/






































































































































































































































































































































Автор: Бабешко В.А. Глушков Е.В. Зинченко Ж.Ф.
Теги: колебания тел колебания тел с распределенными массой и упругостью возбуждение колебаний механика математическая физика
ISBN: 5-02-014001-5
Год: 1989




Текст
В. А. БАБЕШКО
Е. В. ГЛУШКОВ
Ж. Ф. ЗИНЧЕНКО
ДИНАМИКА
НЕОДНОРОДНЫХ
ЛИНЕЙНО-УПРУГИХ
СРЕД
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
19 8 9
ББК 22.25
Б12
УДК 534.11
Бабешко В. А., Г л у ш к о в Е. В., Зинченко Ж. Ф. Динамика не-
однородных линейно-упругих сред.— М.: Наука. Гл. ред. физ.-мат. лит.,
1989,—344 с—ISBN 5 02-014001-5.
Развита теория и прикладные методы решения задач о возбуждении
источниками колебаний волн в упругом полупространстве с изменяющимися
по глубине механическими характеристиками. Дан анализ типов волн, воз-
буждаемых в среде и на поверхности, энергии, переносимой каждым типом
волн, диаграмм направленности для различных типов источников. Построена
теория управления сейсмическими источниками. Описаны ранее не отмечав-
шиеся явления резонанса в глубинных слоях неограниченного полупростран-
ства.
Для специалистов в области механики, акустики, математической физики,
сейсмологии, фундаментостроения, геофизики.
Табл. 1. Ил. 160. Библиогр. 157 назв.
Рецензенты:
доктор физико-математических наук В. М. Бабич.
доктор физико-математических наук П. С. Ланда
доктор физико-математических наук Л. А. Толоконников
1603040000—070
053(02)-89
59-89
ISBN 5-02-014001-5
Издательство «Наука».
1лавная редакция
физико-математической
литературы, 1989
Б
ОГЛАВЛЕНИЕ
Предисловие ...................................................... 5
Глава I. Краевые задачи динамической теории упругости для стра-
тифицированных сред............................................. 9
§ 1. Основные определения и постановка задач. Общая схема ре-
шения ......................................................... 9
§ 2. Матрица Грина упругого полупространства................. 21
§ 3. Методы построения матрицы Грина стратифицированного по-
лупространства ................................................28
Глава II. Вопросы единственности и разрешимости динамических за-
дач для стратифицированного полупространства....................38
§ 4. Системы интегральных уравнений для поверхностных вибро-
источников ...................................................38
§ 5. Свойства интегральных операторов динамических контактных
задач.............................•............................44
§ 6. Теоремы единственности....................................51
Глава III. Методы решения интегральных уравнений динамических
смешанных задач.................................................59
§ 7. Метод факторизации для выпуклых областей.............60
§ 8. Сведение систем интегральных уравнений к уравнениям вто-
рого рода методом факторизации.................................73
§ 9. Метод фиктивного поглощения.........................87
§ 10. Вариационно-разностный метод........................97
§ 11. Вопросы практической реализации вариационно-разностного ме-
тода .......................................................1С 5
Глава IV. Методы выделения особенностей решении в окрестности
угловых точек..................................................116
§ 12. Свойства преобразования Меллина, общая схема метода . 117
§ 13. Клиновидный штамп, контакт с~ трением...................124
§ 14. Движение клиновидного штампа при иаличнн трения . . 131
§ 15. Клиновидный штамп, контакт со сцеплением................134
§ 16. Особенность напряжений в окрестности угловых точек фронта
трещины..................................................139
Глава V. Вибрация массивных штампов на упругом основании 147
§ 17. Выбор модели для численного анализа....................148
§ 18. Анализ контактных напряжений и усилий, возникающих под
осциллирующим штампом...................................153
§ 19. Перемещения штампов, резонансы.........................160
§ 20. Передача колебаний через упругое основание. Экранирующие
эффекты................................................1С6
1*
4
ОГЛАВЛЕНИЕ
Глава VI. Диализ волновых полей, возбуждаемых гармоническими
поверхностными источниками в упругом стратифицированном полу-
пространстве ....................................................176
§ 21. Интегральное представление волновых полей, ближняя зона 177
§ 22. Асимптотический анализ в дальней от источника зоне; объем-
ные, поверхностные и каналовые волны.......................190
§ 23. Волновые поля, возбуждаемые движущимся источником 901
Глава VII. Нестационарные волны..................................209
§ 24. Общие свойства интегральных представлений нестацноиарных
волн.............................................................209
§ 25. Анализ нестационарных волн в дальней зоне . . . . 214
§ 26. Нестационарный импульс в многослойном полупространстве 223
Глава VIII. Энергия упругих волн, возбуждаемых в стратифициро-
ванном полупространстве поверхностными источниками .... 230
§ 27. Энергия упругих волн, мощность поверхностного источника . 231.
§ 28. Поток энергии через плоскость, параллельную поверхности
среды.......................................................240
§ 29. Поток энергии в дальней зоне, энергетический баланс страти-
фицированного полупространства ................................. 248
§ 30. Влияние неоднородности среды на перераспределение энергии 255
§ 31. Резонансные явления в слоистом полупространстве, обратные
потоки и циркуляция энергии ............................... 269
§ 32. Энергия нестационарного импульса...........................278
Глава IX. Группирование источников, формирование направленного
излучения........................................................281
§ 33. Методы формирования, излучения заданной направленности . 281
§ 34. Энергетический анализ излучения группы, оптимизация рас-
становки источников..............................................289
§ 35. Особенности формирования направленного излучения в слои-
стом полупространстве .......................................... 295
Глава X. Внутренние источники....................................302
§ 36. Фундаментальное решение для внутреннего источника . 303
§ 37. Внутренние источники в полупространстве....................311
Глава XI. Динамические задачи для сред с рельефными поверхно-
стями ...........................................................323
§ 38. Интегральные соотношения для полупространства с выпуклой
границей.........................................................323
§ 39. Интегральные уравнения для полупространства с выпуклой
границей.........................................................326
Список литературы.................................................. 337
ПРЕДИСЛОВИЕ
В последние годы в связи с развитием физической акустики,
акустоэлектроники и дефектоскопии, методов вибрационной сей-
сморазведки и глубинного зондирования земной коры, сейсмоло-
гии и теории расчета фундаментов сооружений большой интерес
в стране и за рубежом вызывают задачи о колебаниях упругих
сред, вызванных вибрирующими источниками, расположенными
как на границе, так и внутри среды.
Накопленные к настоящему времени результаты в решении
граничных задач динамической теории упругости весьма много-
численны. Детально изучены законы распространения упругих
волн в сложных средах, выявлены новые типы поверхностных и
каналовых волн, развиты методы потенциала и граничных инте-
гральных уравнений, позволяющие рассматривать дифракцию
волн на внутренних и поверхностных неоднородностях.
Важное место среди этих задач занимают проблемы, связан-
ные с исследованием волновых полей в упругом полупростран-
стве с изменяющимися по глубине свойствами — скоростями рас-
пространения волн и плотностью. Такая модель называется стра-
тифицированным полупространством, ее частным случаем явля-
ется слоистое полупространство, в котором изменение свойств
происходит скачкообразно. Исследованию законов распростране-
ния волн в таких средах посвящена монография [35], в которой
основное внимание уделено лучевому методу, а источник колеба-
ний, как правило, не рассматривается. Наличие источника суще-
ственно затрудняет как математическую постановку задачи, так
и ее решение. Ее исследование в полной мере невозможно без
глубокого математического анализа краевых задач и без при-
влечения ЭВМ.
Так, в случае поверхностного источника для решения данного
класса задач необходимо: 1) построить матрицу фундаменталь-
ных решений для неоднородного полупространства; 2) для пра-
вильной формулировки условий излучения провести полный ана-
лиз дисперсионных свойств среды; 3) из интегральных уравнений
получить неизвестные контактные напряжения; 4) разработать и
реализовать на ЭВМ эффективные алгоритмы расчета волновых
полей в ближней и дальней зонах, а также энергии, переносимой
волнами различных типов.
6
ПРЕДИСЛОВИЕ
Для однозначной разрешимости исходной краевой задачи не-
обходимо выбрать контуры интегрирования и ветви радикалов,
входящих в интегральное представление решения, так, чтобы
обеспечивалось выполнение условий излучения. Неоднозначность
возникает также при наличии угловых точек на границе обла-
сти контакта. В этом случае необходимо предварительно опреде-
лить допустимый вид особенности напряжений в окрестности уг-
ловых точек.
В случае, когда рассматриваются нестационарные колебания,
возникает необходимость дополнительного интегрирования по
частоте.
Авторы в течение ряда лет занимаются разработкой теории и
развитием прикладных методов решения задач о возбуждении и
распространении волн, вызванных источниками в стратифициро-
ванных средах [11—29,46, 47, 53—55, 154—156]. Развита строгая
математическая теория краевых задач и создан комплекс при-
кладных методов их решения, реализованный в программах на
ЭВМ, который позволяет дать ответ на целый ряд важных вопро-
сов о возбуждаемых волновых полях, в частности, о типах волн
в среде, их амплитудно-частотных характеристиках и переноси-
мых энергиях, о взаимодействии волн с объектами, находящимися
на поверхности среды, о возможности управления сейсмическим
источником для получения заданной диаграммы направленно-
сти волн. Проводится также детальное количественное изучение
энергетических характеристик упругих волн и анализируется
энергетический баланс стратифицированного полупространства.
В гл. I монографии приводятся необходимые сведения из тео-
рии упругости, связанные с постановкой краевых задач для полу-
ограниченных сред при наличии источников. Формулируются пра-
вила выбора единственных решений при наличии условий излуче-
ния. Здесь же излагаются методы построения матрицы Грина
для стратифицированных сред.
В гл. II выводятся интегральные уравнения (как правило, си-
стемы интегральных и функциональных уравнений), доказыва-
ются теоремы единственности и разрешимости систем интеграль-
ных уравнений.
В гл. III излагаются методы решения интегральных уравне-
ний и систем, описанных в гл. II. Эти задачи относятся к числу
самых сложных задач динамической теории упругости, их реше-
ние является ключевым при анализе процесса передачи колеба-
ний от источника в упругую среду, при изучении взаимодействия
упругих волн с поверхностными и внутренними объектами, при
учете взаимного влияния источников. Дается описание и обсуж-
даются вопросы практической реализации трех методов: факто-
ризации, фиктивного поглощения и вариационно-разностного.
В гл. IV на основе единого подхода проведен анализ особен-
ностей напряженно-деформированного состояния в окрестности
ПРЕДИСЛОВИЕ /
угловых точек покоящихся и движущихся пространственных
штампов при произвольных условиях контакта и во всем диапазо-
не изменения раствора угла. Кроме того, дается обобщение мето-
да на случай угловых точек фронта пространственных трещин.
Развитые методы решения динамических контактных задач
позволили в гл. V провести исследования конкретных характери-
стик M'JCCUOTTUV m-гямпов НЧ уПОуГОМ ОСНОВЯНИИ РяС-
смотрены вертикальные и горизонтальные колебания штампов
прямоугольной в плане формы на упругом слое. Приводятся ре-
зультаты расчетов, показывающие влияние волноводных свойств
упругого основания, а также размеров, массы, взаимного распо-
ложения штампов и частоты установившихся гармонических ко-
чебаний на распределение контактных напряжений, величину
динамической контактной жесткости и резонансные свойства
системы штамп — слой. Изучается эффект передачи колебаний
через упругое основание (взаимное влияние при вибрации систе-
мы штампов) и эффект экранирования штампами поверхностных
волн. В частности, показано резкое усиление экранирующего эф-
фекта при резонансе перекрывающего штампа.
Глава VI посвящена решению задач, возникающих при изуче-
нии волновых полей, возбуждаемых в упругом полупространст-
ве заданными поверхностными нагрузками. В ближней к источ-
нику зоне определение смещений сводится к расчету однократ-
ных контурных интегралов, а для дальней зоны строятся асимп-
тотические представления, описывающие распространение объ-
емных, поверхностных и каналовых волн. Асимптотики имеют тот
же порядок точности, что и при лучевом подходе, но в отличие
от последних несут в себе полную информацию об источнике и
о всех отражениях и преломлениях на неоднородностях среды.
Дано обобщение асимптотик на случай движущихся источников,
справедливое и для сред с произвольной анизотропией.
В гл. VII сравнительно простые, явные асимптотические пред-
ставления используются для решения задачи о распространении
нестационарного импульса в многослойном полупространстве.
Рассматриваются свойства контурных интегралов от гармониче-
ских решений в комплексной плоскости частоты.
Глава VIII посвящена изучению энергетических процессов,
протекающих при взаимодействии источника колебаний с упру-
гой средой. Получены представления для суммарного потока
мощности через произвольную горизонтальную плоскость, через
боковую поверхность цилиндра и через нижнюю полусферу боль-
шого радиуса, что позволило провести анализ энергетического
баланса неоднородного полупространства.
Для широкого круга двуслойных и многослойных сред приво-
дятся результаты расчетов, показывающие влияние неоднород-
ности на мощность, отдаваемую источником в среду, и ее рас-
пределение между волнами различных типов и по направлениям
8
ПРЕДИСЛОВИЕ
излучения. Установлено наличие в многослойном полупростран-
стве обратных волн и волн с нулевой групповой скоростью, об-
наружена циркуляция энергий по замкнутым траекториям и воз-
никновение обратных потоков энергии, идущих из бесконечности.
В гл. IX рассматривается задача об управлении потоком
мощности, анализируются особенности излучения энергии груп-
пой источников (проблема взаимного влияния и оптимальной
расстановки источников), разрабатываются методы формирова-
ния излучения заданной направленности, изучается процесс
дробления остронаправленного излучения на внутренних неодно-
родностях среды.
В гл. X развитые методы обобщаются на случай внутренних
источников, моделируемых объемными силами. В качестве при-
мера рассматриваются объемные волны, возбуждаемые в упру-
гом полупространстве вибрирующей тонкой сваей.
В гл. XI рассматриваются динамические задачи для сред с
рельефными поверхностями. Предложен новый метод вывода
граничных интегральных уравнений, основанный на идее факто-
ризации.
Особое внимание уделяется возможностям предлагаемых ме-
тодов в плане доведения результатов исследования до численного
анализа и приложений. Изложение иллюстрируется большим ко-
личеством численных примеров.
Рукопись книги внимательно прочитали В. М. Бабич,
И. И. Ворович, П. С. Ланда и Л. А. Толоконников. Сделанные
ими замечания способствовали улучшению изложения материа-
ла. Авторы искренне благодарят их за этот труд.
Авторы выражают глубокую благодарность Н. В. Глушковой,
предоставившей ряд материалов для включения в монографию,
а также взявшей на себя значительную часть работы по подготов-
ке рукописи к печати.
ГЛАВА I
КРАЕВЫЕ ЗАДАЧИ ДИНАМИЧЕСКОЙ ТЕОРИИ
УПРУГОСТИ ДЛЯ СТРАТИФИЦИРОВАННЫХ СРЕД
В настоящей главе дается постановка динамических краевых
задач для полуограниченных вертикально-неоднородных упру-
гих сред при наличии источников колебаний, описывается общая
схема построения их решения. Формулируются условия излуче-
ния, обеспечивающие единственность решения рассматриваемых
задач; на ряде модельных примеров объясняются правила выбо-
ра контуров интегрирования и ветвей радикалов.
Во втором и третьем параграфах детально излагаются методы
построения матрицы Грина стратифицированного полупростран-
ства.
§ 1. Основные определения и постановка задач.
Общая схема решения
1. Рассмотрим упругое тело, занимающее в начальном состоя-
нии известный объем V, ограниченный поверхностью S. Положе-
ние точек тела определяется, например, декартовыми координа-
тами xit х2, х3. Под действием заданной системы поверхностных
и объемных сил тело получает систему непрерывных перемеще-
ний, которые характеризуются вектором перемещений и = {щ, и2,
и3}, компоненты которого являются непрерывными функциями ко-
ординат и времени. Механическое состояние тела характеризует-
ся при этом компонентами тензора деформации е« и тензора на-
пряжений Оу.
В линейной теории упругости перемещения, деформация и на-
пряжения связаны уравнениями движения
д2и,
Otl.i + Pi = Р , (1-1)
dt*
соотношениями обобщенного закона Гука
Oij
(1.2)
10
ГЛ. I. КРАЕВЫЕ ЗАДАЧИ ДЛЯ СТРАТИФИЦИРОВАННЫХ СРЕД
и геометрическими соотношениями Коши
2e« = Uij-(1-3)
Здесь р (х), Cijmn(x) —заданное распределение плотности и коэф-
фициентов упругости материала; F(x) = {Ft, F2, F3} — распределе-
ние объемных сил; х={х-. х.. х,}-—радиус-вектор текущей точки.
Как обычно, в тензорной записи предполагается суммирование по
одинаковым индексам и для производных по координатам ис-
пользуется обозначение Uij — dUi/dxj.
Наряду с цифровой индексацией координат и компонент век-
торов и тензоров в дальнейшем будут широко использоваться их
традиционные обозначения х = {х, у, z}, и = {и, v, w}, ов, eyz и т. д.
В изотропном случае, когда упругие свойства тела одинаковы во
всех направлениях, закон Гука имеет вид
Oij — у —|— 2p8;j,
(1.4)
1, i = j,
о.
где 0 = еи + е22 + е33,
константы Ляме.
б.7 =
— символ Кронекера, %, у. —
Вектор напряжений t = {ti, т2, т3}, возникающих в упругом
теле на некоторой элементарной площадке с нормалью п = {п1,
п2, п3}, выражается через компоненты тензора напряжений:
= 1=1, 2, 3. (1.5)
Учитывая соотношения (1.2), (1.3), вектор напряжений можно
выразить через перемещения: т = Ти, Т — линейный дифференци-
альный оператор, называемый оператором напряжений. В изо-
тропном случае
х — Ти = 7л diva + 2р— + у (axrot а). (1.6)
У однородных тел коэффициенты упругости Ci}mn и плотность
р — константы. Если C{jmn и р зависят от одной пространственной
координаты, то такое тело называется стратифицированным.
Частным случаем стратифицированных тел являются слоистые,
с кусочно-постоянной зависимостью упругих модулей и плотно-
сти от пространственной координаты. Среды с непрерывной за-
висимостью свойств от пространственных координат называют
градиентными.
Изменения в поле смещений, вызванные некоторым внешним
возмущением, например приложенной нагрузкой, распространя-
ются по всему объему V не мгновенно, а с некоторой конечной
скоростью по вполне определенным законам. Такой процесс рас-
пространения возмущений называется распространением упру-
гих волн.
При описании волновых процессов ниже будут широко ис-
пользоваться понятия амплитуды и фазы волны, волнового фрон-
§ 1. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И ПОСТАНОВКА ЗАДАЧ
11
та, фазовой и групповой скорости волн и ряд других. Определе-
ния этих понятий можно найти в хорошо известных монографиях
и учебниках (см., например, [1, 32, 65, 88, 99, 147]).
Значительная часть объема данной книги посвящена изучению
гармонических волн, возникающих при синусоидальных колеба-
ниях частиц среды. Для гармонических волн зависимость от вре-
мени имеет вил cos (0(.г у. ?) —mt) го — круговая частота коле-
баний, 0 — сдвиг фазы. Здесь удобной оказывается комплексная
запись. Пусть одна из компонент вектора смещений имеет вид
и = w,(x, у, z) cos (0—со/). (1.7)
Введем комплексную величину w = wiei’>\ очевидно,
u = w,Re [ei(e-“()] =Re [w-'"']. (1.8)
Величина w в представлении (1.8) носит название комплексной
амплитуды величины и. Аналогично с помощью комплексных
амплитуд и временного множителя e_’“' записываются компонен-
ты тензоров деформации и напряжения. Везде, где над этими ве-
личинами осуществляются линейные операции, их можно свести
к операциям над комплексными амплитудами.
Отсюда вытекает следующая схема решения в случае гармо-
нических колебаний:
1) все величины с гармонической зависимостью от времени в
уравнениях и граничных условиях заменяются их комплексными
амплитудами, а дифференцирование по t-—множителем — iw,
2) решается задача относительно неизвестных комплексных
амплитуд;
3) найденные комплексные амплитуды домножаются на
и берется вещественная часть получившегося выражения.
Введение комплексных амплитуд удобно тем, что они описы-
вают одновременно амплитуду и сдвиг фазы и позволяют в вы-
кладках избавиться от временной зависимости. В дальнейшем в
случае установившихся гармонических колебаний под и, оц, ew, F
и т. д. будем понимать комплексные амплитуды соответствующих
величин, не оговаривая этого особо. Еще раз подчеркнем, что та-
кая замена справедлива только в линейном случае; если встре-
чаются нелинейные операции (например при определении энер-
гии), необходимо возвратиться к вещественной записи.
Изучение гармонических колебаний важно также и как под-
ход к решению нестационарных задач, так как в силу принципа
суперпозиции для линейных систем произвольная зависимость от
времени может быть разложена на гармонические составляющие
в виде ряда или интеграла Фурье. При этом для каждой гармо-
ники формулируется независимая задача, совпадающая с соот-
ветствующей задачей для установившихся гармонических коле-
баний.
12
ГЛ. I. КРАЕВЫЕ ЗАДАЧИ ДЛЯ СТРАТИФИЦИРОВАННЫХ СРЕД
2. Важным частным случаем стратифицированных тел явля-
ются вертикально-неоднородные тела, у которых поверхность и
границы раздела слоев ортогональны к той оси координат, вдоль
которой происходит изменение упругих свойств. Дадим постанов-
ку гранично-начальных задач для изотропных вертикально-неод-
нородных сред.
Пусть координатная плоскость z = 0 совпадает с поверхностью
полупространства, уравнения движения в перемещениях в этом
случае имеют вид
(X + у) grad div и + рД« -ф D (и) + F = р , (1.9)
г\ / \ (,[ ди . dw \ , ( dv . dw \ . , Л. . п , dw 1
Р(«) = -Ь —+ — , ц —+ — , X div « + 2ц —4 ,
t \ az dx J \ dz dy J dz )
, r- (dtp dtp dtp 1
grad ф = Vrp = J ——
I dx dy dz J
Дф = ^£+ ^L + ^L.
dx2 dy2 dz2
Здесь предполагается, что X, p, p — функции от z. Штрихом здесь
и далее обозначена производная по z. Для однородной среды Х' =
= ц/=0 и система (1.9) представляет собой известные уравнения
Ламе.
До начального момента времени t = Q точки тела находятся в
покое:
«1^0- = О.Ю)
Начиная с момента t=0 к телу наряду с объемными силами F,
заданными в некотором ограниченном объеме среды Уо, прикла-
дываются поверхностные нагрузки
т|г=0 = q, (1.11)
не равные нулю в некоторой ограниченной области поверхности
Q; вне Q всюду q(x, у, t) =0.
Обозначим zh 1=2, ... , N, точки разрывов функций X, ц, упо-
рядоченные следующим образом: z1 = 0>z2>z3>.. ,>zw>—
—оо (z, не является точкой разрыва, а введена для дальней-
шего единообразия). Плоскости z=z;, —oo<Jx, у^оо, 1=2, ...
..., N, являются границами раздела слоев. Предположим, что
слои жестко сцеплены между собой, в этом случае должны вы-
полняться условия непрерывности напряжений и перемещений
на границе раздела слоев
т| _ = т| +, и| _ = «| +, 1 — 2, ...,N. (1.12)
'z=zz 'z=zz 'z=zz 'z=zz
§ 1. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И ПОСТАНОВКА ЗАДАЧ
13
Здесь используется обозначение
Z 1г_ - = lim f (г), f I + = Um f (г).
Z—>Z[ z~zl Z~^Zi
Z<Zi z>Zi
Чтобы полностью замкнуть постановку задачи, необходимо к
fl 1П\ fl 1 О\ ... . ___
у CV1V/JUX1/11VA yi.ivy А . А I дииишии J W Ш1Э Г1 /1 П CL V/ VCIWjn С Ч П UL1 И
п->0 при R— |/'x2+z/-’+z2-^co, (1-13)
дополненные некоторыми условиями излучения. Для нестацио-
нарных задач в качестве условий излучения требуется выполне-
ние принципа причинности-, в среде должны отсутствовать пере-
мещения вне области, ограниченной передним фронтом волн,
идущих от источников колебаний.
Для установившихся гармонических колебаний ue~iwt уравне-
ния относительно комплексной амплитуды и(х, у, z) принимают
вид
(X+p)V div u-\-pAu+D(u) +F + pco2u=0. (1-14)
Граничные условия (1.11), условия на границе раздела слоев
(1.12) и на бесконечности (1.13) по форме остаются прежними,
а в качестве условий излучения может быть использован один из
следующих принципов.
1. Принцип Зоммерфельда: в решении удерживаются состав-
ляющие, описывающие волны, уходящие от источника в беско-
нечность, и отбрасываются те, скорость которых направлена к ис-
точнику.
2. Принцип излучения энергии (принцип Мандельштама): по-
ток энергии в среде должен быть направлен от источников в бес-
конечность.
3. Принцип предельного поглощения: в качестве решения за-
дачи для идеально упругой среды берется равномерный по всем
параметрам предел решения соответствующей задачи для вязко-
упругой среды (среды с поглощением) при стремлении вязкости
к нулю.
4. Принцип предельной амплитуды: в качестве решения гар-
монической задачи берется предел при £->оо нестационарной за-
дачи с нулевыми натальными и гармоническими граничными
условиями.
Вопрос об эквивалентности этих принципов в общем случае
до конца не решен. Известны примеры, когда они приводят к раз-
личным результатам («обратная волна» в слое, см. [88, 144] и
§31). Глубокие исследования проведены здесь И. И. Воровичем,
которым получены строгие результаты в задачах теории упругос-
ти для неоднородной полосы [45, 47]. В дальнейшем будет ис-
пользоваться принцип предельного поглощения.
14
ГЛ. I. КРАЕВЫЕ ЗАДАЧИ ДЛЯ СТРАТИФИЦИРОВАННЫХ СРЕД
Вязкоупругие среды наряду с параметрами Л, ц, р характери-
зуются коэффициентом внутреннего трения е. Учет внутреннего
трения эквивалентен переходу к комплексной частоте со; для
идеально упругих тел е = 0, со — вещественно. Для убывания |и\
при Л-»-оо необходимо принять Im со<0 при еУ=0; если задать
Im со>0, то получим среду с самовозбуждением.
Задача (1.9) — (1.13), как и соответствующая гармоническая,
является первой краевой задачей теории упругости. Наряду с за-
дачами этого типа рассматриваются также смешанные задачи,
возникающие при анализе взаимодействия недеформируемого
тела (штампа) с поверхностью упругого полупространства.
В этом случае в области й заданы перемещения поверхности:
«Ь=о=/, (х, у) ей, (1.15)
а вне й— напряжения:
т|г=о = 0, (х, у) ей. (1-16)
Контактные напряжения q в условии (1.11) неизвестны.
Условия (1.15) описывают контакт со сцеплением. Рассматри-
ваются также контакт без трения:
txz=tV2 = 0, —оо<=:х, y<loo, 2=0,
Ч=о=А. (х,У)--°, (1.17)
ог|г=0 = 0, (х, у)"1й
и пленочный контакт:
Щ = туг=0, —оо^х, у^оо, г=0,
«1г=0 = /1> U. У)е^. (1,18)
тхг\г=о = о, (х, у)ей.
Если граница области контакта й имеет угловые точки, то
для однозначной разрешимости смешанной задачи необходимо
сформулировать дополнительные ограничения на поведение ре-
шения в окрестности угловых точек. Подробно этот вопрос рас-
смотрен в гл. IV.
3. Рассмотрим ряд модельных задач для волнового уравнения
и на их примере продемонстрируем, общую схему построения ре-
шения с помощью преобразования Фурье и с учетом принципов
излучения. Волновая картина в акустической среде (идеальной
сжимаемой жидкости) определяется уравнением [81]
с — скорость звука в среде.
§ 1. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И ПОСТАНОВКА ЗАДАЧ
15
Пусть на поверхности среды, занимающей полуплоскость
oosCxsCoo, —оо^,г<0, расположен источник гармонических
колебаний:
-^-1 = Re [q (х) е~1ва], х=[—а, а]
дг lz=o
q = 0, х —[—а, о], (1.20)
ц->0 при г->оо, г = |Лх2 + z2.
Колебания предполагаются установившимися: v(x, z, t) =
= Re[u(x, г)е~‘ш‘]. Комплексная амплитуда и удовлетворяет
уравнению Гельмгольца
А«+^ц = 0, й2 = со7с2 (1.21)
с граничными условиями
— I — q, ы->0 при г->оо. (1-22)
дг 1г=о
Применим к (1.21), (1.22) преобразование Фурье по х:
F[g] = g(x)e‘a*dxsG(a),
(1.23)
F~1[G]=—— ) G (a) e~iax da = g (x).
2л J
—o©
Если функция g(x) достаточно гладкая и стремится к нулю
при |х|—>оо вместе со всеми своими производными до порядка N,
то для преобразования Фурье от производных справедливо
F
' dkg
а?
= (ta)fe G (a), k CJ N.
(1.24)
Предположим, что ц(х, г) обладает требуемыми свойствами;
тогда после преобразования Фурье имеем
— (a2— k2)U = 0, (1.25)
dU
dz
= Q (a),
(1-26)
U(a, z), Q(a) —преобразования Фурье от u(x, г), q(x).
Итак, относительно U имеем обыкновенное дифференциаль-
ное уравнение второго порядка, общее решение которого имеет
16
ГЛ. I. КРАЕВЫЕ ЗАДАЧИ ДЛЯ СТРАТИФИЦИРОВАННЫХ СРЕД
ВИД
2
t/(a,z)=£ C„ev«z, (к27)
п — 1
Y1 = Ъ Ъ = —Ъ Y (а) = fa2—k2.
После определения постоянных clt с2 из граничных условий
решение исходной задачи выписывается в виде обратного преоб-
разования Фурье:
со
и (х, г) = —— f U (a, z) e~iax da. (1-28)
2л J
—СО
Условие (1.26) дает для определения с1; с2 соотношение
Ъс1+Т^г= Q.
второе соотношение должны давать условия на бесконечности.
Рассмотрим поведение решения (1.27) при Z-+—оо. Здесь
имеем две различные ситуации: при |ос | >k значения уп вещест-
венны, при ] ос | <k — чисто мнимые. Пусть для определенности
ветви радикалов в представлении у (а) выбраны таким образом,
что Re y^O, ImY^O; тогда для | ос| >k eVi2->-0, а е^г->-оо при
z—> —оо. Для удовлетворения условию u-^-Q при z->—оо, очевид-
но, при [ос| >k надо положить с2(а)=0. При [ос| <k ситуация
сложнее, так как обе экспоненты дают при z-^>—оо стремящиеся
к нулю решения. Действительно, по лемме Римана — Лебега
[100]
ь
J G (a) e±iX“ da-> 0 при Х->оо, ОееДДп, Ь).
а
Отсюда
сп (а) е±г№~£ад: da->0 при — оо, п=1,2.
|<х|<й
Таким образом, условия ы->0 при z-> —оо оказывается недоста-
точно для определения ct, с2 во всем диапазоне изменения пара-
метра а.
Дадим физическую интерпретацию построенному решению.
Выражение (1.28) при |a| >k представляет собой суперпозицию
плоских неоднородных волн- распространяющихся вдоль оси х,
амплитуда которых экспоненциально убывает с глубиной. При
) ос | <k имеем суперпозицию однородных плоских волн, уравнение
распространения которых имеет вид
Im^nZ—ах—(o£=const. (i.29)
§ 1. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И ПОСТАНОВКА ЗАДАЧ
17
Зафиксировав х, получим
ImV„
(1.30)
Потребуем, чтобы в соответствии с принципом Зоммерфельда в
решении присутствовали только волны, идущие от источника
«вниз», т. е. такие, для которых z<U. Для этого необходимо, что-
бы Im уп<0=>с2(а) =0 для |а|<
Ck. Отсюда
t/(a,z) = —Q(a), (1.31)
Y
у (a) = a2 — k2,
Rey^O, Imy^O. (1-32)
Итак,
«30
u (x, z) —--I ------Q (a) e~‘ax da
2л J y(«)
— 0©
(1.33)
Рис. 1.1
удовлетворяет уравнению (1.21), условиям (1.22) и не содержит
волн, приходящих к источнику «из глубины». Для выделения тре-
буемой ветви функции (1.32) достаточно провести в комплексной
плоскости а разрезы, целиком лежащие в I и III квадрантах
(рис. 1.1), и взять главную ветвь радикалов (fl = 1). Действи-
тельно, для вещественных a
arg у — arg i/~а — k + arg ]7a -}- k =
0, । al Rey > 0, Imy = 0 при|а|>&,
—Rey —0, Imy^O при|а|<;&.
Такой выбор ветви у (а) обеспечивает также выполнение усло-
вий Зоммерфельда и при ± оо.
Покажем, что при х>а решение (1.33) представляет собой на-
бор волн, горизонтальная составляющая скорости которых поло-
жительна, т. е. направлена от источника.
Учитывая, что
а
Q(a)=
—а
18
ГЛ. I. краевые задачи для стратифицированных сред
после изменения порядка интегрирования перепишем (1.33) в
форме
и (х, z) = k (х — 1, г) q (£) dl, (1.34)
—а
со
k (х — %, z) = —— ( —--da. (1.35)
2л J у(а) 4
—эо
Рассмотрим поведение подынтегральной функции (1.35) в
комплексной плоскости а=о~Нт при т->±оо. Анализируя пове-
дение аргументов ^a + k и У а—k, убеждаемся, что при |т|->оо
arg у (а)->±л/2. Другими словами, при |Ima|->-oo Rey(a) =
= 0(1). Отсюда при х>а^% и т-»—оо для вещественной части
показателя экспонент в (1.35) получим
Re (Y(a)z—la(x—£)) =Rcу-з4-т(х—£)->—
Следовательно, подынтегральная функция экспоненциально убы-
вает в нижней полуплоскости, и здесь можно применить лемму
Жордана. Замкнем контур интегрирования в нижнюю полуплос-
кость, обходя разрез [—k, —k—too] по его берегам. По теореме
Коши, ввиду того, что у подынтегральной функции нет полюсов,
получим, что исходный интеграл равен интегралу по берегам раз-
реза.
Из уравнения (1.29) при фиксированном z следует
Re a k
Аналогично показывается, что х<0 для х< —а.
Рассмотрим полосу толщины h. Вместо условия при z->—оо
зададим
и|г=_л=0, —оо^х^оо. (1.36)
Действуя по прежней схеме, получим
t/(a,z) = K(a,z)Q(a), К(а,г)= shY(z + ft) . (1.37)
у ch yh
Здесь U (a, z) не имеет точек ветвления, но имеет счетное число
полюсов, являющихся нулями знаменателя:
& = ± k* — af, at= + / = 0, ±1, ±2, ... (1.38)
При й>л/(2/г) конечное число £г расположено на вещественной
оси, остальные — чисто мнимые. Пусть х>а; аналогично преды-
дущему замкнем контур в нижнюю полуплоскость. Интеграл по
замкнутому контуру равен сумме вычетов в полюсах, попадаю-
§ 1. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И ПОСТАНОВКА ЗАДАЧ
19
щих внутрь контура (разрезов здесь нет):
и (х, г) = ste Si = — i res К (а, г) |a=f/Q (&).
Слагаемые, соответствующие вещественным £г, представляют со-
бой волны, скорость которых х= —©/£,. Для выполнения условия
необходимо, чтобы внутрь контура, замкнутого в нижнюю
полуплоскость, попали только отрицательные вещественные по-
люса. Отсюда получаем, что контур интегрирования по а должен
обходить отрицательные вещественные полюса сверху, а положи-
тельные— снизу. Тот же результат получается при х<—а. При
любом другом выборе контура решение (1.28) удовлетворяет ис-
ходному уравнению и граничным условиям, но противоречит
условиям излучения Зоммерфельда.
4. Построим решение рассмотренных выше модельных задач,
исходя из принципа предельного поглощения. Рассмотрим среду
с поглощением, которое вводится добавлением в уравнение (1.19)
слагаемого, описывающего действие внутреннего трения:
= + 8>0. (1.39)
с2 др dt
При е = 0 имеем среду без поглощения.
Общее решение по-прежнему имеет вид (1.27), в котором
Т1.2 («) = ± Те, Те (а) = -jZa2 — kl = k2 + t’coe = (£х -}- ik2)2,
К • й2^0;
±kc— точки ветвления уЕ(а), расположенные в I и III квадран-
тах плоскости а. Так как контур интегрирования — оо<а<оо не
должен пересекать разрезов, проводимых для выделения одно-
значной ветви (а), эти разрезы должны целиком лежать либо
в верхней, либо в нижней полуплоскости. Соединим разрезами ke
с kc + ioo, —kt с —ke—loo. При этом, если выбрана главная ветвь
радикалов в
уЕ = |/"a — ke У а + k&, то ReyE>0, 1тте<0.
Следовательно, eV->-0, e_V->-oo при z^—оо для всех а. Отсюда
c2sO, Ci — Qly.
Итак, для построения единственного решения ие при наличии
вязкости достаточно условий (1.22). В соответствии с принципом
предельного поглощения в качестве решения для идеальной среды
возьмем и = limue (предел, равномерный по всем параметрам).
е-*о
е>о
20
ГЛ. I. КРАЕВЫЕ ЗАДАЧИ ДЛЯ СТРАТИФИЦИРОВАННЫХ СРЕД
Траектория, которую вычерчивает в комплексной плоскости
функция 7s(a), е>0, при изменении ае[—<х>, оо], целиком рас-
положена в IV квадранте (рис. 1.2). При е->0 эта линия, непре-
рывно деформируясьгсливается с осями Re 7^0, Im 7 = 0 и Re 7 =
= 0, —kIm 7^0, т. е. в пределе имеем тот же выбор ветви, что
и исходя из принципа Зоммерфельда. Контур интегрирования,
в соответствии с выбором разрезов, должен обходить положи-
тельную точку ветвления k снизу, а отрицательную —k — сверху.
Рассмотрим вторую задачу —для полосы, с вязкостью. Ее ре-
шение имеет вид (1.37), в котором k заменено на ke. Полюса
(1.38) располагаются в верхней и нижней полуплоскостях вдоль
осей координат (на рис. 1.2 показаны звездочками). При е->-0
полюса, непрерывно смещаясь, выходят на оси координат. Чтобы
не нарушилась равномерность предела, предварительно отклоним
контур интегрирования в местах выхода полюсов на веществен-
ную ось так, чтобы не произошло пересечение полюсов с конту-
ром в процессе предельного перехода. Деформировать контур
можно ввиду регулярности подынтегральной функции. В рассмо-
тренном примере положительные полюса выходят на веществен-
ную ось сверху, а отрицательные снизу; в результате имеем тот
же выбор контура, что и исходя из принципа Зоммерфельда.
Однако такое совпадение бывает не всегда; для упругих сло-
истых сред в узком диапазоне изменения <в могут существовать
вещественные полюса, которые при введении в среду внутреннего
трения смещаются не «по правилам»: положительные — вниз, от-
рицательные— вверх. Такие полюса будем в дальнейшем назы-
вать нерегулярными. Принцип предельного поглощения требует,
чтобы положительные нерегулярные полюса обходились конту-
ром сверху, а отрицательные — снизу (рис. 1.3). Фазовая ско-
рость волн, соответствующих этим полюсам, направлена к источ-
§ 2. МАТРИЦА ГРИНА УПРУГОГО ПОЛУПРОСТРАНСТВА
21
нику — принцип Зоммерфельда нарушается. Такие волны, с про-
тивоположными направлениями фазовой и групповой скоростей,
называются обратными.
Несмотря на кажущуюся неестественность, обратные волны
существуют в реальной действительности [36]. Показано [47],
что поток энергии, переносимый ими, направлен от источника,
т. е. это решение удовлетворяет также и принципу излучения
энергии. В [47] дается критерий, по которому регулярные полю-
са отделяются от нерегулярных.
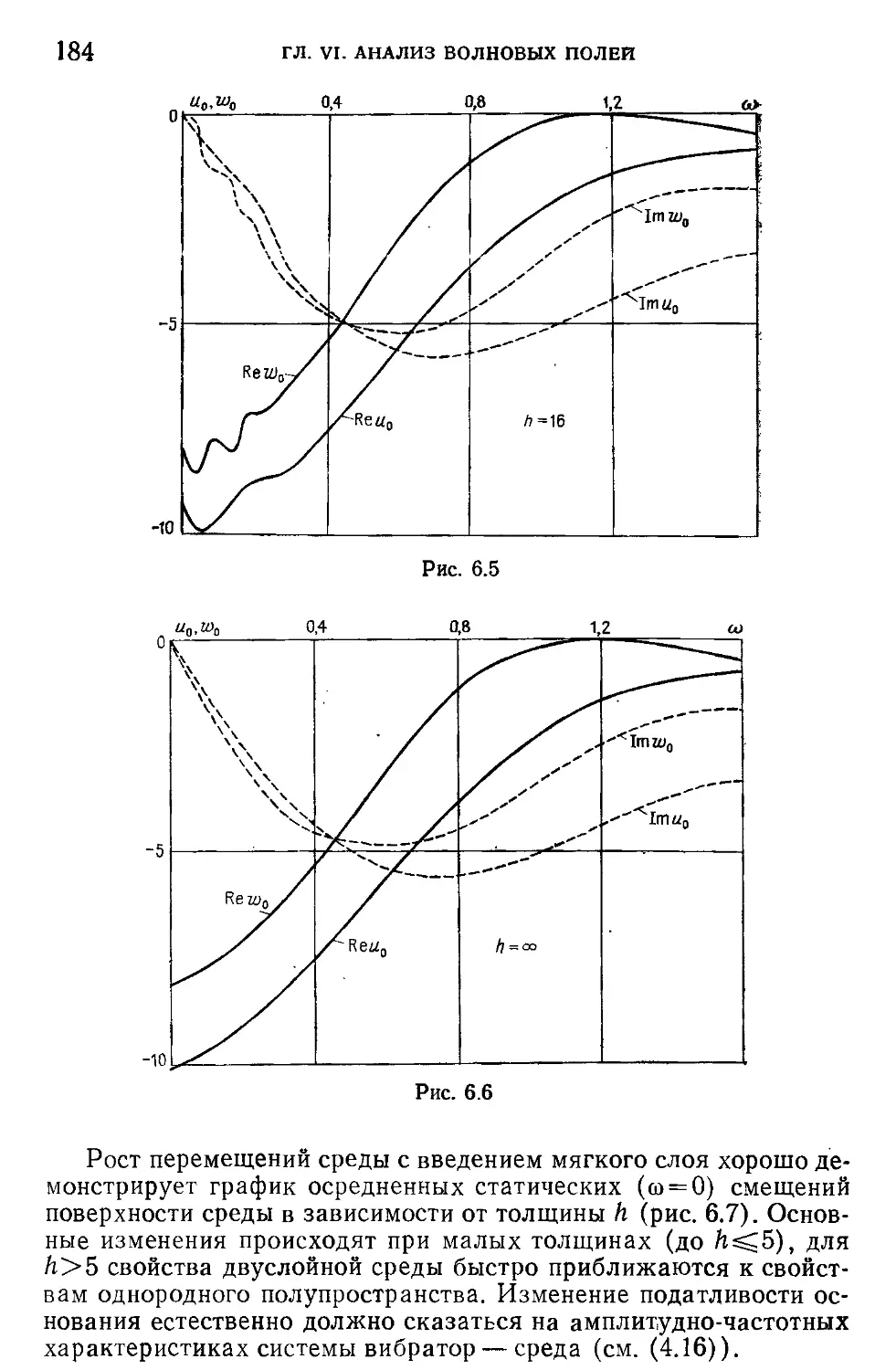
Пусть построена зависимость вещественных полюсов от ы.
Такие зависимости называются дисперсионными. На рис. 5.2—
5.5 приведены дисперсионные зависимости для упругого слоя
(изображены кривые положительных полюсов для отрицатель-
ных полюсов — они будут зеркальным отражением относитель-
но оси абсцисс). Для того чтобы полюс был регулярным, необхо-
димо и достаточно, чтобы выполнялось неравенство
а для того чтобы полюс был нерегулярным — неравенство dtj
/<?со<0 (здесь £(>0). Геометрически эти условия означают, что
касательная к дисперсионной кривой в точках, соответствующих
регулярным положительным полюсам, должна иметь положи-
тельный тангенс угла наклона, а в точках, соответствующих не-
регулярным — отрицательный.
Итак, в задачах об установившихся гармонических колебани-
ях без привлечения принципов излучения нельзя выделить един-
ственное решение; принципы излучения диктуют выбор ветвей,
встречающихся в решении многозначных функций, и направление
обхода контуром интегрирования вещественных особенностей
(полюсов, точек ветвления).
§ 2. Матрица Грина упругого полупространства
1. Известно [40], что в случае однородной среды частное ре-
шение уравнения с правой частью Lu=f, x<=R„ можно по-
строить в виде свертки f(x) и решения уравнения Lua = 8(x):
и(х) = § иа(х—£)f (£)d"§, L—дифференциальный оператор в Rn,
22
ГЛ. I. краевые задачи для стратифицированных сред
6 — функция Дирака. Функция иа(х) называется фундамен-
тальным решением или функцией Грина уравнения Lu=f. Анало-
гично в теории упругости вводится понятие матрицы Грина
g(x), столбцами которой являются частные решения уравне-
ний Ламе с правой частью б(х)е,, е,— единичные орты, 1=1
2, 3 [99]. Другими словами, элементы матрицы g представляют
собой компоненты векторе! перемещении, вызванных сосредото
ченными объемными силами. Перемещения « = {«!, и2, и3}, вызы-
ваемые в упругой среде произвольным распределением массовых
сил fix), представимы в виде свертки:
«(*) = $ —
В сформулированной выше задаче (1.13), (1.15) для упругого
полупространства источником, вызывающим перемещения, явля-
ется поверхностная нагрузка q. Пусть k(x—у—т), z) —матри-
ца, столбцами которой являются перемещения «(, вызванные со-
средоточенными поверхностными нагрузками т;=6(х—£, у—т])е(,
1=1, 2, 3, и удовлетворяющие всем условиям поставленной зада-
чи на границах слоев и на бесконечности. Решение исходной за-
дачи представимо в виде свертки k с q:
а(х, у, г) = ЭД k (х — £, у — л, г) q (£, г|) dgdr|. (2.1)
а
Матрицу k будем называть матрицей Грина упругого полу-
пространства. Аналогично вводится матрица Грина слоя.
Применим к (2.1) преобразование Фурье по х, у с параметра-
ми а1; а2. Исходя из правила преобразования свертки, имеем
U(ait а2, z)=K(a1; a2, z)Q(a,, a2), (2.2)
U, К, Q — преобразование Фурье и, k, q соответственно. Из (2.2),
в частности, следует
и (х, у, г) = J К («1, «г, 2) : («к аг) e~‘<a*z+a^' dv., da2. (2.3)
Г,Г2
Контуры интегрирования Г,, Г2 почти всюду совпадают с вещест-
венными осями, отклоняясь от них при обходе вещественных осо-
бенностей подынтегральной функции в соответствии с принципом
предельного поглощения (см. § 1, п. 4).
По терминологии, принятой в теории псевдодифференциаль-
ных операторов, K(at, a2, z) — символ матрицы Грина.
Соотношения (2.1), (2.3) являются ключевыми при изучении
взаимодействия поверхностных объектов с упругой средой и рас-
пространения волн от поверхностных источников, поэтому в пер-
вую очередь изложим методы построения матрицы K(at, a2, г)
и ее свойства для однородных и стратифицированных сред.
§ 2. МАТРИЦА ГРИНА УПРУГОГО ПОЛУПРОСТРАНСТВА
23
2. Как и в модельных примерах (§ I, п. 3), для построения ре-
шения в виде (2.1), (2.3) необходимо, применив преобразование
Фурье по х, у к исходным уравнениям и граничным условиям,
свести их к системе обыкновенных дифференциальных уравнений
по z, а затем взять обратное преобразование от решения этой си-
стемы.
Известно, что произвольную вектор-функцию и(х, у, z) можно
представить в виде суммы потенциальной и вихревой составляю-
щих:
u = grad ф + rot а. (2.4)
Для однородного упругого пространства представление реше-
ния в виде (2.4) позволяет перейти от системы уравнений Ламе
(1.14) при Х' = р.'=0 к двум независимым волновым уравнениям
относительно ф и а:
<2'6>
Несложно убедиться, что любая функция вида f((n-x)—ctt), п =
= {«,, п2, пз}— произвольный единичный вектор, удовлетворяет
уравнению (2.5). Исходя из того, что (п-х)—ctt = const является
уравнением распространения плоской волны с нормалью к фрон-
ту п и скоростью с„ заключаем, что общее решение (2.5) есть су-
перпозиция таких волн. Аналогично второе слагаемое (2.4) опи-
сывает распространение возмущений со скоростью с2. Ввиду того,
что rot grad ф^О, волны первого типа являются безвихревыми;
они связаны с процессами расширения — сжатия в упругой сре-
де. Анализ поляризации этих волн показывает, что при их про-
хождении частицы среды смещаются вдоль направления нормали
к фронту волны, отсюда их название — продольные волны.
Для волн второго типа справедливо divrota = 0, т. е. при их
прохождении не меняется объем элементов среды. Их распрост-
ранение обусловливается сдвиговыми деформациями, поэтому их
называют волнами сдвига или поперечными, так как перемеще-
ние частиц среды при их прохождении лежит в плоскости, пер-
пендикулярной направлению распространения.
Скорость продольных волн с, больше скорости поперечных с2,
поэтому в геофизике продольные волны называют первичными
(primary) или P-волнами, а поперечные — вторичными (seconda-
ry) или S-волнами. Их скорости сь с2 будем обозначать также сР,
cs или vP, vs соответственно.
Распадение системы уравнений Ламе на две независимых
(2.5), (2.6) означает, что в безграничной однородной среде Р- и
24
ГЛ. I. краевые задачи для стратифицированных сред
S-волны распространяются независимо друг от друга. При на-
личии границ или неоднородностей эта независимость нарушает-
ся, так как граничные условия в общем случае не расщепляются
на вихревую и потенциальную составляющие. Это приводит к из-
вестному на практике явлению: при отражении P-волн от грани-
цы или неоднородности возникают также и S-волны, и наоборот.
С точки зрения построения матрицы Грина, как наличие верхней
границы, так и стратификация среды мешают расщеплению ис-
ходной системы на два волновых уравнения. Однако известно
[35], что поперечные, горизонтально поляризованные волны (SH-
волны) при отражении от горизонтальных границ не вызывают
появления волн других типов, т. е. задачу относительно S/Г-волн
можно выделить из общей задачи.
Возьмем в (2.4) а = {0, 0, ф} и выразим и через три функции
ы = 5ф+^( и = 3ф_аф1 = (27)
дх ду ду дх
Применим к уравнениям и граничным условиям преобразова-
ние Фурье по х, у:
оо
F2 [.? U, Z/)] — У) е^х+^ dxdy — G (аь а2),
—оо
оо
/71 [G (an а2)] = JJ G (а1( а2) er^^-d^ da2 = g (х, у).
—со
(2.8)
Если g(x, у)^С'о, т. е. g(x, у) имеет непрерывные производ-
ные по х, у до порядка IV, стремящиеся к нулю при х, у-*-±оо, то
для преобразований Фурье производных справедливо:
Рг
^1+P2g (X, у)
дхр,дуРг
= (— i'a1)₽1 (— 1а2)Рг G (аг, а2),
(2.9)
Pi +
Предполагаем, что и обладает требуемой непрерывностью по х, у,
тогда после преобразования Фурье с учетом (2.7) система (1.14)
принимает вид
— го^рф" — ia2plIr" — iajp/Ф' — ia2u,’F' — (X 4~ p) W" 4*
4- [(X + 2p) a2 — p®2] Ф + ta2 (pa2 — p®2) ¥ — ta^'IE = 0,
— га2рф" 4- ta1p1F" — га2р'Ф' -J- «a1p,’F' — ta2 (X + p) W +
-f- ia2 [(X + 2p) a2 — p®2] Ф iaj (p®2 — pa2) T — ia2p'R7 =0, (2.10)
(X 4- 2p) W — (X 4- p) а2Ф'4- (X'4- 2p') W'— Х'а2Ф 4- (pw2—pa2)F=0.
Здесь Ф, T, №(а!, a2, z) —преобразования Фурье функций <p, ф,
w, штрих — производная по z, a — »i 4"
§ 2. МАТРИЦА ГРИНА УПРУГОГО ПОЛУПРОСТРАНСТВА
25
Домножив первое уравнение (2.10) на iat, а второе на 1а2 и
сложив их, а затем — первое на ia2, второе—на —tai и снова
сложив, приходим к двум независимым системам
цФ" 4- ц'Ф' + (X + ц) W 4- (рсо2 — (X + 2и) а2) Ф 4- ц'№ = 0,
(2.Н)
(X 4- 2ц) W" — (X 4- ц) а2Ф' 4- (X' 4- 2ц') W — Х'а2Ф 4-
4- (рсо2 — ца2) W = 0;
цф" + ц/4''+(рсо2—ца2)Ф = 0. (2.12)
Вводя векторы У={Ф, Ф', №, W"}, X={4f, УИ'}, уравнения
(2.11), (2.12) можно переписать в матричной форме в виде систем
обыкновенных дифференциальных уравнений первого порядка
(2-13)
(2.14)
a2i = [а2 4- 2ц) — рсо2]/ц,
<?23 = °22>
°4i = а2Х'/(Х 4- 2ц),
«43 -= (“2Р — Р®2)/(^ 4- 2ц),
*21 = (— р«2 4- ра2)/р,
«22 — Ц /Ц,
«24 — (^ + Р)/Р-»
«42 — ос2 (X 4- ц)/(Х 4- 2ц),
«44 = —; (X' 4- 2ц')/(Х 4- 2ц)
*22 = — ц'/ц.
Граничные условия (1.16) после аналогичных преобразований
принимают вид.
— Ха2Ф 4- (X 4- 2ц) W' = Q3,
— 1ца2 (Ф' 4- W) — ajQj 4- a2Q2, г = 0;
— 1ца2Т' — a2Q4 — a4Q2, 2 = 0,
или, в матричной форме,
7’-Г = Р, г = 0, (2.15)
(/, X) = (a2Qi — «tQ^/a2, г = 0. (2.16)
Здесь
у /—Ха2 0 0 Х-|-2ц\ р / Q3 \
\ 0 — <м —1'ц 0 J \(«iQi + aaQ’)/a2/ ’
Z = {0, - t-ц}, Q=FM.
26
ГЛ. I. КРАЕВЫЕ ЗАДАЧИ ДЛЯ СТРАТИФИЦИРОВАННЫХ СРЕД
Условия сцепления между слоями (1.12) также распадаются на
независимые условия относительно X и У:
Т Y\ _ = 7'-Г| +, У(/)| _=Y(n I +> /=1, 3,1=2, 3,... ,N,
iz=zl iz-zl 'z--zt Z=Zl
(2.17)
- . 5z(2) I
|1A | _ = ЦА | + ,
'z=zz 'z=zz
M IO 1«\
Индексом сверху обозначена соответствующая компонента век-
тора.
Таким образом, имеем две независимые задачи: (2.13), (2.15),
(2.17) относительно Y и (2.14), (2.16), (2.18) относительно X.
Очевидно, в силу линейности, их решение можно выразить через
решение вспомогательных задач с единичными граничными усло-
виями:
Y=Pll>Yl+P(1)Yi, jr=[(a2Q1-a1Q2)/a2].X„ (2.19)
= А • Yk, dz (2.20)
T-Yk\z=0 = ek, k=\,2, (2.21)
^~ = вх1, dz (2.22)
^1)L=O=I- (2.23)
Q „ / 1 ) /0\
Здесь е, = 1,е2 =
\оj 2 < 1 /
В случае многослойной среды Yh, X, удовлетворяют также
условиям (2.17), (2.18).
Для компонент векторов Yk, X, традиционно приняты следую-
щие обозначения [47]:
У, = {Р, Р', R, R'}, Y2 = {М, М', S, S'), X, = {N, N'}.
Учитывая эти обозначения, а также соотношения (2.19), (2.7),
для символа матрицы Грина К(а„ а2, г) имеем:
/— i (а27И + а2Л)/а2
I — iaja2 (М — N)/a?
\ aiS/a2
— (М — АО/а2
— i (а^М + а2Л9/а2
а2$/аа
— ia±P
— ia2P
R .
(2.24)
3. Пример. Матрица Грина однородного полупространства.
Пусть X, р, р — постоянные, (2.20), (2.22) —системы с постоянны-
ми коэффициентами, общее решение которых в случае отсутст-
вия кратных корней характеристического уравнения представимо
§ 2. МАТРИЦА ГРИНА УПРУГОГО ПОЛУПРОСТРАНСТВА
27
в виде [ 119]
Yk= У , k= 1, 2,
s—1
(2.25)
JVj = J. prnre^_
r —I
Здесь 7s, 6r — собственные значения, a ms, nr — соответствующие
им собственные векторы матриц А и В:
det (А—ysE)==0, (А — ysE) ms = 0, s=l, . .. , 4,
(2.26)
det (В — 8rE) = О, (В — блЕ) = О, г =1,2,
Е — единичная матрица, 4,s, Р,— неизвестные, определяемые из
граничных условий.
Для однородной среды, когда V=p/=0, уравнение относи-
тельно 78 является биквадратным с корнями
= Тп+2 = — Оп, ога = Уа2 — х*, п=1,2,
(2.27)
х? = р<о2/(Х + 2 ц), х2 = р«>2/ц.
Для бг соответственно имеем ^1 = о2, б2= —о2. В качестве собст-
венных векторов в этом случае можно выбрать
т1 = {1, Oi, Oj, c?i}, й72 — {о2, ot а2, а2о2),
(2.28)
mz = {1, — аъ — аъ of}, тл = {— о2, а|, а2, — а2а2),
= сг2}, я2 = {1,—а2}. (2.29)
Для выделения однозначной ветви функций о„(а)=Уаа-х„ в
комплексной плоскости а необходимо провести разрезы. Как и в
модельных примерах (§ 1, пп. 3, 4), принципы излучения диктуют
разрезы, целиком лежащие в I и III квадрантах: [х„, xn + ioo],
[—х„, —х„—ioo], п= 1, 2. При этом Re о„^0, Im оп^0, ае[—оо,
00] и из условий при Z-+—оо следует tki3 = tk.i = p2 = Q.
Для остальных неизвестных условия при z = 0 дают
д., д.д,. д,,
j 1,1 j 1, * J ___ 2,1 J ___ , 2
‘1,1 ---- ’ *1,2 ~~ —I > 1, *2,2 — ~ ,
д д д д
А1Д = — 2ip.a? (а2 — 0,5>4), А1,г — 2ipa2al,
Д2,1 = — 2ца2о2, Д2,2 — 2ц (а2 — 0,5х2),
Д ==41ц2[— (о:2 - 0,5х2)3 + а2П1О2], р± =1/(— 1ца2о2),
28
ГЛ. I. КРАЕВЫЕ ЗАДАЧИ ДЛЯ СТРАТИФИЦИРОВАННЫХ СРЕД
откуда для элементов матрицы /С имеем
М (а, г) = ^ [— a2e°»z И- (а2 — 0,5х2) e°2Z], (2.30)
N (а, г) = —i— еагг,
— фа2
Р (а, г) = [— (а2 — 0,5х2) еа,г 4- c4cr2eO2Z],
Р (а, г) = [— (а2 — 0,5х2) e°iZ 4- а2е°-г],
S (а, г) = [— о1о2ео,г 4- (а2 — 0,5х2) с°22].
§ 3. Методы построения матрицы Грина
стратифицированного полупространства
1. При произвольной зависимости свойств среды от глубины
системы (2.20), (2.22) являются системами дифференциальных
уравнений с переменными коэффициентами, общее решение кото-
рых не может быть выписано явно, как в случае однородного по-
лупространства. Для построения решения этих систем возникает
необходимость привлечения вычислительной техники. В случае
кусочно-однородной стратификации при определении неизвест-
ных констант из условий сцепления между слоями получаются
большие системы алгебраических уравнений, решение которых
также невозможно без ЭВМ.
Аналитически построить решение для неоднородной среды
удается только при специальной зависимости ее свойств от глу-
бины. В первую очередь это экспоненциальная зависимость Х==
= Xoeaz, p, = poeaz, p = poeaz, когда элементы матриц А, В в (2.20),
(2.22) остаются постоянными; во-вторых, это степенная зависи-
мость от г, когда общее решение также удается выписать в явном
виде. Однако зависимости специального вида не могут дать всего
многообразия неоднородностей, встречающихся на практике, тем
более что в них требуется одинаковая степень роста упругих мо-
дулей и плотности (цР, vs-—постоянные).
Начиная с работ Томсона, Хаскелла, Петрашеня [ЮЗ, 132,
143], к настоящему времени для построения матрицы Грина раз-
работан ряд подходов, основанных как на замене непрерывно-не-
однородной среды многослойной (метод матриц-пропагаторов
или матричный метод), так и на прямом численном интегрирова-
нии краевых задач для систем дифференциальных по вертикаль-
ной координате уравнений (метод численного интегрирования)
[7, 87, 95, 105, 106, 123, 129, 131, 133—135, 137, 140, 142]. Основ-
ные трудности реализации методов обусловлены наличием экспо-
ненциальных составляющих у фундаментальных решений соот-
§ 3. МЕТОДЫ ПОСТРОЕНИЯ МАТРИЦЫ ГРИНА
29
ветствующих систем дифференциальных уравнений, приводящих
к неустойчивости численных процедур решения задач Коши и их
дискретных аналогов и к плохой обусловленности линейных алге-
браических систем, возникающих при удовлетворении граничных
условий. Для преодоления указанных препятствий используются
различные приемы; достаточно полный их обзор и сравнительный
анализ даны, например, в [1, 125, 128—130, 137, 138]. Однако
нельзя считать, что здесь уже сняты все проблемы и разработа-
ны оптимальные алгоритмы; об этом, в частности, свидетельству-
ет и относительный рост числа публикаций по данной проблеме в
последние годы [2, 116, 128, 130, 138, 145].
Авторами был разработан и реализован на ЭВМ ряд методов
построения матрицы Грина, устойчивость которых обеспечивает-
ся выделением экспоненциальных составляющих и выносом их
за рамки численного процесса [19, 22, 60, 156]. На базе этих
алгоритмов проведены исследования дисперсионных и импеданс-
ных свойств сред с различными законами стратификации, рас-
смотрено ее влияние на мощность поверхностного источника и
распределение энергии, поступающей в среду, между волнами
различных типов и по различным направлениям, выявлены неиз-
вестные ранее резонансные явления в неоднородном полупрост-
ранстве, сопровождающиеся появлением встречных потоков энер-
гии [22, 23, 53, 154, 155]. В настоящем параграфе дается "описа-
ние указанных алгоритмов.
2. Рассмотрим непрерывно-неоднородное полупространство.
Пусть X, ц, р при z-*—оо имеют не более чем экспоненциальный
рост либо стремятся к постоянным значениям; тогда существуют
пределы
Лоо (а) = Jim А (а, г), Воо(а) = Нт В (а, г), (3.1)
2^—00 2—ОО
гдеЛ,В — матрицы в (2.13), (2.14).
Общее решение систем (2.20), (2.22) при z->—оо имеет сле-
дующее асимптотическое представление [121]:
4 2
Yk^^tksm^, Х.~^ргпге^г, г-^—оо, £=1,2. (3.2)
S=1 /-=1
Здесь 7S(а), 6г(а) —собственные значения, a ms(a), nr(a) —со-
ответствующие им собственные векторы матриц А„, Вх; ths(a),
Рг(а) —неизвестные, не зависящие от z. Условия излучения ос-
тавляют в (3.2) только слагаемые, соответствующие тем 7„, 61г
у которых Re 7.s^:0, Im 7s^0, s=l,2, Re6t^0, Im 6,^0.
Пусть lt, Z2— линейно-независимые векторы, ортогональные к
т2, a k — вектор, ортогональный к Тогда при z->—оо спра-
ведливо
(ZrKft)=O, /=1,2; £=1, 2, (£-Х,)=0. (3.3)
30
ГЛ. I. КРАЕВЫЕ задачи для стратифицированных сред
Имеем краевую двухточечную задачу с условиями (2.21),
(2.23) при z=0 и (3.3) при 2—>—сю. Последнее можно переносить
в точку 2=0 известными методами (ортогональной прогонки,
Абрамова и др. [94]). В случае слоя конечной толщины перено-
сятся условия, заданные на его нижней границе z— —h. В резуль-
тате исходная краевая задача сводится к задаче Коши с началь-
ными условиями при 2=0. Однако из-за наличия в решении
экспоненциальных составляющих вида eVz,z даже с использова-
нием метода Абрамова, предохраняющего от появления в про-
цессе переноса растущих и линейно-зависимых составляющих, не
удалось на практике реализовать численный перенос условий
(3.3), устойчивый в достаточно широком диапазоне изменения па-
раметров.
Выделить экспоненциальные составляющие помогает извест-
ная структура решения (3.2).
Будем искать решение систем (2.20), (2.22) в виде
Yk = tkS (a) as (а, г) k = 1,2,
S—1
Xi = p (а) Ь (a, z) ев12. (3.4)
Подставив (3.4) в исходные системы, относительно вектор-функ-
ций as, b приходим к следующим задачам Коши:
dae
— = (А — ysE)as, (35)
as->ms, z-э—оо, s=l,2;
dz (о.О)
2->--ОО.
Неизвестные ths, р определяются из условий при 2 = 0 после опре-
деления as(a, 0), b (а, 0).
Таким образом, составляющие е''<г исключаются из рас-
смотрения; отыскиваются только модулирующие их функции as,
b, которые изменяются по z более плавно, чем экспоненты, а при
2-> —оо стремятся к постоянным значениям.
При наличии резких перепадов значений X, ц, р представление
(3.4) уже не соответствует структуре решения на всем интервале
—оо^гСО, так как искомые функции as, b содержат экспонен-
циальные составляющие, показатели которых тем больше, чем
больше отличаются собственные значения матриц A(a,z),
В (а, 2) от ys, 6). Возможны два пути модификации представле-
ния (3.4) с целью выделения экспонент на всем интервале.
§ 3. МЕТОДЫ ПОСТРОЕНИЯ МАТРИЦЫ ГРИНА
31
Первый способ. В окрестности произвольной точки интер-
вала z0 решение имеет представление [121]
Y (a, z) — J (г0) e7s<2o,z,
S=1
2
X (а, z) ~ 2 Р'"' (2о)e&rW'^ г 2о.
где ys(z), 6,(z), ms(z), nr(z) — собственные значения и соответст-
вующие собственные векторы матриц Д(а, z), В (а, z). Возьмем
в представлении (3.4) показатели экспонент, зависящие от г:
ys(z), 6i (2) и удовлетворяющие условиям
lim Re ys (г), 6Х (г) > 0, lim Im ys (z), 6Х (z) < 0.
Z-^—ao Z—>—oo
Задача Коши для определения as, b, в этом случае имеет вид
da г
—— — Aas — (vs + ysz) as, lim as =ms, (3.7}
dz z->-o©
— (б! + lim & = «P (3.8}
dz Z-»-oo
Такой подход позволяет полностью исключить экспоненциальные
составляющие решения, однако за это приходится платить до-
полнительным машинным временем, так как здесь на каждом
шаге численного интегрирования требуется находить 7s(z), 6i(z).
Кроме того, производные от ys, 61 в точках ветвления имеют раз-
рывы второго рода. При численном интегрировании систем (3.7),
(3.8) эти точки можно пройти, только модифицировав соответст-
вующим образом используемый численный метод [76].
Второй способ. Интервал —oo^z^O точками z;, 1= 1,...
..., N, разбивается на такие участки, на которых элементы ма-
триц А и В меняются достаточно плавно. На каждом из участков
решение отыскивается в виде
Y = (°0 (а>z) e7/’s(“)2,
S=1
2
X — 2 P‘-r (а) bl-r (а>2) e6i'rWz.
Г=1
Здесь yZs, — собственные значения матриц A(a, z;+1),
B(a, zl+1). Для ze[-oo, zN] (нижнее полупространство) сохра-
няется представление (3.4). Вектор-функции a; s, 6;,г определяют-
ся из задач Коши, аналогичных задачам (3.5) — (3.6). В качестве
начальных условий для bt r принимаются mis, л(, —собст-
32
ГЛ. I. КРАЕВЫЕ ЗАДАЧИ ДЛЯ СТРАТИФИЦИРОВАННЫХ СРЕД
венные векторы матриц Д(а, гг+1), В (a, z(+1), соответствующие
8г.г. Для определения Pi,? используются условия на по-
верхности и условия непрерывности X и Y в точках zt, которые
приводят к алгебраическим системам размерности 4N—2 и
2М—1. При больших М решение этих систем представляет собой
некорректную задачу. Возникающие здесь трудности и пути их
преодоления такие же, как и при построении матрицы Грина
многослойного полупространства, вывод алгоритма которого
дан ниже.
3. Пусть S(=={— оо^х, y^gZoo, — однородные
слои с характеристиками щ, р;, Г=1, ..., N, zt = 0, zN+l =—оо.
Между слоями предполагается равенство напряжений и переме-
щений. В каждом слое искомые X, Y имеют вид (см. (2.25)):
Yt =2
S=1
Xi = 2pi,rni,ree‘l-'z, z(^Sh
r=l
где 7I1S 8itr — собственные значения, nlr — соответствующие
им собственные векторы матриц Д(=Д(а, z), Bt—B(a, z) при
z^Si. Для однородных сред можно выписать их явный вид:
yi,k==^>l,kt yi,k+2==-8/i2 = ®7,2,
(Ji,k =Va.2 — xlk, ReO7,fc>0, Imo/,*<0,
= k = 1,2, /=1...............M,
+ 2pz p,;
mi.i =
m/,3 —
При /=/V (нижнее полупространство) в соответствии с условия-
ми излучения tN 3—trr i=pN 2=0.
§ 3. МЕТОДЫ ПОСТРОЕНИЯ МАТРИЦЫ ГРИНА
33
Условия на границах раздела слоев (2.17), (2.18) принимают
вид
Ti'Y i (а» Z/+i) = Т /+1 (ос, г/+1), (3.9)
У?’ (а, г/+1) <= УЙ (а, г/+1), / = 1,3,
Р/Х/ * (а, Zi+i) = Ц/+1Х/+1 (ос, г/+1),
Х/> (а, г1+1) = Х& (а, г1+1), I = 1..М,
/—Х,а2 о 0 Ь/ + 2цД
/ I =
0 —i'pz —ifij 0 у
Введем векторы неизвестных pt=
— {pl.i, Pl,г}, И #k=Vn,1( Zk,2}, pN= {Ряд}. Относительно th
pt условия (3.9) приводят к линейным алгебраическим системам
Ci (z/+i) 11 — Ci+i (zi+1) ti+i = 0, (3.10)
Рс(г/+1)Р/-Л+1(г/+1)р/+1 = 0, Z=l, ...,tf-1. (3.11)
Столбцами матрицы Cz(z) размерности 4X4 являются векторы
домноженные на еО/д2, e*z,s*, е"01-1* и е-в,’а* соответственно;
Л(г) =
е°^г
а1
~V4Pl,2« ’
di,i == pi (а2 — o/j2), di,2 = 2pza2oZi2, dii3 =2ipiOitl.
Матрица Cw(z) имеет размерность 4X2 (остаются только пер-
вый и второй столбцы), Px(z)—размерность 2X1 (остается
только первый столбец).
Условия (2.21), (2.23) на поверхности среды относительно
Л, р! переписываются в виде
5 ^=ек, R'pi=l,
Д,1
^1,S
^1,2
-4,1
S =
1 ^”*^1 9 \ \
я _/ ) > /г=(—
1,3 и1Д'
2 В. А. Бабешко и др.
34
ГЛ. I. КРАЕВЫЕ ЗАДАЧИ ДЛЯ СТРАТИФИЦИРОВАННЫХ СРЕД
Соотношения (3.10), (3.11) представляют собой две системы
блочно-диагональной структуры:
Система относительно р( имеет аналогичный вид.
Блочно-диагональное строение системы (3.12) позволяет вы-
разить tt через tt+l:
ti— СТ (z/+i) Cl+1 (zz+l) t/+i, (3.13)
а двигаясь последовательно снизу вверх,— все tt через tN. В ча-
стности, для t, получим
= G1 (г2) С2 (г2) С? (г3) С3 (г3) ... Cn (z.v) In = D-tN, (3.14)
D — матрица 4X2. Подставив (3.14) в первые две строки (3.12),
для нахождения tN получим системы размерности 2
S-D-tN=eh, А=1, 2. (3.15)
После их решения остальные неизвестные определяются из соот-
ношений (3.13).
Цепочка (3.14), осуществляющая перенос условий, заданных
при z->—-сю (в данном случае это условия отсутствия компонент
tn.3, в точку z=0, является дискретным аналогом задачи
Коши для системы (2.20) с начальными условиями (3.3), т. е.
того случая, где еще не произведено выделение экспонент.
При реализации на ЭВМ наличие экспоненциальных множи-
телей в Ct, Pi быстро приводит к переполнению разрядных сеток
или обращению в машинный нуль определителей этих матриц.
Природа возникающих трудностей и возможные пути их пре-
одоления хорошо видны на следующем примере. Функция
N(a, z) в задаче о колебании слоя толщины h, жестко сцеплен-
ного с недеформируемым основанием, имеет вид
N (а, г) = ‘sh (г + Л)) .
’ ца2 ch (aji)
Построение элементов К по формулам (3.13) — (3.15) эквива-
лентно нахождению по отдельности числителя и знаменателя
этой функции, имеющих экспоненциальный рост при а/г-э-сю.
§ 3. МЕТОДЫ ПОСТРОЕНИЯ МАТРИЦЫ ГРИНА
35
В то же время сама функция N убывает при а/г->о° и после вы-
носа экспонент может быть представлена в виде, не содержащем
растущих экспонент:
лг=£.(1-.£?р(^(М-г»)еагг< ге[0_м
ца, (14- ехр ( — 2а.>/гН
Отсюда ясно, что алгоритм построения К может быть моди-
фицирован таким образом, чтобы ни на одном из этапов вычис-
лений не появлялось экспоненциально растущих составляющих.
Достигается это путем замены переменных и выноса экспонен-
циальных множителей.
Введем новые неизвестные sh связанные с tt соотношениями
ii,t$i,i>
6,2= exp Si'2i
ti,3 — exp ((Ц/.i — o/,«) z/+i) sz,3>
6.4 = exp((oZa4-<T/,a)z/+1)sM, l=£N\ (3.16)
6,1 = «/,!,
6.2 = exp ((aZa — O7,2) zz+1) sZ(8, I — N.
Данная замена приводит к выносу экспонент из матриц Се.
Ci(zl+1)
Ci+1 (zz+1) ti+1 = eai+1’1Zl+1Ct+1 (0) Ei+lsI+1,
где£(+1 — диагональная матрица с элементами
еп — 1 >
е22 = exp ((oz+i,i — 0/+112) (zz+a — zz+l)),
^зз= ехр (2oz+1>1 (zi+2 — zi+i)), (3.17)
еы — ехр ((Ц/+1д “Ь Ц/+1.2) (zz+a — zz+i)).
Вещественная часть показателей экспонент в (3.17) может
быть только отрицательной, так как zl+2—zi+1<0, a Reaz>,^
^Reo/,2, т. е. элементы матрицы £; по модулю не могут быть
больше единицы. Аналогично проводится и замена неизвест-
ных рг.
= /’/,2 = exp(2CTZ,2zz+1)rZi2, l=£N',
p^ = r(^, l = N.
Экспоненциальные множители, появляющиеся в результате
замены перед матрицами Cz(0), Cf+1(0) в условиях (3.10), лучше
не учитывать в процессе определения sh гь а ввести их уже при
формировании окончательного решения Xh Yt.
36 гл. I. КРАЕВЫЕ ЗАДАЧИ ДЛЯ СТРАТИФИЦИРОВАННЫХ СРЕД
Ниже приводится алгоритм построения матрицы Грина, по-
лученный на основе указанной замены и не содержащий расту-
щих экспонент ни на одном из этапов:
1. Рг = СГ(0)С|+х(0)Е,„, (3.18)
Qi = Р71 (0) Р1+1 (0) Fz+1, /=1, . ..,1V—1, IV^Z.
2. D = D1D2...DN-i, <? = <?i-9a... Qn-v.
3. sN = (S-G-Drlek, 6=1,2, rN= (R HQ)1.
4. Si = Di-Si+lt ri — Qi-r1+1, l = N — [, N— 2, ...,1.
5. У,(а, Xi(a, z)=Nl-Vl-rl. (3.19)
Здесь Fl+t — диагональная матрица 2X2 с элементами fn = l,
f22=exp (2<J; + 1 2 (Zl+z "2-1+1 )); G, н — диагональные матрицы 4X4
и 2X2 с элементами
£п = 1, £22 = exp ((O/.i — aZ(2) zz+1),
£33 = exp (2az,xz/+1), £44 = exp ((oZil + 07,2) zz+1), / — 1,
^11 = 1» ^12 “ exp (2o7.2zz+1), Z=l;
Mt, Nt для l^=N — матрицы 4X4 и 2X2, столбцами которых яв-
ляются собственные векторы mz>„ ntr, s=l, ..., 4, r=l, 2; при
l=N матрицы MN, Nn имеют размерность 4X2 и 2X1; Ut, V;—
диагональные матрицы 4X4 и 2X2 при l=£=N и 2X2 и 1X1 при
1=1V с элементами
«п = ехР (CTMZ — S/), «22 = exp ((07 д — crz.a) z/+i + 07,2г — 2Z),
ц33 = exp (2oz>1zz+1 — <jZi1z — Sz), м44 = exp ((oz>l+ aZi2) zz+1—<TZ,2z—Sz),
Z-1
2/ = 2 (оТг+i.i о„д) Zn+i, 2X = 0;
n=i
vu = exp (07 ,2z — IIZ), y22 = exp (— oz>2z + 2oZi2zZm — IIZ),
1-1
nZ= (Oti+1,2 ^n,2) ^гг+1, П1 = 0.
n=l
Характерной особенностью приведенного алгоритма являет-
ся то, что после построения sh rh /=1, ..., N, компоненты мат-
рицы К (т. р. векторы Xh Yi) без существенных вычислительных
затрат могут быть определены по формулам (3.19) для произ-
вольного числа точек z, т. е. можно организовать процесс так,
чтобы матрица К (a, z), а следовательно, и волновые поля, опре-
делялись для различных глубин одновременно. Это же замеча-
ние справедливо и для алгоритмов, разработанных для непре-
рывно-неоднородной среды.
§ 3. МЕТОДЫ ПОСТРОЕНИЯ МАТРИЦЫ ГРИНА
37
Приведенные выше алгоритмы естественным образом обоб-
щаются на случай многослойной среды с непрерывно изменяю-
щимися свойствами внутри каждого слоя. Решения для 1-го слоя
ищутся в виде (3.4), но вместо условий непрерывности X, Y ис-
пользуются заданные условия контакта между слоями, напри-
мер (3 9), которые приводят к соотношениям, аналсничным це-
почкам (3.13), (3.14) при определении tt, pt.
Матрицы Ch Pt при этом в соответствии с (3.9) выражаются
через mha, nttr, a(i,(a, z(), 6(.r(a, z;), причем их столбцы, как и в
случае кусочно-однородной среды, содержат множители вида
gT/.s2, что требует проведения нормировки, аналогичной
нормировке алгоритма (3.18). Получающийся в итоге алгоритм
подробно описан в [60], там же даны численные примеры его
использования при расчете диаграмм направленности в гради-
ентной среде.
Кроме того, разработан и реализован на ЭВМ алгоритм по-
строения матрицы К в случае произвольной анизотропии упру-
гих свойств среды [59].
ГЛАВА II
ВОПРОСЫ ЕДИНСТВЕННОСТИ И РАЗРЕШИМОСТИ
ДИНАМИЧЕСКИХ ЗАДАЧ
ДЛЯ СТРАТИФИЦИРОВАННОГО
ПОЛУПРОСТРАНСТВА
В § 4 настоящей главы описывается техника сведения зада-
чи о динамическом взаимодействии конечномерных поверхност-
ных источников с упругим основанием к интегральным уравне-
ниям типа свертки. Обсуждаются возможные пути их решения.
Следующий § 5 носит вспомогательный характер: в нем со-
держится краткая сводка используемых в дальнейшем сведений
из анализа и теории обобщенных функций, а также свойств рас-
сматриваемых интегральных операторов. При первом чтении
данный параграф можно опустить, обращаясь к его содержанию
по мере необходимости.
В § 6 приводится подробное доказательство теорем единст-
венности для рассматриваемых интегральных уравнений.
§ 4. Системы интегральных уравнений
для поверхностных виброисточников
1. Рассмотрим задачу со смешанными граничными условия-
ми. Пусть на поверхности стратифицированного полупространст-
ва в области Й заданы перемещения
и(х, y,0)=f(x, у), (х, у)бЕЙ, (4.1)
а напряжения q(x, у) неизвестны. Вне Й, как и раньше, предпо-
лагаем отсутствие напряжений:
т|г=о=О, (х, у)с=Й. (4.2)
Для того чтобы построить решение данной задачи с помощью
матрицы Грина в виде (2.1), необходимо предварительно найти
неизвестные поверхностные напряжения q, относительно кото-
рых условия (4.1) и представление (2.1) дают систему инте-
гральных уравнений первого рода типа свертки:
Kq $$ k(x—£,y — rj,O)q^,'q)dldr] = f(x,y), (х,//)ей. (4.3)
§ 4. СИСТЕМЫ ИНТЕГРАЛЬНЫХ УРАВНЕНИИ
39
Задачи со смешанными граничными условиями возникают, в
частности, при изучении взаимодействия упругих тел. Смена ти-
па граничных условий происходит здесь в области контакта, от-
сюда название этих задач — контактные задачи. Недеформируе-
мые тела, контактирующие с упругой средой, принято называть
штампами.
Пусть на поверхности z=0 расположено W штампов с плос-
ким основанием, занимающим области Qft, k—1, ..., N;
Установившиеся колебания штампов вызваны осцил-
k
лирующими нагрузками, приложенными к иим, или волнами,
приходящими от поверхностных источников, вида
т|г==0=£(х, у), (x,y)t=S. (4.4)
Предположим, что штампы сцеплены со средой, т. е.
и(х, у, 0)=и*(х, у), (x,y)(=Qk, !fe=l, 2, (4.5)
ttft— вектор перемещений основания k-ro штампа. Вибрация
штампов описывается уравнениями движения твердого тела [37]:
uk = Uk + ffk х R k, — (i)2mkUk = Pk, (4 Q.
~coVw<pw=AfA(, /=1,2,3, k=l,2,...,N.
Здесь ui — вектор перемещения центра массы O*(xA//kzk) k-го
штампа; /?А={х—хк, у—ук, z—zj; <pk={<pkil, ф*.2, <рм) — вектор
углов поворота штампа вокруг осей Окт]к, 0&к, проходящих
через центр массы штампа Ок и параллельных осям координат
Ох, Оу, Oz\ гпк— масса; /к1, /к2, /кз — моменты инерции штампа
относительно осей О^, Ok£&', —главный вектор; Мк—
= {Mki, Мк2, Мк3} — главный момент сил, действующих на штам-
пы. В (4.6) учтено, что для гармонических колебаний
Ранее было введено обозначение q(x, у) — вектор поверх-
ностных напряжений, т. е. вектор нагрузок, приложенных к сре-
де. Соответственно —q(x,y), (х,у)^Ок — реакция среды на
штамп.
Отсюда
Pk = Fk — qdxdy, Mk=Nk— (RkXq) dxdy,
Qk ak
Fk, Nk — заданные главный вектор и главный момент сил, при-
ложенных к штампу.
Неизвестные ик могут быть определены из (4.6), если извест-
ны контактные напряжения q, входящие в Рк, Мк. Последние
определяются из систем интегральных уравнений (4.3), правой
частью которых в соответствии с (4.1) должны быть ик. Таким
40
ГЛ. II. ВОПРОСЫ ЕДИНСТВЕННОСТИ И РАЗРЕШИМОСТИ
образом, для определения ик необходимо знать q, а для нахож-
дения q необходимо знать и,— получается замкнутый круг. Ра-
зорвать его позволяет ограниченность числа степеней свободы
при движении твердого тела и линейность всех соотношений.
Перемещения центра массы штампов и* и вектор углов по-
ворота к разложим по единичным ортам ет:
3 3
ИА == фА — фА,/п^т*
т=1 т—1
Учитывая первое из соотношений (4.6), для перемещений £-го
штампа ик имеем:
Uk = 2 (ет х /?*)). (4.7)
Введем характеристическую функцию:
/ х П, (x,y\<=Qk,
ХИх,У)-(0>
С использованием перемещение оснований всех штампов, а в
силу граничных условий (4.5) — и поверхности среды под ними,
можно представить в виде суммы 6W+ 1 слагаемых:
N 3
и(х,у,0) =2 х* 2 (^ + Фм(^хЛи))-он, (х,у)(=&,
k=i п=1
(4-8)
- УУ k(x-%, у—т\, O)g(g, я) d% dt] — перемещение поверхности
s
заданной нагрузкой (4.4).
Сумма (4.8) является правой частью системы интегральных
уравнений (4.3), и, в силу линейности, ее решение также пред-
ставимо в виде суммы 62V+ 1 слагаемых:
N з
Q (X, У) != 2 2 (^’m^>m "I-Ф^,/п<7&,т+з) <7». (4.9)
k=i т=1
Здесь qAtm, qa удовлетворяют следующим системам интеграль-
ных уравнений:
Kqk,m == ’fjt&m,
Kqk,mjri==rfjt(emX Rk), щ= 1,2,3, (4.10)
К^н = йн, 6=1,2.......N.
Характеристики перемещений штампов к*, <pft определяются из
систем линейных алгебраических уравнений, возникающих после
§ 4. СИСТЕМЫ ИНТЕГРАЛЬНЫХ УРАВНЕНИИ
41
подстановки (4.9) в (4.6):
N
EkSk-{- RkiSj = Tk, k== 1,2, ..., N,
i=i
Sk == (^A,l. W&.2» фь/. фь,2, фь,з) >
Ек=-юг diag(mft, тк, тк, Ju, Jk2, JM)
(4.H)
— диагональная матрица 6X6,
Rki=dA"ki A^ki "
Am.kj 5 У <7 j.mdx dy,
«*
Bm,kj== (R k X (jj,m) dx dy, tn = 1,2, . s . , 6,
—матрица 6x6,
B«,kj /
(Fk + 55 Q^dxdy
ak
Kk+ j j (Rkxqn)dxdy
sik
Итак, для расчета колебаний массивных штампов на поверх-
ности упругой среды необходимо предварительно решить систе-
мы интегральных уравнений (4.10) вида (4.3). Вывод систем
(4.10), (4.11) сделан для самого общего случая контакта — кон-
такта со сцеплением; для других видов контакта их размерность
будет меньше. Так, для контакта без трения, когда на всей по-
верхности задано отсутствие касательных напряжений:
тжг=т!/г=0„ — оо^х, у^.оо,
а в области контакта — равенство только вертикальных переме-
щений:
и<3) (х, у, 0) = ик} (х, у), (х, у) ^Qk, k=l,2, ..., N,
вместо систем вида (4.3) имеем одно интегральное уравнение
Азз<7 = J У k33 (х — g, у — п, 0) </3> (£, л) ft dTQ = fs (х, у), (х, у) 6 Q.
£2
(4.12)
Алгебраические системы относительно
Sk == (Wjfe,3, фйд, фй,г) («Ал == == фА,з== 0)
получаются из (4.11) вычеркиванием нулевых строк и столбцов.
42
ГЛ. И. ВОПРОСЫ ЕДИНСТВЕННОСТИ И РАЗРЕШИМОСТИ
Изложенный выше способ применим к анализу не только
вибрации массивных штампов, но и произвольных поверхност-
ных объектов. Единственное условие: их движение должно опи-
i\\\\\yx\Y^2
А Л./з
Рис. 2.1
соединенной с ней массы w2
сываться конечной системой линей-
ных обыкновенных дифференци-
альных уравнений. При этом ме-
няются только системы (4.11); вид
интегральных уравнений (4.3), ха-
рактеризующих реакцию среды, ос-
тается во всех случаях одним и
тем же.
Пример. Сейсмический вибра-
тор моделируется плитой с массой
mit лежащей без трения на поверх-
ности упругой среды и связанной с
массой т2 упругой и демпфирую-
щей связями (рис. 2.1). На обе мас-
сы действует нагрузка Fe~iat. Вер-
тикальные колебания плиты и
описываются уравнениями
— k (ша — wj — с (w2 — w1) = F — Q,
m2w2 + k (w2 — wj + c (w2 — Wj) = —- F.
(4.13)
Здесь c— жесткость упругой связи, k — коэффициент трения
демпфирующей связи, F — сила, приложенная к плите, —Q=
= — \ \ q3dx dy — реакция упругой среды на внедрение плиты.
*а
Предположим, что вибратор работает в установившемся гар-
моническом режиме с круговой частотой со. Под ауъ w2, F, Q в
дальнейшем будем понимать комплексные амплитуды соответ-
ствующих величин.
Пусть qt— давление, вызывающее единичные перемещения
поверхности под плитой, т. е. qt — решение интегрального урав-
нения
^зз91=1, (x,y)<==Q.
При (х, у) ей перемещение поверхности равно перемещению
плиты wh отсюда
q = W!qlt Q = w1Q1, Q1=^q1dxdy. (4.14)
Учитывая (4.14) и соответствие d’7d/"->(—Г®)”, относительно
Wi, w2 имеем алгебраическую систему — аналог системы (4.11):
(— — i(nk + с + Q3) wx + (i®£ + с) w2 = F,
(ia>k c) w1 -f- (— <n2m2 — i&k + c) w2 = — F. (4.15)
§ 4. СИСТЕМЫ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
43
Отсюда
<4Л6>
Д(ю)=ю2т2(гюА—с) + (Qi—eftrii) (а2т2—iak + c).
Очевидно, Д(ю)=0 является условием резонанса системы. Если
бы отсутствовала реакция грунта Q,, то полином Д(<в), как по-
лином четвертой степени относительно со, имел бы четыре корня.
При наличии Qj (со) вопрос о количестве резонансов и располо-
жении их в комплексной плоскости со требует специальных ана
литических и численных исследований. Особый интерес пред-
ставляют здесь вещественные корни, которым соответствуют не-
затухающие колебания системы с данной частотой. Ниже, в
§ 19 численно изучаются резонансы системы штамп — упругий
слой.
2. Итак, при изучении взаимодействия поверхностных объек-
тов с упругой средой ключевую роль играет определение ее ре-
акции (Ям в (4.11), Q, в (4.15)), т. е. построение решения соот-
ветствующих интегральных уравнений.
Кроме контактных задач, интегральные уравнения возника-
ют также при изучении распространения и дифракции электро-
магнитных волн, в задачах акустики, гидроаэромеханики, тео-
рии трещин, теплообмена и многих других. Пожалуй, справед-
ливо следующее утверждение: любая краевая задача математи-
ческой физики со смешанными граничными условиями может
быть сведена к решению интегральных уравнений.
Отсюда ясна важность разработки эффективных методов их
решения. К настоящему времени по интегральным уравнениям
накоплена достаточно обширная литература, хорошие обзоры ее
имеются в монографиях [101, 108, 110], посвященных решению
контактных задач.
Особенно большие трудности возникают в случае некласси-
ческих областей контакта, неоднородных сред и динамики, так
как
1) при отличии области контакта от круга или полосы инте-
гральные уравнения не сводятся к одномерным, и к ним непри-
менимы хорошо отработанные аналитические и численные мето-
ды их решения;
2) для неоднородных сред, как уже было показано в § 3, са-
мо ядро интегрального уравнения может быть построено только
численно;
3) динамика по сравнению со статикой приводит к сильной
осцилляции ядра. Последнее обусловливает сильное взаимное
44
ГЛ. И. ВОПРОСЫ ЕДИНСТВЕННОСТИ И РАЗРЕШИМОСТИ
влияние всех точек поверхности (поверхностные волны) и дела-
ет неэффективным применение методов, хорошо работающих в
задачах статики или в задачах динамики вязких сред с затуха-
нием.
Ясно, что здесь неприменимы чисто аналитические методы,
так как уже постановка задачи и вывод интегральных уравне-
ний требуют привлечения вычислительной техники. С другой
стороны, прямые численные методы (например метод коллока-
ции) без предварительного анализа и учета свойств интеграль-
ных операторов не приведут к успеху из-за наличия особенно-
стей и осцилляции у решения и ядра. Наиболее перспективным
является путь, предполагающий машинную реализацию всех
этапов решения, выполненную на основе тщательного предвари-
тельного аналитического изучения его свойств и выделения всех
составляющих, несущих особенности и осцилляции решения, та-
ким образом, чтобы численно требовалось находить значения
только гладких, плавно меняющихся функций, являющихся ре-
шениями корректных задач.
В следующем параграфе дается сводка свойств интеграль-
ных уравнений динамических контактных задач, необходимых
для конструирования таких численно-аналитических методов.
§ 5. Свойства интегральных операторов
динамических контактных задач
Для дальнейшего изложения нам понадобится ряд сведений
из функционального анализа, относящихся к свойствам некото-
рых пространств функций и функционалов на них (п. 1). Эти
сведения взяты из монографии [75] и работы [43], в которых
можно найти подробные доказательства приведенных ниже
фактов. Результаты, касающиеся свойств интегральных опе-
раторов динамических контактных задач (п. 2), получены в
[15, 47].
1. Введем необходимые обозначения и определения:
R" — действительное n-мерное векторное пространство с эле-
ментами х=(х‘, х2, . . ., хп) = (х±, х2, ..., хп); {х, £>=х*£*+
+x2g2+ ... +xngn — скалярное произведение двух векторов;
I § | |) = (2^//2~~длина иектора;
QcrR"— ограниченная область в R”;
supp ф — носитель функции ф(х)—множество тех точек Rn,
в которых ф (х) =/=();
ф(х) называется финитной, если supp<p ограничен;
С”— множество бесконечно дифференцируемых в R“ функ-
ций;
С” (й) — те <реС“, у которых supp <pczQ;
§ 5. СВОЙСТВА ИНТЕГРАЛЬНЫХ ОПЕРАТОРОВ
45
С™ — финитные <р ge С°°;
S — пространство Шварца — множество феС", убывающих
при |х|-»-оо быстрее любой степени:
Ит ф(х)(1 4-|л |z) = 0, V/;
| х|-»оо
D — пространство основных функций:
Ф&Р-^-креС00, supp ф — компакт;
D' — пространство линейных непрерывных функционалов над
(p^D: u^D', cph^D, и(фк)->0, если фл->0;
и(ф) — значение функционала на элементе ф;
и (ф) = j и (х) Ф* (х) d* (5.1)
— обозначение общего вида функционала (здесь и ниже, если
не указаны пределы, предполагается интегрирование по всему
R”);
( )* —комплексно-сопряженная величина.
Функционал называется регулярным, если и(х) локально ин-
тегрируема; если не существует такой и(х), то функционал на-
зывается сингулярным, а и(х) в (5.1)—обобщенной функцией
[40]; пример сингулярного функционала:
б (ф) = J б (х) ф (х) dx = ф (0),
б(х) — 8-функция Дирака-,
D' называют также пространством обобщенных функций-,
u(g) —Fu= Ju(x)et<x&>dx— преобразование Фурье основных
функций; для обобщенных функций преобразование Фурье вво-
дится равенством
Fu = и (ф) = и (ф); (5.2)
(u*u) (х) =у u(y)v(x—y)dy— свертка абсолютно интегри-
руемых функций;
свертка обобщенной функции и с основной со определяется
равенством
(и*со)(ф) = и(^со(у)ф(х + у)йу) , (5.3)
при этом t/*coeC“ и Г(ы*<о)=исо;
Dtz.S<^D'— пространства вкладываются со своей топологией
и образуют всюду плотные множества в объемлющем простран-
стве; в частности, любая обобщенная функция u^D' может
быть приближена последовательностью ф*е£, сходящейся к и
46
ГЛ. II. ВОПРОСЫ ЕДИНСТВЕННОСТИ И РАЗРЕШИМОСТИ
в метрике D'; отсюда D' — замыкание 5, т. е. пополнение S пре-
дельными точками в заданной топологии;
Z=F(D)—пространство преобразований Фурье u=Fu,
u^D-,
Z'— пространство линейных, непрерывных функционалов
над Z, Z'—F(D).
Введем пространства и перечислим их свойства.
Г. Пусть функция р(х) непрерывна в Rn, вещественна и
удовлетворяет условию р(^)р-1('п)^с(1+||—т|]г) или, что эк-
вивалентно,
L* — пространство измеримых в R” комплекснозначных
функций, для которых определена и конечна норма
IIU ||[ц = ||Иц lit == J р2 (х) | и (х) |2 dx < с < оо; (5.4)
—полное рефлексивное, гильбертово пространство со
скалярным произведением:
«, ОЕ /Д (и, и)£1* = («ц, = $ И2 (•*) “ (х) у’ (х) dx. (5.5)
2°. Линейный непрерывный функционал над L» имеет вид
f(u)=^(x)u’(4f)dx, feEZ/Д
причем норма функционала равна llfll^i/u-
3°. SczL^ —плотно, т. е.
Vu'E S: ||и — фй||дц->-0, /г—>оо.
При доказательстве полноты S в L& используется так назы-
ваемый оператор осреднения Тв: D'-*-D,
/ S ч
7’аи=и*ш8, и8(^) = е-п® ( —j, со (£) СГ — ядро осреднения,
J <o(?)d£=l.
При доказательстве сходимости вариационно-разностного
метода понадобится следующее свойство Тв.
IIT'sf—v|li,2->0, е->0 для »eL2. (5.6)
4°. LPt^S'czZ' вместе с топологией, т. е. если и(ср) =
= J ы(1)ф‘ (l)dl, cp&S, u^L^, то из ера—->-0 в S следует и(ф)1)->
а из ил->0 в L“ следует щ(ф)->0 VtpeS.
5°. совокупность тех обобщенных функций u^D',
преобразование Фурье которых u(l)=7?ueL^. Метрика в //ч
§ 5. СВОЙСТВА ИНТЕГРАЛЬНЫХ ОПЕРАТОРОВ 47
задается нормой
В«1*=И«1£и = (5.7)
Из 4° VueLu есть преобразование Фурье от некоторой
обобщенной функции v^D', отсюда F(H") = L^, т. е. элемента-
ми Я1* являются те и только те обобщенные функции ией', ко-
торые действуют на основе функции <p^D по правилу
и (<р) = J и (§) (ф (|))’ и е L\ (5.8)
Так как ||u|Ih=||Fh||lh , преобразование Фурье F устанавливает
изометрический изоморфизм и Н^. Следовательно, Н& — пол-
ное, рефлексивное гильбертово пространство со скалярным про-
изведением
(и,^ = $р® ы©(£©)*^, u,vs=H* (5.9)
и линейным функционалом
||/|| = ии
6°. Пространство D образует в Яи всюду плотное множество
и топология D сильней топологии Ни, т. e.V можно при-
близить гладкими функциями фл&0, причем из сходимости
q>h-+u в метрике D следует ||фл—
С другой стороны, топология Н11 сильнее индуцируемой в Я11
топологии пространства D', т. е. если uk->0 вЯ1*, то это будет
выполняться и в D'.
Окончательно: вместе с топологией.
7°. Для нас важно также следующее свойство оператора
осреднения Ts :
=>ТэиеЯ^ПС“ и ||и—ТамЦц-^0, е->-0,
т. е. осредненные функции плотны в Н».
2. Дадим без доказательства сводку основных свойств инте-
гральных уравнений и систем уравнений, возникающих при ре-
шении динамических контактных задач.
Г. Элементы матрицы К(аь а2, z, со) (2.24) являются анали-
тическими функциями всех своих параметров, четными по а=
= + at со и при х=0, |а]->-оо ведущими себя как ]а|_*,
т. е.
Kst (— а, у) =Kst (а, у), VyG[0, 2л], (5.10)
Kst (а, Т) = Cst (у) а"1 (1 + О (| а Г1)), | а | -> оо, s, t =1, 2, 3.
48 ГЛ. II. ВОПРОСЫ ЕДИНСТВЕННОСТИ И РАЗРЕШИМОСТИ
Здесь a^acosy, a2=asiny, 0^"f^2n, | cs41 с=cost,
K(ai, a2, z) |l_o=K(a1, a2) =K(a, y).
Относительно a /Ce(a, у) имеют конечное число полюсов на ве-
щественной оси и счетное число с точками сгущения ±гоо в ком-
плексной плоскости. Другими словами, в любой ограниченной
окрестности вещественной оси число полюсов конечно. Более
того, для слоистых сред показано [46], что с удалением от ве-
щественной оси полюса вы-
страиваются вдоль ветвей не-
которых кривых, симметричных
относительно осей Rea=0,
Im a=0 (рис. 2.2). Причем для
функций М, Р, Р, S(a, z) полю-
са одни и те же, а для N (а, z)
набор полюсов другой. Объяс-
няется это тем, что первые
функции определяются из за-
дач (2.20) —(2.21), а N — из
(2.22)-(2.23).
Для неоднородного полу-
пространства по сравнению со
средами конечной толщины эти
функции, кроме полюсов, име-
ют вещественные точки ветвле-
ния (для однородного полупро-
странства ±%i, ±х2, см. (2.27)).
Положение особых точек в ком-
плексной плоскости а зависит
рис 2 2 от <0 и не зависит отг, а в изо-
тропном случае и от у. При уве-
личении ю полюса непрерывно
движутся в плоскости а в общем направлении к вещественной
оси (пример траекторий движения полюсов в случае упругого
слоя см. в [65]).
2°. Для феС” (£2) — финитных бесконечно дифференцируе-
мых в Q вектор-функций определим норму:
1ItLv = (*v<P> ф)^ =
= 2 ЭД (“ь “г) (“1’ “2) Ф* (ai> dctl da*' (5-10
s,i=i —ос
Ф — преобразование Фурье <р, Kv— интегральный оператор
вида (4.3), символ ядра которого положительно-определенная
матрица
(a2 + B2)-2v-
§ 5. СВОЙСТВА ИНТЕГРАЛЬНЫХ ОПЕРАТОРОВ
49
Определение 5.1. Замыкание в норме (5.11) финитных
функций ф(х, д)еС"°(й) назовем пространством //_V(Q).
Это пространство является частным случаем Н11, здесь роль
весовой функции ц играет матрица Kv(a1; a2);
H-v—гильбертово пространство со скалярным произведе-
нием
(A <p)tf_v= (KvA <р)ь2. (5.12)
Аналогично вводятся H_v в двумерном и одномерном слу-
чае.
Пусть Съ(у) — положительно-определенная матрица с эле-
ментами cs((y) из (5.10), тогда система интегральных уравнений
(4.3) определена на вектор-функциях из пространства Я_7,(й),
соответствующего данной CiA(y).
Справедливы следующие теоремы [15]:
Теорема 5.1 (о фредгольмовости в Пусть й — огра-
ниченная область с кусочно-гладкой границей. Тогда для любой
f(x, y)^H,h(ii) система (4.3) эквивалентна уравнению второго
рода с вполне непрерывным в Н-ч2 оператором Т, т. е.
(q+Tq-Gf) =0, О: Я.А->Я_.А.
Отсюда, для регуляризации, т. е. сведения к уравнению
Фредгольма второго рода системы (4.3), достаточно обратить
оператор К-ч,-
q + Tq = Gf.
Теорема 5.2 (о единственности в Lp). Система интеграль-
ных уравнений (4.3) не может иметь в £р(й) (р>1) — прост-
ранстве абсолютно интегрируемых со степенью р функций более
одного решения.
Доказательство основано на анализе выражения (Kq, q) |2_0,
мнимая часть которого пропорциональна энергии, уносимой
упругими волнами от поверхностного источника qe~iat. Из Kq=
=0 следует (Kq, q)=0; показывается, что последнее приводит
к q=Q для деАр(й), т. е. к единственности решения, но только
в том случае, если выбор контура интегрирования в интеграль-
ном операторе К сделан в соответствии с принципом излучения
энергии. Такой и только такой выбор контура приводит к един-
ственности. С физической точки зрения доказательство теоремы
можно истолковать следующим образом: любая ненулевая по-
верхностная нагрузка q приводит к возникновению ненулевого
потока энергии через поверхность среды (Im (Kg, д) 12=oV=O) или
не существует д#=0, для которой Im(Kg, д) |г=о=О.
3°. Решение д(х, у) непрерывно во внутренних точках обла-
сти й, а вдоль ее границы имеет особенность, порядок которой
определяется поведением К(а, у) при а->оо, т. е. индексом v в
50
ГЛ. II. ВОПРОСЫ ЕДИНСТВЕННОСТИ И РАЗРЕШИМОСТИ
(5.11). Для изотропных упругих сред v = 1/2, что приводит к
корневой особенности решения на границе, впервые для плос-
ких задач полученной в работах [49, 97].
Более строго, справедлива следующая
Теорема 5.3 (о корректной разрешимости в C*/2+s). Пусть
вектор-функция у} дважды непрерывно диффрррниирирмл °
области Й с границей, имеющей непрерывно дифференцируемую
кривизну. Тогда система Kq=f корректно разрешима в прост-
ранстве функций С*/г+е (Q) с нормой
II tfll. = max \q(x, у)НУ1+е\
(R— расстояние до ближайшей граничной точки области), т. е.
ИII. =^^11/lb М = const;
£‘/,+8
здесь е может принимать чисто вещественные или чисто мнимые
значения. В случае вещественности—1/2<е<1/2. В частности,
в задаче о контакте без трения 8 = 0, в задаче о жестко сцеп-
ленном штампе г — ± — arctg 1 ~~ 2v , v — коэффициент Пуас-
Я 2(1 — v)
сона среды [47].
Корректная разрешимость в классе С<*2+8 означает, что в ре-
шении допускается особенность вида R_<l/!+a) при R->0.
Установлено, что поведение К (а, у) при |а|->оо зависит
только от свойств среды при z—О и не зависит от ее неоднород-
ности и частоты, в частности, оно одно и то же для статики
(и=0) и динамики (и>»0). Отсюда показатель особенности ре-
шения в окрестности границы области контакта зависит только
от свойств среды в зоне контакта и одинаков для статики и ди-
намики. В то же время коэффициент интенсивности Кр.
fl-=/C//?-w+8 + O(l), R->0,
зависит от всех параметров задачи.
4°. При наличии угловых точек на границе области контакта
в зависимости от раствора угла 0 контактные напряжения име-
ют особенность вида
q(r, ф)~с(ф)(02 - Гр2)-<^+е)г-?/г(е), г-^0, (5.13)
Ф — угол в полярной системе координат с центром в вершине
угловой точки, г — расстояние до нее. Интегральные операторы
(4.3) допускают счетное число показателей особенности r~^k,
ук— (уА11±1фм), а это грозит неоднозначностью решения для об-
ласти с угловыми точками. Здесь необходимо наложить допол-
нительные условия, позволяющие из допустимого набора пока-
зателей особенности выбрать единственный. Таким условием
§ 6. ТЕОРЕМЫ ЕДИНСТВЕННОСТИ
51
является требование конечности энергии деформации в окре-
стности угловой точки.
Вопросам нахождения у*(6) для различных условий контак-
та посвящена гл. IV.
§ 6. Теоремы единственности
В монографиях [17, 46, 47] доказан ряд теорем единственно-
сти решений систем интегральных уравнений динамических кон-
тактных задач для однородных сред. В случае стратифициро-
ванных сред матрица-функция ядра интегрального уравнения
имеет отличные элементы по сравнению с однородным случаем.
Тем не менее метод доказательства теорем единственности, из-
ложенный в [47], почти полностью применим и для этого слу-
чая. Ниже приводится доказательство теорем единственности
решений интегральных уравнений в стратифицированном слу-
чае.
1. Ядро системы интегральных уравнений в стратифициро-
ванном случае имеет вид
k (х, у) = J J К (а, Р) g-'W+Pi/) da dp,
(У1 (Уг
II а2Л4 (u) + P2jV (и) [М (и)—Л/(и)]сф —iaP (и)
К (а, Р) = [Л1 (u) —N (и)] ар ₽2/И (и) + я’У (и) — /рр (и)
II iaS (и) ipS (и) Р (и)
(6.1)
(6.2)
и = а2 + Р2.
Относительно свойств входящих в матрицу функций считаем,
что функции М(и), N(u), R(u), S(u), Р(и) аналитичны в окре-
стности вещественной оси, регулярны на контуре о, первые
три — четные, две последние — нечетные. На бесконечности на
контуре о имеют место асимптотические оценки вида
М. (и) — сги~3 [1+0 (ы-1)], N (ы) = с2ы~3 [1+0 (ы-1)],
S (и) ~ Р (и) = с3и~2 [1+0 (и-1)], (6.3)
/?(ы) = с4«-г[1 +0(«"1)].
Предполагается, что функции Л4(ы), /?(«), <$(«), Р(и) имеют
вещественные полюса в точках £г (г=1, 2, ..., р), a N (и) —
в точках С (r= 1, 2, ..., s).
Так же как и в [47], будем рассматривать два варианта.
Первый вариант свойствен полупространству с переменными
или постоянными по глубине свойствами. В этом случае функ-
ции М, N, Р, S, Р наряду с перечисленными свойствами имеют
участки вещественной оси на которых они
комплексные. На остальной части оси функции вещественны.
52
ГЛ. И. ВОПРОСЫ ЕДИНСТВЕННОСТИ И РАЗРЕШИМОСТИ
Второй вариант имеет место в задачах для слоя, слоистой
среды, среды с переменными по толщине свойствами в предпо-
ложении, что толщина среды конечная. В этом случае Р(и) =
=S(«) и все функции являются вещественными на веществен-
ной оси и мероморфными в комплексной плоскости, т. е. точки
ветвления отсутствуют.
Теорема 6.1. Пусть область £2 выпуклая, и в первом вари-
анте имеют место следующие свойства:
4 Г 1 1 Т2
------- ---------— ------1—-— >о,
[№х(^)]'>0, As=l,2.....р\ г=1,2......s, (6.4)
Im АГ (и) >0, Im/?(«)> 0,
41тЛ4(«) 1т7?(«) — |S(«)— Р*(и) |2>0,
а во втором — дискретные свойства (6.4), и найдется матрица-
функция П(а, р) такая, что матрица-функция
К (а, 3)П-‘(а, Р)
непрерывна на вещественных осях а, {3 и, кроме того, веществен-
ная или мнимая эрмитова компонента этой матрицы положи-
тельно определена. Тогда в пространстве вектор-функций
q(x, у) из £л(£2), %>1, система не может иметь более одного ре-
шения.
Для доказательства перейдем в системе (4.3) с ядром (6.1),
(6.2) к новым неизвестным ^(х, у), £г(х, у) с носителем в £2,
положив
(6.5)
Qi («, Р) = aGx (а, Р) + pG2 (а, р),
Q2 (а, Р) = pGx (а, Р) — а62 (а, р),
Qs («> Р) = вз («, ₽)•
В результате в новых переменных однородная система, решение
которой предполагается нетривиальным, принимает вид
§ (a, Р) G (а, Р) da dp = 0,
<Ti а,
u2N (и) Р — iaP (и)
—u2N (и) а — t’PP (и) ,
О
и*М (и) а
К± («. ₽) = (и) ₽
iu2S (и)
(6.6)
/?(и)
G(a, p) = {Gt(a, р), G2(a, р), G3(a p)}.
Умножим первую строку системы (6.6) на функцию
(х, у))* = “G* (а, Р) еи‘(аж+Рг/) da dp,
§ 6. ТЕОРЕМЫ ЕДИНСТВЕННОСТИ
53
вторую строку — на
(igiy (х, у))* = § J pG* (а, Р) e+‘W+₽'/) da dp
и сложим эти строки, предварительно проинтегрировав резуль-
тат умножения по области Q. Затем умножим первую строку на
(ig'2y (х, у)У = J J PGa (а, Р) е+'(ах+₽г/) da dp,
—00
вторую—на
(— igzx (х, у))* = — j j aG2 (а, р) е^ах+&1/1 da dp
— 00
и также результаты сложим, проинтегрировав по Q. После этого
первую новую сумму прибавим к третьей строке, умноженной на
g3(x, у) и проинтегрированной по Й. В результате получим со-
отношение
$ J {и*М (и) | Gx (а, Р) |2 + R («) | G3 (а, Р) |2 +
<71 <Ь
+ i«2 [S (ы) Gx (а, р) G*3 (а, р) — Р («) G* (а, р) G3 (а, р)]} da dp =0, (6.7)
§ j «W («) | G2 (а, P) |2 da dp — 0. (6.8)
01 O2
Перейдем в представлении функций Gk(a, р) к цилиндриче-
ской системе координат, положив a=«cosy, р== «sinу. Тогда
последние соотношения принимают вид
ал •
У У {«4Л4 (и) | Gx (и cos у, и sin у) |2 + R (и) | G3 (и cos у, и sin у) |2 +
О °п
+ i«2 [S (ы) Gx (и cos у, и sin у) G*3 (и cos у, и sin у) —
—P(u)G* («cosy, «sinу) G3(«cosy, «sinу)]}ududy, (6.9)
2.1
У У u8Af («) | G2 (ы cos у, «siny) |2d«dy = 0.
0 on
Совместим контур orn с вещественной осью в последних соот-
ношениях, считая, что полюса однократные [47]. Но тогда, как
известно, интегралы в окрестности полюсов будут пониматься в
смысле главного значения, а к полученным соотношениям
Добавятся полувычеты в полюсах. В результате соотношения
54
ГЛ. И. ВОПРОСЫ ЕДИНСТВЕННОСТИ И РАЗРЕШИМОСТИ
принимают вид
2Л оо
J {и*М (и) | Gx (и cos у, и sin у) |2 4- R (и) | G3 (и cos у, и sin у) |2 4-
0 о
4- iu2 [S (и) Gx (и cos у, и sin у) G3 (u cos у, и sin у) —
— Р (и) (и cos у, '' sin у) G3 (и cos у, и sin у)]} и du dy 4~
2Л р
+ Ш f 2 {й | Gi (& COS ух, Zk Sin у) I2 +
J . l Vzk' J
О Я"1
+ [jrl * y IG3 & cos y, Zk sin y) |2 4-
+ Г 77ZX L Gi & cos V> sin V) G*3 cos y, Zk sin y) —
“ .D-1/t >v G* cos v> sin v) G3 (& cos Ъ Zk sin у) П Zkdy =0, (6,10)
in 00
J J u6N (u) | Ga (u cos у, и sin y) |2 du dy 4-
0 0
2Л s
J_ nJ v (Г’.\ъ 1 IG2 (Zk cos y, Zk sin у) I2 dy = 0.
о 1
Перейдем в последних соотношениях к сопряженным значе-
ниям и вычтем их из исходных. Новые соотношения принимают
вид:
f °f {«< [М («) - /И* (и)] | Gx |2 + [7? (и) - 7?* (и)] | G312 4-
+ ш2 [S (и) GXG3 + S* (и) GXG3 — P (и) GXG3 — P (u) GXG3]} и du dy 4-
2Л p
+ ni f V kk Г------------4-------5----I • I Gi I8 +
J Й Г Li^O' ([ЛГ10')*J
4-Г-----!-----1------!----1.1G3 Is 4-
L [7?-1 O' ^([JTHO')* J 1 31
+ ifl Г----!----q g*---------!----G‘G3 —
L [S-1 (?*)]' ([S-1 O')*
-------5---G*Ga 4-------5-----GxG’3l dy = 0, (6.11)
[P-lO' 8 (IP"1 (^)l"1)* JJ 7
§ 6. ТЕОРЕМЫ ЕДИНСТВЕННОСТИ
55
J' J u5 [JV (и) — N* (u)] | Ga12 du dy +
ч» о
2Л s
+ ш f у, (ад5 Г—-Ц—।--------------—1 ig2imy=o.
J A. Ы-чадг о-1 c,,)i')* 11 21 r
О n'~x
Рассмотрим соотношения (6.11) в первом варианте. Этот ва-
риант свойствен полупространству с переменными или постоян-
ными по глубине свойствами. В этом случае функции М, N, Р,
S, Р наряду с перечисленными свойствами имеют участки веще-
ственной оси на которых они комплексные.
На этом участке полюса у вышеперечисленных функций отсут-
ствуют. На всей остальной оси указанные функции веществен-
ны. Соотношения (6.11), сокращенные на i, имеют вид:
да 61
J J {и4 • 21m М (ц)|Gj |2 + 21m Р (и) |G312 +
О 61
+ и2 [S (и) GxGs + S* (и) GiG3 — Р (и) G[G3 — Р* (и) GXG.*]} и du dy+
ал р
+ лГ У Ш---------------IG1N--------Ш2 +
J Аг [м-чадг iR-чадг1 1
О Л—1
+ 1$ Г-----!-----1-----!----1 (GXG* — G’G3)l &dy - О,
L [з-чадг ip-1 (cfe)]zг 3 Р г
2Л 6g 2Л s
[ (ыБ Im (V (ы) | Ga |2 du dy + f £ (ад5 7-77-— |Ga|2dY = 0.
J J J IL- I** (bjfeil
О di 0 R—1
В первом из приведенных соотношений под интегралом и вне
его стоят эрмитовы квадратичные формы, которые традиционно
записываются в форме
N N
2 2 ^mk = Uiim.
т=1А=1
Известно, что условием положительной определенности эр-
митовой формы является положительность всех главных опреде-
лителей, а именно
> о»
ап
а12
^22
>0, ... , det|<2mfe| >0.
В нашем случае эти условия принимают вид
[/г1 (ад]' >о,
(6.12)
_______4
[м-чадг игчад]'
1
[S-1 (ад]
1 у
[р-1 (ад)' J
>о,
56
ГЛ. II. ВОПРОСЫ ЕДИНСТВЕННОСТИ И РАЗРЕШИМОСТИ
>0, 6=1,2, .... р; г=1,2.........s,
Im N (и) >0, Im R (и) > 0,
4 ImМ(и) -ImR(u)— \S(u)—P*(u) |2>0.
Функции могут в отдельных точках отрезка [б1; 62] обра-
щгИьсЯ ь Нуле. IiucKUJiDKy при лил условиях подынтегральные
формы положительно-определенные, то из условия равенства их
нулю следует, что
Gt(u cos у, usin y)sG2(ucos y, и sin y) = G3(u cos y, usiny)=0,
так как они являются целыми функциями по каждому из пара-
метров. Отсюда следует, что
Qh(a, Р)=0, qk(x, р)=0.
Таким образом, для первого варианта теорема доказана.
Рассмотрим теперь случай второго варианта.
2. Второй вариант имеет место в задачах для слоя, слоистой
среды с переменными свойствами.
Соотношения (6.11) принимают следующий вид:
2? Р у5 у
js (Анс-|! + 1Й^0’|,+
it* » * 1
+ Тр-1(Ьг (GiGa^G1Ga)р=0’ (6лз)
2г s (6е
У |G2|2dy = 0.
J ~
о г—1
Из последних соотношений в силу условий теоремы следует, что
Gjgftcosy, CfeSiny)==Gs(^cosY, ^siny) = 0, k — 1, 2, ... , p,
G2 (tr cos y, sin y) = 0, r = 1, 2, ... , s.
Отсюда, используя связь с функциями Qk, получаем, что и по-
следние обращаются в нуль при этих же значениях аргументов.
Раскладывая эти функции в ряд Фурье по параметру заклю-
чаем, что в нуль обращаются функции
Gm/fo) = 0, m=l,3; / = 0, ±1, ±2, ... , О2/(ад = 0. (6.14)
Здесь
оо
Gm (и cos у, ч sin y) == 2 Gms
S=—оо
Ga (и cos у, и sin у) = 2 ^2S (и)
§ 6. ТЕОРЕМЫ ЕДИНСТВЕННОСТИ
57
Произведем в системе (6.6) замену переменного, положив
П(а,Р) = (6.15)
m=l W
Р s
Л (и) = (ц) = [] (и2 - Й), Л (и) = И (и2 - £).
k=l k=l
Здесь Phm(a, р) — полиномы переменных a, р суммарной степе-
ни не выше 2р (tn= 1, 3) и 2s (тп=2).
Введем обозначение
n(a,P) = ||-Pfem(a’^||. (6.16)
II Рт ||
Очевидно, вектор-функция
Т(а, р)=П(а, p)G(a, р)
является преобразованием Фурье функции из Z.P(Q) и имеет но-
ситель в этой же области [17, 47].
Введем теперь в системе (4.3) замену переменного, положив
G(a, р)=П-‘(а, р)Т(а, р).
В результате система принимает вид
$ J (a, р) П1 (а, р) Т (а, р) da dp = 0.
<71(71
Совместим в последнем соотношении контуры <ц, о2 с вещест-
венными осями, получим соотношение вида
J J A"i (а, Р) П1 (а, Р) Т (а, р) da dp = 0.
—оо
Вычетов вне интеграла не возникает в соответствии с условиями
леммы 25.3 из [47].
Применив двойное преобразование Фурье к последнему со-
отношению, умножим полученные соотношения скалярно на
Т(а, р). Тогда с учетом свойств преобразований Фурье финит
ных функций имеем
J J (a, Р) П"1 (а, р) Т (а, р), Т (а, р») dadp = 0.
—00
По условиям теоремы под интегралом стоит матрица, веще-
ственная или мнимая компонента которой положительно опре-
58 ГЛ. II. ВОПРОСЫ ЕДИНСТВЕННОСТИ И РАЗРЕШИМОСТИ
делена, т. е. положительно-определенной является одна из форм
оо
$$ ([К1 («, Р) П-1 (а, ₽) ± к: (а, ₽) (IT1 (а, Р))‘] х
х Т (а, р), Т (а, Р)) dadp,
ип птотлдо гттрттлтр'г тт'гп Т(г, ₽И=Г» Я НТРТЛДО тт П(е, R'l=n Топ.
*“ ч„, г, _ .. .. v~, г/ —
рема полностью доказана. Случай систем меньшего порядка, а
также одного уравнения получаются как частные случаи приве-
денной теоремы.
Доказанные теоремы единственности для системы интеграль-
ных уравнений, заданных в области Q, остаются справедливыми
и в случае нескольких областей Q,„ не пересекающихся между
собой и выпуклых в первом варианте теоремы 6.1.
ГЛАВА III
МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
ДИНАМИЧЕСКИХ СМЕШАННЫХ ЗАДАЧ
В настоящей главе излагаются методы решения интеграль-
ных уравнений, возникающих в задачах о вибрации штампов на
упругой среде. Изложены три метода решения этих задач, каж-
дый из которых обладает своими достоинствами и недостатками.
Методы факторизации, фиктивного поглощения и вариаци-
онно-разностный являются богатым арсеналом средств решения
практически любых смешанных задач теории упругости для об-
ластей с плоскими границами.
Первый из этих методов позволяет сводить интегральные
уравнения первого рода к уравнениям Фредгольма второго рода,
которые затем уже решаются численно. Результаты, полученные
этим методом, качественно верно описывают решение во всей об-
ласти, в том числе и на гладкой границе штампа без угловых
точек. Точность приближенного решения, получаемого этим ме-
тодом, можно повышать, используя некоторые вычислительные
процедуры. Метод позволяет строить решения как для ограни-
ченных, так и для полуограниченных областей контакта штампа
со средой.
Метод фиктивного поглощения позволяет с высокой эффек-
тивностью строить решения смешанных задач для штампов, за-
нимающих в плане ограниченные области, в том числе и для не-
гладких границ. В частности, границы могут содержать угловые
точки разных растворов, часть границы области может быть не-
известна, в области контакта могут быть переменные условия
взаимодействия со средой — сцепление, контакт без трения и
другие. Точность метода ограничивается лишь возможностями
используемой ЭВМ. Достоинством метода является правильное
описание поведения решения в окрестности особых множеств
области задания интегрального уравнения, а также возможность
использования при решении динамических задач решений соот-
ветствующих задач статики.
Вариационно-разностный метод решения интегральных урав-
нений обладает большой универсальностью при решении задач.
Практически этим методом можно строить приближенное реше-
60
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИИ
ние любого интегрального уравнения, и на этом пути достига-
ются значительные результаты. В частности, характеристики ре-
шения, не связанные с влиянием границ штампов, т. е. поведе-
ние решения во внутренней области под штампом, поведение
интегральных характеристик решения получаются с высокой точ-
ностью. Олнако описание петпения вблизи гпянпп областей ЭТИМ
методом не достигается. В то же время в специальных процеду-
рах вариационно-разностный метод позволяет получать практи-
чески точную информацию о характере особенностей решения
вблизи границ штампа в вершине угловых точек клиновидных в
плане частей области контакта (см. гл. IV). В совокупности эти
методы, дополняя друг друга, позволяют практически полностью
исследовать с заданной точностью любое из встречающихся в
смешанных задачах динамической теории упругости для тел с
плоскими границами интегральное уравнение.
§ 7. Метод факторизации для выпуклых областей
Метод факторизации применительно к решению интеграль-
ных. уравнений смешанных задач теории упругости в нашей
стране, по-видимому, впервые был использован Г. Я. Поповым
для полубесконечных областей контакта [104]. Для решения
задач в ограниченных областях в рамках асимптотического под-
хода он впервые разрабатывался в работах В. М. Александрова
[3], им же дан в обзоре [4] глубокий анализ развития этого ме-
тода другими авторами.
В монографии [46] метод факторизации развивается для ре-
шения статических смешанных задач, не обязательно содержа-
щих малый параметр. Изучаются области контакта штампа со
средой типа полосы и круга. В монографии [47] метод фактори-
зации развивается для областей типа полосы и круга, но уже в
динамических смешанных задачах. В [17] метод факторизации
развит для решения смешанных задач динамической теории
упругости для произвольных выпуклых областей. Среды могут
приниматься как изотропными, так и анизотропными.
1. Для применения метода факторизации к интегральному
уравнению или системе интегральных уравнений
k (х — g, у — т])7(?, vl)d^di] = f(x, у), (7.1)
я
£ (*, У) — К (а, Р) е~^ах+м
введем некоторые ограничения на область Q задания системы ин-
тегральных уравнений (7.1).
Будем считать, что ограниченная область Q строго выпуклая,
без точек спрямления. Обозначим 7?т максимальный радиус кри-
§ 7. МЕТОД ФАКТОРИЗАЦИИ ДЛЯ ВЫПУКЛЫХ ОБЛАСТЕЙ 61
визны границы S области й, уравнение которой описывается
соотношением
<р(х, у)=с, с=0. (7.2)
Считаем, что граница S имеет непрерывную кривизну и не име-
ет угловых точек.
Расположим начало системы координат таким образом, чтобы
оно оказалось строго внутри области й (рис. 3.1).
Для областей указанного вида факторизация проводится в
локальных системах, образованных касательными и нормалями
в каждой точке границы. Не-
обходимо владеть техникой ис-
пользования данных локаль-
ных координат, поэтому изло-
жим эти вопросы несколько под-
робнее. ,
Построим подвижную си-
стему координат, связанную с
областью й. Для этого посту-
пим следующим образом. По-
строим в каждой точке границы
S внутреннюю по отношению к
й нормаль, вдоль которой в
сторону й отложим отрезок не-
которой длины /? (рис. 3.2).
Геометрическое место конц<
кривую, которую обозначим N. Каждую точку кривой N примем
за начало декартовой системы координат с осями, параллель-
ными осям исходной системы хОу. Обозначим в системе хОу
координаты начала построенной системы ^ц,у9ц (рис. 3.3).
Угол 0 принимается равным нулю для той нормали к S, которая,
исходя из точки Хк,у°к, оказывается параллельной оси Ох. В по-
строенных таким образом системах координат точки плоскости
62
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
будем обозначать х9, у9, а соответствующий радиус-вектор точ-
ки с началом вхк,у$ —символом гв.
Выберем некоторую систему координат х9, у9. Тогда в зави-
симости от значения 0 начало исходной системы координат хОу
в выбранной системе будет иметь зависящие от 0 координаты.
Обозначим их хм, ум. Тогда, как
несложно увидеть из соотношения
(рис. 3.3)
Г == r0 — NJ),
(7.3)
справедливы связи между коорди-
натами вида
X — X9 — Хц9, хд = — Хде,
« е , (7.4)
У==У~ Уш, Уя = —'Ум. ' ’
Построим уравнение для анали-
тического описания кривой N. Оче-
видно, вектор — градиент к семейству <р(х, у)=с будет паралле-
лен в системе хе, у9 вектору, который определяет наклон нор-
мали к кривой относительно Ох, т. е.
(/?cos0, Z? sin 0) = С(0) .
\дх ду j
(7.5)
Таким образом, находим соотношения между координатами:
R cos 0 = С (0)а<р у} , R sin 0 =С (0)у) . (7.6/
Точка х, у находится на кривой S и поэтому удовлетворяет
уравнению вида
<р(х, у)=0. (7.7)
Разделив в соотношении (7.6) второе уравнение на первое и до-
бавив к нему уравнение (7.7), имеем систему
;г(!г)1 = ^0’ (р(х>^=0- <7-8)
ду \дх J
Система (7.8) позволяет выразить точки кривой S, через ко-
торые проходит нормаль к границе, через параметр 0 — угол на-
клона нормали с осью Ох.
Допустим, что для заданной кривой S удалось разрешить си-
стему уравнений (7.8) и, таким образом, найти значения х=х(0),
у=у(&). Тогда, очевидно, справедливо следующее векторное
§ 7. МЕТОД ФАКТОРИЗАЦИИ ДЛЯ ВЫПУКЛЫХ ОБЛАСТЕЙ
63
соотношение (рис. 3.4):
Щ=Д^ + ОЛ. (7.9)
Так как
AM = {Rcos0, Rsin0},
М)О = {хяв, Уне}, ОД = {х(0), у(0)}, (7.10)
получаем следующие соотношения в координатной форме:
xBe=/?cos0—х(0), z/Be=sinO—z/(0). (7.11)
Из соотношений (7.4) уже без труда получаем представле-
ние координат кривой Af через угол 0:
Хд = х (0) — R cos 0, у^ = у (0) — R sin 0. (7.12)
Пример. Пусть кривая S представляет собой эллипс
tp(x, у)=х2 + е2у2—а2 = 0. (7.13)
Поскольку
— = 2х, ~ = 2е,2у,
дх ду
система (7.8) примет вид
e2z/x-J = tg0, x2 + e2z/2—а2 = 0. (7.14)
Решая (7.14) относительно х, у, находим
х(0) =aex(0)cos 0, z/(0) =ag~‘x(0)sin0, (7.15)
где и (0) = (sin2 0 + е2 cos2 0)
Воспользовавшись соотношениями (7.12), найдем координа-
ты точек кривой N; имеем
х% — х (0) — R cos 0 = [ае% (0) — R] cos 0,
(7.16)
Уд = У (0) — Яsin0 = [ае^к(0) — R]sin 0.
Исключая из этих уравнений тригонометрические функции, по-
лучим уравнение кривой Af в следующем виде:
гег ,Д2
--------------1------—-------= 1. (7.17)
[леи (0) —ЯР [ае-1х (0) — Я]2
Проанализируем получившееся уравнение при различных зна-
чениях параметров.
64
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
Пусть 8 = 1. Тогда эллипс (7.13) вырождается в окружность
радиуса а. Как следует из (7.16), уравнения кривой в этом слу-
чае принимают вид
Хд = (а — R) cos 0, у^~(а—R)sinO. (7.18)
При R<Za кривая N находится строго внутри й, причем знаки
координат соответствующих точек кривых N и S одинаковы
(рис. 3.5). При a<ZR<.2a кривая N по-прежнему находится внут-
ри й, но знаки координат точек кривых N и S, отвечающих одним
и тем же значениям 0, оказываются противоположными (рис. 3.6).
При R=a кривая N вырождается в точку — центр окружности.
При R = 2a — кривые N и S совпадают; при этом точки, отвечаю-
щие одним и тем же значениям 0, расположены симметрично от-
носительно центра окружности. Наконец, если /?>2а, то уже
область й оказывается расположенной внутри области, ограни-
ченной кривой N (рис. 3.7).
§ 7. МЕТОД ФАКТОРИЗАЦИИ ДЛЯ ВЫПУКЛЫХ ОБЛАСТЕЙ
65
При е=#1 кривая N, как следует из формул (7.16), (7.17),
будет уже не окружностью, а некоторой эллипсоподобной кривой.
При этом вместо окружностей, изображающих кривые N и S
на рнс. 3.5—3.7, теперь будут некоторые деформированные из
окружностей кривые, изображенные на рис. 3.8—3.10.
Рис. 3.10
Совершенно аналогичные ситуации будут иметь место и в слу-
чаях других выпуклых и ограниченных исходных кривых S.
В дальнейшем наиболее важное значение будет иметь случай,
когда кривая Af ограничивает область, в которой полностью со-
держится кривая S. Нетрудно видеть, что такая ситуация имеет
место, если при построении кривой N вдоль внутренней к S нор-
мали откладывается отрезок /?, который больше удвоенного мак-
симального радиуса кривизны Rm кривой, т. е.
R>2Rm. (7.19)
Здесь предполагается, что область Q —ограниченная, односвяз-
ная и ее граница не имеет точек спрямления.
Рассмотрим теперь случай односвязной ограниченной выпук-
лой области Q, граница которой гладкая, но допускает точки
спрямления и даже участки, состоящие из отрезков прямой (см.,
например, изображенный на рис. 3.11 отрезок Li).
Пусть D — диаметр области Q — максимальное расстояние
между двумя точками кривой S. При построении кривой N по-
вторим все описанное ранее, откладывая вдоль нормали отрезок
R, который больше диаметра, т. е.
R>D. (7.20)
Очевидно, построенная по описанной границе S кривая N будет
по-прежнему ограничивать область, полностью содержащую
кривую S.
3 В. А. Бабешко и др.
66
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
Надо сказать, что при построении точек кривой N, как кон-
цов нормалей к кривой S, на прямолинейном отрезке придется
Рис. 3.11
строить нормали, которым отве-
чает фиксированное значение угла
0 = Оо, но, очевидно, разные точки
отрезка L, (рис. 3. 11). Дадим в
связи с этим правило параметри-
зации участка кривой N, отвечаю-
щего прямолинейному на S участ-
ку Lt.
Пусть прямолинейный на S
участок L, описывается уравне-
нием
ax+by—c = 0, xt^x^x2.
(7.21)
Запишем это уравнение в векторной форме, положив
г = {х, у}, v — {/, /и}, I = а , т— г b , 6 — с .
1 ’ 1 1 j/a2 + 62 /а2 + &2 Ка2 + 62
(7.22)
Уравнение прямой (7.21) можно записать в виде
r-v = 6, (7.23)
или
xl -|- ут — 6. (7.24)
Здесь 6 — расстояние по нормали от начала координат до линии,
на которой лежит отрезок L{.
Для построения отрезка L2 кривой N как множества концов
нормалей, построенных к отрезку Llt воспользуемся уравнением
(7.24) и перенесем этот отрезок в положение Ь2 параллельно са-
мому себе и перпендикулярно нормали. Очевидно, уравнение
линии, содержащей отрезок L2, дается уравнением
xl+ytn=$—R. (7.25)
Действительно, в этом случае расстояния между прямыми бу-
дут равны R. Остается только определить концы этого отрезка.
Последнее достигается следующим образом: если для отрезка
изменение х происходит на отрезке [хъ х2], то для отрезка
L2 изменение будет иметь место на отрезке |Х—RI, х2—RI], так
как / = cos0o. Из рис. 3.11 видно, что наличие прямолинейных
отрезков у кривой S приводит к появлению точек поворота и
прямолинейных отрезков у кривой N.
§ 7. МЕТОД ФАКТОРИЗАЦИИ ДЛЯ ВЫПУКЛЫХ ОБЛАСТЕЙ
67
Для параметризации участка £2 поступим следующим обра-
зом: если т=#0, то каждой точке х, у отрезка L„ т. е.
х^х^х2, у—т~1(8—xl), (7.26)
отвечает точка отрезка Ь2 с координатами
xN—x—Rl, yN~m~l(8—R~xNl}\ (7.27)
если /=/=0, то точке х, у из
У^У^Уг, х=1~*(8—ут) (7.28)
отвечает точка xN, yN отрезка £2
х„=1~1(8—R—yNm), yN=y—Rm. (7.29)
В дальнейшем будем иметь в виду, что
/ = cos0o, m=sin0o.
угла 0О, но и одновременно,
параметра, который будем
направлении на угол
Таким образом, координаты точки xN, yN являются по-преж-
нему функциями фиксированного
как показано выше,— функциями
обозначать о, а именно
xN=x(o, Оо), yN—y(o, 0О). (7.30)
Как следует из (7.27), (7.29),
в качестве о можно принять х или
у. Координаты точек в системах с
началом координат в xN—х(о, 0о),
Ук=у{с, Оо) будем обозначать
Л’ово» У<зй0- (7.31)
Наряду с построенной систе-
мой хо0„,- z/o0o введем систему коор-
динат х^, у®'1, которая повернута
по отношению к исходной против
часовой стрелки, т. е. в положите
л/2+Оо (рис. 3.12).
Поскольку
СОЗ(л/2 + 0о) =—sin 00, sin(n/2 + 0o) =COS0o,
то формулы перехода имеют вид
ха0о = — Хо sin 0О + уо° cos 0О,
р а а. • п (7.32)
У<з% = — V cos 0О — у^ sm 0О.
Если теперь в системе х®0, у'а произвести перенос начала ко-
ординат по формуле
х,, = х^ 4- RI, у<з = у&в + Rm,
з*
68
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
то, как нетрудно видеть, эта система координат будет иметь на-
чало на отрезке Lb причем ось у„ направлена по нормали к Lj
внутрь области Q, а ха совпадает с L4.
2. Построив системы координат, связанные с нормалями к
границам, вычислим теперь в этих координатах некоторые ха-
рактерные функции и выражения, которые понадобятся в даль-
нейшем.
Дифференциал длины дуги имеет вид
dS=Vdx2+dz/2. (7.33)
Для его нахождения на криволинейном участке кривой S вос-
пользуемся значениями текущих координат х(0), z/(0) кривой S,
выраженных через параметр 0, которые предполагаются най-
денными из системы (7.8). Тогда
dS = Rede, Re = V • (7-34)
г \au /
В качестве примера вычислим /?0 для области с границей
(7.13). Используя значения (7.15), находим
х' (0) = аг [к' (0) cos 0 — х (0) sin 0] — — аги3 (0) sin 0,
у' (0) = ае-1 [и' (0) sin 0 + и (0) cos 0] = аги3 (0) cos 0.
Отсюда
Re = aex3 (0),
%(0) = (sin2 0+е2 cos2 0) ~/г. (7.35)
В частности, при е=1 эллипс вырождается в окружность и фор-
мула (7.35) дает
Re = a. (7.36)
Для нахождения значения dS на прямолинейном участке кри-
вой S воспользуемся представлениями (7.26), (7.28). Тогда, если
для внешней нормали v= {/, т} к отрезку прямой, входящему
составной частью в границу S, выполняется условие 1^0, то
имеем
dS = l~ldy. (7.37)
Если т^О, то dS можно представить по этой же формуле в
виде
dS = m~ldx. (7.38)
При использовании формул (7.37), (7.38) всегда надо учитывать,
что dS>0, а потому dx и dy должны изменяться в сторону роста
длины отрезка в выбранной системе координат.
§ 7. МЕТОД ФАКТОРИЗАЦИИ ДЛЯ ВЫПУКЛЫХ ОБЛАСТЕЙ
69
3. Вычислим значения функций, с которыми придется встре-
титься ниже. Рассмотрим функцию
G = а (х — х£) + р {у — у\) — о (х — х«) — р (у — Уд). (7.39)
Вычислим ее значение, приняв входящие параметры следую-
щими:
a = ucosX, o = t»cosz, p = «sinX, p,= usinz. (7.40)
Значения x, у возьмем из формул (7.12), т. е.
х — х® + R cos 0, У = Ук + R sin 0.
Внося в (7.39) эти значения
(7.41)
вычислений для функции G получаем выражение
G = uRcos(k—0)— vRcos(n—Q)+ugi(®, у, X). (7.42)
Здесь
£1(9, Y, ty = (xR — x£)cosX + (у| — y^)sinX. (7.43)
Изучим некоторые свойства функции ^(О, у, X). Из (7.41)
следует, что
£.(0, 0, Х)=0, £±(0, Ъ Х)=-£,(ъ 0, X). (7.44)
Представим эту функцию в виде
£i (9, Y, ^)=(4 — x«) cos X + (y&R — уд) sin X —
— [(4 - 4) cos X + (yl — y\) sin X] = gl (0, X, X)—gl(y, X, X). (7.45)
Изучим функцию й’ДО, X, X) для случая выпуклых й без
участков спрямления.
Рассмотрим векторы MN и МА (рис. 3.13), где
М (Хд, у\), N (хд, &).
70
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИИ
Имеем
MN — {x% — х\, Уп —Ун}, т = МД-| VIA |-1= {cos X, sinX},
Отсюда находим
gr (0, X, X) = MN-t= | Vl/V|cosv. (7.46)
Но, как видно из рис. 3.13, угол v для случая, когда кривая огра-
ничивает область, полностью содержащую Q, не может превы-
сить значение л/2, т. е. | v | ^л/2.
В результате получаем следующую оценку, справедливую для
любых значений угла 0:
£1(0, А, Х)>0. (7.47)
Исследуем значение функции £,(0, Х + л, X). Очевидно, имеют
место соотношения (рис. 3.14)
cosX =—соз(Х + л), sinX =—sin(X + n).
Внося эти значения в формулу для £i (0, Х + л, X), получаем ра-
венство
£i (0, Х + л, X) =—£1(0, Х + л, Х + л).
Используя свойство (7.47), получаем оценку
£1(0, Х + л, X) =+0. (7.48)
Используя второе соотношение (7.42), отсюда находим
£i (Х+л, 0, X) = —£i (0, X+л, X) J-s 0. (7.49,
Все отмеченные соотношения можно получить также и ана-
литически.
В общем случае функция £1(0, 7, X) является знакоперемен-
ной. Для изучения областей, в которых она принимает опреде-
ленные знаки, будем считать, что R достаточно велико, т. е. /?+> 1.
Тогда из формул (7.16) получается для этого случая приближен-
ное представление точек кривой N, а именно
— ДсозО, у'к —7?sin0. (7.50)
Здесь принято, что х(0) и £(0) от R не зависят и остаются фик-
сированными.
Из формул (7.50) следует, что при больших R кривая N стре-
мится к окружности радиуса R. Внеся соотношения (7.50) в
представление £1 (0, 7, X), получим
£1(0, 7, X) ~ Д[соз(7~X)—cos(0—X) ]. (7.51)
Из последней формулы в рамках принятых приближений по-
лучаем соотношения
£i(0, у, X) 0 при |у— X|< | 0 — Х|,
£1 (0, у, X) 0 при |у — Х|>|0— Х|. (?-52)
§ 7. МЕТОД ФАКТОРИЗАЦИИ ДЛЯ ВЫПУКЛЫХ ОБЛАСТЕЙ 71
Из этих соотношений уже несложно получить следующие оценки:
£1(9, У, А) >0, s (У, А) ~ А + | у —| < 0< 2л,
§i (0, У, А) < 0, 0^0^А4-[у— X|^s(y, А).
Здесь s(y, А) —точное значение функции двух переменных у и X,
разделяющей знаки функции g,(0, у, X). he приближенное зна-
чение дано выше.
В дальнейшем примем обозначения
£i (0, У, A) = £i (0, У, А) > 0, s (у, Х)< 0 < 2л,
(7.53)
£i (9, У, А) — £i (9, У, A) <s0, 0 ^0 s (у, X).
Справедливы также следующие оценки, полученные из (7.46)
(7.51):
l£i(0, У, А) |^27?. (7.54)
4. Изложим основные сведения по теории факторизации функ-
ций и матриц-функций (подробнее см. монографии [17, 47]).
В дальнейшем нам понадобятся следующие сведения, которые
заимствуются из монографии
[17], где дано их детальное
изложение. „ , й
„ ________ Кеа,я
Будем считать, что матри- —-— ---
ца-функция К(а, Р) является 0
квадратной, порядка АХ Ее 1’ 2’
элементами являются анали-
тические функции двух КОМ- Imil
плексных переменных (а, р),
которые регулярны на конту- --------------
рах щ, о2 (рис. 3.15). 0
Для описания поведения
элементов ACm„(a, Р) матрицы- Рис. 3.15
функции ЙС(а, Р) на бесконеч-
ности воспользуемся системой новых параметров. Введем два
преобразования:
а=Л7соэу—B7siny, p = 41siny + B1cosy (7.55)
и
a = ucosy, p = usiny. (7.56)
Введем в рассмотрение две системы матриц-функций:
ЙСт(^т, ST) =ЙС(ЛТ cos у—BTsiny, Л7 sin у + Вт cos у) (7.57)
и
К (и cos у, «sin у).
72
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИИ
Будем считать, что элементы матрицы-функции Лтп(а, р) обла-
дают свойствами
Kin (4, Bv) =
“тп^Г V) Ьтп (Дт, у)~
I в? I К
[1 + О(ВА)
(7.58)
Oss: I h,, (A-,. v) I (Л». у)<^оо. ITS. I—>oo
Из соотношений (7.58) можно вывести и следующие:
К,.„ (и cos у, и sin у) —
= [Лтп(у) |ц|-1+Вгап(у)и-1][1+О(«-е)], (7.59)
Лтп(у) > |Bmn(y) | >0, |Reu|->-oo.
Определение 7.1 [ 17]. Матрица К(и) = {+„„(и)})' с не-
прерывными на контуре о коэффициентами правосторонне (ле-
восторонне) факторизована, если построены две матрицы
К (и) = {Kin («)}?, К^и) = {К1п(ц)}^
с регулярными элементами и отличными от нуля определителя-
ми соответственно в области Е+ выше контура о и£_ ниже кон-
тура о; при этом
К- (и) D (и) К+(и) = К(и)
(K+(u)D(u)K-(u)^K(u)). (7.60)
Здесь матрица D(u) является диагональной, ее элементами яв-
ляются функции
kp
| , p=l,2,...,N,
и — I
—целые числа, называемые частными индек-
сами.
В монографии [63] доказано, что матрицы-функции со свой-
ствами (7.58), (7.59) могут быть факторизованы, и если частные
индексы равны нулю, то элементы факторизованных матриц-
функций обладают на бесконечности асимптотическим поведе-
нием
К11 (Аъ Bv) = gmn (у) (I Av I + zBv)-°—<v) [ 1 + О (ц-Д,
О (7.61)
/< ±(u cos у, и sin у) = Gnm (у) (b + iu) °mn<v> [l+o (u-E)].
Здесь gmn, Gmn— некоторые функции, зависящие лишь от значе-
ния параметра у; 0mn(y), 0т„(у)— некоторые функции, для кото-
рых модуль вещественной части меньше единицы; е>0.
Детальное описание вычисления элементов матриц-функций
приведено в монографиях [17, 47] и здесь не повторяется.
Частным случаем факторизации матриц-функций является
факторизация отдельных функций. Этот вопрос также детально
§ 8. СВЕДЕНИЕ К УРАВНЕНИЯМ ВТОРОГО РОДА
73
изучен в [17, 47J. Имеются конкретные формулы, по которым
вычисляются факторизованные функции. В монографии [47]
имеются примеры решения интегральных уравнений методом
факторизации, которые позволяют детально изучить возможно-
сти этого аппарата и способ его использования.
§ 8. Сведение систем интегральных уравнений
к уравнениям второго рода методом факторизации
1. Ниже излагается метод сведения систем интегральных
уравнений первого рода в произвольных выпуклых областях к
системе интегральных уравнений Фредгольма второго рода. В ос-
нове метода лежит факторизация матриц-функций. Получаю-
щаяся система интегральных уравнений имеет ядро, удобное для
исследования. Этот метод отличается от изложенного в моно-
графии [47].
Суть метода состоит в преобразовании исходного интеграль-
ного оператора средствами факторизации функций в окрестно-
стях нормалей к границе области задания интегрального урав-
нения в тождественный оператор и Фредгольмов. Это достига-
ется с помощью специальных преобразований систем уравнений.
Рассмотрим систему интегральных уравнений первого рода
С k (х— L у — vi)q (g, i])dt.dr] —f (х, у), х, y<=Q,
° 1 гр (8-П
k (х, у) = уу I I К (а, 0) е~1<ах+^ da ф.
а,а,
Здесь матрица-функция К (а, удовлетворяет условиям, опи-
санным в предыдущем пункте; считаем, что она допускает фак-
торизацию (7.60) с частными индексами, равными нулю. Поло-
жение контуров а;, о3 описано в § 7. Область й предполагаем
выпуклой, границу не содержащей точек спрямления.
Функция f(x, у) предполагается дважды непрерывно диффе-
ренцируемой. Предполагаем, что матрица-функция К(а, [1) име-
ет элементы, обладающие свойствами, описанными в § 6. Эти
свойства обеспечивают единственность решения систем интег-
ральных уравнений.
Произведем некоторые преобразования системы интеграль-
ных уравнений (8.1). С этой целью перепишем ее в следующем
виде [17]:
Л (х — В, у — г)) q (£, т|) d£dr]=
у
f (х, у), (х, у) е й,
k(x—l, y — f]) q (I, v^dldf], (x,y)&i. (8'2)
74
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИИ
Этой записью система продолжается на всю плоскость. Теперь
применим к системе (8.2) двумерное преобразование Фурье.
В результате ее можно представить в виде
К (а, Р) Q (а, р)'= F (а, Р) + х
(а + а) cos пх + (В + р) cos пу ,, . . о
Х --- К (<7’ 9 dS d° d^' М
Q (а, P) = (H, t|) dr),
Q
F (я, p) = J f (x, y) e^x+W^dx dy.
£2
При вычислении контурного интеграла движение осуществляет-
ся по кривой S в направлении, указанном стрелкой.
Используя теперь обозначения п. 1 предыдущего параграфа,
введем следующие обозначения:
Qv (a, р) = Q (а, р)
(8.4)
Qe(o, р) = Q (ст, р)
Очевидно, Q(a, р) есть преобразование Фурье, вычисленное в
исходной системе координат х0Оу0, а QT(c', Р) — в системе коор-
динат х'у\
Аналогично обозначим
Fv (a, р) = F (a, р) (8.5)
Внося эти обозначения в формулу (8.3), можем переписать ее
в виде
К (a, р) 3v(a, р) =i (2л)~2 f f J [а2 + р2 - ст2 -р2]’1 х
Oi02S
х [(а + ст) cosпх -|- (Р + р) cos пу] К (ст, р) Q1 (ст, р) х
х exp [i {а (х — xfy — ст (х — х£) + р {у — уЪ) — р (у — <$)}] х
х dS da dp. -ф Fv (a, P). (8.6)
В соотношении (8.6) перейдем теперь к новым переменным по
формулам (7.40), (7.41). В результате этих замен и использо-
вания обозначений (7.39), (7.42), (7.43), а также легко вычис-
ляемых значений
cosnx=cos0, cos пу=sin 0, (8.7)
§ 8. СВЕДЕНИЕ К УРАВНЕНИЯМ ВТОРОГО РОДА
75
выражение (8.3) принимает следующий вид;
К (и cos Л, и sin Л) Q v (u cos Л, и sin X) =
271 2Л
__ i Г С Г [и cos (X — 6) + р cos (х — 6)] АГ (р cos х, v sirfx)
4л2 JjJ и.2 — v2
х ехр IR {[и cos (X—9)—v cos (х—0)] + ugj (0, у, X)} Qe(u cos х, u sin х)х
х Ro dQv dv dn + F? (u cos X, и sin'X), (8.8)
Re дается соотношением (7.35). Для дальнейшего вводим обо-
значения [ 17]
7\ = elRa C3S (V0) = eim'K-e+n^\
m=— oo
(8.9)
T2 — e~iRv cos !x~e) = Jk (vR) ei^Kr^~J,/t\
co
Jm(z) —функции Бесселя. Тогда справедливо очевидное соотно-
шение
[и cos (X — 0) + v cos (х — 0)] eiRlи cos <*-№-“cos (*-0>1 =
= —— 7^2—V (8.10)
dR dR )
Осуществим разложения вектор-функций в ряды Фурье, по-
нимая под этими разложениями операции над компонентами.
Имеем
Qe (и cos х, и sin х) = Фs (и) etsx
s=—oo
Для У® (у) получается одно из следующих представлений;
2Л
Qes(v) =-- JQ0(иcosх, vsinх)er~iMdy.
О
2Я
= У <7e(fcos(p, г sin ф) Js (иг) e_;s<4>“n/2)r dr d<p, (8.11)
о о
Qe (х, у) = q (х + у + у%).
Во втором интеграле интегрирование производится по кругу
радиуса R, причем носитель функции qe(x, у) расположен строго
внутри этого круга, вне его функция qe(x, у) равна нулю.
76
ГЛ. Ill, МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
Ниже будем осуществлять некоторые преобразования, при
этом используем следующие свойства бесселевых функций:
(г?== (—V)nJn (z), Jn (— z) = einnJn (z),
(-z) = (z), (z) = е‘япН™ (z), (8.12)
П 'п (— Z) = —е-г-Пп (z), ll-n (z) = e -M H{n (Z),
Jn (z) = 1 [#£’ (Z) + (z)J, j'n (Z) = ± Jn (Z) - J„+l (z).
Используя первое соотношение (8.12), из равенств (8.11) заклю-
чаем, что имеет место свойство
Q®(—v) = (—l)sQ?(v). (8.13)
Совершенно аналогично, разложив матрицу-функцию (т. е. каж-
дый элемент матрицы-функции) в ряд Фурье вида
К (уcosх, vsinх) = Ks(v)eisx, (8.14)
S——оо
получаем для матриц-функций, являющихся коэффициентами,
следующие свойства:
К,(-у) = (-1)8^,(у). (8.15)
Внесем теперь соотношения (8.10), (8.9) в (8.8); получим
К (и cos X, и sin X) Qv (и cos X, и sin X) ==
2Л 2Л
[uJk(vR) Jm (uR)—
О оп 0
— vJk (vR) Jm (uR)-] eiueM) (u2 - u2)-1 x
x exp i [m ^X — 0 -|- -|- k ^x — 0 — j /Q (у) eiSK Qp (y) x
x e£₽x/?ed0 do dx Ц- (ucosX, usinX). (8.16)
Положение контура <jn изображено на рис. 3.15.
Используя несложные формулы замены переменных, опираю-
щиеся на (8.12), осуществим следующее преобразование интег-
ралов:
J J ginxtk^s+p) [uJk (vR) Jm (uR) —vjk (vR) Jm («/?)] X
0 on
x (u2 — v2y1Ks (v) Q® (v) v du dn=
_ $ glnxfk+si-p) $ Jm+1 (u^) Jm (uR) +
о a
« 8. СВЕДЕНИЕ К УРАВНЕНИЯМ ВТОРОГО РОДА
77
. k — m , z DX , , n.,Ks(v)Qe (v)vdvdv.
+ —— Jk (vR) Jm (uR)]------------— --------=
R o2 — u2
= nein<s+p'> f H(k) (u, v, R, s, p, tn) K^v)QP^vdl. (8.17)
J — U2
a
Здесь функции Hm (u, v, R, «, p, tv.) могут быть выбраны, в за
висимости от других требований, в любом из приводимых ниже
видов:
Hw (и, v, R, s, р, tn) — uH{s+P (vR) Jm+l (uR) —
- vH{^ (vR) ^R) 4- s + ^--- H^p (vR) Jm (uR), k= 1, 2. (8.18)
R
Используя теперь свойства функции ^,(0, у, X), описанные
формулами (7.53), перепишем систему уравнений (8.16) с уче-
том (8.17) в виде
s, р, т) х
К (и cos X, и sin X) Qv (u cos X, и sin X) ==
оо ««
=v 2 И
S,m,p=-X д 5(уД)
a Rnv dQ dv
X e««g.(0.TA)+ifc(0A.m.P,s)/cs (0 Q» (у) JL--- _|-
a, _ s(v,M
U, V, R, S, p, tri) g^uSi(^-VM+iS2(^,m,p,s) x
1
4л
о о
a RaV df) dv „
x Ks (v) Qp (v)--------------(- Fv (u cos X, и sin X). (8.19)
V2 — иг
Здесь
gr2(9, X, tn, p, s) = (e —y) (s + p) 4-/n(X —8 +y) .
Формально используем теперь формулы асимптотического
разложения функций Ханкеля и Бесселя при больших значени-
ях аргумента и фиксированном s в следующем виде [80]:
JS(Z)-^ 1тг<0, |г|->оо,
2 ' лг
Js (г) ~ — 1/ — ег-‘<2-П5/2-я/4>, Im г > 0, | г | -> оо,
2 ' пг
_ (8.20)
(г) ~ У — , [ z | -* оо,
(7\ 1/ — a-l(Z-ns/2-n/4) I 7 1 nr,
78
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИИ
Преобразуем с помощью (8.20) приводимое ниже выражение при
(—I)*-1 Im м>0, (—l)'1Imo>0, |u|->-oo, |vj—>oo:
uH$p (vR) Jm+1 (uR) - vf№p+1 (vR) Jm (uR) ж
x ‘ t- („+v} Д"'-"- T T”] (8 2|)
nR J/ uv
Осуществим преобразование в системе интегральных уравне-
ний (8.19), заменив функции Нт (и, v, R, s, р, т) их асимптоти-
ческими значениями (8.21), используя формулы (8.20). Тогда
интегралы, содержащие функцию с индексом k=l, принимают
вид
8Л
= f 2 g1/~, Ks(v)Q&p(v)vRey.
4л2 J J R у uv (V—и)
a s(vA)
х ехр i {[/? (v — и) -|- (0 + л) (s + р) + т (X—0+ л)] -|-
+ iugi (0, у, X)} dQdv. (8.22)
Используем следующее представление б-функции Дирака:
2лб(0 — X — л) =- е^-0+л’. (8.23)
т—» со
Внося это представление в (8.22), получаем следующее упро-
щенное выражение:
t«(u-u)+iug^(X+n,V,X)
D, = — f R^e. ------------------х
2п о R V^uv(v —и)
x/C(vcosX, osinX) QK+n (vcosX, vsintyvdv. (8.24)
При получении этого соотношения было осуществлено сумми-
рование по s и р с использованием формул (8.14) и аналогичной
для Qe(ucosx, vsinz). Аналогично выражение, содержащее
функцию с индексом k=2, преобразуется следующим образом:
s(vA)
f 2 , Ks (v) Qp (v) vR^
4л2 J .1 ‘-J R у uv Iv—и)
0 0 s,m,p=-cx>
x exp {— i [/? (u —u) + (0 4-л) (s + p) Д-m (X—0)] -\-iug7 (0, у, X)} d0 dv.
(8.25)
Здесь значение б-функции образуется с другим аргументом, а
именно
2лб(0—Х)= J е-мх-е)
§ 8. СВЕДЕНИЕ К УРАВНЕНИЯМ ВТОРОГО РОДА
79
Используя последнее, выражение для Z)2 можем записать в
упрощенном виде
„ -i/?(v-u)+iug~
Pf.e 1
-------=------------ X
R иа (v — и)
xK(ucosX, usinX) Q7'(ucosX, и sin X) и du. (8.26)
В формулах для А и D2 в соответствии с оценками (7.49), (7.44),
(7.47), (7.49) имеем gf (Х + л, у, Х)>0, g7 (X, у, Х)^0. Дальней-
шее преобразование системы уравнений (8.19) состоит в выделе-
нии в интегральных членах правых частей асимптотических вы-
ражений функций Нт(и, v, R, s, р, т). Принимая во внимание
формулы (8.24), (8.26), систему уравнений можем переписать в
виде
К (и cos X, и sin X)QV (и cos X, и sin Х)=
л Р M(v-u)+iug+ (Х+Л,у,Х)
I ( АХ+Ле 1
=------ 1 -----------=-----------X
2л J uv (v — и)
а
х К (v cos X, и sin X) Q7’+It (и cos X, и sin X) и dv —
i
2л
о
х К (v cos X, v sin X) QK (v cos X, v sin X) v dv -f-
2Л oo
+ J 2 («» v> m> p, s)x
a s(’v,A.) m,p,s=-<x
* +iS2(0,K,m,P,s) (u2 _ ^-1 Ks (U) qQ v dv Rf)dQ +
2« no
+ — f f У (u, v, R, tn, p, s) x
4л J J '—
0 0 m.p,S=-ao
X ez«g7(e,vA)+^(e,Mm,p.s)(v2 _ Qep (v)vdv RedG +
-|-Fv(«cosX, usinX). (8.27)
Нетрудно видеть, что первый интеграл является интегралом типа
Коши, аналитически продолжимым ниже контура о, а вто-
рой — аналогично выше контура о. В этом соотношении приняты
р -iJ?(u-u)+tug~(X,vA)
_ 1 х
R Уuv (V —и)
80
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
следующие обозначения:
М(к) (и, v, R, tn, р, s) = H(k} (и, v, R, tn, р, s) —
— (— I)*-1/ [nR Уuv]'1 (и + v) ехр i (v — и)------(s + р) + -у т .
(8.28)
Произведем теперь правостороннюю и левостороннюю фак-
торизации матрицы-функции K(wcosX, wsinX) по параметру и
для всех О^Х^л. В результате получим соотношения вида
К (и cos %, и sin X) = К (и cos %, и sin X) /G (и cos X, и sin X),
(8.29)
К (и cos X, и sin X) = Л1+ (и cos X, и sin X) М (и cos X, и sin X).
Введем теперь замену переменных в системе (8.27), полагая
К+(и cos X, и sin X) Q 7 (« cos X, и sm X) eiRu у и = Х+ (и, у, X),
(8.30)
М_ (и cos X, и sin X) Q7 (и cos X, и sin X) e~iRu У и = Х~ (и, у, X).
Внесем новые неизвестные в систему (8.27), предварительно
умножив ее слева на функцию
/С1 (ucosX, и sinX) e‘R\Vи, (8.31)
а затем результат спроектируем на область, расположенную
выше контура о [17].
После выполнения этих действий приходим к соотношению
Х+(и, у, Х) =
2iRa+iag~ (Л.тЛ) _
1 р р R^e 1 К(a cos %, а sin %)
4л2 J J (а — и) (v — а) R
0,0
х К+ (v cos X, v sin X) X~ (v, X, X; v dv da +
J J 2 (acos^> asinX)M(1)(«, v, R, tn, p, s) *
aia S(V,X) 0 s.m.p=-»
tag+(6,i>A)+i&(eA,x,m,p,s)
X e 1 (a — u) 1 (u2 — u2) 1 x
x Ks (у) RoKi.1 (v cos x, v sin к) У av X+ (v, 0, x) dx dQ dv da -ф
S(V,X) 2Я
УП ] J' 3
OiO о о s,m,p=-~co
‘««7(e.vA)+i&(0A.x.m,P,s) . x_. . „
X e 1 (a — u) 1 (u2 — u2) 1X
a sin X) M<2) («, v, R, m, p, s)*
§ 8. сведение к уравнениям второго рода 81
х К., (у)/?еЛ1 (у cos х, usinx)]/ ayA' (и, 0, и) d^ dQ dv da
H—— f (a — u)-1 K~* (a cos X, a sinX) ]Л a x
2ni J
Oi
x F7 (a cos %, a sin %) da. (8.32}
Теперь умножим соотношение (8.27) на функцию
TM^ucosX, u sin X) e~iRu ]/«, (8.33)
а затем результат спроектируем на область, расположенную
ниже контура о.
В результате приходим к соотношению
X" (и, у, X) =
-2i7?a+tag+(X+n,v,X) _
1 С С 1 (a cosX, a sin X)
4л2 J J (a — u) (o — a) R X
O1O2
x M_ (v cos X, v sin X) X+(v, X л, X) v dv da —
— Jj1 J J M'1 (acosX, asinX) Л4(1) (u, v, R, tn, p, s) x
GiG s(v,X) 0
iug+(O,v.?.)+ifia'OA,z,m,p,s)
x e 1 (a — u) 1 (u2 — u2) 1 x
x Ks (0 RqKj1 (v cos x, v sin p) У av X+ (v, 0, x) dx dQ dv da —
S(VA) 2Л
«.M J 7 / (a cos X, a sin X) Л4<2) (u, v, R, tn, p, s) x
OiO о 0 s,m,p=~ 00
x e 1 (a — u) 1 (u2 — ц2) 1 x
x Xs (v) ReMZ1 (v cos x, v sin x) У av X~ (v, 0, x) dx d0 dv da +
y— J (a — ы)-1 M(a cos X, a sin X) У a er^^F^ (a cos X, a sin X)da.
at
(8.34>
В формулах (8.32), (8.34) принято обозначение
g3(0, X, х, т, р, s) =g2(0, X, tn, p, s)—pK.
(8.35)
Система интегральных уравнений второго рода (8.32), (8.34)
эквивалентна фредгольмовой в пространстве функций, непрерыв-
ных с весом на контурах о. Это пространство вводилось в [47].
Доказательство фрецгольмовости громоздко и здесь опущено.
2. Проведем анализ полученной системы.
82
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
1°. Убедимся, что она пригодна для решения систем интег-
ральных уравнений не только в строго выпуклых областях й, но
и в областях, граница которых допускает точки спрямления и
даже наличие отрезков. Действительно, допустим, что область Й
вырождается в полосу ширины 2а. Тогда для того, чтобы оста-
ваться в рамках всех построений, необходимо радиус R увели-
чивать, т. е. совершить предельный переход. Б л им случае об-
ласть й будет по-прежнему располагаться внутри круга радиу-
са R.
Пусть нормаль к спрямляемому участку составляет с осью х
старой системы координат угол k = v. Теперь в системе уравне-
ний (8.32), (8.34) устремим R к бесконечности. Тогда в силу
•формул (8.28) функции Мт(и, v, R, т, р, s) убывают, и система
принимает следующий вид:
2iff<z!i«g1 (Х.уЛ)
Л+ (и, у, X) — -----— С С ——-----------------/С’ (“ cos X, a sin X; х
4 л2 J J (а — и) (о — а) R
О1(У
х K+(ucosk, и sin к) Х~(у, к, tydvda-\- F-(u, у, к), (8.36/
- 2i7?a-n'ag Н(Х +я, уД)
Х~ (и, у, к) =-------— f f ----------------------X
4л2 J J (а — и) (v — а) R
О1О
х /И* (а cos к, а sin к) М_ (и cos к, v sin к) Х+ (и, к -ф л, к) dv da -ф
+ F? (и, у, к).
Здесь Fi (и, у, к) —последние члены, присутствующие в урав-
нениях (8.32), (8.36). Под интегралами в правых частях (8.36)
условно не был совершен предельный переход при R^-оо, так как
в результате некоторых преобразований этот параметр уйдет из
•системы.
Теперь, учитывая специфику правых частей, положим в пер-
вом уравнении (8.36) у=к + л, а во втором — у=к. Тогда систе-
ма приводится К виду
2O?a+iag_(X.,X4-n,X)
Х+ (и, к + л, к) =-------— f f —-----------------х
4л2 J J (а — и} (v—• a} R
х /G1 (а cos к, a sin к) К+ (у cos к, и sin к) Х~ (и, к, к) du da -ф
-ф Ft (и, к -ф л, к), (8.3:
Х~ (и, к, к) =-------5— ( f ---------------------/И+ (а cos к, a sin к) х
4л2 J J (а — и) (v — а) R
(3i<3
х М_ (v cos к, v sin к) Х+ (и, к -ф л, к) dv da -ф Ff (и, к, к). (8.38)
§ 8. СВЕДЕНИЕ К УРАВНЕНИЯМ ВТОРОГО РОДА
83.
Рассмотрим случай вырождения области й в полосу шириной
2а. Расположив систему координат хОу таким образом, чтобы
в этой системе область й описывалась соотношением |х|^а,
|z/|^oo, произведем некоторые упрощения. Будем считать,,
что полоса получается
в результате предельного пе-
рехода когда центры
окружностей уходят вдоль
оси Ох на бесконечность
(рис. 3.16). В этом случае,
очевидно, Z->-0. Но тогда в
соответствии с формулой
(7.37) ds — dy. Если при этом
перейти к угловой коорди-
нате, то получим ds = RdQ.
Таким образом, получаем
Ro=R.
Отсюда
Rk — Rki-л = R- (8.39)
Используя формулы (8.4), (8.30) и принимая во внимание,
что >-0, получаем представления
Х+ (и, л, 0) = К+ (и, 0) e~tUX*Q (и, 0) У и,
(8.40)
(и, 0, 0) = М_ (и, 0) e~>uxKQ (и, 0) e~iRu У и.
Вычисляя х® или принимая их значения с рис. 3.16, имеем
х»= — (R — a), x% = R—a. (8.41)
Вычислим теперь значения функций
(л, 0, 0) и S7 (0, я, 0).
Очевидно,
g"(0, я, 0) = — g+(n, 0, 0).
Обращаясь теперь к формуле (7.43), имеем
(л, 0, 0) = = 2 (/? - a), g; (о, л, 0) = - 2 (2? - а). (8.42)
Внося теперь соотношения (8.39), (8.40), (8,41) в систему ин-
тегральных уравнений (8.37), (8.38), получим
К+ (и, 0) Q (и, 0) eiua У и —
2iaa.v—i
-----=———К (и, 0) е~1аиУv Q (v, 0) dvda + Ft (u, л, 0),
(a — u) (t> — a)
84
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
М_(и, 0) Q (и, 0) e~tua yii =
I С Г (а, 0)
—-------I I ----------------М (а, 0)eiav tfvQtv, 0)dvda +
,4л2 J J (a. — u) (u — a)
4- Л (u. 0, 0); (8 44)
Fi (и, л, 0) = —— f (a — m)-1 K~l (a, 0) lAx eiaaF (a, 0) da,
2nd J
O1
F\ (u, 0, 0) — ~-y J (a — «)-1 M71 (a, 0) У a e~iaaF (a, 0) da.
a,
Полученные системы интегральных уравнений имеют такой
же вид, что и уравнения для полосы, полученные другим спосо-
бом в [47]. Однако разница состоит в том, что участвующие в
представлении (8.43), (8.44) переменные и, v порождены цилинд-
рической системой координат, а не декартовой. Следствием это-
го явилось и наличие радикалов и fa рядом с неизвестным и
в правой части, так как последние являются преобразованиями
Бесселя, а не Фурье.
2°. Если областью Q является круг радиуса а, то в системе
(8.32), (8.33) необходимо положить
7?0 = а, 0^9<2л, g* (0, у, X) == 0. (8.45)
В этом случае система (8.42), (8.44) несколько упрощается.
Для дальнейшего можно осуществить разложение всех функ-
ций, входящих в систему, по полярным параметрам X, 0, что при-
ведет к еще большему упрощению формул.
3°. Изучим характер особенностей, которые имеет решение в
•окрестности границы области Q. С этой целью изучим поведение
функции Q(ucosX, usinX) при u->oo для случая суммируемой
в Q функции q(x, у). Для этого рассмотрим интегральное пред-
ставление функции Q (ц cos X, и sin X):
Q (и cos X, и sin X) = J У q (х, у) ei(x cos ' ьг/ sin X)u dx dy —
а
2Л 7ЗД)
== J J q (pcosip, psin ф)реГр“СО5(4’-х'>фб/ф. (8.46)
о 0
Изучим поведение при и—>оо интеграла
2 Л ВД)
G (ф) е1'“Рcos ^-^г/ф, G (ф) == у q (р cos ф, р sin ф) pdp. (8.47)
о о
Применим метод стационарной фазы [79, 118]. Полагая для
§ 8. СВЕДЕНИЕ К УРАВНЕНИЯМ ВТОРОГО РОДА
85
отыскания стационарной точки f(if>) =рcos(i|)—X), находим
— — Р sin (ф— X), ф0 = Х,
Г(Фо) = -Р-
Тогда в соответствии с формулой метода стационарной фазы при
имеем
2Я %
С О (ф) eiupcos йф = (—'j 2 О (?.) е‘<«р-л/ц О (и-1). (8.48)
J \“Р /
О
Внося в эту формулу значение функции С(ф0), получим
Q (и cos X, и sin X) =
2л /?(Ч‘)
= j q (р cos ф, psin ф) e‘p«c°s —
о о
*/2 аМ
~ J <7(PCOS^> Р sin ?«) Ур е‘<«р-л/4) dp, 6>0. (8.49)
6
Здесь принято, что асимптотическая формула (8.48) окрестность
точки р = 0 не описывает.
Рассмотрим теперь интегральные операторы в правой части
систем (8.32), (8.34). Будем считать, что имеют место свойства
(7.61), причем
0<Re0m„(y)< 1, 0< Re0mn(y)< 1. (8.50)
Тогда справедлива
Лемма 8.1. Операторы в правых частях (8.32), (8.34) впол-
не непрерывны в пространствах функций, непрерывных с весом
z‘, е>0, на контуре о.
При наличии теоремы единственности система интегральных
уравнений однозначно разрешима для правых частей /(х, г/)е
еС, (Q) —дважды непрерывно дифференцируемых функций в
указанном пространстве с весом.
Обратимся теперь к формулам (8.30), которые на основании
свойств (8.49) позволяют для А7±(«, у, X) получить оценку
АГ± (и, у, X) — 2 и^тпМОтп (и, X, у), и -> ОО,
т,п
(8.51)
| Dmn(U, X, у)]<ОО.
Но тогда, внося (8.51) в правые части системы (8.32), (8.34),
получаем уточненное поведение функций А±(п, у, X) вида
Х± (и, у, X) ~ {U’ V) , и-> оо. (8.52)
и
86
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИИ
Функции с~п (и, X, 7) ограничены для всех значений пара-
метров. Вновь обращаемся к формулам (8.30). Из них, беря
Х~(и, 7, А) с учетом (8.52), (8.49), получаем
о(Х)
J q (р cos X, р sin А) |Лр eiu? dp — М-1 (и cos X, и sin X) х
в
lRu+ia(xV cos Х+Л sin X)
vi с* (и, А, у) е к *
X 2 -. (8.53)
т.п и
Будем считать, что матрица-функция Af_(«cosA, «sinА) облада-
ет таким свойством, что ее обратная М-1 (wcosA, «sin А) обла-
дает элементами, асимптотика которых при |«|—>-оо описывается
соотношениями
е°
М р, s {и cos А, и sin X) = tp.s I и | ps, O<Re0pS<l. (8.54)
Будем теперь считать, что в формуле (8.53) принято А = 7 = 0.
Тогда с учетом формулы (7.12) находим
IRu + i« (х^ cos А + z/v sin А) = iu [/? + х0 cos 0 -ф tf>R sin Я] =
= iu [х (0) cos 0 -ф у (0) sin 0] = iau cos (0 — о),
x (0) = a cos о, у (0) = a sin a. (8.55)
Здесь точка x(0), z/(0) находится на границе области S в точке,
проведенный из начала А/е радиус-вектор которой составляет
угол 0 с осью Ох (рис. 3.3).
Приняв в формуле (8.53) А = 0, получим соотношение
0(0)
Qj (ы) е‘“а cos (0~о) = J q (p cos 0, p sin 0) |Лр eiup dp —
„ . с (и I v) eiua cos
~2 4f-1(«cos0, usin0)———-— -------------------, «->00. (8.56)
m,n
Слева в формуле (8.56) стоит преобразование Фурье суммируе-
мой функции, а справа — его асимптотическое поведение. Беря
его обращение, получаем
оо
<71 (р) = <7 (р cos 0, р sin 0) 1<р = — f (и) е^а cos du. (8.57)
2л J
—00
Сделаем справа под интегралом замену переменного, полагая
[a cos (0 — о) — р] и = v, и = [а cos (0 — о) — р]-1 и,
du = [a cos (0 — о) — р]-1 dv.
§ 9. МЕТОД ФИКТИВНОГО ПОГЛОЩЕНИЯ
87
В результате интеграл принимает вид
1 р г v e‘v dv
J 1 ( [a cos (0 —- а) — р] J [а cos (0 — о) — р] * t8^8)
— ОО
Bvtpm считать, что o->acos(0—а"), т. е. р стремится к границе
области Q. Тогда аргумент у функции Qj стремится к бесконеч-
ности. Заменим его асимптотическим значением (8.56). Имеем:
оо
4Т (р) = 7- S f М-1 {[a cos (0 — о) — р]-1 V cos 0,
2^ rntn J
—00
fa cos (0 —a) — p]-1 v sin 0} cmn ([a cos (0—o) — p]-1, v, 0, 0) eiv dv.
(8.59)
Внеся в эту формулу оценку (8.54), получим соотношение
1 Vi -е°
<7i(p)=— 2 [a cos (0 — ст) — р] psx
m,n,p,s
е° -1
х \ tpscmn ([a cos (0 — о) — р] \ v, 0, 0) v ps eiv dv,
p-»acos(0 — о). (8.60)
Здесь интеграл ограничен.
Таким образом, решение имеет особенности, описываемые
показателями асимптотики элементов факторизованной матри-
цы-функции AfZ^ucosA, usinX). Аналогичные результаты имеют
место и в случае более простых задач для изотропных сред [17,
46, 47].
§ 9. Метод фиктивного поглощения
В монографии [17] изложен метод фиктивного поглощения
решения интегральных уравнений смешанных задач для изотроп-
ных сред, который разработан в [16] и прошел апробацию на
ряде конкретных задач [ 151—153].
В [16] метод описывается применительно к интегральным
уравнениям для сред с анизотропией, но с использованием про-
стейших базисных функций. Схема метода, изложенная ниже,
отличается от развитой в [16], здесь используются базисные
функции более сложного вида.
Метод фиктивного поглощения состоит в проведении некото-
рых преобразований над интегральным уравнением или системой
интегральных уравнений, которые позволяют уравнения с силь-
но осциллирующим и медленно убывающим, а иногда и не убы-
вающим с увеличением аргумента ядром сводить к уравнениям
с убывающим, неосциллирующим ядром.
88
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
Приведем схему метода.
Интегральное уравнение или система интегральных урав-
нений
Kq=f (9.1)
с помощью замены неизвестного
Ч=Р + Ч> (9.2)
приводится к виду
Kp=f—Kq>. (9.3)
Здесь р — новая неизвестная функция, определенная на много-
образии той же размерности, что и q, а <р — функция, определен-
ная на многообразии, размерность которого на единицу меньше,
чем у q. Функция <р содержит при своем построении некоторый
произвол, который устраняется после решения всей задачи.
Функция р строится таким образом, что допускается пред-
ставление
p=Lt, (9.4)
где L — некоторый линейный интегральный оператор, причем
ядро интегрального уравнения или системы, отвечающей опера-
тору C = /(L, уже удовлетворяет свойству экспоненциального убы-
вания с ростом аргумента и отсутствия сильной осцилляции.
Система (9.3) принимает следующий вид:
Ct=f—Яср.
Описанные свойства ядра интегрального уравнения или систе-
мы, отвечающей оператору С, таковы, что обратный оператор
С-1 находится сравнительно легко. В результате находится функ-
ция t в форме
(9.5)
В последнем соотношении функция ср по-прежнему содержит не-
который произвол. Для его устранения составляется некоторое
дополнительное условие вида
VC-‘(f—Яф)=0, (9.6)
здесь V — определенный набор линейных функционалов.
Из этой системы отыскиваются неизвестные составляющие
функции ср, которые вносятся в представление (9.5), а затем в
(9.4). После этого формула (9.2) дает решение интегральных
уравнений или системы.
1. Будем рассматривать интегральное уравнение вида
/^7 = —z/ —r,)^, r\)dtdr] = f(x, у), (9.7)
k (х, у) = -j-ly JJ К (а, Р) сф.
O1O2
§ 9. МЕТОД ФИКТИВНОГО ПОГЛОЩЕНИЯ
89
Здесь предполагается, что функция К (а, р) обладает следующи-
ми свойствами: после замены переменных по формулам
a = wcosy, p = «siny (9.8)
функция М(и, у) = К (и cosy, и sin у) оказывается аналитической
по обоим параметрам. Кроме этого предполагается, что функция
М(и, у) имеет в качестве особенностей нули zt(y) и полюса
£г(у), которые являются периодическими функциями параметра
у. Предполагается, что количество особенностей счетное, причем
на вещественной оси их конечное число; точки сгущения нахо-
дятся на бесконечности в секторах, содержащих мнимые полу-
оси. Считаем, ради простоты, что функция М(и, у) является чет-
ной по параметру и, что влечет за собой четность функции
К (а, р) по обоим параметрам и наоборот. Будем также считать,
что функции Zi(y) и двусторонние, ограниченные снизу и
сверху так, что
0^az^|zz(y)|, |Cz(y)]^6z, 0 2 л,
(9.9)
az~&z~x/[l + 0(1 х)], х —const.
Ради простоты считаем, что кратных среди них нет.
Ядро интегрального уравнения (9.7) можно представить в
следующем виде:
2Я
k (х, у) = -уу J J М(и, у) e‘ur cos (у-^u dy du. (9.10)
а о
Положение контуров оА, о описывалось ранее (рис. 3.15).
Описанные свойства нулей и полюсов функции М(и, у) по-
зволяют представить ее в следующем виде:
М (и, у) = (у) Ц -—--- =
“ u2 - г? (у)
^т2(у)П-----------, 0=Су<2л. (9.11)
(У)
Здесь тк(у) —ограниченные функции.
Для сходимости бесконечных произведений необходимо вы-
числение производить, беря в качестве множителей функции
числителя и знаменателя с одинаковым индексом. Будем также
считать, что для функции М(и, у) при |и|->-оо справедлива
асимптотика вида
М(и, у) ~с(у) |ы|-‘. (9.12)
Эта асимптотика согласуется с оценками (9.9).
90
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
Периодические функции гл(у), £*(у) для конкретных задач
анизотропной теории упругости рассчитываются на ЭВМ, и их
графики для вещественных случаев приведены в [17].
Считая эти функции достаточно гладкими, что в силу анали-
тичности функций К (а, Р), М(и, у) имеет место, разложим их в
ряды Фурье, которые по соображениям четности по параметру и
и параметрам а и [3 должны иметь разложение по четным сте-
пеням экспонент. Отрезки рядов Фурье, которые дают прибли-
женное значение этих функций, можно записать в виде
(у,«) = 2 Cfee2l's7’ «) = 2 dfa(?2I’sv- (9-13)
s=-n s=-n
2. Рассмотрим рациональную по параметру и функцию вида
Rk0 (и, у) = [и2 - 4 (У)] [и2 - g (у)]’1 = Rk (а, ₽). (9.14)
Эту функцию можно представить и в виде отношения аналитиче-
ских функций двух комплексных переменных, используя (9.8)
и соотношения (9.13), (9.14), а также соотношения
= (« + Ф)2 „ «+Ф = «~Ф _ z9 J 5х
а2 + р2 а — ф ’ а + ф ’
Тогда (9.14) можно, используя (9.15), представить в виде
Rk (а, ₽) = Rk0 (и, у) =
(а2 + p2)2n+1
п
2^ (а + i₽)2n+2S (а - <n-2s
(а2 + р2)2П+1 —
- 2 dks (а + ф)2П h2s (а - <"-2S . (9.16)
s=-n
Из этого представления видно, что функция R(u, у) в пере-
менных а, 0 представляет собой отношение двух полиномов по-
рядка 4/г + 2. Каждый из них имеет в качестве корневых мно-
жеств (4« + 2)-значные алгебраические функции а=а*(0), кото-
рые расположены на 4/Ц-2 римановых поверхностях [90].
Переходя в (9.16) к пределу при /г->оо, получим соотношение
вида
Rk (а, ₽) = Rko (и, у) =
§ 9. МЕТОД ФИКТИВНОГО ПОГЛОЩЕНИЯ
91
Последнее соотношение есть мероморфная функция двух ком-
плексных переменных, топология корневых множеств которой
есть предел множества описанных выше алгебраических кривых.
При переходе к полярным координатам и, у корневые множества
имеют явное представление, следующее из формул (9.14). Таким
образом, функция Rk(a, 0) содержит корневое и полярное множе-
ства, являясь мероморфной функцией двух переменных.
Введем в рассмотрение функцию П(а, 0, Af) вида
По (ц, Т, А0 = П (а, ₽, W) = П [и* - г! (у)] [г? - Й (у)]"1 =
k=l
N
= П (а, ₽) Р1 (и> ?) р? («» т). (9-18>
k=l
N N
Pl (tP, у) = п 1«2 — (т)]> р2 (и2, т) = П [и2 — й (?)]•
k=l
Пусть z(a, р, М) — корневое множество функции П(а, 0, N), а
£(а, 0, Af) —полярное. Они являются объединением корневых и
полярных множеств функций Rk(a, 0).
Лемма 9.1. Пусть функция р(р, ip)eLg(Q), q> 1, имеет но-
ситель в выпуклой области Q. Для того чтобы этим же свойством
обладала функция t(p, ф) = Т'-1П(а, |3, N)Vp, необходимо и до-
статочно, чтобы на полярном множестве функции П(а, р, /V) име-
ли место тождества
VBm(u)p= f 5 Р (р, ф)Лп [Up] e‘mil’p t/ф dp = 0, (9.19)
"й
tn = 0, ± 1, ± 2, . . .; k = 1, 2, . . ., АГ, и — 'Д (у).
Здесь V — оператор преобразования Фурье.
Для доказательства вычислим интеграл, совпадающий с
V-lIIVp, положив /(г, <р)=^(х, у), р(г, ср)=р0(х, у):
h (х, У) =
= L JJe-<W+to)[n (а> р, N) — \]P(a,$)dad$ + рДх, у). (9.20)
0102
Под двойным интегралом перейдем к полярным координатам,
положив
х = г cos <р, г/= г sin ф, £ = рсозф, ц = рзтф. (9.21)
92
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
Тогда двойной интеграл, стоящий справа в (9.20), принимает
вид
2Л N ( \
t (г <р) = — С С С С V-------------Р (Р, Ч*) pe‘“Rcos (v-0) dtydpdy du,
4л U JA=i
Ck (у)=£* (у) — 4 (т),
R — У г2 + р2 — 2rp cos (ф — ф),
। g___р sin ф— г sin ср
р cos ф — г cos ф
Воспользуемся ниже представлением
(9.22)
eiuR cos (v-0) _ у Jm ginKv-e+n/a),
m==—oo
Используя приведенную формулу и «разворачивая» контур, при-
ходим к представлению
2 Л AZ оо / \
о о а "
х р(р, ф) Нт (uR)eirnW~e+nte}pdtydpdydu. (9.24)
(9.23)
Будем теперь предполагать, что х, Тогда для всех g,
всегда R>0. Принимая Img^O, Regft;>0, получим
/ (г, ф) =
— J f) 2 2 Cft(Y) Р (р> t) е{т^я^'Н^ [&(у) R] Рd^dpdy.
о n k=i т=-ъ
(9.25)
Примем теперь во внимание, что систему координат всегда
можно расположить таким образом, чтобы по отношению к выб-
ранной вне й точки с координатами г и ф для любой точки вы-
пуклой области Q выполнялось бы свойство г>р, рей. Как
только указанное расположение координат принято, применим к
функции Ханкеля формулу сложения [64]
e‘W<M(Y)fl]== f Js&(Y)p] (9-26)
S=s—30
§ 9. МЕТОД ФИКТИВНОГО ПОГЛОЩЕНИЯ
93
Внесем (9.26) в (9.25); в результате с учетом формулы (9.20)
получим
. 2" N оо
t (г, ср) = р (г, ср) + С 2 S Ck е<т(7+л/2) X
q k—i т=—(х>
х S ^Bs к* (v)] pHs+m[Zk(y) r]e-isvdy, О^ср< 2л. (9.27>
s=-co
Из последнего соотношения следует, что если г расположено
вне области Q, что и подразумевалось при построении этой фор-
мулы, то в силу (9.19) t(r, <р)=0. Наоборот, для того чтобы
t(r, ср) обращалось в 0 вне й, в силу этой же формулы, как мож-
но убедиться, приравняв нулю коэффициенты при e-is<p, должны
выполняться соотношения (9.19).
Вопрос о принадлежности функции t(r, <р) пространству
L,(Q) для любой р(р, ф)е£,(й) не вызывает сомнения, так как
в (9.22) ядро интегрального оператора справа непрерывно.
Лемма доказана.
Замечание. Лемма остается в силе и в том случае, когда
функция р(р, ф) является обобщенной типа 6-функции Дирака
и ее производных с носителем, расположенным в Q. Доказатель-
ство леммы для этого случая приведено в [17] и здесь не по-
вторяется.
Заметим, что функцию VBm(u)p можно также вычислять сле-
дующим образом. Вначале вычисляется двумерное преобразова-
ние Фурье от функции р, т. е.
V (а, р) р = р0 (х, у) dx dy =
—со
= J р (р, ф) eiup cos ('t-v)p dp б/ф =
а а
= S $ $ jt7(p, ф) Js (up) е'^-^+'^р^ф dp. (9.28)
s=—сю о О
Теперь, сравнивая последнюю формулу с (9.19), замечаем, что
VВт (и) р = J V (а, Р) ре‘т^~я/2Щ. (9.29)
о
В дальнейшем эта формула будет использоваться.
Продемонстрируем использование этих формул на обобщен-
ных функциях. Введем в рассмотрение обобщенную функций
94
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИИ
ф(р, ф) вида
Ф (р, ф) = — A j 6 [х — р (ф) cos ф] 6 [у — р (ф) sin ф] f (ф) </ф, (9.30)
о
A—d2/dx2+dz/dyz. Можно показать, что ее носитель расположен
в области Q, ограниченной выпуклым контуром 5?
Найдем преобразование Фурье — Бесселя этой функции по
параметрам х, у. В результате несложных вычислений приходим
к соотношению
2Л
Уф = и2 cos (ф) о!ф. (9.31)
о
Имеем далее
Уф = и2^ Л [иР (Ф)] (ф) с?ф. (9.32)
о $=—оо
Найдем Увт(и)ф, определяемое формулой (9.19). Очевидно,
имеем
Увт (и) ф = dy = J u2Jm [up (ф)] f (ф) t/ф. (9.33)
о о
3. Возвратимся к интегральному уравнению (9.7). Будем
искать его решение в виде
<7(ё, п)=Р(В, П) +<Р(В, Л)- (9.34)
Функцию р(|, т|) подберем из условия
V Brnft = 0, U = ± ^г(у), k = 1, 2, . . ., Af, tn =0, ± 1, ± 2, ...
(9.35)
Возьмем у функции По (и, у, N') (9.18) число N настолько
большим, что числа ^(7) и гЛ(у), k = N+l, .. ., окажутся с боль-
шими мнимыми составляющими, величину которых с ростом N
можно увеличивать. В этом случае функция У-1П(а, 0, N)P(a, 0)
будет по-прежнему иметь носитель в У согласно лемме 9.1 и ин-
тегральное уравнение (9.7) можно переписать в следующем виде
<9.3), (9.5):
7(ф, /=у-«П(а, 0, N)P(a, 0). (9.36)
Здесь оператор Ка имеет представление вида
Kog=^ko(x — — n)g<B. n)^dn.
У
/г0 (х» У)= У У <$ (а> Р> е-1'ах+Ру) da dp, (9.37)
S (а, р, N) = ГТ1 (а, р, N) К (а, 0).
§ 9. МЕТОД ФИКТИВНОГО ПОГЛОЩЕНИЯ
95
Очевидно, стоящая в представлении ядра в последнем инте-
грале подынтегральная функция уже не имеет особенностей на
вещественных осях, поэтому интегрирование ведется по вещест-
венным осям.
Обратный к /Со оператор строится сравнительно просто раз-
ными методами F.ro приближенное представление можно полу-
чить, используя метод факторизации, изложенный в предыду-
щем параграфе.
Систему интегральных уравнений (9.36) можно решать мето-
дом последовательных приближений, ограничиваясь конечным
числом членов. Если N достаточно большое, то в качестве при-
ближенного значения можно взять даже первое приближение,,
так как следующие члены будут незначительно его уточнять.
Для дальнейшего преобразуем уравнение (9.36). С этой
целью возьмем функцию ф(р, ф) в виде
(— A)*j 6 [х — Др (ф) cos ф] х
k=o s=i о
X 6 [у — Др (ф) sin ф] fks (ф) 4/ф, р (ф) > 0, (9.38}
Д = 1 -— 0,5 s-^, s "> Д = 1.
Здесь функции ft,(i|?) подлежат определению. Тогда, вычисляя
V<p, имеем
,, XT* VI V “ДЖ) cos (ф-v).
V Ф = 2 S и ) е fks d^’ (9.39>
k=o s=i о
Отсюда в соответствии с (9.29) находим
Увт (U)<p =
‘X,1 Д . 77 шХ,р(ф) cos Сф-и)+1т(х-л/2) „ ... , ,
= 2 2“Ие Мф)4/ф</х. (9.40}
k=0 S=1 о о
Осуществим следующее разложение:
По (и, у, N) Еф = Y) + Р Y).
оо 7V=1 2Л ,
?М = 2 2>(Y)^ е^Р№)С08(^Х(Ф)^Ф, (9.41)
S=1 fe=o о
00 А^-1 2Л , . , , , л
R(u,y)= 2^(«2,Y)2
S =1 k—o о
96
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИИ
Тогда уравнение (9.36) можем записать в форме
7<о/ = /-Яор —Д’/ р= V~lP, 7= V^R. (9.42)
Отметим, что в последней формуле функция р имеет носитель в
£2, а г — не обязательно в й.
Подействуем слева на (9.42) оператором Л'"1 ; придем к со-
отношению
t»K?f-р - (9.43)
Здесь PQ — проектор на область й.
Для определения функции q по формуле (9.34) необходимо
найти функцию р из соотношения (9.36). Из (9.36) имеем
Р(а, Р) = П71(«, у, N)Vt, p = V-1n;1(«, у, N)V(t). (9.44)
Функция р должна иметь носитель в области й. В соответствии
с условием леммы 9.1 для этого необходимо, чтобы выполнялись
условия
VBm (и) -±- J elm^^ Vt dy, (9.45)
О
и = ±г*(у), k= 1, 2, ..N; т = 0, ±1, ±2, ...
Выражение для Vt (9.43) можно представить в виде
Vt = - Р (и, у) + WZ - VK?PQКо7. (9.46)
Внося (9.46) в (9.45), получаем искомую бесконечную систему
интегральных уравнений для определения неизвестных функций
Mt)-
Таким образом, система принимает вид
j Р (и, х) е1т^-я^ dx + j dx =
О о
= 5 VK?feW*~n'vdx, (9.47)
О
и = ±Zk(y), k = 1, 2, ..., N, m = 0, ± 1, ±2, ...
Рассмотрим более детально первый слева член системы
(9.47). Используя (9.41), имеем
Г* С* л/2) VI V?' S \ 211 \ c°s (ф-V)
j ( е.т(и-л/2) 2 2 gu (z) zk (y) e X
x-fkst^dtydx, 0=Су<2л; k=l,2,...,N, m — 0, ±1, ± 2,...
(9.48)
§ 10. ВАРИАЦИОННО-РАЗНОСТНЫЙ МЕТОД
97
Последнее соотношение представляет собой интегральный
оператор с непрерывным ядром, являющимся бесконечномерной
матрицей. Аналогичным свойством обладает и второй слева опе-
ратор. Для решения системы (9.47) необходимо, таким образом,
применять метод сведения системы интегральных уравнений к
алгебраическим. Для этого можно применять либо квадратур-
ные формулы, либо вариационные методы.
Предположим, что удалось решить систему (9.47) и найти
неизвестные /*,(ф). Для получения функции q(x, у) внесем в
(9.34) значение функции ф(р, ф), даваемое формулой (9.38),
и р(р, ф) из формул (9.44), (8.46).
В результате выражение для q можно представить в виде
q = <р + У1!!;1 (и, у, N) [- Р + VKff - V^PaK^]. (9.49)
Заменим функцию Р ее значением, полученным из формулы
(9.41), приняв
Р — По («, у, N) Уф — R (и, у). (9.50)
Внося (9.50) в (9.49) и произведя несложные преобразования,
сократив функцию ср, получаем окончательно следующее пред-
ставление функции q, уже не содержащее вне интегралов обоб-
щенных функций:
q = У-1Щ1 (и, у, N) [VK?f + R - WtfPcV]. (9.51)
Зная свойства оператора К? как решения интегрального
уравнения (9.7), получаемые методом факторизации § 8, можно
доказать, что функция q, даваемая формулой (9.51) принадле-
жит LP(Q), р>1.
§ 10. Вариационно-разностный метод
Наличие теорем единственности, корректной разрешимости и
эквивалентности интегральных уравнений уравнениям Фред-
гольма второго рода позволяет использовать для их решения
прямые методы. Одним из наиболее удачных здесь оказался
вариационно-разностный метод —вариант проекционного мето-
да Галеркина или метода конечных элементов со специальным
выбором в качестве координатных осесимметричных дельтооб-
разных функций.
1. Опишем общую схему метода Галеркина [82]. Рассмот-
рим линейное операторное уравнение
Kq=f, Kt E-+F, (10.1)
Е, F — гильбертовы пространства. Зададим две последователь-
ности {ф/}/=1, {ф/}7=1 такие, что их линейные оболочки £„<=£,
Fn^F являются предельно плотными последовательностями под-
4 В. А. Бабешко и др.
98
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИИ
пространств, т. е. Vh^E, Vg^F, p(h, Еп)-+0, p(g, Fn)-»-0 при
n->oo. Такие системы элементов {<pj, {i|5j} называются коорди-
натными последовательностями.
Приближенное решение уравнения (10.1) ищется в виде раз-
ложения по координатным функциям
4'п=2с/'₽/- <10-2)
/=1
коэффициенты которого с, определяются из условия ортогональ-
ности невязки zn=Kqn—f второй системе координатных функ-
ций или, что то же самое, подпространству Fn:
(Kqn—f,ty)F = 0, i=l,2, (10.3)
Условия (10.3) приводят к системе линейных алгебраических
уравнений порядка п относительно неизвестных с}
2 (KVi’ '№ci= (?> Mf, »= 1.2, ..., n. (10.4)
/=i
Известно [75], что элемент гильбертова пространства г^Е,
ортогональный всюду плотному подмножеству Е, может быть
только нулевым элементом. Отсюда
||zn||F = ||K<7n — /||f—>0 при /г—>оо,
так как в силу условия (10.3) невязка гп ортогональна предель-
но плотному подпространству Fn.
Стремления к нулю невязки zn, вообще говоря, недостаточно
для сходимости <?„ к решению q-, но если существует ограничен-
ный обратный оператор К~1, то из очевидных неравенств следует
сходимость в метрике Е:
к—п^-оо.
Определение 10.1. Говорят, что метод Галеркина приме-
ним для решения уравнения (10.1), если:
1) система координатных функций {ср,-} предельно плотна
в Е;
2) 3 По'- Vn>n„ приближение qn определяется из условий
(10.3) однозначно,
3) \\q—<7„Нв-*0 при п->оо.
Требуется построить конкретный вариант метода Галеркина,
применимого к решению интегральных уравнений и систем урав-
нений динамических контактных задач. В соответствии с опреде-
лением это означает, что надо построить требуемую систему ко-
ординатных функций, доказать однозначность разложения qn
по этой системе и сходимость qn к q.
§ 10. ВАРИАЦИОННО-РАЗНОСТНЫЙ МЕТОД
99
Для динамических контактных задач £=/f_%(Q), F=H,h(£l),
если же ограничиться правыми частями /<=С2, то из теоремы 5.3
следует, что решение достаточно искать в классе С^+е (Q) С Н-уг (Q)
(для областей с гладкой границей).
Удачным выбором координатных функций можно существен-
но ускорить сходимость метода в требуемой метрике. Например,
введя координатные функции, несущие особенность заданного
типа на границе Q, можно получить сходимость в непрерывной
метрике. Однако введение таких функций, улучшая сходимость,
одновременно повышает трудоемкость метода. Здесь надо стре-
миться к выбору систем {ф,}, {ф,}, которые при хорошей сходи-
мости допускают его численную реализацию за разумный отре-
зок времени.
2. Остановимся на выборе системы координатных функций.
В силу того, что Z/_v('Q) — замыкание С°°(й), для построения
предельно плотной в ff_v(Q) системы достаточно выбрать си-
стему, полную в C(Q),— классе непрерывных функций. Наибо-
лее общим результатом относительно свойств полной в C(Q)
системы функций является теорема Стоуна.
Теорема 10.1 [69]. Любую непрерывную на компакте Е
функцию можно сколь угодно хорошо приблизить элементами
из множества функций А, образующего на этом компакте стоу-
новскую алгебру.
Множество А образует стоуновскую алгебру, если
1) Vf,g^ A^cJ (х) + c2g(x)e А и f(x)g(x)<=A;
2) VXx,х2е£ 3f(= A: f (х^ f (х2);
3) Vxoe£ 3h<=A: й(хо)^0.
Примерами стоуновских алгебр являются множества триго-
нометрических или алгебраических полиномов, поэтому след-
ствием теоремы Стоуна являются известные из начального кур-
са анализа теоремы Вейерштрасса о приближении непрерывных
функций полиномами.
Однако существуют системы, не образующие стоуновских
алгебр, но тем не менее эффективно применяемые для интерпо-
ляции. В основном это получившие широкое распространение в
связи с развитием вычислительной техники сплайн-функции.
Сплайны удовлетворяют свойствам 2, 3 и первому из 1 теоремы
Стоуна, но не образуют алгебры, так как не выполняется
f-g^A— при умножении сплайнов их форма, вообще говоря,
меняется. В отличие от полиномов, где каждая координатная
функция (х4, е*“, Тк(х) и т.д.) определена во всей области ин-
терполяции, каждая из сплайн-функций отвечает за аппроксима-
цию на своем участке.
4*
100
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИИ
Примером приближения непрерывной функции сплайнами
может служить аппроксимация ее кусочно-постоянной ступенча-
той функцией, аппроксимация прямоугольниками либо кусочно-
линейной ломаной (аппроксимация «шапочками») (рис. 3.17,
3.18). Система координатных
Точки хк, k=\, 2, ..., п, покрывающие заданный отрезок с ша-
гом /г, называются узлами, системы сплайнов; вид ср(х) опреде-
ляет форму сплайнов, ее будем называть задающей или опреде-
ляющей функцией. Сходимость интерполяционного переноса
обеспечивается при уменьшении h, т. е. участка, на котором
определен каждый сплайн. Обратим внимание на то, что, не-
смотря на разрывность ступенчатой аппроксимирующей функ-
ции, сходимость обеспечивается при /г—>-0 в непрерывной мет-
рике.
С другой стороны, для достижения заданной точности е по-
требуется существенно больше координатных функций (10.6),
чем (10.7); это ясно из геометрических соображений. Отсюда
скорость сходимости разложения по различным сплайнам
§ 10. ВАРИАЦИОННО-РАЗНОСТНЫЙ МЕТОД
101
различна и существенно зависит от их формы и способа измере-
ния погрешности, т. е. метрики пространства, в котором произ-
водится интерполяция. Влияние метрики на скорость становится
очевидным, если в рассмотренном примере перейти к сеточной
норме, в которой расстояние между функциями определяется по
отклонению в заданных точках
PN(f,g)=^\f(xi)-g(xi)\. (10.8)
1=1
Ясно, что N функций вида (10.5) точно приближают лю-
бую непрерывную функцию в метрике (10.8). При этом вид ф(х)
несуществен, достаточно, чтобы <р(0)=/=0.
В двумерном случае системы сплайн-функций строятся сле-
дующим образом: область £2 покрывается сеткой с заданным
шагом h, узлы сетки (хк, ук), k=l, 2, ..., N, попадающие внутрь
£2, а в некоторых случаях и лежащие снаружи в ближайшей
окрестности ее границы, берутся в качестве узлов системы
сплайнов:
(х— хь у — уь\
ф/е (х, у) = ф —. (10.9)
\ h h /
Большое распространение здесь получили координатные функ-
ции в виде пирамидок:
ф< ,w 1 о, (И>1)У(|1И>1), ( ’
обеспечивающие точное совпадение в узлах и линейную интер-
поляцию между ними. Вариант метода Галеркина с выбором в
качестве базисных функций системы (10.9) является частным
случаем проекционно-сеточных методов, которые широко при-
меняются для решения краевых задач математической физики
в ограниченных областях. По сеточным методам имеется обшир-
ная литература, в том числе и учебная [91], в которой подробно
излагаются аппроксимирующие свойства различных типов
сплайн-функций. Здесь, как правило, используются простран-
ства Соболева tt72S(£2), $=1, 2, ..., функций, имеющих интегри-
руемые с квадратом производные до порядка s (см. [75]). Про-
странства (£2) являются частным случаем пространств НУ,
когда p(g) = (1 +1g|2)5, s^O (U7" = Л2 при .s = 0). При решении
интегральных уравнений возникают так называемые негативные
весовые пространства, у которых s=—>v<;0 ("v=l/2 в нашем
случае), поэтому нельзя непосредственно воспользоваться имею-
щимися результатами, полученными для W'a(Q), s>0. Имеются
и другие отличия при использовании проекционных методов для
102
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
решения дифференциальных и интегральных уравнений, напри-
мер, если в первом случае матрица системы (10.4) получается
ленточной или разреженной, то во втором она целиком запол-
нена.
Проекционно-сеточные методы, используемые для решения
интегральных уравнений, часто называют вариационно-разност-
ными [93], последнего названия мы и будем придерживаться.
3. Остановимся на вопросе о полноте выбранного базиса.
Приближение функциями (10.9) — (10.10) означает аппроксима-
цию кусочно-линейными плоскостями (аналог приближения ло-
маными в одномерном случае). Эта система функций полна, так
как любую непрерывную, заданную в Q функцию можно прибли-
зить ломаными. В силу плотности более узкого класса D в Ни
следует плотность (10.9) — (10.10) во всех (в том числе и в
Ьг, Ws2, Н-у.).
Ясно, что полными будут не только системы ломаных; в ка-
честве базиса можно использовать кусочно-постоянные, кусочно-
полиномиальные и многие другие функции. Как из этого много-
образия выбрать нужный базис? Какие функции можно исполь-
зовать в качестве базиса? Ответ на эти вопросы можно полу-
чить, если воспользоваться подходом, основанным на примене-
нии преобразования Фурье, т. е. на переходе в пространства Н^.
Этот подход, известный также под названием «теория аппрокси-
мации Стренга — Фикса» [91], фактически основан на конечно-
мерном приближении оператора осреднения Те, который ис-
пользуется при доказательстве теорем вложения [43] (напри-
мер, Ь2 в H-v).
Для простоты дальнейшие рассуждения будем проводить в
одномерном случае R1, их обобщение на случай Rn очевидно.
Рассмотрим действие оператора осреднения на непрерывную
функцию ii(jc)eC(fi):
Thu = -L f u(y)q> dy, (10.11)
h J \ h J
й
<peCT; y<p(x)dx=l —ядро осреднения. Так как подынтеграль-
ная функция в (10.11) непрерывна, здесь справедлива квадра-
турная формула, например, прямоугольников:
1 " [х — х\ п
Thu^-~y u(xk} Ф ——- ]h = у\ ukqk (х), (10.12)
k=i k=i
хк — равноотстоящие узлы, покрывающие Q с шагом h, фй(х) —
координатные функции (10.5).
Получено разложение вида (10.2). Известно, что Т\и-+и при
/г->0; для непрерывных и в этом легко убедиться непосред-
§ 10. ВАРИАЦИОННО-РАЗНОСТНЫЙ МЕТОД
103
ственно:
Thu = и(х — th)q> (t)dt-+ и(х) (i)dt = u(x) при h0.
(10.13)
Таким образом, доказана
Лемма 10.1. Для того чтобы система базисных функций
(10.9) была полна в C(Q), достаточно, чтобы задающая функ-
ции ср (х) была ядром осреднения, т. е. чтобы
ФеС0> ф(хМ% = 1.
нп
Условия (10.13) определяют так называемые 6-образные
функции, для которых
— <р(—')->6(х) при й-»-0.
Л \ h 1
(10.14)
Следовательно,
7\и-+ \ и (у) 6(х— y)dy — u(x), h-*-0.
Теперь лемму можно перефразировать так: задающая функция
должна быть 6-образной.
Лемма 10.2. Система базисных функций (10.9) с 6-образ-
ной ф(х) полна в Н*1.
Доказательство. Пусть Покажем, что в выраже-
j N [Х_Х\
нии ф2у= — У Ck(h) ф|------- I можно подобрать такие ch(h), что
h \ h /
Й=1
Цфм — <7||нц->-0при N-+OO.
1. Покажем, что ф^ является конечномерной аппроксимацией
1 ( X \
оператора осреднения Thq—q*<i)h,<f>h = — ф — ]. Рассмотрим
h \h )
Thq=±-\q(y)y(t-^\ du-
ll J \ h )
Интеграл здесь может быть не определен в обычном смысле,
так как обобщенная функция. Сходимость в простран-
стве обобщенных функций означает, что для УфеП(й) значе-
ния функционалов ф.¥(ф) должны сходиться к 7\<7(ф). Из опре-
деления свертки обобщенной функции с основной (5.3)
Т hq (Ф) = (<7*Ф*) (Ф) = q (g),
g W = f Ф/. («/) Ф + У) dy = у J ф (у) ф dy e Co°°.
104
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИИ
В силу непрерывности g(x) можно разложить по системе базис-
ных функций {xJ, полной в С™:
N
гм—2
k=i
тогда
Thq($) ~2
k=i
(10.15)
Рассмотрим действие <pw на ф:
N „ (х — х. \ N
Фа(Ф) =2 dx== 2 hCkg (*k). (10.16)
k—1 k—l
Сравнивая (10.15) и (10.16), получаем, что для сходимости
<Р1у(ф)-»-7'л9(ф) достаточно выбрать £*=—?(%*); ПРИ этом по-
грешность аппроксимации <fN~Thq определяется погрешностью
разложения гладкой функции g(x) по системе {xJ.
2. Известно [43], что \\7\q — ^||йц->0 при й->0. Следова-
тельно, <$N->-Thq-+q при й->-0 в Н^.
Лемма 10.3. Пусть q^H^ в окрестности узла хк—непре-
рывна, тогда при й->0 ck-+q(xk) (ск—коэффициенты разложения
i?no{(pft}).
В силу леммы 10.1 6-образные функции, поэтому
ck = у J q (%) X )dx^-^q(x)S(x — xk) dx = q(xk).
Лемму 10.3 можно доказать и, не предполагая 6-образности, от
противного. Несложно убедиться, что если ck-frq(x^, то
Зф = £): Фа(Ф)'АТХФ).
Следствие 10.1. Из леммы 10.3 вытекает, что для
<?еСуг+е (й) из сходимости в Ни\Н_7,(й)) следует сходимость
в сеточной норме (10.8), если узлы хк не лежат на границе й.
Для сходимости во всех точках й, включая границу, достаточно
к базисным функциям добавить элементы, несущие заданную
особенность на дй.
Замечание 10.1. Для приближения непрерывных функ-
ций широко применяются сплайны-шапочки и сплайны-пира-
мидки (10.7), (10.10), так как они дают совпадение в узлах и
линейную интерполяцию между ними. Разложение же по произ-
вольным 6-образным функциям, обеспечивая сходимость ск в
узлах, может иметь самый причудливый, не отвечающий поведе-
§ 11. ВОПРОСЫ ПРАКТИЧЕСКОЙ РЕАЛИЗАЦИИ
105
нию аппроксимируемой функции график, отклонение которого
от нее тем не менее стремится к нулю при УУ->оо. Пример —
приближение ступенчатыми функциями (10.6) (рис. 3.17). По-
этому следует, определив значения в узлах, провести дополни-
тельную интерполяцию между узлами. Переход к более широ-
кому, чем пирамидки или В-сплайны (см. [91]), классу базис-
ных функции очень важен, так как выоором их формы можно
существенно снизить трудоемкость метода (подробнее об этом
см. в следующем параграфе).
Замечание 10.2. Как следует из доказательства лем-
мы 10.2, ск сходятся к некоторым осредненным значениям q в
окрестности хк, поэтому даже в случае сильной осцилляции q
использование ск дает хорошее приближение интегральных ха-
рактеристик (функционалов) q. Это обстоятельство использует-
ся при решении задачи о колебании массивных штампов на
упругой среде, когда требуется знать не распределение напря-
жений под штампами, а главный вектор и главный момент ре-
акции среды на их внедрение (см. § 4).
4. Теорема 10.1 (о применимости вариационно-разностно-
го метода). Вариационно-разностный метод применим в смысле
определения (10.1) к решению интегральных уравнений и систем
интегральных уравнений динамических контактных задач (10.3),
с дважды непрерывно дифференцируемой правой частью
f^C2(Q).
Доказательство. В качестве F в (10.1) возьмем Л2(й)
со скалярным произведением (f, g) = ^(f,g)dx.
я
1. Полнота систем {ср.,}, {%} доказана в лемме 10.2.
2. Доказательство однозначности определения ск в разложе-
нии qn дословно повторяет доказательство теоремы единствен-
ности в АР(Й), р>Л.
3. Умножение на ф; в (10.3) является операцией ортогональ-
ного проектирования невязки zn=Kqn—f на £2(,Й)\К„ (Д, —ли-
нейная оболочка {ф;}"). В силу полноты ф; в Л2(й) ||z„||i,2->-0 при
п->оо. Учитывая корректную разрешимость в Cy2+S (теоре-
ма 5.3), имеем \\q — qn|| » <M1||zn||C2^Af2||z„||I.2->0, причем в
С %+8
силу леммы 10.2 ck-*-q(xk, ук) во внутренних узлах.
§ 11. Вопросы практической реализации
вариационно-разностного метода
После доказательства применимости вариационно-разност-
ного метода на первый план выходят вопросы его конкретной
реализации. Главным здесь является умение формировать и
106
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
решать систему (10.4), коэффициенты которой
аы = (Кф/, = $$ /Сф/ф^х dy,
pk
Кф/= f j* k(x — I,у — т1)ф/(£, T])^dTi,
(11.1)
k (x, у) = yy J J К (аъ «а) da2,
nr,
St = supp ф/, Pk = supp ф*
выражаются через многократные интегралы.
Очевидно, без предварительных аналитических упрощений
ни о каком прямом их вычислении не может быть и речи. Дело
осложняется наличием вещественных полюсов и точек ветвления
у К(а„ а2).
В настоящем параграфе излагается путь, позволяющий све-
сти трудоемкость вычисления коэффициентов системы до прием-
лемого уровня. От многократности удается избавиться введени-
ем осесимметричных базисных функций; возникающие при этом
однократные контурные интегралы вычисляются либо непосред-
ственно численным интегрированием по контуру в комплексной
плоскости (для близких узлов), либо с использованием леммы
Жордана и асимптотических методов, когда расстояние между
узлами велико и осцилляция подынтегральной функции сильно
возрастает. В конце параграфа обсуждаются вопросы решения
системы (10.4) при большом количестве узлов.
1. Если координатные функции фг, фк таковы, что преобразо-
вание Фурье от них может быть выписано в явном виде, то для
вычисления ам обычно используют равенство Парсеваля
(/,^=-L-(/,iE,
(2л)"
позволяющее перейти от исходных функций к их преобразова-
ниям Фурье. Здесь это особенно удобно, так как оператор К
является сверткой:
аы = ф^ь, = —- (k • фЬ ф*)п =
(2л)г
= JJ К (а1( а2) Ф («Л, cca/i) («X a*/i) da2,
ПП
Ф (аъ аг) = F (ф), Т («1, а2) = F (ф).
(Н.2)
§ 11. ВОПРОСЫ ПРАКТИЧЕСКОЙ РЕАЛИЗАЦИИ
107
Несмотря на то, что в (11.2) появились комплексно-сопря-
женные величины, подынтегральная функция по-прежнему регу-
лярна по а. Это объясняется тем, что функция, сопряженная к
аналитической функции от сопряженного аргумента, является
аналитической. Действительно, если
Н«)=2М«-£Л
k
то
Г (<*•) = 2 ft [(а’ - □*]* = 2 ft (а - й)ь = К (а).
k k
Если вещественны, то f*(a*) =f(а), например, для экспо-
ненты [(e~IZ*)* = £‘z-
Вид (11.2) можно также получить, проведя последовательно
замену порядка интегрирования в (11.1).
Хотя кратность интеграла снизилась до двух, он еще мало
пригоден для численной реализации,— интегрирование здесь
ведется по всей плоскости (ai, a2) от осциллирующей функции.
Правда, встречаются работы, в которых используется именно
такой вид или эквивалентный ему по трудоемкости, например
работа [62], где в задаче статики в качестве базисных функций
берутся пирамидки. Для сокращения требуемого объема вычис-
лительных работ здесь используется асимптотика осциллирую-
щих интегралов, когда расстояние между узлами гы= ((х„—х;)2+
+ (Уи—у^2)'11 становится велико.
В задачах динамики трудоемкость численного интегрирова-
ния повышается из-за наличия полюсов и точек ветвления у
^(«i, а2). За счет увеличения числа критических точек усложня-
ется также структура асимптотического разложения интеграла.
Численные расчеты по этой схеме здесь встречаются не часто,
в основном в американских и японских работах, выполненных в
результате проведения значительного объема вычислений на со-
временных ЭВМ (см., например, [136, 146]). Да и здесь нередко
для облегчения вычислений делаются допущения, сильно огруб-
ляющие общую схему.
Радикально сократить требуемый объем вычислений удается
при переходе к осесимметричным сплайнам. Для простоты огра-
ничимся пока одним интегральным уравнением, возникающим
при контакте без трения:
КззУз — fat Кзз (ai> аг)=== R (а)> а=Уа1-|-а2. (11.3)
Пусть ср (х, //)=ф(г), ф(х, //)=ф(г), г=^хг+уг, т. е. ср, ф осе-
симметричны. Их преобразования Фурье также будут осесим-
108
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИИ
метричными функциями в плоскости cci, а2. Действительно,
Ф (аъ о^) = ЭД' ф (х, у) e‘<ai*+“^)dx dy =
r^a
= ( Ф (r) 003 dy dr = 2 л ф (г) 70 (аг) г dr = Ф (а).
0 0 о
Здесь а^асоз'у, a2 = asin7, х=гсозф, г/=гз1пф и использо-
вана формула [34]
2Л
(j eZ2coS№-v)4fv==2nJ0(z). (11.4)
о
Так как R, Ф, Т зависят только от а, в (11.2) также можно пе-
рейти к полярным координатам и воспользоваться формулой
(11.4). Окончательно
аы = — f R (а) Ф (ah) W* (a*h) Jo (ark!) a da,
2л J
_________________ (П-5)
Гы =V(Xk — X/)2 + (yk — У1)2.
Контур Г почти всюду совпадает с вещественной положительной
полуосью отклоняясь в комплексную плоскость а только при
обходе вещественных полюсов R (а) в соответствии с принципом
предельного поглощения (рис. 1.3).
Для остальных элементов системы, отличных от К33, нельзя
сразу перейти к полярным координатам и воспользоваться фор-
мулой (11.4), так как в состав элементов K<j(at, «2) входят мно-
жителями а, и а2 в первой или второй степени (см. (2.24)).
В общем случае приходится иметь дело с интегралами вида
/PlP2 (11, У = ЭД МТ (a) er^^da^ da,. (11.6)
гл
При каждом дифференцировании /Р1Р2 по в подынтегральной
функции появляется множитель —ta1; по — множитель —ia2.
Отсюда
(П.7)
t00 == ЭД Т (а) erh^^^da! da, = 2 л § Т (a) Jo (а|) a da,
гл ’ г
§ И. ВОПРОСЫ ПРАКТИЧЕСКОЙ РЕАЛИЗАЦИИ
109
Таким образом, интегралы вида (11.6) выражаются через одно-
кратный интеграл:
= (a)J0(al)ada. (11.8)
\ 051/ \ оёг / £
Производные в (11.8) действуют только на j0(ag), ИА можно
внести под знак интеграла и воспользоваться рекуррентными
соотношениями для функций Бесселя [80]:
jv (z) — Jv+1 (z) 4 — Jv-i (z)-------•
z z
В интегралах (11.2) экспонента имеет более сложный вид,
чем в (11.6), но и здесь можно установить соответствие типа
(11.7) между аь а2 и производными:
. д . д
«1^ — 1—, «2*-» —Г——.
dyt
Окончательно в общем случае контакта со сцеплением, когда
символом системы является вся матрица (2.24), элементами си-
стемы (10.4) являются матрицы 3X3 с компонентами
4) = - ~ f [(МТ20 + tfT02)/a2] da,
лП J
г
4/ = 4/ = - f (М - N) TnIa? da,
г
4? = - f РТ^а, 4? = - f PTQ1da,
2л J 2л J
Г Г
а% = - С [(МТ02 + ЛТ20)/а2] da,
J
(Н.9)
4? = f (ST10/a2) da, (ST01fa?) da,
271 J 2Л J
Г Г
4?=^-f/?T00da,
2л J
Г
/ . d \ Pi / • д \
Итак, с помощью осесимметричных задающих функций ср, ф
удалось свести многомерные интегралы (11.1) к однократным
контурным интегралам. Заметим, что такого упрощения не уда-
по
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
етея достичь традиционными пирамидками (10.10), треугольны-
ми или многоугольными элементами.
Примером осесимметричного базиса могут служить финит-
ные «шапочки»
[w + 1 (J____г2)т
ф (г) = । п
‘ о,
г< 1,
Г > 1,
Ф(а) = 2'п+1(т+1)!^^
(11.10)
или нефинитные экспоненты
ф(г)= — егЬг\ Ф (а) = е-а‘^ь\ (11.11)
Л
замечательные тем, что их преобразование Фурье остается того
же вида.
Эффективность разложения по различным функциям можно
проверить на тех интегральных уравнениях, для которых извест-
но точное решение. Например, для К(а) =----, f(x, w) = l и
Я —круга радиуса г= 10 —решение легко строится методом
работы [14] в явном виде:
<7('-) = c1 + c2J0(z1/j, 0<г<10, +
На рис. 3.19 представлен график q(r) для значений Z! = 0,7,
£,= 1 (при этом Cj—2,04, с2=—3,45-|-0,04i). Крестиками и
кружками нанесены значения в
узлах, полученных вариацион-
но-разностным методом с ис-
пользованием в качестве базис-
ных функций вида (10.10) и
(11.11) соответственно; шаг
сетки h = 2. Видно, что и пира-
мидки и осесимметричные ша-
почки дают одинаково хоро-
шую сходимость, но для по-
следних трудоемкость реализа-
ции метода значительно сни-
жена.
2. Остановимся подробней
на вопросах вычисления интегралов (11.9). Предварительно пре-
образуем их с помощью процедуры, которую обычно называют
«разворот контура Г». Этот прием полезен не только здесь, но и
всегда, когда приходится иметь дело с изучением волновых по-
§11. ВОПРОСЫ ПРАКТИЧЕСКОЙ РЕАЛИЗАЦИИ
111
лей не в плоской, как в модельных примерах § 1, а в пространст-
венной постановке.
Рассмотрим интеграл
I(p) = ^Fn(a)Jn(ap)ada, F„(—а) = (—l)"F„(a). (11.12)
г
Функция Бесселя первого рода Z„(z) представима в виде
полусуммы двух функций Ханкеля I и II рода:
Jn (ар) = у (#« ’ (ар) + Н® (ар)).
Соответственно
I (P)~Ii + 1г, Im = ^Fn(a)H(^(ap)ada, /п—1,2.
г
Сделаем в /2 замену а=—а; учитывая (11.12) и равенство
Н{п (— г) = (— 1)" +М’ (z), имеем
1г(Р)}^~ ^Fn(a)H^ (ap)da,
_ f"
Г —контур, симметричный относительно начала координат кон-
туру Г с направлением обхода от 0 к —оо. Изменим в /2 направ-
ление интегрирования на противоположное:
/2 = у J Fn (а) Н(" (ар) a da.
-Г
Окончательно
l = ±§Fn(a)H™(ap)ada, (11.13)
о=—rijr — традиционное обозначение контура интегрирования
от —оо до оо, отклоняющегося от вещественной оси при обходе
полюсов подынтегральной функции в соответствии с принципом
предельного поглощения (рис. 1.3, 3.15).
При |а|—>-оо для Нп‘ъ} справедливо разложение [64]:
Н(п’2) (ар) = 1/— е*‘аР~1 (П+ (1 + О (| а Г1)), | а | -► оо.
' пар
(П-14)
Для a = p+ir, |т|->-оо Нп (ар) экспоненциально убывает при
т= 1, /?т>0 и т—2, px<ZQ, поэтому для вычисления интеграла
(11.13) можно замкнуть контур в верхнюю или нижнюю полу-
плоскость и воспользоваться леммой Жордана. При этом в
Fn(a) допускается экспоненциальный рост при |т|—>-оо с пока-
112
ГЛ. Ill. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
зателем меньшим, чем | рх |, так, чтобы в целом подынтеграль-
ная функция оставалась убывающей. Если F (а) имеет точки
ветвления, то при замыкании контура соответствующие разрезы
обходятся по обоим берегам, аналогично тому, как и в модель-
ном примере § 1.
В интегралах (11.9) р=гь>>0. требуемая для разворота чет-
ность или нечетность Е„(а) обеспечивается четностью элемен-
тов К-
Итак,
00 F*
I (р) = Л.12 res Fn (а) (£*р) + -L j F„ (а) (ар) a da,
k=i 2 L
(11.15)
^ — полюса Fn(a), попадающие внутрь при замыкании контура,
L — контур вдоль берегов разрезов. Вклад комплексных экс-
поненциально убывает с удалением от вещественной оси как
e~iim^p|j П0ЭТ0Му дЛЯ любой наперед заданной допустимой по-
грешности g в (11.15) достаточно ограничиться конечной сум-
мой по k в силу того, что на любом ограниченном расстоянии от
вещественной оси содержится конечное число полюсов элемен-
тов матрицы F(ai, а2). При этом число требуемых слагаемых
уменьшается с увеличением р, так что Ve>Ogpo: для Vp>p0
суммирование можно вести только по вещественным полюсам.
Пусть х>0 — вещественная точка ветвления F(а), а разрез
проведен от х вертикально вверх (см. рис. 1.1). Для 7.eL, а=
=х4-1Т
. .) da — j (F_ — F+) Hn} ((x + ix) p) i (x + ix) dx, (11.16)
L о
F±(x+it) —значения Fn(a) на правом и левом берегах разреза
соответственно. Имея в виду (11.14), убеждаемся, что при т->оо
подынтегральная функция в (11.16) экспоненциально убывает.
Вдоль вещественной оси убывание F„(a) степенное, поэтому с
точки зрения численного интегрирования выгоднее вести его по
L, чем по Г, так как при этом имеем более быструю сходимость
несобственных интегралов.
Экспоненциальное убывание по L позволяет, кроме того, вос-
пользоваться методом Лапласа при больших р. Точка максиму-
ма—граничная точка, не являющаяся перевальной, ее вклад в
асимптотику по лемме Ватсона имеет вид [118]
» оо _*+g м
j хР-i/ (х) tr^dx ~ Р Р^°°> (И.17)
О А=о
Г(г) —гамма-функция Эйлера.
§11. ВОПРОСЫ ПРАКТИЧЕСКОЙ РЕАЛИЗАЦИИ
113
В нашем случае а=1, 0=1, если точка ветвления не несет
слабой особенности,
$(...)da — (F_(х) — F+ (х)) (хр)р-1 (14-0(р-1)), роо.
L
(11.18)
Сравнивая (11.15) и (11.18), убеждаемся, что вклад интегралов
по разрезу в /(р) при р»1 на порядок меньше, чем вклад веще-
ственных полюсов, а именно первые при р->оо убывают как
р~3/2, вторые — как р_1/2.
Итак, наиболее выгодным с точки зрения объема численного
интегрирования является представление (11.15), которым мож-
но пользоваться, если известны все полюса Fn(a) в некоторой
окрестности вещественной оси. Его можно применять также и при
k = l, rkl = 0, если воспользоваться для разворота контура функ-
циями Jn(ah) в Ф(а/г), Чг(а/г). Для F„(a), не имеющих точек
ветвления (слой, среда конечной толщины), (11.15) позволяет
заменить интеграл конечной суммой. Если есть точки ветвления,
то заменить исходный интеграл конечной суммой можно лишь
для тех р>р0, для которых работает асимптотика (11.18). Для
р<р0 остаются быстросходящиеся интегралы по L.
Обычно легко найти только вещественные полюса Fn(a),
комплексные, как правило, неизвестны. В этом случае (11.15)
можно использовать только для тех р, для которых вклад сла-
гаемых, соответствующих комплексным полюсам, мал.
Для меньших р интегрирование можно организовать непо-
средственно по контуру Г, осцилляция подынтегральной функ-
ции при этом еще сравнительно невелика.
Здесь хорошо зарекомендовал себя следующий подход. Чис-
ленное интегрирование методом Симпсона с автоматическим
выбором шага организуется так, что при каждом уменьшении
шага интегрирования используются все накопленные к этому
моменту суммы значений подынтегральной функции в узлах. Это
сокращает время при пересчете для достижения заданной точ-
ности. При этом выбор требуемого шага производится не гло-
бально для всего Г, а локально на определенных участках, дли-
на каждого из которых выбирается в зависимости от величины
шага, достигнутого на предыдущем участке. Это позволяет де-
лать шаги более крупными там, где интегрируемая функция ве-
дет себя более плавно, и дробить в местах ее резких перепадов.
Наиболее плохими с этой точки зрения являются окрестности
обходимых вещественных полюсов, поэтому контур Г желатель-
но отклонить от вещественной оси как можно дальше, но не под-
ходя близко к комплексным полюсам и тем более не пересе-
кая их.
114
ГЛ. III. МЕТОДЫ РЕШЕНИЯ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ
3. Максимальными элементами аи системы (10.4) являются
диагональные, для них k = l, гы—0. С удалением от диагонали
значение аы уменьшается как гы” (см. (11.15)). Такого убыва-
ния явно не достаточно для хорошей обусловленности системы
при больших п (п — число узлов). Тем более, что при любом п
справедливо неравенство ru^.D, D — диаметр области, т. е. | ак11
не стремится к нулю с ростом п.
Число элементов системы равно m2n2, п — размерность ис-
ходной системы интегральных уравнений, N=mn — размерность
системы (10.4), поэтому второй традиционной проблемой явля-
ется размещение ее матрицы в памяти машины.
Решить эти проблемы удается двумя способами.
Первый способ. Решение системы Ac=f доставляет аб-
солютный минимум функционалу
Р(с) = (Ас — f, Ac — f), (а, b) = ^akbk. (11.19)
k
Ставится задача минимизации Р(с) в //-мерном пространстве
комплексных векторов CN, для решения которой имеется боль-
шой выбор итерационных методов спуска (наискорейшего спу-
ска, сопряженных градиентов и т. п.).
Преимущества такого подхода:
а) переход к функционалу (11.19) фактически является ре-
гуляризацией исходной системы, в процессе спуска никогда не
возникает разболтки, характерной для решения некорректных
задач (см. [115]);
б) матрица А не разрушается в процессе минимизации Р(с),
так как значения аи зависят только от расстояния между узла-
ми гы, число различных аи существенно меньше, чем УХ-V (фак-
тически— величина, пропорциональная N); это позволяет орга-
низовать компактное хранение А в оперативной памяти.
Недостатки:
а) так как процесс итерационный, достижение требуемого
результата не гарантируется за определенное заранее число ша-
гов; трудно оценить, достигнута ли уже требуемая точность или
надо еще продолжать спуск;
б) если необходимо решить М систем с различными правыми
частями, то для каждой правой части весь процесс решения
необходимо повторять от начала до конца.
Второй способ (метод двойной ортогонализации [71]).
Столбцы матрицы А в силу их линейной независимости мож-
но считать базисом в CN, а искомое решение сеС;(—вектором
коэффициентов разложения правой части f по этому базису.
После ортогонализации базиса (столбцов Л) требуемые ch опре-
деляются через скалярные произведения f на элементы ортого-
нализованного базиса. При необходимости процесс ортогонали-
§11. ВОПРОСЫ практической реализации
115
зации можно провести дважды или большее число раз, это
позволяет получить результат и при очень плохой обусловлен-
ности системы.
К достоинствам метода следует отнести то, что он а) приго-
ден для решения некорректных плохо обусловленных задач,
фактически является процессом регуляризации системы: б) по-
зволяет получить результат за конечное число шагов; для М
правых частей не надо повторять процесс ортогонализации за-
ново. Недостаток состоит в том, что матрица А разрушается,
поэтому компактное хранение невозможно. Однако здесь удобно
хранить столбцы матрицы в файлах прямого доступа на внешних
носителях (дисках). Так как процесс ортогонализации требует
последовательного перебора векторов, организовать обмен с
внешней памятью несложно, особенно если записывать ортогона-
лизированные векторы на место соответствующих столбцов.
4. Недостатки вариационно-разностного метода:
— быстрый рост времени счета с увеличением числа узлов
сетки;
— меньшая по сравнению с аналитическими методами точ-
ность, особенно в окрестности границы области и с ростом ча-
стоты.
Достоинства метода:
— сравнительная простота реализации;
— независимость от формы области контакта (произвольные
в плане области, системы областей).
Поэтому для классических областей (круг, полоса) выгоднее
применять метод факторизации или фиктивного поглощения, дли
произвольных в плане — вариационно-разностный метод. Для
систем классических областей используются и те, и другие
методы.
ГЛАВА IV
МЕТОДЫ ВЫДЕЛЕНИЯ ОСОБЕННОСТЕЙ РЕШЕНИЯ
В ОКРЕСТНОСТИ УГЛОВЫХ ТОЧЕК
Известно, что гладкость решения краевых задач математиче-
ской физики может нарушаться в окрестности точек, принадле-
жащих множествам, которые принято называть особыми. В сме-
шанных задачах теории упругости особыми являются линии сме-
ны типа граничных условий — границы области контакта либо
области, занимаемой трещиной или включением. Поведение ре-
шения (контактных напряжений q) в окрестности точки смены
граничных условий для плоских задач упругости впервые было
получено Н. И. Мусхелишвили [97]. В настоящее время точно
установлено поведение q в окрестности гладких участков гра-
ницы 5Q области Q при произвольных условиях контакта (без
трения, пленочный, со сцеплением и др.). Во всех случаях при
приближении к границе напряжения ведут себя как Я~а±л,
R — расстояние до границы по нормали, а, b зависят от условий
контакта и свойств среды, чаще всего а=1/2, &У=0 только при
контакте со сцеплением.
Кроме линии смены типа условий, к особым относятся точ-
ки, в которых нарушается гладкость либо самой границы dQ,
либо поверхности тела: например, уголки штампов, угловые точ-
ки на фронте трещин, точки выхода трещин или включений на
поверхность, вершины и ребра упругих многогранников. Здесь
тип особенности установить уже сложнее: он, помимо прочего, за-
висит от раствора угла. Определить же показатель особенности
необходимо.
1) для корректной постановки задачи, так как иначе нельзя
сформулировать условия, обеспечивающие единственность ре-
шения;
2) для повышения эффективности прямых численных мето-
дов, путем введения базисных функций (конечных элементов),
несущих особенность требуемого типа;
3) для анализа процессов разрушения, начинающихся в ме-
стах концентрации напряжений.
Наиболее простым с точки зрения технических трудностей
проведения вычислений является выделение особенностей вдоль
§ 12. СВОЙСТВА ПРЕОБРАЗОВАНИЯ МЕЛЛИНА 1 17
ребер двугранных углов. Установлено, что показатель особен-
ности здесь определяется из решения трансцендентных уравне-
ний, возникающих при удовлетворении граничных условий на
•боковых поверхностях угла [102]. В остальных случаях ситуа-
ция сложнее; задача существенно бесконечномерна и, как мы
убедимся ниже, требует анализа интегральных уравнений либо
бесконечных систем.
Впервые задача о выделении особенности в угловой точке
области контакта была поставлена Л. А. Галиным [49]. В слу-
чае контакта без трения ее решение на основе численного или
асимптотического подхода получено рядом исследователей
[5, 109, 126]. В случае контакта с трением или со сцеплением
решить проблему для всего диапазона углов удалось в работах
авторов [20, 25] (см. также § 13—15). Для трещин, выходящих
на поверхность, к настоящему времени нам известно только ре-
шение для вертикальной трещины (угол выхода л/2 [127]).
Вопрос о поведении решений в окрестности угловых точек ин-
тересовал также многих математиков, среди которых необходи-
мо отметить выполнившего пионерские работы В. А. Кондратье-
ва, а также ведущую активные исследования ленинградскую
школу Мазьи— Пламеневского —Назарова [148—150].
В настоящей главе излагается единая методика решения
перечисленных задач, основанная на сведении их к задаче оты-
скания полюсов преобразования Меллина искомой функции.
Даются расчетные формулы, проводится обсуждение численных
результатов.
Ограниченный объем книги не позволил включить сюда слу-
чай трещины, выходящей на поверхность, и случай вершины
многогранника. Описание реализации рассмотренной методики
в этих случаях, содержащее сводку итоговых расчетных фор-
мул, депонировано в ВИНИТИ.
§ 12. Свойства преобразования Меллина,
общая схема метода
1. Интегральное преобразование Меллина M,[f] функции
f(r), О^г^оо, вводится соотношениями
Ms[n^Kr)r^dr = F(s), (12.1)
о
,M71[F]=— f F(s)r~sds = f(r). (12.2)
2ni J
С—loo
Параметр преобразования s изменяется в комплексной плоско-
118
ГЛ. IV. МЕТОДЫ ВЫДЕЛЕНИЯ ОСОБЕННОСТЕЙ
сти, контур обратного преобразования лежит в полосе регуляр-
ности F(s).
Основой используемого метода является следующее свойство
преобразования Меллина.
Теорема 12.1 [70] (о выделении особенности). Пусть
функция f(r) непрерывна, при г->-оо исчезает быстрее любой
степени г, а в окрестности г=0 разлагается в сходящийся
ряд
со
f (г) = 2 ckr~yk, 0 < г < е; (12.3>
А=1
тогда преобразование Меллина F(s) аналитически продолжимо
на всю плоскость s, за исключением точек s—yit у2, у3, ..., ко-
торые являются полюсами первого порядка F(s).
Обратно, если функция F(s) —аналитическая в плоскости s,
за исключением однократных полюсов то при r->0 f (г) имеет
представление (12.3), причем Ck = resF (s)|s=%.
Доказательство первой части теоремы приведено в [70],
в справедливости второй части несложно убедиться.
Пусть контур интегрирования в (12.2) расположен правее
всех ук. Так как r~s = e~slnr и при r->01nr->—оо, то подынте-
гральная функция экспоненциально убывает в левой полупло-
скости при Res-э—оо. Замкнем контур в левую полуплоскость
и, воспользовавшись леммой Жордана в предположении, что
F (s) не имеет точек ветвления, получим
оо
ж = 2 res F (s) \*=vkr~Vk=2 Ckr~n- (12.4)
A=1 k
Теорема доказана.
Оценим вклад ц-кратных полюсов 7 и точек ветвления х
функции F(s) в разложение f(r) при г->0. Разложим F(s) и
r~'—e~*ln г в ряд Лорана в точке s=f
F(S)= 2 r- = r-T2 (-lnr)m^-.
ml
m——n m—o
Собрав в произведении F(s)r~’ коэффициенты при (s—7)“*, по-
лучим
п-1 г
res [F (s) г”] |s=7 = r-v 2 (- In r)1-^.
z=o
За счет кратности корня перед r~v появляется полином степени
п—1 от In г.
§ 12. СВОЙСТВА ПРЕОБРАЗОВАНИЯ МЕЛЛИНА
119
Пусть F(s) имеет в плоскости s точку ветвления х, в окрест-
ности которой справедливо представление
F(s) = (s-x)p-lf(s), f(s)^C.
При 0<р<1 F(s) имеет в точке s=x слабую особенность, при
р = 1 f(s) непрерывна в окрестности х.
Наличие точки ветвления х приводит к появлению в (12.4)
интегралов вдоль берегов разреза, соединяющего х с —оо.
В силу того, что вдоль разреза подынтегральная функция
экспоненциально убывает, несложно построить асимптотику
этих интегралов при г->0 методом Лапласа [118]. Роль боль-
шого параметра здесь играет л= —In г, после замены s=x—s,
интеграл по разрезу принимает вид
1 00
Л* л
/х (Г) = -J- V (- F+ (X - sj + F~ (x-sj) e-^S1, (12.5)
2m J
о
F+, F~—значения F на верхнем и нижнем берегах разреза.
По лемме Ватсона
f x^f (x) e~Xxdx — V %-<fe+P)r (k + P) oo, (12.6)
J *=o
Шес~[0,8].
Следовательно, вклад интегрируемых точек ветвления х при
г->0 имеет представление
(12.7)
4 (г) -с----------
(— 1пг)е
В дальнейшем наряду с теоремой 12.1 будут использоваться
следующие свойства преобразования Меллина [68, 89]:
1)
2)
3)
Ms [f (ar)] = a~sF (s),
Ms[r“/(r)] = F(s + a),
Msm]=AF(-
dnf (r) '
dr"
при lim r^-1—r —0,
r-»o dr'
Г/ A \4
4)
Ms
Г (п + 1 — s) г, , .
v ------- F(s — ri)
r(l-s)
/ = 0,1, ...,п —1,
(12.8)
5) Ms
120
ГЛ. IV. МЕТОДЫ ВЫДЕЛЕНИЯ ОСОБЕННОСТЕЙ
6)
7)
Ms
р(-0/2(О-7
-о
= F1(s)«Fa(s)
— меллиновская свертка.
2. Выше уже упоминалось, что нельзя требовать единствен-
ности решения, не указав характер особенности в угловой точке.
Поясним это на модельном примере, здесь же покажем технику
решения задач в клиновидных областях с помощью преобразо-
вания Меллина. Рассмотрим задачу Дирихле в клиновидной
области
Ди=0, О^г^оо, —0^<р^6,
и |ф=е = fi (г), «|Ф=-0 = /2 (г).
(12.9)
В полярных координатах г, <р оператор Лапласа имеет вид
. 1 д / ди \ . 1 д2и
Д<р =-------г — Н------------.
г dr \ dr J г2 дер2
Применим к уравнению и граничным условиям (12.9) преобра-
зование Меллина по г. Проделаем эту операцию пока формаль-
но, считая, что Res достаточно велико и условия при г-^0 в
(12.8, п. 4) выполняются. Если при этом нарушается сходимость
ОО
интегралов при г->оо, можно разбить (.. .)dr на два интегра-
0
1 оо
ла J и J, взяв в каждом свое s. В окончательном результате
О 1
две получившиеся аналитические функции сводятся к единой по-
лосе регулярности с помощью аналитического продолжения. Бо-
лее подробно эта техника разбирается в [89].
Относительно U(s, <р) —Ms[u(r, <р) ] получим
^- + s2i/ = 0, (12.10)
i/(s,0) = F1(s), U(s, — 0) = F2(s), (12.11)
= Ms [/„], n=l,2.
Отсюда
Fx (s) sin (s (0 + <p)) + Fz,(s) sin (s (0 — g>))
sin (2s0)
Полюсами U (s, q>) являются
sn=—, n = 0,±l, ±2, ... (12.13)
(12.12)
I/ s,<P
§ 12. СВОЙСТВА ПРЕОБРАЗОВАНИЯ МЕЛЛИНА
121
Рассмотрим функцию
ис (/", ф) — Mr1 [Д] — —— f U (s, ф) r~sds.
2ni J
C— too
При Vc=/=sn uc удовлетворяет исходным уравнениям и гранич-
ным условиям (12.9) везде, кроме точки г=0, т. е. является
обобщенным решением исходной задачи в соответствующих про-
странствах Соболева. Ясно, что при двух различных положени-
ях контура [с—ioo, c+ioo] значения «с отличаются на сумму вы-
четов в полюсах, попадающих между контурами, т. е. ис опре-
деляется неоднозначно, что и требовалось показать.
Решение было бы единственным, если бы заранее было ука-
зано, в каком из промежутков [sn_1; sn] должен проходить кон-
тур. Но такое требование эквивалентно указанию порядка осо-
бенности искомой функции.
3. Изложим общую схему метода. Рассмотрим интегральное
уравнение, заданное в клиновидной области с раствором угла 0:
0 оо
Р, Ф, ф)?(р, Ф)р dp dy = f(r, ф),
-0 0
0<г<оо, -0<ф<0, . (12.14)
оо
& (г> Р> Ф> Ф) = (ai, аг) £)^(y-TiYida,! da2, (12.15)
—ОО
х = г cos ср, y~r sin ф,
£ р cos ф, т] — р sin ф,
= a cos у, а2 = а sin У, а =V«1 + «г-
Пусть символ ядра К является однородной функцией по а по-
рядка р, т. е. /С(^а4, = а2) или, что то же самое,
/((«1, а2) = арФ (у) • Для простоты предположим, что К не зави-
сит от у, т. е. К== сар (обобщение на случай зависимости от у
будет дано ниже в § 14). В этом случае
оо
& (г, Р, ф, Ф) — — I caP+V0 (aP) da,
2я о (12.16)
R — У(х — s)2 + (у — т])2 = V г* + р2 — 2гр cos (ф — ф).
Некоторые из встречающихся здесь и ниже интегралов являются
расходящимися в классическом смысле, их надо рассматривать
как интегральное представление обобщенных функций сингуляр-
122
ГЛ. IV. МЕТОДЫ ВЫДЕЛЕНИЯ ОСОБЕННОСТЕЙ
ного типа, техника работы с которыми изложена в монографиях
и учебниках [40, 41, 51].
Однородность символа ядра позволяет свести (12.14) к одно-
мерному уравнению относительно преобразования Меллина не-
известной функции Q(s, q>)=M,[q(r, <р)]. Действительно, при-
меним к (12.14) М, по г. Так как от г здесь в силу (12.16) зави-
сит только /„(aR), рассмотрим M,[J0(a#)]. По теореме сложе-
ния для цилиндрических функций [34, 80]
сю
J0(a£) =
fr=—oo
Важно, что в силу (12.8.1)
Ms [Jk (ar)] = a-sMs[4 (г)].
Используя известную формулу для преобразования Меллина от
функции Бесселя [68]
2 s'
М8[Л(г)]=-
Г
получим
Ms[J0(a/?)] = a-’ /|ь \/-Л(«р)^(у-ф). (12.17)
*=-00 г /1I )
\ 2 /
Интеграл по а в (12.16) из-за наличия а-’ также является пре-
образованием Меллина от Д(ар), входящих в каждое слагаемое
ряда (12.17) с показателем о=2—s+p.
Таким образом,
[k (г, р, ср, ф)] = ps-«-p — 2 Gk (s, р) ,
231
2^р ~Ь R I \ р / 2 + | fe | — s + Р
k 2 Г (_______________2_________,
г /|fe|—s + 2\ /|fe| —p+s\
\ 2 / \ 2 )
(12.18)
Gk(s,p)~O(k?), |fe|->oo.
После подстановки (12.18) в (12.14) интеграл по р представляет
собой M,-P[q(r, ф) ] = Q(s—р, ф).
§ 12. СВОЙСТВА ПРЕОБРАЗОВАНИЯ МЕЛЛИНА
123
Окончательно
в
NsQ— ^N(s,<p — ф) Q(s — р, ф)<2ф = F(s,q>), —0^q><0,
"° (12.19)
М== Gkeik^~^.
k~—оо
Вид (12.19) можно получить и из общих соображений, убе-
дившись, что из-за однородности К ядро представляет собой
меллиновскую свертку, для которой справедливо равенство
(12.8, п. 7).
Итак, относительно Q(s, ср) получено одномерное интеграль-
ное уравнение по второй переменной ср. Переменная s входит в
(12.19) параметром. Очевидно, полюсами sk будут те значения
параметра s, при которых могут существовать нетривиальные
решения у соответствующего однородного уравнения, т. е. точки
спектра интегрального оператора N,. При этом sk не зависят
от ср.
Для нахождения sh проводится дискретизация уравнения
(12.19) по схеме метода Галеркина: решение ищется в виде раз-
ложения по системе базисных функций цт(ф):
Q (s — р, ф) == tm (s) vm (ф);
m=o
для определения tm невязка раскладывается по второму базису
{ui}T=i, в результате относительно неизвестных возникает бес-
конечная система
оо
2^ = А, / = 0,1,2,..., (12.20)
т=о
0 9
aZm = (Nsvm, wi)^ = J J N (s, <p — ф) vm (ф) wi (<p) t/ф dtp,
-д-^е
e
fi = j F (s, <p) wi (<p) dip.
-6
Здесь {шй}*=о—система проекторов на базис т. е.
(«г, vok) |ь2=бы, бы—символ Кронекера.
Важен правильный выбор базисных функций, учитывающий
особенности аппроксимируемых выражений; пример базисов,
теоретически допустимых, но не дающих практических резуль-
татов, приведен ниже в § 13.
124
ГЛ. IV. МЕТОДЫ ВЫДЕЛЕНИЯ ОСОБЕННОСТЕЙ
Искомыми полюсами sh являются нули определителя A(s)
матрицы А системы (12.20), так как
t(s) = A~1(s)f(s), t = f =
A-l=AJ\, Ai— присоединенная к А матрица.
По свойству (i2.4) коэффициент ск при исобенностях г —
коэффициенты интенсивности напряжений — выражаются через
вычеты tm в полюсах sh. Для их определения можно воспользо-
ваться формулой
С/г = 2 res tm |s=s^fn (ф),
m
res t |S=SA = lim Д"1/ (s — sk) = 4 \ f (s*)- (12.21)
s->Si, Д (sk>
Общая схема, изложенная выше, справедлива для интеграль-
ных операторов с однородными символами и областью опреде-
ления в виде клина. Такими свойствами обладают интегральные
уравнения, возникающие в задачах статики для однородных
упругих сред. Переход к динамическим задачам и неоднород-
ность среды портят однородность символа, не говоря уже о том,
что область контакта или форма трещины не обязательно строго
клиновидны. Однако установлено, что показатель особенности
напряжений q~O{r-^), r->0, 0<Re70<l в угловой точке гра-
ницы смены типа граничных условий при достаточной гладкости
изменения упругих модулей в окрестности вершины зависит
только от раствора угла и свойств среды в ее окрестности и не
зависит от частоты и формы области вдали от вершины. Поэто-
му при выделении показателя особенности напряжений в угло-
вой точке границы штампа или трещины можно переходить к
статической задаче с клиновидной областью контакта или фор-
мой трещины и однородной средой.
Заметим, что коэффициент интенсивности, напротив, зависит
от всех параметров задачи.
§ 13. Клиновидный штамп, контакт с трением
1. Рассмотрим жесткий, клиновидный в плане штамп, вза-
имодействующий с поверхностью упругого однородного полу-
пространства в области й: {z=0, Os^r^oo, —Ое^ф^б}.
Предположим, что в зоне контакта возникают силы кулонов-
ского трения с коэффициентом 1. Штамп находится в со-
стоянии предельного равновесия под действием горизонтальной
сдвигающей силы Т, равной произведению коэффициента трения
б на величину вертикальной прижимающей силы F: T=$F.
В результате компоненты контактных напряжений связаны
§ 13. КЛИНОВИДНЫЙ ШТАМП, КОНТАКТ С ТРЕНИЕМ
125
зависимостью
TZ2 = б COS XCT2z, Xyz = б sin XCTzz.l (13.1)
х+л —угол направления сдвигового усилия с осью Ох (рис. 4.1).
Неизвестные контактные напряжения определяются из системы
интегральных уравнений (4.3), третья строка которой при усло-
вии (13.1) дает интегральное уравнение
0 оо
У ( П (г, р, ф, ip) Ozz (р, г|>) pdp<fc|) = uz (г, ф), (13.2)
-9 О
— 0<^Ф-<0, 0 <^оо,
с ядром n=6(cos zfei+sin хй32)+^зз, ki}—компоненты матрицы
Грина k. Символ ядра Л^сц, а2) в соответствии с (2.24) равен
М (ап а2) = — (ах cos х + sin х) S (а) + 7? (а).
ГУ2
Для однородного полупространства
S(a) = — i —7?(a)=l^—
v ' 2ц * ' fz |a|
Действуя по общей схеме (§ 12, п. 3), применим к (13.2) пре-
образование Меллина по г. Здесь, в отличие от разобранного
случая, символ N зависит как от а, так и от у, поэтому наряду с
интегралом 1Р возникают интегралы вида
₽1₽! = f J ai‘a^1 da2. (13.3)
126
ГЛ. IV. МЕТОДЫ ВЫДЕЛЕНИЯ ОСОБЕННОСТЕЙ
Чтобы найти воспользуемся соотношением (11.7):
. d₽1 \ ( . др2 \ ,
— с-------I I — I j I р •
dg"« } \ dr]p! )
(13.4)
В цилиндрической системе координат
Л Л 1 . д
— — COS ф------------- Sin ф--------,
дх * dr i г dtp
д . д , 1 д
— Sin ф 1-COS Ф-,
ду---------------------------dr г dtp
d . d .1 . , d
— — cos ib--------J sin ib —,
dl dp 'p T dtp
d . , d . 1 d
— = Sin lb--------------------COS lb —.
dr) dp p dtp
Учитывая (12.8), имеем
Ms[/10] = Msp£(/_2)] =
t °°
=-----ps~l V ((s — 1) cos ф + ik sin ф) Gk (s — 1, — 2) ,
2rt
A=>-oq
лад=д[»|(/..У = -
=----2^^ 2 —l)sin rp — t/г cos cp) G/г (s — 1, — 2) etew-'W.
k=—oo
Преобразование Меллина от исходного интегрального урав-
нения (13.2) принимает вид
в
j У (s, ф — ф) Q (s-f-1, ф)б/ф = F (s, ф), —0 <ф^0, (13.5)
-е
)У(5,ф — ф) = 2 (^(s,—В — eGfe(s—1, —2)х
х [(s — 1) cos (ф — х) + ik sin (ф — х)]>
F(s,T) = 2n/-Ms[«z], e = 6-l=22L.
1 — v 2(1—v)
Следующий шаг — дискретизация, необходимо выбрать си-
стему базисных функций. С общетеоретической точки зрения
для этой цели подходит любая полная на отрезке [—0,0] систе-
ма функций, для которых достаточно просто берутся интегралы
(12.20). Этим требованиям удовлетворяют, например, тригоно-
§ 13. КЛИНОВИДНЫЙ ШТАМП. КОНТАКТ С ТРЕНИЕМ
127
метрические функции e±lnv, п, т = 0, 1,2,..., <р=<р/0,
ф=ф/0, причем интегралы (12.20) принимают в этом случае пре-
дельно простой вид, так как N(s, <р—ф) зависит от <р, ф через
экспоненты: Однако реализация схемы с использовани-
ем тригонометрических функций не позволила получить устой-
чйБЬаХ рбЗуЛЬТаТОБ. ДСЛО Б ТОМ, ЧТО МОТрИЦс* системы при током
выборе координатных функций становится плохо обусловлен-
ной. Ее элементы ведут себя как элементы матрицы Гильберта,
являющейся классическим примером матрицы существенно не-
корректной системы [42].
Плохая обусловленность возникает из-за того, что Q(s, ср)
имеет на краях отрезка слабую особенность вида (02—<р2)~,/г, и
хотя система {e±twp}Xo образует плотное множество в Lt, ско-
рость сходимости невысокая. Более естественно было бы вос-
пользоваться системой функций, уже несущих особенность за-
данного типа, тогда скорость сходимости будет того же порядка,
что и при приближении непрерывных функций полиномами. Учи-
тывая эти соображения, в качестве базисных были выбраны си-
стемы функций
( Тщ (МО ] frj, оо
1 /- —4 , {и(ф)}/=о,
(V 1 — фгк=0
Тт(х) — полиномы Чебышева. Во второй системе особенность не
вводится, так как правая часть и невязка — гладкие функции.
Однако при вычислении коэффициентов в разложении невязки
по Л в силу условия ортогональности полиномов Чебышева
—-..— ах —
К1 — X2
л/2, k — l^>0,
л, k = 1 — 0,
.0, k=£l,
в интегралы по <р также вводится весовой множитель (1—<р2)-71.
Возникающие интегралы по <р, ф берутся в явном виде:
С тт (х)
е ±шх . т} ... dx = ne±mni/*Jm (а), (13.6)
J у 1 — х2
-1
7m(z) — функция Бесселя.
Окончательные формулы для элементов матрицы системы
принимают вид
alm (s) = 2 (s, — 1) jI (nd) Jm (n0) cos T(Z — m) Д-1 —
n=0 \ L 2 J
- |G„ (s —1, - 2) Jm (nO) Г JI ((«4-1) 0) (S-I + n) X
128
ГЛ. IV. МЕТОДЫ ВЫДЕЛЕНИЯ ОСОБЕННОСТЕЙ
х cos (х — у (т — k)j + J; ((п — 1) 0) (s —1 — и) х
х cos (х + у (т — • (13.7)
Штрих у знака суммы означает, что первое слагаемое берет-
ся с коэффициентом 1/2.
Быстрое убывание /г(п©), Jm(n0) при I, т-^оо обеспечивает
хорошую обусловленность матрицы А. На практике оказалось
достаточно урезать ее до размерности 4—5, это обеспечивало
при 0>О,1л совпадение результатов до третьего знака. Таким
образом, численно подтвердился известный вывод о том, что
учет особенности в координатных функциях эквивалентен регу-
ляризации исходной некорректной задачи (в нашем случае ин-
тегрального уравнения I рода). Точно так же найденный в ре-
зультате показатель особенности поможет при решении соот-
ветствующей пространственной задачи с уголками.
2. При реализации расчетных формул на ЭВМ возникает ряд
проблем. В данном случае это вопросы сходимости рядов (13.7),
вычисления функций Gn(s, р), !т(пв), особенно при больших
п, т, малых 0, и выделения возможных особенностей по s.
Очень существенную экономию машинного времени дает ис-
пользование рекуррентных соотношений. Их основой для Gn яв-
ляется фундаментальное свойство гамма-функции Г(1+х) =
=хГ(х); в результате
<з, р) =. О„ (s, р) - 1» 1 "I - + <)... (13.8)
(I п I — s + 2) (| п | — р + s)
Это же свойство Г(х) позволяет выделить в явном виде особен-
ности, которые имеются у Go, G,, G2 на краях рассматриваемой
полосы в точках s=0, —1. Для их устранения все аы домножа-
ются на s2 (s+1)2, что, очевидно, не изменяет положения нулей
определителя.
Для функций Бесселя имеются рекуррентные соотношения
по индексу [80]:
/т+1 (Z) = _ Jm-1 (г). (13.9)
2
Соотношения (13.8), (13.9) позволяют ограничиться вычис-
лением гамма-функций и функций Бесселя только при п, т=0. 1.
Причем формулы (13.8) дают устойчивый результат при п->-оо,
в то время как из-за разности в правой части вычисление по
(13.9) становится неустойчивым, начиная с некоторого /п0. Про-
цесс потери устойчивости легко контролируется, так как он на-
ступает в зоне быстрого убывания Jm{z):
/т(2)~г^ НН * т^°° <13Л0)
У 2Д1ГП \ 2Ш /
§ !3. КЛИНОВИДНЫЙ ШТАМП, КОНТАКТ С ТРЕНИЕМ
129
(г — фиксировано), расположенной вслед за зоной осцилляции.
Когда значения |/m(z) | становятся меньше уровня погрешности
вычисления исходных J0(z), дальнейшее вычисление по
(13.9) вместо убывания дает рост по т. Для в рамках
требуемой точности можно принять Jm(z)=0 либо воспользо-
ваться асимшишкий (13.10), если aiu НсиилиДими.
Поведение Gn(s—k, I) ~nl~\ n-+oo, дает убывание Gn(s, —1),
Gn(s—1, —2) как и-1, поэтому сходимость ряда (13.7) обеспечи-
вается только за счет убывания Zm(n0), hfnQ):
Jm. (пВ) cos [пв — я(— -4- — V, и—>оо.
г лпд \ ( 2 4 J /
При 0=0 ряд расходится: atm имеет логарифмическую осо-
бенность при 0->О. Эту особенность можно выделить из выра-
жения (13.7) в явном виде, применив стандартную процедуру
улучшения сходимости ряда [84]. Оставшаяся в результате
часть ряда, абсолютно сходясь, дает функцию, гладкую по 0.
Наличие логарифмической особенности, с одной стороны, огра-
ничивает диапазон применимости метода областью 6^|0о>О,
с другой стороны, позволяет построить асимптотику решения
5 В. А. Бабешко и др.
130
ГЛ. IV. МЕТОДЫ ВЫДЕЛЕНИЯ ОСОБЕННОСТЕЙ
(13.5) при 0->О [5]. Здесь в явном виде получается не только
показатель особенности, но и коэффициент интенсивности.
3. Приведем результаты численного анализа. На рис. 4.2, 4.3
показаны зависимости показателя особенности у от 0 при раз-
личных х и е. При 0—л/2, когда клин вырождается в полуплос-
кость, у совпадает с показателями особенностей Тц т2, возникаю-
щих на краях полосового штампа, контактирующего с полу-
плоскостью при наличии трения [49, 97]:
<?(*) =----Ч-^-----<71(х)еС[-а,а], 0<т1<|<т2<1.
(х — а)Х1(х+а)Хг 2
Считается, что горизонтальная сила направлена вдоль оси х,
меньший показатель ti — на передней кромке х=а, больший
т2 — на задней х =—а. В случае контакта без трения (е = 0)
т1=т2= 1/2.
Такая же закономерность наблюдается и при произвольном
растворе 0: на передней кромке (х=0) значения у меньше, а на
задней (х=л) — больше значений, полученных при отсутствии
трения (е=0). Естественно, что в промежуточном случае х=л/2,
когда сдвигающая нагрузка действует вбок, зависимость у от 0
такая же, как и при е=9. Как показано в [47], т(, т2 совпадают
§ 14. ДВИЖЕНИЕ КЛИНОВИДНОГО ШТАМПА
131
с порядком поведения на бесконечности результата факториза-
ции W+(a), Л-(а) символа ядра АГ (а) соответствующего интег-
рального уравнения; для них получено точное представление:
1 , 1 ,
т,, = — ± — arete е.
2 я
При е=0 результаты, приведенные на рис. 4.2, сравнимы с
у(0), полученной в [109], но ближе к результатам [126], приве-
денным в той же книге. Для малых 9 кривые, построенные из-
ложенным методом, стыкуются с полученными из асимптотиче-
ского представления. Это, в частности, позволяет оценить диа-
пазон применимости асимптотик.
§ 14. Движение клиновидного штампа
при наличии трения
1. Предположим, что горизонтальная сила, действующая на
пригруженный штамп, превышает порог предельного равнове-
сия, в результате штамп движется в направлении х+л с неко-
торой постоянной скоростью V. Нелинейными эффектами, возни-
кающими из-за наличия трения, здесь, как и в остальных слу-
чаях, пренебрегаем.
Введем подвижную систему координат (х, у, z), связанную
со штампом. Перемещения и и контактные напряжения q связа-
ны с этими же величинами «0, qa, взятыми в неподвижной систе-
ме координат (х0, у0, z0), соотношениями вида
u0(x0,y0,z0,t) = u(x,y,z),
х = х0 + и/cos х, у = yQ + vt sin x, z = z0.
Переход к подвижной системе координат не меняет произ-
водных по х0, у0, z0 в уравнениях движения среды и граничных
условиях, производная же по времени в инерционном члене
уравнений Ляме принимает вид
д
dt
дх д
dt дх
ду д ( д . .
—------= V COS X--------[- sin X
dt ду \ ! дх
д_ \
ду ) '
Применяя преобразование Фурье по х, у, в этом случае по-
лучим те же, что и в § 2, уравнения (2.10), с заменой <о2 на
»2a2cos2(y—х) (здесь ai=iacosy, a2=asiny).
Отсюда в подвижной системе координат относительно огг по-
прежнему имеем интегральное уравнение (13.2), ядро которого
л(г, р, ф, ф) выражается через компоненты матрицы Грина
осциллирующего упругого полупространства с заменой в
132
ГЛ. IV. МЕТОДЫ ВЫДЕЛЕНИЯ ОСОБЕННОСТЕЙ
К(аь а2, со) величины со2 на a2u2cos2(y—х):
N (аь а2) = -Ц Ф (у), Ф (у) = 8Ф$ (у) cos (у — х) + Фд (у),
|а|
фс м = _L го.5 п 4. _ а,аД.
“ 2iA u '
®Hv) = -^^ic°s2(y —*), (141)
4Д
А = р [— 0,25 (1 + а|)2 + djoJ,
а,г = V1 — Vn cos2 (у — х), n=l,2; vr = —, v3=—,
vp v,
оо 2Л
п (г, р, <р, ф) = —!- J J Ф (у) dy da.
о о
Зависимость от у в N(a, у) здесь уже существенно сложней,
чем в предыдущем случае, она обусловлена не только множи-
телями типа af1, ос£г, от у зависят и функции 7?, S, входящие в
К, поэтому от нее нельзя избавиться переходом к производным,
как в (13.3), (13.4).
Аналогичным свойством обладают К (а, у) анизотропных
сред, поэтому используемая ниже техника и в какой-то мере по-
лученные результаты применимы при анализе контакта клино-
видного штампа с анизотропной средой, угол х характеризует
ориентацию штампа относительно осей анизотропии.
Преобразование Меллина уравнения (13.2) с ядром (14.1)
приводит к уравнению (13.5) с ядром
2Л
N (s, (р — ф) = -Ц- C£~(s,<p —y)£+(s, ф —y)®(y)dy, (14.2)
4л* J
о
00
Е± (s, 9) = J е±и = | cos 9 |~sr (s) exp i sgn (cos 9) -y s'j.
0
Известное разложение экспоненты [98]
e« »>"<₽== /п(0^"ф (14.3)
П=— оо
позволяет представить (14.2) в виде ряда Фурье по
Действительно, из (14.3)
00
g±it COS ф git sin (ф+Л/2) -— Jn £^(ф±Л/2)
П=—оо
§ 14. ДВИЖЕНИЕ КЛИНОВИДНОГО ШТАМП?.
133
следует
a~sE~ (s, Ф — у) =
= MS
Jn(ar)ein^-n/»
Г„ (s) егп(<мня/2),
(14.4)
2 (ар) еМ W+«/2) = pi
ГН——оо _ j
Разложим Ф(у) в ряд Фурье
ф(т)= 2 ^e‘nv>
2Л
О
(14.5)
Учитывая ортогональность экспонент
f einvdv = [2п> л = 0>
J г 10, пМ
о 1
после ряда несложных преобразований, в результате дискрети-
зации с использованием прежней системы координатных функ-
ций, получим систему с элементами
aki (s) = 2' Гт <s)Jl S' [Гт+П Jk + n)9) x
tn—о n=o
x (e 2 fn + e 2 f.n) +
+ Гт_„ (1- s) Jk (| m - n 19) (e {-‘-n*k}fn + el {~n+l~k}/_„)]. (14.6)
2. Итак, анизотропия, вызванная движением штампа, приве-
ла к двойным рядам в представлении (14.6) и необходимости
считать интегралы (14.5), поэтому здесь необходимо использо-
вать рекуррентные соотношения как по т, так и по п.
В силу бесконечной гладкости Ф(у) коэффициенты f„ при
п->оо убывают быстрее любой степени п. Это обстоятельство
134
ГЛ. IV. МЕТОДЫ ВЫДЕЛЕНИЯ ОСОБЕННОСТЕЙ
фактически снимает проблему суммирования двойных рядов,
так как ряд по п можно заменить конечной суммой. Члены ряда
по т при фиксированном п
убывают как т~3.
Результаты расчетов
для различных значений
v приводятся на рис. 4.4.
При ц = 0 они совпадают с
полученными ранее для
неподвижного штампа.
Здесь следует отметить,
что с увеличением скоро-
сти для острых углов (6<
<л/2) показатель особен-
ности увеличивается, а для
тупых (9>л/2) — умень-
шается. При значениях v,
приближающихся к v„ в
определенном диапазоне
изменения 0 (его границы
зависят от V, б и х) пока-
затель 7 становится отри-
цательным, т. е. поле на-
пряжений не имеет осо-
бенностей при л-Н)1
Более подробно результаты расчетов для движущегося штам-
па при различных значениях входных параметров приведены в
работе [161]. Там же изучена зависимость от 0 коэффициента
интенсивности напряжений.
§15. Клиновидный штамп, контакт со сцеплением
1. При наличии сцепления в области контакта напряжения
определяются из системы интегральных уравнений (12.14) раз-
мерности 3X3. В цилиндрических координатах 9={тгг, т*г, ст„},
/=р{иг, нф, нг}; компоненты символа матрицы Грина К(аь а2)
для упругого однородного полупространства имеют вид
iz 1 „ / . \ v д д
*11 = 7-7 cos (Ф — ф) — г-Z-.
I а| | а I1 or Эр
1 . , v Э 1 Э ,. 1 — 2v Э
*12 = —[51п(ф — ф) —, *\з =----------------ТГГТ’
| а | I а |3 дг р Эф 2а2 Эг
^2i = -^sin(T — D + (15.1)
I а I I а |3 г д<р др
к 1 i ч v 1 д 1 д v 1—2v 1 д
*22 = ~COS (ф—ф) ----— , *23 =-----_____
I а | j а j3 г дф р dif 2а2 г дф
§ 15. КЛИНОВИДНЫЙ ШТАМП, КОНТАКТ СО СЦЕПЛЕНИЕМ
135
1 — 2v д „ 1 — 2v 1 д „ 1 — v
А 31 ----Я-’ ^32 О»' а, ’ Л33 , I »
2а2 др 2а2 р dip | а |
а == VaJ + al, v — коэффициент Пуассона.
Компоненты матрицы lV(s, <р—ф) системы (12.19), возникаю-
щей после применения преобрячовяння Меллина, тем же путем,
что и в § 13, можно получить в виде
Nn = 2 {cos(<p— ф)С*(®,-1) + v(s-l)sGk(s-1,-
fess»—ОО
Nlt = 2 {sin(<p— ||>)GA(S,— 1)— v(s — l)i£Gft(s — 1, — 3)}^«^>,
k=— oo
Nla = 2 (s — 1) Gk(s -1, — 2)1
k—— 00
Nal = 2 {— sin (Ф — Ф) Gfc (s, — 1) — ivksGk (s — 1, —3)} ^(ф-4),
fee-00
tf22 = J {cos(<p —ф)СН8,—1)—^2Gfc(s—1, —3)}e»fP-^, (15.2)
fe=—OO
N23 = 2 {— ^~ikGk(s—1, — 2)b1A<4^>,
fee—oo
N31 = 2 -f—sGk(s,— 2)le«(W>,
feZ-oo *- 2 *
N33= 2 J'-=-^^GHs,-2)p^>,
fe=—OO
^33= 2 {(!-V)G*(S. -1)}^«₽-4
4=^00
Дискретизация проводится, как и раньше, с тем отличием,
что в (12.20) неизвестные tm — векторы размерности 3, а матри-
ца А состоит из блоков aim размерности 3x3, компоненты кото-
рых получаются из (15.2) после интегрирования по <р, ф в соот-
ветствии с (12.20).
Как уже подчеркивалось, при выборе координатных функций
vm надо стремиться к тому, чтобы они имели те же особенности
по ф, что и искомая функция Q, в нашем случае это особенность
136
ГЛ. IV. МЕТОДЫ ВЫДЕЛЕНИЯ ОСОБЕННОСТЕЙ
контактных напряжений в окрестности края штампа. Известно
[47], что в окрестности края жесткого штампа, сцепленного с
упругой средой, контактные напряжения q имеют асимптотику
q — = 2Re[cR"(v,+1'V2)], (15.3)
R ->0, c = const,
, . 1 . . .. 1 — 2v
у, + iy2 = —Ь i arcth-------,
nl r2 2 2(1 —v)
где R — расстояние до края штампа. Асимптотику (15.3) можно
записать в следующей форме:
qk ~ | ck\ R~Vt cos (у2 In R + <pA), <pfc = argcA, (15-4)
R->-0, k= 1,2,3,
которая показывает, что при R->0 наряду с особенностью име-
ется бесконечная осцилляция, обусловленная комплексностью
показателя "fj+iYa. Возникает вопрос: насколько эффективно ис-
Тт (*)
пользование здесь прежних координатных функций ---------------,
V 1 — х*
которые несут только особенность R~,/!, но не «ухватывают» бес-
конечной осцилляции? Ответ на него дают результаты сравни-
- Тт W Тт W , 1 ,,
тельных просчетов с базисами — и — —cos (у.» In (1 — х )).
У1 — X2 V 1 — X2
В первом случае интегралы по ф в соответствии с (13.6) бе-
рутся аналитически, во втором — численно, после предваритель-
ного выделения вклада окрестности х=±1 в явном виде. Ре-
зультаты, полученные при одинаковом числе координатных
функций в пределах требуемой точности, совпали полностью, что
позволило сделать следующий вывод: для регуляризации исход-
ной некорректной задачи путем введения базисных функций, не-
сущих особенности искомого решения, достаточно учитывать
только вещественную часть показателя особенности; другими
словами, устойчивость численной схемы обеспечивается без вве-
дения бесконечной осцилляции в координатные функции.
Из этого вывода не следует, что отпадает необходимость в
поиске мнимой части показателя особенности, он необходим, на-
пример, при определении коэффициента интенсивности или при
анализе напряжений в непрерывной метрике. Приведенные ниже
численные результаты получены с использованием первого ба-
зиса, так как этот путь менее трудоемок в реализации.
2. Комплексность показателя особенности напряжений в
окрестности гладкой границы штампа указывает на то, что по-
казатель особенности для угловых точек границы в случае кон-
такта со сцеплением также должен быть комплексным. Поэтому
§ 15, КЛИНОВИДНЫЙ ШТАМП, КОНТАКТ СО СЦЕПЛЕНИЕМ
137
здесь поиск нулей определителя A(s) =det A(s) проводится уже
не на отрезке — l^s^O, как в § 13, 14, а в полосе — l^Res^O.
Основные моменты реализации остаются теми же, что и в
§ 13, с естественным усложнением, связанным с увеличением
размерности системы и необходимостью считать функции
/>) от комплексного аргумента. Сущесхвенни оольшс про-
блем вызывает сам поиск комплексных нулей, так как не су-
ществует метода (стандартной программы), гарантированно
дающего все нули в бесконечной области комплексной плос-
кости s.
Для построения ч('0) был использован следующий прием.
В силу аналитической зависимости A(s, 0) от s и 0 по теореме
о неявных функциях зависимость sft—корней уравнения Д(«, 0) =
= 0 от 0 также аналитическая. Следовательно, при изменении
0е[О, л] корни sft(0) вычерчивают в плоскости $ непрерывные
кривые. Известные точки, через которые проходят эти кривые
при 0—л/2, были выбраны за начальные. Далее при изменении
0 с мелким шагом прослеживался дрейф каждого из нулей, их
значения уточнялись методом Мюллера (метод парабол); на
каждом шаге за начальные брались значения, найденные на
138
ГЛ. IV. МЕТОДЫ ВЫДЕЛЕНИЯ ОСОБЕННОСТЕЙ
предыдущем. Такой подход показал высокую эффективность и
надежность, единственный его недостаток: не гарантируется на-
хождение всех нулей в полосе, а только продолжение тех, кото-
рые были при 0=л/2. При 9->-0 и 0 = л/2 известно точное коли-
чество нулей и оно не меняется, но открытым остается вопрос:
не происходит ли временного проникновения нулей из соседних
Рис. 4.6
областей в рассматриваемую полосу при промежуточных зна-
чениях 6?
В полосе —l^Res^O прослежено три корня: два комплекс-
но-сопряженных и один вещественный, либо все три веществен-
ные и различные. При интерпретации результата необходимо
определить, какой из компонент вектора напряжений q =
= {т„ тФ, ст2} соответствует каждый из корней. Здесь был ис-
пользован тот же прием продолжения по непрерывности при из-
менении V. Исходная система интегральных уравнений (15.1),
(15.2) при v=0,5 распадается на две независимые системы от-
носительно Тг, тф и относительно о2. Это позволяет на графике
зависимости у (9) однозначно выделить кривую, соответствую-
щую о2, и проследить ее трансформацию при изменении v от 0,5
до 0. Известно, что показатель тг — вещественный при всех
0^v^0,5, 9 = л/2; это указывает, какая из двух оставшихся
§ 16. НАПРЯЖЕНИЯ В ОКРЕСТНОСТИ УГЛОВЫХ ТОЧЕК
139
кривых соответствует тг, а какая тФ. Окончательные зависимо-
сти у (в) для различных v приведены на рис. 4.5, 4.6. В зоне
0<л/1О результаты совпадают с асимптотическими результа-
тами работы [139], при больших 9 кривые, построенные по
асимптотикам, круто заворачивают вверх.
При v = 0,5 во всем диапазоне изменения 0 все три показате-
ля вещественны и различны, с уменьшением v появляется диа-
пазон 0, содержащий точку л/2, в котором ог, тф имеют по два
комплексно-сопряженных показателя yi±iy2 (на рисунках при-
ведена только положительная мнимая часть -/2). Причем в диа-
пазоне комплекснозначности показатели о2 и тФ совпадают.
Максимальное значение у2 наблюдается при 0 = л/2. Для боль-
шей наглядности на рисунках показаны траектории движения у
в комплексной плоскости при изменении 0 от 0 до л.
После того как найдены точные значения у(0), по формулам
(12.21) можно определить зависимость от 0 коэффициентов ин-
тенсивности напряжений в окрестности угловой точки контакта
со сцеплением.
§ 16. Особенность напряжений в окрестности
угловых точек фронта трещины
Развитый метод выделения особенностей можно применить к
решению произвольной смешанной задачи, сводящейся к инте-
гральным уравнениям. Рассмотрим задачу о трещине, которая
моделируется бесконечно тонким разрезом в упругой среде.
1. Пусть в упругой среде, заполняющей все пространство
—оо<Сх, у-^.х, в области Q плоскости xOz имеется тонкий раз-
рез, на берегах которого перемещения и и напряжения
q= {txt,, о», туг} терпят разрыв. Пусть
v(x, z)=a|^0- — и|^=0+, (х, г) ей,- скачок перемещений на
разрезе,
р (х, г) =q | у=0- — q | у=о+, (х, г) ей,- скачок напряжений.
Для трещин обычно предполагается отсутствие напряжений
на берегах разреза: <?^=о± = О, (х, г)ей, при этом скачок на-
пряжений также отсутствует: р=0. Если предположить, что
разрез заполняет абсолютно жесткое включение, сцепленное со
средой, то отсутствует скачок перемещений и=0. В общем слу-
чае упругого включения присутствуют и р, и V, связь между
ними устанавливается при использовании уравнений, описываю-
щих деформацию самого включения. Напряженно-деформиро-
ванное состояние среды вне Q можно выразить через v или р в
виде интегралов типа свертки (см., например, [9]). Для вывода
этих представлений можно, используя полученную ранее матри-
цу Грина полупространства, выразить перемещения в полупро-
странствах и у^О через напряжения, возникающие в
140
ГЛ. IV. МЕТОДЫ ВЫДЕЛЕНИЯ ОСОБЕННОСТЕЙ
плоскости хОг, у=0±, а затем состыковать эти выражения, вос-
пользовавшись условиями непрерывности и и q вне Q и условия-
ми на берегах разреза. С другой стороны, можно использовать
технику интегральных преобразований от разрывных функций
и их производных [105]; такой подход в рамках нашего изло-
жсиия является естественным развитием метод™* ппгтппрпия
матрицы Грина (§ 2—4). Изложение с единых позиций позволит
в дальнейшем без сравнительно больших усилий перейти к рас-
смотрению трещин в полупространстве и к анализу внутренних
источников.
В дальнейшем для определенности ограничимся рассмотре-
нием трещин (р=0), в случае включений принципиально новых
моментов не возникает.
Предварительно остановимся на правилах построения пре-
образований Фурье от производных разрывных функций. Пусть
функция /(у) (—оо, оо) имеет разрыв I рода в точке у0, а в
ОО
остальных точках бесконечно гладкая. Пусть F (а)= ^’/(y)eiwdy—
преобразование Фурье от f (у), f(k) (у) — производные f(y). В точ-
ке у0 производные также терпят разрыв; пусть
Д = lim Ay)- lim f{k](y) (16.1)
У->Уа-0 У-^Уа+0
— скачок производных в у0 (f0 — скачок самой функции). Рас-
смотрим
со / Уо оо\
Fft(a) = F[f>] = J /^(у)е«^у=[ J J (...)dy. (16.2)
-оо \-зо у„ /
Интегрирование по частям в каждом из интегралов (16.2) дает
?о (а) = F (а).
Fj (а) == foertai>> — iaF (а), (16.3)
Г2'(°0 = га/о) — <*F («)» • • -
Более просто соотношения (16.3) могут быть получены, если
использовать аппарат обобщенных функций. Известно [41], что
производная скачка дает 6-функцию
fk} (У) = - Д-16 (У - уо) - fk-£W (У-УО)-...- /об^1’ (у-у0),
(16.4)
/кл— регулярная часть — производная в классическом смысле.
Знак минус появляется из-за того, что, в отличие от [41], ска-
чок в (16.1) вводится слева направо.
§ 16. НАПРЯЖЕНИЯ в ОКРЕСТНОСТИ УГЛОВЫХ ТОЧЕК
141
По определению, для непрерывной g(y}
J6<ft) (y~y0)g(y)dy = (- 1)*^> (р0). (16.5)
Применяя преобразования Фурье к (16.4), с учетом (16.5)
Fk’(a) = (- F («) - (ffe-i - Wk-г + ...+(- ia)^1 f0) №. (16.6)
По постановке, перемещения и терпят разрыв по у при
(х, z) ей, поэтому после преобразования Фурье по х, у исходная
система уравнений (1.14), после учета (16.3), становится не-
однородной системой:
L-U=d, (16.7)
L — линейный дифференциальный по z оператор, а правая часть
d выражается через скачки и и ди/ду:
= p (iaaUo — Uj) + iax (X + р) v0,
d2 = iaj (X + p) Uq 4- (X + 2p) (ia2v0 — vx) — (% -|- p) w'o, (16.8)
d3 = — (% + p) v0 + p (ia2®0 — Wj).
Штрихом здесь, как и раньше, обозначена производная по z;
V(ai, z) = {«о, »о, w0} — скачок преобразования Фурье по х от
и, Vi(at, х)={м1, vt, w,} — от dujdy. Таким образом, правая часть
системы (16.7) выражается через шесть функций ие, ve, w0, ut,
vlt Wi и их производные. Три из этих шести функций можно ис-
ключить, использовав условия отсутствия напряжений на бере-
гах трещины:
о, = (Х + 2ц)^ + %(^ + ^] = 0, (16.9)
ду \дх дг )
^вр(т- + т)=0, (х,р)ей, */ = 0*,
\ ду dz I
из которых следует отсутствие скачка напряжений: р=0. После
преобразования Фурье по х имеем
«1 — t'tXjOo = 0,
(% + 2p) Vj +1 (— tOjt/o w'^ = 0,
®i + < = 0-
142
ГЛ. IV. МЕТОДЫ ВЫДЕЛЕНИЯ ОСОБЕННОСТЕЙ
Правая часть (16.8) после исключения Vt выражается толь-
ко через скачок перемещений V:
di = i (to^q, + ра2“о)>
d2 = I (ра^ + (А + 2р.) Oj»0) — , (16.10)
d3 = — to' + tpa2sy0.
Необходимо выразить перемещения в среде через скачок
v(x,z), т. е. построить частное решение системы (16.7), стремя-
щееся к нулю на бесконечности. В случае динамики на беско-
нечности необходимо добавить условия излучения. Такое реше-
ние несложно получить, применив к (16.7) преобразование
Фурье по z, в результате имеем линейную систему алгебраиче-
ских уравнений
At/=BV, (16.11)
17(а,, а2, а3), а3) — преобразование Фурье по z от
[7(ai, а2, z), У(а!, z),
/₽2 + (1 + у)— *1 О+У)®!^ О + У)®^
А = —I (1 + У)®1«2 ₽’+(1 + у) а2 —х2 (1 + у)а2а3
\ (1 + У)®1“з (1 + т)а2а3 ₽2 + (1 + у) —х2
(ia2 iya, 0 \
7«i i (У + 2) а2 ia3 ,
0 iya3 ia2/
₽=»:+»:+»;, x’i=4h
*; = ^
и
Здесь у=А/р (не путать с показателем у). Из (16.11) получаем
U=MV, М=А-1В,
а (х, у, z) =
= JJJ М (ab a2, а3) V (а„ а3) da, da2 da3, (16.12)
Г,г,г,
или, после замены порядка интегрирования,
и (X, у, z)=^m(x — l,y,z — Qv (g, □ dld^,
2 (16.13)
tn (х, у, z) = JJJ м (alt a2, a3) da, da2 da3.
Г1ГгГ»
Контуры интегрирования Г», k=l, 2, 3, выбираются в соот-
ветствии с принципом предельного поглощения.
§ 16. НАПРЯЖЕНИЯ в ОКРЕСТНОСТИ УГЛОВЫХ ТОЧЕК
143
2. Выражения (16.12), (16.13) описывают перемещения (вол-
новые поля), вызванные в упругой однородной среде скачком
смещений берегов разреза v(x, z), однако сама величина v пока
неизвестна. Для ее определения необходимо учесть причины, вы-
зывающие деформацию среды. Такими причинами могут быть
п^ъбмныс силы, зндзнные в определенных областях среды, вол
ны, набегающие на разрез, нагрузки, приложенные к берегам
разреза. Все эти задачи, возникающие в механике разрушения,
дефектоскопии, сейсмологии, сводятся к интегральным уравне-
ниям, различающимся только правыми частями. Интегральный
оператор в левой части, а следовательно, и показатель особен-
ностей решения один и тот же.
Пусть, например, задана волна ин(х, у, г), падающая на раз-
рез. Функция иа не имеет разрывов, следовательно, ее преобра-
зование Фурье по х, y—UH(ait а2, z) — удовлетворяет однород-
ной системе (18.7): £17н=0. Общее волновое поле и, возникаю-
щее в среде, складывается из ин и и„ — поля отраженных волн.
Очевидно, uv, обусловленное наличием скачка v, имеет вид
(16.13). Суммарное волновое поле u=uH-[-u0 должно удовлетво-
рять условиям отсутствия напряжений на берегах разреза
(16.9), эти условия приводят к интегральным уравнениям отно-
сительно V.
Действительно, выразим q= {тх», ov,tvJ через «=«н+ис:
q (х, у, z) = qa + qv = Tua + JJ«(x— I,у,г—£) dg (16.14)
Q
Г —оператор напряжений (16.9),
глг,
N = Т (аъ аа, а,) М (а1( а2, а3),
(аг а1 0 \
— У«1 (У + 2) а2 уа3
О а3 а2 )
q„ и qv — напряжения, обусловленные волнами «н и и„ соответ-
ственно.
Отметим, что в то время, как и„ терпит на £2 разрыв, т. е. в
(16.12), (16.13) при (х,г)ей пределы при г/->0_ и у->0+ раз-
личны, функция q„ непрерывна, так как при построении «„ ис-
пользовалось условие отсутствия скачка напряжений на разре-
зе. Следовательно, lim^ = 0 для (х, г) ей, отсюда
«(х —z—Qvfc, Z)dZdr, — f(x, z),
п {х, z) = lim п (х, у, z), f (х, z) = — Т|у=0, (х, г) ЕЕ й.
У-М)'
144
ГЛ. IV. МЕТОДЫ ВЫДЕЛЕНИЯ ОСОБЕННОСТЕЙ
Данная система интегральных уравнений имеет тот же вид,
что и в задаче о штампе. Чтобы воспользоваться разработанной
методикой выделения показателей особенности, необходимо све-
сти интегральное уравнение к виду (12.14), т. е. перейти в пред-
ставлении ядра п(х, z) (16.15) от тройного интеграла к дву-
т/r»o'tttqattt тх qt' ПИН2.МВТЮСКОЙ 32.ДЗЧИ К соотвбтств иющвй зздэч^
статики. Избавиться от интегрирования по а2 в (16.15) или еще
раньше в (16.13) проще всего, используя лемму Жордана, замк-
нув контур Г2 в верхнюю полуплоскость при у<0 и в нижнюю
при у>0 в соответствии с убываииеме-1®2^. Полюсами М, N по а2
являются нули определителя матрицы А:
det А = (2 + у) (₽2 - х2) (₽2 - хр = О,
а2Л = ±К^—а2 —а| = ±т^Л 6=1,2.
Если выбрать ветвь радикала так, что при вещественных
аъ «з, xfeReTfe, Imr^O, то полюса однозначно распадаются на
две группы, расположенные при всех а1; а3е[—оо, оо] либо вы-
ше, либо ниже контура Г2- Такой выбор ветви радикала, как не-
сложно убедиться, эквивалентен выбору ветви в щ=1‘тй, Reafe^
^0,
Далее, взяв предел по ow-О, получим интегральное уравне-
ние статики с ядром
оо
П (х, У) = JJ N (ai> аа) da2,
—с»
(16.17)
(2(1+у) а2 — уа| 0 уа^ \
0 2(1+у) а2 0
yaiOg 0 2 (1+у)а2—ya2 J
а1 = а2фа2.
(Здесь для удобства сопоставления с результатами предыдущих
параграфов а3 заменено на a2, z — на у.)
В отличие от системы предыдущего параграфа с ядром
(15.1), система (16.16) с ядром (16.17), во-первых, распадается
на независимое уравнение (с символом ядра N22) и систему
2X2, во-вторых, символ ядра не убывает как а-1 при а->-оо,
а растет как а.
Действуя по схеме § 13, можно определить полюса по s пре-
образования Меллина скачка V(s, ф), но нас интересуют осо-
бенности, а следовательно, и полюса преобразования Меллина
напряжений </, возникающих вне разреза ((х, г)ей) в окрест-
ности угловой точки контура трещины. Связь между полюсами
§ 16. НАПРЯЖЕНИЯ В ОКРЕСТНОСТИ УГЛОВЫХ ТОЧЕК
145
V(s, ф) и Q(s, ср) дает соотношение, получающееся в результате
применения преобразования Меллина к равенству (16.14) при
у=0, (х, z) вне Q. (Как и ранее, Q имеет клиновидную форму с
раствором угла 20: {О^г^оо, —0=С<р=С6}.) Имеем
о __
v (>, Ч>)=$ •<’* V*, ФИ Is— й Ф1йфф- QH(s, <р), <ре.[—0, 0]. (16.18)
—0
Элементы матрицы N(s, ф) выражаются в виде рядов, анало-
гично представлению (15.2). Из (16.18) следует, что полюсами
Q(s, ф) по s являются полюса N, V, QB. В интересующей полосе
O^Res^l QH не имеет полюсов в силу непрерывности qs, а по-
люса элементов N обусловлены полюсами гамма-функций, по-
этому основной интерес для анализа особенностей напряжений
представляют полюса V(s—1, ф). Причем, в силу независимости
М22, особенности выражаются через полюса второй компонен-
ты вектора V(s, ф), a -гху, rzy — через полюса первой и третьей
компоненты. Другими словами, в плоскости трещины у=0 нор-
мальные к ней компоненты напряжений ov и их особенности пол-
ностью определяются скачком нормальной компоненты переме-
щений берегов трещины, а касательные — скачком касательных
перемещений.
3. Покажем, как преодолеваются трудности реализации ме-
тода, обусловленные растущим символом ядра. Для простоты
ограничимся уравнением для ау с символом ядра N(alt а2)=а
(константу перед а перебросили в правую часть). Преобразова-
ние Меллина дает интегральное уравнение (12.19), только не
относительно Q, а относительно V2(s—1, ф) (в данном случае
р=1). Несложно убедиться, что действуя по прежней схеме,
в выражении для а1т получим расходящийся ряд:
т Г -1
aim (s) = 2 Gn(s’ V J ‘ J т (nO)cos |(Z — , (16.19)
П—0 L J
так как Gn<s, p) ~O(np), n-^oc. Ясно, что для численной реали-
зации формула (16.19) непригодна. Трудности возникли из-за
растущего символа ядра.
Множителю а2 в символе ядра (16.17) соответствует опера-
тор Лапласа (см. (11.8)). Обычно в задачах о трещине избавля-
ются от растущего символа путем выноса оператора Лапласа из
интегрального оператора. Однако здесь данный способ не дает
результата, так как после применения преобразования Меллина
к интегральному оператору, на который действует оператор Лап-
ласа, снова получаем расходящиеся ряды.
Доопределим правую часть (16.16) в области (х, z)e=Q, у=0
неизвестными напряжениями q(x, z) и применим преобразование
146
ГЛ. IV. МЕТОДЫ ВЫДЕЛЕНИЯ ОСОБЕННОСТЕЙ
Фурье по х, z; имеем:
N(a,i, а2) V(ab a2)=F(a1( a2)+Q(<Xi, a2).
Выразим скачок v(x, z) через q(x, z):
У(к„ aj — (Q^, a-)+_F(a;, „))=>
v(x, z) = J J /i4 (x——g, z— t,)q(%, t,)d^dt,—g(x, z),
«2\й
tii(x, y) = J J V"‘ (ab a2)e-f(“'l+^v,JaiJa2,
-00
g(x, y) = — J J N~l (аь a2)F(ai, a2)e-i(“‘x+^)Ja1Ja2.
Учитывая, что вне разреза скачок отсутствует (v(x, z)=0,
(х, z) ё=£!), относительно напряжений q(x, z) приходим к системе
интегральных уравнений
n^x-l, z-^)q(l,t)dldZ=g{x, z), (х, z)e=₽2\Q, (16.20)
ядро которого обладает теми же свойствами, что и в задаче о
штампе.
Как отмечено выше, система (16.20) распадается на незави-
симые уравнения относительно нормальной составляющей на-
пряжений gv и касательной {тта, т2„}. Причем в первом случае ин-
2 + т
тегральный оператор N^ziai, a2) = —- а-1 тот же, что и в
случае гладкого контакта штампа. Соответственно справедливой
здесь остается и найденная зависимость у(р) (рис. 4.2, [}=л—0).
Система относительно {тх„, t2V} не сводится к рассмотренным
выше и требует самостоятельного численного анализа.
ГЛАВА V
ВИБРАЦИЯ МАССИВНЫХ ШТАМПОВ
НА УПРУГОМ ОСНОВАНИИ
При расчете поведения зданий и сооружений, подвергающих-
ся динамическим воздействиям (например, сейсмическим), при
определении воздействия колебаний массивных вибрирующих
объектов: турбин, станков, железных дорог —на близлежащие
сооружения, при изучении взаимодействия упругих волн с по-
верхностными объектами, например, с электродами акустоэлек-
тронного устройства, возникает необходимость решения динами-
ческих контактных задач с произвольной в плане областью кон-
такта. К этим же задачам сводится оптимизация поверхностных
вибросейсмоисточников, синтез направленных сейсмических ан-
тенн для глубинного просвечивания Земли, создание направлен-
ного излучения в дефектоскопии и т. п.
Из приведенных примеров ясно, насколько важно хорошо
изучить особенности колебаний системы штамп — упругая среда,
однако возникающие здесь интегральные уравнения являются
серьезным препятствием на пути исследований. Попытки обойти
эти трудности породили ряд приближенных, «инженерных» под-
ходов, в рамках которых реакция среды моделируется упругими
и демпфирующими связями с некоторой «присоединенной мас-
сой». Характеристики упругих элементов и величина присоеди-
ненной массы подбираются по экспериментальным данным. Ко-
лебания получающейся в результате конечномерной системы оп-
ределяются обычными методами теоретической механики. Осо-
бенно широко такой подход применяется в строительных расче-
тах, он позволяет с достаточной точностью определять статиче-
ские осадки сооружений, дает удовлетворительные результаты
на определенной, фиксированной частоте. При анализе колеба-
ний в широком диапазоне частот упругая среда является суще-
ственно бесконечномерной системой с собственными резонанса-
ми и сложными дисперсионными свойствами и поэтому не ап-
проксимируется конечным набором пружинок.
Следующим шагом к более полному учету свойств упругой
среды является подход, при котором деформация ее поверхно-
148
ГЛ. V. ВИБРАЦИЯ МАССИВНЫХ ШТАМПОВ
сти определяется путем решения соответствующей первой крае-
вой задачи теории упругости, однако распределение нагрузки в
зоне контакта не определяется через решение соответствующих
интегральных уравнений, а задается в некотором виде, напри-
мер, равномерном или параболическом [73, 96, 124]. Такой спо-
соб можно трактовать как париационно-разпо<"тный метот с ис-
пользованием в качестве базиса одного элемента — нагрузки за-
данной формы. Насколько правильно при этом описываются ка-
чественные и количественные характеристики решения, можно
установить только после сравнения с результатами, полученны-
ми путем решения интегральных уравнений.
С целью выявления характерных особенностей динамики
массивных штампов на упругом основании проведен большой
объем вычислений с использованием методов решения инте-
гральных уравнений, изложенных выше [18, 21, 54, 55]. Анали-
зу численных результатов и обсуждению выявленных здесь ка-
чественных эффектов посвящена настоящая глава.
§ 17. Выбор модели для численного анализа
В качестве упругой среды взят слой толщины h, жестко сцеп-
ленный с недеформируемым основанием. Штампы предполага-
ются плоскими, имеющими прямоугольную в плане форму, т. е.
в (4.6)
2а=0, Яа= {х—хк, у-ук, 0}.
Просчитывались случаи одного, двух или трех штампов, распо-
ложенных, как показано на рис. 5.1.
В дальнейшем везде, где не указано особо, результаты при-
водятся для коэффициента Пуассона среды -v = 0,3. Все линейные
размеры отнесены к h, контактные напряжения и нагрузки (дав-
ление) к ц — модулю сдвига упругого слоя, плотность к р —
плотности слоя. Такой выбор трех задающих величин приводит
§ 17. ВЫБОР МОДЕЛИ ДЛЯ ЧИСЛЕННОГО АНАЛИЗА
149
к следующей системе единиц измерения:
единица массы m0 = p/i3,
единица скорости ц0 = у р/р,
единица силы FQ = [ih2, (17.1)
единица времени t0 = h/v0 = h У р/ц,
единица частоты /0 = t^1 = hr1 У р/р.
Безразмерная круговая частота (o = 2nf/i]/p/p, f — частота в гер-
цах.
Для перевода в реальные единицы необходимо безразмерные
параметры и результаты, приведенные ниже, домножить на со-
ответствующие единицы (17.1).
Упругий слой обладает более сложными дисперсионными
свойствами, чем однородное полупространство.
На рис. 5.2—5.5 приведены зависимости от со нулей и полю-
сов функций R,M,N, входящих в матрицу К. Приу=0,3 (рис. 5.4)
для со<1,57 нет вещественных особенностей — «квазистатика»;
для l,57<i(o<2,6 вещественные нуль и полюс функции R(a)
имеют близкие значения, следовательно, соответствующая по-
верхностная волна, вызванная вертикальным источником, имеет
малую амплитуду; для 2,88<со<2,94 имеется нерегулярный по-
люс (обратная волна); для со= 1,57, 2,88, 2,94 (точки появления
вещественных полюсов на рисунке отмечены крестиками) име-
ются двукратные полюса; эти частоты являются резонансными
для слоя, так как, если только поверхностная нагрузка q тако-
ва, что Q(£)¥=0, £ —двукратный полюс, то перемещения на дан-
ной частоте растут как при /—>оо, соответственно амплитуда
поверхностных волн в окрестности этих частот стремится к бес-
конечности [47].
150
ГЛ. V. ВИБРАЦИЯ МАССИВНЫХ ШТАМПОВ
Рис. 5.5
§ 17. ВЫБОР МОДЕЛИ ДЛЯ ЧИСЛЕННОГО АНАЛИЗА
151
Нагрузки, приложенные к штампам, предполагаются равно-
мерно распределенными с единичным давлением. Результаты
для неединичных нагрузок в силу линейности задачи полу-
чаются простым домножением на соответствующие коэффици-
енты. Во всех случаях, где это не указано особо, масса штампов
лгА=1, размеры Зх^.
Рассмотрено два случая контакта штампов со средой: кон-
такт без трения жесткого штампа, при вертикальных нагрузках
(случай А); сцепление при горизонтальных нагрузках, направ-
ленных вдоль оси Ох, при отсутствии напряжений в других на-
правлениях (пленочный контакт (случай Б).
Интегральный оператор в случае А имеет вид
Азз° = П k33(x — %, у — х\, 0)о(£, T|)d^dx],
я
^зз (х, У) = JJ к33 (а) е-^х+а^ йаг da2,
1 г,г2
Кзз (а) = R (а, 0) = — (а2 sh у2 ch — у^ sh ch y2)/ Д ,
<j(x, у)-вертикальная составляющая вектора контактных на-
пряжений.
В случае Б
An't = П kl (х ~ у ~ Т1’ °)т &
я
ku (х, У} = J J Лц («ъ «2) dar da2,
г,г2
Аи (an а2) = — i (а2М (а, 0) + ajW (а, 0)),
М (а, 0) = — tx2y2 (а2 sh у2 ch у2 — у^ sh у2 ch ?i)/(a2/\),
N (а, 0) = i sh у2/(а2у2 ch y2),
т(х, у) — касательные напряжения вдоль оси Ох,
А (а) = 4а2у1у2 (а2 + ур — у^ [4а4 + (а2 -ф ур2] ch у2 ch у2 -ф
+ а2 [(а2 -ф ур2 -ф 4у2у2] sh у, sh у2,
Ут = /«2 — m=l,2, Reym>0, Imy,„c:0,
В случае А система (4.10) принимает вид
^зз°1Л == Xk, k = 1, 2, ..., N,
^33^2,k (X Xfc)
Кзз®з,к =: (у ~ Ук) %k, Кзз^н == ®h,
152
ГЛ. V. ВИБРАЦИЯ МАССИВНЫХ ШТАМПОВ
wa — вертикальные перемещения среды, вызванные поверхност-
ной нагрузкой.
Предполагается, что поверхностная нагрузка расположена
достаточно далеко от штампов на оси Ох, поэтому в расчетах в
качестве wa использовано выражение для рэлеевских волн в
дальней от источника зоне
р __ j? у
wa = C! 2 т , (17.3)
m=i
tR,m = res R (a, 0) |a=gm, — вещественные полюса R, cx — ам-
плитудный множитель, пропорциональный величине нагрузки и
обратно пропорциональный Уг, г —расстояние до источника.
В расчетах принято с,= 1 (пренебрегаем изменением ct на рас-
стояниях, соизмеримых с размерами штампов). Неизвестные
wh — вертикальные перемещения центров масс штампов, <рх,ъ
Ф»,*— углы поворота штампов вокруг соответствующих осей
определяются из системы (см. (4.11))
N
EkSk + '^i RkjSj = Tk, k=l,...,N,
i=i
sk = qx,k, Ф<ла}, Ek = — <o2 diag (mk, Jx,k, Jy,k). (17.4)
Элементами матриц RM являются усилия
Pz,m = jj om,idQ (17.5)
и моменты
Mx,m = ^^(i/ Uk) OmjdQ, ^dy,m (X - Xk) 0m,jd£i, (17.6)
приложенные к штампам в результате действия напряжений
Gmj. Компонентами векторов Тк являются усилия и моменты, дей-
ствующие на штампы в результате приложения к ним заданных
вертикальных нагрузок F3,h и контактных напряжений ав.
В случае Б система (4.10) принимает вид
KliTi.fe — Xfe,
Kiix2,k = — (у — yk)%k,
(17.7)
КцТн — Wh, — 1, • . •,
§ 18. АНАЛИЗ КОНТАКТНЫХ НАПРЯЖЕНИИ И УСИЛИИ
153
— касательные перемещения, возникающие от действия каса-
тельной поверхностной нагрузки, расположенной на расстоянии
г0 от начала координат, на оси Ох (в расчетах го=4О),
tM,m = res М (а, 0) |а=?т, tN,i = res N (а, 0) |а=£',
5/ — полюса N (а, 0), с2 — то же, что с, в wH.
Здесь оставлено два члена в асимптотике поверхностной вол-
ны, так как иначе не был бы учтен вклад полюсов функции N,
который велик в окрестности ее двукратного полюса (со = 1,57).
Неизвестные uh — перемещения центров масс штампов вдоль
оси Ох и сргЛ — углы поворота штампов вокруг осей, параллель-
ных Oz, определяются из системы
N
Dktk + ^Hkjtj^Bk, k='T',...,N, (17.8)
/=i
tk =~ {и/г, Cpz.ft},
Dk = — и1 2 diag (tnk, JZtk).
Элементами матриц являются касательные усилия
Pxm=^XmjdQ (17.9)
и моменты
Мг,т = — (у — yk)xmj-dQ, m=l,2. (17.10)
Компонентами векторов Bk являются усилия и моменты усилий,
действующие на штампы в результате приложения к ним задан-
ных касательных нагрузок Flih и контактных напряжений тн-
Как уже указывалось, все результаты (перемещения, уси-
лия и т. д.) являются комплексными а=|а|е’е, |а| — амплитуда,
6 — сдвиг фазы соответствующей величины. Как правило, на
графиках приводятся амплитуды и фазы, реже — вещественные
и мнимые части величин.
§ 18. Анализ контактных напряжений и усилий, возникающих
под осциллирующим штампом
1. В статике усилия Р, возникающие под штампом, равны
главному вектору F сил, приложенных к нему. В динамике кон-
тактные усилия могут значительно отличаться от главного векто-
ра приложенных сил. В частности, справедлива уже упоминав-
шаяся выше
154
ГЛ. V. ВИБРАЦИЯ МАССИВНЫХ ШТАМПОВ
Теорема 18.1 [47] (о резонансе в двукратных полюсах).
Пусть £0 — двукратный полюс, тогда, если поверхностная на-
грузка такова, что Q(£o)=/=O (для неосесимметричных нагрузок
2Л
|Q(50cosy, £о sin-у) |<2у=/=0), то на данной частоте перемеще-
О
ния растут как t‘h при t-^oo.
В слое все двукратные полюса, кроме дающих начало нере-
гулярным при увеличении со, появляются в точках выхода новых
дисперсионных кривых и поэтому равны нулю.
Для £о=О <?(0) =Р.
Следствие 18.1. Для ограниченности перемещений слоя на
частоте, соответствующей t;0 = 0, необходимо и достаточно, что-
бы главный вектор контактных усилий был равен нулю:
P=Q(0)=0. (18.1)
Определение контактных усилий и моментов необходимо не
только для расчета смещений штампов, но и при анализе излу-
чения энергии в среду. Так, для осредненной за период колеба-
ний энергии, уносимой упругими волнами через поверхность сре-
ды, справедливо [86] (см. также § 27):
£ = — yIinJJ(».tf)dQ. (18.2)
Я
Для жестких штампов «=const, поэтому
Е = — yltn(a, Р). (18.3)
В частности, для наших случаев А и Б соответственно
£z = -y Itn(®PZ‘), Ex = -^Im(uPx). (18.4)
Рассмотрим, как меняются с частотой усилия и их моменты
для штампа, колеблющегося с постоянной (единичной) ампли-
тудой (и>=1, случай А, и—1, случай Б). При этом
Ег=^1тРг, Ех = а-1шРх. (18.5)
На рис. 5.2—5.5 приведены дисперсионные кривые для v=0,l;
0,2; 0,3; 0.4. Частота собственных колебаний слоя меняет поло-
жение с изменением v: со0=2,356; 2,565; 2,939; 3,848 для v=0,l;
0,2; 0,3; 0,4 соответственно. Кроме того, с увеличением у сущест-
венно расширяется диапазон обратных волн от 2,5649<со<
<2,5651 при v = 0,2 до 3,587< со <3,848 при v = 0,4. На рис. 5.6,
5.7 даны зависимости |Рг|, 0г для различных значений v, под-
тверждающие обращение усилий в нуль на частотах собствен-
§ 18. АНАЛИЗ КОНТАКТНЫХ НАПРЯЖЕНИЙ И УСИЛИИ
155
ных колебаний слоя. Фаза Pz при переходе через и0 изменяется
на л — усилия меняют знак на противоположный. Нет обраще-
ния в нуль при'<0=1,57 в случае А и ш = 2,94 в случае Б, так как
здесь одновременно с полюсом появляется и нуль функций R (а)
или Л1(а), т. е. полюс устраним. Поток энергии в среду там, где
|Р|=0, также отсутствует. Хотя колебания и происходят, но
слой вибрирует фактически без приложения к нему внешней на-
грузки (Р=0) и нет поступления энергии в слой. Для конечно-
мерных систем такие колебания реализуются на резонансных
частотах и называются собственными колебаниями системы. По
аналогии будем называть частоты, на которых появляются не-
устранимые двукратные полюса £0, частотами собственных ко-
лебаний слоя.
На частотах, являющихся левой границей диапазона обрат-
ных волн, возникают двукратные полюса £0=#О- Здесь
и из условия теоремы 22.1, вообще говоря, не следует обраще-
ние в нуль Р(ш), хотя оно и не противоречит условиям теоремы.
156
ГЛ. V. ВИБРАЦИЯ МАССИВНЫХ ШТАМПОВ
Чтобы выявить характер поведения усилий в окрестности этих
частот, был проведен детальный численный анализ в диапазоне
обратных волн. Результаты для v=0,4, приведенные на рис. 5.8,
показывают, что | Рг | обращается в нуль как на левом, так и на
правом краю диапазона, а фаза (рис. 5.9) получает приращение
на л не скачком, как при переходе через вещественный нуль
функции, а постепенно в пределах диапазона. Таким образом,
нерегулярные двукратные полюса g0=#O также соответствуют
частотам собственных колебаний слоя.
Оттока энергии в среду нет также и в том случае, когда
|Р| #=0, но равна нулю мнимая часть усилий. Фаза усилий 8 при
этом равна пл, п—0, ±1, ±2, ... В наших случаях 0=0 для
(о< 1,57, в зоне «квазистатики». С физической точки зрения от-
сутствие потока энергии в диапазоне квазистатики объясняется
тем, что на этих частотах в слое не возбуждаются бегущие вол-
ны, которые могли бы уносить энергию на бесконечность. Сдви-
§ 18. АНАЛИЗ КОНТАКТНЫХ НАПРЯЖЕНИЙ И УСИЛИЙ
157
га фазы между смещениями и усилиями нет, слой работает как
упругая пружина.
Для и> 1,57 0е[—л, 0] и не выходит из этого диапазона,
так как в противном случае при | Р | ¥=0 получили бы поток энер-
гии, направленный вверх к источнику.
Определение 18.1. палшем ЛиЭСрСрициепТОм ИОЛёЗНОсО
действия (к. п. д.) поверхностной нагрузки т| отношение энергии,
поступающей в среду от данной нагрузки, к максимально воз-
можному для нагрузки такой же амплитуды потоку.
Последний реализуется при сдвиге фазы между перемеще-
ниями и напряжениями, равном л/2. Для w.= l, u=l, очевидно,
'Цх.г = — *’z- = sin 6. В случае A (v = 0,3) фаза 0 близка либо
I Px,Z I
к 0 при <о<2,6, либо к —л при и>3 (см. рис. 4.7), следователь-
но, мал и к. п. д. тр при вертикальных колебаниях штампа на
слое.
При касательной вибрации пленочного штампа (случай Б),
рис. 5.17), напротив, в широком диапазоне (после и=1,57)
0«—л/2, следовательно, г\хш 1. Такое качественное различие
между к. п. д. т]ж и t]z объясняется следующим. В слое энергия
на бесконечность переносится только волнами рэлеевского типа,
затухающими как г~>!\ которые можно трактовать как результат
взаимодействия поперечных волн с границами слоя. При верти-
кальной вибрации под штампом возбуждаются продольные вол-
ны, которые при отражении от границ порождают поперечные,
а' последние трансформируются в рэлеевские. Каждая транс-
формация сопровождается потерями энергии. При касательной
вибрации возбуждаются сразу поперечные волны — цепочка
трансформаций короче, потерь меньше.
2. На рис. 5.10—5.11 даны графики контактных напряжений
вдоль большой оси симметрии прямоугольного, вибрирующего
с единичной амплитудой штампа (сечение эпюры напряжений)
для различных частот в случаях А и Б. Видно, как при переходе
через собственные частоты и0—2,88; 2,92 (случай А), контакт-
ные напряжения, а как следствие — и усилия меняют знак.
Результаты, полученные вариационно-разностным методом,
хорошо согласуются с контактными напряжениями, построенны-
ми методом факторизации для соответствующей плоской задачи
с этой же шириной полосы [55]. В указанной работе приводится
зависимость усилий от частоты, которая имеет такой же вид,
как и в пространственном случае. Усилия здесь также обраща-
ются в нуль в точке и0. Это свидетельствует о том, что многие
качественные эффекты могут быть вскрыты и на более простой,
чем пространственная, плоской модели. Более трудоемкую про-
странственную модель лучше использовать только там, где она
требуется по существу, например при выяснении влияния фор-
158
ГЛ. V. ВИБРАЦИЯ МАССИВНЫХ ШТАМПОВ
мы области контакта или взаимного расположения штампов на
их колебания.
Так, в работах [48, 153] при анализе вибрации полосовых
штампов на слое методом фиктивного поглощения впервые были
детально изучены бесконечные резонансы в диапазоне квазиста-
тики. Данное явление было предсказано ранее И. И. Воровичем
[44, 45].
3. Мы рассмотрели, как зависят усилия от частоты в случае
штампов, вибрирующих с постоянной амплитудой. Такой анализ
полезен для уяснения закономерностей формирования контакт-
ных напряжений, однако рассмотренный случай является искус-
ственным в том смысле, что для реализации постоянной (еди-
ничной) амплитуды вибрации необходимо специальным образом
менять нагрузку, приложенную к штампу, с изменением часто-
ты. Чтобы получить истинные усилия, необходимо усилия, соот-
ветствующие единичным перемещениям, умножить на величи-
ну перемещений штампа.
§ 18. АНАЛИЗ КОНТАКТНЫХ НАПРЯЖЕНИЙ И УСЛОВИИ
159
Действительно, с учетом (4.9)
Р = J J У (Х> у) dy — 2 2 m-k 4~ ^rn,kPm+3,k) —[Put
Й k=i m—i
(18'6>
.. 'a”.......-
ucmk, 4W—элементы разложения перемещений k-го штампа в
соответствии с (4.7)
3
«а.= 2 {um,kem +4>m.k(em х Rk)).
m=i
Для одиночных штампов, совершающих только вертикальные в
случае А или только касательные в случае Б колебания
P2 = wPM, Px = uPltl. (18.7)
Таким образом, для определения усилий, возникающих под
штампом, необходимо определить его перемещения.
160
ГЛ. V. ВИБРАЦИЯ МАССИВНЫХ ШТАМПОВ
§ 19. Перемещения штампов, резонансы
1. Рассмотрим вертикальные колебания штампа w под дейст-
вием нагрузки F. Из (4.6) после очевидных упрощений имеем
— ma?w = F— Q, Q = wPz, (19.1)
-—Pz = ——реакция среды на единичные перемещения
а
штампа,
а> = Г/Д(со), Д (со) = Рг (со) — /псо2. (19.2)
Пусть F—const, перемещения штампа w целиком определя-
ются зависимостью Рг от со. В частности, если Зсол: Д(сол)=О,
то при со->-сол w-o-oo—’частота сол является резонансной.
Рассмотрим для сравнения конечномерную модель. Заменим
реакцию среды на реакцию «присоединенной массы» М, связан-
ной со штампом упругой и демпфирующей связями.
Координаты центров масс w4, w2 удовлетворяют системе
mwx = F — c(w1 — w2) — k — w2),
Mw2 = c(w1 — w2) + k (щх — w2),
из которой для установившихся гармонических колебаний имеем
г. Р — СО2/И о . ,
Wi = F —-------, р = с — itak,
Д (со)
6 (19.3)
w2 = F—, Д (со) — со2 (со2т И — 0(т + /И)).
Д (со)
Из Д(сол) =0 следует
' (М mJ
Сравнивая (19.2) и (19.3), получаем, что в принятом прибли-
жении реакция среды Рг дается выражением
р _____ Р<о2Л1 .
г р — со2М ’
сопоставим его с рис. 5.6—5.7. Очевидно, Pz не может описывать
реакцию среды во всем диапазоне частот, если не предположить
зависимости от со параметров р, М. Другими словами, параметры
модели с, k, М должны подбираться для каждой конкретной ча-
стоты со, модель «настраивают» на данную частоту, и пользовать-
ся ею можно только в некоторой окрестности данной частоты.
В частности, в зоне квазистатики (со< 1,57) Pz вещественно, сле-
довательно, k=0. На частотах собственных колебаний слоя, где
§ 19. ПЕРЕМЕЩЕНИЯ ШТАМПОВ, РЕЗОНАНСЫ
161
Rz = 0, должны обращаться в нуль либо связи k, с, либо присоеди-
ненная масса М.
Бесконечный резонанс может возникать только там, где Pz ве-
щественно, т. е. в зоне квазистатики. Геометрически соя опреде-
ляется как абсцисса точки пересечения | Pz | с параболой тсо2
(см. рис. 5.6). Если в точке пересечения 0Z#=O (0Z— фаза Л),
то А<=0 ил-за наличия Im Pz#=0, однако всплеск на графи-
ке w в окрестности этой точки имеется и высота его обрат-
но пропорциональна значению А(сол), т. е. тем больше, чем мень-
ше Im Pz. Данные ограниченные резонансы названы И. И. Воро-
вичем резонансами третьего типа.
При ю>(Во ReRz становится отрицательной, и возможность
для появления даже ограниченных резонансов пропадает, так как
Re Л и —ты2 складываются. В зоне квазистатики (со<1,57) ре-
зонансные частоты вещественны, а при Reи> 1,57 расположены
близко к вещественной оси. В первом приближении резонансная
частота сол определяется выражением
со« = со® + б гы со£, — I
Im Рг (а^)
Р'г — 2тыР.
которое получается, если разложить А (и, т) в окрестности co®j
вещественной точки пересечения параболы та1 с |Pz(co)| в ряд
по малому параметру б. До первой собственной частоты
ReP' (cojj) < 0, Im Рг (со^) 0, отсюда 1тия<:0. Следовательно,
сол при со >1,57 смещается с вещественной оси в нижнюю полу-
плоскость комплексной плоскости со на величину, пропорциональ-
ную мнимой части усилий.
Численный анализ резонансных свойств упругого слоя в широ-
ком диапазоне [61] выявил наличие периодических изменений
фазы Pz (знака RePz) с ростом частоты. При переходе через ок-
рестность собственных частот слоя (неустранимые £о = О) RePz
становится отрицательной, а при переходе через окрестность час-
тот выхода кривых вещественных нулей — положительной. Таким
образом, на оси со чередуются диапазоны, в которых могут и в
которых не могут возникать ограниченные резонансы. Границы
диапазонов расположены в окрестности точек выхода кривых ну-
лей и полюсов символа ядра R(a). Аналогичная картина наблю-
дается и для пленочного штампа (подробнее см, [24]). Возмож-
ность появления набора ограниченных резонансов с ростом со
аналитически доказана в работах [158, 159].
Изменение положения резонанса в зависимости от свойств
среды иллюстрирует рис. 5.12; здесь сол комплексные и всплески
ограниченные. Вещественные сол получаются при больших мас-
сах, когда параболы та2 поднимаются круче.
Случай вещественных сол для системы штамп — упругий слой
изучен в работах [48, 153].
6 В. А. Бабешко и др.
162
ГЛ. V. ВИБРАЦИЯ МАССИВНЫХ ШТАМПОВ
§ 19. ПЕРЕМЕЩЕНИЯ ШТАМПОВ, РЕЗОНАНСЫ
163
Из (19.4) соя уменьшается с увеличением массы штампа т
или присоединенной М и растет с увеличением жесткости с.
На рис. 5.13 даны амплитуды |w| и фазы 0«, колебаний штам-
па трех различных размеров, т=1, Fz=l. Четко видны ре-
зонансы, которые в данном случае не бесконечны, так как здесь
Im Pz¥=0-
Хигя масса и упругие ивийсхва ви всех грех случаях одни и
те же, резонансная частота у каждого штампа своя. Отсюда: су-
щественную роль в формировании резонансных свойств системы
штамп — упругая среда играют размеры области контакта.
Причем с увеличением размеров сои смещается вправо, как при
усилении жесткости с в (19.4).
2. Выявление резонансных частот важно для анализа неста-
ционарных колебаний системы, вызванных импульсной нагруз-
кой.
Действительно, рассмотрим нестационарную задачу о действии
нагрузки f(t) на массивный штамп. Применяя преобразование
6*
164
ГЛ. V. ВИБРАЦИЯ МАССИВНЫХ ШТАМПОВ
Лапласа
L [и] = и (р) = и (/) e~pt dt,
о (19.5)
А"1- [и] — и (0 = j u(p)e^dp
C—i<x>
к уравнениям и граничным условиям при нулевых начальных
условиях, получаем краевую задачу, по форме совпадающую с
рассмотренной выше задачей об установившихся гармонических
колебаниях, отличающуюся только тем, что на месте параметра
со2 стоит — /?2. В этом нетрудно убедиться, принимая во внимание
соответствие d4ildt2-+ (—ico2) и для гармонической зависимости и
Цдги!д?] =р2и(р) для преобразований Лапласа. Зависимость от
и или р входит только через инерционный член pd^ujdt2 уравне-
ний (1.14).
Рассмотрим задачу о нестационарных колебаниях, вызванных
нагрузкой F (х, у, t) =р(х, y)f(t); р задает распределение нагруз-
ки, /(/) —-зависимость от времени. Пусть v(t) — искомые переме-
щения, например штампа,
<0 (/) = —L- f v (/?) ept dp, (19.6)
2ш* J
С— foo
v(p) — решение задачи, возникающей после применения преоб-
разования Лапласа к исходной, т. е. соответствующее нагрузке
P{x,y)J(p), f = (f) e~pt dt.
О
Очевидно, в силу линейности v(p) =J{р)и0{р~) где v0(p) — реше-
ние, соответствующее нагрузке р(х, у) 8(t).
Параллельно рассмотрим задачу об установившихся гармони-
ческих колебаниях под действием нагрузки р(х, y)e~iat, обозна-
чим ее решение «o(a>)e~im!- Отмеченная выше связь между реше-
ниями гармонической и нестационарной задач в данном случае
имеет вид w0(±ico) =а0(ш). Сделаем в интеграле (19.6) замену
р= — ia, вертикальный контур интегрирования [с—too, c+ioo]
перейдет при этом в горизонтальный контур расположенный
в комплексной плоскости со выше всех особенностей подынте-
гральной функции:
®(/) = -^-J f(—tco) и0 (со) e~iat da. (19.7)
§ 19. ПЕРЕМЕЩЕНИЯ ШТАМПОВ, РЕЗОНАНСЫ
165
Таким образом, решение нестационарной задачи выражено в
виде интеграла Фурье через решение u0(w) соответствующей
гармонической задачи. Описанная процедура фактически есть не
что иное, как применение принципа суперпозиции к ана-
лизу нестационарных колебаний линейной системы путем их раз-
ложения на гармонические составляющие. Получен-
ная формула (19.7) показывает, что решение гармонической
задачи является необходимым этапом при решении нестацио-
нарной.
Подынтегральная функция в (19.6), как преобразование Лап-
ласа вещественной v(t), обладает свойством v(p*) =v*(p). В плос-
кости со это приводит к тому, что подынтегральная функция прини-
мает комплексно-сопряженные значения при замене со = со1 + ссо2
на —со!-Нiсо2. Отсюда:
1) особенности подынтегральной функции в плоскости со сим-
метричны относительно мнимой оси;
2) «(/)= —Re J [йо(со)/(—ico) dco, £*— правая полови-
ж+
на контура £ (Re со >0).
При ^>0 убывает в нижней полуплоскости как e“2i, со2 =
= 1шсо<0; это позволяет при достаточно больших t воспользо-
ваться леммой Жордана для вычисления (19.7):
и (/) = — I 2 res (й0 (со) f (— ico) е~ш)
k
со„ — полюса подынтегральной функции, С — контур, обходящий
точки ветвления (если они имеются) по берегам разрезов.
Полюсами coft, кроме полюсов /(—ico), являются резонансные
частоты решения и0(со). Проанализируем их вклад в u(t) при
больших t. Для комплексных со*=сом-Нсол,2, а>м<0, e~L<“kt—
— О (e~|o)&i2'z), вклад экспоненциально убывает, тем быст-
рее, чем дальше полюс расположен от вещественной оси. Вещест-
венные со„ дают осциллирующий с периодом Тк=2л/ак незатухаю-
щий вклад. Если имеются вещественные точки ветвления, то
вклад интегралов по разрезам убывает по t степенным образом.
Итак, при наличии резонансной частоты сон движение штампа,
выведенного из положения равновесия кратковременным импуль-
сом, с течением времени приобретает колебательный характер с
частотой Re сол. Если частота сол вещественна, то колебания не
затухают при t-+co.
3. Рассмотрим, как зависят перемещения штампов одного раз-
мера от массы. Масса входит в уравнения движения штампа че-
рез инерционные члены, поэтому в системе, из которой опреде-
ляются комплексные амплитуды, перемещений, массы фигуриру-
166
ГЛ. V. ВИБРАЦИЯ МАССИВНЫХ ШТАМПОВ
ют с множителем со2. Отсюда, увеличение массы в первом при-
ближении должно быть эквивалентно уменьшению частоты и на-
оборот.
Если частота зафиксирована в зоне квазистатики или левее
первой собственной частоты, где argP2 мал, то при изменении т
существуют такие же острые резонансы, как и при изменении со
в этом диапазоне при фиКсириьанНим at. Для тех частот, при КО’
торых аргумент усилий близок к л, резонансы по т отсутствуют.
Рассмотрим колебания штампов под действием набегающей
волны. Как и прежде, и, w определяются из систем (17.4), (17.8),
в которых меняется только правая часть, поэтому нули опреде-
лителя, а следовательно, и резонансы здесь те же, что и раньше.
В настоящем параграфе резонансные явления изучались на
примере одномерных поступательных колебаний штампа. С уве-
личением числа степеней свободы у поверхностного объекта, на-
пример, при замене штампа конечномерной линейной системой
или при рассмотрении вибрации системы штампов, вид А (<о) ус-
ложняется и появляется возможность возникновения нескольких
резонансов. Кроме того, при одновременной вибрации штампов
искажаются контактные напряжения и усилия под ними за счет
передачи колебаний через основание, что также приводит к изме-
нению резонансных свойств и появлению новых эффектов. Их
анализу посвящен следующий параграф.
§ 20. Передача колебаний через упругое основание,
экранирующие эффекты
1. Рассмотрим вибрацию двух прямоугольных штампов.
В первую очередь проследим за изменениями, к которым приво-
дит наличие соседнего штампа по сравнению со случаем колеба-
ний одиночного. На рис. 5.14—5.15 даны усилия, возникающие
под первым, вибрирующим с единичной амплитудой, и вторым,
закрепленным неподвижно, штампами. Штриховыми линиями
приведены результаты для одиночного штампа. Усилия под вто-
рым штампом в случае вертикальных колебаний (рис. 5.14) даны
увеличенными в 10 раз. Результаты здесь и далее приведены для
диапазона появления бегущих волн, в диапазоне квазистатики
взаимное влияние практически отсутствует (при со < 1 перемеще-
ния и усилия ненагруженного штампа на несколько порядков
меньше, чем у нагруженного).
Контактные напряжения и усилия для систем штампов опре-
делены путем решения интегральных уравнений (17.2), (17.7)
при N = 2 вариационно-разностным методом. Путем решения ин-
тегральных уравнений удается получить строгое количественное
значение усилий Р°х, Р°г, возникающих под вторым, покоящимся
штампом, и тем самым определить так называемые «функции
§ 20. ПЕРЕДАЧА КОЛЕБАНИИ ЧЕРЕЗ УПРУГОЕ ОСНОВАНИЕ
167
влияния» или «переходные функции», использующиеся в строи-
тельных расчетах при анализе колебаний систем сооружений.
Амплитуды | Рах |, | Рг | ведут себя так же, как и амплитуды
усилий под вибрирующим штампом, обращаясь в нуль на часто-
тах собственных колебаний слоя. Таким образом, на этих часто-
тах нет передачи вибрации, а в их окрестности взаимное влияние
штампов мало. Это обстоятельство можно использовать при ре
шении проблем виброизоляции и виброгашения.
Фазы Рах, Р°г, монотонно возрастая с ростом со, меняются в
значительно более широком диапазоне, чем у Рх, Рг, однако выход
их за пределы [—л, 0] не означает, что в области Q2 возникает
поток энергии, направленный вверх, так как перемещения в Q
нулевые; следовательно, здесь потока энергии нет.
Особенно быстро фаза усилий в Q2 растет в окрестности соб-
ственных частот, это означает, что с приближением к ним знак
усилий начинает быстро меняться.
168
ГЛ. V. ВИБРАЦИЯ МАССИВНЫХ ШТАМПОВ
Моменты М и М° ведут себя, как и усилия, имеют те же участ-
ки роста и убывания, также обращаются в нуль в <в0.
Отличие между результатами для одиночного штампа и для
системы, как и следовало ожидать, становится тем больше, чем
больше амплитуда бегущих волн, возникающих в слое. В диапа-
зоне о>>а>0 для двух штампов наблюдаются всплески, указываю-
щие на усиление взаимного влияния в окрестности определенных
частот.
На рис. 5.16—5.17 даны амплитуды и фазы перемещений
штампов в случаях АиБ (m=l, F=l). На схеме взаимного рас-
положения штампов, которая приводится в углу рисунков, те из
них, к которым приложена нагрузка, заштрихованы. Номер ли-
нии соответствует номеру штампа на схеме.
§ 20. ПЕРЕДАЧА КОЛЕБАНИИ ЧЕРЕЗ УПРУГОЕ ОСНОВАНИЕ
169
Положение резонансных частот для одного и двух штампов не
меняется. Более того, в случае А колебания нагруженного штам-
па остаются практически прежними, а у второго их величина при-
мерно на два порядка меньше (на рисунке |оу2| даны увеличен-
ными в 50 раз). В случае Б, напротив, взаимное влияние значи-
тельное. Это сопоставление еще раз показывает, что при прочих
равных условиях источник сдвиговых колебаний работает в вол-
новоде типа упругий слой существенно более эффективней, чем
действующий по принципу передачи нормальной к поверхности
слоя нагрузки (см. также Ех, Ег в § 18).
В результате взаимного влияния (действия отраженных волн)
в случае А возникают покачивания штампов, характеризующиеся
углом поворота <ру. На рис. 5.18 изображена зависимость амп-
литуды) от частоты; <рх в случае А и <р2 в случае Б равны
нулю в силу самоуравновешенности приложенной нагрузки от-
носительно соответствующих осей. Покачивание у ненагруженно-
го штампа больше, чем у того, к которому приложена нагрузка,
так как первый раскачивается волнами от источника, а второй —
отраженными волнами.
Рис. 5.18
§ 20. ПЕРЕДАЧА КОЛЕБАНИИ ЧЕРЕЗ УПРУГОЕ ОСНОВАНИЕ
171
Видно, что частота резонансов w и углов у нагруженных и
ненагруженных штампов одна и та же.
Поведение фазы u, w ненагруженных штампов напоминает
фазы усилий под неподвижным штампом, также быстро меняясь
в окрестности собственной частоты слоя.
Рассмотрим колебания ненагруженных штампов под действи-
ем поверхностных волн, приходящих от удаленного источника.
Зависимости |w|, |фг,|, |п| от со приведены на рис. 5.19—5.21.
Что касается фаз (см. рис. 5.21), поведение первого штампа
такое же, как и у вибрирующего под действием нагрузки, а у вто-
рого — как у расположенного рядом ненагруженного.
172
ГЛ. V. ВИБРАЦИЯ МАССИВНЫХ ШТАМПОВ
Видно, что положение резонансной частоты здесь также не из-
менилось, а основное отличие от случая одного штампа заключа-
ется в появлении экранирующего эффекта, а именно в изменении
амплитуды колебаний второго штампа, который загораживается
первым от прямого воздействия поверхностной волны. В приве-
денных вариантах этот эффект существенно проявляется на ча-
стотах выше первой собственной со0, для со<со0 колебания штам-
пов практически одинаковы.
Степень проявления экранирующего эффекта зависит также и
от размеров перекрывающей области по отношению к длине вол-
ны: с уменьшением размеров степень проявления эффекта пада-
ет. Так, для областей, размеры которых меньше в 4 раза, отличие
и [w3| в масштабе рис. 5.19 едва заметно.
§ 20. ПЕРЕДАЧА КОЛЕБАНИИ ЧЕРЕЗ УПРУГОЕ ОСНОВАНИЕ
173
Возникает естественный вопрос: уменьшатся ли колебания
второго штампа, если первый сделать более массивным? Или —
как влияет масса штампов на экранирующий эффект? Картину
проясняют графики зависимости |w|, |<ру| от изменения массы
первого либо второго штампа при фиксированной частоте
(рис. 5.22, 5.23). Их анализ показывает, что к уменьшению коле-
баний второго штампа приводит не увеличение массы первого,
а главным образом его резонанс. Вне зоны резонансных масс
1 74 ГЛ. V. ВИБРАЦИЯ МАССИВНЫХ ШТАМПОВ
или на тех частотах, где резонансы не могут возникнуть вообще
(рис. 5. 23, со = 3,35), амплитуда смещений штампа, масса которо-
го не меняется, мало зависит от изменения массы другого. Там
же, где имеется резонансный рост колебаний загораживающего
штампа, происходит резкое уменьшение колебаний второго.
Рассмотрим систему из трех штампов (рис. 5.1), когда нагруз-
ка приложена только к первому. Такая модель является более
точной, чем предыдущая, так
как здесь учитывается поведе-
ние самого источника. На рис.
5.24, 5.25 показано изменение
|о>к|, &=1,2,3, в зависимости
от массы среднего, перегора-
живающего штампа т2 на час-
тотах 0=2,5 и 1,8. Интересно,
что при (о=1,8 у |щ3| имеется
не один, а два резких миниму-
ма. Фаза w2, как и положено,
при переходе через резонанс получает приращение л, a ш3 —
приращение 2л, т. е. возвращается к исходному значению.
Таким образом, штампы работают как фильтр, не пропу-
ская поверхностных воли на частотах собственных резонансов.
И наконец, рассмотрим влияние взаимного расположения
штампов на вибрацию системы в целом. Предположим, что меня-
ется расстояние I между двумя штампами. При этом периодиче-
ски повторяются резонансные расстояния, на которых | Рг | име-
ют локальный максимум, и диссонансные, на которых усилия ми-
нимальны. С увеличением I максимумы становятся все меньше;
очевидна, что при /->оо Рх стремится к усилиям, возникающим
под одиночным штампом. Резонансы усилий, вызванные наличи-
ем соседнего штампа, естественно приводят к наличию резонан-
сов по перемещениям (рис. 5.26, здесь прямая линия—'амплиту-
да перемещений |w| одиночного штампа на данной частоте).
§ 20. ПЕРЕДАЧА КОЛЕБАНИИ ЧЕРЕЗ УПРУГОЕ ОСНОВАНИЕ
175
Рис. 5.26
Г Л AB A VI
АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ, ВОЗБУЖДАЕМЫХ
ГАРМОНИЧЕСКИМИ ПОВЕРХНОСТНЫМИ
ИСТОЧНИКАМИ В УПРУГОМ
СТРАТИФИЦИРОВАННОМ ПОЛУПРОСТРАНСТВЕ
При заданных поверхностных напряжениях перемещения
упругого полупространства определяются из решения краевой
задачи, сформулированной в п. 2 § 1, и с помощью матрицы Гри-
на могут быть представлены в виде (2.1). Как правило, реальное
распределение поверхностных напряжений под излучающей пли-
той неизвестно и может быть определено либо натурными изме-
рениями, либо путем решения соответствующих контактных за-
дач. Поэтому моделирование работы поверхностного виброисточ-
ника с необходимостью включает следующие этапы:
1. Выбор механической модели источника, ее математическое
описание с помощью дифференциальных уравнений.
2. Выбор модели среды, построение матрицы Грина.
3. Определение колебаний излучающей плиты, усилий и кон-
тактных напряжений q. Здесь возможны два пути: а) точный,
с решением интегральных уравнений; б) приближенный, когда
распределение контактных напряжений считается заданным и
требуется равенство только осредненных перемещений плиты и
поверхности среды в зоне контакта. Однако и в том, и в другом
случае совместно рассматриваются уравнения, описывающие ви-
братор, и интегральное представление для реакции среды.
4. Анализ волновых полей с помощью представления (2.1)
или эквивалентного ему
и (х, у, z) = J J К («!, «2, z) Q (а1( а2) £-‘(«^+ад) day da^ (VI. 1)
Л Г2
в гармоническом случае. Для нестационарной нагрузки
Сф/Оо
и (х, у, z, t) = [ -L f f К (аъ а2, z, р) Q (аь а2, р) х
2ш J 4л2 J J
С-10О Г1Г2
х day da2e~pt dp. (VI.2)
§ 21. ИНТЕГРАЛЬНОЕ ПРЕДСТАВЛЕНИЕ
177
Решение задач, возникающих на этапах 1—3, описано в пре-
дыдущих главах, в этой главе мы остановимся на этапе 4, т. е.
на конкретных способах вычисления и при заданных К и Q.
§ 21. Интегральное представление волновых полей,
ближняя зона
1. Вычисление и(х, у, z) по (VI. 1) связано с теми же слож-
ностями, что и вычисление элементов аы в вариационно-разност-
ном методе, а именно: сильная осцилляция подынтегральной
функции, наличие полюсов и точек ветвления, комплексность кон-
тура интегрирования. К ним добавляется более медленное убыва-
ние по а. В § 11 достаточно подробно описаны пути преодоления
этих трудностей, в частности, переход от двукратных интегралов
к однократным, а от однократных к интегрированию вдоль раз-
резов, поэтому здесь мы часто будем пользоваться готовыми ре-
зультатами §11, опуская их вывод.
Пусть источник осесимметричный, в этом случае можно перей-
ти от двукратного интеграла к однократному:
я(х, У, z) = —— f /С (i — , i —, a, zY? (а) Д(аг) а da. (21.1)
2л J \ дх ду )
г
• д . д „
Операторы i — , i — стоят в элементах матрицы д на месте
переменных ab a2 (см. (2.24)) и действуют на /0(аг). ^=Т^2+у3-
В частности, для вертикальных перемещений w, вызванных
вертикальной нагрузкой, aZ2 = <73(/'), и горизонтальных и (вдоль
оси х), вызванных касательной нагрузкой, тхг = ^1(г), имеем
w (х, У, г) = —J— f R (a, z) Q3 (a) Jo (ar) a da, (21.2)
2л J
г
ц(х, у, г) =
= г) (v*’ + (7—тт)71*")) +
г
+ N (a, z) (~J0(ar) +(— — 71(аг)'П QJa) a2da.
\ Г2 \ Г Г* / / J
Интегралы здесь считаются либо непосредственно по контуру Г
при малых z, г, либо применяется процедура разворота и замыка-
ния контура.
Для неосесимметричной q(x, у) выражение для и не сводится
к однократным интегралам, но можно перейти к ним в представ-
лении матрицы Грина k(x, у, z). Выражение для k(r, z) получа-
ется из (21.1), если заменить Q единичной матрицей. Это соответ-
ствует и физическому смыслу матрицы k, столбцами которой
178
ГЛ. VI. АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ
являются перемещения, вызванные в упругом полупространстве
сосредоточенными нагрузками, приложенными последовательно
вдоль трех координатных осей. Их преобразование Фурье равно
единице.
Известно, что элементы К(аь a®, z) при а->оо, z->~0 убывают
как а-1 (см. § 5), поэтому интеграл
к (х, у, 0) ="~ J J К (04, а2, 0) ег^а1Х+а^ daT da2
rt гг
сходится только благодаря осцилляции экспоненты. При х=у=
=z=0 осцилляции нет и интеграл расходится, т. е. fe(x, у, г) име-
ет особенность в начале координат. Заметим, что при z<—б<0
точка х = у=0 не является особой, так как сходимость интеграла
на бесконечности обеспечивается экспоненциальным убыванием
е1г~еаг, а-хю, у=УГа2 — х„.
Аналогично однократный интеграл
к (г, ср, г) = —— С К ( i —, i — , a, z'] Jo (ar) a da (21.3)
2л J \ dx dy }
г
расходится при r = z=0, Сходимость при z = 0, г>0 обеспечивает-
ся только благодаря функции Бесселя, убывающей с осцилляци-
ей как (га)~‘/2 при а-хю. В случае r=0 J0(ar) |г=0=1 —осцилля-
ции и убывания нет.
Особенность k в нуле логарифмическая [46], т. е.
k (х, у, 0) = кй (ср) In г + кг (х, у), г = /х2 +у2,
fe0, ki непрерывны.
Основная идея вычисления волновых полей от неосесимме-
тричной нагрузки состоит в замене интегрального представления
некоторой кубатурной формулой
«(х, у, z) = уу k (х — g, у — Т], г) q (g, г]) dg du]
Я
3 ^ткщ~(х, у, z) qmt (21.4)
кт = к (X gm, у ут, z), qm = q (Im, T]m),
Am — коэффициенты, a (gm, — узлы кубатурной формулы.
На этом пути возникают следующие проблемы:
1) плохая сходимость интегралов в представлении
2) сильная осцилляция подынтегральной функции при боль-
ших г, г;
3) переход от одной точки пространства (х, у, г) к другой ме-
няет значение аргументов в кт, т. е. требует проведения вычисле-
ний интегралов заново;
§ 21. ИНТЕГРАЛЬНОЕ ПРЕДСТАВЛЕНИЕ
179
4) наличие логарифмической особенности ухудшает точность
кубатурной формулы.
Покажем, как здесь можно снизить до приемлемого уровня
объем вычислительных работ.
1) Улучшения сходимости интегралов при а->оо можно до-
биться стандартным способом, выделяя медленно сходящиеся го-
ставляющие в явном виде так, чтобы интегралы от них брались
аналитически. Существенно помогает здесь то, что элементы
К(аь а2, 0) имеют вполне определенные свойства, подробно опи-
санные в § 5. В частности, правее зоны комплекснозначности и
вещественных полюсов поведение элементов К хорошо аппрокси-
мируется главным членом их разложения при а->оо
К(а, 7) ~К1(7)сс-1+К2(7)а-2+Кз(7)а-3 + . • •
2) С ростом г, z из-за усиливающейся осцилляции подынте-
гральной функции счет интегралов по контуру Г требует все боль-
ше времени, а начиная с некоторых г0, становится невозмож-
ным из-за чрезмерного накопления ошибок округления. Выход —
в использовании асимптотических методов вычисления осцилли-
рующих интегралов (см.§ 22).
3) Избавиться от повторных пересчетов интегралов для каж-
дого ф и при каждом изменении fem позволяет тот факт, что ин-
тегралы, входящие в й(г, ф, z), не зависят от ф. Пусть, например,
необходимо рассчитать волновое поле вокруг источника вдоль не-
которой дуги D при фиксированном г (чаще всего требуется z=
= 0). Введем обозначения
УИ0 (г) = М. (а, г) Jo (аг) а3 da,
г
М, (г) = j М (а, г) (аг) a2 da/r,
г
No (г) = N (a, z) Jo (аг) a3 da и т. д.
г
Элементы k выражаются через эти функции, например (см.
(21.2))
= — i (cos2 ф Wo + (1—2 cos2 ф) Мг + sin2 q>N0 + (1 — 2 sin2 ф)
^зз ~ Rq (r)-
Пусть г0 — минимальное расстояние от точек (В, iq)eQ до то-
чек (х, у) ^D, а Гм — максимально возможное расстояние между
этими точками. Ясно, что при вычислении волнового поля понадо-
бятся значения функций M0(r), N0(r) и т. д. только на от-
резке Го^г^Гм. Разобьем отрезок [г0, rw] точками г,„ n = 0,1,...
..., М, с некоторым шагом h и вычислим значения функций в
180
ГЛ. VI. АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ
этих точках, сохранив их в некоторых массивах М0„, АИ„,
JVOn, ..., /?1„. При вычислении km в (21.4) каждым т]т, х, у
соответствуют свои г, ср. Имея массивы значений в точках гп,
с помощью интерполяционных формул получаем приближенные
значения в требуемых г. Как правило, достаточно пользоваться
трехточечной интерполяцией с равномерным шагом h:
’« ~ <г -г»)+
In = I(rn), п: \ rn — r\^h!2.
Шаг интерполяции h, с одной стороны, должен быть достаточно
малым, чтобы ухватывать осцилляцию по г (не менее четырех
точек на полуволну), а с другой стороны, соизмеримым с шагом
•сетки, покрывающей й.
Ограничение сверху на число узлов интерполяции, т. е. на раз-
мерность массивов МО, Ml, R1, обусловливается объемом
оперативной памяти ЭВМ. Ясно, что минимальная величина от-
резка [г0, Гм] определяется размерами Й. Если они таковы, что
оперативной памяти недостаточно, то для хранения массивов
можно использовать внешние носители.
4) Если (х, у, г) попадает в Й или расположена достаточно
близко от нее (r0, z — малы или нули), то необходимо воспользо-
ваться более сложными кубатурными формулами, учитывающи-
ми наличие логарифмической особенности. Обычно в этом случае
вместо вычисления fe(x—gm, у—т]т, z) в фиксированной точке
используют процедуру осреднения, суть которой в следующем.
В малой окрестности особенности йт значение q предполагается
постоянным и выносится за знак интеграла, а оставшийся инте-
грал от k вычисляется:
«т=^£(хт—В, ут — п, ?т)<7(1, ^dZdvi^kmqm,
ym — t\,z^d^dy\
ат
— осредненное по й™ значение k.
В результате значение km ограничено, даже в случае совпаде-
ния (хт, ут, гт) с узлом (Вт, Г]т). Для единообразия можно про-
вести осреднение во всех узлах сетки, разбив Й на подобласти Йт;
такой подход эквивалентен тому, что для q используется кусочно-
постоянная аппроксимация:
<7=2 (х, У), qm=q (Вт, Пт)>
(21.5)
т
Фт
1,
.0,
(X, у) S йт,
(х, у) е йт.
§ 21. ИНТЕГРАЛЬНОЕ ПРЕДСТАВЛЕНИЕ
181
Тогда km—Ktym — перемещения, вызванные нагрузкой в виде ко-
ординатной функции фт. Такая замена напоминает вариационно-
разностный метод, но в (21.5) фт неосесимметричны, а для эффек-
тивного вычисления km необходима осевая симметрия координат-
ных функций. Поэтому возьмем в качестве координатной систему
функций 00.9), (11.10). Имеем*
km = (* К (i —, i 4~ , a, Ф (сс/г) Jo (arm) ada,
2л J \ дх ду /
г
Гт = V (X — £т)2 + (У — Пт)2-
Вместо Amkm в (21.4) используется km, а вместо qm можно брать
ст из (10.2). Такой подход, являющийся естественным продолже-
нием вариационно-разностного метода, оказался наиболее удоб-
ным и эффективным при расчете перемещений, вызванных вибра-
цией произвольных в плане штампов. Так, на рис. 6.1, 6.2 приве-
Рис. 6.2
182
ГЛ. VI. АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ
дена зависимость от полярного угла ср амплитуды вертикальных
перемещений w поверхности слоя, вызванных вертикальной ви-
брацией с единичной амплитудой штампов, форма которых в пла-
не приведена на рисунках.
Свойства слоя те же, что и в § 17. Этот пример показывает, что
неосесимметричность формы штампа может привести к сильной
направленности поверхностных волн.
2. При учете реакции среды без решения контактной задачи
необходимо найти осредненные по области контакта перемещения
поверхности:
»о = -у jJ «(*. У, °)dx ЛУ>
а
S — площадь Q. Для круга единичного радиуса имеем
= — J R (а, 0) Q (а) J± (а) da,
П \ с (21- 6)
и0 =-------I [М (а, 0) 4- N (а, 0)] Q (а) Jr (а) da.
2л J
г
Пусть задана равномерно распределенная нагрузка; в этом
случае
Q1(a) = Q3(a) = 2n^W .
а
При заданной нагрузке и„, w0 зависят только от частоты и
свойств среды. Рассмотрим, как влияет неоднородность среды на
«о(со), w0(со), т. е. на частотные характеристики реакции упруго-
го основания. С этой целью сравним осредненные перемещения
однородного и двуслойного полупространства с различной тол-
щиной верхнего слоя h. Свойства каждого из слоев определяются
тремя параметрами A,ft, щ, pft, либо vp.h, vs.k, pft, £=1—верхний
слой, k = 2 — нижнее полупространство. В рассмотренном приме-
ре свойства слоев определяются следующим образом:
Верхний слой более мягкий, чем нижнее полупространство. В ка-
честве обобщенной частоты взято со=%2,2 = 2л/а/и8,2.
На рис. 6.3—6.6 приведены графики «о(со), ®0(co) при А=0
(однородное полупространство со свойствами нижней среды),
/i = 4,16 и й = оо (полупространство со свойствами верхнего слоя).
§ 21. ИНТЕГРАЛЬНОЕ ПРЕДСТАВЛЕНИЕ
183
Видно, как по мере увеличения толщины верхнего, более мягкого
слоя увеличивается амплитуда перемещений, т. е. податливость
среды. При й = 4 наблюдается резкая, резонансная зависимость
перемещений от ф. Очевидно, резонансы обусловлены волнами,
отражающимися от нижнего, более жесткого полупространства.
При толщине h= 16 вклад отраженных волн уже незначителен и
амплитуда податливости двуслойной среды практически совпада-
ет с амплитудой податливости однородного полупространства
(h = оо).
184
ГЛ. VI. АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ
Рост перемещений среды с введением мягкого слоя хорошо де-
монстрирует график осредненных статических (со = 0) смещений
поверхности среды в зависимости от толщины h (рис. 6.7). Основ-
ные изменения происходят при малых толщинах (до /i=C5), для
/1>5 свойства двуслойной среды быстро приближаются к свойст-
вам однородного полупространства. Изменение податливости ос-
нования естественно должно сказаться на амплитудно-частотных
характеристиках системы вибратор — среда (см. (4.16)).
§ 21. ИНТЕГРАЛЬНОЕ ПРЕДСТАВЛЕНИЕ
185
Рис. 69
186
ГЛ. VI. АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ
Рис. 6.11
§ 21. ИНТЕГРАЛЬНОЕ ПРЕДСТАВЛЕНИЕ
187
Рис. 6.14
188
ГЛ. VI. АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ
Рис. 6.17
§21. ИНТЕГРАЛЬНОЕ ПРЕДСТАВЛЕНИЕ
189
На рис. 6.8—6.19 приведены перемещения в точках полупрост-
ранства (Л = 0; 4; оо), расположенных под штампом, на глубине
z= —4 и на поверхности среды на расстоянии г=4 от центра об-
ласти Q [57].
Рис. 6.18
Рис. 6.19
С увеличением 7?=]/x2-]-y2 + z2 прямой счет интегралов по кон-
туру Г требует все больше машинного времени из-за усиления ос-
цилляции подынтегральной функции. Усиление осцилляции ре-
зультата при увеличении R означает, что доминирующими состав-
ляющими в нем становятся зависимости вида е1СшЯ, которые могут
быть выделены в явном виде асимптотическими методами.
190
ГЛ. VI. АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ
§ 22. Асимптотический анализ в дальней
от источника зоне; объемные, поверхностные
и каналовые волны
Итак, при больших R возрастающая осцилляция подынте-
гральной функции сильно затрудняет счет интегралов. Но эта же
осцилляция поздолярт выделить из волнового поля некоторые ре-
гулярные структуры, которые в дальнейшем удается ©тождеств
вить с объемными (продольными и поперечными) либо с поверх-
ностными и каналовыми волнами. Выделение осуществляется
путем анализа вклада критических точек в асимптотику осцил-
лирующих интегралов [118]. К критическим относятся стацио-
нарные точки показателей экспонент (фазовых функций), полю-
са и точки ветвления.
При построении асимптотик предполагается, что частота <о
фиксирована, а расстояние от источника R, выраженное в длинах
волн, намного больше единицы. Использование полученных фор-
мул для R, соизмеримых с длиной волны, либо при приве-
дет к неверным результатам.
1. Исследуем асимптотику объемных волн. Пусть X, ц, р неод-
нородного полупространства при z—>—оо растут не более чем сте-
пенным образом, тогда по построению (см. § 3) матрица К имеет
представление
2
К (аъ «2, z) ~ 2 («1, «2)-----------ос, (22.1)
П—1
Recr„^O, Inidn^O,
в котором в соответствии с условиями излучения из четырех оста-
ются две экспоненты. Элементы Кп, стоящие при экспонентах,
в соответствии с общей схемой (3.4) — (3.6) выражаются через
ptnt и определяются в рамках развитых методов построе-
ния К. Здесь
Z—оо Л (?) 4" 2|1 (z)
х| = Ит
г->—о И (z)
В круге Dn: | а| = V а* + а| х„ плоскости а4, а2 показатель
е°"г чисто мнимый, вне этого круга — вещественный, поэтому ра-
зобьем всю поверхность интегрирования (а4, а2) еГ(, Г2 на облас-
ти Dn и Г4Г2\Л„:
«(х, у, г) ~ ~ j JJ KnQe^da-y da2 -ф
П~1 _
Я,, л onz-i(a,tX+a2ii) "1
KnQe da-i da2
Г1Г2\О„
z —— ос, (22.2)
0n = — (Vx„ — a2 cos ф + («! cos ф 4- eta sin <p) sin'ip)
§ 22. АСИМПТОТИЧЕСКИЙ АНАЛИЗ В ДАЛЬНЕЙ ЗОНЕ
191
— фазовая функция. Здесь использованы сферические коорди-
наты
х = R cos ф sin ф, y = R sin ф sin ф, г = R cos ф,
О =4 ф-Г 2л, л/2^ф^л, 0 R = ]/х2 4-у2 -j- z2.
Предполагается, что ф строго больше л/2, т. е. при рас-
сматриваемая точка расположена на большой глубине. Это не-
обходимо, так как представление (22.2) и асимптотики, по-
строенные в этом пункте, справедливы только при Z-*—оо
(в многослойной среде в самом нижнем слое).
1.1. Рассмотрим вклад стационарных точек. Рассмотрим ос-
циллирующий интеграл по ограниченной области D т-мерного
чространства:
F (R) — § f (х) dx, x = (xlt х2, .. . , хт), 7? = |х|.
D
Стационарными называются точки х0, в которых выполняется
VO(Xo) =0. Обозначим 0"(х) матрицу размерности tn с элемента-
/ э2е \
ми Га—л— J (матрица Якоби). Если det (9"(ха)) 4=0, то
\ uX^OXj /
стационарная точка ха называется невырожденной.
Вклад невырожденной стационарной точки в асимптотику ин-
теграла при 7?->оо определяется по методу стационарной фазы
и в многомерном случае имеет вид [ 118]
Fo (R) = f (*о) exp (iRG0 + sgn OX
x|deto;r1/!(l+О(/?-1)), /?->оо. (22.3)
Здесь использованы обозначения 0о = О(хо), 9о=0//(хо), sgn/l —
разность между числом собственных значений матрицы А с по-
ложительной и отрицательной вещественной частью.
Формулу (22.3) можно использовать для определения вкла-
да стационарных точек в интегралы по Dn, при этом т== 2,
а2) f (х) -^->-KnQ. Системы для определения стационарных
точек — V0„=O принимают вид
—°6.1 cos -sin ф cos ф = 0,
/ х2 - а2
—ааС05^----5И1ф5Шф = 0, п=1,2.
1/иа-а2
Отсюда следует, что стационарными будут точки
= — хп sin ф cos <р,
<%2,rj = — xn sin ф sin ф, п=1,2,
ап ~ Vaj,n 4- а2\ = х„ sin ф.
(22.4)
192
ГЛ. VI. АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ
Далее, 0„=х„, | det 0П| 1/2 = —х„созф (знак минус, так как ф>л/2,
cos ф< 0).
Собственными значениями матрицы 0П являются vt = —1/х„<
<0 и v2 — — ----соз2ф<0, следовательно, sgn0„ = — 2. Таким
образом, получаем следующее выражение для вклада а;,,.)
в интегралы по Dn:
ип (х, у, г) - К„->пх„?Лх« (1+0 (+1)),
+ и=1,2, (22.5)
KnQn == Кп (®1,П®2,п) Q (®1,П, ®2п)-
Заметим, что при ф =л/2 (строго горизонтальное направление)
происходит слияние стационарной точки с границей |<%|=х„ об-
ласти Dn и формула (22.5) в этом случае неприменима. Здесь не-
обходим анализ вклада вещественных полюсов и точек ветвления
подынтегральной функции.
Главный член асимптотики (22.5) описывает сферическую вол-
ну, амплитуда которой убывает с удалением от источника как
R~l. Распространение волны определяется уравнением Рх„—at =
= const, отсюда сп = Я — (л/ип — ее фазовая скорость. Имеем
с1== Пт 1/”* + 2И __ vp, с2= lim ]— = пз
Z—>—ОО |/ Р Z—»-ОО |/ Р
— скорости Р- и 5-волн.
Окончательно: вклад стационарных точек в асимптотику вол-
новых полей в дальней от поверхностного источника зоне пред-
ставляет собой сферические Р- и S-волны, называемые также
объемными. Известно, что в однородной среде P-волны являются
продольными, а S-волны — поперечными.
Проверим поляризацию (22.5), с этой целью найдем компо-
ненты ип, п= 1, 2, в системе координат, связанной с направлением
распространения волны; ее ортами являются векторы
Пр = {cos <р sin ф, sin ф sin ф, cos ф},
Итр = {cos ф cos ф, sin ф cos ф, — sin ф}, (22.6)
п9 = {— sin ф, cos ф, 0}.
В (22.5) KnQn=Un, п—\, 2, где U — Unea,lZ— преобразование
П=1
§ 22. АСИМПТОТИЧЕСКИЙ АНАЛИЗ В ДАЛЬНЕЙ ЗОНЕ
193
Фурье от и. По построению (см. § 2, 3)
ип = В • Vn, V = {Ф, Т, W} = 2 V^nZ'
П=1
— iaj — ia2 0\
— ia2 (од О I .
О 0 1/
В зоне однородности (см. (2.25), (2.28))
/ С ‘ / ^2°2 \
о , К2= л .
V1O1 \ /
В стационарных точках (22.4)
(1 \ / /2 (tx2 COS 1|>) \
0 1 > V2 = I Pi j •
izjcosip / \ Z2z|sin2ip /
Для перехода к системе координат (22.6) достаточно умно-
жить ип на матрицу перехода С, строками которой являются ор-
ты nR, п^, пч. В результате имеем
ДцхЛ / 0 \
С • Uг == о , С • иг = — /,х22 sin ф.
\ 0 / \—р1;х2/
Получили требуемую поляризацию: при п= 1 частицы среды
колеблются в направлении распространения волны nR — это про-
дольная P-волна, а при п = 2 колебания происходят в плоскости
ортогональной nR—поперечная S-волна. Причем для S-волн вер-
тикально поляризованные SV-колебания вдоль обусловлива-
ются константой tz, т. е. элементами Ф, W в разложении U (функ-
ции М, Р, R, S в К), а горизонтальные S/7-колебания вдоль —
элементом Т (функция N в К); они определяются из независи-
мых задач.
Стационарные точки дают главный вклад в асимптотику вол-
нового поля в направлении, отличном от горизонтального (ф>
>л/2), поэтому формулы (22.5) позволяют строить диаграммы
направленности объемных Р- и S-волн, излучаемых в вертикаль-
но неоднородное полупространство поверхностным источником
1.2. Рассмотрим теперь вклад границы области Dn. Согласно
[ 118] для вклада границы dD в асимптотику осциллирующего ин-
теграла справедливо:
F (R, dD) ~ R~{m н1,/2 exp (i Д0 (x0)) (1 + 0 (R"1)), R -» oo.
В нашем случае n=2 и вклад границы области D„ имеет порядок
убывания О(/?_3/2), т. е. больший, чем вклад стационарных точек
7 В. А. Бабешко и др.
194
ГЛ. VI. АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ
un~O(R~l), R-^-oo. Такой же порядок убывания O(R~3/2) получа-
ется и для вклада граничных точек в интегралы по ГТаХДп, ко-
торый в данном случае определяется по методу Лапласа.
2. Перейдем к рассмотрению поверхностных и каналовых
волн.
2.1. Вклад полюсов, как обычно, выделяется с помощью замы-
кания контура и теоремы Коши о вычетах; соответствующая тех-
ника уже демонстрировалась на модельном примере в § 1 и 11.
Воспользуемся представлением матрицы Грина (21.3), в котором
после разворота полубесконечного контура Г в бесконечный кон-
тур о (см. § 11) необходимо заменить /0(<%г) на (аг); в ре-
зультате имеем:
и (х, у, z) = —— С К (i — , i — , a, z\ Р (х, у, a) a da,
4л J \ дх ду /
а
Р (х, у, а) = J ^q (I, т]) (al) d% dr\,
а
I = 1/'(^ —Й2 + (г/ —л)2.
Для осесимметричного источника q = q(r) интеграл по £2 бе-
рется в явном виде:
Р (х, у, а) = Q (а) (ar), r = yf х2 + г/2.
Функция Ханкеля (1а) экспоненциально убывает в верхней
полуплоскости комплексной плоскости а как О (ехр (—| Im <%|/)),
поэтому замкнем контур о вверх, обходя разрезы, соединяющие
возможные точки ветвления элементов К, по их берегам вдоль
контура S (см. рис. 1.1). Предполагается, что 1>а, т. е. (х, у)
расположена вне Q и убывание функции Ханкеля гасит экспонен-
циальный рост Q (а) ~ О (e“|Im а|), |1ша|-*оо (а — радиус Q). Со-
ставляющие А"г элементов матрицы К. при |1та|-»-оо не дают
экспоненциального роста, так как при | Im а| ->-оо arg ч„-> ±л/2
н eVnZ~O(l).
Имеем
«(х, у, г) = 2 KmPmtm + [К Ра da,
2 т 4я J
£т— полюса элементов К, расположенные выше о,
KmPm=resK I P(x,y,U- (22.7)
\ дх dy J \a=tm
Сумма по m — вклад полюсов в представление и. Асимптотика
интегралов по разрезам S в случае ф>л/2 строится по методу
перевала и совпадает с результатом п. 1. В горизонтальном на-
правлении z = const главный вклад в интегцалы по S определяет-
§ 22. АСИМПТОТИЧЕСКИЙ АНАЛИЗ В ДАЛЬНЕЙ ЗОНЕ
195
ся точками ветвления, он эквивалентен вкладу границы Dn (см.
ниже п. 2.2).
Изучим поведение слагаемых в дальней зоне.
При z->----оо К имеет представление (22.1). Ограничимся пока
вещественными £т, тогда оп(£т)= V&i — nh может быть либо
ЧИС1О ЬёЩес! венний при либо ЧИСТО МНИМОЙ При L,m<.Xn.
В первом случае имеем экспоненциальное убывание слагаемых
при Z-*—оо. Второй случай на практике не реализуется, при чис-
ленных расчетах всегда оказывается, что вещественные полю-
са расположены правее х£ = lim —-—, vs(z) =Vp/p — ско-
2->-эо vs(z) ___________________________________
рость S-волн. В противном случае ехр (—i Vx„ —£m?) описывала
бы волну, распространяющуюся в объеме упругой среды со ско-
ростью, отличной от скорости Р- и S-волн и с неубывающей при
фиксированных х, у амплитудой.
При z фиксированном, г->оо в осесимметричном случае
имеем [34]
яа)М = 1/'т Л-г-я/4) +О(г-/<), г^оо. (22.8)
При вещественных |//oU (smH | — О (^~%)> г-*°°, а для комп-
лексных Н? убывает экспоненциально как О (e-|im Sm'r), т. е. тем
быстрее, чем дальше расположен полюс от вещественной оси.
Рассмотрим действие производных по х, у на (СщГ) при г -►
т- дг х дг у . д . _v. 1 _г,
—>оо. Так как — = — = cos <р, —= — = sin ф, — (г '*) —--г
дх г ду г дг 2
ТО
ЯР1+Р2 / \ У°тг
~М>>дуР, ; = (г?т)₽1+₽2 COS₽7P sinft ф -у=- + О (Г-Н г -> ОО.
Отсюда производные i—, i— .стоящие на месте аргумен-
дх ду
тов аь а2 в (22.7), можно с точностью до членов порядка О(г~3/2)
заменить на —£тсозф, —£тзтф:
mt itmr
а (х, у,г) = Ьт
rn—i
— f К Ра da + О
4л J
Ьт (ф, ф, г) = у ~ res К (— a cos ф, — a sin ф, а, г)
(22.9)
Сп1,
Qm = Q(t.m) в осесимметричном случае; nit — число веществен-
ных Ъп. "
7 *
196
ГЛ. VI. АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ
Пусть осевая симметрия нагрузки отсутствует, тогда при г->
—►оо
/ = г 1— S cos ф + чsin Ф । о (г-2^
и
//о1’ («/) = 1 / —-— ef(ar-3,/4>e_fatt cos ф И1 sin ф) + О (г~,/г)
V nZmr
Р (х, у, a) = Q (— a cos ф, — a sin ф) 1 / —-— е‘1аг~л/^ 4- О (г_’/г).
|/ ЛЯГ
Далее остаются в силе все прежние рассуждения, в резуль-
тате которых приходим к формуле (22.9), в которой Q,—
=Q(—?„coscp, —£msin<p), причем bm~O(V) при r-->oo.
Слагаемые по т в (22.9) представляют собой цилиндрические
волны (или моды), распространяющиеся в горизонтальном на-
правлении с фазовыми скоростями vm=afcm и групповыми ст —
= [dgm/d<o]-4. Полюса в представлении (22.9) играют роль
волнового числа, £т(о)) —дисперсионные зависимости, а соответ-
ствующие кривые в плоскости (<в, £) — дисперсионные кривые.
Амплитуда этих волн убывает экспоненциально при z->- —оо.
Если полупространство многослойное, то экспоненциальное убы-
вание амплитуды по z начинается в самом нижнем слое, в верх-
них слоях в состав Ьт входят у которых Re*^ может быть
как положительной, так и отрицательной, что приводит к слож-
ной зависимости амплитуды от глубины.
В случае однородного полупространства функции М, Р, Р, S
имеют единственный вещественный полюс (у М полюсов нет), ко-
торому соответствует поверхностная волна Рэлея, возникающая
в результате взаимодействия S-волн с поверхностью [35]. Дейст-
вительно,
1) знаменатель этих функций А — а2сг1о2 — (а2— 0,5х1)2 со-
впадает с левой частью уравнения Рэлея, вещественным корнем
которого является волновое число £ рэлеевской волны;
2) амплитуда экспоненциально убывает с глубиной за счет
e®s©z, £>х12, причем из-за того, что (£) = <» 1 / -4--------V" ,
V VR vn
СО л „
=—On, n= 1, 2, убывание тем быстрее, чем больше часто-
та <0 (скин-эффект);
3) при г—>оо амплитуда убывает как г-1/2;
4) вектору bt в (22.9) соответствуют перемещения, при кото-
рых частицы вычерчивают эллипсы, лежащие в вертикальной
плоскости.
Перечисленные факты являются классическими признаками
волны Рэлея, поэтому и в случае неоднородного полупространст-
§ 22. АСИМПТОТИЧЕСКИЙ АНАЛИЗ В ДАЛЬНЕЙ ЗОНЕ
197
ва волны, соответствующие вещественным £т, часто называют
волнами рэлеевского типа. Это название не совсем строгое, так
как сюда попадают и волны типа волн Стоунли, возникающие на
границе раздела слоев, и горизонтально поляризованные типа
волн Лява, и волны типа изгибных в пластине. Волна Гуляева —
Блюстейня, возникающая в электроупругом полупространстве,
также описывается вычетом в вещественном полюсе соответст-
вующей матрицы К. Общим для этих волн является более мед-
ленное по сравнению с объемными волнами убывание амплитуды
при r->oo z= const (как г~1/2 по сравнению с R~l), экспоненциаль-
ное убывание при Z-*—оо и возникновение их из-за наличия не-
однородностей (поверхность, границы слоев и т. п.). (В однород-
ном неограниченном пространстве, как известно, могут возник-
нуть только объемные Р- и S-волны.) Поэтому для них использу-
ют также общее название —слабозатухающие поверхностные и
каналовые волны.
По построению функция N имеет знаменатель, а следователь-
но, и набор полюсов, отличный от знаменателя и полюсов М, Р,
R, S. Их вклад дает горизонтально поляризованные волны, т. е.
волны типа волн Лява.
Дисперсионные кривые для различных сред приводятся
в § 17, 30.
2.2. Рассмотрим вклад точек ветвления. В выражении (22.9)
осталось оценить поведение интегралов по разрезам S при г->оо.
Рассмотрим модельный интеграл
I (г) = r~'A J / (a) elar da, (22.10)
se
к которому сводятся интегралы в (22.9), если воспользоваться
асимптотикой (22.8) функций Ханкеля при г->оо. Здесь S — кон-
тур, идущий вдоль берегов разреза, соединяющего некоторую
точку ветвления х функции f (а) и х-|-гоо по правому берегу вниз,
по левому — вверх; f(<%) —аналог KnQna. Пусть в окрестности х
при а=х-Нт, т>0, т. е. вдоль берегов разреза, f(a) имеет разло-
жение
f(a)~±x-*f_1 + f0±^1 + xf2±^f3+ ... , (22.11)
т->0, т>0.
Для определенности считаем, что верхний знак — на левом бе-
регу, нижний — на правом. Несложно убедиться, что такое пред-
ставление справедливо для элементов матрицы К, в которых
точка ветвления обусловлена наличием радикалов о=Уа2—хг=
= УгтУ2х-Н'т. Действительно, значения Ут на разных берегах раз-
реза отличаются знаком: Ут= ±У|т|, а значения у2х-Н’т совпа-
дают, так как т=0 для этого радикала не является точкой ветвле-
ния. Введем обозначение г/ = У|т|; /(х-Н’т) зависит от ±у и у2.
198
ГЛ. VI. АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ
Разложив функцию двух аргументов g{±y, У2) = f (и+ix) в ряд
Тэйлора в окрестности у = 0, убеждаемся в справедливости пред-
ставления (22.11).
Слагаемое T_1/7-t описывает слабую особенность, совпадаю-
щую с точкой ветвления. Например, для однородного полупрост-
ранства
N (а, г) =---= — т — т_,\
<а2 ( у i (2z -|- it)
а остальные функции М, Р, Р, S, входящие в К, слабых особенно-
стей не имеют. Для них f-t = 0, разложение начинается с f0 или
даже с ft. В случае многослойной среды элементы К могут иметь
слабые особенности тг1/2 только при определенных сочетаниях
свойств слоев и частоты. Для градиентных сред не исключена
возможность, что могут встретиться показатели, отличные от 1/2:
f(x-H’r) ~О(т6-4), т->-0, Ь>0. Для определения точного значения
b нужны специальные исследования в каждом конкретном случае
неоднородности, однако схема построения асимптотики, изложен-
ная ниже, как для однородных, так и для градиентных сред одна
и та же.
По лемме Ватсона [118] для интегралов
Ф (г) = j х6-1/ (х) e~rx° dx
О
справедливо разложение
(22.12)
а \ а. ) k\ v '
k=o '
Заменой a=x + ix интеграл (22.10) сводится к виду
I (г) = /+ (г) — Г (г), I± (г) = г-Ъе'^Ч j f± (х -f- it) e~xrdx,
О
удобному для использования формулы (22.12). Учитывая разло-
жение (22.11), имеем:
1(ХГ+Л/2) 00
Цг)^2 —------------V l/?)r-(«^', г+оо. (22.13)
Здесь остались только нечетные слагаемые разложения, имею-
щие противоположные знаки на разных берегах разреза. Полу-
ченная формула дает возможность оценить вклад точек ветвле-
ния xft в асимптотику перемещений при г->-оо, 2~0(1), Для это-
го необходимо вместо f2n-i подставить соответствующие коэф-
фициенты разложения KQa в окрестности xft.
§ 22. АСИМПТОТИЧЕСКИЙ АНАЛИЗ В ДАЛЬНЕЙ ЗОНЕ
199
Вклад слабой особенности т-7’ убывает как г-4, если же f_t =
=0, то вклад точки ветвления убывает как г-2. В общем случае
ть~4, Ь>0 имеем убывание г-(,/2+ь>, т. е. всегда более быстрое, чем
у вклада полюсов г~'/2.
Экспонента eiKr в (22.13) показывает, что это цилиндрические
волны, распространяющиеся в горизонтальном направлении со
скоростью у = (о/х, которая в многослойном полупространстве
совпадает со скоростями объемных волн в слоях (так как хй11 =
= (i)/t\l, k=i, 2, 1=1, 2, ..., N, —скорость P- и S-волн в l-м
слое). Их амплитуда убывает быстрее, чем амплитуда поверх-
ностных и каналовых волн, а суммарная энергия, переносимая
ими, стремится к нулю при г->-оо (см. ниже § 29). Поэтому в
большинстве случаев при г—<-оо достаточно учитывать только
вклад полюсов. Вклад точек ветвления может понадобиться, на-
пример, при анализе объемных волн, отраженных от нижних
слоев, в этом случае не обойтись без асимптотик типа (22.13).
3. Итак, в неоднородном по глубине полупространстве в даль-
ней от поверхностного источника зоне волновое поле описывает-
ся выражениями
2
«(Я, Ф. Ф) = 2 ап ’l’) + 0
п = 1
R~^oo3 ф>л/2, (22.14)
7711 J^mr
«(Г, ф, г) = 2 Ьт —7^ + 0 (г-’7’).
r-+oo, г~О(Г), (22.15)
i cos ф •->
— —- Кп. ' п^п,
2л
Ьт — 1^/” 2^ reS К (ОС, ф, г)
ап, 6т~0(1),
представляющими собой объемные сферические Р- и S-волны в
первом случае и цилиндрические поверхностные и каналовые во
втором.
4. Приступим к сравнительной характеристике интегрально-
го и лучевого метода. Развитый метод анализа волновых полей
в упругом полупространстве, в отличие от широко известного
лучевого [32, 35], назовем интегральным, так как его основу
составляет интегральное представление волновых полей с по-
мощью матрицы Грина. Ключевую роль при использовании ин-
200
ГЛ. VI. АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ
тегрального подхода, т. е. представлений (2.3), (22.14), (22.15),
играет матрица К(<Х!, а2, z). Эти формулы бесполезны, если нет
эффективных программ расчета элементов К как функции a, z,
и. Методы построения К в случае многослойных и градиентных
сред изложены в § 3. Следующей составной частью выражений
для и является преобразование Фурье поверхностной нагрузки
$(«!, а2). Нагрузка q\x, у) и Q(ab a2) определяется из решения
контактных задач, методы решения которых изложены в гл. III.
Часто, когда исследуется влияние неоднородности среды на вол-
новое поле, источник колебаний задается без решения контакт-
ной задачи в виде некоторой элементарной нагрузки (сосредото-
ченная, равномерно распределенная в круге и т. п.).
Для эффективной реализации интегрального подхода наряду
с программами расчета К(аъ a2, z), a2) необходимо вла-
деть приемами повышения эффективности счета контурных
интегралов в комплексной плоскости и уметь находить веществен-
ные, а иногда и комплексные полюса функций, заданных числен-
но, и вычеты в них. Все это технически достаточно сложные про-
блемы, потребовавшие при реализации на ЭВМ тщательной пред-
варительной проработки. Лучевой метод, напротив, сравнительно
прост в реализации и дает физически наглядные результаты.
Естественно возникает вопрос: зачем понадобилось развивать
иной, требующий более глубокой математической подготовки
интегральный подход, если существует лучевой метод? Для этого
должны быть веские причины, оправдывающие затраты на его
разработку и реализацию.
Лучевой метод по своей природе имеет ряд ограничений и
трудных в реализации моментов: 1) неоднородность среды долж-
на быть достаточно плавной; 2) в рамках лучевого приближения
нельзя описать источник, он должен быть задан; 3) большие
трудности возникают при описании дифракционных явлений, по-
верхностных и каналовых волн; 4) в многослойной среде учет
всех отражений и преломлений приводит к лавинообразному
росту количества отраженных и преломленных волн.
При интегральном подходе этих ограничений нет, хотя по п. 1
и 3 преимущество не столь существенно, как может показаться.
Так, построение K(alt a2, z) идет тем быстрее, чем плавнее
неоднородность, но, построив К, мы имеем точное представ-
ление волнового поля с учетом бесконечного числа отражений и
преломлений, произошедших, пока колебания всей среды вы-
ходили на установившийся гармонический режим. Асимптотика
в дальней зоне (22.14), (22.15), хотя и имеет тот же порядок точ-
ности, что и лучевая, в отличие от последней уже содержит через
К информацию о всех отражениях — преломлениях, а через Q —
об источнике.
Учет источника — основное преимущество интегрального под-
хода; он позволяет: 1) строить волновое поле в ближней зоне,
§ 23. ВОЛНОВЫЕ ПОЛЯ ДВИЖУЩЕГОСЯ ИСТОЧНИКА
201
т. е. решить проблему начального поля для лучевого продолже-
ния, 2) изучать процесс подвода энергии к среде, влияние неод-
нородности среды на ее входное сопротивление {импеданс),
3) ставить и решать задачу о формировании излучения заданной
направленности с учетом взаимного влияния источников, 4) изу-
чать взаимодействие упругих волн е массивными объектами (как
поверхностными, так и заглубленными).
Учет многократных отражений позволил обнаружить явление
резонанса многослойных сред [154, 155] (см. также § 31) и эф-
фективно рассчитывать его характеристики.
Вместе с тем интегральный подход пока еще не обобщен на
случай трехмерно неоднородных (или хотя бы горизонтально
неоднородных) сред, первые шаги делаются в его применении
к средам с неплоскими, рельефными поверхностями и границами
раздела слоев; лучевой метод не имеет ограничений в этом пла-
не. Однако резонансные явления, возникающие из-за многократ-
ных отражений на рельефной поверхности, удастся эффективно
рассчитывать все-таки с помощью интегральных представлений,
как и резонанс слоев.
Лучевой подход более удобен с точки зрения анализа неста-
ционарных волн, так как, зная траекторию луча и акустическую
длину пути вдоль него, легко установить время прихода сигнала
в любую точку на луче. Интегральный же подход позволяет в
нестационарном случае регистрировать все сигналы, приходящие
в данную точку, т. е. строить теоретическую сейсмограмму, но не
дает указаний на предысторию этих волн — через какие участки
они прошли, от чего отразились и т. п.
Эти подходы нельзя противопоставлять, они предназначены
для изучения одних и тех же волновых явлений, но действуют
как бы с разных сторон навстречу друг другу: лучевой идет от
волны и, прослеживая ее распространение, в пределе дает пол-
ную картину колебаний в среде, интегральный — сразу дает пол-
ную картину колебаний во всей среде, из которой, пробившись
через интегралы, удается выделить волны. Наиболее эффектив-
ным представляется совместное использование этих подходов,
в котором интегральному отводилась бы задача учета источника
и формирования исходного поля, а лучевому — его продолже-
ние через произвольные неоднородности, границы разделов
и поверхности с сохранением исходной информации об источ-
нике.
§ 23, Волновые поля, возбуждаемые движущимся источником
В § 14 уже рассматривалась задача о движущемся невибри-
рующем штампе. В данном параграфе предполагается, что дви-
жущийся объект совершает гармонические колебания; изучают-
ся особенности формирования волновых полей.
202
ГЛ. VI. АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ
1. Рассмотрим упругое полупространство с заданной поверх-
ностной нагрузкой q(xt-—ct, у))е~м, движущейся с постоянной
скоростью с вдоль оси Ох, неподвижной системы координат
(*!, У1, zt).
Перемещения среды ReCwjfXj, у,, z1( в этой системе
координат удовлетворяют краевой задаче
= ®k=o = 4'i. (23.1)
£i—дифференциальный матричный оператор, описывающий ле-
вую часть уравнений Ламе.
Введем подвижную систему координат (х, у, z), связанную с
движущейся нагрузкой: x=Xj—ct, у=у,, z=z,. Распределение
поверхностных напряжений в подвижной системе не зависит
от времени:
<Ма—ct, yl)=q(x, у).
Предположим, что колебания частиц в системе координат, свя-
занной с источником, также являются установившимися:
«1(х1, у>, гл, t)=u(x, у, z).
Тогда в подвижной системе (х, у, г) имеем
L [ue~ib)i]= р (ue~ib,i), (23.2)
<r\z=0 = q.
„ , ... д д д
Оператор L, содержащий производные —,—,— на месте
дх ду дг
д д д , , ди,
----,—,-------в L., по форме остается прежним, так как-—L =
дх, ду, dzt---дх,
ди ди, ди г, - ь
= —,—-==— и т. д. Действие же производной по времени
дх ду, ду
Изменится:
ди ди дх ди
= == — С-.
dt-------------------дх dt-дх
Решение задачи строим с помощью преобразования Фурье по
х, у с параметрами <х4, а2; при этом
ди . тт ди . тт ди гт,
> — t<x,U, —--э ta2c/, >С/,
дх-----------------------------ду-дг
— (tier-®*) = / — 1<ли — с е~'м -»— I (® — a,с) U,
dt \ дх /
, (д д д \ , [ . . d \
— ta,, — ta2, — .
\дх ду дг) \ dz)
§ 23. ВОЛНОВЫЕ ПОЛЯ ДВИЖУЩЕГОСЯ ИСТОЧНИКА
203
Относительно U(а1; а2, z)—преобразования Фурье перемеще-
ний в подвижной системе координат получили задачу:
L (— iab — ta2, —'j U = — р (со — о^с)2 U,
(23.3)
TU |г=о = у,
Т — преобразование Фурье оператора напряжений. Задача (23.3)
отличается от задачи для неподвижного источника только тем,
что в инерционном члене вместо ю2 стоит (®—ajc)2, поэтому ин-
тегральное представление и в подвижной системе координат по-
лучается из представления (2.3) для неподвижного источника
заменой в матрице K(ab a2, z, or) со2 на (со—tZjC)2.
Итак, при решении задачи о движущемся с постоянной ско-
ростью с гармоническом источнике можно проводить выкладки
для неподвижного источника (остаются в силе все описанные
выше методы построения матрицы К), заменив лишь в оконча-
тельном интегральном представлении ®2 на (®—со^)2.
Однако вид асимптотики волнового поля в дальней зоне не
получается из (22.14), (22.15) указанной заменой, необходимо
получить асимптотические представления специально для дви-
жущегося источника.
2. Перейдем к выделению волн рэлеевского типа. Для не-
подвижного источника волны рэлеевского типа определяются по
Рис. 6.20
Рис. 6.21
(22.15) вычетами в полюсах t,m, которые являются корнями
трансцендентного уравнения
А (а, со2) — 0 => a = (со2) либо co = ±com(a).
В пространстве (аь а2, со) указанные дисперсионные зависимости
представляют собой осесимметричные поверхности с осью сим-
метрии Осо (рис. 6.20).
204
ГЛ. VI. АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ
Для подвижного источника имеем
А (а, (® — caj2) = 0 => со = с«1 ± (а) = рт (а, у). (23.4)
Поверхность ®=рт(а, у) (а, = а cos у, a2=asiny) уже не яв-
ляется осесимметричной, она получается из исходной путем при-
бавления плоскости (о = са1 (рис. 6.21).
В асимптотике (22.15) волновое число и фазовая скорость не
зависят от <р, так как сечение поверхности a = £m(®2) плоскостью
<0 = const представляет собой окружность радиуса Сечение
же поверхности (23.4) представляет собой кривую, отличающую-
ся от окружности: a,=sm(y, ®2). Эти кривые могут стать разрыв-
ными, если сечение производится в окрестности начала вещест-
венных ветвей дисперсионных кривых (рис. 6.22).
Полюса, зависящие от угла у, получаются также для анизо-
тропных сред, дисперсионное уравнение которых (знаменатель
элементов матрицы К) зависит от у: Д(а, у, со2) — 0. В этом
смысле задачу для движущегося источника можно рассматри-
вать как частный случай задач для сред с анизотропией. И с
физической точки зрения движение источника приводит к нерав-
нозначности условий распространения волн в различных направ-
лениях, т. е. к анизотропии свойств, проявляющейся в явной за-
висимости от а,. Техника выделения волн из общего интеграль-
ного представления, описанная ниже, остается той же и в случае
сред с произвольной анизотропией.
Итак, имеем
2Л
„(Г,Ф,г)=Лгуук(«,
0 Г
у, г, ©) Q (а, у) e~iarcos w-^adady. (23.5)
Вклад вычетов в полюсах ранее определялся путем-разворо-
та контура Г в контур о с последующим замыканием его в верх-
§ 23. ВОЛНОВЫЕ ПОЛЯ ДВИЖУЩЕГОСЯ ИСТОЧНИКА
205
нюю полуплоскость. При развороте контура существенно исполь-
зовалось то, что интеграл по у сводился к
J0(ar) = ±(H™(ar)+H™ (аг)).
Теперь же. в силу зависимости элементов К от у через
(и—cacosy)2, этот интеграл в явном виде не берется.
Разворот контура Г в о здесь можно провести путем замен а на
—а, у на у—-л и искусственным введением точки ветвления а = 0.
Однако выделение волн рэлеевского типа, т. е. вклада вычетов
в вещественных полюсах sm(y), можно провести и без разворота
контура, исходя из (23.5).
Замкнем контур Г в верхнюю или нижнюю четвертьплос-
кость в зависимости от убывания экспоненты. При r-ч-оо ее убы-
вание определяется знаком cos (ср—у):
л 3
cos (ср — у) < О или — +ф<у<ул+Ф — вверх,
cos (ср — у) > 0 или — ^- + ф‘Су<С~ + (Р — вниз •
По теореме Коши получаем, что исходный интеграл по Г равен
произведению 2ш на сумму вычетов в полюсах, расположенных
в первом квадранте (в том числе и в регулярных вещественных
sra(y), обходимых контуром Г снизу), плюс интеграл по верхней
половине мнимой оси [too, 0] для
л । .. . 3 ।
у + ф<У<у^4-ф
либо
—2м на сумму вычетов в полюсах четвертого квадранта и нере-
гулярных вещественных плюс интеграл по [—too, 0] для осталь-
ных у. По аналогии со случаем неподвижного источника ясно,
что волны рэлеевского типа, убывающие при г->оо как г~1/2, опи-
сываются только вычетами в вещественных полюсах. Вычеты в
комплексных полюсах и интегралы по мнимой оси дают больший
порядок убывания по г (см. § 22).
Предположим для простоты, что все sm—регулярные, имеем:
и (г, ф, г) = 2 »т (г, ф, г) + О (г_’А), г-*-оо, (23.6)
пг
л
t С - /л ч {sm<&sin Vr ,
W/n — i bm (9j z) в dy,
2л J
о
bm (y, z) = res к (a, y) Q (a, y) a |a=Sm(V), 0 = ф + у + y.
В um проведена замена у на у + ф + л/2. Асимптотику ит при
г—»оо построим методом стационарной фазы. Здесь фазовая
206
ГЛ. VI. АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ
функция имеет вид
s (?) = Sm (0) sill ?,
, sm (9)
s' (?) = Sm (0) cos ? + sm (0) sin ? = 0 ctg ? = — —— .
sm V3'
Из геометрических соображений следует, что на отрезке [0, л]
имеется единственная стационарная точка ?о = л/2 + е (ф)
(рис. 6.23),
е (<р) — 0 при ф = 0, л; е (— ф) — е (ф);
е (ф)< 0 при 0<ф<л, е(ф)>0 при л<ф<2л.
В итоге
ikm№)r
ит (г, <р, z) = dm (<р, г)е + О (г^2), г<х>,
dm = -pU- Ьт (0О, z) ((sm (0o)-S; (0O)) cos в - 2sm(0o) sin s)’1'2, (23.7)
km = sm (0O) cos e (ф), 0O = ф 4- л + e (<p).
В силу периодичности фазовой функции концы интервала
[0, л] не дают вклада в асимптотику. При с = 0 выражение
(23.7) совпадает с (22.15) для неподвижного источника.
Для движущегося источника волновое число &т(ф) становит-
ся зависящим от направления распространения волн. При ф = 0
(вперед) оно максимально, при ф = л (назад) — минимально. Со-
ответственно фазовая скорость этих волн в подвижной системе
координат vm=&lkm различна в различных направлениях. При
§ 23. ВОЛНОВЫЕ ПОЛЯ ДВИЖУЩЕГОСЯ ИСТОЧНИКА
207
Ф = 0 она минимальна, при ф = л максимальна. Несложно пока-
зать, что для волн без дисперсии (например, для волны Рэлея
в однородном полупространстве) при движении источника со
скоростью с фазовая скорость в подвижной системе координат
в направлении вперед уменьшается, а в направлении назад уве-
личивается ровно на с.
При наличии нерегулярных полюсов соответствующие им
km берутся с противоположным знаком. Для тех значений <р, при
которых полюса sm(0o) уходят в комплексную плоскость, необхо-
димо положить </,„ = 0.
Асимптотическое представление (23.7) согласуется с асимп-
тотиками, построенными А. В. Белоконем, А. В. Наседкиным
для более общего случая анизотропной среды [160].
3. Рассмотрим теперь объемные волны. Фазовая функция 0П
в (22.2) для движущегося источника вместо х„ = &)/с„ содержит
х„ = х»—с„а1( с„ = с/с„, п=1, 2, поэтому при отыскании стацио-
нарной точки изменится вид V0„: в производной djda.1 добавится
дифференцирование по х„:
сЮ„ «1 + с„х„
----=-----cos ф — sin ф cos <р - 0,
5X1 - а2
(23.8)
----—-----=^==г cos ф — sin ф Sin ф = 0, п = 1, 2.
1/х2 — «2
Выразить решение этой системы в явном виде при с=#0 уже
не удается, стационарные точки здесь можно определить только
численно, например, методом Ньютона, выбирая за начальное
приближение a1>n, a2,n для неподвижного источника.
4. Рассмотрим в качестве примера волновые поля, возбуж-
даемые в упругом многослойном полупространстве точечным
источником гармонических колебаний, движущимся в акустиче-
ской среде с постоянной скоростью с над поверхностью полупро-
странства на высоте h.
Потенциал скоростей смещения частиц акустической среды
для неподвижного точечного источника имеет вид
Ф1 (X, Г/, 2Г) = —, 7?0=/x2 + l/2 + (^-/l)2, Х = — ,
4л Rti Со
с0—скорость звука, А — константа, характеризующая мощность
источника. Для перемещений упругого полупространства имеем
и (х, у, г) =
И/ (aiPi\
Г, г2 \ «1 /
1
4л2
---------------------------аа, аа9.
Рой2/?! (а, 0) — a0At (а)
(23.9)
208
ГЛ. VI. АНАЛИЗ ВОЛНОВЫХ ПОЛЕЙ
Здесь P — PJ&.1, R = RJ^l—элементы матрицы К, р0—плотность
акустической среды, о0 = — ®2/с3.
В простейшем случае однородного полупространства элемен-
ты Р, R имеют единственный рэлеевский полюс t,l = o)/cB, св—ско-
рость волны Рэлея. Для движущегося источника в соответствии
с формулами перехода (23.4) (у) =®/(сн + сcos7). Далее,
воспользовавшись представлением (23.6), (23.7), несложно по-
лучить конкретный вид поверхностных волн, возбуждаемых дви-
жущимся источником. Чтобы оценить, как влияет скорость дви-
жения с на амплитуду поверхностных волн, рассмотрим отноше-
ние т] = | wJwB |, здесь шп— вертикальная компонента перемеще-
ний для подвижного источника, wB—для неподвижного. После
упрощений имеем
cr ”
Т]= ---------- .
+ с COS fn
В частности,
с3
приф = 0 ?0 = л, Г] = (Сд-^с)з
с3
при ф = л уо = О, Т] = ;—гЧг’ С<СИ-
(С« + с)3
Амплитуда вертикальных перемещений поверхности с приближе-
нием с к сн перед источником возрастает (нагонная волна), а за
источником уменьшается.
ГЛАВА VII
НЕСТАЦИОНАРНЫЕ ВОЛНЫ
Известно, что решение задачи о гармонических колебаниях
является необходимым промежуточным этапом при анализе про-
извольных нестационарных колебаний. В настоящей главе с этой
точки зрения рассматриваются гармонические решения, получен-
ные в предыдущих главах. Основное внимание уделено исполь-
зованию сравнительно простых асимптотических представлений
волновых полей для дальней от источника зоны. Изучаются их
свойства в комплексной плоскости частоты (распределение по-
люсов и точек ветвления) и соответствующий вид волновых фрон-
тов нестационарного импульса.
§ 24. Общие свойства интегральных представлений
нестационарных волн
Выше мы рассматривали установившиеся гармонические ко-
лебания упругой среды, при которых зависимость от времени
имеет вид перейдем теперь к изучению нестационар-
ных колебаний с произвольной зависимостью от времени.
1. Пусть смещение точек среды v(x, у, z, t) удовлетворяет
уравнениям
dv
dt
Здесь матричный дифференциальный оператор L тот же, что и
в левой части (1.13). До момента £=0 среда (упругое вертикаль-
но неоднородное полупространство) находится в покое, т. е.
= 0. (24.2)
igo
Для простоты предположим, что скорость Р- и S-волн стаби-
лизируется при z->—оо. Пусть начиная с момента t—О к поверх-
ности полупространства в ограниченной области й приклады-
вается нагрузка q(x, у, t):
^z—7i, ^г = 72, аа = ?з, (24.3)
вне Q^esO, z = 0,
210
ГЛ. VII. НЕСТАЦИОНАРНЫЕ ВОЛНЫ
Кроме того, на бесконечности требуется удовлетворение принци-
па причинности, в соответствии с которым точки среды должны
находиться в покое до момента прихода переднего фронта воли,
идущих от источника колебаний.
Самым общим методом решения линейных нестационарных
задач является использование интегрального преобразования
ЛаиЛ3C3Z
оо С+1оо
f(t)=^~ f f (p) eptdp, (24.4)
J 2m J
0 C—loo
где с выбирается таким, что в комплексной плоскости р контур
интегрирования лежит правее всех особых точек f(p).
Применение преобразования Лапласа к (24.1)— (24.3) дает
JLv = pp2V —oo^z^O, —оо^х, оо, ,
^хг = Яъ — Z = 0, --ОО < X, I/ОО,
q = 0 при (х, у) G Q, z = 0.
(24.5)
Сопоставив (24.5) с гармонической задачей, убеждаемся, что
они совпадают, если отождествить рг с —<в2, a v с и; следова-
тельно,
v (х, у, z, р) —и (х, у, z, ± ip), (24.6)
где м(х, у, г, со) —решение гармонической задачи.
Используя интегральное представление м(х, у, г, со) через
матрицу Грина, получаем
e+ioo
о(х, у, z, i) = Г и (х, у, z, ± ip) ept dp = .
2ш J
С—too
C+i<x>
(2^ J “2’ Z' ~ Q (0£1’ X
c—too Г1 Га
(24.7)
x dar dct2ept dp,
jK(«i, a2, a>2) — символ матрицы Грина соответствующей гармо-
нической задачи, Q(ab a2, р)—преобразование Фурье по х, у
и Лапласа по t от q(x, у, t).
Принцип причинности удовлетворяется при правильном вы-
боре контуров интегрирования и ветвей многозначных функций
(радикалов) в (24.7). Эти вопросы мы рассмотрим ниже на кон-
кретных примерах; заметим только, что удовлетворение услови-
ям изучения в гармонической задаче в соответствии с принципом
§ 24. ОБЩИЕ СВОЙСТВА ИНТЕГРАЛЬНЫХ ПРЕДСТАВЛЕНИЙ
211
предельного поглощения не противоречит принципу причин-
ности.
Таким образом, анализ нестационарного волнового поля
усложняется по сравнению с гармоническим случаем необходи-
мостью дополнительного интегрирования по р; решение гармо-
нической задачи можно рассматривать как промежуточный этап
решения нестационарной.
2. Изучим подробнее свойства представления (24.7). В тех.
случаях, когда это не приводит к путанице, ряд параметров-
функций будем опускать, например, v(p) вместо v(x, у, z, р).
В силу того, что v(f)—вещественная функция, для v(p) спра-
ведливо
£(р*) = £*(р) (24.8)
(звездочкой, как и раньше, обозначена операция комплексного
сопряжения). Действительно,
v (р‘) — ф (t) е~р*1(И — J v (t) e~ptdt I = v* (p).
0 \o /
Свойство (24.8) справедливо для любой голоморфной функции,
коэффициенты разложения которой в ряд вещественны. Из (24.8)
следует, в частности, что комплексные особые точки v(p) сим-
метричны относительно вещественной оси. Они могут распола-
гаться только в левой полуплоскости Rep<0, это следует из-
анализа сходимости (24.4) при ограниченных v(t).
Вклад вычетов в полюсах рк в окончательное решение имеет
ВИД
Vk (/) = resv(p) \p=pk^kt.
(24.9)
Для Repft>0 получается недопустимый экспоненциальный рост
решения, при Rep„<0— экспоненциальное убывание при t-+oo.
Допустимым является также выход полюсов на мнимую ось, в
этом случае vk(t) описывает осциллирующие, незатухающие при
t-+oo колебания.
Таким образом, контур интегрирования по р в (24.7) можно
почти всюду совместить с мнимой осью, отклоняясь вправо толь-
ко при обходе чисто мнимых полюсов (рис. 7.1).
В гармоническом случае в решение входили радикалы ок =
= ]Лх2— н2, н2 = (й2/с2, k=l, 2, однозначные ветви которых
выбирались в соответствии с принципом предельного поглоще-
ния или из условия Зоммерфельда (§ 1, п. 3); чтобы избежать
путаницы с перемещениями v, скорости Р- и S-волн в среде бу-
дем обозначать сь с2 или сР, cs наряду с прежними обозначения-
ми Vt, v2 и vP, vs. В нестационарном случае в силу соответствия
212
ГЛ. VII. НЕСТАЦИОНАРНЫЕ ВОЛНЫ
о>2-<->—р~ радикалы имеют вид ak = К а2 + х*, х* = р^/с\, выби-
раем их ветви из условий затухания и излучения при z->—оо.
Для выполнения е ->0 при —оо необходимо, чтобы
ReObX); если Reo*=0, воспользуемся условиями излучения, в
8kz+pt
соответствии с которыми е должна описывать волну, иду-
щую от источника вниз, Im (ahz+pt) = const — уравнение распро-
странения волны, z=—Im р/Imo*—ее фазовая скорость,
z<0^|Im°ft>0 ПрИ 1тр>0’ (24.10)
1т о* <0 при 1тр<0.
Выполнение условий (24.10) и условия Re 0*^0 при Rep^O
обеспечивается, если в плоскости р провести разрезы, соединяю-
щие точки ветвления ±iach радикалов Vх*— ia, Yx* + ta с —<»
(рис. 7.1), и выбрать их главную ветвь: /1 = 1. Кроме того,
эти условия устраняют произвол в соотношении р*->±г’(о, до-
пуская только знак минус. Действительно, из о*((о) =oft(p) при
<о2=— р2 и
Im (Jk 0 при со > О,
Im Ok 0 при Im р < О
следует, что р = —ico или a = ip.
Сделаем в (24.7) замену р = —йо, которой соответствует по-
ворот на угол л/2 при переходе из плоскости р в плоскость <в,
контур интегрирования при этом расположится горизонтально
над вещественной осью с направлением обхода влево. Изменим
направление на противоположное и в-таком виде обозначим кон-
тур З’а, а часть, лежащую в правой полуплоскости, S’а(рис. 7.1).
§ 24. ОБЩИЕ СВОЙСТВА ИНТЕГРАЛЬНЫХ ПРЕДСТАВЛЕНИИ
213
Операции комплексного сопряжения p* = pt—ip2 на плоскости
ш==со1+1'со2 соответствует операция, которую в дальнейшем бу-
дем обозначать волной сверху: со =—кц-Нсог- Эта операция пе-
реводит точки плоскости <0 в симметричные относительно мнимой
оси. Свойство (24.8) в плоскости о принимает вид
«(со) = « (ш), (24.11)
или, для вещественных со, и(—со^ =«’(со1). Здесь «(со) —реше-
ние гармонической задачи, ранее построенное для вещественных
положительных со. Условие (24.11)—основное ограничение при
аналитическом продолжении и (со) на всю комплексную плос-
кость со.
После замены имеем
v(t)=— Г и (со) = — Re С [и (со) e~iat] da>. (24.12)
2л J л J
^<о <S?+
СО
Получили интегральную форму записи принципа суперпо-
зиции для линейных систем, в соответствии с которым произ-
вольные нестационарные колебания в системе можно предста-
вить в виде наложения (суперпозиции) ее гармонических коле-
баний. Из (24.12) видно, что, несмотря на то, что решение «(св)
комплекснозначно, окончательное решение »(/) всегда вещест-
венно.
3. Для вычисления v(Z) возможны следующие подходы:
1) численное интегрирование по (24.12) после построения
«(со) в достаточно широком диапазоне 0=Ссосоа;
2) использование леммы Жордана, которое позволяет свести
(24.12) к сумме вычетов в полюсах coft плюс интегралы по раз-
резам;
3) асимптотические методы;
4) обращение преобразования Лапласа как решение некор-
ректной задачи с помощью регуляризации Тихонова;
5) прямая конечно-разностная или конечно-элементная ап-
проксимация исходных уравнений.
Ограничения подхода 1) определяются тем, что
— со0 должна быть достаточно велика, чтобы отброшенный
интеграл по [со0, 00] был меньше уровня допустимой погреш-
ности;
— шаг интегрирования по со должен быть достаточно мелким,
чтобы с заданной точностью аппроксимировать «(со);
— при /^>1 численное интегрирование невозможно из-за уси-
ления осцилляции за счет необходимо переходить к асимп-
тотическим формулам.
Эти ограничения определяют круг задач, в которых
214
ГЛ. VII. НЕСТАЦИОНАРНЫЕ ВОЛНЫ
— Q(co)->0 при (о->-оо достаточно быстро (это выполняется,
если исходный импульс q(t) достаточно гладкий);
—t сравнительно мало.
Если и (со) задана не численно, а аналитически, то наиболее
выгодными, безусловно, являются подходы 2 и 3. Трудности, свя-
занные здесь с поиском комплексных полюсов и (со), полностью
окупаются простотой и физической наглядностью окончательныд
формул. Богатый арсенал методов выделения волновых пакетов
из общего решения, которые используются, как правило, в соче-
тании с лучевыми асимптотиками, накоплен в акустике, радио-
физике, оптике, геофизике. Хорошее представление о них дает
монография [120], а конкретно для упругих сред — обзор [122].
По терминологии [122] выделение Р- и S-волн в явном виде с
последующим асимптотическим анализом интегралов по со на-
зывается рефлективным методом. Наличие асимптотик (22.14),
(22.15) позволяет обобщить рефлективный метод на случай вол-
новых полей, возбуждаемых поверхностными источниками
(§ 25).
Подход 4 развит в работах [28, 29], в которых он применя-
ется для анализа нестационарных колебаний .массивного штам-
па на упругом основании.
Подход 5 требует проведения большого объема вычислений,
и его применимость или неприменимость в каждом конкретном
случае обусловлена в первую очередь ресурсами ЭВМ. Основ-
ным его преимуществом является то, что он дает результат при
произвольной неоднородности и форме поверхности упругой сре-
ды, поэтому по мере развития вычислительной техники он нахо-
дит все более широкое применение.
Однако было бы неправильно, ориентируясь на стремитель-
ное развитие вычислительной техники, делать упор на прямые
численные методы в ущерб аналитическим исследованиям. Дело
в том, что численные эксперименты дают в принципе ту же внеш-
нюю информацию о поведении реальных тел, что и натурные, не
раскрывая происхождения и природы наблюдаемых явлений,
например, резонансов. Их объяснение и предсказание новых эф-
фектов может быть получено только на основе глубокой анали-
тической проработки.
§ 25. Анализ нестационарных волн в дальней зоне
1. Рассмотрим v(t) в дальней от источника зоне R-^-co, л/2<
<4-^л. С этой целью в (24.12) в качестве «(со) возьмем асимп-
тотику (22.14)
П=1
cto + 0(£-2), (25.1)
§ 25. АНАЛИЗ НЕСТАЦИОНАРНЫХ ВОЛН В ДАЛЬНЕЙ ЗОНЕ
215
„ , х tcosib -г , _ , ч
«П (®) - 2,О> ®) V (®1.П, ®2,п) ^Пг
^i,n = — хге cos ср sin ф, ап = ип sin ф,
= — х„ sin ср sin ф, хп = <а/сп, п=А, 2.
Rye in
tn—t—R/cn,
i 2
®(4=4>Ш0(П (25.2)
n—1
®n(/n) = -^- f are(®)e
2л J
^<o
Значения vn не меняются, если R и t таковы, что tn=t—R/cn =
=const, отсюда vn описывают сферические волны, распростра-
няющиеся от начала координат со скоростями с,, с2, т. е. Р- и
5-волны. Точки среды, для которых /„СО, находятся перед фрон-
том соответствующей волны, а те, для которых /„>0,—за пе-
редним фронтом.
Необходимо доопределить а„(ы), построенную для ®>0, на
всю комплексную плоскость со так, чтобы выполнялось (24.11).
Рассмотрим, как зависит ап от со в случае однородного полупро-
странства; со входит в Q„(®), ix„ и К„(ы), причем в первые две
функции в виде ico, а в К„(и) через радикалы:
(со) = = Гш21/ S-" - 4 • <25-3)
V сп ck
Там, где св входит в виде с®, свойство (24.11) выполняется авто-
матически, например,
оо . (О . .
~ Г (* (* 1 — sm i|'(x cos ф+f/ sin ф» ~
Qn (со) == I И q (х, у, t) е Сп dxdyelu>t dt, (25.4)
о о
ico = I (— <Bj 4- ко.,) == — i (©j — i®2) = — t®*,
ei<s>a = e-ia-a — ^ei<s>ay — для вещественных а. В силу веществен-
ности q окончательно имеем
Qn (ы) — Qn (®).
Неоднозначность возникает при трактовке У®2, например,
для вещественных со можно положить У®2 = ®, а можно У®2 = | о |;
оба варианта одинаково равноправны. Посмотрим, какой из них
диктуется свойством (24.11). Оказывается, все зависит от мно-
216
ГЛ. VII. НЕСТАЦИОНАРНЫЕ ВОЛНЫ
жителя, стоящего при У со2: если он чисто мнимый, то для выпол-
нения (24.11) необходимо брать Усв2=ю, если же вещественный —
то | со |, так как свойство (24.11) означает, что при веществен-
ных со замена св на —св должна изменить на противоположный
знак мнимой части функции и оставить без изменения вещест-
венную часть функции. Множителем при у®2 является
-----------5- . В соответствии с правилом ReoA^0, Imo^O
4
— id „I,, sin ф < — ,
апь, sin ф > —,
ck
В итоге имеем
<Jk,n (со) =
— iadnk, sin ф < — ,
ck
| co | dnk, sin ф > ~
ck
(25.5)
для вещественных co. Аналитическое продолжение в комплекс-
ную плоскость со в первом случае дает функция {(&)=<$, у ко-
торой, в отличие от Усо2, уже нет точек ветвления (и, следова-
тельно, отпадает необходимость в проведении разрезов!). Во вто-
ром случае аналитическое продолжение | со | дает произведение
двух радикалов (yco)j- (Усо)ц. Индексы I и II означают, что раз-
резами в плоскости со зафиксированы различные ветви этих
функций. Для радикала I разрез проведен от со = О в верхнюю
полуплоскость, а для II — в нижнюю, и зафиксирована главная
ветвь: yi = l. Таким выбором разрезов обеспечивается то, что
для комплексных со, расположенных справа от разрезов,
arg(У<о)i = arg(Усо)п = - arg со=»Усо2 = (о, а слева от разрезов
arg(y<o)I = - arg со—л, arg(yco)n=- argco=>y<B2=—св.
Здесь не обязательно, чтобы разрезы совпадали с мнимой
осью, существенно только, чтобы они выходили из со = 0 и шли
на бесконечность — один выше, а другой ниже вещественной оси,
причем форма разреза может быть не прямолинейной. Этим про-
изволом в дальнейшем при необходимости можно воспользо-
ваться, например, отклоняя разрезы так, чтобы они' обходили
полюса coft. Анализ элементов К в случае однородного полупро-
§ 25. АНАЛИЗ НЕСТАЦИОНАРНЫХ ВОЛН В ДАЛЬНЕЙ ЗОНЕ 217
странства (2.30) показывает, что К„ является однородной функ-
цией со: Кп (<’>) = — Кп (ф, ф), Кп — различные справа и слева
от разрезов в соответствии с правилом замены oft,„ при зшф>
Сп[ск.
(со) = ! ~ cnpWd 01 Р-1—- (25,6)
(— adnk — слева от разрезов.
Если разрезов нет (Vk, п=1, 2, sinф<cn/ck), то Кп = Кп.
Таким образом, в случае однородного полупространства ап
зависит от со только через Q„(co) и разницу значений Kt, К~\
1/со перед Кп сокращается с хп = со/с„. Найдем v„(/n) (из 25.2)
по лемме Жордана, для простоты предположим, что задана со-
средоточенная нагрузка:
q (х, y,t) = & (х, у) f(t)=>Q (а1; а2, p)=f (р) => Qn (®) =/ (— ко).
(25.7)
Направление замыкания контура S?a определяется знаком
при /„<0 экспонента е-1Ю<л убывает в верхнюю полуплоскость —
замыкаем вверх, при Рп>0— вниз. Полюсами а„(<в) могут быть
только полюса Q„(<b), все они расположены в нижней полуплос-
кости. В зависимости от номера п и угла ф имеем различные си-
туации.
1) п=1 — продольные волны. Так как Ct>с2, то Уф, бвшф^
1 ^Ci/c;,— разрезов нет; — вверху полюсов нет =^щ(Л) =
=0 — перед фронтом среда покоится;
ti > 0, (Л) = — » Zres |и=(йт е = Лх((р, ф) f (ix). (25.8)
т
В данном случае со™— полюса/ (— ico), Вп (ср, ф) —г cos ^Кп (ф, ф)—
2лсп
вещественные матрицы, определяющие диаграмму направлен-
ности излучения. Последнее равенство в (25.8) следует из того,
что в случае отсутствия разрезов
vn (tn) — f^°SA|) Кп (ф, ф) f /(—ico)e IW/"dco, (25.9)
2л 2лсп J
-'.(п
а последний интеграл заменой р = —ico сводится к обратному
преобразованию Лапласа от f(p), т. е. равен f(tn).
2) п=2 — поперечные волны, здесь разрезы появляются толь-
ко у о12 при sin ф^г c2/ct, у о2,2 разрезов нет для всех ф.
2.1) 51пф<с2/с1—разрезов нет, как и при п=1, t2^0==>
^v2(t2)=O— перед фронтом S-волн нет поперечных волн;
218
ГЛ. VII. НЕСТАЦИОНАРНЫЕ ВОЛНЫ
2.2) sin ф>с2/с1— появляются разрезы,
/,^0 о2(/2)=—f а2(со) (25.10)
2л J
R+
V2(/2) = — iZresa2|<o=come to,nG + ^- ( «2 (®) e~iat* da.
R~
(25.11)
Здесь R+, R~— контуры, идущие вдоль берегов верхнего и ниж-
него разрезов соответственно.
Учитывая, что матрицы ='cos Кп не зависят от со, ин-
2яс„
тегралы по R+, R~ можно упростить. Обозначим Ро, Ro линии
самих разрезов, ориентированные от <о = 0 на бесконечность,
— Г а2(со)е_'‘в/гб/со = —(В2 — В2) f /(—ia) егшч1а, t2^G,
2л J 2л J
«+ R+
(25.12)
— f a2 (co) e~iatl da = — (ВГ — B2) C f (— tco) da, t2 > 0.
2л J 2л J
R-
Интегралы вдоль Ro, Ro не зависят от ср, ф, а определяются
только формой исходного импульса /(/). Так как в верхней
полуплоскости полюсов нет, то в качестве Rt всегда можно взять
мнимую полуось [0, too], тогда после замены р = —ia имеем
J (...) da = i / (р) eptldp — iJ f (т) ер(/г~т) dp dx =
r+ 0 oo-
00
= — i f f (t)—-—dx = — i(h*f)(t2), Z2< 0, (25.13)
J t2 — T
0
M0=-p
2. Перейдем к физической интерпретации. Изображенная на
рис. 7.2 картина волновых фронтов, получающаяся при анализе
выражений (25.8) —(25.11), совпадает с той, которую дает прин-
цип Гюйгенса. Картина приведена для некоторого фиксирован-
ного момента времени t. Полуокружность большего радиуса изо-
бражает передний фронт P-волн, находящийся на расстоянии c,t
от источника, меньшая полуокружность радиуса c2t — передний
фронт S-волн, идущих от источника. В однородной упругой среде
Р- и S-волны распространяются независимо — прохождение воли
§ 25. АНАЛИЗ НЕСТАЦИОНАРНЫХ ВОЛН В ДАЛЬНЕЙ ЗОНЕ
219
одного типа не приводит к возникновению волн другого типа,
поэтому, если бы у нас было не полупространство, а все про-
странство, то картина исчерпывалась бы этими двумя фронтами.
Наличие поверхности приводит к взаимодействию Р- и S-волн
и к появлению шлейфа S-волн, идущего за передним фронтом
р.ппта от поверхности. Каждую точку поверхности, расположен-
ную за передним фронтом P-волны, в соответствии с принципом
Гюйгенса можно рассматривать как новый источник S-волн. Пе-
редние фронты отраженных S-волн в момент t на рис. 7.2 пока-
заны полуокружностями с центрами на отрезке ОВ, причем их
радиус непрерывно уменьшается по линейному закону при дви-
жении центра х0 вправо и равен сг{1—/„), 1е—ха1сх.
Огибающая фронтов отраженных S-волн является передним
фронтом шлейфа в целом и представляет собой отрезок BD, ка
сательный к переднему фронту S-волн, идущих от источника. Это
следует из подобия треугольников ODB и АСВ. Для ф>ф0 перед
фронтом S-волн нет других поперечных колебаний, а при ф'<ф0
перед основным фронтом появляются S-волны шлейфа, которые
называются головными или боковыми волнами [35]. Легко ви-
деть, что sin ^0=OD/OB = cJc2, а головные волны описываются
интегралами вдоль разрезов, появляющимися, когда ф<ф0.
Итак, точечный поверхностный источник f(t) возбуждает в
однородном упругом полупространстве две сферические волны,
при прохождении которых смещение частиц среды описывается
законом
и (/(/) = 0 при КО),
и головную S-волну, существующую при ф<ф0, вид которой
определяется интегралами вдоль разрезов в (25.12), (25.13).
На рис. 7.3 приведена зависимость амплитуды смещений час-
тиц в S-волне от t2 для различных ф.
Возможен вопрос: зачем понадобилось выводить формулы
(25.8) — (25.11), если результат получился тот же, что и исходя
220
ГЛ. VII. НЕСТАЦИОНАРНЫЕ ВОЛНЫ
из принципа Гюйгенса? Ответ: коэффициенты Вп, Кп содержат
количественную информацию о направленности источни-
ка, что позволяет, в частности, изучать количественное распреде-
ление мощности поверхностого импульса по типам волн и
направлениям.
3. В предыдущем пункте источник предполагался точечным,
возьмем теперь источник конечных размеров:
Q (г, t) =
Имеем
/(0 (
J/ а2 — г2
о,
(25.14)
г у>а.
г sC а,
\ sin ottz / \
(аь а2, р) =-----------f (р)
и в (25.1)
_ sin
Оп (0)) =-----/(-гм),
ип---
сп
Если в случае точечного источника направление замыкания
контура З’щ определялось только экспонентой то теперь
под интегралом появились дополнительные экспоненты за счет
1 / iano ~ia ь\
sinana>=—(е —е ); направление замыкния определяет-
§ 25. АНАЛИЗ НЕСТАЦИОНАРНЫХ ВОЛН В ДАЛЬНЕЙ ЗОНЕ
221
ся для каждой из них в отдельности знаком tn±an, при tn±an^
^0 — вверх, при tn±a„^O— вниз. Посмотрим, как это изменит
картину волновых фронтов. Раньше в случае отсутствия разре-
зов имели две зоны: £„<() — зона покоя и /„^0 — зона колеба-
ний, граница их раздела tn = t—R/cn = 0. Теперь вместо (25.9)
при отсутствии разрезов имеем:
, р -iadn+an) ~
vn (Q = ^-Вп\ --------—---------fn (- I(o)d(O, (25.1 5)
2л J 2ian<s>
и различных зон становится три: при £„<—а„—покой; при
—an<Ztn<Zan для экспоненты e~ia(tn~an'> заМыкаем контур по-
прежнему вверх, где полюсов нет, а для е п п — вниз. В ре-
зультате
®n(/n)s0, 6i< —а,г,
vn(tn)^=Bn(^^ei&mW+ 4/(0)V -а„^;„^«„,(25.16>
к т 2ап®т 1 /
/ у \ ; П V ( S'n ~{ат!п ,
(tn} — lBn / I f in ' £ > tn Vn,
tn an®tn
=res/(—i(o)|w=(Bm.
В средней зоне к вычетам в полюсах f—а>т добавляется вычет в
со = 0, так как эта особенность становится неустранимой. Для
п = 2, ф<?ф0 к (25.16) добавляются соответствующие интегралы
вдоль разрезов.
С физической точки зрения изменение волнового поля вызва-
но тем, что за счет протяженности источника сигналы, идущие-
одновременно от разных его участков, приходят в данную фик-
сированную точку не синхронно с сигналом, идущим от центра.
Время ДД между приходом волны от переднего и заднего
краев источника есть время движения волны вдоль отрезка, рав-
ного проекции диаметра источника на рассматриваемое направ-
ление ф: Atn — 2 — sin ф = 2ап, и совпадает с длительностью
сп
среднего диапазона в (25.16). Ясно, что в момент tn = —ап в за-
данную точку (R, ф) приходит передний фронт сигнала, излу-
чаемого передним краем источника, а за время —
вступают волны от остальных участков. Протяженность источ-
ника приводит к тому, что исходная форма импульса f(t) иска-
жается.
Мы рассмотрели простейший осесимметричный источник, для
которого имеется явное выражение для Q(a), в самом общем
222
ГЛ. VII. НЕСТАЦИОНАРНЫЕ ВОЛНЫ
случае q(x, у, t) надо исходить из интегрального представления
“ io> (5^ (geos <р+Ч sin (pH-t'I
Qn(®) = $ Ч,т)е V c“ Idld^dr, (25.17)
0 Q
разбивая в пространстве (|. n. т) область интегрирования Q?<
X [0, оо] на две части плоскостью
sln^ (g cos ф + i] sin ф) + т — tn = 0, (25.18)
сп
Ф, ф, tn — фиксированные. В результате &п = + "" п, в Qn
интегрирование ведется по различным частям объема Qx[0, оо]
с границей раздела (25.18). Контур для Qn и „ замыкает-
ся в разные стороны.
4. Кроме объемных волн (25.1), в однородном полупростран-
стве возникает поверхностная волна Рэлея (см. (22.15)):
I ' п —I (t-— <0
(/)==——— J & (ю) е ' CR1 dw + О (г~3/!), г->оо,
Ь (<о) = res К («1, а2, ю) |а=£ Q (— £ cos ф, — £ sin ф) £,
^ = w/Cr—полюс Рэлея, св—скорость волны Рэлея. Основным
при продолжении &(<о) на всю комплексную плоскость, как и в
предыдущем случае объемных волн, является анализ радикалов.
При а=£
щ(£о)=1/<о* М—^), *=1,2.
Так как ch>cR, k=l, 2, значение щ(ы) вещественно при вещест-
венных ю, поэтому надо брать У<о2 = |<о| = (V®)i-(У®)п с соот-
ветствующими разрезами в плоскости ю:
(/) =
& (®) + О (г-3/,), /д<0,
R+
= < »2 res & (®) + М & (“) e~iatRd^\ +
У Г \ т я- >
t +О(г_3/,), г -> оо, /^>0.
Здесь, как и в (25.10), перед основным фронтом рэлеевской вол-
ны, двигающимся от источника со скоростью cR, появляются до-
полнительные поверхностные волны-предвестники, которые опи-
сываются интегралом вдоль разреза R+.
§ 26. НЕСТАЦИОНАРНЫЙ ИМПУЛЬС
223
§ 26. Нестационарный импульс в многослойном
полупространстве
1. При переходе от однородного полупространства к много-
слойному: 1) элементы К„(а1п, а2>п, <о) в (25.1) по построению
-Vh л’г у
содержа! соединяющие иида е ....( . .., 7V, и Поэтому уже
не являются однородными по со функциями; 2) у элементов К„,
а следовательно, и у а„(со) появляются счетные наборы полюсов
и,, в комплексной плоскости со; 3) за счет элементы К„(со)
имеют экспоненциальное поведение при 1пко—>±оо, которое не-
обходимо учитывать для правильного выбора направления за-
мыкания контура интегрирования в (25.2).
Эти трудности усугубляются тем, что, как правило, явный вид
матриц К„(со) нам не дан, имеется только алгоритм их построе-
ния, т. е. функции а„(со) в комплексной плоскости со заданы чис-
ленно. Построение v(t) путем численного интегрирования по S’»
в силу осцилляции подынтегральной функции требует значитель-
ных затрат машинного времени и поэтому малоэффективно.
Один из способов преодоления вычислительных трудностей —
гладкая аппроксимация а„(и). Используя ее, можно с удовлетво-
рительной точностью построить (синтезировать) теоретическую
сейсмограмму в заданной точке многослойной среды, но трудно
проанализировать, какие именно факторы (преломления, отра-
жения и т. п.) определили ее окончательный вид. Для такого,
более тонкого анализа необходимо уметь: 1) строить а„(ю) для
комплексных со, 2) находить полюса и вычеты а„(ю) в них
в заданной области комплексной плоскости ю, 3) для анализа
первых вступлений выделять экспоненциальные составляющие
а„(со) вида e!ti“ при ы-^-±оо.
Решение первой проблемы связано с выбором ветвей радика-
лов (от) при комплексных ю, который осуществляется так же,
как и в случае однородного полупространства, по правилу (25.5).
Алгоритм построения Kn(ait а2) (3.18) по форме остается преж-
ним, в нем под понимаются выражения (25.5) — (25.6) и
должно быть указано заранее, на каком берегу разреза (если он
имеется) берется ю.
2. Рассмотрим в качестве модельного примера объемные SH-
волны в двуслойном полупространстве, которые описываются
функцией N (ос, z) матрицы К (а, z).
Возьмем упругое двуслойное полупространство, к поверх-
ности которого приложена горизонтальная нагрузка:
P/z = 7г (*, У) f (0- тА2 = агг = 0, г = 0. (26.1)
Требуется найти горизонтальные смещения v2(0 в дальней от
источника зоне при ^->оо, ср = О (в плоскости xOz).
224
ГЛ. VII. НЕСТАЦИОНАРНЫЕ ВОЛНЫ
Представление v2(t) дает (25.1), в котором в качестве KnQ
надо взять Ka-iQiF(а) (га=2),
«1,2 = — х2 sin ф, «2.2 = 0, а2 = х251пф, (26.2)
a2
К22,2 = -г-^У2(а) = -1-^—.
а* а1 -+-
Ai = (И1а1 + Цаа2) Д2 = (р2а2 — ц/зу) e~^^h,
<уп = V a2 — kn, п - 1, 2.
Здесь сп—скорость vB в верхнем слое (п=1) и нижнем полу-
пространстве («=2), h — толщина верхнего слоя. Выражение для
N(а) получено в явном виде из (3.18).
Предположим для простоты, что Ci<Zc2, источник точечный:
тиг = б(х, y)6(t) и нас интересует направление ф = л —строго
вниз. Тогда Q2F=1, a2 = 0,
1 л—
а (ю) =---!-----е---------, (26.3)
ж2 + p jk,h v
„ _ц Из. „ _ ±1 _ Н
Pl - “Г 9 Ръ ---------- ,
С} С% Cj Ci
f а(ю)е-г“Мсо + О(/?-2), R^>~<x>, t2 = t — R/c2.
2л/? J
^G)
(26.4)
Наша задача — взять интеграл (26.4) по вычетам. Полюсами
а (со) являются нули знаменателя:
д_ р2е‘М = 0 => e2lkih =---------------~ 2ikjh — In [ — — I . (26.5)
Pi \ Pi /
В силу многозначности логарифма уравнение (26.5) имеет счет-
ный набор корней (рис. 7.4)
<ог = — (1 + 2Z) — ip, / = 0,±1,±2, ...
2ТУ
(26.6)
тп=—, n=l,2, р = In
сп
“|/(2Т1) >0,
Р2 I
так как р,>р2. Полюса со( лежат в нижней полуплоскости комп-
лексной плоскости ю на расстоянии р от вещественной оси; точек
ветвления а(®) не имеет, поэтому при замыкании контура
вверх с’2=0, а если замыкать его вниз, то v2 равно сумме выче-
тов в и,. Направление замыкания контура определяется экспо-
ненциальными составляющими подынтегральной функции.
§ 26. НЕСТАЦИОНАРНЫЙ ИМПУЛЬС
225
Пусть со = о»! + i®2; е<ша убывает при ®2->-оо, если d>0, и при
«2-*—оо, если d<0. Вынесем из знаменателя а(ю) растущую
экспоненту, при ®2—>оо— это а при м2—>—ooelfe/!:
a (w) =
------!----------------
пс2 p1 + p2e2ikJl
______!________1_______g-ta(Ti+T2)
яс2 р2 да"*®*6
<02—>ОО,
(0а -»----оо.
(26.7)
Учитывая множитель er*»**, получаем, что
можно замыкать кон-
тур:
при£2<т4—т2—вверх, при /2>—(т4 + т2) — вниз. (26.8)
Получается, что в зоне— (tj + t2) <Zt2<Zti—т2 контур можно за-
мыкать как вверх, так и вниз — это следствие наличия в знаме-
нателе а(®) экспонент, растущих как при ®2->оо, так и при
<о2->—оо. Результат, тем не менее, должен быть один и тот же
независимо от направления замыкания. Так как при замыкании
вверх v2=0, то в рассматриваемой зоне сумма вычетов также
должна быть тождественным нулем. Этот факт служит хорошим
контролем правильности формирования суммы вычетов.
Итак,
О, t2 < Ti — т2,
. 00
---^"2 res а , 4 > И — Т2.
** 1 __
(26.9)
Заметим, что мы применили лемму Жордана формально, так как
при <о->±оо нет убывания подынтегральной функции. Однако
обойти это ограничение несложно, достаточно ввести в среде ма-
лое затухание, устремив его в окончательном результате к нулю.
Введение внутреннего трения приводит к тому, что ни на одном
из этапов решения нет расходящихся интегралов или рядов.
8 В. А. Бабешко и др.
226
ГЛ. VII. НЕСТАЦИОНАРНЫЕ ВОЛНЫ
Действительно, нагрузим исходные уравнения слагаемым,
описывающим действие сил трения, пропорциональных скорости
смещения частиц среды: б2—, б<С1. Это приводит к тому, что
в интегральном представлении решения скорости сп становятся
Ко^гплрксными:
Cn = Cnji 1Сп,2, сп,2=>0, Сп,2 О (в), 8—>0.
Если без трения (б=0) при = — ЦУйп— ®2|, то при
е>0 = — i /| kn — aa | + em (®> a), m>0 (£„->£„ при e->-0). Со-
ответственно ea"z = e~i<3nZeemz. Наличие множителя e8mz дает экс-
поненциальное затухание решения при z—>—оо. Асимптотику
(25.1) можно по-прежнему строить методом стационарной фазы,
если отнести e*mz в KnQ. В силу вещественности т(а, (о) в ста-
ционарной точке а2 т(а2, со) =У®2/П! = | со(иг,, т,>0 — const по со.
Таким образом, а(<в) в (25.1) содержит множитель (при
ф=л, z=—R). Кроме того, в а (со) войдет еще ряд экспонент с
показателями ±ed|®| за счет е,п'\ но при R-^oo определяю-
щим будет вклад e-ey?'n»l“l.
За счет экспоненциального убывания при <в->±оо примене-
ние леммы Жордана к (37.4) становится оправданным, однако к
сумме вычетов (37.9) теперь необходимо добавить интеграл
вдоль берегов разреза, появляющегося при продолжении |<о| в
комплексную плоскость. Значение этого интеграла стремится к
нулю при е->0, так как при е = 0 подынтегральная функция оди-
накова на обоих берегах (точка ветвления исчезает). В пределе
получаем (26.9).
Явный вид вычетов:
i<oz(Ti-T2)
отсюда
(/2) =----—е 2Ti (т W у е Xi lT **’, t2 > т,
(26.10)
b —----5---, т = — т2.
2ПГ1Р!С2
Сравним ряд по I в (26.10), который в классическом понимании
является расходящимся, с разложением б-функции в ряд Фурье
на отрезке [—s, s]:
оо . Лих
б(х)=-^-у е‘~, xE[-s,s], (26.11)
§ 26. НЕСТАЦИОНАРНЫЙ ИМПУЛЬС
227
b [(* эт \/ J \\
— схр Н — + Р (т — /2)
А \ \ zTj / /
Представление (26.11) можно продолжить на всю вещественную
ось —оо^х^оо, получим периодическую функцию с периодом
2s, т. е. сумму 8-функций с носителями в точках 2s/, /=0, ±1,
±2, ... В (26.10) х=т—/2^0, «=тъ следовательно,
Vo (Q =
ОО
2 6(т —/2 —2/ту), г2>т,
1~—оо
/2<т.
(26.12)
Пусть теперь —8(х, y)f(t), по принципу суперпозиции со-
ответствующие смещения v(t) выражаются в виде свертки
и f:
v(t) = ]f©v0(t-l)dt (26.13)
О
При подстановке (26.12) в (26.13) /2 меняется на /2—| и
из /2>т следует g</2—т, поэтому в свертке верхний предел ин-
тегрирования будет /2—т>0. Рассмотрим модельный интеграл
gi (/2) = р © g - 5) 6 (т -12 - 2/Т1 + g) di.
о
Он не равен нулю только при таких I, для которых аргумент 8-
функции обращается в нуль на отрезке интегрирования [0, /2—т],
т. е. при / = 0, —1, ..., —NL, NL= -—— — целая часть дроби.
L 2?1 J
В качестве g(t2—£) возьмем множитель перед суммой в
(26.12): окончательно получим:
. <VL п In
v (/) = - 2 (-1)пе~ I/ (/2 - т - 2иТ1), (26.14)
п=о
. . R . h h л kjj Пз т ] _ h
t2 — t' — Т 0, /V/. — I I, Tj — «
c2 Q c2 |_ 2t2 j Ci
3. Определим время прихода сигнала, вышедшего из начала
координат в момент 1 = 0. Время, затраченное на верхний слой,
ti=hlcly в нижнем полупространстве расстояние R—h будет прой-
дено за (R—h)lc2 = Rlc2—т2. Таким образом, при t<ZRIc2—t2 + ti,
или в прежних обозначениях, /2<т должен быть покой (и=0),
t—R/c2 = Xi—т2—время прихода переднего фронта на глубину R.
Первое слагаемое в (26.14) описывает прямую волну, прошед-
шую границу раздела слоев. С ростом t через интервалы време-
ни 2т1 в (26.14) добавляется по одному слагаемому, им соответ-
8*
228
ГЛ. VII. НЕСТАЦИОНАРНЫЕ ВОЛНЫ
ствуют многократно отраженные в верхнем слое волны (2т!—
время, необходимое на то, чтобы сигнал достиг границы раздела
и, отразившись, вернулся к поверхности; 2п—число отражений
соответствующей волны). Множитель e-«in|Pi/pd дает убывание
амплитуды за счет отражений, а множитель (—1)п указывает
на изменение поляризации при каждом отражении от свободной
поверхности.
Таким образом, каждому полюсу юг соответствует своя отра-
женно-преломленная волна (волновой фронт), расстояние между
<ог по горизонтали обратно пропорционально сдвигу времени
между фронтами и определяется толщиной и свойствами верх-
него слоя, а расстояние со1 от вещественной оси определяет поте-
ри при отражениях.
Связь между свойствами среды и положением полюсов важна
с точки зрения поиска <вг в случае произвольной многослойной
или градиентной среды.
4. Рассмотрим направление, отличное от вертикального
(ф^=л), тогда, из (26.2) следует
Получается, что вид а (а) (26.3) остается прежним, если в нем
, i Г 1 sin2 ф г,
под понимать не <в/с„, а лп = а 1 /---------. В окончатель-
1 sin2ф
с2 с2
ной формуле (26.14) достаточно заменить все с„, кроме с2, в b
/ 1 sin2ф \-‘/«
на сп =--------------— I :
I с2 с2
\ П С2 /
=------------, с2 =----—------, COS2 Фо = 1
| COS ф0 I I COS фо I
с2 sin2ф
4
Новый период Ti=2Ti| cos ф01 уменьшится.
В более общем случае Р- и SV-волн отклонение направления
ф от вертикального приводит к тому, что некоторые из стано-
вятся вещественными и к сумме вычетов необходимо добавить
интегралы по разрезам, т. е. появляются боковые волны.
5. Разобранный модельный пример подсказывает, каким об-
разом организовать вычисление v(tn) в случае Р- и SV-волн в
многослойном полупространстве. Ясно, что для локализации по-
люсов и анализа показателей экспонент, определяющих момент
первых вступлений, надо максимально использовать информа-
цию, которую дает физическое осмысление картины волновых
фронтов.
Так, например, для двуслойного полупространства в случае
Р- или SV-волн расчеты дали два набора полюсов, расположен-
§ 26. НЕСТАЦИОНАРНЫЙ ИМПУЛЬС
229
ных вдоль двух горизонтальных прямых в нижней полуплоскости
Imco^O. Расстояние между полюсами в каждом наборе связано
с временем прохождения Р- и SV-волн в верхнем слое, как и в
случае S/7-волн. Наличие двух наборов полюсов согласуется с
фактом трансформации типа волны при отражении от границ.
В отличие от рассмотренного примера, в общем случае числи-
тель a(w) представляет собой линейную комбинацию экспонент
(их число конечно), и анализ направления замыкания контура,
а следовательно, и времени первых вступлений для каждого из
этих слагаемых надо приводить отдельно.
Мы не будем подробно излагать общую схему, ограничившись
этими краткими замечаниями, так как особенности конкретной
реализации сильно зависят от параметров задачи (типа волн,
вида неоднородности и т. п.), заметим только, что v(t) можно
находить не только через импульсную переходную функцию v0
в виде свертки (26.13), но и непосредственно по вычетам из ин-
тегрального представления
ОО
v (t) = —— С a(o)f (— tco) e~iatd(n, f(p) — f f (t) e-f^dt.
2nP J J
0
Такой путь на первый взгляд кажется более предпочтительным,
так как за счет убывания |7| обычно не возникает расходящихся
интегралов и рядов и отпадает необходимость обосновывать ра-
боту с ними. Однако ряды, получающиеся в результате, не обла-
дают такой простой физической наглядностью, как (26.14), кро-
ме того, возникает необходимость брать вычеты в полюсах
f(—i<o), которые нередко оказываются кратными (например, для
f(t) =tm~le~bt имеем f (—irn) = - ). Только анализ пере-
(Ь — ia>)m
ходной функции Uo(0 позволяет наглядно выделить систему вол-
новых фронтов, образующуюся в многослойном полупростран-
стве.
ГЛАВА VIII
ЭНЕРГИЯ УПРУГИХ ВОЛН, ВОЗБУЖДАЕМЫХ
В СТРАТИФИЦИРОВАННОМ ПОЛУПРОСТРАНСТВЕ
ПОВЕРХНОСТНЫМИ ИСТОЧНИКАМИ
В предыдущих главах рассматривались методы анализа вол-
новых полей, позволяющие определять амплитудные и фазовые
характеристики упругих волн исходя из общего интегрального
представления решений. Наряду с амплитудой и фазой важной
характеристикой волнового поля является количество переноси-
мой волнами энергии. Для одной волны переносимая энергия
пропорциональна квадрату амплитуды, а при наличии в среде
нескольких волн их интерференция приводит к тому, что сум-
марная мощность волнового поля не пропорциональна сумме
квадратов амплитуд всех волн, так же как модуль суммы ком-
плексных чисел не равен сумме модулей слагаемых. Этот факт
является следствием нелинейной (квадратичной) зависимости
энергетических характеристик от напряжений и деформаций и
приводит к неприменимости принципа суперпозиции при расче-
тах энергии. (Заметим, что в некоторых частных случаях, на-
пример, в однородном слое свойство аддитивности энергии раз-
личных мод выполняется [157].)
Таким образом, энергетический анализ не сводится к ампли-
тудному, а требует разработки специального подхода. На пер-
вый взгляд кажется, что в силу пестроты интерференционной
картины трудно выявить какие-либо закономерности распреде-
ления энергии в волновом поле. Но, с другой стороны, понятие
энергии является одним из фундаментальных понятий, лежащих
в основе механики в целом. Уравнения механики описывают
процессы, в которых выполняется закон сохранения
энергии, поэтому и решения, независимо от способа их пост-
роения (аналитический, асимптотический, численный), должны
удовлетворять этому закону, а также принципам излучения
энергии.
Сохранение энергии обусловливает возникновение при дина-
мическом нагружении упругой среды потока энергии. По-
нятие потока и вектора плотности потока энергии упру-
гих волн было введено Умовым [117]. Взгляд на распростране-
§ 27. ЭНЕРГИЯ УПРУГИХ ВОЛН
231
ние энергии как на течение, характеризуемое в каждой точке
среды вектором плотности энергии, позволяет развивать анало-
гии с потоком жидкости.
В настоящей главе энергетический анализ проводится на ос-
нове построенного в предыдущих главах представления волно-
вых полей через матрицу Грина. Энергетические характеристи-
ки волн различного типа и волнового поля в целом выражаются
через компоненты матрицы K(aj, a2, z) и нагрузки Q(.ait a2), и
на этой основе изучается влияние неоднородности среды на
мощность, отдаваемую источником, и ее перераспределение
между волнами различных типов, по глубине и по направле-
ниям.
§ 27. Энергия упругих волн, мощность
поверхностного источника
1. Энергия Э, заключенная в некотором объеме V упругой
среды, складывается из кинетической К и потенциальной П
энергии смещения частиц среды. (Тепловая и электромагнитная
энергия здесь не учитывается.)
Пусть v={Vi, у2, ц3}—вектор перемещения частиц среды.
Тогда [86]:
П = JJj % (div <ц)2 + р, (4 + 4 + 4 + 24 + 24 + 24)] dV,
v
dvk dv,
— Н------------L
dxt dxk
С течением времени количество энергии, заключенное в объ-
еме V, изменяется, т. е. Э является функцией от времени. Изме-
нение количества энергии в объеме, если в нем нет внутренних
ее источников, объясняется наличием потока энергии через по-
верхность объема S. Основное динамическое соотношение для
изменения количества энергии в момент времени t имеет вид
[86]
di=-Ж-Ь <27-»
3
еп = — (—, <уЗ—плотность потока энергии через фиксирован-
ий/ )
ную точку поверхности S в направлении, совпадающем с внеш-
ней нормалью п к поверхности в этой точке, в момент t;
232
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
-----скорость перемещения точек поверхности; = Ал div v -f-
dt
4- 2ц — + ц (» X rot v) — вектор напряжений, возникающих на
дп
площадке с нормалью п.
При изучении установившихся колебаний удобно брать в ка-
честве меры изменения энергии в объеме ее изменение, осред-
ненное за период колебаний Т—2л/со:
т
E = -L^dt, (27.2)
О
Е — осредненная мощность.
Для гармонических колебаний используется представление
перемещений и напряжений среды через комплексные амплиту-
ды и, т:
v (х, у, z, t) — Re [а (х, у, г)
а (х, у, г, /) = Re [т (х, у, г)
Выразим через них изменение энергии Е.
Представление Е через и и и не является операцией, линей-
ной относительно этих величин, поэтому мощность Е нельзя по-
лучить непосредственной подстановкой и, х на место V, о в
(27.1). Вернувшись к вещественной записи
<D = Re [(«; + ш2) e-Zft)Z] = cos at + z?2 sin at,
a — Re [(tj + ir2) e~Z(oZ] = Tj cos at + t2 sin at,
= co (— «! sin at + u2 cos at),
имеем
т
E =-----J f J dS dt = -y- J j* («хт2 — «2Tj) dS =
0 "s 5
=----Im T) = -y Im j j (t, a) dS.
По определению скалярного произведения (a,b) = 2
k
звездочкой обозначены комплексно-сопряженные величины.
Итак, среднее за период изменение количества энергии гар-
монических колебаний в объеме с поверхностью S дается фор-
мулой
Е =Л f endS, (27.3)
§ 27. ЭНЕРГИЯ УПРУГИХ ВОЛН
233
еп — — -у Im (и, т) = -у Im (т, и) — осредненная плотность потока
энергии через S,
T = 7'nMsXndivM + 2p ^- + p(nxrot«). (27.4)
on
Ewiii BvKiup и чисю вещественный, то cn=0,— такая ситуа-
ция имеет место при колебаниях ограниченных тел. Если вектор
и комплексный, то между и и т, как правило, имеется
сдвиг фаз и е„#=0, что указывает на наличие в среде
потока энергии с плотностью еп. Можно построить выра-
жения для плотности энергии не только в направлении,
определяемом нормалью к рассматриваемой поверхности, но и
в двух ортогональных к этой нормали и между собой направле-
ниях. Для этого достаточно в (27.3) взять соответствующее вы-
ражение для п. Три получившиеся величины являются проекция-
ми вектора плотности потока энергии е на три выбранных
направления. Этот вектор (вектор Умова) определяет количест-
во и направление переноса энергии через данную точку среды.
Иногда удобнее в качестве направлений п брать направления,
параллельные осям координат, при этом получаем проекции век-
тора е на координатные оси: е—{еъ е2, е3}.
В зависимости от используемых для вычисления е представ-
лений и естественно вводятся понятия вектора плотности потока
энергии объемных ег и рэлеевских eR волн.
Вектор Умова является важнейшей характеристикой потока
энергии в среде. Его длина определяет количество энергии, пере-
носимой через данную точку пространства в единицу времени, а
направление — направление переноса. В случае установившихся
гармонических колебаний эти характеристики являются осред-
ненными за период и вектор е зависит только от пространствен-
ных координат х= {xt, х2, х3}.
Таким образом, в объеме, занятом упругой средой, определе-
но непрерывное в силу непрерывной зависимости напряжений и
перемещений от координат векторное поле е(х). Известно [10],
что векторному полю соответствует семейство кривых x=x(s),
определяемых дифференциальным уравнением
— = g(x) (27.5)
ds | е (х) |
За счет нормировки правая часть является вектором единичной
длины, в этом случае s — е сте ст в е н н ы й параметр, сов-
падающий с длиной кривой x(s) от начала х(0) до рассматри-
ваемой точки x(s). В каждой точке х вектор плотности энергии
е(х) является касательным к интегральной кривой x(s), прохо-
дящей через данную точку, следовательно, энергия течет вдоль
этих кривых. Отсюда линии x(s) называют линиями тока энер-
234
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
гии. Для одной волны понятие линии тока совпадает с поняти-
ем луча, определяющего траекторию движения точек фронта
волны, но для двух и более волн линии тока энергии не совпада-
ют с лучевой картиной.
Определение потока энергии Е через произвольную поверх-
ность S или плотное™ чирпгии р r некоторой произвольной точ-
ке неоднородной среды является задачей весьма трудоемкой, так
как и и т представляются двукратными несобственными инте-
гралами. Однако для некоторых частных случаев поверхности S
либо в дальней от источника зоне выражения для Е и е сводят-
ся к формулам, удобным для численного анализа.
2. Рассмотрим энергию поверхностного источника. Пусть на
поверхности упругого полупространства в области й задана гар-
моническая нагрузка qe~i№>. Нагрузка может быть вызвана, на-
пример, штампом, колеблющимся на поверхности среды, в этом
случае q— контактные напряжения, определяемые путем реше-
ния интегральных уравнений соответствующей контактной за-
дачи.
В соответствии с (27.3) средняя за период мощность, отда-
ваемая в среду через поверхность полупространства, определя-
ется по формуле
(и, q)dxdy.
£2
Е = — — Im
2
(27.6)
Интеграл берется по й, так как вне й в соответствии с гранич-
ными условиями q=Q. Перемещения среды и выражаются через
поверхностные напряжения по формуле (2.1). Подставив q в
виде
оо
q (х, у) == —j J Q (аь аа) da2
— ОО
и- поменяв в (27.6) порядок интегрирования, получим
Е = — Im f f (К (аъ ое2, 0) Q (аь а2), Q (а’, aj)) daY da2. (27.7)
8«2 J J
Г,Г2
Здесь учтено, что
q' (х, у) er^+^dx dy = q (х, у) е (а1Х4‘а2/у) dxdy^ =
= Q* (а^).
Напомним, что в скалярном произведении по определению вто-
рой вектор берется комплексно-сопряженным.
Если в качестве источника взяты единичные вертикальные
о2 = (73(г) (случай А) или горизонтальные вдоль оси Ох тХ2 =
§ 27. ЭНЕРГИЯ УПРУГИХ ВОЛН
235
— т/Дг) (случай Б) осесимметричные напряжения (Q —круг ра-
диуса а), то представление (27.7) значительно упрощается:
в случае А
Е z = — Im f /? (а, 0) Q3 (а) & (а*) а da, (27.8)
У
в случае Б
Ех = Im fi С (М (а, 0) + N (а, 0)) Qr (а) Qj* (а*) adal ,
oJT I J \
t Г J
M, N, R— функции, входящие в состав матрицы К, Ez— мощ-
ность вертикального источника, Ех-—-мощность источника гори-
зонтального действия.
На примере Ez для однородного полупространства рассмот-
рим, из чего складывается энергия поверхностного источника.
Выражение R (a, z) приведено в (2.30); R (а, 0) комплекснознач-
на при |а| ^х2, а в зоне вещественнозначности |а|>х2 распо-
ложен рэлеевский полюс £, который обходится контуром Г сни-
зу. Ясно, что мнимую часть интеграла, а следовательно, и мощ-
ность Ez определяет интеграл по зоне комплекснозначности
[0, х2] и вычет в
EZ = EV,Z + EKrZ,
х2
Ev,z = — f Im R (a, 0) | Q3 (a) I2 a da, (27.9)
4л J
0
Eli,z = — у res R (a, 0) |a=s | Q3 (?) |2 ?.
Известно [78], что EVz равно количеству энергии, уносимой от
источника объемными Р- и S-волнами, а ЕЯг— энергия рэлеев-
ской волны.
Оказывается, что подобное расщепление справедливо и в бо-
лее общем случае для произвольного источника и стратифициро-
ванного полупространства. Этот факт был установлен на основе
численного анализа энергетического баланса полупространства
[22, 53, 56] (см. также § 29).
Заметим, что Im/?(a, 0) или, в более общем случае,
Im (KQ, Q) в (27.7) не должна менять знак в зоне комплексно-
значности, так как в противном случае соответствующим подбо-
ром параметров нагрузки Q удастся добиться того, что Ev будет
принимать как положительные, так и отрицательные значения.
Это означало бы, что при определенном выборе нагрузки сум-
марный поток энергии через область ее приложения Q мог бы
быть направлен из среды к источнику (откачка энергии из сре-
ды), что противоречит принципу излучения энергии. И действи-
236
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
тельно, при анализе конкретных моделей сред мнимая часть ука-
занных выражений всегда получается знакопостоянной, причем
того же знака, что и у вычетов в вещественных полюсах
Этот факт ранее уже использовался при доказательстве теорем
единственности (§6, см. также [11, 13, 47]).
На рис. 8.1-8.? изображена зависимость m иягтоты won-
гии объемных волн (Er, 2, Ev, х), энергии поверхностных волн
(Ен,2, Ед,х) и общего количества энергии (Ег,Ех), поступающей в
среду от единичного поверхностного источника. Среда — упругое
однородное или двуслойное полупространство с параметрами
(теми же, что и в § 21)
cs,t 1 _cs,z 1
cP.i СРЛ 2^3
—— =0,2, р,2=1,ра=1.
cp,t
(27.10)
§ 27. ЭНЕРГИЯ УПРУГИХ ВОЛН
237
Рис. 8.5
238
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
Индексом 1 здесь обозначены характеристики верхнего слоя,
2 — нижнего полупространства.
Видно, что распределение общего количества энергии между
энергией объемных и поверхностных волн для однородного (h=
= 0, оо) и двуслойного полупространства (й=4; 16) резко раз-
личается. При наличии границы раздела слоев резко возрастает
доля энергии волн рэлеевского типа, хотя общее количество
энергии остается примерно тем же, т. е. происходит перераспре-
Рис. 8.7
3. Пусть на поверхности среды расположено N источников,
для простоты предположим, что они представляют собой осцил-
лирующие нагрузки, равномерно распределенные в круговых
§ 27. ЭНЕРГИЯ УПРУГИХ ВОЛН
239
областях Qft, т. е.
N
Q(x,y) = \
(x — xk)2 + (y — yk)2>l,
(Хь, th) — центры областей Qft.
В этом случае
N N
Q (a1( a2) = 2 $ $ tke^^dx dy = ^ - 2 л ,
k=i ak k=i a
(27.11)
E = — Im 2 J J «“s) tk, ti) x
*,/=1 r,r2
X /2л h^\\l^k-WWiryi})da d
\ к /
TV
— — юл Im V
. д
i-----------, a
J® (a)
•—— J0 (ar hi) a da,
к2
Гм = / (Xk — Xi)2 + (yk — У1)2.
В выражении (27.11) слагаемые, соответствующие k — l, рав-
ны энергии, поступающей от одиночного k-ro источника, слагае-
мые при k=^=l показывают, на сколько уменьшается или увели-
чивается суммарная мощность в результате интерференции волн
от этих источников.
4. В геофизике при исследовании строения Земли с помощью
невзрывных вибрационных методов существует проблема умень-
шения в общем количестве энергии, поступающей в среду, доли
энергии рэлеевских волн, так чтобы как можно большая часть
энергии виброисточника шла на объемные волны. В соответст-
вии с (27.9) ясно, что поверхностная волна, соответствующая по-
люсу не будет излучаться и уносить энергию источника, если
нагрузка q(x, у) такова, что <?(£*) =0. Например, для круга ра-
диуса а с равномерно распределенной нагрузкой
Волна, соответствующая полюсу не будет излучаться, если
a=bilt,h, b, — нули функции Бесселя, s=l, 2, ..., т. е. подавить
240
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
одну поверхностную волну можно изменением радиуса области
приложения нагрузки.
Для того чтобы подавить две и более волн рэлеевского типа,
очевидно, достаточно выбрать нагрузку так, чтобы
Q(k) =0, k=\,...,N. (27.12)
Для системы круговых источников (27.12) приводит к системе
»,, =0>
из которой могут быть выбраны параметры нагрузки 4 либо ра-
диусы областей ак.
В общем случае, когда q(x, у)—контактные напряжения,
определяемые из решения контактной задачи, проблема не под-
дается столь простой алгоритмизации, так как явный вид
Q (аь а2) неизвестен.
Если предположить штамп гибким, на форму которого не на-
ложено ограничений, то можно подавить рэлеевские волны,
варьируя формой его подошвы f(x, у), являющейся правой
частью интегрального уравнения, так чтобы для решения q вы-
полнялось условие (27.12). При этом f(x, у) можно выбрать сле-
дующим образом: 1) построить Q(a1; а2), удовлетворяющую ус-
ловию (27.12); 2) определить f(x, у)—и(х, у, 0) путем подста-
новки Q(cii, а2) в представление для перемещений поверхности
(VI.1).
Более обстоятельный численный анализ энергетических про-
блем группирования виброисточников дан в § 34.
§ 28. Поток энергии через плоскость, параллельную
поверхности среды
1. Пусть S— плоскость, параллельная поверхности, т. е.
плоскость z=const. На поверхности среды в области Q задана
нагрузка q. Тогда для потока энергии через S имеем:
Е— -~-Im (т, u)dxdy, (28.1)
—оо
т= {тхг, тв2, щ} — вектор напряжений, возникающих на поверх-
ности
! дич . ди,
г, = ». = (>.+2ц) +
дг \ дх
Т2 — XyZ —
(28.2)
т (х, у, г) |г=0 = q (х, у). (28.3)
§ 28. ПОТОК ЭНЕРГИИ ЧЕРЕЗ ПЛОСКОСТЬ
241
Обозначим U, Т, Q преобразование Фурье векторов и, т, q соот-
ветственно; из (28.2) следует
Л==н(— +
Т2 = р (— ta2^3 + (28.4)
Тз~(^ + 2р) Из — iX (ajt/j + a2t/2),
а из (28.3)
Т(а,, а2, 0) =Q(ab а2). (28.5)
Штрих здесь и далее — производная по z. Подставив
т = J j" Т (alt «2, z) da2
r.h
в (28.1), после замены порядка интегрирования имеем
Е (z) = — —— Im f С (Т (ab о^, z), U (aj, с^, z)) dax da^, (28.6)
2 4я2 J J
Г,Г2
Гъ Г2 — контуры, отклоняющиеся от вещественной оси при обхо-
де особенностей подынтегральных функций; подробнее об их вы-
боре будет сказано ниже.
При выводе (28.6) использовано соотношение
ЭД и’ (х, у, z) er^x+a^dx dy =
— 00
= fЭД и (х, у, z) Jxdz/j = U* (a*, a2,2).
\—00 /
В соответствии с (28.4)
(Т, U) = ц [— iUs (ос/?! a2L/2) 4- UjUx 4- U1U3] 4~
4- (X 4- 2р) U3V3 — MUS (04^1 И- a2^2)*
Выразим (Т, U) через элементы матрицы К, введя обозначе-
ния
Q12 = (aiQi 4” ^гСг)/0^2» Q21 — (®гС1 aiQ2)/a2>
при этом
Ui = — i (®i ’>4Qi2 4- 4~ a^Qs).
U2 = — i (a2 WQ1S — axlVQ21 4- a2^Q3).
Us = SQ12 + RQ3.
242
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
Собрав коэффициенты при QI2, Qu, Q3, после замены at =
= a cos "f, a2 = a sin у имеем
E (г) = ——— Im f G (a, z) a da, (28.7)
2 4л2 J
Г
6 (a, z) = Fr [p (/Vi’ -f- 3; м -+- ((X -j- 2р.) S’/a2 — X/Vi) 3 ] + F2p/V'/V* -j-
+ F3 [a2p (R + F') P* + ((X + 2p) R' — a2XP) 7?*] +
+ F4 [p (ЛГ + 3) p* + ((X + 2p) S'/®2 - XM) p*] +
+ F5 [p (P + P') W + ((X + 2p) P'/a2 - XP) S*],
Fj = J QizQvidy, F2 = J QilQildy, F3 = J QgQady,
0 0 0
F 4— J QnQsdy, F- = J Q3Qndy.
о 0
'Сопряженные функции везде берутся от сопряженных аргумен-
тов ах, Оа, а*.
В силу граничных условий на поверхности среды, использо-
вавшихся при построении элементов матрицы К, для них при
.2 = 0 выполняются соотношения:
(X 4-2р) Р'— Xa2P — 1, (X + 2р) S'/a2 — X И = О,
(28.8)
Р4-Р'=я0, ip(М' + S) = 1, —ipP' = l.
Из (28.7) при 2=0 с учетом (28.8) получается та же форму-
ла для Е, что и выведенное непосредственно для поверхности
представление (27.7).
Учитывая, что Q12, Q2i — преобразования Фурье касательных,
а Q3 —нормальной составляющих вектора поверхностных напря-
жений, ясно, что первому и второму слагаемым в (28.7) соответ-
ствует энергия волн, вызванных горизонтальной составляющей
поверхностной нагрузки, третьему — вызванных вертикальной
составляющей. Четвертое и пятое слагаемые дают энергию взаи-
модействия этих волн.
Для осесимметричной нагрузки, когда Q(a1; a2)=Q(a):
л (Q,Q* + (ХОЪ *
Л = Ft = ----- X > = Р, = О,
a (a*)*
т. е. волны, вызванные касательной и нормальной составляющи-
ми осесимметричной нагрузки, энергетически не взаимодейст-
вуют.
2. Функция G(a, г) обладает следующими свойствами:
1) комплекснозначна в некоторой ограниченной области измене-
§ 28. ПОТОК ЭНЕРГИИ ЧЕРЕЗ ПЛОСКОСТЬ
243
ния а; 2) имеет на вещественной оси двукратные полюса, распо-
ложенные правее зоны комплекснозначности.
Поэтому E(z), как и в (27.9), можно разбить на две состав-
ляющие:
Е (z) = Ev (z) + Ен (г), (28.9)
Ev (z) — у Im J G (a, z) a da,
0
£>(z) = у 2 res G (a> z) a |a=eft-
Здесь x —верхняя граница зоны комплекснозначности; для од-
нородного полупространства х=х2=ри2/ц для слоя конечной
толщины х = 0=^£'г=0. Вычеты от различных слагаемых, вхо-
дящих в G(a, z), берутся со знаком плюс или минус в зависимо-
сти от обхода контуром Г данной особенности снизу или
сверху.
Установлено [22, 53, 56], что Ev(z)—энергия объемных
волн, проходящих через плоскость z—const, ER(z}—энергия,
переносимая через эту плоскость поверхностными или каналовы-
ми волнами.
Остановимся на выборе контура Г. Подынтегральная функ-
ция G(a, z)a представляет собой ряд слагаемых, структуру ко-
торых условно можно изобразить следующим образом:
Н (a, z) = Р (a) Q* (а*) Т (a, z) U* (а’, г). (28.10)
Здесь Р, Q* — составляющие функций Ел; U*, Т выражаются че-
рез элементы матрицы К (см. (28.7)). Причем в некотором по-
люсе £ справедливы разложения
^(«) = Po + Pi(a — 0 + р2(а — С)2+ ....
Q(a) = <7u + <7i(a — £) + <72(a — Ю2 +
U (а) = и_г (а — О-1 + «о + «г (« — 9 + • • •.
T(a) = Li(a — £)-1 + (“ — 9+ •••
Следовательно, слагаемые, содержащие составляющие (a—£)_1,
(а—£*)-1 в разложении Н(a, z) в ряд Лорана, имеют вид
Н х (а, г) = + (^(W, , (28 j 1}
a — £* a — £
(РЛо = Pofo + Pit-1, (PT)-I = pot-1,
(Q*G’)o = 7o4 + 7X1( (Q’t/’)-i = <?0X1.
Необходимо правильно выбрать знак вычета, т. е. обход конту-
ром Г особенности £ сверху или снизу. Воспользуемся принци-
244
ГЛ. VIII. ЭНЕРГИЯ УПРУ1ИХ волн
пом предельного поглощения. Предположим, что внутреннее
трение среды е отлично от нуля. При этом полюса элементов
К, которые при е=0 расположены на положительной части ве-
щественной осн, становятся комплексными, смещаясь в верхнюю
полуплоскость. Возможно также, смещение одного из в ниж-
нюю полуплоскость; ото имеет место для полюсов, которым со-
ответствуют «обратные волны».
В силу того, что
U* (а*) = и\ (а - ГГ1 + «J + < (а - Г) + •..,
+ .... (2812)
полюса функций U*, Q* смещаются в противоположном полю-
сам £ направлении. Если е=^0, то Н (а, г) не имеет веществен-
ных особенностей и контур Г совпадает с вещественной осью.
Устремим теперь е к нулю, деформировав контур Г в местах вы-
хода и* на вещественную ось так, чтобы не произошло пересече-
ния полюса с контуром. Деформировать контур мы имеем пра-
во, так как G(a, z) — аналитическая функция. Хотя операция
комплексного сопряжения и портит аналитичность, сопряжен-
ная функция от сопряженного аргумента остается аналитиче-
ской по а; это вытекает, в частности, нз разложения (28.12).
Таким образом, первое слагаемое в (28.11) обходится сверху
(£‘ — смещается вниз), второе — снизу.
Следовательно, в (28.9) под res G (a, z) a |a=jft надо понимать
выражения вида
- (РТ)9 + (PT)_t ((Ж)о- (28.13)
Речь идет о регулярных полюсах, для нерегулярных знаки меня-
дотся на противоположные.
Теперь можно сделать основные выводы.
Во-первых, контур Г нельзя выбрать одним и тем же для
всей функции G(a, z) в целом; фактически в представлении
(28.7) под Г надо понимать набор контуров, каждый из которых
выбирается отдельно для различных составляющих разложения
G(a, z) в ряд Лорана в разных полюсах
Во-вторых, в представлении G(a, z) необходимо тщательно
•отделить комплексно-сопряженные сомножители (входящие в
Q* (а), LJ* (а*)) от несопряженных (Р, Г). Здесь реальной явля-
ется опасность отнести функции вида (а*)*—а к несопряжен-
ным, хотя при разложении этих функций в ряд Лорана для ком-
плексных £ получаются различные представления, например,
a=H-(a-£), (аТ=Г+(<х-Г).
и L* при 8=/=0 смещаются в противоположных направлениях.
§ 28. ПОТОК ЭНЕРГИИ ЧЕРЕЗ ПЛОСКОСТЬ
245
Получается, что с точки зрения выбора контура не безраз-
лично, побывала ли функция сопряженной: нарушается транзи-
тивность операции комплексного сопряжения — сопряженная от
сопряженной не будет исходной! При выводе (28.9) нельзя поль-
зоваться правилом (z*)*=z, все звездочки необходимо сохра-
нять до конца.
Введем обозначения:
TM = р (М' 4- S), 71S = (X + 2p)S7a2 — Ш,
TN = pN', ТР = а2ц (R + Р'\ TR=s(K + 2ц) R’ — а2ХР.
В этих обозначениях для осесимметричной нагрузки (Fi=Fs —
=0):
G(a, z) = Fn • ТМ -М* + Р12• TS -S* + Fn-TN -N* +
+ F31.TP.P* + F92.TR.R\
Для равномерно распределенной единичной нагрузки (случаи А
и Б):
Л1 = 4л3рпрп,
F12= 4л3р12<712,
F31 = 8nap31q31,
F3i = 8зт3р32рз2,
Ри = Л («)/«,
Р12 — Л (К),
Рз1 = Л(«)/®2,
Рз2 = Ji («)/«,
<7и = (А(О/О’.
<7i2 = (A(a’)/(«*)2)*,
7зх — Л (а )>
Тогда для энергии рэлеевских волн через плоскость z=const
имеем
Er (z) — — л2 2^* (Рн.оТ/И_2 (<7ii,o Ио 4~ Рид M_i)
2 k
(pM 4- Pu.lTAfj) <711,0 W_1 4- Pi2,oT’S_i (<712,0$0 -j- Pi2,iS-i)
— (Pis.oT'Sq 4- pi2,iTS_^) <7i2,oS-i 4- pu.oFN^i (<7ii,oAo 4- ‘7ii,i^-i) —
--- ( Pll,oTN0 4~ pll,lTN_J <711,0^-1 4" 2 (Psl.oPo 4- Cfal.lP-l)
— (Рз1,оТРо 4" Рз1,1ТР-1) <7з1,о P-l + p31,oTR_! (<7з2,(Л> 4" Рз2,1^-1) ------
---- (P32,oTV?o 4- Рз2,17’7?_1) Рз2,0^-1])- (28.14)
Дополнительными индексами обозначены коэффициенты раз
ложения соответствующих функций в полюсах Например,
Рп(а) = Ри.о+ Рп.1(« — 0 + Рп,з(а — 92 + • • •.
М (a, z) = М_! (z) (а - С)-1 + Мо (г) 4- (г) (а - С) +...,
= lim М (а, г) (а — р = res М (а, z) |a==j,
а-»£
/И = lim (М------= (44 (а—0)а |а=Е и т. д.
а-ч \ а — I Г
246
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
3. Представления (28.7), (28.9), (28.14) позволяют: а) полу-
чать количество энергии объемных и рэлеевских волн, поступаю-
щее от поверхностных источников в среду; б) изучать ее распре-
деление между различными объемами среды, заключенными
между плоскостями zlt z2 = const, например между различными
r'Tnowir Л < тТАГЛО ’Т ГЧ ГТ Ттгч TJ опаптт- -О \ ГТ ГХ ГЧ Г' гг Г» ’Т ТТ TV О Q Г> ПТ7 СТ LJTJ Т Г>ТЭГЧТ7СТТ-
неоднородной среды на зависимость количества энергии, прохо-
дящей через плоскость z—const, от z и т. п.
Остановимся на вопросах реализации полученных представ-
лений, считая, что элементы К заданы численно, т. е. имеется
программа их расчета по алгоритмам § 3 для любых веществен-
ных a, z.
Здесь возникают следующие проблемы.
1) При вычислении Ev(z) заранее неизвестна правая грани-
ца зоны комплекснозначности х, поэтому интегрирование в
(28.9) должно вестись путем постепенного наращивания длины
отрезка интегрирования. Критерием остановки является обра-
щение Im G в нуль на достаточно продолжительном участке
(проблема: какова достаточная длина этого участка, не может
ли получиться так, что правее зоны, в которой ImG=0, снова
появятся точки с отличной от нуля мнимой частью?).
Далее необходимо локализовать границу х с достаточно вы-
сокой точностью, так как первый из вещественных полюсов £1;
расположенный непосредственно за точкой х, может быть поте-
рян, если погрешность в ее определении будет такова, что этот
полюс окажется левее найденного численно значения верхней
границы. Кроме того, в случае однородного полупространства
граница х=х2 является слабой особенностью функции N (a, z)
и, следовательно, однократным полюсом G (a, z). Поэтому в ее
окрестности необходимо использовать специальные численные
схемы, нацеленные на выделение вклада особых точек в явном
виде.
2) Для вычисления Ев необходимо также уметь находить ко-
эффициенты разложения f_1; f0 в окрестности полюса t, функции
f(a), заданной численно. Введем функцию g(a) =f (a) (a—5), ко-
торая является непрерывной в окрестности £. Ясно, что f_i=g(t,),
f<s=g'(rQ')- Однако непосредственно в точке £ считать g(a) нель-
зя, так как имеется не аналитическое, а только численное пред-
ставление g(a) через f(a). При попытке вычислить g(a) в точ-
ке а=£ получим машинное переполнение разрядной сетки. Ап-
проксимируем g(a) в окрестности £ некоторым полиномом р„(а)
степени п. По указанной причине узлы аппроксимации не долж-
ны располагаться относительно £ ближе некоторого расстоя-
ния h. С определенной погрешностью можно принять
f0 = g’ &)~Рп®-
Рис. 8.10
248
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
В случае простейшей двухточечной аппроксимации имеем
l-i 2 >lo 2 •
Заметим, что точность здесь зависит не столько от степени поли-
нома п, сколько от е — точности нахождения полюса £, величи-
ны h и разрядной сетки (числа десятичных знаков) в представ-
лении чисел на используемой ЭВМ. Эта зависимость хорошо вид-
на уже на модельных примерах типа f (a) =cos а/а. Так, при
е=10~8 нельзя рассчитывать на точность выше, чем 10-5,
т. е. она на три порядка хуже.
4. На рис. 8.8—8.10 изображена зависимость от z энергии
объемных и рэлеевских волн, проходящей через плоскость z=
= const; EVjX, ER,X — касательный источник (случай Б), EViZ, ERz—
вертикальный (случай А) для сред с параметрами (27.10).
Рис. 8.8 — однородное полупространство, h=oo (сплошные ли-
нии), двуслойное, й = 4 (штриховые); рис. 8.9 — трехслойное, hi =
=hz=2, первый и третий слой — среда 2, промежуточный — сре-
да 1; рис. 8.10 — пятислойное полупространство с толщиной
верхних слоев ^=1, i=l, 2, 3, 4, и с регулярным чередованием
свойств слоев (среда 1, среда 2), начиная со свойств среды 2;
со = 0,5. Видно, что энергия рэлеевских волн ER убывает по z, так
как происходит отток энергии в горизонтальном направлении,
в то время как энергия объемных волн Ev для всех z остается
постоянной.
§ 29. Поток энергии в дальней зоне, энергетический
баланс стратифицированного полупространства
1. Используя асимптотику объемных волн в дальней от источ-
ника зоне (22.14), (22.15), сравнительно несложно рассчитать
поток энергии через следующие поверхности:
а) боковая поверхность цилиндра радиуса г=У%2+у23> 1, за-
ключенная между плоскостями z=zt и z=z2:
<₽’ Г
Z, 0
б) нижняя полусфера радиуса 7?=]/х2+г/2+.г2^> 1, 0^<р^2л,
л/2<ф^л:
(29.1)
зл л
Еу = у еу (R, <р, ф) R2 sin ф йф d<p.
О Л/2
Здесь eR, ev — проекции вектора плотности энергии на нормаль к
соответствующим поверхностям. Они рассчитываются'по (27.3),
в которой и берется в виде (22.14), (22.15).
(29.2)
§ 29. ПОТОК ЭНЕРГИИ В ДАЛЬНЕЙ ЗОНЕ
249
Покажем, что в этих асимптотиках достаточно ограничиться
главными членами, причем Еп при г->оо определяется только
асимптотикой поверхностных и каналовых волн (22.15), a Ev
при 7?->оо — асимптотикой объемных волн (22.14).
Рассмотрим £л. Из (22.14), (22.15) следует, что при г-*-оо,
а~О(г-1/2) напряжения т в силу связи с и через оператор Т„
(27.4) имеют тот же порядок убывания: т ~ О (г-1/2). Тогда
.eR = —^-^т(и‘т)—О (г-1), а подынтегральная функция
в (29.1): еяг~О(1), г->оо. Члены большего порядка малости
дают в подынтегральную функцию Ел вклад, стремящийся к
нулю при г->оо. Такое же стремление к нулю получится, если
подставить в eR асимптотику объемных волн (22.14). Таким об-
разом, при г->оо поток энергии через боковую поверхность ци-
линдра определяется только слагаемыми &.„е1ЕтГ в (22.15) (мно-
житель г~1/2 сокращается с г в (29.1)).
Аналогично для Ev получаем ev(JR, <р, ф) ~О(/?-2), 7?->оо, и
учитывая R2 под интегралом, заключаем, что к нулю не стремит-
ся только вклад слагаемых anec>tnR в (22.14) (вклад полюсов
(22.15) при ф>л/2 убывает экспоненциально).
Итак, в дальней от источника зоне через боковую поверхность
цилиндра энергия переносится только поверхностными и кана-
ловыми волнами (22.15), а через нижнюю полусферу — объемны-
ми волнами (22.14). То, что в асимптотиках достаточно удержи-
вать главный член, позволяет значительно упростить вычисление
т, а следовательно, и вектора плотности энергии в дальней зоне.
Упрощение достигается заменой в операторе напряжений (27.4)
операций дифференцирования по координатам на операции ум-
ножения на некоторые константы. Действительно,
(29.3)
д
дг
г —> оо,
Соответственно в Тп можно сделать следующие замены.
1. Для ев введем обозначение ит = Ьт (<р, г) е1^тГ/ У г; с точ-
ностью до членов О(г~3/2) при г—>-оо
дит дит дг
—— = —-------— = tu COS q>«m,
дх дг дх
rr г (29.4'
. дит , е^"п
” := Е>т ЗШ ф Um., ~ ’ От. .
ду дг у г т
250
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
Здесь отсутствуют производные Ьт по ср, так как —, — — О (г"1).
дх ду
Компоненты Ьт выражаются через М', N', Р', R', S' — производ-
ные соответствующих функций, входящих в К. Как уже отмеча-
лось, эти производные в соответствии с алгоритмами § 2, 3 опре-
тта чяютрр п п wnnnpmpuuq г фуНКЦИЯМИ, Т. 5, ПОСТрОвНИС
Ьт не требует дополнительных затрат по сравнению с Ьт.
Нормалью п к боковой поверхности цилиндра является век-
тор п={cos ф, sin <р, 0}, —— = i^nUm- Окончательно
дп дг
т = 2 тт + О (г-3А) = 2 (Ал div ит + 2|ii^«m +
т т
+ p(nxrot ит)) + О(г-3^), /—>оо, (29.5!
div ит = itm (cos ф итл + sin ф«т>2) + и'тз,
rot пт = i (ftm sin ф ит,3 — um J +
+ j ~ C0S ФМ«.з) + feii;m(izm,2 COS ф — итл sin ф),
«т !— {«m.i,
= SS(T«. «z) + O(<2), r—»oo.
2 m I
2. Для ev введем обозначение ilk = akemkRlR = {иь\ и£\ u{k}.
В соответствии с (29.3) имеем с точностью до О(7?~2):
duk
---- = IKk COS ф Sin ф • «ft,
дх
-- — = ixfe sin ф sin ф •«*, (29.6)
ду
dak
---- — IXft COS ф-«ft.
дг
п . duk dak
Внешняя нормаль zi= {cosфsinф, зшфэшф, соэф}, -—=--------------------=
дп dR
= iKti4k. Используя (29.6) и вид нормали п, операторы div.
rot, «Xrot в Т„ можно записать более компактно:
’ — grad — Wktui^,
rot «ft — (V X 8ft) = IXft (« x «ft),
n x rot «ft — IXft (n x (« x «ft)) = IXft («ft,r.« — «ft),
div «ft = (V, я*) = ixfe («ft, n) — iKkUk.n,
§ 29. ПОТОК ЭНЕРГИИ В ДАЛЬНЕЙ ЗОНЕ
251
,и>п — проекция ик на п. Отсюда
2
t = 2 + 2p.«fe + И — «*)] =
А=1
2 2
= V lx* Г(л + я) uk nn + iiUk] = У rk, (29.7)
k=\ k—1
2 2
ev = y Im 2 ^т*’+ °^3)’ (29.8)
k=i t=i
Учтем поляризацию объемных волн: ul = uPnPt u2 = usns, иР,
ив — амплитуды Р- и S-волн, пР, пв— направления их поляриза-
ции, Пр—п, пв±.п. В (29.7) uitn=uP, м2,п=0, т1 = 1х1(А+2р,)мРПр,
T2=ix2p,«sns. Из (29.8) следует
= &Р~I-
(29.9)
еР = хх (А + 2ц) | иР |t es = х2ц | us |2.
Z л
При k=^l (т*, щ)=9 в силу ортогональности Яр, я§, т. е. взаимо-
действие Р- и S-волн не приводит к переносу энергии через полу-
сферу. Расщепление (29.9), указывающее на аддитивность энер-
гии Р- и S-волн, имеет место только там, где среда однородна.
Неоднородность (градиентность) приводит к нарушению ортого-
нальности поляризации и появлению так называемых примес-
ных компонент в плотности потока ev соответствующих (тк, ut)
при &#=/. Заметим, что выражения для еР, ев получились такими
же, как и для плоских Р- и S-волн, идущих в направлении и.
Удерживая при их выводе только главные члены асимптотик и
дифференцируя только экспоненты e‘XfeR, мы фактически заме-
нили сферические волны локально-плоскими с волновым векто-
ром хь/г.
2. Выражения (28.9), (29.1), (29.2) позволяют определить ко-
личество энергии, проходящей в единицу времени через произ-
вольную горизонтальную плоскость, боковую поверхность цилин-
дра (г>1) и нижнюю полусферу (/?^>1). Кроме того, самостоя-
тельный интерес представляет пространственное распределение
потока энергии еи, ev, характеризующее направленность излуче-
ния соответствующих волн. Так, на рис. 8.11, 8.12 изображены
зависимости плотности энергии рэлеевских волн eR от глубины z
при г»1 в трехслойном и пятислойном полупространствах с ре-
гулярным чередованием свойств слоев (среда 2 — среда 1), на-
чиная со среды 2; толщины слоев указаны на рисунках; со=0,5,
ев,х— касательный источник, eRz — вертикальный. Видно, что в
более жестких слоях (среда 2) плотность потока энергии больше,
Рис. 8.13
§ 29. ПОТОК ЭНЕРГИИ В ДАЛЬНЕЙ ЗОНЕ
253
чем в мягких слоях (среда 1), и растет в окрестности границ сло-
ев, в то время как для однородного полупространства eR убывает.
Результаты, приведенные на рис. 8.11, 8.12, не зависят от г.
Если же число полюсов О, & элементов матрицы К, дающих су-
щественный вклад, более одного, то картина распределения
плотности энергии eR по z различна для разных г, хотя общее ко-
ЛИчеиьи гшер1ии ПрилидЯЩсИ через ииьиьую поверхность ци-
линдра, остается постоянным. Так, на рис. 8.13 для различных
расстояний г построены векторы reR для касательного источника
и направления ф=л/2. Среда - двуслойное полупространство,
/i=4, <0=0,5.
Для объемных волн строят зависимости еР/?2, es/?2 от ф—
диаграммы направленности энергии объемных волн. В силу того,
что еР, es выражаются через | иР |2, | us |2, имея зависимости | иР|,
|цв| от ф, несложно получить вид диаграмм направленности,
Здесь мы не будем останавливаться на численных результатах
для еР, е8, заметим только, что в многослойном полупространстве
вид диаграмм направленности сильно меняется при изменении
свойств среды и частоты.
Расчет потока энергии через указанные поверхности позволя-
ет провести исчерпывающий анализ энергетического баланса в
неоднородном полупространстве.
Как и ожидалось, при г, R—>-oo значения ER, Ev, найденные
по (29.1), (29.2), стремятся к постоянным, совпадающим со зна-
чениями ER, Ev, найденными по (28.9) при z=0. Это означает,
что вся энергия Е, поступающая от поверхностного источника,
уносится на бесконечность объемными волнами через нижнюю
полусферу в количестве Ev и поверхностными и каналовыми
волнами в горизонтальном направлении в количестве Ея. При-
чем Er, Er можно определять с помощью (28.9) без интегрирова-
ния по соответствующим поверхностям. А вот разделение Ev на
энергию Р- и S-волн в общем случае можно осуществить только
путем интегрирования по полусфере.
Проследим, как меняется количество энергии, проходящей че-
рез плоскость z= const, с глубиной. На рис. 8.10 изображены за-
висимости Ev(z), Er(z) для той же пятислойной среды, что и на
рис. 8.12. Видно, что Еп монотонно убывает с глубиной, a Ev ос-
тается постоянной. Убывание Еп объясняется оттоком энергии в
горизонтальном направлении. Ясно, что разность E^z^—EB(z2)
равна количеству энергии, уносимой на бесконечность волнами
рэлеевского типа вдоль мысленно выделенного в среде слоя
(Заметим, что в процессе переноса часть энергии мо-
жет периодически покидать этот слой через верхнюю или ниж-
нюю поверхность и возвращаться в него; подробнее об этом см.
§31.) То, что Ег не зависит от z, подтверждает отсутствие пере-
носа энергии на бесконечность в горизонтальном направлении
объемными волнами, установленное при анализе ER в (29.1).
254
ГЛ, VIII. ЭНЕРГИЯ УПРУГИХ волн
Образно приток энергии в упругое полупространство от по-
верхностного источника можно представить в виде потока жид-
кости, закачиваемой через область приложения нагрузки в неко-
торый объем, заполненный пористым материалом, пропускаю-
щим ее. Свойства материала могут меняться с глубиной. Жид-
кость состоит из двух несмешивающихся компонент, одна из ко-
торых (Ея) намагничена и притягивается боковыми стенками
объема, не достигая дна. Другая (£г) — немагнитная, под дей-
ствием силы тяжести она просачивается вниз до самого дна, рас-
текаясь с глубиной все шире, но не достигая боковых стенок.
3. Рассмотрим линии тока энергии в дальней зоне. Из (29.9)
следует, что распределение плотности потока энергии еР, es по
полусфере не меняется с увеличением R (направленность не за-
висит от радиуса), а их величина уменьшается как R~2 только за
-счет увеличения площади полусферы. На первый взгляд может
показаться, что линиями тока энергии Р- и S-волн при R-^-oo
должны быть прямолинейные лучи (радиусы), ортогональные
поверхности полусферы, вдоль которых и течет определяемое
плотностью еР или es количество энергии. Однако неизменность
нормальных составляющих вектора плотности энергии е еще не
означает отсутствия его касательных составляющих. Как уже
отмечалось, в дальней зоне при анализе переноса энергии сфери-
ческие волны можно считать локально-плоскими, поэтому в ка-
честве примера рассмотрим линии тока энергии для двух плос-
ких Р- и S-волн, движущихся в направлении
иг = Upei'k'x^n1, и2 = usl(k‘x}n2,
X = {*!, Х2, х3} = R«l, km — ИтП1, т= 1, 2,
up, us — const, | tik | = 1, £ = 1,2,3.
Единичные векторы n„ n2, n3 образуют правый триедр.
Найдем eh — проекции вектора плотности-энергии на и*. Ком-
понента е, совпадает с ev в (29.9), а для е2, е3 получаем
е2 = у (Ххх + цх2) | иР | | us | cos ((xj — x2) R + 0P — 0S),
(29.10)
e3 = 0.
Здесь 0P, 0S: uP —\uP\eQp, «s = |«s|el9s. Касательная состав-
ляющая e2 зависит от R, периодически меняя знак. Период
2 л 2 л с
AR =-------= 1г —12, 1т =---------длина соответствующей вол-
— х2 <о
ны. Линии тока энергии представляют собой синусоиды с этим
периодом, идущие вдоль лучей Rn,.
Для поверхностных и каналовых волн вывод не столь одно-
значен; здесь существенную роль играют дисперсионные свой-
§ 30. ВЛИЯНИЕ НЕОДНОРОДНОСТИ СРЕДЫ
255-
ства среды. В случае, когда имеется только один вещественный
полюс, например для однородного полупространства, распрост-
раняется только одна цилиндрическая волна, переносящая энер-
гию в горизонтальном направлении. Вектор плотности энергии
строго горизонтален и не меняет направления в зависимости от
гиг, касательные составляющие е отсутствуют. Если полюсов
больше одного, то за счет интерференции, как и в случае объемных
волн, возникает перенос энергии в направлении, ортогональном
к направлению их распространения. Такой случай изображен нд
рис. 8.13. Здесь линии тока уже не прямые, а волнистые линии,,
также обладающие периодом, связанным разностью длин соот-
ветствующих волн. Однако такой картиной не исчерпываются все
возможные ситуации: характер линий тока энергии волн рэле-
евского типа существенно зависит от резонансных свойств среды
(см. § 31).
§ 30. Влияние неоднородности среды
на перераспределение энергии
Развитые методы энергетического анализа и созданный на их
основе комплекс программ позволили организовать систематиче-
ское накопление численных результатов с целью выявления об-
щих закономерностей распределения энергии поверхностного ис-
точника в стратифицированном полупространстве. Расчеты про-
водились в основном для двух- и трехслойных моделей. Сравне-
ние полученных результатов с аналогичными результатами для
однородного полупространства дает количественную информа-
цию о влиянии слоистости среды на перераспределение энергии.
1. Расчеты проводились в основном для целей вибросейсмо-
разведки, поэтому рассматривались в первую очередь среды, мо-
делирующие свойства грунтов. Приводятся результаты для сле-
дующих сред (скорость в км/с, плотность в г/см3) [111]:
1) почва, суглинок сухой
1.1) vP = 0,2, Vs = 0,12, р=1,4,
1.2) vP = 0,8, vs = 0,32, р=1,6;
2) водонасыщенные породы
2.1) vP = 0,7, vs = 0,07, р = 1,4,
2.2) щ>=1, vs = 0,17, р= 1,6,
2.3) Ур=1,3, vs = 0,65, р= 1,8,
2.4) »р = 2,5, vs= 1,25, р = 2;
3) известняк,
vP=4, vs=l,8, р = 2,2;
256
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
4) мерзлота, лед,
уР=2,5, ys=l,25, р=1,3.
Остановимся на трех двуслойных моделях (назовем их А, В, С)
и трехслойной (D) со следующими свойствами слоев (в числите-
ле свойства верхнего слоя, в знаменателе — нижнего полупрост-
ранства) :
А— 1,1/2,2 В—1,2/2,4, С —2,2/3, Нг = 4м,
D — 4/2,1/2,3, /ij = 1,5м, й2=3м,
Л1, ^2 — толщина слоев.
Плотности слоев во всех моделях примерно одинаковы, их из-
менение в диапазоне 1,3—2,2 несущественно сказывается на ре-
зультатах, основное отличие моделей обусловливают упругие
свойства слоев, которые характеризуются двумя параметрами
(Ор, vB или X, р.). Среды с пониженной скоростью распростране-
ния P-волн (звука) обычно называют более мягкими, а с повы-
шенной — жесткими. Кроме того, они классифицируются по сте-
пени сдвиговой деформации, характеризующейся отношением
y = vB/vP. При -у, близких к нулю, свойства среды близки к свой-
ствам акустической жидкости (для нее у = 0), будем называть
такую среду более жидкой, при у»0,5—0,7 — сильно упругой.
В средах А, В, С верхний слой более мягкий, чем нижнее
полупространство. Что касается у, картина следующая: А—у,=
= 0,6/у2 = 0,17— сильно упругий слой на более жидком полупро-
странстве; В — 0,4/0,5 — слои примерно одинаковые, упругие;
С — 0,17/0,45 — более жидкий слой на упругом. Среда D моде-
лирует замерзшее болото, в ней верхний слой самый жесткий,
средний существенно мягче, третий немного жестче среднего. По
vD — 0,5/0,1/0,5 — упругий/почти жидкий/упругий.
В качестве источника берется нагрузка Pe~iat, равномерно
распределенная в круге радиуса а. Рассматривается два случая
приложения нагрузки:
а) вертикальный источник
___1Р/(ла2), г < а,
г I 0, г >а,
TxZ --Туг --- 0,
б) горизонтальный источник
Тхг =
Р/(ла2), г
0, г
О г — Туг — 0.
Результаты, полученные для вертикального источника, помеча-
ются индексом г, а для горизонтального — х, например, £у>х, Ея,х
и Ev z, ER z.
При переходе к безразмерному виду в качестве характерных
величин взяты /0= 1 м, у0= 1000 кг/м3, р0 = 1000 м/с.
§ 30. ВЛИЯНИЕ НЕОДНОРОДНОСТИ СРЕДЫ
257
Для осредненных за период потока мощности Е и плотности
потока е, излучаемых нагрузкой Pe-iat, равномерно распределен-
ной в круге радиуса а = 1а (единичного), имеем:
/ D \ 2 —
/ р \2 1 - / р \2 1 „ -
еу = —- eaev, eR — —- 1 — еое^.
\лро / /?2 \лРо / г
Здесь Ро = p0t^/2 — единица силы, Ео — р0^/2 — единица мощно-
сти, е0 = Ejlo — единица плотности потока мощности, R = R/la,
r=r/l0, R = ^x2-\-y2-\-z\ г = Ух2+у2, ev — плотность энергии объем-
ных волн, eR — плотность энергии поверхностных и каналовых
волн, Е, —— еу, — вц — безразмерные
R2 г
мощность и плотность
потока мощности от единичного давления, приложенного в
круге единичного радиуса. Эти величины зависят от без-
размерной частоты и = — (j — частота в Гц). На ри-
»о До _
сунках приводятся зависимости Е, ег, eR от безразмерных пара-
метров. Черта над безразмерными величинами в дальнейшем
опущена. Используются обозначения: £в, — волновые числа
волн рэлеевского типа и волн Лява соответственно, ub=<d/£b,
vL=‘(o/^i,— фазовые скорости этих волн, Дх(<в)—осред-
ненная за период мощность поверхностного единичного
источника вертикального типа; Ду,Ди)—то же для энер-
гии объемных (Р+Д)-волн этого источника; £в,Ди) —то же для
поверхностных и каналовых волн; Ех(а), EViX(.a), Дв,«(<в)—то
же для источника горизонтального типа; Ду,х(г), ER,z(z) —энер-
гия объемных —и поверхностных и каналовых — Дв волн, про-
ходящая через горизонтальную плоскость z=const, для источни-
ка вертикального типа (при г=0 имеем полную мощность источ-
ника); eB,x(z) —вектор плотности потока энергии поверхностных
и каналовых волн в зависимости от глубины для источника гори-
зонтального типа; еР(ф), ев(ф)—зависимость радиальной со-
ставляющей вектора плотности энергии Р- и S-волн от угла ф
для источника вертикального типа (диаграмма направленности
объемных волн). На рисунке для еР(ф), ев(ф) приведены числа
ДР, Es — общее количество энергии Р- и S-волн на данной часто-
те, посчитанное путем интегрирования плотности потока энергии
по полусфере.
2. Прежде чем переходить к обсуждению результатов для
слоистой среды, на модели однородного полупространства рас-
смотрим, как влияет у и размеры источника а на энергетические
характеристики.
На рис. 8.14—8.15 приведены зависимости Дх от и для сред
с одинаковыми vs и различными у. Общее количество Дх при
Va? В. А. Бабешко и др.
Рис. 846
§ 30. ВЛИЯНИЕ НЕОДНОРОДНОСТИ СРЕДЫ
259
изменении у здесь меняется мало, для больших у увеличивается
доля ERz. Если же взять vP = const, то аналогичные зависимости
для различных у получаются из приведенных заменой to на —<о,
Ег на -^-Ez.
v2
В этом случае для более жидких сред (у->-0) мощ-
ность единичного источника возрастает.
На рис. 8.16 дана зависимость Е от радиуса области а на
фиксированной частоте. Общая сила Р, приложенная к поверхно-
сти, при изменении а остается постоянной. На оси абсцисс от-
кладывается радиус а, отнесенный к длине продольных волн в
среде ХР.
При а/Ар<;0,02 мощность источника остается, примерно по-
стоянной, а при а/Хр>0,1 резко падает. Уменьшение мощности
объясняется взаимным гашением волн, приходящйх от разных
точек области со сдвигом фаз, который Становится тем больше,
чем больше ее размеры.
Заметим, что приведенные результаты получены для равно-
мерно распределенной нагрузки, которая реализуется при дей-
ствии гибкого штампа, повторяющего перемещения поверхности
среды, соответствующие равномерному распределению напря-
жений в Q. При действии жесткого штампа напряжения опреде-
ляются из решения контактной задачи и могут значительно от-
личаться от равномерных. Однако сравнение мощности источ-
ников при одинаковых Р и различных законах распределения на-
пряжений в большинстве случаев (особенно на низких частотах,
когда a/Kj, мало) дало близкие результаты.
3. Указанные выше энергетические характеристики для дву-
слойных сред А, В, С даны на рис. 8.17 -8.29, для трехслойной
среды Д — на рис. 8.30—8.35. Чтобы подчеркнуть изменения, к
которым приводит учет многослойное™, на некоторых рисун-
ках штриховой линией нанесены соответствующие зависимости
для однородного полупространства со свойствами верхнего
слоя.
Анализ как приведенных, так и. не приведенных здесь чис-
ленных результатов позволяет сделать следующие выводы.
1. Для двуслойной среды по сравнению с однородной возрас-
тает доля энергии поверхностных и каналовых волн, появляются
резонансные периодически чередующиеся частоты. Период чере-
дования зависит от толщины и свойств слоев, т. е. от отношения
ШР, h/Xs (ХР, Xs — длина продольных и поперечных волн).:
2. Количество энергии объемных волн Ev(z), переносимой
через плоскость z = const, остается постоянным для всех z.
3. В многослойном полупространстве, как и в слое, возника-
ют «обратные» волны, т. е. имеются точки дисперсионных кри-
вых, которым соответствуют волны с противоположным направ-
лением фазовой и групповой скоростей. Точкам и, отмеченным
260
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
Рис. 8.18
Рис. 8.19
§ 30. ВЛИЯНИЕ НЕОДНОРОДНОСТИ СРЕДЫ
261
Рис. 8.21
9* В. А. Бабешко и др.
262
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
Рис. 8.23
§ 30. ВЛИЯНИЕ НЕОДНОРОДНОСТИ СРЕДЫ
263
?»»
Рис. 8.27
Рис. 8.29
266
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
§ 30. ВЛИЯНИЕ НЕОДНОРОДНОСТИ СРЕДЫ
267
Рис. 8.33
268
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
Рис. 8.35
§ 31. РЕЗОНАНСНЫЕ ЯВЛЕНИЯ
269
звездочками, соответствуют двукратные £й, энергия на этих ча-
стотах стремится к бесконечности
4. Для трехслойной среды D на графике зависимости Ех от <о
(рис. 8.34) имеются узкие глубокие провалы. Их периодическая
повторяемость на частотах, для которых h2/hS2=nJ2, п=1, 2, 3, ...
— длина S-волн во втором слое), указывает, что проваты
вызваны резонансным откликом среднего слоя на этих частотах,
приводящим к запиранию потока энергии.
Интересно, что для вертикального источника (рис. 8.33) про-
валы наблюдаются на частотах, при которых /i2/%s,2=«, п=
= 1, 2,..., т. е. в толщину слоя укладывается целое число S-волн,
а если в толщину h2 укладывается нечетное число полуволн:
h2l\s,2 = n-\-\/2, то наблюдается всплеск. Причем для Ех провалы
появляются за счет энергии объемных волн, а для Ez и провалы,
и всплески обусловливаются волнами рэлеевского типа.
5. Анализ доли энергии объемных волн Ev в общем количе-
стве Е показывает, что для однородного полупространства на
низких частотах, когда еще не происходит гашения рэлеевских
волн, которое наблюдается в случае соизмеримости размеров ис-
точника с ее длиной, EV!ER-^ 1. Для более высоких частот доля
энергии объемных волн становится превалирующей (рис. 8.17,
8.18, 8.22, 8.23, 8.26, 8.27, штриховая линия). Отношение EV[E
больше для касательного источника, очевидно, за счет энергии
S-волн.
В двуслойном полупространстве доля Ev в общем балансе
энергии остается значительной для среды А (сильно упругий
слой на почти жидком полупространстве) (рис. 8.17, 8.18), а при
обратном сочетании (среда С, рис. 8.26, 8.27) существенно па-
дает. Для среды В (примерно одинаково упругие слои, у = 0,4/0,5)
доля Ev падает не столь значительно, как в С. Интересно,
что при наличии почти жидкой прослойки в среде D доля Ev
вновь повышается, причем для касательного источника она ста-
новится значительной (рис. 8.34).
§ 31. Резонансные явления в слоистом полупространстве,
обратные потоки и циркуляция энергии
1. Известно, что в упругом слое конечной толщины в опреде-
ленном диапазоне частот возникают обратные волны, фазовая и
групповая скорости которых направлены в противоположные
стороны (§ 17). Дисперсионная кривая U(w) в этом диапазоне
имеет характерный изгиб с отрицательным тангенсом угла накло-
на касательной к ней (рис. 4.2—4.5). Точкам <о = ®0, в которых
этот угол равен л/2, соответствуют двукратные полюса £0; <о0 —
Частота резонанса II рода по L47J. Если поверхностная нагрузка
270
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
q не удовлетворяет условию
2Л
J |Q (SoCosy, ^siny) |dy = 0, (31.1)
О
то перемещения вызванные ею. растут со временем как tl/2. Из-
вестно также, что в однородном полупространстве не возникает
резонансов II рода.
С физической точки зрения резонанс означает, что на опреде-
ленных частотах (их можно назвать частотами запирания) в уп-
ругом слое групповая скорость равна нулю и прекращается отток
энергии на бесконечность. Энергия начинает накапливаться в
окрестности источника в ограниченном объеме среды, что при-
водит к бесконечному (для идеально упругой среды) росту ам-
плитуды перемещений. Если же источником является вибрирую-
щий штамп, то контактные напряжения q становятся такими,
что в соответствии с условием (31.1) обращаются в нуль усилия
Р и на данной частоте прекращается поступление энергии в
среду (см. § 18). Известно, что при учете внутреннего трения в
линейной конечномерной колебательной системе бесконечные
резонансы становятся ограниченными. Не исключено, что пере-
ход от слоя конечной толщины к слоистому полупространству,
например путем непрерывной замены абсолютно жесткого осно-
вания деформируемым, с точки зрения резонансных свойств игра-
ет ту же роль, что и введение внутреннего трения. В деформируе-
мом полупространстве возникают при этом объемные волны,
уносящие энергию в глубь среды на бесконечность.
Переход от абсолютно жесткого основания к деформируемо-
му приводит к тому, что в плоскости (со, £) дисперсионные кривые
начинаются уже не с оси £=0, а с линии £=<o/ns (vs основания).
При этом расходятся двукратные полюса, расположенные в точ-
ках пересечения кривых с осью £ = 0, т. е. при переходе от слоя
к двуслойному полупространству исчезает большая часть резо-
нансов II рода, но не все. В многослойном полупространстве воз-
можны резонансы, связанные с появлением диапазонов обратных
волн. На рис. 8.24 для среды С и на рис. 8.30 для среды D в
укрупненном масштабе даны изгибы дисперсионных кривых, ука-
зывающие на появление обратных волн. Границы диапазона об-
ратных волн, помеченные звездочками, являются резонансными
частотами. На рис. 8.28, 8.35 также укрупиенно показана зави-
симость мощности единичного поверхностного источника от <о в
окрестности резонансов. Характерно, что рост Е наблюдается в
чрезвычайно малой окрестности резонансной частоты.
Отметим еще раз, что в случае, когда источником является не
заданная нагрузка, а вибрирующий штамп, роста Е до беско-
нечности не наблюдается из-за стремления усилий Р к нулю в
указанной малой окрестности резонансной частоты.
§ 31. РЕЗОНАНСНЫЕ ЯВЛЕНИЯ
271
2. Рассмотрим более детально распределение в слоистом по-
лупространстве энергии, поступившей от поверхностного источни-
ка. Выше указывалось, что линии тока энергии, переносимой по-
верхностными и каналовыми волнами в горизонтальном на-
правлении, представляют собой прямые (один полюс) либо вол-
нлобпазные линии Однако ня некоторых частотах па определен
ной глубине обнаруживается поворот вектора плотности энергии
к источнику (рис. 8.36). Такое явление известно для потока мощ-
ности в упругой пластинке [65]: здесь, несмотря на частичный
разворот вектора, суммарный поток мощности направлен от ис-
точника.
В полупространстве появление у eR составляющих, направлен-
ных к источнику, приводит к сильному закручиванию линий тока
энергии (рис. 8.37), причем внутри петель, которые вычерчива-
ются линиями тока, появляются области, в которых энергия цир-
кулирует по замкнутым траекториям, т. е. появляются зоны, че-
рез границы которых отсутствует поток энергии. Несмотря на то.
что двигаясь вдоль незамкнутых траекторий, энергия на некото-
рых участках приближается к источнику, общая направленность
траекторий такова, что в целом происходит ее отток на бесконеч-
ность.
Возникает вопрос: не может ли закрученность линий тока
стать такой, что узкие перешейки образовавшихся здесь петель
разорвутся? При этом должен появиться встречный поток энер-
гии, отделенный от прямого потока областями с энергией, цир-
кулирующей по замкнутым траекториям. Численный анализ на
частотах, близких к резонансным, вскрыл наличие такого явле-
ния (рис. 8.38—8.40).
Естественно возникает следующий вопрос: где начало и где
конец встречного потока? Приведенная картина справедлива для
дальней зоны г^»1; в ближней зоне, где существенным становит-
ся вклад объемных волн, обратный поток энергии разворачива-
ется более мощным потоком, идущим от источника, и далее
сливается с энергией, уходящей на бесконечность. Отно-
сительно начала обратного потока возможны два варианта: 1) он
может по периферии вихрей подпитываться энергией прямых по-
токов; 2) идти из бесконечности. Во втором случае убывание
энергии, проходящей через плоскость z = const, с глубиной не
будет монотонным из-за притока дополнительной энергии из бес-
конечности. Именно такая немонотонность на глубине возникно-
вения обратного потока и наблюдается (рис. 8.29, 8.41). Анализ
численных результатов показал, что во всех случаях, когда в
дальней зоне имеется встречный поток, он приносит энергию из
бесконечности; его можно рассматривать как один из рукавов
Циркуляции энергии через бесконечность. О том, что здесь име-
ет место именно циркуляция неизменного количества энер-
гии, говорит сохранение энергетического баланса в среде и при
272
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
Рис. 8.36
Рис. 8.37
§ 31. РЕЗОНАНСНЫЕ ЯВЛЕНИЯ
273
Рис. 8.39
274
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
наличии обратного потока: общее количество энергии, проходя-
щей через боковую поверхность цилиндра, рассчитанное по
(29.1), не зависит от г и по-прежнему равно энергии Еа, опреде-
ленной по (28.9).
Мощность встречного потока может быть весьма значитель-
ной, особенно в окрестности резонансной частоты. На рис. 8.41
показаны зависимости ER от z для ряда частот в окрестности
резонанса (о0 = 0,06694 трехслойной среды D. Видно, что при
to—>-(Оо немонотонность ER(z) усиливается. При со = 0,06694 мощ-
ность встречного потока становится существенно больше мощно-
сти Er(0), поступающей от источника.
Таким образом, в окрестности резонансных частот в слоистой
среде могут возникать внутренние потоки энергии, мощность ко-
торых существенно больше мощности источника.
§ 31. РЕЗОНАНСНЫЕ ЯВЛЕНИЯ
275
Данный вывод имеет большее практическое значение, напри-
мер при виброуплотнении бетона, при вибровоздействии на неф-
тяной пласт с целью интенсификации добычи, на угольный пласт
для снятия внутренних напряжений и т. п. Резонансные часто-
ты, на которых возникает мощная внутренняя циркуляция энер-
гии, с точки зрения направленного воздействия на глубинные об-
ласти среды могут оказаться наиболее эффективными.
Нарушение монотонности ER(z) является хорошим критери-
ем для обнаружения обратных потоков, зона z^z^Zj, в кото-
рой нарушается монотонность, указывает на глубину их залега-
ния. Встречаются зависимости, указывающие на наличие не-
скольких обратных потоков, перемежающихся прямыми
(рис. 8.41).
Рассмотренные примеры указывают на то, что на резонанс-
ной частоте, когда прекращается перенос энергии на бесконеч-
ность волнами рэлеевского типа, весь объем, занятый упругой
средой, распадается на счетное число областей с циркулирую-
щим в них неизменным количеством энергии. Причем циркуля-
ция может происходить и через бесконечно удаленные точки.
3. Резонансы, которые характеризуются бесконечным ростом
перемещений при ограниченных поверхностных нагрузках, мож-
но назвать резонансами перемещений. В упругой среде могут
существовать также резонансы напряжений, когда при заданных
ограниченных перемещениях некоторой поверхности, например,
дневной поверхности стратифицированного полупространства
или границы раздела слоев в бесконечном многослойном прост-
ранстве, в среде возникают бесконечные напряжения.
276
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
Выразим вектор напряжений т„(х, у, z), возникающих в неко-
торой точке стратифицированного полупространства на площад-
ке с нормалью п, через перемещения поверхности и(х, у, 0).
Для простоты будем оперировать с величинами, преобразован-
ными по Фурье, зависимость от ах, а2 иногда будем опускать;
т„(х. г/, z) = Т,.-и(х. у, z), Тп — оператор напряжений (27.4). Пос-
ле преобразования Фурье по х, у имеем
Т («ь «г. г) = D (аь а2, z) U (аь а2, г),
U(z) = K(z)O0, Д (0) = А (0) <Q0-
U (г) = К (?) А-1 (0) U (0) --=> Т (г) = D (z) К (г) К"1 (0) U (0)
5 0 —
D (аь «г, z) =’ 0 д — фСС2
— — 1ла2 (Ь + 2ц) -у- az
•Qo — преобразование Фурье поверхностных напряжений.
Проанализируем, из чего складываются полюса ^(а,, а2, z).
Матрица D(z) полюсов не имеет, К(а) =Л (z)/A, А(а) —общий
знаменатель элементов матрицы К, Л (г) — матрица числителей
этих элементов, не имеющая полюсов:
Т (z) =D (г) А (г) А~1 (0) 17(0).
В матрице Д(г)Л(г)Л_*(0) полюсами элементов могут быть толь-
ко нули определителя матрицы Л(0), не сокращающиеся с ну-
лями алгебраических дополнений этой матрицы. Обозначим Mit
Nlt Piy Р„ Si числители соответствующих функций, входящих в
Матрицу K(at, а2, г). Легко показать, что
det Л (0) = (Р& - [г=0.
Анализ резонансов по напряжениям сводится к отысканию нулей
detA(O) и построению их зависимости от ш. Здесь, как и при
анализе полюсов, возникает два независимых набора: 1) нули
Nt(a, 0) —для горизонтально поляризованных волн типа волн
Лява, 2) нули Р£, — 7?1М1|г=0 для волн типа Рэлея — Стоунли.
Первый набор обозначим nL, второй пп.
На рис. 8.42 изображены пя(ш) для среды D, звездочками ука-
заны частоты резонансов напряжений. Заметим, что в силу
A(z)A_1(0) |z=0 = £' на поверхности указанные особенности устра-
няются. Это означает, что резонансы напряжений -возникают
только в глубине, поверхностные напряжения остаются при этом
§ 31. РЕЗОНАНСНЫЕ ЯВЛЕНИЯ
277
ограниченными или даже нулевыми в случае внутренних источ-
ников.
Аналогичные резонансы возникают не только в полупростран-
стве, но и в неограниченном слоистом пространстве.
4. В § 23 рассматривался движущийся источник гармониче-
ских колебаний. Дисперсионные зависимости (о = (от(а) при дви-
жении источника со скоростью с деформируются к виду <о =
= са cos у+(от (а). С точки зрения резонансных свойств это при-
водит к новым эффектам. Во-первых, меняют положение точки,
278
ГЛ. VIII. ЭНЕРГИЯ УПРУГИХ волн
в которых плоскость со — const является касательной к диспер-
сионной поверхности (точки резонансов), во-вторых, для разных
направлений у величина резонансной частоты становится раз-
личной: (Оо = и0(у). Величина со0 уменьшается по сравнению с «0
неподвижного источника при у = л (<р = 0— направление вперед)
и увеличивается при у = 0 (<р = л — назад). Изменение резонанс-
ной частоты в этих направлениях примерно равно оа0, а„:
со о Ют (а0).
Далее, точки резонансов могут появиться у тех дисперсион-
ных кривых, которые при с = 0 их не имели совсем. Пусть, на-
пример, касательная к дисперсионной кривой в некоторой точке
а имеет угол с осью Оа, равный -ф. Тогда при скорости c = tgi|>
касательная к со = са cos (а) имеет нулевой угол при у=л,
т. е. эта точка (со, а, у) становится резонансной. Ясно, что такие
дополнительные резонансы возникают в первую очередь при
у=л, которым соответствует направление вперед (<р = 0). Так как
групповая скорость cg волны, определяемой дисперсионным со-
<&£>т
отношением со = сот(а), равна ---= tg ф, то условие c = tgib
da
означает, что скорость источника равна групповой скорости этой
волны. Групповая скорость — это скорость переноса энергии, по-
этому при c=cg происходит безграничное накопление энергии в
некоторой зоне, движущейся вместе' с источником, т. е. резонанс.
Дополнительные резонансы в направлении назад (у = 0,
Ф=,л) могут появиться за счет выхода в положительную область
(i)>0 отрицательных ветвей дисперсионных'кривых со = —сот(а).
Выход части отрицательных ветвей в положительную область
(и соответствующий переход положительных сот(а) в отрица-
тельную при у = л) означает, что скорость источника превысила
фазовую скорость этих мод, они движутся в том же направлении,
что и источник, но уже не впереди, а позади’ него, постепенно от-
ставая. Их групповая скорость может совпадать с с, это и приво-
дит к дополнительным резонансам сзади. Частоты таких резо-
нансов низкие.
§ 32. Энергия нестационарного импульса
Расчет энергии, переносимой нестационарными упругими вол-
нами, является задачей существенно более сложной, чем для гар-
монических колебаний. Дополнительные трудности связаны с
появлением интегралов по со в представлении v и т, что препят-
ствует упрощению основного соотношения (27.1). Даже в случае
поверхности z=const его уже не удается свести к однократному
интегралу вида (28.7).
Рассмотрим передачу энергии при нестационарном взаимодей-
ствии штампа с упругой средой. Пусть на массивный штамп, по-
§ 32. ЭНЕРГИЯ НЕСТАЦИОНАРНОГО ИМПУЛЬСА
279
коящийся на упругом основании, действует импульсная нагрузка
Методы расчета смещений штампа v(f) описаны в [28, 29].
Общее количество энергии 5(0, поступающей в среду через об-
ласть контакта Й, исходя из (27.1), определяется соотношением
t
(32.1)
О
F (0 = т) dxdy — мгновенная мощность потока
о
энергии через поверхность.
Предположим для простоты, что штамп совершает вертикаль-
ные колебания, тогда dvjdt не зависит от х, у и может быть вы-
несена за знак интеграла по Й, а (( т (х,у, f)dxdy =P(t)=Q(fi, t),
а
P(t)—вектор сил, действующих на поверхность среды в облас-
ти й, Q — преобразование Фурье контактных напряжений. В ито-
ге имеем:
г(о = -^р3(о,
at
т. е. мощность равна произведению скорости смещения штампа
на силу сопротивления среды его внедрению. Этот результат сле-
дует и из общих физических соображений.
В случае, когда колебания штампа не строго вертикальные,
из (32.1) возникают интегралы типа
ЛТ* — (х — х„) т </й,
а
Му — JJ (у — yc)xdQ,
а
описывающие моменты контактных усилий. Эти величины также
определяются одновременно с v(f) при решении контактной за-
дачи.
Рассмотрим равномерно распределенную в й поверхностную
нагрузку т=/(/); из (32.1) следует:
№(/) = — Sa(^-, НО) - v = -±-^v(x,y,f)dxdy,
v — осредненные по Й перемещения поверхности, SQ — площадь
й. Если имеется V(p) — преобразование Лапласа v(t), то ско-
рость dvjdt определяется путем вычисления обратного преобразо-
вания Лапласа от pV(р) методом регуляризации, либо интегра-
ла по 3?т от (—ico), V(—/со), если найдена частотная развертка
осредненных перемещений поверхности.
280
ГЛ. VIH. ЭНЕРГИЯ УПРУГИХ волн
Рассмотрим плотность потока мощности в дальней от источ-
ника зоне
еп (/) = — (—5— f (— md) tier^dm, —— f Tnaer-i,atda}\ . (32.2)
2ni J 2ni J I
\ <^(0 /
Пусть = —) (—i®) Ui (<d) e~Md<£>, вид «(®) дают асимпто-
2ш J
S3 a
тики (22.14), (22.15). Для объемных волн дифференцирование
по координатам при 7?->оо эквивалентно умножению на txs, т. е.
на /со; поэтому напряжения в (32.2) в конечном счете также вы-
ражаются через Vi. Например, для радиальной составляющей
плотности потока мощности объемных волн в многослойном по
лупространстве получим:
TRv = — [у- (К + 2р.) vRnR + -у- (йфВф + р^Дф) J ,
бд (0 = — (^ + 2ц) vR 4---Ц (v| + Уф)>
С1 с2
цф — компоненты v в сферических координатах.
Аналогичное выражение получается для энергии плоских Р- и
S-волн. В силу ортогональности их поляризации, как уже ука-
зывалось ранее, они энергетически не взаимодействуют в направ-
лении распространения. В ортогональных направлениях пф, п*.
ft|> (0 = еч> (0 = (— + vRvv.
\ ^2 / \ ^2 /
Особенно удобно использование приведенных формул в тех слу-
чаях, когда удается выразить компоненты смещения частиц сре-
ды v(/) через исходный импульс /(/) в явном виде, как это было
сделано для S/7-волн в двуслойной среде в § 26.
Характерно, что мощность потока обращается в нуль в тот
момент, когда смещение частиц среды становится максимальным,
так как при этом у„ = 0.
Вектор плотности потока энергии в нестационарном случае
является функцией не только координат, но и времени: е(х, t).
Соответственно линии тока энергии определяются из задачи
Коши с параметром
лг(0,/) = лго. (32.3)
ds
При каждом фиксированном t (32.3) дает свою картину рас-
пределений линий тока, причем их деформация при изменении t
может быть как непрерывной — для гладких импульсов, так и
скачкообразной — для волн с разрывными фронтами.
ГЛАВА IX
ГРУППИРОВАНИЕ ИСТОЧНИКОВ, ФОРМИРОВАНИЕ
НАПРАВЛЕННОГО ИЗЛУЧЕНИЯ
Ранее (§21) было показано, что варьируя формой штампа,
можно добиться направленного излучения поверхностных волн.
Направленное излучение требуется при решении многих приклад-
ных задач, например при расчете акустоэлектронных пьезоэлект-
рических устройств на поверхностных волнах или при размеще-
нии тяжелого вибрирующего оборудования, когда требуется экра-
нировать различные объекты, направив излучение в безопасную
сторону.
В сейсморазведке и дефектоскопии актуальной является про-
блема создания направленного излучения объемных волн. На-
правленные сейсмические антенны находят все более широкое
применение при вибрационном исследовании земной коры и верх-
ней мантии Земли, однако оптимальные характеристики элемен-
тов антенн (амплитуды и фазы нагрузок) определяются чисто
эмпирически, а использование акустической теории антенн, по-
строенной для идеальной однородной акустической среды, в слу-
чае упругих стратифицированных сред приводит к большим
погрешностям. Для получения результатов, применимых на прак-
тике, важную роль, как подчеркивается, например, в 174], игра-
ет также учет вертикальной неоднородности среды, осуществлен-
ный в настоящей работе.
§ 33. Методы формирования излучения заданной
направленности
1. Задача расчета характеристик антенны, обеспечивающих
заданное излучение, называется синтезом антенны. Для синтеза
сейсмической антенной решетки, элементами которой являются
поверхностные виброисточники, необходимо: 1) иметь диаграмму
направленности каждого отдельного элемента; 2). сформулиро-
вать критерий оценки направленности; 3) учесть взаимное влия-
ние элементов.
Для стратифицированного упругого полупространства име-
ется диаграмма направленности объемных волн в виде (22.14).
10 В. А. Бабешко и др.
282
ГЛ. IX. ГРУППИРОВАНИЕ источников
Взаимное влияние источников учитывается при решении контакт-
ной задачи для системы штампов. В общем случае контактные
напряжения можно представить в виде
u\ = [tk^k {х,у\ (x,y)(=Qk,
( 0, (x,y)^®k, k=l,2,...,N, /=1,2,3.
(33.1)
Здесь (pk = {«Pfe11, <р12\ <pls)} —вектор-функция, задающая контактные
напряжения, tk = {/V1, tk \ d3’}— постоянные, величина которых
линейно зависит от величины смещений штампов. Индексом
сверху обозначены компоненты соответствующих векторов, N—
число источников, — область, занимаемая k-м штампом.
При этом Q в (22.14) имеет вид
N з
Q («1. “г) = 2 2 ’ (“ь “г)
fe=i l—i
Ф*0 (аь а2) = JJ (p(k ’ (х, у) e^^dx dy,
'ak
Если взаимным влиянием источников можно пренебречь, то
<pf’—форма контактных напряжений для одиночного штампа,
или просто заданная без решения контактной задачи форма по-
верхностной нагрузки.
Осталось сформулировать критерий направленности. На пер-
вый взгляд кажется, что следует поступить следующим образом;
задать требуемую форму лепестков диаграммы направленности,
выбрать на ней 3N точек (направлений) и потребовать совпаде-
ния рассчитанного по (22.14) поля с заданным в этих точках. При
этом относительно ЗМ неизвестных № возникает система ли-
нейных алгебраических уравнений размерности 3N. Такой способ
часто применяют при расчете радиоантенн. Его реализация в
случае упругой среды показала, что хотя совпадение в требуе-
мых точках и достигается, между ними возникают дополнитель-
ные лепестки, существенно искажающие требуемую картину.
Стало ясно, что нельзя диктовать форму лепестка, так как если
она не отвечает той, которая может сформироваться в соответ-
ствии с внутренними законами среды, то получается сложная ин-
терференционная многолепестковая картина. Можно требовать
только максимума излучения в некотором направлении по срав-
нению с остальными. Вид лепестков при этом должен сформиро-
ваться сам.
§ 33. МЕТОДЫ ФОРМИРОВАНИЯ НАПРАВЛЕННОГО ИЗЛУЧЕНИЯ 283
2. Пусть в стратифицированном полупространстве с помощью
источников, имеющих заданную расстановку, требуется получить
как можно большую амплитуду волн (для определенности возь-
мем P-волны) в некотором направлении <р0, ф0. Наиболее естест-
венным и физически наглядным путем решения этой задачи яв-
ляется следующий: необходимо задать максимально возможную
для источников амплитуду нагрузки j q'4 j, а сдвиг фаз между на-
грузками подобрать таким, чтобы в требуемом направлении
волны, идущие от разных источников, складывались. Согласно
(22.14) радиальные компоненты смещений для P-волн, излучае-
мых &-м источником в дальней зоне, имеют вид
= ei(Z1/?ft+eA) + О (Р~2), Р -> оо
&=У(х—xk)2+(y—Уй)2+2\ Ак— вещественные величины,
(хк, У*) — координаты центра
Ясно, что при фиксированных х, у, z максимум |ы| = 2м*
достигается при условии
XiPi-|-6i — [—'02 —. . . —Х1Рх+9у,
из которого следует условие на требуемый сдвиг фаз
0* — 0/п = (Rm — Rk) = — (Rm — Rk) = axmk,
(33.2)
(33.3)
Tmft= \Rm—Rk)/Cp — разность времени прохождения волны к дан-
ной точке от т-го и &-го источников. При Р->оо хтк выражаются
только через координаты источников и <р0, ф0 и не зависят от R:
Rm — Rk = — rmk sin ф0 cos (<p0 — <pmfc) -f- 0 (P-1), P -> oo, (33.4)
z= Гmk COS ф;П&, ym • Уь fmk sin фш/г?
rmk = /(xm — xk)2 + (ym — yky.
Геометрически (33.4) дает проекцию расстояния между ис-
точниками гтк на заданное направление <р0, фо.
Выполнения условия (33.2), (33.3) несложно достичь соответ-
ствующим выбором фаз поверхностных нагрузок. В случае
•S-волн результат отличается только заменой Zj на х2. Если же
требуется максимизировать суммарное поле uP-\-us не в одном
направлении ср0, ф0, а в некотором телесном угле, то задача не
решается простым варьированием фаз, а требует поиска макси-
мума некоторой целевой функции многих переменных. Методы
решения таких задач рассмотрим на примере более сложного
с точки зрения проведения вычислений случая формирования из-
лучения максимальной контрастности.
10*
284
ГЛ. IX. ГРУППИРОВАНИЕ источников
3. Выделим на полусфере 3(0^<р^2л, л/2^ф^л, 7?3>1) не-
которые области So, S). Пусть требуется создать направленное
через So излучение, т. е. добиться, чтобы амплитуда волн, про-
ходящих через So, была максимальной по отношению к ампли-
тудам волн, проходящих через Sj.
Обычно в качестве S, берется вся оставшаяся (кроме So)
часть поверхности.
Пусть | а (7?, <р, ф) |2dS — осредненный по области S,„
квадрат амплитуды объемных волн, т = 0, 1; у = — контраст-
ность излучения в направлении So. В соответствии с (22.14) v,
—0(1) при 7?->оо.
Основная проблема формулируется следующим образом: вы-
бором параметров поверхностных нагрузок th необходимо добить-
ся максимальной контрастности излучения, т. е. максимизиро-
вать v (О-
Для компонент векторов tk введем сквозную нумерацию:
/ = 3(й —1) + /, /=1,2,3; й=1,
тогда
sw
«(R, ф, Ф) = 2 Ьи> (#>(р’ Ф)’
/=х
3/V 3N
| и |2 = («, а) = 2 («/,»/),
1=1 /=1
здесь
I 3
«/ _ V (aj r> j е/ХгФ^ (a1>r, a2>r).
r=l
Звездочкой обозначены комплексно-сопряженные величины.
Величины vm являются квадратичными формами от t=
~{t,, /2, - - •,
щ = (At, t), vt= (Bt, t),
A, B~ эрмитовы матрицы с компонентами
atj = (u/,Ui)dS,
So
Si
t. e. A—A,-l-iA2; At — симметричная матрица: Al=At; A2 — ан-
тисимметричная: Да — — A2; аналогично B = Bl+iB2, B} = Bi,
Bl=-B2.
§ 33. МЕТОДЫ ФОРМИРОВАНИЯ НАПРАВЛЕННОГО ИЗЛУЧЕНИЯ 285
Точками экстремумов функции v (f) = являются те точ-
ки, в которых выполняется
^^- = 0, V/=1,...,3W. (33.5)
Найдем производные v(f) по tj. Введем обозначения
/ = /1 + ^г, /^Ref, t2 — Imf,
/ j - t /д “I- it y,g, t j,l -Re t j, t jt2 - Itn / /,
p (t) = (At, t) = (A^, tj + (Att2, t2) + 2(A2tlt t2),
q (t) = (Bt, t) = (BttA, fj) + (BJ2, tz) + 2 (B2tlt t2),
d 3N
- (Д1^1,?2)=2 S’\ ctijkti.k = 2 {ЛД^i, Щ,jk == Re ajk>
i к
I-1 fe=i
-^-(A2tlt t2)~{A2}jt2 и т. д„
dli.i
{... -}j — /-строка соответствующей матрицы.
Далее,
= 2 {ЛД/ - 2 {A2},t2 4- 2i {{AJit, + {Л2};^> =2{A},t,
dti
Следовательно, условие (33.5)
dv (t) / dp dq \ 1 „
—= 1 q p—\ — = 0
V dtj dtj J q*
выполняется, если
q{A}jt— p{B}jt =0, V/=l........3N,
что приводит к системе
(Л—vB)t = 0,
или
Д t - vZ = 0, R = B~rA, (33.6)
относительно вектора неизвестных t.
Система (33.6) является нелинейной, так как неизвестные t
ММ)
входят в v (г) — -----, однако ясно, что она может иметь толь-
286
ГЛ. IX. ГРУППИРОВАНИЕ источников
ко такие ненулевые решения ts, для которых v(fs) = XS, Xs— соб-
ственное значение матрицы R, т. е. должно выполняться Rts^a
=ksta, или, через А, В, Ats=iksBts, ts при этом — собственный
вектор R. Найдем v(/s):
(,4£s, ts) (Bts, ts)
(Bts, ts) (Bis’
~fS,
что и требовалось. Таким образом, справедлива
Т е о р е м а 33.1. Если в качестве параметра поверхностной на-
грузки (33.1) выбран собственный вектор матрицы R, соответ-
ствующий максимальному по модулю собственному значению Хо,
то этим обеспечивается излучение наибольшей контрастности в
заданном направлении.
Действительно, система (33.6) имеет ненулевые решения
только для v(f) =Л8, As — собственные значения матрицы R, и на-
оборот, если — собственный вектор, соответствующий собствен
ному значению А8, то соответствующая ему контрастность рав-
на As.
Основной результат доказанной теоремы можно сформулиро-
вать следующим образом: проблема расчета источника с макси-
мальной контрастностью излучения объемных волн сводится к
задаче на собственные значения для некоторой матрицы. Ясно,
что, взяв соответствующее представление вектора перемещений,
аналогично можно рассчитывать источники с заданной направ-
ленностью только продольных или только поперечных волн или
же с заданной направленностью волн рэлеевского типа.
Для построения собственного вектора, соответствующего мак-
симальному по модулю собственному значению, имеются раз-
личные методы, в том числе и реализованные в виде стандартных
подпрограмм для ЭВМ.
Пусть требуется максимизировать не контрастность, а толь-
ко | и |2 через So, т. е. v0=i(A/, f). Условие dvo/dtj = 0 приводит к
А/=0. Но А не зависит от t, поэтому последнее равенство не
дает содержательной информации для выбора t. Причина в том,
что нет ограничений на область изменения t, а из | (At, t) |->-оо
при |f|->oo следует отсутствие искомого локального максимума.
Ограничения на t обычно вытекают из конструктивных огра-
ничений на величину усилий, развиваемых в зоне контакта источ-
ника со средой. Естественно, например, потребовать выполнения
условия 11}]<;& = const, т. е. максимизировать t в ЗУ-мерном
кубе. Если ограничиться поверхностью сферы |/|=й, то в каче-
стве целевой функции можно взять u0(/)/|f|2. Результат здесь
тот же, что н при нахождении максимальной контрастности, если
заменить В единичной матрицей. Требуемый режим обеспечива-
ется собственным вектором матрицы А, нормированным усло-
вием 1101 = b.
§ 33. МЕТОДЫ ФОРМИРОВАНИЯ НАПРАВЛЕННОГО ИЗЛУЧЕНИЯ 287
1«р|
Рис. 9.2
2§8
ГЛ. IX. ГРУППИРОВАНИЕ ИСТОЧНИКОВ
При вырождении So в направление <р0, ф0 эта методика дает
тот же результат, что и выбор фаз (33.2) (при одинаковой нор-
мировке t). Если же потребовать максимальную контрастность в
направлении <р0, фо, то при одинаковой нормировке t, v0(t) ока-
зывается существенно меньше, чем при условии В=Е или най-
денной из условия (33.2). Причем различне е увеличением числа
источников все возрастает (рис. 9.1, 9.2). объясняется это тем,
Рис. 9.3
что увеличение контрастности достигается в основном не за счет
сложения волн в направлении So, а за счет взаимного гашения
через Sj.
На рис. 9.3 показано, как возрастает контрастность при уве-
личении числа источников.
§ 34. ЭНЕРГЕТИЧЕСКИЙ АНАЛИЗ ИЗЛУЧЕНИЯ ГРУППЫ
289
§ 34. Энергетический анализ излучения группы,
оптимизация расстановки источников
В предыдущем параграфе было показано, что направленность
и мощность излучения в дальней зоне существенно меняется при
изменении фаз системы источников. Ясно, что характеристики
волнового поля зависят и от их взаимного расположения. Упру-
гая среда отличается большим многообразием типов волн, воз-
никающих в ней, поэтому наряду с задачами управления харак-
теристиками волн определенного типа на практике возникают
задачи, требующие максимизации либо минимизации суммарного
потока мощности, излучаемого системой. Развитые выше методы
расчета энергии упругих волн позволяют успешно решать эти
проблемы. В настоящем параграфе в качестве примера рассмот-
рены две задачи: 1) для целей вибросейсморазведки требуется
расстановкой источников добиться максимума доли энергии объ-
емных волн Ev в общем количестве Е, излучаемой группой;
2) с целью виброгашения требуется сдвигом фаз нагрузок до-
биться минимума энергии, отдаваемой вибрирующими массив-
ными штампами в упругое основание.
1. Ранее была получена формула (27.11) для расчета мощно-
сти, отдаваемой группой источников. Предположим, что имеется
N осесимметричных виброисточников вертикального типа:
ог (X, у) = Q (Х + (У — Ук)2 < 1,
i О, rfc>l.
Аналогично (27.11) имеем
n
Е = EV + Er — — Im R (a) Q2 (а) Jo (аМ а da,
р k,l=l
к 7V
/'.'=---— Clin R (а) Q2 (а) У .1 (ar/,,) a da,
4” .J >£.
А/
Er= — 2 res R (а) |a=tmQ2 (?m) 2 ^0 (&пГkl)
m k,l=l
7? (а) — элемент /Q, матрицы К (a,, a2, 0). Общий к. п. д. группы
г] можно определить отношением vy=Ev[E. На рис. 9.4 приводит-
ся зависимость и от расстояния / между двумя источниками для
однородного полупространства.
Для удобства на оси абсцисс показана Длина рэлеевской вол-
ны Ал. Расчеты, проведенные для <у(г) = 1 и <?(г) = (1—г2)-1'2
290
ГЛ. IX. ГРУППИРОВАНИЕ источников
(а = 1), показали, что в пределах допустимой погрешности вычис-
лений е=0,001 результаты для этих законов распределения пол-
ностью совпадают. Максимум EVIE достигается в окрестности
А.я/2, его значение увеличивается с увеличением частоты.
На рис. 9.5—9.6 даны зависимости от I Е, Ev, ER, -q при числе
источников от 1 до 4. Источники расположены в одну линию на
равных расстояниях. Видно, что с увеличением АГ расширяется
зона первого максимума Ev/E и смещается второй максимум.
Рис. 9.4
Если источники расположить не вдоль прямой, а по углам квад-
рата со стороной I, то такая расстановка приводит к увеличению
к. п. д.
2. Приведенные выше результаты получены для заданной на-
грузки без решения контактной задачи; здесь не учитывается из-
менение q в результате взаимного влияния источников. Ниже
проводится обобщение результатов гл. V с целью анализа точ-
ных энергетических характеристик системы, полученных с реше-
нием контактной задачи.
Предварительно выведем одно удобное для анализа представ-
ление для потока энергии от системы штампов. Исходным явля-
ется выражение для потока энергии через произвольную поверх-
ность
Е =
-у Im JJ (q, и) dS.
s
(34.1)
§ 34. ЭНЕРГЕТИЧЕСКИЙ АНАЛИЗ ИЗЛУЧЕНИЯ ГРУППЫ
291
Рис. 9.6
292
ГЛ. IX. ГРУППИРОВАНИЕ источников
Для системы штампов имеем (см. § 4)
N
я=2
Л=1
з
s= 2 “I- з)»
tn=i
М / з \
й = 2«л «/ = xz1 di 4-2 4i.n (епх Pi) j
/=1 \ п=1 /
(34.2)
(34.3)
Подставим (34.2), (34.3) в (34.1):
Е = — Im
2
JJ (q,ut)dxdy = ^ (q, uct)dxdy + У tp*„^ (q, (e„x Ri))dxdy,
ai »z Xi ’ az
(34.4)
ДГ g
q dxdy = \ у /и^т И qkmdxdy + qk,mKldxdy\ =
Ql k=i m=i '' al '
N з N
: : У У (Wfe1(nAm,Zft -f- tyk,mAmi-3,lk) == У R Ik Sk-
k=i m—i k=i
Здесь использованы обозначения § 3, Rik означает верхние три
строки матрицы Rth. Аналогично
ср N 8 N .
j\(R ixq) dx dy = У У (Uk,mBm,lk 4~ ф^,гп^/М|-з,1/г/ == У RlkSk,
al A=1 m=l *=1
/?z* — три нижние строки матрицы Rlh. Учитывая, что «/ не за-
висит от х, у, окончательно имеем
N N
Е = vImS2 ^ikSk,si)^-^-\m(Rs, s), (34.5)
Z=lft=l
R матрица 6AX6W, блоками которой являются матрицы Rlk,
составленные из усилий и моментов усилий, возникающих в 1-й
области при различных элементарных перемещениях (сдвиг
вдоль и поворот вокруг координатных осей) в &-й области и ну-
левых перемещениях в остальных областях, s= {sb s2, ..., sN} —
вектор длины 6А, компонентами которого являются характерис-
тики перемещений штампов как твердых тел—ис, <р. Представ-
ление (34.5) справедливо в самом общем случае контакта со сре-
§ 34. ЭНЕРГЕТИЧЕСКИЙ АНАЛИЗ ИЗЛУЧЕНИЯ ГРУППЫ
293
дой, а в частных случаях контакта без трения или пленочного
контакта из R надо вычеркнуть нулевые строки и колонны и из s
удалить соответствующие компоненты.
В силу того, что поток энергии всегда направлен внутрь сре-
ды, т. е. в направлении, противоположном внешней нормали к по-
верхности, £^0=»Im(Rs, s)^0. Причем Im(/?s, s)=0, только
если s=0 (см. также доказательство теорем единственности
[17, 47] и § 6). Таким образом, для Е получили выражение в
виде квадратичной формы относительно компонент смещений
штампов, причем мнимая часть формы знакопостоянная, что ука-
зывает на наличие внутренни-х связей между элементами R и s.
Пусть два штампа вибрируют под действием нагрузок Ft =
= £2=1, характеристики их колебаний описываются вектором
s={s(, s,}. Пусть t,— характеристики колебаний обоих штам-
пов для нагрузки 771= 1, F2 = 0, а /2— для F.= О, F2=l. В силу ли-
нейности задачи s = tl-\-t2
£ = Im 2eih еч = ^-(Rtif t}). (34.6)
Физический смысл: Im — поток энергии через обе области кон-
такта при нагружении только t-го штампа; Ime0, 1ф],— энергия
взаимодействия колебаний, вызванных нагрузками, приложен-
ными к каждому штампу по отдельности.
Пусть далее ко второму штампу нагрузка прикладывается со
сдвигом фазы 0: £2е’0; тогда вместо t2 получим t2eie. Теперь
£е = Im (an + е22 + е12е-'0 + е21е‘'9). (34.7)
Мощность Ев отличается от Е на величину
Д£ = £е — £ = Im (е12 (е~‘е — 1) + <?21 (е10 — 1)). •
Обозначим ei2 = ai-\-ibl, e2i = a2-]-ib2, точками экстремумов £в бу-
дут те, в которых d£e/d0 = O, т. е. tg 0 = ——— .
bi + ь2
На рис. 9.7 приведена зависимость £г и Ех от 0 для рассмот-
ренной в гл. V модели. Во всех просчитанных вариантах экстре-
мальными оказались точки 0, л, 2л, причем в случае Б при 0 = л
(силы прикладываются в противофазе) всегда максимум £х, в то
время как в случае А в зависимости от ш и т может быть либо
максимум,либо минимум.
Из 0 = л&, k = 0, 1,2, , вытекает tg 0 = 0=>ai = a2 — еще одно
не очевидное на первый взгляд свойство формы (34.5).
Зависимость Ег от ш для одного и двух штампов приведена
на рис. 9.8.
294
ГЛ. IX. ГРУППИРОВАНИЕ источников
Рис. 9.7
Рис. 9.8
§ 35. ОСОБЕННОСТИ ФОРМИРОВАНИЯ ИЗЛУЧЕНИЯ
295
§ 35. Особенности формирования направленного
излучения в слоистом полупространстве
Результаты, приведенные в данном параграфе, получены ме-
тодом максимизации контрастности суммарного волнового поля
в заданном направлении. Так как S-волны являются доминиру-
ющей составляющей объемных волн в многослойном полупро-
странстве, то, как правило, приведенные графики практически
совпадают с графиками только для S-волн. Диаграммы направ-
ленности изображены для сечения в плоскости xOz (ср = О)
в виде развертки на прямоугольную систему координат (ф, |и|),
стрелками показано направление, в котором требовалось мак-
симизировать излучение.
Диаграммы направленности, приведенные на рис. 9.3, пока-
зывают, что уже двух источников достаточно, чтобы поворачи-
вать главный лепесток в нужном направлении. Интересно, что
работа двух источников всегда получается в противофазе, изме-
нение же направленности достигается изменением соотношения
между амплитудой вертикальных (oz) и горизонтальных (тхг)
составляющих нагрузки в каждом из источников. Этот вывод
следует из табл. 1, в которой приведены рассчитанные ts для
двух источников при различных ш. Здесь принималось (в без-
размерных величинах): радиус aft=l, fe=l,2; расстояние между
центрами областей /=10; области расположены вдоль оси Ох
симметрично относительно начала координат; все измерения
проводятся в плоскости xOz-, qh={xkx, хкл, сц,2}— комплексный
вектор т*,х, Tfty, — его составляющие вдоль соответствующих
координатных осей; т*,ж = |т*>лг|el<fk-x, здесь |тм| — амплитуда,
фл.х—-фаза компоненты тА>х заданной нагрузки. Аналогично, ос-
тальные компоненты тм, характеризуются амплитудой и
фазой.
На каждой из частот требовалось создать волновое поле, у ко-
торого: 1) главный лепесток направлен под углом ф=Зл/18«
«34°; 2) главный лепесток направлен под углом ф=Зл/8»68°;
3) вправо от источника (So: 0^ф^л/2) идет больше энергии,
чем влево (S,: л/2^ф^п, случай ф3), ф=л/2 — направление
строго вниз.
На рис. 9.9, 9.10 даны развертки диаграмм направленности
для двух частот <о = 0,05 и ш—0,5 из табл. 1.
Во всех случаях, кроме <0=0,1, ф = ф2, векторы нагрузки ле-
жат в плоскости xOz (xky=0). С ростом частоты боковые ле-
пестки подавляются хуже — необходимо увеличивать число ис-
точников.
В случае ф3, когда не задается конкретная направленность,
почти всегда направление главного лепестка совпадает с ф2;
объясняется это тем, что максимум излучения S-волн от оди-
ночного ненаправленного источника идет примерно в направле-
296
ГЛ. IX. ГРУППИРОВАНИЕ источников
Рис. 9.10
§ 35. ОСОБЕННОСТИ ФОРМИРОВАНИЯ ИЗЛУЧЕНИЯ
297
Таблица 1
(0 4 k Ч.Х хк, у Z <₽fe,x *k,y <₽fe,z
1 0,332 0 0,628 —0,042 0,538
4i
2 0,334 0 0,620 0,952 —0,480
1 0,688 0 0,165 —0,512 —0,286
0,01 4 г
2 0,688 0 0,161 0,479 0,669
1 0,102 0 0,701 0,926 —0,482
4з
2 0,100 0 0,699 -0,073 0,498
1 0.351 0 0,621 —0,012 0,600
2 0,353 0 0,604 0,979 —0,436
1 0,680 0 0,191 —0,357 —O', 108
0,02 т|?г>
2 0,684 0 0,183 0,624 0,811
1 0,136 0 0,698 0,883 —0,460
4з
2 0,134 0 0,690 —0,115 0,499
1 0,347 0 0,629 0,851 —0,419
41
2 0,350 0 0,595 —0,172 0,498
1 0,654 0 0,259 —0,415 —0,240
0,05 4’2
2 0,663 0 0,255 0,527 0,610
1 0,168 0 0,696 —0,126 0,729
4з
2 0,169 0 0,677 0,870 —0,366
1 0,111 0 0,718 —0,268 —0,304
41
2 0,137 0 0,673 0,824 0,611
1 0 0,707 0 —0,356
0,1 41
2 0 0,707 0 0,470
1 0,120 0 0,702 —0,218 0,612
4з
2 0,128 0 0,690 0,683 . —0,580
1 0,277 0 0,670 —0,982 —0,138
0,2 41
2 0,326 0 0,606 —0,073 0,569
298
ГЛ. IX. ГРУППИРОВАНИЕ источников
Таблица 1 (окончание)
<0 k xk,x xk, у Gk, Z <₽*, X ф*. г/ 4k, г
1 0,646 0 0,274 —0,262 —0,036
0,2 Т'Л 2 0,636 0 0,322 0,507 0,385
’рз 1 2 0,182 0,219 0 0 0,692 0,664 —0,220 0,659 0,755 —0,609
1 2 0,143 0,206 0 0 0,722 0,645 —0,036 —0,619 —0,201 —0,669
0,5 'Рг 1 2 0,212 0,291 0 0 0,617 0,699 —0,537 0,506 0,166 0,391
Ч'з 1 2 0,531 0,621 0 0 0,519 0,252 0,007 0,595 0,798 0,259
1 2 0,078 0,120 0 0 0,760 0,634 0,399 0,627 —0,093 0,528
1,0 'Рг 1 2 0,503 0,666 0 0 0,482 0,268 —0,047 —0,842 —0,035 —0,842
1 0,404 0 0,877 0,254 —0,029
тз 2 0,119 0 0,232 —0,713 0,744
нии ф2=Зл/8. А так как в общем волновом поле, направленность
которого мы формируем, доля S-волн доминирующая, то и мак-
симизировать его для ф=ф2 легче, чем под другими углами.
На рис. 9.11 показано формирование направленного излуче-
ния в двуслойном полупространстве (У=6, а=0,5, источники,
расположены на равных расстояниях /=3 вдоль оси х). Чтобы
изучить, как остронаправленный поток мощности разрушается
на неоднородностях среды, была проведена серия численных
экспериментов по следующей схеме:
1) создается направленное излучение в однородном полупро-
странстве;
2) однородное полупространство заменяется на двуслойное,
причем сохраняются прежними свойства верхнего слоя и пара-
метры источников;
§ 35. ОСОБЕННОСТИ ФОРМИРОВАНИЯ ИЗЛУЧЕНИЯ
299
Рис. 9.12
300
ГЛ. IX. ГРУППИРОВАНИЕ источников
Рис. 9.14
§ 35. ОСОБЕННОСТИ ФОРМИРОВАНИЯ ИЗЛУЧЕНИЯ
301
3) строится диаграмма направленности в нижнем полупро-
странстве, которая в данном случае есть результат преломления
на границе раздела двух слоев остронаправленного луча, сфор-
мировавшегося в верхнем слое;
4) чтобы проследить дальнейший вид преломленного луча,
двуслойная среда заменяется трехслойной (два верхних слоя и
нс 1 очники прежние), затем четырехслойной и т. д.
Такое поэтапное рассмотрение позволяет проследить процесс
дробления и разрушения первоначально острого луча (рис. 9.12—
9.14). Анализ численных результатов показал, что:
1) при прохождении границы раздела слоев направление
главного лепестка меняется (луч отклоняется), угол отклонения
хоть и зависит от свойств среды, но не описывается законами
типа законов Снелиуса, так как зависит от частоты и, более того,
может быть как положительным, так и отрицательным при раз-
личной исходной направленности;
2) наряду с главным, слегка изменившим свое положение
максимумом, появляется дополнительный, направленный в дру-
гую сторону от вертикальной оси, менее мощный боковой лепе-
сток, в дальнейшем каждый из них дает еще по два лепестка
и т. д.;
3) если требовать направленного излучения сразу в много-
слойном полупространстве, то главный лепесток получается до-
статочно острым и в нужном направлении (см. рис. 9.3, 9.11).
Общий вывод тот же, что и сделанный на основе практики в
[74]: для формирования направленного излучения необходимо
строго учитывать неоднородность среды, так как луч, сформи-
рованный только по данным на поверхности, на неоднородно-
стях среды размывается.
ГЛАВАХ
ВНУТРЕННИЕ ИСТОЧНИКИ
В предыдущих главах основное внимание было сосредоточе-
но на анализе волновых полей, возбуждаемых поверхностными
нагрузками либо штампами. Между тем большое число задач,
возникающих в сейсмологии, дефектоскопии, теории акустиче-
ской эмиссии и теории разрушения, требуют рассмотрения ис-
точников упругих волн, расположенных внутри среды; их назы-
вают внутренними или заглубленными источниками. Внутренние
источники моделируются объемными силами разрезами,
включениями или полостями с приложенной к их поверхности
нагрузкой.
Волновое поле, возбуждаемое в однородном упругом полу-
пространстве внутренним источником, складывается из двух
компонент:
1) поле источника,
2) волны, отраженные от поверхности.
В случае не точечного источника поле отраженных волн ис-
кажается из-за дифракции на самом источнике. В многослойном
полупространстве добавляются волны, отраженные и прелом-
ленные на границах слоев. Анализ отраженных и преломленных
волн при известном поле внутреннего источника сводится к
разобранному выше анализу волн от поверхностной нагрузки, по-
этому основное внимание в настоящей главе уделяется построе-
нию прямого поля. Учет взаимодействия отраженных волн с ис-
точником приводит к интегральным уравнениям, вид которых
отличен от интегральных уравнений контактных задач.
В случае поверхностного источника ключевую роль играет
матрица Грина полупространства, являющаяся решением соот-
ветствующей задачи о действии сосредоточенных нагрузок. Ана-
логичную роль для внутренних источников, которые моделиру-
ются объемными силами, играет матрица фундаментальных ре-
шений (матрица Грина упругого пространства).
§ 36. ФУНДАМЕНТАЛЬНОЕ РЕШЕНИЕ
303
§ 36. Фундаментальное решение для внутреннего источника
В данном параграфе на примере волнового уравнения пока-
заны методы построения фундаментального решения, удовлет-
воряющего условиям на бесконечности. Рассматриваются во-
просы представления его в виде суперпозиции плоских, ци-
линдрических или сферических волн, анализируется гладкос1ь
решения.
1. Рассмотрим акустическую среду, в которой задан осцил-
лирующий источник расширения — сжатия f(x)e~iat. Скорость
смещения частиц ve~iat выражается через потенциал ср: v=
= —Vq>, который удовлетворяет уравнению
Аф (х) + £2ф (х) = f (х), (36.1)
х={х,, х2, х3} = {х, у, г}, &2=ю2/с2, с — скорость звука в среде.
Известно [40], что
Ф(х) = р©^(х-^ = (/^)(х), (36.2)
л*
£ = {£ь £2, g(x)—фундаментальное решение, удовлетворяю-
щее уравнению
Д^(*)+^ (*)=«(*)• (36.3)
Функция Дирака б (х) описывает сосредоточенный источник,
расположенный в начале координат.
Следуя [40], для построения g(x) применим к (36.3) преоб-
разование Фурье по всем трем координатам, получим
Л3
а={аь а2, а3}, |р=|а|.
В пространстве переменных а сфера |а| =k является полярным
множеством подынтегральной функции (36.4), поэтому g(x)
определяется с точностью до обобщенных функций, имеющих
носитель на этой сфере. Кроме того, фундаментальные решения
определяются с точностью до слагаемых <р0, являющихся реше-
ниями однородного уравнения. Этим произволом пользуются
при удовлетворении граничных условий и условий на бесконеч-
ности. Физически более наглядный результат получается, когда
условия на бесконечности (условия излучения) удовлетворяют-
ся не за счет добавления к (36.2) однородных решений <p0, а са-
мим g(x). В этом случае g(x) описывает волны, идущие от то-
чечного источника на бесконечность, а с помощью ф0(х) удов-
летворяются условия на поверхности и границах слоев (отра-
женные волны).
304
ГЛ. X. ВНУТРЕННИЕ ИСТОЧНИКИ
Произвол, вызванный наличием в (36.4) полярного множе-
ства | а| =k, означает, что уравнению (36.3) удовлетворяют как
интегралы в смысле главного значения, так и интегралы с обхо-
дом полярного множества через комплексную область. Выбором
контура интегрирования, как и в случае поверхностного источ-
ника (§ 1), выделим из этого множества единственное решение,
удовлетворяющее условиям излучения. По-прежнему будем
пользоваться принципом предельного поглощения.
Пусть k=ki^-ik2, k2>0, тогда в (36.4) нет полюсов. Перейдем
к сферическим координатам при помощи замены
04 = Р cos у sin 0, а2 = р sin у sin 0, а3 = Р cos 0,
X! = R cos ф sin ф, х2 = R sin ф sin ф, х3 = /?со5ф,
0 0, ф п, 0 <у, ф 2л, 0 Р, R < оо;
имеем
g(x) =
оо Л 2Л
= 'тЛг Г I* f ехр ®Rtl (ф’v’0)) dy sin 9 dQ (36-5^
(ZJTy J к P J J
0 0 0
n (ф, Ф> v> 6) — — = cos (y — ф) sin 0 sin ф + cos 0 cos ф.
Внутренние интегралы по у, 0 (интеграл от экспоненты
по сфере |а|=р) берутся в явном виде, например, следующим
образом. Интеграл по у в соответствии с формулой (11.4) дает
2nJ0 (р R sin 0 sin ф), а по формуле 2.12.21 (6) из [107]
а_______________
Р cos bfа2 + х2 , . . ,
I X---, — Jn (сх) ах
J У а2 — х2 ° '
sin (aVb2 + с2)
а >0,
/б2+ с2
получаем
Л 2Л
о о
Таким образом,
я W = - f (36.6)
4 л2/? J р2 — /е2
—оо
Здесь, в силу четности подынтегральной функции, интеграл
оо оо
^(...)dp заменен на — 1 (,..)б/р, т. е. выполнен разворот
а 2 J
— ОО
контура.
§ 36. ФУНДАМЕНТАЛЬНОЕ РЕШЕНИЕ
305
1
fl2 — k2
Функция
имеет два полюса k и — k, расположенных
выше 'И ниже вещественной оси. Устремив внутреннее трение
среды к нулю, деформируем контур интегрирования так, чтобы
не произошло пересечения с ним полюсов выходящих на
вещественную ось. В результате получим прежний контур о
(рис. 1.2). В представлении (36.5) соответственно вместо кон-
тура [0, оо] необходимо использовать контур Г, обходящий по-
люс k снизу, а в представлении (36.4) контуры интегрирования
по аналогии с (2.3) обозначим Г1? Г2, Г3-
Замыкая а в верхнюю для eiaR и в нижнюю для e~1aR полу-
плоскость по лемме Жордана и теореме Коши получим
g(R) = -
eikR
~R~~
(36.7)
1
4 л
2. Выражение (36.7) — хорошо известное представление поля
точечного источника в виде сферической волны, а формулы
(36.4), (36.5) можно трактовать как представление сферической
волны в виде суперпозиции плоских волн е~‘(ал:>. Если среда
имеет горизонтальные границы раздела, то удобно перейти к
представлению фундаментального решения в виде суперпозиции
цилиндрических волн. С этой целью найдем G(a,z) — преобра-
зование Фурье g(R) по х, у. Используя цилиндрические коор-
динаты
X — Г COS <Р, у = г sin <р, 2 = 2,
cq = a cos у, = а sin у,
а2 = с4 + с4, r2 = x2 + i/2,
получим
i pikVr4z2
= J0(ar)rdr.
о
По формуле 2.12.23(8) [107]
* х (sin (£> ]/х2 + ?2)[ , ; \ л
-. -.—„ v F _____ } Jn (ex) dx =
|cos(b]/x2 + Z2)j
1 (cos (2 j/b2 — c2)
[sin (ztfb2 — c2)
0<Zc<Z.b,
Re г > 0,
Pl-----J---exp(—z]/'c2 — b2),
H Re2>0,
306
ГЛ. X. ВНУТРЕННИЕ ИСТОЧНИКИ
имеем
1 а|г| _________
б(а, г) =-------------, о = 1Аа2— k2, Reo^O, lmo-<0,
2 о
(36.8)
оо
1 Р Р о~^1^1
g (г Z) —-----— I I —-----е-цсця+айо daj 0.^2 —
i8n2 JJ а
=-------I -----Jo (ar) a da. (36.9)
4л J о
о
Представление (36.9), являющееся суперпозицией цилиндри-
ческих волн, можно получить непосредственно из (36.4), взяв по
вычетам интеграл по а3. Рассмотрим
При z>0 контур Г3 можно замыкать вниз, при z<0 —вверх.
Полюсами в комплексной плоскости а3 являются точки а3—
=±У/г2—а2, положение которых меняется при изменении а.
Здесь важно правильно выбрать ветви радикалов, чтобы одно-
значно определить положение полюсов относительно Г3. Одно-
значность нарушается, когда а2 становится меньше k2, при этом
два чисто мнимых полюса, расположенных при а2^й2 выше и
ниже Г3, через точку а3=0 выходят на вещественную ось.
Вводя внутреннее трение k=kl-\-ik2., как и в п. 4 § 1, убеж-
даемся, что полюс а3=У^2—а2, спустившийся сверху, движется
далее по вещественной оси вправо и потому должен обходиться
контуром Г3 снизу, а полюс а3=—У^2—а2 — влево и обходится
контуром сверху. Ветвь радикала У^2—а2 должна быть выбрана
так, чтобы Rey/?2—а2^0, 1ту/?2—а2^0. Взяв вычеты, имеем
i/fe2-a2|z| ______
/ (?) =— i—r - — G(a,z), а = — k2— а2.
v ’ 2 fk2 — a2 к ' v
3. Пусть f(x) задана в некотором объеме S, изучим гладкость
решения cp=f*g. Предварительно рассмотрим дифференциаль-
ные свойства g(x). Из (36.7) непосредственно следует, что
g(.t)eCx VxeR3\Ss, Ve>0. Здесь S„ — g-окрестность начала
координат. Точка х=0 является особой точкой g(x) при |х|->0,
£(*)------77И'1-
4Л
Как понимать производные от g(x) при |х|->0? Здесь по-
лезна формула дифференцирования |х[~х в классе обобщенных
§ 36. ФУНДАМЕНТАЛЬНОЕ РЕШЕНИЕ
307
функций в Rn [41]:
Д —-— = — (п — 2) а„6 (х), п 3,
[хГ2
<зп = ^dS = 2nn/2/r^-^-j — площадь поверхности единичной
сферы в Rn. При п=3 Д |х1~‘=—4лб(х) и для g(x) получаем
требуемое соотношение (36.3).
Заметим, что за счет |z| в представлении (36.8) производ-
ные G(a, z) по z терпят разрыв в точке z=0:
dG = — ст sign zG (a, z), — (ст2 — об (z)) G (a, z) и т. д.
дг дг2
На первый взгляд кажется, что и g(r, z) в представлении (36.9)
должна терпеть разрыв в плоскости z=0, так как
Dpg (r,z)|z=0 =
= — уу у J af'ctf2 1‘ -у-J Р3 —— ]fr{a'x+a^ da2, (36.10)
/. д \Pt ( . д \Рг ( . д \рз
II----I I — I--------------) ,
\ дх ) \ ду 1 \ дг /
Р = (Pl, Pt, Рз)
и при |р| 1 интеграл в классическом понимании является рас-
ходящимся из-за роста подынтегральной функции на бесконеч-
ности.
Поскольку, с другой стороны, g(x) — бесконечно гладкая вне
функция, получается явное противоречие. Разрешить его
можно только, вспомнив, что при построении g'(x) применялся
принцип предельного поглощения. Введение внутреннего трения
приводит к экспоненциальному убыванию по а подынтегральных
функций осциллирующих интегралов, что обеспечивает их бес-
конечную гладкость, позволяет вносить производные под знак
интеграла и менять порядок интегрирования. Необходимо
помнить о предположении, что все интегралы Фурье, встречаю-
щиеся в рассматриваемых задачах, получаются в результате
равномерного предельного перехода при стремлении вязкости
среды к нулю. __
Из (36.1) следует Дф=/(х) — £2<р(х). Для x<=S f(x) = O и из
Дф=£2ф, как и для фундаментального решения, следует беско-
нечная гладкость ф вне S. Для xeS гладкость <р определяется
гладкостью f(x), причем она на два порядка лучше, так как
вторые производные ср выражаются через f. Так, если f(x) —
гладкая вплоть до границы S, а на границе dS терпит разрыв,
то (реС, (/?п) ПС” (/?" \S), первые производные ф непрерывны
308
ГЛ. X. ВНУТРЕННИЕ ИСТОЧНИКИ
всюду, а вторые терпят разрыв на dS. Производные <р выше вто-
рого порядка — бесконечно гладкие вне dS, а на dS выражаются
через производные 6-функций.
Производные ф можно точно выразить через f, исходя из ин-
тегрального представления
ф ( V) —---— f f С e-i(a,x) fa
(2л)3 J J J ^-0*
Г,Г2Г,
и учитывая,что
Dp?> (х) = аГа?газ3е_‘<“' х> da.
—ОО
Если потребовать большей гладкости ф, чем определяет f,
и устранить скачки на dS, добавляя кусочно-однородные реше-
ния ф0, то тем самым неизбежно нарушатся либо условия на бес-
конечности, либо исходное уравнение (вид f(x) на dS).
4. Построим матрицу фундаментальных решений (матрицу
Грина) упругой среды. Рассмотрим системы
Lgk + р®2^* = 8 (.х) ek, k = 1,2,3, (36.11)
L — оператор теории упругости, gk — фундаментальное решение,
соответствующее сосредоточенной силе 6(х)осциллирую-
щей в направлении оси Oxh с частотой со.
Матрица g(x), столбцами которой являются gk, называется
матрицей фундаментальных решений. Колебания среды
и(х)е~1Ш‘, вызванные произвольной объемной силой f(x)e-i“!, вы-
ражаются с помощью g в виде свертки
(36.12)
s
Матрица g строится так же, как и фундаментальное решение
для акустической среды. Преобразование Фурье оператора L по
всем координатам дает
= (р®2 — p(J2)t/z — (^ + p-)«z2 ak^k’ 2> 3,(36.13)
k~i
U={U j, U2, U3}, —Кя компонента соответствующего век-
тора.
оо
Относительно G (alt а2, а3)g (х) еЦа’х'> dx из (36.11),
—оо
§ 36. ФУНДАМЕНТАЛЬНОЕ РЕШЕНИЕ
309'
(36.13) следует
М • G = Е, М = (р<о2 — рр2) Е — (1..+ р) D,
(36.14).
/а2 aja2
D = I a,a2 a2 a,a, | = || 0№||/,fe=i,
\ахаз а2аз a2 /
E — единичная матрица.
Отсюда G=M~lE; для построения G необходимо обратить
матрицу М. Это можно сделать в явном виде, исходя из (36.14),
а можно — выполнив предварительно некоторые упрощающие
преобразования.
При построении матрицы К замена (2.7) и преобразование
первой и второй строки уравнений (2.10) приводили к расщеп-
лению исходной системы на две независимые относительно
(Ф, W) и Т. Выполним аналогичные преобразования; для
(36.14) они эквивалентны замене
(—1ах —ia2 0\
— ia2 («! 0
0 0 1/
и домножению системы слева на Р:
PMPV = Р, РМР = (рсо2 — рр2) Р2 — (л + р) PDP,
/—а2 0 0\ / — а4 0 — ta3a2\
Р2 =1 0 — а2 0 , POP = 0 0 0
\ 0 0 1 / V— i'a3a2 0 а2 /
а2 = а2 4- а2.
1 1 2
Исходная система распалась на две независимые:
N.V^P., N2V2=P2,
(36.15)
Vi, Pi — матрицы 2x3, состоящие из первой и третьей строки
матриц V и Р соответственно,
V2, Р2 — вторые строки матриц V и Р, N2=—a2(pco2—рР2).
Определив V из (36.15) и используя связь G=PV, оконча-
тельно имеем
G(a) =
/-(Z.+2H) ((32-x2)+(X+u)a2
1 / , 1
= I (л+ц) aitx2
A I
\ (X+H)aia3
(X+U)aiO2
(X+H)a2as
Д = (1(А + 2р) (P2-x;) (P2- x2).
(X+uJasaj
-(X+2jx)(p2-x2)+(X+n)a2j
310
ГЛ. X. ВНУТРЕННИЕ источники
или, учитывая
J___________1_______
А н (К+ 2н) (xi — х2)
1
Р2-Х2
1
Р2-Х2
6 (а) =--------— (-------!_----------!—Л D----------------!-----Е. (36.16)
\ Р2 — Р’ — *2 / Н tP: — Ki>
При построении g’(x) элементы матрицы D дают производ-
ные по xh, и интегралы сводятся к (36.4), для которых получено
точное выражение (36.7). Таким образом,
здесь
, к 1 Г
g(x) = _L _ 1—£4
4л L g/?
Z>1 = а2 а2 а2 ' a*2 ^xi ^xi ^хз а2 а2 а2 дх± а«2 дх* а«2 дх3 а2 а2 а2 а%! дх3 дх, дх3 дх?,
1
рю2
(36.17)
а2
дх,- дх,
► J
В дальней от источника зоне
g (х) = —-— Г — е’-'^Е + (----------------— eiXiRС (<р, гр) 1 +
4лц7? L \ 2 + у / J
+ О(Я"2), Я->оо, (36.18)
/ cos2 ф sin2 ф
С(ф, ф) — I sin ф cos ф sin2 ф
\cos ф sin ф cos ф
sin ф cos ф sin2 ф
sin2 ф sin2 ф
sin ф sin ф cos ф
cos ф sin ф cos ф'
sin ф sin ф cos ip
cos2 ф
Т = Х/ц.
5. В качестве примера использования матрицы фундамен-
тальных решений рассмотрим отраженное волновое поле, воз-
никающее при падении гармонической волны ин(х)е~““ на тре-
щину, моделируемую бесконечно тонким разрезом в упругом
пространстве. Предположим, что трещина занимает область Q
в плоскости xOz. Аналогичная задача рассматривалась в § 16,
там перемещения и напряжения, возникающие в среде, были
выражены через вектор скачка смещений границ трещины
v(x, г). При этом фактически использовалась та же техника, что
и при построении фундаментального решения. В п. 2 § 16 пока-
зано, что суммарное волновое поле складывается из- поля набе-
гающей волны «н и отраженного поля и„, выражающегося через
§ 37. ВНУТРЕННИЕ ИСТОЧНИКИ В ПОЛУПРОСТРАНСТВЕ
311
скачок V. Последний определяется из интегрального уравнения
(16.14).
Поле отраженных волн описывается интегральным пред-
ставлением (16.12), (16.13), в котором матрица М есть не что
иное, как произведение G на матрицу В из (16.11); BV—аналог
Р az. а.) = f (х) da. где f — заданные объемные-
'’s
силы. Сопоставление F и BV указывает, каким именно распре-
делением объемных сил моделируется волновое поле трещины.
Явное представление (36.17) для g(x) позволяет дать на-
глядную физическую трактовку свертки (16.13) как суперпози-
ции сферических волн. Учитывая асимптотику (36.18), неслож-
но построить диаграммы направленности отраженных волновых,
полей.
6. В разобранном примере не являются существенными пред-
положения о том, что трещина плоская и бесконечно тонкая.
Развитая методика легко обобщается на случай полостей про-
извольной формы. Действительно, предположим, что в объеме
S, который занимает полость, и=0; тогда при переходе границы
dS и(х), заданные во всем пространстве, терпят разрыв; скачок
перемещений на dS равен и(х) = ±«(х) |*евз (знак «+» или
«—» зависит от ориентации поверхности). Преобразование;
Фурье, как и для (16.7), приводит к появлению и(х) в правой
части, с тем отличием, что вклад в d дают производные по тем
координатам, которые не параллельны поверхности полости.
Скачок производных от перемещений, как и раньше, исключает-
ся из условий, заданных на поверхности полости (например, из
условия отсутствия напряжений). Выразив решение получив-
шейся задачи через матрицу фундаментальных решений, полу-
чаем в итоге волновое поле вне S, выраженное в виде свертки
матрицы g(x) и перемещений на dS. Такое представление, как
уже указывалось, удобнее для анализа направленности излуче-
ния в дальней зоне.
Преимущество описанного подхода в том, что он применим;-
к произвольному числу полостей произвольной формы. Для по-
лостей же классической сферической или цилиндрической фор-
мы более естественным является разложение волнового поля по-
сферическим или цилиндрическим функциям методом разделе-
ния переменных.
§ 37. Внутренние источники в полупространстве
Переход от всего пространства к полупространству приводит
к необходимости учета отражения волн от поверхности. Отра-
женное волновое поле (или идущее от поверхностного источни-
ка) может в свою очередь взаимодействовать с внутренним
источником, дифрагировать на нем, отражаться в сторону по
312
ГЛ. X. ВНУТРЕПпие 1Ъ1 ОЧНИКИ
верхности и т. д. С этой точки зрения внутренние источники де-
лят на два класса: прозрачные и непрозрачные. Прозрачными
называют такие источники, для которых можно пренебречь их
влиянием на отраженное волновое поле, например, когда длина
волны существенно больше размеров источника или когда он
сильно заглублен. Непрозрачными являются большие полости,
расположенные сравнительно близко к поверхности.
1. Рассмотрим точечный источник Аб(х—х0)е_:'“‘, располо-
женный в точке хо={0, 0, —h} упругого полупространства.
С помощью матрицы фундаментальных решений излучаемое им
прямое поле представимо в виде
«1 (х) — g(x — х0) А = JJ G (аъ а2, z -j- h) Aer^xwri) rfct, da2.
гл
(37.1)
Здесь G(alt а2, z)—преобразование Фурье по х, у матрицы
g(x). Учитывая (36.8), несложно получить G в виде
1 Г
<7(аъ а2, г) = — — ---------Е 4
2 L ро2
1
р<о2
/
Оп («1, а2 г) = I п1а2
\ — /assign г
(37.2)
а2
— 1С/.2ога sign г
— ia^signz
— ia2on sign г
— ап (26 (z) 4- <тп)
Фактически можно убрать б (г) из £)„.3з, так как Dt и D2 входят
в G с противоположными знаками и в окончательном представ-
лении G б-функции приводятся.
Полное волновое поле в полупространстве «(х) складывает-
ся из прямого «Дх) и отраженного «2(х); последнее определя-
ется из условий на поверхности. Пусть поверхность полупро-
странства z-О свободна от. напряжений:
2=0, Ти=0,
Т — оператор напряжений. Из м = м1 + «2 относительно и2 полу-
чаем
Lu2 = Аб(х — х0) — Lu^ — Q, (37.3)
Та2]г=0 = -Га1|г^0. (37.4)
Если обозначить — Ti*, | г=0=д, то задача (37.3), (37.4) пол-
ностью совпадает с рассмотренной ранее задачей о действии
§ 37. ВНУТРЕННИЕ ИСТОЧНИКИ В ПОЛУПРОСТРАНСТВЕ
313
поверхностной нагрузки q на упругое полупространство. Отсюда
U2 = KQ, Q = - TU± = — ТО А, (37.5)
«2 (*) =
=------i— f f К (аь «2, г) Т (аь а2) О (аь аг. Л) Aeri^x+a^ da± da2.
4л2 I I
Г£Г»
Физически условие (37.4) означает, что напряжения, возни-
кающие на поверхности при падении волны ии компенсируются
полем смещений и2, поверхность также становится источником,
эквивалентным поверхностной нагрузке — Ти,)^.
Асимптотика объемных и рэлеевских волн для м2 легко по-
лучается из (22.14), (22.15) заменой Q на — TGA |z=0. Аналогич-
но проводится учет отражений от границ слоев в многослойной
среде: в том слое, где задан источник, волновое поле ищется в
виде суммы Ui + u2, что приводит к появлению свободных членов
в граничных условиях (2.17), (2.18), которые ранее были одно-
родными. Модификация алгоритмов построения К и U для
стратифицированного полупространства при наличии внутрен-
них источников не имеет принципиальных отличий от алгорит-
мов, описанных в § 3.
2. Рассмотрим вибрацию тонкой сваи, действие которой на
среду моделируется объемной силой /(г)б(х, у)е~<ш‘, распреде-
ленной вдоль отрезка —/i^z<0 [58]. При вертикальных коле-
баниях f = {0, 0, f} прямое поле ult излучаемое сваей, в силу
(36.12) имеет вид
О
«1 (х, у, г) = J g3 (х, у, z — ?) f (Qdt,. (37.6)
—/г
Для отраженного волнового поля и2 из (37.5), (37.6) следует
о
и2 (аь а2, Z) = — К («1, «2, г) т (аъ а2) Г Gs (ап а2, — ?) f (?) d?.
—h
(37.7).
Введя обозначение J / (?) eia&dt, = F (а3), из (37.7), (37.2) имеем
—/г
G2 (аъ а2, z) = — К(аь а2, г) Т (аь а2) G“ («1, а2),
Оз (а„ а2) = — Т [—7 D (а1( «2, — io,) (~ Ш1) +
2 [ рсо2 щ
+ (— Е--------\d (а,, а2, — io2)'j F tg2) 1 .
\ рст2 р<о2 / а2 J
Асимптотика объемных и рэлеевских волн для и2 получается из
(22.14), (22.15) заменой Q = TG°3.
11 В. А. Бабешко и др.
314
ГЛ. X. ВНУТРЕННИЕ ИСТОЧНИКИ
На рис. 10.1—10.3 даны диаграммы направленности ампли-
туды P-волн, излучаемых сваей при различных соотношениях
длины сваи h к длине волны ХР. Для сравнения на каждом ри-
сунке штриховой линией изображена диаграмма направленности
P-волн для вертикального поверхностного точечного источника,
не зависящая от со. Поверхностный и внутренний источники со-
поставимы в том смысле, что
J f(z)dz—^q{xty)dxdy.
—h £2
Безразмерные характеристики среды следующие: vP= 1,896,
vs = 0,632, р=0,16, сила распределена вдоль [—h, 0] равномер-
но (f (г) — const).
Из анализа рисунков следует, что 1) если для поверхностно-
го источника лепесток диаграммы направлен ровно вниз (мак-
симум при 1р=л;), то для сваи он направлен «вбок»; 2) с увели-
чением отношения h/kp общий уровень излучения колонны па-
дает, число лепестков (локальных максимумов) увеличивается;
3) при /г/Х^О, когда свая вырождается в точечный источник,
расположенный под поверхностью, амплитуды |иР| в направле-
нии вниз (ip=n;) для обоих источников совпадают, но суммар-
ная энергия P-волн для внутреннего источника при одинаковых
с поверхностным источником усилиях существенно больше за
счет максимума |иР| при ip=3n;/4.
3. При рассмотрении внутренних источников интерес пред-
ставляют не только волновые поля, но и прочностные характе-
ристики в зоне действия нагрузки. В качестве примера рассмот-
рим следующую задачу.
Пусть к нижней поверхности упругого слоя, занимающего
объем —oo^gZx. г/^оо, —/г^г^О, приложена ударная нагрузка
az=p(x, y)f(t). Дневная поверхность слоя свободна от напряже-
ний т|2=о=0, нижняя контактирует с полупространством иде-
альной сжимаемой жидкости:
А 1 d2q> А __ .
Дф--------— = 0, —оо^г^ — п, — оогСх, у<С<х>.
с2 дР
На границе z=—h выполняются условия равенства нормаль-
ных составляющих скоростей и давлений:
ди3 дт . _
—- =------2 =— п, —оо^х, г/^оо,
<Уг = — Ро^- +р(х, y)f(t) (р = 0 для (х, </)eQ).
Касательные напряжения на нижней поверхности слоя отсут-
ствуют: tX2 = t1/z=0 при г=—h.
§ 37. ВНУТРЕННИЕ ИСТОЧНИКИ В ПОЛУПРОСТРАНСТВЕ
315
Рис. 10.2
Рис. 10.3
11*
316
ГЛ. X. ВНУТРЕННИЕ ИСТОЧНИКИ
Требуется определить напряжения
7 ди , dw \ о ч ди , . / dv . dw \
, а^ = (Х4-2р) — + % — + —
\ дг дх) дх \ду дг )
внутри слоя.
Перейдем от нестационарной постановки к гармонической:
нестационарные характеристики в силу линейности задачи мо-
гут быть получены суперпозицией гармонических составляющих.
Анализ действия отдельных гармоник показывает, какие напря-
жения вызывают составляющие с различной длиной волны.
Стандартная методика интегральных преобразований для
перемещения слоя и и потенциала <р дает
«(х, у, г) = —Ц- f С U (аь ot2, г) е-йад+ад) rfai da2,
(2л) J J
Г1Г2
<р (х, У, Z) = (2 у j1 j1 Ф (а) g-HaiZ+W+Vo'z^)) ^а2,
Г1Г2
(/1 = — tajA (а) Р (a, г) Q (аъ а2),
U2 — — "ЧА (а) Р (а> г) Q (ai. аг),
U3 = A (a) R (a, z) Q (аь а2), а =/а2 + а|,
ф _ Pi («, —h)Q (а) , А (а) = __________7о ________,
у0Д 4- poto2/?! (а, — h) ’ 7о 4- р0<о2/? (а, — h)
P{a>z)^Pi^Lt
Д (а) Д (а)
Рх (а, г) — уа2о1о2 ch <4 (г + /г) + у2о1а2 ch ст2 (z 4- h) —
— [T2<7ia2 ch <hh ch в2г + уа2а1о2 ch c2h ch cTjZ +
+ а2о2о2 sh Oj/i sh о2г + у3 sh o2/i sh ffj/i],
Ri (a, z) = Oj sh о2 (z + h) 4- a2y2 sh o2 (z 4- h) —
— [a2y2 ch Oj/i sh о2г 4- ch o2/i sh охг +
4- оАс^сТг sh (Tj/i ch o2z 4- y3 sh o2h ch с^г]},
A (a) = 2ц [Яа2^^2 (1 — ch Oj/i ch o2h) 4- (a4*?2*?2 4- V1) sh cjj/i sh oji],
y0 = ]/a2—£2, Rey0>0, Imy0<0, у = a2 — 0,5x2,
Ofe =/a2 — x2, Kk = ~, Re a* >0, Imcr/.<0, 6=1,2,
§ 37. ВНУТРЕННИЕ ИСТОЧНИКИ В ПОЛУПРОСТРАНСТВЕ
317
Со, Ро—скорость звука и плотность жидкости, с„ с2—-скорость Р~
и S-волн в слое, р — его плотность.
Предположим, что область приложения нагрузки Q круговая
радиуса а, закон распределения давления в й описывается вы-
ражением
Р (х, у) =
(р (П J- П . .
——;—-
пагп+2
г а, г = у'х2 -f- у2,
О,
При п—0 — равномерное распределение, модель действия
плоского фронта давления на слой, при «=1—действие сфери-
ческого фронта. Для этой нагрузки Q(a) =Р-2п+1(«+1)1Х
X/n+1(«a)/(aa)"+l. Учитывая связь между тх2, ап и и, в плоско-
сти xOz (*/=0) имеем
Xzx = — f А (а) (“’ г) + R (аг)') Q (a) J1 (ar) a2da,
2л J \ dz /
г
охх =-^~ f Я — (X + 2р) Jo (аг) + 2ц Мд)]
2л .1 Ц ar J
Г
_]_ X -д?г) Jq (аг)у аД (a) Q (a) da.
На рис. 10.4—10.7 приводятся графики изменения напряже-
ний по г в срединной плоскости (г=—/г/2), а на рис. 10.8—10.9
по толщине г на различных расстояниях г. Распределение на-
грузки соответствует значению п=2, для п=0,1 результаты
Рис. 10.4
318
ГЛ. X. ВНУТРЕННИЕ ИСТОЧНИКИ
Рис. 10.6
§ 37. ВНУТРЕННИЕ ИСТОЧНИКИ В ПОЛУПРОСТРАНСТВЕ
319
Рис. 10.8
320
ГЛ. X. ВНУТРЕННИЕ ИСТОЧНИКИ
Рис. 10.9
Рис. 10.10
§ 37. ВНУТРЕННИЕ ИСТОЧНИКИ В ПОЛУПРОСТРАНСТВЕ
321
(тхг, Охх) отличаются незначительно. Линейные размеры отнесе-
ны к радиусу области приложения нагрузки, а характеристики
среды
вклад низкочастотных со-
с1=3,98, с2=1,99, р = 0,917, с0=1,5, р0=1
— к некоторым характерным значениям п0, р0.
На низких частотах |txJ имеет максимум на расстоянии
примерно 0,65а от центра приложения нагрузки, это означает,
что при «длительном» ударе, когда
ставляющих доминирующий, разлом
произойдет примерно в этом месте.
С увеличением частоты величина
максимума уменьшается, а положе-
ние его смещается к центру Q. Начи-
ная с некоторой частоты <о (для
каждого hl а своей), в области по-
является второй локальный макси-
мум, затем третий и т. д. Все они с
ростом частоты уменьшаются, сме-
щаясь от края к центру. В итоге на
высоких частотах в области Q возни-
кает распределение |тХ2| вдоль г с
чередующимися локальными макси-
мумами и минимумами. С удалени-
ем от области приложения нагрузки
на всех частотах происходит моно-
тонное убывание амплитуды перере-
зывающих напряжений.
Зависимость |охх| от г для раз-
личных z имеет осциллирующий ха-
рактер, который объясняется перио-
дическим изменением наклона рас-
пределения по г (рис. 10.8, 10.9).
Под действием нагрузки в слое
возбуждаются упругие волны рэ-
леевского типа, их дисперсионные характеристики изображены
на рис. 10.10.
Асимптотическое представление акустического поля в жид-
кости строится методом стационарной фазы и имеет вид
р ф) = eikR + о (/Г2),
R
/? = y(2 + /i)2 + r2-^oo, ф>у,
, . X . W2 COS ф « ,, . . . , . G)
а (ф) = tp0 —---- Ф (k sin ф) k, k = —
2л с0
dm
р — ри-^- — поле звукового давления.
322 гл. X. ВНУТРЕННИЕ источники
Для акустического полупространства со свободной поверх-
ностью диаграмма направленности имеет каплеобразную форму
с максимумом в направлении строго вниз. Наличие упругого
слоя приводит к появлению острого бокового лепестка
(рис. 10.11), возникающего в результате интерференции волн,
пришедших от различных участков верхней и нижней поверх-
ности слоя. Заметим, что угол направленности дополнительного
лепестка не меняется с изменением толщины h. Для больших h
возрастает частота <о0, начиная с которой появляются дополни-
тельные лепестки. С увеличением со направленность также
практически не меняется, но число лепестков возрастает и меня-
ется их максимальное значение.
ГЛАВА XI
ДИНАМИЧЕСКИЕ ЗАДАЧИ ДЛЯ СРЕД
С РЕЛЬЕФНЫМИ ПОВЕРХНОСТЯМИ
В настоящей главе рассматриваются краевые задачи динами-
ческой теории упругости для неограниченных выпуклых областей
с неплоской границей.
Дается метод сведения указанных краевых задач к инте-
гральным уравнениям первого рода, для решения которых мож-
но применять ряд численных методов. В основе метода лежит
идея факторизации функций. В частном случае плоской границы
приходим к интегральным уравнениям для упругого полупро-
странства, которые можно получить другими методами.
§ 38. Интегральные соотношения для полупространства
с выпуклой границей
Рассматривается упругое полупространство с границей, опи-
сываемой уравнением
ф(х4, х2, х3) =0. (38.1)
Считаем, что функция ф(х4, х2, х3) является дважды непрерывно
дифференцируемой, однозначной и допускающей существование
неявной функции
х3=ф0(х1, х2). (38.2)
Принятое упругое полупространство с неплоской границей за-
нимает область
Хз^фо^, х2), |хп|<оо, п=1, 2. (38.3)
В дальнейшем эту область будем обозначать Q, а ее границу —
S. Граница области такова, что внешние нормали к ней не пере-
секаются между собой.
Обозначим 1= {llt 12, 13} внешнюю нормаль к границе S. Счи-
таем, что /3^0 и может обращаться в 0 лишь на бесконечности.
Декартовы перемещения точек в Q обозначим вектором и=
~{и, v, w}, компоненты напряжений будем обозначать o;j.
324
ГЛ. XI. ЗАДАЧИ ДЛЯ СРЕД С РЕЛЬЕФНЫМИ ПОВЕРХНОСТЯМИ
(38.5)
(38.6)
Тогда соотношения линейной упругости даются в форме
=Х06,7 + 2р^/, (38.4)
1 / ди, ди \ „3 ди,
2 \ дх, дх, I дх.
Уравнения линейной упругости, описывающие установивший-
ся закон колебания, имеют вид [86]
Д°а + х2я = 0.
Здесь приняты обозначения
Д° = (X 4- р) grad div + р A == (X + 2р) grad div — р rot rot. (38.7)
x2=pm2—приведенный параметр.
Построим интегральное представление решения задачи, вос-
пользовавшись интегральными соотношениями, существующими
для упругих сред между напряжениями и перемещениями.
Формула Бетти [86] может быть представлена в форме
[ (я Д°т» — т»А°и) dQ = (иТv — vTu) dS. (38.8)
р • s
В этом соотношении вектор-функции и, v — произвольные дваж-
ды непрерывно дифференцируемые. Область Q может быть не-
ограниченной с гладкой границей.
Введем систему векторов
Л1 = {е‘<ах>, 0, 0}, а2 = {0, е1<ах>, 0}, а3 = {0, 0, е‘<ах>}, (38.9)
(ах) — а1х1 + а2х2 + а3х3.
Эти векторы формируют матрицу
е‘<“х>
0
0
О
е‘<ах>
О
0
0
е‘<а*>
(38.10)
Внесем в соотношение (38.8) вместо произвольного вектора
и решение дифференциального уравнения (38.6), а вместо век-
тора v — последовательно векторы ак или, что то же самое,
матрицу V. Тогда соотношение (38.8) порождает не скалярное,
а векторное выражение.
Нетрудно вычислить выражение Д°У, которое имеет вид
А°И = —
(X + |i) а2 4- р.02
(X + р) оф
(X + р.) ау
(X 4- и) оф
(X 4- р.) р2 4- ра2
(X 4- р.) ру
(X 4- ц) ау
(X 4- р) ру
(X 4- и) т2 4- и°2
gi(ax>
оа = а£ + а«4-а« = а2 4-₽2 4- ya, at —а, а2=р, а3=7.
(38.11)
§ 38. ИНТЕГРАЛЬНЫЕ СООТНОШЕНИЯ
325
Обозначив В матрицы справа, a Ьк— векторы, формируемые
строками этой матрицы, можем записать
Д°И = Ве‘<ах>, Aoak==bkel<ax>, Л°и = — х2а. (38.12)
Вычислим теперь векторы Так (Т — оператор напряжений
(1.6)), которые необходимы для преобразования правых частей
соотношения (38.8). Несложные вычисления приводят к фор-
муле
P.O
3
ф2ц У — Is + p-Pm,
дх
s=l s
(38.13)
ти =={C};U,
3
*=i xk
' дип dum \ . z / дир дит \
дхп ) ” '/Ч.ч дхр J '
для т=1, 2, 3 берется соответственно по порядку п=2,
п=1, р = 3; п=1, р=2, ln=coslxn, l2, 13} = {1п}.
Внося в
лучаем
Здесь
Р = 3;
эти соотношения вместо и значения векторов ак, по-
Tak = {
Вектор
обозначать
3
^km =~ I hOLklin “h 4“
s=l
напряжений, действующих на границе S, будем
(38.14)
То={ГА}, (38.15)
Тк—проекции вектора напряжений на направления осей хк со-
ответственно.
Вычисляя вектор Ти на границе S с учетом (38.13) и соотно-
шения
(38.16)
получаем следующее выражение для вектора Ти:
Ти=Т0. (38.17)
Внося соотношения (38.12), (38.14), (38.17) в (38.8) для
каждого вектора ак и вектора и —решения уравнения (38.8),
приходим к соотношению
(Л+х7) х2;
х3) е‘<ах> dQ = jy 2 — Tk
,m=l
3
e£<ax>dS,
k=l
(38.18)
I — единичная матрица третьего порядка.
3
s
3
326
ГЛ. XI. ЗАДАЧИ ДЛЯ СРЕД С РЕЛЬЕФНЫМИ ПОВЕРХНОСТЯМИ
Если разрешить соотношения (38.18) относительно тройного
интеграла в левой части, то получим преобразование Фурье
искомого решения краевой задачи для дифференциального урав-
нения (38.6). Однако оно оказывается зависящим как от значе-
ния вектора перемещений на границе области, так и от значения
вектора напряжений. Поскольку б любой области на границе S
может быть задан согласно постановке задач теории упругости
лишь один из перечисленных векторов, то между компонентами
вектора перемещений и напряжений на границе должны сущест-
вовать определенные зависимости. Их выводу посвящен следую-
щий параграф.
§ 39. Интегральные уравнения для полупространства
с выпуклой границей
В соотношении (38.18) рассмотрим матрицу В+х2/; имеем
В + х2/ = — (X -|- р)
а2 —02
сф
ау
аД ау
Р2 — 02 р?
₽у у2 — 02
(39.1)
Ее определитель D(o, х) после вычислений принимает вид
D (ст, х) = det (В + х2/) = (X 4- ц)2 О2 (02 — о2),
да________________^2 к* — (А, 2р) о2 х2 — pg2
% -f- р к -f- р
Вычисляя обратную матрицу, находим
(В + х2/)"1 =
х2— (Х+ар.) о2+(Х+р.) а2- сф(Хщ.)
=---------- ар(Х+ц) х2- (X+2J1) а*+ (Х+ц.) Р2
D (а, х) , „ ,
' ' ау(Х+ц) Pv(k+U)
av(X+u)
PV(Uu)
х2- (Х+2ц) а2+ (/.+p,)v2
(39.3)
В дальнейшем элементы матрицы (В+х27)~* будем обозна-
чать cfem. Таким образом, имеем
“йПШ) , (х2— (%Ч-2р) a2 + (А, + р) а|]
Ckm — — - , к =5^= Ckk — — - ; .
D (а, х) и (о, х)
(39.4)
Подействовав слева на соотношение (38.18) матрицей (В-Ьх2/)-1,
после вычисления найдем
Up («ь «2, а3) = П J “₽ Вз) ег<“£> dQ =
= И 2 S — cpkTk] eWVdS, р = 1, 2, 3. (39.5)
S k=l т=1
§ 39. ИНТЕГРАЛЬНЫЕ УРАВНЕНИЯ
327
Для вывода интегральных уравнений, связывающих на гра-
нице перемещения ит и напряжения Th, изучим аналитические
свойства функции [/р(а1; а2, а3)- Учитывая геометрию тела, за-
ключаем, что она должна быть аналитически продолжимой по
параметру «3 в верхнюю полуплоскость. Это вытекает из свой-
СТРЯ пбчягттл О ППНСЫРЯРДПЙ НРПЯРРРГТРПМ
- - - - --- - - - а
^з^>ф(х1, Х2) >0.
Для выяснения условия, обеспечивающего аналитическую
продолжимость решения, изучим распределение особенностей в
представлении функций [/р(аь а2, а3). Очевидно, все особенности
этих функций описываются уравнением
£>(а, х)=0. (39.6)
Решая это уравнение, находим следующие корни:
9 2 9 2
= Хь О2 = Х2,
2__ х2 ______ рсо2 2___________ х2 __ рсо2 (39.7)
— — --------, X 2 — .
X + 2|л X + 2р. |х р
Но о2 = «1 + а2 + <4 • Таким образом, особенности функций
Up(at, <Хг, а3) описываются корневыми множествами функций
трех комплексных переменных вида
«1 + «2 + «з — к?, а? +.«2 + аз — Xg. (39.8)
Эти корневые множества представляются аналитическими под-
многообразиями в С3 комплексной размерности, равной двум
[90]. Разрешая уравнения относительно а3, получаем представ-
ления корневых множеств вида
«31 = Xi OCj (Xg, «33 = — «31,
1/ 2 2 2
CC32 — * X2 0*1 - OC32.
Здесь у радикала выбраны такие ветви, что
a3i>0, (ХзаТ^О при Otj =а2=о.
В этом случае при у2 = оц -[- <х2 ->оо имеем
а31^ф|, а32^Пу1>
«зз^ —«34-* —Ф1-
(39.9)
(39.10)
(39.11)
Поскольку область £2 содержит положительную полуось х3^0,
то функции [/Р(аь а2, а3) не должны иметь особенностей по па-
раметру а3 в верхней полуплоскости, т. е. должны быть анали-
тически продолжимыми в область 1ш а3^0. Следовательно, пра-
вая часть в выражении (39.5) должна быть ограниченной при
а3 = а31 и а3 = «32. Для построения вытекающих из этого условия
328
ГЛ. XI. ЗАДАЧИ ДЛЯ СРЕД С РЕЛЬЕФНЫМИ ПОВЕРХНОСТЯМИ
соотношений положим в (39.5)
Cpk = D (о, х) cPk. (39.12)
Тогда для ограниченности £/Р(<хь а2, а3) достаточно потребовать
обращения в нуль при а3=а31 и a3=a32 выражений (39.5), в ко-
торых вместо срк взято с^.
Выполнив указанные подстановки, приходим к соотношениям
вида
3 3
i 2 2 П Um (Bl, В2, Вз) e‘<a|> d-S =
/г=1 m=i S
з
(39.13)
m=l S
[cCjI^oo, j a2 |^oo, a3 = a31=Vrxi — a? — a2;
3 3
Щ 2 2 j f {(a3^“ “Л) “m + “sk (a36km ‘ “^63^)) X
s=i m=i S
xuzn(BUU3)ef<aS>4S =
= И № Ъ, 1з) - “^3 (Bl, в2, Вз)] e^>dS, (39.14)
s
| | oo, | a2oo, Оз = а32 = /х2 — — at &=1,2;
= Фо (?i> £2)-
Здесь lk—функции параметров gt, g2.
Соотношения (39.13), (39.14) являются своеобразной формой
записи интегральных уравнений, связывающих заданные на гра-
нице S тела напряжения Тк и перемещения uw„ Так, если рас-
сматривается краевая задача теории упругости I рода, т. е. при
заданных на границе S напряжениях, то правые части соотноше-
ний (39.13), (39.14)—известные выражения. Из уравнений не-
обходимо найти перемещения ит, стоящие в левых частях. Если
же рассматривается краевая задача теории упругости II рода,
т. е. при заданных на границе S перемещениях, то, наоборот,
левые части соотношений (39.13), (39.14) известны, а определе-
нию подлежат стоящие в правых частях функции Тк(х1} х2, х3).
В случае смешанной задачи теории упругости, когда на одном
множестве S, поверхности S заданы напряжения Тк, а на дру-
гом S2—перемещения Hm(S1US2 = S), соотношения (39.13),
(39.14) представляют собой систему интегральных уравнений,
неизвестные которых расположены и в левой, и в правой частях
в зависимости от того, по какому множеству осуществляется ин-
тегрирование. Важно, что на одном и том же множестве не мо-
гут быть одновременно либо только неизвестные и справа и еле-
§ 39. ИНТЕГРАЛЬНЫЕ УРАВНЕНИЯ
329
ва, либо только известные функции. Допустим, что удалось ре-
шить интегральные уравнения (39.13), (39.14) для перечисленных
выше краевых задач теории упругости. Тогда известными функ-
циями на всей поверхности 5 оказываются как перемещения ит>
так и напряжения Тк. Внесем их в (39.5).
В результате выражение для и„(х,. х,. х») после применения
формул обращения Фурье можно представить в виде
оо
Up(хъ х2, х3) = JJJUp(аь аа, а3) е-‘<ах> da-ida2da3 =
х exp i [tzz (gj — xj + a2 (E2 — x2) + a3 (E3 — X3)] dS dar da2 da3,
(39.15)
Интеграл по параметру а3 легко вычисляется по теории вы-
четов. Действительно, положим х3>0, x.eQ и примем во внима-
ние, что в силу соотношений (39.13), (39.14) функции ит, Тк не
зависят от а3. Тогда параметр а3 оказывается присутствующим
ЛИШЬ В функции D~* (о, х) В Cpk, Xkm-
Функция e~haM> =ехр[—i(a1x1+a2x2+<z3x3)] оказывается при
х3>0 аналитически продолжимой в нижнюю полуплоскость.
Тогда, замыкая контур интегрирования по параметру сс3 в ниж-
ней полуплоскости и применяя вторую лемму Жордана, после
вычисления интегралов по вычетам получим выражение
UP (xlt Х2, X) = f f - f f 2 2 ~~ ср^*] x
n=i "" Uactin’ - J fe=1 m=1
X exp i [«! (^ — xr) + a2 (E2 — x2) + (E3 — x3)] dS dax da2. (39.16)
Здесь функциис^, вместо <х3 содержат один из корней а32„.
Выпишем отдельно выражения для экспоненциальных функ-
ций. Они, очевидно, имеют вид
exp i {(Zj (Ei Xi) -|- <x2 (E2 x2) Vxn <x2 [<p0 (Ei, E2) x3]},
/г=1,2, (39.17)
азап == V— ai cx2 = i V'ctj -|- a2 — xn, ф0 (Ei, E2) 0.
Элемент площади dS, выраженный через переменные Ei, Ег, име-
ет вид
dS = У a (Ei, Ег) dh dl2,
a (Ex, Е2) = 1 + [<4 (Ei, У]2 + [%ь (Ei, Е2)]2. (39Л8)
330
ГЛ. XI. ЗАДАЧИ ДЛЯ СРЕД С РЕЛЬЕФНЫМИ ПОВЕРХНОСТЯМИ
Из соотношения (39.16), (39.17) видно, что решение содержит
волны, уходящие от поверхности S на бесконечность.
Пример 1. Рассмотрим частный случай исследуемой зада-
чи, когда поверхность <p(x4, х2, х3)=0 вырождается в плоскость,
совпадающую с координатной плоскостью х3 = 0. В этом случае
внешняя нормаль к поверхности остается неизменной в любой
точке и имеет компоненты
Л = 0, Z2 = 0, Zs=—1. (39.19)
Кроме того, надо принять £3 = 0 на S, а также равенства
Ь)=0, dS=d%ld&. (39.20)
Внесем значения указанных параметров в интегральные урав-
нения (39.13), (39.14). Тогда в подынтегральных выражениях
члены, стоящие в квадратных и фигурных скобках, оказываются
постоянными, не зависящими от параметров и их можно вы-
нести за знак интегралов.
Введем следующие обозначения:
00
Um (“1, а2) = 51 Um °) е,'<а1МоШ
—оо
(39.21)
оо
П (аь а2) = $ $ Тк |2, 0) d^.
—ОО
Интегральные уравнения (39.13), (39.14) можно переписать
в виде
2рос1а31(7“ +2Иссас£а1С/’ + (Ха2 + 2^ (,’ = i акГк + (а31Т’,
А=1
(39.22
а2С/х° - (а^0 - a/Q,
раза
(а32 — ttx) (71 — aj<x2(7a — 2а1а32(/3 = —— (<x3a7^ — с^Тз).
Эти соотношения полностью совпадают с уравнениями, полу-
чающимися при удовлетворении граничных условий в краевой
задаче об установившихся колебаниях упругого полупростран-
ства. Если на границе задается вектор напряжений Тв, то для
получения перемещений на границе левые части соотношений
(39.22) необходимо разрешить относительно компонент векто-
ра и*.
§ 39. ИНТЕГРАЛЬНЫЕ УРАВНЕНИЯ
331
В матричном виде систему (39.22) можно представить в
форме
LU° = DT°, (39.23)
— V2
а2 j/ — v:
2s + а2
a2 V x.J — v2 s
— at ]/Гх2 — vz 0
—cc,cc2 — 2at Vx2 — v2
9 2 I 2
V — «1 + «2,
«1
D = — 2
и a2
/ x2 — v2
s = 0,5x2 — v2,
a2 V*22-v2
2 2
— at 0
0 — ax
Вычислив определитель матрицы L, находим
det £ = 2ax /xj^o2 [v2 Vxj —o2 /xl —v2 + s2] = Д. (39.24)
Стоящая в скобках функция является известной функцией Рэлея..
Обратная матрица £-1 после вычисления принимает вид
£^ = A-!
2a2a22
2a1a2a|2
2СС ] Ctg-jS
aia2 (2a31a33 — s)
“за — ai
a2a33a22
Ct^O^S
^2^32®
— a31a32v2
(39.25)
Подействовав матрицей L~1 слева на систему (39.23), получим
ULDT. (39.26)
Образовавшаяся в результате перемножения матрица L~lD после
упрощения принимает вид
£XD =
цА
:2a32+2a2a31a32-'a2-a32) s
aia2[a32-2a3ia32 rs]
-aia3«(a3ia33-s)
aiO2[a|2-2a31a32+s]
„2 2 „ 2 22,
“2a32+2a1aMa32-(a1-a32) s
—ОСгО'ЗзСО'З^зг- s)
0*10*32 (0* 31<X 32~S )
0^2(Хз2((Хз10Сз2"“3)
0,5(Хз1<%32^2
(39.27}
ask = V x| — V2.
Нетрудно видеть, что эта матрица совпадает с соответствующей
матрицей Грина для упругого полупространства в задаче теории
упругости первого рода (см. § 2).
Вычислив двойное обращение Фурье от функции С7° в соот-
ветствии с преобразованием (39.21), найдем перемещения точек
на поверхности S.
В случае смешанной задачи теории упругости соотношения
(39.26) служат для вывода традиционных систем интегральных
332
ГЛ. XI. ЗАДАЧИ ДЛЯ СРЕД С РЕЛЬЕФНЫМИ ПОВЕРХНОСТЯМИ
уравнений. Для этого к функциям, входящим в соотношение
(39.26), необходимо применить двойное обратное преобразование
Фурье и справа использовать интегральное представление век-
тор-функции Т° (39.21). В результате получается следующая си-
стема интегральных уравнений, совпадающая с построенными в
147].
U° (х1, х2, 0) = $$ k (Х1 - х2 - У Т g2, 0) d^ d^, (39.28)
оо
t (5i. Ba) = т ga, 0) = J j T° (ab a2yer^M dai da2,
—00
OO
и° (xb xit 0) = J J U° (ab a2) da2>
—oo
oo
A (Xj, x2) = J J rfai da2.
—oo
Область S2—часть границы S, в которой заданными являются
перемещения и неизвестными — напряжения. На ее дополнении
<S, (S1+S2=S) заданы напряжения (нулевые) и неизвестны пе-
ремещения.
Применив к интегральным уравнениям (39;28) вновь двойное
преобразование Фурье, получим их запись в форме (39.22), вы-
текающей из (39.13), (39.14).
Таким образом, уравнения (39.13), (39.14) содержат как
частный случай интегральные уравнения краевых задач теории
упругости об установившихся колебаниях полупространства с
плоской границей для всех случаев постановок — первого рода,
второго рода и смешанных.
Пример 2. Рассмотрим случай поверхности Xi=<po(x1; х2)
с медленно меняющейся кривизной, так что вся поверхность
близка к плоскости. В этом случае для компонент 1к внешней
нормали к поверхности должны быть справедливы соотношения
/,~0, /2~0, /3------1. (39.29)
Тогда систему (39.22) можно рассматривать для этого типа об-
ластей как первое приближение.
Будем считать, что рассматривается краевая задача теории
упругости первого рода о колебании области со слабо искривлен-
ной границей, нормали к которой подчинены условию (39.29).
В качестве приближенного решения интегральных уравнений
(39.13), (39.14) можно взять вектор-функцию £7°, даваемую вы-
ражением (39.26).
Вычислив обращения Фурье от компонент вектор-функций U0,
Т° и внеся их в представления (39.15), получим приближенное
§ 39. ИНТЕГРАЛЬНЫЕ УРАВНЕНИЯ
333
решение краевой динамической задачи для полутела со слабо
искривленной поверхностью. Для построения следующего при-
ближения можно организовать итерационный процесс по сле-
дующей схеме: необходимо из системы (39.13), (39.14) при
13---1 выделить, как главную, систему (39.22), а остав-
шаяся часть б'щет давать мал'цо составляющую, порождающую
оператор с малой нормой (сближения). После этого процесс ите-
рации состоит из обращения главной системы (39.22) и последо-
вательных приближений для уточнения решения.
В качестве конкретного примера рассмотрим случай упругого
шара с очень большим радиусом. Эта ситуация подобна модели-
рованию земной поверхности.
Рассмотрим шар
x2+y2 + z2^R2 (39.30)
и некоторую область на его поверхности. Будем считать, что по-
перечные размеры этой области много меньше радиуса шара.
Осуществим преобразование координат, положив
y = xz, z + R = x3. (39.31)
В результате такого преобразования координат уравнение по-
верхности сферы в окрестности начала х1 = х2 = х3 = 0 можно пред-
ставить в виде
x3 = R~ /Я2 —г2, r2 = xl + xl (39.32)
Приближенно при r/R^l эта функция имеет выражение
. _ xi + х!
3--------------
2 - 2
| л / г \4
4 Я2 \ R }
(39.33)
Заметим, что если принять /? = 6400 км, то второй член для ра-
диуса на поверхности в 4000 км имеет порядок 3% от главного
решения
х? +
= (39.34)
2 А
Точность этого представления растет по мере приближения к
началу координат, а абсолютную погрешность б для значений
+ Х1 R2, x3<R всегда можно вычислить по формуле
в = Я — УR2 — (х? + xl) — (xl + xi) (2RY1. (39.35)
Вычислим значения компонент нормали к поверхности пара-
болы (39.34), аппроксимирующей часть сферы. Очевидно, имеем
334 ГЛ. XI. ЗАДАЧИ ДЛЯ СРЕД С РЕЛЬЕФНЫМИ ПОВЕРХНОСТЯМИ
Ограничиваясь главными членами, приближенно можно принять
4,^-1.
К л
Вычислим элемент поверхности dS. В соответствии с форму-
лой (39.18) имеем
Е2 + Е2
= 1 + (39.37)
А
Таким образом, в рамках принятого приближения
dS = d^dl2. (39.38)
Внесем найденные значения нормали I (39.36) в функции тйт.
Имеем, используя (38.14),
Г £ -
ffezn = i ^ak --1" ~--F liking
A A J
g = k,m=l,2,
Я Я
(39.39)
Т13 --1
— на1 »
т2, = t Ха2 + р.а3 ) >,
\ А /
Т81 —
Т32 — I
— »
T33 = — i (k + 2ц) «з + у («Л1 + 0S2I2).
Выясним, какой поправочный член вносится искривлением по-
верхности по сравнению с плоской границей в решение (39.16).
Прежде всего заметим, что в формуле (39.16) для принятой
поверхности границы (39.34) от формы поверхности зависят
лишь функции тАт, значения которых даются формулами (39.39),.
а также экспоненциальный член (39.17). Надо иметь в виду, что
в зависимости от приближения, на котором остановились при ре-
шении интегральных уравнений (39.13), (39.14), функции ит
также зависят от кривизны. В первом приближении, как отме-
чено выше, функции ит полностью совпадают с перемещениями
для плоской границы.
Возьмем лишь первое приближение ит, не зависящее от кри-
визны. Затем разобьем функции тйт на две составляющие, одна
из которых ikm зависит от кривизны, а вторая т",„ отвечает
плоской границе. Очевидно, имеем
4m=0, k=l, 2; m=l,2; k =£ т, (39.40)
Tji := Т22 —= т13 " tXccj, Т23=—: tXctg»
§ 39. ИНТЕГРАЛЬНЫЕ УРАВНЕНИЯ
335
tai — — Т32 —• ijicti, Т33 — i (X- 2ц) ctg,
. = i кak 4- + 4 + Л1-Ч —-1 >
L i\ 1\ i\ -»
т^ = Й1«з4’ т2з = ^аз4’ тз1 = ^«з^,
-ч *ч
Тз2 = Za3 4 > Т33 = («111 + «2^) •
R R
Одновременно в представлении экспоненциальной функции
(39.17) произведем следующие преобразования. Положим
ехр [— i V%n — «1 — а|ф0 (Bi, Ba)] = 1 + G (аь а2, gx, У, (39.41)
G (ах, «2, Bi, B2) = — 1 + exp [— i/xn — af — o$p0 (gx, У].
В результате указанных преобразований решение задачи (39.16)
можно представить в виде
Up (хх, х2, х3) —Up (xlt х2, х3) + Up (xlt xz, х3). (39.42)
Здесь Up (xi, х2, х3) — решение задачи для области Q с плоской
границей, a dj> (хь х2, Хз)—поправочный член, учитывающий
искривленность поверхности. Его явное представление дается
приводимой ниже формулой, если ввести обозначения
(«1, «а) =»
— [(x^m^m 7\) G («х, 0С2, Bl, В2) 4“ X^,nUm] СХр I (otx^x “Е «2В2) ^В1 ^Ва,
S
(39.43)
2 3
“1 (*х, х„ х„) = 2 JJ gr-i-j £ ТГ, («„ «0 X
rt-1 .„QQ * К-1
х exp i [х3 VХп — af — а* — а1х1 — а.2х2] da^ da3. (39.44)
Формула (39.44) имеет тот же вид, что и соответствующая
формула для упругого полупространства, с одной лишь разницей:
параметр xs не может равняться нулю, он все время положитель-
ный на поверхности, кроме случая, когда рассматривается нача-
ло координат.
Функция Wk(ai, а2) сложным образом зависит от перемеще-
ний, а через них и от напряжений Тк.
Для оценки вклада, вносимого искивлением поверхности об-
ласти в поведение перемещений в дальней зоне, при вычислении
интеграла (39.44) можно по-прежнему пользоваться методом
перевала, используемого и при изучении функции ир (хъ х2, х3)
для полупространства с плоской границей.
336
ГЛ. XI. ЗАДАЧИ для СРЕД С РЕЛЬЕФНЫМИ ПОВЕРХНОСТЯМИ
Пример 3. Рассмотрим случай цилиндра большого ра-
диуса. Уравнение
82x2 + z2=7?2 (39.45)
после замены переменных (39.31) принимает вид
X3 = R — //?2 —е24. (39.46)
При 1 это уравнение можно представить в более про-
стом виде
82Х? Г J 82Х? /Еу, \4
х3 = —L 1+-—+ , (39.47)
2Я L 4 Я2 к Я J J '
или
е2х2
= (39.48)
Используя описанный ранее подход, вычислим компоненты
внешней нормали к поверхности (39.48).
Имеем
. 1е2л. 1 I if е2лс2
/ = p-,0,-- , 0=1/ 14-—г-.
I Я9 0 J V Z?2
Все остальные формулы повторяют полученные в предыдущем
примере.
СПИСОК ЛИТЕРАТУРЫ
1. Аки К-, Ричардс П. Количественная сейсмология. В 2-х т. М.: Мир,
1983.
2. Аккуратов Г. В., Дмитриев В. И. Метод расчета поля установившихся
упругих колебаний в слоистой среде//ЖВМ и МФ.— 1984.— Т. 24, № 2.
3. Александров В. М. К решению некоторых контактных задач теории упру-
гости//ПММ.— 1963.— Т. 27, вып. 5.
4. Александров В. М. Асимптотические методы в контактных задачах тео-
рии упругости//ПММ,-— 1968.— Т. 32, вып. 4.
5. Александров В. М., Бабешко В. А. О давлении на упругое полупро-
странство штампа клиновидной формы в плане//ПММ.— 1972.— Т. 36,
вып. 1.
6. Александров В. М., Чебаков М. И. Смешанные задачи механики сплош-
ных сред, связанные с интегральными преобразованиями Ханкеля и Мел-
лера — Фока//ПММ.— 1972.— Т. 36, вып. 3.
7. Алексеев А. С., Михайленко Б. Г. Решение задачи Лэмба для вертикаль-
но-неоднородного упругого полупространства//Изв. АН СССР. Физика
Земли.— 1976.— № 12.
8. Амензаде Ю. А. Теория упругости,-—М.: Высшая школа, 1976.
9. Андрейкив А. Е. Пространственные задачи теории трещин.— Киев: Наук,
думка, 1982.
10. Арнольд В. И. Обыкновенные дифференциальные уравнения.—М.: Наука,
1971.
11. Бабешко В. А. К теории динамических контактных задач//ДАН СССР.—
1971.—Т. 201, № 3.
12. Бабешко В. А. Асимптотические свойства решений некоторых двумерных
интегральных уравнений//ДАН СССР.— 1972.— Т. 206, № 5.
13. Бабешко В. А. О единственности решения интегральных уравнений дина-
мических контактных задач//ДАН СССР.— 1973—Т. 210, № 6..
14. Бабешко В. А. Новый эффективный метод решения динамических контакт-
ных задач//ДАН СССР,— 1974,—Т. 217, № 4.
15. Бабешко В. А. Метод факторизации в статических и динамических зада-
чах теории упругости//Докторская диссертация.— М.: ИПМ АН СССР,
1974.
16. Бабешко В. А. Новый метод в теории пространственных динамических
контактных задач//ДАН СССР.— 1978.— Т. 242, № 1.
17. Бабешко В. А. Обобщенный метод факторизации в пространственных ди-
намических смешанных задачах теории упругости.— М: Наука, 1984.
18. Бабешко В. А., Глушков Е. В., Глушкова И. В. К проблеме дина-
мических контактных задач в произвольных областях//Изв. АН СССР,
МТТ,— 1978,— № 3.
19. Бабешко В. А., Глушков Е. В., Глушкова Н. В. К расчету динамической
прочности вязкоупругого неоднородного по глубине полупространства при
произвольной форме области контакта//Тез. докл. Всесоюзной науч. конф,
по прочности и пластичности.— Горький, 1978.
338
СПИСОК ЛИТЕРАТУРЫ
20. Бабешко В. А., Глушков Е. В., Глушкова И. В. Об особенностях в угло-
вых точках пространственных штампов в контактных задачах//ДАН
СССР,— 1981.—Т. 257, К» 2.
21. Бабешко В. А., Глушков Е. В., Глушкова Н. В., Зинченко Ж. Ф. Устано-
вившиеся колебания массивных объектов на поверхности упругой сре-
ды.— Ростов-на-Дону: Ростовский гос. ун-т, 1981. Деп. в ВИНИТИ
22.01.82, № 290-82.
22. Бабешко В. А., Глушков Е. В., Глушкова И. В. Расчет энергетического
баланса неоднородного полупространства.— Ростов-на-Дону: Ростовский
гос. ун-т, 1982. Деп. в ВИНИТИ 08.07. 82, № 3630-82.
23. Бабешко В. А., Глушков Е. В., Глушкова Н. В. Численное исследование
распределения энергии поверхностного виброисточника в многослойном,
упругом полупространстве.— Краснодар: Кубанск. гос. ун-т, 1984. Деп.
в ВИНИТИ 31.05.84, № 3545-Деп.
24. Бабешко В. А., Глушков Е. В., Глушкова И. В. О резонансных свойствах
системы штампы — упругий слой.— Краснодар: Кубанск. гос. ун-т,.
1985.—Деп. в ВИНИТИ 04.12.85, № 8329-В.
25. Бабешко В. А., Глушков Е. В., Глушкова Н. В. Выделение особенностей
в угловых точках пространственных штампов в контактных задачах.—
Ростов-на-Дону: Ростовский гос. ун-т, 1980. Деп. в ВИНИТИ 22.12.80,
№ 5410-80.
26. Бабешко В. А., Глушков Е. В.,- Зинченко Ж. Ф. К расчету сейсмического
источника с заданной направленностью излучения//ДАН СССР.— 1982.—
Т. 262, № 4.
27. Бабешко В. А., Зинченко Ж. Ф. К теории направленных сейсмических
антенн//ДАН СССР.— 1980,—Т. 251, № 6.
28. Бабешко В. А., Зинченко Ж. Ф-, Пряхина О. Д., Смирнова А. В. Об одном
новом методе решения нестационарных контактных задач теории упруго-
сти.— Ростов-на-Дону: Ростовский гос. ун-т, 1982. Деп. в ВИНИТИ
22.01.82, № 291-82.
29. Бабешко В. А., Зинченко Ж- Ф., Смирнова А. В. К задаче о набегании волн
нормального давления на штамп//ЖПМ и ТФ.— 1982.— № 2.
30. Бабешко В. А., Селезнева Т. Н., Селезнев М. Г., Соколов В. П. Осесим-
метричная задача об установившихся колебаниях упругого полупростран-
ства, содержащего сильно заглубленную сферическую полость.— Ростов-
на-Дону: Ростовский гос. ун-т, 1981. Деп. в ВИНИТИ 07.01.82, № 293-82.
31. Бабешко В. А., Селезнева Т. Н., Селезнев М. Г., Соколов В. П. Задача об
установившихся колебаниях упругого полупространства со сферической
выемкой.— Ростов-на-Дону: Ростовский гос. ун-т, 1981. Деп. в ВИНИТИ
07.01.82, № 296-82.
32. Бабич В. М., Булдырев В. С. Асимптотический метод в задачах дифрак-
ции коротких волн: Методы эталонных задач—М.: Наука, 1972.
33. Бахвалов Н. С. Численные методы.— М.: Наука, 1975.
34. Бейтмен Г., Эрдейи А. Высшие трансцендентные функции. Т. 2.— М.:
Наука, 1974.
35. Бреховских Л. М. Волны в слоистых средах.— М.: Наука, 1973.
36. Бурлий П. В., Кучеров И. Я. Обратные упругие волны в пластинах.—
Письма в ЖЭ и ТФ,— 1977,— Т. 26.— № 9.
37. Бухгольц И. И. Основной курс теоретической механики. Ч. 2.— М.: Наука,
1969.
38. Векуа И. Н. К вопросу распространения упругих волн в бесконечном слое,
ограниченном двумя параллельными плоскостями.— Тр. Тбил. геофиз.
ин-та.— 1937.— Т. 2.
39. Викторов И. А. Физические основы применения ультразвуковых волн
Рэлея и Лэмба в технике.— М.: Наука, 1966.
40. Владимиров В. С. Обобщенные функции.— М.: Наука, 1979.
41. Владимиров В. С. Уравнения математической физики.— 5-е изд.— М.:
Наука, 1988.
СПИСОК ЛИТЕРАТУРЫ
339
42. Воеводин В. В. Вычислительные основы линейной алгебры,—М.: Наука,
1977.
43. Волевич Л. Р., Панеях Б. П. Некоторые пространства обобщенных функ-
ций и теоремы вложения//УМН.— 1965.— Т. 20, вып. 1 (121).
44. Ворович И. И. Динамические и статистические смешанные задачи для по-
луограниченных тел.— Аннот. докл. IV Всесоюзного съезда по теор. и
прикл. механике.—М., 1972.
т~» тх г г т> _- - __-°-_____„___.4___________А________ - !! тт л т Т
*±U. £)U}JUUU4 tl. Г1. r'CcHjnancriDic свипсюа псидпиридпип
СССР,— 1979,—T. 245, № 5.
46. Ворович И. И., Александров В. М„ Бабешко В. А. Неклассические сме-
шанные задачи теории упругости.— М.: Наука, 1974.
47. Ворович И. И., Бабешко В. А. Динамические смешанные задачи теории
упругости для неклассических областей.— М.: Наука, 1979.
48. Ворович Е. И., Пряхина О. Д., Тукодова О. М. Некоторые динамические
смешанные задачи взаимодействия массивных штампов с полуограничен-
ными средами//Смешанные задачи механики деформируемого тела. Третья
Всесоюзная конф. Тез. докл.— Харьков, 1985.
49. Галин Л. А. Контактные задачи теории упругости,—М.: Гостехиздат, 1953.
50. Гельфанд И. М„ Фомин С. В. Вариационное исчисление.— М.: Наука, 1970.
51. Гельфанд И. М., Шилов Г. Е. Обобщенные функции. Т. 2.— М.: Физмат-
гиз, 1958.
52. Гладской И. Б., Глушков Е. В., Нагорный С. В., Сыромятников П. В. По-
верхностные волны в кристаллах с произвольной анизотропией//Вторая
Всесоюзная конф, по теории упругости. Тез. докл.— Тбилиси: Мецниереба,
1984.
53. Глушков Е. В. Распределение энергии поверхностного источника в неод-
нородном полупространстве//ПММ.— 1983.— Т. 47, № 1.
54. Глушков Е. В. Вибрация системы массивных штампов на линейно-дефор-
мируемом основании//ПММ.— 1985.— Т. 49, № 1.
55. Глушков Е. В., Глушкова Н. В. Плоская задача о колебании штампа на
слое//Изв. СКНЦ ВШ.— 1979,—№ 1.
56. Глушков Е. В., Глушкова Н. В. Расчет энергии упругих волн, возбуждае-
мых поверхностными источниками в стратифицированном полупростран-
стве.— Ростов-на-Дону: Ростовский гос. ун-т, 1981. Деп. в ВИНИТИ
24.12.81, № 5827-81 Деп.
57. Глушков Е. В., Глушкова Н. В., Зинченко В. Ж- Возбуждение волновых
полей массивным штампом.— Ростов-на-Дону: Ростовский гос. ун-т,
1982. Деп. в ВИНИТИ 06.09.82, № 4741-82 Деп.
58. Глушков Е. В., Глушкова Н. В., Тукодова О. М. Расчет волнового поля,
возбуждаемого виброисточником, анкерно сцепленным с грунтом.— Крас-
нодар: Кубанский гос. ун-т, 1983. Деп. в ВИНИТИ 19.04.83, № 2305-83
Деп.
59. Глушков Е. В., Сыромятников П. В. Анализ волновых полей, возбуж-
даемых поверхностным гармоническим источником в анизотропном по-
лупространстве.— Краснодар: Кубанский гос. ун-т, 1985. Деп. в ВИНИТИ
07.08.85, № 5861-85 Деп.
60. Глушков Е. В„ Фурманюк О. С. Построение матрицы Грина упругого
полупространства с кусочно-непрерывной зависимостью свойств от глу-
бины для поверхностного гармонического источника.— Краснодар: Ку-
банский гос. ун-т, 1985. Деп. в ВИНИТИ 18.09.85, № 6723-В.
61. Глушкова Н. В., Зинченко В. Ж- Вибрация системы массивных штампов
на линейном упругом полупространстве//Смешанные задачи механики де-
формируемого тела. Третья Всесоюзная конф. Тез. докл,—Харьков, 1985.
62. Гольдштейн Р. В., Клейн И. С., Эскин Г. И. Вариационно-разностный
метод решения некоторых интегральных и интегродифференциальных
уравнений трехмерных задач теории упругости/Препринт № 33, ИПМ
АН СССР,—М.; 1973.
63. Гохберг И. Ц., Фельдман И. А. Уравнения в свертках и проекционные
методы их решения.— М.: Наука, 1971.
340
СПИСОК ЛИТЕРАТУРЫ
64. Градштейн Н. С., Рыжик Н. М. Таблицы интегралов, сумм, рядов и про-
изведений.— М.: Физматгиз, 1963.
65. Гринченко В. Т., Мелешко В. В. Гармонические колебания и волны в
упругих телах.— Киев: Наук, думка, 1981.
66. Гузь А. Н., Головчан В. Т. Дифракция упругих волн в многосвязных
телах.— Киев: Наук, думка, 1972.
67. Диткин В. А., Прудников А. П. Справочник по операционному исчисле-
нию ?А.' Высшая школа 1965
68. Диткин В. А., Прудников А. П. Интегральные преобразования и опера-
ционое исчисление.— М.: Наука, 1974.
69. Дзядык В. К. Введение в теорию равномерного приближения функций
полиномами.— М.: Наука, 1977.
70. Евграфов М. А. Аналитические функции.— М.: Наука, 1968.
71. Загускин В. Л. Численные методы решения плохо обусловленных за-
дач.— Ростов-на-Дону: Ростовский гос. ун-т, 1976.
72. Зинченко Ж. Ф., Смирнова А. В. Контактные задачи о нестационарных
колебаниях массивного штампа.— Ростов-на-Дону: Ростовский гос. ун-т,
1982. Деп. в ВИНИТИ 19.07.82, № 3745-82 Деп.
73. Ильичев В. А. К построению импульсной переходной функции системы
штамп-полупространство//Изв. АН СССР. МТТ.— 1973.— № 1.
74. Исследование Земли невзрывными сейсмическими источниками.— М.:
Наука, 1981.
75. Канторович Л. В., Акилов Г. П. Функциональный анализ.— М.: Наука,
1977.
76. Касти Дж., Калаба Р. Методы погружения в прикладной математике.—
М.: Мир, 1976.
77. Кейлис-Борок В. И. Интерференционные поверхностные волны.— М.:
Изд-во АН СССР, 1960.
78. Коган С. Я. О сейсмической энергии, возбуждаемой источником, нахо-
дящимся на поверхности//Изв. АН СССР (сер. геофизическая).— 1963.—
№7.
79. Копсон Э. Асимптотические разложения.— М.: Мир, 1966.
80. Коренев Б. Г. Введение в теорию бесселевых функций.— М.: Наука,
1971.
81. Кошляков Н. С., Глинер Э. Б., Смирнов М. М. Уравнения в частных про-
изводных математической физики — М.: Высшая школа, 1970.
82. Красносельский М. А. и др. Приближенное решение операторных урав-
нений.— М.: Наука, 1969.
83. Крейн М. Г. Об одном новом методе решения линейных интегральных
уравнений первого и второго ряда//ДАН СССР.— 1968.— Т. 100.— № 3.
84. Крылов В. И., Бобков В. В., Монастырный П. И. Вычислительные мето-
ды. Т. 2.— М.: Наука, 1977.
85. Крылов В. И., Скобля И. С. Справочная книга по численному обраще-
нию преобразования Лапласа.— Минск: Наука и техника, 1968.
86. Купрадзе В. Д. Методы потенциала в теории упругости.— М.: Физмат-
гиз, 1963,
87. Левшин А. Л. Поверхностные н каналовые сейсмические волны.— М.:
Наука, 1973.
88. Мандельштам Л. И. Лекции по оптике, теории относительности и кван-
товой механике.— М.: Наука, 1972.
89. Маричев О. И. Метод вычисления интегралов от специальных функций:
теория и таблицы формул.— Минск: Наука и техника, 1978.
90. Маркушевич А. И. Теория аналитических функций.— М.: Наука, т. 1,
1967; т. 2, 1968.
91. Марчук Г. И., Агошков В. И. Введение в проекционно-сеточные мето-
ды.— М.: Наука, 1981.
92. Матвеенко В. П. Сингулярность напряжений в вершине трехгранного
СПИСОК ЛИТЕРАТУРЫ
341
угла в упругом теле//Вторая Всесоюзная конф, по теории упругости.
Тез. докл.— Тбилиси: Мецниереба, 1984.
93. Михлин С. П. Вариационные методы в математической физике.— М.:
Наука, 1970.
94. Моисеев Н. Н. Численные методы в теории оптимальных систем.— М.:
Наука, 1971.
95. Молотков Л. А., Смирнова И. С. К вопросу о колебании пачки тонких
слоев межд'7 двумя упругими полупространствами//Вопросы динамики тео-
рии распространения сейсмических волн.— Л., 1971.
96. Муравский Г. Б. Гармонические колебания штампа на полупространстве
при действии силы, приложенной к поверхности полупространства//
Изв. АН СССР, МТТ,— 1969,—№ 6.
97. Мусхелишвили Н. И. Некоторые основные задачи математической теории
упругости.— Л., 1933; 5-е изд.— М., 1966.
98. Никифоров А. Ф., Уваров В. Б. Основы теории специальных функций.—
М.: Наука, 1974.
99. Новицкий В. Теория упругости.— М.: Мир, 1975.
100. Олвер Ф. Введение в асимптотические методы и специальные функции.—
М.: Наука, 1978.
ЮГ. Партон В. 3., Перлин П. И. Интегральные уравнения теории упругости.—
М.: Наука, 1977.
102. Партон В. 3., Перлин П. И. Методы математической теории упругости.—
М.: Наука, 1981.
103. Петрашень Г. И. Распространение упругих волн в слоисто-изотропных
средах, разделенных параллельными плоскостями//Уч. зап. ЛГУ, Л., 1952.
104. Попов Г. Я- Вдавливание полубесконечного штампа в упругое полупро-
странство.— Теоретическая и прикладная математика.— Львов.— 1958,
№ 1.
105. Попов Г. Я- К решению задач механики и математической физики для
слоистых сред//Изв. АН СССР. Механика.— 1978.— № 2.
106. Приварников А. К- Пространственная деформация многослойного осно-
вания//Устойчивость и прочность конструкций.— Днепропетровск: Изд-во
Днепр, ун-та, 1973.
107. Прудников А. П., Брычков Ю. А., Маричев О. И. Интегралы и ряды. Спе-
циальные функции.— М.: Наука, 1983.
108. Развитие теории контактных задач в СССР.— М.: Наука, 1976.
109. Рвачев В. Л., Проценко В. С. Контактные задачи теории упругости для
неклассических областей.— Киев: Наук, думка, 1977.
ПО. Сеймов В. М. Динамические контактные задачи.— Киев: Наук, думка,
1976.
111. Сейсморазведка. Справочник геофизика/Под ред. И. И. Гурвича,
В. П. Номоконова.— М.: Недра, 1981.
112. Сиротин Ю. И., Шаскольская М. П. Основы кристаллофизики.—М.: Нау-
ка, 1979.
113. Слепян Л. И., Яковлев Ю. С. Интегральные преобразования в неста-
ционарных задачах механики.— Л.: Судостроение, 1980.
114. Тихонов А. Н. О решении некорректно поставленных задач и методе ре-
гуляризации//ДАН СССР.— 1963.— Т. 151.— № 3.
115. Тихонов А. Н., Арсенин В. Я- Методы решения некорректных задач.—М.:
Наука, 1979.
116. Тютекин В. В. Нормальные волны твердых слоисто-иеоднородных вол-
новодов//Акустический журнал.— 1984.— Т. 30, вып. 3.
117. Умов Н. А. Избранные сочинения.— М.; Л.: Гостехиздат, 1950.
118. Федорюк М. В. Метод перевала.— М.: Наука, 1977.
119. Федорюк М. В. Обыкновенные дифференциальные уравнения.— М.: Наука,.
1980.
120. Фелсен Л., Маркувиц Н. Излучение и рассеяние волн. Т. 1,— М.: Мир,
1978.
342
СПИСОК ЛИТЕРАТУРЫ
121. Чезари Л. Асимптотическое поведение и устойчивость решений обыкновен-
ных дифференциальных уравнений.— М.: Мир, 1964.
122. Червены В., Фукс К., Мюллер Г., Заградник И. Теоретические сейсмограм-
мы для неоднородных упругих сред//Вопросы динамич. теории распр. сей-
смических волн.— М.; Л.: Наука, 1981.
123. Шевляков Ю. А. Матричные алгоритмы в теории упругости неоднородных
сред.— Киев; Одесса: Вища школа, 1977.
Iz4. Luexiep О. Л. О взаимном влиянии колебаний двух жестких круглых шта:.:
пов на упругом полупространстве при вертикальных, осесимметричных гар-
монических воздействиях//Основания, фундаменты и подземные соору-
жения. Сб. трудов НИИ оснований и подземных сооружений, № 62. М.:
Стройиздат, 1973.
125. Abo-Zena A. Dispersion function computations for unlimited frequency
values.— Geophys. J. Roy. Astron. Soc.— 1979.— V. 58.— P. 91—105.
126. Bazant Z. I. Three-dimensional harmonic near termination or intersection
of gradient singularity lines; a general numerical method.— Int. J. of Eng.
Soc.— 1974.—V. 12, N 3.
127. Benthem J. P. State of stress at the vertex of a quarter infinit crack in
a half-space.— Int. J. Solids and Struct.— 1977.— V. 13, N 5.—P. 479—
492.
128. Chin R. C. Y., Hedstrom G., Thigpen L. Matrix methods in synthetic seis-
mograms.— Geophys. J. Roy. Astron. Soc.— 1984.— V. 77, № 2.— P. 483—
502.
129. Dunkin J. W. Computations of modal solutions in layered elastic media
at high frequencies.— Bull. Seism. Soc. Amer.— 1965.— V. 55.— P. 335—
358.
130. Franssens G. R. Calculation of the elastodynamic Green’s funettion in laye-
red media by means of a modified propagator matrix method.— Geophys.
J. Roy. Astron. Soc.— 1983.— V. 75—P. 669—691.
131. Harkrider D. G. Surface waves in multilayered elastic media 1. Rayleigh and
Love waves from buried sources in a multilayered elastic half-space.—
Bull. Seism. Soc. Amer.—1964.— V. 54.— P. 627—679.
132. Haskell N. A. The dispersion of surface waves on multilayered media.—
Bull. Seism. Soc. Amer.— 1953.— V. 43.— P. 17—34.
133. Gilbert F., Backus G. E. Propagator matrices in elastic and vibration prob-
lems.— Geophysics.— 1965—V. 31.— P. 326—332.
134. Keills-Borok V. I., Neigaus M. G., Shkadinskaya G. V. Applications of the
theory of eigen-functions to the calculations of surface waves velocities.—
Rev. Geoph.— 1965.— V. 3, N 1.
135. Kennet B. N. Reflections rays and reverberations.— Bull. Seism. Soc.
Amer.— 1974.—V. 64,—P. 1685—1696.
136. Kitamura Y., Sakurai S. Dynamic stiffness for rectangular rigid founda-
tions on a semi-infinite elastic medium.— Int. J. Numer. and Meth. Geo-
mech.— 1979,—N 3,— P. 159—171.
137. Knopoff L. A matrix method for elastic waves problems.— Bull. Seism. Soc.
Amer.— 1964,—V. 54.— P. 431—438.
138. Luco J. E., Apsel R. J. On the Green’s functions for a layered half-space.
Part 1.—Bull. Seism. Soc. Amer.— 1983,—V. 73, N 4,—P. 909—951.
139. Parihar K. S., Keer L. M. The singularity at the apex of a Bounded Wedge-
Shaped Stamp.— J. of Appl. Meeh.— 1979.— V. 46.
140. Satd J. Numerical integration of the equation of motion for surface waves
in a medium with arbitrary variation of material constants.— Bull. Seism
Soc. Amer.— 1959.—V. 49.—P. 57—77.
141. Silverberg M. An effecient method for numerical Laplace transform inver-
sion based on error control.— EEE Intern. Conv. Rec.— 1967.— V. 15,
N 5,—P. 117—120.
142. Takeushi H„ Saito M. Seismic surface waves.— Methods of Computational
Physics.— N. Y.: Acad. Press, 1972.
СПИСОК ЛИТЕРАТУРЫ
343
143 Thomson W. Т. Transmission of elastic waves through a stratified me-
dium. — J. Appl. Phys.— 1950.— N 21,— P. 89—93.
144. Tolstoy I., Usdin E. Wave Propagation in Elastic Plates: Low and High
Mode Dispersion.— J. Acoust. Soc. Amer.— 1972,—V. 52, N 3.— P. 935—
943.
145. Woodhouse J. H. Efficient and stable methods for performing seismic cal-
culations in stratified media.— N. Y.: Dziewonski A. M., Boschi E., Else-
,- 1 no 1
146. Wong H. L„ Luco J. E. Dynamic response of rectangular foundaions to
obliquely incident seismic waves.— Earthquake Eng. and Struct. Dyn.—
1978,—V. 6, N 1,—P. 3—16.
147. Исакович M. А. Общая акустика.— M.: Наука, 1973.
148. Кондратьев В. А. Краевые задачи для эллиптических уравнений в обла-
стях с коническими или угловыми точками//Тр. Моск. мат. о-ва.— 1967.—
Т. 16,—С. 209—292.
149. Мазья В. Г., Пламеневский Б. А. О коэффициентах в асимптотике ре-
шений эллиптических краевых задач в областях с коническими точка-
ми/ZMath. Nach — 1977,—Bd. 76,—S. 29—60.
150. Назаров С. А. Введение в асимптотические методы теории упругости.—
' Л.: Изд-во ЛГУ, 1983.
151. Бабешко В. А., Пряхина О. Д. Метод фиктивного поглощения в плоских
динамических задачах//ПММ.— 1980.— Т. 44, вып. 3.
152. Бабешко В. А., Пряхина О. Д. Об одном методе й теории динамических
контактных задач для круглых штампов//Изв. АН СССР. МТТ.— 1981.—
№ 2.
153. Ворович Е. И., Пряхина О. Д., Тукодова О. М. Динамические свойства
упругой полуограниченной среды контактирующей с упругим инерцион-
ным элементом//Изв. АН СССР. МТТ.— 1986.— № 2.
154. Бабешко В. А., Глушков Е. В., Глушкова Н. В., Зинченко Ж. Ф. Ре-
зонансные явления в многослойном полупространстве//ДАН СССР.—
1986,—Т. 286, № 4.
155. Бабешко В. А., Глушков Е. В., Глушкова Н. В. Анализ волновых полей,
возбуждаемых в упругом стратифицированном полупространстве, по-
верхностными источниками//Акуст. журн.— 1986.— Т. 32, вып. 3.
156. Бабешко В. А., Глушков Е. В., Глушкова Н. В. Методы построения:
матрицы Грина стратифицированного упругого полупространства//ЖВМ
и МФ,— 1987.—Т. 27, № 1.
157. Зилъберглей! А. С., Нуллер Б. М. Обобщенная ортогональность однород-
ных решений в динамических задачах теории упругости//ДАН СССР.—
1977,— Т. 234, № 2.
158. Бабешко В. А. Некоторые соотношения для решения динамических сме-
шанных задач на всей частотной оси//ДАН СССР.— Т. 295, № 2.
159. Бабешко В. А. Высокочастотный резонанс штампов.— Краснодар: Ку-
банский Гос. ун-т, 1987. Деп. в ВИНИТИ 18.08.87, № 6021—87.
160. Белоконь А. В., Наседкин А. В. Волны в неоднородном по толщине слое,,
вызванные движущимися нагрузками//ПММ.— 1987.— Т. 51, вып. 2.
161. Глушков Е. В., Глушкова Н. В. Концентрация напряжений в окрестности
угловой точки клиновидного движущегося штампа,—Краснодар: Кубан-
ский гос. ун-т, 1988. Деп. в ВИНИТИ 25.08.88, № 291-88.
Научное издание
БАБЕШКО Владимир Андреевич,
ГЛУШКОВ Евгений Викторович,
ЗИНЧЕНКО Жанн Федорович
ДИНАМИКА НЕОДНОРОДНЫХ
ЛИНЕЙНО-УПРУГИХ СРЕД
Заведующий редакцией Л. А. Русаков
Редактор В. А. Романов
Художественный редактор Т. Н. Кольченко
Технический редактор И. Ш. Аксельрод
Корректоры О. А. Бутусова, И. Я. Кришталь
ИБ № 32707
Сдано в набор'04.10.88. Подписано к печати 13.04.89
Формат 60X90/1S. Бумага книжно-журнальная.
Гарнитура литературная. Печать высокая. Усл.
печ. л. 21,5. Усл. кр.-отт. 21,5. Уч.-нзд. л. 21,74
Тираж 2000 экз. Заказ № 4725. Цена 4 р. 70 к.
Ордена Трудового Красного Знамени
издательство «Наука»
Главная редакция
физико-математической литературы
117071 Москва В-71, Ленинский проспект, 15
2-я типография издательства «Наука»,
121099, Москва, Шубинскнй пер., 6