqyXq +Г2?^1Ч/2ХГ1?г ’ (12); (13)
q q
с теми же поперечными постоянными распространения, что и выше, но с другими продольными посто-янными распространения Г19 = (к2£х -w2?)1/2, учитывающими специфику подложки, и неизвестными амплитудами Tjq прошедших волн ТЕ и ТМ.
Гибридный проекционный метод
Сшивание электрических полей (1) и (6), а также магнитных полей (2) и (7) (последнее должно быть векторно умножено на ez) при z = h дает соотношения:
E\q =EXq(h)~Ax8Qq, R2q = ~H\q(h)-A23Qq, (14)
E2q(h) = (R2q-A2S0q)rq/k и H2q(h) = (Riq-Ax30q)rq/k,
откуда получаем равенства:
E2q(h) = -Hiq(h)rq/k-2A280qTq /к; H2q(h) = EXq{h)rqlk-2Ax8.qrqlk, (15); (16)
которые будут использоваться в последующих формулах.
Аналогичное сшивание электрических полей (6) и (12), а также магнитных полей (7) и (13) при z = 0 дает соотношения:
7].=Д?(0), T2q=-^ (17)
E2q(Q^-T2qVXq/k и Я2/0) = -ГкГк/^,
из которых получаем равенства:
£2<?(0) = ^-Я19(0); Я2/0) = -^Д/0), (18); (19)
которые также будем использовать в последующих формулах.
82
"Радиотехника", 2013 г., № 5
“Радиолокация и связь”№ 15
Проектирование уравнений Максвелла (10) и (И) для полей (6) - (9) на поперечные функции уХр(х,у) и у*2р(х,у), все подробности которого имеются в [6, 7], сводит их к бесконечной системе обыкновенных дифференциальных уравнений для переменных коэффициентов разложений (6) - (9):
-^ = 0, dz
О 'V "1
я я + k2^YP4E^ + ZP4E^ + = 0 ’
ч 1 dE,n и ______}р_
lp ik dz с коэффициентами (см. также [11]) а„ао + В„Ва апВ„ -ааВ„
Z„(z) = р q РрР^п, Y (z) = -^.......^-P-Wn,
V«
W (z\ = (f-\\txty ^п^ач~ар^1х sin[(/?g -Ppjty! 2] т }dxdy (aq-ap)tx/2 (fiq-0p)ty/2
- для пирамидальных элементов c tx (z) = tOx 0 + -^2——P.z ; ,Л ’ Л h
Wm (z) = (e -1)----——
M d d A r
uxuy ^pq'
- для элементов структуры конической формы с A w = [(ар -aq)~ + (J3p -Pq)2]1/2, r(z) = r0+ z.
Отметим, что соотношение (23), во-первых, обеспечивает необходимое условие VH = 0 для магнитного поля с составляющими (7) и (9) и, во-вторых, в отличие от [3] и [9 - 11], устраняет избыточность числа неизвестных коэффициентов в разложениях для полей в области, содержащей продольно неоднородные элементы.
Решение дифференциальных уравнений (20) - (23) ищем в виде разложений по "треугольным" функциям/„(z) [6, 7]:
7/i?(^) = 27/1^/„(z); Ejq(z) = ^Ejnqfn(z), J = 1,2, И=1 W=1
(20)
(21)
(22)
(23)
(24), (25)
(26)
(27)
(28); (29)
с вершинами в N узлах, расположенных равномерно на интервале 0 < z < h , включая его концы. Далее применяем метод конечных элементов [12] к уравнениям (20) - (22), включая следующие операции. Умножаем указанные уравнения на /m(z) и интегрируем их от 0 до h. Подставляем (15) и (18) в неинтегральные слагаемые, образующиеся при интегрировании по частям производной от Е2р в (20). Подставляем (16) и (29) в неинтегральное слагаемое, образующееся при интегрировании по частям производной от Н2р в (21), и подставляем (23) вместо функции Н2р, остающейся под интегралом. При использовании (15) и (16) учитываем, что Hlp(h) = HWp и EXp(h) = EXNp. Наконец, подставляем разложения (28) и (29) под интегралы, и в результате получаем алгебраические уравнения:
ir N ir N _ 2ir
+^-H^p3Nm ^KmnE2np=~-^A2d0pSNm, (30)
1 n=l q n=l
"Радиотехника", 2013 г., № 5
83
“Радиосистемы”, выпуск 179
ir _ ir 2ir
_Y™E2nq)+-^ElNp3Nm =-^A^p3Nm,
n-1 q
+ да-,)! = 0
n-1 q
с матричными элементами
а Г2 w w
ur™ _ __P_ rmnv ” '
pq p upq
в которых h
Imn=kjfmfndz, 0 h rtf
Kmn = \fm^dz, 0 h
(31)
(32)
(33)
(34)
(35)
',pr4Wmn 7mn /тЗ Ттп пЛ Tmn\£ i 7mn Jinn Tmn £ 1 7ГПП
TT~WP4^ £pq P1 'k “7 )dpq+£pq> £pq=l °pq+£pq> к £
/'"”=1 \^т-^п dz, k J dz dz
о
^” = \^Lfndz, J dz о
О
Коэффициенты Ypq и Zpq вычисляются по формулам, аналогичным формуле (35), где коэффициент Wpq следует заменить на (25) и (24) соответственно. Явные выражения для коэффициентов (33) -(35) имеются в [7].
Уравнения (30) - (32) образуют полную бесконечную алгебраическую систему, которую решаем методом усечения до размера 3PN, где Р - число учитываемых пространственных гармоник для каждого из наборов HXnq, EXnq и E2nq , п = 1,..., N. Так как каждая "треугольная" функция частично перекрывается только с ближайшими соседними функциями, то интегралы (33) - 35) равны нулю для | т - п |> 1, и поэтому матрица системы является блочно-ленточной.
Реализация и проверка
Алгоритм, описанный выше, был реализован в нескольких компьютерных программах на языке Фортран-90. Система линейных алгебраических уравнений (30) - (32) после ее усечения решалась методом исключения Гаусса с выбором ведущего элемента в столбце. Минимизация времени решения системы достигалась исключением блоков со всеми нулевыми элементами в блочно-ленточной матрице из процедуры обработки.
Работа программ была проверена несколькими способами, включая выполнение соотношения энергетического баланса, сходимость результатов при увеличении количества учитываемых пространственных гармоник Р и числа узлов N, а также сравнение с результатами, имеющимися в литературе. Соотношение энергетического баланса при условии отсутствия диэлектрических потерь в структуре с полу-бесконечной подложкой можно записать в виде
Л. I2 +1 *2q I2)МГ,}] + £[(1 TXq |2 | T2q |2)Re{r1?}] = (Ax + Л2)Г0 , (36)
q q
где первая сумма соответствует отраженной мощности, а вторая - мощности, прошедшей в подложку. Во всех расчетах при указанных условиях соотношение (36), нормированное на к, при Ах=1, А2 = 0 или Ах = 0 А2 = 1 выполняется с погрешностью не более 10'6 .
Примеры, характеризующие сходимость результатов, приведены на рис. 2 и 3 для структуры с коническими элементами с £ = 2,56, расположенными в квадратной сетке с периодом dx=dy= 0,352 (как
84
"Радиотехника", 2013 г., № 5
“Радиолокация и связь” № 15
в [3]) на подложке с £х=£. Геометрические параметры конусов r0=dx/2, ?! =0,09532 и h = 0,26672 выбраны из условия обеспечения согласования структуры со свободным пространством для волны, падающей по нормали к плоскости структуры. Кривые, приведенные на рис. 2, соответствуют числу узлов N = 30, заведомо достаточному для обеспечения высокой точности аппроксимации решения по продольной координате, характеризуют сходимость коэффициента отражения для ТЕ-волны при возрастании числа учитываемых поперечных функций Р. Кривые на рис. 3 демонстрируют сходимость коэффициента отражения волны ТЕ при фиксированном Р = 81 и возрастающем числе узлов N . Коэффициент отражения для волны ТМ сходится с аналогичной скоростью, и на рис. 2 и 3 приведены только окончательные кривые, соответствующие Р = 81 и N = 30.
Рис. 2 Рис. 3
Проверки, указанные выше, показали хорошие возможности предложенного алгоритма для численного анализа и оптимизации согласующих двумерно-периодических диэлектрических структур с пирамидальными и коническими элементами. Некоторые результаты такого анализа приводятся ниже.
Численные результаты
Ряд результатов был получен при анализе и оптимизации элементов структуры для согласования подложки полубесконечной толщины со свободным пространством. В качестве примера рассмотрим структуру с £ = £х= 2,56, элементы которой расположены в квадратной или гексагональной сетке с периодом dx =0,352 как в работе [3]. Оптимизация геометрии продольно однородных элементов [1, 2] с целью согласования подложки при падении плоской волны по нормали дала следующие результаты: г0 = г\ = 0,12832, h = 0,19792 - для цилиндрических элементов в гексагональной сетке, г0 = г\ = 0,13672 , h = 0,19792 - для цилиндрических элементов в квадратной сетке, tx(s = txX =ty0 =tyl =0,24152, h = 0,19792 - для прямоугольных параллелепипедов в квадратной сетке. Указанная оптимизация проводилась при Р = 93, У = 10 для гексагональной сетки и Г = 81, N = 10 для квадратной сетки. Заметим, что оптимальная высота указанных продольно однородных элементов практически совпадает с толщиной сплошного согласующего слоя, определяемой как /2 = 0,252/77, где £• = 7^ - диэлектрическая проницаемость слоя для случая падения волны по нормали.
Коэффициенты отражения в плоскости <р = 0 для структуры с оптимизированными цилиндрическими элементами, расположенными в гексагональной сетке, приведены на рис. 4. Отметим, что функции коэффициента отражения от угла падения в для указанных продольно однородных структур практически не зависят от ориентации плоскости падения волны (угла <р) и типа сетки и близки к соответствующим функциям для плоского согласующего слоя, определяемым хорошо известными аналитическими выражениями, приведенными, например, в [4]. Кроме того, плоский слой является частным случаем рассматриваемой здесь структуры с пирамидальными элементами, когда размеры оснований пирамид совпадают с периодами прямоугольной сетки. Поэтому плоский слой служил еще одной моделью для проверки работы программы, разработанной для анализа периодических структур.
''Радиотехника", 2013 г., № 5
85
“Радиосистемы ”, выпуск 179
Оптимизация геометрии конических элементов, расположенных в гексагональной сетке с периодом, указанным выше, дает следующие значения rQ=dx/2, =0,07972 и h = 0,29952, полученные при Р = 93, N = 15 и обеспечивающие согласование структуры, возбуждаемой волной, падающей по нормали. Зависимости коэффициентов отражения от 0 для такой структуры приведены на рис. 4. Как видно, конические элементы обеспечивают в целом меньше отражений по сравнению с цилиндрическими. Сравнение приведенных характеристик с аналогичными характеристиками, на рис. 2 и 3 для оптимизированных конических элементов, расположенных в квадратной сетке, показывает, что гексагональная сетка в этом случае имеет некоторое ожидаемое преимущество. Эта особенность объясняется тем, что неоднородность перехода от конусов к подложке для гексагональной сетки слабее, чем для квадратной сетки.
Угловые зависимости коэффициентов отражения ТЕ-волн для указанной структуры с коническими элементами на частотах f = 0,9f0, f = /0 и f = 1,1/о приведены на рис. 5, где /0 - опорная частота, соответствующая длине волны 2, через которую выражены все геометрические параметры структуры. На рис. 6 представлены частотные зависимости коэффициентов отражения ТЕ-волн для углов падения 0 = 0°, 0 = 30° и 0 = 60°. Результаты для гексагональной структуры с коническими элементами на рис. 5 и 6 сравниваются с соответствующими результатами, полученными для структуры с пирамидальными элементами, расположенны
ми в квадратной сетке с тем же шагом dx = dy =0,352. Параметры пирамид = ty(j = dx,
= tyX = 0,14052 и h = 0,33252, определенные в результате оптимизации при Р = 81, N = 15, обеспечивают согласование структуры при нормальном падении волны. Пирамидальные элементы имеют такие же преимущества по сравнению с продольно однородными элементами в виде прямоугольных параллелепипедов, как и конусы по сравнению с цилиндрами (см. рис. 4). Сравнение пирамид и конусов показывает, что, несмотря на расположение пирамид в квадратной сетке, которая во многих случаях уступает гексагональной, характеристики структуры с пирамидами в квадратной сетке очень близки к характеристикам гексагональной структуры с конусами. Эти результаты представляют практический интерес, так как изготовление структуры с пирамидальными элементами в квадратной сетке проще, чем структуры с конусами. Подобные результаты были получены и для случая возбуждения структуры ТМ-волнами. Так как зависимости для этого случая в целом не сильно отличаются от результатов, приведенных на рис. 5 и 6, они здесь не приводятся.
Рис. 5 Рис. 6
86
"Радиотехника", 2013 г., № 5
“Радиолокация и связь” М15
Учитывая практический интерес к пирамидальным согласующим элементам, была проведена оптимизация их параметров (высоты и ширины у вершины), обеспечивающих согласования полупространства для различных углов падения ТЕ- и ТМ-волн. Результаты такой оптимизации для структуры с квадратной сеткой при tx0 = ty0 = dx=dy= 0,352 и е = = 2,56 приведены на рис. 7, где показаны зависимости оптимальной высоты /гор( и оптимальной ширины 0 t = tyX>opt от угла падения волны в. Как и ожидалось, оптимальные параметры для согласования ТЕ- и ТМ-волн совпадают только для случая падения по нормали, а кривые далее расходятся при увеличении угла падения. Таким образом, если параметры структуры обеспечивают полное согласование для ТЕ-волны, то ТМ-волна будет испытывать отражение. Уровень коэффициента отражения ТМ-волны от структуры, согласованной для ТЕ-волны, показан сплошной кривой на рис. 8, штриховая кривая соответствует коэффициенту отражения ТЕ-волны от структуры, согласованной для ТМ-волны. Следует ожидать, что если выбрать средние значения оптимальных высот и оптимальных ширин, приведенных на рис. 7, то можно добиться одинакового уровня отражений для ТЕ- и ТМ-волн, кривая для которого будет проходить ниже кривых, показанных на рис. 8.
Рис. 7 Рис. 8
• Разработан гибридный проекционный метод для анализа электромагнитного рассеяния на двумерно-периодических диэлектрических структурах с коническими и пирамидальными элементами. Метод включает применение метода связанных волн (неполного метода Галеркина), метода проекционного сшивания полей на границах областей и одномерного метода конечных элементов. Предложенный метод позволяет избежать использования избыточного числа неизвестных коэффициентов разложения, имеющего место в предыдущих версиях.
Метод реализован в нескольких компьютерных программах на языке Фортран-90. Работа программ проверена несколькими способами, включая проверку выполнения энергетического баланса, проверку сходимости результатов и сравнение результатов с данными, имеющимися в литературе для некоторых частных случаев.
Разработанные программы применены для анализа и оптимизации диэлектрических структур с цилиндрическими, коническими и пирамидальными элементами. Полученные результаты могут быть использованы для согласования (просветления) поверхностей диэлектрических линз.
Авторы благодарны С. А. Ганину и Ю. В. Кривошееву (ОАО «Радиофизика») за помощь при освоении пакета Microsoft Visual Studio 2010.
Литература
1. Morita Т., Cohn S. В. Microwave Lens Matching by Simulated Quarter-Wave Transformers. // IRE Trans. Antennas Propagat. 1956. V. AP-4. P. 33-39.
2. Жук M. С, Молочков Ю. Б. Проектирование линзовых, сканирующих, широкодиапазонных антенн и фидерных устройств. М.: Энергия. 1973.
"Радиотехника", 2013 г., № 5
87
“Радиосистемы”, выпуск 179
3. MirotznikM. S., Good В. L., Ransom P., Wikner D., Mait J. N. Broadband Antireflective Properties of Inverse Motheye Surfaces H IEEE Trans. Antennas Propagat. 2010. V. 58. № 9. P. 2969 - 2980.
4. Скобелев С. IL, Смольникова О. H. Анализ одномерно-периодических диэлектрических структур гибридным проекционным методом // Радиотехника и электроника. 2012. Т. 57. № 10.
5. Smolnikova О. N., Skobelev S. Р. Analysis of Electromagnetic Scattering From Lossy Periodic Structures with Application to Wedge Absorber // Proc, of the 6th European Conference on Antennas and Propagation (EuCAP'12), Prague, Czech Republic, 26-30 March 2012. Catalog number: CFP1277B-USB, ISBN: 978-4577-0919-7.
6. Скобелев С. П. Гибридный проекционный метод анализа волноводных решеток с выступающими диэлектрическими элементами. Трехмерная задача И Радиотехника и электроника. 2007. Т. 52. № 3. С. 322 - 330.
7. Скобелев С. П. Фазированные антенные решетки с секторными парциальными диаграммами направленности. М.: Физмат-лит. 2010.
8. Амитей Н., Галиндо В., By Ч-П. Теория и анализ фазированных антенных решеток. М.: Мир. 1974.
9. Ильинский А. С., Косич Н. Б. Дифракция плоской волны на двумерной периодической структуре // Радиотехника и электроника. 1974. Т. 19. №6. С. 1171-1177.
10. Ильинский А. С., Трубников С. В. Расчет фазированной антенной решетки волноводно-стержневого типа прямым проекционным методом //Численные методы электродинамики. М.: Изд. МГУ. 1980. С. 26 - 54.
11. Трубников С. В. Проекционные методы исследования электродинамических задач волноводных и волноводно-стержневых излучающих систем. Дисс. к.ф.-м.н. М.: МГУ. 1980.
12. Pinello W. Р., Lee R., Cangellaris А. С. Finite Element Modeling of Electromagnetic Wave Interactions with Periodic Dielectric Structures // IEEE Trans. Microwave Theory Tech. 1994. V. 42. № 12. P. 2294 - 2301.
Поступила 4 апреля 2013 г.
Analysis and optimization of periodic dielectric structures
for blooming of lenses in radio and optical bands
© Authors, 2013
S. P. Skobelev, O. N. Smolnikova
Analysis of electromagnetic wave scattering from periodic dielectric structures is of great interest for a number of applications. One of them is creation of artificial dielectric layers for blooming of lens surfaces. The purpose of the present work is development of a hybrid projective method for numerical analysis of electromagnetic wave scattering by doubly periodic dielectric structures with pyramidal and conical elements. The indicated elements are of interest because they provide a few degrees of freedom for optimization of their shape to obtain the best desirable parameters of scattering.
The problem to be solved is formulated as determination of the field scattered from a doubly periodic dielectric structure illuminated by plane ТЕ and TM waves. The algorithm we propose for solution is a new modification of a hybrid projective method developed earlier for calculation of waveguide-dielectric array antennas (S. P. Skobelev, Phased Array Antennas with Optimized Element Patterns, Norwood, MA: Artech House, 2011). The hybridity implies here use of expansion of the transverse electric and magnetic fields over transverse functions of the Floquet modes with unknown variable coefficients, projection of the Maxwell's equations on the indicated transverse functions, application of the one-dimensional finite element method, and projective matching of the fields on the boundaries of the partial regions. As a result, the problem is reduced to appropriate systems of linear algebraic equations solved numerically. The main feature of our approach is elimination of the redundancy of the unknowns that takes place in the well known relative method of coupled modes (e.g. M. S. Mirotznik, B. L. Good, P. Ransom, D. Wikner, and J. N. Mait, "Broadband Antireflective Properties of Inverse Motheye Surfaces," IEEE Trans, on Antennas and Propagat. 2010, vol. 58, no 9., pp. 2969-2980).
The paper also includes the results of validation characterizing the efficiency of our approach, as well as the number of results obtained after optimization of the parameters of artificial matching dielectric layers characterizing their capabilities in blooming of lens antennas.
88
"Радиотехника", 2013 г., № 5
Аппаратура и испытания
УДК 621.396.67
Влияние ошибки установки юстировочной антенны на фазовую ошибку в апертуре при формировании луча и калибровке в ближней зоне
© Авторы, 2013
Е. В. Коротецкий.- инженер, аспирант МЭИ, ОАО «Радиофизика»
А. М. Шитиков - к.т.н., начальник сектора, ОАО «Радиофизика»
В. В. Денисенко - к.ф.-м.н., начальник НИО ОАО «Радиофизика»
Рассмотрено влияние неточностей в определении координат калибровочной антенны на результаты калибровки и на форму луча ФАР. Отдельно рассмотрено влияние «уходов» калибровочной антенны из заданного положения вдоль апертуры ФАР и по ее оси.
Ключевые слова: фазированная антенная решётка, калибровка, ближняя зона, ошибка определения координат, диаграмма направленности.
In this paper, errors influences of probe coordinates determination on calibration results together with main beam distortions are considered. Probe offsets from prearranged positions are separately examined
Keywords: phased array antenna, calibration, near field, coordinate distortions, gain pattern.
Введение
В ряде случаев калибровка фазированных антенных решеток производится по сигналу калибровочной антенны (КА), расположенной в непосредственной близости от ФАР. Пересчет результатов калибровки в дальнюю зону осуществляется с учетом положения КА относительно ФАР. Цель работы- рассмотреть влияние ошибки определения координат КА на ошибки калибровки и связанные с этим изменения формы луча, а также влияние «уходов» КА из заданного положения вдоль апертуры ФАР и по ее оси.
Постановка задачи
Калибровкой ФАР обычно называют определение характеристик каналов ФАР, которые в дальнейшем используются в алгоритмах диаграммоформирования. В большинстве случаев в качестве таких характеристик используются начальные комплексные коэффициенты передачи каналов, определенные для ситуации, когда управляемый сдвиг фазы и аттенюация установлены в нулевое состояние. Если ФАР не имеет возможности управления амплитудой, то в алгоритмах диаграммоформирования используются только фазы этих коэффициентов.
В классическом случае калибровка проводится с помощью калибровочной антенны, расположенной на достаточном удалении так, что можно считать, что в апертуру калибруемой ФАР приходит плоская волна с постоянной по апертуре амплитудой и фазой. При калибровке каким-либо образом выделяется сигнал каждого канала антенны. Выделение может осуществляться как прямым отключением каналов, так и косвенно на основании серии измерений сигналов с последующим вычислением [1].
На практике часто нет возможности разместить калибровочную антенну в дальней зоне ФАР и приходится располагать её в ближней зоне. При этом распределение комплексного поля в апертуре отлично от равномерного, но при известных координатах калибровочной антенны может быть пересчитано к «классическому» случаю удаленной антенны.
Радиотехника", 2013 г., № 5
89
“Радиосистемы”, выпуск 179
Рассмотрим случай плоской ФАР. Для простоты изложения расчёты будем проводить для одномерной ФАР, ось х направим вдоль апертуры, а ось z - перпендикулярно ей. Начало отсчёта оси координат свяжем с краем апертуры (рис. 1).
Пусть калибровочная антенна расположена в точке с координатами (xc,zc), а координаты излучателя канала в апертуре х, 0, z(- = 0. Тогда амплитуда комплексного поля в раскрыве ФАР
Ах,) = -Ц, Г (Xi)
а фаза
Phs(Xj) = kr(Xj), где
,2 , _2
(1)
(2)
(3) - расстояние от калибровочной антенны до z-ro излучателя; к - волновое число. Эти зависимости амплитуды и фазы должны быть использованы при пересчете результатов калибровки к дальней зоне.
Предположим теперь, что калибровочная антенна фактически расположена в точке с координатами (хс + Дх,гс + Дг), а пересчет ведется по формулам (1) - (3), не учитывающим смещения калибровочной антенны, и потому «собственные» коэффициенты каналов определяются с ошибкой. Это приведет к следующим ошибкам в апертуре ФАР:
А А/ \ ^(Х,)
Mxz) = —-L-, '•(Х;)
Др(х,) = ф(х,)-г(х;)], где
(4)
(5)
r(xt) = 7(х,- - хс - Дх)2 + (zc + Дг)2 . (6)
Ниже подробно рассматриваются фазовые ошибки в апертуре ФАР, возникающие при неучтенном смещении калибровочной антенны по одной и другой осям координат, а также их влияние на форму луча, который будет сформирован по результатам калибровки. Амплитудные ошибки не рассматриваются, поскольку их влияние на форму луча сравнительно мало.
Влияние смещения калибровочной антенны вдоль апертуры на фазовые ошибки
Рассмотрим вариант Az = 0, Дх * 0. Для определённости примем хс = 0. Тогда фазовая ошибка по апертуре описывается следующим образом:
Д^(х;) = £ Тс
х,. - Дх)2 +zc2 -7x(-2+zc2
(7)
Разложим (7) в ряд в предположении Дх « г(х;). Для этого, помня, что выражение (7) в виде
Др(хг) = £ 7г2 (Xi) + (Дх2 - 2х;Дх) - г(х,-)
:с2 = г(х; ), запишем
(8)
ИЛИ
Д^>(х;) = Лг(х;) 1 +
Дх2 - 2х, Дх г2(х,)
(9)
Величина С =--------~-----— является малой при малых Дх, что позволяет воспользоваться разложением
Г2(х,.)
Jl + C = 1 + С/2 - С2/8 +.... Тогда
90
"Радиотехника", 2013 г., № 5
“Радиолокация и связь”№ 15
Др(х,)» Лг(х,)
/ 2 \2
Дх2 - 2х,-Дх ~ 2x,Axj
2r2(xz) 8г4(х;)
или, располагая члены в порядке возрастания степени Дх,
. , ч , х.Дх Дх2 х,2Дх2
Дю(х..)«А: —1— +---------------4-----
[ Г(х,.) 2г(х,.) 2г3(х;)
(Ю)
(И)
При Дх«г(х() влияние первого по Дх члена в разложении (11) является определяющим. Таким образом, АхДх Др(х,)«— г(х,)
(12)
На рис. 2 представлен график зависимости фазовой ошибки (12) от нормированной координаты —
Zc
для Дх = Л в случае Дг = 0, Дх * 0. Из графика видно, что пока х(- не превосходит по модулю zc зависимость близка к линейной.
Во втором приближении можно учесть зависимость фазового набега по апертуре от расстояния до калибровочной антенны. Проведем более подробное исследование (12), использовав точное выражение для
kx^ j ....
y]xf+zc
(13)
Теперь рассмотрим
+ zc2 = r(x, ). Для этого перепишем (12) в виде Лх;Дх 1
114-—
N zc
случай, когда х < zc .Так как
функции /(х) = х2 и g(z) = z2 являются аналитическими в рассматриваемых областях определения (х > 0, z > 0 ), то, учитывая свойства аналитических функций, функция
х2
1 + -у также является аналитической. Следователь-Zc
но, её можно разложить в ряд по — и тогда (см. (13)) 2с
. ( 2 \
. , . , Дх , X;
Д^(х;) = -Ц— I--5- + ... .
2zc2 )
(14)
Рис. 2
2С
Из (14) видно, что в функции распределения фазовой ошибки по апертуре присутствует линейный , . (Дх^
член, обеспечивающий в первом приближении отклонение луча на величину arcsm — , а также члены
более высоких порядков, искажающие форму отклоненного луча. При этом можно отметить, что угол отклонения не зависит от максимального х; (т.е. размеров апертуры), тогда как степень искажения тем больше, чем больше х( (размеры апертуры).
В (14) показан только член, формирующий дополнительный кубический набег по апертуре, при небольших нормированных размерах апертуры он является определяющим:
. , . . Дх х,3
Д^(х,.) = 2л-—— Л 2zc3
(15)
где Л - длина волны излучения.
"Радиотехника", 2013 г., № 5
91
“Радиосистемы”, выпуск 179
-0,5 -0,3 -0,1 0 0,1 0,3 0,5-с
размеры апертуры
Рис. 3
его увеличении.
Графики кубической зависимости (15) от нормированной координаты представлены на рис. 3 для различных величин ошибки установки вспомогательной антенны в длинах волн: 2/2,Л,2Л,32,42,5Л в случае Az = 0, Ах 0 .
Рассмотрим типовой пример, когда калибровочная антенна расположена по центру апертуры на расстоянии, равном размеру апертуры. При этом модуль нормированной координаты не превосходит 0,5. При ошибке установки калибровочной антенны А, максимальная фазовая ошибка составляет 22,5°, ее влияние на форму диаграммы показано ниже.
Максимальная ошибка линейно зависит от ошибки установки калибровочной антенны и растет по кубическому закону от нормированного размера апертуры при
Влияние смещения калибровочной антенны перпендикулярно апертуре на фазовые ошибки в апертуре
Рассмотрим вариант Ах = 0, Az * 0. Примем, что исходно калибровочная антенна расположена в начале оси координат и хс = 0. Тогда фазовая ошибка по апертуре описывается следующим образом:
xz2+zc2
(16)
или
A<z>(x/) = h-(x/)
(17)
Действуя так, как описано в предыдущем разделе, с разложением в ряд и использованием первого
члена ряда, получим
Др(х,.) = £
(Az2-2zcAz) (Az2-2zcAz)
2r(x,) 8r(x,)3
и, окончательно имеем
(18)
Д$>(х;) = —&-у—
График функции (19) при Az = 2 от величины отношения x/zc в случае Ах = 0, Az * 0 представлен на рис. 4. Из графика видно, что пока х( не превосходит по модулю zc, зависимость близка к параболической. В отличие от (13), поведение фазовой ошибки при x«zc определяется только изменением знаменателя в (19). Проводя преобразования, аналогичные описанным в предыдущем разделе в случае х < zc, получаем
Итак, в раскрыве наряду с константой существует квадратический член:
Л7.
&<p(xi) = -kzc— 1-ZC I
(19)
(20)
92
"Радиотехника", 2013 г., № 5
“Радиолокация и связь”№ 15
2
= (21)
Л 2С
Графики квадратической зависимости (21) от нормированной координаты представлены на рис. 5 для различных величин ошибки установки вспомогательной антенны в длинах волн: Л/2, Л, 22,32,42,52 в случае Дх = О, Д? 0.
Рассмотрим типовой пример, когда калибровочная антенна расположена по центру апертуры на расстоянии, равном размеру апертуры. При этом модуль нормированной координаты не превосходит 0,5. При ошибке установки калибровочной антенны Л, максимальная фазовая ошибка составляет 45°, т.е. вдвое больше, чем в предыдущем случае, ее влияние на форму диаграммы показано ниже. Максимальная ошибка линейно зависит от ошибки установки калибровочной антенны, и растет по
квадратическому закону от нормированного размера апертуры при его увеличении.
-0,5 -0,3 -0,1 0 0,1 0,3 0,5-с
размеры апертуры
Рис. 5
Искажение формы луча под влиянием фазовых ошибок
Влияние квадратических и кубических фазовых ошибок в апертуре на форму луча хорошо известно и описано, например, в [2]. Для наглядности на рис. 6 показаны формы диаграммы направленности для квадратических и кубических фазовых ошибок в апертуре, соответствующие типовым примерам, рассмотренным выше (т.е. при расположении калибровочной антенны над центром апертуры на расстоянии, равном ее размерам) при ошибке установки, равной одной длине волны. Это соответствует квадратической и кубической ошибкам с максимальными значениями 45° и 22,5° соответственно.
Из рисунка видно, что влияние квадратической ошибки выражается в "заплывании" нулей ДН и подъеме уровня боковых лепестков, кубическая ошибка вызывает несимметричный перекос ДН с небольшим смещением максимума диаграммы направленности. Расширение главного луча в данном случае мало выражено. Дополнительное отклонение направления главного луча может быть вычислено по формуле и = 0,6х \<р [2] и не превосходит в данном случае 10% ширины ДН. В целом, искажения формы ДН относительно невелики и в ряде задач ими можно пренебречь. Основное внимание следует уделять смещению максимума ДН из-за неточности установки калибровочной антенны.
Гораздо существеннее форма ДН искажается, когда вспомогательная антенна расположена на том же расстоянии, но не в центре, а на краю апертуры. Форма ДН для этого случая представлена на рис. 7. В частности, происходит перекос ДН со смещением положения максимума на величину около половины
Рис. 6
Рис. 7
"Радиотехника", 2013 г., № 5
93
“Радиосистемы”, выпуск 179
ширины луча. Связано это с тем, что нормированная координата изменяется при этом не в диапазоне [-0,5...0,5], а в диапазоне [0...1], и, соответственно, максимальные значения фазовых ошибок при этом существенно больше.
• Таким образом рассмотрено влияние ошибок установки калибровочной антенны на фазовое распределение в раскрыве ФАР, формируемое в результате калибровки без учета этих ошибок. Рассмотрены случаи неучтённого смещения калибровочной антенны вдоль апертуры и в перпендикулярном направлении. Получены формулы для оценки фазовой ошибки в апертуре.
Показано, что смещение калибровочной антенны вдоль апертуры приводит к ошибке установки направления луча, формируемого ФАР, на угол, равный отношению ошибки установки к расстоянию между антеннами. Кроме того, показано, что в апертуре возникает кубическое в первом приближении искажение фазы, а также при смещении калибровочной антенны в плоскости, перпендикулярной ФАР, в её апертуре возникает квадратическое, в первом приближении, искажение фазы. Влияние подобных фазовых искажений на форму луча хорошо известно и описано, например, в [2].
Для уменьшения искажений рекомендуется располагать калибровочную антенну на достаточном удалении от ФАР, а при необходимости близкого расположения калибровочной ФАР - над центром апертуры.
Литература
1. БубновГ.Г., Никулин С.М. Коммутационный метод измерения характеристик ФАР. М.: Наука. 1988.
2. Айзенберг Г.З., Ямпольский В.Г. Антенны УКВ. М.: Связь. 1977.
Поступила 4 апреля 2013 г.
Influence of calibration probe positioning error on the aperture phase error when calibration and beam forming in near-field region
© Authors, 2013
Y.V. Korotetskiy, A.M. Shitikov, V.V. Denisenko
As a rule, calibration of PAA is preformed with a calibration probe in a far field of antenna under test. It is reasonable to assume wave that reached PAA aperture as plane, with constant phase and amplitude. But in some cases PAA calibration is performed by calibration probe located in near field of PAA. Recalculation of initial complex weights to the far field is commit with taking into account calibration probe coordinates relative to the PAA. In this paper, errors of probe coordinates determination influences on calibration results and beam shape are considered. Distortion influences along the PAA aperture and parallel to vertical axis of it are separately discussed.
Equations for aperture phase errors are obtained. Shown, that phase errors because of distortions along the aperture are described by cubic function, and phase errors because of distortions parallel to vertical axis of the aperture are described by quadratic function. Proved, that distortions of probe location along the aperture leads to further degradation of beam pointing than distortions parallel to vertical axis of the aperture. On the other hand, distortions of probe location parallel to aperture vertical axis leads to degradation of beam shape.
94
"Радиотехника", 2013 г., № 5
“Радиолокация и связь”№ 15
УДК 621.396.67
Методы калибровки фазированных антенных решеток
© Авторы, 2013
Е. В. Коротецкий - инженер, аспирант МАИ, ОАО «Радиофизика»
А. М. Шитиков - к.т.н., начальник сектора, ОАО «Радиофизика»
В .В. Денисенко - к.ф.-м.н., начальник НИО, ОАО «Радиофизика»
Дано описание большинства известных подходов к калибровке ФАР, а также точностные оценки методов. Рассмотрены различные аспекты калибровки ФАР.
Ключевые слова: фазированная антенная решётка, калибровка, ближняя зона, дальняя зона, диаграмма направленности, метод переключений, взаимные связи.
In this paper most popular principles of PAA calibration methods are described. Accuracy estimation principles are noted. Different aspects of PPA calibration are presented.
Keywords: phased array antenna, calibration, near field, far filed, gain pattern, switching method, mutual coupling.
Введение
Под калибровкой принято понимать определение характеристик каналов антенны, которые в дальнейшем используются в алгоритмах диаграммоформирования. В большинстве случаев в качестве таких характеристик используются начальные комплексные коэффициенты передачи (КП) каналов, определенные для ситуации, когда управляемый сдвиг фазы и аттенюация «сброшены» в ноль. На сегодняшний день в связи с активной разработкой радиолокационных комплексов на базе ФАР растёт интерес к методам их настройки и калибровки. Цель работы- рассмотреть большинство известных на данный момент подходов к калибровке ФАР, касающихся точности определения начальных комплексных КП.
Постановка задачи калибровки
Опишем вопросы, решаемые при калибровке типовой плоской ФАР с амплитудно-фазовым управлением. Будем считать, что взаимное влияние управляемых устройств друг на друга при таком управлении пренебрежимо мало. Примем, для простоты, элементы ФАР всенаправленными, поле всей антенны в дальней зоне запишем в виде:
Ё(и,v) = £gJ х Gy° X
7=1
где J - индекс канала; L - количество каналов; GJ - затухание, вносимое аттенюаторами; - фаза, вносимая фазовращателями; u,v - направляющие косинусы; Xj,yj - координаты j-го канала; Gy - начальное усиление канала; <р^ - начальная фаза канала;
Целью калибровки является определение начальных комплексных КП Gy = Gy х е l4>i.
Методы непосредственного измерения коэффициента передачи каждого канала ФАР
Создаваемые в 60- 70-х годах прошлого века системы на базе ФАР были, как правило, единичными и дорогостоящими изделиями, а методы автоматической калибровки не были еще достаточно разработаны, в том числе и из-за слабого развития вычислительной техники. Использование мало автоматизированного, ручного метода калибровки при настройке таких систем считалось вполне допустимым.
В частности, для антенн с небольшим количеством элементов калибровка могла производиться путём непосредственного измерения поля на выходе каждого элемента в антенне. Измерительный зонд устанавливался непосредственно над излучающим элементом канала ФАР, а зачастую надевался непо
"Радиотехника", 2013 г., № 5
95
“Радиосистемы”, выпуск 179
Плоскость расположения
2-D БПФ 2-D инверсное БПФ
Ст(к П Пересчитываем t vVW поле к другой 1—► плоскости, —* меняя его фазу
Рис. 1
средственно на него, после чего производилось измерение комплексного КП с помощью анализатора цепей. Очевидным недостатком такого метода является большой объём ручных измерений и временных затрат. При использовании автоматических стендов для измерения поля в ближней зоне этот недостаток может быть преодолён. Другим недостатком метода является нахождение антенны-зонда в непосредственной близости от излучателей апертуры, что может существенно влиять на характеристики излучения.
Развитием метода, позволяющим обойти эту проблему, можно назвать процедуру определения амплитудно-фазовых характеристик каналов ФАР в ближней зоне и последующим пересчетом в апертуру [1,2]. Например, в [2] подвижный измерительный зонд располагают в ближней зоне тестируемой ФАР в плоскости, параллельной её апертуре (рис. 1). Производят зондирование поля ФАР в указанной плоскости, а затем при помощи обратного преобразования Фурье приводят измеренный комплексный КП непосредственно к апертуре антенны, получая начальный комплексный КП (напряжённость поля на апертуре ФАР):
ё°(*м)=-^
где (x,y,z0) - плоскость, в которой производится зондирование; (x,y,zj) - плоскость апертуры ФАР, Zi=0; G° =(x,y,zr) - напряжённость поля в апертуре ФАР; кх ,ку - пространственные компоненты вектора распространения к.
Недостатком подобных методов является рост ошибок определения начальных комплексных КП при росте рабочей частоты из-за ошибок в определении взаимного положения измеряемой и калибровочной антенн, а также необходимость фазовых измерений.
Коммутационные методы калибровки ФАР. С увеличением размеров антенных решеток использовать метод, описанный выше, становится все более затруднительно, а при размере апертуры порядка сотни метров перемещение зонда по всей апертуре просто невозможным. Поэтому используется зонд, неподвижно закрепленный на достаточно большом от апертуры расстоянии. С каналами антенны производятся манипуляции, состоящие в коммутации сигнала в каналах, а также управлении фазовращателями и аттенюаторами каналов и одновременном измерении сигнала антенны. На основании измерений рассчитываются начальные комплексные КП каналов. Подобные методы получили обобщенное название коммутационных или методов переключений.
В частности, ранее при настройке большой активной ФАР с помощью калибровочной антенны, расположенной на достаточном удалении на калибровочной вышке, использовались последовательное включение каналов антенны и максимизация сигнала с помощью настроечных фазовращателей, управляемых вручную. Так, для РЛС миллиметрового диапазона, описанной в [3], состоящей из 120 активных каналов, цикл работ по фазированию занимал несколько часов.
Развитие антенной техники и вычислительных средств позволило применять коммутационные методы с высокой степенью автоматизации, что вызвало их бурное развитие. В результате они получили широкое распространение при калибровке практически всех типов ФАР, в том числе и малоразмерных, и малоэлементных.
В СССР коллективом авторов во главе с Бубновым Г.Г. была выпущена монография [4], рассматривающая основные вопросы калибровки ФАР коммутационным методом. По существу, эта монография предвосхитила создание эффективных производительных коммутационных методов, предложенных позже.
Ниже описаны наиболее используемые подходы для калибровки ФАР.
Метод двух элементов (МТЕ, measurements of two elements). Метод [5, 6] сходен с описанным выше методом ручной попарной калибровки каналов между собой и используется в том случае, когда существует возможность отключать каналы антенны. Один из каналов антенны выделяется в качестве опорного, затем производится отключение всех каналов антенны кроме опорного и тестируемого. После этого фазовращатель тестируемого канала последовательно устанавливается во все возможные состояния.
96
"Радиотехника", 2013 г., № 5
“Радиолокация и связь” № 15
На рис. 2 на комплексной плоскости представлено поле опорного, тестируемого канала и суммарное поле двух каналов. При описанном управлении фазой конец вектора поля тестируемого канала опишет круг вокруг конца вектора поля опорного канала, а суммарная мощность двух каналов будет изменяться по синусоиде (рис. 3). Определяя положение максимума и минимума мощности, можно оценить относительные фазы опорного и тестируемого ка-
налов, а по размаху синусоиды - отношение амплитуд, например, по формулам [5]:
Ё= + G°ei(p”+A)
<Pn
(Pnl )’
где срм= n - Amin + (wz - 1)А, L = \...M,M = —,
A
G« <1 _>Г-G" -+ 1
---I —> I _----_----- ------1 —> 1 —----_-----
Gj Gi r + 1 G] G,
p ^max £min’
M- количество шагов переключения фазовращателя.
Действия повторяются для всех каналов антенны. При этом в качестве опорного используется один
и тот же канал.
Метод 180-градусной манипуляции фазой элемента. В случае, когда отключение каналов ФАР невозможно, применяется выделение сигнала канала за счет манипуляции его фазой. Такой метод предложен Куан-Мин Ли, Руи-Ши Чу (Китай) [6]. На апертуру ФАР поступает стробирующий прямоугольный импульс, при этом фазовращатель в тестируемом канале переключается на 180° синхронно с каждым чётным импульсом; состояния остальных фазовращателей не меняются. В каждом такте измеряется амплитуда и фаза сигнала, затем производится математическая обработка измеренных величин: комплексный КП чётного такта Gc вычитается из нечётного Gb. При таком действии, как нетрудно убе
диться, результат равен удвоенному сигналу тестируемого канала:
Gb = Gf + Ga, GC=G2+Ga, Gd=Gb-Gc = G? -G2 = G?(l -e^), <P = 180°, Gd = 2G?, где Gb - суммарный КП ФАР; Ga - суммарный КП ФАР без тестируемого канала; G° - искомый начальный КП канала; G2 - КП тестируемого канала, после приращения фазы на <р, G2 = Gfe"3.
В случае, когда динамический диапазон сигнала составляет 20 дБ при уровне сигнала -20 дБ, амплитудная ошибка составляет 0,3 дБ, фазы - 3 . К плюсам данного метода можно отнести вычислительную простоту, к минусам - необходимость фазовых измерений.
Бесфазный метод поканальной максимизации сигнала. Простой по идее метод калибровки предложен М. Факхарзадехом из университета Ватерлоо (Канада) [7]. Предлагается калиброваться в дальней зоне по суммарному сигналу, переключая фазовращатель каждого канала во все возможные состояния, при фиксированных положениях всех остальных элементов. Выбирают то состояние, в котором сигнал был максимальный. К плюсам такого подхода относится простота рёализации и чисто амплитудные измерения, к минусам - невозможность его применения для многоэлементных ФАР, так как при росте числа каналов амплитудное изменение суммарного сигнала при управлении фазовращателем одного канала становится менее заметно.
Метод REV. В 1982 г. японские учёные S.Mano и T.Katagi предложили метод калибровки, в основе которого лежит управление одним элементом ФАР на фоне суммарного сигнала всех каналов антенны или REV (Rotation of Electromagnetic field Vector) [8-11]. Алгоритм является развитием метода МТЕ, фазовращатель тестируемого канала управляется так же, но отключения каналов не производится. В качестве опорного выступает сигнал всех остальных каналов (рис. 4). Вычисление начальных фаз и относительных амплитуд каналов производится по следующим формулам:
"Радиотехника", 2013 г., № 5
97
“Радиосистемы”, выпуск 179
Ё=
+ G°ei(₽"+A)
ж _ (faw»
\k=l
Г
„О 1 0 . -lz SinAmax sinAmin / —1 Emax Z7
где G„ = , .......—, с> =tan (------——) = tan (------222—), Г = -—;v= , -А -
Jl + 2FcosAmax +Г2 cosAmax+r F-cosAmin y + 1 £min
поле всей ФАР; - амплитуды и фазы, соответствующие опорным и тестируемым каналам
соответственно; A^jA^ - фазы, максимизирующие Етах и минимизирующие £min, суммарный сигнал ФАР, А - дискрет фазы для калибровки.
Ошибка метода при управлении фазовращателем [11-13] записывается как:
2 __ 2ог2
где дисперсия
„! = (С^)^+ф2)
Тогда для амплитуды имеем
|£2 + Ф2
аа = 8,68^—[дБ], и аналогично для фазы
180 /£2+Ф2г
<тф =--.—-—[град],
* я- V N
где N- количество элементов в решётке; 8 - девиация ошибки по амплитуде; Ф - девиация ошибки по фазе.
Алгоритм приобрёл широкую популярность ввиду простоты реализации, неприхотливости и точности получаемых результатов. В частности, он с некоторыми усовершенствованиями больше 10 лет успешно используется в ОАО «Радиофизика» [4,5,14,15].
Метод циклического ортогонального кодирования. Как уже отмечалось выше, основная идея методов REV и МТЕ - переключение управляемого элемента в определённой последовательности - является базовой и получила множество продолжений. Так, например, аналогичный принцип, что и в МТЕ, используется в предложенном в 2000 г. Роном Сорейсом [16] способе для калибровки антенны космического базирования в процессе эксплуатации. Автор считает, что переключать фазовращатели во все возможные фазовые состояния избыточно в плане количества необходимых измерений и долго. Предложено переключение фазовращателя в ортогональные состояния в соответствии с некоторой периодической последовательностью (рис. 5). Утверждается, что заданная последовательность позволяет однозначно определить текущий номер переключения. Шаг дискретизации, в течении которого фазовое состояние не меняется, выбирается в соответствии с критерием Найквиста. Доказывается, что для достижения погрешности определения начальной фазы в 2° необходимо выполнить 12 переключений или 3 ортогональных круга при соотношении сигнал-шум не хуже 13 дБ на элемент. Получены следующие выражения для начальной фазы и амплитуды элемента, а также для их ошибок определения:
-0~^90ч Л0 _ у(?270 -?9о)2+(^0 ~?18о)2 -2 ~ N0B NqB
^о-^18о 44 р 4£Р/ 2Рк(М-1)2’’
.2 N0B „ N()B ч
<Tq s —2— x (1 +--2----),
4Z 2Pa(M-1)2/
a2
где Pk=-~- ~ мощность k-ro элемента; ?270’?90,?0’^i80 _ среднеарифметические значения мощности на
м
выходе детектора; Ас = '^ат cos 8т (где ат,8т - амплитуда и фаза элемента /и); М - количество эле-т=\
ментов в решётке; L - количество замеров мощности.
4Д.
98
"Радиотехника", 2013 г., № 5
Достоинствами метода являются использование чисто амплитудных измерений, а также малые
временные затраты.
Метод кодирования контрольной последовательностью. Интересная идея управления аттенюаторами и фазовращателями при калибровке представлена в методе ССЕ (control circuit encoding), предложенном Эриком Лаером и Майклом Землянски (США) [17]. Метод ССЕ использует набор ортогональных кодов, соответствующих значениям элементов матрицы Адамара, которые последовательно применяются ко всем имеющимся аттенюаторам и фазовращателям, позволяя производить калибровку всей ФАР. Контрольный сигнал излучается или принимается калибровочной антенной в дальней или ближней зоне. Выделяют два типа состояний элемента: опорное и кодированное. Эти состояния могут быть любыми, главное, чтобы их применение приводило к изменению сигнала. Используется свойство ортогональности столбцов матрицы Адамара, что позволяет определить передаточные коэффициенты каждого элемента ФАР относительно опорного состояния из суперпозиции сигналов всех элементов:
• / ч V1 Д + Н(т,л + 1) . 1-Н(/и,и + 1) ... ..
У(т) = 2/-------V------~а^ +------- э------d(n)a(n)),
п=\
где у(т) - суммарный сигнал ФАР; а(п) - комплексный коэффициент опорного состояния; d(ri) -
комплексный коэффициент кодированного состояния; Н - матрица Адамара; т - количество строк в матрице или количество ортогональных кодов; п - количество столбцов или количество элементов ФАР.
тт в, 14 1 1 + Н(/ил + 1) . 1-Н(/«.и + 1) .
При этом, если Н(т.п +1) = +1, то ----------- = 1, --------- = 0, и нужно установить опорное
состояние;
.. , 1 + Н(т.п +1) 1-Н(т.и + 1) .
если Н(т.п +1) = -1, то------------- = 0, ----------- = 1, и нужно установить кодированное состояние.
Тогда коэффициент передачи одного канала определяется как
z(k)- — У^Н(от,Л + Т)у(т), k = 1,2,...,N, или z(k) = ———, к = 1,2,...,N. т-\
Ошибка метода по фазе составляет от долей до нескольких градусов.
Метод МЕР. Хэмпсон и Смолдерс (Нидерланды) [18] для определения начальных коэффициентов передачи предлагают применять метод управления несколькими элементами - МЕР (multi-element phase
"Радиотехника", 2013 г., № 5
99
“Рад ио cue темы”, выпуск 179
toggle). Суть его состоит в том, что все фазовращатели за один шаг делают приращение фазы. Первый фазовращатель всегда инкрементируется на одно состояние, второй на три, и так далее:
L 2mnfk
Sn=^ske N , fc=0
где Sn - измеренный сигнал; sk - амплитуда в канале k-, L - число калибруемы элементов; N - число измерений; п - текущее измерение; fk - приращение фазового состояния для канала к.
Затем делается быстрое преобразование Фурье (БПФ) измеренных комплексных сигналов, и «пики», соответствующие разным каналам, становятся видны на разных местах - частотах. Шаг переключения выбирается в зависимости от разрядности фазовращателя с тем, чтобы охватить все его возможные состояния для увеличения точности метода. Плюсом такого способа является то, что паразитный сигнал, который может присутствовать в процессе калибровки, остаётся в «нулевом пике» БПФ спектра. Одновременно можно калибровать до восьми элементов. Используются амплитудные измерения.
Метод MEP+REV. Тору Такахаши и Йошико Кониши (Япония) [11] в своей работе объединили преимущества методов REV и МЕР. В результате они получили существенное сокращение времени измерений, однако, ценой некоторого увеличения ошибок определения начальных фаз и амплитуд каналов по сравнению с чистым REV. Метод предполагает одновременное ортогональное переключение нескольких элементов М в различные одного от другого фазовые состояния. После каждого переключения происходит измерение поля ФАР: м м
Ё = Еое^° -'^Етё<Рт + т=\ т~\
где E0,<z>0 - амплитуда и фаза суммарного поля ФАР до начала калибровки; 1т/±(р - фазовый сдвиг для w-ro элемента, 1т - целое число, различное для каждого тп; &.<р - дискрет фазовращателя.
Далее производится нормировка Ё к Ёо и преобразование нормированного выражения в ряд Фурье. Коэффициенты разложения находятся преобразованием Фурье от полученных мощностных замеров. Декларируется, что при 1т = 0, за исключением случая т = п, можно получить те же формулы для комплексного начального КП, что и при REV калибровке. Амплитудные и фазовые ошибки представленного метода в М раз больше чем у REV, однако, время, требуемое на измерения, в М раз меньше.
Использование генетических алгоритмов. Сеон Хо Сон и Сун Йонг Йом (Китай) [19] для нахождения начальных фаз каналов используют генетический алгоритм. В основе метода лежит нахождение таких фаз каналов, которые бы максимизировали мощность ФАР. Генетический алгоритм инициализируется набором, хромосомой произвольно сгенерированных фаз каналов, которые применяются к фазовращателям, а затем производится измерение мощности сигнала. Наиболее оптимальные хромосомы оставляют в следующей генерации. С каждой новой генерацией производятся мутации вида:
(Pj —cPj-x + £А(0,1),
где q>j - фаза канала текущей генерации; <Pj_x - фаза канала предыдущей генерации; <5А(0,1) - распределение Гаусса со стандартным отклонением 1 и математическим ожиданием 0.
На финальном шаге выполняется анализ сходимости: процесс повторяется до тех пор, пока не будет достигнута заранее заданная граница уровня мощности, либо превышено число генераций хромосом. Авторами утверждается, что точность метода составляет «10°. Отмечается, что калибровка представленным способом имеет временные затраты ниже, чем REV метод. Используются амплитудные измерения.
Аспекты применения методов калибровки ФАР
Корректировка уходов параметров каналов в процессе эксплуатации. Уход фаз со временем приводит к систематической погрешности фазового распределения, а следовательно, направления и формы луча. Частота проведения калибровок определяется скоростью ухода фаз требованиями по допустимой погрешности фазового распределения. Если достаточно проводить калибровку после первоначальной сборки антенны и далее после ремонтов, то калибровку можно рассматривать как часть настройки. Если
100
"Радиотехника", 2013 г., № 5
“Радиолокация и связь”№ 15
А'-ый элемент.ФАР
Тестовый сигнал
Калибровочный элемент
Плоская волна при калибровке на первом этапе
Калибровочная антенна (дальняя зона)
Рис. 6
калибровать нужно во время эксплуатации, то калибровка - штатная процедура. В этом случае время калибровки становится важным параметром.
Хэмпсон и Смолдерс [20] первыми предложили калибровать ФАР в два этапа. Первый они назвали «офф-лайн» калибровкой, а второй - «он-лайн». Первый этап выполняется единожды после изготовления ФАР в условиях полигона. На втором этапе производится определение КП каждого канала при использовании калибровочных элементов непосредственно в апертуре ФАР (рис. 6), т.е., зная «идеальные» начальные комплексные коэффициенты передачи в ближней и дальней зонах, производить только их корректировку во время эксплуатации изделия.
Т. Такаши (Япония) [21] использовал аналогичный подход, что и Хэмпсон, Смолдерс. Он предложил калибровать ФАР космического базирования при помощи вспомогательной антенны, находящейся в ближней зоне ФАР на спутнике. Сначала ФАР калибруют REV методом на Земле по калибровочной антенне в дальней зоне и получают начальные фазы <pQ . Затем, снова используя метод REV, калибруются по калибровочной антенне в ближней зоне, получают </\. И наконец, после того, как спутник вывели на рабочую
высоту, ФАР калибруют REV методом по той же самой калибровочной антенне в ближней зоне и находят <р2 Тогда скорректированный набор начальных фаз запишется в виде: -<р0 + {<р2 -ft)- Разность <p2-(f\ компенсирует механические отклонения в апертуре ФАР после развёртывания спутника на орбите.
Корректировка механических отклонений в апертуре антенны. Метод калибровки антенны космического базирования предложен Румико Йонезава (Китай) [8]. Метод использует REV калибровку для определения относительных начальных фаз и амплитуд каналов, а для корректировки ошибок геометрии ФАР на спутнике применяется несколько наземных станций. Получено, что начальную фазу канала, с учётом ошибок геометрии, можно записать в виде: ср'о т = (р'п<т-k[rm() + Arm)(v„ - v0), где <p'q т - относительная начальная фаза канала /и; (р'пт - относительная начальная фаза канала т, полученная при калибровке по точке и; к - волновое число; гт0 - начальная относительная координата элемента т в выбранной системе отсчёта; Arm - ошибка координаты элемента /и; г0 - единичный вектор, указывающий положительное направление оси z выбранной системы координат; - единичный вектор, указывающий направление на п-ю наземную станцию;
Далее рассматривается два случая, когда произведением k\rm(vn -v0) можно пренебречь и когда этого сделать нельзя. В первом случае получают, что (р\т можно вычислить с использованием только одной наземной станции, во втором, из-за наличия четырёх неизвестных в выражении для (р\т (<р'„>т и 3 координаты), необходимо четыре станции.
Методы подвода калибровочного сигнала в процессе эксплуатации. Кроме методов, основывающихся на управлении, большое распространение получил подход, базирующийся на подаче заранее определённого контрольного сигнала в апертуру ФАР [22 - 36].
Так, в статье Шитикова, Россельс и Шишлова (Россия) [37] описывается схема разводки контрольного сигнала по внутренним цепям ФАР, с коммутацией сигнала так, чтобы в каждый момент времени контрольный сигнал подавался в единственный канал. В случае построения полотна антенны на основе сменных модулей отмечается, что после замены модуля нет необходимости производить перекалибров-ку всей антенны. Достаточно перекалибровать заменяемый модуль и несколько соседних, а потом «сшить» полученный набор фаз с исходным, полученным после замены. Недостатком этого подхода является необходимость наличия фазового детектора сигнала для определения фазовой длины тракта, что не всегда возможно.
В статье Денисенко, Кияко и Макарова (Россия) [38] описываются различные схемы построения систем взаимной калибровки пары сигналов. Работа основывается на факте покоординатного равенства сумм полных фаз двух синхросигналов, распространяющихся навстречу друг другу по единой линии
"Радиотехника", 2013 г., № 5
101
“Радиосистемы”, выпуск 179
связи. В этих схемах синхросигналы, выделенные раздельно из линии связи с помощью направленных ответвителей, используются для фазовой синхронизации. При этом становится возможной калибровка по внутренним цепям всех каналов одновременно. Минусом данного метода является необходимость введения дополнительных элементов (ответвители, смесители, фазометры) в каналы ФАР.
Метод МСМ. Используется калибровка через взаимные связи (mutual coupling measurements) [39,40]. Базовые принципы таких измерений представлены в статье Герберта Аумана и Алана Фена (США) [39]. Фазированная АР для таких измерений должна обеспечивать одновременную работу на приём и передачу, а её элементы должны быть идентичны, иметь раздельное управление и равномерно распределены по апертуре. Процедура начинается с того, что отключаются все каналы, кроме одного приёмного т и одного передающего п. Затем производится измерение амплитуды и фазы сигнала в точке т относительно точки п, определяется комплексный передаточный коэффициент С'т<п. Он состоит из коэффициентов, относящихся к управляемым элементам и к подводящим линиям:
т.п ~WmUmCm>nWnUn,
где wm,wn - вклад в КП от аттенюаторов и фазовращателей в каналы тип; ит,ип - вклад в КП от подводящих линий (разъёмы, делители мощности, СВЧ кабели) в каналы тип; Стп - передаточный коэффициент, характеризующий взаимную связь между элементами т и п по эфиру.
Если бы элементы были абсолютно идентичными и неоднородности с потерями в системе отсутствовали, то передаточная функция от т к п равнялась бы передаточной функции от т к п+1-. С — С ^т,п ^т.п+1 *
Однако по факту Ст>„ * С^„+1, Q>n+1 = wmumCm>n+lw„+iun+i.
Тогда имеем W', = = W”Un .
т,п+\ ^п+\^п+\
где №'п+1 представляет собой комплексный множитель, при домножении на который сигнал элемента п становится таким же, как и сигнал элемента п+1. Таким образом, все элементы могут быть скалиброва-ны к одному. В большинстве случаев используются амплитудно-фазовые измерения.
К плюсам данного метода можно отнести простоту реализации, а также отсутствие необходимости использовать внешнюю калибровочную антенну.
Вопросы калибровки многоэлементных антенн
При калибровке больших ФАР суммарный сигнал всей антенны получается намного больше сигнала интересующего канала. В связи с этим вариации сигнала при управлении фазовращателем единственного канала могут быть просто неразличимы на общем фоне. Чтобы этого не допустить, надо либо расфази-ровать антенну, либо проводить калибровку по частям. Очевидно, что расфазировка должна происходить по определённому алгоритму. Дополнительным негативным фактором при калибровке по частям может быть необходимость постоянной периодической юстировки оборудования, участвующего в процедуре (чувствительность приборов к температурным изменениям).
В общем случае процесс калибровки многоэлементных ФАР можно условно разбить на две стадии: сначала производится минимизация уровня сигнала всей ФАР до уровня десятка каналов, а затем происходит калибровка в соответствии с выбранным алгоритмом. Способы минимизации зависят от архитектуры системы управления антенны и количества каналов. Так, например, в [5] описаны два способа минимизации суммарного сигнала. В первом случае (рис. 7) апертура ФАР содержала в себе управляемые единицы, модули, состоящие из шести каналов каждый. У всех модулей ФАР, кроме тестируемого, половина фазовращателей каналов устанавливалась в состояния, обеспечивающие синфазное сложение сигналов в направлении оси антенны (белые кружки), а другая половина - в противофазное им состояние (серые кружки). Фазовые состояния были рассчитаны на основе априорной информации. Сигнал каждого модуля при этом существенно снижался.
Во втором случае можно было осуществлять управление каждым элементом в отдельности. При калибровке изменялись состояния половины фазовращателей всей антенны до достижения минимального уровня сигнала. Затем производилось перераспределение каналов по группам и повторная мини
102
"Радиотехника", 2013 г., № 5
“Радиолокация и связь”№ 15
мизация. Процесс повторялся до достижения приемлемого уровня сигнала. Для разбиения каналов на группы использовался набор функций Уолша (рис. 8). Свойство ортогональности функций позволяет успешно делить каналы пополам: при каждом последующем разбиении в каждой группе остается примерно половина каналов, находившихся в ней при предыдущем разбиении. Остальные каналы пе-
• Описаны реализации большинства известных методов калибровки ФАР. Сделан обзор существующей литературы. Основываясь на материалах работы, можно сделать вывод о том, что в настоящее время уделяется всё больше внимания настройке ФАР в процессе эксплуатации и сокращению времени измерений. При этом большинство методов предполагают работу с антенной, имеющей от нескольких единиц до нескольких десятков управляемых элементов в апертуре. Это ограничение связано с тем, что ядром большинства методов являются амплитудные измерения суммарного сигнала ФАР при коммутации одного или нескольких каналов. При увеличении числа каналов, амплитуда суммарного сигнала ФАР становится много больше амплитуды одного канала, что ведёт к существенному увеличению ошибок методов. Для калибровки многоэлементных ФАР общими подходами являются либо минимизация суммарного сигнала всей ФАР и калибровка коммутационными методами, либо разделение каналов на группы и калибровка по частям. Оба метода предполагают работу в условиях БЭК, в то время как вопросы калибровки многоэлементных антенн в процессе эксплуатации представляются не полностью раскрытыми.
Литература
1. Dandekar K.R. Smart antenna array calibration procedure including amplitude and phase mismatch and mutual coupling effects I I IEEE International Conference on Personal Wireless Communications. 2000.
2. Hi J.T.L., Reinhard D.S. Hauck K.E. Phased array calibration and diagnostics utilizing a student-built planar near-field system I I Applied Radar Inc. 2010.
3. Толкачёв А.А., Макота В.А., Николаев A.M. Большая радиолокационная ФАР миллиметрового диапазона волн И Антенны.
1999.
4. Бубнов Г.Г. Никулин С.М. Коммутационный метод измерения характеристик ФАР. М.: Наука. 1988.
5. Бондарик А.В., Шитиков А.М., Шубов А.Г. Опыт использования в многоканальных фазированных антенных решетках поэлементных методов калибровки без применения фазометрической аппаратуры // Антенны. 2005. № 1 (92).
6. Lee К., Chu R. A built-in performance-monitoring and fault correction. // IEEE Transactions on Antennas and Propagation. 1993.
7. Fakharzadeh M. et al. A fast calibration algorithm for phased array antennas based on a modified perturbation method I I IEEE Antennas and Propagation Society International Symposium. 2006.
8. Yonezawa R., Konishi Y. Beam-shape correction in deploy able phased arrays I I IEEE Transactions on Antennas and Propagation. 1999.
9. Chiba 1. Phased array antenna calibration method in operating condition REV method H Mitsubishi Electric Corporation. 1999.
10. Takahshi T. A simple on-board calibration method and its accuracy for mechanical distortions of satellite phased array antennas H Mitsubishi Electric Corporation. 2009.
11. Takahashi T. Fast measurement technique for phased array calibration H IEEE Transactions on Antennas and Propagation. 2008.
12. Nakamoto N. Calibration procedure and calibration accuracy 11 IEEE Transactions on Antennas and Propagation. 2009.
13. Takahashi T. Theoretical study on measurement accuracy of rotating element electric field vector (REV) method H Electronics and Communications in Japan (Part I: Communications). 2006.
14. Shubov A.G., Shishlov A. V. Analysis of methods for phased array antenna phasing based on amplitude measurements only H IEEE Transactions on Antennas and Propagation. 2000.
15. Shishlov A. V., Ganin S.A., Shubov A.G., Shitikov A.M. Limit of accessible antenna array efficiency under their calibration by means of switching method // Proc, of the Nordic Antenna Symposium. 2000.
16. Sorace R. Phased array calibration H IEEE Antennas and Propagation Magazine. 2000.
"Радиотехника", 2013 г., № 5
103
“Радиосистемы”, выпуск 179
17. Lier Е. Phased array calibration and characterization based on orthogonal coding □: Theory and experimental validation 11 Phased Array Systems and Technology (ARRAY). 2010.
18. Hampson A.B. A fast and accurate scheme for calibration of active phased-array antennas // IEEE Antennas and Propagation Magazine. 1999.
19. Son S.H, Eom S.Y., Jeon SI. Automatic phase correction of phased array antennas by a genetic algorithm 11 IEEE Antennas and Propagation Magazine. 2008.
20. Hampson G.A., Smolders A.B. A fast and accurate scheme for calibration of active phased-array antennas H IEEE Int. Conf, on Antennas and Propagation. 1999.
21. Maruyama T. Design of multibeam dielectric lens antennas by multiobjective optimization H Antennas and Propagation. 2009.
22. Shi C, Lu Z. A Transmission double-line for the calibration system of X-band active phased-array antennas // IEEE Transactions on Antennas and Propagation. 2008.
23. Rotman R. Calibration of pulsed phased arrays with wide instantaneous bandwidths // Tel-Aviv university. 2007.
24. MengotA.M., Manikas A. Global calibration of CDMA-based arrays H Imperial college London. 2004.
25. Liou L.L. Digital wideband phased array calibration and beamforming using time reversal technique // 2010 IEEE International Symposium on Phased Array Systems and Technology. 2010.
26. Lie J.P. A practical simple geometry and gain/phase calibration technique for antenna array processing И IEEE Transactions on Antennas and Propagation. 2009.
27. Fistas N., Manikas A. A new general global array calibration method // IEEE International Conference on Acoustics, Speech and Signal Processing. 1994.
28. Caplan B.L. Assembling, calibrating and testing a phased array in two separate halves H Raytheon Company. 1990.
29. Zeyang D., Yuming D. Fast active calibration for uniform linear array with amplitude and phase errors // Proceedings of the 2009 International Workshop of Information Security and Application. 2009.
30. Yao W., Wang YE. Beamforming for phased arrays on vibrating apertures // IEEE Transactions on Antennas and Propagation. 2006.
31. ZemingX., Jingsheng W. The ability of blind calibration for the linear array // IEEE Antennas and Propagation Society International Symposium. 2006.
32. Samminga R.K., Gangwar F.S., Shankar U. Calibration of active array in NTFR H Electronic and radar development Establishment Bangalore. 1998.
33. Cooper T. Toward scalable, automated tower-top phased array calibration H IEEE 65th Vehicular Technology Conference. 2007.
34. Fulton C, Chappell W.J, Lafayette W. Calibration of a digital phased array for polarimetric radar И Purdue University. 2010.
35. Chen W. Array calibration for compensating gain/phase mismatch and mutual coupling effects in Smart Antenna Systems // IEEE International Symposium on Wireless Communication Systems. 2008.
36. Alfred Q.M. A novel schematic for calibration of large phased array antenna using programmable tine delay units H Progress in Electromagnetic Research. 2006.
37. Росселъс НА., Шишлов A.B., Шитиков.А.М. Активные фазированные антенные решетки - некоторые вопросы настройки и обслуживания И Радиотехника. 2009.
38. Денисенко В.В., Кияко В.И. Взаимное фазирование пространственно разнесённых источников СВЧ колебаний при помощи общей линии связи И Радиоэлектроника. 1991.
39. Herbert М., Aumann A.J. Phased Array calibration and pattern prediction using mutual coupling measurements H IEEE Antennas and Propagation Magazine. 1989.
40. Shipley C, Woods D. Mutual coupling-based calibratio of phased array antennas // IEEE Phased Array Systems and Technology. 2000.
Поступила 4 апреля 2013 г.
Methods of phased array antenna calibration
© Authors, 2013
Y. V. Korotetskiy, A. M. Shitikov, V. V. Denisenko
Today, in connection with active development of PAA-based radar-tracking complexes, interest to methods of their calibration is growing, since calibration procedures are an integral part of PAA life cycle. It is accepted to understand estimation of complex characteristics of PAA channels, which are further used in beamforming algorithms, as calibration. In a large number of cases this characteristics generalized initial complex transfer factors of channels, defined for a situation when operated phase shift of the phaseshifter and gain of the attenuator are dumped in zero state. In this work the majority of known approaches to calibration of PAA are considered. Article is devised into four sections: formulation of calibration problem, methods of transfer factors direct measurements, switching algorithms, aspects of calibration methods applications. Last part provides an overview of channel's electrical parameters shifts during in-flight work correction, mechanical distortions correction, calibration signal in-flight usage, multielement PAA calibration procedures. The question of initial complex transfer factors estimation accuracy is mentioned. Numbers of literature references are given.
As a result of review, it's marked that modern calibration methods are pointed on time save and in-flight operationing. On the other hand, questions of multielement PAA calibration seems to be not fully covered.
104
"Радиотехника", 2013 г., № 5
“Радиолокация и связь”№ 15
УДК 621.372.88
Селектор для частотного и поляризационного разделения сигналов в облучателе антенны К- и Ка- диапазонов
© Авторы, 2013
Ю. Б. Корчемкин - к.т.н., ст. науч, сотрудник, начальник отдела, ОАО «Радиофизика»
М. В. Уруков - студент МАИ, техник, ОАО «Радиофизика»
Рассмотрены результаты электродинамического компьютерного моделирования поляризационного селектора двухдиапазонного облучателя антенн. Селектор обеспечивает разделение сигналов с высоким уровнем поляризационной и частотной развязки в К- и Ка- диапазонах.
Ключевые слова: поляризационный селектор, двухдиапазонный облучатель, поляризационная и частотная развязки, численное моделирование, К-и Ка-диапазоны.
The electrodynamics computer simulation results of the orthomode transducer for a dual-band antenna feed are considered. The transducer is providing signals separation with a high level of polarization and frequency decoupling at Д'-and Ka- band.
Keywords: orthomode transduser, dual-band feed, polarization and frequency decoupling, computer simulation, K- and Ka- band.
Введение
Одной из актуальных задач современных систем спутниковой связи является разработка широкополосных двухдиапазонных облучателей антенн, обеспечивающих частотную и поляризационную развязку сигналов в К (17,7...21,7 ГГц)- и Ка (27,5...31 ГГц)-диапазонах.
О разработках подобных облучателей сообщается на сайтах компаний General Dynamics SATCOM Technologies [1] и ASC Signal Corporation [2], однако описания их конструкций и схем построения не приводится.
В настоящей статье представлены результаты электродинамического моделирования поляризационного селектора облучателя К- и /fa-диапазонов с требуемыми уровнями поляризационной и частотной развязок. Селектор выполнен по схеме, аналогичной облучателю сантиметровых Ku- и ^-диапазонов [3], в виде осесимметричного соединения двух круглых волноводов разного диаметра, соединенного через щелевые элементы связи с четырьмя боковыми прямоугольными волноводами. Для увеличения уровня частотной развязки в миллиметровом Ка- диапазоне использованы трехщелевые элементы связи, предложенные в [4].
Цель работы - описание конструкции и анализ результатов моделирования селектора для частотного и поляризационного разделения сигналов в облучателе антенны К- и Ка-диапазона.
Описание модели и конструкции элементов селектора
Поляризационный селектор предназначен для работы в составе облучателя наземной антенны спутниковой системы связи. Он должен обеспечивать разделение сигналов двух диапазонов частот, имеющих ортогональные линейные поляризации. Требуемый уровень частотной развязки не менее 28 дБ, уровень поляризационной развязки - не менее 30 дБ.
Для моделирования были выбраны два варианта селектора. Первый вариант - поляризационный селектор с трехщелевыми диафрагмами, представлен на рис. 1. Второй вариант - поляризационный селектор с трехщелевыми диафрагмами и дополнительными настроечными элементами в виде металлических штырей, установленных в ступенчатых переходах прямоугольных волноводов (рис. 2).
Устройства содержат круглые волноводы 1 диаметром D, соединенные при помощи ступенчатых волноводных переходов 3 с круглыми волноводами 2 диаметром d, а также с помощью щеле-
"Радиотехника", 2013 г., № 5
105
“Радиосистемы”, выпуск 179
Рис. 2
вых элементов связи в стенках волноводов 1 и ступенчатых переходов, с расположенными симметрично четырьмя прямоугольными волноводами 4 стандартного сечения.
Сигналы вертикальной поляризации ^-диапазона поступают на вход круглого волновода диаметром D, пройдя ступенчатый волноводный переход, отражаются от круглого волновода диаметром d, являющегося запредельным для этого диапазона частот, поступают через элементы связи в боковые прямоугольные волноводы. Аналогично сигналы горизонтальной поляризации поступают в верхний и нижний прямоугольные волноводы.
Сигналы линейной поляризации Ка-диапазона, поступающие в волновод диаметром D, пройдя ступенчатый волноводный переход, имеющий низкий уровень КСВН, поступают на вход отрезка круглого волновода диаметром d и далее разделяются с помощью
однодиапазонного селектора, не включенного в состав моделей.
Для обеспечения такого распространения волн диаметры круглых волноводов выбираются из соотношений:
<f, и /2<-----------</3, 3,1437)-----------------------1 2 3,143d-3
где с - скорость света,/ь/2 границы низкочастотного и высокочастотного диапазонов. В рас-
сматриваемых моделях использованы волноводы диаметрами D = 11,6 мм, d= 6,9 мм, а прямоугольный волновод - стандартного сечения размером 11х5,5 мм.
Выбранная схема построения поляризационных селекторов обеспечивает работу круглых волноводов селектора в многомодовом режиме без возбуждения волн £01 и Ни. Поскольку на ступенчатом волноводном переходе возможно возбуждение волны Е\\, то для уменьшения ее влияния на характеристики селектора она не должна распространяться в круглом волноводе диаметром D. Поэтому верхняя граница высокочастотного диапазона не должна превышать нижнюю границу низкочастотного диапазона более чем в 2 раза.
Требуемый уровень поляризационной развязки достигается за счет применения симметричной схемы построения селектора. Частотная развязка круглых и прямоугольных волноводов в высокочастотном диапазоне обеспечивается конструкцией элементов связи.
Отметим, что в селекторе Ки (10,95...12,75 ГГц)- и К (19,5...20,3)-диапазонов [3], выполненном по аналогичной схеме, в качестве элемента связи использовалась одна щель переменной ширины. Расчеты показали, что при такой конструкции элемента связи для обеспечения уровня частотной развязки более 28 дБ в Ка диапазоне (27,5...31 ГГц), ширина узкой части щели должна быть менее 0,3 мм и
щель выполнена с допуском на размеры ~ 0,01 мм, что вызывает технологические трудности. Кроме этого, в рассматриваемом селекторе требуется существенно большая, в процентном отношении, полоса рабочих диапазонов частот и диапазоны расположены ближе друг к другу, что также приводит к трудностям достижения требуемых характеристик селектора при использовании однощелевого элемента связи. Поэтому в моделях были применены элементы связи, представляющие собой трехщеле-
вые резонансные диафрагмы.
Рис. 3
Схематическое изображение трехщелевой диафрагмы, без технологических отверстий, представлено на рис. 3. Основная резонансная щель 1 предназначена для прохождения сигналов низкочастотного диапазона. Расположенные симметрично относительно основной две дополнительные щели 2, запирают сигналы высокочастотного диапазона, что обеспечивает высокий уровень частотной развязки, который определяется отношением мощностей сигналов высокочастотного и низкочастотного диапазонов в прямоугольных волноводах.
106
"Радиотехника", 2013 г., № 5
“Радиолокация и связь” № 15
Как показывают расчеты, длину дополнительных щелей можно приближенно выбирать из соотношения:
I л+aJ
где а = 0,30.„О,42; L, Lo - длины дополнительных и основной щелей.
В первой модели селектора (см. рис. 1) использовался элемент связи с основной щелью переменной ширины и двумя прямоугольными дополнительными щелями, а во второй (см. рис. 2) все щели имели прямоугольную форму и был введен дополнительный настроечный элемент - металлический штырь, установленный в волноводном переходе.
Результаты численного моделирования
Используя программы электродинамического анализа на основе решений уравнений Максвелла сеточными методами, были проведены расчеты с целью определения влияния геометрических параметров на согласование и частотную развязку сигналов в заданных диапазонах частот. Полученные закономерности позволили оптимизировать параметры моделей селекторов и получить значение модуля коэффициента отражения в рабочей полосе частот 17,7...21,7 ГГц на уровне -26... -30 дБ (рис. 4), в диапазоне частот 27,5...31 ГГц на уровне -24.. .-25 дБ (рис. 5).
Ширина узкой части щелей для первого и второго вариантов селекторов составила 0,66 мм и 0,82 мм соответственно, что не приводит к технологическим сложностям изготовления.
Анализируя графики, представленные на рис. 4, видно, что полученные модели обеспечивают требуемую широкополосность в нижнем диапазоне частот, при этом уровень отражений для второй модели ниже благодаря введению дополнительного металлического штыря, устанавленного в ступенчатом переходе прямоугольных волноводов. Графики, представленные на рис. 5, отличаются незначительно, поскольку согласование в верхнем диапазоне достигается за счет выбора параметров ступенчатого волноводного перехода, одинакового для рассматриваемых моделей.
Для первой модели селектора в диапазоне 27,5...31 ГГц расчетный уровень частототной развязки составил около 28 дБ, во второй модели - более 30 дБ (рис. 6). В реальных устройствах с учетом влияния допусков эти уровни могут оказаться на 2...3 дБ ниже.
Рис. 4 Рис. 5 Рис. 6
Отметим, что рассмотренные модели селекторов могут найти применение и для работы антенн с сигналами круговой поляризации при дополнительном включении в фидерные тракты антенн однодиапазонных поляризаторов.
• С помощью электродинамического моделирования получена конструкция поляризационного селектора, которая может обеспечить высокие уровни поляризационной и частотной развязок в двухдиапазонных зеркальных антеннах спутниковых систем связи, работающих практически во всей разрешенной рабочей полосе частот К- и Ка- диапазонов.
Авторы выражают благодарность начальнику сектора ОАО «Радиофизика» А.Э. Казаряну за полезное обсуждение результатов работы.
"Радиотехника", 2013 г., № 5
107
“Радиосистемы”, выпуск 179
Литература
1. www.gdsatcom.com.
2. www.ascsignal.com.
3. Казарян А.Э., Корчемкин Ю.Б., Майоров А.В., Наследов Н.Д., Тоболев А.К. Двухдиапазонные облучатели зеркальных антенн с высоким уровнем кроссполяризаци- онной развязки И Радиотехника (Журнал в журнале). 2009. № 7.
4. Казарян А.Э., Корчемкин Ю.Б., Уруков М.В. Устройство для поляризационного и частотного разделения двухдиапазонных сигналов. Решение о выдаче патента на полезную модель по заявке регистрационный номер 2013103167, РОСПАТЕНТ. 21 февраля 2013.
Поступила 4 апреля 2013 г.
The orthomode transducer for frequency and polarization separation of K- and Ka-band signals at antenna feed
© Authors, 2013
Yu. B. Korchemkin, M. V. Urukov
Electrodynamics computer simulation results of orthomode transducers for high level frequency and polarization separation of К and Ka band signals at dual-band antenna feed are presented.
Two models of circular waveguide transducers with different design of elements that are coupling the circular waveguides with К -band rectangular waveguides are considered. High level of frequency separation is achieved by using the tree slot design of coupling elements. The possibility to achieve the return loss levels at the orthomode transducer less than -26 dB at /Г-band (17,7...21,7 GHz), -24 dB at Ka (27,5...31 GHz) and level of frequency separation more than 28 dB at /Г-band is shown.
The developed orthomode transducers can be used at satellite communication systems.
108
"Радиотехника", 2013 г., № 5
ВНИМАНИЕ !
Издательство «Радиотехника» начинает выпуск серии книг, представляющих собой сборники статей, объединенных единой тематической направленностью:
серия «Радиолокация»;
серия «Радионавигация»;
серия «Радиоуправление»;
серия «Радиотехническая разведка и радиоэлектронное подавление»;
серия «Антенны и устройства СВЧ»;
серия «Системы радиосвязи и беспроводной передачи данных» и др.
Каждый выпуск является коллективной монографией. Авторы статей, включенных в книги, - ведущие разработчики и специалисты. Содержание выпусков с указанием фамилий авторов статей будет также размещаться на сайте Издательства «Радиотехника» http://www. radiotec.ru.
Вышли в свет следующие выпуски научно-технических серий:
СИСТЕМЫ РАДИОУПРАВЛЕНИЯ
Книга 1
Состояние и тенденции развития систем радиоуправления
Под ред. до кт. техн, наук, профессора В. С. Вербы
От Издательства......................................................................... 5
От редакторов........................................................................... 6
Введение................................................................................ 7
РАДИОЭЛЕКТРОННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ..................................................... 8
Ашурбейли И.Р., Лаговиер А.И. Основные направления развития воздушно-космической обороны Российской Федерации ................................. 8
Акопян И.Г., Вексин С.И., Медведев Г.П, Сухов А.М Особенности построения и развития техники радиолокационных головок самонаведения
в системах ракетного вооружения ВВС и ЗРК ........................................ 13
Борзов А.Б., Быстров Р.П., Корачков А.С, Машляковский В.К, Сучков В.Б., Черепенин В.А.
Современные радиотехнические системы управления и наведения высокоточного оружия. Часть I................................................... 22
Борзов А.Б., Быстров Р.П., Корачков А. С., Машляковский В.К, Сучков В.Б., Черепенин В.А.
Современные радиотехнические системы управления и наведения высокоточного оружия. Часть II ................................................... 32
Канащенков А. И.
Выбор и обоснование метода оптимизации структуры системы управления вооружением многофункционального самолета......................................... 48
Краснов А. М, Моисеев А.Г.
Основные закономерности и перспективы развития бортовых автоматизированных систем управления летательных аппаратов............... 56
Федунов Б. Е.
Интеллектуальные системы пилотируемых летательных аппаратов....................... 66
Пигин Е.А.
История и тенденции развития мобильных зенитных ракетных комплексов средней дальности для противовоздушной обороны сухопутных войск .................. 78
Андриенко А. А.
Анализ перспектив развития системы огневого противодействия бортового комплекса обороны самолета.............................................. 82
Верба В. С., Дёмин А.Н., Хрипунов С.П.
Принципы построения системы прогнозирования развития конфликтных ситуаций......... 85
Козирацкий Ю.Л., Маевский Ю.И., Шляхин В.М.
Диалектика конфликта в радиоэлектронной борьбе.................................... 91
МНОГОПОЗИЦИОННЫЕ СИСТЕМЫ НАВЕДЕНИЯ ........................................................ 94
Верба В. С., Меркулов В.И. Многопозиционные радиоэлектронные системы наведения. Возможности и ограничения........ 94
Меркулов В.И, ЧерновВ.С, ЮрчикИА.
Авиационные многопозиционные системы радиоуправления................................. 100
Даринцев О.В., Мигранов А.Б.
Построение распределенных систем управления комплексами разнородных объектов......... 123
АВИАЦИОННЫЕ КОМПЛЕКСЫ РАДИОЛОКАЦИОННОГО ДОЗОРА И НАВЕДЕНИЯ ............................... 128
Верба В. С.
Авиационные комплексы радиолокационного дозора и наведения. Роль и место
в составе общегосударственной единой информационно-управляющей системы военного назначения.. 128
Верба В. С.
Теоретические основы разработки облика систем управления перспективного авиационного комплекса радиолокационного дозора и наведения........... 132
Верба В. С., Гандурин В.А., Меркулов В.И.
Стратегические, оперативные и тактические факторы, влияющие на облик авиационного комплекса радиолокационного дозора и наведения.......................... 137
Верба В. С., Гандурин В.А., Меркулов В.И.
Экономические факторы, влияющие на облик авиационных комплексов радиолокационного дозора и наведения ................................................ 145
Верба В. С, Меркулов В.И, Самарин О. Ф.
Технологические факторы, влияющие на облик авиационных комплексов радиолокационного дозора и наведения ................................................ 151
Верба В.С., Васильев А.В., Меркулов В.И, Чернов В.С.
Радиолокационные системы авиационных комплексов радиолокационного дозора и наведения. 156
Верба В.С., Васильев А.В., Меркулов В.И, Чернов В.С.
Радиолокационные системы пилотируемых авиационных комплексов разведки наземных (надводных) целей и целеуказания .................................. 169
БЕСПИЛОТНЫЕ ЛЕТАТЕЛЬНЫЕ АППАРАТЫ.......................................................... 174
Кузнецов А. В.
Некоторые вопросы перспективного развития комплексов с беспилотными летательными аппаратами. 174
Верба В. С., Меркулов В.И
Облик информационно-вычислительной системы беспилотного самолета-истребителя ........ 176
Ануфриев О.Н., Герасимов А. А., Меркулов В.И, Самарин О.Ф., Чернов В.С.
Ударные беспилотные летательные аппараты и их радиолокационные системы .............. 182
Антипов В.Н, Колтышев Е.Е., Мухин В.В., Печенников А.В., Фролов А.Ю., Янковский В. Т.
Радиолокационная система беспилотного летательного аппарата.......................... 196
Верба В.С., Васильев А.В., Меркулов В.И, Чернов В.С.
Радиолокационные системы беспилотных авиационных систем разведки, наблюдения и управления.............................................................. 204
ИНТЕГРИРОВАННЫЕ РАДИОЭЛЕКТРОННЫЕ КОМПЛЕКСЫ................................................ 214
Бородин А.М., Перунов Ю.М., Усков Н.В.
Использование перспективных направлений развития радиолокационной техники в интегральных радиоэлектронных комплексах самолетов дальней авиации ................ 214
Бражник В. М., Герасимов Г. И.
Развитие интегрированных комплексов бортового оборудования самолетов нового поколения .......................................................... 232
Ушкар М.Н., Гуськов Ю.Н.
Системная оптимизация интегральных РЭУ .............................................. 239
Мочалов С.А.
Разработка технологии синтеза многофункциональных интегрированных РЭС в составе комплекса бортового оборудования летательных аппаратов..................... 245
Белый Ю.И, Каюмжий В.Н., Артамонов П.И
Принципы построения унифицированных бортовых радиоэлектронных комплексов интегрального типа................................................................... 255
Меркулов В.И, Забелин ИВ.
Анализ необходимости и возможных путей интеграции бортовых радиолокационных и оптических систем ....................................... 263
РАДИОСВЯЗЬ И РАДИОНАВИГАЦИЯ
Выпуск 1
Спутниковые радионавигационные системы
Под редакцией докт. техн, наук, профессора М.С. Ярлыкова
От редактора......................................................................... 5
ПРИНЦИПЫ ПОСТРОЕНИЯ, РЕЖИМЫ ФУНКЦИОНИРОВАНИЯ И РАЗВИТИЕ СРНС......................... 6
Соловьев Ю.А., Царев В.М., Коровин А.В., Устюжанин Д.А.
Развитие глобальных навигационных спутниковых систем и их широкозонных функциональных дополнений .................................... 6
Миронов М.А., Башаев А.В., Андреев С.Г., Важинский В.В.
Псевдодифференциальный режим в спутниковых радионавигационных системах ........ 19
Ефименко В. С., Харисов В.Н.
Эффективность пространственной обработки сигналов для СРНС..................... 24
НОВЫЕ СИГНАЛЫ СРНС ................................................................. 29
Ярлыков М. С. Меандровые шумоподобные сигналы (ВОС - сигналы) в новых спутниковых радионавигационных системах ............................... 29
Ярлыков М.С. Характеристики меандровых сигналов (ВОС- сигналов)
в спутниковых радионавигационных системах нового поколения .................... 39
Стеценко О.А. Алгоритм расчета спектральных характеристик навигационных меандровых шумоподобных сигналов (ВОС - сигналов)................ 53
Перов А.И., Болденков Е.Н. Сравнительный анализ характеристик приема сигналов спутниковых навигационных систем с модуляцией вида BPSK(w) и BOC(zw,/?)........ 58
ПРИЕМ И ОБРАБОТКА СИГНАЛОВ СРНС .................................................... 65
Иванов А.В., Топников А.И. Влияние ошибки оценивания квазидальности на различение фазоманипулированных сигналов в спутниковой радионавигационной системе NAVSTAR. 65
Соколов А. А., Юрченко Ю.С. Оценка точности измерения отношения сигнал-шум в приемном устройстве спутниковой радионавигационной системы................... 70
Глухов П.В. Разрешение неоднозначности измерений псевдофазы в СРНС
с учетом опорной информации.................................................... 75
Тихомиров А.В. Исследование методов формирования сигналов
в спутниковой радионавигационной системе Galileo .............................. 80
ОПТИМИЗАЦИЯ АЛГОРИТМОВ ФУНКЦИОНИРОВАНИЯ СРНС........................................ 87
Кушнир А.А., Шувалов А.В. Оптимальный алгоритм совместного сопровождения спутниковых сигналов в навигационной аппаратуре GPS/ГЛОНАСС.................... 87
Шувалов А.В. Синтез алгоритмов обработки и анализ точности оценивания параметров при приеме сигналов GPS L2C.................................................... 93
Харисов В.Н., Поваляев А.А. Оптимальное выравнивание суммы навигационных сигналов в ГНСС................................................. 102
КОМПЛЕКСИРОВАНИЕ И ИСПОЛЬЗОВАНИЕ СРНС С ДРУГИМИ СИСТЕМАМИ.......................... 113
Соловьев Ю.А. Комплексная обработка информации в навигационных системах (обзор методов) .............................................................. 113
Казаков А.А., Ларионов П.В., Успенский В.Б., Фомичев Л.Л. Интегрированные с СНС ГЛОНАСС оптоэлектронные датчики ориентации и навигации.................. 118
Иванов А.В. Комплексная система межсамолетной навигации на основе спутниковых радионавигационных систем............................... 128
РАБОТА СРНС В УСЛОВИЯХ ПОМЕХ....................................................... 140
Демьянов В.В. Срыв сопровождения сигналов навигационных спутников под воздействием солнечных вспышек радиоизлучения ............................ 140
Корогодин ИВ. Анализ влияния многолучевого распространения сигналов спутниковых радионавигационных систем на характеристики коррелятора навигационного приемника.......................................... 150
Ефименко В. С., Харисов В.Н. Адаптивные формирователи лучей для повышения помехоустойчивости приемников СРНС.............................. 155
АППАРАТУРА СРНС.......................................................................... 161
Болошин С.Б., ГайворонскийД.В., Ипатов В.П., Самойлов ИМ., Шебшаевич Б.В.
Статистика доплеровских сдвигов сигналов среднеорбитной спутниковой радионавигационной системы.......................................................... 161
Писарев С.Б., Осипов О.Д. Современная технология серийного производства малогабаритной аппаратуры потребителей спутниковых навигационных систем ГЛОНАСС/GPS.................................................... 168
Перов А.И, Захарова Е.В., Шатилов А.Ю. Анализ точности оценки задержки навигационного сигнала с модуляцией ВОС(1,1) для различных типов задержки........... 174
ОБЛАСТИ И ОСОБЕННОСТИ ПРИМЕНЕНИЯ СРНС ................................................... 180
ЗахаровВ.И, Зиенко А.С., Куницын В.Е. Распространение радиосигналов GPS при различной солнечной активности.................................................. 180
Акимов А.А., Кузьмин Г.В., Шевчук Д.В. Оценка интегральной доступности навигации космических потребителей систем ГЛОНАСС и GPS....................................... 187
В июне - июле 2013 г. выйдут в свет следующие выпуски:
РАДИОСВЯЗЬ И РАДИОНАВИГАЦИЯ
Выпуск 2
Спутниковые радионавигационные системы
Под редакцией М.С. Ярлыкова
СИСТЕМЫ РАДИОУПРАВЛЕНИЯ
Книга 2
Эффективность систем радиоуправления
Под редакцией В. И. Меркулова
По вопросам заказа и приобретения книг обращаться по адресу: 107031 г. Москва, Кузнецкий мост, 20/6.
Телефакс: (495) 625-92-41, тел.: (495) 625-78-72,621-48-37
Полный перечень книг, выпускаемых Издательством «Радиотехника», размещен на сайте http://www. radiotec.ru;
e-mail: info@radiotec.ru