/







































































Текст
И.И.ХОЛМАКОВ
ДИНАМИКА
АВИАЦИОННЫХ
ДВИГАТЕЛЕЙ
ОВОРОНГИЭ'193в
f,4'i '4
И. И. ХОЛМАНОВ
да ».
сисл s "ог
о г
Л - 724
ДИНАМИКА
АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
Под редакцией проф. В. В. ДОБРОВОЛЬСКОГО
И
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО ОБОРОННОЙ ПРОМЫШЛЕННОСТИ
МОСКВА 1938 ЛЕНИНГРАД
В книге рассмотрены вопросы динамики авиационных
двигателей: аналитический расчет кинематики прицепного»
механизма и определение его сил инерции, вопросы уравно-
вешивания и определение крутящего момента двигателя.
Особенно подробно н оригинально освещены вопросы уравно_
вешивания; общая теория широко иллюстрируется разбором
конкретных случаев уравновешивания различных типов авиа-
ционных двигателей.
Книга представляет большой интерес для авиационных,
инженеров и может служить учебным пособием для студен-
тов авиамоторостронтельной специальности.
ЙОВЕРГНП Г "3 г
И. И. ХОЛМ А КОВ
Иван Иванович Холмаков родился в 1903 г. в крестьян-
ской семье. Окончив начальную школу, он поступил в Ко-
миссаровское техническое училище, после Октябрьской
революции преобразованное сначала в Ломоносовский тех-
никум, затем в Ломоносовский институт.
Сильная тяга к образованию побудила его поступить
одновременно на физико-математический факультет Мос-
1»
з
ковского университета. Учиться в двух учебных заведениях
было трудно, тем более что И. И. приходилось одновре-
менно зарабатывать на жизнь. И. И. не отступил перед
трудностями.— он окончил и Ломоносовский институт
(в 1929 г.) и Университет (в 1930 г.). С этого времени
начинается его педагогическая и научная работа.
И. И. работал научным сотрудником в ЦИАМ, препо-
давателем в Московском авиационном институте, Военной
воздушной академии, в Рыбинском авиационном институте*
затея в Московском станко-инструментальном инсти-
туте, сначала по теории механизмов (по прикладной ме-
ханике), в последнее время — по моторостроению. Сам
прошедший тяжелую школу жизни, он чутко относился
к рабочей молодежи, обучающейся в высшей школе, и поль-
зовался любовью и уважением студентов. В 1934 г. И. И.
защитил диссертацию на степень кандидата технических
наук и получил звание доцента. В издании Военной воз-
душной академии выпущено его учебное пособие по кине-
матике и динамике кривошипных механизмов авиационных
моторов.
В последнее время И. И. работал над вопросами дина-
мики моторов (уравновешивание и крутильные колебания),
подготовил несколько журнальных статей по этим вопро-
сам и настоящий труд. Все эти работы носят на себе
печать оригинальности и незаурядности. Но самому И. И.
не довелось увидеть их в печати. 27 мая 1937 г. несчаст-
ный случай оборвал эту многообещающую жизнь.
Все, кто знал И. И. лично, навсегда запомнят его не-
утолимую жажду знания, его прямой и открытый харак-
тер, требовательность к себе, высокую честность и добро-
совестность мысли, которая является неотъемлемым
качеством истинного работника науки.
Кафедра конструкции авиационных двигателей
МАИ им. С. Орджоникидзе
Кафедра~ теории механизмов Военной возду-
шной ордена Ленина Академии РККА
им. Н. Е. Жуковского
ГЛАВА I
ОСНОВНЫЕ СВЕДЕНИЯ ИЗ КИНЕМАТИКИ ПРИЦЕПНОГО
МЕХАНИЗМА
§ 1. Обозначения (фиг. 1):
/?—радиус кривошипа;
L — длина I лавного шатуна;
г—радиус прицепа;
I — длина прицепного шатуна;
Фиг. 1, Обозначения для обыкновенного кривошипного механизма.
«— угол поворота кривошипа, отсчитываемый в сторону
вращения вала от положения, соответствующего верхней
мертвой точке (в. м. т.) главного поршня;
«г — угол, образованный кривошипом с осью прицепного ци-
линдра, отсчитываемый в сторону вращения кривошипа;
5
3— угол отклонения главного шатуна от оси главного
цилиндра, считаемый положительным при отклонении
шатуна в сторону вращения коленчатого вала;
Зг— угол отклонения прицепного шатуна от оси прицепного
цилиндра со знаком по правилу для угла 3;
7 — угол развала цилиндров;
— угол прицепа;
о—угол, образованный радиусом прицепа с осью прицепного
цилиндра.
Согласно принятому отсчету имеем:
«г = « —Ъ (1)
9 = ₽-Н“ li
или, обозначая — у через <Ь:
? = ₽-«. (2)
§ 2. Угол отклонения прицепного шатуна. Проектируя за-
мкнутый контур OACDO на направление, перпендикулярное к OD,
получим:
/? sin аг— г sin а— Z sin 3z = 0,
откуда
sin 3/ = 4 sin — 7 sin (3 — .
Из кинематики обыкновенного кривошипно-шатунного механизма
известно:
sin р = Л Sin а — X sin (az 4~ у);
cos? = Vl — X2sin2a = (l — ±Х2—-Д-Х*)4-
~Ь 6тТк *4 cos 2а — cos 4а,
' \4 1 16 / 64 ’
если ограничиться членами, содержащими X4. Поэтому
sin = 7- sin az-~ cos^ sin {3 —sin Ф cos 3 =
= 7(1 —7ха —-^>'4)sin^ + (T~k7 cos Ф cos 7^ sin az—
— X ~ sin у cos cos az -{- 7(7 +1K J'4) sin * cos 2 (a« “T T) —
— fa V 7 sin 4- cos 4 (az + 7).
Пренебрегая последним членом и соединяя второй и третий
в один, можно эту формулу переписать так:
sin Зг = Фо 4- Ф, sin (az — у) 4- Ф2 cos 2 (az 4- г),
(3)
6
где
Фо=т(1-4^-4>л)51п'!';
Ф1 — у YL2 -ф-r2 cos2 — 2rL costycos 7;
, r cos ф sin y
® '/• L — r cos 4 cos 7 ’
^=7(7 K8+tVm) sin*'
При менее точных подсчетах можно принять:
sin^ = y sin^-ф-Ф, sin (аг —'}).
Для cos pz получим:
cos pz = V 1 — sin2 £z да 1 — у sin2 pz — sin4 pz.
Подставляй значение sin р{ и отбрасывая все члены, содержащие
Ф( в степени выше 4-й и sin в степени выше 1-й, получаем:
cosp,-l—|-Ф12-^Ф14-[ФоФ1 + уФЛ-твш^-4ф,Ф2] sin(«r-z) +
+ [| ф1г+ф/] cos 2 <а' — /-)+
+ [| Ф(" у sin 6 — 1 ФйФ2] sin 3 (аг — у) — Ф/ cos 4 (аг — у).
§ 3. Угловая скорость и угловое ускорение прицепного
шатуна. Диференцируя формулу (3) и полагая со$&да1, найдем
угловую скорость прицепного шатуна:
o>i — ~~ = ®Ф! cos (az — у) — 2<«Фа sin 2 (а, -ф- 7). (4)
Диференцируя формулу (4), получим угловое ускорение:
ez = = — «Зф, sin (az — х) — 4<в2Фа COS 2 (az ф- 7). (5>
§ 4. Перемещение прицепного поршня. Проектируя ломаную
OACD на ось цилиндра OD, найдем (фиг. 2):
OD — Sl = R cos az -ф-г cos ®-ф-1 cospz;
подставляя у = $ — ф, sin?, cosp и cospz из предыдущих пара-
графов, найдем:
St == Со — at cos az — b t sin az — a3 cos 2az — b2 sin 2az -ф-
-ф- Cs sin 3 (a, — 7)— at CPS 4«г — sin (6)
7
где
Со=(1-тх2~4х7гсо8-+/(1'~тф12--й-ф14); ‘ '
at = f I sin / £ф0Ф1 ~Ь •§• Ф? -7 sin — у Ф]Ф2 4* (R-^-lr sin у sin 7)
[ 1л 1
Фо Ф1 + 8~ ф18 -/-’sin I — 2 $1Ф2 — sin’tcos т;
а2 =— l/cos 2/. [7 Ф^-j-Ф/|-}- ^-X2rcos2y costy};
b^ = — l sin 2/ [4 Фх2 4- -jg Ф/] 4- у X2r sin 2? cos <]r,
^-/[^t^sini—Аф.фф
a4 — -i- [/Ф14 cos 4z 4~ cos cos 4-yJ;
bi = [/Ф/ sin 4/— XV cos <J> sin 4y].
Фиг. 2. К определению перемещения поршня.
§ 5. Скорость и ускорение прицепного 'поршня. Диферен-
цируя по t уравнение (6) и считая скорость поршня положи-
тельной по направлению к центру вала, найдем:
Vd — sin az 4- b,«> cos az — 2a2<« sin 2az 4-
4“ 2&2<b cos 2az -— 3C;i« cos 3 (7 — 7) — 4a4« sin 4«z 4- 4Z>4<d cos 4az; (7)
dVT>
JD — ~ — tijW2 cos az — Ajio2 sin az — 4a2<»2 cos 2oz — 4£2w2 sin 2az4-
9C3w2 sin 3(az — /) — 16g4<u2 cos 4az — 16Z>4<»2 sin 4az. (8)
S
§ 6. Определение мертвых точек прицепного механизма и
величины хода поршня. Полагая в формуле (7) скорость Кл = 0,
найдем углы alf соответствующие мертвым точкам прицепного
механизма. Ограничиваясь только первыми четырьмя членами,
получим:
— at sin at bx cos аг — 2at sin 2аг -f- 2b2 cos 2az == 0.
После подстановки
cos 2az = 1 — 2 sin2 at
это уравнение можно написать так:
(bt — 4a2 sin az) cos az — 4b2 sin2 az -ф ax sin az — 2b2;
после возведения в квадрат и замены
cos2 az — 1 — sin2 аг
получаем уравнение 4-й степени:
16С22 sin4 az -ф 8 (a2bl -ф ахЬ2) sin3 az -ф
+ (Cj2J- 16C22)sin2az —(4аД —8a2£j)sin аг-ф(4^22 — bf) =0;
Здесь С12 = а12-ф^12 и C22 = а22-фА22.
Приближенно корни этого уравнения можно получить, если
пренебречь первыми двумя членами ввиду близости угла at
к нулю или 180° и, следовательно, малости его синуса. Тогда
получается квадратное уравнение, решаемое обычным способом.
Потерянные два корня оказываются большими единицы, а по-
тому не имеют реального значения.
Подставив найденные значения угла аг в формулу (6), найдем
расстояния мертвых точек от центра. Разность их дает ход при-
цепного поршня:
S == — a, (cos а/ — cos а/) — br (sin а/ — sin а/) —
— а2 (cos 2а/ — cos 2а/) — b2 (sin 2а/ — sin 2а/).
Здесь через а/ и а/ обозначены углы, соответствующие мертвым
положениям поршня.
Полагая
COS а/ «^1 — у sin2 а/ = -ф у cos 2а/,
sin 2а/ йй 2 sin а/
и аналогично для а/, получаем:
5 = ф- (cos 2а/ — cos 2а/) — (bt -ф 2b2) (sin а/ — sin a/). (9)
§ 7. Определение наибольшего ускорения прицепного
поршня. Наибольшее ускорение поршня будет при угле «1г удо-
влетворяющем условию — Ограничившись в формуле (8.)
9
первыми четырьмя членами, получим:
= алы~ sin а, — cos ar -f- 8ла<о3 sin 2а, — 862шв cos 2а, = О
пли
at sin а, — Ьх cos а, 8а2 sin 2а, — 8Ь2 cos 2а, — 0.
Делая преобразования, аналогичные указанным в предыдущем
параграфе, придем к уравнению 4-й степени. Два корня этого
уравнения найдем, взяв углы а, близкими к углам для мертвых
точек; остальные два корня найдем из квадратного уравнения,
которое получается после выделения найденных двух корней
из нашего уравнения 4-й степени ’.
§ 8. Кинематическое проектирование прицепного механизма.
Выведенными формулами можно воспользоваться для определе-
ния размеров г, I и 7,. Будем ограничиваться членами, содержа-
щими X в степени не выше 4-й, Ф,—также не выше 4-й и sin^ —
не выше 2-й. Тогда выражения для коэфициентов Фурье и по-
стоянной Со, приведенные в § 4, примут следующий вид:
Со = г cos Ф (1 -1 Х2)+ Z-1/Ф.в,
а, = — [ФоФ,/ sin у -J- rX sin ф sin 7 -f- /?],
где Фо = 7- sin <р,
’ /Ф^ cos 2/ 4- ~ X2r cos 2? cos ф |.
Так как при проектировании прицепного механизма неизвестны
размеры г, Z и угол 7,, а размеры главного механизма и угол
развала 7 известны, то эти выражения неудобны для определе-
ния неизвестных размеров, потому что они не выражены прямо
через г,/и 7,, а содержат функции этих неизвестных cos ty, sin 4,
1 Если в уравнении 4-й степени
х*4-рх3 4 4-rx 4 5 = о
известны 2 корня xt и х.>, то остальные 2 корня найдутся из квадратного
уравнения
х'1 4 (р 4 •*! 4 *»)* * * * * * х + ' = о;
это следует из того, что сумма всех четырех корней
xi + хз 4 хз + xt = —р,
а произведение их
поэтому коэфициент при х, равный —<х84-х4), и будет (р 4- х, 4 хз), а сво"
бедный член, равный х3х4, будет —-—.
10
Ф sin у cos 2у. Преобразуем только коэфициенты Со, а, и а2.
Выразим функции cos<p, sin у, cos2y и Ф! через г, I и sin$.
Так как угол мал, то для него
cos — |/1— sin24» = 1 — у sin2 ф.
Коэфициенты и а2 можно написать в виде, более удобном
для определения размеров, если выразить Ф^пу и Ф(2со5 2у
в функции г, I и sin4*. Согласно формулам § 2 для выражения
Ф^шу имеем:
Ф, sin у — у X cos ф sin у.
Здесь cos<p можно принять равным единице, так как, подставляя
значение costy, мы получим разницу в вычислениях меньше X4.
Значит, можно принять:
Ф, sin у те у X sin 7.
Подставляя полученное значение произведения Ф1sin у в выра-
жение для получаем:
— a,=/?-[-rXsin^sinY^l 4-у^). (10)
Теперь найдем <I>12cos2y:
Ф,2 sin2 у = уу — -у Ф(2 cos 2у,
откуда получим:
Ф^2 cos 2у — Ф,2 — 2Ф,2 sin2 у — Ф,2—2Ха cos2 $ sin2 -у те
те Ф,2 — 2Х2 у sin2 7 = Ф,2 — X2 - J (1 — cos 27).
Теперь, подставив в выражение для аа, получим:
—/Ф(2 —4(4~ 4cos2\) + zXrcos2T (11)
В последнем члене этого равенства принято со5<1»=1. Нако-
нец, для Со получим:
Со = г — у X2r+ Фг2 — -у г sin2(12)
Если положить:
11
то для большинства прицепных кривошипных механизмов ошибка
в ходе поршня будет около 0,1 мм. У механизмов с большими
углами 7 развала цилиндров эта ошибка будет доходить до 1 мм.
Определение положения в. м. т. по уравнению (13) для опре-
деления размеров г, I и 7Z дает вполне удовлетворительную точ-
ность.
, Уравнения (13) назовем уравнениями выбора разме-
ров г, I и 7г механизма. Воспользовавшись формулами (10),
(11) и (12), напишем уравнения выбора размеров в раскрытом
виде.
Введем новые обозначения:
В = — т+т cos 21>
р — X sin 7,
1 (14)
и = — ах — R — хода —
Q = C(j а2~^в. м. т. + °1-
Тогда наши уравнения примут вид:
Q = /+r(l+B) + B£_|rsin4 j
( Г\ I <15>
гг = rp sin 1 4—-у I
Для = 7, т. e. при ty = 0, вместо двух уравнений выбора
размеров будет только одно:
Q = /+r(l+5)H-£4, С15')
так как — ax = R и 5>вд = 2/?.
а) Для = 7 имеем:
^SB^T+ax = R-{-L-R = L,
поэтому
/2 _j_ fl (1 4- В) 4- Br* — Ll = Q. (16)
Это и будет уравнением выбора размеров г, / и 7г
в раскрытом виде для случая 7г = 7- Это уравнение —
квадратное как относительно г, так и относительно I. Из ура-
внения (16) получим:
/ = -|['-(l + 5)-z]-/’ |[г(1+В)_£]2_г25, (17)
г = _ 1 /<1 + В) , Г 17/(1 +В) 12 7Г=Т7
2 В V в J В~-
12
Перед корнем надо брать только один знак, так кай из двух
корней квадратного уравнения только один имеет физичгский
смысл.
Ь) Для случая из уравнений (15) получаем следующие
уравнения выбора размеров в раскрытом виде:
В + rl (1 4- В) + В/'2 — ± rl sin2 — QI = О,
Теперь выразим размеры г и I через sin ф и известные коэфи-
циенты В, р, Q и и.
Из второго уравнения (15) имеем:
I (и — гр sin •}) — r'2p sin ф,
откуда
__ /-psin'l/ и 1 и—гр sin ф
и — гр sin '}> I r-p sin ф
Подставив эти выражения в первое уравнение (15), получим:
4- Г [ (1 + В) -1 sin2 d + - Q=о,
и — гр Sin'll 1 |4 7 % 7J psin<b
или
r2p sin 6 , /, 1 . „, X , / Ви t п
----1---гН—НН 1 —--TT-Sin2^ 4~( - . — Q =0,
и — гр sin '!i 1 \ 2 / 1 \р siri'li
или
(— 7 Р sin8 ф) 4- г (и cos ф — Ви 4- Qp sin ф) 4- — Qu ) = 0,
откуда •
__и cos 'li — Ви 4- Qp sin 'р (
Г p sin3 ф
, Г Г neps'}! — В» -H gp sin 'Я- 2[Bu2—guj
V L pstn3'}» J ' pasin4'li " ' '
Зная г и sinф, можем найти l из уравнения (19), которое
можно переписать так:
Z24-/{r[14-B — -J-sin2^] — Q|4-Br2 = °,
откуда
13
§ 9. Угловое перемещение, скорость и ускорение шатуна
дезаксиального механизма. Обозначим смещение оси вала от
оси цилиндра через Ь. За положительное направление вращения
будем считать вращение вала от вертикали (параллельной оси
цилиндра) в сторону дезаксажа Ь.
Фиг. 3. Дезаксиальный
механизм.
Проектируя треугольник ОАВ (фиг. 3)
на перпендикуляр к оси цилиндра, получаем:
7? sin а — b -f- L sin ,9.
Обозначим:
. ь
k— L-
Тогда будем иметь:
sin ,9 = — Л-f-X sin а.
Угловое отклонение р шатуна от оси
цилиндра найдется таким путем:
fia^sin? 4--isins19 = —A-j-Xsina-f-
-ф ( — k -f- X sin a)3 = — k 4- X sin a -f-
4- -g- [X3 sin a — —- sin 3a) —
— 3X2A (y cos 2a ) 4- 3Z:2X sin a — Л::| ;
.9=-(a4-tzsa4-|^)4-
4~(^4-y хз4--уА:2х) sin a-|-
4- 4- Х2/г cos 2a — ~ X3 sin 3a ... =
' 4 24
— Ф04~Ф1 sin «4~-y X2A COS 2a — Xssin 3a...,
где
ф0 = -(а4-4^4-|^)»
ф1=х+уХ3 4-2#!х.
Диференцируя, получим угловую скорость шатуна:
<в = Ф <в cos a-/ X2A<»sin2a—-|-X:!<»cos3a (22)
Ш J О z
и угловое ускорение шатуна:
Еш = — Ф^2 sin a — X2A<i>2 cos 2a 4~ Х3ш2 sin За. (23)
14
Если пренебречь членами, содержащими А2, то можно полу-
чить:
р — — k -f- X sin а, |
<ош = Хо> cos я, } (24)
еш — — Х<в2 sin я. J
В этом случае формулы скорости и ускорения шатуна деза-
кснального механизма такие же, как и для шатуна главного
механизма.
Формула для определения cosp. По строке Тейлора,,
подобно §2 гл. 1, имеем:
cosP=l-4 + ^?4; <1Г>
р2=ф02 4- (4—4 c°s 2а)+2фоф1 sin я-j-
-ф у Ф0Х2А cos 2а—Фохз sin Зя 4-
4~у ‘I’jX2^ (у sin3a — у sin a) — ^ФЛ3 (4 cos 2,1 — 4 cos 4a) —
= Ф02 4-1Ф,2 4- (2Ф0Ф! — ± ФхХ2а) sin я 4-
+(4 ф12 + 4 ~ h М cos 2a+
4- ( — Д Ф0Х3 4~ 4 ф/2^) sin Зя 4- 4? Ф]А3 cos 4a;
р4 вычислим, пренебрегая всеми членами, меньшими X2:
р4 » ^Ф02 4- i- Ф,2 4~ 2Ф0Ф] sin a— 4 Ф,2 cos 2ap =
= [фо4 + 4 ф14 + Зфо2ф12] + [4фо3ф1 + Зф1фо] sin “ +
4- | — ЗФ’^Ф,2 — ~ Ф/j cos 2a — Ф0Ф/ sin Зя 4- у Ф/ cos 4a.
Подставив в уравнение (11')> получим:
со8р = 1-1ф02-4ф124-^фо44-44ф14 + тфойф12+
4- [фоФ, (4 ф02 4- 4 ф.2 - 1) - 4 ф!^] sin a +
+ [т фг - 4 ф</2*+й ф«хз - 4 w - i ф‘4]cos 2a+
+[4 фо)л—4 ф1Х2А—й Ф«Ф1Я]sin 3a+[ife ф»4~^ Ф1ХЗ]cos 4a-(25)
Приближенно ограничившись двумя гармониками, получим:,
cos р = 1 — 4 —4 Х2 — АХ sin а 4” 4 Х2 cos 2“' (25')
15
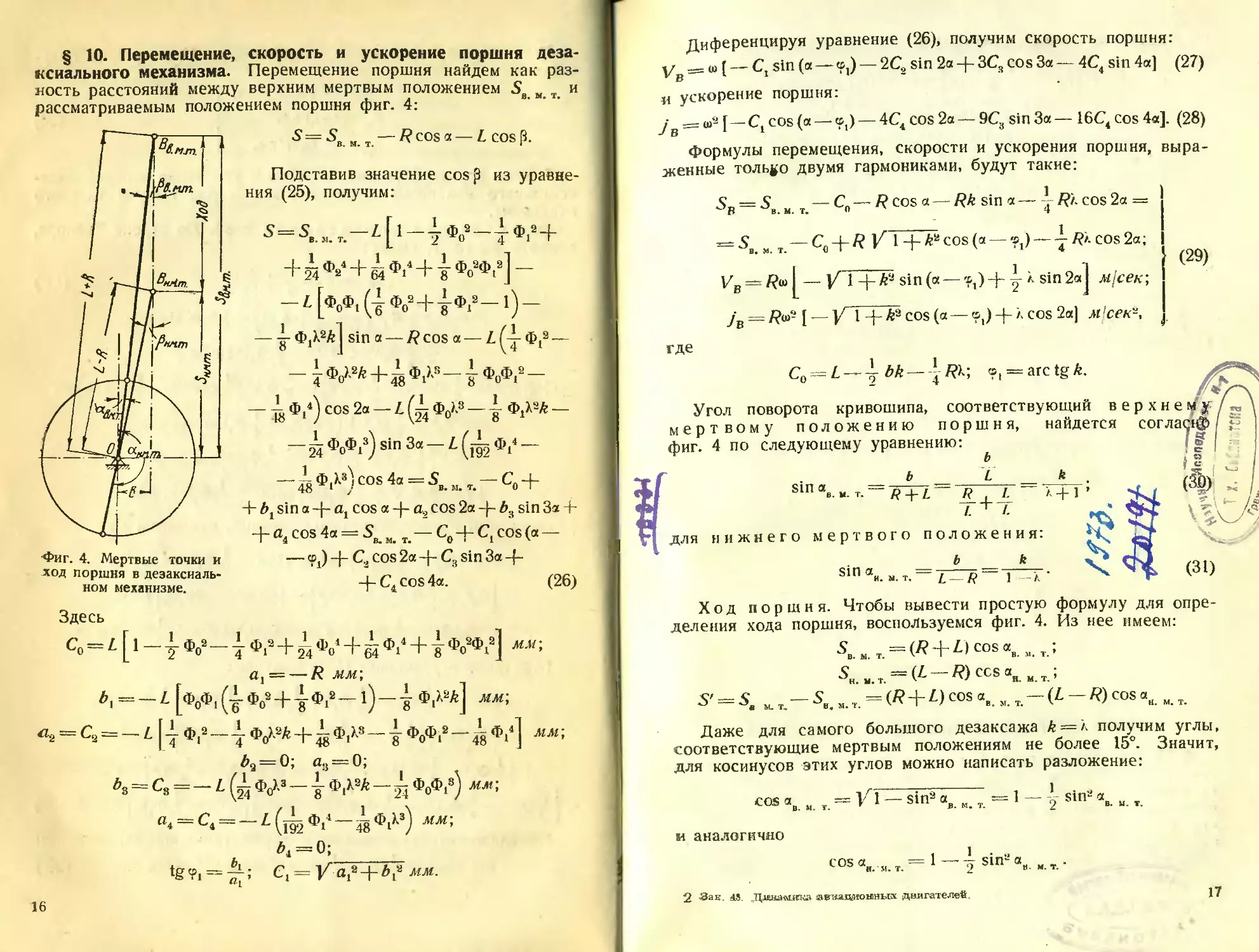
§ 10. Перемещение, скорость и ускорение поршня деза-
аксиального механизма. Перемещение поршня найдем как раз-
ность расстояний между верхним мертвым положением м т и
рассматриваемым положением поршня фиг. 4:
Фиг. 4. Мертвые точки и
ход поршня в дезаксиаль-
ном механизме.
S = -$в м т — 7? cos а — L cos |3.
Подставив значение cosp из уравне-
ния (25), получим:
5 = \5,т-41-7фо2~Тф12 +
+йф«4+яф14+1фо2фг]-
-д[фоф,(4фо2Н-|ф?-1)-
— у Ф(к2& | sin а — /? COS а — L Ф(2 —
-|ф0^+^фЛ5-|ф0Фг-
- ~ Ф,<) cos 2а - L (1 Фо)Л -1 Ф^к -
~ й Фоф13) sin 3« — L (j$2 ф/ —
— 4§ Ф<ХЗ) C0S 4а = 5». и. т. ~ Со +
+ bY sin а COS а а2 cos 2а bs sin За +
4- Д, cos 4а = S „ _ — С. 4- С. cos (а —
I 4 В. М. Т. О । 1 v
— cpj С2 cos 2а 4- С3 sin За 4-
4- С4 cos 4а. (26)
Здесь
Со = L [1 - | Ф02 - ± Ф,2 4- фо14.1Ф/ +1Ф‘4^] мм;
ax — — R мм\
b^ — L [ф0Ф, (1Ф02 4- АФхз — 1) — | Ф,л2а] мм\
= С, = - L [ 1 Ф,2 -1 Фо)2А 4-1 ф,хз-1Ф0Ф,2 -1Ф/] мм
Ь2 = 0; а3 = 0;
\ = С8 = - L (1 ФйР_ L фгХЗА-фоф з) мм-
а4 ~ С4 = 7. Ф11 4g Ф^3) л{м;
^ = 0;
tg ?i = ~; с, = V «i2+*i,<! мм-
16
Диференцируя уравнение (26), получим скорость поршня:
VB = ® sin (а — а,) — 2С2 sin 2a-|-3C3cos3a— 4С4 sin 4а] (27)
и ускорение поршня:
jв = ш2 [—Ctcos (а — ?t) — cos 2a — 9C3 sin 3a — 16C4 cos 4а]. (28)
Формулы перемещения, скорости и ускорения поршня, выра-
женные только двумя гармониками, будут такие:
5р = 5в м т — Сп — R COS a — Rk sin a — 1R'/. cos 2a =
= 5B. M. T.— Co + Я / 1 + k* cos (a — ?1) — 1 R/. COS 2a;
VB = Ru — ]/ 1 k2 sin (a — ®t) ~ к sin 2a j м/сек;
jB = Ru- [ — У 1 Д- k2 cos (a — ®() -f- к cos 2a| м ’сек2,
(29)
где
C0 = L — ±bk- ’Rl;
Угол поворота кривошипа,
мертвому положению поршня,
фиг. 4 по следующему уравнению:
Ь
L
R
L
sin a,
arc tg k.
найдется
(31)
соответствующий в ер хне
согла
для нижнего мертвого положения:
b k
sina«. м.т.= дТ^ = —
ь
Ход поршня. Чтобы вывести простую формулу для опре-
деления хода поршня, воспользуемся фиг. 4. Из нее имеем:
S = (7? 4-Z) cos a ;
5 == (L — R) ccs a ;
н. м. т. ' и. м. т. ’
S' — S —S — (7?4-7) cos a —(L— 7?) cos a
Даже для самого большого дезаксажа A = k получим углы,
соответствующие мертвым положениям не более 15°. Значит,
для косинусов этих углов можно написать разложение:
COS «в. м. т. = — SinS “в. м. т. = 1 — 2 Sint' ’в- »- ».
и аналогично
C0Sae. я. т.= 1 — 4 SinL‘a" -
2 -Зак. 4S явнащсоыньм двигателей.
17
Делая подстановку, получим:
У = (R+ /.) [ 1 - -а—Z0 [ 1 4^'
-9РjJ: L~R — R + L 1.
к ' 2 [а—л)2 d+x)2J —
= 2Z?-f~ Л2 1 (Z - 7?) (1 + X2 + 2).)— (7? + L) (1 + X2 — 2Х)1
2 L (1 -Х)(]-А)(1+Х)(1 + Л) | —
орд [ 4X7. 2/?- , Л2 ( 47? —2/? —2/?Х]
— г о L d-х2)2 J - ' 1 2 L (i-i2)2 J —
= 2R-\
Л2/?(1—X2)
(1 —X2)2 ;
окончательно:
s>=2R-y^.
(32)
Для заданного хода дезаксаж надо выбирать по формуле,,
полученной из (32):
J~ («ход-2/?)(1- -/^
V R
(33)
b~kL.
Верхнее мертвое положение поршня будет:
5,. „.,=(«+О cos +О [ 1 - 4 йтг?]=
=(«+^-20%(т+т)=
\„.,.=У?+0-2(гЬг
Нижнее мертвое положение поршня:
ГЛАВА II
СИЛЫ ИНЕРЦИИ ПРИЦЕПНОГО МЕХАНИЗМА
§ 11. Приведение масс. В механизме мотора имеются звеньяр
совершающие вращательное движение (коленчатый вал), посту-
пательное (поршни) и плоское общего вида (шатуны) При вра-
щательном движении в случае постоянной скорости силы инер-
ции будут лишь центробежными; как известно, они сводятся
к одной центробежной силе центра тяжести, в котором считается
сосредоточенной вся масса звена, и к одной паре в осевой пло-
18
скости. При поступательном движении силы инерции приводятся
к одной силе инерции центра тяжести, и в нем считается сосре-
доточенной вся масса звена. Для шатуна, совершающего плоское
движение общего вида, силы инерции можно свести также
к силе и паре; в частности, для шатунов, имеющих плоскость
симметрии, совпадающую с плоскостью движения, — к силе
инерции центра тяжести и к паре в этой плоскости от враще-
ния шатуна вокруг его центра тяжести. Это приведение тре-
бует знания ускорения центра тяжести, переменного не только
по величине, но и по направлению, между тем как центробеж-
ная сила меняет лишь направление, оставаясь постоянной по
величине, а сила инерции меняет величину, действуя по одному
и тому же направлению. Вследствие этого на практике предпо-
читают приводить силы инерции шатуна к двум силам инерции
масс, помещенных в центрах его головок, и к паре. Эта замена
действительной распределенной массы шатуна двумя отдельными
массами называется приведением, или разносом, масс; так как
силы инерции этих двух масс, вообще говоря, не эквивалентны
силам инерции шатуна, то вводится поправка в виде добавочной
пары.
Массы, помещаемые условно в головках шатуна, опреде-
ляются по массе шатуна тш и расстоянием центра тяжести от
головок а и b (фиг. 5) следующими уравнениями:
7«.-4-щп = щ ; ---= —; а±Ь = Ь,
А 1 в ш ’ а 1
отсюда имеем:
тА = тШ--Ь' тВ = тт-Т- (34)
Силы инерции этих масс дают равнодействующую, равную силе
инерции центра тяжести, и пару с моментом
М' = — (тАа? -f- mBb2) е,
где е— угловое ускорение шатуна.
После подстановки значений тА и тв получим:
М' = — тш abe,
между тем действительные силы инерции дают пару с моментом
Л1 = — Ле — т р2е,
где ls — момент инерции шатуна относительно его центра тяжести.
Таким образом поправочная пара имеет момент
М^ — тш(^-аЬ)з. (35)
Благодаря такому разносу мы получаем в главном механизме
массы, имеющие только поступательное (тв) и вращательное
(лгЛ) движение. Что касается прицепного механизма, то после
2* щ
разноса массы шатуна по головкам мы будем иметь на главном
шатуне еще массу в точке прицепа, равную Перенося
ее в проекцию этой точки на ось главного шатуна и разнося
отсюда по его головкам, мы получим еще на пальце кривошипа
массу
т' — т • ~г • ~г > (36)
где b"~L — г cosy,, и на главном поршне массу
тв = тп.а' 7 Т’ <37)
где a" = rcosyr Этот перенос массы из точки прицепа в ее
проекцию вводит некоторую ошибку, которой мы пренебрегаем.
Для симметричного механизма, какой представлен на фиг. 5,
ошибки не будет.
20
В итоге каждый прицепной поршень будет иметь как бы
увеличенную массу:
!Яр=Л„+т,..|, (38)
а главный поршень—массу
аяв = Мв + тг 2 (тп ш • 7 4)- <39>
В этих выражениях через и Мв обозначены соответ-
ственно массы поршней в прицепном и главном цилиндрах.
Кроме того, на каждом шатуне будем иметь еще поправочную
пару.
§ 12. Действие сил инерции на опоры. Массы от всех шату-
нов, приведенные к головке главного шатуна, надетой иа шейку
коленчатого вала, могут считаться принадлежащими последнему
и вместе с центробежными силами инерции его вызывают реак-
ции опор, определяемые известным способом. При помощи тща-
тельной балансировки эти добавочные „динамические* реакции
могут быть практически сведены к нулю. Остаются силы инер-
ции поршней, рассчитываемые по приведенным массам 5R.
Для главного поршня получим:
Pi = — !®1В/В = — (cos a -f- X cos 2a), (40)
если ограничиться двумя членами.
Для прицепного поршня согласно (8) имеем:
Р/ — — ^njn = — Ш?в<1>8 (rtj cos -f- sin а, Ц- 4<i2 cos 2аг Ц-
+ 4Л2 sin 2аг — 90g sin 3(аг— /)-|- 16<т4 cos 4az4- 16Z>4 sin 4a;). (41)
Выражение в скобках может быть приведено к виду:
Ct COS (az — <?|)-|-4С2 cos (2аг — <р2) —
— 9С3 sin 3 (аг — X.) + 16С4 cos (4аг — rf4),
где
Q = + 'Pji^arctg-^-.
ЛГ
Силы инерции поршней, будучи периодическими функциями
угла поворота кривошипа, вызывают периодические же реакции
в опорах, направленные по осям цилиндров. Аналитическое вы-
ражение их показывает, что они составляются из частей, имею-
щих разный период. Поэтому различают:
1) силы инерции 1-го порядка, имеющие период, совпадаю-
щий с периодом вращения вала, т. е. с одним его оборотом;
2) силы инерции 2-го порядка, имеющие период вдвое мень-
ший, т. е. равный полуобороту вала, и т. д.
Таким образом порядок силы инерции равен коэфициенту
при а (или az) в разложении. Член Л-го порядка называют еще
21
Л-й гармоникой, считая указанную формулу рядом Фурье, огра-
ниченным конечным числом членов.
Определения. Неуравновешенной силой, вызывающей не-
уравновешенность двигателя, называется периодически изменяю-
щаяся сила, передающаяся на фундамент двигателя. Двигатель
считается уравновешенным, если на его фундамент не действует
периодическая сила или момент.
§ 13.
Кельшу.
в
•. cosa
О
Фиг.6. Изображе-
ние силы инер-
ции 1-го порядка
по Келыпу.
От-
no-
il 30-
по-
Изображение сил инерции поступательных масс по
Сила 1-го порядка. Изобразим амплитуду Pj силы
инерции 1-го порядка вектором, направленным по
кривошипу. Для удобства построения можно взять
этот вектор по величине равным кривошипу фиг. 6.
Тогда его проекция нд ось цилиндра будет равна
Pt cos а.
Это и будет сила инерции 1-го порядка,
сюда правило:
Для получения силы инерции 1-го
рядка по величине и направлению надо
бразить амплитуду силы инерции 1-го
рядка вектором, направленным по криво-
шипу, и спроектировать его на ось цилиндра.
Эта проекция и будет силой инерции 1-го по-
рядка.
Сила 2-го порядка. Отложим от оси ци-
линдра угол 2а (фиг. 7). Назовем это направление
направлением кри-
вошипа 2-го порядка
и направим по этому на-
правлению вектор ампли-
туды Р2. Тогда проекция вектора Р2 на
ось цилиндра будет равна P2cos 2а.
Проекция эта будет вектором силы
инерции 2-го порядка. Отсюда правило:
Для получения силы инерции
2-го порядка по величине и напра-
влению надо по кривошипу 2-го по-
рядка направить вектор амплиту-
ды Р2. Проекция этого вектора на
ось цилиндра будет силой инерции
2-го порядка.
Кривошип 2-го порядка напра-
влен под углом 2а к оси цилиндра.
Кривошипа 2-го порядка в машине
нет, это воображаемая линия, так же
как нет сил Pt и Р2, а есть силы
Мы вводим новые понятия: „кривошип 2-го порядка"~и „силы
Фиг. 7.
Изображение силы
инерции 2-го порядка по
Кельшу.
Рг СО S « И Р2 COS 2«.
22
Р и Р2"“ Для облегчения отыскания сил инерции. С помощью
этих фикций можно найти действительные величины сил инерции.
Так как кривошип машины меняет свое положение со скоростью
<в, а кривошип 2-го порядка со скоростью 2<», значит, векторы
р и Р2, направленные по этим кривошипам, являются вращающи-
мися векторами, меняющими свое положение со скоростями о>
и 2« соответственно.
§ 14. Изображение инерционных сил 1 и 2-го порядков по
Тейлору. Идея Тейлора заключается в том, чтобы каждый по-
стоянный по направлению (по линии действия), но переменный
по величине вектор Pt cos а и Р2 cos 2а заменить двумя векто-
рами, постоянными по величине, но переменными по направле-
нию-.
и 'Трд и 4'^’
расположенными под углами а и — а, 2а и — 2а соответственно.
В самом деле, тогда вектор ~Р1Г расположенный под углом
а (фиг. 8), и вектор -у-Рр расположенный под углом — а, дадут
Фиг. 8. Изображение силы
инерции 1-го цорядка по
Тейлору.
Фиг. 9. Изображение
силы инерции 2-го по-
рядка по Тейлору.
в геометрической сумме вектор P,cosa, проекция обоих векто-
ров ~^~Pi на ось цилиндра будет равна силе инерции 1-го по-
рядка Pt cos а, а проекции на ось, перпендикулярную к оси ци-
линдра, взаимно уничтожатся.
23
Вектор -у- Р2, расположенный под углом 2а, и вектор
расположенный под углом — 2а (фиг. 9), в геометрической сумме
дадут вектор P2cos2a, потому что проекция обоих векторов
-%~PS на ось цилиндра будет равна силе инерции 2-го порядка
Р2cos 2a, а проекции на перпендикулярную ось взаимно уничто-
жатся. Так как кривошип двигателя меняет свое положение со
скоростью и>, а кривошип 2-го порядка со скоростью 2<о, значит
векторы Тейлора
4“Pi и -ТРи -^-Р-2 и ~ГР‘.
расположенные под углами а и — а, 2а и — 2а, являются вра-
щающимися векторами, меняющими свое положение со скоростями
ш и — <о; 2<в и — 2ш соответственно.
Идеи Тейлора в изображении сил инерции до сих пор не были
достаточно оценены, а между тем в самых трудных случаях
уравновешивания полный ответ о величине составляющих векто-
ров и максимумов сил инерции дают только идеи Тейлора. В мно-
горядных и звездообразных моторах ими постоянно теперь при-
ходится пользоваться.
§ 15. Определение результирующей инерционных сил для
многоцилиндровой однорядной машины. При определении урав-
новешенности машины могут встретиться четыре случая.
Силы инерции машины, складываясь, дадут:
1) силу и пару,
2) только силу,
3) только пару,
4) не будет ни силы, ни пары.
Сила инерции Л-го порядка всей машины будет алгебраиче-
ской суммой:
i
У Рк COS kaf,
где i—число цилиндров;
Ъ—угол между осями 1-го и /-го кривошипов;
a — угол, образованный осью 1-го кривошипа с осью 1-го ци-
линдра.
По правилу Кельша силу инерции одного цилиндра можно
изобразить в виде проекции на ось цилиндра вектора Рк, на-
правленного по кривошипу А-го порядка, т. е. под углом ka
к оси цилиндра.
Значит, для отыскания силы инерции k-vo порядка всей ма-
шины надо взять сумму таких проекций.
Вместо того, чтобы проектировать каждый вектор Рк на ось
цилиндра и брать сумму проекций таких векторов, можно сначала
24
найти геометрическую сумму Рк векторов Рк, которая полу-
чится направленной под углом к оси цилиндра (угол4>Л—
фаза вектора Рк с 1-м кривошипом; а — угол 1-го кривошипа
с осью цилиндра) и эту геометрическую сумму спроектировать-
уже иа ось цилиндра. Получим:
i
2 Рк cos kaj = Рк COS (ka + ф*).
j = l тез
Эта сила инерции будет иметь максимум, когда угол Ла-|-— О
или гс, т. е. при следующих углах поворота кривошипа:
а — и а = -—— , где п = 1, 2, 3, ... до k — 1.
п п ’ ’ ’ ’
Сила инерции Л-го порядка будет равна нулю, когда ЛаЦ-фь = ~
3
или —к, т. е. при углах поворота кривошипа:
2п — 1
а— 4 it,
где п = 1, 2, 3, ... до Л.
Если векторы Рк и углы 7 между соседними кривошипами оди-
наковы для всех цилиндров, то результирующая Рк ге1 будет
равна нулю и многоугольник векторов Рк будет замкнутым пра-
вильным многоугольником для всех порядков Л, кроме тех, для
которых
Л? = 2гс,
т. е. когда порядок Л = у. Тогда векторы Рк амплитуд отли-
чаются друг от друга по фазе на целое число окружностей, по-
этому такие векторы совпадают, имеют одинаковое направление
и сумма их будет арифметической суммой.
Для всех других порядков, т. е. когда кф —, при переходе
от одного вектора к другому происходит смещение каждый раз
на одинаковую часть окружности; а так как I таких частей
должны составлять целое число окружностей, то векторы ампли-
туд будут равномерно расположены около центра и в сумме
дадут нуль, т. е. образуют замкнутый многоугольник.
Теперь покажем аналитическое вычисление результирующего
вектора Рк силы Л-го порядка и ее фазы которую она
имеет с 1-м кривошипом:
i
Рк 2 cos kaj = Рк cos (Ла -f- фЛ).
j=i
Возьмем а = 0, т. е. случай, когда 1-й кривошип находится на
оси 1-го цилиндра. Тогда сила инерции всей машины будет:
Рк 2собЛ7л. = РАрез cos %. (42)
25
Здесь вектор Pkj№3 представляет, собой фиктивную силу, ко*
горой на самом деле в машине нет. В машине есть только ее
проекция на ось цилиндра. Для отыскания угла составим
уравнение проекций сил Рк на перпендикуляр к оси цилиндра:
Р, 2sin^T, = R sin^.. (43)
Разделив уравнение (43) на (42), получим уравнение, из кото-
рого определим фазу
У Sin k-fj
= ----- (44)
2 cos k-lj
Зная фазу можем найти по уравнению (42) или (43) вектор
Рк
"рез
§ 16. Определение 4 неуравновешенных моментов для всей
машины от сил инерции вращательных и поступательных масс.
Определим силу инерции k-vo порядка для всей машины:
Р cos(Aa-}-6ft). (45)
Л рез
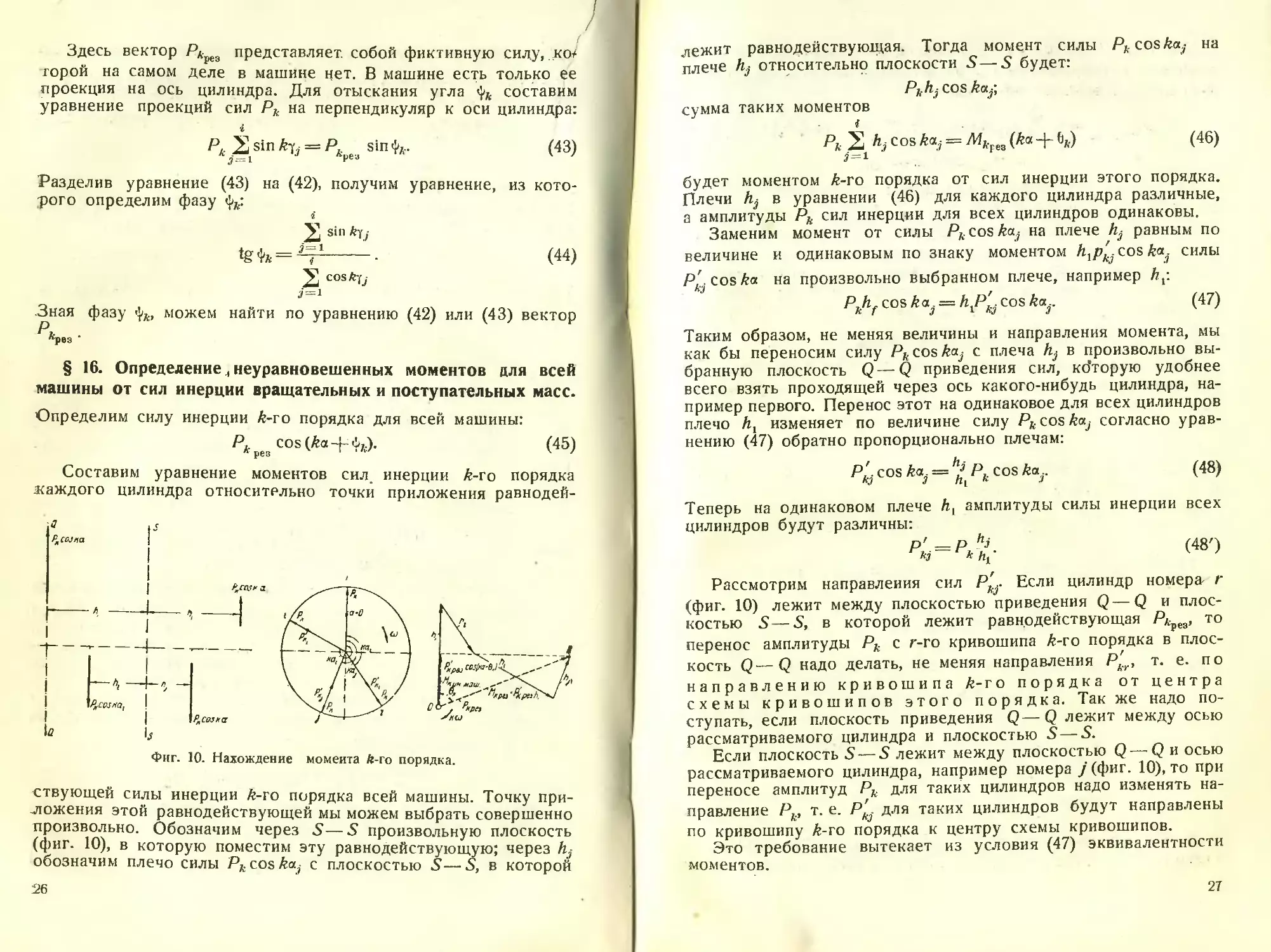
Составим уравнение моментов сил. инерции Л-го порядка
каждого цилиндра относительно точки приложения равнодей-
Фиг. 10. Нахождение момента й-го порядка.
ствующей силы инерции /г-го порядка всей машины. Точку при-
ложения этой равнодействующей мы можем выбрать совершенно
произвольно. Обозначим через 5—S произвольную плоскость
(фиг. 10), в которую поместим эту равнодействующую; через /г,-
обозначим плечо силы Рксо&ка^ с плоскостью S—S, в которой
26
лежит равнодействующая. Тогда момент силы Рк cosAa.; на
плече Щ относительно плоскости S—S будет:
Pkhjcos ka;,
сумма таких моментов
Рк 2 Л,со8Ла, = 7Ид (Ла + 6А.) (46)
будет моментом А-го порядка от сил инерции этого порядка.
Плечи hj в уравнении (46) для каждого цилиндра различные,
а амплитуды Рк сил инерции для всех цилиндров одинаковы.
Заменим момент от силы PfccosAa7- на плече А,- равным по
величине и одинаковым по знаку моментом hApk.cosAa; силы
Р'к. cosAa на произвольно выбранном плече, например А,:
Pkhf cos А а. = hvPkj cos ka.. (47)
Таким образом, не меняя величины и направления момента, мы
как бы переносим силу Рк cosAa^ с плеча hj в произвольно вы-
бранную плоскость Q — Q приведения сил, ко’торую удобнее
всего взять проходящей через ось какого-нибудь цилиндра, на-
пример первого. Перенос этот на одинаковое для всех цилиндров
плечо А, изменяет по величине силу Рк cosAa, согласно урав-
нению (47) обратно пропорционально плечам:
Р^ cos ka. = h£ Рк cos ka.. (48)
Теперь на одинаковом плече hv амплитуды силы инерции всех
цилиндров будут различны:
рк1 = рЛ- (48')
К3 к fly
Рассмотрим направления сил Р^. Если цилиндр номера г
(фиг. 10) лежит между плоскостью приведения Q — Q и плос-
костью 5—5, в которой лежит равнодействующая РАрез, то
перенос амплитуды Рк с /'-го кривошипа А-го порядка в плос-
кость Q—Q надо делать, не меняя направления Ркг, т. е. по
направлению кривошипа А-го порядка от центра
схемы кривошипов этого порядка. Так же надо по-
ступать, если плоскость приведения Q—Q лежит между осью
рассматриваемого цилиндра и плоскостью S—S.
Если плоскость S — S лежит между плоскостью Q—Q и осью
рассматриваемого цилиндра, например номера /(фиг. 10), то при
переносе амплитуд Рк для таких цилиндров надо изменять на-
правление Рк, т. е. Pkj. для таких цилиндров будут направлены
по кривошипу А-го порядка к центру схемы кривошипов.
Это требование вытекает из условия (47) эквивалентности
моментов.
27
На фиг. 10 на схеме кривошипов А-ro порядка стрелками
изображены направления Р'к. Уравнение момента силы инерции
Л-го порядка всей машины будет:
г
м^. == h • cos =А> р'^я cos +М=
= AfftreBc°s(Aa4-0ft). (49)
Из этого уравнения можно вывести следующее заключение:
для того чтобы найти момент маш, надо найти алгебраиче-
скую сумму проекций векторов Р' с направлений ka на ось ци-
линдра и помножить ее на плечо приведения А,. Но сумма проекций
равняется проекции суммы. Значит, вместо того, чтобы проекти-
ровать каждый вектор Рк на ось цилиндра и брать сумму та-
ких проекций, можно найти геометрическую сумму Р'к векто-
ров Рк и эту сумму спроектировать на ось цилиндра.
Помножив Ptpes на Лг, получим амплитуду момента По-
кажем простое графическое определение этой амплитуды. Изо-
бразим плечо ht отрезком у мм в масштабе:
а = у м/мм, откуда У = ~ мм.
Теперь тем же отрезком у, которым изображено плечо Лр изо-
бразим и силу Рк в масштабе
8==у==~ кг/мм, откуда Рк = °^- кг. (50)
О
Подставим значение Рк из уравнения (50) в (46), тогда по-
лучим:
t
маш = S ^COSAaj-
Произведение 8ft] есть масштаб моментов. Обозначим его через а.
«г = б/?, == Л, = Ркз кгм/мм,
а
отношение ~=yj мм представляет отрезок, изображающий
плечо hj. Следовательно, Л1Лия мвш может быть записан так:
г
маш = и 2 yj cos кгм. (51)
J=1
Это уравнение показывает, что 7ИАин ,.вш будет пропорцио-
нален (коэфициент пропорциональности у.) алгебраической сумме
28
проекций векторов », спроектированных с направления kctj криво-
шипа А-го порядка на ось цилиндра. Вместо того чтобы брать
сумму проекций векторов yj (пропорциональных плечам АД
можно построить геометрическую сумму этих векторов и уже
эту сумму спроектировать иа ось цилиндра.
Итак, чтобы найти момент 7И*ии маш, надо построить много-
угольник из отрезков yjt изображающих плечи hj, параллельных
кривошипам А-го порядка.
Для цилиндров, лежащих между плоскостями Q—Q и 5—S,
отрезки, изображающие плечи А, надо откладывать по напра-
влению от центра схемы кривошипов А-го порядка, а для осталь-
ных цилиндров — к центру схемы кривошипов. Тогда результи-
рующая такого многоугольника в масштабе
1 мм -+ [а кгм
даст вектор М£рс.,- Угол этого вектора с 1-м кривошипом будет
фазой 6,.. Проекция этого вектора на ось цилиндра будет мо-
ментом А-го порядка всей машины:
C0S (ka + М-
Момент этот равен нулю, когда Аа-|-6,. = 90 и 270° и имеет ма-
ксимум, равный ЛЦ,ез, при
Aa4-efc = 0 и 180°.
Результирующие моменты Л4Лрез и Л11рвз будут равны нулю тогда,
когда коленчатый вал симметричный, т. е. когда каждый левый
кривошип имеет симметричный, одинаково расположенный криво-
шип справа, и оба эти кривошипа находятся на одинаковом
расстоянии от середины вала.
Л/2рез = 0, когда кривошипы 2-го порядка симметричны, т. е.
-симметрично расположены и имеют одинаковое расстояние от
середины коленчатого вала. В этих случаях моменты сил инер-
ции на симметричных кривошипах относительно середины ко-
ленчатого вала равны, действуют в прямопротивоположиые сто-
роны и друг друга взаимно уравновешивают.
Теперь напишем формулы для аналитического определения
/И* и 6*. Спроектировав вектор 7Илре., на перпендикуляр к оси
цилиндра, получим:
рк S hi sin = Mt sin (ka + М- (52)
j=x
Для a = 0:
P У hj sin k'i, — MkB.r sin 6ft. (52')
29
Разделив уравнение (52') на (50), получим формулу для опре-
деления фазы 6Л: i У hj sin kij = tgeft. (53) 2 hjcosk^j 3=1
Зная фазу можно ний (52') или (50). определить УИ* по одному из уравне-
глава ш
УРАВНОВЕШИВАНИЕ ОДНОРЯДНОЙ МАШИНЫ
§ 17. Уравновешивание сил инерции 1-го порядка. Сила
инерции 1-го порядка имеет вид:
Р. = —9»B®2^cosa. (54)
Если на валу поставить противовес массы т на радиус г так,
чтобы
mr = 2)iB/?,
то центробежная сила этого противовеса даст по оси цилиндра
слагающую
щ<о2Г cos а = <d‘~R cos я,
т. е. силу, уравновешивающую силу инерции 1-го порядка. Но
зато появится слагающая этой центробежной силы по перпен-
дикулярному направлению:
mi&r sin я,
которая будет раскачивать опору.
Таким образом одним противовесом нельзя уравновесить силы
инерции 1-го порядка. Тем не менее, иногда (например в паро-
возах) применяют противовесы, уравновешивающие частично силу
инерции 1-го порядка, имея в виду, что неуравновешенность
в перпендикулярном направлении менее опасна.
§ 18. Уравновешивание Ланчестера. Этот способ уравновешива-
ния основан на идеях Тейлора. Разберем уравновешивание каж-
дого порядка в отдельности.
Сила инерции 1-го порядка Рг cos я эквивалентна двум
силам -у Р, и------- Р1г расположенным под углами я и —я
к оси цилиндра и вращающимся со скоростями <о и —® соответ-
30
ственно. Следовательно, если поставить с противоположной сто-
роны векторов (фиг. 11)
,”2 и ~2
противовесы, подобрав массу дг и радиус р центра тяжести
этих противовесов так, чтобы развиваемая центробежная сила
инерции каждого противовеса равнялась уРр и вращать спе-
циальным приводом один противовес со скоростью <о, а другой
со скоростью —<и, то сила инер-
ции 1-го порядка Pjcosa будет
уравновешена этими противове-
сами. Горизонтальные составляю-
щие
-J Pt sin а И — у Р, Sin а
центробежных сил Pt проти-
вовесов взаимно уравновесятся,
а вертикальные составляющие
— 2 Pi cos a и — cos 01
в сумме дадут силу — Р1 cos a,
по величине равную, а по напра-
влению обратную силе инерции
1-го порядка.
2-й порядок. После ска-
занного об уравновешивании
силы инерции 1-го порядка ста-
новится совершенно ясным спос<
ции 2-го порядка
Фиг. 11. Уравновешивание по методу
Ланчестера силы инерции 1-го
порядка.
уравновешивания силы инер-
Р2 cos 2a,
эквивалентной двум силам
1 Р и — Р
2*2 11 2*2’
которые расположены под углами 2a и -г-2a и вращаются со
скоростями 2<о и —2<о соответственно.
Расположим с обратной стороны векторов (фиг. 12)
р и _L р
2'2“ 2'2
противовесы, у которых массы дгпр и радиус центра тяжести р
надо подобрать так, чтобы центробежная сила каждого противо-
веса равнялась у Р2. Вращая специальным приводом один проти-
31.
вовес со скоростью а другой со скоростью —2™, получим
уравновешивание силы инерции 2-го порядка.
В самом деле, горизонтальные составляющие
взаимно уравновесятся, а вертикальные
— у cos 2® и —2 cos 2“
в сумме дадут силу, равную по величине и обратную по напра-
влению силе инерции 2-го порядка, и ее уравновесят.
32
Чтобы осуществить полное уравновешивание одноцилиндровой
машины, надо еще уравновесить момент сил инерции шатуна:
где
г — Хю2 sin а,
т. е.
—(/ — /') г — -|- Хш2 (/—Г) sin а.
Момент этот действует
.всегда к оси цилиндра.
Для уравновешивания этого
момента (фиг. 13) поставим
два противовеса: один с об-
ратной стороны кривошипа,
а другой параллельно криво-
шипу в плоскости кривошипа.
Тогда вертикальные состав-
ляющие центробежной силы С
каждого противовеса погаснут,
а горизонтальные образуют
на плече b пару с моментом
Cb sin а,
направление действия кото-
рого обратно моменту
Массу и центр тяжести каж-
дого противовеса надо подо-
брать так, чтобы удовлетво-
рялось уравнение
•СЬ — {Г — I) ш2Х = т^^Ь,
Фиг. 13. Уравновешивание момента от
сил инерции шатуна и центробежных
сил инерции.
откуда
Следовательно, для пол-
ного уравновешивания необходимо уравновесить четыре силы:
PR, С и -С,
вращающиеся со скоростью о>, из которых первые три силы при-
ложены в точке О — в центре вращения вала, а последняя сме-
щена от этой точки на расстояние Ь, и, кроме того, одну силу
3 Зак. 48. Динамика авиационных двигателей. 33
~2 ^*1» вращающуюся со скоростью —«, и две силы -^Р2 и ? Pz-
вращающиеся со скоростями 2о> и —2<о. Четыре силы могут быть
приведены согласно правилу сложения параллельных сил, напра-
вленных в разные стороны, к одной равнодействующей, равной.
и приложенной в точке О' (фиг. 13) на расстоянии а от центра
вала, равном
, С
а = Ь------—.
РВ + ±Р,
Мы получим, что для полного уравновешивания одноцилиндро-
вого двигателя надо четыре противовеса, уравновешивающих
следующие векторы сил: 1) вектор Рр приложенный в
точке О' и вращающийся со скоростью о>; 2) вектор прило-
женный в точке О и вращающийся со скоростью —о>; 3) вектор
-|-Р2, приложенный в точке О и вращающийся со скоростью 2а>„
и 4) вектор -^Ра, приложенный в той же точке О и вращающийся
со скоростью —2ш.
§ 19. Частичное уравновешивание вращательных и поступа-
тельных масс одним противовесом. Годограф сил инерции.
Вращательная масса имеет центробежную силу инерции,,
равную PR, изобразим эту силу вектором OA — R в масштабе
1 мм -> 8 кг. Сила инерции PR изображается этим вектором,
вращающимся с угловой скоростью ® по направлению вращения
вала. Полярная диаграмма этой силы будет окружность F ради-
уса OA = R (фиг. 14). Возьмем кривошип под некоторым углом а
и силу инерции вращательных масс, изображаемую вектором ОА,
сложим геометрически с силой инерции поступательно движу-
щихся масс направленной для данного угла поворота а вверх
и действующей по вертикали. Пусть эта сила инерции изобра-
зится вектором Рня в масштабе 8 кг!мм. Тогда суммарной силой
инерции для данного положения кривошипа будет вектор g.
Сделав такое геометрическое сложение центробежной силы PR
с силой инерции поступательно движущихся масс для целого
ряда положений кривошипа, получим диаграмму суммарных сил
инерции—кривую g, называемую годографом сил инерции. Эта
сила инерции, будучи неуравновешенной, производит сотрясение
машины.
34
Уравновесим силу и силу i Pv изображаемую по методу
Тейлора вектором, направленным под углом а и вращающимся
со скоростью <о. Такое уравновешивание можно произвести, мон-
тируя на обратной стороне кривошипа противовес, массу иг и
центр тяжести р которого подберем так, чтобы развиваемая им
центробежная сила инерции равнялась
„ , 1 г,
Тогда в машине останутся неуравновешенными силы 2-го порядка
P2cos2a и сила вращающаяся со ско-
ростью — <о и расположенная под углом — а.
Начертим годограф оставшейся неуравнове-
шенной силы инерции ма-
шины. В нашей машине
будут две центробежных
силы: одна Рк у кривошипа,
а другая -^Р, у проти-
вовеса; они направлены друг
против друга, их результи-
рующая будет равна:
и направлена по противо-
весу от центра коленчатого
вала. Проведем на фиг. 15
окружность радиусом, рав-
ным вектору g Это
будет годограф центробеж-
ной силы машины, которая
всегда направлена в сто-
рону, противоположную
направлению
Прикладывая
Фиг, 15. Годограф
неуравновешенной
силы инерции од-
ноцилиндровой ма-
шины при частич-
ном уравновеши-
вании.
кривошипа,
к вектору
по-
фиг. 14. 1 одограф силы центробежной силы
”"ер » “а“"Хн’р,> ступательную салу по-
лучим точку годографа не-
уравновешенных сил инерции. Сделаем такое построение хотя
бы для девяти точек (через 20° угла поворота кривошипа) в пра-
вой половине кривошипного круга; точки второй половины
нанесем симметрично, и годограф неуравновешенной силы инер-
ции всей машины будет построен.
3
35
ГЛАВА IV
ОБЩАЯ ТЕОРИЯ УРАВНОВЕШИВАНИЯ
§ 20. Теоремы общей теории уравновешивания поршневых
машин. Докажем первые три теоремы уравновешивания, спра-
ведливые для всякой однорядной, многорядной и звездообраз-
ной поршневой машины.
Первая теорема предложена А. Н. Огуречниковым и
состоит в следующем:
Если центробежные силы инерции и их моменты свести
к динаме', центральная ось которой проходит через точку
приложения равнодействующей проекций центробежных сил на
направление результирующей PR то уравновешивание можно
сделать самым легким по весу.
Доказательство. Пусть имеем машину с i кривошипами,
для которой определена результирующая центробежных сил
инерции PR и ее фаза Разложим центробежную силу PR
каждого кривошипа на направление PR и по перпендикуляру
к PR . Тогда проекции’ сил PR на направление PR алгебраи-
чески сложатся и дадут силу, равную PR . Проекции сил PR
на перпендикуляр к PR результирующей силы не дадут, так
как если бы они имели равнодействующую, то геометрическая
сумма равнодействующих сил, параллельных PR и перпенди-
кулярных к PR , не совпадала бы с направлением PR , чего
быть не может. Значит, силы перпендикулярные приводятся
к паре, плоскость действия которой перпендикулярна к силе
PR . Обозначим момент этих сил через
MR
"рез min
Фаза его будет:
. =^ + 90°.
* 1П1П ‘
Индекс min у фазы обозначает, что эта фаза принадлежит мо-
менту.
Теперь докажем, что из всех возможных пар пара
2£рез min
этой динамы будет наименьшей.
Сдвинем главный вектор с центральной оси динамы на рас-
стояние Ь. Для этого приложим на расстояние b две равные и
1 Динамой называется система сил, которая приводится к силе, равной
главному вектору, и к паре, плоскость которой перпендикулярна к главному
вектору. Центральной осью динамы называется линия действия силы, которую
изображает главный вектор.
;'6
противоположные силыг±Рв . Тогда к паре MR динамы
добавится еще пара PR b, плоскость действия которой пер-
пендикулярна к плоскости действия пары AfBpt;imjo. Тогда наша
машина будет иметь силу PR , приложенную на расстоянии Ь
от центральной оси динамы, и пару с моментом
/И „ = VWR +(РВ Ь)*;
а-рез "рез min -° pes
(55)
-^т- = : ™ ~ (90° “ н'*)-
Т^рез
Так как пара 7И„ в динаме меньше, чем /И,, , а равнодей-
лрез min я] ез
ствующие силы PR в обоих случаях одинаковы, то для уравно-
вешивания нашей динамы с парой /И„ нужны противовесы
лрез min
меньшего веса, чем во всяком другом случае, и наша теорема
доказана. Как вектор Р„ , так и вектор, изображающий
2Грез
пару , будут вращающимися со скоростью ш.
Вторая теорема. Систему всех инерционных сил них
моментов от поступательных и вращательных масс можно
свести к четырем динамам, из которых каждая имеет пару
с минимальным моментом.
Доказательство. Из метода Тейлора изображения сил
инерции вытекает, что силы инерции поступательных и враща-
тельных масс одного цилиндра могут быть сведены к системе
векторов сил:
и — Р
2 '2 рез’
— 2« соответственно,
4- М9
9 2 рез
И 2 ^2 рез"
и 2-го порядка, Л41 и ТИ2’—
f р -J- 1 р . — р — р
\ к V 2 Мрез 2 1 рез’ 9 3 Рез
вращающихся со скоростями ш, —ш, 2о> и
и к системе моментов:
(/Мв+‘ч),.,.
Здесь PR и Мг, центробежная сила и ее момент, Р, и Р.2— силы
инерции поступательных масс 1-го
их моменты.
Векторы, изображающие моменты этих пар, вращаются с теми
же скоростями, что и соответствующие им силы.
Поступая так, как было сделано в первой теореме, т. е. проек-
тируя вектор у Р]; каждого цилиндра на направление у Р,.
и на направление, перпендикулярное к -уР,. , получим, что
проекции векторов -yPk на направление ^Рк дадут в алге-
37
браической сумме вектор * Рк , а проекции на перпендикуляр
к этому вектору дадут только пару сил с моментом
z Л рез min
Другого момента, меньшего чем этот, согласно первой теореме
быть не может. Следовательно, система 2 Р. и -1-7И,
z К рез z Л рез min
представляет собой динаму.
Этих динам четыре: две для сил инерции 1-го порядка и
центробежных сил и две для сил инерции 2-го порядка. Фаза
пары каждой динамы будет:
^ = ^ + 90°.
Динама от центробежных сил входит в состав динамы сил инер-
ции 1-го порядка от векторов yPj, вращающихся со скоростью
4-ш. Итак, наша теорема доказана.
Может случиться, что в некоторых поршневых машинах
в какой-нибудь из четырех динам или в нескольких динамах
либо равнодействующая сила, либо пара сделается равной нулю,
либо вся динама обратится в нуль. Может случиться, что в неко-
торых машинах не одна, а несколько динам, а то и все четыре
динамы обратятся в нуль.
Смещая главный вектор с центральной оси динамы на рас-
стояние Ь, получим для машины момент:
4 = /"(Т Mk Ч+(4 рк ь У •>
z Лрсз г \ I Лрез mm / \ z лрез /
Мк
“ резпип +„ Q .
~к ’
лрез
0* = % + 0'* = 0* lnin - (90° - €♦'*).
Расстояние, например, от оси 1-го цилиндра центральной оси
каждой динамы найдем, полагая а = 0, из уравнения:
4p*S/?jc°s ф*)
h =
i=i______________
2 P.
2- лРез
Положение центральной оси каждой динамы можно найти также
графически путем построения силового и веревочного много-
угольника для проекции сил 2 на направление 2Рк
38
Момент пары Д-/И. легко может быть подсчитан по
2 «рез min
формуле:
\г
| м =\рк^hjsin —
Д «рез min 2 « J j к.'
J=1
Третья теорема. Динаму можно уравновесить двумя
ярцтивовесами.
Пусть имеем динаму, пара Мк которой имеет плечо а,
как изображено на фиг. 16. Силы, составляющие пару, имеют
величину
4-М*
2 р<'3 пип
а
Фиг. 17. Уравновешивание динамы
тремя противовесами.
Фиг. 16. Уравновешивание динамы
двумя противовесами.
скости, значит, они могут быть геометрически сложены; их равно-
действующая будет:
(56)
Значит, уравновешивать противовесами придется две силы:
] 2 min
-ргР, И ------------- .
2 Лрез а
Противовесы надо монтировать с обратной стороны этих векто-
ров и вращать их с такой же скоростью, с какой вращаются
векторы сил, т. е. со скоростью ±А<в.
Такое уравновешивание может быть конструктивно неудобно,
39
так как плечо а мало использует габарит коленчатого вала и
сила
т Мк /
2 Л резит
а
из-за малого плеча а будет велика и для нее потребуется тяже-
лый противовес.
Для того чтобы эту силу сделать меньше, надо взять боль-
шее плечо, например а' (фиг. 17). Если еще вдобавок окажемся,
что и силу * Рк по конструктивным соображениям нельзя
поместить на центральной оси динамы, то системы сил фиг. 17
нужно уравновешивать тремя противовесами, монтированными
с обратной стороны векторов сил, и вращать их со скоростью
вращения векторов сил, т. е. со скоростью ztAw.
Из доказанных трех теорем уравновешивания выводим след-
ствие:
Неуравновешенные силы и моменты от сил инерции
вращательных и поступательных масс (1 и 2-го порядков)
в самом общем случае можно свести к четырем динамам.
На уравновешивание каждой динамы надо минимум два,,
максимум три противовеса. Значит, для уравновешивания
четырех динам в самом общем случае для любой поршневой,
машины надо минимум восемь, максимум 12 противовесов.
В частных случаях какая-нибудь динама может обратиться
либо просто в равнодействующую силу, либо в пару, либо
в нуль. В равнодействующую силу или в пару, или даже
в нуль могут обратиться несколько динам, а в некоторых
случаях даже все четыре.
Равнодействующие силы и пары четырех динам склады-
вать нельзя, так как они вращаются либо с различными
скоростями в одинаковых направлениях, либо с одинаковыми
скоростями, но в различных направлениях, либо с различ-
ными скоростями в различных направлениях.
§21. Замечания к проверке уравновешенности. Первое
замечание. Допустим, что поступательные или вращательные
массы в некоторых цилиндрах немного отличаются от тех же
масс в других цилиндрах. Пусть, например, в моторе Кертисс-
Конкверор вес поступательных частей в одном цилиндре на 20 г
отличается от веса другого. Тогда амплитуды сил инерции будут
отличаться для 1-го порядка на 10 кг, а для 2-го порядка на 3 кг.
Сила инерции 3-го порядка прицепного цилиндра в этом моторе
имеет амплитуду (при одинаковых массах) в 5 кг.
Таким образом неодинаковость масс вызывает изменение
в силе 2-го порядка, почти равное полной силе 3-го порядка,
и изменение силы 1-го порядка превышает силу 3-го порядка
почти в два раза..
40
Возьмем мотор BMW-VI; по типу этот мотор такой же, как
Кертисс-Конкверор—12-цилиндровый. При изменении поступатель-
ной массы в весе на 20 г амплитуды сил инерции изменяются^
1-го порядка на 4,2 кг, 2-го порядка на 1,2 кг. Для прицепного
механизма амплитуды сил инерции 3-го порядка будут 6,4 кг,
6-го порядка 0,3 кг. Вся машина может при этом получить
неуравновешенную силу 1-го порядка до 30—40 кг или момент
в 5—6 кгм. Поступательные и вращательные массы во всех
цилиндрах могут быть неодинаковыми, хотя и мало отличающи-
мися друг от друга. Из показанных примеров видно, что нет
надобности вычислять силы инерции с точностью до 1 кг или
моменты с точностью до 1 кгм, так как, принимая массы одина-
ковыми, мы делаем большую ошибку. Приведенные примеры
показывают, что в авиационных двигателях нет надобности
вычислять силы 3, 4 и 6-го порядков.
Второе замечание — о вычислении момента
м,.=-и~Пе.
Возьмем уравнение для в в виде одной гармоники:
г = — Хо>2 sin а;
тогда
== -ф (/—/') X®2 sin я.
Сумма моментов для всей машины будет:
г
(/ — Г)1ш- 2 sin аг
j=i
Этот момент можно найти графически. Изобразим (/—/')Х®*
вектором, направленным по кривошипу. Построив многоугольник
таких векторов, спроектируем результирующую этого много-
угольника на перпендикуляр к оси цилиндра, получим момент
всей машины. Как и момент силы Zi-ro порядка от поступательных
масс, этот момент может быть уравновешен четырьмя противо-
весами; ввиду малости величины момента /—/' им обыкновенно
пренебрегают.
У большинства многоцилиндровых двигателей, у которых
углы между кривошипами одинаковы,
•;
У sin = О,
3 =1
этот момент равен нулю.
Третье замечание. Для решения вопроса о проверке
уравновешенности многорядных машин надо машину с цислом
рядов I считать за i однорядных машин, т. е. разбивать много-
рядную машину на однорядные, уравновешенность которых
известна. Найдя неуравновешенные силы и моменты в каждой
однорядной машине, т. е. в каждом ряду, надо эти силы
и моменты сложить в е к т о р н о.
41
Алгебраически их складывать нельзя, потому что эти силы
и моменты действуют в разных рядах, т. е. по осям цилиндров
различного направления. От такого векторного сложения полу-
чим силу инерции мотора, которая в зависимости от расположе-
ния кривошипов и рядов будет или нулем, или постоянной, или
же переменной по величине и направлению.
ГЛАВА v
УРАВНОВЕШИВАНИЕ СИММЕТРИЧНЫХ МАШИН
для главного ряда мы имеем ряд членов,
Фиг. 18. Изображение поступательной силы
инерции fe-ro порядка по Тейлору.
Но если результирующую каждого
§ 22. Уравновешивание сил инерции любого порядка. Идеи
Тейлора могут быть распространены на любой порядок. Если
содержащих только
углы поворота кри-
вошипа : а, 2а и т. д.,
то для ряда при-
цепных механизмов
имеются еще сме-
щения фаз (®р
и т. д.). Кроме того,
приведенные массы
вообще не ра-
вны главного
поршня, а потому
даже при уг = т и
для 1-го порядка
получается перемен-
ная результирующая
сил инерции, кото-
рая не может быть
уравновешена одним
противовесом.
да представить по
Тейлору двумя векторами, вращающимися в противоположные
стороны со скоростью k<a и смещенными на углы (фиг. 18),
то для каждого порядка в /-цилиндровой машине будем иметь
i векторов, вращающихся с угловой скоростью kw, и i векто-
ров, вращающихся с угловой скоростью—ku>. Первые / векторов
могут быть сложены в один, который назовем Рки>, вторые —
в Другой, который назовем Р_Аш.
Вообще говоря,
Р&ш /
и только для однорядной машины
р ___________________________р
42
Отсюда вытекает следующее: так как каждый из векторов
Pfcw и постоянен по величине и меняет свое положение
с постоянной скоростью соответственно, то каждую силу
инерции, изображаемую этим вектором, можно уравновесить
противовесом, вращающимся с той же скоростью. Центробеж-
ная сила инерции этого противовеса по величине должна рав-
няться силе
Pftl0 или Р_1м,
соответственно, а направление ее должно быть обратно напра-
влению указанных выше векторов.
Итак, силу инерции любого порядка можно уравновесить
двумя противовесами, вращающимися со скоростями ±kw.
§ 23. Теоремы уравновешивания симметричных машин. Вве-
дем следующую терминологию.
1. Назовем линией начальных положений проти-
вовесов линию, по которой уравновешивающие противовесы
совпадают (лежат друг на друге или стоят друг против друга).
2. Назовем начальным положением кривошипа
положение кривошипа, соответствующее начальным поло-
жениям противовесов.
Примечание. Для машин, имеющих ось симметрии, эта линия совпа-
дает с линией начальных положений противовесов, т. е. лежит на оси сим
метрик. Ниже мы дадим этому доказательство.
Для машин, не имеющих оси симметрии, „линия начального положения
кривошипа" не совпадает с „линией начальных положений противовесов",
а отстоит от нее на некоторый фазовый угол.
3. Углом поворота а кривошипа будем называть
угловое расстояние кривошипа от „начального положения криво-
шипа", измеряемое по направлению +<о.
Примечание. Для машин, имеющих ось симметрии, „начальное поло-
жение" будет на оси симметрии, поэтому „угол поворота а" будет угол криво-
шипа с осью симметрии.
Четвертая теорема. Ось симметрии есть линия началь-
ных положений кривошипа и уравновешивающих противовесов.
Первая часть доказательства.
Докажем эту теорему сначала для мотора, в котором все
механизмы главные. Пусть углы развала между рядами одина-
ковы и механизмы симметричны. Возьмем кривошип на оси
симметрии машины (фиг. 19). Тогда для цилиндров правого ряда
амплитуда поступательной силы инерции А-го порядка будет
направлена под углом ka к оси правого ряда, а для цилиндров
левого ряда эта амплитуда будет направлена в другую сторону
от оси симметрии под углом—ka к оси левого ряда.
Амплитуды Рк для обоих рядов по величине равны и напра-
влены симметрично, поэтому на симметричные оси рядов они имеют
проекции, одинаковые по величине и симметричные по напра-
43
влению. Геометрической суммой таких векторов будет вектор,
направленный по оси симметрии.
Теперь дадим первую часть доказательства для машины
с прицепными механизмами.
Поставим кривошипы на ось главного цилиндра. Поступатель-
ные силы инерции Л-го порядка первого и последнего прицеп-
ных цилиндров равны по величине, действуют по осям симмет-
ричных цилиндров и имеют одинаковый знак, потому что с правым
Фиг. 1Р. Четвертая теорема уравновешивания.
(первым) прицепным цилиндром кривошип образует угол aZl,
а с последним левым прицепным цилиндром — угол
а,. = — а,,
4-1 ч
а это и есть соответствие между углами кривошипов в симмет-
ричных механизмах, для которых ускорения, а следовательно, и
силы инерции равны по величине и одинаковы по знаку.
Но сумма двух таких векторов сил инерции, симметричных
относительно оси главного цилиндра, есть вектор, направленный
по оси симметрии, т. е. по оси главного цилиндра.
То же самое будет и для векторов сил инерции 2-го при-
цепного и предпоследнего (z— 2) цилиндра и дальше для 3-го
и (z— 3) цилиндров, 4-го и (z — 4) и т. д.
В результате получим, что каждая пара симметричных цилин-
дров дает силу инерции, лежащую на оси главного цилиндра.
Результирующая инерционная сила будет также лежать на оси
главного цилиндра, и к ней можно применить вторую часть дока-
зательства второй теоремы уравновешивания. Этим первая часть
четвертой теоремы будет доказана.
44
Вторая часть доказательства. Итак, сила инерции
/,-го порядка машины для положения кривошипа на оси сим-
метрии направлена по оси симметрии. Согласно сказанному
в § 22, эту силу можно изобразить двумя векторами: Ркю и
Каждую силу можно уравновесить одним противовесом, на-
правленным обратно вектору силы. Значит, если силы Рки) и P_fcu,
лежат на оси симметрии, то и уравновешивающие ее противо-
весы будут лежать тоже на оси симметрии с обратной стороны
векторов сил, и наша теорема доказана.
В этой теореме мы не говорим, где именно лежат наши про-
тивовесы: вверху или внизу на оси симметрии. Они могут оба
лежать сверху на оси симметрии или оба снизу на оси симмет-
рии и, наконец, могут стоять друг против друга.
Для силы Рю из этой теоремы вытекает следующее следствие:
для моторов, у которых ^ = 7, вектор Рю на каждом кривошипе
равен:
=4+Ц2+(* - о w
В самом деле, по идее Тейлора поступательную силу 1-го
порядка можно изобразить двумя векторами, по величине рав-
1 п
ными — Рх пр ц и направленными в случае — i под углами ztaz.
Значит, все векторы -у^пр.ц и °ДИН вектор-^ Pt для главного
цилиндра, вращающиеся со скоростью о>, будут направлены по
кривошипу, и их сумма Ра (в данном случае арифметическая
сумма) будет также направлена по кривошипу и равна:
Р. = т Л+пг.ц=| ДОВ+(/ -1) 9^]
Когда все механизмы, работающие на первый кривошип, бу-
дут главными, тогда ЗЛв — дЛ1) и
Пятая теорема. Векторы Ркш и Р~ки> многорядной ма-
шины направлены к оси симметрии под углами±йа соответ-
ственно.
Доказательство. В самом деле, векторы Ркм и
начинают свое вращение от оси симметрии. Когда кривошип
расположится под углом а к оси симметрии, то эти векторы
расположатся под углами ±ka к оси симметрии соответственно.
Эта теорема имеет для практики очень большое значение.
Пусть нам известна поступательная сила инерции А-го порядка
машины. Ее можно найти весьма просто: для получения инер-
ционной силы машины надо отыскать кривошипы А-го порядка
для каждого цилиндра, сместиться с него на фазовый угол <?к,
взятый со знаком минус, по этому фазовому положению напра-
45
Фиг. 20. Вторая теорема уравновеши-
вания.
вить амплитуды Рк силы инерции А-го порядка и спроектировать,
эту амплитуду на ось ее цилиндра. Получим инерционную силу
А-го порядка в этом цилиндре. Просуммировав геометрически
силы инерции у всех цилиндров, получим результирующую*
инерционную силу А-го по-
рядка для всей машины, пе-
ременную по величине и на-
правлению. Теперь спраши-
вается, как представить эту
силу, переменную по величине
и по направлению, двумя век-
торами Ркш и Р_ки>, постоян-
ными по величине и меняю-
щими свое положение с по-
стоянными и известными нам
скоростями ztAw соответст-
венно?
Наша вторая теорема поз-
воляет отыскать эти векторы
крайне просто. Пусть вектор
РЛпн.,:аш всей машины (фиг. 20).
будет вектором, изображаю-
щим инерционную силу А-го
порядка всей машины. Отло-
жим углы zLAa к оси симмет-
рии; направления вторых сто-
рон этих углов будем называть
н а п р а в л ен и я м н ± Аа. Раз-
лож ив вектор РЛ„Н_МПШ по
этим направлениям, получим
векторы Рки> и Р_кт. Урав-
будут лежать с противополож-
новешивающие их противовесы
ной стороны этих векторов.
Ш естая теорема. Годограф инерционной силы k-го по-
рядка многорядной машины есть эллипс.
Пусть поступательная сила инерции А-го порядка всей ма-
шины изображается вектором Ркев каш (фиг. 21). Рки> и Р_кш— век-
торы, которыми изображается инерционная сила машины. Первый
вектор направлен под углом —Аа, а второй под углом —Аа к оси
симметрии, которую мы примем за ось ординат у; горизонталь-
ная ось будет осью абсцисс х.
Проекции вектора Рк и1| маш и сумма проекций векторов Ркы
и Р-кю на оси координат будут:
У = cos Aa 4- cos Аа = (Р,по -ф- P_t(U) cos Аа;
при Аа = 0 вертикальная сила будет максимальной:
.Упни = + Р-м»!
(57>
46
она равна сумме сил инерции двух противовесов.
Сумма проекций по горизонтали будет:
X = ркш sin ka — Р_ки> sin ka = (Pfcu> — Р_Аш) sin ka.
(58)
При Ла = 90° горизонтальная сила будет максимальной:
Ркм P—kwi
она равна разности сил
инерции двух противовесов.
Возьмем отношения:
-У— — cos ka-, ~ = sin ka.
J’ninx Хщах
Возведя два последних
равенства в квадрат и сло-
жив их, получим уравнение
годографа силы инерции
А-го порядка:
•*2 + Л = 1.
X2niax .У" max
Это будет эллипс с полу-
осями Х-П1нх .Утах*
Пользуясь этой общей
теорией уравновешивания,
можно весьма просто ре-
шать задачи на уравнове-
шивание многорядной ма-
шины любой сложности,
имеющей ось симметрии.
§ 24. Примеры на про-
верку уравновешенности
многорядных моторов, в
которых все механизмы
главные. Проверка урав-
новешенности V-об-
разного двухцилин-
дрового двигателя
с произвольным уг-
лом 7 развала цилин- Фиг. 21. Годограф силы инерции Л-го
дра (фиг. 22). порядка.
Возьмем кривошип в ка-
ком-нибудь положении а к оси симметрии.
1-й порядок. Направим по кривошипу амплитуду Рх и
спроектируем ее на оси цилиндров (фиг. 23). Проекции геомет-
рически сложим, получим вектор Ptu„rKaui—силы инерции 1-го
порядка машины. Раскладывая ее по направлениям а, получим
векторы Рш и Р_ш.
47
Фиг. 22. Схема V-образного двухцилин-
дрового мотора.
Эти векторы можно по-
лучить еще проще, если
взять кривошип на оси од-
ного из цилиндров (фиг. 24),
когда а = — тогда инер-
ционную силу 1-го по-
рядка машины придется
раскладывать по направле-
ниям ± у, а это и будут
векторы проекций для
всякого положения криво-
шипа. Для у = 90°
Л-ш = 0.
2-й п о р я до к. Сделаем
построения для угла по-
ворота а кривошипа (фиг.25),
отыщем кривошип 2-го
Фиг. 23. Определение силы 1-го порядка V-образного мотора.
48
порядка для обоих цилиндров и по ним направим ампли-
туды Ри спроектируем последние с кривошипа 2-го парядка на
оси соответствующих цилиндров. Проекции геометрически сло-
Фиг. 24. Простейшее определение графическим путем
вектора в V-образном моторе.
жим, получим инерционную силу 2-го порядка в машине. Разло-
жим эту силу по направлениям z±z2а. Получим векторы Р2ш и Р
При положении кривошипа на оси симметрии Р2пи м ш полу-
чает максимальное значение, равное
Р‘2о> I Р-
При повороте кривошипа на а = 45° Р2пи. мгш
ное значение, равное Р2ц) — Р..2ш-
При у = 90° (фиг. 26), взяв кривошип на оси 1-го цилиндра,
получим инерционную силу 2-го порядка машины, направленную
по горизонтали, а при положении кривошипа на оси симметрии
получает минималь-
4 Зак. 48. Динаннка авиационные двигателей.
49
(фиг. 27) получим инерционную силу 2-го порядка, равную нулю.
Векторы Раш и Р_2ш для этой машины равны друг другу и при
а. = 0 стоят друг против друга, а при а = 45° (фиг. 26) совпадают
друг с другом. Инерционная сила всегда будет направлена по
горизонтали, так как Раш = Р_2,и и имеет максимум при а = 45°.
Фиг. 25. Определение сил 2-го
порядла в V-образном моторе.
При у = 60° сила инерции P_2w равна нулю.
В самом деле, возьмем кривошип на осн 1-го цнлиндра'(фиг. 28).
Тогда сила инерции во 2-м цилиндре будет:
cos 60° = Р2.
50
Сила инерции 2-го порядка всей машины будет катетом пря-
моугольного треугольника:
'V -(!₽»> = 0.866 Р,
и направлена под углом 2а —
— 60° к осн симметрии. Сле-
довательно, составляющей по
направлению — 2а не будет,
и сила инерции 2-го порядка
этой машины есть сила, по-
стоянная по величине, которая
может быть уравновешена
одним противовесом, враща-
ющимся со скоростью 2<».
Проверка уравнове-
шенности трехцилин-
дрового W-образно-
го мотора (фиг. 29) с
углом развала f == 60°.
а) Силы инерции 1-го по-
рядка (фиг. 30). Все поступа-
тельные массы в каждом ци-
г-
Фиг. 27. Нуль силы 2-го ги рядка
в V-образном моторе.
линдре одинаковы. Следовательно, амплитуды сил инерции
1-го порядка для всех цилиндров одинаковы и направлены
Фиг. 28. Сила 2-го порядка в V-образном моторе с у — 60°.
ло физическому кривошипу, но проектироваться эти ампли-
туды будут все на разные направления — каждая на ось сво-
•Фиг. 29. Схема W-образного мотора
с т = 60".
жения кривошипа.
его цилиндра.
Складывая геометрически
проекции этих амплитуд, полу-
чим результирующую силу инер-
ции всей машины; она " равна
1,5 Pv Так как угол а взят
произвольно и для этого про-
извольного угла получилась ре-
зультирующая сила инерции,
равная полуторной силе инерции
одного цилиндра или, что все
равно, силе инерции половины
всех поступательных масс, то
такая же по величине будет
результирующая сила инерции
при любом положении кривошипа; в этом можно убедиться
аналогичным построением для какого-нибудь другого поло-
52
Следовательно, для
угла развала у = 60°
У W-образного трех-
цилиндрового мотора
сила инерции 1-го по-
рядка всего мотора
выражается вектором
р равным 1,5 на-
правленным по криво-
шипу. Вектор этот
.может быть уравнове- .
шеи противовесом, \
монтированным на про-
тивоположной стороне
кривошипа.
Вектор Р й = 0.
Ь) Силы инерции
2-го порядка (фиг. 31).
Возьмем кривошип
под каким-нибудь уг- Фиг. 30. Силы инерции 1-го порядка W-образного
лом а к оси верти- мотора с? = 60°.
кального среднего ци-
cj>jj р J
пределение силы 2-го порядка W-образного мотора с ) = 60°.
53
линдра. Амплитуды сил инерции 2-го порядка одинаковы для
всех цилиндров, но направлены каждая по своему кривошипу
2-го порядка. Поэтому определим для каждого цилиндра поло-
Фиг. 33. Схема 12-цилиндрового W-образного мотора.
жецие кривошипов
2-го порядка, отло-
жив от оси цилиндра
удвоенный угол кри-
вошипа с осью ци-
линдра. По каждому
кривошипу 2-го по-
рядка направим
амплитуду Р2 и
спроектируем ее на
ось соответствую-
щего ей цилиндра;
проекции всех ам-
плитуд сложим гео-
метрически; полу-
чим результирую-
щую силу инерции
всего мотора.
Теперь проведем
направления 2а к
линии начальных
положений противо-
весов и разложим
по этим направле-
ниям результирую-
щую силу инерции
2-го порядка всего
мотора.
Получим силы
инерции, которые
можно уравновесить
двумя противовеса-
ми, вращающимися
от начального поло-
жения в разные
стороны со скоростями zt2w. Зная силы инерции, которые
должны развить противовесы, и задаваясь радиусом их центра
тяжести, найдем их вес. Из фиг. 31 получается, что большой
противовес в начальном положении должен находиться на ли-
нии начального положения и вращаться в сторону-(-2 а со ско-
ростью 2 w, а малый должен находиться вверху и вращаться со
скоростью — 2<и в сторону — 2а. Таким образом в начальном
положении кривошипы будут друг против друга и результи-
рующая сила инерции будет равна разности их сил инерции.
Когда физический кривошип пройдет угол 45° от оси среднего
54
цилиндра (фиг. 32), тогда кривошип 2-го порядка среднего
цилиндра будет перпендикулярен к его оси, и амплитуда, про-
ектируемая с него, даст для среднего цилиндра проекцию (силу
инерции), равную нулю. Кривошипы 2-го порядка боковых ци-
линдров располагаются симметрично относительно линии началь-
ных положений, и амплитуды, направленные по ним, дают оди-
наковые по величине проекции на оси цилиндров. Геометриче-
ская сумма этих проекций дает результирующую, направленную
под углом 90° к линии начальных положений противовесов.
Сумма эта больше амплитуды одного цилиндра.
Для рассматриваемого положения кривошипа противовесы
совпадут и их силы инерции будут складываться. Следовательно,
при положении кривошипа под 45° к оси среднего цилиндра на
горизонтали получается максимальная сила инерции, а при по-
ложении кривошипа на оси среднего цилиндра на вертикали
получается минимальная сила инерции.
Теперь возьмем 12-цилиндровый W-образный мотор. В нем
в каждом ряду по четыре цилиндра. Вал имеет четыре криво-
шипа. На каждую шейку вала работает по три цилиндра (фиг. 33).
Кривошипы расположены под углом 180° друг к другу. Угол раз-
вала цилиндров 60°.
Наш мотор мы можем рассматривать как три однорядных
четырехцилиндровых мотора, у которых, как известно, нет не-
уравновешенных сил 1-го порядка и моментов 1 и 2-го порядка,
значит, их не будет иметь и наш 3-рядный мотор.
Силы 2-го порядка. Сила инерции 2-го порядка у одного
ряда равна
Ро =4 Ра cos 2я,
Зин. ряда 2 ’
где а — угол первого кривошипа с осью второго ряда.
Амплитуда этой силы
4 Р2 = 4
Эта амплитуда есть вектор, вращающийся со скоростью 2<в.
Чтобы найти векторы Р^ и Р_8(0, изображающие силу инерции
2-го порядка всего мотора, сделаем два простых построения для
углов поворота кривошипа а = 0° и а = 45°.
При а = 0 (фиг. 34) амплитуда 1-го ряда ляжет на ось 3-го
ряда и, наоборот, амплитуда 3-го ряда ляжет на ось 1-го ряда.
Проектируя амплитуды на оси их цилиндров и алгебраически
складывая проекции, получим для а = 0 силу инерции машины
— Р =J-4P =2Р
2 а ив. ряда 2 2 2 *
Так как векторы вычитаются, то это будет разность векторов:
—Л<2ш = 2Р2. (а)
При а = 45° (фиг. 35) амплитуда 2-го ряда перпендикулярна
к оси ряда и имеет проекцию, равную нулю; поэтому ее не чер-
55
Фиг. 35. Сила инерции 2-го порядка в 12-цилиндровом моторе
при а = 45°.
56
тим, а инерционные силы в первом и третьем рядах, распола-
гаясь симметрично относительно
ческой
шины,
горизонтали, дадут в геомегри-
сумме силу инерции ма-
равн\ю
1.5Лряда = 6Л.
сила инерции будет сум-
Эта
мой векторов:
+ (Ь)
Решая уравнения (а) и (Ь) от-
носительно двух неизвестных Р2„,
и Р получим:
Р.,, = 4Р.
р,
р ,..=2р,=4р».«»-
Фиг. 36. Х-образный чегырехци-
лпндровын двигатель с одним
кривошипом.
Рассмотрим теперь уравнове-
шенность Х-образного мотора.
Возьмем сначала четырех-
цилиндровый мотор, все
четыре цилиндра кото-
рого работают на одну
шейку (фиг. 36). Угол раз-
вала произвольный.
Силы инерции 1-го порядка. Наш четырехцилиндро-
представляет собой два двухцилиндровых мотора
38),
вый мотор
(фиг. 37 и
в которых силы
2-го порядка уравновешены.
Фиг. 37. Разбивка Х-образного
двигателя на два двухцилиндровых.
Значит, наш мотор будет иметь только неуравновешенные силы
инерции 1-го порядка. Сила инерции 1-го порядка будет геоме-
трической суммой проекций вектора 2Pt на оси 1 н 2-го цилин-
дров (фиг. 39):
Pu> = 2Pr
Спроектируем вектор 2Р, на оси первого и второго рядов
цилиндров (фиг. 39). Через конец вектора 2Pi cos а., проведем
вектор 2Р\ cos аг Тогда
Р —2Р. cos а. -Г-2Р. cos ос,;
1 нн. маш. 1 ill
р
= р
1 пн. маш.
Фиг.'39.;Нахождение векторов и Р. „„
а д НИ. 3-АШ
четырехцилиндрового Х-образного мотора
с одним кривошипом.
Машина по схеме фиг. 42 имеет
моменты 1 и 2-го порядков, значит и
будет их иметь.
Силу Рш можно урав-
новесить противовесом,
монтированным на дру-
гой стороне кривошипа,
а сила обычно
остается неуравновешен-
ной. Для 7 — 90°
Р_ш = 0; РШ = 2РГ
Пусть мотор имеет
два кривошипа (фиг. 40),
поставленные под углом
в 180° с произвольным
углом 7. Нашу машину
можно рассматривать как
две двухцилиндровых ма-
шины по схеме фиг. 41
и 42. В машине по схеме
фиг. 41 нет ни сил, ни
моментов 1 и 2-го поряд-
ков; значит, в нашей ма-
шине, состоящей из двух
машин (фиг. 41), тоже
нет ни сил, ни моментов
1 и 2-го порядков, т. е.
машина полностью урав-
новешена.
только неуравновешенные
машина по схеме фиг. 40
Для машины по схеме фиг. 40 момент 1-го порядка в 1 и
3-м цилиндрах будет:
2Pyh cos а, = Af1 cos
он действует в плоскости осей первого н третьего цилиндров.
58
Для второго и четвертого цилиндров момент 1-го порядка
будет:
2Р(Л cos а — Afj cos (04 — 7);
действует этот момент в плоскости осей второго и четвертого
цилиндров.
Значит, векторы этих моментов есть проекции вектора /И,
с кривошипа на оси первого и второго цилиндров. Поэтому
с отысканием вектора момента машины и изображением его век-
торами и Л4_ш дело обстоит так же, как и с силами Рр ,
Рш и Р-ю Для V-образной двухцилиндровой однокривошипной
машины или так же, как для сил Х-образиой машины по схеме
фиг. 39.
Фиг. 42,
Фиг. 40. Х-образный четы- Фиг. 41.
рехцилиндровый мотор
с 'двумя кривошипами.
На фиг. 43 проделаны построения для отыскания векторов
и и» сов^ршенно аналогичные построениям на
фиг. 39. Для 7 = 90° момент ALW = O. Момент /Иш может быть
уравновешен противовесами, монтированными на кривошипе.
Моменты 2-го порядка. Мзмаш, М3ш и находятся
совершенно так же, как находились на фиг. 25 Р2нн маш, Р2ш
и Р_3ш для V-образной двухцилиндровой однокривошипной ма-
шины. Если взять кривошип в положении фиг. 25, то для векто-
ров М., , М.,ш и 7И Зц> нет надобности делать отдельного по-
59
строения. Заменив обозначение Р2 на ЛС, получим ответ на вопрос
о нахождении означенных моментов. В нашем случае
Фиг. 43. Моменты 1-ю порядка Х-образпою
четырехцилиндрового мотора с двумя криво-
шипами.
М2 = 2РЛ
Возьмем еще четырех-
цилиндрзвый мотор пэ
схеме фиг. 44.
Силы инерции
1-го порядка. Наш
мотор можно рассматри-
вать как две машины по
схеме фиг/ 45 и 46 с
-у = 90 , в которых 1-й по-
рядок может быть урав-
новешен противовесом на
кривошипе. Следователь-
но, сила инерции 1-го по-
рядка нашей машины бу-
дет равна:
Р„ = 2РР
Силы инерции
2-го порядка. Возьмем
кривошип на оси вто-
рого цилиндра (фиг. 47).
Наметим оси симметрии
машин, составленных из
первого и четвертого ци-
линдров и второго и
третьего цилиндров. На-
несем положения векто-
ров Р2<„ и Р_2ш для каждой пары цилиндров, удваивая углы
между кривошипом и осями симметрии пар цилиндров сначала
Фиг. -14. Схема четырехцилиндро-
вою Х-образною мотора.
Фиг. 45 и 46. Разбивка < етырехцилиндро-
вого мотора на два двухцилиндровых.
60
в одну, потом в другую сторону от оси симметрии. Напомним,
что для V-образной двухцилиндров эй машины с у = 90“
| Р^"л j = | Р^ | = 0,707 Р.,,
причем один из этих векторов начинает свое вращение сверху
оси симметрии, а другой снизу. Складывая векторы, вращаю-
щиеся в одну сторону, получим:
Р, = 1,84Р2цнл==1.3Р2;
2ч> ’
Р . = 0,761 Р2ц,ил = 0,54 Р„.
— 2<о ’ 2<о ’ *-
Фиг. 47. Силы 2-го порядка
в четырехцчлиндровом моторе.
При этом В
векторы Р2ю и
при а = 0:
при а = 45°
начальном положении, как видно на фиг. 47,
Р_2ш располагаются сверху от оси симметрии
(^2 ин. маш)шах = 1,84 Р2,
Для 16-цилиндрового мотора, в котором все механизмы глав-
ные (фиг. 48), будем иметь только неуравновешенные силы
2-го порядка, равные учетверенной силе инерции одной шейки.
Значит, для мотора
Р_2ш = 4 • 0,54Р2 = 2,16Р2;
Р2Ш = 4- 1,ЗР2=5,2Ра;
6Г
максимум по вертикали:
7,ЗР2;
минимум по горизонтали:
3,04Р2.
Моментов 2-го порядка не будет.
Итак, наша машина крайне неуравновешенная.
Фиг. 48. 16-цилиндровый Х-образный мотор.
Если по схеме фиг. 44 сделать машину 24-цилиндровую с ко-
ленчатым валом нормального шестицилиндрового двигателя, то
она будет очень хорошо уравновешена, так как ее можно рас-
сматривать как четыре шестицилиндровых однорядных пол-
ностью уравновешенных
Фиг. 49. Углы развала Х-образ-
иого 24-цил11ндрово1 о двухтакт-
ного мотора.
машины.
Разберем, наконец, Х-образный
24-цилиндровый двухтактный двига-
тель (фиг. 49), в котором все шатуны
главные. Вал имеет шесть колен
(фиг. 50). Первые три колена, распо-
ложенные друг к другу под углом 120°
каждое, смещены для равномерного
распределения крутящего момента
на 30° по отношению ко вторым трем
коленам, которые имеют также угол
в 120°. За каждое колено хватается
по четыре шатуна. Углы между осями
двух верхних и двух нижних цилин-
дров по 60°.
У четырехцилиндровой машины на
одном колене могут быть только силы
Р.» и Р_.„.
Сил инерции 2-го порядка нет. Сила Р,„ направлена по криво-
шипу под углом а к оси симметрии. Сила Р_„, направлена под
62
углом —<х к оси симметрии, где а — угол кривошипа с осью»
симметрии машины.
Нашу машину с шестью кривошипами по схеме фиг. 49 можно
рассматривать как две трехкривошипные машины по схемам
фиг. 51 и 52.
Фиц 50, Схема кривошипов 24-цилиндрового двухтактного мотора.'
Так как силы Ры направлены по кривошипам, а для трех:
кривошипов геометрическая сумма векторов этих сил равна
нулю, то силы Рш у всего мотора не будет.
Момент ЛЛ маш. Каждые три колена рассматриваются как*
трехцилиндровая машина, которая имеет неуравновешенные мо-
менты 1-го порядка.
Фиг. 51. Схема первой тройки кривошипов 24-цилиндровою
двухтактного мотора.
Из треугольника моментов первых трех кривошипов (фиг. 51)-
получаем, что для первых кривошипов
где Pw— сила от четырех шатунов на одном кривошипе.
сз
Из фиг. 52 для остальных трех кривошипов имеем:
/И = 1,732 Ph.
Wjj ’ <L>
Фиг. 52. Схема второй тройки кривошипов 24-цилиндрового
двухтактною мотора.
На фиг. 53 показано геометрическое сложение векторов мо-
ментов обеих троек кривошипов.
Для а = Ь получим:
М = 2 • 1,732 cos 15°Л 2а = Ь,Т2Р а
в фазе в 45° с первым кривошипом первой тройки.
Фик 53. Вектор момента 1-ю порядка всего мотора.
Момент Л4_шмаш. На фиг. 54 начерчены схема кривошипов
и схема векторов этих кривошипов. Как видим, последняя схема
представляет собой повернутую вокруг оси цилиндра (вертикали)
г
на 180° первую схему. Значит, и вектор А7_ш .,ащ представляет
собой повернутый на 180° вектор Af^^, а по величине при а = Ь
равен: .
М а =6,72 Р а.
Максимум момента будет при
а = — 45°, т. е. когда первый
кривошип первой тройки кри-
вошипов смещен с оси сим-
метрии на угол —45°. Тогда
(^1 ин маш )щах
= 6,72. а(Р^Р ш)
Фнг. 54. Схема кривошипов и схема
векторов
и минимум при а ==45°, т. е. когда первый кривошип первой
тройки сместится с оси симметрии на угол -|-45о. Тогда
(^иИ.маШ)ш1В = 6,72.а(Рш-Р^,и).
Моментов 2-го порядка мотор не имеет, так как ни на одном
из кривошипов нет сил инерции 2-го порядка.
Уравновешивание этой машины показано на фиг. 56.
Для уравновешивания надо четыре противовеса, по два
на каждый момент (Л4Ш и М и1). Вес противовесов Ош, уравнове-
шивающих момент Л4„„ найдется из уравнения:
Фиг. 55. Положение вектора Л4-10.
Af = —— “‘“РшА;
ю маш g *ш ’
где рш — расстояние центра
тяжести противо-
веса до оси вра-
щения,
h— расстояние между
противовесами.
Монтировать противове-
сы надо на коленчатом валу
под фазовыми углами 225°
и 45° к оси первого кри-
вошипа. Располагать их
надо так, чтобы вектор Л1 был направлен в сторону,
противоположную направлению вектора АГшмаш. Вес противовеса
С подсчитывается по аналогичному уравнению:
G
№ маш S
«2Р Jl' ‘
5 Зак. 48. Динамика а виа-дионнътк двигателей.
65
Два таких противовеса на-
до вращать в сторону, обрат-
ную направлению вращения
коленчатого вала. Геометри-
ческой осью их вращения
должна быть геометрическая
ось коленчатого вала. Проти-
вовесы должны быть устано-
влены в фазе 45° и 225° к оси
первого кривошипа и их век-
тор Л4„шпрот должен быть на-
правлен в сторону, противо-
положную направлению век-
тора 7И_и)маш.
§ 25. Уравновешивание
звездообразных моторов, в
которых все механизмы глав-
ные. Для изложения теории
уравновешивания таких звездо-
образных моторов можно вы-
брать два пути: развить идеи
Келыпа и применить к ним
идеи Тейлора. По идеям
Келыпа уравновешенность
подсчитывается чрезвычайно
просто.
Для вычисления силы инер-
ции 1-го порядка звезды
при взятом положении криво-
шипа надо спроектировать
амплитуду Pj на оси всех ци-
линдров и проекции геометри-
чески сложить. Для вычисле-
ния силы 2-го порядка звезды
надо отыскать положения кри-
вошипов 2-го порядка для
всех цилиндров, направить по
ним амплитуды Ра, спроекти-
ровать эти амплитуды на оси
соответствующих цилиндров
и проекции геометрически
сложить.
Проверим уравновешен-
ность девятицилиндровой звез-
ды (фиг. 57).
1-й порядок. Геометри-
ческая сумма проекции ампли-
66
туд (фиг. 58) дает результи-
рующую, равную 4,5Рр напра-
вленную по кривошипу.
2-й порядок. Геометри-
ческая сумма проекций ампли-
туд (фиг. 59) дает результи-
рующую, равную нулю.
Хотя, как видим, идеиКель-
ша дают весьма просто ответ
на поставленный вопрос, но
они не позволяют произвести
достаточно глубокого исследо-
вания и найти общий ответ.
По этим причинам пойдем
для исследования уравновеши-
вания звезд вторым путем —
применим идеи Тейлора.
По Тейлору сила инер-
Фиг. 57. Девятицилиндровая звезда,
в которой все механизмы главные.
6ц
Фиг. 58. Уравновешивание силы инерции 1-го порядка.
5*
67
ции любого порядка k у всякого цилиндра, например z-го, при
угле поворота кривошипа а,, может быть представлена двумя
векторами, направленными под углом соответственно коси
z-го цилиндра. По величине эти силы равны половине ампли-
туды Рк силы инерции k-ro порядка.
Чтобы получить ответ, каковы величина и направление силы
инерции Л-го порядка в любой звезде с главными механизмами,
6Ц
Р74
'гих
Зц
Фиг. 59. Сила инерции 2-го порядка.
мы поступим следующим образом: поставим кривошип на ось
вертикального цилиндра, который мы будем называть „первым",
и найдем закон расположения векторов Ркш и Р~ки> для всех
цилиндров. Потом будем геометрически суммировать при помощи
отдельных векторных многоугольников сначала векторы, вра-
щающиеся со скоростью ku>, потом векторы, вращающиеся со
скоростью — kv.
Для положения кривошипа наноси „первого" вертикального
цилиндра (хотя выбор первого цилиндра безразличен) названные
68
векторы для различных звезд займут положение на осях цилин-
дров, указанных в табл. I.
Итак, при положении кривошипа на оси первого цилиндра имеем:
а) векторы Рш располагаются на оси этого цилиндра; их ариф-
метическая сумма будет:
кг>
она может быть уравновешена противовесом на кривошипе;
б) векторы Р ш располагаются последовательно на осях цилин-
дров сначала нечетных, потом четных;
в) векторы Р.2т — на осях цилиндров в порядке номеров обрат-
ного счета;
г) векторы Р 2ш — на осях цилиндров через три цилиндра:
у первого цилиндра на оси этого цилиндра; у второго цилиндра
для трехцилиндровой звезды — на оси 1-|-3 = 4 цилиндра, т. е.
на оси первого цилиндра, для остальных звезд—на оси четвер-
того цилиндра; вектор Р_8<0 для третьего цилиндра (для трех-
цилиндровой звезды) — на оси 1-ф-3-|-3 = 7 цилиндра, т. е. на
оси первого цилиндра; для пятицилиндровой звезды на оси
7 — 5 = 2 цилиндра; для шестицилиндровой звезды на оси
7 — 6=1 цилиндра, а для остальных звезд — на оси седьмого
цилиндра.
Если построить многоугольники векторов Р+ки>, то все они
за исключением порядка i—1 и кратного ему (где i — число
цилиндров) будут правильными замкнутыми многоугольниками,
так как все векторы по величине равны и отстоят друг от друга
последовательно на одинаковый угол. Результирующая много-
угольника будет равна нулю, и сил инерции всех порядков А,
кроме i— 1 и кратного ему, не будет.
В самом деле, для порядка i—1 векторы Р распола-
гаются для всех цилиндров на оси первого цилиндра, многоуголь-
ник векторов обращается в прямую линию, его результирующая
будет арифметической суммой yz'Pj.,.
Эта сила инерции -^iPi_l представляется вектором, вращаю-
щимся со скоростью —(i — 1) в сторону, обратную вращению вала.
Итак, в рассматриваемых звездах первая неуравновешенная
инерционная сила будет (z—1)-го порядка, равная
~2 1 •
Следовательно, звезды с главными механизмами представляют
собой хорошо уравновешенные машины, за исключением трех-
цилиндровой звезды, в которой будет неуравновешена сила
2-го порядка, равная
1,5РЙ,
представляемая вектором, вращающимся со скоростью — 2« в сто-
рону, обратную вращению вала.
69
1
TAB
Уравновешивание звезд,
№ Тип звезды В е К
Р» для всех цилин- дров Р ш
1 2 3 4 5 6 7 8 9 1 2 3
1 3-цилиндровая На оси 1-го цилиндра 1 3 2 — — — — 1 3 21
2 5-цилиндровая 1 3 5 2 4 — — — 1 5 1
3 6-цилиндровая 1 3 5 1 3 5 — — — 1 6 5 II
4 7-цилиндровая 1 3 5 7 2 4 6 — — 1 7 61
5 9-цилиндровая 1 3 5 7 9 2 4 6 8 9 8 1
Пятицилиндровая звезда будет иметь первую неуравновешен-
ную силу 4-го порядка, равную 2,5Pv вращающуюся со скоро-
стью — 4ш против вращения вала; шестицилиндровая звезда —
первую неуравновешенную силу 10-го порядка, равную ЗР]0,
вращающуюся со скоростью —10<» против вращения вала; семи-
цилиндровая— силу 6-го порядка, равную 3,5Р6, вращающуюся
со скоростью —6о) против вращения вала; девятицилиндровая —
силу 8-го порядка, равную 4,5/^, вращающуюся со скоростью
— 8<о против вращения вала.
§ 26. Аналитическое определение сил Р_ш, Р2ш и Р ,йш для
многорядных моторов с главными механизмами. Вывод фор-
мулы для определения силы Р_ю. Угол поворота криво-
шипа от оси /-го цилиндра (фиг. 60) будет:
Поставим кривошип под углом 90° к оси симметрии. Тогда
—90° — cosa?- = sin-fy.
Сила ^инерции 1-го порядка у /-го цилиндра будет:
P,cosaj = Pt sin-fj;
при повороте кривошипа на 90° от оси симметрии векторы Рш
и Р_ю станут перпендикулярно к оси симметрии, образуя либо
разность, либо сумму:
Р + Р
Значит, силы инерции PjSiny^ отдельных цилиндров дадут
только проекции на перпендикуляр к оси симметрии:
Р{ sin • sin т,- = Pt sins 7, = Pt 0- — у cos .
70
ЛИЦА I
в которых все механизмы главные
Сумма таких проекций будет:
i
:р„, = р_. =Vp,fJ._-’ cos
Но
Ри. = ^Р
следовательно,
р_ш=4р«2с°82^ <59>
5 = 1
СилуР_ш надо брать только
со знаком плюс.
Формулы для сил Р2и)
и Р_аш. Возьмем кривошип на
оси симметрии. Тогда
ai=0; «5=—v
2а; = —2Ь-.
Сила инерции 2-го порядка
/-го цилиндра
Pg cos 2а^ — Р2 cos 2f7.
]
5 = 1
Фиг. 60. К аналитическому опреде-
лению сил Р-ш, ЯШ1 и Р_2ш-
Проекция этой силы на ось симметрии будет:
Ps cos 2у; cos is.
71
Но
cos 2-f cos 7 = -j cos 7 -f- у cos З7.
При положении кривошипа на оси симметрии сила инерции
также направлена по оси симметрии и равна
Р Р
г 2*о-' —2и> *
Значит, проекции сил инерции 2-го порядка на перпендикуляр
к оси симметрии в сумме дадут нуль, а сумма проекций на ось
симметрии будет равна:
i *
Р^ — Р »» = 4 Р‘2 (2 cos Ъ + S C0S Зь) • (60)
5=1 5 = 1
Теперь возьмем кривошип под углом «==45° к оси симметрии.
Тогда
04 = 45°; а,-= 45°—7,-; 2а; = 90°—2Ti.
Сила инерции 2-го порядка будет:
Р2 cos 2otj = Р2 cos (90° — 2^) = Р2 sin 27^.
Проекция ее на перпендикуляр к оси симметрии будет:
Р2 sin 2у j sin 7?-,
но
„ . J 1 „
Sin 27 Sin f = у cos 7 — у 07.
При положении кривошипа под углом а = 45° к оси симметрии
сила инерции машины будет направлена перпендикулярно к оси
симметрии, а следовательно, она будет суммой проекций сил
инерций 2-го порядка на перпендикуляр к оси симметрии:
i i
Р2Ш + Р-^ = у Рэ (2 cos 7,- — 5} COS З7,.). (61)
5=1 >=1
Из уравнений (60) и (61) находим:
i
р»о = р., 2cos W’ <62)
5=1
i
Р 2» = ^2 Р2 S С0 S 3Ъ' (63)
5=1
Силы эти надо брать только со знаком плюс. Максимум и ми-
нимум сипы инерции А-го порядка будут равны соответственно:
Р];и> I Р kvi И Pjmi Р -
72
Например, для V-образной машины с углом развала 60° углы
осей цилиндров с осью симметрии будут 30°, и векторы полу-
чатся следующие:
р.,=4р* icos 6°с+cos 60°)i=I
Р2н, = 1 ра [cos 30° + cos (— 30°)] = 0,866 Р2;
р = у Р2 [cos 90° + cos (— 90°)] = 0.
Для угла развала 90° имеем:
Ъ = 45°;
Р_и, = 0;
= 4 р2 [cos 45° + cos (- 45°М = у
Р ^ = ^Р‘2 Icos 135° -f- cos (- 135°)] = - A Г>,.
Для W-образной машины с углом развала 40° получим:
Р_ш = 4 Р« <cos °° + 2 cos 80°) = 0,674 Р,;
Р2„, = 4 Р2 (cos 0° + 2 cos 40°) J 1.266Р2;
р_,ш = X Р2 (cos 0°4- 2 cos 120°) = 0.
Сила инерции 1-го порядка имеет максимум 2,174Pj и минимум
0,826Рг Сила инерции 2-го порядка постоянна и равна 1,266Рг.
Она представляет собой вектор, вращающийся со скоростью 2о>.
Для трехцилиндровой звезды с углом развала 120°
Р „, = 0;
^ = 0;
|Р = 4 Р2 3 cos 0° = 1ДР2.
Для четырех цилиндровой звезды с углом развала 90°
Р ю==0; Р2(|> = 0; Р 2ш=-0
и вообще для всякой звезды, кроме трехцилиндровой, ПО' фор-
мулам для (Р,„), (P j, (Р3.о), (Р 2и}) имеем: Р_„, = 0; Рйи = 0;
Р ^ = 0; Рш = 4Рг
§ 27. Графический метод уравновешивания звездообразных
моторов. Определение силы инерции 1-го порядка
звездообразного мотора. Как было уже сказано выше,
вследствие неравенства поступательных масс амплитуды силы
73
инерции 1-го порядка в главном и прицепном механизмах не
одинаковы, а отличаются между собой на величину
^Я-ак^Я^-р, п₽иц.
Если бы Рх — Ру прнц, то согласно теории уравновешивания
звезд, в которых все механизмы главные, мы имели бы
Р_^0;
рш=4р1-
Во всех прицепных механизмах поступательные массы одина-
ковы, одинаковы и амплитуды Рг приц. Если бы в главном ме-
ханизме амплитуда 1-го порядка была Р1 , а не Рр то
1-й порядок во всей машине изобразился бы вектором
— Р
2 1 приц 7
но амплитуда 1-го порядка в главном механизме отличается
от амплитуды в прицепном механизме на величину
Р — Р
1 1 приц
Эта разность амплитуд и создает в звездах неуравновешен-
ность сил инерции 1-го порядка.
Разность эта могла быть представлена двумя векторами:
&Р и ДР
ж Ш 1 — си’
которые по величине равны половине разности амплитуд:
ДР = др = —(Р______Р )
и направлены соответственно под углами ±а к оси главного
механизма, которая для звезд будет осью симметрии.
Значит, звезда будет иметь две силы: Рш, равную
₽.=*Р. ч».+дР.=^-[(г-1)Р, ,,.д+р.].
направленную по кривошипу, и силу
Р = ДР = — (Р —р )
и> —ш 2 ' 1 1 приц’*
Сила Рш может быть уравновешена противовесом, а сила Р
обычно остается неуравновешенной. Величина ее в больших
звездах достигает 100 кг.
Определение силы инерции 2-го порядка для
всего мотора. Поставим кривошип в какое-нибудь произ-
вольное положение, например а.
74
Отыскиваем положение кривошипов 2-го порядка у каждого
из цилиндров и смещаемся от них на угол
— Ку + ’О
(у —номер цилиндра).
По фазовым положениям направляем амплитуды Ра 1рнц и
проектируем их на оси цилиндров. Проекции геометрически
складываем. Разложим Р9 рез по направлению ±2а к оси сим-
метрии. Получим векторы:
Р-ъ» и Р_^.
Каждую из этих сил можно уравновесить противовесом, вра-
щающимся со скоростью ±2«) соответственно. Массу и радиус
центра тяжести этих противовесов надо подобрать так, чтобы
развиваемая ими сила равнялась соответственно.
Результирующая инерционная сила 2-го порядка у всей ма-
шины будет максимальной (минимальной) при положении криво-
шипа на оси симметрии. Инерционная сила 2-го порядка у ма-
шины в этом положении кривошипа будет равна сумме (раз-
ности) сил:
Р Р
1 1 —So:’
Результирующая инерционная сила машины будет минималь-
ной (максимальной), когда кривошип пройдет 45° от оси сим-
метрии. Результирующая сил инерции 2-го порядка будет гори-
зонтальна и равна разности (сумме) сил:
‘-2^ ‘ — guj*
§ 28. Аналитический метод определения векторов Рш, Р_ш,
Р2и> и Р_2ш для многорядных и звездообразных моторов, имею-
щих ось симметрии. По фиг. 60 имеем зависимость углов по-
ворота кривошипа от осей 1-го и у-го цилиндров:
а = «у—V ац = а~Ъ
(^. — угол развала между первым и у-м цилиндром). Возьмем
кэивошип на оси симметрии, т. е. при а = 0. Тогда аг,- =— х»-
Сила инерции 1-го порядка у у-го цилиндра будет:
pi.lcos К/ — ?м) = Picos
Проекция этой силы на ось симметрии будет равна:
cos (®, t-j- х,) cos ъ = Рц (cos cos2 х,- — sin sin cos =
= у cos <f>v -j- Рц (cos cos — sin ®„- sin 2x;) =
= | PlS cos -p\,- cos (®l7 + 2xy).
75
Сила инерции 1-го порядка при этом положении кривошипа
определится по формуле:
i i
Рю + = у S P'j C0S + 4 2 cos + 2Ъ> (64)
J=1 j=l
Теперь возьмем кривошип под углом 90° к оси симметрии:
а = 90°; ау =90 — 7
Сила инерции 1-го порядка в /-м цилиндре
Р, cos (at — »,) = Р, sin (ф,;+7,).
Проекция этой силы на перпендикуляр к оси симметрии будет:
^ijSin(4>irb7,)sin7J=PJJ|sin | sin 27^-}- cosф,; ( } — |cos27;)j =
= 2 P13COS'рv — 4 cos ('Pi.j + 2ТД
Сумма таких проекций для всех цилиндров будет:
i i
рш — = 4 2 Р”’cos ~ 2" 2 Р'-> COS + 2Ь>- (65>
J=1 J=1
Из уравнений (64) и (65) получим:
г
Ри> — ~2 cos >
3 1
Р “ = 4 S Риcos (Ч>13 + 2ъ)-
Сила инерции 2-го порядка у /-го цилиндра при а = 0 равна:
Р2> cos (2аг — ф.^) = Ру cos (27 j + «у).
Сумма проекций этих сил на ось симметрии для всех цилиндров
будет:
Р-з» 4- Р а» 2 Ръ cos <2Ъ + ?2j) cos 7j =
J=t
i
= 2 Py (cos tj cos 27,- cos Фу— sin 27 • cos 7, sin ф.»,).
j=i
Подставляя
c os 7j cos 27j = ~- cos 7j + у cos 87^
и
sin 27; cos7y = y sin 7; sin З7;,
76
получим:
^2ш + ^2ш= у P4UCOS?9HCOSlj+COs3Xj) —
5 = 1
i
— 7 У sin «ад (sin 4 sin 3i,). (b6)
J= ।
Для a = 45° имеем: сила инерции 2-го порядка в j-м цилиндре
P2j cos (2ay — ®3j) = Рад sin (2Tj- -f- «ад),
где ay = 45°—
Сумма проекций таких сил для всех цилиндров на перпенди-
куляр к оси симметрии будет:
i
Ръ» —Р йш = 2 Р»1 Sin (2Ъ + Т-J,) Sin Ъ =
.7 = 1
i
— 2 P^i (sin 2Ъ Sin 1i COS ?27 + COS 2T, sin Tj Sin ?й,)-
.7=1
Подставляя опять
o . 1 • ,1.0
cos 2-^ sin f j = — -g sin -|- -9 sin
и
sin 2-fy sin yj — — cos у.) — % cos Зуг,
получим:
i
P^> — P -2.0 = Y P* C0S '‘ij (C°S T# ~ C0S 3l^ —
2 = 1
— 7 V Рад sin Зад (sin sin Зу,). (67)
3—1
Складывая 466) c (67), потом вычитая (67) из (66), получим:
2PSu, = 2 P»i COS cos Tj — 2 P21sin ?0jSin I; =
i «
= 2 Р4 (cos cos l—sin sin ъ) = 2 Pacos (rnj+ъ);
5=1 ' 5=1
i
p.^ = 7 У P2j cos (ср.ад 4- у,); (68)
2P = 2 P21 cos ?iiicos ЗУ/ — 2 P'j-isin ?й7sin ^1/=
~ 2 рч,-(cos «ад cos 37j — sin «ад sin 37j) = 2 P‘>j cos (®ад + 3^);
y=t J-1
77
Р-2» = у C°S + 3Ь)’ (69)
J = 1
Возьмем для примера шестицилиндровую звезду с такими пара-
метрами:
# = 110 мм; L = 339 мм; г1 = г2 = г3 = г4 = гъ = 63 мм;
// = 1500 об/мин; Ц=1Ъ = 279 мм; Z2 = /4 = 278,5 мм;
/8 = 276 мм;
'JRB — 0,29 кг • сек'г/м; = 0,256 кг • сек^/м.
Для главного механизма: Для прицепного механизма:
Ру — 785 кг; Р, = 690 кг;
Р2 = 255 кг. Р^ 6> = 202 кг; 5> = 10°;
ра(2,4) = 326 кг; ф8'- 4> = 21с50';
Рй(з)=428 кг; «2(8> = 0°.
Вместо способа Ланчестера применим идеи Шлика, который
в свое время предложил для пароходных машин уравновеши-
вание путем выбора соответствующих размеров кривошипных
механизмов и поступательных масс. Так как в авиационных ма-
шинах нельзя менять размеры, то остается попробовать уравно-
весить машину только путем подбора поступательных масс.
Оставив поступательные массы второго и четвертого меха-
низмов, изменим массу главного механизма в х раз, массы пер-
вого и пятого механизма в у раз и массу четвертого механизма
в z раз. Тогда силы инерции 1 и 2-го порядка будут:
Механизмы Амплитуды сил, кг
1-го порядка 2-го порядка амплитуда | ее фаза
Главный I и V прицепные И и IV III прицепной 785х 690у 690 690г 255-т 202у 326 128г 0° 10° 21°50' 0°
Напишем теперь уравнения для (#2(j и {Р^ю). Для
того чтобы машина была уравновешенной, нужно, чтобы эти
три вектора были равны нулю:
Ри> = 392,5% + 690у cos 120° + 690 cos 240г Ц- 3452 = 0,
или
392,5% — 345у — 345-4-345.2 = 0, (а)
Р2Щ = 127,5% -Ь- 202_у cos 70° Ц- 326 cos 141°50' — 214z = 0,
78
или
127,5%4 69у —256 —214z = 0, ФХ
Р. 2Ш = 127,5% — 202у cos 10° + 326 cos 21°5(У — 214z = 0,
или
127,5% — 190у—J-315 — 214z = 0. (с)
Решая систему уравнений (а), (Ь) и (с), найдем:
% = 2,12; у = 2,2; z = 0,79.
Значит, если сделать в каждом механизме следующие посту-
пательные массы:
в главном 2,12 31в кг сек2]м
в 1 и V прицепных 2,2 3?в „
во II и IV „ ЗЛВ
в III прицепном 0,79 3)1Л „
2 = 1,06 ЗЛв + 3,593 3?Пг
то машина будет уравновешена:
Р-<и — Рош = Р--2ч> ~ О’
Для уравновешивания силы Р,:, надо поставить противовес,,
который на радиусе центра тяжести должен иметь массу,
равную 1,06 3?в-j-3,593 ЗКр. Противовес у неуравновешенной
массы был бы
0,5 ЭЛВ + 2,5 31п.
Значит, противовес будет тяжелее на
0,506 3iR +1,093 2Rn.
Отношение самой тяжелой массы к самой легкой будет:.
0,786 ~ 2’8’
Массы машины увеличатся на
1,626 ЭЛл + 3,279
Уравнения для (Р_ш), (Р2(й) и (Р 2ш) можно применять только
в случае симметричного изменения масс, т. е. когда поступа-
тельные массы левого механизма и симметричного ему правого
механизма изменяются одинаково.
Для уравновешивания звезды путем симметричного изменения
поступательных масс надо иметь минимум шесть цилиндров, так
как придется сделать три различных симметричных изменения
масс, потому что имеется три уравнения для векторов Р_ш, Р2<о
и Р_2ш, которые допускают только три неизвестных; больше
7»
или меньше трех симметричных изменений масс сделать будет
нельзя.
Против этого способа уравновешивания может быть только
одно серьезное возражение, которое не позволит осуществить
это уравновешивание: от изменения поступательных масс в k
раз возрастут в k раз и силы инерции в отдельных цилиндрах
и механизм не сможет выдержать их действия. Будет чрезмерно
велик износ и большое нагревание в местах соприкосновения
подвижных деталей. Сложность конструкции поршней, дорого-
визна их изготовления, неудобство монтажа и т. д. послужат
также препятствием такому уравновешиванию, но в гораздо
меньшей степени. Метод этот будет иметь большое значение
для паровых машин.
§ 29. Оценка уравновешенности по критерию Стечкина-
Климова. Пусть в машине действуют:
а) неуравновешенная сила А-го порядка:
Рк cos (Аа-рФ*),
Ь) неуравновешенный момент А-го порядка:
Мк cos (Act+ <!>*).
Если считать двигатель подвешенным за центр тяжести или
монтированным на других опорах, собственные колебания кото-
рых не сказываются на колебании двигателя, то действие этой
неуравновешенной силы и момента можно подсчитать следую-
щим образом:
уравнение движения центра
тяжести двигателя будет:
у"т=-Рк cos (Aa-j-tsfc); (а)
У — ускорение центра
сти двигателя,
т -—масса двигателя.
тяже-
уравнение колебания двига-
теля вокруг центра тяжести
будет:
/fi" = AfjtCOs(Aa+4fc); (а')
Ь"— угловое ускорение дви-
гателя,
/— его момент инерции отно-
сительно оси, проходящей
через центр тяжести дви-
гателя.
Общий интеграл уравнения движения двигателя есть сумма
интегралов уравнения без правой части и частного интеграла
уравнения с правой частью.
Интегралы уравнений без правой части:
у = А11~1~А2; (Ь) | ^ = В^-]-В^; (Ь')
частный интеграл:
y = Ccos(Aa {-?*); (с) 0 == £>cos(Aot4 'Ю- (с')
80
С и D определим, подставив (с) и (с') в (а) и (а7), принимая
во внимание, что а = о>( и «' = <»:
У' — — k-Сш- cos (Ла -j- ®fc);
Рк
mk'-ui2
О" = — k-D^~ COS (Ла <рЛ);
d = 7^5- [радиан]
М
Общий интеграл будет:
у=Д/-уД2— cos (Аа-Усрд.) | 7^ СОБ(Ла-уу).
Постоянные интеграции найдем из общего интеграла, полагая
/-=0:
Уо = А2-^с°8<Р7г, | в0 = В.2-ACOS.y„
откуда
Л = Jo+ж» cos <?,. | В2 = 60 + cos у.
Для определения Д, и Вх возьмем производные:
У = Д, -у sin(Aa + ?fr); | 6' = В, + sin (Л« + У);
при t = 0:
У=^о, | б7 = о,
откуда
Рк I о М,. . ,
-7^sln^’ | Bi = -7^sin'^
Общий интеграл будет:
M. ft Л cin Л. / 1 A 1
у mku ^"ЧкС-ГУо Т- /Ы Sln 1
рк -4 тУт COS Ф,. — 1 mk^m- ' h 1 Mh < rtW cos
Pl -гг-^ COS (ka 4- Ф> ), lk^2 cos (Ла 4-y.).
Если фл. = 0, то общий интеграл будет:
У = У о + тда (1 — cos ka) м.
Если у = 0, то общий
6==Ьо+т^ (1—cos ka) [радиан].
интеграл будет:
,6 Зак. 48. Динамила, ввиащюиных двигателей.
81
J
Тогда максимальное переме- Тогда максимальное откло-
щение центра тяжести двига- Зтс - теля при a — ~2k будет: Зти некие двигателя при а= — будет:
. 1 2Р* етах = ео+[Радиан)
Полагая уо = 0, найдем: Полагая &о = О, найдем:
= 7^2 [радиан]
Zmax mk-ш-
Стечкин и Климов предлагают оценивать уравновешенность
двигателя по амплитуде вынужденных колебаний _ушах м 0mai,
вычисленных указанным способом.
Тот двигатель считается лучше уравновешенным, у которого
меньше амплитуды _утю[ и 6гаах вынужденных колебаний.
Амплитуда больше 0,2 — 0,3 мм считается недопустимой.
§ 30. Уравновешивание двойных звезд. Для суждения
об уравновешенности двойной звезды надо исследовать каждую-
звезду в отдельности. В результате исследования каждой отдель-
ной звезды получим для каждого порядка сил инерции два век-
тора Ркш и Р_}ж, которыми этот- порядок изображается.
Силы инерции, изображаемые этими векторами, можно уравно-
весить двумя противовесами (jkv. и G_to.
Начальным положением противовесов каждой звезды будет
ее ось симметрии, т. е. ось главного цилиндра этой звезды.
Сложив у каждой звезды векторы сил инерции, вращающиеся
в одну и ту же сторону с одинаковой скоростью, получим
у двойной звезды для каждого порядка по два вектора сил
инерции, вращающихся в различные стороны с одинаковой по
абсолютной величине скоростью.
Двойные звезды бывают двух типов. Первый тип — звезды
стоят по отношению друг к другу в шахматном порядке: оси
цилиндров второй звезды стоят посередине углов развала первой
звезды, так что между осями рядом стоящих цилиндров первой
и второй звезд имеется угол смещения осей s = -~. Второй тип
звезд-—оси цилиндров обеих звезд стоят друг против друга.
Смещение осей е —0.
Каждая звезда имеет свою ось симметрии — ось главного
цилиндра. Поэтому ось симметрии двойной звезды будет нахо-
диться на половине углового расстояния между осями симметрии
обеих звезд. Начальным положением векторов силы инерции
двойной звезды будет ось симметрии двойной звезды.
Для того чтобы найти результирующие векторы сил инерции
по величине, надо поставить кривошип двойной звезды на ось
симметрии двойной звезды; кривошипы каждой звезды располо-
жены друг против друга, угол между ними равен 180°. Тогда
вращающиеся векторы сил инерции каждой отдельной звезды
«2
будут расположены симметрично относительно оси симметрии
двойной звезды. Здесь векторы сил инерции, вращающиеся
в одинаковом направлении, могут быть геометрически сложены,
их результирующая будет вращающимся вектором сил инерции
двойной звезды.
Силы Рш уравновешиваются сами собой. Все остальные силы
инерции остаются неуравновешенными.
Введем новые определения. Будем называть углом а, угол
поворота кривошипа первой звезды от оси симметрии первой
звезды и углом а.2 — угол поворота кривошипа второй звезды
Фиг. 61. Определение силы Р_ ш и пары М ш.
от оси симметрии второй звезды и углом а — угол поворота
первого кривошипа от оси симметрии двойной звезды.
Теперь выведем формулы для сил и моментов сил инерции
двойной звезды.
Сила Р”*т и пара М^. Силы Рш уравновешиваются, так
как они для каждой звезды направлены по противоположным
кривошипам и результирующей не дают, образуя пару
МЮ = Р„-Ь,
где Ь — расстояние между плоскостями осей цилиндров обеих
звезд.
Сила Р^™ и пара ЛГ™. На фиг. 61 построены век-
торы Р ш каждой звезды. Вектор Р1_ы направлен под углом — at
к оси первой звезды, вектор Р“ш— под углом—а2 к оси второй
6* 83
184Я
звезды. Кривошип взят на оси симметрии. Результирующая этих
сил будет:
р'ат=2Р . • sin 2г.
—
Здесь г — угол оси симметрии машины с осями симметрии звезд;
e — так как угол между осями симметрии обеих звезд
равен —. Если звезды поставлены в затылок друг другу, то е = О
и Р”аш = 0.
—
По первой теореме уравновешивания (теореме Огуречникова)
пара будет создаваться проекциями сил Р_ш на перпендикуляр
к результирующей Перпендикуляр к совпадает с на-
правлением кривошипов звезд. Проекции Р_ю на кривошипы
будут:
Р_ш cos 2е.
Пара M_w будет равна:
М = PJ) cos 2г.
Когда звезды поставлены в затылок,
М.^Р^Ь.
Сила и пара На фиг. 62 представлено нахо-
ждение силы Р*^ для положения кривошипа на оси симметрии.
Вектор отложен под углом 2alt вектор F^m— под углом 2а2;
Р^ш = 2Р3шсоГ?.
Для звезд, поставленных в затылок,
риаш__________________________ор
'•Mi 2<»‘
По первой теореме момент будет создаваться проекциями сил Р.1М
на перпендикуляр к Р^“, т. е. силами P3u> sin е.
= Р.2шЬ sin е.
Для звезд, поставленных в затылок,
М2ш = 0.
Сила и пара М „т. На фиг. 63 представлено нахо-
ждение этой силы и момента для положения кривошипа на оси
симметрии.
Вектор Р1 отложен под углом — 2а„ вектор — под
углом —2а,.
84
Oct симметрии машины
Фиг. 63. Определение силы P_Su) и пары М _2ш.
85
Для звезд, поставленных в затылок,
омаш О О
- 2w 2ш'
Проектируем Р_2ш каждой звезды на перпендикуляр к Р™2ш-
Проекция каждой силы Р_о,0 по величине будет:
Р^и sin 3s.
Пара М _2,„ будет:
= P_3u,Z> sin 3s.
Когда звезды поставлены в затылок,
Обыкновенно главные механизмы в двойных звездах ставятся
один против другого, так как при этом достигается лучшее урав-
новешивание.
Определим для примера уравновешенность и покажем, как
можно уравновесить мотор типа Румплера, представляющий
собой четыре Z-цилиндровых звезды. Коленчатый вал этого
мотора такой же, как у обыкновенного четырехцилиндрового
двигателя. Звезды стоят в затылок друг к другу.
Силы Р™ направлены по кривошипам и в сумме дают нуль.
Силы Рзвш для верхних кривошипов направлены в одну, а для
нижних кривошипов — в другую сторону и в сумме дают нуль.
Силы Р^'а направлены по кривошипам 2-го порядка и в сумме
дают:
рчыа
2и> ‘2о> •
Силы Р™2ю вращаются в сторону, противоположную вращению
кривошипа 2-го порядка, и в сумме дают:
рмаш = 4рЯ.
— 2ю —2п>
ГЛАВА VI
УРАВНОВЕШИВАНИЕ МАШИН. НЕ ИМЕЮЩИХ ОСИ
СИММЕТРИИ
§31. Графический метод. Уравновешивание сил инерции 1-го
порядка в V-образной двухцилиндровой машине. Разберем во-
прос уравновешивания V-образного двухцилиндрового двигателя,
цилиндры которого поставлены под углом развала 7, причем
возьмем случай, когда угол развала 7 не равен углу прицепа 7,
(фиг. 64). В этом случае прицепной механизм будет иметь силы
инерции всех порядков как четных, так и нечетных.
86
По Кельшу решить полностью вопрос уравновешивания та-
кого двигателя нельзя, поэтому мы применим универсальный
метод идеи Тейлора.
Опираясь на принцип Кельша, можно отыскать инерционную силу
машины, но векторов Ркю и Р_ки), ее изображающих, найти нельзя.
Если требуется отыскать только инерционную силу машины,
то надо поступать по Кельшу следующим образом.
Для главного цилиндра амплитуда силы инерции 1-го порядка
направляется по кривошипу, а для прицепного амплитуда сме-
щается с физического
кривошипа на фазо-
вый угол гармоники
силы инерции 1-го по-
рядка прицепного .ме-
ханизма. Амплитуды
сил инерции главного
и прицепного механиз-
мов не одинаковы и по
величине. Пусть они
.на фиг. 65 изображаю-
тся векторами Рг и Р t •
Спроектировав их на
оси цилиндров и сло-
жив геометрически
проекции, получим си-
лу инерции 1-го по-
рядка для всей машины
при данном положении
кривошипа.
Величину и поло-
жение векторов Р^
и Р-ъи» изображающих
силу инерции k-ro по-
рядка, найдем, Поль- фиг. 64. Схема двухцилиндрового V-образного
зуясь идеями Тей- мотора.
лора.
По Тейлору поступательная сила инерции А-го порядка лю-
бого механизма может быть изображена двумя векторами, оди-
наковыми по абсолютной величине, равными половине ампли-
туды Рк и направленными к оси цилиндра под углами
Tt(Aa — в*.) соответственно: силы РклЛ и Р_ка> можно уравновесить
противовесами, вращающимися со скоростями ±Ав> соответ-
ственно. Монтируются эти противовесы так, что их центробеж-
ная сила инерции направлена обратно векторам Рка> и P_fcu„
а вес и радиус центра тяжести этих противовесов подбираются
из условия равенства центробежной силы противовеса силе, изо-
бражаемой векторами Ркм и Р_к,о соответственно.
87
Фиг. 65. Уравновешивание сил инерции 1-го порядка в двух-
цилиндровом V-образном моторе.
Фиг. 66. Уравновешивание сил инерции 1-го порядка
в первом цилиндре.
Определим эти век-
торы для нашей V-образ-
ной машины.
Силы инерции первого
цилиндра можно уравно-
весить двумя противове-
сами, масса каждого из
которых на радиусе кри-
вошипа равна половине
поступательной массы в
главном цилиндре, при-
чем один противовес
вращается в сторону ш
и находится на другой
стороне физического
кривошипа, так как он
должен образовать угол
-J-a, с осью 1-го цилин-
дра, а другой вращается
в сторону — ш и обра-
зует с осью 1-го цилин-
дра угол —а, (фиг. 66).
Силы инерции второго
цилиндра можно уравно-
Фиг. 67. Уравновешивание сил инерции 1-го
порядка во втором цилиндре.
89
•весить также двумя противовесами, вращающимися: первый со
скоростью -ф- <и под углом —|-(«а — к оси главного цилиндра,
а второй — со скоростью —и> под углом —(а2 — к оси глав-
ного цилиндра. Массы каждого из противовесов вычисляются
из условия равенства силы инерции каждого из противовесов
силе, равной половине амплитуды Р, прнц (фиг. 67).
Для уравновешивания 1'и II цилиндров сложим геометри-
чески силы инерции противовесов, вращающихся в одну и ту же
сторону с одинаковыми скоростями (фиг. 65). Получим два сум-
марных противовеса. Первый из них (малый) вращается со ско-
ростью —ю, а второй (большой) — со скоростью ф-а>. Обозначим
углы между суммарными противовесами через зг
Противовес, уравновешивающий силу Рш, монтируется на
кривошипе не с обратной его стороны, а несколько смещается
•с нее на угол s.
§ 32. Седьмая теорема уравновешивания. Линия, деля-
щая угол а пополам, будет линией начальных по-
ложений противовеса.
В самом деле, противовесы вращаются в разные стороны
с одинаковыми по абсолютной величине скоростями, следова-
тельно, от линии, находящейся где-то внутри угла о,, они прой-
.дут одинаковые по абсолютной величине углы, которые будем
обозначать через а. Такой линией может быть только линия,
равноотстоящая от суммарных противовесов, т. е. линия, делящая
угол -у пополам.
Следовательно, углы поворота противовесов равны:
Во время нахождения противовесов на линии начальных по-
ложений кривошип не будет находиться на этой линии, как
это было в машинах, обладающих осью симметрии, а будет сме-
щен с нее на некоторый фазовый угол, который мы обозначим
через Это положение кривошипа, соответствующее началь-
ным положениям противовесов, будем по аналогии с симмет-
ричными машинами называть начальным положением криво-
шипа.
Фазу найдем из следующих рассуждений: когда суммарные
противовесы из найденных положений повернутся на угол -у-
’и займут начальное положение (совпадут по направлению), тогда
кривошип повернется из начерченного произвольного положения
на угол -у- в свое начальное положение, причем вращаться он
будет в ту же сторону, что и противовес (большой) закреплен-
ный на другой стороне кривошипа, вращающийся со скоростью
-ф-w. Угол, который он образует с линией начальных положе-
ний, и будет фазой 6(.
90
Углы поворота кривошипа будем отсчитывать от его началь-
ного положения.
С линией начальных положений противовесов кривошип об-
разует угол «-{-бр Большой противовес образует с линией на-
чальных положений угол -f- а, а малый —а.
Когда кривошип находится в своем начальном положении,
противовесы совпадают (находятся на линии своих начальных
положений); когда кривошип перпендикулярен к своему началь-
ному положению, противовесы находятся друг против друга.
Линии начальных положений мы принуждены были отыскать
потому, что в машине нет оси симметрии.
§ 33. Уравновешивание сил инерции 2-го порядка в V-об-
разной машине. Найдем положения кривошипов 2-го порядка
для обоих цилиндров, удваивая углы, образуемые физическим
кривошипом с осью цилиндров (фиг. 68). Амплитуда Р2 2-го по-
рядка 1-го цилиндра направлена по кривошипу 2-го порядка,
Фиг. 68. Уравновешивание сил инерции 2-то порядка в V-образном
двухцилиндровом двигателе.
91
а амплитуда прицепного механизма, которую обозначим векто-
ром Р2”, смещена со своего кривошипа 2-го порядка на фазовый
угол ф8, взятый со знаком минус.
Спроектируем амплитуды Р2 на оси цилиндров и проекции
их геометрически сложим. Получим результирующую инерцион-
ную силу 2-го порядка. Теперь ее уравновесим. Задача уравно-
вешивания сводится к нахождению линии начальных положений
противовесов 2-го порядка, которая, вообще говоря, не совпа-
дает с линией начальных положений противовесов 1-го порядка.
Для этого надо разобрать сначала уравновешивание каждого
механизма в отдельности, потом обоих вместе.
Первый цилиндр. Силу инерции в первом цилиндре
уравновесим двумя противовесами, направленными под углами
-j-2a, и —2а,. Сила инерции каждого из них равна половине
амплитуды Р2.
Второй цилиндр. Силы инерции во втором цилиндре
уравновесим двумя противовесами, которые с осью прицепного
механизма образуют углы -f-(aa— »s) и —(a2 — «2).
Силы инерции их равны половине амплитуды Рап.
§ 34. Уравновешивание всей машины. Сложим силы инерции
противовесов, вращающиеся в одну и ту же сторону; получим
суммарные противовесы. Один из них (большой) вращается со
скоростью —2о>, а второй (малый) — со скоростью — 2<о. Разде-
лив угол з2 между суммарными противовесами пополам, получим
направление линии начальных положений суммарных противо-
весов.
Теперь найдем начальное положение кривошипа, соответ-
ствующее начальному положению противовесов.
Для того чтобы суммарные противовесы из произвольного
положения переместились в начальное, каждому из них нужно
пройти угол 2« = -~, а следовательно, кривошипу, который вра-
щается вдвое медленнее противовесов, надо за это время из положе-
До
ния, которое он занимает, переместиться на угол — а в сто-
рону вращения большого противовеса, который имеет скорость
-}-2«. Полученное положение кривошипа будет начальным поло-
жением 2-го порядка.
Угол, который в это время кривошип образует с линией
начальных положений противовесов, будет фазовым углом 62
2-го порядка. Для сил 2-го порядка угол а поворота кривошипа
будем отсчитывать от его начального положения 2-го порядка.
Большой противовес с линией начальных положений проти-
вовесов 2-го порядка образует угол -f-2a, а малый угол —2a.
Когда кривошип находится в своем начальном положении 2-го
порядка, противовесы совпадают. Когда кривошип пройдет от
своего начального положения 2-го порядка угол а = 45°, проти-
вовесы станут друг против друга.
92
§ 35. Уравновешивание Х-образной машины. Исследуем
сначала уравновешенность Х-образного четырехцилиидрового
мотора, представленного на схеме фиг. 69.
Результирующие инерционные силы 1 и 2-го порядков опре-
деляются обычным способом, как и в звездообразных и много-
рядных моторах, — путем геометрического сложения проекций
.амплитуд, смещенных на фазовый угол с кривошипов 1 н 2-го
порядков.
На фиг. 70—81 сделаны такие построения для Х-образного
мотора, для которого
— 70 мм-, L — 245 мм; /. = 0,286;
<ий = 29855 if сек-; г = 52 мм; /==195 мм;
= т = 5°; 9RB = 0,2 кг • сек^м;
Di D = 0,18 кг • сек2! м.
Амплитуды сил
инерции 1-го
порядка
Фазы
Р/ =418 кг Tl'=0°
ри=388 кг ф1и = - 0,5°
Р|Ш =382 кг|' = —2,3°
Piiv = 368 кг f П' = — 1,3°
На фиг. 70 амплитуды Фиг. 69. Схема Х-образиого мотора,
направлены под их фазо-
выми углами к физическому кривошипу, взятыми со знаком
минус, согласно уравнению ускорения 1-го порядка, и спроек-
тированы на оси соответствующих цилиндров; полученные про-
екции геометрически сложены. Таким образом определена ре-
зультирующая сила инерции 1-го порядка, равная
Р.,,» = 775 кг.
1 рея
Уравновешивание противовесами сил инерции
J-r о порядка. Для того чтобы найти веса и положения уравно-
вешивающих противовесов, надо определить их начальные
положения, когда они находятся на одной прямой линии. Для
этого уравновесим противовесами Ланчестера для удобства по-
строения каждую пару цилиндров в отдельности.
Каждый противовес должен развивать силу, по величине
равную половине амплитуды силы инерции 1-го порядка.
Противовес, вращающийся со скоростью —{—«>, должен образо-
вать с осью z-го цилиндра угол ах— о/.
93
Другой противовес, вращающийся со скоростью —«>, обра-
зует угол — (а4 — «/).
На фиг. 71 показано определение этих противовесов для
первого и второго цилиндров. Кривошип взят на осн второго
Фиг. 70. Определение результирующей инерционной силы инерции
1-го порядка у Х-образной машины.
цилиндра. Векторы, вращающиеся в одну и ту же сторону,
геометрически сложены, и в результате получены противовесы,
94
Фиг. 72. Уравновешивание противо-
весами сил инерции 1-го порядка
третьего и четвертого цилиндров..
Фиг. 73. Сложение противове-
сов, вращающихся со скоро-
стью — »>-
Фиг. 74. Сложение противовесов,
вращающихся со скоростью
(которыми можно уравновесить силы инерции 1-го порядка
.первого и второго цилиндров.
На фиг. 72 показано аналогичное определение противовесов,
уравновешивающих силы инерции 1-го порядка у третьего и
четвертого цилиндров. Кривошип взят на оси второго цилиндра.
На фиг. 73 сделано геометрическое сложение сил инерции
противовесов, вращающихся со скоростью —-<м у обоих пар ци-
линдров. Их геометрическая сумма дает величину и положение
силы инерции первого противовеса всей машины, вращающе-
гося со скоростью —®.
На фиг. 74 показано геометрическое сложение противовесов
обеих пар цилиндров, вращающихся с коленчатым валом. Резуль-
тирующая их сил инерции равна
Pv, == 790 кг.
На фиг. 75 нанесены эти силы инерции для произвольного
шоложения кривошипа. Измерив угол между этими векторами
Рш и и разделив его пополам, найдем направление линии
(начальных положений противовесов. Линия эта отстоит от про-
тивовесов на угловом расстоянии, по абсолютной величине рав-
ном а = 72,5°.
Для того чтобы перевести противовес из его положе-
ния, которое он занимает, на линию начальных положений, надо
передвинуть его на угол —72,5°, следовательно, кривошип, на-
ходящийся на оси второго цилиндра, для положения противо-
веса на линии начальных положений надо перевести на такой же
угол —72,5°; это и будет начальным положением кривошипа.
Начальное положение кривошипа для 1-го порядка совпадает
как раз с линией начальных положений противовесов. От нее
(поэтому следует отсчитывать углы поворота а кривошипа. Эта
линия будет осью годографа-эллипса сил инерции.
Р>Ии.Шзх=Р‘« + Р-==790 + 31==821 Кг'
Р1ВВ.Ш(0 = ^-Р-^790-31=759 Кг-
Для того чтобы найти наибольшие значения сил инерции
1-го порядка по осям ОХ и 0Y, надо построить эллипс (см. по-
строение фиг. 76). Касательные, проведенные к нему на наи-
большем расстоянии от осей ОХ и 0Y, определят максимальные
значения сил:
по оси ОХ:
pt аа max = 790 кг-,
по оси О Y:
Л ик max = 782 кг.
96
•Фиг. 75. Нахождение линии начальных положений
кривошипа и противовесов для сил 1-ю порядка.
7 Зак. 48. Динамика авиационных двигателей.
Уравновешивание противовесами сил инерции
2-го порядка.
Сила инерции 2-го порядка какого-нибудь Z-го цилиндра будет
^шМС2со8(2а4—
Здесь 'i»2—фаза гармоники 2-го порядка перемещения поршня.
Ци- линдры Амплитуды инерции 2-го рядка СИЛ по- Фазы Та
1 А1 =119 кг 180э
II Р211 = 100 кг 187,5°
III Р2П1 = 194 кг 199,6°
IV P21V = 167 кг 171°
На фиг. 77 показано определение результирующей силы
инерции 2-го порядка этого мотора. Амплитуды этих сил отло-
Фиг.Г 77. Определение результирующей инерционней силы 2-го порядка
в Х-образном моторе.
ss
жены под фазовыми углами, взятыми со знаком минус к кри-
вошипам 2-го порядка, и спроектированы на оси соответствую-
щих цилиндров. Все проекции геометрически сложены, и в ре-
зультате получена результирующая сила инерции:
Р2рез = 228 кг.
Уравновешивание сил 2-го порядка противове-
с а м и. Здесь так же, как и в случае уравновешивания сил инер-
Фиг. 78. Уравновешивание противовесами сил инерции 2-го
порядка первого и второго цилиндров.
ции 1-го порядка, решение задачи состоит в нахождении линии
начальных положений противовесов.
Для удобства построений будем уравновешивать каждую
пару цилиндров в отдельности. Противовесы должны развивать
силы инерции, по абсолютной величине равные половине ампли-
туды 2-го порядка z-ro цилиндра.
Векторы сил инерции Р’’, которые погашаются противове-
сами, вращающимися со скоростью —f-2<» с осью z-ro цилиндра,
7® 99
образуют угол 2а,-— Они будут параллельны амплиту-
дам А/4.
Векторы вращающиеся со скоростью —2о>. образуют
угол —(2а,; — с осью z’-го цилиндра. Они симметричны век-
торам относительно оси /-го цилиндра.
На фиг. 78 сделано геометрическое сложение векторов, вра-
щающихся с одинаковыми скоростями, для первого и второго
цилиндров. На фиг. 79 сделано то же для векторов третьего и
четвертого цилиндров. На фиг. 80 сложены геометрически век-
торы обоих пар цилиндров, вращающиеся в одну и ту же сто-
рону.
Сила инерции всей машины, представляемая вектором, вра-
щающимся со скоростью 2ш, будет:
Р?ш = 210 кг,
вращающимся со скоростью —2<о:
— кг.
Теперь можно найти положение линии начальных положений
противовесов.
Начертим (фиг. 81) векторы и Р_^. Измерим угол между
ними. Это будет угол 4а = 54°. Линия, делящая этот угол попо-
лам, и будет линией начальных положений противовесов. Нахо-
дясь на этой линии, противовесы совпадают.
Угол поворота кривошипа, если его отсчитывать для криво-
шипа от его начального положения 2-го порядка, будет:
540 т-
а =—г- — 13,5 .
4
Проведем к данному положению кривошипа (на оси второго'
цилиндра) угол 13,5°. Он определит нам начальное положение
кривошипа, соответствующее начальным положениям противо-
весов.
Кривошип в начальном положении имеет с линией начальных
положений фазу, равную 83° (по измерению фиг. 81). Макси-
мальная сила инерции 2-го порядка будет в начальном положе-
нии
А, . „ = 210 -I- 26,2 = 236,2 л-г;
минимальная сила инерции
Р.т^ = 210-26,2 = 183,8 кг
будет при повороте кривошипа на 45° от его начального поло-
жения.
100
Фиг. 79. Уравновешивание противовесами сил инерции 2-го
порядка третьего и четвертого цилиндров.
Фиг. 80. Уравновешивание сил 2-го порядка у всей машины.
Максимумы по осям ОХ и OY будут мало отличаться от
двух найденных последних сил, так как оси симметрии эллипса
мало наклонены к оси ОХ. Поэтому можно принять:
по оси ОХ:
шах ==236 кг;
по оси OY:
Пикшах = 184
Возьмем теперь 16-цилиндровый Х-образный мотор. Схема
расположения цилиндров дана на фиг. 69. Коленчатый вал этой
Фиг. 81. Определение линий начальных ' положений противовеса
н кривошипа для сил 2-го порядка.
машины представляет собой нормальный вал обыкновенного
четырехцилиндрового четырехтактного мотора. Будем рассмат-
ривать наш мотор как четыре четырехцилиндровых мотора. Раз-
ница от обыкновенного мотора будет заключаться в том, что в
выражения сил инерции прицепного ряда будут входите, фазы,
одинаковые для всех прицепных цилиндров.
Для того чтобы получить силу инерции в одном прицепном
ряду, надо направить ее амплитуду по направлению, смещен-
ному с кривошипа данного порядка на фазовый угол со знаком
минус. Но вместо того, чтобы смещать каждую амплитуду, можно
построить многоугольник амплитуд, не смещенных на фазовый
102
угол, и уж его результирующую потом повернуть на этот угол.
Спроектировав последнюю на ось ряда, получим силу инерции.
Так как схема кривошипов 1-го порядка для нашего
вала дает замыкающийся многоугольник, то сил инерции 1-го
порядка в нашем моторе нет. Чтобы найти силы 2-го по-
рядка, поставим кривошип в его начальное положение, которое
было определено на фиг. 81. Тогда векторы Р+2ш для первого
и четвертого кривошипов будут на линии своих начальных по-
ложений. Второй и третий кривошипы смещены с линии своих
начальных положений на 180°, значит, векторы Р+2ш этих кри-
вошипов будут смещены с линии своих начальных положений
на угол 360°, т. е. для взятого положения кривошипов векторы
Р+ 2<0 всех кривошипов находятся в начальном положении, и
сила инерции всего мотора имеет максимум согласно предыду-
щему примеру:
) = 4 (Р«шР 9и)) = 840 4-105 = 945 л:г;
/>7“ =840 «г;
Р^ = Ю5 кг.
Машина будет иметь минимум сил инерции 2-го порядка,
когда кривошипы пройдут 45° от своих начальных положений.
Тогда векторы Р 2ш пройдут от своих начальных положений 90°,
станут друг против друга и дадут
(рч ) . =840 — 105 = 735 кг.
V 2 ин маш/шш
§ 36. Аналитический метод. Дадим теперь формулы для оп-
ределения неуравновешенных сил Рш, Р_ю, Р2„, и Р_2и>, линий
начальных положений этих сил и линий начальных положений
кривошипа, соответствующих начальным положениям противове-
сов. Предварительно сделаем следующее замечание.
Будем измерять угол развала какого-нибудь у-го цилиндра
от вертикали (фиг. 82). Счет цилиндров будем вести тоже от вер-
тикали по вращению коленчатого вала. Обозначим угол пово-
рота кривошипа от вертикали через а. Тогда угол поворота кри-
вошипа от оси у-го цилиндра будет:
аУ = а — Ъ-
Почти для всех авиамоторов вертикаль является осью сим-
метрии цилиндров (но не механизмов). Это обстоятельство не-
сколько облегчает вычисления, так как углы развала при этом
симметричны. Для вывода наших формул это обстоятельство
несущественно.
Для облегчения вывода формул поставим кривошип на верти-
каль (фиг. 83). Векторы Рш, P_w, Р2и. и Р^ш, которые мы полу-
чим для положения кривошипа на вертикали, будут, конечно,
одинаковы для любых положений кривошипа, так как величина
их постоянна.
ЮЗ
Для положения кривошипа на вертикали угол поворота криво-
шипа от оси i-го цилиндра будет:
вертикаль
Фиг. 82. Отсчет углов поворота кри-
вошипа и углов развала’в несимметрич-
ной машине.
aj=~ Ъ-
Вертикаль
Фиг. 84. К определению силы Р1О.
Фиг. 83. Положение кривошипа
дли вывода универсальных фор-
мул уравновешивания.
Силы инерции 1-го п о р яд к а. Сила инерции 1-го порядка
в у-ом цилиндре будет:
—®17)
для а = 0; при а^ = -—7,- она будет равна
104
^u-cos(—Ъ—?0).
Эту силу мы по идее Тейлора представляем двумя векторами::
первый вектор — Р^, вращающийся со скоростью со, расположен
под углом —— ®u- к оси у-го цилиндра (фиг. 84), а второй
вектор у Р^, вращающийся со скоро-
стью — <о, расположен под углом у,--)-''?»
(фиг. 85).
Сила Рш. Все векторы у Рр имею-
щие скорость со, будут направлены под
углами —<f>j (фиг. 84) к вертикали. Проек-
ции их на вертикаль дадут:
<ъ
Фиг. 86. К определению фазы
вектора Рш с кривошипом.
Л pwcos '?>./
J=1
проекции на горизонталь:
у Vpi..Sin(
*j=i j=i
Вектор Ры всей машины будет (фиг. 86):
> =1
О 2
?М
(70>
J=1 j=i
его фаза с кривошипом найдется из соотношения:
t<r f
(71)
j i
Сила Р_т. Все векторы ~-Р^, имеющие скорость — со, будут
направлены под углами 2yj-j-Vjj (фиг. 85) к вертикали. Проекции
их на вертикаль дадут:
2^pijc0s(2^+?i,/);
j=i
проекции на горизонталь:
У=1
К5»
Вектор Р ш всей машины будет:
Р_ш= [^’vcos(2b + ?U>] + sin(гу.Н-Ти)] - (72)
jEro фаза с вертикалью в момент положения кривошипа на вер-
тикали найдется из формулы:
2 P‘l sin Gfy + 'fij)
tg U = . (73)
У ^i;cos(2y, + <?u)
j = i
Противовесы Gw и G_ul, которыми можно уравновесить силы
и Р_ш, надо^монтировать с обратной стороны векторов Рш и Р_ш.
Фиг. 87. Определение начальных положений противовесов
для сил 1-го порядка и начального положения кривошипа
для сил 1-го порядка.
Линия начальных положений этих противовесов, согласно седь-
мой теореме уравновешивания, есть линия, делящая пополам
угол Oj (угол между векторами Рш и Р_„„ фиг. 87), будет линией
начальных положений противовесов:
Линия начальных положений противовесов, уравновешиваю-
щих силы инерции 1-го порядка, отстоит от вертикали под
углом
106
Когда эти противовесы станут на линию начальных положений,
тогда кривошип будет иметь с вертикалью угол
С| » —U> С<д
2 ~ ~ 2
Положение кривошипа под углом к вертикали есть началь-
ное положение кривошипа, соответствующее начальным положе-
ниям противовесов, уравновешивающих силы инерции 1-го по-
рядка.
Силы инерции 2-го порядка. Сила инерции 2-го по-
рядка в/-м цилиндре будет:
P2i cos (2а.; — 9»j)
для а —0; при а,—— она будет равна:
Pajcos(—2^ —<paJ).
Эту силу по идее Тейлора представляем двумя векторами: пер-
вый вектор расположен под углом —2-^ — se- к оси /-го
1
цилиндра (фиг. 88) и вращается со скоростью 2<о, а второй
расположен под углом 2^-|-%.7 к осн того же цилиндра и вра-
щается со скоростью —2ш (фиг. 89).
Сила Р2<„. Все векторы ^P2j, имеющие скорость 2ш, будут
107
направлены к вертикали под углами — tj — ?sj (фиг. 88). Проекции
их на вертикаль дадут (фиг. 90):
а
4 + %.?)>
J=i
p2« = yl/"P2jcos(ъ--f-?2j)]2 +1 sin (L. + ?3y)j2. (74)
j=i j=i
Его фаза с вертикалью в тот момент, когда кривошип нахо-
дится на вертикали, найдется из соотношения:
*
— 2 sin (7J + ?2j)
tg !‘>41 = — . (75)
2 p^j cos (ъ + ?2.7)
3 »
108
Сила Р-^». Все векторы \ P.2j, вращающиеся со скоростью—2а>,
будут направлены под углами 3^4-ю22- (Фиг- 89) к вертикали.
Проекции их на вертикаль будут:
ъ
ЩЯ/СО5(Зъ4-?;;/),
3=1
проекции на горизонталь:
i
4 + 'та?-
3 = 1
Вектор Р_2(и всей машины будет:
Р-^> = |1/ Я; cos (3Ъ-f ?2j) j* + | £ Я/ sin (3Ъ + ?эд)j2. (76)
r 1 31
Его фаза с вертикалью в момент положения кривошипа на вер-
тикали найдется из соотношения:
2P2jSinl37z- ;
tg L2u) = . (77)
У P’j COS (3-fj- + =y)
Противовесы G2u„ G_2w, которыми можно уравновесить силы
P2w и Р-ьм, надо монтировать с обратной стороны векторов
Рош И P^2v>"
Согласно седьмой теореме линия начальных положений про-
тивовесов, уравновешивающих силы инерции 2-го порядка, будет
лежать посередине угла о2, т. е. посередине угла между векторами
Л® и Р^2т (фиг. 91):
2 2
Угол, образованный линией начальных положений этих про-
тивовесов с вертикалью, будет:
f Г С2 g2u>4~ 2и>
’-в»Т 2 2
Когда противовесы будут на линии своих начальных положе-
ний, тогда кривошип с вертикалью будет иметь угол
4 ~ 4
Это есть начальное положение кривошипа, соответствующее
начальным положениям противовесов 2-го порядка.
н»
Вообще говоря, линии начальных положений противовесов.
1 н 2-го порядков не совпадают, также не совпадают и соответ-
ствующие им начальные положения кривошипа.
Для примера возьмем мотор Юпитер. У него /? —95 мм;
Фиг. 91. Определение начальных положений противовесов 2-го порядка
и начального положения кривошипа для сил 2-го порядка.
—343 мм; / = 292 мм для всех прицепных цилиндров;
Г1 и 8 = о2 мм; г2 п 7 = 53,3 мм; г3 н 6 = 52,5 мм;
г4 >15 — 51’2 Л{ЛГ’ п = 2000 об/мин; Ne = 600 л. с.;
= 0,23 кг сек^/м; = 0,21 кг сек*'м.
ТАБ
Цилиндры Амплитуды сил 2-го по- рядка в суще- ствующем моторе кг Массы увели- чены в следую- щее число раз Амплитуды сил 2-го по- рядка мотора с измененными массами кг Отношения амплитуд сил 2-го порядка’ каждого цилиндра к амплитуде силы 2-го порядка главного цилиндра мотора с измененными массами
Главный . . • ... 266 3,32 883 1
I прицепной . . . 227 2,67 606 0,688
П 238 2,99 711 0,807
Ш 328 1 328 0,371
IV 392 1,51 605 0,683
v „ ... 392 1,09 427 0,484
VI „ ... 328 1,34 440 0,498
VII 238 2,77 660 0,747
VIII 227 2,77 630 0,712
ИО
Проверить уравновешенность этого мотора можно, изменив,
поступательные массы следующим образом:
в я главном цилиндре сделать ее равной 0,765 I прицепном цилиндре сделать ее равной . . 0,561 кг сек2/м я я я
BO II я я • • -0,628 я л и
в III » п масса остается без изме-
нения ......... 0,21 »» я я
я IV п я сделать массу равной . 0,324 я я я
4 V я я • 0,229 я »» я
я VI Я я „ 0,282 я я я
VII и VIII прицепном цилиндре сделать массу
равной . . 0,582 „ я я
Такая машина в кинематическом отношении имеет ось сим-
метрии, так как массы на кинематику не влияют. Неодинако-
востью же поступательных масс динамическая однородность
машины нарушается, и ось симметрии исчезает. Значит, к ней
полностью применимы уравнения предыдущего параграфа.
Все <a,j = O, так как 77 = 7.
Для вычисления сил инерции машины Р Р^ и Р_пш соста-
вим следующую таблицу (см. табл. II).
Теперь для вычисления векторов P_w, Р.^, и Р^, составим:
V cos 27j= 1,31 -f- [0,966 cos 80° 1,08 cos 160° +
“/ 1ГЛ.Ц
-[-(0,556+0.394) cos 46°+(0,361+0,485) cos 120°+cos 80°+cosl60ol=--0;
V p'j— sin 2y; = 0 + [0,966 sin 80° + 1,08 sin 160°+
Cl гл. ц
3^ 1
ЛИЦА II
Фазы Отношение увеличения масс к увели- чению массы VIII цилиндра
Ъ-J ь° ъ 1)° ь° ъ° ь°
о 0 0 0 0 1,31
3°15' 40 80 4345' 123°15' 0,°66
17°4О' 80 160 97°4О' 102’20' 1,08
20е'Ч)' 120 — 120 14О°2О' 2О°2О' 0,361
840' 160 — 40 щвчо7 128'10' 0,556
8°10' — 160 40 168=10' 128 10' 0,394
20°20' 120 120 140°20' — 20-20' 0,485
17°40' 80 160 97’40' + 102 20' 1
— 3'15' s0 80 43’15' - 12345' 1
111
+ (0,394 — 0,556) sin 40° + (0,485 — 0,361) sin 120° —
— sin 80° — sin 160°] = 0.
У cos (f; + <?«,-) = 1 + 0,688 • cos43°15' -f- 0,807 cos97°40' —
i “ гл‘4
(0,3714- 0,498) • cos 140°20' + (0,683 + 0,484) • cos 168°1O' +
4- 0,747 - cos 97°40' 4- 0,712 • cos 43°15' = 0;
V - sin (7j. 4- ®y) = 04- 0,688 - sin 43°15' 4- 0,807 • sin 97°40' 4-
Згл-Ц
4-(0,371 — 0,498) • sin 140°20' 4- (0,683 — 0,484) • sin 168°10' —
— 0,747 • sin 97°40' — 0,712 • sin 43°15' = 0;
V fi-L cos (3-1; j ?у) = 14-0,688 • cos 123°15'4
. , 7 2 гл. Ц
J - 1
0,807 cos 102°20' 4- (0,371 4- 0,498) • cos 20°20' 4-
4- (0,683 4-0,484) • cos 128°10' 4-0,747 . cos 102°20' 4-
4- 0,712 -cos 123° 15'= 0;
У p —sin(37y4_'-s»;) = ^ ' 0,688 • sin 123°15' —
/“1 -глц
— 0,807 • sin 102D20' 4- (0,371 — 0,498) • sin 20°20'
- r (0,683 — 0,484) • sin 128°10'4-0,747 • sin 102°20' —
— 0,712 -sin 123°15' = 0.
Так как псе суммы, входящие в формулы сил Р_№, Р^и„ по-
лучились равными нулю, значит, эти силы будут равны нулю,
и машина наша будет уравновешенной.
Сила будет равна:
ры = 4 ^Р V ЭИЯ0СТ= у «>*Р [3,32 - ЭДВ 4- ЭДр (2,67 4- 2,99 4-
J = i
4- 1 -г 1,54 4-1,09 4- 1,34 4- 2,77 4- 2,77)] -=
= у <3’32 • + 16Л7
В существующем моторе эта сила была равна — ш^Р [2ЙВ 4“
Значит, наше уравновешивание дало увеличение поступательных
масс на величину
2,322RB4-8,17 9JtD;
увеличение веса противовеса, уравновешивающего силу Р,„, -на
величину
1,16 ЭД п 4- 4,085 ЭДЛ.
112
Общее увеличение массы:
3,48W?B+12,255 WD = 3,48 • 0,23 +12,255 • 0,21 = 3,38 кг • сек^м.
Вес мотора увеличился на 33,2 кг, что при мощности мотора
в 600 л. с. дает увеличение веса на 1 л. с. в 55 г.
Теперь покажем, как подобрать веса поступательных масс,
чтобы машина получилась уравновешенной. Так как фаз
у звездообразного двигателя нет (Тг = т), то сила Ры будет на-
правлена по оси кривошипа, и как бы мы ни выбирали массы,
ее всегда можно уравновесить противовесом.
Для того чтобы Р_ш и Р±2ш были равны нулю, нужно, чтобы
шесть сумм, входящих в формулы, определяющие эти силы, сде-
лались равными нулю. Имеем шесть уравнений, которые допу-
скают только шесть неизвестных.
Значит шесть масс нельзя изменять произвольно, а осталь-
ные можно менять совершенно произвольно. Решая уравнения,
в которых шесть масс будут неизвестными, определим эти массы.
Выберем поступательную массу в главном цилиндре, равную
1,2 2)?в= 1,2 •0,23 = 0,276 кг-сек^м. Тогда амплитуда силы инер-
ции 2-го порядка в главном цилиндре будет 266-1,2 = 319 кг.
Выбор величины произвольной поступательной массы делается
на основании ряда просчетов. Для первого просчета можно поло-
жить ее просто равной 2RB. Составим следующую таблицу:
ТАБЛИЦА III
Цилиндр Амплитуды сил II порядка в существую- щем моторе кг Сделаем изменение поступательных масс каждого цилиндра по отношению к по- ступательной массе 7-го и 8-го прицепных цилиндров в следую- щее количество раз Амплитуды сил инерции 11 порядка в могоре с измененными массами Отношение амплитуд сил II порядка каждого цили * др а к амплитуде силы II порядка главного цилиндра в моторе с измененными массами
Главный 266 1,315 319 1
I прицепной 227 X 227-х 0,712- х
П 238 у 238- у 0,747 у
III 328 2 328. z 1,028-г
IV 392 и 392- и 1,228-и
V 392 V 392-» 1,228-»
VI 328 w 328 w 1,028 -w
VII 238 1 238 0,747
VIII 227 1 227 0.712
Тогда для определения неизвестных х, у, z, и, v, w получим
уравнения:
х cos 80° 4- у cos 160° -f- (и 4~ v) cos 40° 4- (z -|- w) cos 120° =
= _ 1,315— cos 80° — cos 160°;
8 Зак. 48. Динамика авиадиан-ных двигателей.
113
xsin80°+>sin 160° + (27 — и) sin 40°4-(w—z) sin 120° =
= sin 80° — sin 160°;
0,712 x cos 43°15' + 0,747 у cos 97°40' + (z + w) 1,028 cos 140°20' -f-
4- (» + v) 1,228 cos 168°10' =
= — 1 — 0,747 cos 97°40' — 0,712 cos 43°15';
0,712%sin 43°15'4-0,747ysin97°40' —(w —£)• 1,028sin 140°20' —
— (?> — «) 1,228 sin 168°10' = 0,747sin97°40'4-0,712sin43°15';
0,712% cos 123°15'-|-0,747 у cos 102°20'4-(w4-z) • 1,028 cos 20°20'4~
4- (27 4- it) 1,228 cos 128°10' = — 1 — 0,747 cos 102°20' —
— 0,712 cos 123°15';
0,712%sin 123°15' — 0,747у sin 102°20' — (w — z) 1,028 sin 20°20' —
— (v — u) 1,228 sin 128°10' = — 0,747 sin 102°20' 4-
4-0,712 sin 123“ 15';
0,549 = 0,94 у — 0,1736 % 4- 0,5 (w 4- z) — 0,766 (27 — «);
1,418 = 0,1 у — 0,518 % 4- 0,79 (w 4- z) 4-1,2 (v 4- u);
0,45 = 0,16 у 4- 0,39 % — 0,964 (w 4- z) 4- 0,759 (v 4- u\
1,33 = 0,342 у 4- 0,988 % 4- 0,866 • (w — z) 4- 0,643 (27 — «);;
1,227 = 0,743/4- 0,487 % — 0,655 • (w — z) — 0,252 (27 — u);
0,135 = 0,73 у — 0,595 %-f-0,356 • (id — z) 4- 0,76 (v—u)~
Корни этих уравнений будут:
% = 0,966; у =1,08; z = 0.361; и = 0,556;
v = 0,394; id = 0,485.
Решение уравнений приводит к выводу, что самой легкой
должна быть поступательная масса третьего прицепного механизма.
Мы не можем сделать ее легче, чем она есть в существующем
моторе, поэтому примем эту массу равной 0,21 кг сек2]м. Так
как отношение поступательной массы седьмого или восьмого
прицепных цилиндров к поступательной массе третьего прицеп-
ного цилиндра будет z = 0,361, то, следовательно, поступательная
масса седьмого и восьмого прицепных цилиндров будет:
— 0,582 кг сек21м.
Тогда поступательные массы в остальных цилиндрах и увели-
чение их масс по отношению к существующим будут:
314
ТАБЛИЦА IV
№ Отношение поступательной массы каждого цилиндра к поступательной массе VII или VIII цилиндров в моторе с измененными массами Величины масс кг* сек2!м По отношению к существующей масса увеличится в следующее количество раз
цилиндров
Главный . . . 1,315 0,765 3,32
1 прицепной х = 0,966 0,56] 2,67
II у= 1,08 U,628 2,99
III z = 0,361 0,21 1
IV »» и — 0,556 0,324 1,54
V и V = 0,394 0,229 1,09
VI w = 0,485 0,282 1,34
VII 1 0,582 2,77
VIII » 1 0,582 2,77
Максимальное увеличение масс равно 3,32 раза. Как видим,
отношения масс и их увеличения взяты такими, какими они были
в первой половине этого примера.
Итак, во второй половине этого примера мы нашли, как
изменить поступательные массы, чтобы машина была уравнове-
шенной, а в первой половине этого примера мы показали, что
машина с такими массами будет действительно уравновешена.
Здесь задача уравновешивания звездообразных моторов путем
изменения поступательно движущихся масс решена в общем
случае, при этом сделано несимметричное изменение масс. Такое
изменение масс можно проделать только в восьми- и девятици-
линдровых звездообразных двигателях. Изменение масс будет
несимметричным, если произвольно выбирать поступательные
массы в трех цилиндрах (в восьмицилиндровых звездах — в двух
цилиндрах). В семи- и шестицилиндровых звездообразных дви-
гателях всякое изменение масс по приведенным выше уравне-
ниям будет только симметричным.
При несимметричном изменении масс можно снизить отноше-
ние самой большой поступательной массы к самой маленькой
до 2. Значит, применяя для одних поршней магний, а для дру-
гих алюминий можно уравновесить машину.
В нашем примере это отношение равно 3,32. В заключение
мы повторим, что основным препятствием к применению этого
способа уравновешивания будет увеличение сил инерции больше,
чем на 300%. Если бы материал выдержал такое увеличение сил
инерции, то, несмотря на неудобства изготовления и эксплоатации
двигателя, этот способ уравновешивания можно было бы приме-
нять. Он может иметь значение также и для паровых машин.
Сила 7% Проекция сил -^-Р, на ось х равна:
405- sin 3° (®iB" — »%),
8*
115
на ось у.
Рю = 405 У sin2 3° (ЭДВ — ЭДВ)2 + cos2 3° (^в + ^в)2 =
= 405 У ЭЛ“2 + + 2 cos 6°ЗИдЭД"в;
считая cos6°»l, получаем:
Рш = 405 (УЛ'В 4- SR;) = 405 (0,1665 + 0,0855) = 99 кг;
ЗИ'в — Э?в - 0,081 Л Л „
tgE"",g3 =°-0624-5® =-°’0168-
Угол вектора Рш с вертикалью будет $ш = —Г.
Сила Р_ш. Проекции сил —-i-Р, на ось у:
405 [®1В cos (2 • 42° 4-З0) 4- ЭД'В cos (2 48е -|- 3°)] =
= 405 [0,1665 cos 87° 4-0,0055cos 99°] = — 1,65 кг;
на ось х:
405 [0,1665 sin ( — 87°) 4-0,0855 sin 99°] = —33,2;
Р_ш = /33,224-1,652 = 33,3 кг;
tgU=^g=o,o5.
Угол вектора Р_ш с положительным направлением оси х
будет $_ш==183°. Угол между векторами Рш и Р_ш для рассма*-
триваемого положения кривошипа будет:
aj = 183° — 91° = 92°.
Линия начальных положений противовесов, которыми можно
уравновесить силы Рш и Р.ш, отстоит от вертикали влево на
угол
-^-=46°.
§ 37. Замечание о влиянии на уравновешенность машины
неравномерности вращения и крутильных колебаний вала.
Формулы ускорения поршня выведены в предположении равно-
мерной скорости вращения ш вала. В действительности же вал
вращается неравномерно, следовательно, если бы мы в состоя-
нии были учесть неравномерность вращения вала аналитически,
то в формулах ускорения появились бы гармоники всех порядков.
Но вал не только вращается неравномерно, он еще колеблется.
Все колена вала имеют, вообще говоря, различные скорости,
значит, от каждого цилиндра будут возникать силы и моменты,
которые по амплитуде и фазе будут неодинаковы с силами и
моментами от других цилиндров.
Особенно резко будут проявлять себя эти неуравновешенные
силы и моменты при резонансе коленчатого вала. При резонансе
116
вала двигатель начинает вести себя очень неспокойно от дей-
ствия именно неуравновешенных сил и моментов, которые
появляются вследствие различных скоростей у коленчатого вала.
По этой причине нет надобности делать вычисления всякой
силы и момента низких порядков больше, чем с четырьмя зна-
ками для 1-го порядка и с тремя для 2-го порядка, а более
высоких порядков вовсе не следует учитывать, потому что, при-
нимая <о = const, мы может быть больше ошибаемся, чем ошиба-
емся при учете трех-четырех знаков и отбрасывании гармоник
высоких порядков.
Вопрос о влиянии неуравновешенности вращения коленчатого
вала и неодинаковости скоростей колен от колебаний может
быть решен только путем экспериментов.
ГЛАВА VII
КРУТЯЩИЙ МОМЕНТ МОТОРА
§ 38. Общая формула крутящего момента. Крутящий
момент на валу мотора для каждого положения механизма может
быть получен путем сложения момента от газов, действующих
во всех цилиндрах, и от сил инерции всех звеньев механизма.
Учитывая силы инерции по методу разноса масс шатунов с приба-
влением поправочной пары, мы найдем, что массы на кривошип-
ных головках шатунов моментов не дадут, а потому останутся
только моменты от сил инерции поступательно движущихся
масс и от поправочных пар.
Крутящий момент часто представляют условно в виде произ-
ведения „тангенциального усилия" (фиктивной силы, считаемой
приложенной по касательной к кругу кривошипа) на радиус кри-
вошипа:
(78)
Как известно из общих курсов теории механизмов, танген-
циальное усилие от силы Рв, действующей на главный поршень,
вычисляется по формуле:
г = р (79)
в COS ₽ ' '
а от силы Рд, действующей на прицепной поршень, по формуле:
7' = ^> (80)
к л
где — скорость прицепного поршня,
VA — скорость на окружности кривошипа.
Подставляя выражение VD через угол поворота кривошипа
и VA = шР, найдем аналитическое выражение для Т'.
117
Так как PR и PD могут быть в свою очередь выражены ана-
литически через угол поворота в своей инерционной частиг
а в газовой части выражаются обыкновенно лишь графически
по индикаторной диаграмме, то аналитическое выражение для Т
доведем до конца лишь в инерционной части, а для газовой
части покажем разложение в ряд Фурье крутящего момента
непосредственно по диаграмме моментов.
§ 39. Разложение в ряд Фурье тангенциального усилия
(крутящего момента) от сил инерции поступательно движу-
щихся масс. Ограничиваясь двумя гармониками, получим фор-
мулы скорости и ускорения прицепного поршня:
jD = — 0)2 [Q COS (а, — ©,) -f- 4С2 COS (2а, — ©2)];
1/д = — [С, sin (а, — ©,) 4- 2С2 sin (2а, — <?3)].
После этого тангенциальное усилие от сил инерции можно
представить так:
Кг, ЯЛг,“г
<81’
где через D обозначено:
D = [Ct cos (а, — ©,) Н- 4С2 cos (2а, — ©g)] [С\ sin (а, — ©,) -|-
-j- 2С2 Sin (2а, — ©2)];
D — С; sin (а, — ©j cos (а, — ©,) -}- 2C2C, sin (2a, — ©4 COS (a, — Ф,)-]-
+ 4C2Cj cos (2a, — ©2) sin (a, — ©,) -j- 8Cj sin (2a, — <p2) cos (2a, — ©2). —
= ~ Q sin 2 (a, — 'f J -j- 4Q sin 2 (2a, — ©2) -j-
1 - 2C2Cj [sin (2a, — ®2) COS (a, — ©j) 4- cos (2a, — ©g) sin (a, — ©J4-
4-2CgCj cos (2а, —?2) Sin (a,—©4 = 1 Cfsin 2 (a,-—©J 4-
4- 2C2Cj sin [3a, — (?14- tpg)] 4- 4Q sin (4a, — 2<p2) 4-
2C2Cj [(cos 2a, cos <p2 4- sin 2a, sin ©2) (sin a, cos ©j — cos a, sin 9,)];
Преобразуем квадратную скобку в последнем члене:
cos (2a,—<р2) sin (a, — ср,) = cos 2a, sin a, [cos ©2 • cos ©J 4~
4- sin 2a, sin a, [sin cp2 cos ©J — cos 2a, cos a, [cos <pB sin ©2] —
— sin 2a, cos a, [sin <p2 sin ©J.
В этой формуле заменим произведения синусов и косинусов
через суммы синусов и косинусов по следующим формулам:
cos 2a sin a = — ~ sin a 4- sin 3a; cos 2a cos a = ~ cos a 4- cos 3«;
sin 2a sin a = — cos a-cos 3a; sin 2a cos a = -j §in “ 4" "J S*n
118
Подставляя, получим:
cos (2а,— ®2) sin (а, — ®,) = — sin a [cos <э2 cos cpj 4~
4- (j sin 3a [cos a2 cos -j- cos a [sin ®s cos —
— у cos 3a [sin tp2 COS®j]-у cos a [cos «2 sin ®j] —
— 4- cos 3a [cos ®s sin ®,] — 4- sin a [sin »2 sin ?,] —
— L sin 3a [sin ®2 sin t?j ] = — 1 sin a, [cos (o„ — »,)] -f-
4- cos a, [sin («, — ®,)1 — ~ cos 3a, [sin (o2 — ®,)] 4-
4- T sin 3a, [COS (®2 4- '?,)] — — у Sin [a, — (®2 — ®,)] 4~
4--i-sin [За, —(<P2—®,)].
После подстановки в (81) получаем формулу для инерцион-
ного момента:
1) для моторов с 7,^7:
М,н = VCA sin [a, — (®2 — ?1)1 -1 sin (2a , - 2?I) -
— SSBlpOjSqCj sin [3 a, — (?, 4- ®2)] — 4sJ)q<u2q sin (4a, — 2®.,); (82)
2) для моторов с 7, = 7; ®i = ir; С, = /?:
MnH = 3RD^RC2 sin [a, — (®,4- к)] — 1sin 2a, -
— 39ЙЛ®*/?С2 sin [3a, — (®s 4- z)] — 45)q^Q sin (4a, — 2?2); (83)
3) для дезаксиального главного механизма:
С, — R Kl 4-Xs, здесь k — ; C2 = -jRX; ®2 = t;
/Иия = -аКВ4~- x / l + *s sin [« — (- — ?i)] —
— Жв<«2/?2 sin (2a — 2?1)---v 1 4- A® sin [3a — (к — ?1)]
-----------sin 4a; (84)
4) для главного механизма: <r2 = к; <s, = к; Q = ~/?X;
q=/?;
AfHH = -b k Sin a — ®iB<D2/?2 у Sin 2a — X sin 3a —
— 9X 1 Xй sin 4a. (85)
119
Первая гармоника инерционного момента у главного меха-
низма фазы не имеет, остальные три гармоники имеют фазу тг-,
амплитуда второй гармоники не зависит от X, она самая боль-
шая; за ней идет амплитуда третьей гармоники, она в три раза
больше амплитуды первой гармоники; амплитуда четвертой гар-
моники в X раз меньше амплитуды первой гармоники.
Гармонические моменты всех четырех порядков можно изо-
бразить вращающимися векторами: амплитуда гармоники 1-го
порядка изображается вектором, вращающимся со ско-
ростью <и в сторону вращения вала в фазе, равной —(<ро — и.)°.
Амплитуда гармоники 2-го порядка -?- изображается век-
тором, вращающимся со скоростью 2ш в фазе — 2<р°1.
Амплитуда гармоники 3-го порядка изображается
вектором, вращающимся со скоростью Зш в фазе —
Амплитуда гармоники 4-го порядка 49RZ)o>2C^ изображается
вектором, вращающимся со скоростью 4<о в фазе — 2<р°2.
Приведем более полное разложение момента от сил инерции
главного механизма с гармониками до 6-го порядка:
Ч,=М? [G + .) sin а -
-a+^ + 5+-)s'n2’-(T + S+^+...)sl„3«-
-(т + -? + <+->4п + (§ + ^+...)^ +
/ЗХ4 | 3X6 \ • с , ]
+ v32 + 32 + JSln 6а+ •••]•
Разложение инерционного крутящего момента на гармоники
до порядков выше 4-го вряд ли целесообразно, а вычисление
гармоник порядков выше 6-го вовсе нецелесообразно, потому
что, полагая ® = const, мы делаем погрешность гораздо бдль-
шую, чем та погрешность, которая получается от отбрасывания
гармоник порядков выше 4-го и тем более выше 6-го. Здесь гра-
ница точности вычислений устанавливается не только малостью
значений гармоники высокого порядка, но и неправильным исход-
ным предположением—принятием <0 = const. Поэтому обычно
гармониками, начиная с 5-го порядка, пренебрегают.
§ 40. Крутящий момент от поправочной пары инерции
шатуна. Мощность от поправочной пары на шатуне передается
на кривошип. Инерционный момент на кривошипе найдем опять
из условия равенства мощностей: мощность —-(/ — кгм!сек
от момента —(/—сил инерции шатуна равняется мощ-
ности ТИпн <о на кривошипе. Отсюда
А1*н = — (/— О ~ • кгм>
J20
Выпишем значения ₽ и ...
ия ещ и <о1п только с одной гармоникой
®г = шф1 cos (аг — Zj);
8,=^“2ф’ sin(^~
г, Ф’ sin 2(а,— у) ...
дставляя, получим:
Момент Л/ин==2‘^/~/^<оаф12 sin 2(аг~ /.,) ... А'гл. (86)
с фазой —2^7C^nL°uHJ только нз ОДНОЙ гармоники 2-го порядка
момента от сил инерции Э(82)-МОМент с гаРмоиикой 2-го порядка
V</-/')^sin 2(Яг--Х1)_| vc? sin 2(a^i)==
f C°S 2Z1 ~ C0S 2?t] Sin 2a‘+
+ “2ф’ sin Ч+4 Vq Sin 2?,jcos 2a, «
где ~ d Cos 2ai +1 sin 2az = £s cos (2az — (87)
d “ ~ “4S sin 2Zj -f-1 ^o<B2Q sin 2?, ;
z=7 (/- /') ш2ф? cos 2Z1 - 2 cos 2?1;
С одними Главными м^1ЯЩИЙ иоиент от сил инерции в моторе
уеханизмами. Для у-го цилиндра имеем:
Отсю'7 = 7 8,П * ~~ 78’П 2aj~ S’n 3“ ~ Т sin 4a^) ^в^2-
бУДет имет^тако^ ^М&НТ от сил инеРйии в соседнем цилиндре
шипа у-го цилиндра налп^аЖеНИе’ ТОЛЬКО вместО уГЛа криВо’
Цилиндра и т. дДР Д брать Угол 5’+т кривошипа (у4-1)-го
и тот жеаИ амплитТеЛЬ будет для всех цилиндров один
дров одни И те жеУДтп гармоник всех порядков для всех цилин-
сил инерции всего лви ДЛЯ отыскания суммарного момента от
соответствующих г^.^ЛЯ ,адо тольь'о суммировать синусы
четырех гармоник буде?^^ Момент от сил инерции в виде
3
М...... = 2 Ч.; = j; sin%_ > 2 Sin 2,;-
» J
~ тA 2sin 3a>—-? 2sin 4aj) (88)
121
где i—число цилиндров. Суммирование производится для всех i
цилиндров.
Вычислим отдельно сумму гармоник одинаковых порядков
и по ним вычислим момент от сил инерции всего мотора.
В уравнении (88) выпишем отдельно суммы гармоник одина-
ковых порядков:
для гармоник 1-го порядка:
i i
7 ЗКрШ2/?2 sin а. = У sin а.; (89)
J = 1 3 I
для гармоник 2-го порядка:
i i
— — 2Кво>2/?2 sin 2а. = V Sin (2а. 4- те); (90)
.7 = 1 J = 1
для гармоник 3-го порядка:
ХЖдШ2/?2 sin (За.-L-) — мз 2 sin(3a.-j--re); (91)
#=i j=i
для гармоник 4-го порядка:
I«i i
~ У sin (4a. -f- те) = /И4 ^(sin;(4a. -f - те). (92)
5=1 5 = 1
Если для у-го цилиндра изобразить амплитуду Л1к гармоники
А-го порядка вектором, наклоненным к вертикали (оси цилин-
дров в большинстве случаев вертикальны) под углом Аа^-Д-те, то
.44fc{sin (ka.j -j- те)
будет проекцией вектора Мк с направления Аа^Д-те на горизон-
таль, перпендикулярную к оси цилиндра.
Э1и уравнения показывают, что берется сумма проекций на
горизонталь некоторых векторов Мк, наклоненных к вертикали
(к оси цилиндра) под углом где k — порядок гармоник,
j—номер цилиндра, а,—угол у-го кривошипа, который он обра-
зует с осью цилиндра.
; Для удобства построений и вычислений удобно брать криво-
шип первого цилиндра на оси цилиндра. Тогда угол
kaj = k^,
где ц—угол у-го кривошипа с первым кривошипом.
Как известно, сумма проекции равняется проекции суммы.
Вместо того чтобы проектировать каждый вектор Мк с напра-
вления на горизонталь и проекции складывать, можно
геометрически сложить векторы Мк всех цилиндров и уже их
геометрическую сумму /HA.fe3 спроектировать на горизонталь.
Проекция результирующего вектора Мк этого многоугольника
122
Фиг. 92. Получение момента Л-го
порядка приемом Келына,
амплитуд Мк на горизонталь и будет вектором крутящего
момента А-го порядка От сил инерции в моторе; фазу г не
надо учитывать только Для векторов /И, 1-го порядка.
Направление Аау по предложению Кельша назовем направле-
нием кривошипа А-го порядка для у-го цилиндра (фиг. 92).
Следовательно, векторы амплитуд Мк надо направлять по
кривошипам А-го порядка. Кривошипы эти вращаются со ско-
ростью Аш, поэтому и многоугольник амплитуд Мк называется
вращающимся многоугольником. Вращается он со скоростью Aw.
Если проекция результирующей получилась в правой поло-
вине (при вращении вала мотора по часовой стрелке) кривошип-
ного круга, то момент этот
будет положительным, т. е.
он будет вращать вал по ча-
совой стрелке. Если проекция
результирующей получилась
в левой половине кривошип-
ного круга, то момент будет
отрицательным.
Угол результирующего
вектора №реа с первым кри-
вошипом назовем фазой инер-
ционного момента.
При повороте коленчатого
вала на угол Аа весь многоугольник векторов амплитуд Л1к
А-го порядка повернется также на угол Аа, угол ее с верти-
калью (с осью цилиндра) будет Аа-}-®*, т. е. результирующая
векторов отклонится от фазового положения на угол Аа.
Итак, гармонический результирующий момент А-го порядка
представляет собой проекцию вектора, вращающегося в сторону
вращения вала с угловой скоростью, равной скорости коленча-
того вала, увеличенной в А раз.
Напомним, что амплитуды Мк моментов А-го порядка для
всех цилиндров одинаковы. Угол у-го кривошипа А-го порядка
2к
z-цилиндрового двигателя с осью цилиндра будет А — j для
четырехтактных двигателей и А-5-у—для двухтактных двига-
телей.
к
Когда отношение -j — m есть целое число (J — всегда целое чи-
сло), тогда векторы амплитуд отличаются друг от друга по фазе на
целое число полных окружностей, поэтому такие векторы по
направлению совпадают, сумма их будет арифметической сум-
мой, а так как все они по величине равны, то сумма этих
амплитуд в i раз больше каждой амплитуды.
k k
Когда — или ygv — не целое число, а дробь, то мы, переходя
123
от одного вектора к другому, смещаемся каждый раз на часть
окружности, а так как i таких частей должны составлять целое
число окружностей, то векторы амплитуд будут равномерно
расположены около центра, и их геометрическая сумма будет
равна нулю.
Заключение: если в моторе с i коленами порядок k неко-
торой гармоники не будет нацело делиться на число колен i,
то векторы амплитуд этих гармоник будут образовывать пра-
вильный /-угольник, который сам собой замыкается и имеет
результирующую, равную нулю. Момент от сил инерции такого
мотора состоит только из гармоник, порядок которых кратен
числу цилиндров или ’/а числа цилиндров, амплитуда которых
равна i амплитудам гармоники k-ro порядка одного колена.
А так как в авиамоторах все углы между соседними коле-
нами одинаковы, то для вычисления момента от сил инерции
нет необходимости вычислять все гармоники на каждом колене
и потом их складывать. Достаточно только вычислить ампли-
k
туды гармоники £-го порядка, гдет = у—целое число для четы-
k
рехтактных двигателей или т = о§-— целое число для двухтакт-
ных двигателей, и взять ее в /-кратном размере. Следовательно,
момент сил инерции мотора представляет собой проекцию на
перпендикуляр к оси цилиндра вектора, величина которого
равна z-кратной амплитуде гармоники Л-го порядка для одного
Цилиндра; этот вектор вращается со скоростью, в k раз боль-
шей скорости коленчатого вала, в сторону вращения вала.
Значит, в /-цилиндровом моторе, в котором углы между кри-
720°
вошипами одинаковы и равны —------для четырехтактных дви-
„ 360°
гателеи и—----для двухтактных двигателей исчезнут все гармо-
ники за исключением гармоник, порядок которых равен A j—для
четырехтактных двигателей и k • /—для двухтактных двигателей
ТАБЛИЦА V
Число цилиндров Число рядов Угол 7 между кривошипами Угол развала цилиндров №№ гармоник, из сил инерции которых состоит момент мотора
2 I 180° 0 2; 4; 6 и т. д.
3 1 240° 0 3; 6; 9 и т. д.
4 1 90° 0 4; 8; 12 и т. д.
8 1 45° 0 8; 16; 24 и т. д.
8 2 lf(P ео° 4; 8; 12 и т. д.
12 2 120° 60° 6; 12; 18 и т. д.
12 3 180° 60° 6; 12; 18 и т. д.
18 3 120° 40° 9; 18; 27 и т. д.
1
Возьмем для примера пятицилиндровый звездообразный дви
гатель с главными механизмами (фиг. 93). Углы кривошипа
с осями цилиндра при а = 0 будут:
с 1 цилиндром aj=0;
с II » «2 = «1 —т = —Ъ
с Ш - аз = а1 — 27== — 2т;
с IV „ а4 = а1-|-2т = 2т;
с V я ав = а1 + 'Г==Т-
Увеличивая углы
для гармоник 2, 3 и
4-го порядков в 2, 3,
4 раза, мы получим
углы,тригонометри-
ческие функции ко-
торых (синусы) бу-
дут в сумме давать
нуль, кроме 5-го по-
рядка.
Для 5-го порядка
углы будут 0°:
0;— 5т° —0;—lOf—
— 0; + 10f = 0; —
— 5T° = 0,
и поэтому этот дви-
гатель будет иметь
первый не равный
нулю момент только
5-го порядка:
Чпв.маш = ^б sin 5а-
Итак, в звездах
с главными шатуна-
ми первый не равный нулю инерционный момент имеет порядок,
равный числу цилиндров.
§ 42. Инерционный момент мотора с прицепными шатунами.
Для V-образного мотора с 12 цилиндрами при т = 60° (фиг. 94)
будем иметь гармонические инерционные моменты 3, 6, 9-го и т.д.
порядков.
3-й порядок. Обозначения: а — угол кривошипа с осью пер-
вого цилиндра (главного), аг— угол кривошипа с осью прицеп-
ного цилиндра.
<*• ” sin За + М?'₽ sin [За, — + ?2)].
125
Здесь
тогда
а( = а — 1 —а — 60°;
3яг=3а—180°;
9gftBwv?2x. ^”г р=—
Хлр=
Фиг. 94. Момент 3-го порядка в V-образном 12-цнлнидровом
моторе с прицепными шатунами.
Этот момент может быть изображен вектором Л1Р 3 (фиг. 94).
Для этого изобразим векторы 7И™‘Р и Л1',р‘г под углами
Зя тт,
За —(®1 + ?й) + ’
соответственно. Геометрическая сумма этих векторов будет
вектором Л1|ез, проекция которого на горизонталь будет векто-
ром, изображающим инерционный момент мотора:
Л1Г мяш ==/Ирез sin (За-|-£3).
Итак, инерционный момент 3-го порядка мотора есть проекция
на горизонталь вектора Л4р€3, вращающегося со скоростью 3<о
в фазе Ss.
126
Рассмотрим W-образиый 12-цилиндровый трехрядный МОТ°Р'
(фиг. 95). Развал между соседними рядами цилиндров по 60°.
Угол между кривошипами 180°. Углы кривошипа:
с главным рядом..........а
с левым прицепным рядом . аглев = «4"Т
с правым прицепным рядом . а^пр = а — f
В каждом ряду могут быть моменты только четных порядков
Прицепные ряды симметричные, значит, если в правом ряд}
будет фаза %, то в левом будет фаза — %.
Фиг. 95. Схема и углы кривошипа с осями цилиндров в W-образном
моторе.
2-й п о рядо^к.^гАмплитуды моментов в обоих прицепных
рядах одинаковые, следовательно, момент 2-го порядка будет
равен:
Af™*Р «п 2а + AT'р [sin (2а — 27 — 2?1) + sin (2а + 2f + 2?t)]•
Ha фиг. 96 показано определение вращающегося со ско-
ростью результирующего вектора момента 2-го порядка всего
мотора для а = 0.^Фаза этого вектора равна нулю.
д/Ий. маш л - о
М, = ТИ2реа Sin 2а.
12Т
Из фиг. 96 для Л7рез имеем следующую формулу:
Ч рез=<л' ”+2уИГ ” cos 2 h+?.)•
4-й порядок.
/И™’р Sin 4а -ф М^'р [sin (4а — 4? —2<р2) sin (4а -f- 4? -j- 2<ps)].
Ha фиг. 97 при а = 0 определен вектор ез, вращающийся
со скоростью 4ш. Построение сделано без учета фазы it, поэтому
вектор ТИ4реа на фиг. 97 надо повернуть на угол к. Проекция
этого вектора на горизонталь будет вектором момента 4-го по-
рядка
Л14в маш =/И. sin 4а,
4 4 рез ’
где
М. рез = К’Р + р cos 2 (2а + 2-г + ?2).
Для 18-цилиндрового W-образного трехрядного мотора полу-
чим 7 = 40°. Угол между кривошипами 120°, значит, каждый ряд
имеет моменты только 3, 6-го и так далее порядков.
ле в и пр р
Фиг. 96. Моменты 2-го порядка
12-цилиндрового W-образного
мотора для а = 0.
Фиг. 97. Момент 4-го порядка
W-образного мотора для
а = О.
3-й порядок. ТИ8гез легко найти построением, подобным тем
которыми мы определяли гармонические моменты у 12-цилиндро-
вого трехрядного мотора.
у^вн. маш = у^гл. р sin За + ^приц । sin |3а __ 37 __ _|_
+ sin [За + Зт + (?, + <р2)]} = /из рез sin За.
4-й порядок имеет уравнение того же вида, как и в при-
мерах с предыдущими моторами.
128
Для Х-образного 16-пилиндрового мотора, по четыре цилиндра
в ряд с четырехколенчатым валом под углами 180° (фиг. 98),
получим для каждого ряда моменты только 2, 4, 6-го и так да-
лее порядков. Углы кривошипа с осями рядов будут:
с главным рядом...................а
с верхним прицепным рядом.........ав.рХв. р —«— 45"
с нижним левым прицепным рядом . . аЯВжн.л.р —«—135°
с нижним правым прицепным рядом. . аВИяж. пр. р = «4* 90°
Фиг. 98. Схема Х-образиого менора с прицепными шатунами.
Общее уравнение Л-го порядка будет:
Л1А»н. ,,aw Мт* р sin Ла 4- /H’epsH-р { sin (Ла — Л 45° 4-- х“р“- *) +
4^Л1«ия«.р | sin .Аа _ k 135о । + sin -ka t k 9а , _ J .
Для 8-го порядка это уравнение несколько упрощается, так как
Л 45° = Л 90° = Л 135° —0°.
§ 43. Суммарный инерционный момент в звездообразных
двигателях. Углы кривошипа с осями цилиндров:
в главном цилиндре .... а
в 1-м прицепном цилиндре . ah — a — 7
во 2-м прицепном цилиндре . аь —а — 2у
в у-прицепном цилиндре . . а^. — а-—yj
9 Зак. 48. ДиЕамикя авжщиогаых даитател'ей.
129
Для цилиндров, Им симметричных,
ч <•««.= я4г
смм = « 4- 2 т;
%, сямм = а ^УК-
Моментов 2-го порядка в звездообразных двигателях нет, так
как для всякого цилиндра они равны
у SSJZpW2/?-’ sin 2а,
(разницей 9ЙВ — 2КЛ пренебрегаем), т. е. имеем такое же выра-
жение, как и для звезд с одними главными механизмами, в кото-
рых первый, не равный нулю момент имеет порядок, равный
числу цилиндров.
Если фаза А-го порядка у какого-нибудь прицепного цилиндра
будет /к, то для цилиндра, ему симметричного, фаза будет — уЛ,
Амплитуды у симметричных цилиндров одинаковые.
Формула гармоники А-го порядка инерционного крутящего
момента всего мотора будет (для i—нечетного):
г-1 '
7ИЛГЛ’4 sin (^а + 1) 4- У, MJ;j1 sin j Аа -j- ? — А — -/k^ 4-
о" J 1 Я
4- sin (ka -f- 1 4-/IA 4- /A?) = M™' >аШ sin ^Аа -j- Q.
Фаза его равна нулю или к.
Эту формулу можно привести к виду, более удобному для
вычислений. Если обозначим через Е угол
&=Лт4-хл>
и преобразуем:
sin (Аа — $) -|- sin (Аа -j- Е) =
— sin AacosE— cos Aa sin E4~sin cosE4~cos sin E = 2 sin Aa cosE
(так как cos (— E) = cos E), то углы yAf должны будем взять для
удобства вычислений только положительными и фазу /6 — со
знаком плюс. Теперь напишем формулу для углов \1к для гар-
моник до четвертых порядков:
для 1-го порядка =/у 4" ?з 4“
„ 2-го „ Еа = 2л,
» 3-го „ = 3/х4~?а4~
» 4-го „ ^=4/r4-2<ps.
Фазу везде следует брать положительной.
130
Выражение гармоники й-го порядка инерционного крутящего
момента примет вид:
для нечетного числа цилиндров г.
g — 1
[ W'"' ц + 2 Mkj cos (y^Tf -f- /£) j • sin (Aa ;
j=i
для четного числа цилиндров i эта гармоника будет:
» —1
{ 4 + 2 £ Мк} cos (Jky + X*) +
ji=i
+ ^*£+2 COS Ilsin(b+J. (94)
2 L 2 J J
Гармоника 2-го порядка в звезде будет:
— (ЭДВ — sin 2а. (95)
§ 44. Разложение диаграммы крутящего момента от сил газов
в ряд Фурье по методу Перри. Задача разложения этого момента
для авиационных двигателей представляет технические трудности,,
потому что этот мотор четырехтактный и имеет от сил газов
одного цилиндра на протяжении более 400° момент, равный нулю.
Значит, нам предстоит подобрать такие гармоники, которые при
суммировании дадут на протяжении более 400° нуль.
Самым удобным способом такого разложения является метод
Перри. Мы разовьем этот способ так, чтобы он дал достаточ-
ную точность.
Другой метод разложения — способ Рота — удобен для двух-
тактных двигателей. Распространенный в настоящее время спо-
соб Фишера-Хинненена уступает по точности способу Рота и
очень громоздок в применении, поэтому мы его рассматривать
не будем.
Метод, предложенный Перри, усовершенствован Ципперером
(механизированы просчеты) и изложен в книге L. Zipperer
„Tafeln fur Harmonischen Analysen periodischen Kurven" (Verl.
Springer, 1932).
Ципперер сделал свои шаблоны и вычислил таблицы для
кривых, которые он делил на 24 части.
Ввиду того что кривая момента авиадвигателя на большей
части своего периода имеет ординаты, равные нулю, то очень
важно для точности вычислений взять возможно большее число
точек деления. Деление кривой на 24 части по Циппереру не-
достаточно, так как вычисления будут очень неточны: из 24 орди-
нат 14 принимают нулевые значения, и разложение придется
вести только по 10 точкам, ординаты которых отличны от нуля
9*
131
О периоде газовых гармоник. Так как рабочий период
газовых гармоник четырехтактного двигателя равен 4л, а рабо-
чий период гармоник сил инерции 2л, то газовая гармоника 1-го
порядка относительно периода 4л, меняющаяся 1 раз за 2л, будет
гармоникой половинного порядка.
Газовая гармоника 2-го порядка относительно периода 4-я
изменяется 2 раза; она будет гармоникой 1-го порядка в периоде
2л, так как в этом периоде изменится 1 раз.
Газовая гармоника 3-го порядка относительно периода 4тг
изменится 3 раза; она будет гармоникой Р/г-го порядка в периоде
2л, так как в этом периоде изменится 1,5 раза, и т. д.
Так как силы инерции меняются за 2л всегда целое число
раз, то силы инерции дробных гармоник не имеют, газовые же
гармоники имеют дробные гармоники, если их относить к пе-
риоду 2л, и их порядок при переходе от рабочего периода 4л
к периоду 2л понижается вдвое.
Если, наоборот, относить силы инерции к периоду 4л, то
тогда порядок гармоник сил инерции будет повышен вдвое, и
силы инерции относительно периода 4л будут иметь только
четные порядки 2, 4, 6, 8-й и т. д.; в периоде 4л им соответ-
ствуют порядки 1, 2, 3, 4-й и т. д.; нечетных порядков при пере-
ходе в период 4л силы инерции иметь не будут. При учете сов-
местного действия газов и инерции будем пользоваться основным
периодом сил инерции, т. е. будем порядки гармоник газов
отсчитывать относительно периода 2л.
Таким образом газовые гармоники n-го порядка относитель-
но периода 2л будут гармониками 2и-го порядка относительно
периода 4л.
Разложение момента от газов для одного цилиндра на гармо-
нические моменты будет иметь вид:
^газ = Чр + Ml sin (°-5а + ?i) + Щ sin (а + ) +
2 2
+ ±sin (1,5а + ® J + М2 sin (2а 4- <s2) -ф ± sin (2,5а ?2 J
2 2 2
Ч~ Мц sin (За 4~ ¥3) 4- • • • + Мк sin (ka + %)-(-•••
Здесь Л4ср—средний крутящий момент.
Изобразим угол а поворота кривошипа отрезком х, а крутя-
щий момент М — отрезком y=f(x). Диаграмма М, а изобразится
кривой у, х. Примем период основной кривой у=/(х) равным
2л. До сих пор мы вычисляли функцию y—f(x), зная коэфи-
циенты Фурье ак и Ьк, приближенно заменяя ее несколькими
гармониками. Теперь мы имеем обратную задачу: известна сама
функция y=f(x), надо найти коэфициенты Фурье ак и Ьк.
Если функция y—f(x) задана аналитически, то коэфициенты
Фурье могут быть вычислены по формулам:
332
= -i- J у COS kxdx\
0
2n
bk — ~ J У sin kxdx.
0
Диаграмма крутящих моментов задается не аналитически, а
графически, поэтому для вычисления коэфициентов Фурье делят
период кривой, который принимается за 2-, на п частей; каждая
n-ая часть соответствует
Тогда коэфициент Фурье вычисляем по следующим форму-
лам, дающим приближенное значение интегралов:
п
= cos
7П~1
11
= knm°'
т— 1
Здесь k — порядок гармоники, п — число точек деления,
т— номер ординаты.
При делении периода основной кривой на 48 частей каждое
деление будет иметь по 7,5°, а синусы и косинусы кратных дуг
будут принимать только следующие значения:
zt 1,00; tz 0,991; ± 0,966; zt 0,924; zt 0,866; zt 0,793;
zt 0,707; zt 0,609; zt 0,500; zt 0,383; zt 0,269; zt 0,131.
В приложениях к гармоническому анализу в табл. VI
(в конце книги) вычислены значения cos (Ап 7,5°) и sin (Ап 7,5°)
для и, равного от 1 до 48 и для гармоник от 1 до 6-го порядка
включительно.
При построении кривой (М, а), т. е. (у, х), ординату наиболь-
шего момента _ушах следует выбирать возможно больше, но не
более 200 мм.
В табл. VII (см. в конце) даны произведения этих синусов и
косинусов на все числа от 1 до 200 последовательно.
Таким образом числа от 1 до 200 будут удовлетворять вся-
ким ординатам кривой у, х, если построить кривую М, а, подо-
брав масштаб по оси ординат так, чтобы наибольшая ордината ymaI
не превышала 200 мм.
Слева и справа этих таблиц даны произведения указанных
синусов и косинусов на дроби от 0,1 до 0,9 последовательно.
Это сделано для случая, если ордината ут будет измеряться не
целым числом миллиметров.
932
133
Все эти таблицы облегчают нахождение шести гармоник вся-
кой кривой без вычисления произведений.
С помощью этих таблиц надо только выписать произведения
ординаты ут на соответствующую тригонометрическую функцию
от 1 до 6-го порядка, все эти произведения для одинакового порядка
сложить и разделить на половину числа суммируемых ординат,
т. е. на 24. Получатся коэфициенты Фурье ак и Ьк.
Постоянный член разложения Со находится алгебраическим
сложением всех суммируемых ординат и делением их суммы на
число суммируемых ординат.
Если в первой половине периода кривая такая же, как и во
второй, то суммирование произведений ординат достаточно про-
извести только за половину периода. Если же кривая вдобавок
еще симметрична в половине своего периода, т. е. левая поло-
вина верхней (положительной) части кривой симметрична с пра-
вой верхней частью (аналогично и внизу), то можно ограничиться
суммированием произведений только для ординат в четверти
периода.
Для примера разложим момент от сил газов для мотора Дол-
лежаля— трехцилиндровой звезды НАМИ-65 на шесть гармоник.
На фиг. 99 представлена диаграмма крутящего момента этого
мотора.
Для разложения составим таблицу произведений ординат
на соответствующие синусы и косинусы для первых шести
гармоник.
В первом вертикальном столбце в табл. VIII (см. в конце) слева
пишем номера ординат, а во втором вертикальном столбце выпи-
сываем сами ординаты; в третьем столбце выписываем произве-
дения ординат на тригонометрическую функцию, причем эти
произведения не вычисляем, а берем в готовом виде из двух
предыдущих таблиц синусов и косинусов и их произведений на
все числа от 1 до 200.
Для ординаты, например 43-й, уК =—15 мм, для 4-й гармо-
ники 6 = 4 берем из таблицы косинусов в пересечении 43-й го-
ризонтали с 4-й вертикалью множителем число —0,866. Произ-
ведение yv. на это число, во-первых, будет положительно, так
как _у4., имеет тоже знак минус, и, во-вторых, найдется по таблице
произведений в пересечении горизонтали 15 с вертикалью, кото-
рая имеет вверху наименование 0,866. Это будет число 12,99. Его
ставим в составляемую табл. VIII.
Для произведений у„ sin (knx), например 11-й ординаты,
уэ = 9 мм. Для 3-й гармоники в качестве множителя надо взять
число, которое стоит в пересечении 11-й горизонтали таблицы
синусов с 3-й вертикалью, т. е. число —0,924. Произведением
будет число, которое в табл. VII „произведений*1 стоит в пере-
сечении 9-й горизонтали с вертикалью, которая вверху имеет
наименование 0,924. Это будет число —8,32.
Его и подставим в табл. VIII.
134
ЫМ,
звезды Доллежаля НАМИ-65,
Таким образом, пользуясь таблицей синусов и косинусов и
таблицей произведений, легко составим таблицы для
у„ cos(knx) и sin (£пх).
Задача разложения в ряд будет сведена таким образом к сум-
мированию всех цифр в вертикалях табл. VIII.
Деля суммы чисел, стоящих в вертикалях, на 24, получим
соответствующие коэфициенты Фурье.
В табл. VIII произведено суммирование. Ход дальнейших
вычислений ясен и в подробных объяснениях не; нуждается. В
табл. VIII сделаны вычисления всех амплитуд и фаз и написано
разложение нашей кривой у=/(х).
Ципперер составил таблицы, которые облегчают отборку мно-
жителей из таблиц косинусов и синусов и их произведений
из таблиц произведений.
Для первой гармоники не получается значительной разницы
между подсчетом по Циппереру и по приведенным таблицам при
делении кривой на 48 частей, но для гармоник малых амплитуд
разница довольно значительная.
Порядок гармоник По Циппереру По нашим вычислениям
1 «г = 25,3 bi = 19,80 flt= 25,16 bi = 19,67
2 a> = 11,00 ft, = 27,43 й2 = 12,33 6., = 29,12
3 as= 0,32 6з = 27,43 й3 = 1,35 *3 = 27,14
4 at = -2,71 bi = 20,42 й4 = - 2,95 *4 = 20,42
5 c6 = 5,18 65 = 14,60 a- = —3,51 b- = 14,39
6 йе = —5,42 *6= 11,12 й6= 3,65 6e = 10,84
Так как рабочим периодом диаграммы крутящего момента
будет 720°, а не 360°, а относим мы все гармоники именно к этому
последнему периоду, то у нас будут гармоники как целых, так
и дробных порядков.
Масштаб диаграммы крутящих моментов от сил газов
1 мм-— 0,7 кгм.
Поэтому разложение будет:
’ W = 4fo-f-Alo,Bsin(0,5a-|-®o,6)-|-/WIsin(a-}-'Pi)HJ
+ sm (1,5а -f-<рЬб) -f- М2 sin (2a 4- ®2) + /И2,Б sin (2,5a 4- ?2J Д-
+ М3 sin (3a + ?s) = 10,85 -f- 22,3 sin (0,5a + 53°) -f-
+ 22,1 sin (a 4- 22°45') 4- 19 sin (1,5a 4- 3°15') 4-
4- 14,45 sin (2a 4- 351°15') 4- 9,9 sin (2,5a 4- 346°15') -}-
4-8 sin (3a 4-341 °25').
Напишем разложение тангенциального усилия, отнесенного
к 1 см2 поршня (4?пор= 12,5 см; /=122,7 см2; 7? = 0,07 м):
= 12,Ь4 4- 26 sin (0,5a 4- 53°) -f- 25,7 sin (a 4- 22°45') 4-
4- 22,1 sin (1,5a 4- 3°15') -f- 16,9 sin (2a 4- 351°15') 4-
4- ll,5sin(2,5a4-346°15/)4-9,3sin(3a4-341°25') кг[см2.
136
Шесть гармоник разложения представлены на фиг. 99. Справа
начерчены их амплитудные круги.
Так как диаграммы действующих на поршни сил для всех
трех цилиндров мотора Доллежаля будут неодинаковые, а сле-
довательно, и кривые крутящих моментов тоже будут неодина-
ковые, то разложение каждой кривой надо проводить особо, и
амплитуды и фазы в каждом цилиндре получатся, вообще говоря,
различные.
О точности вычисления гармоник. Разделив кривую
на 12 равных частей, мы можем получить гармоники до 2-го
порядка сравнительно точные. В периоде гармоники 2-го порядка,
который равен половине периода основной кривой, мы берем
шесть точек. Закон течения кривой взятым количеством ординат
может схватываться довольно точно, и гармоника по этим точкам
может быть построена довольно хорошо.
В периоде гармоники 3-го порядка берем у основной кривой
уже по четыре точки, и по четырем точкам гармоника характе-
ризуется грубо.
При делении основной кривой на т частей мы достаточно
точно можем вычислить гармонику до такого порядка k, для
/которого
2п
потому что в периоде эта гармоника характеризуется шестью
или больше точками кривой. Гармоники более высокого порядка
k', для которого
вычислять при таком делении кривой не имеет смысла, так как
в период гармоники попадает меньше шести точек кривой и
в этом случае синусоида вычерчивается очень грубо. Взятые
.точки кривой в этом периоде ее мало характеризуют.
По нашим табл. VI и VII приложений к гармоническому анализу
с достаточной точностью могут быть вычислены гармоники до
8-го порядка, так как число точек деления 48.
Изложенный метод имеет большое значение для динамики
сложных механизмов авиационных моторов, т. е. для моторов,
у которых поршневой кривошипный механизм не простой и
которые работают, например, на механизм шарнирного четырех-
звенника или на какой-нибудь другой механизм.
§ 45. Разложение по методу Рота. Этот графический метод
ючень удобно применять для плавных кривых (для двухтактных
двигателей), не имеющих таких длинных перерывов, как танген-
циальные усилия от газов в четырехтактном двигателе.
При делении кривой на т частей этот метод позволяет до-
статочно точно определить любую гармонику порядка k, для
137
которого -^-^>6 независимо от других гармоник, как и в методе
Перри. (В методе Фишера, например, для того чтобы иайтн вторую,
гармонику, надо начать с определения шестой и делать после-
довательный подсчет через все гармоники до второй).
Возьмем диаграмму фиг. 100 и разделим период иа 12 частей.
При таком делении достаточно точно можем вычислить только
первые две гармоники—1 и 2-го порядков. Через точки деления
Фиг. 100. Кривая для разложения по методу Рота и ее первые
две гармоники.
проводим ординаты кривой и их нумеруем. Затем проводим"из;
какого-нибудь центра т радиусов (фиг. 101), наклонных друг к.
другу под углом
— = 30°.
т
Назовем вертикальный верхний радиус первым, соседний с ним’—
вторым (слева или справа, все равно), соседний со вторым —
третьим и т. д. Такую схему назовем „схемой радиусов 1-го
порядка".
Для нахождения амплитуды и фазы гармоники 1-го порядка
отложим на первом радиусе схемы 1-го порядка первую орди-
нату кривой момента, на втором радиусе — вторую ординату
кривой момента, на третьем — третью и т. д., причем положитель-
ные ординаты кривой момента отложим от центра схемы, а отри-
цательные ординаты —к центру схемы. В таком случае наши
138
ординаты кривой момента в схеме 1-го порядка изобразятся
т
векторами, геометрическая сумма которых, разделенная на-^» дает
величину амплитуды гармоники 1-го порядка.
Фазой будет угол, который образует геометрическая сумма
с горизонтальной осью. Углы будем отсчитывать справа, причем
направление против стрелки часов будем считать положительным,,
а направление по стрелке часов — отрицательным.
Для получения амплитуды и
построим схему радиусов 2-го
порядка, откладывая нулевой
радиус по вертикали. Первый
радиус отложим под углом
(фиг. 102).
1 • 2- — =1 • 2-30° = 60°
т
к нулевому радиусу; второй ра-
диус отложим под углом
2-2-30° =120°;
третий радиус отложим под углом
3 2 • 30° = 180°
и т. д. Шестой радиус отложим
под углом
6 -2 -30° = 360°,
т. е. шестой радиус совпадает
с нулевым; седьмой радиус отло-
жим под углом
7-2-30° = 420°
— он совпадает с первым и т. д.
На одном направлении от
центра будет лежать по два ра-
диуса; углы между соседними радиусами будут по 60°, и наши
радиусы разделят круг иа шесть частей.
На направлении каждого радиуса отложим ординаты кривой»
иомер которых соответствует номеру радиуса. Положительные
ординаты направим от центра схемы, отрицательные — к центру
схемы. Полученные на радиусах векторы сложим геометрически.
Их геометрическая сумма, разделенная на т. е. на 6, даст ампли-
туду гармоники 2-го порядка. Наклон геометрической суммы
к горизонтали справа даст ее фазу.
Из построения схемы радиусов 2-го порядка легко усмо-
треть закон образования схем высшего порядка. Надо делить
круг на большое количество частей.
139
Для отыскания гармоники Л-го порядка первый радиус нужно
‘Откладывать под углом
к нулевому радиусу; второй радиус под углом
Фиг. 10‘2. Определение второй гармоники по Рогу
третий — под углом
ЗЛ—
т
и т. д., и радиус т — 1 под углом
НО
На направлении каждого радиуса отложим соответствующие
ординаты кривой и векторы, получаемые иа этих радиусах, сло-
жим геометрически. Разделив результирующий вектор на ^.полу-
чим амплитуду гармоники £-го порядка. Ее наклон к правой
горизонтали дает фазу
Если кривая j=/(x) моментов (фиг. 100) вычерчена в масштабе
1 мм — 0,395 кг, то амплитуда 1-го порядка изображается орди-
натой в 8,7 мм с фазой —18°, а амплитуда 2-го порядка — орди-
натой в 37 мм с фазой 180°.
Описанный графический способ разложения кривой основан
на следующих математических соображениях.
Обозначим ординаты кривой соответственно точкам деления
через j0, j(, j2, ...,ут. Эти ординаты являются функциями абс-
циссы х. Будем проектировать геометрическую сумму построен-
ных таким образом векторов на горизонталь и вертикаль. Так
как проекция геометрической суммы (замыкающего вектора) равна
сумме проекций векторов, составляющих сумму, то проекция на
горизонталь гармоники 1-го порядка по схеме 1-го порядка будет:
josin04~J1 sin^+j2sin2^-+yssin3^+... 4-
W — 1
4"Л»-1 sin (т — 1)— = 2, Учsin хп-
И=0
Аналогично проекция на вертикаль равна:
,, , 2л . о 2л . г, 2л .
Jo cos 0 4-j, cos — + j2 cos 2 — 4- j3 cos 3 — 4
- 1
, . z .4 2л V
4- • • 4-Л1-1 cos (m — 1) — = 2 Уп cos xn-
n=O
Для гармоники k-го порядка из схемы Л-го порядка можем напи-
сать: проекция геометрической суммы иа горизонталь
joSinO-j-Ji sin 1 - £-^4-ji2sin2£-^4-y8sin3£-^4- ... 4-
4-K-i sin (m — 1) A = 2 b sin kxn. (a)
П — 0
Аналогично проекция на вертикаль:
Jo cos 0 4- j, cos 1 • Zj-^4-j2cos2£-^ 4-j8cos3A^--J-...4-
4- У,„ -1 cos (tn — 1) k ~ = 2 b cos kxn. (b)
141
Но из теории рядов Фурье известно, что суммы, даваемые равен-
2
ствами (а) и (Ь), будучи помножены на —, дают коэфициенты Фурье:
из проекции на вертикаль:
1
2 V l
ак=т24 Уп COS kXn’
п=0
из проекции на горизонталь:
7W —1
bk = -^^yn^kxn.
п— О
Угол &к, который образует геометрическая сумма с горизонталью,
будет фазой.
Длина вектора Ск, изображающего амплитуду, будет:
Вектор ак можно определить как проекцию Ск на вертикаль:
вектор Ьк как проекцию на горизонталь:
ьк = Ск cos
Отношение ак к Ък дает фазу:
Периодические кривые можно разлагать с помощью механи-
ческих приборов, называемых гармоническими анализаторами.
В книге проф. Л. К. Мартенса „Динамика поршневых двигате-
лей" (1932 г.) описаны эти приборы, из которых очень удобным
следует признать анализатор Мартенса, изготовляемый фирмой
Askania в Германии. Им можно взять гармоники очень высоких
порядков, например 50-го, с точностью не меньшей, чем в более
сложном анализаторе Генричи-Коради. Здесь мы не будем описы-
вать эти анализаторы и отошлем интересующихся к упомянутой
книге.
§ 46. Сложение гармоник от сил газов для всего мотора.
Гармоники от сил газов для простых кривошипных механизмов
складываются в основном совершенно так же, как и гармоники
от сил инерции, с той только разницей, что рабочим периодом
для газовых гармоник четырехтактного мотора будет 4тг, а для
гармоник момента сил инерции 2тг; кроме гармоник 1, 2, 3-го и
т. д. порядков, в моторе будут еще гармоники дробного и нуле-
вого порядков; последняя просто будет средним моментом мотора:
М — iM
ср. мот ср. ДИЛ >
где i — число цилиндров.
М2
Для мотора, в котором все кривошипные механизмы главные,
амплитуды Мк гармоник А-го порядка у всех цилиндров одина-
ковы. Чтобы получить гармонический момент А-го порядка для
всех цилиндров, надо взять сумму
V sin (Аа;
j=i
Суммируя гармонические моменты от 1 до А-го порядка для
всех i цилиндров, получим момент мотора от сил газов. Для
получения по этой формуле гармонического момента А-го порядка
для всех цилиндров надо брать сумму проекций на горизонталь
векторов амплитуд Мк, направленных к вертикали под углами:
для I-го цилиндра Aat -)-?*•
для П-го цилиндра Аай-|- <?к
для у-го цилиндра Аа;-]-^д.,
т. е. для всех цилиндров к углу между осью цилиндра и криво-
шипом А-го порядка добавляется фазовый угол одинаковый
для всех цилиндров. Вместо того чтобы вычислять сумму проек-
ций векторов амплитуд, можно взять проекцию сумм этих векто-
ров, т. е. построить результирующую этих векторов и ее спроек-
тировать на горизонталь. Результирующая векторов амплитуд
будет амплитудой момента А-го порядка.
Для получения результирующей амплитуд нет надобности при
построении смещать векторы амплитуд отдельных цилиндров на
угол одинаковый для всех цилиндров. Можно построить
векторный многоугольник амплитуд, направленных по кривоши-
пам А-го порядка, и уже получившуюся результирующую этого
многоугольника сместить на фазовый угол ?к с найденного для
иее положения, потому что это все равно, что сместить каждый
вектор суммы или всю сумму на фазовый угол »д.. Следовательно,
результирующий гармонический момент от газовых гармоник
отдельных цилиндров будет только тогда, когда векторный мно-
гоугольник амплитуд, направленных по кривошипам А-го порядка,
сам собой не замыкается и имеет ие равную нулю результи-
рующую.
Гармонический момент А-го порядка будет вектор, вращаю-
щийся со скоростью, в А раз большей скорости кривошипа,
в сторону кривошипа.
Для получения результирующей амплитуды А-го порядка
построим схемы векторов амплитуд */з, 1, Г5, 2, 21/г, 3 и т. д. до
А-го порядка. Построим такие схемы (фиг. 103) для двух-, трех-,
четырех- шести- и восьмицилиндровых моторов. Когда отноше-
ние порядка гармоники А к числу цилиндров i есть целое число
143
I
I
Цыые порябей Лробпыг рррябки
Фиг, 103. Схемы кривошипов различных порядков многоцилиндровых двигателей,
или число, кратное половине числа цилиндров, тогда векторы,
амплитуд отличаются друг от друга по фазе на целое число
окружностей, их направления совпадают, а так как все ампли-
туды по величине одинаковы, то их сумма будет в i раз больше
k k
амплитуды одного цилиндра. Когда и — не равно целому
числу, тогда, переходя от одного вектора к другому, мы сме-
шаемся на часть окружности; i таких частей составляет целое
число окружностей. Векторы оказываются равномерно размешен-
ными около центра и в сумме дают нуль, образуя замкнутый
многоугольник.
Вывод:
Для схем, начерченных на фиг. 103, получаем:
1) двухцилиндровый мотор имеет газовые гармоники только»
целых порядков: 1, 2, 3, 4 и т. д.
2) трехцилиндровый мотор имеет газовые гармоники поряд-
ков только 1,5; 3; 4,5; 6; 7,5; 9 и т. д. — порядок их кратен 1,5;.
3) четырехцилиндровый мотор имеет газовые гармоники только
четных порядков: 2, 4, 6 и т. д.;
4) шестицилиндровый мотор имеет газовые гармоники, поря-
док которых кратен трем, т. е. 3, 6, 9*и т. д. порядков;
5) восьмицилиндровый мотор имеет газовые гармоники только-
четных порядков, кратных четырем, т. е. только 4, 8, 12 поряд-
ков и т. д. Если углы между кривошипами неодинаковы, то,,
вычерчивая схемы векторов различных порядков, мы найдем
порядки, для которых гаснут те или иные гармоники. Может
случиться, что для некоторых углов между кривошипами у мотора
будут гармоники всех порядков.
§ 47. О газовом моменте многорядных и звездообразных
моторов с главными и прицепными шатунами. После сказанного
об инерционном моменте этих моторов и газовом моменте одно-
рядного двигателя нет надобности выписывать формулы сложе-
ния моментов. Эти формулы будут иметь совершенно такой же
вид, какой они имели в главе об инерционном моменте этих
моторов. Если многорядный и звездообразный мотор имел инер-
ционную гармонику какого-нибудь порядка, то он будет иметь
и газовую того же порядка; если у многорядного мотора (но не
звездообразного) не было инерционной гармоники некоторого
порядка, то у него не будет и газовой гармоники того же порядка.
Для звезд дело немного меняется, звезда будет иметь моменты
всех порядков: */г; 1; 1,5; инерционного момента 2-го порядка
нет, если пренебречь разницей между 91?в и
Звезда будет иметь главный момент 2-го порядка, потому
что в ней ни у одного цилиндра нет одинаковых амплитуд
и фаз
JO Зак. 48. Динамика авиационныЛ двигателей.
145»
Газовый момент А-го порядка для звезды вычисляется по
формуле:
^Лгаа. «от Sin (Л“ + ^газ.мот) = £ Si" <4 + ?*./)•
J=1
Для всех цилиндров звезды разностями величин Мк и <зЛ.
пренебрегают, т. е. все механизмы считаются за главные. Так
как газовые гармоники бывают как целых, так и дробных поряд-
ков, а силы инерции имеют только целые порядки, то склады-
ваться будут, т. е. действовать совместно, газовые инерционные
гармоники только целых порядков.
ОГЛАВЛЕНИЕ
Глава (
Основные сведения из кинематики прицепного механизма
Стр.
1. Обозначения....................................................... 5
§ 2. Угол отклонения прицепного шатуна . . .•.- . . . . 6
§ 3. Угловая скорость и угловое ускорение прицепного шатуна ... 7
§ 4. Перемещение прицепного поршня. .....................•. • 7
§ 5. Скорость и ускорение прицепного поршня....................... 8
•§ 6. Определение мертвых точек прицепного механизма и величины
хода поршня ..................................................... 9
§ 7. Определение наибольшего ускорения прицепного поршня .... 9
§ 8. Кинематическое проектирование прицепного механизма................ К)
£ 9. Угловое перемещение, скорость и ускорение шатуна дезаксиального
механизма .............................................. 14
§ 10. Перемещение, скорость и ускорение поршня дезаксиального ме-
ханизма ................................................... 18
Глава П
Силы инерции прицепного механизма
4} 11. Приведение масс.................................... 18
§ 12. Действие сил инерции на опоры......................... 21
§ 13. Изображение сил инерции поступательных масс по Кельшу ... 22
§ 14. Изображение инерционных сил I н 2-го порядков по Тейлору . . 23
§ 15. Определение результирующей инерционных сил для многоцилинд-
ровой однорядной машины 24
§ 16. Определение неуравновешенных моментов для всей машины от
сил инерции вращательных и поступательных масс............. 26
Г л а в а 1П
Уравновешивание однорядной машины
§ 17. Уравновешивание сил инерции 1-го порядка........................ 30
•§ 18. Уравновешивание Ланчестера..........•........................... 30
§ 19. Частичное уравновешивание вращательных и поступательных
масс одним противовесом. Годограф сил инерции.............. 34
Глава IV
Общая теория уравновешивания
§ 20. Теоремы общей теории уравновешивания поршневых машин ... 36
9 -21. Замечания к .проверке уравновешенности.......................... 40
10* ' 117
Стр-
Глава V
Уравновешивание симметричных машин
§ 22. Уравновешивание сил инерции любого порядка................. 42
§ 23. Теоремы уравновешивания симметричных машин................. 43
§ 24. Примеры на проверку уравновешенности многорядных моторов,
в которых все механизмы главные . . . .......................... 47
§ 25. Уравновешивание звездообразных \ оторов, в которых все меха-
низмы главные.....................................................66
§ 26. Аналитическое определение сил Р и R для миогоряд-
ных моторов с главными механизм ами......................... 70
§ 27. Графический метод уравновешивания звездообразных моторов . . 73.
§ 28. Аналитический метод определения векторов Р,о, Р_,о, Р-Лп, Р.. 2ы,
для многорядных и звездообразных моторов......................... 75
§ 29. Оценка уравновешенности по критерию Стечкина-Климова .... 80
§ 30. Уравновешивание двойных звезд.............................. 82
Г ла в а VI
Уравновешивание машин, не имеющих оси симметрии
§ 31. Графический метод. Уравновешивание сил инерции 1-го порядка
в V-образной двухцилиндровой машине.......................... ; 6
§ 32. Седьмая теорема уравновешивания........................ <>()
§ 33. Уравновешивание сил инерции 2-го порядка в V-образной ма-
шине ........................................................ 91
§ 34. Уравновешивание всей машины.............................. 92
§ 35. Уравновешивание Х-образной машины........................ 93
§ 36. Аналитический метод...................................... ЮЗ
§ 37 Замечание о влиянии на уравновешенность машины неравномер-
ности вращения и крутильных колебаний вала.................... 1К>
Глава VII
Крутящий момент мохора
§ 38. Общая формула крутящего момента............................ 117
§ 39. Разложение в ряд Фурье тангенциального усилия (крутящего
момента) от сил инерции поступательно движущихся масс. .. . 118
§ 40. Крутящий момент от поправочной пары инерции шатуна .... 12G
§ 41. Суммарный крутящий момент от сил инерции в моторе с одними
главными механизмами........................................ 121
§ 42. Инерционный момент мотора с прицепными шатунами............ 125
§ 43. Суммарный инерционный момент в звездообразных двигателях . . 129'
§ 44. Разложение диаграммы крутящего момента от сил газов в ряд
Фурье по методу Перри....................................... 131
§ 45. Разложение по методу Рота.................................. 137
§ 46. Сложение гармоник от сил газов для всего мотора............ 142
§ 47. О газовом моменте многорядных и звездообразных моторов
с главными и прицепными шатунами ........................... 145
Редактор Р. С. Кгнасишвили.
Техн, редактор А. И. Caeapuz
Сдано в набор 13(1 1938 г.
Авт. дог- № 192.
Подписано к печати 13/III 1938 г-
Тираж 2000-
Инд. 50’5-4
Кол. печ. лист. (V4 4-2 вклейки с оборотом. Учетноавт. лист. 10,62. Формат бум, 62X94/^
У ноли. Главлита № C-3J588, Гип. зн. в 1 бум. л. 90624. Бум. л. 4%. Заказ № 48
2-я типография ОНТИ иъ. Енгткгн Сдгаолопой. Левгитнпрад, nrp. Красных Комалтлдятмпз, 20.
I 1
ih <• и , । • «ня v ионика вист' ' p« •
• 14 . , lil. ”*
IV ti . <1.114-
Jul
1V *' uh 14
•v • '*• ТТ1Й 03 iV
и, ИЩА \III
В
Га loACfiiie фчНг.111, • I
ТАБЛИЦА
I/
cos (А п 7,5 )
п k 1 2 3 1 4 5 6
1 0,991 0966 0.921 0,866
0.966 0,866 0,707 0,500 0,259 —
0,924 0,707 0.383 0 -0,383 0 707
4 0.866 0.500 0 -0.500 0,866 IjwO
5 0793 0.259 -0.383 —0,866 —0.991 -0 707
6 0,707 0 0.707 — 1.000 —0,707 0
7 0.GUJ 0.259 0,924 —0.866 —0,131 0,707
8 0.5Э0 -0.500 1000 0,500 0,500 1,000
9 0 J83 —0 7U7 0924 0 0,924 0.707
10 0,259 —0.866 —0,707 0500 0.966 0
11 0,131 -0.966 -0,383 0,866 0,609 0.707
12 0 1,000 0 1.000 0 -l,OuO
13 <1.131 0.966 0,383 0,866 —0,609 0.707
14 -0.259 0866 0,707 0.500 —0,966 0
15 - 0383 0.707 0,924 0 —0,924 0.707
1и —0,500 -0.500 1.000 —0,500 -0,500 l.ouO
17 -0.609 —0, j9 0.924 -0.866 0,131 0.707
18 —0,707 0 0.767 -1,000 0.707 0
19 —0,793 0/259 0.383 0,866 0.991 —0,707
20 -0.866 0\KJ 0 -0.500 0,866 1000
21 0.924 0.707 —0,383 0 0.383 0,707
—0,966 0166 0.707 0.500 -0,’59 и
л —0.991 0,4.6 —0.924 0.866 0.793 0.707
24 —1.000 1.000 — 1.000 1,000 —1.000 1.000
1 25 0.991 0.96b —0,924 0.8G<i —0.793 0,707
26 0,966 0.1 6 —0,707 0.500 -0.259 0
27 —0,924 0.707 —0383 0 U.383 0.70I
28 -0.866 0500 0 —0,500 0.866 1 uuu
29 —0.793 0 259 0,383 0,866 0,991 0.707
30 - 0,707 0 0.7U7 —1,000 0,707 0
31 -0,609 -0.259 0,9’4 —0,866 0.131 0.707
32 —0,500 —0500 i.ooo —0,500 —0.500 I.UOO
33 —0,383 —0.7О7 0.924 0 —0.924 0 707
34 —0.259 0.866 0.707 0500 —0,966 b
35 —0,131 —0.966 0.383 0.866 —0,609 -0.797
36 0 1.000 0 1.000 0 — lOUO
37 0,131 —0,966 -0,383 0.866 0.604 0.707
38 0,259 0,866 —0 707 0,500 0.9(ю 0
39 0333 —41.707 —0,924 0 0,424 0.707
40 0.500 -0 5Э0 1,000 —0,590 0,500 1.000
« 0.609 -0 259 -0.924 —0.866 -0,131 0,707-
42 0.707 0 -0.707 1,0 >0 -0,707 0
43 0,793 0,259 —0,383 -0.866 4)191 —0,707
44 0,866 0.УЮ 0 -0,500 -0.866 —1.003
45 0.921 0,707 0.383 0 Ю.ЗХЗ —0.707
46 0.966 0,866 0.707 0 500 0. j9 0
47 0,991 0.966 0.924 0.866 0,793 0,7o7
48 1.000 1,000 1.000 1,000 1,000 1 000
sin [k - п /.5J
1 2 3 4 _s_
1 0.131 0.259 0.383 0,500 0.609 о .п
2 0,259 0.500 0.707 0,860 0.9оо 10ч
3 0.383 0.707 0,924 1.000 0.921 0 70’, 1
4 0,500 0.8«>6 1.000 0.85b О.ЧХ) 0
5 0.609 0.966 0924 О.ЮО 0.131 Q7.
t 0,707 1,000 0 5)7 0 0.707 1 ми
7 0 79J 0,966 0,187 0.500 0.991
О.яоб 0,866 0 0.866 О.ЯЬо и
ч 0.921 0.707 -0.383 —1.000 -0.383 Огр.’
10 0.966 0.500 -<1707 -0.866 0 '59 1ч •>
11 0 991 0,259 —0921 0 500 0.7*3 0/I-’ ।
12 1 000 0 — 1 0OU 0 НЮи с
13 0991 -0.259 4)924 0.500 0 793 —0 /<>7
н 0.906 —0.500 —0.707 0,856 0,259 1 О’»)
15 0.<24 —0,707 -0.383 1000 р/сг
16 0.8о 0.8Ьб 0 0,866 -01:66 и J
17 о?И О.чбб 0.383 ОйоО -о>л 0 г
18 0..07 i.ooo 0.707 0 -0.707
19 ОД 09 096b 0 924 —О.оОО —0.131 0 .nfl
•о U.,n)0 —0.8Ь6 1.000 —0.866 0500
•1 0 |Ш 0.707 0.624 1.000 0.9 4 .*N
22 0*1 0.500 0.707 0.866 0966
.’Л 0.131 О, 59 0.383 -0500 0,609 —0 f
.4 и 0 0 0 0 b •
25 0.131 0 *59 О.ЗлЗ 0500 —0009 0 ‘
2b .» ч о,.»ои —0./U7 0.865 0966 МяХ
27 и ЛМ 0.707 0 924 1 ООО —09’1 0 t
л» О ^0 0866 — 1000 0866 -6,500 0
2у o»«W 0 966 -0924 0500 0.131
30 0.7117 1.000 О.7о7 0 0.707 . c
31 0 kJ 0.9С4 ОЗЫ3 0.5 X) 0 991 U.lt
зг <•.866 08Ьо 0 —0.866 0“*6 0
O.W24 О 707 1000 0 ЛЗ 0 jf
34 0. - 0 500 0 707 —0.866 —0,279 1 -o
35 1.991 0J59 0.924 -0.500 - 0.793 о
3b 11Ю0 0 1.000 0 -1 000 0
37 —0<Ю| 0.259 0924 050) —0.793 -0 -f
38 —0.Э00 0.707 0.866 -0 259 1 ’«0
34 0.924 -0,707 0.381 1.000 0.3” 3
10 —0866 —0,866 0 0866 0 466 о 1
41 0.793 -0,966 —0.383 0.500 0 991 и :7
42 -0,707 -1,000 —0.707 0 0.707 Ю
13 —0.609 —0.96b - О.и?4 -0.500 0131 0 i7
14 —0 50J —0 866 —1Л»Ю 0.-66 0г'00 o I
45 -о.зкз 0.707 —р '11 1.000 0 1 4 —0 V
46 -ОН) 0500 и, 707 Р 1 njll
47 —О.Ы —0,2,э9 —0. 3 -0500 4*7
13 0 0 0 0 0
{Ни оборот см I /Л.
ОЛяю
• 5
О
0.
0,10
0,19
О,
Таблица произведении
1 -50
О 87
м>
J1M
.'СП
»А7
0,793
43
-”.»0
W.!
*<-f
| О’к I 0X53
| 0,9 | 0.71
У1
t 11
Ll?
JV6
11,19
i 4
•1»
46,58
47 57
44 >5
19.55
40
41
;'.Й4
10,70
41.37
10,(<
к
МЛ
25 £Ю
Iй
201»
20 '•
18.4л
!•: Iv
2 I)
>18
. ‘ 10
?<;и
о.
о, I
0. 2
0.01
0.69
0,7»
21 »5
2'< 87
24,25
4.1
45
4/
48
Л >,
W. 11 I
МЮ Г
31.’0 I
• .1 ’/И
• 1 1 j7
“ ’ ’ 1,49
41.42
0.7 .
0,8
0.9 |
Sa* И Дтамвка аяижци -дны^
01
О 1
о .
0.1
О Л
О-
0.1
о?
0,1
0.1
0,5
0,6
0..
0.10
0,20
0.30
o.. I
0,56
039
0 69
0,79
О .
0.4’
o s
PM
< r
О'7!
0’13
1)09
IJ 44
14,7
5,71
2 GJ
146
10
и -
12.!
13.“.
lhj>
17.;’
1*19
io л
* 4b
919
•4,4
IU 61
12.02
I < 43
14. <5
17,<58
!
4-.. ©
НМ)
6,70
7 П
8. •
10 .)
10 »i
12.18
12.79
13.. О
14,00
11,02
15.63
К U
0,08
0.16
0.2-1
0 32
0,40
0,48
О.ч
39/54
40,-
41. «2
41.61
43.»)
Ц,»»1 1
4057
41 ’|3
Р’Ю
43.4
41.4
45,Ю
46Л>
47Л
HOI
И.96
7.8»
•81
«473
40, 5
41Д.°
42. •)
-7,71
2^58
_\*,44
3031
.31,18
о2,01
32.91
33.77
.4 64
о5.51
збг.
17,66
18, U
18,88
19.49
Л).1О
| 20.71
I .4.31
.4.11
219
13 (' •
13 »o
14.Ю
15 "
зми
*1'1
Таблица промзвсд<ний
51 100
ll •/. > 0.&Л j 0.703 I |o.iW > 0.1109 j 0.500 0,’T» r ' •' ' J- 1
<•» %1 41 17 10.41 Ih.iHi 3!,06 °550 •0 ь.пв •1
И <1, 1 I i 11,21 3677 Jl »>7 • ' 0 6«j
I- 4. 1 89 12.03 * : ?b.;>« <L® 1 !_ f.
4( 77 4’“2 j ЫУ 27 Oo 1. i 761
47.63 4 ..61 -• •) 31. >o •7 50 li 4 7
48^0 41,41 J.lX) Д 10 > | • 111) 7 »
• •• id 4 .20 10,30 И 74 4 > i . i 7 ।
*«• 23 4599 11 01 .•9 00 15 .
Il .1 • 10 4 ,79 41,71 3л.!» 4 Л». .)
. H Ы.* 47,58 4 ’ 13 36.31 il.OO П 1
4- ;7 13 47,15 30,50 1 .'J о1
1 »,.«*» 4- 17 4. - 1 o7,76 1,00 ll .' , в 1. G
‘.1 • 96 41 .. 3* J .?! Я I-. 11
*• H .. 13 5»\ 15 .1.'.» 3* r-8 1 K) Г . rf» <U
1 < * । <<i 1.51 10.9G ,8 ..»50 1 2 а и
.• 31 46,h7 4 1.19 JVX) Г '18
3.13 47,38 10.80 4. >0 • И И . л 67
’3,92 48.08 41,41 .4Ю i<ю И 91
51,72 48.79 42,02 Г >16 ..и! 6»
51 44.50 42 63 . । 18.1 9.17 ГО
1 «J 2 30 50. _• 43,24 «5») а
) . M ...’.10 50.”; 43,85 'Ю •• 13
51 • . 44.46 м,:>л 9 л'5 1
... 1 с .Д 52.53 45.07 37 •• 9 •*) 74
< 17 5 .0 45,67 37 > 1 им» 75
и 53,74 46,/n 48 V' 7
л <U.»i .1 15 46,89 || '
1 •1Л I 5 ’5 47.50 | 1(
5’ k6 48.11 Л .5 10.1)
Ul 14 5- 18.72 4<> IM) .•« .1 1. 4 4
/7 fl u , w.n 40". НлБ1 41
5’ |u 44 41.'- 10. 1
5*i^ M55 I’ .1 «в 1о л г *3
< .1 31.16 Г Ol- 11.11) - 1
fl.’ «> .0 51.76 1 и. 1 лЛ
»« na?n »J 17 4 11 я»
• •» и 52.'* 43 - Л'Л.' 11.4Ч Ы
л ’ '1 t? .3 ,*V*i . I’I 44 и и, а 88
.20 n -• "J3 . 1,20 44 5 Ilf И»)
11 л> Ч 1 * ।' 1 ,1 »f nUil • 1.41 4е ‘ Л.ч 11. ‘HJ
18 к 64.1. V42 4- . 241Л 4 11 <??
17 • »vrt W |l. IH Л -1
1 I. ;• • M 56,u i <> *HI JV».' • Л lb 1
г. III • i n i lT.'Mt м
и ’«1 If 1 i 1 '.и
и • 11 *> ’ 4 14,’И'
яви С ' ' i'l 1 U • » O’ * yjtii -ХН» । Ш1
971* *• <1 * * .i 11 71 _ЧЛ| 1-'Л< •я
9811 M |« 19 1 ai. 1 . ' )7.У7
9910 У» 19 J',4 G0.4, i W
Й. к
о,е»
Ol4/
Hl
<• •
(•1.
0J
0«
• 0
__ й‘
О! I
и4
07
о •
01
0.1
0*J
0.1
о
о. •
ил
0.9
и
О*1
0.9
I'.b)
I 1
й '/
й 31
л 34
О, '
0,1 ч
0,1b
( 15
0,18
I- 'I
о.ч
(И
0,03
• »4
0.6»
().<•!
0,(4
О .Г»
0,10
0,1-
Таблиц* npawjiei *ниА
101 -ь 150
у 0,991 у 0,966 v 0.924 У 0,866 > С.793 у 0,707 v 0,609 г 0.50! > 0,383 j >'• 1 , 1 »
0.991
0.1 0,10 1
0.2 0,20
0.3 0,30 0,4 0,40 101 100.09 97.56 93.12 87,47 80.09 71.42 61.51 50,59 38.68 >14 1, 101 151
0,5 0.50 102 101,08 98.51 9125 85.33 80 89 72 12 62.1» 51.UJ 34.07 2». 4» 11 К» 1 ’
0,6 0,59 103 102,07 99.4) 9г 17 8» *) 81,68 72,83 62.73 51 >J [3J.4* -> ill 1<1 1.1
0,7 0*69 104 103.06 100,16 93. Ю 9о,о7 Н2.47 73.54 63.34 52.)) 39.81 i > |ч* 1>1
0,8 0,79 105 101.06 101.42 97 )2 90.9.4 83.9г» 74.25 63.91 52 ЗЭ 4 1 >1 7.1 < 11 10* 15»
0.9 0,89 106 105.0.» 102 3) 97.941 91.Н0 8106 74.95 64.55 53.0) 40,6) 7.4* 1 г IX» 156
107 10 ..01 10*.Л5 9S Г О»*» 81.45 75.65 65.16 эЗ.-эЭ 4048 ; п । и Ю7 1 >7
0.966 108 107,03 101.3! 9 Л19 чз.м 83 61 76 37 65 77 54.00 41.36 27з; и > IV* 1Л
01 0.10 109 108.02 1’15.21 10(1 П 91.1 > 85. 14 77.07 65 34 54 5) 41.75 28. Ч 14 10) 159
0.2 0,19 ПО 109,01 10 *.26 10 я 9,э *Г» 87 23 77.78 65.9) 55.00 42.13 28 17 14 >1 110 И»)
0,3 0,29 111 ПО.оО 107 ?» 102,15 96.13 99 •? 78 19 67.60 55 5) 4251 2173 II 1 III 161
0 4 0,39 112 110.99 108.18 1 >3 19 93.4J 84 В» 79 20 6421 56.9) 42.9J Н ») II 11 • lu?
0^5 0.48 113 111,98 10*. 1-5 101. и 97.88 я»./>1 7J.QJ 68 К? 55 Ю 43 28 >1 •» И * II* 1в*
0.6 0Д8 114 112.97 110,12 105, И 9171 9>. 10 8061 6).43 57 0) 43.66 1 >5) II III 1 И
0 7 0,68 115 113,9» 111 К 10 16 91.5) 91 19 81.32 70.J3 57.5 J 41.01 21,7b Г» 4 115 I6J
0,8 0 77 116 111.9» 112.05 107 18 100,4 i 91 У) 82.02 70,64 58.09 4143 3»,0’ 1> ) 11 > I6>
0,9 0,87 117 115. ♦» 113,01 Н)« 11 101.32 9’.78 82 73 71.25 58.59 44.81 39.28 1» 1 117 167
118 116,91 113.98 104 13 ’O.’.lu •4.17 8 4.14 71.85 59. Ю 15 19 30.5* 18. «б 118 158
0.92-1 119 117.91 114,95 103 н I0JO5 91.37 81.13 72.47 5U9 45.58 30.80 ИИ 119 169
0,1 009 12) 118,92 115.91 1 103.42 95.16 81.85 73.08 ед 45.93 31.06 1м2 12) 17)
0,2 018 121 110.91 116,88 Ш.8Э 101.79 9 >.95 85.55 73.69 60,5) 46.34 31,3? 15-» 121 171
0.3 0.28 122 123.90 117,84 П2 73 103.6» 96,75 86 27 74.3) 61.0) 4 >73 31,58 15 ‘1 12* 172
0,4 6.37 123 121,89 118.81 nib 105 52 97.51 8>97 74 91 61.59 47.11 31.83 16.1! 123 171
6’5 0.46 124 122.88 119.77 114 .Л 107,39 98.33 87,64 75.52 62. У) 47.19 32,09 16.24 121 174
0.6 0,55 125 125.87 I2L7I 115'0 108,25 91.12 88.3) 76.12 62.50 17,87 32.35 16 37 12) 175
0.7 0,65 126 124.^ 121.71 116. 2 103.12 9)92 89.10 76.73 63.J0 48.25 32.61 16.,! 126 176
0.8 О 71 127 12» 1 >2.67 в > 1 >9 ч.) 1)0.71 8J.89 77.31 635) 48.64 32.87 16.61 127 177
0.9 6.83 128 125,8» 123,61 118,-7 11085 101.59 93,-51 77.95 61.0) 49.02 31.13 16.77 128 178
129 127.84 121.60 119. Ь 111.72 102.39 91.22 78.55 6150 49.11 31.39 16.9) 12» 179
0855 130 128,81 125.57 12) 2 112,54 103.0) 91.92 79.17 65 ОЭ 49.79 >3,65 п.н 13) 180
0 1 0 0) 131 12 >4 113.4» ЮЗ 88 9261 79 78 65 5) 5J.17 з;.9) 17.16 1)1 1S1
0.2 0.17 132 131.81 127,5) 121 17 in к 101.68 94.31 8J.39 65.0) 59.5) 31,1 > 17.2» 132 182
0.3 0 26 133 131.80 128.47 122.4) 115.18 ЮЗ 17 9 4.05 81.0) 6 >59 59.94 31.42 17.» > 131 183
0,4 035 134 132.79 129.43 123 42 115.05 105.26 94.75 81.61 67.0) 51.32 31.68 17 »5 131 184
0.5 0,43 135 1,33.78 130.19 121 4 116.41 107.0.5 95.45 82.21 67.5) 51.73 34.94 I7.t.9 1*5 185
0.6 ОД? 136 134,77 131 37 117.78] 107.85 93.17 82 82 68.00 52,09 35.20 17,82 13» 186
0,7 0.61 137 135,77 132.33 126.79 118.65 108.64 97.87 83.13 68.5) 5’.47 35.4) 179» 137 187
0.8 0.69 138 136,76 133,3) 127.71 114.51 1)3.41 97.58 8401 69 0) 52.85 35 72 1808 138 183
0.9 0,78 139 137.75 131.2 > 128, И 12),33 110,23 98.2) 84 65 69.59 51.24 3)93 18 21 1)9 14 1
140 138.74 135.23 12)16 124.24 11102 93.93 85.2) 71.0 > 51,62 36.23 18.31 1Ю 133
0.793 141 134,73 1-36 20 13)38 122.11 Ш 81 94,70 8587 70,53 51.09 3>.П 18.17 HI 191
01 0,08 142 137,16 131 ’1 122,98 112.61 10) )1 86.18 71.00 5139 35.75 1860 14? 192
0.2 0,16 143 441,71 138,13 132.13 123.41 ИЗ.» 101.12 87.09 71.59 51.77 37.01 18 73 143 193
0,3 0 24 144 112,70 139,09 131,03 124.71 114,19 101.82 87.70 1\00 55.15 37.27 18,8» 144 DI
0.4 0,32 145 143.69 140.05 13108 125,57 114.93 102.52 88.30 тли 55 53 37.51 18,99 14» D5
0.5 6^40 1 16 144.61 111.03 134, Ю 125.41 115.78 193.24 88.91 73.0) 55.92 37.74 1913 14» 191
0.6 0 48 147 115,68 141.94 13»ЛЗ 127,31 116.57 101.94 89.52 73.3) 553) 3105 19,26 147 197
0.7 055 148 146,57 142.96 13 >.75 123,17 117.36 104,65 9J.13 74.00 55 68 38,3) 19.39 IB D8
0,8 0,63 149 147,65 143,92 137.69 129,04 118.16 105,36 90.74 74.5) 57.07 38.56 19.52 149 19)
0.9 0,71 159 148,65 114,89 138,60 123,90 118,95 106.07 91,3 5 75.00 57,4-5 38,82 19,65 15) 20)
Таблица прочие мн**
151 -200
a v.i л о.»«х 0.W4 / 0*W / МИ jr 0,707 /
1 W.64 113 ы >ЯЛ) 1JM.77 114.74 106.77 91 )
1 »»») 1 Ю 87 140.1 1 IM * 1 16.51 U7.I8
И1 * 117..-9 iii.i; lb.lt Izi 31 108.19 «I»
1) *.ot 1 и. и I** *i IJJ 4 Jl> 108.89
ВЗ.м» 1 Г».71 Hl. ’ III 1 1x14 109.69 •M.»-
15 На» Ш »>9 114 II 1.0 10 1’1 7| 110.39
1 > i» 15| 1 15 «7 1 .1-17 I IM 111.02 4
1»»,^ 1 > U 1 к 1 '•! 1 I k Ki I 1 111.72 «>
1 »/.»*’ 131 Л 11.1 1 1/ 7.) 1 *.09 112.43 %
1 >ч > > 1* *5 IIMI 1И1 1 41 88 111,11 9/ II
] > 1, > 1> м I is n 11141 1 76. 111.84 •w
1 >\.1 1 »•.•’* 114 < 1 HI 1 1 * 4 11455 U* i
1 >1 о 1 >:.i> 15) M 141 В 1 "1 11.26 1» J
!•'.)’ 1 >ш Ы > II'Di no 115 97 qa-
1 *1.51 IV* ш 1j W II '*i В >81 116.67 101» (•
Ы я 1и> 11 1 • 1. И 14 1 |<l bl 117,38 14!
161.31 1 >111 1 11 1 I.JII 114.09 1 1
Им 1» ь’.’в 1») ’I 1 3 1 К .•-> 111.79 1 2
1 »/.в IM.24 1».1. 116 1 11»O.’ 1B.5) 10 • .
1 *4 1 >121 157 OR 147.7’ 1 1181 12!» 21 103
IWI. 1м |/ П1<» IUH* 1 1 i.lMI 1 *J.92 101.11
170. Г, 1 Л 11 1»VH 113. - 1 И KI 121.6» 1(M
171.11 1 >7.11 151.6.5 114,8. II? 14 122.33 la
172. 13 164 07 IbOjS В »,»*» 1 17/18 1 /3.01 1'
173.12 1Ь<«»1 151 70 Bl 1И./7 121.71 IX
171.1’ 110.00 16’fiJ 152 4 ’ II >17 121.45 107 1
175 II 170.47 161 5. 2 1 W.l • 125.15 107 •
17b. W 171.91 10I..7 151.15 III 13 125.87 108 !
177.34 172.90 1 ».*) 155f,2 111 .4* 125.57 104
178.38 17187 16*» 3» li.V H’ n 127,28 ll»>’
179.371 171.83 Г.7.21 15 *.? • Bi »l 1 27.99 ll>
ISO.-Зэ 173.30 164.17 Il’.ftZ 111 11 128.69 HUM*
IM.И 176 7ft 161.114 ь<.и 141.12 129.40 111 1.
В 2.3 4 1 77.73 I7'W i»1 41 lb H 13011 112 06
из п 178.70 1/0 41 1 »». »’ 11 ».7O 110.81 112 •
184.32 179.66 171.5. Ibl.UH 117.) > 131.52 113
115.31 183.61 172.79 I’ll.4% 114.29 132.2, 113."
Кб 31 131 5» 171.71 1 »-3 1 l‘*u 1 112.91 1144»
I37.D В2,5» I74.M 1,1.* 143.87 131.61 11510
1«.29 131 51 1 ?.* »'» 101.1» l.i >.">7 114.35 115 71
191.3» 181.4»1 1/6. <*} 16l.ll 131.»’» 115.05 lb
1Ю_’7 It) l> 177 41 1 1. 1 Й.7С lib
1»! *6 116.12 1 M.13 167,11 Ш05 115.47 117 >1
Dr В В7.39 1792, lot .01 is mi 117.18 118 1
193,21 И» 1* BOB 1М.ВД I5?.G1 137.89 ИВ 75
141.23 т.з> 131,10 169,71 U5.13 133,51 lll.V
141.23 1 W. 29 182,03 l/d.fil IB.22 139.13 119*
196 2? Bl.25 182,9) 171.47 1 i’.Ol 1 W.01 120.5
177 21 142.22 181. «8 172,31 1 >7.81 131,71 121 W
138.20 193,19 184.80 173,21 I) 1,60 111,42 121.801 i
W. •