
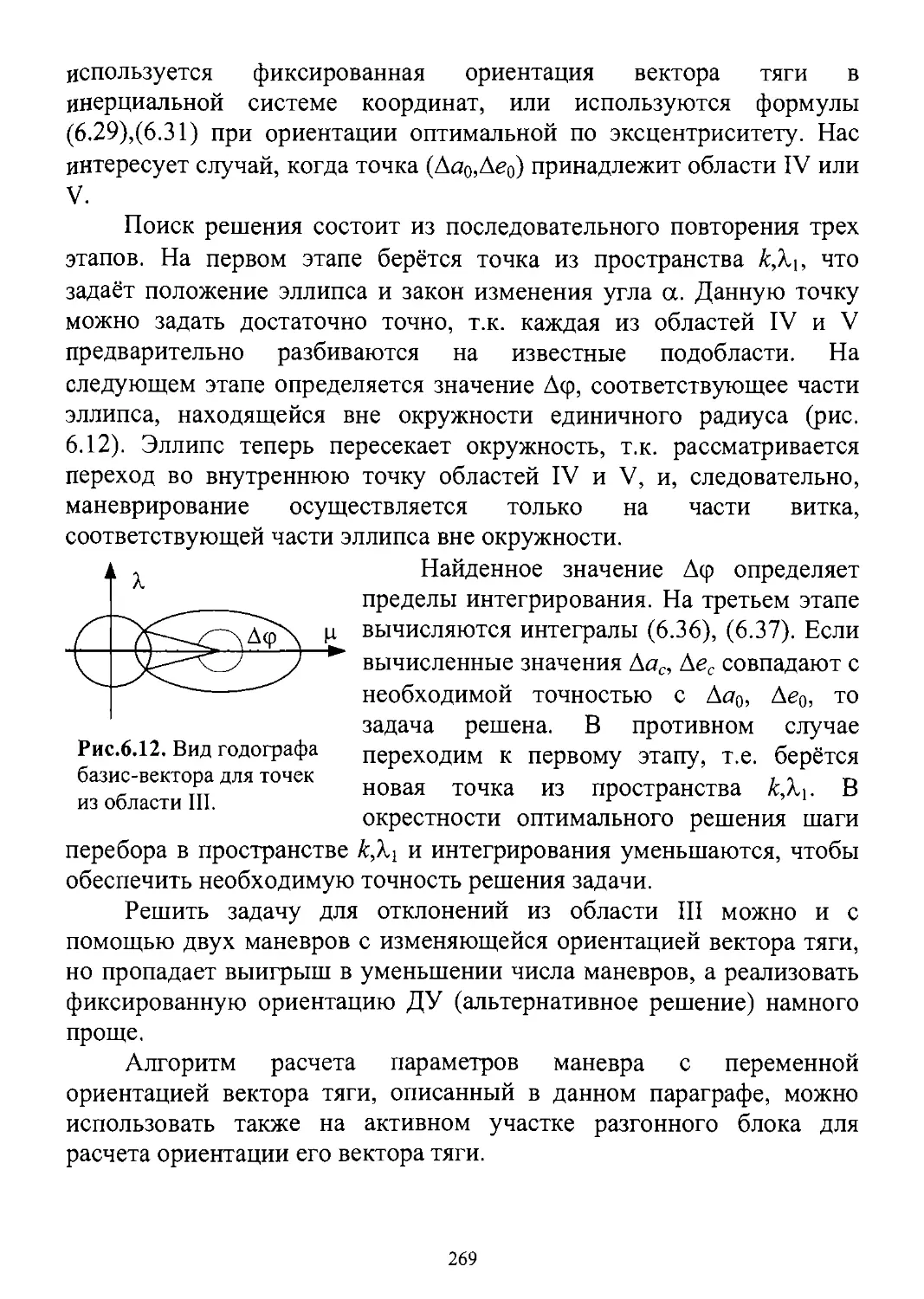
Автор: Баранов А.А.
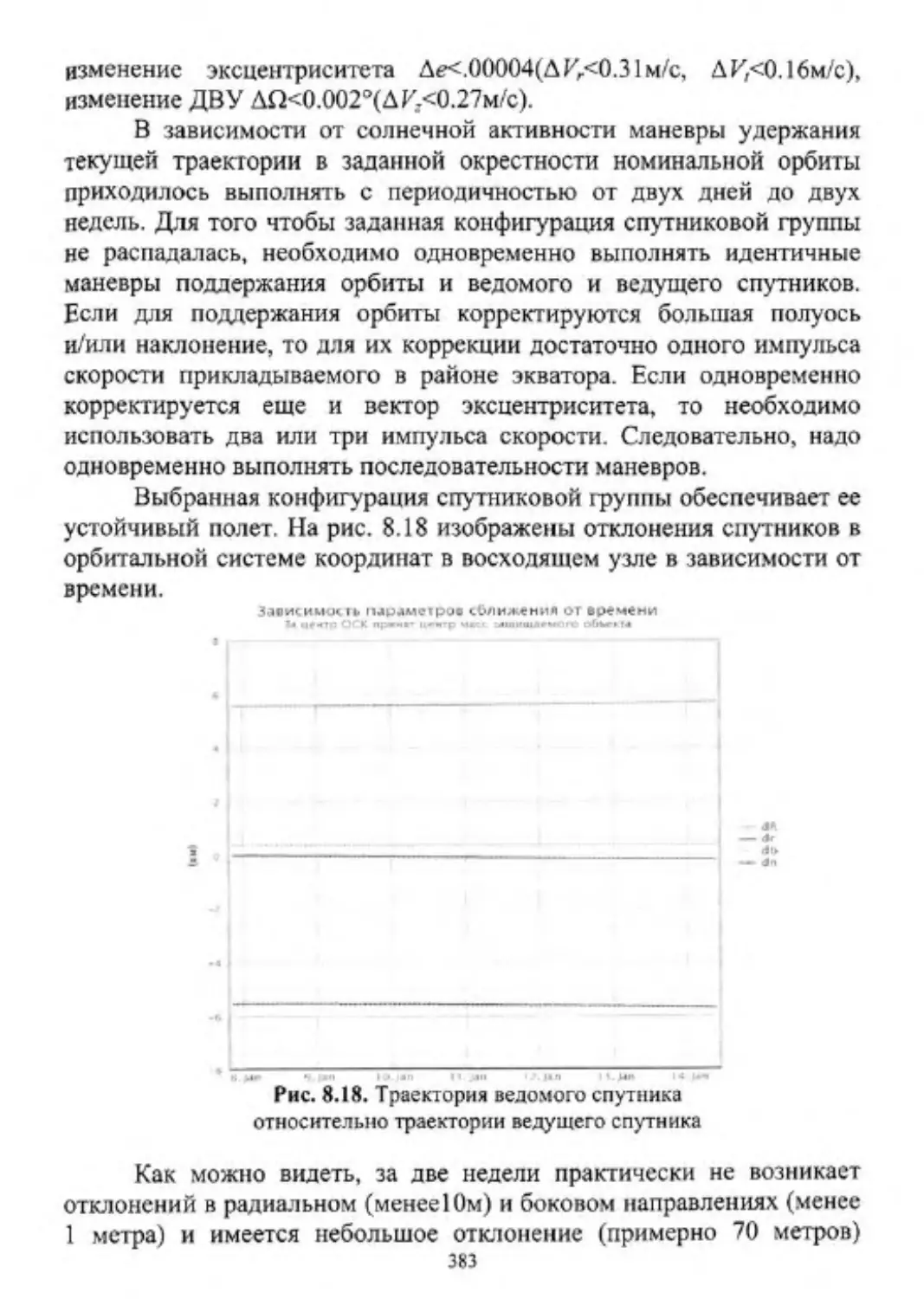
Теги: авиация и космонавтика летательные аппараты ракетная техника космическая техника междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика) космонавтика
ISBN: 978-5-9973-3872-5
Год: 2016




А.А. Баранов
Маневрирование
космических
аппаратов
в окрестности
круговой орбиты
А.А. Баранов
Маневрирование
космических аппаратов
в окрестности
круговой орбиты
Москва 2016
УДК 629.78
ББК 39.62-082.022.5
Б 24
Автор:
ведущий научный сотрудник Института прикладной математики
им. М.В. Келдыша Российской академии наук,
член-корреспондент Международной академии астронавтики
(Corresponding Member of the International Academy of Astronautics, IAA)
Андрей Анатольевич Баранов
Баранов А.А.
Б 24 Маневрирование космических аппаратов в окрестности
круговой орбиты. - М.: Издательство «Спутник +», 2016. -
512с.
ISBN 978-5-9973-3872-5
Основу книги составляет теория оптимального маневрирования космиче-
ских аппаратов (КА) в окрестности круговой орбиты. Описаны типы возможных
оптимальных решений задач расчета маневров перехода и встречи на компланар-
ных и некомпланарных орбитах, установлены области существования этих реше-
ний. Приведены аналитические и численно-аналитические алгоритмы, позволяю-
щие определить параметры оптимальных решений. Имеющиеся примеры решения
задач маневрирования КА позволят читателям проверить правильность собствен-
ной реализации описанных алгоритмов. Приведены примеры решения наиболее
важных практических задач, в том числе задач формирования и поддержания за-
данной конфигурации спутниковых систем. Рассмотрены вопросы маневрирова-
ния в проблеме космического мусора.
Книга предназначена для широкого круга читателей от студентов до специа-
листов с большим стажем практической работы. Студентам она позволит понять
основы оптимального маневрирования КА, аспирантам - углубленно изучить тео-
рию оптимального маневрирования. Опытным специалистам предоставляется воз-
можность ознакомиться с альтернативными (численно-аналитическими) методами
решения наиболее сложных практических задач, обычно решаемых с помощью
громоздких численных методов.
УДК 629.78
ББК 39.62-082.022.5
Отпечатано с готового оригинал-макета.
ISBN 978-5-9973-3872-5 © Баранов А.А., 2016
ОГЛАВЛЕНИЕ
От автора..................................................... 9
Введение..................................................... 11
Глава I. Постановка задачи. Общая схема решения .... 28
1.1. Уравнения движения КА в отклонениях от движения по
опорной круговой орбите......................................28
1.1.1. Уравнения движения КА, записанные в цилиндрической сис-
теме координат. 1.1.2. Уравнения движения КА в отклонениях от
движения по опорной круговой орбите. 1.1.3.Решение системы
уравнений.
1.2. Постановка задачи .......................................34
1.2.1. Влияние импульсов скорости на отклонения в заданной точке.
1.2.2. Влияние импульсов скорости на отклонения элементов орбиты.
1.2.3. Постановка задачи. 1.2.4. Геометрическая интерпретация
импульсов скорости. 1.2.5. Относительная орбита.
1.3. Одноимпульсные маневры...................................40
1.3.1. Изменение большой полуоси. 1.3.2. Изменение эксцентриситета.
1.3.3. Одноимпульсный переход между орбитами. 1.3.4. Поворот
плоскости орбиты. 1.3.5.Изменение большой полуоси эллиптической
орбиты.
1.4. Изменение формы орбиты в результате приложения импуль-
са скорости..................................................45
1.4.1. Влияние радиальной составляющей импульса скорости.
1.4.2. Влияние трансверсальной составляющей импульса скорости.
1.4.3. Влияние боковой составляющей импульса скорости.
1.4.4. Изменения элементов круговых орбит различного радиуса.
1.5. Оценка величины маневров, выбор начального отклонения
вдоль орбиты при старте КА.................................. 51
1.5.1. Оценка величины маневров КА «Союз». 1.5.2. Выбор
начальной фазы при старте КА.
1.6. Необходимые условия оптимальности........................57
1.6.1. Уравнения движения в безразмерном виде. 1.6.2. Система
сопряженных уравнений. 1.6.3. Необходимые условия
оптимальности.
1.7. Общая схема решения......................................61
1.8. Основные типы задач оптимального маневрирования КА . . 64
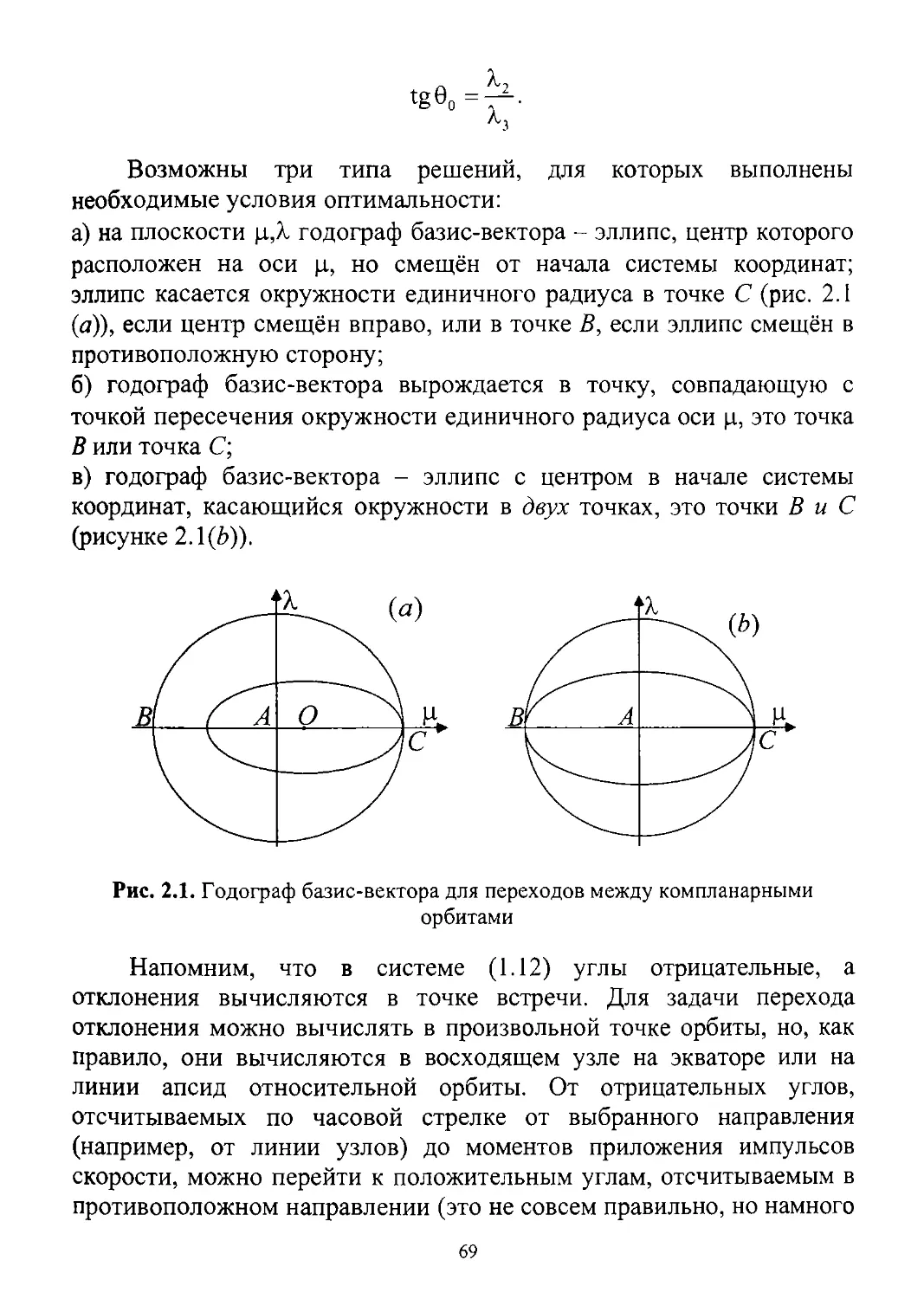
Глава II. Маневры переходов...................................68
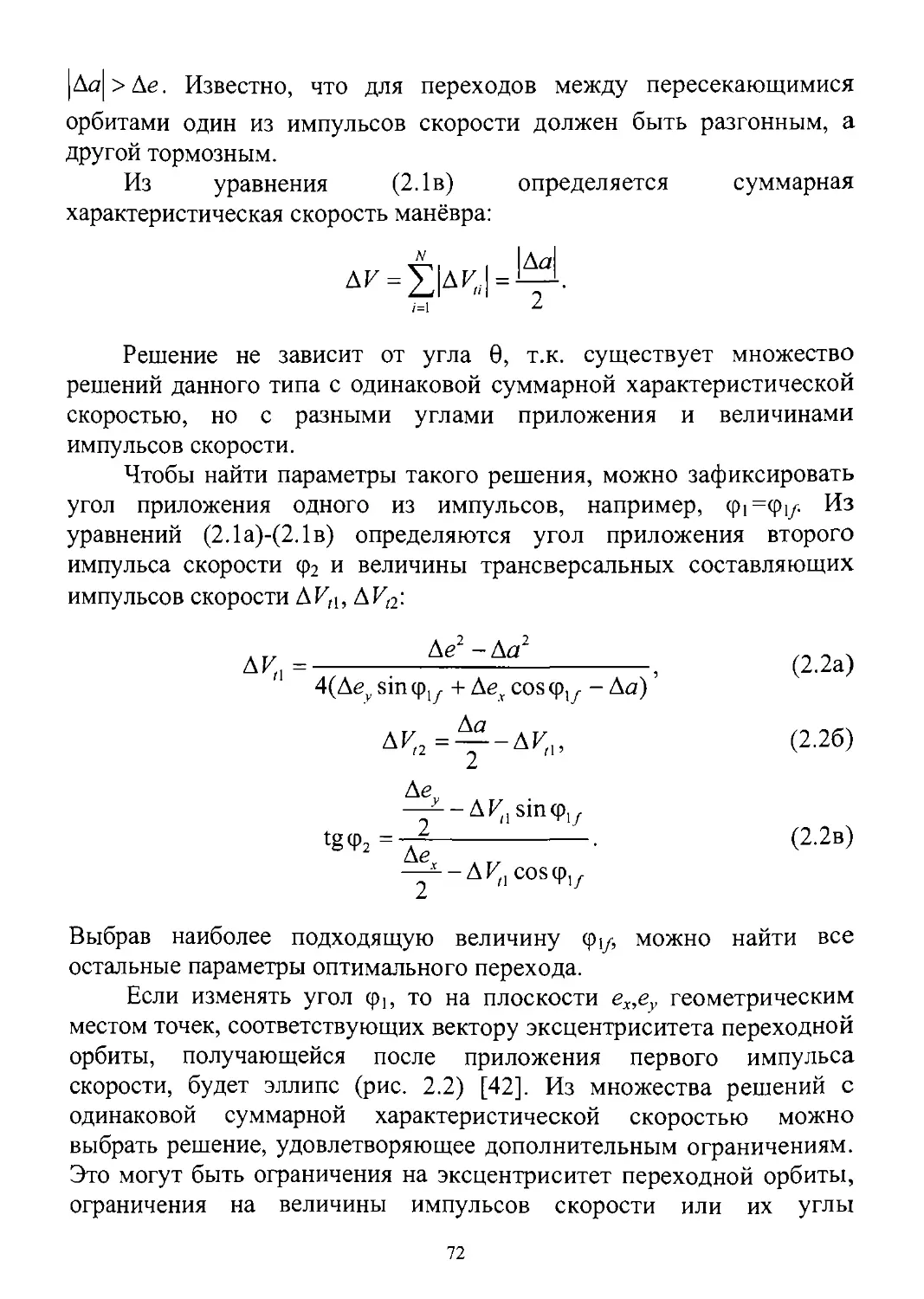
2.1. Компланарные переходы....................................68
2.1.1. Постановка задачи. 2.1.2. Компланарные переходы между
3
касающимися орбитами. 2.1.3. Компланарные переходы между
непересекающимися орбитами (особые решения (CSS)). 2.1.4.
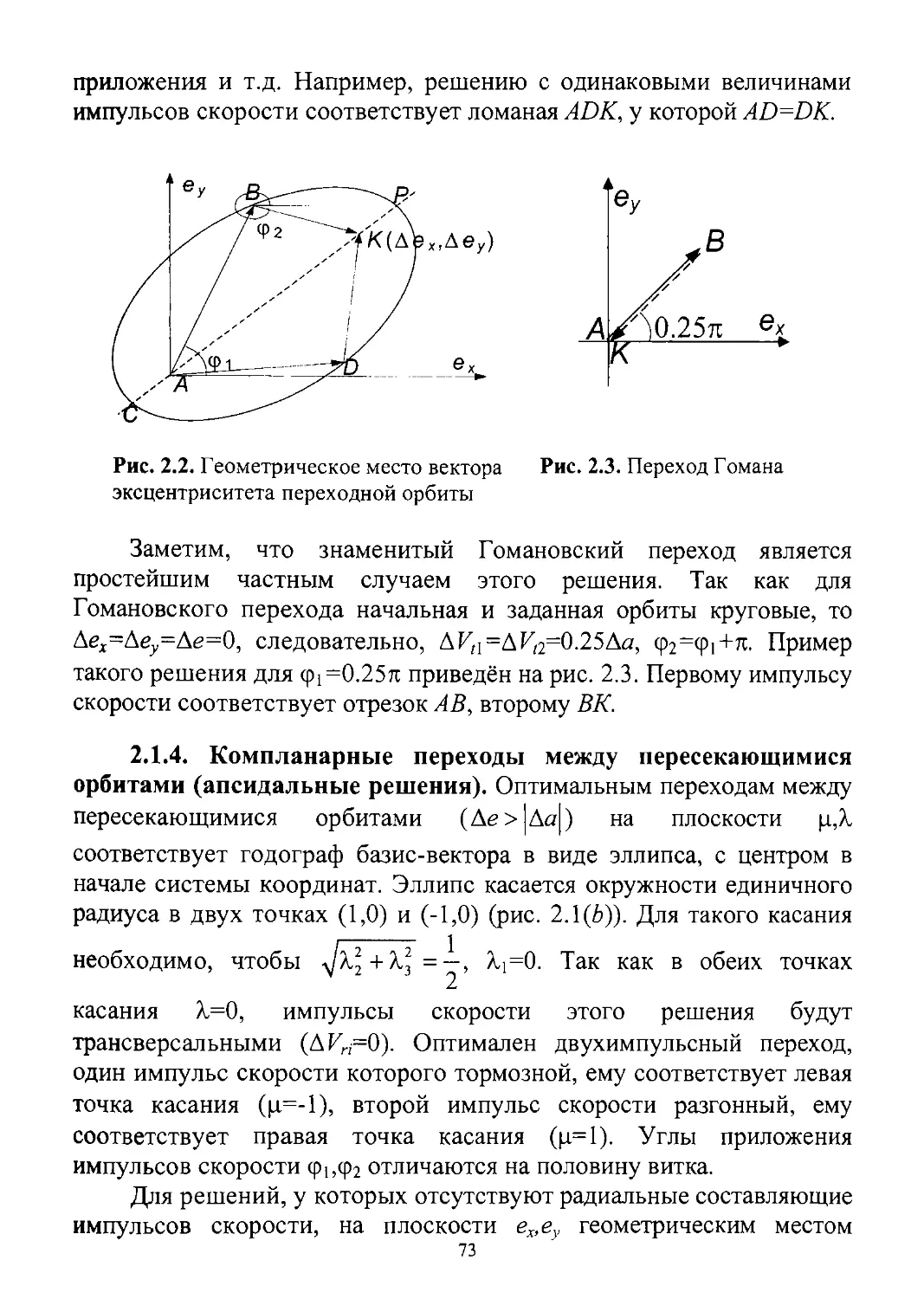
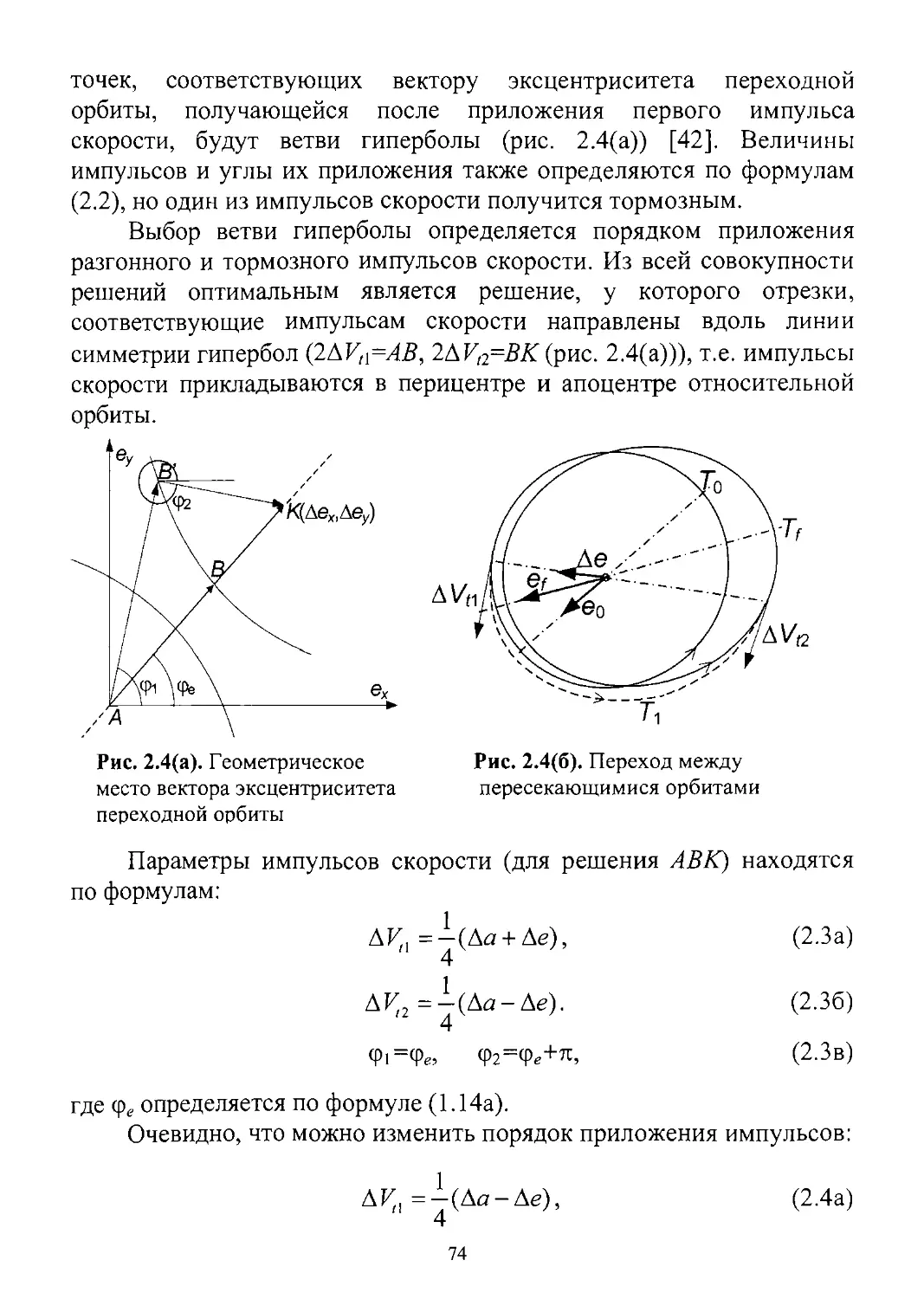
Компланарные переходы между пересекающимися орбитами
(апсидальные решения (CNS)). 2.1.5. Пример. 2.1.6. Сравнение
с решением задачи в точной постановке. 2.1.7. Решение задачи
при фиксированных углах приложения импульсов скорости.
2.2. Некомпланарные переходы...................................83
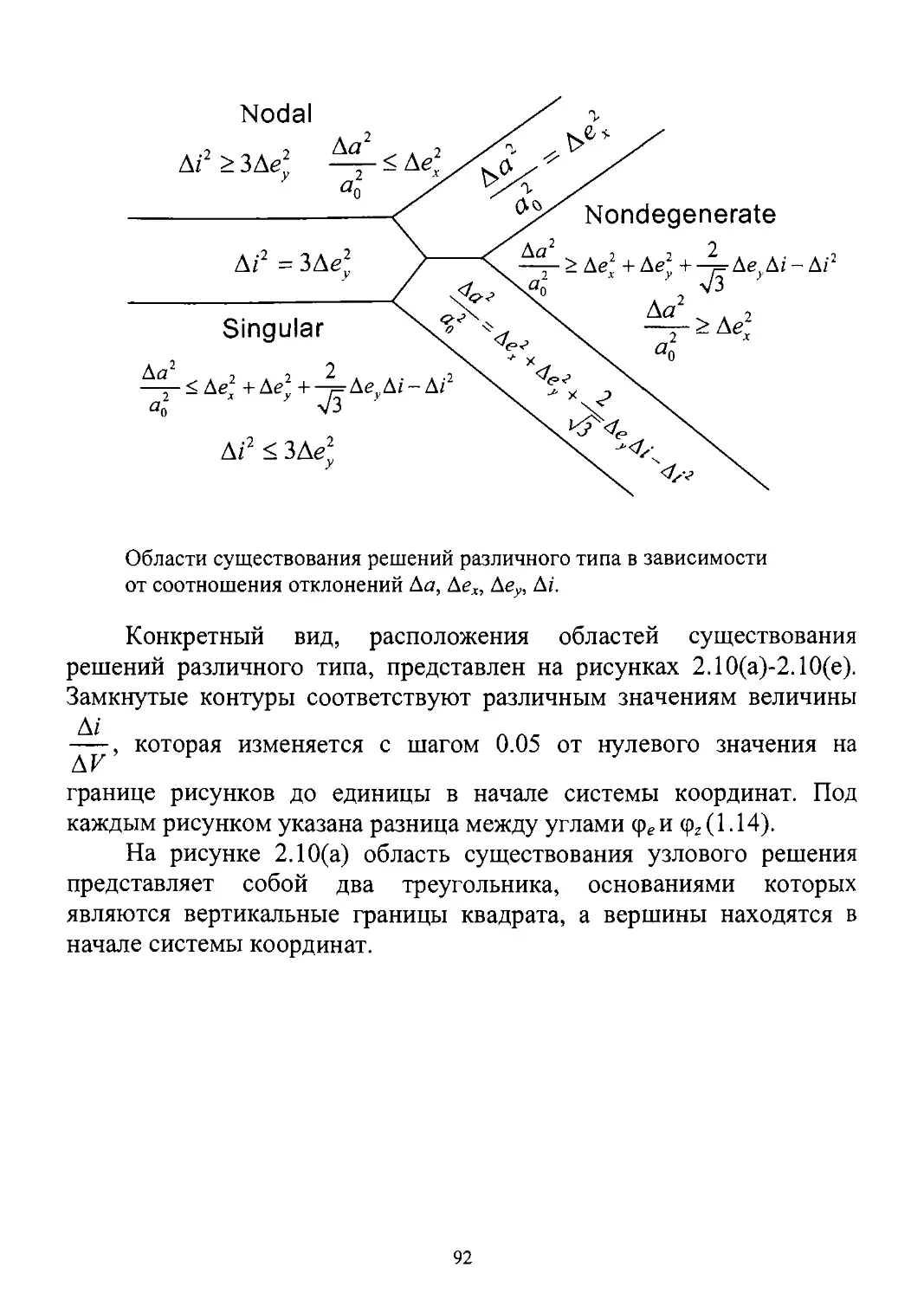
2.2.1. Постановка задачи. 2.2.2. Узловое решение. 2.2.3. Невы-
рожденное решение. 2.2.4. Особое решение. 2.2.5. Области
существования решений. 2.2.6. Оптимальное решение без
радиальных составляющих импульсов скорости. 2.2.7. Маневры
без радиальных составляющих (универсальное решение).
2.2.8. Пример.
Глава III. Встреча на компланарных орбитах...............101
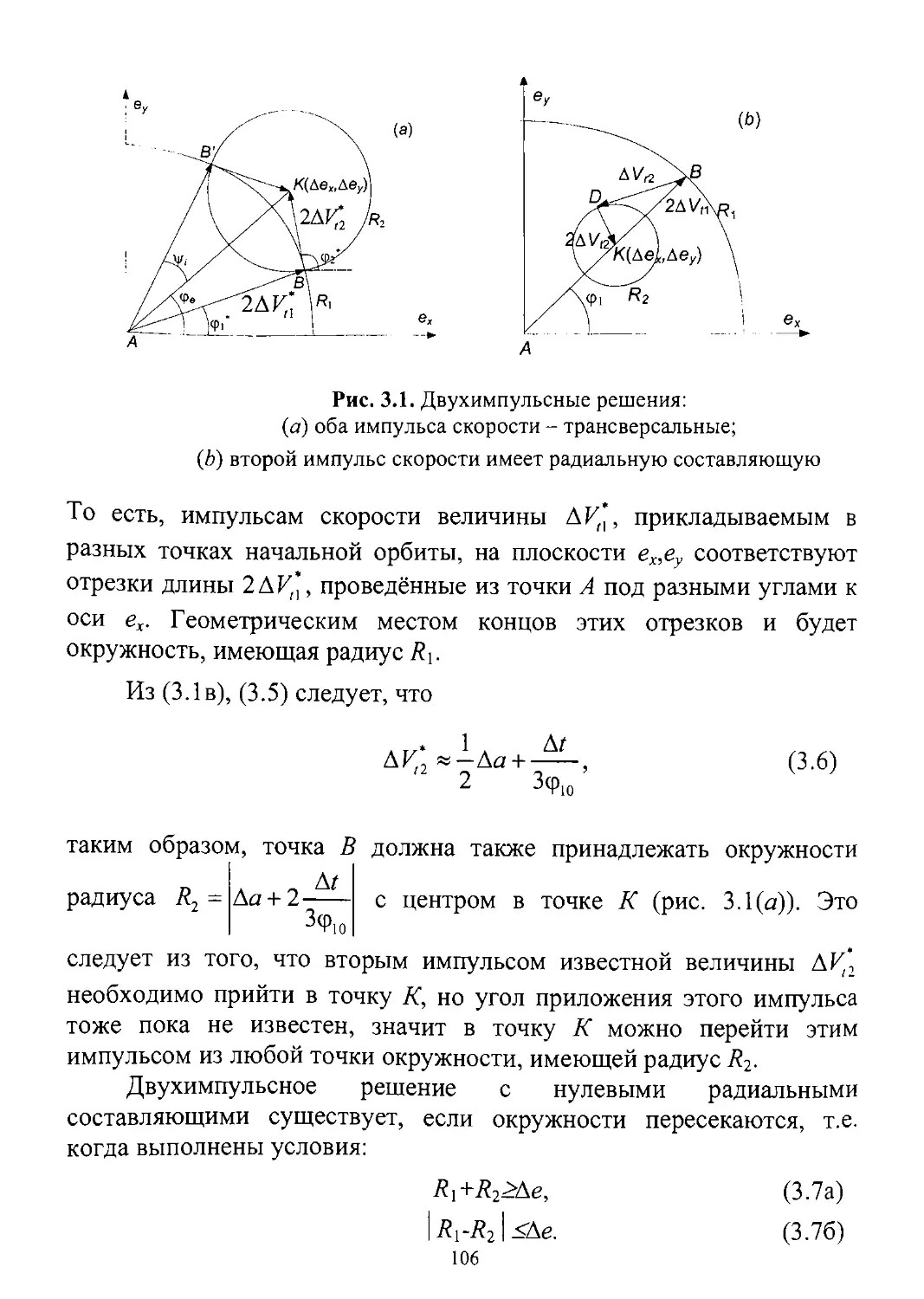
3.1. Постановка задачи...................................101
3.2. Встреча на компланарных непересекающихся орбитах
(особое решение CSS).....................................104
3.2.1. Двухимпульсные решения. 3.2.2. Трехимпульсные решения.
3.2.3. Пример. 3.2.4. Четырехимпульсные решения. 3.2.5. Особен-
ности схем маневрирования КК «Союз» и «Прогресс». 3.2.6. Апси-
дальные четырехимпульсные решения.
3.3. Встреча на компланарных пересекающихся орбитах (апси-
дальное решение (CAS))...................................122
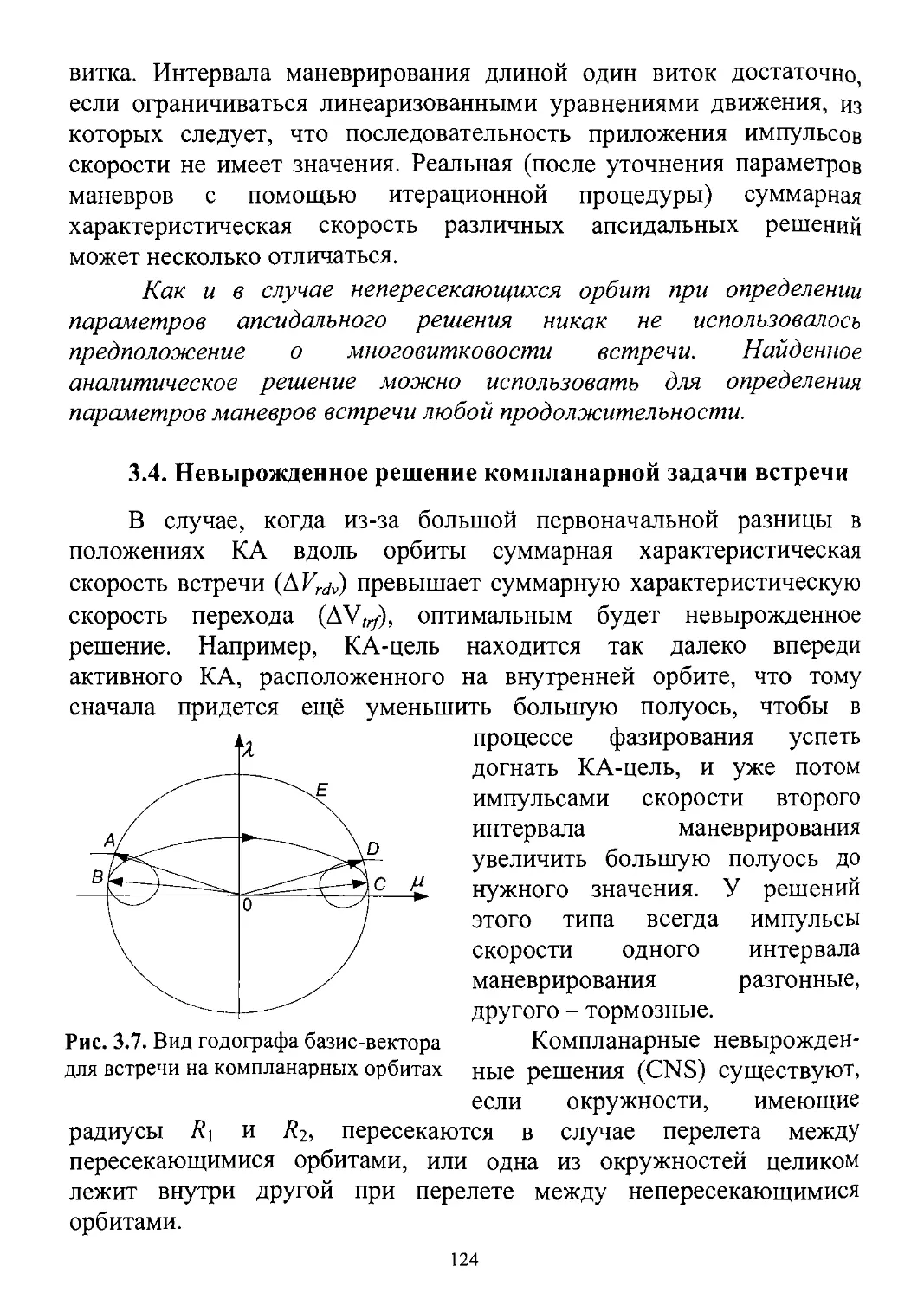
3.4. Невырожденное решение компланарной задачи встречи. . .124
3.4.1. Определение параметров четырехимпульсного решения.
3.4.2. Определение параметров двух- и трехимпульсных решений.
3.4.3. Примеры.
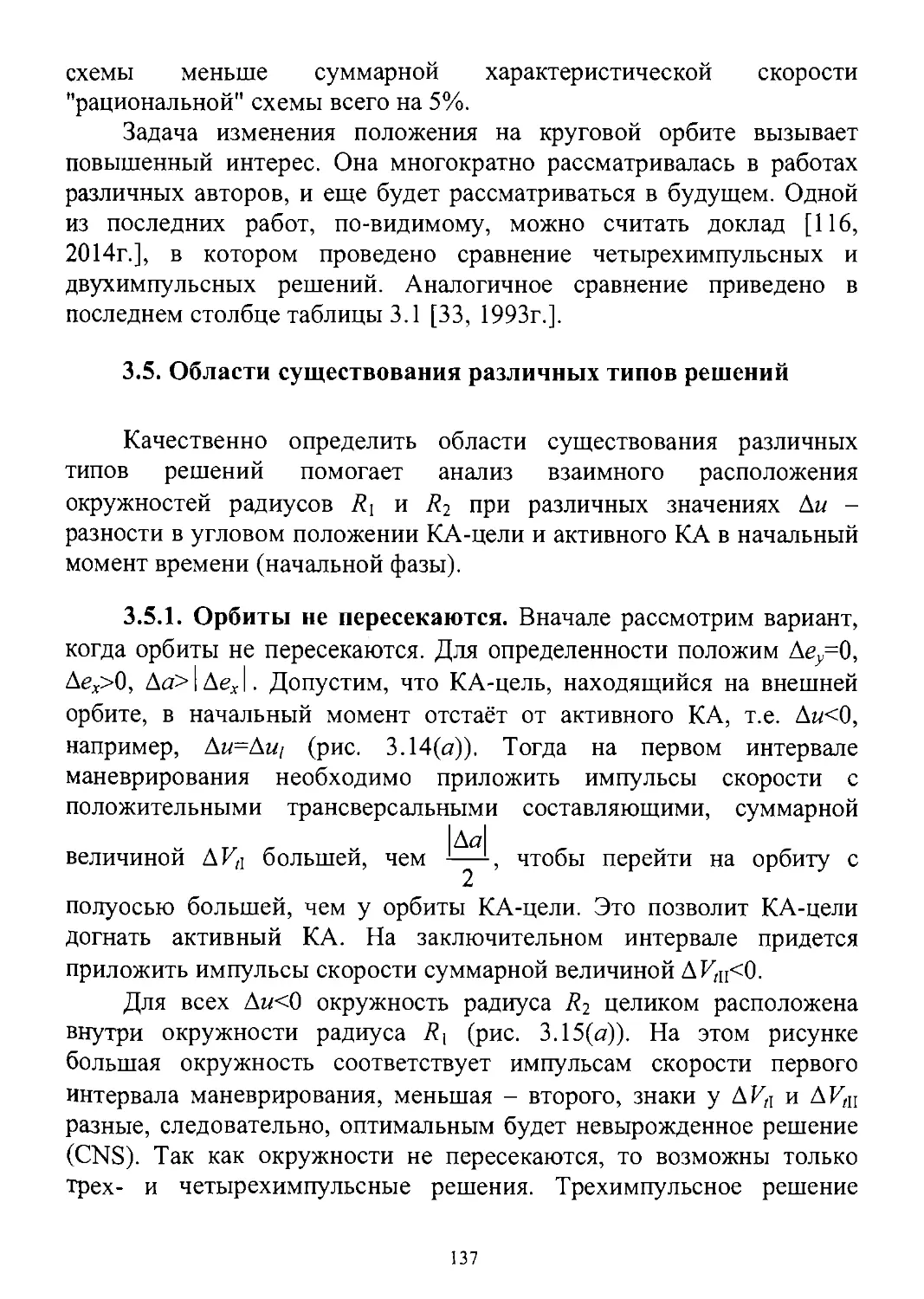
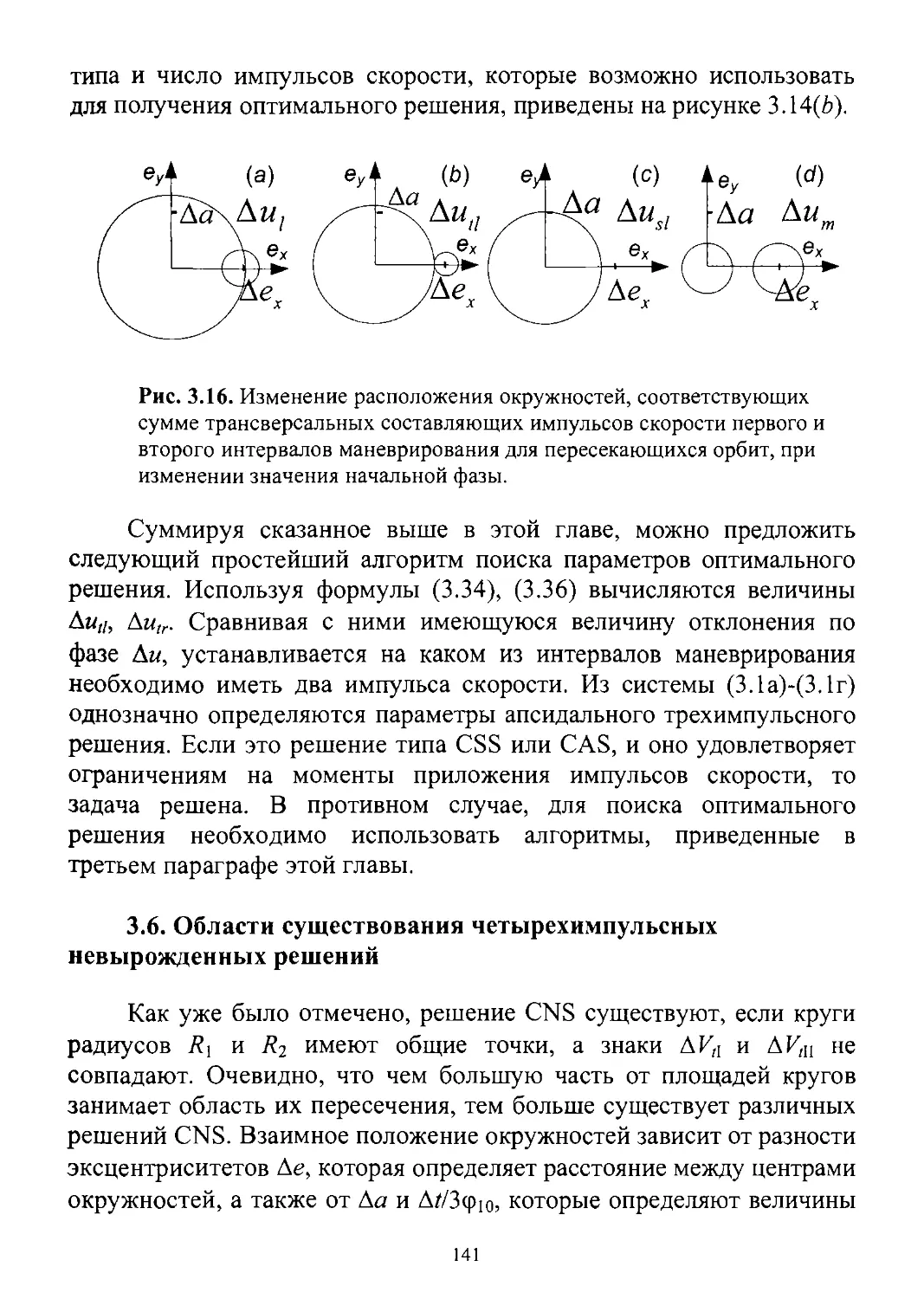
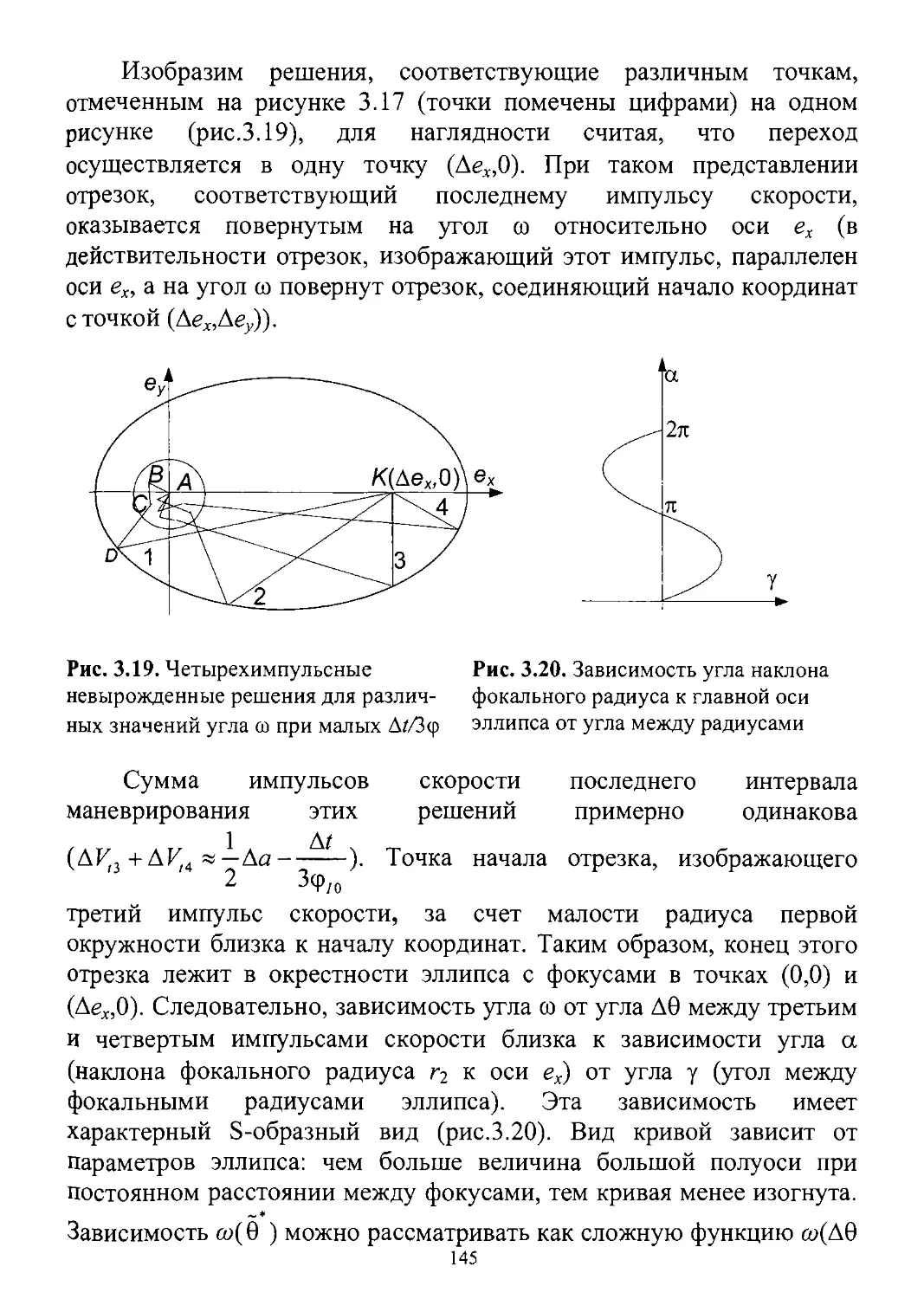
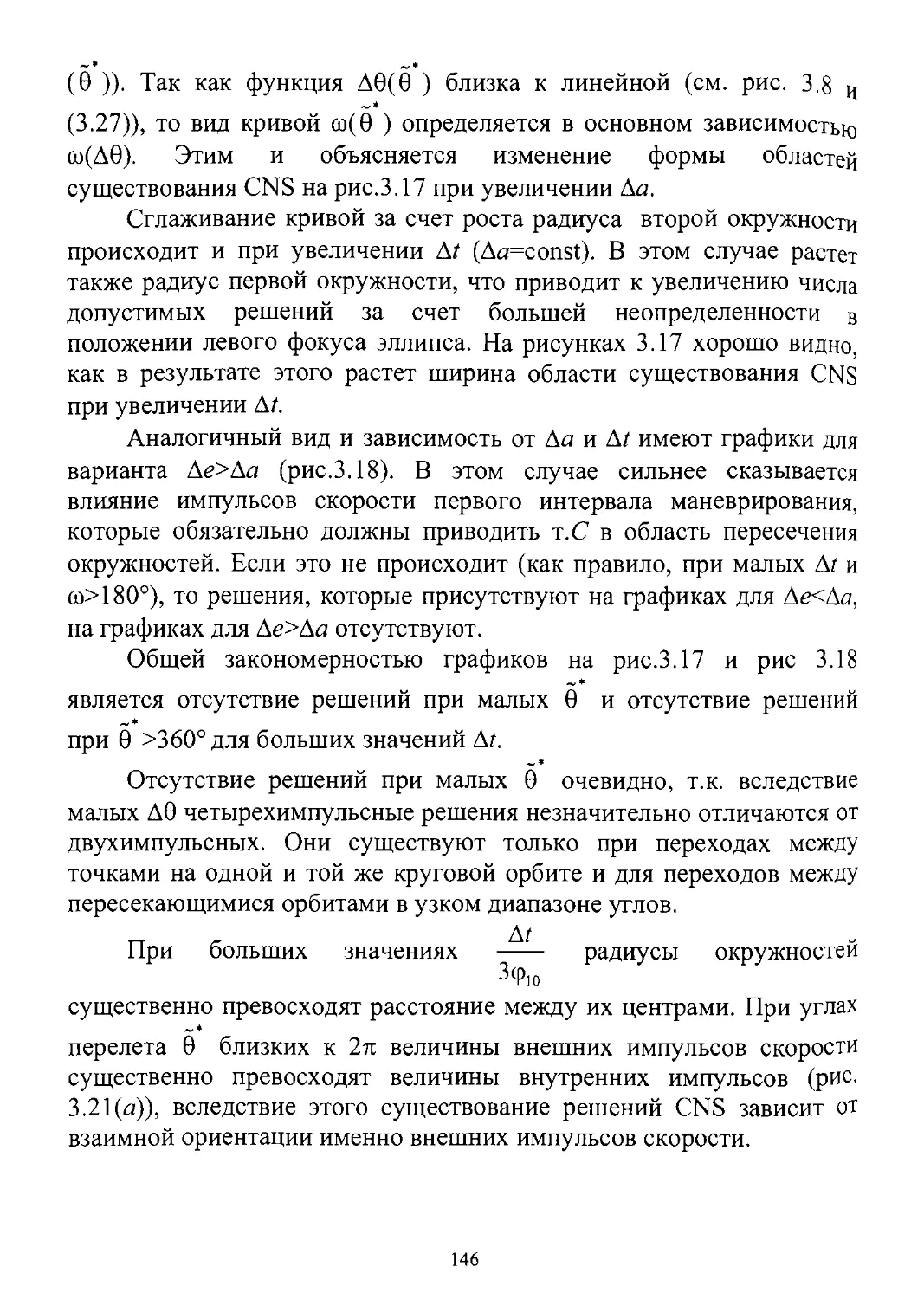
3.5. Области существования различных типов решений.......137
3.5.1. Орбиты не пересекаются. 3.5.2. Орбиты пересекаются.
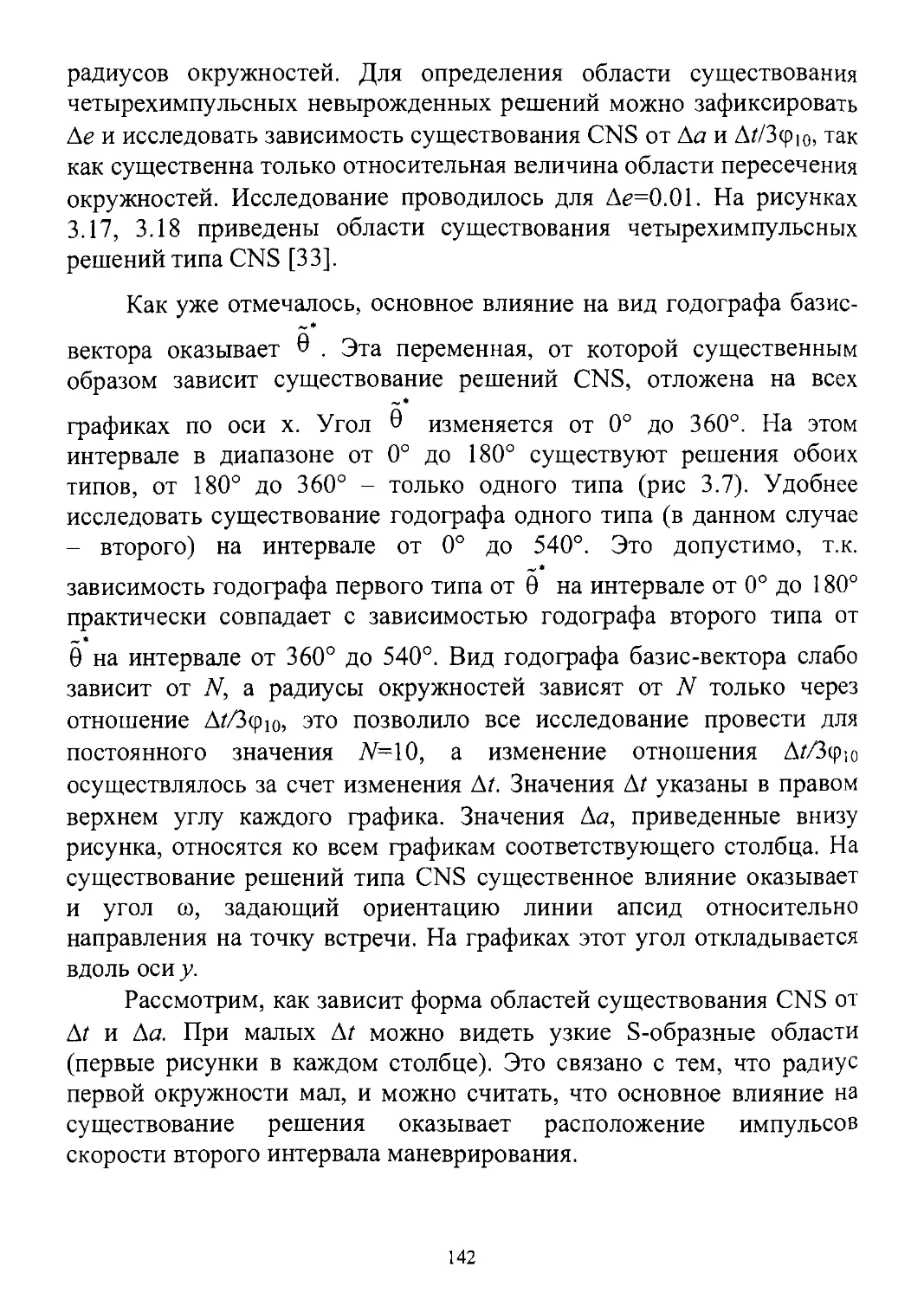
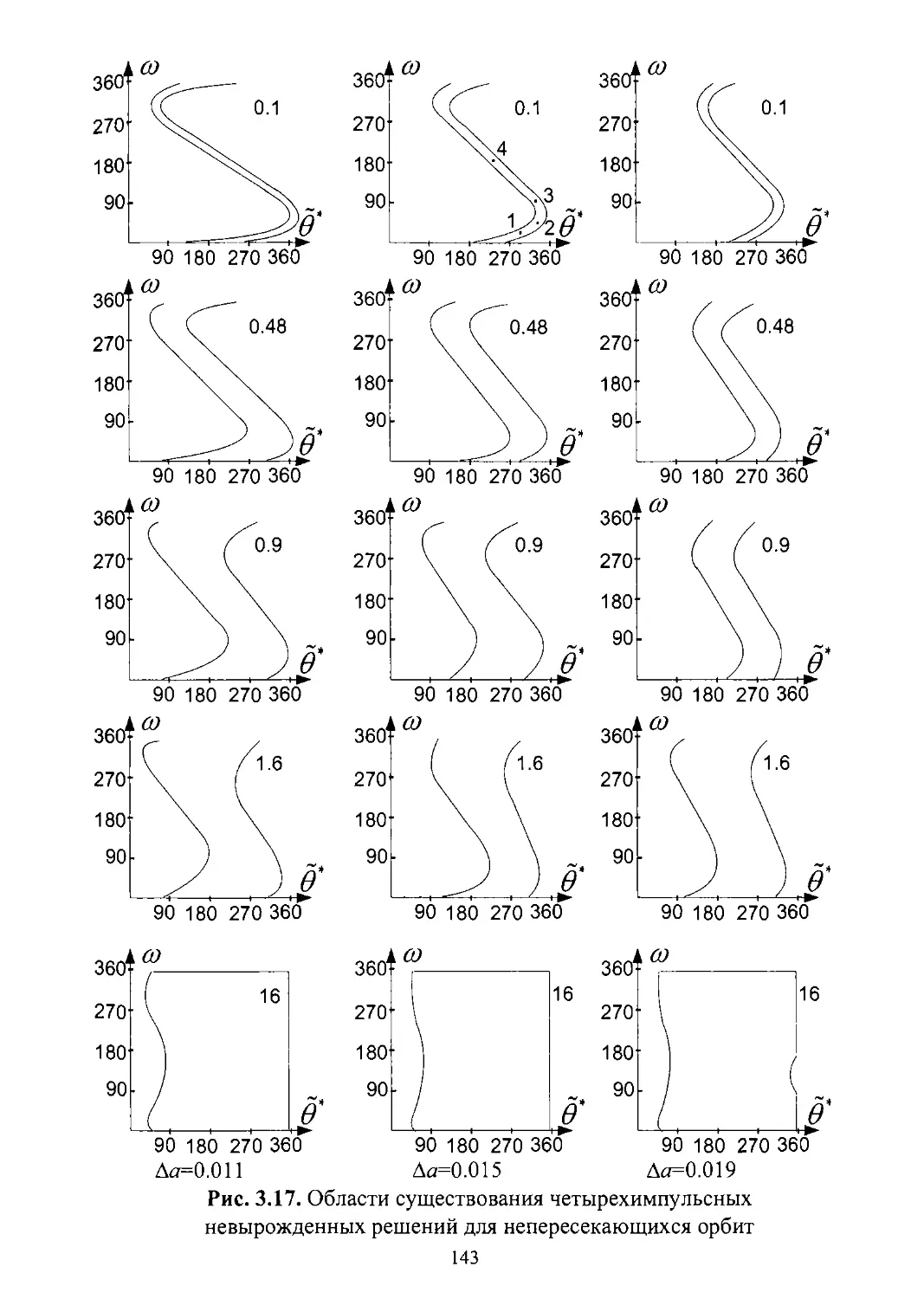
3.6. Области существования четырехимпульсных невырожден-
ных решений..............................................141
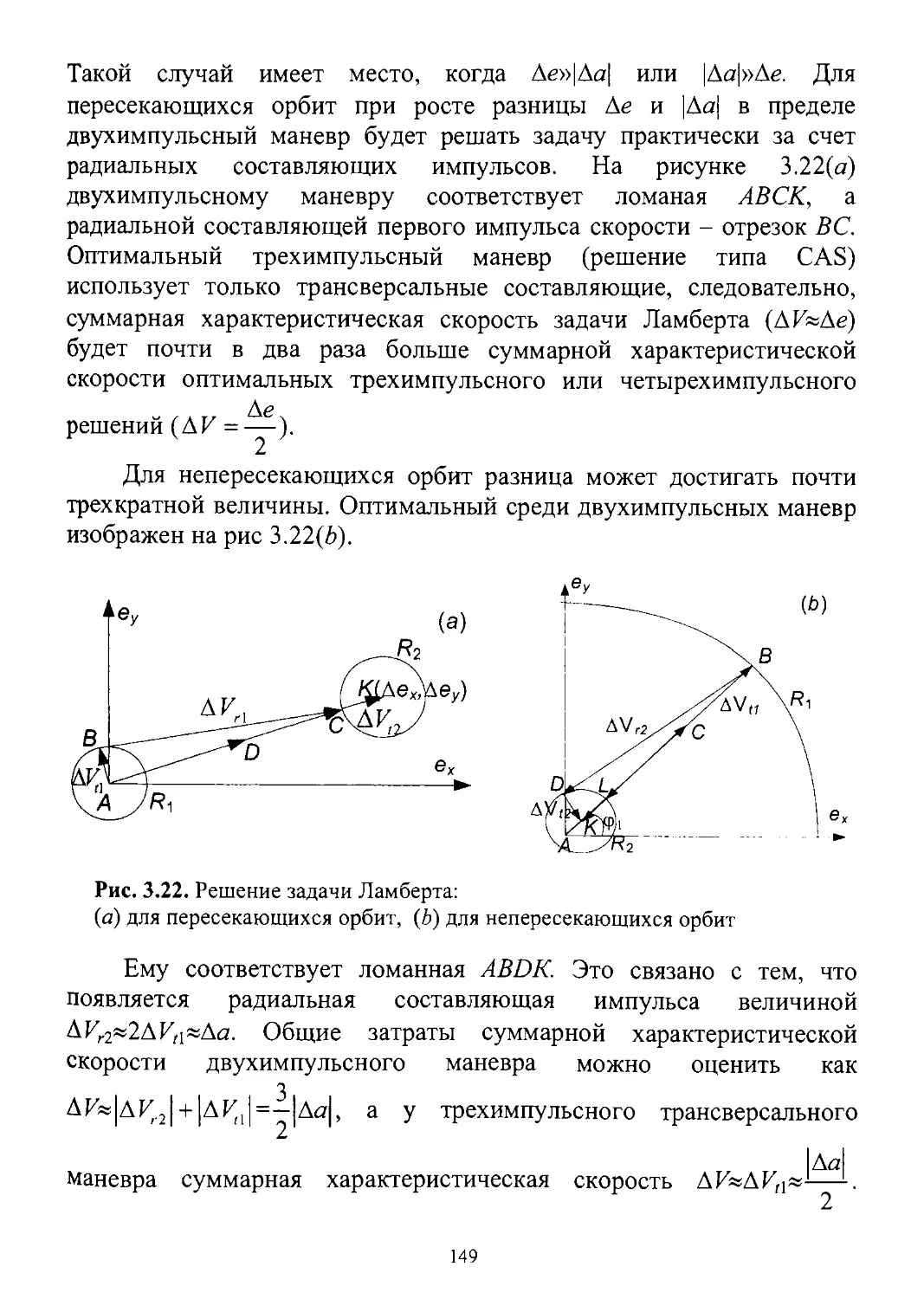
3.7. Задача Ламберта, преимущества и недостатки двухимпуль-
сных решений.............................................147
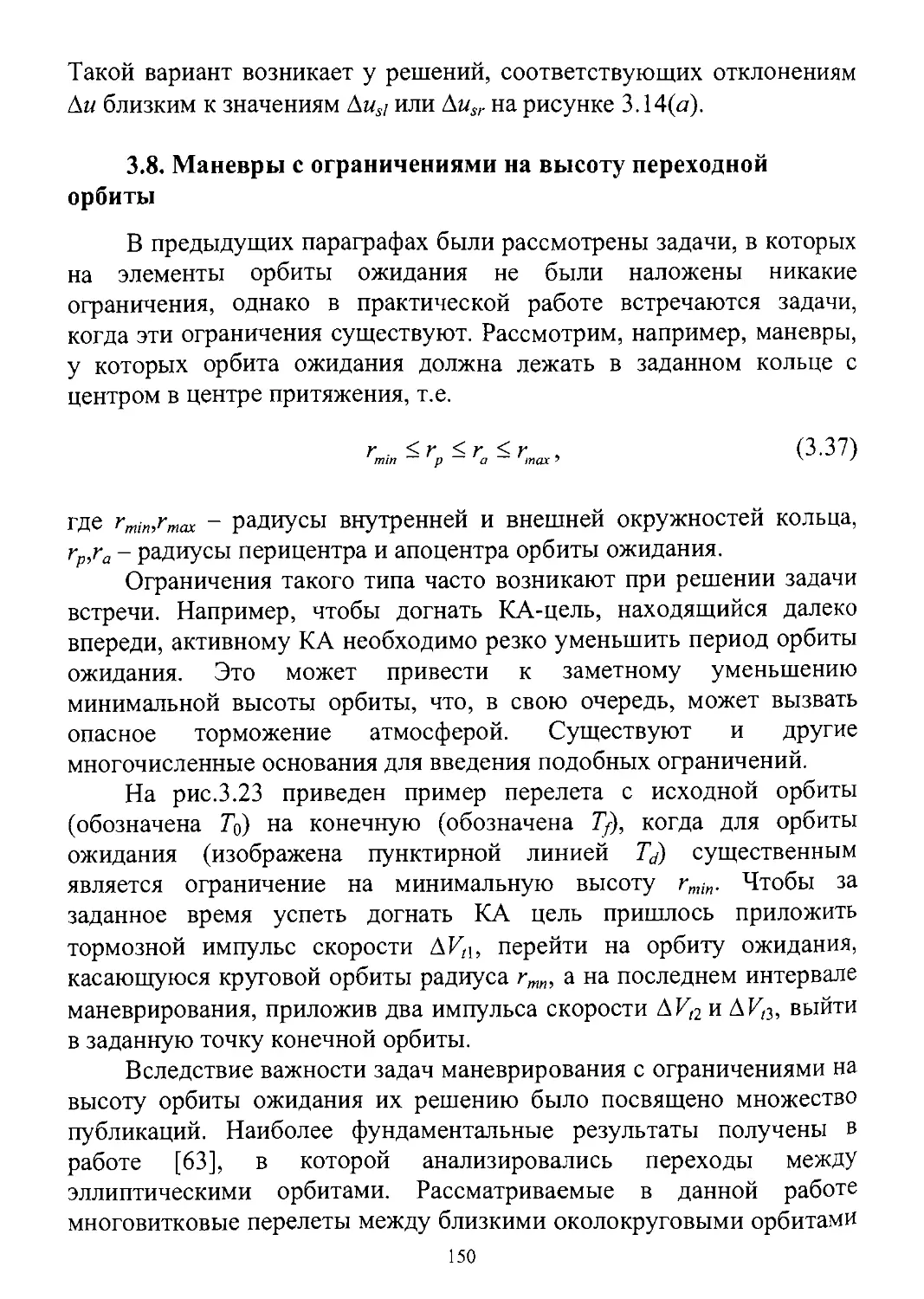
3.8. Маневры с ограничениями на высоту переходной орбиты . . 150
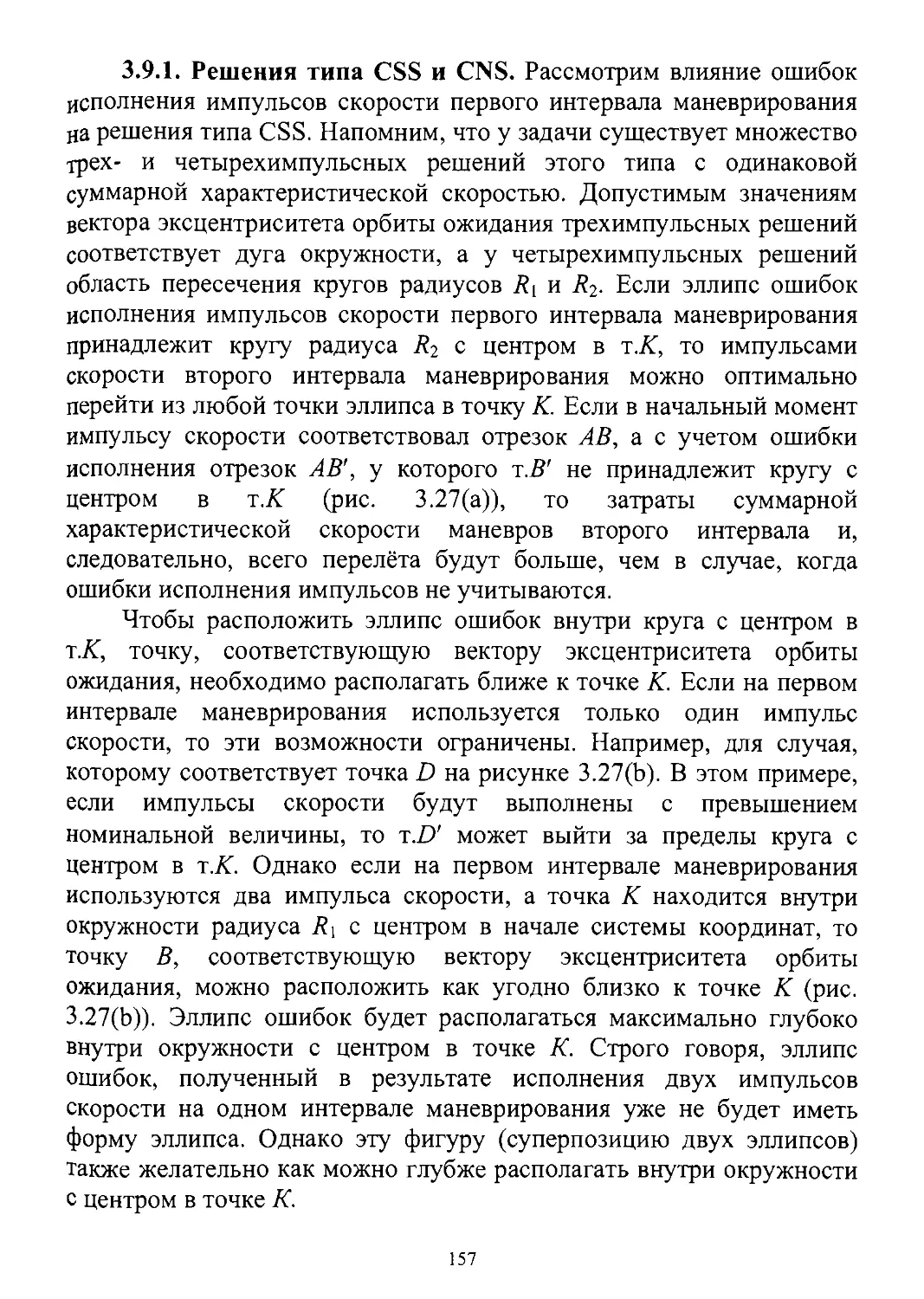
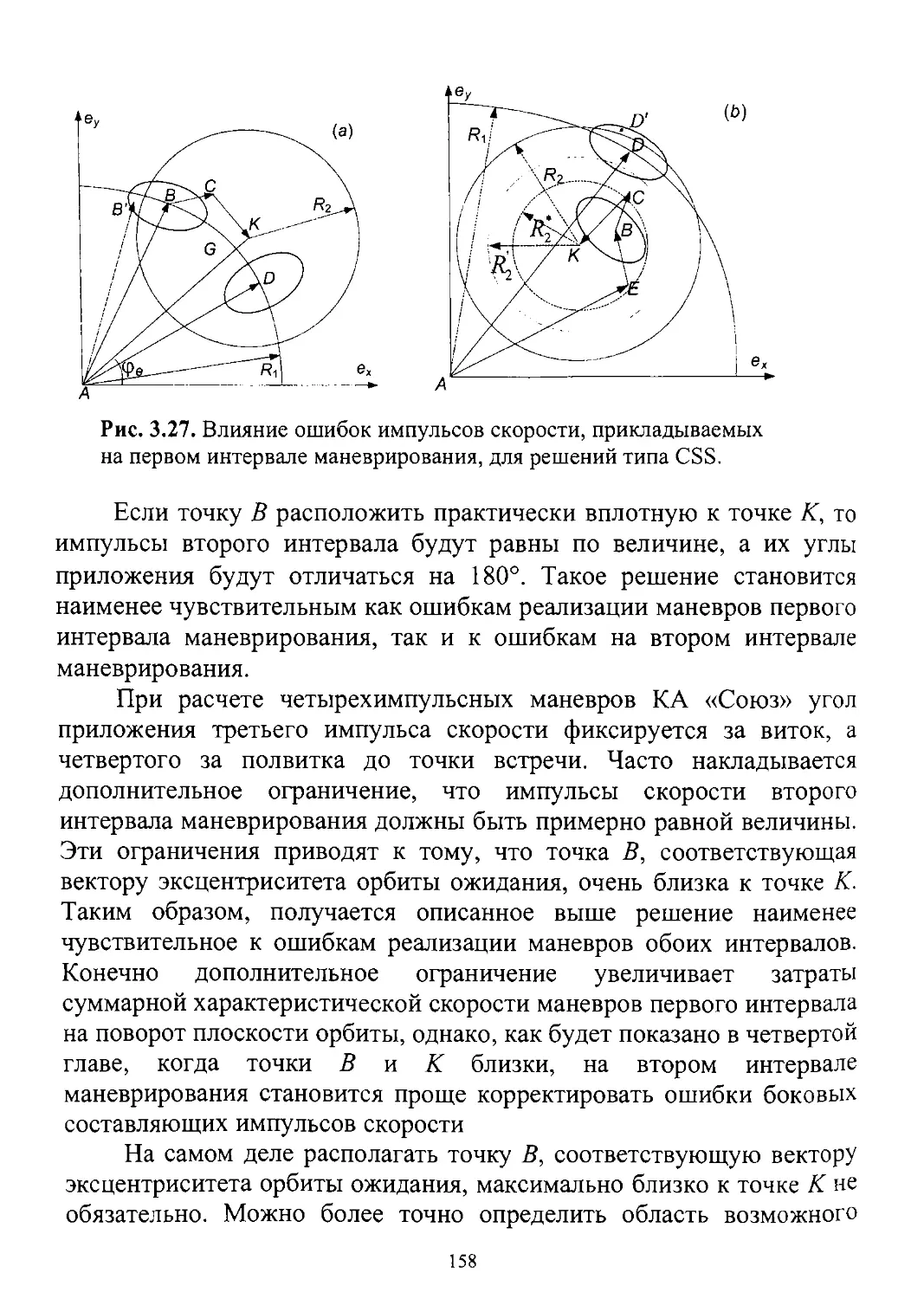
3.9. Влияние ошибок исполнения маневров..................155
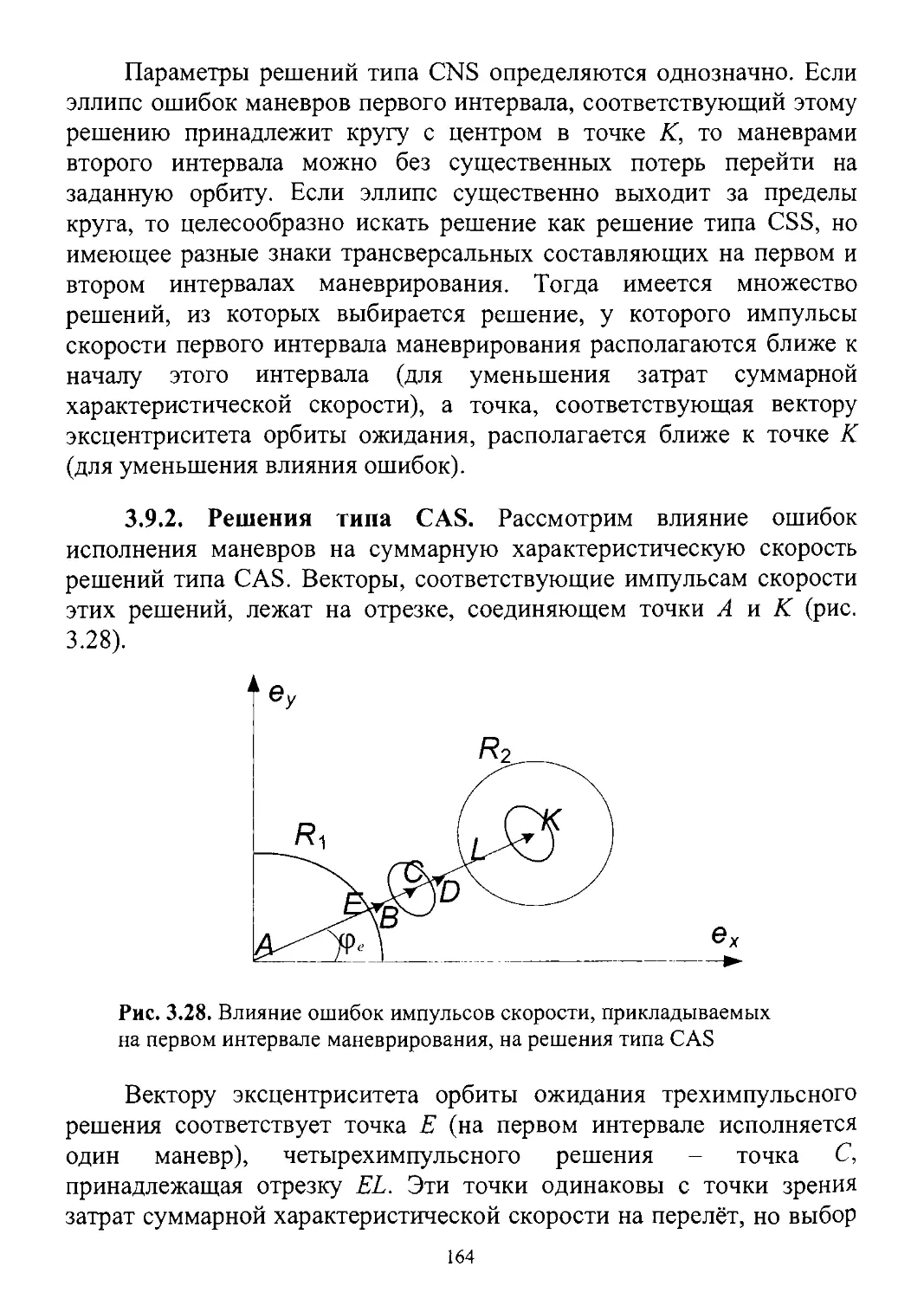
3.9.1. Решения типа CSS и CNS. 3.9.2. Решения типа CAS.
Глава IV. Встреча на некомпланарных орбитах..............166
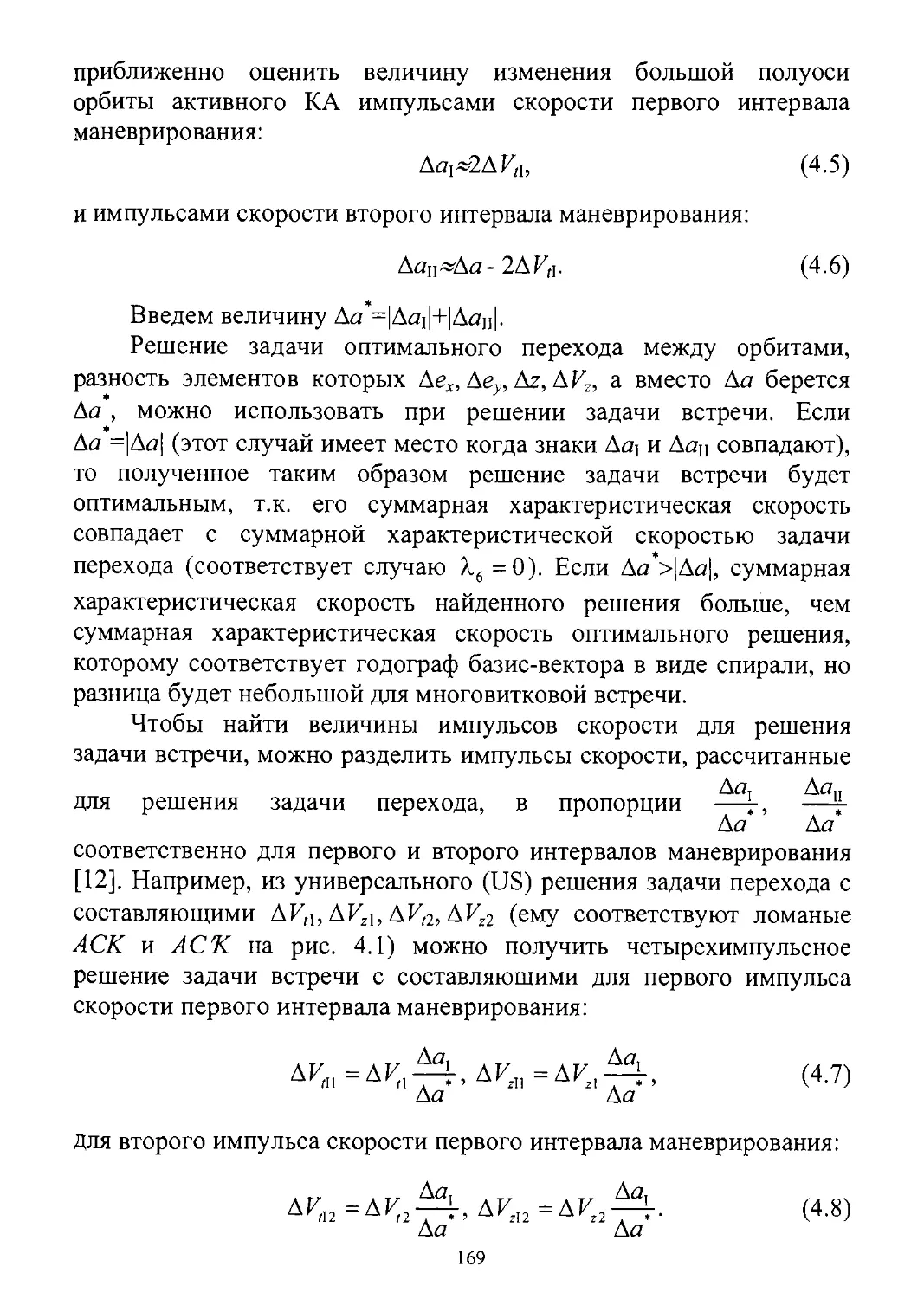
4.1. Постановка задачи...................................166
4.2. Универсальный алгоритм решения некомпланарной задачи
4
встречи, основанный на решении задачи перехода.........168
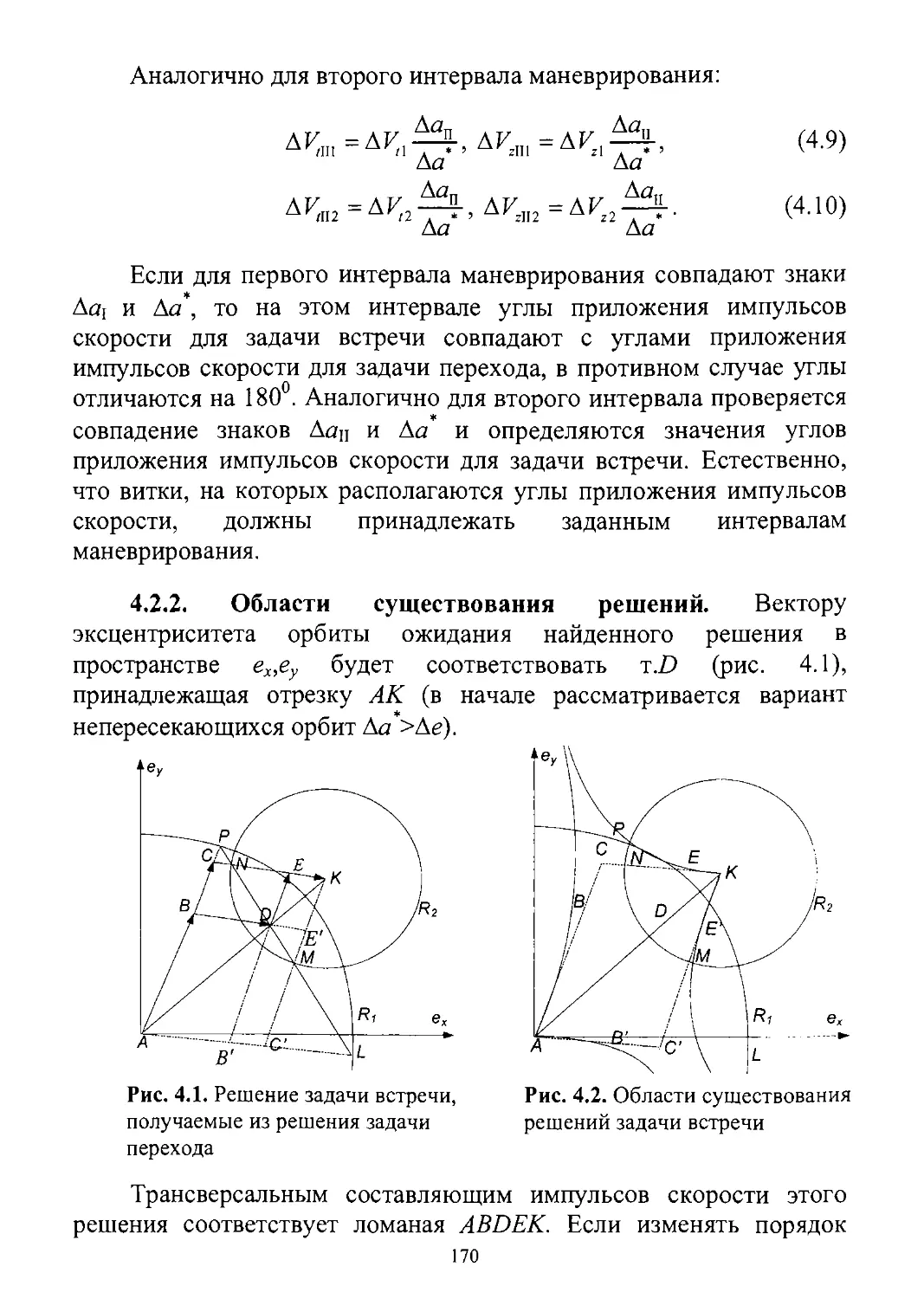
4.2.1. Определение параметров маневров. 4.2.2. Области существо-
вания решений. 4.2.3. Пример.
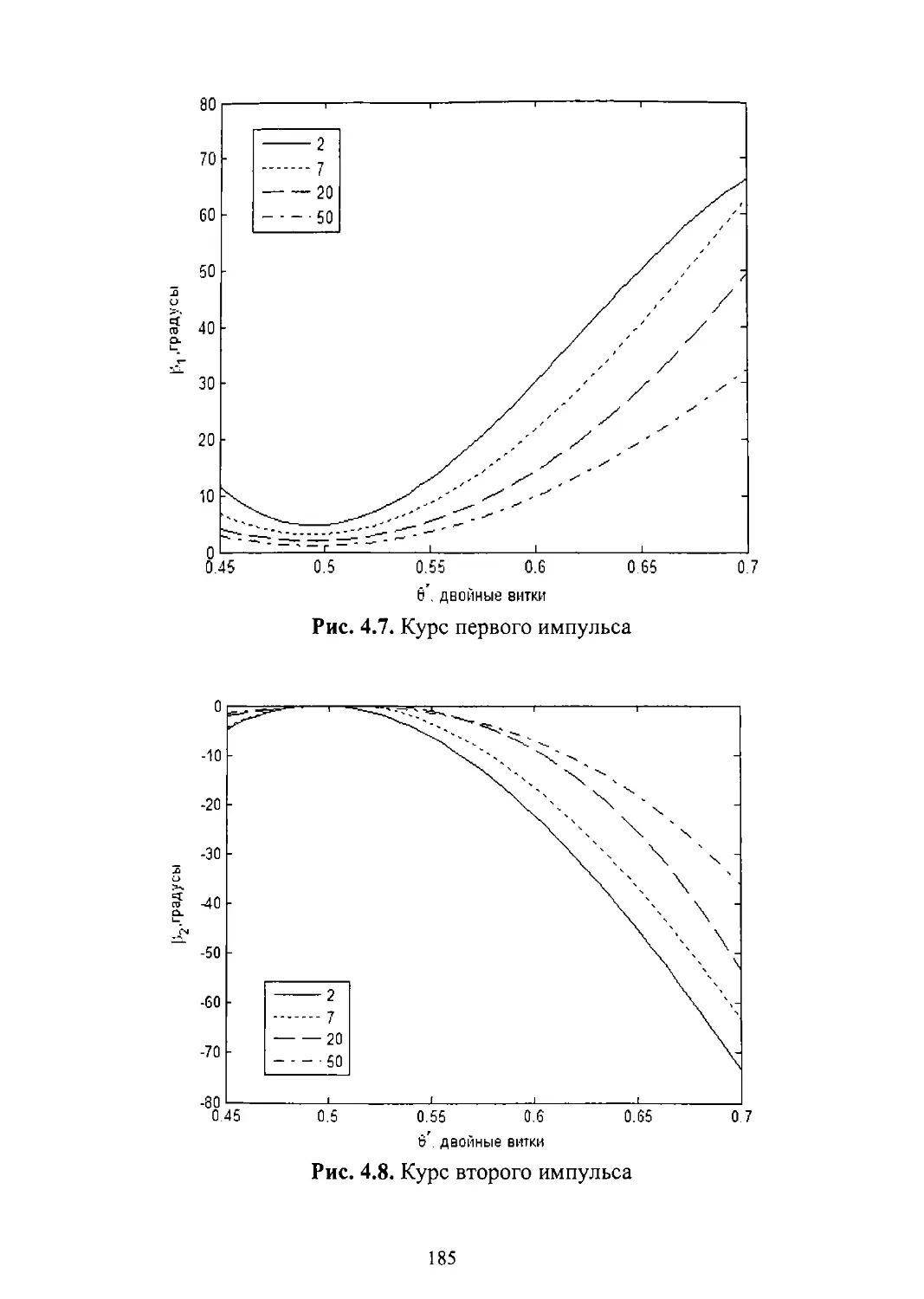
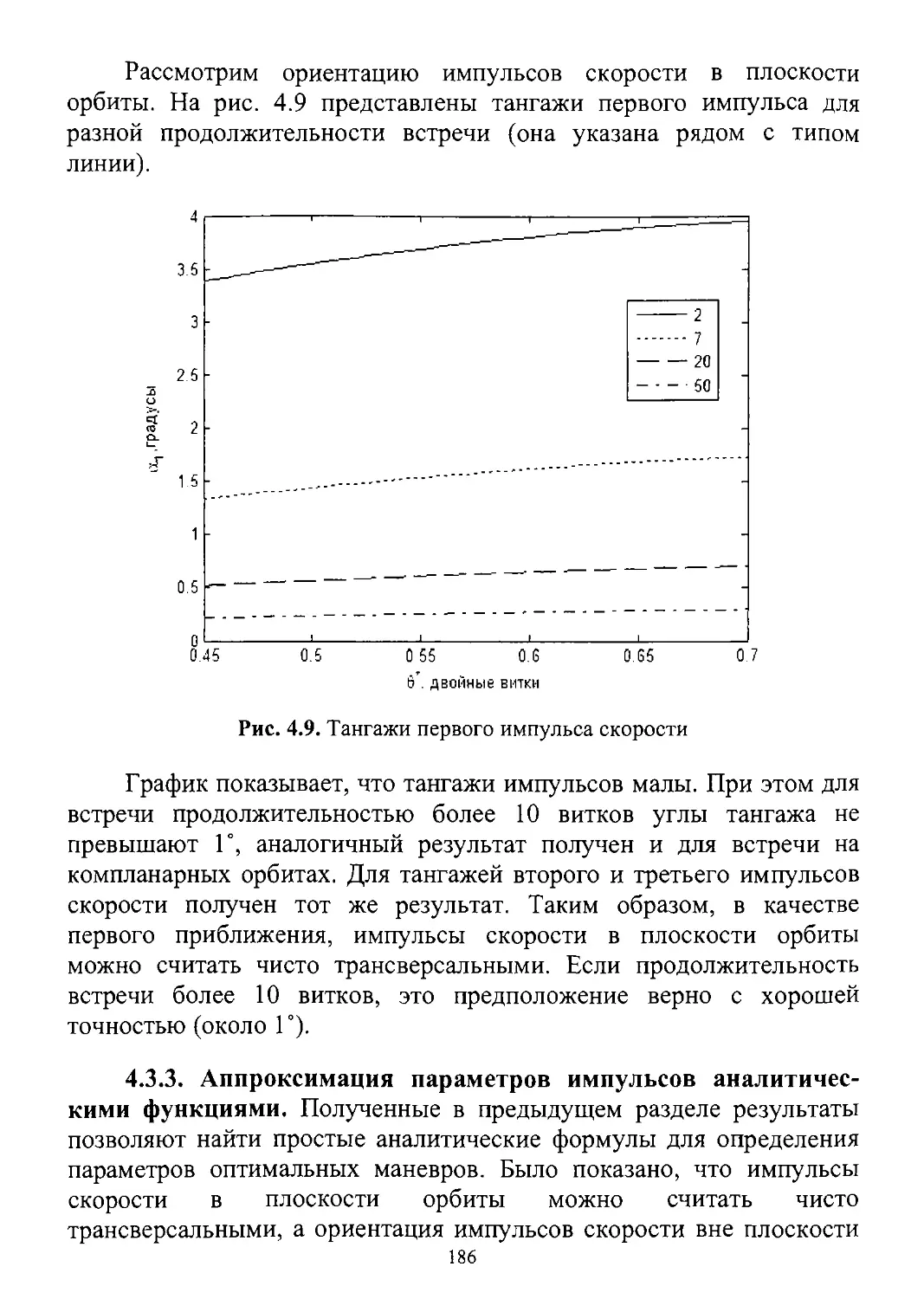
4.3. Невырожденное решение некомпланарной задачи встречи. . 180
4.3.1. Численное определение параметров оптимального шестиим-
пульсного решения.4.3.2.Характеристики оптимального шестиим-
пульсного решения. 4.3.3. Аппроксимация параметров импульсов
аналитическими функциями. 4.3.4. Сравнение шестиимпульсного
решения с решением задачи Ламберта. 4.3.5. Пятиимпульсные
маневры.
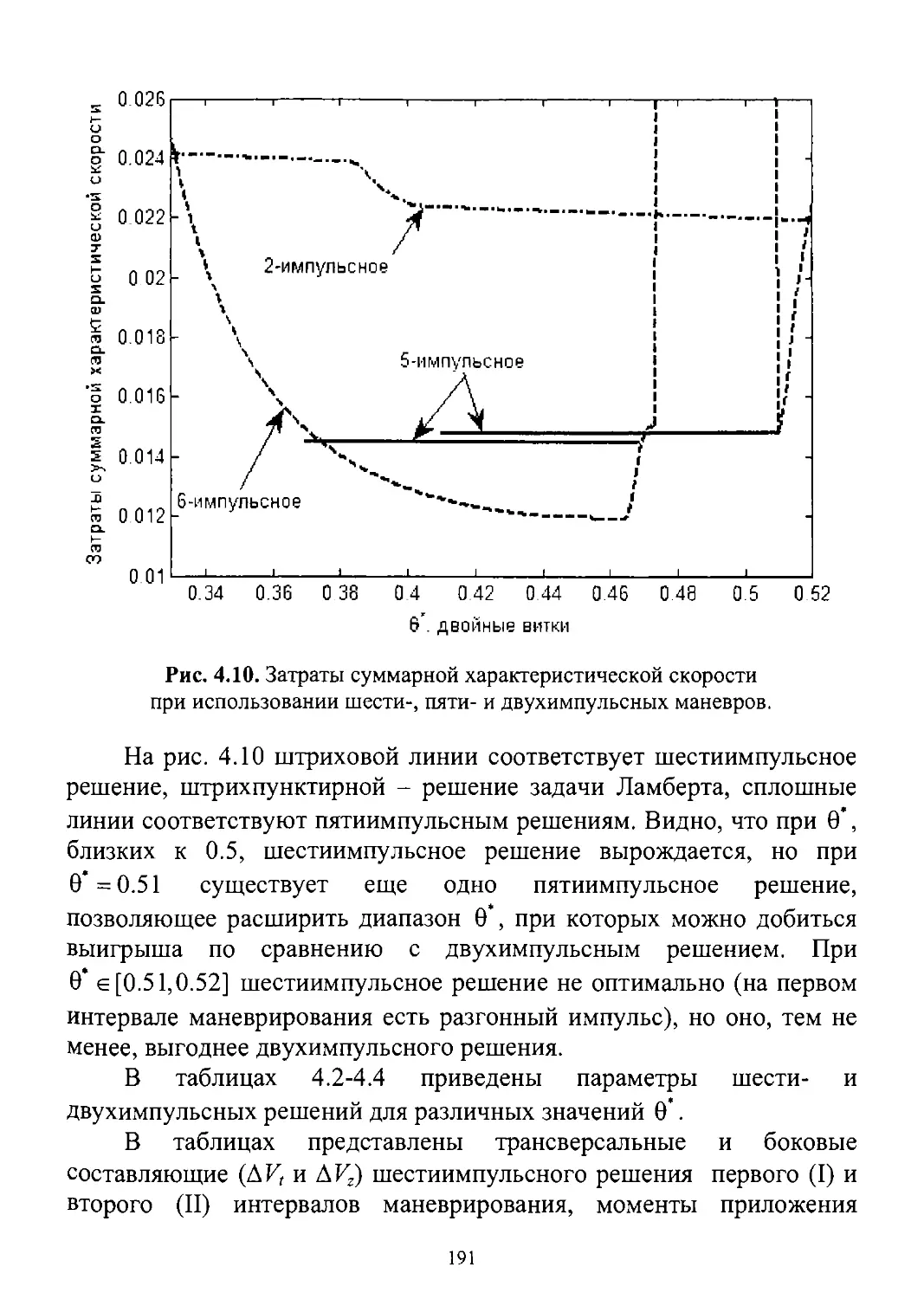
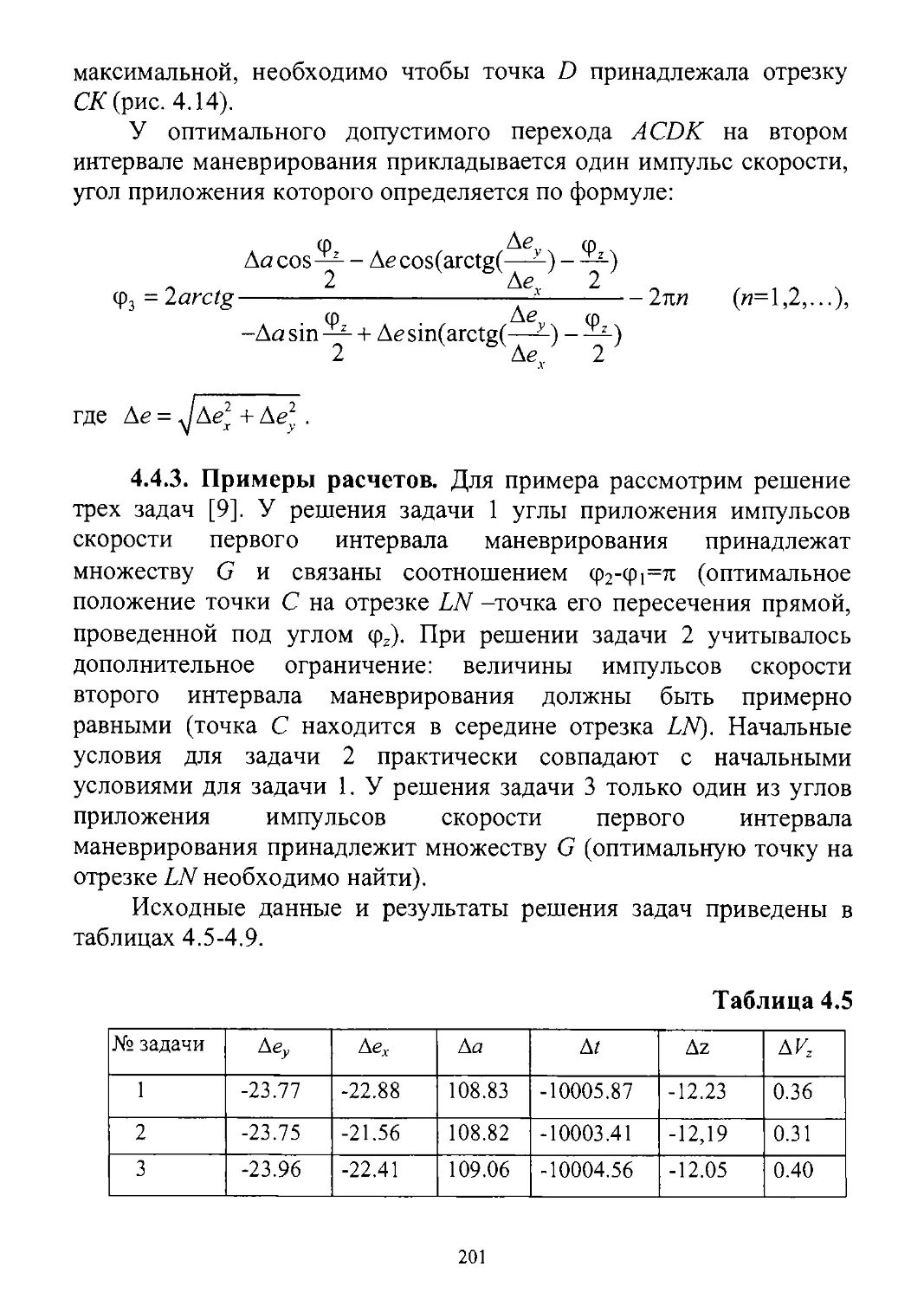
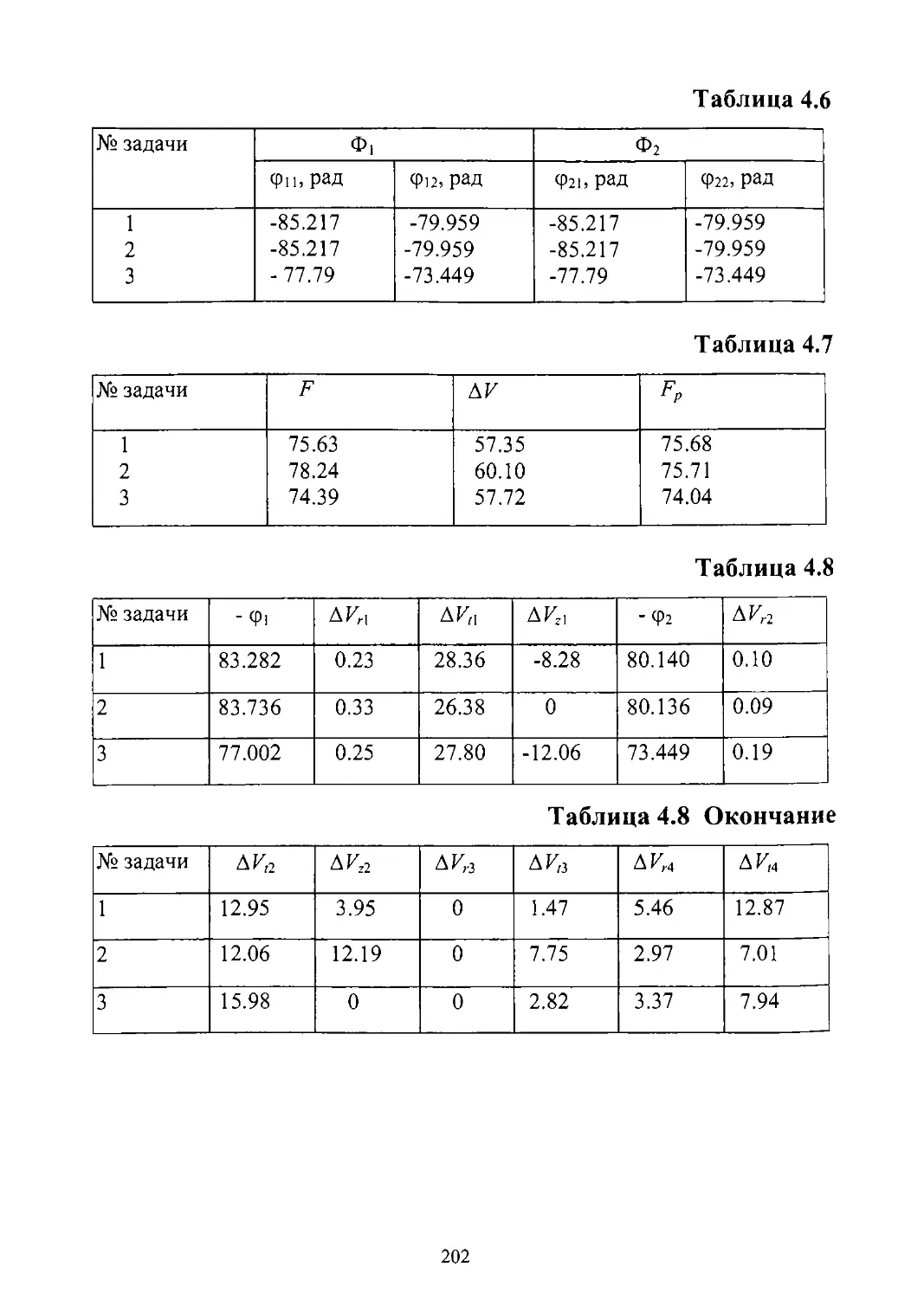
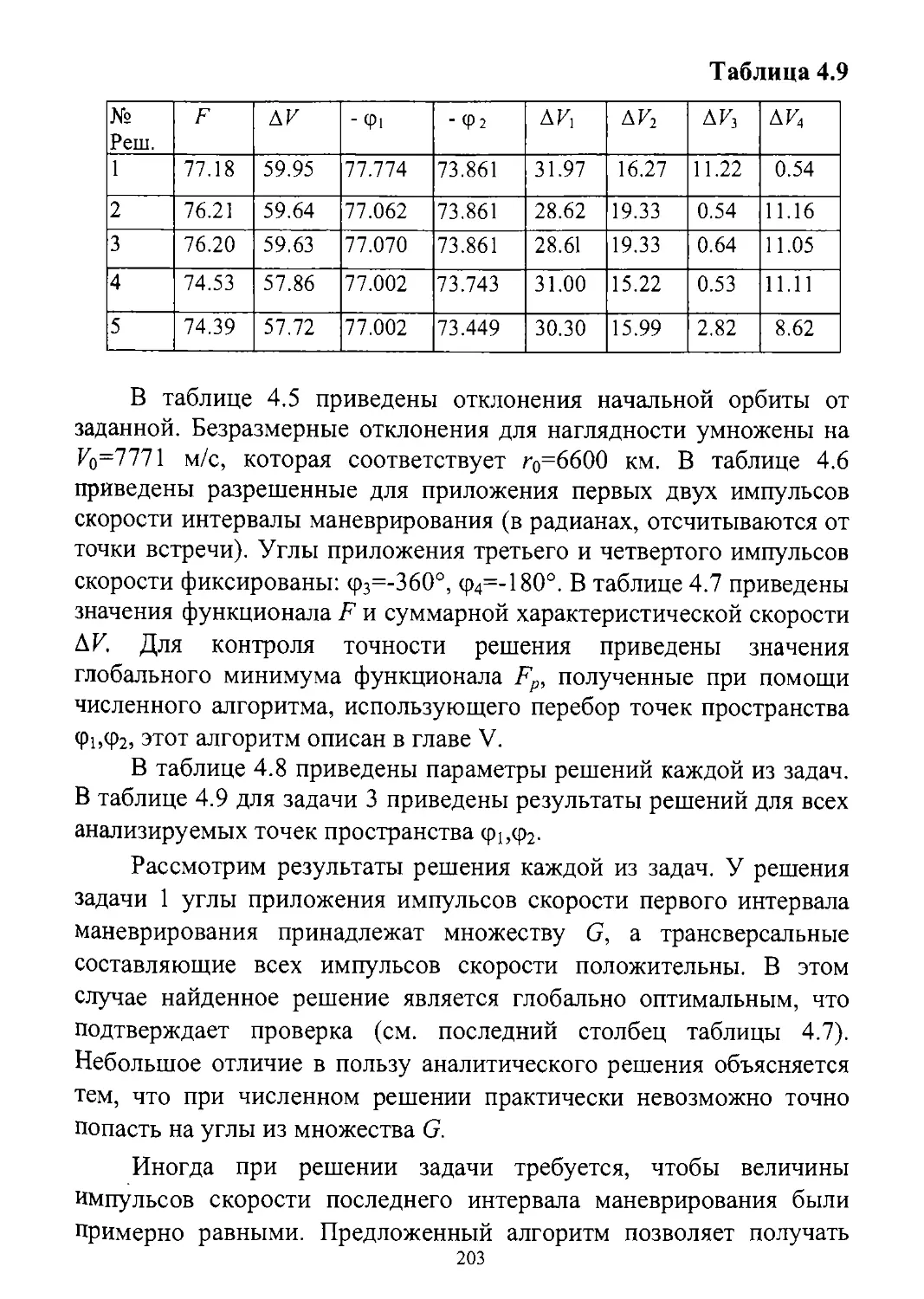
4.4. Алгоритм расчета маневров дальнего наведения..........193
4.4.1. Постановка задачи. 4.4.2. Алгоритм решения. 4.4.3. Примеры
расчетов.
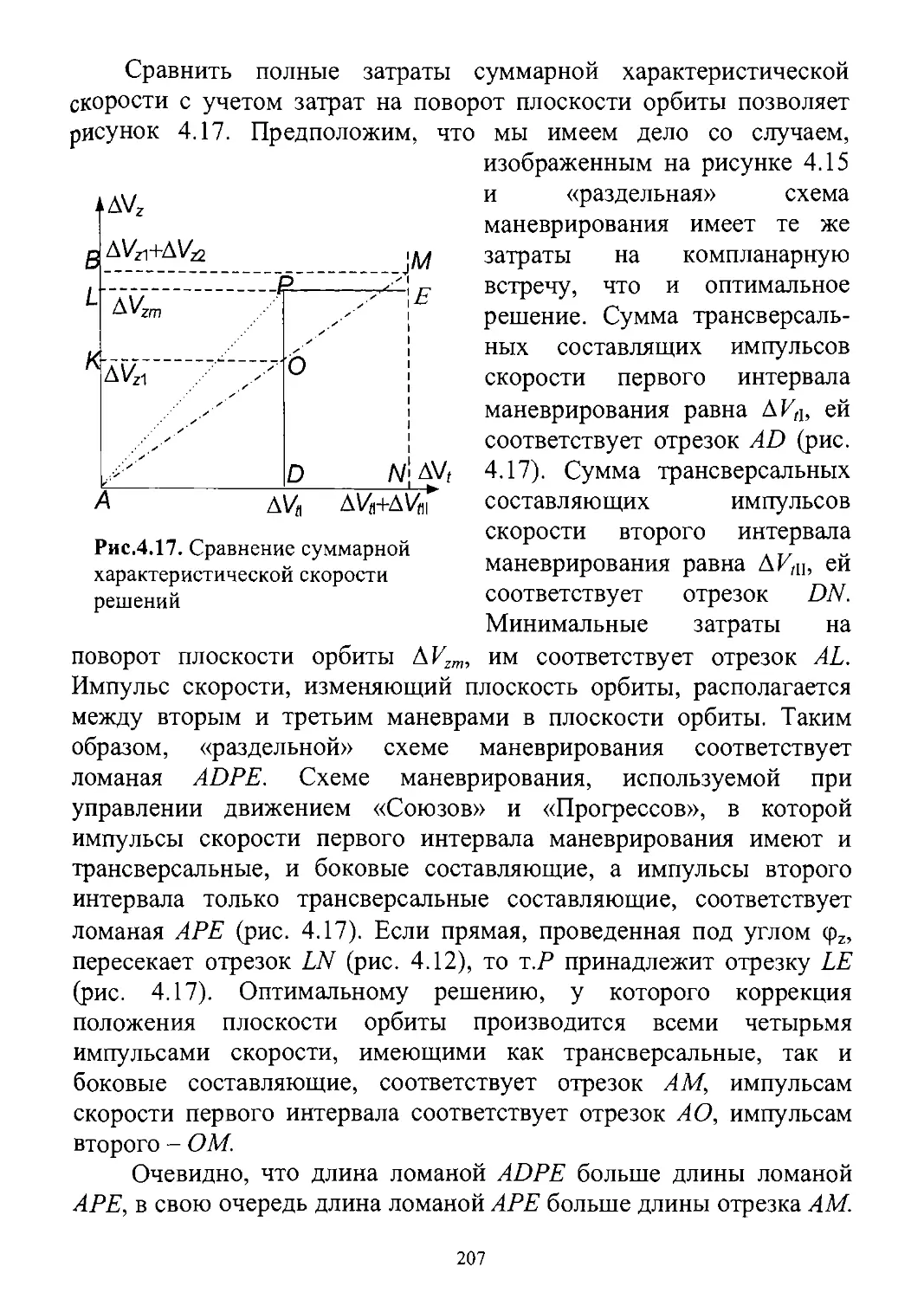
4.5. Сравнение различных типов решений (НАСА, ЦУП, комби-
нированное) ...............................................205
4.6. Встреча на некомпланарных орбитах, осуществляемая за
счет маневрирования на многих витках.......................208
4.6.1. Определение длины подинтервалов. 4.6.2. Пример.
Глава V. Численные методы. . 215
5.1. Постановка задачи, общий метод решения................215
5.2. Минимизация в пространстве составляющих импульсов . .218
5.3. Определение минимума в пространстве углов приложения
импульсов..............................................223
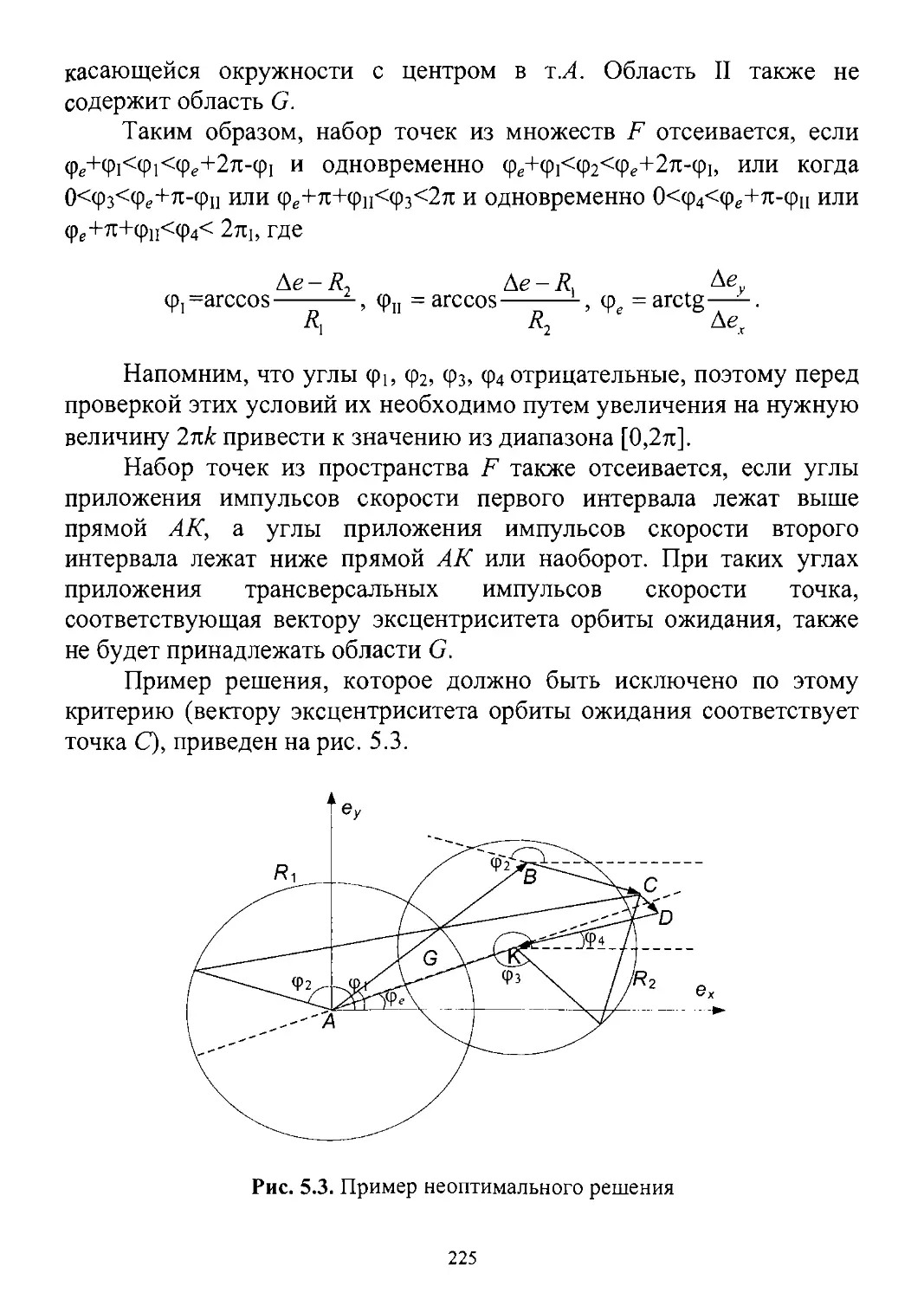
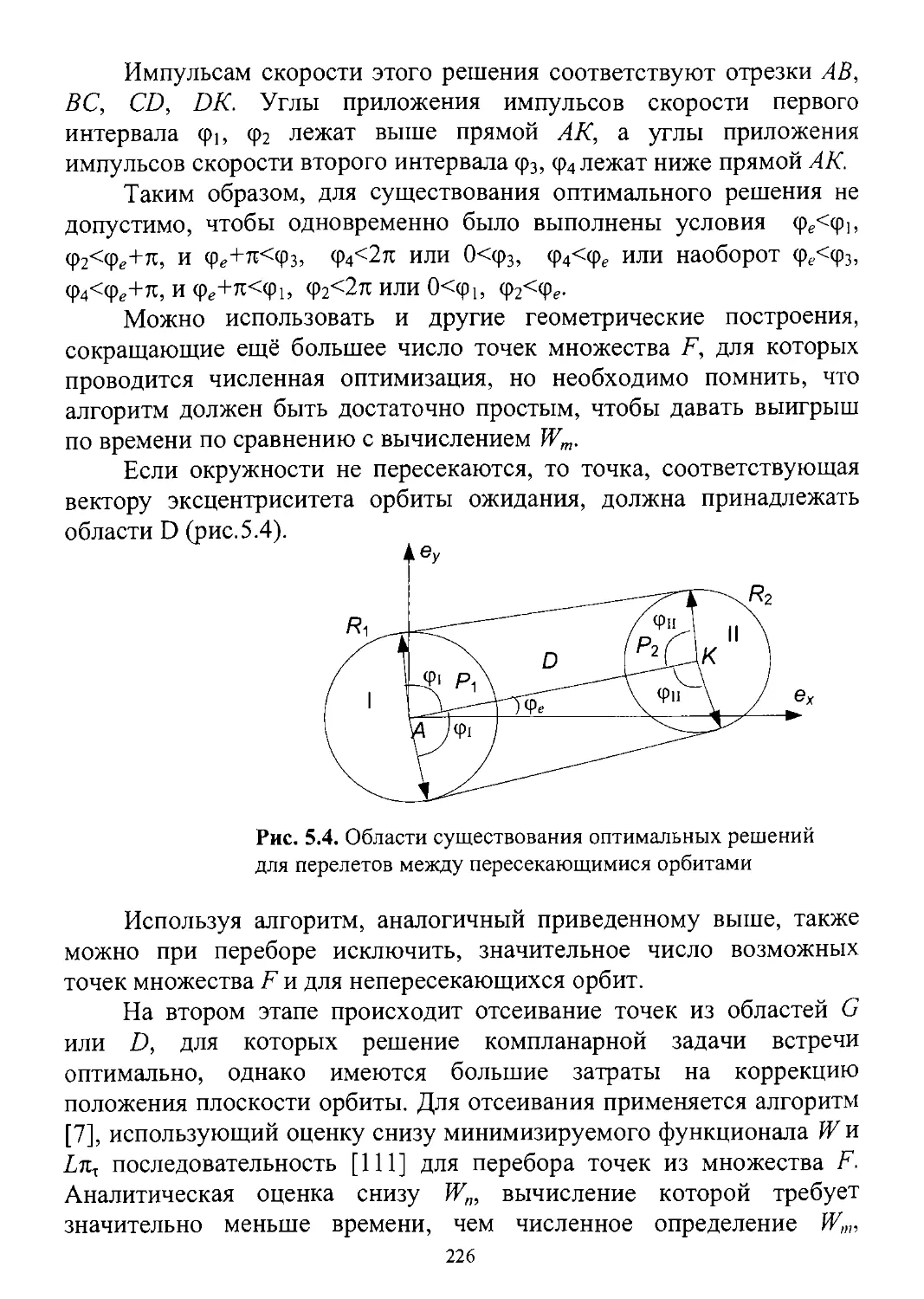
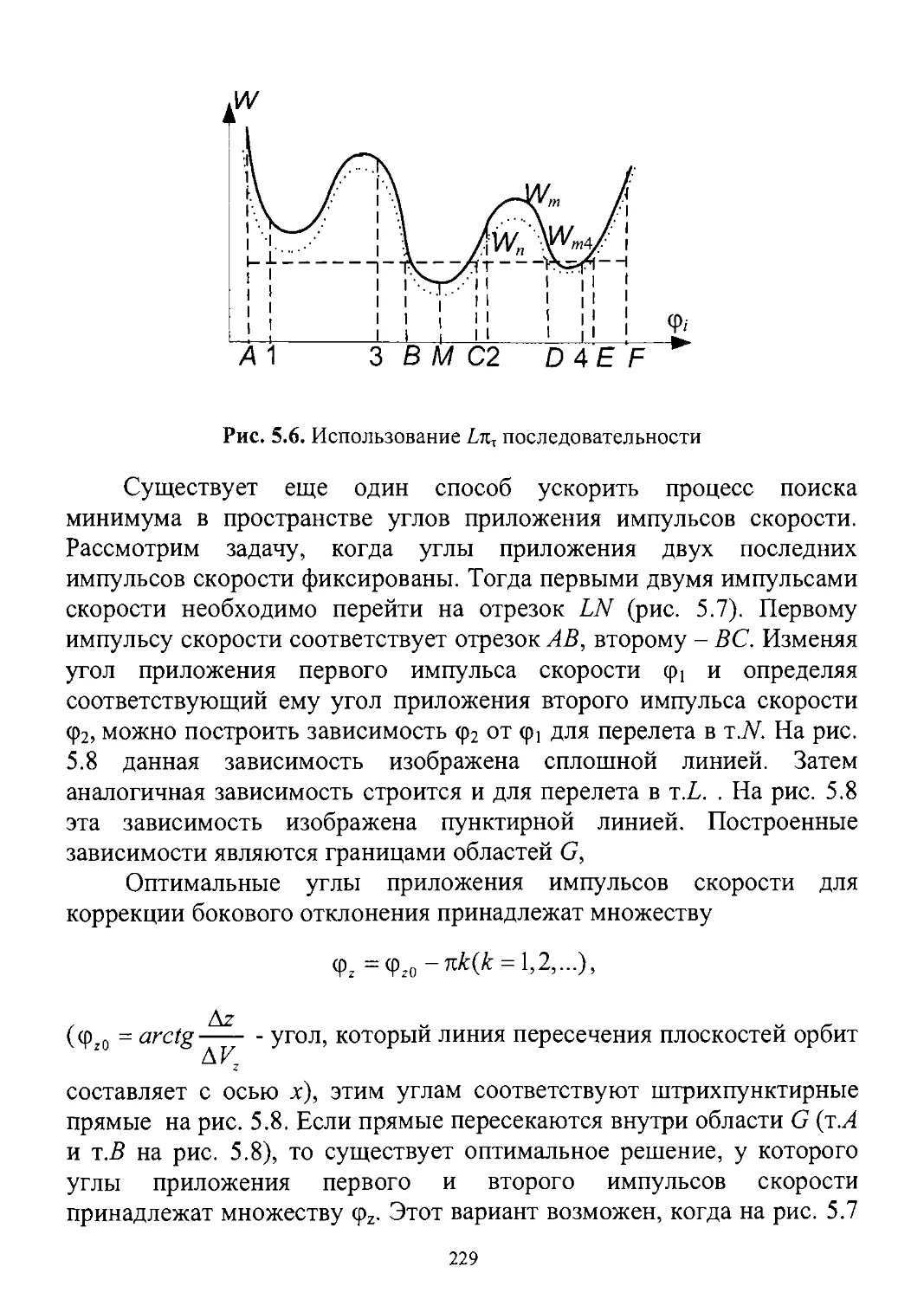
5.4. Использование графического диалога с задачей..........230
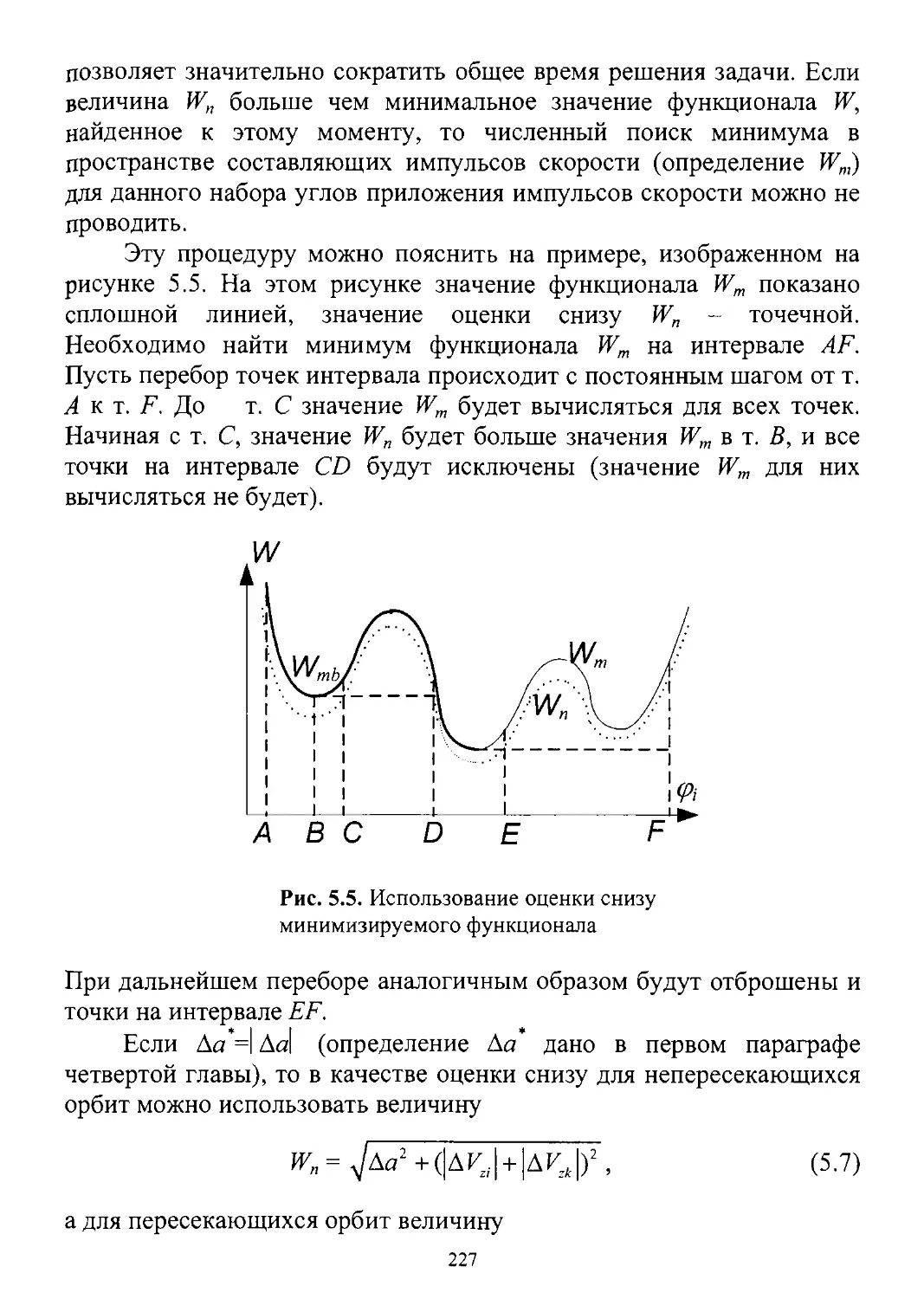
5.5. Примеры решения задач.................................233
5.6. Использование итерационной процедуры для точного уче-
та ограничений на высоту орбиты ожидания...................242
5.7. Использование симплекс-метода для расчета параметров
маневров. . . . . .............243
Глава VI. Маневрирование с помощью двигателя, имеющего
ограниченную постоянную тягу . . . . 246
6.1. Переходы между компланарными орбитами.................249
6.1.1. Постоянная ориентация вектора тяги в орбитальной системе
координат. 6.1.2. Пример. 6.1.3. Постоянная ориентация вектора
тяги в инерциальной системе координат. 6.1.4. Оптимальная ори-
ентация вектора тяги для изменения вектора эксцентриситета.
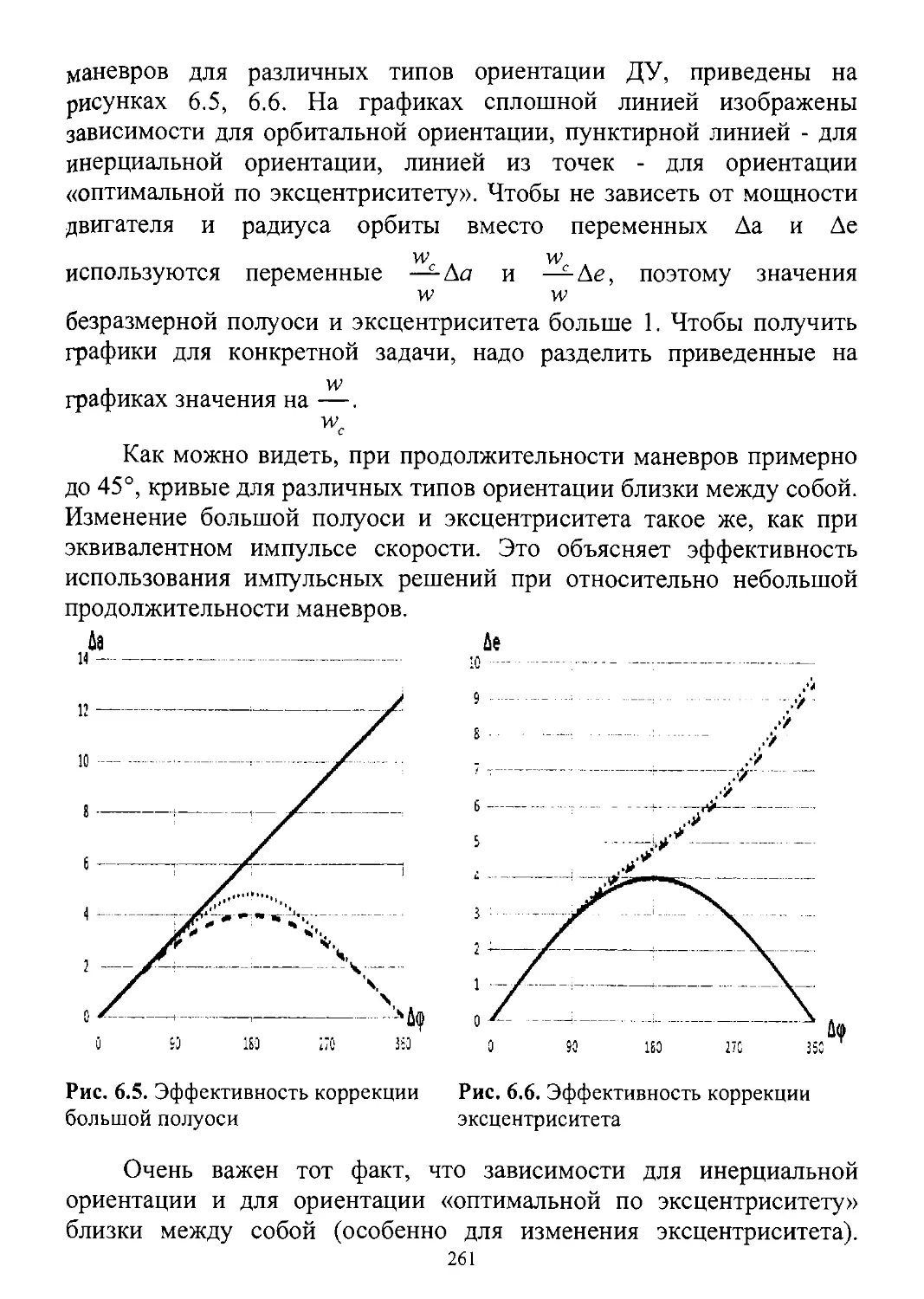
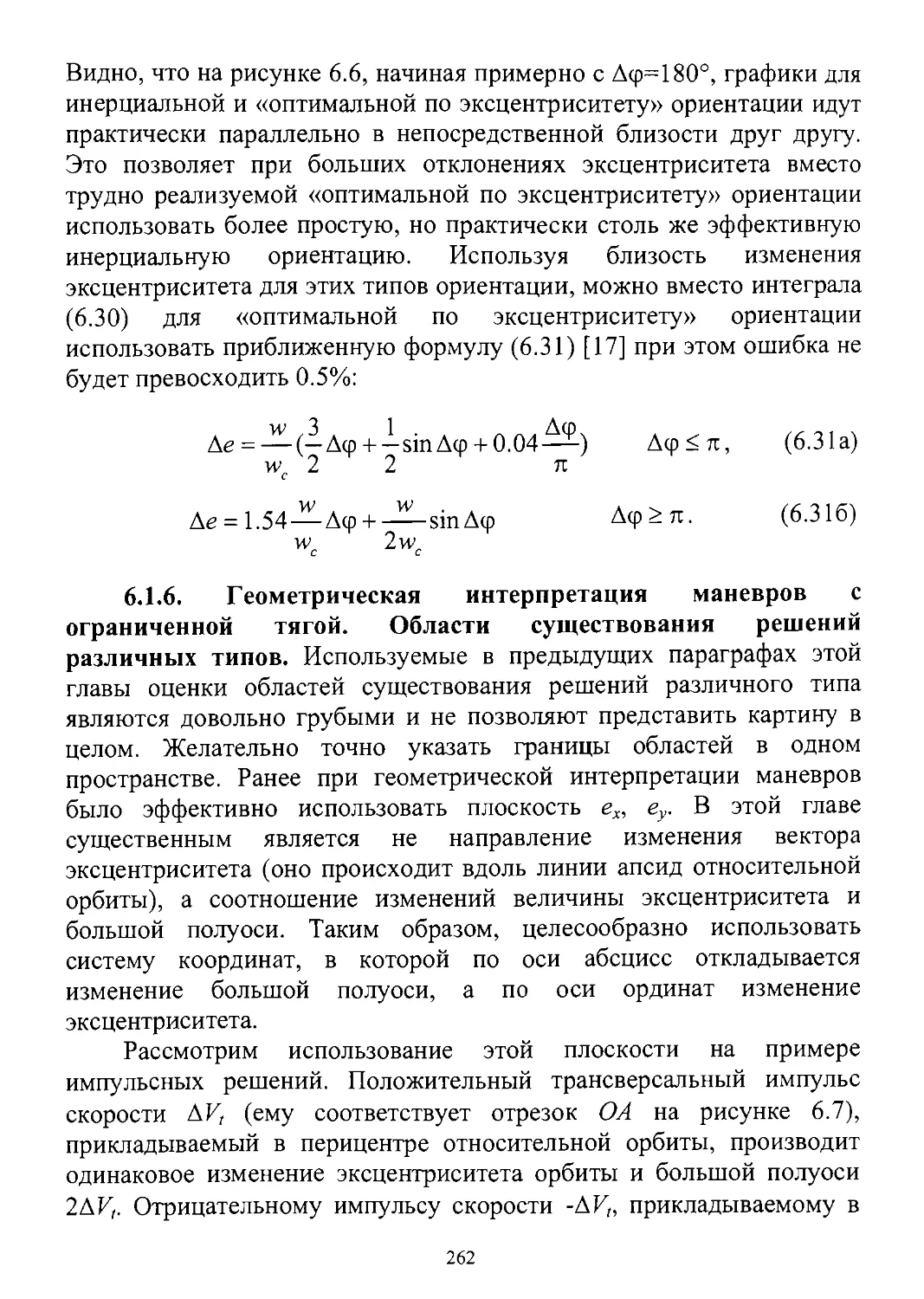
6.1.5. Сравнение различных типов ориентации вектора тяги.
6.1.6. Геометрическая интерпретация маневров с ограниченной тя-
гой. Области существования решений различных типов. 6.1.7. Оп-
5
тимальная ориентация вектора тяги в общем случае. Области суще -
ствования различных невырожденных решений. 6.1.8. Определение
параметров оптимального невырожденного решения. 6.1.9. Опреде-
ление числа витков маневрирования. 6.1.10. Распределение коррек-
ции элементов орбиты между витками маневрирования.
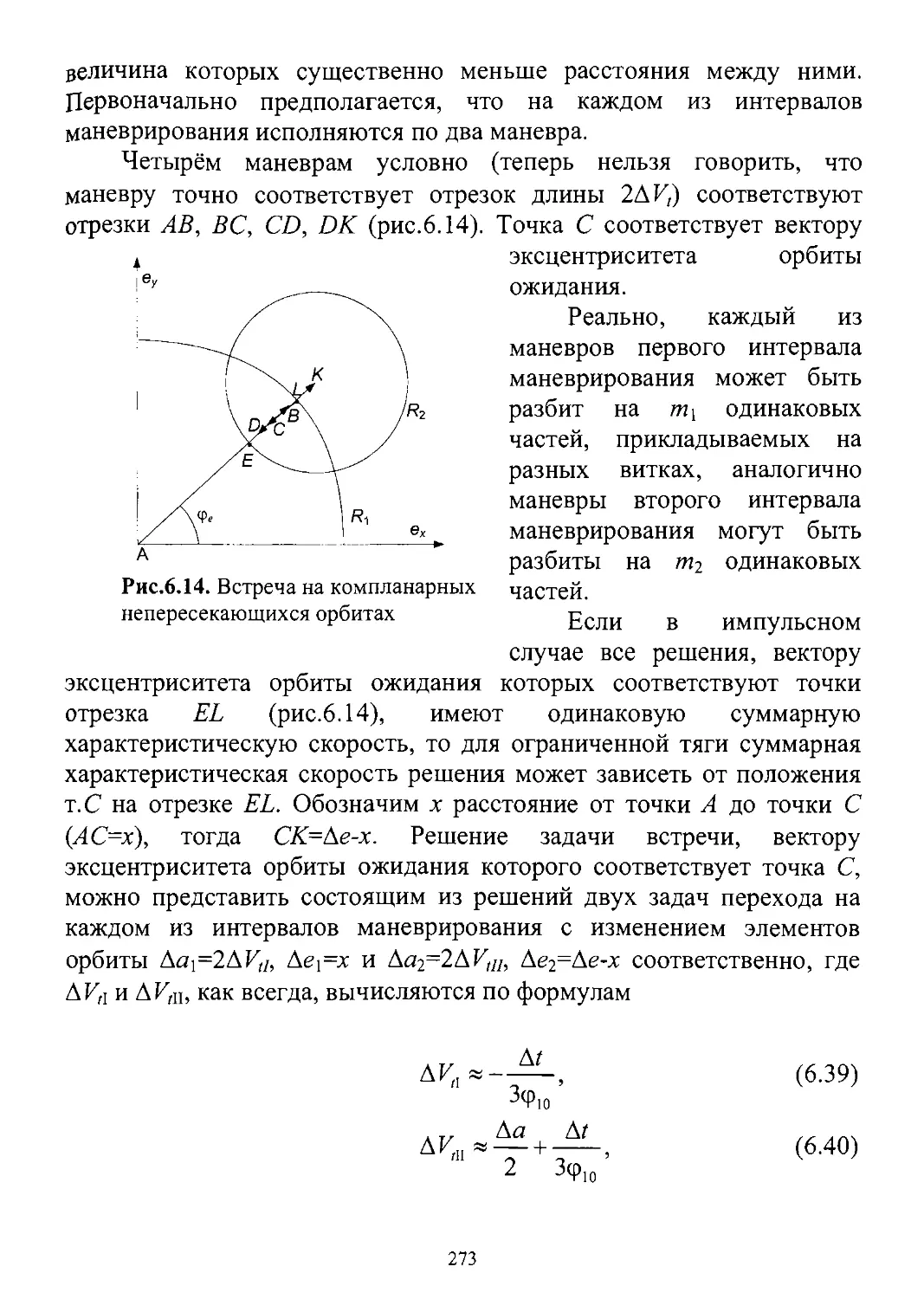
6.2. Встреча на компланарных орбитах.........................272
6.2.1. Встреча на компланарных непересекающихся орбитах.
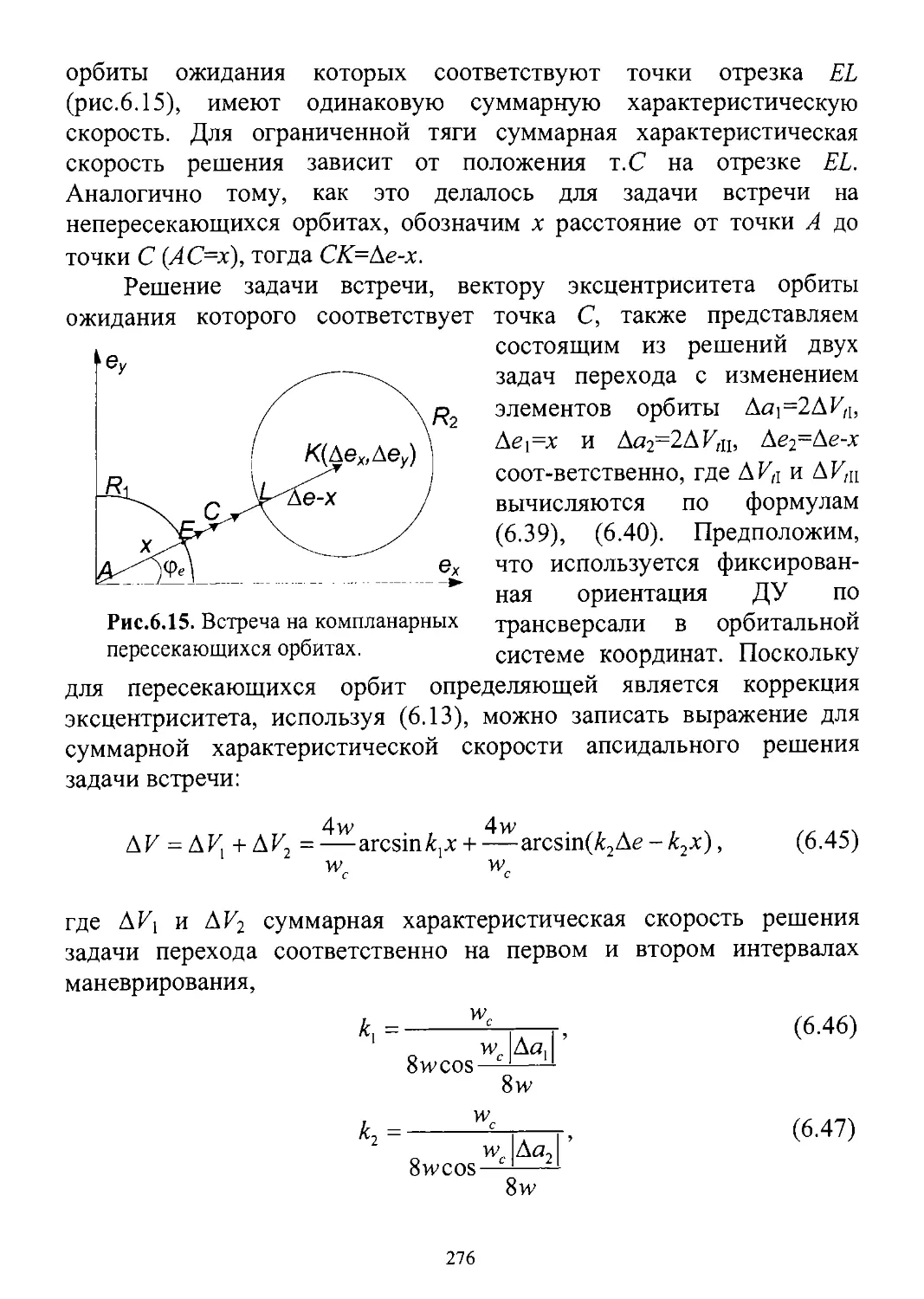
6.2.2. Встреча на компланарных пересекающихся орбитах.
6.2.3. Встреча, обеспечиваемая маневрированием на каждом витке.
6.2.4. Пример.
6.3. Переход с помощью ДУ конечной тяги между некомпланар-
ными орбитами................................................281
6.3.1. Маневр, обеспечивающий только изменение ориентации
плоскости орбиты. 6.3.2. Одновременное изменение всех элементов
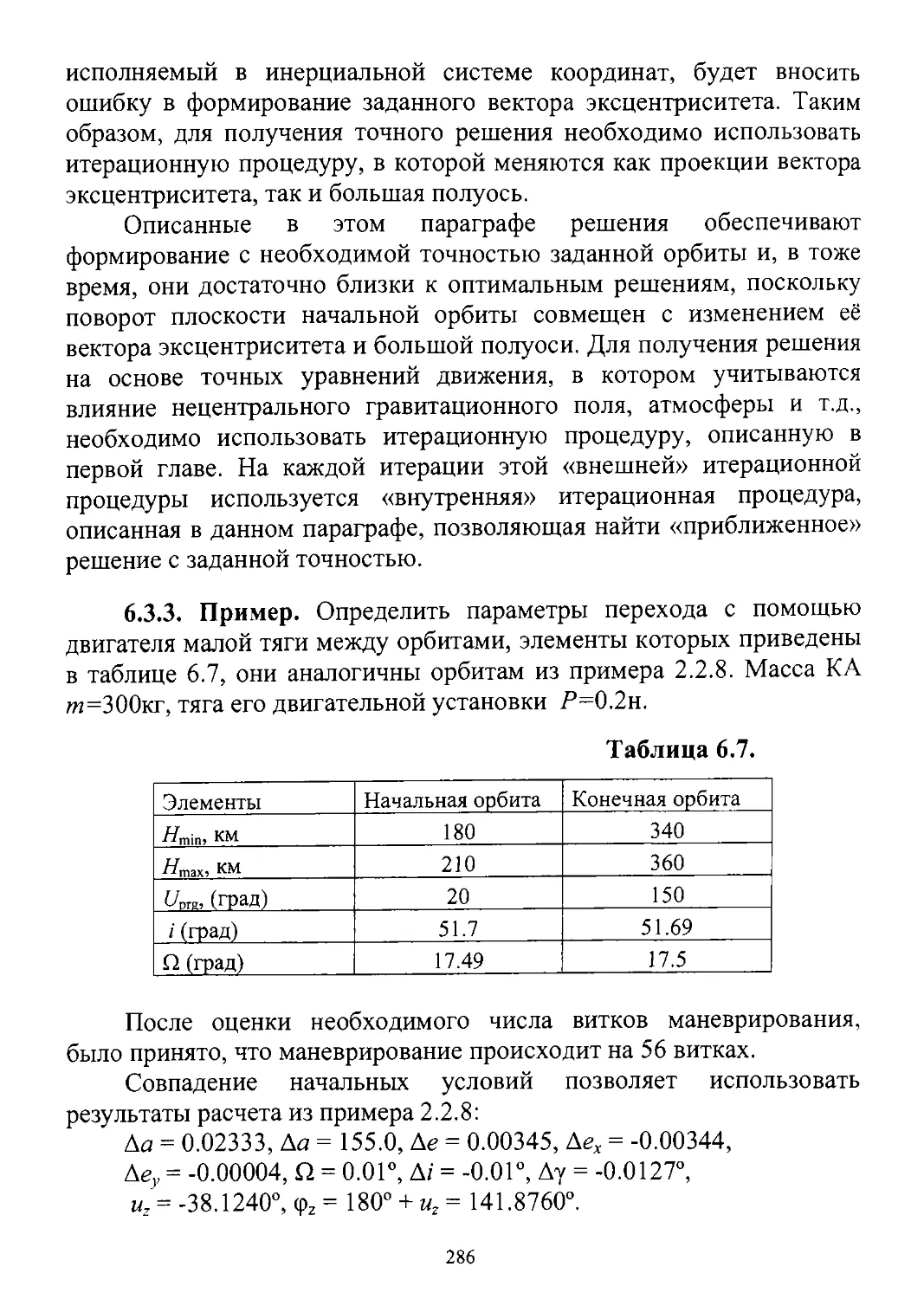
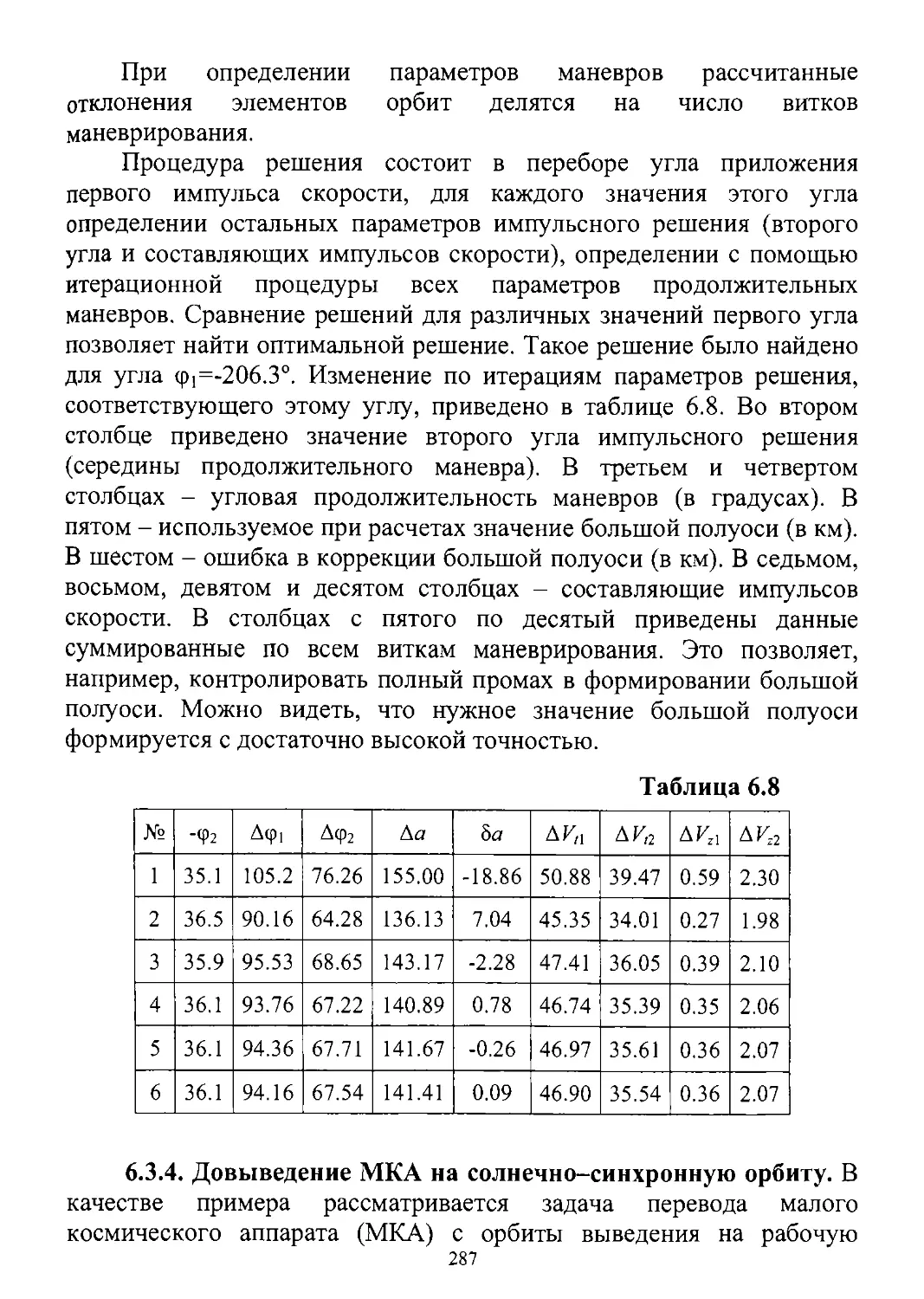
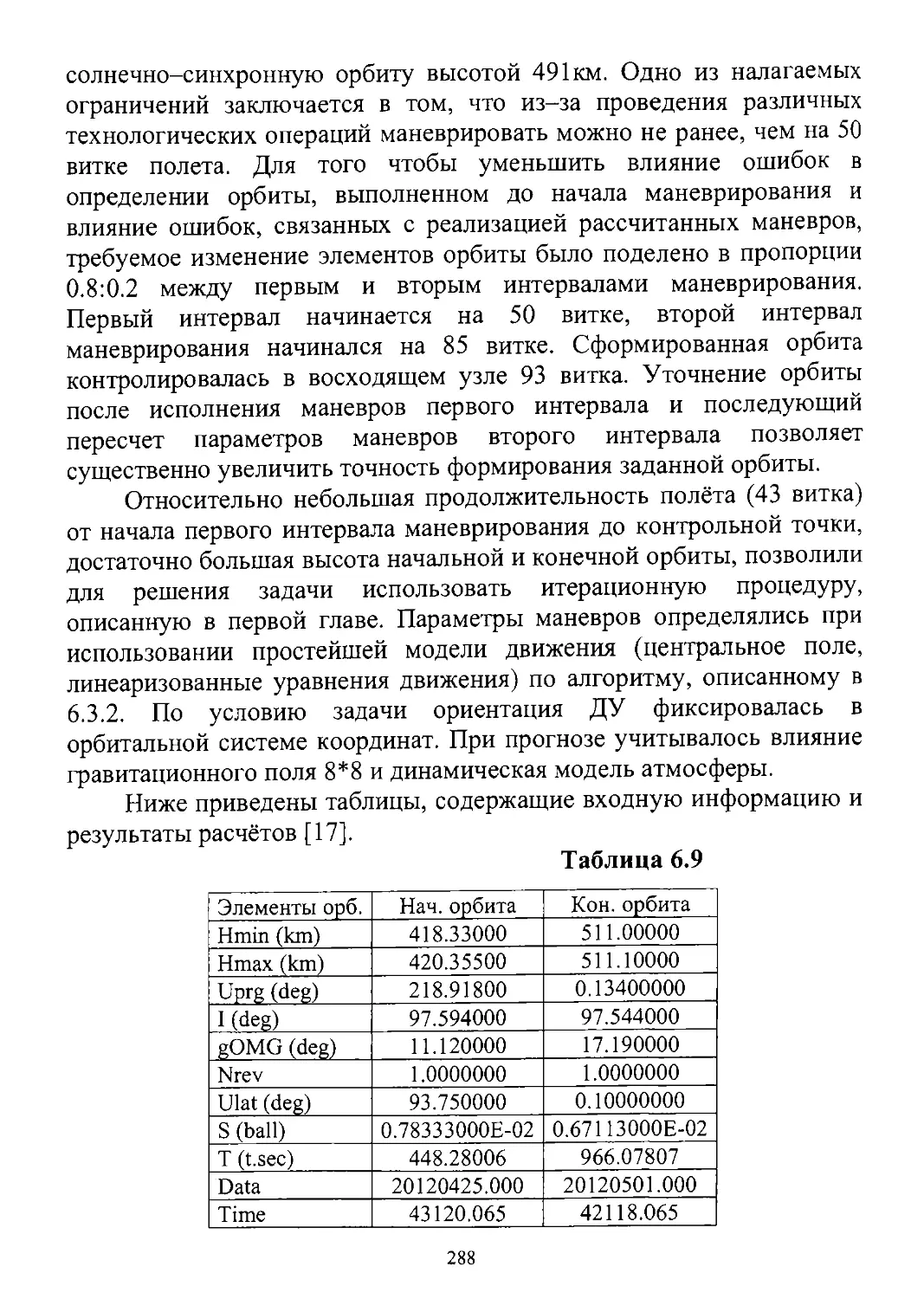
орбиты. 6.3.3. Пример. 6.3.4. Довыведение МКА на солнечно -
синхронную орбиту.
Глава VII. Формирование спутниковых систем и спутнико-
вых групп....................................................292
7.1. Изменение положения КА в спутниковых системах, располо-
женных на круговых орбитах...................................292
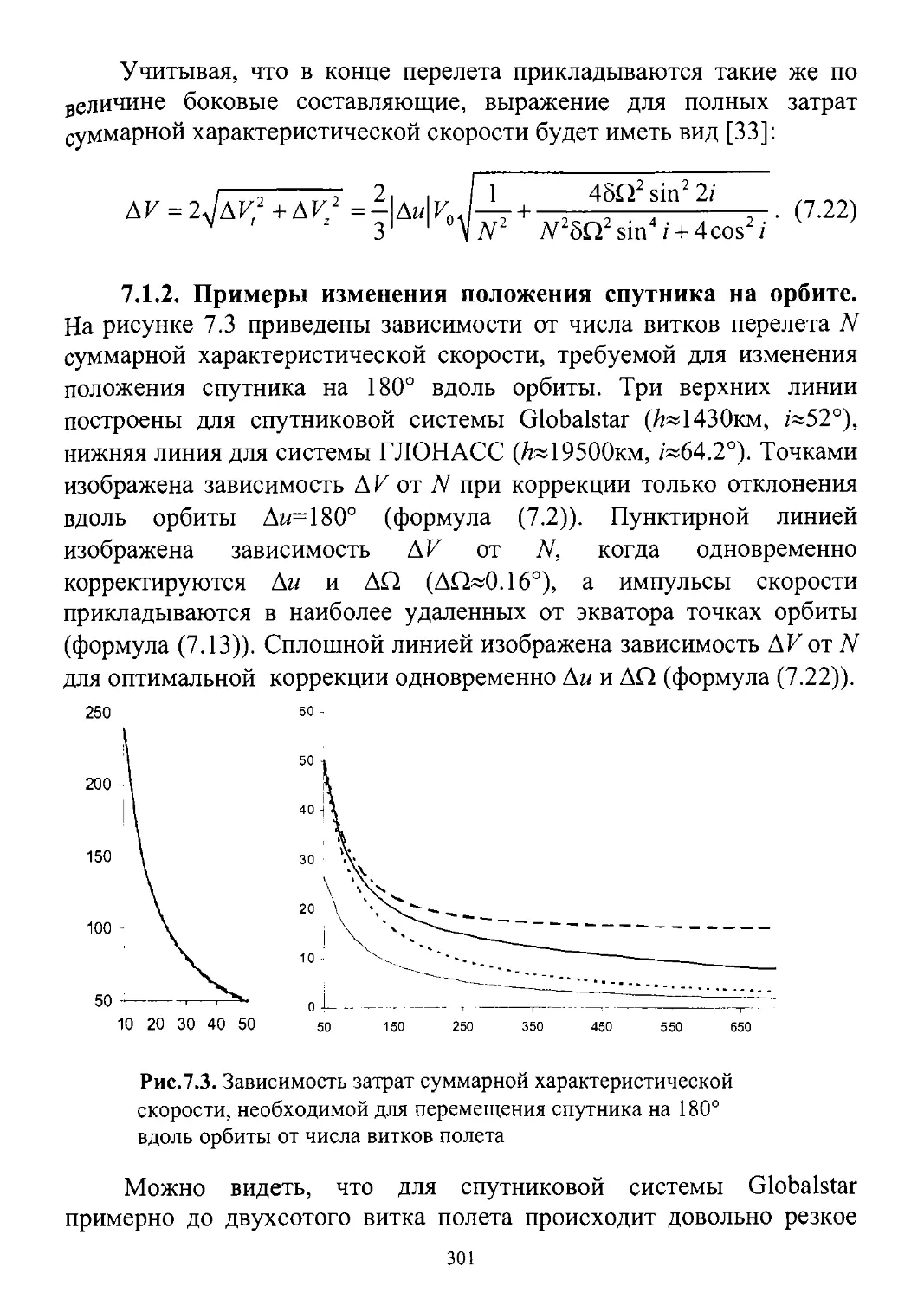
7.1.1. Изменение положения на орбите. 7.1.2. Примеры изменения
положения спутника на орбите. 7.1.3. Определение компромиссной
продолжительности перелета. 7.1.4. Перевод спутника в другую
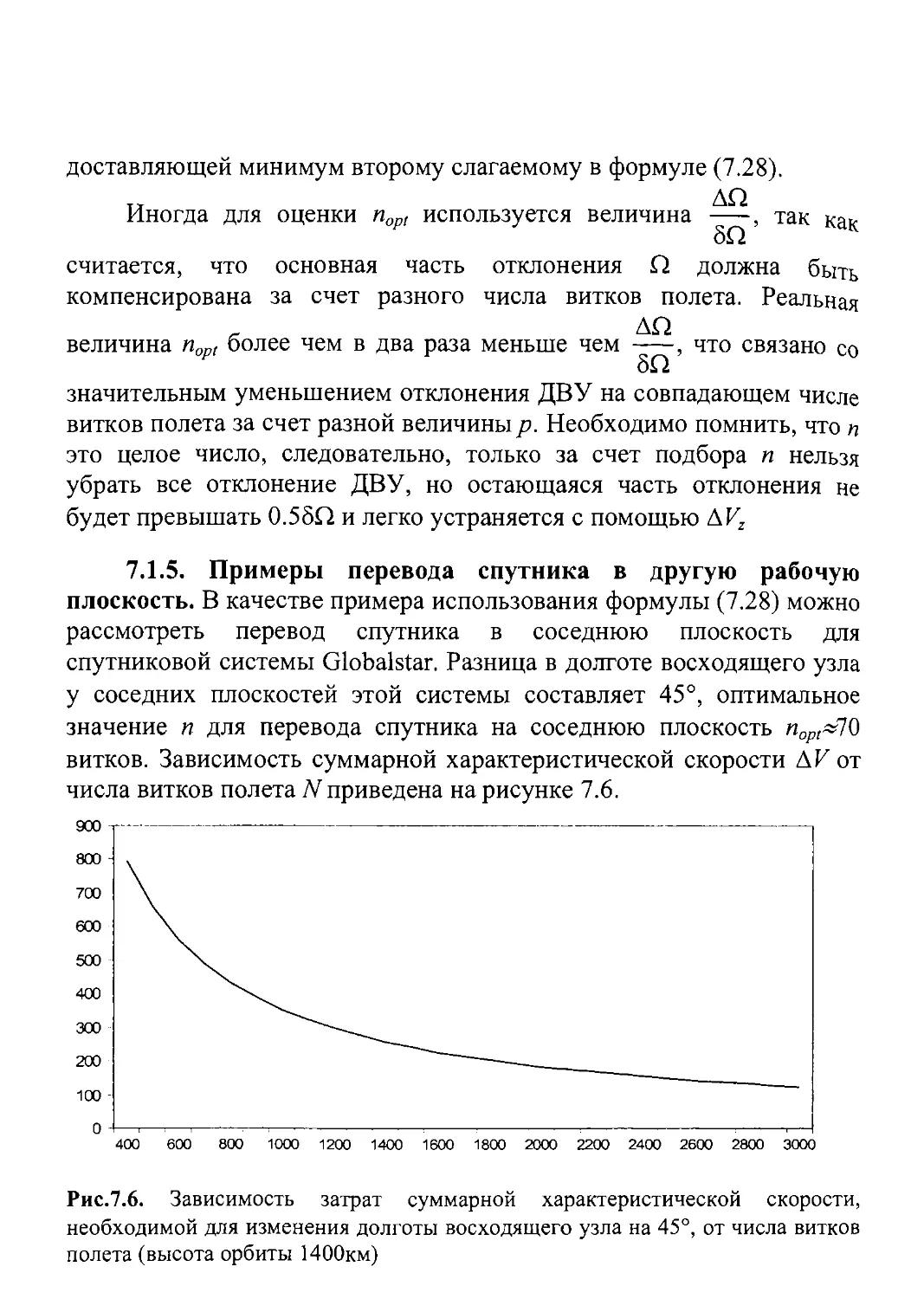
рабочую плоскость. 7.1.5. Примеры перевода спутника в другую
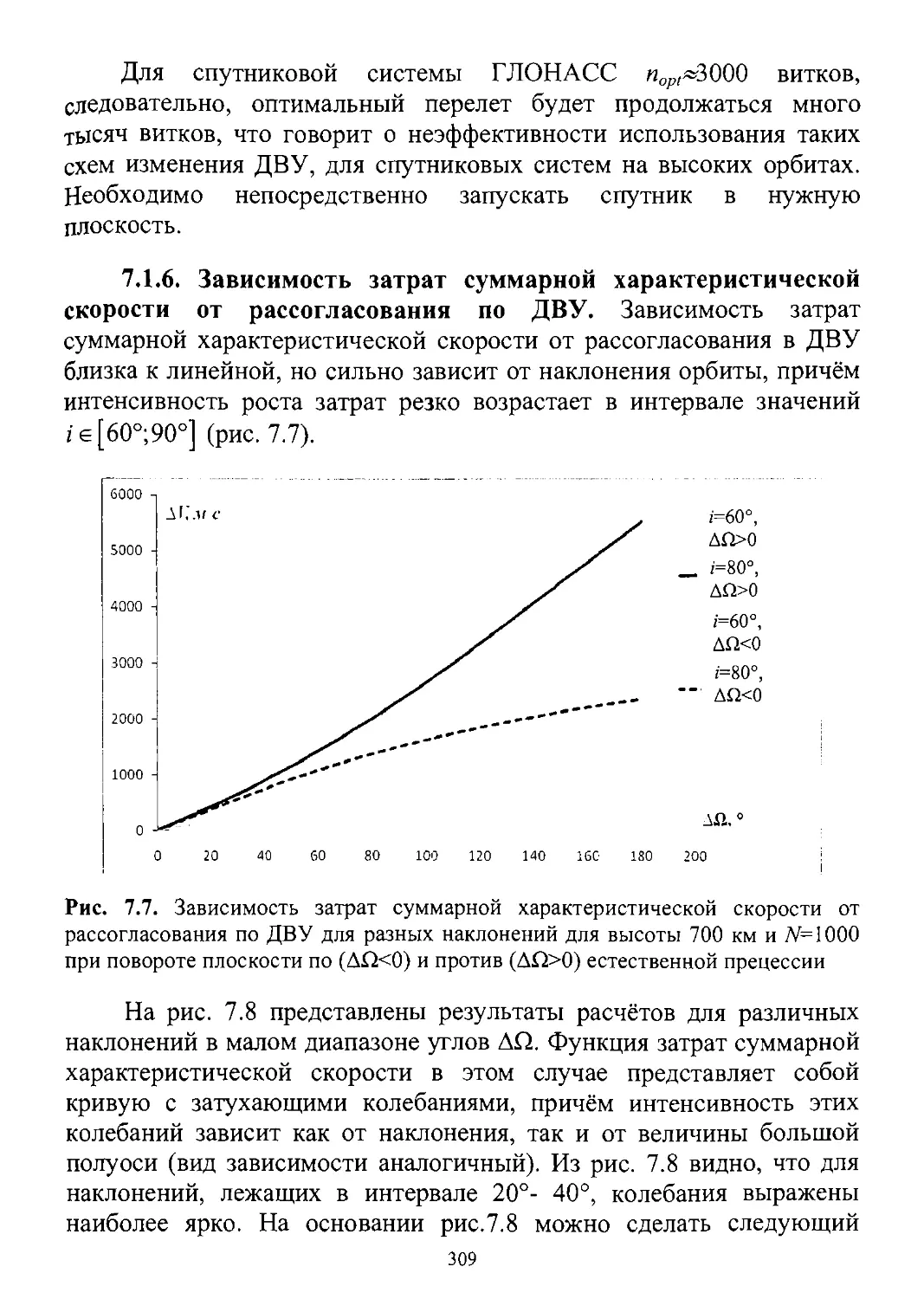
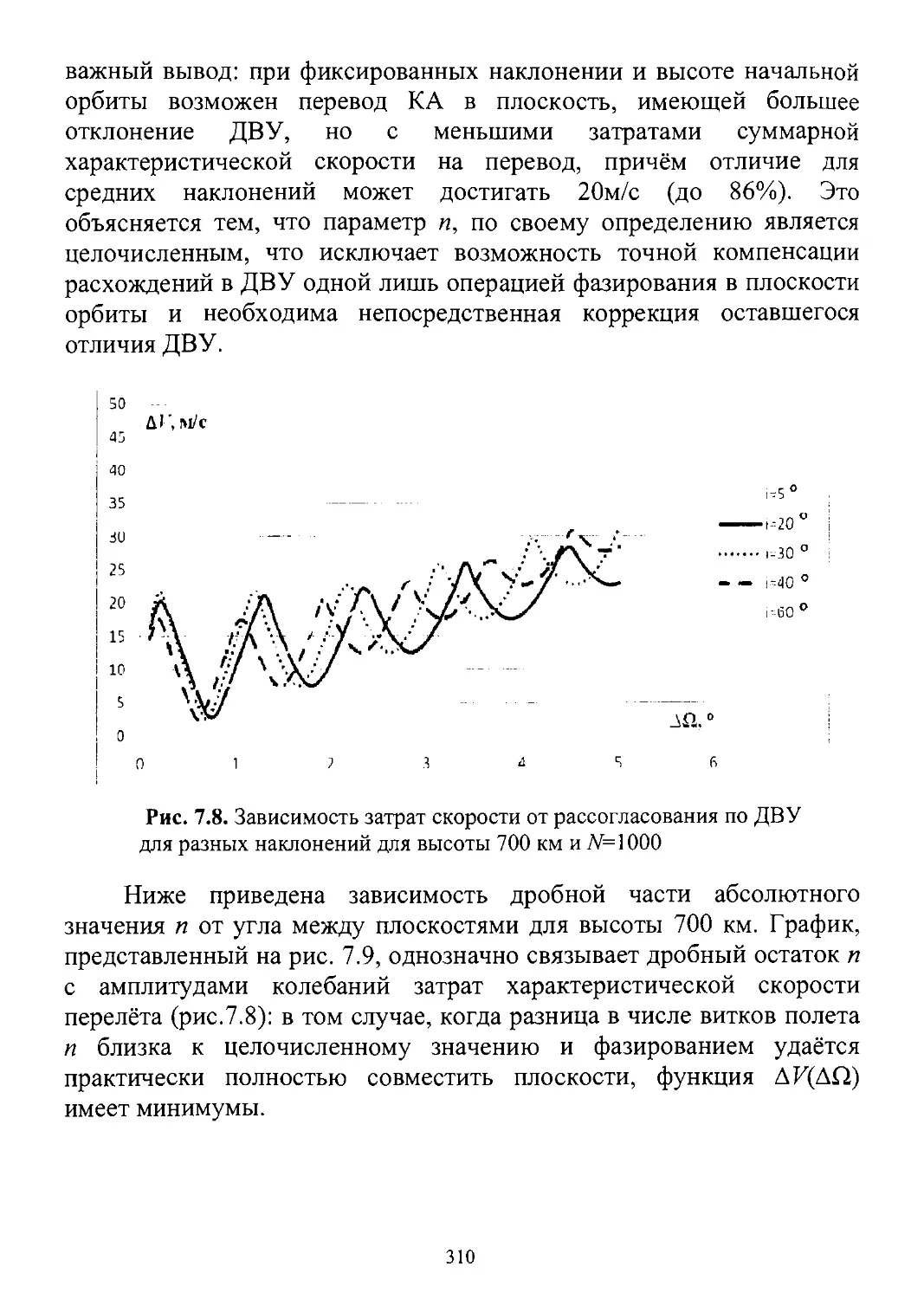
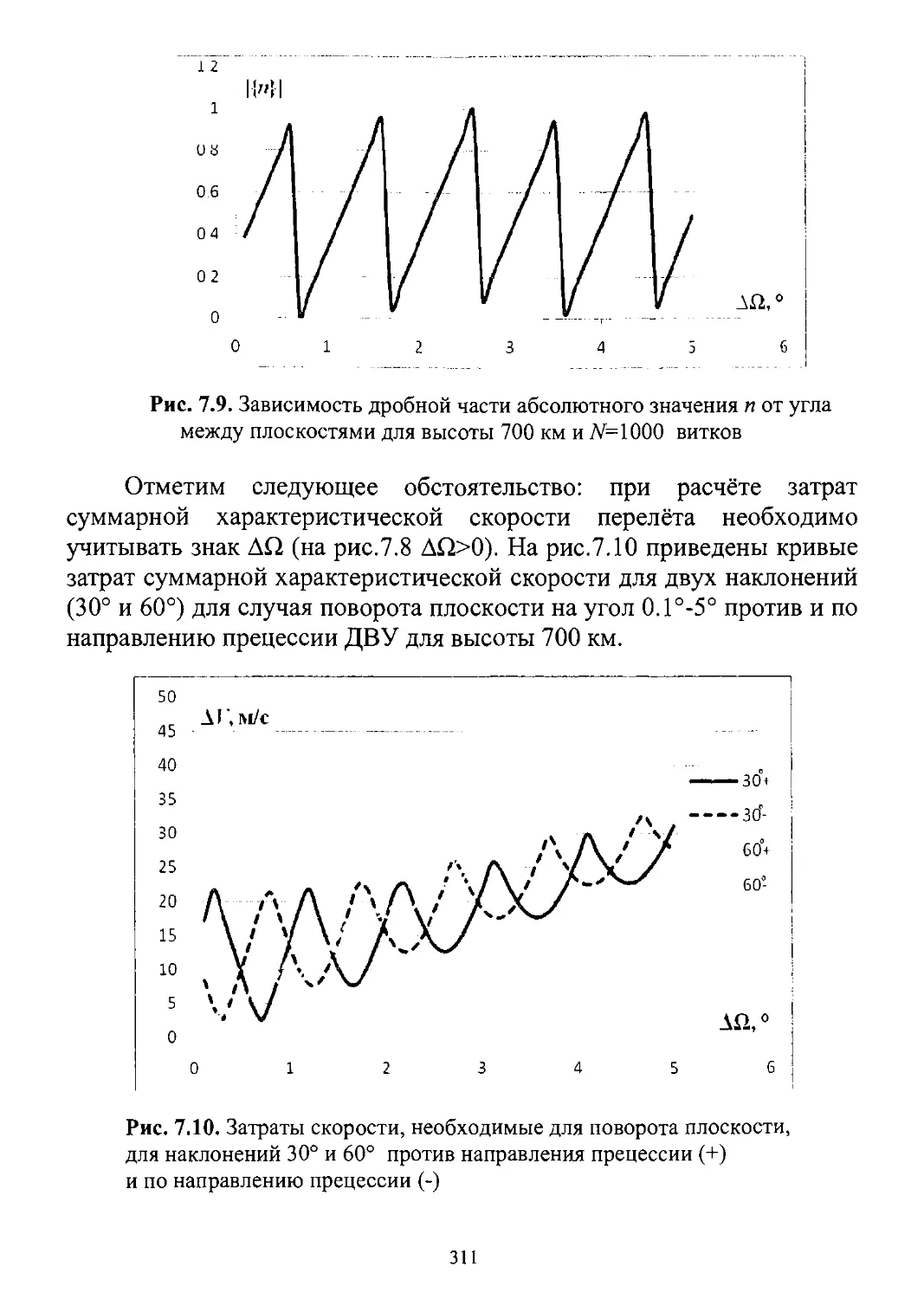
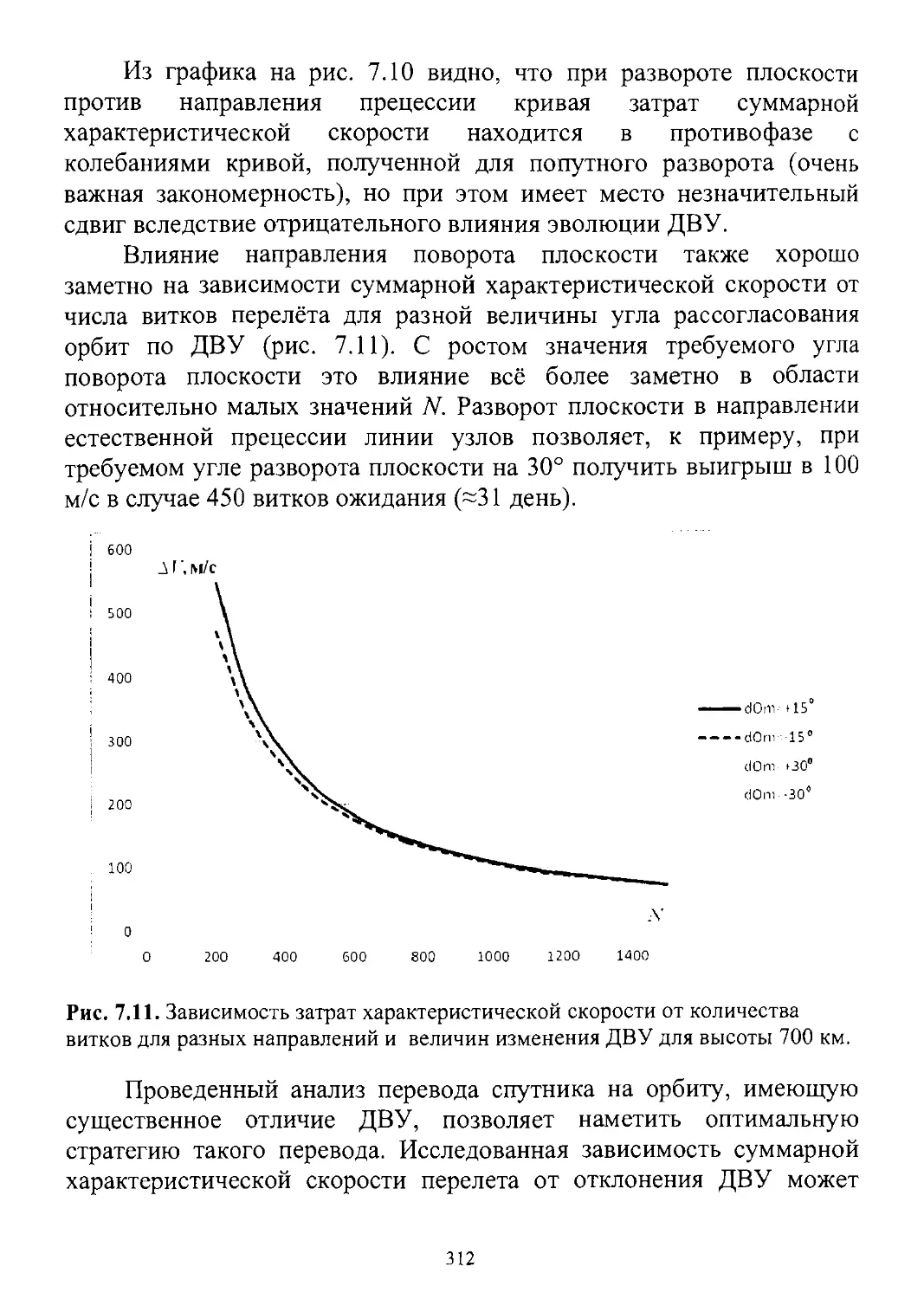
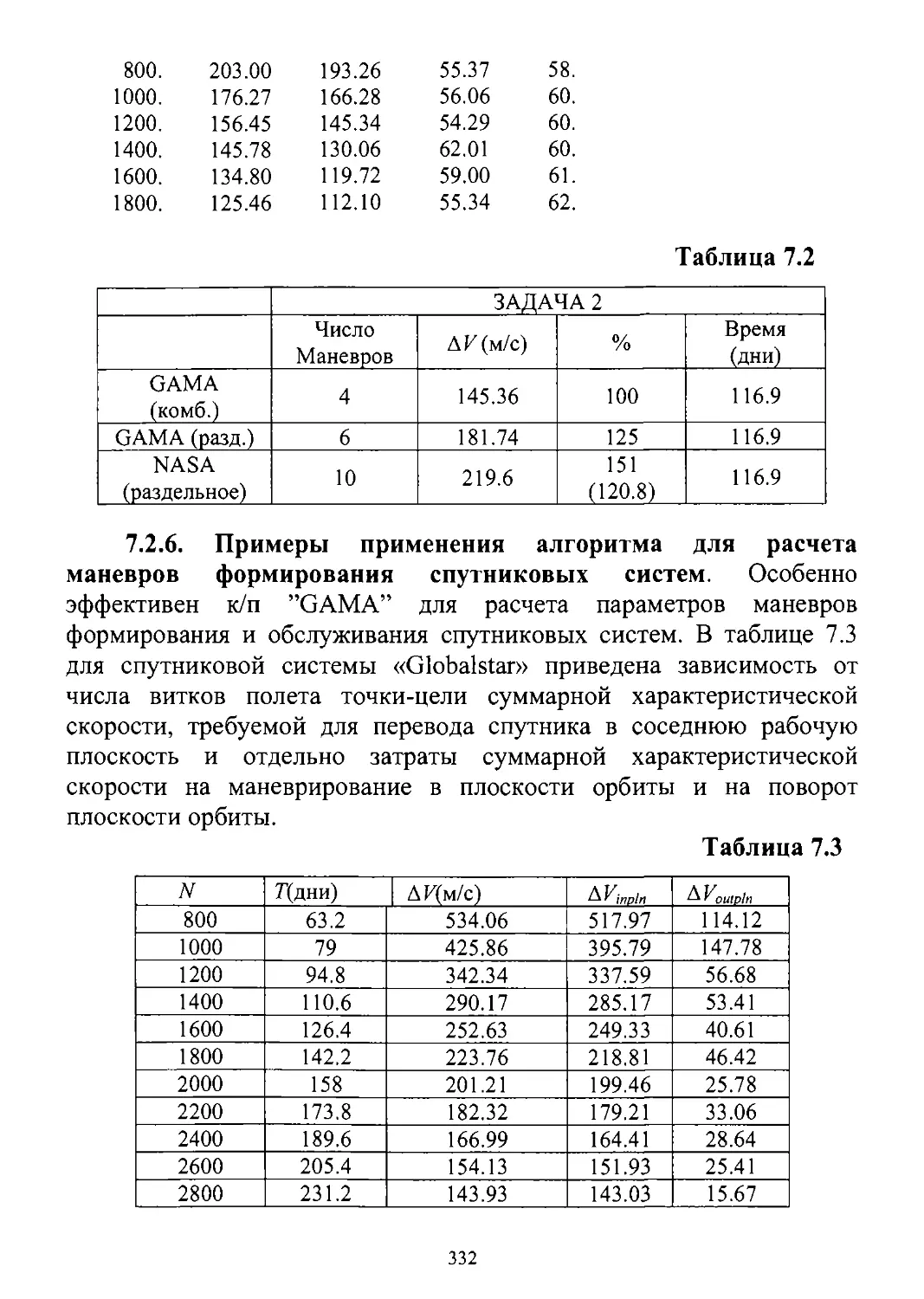
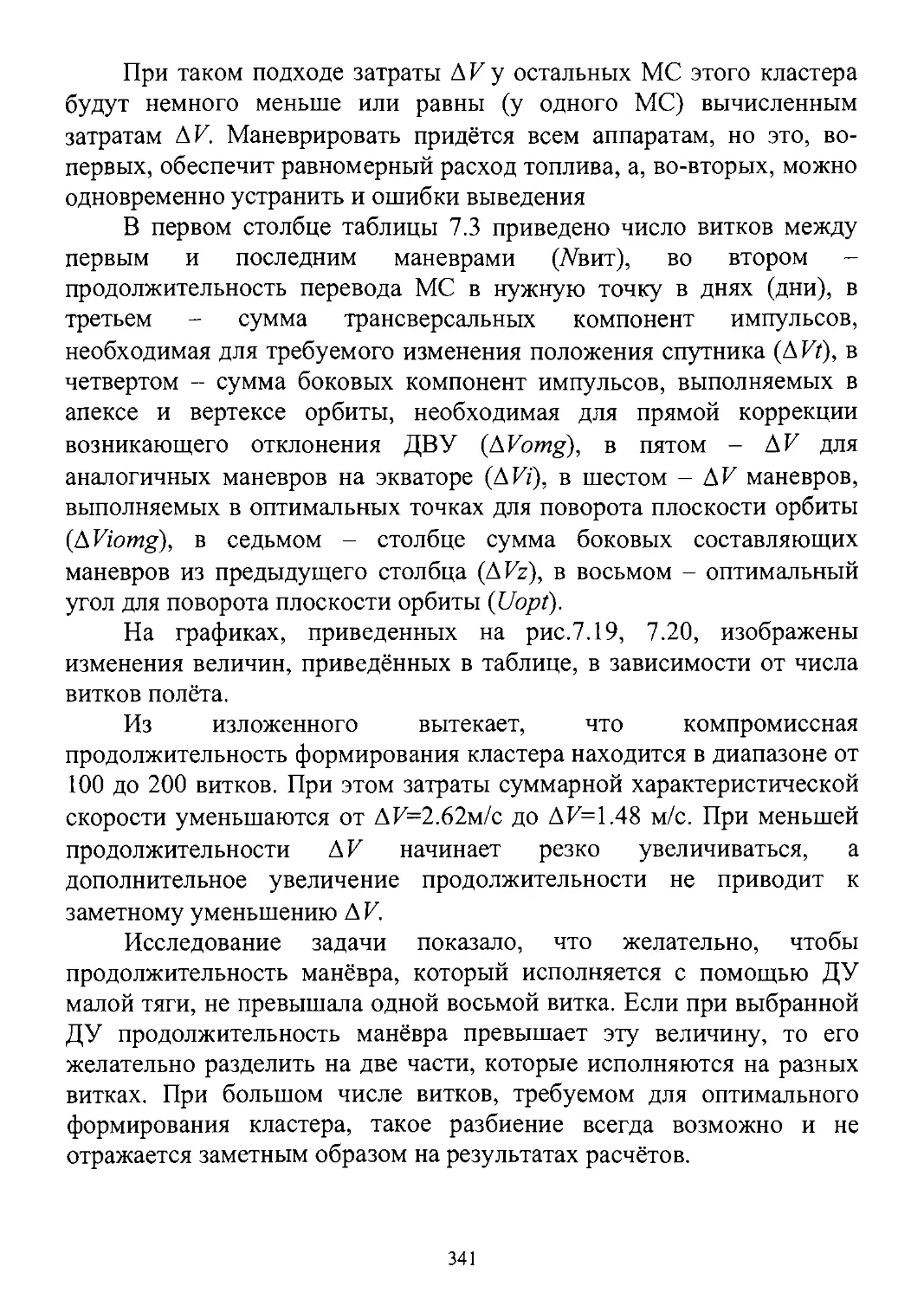
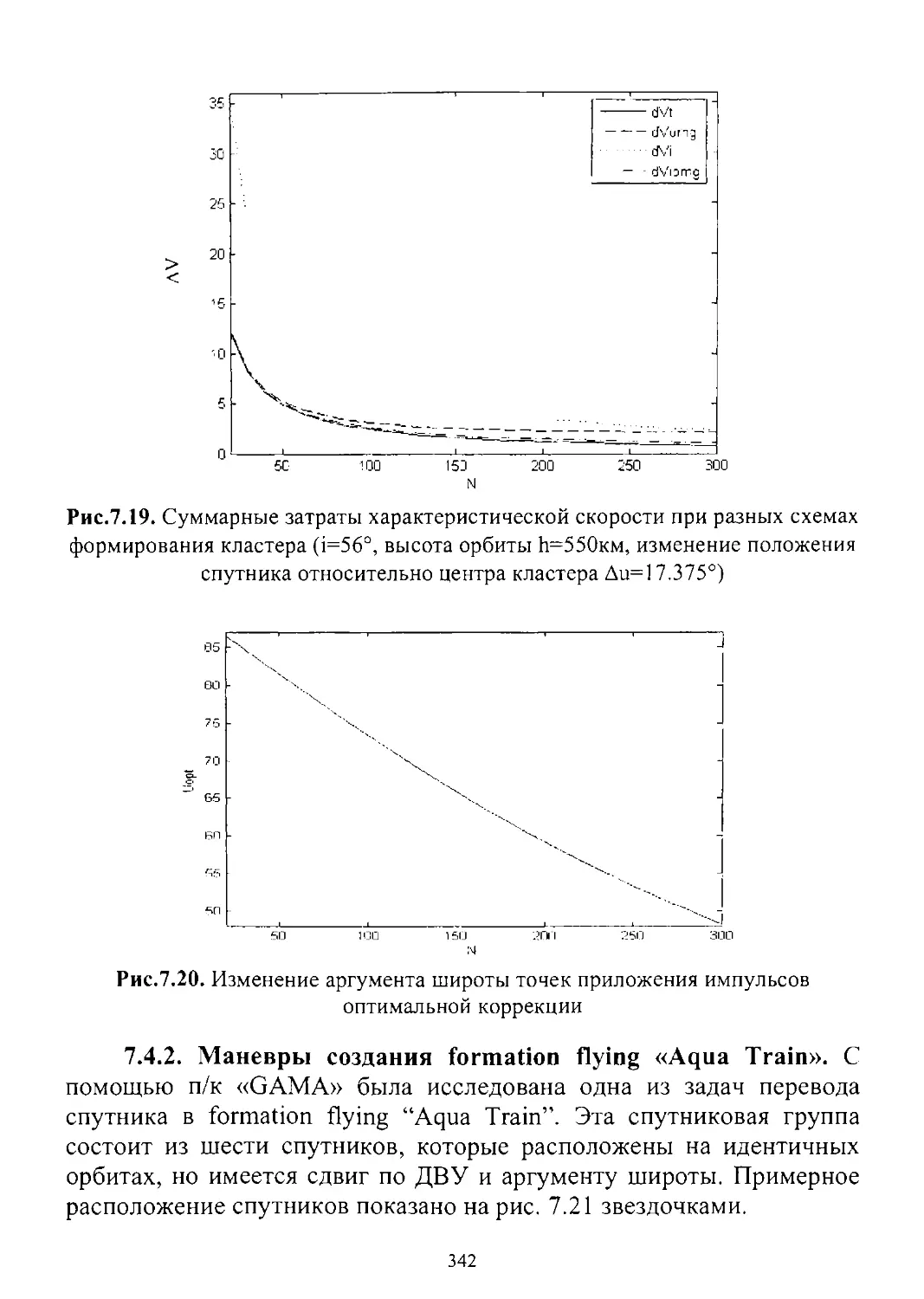
рабочую плоскость. 7.1.6. Зависимость затрат суммарной характери-
стической скорости от рассогласования по долготе восходящего узла.
7.2. Универсальный алгоритм расчета параметров маневров соз-
дания спутниковых систем.....................................313
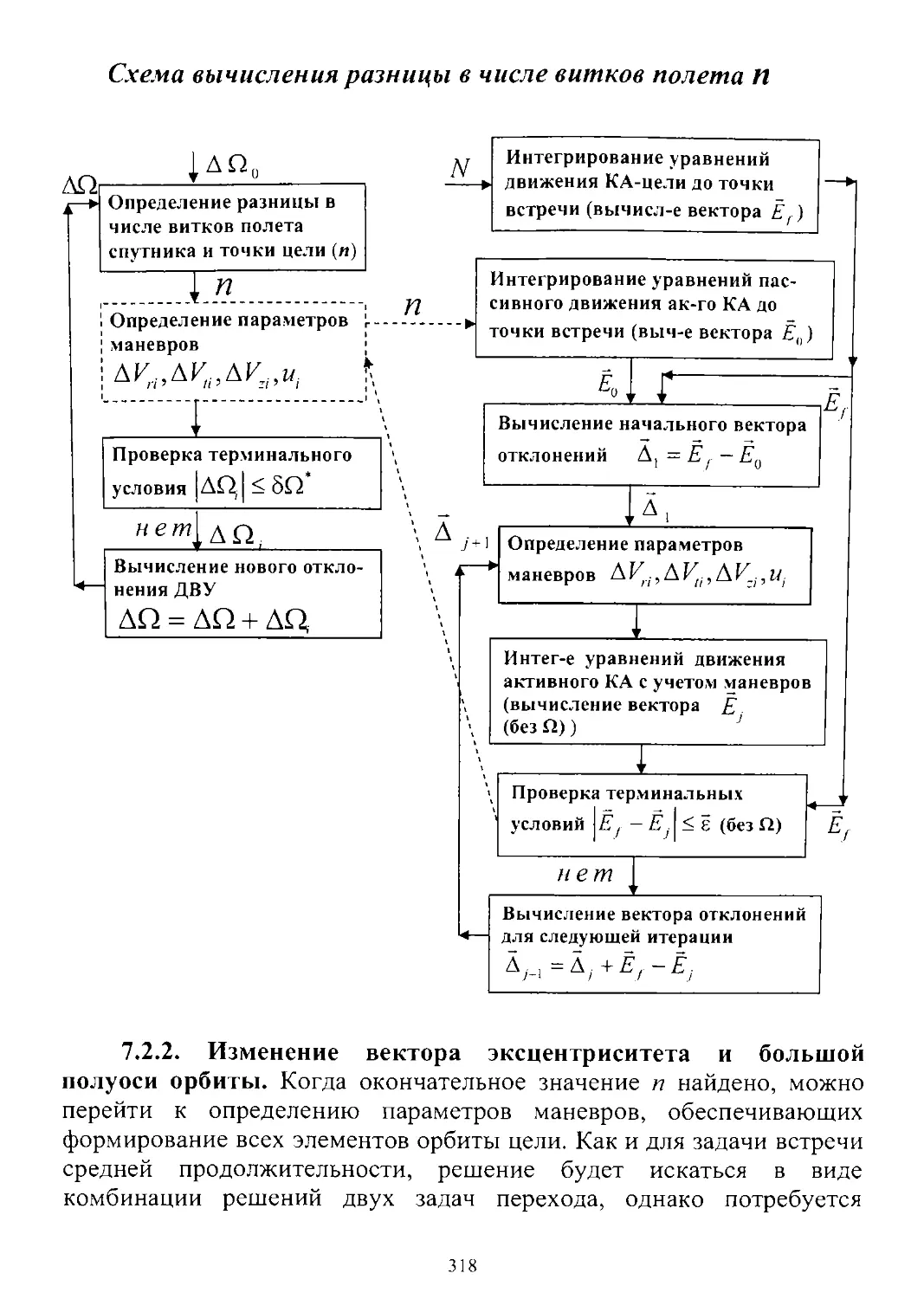
7.2.1. Определение разницы в числе витков полета активного КА и
КА-цели. 7.2.2. Изменение вектора эксцентриситета и большой полу-
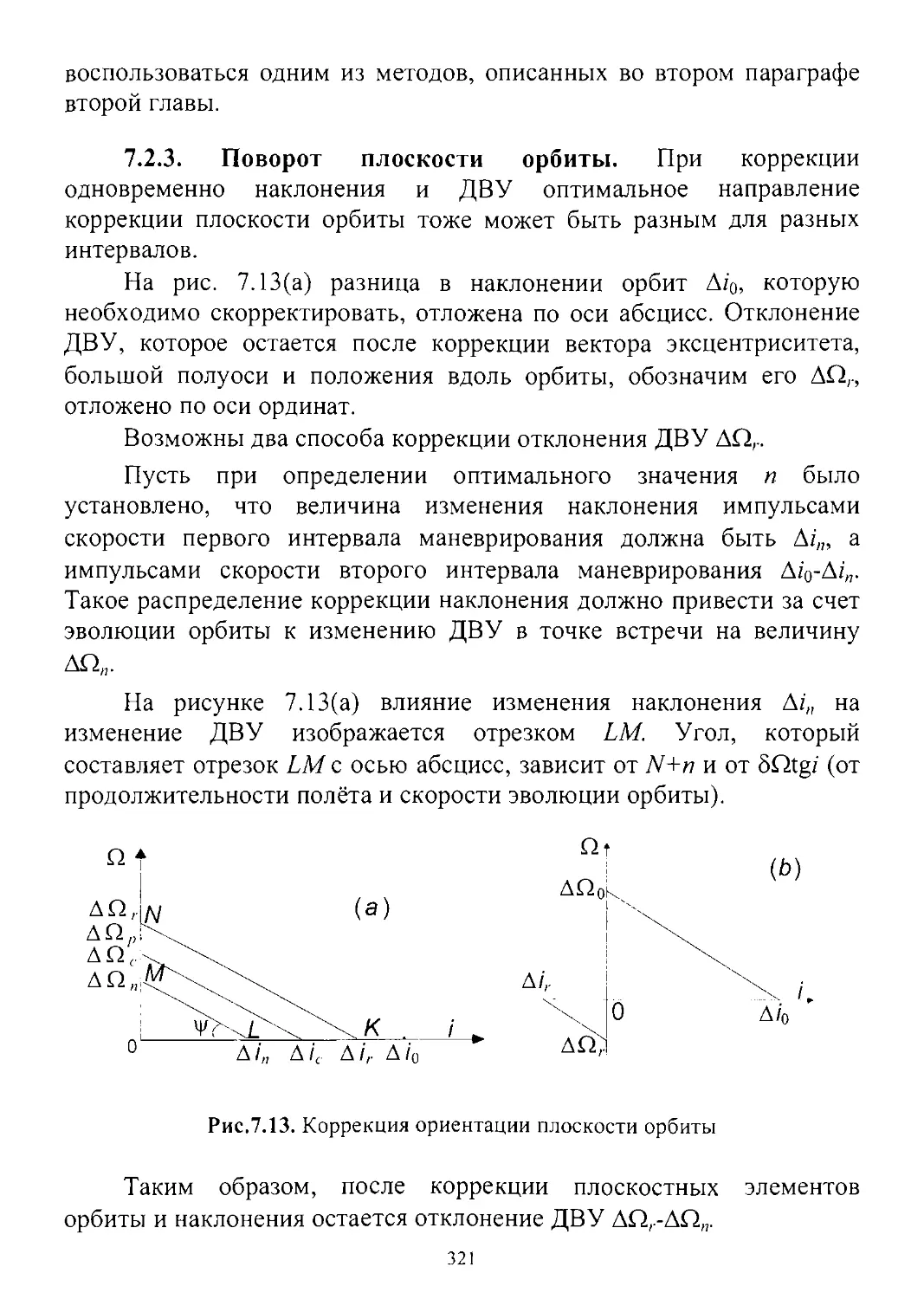
оси орбиты. 7.2.3. Поворот плоскости орбиты.7.2.4. Общая схема
алгоритма решения задачи. 7.2.5. Примеры применения алгоритма
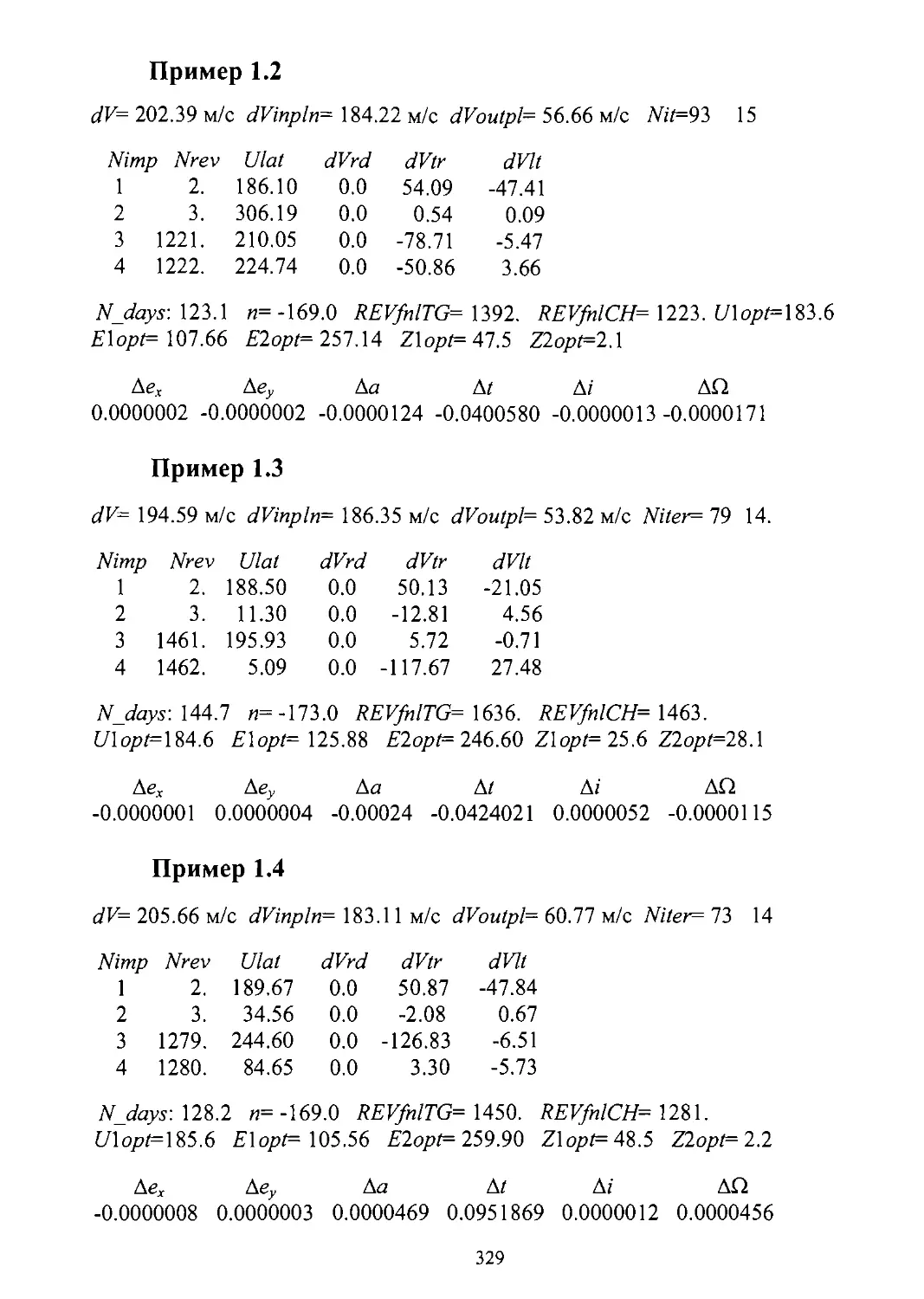
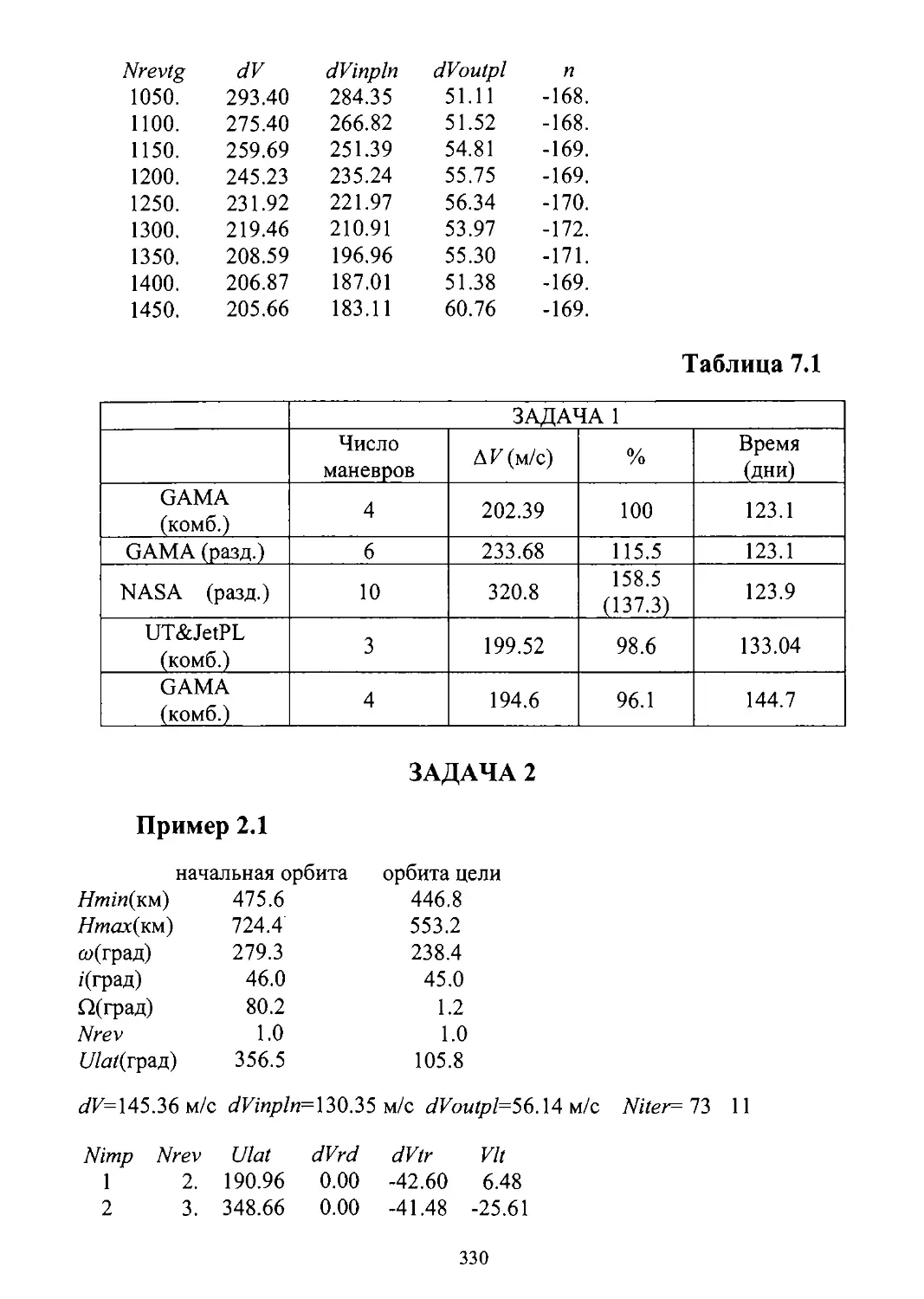
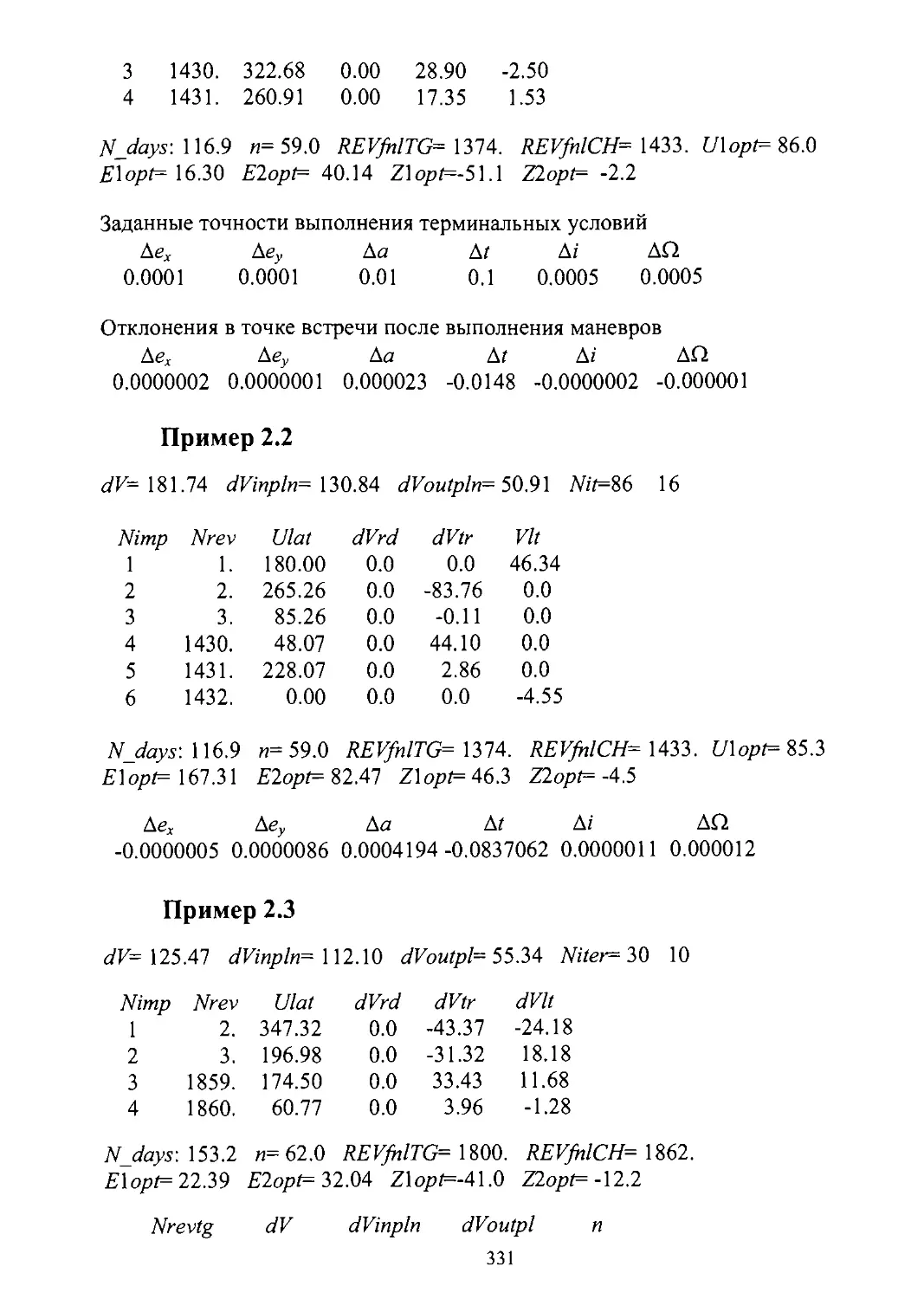
в проекте “Mars sample return mission”. 7.2.6. Примеры применения
алгоритма для расчета маневров формирования спутниковых систем.
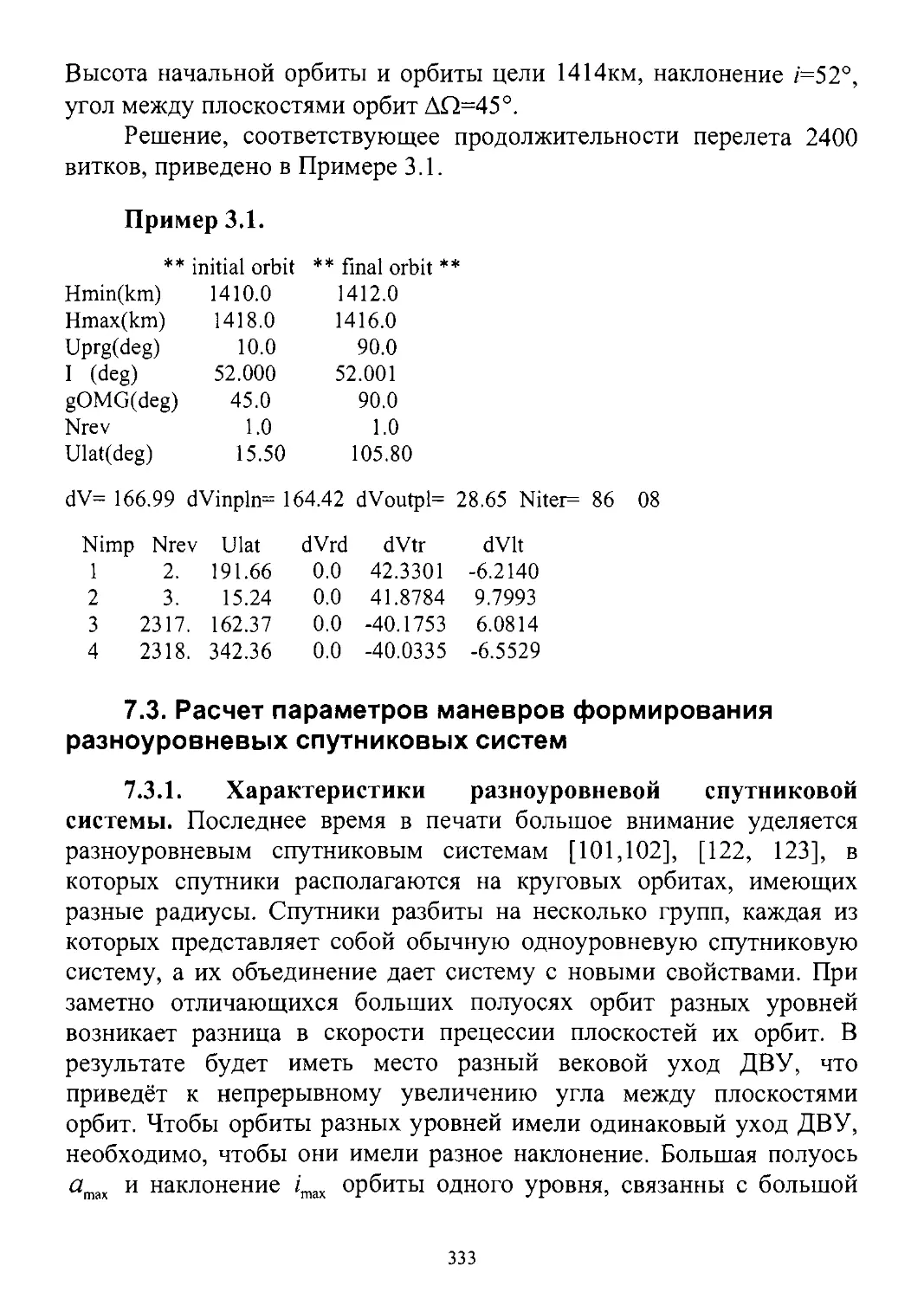
7.3. Расчета параметров маневров формирования разноуровне-
вых спутниковых систем.......................................333
7.3.1. Характеристики разноуровневой спутниковой системы.
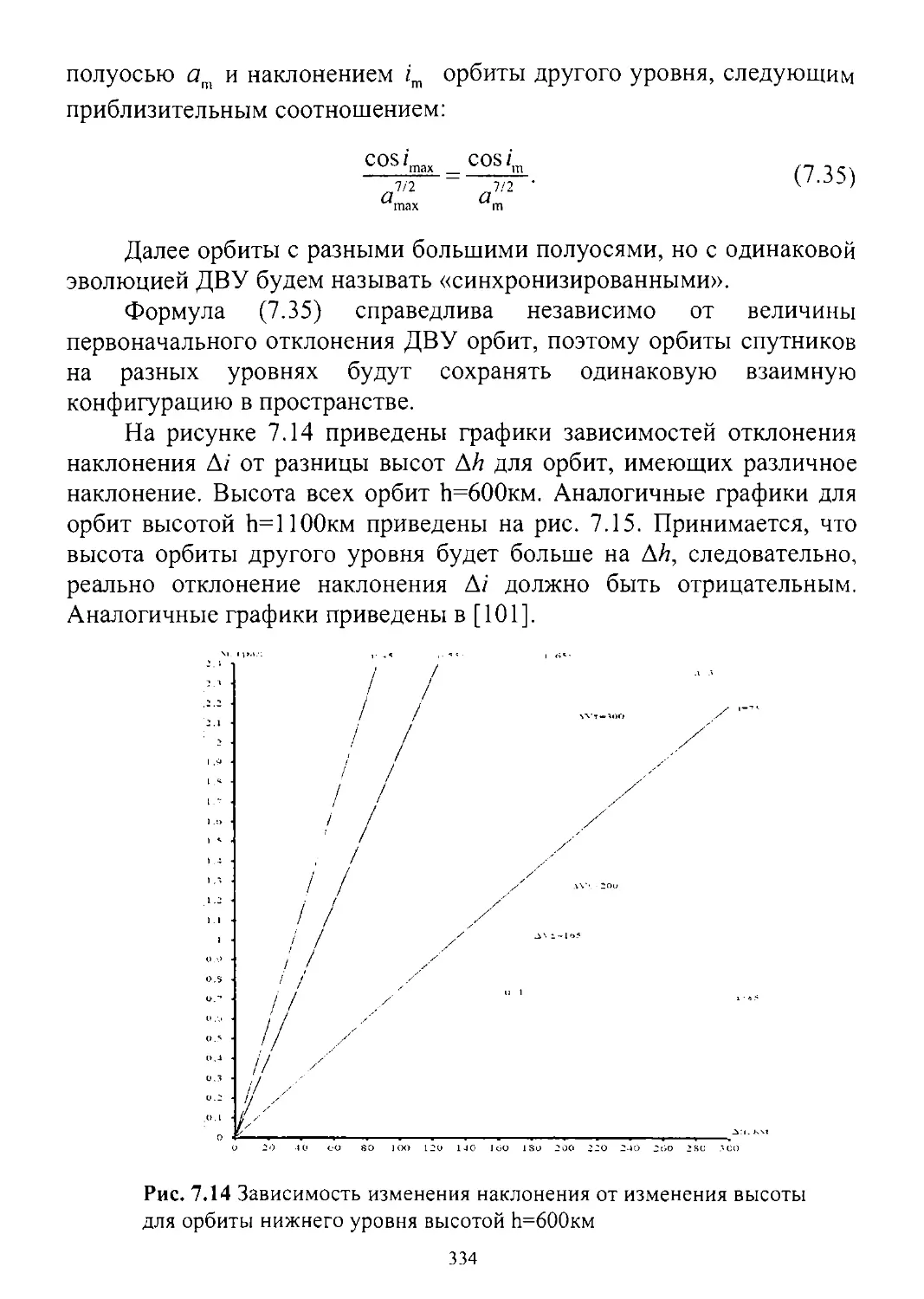
7.3.2. Оценка энергетики перелета на орбиту другого уровня.
7.3.3. Определение оптимального начального фазового отклонения.
7.3.4. Расчет параметров маневров формирования разноуровневых
спутниковых систем.
6
7.4. Определение параметров маневров формирования спутнико-
вых групп (formation flying) ........................... .339
7.4.1. Создание кластера для томографии атмосферы.
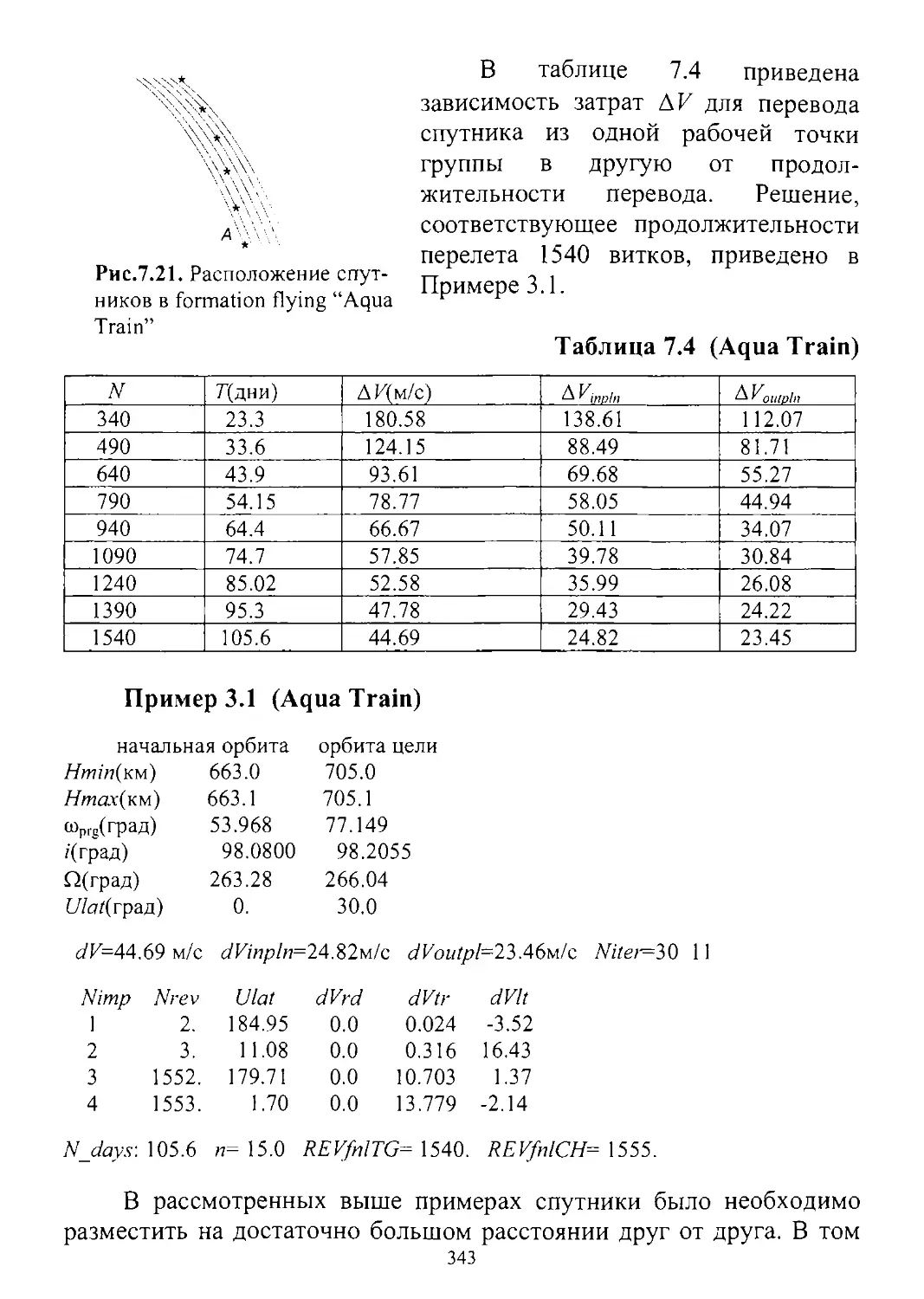
7.4.2. Маневры создания formation flying «Aqua Train».
Глава VIII. Поддержание заданной конфигурации спутнико-
вой системы............................................345
8.1. «Гибкое» поддержание заданной конфигурации спутниковой
системы....................................................345
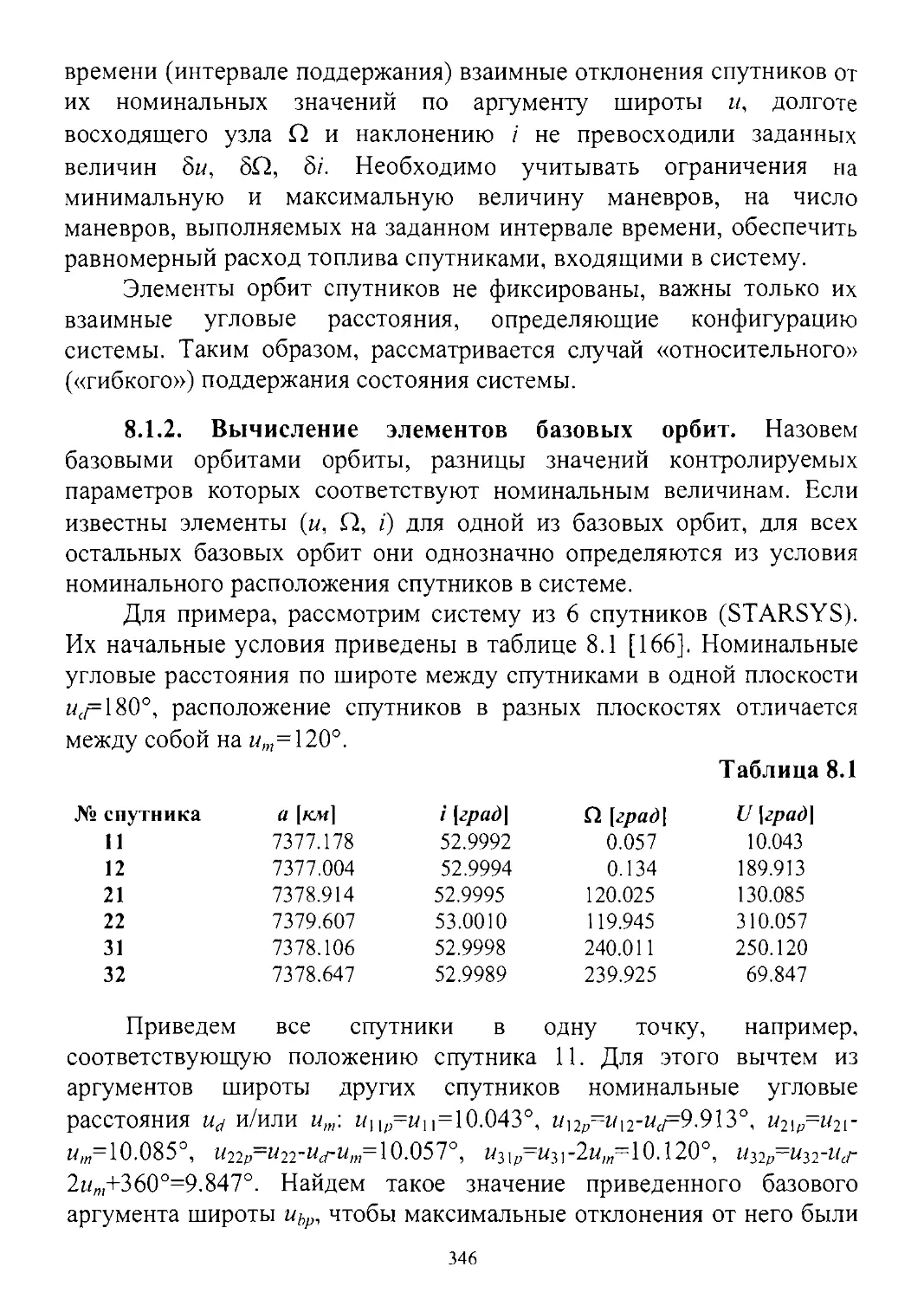
8.1.1. Постановка задачи. 8.1.2. Вычисление элементов базовых
орбит. 8.1.3. Общий алгоритм решения задачи. 8.1.4. Определение
параметров маневров. 8.1.5. Использование итерационной
процедуры. 8.1.6. Выбор точки прицеливания. 8.1.7. Определение
интервалов маневрирования. 8.1.8. Примеры расчетов.
8.2. «Жесткое» поддержание заданной конфигурации спутниковой
системы....................................................360
8.2.1. Общая схема решения задачи. 8.2.2. Поддержание большой
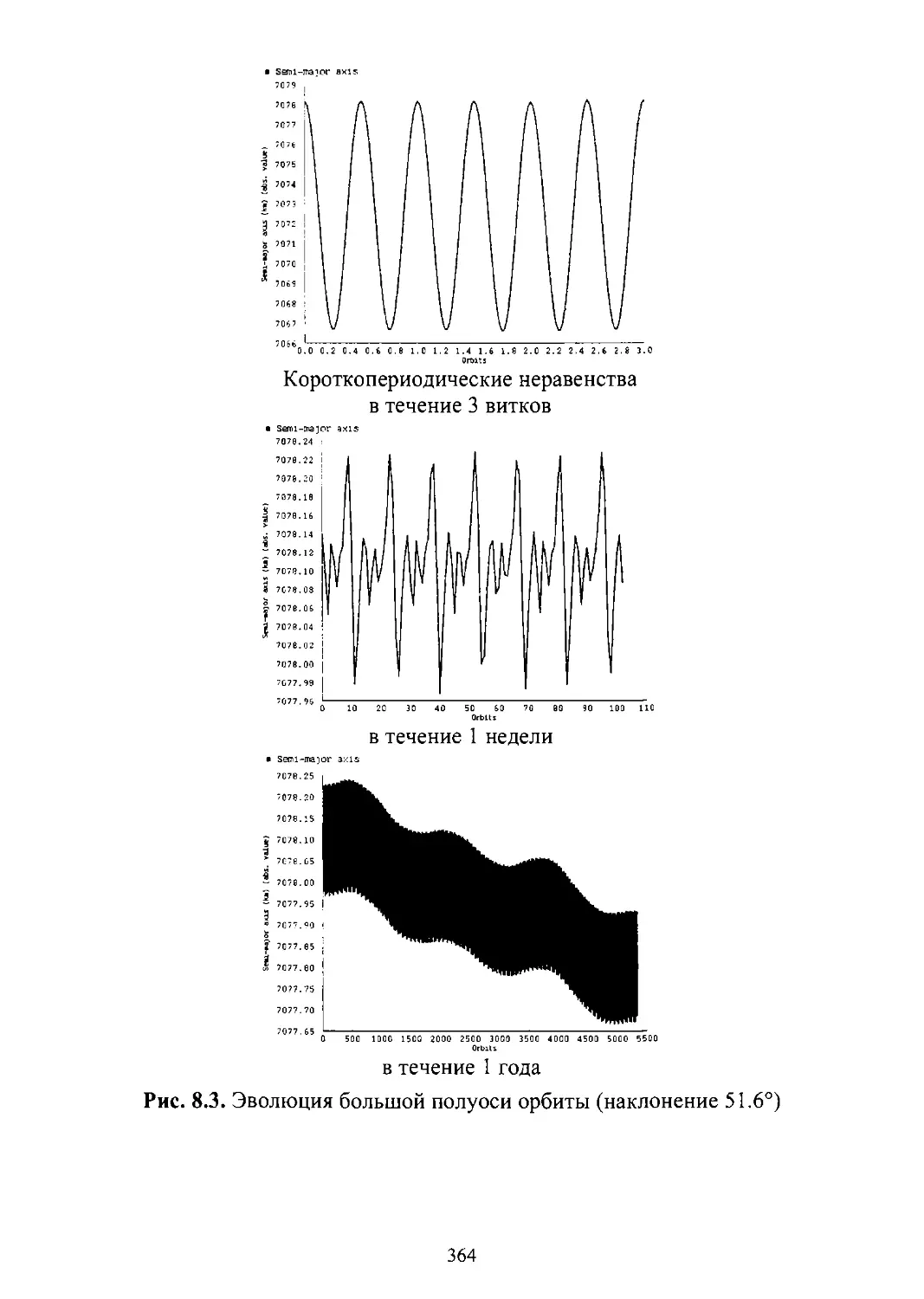
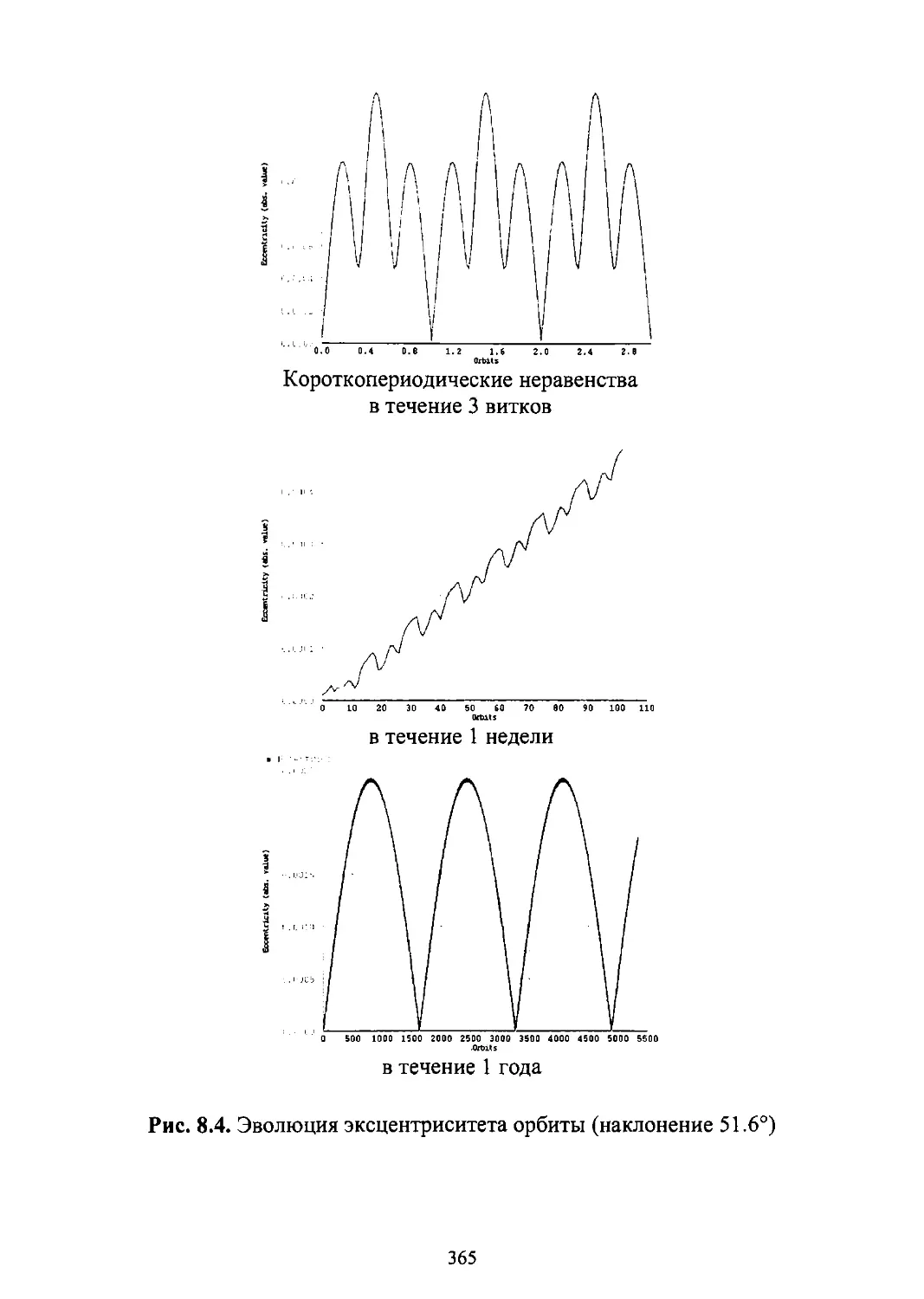
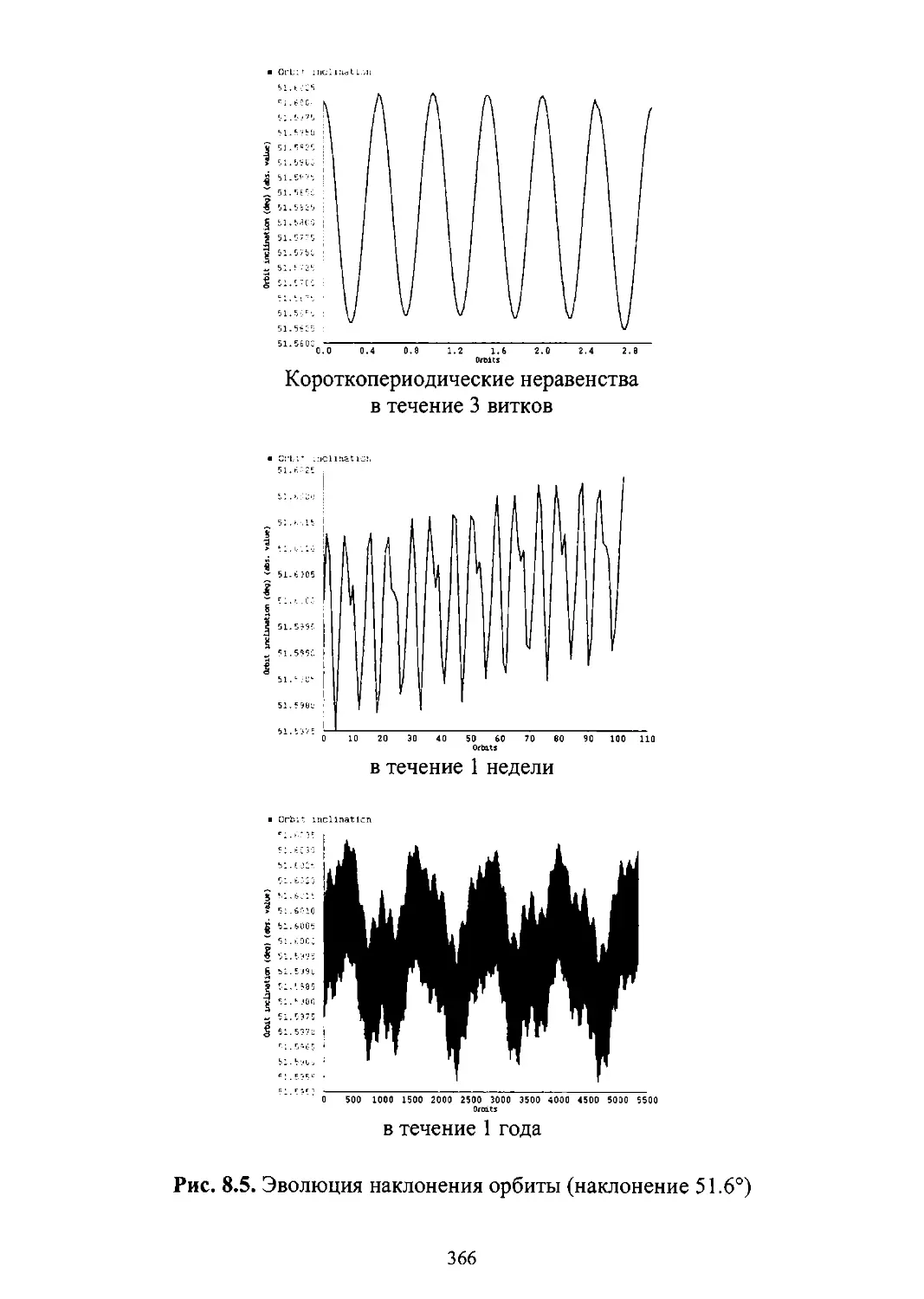
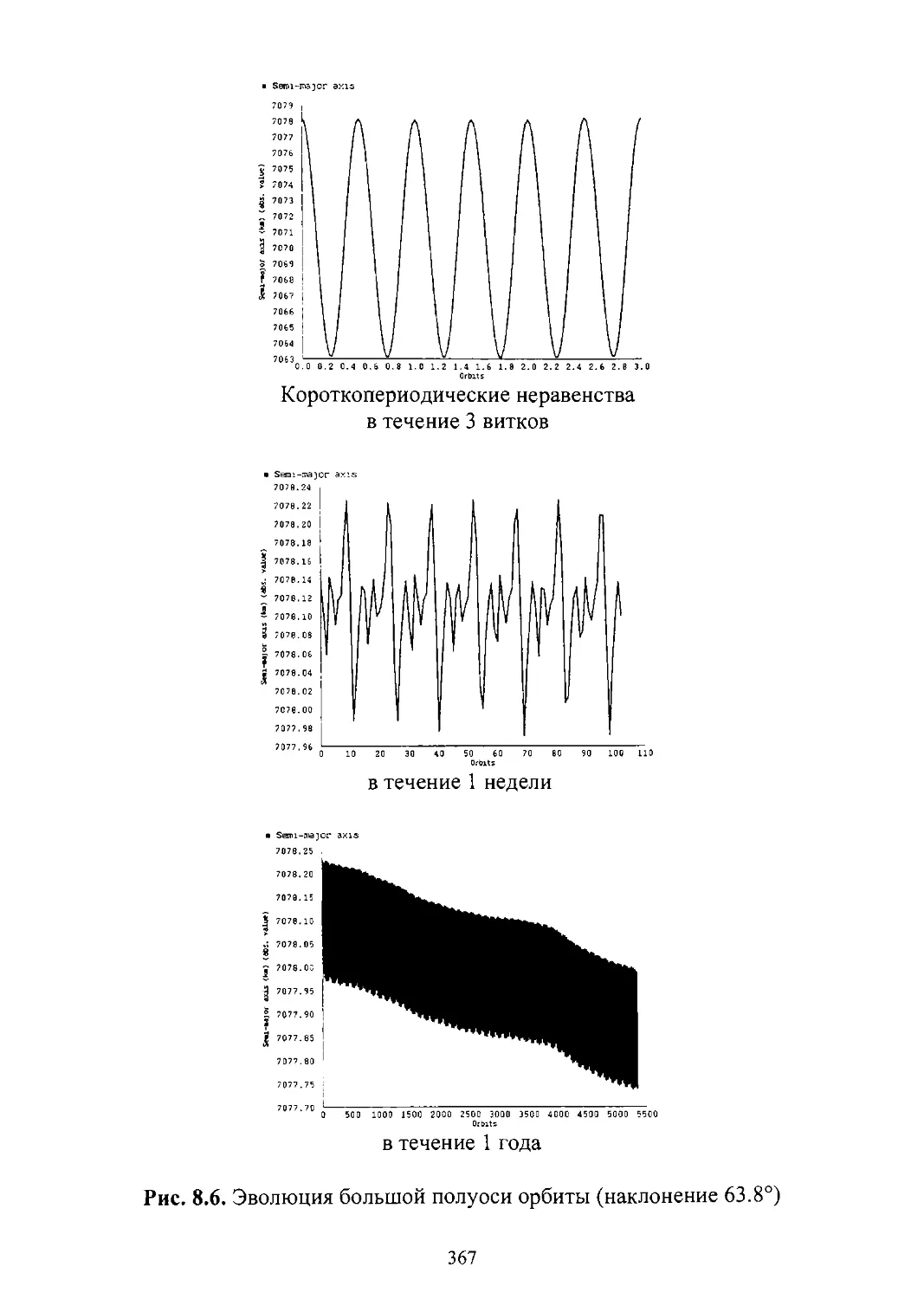
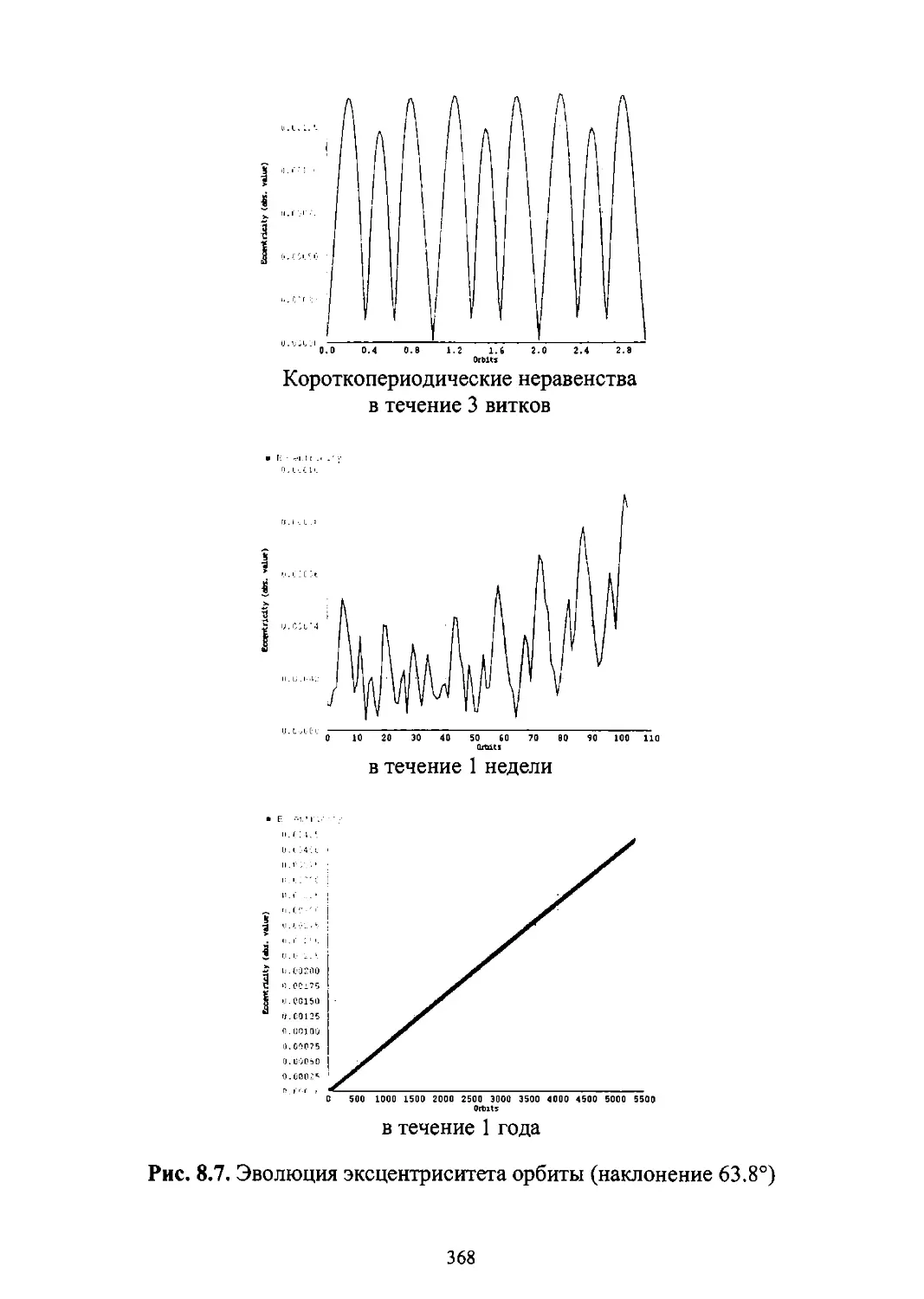
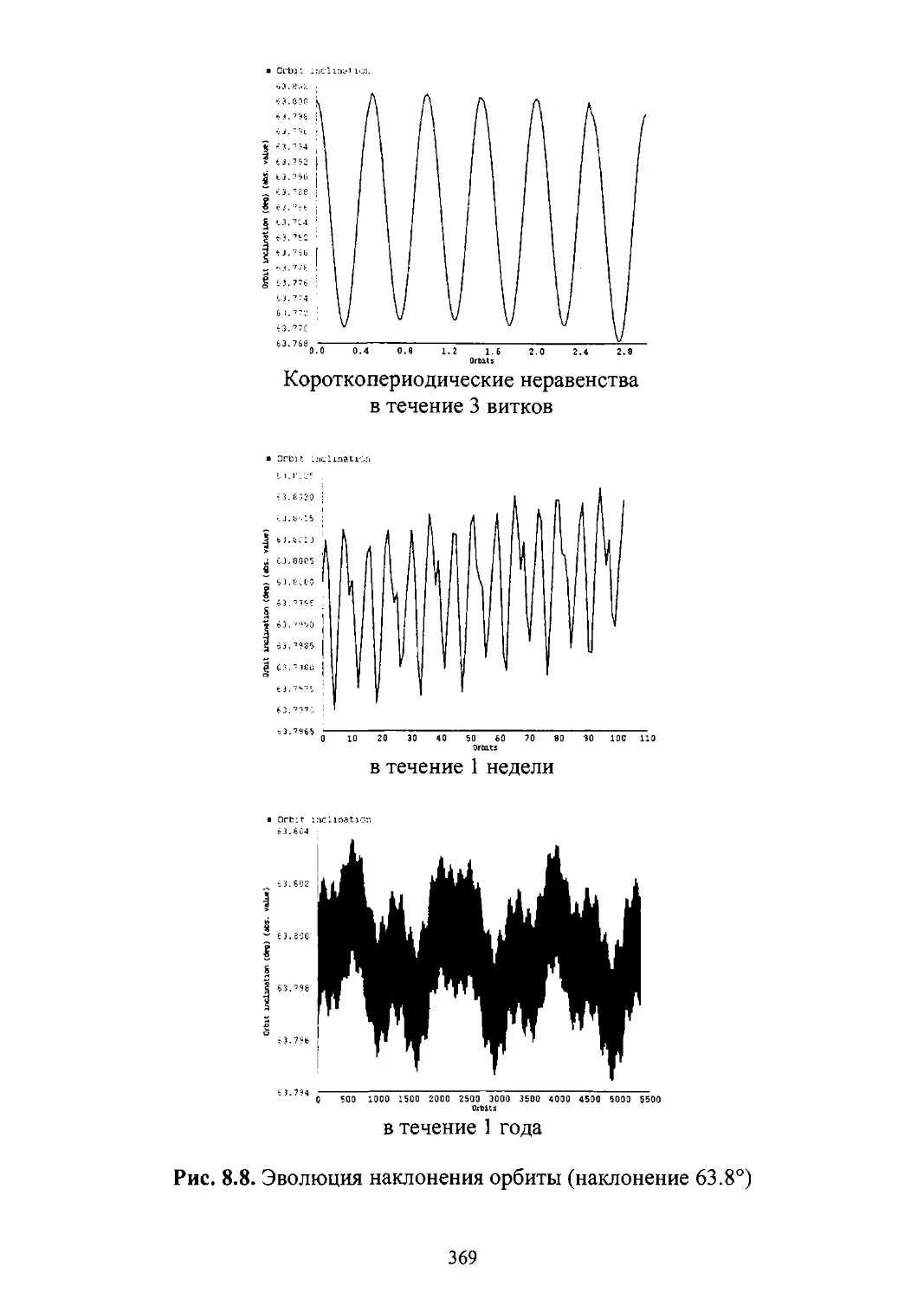
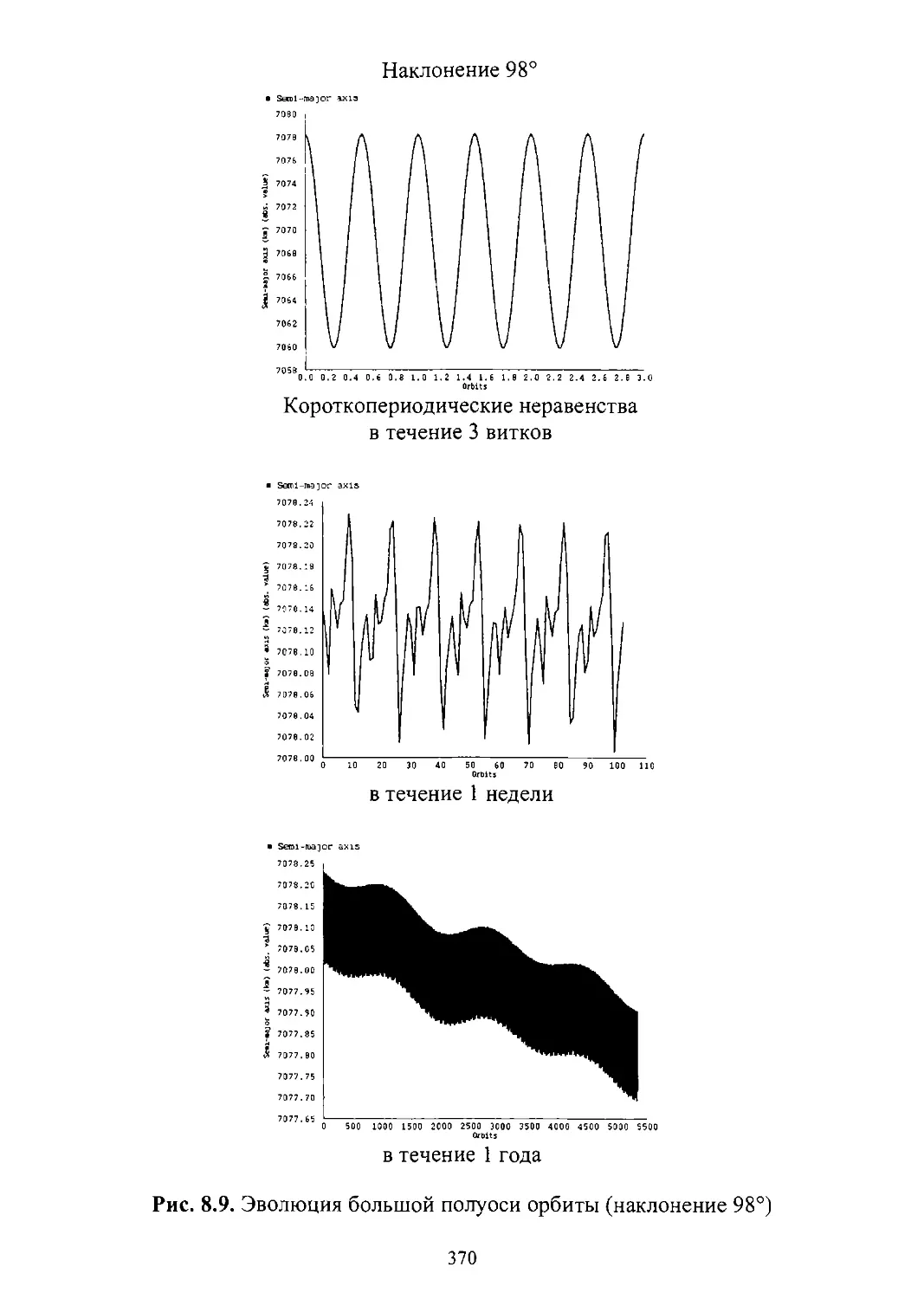
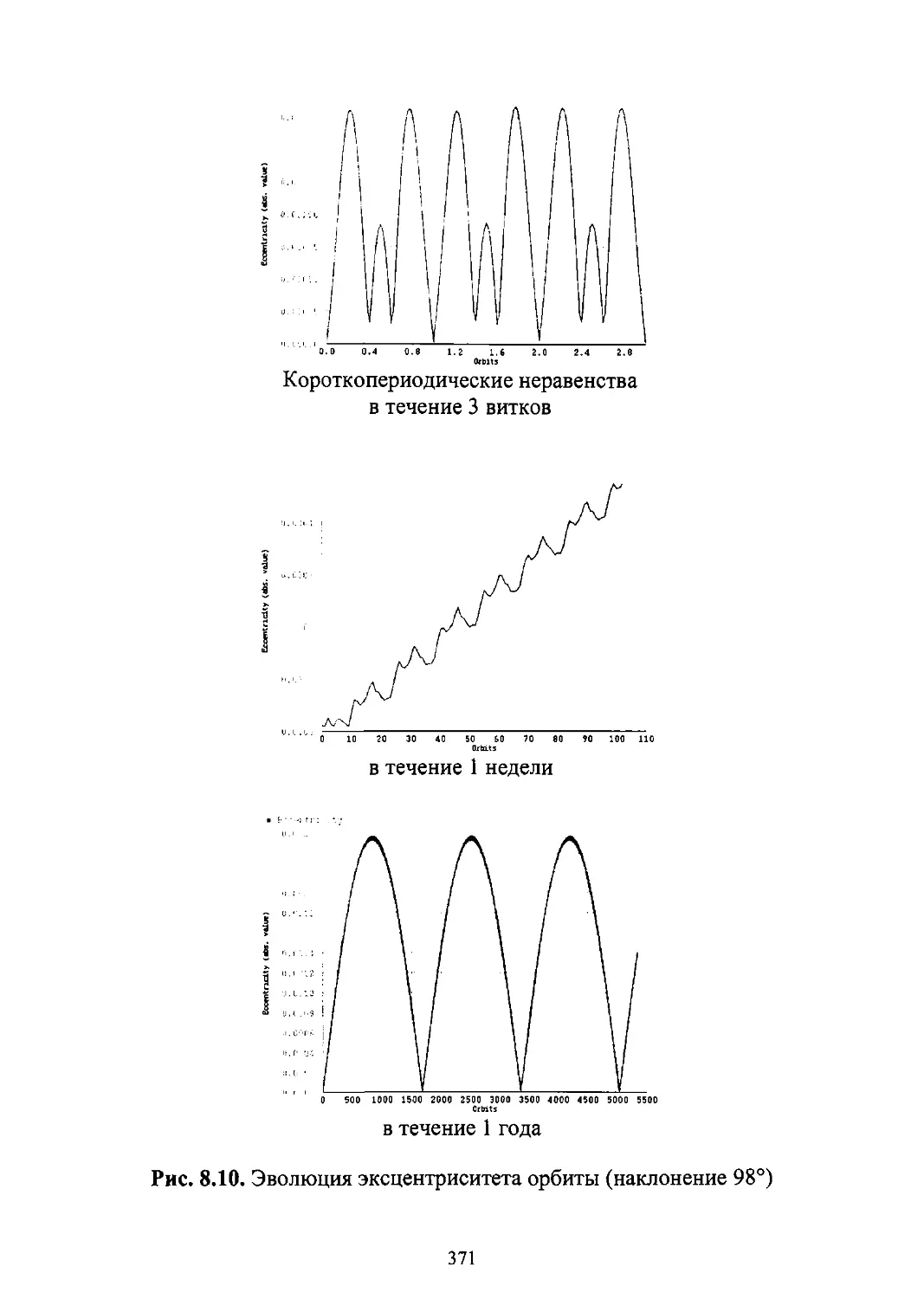
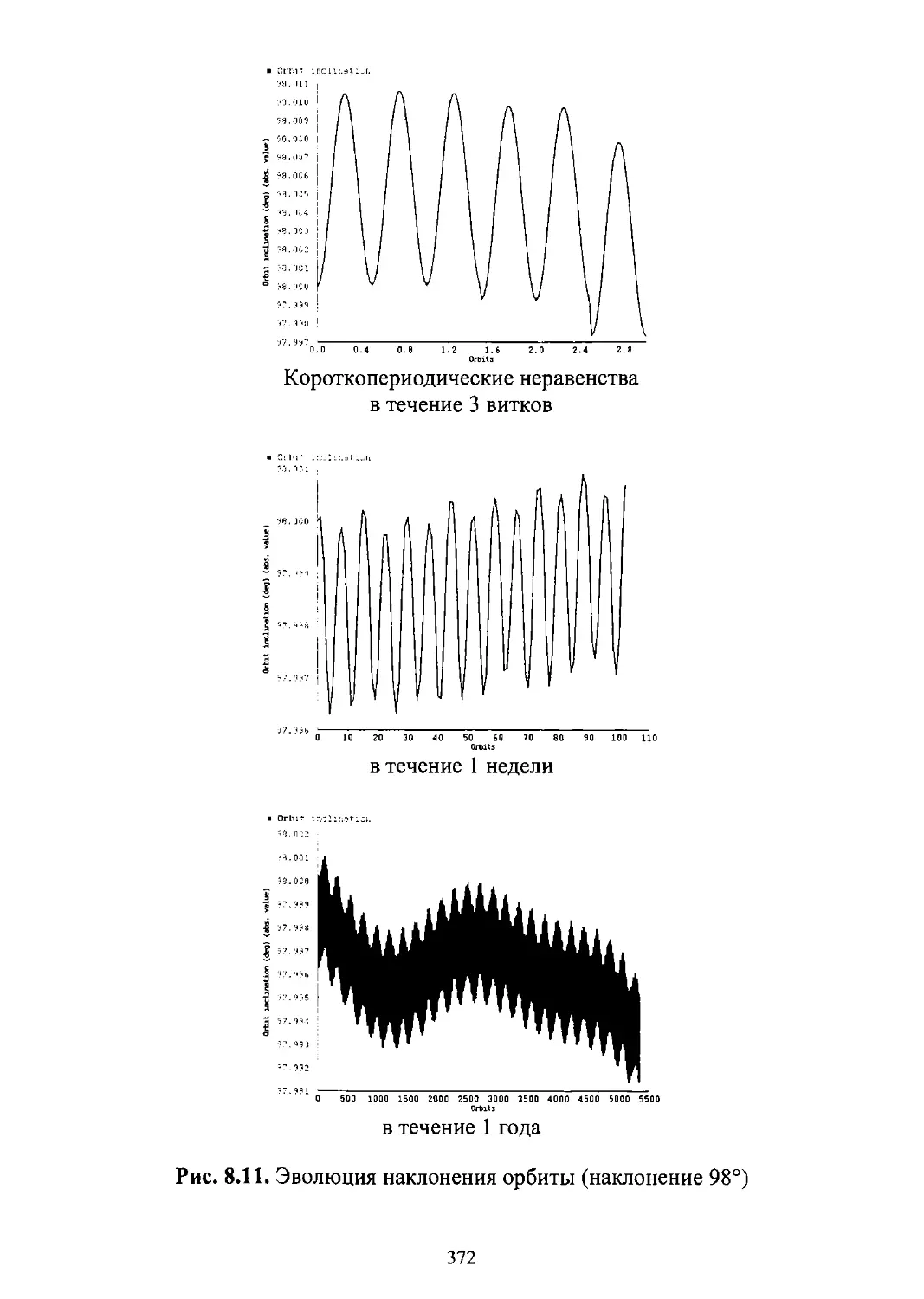
полуоси орбиты и ее наклонения. 8.2.3. Исследование эволюции
орбит. 8.2.4. Аналитический прогноз изменения элементов
орбит. 8.2.5. Поддержание солнечно-синхронной орбиты МКА.
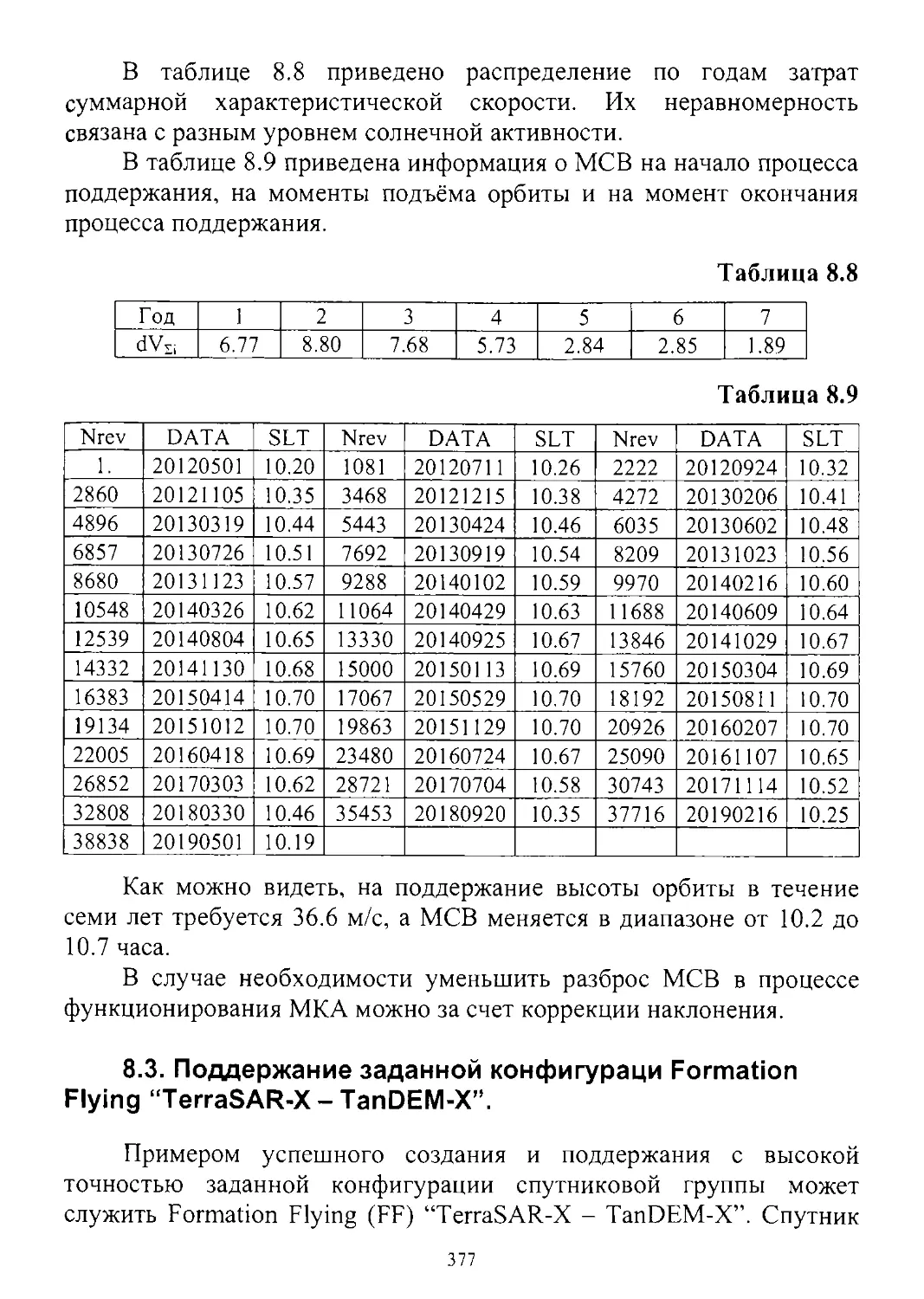
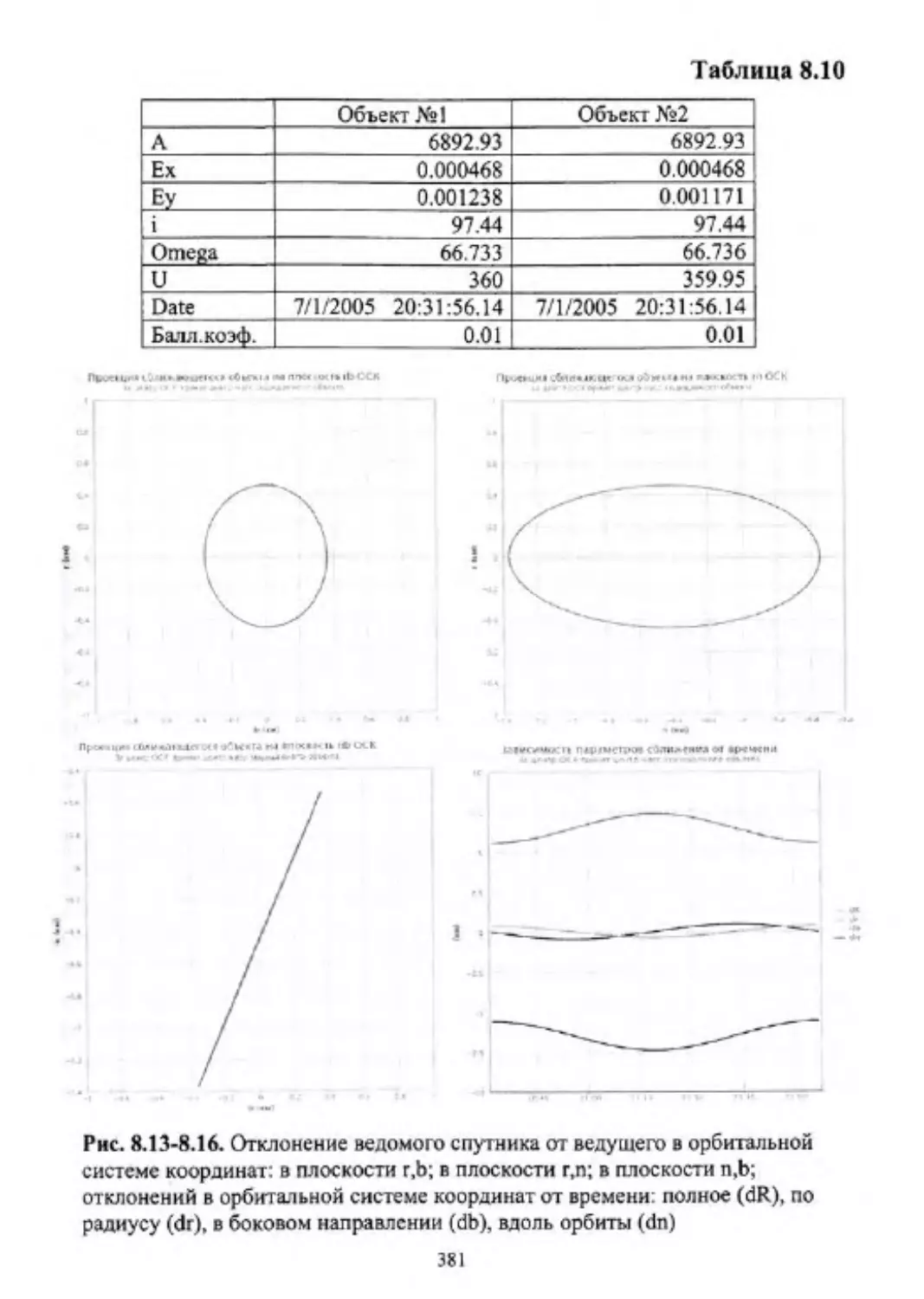
8.3. Поддержание заданной конфигурации спутниковой группы
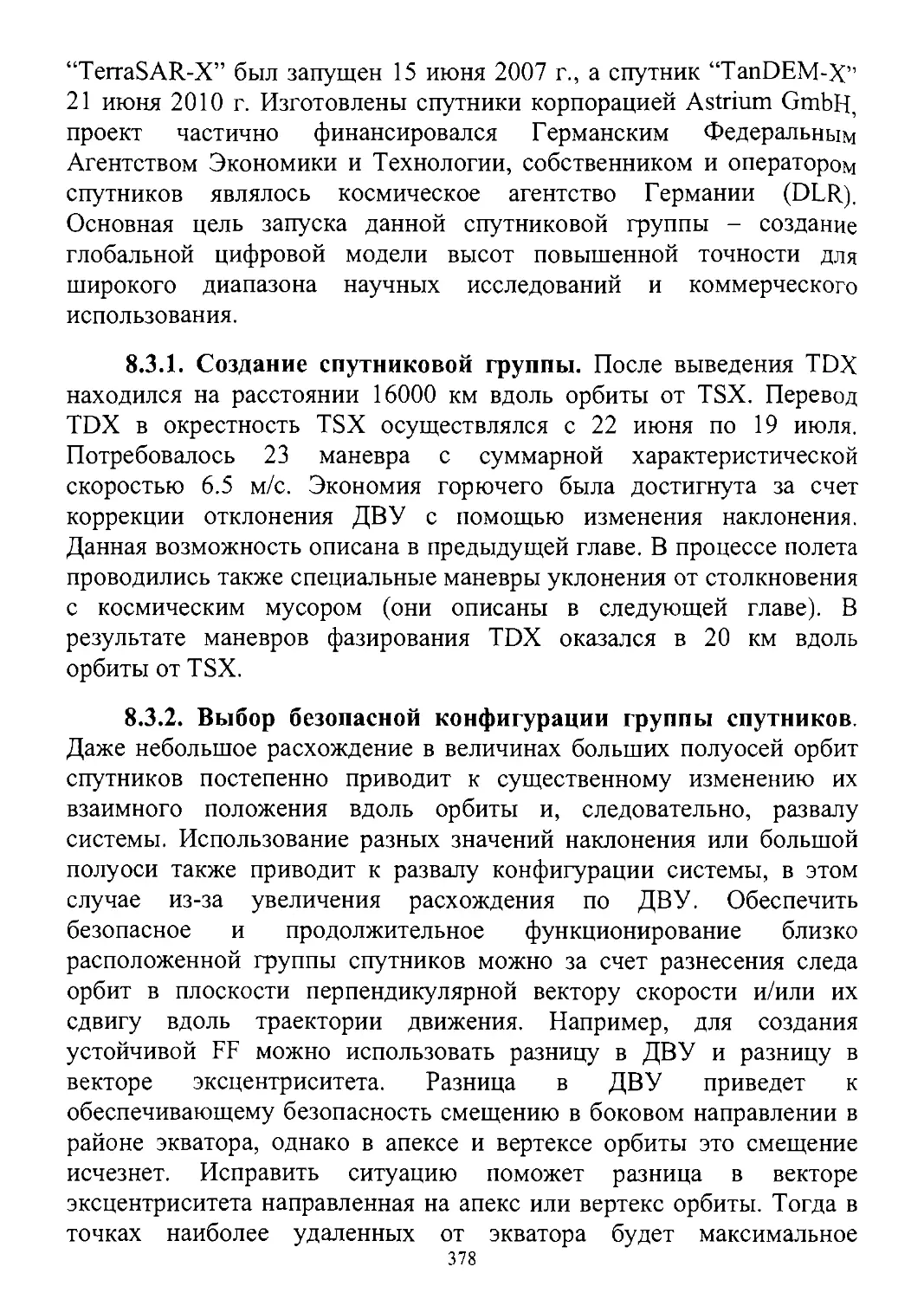
(formation flying)........................................377
8.3.1. Создание спутниковой группы. 8.3.2. Выбор безопасной
конфигурации группы спутников. 8.3.3. Поддержание заданной
конфигурации спутниковой группы.
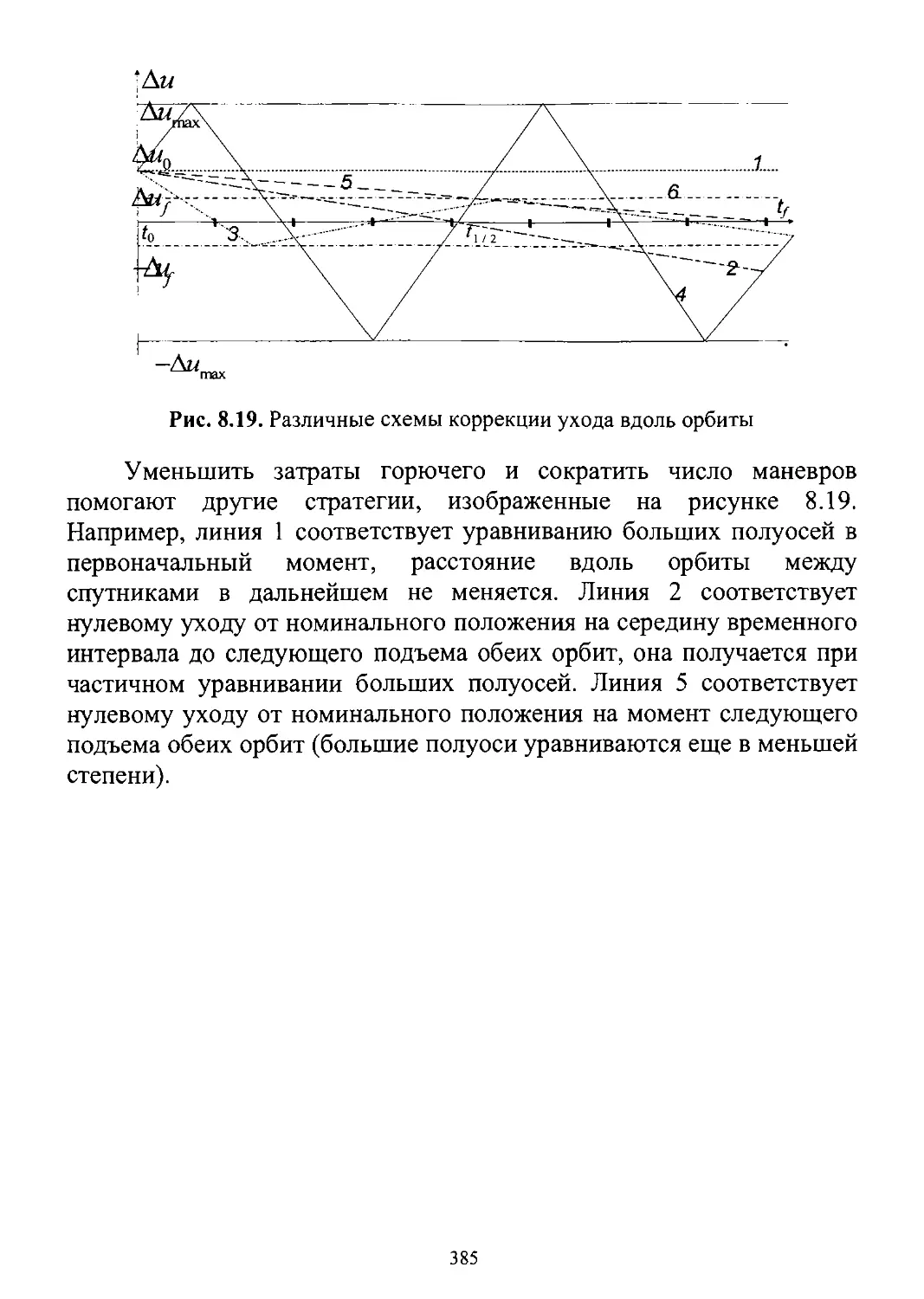
Глава IX. Вопросы маневрирования в проблеме космического
мусора...............................................386
9.1. Маневры уклонения космического аппарата от столкнове
ния с космическим мусором...............................386
9.1.1. Определение размеров зоны безопасности. 9.1.2. Расчет одно-
импульсных маневров уклонения. 9.1.3. Перерасчет маневров встре-
чи, чтобы избежать столкновения с космическими объектами в про-
цессе фазирования без дополнительных маневров уклонения.
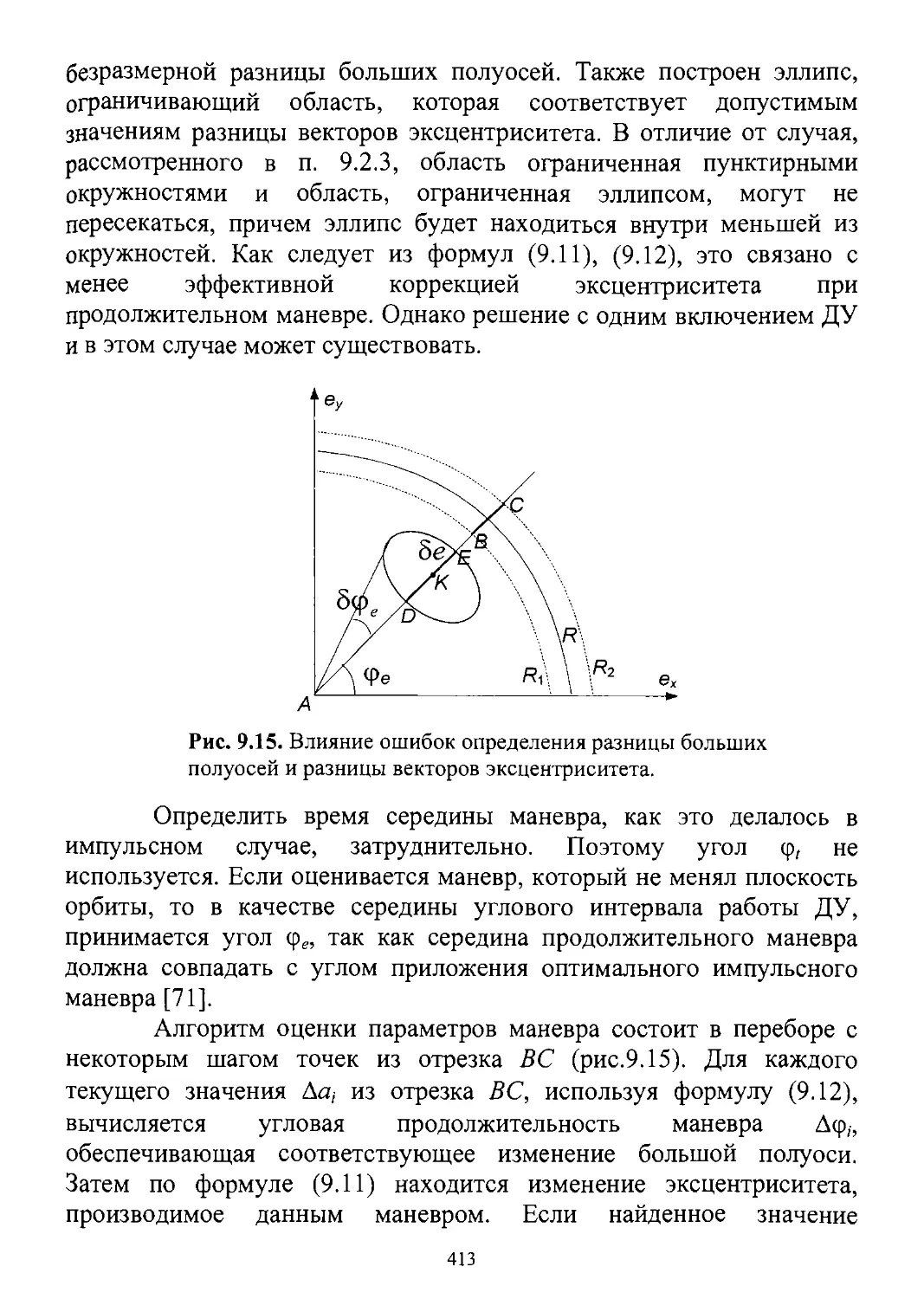
9.2. Оценка маневров, выполненных активным космическим
объектом.....................................................398
9.2.1. Постановка задачи, общий метод решения. 9.2.2. Оценка
параметров одноимпульсных маневров без учета ошибок опре-
деления орбиты. 9.2.3. Оценка параметров одноимпульсных манев-
ров с учетом ошибок определения орбиты. 9.2.4. Оценка парамет-
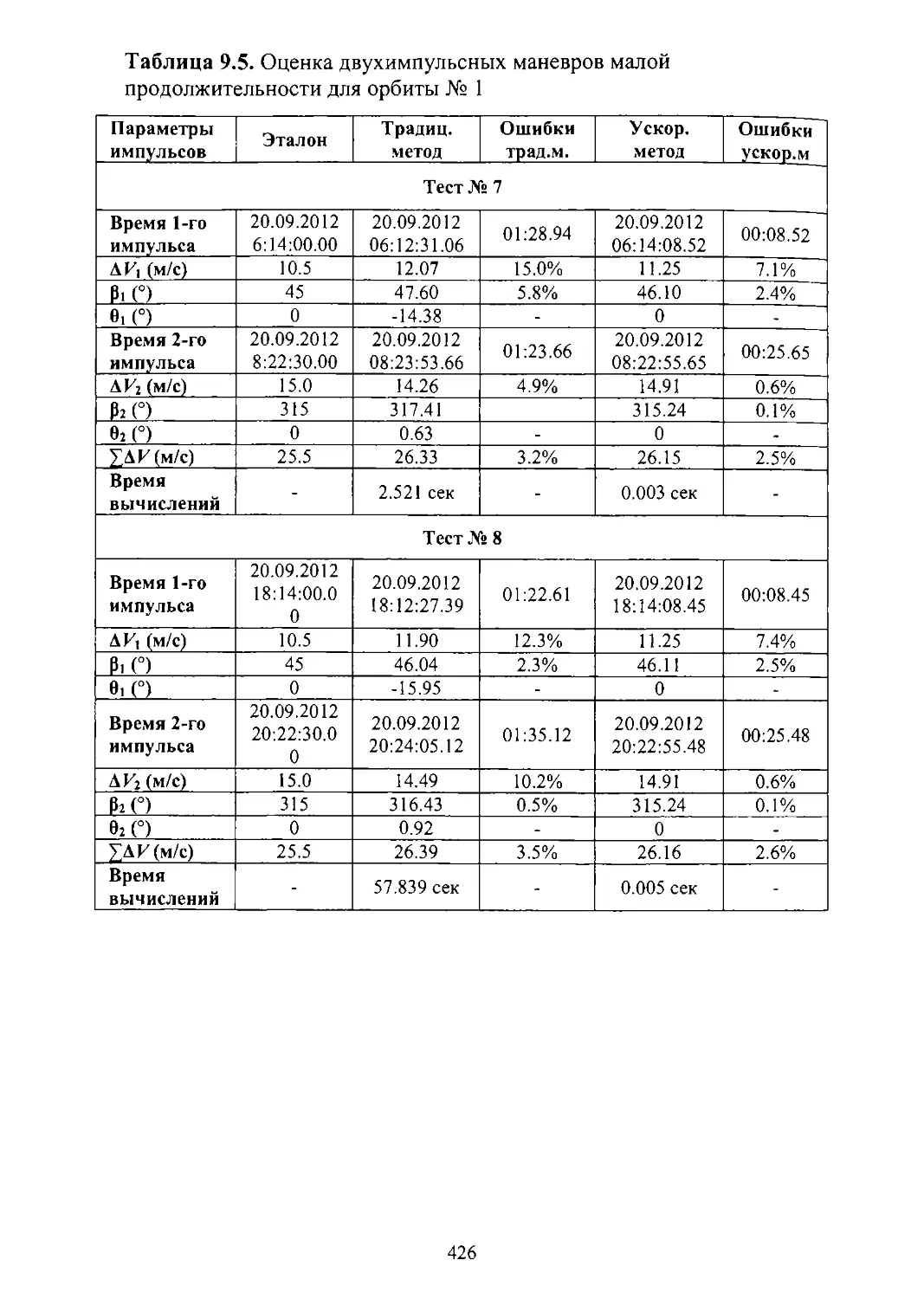
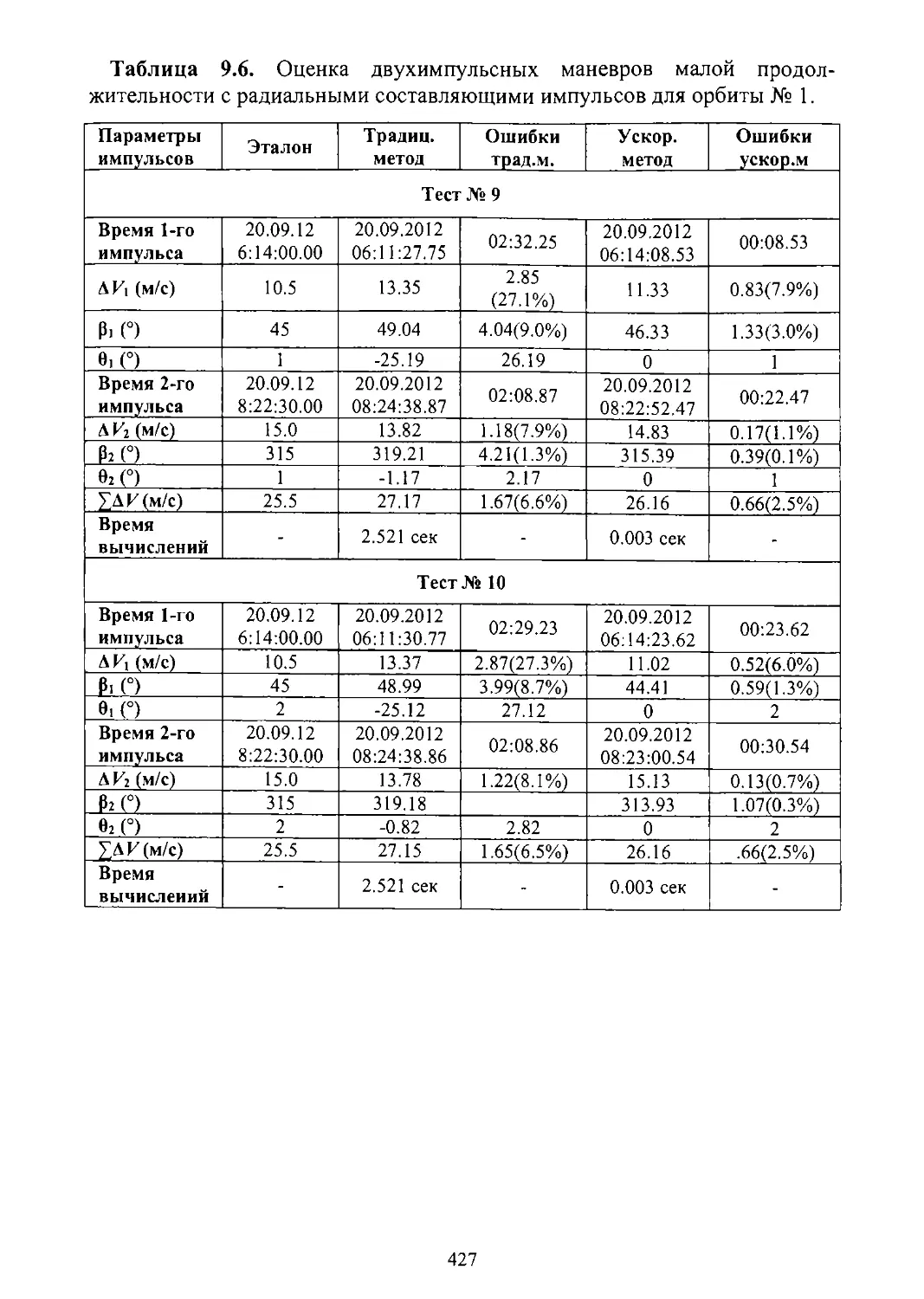
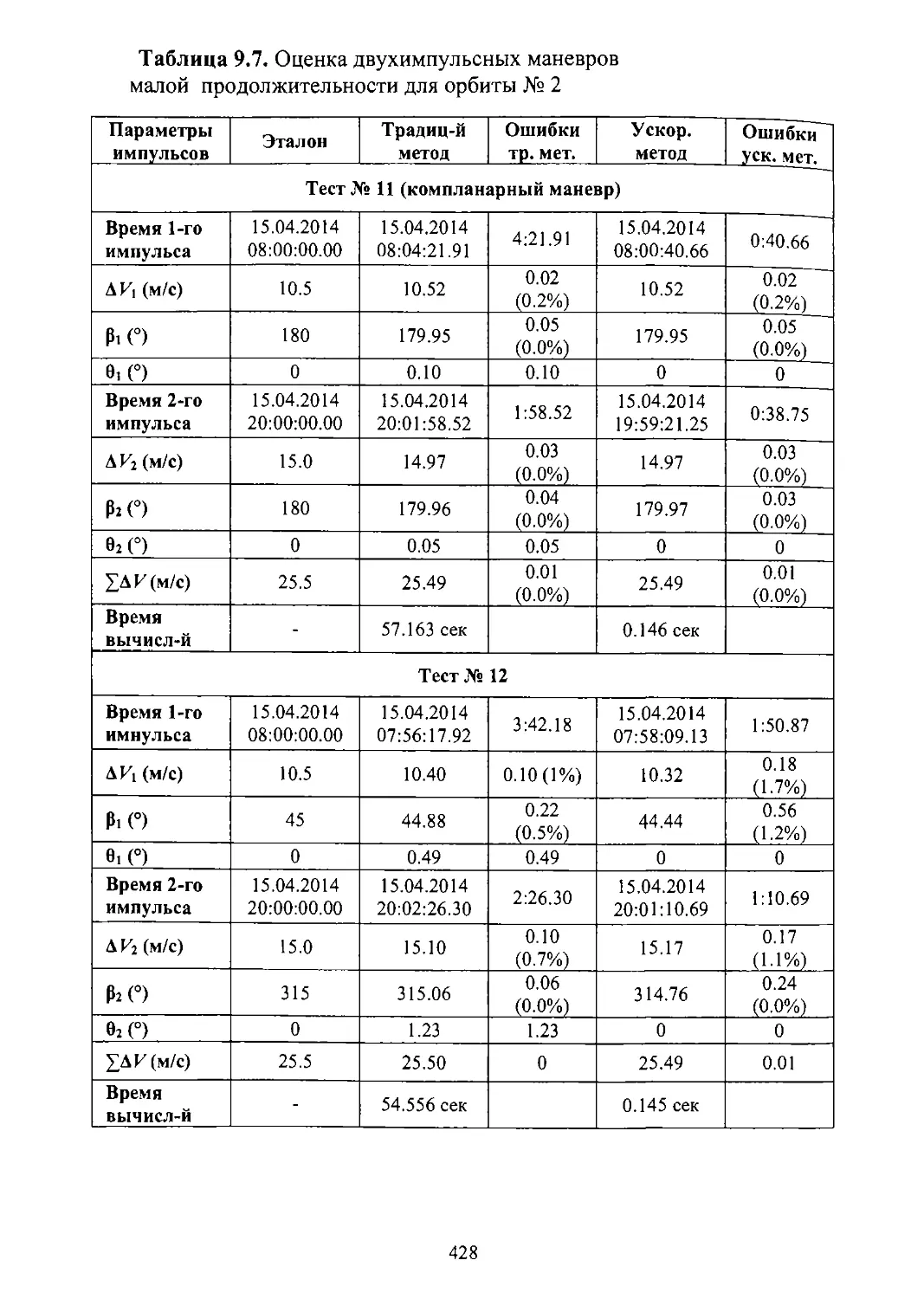
ров двух маневров малой продолжительности. 9.2.5. Оценка оди-
ночного маневра, исполняемого ДУ малой тяги. 9.2.6. Оценка пара-
7
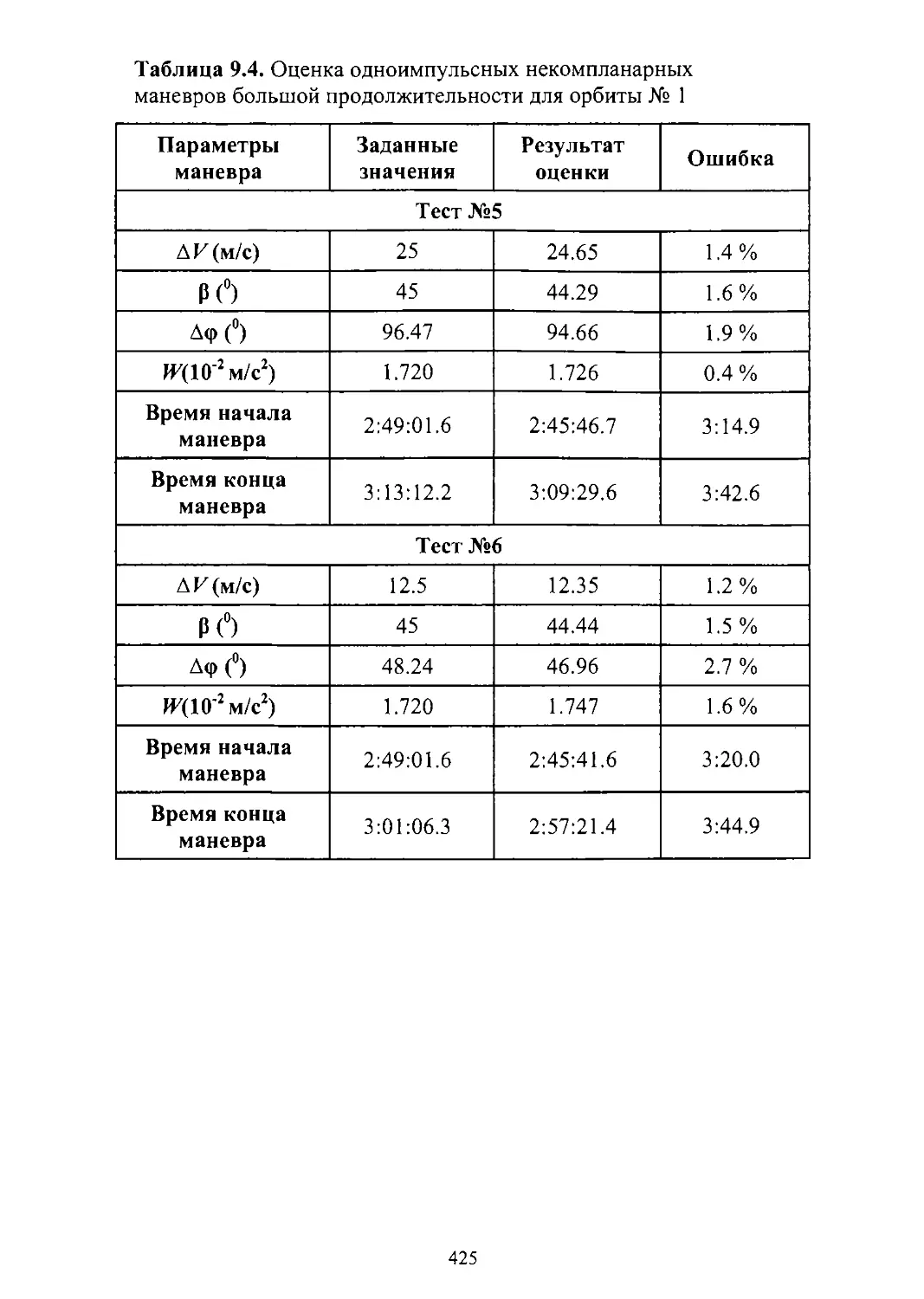
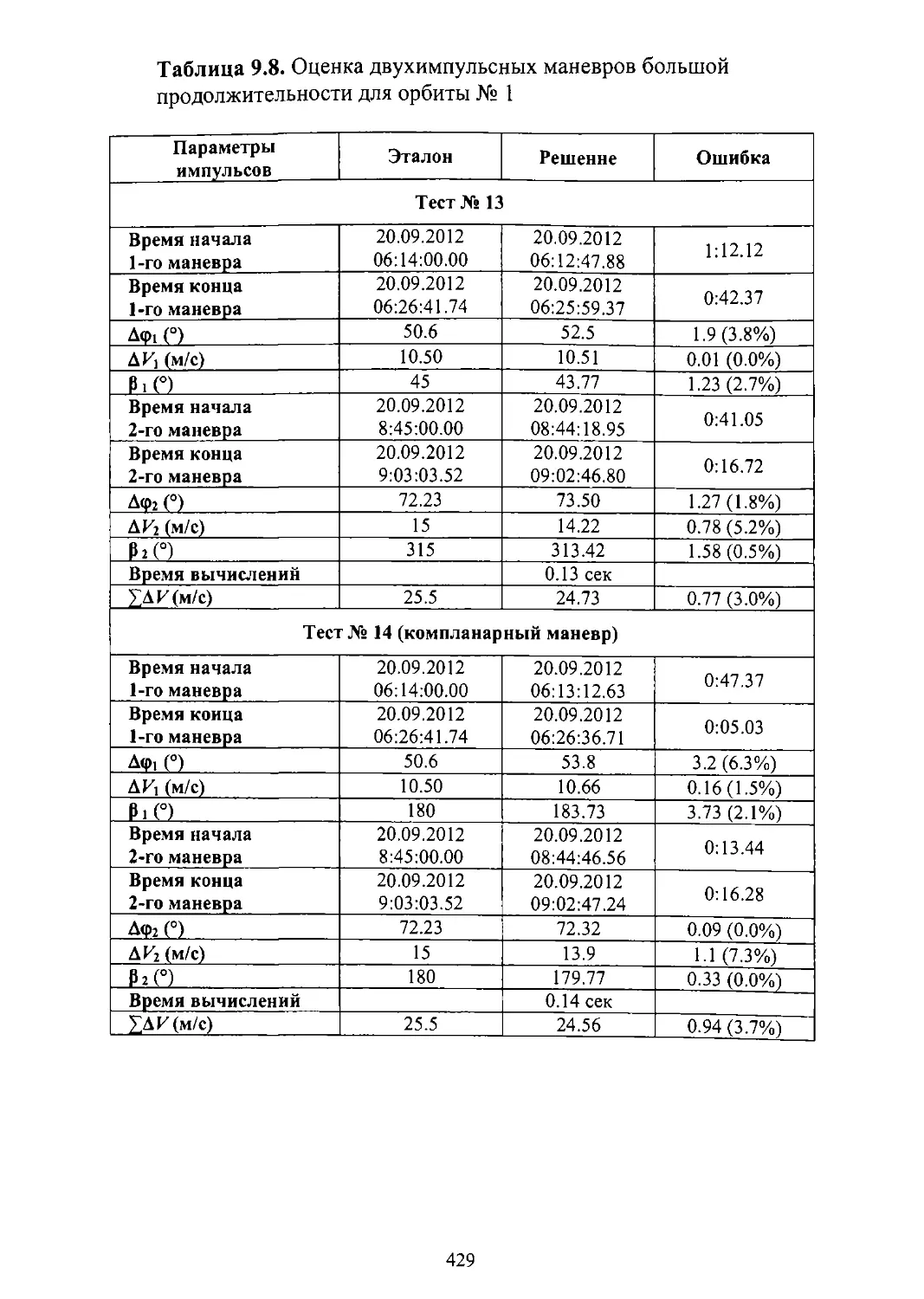
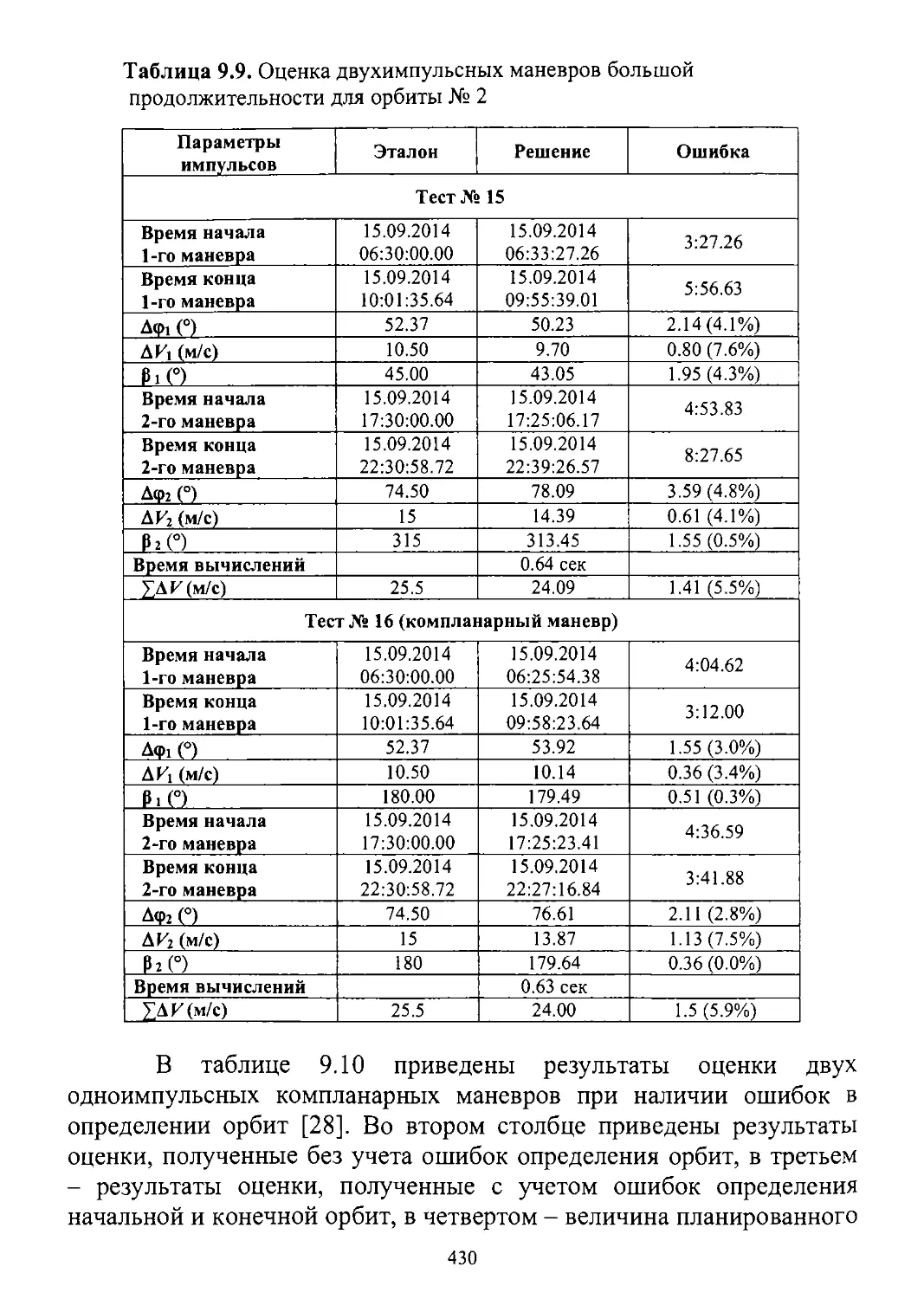
метров двух компланарных маневров большой продолжительности.
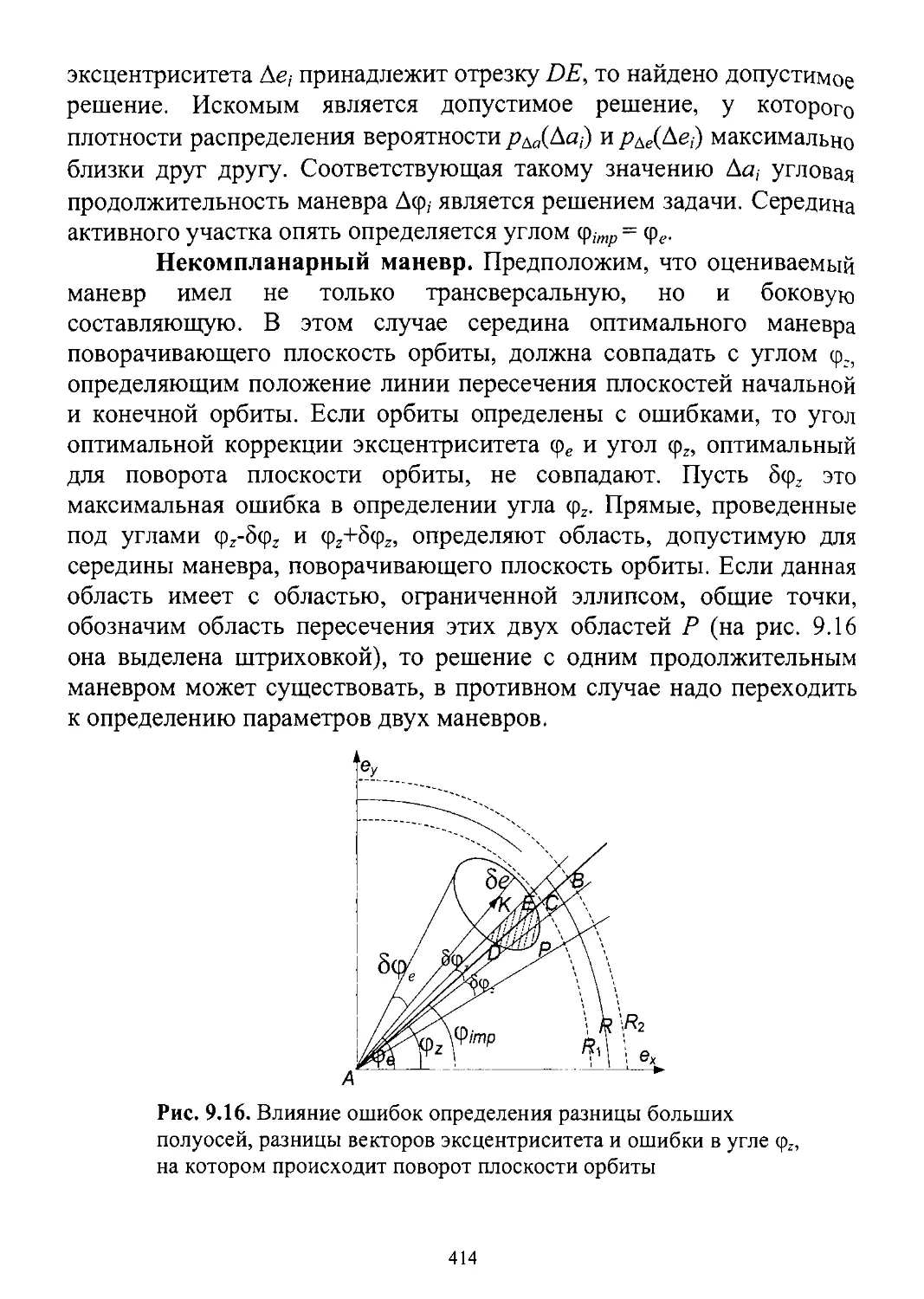
9.2.7. Оценка параметров двух некомпланарных маневров большой
продолжительности. 9.2.8. Примеры оценки параметров маневров.
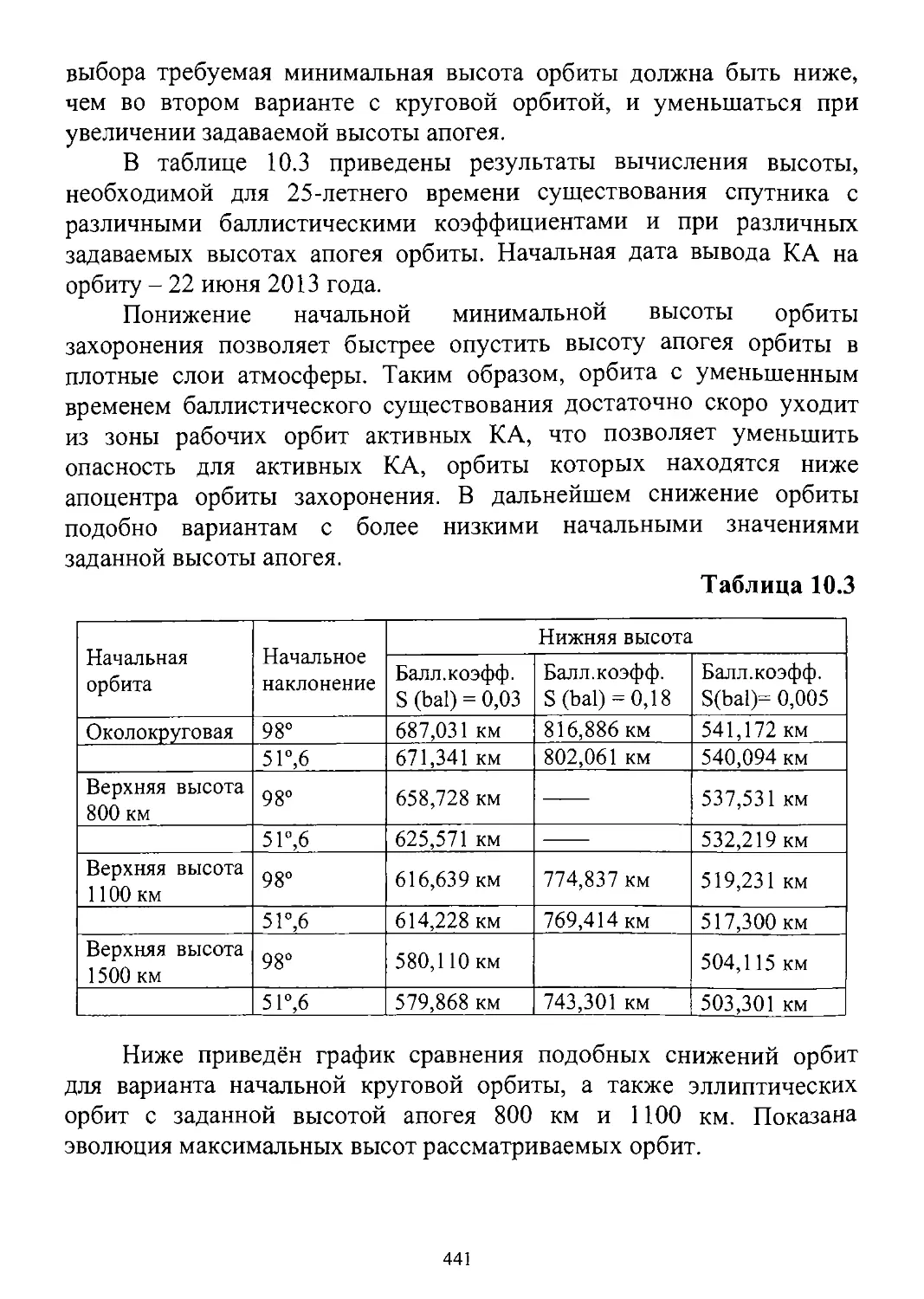
Глава X. Уменьшение загрязненности космического
пространства ................................................ 432
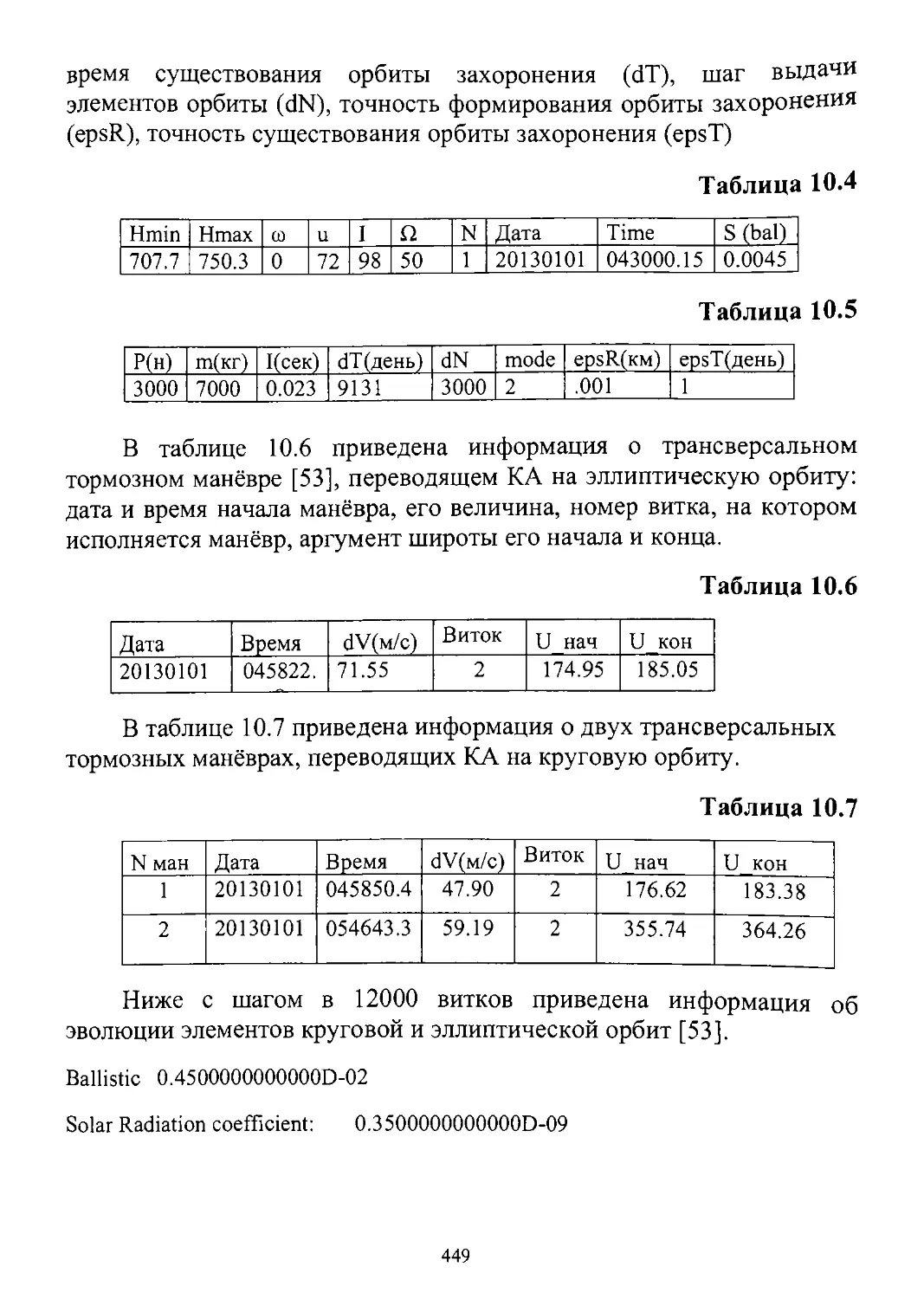
10.1. Расчет маневров, переводящих КА на орбиту с заданным
временем баллистического существования........................432
10.1.1. Модель движения КА на длительном интервале времени.
10.1.2. Эволюция орбит с заданным временем баллистического
существования. 10.1.3. Алгоритм расчета параметров орбиты с
заданным временем баллистического существования.
10.1.4. Алгоритм расчета параметров маневров перелета на орбиту
с заданным временем баллистического существования.
10.1.5. Пример перевода КА на орбиту с заданным временем
баллистического существования.
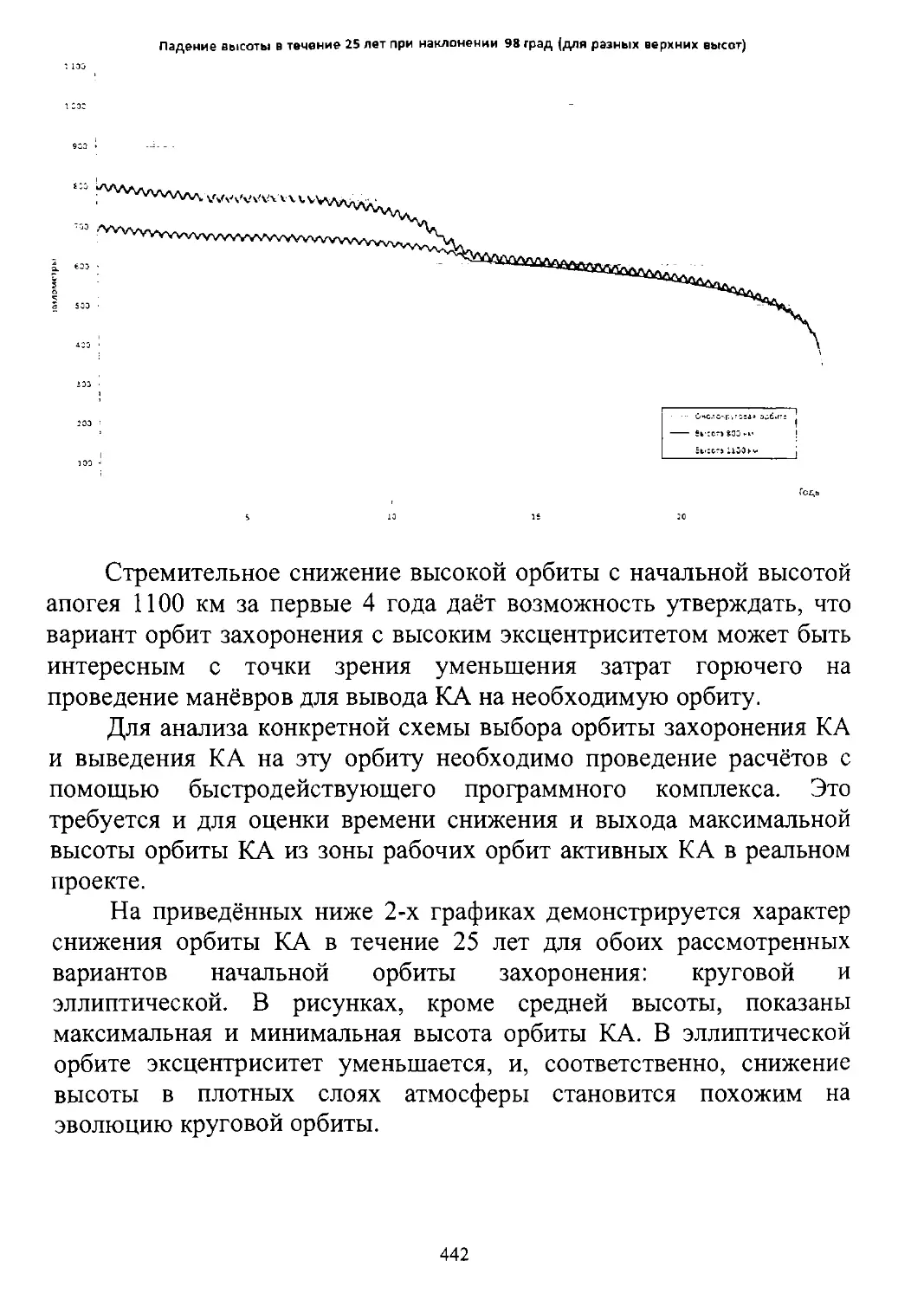
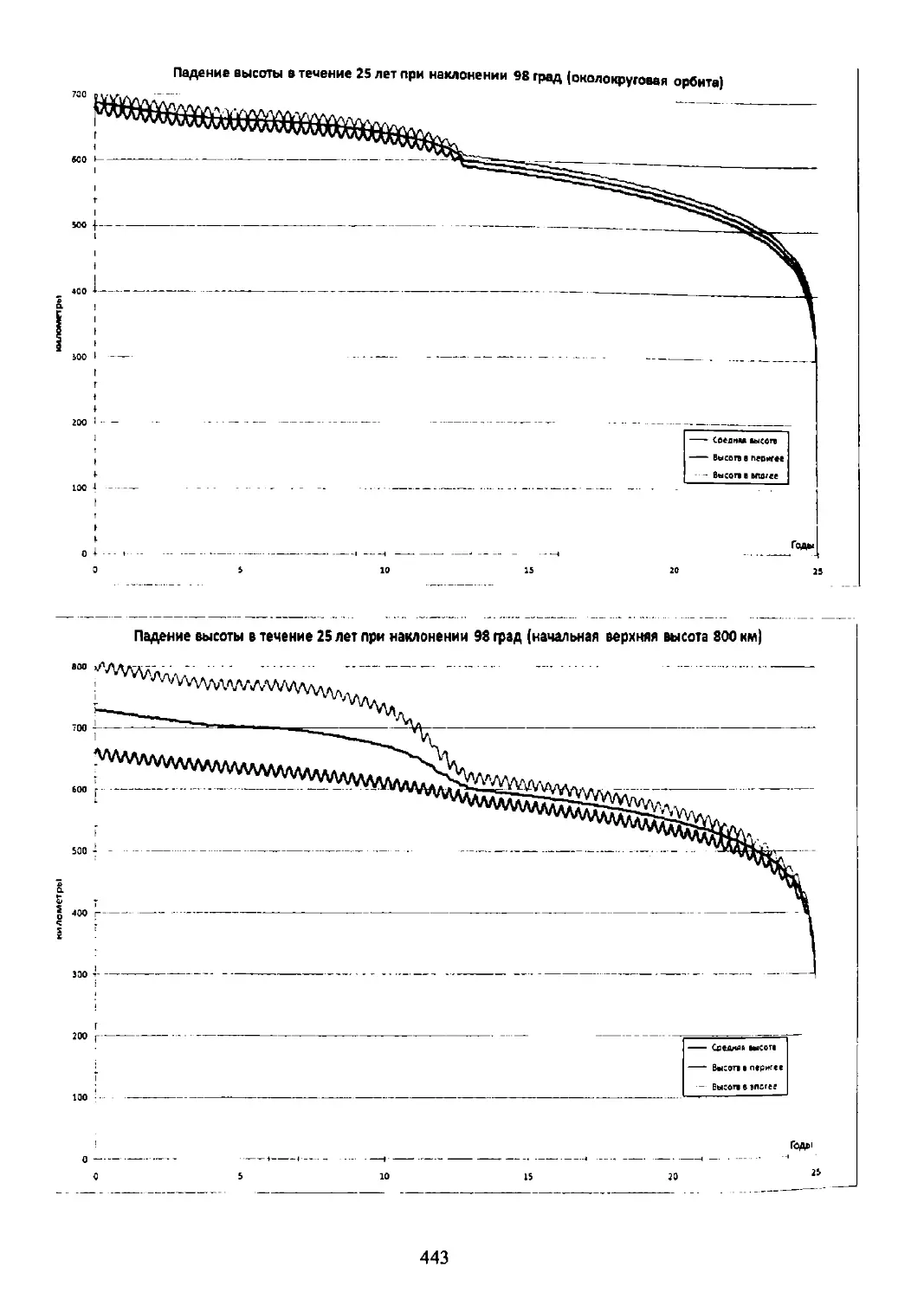
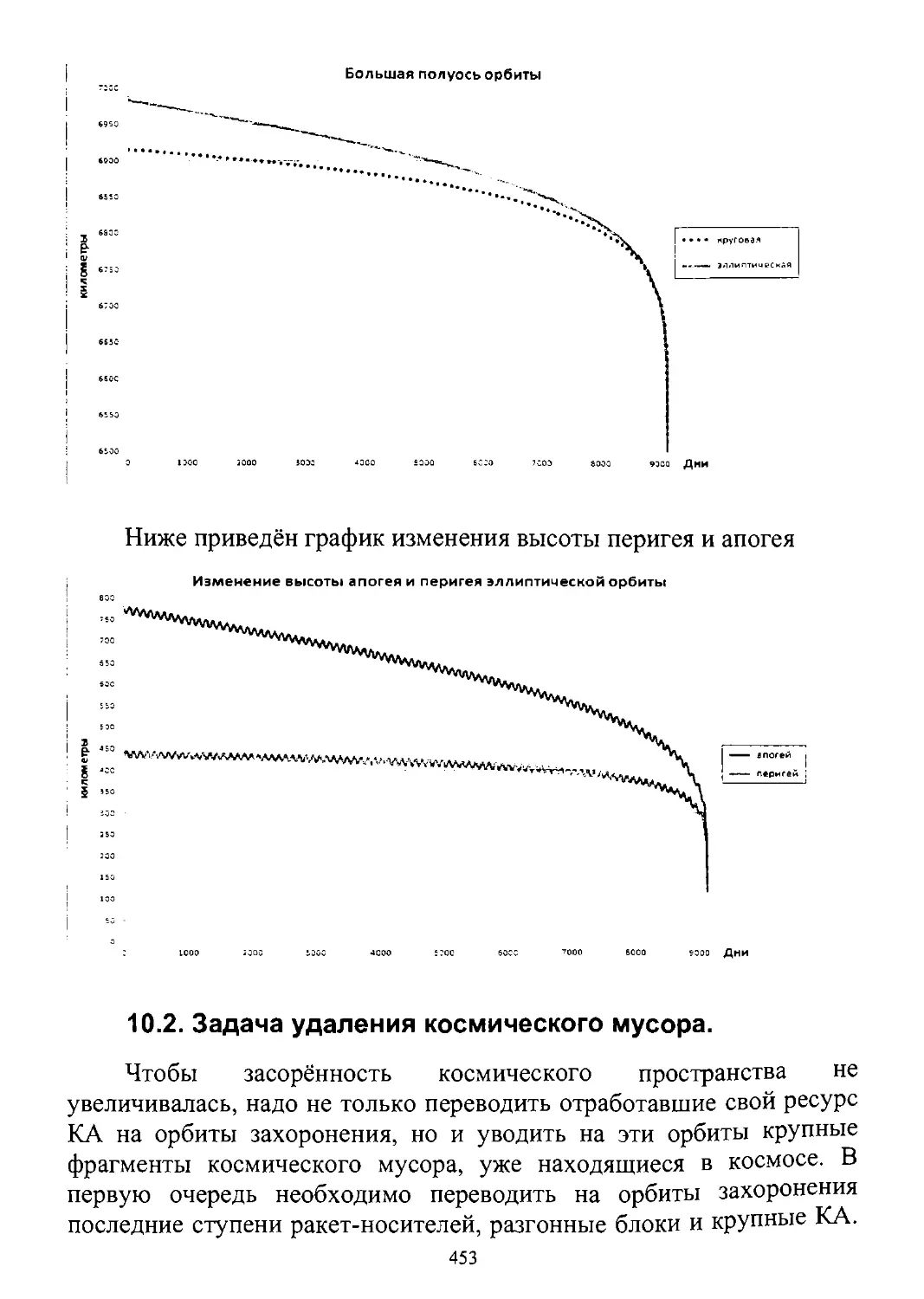
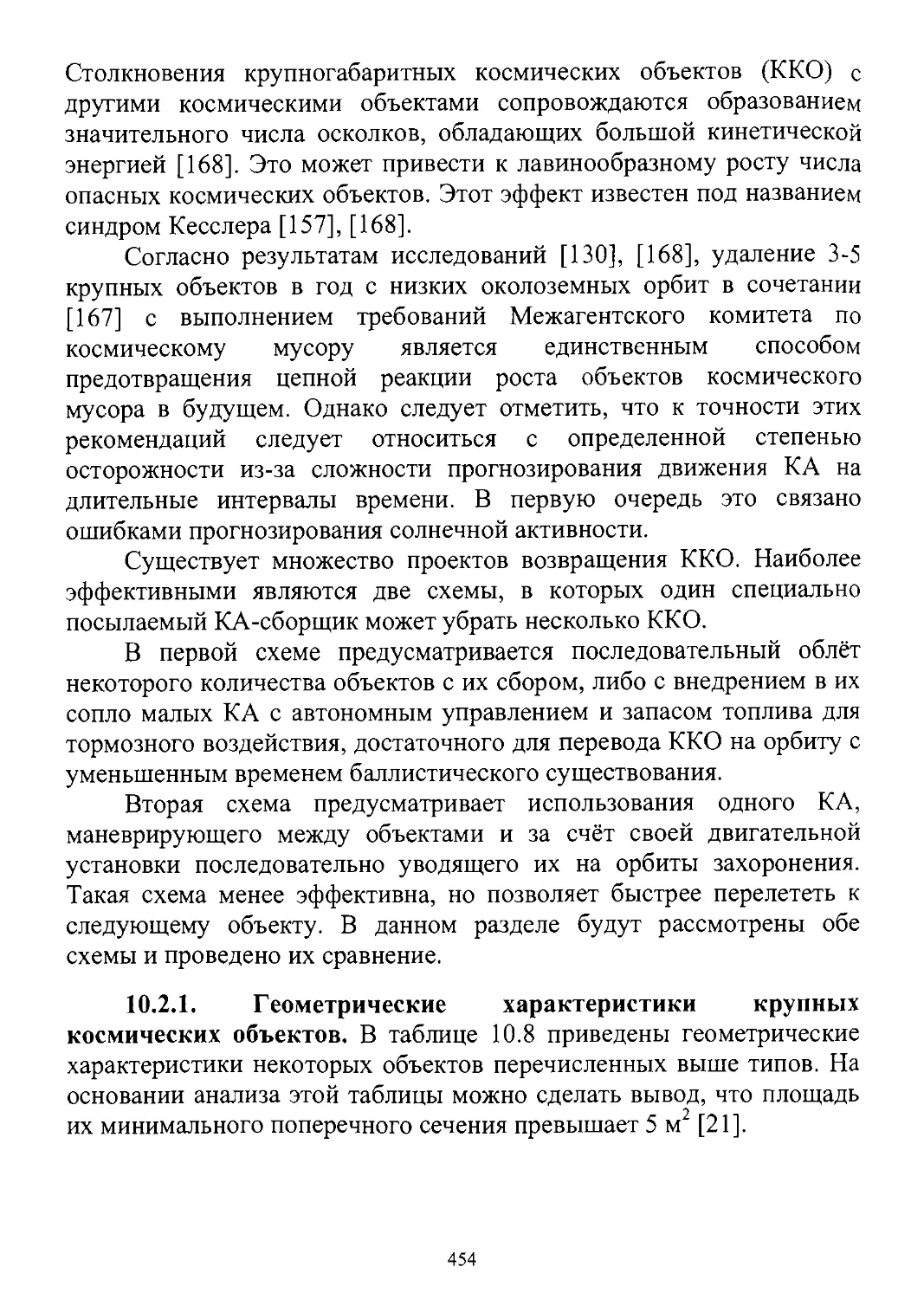
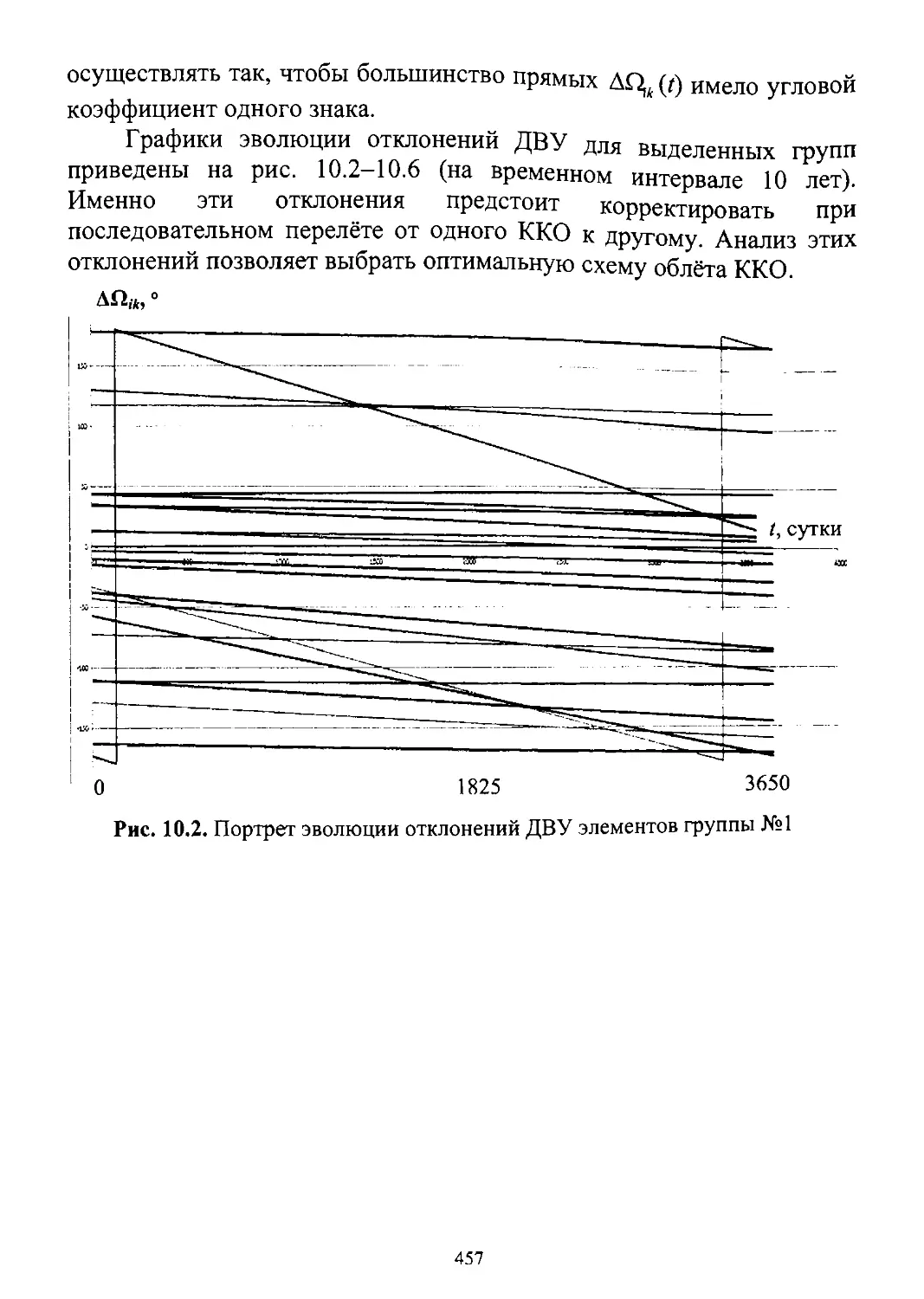
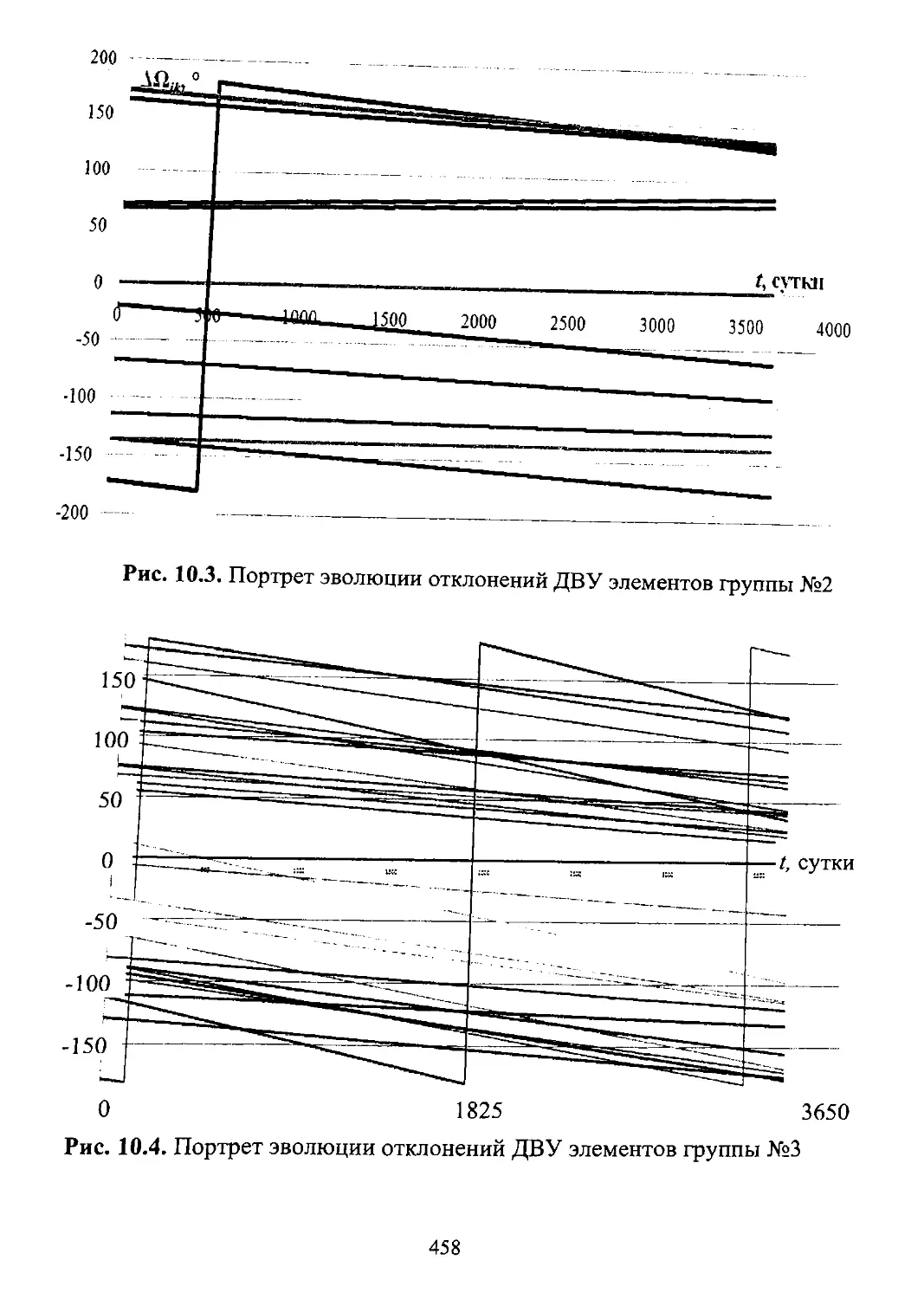
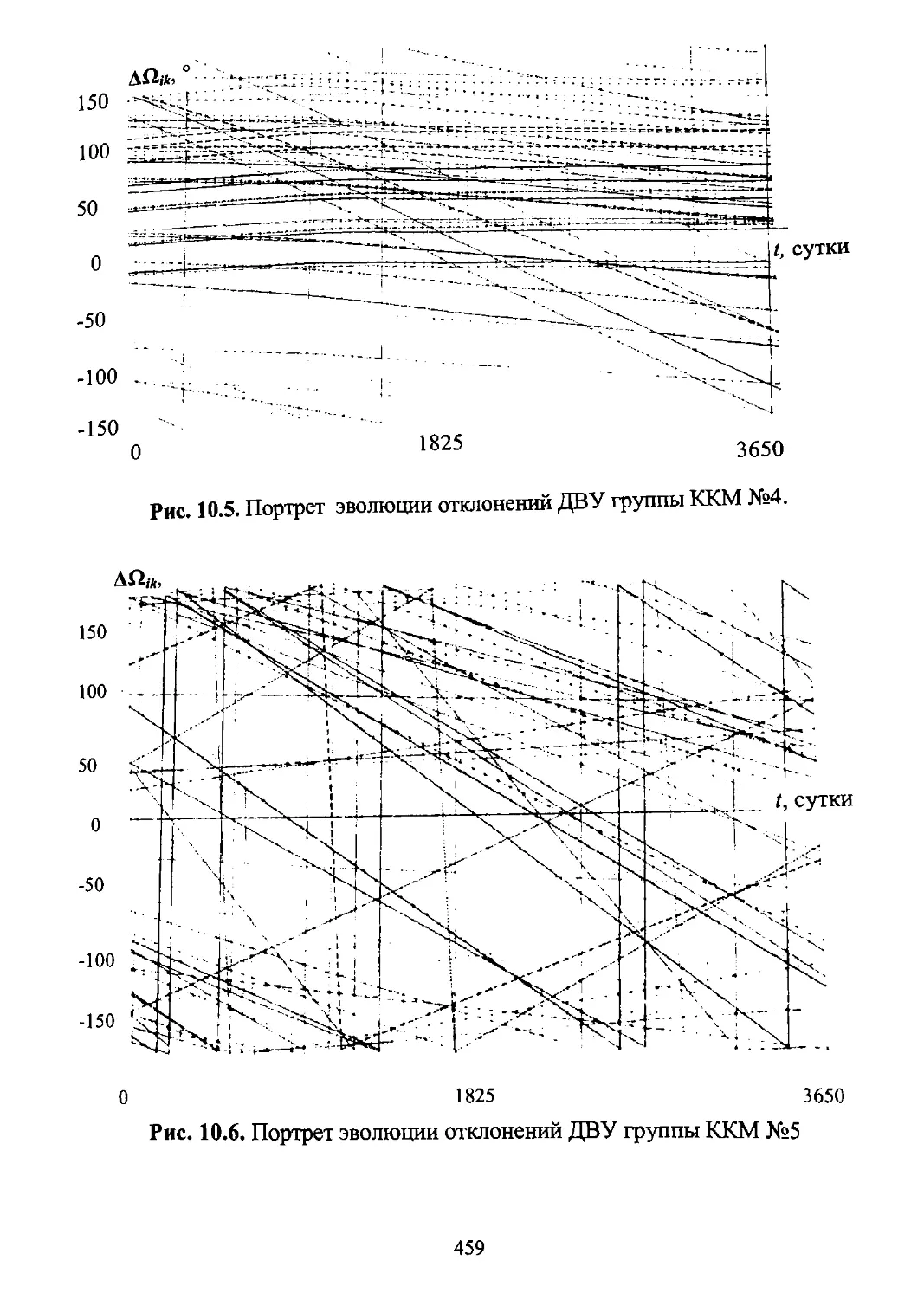
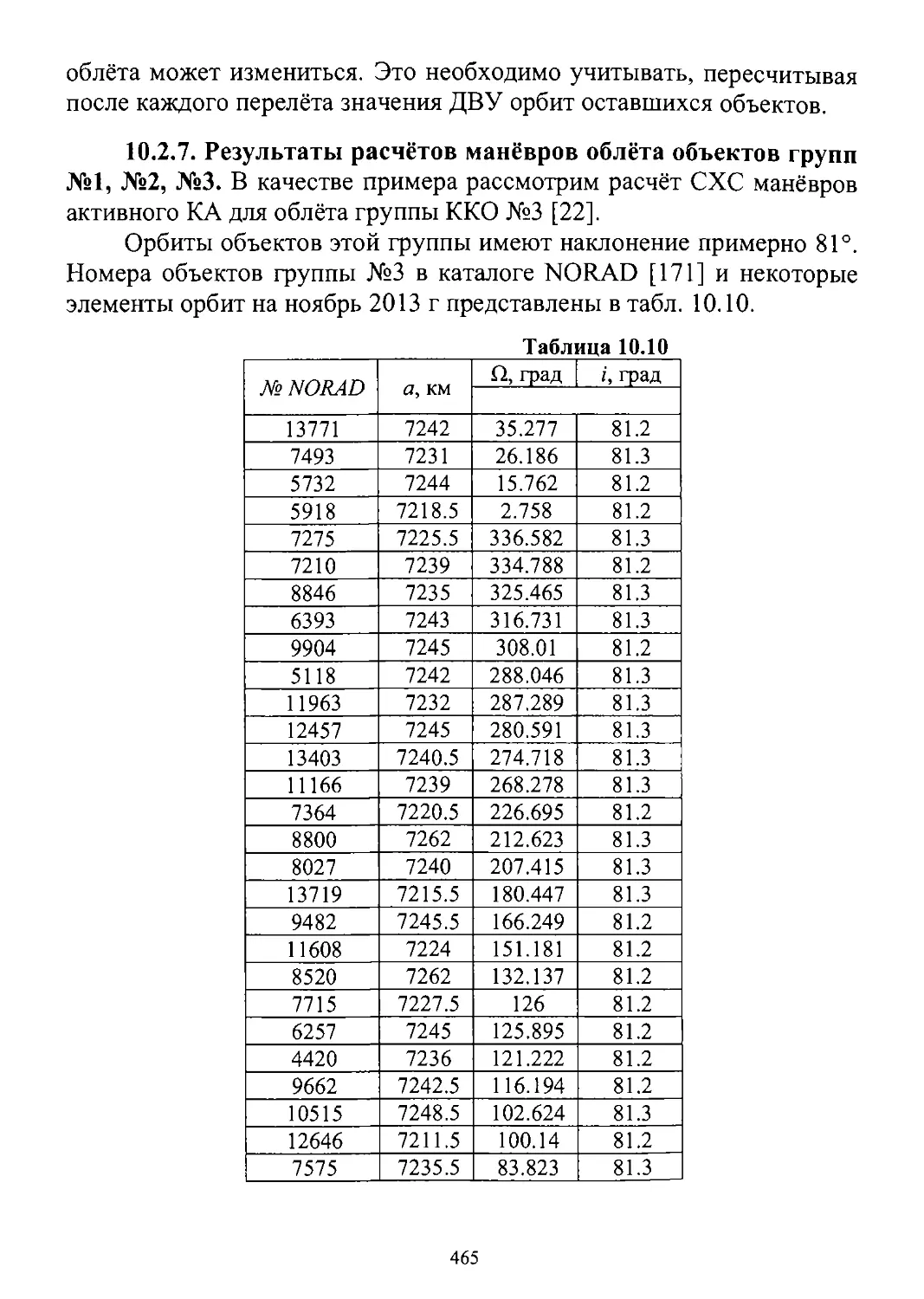
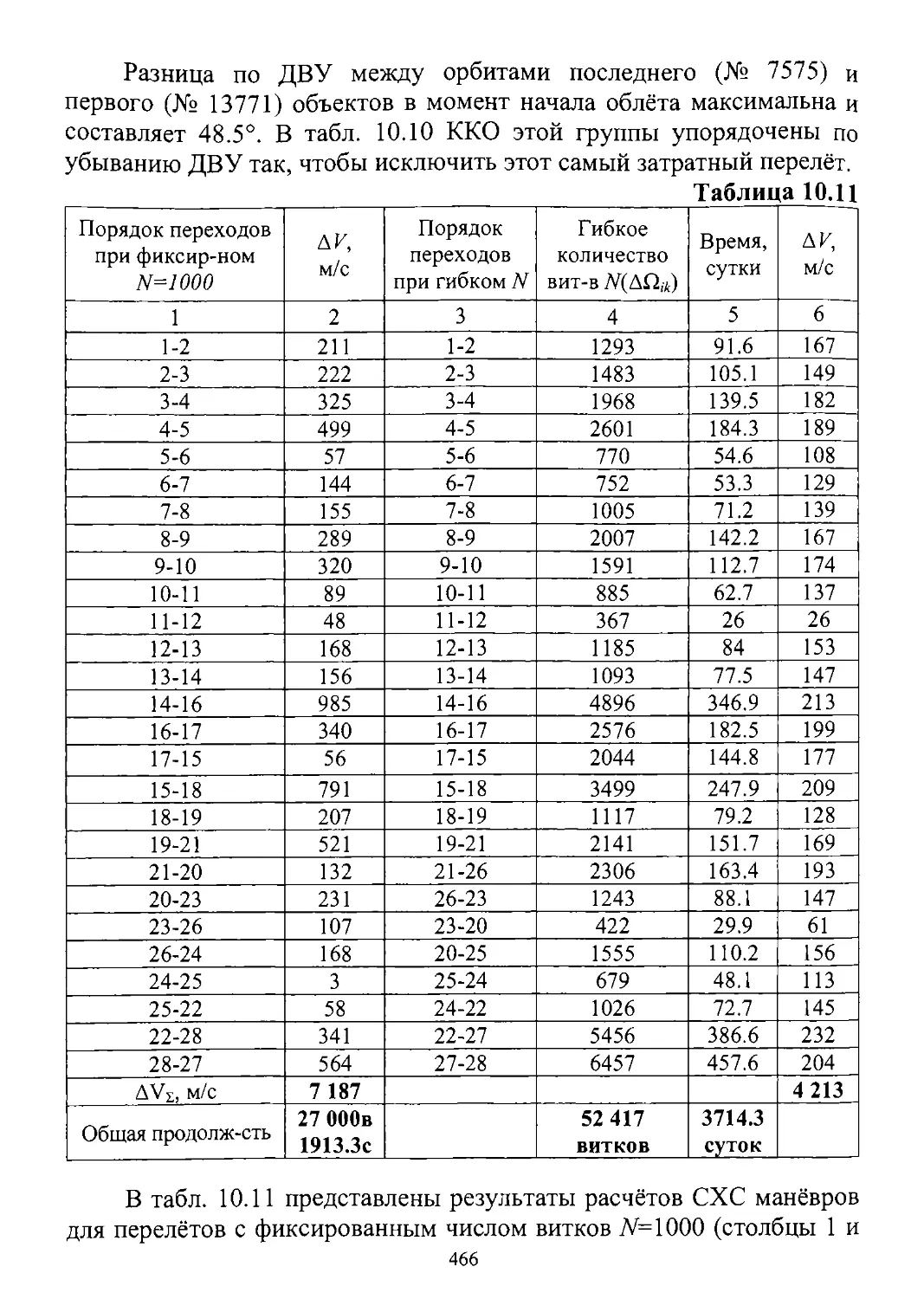
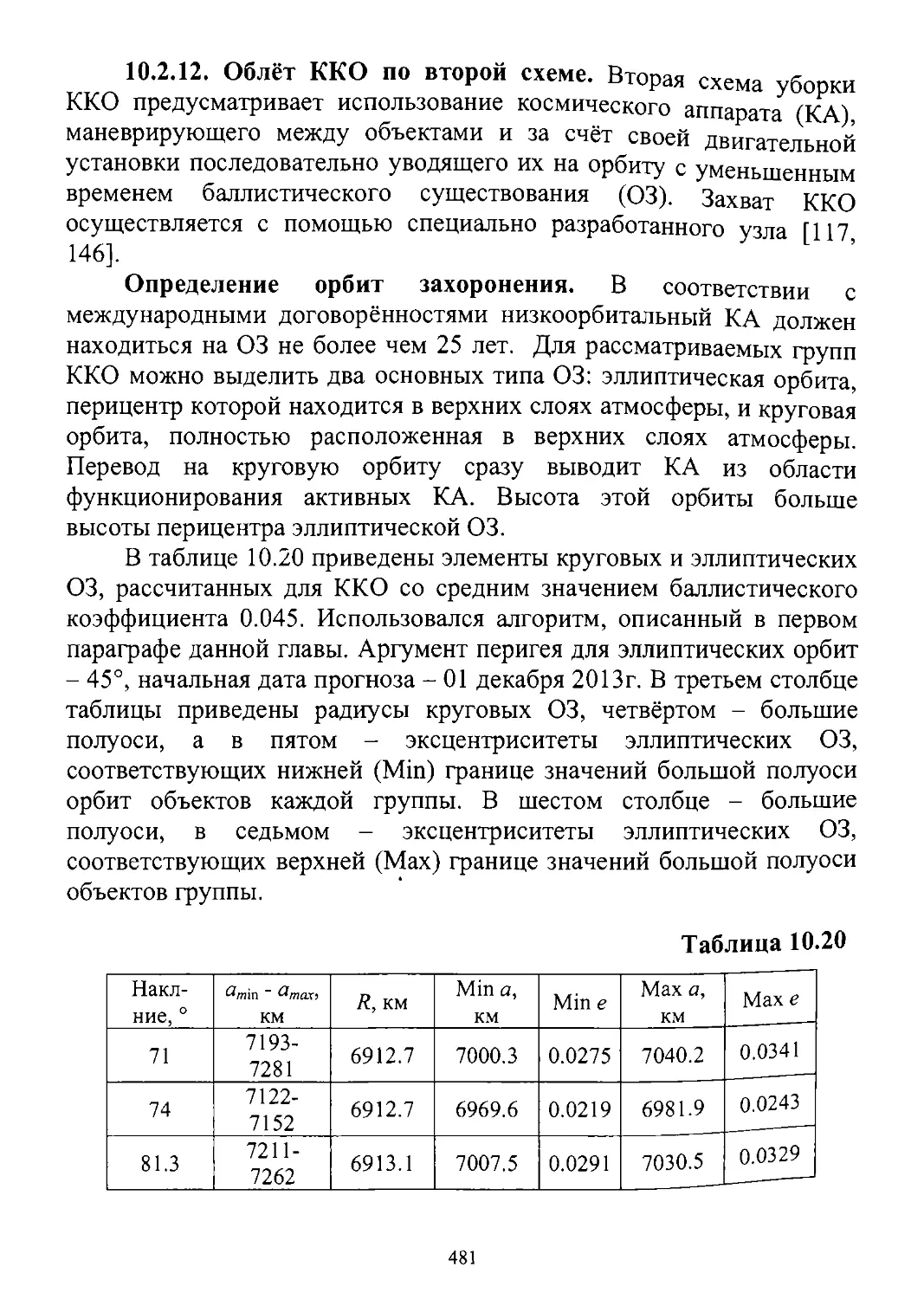
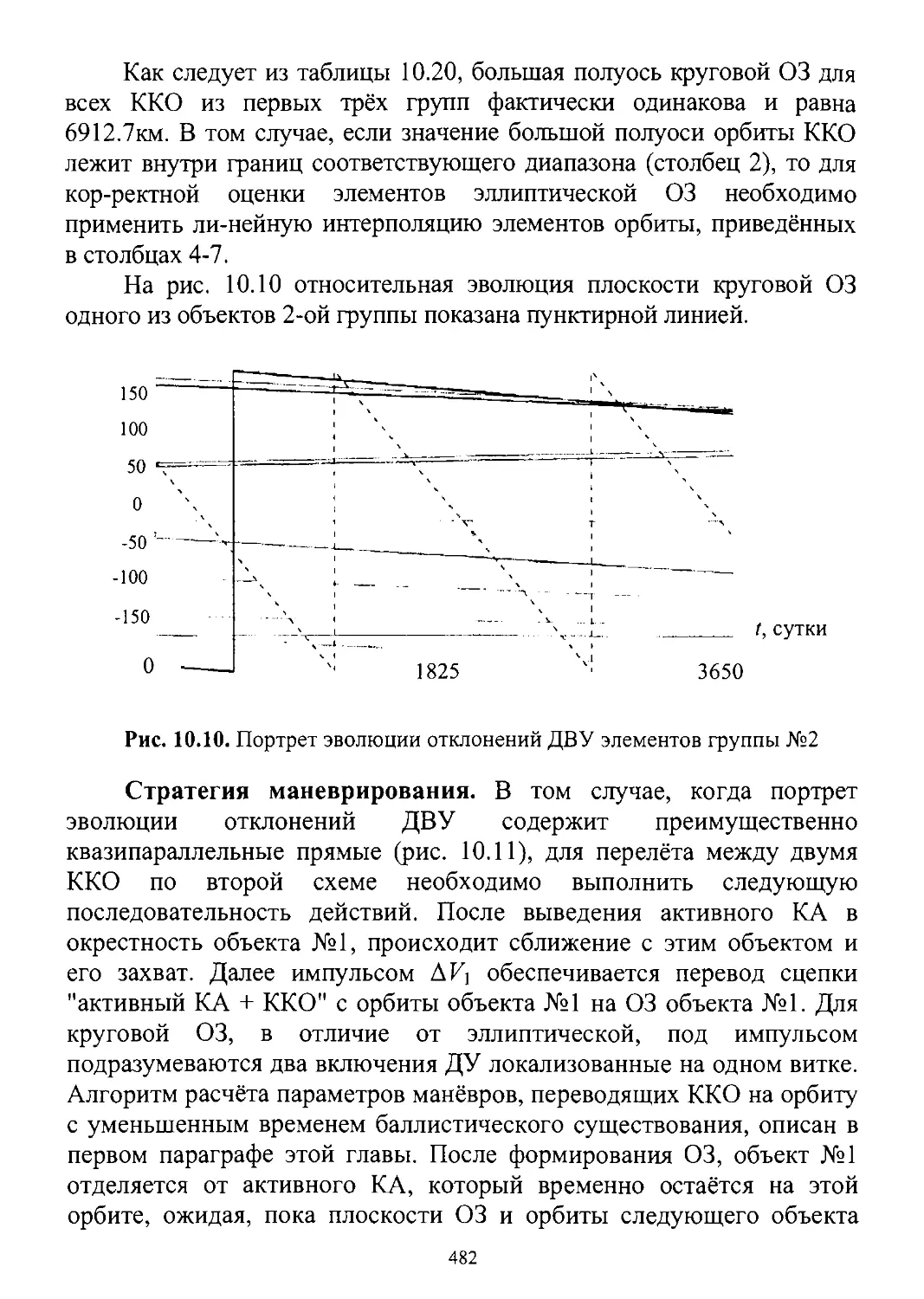
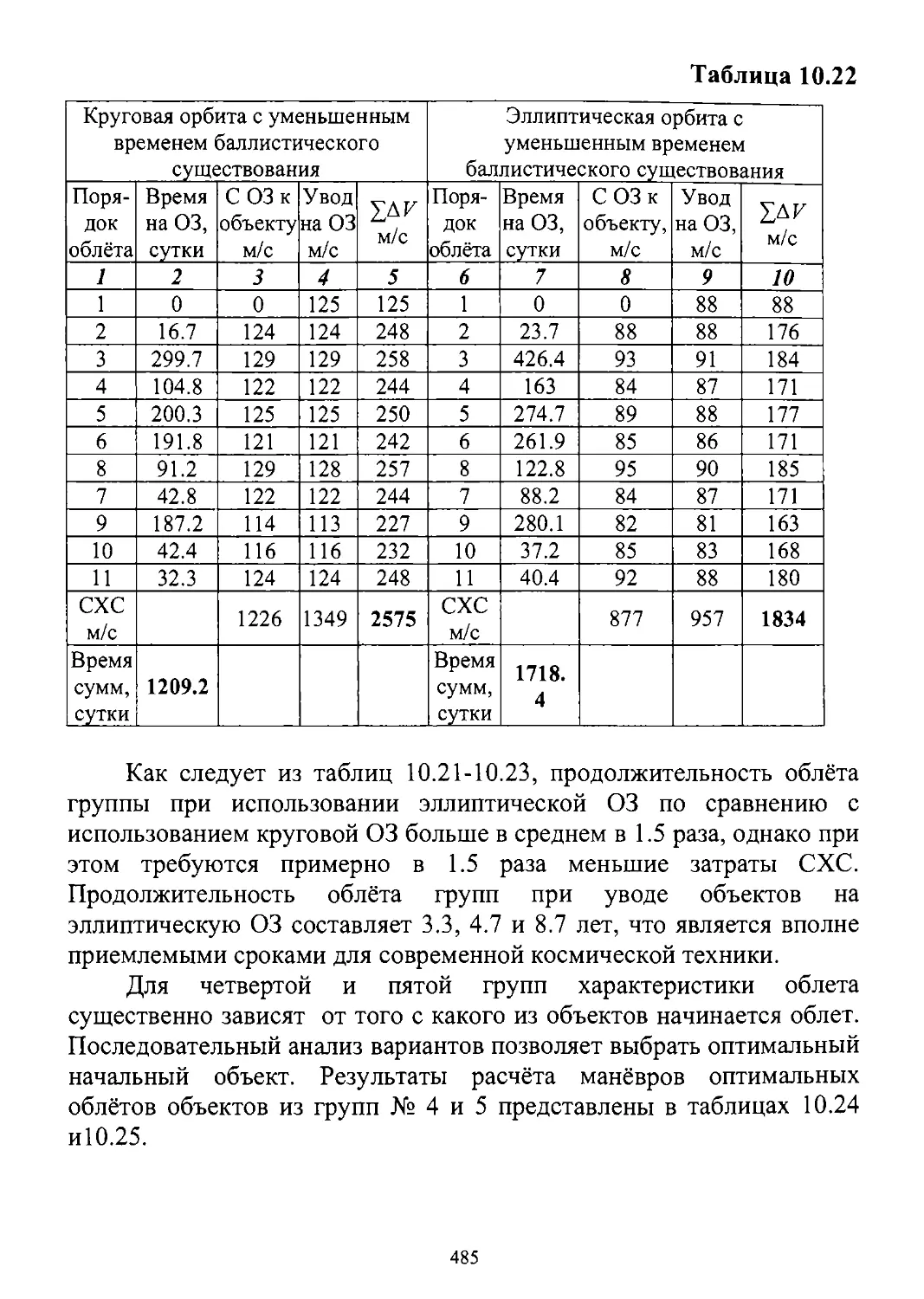
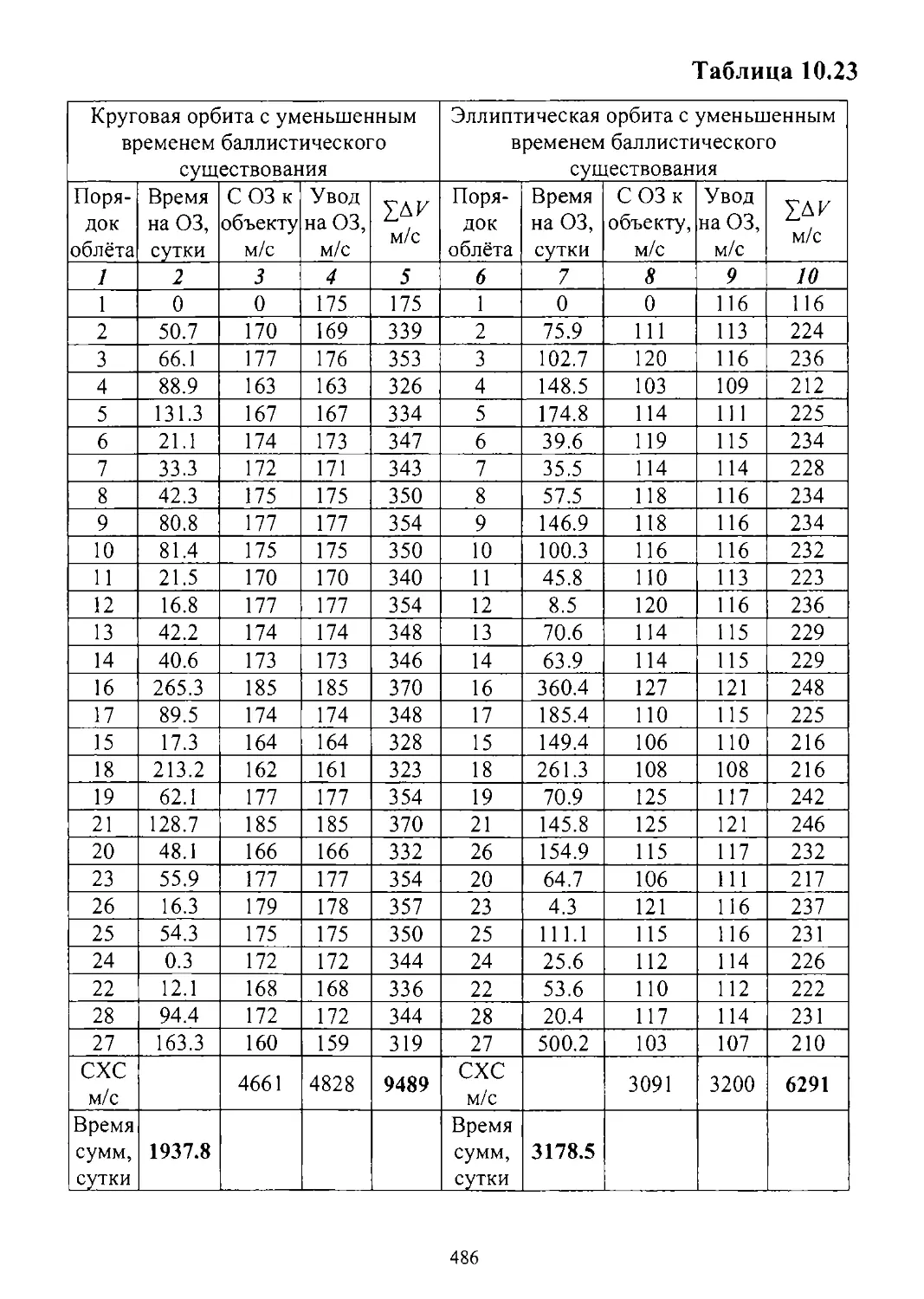
10.2. Задача возвращения космического мусора...................453
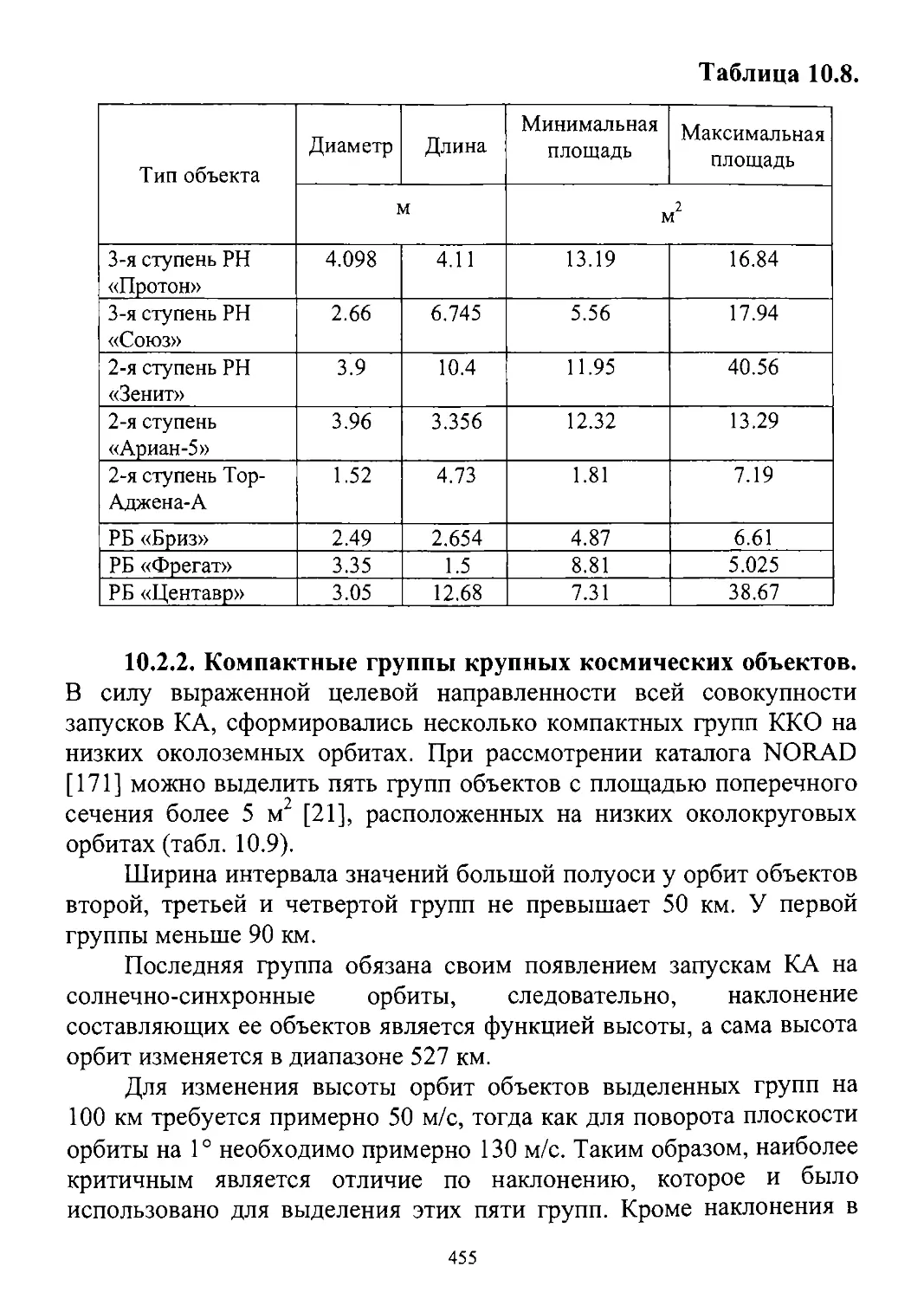
10.2.1. Геометрические характеристики крупных космических
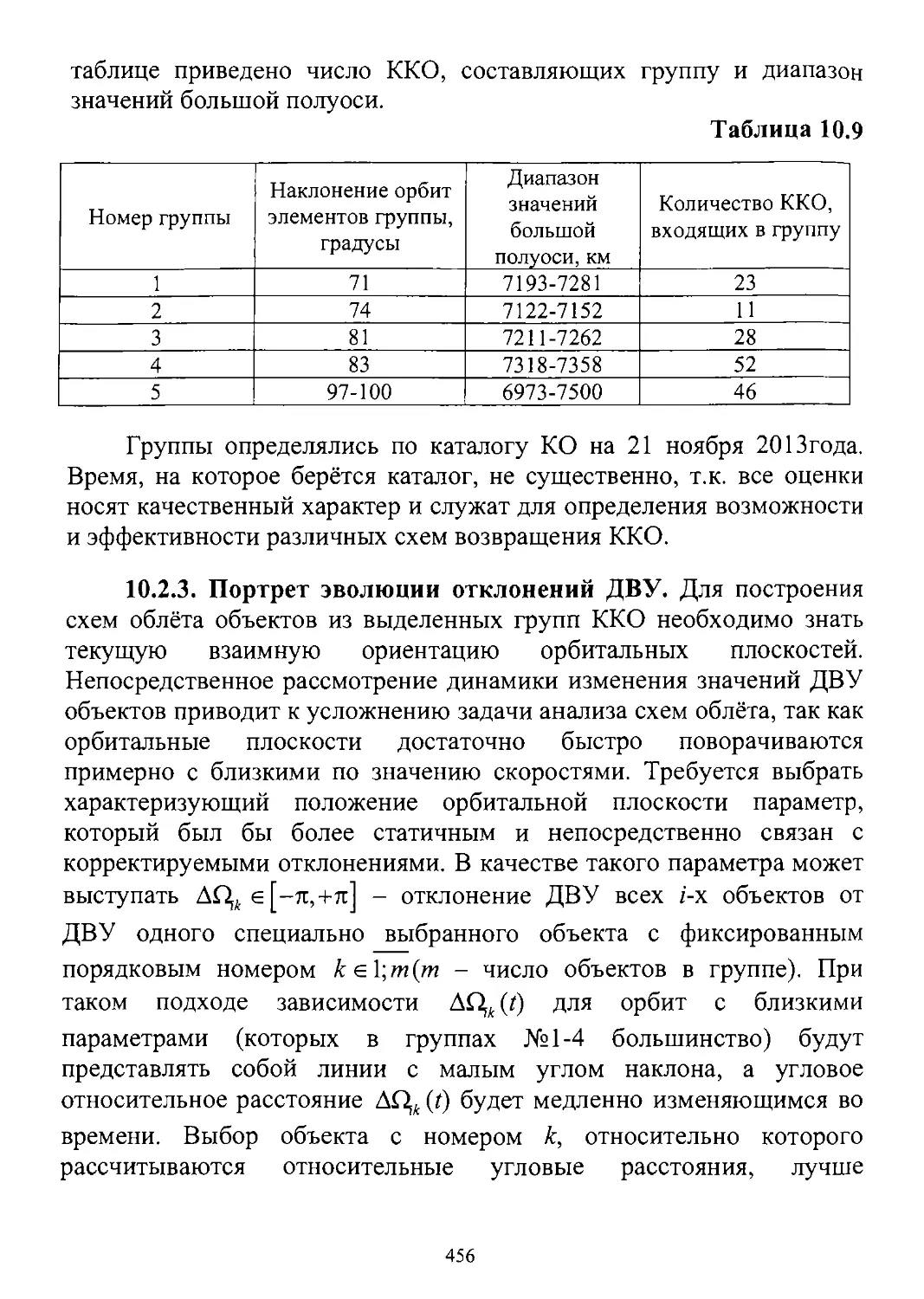
объектов. 10.2.2. Компактные группы крупных космических
объектов. 10.2.3. Портрет эволюции отклонений ДВУ. 10.2.4. Энер-
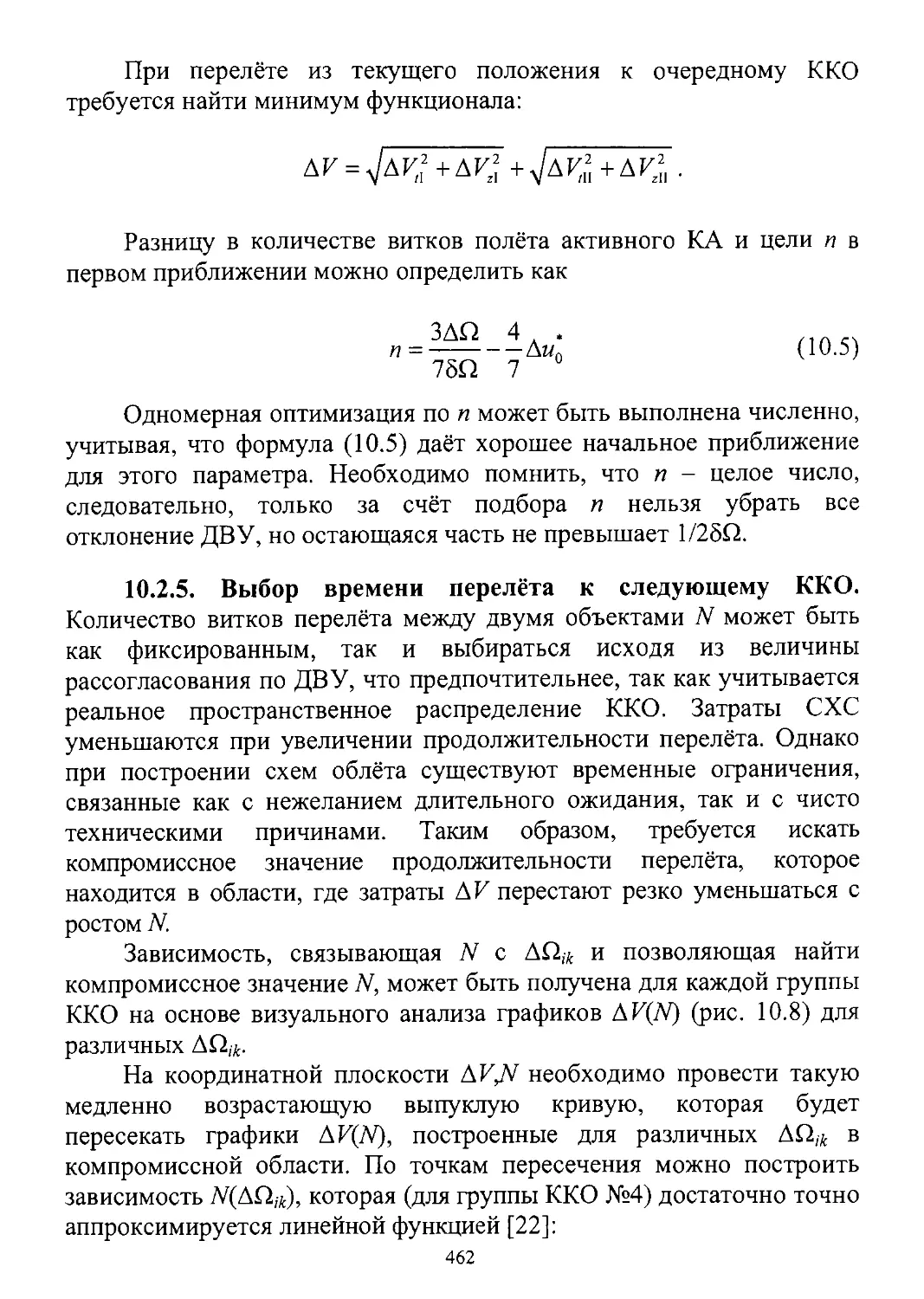
гетические аспекты задачи облета ККО. 10.2.5. Выбор времени
перелета к следующему ККО. 10.2.6. Определение последователь-
ности облета группы ККО, орбиты которых близки по большой
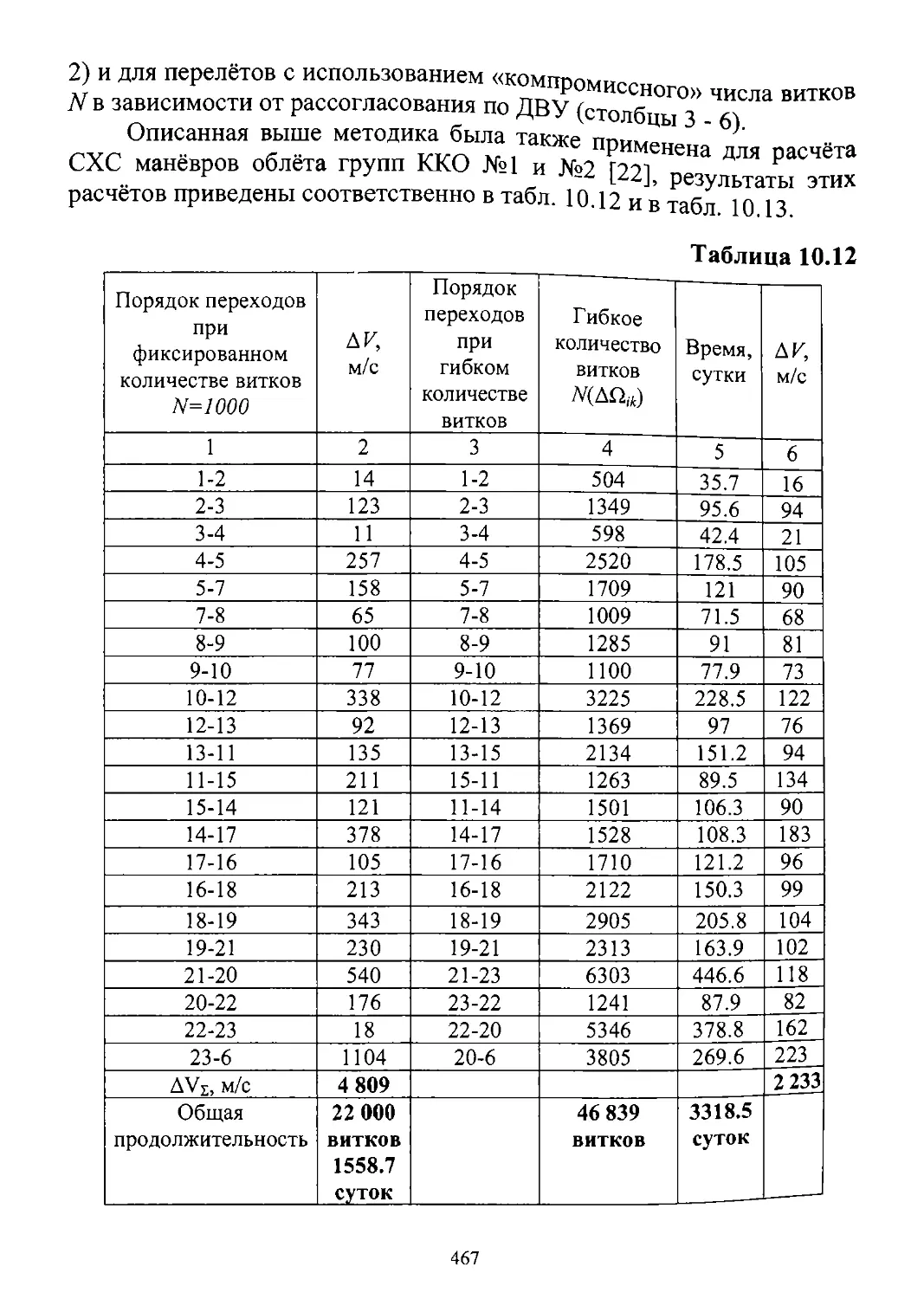
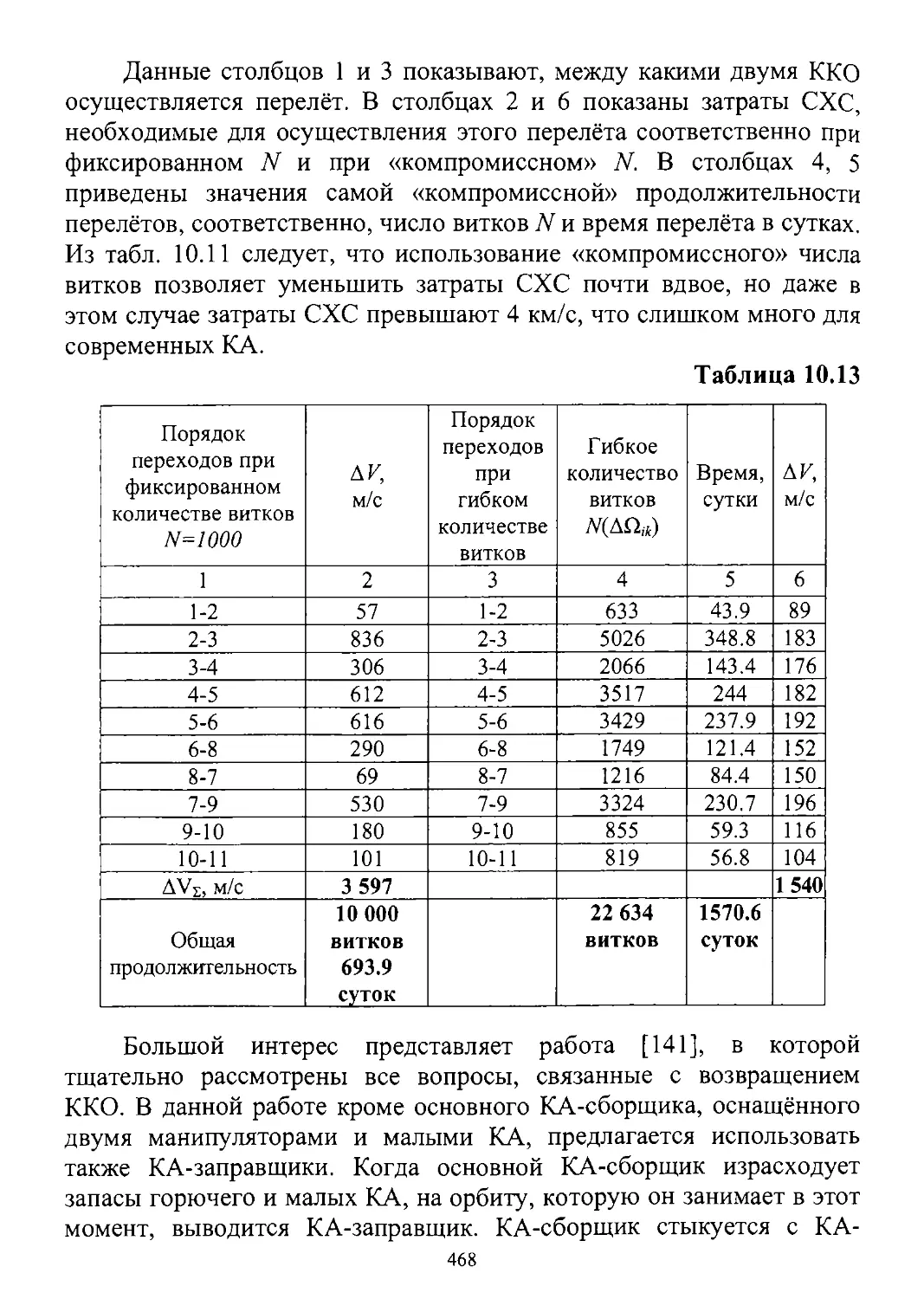
полуоси и наклонению. 10.2.7. Результаты расчетов маневров
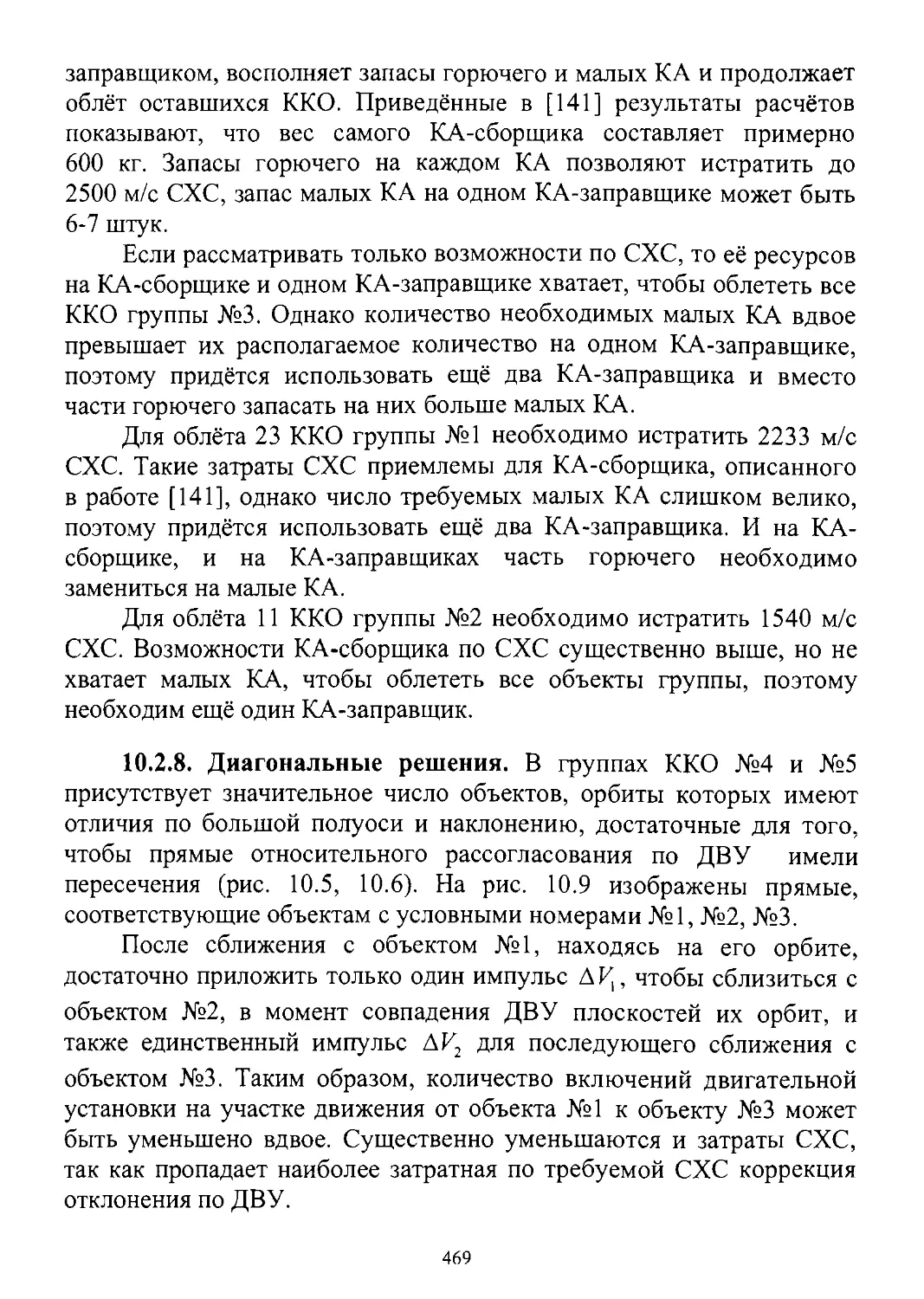
облета объектов групп №1, №2, №3. 10.2.8. Диагональные решения.
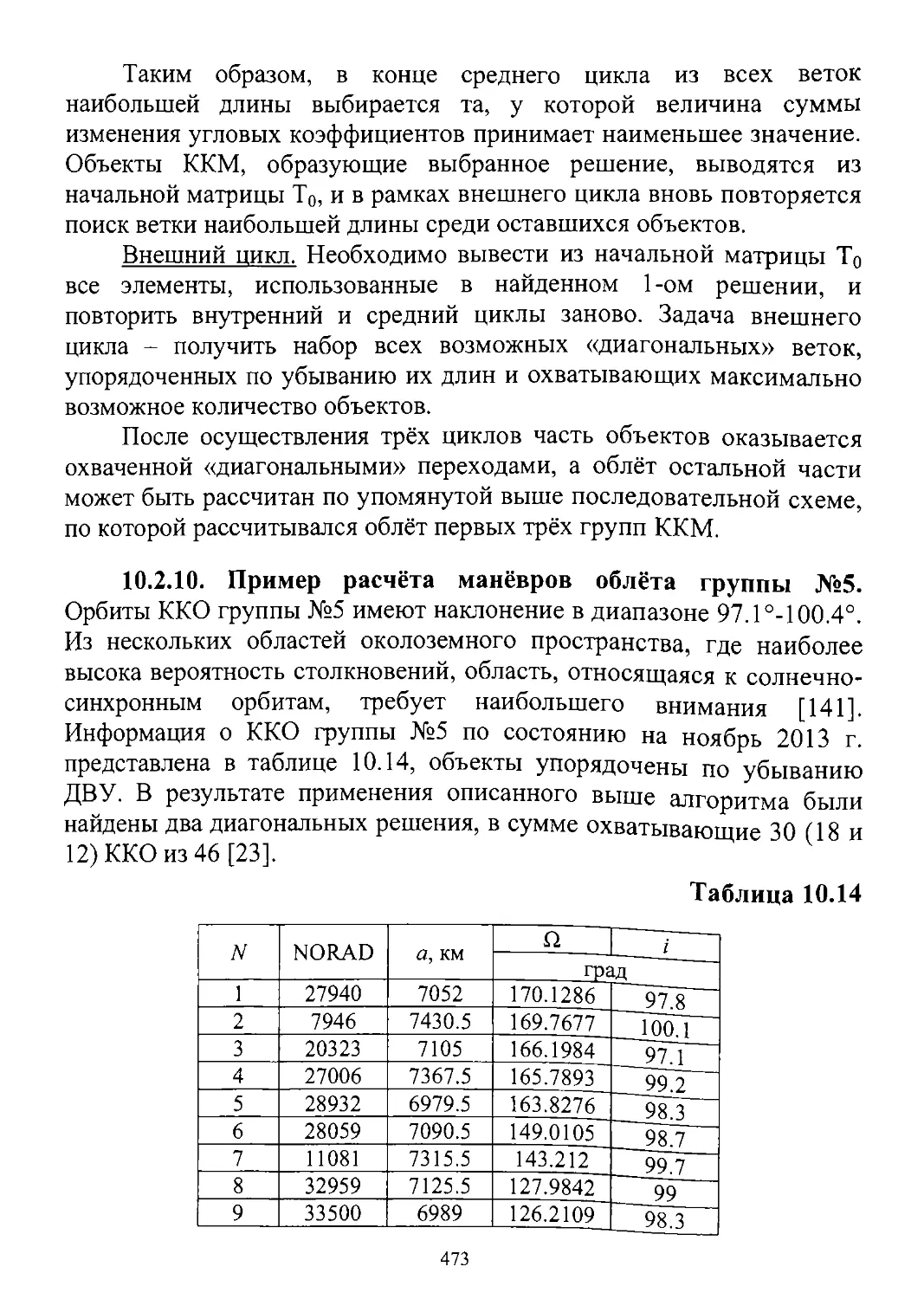
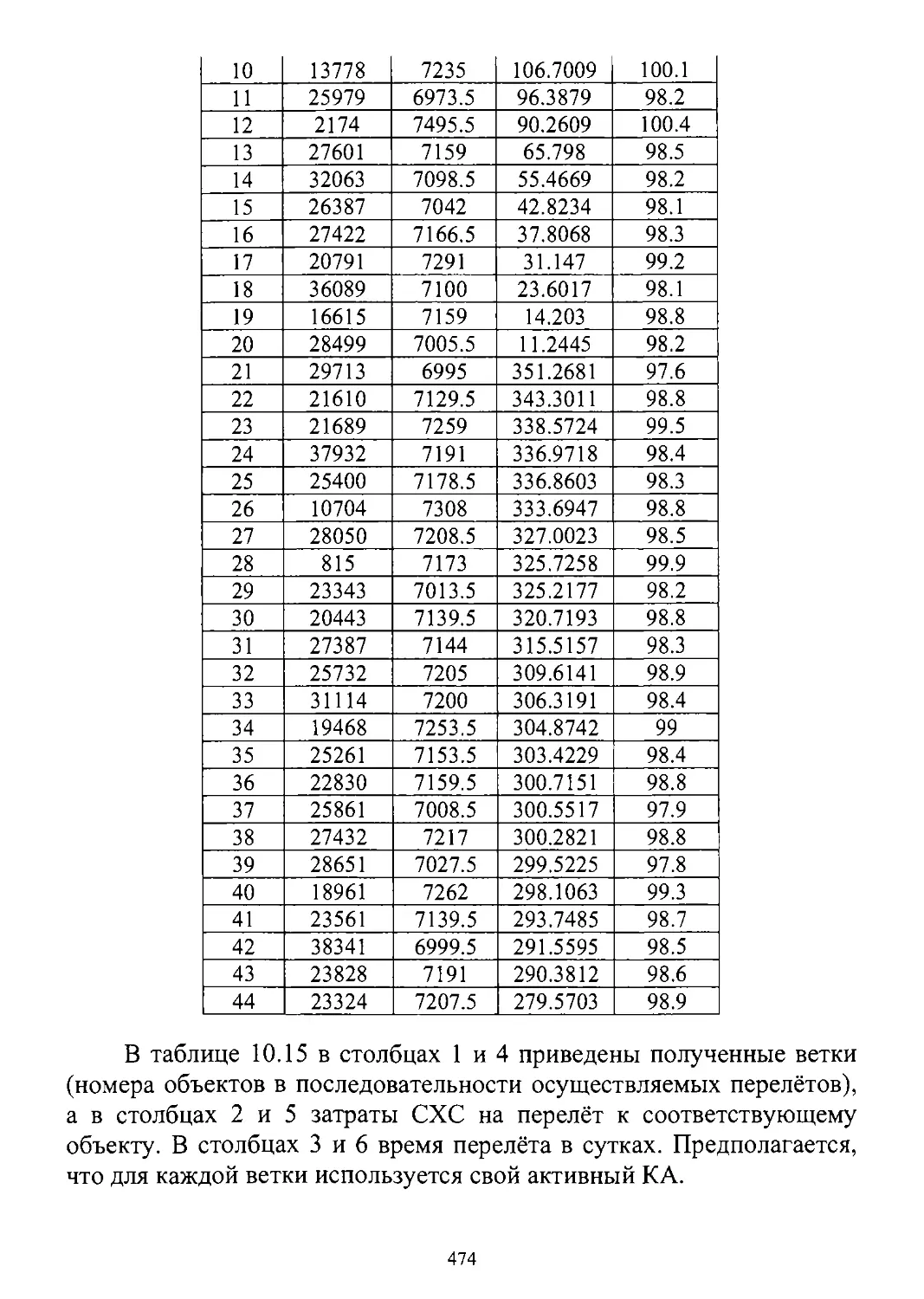
10.2.9. Поиск диагональных решений. 10.2.10. Пример расчета
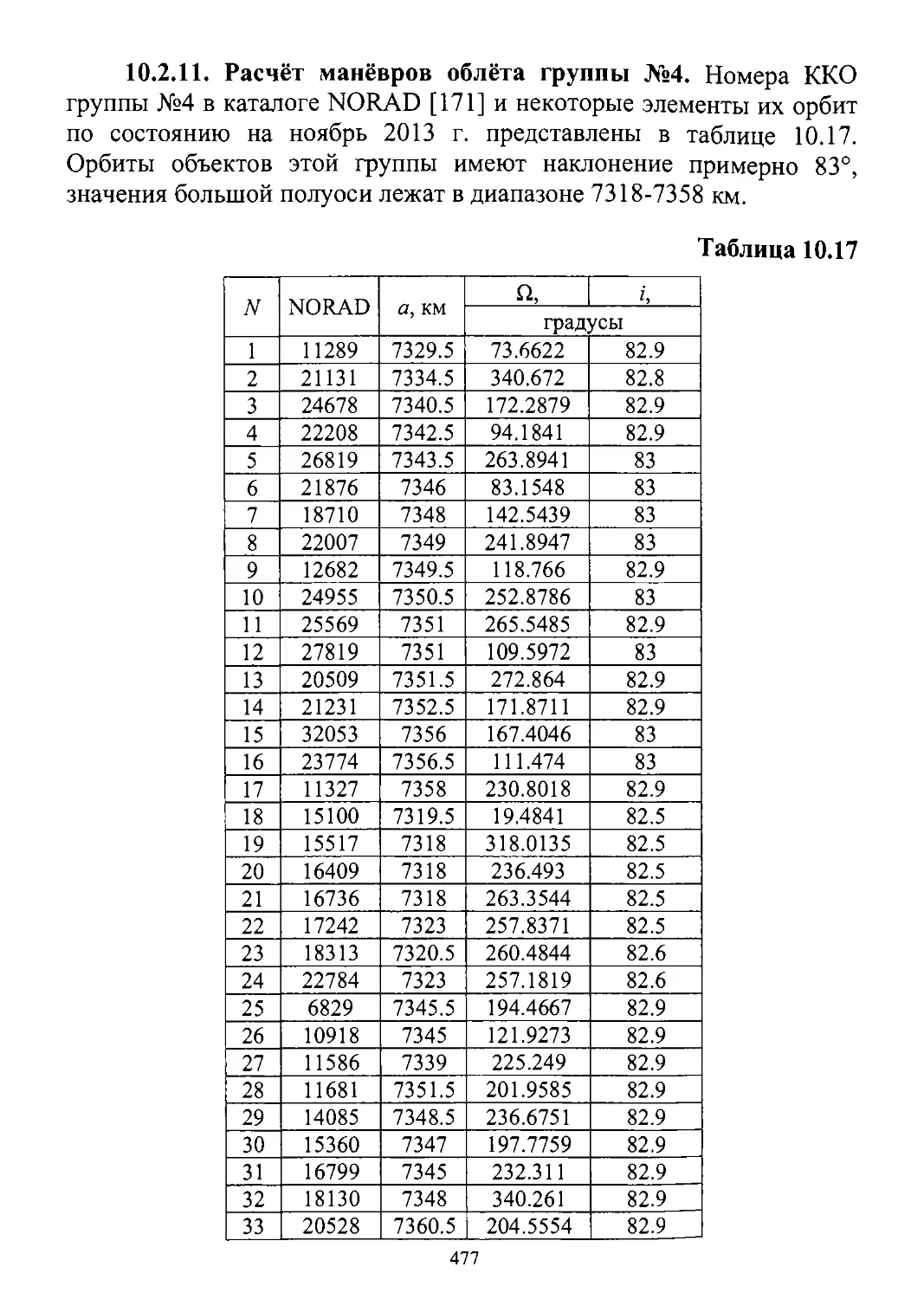
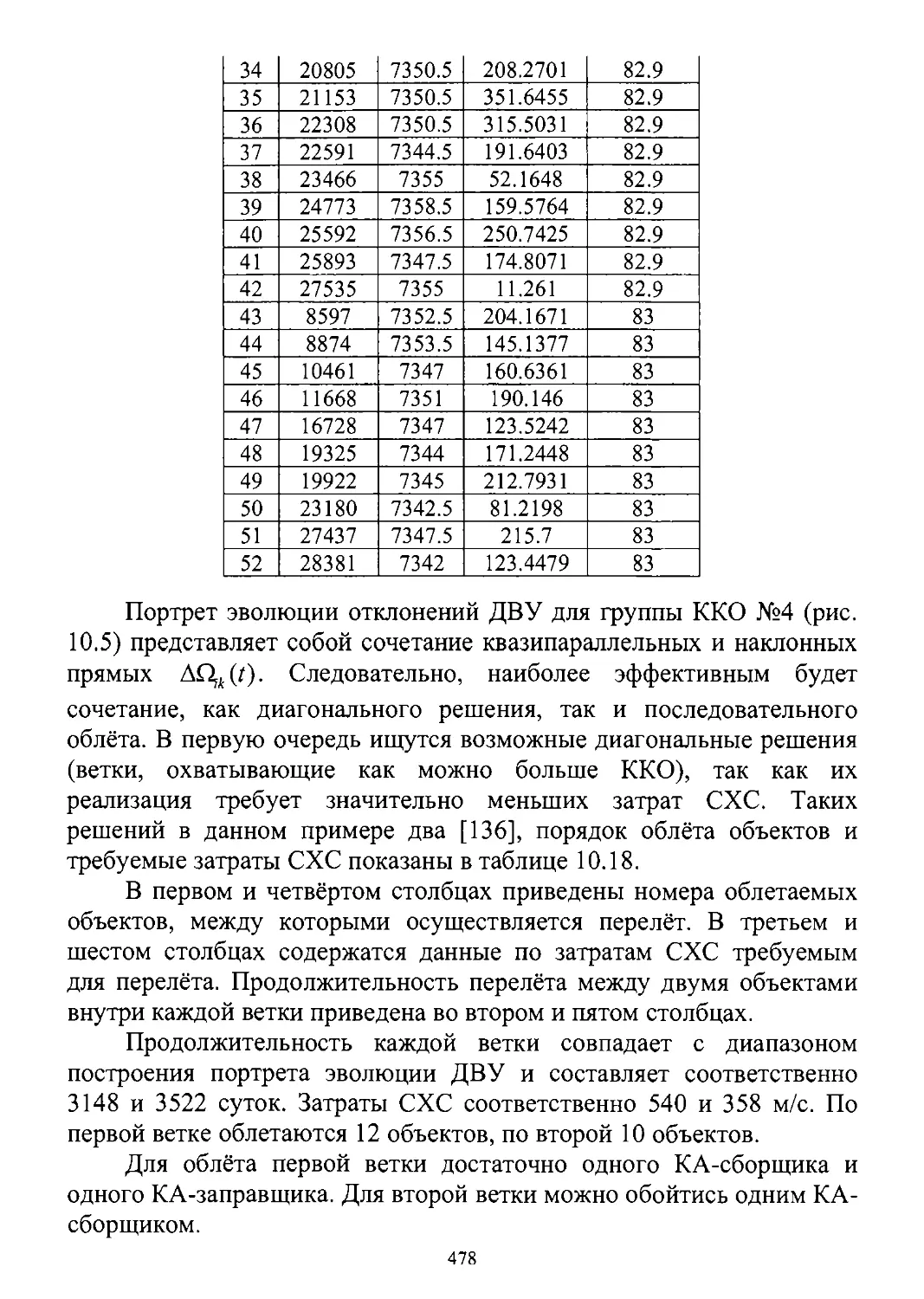
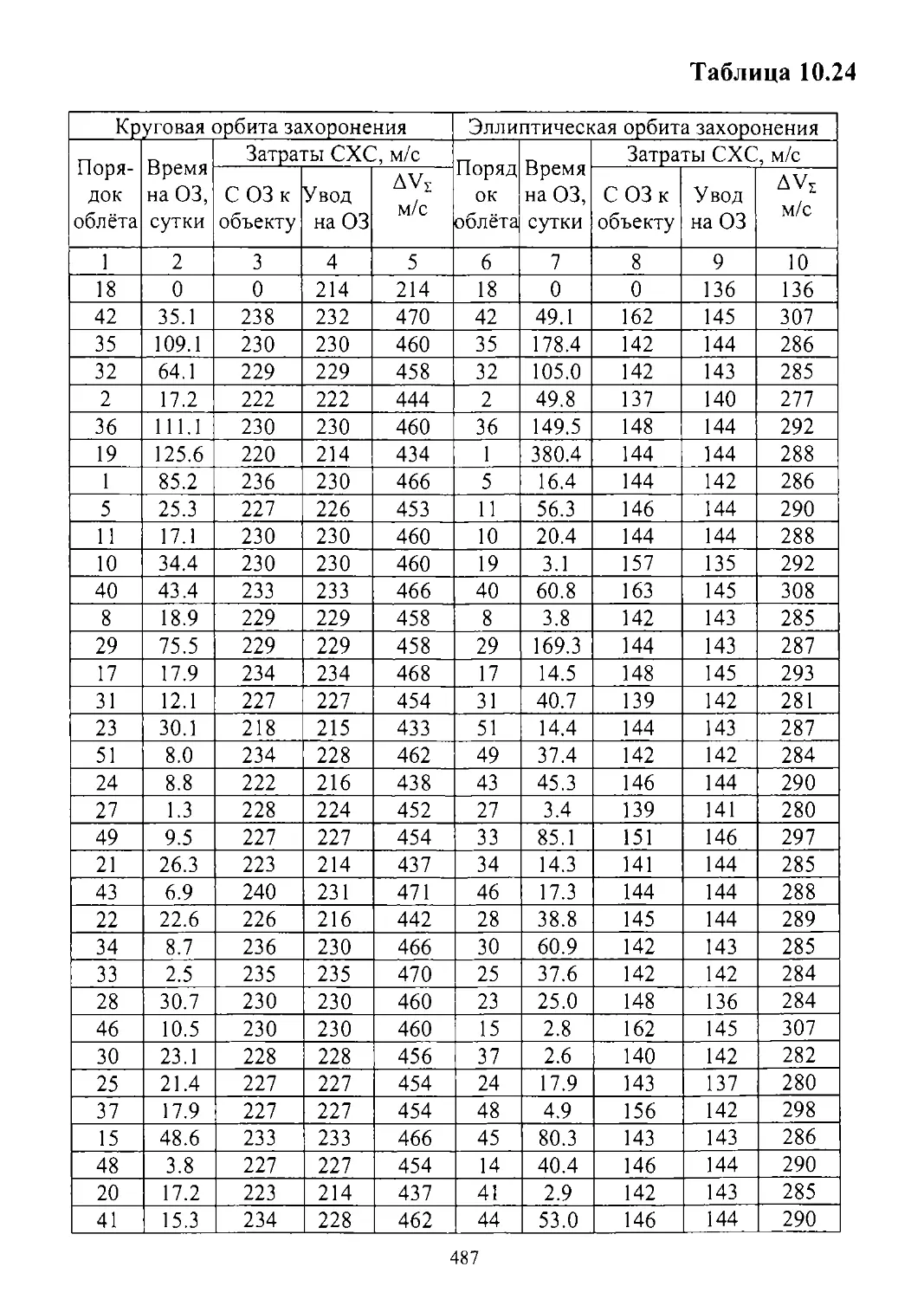
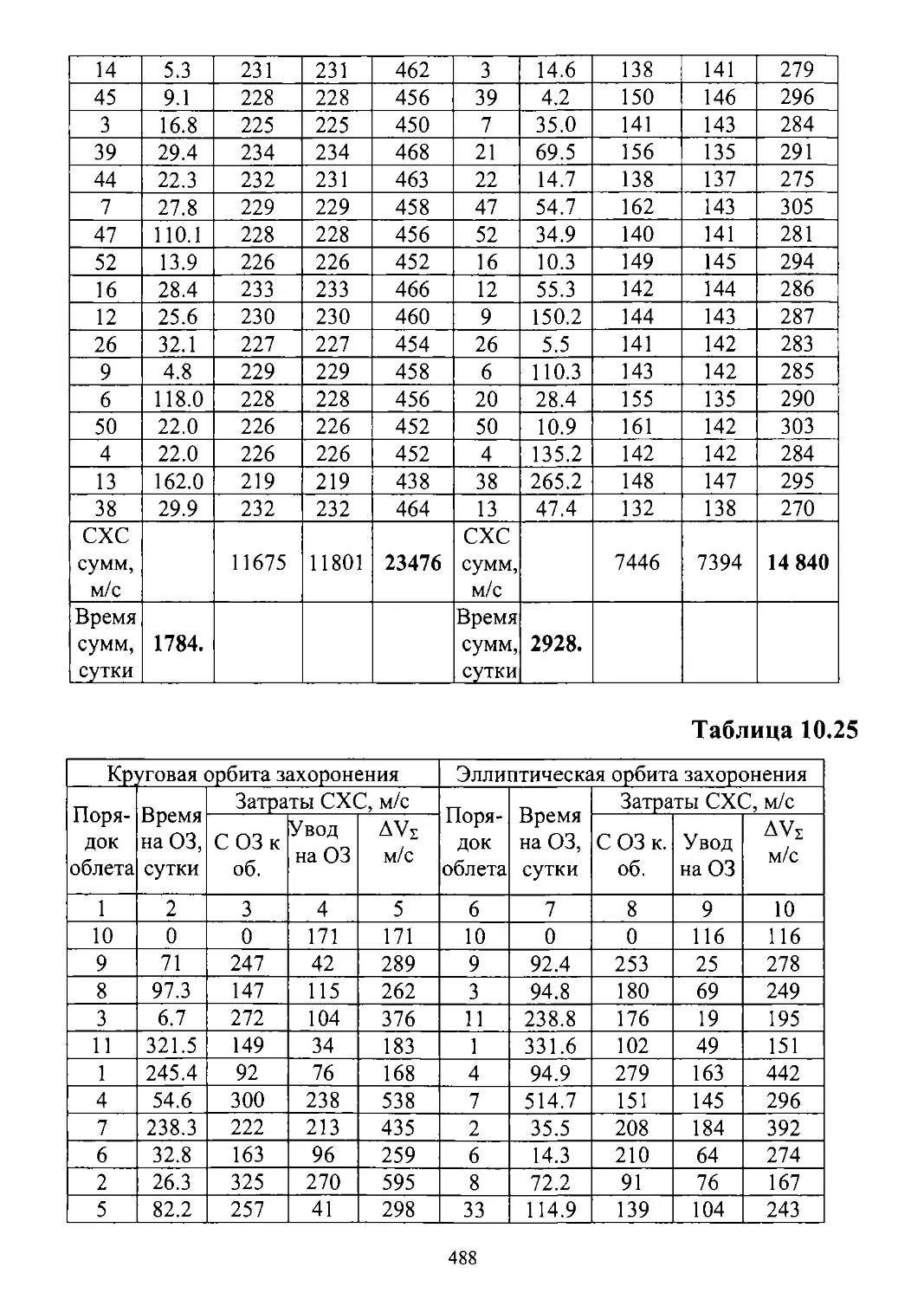
маневров облета группы №5. 10.2.11. Расчет маневров облета
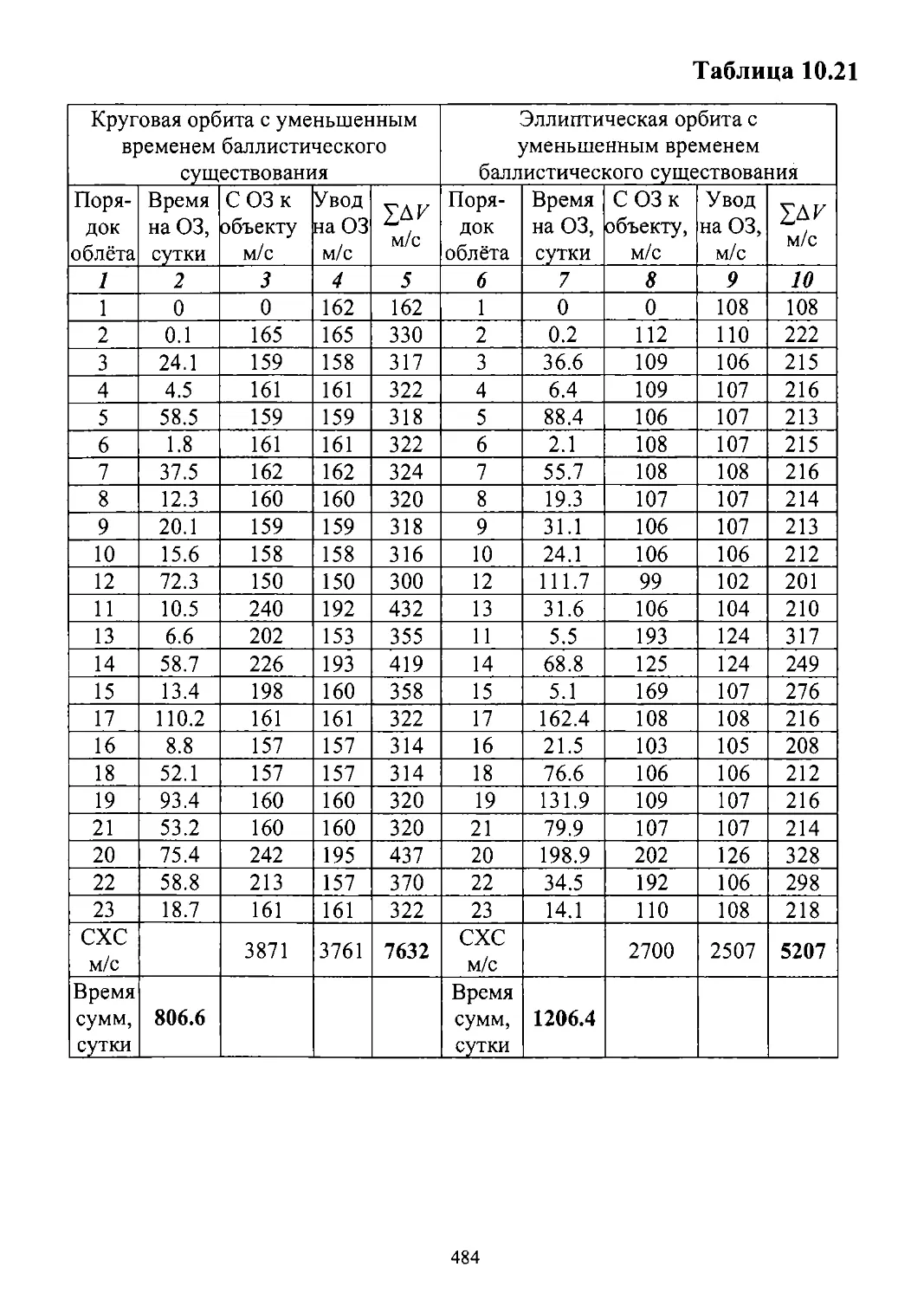
группы №4. 10.2.12. Облет ККО по второй схеме. 10.2.13. Пример
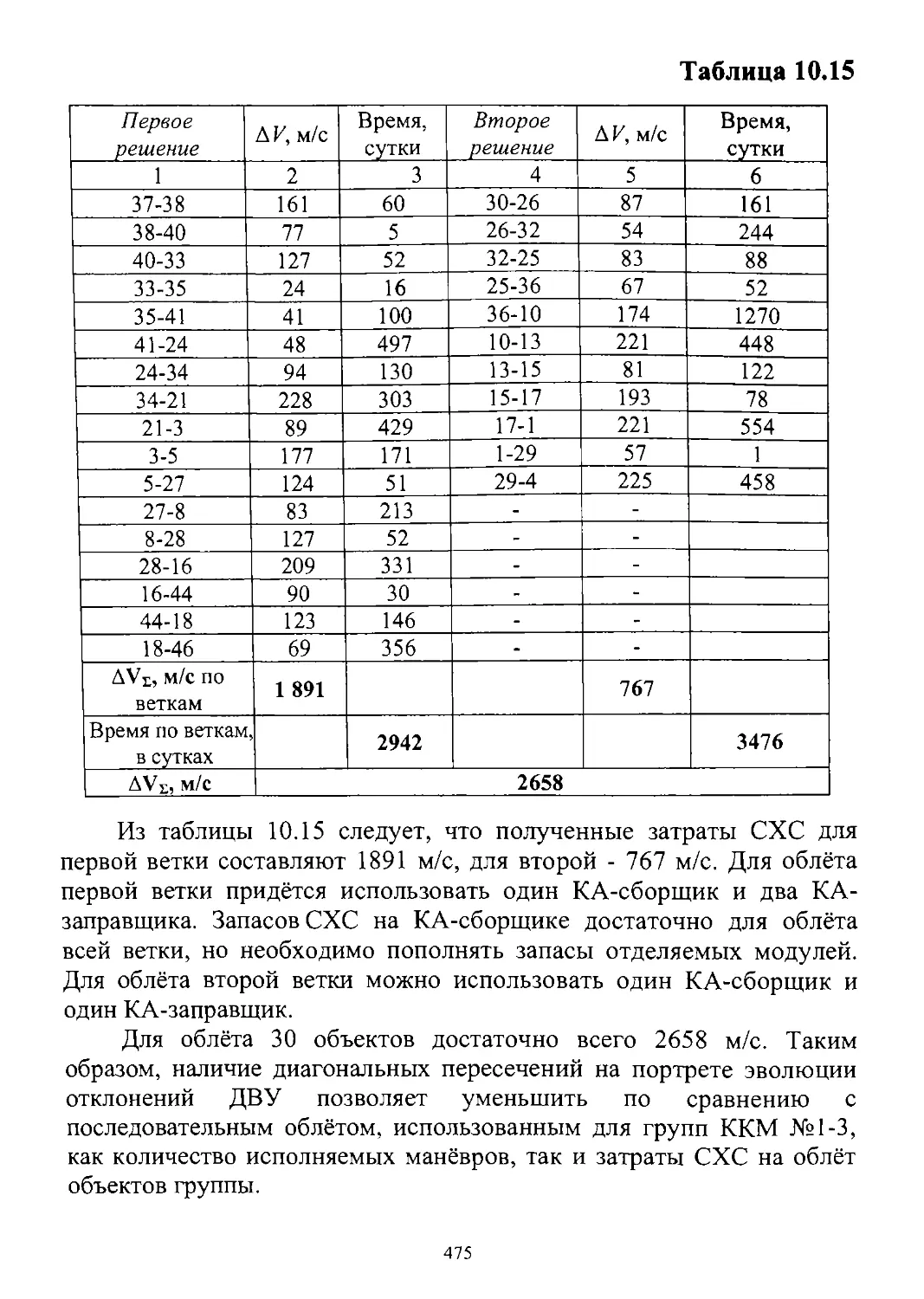
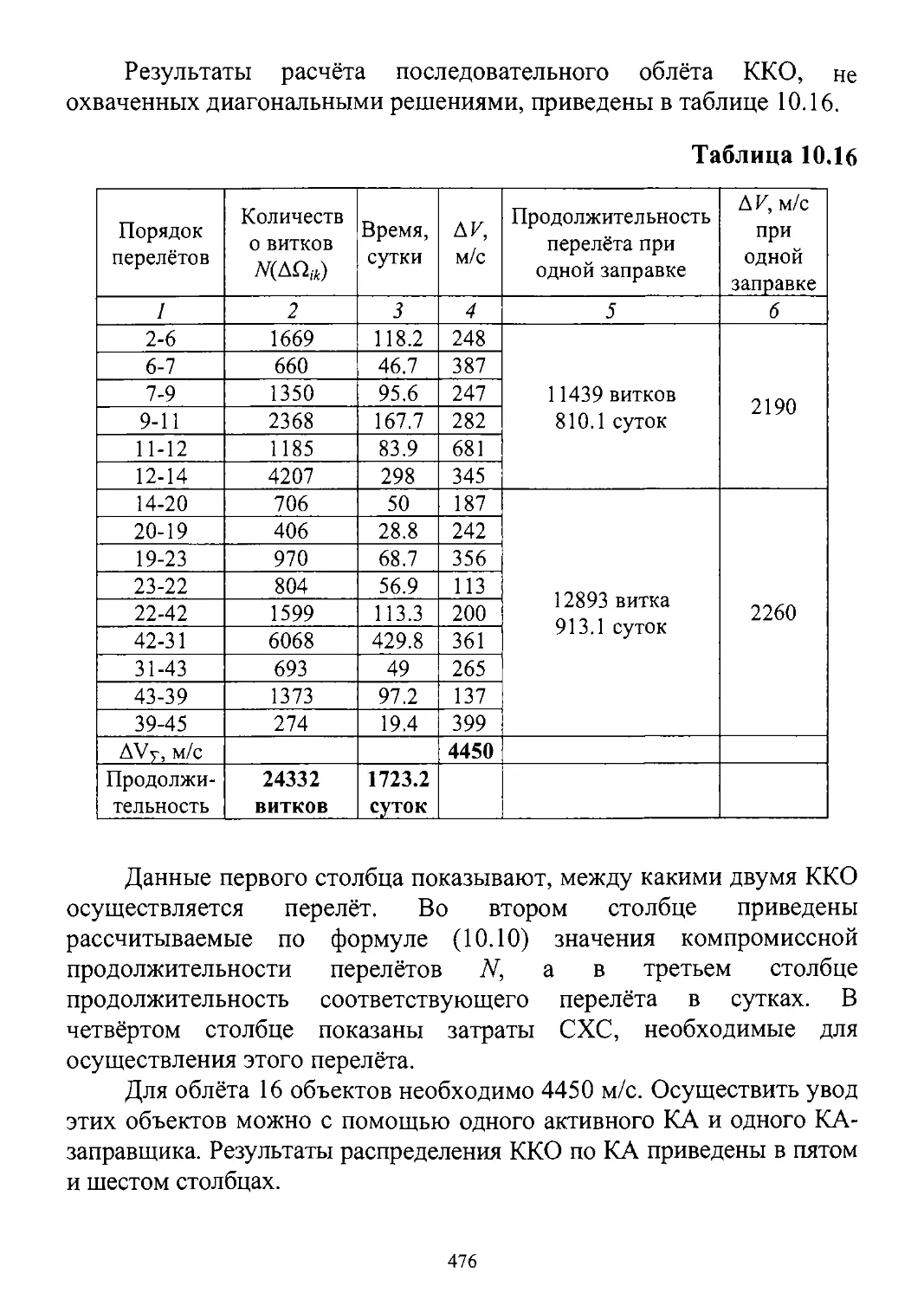
расчета маневров облета групп №1-3 по второй схеме.
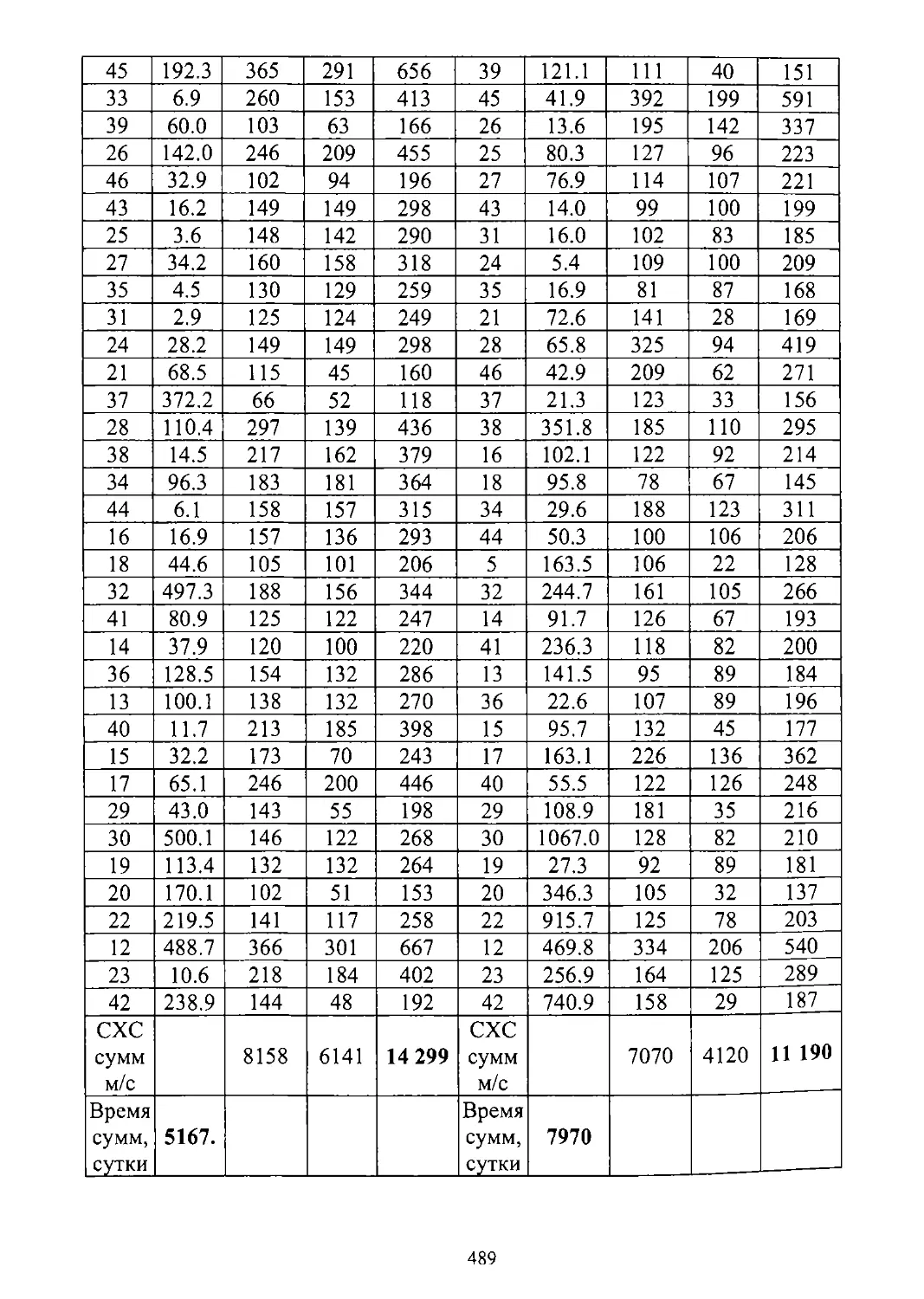
10.2.14. Сравнение с результатами облета по второй схеме, полу-
ченными другими авторами. 10.2.15. Сравнение с результатами
расчёта маневров облёта групп №1-5 по первой баллистической
схеме. 10.2.15. Выводы по стратегии облета всех пяти групп по
двум схемам.
Литература................................................... . 493
8
ОТ АВТОРА
В этой книге автор делится своим более чем сорокалетним
опытом работы в области расчета маневров космических аппаратов
(КА) на околокруговых орбитах.
Во второй половине семидесятых годов перед баллистическим
центром ИПМ им. М. В. Келдыша АН СССР была поставлена задача
подготовиться к баллистико-навигационному обеспечению полетов
пилотируемых и грузовых КА. Наибольшая сложность возникла при
подготовке к решению многоимпульсной задачи встречи этих КА с
орбитальной станцией.
Автором изучил существовавшую на тот момент литературу по
задаче встречи, с целью найти описание аналитического или
численно-аналитического решения данной задачи, но ответа на
интересовавший его вопрос в этих работах не было. Для решения
задачи, как правило, использовались громоздкие численные методы.
Аналитические и численно-аналитические решения, описанные
в работах Ж.П. Марека (Marek J.-P.) и Ж.Е. Прассинга (Prussing J.E.),
относились только к невырожденной встрече (у Прассинга
компланарная встреча и круговые орбиты), кроме того, не учитывали
ограничения на моменты приложения импульсов скорости и их
ориентацию, имевшиеся в реальной задаче.
Первоначально в ИПМ им. М.В. Келдыша АН СССР был также
разработан численный метод, который позволял решить
поставленную задачу, но не давал объяснение, почему было найдено
именно такое решение, что осложняло его использование в
нештатных ситуациях. Численно-аналитический метод решения
задачи удалось разработать в первой половине восьмидесятых годов.
Он предназначался для решения вырожденных компланарной и
некомпланарной задач встречи, как в классической постановке, так и
при наличии различных ограничений. Геометрическая интерпретация
импульсов скорости в пространстве составляющих вектора
эксцентриситета дала возможность объяснить характер найденного
решения. Графический диалог с задачей позволял быстро выбрать
новую схему маневрирования при нештатных ситуациях. Простота и
надежность данного метода позволяла реализовать его на борту КА.
Позднее были найдены аналитические решения задачи компланарной
и некомпланарной невырожденной встречи. В конце девяностых
годов было найдено решение задачи встречи при значительном
9
начальном отклонении долготы восходящего узла, в которой
требуется очень большая продолжительность перелета. Таким
образом, была полностью сформирована теория оптимальной
многоимпульсной встречи.
Следующим естественным шагом развития теории
маневрирования в окрестности круговой орбиты стало создание в
первом десятилетие нового века методов решения компланарных и
некомпланарных задач перехода и встречи, когда маневры
исполняются с помощью двигателей малой тяги. Также были
определены типы оптимальных решений и области их
существования. Параметры этих решений определялись с помощью
максимально простых аналитических и численно-аналитических
алгоритмов.
Разработанная практически полная теория оптимального
маневрирования в окрестности круговой орбиты позволила автору
найти численно-аналитические решения всех практических задач,
встретившихся за более чем сорок лет работы с реальными КА.
Время решения этих задач было значительно меньше времени
решения традиционными численными методами. Кроме того,
появилась возможность объяснить физический смысл найденного
решения. Ответ именно на этот вопрос безуспешно искал автор много
лет назад в начале работы в этой области.
Были решены задачи компланарной и некомпланарной встречи
различной продолжительности, задачи формирования и поддержания
заданной конфигурации спутниковых систем. Последнее время
основное внимание уделялось задачам маневрирования в проблеме
космического мусора.
Несмотря на то, что в книге обобщен большой опыт решения
наиболее сложных практических задач, она будет чрезвычайно
полезна специалистам только начинающим работать в области
маневрирования КА. Каждый теоретический раздел заканчивается
примером решения задач с помощью описанных алгоритмов. Как
показывает опыт автора преподавания на кафедре СМ-3 МГТУ им.
Н.Э. Баумана, это позволяет студентам глубже усвоить материал
раздела и научиться самим решать реальные, а не упрощенные
задачи.
Читателям, имеющим большой опыт решения сложных
практических задач, данная книга поможет найти новые подходы к их
решению, объяснить характер получаемых решений.
ю
ВВЕДЕНИЕ
Важное место в процессе полета большинства КА занимают
маневры - целенаправленное изменение параметров орбиты КА с
помощью двигательной установки (ДУ). Как правило, именно
проведение маневров позволяет с необходимой точностью
сформировать орбиту, обеспечивающую выполнение КА его целей.
Важная роль маневров КА, их разнообразие, наличие маневров
практически во всех миссиях КА, определяют то большое внимание,
которое уделяется вопросам маневрирования в литературе по
механике космического полета.
Ещё в вышедшем в 1969 году обзоре Гобеца и Дола (Gobetz
F.W., Doll J.R.) [50], анализировались более 300 работ, посвященных
вопросам оптимального маневрирования КА. В настоящее время
число опубликованных по этой теме работ измеряется тысячами,
изданы несколько десятков монографий, из которых можно отметить
работы В.В. Ивашкина [63], К.Б. Алексеева, Г.Г. Бебенина,
В.А. Ярошевского [1], В.А. Егорова [58], Ц.В. Соловьева,
Е.В. Тарасова [НО]. Основополагающей считается работа
Д.Ф. Лоудена (Lawden D.F.)[77].
Особое место в теории оптимального маневрирования занимают
задачи расчета параметров оптимальных маневров КА на близких
околокруговых орбитах. Во-первых, эти задачи имеют наибольший
практический интерес, т.к. именно на орбитах этого типа
функционирует значительная часть реальных КА, во-вторых, эти
задачи несколько проще задач в общей постановке и в некоторых
случаях допускают аналитическое или численно-аналитическое
решение. Естественно, что задачам этого типа посвящено множество
работ, ссылки на основные из них будут даны в соответствующих
главах. Особого внимания заслуживают монографии Ж.-П. Марека
(Marek J.-P.) [170], В.А. Ильина и Г.Е. Кузмака [67], М.Ф. Решетнева,
А.А. Лебедева, В.А. Бартенева, М.Н. Красилыцикова,
В.А. Малышева, В.В. Малышева [105].
В работе [67] на основе вариационного подхода получены
необходимые условия строгой локальной оптимальности импульсных
перелетов в произвольном и ньютоновском гравитационных полях.
н
Дано решение задачи перехода (перелёта со свободным временем)
между околокруговыми орбитами в линеаризованной постановке,
рассмотрена задача перехвата. Краткое и в то же время достаточно
полное решение задачи перехода между околокруговыми
некомпланарными орбитами приводится в работе Т. Эдельбаума
(Edelbaum T.N.) [145]. В книге [105] рассмотрены вопросы
определения орбит и маневрирования с помощью двигателей
большой и малой тяги (в основном задачи перехода). В монографии
Ж.-П. Марека (Marek J.-P.) [170] основное внимание уделено задаче
невырожденной встречи КА на околокруговых орбитах.
Фундаментальный современный обзор работ по задаче встречи
приведен в [185].
Изучение задачи встречи началось с середины 60-х годов. До
сих пор часто цитируемыми являются работы Ж.Е. Прассинга
(Prussing J.E.) [98, 99], рассмотревшего встречу двух КА,
находящихся на круговых компланарных орбитах, с
продолжительностью встречи от 1 до 3-х витков. В работе Ж,-
П.Марека [170] проведено исследование классической задачи
некомпланарной встречи средней продолжительности на
околокруговых орбитах. Показано, какие области элементов орбит
могут быть достигнуты при использовании различных типов
оптимальных невырожденных решений (решение обратной задачи).
Одной из причин, помешавшей широкому использованию
изложенных в работе идей, является определённая сложность
представления материала. Алгоритм определения параметров
маневров встречи, соответствующих невырожденному годографу
базис-вектора был приведен в [154].
В 60-х годах были осуществлены первые стыковки КА в
космосе. Оказалось, что при решении практических задач часто
необходимо учитывать различные дополнительные ограничения: на
моменты приложения импульсов, их ориентацию и величину, на
параметры переходной орбиты и т.д. Задача стала намного сложнее
классической задачи встречи, рассмотренной в первых теоретических
работах. Непосредственно использовать описанные в этих работах
решения оказалось невозможно. Потребовалось разработать новые
эффективные, в первую очередь численные методы для решения
практических задач.
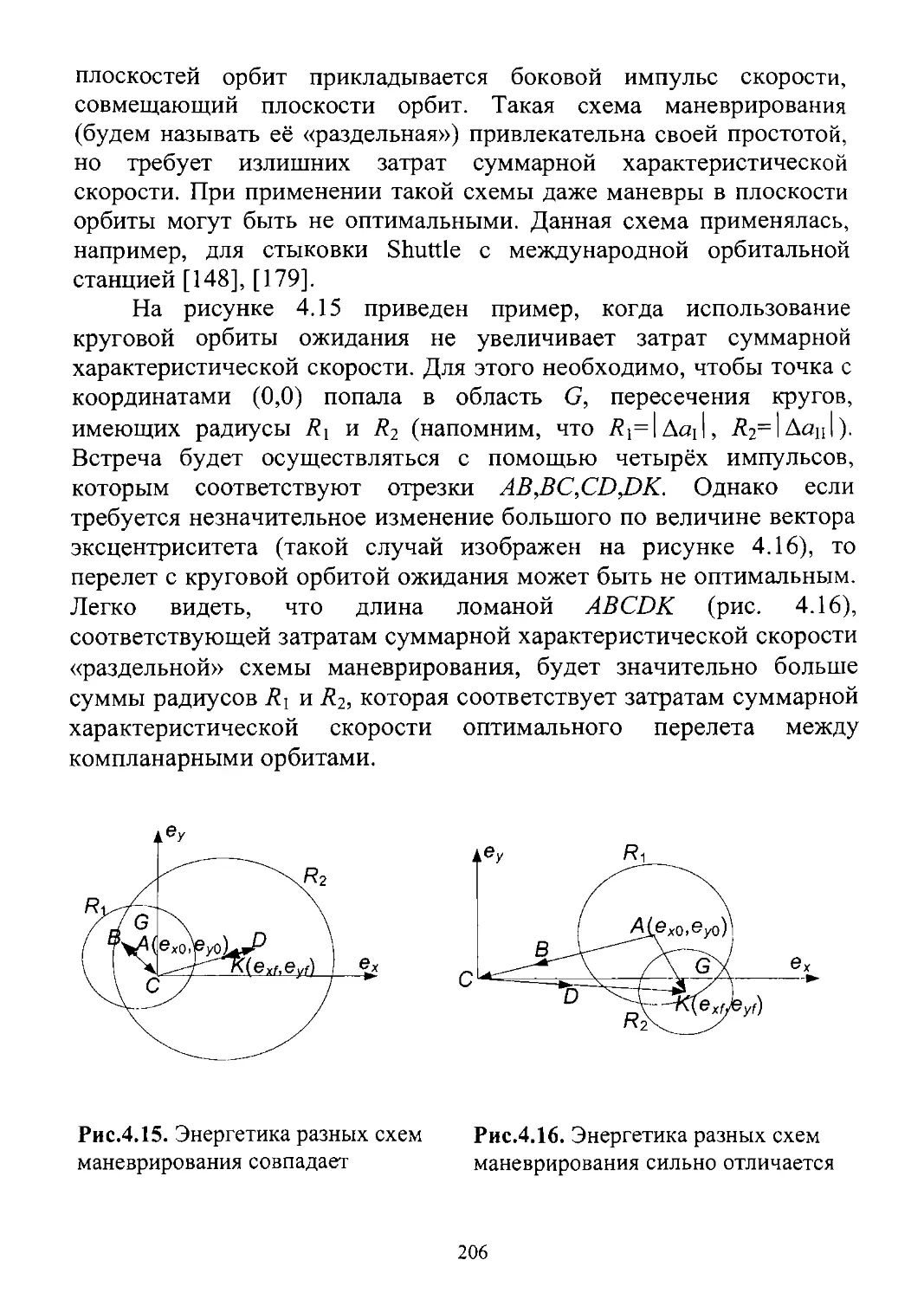
В настоящее время широкое распространение получили три
основных подхода к решению сложных многоимпульсных задач
12
маневрирования КА. В первом случае задача разбивается на
несколько более простых задач. Например, отдельно решаются задача
маневрирования в плоскости орбиты и задача поворота плоскости
орбиты. Поворот плоскости орбиты в данной схеме осуществляется
одним импульсом скорости, прикладываемым на линии пересечения
плоскостей орбит. Такая схема маневрирования использовалась,
например, для встречи Shuttle с международной орбитальной
станцией [148], [179]. Аналогичный подход широко используется для
управления движением геостационарных спутников [41], спутников,
входящих в спутниковые системы [107], [78], и т.д. Достоинством
такой схемы является её простота и надежность, ясность физического
смысла каждого из маневров, использование простых систем
ориентации КА. Недостатком - излишние затраты суммарной
характеристической скорости на маневрирование.
Во втором случае используются численные методы,
позволяющие находить оптимальное решение самых сложных
многоимпульсных задач, учитывать различные ограничения.
Численные методы в течение нескольких десятков лет с успехом
применяются для расчета маневров сближения КА «Союз»,
«Прогресс» с долговременными орбитальными станциями [4], [89],
[7]. Большую роль в развитии этих методов сыграла работа
В.П. Гаврилова и Е.В. Обухова [48]. Численные методы дают
возможность находить решения с минимальными затратами
суммарной характеристической скорости, что иногда имеет
решающее значение для успеха выполнения миссии. Например,
орбитальный модуль «Квант» состыковался с орбитальной станцией
.«Мир» с третьей попытки на последних запасах горючего. Если хотя
бы на одной из попыток использовалась не оптимальная схема
маневрирования, горючего на решающее сближение не хватило бы.
Наиболее часто для расчётов параметров маневров используется
симплекс-метод [75], [76], [48], [47], [69], [35]. Данный метод был
впервые использован для этих целей М.Л.Лидовым.
Недостатком всех численных методов является отсутствие
информации, почему получили решение именно такого вида,
неопределённость в том, как будет меняться решение при изменении
начальных условий. Особенно остро это чувствуется при
возникновении нештатных ситуаций во время полёта, когда надо
быстро выбрать новую схему маневрирования, учитывающую
дополнительные ограничения. С похожими проблемами сталкиваются
13
на стадии проектирования, когда выбирается будущая схема
маневрирования. Непосредственно определение параметров маневров,
как правило, является более простой задачей, чем выбор схемы
маневрирования, т.к. при выборе схемы вначале надо определить,
сколько импульсов скорости необходимо использовать для получения
оптимального решения, выбрать интервалы маневрирования и
продолжительность встречи, и только после этого приступить к
расчету параметров маневров. К недостаткам численных методов
также относится их громоздкость, что затрудняет использование
численных методов в бортовых алгоритмах. Кроме того, численные
методы, как правило, требуют для решения задачи значительного
машинного времени. Данный фактор является существенным
недостатком при решении сложных комбинированных задач, когда
для получения комплексного оптимального решения требуется
решение множества обычных задач встречи или перехода, а также при
работе с каталогом космического мусора, когда за короткое время
необходимо решить тысячи задач определения параметров маневров.
Третий подход к решению задачи встречи наиболее часто
встречается в работах, выполненных в университетах. Он впервые
был применен в работах Лайона и Хенделсмена (Lion Р.М.,
Handelsman М.) [73], Ежовского и Розендала (Jezewski D.J., Rozendaal
H.L.) [59]. В этом методе на первом этапе с помощью решения задачи
Ламберта определяются параметры двухимпульсного решения. Затем
анализируется поведение годографа базис-вектора, соответствующего
найденному решению, и в случае необходимости добавляются
дополнительные импульсы скорости, чтобы получить оптимальное
решение. С помощью этой техники и градиентных оптимизационных
алгоритмов были получены многоимпульсные решения в рамках
невозмущенной задачи двух тел [150], [175], [153]. Использование
задачи Ламберта - это наиболее известный и разработанный метод
решения задачи встречи [92], [44], [45], [61], [72], [129], [119].
В отдельные группы можно выделить решение многовитковой задачи
Ламберта [176], [178], [151] и универсальные алгоритмы её решения
[173], [159], [114]. Метод поиска оптимального многоимпульсного
решения задачи встречи на основе задачи Ламберта достаточно
распространен и в настоящее время [184].
Особую группу составляют задачи расчета параметров маневров
орбитальных станций, некоторые из которых, несмотря на их
специфичность, тоже можно отнести к задачам встречи.
14
Особенностью этих задач являются длительные интервалы времени
от первых до завершающих маневров и многочисленные, иногда
противоречивые ограничения на параметры промежуточной орбиты.
Основные исследования в этой области выполнены
Е.К. Мельниковым [80, 81, 70].
Цель данной книги - ознакомить читателя с численно-
аналитическими методами решения многоимпульсной задачи встречи
на близких околокруговых орбитах, сочетающими достоинства
первого и второго из перечисленных ранее подходов. Эти методы
достаточно просты, наглядны и надёжны и в то же время позволяют
находить решения очень близкие к оптимальным. Они позволяют
использовать результаты, полученные в работах Г.Е. Кузмака,
Т. Эдельбаума, Ж.-П. Марека, при решении современных
практических задач. Предлагаемые численно-аналитические методы
на несколько порядков быстрее численных, и, кроме того, дают
объяснение, почему было получено именно такое оптимальное
решение. Они позволяют определить области существования
оптимальных решений различного типа. Определить эти области с
помощью численных методов очень затруднительно, а понимание
этого вопроса очень важно в момент выбора схемы маневрирования,
когда решается, сколько импульсов скорости необходимо
использовать и на каких интервалах маневрирования их можно
исполнять. Найденные решения имеют простую геометрическую
интерпретацию, что также существенно упрощает их объяснение, а в
случае необходимости позволяет организовать графический диалог с
задачей.
Рассмотрены также основные задачи маневрирования с
помощью ДУ малой тяги. Большое внимание уделено вопросам
создания и поддержания спутниковых систем (Satellite constellation) и
спутниковых групп (Formation flying). Рассмотрены задачи оценки
маневров, исполняемых активными космическими объектами,
вопросы уклонения от столкновения с космическим мусором,
вопросы возвращения крупногабаритного космического мусора и
перевода заканчивающих работу КА на орбиты захоронения.
Структура книги построена в соответствии с принятой
классификацией [50] маневров на околокруговых орбитах.
В первой главе приводится решение линеаризованной системы
уравнений движения КА в цилиндрической системе координат. Дана
постановка задачи расчета параметров оптимальных импульсных
15
маневров КА на околокруговых орбитах, сформулированы
необходимые условия оптимальности. Описана итерационная
процедура, позволяющая выполнять терминальные условия с
необходимой точностью с учетом нецентральное™ гравитационного
поля, влияния атмосферы, работы двигательной установки и т.д.
Приведена геометрическая интерпретация влияния составляющих
импульсов скорости на различные элементы орбиты. Описано
относительное движение КА, сближающегося с другим КА, при
различных прицельных векторах. Показано, как с достаточно
высокой точностью можно аналитически оценить сумму
трансверсальных составляющих импульсов скорости на каждом из
интервалов маневрирования КА, сближающегося со станцией.
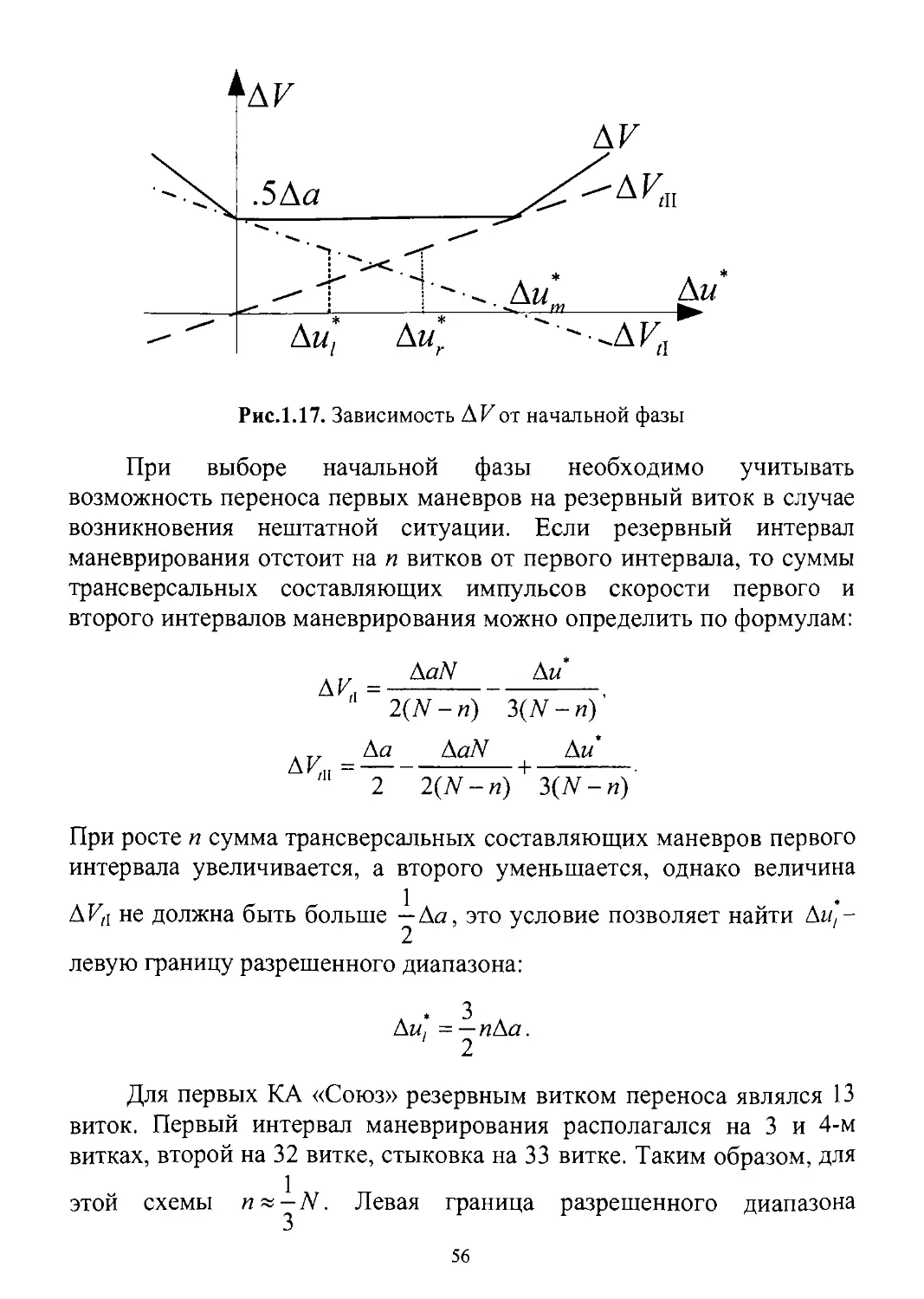
Приведены формулы для расчета оптимального диапазона фазового
рассогласования между орбитальной станцией и стартующим КА.
Формулы учитывают возможность переноса маневров первого
интервала на более поздние витки и возможность переноса даты
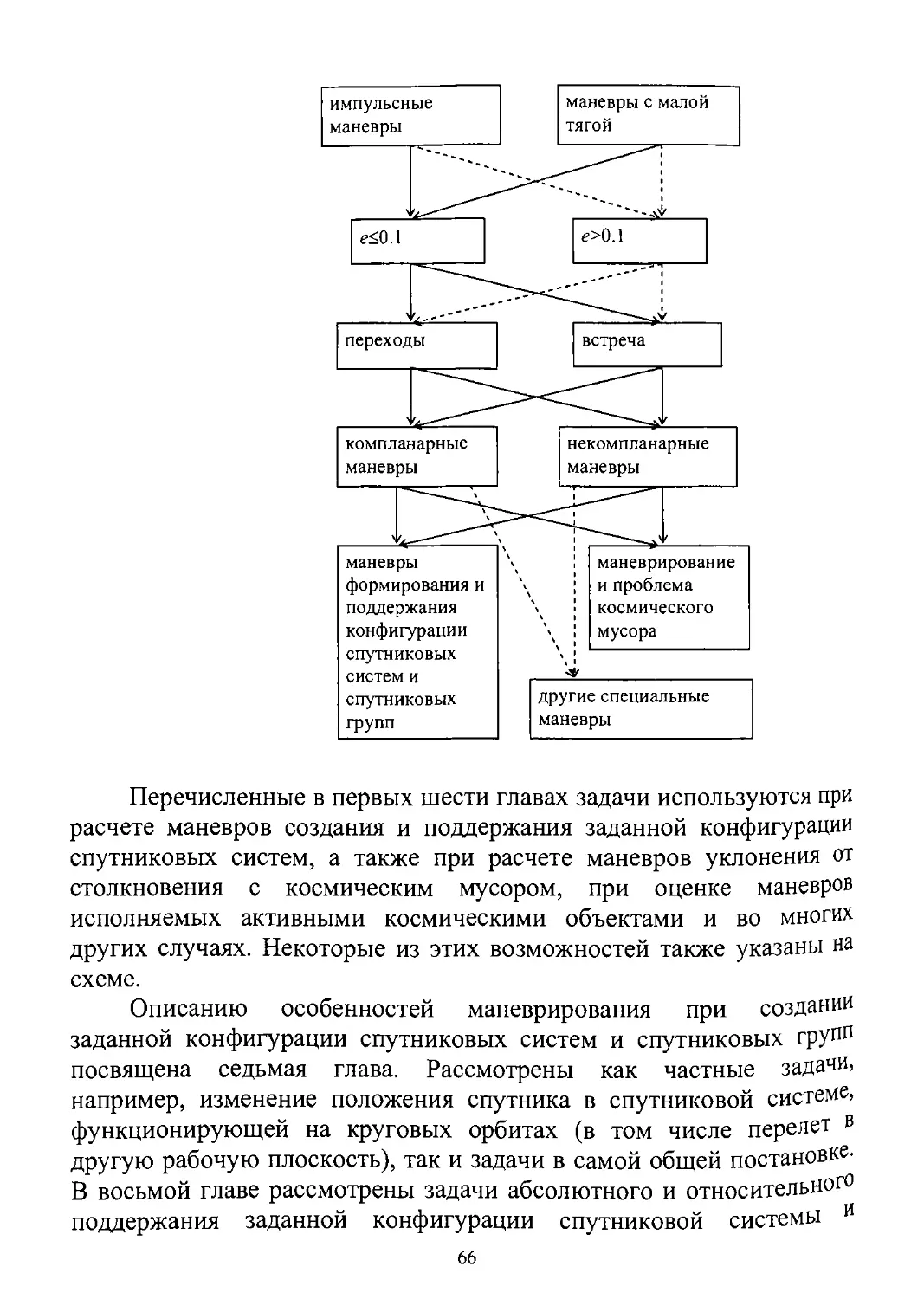
старта КА. Приведена классификация маневров, в соответствии с
которой строится дальнейшее изложение материала.
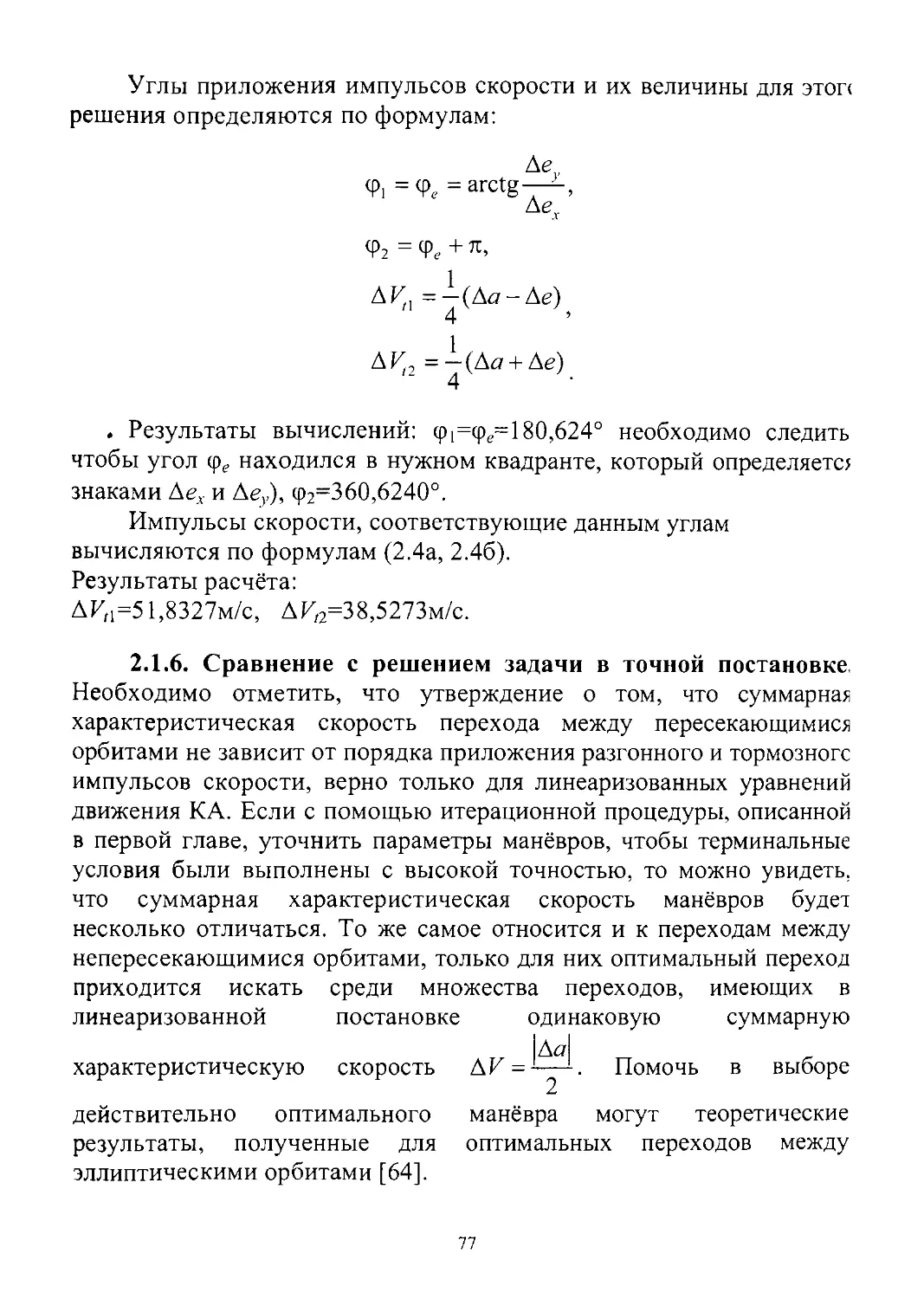
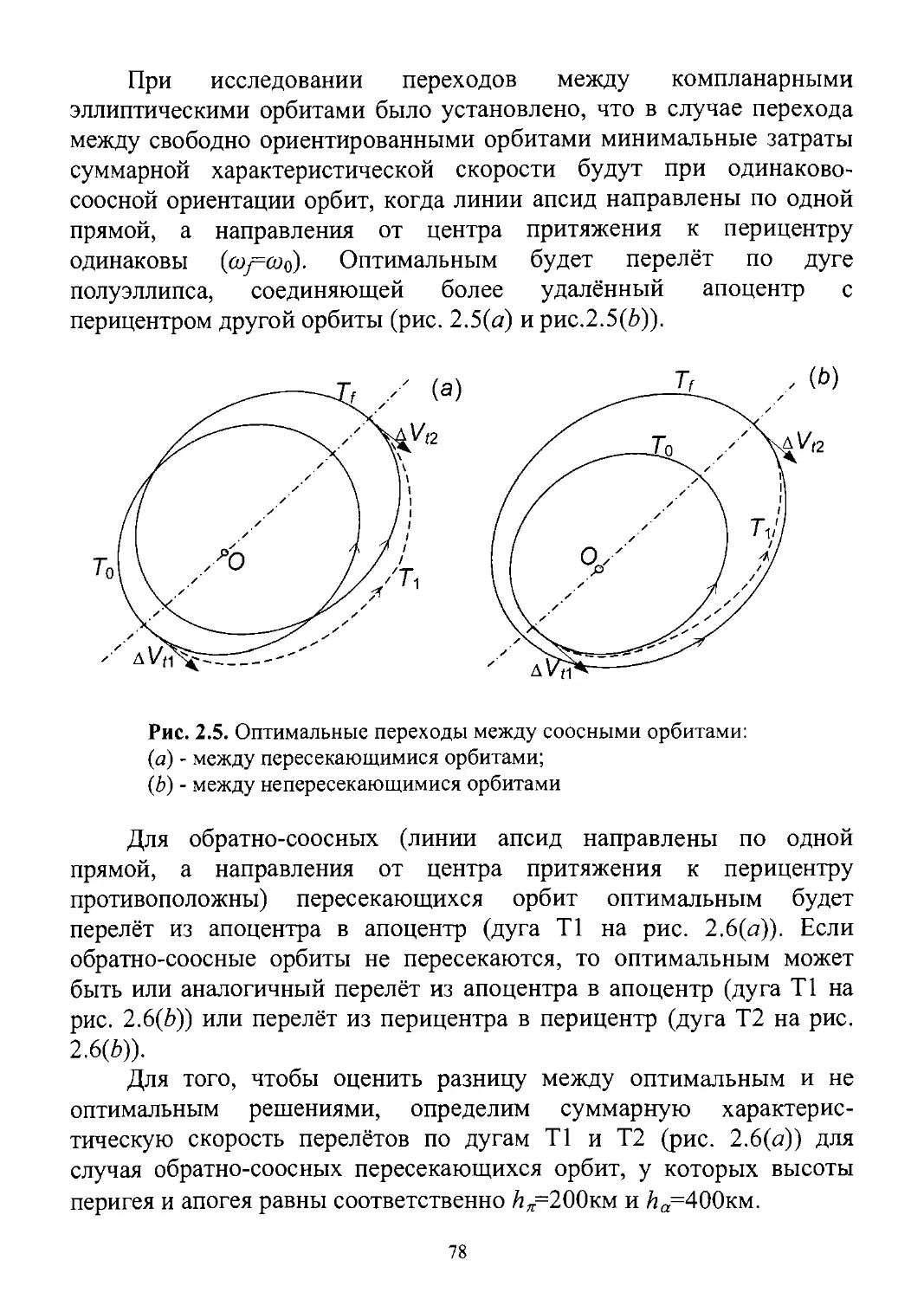
Во второй главе рассмотрена задача перехода между
компланарными (три типа двухимпульсных решений) и
некомпланарными орбитами (три типа двухимпульсных решений и
один тип трехимпульсного решения). Приведены формулы для
расчета параметров маневров этих решений. Проведено сравнение
решения задачи в линеаризованной постановке с точным решением.
Приведены также формулы для определения составляющих
импульсов скорости оптимального компланарного двухимпульсного
решения при фиксированных углах приложения импульсов.
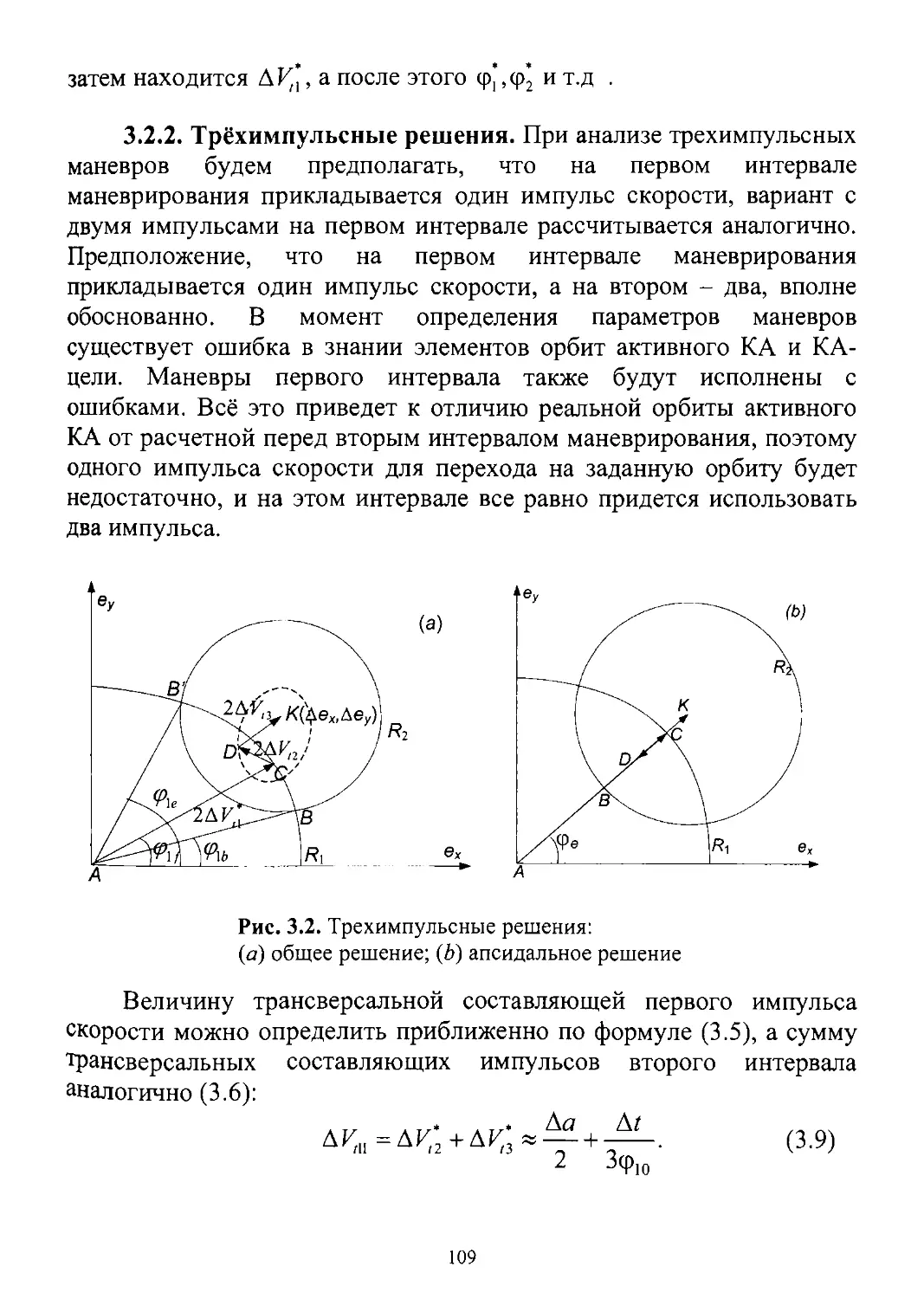
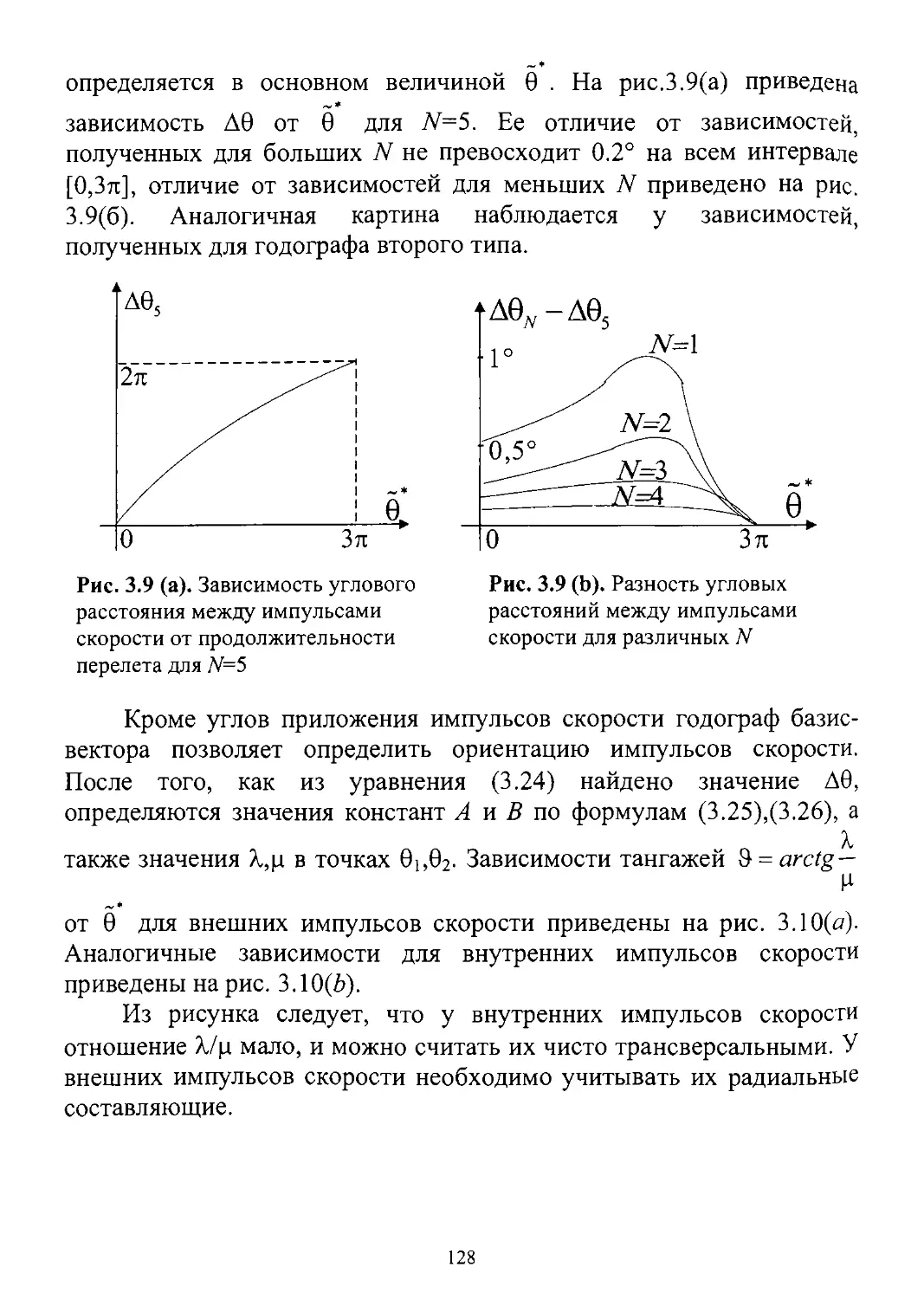
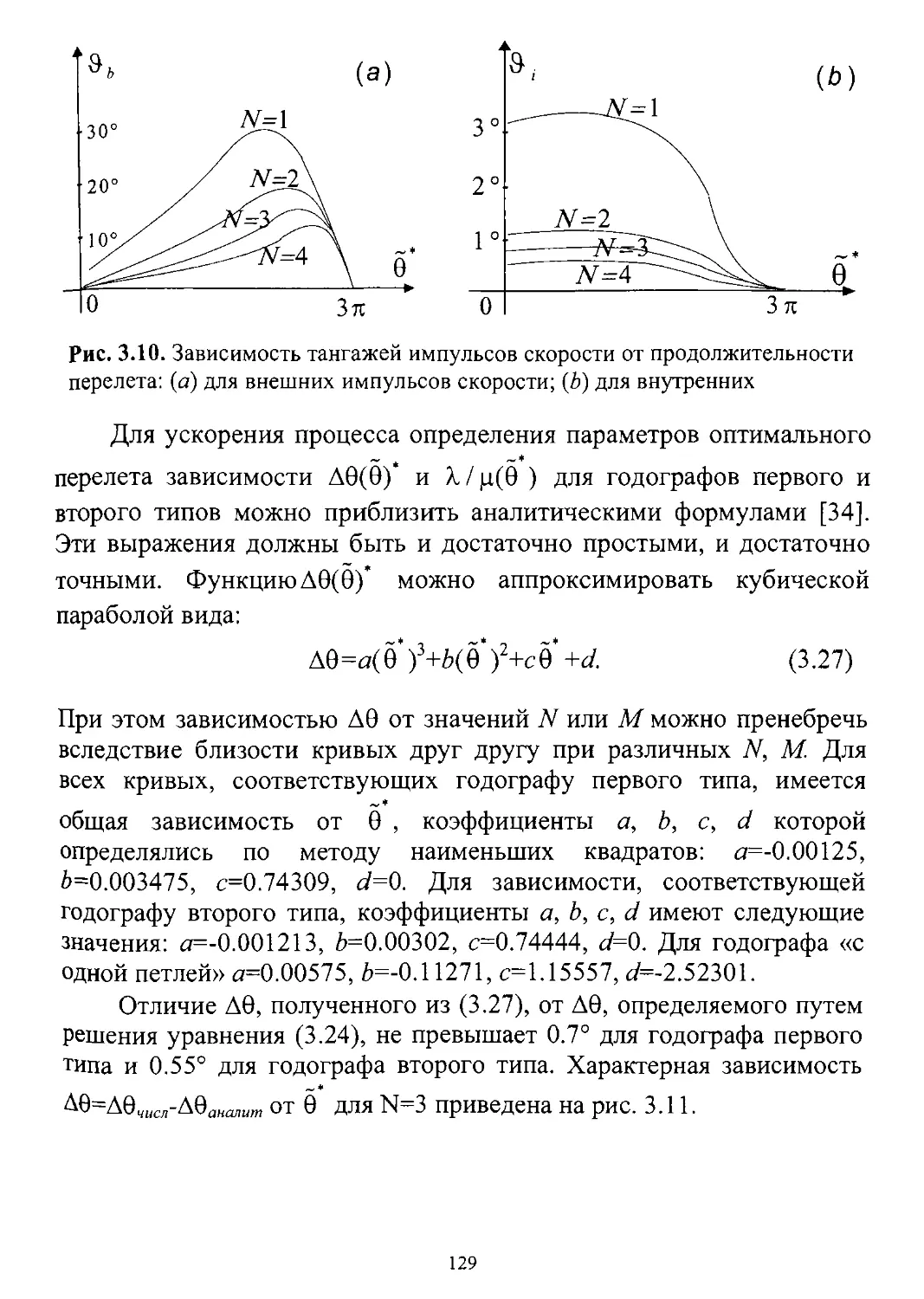
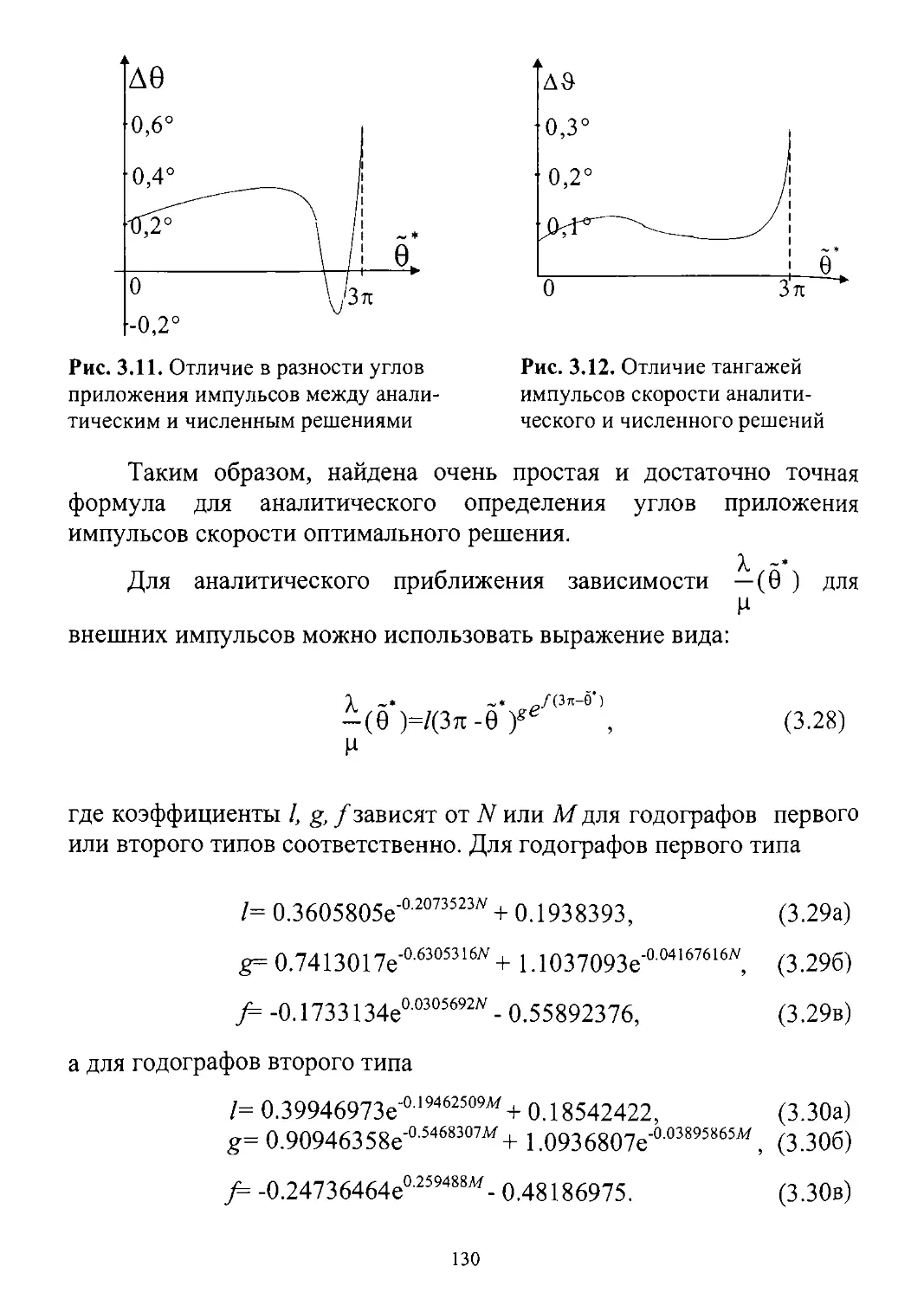
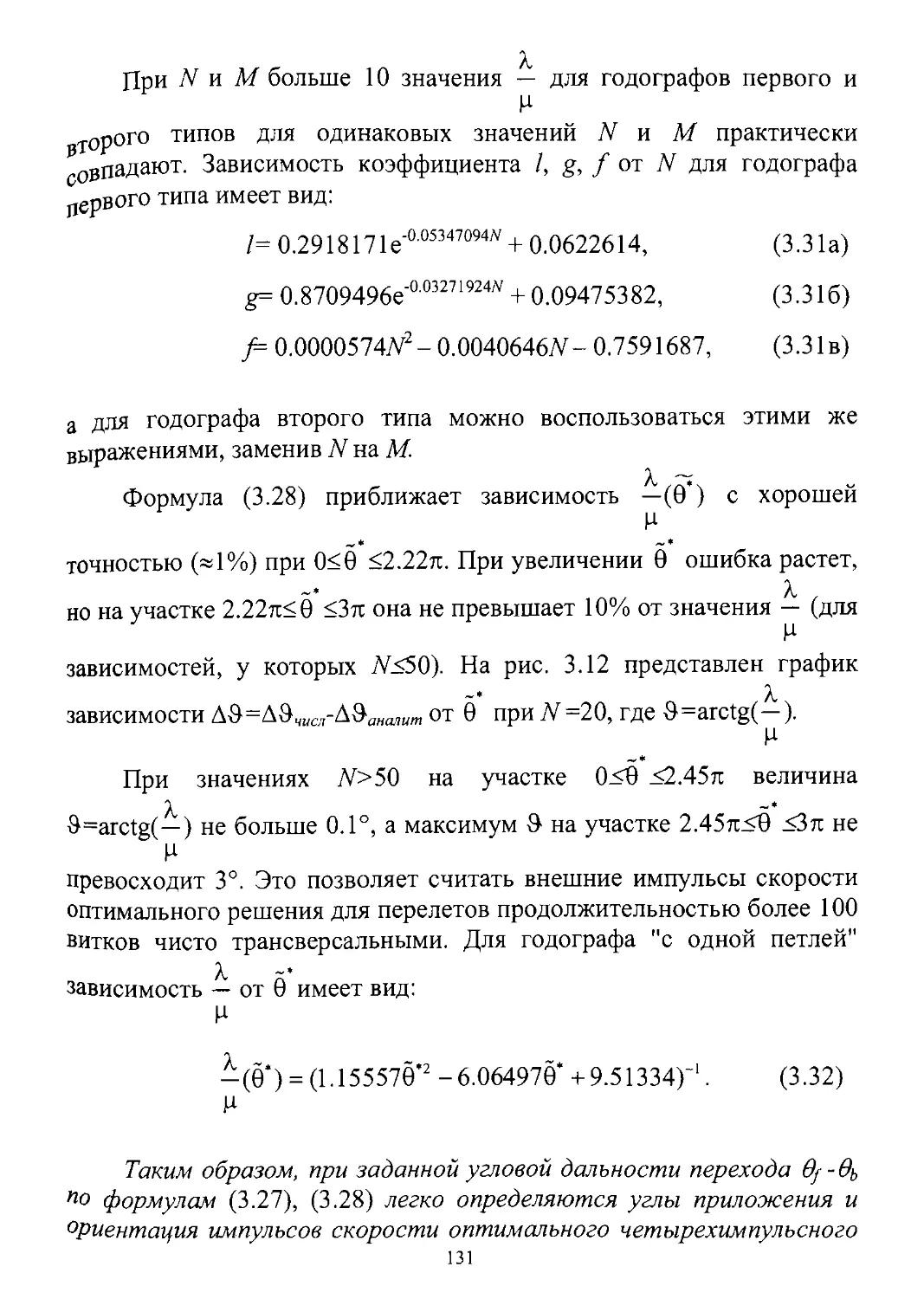
В третьей главе рассмотрена встреча на компланарных орбитах.
Проанализированы три типа возможных решений, соответствующих
годографу базис-вектора в виде точки, эллипса и циклоиды,
установлены области их существования. Приведены алгоритмы для
определения параметров двух-, трех- и четырёхимпульсных решений
для каждого из возможных типов годографа базис-вектора.
Приведены примеры, когда суммарная характеристическая скорость
оптимального решения задачи Ламберта в два и в три раза больше
суммарной характеристической скорости оптимального
трехимпульсного решения. Рассмотрена задача встречи, в которой
необходимо учитывать ограничения на высоту переходной орбиты.
Проанализировано влияние ошибок определения орбиты и
16
исполнения маневров. Приведена процедура выбора решения,
позволяющего уменьшить влияние этих ошибок.
В четвертой главе описаны универсальный алгоритм расчета
параметров маневров четырехимпульсной многовитковой встречи на
некомланарных околокруговых орбитах и численно-аналитический
алгоритм расчета параметров маневров дальнего наведения КК типа
«Союз», «Прогресс». Исследованы шестиимпульсные решения,
соответствующие годографу базис-вектора в форме спирали,
приведены формулы для определения оптимальных углов
приложения импульсов скорости этих решений. Описан численно-
аналитический алгоритм определения параметров нескольких
десятков маневров встречи.
Поскольку в практической работе встречаются задачи, при
решении которых трудно обойтись без численных методов, пятая
глава книги посвящена численным методам. В ней приводится
описание численного метода, который в течение многих лет
использовался в баллистическом центре (БЦ) ИПМ им.
М.В. Келдыша РАН для определения параметров маневров реальных
КА, приведены примеры расчётов.
БЦ ИПМ, создателем и многолетним руководителем которого
являлся член-корреспондент РАН Э.Л. Аким, участвовал в
баллистико-навигационном обеспечении (БНО) полетов всех
основных научных КА. Большую роль играл БЦ ИПМ и в БНО
программы пилотируемых полетов. Автор данной работы принимал
участие в расчете параметров маневров КА «Союз 19» (1974 г.), КА
«Союз 20» (1975 г.) в рамках совместной программы «Союз» -
«Аполлон», КА «Союз 22» (1976 г.). На протяжении многих лет (с
1978 г.) БЦ ИПМ участвовал в обеспечении функционирования
долговременных орбитальных станций «Салют-6», «Салют-7»,
«Мир», в работах связанных с созданием международной
космической станции, в баллистическом обеспечении полета
космической системы (КС) «Буран». В рамках этих работ автор
рассчитывал параметры маневров около 140 КА различного типа:
«Союз», «Союз-М», «Союз-ТМ», «Прогресс», «Прогресс-М»,
орбитальных модулей «Квант», «Природа», «Спектр», «Звезда», КС
«Буран» и т.д. Участие в БНО полетов этих КА дало возможность
разработать и проверить на практике различные методы расчета
параметров маневров, выбрать наиболее простые и надежные из них,
максимально учитывающие особенности полета реальных КА.
17
Поскольку описанные в книге методы были разработаны для решения
практических задач, они позволяют учитывать ограничения на
моменты приложения импульсов скорости, их величину и
ориентацию, ограничения на высоту переходной орбиты,
удовлетворяют самым высоким требованиям по быстродействию и
надёжности.
Преимущества этих методов обусловили их выбор Французским
центром космических исследований (CNES) в качестве основы при
создании собственного метода расчета параметров маневров встречи
ATV (автоматического КА) с международной орбитальной станцией
(ISS) [164].
Нештатные ситуации, возникавшие на орбите, показали
необходимость создания эффективного графического диалога с
задачей, позволяющего оперативно выбрать новую схему
маневрирования, учитывающую дополнительные ограничения,
вызванные нештатной ситуацией.
Первое применение графического диалога при решении задачи
маневрирования описано в работе А.К. Платонова и Р.К. Казаковой
[96]. Для расчета параметров маневров использовалось решение
задачи Ламберта. В книге Ю.А.Захарова [62] дано описание
графического диалога для расчета межорбитальных перелетов с
конечной тягой. От импульсного решения с помощью методов
нелинейного программирования осуществляется переход к решению
задачи с конечной тягой. Оба графических диалога создавались для
использования на стадии проектирования полётов КА.
В пятой главе приводится описание графического диалога,
который можно эффективно использовать как на стадии
баллистического проектирования, так и во время полёта КА при
возникновении нештатной ситуации, в том числе при необходимости
уклонения от столкновения с космическим мусором. В отличие от
двух предыдущих диалогов в данном диалоге анализ решения и его
изменение происходит не в пространстве, где изображены сами
орбиты, а в пространстве проекций вектора эксцентриситета.
В перечисленных ранее задачах предполагалось, что во время
исполнения маневра продолжительность работы ДУ заметно меньше
периода орбиты. Это позволяло решать задачу в импульсной
постановке, а затем с помощью итерационной процедуры аккуратно
учитывать работу ДУ. Вместе с тем в ряде практических задач
продолжительность исполнения маневров сравнима с периодом
18
орбиты. Например, когда для реализации значительных маневров
орбитальных модулей применяются двигатели причаливания и
ориентации, при использовании ЭРДУ и т.д. В этих случаях
импульсного приближения недостаточно и требуются специальные
методы расчета параметров маневров.
Задачи этого типа занимают особое место среди задач
оптимального маневрирования КА. Им посвящено значительное число
статей, можно назвать, например, работы коллектива, которым
руководили Т.М. Энеев и В.А.Егоров [37, 147, 60, 3, 106], работы
М. П. Заплетина и И.С. Григорьева из МГУ [190], [191]. Выпущено
несколько очень интересных монографий [56], [74], [105], [62].
Особенно следует отметить работы М.С. Константинова [158] и
В.Г. Петухова [93, 94, 95]. В силу сложности задач, в которых
предполагается, что маневрирование осуществляется с помощью ДУ
малой тяги, они традиционно решались численными методами с
использованием принципа максимума Понтрягина или задача
разбивались на последовательность более простых частных задач [41],
имеющих тривиальное решение, аналогично схеме, используемой для
расчёта маневров Shuttle. В последние годы для решения задач с
большой протяженностью маневров Ю.П. Улыбышев успешно
использует метод внутренней точки [124, 125, 126].
Вопросы маневрирования с помощью ДУ ограниченной
мощности рассмотрены в шестой главе. Описаны алгоритмы
определения параметров маневров перехода между компланарными
орбитами при фиксированной ориентации ДУ в орбитальной и
инерциальной системах координат, алгоритм определения
оптимальной изменяющейся ориентации ДУ. В пространстве
отклонений большой полуоси и эксцентриситета конечной и
начальной орбит установлены области, в которых оптимальна каждая
из упомянутых выше ориентаций ДУ. Приведен численно-
аналитический алгоритм расчета параметров маневров перехода
между некомпланарными орбитами. Рассмотрены задачи встречи на
компланарных орбитах, когда маневрирование осуществляется на
каждом витке и когда маневрирование осуществляется на двух
разнесенных интервалах.
В перечисленных ранее теоретических работах 60-х, начала
70-х годов не исследовались маневры КА, входящих в спутниковые
системы (СС), которые играют важнейшую роль в современной
космонавтике. В настоящее время используется множество СС,
19
существенно отличающихся друг от друга по назначению, по
количеству входящих в них спутников, по типам орбит, на которых
они функционируют, по взаимному расположению спутников.
Наиболее распространенными являются СС, у которых спутники
расположены на околокруговых орбитах. Описанные в предыдущих
главах алгоритмы можно также использовать и для расчета
параметров маневров спутников, входящих в спутниковые системы.
Вместе с тем маневры таких спутников имеют свои особенности,
которые необходимо учитывать.
Спутниковым системам посвящено множество работ.
Первоначальным является вопрос выбора конфигурации СС,
обеспечивающей необходимое покрытие земной поверхности. В этой
области можно выделить работы Г.В. Можаева [82,83], Дж. Уокера
(Walker J.G.) [188], Б.П. Быркова [43], Ю.Н. Разумного [100],
Э. Лансарда (Lansard Е.) [165], В.К. Саульского [108]. Последнее
время в работах Ю.Н. Разумного [101, 102] и С.Ю. Улыбышева [122,
123] рассматриваются разноуровневые спутниковые системы, в
которых спутники располагаются на круговых орбитах, имеющих
разные радиусы.
Несмотря на всё разнообразие спутниковых систем, для каждой
из них приходится решать два типа задач оптимального
маневрирования: создание заданной конфигурации спутниковой
системы и поддержание этой конфигурации.
Первая из них близка к классической задаче встречи. Каждый
спутник рассматривается отдельно, требуется перевести его в
заданную точку конечной орбиты за фиксированное время. В отличие
от задачи маневрирования, решаемой, например, при стыковке КК
«Союз», «Прогресс» с долговременной орбитальной станцией, в
данном случае время перевода спутника в фиксированную точку
орбиты не жестко ограничено, а может выбираться в достаточно
широких диапазонах. Это связано с поиском компромисса между
желанием сократить продолжительность перевода и необходимостью
уменьшить затраты суммарной характеристической скорости,
которые при формировании спутниковых систем, как правило, растут
с уменьшением времени перевода спутника в заданную точку.
Ситуация усложняется тем, что на низких орбитах во время
простейшего перевода спутника из одной точки орбиты в другую
возникает отклонение долготы восходящего узла (ДВУ), которое
необходимо корректировать. Этот случай рассмотрен достаточно
20
подробно в первом параграфе седьмой главы. Предложен алгоритм
определения оптимальных углов приложения импульсов скорости и
алгоритм определения компромиссного времени встречи.
Задача существенно усложняется, когда спутник необходимо
перевести на орбиту, долгота восходящего узла которой на десятки
градусов отличается от долготы восходящего узла исходной орбиты.
Такая ситуация имеет место, например, когда одна ракета-носитель
выводит на орбиту несколько спутников, часть из которых
необходимо перевести в другие рабочие плоскости, или когда в
системе имеется резервный спутник, который необходимо перевести
в плоскость другой орбиты вместо выбывшего из строя спутника.
Оптимальный по затратам суммарной характеристической скорости
перевод таких спутников требует большого времени (нескольких
сотен витков). Задача перевода спутника с круговой орбиты в
заданную точку аналогичной орбиты, имеющей существенное
отличие ДВУ, также достаточно подробно разобрана в седьмой главе.
Показано, что с ростом отклонений по ДВУ затраты суммарной
характеристической скорости не растут, как можно ожидать
пропорционально, а колеблются по синусоидальному затухающему
закону относительно прямой, соответствующей ожидаемой
пропорциональности. Амплитуда этих колебаний достаточно заметна
при отклонениях ДВУ в несколько градусов. В этом случае затраты
суммарной характеристической скорости на компенсацию
существенно большего отклонения ДВУ могут быть на десятки
процентов меньше затрат на компенсацию относительно небольших
отклонений.
В общем случае при перелете в заданную точку конечной
орбиты с произвольной орбиты выведения необходимо иметь
универсальный алгоритм расчета параметров маневров встречи
большой продолжительности, который существенно усложняется,
когда между начальной и конечной орбитами имеется значительное
отличие ДВУ.
Для решения этой задачи нельзя воспользоваться известными
методами, разработанными для решения задачи встречи короткой и
средней продолжительности. В этих методах влияние сжатия Земли
или вообще не учитывалось [98], [99], [154], [169], [170], или
учитывалось с помощью итерационной процедуры [89], [4], [49], [25]
для выполнения с заданной точностью терминальных условий.
В задаче перевода спутника в плоскость, ДВУ которой отличается на
21
несколько десятков градусов, сжатие Земли можно использовать для
существенного уменьшения затрат суммарной характеристической
скорости.
В существующих работах по спутниковым системам задачи
расчета параметров маневров перевода спутника в другую рабочую
плоскость практически не рассматриваются. Два метода [143], [172]
решения задачи встречи при большом первоначальном отклонении
ДВУ докладывались на международных конференциях, проводимых
AIAA. Работа методов демонстрировалась на решении задачи встречи
на орбите Марса, в которой требовалось изменить ДВУ орбиты на
182°. Первый из них [143] (работа выполнена в NASA) аналогичен
методу, используемому для расчета маневров стыковки Shuttle с
международной орбитальной станцией. Коррекция элементов в
плоскости орбиты и поворот самой плоскости орбиты выполняется
раздельно. Получаемое решение не оптимальное (затраты суммарной
характеристической скорости на 60% превышают необходимые),
используются десять импульсов скорости, т.к. задача значительно
сложней классической задачи встречи, для решения которой NASA
использует пять импульсов скорости. Второй метод [172],
разработанный совместно JPL и Техасским университетом, -
численный. Он позволяет найти оптимальное решение с небольшим
числом импульсов скорости, но время решения задачи чрезвычайно
велико и требуется существование хорошего начального
приближения. Производить массовые расчеты, необходимые для
полного исследования задачи, этими методами весьма
затруднительно.
В седьмой главе приводится достаточно простой, надежный и
быстродействующий численно-аналитический метод, позволяющий
находить оптимальное решение задач такого типа [16]. Он даёт
возможность при однократном решении задачи построить
зависимость затрат суммарной характеристической скорости от
продолжительности перелёта. Кроме того, процесс вычисления
построен таким образом, что всегда существует объяснение, почему
оптимальное решение имеет найденный вид, и как будут меняться
параметры маневров при изменении начальных условий. Имеется
возможность находить решения, уменьшающие влияние ошибок
реализации маневров.
Данный метод использовался для решения упомянутой выше
задачи встречи на орбите Марса, для расчета параметров маневров
22
формирования спутниковых систем (приводится пример для СС
«Globalstar»), а также для расчета параметров маневров
формирования спутниковых групп (formation flying). Приводятся
примеры расчета параметров маневров создания кластера для
томографии атмосферы, и маневров создания formation flying «Aqua
Train». Из-за близкого расположения спутников в группе, при расчете
маневров формирования спутниковых групп большое внимание
должно быть уделено устранению возможного столкновения
спутников. Такая задача рассмотрена в работах [137, 138, 139].
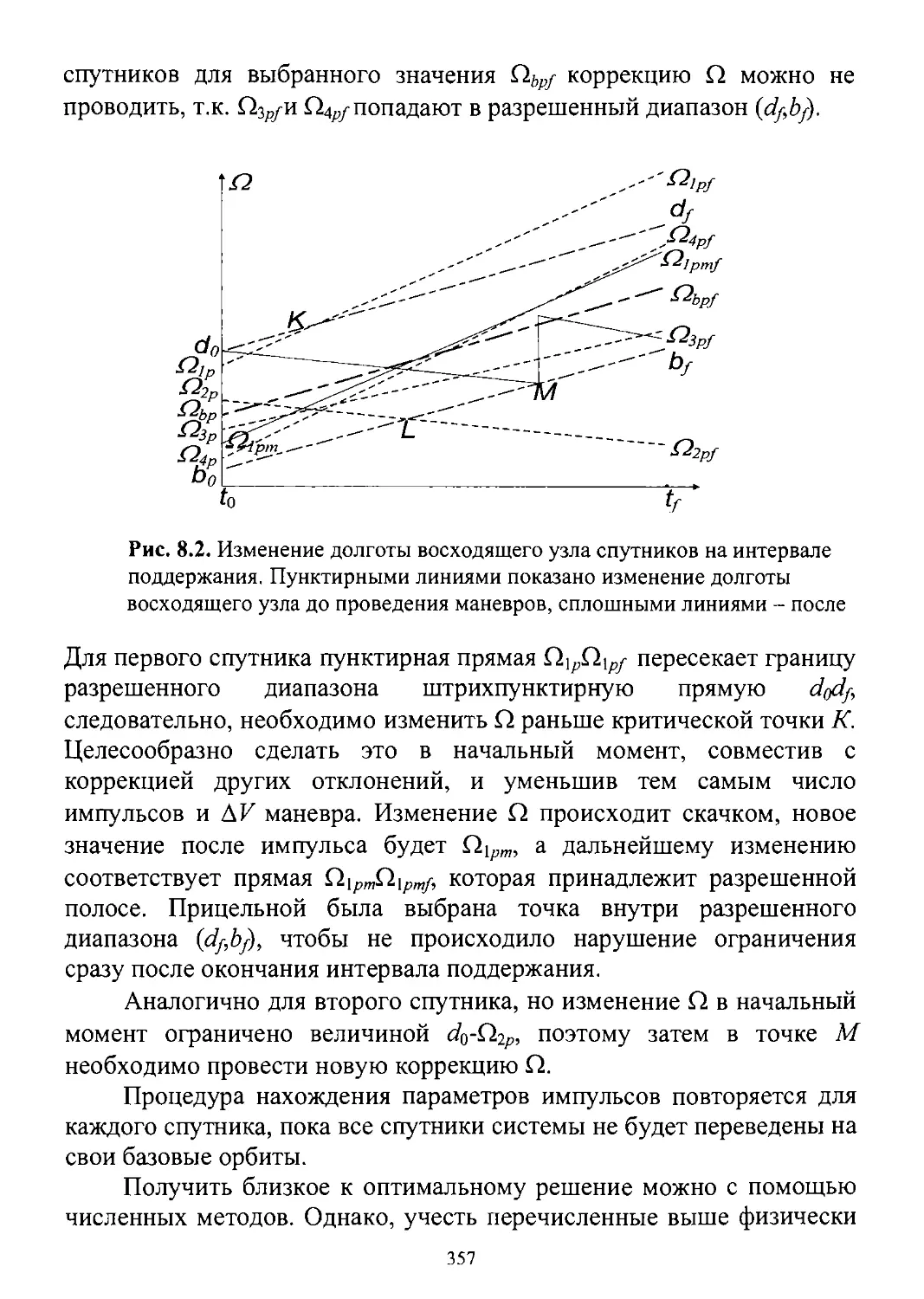
Задаче поддержания заданной конфигурации спутниковой
системы, которая имеет ряд существенных отличий от задачи
создания спутниковой системы, также уделено большое внимание и в
первую очередь в зарубежной литературе. Различают две стратегии:
«жесткое» и «гибкое» поддержание (в зарубежной литературе чаще
используются термины «абсолютное» и «относительное»
поддержание). При «жестком поддержании» движение каждого из
спутников согласуется с некоторым заданным движением, что
позволяет рассчитывать параметры маневров каждого спутника
независимо от положения других спутников, входящих в систему
[142], [46]. При «гибком» поддержании - обеспечивается
согласованное движение всех спутников системы. Оно существенно
экономичнее «жесткого», т.к. нет необходимости постоянно
корректировать те элементы орбиты, которые практически
одинаковым образом меняются у всех спутников. Например, большая
полуось всех орбит может уменьшаться под действием атмосферы
практически одинаковым образом, и нет необходимости ее
корректировать, а остается контролировать взаимные угловые
расстояния спутников, определяющие конфигурацию системы.
«Гибкое» поддержание является более сложной задачей, т.к. при
расчете параметров маневров одного из спутников необходимо
учитывать положение всех остальных элементов системы. В работах
Г.В. Можаева [84] и Р.Ф. Муртазина [85] на примере конкретных
спутниковых систем было проведено сравнение стратегий «гибкого»
и «жесткого» поддержаний, показано, что на «гибкое» поддержание
требуется значительно меньше маневров и меньшие затраты
суммарной характеристической скорости.
Задача расчета параметров маневров «гибкого» поддержания
конфигурации спутниковой системы исследовалась в работах ряда
авторов. Для её решения чаще всего используется симплекс-метод
23
численно-аналитический метод, позволяющий
вычислять величины маневров, обеспечивающих
конфигурацию системы на всем интервале
Учет физических особенностей задачи позволяет
число используемых маневров. Предлагаемая
интерпретация процесса поддержания дает
решения.
[166], [144], [79] или численно решается уравнение Риккати [181].
Состояние системы при этом контролируется через заданные равные
промежутки времени. К недостаткам такого подхода можно отнести
то, что оптимально корректировать элементы орбиты может быть
необходимо до или после этих фиксированных моментов.
В некоторых работах предлагались аналитические решения, но
предполагалось, что маневры исполняются в начальный [84] или в
начальный и конечный моменты времени [85]. В промежуточные
моменты состояние системы не контролировалось. В седьмой главе
приводится
аналитически
необходимую
поддержания.
сократить число используемых маневров.
геометрическая интерпретация процесса поддержания
исчерпывающее объяснение характера оптимального
Численные методы не позволяют это сделать.
Работа по созданию методов расчета параметров маневров
формирования и «относительного» поддержания спутниковых систем
была выполнена по инициативе и при поддержке CNES. Большую
помощь в организации этой и других работ оказали J.-P. Carrou,
J.-P. Bertiasse, Р. Legandre, J. Folliard, P. Brousse, J.P. Guster, F. Dufour.
Разработка универсального метода расчета параметров маневров
перевода спутника в заданную точку орбиты, ДВУ которой
отличается на несколько десятков градусов, выполнялась совместно с
Р. Labourdette [161, 162].
В практической работе намного чаще используется жесткое
поддержание, рассмотренное в последних параграфах восьмой главы.
Приводятся пример решения задачи «жесткого» поддержания орбиты
малого спутника, находящегося на солнечно синхронной орбите и
осуществляющего дистанционное зондирование Земли.
На примере Formation flying “Tandem” рассмотрены задача
создания устойчивой конфигурации спутниковой группы и
поддержания этой конфигурации на длительном интервале времени.
Существенное внимание уделено устранению опасности
столкновения спутников, образующих FF, в процессе поддержания
орбиты.
В настоящее время большое значение приобретает проблема
безопасности полета КА из-за увеличивающейся возможности
24
столкновения с космическим мусором (КМ). Вопросы
маневрирования занимают важное место в проблеме КМ, этим
вопросам посвящены девятая и десятая главы.
Можно выделить четыре основных направления расчета
маневров в проблеме космического мусора. В девятой главе
рассмотрены первое и второе направления в десятой - третье и
четвертое.
Первое - расчет маневров, позволяющих уклониться от
столкновения с КМ. Обычно применяются специальные маневры
уклонения от столкновения. Это довольно простые маневры, их
описание дано в начале девятой главы. Представляет интерес более
сложная задача: найти такое решение задачи встречи, чтобы на
фазирующей орбите (орбите ожидания) не было столкновения с КМ.
Безопасная орбита получается не за счет традиционного
дополнительного маневра уклонения, а за счет специального подбора
величин и моментов приложения импульсов скорости на первом
интервале маневрирования. Получить компромиссное решение,
позволяющее гарантированно уклониться от столкновения с КМ без
существенного увеличения затрат горючего, можно с помощью
описанного ранее графического диалога с задачей.
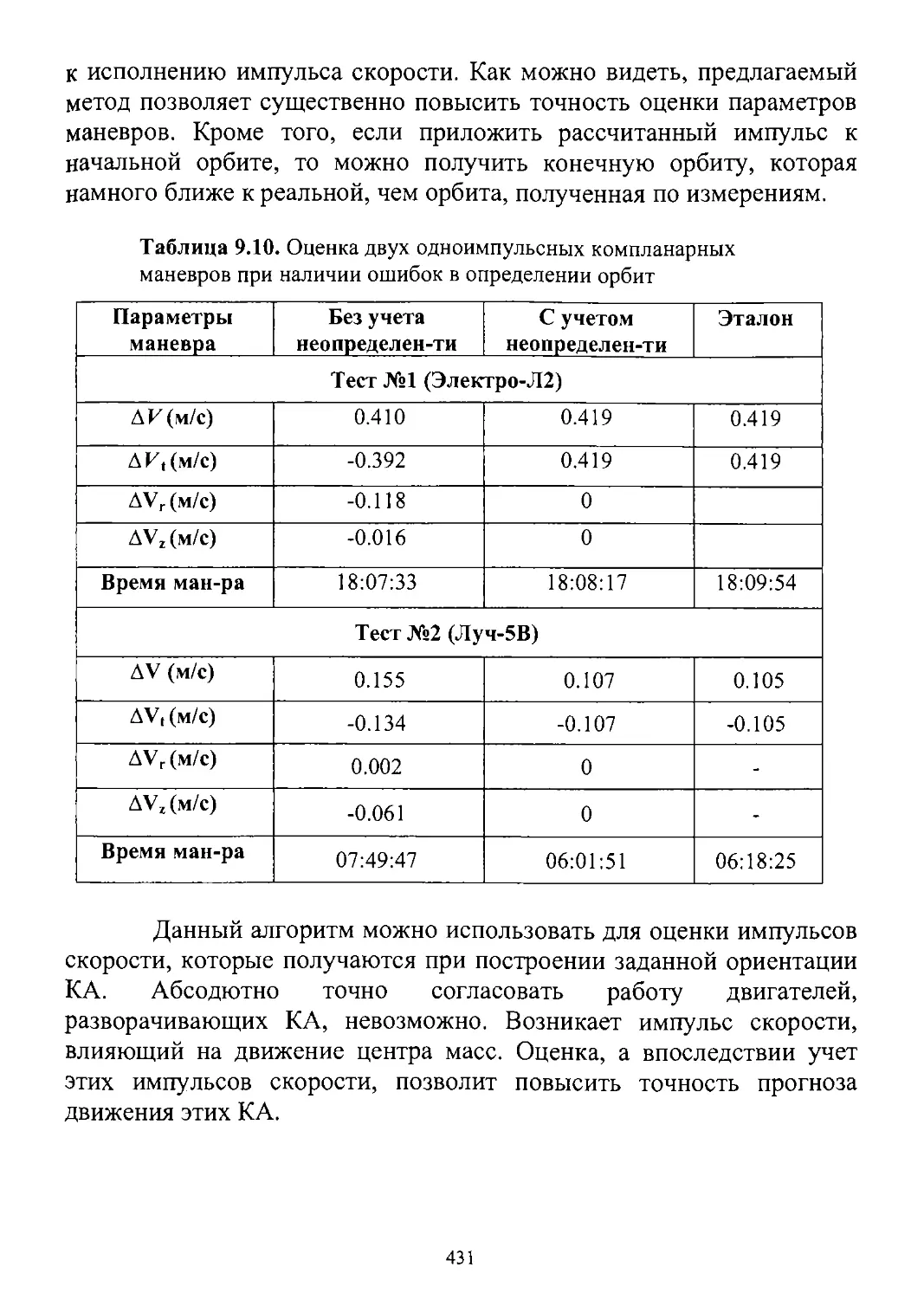
Второе направление - оценка маневров, выполненных
активными космическими объектами. Оценка, а в дальнейшем и
прогнозирование таких маневров, позволит с более высокой
точностью моделировать движение активных космических объектов
и, следовательно, избежать столкновения с ними. Оцениваются
параметры одноимпульсных и двухимпульсных маневров. Алгоритм
оценки параметров двухимпульсных маневров позволяет на
несколько порядков сократить время решения задачи по сравнению с
традиционно используемой для этих целей задачей Ламберта, при
этом увеличивается и точность оценки маневров. Оцениваются также
одноимпульсные и двухимпульсные маневры большой
продолжительности при этом время решения также на порядки
меньше времени решения этой задачи традиционными методами
[155], [40]. Рассмотрены алгоритмы оценки одноимпульсных
маневров малой и большой продолжительности при больших
ошибках в определении начальной и особенно конечной орбит.
В этом случае оценка маневров позволяет существенно увеличить
точность знания конечной орбиты (она получается приложением
рассчитанного маневра к начальной орбите) и тем самым повысить
25
точность расчета сближения защищаемого КА с данным объектом.
Даными алгоритмами можно воспользоваться при оценке импульсов
скорости, которые возникают при построении заданной ориентации
КА, что позволяет повысить точность прогноза орбиты своих КА.
Постановки задач оценки маневров активных космических
объектов и подходы к их решению неоднократно обсуждались с
В.М. Агаповым.
Третье направление - перевод заканчивающих работу КА на
орбиты, на которых они не могут представлять опасности для активно
функционирующих КА. Для геостационарных КА это их увод на
орбиты выше геостационарной области (на 250-350 км), а для низких
орбит - перевод КА на орбиты, время существования на которых не
превышает 25 лет. Приведен алгоритм определения параметров таких
орбит, исследована эволюция эллиптических и круговых орбит этого
типа. Рассмотрена зависимость элементов орбиты с уменьшенным
сроком баллистического существования от времени ее формирования,
от величины баллистического коэффициента и т.д.
Четвертое направление - увод крупных (площадь миделя не
менее 5 м2) объектов КМ (последних ступеней ракет и разгонных
блоков) на орбиты с уменьшенным сроком баллистического
существования, на которых они не могут представлять опасности для
активно функционирующих КА.
Существует множество проектов удаления крупногабаритных
космических объектов (ККО). Наиболее эффективными являются две
схемы, в которых один специально посылаемый KA-сборщик может
убрать несколько ККО.
В первой схеме предусматривается последовательный облёт
некоторого количества объектов с их сбором, либо с внедрением в их
сопло малых КА с автономным управлением и запасом топлива для
тормозного воздействия, достаточного для перевода ККО на орбиту
захоронения. Облет ККО осуществляет KA-сборщик, а когда у него
заканчиваются запасы горючего и малых КА, к нему запускается КА-
заправщик.
Вторая схема предполагает использование одного КА,
маневрирующего между объектами и за счёт своей двигательной
установки последовательно уводящего их на орбиты захоронения.
Такая схема менее эффективна, но позволяет быстрее облететь все
объекты. В десятой главе рассмотрены обе схемы и проведено их
сравнение.
26
Были выделены пять групп объектов близких по наклонению их
орбит, определена стратегия облета, найдено компромиссное время
каждого перелета, чтобы уложиться в ограничение по времени всей
экспедиции, рассчитаны затраты суммарной характеристической
скорости на различные схемы перелета и выбраны наиболее
предпочтительные схемы облета каждой из групп. Определено, каким
запасом горючего и малых КА должны обладать KA-сборщик и КА-
заправщик, а также сколько KA-сборщиков и КА-заправщиков
необходимо для почти полной очистке всех групп.
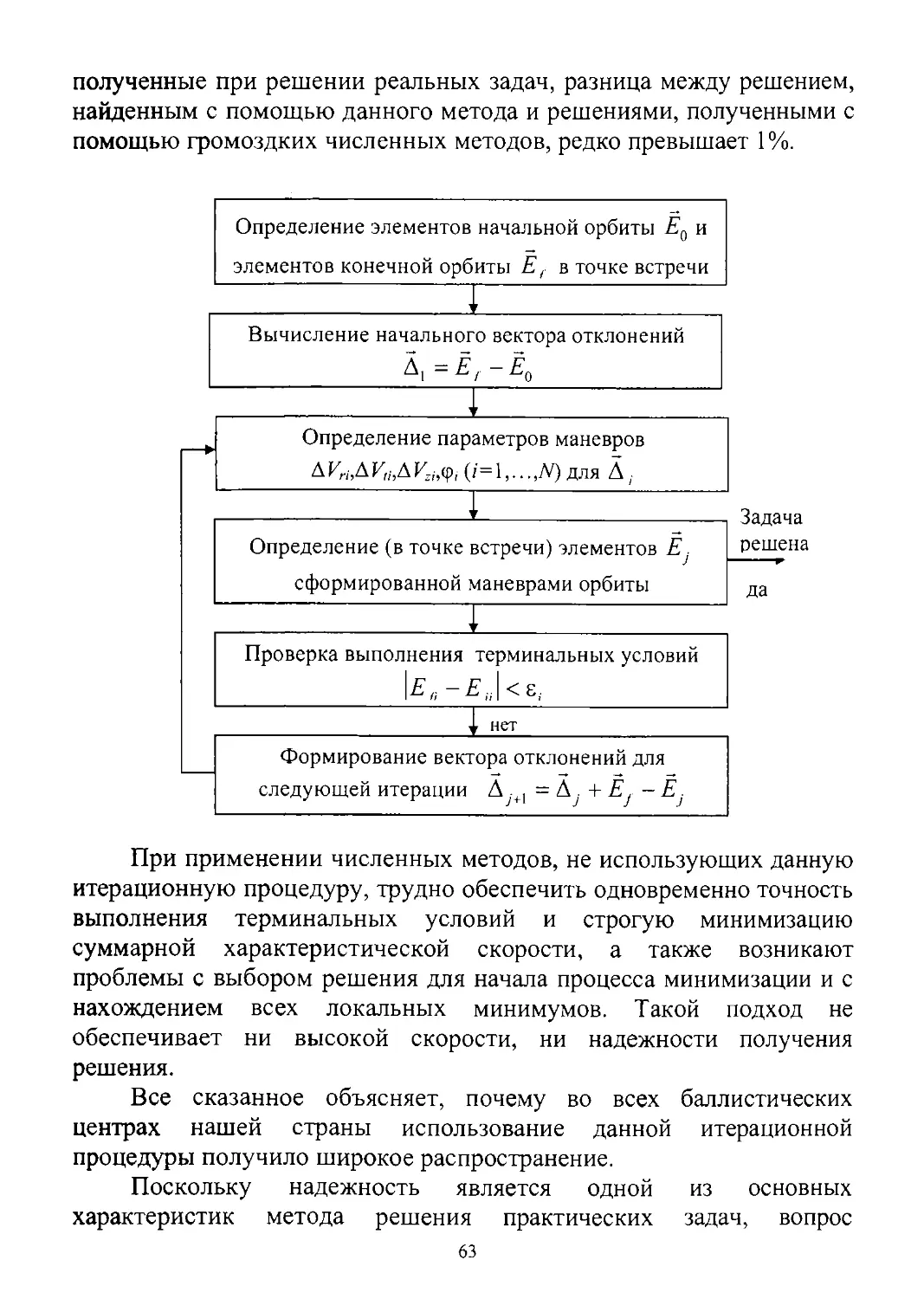
Практически для всех описанных в книге алгоритмов приведены
примеры решения задач с их помощью. Это позволит читателям,
которые будут использовать данные алгоритмы, проверить
правильность собственной их реализации.
Для приведенных в книге задач, встречающихся в практической
работе, дано их решение, в котором терминальные условия
выполнены с заданной точностью с помощью итерационной
процедуры, описанной в первой главе, позволяющей учесть все
необходимые возмущения.
Автор благодарит А.Р. Голикова, М.О. Каратунова,
Д.А. Гришко, А.А. Будянского, Н.В. Чернова, И.С. Гундобина,
М.А. Капралова, Е.О. Терехову, Д. С. Ролдугина, совместная работа с
которыми позволила получить ряд численных результатов,
приведенных в данной книге.
Автор благодарен сотрудникам пятого отдела ИПМ им.
Келдыша РАН, ведущим специалистам в области расчета параметров
маневров КА: В.В. Ивашкину, А.К. Платонову, В.А. Егорову,
М.Л. Лидову, Г.С. Заславскому, Р.К. Казаковой, у которых ему
посчастливилось учиться. Высочайший научный уровень отдела был
создан его руководителем академиком РАН Д.Е. Охоцимским, и
поддерживается в настоящее время профессором Ю.Ф. Голубевым.
Особую благодарность автор выражает рецензенту книги
Г.А. Колегову за высказанные им предложения и замечания.
Автор будет очень признателен читателям, которые пришлют
свои критические замечания по книге.
Значительная часть приведенных результатов (в первую очередь это
относится к девятой и десятой главам) была получена при финансовой
поддержке РФФИ (проект № 15-01-08206 А).
27
ГЛАВА I
ПОСТАНОВКА ЗАДАЧИ.
ОБЩАЯ СХЕМА РЕШЕНИЯ
1.1. Уравнения движения КА в отклонениях от
движения по опорной круговой орбите
Особый интерес к задачам маневрирования на околокруговых
орбитах объясняется тем, что на орбитах этого класса располагается
значительная часть реальных космических аппаратов (КА). Скорость
движения по круговой орбите в центральном гравитационном поле
определяется по формуле:
где г0 - радиус круговой орбиты, ц - коэффициент, равный
произведению гравитационной постоянной на массу притягивающего
тела (для Земли ц=уМ~3,986028*105 км3/сек2, радиус Земли
7?з«6371км).
В реальных условиях, в результате влияния различных
возмущений, всегда существуют отклонения действительной орбиты
от круговой.
Можно выделить три основных группы возмущающих
факторов:
1. Отклонения начальных условий (скорости, радиуса или угла
между ними) от условий, обеспечивающих движение по круговой
орбите.
2. Дополнительные внешние силы: влияние нецентральности
гравитационного поля; влияние атмосферы; влияние других
притягивающих тел; световое давление; влияние магнитного поля
ит.д.
3. Силы, создаваемые двигательной установкой (ДУ) КА.
Все эти возмущения могут существенно отклонить орбиту
спутника от круговой. Однако в большом количестве имеющих
28
итнческое значение случаев отклонения орбиты от круговой
ПР ся сравнительно небольшими, и при их изучении (по крайней
ЯВ на первом этапе) можно воспользоваться линеаризованными
М6авнениями движения. Далее круговую орбиту радиуса г0 будем
называть невозмущенной орбитой, а исследуемую околокруговую
орбиту - возмущенной.
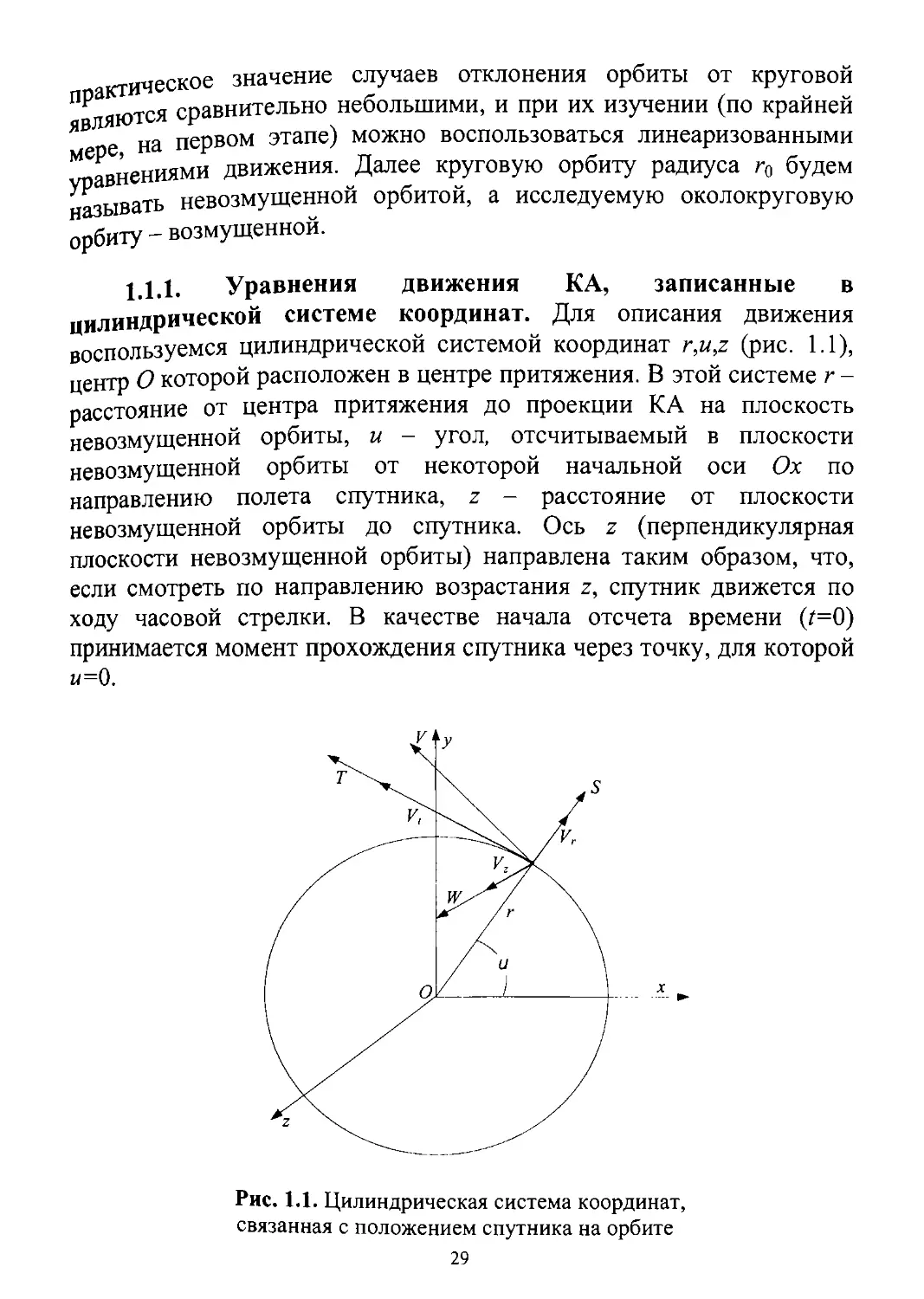
1.1.1. Уравнения движения КА, записанные в
цилиндрической системе координат. Для описания движения
воспользуемся цилиндрической системой координат r,u,z (рис. 1.1),
центр О которой расположен в центре притяжения. В этой системе г -
расстояние от центра притяжения до проекции КА на плоскость
невозмущенной орбиты, и - угол, отсчитываемый в плоскости
невозмущенной орбиты от некоторой начальной оси Ох по
направлению полета спутника, z - расстояние от плоскости
невозмущенной орбиты до спутника. Ось z (перпендикулярная
плоскости невозмущенной орбиты) направлена таким образом, что,
если смотреть по направлению возрастания z, спутник движется по
ходу часовой стрелки. В качестве начала отсчета времени (7=0)
принимается момент прохождения спутника через точку, для которой
и=0.
Рис. 1.1. Цилиндрическая система координат,
связанная с положением спутника на орбите
29
Возмущающим ускорением будем считать суммарное
ускорение, возникающее в результате действия всех сил за
исключением силы, создаваемой центральным гравитационным
полем (g=-^-). Проекции возмущающего ускорения на направление
г
радиус-вектора г, на нормаль к нему в плоскости невозмущенной
орбиты и на ось z обозначим соответственно через S, Т и W (рис. 1.1).
Считая отношение — малым, и пренебрегая величинами второго
г
порядка малости, можно написать уравнения движения КА во
введенной системе координат [113]:
S - g = г - ги2
Т=~(г2и), (1.1)
г at
W = z + g—.
r
Ограничимся рассмотрением случая малых по сравнению с
основным ускорением g возмущающих ускорений S,T,W, а также
будем считать малыми по сравнению с величинами г0 и
отклонения от кругового движения, вызываемые возмущающими
ускорениями. При этом можно с точностью до малых первого
порядка не учитывать влияние на величины S,T,W отклонений
возмущенной орбиты от невозмущенной круговой орбиты и
определять эти ускорения, как соответствующие невозмущенной
орбите. Это позволяет решать первые два уравнения системы (1.1)
независимо от третьего уравнения, так как величины S и Т с
точностью до малых первого порядка не зависят от бокового
отклонения z.
Обозначим через
Vr = г и Vt = гй
проекции вектора скорости соответственно на направление радиус-
вектора и нормаль к нему в плоскости невозмущенной орбиты.
Подставляя эти величины в первые два уравнения (1.1), получаем:
зо
^.=5-4+—>
г г
VV
V,=T—
г
r = V ,
(1-2)
Эта система трех дифференциальных уравнений относительно
неизвестных г,Г„Г, не решается в конечном виде при произвольных
значениях возмущающих ускорений S и Т.
1.1.2. Уравнения движения КА в отклонениях от движения
по опорной круговой орбите. Для построения приближенного
решения системы уравнений (1.2) предположим, что основные
характеристики рассматриваемого возмущенного движения на
интересующем нас интервале времени мало отклоняются от
соответствующих характеристик движения по невозмущенной
круговой орбите. Обозначим через Аг, АГГ, АГ,, Aw разности между
значениями соответствующих величин для возмущенной и
невозмущенной орбит
г = г0 + Аг,
Гг =АГ,
(1-3)
Г,=Го+АГ,.
Первое уравнение (1.2) для невозмущенной орбиты имеет вид:
п JZ2
0 = -4 + ^. (1.4)
г го
Подставим зависимости (1.3) в уравнения (1.2) и вычтем из
первого уравнения равенство (1.4). Тогда, пользуясь зависимостью
(1.4) и полагая величины Аг, АГ,., АГ, малыми, можно написать
(с точностью до членов первого порядка малости):
АГ-2Х0АГ,-^Аг = 5,
АГ,+Х0АГ=Т, (1.5)
31
Дг-ДПг =0,
Дй = — (Д Vt - ЛоДг),
го
где Х,о - угловая скорость движения спутника по круговой
невозмущенной орбите, определяемая из выражения
(1.6)
Получили систему четырех линейных дифференциальных
уравнений с постоянными коэффициентами относительно
неизвестных Дг, ДИ,., ДИ„ Ди.
Аналогичным образом для отклонений от плоскости орбиты
получаем уравнение
z + ^z = W.
(1-7)
1.1.3. Решение системы уравнений. Система (1.5), (1.7) имеет
решение, которое можно записать в виде [127]:
Дг = (2-cosX0r)Aro+ —sinXo/ДИго + —(1-со8Х0/)ДИй +
Т-о 7,0
+ -Ц 5©sinXo(^ + ^-j ^)[l-cosXo(^M,
А * А *
Ло о Ло о
ДИГ = Ло8тЛо/Дго + созХойДРфо + 28тХ0/ДИй +
/ I
+ J 5©cosX0(/-^ + 2j 7№пХ0(^Ж
о о
ДК, = -Xo(l-cosXo/)Ar0 - sinXo/ДКн) - (l-2cosX0OA^/o -
t t
-J 5(^sinX0(^X-J T©[l-2cosX0(^)]^> (1-8)
0 0
32
1 2
дм = Дно - — (3W-2sinV)Ar0 - — (l-cosV)AKo -
го К
. ±(3Xor - 4sinM^Ko— f 5ft)[l-cosX0(H^)]^-
K Ko i
- - Г 7Ю[ЗХо(Ч) - 4sinM^M,
Ко
1 1 1
Z = cosk0tz0 + — sinA-oZ Ко + — f ^(^)sinX0(r-^)a^,
Ч Ч о
Vz = -AosinAo?z0 + cosV Ko + J W (Q cosXzero d^.
0
. ^Ko.
•13 v >
*0
Члены, стоящие под интегралами в этих выражениях,
определяют влияние возмущающих сил, а внеинтегральные члены -
влияние малых начальных возмущений на текущие отклонения
орбиты от невозмущенной круговой. Пока нас будет интересовать
только влияние малых начальных возмущений. Выражения для них в
безразмерной форме имеют вид:
— = ^U —+ ^.2
''о
— =К1—+к-
т/
К го
^L = k 31 —+ А.
V г
у о fo
Ди = А4| -^- + к,
го
^ + k
К '
'22 v
y Q
^r0
32 V
y 0
ДКо
42 v
y0
Ko
к ’
z V
— '' Kz0
65 ^*66 TZ
ro
11 •
+к33^,
33 у
го
ДИ
+ А43 —— I- А44 Дг/0,
К
(1-9)
— = A: — + k
K55 + K56
ro ro
V z
~ = к^ — + к,
К
33
Здесь ky (ij=\,2,.. .,6) безразмерные коэффициенты, определяемые из
выражений:
&11 = 2-СО5ф, кп = БШф, &13 =2(1-СО5ф),
&21 = SHKp, к22 - СО5ф, = 2зтф,
k3i = -(1-СО8ф), къ = -БЮф, А:33 =-(1-2созф),
&41 = -(Зф-25Шф), кп = -2(1-со8ф), ^43 ~ -(Зф-4зтф),
^44 ~ 1,
к55 = созф, А:56 = SHKp,
к65 = -зшф, &66 = СО8ф,
где ф =kot - невозмущенное значение угла и.
1.2. Постановка задачи
1.2.1. Влияние импульсов скорости на отклонения в
заданной точке. Составляющие импульса скорости АС,., ДК„ ДИ,,
используемого для целенаправленного изменения орбиты, можно
рассматривать как начальные отклонения скорости. Каждый из этих
импульсов скорости, прикладываемых в точках с углами ф,(/=1,...,Д),
вызовет отклонения элементов орбиты в заданной точке с углом ф=ф/,
которые вычисляются с помощью системы (1.9). Сумма этих
отклонений, вызванных N импульсами скорости, имеет вид:
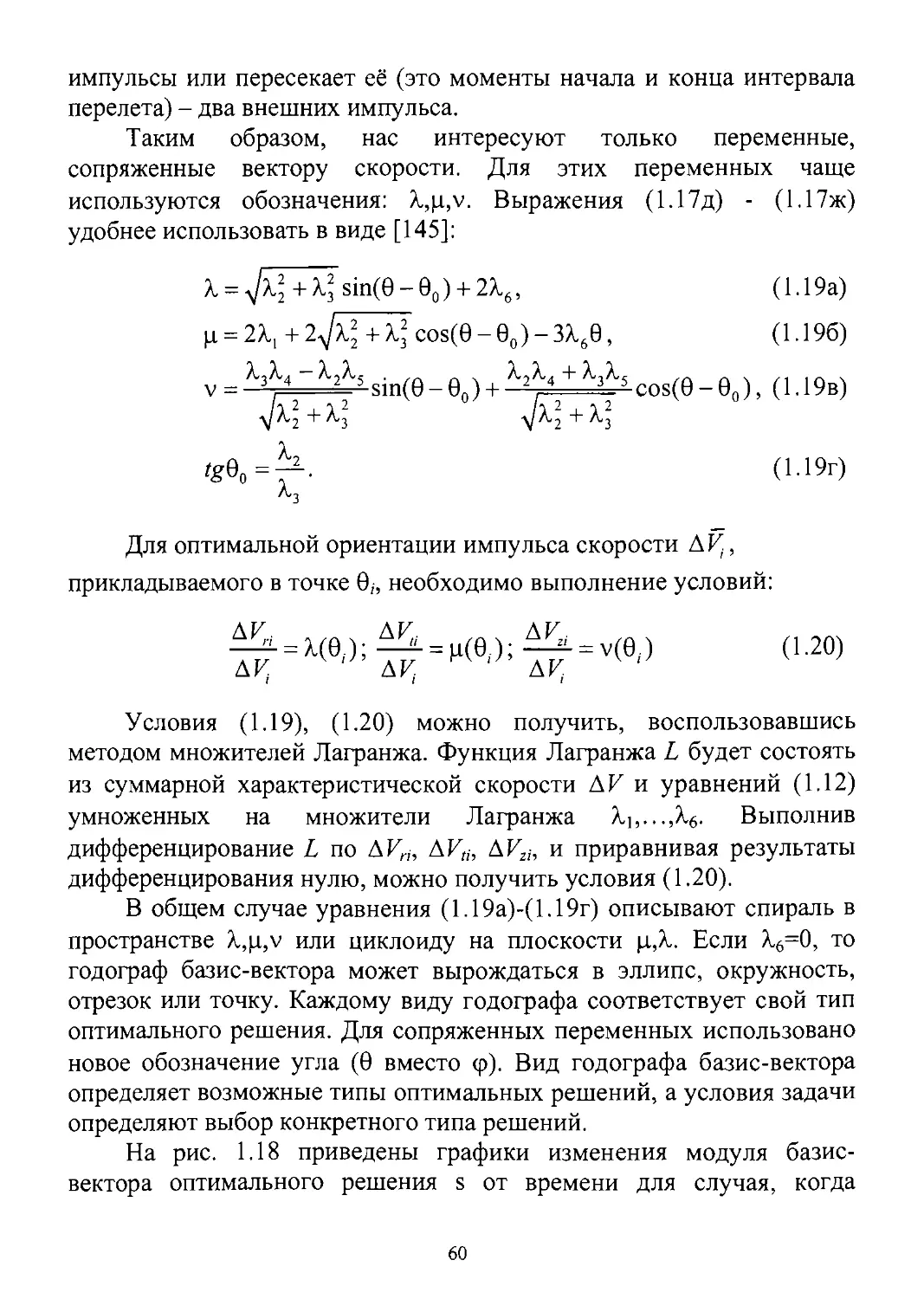
£ (^зт(ф/ -Ф,- )+2 - cos (Ф/ -Ф, )))=—, (1.10а)
/=1 '0 'о
JL ЛУ ЛУ ЛУ
X (“77^ cos (Ф/ -Ф, )+2 —^1п(ф f -ф,. ))= —, (1.Ю6)
'=1 'о 'О 'О
Ц (- sin(9 f -Ф;)- ^-(1 - 2 cos (Ф/ -ф,. )))= , (1.10в)
i=l *0 *0 Ч)
£(~2- c°s(Ф/-Ф,-))-^-(3(ф/ -Ф; )-4эт(ф/ -ф,.)))=Ди, (1 10г)
(=1 *о к0
^АЕк8т(ф -ф.)=—, (Е10д)
34
x^rtcos((p/-(p,)=4r'’ (ij0e)
i=l '0 '0
здесь ДИп-,ДИг,-,ДИг,- - радиальная, трансверсальная и боковая
составляющие z-го импульса скорости соответственно.
Из системы (1.10) можно определять параметры импульсов
скорости, при которых будут выполнены терминальные условия
выхода на конечную орбиту, если стоящие в правой части отклонения
рассматривать как отклонения параметров конечной орбиты (орбиты
на которую необходимо выйти с помощью импульсов скорости) от
параметров начальной орбиты. Эти отклонения вычисляются по
формулам:
Аг = Ату -Дг0, AVr =AVrf -AVrQ, ДР) = AVlf -ДР)0,
Au = Auf - Au0, Az = zf -z0, AVz = Vzf -Kz0,
где индексами «_/>>, «0» обозначены отклонения от круговой орбиты
соответственно конечной и начальной орбит в точке <р=<р/.
Отклонения от круговой орбиты, вычисленные в
цилиндрической системе координат, наиболее эффективно
использовать при решении задачи встречи двух космических
аппаратов на последнем интервале маневрирования, когда большое
значение имеет оценка их взаимного положения и движения. В этот
момент прицельной точкой, как правило, является не сам пассивный
аппарат, а некоторая точка в его окрестности. Этот сдвиг задается так
называемым «прицельным вектором». Например, если активный КА
находится на внутренней орбите относительно КА цели, то можно
выбирать небольшие отрицательные отклонения по радиусу и
трансверсальной скорости (например, Дг=-0.5км, ДР)=-10м/с), что
обеспечивает сближение «снизу», при котором активный КА
догоняет цель и подходит к ней снизу.
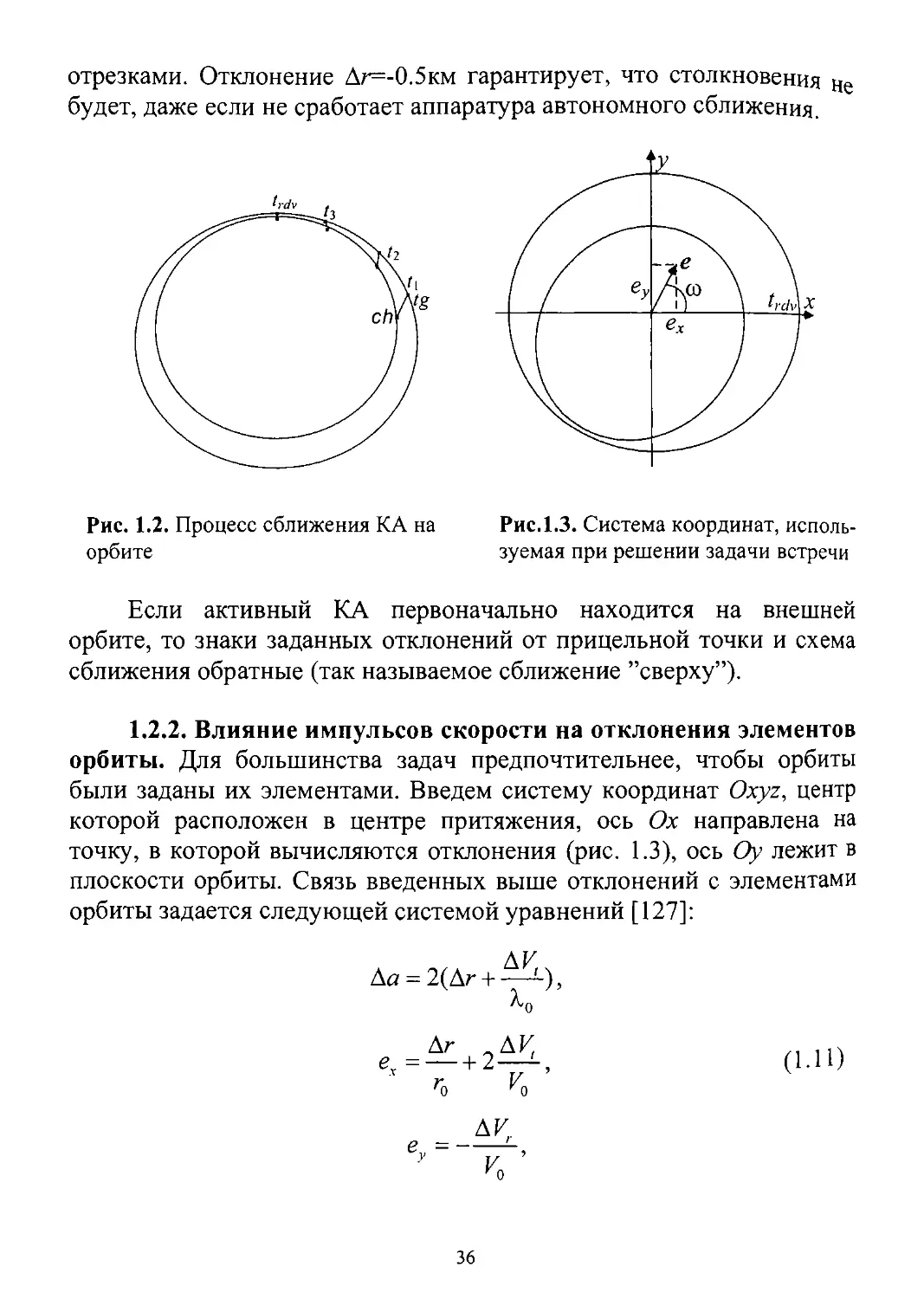
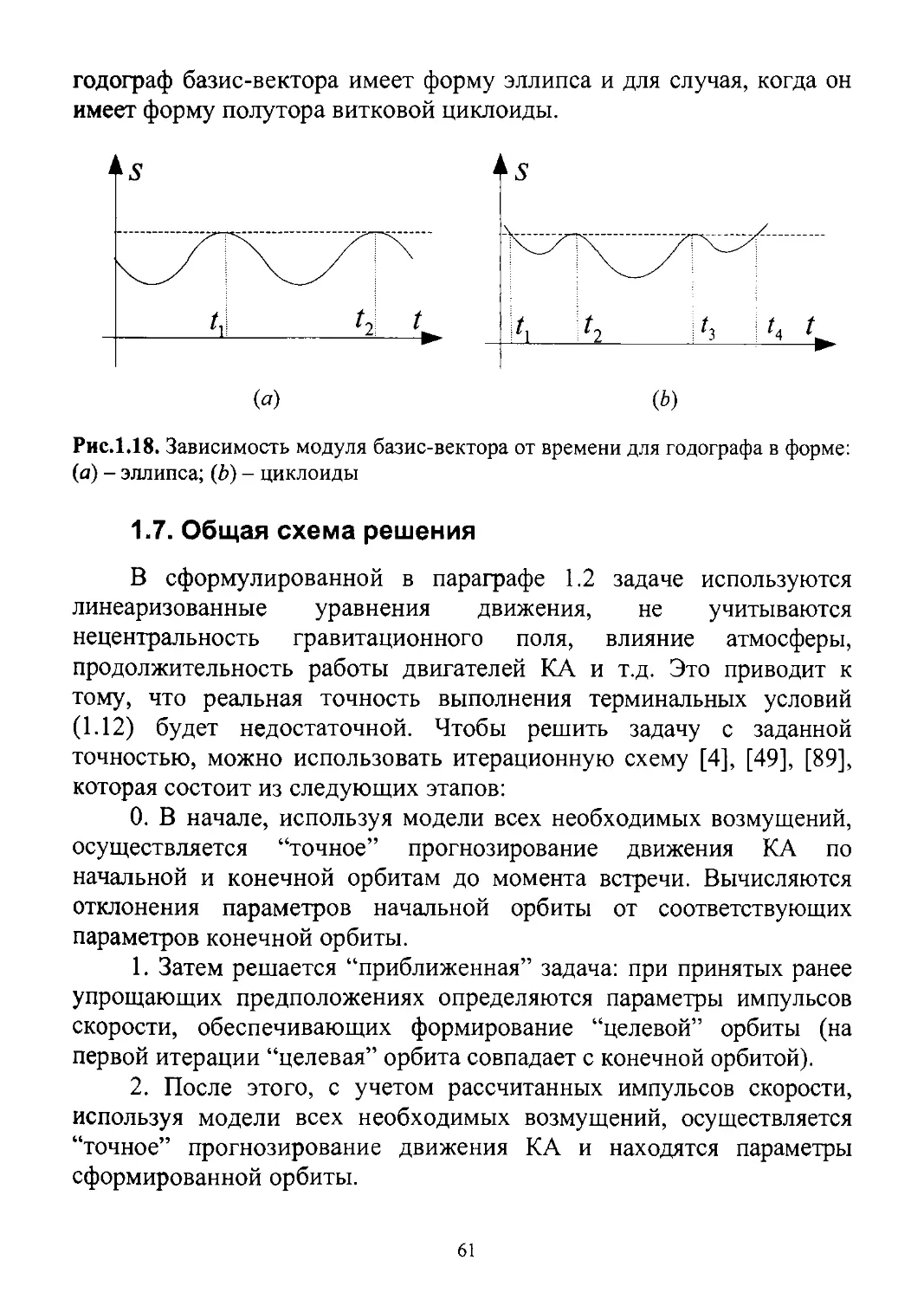
Схема такого сближения представлена на рисунке 1.2. На
рисунке изображены положения активного КА (обозначен ch,
внутренняя орбита) и KA-цели (tg) в моменты времени
предшествующие моменту встречи, а также сам момент встречи trdv.
Положения КА на один момент времени соединены между собой
35
отрезками. Отклонение Дг=-0.5км гарантирует, что столкновения не
будет, даже если не сработает аппаратура автономного сближения.
Рис. 1.2. Процесс сближения КА на
орбите
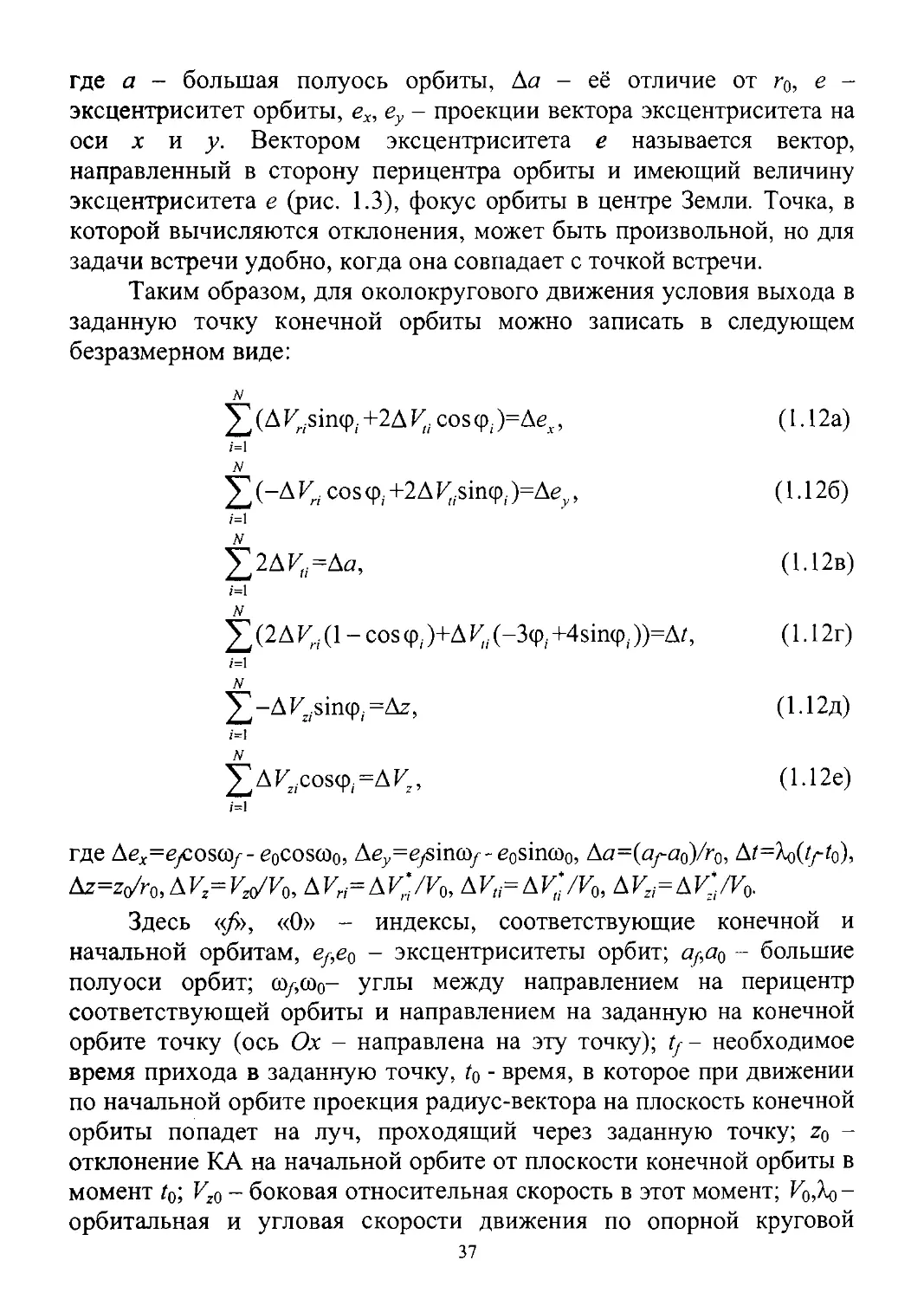
Рис. 1.3. Система координат, исполь-
зуемая при решении задачи встречи
Если активный КА первоначально находится на внешней
орбите, то знаки заданных отклонений от прицельной точки и схема
сближения обратные (так называемое сближение ’’сверху”).
1.2.2. Влияние импульсов скорости на отклонения элементов
орбиты. Для большинства задач предпочтительнее, чтобы орбиты
были заданы их элементами. Введем систему координат Oxyz, центр
которой расположен в центре притяжения, ось Ох направлена на
точку, в которой вычисляются отклонения (рис. 1.3), ось Оу лежит в
плоскости орбиты. Связь введенных выше отклонений с элементами
орбиты задается следующей системой уравнений [127]:
ДЕ
Да = 2(Дг + —-),
Дг „дк
е = — + 2—
Г0 ^0
. -
(ЕН)
36
где а - большая полуось орбиты, Да - её отличие от г0, е -
эксцентриситет орбиты, ех, еу - проекции вектора эксцентриситета на
оси х и у. Вектором эксцентриситета е называется вектор,
направленный в сторону перицентра орбиты и имеющий величину
эксцентриситета е (рис. 1.3), фокус орбиты в центре Земли. Точка, в
которой вычисляются отклонения, может быть произвольной, но для
задачи встречи удобно, когда она совпадает с точкой встречи.
Таким образом, для околокругового движения условия выхода в
заданную точку конечной орбиты можно записать в следующем
безразмерном виде:
А (A KHsin<p/ +2А Vti cos ср/ )=Aev, (1.12а)
/=i А (-А Vri cos <p/ +2A ^.sincp)=кеу, (1.126)
/=1 £2ДК,=Да, (1.12b)
/=1 (2 Д Vri (1 - cos <р(. )+Д (—3<р,. +4sincp,. ))=Д/, (1.12г)
/=1 -A ^sincp. =Az, (1.12д)
i=i ^Д^.созф^ДК,, J=1 (1.12е)
где Aex=e/cosay-e0coscoo> Ae7=e/sinci2y-e0sinco0, Aa=(ay-a0)/r0, Д/=Х0(/7-/0),
Az=Z(/r0, AJ/ = rz(/r0, ДГ„=Д1<;/Го, ДК(,=Д^/Г0, ДК,=ДИ'/И0.
Здесь «у», «О» - индексы, соответствующие конечной и
начальной орбитам, е^е0 - эксцентриситеты орбит; а^,а0 - большие
полуоси орбит; ау,®0- углы между направлением на перицентр
соответствующей орбиты и направлением на заданную на конечной
орбите точку (ось Ох - направлена на эту точку); tj- необходимое
время прихода в заданную точку, Го - время, в которое при движении
по начальной орбите проекция радиус-вектора на плоскость конечной
орбиты попадет на луч, проходящий через заданную точку; z0 -
отклонение КА на начальной орбите от плоскости конечной орбиты в
момент t0; - боковая относительная скорость в этот момент; Kj, А -
орбитальная и угловая скорости движения по опорной круговой
37
орбите радиуса r0 (r0=<2y); N - число импульсов скорости; ф,- - уГОд
приложения /'-го импульса скорости, отсчитываемый от направления
на заданную точку в сторону движения КА; Д1К ,Д^*,ДГ* _
радиальная, трансверсальная и боковая составляющие /-го импульса
скорости соответственно. Необходимо учитывать, что углы ф, _
отрицательны, тж. было принято, что в заданной точке фу=О (этим в
частности объясняется знак «-» в пятом уравнении).
1.2.3. Постановка задачи. Интервалы маневрирования
на которых можно прикладывать импульсы скорости, обычно
задаются номером витка и аргументом широты начала и конца
интервала. Имеется следующее ограничение на углы приложения
импульсов скорости:
Ф, eF,,...^ еК , (1.13)
где Fi,...,Fn- заданные интервалы маневрирования.
Таким образом, в общем виде задачу поиска параметров
оптимальных маневров можно сформулировать следующим образом:
надо определить ДИ,.,-, ДИ„-, ДИ2,-, ф,- (/=1,...,А), при которых
минимальна суммарная характеристическая скорость маневров Д V
ДИ = ^ Д^=^Д^+ДИ„2+Д^
i=l i=l
при ограничениях (1.12), (1.13).
В конкретной задаче могут учитываться только некоторые из
приведенных здесь ограничений.
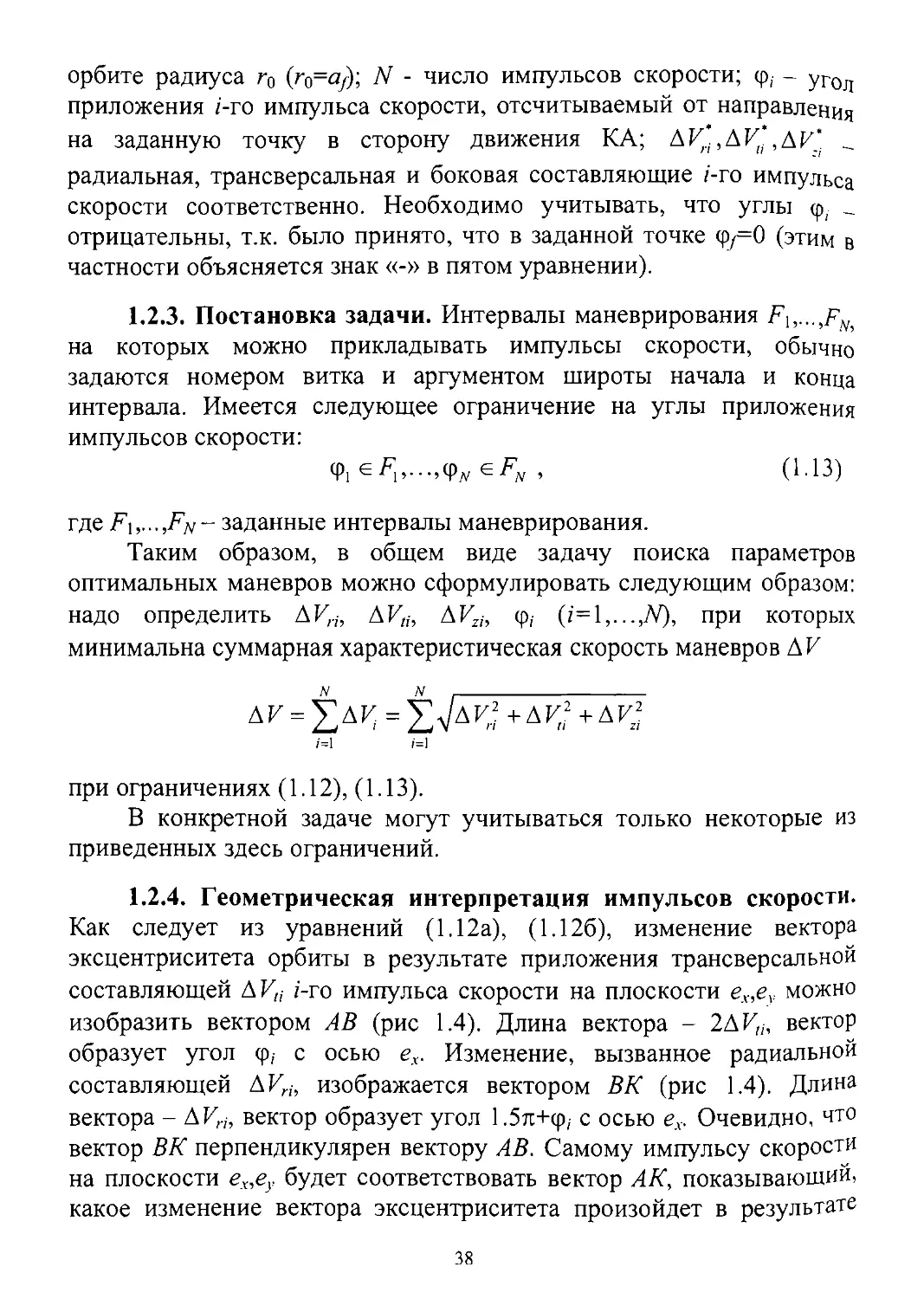
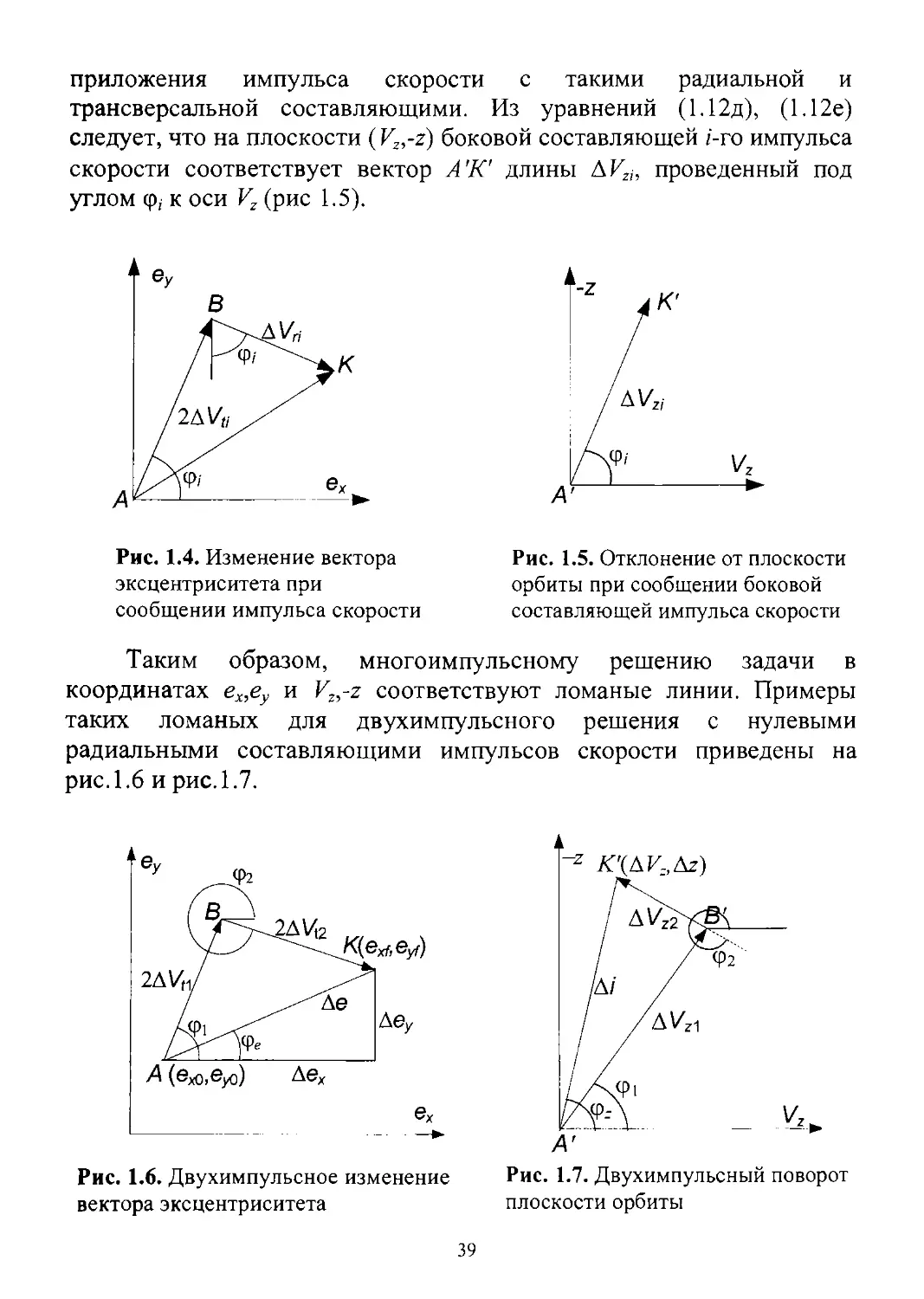
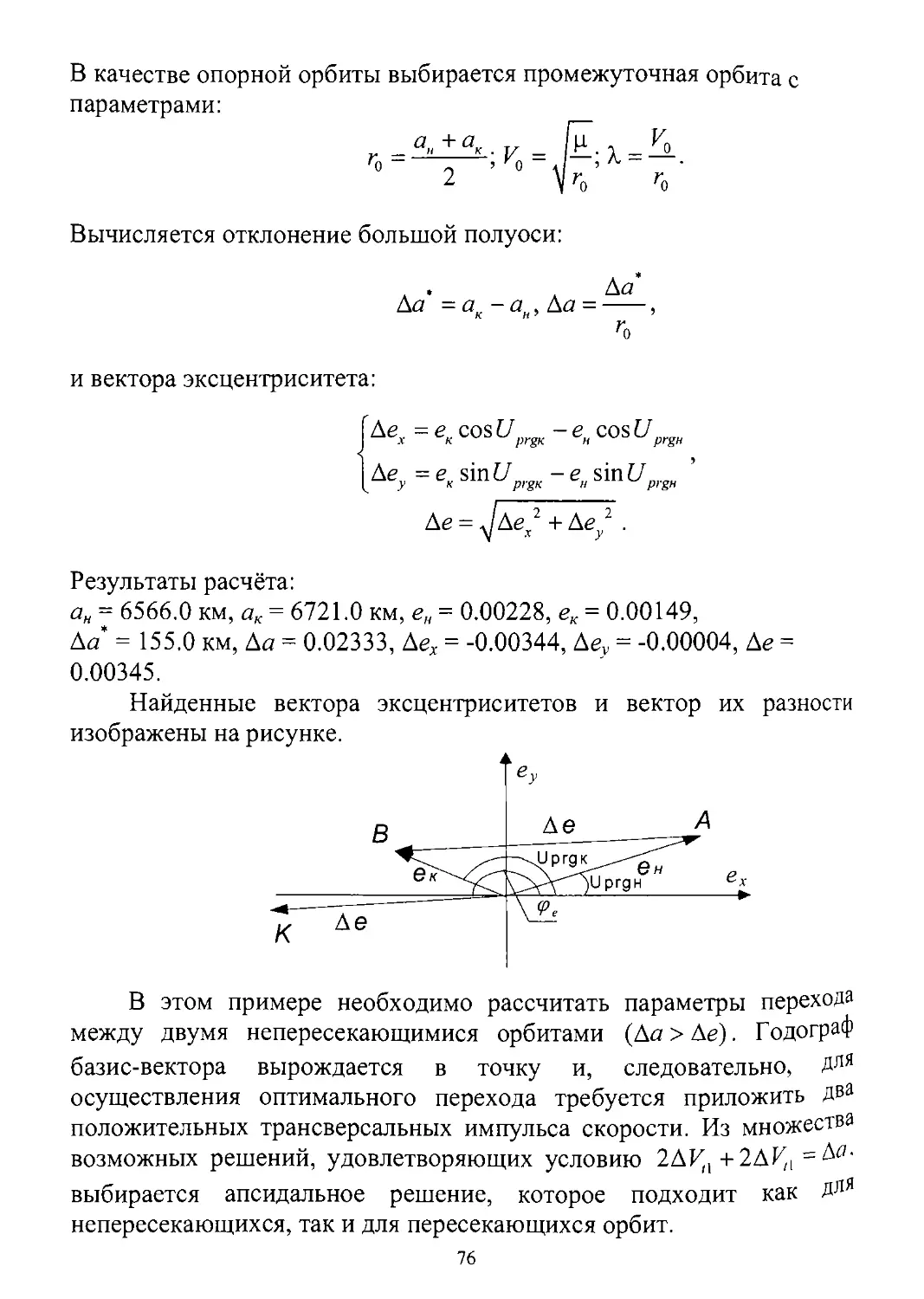
1.2.4. Геометрическая интерпретация импульсов скорости.
Как следует из уравнений (1.12а), (1.126), изменение вектора
эксцентриситета орбиты в результате приложения трансверсальной
составляющей ДИ„- /-го импульса скорости на плоскости ev,ev можно
изобразить вектором АВ (рис 1.4). Длина вектора - 2ДК„, вектор
образует угол ф,- с осью ех. Изменение, вызванное радиальной
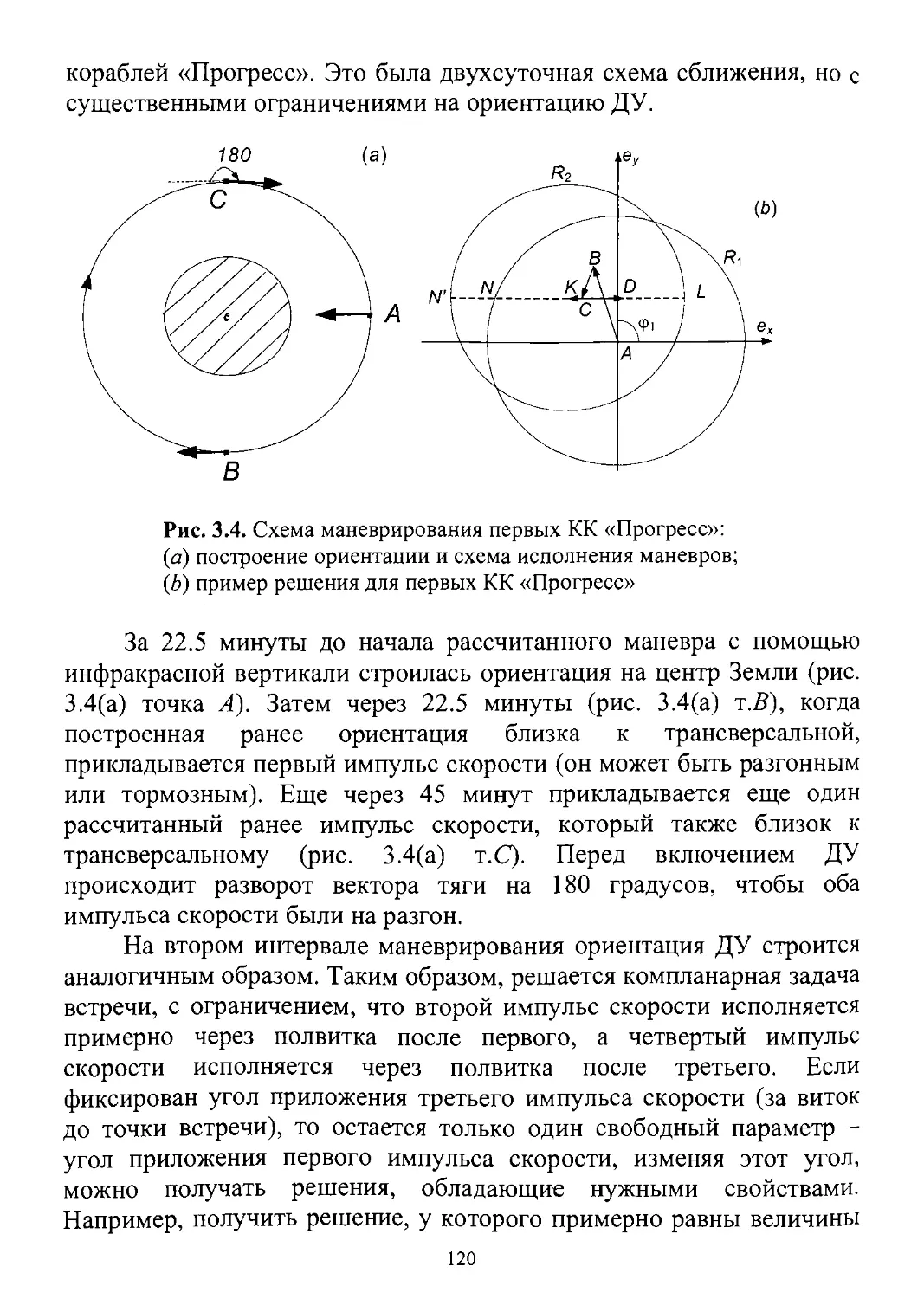
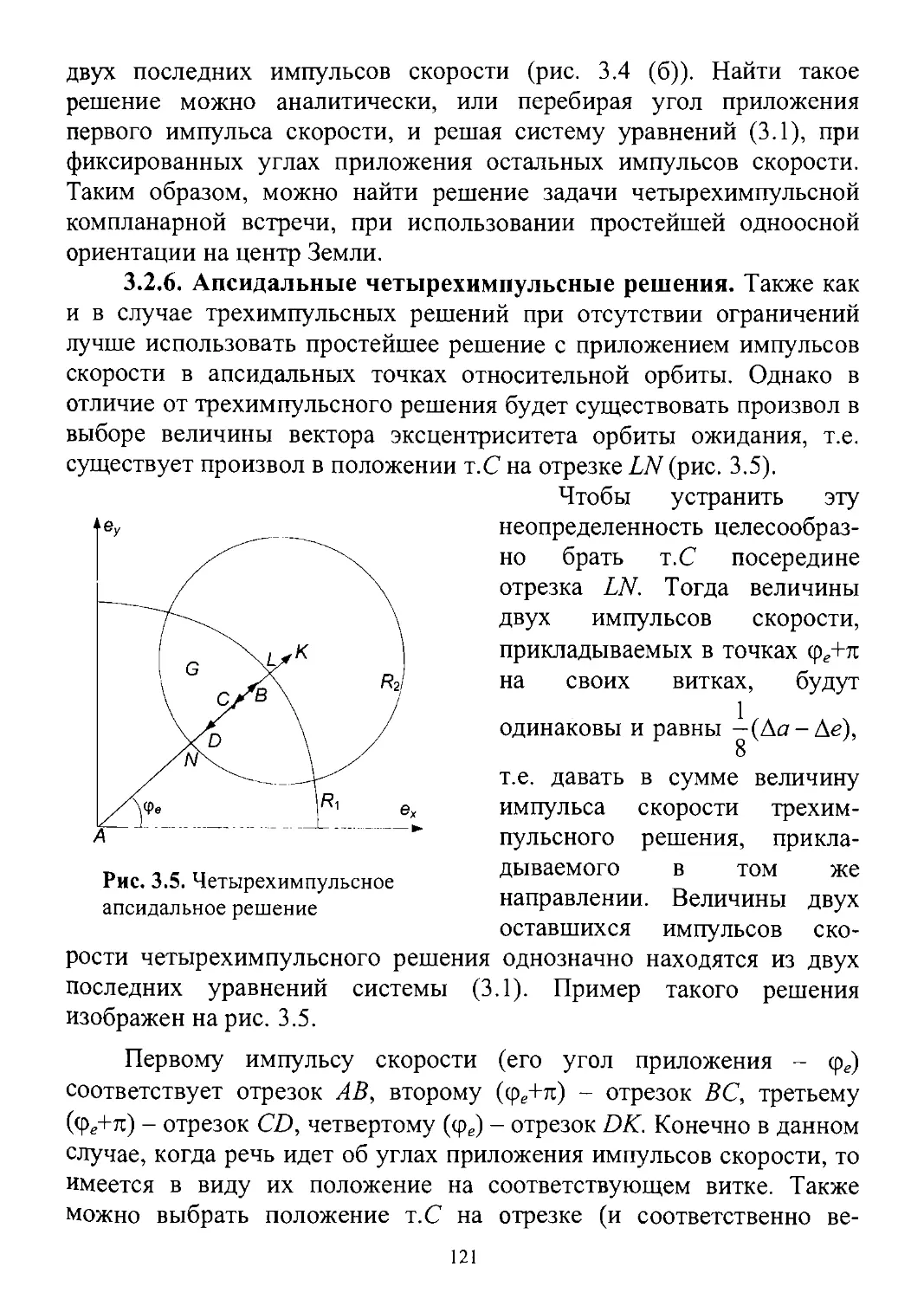
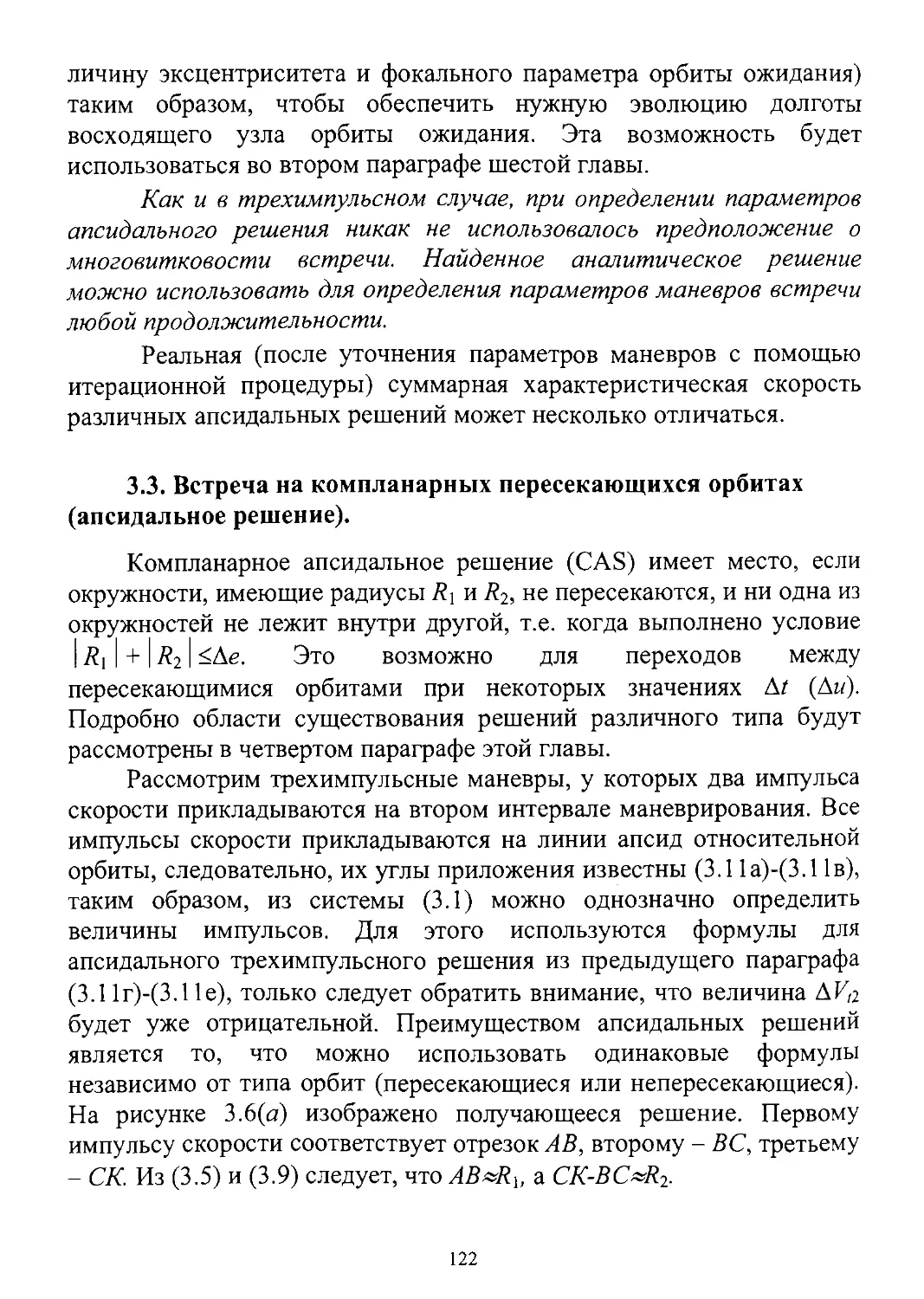
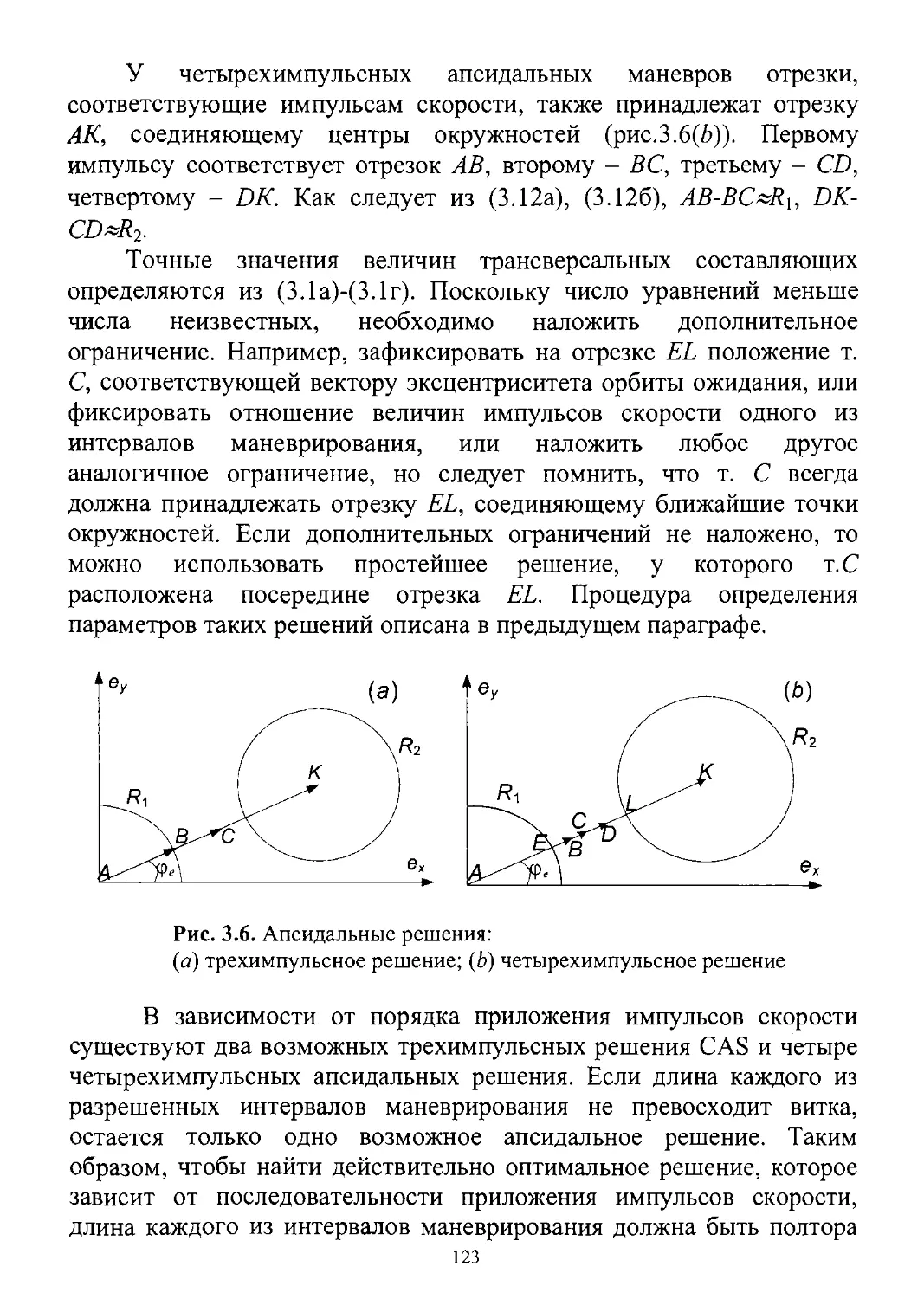
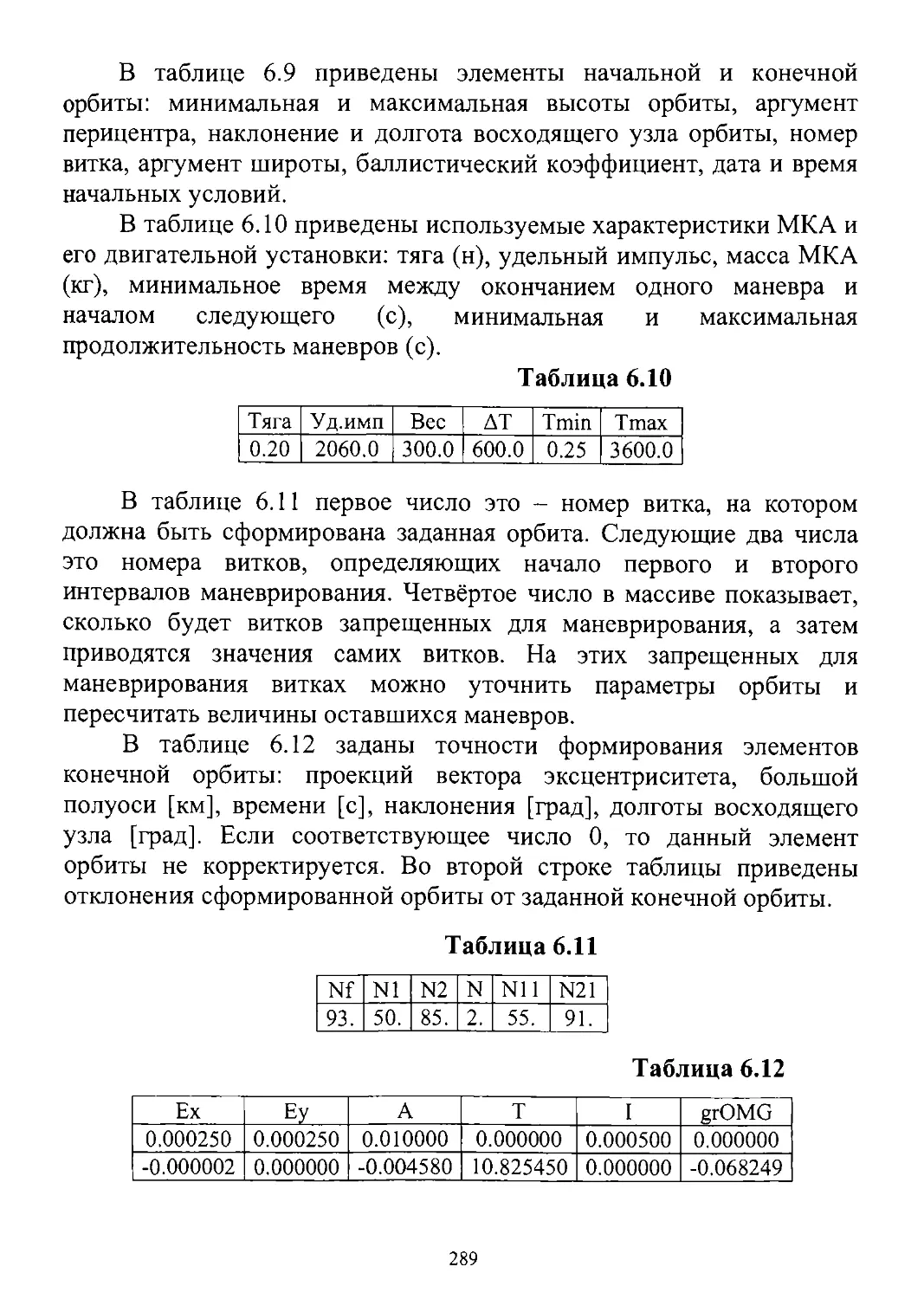
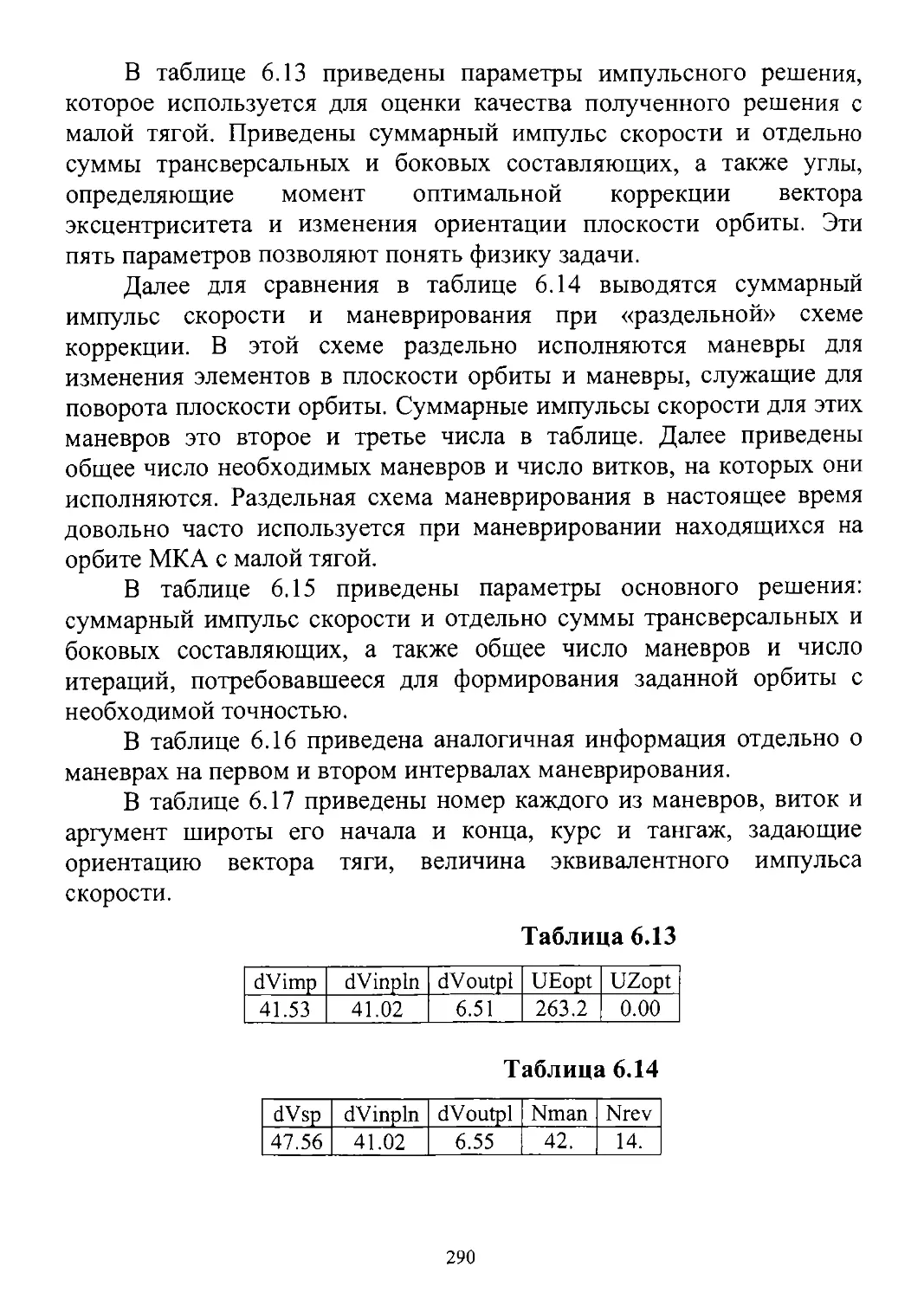
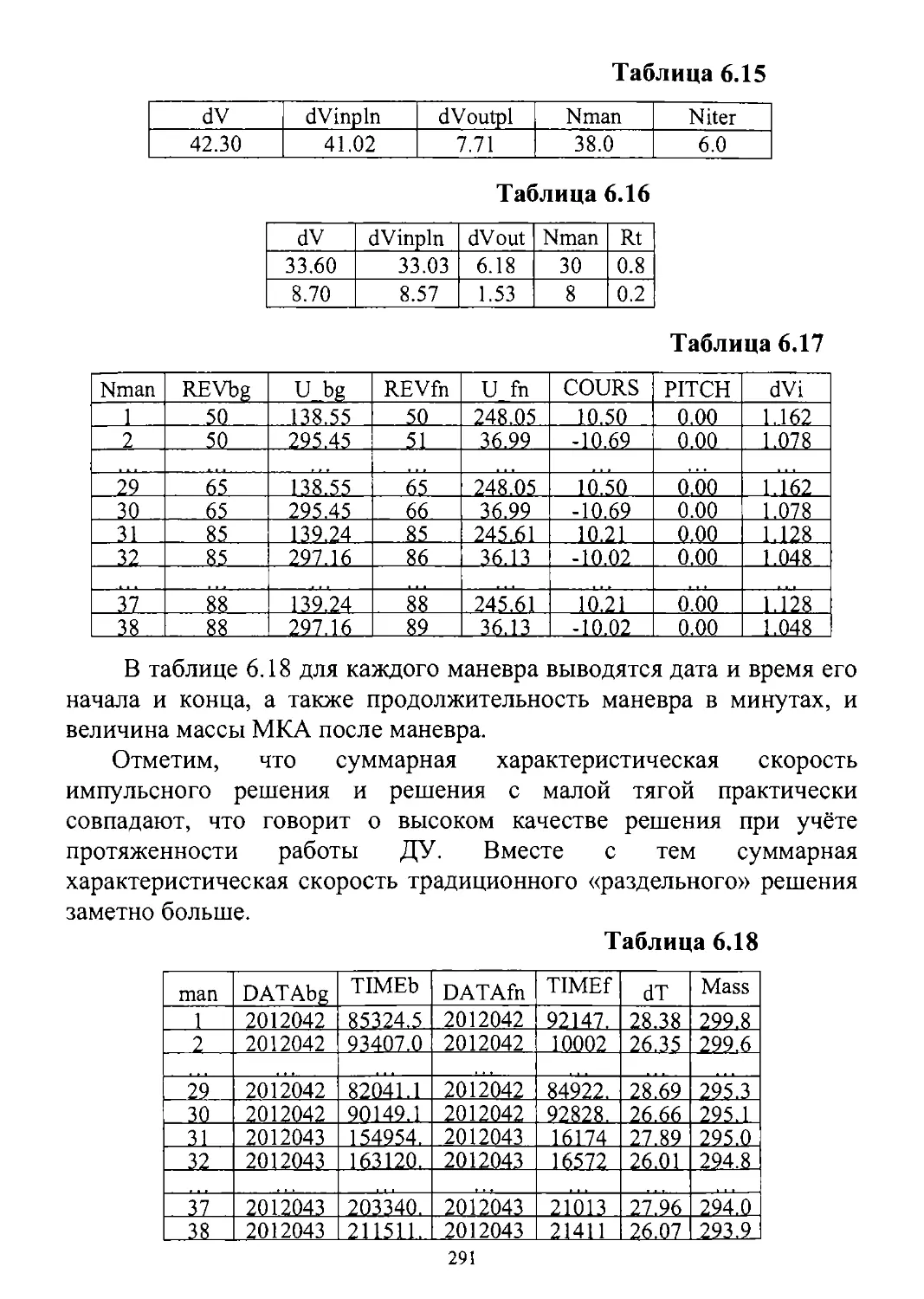
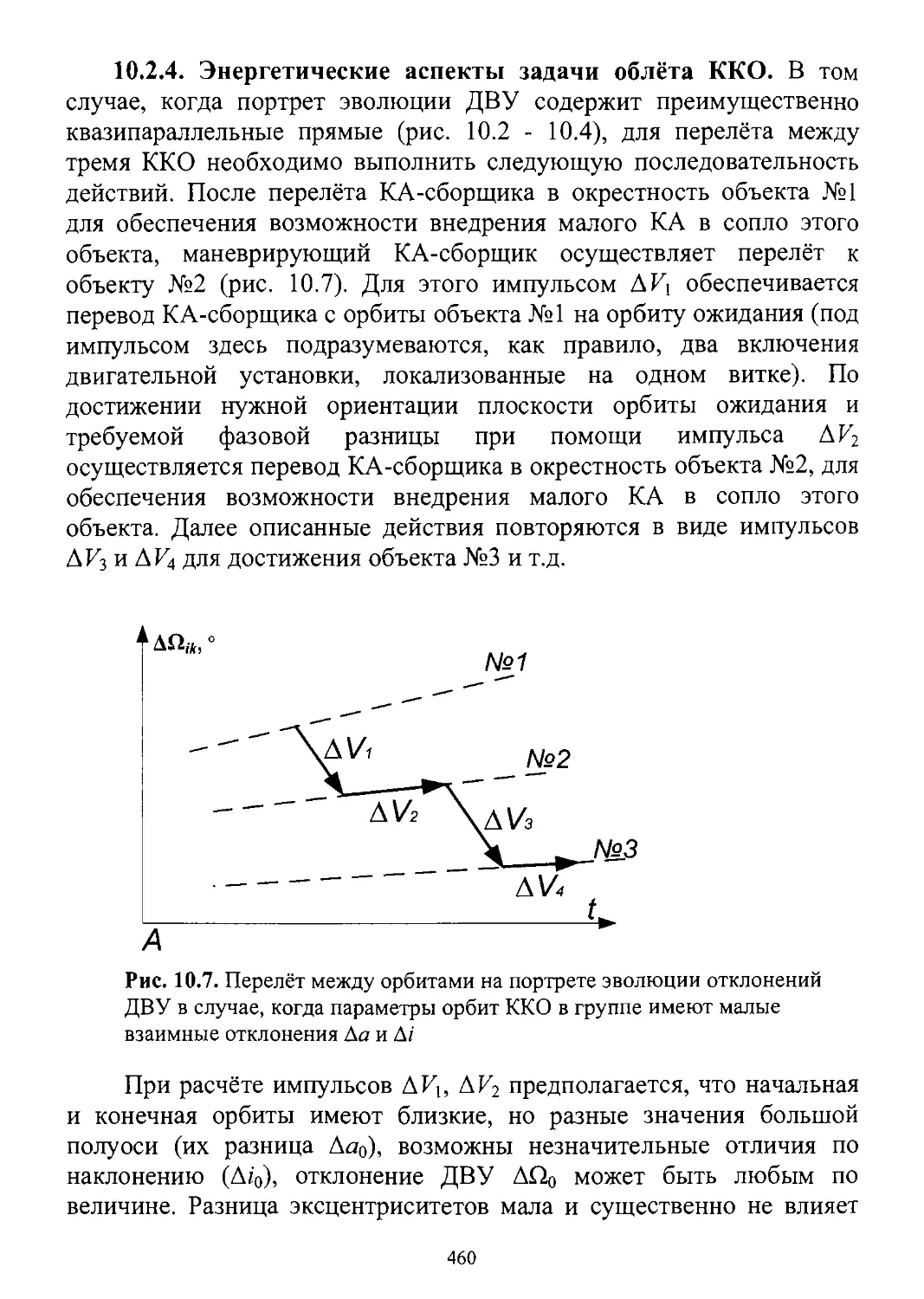
составляющей ДИ„, изображается вектором ВК (рис 1.4). Длина
вектора - ДИ,.,-, вектор образует угол 1.5л+ф, с осью ед. Очевидно, что
вектор ВК перпендикулярен вектору АВ. Самому импульсу скорости
на плоскости ех,еу будет соответствовать вектор АК, показывающий,
какое изменение вектора эксцентриситета произойдет в результате
38
приложения импульса скорости с такими радиальной и
трансверсальной составляющими. Из уравнений (1.12д), (1.12е)
следует, что на плоскости (Kz,-z) боковой составляющей z-ro импульса
скорости соответствует вектор А'К' длины ЛИ,,, проведенный под
углом ф, к оси Vz (рис 1.5).
Рис. 1.4. Изменение вектора
эксцентриситета при
сообщении импульса скорости
Рис. 1.5. Отклонение от плоскости
орбиты при сообщении боковой
составляющей импульса скорости
Vz
—►
Таким образом, многоимпульсному решению задачи в
координатах ех,еу и Vz,-z соответствуют ломаные линии. Примеры
таких ломаных для двухимпульсного решения с нулевыми
радиальными составляющими импульсов скорости приведены на
рис. 1.6 и рис. 1.7.
Рис. 1.6. Двухимпульсное изменение
вектора эксцентриситета
Рис. 1.7. Двухимпульсный поворот
плоскости орбиты
39
На рисунках обозначены углы сре, cpz, которые задают
направление оптимальной коррекции отклонения вектора
эксцентриситета и отклонения плоскостей орбит соответственно. Эти
углы вычисляются по формулам:
Де
tg<Pe=—(1.14а)
Aev ’
tg(pz=“^' (И4б)
Представляет интерес Дер - разница углов между направлениями
оптимальной коррекции отклонения вектора эксцентриситета и
отклонения плоскостей орбит:
Дф = сре-(рг, (1.14в)
Дг - минимальный импульс скорости (безразмерный) необходимый
для совмещения плоскостей орбит вычисляются по формуле:
Дг = д/Дг2 + ДГ/ . (1.14г)
1.2.5. Относительная орбита. В системе (1.12) присутствуют
только отклонения элементов орбит в точке встречи, а не значения
самих элементов. Это означает, что переход между начальной и
конечной эллиптическими орбитами с параметрами (ezo>evO,°o) и
(ех/,е7/,«у) формально эквивалентен переходу с опорной круговой
орбиты радиуса г0 на эллиптическую с параметрами
(Дег,Де7,<7=г0+Д<з), где Дех=ех/-ех0, Де^е^у-вц), &a=aj-a0. В дальнейшем
исследовании орбита с такими элементами будет называться
относительной, а вместо перехода из точки (е^е^) в точку (е^е,./) на
плоскости ех,еу будет изображаться переход из точки (0,0) в точку
(Д^Х>Д^у)-
1.3. Одноимпульсные маневры
Очевидно, что перейти с помощью одного импульса скорости с
начальной на заданную орбиту можно только в случае, когда орбиты
пересекаются или касаются. В остальных случаях с помощью
одноимпульсных маневров можно сформировать только некоторые из
элементов нужной орбиты.
40
Вид уравнений (1.12) позволяет сделать несколько очевидных
выводов об изменении элементов орбиты одним импульсом скорости.
1.3.1. Изменение большой полуоси. Изменение большой
полуоси орбиты происходит за счет трансверсальной составляющей
импульса скорости, причем величина изменения не зависит от
момента приложения импульса. Радиальная составляющая не
изменяет большую полуось. Величина трансверсальной
составляющей находится из уравнения (1.12в)
ДИ = —Да.
2
1.3.2. Изменение эксцентриситета. Изменение эксцентриситета
происходит за счет обеих составляющих, при этом величина
изменения существенно зависит от момента приложения импульса
скорости. Очевидно, что наиболее эффективно изменять
эксцентриситет, прилагая трансверсальную составляющую импульса
в перицентре (ср=сре) или апоцентре (<р=<ре+л) относительной орбиты.
Величина трансверсальной составляющей определяется из уравнения
(1.12а), знак “+” соответствует импульсу скорости, прикладываемому
в перицентре, знак в апоцентре
ДИ, = ±-Де,
2
где Де = ^Де* + Де| .
Изменять величину эксцентриситета можно и за счет
радиальной составляющей. Эффективность вдвое меньше, зато не
меняется величина большой полуоси. Импульс скорости
л
прикладывается в точке ср = сре +—, тогда
ДИГ = Де,
я
или в точке ср = <ре -тогда
ДИг = -Де.
1.3.3. Одноимпульсный переход между орбитами. Если
орбиты лежат в одной плоскости и пересекаются, то с начальной
41
орбиты на конечную можно перейти одним импульсом скорости
который прикладывается в одной из точек пересечения орбит. Ка^
уже отмечалось, на плоскости ех,еу решению задачи соответствует
ломаная, которая начинается в начале системы координат (т.Л) и
должна заканчиваться в т.К, соответствующей вектору
эксцентриситета относительной орбиты (рис. 1.8).
Рис. 1.8. Одноимпульсный переход между
компланарными пересекающимися орбитами
В одноимпульсной задаче имеются трансверсальная и
радиальная составляющие импульса скорости, следовательно,
ломаная будет состоять из двух отрезков. Величина трансверсальной
составляющей находится из (1.12в) Д1^=-^-.На плоскости ех,еу
геометрическим местом точек, которые можно достичь с помощью
этой составляющей, будет окружность радиуса Да (рис. 1.8), т.к. угол
приложения импульса скорости пока не определен, а величина
трансверсальной составляющей известна. Как было показано выше,
отрезок, соответствующий радиальной составляющей,
перпендикулярен отрезку, соответствующему трансверсальной
составляющей, значит, радиальной составляющей импульса скорости
должен соответствовать отрезок касательный к окружности. Так как
необходимо сформировать заданный вектор эксцентриситета
(перейти при помощи двух составляющих из точки А в точку К), то
радиальной составляющей будет соответствовать отрезок ВК
(удвоенной трансверсальной - АВ) (рис. 1.8). Используя найденное
42
геометрическое решение задачи, можно найти величину радиальной
составляющей и угол приложения импульса скорости <р:
ДКг = л/Де2 - Да2 ,
Ф = Фе±Ф*>
. . ДИ
где sin ф = —-, а также затраты суммарной характеристической
Де
скорости на переход между орбитами:
ДИ = Л/де2--Да2 .
V 4
При помощи радиальной составляющей достичь точки К можно
только, если она лежит вне окружности, т.е. если выполнено условие
АК>АВ, а это эквивалентно условию Де > | Д«|. Но, с другой стороны,
одноимпульсное решение существует, только если орбиты
пересекаются, следовательно, для пересечения орбит необходимо
выполнение условия Де>|Да|. Заметим, что формулу для угла
приложения импульса скорости одноимпульсного перехода на
заданную орбиту можно использовать для нахождения положения
точек пересечения орбит.
1.3.4. Поворот плоскости орбиты. Как видно из рисунка 1.7,
совместить плоскости орбит можно также одним импульсом
скорости, прикладываемым в точке ф=ф-. величина импульса
ДК =д/,
или в точке ф= фг + п, тогда
ДИ2 =-Д/,
здесь ф2, Д/- вычисляются по формулам (1.146), (1.14г).
Очевидно, что эти импульсы скорости прикладываются на линии
пересечения плоскостей конечной и начальной орбит.
Определить Д/ можно и не вычисляя отклонений Дг, ДИ., если
мы знаем угол между плоскостями орбит Ду:
43
л- т AY
Az = 2sin—
2
Для малых углов между орбитами, а такие задачи и рассматриваются
в данной работе,
Az = Ау.
Таким образом, можно считать, что Az - угол между плоскостями
орбит.
Определить Ау и uz (uz - аргумент широты точки приложения
импульса скорости, совмещающего плоскости орбит) можно, зная
наклонение начальной z0 и конечной if орбит и разность их долгот
восходящего узла AQ:
cos Ay = cos if cos z0 + sin if sin z0 cos AQ,
sinz' sin AQ
sin uz =---------.
sin Ay
Особенно простые формулы получаются, если необходимо
корректировать только разность в наклонении z или АО:
Ay = if - z0, uz =0° или 180° (экватор),
Ay = AQ, uz =90° или 270° (апекс или вертекс орбиты).
1.3.5. Изменение большой полуоси эллиптической орбиты.
Конечно, для изменения только одного из элементов орбиты можно
воспользоваться более точными формулами, чем формулы
околокругового движения. Например, изменение большой полуоси
эллиптической орбиты можно вычислить по формуле:
А. = ^АИГ,
Ц
где l\V~ -тангенциальная составляющая импульса скорости, а V -
скорость в той точке орбиты, где прикладывается импульс скорости.
Из этой формулы следует, что для оптимального изменения большой
полуоси орбиты импульс скорости необходимо ориентировать по
касательной к орбите, а максимальное изменение произойдет, если
импульс прикладывать в перицентре орбиты, где скорость КА
наибольшая.
44
Простые формулы линеаризованного движения понадобятся для
получения аналитического решения задачи, в которой необходимо
одновременно корректировать все элементы орбиты.
1.4. Изменение формы орбиты в результате
приложения импульса скорости
Изобразим изменение формы орбиты и смещение вдоль орбиты
[127] под действием различных составляющих импульса скорости.
1.4.1. Влияние радиальной составляющей импульса
скорости. На рис. 1.9 орбита, полученная в результате приложения
положительной радиальной составляющей импульса скорости,
изображена пунктирной линией.
Перицентр орбиты расположен в точке <р0=1.5л. Абсолютные
величины отклонений по радиусу в апоцентре и перицентре орбиты
равны между собой
Рис.1.9. Изменение формы орбиты при сообщении
радиальной составляющей импульса скорости
Смещение вдоль орбиты, происходящее в течение витка,
изображено на рис. 1.10.
45
Рис.1.10. Смещение вдоль орбиты при сообщении
радиальной составляющей импульса скорости
Как видим, после половины витка полета достигается
максимальное отставание от невозмущенного движения
Aw =
-4^
но к концу витка отставание исчезает, следовательно, вековое
смещение отсутствует.
Рис. 1.11(a). Относительное движение
после приложения радиальной
составляющей импульса скорости
Рис.1.11(б). Сближение с помощью
радиальной составляющей импульса
скорости
Полученные результаты можно использовать для представления
движения активного КА (или брошенного со станции предмета)
относительно станции. Это движение удобно изображать в
орбитальной системе координат, центр которой совпадает с центром
масс станции, ось г направлена вдоль радиус-вектора, ось п лежит в
плоскости орбиты и направлена в сторону движения КА.
Относительное движение, вызванное приложением
положительной радиальной составляющей импульса скорости,
изображено на рис. 1.11(a). Через четверть витка полета достигается
46
максимальное положительное отличие по радиусу. Через половину
витка полета достигается максимальное отставание вдоль орбиты, но
отсутствует отклонение по радиусу. Еще через четверть витка полета
достигается максимальное отрицательное отличие по радиусу. Через
виток объект возвращается в исходную точку.
Иногда отличие в радиальной составляющей скорости
используют для приближения к КА цели. Например, выводят
активный КА в точку, находящуюся на орбите цели, но позади неё
(точка А на рисунке 1.11(6)). Затем, прилагая импульсы скорости с
отрицательной радиальной составляющей (используя только нижние
половины эллипса рисунка 1.11(a)), приближаются к цели [164]. Эта
стратегия хороша тем, что если, например, не прилагать импульса
скорости в точке С (рис. 1.11(6)), то можно просто вернуться в точку
В и дальше двигаться без векового изменения положения
относительно КА цели. В нужный момент процесс сближения можно
возобновить.
1.4.2. Влияние трансверсальной составляющей импульса
скорости. На рис. 1.12 пунктиром изображена орбита, полученная в
результате приложения положительной трансверсальной
составляющей.
Перицентр орбиты находится в точке (ро=О°, а отклонение по
Рис.1.12. Изменение формы орбиты
при сообщении трансверсальной
составляющей импульса скорости
Рис.1.13. Смещение вдоль орбиты при
сообщении трансверсальной
составляющей импульса скорости
47
Смещение вдоль орбиты изображено на рис. 1.13. Вначале
смещение положительно, и достигает своего максимума
ДК
Дг/^ 0,4776—
при <р= 4Г24'35", затем смещение вперед начинает уменьшаться и
после <р=73°05'32" начинается отставание от невозмущенного
движения.
За один виток набирается отставание:
Л А
Ли = -6 л—
Vo
Это означает, что после приложения импульса скорости Д
направленного вперед, фактически КА начинает двигаться назад со
средней скоростью ЗДК,.
Рис.1.14. Относительное движение после приложения
трансверсальной составляющей импульса скорости
Относительное движение, вызванное приложением
положительной трансверсальной составляющей импульса (ДК,=2м/с,
радиус орбиты го=67ООкм), изображено на рис. 1.14 (по осям отложено
расстояние в км). Как видим, предмет, брошенный со станции вперед,
сначала будет двигаться вперед и вверх, затем будет продолжать
двигаться вверх, одновременно смещаясь назад, потом будет
опускаться и достигнет уровня станции, но позади неё (аналогичное
движение на втором витке показано пунктиром).
48
Рис.1.15. Относительное движение КА «Союз»
при сближении с орбитальной станцией
Движение КА «Союз» относительно орбитальной станции,
которое теоретически должно происходить после приложения
последнего импульса за 180° градусов до прицельной точки,
изображено на рис. 1.15. Здесь предполагается, что в прицельной
точке отклонение (прицельный вектор) должно составлять ДК(=-
12.5м/с. Можно видеть, что на угловой дальности от -180° до
примерно -73° корабль догоняет станцию, приближаясь к ней снизу,
затем слегка опережает ее, а на последнем этапе полета от —41° до 0°
уже станция догоняет корабль. На самом деле примерно за 100° до
прицельной точки начинает работать аппаратура автономного
сближения, и реальное движение КА будет отличаться от движения,
изображенного на рис. 1.15.
1.4.3. Влияние боковой составляющей импульса скорости.
На рис. 1.16 изображено влияние боковой составляющей импульса
скорости.
Рис.1.16. Влияние боковой составляющей импульса скорости
49
Как можно видеть, она приводит к повороту плоскости орбиты на
угол
Максимальное отклонение от плоскости орбиты
V
Смещения вдоль орбиты не происходит.
Относительное движение состоит в колебательном движении
вдоль оси z, перпендикулярной плоскости орбиты.
Для тренировки используем полученные результаты для
решения задачи, которая предлагалась на экзаменах в Московском
физико-техническом институте.
ЗАДАЧА. В каком направлении нельзя стрелять из пулемета с
космического корабля (КК) из-за опасности попадания пуль в сам
корабль?
Решение. Пули попадут в КК, если период их орбиты совпадает
с периодом КК. Для околокругового движения не меняют период
импульсы скорости в радиальном и боковом направлении.
Следовательно, нельзя стрелять в плоскости, содержащей радиус-
вектор и вектор перпендикулярный плоскости орбиты.
1.4.4. Изменения элементов круговых орбит различного
радиуса. В таблице 1.1 приведены изменения элементов круговых
орбит различного радиуса в результате приложения трансверсальной
(первые пять элементов) и боковой (последние два элемента)
составляющих импульса скорости каждая величиной 1м/с.
В первом столбце приведена высота орбиты над поверхностью
Земли. В последующих столбцах приведены изменения следующих
элементов: Да - изменение большой полуоси орбиты, Де - изменение
эксцентриситета, \Р - изменение периода, Д[/ - угловое смещение
вдоль орбиты за виток, NL - линейное смещение вдоль орбиты за
виток, Ду - угол поворота плоскости орбиты, Az - максимальное
отклонение от плоскости орбиты.
50
Таблица 1.1
н Да км Де ДР (с) ДО' (гр) ДР (км) Ду (град) Дг (км)
200 1.689 0.000256 2.042 -0.138 -15.826 0.0073 0.844
400 1.765 0.00026 2.166 -0.140 -16.589 0.0074 0.880
800 1.924 0.00027 2.432 -0.143 -17.928 0.0077 0.968
1500 2.212 0.00028 2.930 -0.149 -20.465 0.0080 1.102
10000 6.635 0.00040 12.674 -0.218 -62.210 0.0114 3.274
20000 13.566 0.00051 32.887 -0.278 -127.899 0.0146 6.725
36000 27.428 0.00065 84.077 -0.351 -258.471 0.0186 13.704
Некоторые из отклонений отсутствуют в таблице, но они легко
вычисляются при помощи приведенных в ней данных. Например,
максимальное отклонение по радиусу равно удвоенному отклонению
полуоси и т.д. Отклонения в результате действия радиальной
составляющей легко вычисляются по отклонениям для
трансверсальной составляющей. Используя эту таблицу можно
примерно определять величины не только одноимпульсных, но и
многоимпульсных маневров.
1.5. Оценка величины маневров, выбор начального
углового отклонения при старте КА
1.5.1. Оценка величины маневров КА «Союз». Оценим, для
примера, суммы трансверсальных составляющих импульсов скорости
первого и второго интервалов маневрирования четырехимпульсного
маневра сближения КА «Союз» с орбитальной станцией. Первый
интервал маневрирования расположен на третьем и четвертом витках,
второй начинается за виток до прицельной точки, которая задана в
конце 33 витка.
Примем, что в момент выведения «Союза» станция находится
впереди на Аа0=197° (это угловое отклонение часто называют
«начальная фаза» или просто «фаза»). Орбита выведения КА «Союз»
(начальная орбита) имеет высоты Amin= 192км, Атах=238км, а орбита
станции (конечная орбита) - /гтй1=330км, /гтах=341.5км.
Средние радиусы орбит отличаются на 120.75км. Как следует из
таблицы, чтобы устранить эту разницу необходим трансверсальный
51
„ 120.75 п
импульс скорости равный - — ~71.4м/с. За счет полета до начала
первого интервала маневрирования, расположенного на третьем
витке, при имеющейся разницы больших полуосей орбит угловое
отклонение (фаза)
0.139*71.4*3=167.218°.
величиной 2м/с (он
исправления ошибок
интервала) на изменение фазового отклонения можно оценить как
0.139*2*14=3.892° (14 - число витков от первого интервала
маневрирования до момента приложения фиксированного импульса
скорости). Таким образом, чтобы за 29 витков полета догнать
станцию, разность фаз, которую «Союзу» необходимо сокращать на
г 167.218-3.892 г л г,
каждом витке полета, будет ------------—--------«5.632 . Для этого
уменьшится до величины 197°—
Влияние фиксированного импульса скорости
исполняется на 17 витке и служит для
реализации импульсов скорости первого
29
требуется разница в больших полуосях орбит эквивалентная
„ 5.632 .
трансверсальному импульсу скорости величиной «40.52м/с.
Чтобы получить сумму трансверсальных составляющих импульсов
скорости второго интервала маневрирования, найденную величину
необходимо уменьшить на величину прицельного вектора (-12.5м/с),
т.к. это отклонение не компенсируется импульсами скорости. В
итоге, для суммы трансверсальных составляющих импульсов
скорости второго интервала маневрирования получаем величину
ДИ,ц=40.52-12.5=28.02м/с. Сумма трансверсальных составляющих
импульсов скорости первого интервала маневрирования AKZI=71.4-2-
12.5-28.02=28.88м/с. При аккуратном численном решении задачи (см.
Пример 1, глава V) соответствующие величины имели значения
ДИ,ц=28.67м/с, ДИ,!=32.1м/с. Как можно видеть, фазовое условие
помогает определять величины импульсов скорости с хорошей
точностью, т. к. суммы трансверсальных составляющих импульсов
скорости второго интервала маневрирования, вычисленные
аналитически и численно, отличаются незначительно. Для суммы
трансверсальных составляющих импульсов скорости первого
интервала маневрирования имеется заметное различие, которое
связано с тем, что было не учтено ощутимое влияние атмосферы на
КА, находящийся много витков на относительно низкой орбите.
52
Оценить влияние атмосферы на движение КА по круговой
орбите также можно при помощи достаточно простых формул. Сила
сопротивления атмосферы определяется по формуле:
где сх - безразмерный коэффициент сопротивления атмосферы, Fm -
площадь миделевого сечения спутника (площадь максимального
сечения КА, нормального к вектору скорости полета относительно
атмосферы), р - плотность атмосферы, Vom- абсолютная величина
вектора скорости полета относительно атмосферы. Тормозящее
ускорение, которое испытывает КА, двигающийся по круговой
орбите, определяется по формуле:
т г
с F
где с = х т - баллистический коэффициент, который обычно
2т
уточняется в процессе полета. За один виток высота и период
круговой орбиты изменятся на величины [127]:
5г = -4лсрг2,
ХР 5/2
оР =----т=-срг .
Vh
Плотность атмосферы зависит от многих факторов, существуют
различные статические и динамические (учитывающие влияние
Солнца) модели атмосферы.
Для оценки влияния атмосферы удобно воспользоваться
таблицей 1.2 [127], в которой изменения величин 8Р и 8г для
круговых орбит с различной высотой Н над поверхностью Земли
рассчитаны для КА, имеющего баллистический коэффициент с=0.1
(использовалась статическая модель атмосферы CIRA 1961).
53
Таблица 1.2
Я(км) 150 200 250 300 350
8Р(сек) И 2.4 7.0*10'' 2.3*10'' 8.7*10'2
8г(км) 9.2 2.0 5.8*10'' 1.9*10'' 7.1 *10‘2
Я(км) 400 500 600 700 800
6Р(сек) 3.7*10'2 8.6*10‘J 2.7*10'J 9.6* 10'4 3.8* 10'4
8г(км) 3.0*10'2 7.1*10'3 2.1 * 10’3 7.6*10'4 3.0*10'4
Таблица основных параметров этой атмосферы (плотность,
давление, температура, молекулярный вес) для различных высот над
поверхностью Земли приведена в [ 127].
Используя таблицу 1.2, можно рассчитать, насколько
уменьшится высота орбиты за 33 витка полета, считая, что средняя
высота орбиты после первого интервала маневрирования была 265км
(что соответствует AE,i=28.88m/c). Для такой высоты за один виток
радиус орбиты уменьшается на 0.46км для КА с баллистическим
коэффициентом с=0.1. У КА «Союз» баллистический коэффициент
примерно 0.039, таким образом, за 33 витка высота уменьшится на
0 46*0 039*33
Аг =------—-------= 5.92км. Для того чтобы компенсировать это
понижение высоты орбиты, на первом интервале маневрирования
требуется увеличить сумму трансверсальных составляющих на
5.92
у^- = 3.5м/с. Таким образом, получаем оценку
AC,i=28.88+3.5=32.38м/с, что хорошо согласуется с результатом
численного расчета.
1.5.2. Выбор начальной фазы при старте КА. Угловое
расстояние между КА и орбитальной станцией в момент выхода КА
на орбиту Aw (начальная фаза) оказывает определяющее влияние на
распределение затрат суммарной характеристической скорости
между интервалами маневрирования. Предположим, что основное
маневрирование происходит в начале и конце перелета, который
продолжается N витков. Если КА не маневрирует, то в точке встречи
безразмерное отклонение вдоль орбиты будет
54
. 3
и, = Au —AaN,
f 2
где Да - разность больших полуосей КА и орбитальной станции,
Ди-начальная фаза, измеряемая в долях витка (Ди = —). Чтобы
2л
устранить это отклонение сумма трансверсальных составляющих
импульсов скорости первого интервала маневрирования должна
быть:
. 3
-ЗАДК, =Ди —ДаА,
2
. 1 . Дм*
ДИ, = —Да------.
2 ЗА
Сумма трансверсальных составляющих импульсов скорости
последнего интервала маневрирования:
Л Г/ 1 Л А Г/
ДИ,, =— Да-ДИ. =-------
2 '* ЗА
Таким образом, начальная фаза и продолжительность встречи
однозначно определяют сумму трансверсальных составляющих
импульсов скорости второго интервала маневрирования в
предположении, что оставшаяся часть изменения большой полуоси
будет произведена маневрами первого интервала.
Зависимость ДИ,п от Дм’ изображена на рис. 1.17 пунктирной
линией, зависимость ДИ,, от Ди* - штрихпунктирной линией,
суммарная характеристическая скорость - сплошной линией.
Таким образом, существует оптимальный диапазон :
начальной фазы Ди’е^0,Ди^], где Ди^=—АДа, на
значений
котором
суммарная характеристическая скорость постоянна и равна
минимально возможной ДИ =—Да.
2
55
Рис.1.17. Зависимость AV от начальной фазы
При выборе начальной фазы необходимо учитывать
возможность переноса первых маневров на резервный виток в случае
возникновения нештатной ситуации. Если резервный интервал
маневрирования отстоит на п витков от первого интервала, то суммы
трансверсальных составляющих импульсов скорости первого и
второго интервалов маневрирования можно определить по формулам:
,,. AaN Аи
ДИ. =------------------,
2(А - и) 3(N - п)
д TZ Дбг AaN &и*
А —----------------1--------•
2 2(А-п) 3(N-ri)
При росте п сумма трансверсальных составляющих маневров первого
интервала увеличивается, а второго уменьшается, однако величина
ДИЛ не должна быть больше ^Аа, это условие позволяет найти До-
левую границу разрешенного диапазона:
. 3
Аи, = —пАа.
2
Для первых КА «Союз» резервным витком переноса являлся 13
виток. Первый интервал маневрирования располагался на 3 и 4-м
витках, второй на 32 витке, стыковка на 33 витке. Таким образом, для
этой схемы пк—N. Левая граница разрешенного диапазона
56
Ди’сдвигается вправо на треть от общей длины оптимального
диапазона.
Может возникнуть ситуация с переносом даты старта КА. Для
КА «Союз» резервная дата старта планируется через двое суток
(через 32 витка). В этом случае начальная фаза увеличивается, если
период станции меньше примерно 90 минут. Значение изменения
фазы Аи* можно вычислить по формуле:
. [Зл^]
=)—— (modi),
I vE J
где т число витков, на которое смещается время старта, v = со£ + ,
соЕ - угловая скорость вращения Земли, О,- скорость изменения Q в
результате учета влияния второй зональной гармоники
гравитационного поля.
Если начальная фаза увеличивается, это означает, что правую
границу разрешенного диапазона Ди’надо смещать на Аи*, влево от
Аи’ , чтобы и для смещенной даты старта величина фазы после
увеличения оставалась внутри оптимального диапазона.
Кроме того, могут накладываться ограничения на величину
суммы импульсов скорости второго интервала маневрирования, это
также смещает влево правую границу разрешенного диапазона.
1.6. Необходимые условия оптимальности
Когда нам необходимо сформировать все элементы заданной
орбиты, одного импульса скорости недостаточно и используются два
и более импульсов. Число управляющих параметров (4А, где N -
число импульсов скорости), как правило, превышает число
ограничений в системе (1.12) (если не наложены дополнительно
ограничения на ориентацию импульсов скорости и/или их моменты
приложения). Возникает задача поиска оптимального решения.
Чтобы найти её решение, можно воспользоваться необходимыми
условиями оптимальности из теории базис-вектора (prime vector) [77].
1.6.1. Уравнения движения в безразмерном виде. Уравнения
движения материальной точки в цилиндрической системе координат
57
(1.5), (1.7) в безразмерном виде после перехода от переменной t к
независимой угловой переменной 0 имеют вид [67]:
— = APr, de (1.15a)
dAt - = Ar - AP, de (1.156)
dAz — = de (1.15b)
^- = 2АЙ,+АЯ + и,„ de (1.15г)
de (1.15д)
dAPz Л„ = -Az + и, de (1.15e)
dq — = n, de (1.15ж)
здесь Ar, Az, Az, А К, А К, А Й.,# - безразмерные величины, g = cln—-
' т
характеристическая скорость, где с - скорость истечения, т0 и т -
соответственно начальная и текущая массы, nr,nt,nz и
п = и2 + и2 + п] - компоненты реактивного ускорения и его модуль,
отнесенные к ускорению силы тяжести g(r0).
1.6.2. Система сопряженных уравнений. Система
сопряженных уравнений для системы (1.15) имеет вид [67]:
dpr
= ~s,- ~ Р, >
б/0 ' '
^ = 0,
de
^ = s,
de z
dp
-^- = e,
de
(1.16a)
(1.166)
(1.16b)
(1.16г)
58
dsr
de
= s,-pr,
ds,
—~ = ~^s,- + P,
de
ds_
~de
-Pz’
(1.16д)
(1.16e)
(1.16ж)
здесь s=(snst,sz) - вектор, сопряженный вектору скорости V=(Vr,VhVz),
Pr,Pt,Pz - переменные сопряженные Аг,А/,Az.
Общее решение этой системы записывается в виде:
р,. = 2Х, + X, sin9 + X. cos9-3X,9, i I 12 J О ’ (1.17а)
р, = ^6. (1.176)
рг = Х5 sin 9 - Х4 cos 9, (1.17в)
л=-1> (1.17г)
sr = -X, cos 9 + X, sin 9 + 2Х,, г 2 5 o' (1.17д)
st = 2Х, + 2Х2 sin 9 + 2Х3 cos 9 - ЗХ69, (1.17е)
sz = Х4 sin 9 + Х5 cos 9, (1.17ж)
где A.i,A.2,A.3,X4,X5,A.6 - произвольные константы.
Гамильтониан задачи имеет вид:
Н =[($,«) + рчп\ + ,v,.(2 А V, + Ar) + s((-A Г,) + sz(-Az) +
+ргАГг+/?,(Аг-АГ,)+/?2АГг. (1-18)
1.6.3. Необходимые условия оптимальности. Базис-вектором
называется вектор-функция s(sr,s„sz), сопряженная вектору скорости.
Лоуден (Lawden D.F.) [77] показал, что на оптимальной импульсной
траектории модуль базис-вектора не должен превосходить единицы, а
импульсы скорости прикладываются в те моменты, когда модуль
базис-вектора равен единице, причем направление импульса скорости
совпадает с направлением базис-вектора в данной точке траектории.
Это означает, что у оптимального решения годограф базис-вектора не
выходит за пределы сферы единичного радиуса (пространственная
задача) или окружности единичного радиуса (плоская задача).
Импульсы скорости оптимального решения прикладываются в
моменты, когда годограф касается сферы (окружности) - внутренние
59
импульсы или пересекает её (это моменты начала и конца интервала
перелета) - два внешних импульса.
Таким образом, нас интересуют только переменные,
сопряженные вектору скорости. Для этих переменных чаще
используются обозначения: X,p,v. Выражения (1.17д) - (1.17ж)
удобнее использовать в виде [145]:
X = + X] sin(0 - 0О) + 2Х6,
ц = 2Х, + 2-^Xj + Xj cos(0 — 0O) — 3X60,
(1.19a)
(1.196)
v = sin(0 - 0O) + + cos(0 - 0o ), (1.1 9b)
Zg9°=I1
(1.19r)
Для оптимальной ориентации импульса скорости А Р],
прикладываемого в точке 0„ необходимо выполнение условий:
ДИ ДИ АИ
^- = Х(0.); —4- = ц(0 );^- = v(0.) (1.20)
Др; ' др; ' Др;
Условия (1.19), (1.20) можно получить, воспользовавшись
методом множителей Лагранжа. Функция Лагранжа L будет состоять
из суммарной характеристической скорости АИ и уравнений (1.12)
умноженных на множители Лагранжа Xi,...,X6. Выполнив
дифференцирование L по ДИ„, АИ„, ДИг„ и приравнивая результаты
дифференцирования нулю, можно получить условия (1.20).
В общем случае уравнения (1.19а)-(1.19г) описывают спираль в
пространстве X,p,v или циклоиду на плоскости ц,Х. Если Х6=0, то
годограф базис-вектора может вырождаться в эллипс, окружность,
отрезок или точку. Каждому виду годографа соответствует свой тип
оптимального решения. Для сопряженных переменных использовано
новое обозначение угла (0 вместо <р). Вид годографа базис-вектора
определяет возможные типы оптимальных решений, а условия задачи
определяют выбор конкретного типа решений.
На рис. 1.18 приведены графики изменения модуля базис-
вектора оптимального решения s от времени для случая, когда
60
годограф базис-вектора имеет форму эллипса и для случая, когда он
имеет форму полутора витковой циклоиды.
Рис.1.18. Зависимость модуля базис-вектора от времени для годографа в форме:
(а) - эллипса; (Ь) - циклоиды
1.7. Общая схема решения
В сформулированной в параграфе 1.2 задаче используются
линеаризованные уравнения движения, не учитываются
нецентральность гравитационного поля, влияние атмосферы,
продолжительность работы двигателей КА и т.д. Это приводит к
тому, что реальная точность выполнения терминальных условий
(1.12) будет недостаточной. Чтобы решить задачу с заданной
точностью, можно использовать итерационную схему [4], [49], [89],
которая состоит из следующих этапов:
0. В начале, используя модели всех необходимых возмущений,
осуществляется “точное” прогнозирование движения КА по
начальной и конечной орбитам до момента встречи. Вычисляются
отклонения параметров начальной орбиты от соответствующих
параметров конечной орбиты.
1. Затем решается “приближенная” задача: при принятых ранее
упрощающих предположениях определяются параметры импульсов
скорости, обеспечивающих формирование “целевой” орбиты (на
первой итерации “целевая” орбита совпадает с конечной орбитой).
2. После этого, с учетом рассчитанных импульсов скорости,
используя модели всех необходимых возмущений, осуществляется
“точное” прогнозирование движения КА и находятся параметры
сформированной орбиты.
61
3. Вычисляются отклонения параметров сформированной
орбиты от соответствующих параметров конечной орбиты.
4. Если отклонения превышают допустимые, то параметры
“целевой” орбиты меняются на величину вычисленных отклонений, и
проводится следующая итерация (осуществляется переход к пункту
1).
Процедура заканчивается, когда терминальные условия
выполнены с заданной точностью.
Для “точного” прогнозирования используются, как правило,
численное и/или высокоточное численно-аналитическое
интегрирование. Возможно, на разных итерациях использовать
разные методы прогноза, но точность прогноза должна расти с
ростом номера текущей итерации.
При численном интегрировании учитываются влияние
нецентральное™ гравитационного поля, атмосферы, светового
давления и т.д., моделируется работа двигателей КА, поэтому,
несмотря на то, что параметры маневров и находятся на каждой
итерации с использованием простейшей модели движения, в
результате итерационной процедуры они обеспечивают выход на
конечную орбиту с требуемой точностью.
Ниже приведена блок-схема этой итерационной процедуры.
Можно видеть, что использование данной итерационной процедуры,
в которой поиск оптимального решения происходит при ряде
упрощающих предположений, не гарантирует, что найденное
решение будет строго оптимальным. Примерная оценка возможного
отличия от оптимального решения на первой итерации приведена в
таблице 2.1 раздела 2.1.6. Но, во-первых, изменение терминальных
условий решаемой задачи в ходе итерационного процесса, а также
некоторые специальные приемы, например, изменение порядка
приложения импульсов скорости (см. 2.1.6), позволяют приблизить
найденное решение к реальному оптимальному решению. Во-вторых,
при решении реальных задач на первое место выходят точность
формирования заданной орбиты, а также надежность и скорость
получения решения, что и обеспечивает данная схема. Отличие по
суммарной характеристической скорости в несколько процентов
найденного решения от оптимального обычно допускается. Как будет
показано ниже, практики готовы иногда жертвовать и 40%
суммарной характеристической скорости ради простоты и
надежности решения. К тому же, как показали результаты,
62
полученные при решении реальных задач, разница между решением,
найденным с помощью данного метода и решениями, полученными с
помощью громоздких численных методов, редко превышает 1%.
При применении численных методов, не использующих данную
итерационную процедуру, трудно обеспечить одновременно точность
выполнения терминальных условий и строгую минимизацию
суммарной характеристической скорости, а также возникают
проблемы с выбором решения для начала процесса минимизации и с
нахождением всех локальных минимумов. Такой подход не
обеспечивает ни высокой скорости, ни надежности получения
решения.
Все сказанное объясняет, почему во всех баллистических
центрах нашей страны использование данной итерационной
процедуры получило широкое распространение.
Поскольку надежность является одной из основных
характеристик метода решения практических задач, вопрос
63
сходимости используемой итерационной процедуры имеет
первостепенное значение.
Заметим, что возможности данной схемы решения весьма
велики. Отклонения каждой из орбит от опорной круговой могут
достигать нескольких сотен километров, а протяженность каждого из
маневров составлять два-три десятка градусов по аргументу широты,
что весьма далеко от первоначального импульсного предположения.
Для большинства практических задач данная процедура быстро и
надежно сходится. Например, при расчете параметров маневров КК
типа «Союз», «Прогресс», как правило, достаточно пяти итераций.
Однако, когда отбрасываемые возмущения становятся действительно
значительными или имеет место одновременный рост нескольких
возмущений, проблемы со сходимостью итерационной процедуры
появляются. В этом случае требуется учесть некоторые из
возмущений, например, влияние второй гармоники разложения
потенциала гравитационного поля или продолжительную работу ДУ,
непосредственно при определении параметров маневров, а также
использовать специальные приемы, улучшающие сходимость, - такие
приемы были разработаны автором. Это позволило обеспечить
необходимую надежность и скорость сходимости для всех
многочисленных практических задач, встретившихся за 40 лет работы
с реальными проектами.
1.8. Основные типы задач оптимального
маневрирования КА
Задача поиска параметров оптимальных маневров на
околокруговых орбитах была сформулирована в общем виде. На
самом деле можно выделить несколько различных типов задач,
которые приходиться решать при работе с реальными КА.
Естественно, что у каждой из этих задач существует своё решение.
Имеются и хорошо известные частные случаи основных типов задач,
которые имеют свои ещё более простые решения.
Можно выделить два основных типа задач оптимального
маневрирования КА на околокруговых орбитах:
I. Задача перехода между орбитами, когда время перехода с
начальной на заданную конечную орбиту свободно (как правило,
двухимпульсные решения).
64
II. Задача встречи, в которой время выхода в заданную точку на
конечной орбите фиксировано (иногда двухимпульсные, но, как
правило, трех и более импульсные решения).
В свою очередь, в каждом из этих типов задач возможны две
разновидности маневров:
1. Компланарные маневры (конечная орбита лежит в одной
плоскости с начальной).
2. Некомпланарные маневры (плоскости этих орбит не
совпадают).
Таким образом, для импульсных маневров имеется четыре
различных класса задач. Необходимо отметить, что у каждой из этих
задач существуют три-четыре типа возможных оптимальных
решений.
Те же классы задач имеются для маневров, исполняемых с
помощью двигателей ограниченной мощности, когда участки работы
двигателя занимают значительную часть витка.
Аналогичные задачи встречаются и при расчете маневров
перелета между орбитами с большими эксцентриситетами.
Описанная классификация маневров приведена на схеме.
Задачи, соответствующие пунктирным стрелкам, а это все что
касается перелетов, когда хотя бы одна из орбит имеет значительный
эксцентриситет, в данной книге не рассматриваются. Весь комплекс
задач, соответствующих сплошным стрелкам, рассмотрен достаточно
подробно.
На этой схеме приведено условное деление задач по
эксцентриситету равному 0.1. На самом деле, как уже упоминалось,
используемая при решении задач итерационная процедура сходится и
при значительно больших значениях эксцентриситета.
Точно также достаточно трудно провести точную границу
между задачами, которые решаются с импульсным приближением
маневров, и задачами, в которых необходимо учитывать реальную
продолжительность маневров.
Импульсные маневры переходов между компланарными и
некомпланарными орбитами будут рассмотрены во второй главе.
В третьей и четвертой главах исследуются задачи встречи на
компланарных и некомпланарных орбитах. В пятой главе описаны
численные методы решения близких к импульсным задач встречи.
В шестой главе рассмотрено маневрирование с помощью двигателей
малой тяги.
65
импульсные
маневры
маневры с малой
тягой
Перечисленные в первых шести главах задачи используются при
расчете маневров создания и поддержания заданной конфигурации
спутниковых систем, а также при расчете маневров уклонения от
столкновения с космическим мусором, при оценке маневров
исполняемых активными космическими объектами и во многих
других случаях. Некоторые из этих возможностей также указаны на
схеме.
Описанию особенностей маневрирования при создании
заданной конфигурации спутниковых систем и спутниковых групп
посвящена седьмая глава. Рассмотрены как частные задачи,
например, изменение положения спутника в спутниковой системе,
функционирующей на круговых орбитах (в том числе перелет в
другую рабочую плоскость), так и задачи в самой общей постановке'
В восьмой главе рассмотрены задачи абсолютного и относительного
поддержания заданной конфигурации спутниковой системы и
66
писания конфигурации спутниковой группы (Formation flying). В
П°ДД Р главе описаны маневры уклонения от столкновения с
ДевЯТ ческим мусором, в том числе изменение решения задачи
К°С чи позволяющее уклониться от столкновения с космическим
ВС1Роом на орбите ожидания. Приведены алгоритмы, позволяющие
ивать одноимпульсные и двухимпульсные маневры малой и
° шой продолжительности, исполняемые активными
осмическими объектами, в том числе в случае, когда начальная и
конечная орбиты определены с большими ошибками.
В десятой главе рассмотрена задача перевода КА на орбиту
захоронения, исследована эволюция таких орбит. Приведено
исследование задачи возвращения крупногабаритного космического
мусора. Выделены пять компактных групп крупногабаритного
космического мусора, рассмотрены две схемы увода этого мусора на
орбиты захоронения, дана оценка количества КА, необходимых для
перевода на орбиты захоронения большей части элементов этих
групп.
67
ГЛАВА II
МАНЕВРЫ ПЕРЕХОДОВ
2.1. Компланарные переходы
2.1.1. Постановка задачи. При расчёте параметров манёвров
переходов между компланарными орбитами боковое движение и
ограничение по времени не учитываются. Таким образом, условия
выхода на заданную орбиту (1.12) имеют вид:
(A Vnsincp. +2Д cos ср,. )=Ает, (2.1а)
/•=]
N
(—Д Vrj cos (р/ +2Д r/(.sin(pz)=Деу, (2.16)
/=1
£2Д^=Дя. (2.1в)
/=1
Задача определения параметров оптимальных манёвров
переходов между компланарными орбитами формулируется
следующим образом: необходимо определить ДГ„, &Vti, ср, (z=l,...,AQ,
при которых минимальна суммарная характеристическая скорость
дг = £7А^+д^2 ’
/=1
при ограничениях (2.1а) - (2.1 в).
Так как решение задачи не зависит от времени, в необходимых
условиях оптимальности (1.19а) - (1.19г) Х6=0. С другой стороны, т.к.
это компланарные манёвры, Х4=0, Х5=0. Таким образом, уравнения
для базис-вектора приобретают вид:
X = sin(0 — 0q ),
ц = 2Xj + 2^2-2 + cos(0 — 0О),
68
tg0° =ЗГ'
Возможны три типа решений, для которых выполнены
необходимые условия оптимальности:
а) на плоскости годограф базис-вектора - эллипс, центр которого
расположен на оси ц, но смещён от начала системы координат;
эллипс касается окружности единичного радиуса в точке С (рис. 2.1
(а)), если центр смещён вправо, или в точке В, если эллипс смещён в
противоположную сторону;
б) годограф базис-вектора вырождается в точку, совпадающую с
точкой пересечения окружности единичного радиуса оси ц, это точка
В или точка С;
в) годограф базис-вектора - эллипс с центром в начале системы
координат, касающийся окружности в двух точках, это точки В и С
(рисунке 2.1(Z>)).
Рис. 2.1. Годограф базис-вектора для переходов между компланарными
орбитами
Напомним, что в системе (1.12) углы отрицательные, а
отклонения вычисляются в точке встречи. Для задачи перехода
отклонения можно вычислять в произвольной точке орбиты, но, как
правило, они вычисляются в восходящем узле на экваторе или на
линии апсид относительной орбиты. От отрицательных углов,
отсчитываемых по часовой стрелке от выбранного направления
(например, от линии узлов) до моментов приложения импульсов
скорости, можно перейти к положительным углам, отсчитываемым в
противоположном направлении (это не совсем правильно, но намного
69
привычней). Тогда в первом случае, когда отклонения вычисляются
на линии узлов, значения углов <р, будут совпадать с аргументами
широты точек приложения импульсов скорости щ, что очень удобно.
Во втором случае, когда ось х направлена по линии апсид
относительной орбиты, Деу=0, \ех=е и для определения величин
импульсов скорости, прилагаемых на линии апсид относительной
орбиты, достаточно решить систему из двух уравнений:
2ДГ„-2ДГ,2=Де,
2AVrl+2AVr2=Aa.
Из этой системы находятся величины импульсов скорости:
ДР(, = ^-(Да +Де),
АЕ(, =^-(Да-Де).
2.1.2. Компланарные переходы между касающимися
орбитами. Если Л.^0 и 0, то годограф базис-вектора
представляет собой эллипс, смещённый относительно начала системы
координат. Чтобы на плоскости ц,л эллипс касался окружности
единичного радиуса, необходимо чтобы 2\ + 2yjkl + к23 = 1 (при
Х|>0), или 2A.J -2^2 + /ф = -1 (при Xi<0). Годограф касается
окружности в одной точке, расположенной на оси ц (ц=1,А.=О). Таким
образом, оптимальным является решение, состоящее из одного, как
следует из (1.20), трансверсального импульса скорости. Необходимо
отметить, что через виток и т.д. необходимые условия будут опять
выполнены, следовательно, этот импульс скорости можно делить на
части, которые реализуются на разных витках, но в одной и той же
точке орбиты. Возможность деления импульсов скорости существует
для всех задач переходов, но в первую очередь интересны решения с
минимальным числом импульсов. Решения этого типа и будут
анализироваться далее.
Найденное одноимпульсное решение возможно только для
переходов между касающимися орбитами. Величину импульса
скорости можно найти из уравнения (2.1 в):
70
AV, = —Aa,
' 2
или из уравнений (2.1 а) и (2.1 б):
2А1^ cos<p=Aex,
2 А Г; sincp=Ae>,,
|А^|=|де.
Таким образом, для касающихся орбит Де = |Да|.
Обращает на себя внимание парадоксальность оптимального
решения этого типа. Общему виду годографа базис-вектора
(существует множество эллипсов, касающихся окружности в одной
точке) соответствует частное решение, имеющее место только для
касающихся орбит. Частным же видам годографа базис-вектора,
когда он вырождается в точку или эллипс с центром в начале системы
координат, соответствуют наиболее часто встречающиеся в
практической работе переходы между непересекающимися или
пересекающимися орбитами. Как будет показано в шестой главе, эта
парадоксальность исчезает, если рассматриваются не импульсные, а
протяжённые манёвры.
2.1.3. Компланарные переходы между непересекающимися
орбитами (компланарные особые решения). В случае вырождения
годографа базис-вектора в точку, она принадлежит окружности
единичного радиуса, если Л2=Л3=0, Xj=±0.5. Координаты точки (1,0)
или (-1,0), следовательно, импульсы скорости трансверсальные
(ДИ„=0). Все импульсы скорости разгонные (АР),>0), если ц=1, или
тормозные (ДИ„<0), если р=-1. Годограф не зависит от 0,
следовательно, для этого типа решений углы приложения импульсов
скорости и их минимальное число из уравнений для базис-вектора
определить нельзя. Назовём такие решения, в соответствии с
терминологией введённой Эдельбаумом для некомпланарных
решений - компланарные особые решения (coplanar singular solution,
CSS).
Так как знаки всех трансверсальных составляющих совпадают,
то решения этого типа возможны только для переходов между
непересекающимися орбитами, для которых справедливо неравенство
71
|Да|>Де. Известно, что для переходов между пересекающимися
орбитами один из импульсов скорости должен быть разгонным, а
другой тормозным.
Из уравнения (2.1в) определяется суммарная
характеристическая скорость манёвра:
Л, , |Да|
ДИ = £|дг„| = ЬЛ
/=1
Решение не зависит от угла 9, т.к. существует множество
решений данного типа с одинаковой суммарной характеристической
скоростью, но с разными углами приложения и величинами
импульсов скорости.
Чтобы найти параметры такого решения, можно зафиксировать
угол приложения одного из импульсов, например, <pi=<piy Из
уравнений (2.1а)-(2.1в) определяются угол приложения второго
импульса скорости <р2 и величины трансверсальных составляющих
импульсов скорости ДИ,Ь ДИ,2:
Де2 - Да2
Д И„ =-------------------------,
4(Деу sin ф1у. + Дег cos<plz - Да)
ДИ,2=^-ДИ„,
Дер
-^-Д^япф,/
= Те------------'
-у^-ДИ,! cosq))Z
(2.2a)
(2.26)
(2.2в)
Выбрав наиболее подходящую величину фу, можно найти все
остальные параметры оптимального перехода.
Если изменять угол <р15 то на плоскости ех,еу геометрическим
местом точек, соответствующих вектору эксцентриситета переходной
орбиты, получающейся после приложения первого импульса
скорости, будет эллипс (рис. 2.2) [42]. Из множества решений с
одинаковой суммарной характеристической скоростью можно
выбрать решение, удовлетворяющее дополнительным ограничениям.
Это могут быть ограничения на эксцентриситет переходной орбиты,
ограничения на величины импульсов скорости или их углы
72
приложения и т.д. Например, решению с одинаковыми величинами
импульсов скорости соответствует ломаная ADK, у которой AD=DK.
Рис. 2.2. Геометрическое место вектора
эксцентриситета переходной орбиты
Рис. 2.3. Переход Гомана
Заметим, что знаменитый Романовский переход является
простейшим частным случаем этого решения. Так как для
Романовского перехода начальная и заданная орбиты круговые, то
Дех=Де7=Де=0, следовательно, ДК(1=ДК(2=0.25Да, <p2=(pi+^. Пример
такого решения для cpj =0.25п приведён на рис. 2.3. Первому импульсу
скорости соответствует отрезок АВ, второму ВК.
2.1.4. Компланарные переходы между пересекающимися
орбитами (апсидальные решения). Оптимальным переходам между
пересекающимися орбитами (Де>|д<т|) на плоскости
соответствует годограф базис-вектора в виде эллипса, с центром в
начале системы координат. Эллипс касается окружности единичного
радиуса в двух точках (1,0) и (-1,0) (рис. 2.1(6)). Для такого касания
необходимо, чтобы =^, A,]=0. Так как в обеих точках
касания А,=0, импульсы скорости этого решения будут
трансверсальными (ДИ„=0). Оптимален двухимпульсный переход,
один импульс скорости которого тормозной, ему соответствует левая
точка касания (ц=-1), второй импульс скорости разгонный, ему
соответствует правая точка касания (ц=1). Углы приложения
импульсов скорости (pi,(p2 отличаются на половину витка.
Для решений, у которых отсутствуют радиальные составляющие
импульсов скорости, на плоскости е„еу геометрическим местом
73
точек, соответствующих вектору эксцентриситета переходной
орбиты, получающейся после приложения первого импульса
скорости, будут ветви гиперболы (рис. 2.4(a)) [42]. Величины
импульсов и углы их приложения также определяются по формулам
(2.2), но один из импульсов скорости получится тормозным.
Выбор ветви гиперболы определяется порядком приложения
разгонного и тормозного импульсов скорости. Из всей совокупности
решений оптимальным является решение, у которого отрезки,
соответствующие импульсам скорости направлены вдоль линии
симметрии гипербол (2A7tl=AB, 2А7,2=ВК (рис. 2.4(a))), т.е. импульсы
скорости прикладываются в перицентре и апоцентре относительной
орбиты.
Рис. 2.4(a). Геометрическое Рис. 2.4(6). Переход между
место вектора эксцентриситета пересекающимися орбитами
переходной орбиты
Параметры импульсов скорости (для решения АВК) находятся
по формулам:
AVlt = -(Да + Де), (2.3а)
а^2 =|(Дл-Де). (2.36)
ф|=фе, ф2=фг + Л, (2.Зв)
где (ре определяется по формуле (1.14а).
Очевидно, что можно изменить порядок приложения импульсов:
AVtl = |(Да-Де), (2.4а)
74
Д^2 = |(Да + Де), (2.46)
(р,=(ре+л, <Р2=<Ре- (2.4в)
Для суммарной характеристической скорости манёвра получаем
выражение:
^2М1=у,
<=1
которое не зависит от порядка приложения импульсов скорости.
Напомним, что если использовать одноимпульсное решение с
импульсом скорости в точке пересечения орбит, затраты суммарной
характеристической скорости вычисляются по формуле:
I 1 з Г
ДИ = . Де2—Ла2 .
N 4
Сравнение двух формул показывает, что суммарная
характеристическая скорость одноимпульсного манёвра больше, т.к.
для пересекающихся орбит Де > |Д<?|.
Двухимпульсные решения этого типа назовём - компланарные
апсидальные решения (coplanar apsidal solution, CAS).
2.1.5. Пример. Требуется определить параметры импульсного
перехода между орбитами, элементы которых приведены в таблице
2.1.
Таблица 2.1
Элементы Начальная орбита (н) Конечная орбита (к)
Нмт (км) 180 340
Ямяд-(км) 210 360
. U„„ (град) 20 150
Основные константы:
Яз = 6371.0 км; ц = 3.986028-105 км3/с2.
Большая полуось и эксцентриситет орбиты:
а = R3 + мах + Н мт е _ Н мах ~ мт
2 ’ 2а
75
В качестве опорной орбиты выбирается промежуточная орбита с
параметрами:
2 Vo го
Вычисляется отклонение большой полуоси:
а • * Да’
Да = а -а , Да =-,
го
и вектора эксцентриситета:
Де = е cosU —е cosU
-V К prgK Н prgH
< 5
Де = е sintZ -е sin £7
У К prgK Н prgH
Ае = ^Де/ + Де/ .
Результаты расчёта:
ан = 6566.0 км, ак = 6721.0 км, ен = 0.00228, ек = 0.00149,
Да* = 155.0 км, Да = 0.02333, Дех = -0.00344, Деу = -0.00004, Де =
0.00345.
Найденные вектора эксцентриситетов и вектор их разности
изображены на рисунке.
В этом примере необходимо рассчитать параметры перехода
между двумя непересекающимися орбитами (Да>Де). Годограф
базис-вектора вырождается в точку и, следовательно, ДлЯ
осуществления оптимального перехода требуется приложить Два
положительных трансверсальных импульса скорости. Из множества
возможных решений, удовлетворяющих условию 2ДРП+2Д^|
выбирается апсидальное решение, которое подходит как ДлЯ
непересекающихся, так и для пересекающихся орбит.
76
Углы приложения импульсов скорости и их величины для этой
решения определяются по формулам:
Де,,
<Pj = <р = arctg—
Дег
ф2 = Фе +
ДР^ = —(Д<т-Де)
Д Vt2 = — (Да + Де)
. Результаты вычислений: ф1=фе=180,624° необходимо следить
чтобы угол находился в нужном квадранте, который определяете?
знаками Дед и Де,,), ф2=360,6240°.
Импульсы скорости, соответствующие данным углам
вычисляются по формулам (2.4а, 2.46).
Результаты расчёта:
ДИН=51,8327м/с, ДИЙ=38,5273м/с.
2.1.6. Сравнение с решением задачи в точной постановке.
Необходимо отметить, что утверждение о том, что суммарная
характеристическая скорость перехода между пересекающимися
орбитами не зависит от порядка приложения разгонного и тормозного
импульсов скорости, верно только для линеаризованных уравнений
движения КА. Если с помощью итерационной процедуры, описанной
в первой главе, уточнить параметры манёвров, чтобы терминальные
условия были выполнены с высокой точностью, то можно увидеть,
что суммарная характеристическая скорость манёвров будет
несколько отличаться. То же самое относится и к переходам между
непересекающимися орбитами, только для них оптимальный переход
приходится искать среди множества переходов, имеющих в
линеаризованной постановке одинаковую суммарную
|До'|
характеристическую скорость ДЕ = J-y-L. Помочь в выборе
действительно оптимального манёвра могут теоретические
результаты, полученные для оптимальных переходов между
эллиптическими орбитами [64].
77
При исследовании переходов между компланарными
эллиптическими орбитами было установлено, что в случае перехода
между свободно ориентированными орбитами минимальные затраты
суммарной характеристической скорости будут при одинаково-
соосной ориентации орбит, когда линии апсид направлены по одной
прямой, а направления от центра притяжения к перицентру
одинаковы (со/=й>о). Оптимальным будет перелёт по дуге
полуэллипса, соединяющей более удалённый апоцентр с
перицентром другой орбиты (рис. 2.5(a) и рис.2.5(b)).
Рис. 2.5. Оптимальные переходы между соосными орбитами:
(а) - между пересекающимися орбитами;
(Ь) - между непересекающимися орбитами
Для обратно-соосных (линии апсид направлены по одной
прямой, а направления от центра притяжения к перицентру
противоположны) пересекающихся орбит оптимальным будет
перелёт из апоцентра в апоцентр (дуга Т1 на рис. 2.6(a)). Если
обратно-соосные орбиты не пересекаются, то оптимальным может
быть или аналогичный перелёт из апоцентра в апоцентр (дуга Т1 на
рис. 2.6(b)) или перелёт из перицентра в перицентр (дуга Т2 на рис.
2.6(6)).
Для того, чтобы оценить разницу между оптимальным и не
оптимальным решениями, определим суммарную характерис-
тическую скорость перелётов по дугам Т1 и Т2 (рис. 2.6(a)) для
случая обратно-соосных пересекающихся орбит, у которых высоты
перигея и апогея равны соответственно /гу=200км и йа=400км.
78
Рис. 2.6. Переходы между обратно-соосными орбитами:
(а) - между пересекающимися орбитами;
(Ь) - между непересекающимися орбитами.
Для рассматриваемого случая обратно-соосных пересекающихся
орбит разница в энергетике решений будет максимальна. Большие
полуоси, эксцентриситеты и фокальные параметры орбит
одинаковые:
г + г h + h
а = = г„ + -а---= 6611км,
2 ° 2
е = —---— = 0.015, р = а(1-е2) = 6669.5км.
2а
Скорости в перигее и апогее орбит:
F = ^Ь(1 + е) = 7730.756(1 + 0.015) = 7846.717л/ / с,
Va = ^(1 - е) = 7730.756(1 - 0.015) = 7614.795л / с.
Используя формулу для изменения большой полуоси орбиты
(раздел 1.3.5)
ba=2-^VT,
79
можно найти величину первого импульса скорости для перелёта из
апоцентра в апоцентр
Г|=М^= 100-398600 1000 = 5881л)/С|
1 2а2Ка 2 *66712 *7.614795
и для перелёта из перицентра в перицентр
л 2 = = ^10(Р398600 1000 = _57 07л / с
1 2й2К 2*66712 *7.846717
На первом этапе для одного и того же изменения большой
полуоси получили разницу в 1.74м/с, что составляет примерно 3% от
величины импульса скорости. Большие полуоси переходных орбит
заметно отличаются. Для перелёта по дуге Т1 й]=6771км, для
перелёта по дуге Т2 «2=6571км. Обе переходные орбиты являются
круговыми; скорость движения по дуге Т1 V\—l.67259, скорость
движения по дуге Т2 К2=7.78848.
Теперь можно найти величины вторых импульсов скорости:
-100*398600 1ЛЛЛ ,
э - -----------------1000 = -56.65л/ / с,
2й2К, 2 * 67712 *7.67259
100*398600 ,
, --------:--------1000 = 59.26м / с.
2a\V1 2 *65712 *7.78848
Суммарная характеристическая скорость перелёта по дуге Т1
ДИ=58.81+56.65=115.46м/с, по дуге Т2 ДК2=57.07+59.26=116.33м/с.
Их разница - 0.87м/с, что составляет 0.75% от суммарной
характеристической скорости перелёта. Как можно видеть, разница в
величинах отдельных импульсов скорости достигает нескольких
процентов, но суммарная характеристическая скорость самих
перелётов отличается незначительно. Воспользовавшись формулами
для околокругового движения можно вычислить величины импульсов
скорости, которые одинаковы для обоих переходов
А ^=200»7.729881000 = 57936л(/с
1,2 4«К 4*6671
80
Таким образом, суммарная характеристическая скорость перехода
ДР=115.87м/с. И величины импульсов скорости, и суммарная
характеристическая скорость решения, полученного по формулам
околокругового движения, находятся между аналогичными
величинами двух точных решений.
Можно оценить и точность формирования заданной орбиты,
получаемую при использовании формул околокругового движения,
например, для перелёта из апоцентра в апоцентр. В результате
приложения первого разгонного импульса скорости величиной
57.936м/с
Дг =
4*66712 *7.614795
398600
*0.057936 = 197.02км,
перицентр орбиты увеличится на 197.02км вместо необходимых
200км. Исполняемый в противоположной точке тормозной импульс
скорости 57.936м/с опустит апоцентр орбиты
Дг =
4 * 67712 *7,67259
398600
*0.057936 = 204.51км,
на 204.51км вместо необходимых 200км. Таким образом, существует
заметная ошибка в формировании перицентра и апоцентра орбиты, но
ошибка в большой полуоси в два-три раза меньше, примерно 1.5 км.
Можно констатировать, что ошибки составляют всего 2-3% от
производимого изменения соответствующих величин. Они легко
устраняются с помощью описанной в первой главе итерационной
процедуры.
При аналитическом решении задачи можно выбрать порядок
приложения импульсов, обеспечивающий получение оптимального
решения. Так как элементы орбит известны, легко вычислить
расстояния до апоцентров и перицентров каждой из орбит. Разница
известных a>f и <в0 позволяет судить к какому из видов (соосной или
обратно-соосной) ближе ориентация линий апсид орбит. Далее по
сформулированному выше алгоритму выбирается оптимальное
решение. Для непересекающихся орбит оптимальными также могут
быть апсидальные решения. На рис. 2.2 им соответствуют ломаные
АСК и АРК. Вычисляются параметры этих решений по тем же
81
формулам (2.4). Если есть возможность, имеет смысл с помощью
итерационной процедуры получить точное решение для обеих
последовательностей апсидальных импульсов, а затем выбрать из них
оптимальное.
В таблице 2.2 приведены результаты аналогичных вычислений
для разных высот орбит и разных отклонений по высоте в перицентре
и апоцентре. В первой строке каждой клетки приведены результаты
перелёта из апоцентра в апоцентр и перелёта из перицентра в
перицентр, а во второй строке результаты, полученные по
приближенным формулам, и относительная ошибка.
Ah=50 км Ah=100 км Ah=300 км Ah=500 км Ah=1000
Н=300 км 57.832 58.049 115.47 116.34 - - - - - -
57.937 0.0038 115.87 0.0075 - - - - - -
Н-600 км 54.143 54.338 108.11 108.89 322.62 329.66 - - - -
54.237 0.0036 108.47 0.0072 325.42 0.0218 - - - -
Н=1000км 49.801 49.97 99.448 100.13 296.82 302.95 492.98 510.16 - -
49.883 0.0034 99.765 0.0068 299.3 0.0206 498.83 0.0349 -
Н=1500 км 45.136 45.28 90.142 90.716 269.11 274.3 446.96 461.51 891.47 952.1
45.206 0.0032 90.412 0.0064 271.24 0.0193 452.06 0.0326 904.12 0.068
Н=19100км 7.7617 7.7694 15.516 15.547 46.463 46.738 77.309 78.072 154.06 157.13
7.7655 0.001 15.531 0.002 46.593 0.0059 77.655 0.0099 155.31 0.0199
Н=36000 км 3.6183 3.6205 7.2346 7.2431 21.679 21.756 36.093 36.307 72.008 72.864
3.6194 0.0006 7.2388 0.0012 21.716 0.0035 36.194 0.0059 72.388 0.0119
2.1.7. Решение задачи при фиксированных углах
приложения импульсов скорости. В некоторых случаях
необходимо найти решение задачи при фиксированных углах
приложения импульсов скорости. Такая необходимость возникает,
например, при наличии ограничений на разрешённые интервалы
маневрирования, а также когда решение задачи перехода является
частью алгоритма решения более сложной задачи встречи.
Решение задачи при фиксированных углах приложения
импульсов скорости дано в [49]. В этой работе приведены выражения
для трансверсальных и радиальных составляющих импульсов
скорости, при которых суммарная характеристическая скорость
манёвров минимальна, однако выражены они через отклонения
координат и скоростей в точке приложения второго импульса
скорости, что не очень удобно. Если воспользоваться результатами.
82
приведёнными в работе [49], то можно показать, что справедливо
соотношение:
ДИГ, Д^-2
д^, Д^2 '
Используя это соотношение и условия выхода на заданную
орбиту (2.1) можно найти выражения для составляющих импульсов
скорости:
а-Де cos (р,-Де sirup.
Д =0.5Да--------------------22--->---22---------,
2a-Aev(cos(p| + cos <р2)-Де,, (sirup,+sin<p2)
а-Де,. cos ср, -Де sirup,
Д =0.5Аа----------------2---22--->—22-----------,
2a-Aev(cos(p, + cos <р2)-Дег (sirup, +sin<p2)
_ 2ДИ,2(Дег — a cos (р, +2 А К,2 (cos <р, -coscp2))
2Д И,2 (sirup,+sirup2) - asirup,
2ДИ,,(ДеЛ.-acos<p,+2Al/z2(cos(p1-cos(p2))
н 2 A Vl2 (sirup, +siiup2) - asincp,
которые обеспечивают оптимальное решение.
2.2. Некомпланарные переходы
2.2.1. Постановка задачи. Задача оптимального перехода
между некомпланарными орбитами исследовалась в работах Кузмака
[67], Марека [170] и многих других авторов. Наиболее полное,
компактное и простое по изложению решение задачи дано
Эдельбаумом [145]. Однако необходимо отметить, что в этой работе
не приведены формулы для поиска параметров третьего из
описанных в ней типов решений (в статье только указано, что
решение этого типа существует).
Условия выхода на заданную орбиту для данной задачи имеют
вид:
(AH'Sincp,. +2АJS. cos(p, )=Aev, (2.5а)
^(-ДИП. cos(p/+2AJ///sin<p/)=Aer, (2.56)
83
^2А^=АД,
i=\
N
£-A^,.sin<p,=O,
i=[
N
£A^,.cos(p,=A/.
/=!
(2.5b)
(2.5г)
(2.5д)
Здесь предполагается, что отклонения вычисляются в системе
координат, ось х которой направлена вдоль линии пересечения
плоскостей орбит. Вследствие этого правая часть уравнения (2.5г)
равна нулю.
Напомним, что приближённо можно считать, что А/ - угол
между плоскостями орбит, его величина вычисляется по формуле
(1.14г) А/ = -УAz2 + А И2. Угол Дер между линией пересечения
плоскостей орбит и линией апсид относительной орбиты вычисляется
по формуле (1.14в).
Требуется определить параметры импульсов скорости А А
АН,,, ср, (г'=1,...Д), при которых минимальна суммарная
характеристическая скорость перехода:
АИ = £7АИ2+АИ„2 + АИг2,
/=1
при ограничениях (2.5а)-(2.5д).
Для некомпланарных переходов уравнения для базис-вектора
приобретают вид:
X = д/zfTxf sin(0-0О), (2.6а)
ц = 2 А,, + 2д/А.2 + A.2 cos(0 - 0О), (2.66)
V = -у—' 2 sin<9 ~ 9о)+ / р 7 cos<9 - 9о) > (2.6в)
уА_2 + Л3 + л3
^00 = ~- (2.6г)
Л3
Уравнения (2.6а)-(2.6г) - уравнения эллипса в трёхмерном
пространстве.
84
Существуют три конфигурации годографа базис-вектора в
форме эллипса, которые позволяют годографу иметь более одного
максимума и, следовательно, касаться сферы единичного радиуса в
двух и более точках [145]. Первая конфигурация представляет собой
семейство решений, у которых центр эллипса расположен в начале
системы координат (рис. 2.7а). Два эквивалентных максимума
расположены на главной оси эллипса, следовательно, расстояние
между углами приложения импульсов скорости составляет полвитка.
Рис. 2.7. Годограф базис-вектора для некомпланарного перехода:
а) узловой случай; Ь) невырожденный случай; с) особый случай
Следующие уравнения описывают этот случай, которому было
Дано название узловой случай (nodal case, NC):
=0, (2.7а)
02 — 01 + я, (2.76)
Х(0,) = -Х(02)'
ц(0,) = -ц(02) (2.7в)
v(0,) = -v(02)
Вторая конфигурация, которая допускает два одинаковых
максимума базис-вектора, соответствует случаю, когда две точки
эллипса и его центр принадлежат оси ц и центр эллипса сдвинут
относительно начала системы координат (рис.2.76). Этот варианту,
которому было дано название невырожденный случай (nondegenerate
case (NDC)), описывается следующими уравнениями и
неравенствами:
Х2Х4=-Х3Х5, (2.8а)
е2-ео = е0-е|5 (2.86)
85
A(0,) = -A(02)'
И(0]) = И(02) ,
v(0,) = -v(02)
COS(0J -0О) =
4Л-! (yJ’X-l + A2 )3
(А3А„ -А2А5)2 -3(^2 +^з)2 ’
3(А2+А2)2 <(А3А4-А2А5)2,
4 А, у/х22 + А2 < (А3А4 - А2А5 )2 -3(А2 + А2 )2.
(2.8в)
(2.8г)
(2.8д)
(2.8е)
Третья конфигурация является комбинацией первых двух.
Форма годографа базис-вектора - окружность и базис-вектор имеет
одну и ту же величину во всех точках орбиты (рис. 2.7в). Этот особый
случай (singular case (SC)) описывается следующими уравнениями
(величина базис-вектора была взята равной единице):
А]=0, (2.9а)
А2А4=—А3А5, (2.96)
3(А2+А2)2 =(А3А4-А2А5)2 = -, (2.9в)
A = |sin(0-0o), (2.9г)
ц = cos(0-0О), (2.9д)
7з
v = ±-^-sin(0-0o) (+если АКО). (2.9е)
A L С М
Рис. 2.8. Узловое решение
Решая совместно (2.5а)-
(2.5д), (1.18) и (2.7а)-(2.7в)
или (2.8а)-(2.8е) или (2.9а)-
(2.9е) можно найти пара-
метры импульсов скорости
перехода, соответствующего
своему типу оптимального
решения.
Наиболее просто это
сделать для узлового случая,
параметры импульсов кото-
рого можно найти геометри-
ческим методом.
86
2.2.2. Узловое решение. Как всегда, изобразим переход между
орбитами на плоскости ех,еу. Точка К соответствует параметрам
относительной орбиты. Так как углы приложения импульсов
скорости отличаются на полвитка (условие (2.76)), совместить
плоскости орбит можно только, если импульсы скорости
прикладываются в момент пересечения плоскостей орбит.
Следовательно, углы приложения импульсов скорости равны 0 или п.
Таким образом, отрезки, изображающие трансверсальные
составляющие импульсов, будут параллельны оси ех, а радиальные -
оси еу (рис.2.8).
Проведём окружность радиуса | Аа | с центром в начале
системы координат. Точку пересечения окружности с осью ех
обозначим L, проекцию точки К на ось ех обозначим М. Величину
трансверсальной составляющей первого импульса скорости выберем
такой, чтобы LC=CM\
2AKZ1 = А С = -^(Да +Дех),
а величину радиальной составляющей - такой, чтобы т. В,
соответствующая эксцентриситету орбиты, получающейся после
приложения первого импульса скорости, принадлежала отрезку АК:
Дб
ДК = С5 =-(Д<2 + Де )--
2Дех
После этого легко определяются величины трансверсальной и
радиальной составляющих второго импульса скорости:
2ДК(2 =2Ж=|(Да-Дех),
Де
ду =5Г> = -(Дя-Дех)—у-.
2Дех
Знаки составляющих одного типа различны, но углы приложения
импульсов скорости отличаются на л, поэтому вектора,
изображающие составляющие импульсов на плоскости ех,еу,
направлены одинаково.
Аналогично распределяем между боковыми составляющими
импульсов коррекцию Д/:
87
(Да + Де )Д/
ди, ----------
2Дех
(Да - Аел.) Az
*'2 “ 2\ёх '
Зная составляющие импульсов скорости, можно найти
суммарную характеристическую скорость перехода:
Az2 +-Де2 + Де2
Л ?
ДГ =
Найденное решение удовлетворяет условиям (2.7в), если т.С
находится левее т.Л/, следовательно должно быть выполнено условие:
Да2 < Де2,
которое означает, что такое решение возможно только для переходов
между пересекающимися орбитами (для таких орбит справедливо
неравенство Де>|Да|).
Второе условие задаётся требованием, чтобы базис-вектор
достигал максимума в точке приложения импульса скорости:
ЗДе2 < Az2.
2.2.3. Невырожденное решение. Для невырожденного случая
приходится непосредственно решать достаточно сложную систему
(2.5а)-(2.5д), (1.18), (2.8а)-(2.8е). В статье Эдельбаума описана
процедура этого решения и приведены найденные выражения для Д V
и коэффициентов А4Л2Л3Л4Л5:
А К = J Дг2 + Дег + Ае2 _ Да2 + -J(Az2 - AeJ “ Де;2 + да2)2 + 4 А/2 Де2 ,
1 Az2 - Де2 - AeJ + Да2
2 ^(Дг2 - Де2 - Де2 + Да2)2 + 4Дг'2Де2
-Az2 - Де2 - Де2 + Да2
^(Az2 - Де2 - Де2 + Да2)2 + 4Az'2Ae2
Да
_ 2д7
. ч
2 ДИ
88
Аех Ы1 - Ле2 - ^е2у + Да2
2АИ ^(Az2 - Де2 - Де2 + Да2)2 + 4Д/2Де2
Аеу
2ЛИ
Х5= —
5 2ЛИ
2Дг'Дел
^(Az2 - Де2 - Де2 + Да2)2 + 4 Az2 Де2
Az2 - Де2 + Де2 + Ла2
^(Az2 - AeJ - Ае2 + Ла2)2 + 4 А/2 Де2
Зная эти коэффициенты, можно из уравнения (2.6г) найти 0О, а
затем из уравнения (2.8г) моменты приложения импульсов скорости.
Ориентация импульсов находится из (2.6а)-(2.6г). Зная ЛИ, можно
найти распределение величин импульсов скорости, например, из
уравнения (2.5в).
Область существования решения задана неравенствами:
Да2 > Де2,
2
Да2 > Ае2 + Ае2 + Az'Aev - Az2.
V3
2.2.4. Особое решение. Для особого случая предельным
переходом от невырожденного случая можно найти суммарную
характеристическую скорость:
A V = - J(V3Az + Aev)2 +Де2
4 v у
и область существования решения:
Д/2 <ЗДе2,
2
Да2 < Де2 + Де2 + -7= Az Де - Az2,
х/З
вычислить значение 0О:
tg90
х/з Az + Аеу
Ае,
(2.10)
89
Для нахождения величин импульсов скорости и их углов
приложения необходимо упростить исходную систему уравнений.
Для этого повернём систему координат на угол 0О, вычисленный по
формуле (2.10). Обозначим новые проекции вектора эксцентриситета
Ду<лъ ^&уП'
Деот =Aexcos0o+Ae>,sin0o,
Ae7„=-Ae^sin0o+Ae>,cos0o.
Введём новые переменные as,xs,y^ связанные с переменными
1 2 2
Aa,AeOT,Ae7„,<p соотношениями as=—Да, х5=у (2Д И-Дем), ys=—\evn,
V=<p-0o-
Уравнения для выполнения терминальных условий приобретают
вид:
N
£Д1(=ДИ, (2.11а)
1=1
N
cos\|/z = as, (2.116)
/=i
^A^sin2^,. =х5, (2.11b)
/=1
N
^Д^. sin\|/( cosy,. =ys, (2.11г)
/=1
где ДИ; - величина z-ro импульса скорости.
В системе (2.11) меньше уравнений, чем в системе (2.5), так как
ещё два уравнения системы (2.11), являвшихся линейной
комбинацией остальных уравнений, были исключены. Для этой
возможности и была произведена замена переменных.
Получить аналитическое решение, казалось бы, несложной
системы уравнений для параметров двух импульсов скорости не
удаётся (можно только показать, что оно существует), поэтому
Эдельбаум предлагает использовать трехимпульсное решение. Он не
приводит конкретных формул, тж. существует множество возможных
трехимпульсных решений. Вместе с тем, иметь формулы для
расчётов очень важно, поэтому приведём один из возможных путей
нахождения одного из таких решений.
90
Пусть угол приложения первого импульса скорости совпадает с
0о (ф1=®о)’ а Угол приложения второго импульса скорости отличается
। на половину витка, т.е.
У q 2Д\/Й Vi=°, V2=7L Тогда из
* уравнений (2.11 в) и (2.11г)
1Д/з\У3 можно определить угол
/ ♦ >^Л(Дех,Деу) приложения и величину
В/ третьего импульса скорости:
2AV/ tgv3= —, (2.12а)
/ Л
М е, ЛГз=^’ <2'12б)
Рис. 2.9. Особое решение „ ,
затем из уравнении (2.11а) и
(2.116) находятся величины первого и второго импульсов скорости:
APJ = -^(ДИ + а, -AC3cos\|/3 + ДГ3), (2.13а)
ДИ2=|(ДИ-а,+ДИ3С08\|/3-ДИ3). (2.136)
Геометрическая интерпретация решения представлена на рис.2.9. У
первых двух импульсов скорости отличны от нуля только транс-
версальные составляющие. Углы приложения импульсов <pi=0o,
<р2=0о+я- Этим импульсам скорости соответствуют отрезки АВ и ВС.
Боковая составляющая третьего импульса скорости равна А/, т.к. это
единственный импульс скорости, изменяющий положение плоскости
орбиты, следовательно, его угол приложения ср3=О. Трансверсальной
составляющей этого импульса скорости соответствует отрезок,
параллельный оси ех. Соотношение радиальной и трансверсальной
составляющих должно быть таким, чтобы отрезок СК,
изображающий влияние третьего импульса скорости, был
перпендикулярен отрезку АС.
2.2.5. Области существования решений. Тип оптимального
решения, соответствующий конкретным отклонениям исходной и
заданной орбит, может быть найден из следующей диаграммы
91
Области существования решений различного типа в зависимости
от соотношения отклонений Да, Д<?„ Де,„ Дг.
Конкретный вид, расположения областей существования
решений различного типа, представлен на рисунках 2.10(а)-2.10(e).
Замкнутые контуры соответствуют различным значениям величины
Д/
которая изменяется с шагом 0.05 от нулевого значения на
границе рисунков до единицы в начале системы координат. Под
каждым рисунком указана разница между углами <ре и <рг (1.14).
На рисунке 2.10(a) область существования узлового решения
представляет собой два треугольника, основаниями которых
являются вертикальные границы квадрата, а вершины находятся в
начале системы координат.
92
(6) (Аф=фе - <рг =5
(а) (А(р=(ре - <рг =0)
(е) (Дф=фе - фг =90°)
(д) (Дф=фе, - фг=85°)
Рис. 2.10. Области существования решений различного типа
93
Областью существования невырожденных решений являются
два оставшихся треугольника смыкающиеся вершинами,
основаниями которых являются горизонтальные границы квадрата.
На рисунке 2.10(6) рядом с вертикальными границами квадрата
появляется область существования особого решения, узловое
решение занимает треугольную область, примыкающую к области
особых решений. Область существования невырожденных решений
занимает оставшуюся часть рисунка.
С увеличением разницы между углами <ре и <рг область
существования узловых решений быстро уменьшается (рис. 2.10(b) -
рис. 2.10(д)), в то время как область существования особых решений
растёт. В результате на рисунке 2.10(e) область существования
узловых решений полностью отсутствует.
2.2.6. Оптимальное решение без радиальных составляющих
импульсов скорости. Решение с нулевыми радиальными
составляющими импульсов скорости упоминалось Эдельбаумом, но
не выделялось в самостоятельный тип оптимального решения. Ему
соответствует первый из рисунков 2.10, когда A<p=<pe-<p_- =0,
следовательно, т.А? на рис. 2.8 принадлежит оси абсцисс, а это значит,
что радиальные составляющие импульсов скорости равны нулю.
Можно показать, что решение без радиальных составляющих
импульсов скорости представляет собой четвёртый возможный тип
оптимального решения [13].
При А.2=Хз=Х6=0 система (1.17д-1.17ж) принимает вид:
Х=0,
ц=2Х1,
v = + Л-5 cos(0 - 0j ),
^=Г-
Годограф базис-вектора вырождается в отрезок, параллельный оси v
и пересекающий ось ц (рис. 2.11 - отрезок ВС). Условия
оптимальности выполнены, т.к. годограф базис-вектора не выходит за
пределы сферы единичного радиуса и касается её в двух точках.
94
Решение этого типа нельзя считать частным случаем
невырожденного решения, т.к. нарушено условие (2.8д) и нельзя
воспользоваться формулой (2.8г). У этого нового решения
v(9.) . v(62)
ц(0,) р(02)’
Рис. 2.11. Годограф базис-вектора
в форме отрезка
ДИг1 А ^2 т
то есть —— =------Такое решение существует, если линия апсид
относительной орбиты совпадает с
линией пересечения плоскостей
начальной и конечной орбит (<pe=<pz,
Д(р=0, Де^О). Углы приложения
импульсов скорости отличаются на
180° (01-02=180°). На рисунке 2.10а
именно такое решение (а не
невырожденное решение)
существует в треугольниках с
горизонтальными основаниями. При
сколь угодно малом нарушении
условия (pe=<pz в этих областях
существует уже невырожденное
решение, поэтому только оно и упоминалось при описании областей
существования решений различного типа.
Может показаться, что решение этого типа редко встречается в
практической работе, т.к. трудно представить случай, когда линии
узлов и апсид полностью совпадают. Однако именно такое решение
на первом интервале маневрирования довольно часто является
составной частью четырехимпульсного решения для манёвров
встречи КА типа «Союз», «Прогресс» с орбитальной станцией.
Создать условия существования на первом интервале такого простого
и оптимального решения позволяют два импульса скорости второго
интервала маневрирования.
2.2.7. Манёвры без радиальных составляющих
(универсальное решение). Иногда при расчёте манёвров КА
приходиться сталкиваться с ограничениями на ориентацию и
моменты приложения импульсов скорости, на параметры переходной
95
орбиты и т.д. Довольно часто встречается запрет на использование
радиальных составляющих импульсов скорости.
Рассмотрим процедуру определения параметров оптимальных
двухимпульсных манёвров перехода между произвольными
некомпланарными орбитами при отсутствии радиальных
составляющих импульсов скорости (в предыдущем параграфе
предполагалось, что линия апсид относительной орбиты совпадает с
линией пересечения плоскостей начальной и конечной орбит, но в
рассматриваемом общем случае это не является необходимым
условием).
При отсутствии радиальных составляющих имеется шесть
свободных переменных (два угла приложения импульсов скорости <рь
<р2 и четыре составляющих импульсов ДЕгЬ ДИ,2, ДС,2) и пять
ограничений в виде равенств (2.5а)-(2.5д). Можно зафиксировать
значение одной из переменных, например, cpi=cpiy и определить
значения переменных ДКП, ДКЙ, <р2 по формулам (2.2а)-(2.2в), а затем
найти величины боковых составляющих импульсов скорости из
уравнений (2.5г),(2.5д):
Ашпф, , р14а)
4^ AiSin,P1 . (2.146)
sm(<p, -<р2)
Далее достаточно провести оптимизацию по одной переменной (pi,
чтобы найти параметры оптимального решения. Если на углы
приложения импульсов не наложены ограничения, то перебор
осуществляется на интервале [0,л]. Если ограничения наложены, то
(pi перебирается в разрешённом диапазоне и отсеиваются решения, у
которых (р2 не удовлетворяет наложенным ограничениям.
Среди решений с нулевыми радиальными составляющими
импульсов скорости можно аналитически найти параметры решения
близкого к оптимальному. Будем считать, что составляющие
импульсов скорости этого решения связаны соотношением:
дг/2
(2.15)
96
“0у
Рис. 2.12. Универсальное решение
Это требование довольно естественное, т.к. этим свойством обладает
большая часть из рассмотренных ранее оптимальных решений,
удовлетворяющих необходимым условиям оптимальности.
Решения, у которых Л7г1=Л7г2=0, а трансверсальные и боковые
составляющие импульсов скорости связаны соотношением (2.15), но
61-02*18О°, назовём универсальными решениями (universal solution,
US). Ими можно воспользоваться как при наличии, так и при
отсутствии запрета на использование радиальных составляющих
импульсов. Для определения параметров универсального решения
также можно использовать
геометрический метод [12].
Пусть опять на
плоскости ех,еу элементам
относительной орбиты
соответствует точка К, а
направлению оптимальной
коррекции плоскости орбиты
соответствует ось ех.
Проведём через середину
отрезка АК (точку Q прямую
СМ, параллельную оси ех
(рис. 2.12).
Найдём на этой прямой
точку В такую, чтобы
АВ+ВК=Мл, если |Д<з|>Де, или AB-BK=Mi, если |Д<з|<Де. Ломаная АВК
будет соответствовать решению плоской задачи (Л5=2Д1/,1,
BK=2AV!2). Продолжим отрезок КВ до пересечения с осью ех (точка
L). Отложим на оси ех отрезок AL' (AL -Дг). Проведём отрезок L В
параллельный отрезку LB.
Отрезки АВ' и ВТК проведены под теми же углами, что и
отрезки АВ и ВК, следовательно ломаная AB'L' соответствует
коррекции бокового отклонения (АВ -ДИ1( ВВ-АУд). Легко видеть,
Л5' B’L’ А/, ДК2 „
что -----=----, следовательно, —— =--------Таким образом,
АВ ВК ДКИ ДК,2
найдено решение, обладающее искомым свойством.
Зная геометрическую интерпретацию, можно найти, например,
угол приложения первого импульса скорости этого решения [12]:
97
ф]=Дф-ф*, Лф=фе-фг,
tg2Ui-^
2 I Ла
-ctgA(p +. ctg2 А<р +
Ла2
Ла2 - Ле2
(2.16)
а затем по формулам (2.2а)-(2.2в), (2.14а), (2.146) остальные
параметры манёвров.
Численные исследования показали, что суммарная
характеристическая скорость этого простейшего решения достаточно
близка к суммарной характеристической скорости приведённых выше
оптимальных решений, особенно к решению для невырожденного
случая. Таким образом, для большого количества практических задач
определения параметров оптимального перехода между
некомпланарными орбитами можно воспользоваться этим
аналитическим решением. Более того, когда с помощью
итерационной процедуры находится решение, у которого
терминальные условия выполнены с заданной точностью, то в
некоторых случаях использование в итерационной процедуре
универсального решения даёт даже меньшую конечную суммарную
характеристическую скорость, чем использование оптимального
решения. Кроме того, в сложных задачах, рассматриваемых в седьмой
главе, использование в итерационной процедуре универсального
решения позволяет существенно уменьшить число итераций,
необходимых для получения заданной точности выполнения
терминальных условий.
Очевидно, что в любом из рассмотренных в этом параграфе
решений можно менять местами порядок приложения импульсов
скорости. Более того, импульсы можно делить на части и
прикладывать эти части на разных витках, но на одном и том же
аргументе широты. Это позволяет уменьшить, например, величину
ошибки реализации импульсов скорости. Однако, как и для
переходов между компланарными орбитами, необходимо помнить,
что утверждение о произвольном порядке приложения импульсов
скорости справедливо только в линейном приближении. Если есть
возможность, лучше с помощью итерационной процедуры получить
аккуратные решения для обеих последовательностей импульсов, а
затем выбрать из них оптимальное.
98
2.2.8. Пример. Требуется определить параметры импульсного
перехода между некомпланарными орбитами, элементы которых
приведены в таблице 2.2.
Таблица 2.2.
Элементы Начальная орбита Конечная орбита
Ят„, км 180 340
^тах> КМ 210 360
(/„я, (град) 20 150
i (град) 51.7 51.69
<2 (град) 17.49 17.5
. .ДО
Ш I--
Д/
В дополнение к информации первого примера этой главы
добавлена информация о наклонении орбит и их долготе восходящего
узла (ДВУ).
Результаты расчета из первого примера:
Да = 0.02333, Лех = -0.00344, Леу = -0.00004, Де = 0.00345.
Отклонения ДВУ и наклонения:
ДО = 0.01°, Д/ = -0.01°.
Используя соотношения для сферического треугольника, можно
найти угол между плоскостями орбит Ду и аргумент широты линии
узлов uz:
sinw
ДО =-------Ду
sin i
Ai = coswzAy
Получаем:
Ду = -0.0127°,
wz =-38.1240°.
Из двух возможных оптимальных углов коррекции бока
необходимо выбрать ближайший к сре:
<рг = 180° + щ= 141.8760°.
Затем вычисляется Д<р - угол между оптимальным
направлением коррекции эксцентриситета и оптимальным
направлением коррекции бока
Дер = сре - <pz=180.624°-141.876°=38.748.
Необходимо помнить, что во всех формулах используются углы
в радианах, а скорости и другие переменные - безразмерны.
Воспользовавшись формулой (2.16)
99
2 l Да
л 2a д«2
-ctg Дф + Jctg Д(р + —-——
V Да - Де
можно найти ср’ - угол приложения первого импульса, в отсчёте от
линии фе=СОП51
ф; =34.004.
Угол ф1 приложения первого импульса в отсчёте от оси х:
Ф1 = Фе -ф’>
ф! = 146.620°.
Для угла ф1 по формулам (2.2) определяются трансверсальные
составляющие импульсов скорости и угол приложения второго
импульса:
Д V, j = 50.3461 м/с,
Д = 40.0139 м/с,
ф2 = 315.9030°.
Затем по формулам (2.14а), (2.146), где ф/ = ф;-ф2, находятся
значения боковых составляющих импульсов:
ДИ21 = -0.9616 м/с,
ДИЙ = 0.7643 м/с,
сумма боковых составляющих: ДИг = |Д Кг1( + |ДКг2| = 1-7259 м/с,
сумма всех составляющих: ДИ = 90.37 м/с
Минимально возможные затраты на поворот плоскости орбиты
(при коррекции на линии узлов):
AKzm,„= К0Ду= 1-7185 м/с.
Получили близкое к оптимальному решение, т.к. ДИг
практически совпадает с &Vzmin.
Для контроля проверяется выполнение соотношения
Д^2
ди,2
, которому должно удовлетворять найденное решение
дг, ДК,
= 0.0191, = 0.0191
ДИ,. Д^,2
Соотношения совпали, следовательно, найдено верное решение.
100
ГЛАВА III
ВСТРЕЧА НА КОМПЛАНАРНЫХ ОРБИТАХ
3.1. Постановка задачи
В задаче встречи требуется определить параметры маневров,
обеспечивающих перелёт за фиксированное время в заданную точку
конечной орбиты.
Для встречи на компланарных орбитах условия выхода за
фиксированное время в заданную точку конечной орбиты имеют вид:
N
^2 (A Vrisin<pz +2A Vtj cos (pz )=Aex, (3.1a)
/=! N ^2 (“A Vri cos (p. +2A K/Zsincpz )=Aev, (3.16)
E2A^=Aa’ (3.1b)
/=1 ^2 (2 A Vri (1 - cos q>z)+A Vti (-3cpz +4sin<pz))=A/. i=l (3.1r)
Импульсы скорости прикладываются на двух интервалах
маневрирования. Первый интервал начинается с момента, когда
впервые можно исполнять маневр, второй интервал заканчивается
непосредственно перед точкой встречи, длина каждого из интервалов
маневрирования - виток, расстояние между интервалами - несколько
витков. Разделение интервалов маневрирования несколькими
витками имеет ряд преимуществ. В случае, когда суммарная
характеристическая скорость встречи (ДКгА) превышает суммарную
характеристическую скорость перехода (AV,ry) из-за большой
первоначальной разницы в положениях КА вдоль орбиты,
длительный интервал полета на промежуточной орбите позволяет
существенно приблизить АКл к kNtrf. Кроме того, появляется
возможность определить орбиту после первого интервала
маневрирования и уточнить параметры маневров второго интервала,
101
компенсировав, таким образом, ошибки, накопившиеся после
реализации первых импульсов скорости. В случае необходимости
можно добавить дополнительные импульсы скорости, исправляющие
ошибки определения орбит и реализации первых импульсов
скорости, можно добавить специальный маневр для уклонения от
столкновения с космическим мусором и т.д. В реальных проектах
интервалы маневрирования разделяет весьма значительное число
витков. Например, у КА «Союз» и «Прогресс» первый и последний
интервалы маневрирования разделяет около 30 витков. У «Shuttle»
более 40 витков, у европейского ATV несколько десятков витков и
т.д. Определенные преимущества имеет и относительно короткая
схема встречи [86,88], когда сближение осуществляется за несколько
витков. В первую очередь это связано с удобством
жизнедеятельности космонавтов. Однако разрешенный фазовый
диапазон (разность аргументов широты KA-цели и активного КА в
начальный момент перелета) становится чрезвычайно узким, что
накладывает существенные ограничения на возможные окна стартов.
Таким образом, для автоматических КА предпочтительней является
многовитковая встреча, а для пилотируемых возможны оба варианта.
В нештатных ситуациях для пилотируемых КА осуществляется
переход от короткой схемы к обычной многовитковой.
Запишем принадлежность импульсов скорости заданным
интервалам маневрирования в виде:
<Р1 с’ F[,... , фмсг F\ , фм-н ст Fz,... , <Pn\+nFF F2, (3-2)
где jVI, N2 - число импульсов скорости на первом и втором
интервалах маневрирования (A=jV1+А2), F[, F2 - соответственно
первый и второй интервалы маневрирования.
Задача определения параметров оптимальных маневров встречи
на компланарных орбитах формулируется следующим образом: надо
определить АКг/, АК,„ ср, (/=1, ..., А), при которых минимальна
суммарная характеристическая скорость маневров А К:
аи = х7аи;+аи„2
/=1
при ограничениях (3.1а) - (3.1г), (3.2).
Уравнения для базис-вектора имеют вид:
102
Х = 5/1| + А.з 3in(0 — 0О) + 2Z6, (3.3а)
ц = 2Х, + 2^X2 + cos(0-О0)-3\(0- 0О), (3.36)
«е.=А <з.зв)
л3
или
А. = H(cos(0-0O) + 2B), (3.4а)
ц = H(-2sin(0-0o)-35(0-0o) + —), (3.46)
А
tge0-^, (з.4в)
Л-,
где А = 7^+2^ , В = X С=2А.,.
А
В общем случае уравнения (3.4а), (3.46) в плоскости ц,А,
описывают циклоиду. Форма циклоиды зависит только от константы
2
В, константа А определяет масштаб годографа. При В > — петля у
циклоиды исчезает. При 5=0 циклоида вырождается в эллипс, а при
А=0, В=0 в точку. Таким образом, возможны три типа оптимальных
решений:
А) годограф вырождается в точку, следовательно, как и для
переходов между компланарными орбитами, импульсы скорости
имеют только трансверсальные составляющие (%=0), которые все или
разгонные (если ц=1) или тормозные (если ц=-1). В предыдущей
главе эти решения были названы компланарные особые решения
(CSS).
Б) годограф вырождается в эллипс, аналогично переходам
между компланарными орбитами, импульсы скорости имеют только
трансверсальные составляющие (А.=0), часть из которых разгонные
(ц=1), остальные - тормозные (ц=-1). Импульсы скорости
располагаются на линии апсид относительной орбиты. Эти решения
были названы компланарные апсидалъныерешения (CAS).
В) годограф - циклоида, у импульсов скорости присутствуют
радиальные составляющие (т. к. А.^0), импульсы, прикладываемые на
одном интервале маневрирования тормозные (трансверсальные
103
составляющие отрицательные (ц<0)), на другом разгонные
(трансверсальные составляющие положительные (ц>0)). Эти решения
будем называть компланарные невырожденные решения (CNS).
В первых двух случаях суммарная характеристическая скорость
задачи встречи &Vrdv равна суммарной характеристической скорости
задачи перехода AVlff (AVrdv=AVtlj), в третьем AVrdv>AV!rf.
Условия существования каждого из трех возможных типов
решений задачи встречи будут сформулированы в четвертом
параграфе данной главы.
Вначале будут рассмотрены процедуры определения параметров
каждого из этих типов решений.
3.2. Встреча на компланарных непересекающихся орбитах
(особое решение)
Решения этого типа существуют, когда встречу можно
осуществить, разделив соответствующим образом между первым и
вторым интервалами маневрирования импульсы скорости,
необходимые для перехода между орбитами. Например, активный КА
находится на внутренней орбите, KA-цель на внешней орбите
несколько впереди активного КА (но не слишком далеко). Активный
КА проводит на первом интервале маневры, увеличивающие
большую полуось орбиты и изменяющие нужным образом вектор
эксцентриситета. Затем происходит процесс, который обычно
называют «фазирование». Так как активный КА продолжает
находиться на внутренней орбите, он постепенно, виток за витком,
догоняет KA-цель. Когда он практически окажется под КА-целью,
проводятся маневры на втором интервале маневрирования,
обеспечивающие встречу двух КА. Если первоначально активный КА
находился на внешней орбите, то KA-цель должен в начальный
момент несколько отставать от активного КА. Далее аналогично
предыдущему случаю сначала исполняются тормозные маневры на
первом интервале маневрирования, затем следует этап фазирования,
потом - завершающие тормозные маневры.
Исследуемым в данном параграфе особым решениям CSS
соответствует годограф базис-вектора в виде точки. У оптимального
решения задачи встречи импульсы скорости имеют только
трансверсальные составляющие, которые все или разгонные или
тормозные. Об углах приложения импульсов базис-вектор не дает
104
никакой информации. Суммарная характеристическая скорость таких
маневров встречи совпадает с суммарной характеристической
скоростью маневров перехода, частным случаем которых они
являются:
ac = £|ac„| = LJ
Рассматриваются двух-, трех- и четырехимпульсные решения.
Процедуры поиска параметров решений с различным числом
импульсов скорости несколько отличаются. Решения с числом
импульсов более четырех существенно не отличаются от
четырехимпульсных решений.
3.2.1. Двухимпульсные решения. Определение параметров
двухимпульсного решения начнем с оценки величин импульсов
скорости. Соотношение (3.1г) показывает, что для рассматриваемых
перелетов продолжительностью несколько витков основное влияние
на время прихода в точку встречи оказывает трансверсальная
составляющая первого импульса скорости. Это позволяет
приближенно определить её величину:
АИ,>-—,
Зф10
(3.5)
где ср10 - произвольная точка первого разрешенного для
маневрирования интервала. Здесь был использован тот факт, что
длина первого интервала маневрирования существенно меньше его
расстояния до точки встречи. В дальнейшем параметры маневра, при
которых приближенно выполнено условие (3.1г), будем помечать
звездочкой. Геометрически условие (3.5) означает, что на плоскости
ех,еу точка В (рис. 3.1(a)), соответствующая вектору эксцентриситета
орбиты ожидания (орбите, получающейся после приложения
импульсов скорости первого интервала маневрирования, часто
используется также термин «фазирующая орбита»), должна
А?
принадлежать окружности, имеющей радиус R, = 2
----, с центром в
3<Рю
точке А, так как известна величина первого импульса скорости, но
ещё не известен угол его приложения.
105
Рис. 3.1. Двухимпульсные решения:
(а) оба импульса скорости - трансверсальные;
(Ь) второй импульс скорости имеет радиальную составляющую
То есть, импульсам скорости величины АР',*, прикладываемым в
разных точках начальной орбиты, на плоскости ех,еу соответствуют
отрезки длины 2 ДР,*, проведённые из точки А под разными углами к
оси ех. Геометрическим местом концов этих отрезков и будет
окружность, имеющая радиус Яр
Из (3.1 в), (3.5) следует, что
таким образом, точка В
радиуса
3(Рю
Д<2
1 А
—Да +-------,
2 3<р10
(3.6)
должна также принадлежать окружности
с центром в точке К (рис. 3.1(a)). Это
Я2 =
следует из того, что вторым импульсом известной величины Д^2
необходимо прийти в точку К, но угол приложения этого импульса
тоже пока не известен, значит в точку К можно перейти этим
импульсом из любой точки окружности, имеющей радиус Я2.
Двухимпульсное решение с нулевыми радиальными
составляющими существует, если окружности пересекаются, т.е.
когда выполнены условия:
7? 1+7?2>Ae,
I R[-R21 <Де.
106
(3.7а)
(3.76)
Для того чтобы найденное двухимпульсное решение
принадлежало рассматриваемому типу решений CSS, необходимо
совпадение знаков трансверсальных составляющих импульсов
первого и второго интервалов маневрирования. При каких значениях
параметров орбит это происходит, будет определено в четвертом
параграфе этой главы.
Очевидно, что при пересечении окружностей имеются два
двухимпульсных решения АВК и АВ'К (рис. 3.1(a)).
Углы приложения импульсов скорости ПРИ которых
происходит пересечение окружностей, находятся из (3.1а), (3.16):
ф’=фе ±\|/,-2ли;+-i-n(l-signA^’) (и, =0,1,2, ...), (3.8)
где
,Дехч . д Де2+4(-1)'(ДИ’2 - ДИ*2) ,
фе =arccos(—-)signAe , у, =arccos------- '2---— (z=l,2).
Де ’ 4Д1ф Де
В соотношении (3.8) верхние знаки соответствуют точке В',
нижние - точке В. Константы п{ и п2 выбираются такими, чтобы углы
фиф2 принадлежали соответственно первому и второму интервалам
маневрирования.
Найденные значения углов можно использовать в качестве
начального приближения для итерационной процедуры [8],
позволяющей определить параметры маневра, при которых условие
(3.1г) выполняется с заданной точностью.
На очередной итерации этой процедуры величины
трансверсальных составляющих импульсов скорости Д^*, ДИ12
определяются из уравнений (3.1 в), (3.1г), где значения углов
приложения импульсов скорости ф’,ф2 вычислены на предыдущем
Шаге. Затем по формулам (3.8) уточняются значения углов
приложения импульсов скорости. Если при найденных значениях
Ф1;ф2, ДИ,’, ДИ12 правая и левая части уравнения (3.1г) не совпадают
с заданной точностью, то вычисления продолжаются.
Можно показать, что процедура сходится при выполнении
условия
107
(Ф1 -ф2)
2----2—
(ф! - Ф2)
следовательно, пересечение окружностей в малой окрестности
прямой АК не допускается, но в этой области оптимальны простые
апсидальные решения, параметры которых будут определены ниже.
Если окружности радиусов 7?] и R2 не пересекаются, то
двухимпульсный переход с нулевыми радиальными составляющими
обоих импульсов скорости невозможен. Для непересекающихся
орбит этот случай имеет место, когда одна из окружностей находится
целиком внутри другой. Для этой задачи наименьшей суммарной
характеристической скоростью будет обладать маневр, у которого
отлична от нуля только радиальная составляющая импульса скорости
с меньшей по модулю трансверсальной составляющей (рис. 3.1 (/>)).
Итерационная процедура, позволяющая определять параметры таких
маневров, описана в [6]. Суммарная характеристическая скорость
Р. “ 1Аа1
таких маневров больше минимально возможной J—L, следовательно,
если окружности не пересекаются, для получения оптимального
решения необходимо использовать трех или четырехимпульсные
схемы маневрирования.
Приведенный метод определения параметров маневров очень
удобен для качественной оценки решения. Однако, у исследователей,
проводящих эту оценку, как правило, имеются значения параметров
орбит не в конечный, а в начальный момент времени (перед первым
интервалом маневрирования). При продолжительности встречи до
нескольких десятков витков вектора эксцентриситетов и полуоси
меняются незначительно, поэтому в приведенных выше формулах
вполне можно использовать их отклонения соответствующие
начальному моменту. От А? удобно перейти к Ди - разности в
угловом положении КА цели и активного КА в начальный момент
времени (начальной фазе). Тогда вместо А И,’ можно вначале
приближенно найти АЕ,’2
аи,;
Aw
Зфю ’
108
затем находится A^j, а после этого ф’.фг и т.д .
3.2.2. Трёхимпульсные решения. При анализе трехимпульсных
маневров будем предполагать, что на первом интервале
маневрирования прикладывается один импульс скорости, вариант с
двумя импульсами на первом интервале рассчитывается аналогично.
Предположение, что на первом интервале маневрирования
прикладывается один импульс скорости, а на втором - два, вполне
обоснованно. В момент определения параметров маневров
существует ошибка в знании элементов орбит активного КА и КА-
цели. Маневры первого интервала также будут исполнены с
ошибками. Всё это приведет к отличию реальной орбиты активного
КА от расчетной перед вторым интервалом маневрирования, поэтому
одного импульса скорости для перехода на заданную орбиту будет
недостаточно, и на этом интервале все равно придется использовать
два импульса.
Рис. 3.2. Трехимпульсные решения:
(а) общее решение; (Ь) апсидальное решение
Величину трансверсальной составляющей первого импульса
скорости можно определить приближенно по формуле (3.5), а сумму
трансверсальных составляющих импульсов второго интервала
аналогично (3.6):
Д^„ = ДИ,*2+Д^> — +—. (3.9)
2 Зф10
109
Пусть окружности, имеющие радиусы A t=2 |л 1^* | и А2=21Д Е,н |;
пересекаются (рис. 3.2(a)), а знаки ДЕ(’ и ДКШ совпадают, что
возможно при оптимальных значениях Д/ для перелетов между
непересекающимися орбитами.
Для существования рассматриваемых решений типа CAS
необходимо, чтобы совпадали знаки и у трансверсальных
составляющих импульсов скорости второго интервала
маневрирования, что возможно при |ДЕ,'| < |ДЕг11| (/=2,3). Углы
приложения этих импульсов могут быть любыми, следовательно,
точка С, соответствующая вектору эксцентриситета орбиты
ожидания, должна принадлежать кругу радиусом Я2 с центром в т. К
(рис. 3.2(a)). Это связано с тем, что переход в точку К на втором
интервале маневрирования осуществляется не одним отрезком длины
2ДКЛ1 (как в двухимпульсной схеме с одним импульсом скорости на
втором интервале маневрирования), а двухзвенной ломаной линией
длины 2ДК(П (так как на втором интервале маневрирования
прикладываются два импульса скорости, углы приложения которых
могут быть любыми). Пример такой линии - ломаная CDK на
рис.3.2(а). Таким образом, точка С может лежать не только на
окружности радиуса Я2, но и внутри неё. В то же время она должна
принадлежать окружности, имеющей радиус R\. Следовательно,
точка С должна принадлежать дуге ВВ' окружности радиуса R\ (рис.
3.2(a)). Каждому положению точки С на дуге ВВ' соответствует
множество решений, отличающихся углами приложения и
величинами второго и третьего импульсов скорости, но имеющих
одинаковую суммарную характеристическую скорость ~ |Да|. Пример
трехимпульсного решения изображен на рис. 3.2(a), это ломаная
ACDK. Точка D, соответствующая вектору эксцентриситета орбиты,
получающейся после исполнения первого импульса скорости на
втором интервале маневрирования, должна принадлежать эллипсу с
фокусами в точках С и К. Большая полуось этого эллипса равна А Рф
(рис 3.2(a)).
В рассматриваемой трехимпульсной задаче встречи шесть
переменных (три трансверсальных составляющих импульсов
скорости и три их угла приложения) и четыре ограничения в виде
равенств. Если дополнительно зафиксировать значения двух из шести
но
переменных, то значения остальных переменных однозначно
определяются из системы (3.1а)-(3.1г).
Зафиксируем углы приложения первого и второго импульсов
скорости <Р1=<Р1/, <Р2=<Р2/- Решение интересующего типа можно
получить, если фу с(ф14,ф1е), т.е. точка С принадлежит дуге ВВ'.
Естественно, что фу и ф2/ должны принадлежать соответственно
первому и второму интервалам маневрирования. Так как ф! задан, а
ДЕ/ определяется из (3.5), то положение точки С известно (известен
вектор эксцентриситета орбиты ожидания). Два последних импульса
скорости обеспечивают переход со свободным временем на втором
интервале маневрирования (переход из точки С в точку К). Угол
приложения первого из этих импульсов задан, следовательно,
используя формулы (2.2а)-(2.2в), можно определить Л Р)’, ДР)’ и ф’3:
Д V'2 =----=------——,
4(Аеу sin ф2/ + Ае< cos ф2/ - Да)
Де>- А г/. •
—----ДЕ(2 5Шф2/
tg<P3 =-^-------------
ДЩ А TZ*
—-ДГ,2 СО8ф2/
(3.10а)
(3.106)
(З.Юв)
где Дщ = Дех-2ДИ/со5ф1у., Аеу = Аеу -2ДЕг*зтф1/, Да = Да-2ДЕ'.
Воспользовавшись значениями ДР/, ДЕ(2, ДЕ/, ф* в качестве
начального приближения, можно найти параметры маневра, при
которых условие (3.1г) выполнено с заданной точностью. Для этого
подставим фиксированные углы приложения и найденные параметры
импульсов скорости в левую часть уравнения (3.1г) и вычислим
сформированное значение At . Затем изменим в уравнении (3.1г) At на
величину At-At (At:=At+At-At) и повторим все вычисления.
Процедура заканчивается, когда |д/-Д/*| <е, где е - точность
ill
выполнения условия (3.1г). Так как имеется еще описанная в первой
главе внешняя итерационная процедура, которая обеспечивает учет
всех возмущений, то точность данной итерационной процедуры, как
правило, должна быть на порядок выше точности выполнения
условия по времени во внешней итерационной процедуре.
Требование фиксации углов приложения импульсов скорости
обычно связано с условиями полета. Если ограничений на моменты
приложения импульсов скорости нет, то для простоты и надежности
лучше использовать простейшее решение, у которого импульсы
прикладываются на линии апсид относительной орбиты (апсидальное
решение). Можно предположить, например, что третий импульс
скорости имеет тот же угол приложения фе (1.14а) на своем витке, что
и первый импульс на своем витке, а угол приложения второго
импульса скорости отличается на 180° от угла приложения третьего
импульса. На рисунке 3.2(Z>) импульсам скорости такого решения
соответствуют отрезки AC, CD, DK. Зная углы приложения
импульсов на витке, легко вычислить значения углов (р,:
<р, = <?e+2n(Nl-Nap)-uap, (3.11а)
ф2 =<pe~K + 2n(Nn-Nap)-uap, (3.116)
ф3=фс + 2л(^1-^р)-нар, (3.11в)
где Nap, иар - номер витка и аргумент широты прицельной точки, Nlf
- номера витков, на которых прикладываются импульсы скорости
первого и второго интервалов маневрирования соответственно.
Величины трансверсальных составляющих импульсов
скорости однозначно определяются из системы (3.1):
ДИ/2 = ^(Да-Де),
Д?-А:2Д^2 к3(Аа + Де)
ДЕ„ =------------4-----------
(*,-*з)
ДИ/3 =^(Да + Де)-ДЕ,1,
(З.Нг)
(З.Нд)
(З.Не)
где &,=4sincp, -3(p, (z= 1,2,3).
112
В зависимости от расположения второго интервала
маневрирования может существовать решение, у которого порядок
исполнения импульсов скорости обратный. Угол приложения первого
импульса скорости второго интервала маневрирования <р(,, а второй
импульс прикладывается через полвитка.
Важно отметить, что при определении параметров
апсидалъного решения никак не использовалось предположение о
многовитковости встречи. Найденное аналитическое решение
можно использовать для определения параметров маневров встречи
любой продолжительности.
Для оценки величины первого импульса скорости вместо
формулы (3.5) можно использовать формулу (3.11д).
Рассмотренные решения существуют, если окружности
радиусов 7?! и Т?2 пересекаются или окружность радиуса R\ целиком
лежит внутри окружности радиуса R2. Если наоборот, окружность
радиуса R2 целиком лежит внутри окружности радиуса Rb то
трехимпульсные решения CSS существуют только, если на первом
интервале маневрирования прикладываются два импульса скорости.
Если одна из окружностей целиком лежит внутри другой, и
трехимпульсные решения CSS существуют, среди них можно
выделить четыре простейших трехимпульсных апсидальных решения
(если два из трех импульсов скорости можно располагать как на
первом, так и на втором интервалах маневрирования). Параметры
этих решений аналогичным образом однозначно находятся из
системы (3.1). Как было показано во второй главе, реальная (после
уточнения параметров маневров с помощью итерационной
процедуры, описанной в первой главе) суммарная
характеристическая скорость этих решений может несколько
отличаться. Если длина каждого из разрешенных интервалов
маневрирования не превосходит витка, остаются только два
возможных апсидальных решения.
3.2.3. Пример. Рассматривается трехимпульсная встреча, один
импульс скорости прикладывается на первом интервале
маневрирования и два импульса на втором интервале. Элементы
начальной и конечной орбиты приведены в таблице. Они аналогичны
элементам орбит из примера 2.1.5, но добавлена информация об
аргументе широты активного КА и KA-цели в начальный момент,
из
номера витков обоих КА на этот момент NOh. и NOk, а также их номера
витков на момент встречи NapH. и NapK. Рассматриваются три варианта,
которые отличаются разным положением КА-цели.
Элеметы Начальная орбита Конечная орбита
(км) 180 340
^тах (КМ) 210 360
и„гг (град) 20 150
А (град) 60 5
А(град) 60 210
Аз (град) 60 355
Ао нач-ного витка 1 201
Аар витка встречи 17 217
Точка встречи: начало 17го витка, то есть
Uap = 0 - аргумент широты прицельной точки,
Nap = 17- номер витка прицельной точки.
Первый интервал маневрирования - первый виток, второй интервал
маневрирования - шестнадцатый виток.
Схема маневрирования приведена на рисунке.
Будет использоваться простейшее апсидальное решение. Углы
<р„ отсчитываемые от прицельной точки, определяют моменты
приложения импульсов скорости:
< ps =Фе + 2л:(^1 -^р)-С/ал,5
< Р2 = <Ре - * + - Nap) ~ Uap>
< р3=<ре + 2л(А11-Аар)-Аар,
Aj, Ап - номера витков, на которых прикладываются импульсы
скорости первого и второго интервалов маневрирования
соответственно.
В нашем случае Aj = 1, Ап = 16.
114
Результаты расчета:
ср, = -97.3784, ф2 = -6.2723, ср3 = -3.1307.
Рассчитывается примерное значение параметра Д7
(рассогласование времени прилета в точку встречи активного КА и
KA-цели). Периоды обращения активного КА и КА-цели:
Тн = 2пан —, Тк = 2пак — .
П “41 ’ А л А I
V М V м
Время прилета корабля в точку встречи
t =т[ N -N -1 + 360
‘и 1п 14 арн 1У0и 1
V ЭО1) )
(15 витков плюс расстояние, которое осталось пройти до полного
витка при движении из начальной точки).
Результат вычислений:
/„= 83836.54 с.
Для КА-цели:
t =т f N - N -1 + —
‘Ki 1к\1Уарк 1у0к 36Q I
Д/, вычисляется как: Д/; =
Точное значение Д/,- можно было получить с помощью
численного прогноза орбит активного КА и КА-цели до точки
встречи с учетом всех возмущений, так обычно и делается при
решении практических задач.
Величины трансверсальных составляющих импульсов
скорости однозначно определяются из системы (3.11г)-(3.11е), где
^=4sin<p,-3<p,(z= 1,2,3), ^=292.0919, fc2=l8.86044, ^=9.348559.
Решение задачи:
1) UK}=5° Тю= 87660.38с Д/1 =4.458352 (3823.84с)
ДV,!=117.8551м/с, ДИ,2=38.5273м/с, ДИ,3=-66.0223м/с,
2)[/га=210° Ти= 84537.82с Д/2 =0.8176375 (701.2713с)
ДИ,!=18.1158м/с, ДИй=38.5273м/с, ДИд=33.7169м/с,
3)[/и=355° Тю= 82329.17с Д/3 =-1.757502 (1507.37с)
115
ДИ,,=-52.4314м/с, ДИд=38.5273м/с, ДИд=104.2641м/с,
Выводы:
1) В первом случае KA-цель “отстает” от активного КА ((7xi=5°,
С7н=60°). Чтобы сократить это отставание, необходимо значительно
увеличить большую полуось орбиты корабля (см. рисунок 1), это
позволит KA-цели, двигаясь по орбите с меньшим периодом,
“догнать” активный корабль. За счет большого разгонного импульса
скорости формируется необходимая орбита ожидания, изображенная
пунктирной линией на первом рисунке. Затем с помощью разгонного
импульса скорости, исполняемого на втором интервале
маневрирования, формируется орбита, касающаяся орбиты КА-цели.
Последний тормозной импульс скорости завершает переход на
орбиту КА-цели. Такой перелет не оптимален, так как один из
импульсов скорости тормозной, и энергетика перелета больше, чем в
случае, когда все импульсы разгонные. С другой стороны, нельзя
применить обратную схему и позволить кораблю “догонять” КА-
цель, так как число витков перелета задано.
2) В данном случае корабль отстает от КА-цели ((7xi=210°, (7я=60°).
Разность фаз лежит в оптимальном диапазоне, следовательно, все три
импульса скорости разгонные. Оптимальный маневр (большая
полуось фазирующей орбиты, изображенной пунктирной линией на
втором рисунке, лежит между полуосями начальной и конечной
орбит рис. 2).
3) В данном случае корабль сильно отстает от КА-цели ((7xi=50,
(7и=3550). Чтобы успеть его догнать за заданное число витков, надо
еще более уменьшить период орбиты активного КА (см. рисунок 3),
сформировав нужную орбиту ожидания (пунктирная линия на
третьем рисунке). Второй и третий импульсы скорости разгонные,
они формируют конечную орбиту.
3.2.4. Четырёхимпульсные решения. Использование
четырехимпульсной схемы позволяет на каждом интервале
маневрирования иметь по два импульса скорости и таким образом не
зависеть от взаиморасположения окружностей, имеющих радиусы R<
и Т?2 (не имеет значения, какая из окружностей расположена внутри
другой окружности). Более того, наличие новых свободных
переменных позволяет накладывать различные дополнительные
ограничения на параметры маневров.
Оценим приближенно сумму трансверсальных составляющих
импульсов скорости каждого из интервалов маневрирования
аналогично тому, как это делалось для двух- и трехимпульсных
маневров
ДК^Д^+Д^*--^-, (3.12а)
Зфю
ДГ,П=ДК(;+ДГ>^ + -^-. (3.126)
2 Зф10
Пусть окружности, имеющие радиусы 7?i=21 ДИд| и
7?2=21 ДК,П|, пересекаются и знаки ДИг1, ДИ,П совпадают. В этом случае
существует множество решений с одинаковой суммарной
|Дд|
характеристической скоростью маневров . Т. С, соответствующая
параметрам орбит ожидания таких решений, должна принадлежать
множеству G - пересечению кругов радиусов и R2 (рис.3.3). Это
необходимо для совпадения знаков трансверсальных составляющих
импульсов скорости на каждом из интервалов маневрирования. В
задаче определяются значения восьми переменных <рь ДИ„ (1=1,...,4)
при четырех ограничениях, следовательно, для однозначного
решения задачи необходимо наложить четыре дополнительных
ограничения. При этом надо учитывать, что получаемое решение
должно оставаться решением типа CSS. Можно, например,
фиксировать углы приложения трех импульсов скорости и отношение
величин импульсов скорости одного из интервалов. Пусть, например,
ДИ,
Ф1=(Р1/ фз=фзд ф4=ф4/, т =------------. Ограничение на
А^)з + АР(4
распределение величин импульсов скорости на втором интервале
маневрирования часто встречается в практической работе при расчете
Параметров маневров КА «Союз», «Прогресс».
117
Фиксация углов приложения импульсов скорости на втором
интервале маневрирования означает, что точка С, соответствующая
вектору эксцентриситета орбиты ожидания, для второго интервала
маневрирования должна принадлежать не всему кругу радиусом /?2, а
отрезку LN' (рис. 3.3(a)).
Рис. 3.3. Четырехимпульсные решения:
(а) общее решение; (Ь) типичное решение для КА «Союз»
Одновременно точка С должна принадлежать кругу радиусом А,,
следовательно, она обязательно должна принадлежать отрезку LN.
Так как отношение величин импульсов скорости второго интервала
маневрирования задано, а их сумма известна (3.12(6)), то тем самым
известны величины этих импульсов A^j, A V^. Следовательно,
известно и положение точки С на отрезке LN.
Первые два импульса скорости обеспечивают переход со
свободным временем в т.С. Угол приложения одного из импульсов
фиксирован, следовательно, как и для второго интервала
маневрирования трехимпульсных переходов, по формулам,
аналогичным (З.Юа)-(З.Юв), можно определить величины импульсов
скорости и угол приложения второго из них. В формулах (3.10а)-
(3.1 Ов) надо заменить индексы «3» на «2» и «2» на «1», а величины
Ае.г, Аеу, Аа определять по формулам
Ае.г = Абл - wAKrtI cos(p3/ - (1 - m)&Vin coscp4/
118
Аеу = Aev -wAKmsin(p3/ - (1 - m)AГ,п sin q>4/ (3.13)
Aa = Aa - 2 A Г,п _
Найденному решению соответствует ломанная ABCDK (рис. 3.3(a)).
Значения АГ,*,АГ,*,АГ,АГ,* и cpj используются в качестве
начального приближения для итерационной процедуры, которая
аналогична процедуре для трехимпульсной задачи и позволяет
выполнить условие (3.1г) с заданной точностью.
3.2.5. Особенности схем маневрирования КК «Союз» и
«Прогресс». При полете КА «Союз» углы приложения двух
последних импульсов скорости фиксируются за виток и полвитка до
точки встречи. Таким образом, импульсами скорости первого
интервала маневрирования необходимо перейти на отрезок LN
параллельный оси абсцисс (рис. 3.3(6)). Часто накладывается
дополнительное ограничение, чтобы импульсы скорости последнего
интервала маневрирования были примерно равной величины. Это
означает, что т.С, соответствующая вектору эксцентриситета орбиты
ожидания, должна располагаться на отрезке LN в окрестности точки
К, тогда отрезок CD (третий импульс скорости) примерно равен
отрезку DK (четвертому импульсу скорости). Угол приложения
одного из импульсов скорости первого интервала маневрирования
часто фиксируется таким образом, чтобы этот импульс исполнялся на
линии пересечения плоскостей орбит КА «Союз» и орбитальной
станции. Таким образом, наложены четыре дополнительных условия,
которые позволяют однозначно определить величины всех импульсов
скорости четырехимпульсной компланарной встречи. Изображенная
на рисунке 3.3(6) картинка соответствует реальному решению и
реальному взаимному расположению окружностей для
четырехимпульсной задачи, решаемой при баллистическом
обеспечении полета КА «Союз».
Схемы маневрирования, используемые для стыковки
космических кораблей «Союз», «Прогресс» с орбитальной станцией в
конце 70-х начале 80-х годов, заметно отличались от схем
используемых позднее. Так для стыковки космических кораблей
«Союз» использовалась не двухсуточная, а односуточная схема
стыковки. Наибольшее отличие имела схема стыковки космических
119
кораблей «Прогресс». Это была двухсуточная схема сближения, но с
существенными ограничениями на ориентацию ДУ.
Рис. 3.4. Схема маневрирования первых КК «Прогресс»:
(а) построение ориентации и схема исполнения маневров;
(6) пример решения для первых КК «Прогресс»
За 22.5 минуты до начала рассчитанного маневра с помощью
инфракрасной вертикали строилась ориентация на центр Земли (рис.
3.4(a) точка Л). Затем через 22.5 минуты (рис. 3.4(a) т.5), когда
построенная ранее ориентация близка к трансверсальной,
прикладывается первый импульс скорости (он может быть разгонным
или тормозным). Еще через 45 минут прикладывается еще один
рассчитанный ранее импульс скорости, который также близок к
трансверсальному (рис. 3.4(a) т.С). Перед включением ДУ
происходит разворот вектора тяги на 180 градусов, чтобы оба
импульса скорости были на разгон.
На втором интервале маневрирования ориентация ДУ строится
аналогичным образом. Таким образом, решается компланарная задача
встречи, с ограничением, что второй импульс скорости исполняется
примерно через полвитка после первого, а четвертый импульс
скорости исполняется через полвитка после третьего. Если
фиксирован угол приложения третьего импульса скорости (за виток
до точки встречи), то остается только один свободный параметр -
угол приложения первого импульса скорости, изменяя этот угол,
можно получать решения, обладающие нужными свойствами.
Например, получить решение, у которого примерно равны величины
120
двух последних импульсов скорости (рис. 3.4 (б)). Найти такое
решение можно аналитически, или перебирая угол приложения
первого импульса скорости, и решая систему уравнений (3.1), при
фиксированных углах приложения остальных импульсов скорости.
Таким образом, можно найти решение задачи четырехимпульсной
компланарной встречи, при использовании простейшей одноосной
ориентации на центр Земли.
3.2.6. Апсидальные четырехимпульсные решения. Также как
и в случае трехимпульсных решений при отсутствии ограничений
лучше использовать простейшее решение с приложением импульсов
скорости в апсидальных точках относительной орбиты. Однако в
отличие от трехимпульсного решения будет существовать произвол в
выборе величины вектора эксцентриситета орбиты ожидания, т.е.
существует произвол в положении т.С на отрезке LN (рис. 3.5).
Рис. 3.5. Четырехимпульсное
апсидальное решение
Чтобы устранить эту
неопределенность целесообраз-
но брать т.С посередине
отрезка LN. Тогда величины
двух импульсов скорости,
прикладываемых в точках <ре+ти
на своих витках, будут
одинаковы и равны -(Ди-Де),
8
т.е. давать в сумме величину
импульса скорости трехим-
пульсного решения, прикла-
дываемого в том же
направлении. Величины двух
оставшихся импульсов ско-
рости четырехимпульсного решения однозначно находятся из двух
последних уравнений системы (3.1). Пример такого решения
изображен на рис. 3.5.
Первому импульсу скорости (его угол приложения - фе)
соответствует отрезок АВ, второму (фе+л) - отрезок ВС, третьему
(фе+л) - отрезок CD, четвертому (фе) - отрезок DK. Конечно в данном
случае, когда речь идет об углах приложения импульсов скорости, то
имеется в виду их положение на соответствующем витке. Также
можно выбрать положение т.С на отрезке (и соответственно ве-
121
личину эксцентриситета и фокального параметра орбиты ожидания)
таким образом, чтобы обеспечить нужную эволюцию долготы
восходящего узла орбиты ожидания. Эта возможность будет
использоваться во втором параграфе шестой главы.
Как и в трехимпульсном случае, при определении параметров
апсидального решения никак не использовалось предположение о
многовитковости встречи. Найденное аналитическое решение
можно использовать для определения параметров маневров встречи
любой продолжительности.
Реальная (после уточнения параметров маневров с помощью
итерационной процедуры) суммарная характеристическая скорость
различных апсидальных решений может несколько отличаться.
3.3. Встреча на компланарных пересекающихся орбитах
(апсидальное решение).
Компланарное апсидальное решение (CAS) имеет место, если
окружности, имеющие радиусы и Т?2, не пересекаются, и ни одна из
окружностей не лежит внутри другой, т.е. когда выполнено условие
17?i I + I Т?21 -Ае. Это возможно для переходов между
пересекающимися орбитами при некоторых значениях Д/ (Aw).
Подробно области существования решений различного типа будут
рассмотрены в четвертом параграфе этой главы.
Рассмотрим трехимпульсные маневры, у которых два импульса
скорости прикладываются на втором интервале маневрирования. Все
импульсы скорости прикладываются на линии апсид относительной
орбиты, следовательно, их углы приложения известны (3.11 а)-(3.11в),
таким образом, из системы (3.1) можно однозначно определить
величины импульсов. Для этого используются формулы для
апсидального трехимпульсного решения из предыдущего параграфа
(3.11г)-(3.11е), только следует обратить внимание, что величина АИ,2
будет уже отрицательной. Преимуществом апсидальных решений
является то, что можно использовать одинаковые формулы
независимо от типа орбит (пересекающиеся или непересекающиеся).
На рисунке 3.6(a) изображено получающееся решение. Первому
импульсу скорости соответствует отрезок АВ, второму - ВС, третьему
- СК. Из (3.5) и (3.9) следует, что АВИ., а СК-ВС НС
122
У четырехимпульсных апсидальных маневров отрезки,
соответствующие импульсам скорости, также принадлежат отрезку
АК, соединяющему центры окружностей (рис.3.6(A)). Первому
импульсу соответствует отрезок АВ, второму - ВС, третьему - CD,
четвертому - DK. Как следует из (3.12а), (3.126), AB-BC~R\, DK-
CD~R2.
Точные значения величин трансверсальных составляющих
определяются из (3.1а)-(3.1г). Поскольку число уравнений меньше
числа неизвестных, необходимо наложить дополнительное
ограничение. Например, зафиксировать на отрезке EL положение т.
С, соответствующей вектору эксцентриситета орбиты ожидания, или
фиксировать отношение величин импульсов скорости одного из
интервалов маневрирования, или наложить любое другое
аналогичное ограничение, но следует помнить, что т. С всегда
должна принадлежать отрезку EL, соединяющему ближайшие точки
окружностей. Если дополнительных ограничений не наложено, то
можно использовать простейшее решение, у которого т.С
расположена посередине отрезка EL. Процедура определения
параметров таких решений описана в предыдущем параграфе.
Рис. 3.6. Апсидальные решения:
(а) трехимпульсное решение; (Ь) четырехимпульсное решение
В зависимости от порядка приложения импульсов скорости
существуют два возможных трехимпульсных решения CAS и четыре
четырехимпульсных апсидальных решения. Если длина каждого из
разрешенных интервалов маневрирования не превосходит витка,
остается только одно возможное апсидальное решение. Таким
образом, чтобы найти действительно оптимальное решение, которое
зависит от последовательности приложения импульсов скорости,
длина каждого из интервалов маневрирования должна быть полтора
123
витка. Интервала маневрирования длиной один виток достаточно,
если ограничиваться линеаризованными уравнениями движения, из
которых следует, что последовательность приложения импульсов
скорости не имеет значения. Реальная (после уточнения параметров
маневров с помощью итерационной процедуры) суммарная
характеристическая скорость различных апсидальных решений
может несколько отличаться.
Как и в случае непересекающихся орбит при определении
параметров апсидального решения никак не использовалось
предположение о многовитковости встречи. Найденное
аналитическое решение можно использовать для определения
параметров маневров встречи любой продолжительности.
3.4. Невырожденное решение компланарной задачи встречи
В случае, когда из-за большой первоначальной разницы в
положениях КА вдоль орбиты суммарная характеристическая
скорость встречи (АигЛ) превышает суммарную характеристическую
скорость перехода (AVf^), оптимальным будет невырожденное
решение. Например, KA-цель находится так далеко впереди
активного КА, расположенного на внутренней орбите, что тому
сначала придется ещё уменьшить большую полуось, чтобы в
Аи процессе фазирования успеть
Рис. 3.7. Вид годографа базис-вектора
для встречи на компланарных орбитах
догнать KA-цель, и уже потом
импульсами скорости второго
интервала маневрирования
увеличить большую полуось до
нужного значения. У решений
этого типа всегда импульсы
скорости одного интервала
маневрирования разгонные,
другого - тормозные.
Компланарные невырожден-
ные решения (CNS) существуют,
если окружности, имеющие
радиусы R\ и Т?2, пересекаются в случае перелета между
пересекающимися орбитами, или одна из окружностей целиком
лежит внутри другой при перелете между непересекающимися
орбитами.
124
Для невырожденного решения годограф базис-вектора имеет
вид циклоиды. Чтобы необходимые условия оптимальности для
четырехимпульсного перелета были выполнены, годограф должен
быть симметричен относительно оси А, [98]. Следовательно, центр
системы координат должен лежать либо посередине между петлями
годографа (рис.3.7) (назовем такие решения годографом первого
типа), либо на оси петли (годограф второго типа).
Первый тип годографа существует, если в системе (3.4а), (3.46)
С=0, 0о=-^(0б+0/), второй - если С=ЗВАп, Оо=-^(0г,+0/)+л. Угол 06
соответствует началу первого интервала маневрирования (точка А,
рис. 3.7), 0у- концу второго интервала маневрирования (точка D, рис.
3.7).
Из симметричности решения следуют ограничения на
параметры маневра:
02 - 0, =04 - 03,(3.14)
М0.) : Ц04) (315)
4(0,) ц(04)’
ц(02) ц(03)
Таким образом, у оптимального четырехимпульсного решения
первый импульс скорости должен прикладываться в начале первого
интервала маневрирования 0i=0ft, последний импульс - в конце
второго интервала маневрирования 04=9/, угол между моментами
приложения первого и второго импульсов скорости равен углу между
моментами приложения третьего и четвертого импульсов (3.14).
Простые соотношения (3.15), (3.16) связывают и ориентацию
импульсов скорости.
Из симметричности годографа следует, что если необходимые
условия оптимальности выполнены для первого и второго импульсов
скорости, то они выполняются и для третьего и четвертого
импульсов.
3.4.1. Определение параметров четырехимпульсного
решения. Запишем условие пересечения годографа базис-вектора с
окружностью единичного радиуса для первого импульса скорости и
125
условия касания годографа и окружности для второго импульса
скорости:
V(e1)+p2(6i)=i, (3.17)
х2(е2)+ц2(е2)=1, (3.18)
х(02)Х(е2)+ц(е2)ц(02)=о, (3.19)
V(0)+p2(0) <1 V0 e[eb,0z]. (3.20)
Обозначим Д0=02-01, 0=i(04-0/)=i(04-0i). Тогда система (3.17)-
(3.19) принимает вид:
/T(±cos0 + 25)2 + ^2(+2sin0-350)2 =1 , (3.21)
^2(±cos(0-A0) + 25)2 + /T(+2sin(0-A0)-35(0-A0))2 =1, (3.22)
(-cos(0-A0) + 25)sin(0-A0) + (+2sin(0-A0)-
-35(0 - Д0))(+ cos(0 - Д0) - 35) = 0,
где верхние знаки соответствуют годографу первого типа, а нижние -
годографу второго типа.
Выразив из уравнений (3.21), (3.22) В, А и подставив их в (3.23),
получаем уравнение для нахождения Д0 при заданном 0. Это
уравнение для годографов и первого, и второго типа имеет вид:
952(0-A0) + (4sin(0-A0) + 6(0-A0)cos(0-A0)5+
+3 sin(0 - Д0) cos(0 - Д 0) = 0,
где 5=-
5, = 3 sin(0 - Д0) cos(0 - Д0)(02 - (0 - Д0)2) - 5)
-3(0 - A0)(sin2 0 - sin2 (0 - Д0)),
52 = 12(0 - Д0)(0 sin 0 - (0 - Д0) sin(0 - Д0)) + 4(0 - A0)(cos 0 -
- cos(0 - Д0)) - (02 - (0 - Д0)2 )(6(0 - Д0)cos(0 - Д0) + 4sin(0 - Д0)).
Константа Л определяется из уравнения (3.21):
126
A = ((± cos 6 + 25)2 + (+2 sin 6 - 356)2 ).’1/2
(3.26)
Уравнение (3.24) решается численно. Оно может иметь до 6
корней, часть из которых отсеивается по условию (3.20). Остаются
корни, соответствующие годографу первого и/или второго типа.
Изменяя ё и определяя соответствующие ему значения ДО,
можно получить зависимости расстояния между импульсами одного
участка маневрирования ДО от длины интервала перелета 2 ё.
Эти зависимости изображены на рис. 3.8.
Рис. 3.8. Зависимость расстояния между импульсами
скорости от продолжительности перелета.
Сплошные линии соответствуют годографу первого типа,
штрихпунктирные - годографу второго типа. Длина непрерывного
интервала существования каждого из решений - Зл. При угловой
дальности перелета [2лн,2лн+л] существуют решения обоих типов,
на участках [3n+4n(N-l),4n7V] - решения только для годографа
первого типа, на участках [5л+4л(М-1),6л+4л(А/-1)] - только
решения для годографа второго типа. Исключение составляет первая
зависимость, изображенная точками, которая соответствует
годографу "с одной петлей" [98]. В дальнейших рассуждениях
значения N и М будут использоваться в качестве порядкового номера
непрерывных кривых, соответствующих годографам первого и
второго типов.
Зависимость Д0 = f (ё) удобно представить в виде функции двух
переменных: A0 = /’(0,N), где ё =ё-2л-4л(2У-1), ё е[0,Зл].
Изображенные на рис.3.8 зависимости близки по виду друг другу, т.е.
функция f слабо зависит от N, и изменение Д0 на отрезке [0, Зл]
127
определяется в основном величиной 0 . На рис.3.9(a) приведена
зависимость Д0 от 0 для А=5. Ее отличие от зависимостей,
полученных для больших N не превосходит 0.2° на всем интервале
[0,3л], отличие от зависимостей для меньших N приведено на рис.
3.9(6). Аналогичная картина наблюдается у зависимостей,
полученных для годографа второго типа.
Рис. 3.9 (а). Зависимость углового Рис. 3.9 (Ь). Разность угловых
расстояния между импульсами расстояний между импульсами
скорости от продолжительности скорости для различных N
перелета для N=5
Кроме углов приложения импульсов скорости годограф базис-
вектора позволяет определить ориентацию импульсов скорости.
После того, как из уравнения (3.24) найдено значение Д0,
определяются значения констант А и В по формулам (3.25),(3.26), а
X
также значения Х,ц в точках 0i,02. Зависимости тангажей Q = arctg —
Ц
от 0 для внешних импульсов скорости приведены на рис. 3.10(я)-
Аналогичные зависимости для внутренних импульсов скорости
приведены на рис. 3.10(6).
Из рисунка следует, что у внутренних импульсов скорости
отношение Л/ц мало, и можно считать их чисто трансверсальными. У
внешних импульсов скорости необходимо учитывать их радиальные
составляющие.
128
Рис. 3.10. Зависимость тангажей импульсов скорости от продолжительности
перелета: (а) для внешних импульсов скорости; (Ь) для внутренних
Для ускорения процесса определения параметров оптимального
перелета зависимости А0(0)* и Х/ц(0 ) для годографов первого и
второго типов можно приблизить аналитическими формулами [34].
Эти выражения должны быть и достаточно простыми, и достаточно
точными. Функцию А0(0)* можно аппроксимировать кубической
параболой вида:
A0=a(0 )3+/>(0 )2+с0 +d. (3.27)
При этом зависимостью А0 от значений N или М можно пренебречь
вследствие близости кривых друг другу при различных N, М. Для
всех кривых, соответствующих годографу первого типа, имеется
общая зависимость от 0 , коэффициенты a, b, с, d которой
определялись по методу наименьших квадратов: а=-0.00125,
/>=0.003475, с=0.74309, d=Q. Для зависимости, соответствующей
годографу второго типа, коэффициенты a, b, с, d имеют следующие
значения: а=-0.001213, />=0.00302, с=0.74444, <7=0. Для годографа «с
одной петлей» а=0.00575, />=-0.11271, с=1.15557, <7=-2.52301.
Отличие А0, полученного из (3.27), от А0, определяемого путем
решения уравнения (3.24), не превышает 0.7° для годографа первого
типа и 0.55° для годографа второго типа. Характерная зависимость
А0=А0Ч1,сл-А0аН£Игат от 0 для N=3 приведена на рис. 3.11.
129
Рис. 3.11. Отличие в разности углов
приложения импульсов между анали-
тическим и численным решениями
Рис. 3.12. Отличие тангажей
импульсов скорости аналити-
ческого и численного решений
Таким образом, найдена очень простая и достаточно точная
формула для аналитического определения углов приложения
импульсов скорости оптимального решения.
у -•
Для аналитического приближения зависимости — (0 ) для
М
внешних импульсов можно использовать выражение вида:
1 „/(Зл-о-)
— (0 )=/(Зл-0
(3.28)
М
где коэффициенты I, g, f зависят от N или М для годографов первого
или второго типов соответственно. Для годографов первого типа
/= 0.3605805е'° 207352377 + 0.1938393, (3.29а)
g= 0.7413017e'°'63053I6jV + 1.1037093е’° 041676167V, (3.296)
/= -0.1733134е00305692" - 0.55892376, (3.29в)
а для годографов второго типа
/= 0.39946973е'°'19462509Л/ +0.18542422, (3.30а)
g= 0.90946358е’°'5468307М + 1.0936807е’0 03895865М, (З.ЗОб)
f= -0.24736464е°'259488м- 0.48186975. (З.ЗОв)
130
При N и М больше 10 значения — для годографов первого и
Р
вТорог° типов для одинаковых значений N и М практически
с0Впадают. Зависимость коэффициента /, g, f от N для годографа
первого типа имеет вид:
/=0.2918171 е-005347094Л/ + 0.0622614, (3.31а)
g= 0.8709496e'°03271924;V + 0.09475382, (3.316)
/= 0.0000574W2-0.0040646/V- 0.7591687, (3.31 в)
а для годографа второго типа можно воспользоваться этими же
выражениями, заменив N на М.
X ~
Формула (3.28) приближает зависимость — (0 ) с хорошей
Р
точностью (~1%) при О<0 <2.22л. При увеличении 0 ошибка растет,
X
но на участке 2.22л<0 <3л она не превышает 10% от значения — (для
Р
зависимостей, у которых /V<50). На рис. 3.12 представлен график
X
зависимости Д0=Д0ЧИС7-ДДана7мт от 0 при .V =20, где 3=arctg(—).
Р
При значениях N>50 на участке 0<0 <2.45л величина
0=arctg(—) не больше 0.1°, а максимум 9 на участке 2.45л <0 <3л не
0
превосходит 3°. Это позволяет считать внешние импульсы скорости
оптимального решения для перелетов продолжительностью более 100
витков чисто трансверсальными. Для годографа "с одной петлей"
А,
зависимость — от 0 имеет вид:
0
-(0‘) = (1.155570*2 -6.064970* +9.51334)'1. (3.32)
Таким образом, при заданной угловой дальности перехода в/-0ь
но формулам (3.27), (3.28) легко определяются углы приложения и
ориентация импульсов скорости оптимального четырехимпульсного
131
маневра. После этого из системы (3.1 а)-(3.1г) однозначно
определяются величины импульсов скорости. Если знаки
трансверсальных составляющих импульсов скорости одного
интервала маневрирования совпадают, то решение принадлежит
рассматриваемому классу CNS и локально оптимально.
Следует отметить, что попытка упростить процесс определения
параметров только четырехимпульсной невырожденной встречи
также была предпринята в работе [140, 2000 г.]. Материалы раздела
3.4.1 впервые были опубликованы намного раньше [33, 1993 г.],
журнальный вариант [34, 1995 г.], на английском языке [34, 1995 г.].
3.4.2. Определение параметров двух- и трехимпульсных
решений. Для того чтобы найти глобально оптимальное решение,
необходимо найти еще трех- и двухимпульсные решения,
удовлетворяющие необходимым условиям оптимальности, и
сравнить суммарную характеристическую скорость всех решений.
Для поиска параметров решений этого типа можно
воспользоваться итерационными процедурами, описанными в
параграфе III.2. Поскольку тангажи внутренних импульсов скорости
малы, двухимпульсному решению также соответствуют точки
пересечения окружностей, имеющих радиусы R\ и Т?2 (только знаки у
Д/,1 и Д/д разные). Процедура определения параметров этих
решений описана выше. У трехимпульсного решения в качестве
фиксированных углов приложения импульсов скорости берутся
начало первого интервала маневрирования <pi=<pi/ и конец второго
интервала маневрирования (рз=(рц,- (два импульса скорости первый и
последний прикладываются в точках, где циклоида пересекает
окружность). Затем по формулам (3.11а)-(3.11в) определяются
величины трансверсальных составляющих импульсов скорости и
угол приложения внутреннего импульса <р2. Если трехимпульсные
решения этого типа существуют, то этому углу соответствует момент
касания циклоиды и окружности. Параметры маневров уточняются с
помощью итерационной процедуры.
Несколько более сложной является процедура поиска
параметров решения, у которого только один из импульсов скорости
прикладывается на границе, а два других в точках касания циклоиды
с окружностью. На том из интервалов, на котором исполняются два
маневра, один из импульсов скорости также должен прикладываться
на внешней границе интервала <рп,- Следовательно, момент
132
приложения этого импульса скорости известен фз=фцг. Момент
приложения второго импульса скорости этого интервала выбирается
внутри интервала ф2=Фп/- Примерную величину трансверсальной
составляющей импульса скорости первого интервала маневрирования
ДИн можно определить по формуле (3.5) или по более точной
формуле (3.11д). После этого угол приложения первого импульса
скорости <pi и величины импульсов скорости ДК,2 и ДР)з
определяются из системы (3.1а)-(3.1в) [6]:
. ф + ф де ф + ф
(р. = arccos(-— sin ——+---------— cos —i------
2ДИ„ 2 2ДР), 2
+(1 - _ 2™,
2ЛГ, 2 2
Д Vl3 = (ДеЛ + (2 Д - Да) cos ф2 -
-2ДК„ созф|)----------------,
2(сО5ф3 — С03ф2)
ДИ2 = -Да-ДИ,-ДИ3.
'2 2
Как всегда, параметры маневров уточняются с помощью
итерационной процедуры, чтобы четвертое уравнение системы (3.1)
было выполнено с заданной точностью. После определения
параметров маневров вычисляется суммарная характеристическая
скорость решения. Варьируя положение второго импульса на
интервале маневрирования, можно найти оптимальное решение этого
типа. Для этого можно использовать простой перебор с постоянным
шагом точек из соответствующего интервала маневрирования.
3.4.3. Примеры. В качестве примера применения изложенной
выше методики рассмотрим задачу определения параметров
оптимального маневра, в результате которого КА должен изменить
свое положение на круговой орбите и перейти в заданную точку за
фиксированное время (происходящее при этом изменение в
ориентации плоскости орбиты не имеет значения). Задача в такой
постановке рассматривалась в работах ряда авторов.
Используя приведенные выше формулы, можно аналитически
найти параметры оптимальных четырехимпульсных маневров.
133
Интересно сравнить суммарную характеристическую скорость
полученных решений с суммарной характеристической скоростью
двухимпульсных и "рациональных" четырехимпульсных маневров,
предложенных в работах [65, 66]. У "рациональных" четырех-
импульсных маневров внутренние импульсы скорости отстоят от
внешних на половину витка.
Для данной задачи Дех=Де?=Да=0. Угол 0 полностью
определяет характер оптимального решения, Д/ определяет только
суммы величин импульсов скорости первого и второго интервалов
маневрирования (для расчетов было выбрано Д/=0.01). Исследование
проводилось для N=l, а 0 изменялся в диапазоне [0°,360°].
Оказалось, что оптимальные четырехимпульсные решения
существуют для 0 е[0°,339°]. На рисунках 3.13 приведен вид
оптимальных решений для различных 0 .
Рис. 3.13. Вид оптимальных решений при различной дальности перелёта
Из рисунков 3.13 следует, что оптимальных трехимпульсных
решений у задачи изменения положения на круговой орбите не
существует. Какие бы не были два первых импульса скорости,
которым соответствуют отрезки АВ и ВС, третьему импульсу должен
134
соответствовать отрезок СК, но угол приложения этого импульса
скорости не совпадает с возможными оптимальными углами
приложения импульсов скорости, которым соответствуют отрезки CD
и DK (кроме того третья сторона треугольника должна быть равна
сумме двух других, а это невозможно).
В таблице 3.1 приведена суммарная характеристическая
скорость оптимальных (АКор/) и "рациональных" (А Км)
четырехимпульсных решений, а также суммарная характеристическая
скорость двухимпульсных решений (АК2) и их отношение в
процентах. У "рациональной" схемы все импульсы скорости
одинаковы по величине, у оптимальной схемы величины внешних
импульсов скорости отличаются от величин внутренних импульсов.
Таблица 3.1
0 А К-4 АКг4 ди2 А К,,, А К
5 1.060 2.065 51.35 1.070 99.1
15 1.0598 1.698 54.10 1.113 95.22
30 1.0594 1.819 58.24 1.242 77.88 .
45 1.058 1.698 62.32 1.452 72.89
60 1.0569 1.592 66.40 1.546 68.35
90 1.0506 1.415 74.26 2.870 36.59
120 1.050 1.273 82.46 6.400 16.41
150 1.0385 1.158 89.72 47.780 2.12
180 0.9857 1.061 92.90 5.000 19.72
210 0.9389 0.979 95.86 2.52 37.26
240 0.8745 0.9095 96.15 1.59 55.00
270 0.7900 0.849 93.07 1.09 72.48
300 0.6850 0.796 86.08 0.78 87.82
330 0.5620 0,749 75.03 0.593 99.77
338 0.5269 0.737 71.45 0.563 93.60
355 - 0.714 - 0.5303 -
360 - 0.796 0.5305 -
При небольших 0 у оптимального решения мало и Д0
2 -•
(А0«—0), следовательно, два первых импульса скорости
прикладываются в самом начале перелета, а два последних - в конце.
135
Суммарная характеристическая скорость оптимальной схемы близка
к суммарной характеристической скорости двухимпульсной схемы.
За счет существенно большего времени движения по орбите
ожидания получается заметный выигрыш в суммарной
характеристической скорости по сравнению с "рациональной"
схемой.
При росте 0 растет Д9, в результате чего суммарная
характеристическая скорость оптимальных решений приближается к
суммарной характеристической скорости "рациональных" решений,
но заметно ухудшается суммарная характеристическая скорость
двухимпульсных решений.
При 9 «240°, когда Д0 ~180°, суммарная характеристическая
скорость оптимальных и "рациональных" решений практически
совпадает. При дальнейшем увеличении 9 продолжает расти и Д9,
но суммарная характеристическая скорость оптимальных решений
опять становится заметно меньше суммарной характеристической
скорости "рациональных" решений за счет возрастания величин
внешних импульсов и уменьшения величин внутренних импульсов.
Суммарная характеристическая скорость оптимальных решений
опять приближается к суммарной характеристической скорости двух-
импульсных решений. Когда 9 становится примерно равным 339°
(точное значение зависит от N), величина внутренних импульсов
скорости уменьшается до 0. Оптимальное четырехимпульсное
решение вырождается в двухимпульсное. При дальнейшем росте 9
оптимальные по базис-вектору четырехимульсные решения не
существуют. На интервале [339°, 360°] оптимальными будут являться
двухимпульсные перелеты.
Как видно из таблицы, оптимальное четырехимпульсное
решение дает наибольший выигрыш при 9 =60°. При этих углах
суммарная характеристическая скорость оптимальных решений
меньше "рациональных" или двухимпульсных решений более чем на
30%.
При росте N, когда растет продолжительность пребывания на
орбите ожидания, разница в суммарной характеристической скорости
оптимальной и "рациональной" схем уменьшается. Например, для
#=10, 9 =30° суммарная характеристическая скорость оптимальной
136
схемы меньше суммарной характеристической скорости
"рациональной" схемы всего на 5%.
Задача изменения положения на круговой орбите вызывает
повышенный интерес. Она многократно рассматривалась в работах
различных авторов, и еще будет рассматриваться в будущем. Одной
из последних работ, по-видимому, можно считать доклад [116,
2014г.], в котором проведено сравнение четырехимпульсных и
двухимпульсных решений. Аналогичное сравнение приведено в
последнем столбце таблицы 3.1 [33, 1993г.].
3.5. Области существования различных типов решений
Качественно определить области существования различных
типов решений помогает анализ взаимного расположения
окружностей радиусов и /?2 при различных значениях Aw -
разности в угловом положении КА-цели и активного КА в начальный
момент времени (начальной фазы).
3.5.1. Орбиты не пересекаются. Вначале рассмотрим вариант,
когда орбиты не пересекаются. Для определенности положим Ае^О,
Аех>0, Да> I Дех I. Допустим, что KA-цель, находящийся на внешней
орбите, в начальный момент отстаёт от активного КА, т.е. Aw<0,
например, Aw=Awz (рис. 3.14(a)). Тогда на первом интервале
маневрирования необходимо приложить импульсы скорости с
положительными трансверсальными составляющими, суммарной
величиной ДКЛ большей, чем чтобы перейти на орбиту с
полуосью большей, чем у орбиты КА-цели. Это позволит КА-цели
догнать активный КА. На заключительном интервале придется
приложить импульсы скорости суммарной величиной AKrtI<0.
Для всех Aw<0 окружность радиуса /?2 целиком расположена
внутри окружности радиуса Rt (рис. 3.15(a)). На этом рисунке
большая окружность соответствует импульсам скорости первого
интервала маневрирования, меньшая - второго, знаки у ДИЛ и ДК,П
разные, следовательно, оптимальным будет невырожденное решение
(CNS). Так как окружности не пересекаются, то возможны только
трех- и четырехимпульсные решения. Трехимпульсное решение
137
возможно только с двумя импульсами скорости на первом интервале
маневрирования.
Области существования решений различного типа и число
импульсов скорости, которые возможно использовать, приведены на
рисунке 3.14(a) [8]. Двойка в круглых скобках перед числом три
означает, что у трехимпульсного решения два импульса скорости
должны прикладываться на первом интервале маневрирования.
Двойка в круглых скобках после числа три означает, что два
импульса скорости должны прикладываться на втором интервале
маневрирования.
Рис. 3.14. Области существования решений различного типа:
(а) для непересекающихся орбит; (/>) для пересекающихся орбит
Рис. 3.15. Изменение расположения окружностей, соответствующих
сумме трансверсальных составляющих импульсов скорости первого
и второго интервалов маневрирования для непересекающихся орбит,
при изменении значения начальной фазы.
Если Au=Aus/»0 (здесь и далее индексом «s» обозначены
моменты, когда радиус одной из окружностей равен нулю, а
индексом <Ф> - моменты, когда окружности касаются), то можно
сразу импульсами скорости первого интервала маневрирования
перейти в нужную точку заданной орбиты. Конечно, рассматривается
138
только качественная картина маневра и не учитывается время
перелета на заданную орбиту. Этому случаю соответствует
расположение окружностей на рисунке 3.15(Z>). Радиус второй
окружности, который уменьшался с ростом Aw, в этот момент стал
равен нулю.
Когда Aws/<Aw<Awr/, импульсы скорости на первом интервале
маневрирования производят только часть необходимого изменения
большой полуоси, остальная часть производится импульсами
скорости второго интервала маневрирования. Знаки АИ(1 и АКИ
совпадают, значит, будут иметь место особые решения (CSS). После
husi радиус второй окружности растет с ростом Ли. Окружности,
соответствующие Aw из этого интервала, не пересекаются,
следовательно возможны только трех- и четырехимпульсные
решения CSS (рис. 3.14(<я)), причем как и у решений CNS, на первом
интервале маневрирования обязательно должно быть два импульса
скорости. Момент касания окружностей, происходящий при Aw=Awrf,
изображен на рисунке 3.15(c).
На интервале Autj<Au<Aulr окружности пересекаются,
следовательно, существуют двух- ,трех- и четырехимпульсные
решения CSS (рис. 3.14(a)). Момент, когда окружности имеют
одинаковые радиусы (Aw=Awm), изображен на рисунке рис. 3.15(<7).
При Aw>Awm картина зеркально симметрична, т.е. существуют те
же типы решений, но АИг1 и АИ/П меняются величинами.
Когда Aw>Awsr, KA-цель находится так далеко впереди активного
КА, что тому сначала придется уменьшить большую полуось, чтобы в
процессе фазирования успеть догнать KA-цель, и уже потом
импульсами скорости второго интервала маневрирования увеличить
большую полуось до нужного значения. Для этих значений Aw
оптимальным опять будет трех- или четырехимпульсное
невырожденное решение CNS.
Можно оценить значения Aw, при которых происходит
изменение знаков АИг1 или АР)Ц и соответственно типа решения.
Сумма трансверсальных составляющих импульсов скорости первого
интервала маневрирования ДКЛ меняет знак при Aw=Aw5/®0, сумма
трансверсальных составляющих импульсов скорости второго
интервала маневрирования ДКЛ1 меняет знак при Au=Ausr&3nAaN, где
N число витков от начала первого интервала маневрирования до
точки встречи.
139
Касание окружностей в случае, когда радиус первой окружности
больше радиуса второй окружности (рис. 3.15с), происходит при
Д^=1(Да + Де), (3.33а)
ДК,п=1(Да-Де), (3.336)
следовательно
&utl = ^nN(Aa- Де), (3.34)
Касание окружностей, когда радиус второй окружности больше
радиуса первой окружности, происходит при
Д^( =-^-(Да-Де), (3.35а)
ДК/П =|(Да + Де), (3.356)
таким образом
Дм(г =-|лА(Да +Де). (3.36)
3.5.2. Орбиты пересекаются. На рис.3.146 изображены
зависимости величин ДР), и ДКД1 от Дм для пересекающихся орбит.
Для определенности также предполагаем, что Да>0.
Примеры расположения окружностей радиусов 7?i и R2 для
разности фаз Дм/, Дм(/, Дм5/, Дмт приведены на рис. 3.16. Для времен
симметричных относительно Дм,„ отношение радиусов окружностей
обратное.
Как видно из рисунков, при Дм<Дм,/ и Дм>Дм„. окружности
пересекаются (3.16(a)), а ДКлДКш<0, следовательно, оптимальным
будет решение типа CNS, причем возможны двух-, трех- и
четырехимпульсные решения.
При Дм,/<Дм<Дм,г окружности не имеют общих точек,
следовательно, оптимальными будут трех- и четырехимпульсные
решения С AS. Вычисление величин Дм(/, Дм„. производится по тем же
формулам (3.34), (3.36). Области существования решений различного
140
типа и число импульсов скорости, которые возможно использовать
для получения оптимального решения, приведены на рисунке 3.14(2?).
Рис. 3.16. Изменение расположения окружностей, соответствующих
сумме трансверсальных составляющих импульсов скорости первого и
второго интервалов маневрирования для пересекающихся орбит, при
изменении значения начальной фазы.
Суммируя сказанное выше в этой главе, можно предложить
следующий простейший алгоритм поиска параметров оптимального
решения. Используя формулы (3.34), (3.36) вычисляются величины
Aw;/, Аи,г. Сравнивая с ними имеющуюся величину отклонения по
фазе Aw, устанавливается на каком из интервалов маневрирования
необходимо иметь два импульса скорости. Из системы (3.1а)-(3.1г)
однозначно определяются параметры апсидального трехимпульсного
решения. Если это решение типа CSS или CAS, и оно удовлетворяет
ограничениям на моменты приложения импульсов скорости, то
задача решена. В противном случае, для поиска оптимального
решения необходимо использовать алгоритмы, приведенные в
третьем параграфе этой главы.
3.6. Области существования четырехимпульсных
невырожденных решений
Как уже было отмечено, решение CNS существуют, если круги
радиусов и Т?2 имеют общие точки, а знаки АЕн и АРф не
совпадают. Очевидно, что чем большую часть от площадей кругов
занимает область их пересечения, тем больше существует различных
решений CNS. Взаимное положение окружностей зависит от разности
эксцентриситетов Ае, которая определяет расстояние между центрами
окружностей, а также от Аа и AZ/Зфю, которые определяют величины
141
радиусов окружностей. Для определения области существования
четырехимпульсных невырожденных решений можно зафиксировать
Де и исследовать зависимость существования CNS от Ад и Дг/Зфю, так
как существенна только относительная величина области пересечения
окружностей. Исследование проводилось для Де=0.01. На рисунках
3.17, 3.18 приведены области существования четырехимпульсных
решений типа CNS [33].
Как уже отмечалось, основное влияние на вид годографа базис-
— *
вектора оказывает 9 . Эта переменная, от которой существенным
образом зависит существование решений CNS, отложена на всех
графиках по оси х. Угол 9 изменяется от 0° до 360°. На этом
интервале в диапазоне от 0° до 180° существуют решения обоих
типов, от 180° до 360° - только одного типа (рис 3.7). Удобнее
исследовать существование годографа одного типа (в данном случае
- второго) на интервале от 0° до 540°. Это допустимо, т.к.
зависимость годографа первого типа от 0 на интервале от 0° до 180°
практически совпадает с зависимостью годографа второго типа от
0 на интервале от 360° до 540°. Вид годографа базис-вектора слабо
зависит от N, а радиусы окружностей зависят от N только через
отношение ДГ/Зфю, это позволило все исследование провести для
постоянного значения У=10, а изменение отношения А/73фю
осуществлялось за счет изменения А/. Значения А/ указаны в правом
верхнем углу каждого графика. Значения Ад, приведенные внизу
рисунка, относятся ко всем графикам соответствующего столбца. На
существование решений типа CNS существенное влияние оказывает
и угол оэ, задающий ориентацию линии апсид относительно
направления на точку встречи. На графиках этот угол откладывается
вдоль оси у.
Рассмотрим, как зависит форма областей существования CNS от
А/ и Ад. При малых А/ можно видеть узкие S-образные области
(первые рисунки в каждом столбце). Это связано с тем, что радиус
первой окружности мал, и можно считать, что основное влияние на
существование решения оказывает расположение импульсов
скорости второго интервала маневрирования.
142
90 180 270 360
360“
270'
180
90-
(У
16
90 180 270 360
Д<т=0.011 Да=0.015
Дя=0.019
Рис. 3.17. Области существования четырехимпульсных
невырожденных решений для непересекающихся орбит
143
0 90 180 270 360450 540 0 90 180 270 360 450540 0 90 180 270 360 450МО
0 90 180270 360450540 0 90 180 27036043)540 0 90 180 270 360450 540
0 90 180 270360 450540 0 90 180 270360 450540 0 90 180 270360 450540
Да=0.001
Да=0.005
Да=0.009
Рис. 3.18. Области существования четырехимпульсных
невырожденных решений для пересекающихся орбит.
144
Изобразим решения, соответствующие различным точкам,
отмеченным на рисунке 3.17 (точки помечены цифрами) на одном
рисунке (рис.3.19), для наглядности считая, что переход
осуществляется в одну точку (Дех,0). При таком представлении
отрезок, соответствующий последнему импульсу скорости,
оказывается повернутым на угол со относительно оси ех (в
действительности отрезок, изображающий этот импульс, параллелен
оси ех, а на угол со повернут отрезок, соединяющий начало координат
с точкой (Дех,Де7)).
Рис. 3.19. Четырехимпульсные Рис. 3.20. Зависимость угла наклона
невырожденные решения для различ- фокального радиуса к главной оси
ных значений угла со при малых Дг73<р эллипса от угла между радиусами
Сумма импульсов скорости последнего интервала
маневрирования этих решений примерно одинакова
(ДИ,3 + ДИ/4 « — Да——-). Точка начала отрезка, изображающего
2 Зср/0
третий импульс скорости, за счет малости радиуса первой
окружности близка к началу координат. Таким образом, конец этого
отрезка лежит в окрестности эллипса с фокусами в точках (0,0) и
(Дех,0). Следовательно, зависимость угла со от угла ДО между третьим
и четвертым импульсами скорости близка к зависимости угла а
(наклона фокального радиуса г2 к оси ех) от угла у (угол между
фокальными радиусами эллипса). Эта зависимость имеет
характерный S-образный вид (рис.3.20). Вид кривой зависит от
параметров эллипса: чем больше величина большой полуоси при
постоянном расстоянии между фокусами, тем кривая менее изогнута.
Зависимость а>( 0 ) можно рассматривать как сложную функцию су(Д0
145
(0 )). Так как функция Д0(0 ) близка к линейной (см. рис. 3.8 и
(3.27)), то вид кривой со(9 ) определяется в основном зависимостью
<п(Д0). Этим и объясняется изменение формы областей
существования CNS на рис.3.17 при увеличении До.
Сглаживание кривой за счет роста радиуса второй окружности
происходит и при увеличении Д/ (Aa=const). В этом случае растет
также радиус первой окружности, что приводит к увеличению числа
допустимых решений за счет большей неопределенности в
положении левого фокуса эллипса. На рисунках 3.17 хорошо видно,
как в результате этого растет ширина области существования CNS
при увеличении ДЛ
Аналогичный вид и зависимость от До и Д/ имеют графики для
варианта Де>До (рис.3.18). В этом случае сильнее сказывается
влияние импульсов скорости первого интервала маневрирования,
которые обязательно должны приводить т.С в область пересечения
окружностей. Если это не происходит (как правило, при малых Дг и
<в>180°), то решения, которые присутствуют на графиках для Де<Да,
на графиках для Де>До отсутствуют.
Общей закономерностью графиков на рис.3.17 и рис 3.18
является отсутствие решений при малых 0 и отсутствие решений
при 0 >360° для больших значений Дг.
Отсутствие решений при малых 0 очевидно, т.к. вследствие
малых Д0 четырехимпульсные решения незначительно отличаются от
двухимпульсных. Они существуют только при переходах между
точками на одной и той же круговой орбите и для переходов между
пересекающимися орбитами в узком диапазоне углов.
ГТ А?
При больших значениях ---------- радиусы окружностей
Зфю
существенно превосходят расстояние между их центрами. При углах
перелета 0 близких к 2л величины внешних импульсов скорости
существенно превосходят величины внутренних импульсов (рис.
3.21(a)), вследствие этого существование решений CNS зависит от
взаимной ориентации именно внешних импульсов скорости.
146
Рис.3.21. У решений с углами перелета 9 близкими к 2тг величины
внешних импульсов скорости существенно превосходят величины
внутренних импульсов: (а) 0 <2л оптимальное решение;
(Z>), (с) 0 >2тс не оптимальные решения
При 0 <2л т.В - конец отрезка, изображающего первый
импульс скорости, лежит выше отрезка, изображающего последний
импульс. Так как в этом случае Д0~24О°, переход из т.В в т.В
осуществляется внутренними импульсами скорости, имеющими те же
знаки трансверсальных составляющих, что и внешние импульсы
соответствующего интервала маневрирования. Эти решения - типа
CNS. Если 0 >2тс, то т.В лежит ниже отрезка DK, и в этом случае или
у одного (рис.3.21(c)), или у обоих (рис.3.21(/>)) внутренних
импульсов скорости знаки трансверсальных составлявших не
совпадают со знаками трансверсальных составляющих внешних
импульсов соответствующих интервалов маневрирования,
следовательно, это не решения типа CNS.
Как уже отмечалось, для данного примера решения второго типа
на интервале 360°-540° соответствуют решениям первого типа на
интервале 0°-180°. Из графиков видно, что решения обоих типов
одновременно не существуют даже при значительных величинах
Д?/3(р, когда области существования решений CNS второго типа
заполняют практически все пространство 0°-360°.
3.7. Задача Ламберта, её преимущества и недостатки.
Хорошо известным и довольно часто используемым методом
решения задачи встречи является решение задачи Ламберта (расчет
параметров двухимпульсного маневра при фиксированных моментах
Приложения импульсов скорости). Представляется интересным
147
сравнить ее возможности с возможностями приведенных выше
методов. В четвертом параграфе этой главы было показано, что
оптимальное двухимпульсное решение существует не для всех
значений начального фазового отклонения Aw. Оценим, какой
величины может достигать отличие суммарной характеристической
скорости двухимпульсного решения от суммарной
характеристической скорости оптимального трехимпульсного
решения.
Для околокругового движения задача Ламберта имеет
тривиальное решение. При фиксированных моментах приложения
импульсов скорости Ф1=ф1у; ф2=ф2/ имеется система четырех линейных
уравнений (3.1 а)-(3.1 г) с четырьмя неизвестными АКи,Д -2,^,2
(для встречи на компланарных орбитах). Решив эту систему и
определив величины составляющих импульсов, находим суммарную
характеристическую скорость маневров. Перебрав возможные
сочетания фь ф2 можно найти решение задачи встречи близкое к
оптимальному. Чем больше будет рассмотрено сочетаний фь ф2, тем
точнее будет найдено оптимальное решение.
Такой двухимпульсный метод решения задачи встречи имеет
два преимущества. Во-первых, можно удовлетворить любым
ограничениям на моменты приложения импульсов скорости. Во-
вторых, метод надежно работает как для многовитковой встречи, так
и для встречи небольшой продолжительности. Однако имеется
проблема с оптимальностью найденного решения. Двухимпульсные
решения с суммарной характеристической скоростью близкой к
оптимальной (оба импульса скорости практически трансверсальные)
существуют только, когда окружности радиусов R} и Я2
пересекаются. Это пересечение имеет место у некоторых решений
CSS для не пересекающихся орбит, и у решений типа CNS для
пересекающихся орбит.
Совсем другая ситуация, если окружности радиусов R, и Т?2 не
пересекаются. В этом случае, как было показано выше, оптимальных
двухимпульсных решений (у которых оба импульса трансверсальные)
не существует, следовательно, задача Ламберта будет давать
неоптимальное решение при любом количестве просмотренных
наборов точек фьф2.
Разница в суммарной характеристической скорости
оптимального трехимпульсного и двухимпульсного решений будет
тем больше, чем больше расстояние между точками окружностей.
148
Такой случай имеет место, когда Ае»|Аа| или |Да|»Де. Для
пересекающихся орбит при росте разницы Де и |Да| в пределе
двухимпульсный маневр будет решать задачу практически за счет
радиальных составляющих импульсов. На рисунке 3.22(a)
двухимпульсному маневру соответствует ломаная АВСК, а
радиальной составляющей первого импульса скорости - отрезок ВС.
Оптимальный трехимпульсный маневр (решение типа CAS)
использует только трансверсальные составляющие, следовательно,
суммарная характеристическая скорость задачи Ламберта (ДГ»Де)
будет почти в два раза больше суммарной характеристической
скорости оптимальных трехимпульсного или четырехимпульсного
„ , . г, Де.
решении (ДГ = ~^)-
Для непересекающихся орбит разница может достигать почти
трехкратной величины. Оптимальный среди двухимпульсных маневр
изображен на рис 3.22(6).
Рис. 3.22. Решение задачи Ламберта:
(а) для пересекающихся орбит, (Ь) для непересекающихся орбит
Ему соответствует ломанная ABDK. Это связано с тем, что
появляется радиальная составляющая импульса величиной
ДЕг2®2ДЕ,1»Д<2. Общие затраты суммарной характеристической
скорости двухимпульсного маневра можно оценить как
ДЕ«|АЕ,| + К|=||Аа|>
а у трехимпульсного трансверсального
м
2
Маневра суммарная характеристическая скорость ДЕдаДЕ,!®
149
Такой вариант возникает у решений, соответствующих отклонениям
Aw близким к значениям AwiZ или Aw„. на рисунке 3.14(a).
3.8. Маневры с ограничениями на высоту переходной
орбиты
В предыдущих параграфах были рассмотрены задачи, в которых
на элементы орбиты ожидания не были наложены никакие
ограничения, однако в практической работе встречаются задачи,
когда эти ограничения существуют. Рассмотрим, например, маневры,
у которых орбита ожидания должна лежать в заданном кольце с
центром в центре притяжения, т.е.
где rmin,rmax - радиусы внутренней и внешней окружностей кольца,
гр,га - радиусы перицентра и апоцентра орбиты ожидания.
Ограничения такого типа часто возникают при решении задачи
встречи. Например, чтобы догнать KA-цель, находящийся далеко
впереди, активному КА необходимо резко уменьшить период орбиты
ожидания. Это может привести к заметному уменьшению
минимальной высоты орбиты, что, в свою очередь, может вызвать
опасное торможение атмосферой. Существуют и другие
многочисленные основания для введения подобных ограничений.
На рис.3.23 приведен пример перелета с исходной орбиты
(обозначена Го) на конечную (обозначена 7}), когда для орбиты
ожидания (изображена пунктирной линией Tj) существенным
является ограничение на минимальную высоту rmin. Чтобы за
заданное время успеть догнать КА цель пришлось приложить
тормозной импульс скорости АК/i, перейти на орбиту ожидания,
касающуюся круговой орбиты радиуса гт„, а на последнем интервале
маневрирования, приложив два импульса скорости ЛИ/2 и ДКг3, выйти
в заданную точку конечной орбиты.
Вследствие важности задач маневрирования с ограничениями на
высоту орбиты ожидания их решению было посвящено множество
публикаций. Наиболее фундаментальные результаты получены в
работе [63], в которой анализировались переходы между
эллиптическими орбитами. Рассматриваемые в данной работе
многовитковые перелеты между близкими околокруговыми орбитами
150
имеют ряд особенностей, которые можно использовать для
получения аналитических решений.
Рис. 3.23. Перелет с ограничением на высоту орбиты ожидания
Как уже было показано выше, условие (3.1г) позволяет
приближенно оценить величину суммы трансверсальных
составляющих импульсов скорости первого интервала
маневрирования Д^* многовиткового перелета, а, следовательно,
приближенно определить величину большой полуоси орбиты
ожидания
ad ~ а0+ 1
где ad - большая полуось орбиты ожидания, а0- начальное значение
большой полуоси орбиты активного КА, ДК,* определяется по
формуле (3.12а).
При последующем анализе задачи предполагается, что условие
(3.1г) заменено приближенным условием (3.12а). Значения
параметров оптимального маневра, при которых условие (3.1г)
выполнено с заданной точностью, как обычно, можно определить при
помощи итерационной процедуры.
Очевидно, что сформулированная выше задача имеет решение,
если
r,nin -ad-rmax, (3.38)
151
в противном случае КА придет в точку встречи в заданное время,
нарушив одно из ограничений (3.37).
Так как большая полуось орбиты ожидания известна,
ограничению (3.37) эквивалентно ограничение на эксцентриситет
орбиты ожидания
е^<е5, (3.39а)
(3.396)
где ed,es,eb - соответственно эксцентриситеты орбиты ожидания,
орбиты с полуосью ad, касающейся нижней границы кольца, и орбиты
с полуосью ad, касающейся верхней границы кольца. Величины е„еА
вычисляются по формулам
е =ad~ rmin , (3.40а)
ad
еь = . (3.406)
ad
Ориентация линии апсид орбиты ожидания не существенна.
Увеличивать эксцентриситет орбиты ожидания, сохраняя заданное
значение большой полуоси, больше меньшей из величин es,eb нельзя,
т.к. орбита выйдет за пределы ограничивающего кольца.
Таким образом, из неравенств (3.39а), (3.396) следует, что на
плоскости ех,еу геометрическим местом точек, которые соответствуют
допустимым значениям вектора эксцентриситета орбиты ожидания,
является круг радиуса Rm (рис. 3.24), равного меньшей из величин
es,eb [6]. Центр круга расположен в начале системы координат.
Построим окружности радиусов 7?1=2ДЦ*, 7?2=2ДЦ* (ДР)’
вычисляется по формуле (3.126)) с центрами в тА (ем,еу0) и т.К
(exf,eyj). Напомним, что точка А соответствует вектору
эксцентриситета орбиты активного КА, а точка К соответствует
вектору эксцентриситета орбиты KA-цели. В том случае, когда
множество G на рис. 3.24(a) (множество точек пересечения кругов
радиусов R\ и Т?2) имеет с кругом радиуса Rm общие точки, среди
решений, исследованных в предыдущих параграфах, легко указать
двух-, трех- и четырехимпульсные варианты, для которых указанные
точки будут соответствовать допустимым значениям вектора
эксцентриситета орбиты ожидания. Для двухимпульсного решения
это точка В, для трехимпульсного решения с двумя импульсами
152
скорости на втором интервале маневрирования это дуга ВС, для
четырехимпульсного решения вся область BCD. Поскольку, для
найденных таким образом решений, выполнены условия (3.39а),
(3.396), то, следовательно, выполнено и условие (3.37). Параметры
решений уточняются при помощи описанных ранее итерационных
процедур, которые обеспечивают выполнение с заданной точностью
условия (3.1г).
Рис. 3.24. Взаимное расположение окружностей, соответствующих
сумме трансверсальных составляющих импульсов скорости первого и
второго интервалов маневрирования и допустимым значениям вектора
эксцентриситета орбиты ожидания:
(а) среди решений обычной задачи встречи существуют решения,
удовлетворяющие ограничениям на высоту орбиты ожидания;
(Ь) необходимо искать специальные решения
Вариант, когда круги радиусов R\ и R2 имеют общие точки
(пересекаются или один целиком расположен внутри другого)
наиболее типичен для задач, в которых необходимо учитывать
ограничения на высоту орбиты ожидания. Как правило, учитывать
ограничения на высоту приходится, когда суммы трансверсальных
составляющих импульсов скорости первого и второго интервалов
маневрирования имеют разные знаки, а это необходимое условие,
чтобы круги радиусов Rt и Т?2 имели общие точки
Если ограничение по высоте довольно жесткое (ad не сильно
отличается от rmi„ или гтаХ), то эксцентриситет орбиты ожидания
(радиус окружности /?т) будет небольшим. Если в этой задаче
153
исходная и заданная орбиты имеют относительно большие эксцен-
триситеты, а разность их больших полуосей и векторов эксцен-
триситетов не велики, то общих точек у трех кругов может не быть
(рис. 3.246). В этом случае оптимальным будет четырехимпульсный
маневр, которому соответствует ломаная ABCDK (рис. 3.246). Точка
С, соответствующая вектору эксцентриситета орбиты ожидания,
должна принадлежать дуге LM (дуга LM- часть окружности радиуса
Rm, заключенная между отрезками, соединяющими центры
окружностей радиуса Rx и Т?2 с началом системы координат).
Если исходная и заданная
Рис. 3.25. Среди оптимальных че-
тырехимпульсных решений су-
щеествуют решения, удовлет-
воряющие ограничениям на
высоту орбиты ожидания
орбиты пересекаются, то
возможен вариант, когда кругу
радиуса Rm принадлежат только
внутренние точки отрезка Е<Е2
(рис. 3.25), в этом случае среди
решений, оптимальных без учета
ограничения (3.37), удовлетворять
ограничению (3.37) будут только
четырехимпульсные решения,
допустимым значениям вектора
эксцентриситета орбит ожидания
которых соответствуют точки
отрезка LN.
Когда ни множество G , ни
отрезок Е[Е2 не имеют с кругом
радиуса Rm общих точек, суммарная характеристическая скорость
допустимого решения будет превосходить суммарную
характеристическую скорость решения, получаемого без учета
ограничения (3.37).
Определим, какие точки круга радиуса Rm могут соответствовать
допустимым значениям вектора эксцентриситета орбиты ожидания,
получающейся после проведения оптимального маневра в этом
случае.
Рассмотрим четырехимпульсные маневры. Пусть т.С (рис.3.26),
соответствующая параметрам орбиты ожидания, является внутренней
точкой круга радиуса Rm, не принадлежащей множеству Р (Р -
множество точек пересечения кругов радиусов Rm и R2). Для такого
маневра значение минимальной суммарной характеристической
скорости равно Д7с=0.5(ЛС+СК). Минимальные затраты для
154
перехода через произвольную т.С, принадлежащую дуге L\L-, (рис.
3.26), меньше чем Ат.к. А.С+СК<АС+СК.
Среди маневров, которым соответствуют точки множества Р,
минимальны затраты у маневра, параметрам орбиты ожидания
которого соответствует ближайшая к точке А точка множества Р. Для
случая, изображенного на рис. 3.26, такой точкой будет точка N.
Оптимальность этого решения следует из того, что для всех точек
множества Р минимальная суммарная характеристическая скорость
импульсов второго интервала маневрирования равна 0.57?2, а ми-
нимальная суммарная характеристическая скорость импульсов пер-
вого интервала маневрирования равна половине расстояния до т. А.
Рис. 3.26. Вариант, когда ограничение
на высоту меняет оптимальное пешение
Таким образом, опти-
мальному переходу соот-
ветствует точка окружности
радиуса Rm, лежащая на дуге
L{N. Положение точек этого
множества можно задавать
углом a>d (рис. 3.26).
Минимизацией суммарной
характеристической скорости
по a>d, находятся параметры
орбиты ожидания, а затем
при помощи итерационной
процедуры определяются параметры оптимального маневра,
удовлетворяющие с заданной точностью условию (3.1г).
3.9. Влияние ошибок исполнения маневров
В процессе полета КА всегда имеются ошибки знания элементов
его орбиты и ошибки при исполнении маневров. Для многовитковой
встречи учет и компенсация влияния этих ошибок имеют очень
большое значение. И в первую очередь учет тех ошибок, влияние
которых имеет вековой характер. Обычно влияние ошибок
исследуется с помощью метода Монте-Карло или аналогичных
методов. Для околокругового движения в некоторых случаях учесть
влияние ошибок удается аналитически.
Вначале рассмотрим влияние ошибок исполнения маневров. Это
могут быть неточности в моменте включения или выключения ДУ,
ошибки в величине исполненного импульса скорости, в ориентации
155
ДУ. Ошибки в моменте включения А/о и/или выключения ДУ Д^
приводят к изменению момента приложения импульса скорости,
которым моделируется маневр, на угол Д<р
Atn + А/,
Д<р = —----
2Т
и к изменению величины этого импульса скорости на 5 Г
Sf/_ АГ(А?/~Аг°)
Д/
здесь Т период орбиты, At - продолжительность маневра, ДЕ -
величина импульса скорости.
Рассмотрим влияние этой ошибки на изменение вектора
эксцентриситета. На плоскости ех,еу вектор, который соответствует
импульсу скорости, поворачивается на угол Д<р, изменяется и длина
28Е „ _
вектора на ---, если импульс скорости трансверсальный. 1акже к
повороту этого вектора (и к небольшому изменению его величины)
приводит ошибка в ориентации импульса скорости. Ошибка в
величине импульса скорости приводит к дополнительному
изменению длины вектора.
Таким образом, при реализации первого маневра, например,
трехимпульсного решения АВСК (на первом интервале
маневрирования прикладывается один импульс скорости), первому
импульсу скорости может соответствовать не расчетный вектор АВ, а
некоторый вектор АВ' (рис. 3.27(a)). Точка В' принадлежит эллипсу с
центром в точке В. Если основной является ошибка в ориентации ДУ,
то большая полуось эллипса перпендикулярна отрезку,
соответствующему номинальной величине импульса скорости
(например, эллипс с центром в точке В на рисунке 3.27(a)). Если
основной является ошибка в величине маневра, то большая полуось
эллипса направлена вдоль отрезка, соответствующего номинальной
величине импульса скорости (эллипс с центром в точке D на рисунке
3.27(a)). Эллипс ошибок имеет такое расположение, например, если
имеется ошибка только в моменте включения или выключения ДУ,
или эти ошибки имеют разные знаки (Д/0Д/у<0).
156
3.9.1. Решения типа CSS и CNS. Рассмотрим влияние ошибок
исполнения импульсов скорости первого интервала маневрирования
на решения типа CSS. Напомним, что у задачи существует множество
трех- и четырехимпульсных решений этого типа с одинаковой
суммарной характеристической скоростью. Допустимым значениям
вектора эксцентриситета орбиты ожидания трехимпульсных решений
соответствует дуга окружности, а у четырехимпульсных решений
область пересечения кругов радиусов К и Т?2. Если эллипс ошибок
исполнения импульсов скорости первого интервала маневрирования
принадлежит кругу радиуса Т?2 с центром в т.К, то импульсами
скорости второго интервала маневрирования можно оптимально
перейти из любой точки эллипса в точку К. Если в начальный момент
импульсу скорости соответствовал отрезок АВ, а с учетом ошибки
исполнения отрезок АВ', у которого т.В' не принадлежит кругу с
центром в т.К (рис. 3.27(a)), то затраты суммарной
характеристической скорости маневров второго интервала и,
следовательно, всего перелёта будут больше, чем в случае, когда
ошибки исполнения импульсов не учитываются.
Чтобы расположить эллипс ошибок внутри круга с центром в
т.К, точку, соответствующую вектору эксцентриситета орбиты
ожидания, необходимо располагать ближе к точке К. Если на первом
интервале маневрирования используется только один импульс
скорости, то эти возможности ограничены. Например, для случая,
которому соответствует точка D на рисунке 3.27(b). В этом примере,
если импульсы скорости будут выполнены с превышением
номинальной величины, то T.D' может выйти за пределы круга с
центром в т.К. Однако если на первом интервале маневрирования
используются два импульса скорости, а точка К находится внутри
окружности радиуса К с центром в начале системы координат, то
точку В, соответствующую вектору эксцентриситета орбиты
ожидания, можно расположить как угодно близко к точке К (рис.
3.27(b)). Эллипс ошибок будет располагаться максимально глубоко
внутри окружности с центром в точке К. Строго говоря, эллипс
ошибок, полученный в результате исполнения двух импульсов
скорости на одном интервале маневрирования уже не будет иметь
форму эллипса. Однако эту фигуру (суперпозицию двух эллипсов)
также желательно как можно глубже располагать внутри окружности
с центром в точке К.
157
е
Рис. 3.27. Влияние ошибок импульсов скорости, прикладываемых
на первом интервале маневрирования, для решений типа CSS.
Если точку В расположить практически вплотную к точке К, то
импульсы второго интервала будут равны по величине, а их углы
приложения будут отличаться на 180°. Такое решение становится
наименее чувствительным как ошибкам реализации маневров первого
интервала маневрирования, так и к ошибкам на втором интервале
маневрирования.
При расчете четырехимпульсных маневров КА «Союз» угол
приложения третьего импульса скорости фиксируется за виток, а
четвертого за полвитка до точки встречи. Часто накладывается
дополнительное ограничение, что импульсы скорости второго
интервала маневрирования должны быть примерно равной величины.
Эти ограничения приводят к тому, что точка В, соответствующая
вектору эксцентриситета орбиты ожидания, очень близка к точке К.
Таким образом, получается описанное выше решение наименее
чувствительное к ошибкам реализации маневров обоих интервалов.
Конечно дополнительное ограничение увеличивает затраты
суммарной характеристической скорости маневров первого интервала
на поворот плоскости орбиты, однако, как будет показано в четвертой
главе, когда точки В и К близки, на втором интервале
маневрирования становится проще корректировать ошибки боковых
составляющих импульсов скорости
На самом деле располагать точку В, соответствующую вектору
эксцентриситета орбиты ожидания, максимально близко к точке К не
обязательно. Можно более точно определить область возможного
158
расположения т.В. Напомним, что для многовитковой встречи сумма
трансверсальных составляющих импульсов скорости первого
интервала маневрирования AEZI вычисляется по формуле (3.12а). Если
известна максимальная ошибка (Зст) в ориентации импульса скорости
Афтах и максимальная ошибка (Зст) в величине импульса скорости к
(возможной ошибке в величине импульса скорости в 1%
соответствует £=.01), то можно вычислить величины полуосей
эллипса ошибок a=AEZIsnb!^max, Ь=кЬУл. Обозначим с максимальную
из величин а и Ь. Если точка В принадлежит кругу радиуса R2 = R2 - с
с центром в точке К (окружность, нарисованная точками на рис.
3.27(b)), то эллипс ошибок будет принадлежать кругу радиуса R2 с
центром в точке К, и, следовательно, можно будет оптимально
перейти из любой точки В' в точку К маневрами второго интервала.
Ошибки в величине импульсов скорости влияют не только на
положение точки, соответствующей вектору эксцентриситета орбиты
ожидания, но и на величину радиуса круга с центром в т.АЗ Если на
первом интервале маневрирования реальная величина исполненных
импульсов скорости превышает расчетные величины на £АЕ(1, то на
втором интервале величины импульсов скорости должны быть
меньше расчетных на £A/Z1, чтобы обеспечить необходимое
изменение большой полуоси. Таким образом, точку В желательно
помещать в круг радиуса R2 = R2 - с - b с центром в точке К
(пунктирная окружность на рис. 3.27(b)), чтобы эллипс,
соответствующий ошибкам импульсов скорости первого интервала
маневрирования, оставался внутри окружности уменьшенного
радиуса.
Апсидалъные решения, параметры которых определяются
наиболее просто, являются в тоже время и решениями наименее
чувствительными к ошибкам импульсов первого интервала
маневрирования, так как позволяют, при соответствующем
распределении величин импульсов скорости этого интервала,
получить максимальное приближение т.В к т.К.
Решение начинается со сравнения величин AEZI и Ае (длины
отрезка АК). Если 2AEzi<Ae, то на первом интервале маневрирования
лучше использовать один трансверсальный импульс скорости. Если
2АЕ/1>Ае, то на первом интервале маневрирования используются два
трансверсальных импульса скорости, величины которых связанны
соотношением
159
Л712 2ДИ„-Де
ДИ„ 2ДИГ|+Де’
обеспечивающим близость т.5 к т.К. Величины всех импульсов
скорости находятся из системы (3.1а)-(3.1г).
Было рассмотрено влияние ошибок исполнения импульсов
скорости на изменение вектора эксцентриситета. Их влияние на
коррекцию большой полуоси обычно не столь существенно. Ошибка
в моменте включения и выключения ДУ при сохранении общей
продолжительности маневра не приводит к отклонению от
расчетного изменения большой полуоси, т.к. она одинаково
эффективно корректируется в любой точке орбиты (для
линеаризованных уравнений движения).
Небольшая ошибка в ориентации импульса скорости также не
приводит к существенному изменению величины трансверсальной
составляющей и, следовательно, к существенному изменению
большой полуоси. Основной вклад в ошибку коррекции большой
полуоси вносит ошибка в величине импульса скорости. Однако и эта
ошибка не приводит к увеличению суммарной характеристической
скорости маневров для решений типа CAS, когда суммарная
характеристическая скорость маневров встречи равна суммарной
характеристической скорости маневров перехода между этими
орбитами, а годограф базис-вектора вырождается в точку. В этом
случае ошибка в коррекции большой полуоси импульсами скорости
первого интервала маневрирования может быть компенсирована
соответствующим изменением импульсов скорости второго
интервала маневрирования без увеличения суммарной
характеристической скорости всех маневров.
Если годограф базис-вектора имеет вид циклоиды (решение
типа CNS), то суммарная характеристическая скорость маневров
встречи больше суммарной характеристической скорости маневров
перехода между этими орбитами. В этом случае ошибка в коррекции
большой полуоси импульсами скорости первого интервала
маневрирования может привести как к увеличению общей суммарной
характеристической скорости маневров (если изменение большой
полуоси больше расчетного), так и к ее уменьшению (если изменение
большой полуоси меньше расчетного). Но в обоих случаях, также как
и для решений типа CSS, эта ошибка в изменении большой полуоси
приводит к ошибке во времени прилета в точку встречи.
160
Для многовитковой встречи эта ошибка, вызванная ошибками в
коррекции большой полуоси импульсами скорости первого интервала
маневрирования, является наиболее существенной.
Промах во времени прилета в точку встречи можно вычислить
по формуле
Д?1=-6л№\И,1ег.
где Д7,1ет. - ошибка в сумме трансверсальных составляющих
импульсов скорости первого интервала маневрирования, вызвавшая
ошибку в коррекции большой полуоси.
Исправить эту ошибку только за счет необходимого
аналогичного изменения величины импульсов скорости последнего
интервала маневрирования 5Иц=ДИЛгг без изменения моментов
приложения импульсов этого интервала маневрирования невозможно.
Соответствующее изменение величин импульсов скорости даёт
изменение времени прилета в точку встречи не превышающее
величину
Д/=6л5Кп.
Попытаться исправить ошибку можно за счет изменения
моментов приложения импульсов скорости, исполняемых на втором
интервале маневрирования. Для случая, когда точки В и К близки, и,
следовательно, практически равны величины третьего и четвертого
импульсов скорости (ДКЙ»ДК,4), изменение времени прилета в точку
встречи, за счет изменения угла приложения одного из импульсов
скорости на Д(рсл, и изменения на близкую величину угла приложения
другого импульса скорости, вычисляется по формуле
Лй1=ЗД<РслД^п,
где ДК,П - сумма трансверсальных составляющих импульсов скорости
второго интервала маневрирования.
Максимальное изменение угла приложения одного из импульсов
скорости не превышает полвитка (предполагается, что длина
интервала маневрирования примерно виток), следовательно,
максимальное изменение времени прилета в точку встречи
A?ii~3 лД
161
Как правило, можно осуществить только небольшое изменение
положения импульсов скорости на втором интервале
маневрирования, что ещё более уменьшает величину Д/п.
Если Ati>Ata, исправить ошибку во времени прилета в точку
встречи за счет изменения моментов исполнения маневров второго
интервала невозможно.
Для того чтобы эффективно исправлять отклонение во времени
прилета в точку встречи, вызванное ошибками исполнения импульсов
скорости первого интервала маневрирования, обычно используются
дополнительные маневры.
Например, у КА «Союз» между первым интервалом
маневрирования на 3-4 витках и вторым основным интервалом на 32
витке располагается дополнительный маневр на 17 витке. При
расчете параметров четырехимпульсного маневра на 3 и 32 витках
учитывался трансверсальный разгонный импульс скорости
фиксированной величины 2 м/с, исполняемый на 17 витке. Величина
этого импульса скорости должна быть вдвое больше (т.к. расстояние
от этого импульса до точки встречи вдвое меньше расстояния от этой
точки до первого интервала маневрирования) чем максимальная
ошибка в величине суммы импульсов скорости первого интервала
маневрирования ДЕйег. После определения орбиты перед 17 витком,
рассчитываются параметры трехимпульсного маневра: первый
импульс скорости исполняется на 17 витке, второй и третий на 32
витке. Таким образом, вычисляется уточненная величина
дополнительного импульса скорости, что позволяет компенсировать
ошибки первого интервала маневрирования. Если первые импульсы
скорости были исполнены с ошибкой на увеличение AV/ler, то
величина дополнительного импульса скорости будет после уточнения
уменьшена примерно на 2&Vtler. Если первые импульсы скорости
были исполнены с недоработкой нужной величины, то величина
дополнительного импульса скорости будет после уточнения
увеличена примерно на удвоенную величину ошибки.
В этой схеме очень важно правильно выбрать величину этого
дополнительного импульса скорости. Если взять его слишком
большим, то соответственно на половину его величины уменьшится
сумма трансверсальных составляющих импульсов скорости первого
интервала маневрирования, а именно эти импульсы вносят основной
вклад в необходимый поворот плоскости орбиты. Тем самым
162
увеличится суммарная характеристическая скорость маневров. Если
взять его слишком маленьким, то после уточнения его величина
может стать отрицательной, что также увеличивает суммарную
характеристическую скорость маневров.
Оптимальная величина этого дополнительного импульса
скорости
Д Vmidr~2-kN Vt]max,
где ДЕ,1тем - максимальная величина суммы трансверсальных
составляющих импульсов скорости первого интервала
маневрирования. Её величина зависит от максимальной возможной
разницы больших полуосей начальной и конечной орбит и от
начальной фазы Ди* (см. раздел 1.5.2).
Чтобы получить практически оптимальное и устойчивое к
ошибкам реализации импульсов скорости решение, можно каждый из
импульсов ДЕ, разделить на две части (1-Л)ДЕ, и kNVt {к -
максимальная ошибка в величине импульса скорости). На основном
витке прикладывается импульс скорости (1-/г)ДЕ,, а на следующем
k^Vj. Точка приложения на витке и ориентация дополнительного
импульса скорости аналогичны этим величинам для основного
импульса скорости. Таким образом, например, вместо
четырехимпульсного решения получаем восьмиимпульсное решение.
Деление происходит после решения приближенной
четырехимпульсной задачи, а учет влияния разделения происходит с
помощью итерационной процедуры описанной в первой главе,
обеспечивающей выполнение с заданной точностью терминальных
условий. При такой схеме даже если маневр был исполнен с
максимальной ошибкой на превышение заданной величины, то
дополнительный маневр можно просто не проводить, т.к. он уже был
реализован этой максимальной ошибкой. Если основной маневр был
исполнен с максимальной ошибкой на недоработку его величины, то
величина дополнительного маневра удвоится. Такая схема позволяет
скомпенсировать ошибки основных маневров, и в тоже время не
тратить дополнительное топливо. Если требуется очень высокая
точность формирования конечной орбиты, например, при создании
спутниковых групп (Formation flying), то приходится в той же
Пропорции делить и дополнительные импульсы второго интервала
Маневрирования [137].
163
Параметры решений типа CNS определяются однозначно. Если
эллипс ошибок маневров первого интервала, соответствующий этому
решению принадлежит кругу с центром в точке К, то маневрами
второго интервала можно без существенных потерь перейти на
заданную орбиту. Если эллипс существенно выходит за пределы
круга, то целесообразно искать решение как решение типа CSS, но
имеющее разные знаки трансверсальных составляющих на первом и
втором интервалах маневрирования. Тогда имеется множество
решений, из которых выбирается решение, у которого импульсы
скорости первого интервала маневрирования располагаются ближе к
началу этого интервала (для уменьшения затрат суммарной
характеристической скорости), а точка, соответствующая вектору
эксцентриситета орбиты ожидания, располагается ближе к точке К
(для уменьшения влияния ошибок).
3.9.2. Решения типа CAS. Рассмотрим влияние ошибок
исполнения маневров на суммарную характеристическую скорость
решений типа CAS. Векторы, соответствующие импульсам скорости
этих решений, лежат на отрезке, соединяющем точки А и К (рис.
3.28).
Рис. 3.28. Влияние ошибок импульсов скорости, прикладываемых
на первом интервале маневрирования, на решения типа CAS
Вектору эксцентриситета орбиты ожидания трехимпульсного
решения соответствует точка Е (на первом интервале исполняется
один маневр), четырехимпульсного решения - точка С,
принадлежащая отрезку EL. Эти точки одинаковы с точки зрения
затрат суммарной характеристической скорости на перелёт, но выбор
164
конкретного положения т.С оказывает существенное влияние на
распределение ошибок первого и второго интервалов
маневрирования. Чем ближе т.С к т.Е, тем меньше ошибки первого
интервала маневрирования (так как величина импульсов этого
интервала уменьшается) и тем больше будут ошибки на втором
интервале маневрирования. Выбрав точку С посередине отрезка АК,
получаем решение с одинаковыми возможными максимальными
ошибками на первом и втором интервалах маневрирования (рис.
3.28). Если точка С выбрана так, что эллипс ошибок первого
интервала маневрирования не имеет общих точек с окружностями
радиусов 7?! и R2, то ошибка в величине маневров первого интервала
незначительно увеличивает затраты суммарной характеристической
скорости на втором интервале. Если ошибки второго интервала
маневрирования не имеют существенного значения, например, когда
аппаратура автономного сближения легко их компенсирует, то точку
С лучше располагать ближе к точке Е, но чтобы при этом эллипс
ошибок не имел общих точек с окружностью радиуса R\. Это
позволит уменьшить влияние ошибки в ориентации импульсов
скорости первого интервала на суммарную характеристическую
скорость маневров второго интервала.
Ошибку во времени прилета в точку встречи, которую вносит
ошибка в коррекции большой полуоси маневрами первого интервала,
для решений типа CAS устранить труднее, чем для решений типа
CSS. Углы приложения импульсов второго интервала принадлежат
множеству фе (1.14а). Перенести момент приложения импульса
скорости можно только на виток, что не всегда допускается.
Заметный сдвиг моментов приложения импульсов скорости,
необходимый для компенсации ошибки во времени прилета в точку
встречи, приводит к значительному увеличению суммарной
характеристической скорости маневров второго интервала.
Исправить ситуацию может использование одного или нескольких
дополнительных импульсов, которые лучше заложить в схему
маневрирования заранее.
Поскольку в многовитковой схеме маневрирования перед
исполнением маневров второго интервала заново определяется
орбита, и пересчитываются величины импульсов скорости, влияние
ошибок их исполнения в основном рассчитывается аналогично.
Отсутствует только вековое влияние ошибки в величине
трансверсальных составляющих импульсов скорости.
165
ГЛАВА IV
ВСТРЕЧА НА НЕКОМПЛАНАРНЫХ ОРБИТАХ
4.1. Постановка задачи
Для некомпланарной задачи встречи условия выхода на
заданную орбиту имеют вид:
^2 (A rr|.sin(p; +2Д cos ср; )=Дех, (4.1 а)
/=|
N
^2 (“А cos ср, +2Д r^.sincp,. )=Де,, (4.16)
/=1
£2ДГ,=Да, (4.1в)
/=1
^2(2ДИ,.,.(1 -cos(p,.)+Ar,f(-3(p,+4sin(p(.))=A?, (4-1г)
/=1
^2-Д Гейзер,. =Дг, (4.1д)
/=1
N
^2дИ.;.со8(р;.=ДИ, (4.1е)
(=1
где отклонения вычислены в точке встречи (ось х направлена на
точку встречи).
Импульсы скорости, как и для компланарной задачи,
прикладываются на двух интервалах маневрирования, длина
каждого из которых составляет виток, расстояние между
интервалами составляет несколько витков.
Условие принадлежности импульсов скорости заданным
интервалам маневрирования можно записать в виде:
cpi^F,, ... , cpyi^Fj, (pM+i^F2, ... , <pm+7v2^F2, (4.2)
где У1, N2- число импульсов скорости соответственно на первом и
втором интервалах маневрирования (У=У1 +N2).
166
Требуется определить &Vri,&Vti,&Vzi, (p; (z=l,.при которых
суммарная характеристическая скорость маневров
Л' N ________________
дг = £д^.=£7д^+дг„2 + д^
при ограничениях (4.1а) -(4.1е), (4.2) будет минимальной.
Уравнения для базис-вектора имеют вид:
л=--л2со8б+лззт0+2л6, (4.3а)
p=2X|+2X2sin0+2X3cos6-3X60, (4.36)
v=X4sin6+X5cos6, (4.Зв)
где X], Х2, Х3, Х4, Х5, Х6 - произвольные константы.
В общем случае уравнения (4.3) описывают спираль. Если же
Х6 = 0, уравнения описывают эллипс (окружность) или отрезок
(точку).
Когда годограф базис-вектора имеет вид спирали (Х6 0),
суммарная характеристическая скорость задачи встречи ДЕгЛ
превышает суммарную характеристическую скорость задачи
перехода Как и для компланарной задачи встречи в этом
случае импульсы скорости одного из интервалов маневрирования
будут тормозными, другого разгонными.
При Х6 = 0 суммарная характеристическая скорость задачи
встречи ДКгЛ совпадает с суммарной характеристической скоростью
задачи перехода Wtrf. Импульсы скорости для переходов между
некомпланарными орбитами можно разделять на части и
прикладывать их на разных интервалах маневрирования. Характер
решения при этом остается неизменным, но меняется время выхода
на заданную орбиту. Подобрав соответствующим образом разбиение
импульсов, можно решить задачу встречи.
Идея делить импульсы скорости оптимального перехода для
того, чтобы получить решение задачи встречи, довольно естественна
и многократно описывалась в литературе [89], [154]. Однако случай,
когда суммарная характеристическая скорость задачи встречи
превышает суммарную характеристическую скорость задачи
перехода A Vtrj (для таких решений годограф базис-вектора имеет вид
спирали), авторами, как правило, не рассматривается, либо для него
предлагается другой способ решения задачи, отличный от деления
167
импульсов скорости оптимального перехода. Необходимо отметить,
что традиционный метод деления импульсов скорости решения
задачи перехода имеет ряд недостатков. Он не применим к задаче, в
которой на импульсы скорости первого и второго интервалов
маневрирования наложены разные ограничения, его нельзя
использовать, когда наложены ограничения на параметры орбиты
ожидания, и т.д. Для решения задач с такими ограничениями не
подходят также и методы, изложенные в [154], [169].
Учитывая многовитковый характер рассматриваемой встречи,
можно предложить три алгоритма расчета обеспечивающих её
параметров маневров. Первый алгоритм также основан на решении
задачи перехода, но является более универсальным, чем алгоритмы,
описанные в [89], [154]. Он будет рассмотрен во втором параграфе
данной главы. Второй алгоритм (на каждом из интервалов
маневрирования также решается задача перехода) основан на
решении задачи минимизации в пространстве элементов орбиты
ожидания. Частный случай этого алгоритма, используемый для
расчета маневров дальнего наведения, рассмотрен в данной главе;
алгоритм в общей постановке будет рассмотрен в седьмой главе.
Кроме того, в данной главе рассмотрен алгоритм определения
параметров оптимального невырожденного решения (Х6*0),
основанный на использовании необходимых условий
оптимальности.
4.2. Алгоритм решения некомпланарной задачи
встречи, основанный на решении задачи перехода
4.2.1. Определение параметров маневров. Вследствие
многовитковости перелета коэффициенты при трансверсальных
составляющих импульсов скорости первого интервала
маневрирования во много раз превышают все остальные
коэффициенты в уравнении (4.1г), но мало отличаются между
собой. Это позволяет приближенно оценить величину суммы этих
составляющих (ДИ,!):
ДИ„»-^, (4.4)
Зеро
где <ро - угловое расстояние от произвольной точки первого
интервала маневрирования до точки встречи. Затем можно
168
приближенно оценить величину изменения большой полуоси
орбиты активного КА импульсами скорости первого интервала
маневрирования:
Аа^2АУл, (4-5)
и импульсами скорости второго интервала маневрирования:
Аап^Аа-2ДЕ„. (4.6)
Введем величину Д<2*=|Дщ|+|Да)1|.
Решение задачи оптимального перехода между орбитами,
разность элементов которых Аех, Аеу, Az, АУ2, а вместо Аа берется
Аа , можно использовать при решении задачи встречи. Если
Аа =|Да| (этот случай имеет место когда знаки Аа} и Дап совпадают),
то полученное таким образом решение задачи встречи будет
оптимальным, т.к. его суммарная характеристическая скорость
совпадает с суммарной характеристической скоростью задачи
перехода (соответствует случаю л6 =0). Если Аа >|Да|, суммарная
характеристическая скорость найденного решения больше, чем
суммарная характеристическая скорость оптимального решения,
которому соответствует годограф базис-вектора в виде спирали, но
разница будет небольшой для многовитковой встречи.
Чтобы найти величины импульсов скорости для решения
задачи встречи, можно разделить импульсы скорости, рассчитанные
Аа, Аа„
для решения задачи перехода, в пропорции —j-, —
Аа Аа
соответственно для первого и второго интервалов маневрирования
[12]. Например, из универсального (US) решения задачи перехода с
составляющими ДИ,1, ACzl, ДИЙ, АУЛ (ему соответствуют ломаные
АСК и АСК на рис. 4.1) можно получить четырехимпульсное
решение задачи встречи с составляющими для первого импульса
скорости первого интервала маневрирования:
AVm=AV,^,AVm=AV2^, (4.7)
Аа Аа
Для второго импульса скорости первого интервала маневрирования:
AV,u^AVi2^,AVm=AV21^. (4.8)
Аа Аа
169
Аналогично для второго интервала маневрирования:
ду =Д7 —П. = ДЕ —IL
^Olll ^01 А • ’ zlll Z1 Л *
Да Да
ду =Д7 —0. ду = ду _
Ла Ла
(4.9)
(4.Ю)
Если для первого интервала маневрирования совпадают знаки
Ла[ и Ла , то на этом интервале углы приложения импульсов
скорости для задачи встречи совпадают с углами приложения
импульсов скорости для задачи перехода, в противном случае углы
отличаются на 180°. Аналогично для второго интервала проверяется
совпадение знаков Лац и Ла и определяются значения углов
приложения импульсов скорости для задачи встречи. Естественно,
что витки, на которых располагаются углы приложения импульсов
скорости, должны принадлежать заданным интервалам
маневрирования.
4.2.2. Области существования решений. Вектору
эксцентриситета орбиты ожидания найденного решения в
пространстве ех,еу будет соответствовать i.D (рис. 4.1),
принадлежащая отрезку АК (в начале рассматривается вариант
непересекающихся орбит Ла*>Ле).
Рис. 4.1. Решение задачи встречи,
получаемые из решения задачи
перехода
Рис. 4.2. Области существования
решений задачи встречи
Трансверсальным составляющим импульсов скорости этого
решения соответствует ломаная ABDEK. Если изменять порядок
170
приложения импульсов скорости на первом или втором интервалах
маневрирования, то можно получить ещё три вида ломаных:
АВ DEX, ABDEK, АВТ)ЕК. Эти четыре решения мало отличаются
между собой при большой продолжительности встречи, но при
короткой продолжительности порядок приложения импульсов
скорости имеет значение. Возможность использовать разные
решения может оказаться полезной и с точки зрения попадания
моментов приложения импульсов скорости в разрешенные
интервалы маневрирования.
Области существования решений задачи встречи, суммарная
характеристическая скорость EVrdv которых совпадает с суммарной
характеристической скоростью решения задачи перехода EVtrj
(Да =|Ла|), в пространстве Ей (начальной фазы) совпадают с
областями существования решений CSS и CAS, соответствующей
компланарной задачи встречи (отклонения от плоскости не
учитываются), приведёнными на рис. 3.14а и 3.146. Соответственно
области существования решений, у которых затраты на встречу
ДСгА превышают затраты на переход EVtrf (Ла >|Да|) в пространстве
Ей совпадают с областями существования решений CNS,
приведёнными на рис. 3.14а и 3.146.
Для приближенного выполнения условия (4.1г) необходимо,
чтобы сумма трансверсальных составляющих импульсов скорости
Ла,
первого интервала маневрирования равнялась —L:
AF+AF=^I-
,2 2
Однако распределение величин трансверсальных
составляющих импульсов скорости в рамках этой суммы может
быть произвольным, а не только заданным соотношениями (4.6),
(4.7). Таким образом, возможным значениям вектора
эксцентриситета орбиты ожидания соответствует отрезок MN (рис.
4.1). В точках М и N четырехимпульсное решение вырождается в
трехимпульсное, когда на втором интервале прикладывается только
один импульс скорости величиной Угол приложения этого
импульса совпадает с углом приложения первого импульса скорости
171
универсального решения задачи перехода для точки М или с углом
приложения второго импульса скорости для точки N.
Боковые составляющие должны быть распределены между
импульсами таким образом, чтобы для каждого импульса скорости
сохранялось соотношение боковой и трансверсальной
составляющих, которое имело место для соответствующего
импульса скорости задачи перехода.
Наиболее просто находятся параметры пропорционального
решения, но, если, например, из-за ограничений на эксцентриситет
орбиты ожидания требуется решение, которому соответствует точка
отрезка MN, отличная от точки D (рис. 4.1), параметры такого
решения также находятся достаточно просто.
Для разных значений Aw положение отрезка MN будет
меняться, он будет перемещаться параллельно самому себе. Для
значений Aw6[Aw^,Aw.,r] (см. параграф 3.4) допустимым множеством
значений вектора эксцентриситета орбиты ожидания на плоскости
ех,еу будет параллелограмм АСКС'. При Aw=AwjZ отрезок MN
вырождается в т. К, а при Aw=Awsr в т. А.
Когда Aw становится больше Aw,r и продолжает расти, или
становится меньше Aw,/ и продолжает уменьшаться, начинает расти
Аа (на интервале [AwjZ,Awir] оно было постоянным). Одновременно
начинают расти радиусы обоих окружностей и R2, так как растут
A<2j и Аап (как всегда R\= IAwjI , R2= |Дап1), знаки которых теперь не
совпадают. При каждом конкретном значении Aw возможным
значениям вектора эксцентриситета орбиты ожидания вновь
соответствует отрезок, но его величина будет больше, чем у отрезка,
соответствующего Aw из интервала [Aus/,Ausr] и пересекающего ту
же точку отрезка АК. Для значений Aw<Aw,/ и Aw>Aw,r допустимым
множеством значений вектора эксцентриситета орбиты ожидания на
плоскости ех,е? будет геометрическая фигура, изображенная на рис
4.2, содержащая параллелограмм АСКС'.
При исследовании областей существования использовалось
универсальное решение (US) (см. параграф 2.4), как самое простое,
но аналогичную картину можно получить и для областей
существования решений, описанных в работе Эдельбаума [145].
Рассмотрим теперь вариант, когда орбиты пересекаются и
Да*=|Да|. В этом случае на плоскости ех,еу окружности, имеющие
радиусы R[ и R2, не пересекаются (рис. 4.3). Универсальному
172
решению задачи перехода соответствуют ломаные АСК и АСК, а
пропорциональным решениям задачи встречи - ломаные ABDEK,
АВ DE К, ABDEK, ABDEK. Выше упоминалось, что у решения
задачи перехода между пересекающимися орбитами знаки
трансверсальных составляющих импульсов скорости не совпадают.
Следовательно, например, у решения ABDEK R,=AB'-BD и R2=EK-
DE, отсюда, МВ -В D, a DE=EN.
Как и в случае непересекающихся орбит, распределение
величин трансверсальных составляющих импульсов скорости
первого интервала маневрирования в рамках суммы (4.10) может
быть произвольным, а не только заданным соотношениями (4.6),
(4.7). Таким образом, возможным значениям вектора
эксцентриситета орбиты ожидания соответствует отрезок MN (рис.
4.3).
Аеу
Рис. 4.3. Решение задачи встречи для непересекающихся орбит.
В точках М и N четырехимпульсное решение вырождается в
трехимпульсное. Точке М соответствует решение, когда на первом
интервале прикладывается только один импульс скорости с
„ „ Да,
трансверсальной составляющей -^-L, угол приложения которого
совпадает с углом приложения второго импульса скорости
универсального решения задачи перехода. Точке N соответствует
решение, когда один импульс скорости с трансверсальной
Да,,
составляющей —прикладывается на втором интервале
маневрирования.
173
Как и в случае встречи на непересекающихся орбитах для
разных значений Aw положение отрезка MN будет меняться. Для
значений AwefAw^Aw^] допустимым множеством значений вектора
эксцентриситета орбиты ожидания на плоскости ех,еу будет
параллелограмм АСКС'. При Au=Aus! отрезок вырождается в точку
К, а при Aw=Awir в точку А. Когда Aw становится больше Aw„. и
продолжает расти, начинает расти и Ад (на интервале [Aws/,Aws.,] оно
было постоянным). Одновременно начинают расти радиусы
окружностей /?] и Т?2, так как растут Ад] и Адп, знаки которых теперь
не совпадают. При каждом конкретном значении Aw возможным
значениям вектора эксцентриситета орбиты ожидания опять
соответствует отрезок, расположенный левее точки К, но его
величина будет больше, чем у отрезка, соответствующего Aw из
интервала [Aws/,Aw5r] и пересекающего ту же точку отрезка АК. Для
значений Aw<Aws/ и Aw>AwJ,. допустимым множеством значений
вектора эксцентриситета орбиты ожидания на плоскости ех,еу будет
неограниченная геометрическая фигура, изображенная на рис 4.2.
Области существования обоих типов решений были
исследованы в предположении, что условие (4.1г) было заменено
приближенным условием (4.10). Однако этого вполне достаточно,
чтобы получить представление о виде этих областей.
Параметры любого из решений, принадлежащего допустимой
области, можно уточнить при помощи итерационной процедуры,
аналогичной процедуре описанной в главе 3 (изменяется величина
Ад]), чтобы условие (4.1г) было выполнено с заданной точностью.
Необходимо отметить, что при незначительной
продолжительности встречи, когда указанная итерационная
процедура работает недостаточно эффективно, для определения
параметров маневров можно воспользоваться задачей Ламберта.
При фиксированных моментах приложения двух импульсов
скорости из системы шести линейных уравнений с шестью
неизвестными (4.1а) - (4.1е) определяются величины составляющих
импульсов скорости ДИ„-, ДИ„-ДИЯ- (z=l,2). Перебором возможных
сочетаний (рь (р2> находится оптимальное решение. Использование
задачи Ламберта на коротких интервалах маневрирования
обоснованно, так как на этих интервалах обычно трудно
расположить более двух маневров. Кроме того, нередко эти два
маневра являются частью рассчитанного ранее четырех- или
174
трехимпульсного маневра. Если двух импульсов скорости
недостаточно для оптимального решения задачи и необходимо
использовать трёх- или четырехимпульсную схему маневрирования,
то для определения параметров маневров можно воспользоваться
численным методом, изложенным в следующей главе.
При наличии дополнительных ограничений на углы
приложения, ориентацию и величину импульсов скорости, а такие
ограничения часто встречаются в практических задачах, процедура
поиска оптимального решения многовитковой задачи встречи
несколько усложняется. Однако геометрический подход позволяет и
в этом случае находить оптимальное аналитическое решение.
Алгоритм решения задачи такого типа приведен в параграфе 4.4.
4.2.3. Пример. Рассматривается четырехимпульсная встреча на
некомпланарных орбитах. Элементы начальной и конечной орбиты
приведены в таблице 4.1. Они аналогичны элементам орбит из
примера 2.2.8, но добавлена информация об аргументе широты
активного КА и КА-цели в начальный момент из примера 3.2.3,
номера витков обоих КА на этот момент ^н. и NOk, а также их номера
витков на момент встречи NapH. и NapK. Рассматриваются три варианта,
которые отличаются разным начальным положением КА-цели.
Таблица 4.1
Элементы Начальная орбита Конечная орбита
Hmi„ (км) 180 340
Нтах (км) 210 360
(град) 20 150
i (град) 51.7 51.69
Q (град) 17.49 17.5
Ui (град) 60 5
U2 (град) 60 210
Уз (град) 60 355
Na нач-ного витка 1 201
А^ар витка встречи 17 217
Точка встречи совпадает с началом 17го витка.
Пусть маневрирование осуществляется на двух интервалах (на
первом и на последнем витках полета), на каждом из которых
175
прикладываются по два импульса скорости, имеющих
трансверсальную и боковую составляющие.
Изменение большой полуоси орбиты на первом интервале
маневрирования можно оценить по формуле
Aa!=2AKz],
где £1=4sincpi-3<pi. Значения кх, Atj вычислены в примере
К
3.2.3.
Изменение большой полуоси орбиты на втором интервале
маневрирования Aan=Aa-Aai.
Для t/n=5°
Аа^О.03052705, Ааи =-0.007195977, Aaj >0, Лац <0.
Первыми маневрами активный КА переходит на более высокую
орбиту для того, чтобы KA-цель «догнал» его, а маневрами второго
интервала понижается до уровня орбиты КА-цели.
Для С4з=210°,
когда разность фаз лежит в оптимальном диапазоне, знаки
отклонений одинаковые
Aai=0.005598495, Аап=0.01773258, Да,>0, Дап >0.
Все маневры разгонные.
Для С/и=355°
A<2i=-0.0120339, Дац=0.03536497, Aaj <0, Дац >0.
Первыми маневрами КА переходит на более низкую орбиту,
чтобы успеть догнать КА-цель.
Введем величину:
Аа* = | A<3j| + |А<2ц|.
Определим составляющие AKZ1, ДК,2, AKZi, АИ^ импульсов
скорости, некомпланарного двухимпульсного перехода, при этом в
качестве изменения большой полуоси при расчете параметров
перехода примем величину Аа*. Углы приложения импульсов также
могут быть взяты из решения задачи некомпланарного перехода.
Параметры AKZ1, AKz2, AKZ1, АИ^ в случае 2 (при одинаковых знаках
A<2i и А<2ц) совпадают с рассчитанными в задаче некомпланарного
перехода (пример 2.2.8), так как Аа* = Аа.
176
Распределение составляющих АКь АКЙ, AKZ), ДР^ импульсов
скорости, рассчитанных для некомпланарного двухимпульсного
перехода, производится в соответствии с формулами (4.7)-(4.10):
ДИл. =Д17,-^-, п ’Да* ДК/,,=ДК/2-^-, п 2 Да* ДГг.. =ДИ/1^-, 1 Да * ДГ/,, =ДК/,^Х 22 2 Да* дгг„=дгг,^\ 21 1 Да* ДГг„ =ДГг,^-, 22 2 Да* ДГг^АГг.^-, 221 1 Да* дгг,, = дгг,^. 22 2 Да*
1). 6^=5° Да*=0.03772303 Тк,= 87660.38с АГ/;1 =63.3067 м/с ДГ/;2 =54.9230 м/с АГ/;;1 =-14.9230 м/с ДГ/;;2 =-12.9467 м/с АГ^=146.12 Д/, =4.458352 (3823.84с) ДГг;1 =-0.7458 м/с ДГг;2 = 0.6471 м/с ДГг;/1 =0.1758 м/с А Гг;/2 =-0.1525 м/с
q>! = 144.9271°, ф2 = 318.3586°,
9з = 144.9271°, 94 = 318.3586°.
В соответствии с описанной выше процедурой углы приложения
тормозных импульсов скорости изменяются на половину витка
Фз = 324.9271°, <р4 = 138.3586°.
Так как после формального применения этой процедуры, когда
учитывалась лишь необходимость того, чтобы импульсы исполнялись
на одном витке, угол приложения третьего импульса скорости стал
больше угла приложения четвертого импульса скорости, импульсы
необходимо поменять местами
9з = 138.3586°, 94 = 324.9271°,
АИ/„1 = -12.9467 м/с Д Г? ((1 =-0.1525 м/с
АР7Я2 =-14.9230 м/с ДИг,/2 = 0.1758 м/с
2). 0/и=210°
Аа*=0.02333108 ТК2= 84537.82с Д/2 =0.8176375 (701.2713с)
177
ДИ/;| =12.0810 м/с ДИг/2 =9.6017 м/с ДИ//;1 =38.2651 м/с ДИг„2 =30.4122 м/с ДИе=90.37 91 = 146.6201°, 92 = 315.9030° 93 = 146.6201°, 94 = 315.9030° ДИг;1 =-0.2307 м/с ДИг;2 =0.1834 м/с Д Иг,;1 =-0.7309 м/с ДИг„2 =0.5809 м/с
3). 6/и=355° Да*=0.04739887 Ткз= 82329.17с ДИг„ =-21.9874 м/с ДИг,2 =-24.6193 м/с ДИг,„ =72.3506 м/с ДИ/,2 = 64.6162 м/с ДИе=183.58 91 = 139.1202° 92 = 324.3370° 93 = 144.3370° 94 = 319.1202° Д/3 =-1.757502 (1507.37с) Д Иг,,=-0.2060 м/с ДИг,2 = 0.2307 м/с Д Иг ;/1 =-0.6780 м/с Д Иг,2 =0.6055 м/с
Здесь также учтено изменение углов у тормозных импульсов
скорости и изменение порядка приложения этих импульсов.
В качестве примера работы итерационной процедуры можно
рассмотреть решение задачи для второго вариант
2). ^=210°
1 итерация
Д/=0.8176375 (701.271 Зс) Используемое на итерации время
Дй,=0.005598495 Дя2=0.01773258
Дя*=0.02333108
1 импульс ДИ=12.08099 ДИг=-0.2307577 (р,=-97.97196 (и=146.6201 °)
2 импульс ДИ,=9.601689 ДИ2=0.1834008 <р2=-95.01742 (ц=315.903 °)
3 импульс ДИ,=38.26514 ДИ2=-0.730898 (р3=-3.724182 (ц=146.6201 °)
4 импульс ДИ,=30.41223 ДИ2=0.5809005 q>3=-0.7696386 (и=315.903 °)
Д/г=0.8759396 (751.2758с) сформированное отклонение по времени
Д/„=0.8176375 (701.2713с) номинальное отклонение по времени
btaj= \t„ - &tr= -0.05830208 (-50.00453с) промах по времени на данной итерации
Д/=ДН-Д/О,=0.8176375-0.05830208=0.7593354 отклонение времени для
следующей итерации
2 итерация
Д/=0.7593354 (651.2667с) Используемое на итерации время
Да,=0.005128624 Да2=0.01820245
178
дд*=0.02333108
1 импульс ДИ,=11.06706 АИг=-0.2113906 (р,=-97.97196 (и=146.6201 °)
2импульс AHt=8.795837 ДИ;=0.1680083 <р2=-95.01742 (и=315.903 °)
3 импульс АИ,=39.27907 ДИ2=-0.7502651 <р3=-3.724182 (и= 146.6201 °)
4 импульс ДИ,=31.21808 ДИг=0.596293 <р4=-0.7696386 (и=315.903 °)
Д/г=0.8095131 (694.3031с) сформированное отклонение по времени
Д/„=0.8176375 (701.2713с) номинальное отклонение по времени
Д/а,= Д/„- Д/г= 0.00812438 (6.968117с) промах по времени на данной
итерации
Д/= Д/+ Дга,=0.7593354+0.00812438=0.7674598 отклонение времени для
следующей итерации
3 итерация
Д/=0.7674598 (658.2349с) используемое на итерации время
Дя1=0.005183497 Да2=0.01814758
1 импульс АИ,=11.18547 ДИ/=-0.2136523 <р,=-97.97196 (и=146.6201°)
2 импульс ДИ,=8.889947 ДИ2=0.1698059 <р2=-95.01742 (и=315.903°)
3 импульс ДИ,=39.16066 ДИг=-0.7480033 <р3=-3.724182 (ц=146.6201°)
4 импульс ДИ,=31.12397 ДИг=0.5944954 <р4=-0.7696386 (ц=315.903°)
Дгг=О.8172706 (700.9566с) сформированное отклонение по времени
Д/„=0.8176375 (701.2713с) номинальное отклонение по времени
Дб>,= Д1„-Д1,=0.0003669154 (0.314696с) промах по времени на данной
итерации
Д/= Дг+ Дга,=0.7674598+0.0003669154=0.7678267 отклонение времени для
следующей итерации
4 итерация
Д/=0.7678267 (658.5495с) используемое на итерации время
Да,=0.005185975 Да2=0.0181451
1 импульс ДИ,=11.19082 ДИ2=-0.2137545 р,=-97.97196 (u= 146.6201 °)
2импульс ДИ,=8.894197 ДИ2=0.169887 <р2=-95.01742 (и=315.903°)
3 импульс ДИ,=39.15532 ДИг=-0.7479012 <р3=-3.724182 (ц=146.6201°)
4 импульс ДИ,=31.11972 ДИг=0.5944142 <р4=-0.7696386 (и=315.903°)
Д^=0.8176209 (701.257с) сформированное отклонение по времени
Д/„=0.8176375 (701.2713с) номинальное отклонение по времени
Д/а,= Дг„-Дгг=1.657073е-005 (0.01421238с) промах по времени на
Данной итерации
Ди= Д/+ Дга,=О.7678267+1.657073е-005=0.7678433 отклонение времени для
следующей итерации
5 итерация
Ди=0.7678433 (658.5638с) Используемое в начале итерации время
Да1=0.005186087 Да2=0.01814499
1 импульс ДИ,=11.19106 ДИ2=-0.2137591 <р,=-97.97196 = 146.6201°)
179
2 импульс ДИ,=8.894389 ДИг=О.1698907 (р2=-95.01742 = 315.903°)
3 импульс ДИ,=39.15507 ДИ=-0.7478966 ср3=-3.724182 = 146.6201°)
4 импульс ДИ,=31.11953 ДИг=0.5944106 ср4=-0.7696386 = 315.903°)
Д/г=0.8176368 (701.2706с) сформированное отклонение по времени
Д/=0.8176375 (701.2713с) номинальное отклонение по времени
А/о,= Дг„- Д/г=-7.483718е-007 (-0.0006418635 с) промах по времени на данной
итерации
После пяти итераций первоначальный промах в 701.2713с
становится равным 0.00064с, т.е. ошибка прилета в точку встречи
меньше 3 м.
4.3. Невырожденное решение некомпланарной задачи
встречи
4.3.1. Численное определение параметров оптимального
шестиимпульсного решения. Рассматривается невырожденное
решение (Х6 ^0), когда годограф базис-вектора имеет вид спирали в
пространстве (p,X.,v). При определенных характеристиках этой
спирали существует шестиимпульсный оптимальный маневр. Первый
импульс скорости прикладывается в начале первого разрешенного
интервала маневрирования (спираль пересекает сферу в начальный
момент времени 0 = 0). Второй и третий импульсы скорости
прикладываются внутри первого витка полета в момент касания
спирали и сферы. Четвертый и пятый - на последнем витке полета в
точках касания, а шестой импульс скорости снова соответствует
пересечению сферы в конечный момент времени 0Z. Как показано в
[170], другого распределения импульсов скорости по виткам быть не
может. Таким образом первый и последний импульсы скорости
максимально разнесены, что позволяет уменьшить затраты
суммарной характеристической скорости на обеспечение встречи, т.к.
КА максимально долго находится на переходной орбите.
Касание спирали и сферы в четырех внутренних точках
возможно только, если выполнены следующие условия «симметрии»
спирали:
ц(о) = -ц(е/), х(о) = x(ez), v(o) = -v(ez). (4.п)
Такая «симметричность» спирали приводит к симметричности
моментов приложения импульсов, то есть:
180
е2 = Qf -е5, е3 = Qf -е4. (4.12)
Таким образом, достаточно найти углы приложения и
ориентацию импульсов скорости одного интервала маневрирования,
аналогичные параметры импульсов скорости другого интервала
могут быть найдены из условий (4.11), (4.12). Для нахождения этих
параметров необходимо найти коэффициенты X, (z=l,... , 6),
определяющие положение спирали.
Условия (4.11) и (1.19) приводят к соотношениям:
-Х2 = -X2cos0A +X3sin0z,
-2Х, -2Х3 = 2Х, + 2Х2 sin0/ + 2Х3 cos0z -3X60Z, (4.13)
Х5 = Х4 sin Qf + Х5 cos 0Z,
которые позволяют сократить число независимых параметров
спирали до трех.
Заметим, что, исходя из соотношений (4.13), можно заключить,
что в числе этих трех параметров обязательно должны быть
представители пар Х2 и Х3, Х4 и Х5, Xj и Х6. Кроме того, параметр Х6
имеет наибольшее влияние на поведение спирали, поэтому логично
включить его в число независимых параметров. В качестве
независимых параметров спирали были выбраны Х3, Х5, Х6.
Поиск величин Х3,Х5,Х6 производился при помощи
последовательного применения двух различных программных
комплексов [31]. Единственным входным параметром является длина
интервала маневрирования 0/.
Последовательное применение двух программ позволяет для
каждого 0у полностью определить характеристики спирали,
касающейся сферы в четырех внутренних точках
Таким образом, по заданной продолжительности встречи
определяются моменты приложения импульсов скорости и их
ориентация. Можно построить представляющие большой интерес
зависимости изменения этих параметров маневров при изменении
продолжительности встречи.
4.3.2. Характеристики оптимального шестиимпульсного
решения. На рис. 4.4 представлены 02 и 03 - моменты приложения
второго (нижний ряд) и третьего (верхний ряд) импульсов скорости в
181
зависимости от общей длины интервала перелета. Предполагается,
что первый импульс скорости прикладывается при 0!=О.
Из рисунка видно, что графики практически повторяются для
различных 0/. Для того чтобы оценить эту близость, данные
зависимости целесообразно изобразить на одном рисунке, отбросив
для каждой зависимости целую часть витков у аргумента 0/, до витка
на котором начинает существовать шестиимпульсное решение.
Рис. 4.4. Моменты приложения второго и третьего импульсов
Обозначим отбрасываемую часть 0. Для первых зависимостей
02 и 03 0 = 2, для вторых 0 = 3 и т.д. Для каждой зависимости
оставшаяся часть 07, обозначим ее 0^, принадлежит интервалу
0^е[О,2], причем решения существуют при Q'f е [0.9,1.4]. Введем
переменную 0’ = 0.50^ и построим зависимости моментов
приложения второго и третьего импульсов 02 и 03 от 0*. На рис. 4.5 и
4.6 приведены эти зависимости, полученные в результате работы
второго программного комплекса. На легенде каждого из рисунков
отображена отброшенная длина интервала маневрирования 0.
182
Рис. 4.5. Момент приложения второго импульса
Рис. 4.6. Момент приложения третьего импульса
183
Из рисунков 4.5, 4.6 видно, что зависимости 02 и 03 от 0’ для
различных 0 практически совпадают. Расхождения разных кривых
наблюдаются, когда 0’ приближается к концу интервала
существования невырожденного шестиимпульсного решения. Это
связано с ошибками определения параметров решения,
возрастающими при вырождении спирали в эллипс при приближении
0* к 0.7. При этом параметр л6 уменьшается до нуля. Проблема с
определением параметров решений при 0*>О.7 существует, но при
такой продолжительности встречи можно воспользоваться
результатами предыдущего параграфа, в котором предложен простой
и надежный алгоритм поиска параметров вырожденных решений
задачи встречи, которым как раз соответствует годограф базис-
вектора в форме эллипса. Как следует из этих графиков, разность
между вторым и третьим моментами приложения импульсов
скорости составляет практически половину витка, и в основном не
превышает 10°. Поэтому в первом приближении можно считать, что
интервал между вторым и третьим (а значит, между четвертым и
пятым) импульсами составляет половину витка.
На рис. 4.7 и 4.8 представлены курсы первого (PJ и второго
(Р2) импульсов скорости в зависимости от угла 0*.
На обоих графиках заметна схожая тенденция изменения курсов
в зависимости от 0 - медленное падение их величины (по модулю).
Значение 0 как и в предыдущих графиках изображено на легенде.
Курсы второго и третьего импульсов практически совпадают по
модулю, но имеют разные знаки, т.к углы приложения импульсов
скорости отличаются примерно на половину витка. Разница их
величин в основном составляет не более Г.
184
185
Рассмотрим ориентацию импульсов скорости в плоскости
орбиты. На рис. 4.9 представлены тангажи первого импульса для
разной продолжительности встречи (она указана рядом с типом
линии).
6 . двойные витки
Рис. 4.9. Тангажи первого импульса скорости
График показывает, что тангажи импульсов малы. При этом для
встречи продолжительностью более 10 витков углы тангажа не
превышают 1°, аналогичный результат получен и для встречи на
компланарных орбитах. Для тангажей второго и третьего импульсов
скорости получен тот же результат. Таким образом, в качестве
первого приближения, импульсы скорости в плоскости орбиты
можно считать чисто трансверсальными. Если продолжительность
встречи более 10 витков, это предположение верно с хорошей
точностью (около 1 °).
4.3.3. Аппроксимация параметров импульсов аналитичес-
кими функциями. Полученные в предыдущем разделе результаты
позволяют найти простые аналитические формулы для определения
параметров оптимальных маневров. Было показано, что импульсы
скорости в плоскости орбиты можно считать чисто
трансверсальными, а ориентация импульсов скорости вне плоскости
186
для второго и третьего импульсов противоположна. Таким образом,
необходимо найти всего четыре аналитические функции,
аппроксимирующие зависимости моментов приложения второго и
третьего импульсов (в первом приближении можно еще более
упростить задачу, считая, что они отличаются на половину витка) и
курсов первого и второго импульсов.
Из рис. 4.5 и 4.6 видно, что моменты приложения второго и
третьего импульсов 02 и 03 практически не зависят от
продолжительности перелета (целой части витков) 0. Для
аппроксимации зависимостей 02(0’) и 03(0*) используются
полиномы третьей степени:
02(0’) = 724.8(0’)3 -1382.3(0’)2 +1298.90’-317.1,
03 (0’) = -35.9(0’ )3 + 18О.б(0’)2 + 213.90’ +116.6.
Напомним, что 0’ измеряется в долях двойного витка, моменты
приложения импульсов в формулах (4.14) измеряются в долях витка.
В первом приближении зависимость 03(б’) можно не рассматривать
и считать, что 03 (0’) = 02 (0’) + 0.5.
Ошибка аппроксимации в основном не превышает 3°, лишь на
границах приближаясь к 8° для зависимостей с небольшим числом
витков перелета. Такая точность вполне достаточна для получения
приближенного решения. Например, при использовании численных
методов [11] шаг перебора по углам приложения импульсов скорости
(при решении четырехимпульсной задачи) обычно принимается 6°.
На рис. 4.7 и 4.8 видно, что курсы первого и второго импульсов
зависят от общей продолжительности перелета. Для аппроксимации
их зависимости от 0' будем снова применять полиномы третьей
степени, но коэффициенты не будут постоянными, их зависимость от
0 также аппроксимируется полиномами третьей степени:
Р,(0’) = а3(0’)3+а2(0’)2+а,0’ +а0,
р2 (0’) = Ь, (0’ )3 + Ь2 (0’ )2 + 6,0* + Ьо,
где
187
а} = О.4803 -44.76Q2 +1247.410 -10134.39,
а2 = -О.8О03 + 75.58Э2 -2127.970 +18640.44,
a, = О.4403 - 41,9602 +1190.510 -11002.99,
а0 = -О.О803 + 7.6902 - 219.440 + 2112.89,
Ь} =-О.2303 + 22.9102 -654.310 + 2418.01,
b2 = О.3903 - 38.1302 +1116.27 0 - 5726.06,
Ь} = -О.2103 + 2О.7102 - 619.140 + 3854.87,
b0 = О.О403 - 3.6902 +112.370 - 798.44.
Ошибка аппроксимации составляет менее градуса, что вполне
достаточно для получения приемлемого решения.
Таким образом, зная продолжительность встречи (угловое
расстояние от начала первого интервала маневрирования до конца
второго) для шестиимпульсных маневров можно найти углы
приложения импульсов скорости и их ориентацию, используя
аналитические формулы, полученные на основании необходимых
условий оптимальности. Для первого интервала маневрирования
момент приложения первого импульса скорости совпадает с началом
этого интервала, а моменты приложения второго и третьего
импульсов относительно первого импульса задаются формулами
(4.14), курсы первого и второго импульсов задаются формулами
(4.15), курс третьего импульса противоположен курсу второго,
тангажи всех импульсов скорости равны нулю. Параметры импульсов
второго интервала маневрирования «симметричны» параметрам
импульсов первого интервала, согласно формулам (4.11), (4.12).
Используя эту информацию из системы (4.1а)-(4.1е) определяются
величины импульсов скорости.
4.3.4. Сравнение оптимального решения с решением задачи
Ламберта. Сравним затраты суммарной характеристической
скорости, получаемые с использованием оптимального
шестиимпульсного решения и с использованием двухимпульсного
решения.
Для сравнения выбрано двухимпульсное решение, т.к. задача
Ламберта довольно часто используется для решения задачи встречи.
188
Импульсы двухимпульсного решения располагаются на первом и
последнем витках перелета. Перебираются возможные моменты
приложения импульсов скорости на каждом из интервалов
маневрирования, и для каждой пары углов фь ф2 из системы (4.1а)-
(4.1е) определяются шесть величин ДИ„, ДИ„, AHZ„ <р, (/=1,2).
Сравнивая суммы импульсов скорости для различных пар фь <р2,
находятся моменты приложения импульсов, при которых затраты
суммарной характеристической скорости минимальны.
Параметры шестиимпульсного решения определяются с
помощью формул (4.14), (4.15), из системы (4.1а)-(4.1е) при этом
предполагается, что третий импульс отстоит от второго на половину
витка (аналогично для четвертого и пятого импульсов скорости), а
крайние импульсы располагаются на границах интервалов
маневрирования.
Оказалось, что шестиимпульсное решение, удовлетворяющее
условиям оптимальности, может не существовать, даже когда
продолжительность встречи попадает в интервалы существования
шестиимпульсных решений (рис.4.4). Как следует из необходимых
условий оптимальности, у невырожденного шестиимпульсного
решения трансверсальные составляющие импульсов скорости одного
интервала маневрирования положительные, а другого отрицательные.
Однако, используя найденные моменты приложения и ориентации
импульсов скорости, иногда можно получить решение, у которого
разные знаки имеют трансверсальные составляющие импульсов
одного интервала маневрирования.
Рассмотрим пример, когда обе орбиты круговые (Дед=Дф=0),
разница больших полуосей Да=0.01, отклонение плоскости орбиты
пассивного аппарата от плоскости орбиты активного Дг=0.0001,
ДК2=0.0001, активный спутник опережает пассивный (Ди=-50°) в
точке встречи. Общая продолжительность перелета 0 = 5.
Используя формулы (4.14), (4.15), шестиимпульсное решение
можно найти для любой продолжительности перелета, что и было
сделано при решении задачи. Шестиимпульсное решение выгоднее
двухимпульсного при продолжительности до 0* = 0.33. Такая
продолжительность лежит вне диапазонов существования
оптимальных решений, представленных на рис. 4.4. При 0’ = 0.46
получается максимальный выигрыш, который достигает 45%. С
убыванием 0* выигрыш медленно уменьшается, при 0* = 0.38, то есть
189
на границе интервала существования оптимального решения согласно
первой программе, выигрыш составляет 41%. На интервале
0’ е [0.33,0.38] необходимые условия не выполнены (спираль нельзя
вписать в сферу), но знаки трансверсальных составляющих
импульсов одного интервала маневрирования совпадают, как должно
быть у оптимального решения. Преимущество найденного
шестиимпульсного решения подтверждает его сравнение с
двухимпульсным.
4.3.5. Пятиимпульсные решения. Формулы (4.14), (4.15)
можно использовать для расчета пятиимпульсных маневров [32]. Для
этого, увеличивая продолжительность перелета, можно добиться
нулевого первого или последнего импульса. При этом интервал
перелета будет больше заданного, но на самом деле за счет того, что
маневрирование начинается со второго импульса (или заканчивается
пятым) время перелета удовлетворяет требованиям задачи. В
примере, рассмотренном выше, при 0* = 0.469 существует
шестиимпульсное решение практически с нулевым первым
импульсом. При этом второй импульс (при пятиимпульсном маневре
- первый) отстоит от начала интервала с нулевым импульсом
скорости перелета на 0.2 витка. То есть, фактически, такая схема
маневрирования соответствует 0* =0.369. Это позволяет
использовать на интервале 0* е [0.369,0.469] как шестиимпульсное,
так и пятиимпульсное решение, производное из шестиимпульсного
при 0’ = 0.469. В этом случае спираль, которая описывает поведение
годографа базис-вектора, будет начинаться внутри единичной сферы,
но, тем не менее, будет удовлетворять условиям оптимальности (4
касания и 1 пересечение). Длина интервала, на котором такое
решение может быть использовано, определяется расстоянием до
первой точки касания.
На рис. 4.10 представлен график затрат суммарной
характеристической скорости (безразмерной) при использовании
шести-, пяти- и двухимпульсных маневров.
190
£
г
О 026
0.024
О 022
О 02
2-импульсное
0.018 -
0.016
0.014
0 012
6-импупьсное
5-импупьсное
О Q1-----1-------1-------1-----1---------1-------1-------1-------1-----1--------
0.34 0.36 0 38 0.4 0.42 0.44 0.46 0.48 0.5 0 52
6 . двойные витки
Рис. 4.10. Затраты суммарной характеристической скорости
при использовании шести-, пяти- и двухимпульсных маневров.
На рис. 4.10 штриховой линии соответствует шестиимпульсное
решение, штрихпунктирной - решение задачи Ламберта, сплошные
линии соответствуют пятиимпульсным решениям. Видно, что при 0*,
близких к 0.5, шестиимпульсное решение вырождается, но при
О* = 0.51 существует еще одно пятиимпульсное решение,
позволяющее расширить диапазон 0*, при которых можно добиться
выигрыша по сравнению с двухимпульсным решением. При
О’ е [0.51,0.52] шестиимпульсное решение не оптимально (на первом
интервале маневрирования есть разгонный импульс), но оно, тем не
менее, выгоднее двухимпульсного решения.
В таблицах 4.2-4.4 приведены параметры шести- и
двухимпульсных решений для различных значений 0’.
В таблицах представлены трансверсальные и боковые
составляющие (A V, и ДКг) шестиимпульсного решения первого (I) и
второго (II) интервалов маневрирования, моменты приложения
191
второго и третьего импульсов (Аф2 и Аф3), радиальная
трансверсальная и боковая составляющие первого и второго
импульсов двухимпульсного решения (A И21 и АК211), расстояние от
момента приложения соответствующего импульса до границы
интервала перелета (Аф[ и Афц), и затраты суммарной
характеристической скорости в обоих случаях (АИ6 и ДК2).
Из таблицы 4.4 видно, что пятиимпульсное решение не
удовлетворяет необходимым условиям оптимальности. Тем не менее,
оно позволяет добиться заметного выигрыша в затратах суммарной
характеристической скорости.
Таким образом, использование пятиимпульсных маневров,
получаемых из шестиимпульсных, позволяет получить выигрыш в
затратах суммарной характеристической скорости и расширить
область существования оптимальных многоимпульсных решений.
Можно видеть, что хотя оптимальные многоимпульсные
решения существуют далеко не всегда, шести- и пятиимпульсные
решения позволяют добиться значительного выигрыша в затратах
суммарной характеристической скорости по сравнению с решением
задачи Ламберта.
Таблица 4.2. Параметры импульсов при 0’ = 0.33.
А^ 0 0.0037 0.0049 Аф2 = 0.0342
-0.0003 -0.0033 0 Аф3 =0.5719
0.0047 -0.0028 0.0037 А И6 =0.0241
-0.0003 0.0025 -0.004 А И2 =0.0241
0.0201 0.0089 -0.001 Аф; = 0
АИ2// 0.0257 -0.0039 0 Аф/; = 0.8488
Таблица 4.3. Параметры импульсов при 0’ = 0.38.
АК„ 0.002 0.0017 0.0049 Аф2 = 0.0462
А^ -0.0005 -0.0014 -0.0018 Аф3 = 0.6166
0.0019 -0.0006 0.0015 АИ6 =0.014
АИг// -0.0001 0.0004 -0.0016 ДИ, =0.0239
аи2/ 0.0072 0.0092 -0.0001 Аф; = 0
ДГ2// 0.0178 -0.0042 0.001 Аф/; = 0.9443
192
Таблица 4.4. Параметры импульсов при 0* = 0.469.
Д^ 0 0.0029 0.0059 Дср2 = 0.0342
Д^/ -0.0006 -0.0041 0.009 Дф3 =0.5719
д^ 0.000001 -0.000018 0.000035 ДН6 =0.0145
д^ 0.000003 0.000026 0.00014 Д И, =0.0221
дк2/ -0.0227 0.0093 -0.0003 Дф7 = 0
Д^/ 0.028 -0.0043 0.003 Дф„ = 0.1326
4.4. Алгоритм расчета маневров дальнего наведения
Маневрами дальнего наведения называются маневры, целью
которых является перевод КА в заданную окрестность орбитальной
станции, в которой начинает работать аппаратура автономного
сближения, обеспечивающая стыковку КА со станцией [89].
Постановка задачи расчета параметров маневров дальнего
наведения существенно отличается от постановки классической
задачи встречи (другой функционал, многочисленные ограничения
для импульсов скорости), но даже для решения такой нестандартной
задачи можно воспользоваться алгоритмами, описанными в третьей
главе и втором параграфе этой главы.
4.4.1. Постановка задачи. Для обеспечения высокой точности
выполнения терминальных условий, необходимой при расчете
маневров дальнего наведения, используется итерационная схема,
описанная в первой главе. Это позволяет при определении
параметров импульсов скорости воспользоваться довольно простой
системой уравнений (4.1).
При расчете четырехимпульсных маневров дальнего наведения
предполагается, что импульсы скорости прикладываются на двух
интервалах маневрирования, расстояние между которыми не менее
10 витков. На первом интервале маневрирования на углы
приложения импульсов скорости наложены ограничения:
Ф1С" Фь <р?сг Ф2, (4.16)
где Фь Ф2 — заданные множества. Обычно это непрерывные
интервалы, начинающиеся в районе 200°=220° одного витка и
193
заканчивающиеся в районе 60°4-80° следующего витка. Углы
приложения третьего и четвертого импульсов скорости
фиксированы на последнем витке полета:
фЗ=фЗ/, ф4=ф4/ (4.17)
Как правило, эти импульсы скорости прикладываются за
виток и за половину витка до точки встречи.
Для того чтобы ошибки двигательной установки не приводили
к существенному нарушению условия (4.1г), фиксируется
ориентация двух последних импульсов скорости:
^L = ^L, AJZ=O (z=3,4), (4.18)
А^ ап
а для двух первых импульсов скорости в функционал задачи
вводятся штрафные члены вида [89]:
С, = ^(о„ДК„.-а„.Д^)2+(«2+^)Д^,
здесь a„=2-2cos<p„ a/;=-3+4sin<p„ к=к*с>\у, к*- заданный коэффициент
(£*>0), 8\у -принятая максимальная ошибка ориентации импульсов
скорости.
Требуется определить &Vri, AVti, AVzi, <р, (z= 1,...,N),
минимизирующие функционал
4 .------------- 2
^=ZVA^+A^+A^+Ze,-
<=i и
при ограничениях (4.1а)-(4.1е), (4.16)-(4.18).
4.4.2. Алгоритм решения. Введем дополнительное
ограничение:
ДКн=ДКг2=0, (4.19)
упрощающее задачу. Отметим, что получающееся при этом решение
близко к оптимальному (как было показано в третьей главе у
оптимального многовиткового решения, как правило, радиальные
составляющие импульсов скорости малы или равны нулю).
194
Расстояние от точки встречи до первого интервала
маневрирования существенно превосходит величины самих
интервалов. Поэтому как всегда можно перейти от уравнения (4.1г)
к приближенному уравнению, определяющему сумму
трансверсальных составляющих импульсов скорости первого
интервала маневрирования:
ДКЛ=ДИ„+ДИ(2«-^, (4.20)
3<ро
где <ро - некоторая точка первого интервала маневрирования. Из
(4.1 в) определяется сумма трансверсальных составляющих двух
последних импульсов скорости:
Л Г/ Л Г/ Л г/
2 Зср0
(4.21)
Четырехимпульсному решению системы (4.1а)-(4.1в) при
ограничениях (4.18), (4.19) на плоскости ех,еу соответствует ломаная
ABCDK (рис. 4.11), с началом и концом в точках А и К
соответственно.
Рис. 4.12. Вектору эксцентриситета
орбиты ожидания соответствует
отрезок LN
Рис. 4.11. Геометрическая
интерпретация маневров
дальнего наведения.
При планировании экспедиций начальная разность фаз Ди
орбитальной станции и активного КА выбирается таким образом,
чтобы у оптимального решения знаки трансверсальных
195
составляющих всех импульсов скорости совпадали (это возможно,
так как орбита выведения КА всегда лежит внутри орбиты станции).
В этом случае из ограничения (4.20) следует, что точка С,
соответствующая вектору эксцентриситета орбиты ожидания,
принадлежит кругу с центром в точке А радиуса 7?i= I 2AE,i | (рис.
4.12). Из (4.17), (4.18) и (4.21) следует, что точка С также должна
принадлежать отрезку L'N (рис. 4.12). На этом рисунке
L'L"=NN'=bVab KL"1L'L", NN'IN'K, L"K=bVin^, KN'=bVax^.
ai4 ai3
Таким образом, точка С принадлежит отрезку LN. Положение точек
L и N уточняется при помощи итерационной процедуры, которая
несколько отличается от процедур, рассмотренных в главе III, т.к.
необходимо учитывать радиальные составляющие импульсов
скорости второго интервала маневрирования. Как видно из рисунка
4.12, точке L соответствует трехимпульсное решение, в котором на
первом интервале маневрирования прикладывается один импульс
скорости. Неизвестные величины трансверсальных составляющих
импульсов скорости и угол приложения импульса скорости первого
интервала маневрирования легко находятся из уравнений (4.1а)-
(4.1в), (4.20). Если при найденных параметрах маневра условие
(4.1г) не выполнено с заданной точностью, то проводится
следующая итерация. На второй и последующих итерациях вместо
(4.20) используется уравнение (4.1г), в которое подставлено
значение угла приложения импульса скорости первого интервала
маневрирования, вычисленное на предыдущей итерации.
Аналогичным образом определяются параметры маневра,
которому соответствует точка N. Это также трехимпульсный
маневр, так как на втором интервале маневрирования только первый
импульс скорости отличен от нуля. В задаче пять неизвестных: оба
угла приложения импульсов скорости первого интервала и
величины трансверсальных составляющих трёх импульсов
скорости, следовательно, можно зафиксировать угол приложения
одного из импульсов, а затем воспользоваться указанной
итерационной процедурой.
Покажем, что когда положение отрезка LN известно, то можно
определить углы приложения импульсов скорости <р| и <р2, при
которых функционал F близок к своему минимальному значению.
196
Анализируя изменение входящей в функционал F суммы
(21+£?2, можно показать, что ее минимум достигается, если угол
приложения хотя бы одного из импульсов скорости первого
интервала маневрирования лежит в малой окрестности линии узлов,
Дз
eG = (9e((pz), где <pz = arctg-^--пк(к = 1,2,...). В этом случае
затраты суммарной характеристической скорости на изменение
плоскости орбиты близки к минимально возможным:
д/ = д = 7 Az2 + ДК2 (4.22)
Будем предполагать, что углы множества G принадлежат
одному из интервалов Ф] или Ф2. Это допустимо, т.к. длина каждого
из разрешенных интервалов маневрирования превосходит полвитка.
Определим теперь, каким должен быть второй из углов
приложения импульсов скорости первого интервала
маневрирования, чтобы суммарная характеристическая скорость Л Р)
+ Д К/ была минимальна при условии, что угол
/=1
приложения одного из импульсов скорости принадлежит множеству
G. На рис. 4.13 г-й импульс скорости изображается отрезком,
проекции которого на оси ДК, и ДИ, равны |ДИ„| и |ДИг,|
соответственно. Очевидно, что ДИ1=7д^2 + ДИД + 7дрД + ДИД
соответствует длина ломаной АРМ. Из (4.20), (4.22) следует, что
минимально возможное значение ДИ, равно Д И1тт=7ДИ,2 + ДИД .
Оно достигается, если , а IДИг11 +1ДKz21 =ДИ™ (на рис.
ДИ„ KVa
4.13 такому решению соответствует отрезок АЕ). Так подобрать
величины ДИг1 и ДИ,2 удается лишь, когда углы приложения обоих
импульсов скорости первого интервала маневрирования
принадлежат множеству G (импульсы скорости прикладываются на
линии пересечения плоскостей орбит). Это четвертый тип
оптимальных решений, рассмотренных во второй главе, когда
годограф базис-вектора вырождается в отрезок. Решение этого типа
существует, если на плоскости ех,еу прямая, проходящая через
начало координат под углом <pz к оси абсцисс, пересекает отрезок
197
LN. Если прямая не пересекает отрезок LN, то изменение плоскости
орбиты производится тем из импульсов скорости, угол приложения
которого принадлежит множеству G (прикладывается на линии
пересечения плоскостей орбит). Величина боковой составляющей
этого импульса скорости равна AEzm. Для решений такого типа ДИ,
минимальна тогда, когда максимальна трансверсальная
составляющая импульса скорости, изменяющего ориентацию
плоскости орбиты. Например, если плоскость поворачивается
вторым импульсом скорости, то ADE<AD'E при DM’>D'M' (рис.
4.13).
Легко видеть, что для того чтобы трансверсальная
составляющая импульса скорости, поворачивающего плоскость
орбиты, была максимальна, необходимо, чтобы на плоскости ех,ег
отрезок, соответствующий другому импульсу скорости первого
интервала маневрирования, был перпендикулярен LN. Угол
приложения этого импульса должен принадлежать множеству
Фи =ф’ - —-2ли (и=1,2, ...), где ср’ = arctg—-exL, eyL, exN, eyN-
2 exN~eXL
координаты точек L и N соответственно.
Рис.4.13. Сравнение суммарной
характеристической скорости
решений
Если знаки трансверсальных
Рис.4.14. Углы приложения
третьего и четвёртого
импульсов не фиксированы
составляющих не совпадают или
угол ср„ не принадлежит разрешенным интервалам маневрирования
(4.16), то оптимальным будет решение, переходной орбите которого
198
соответствует один из концов отрезка LN. Границы отрезка LN
определяются при условии, что углы приложения импульсов
скорости первого интервала маневрирования принадлежат заданным
множествам (4.16).
Суммарная характеристическая скорость найденного решения
определялась при ограничении (4.19) и условии, что угол
приложения одного из импульсов скорости первого интервала
маневрирования принадлежит множеству G, поэтому ее необходимо
сравнить с АЕ„, - минимально возможной суммарной харак-
теристической скоростью перехода в заданную точку встречи. Если
их разность меньше AF - допустимой точности определения
минимума функционала F, то задача считается решенной.
Чтобы найти АЕт, требуется определить суммарную
характеристическую скорость маневра, орбите ожидания которого
соответствует фиксированная точка отрезка LN, затем, варьируя
положение этой точки на отрезке LN, определяется само значение
Прямая, проходящая через точки L и N, задаётся уравнением
ey=d+bex,
, z . eyN ~ eyL , eyN — eyL
где d = (eyL - exl) -А-, b = -4---у-.
exN exL SxN SxL
Для этой прямой зависимость AP}m минимальной
характеристической скорости импульсов первого интервала
маневрирования от ех имеет вид:
ДЕ1т(ег) = Д„,2 + - Д ИД + 7( Д Ez,„2 - £2 + Д И/ )2 + 4( Д К (rf + J - AzeJ,
где E2=(d+bex)2+e2.
Здесь было использовано выражение для суммарной
характеристической скорости переходов со свободным временем
между близкими почти круговыми некомпланарными орбитами,
приведенное в параграфе 2.2 (невырожденный случай).
Зависимость суммарной характеристической скорости
импульсов второго интервала маневрирования А Гц от ех имеет вид:
199
A Ец(ех)-А Ещ+( A А EIU.) —--—,
exN ~ exL
где А(/ш=АМ1+(—)T2> АК11Л=АКш(1+(^)2)1/2.
ai3 an
Минимизируя суммарную характеристическую скорость
четырехимпульсного маневра АУ=А71т(ех)+АУп(ех) на отрезке
[exi,eXjV], можно определить величину AVm. Если АЕ^ -^Vm<AF,
задача считается решенной. В противном случае найденное решение
используется в качестве начальной точки для минимизации
функционала F методом деформируемого многогранника [121] или
численными методами, изложенными в следующей главе.
Алгоритм применим и в случаях, когда величина импульсов
скорости ограничена снизу, или когда требуется, чтобы импульсы
скорости второго интервала маневрирования были примерно равны
по величине и т.д.
Рассмотрим, например, как изменяется алгоритм, когда углы
приложения импульсов скорости второго интервала маневрирования
не фиксированы. В этом случае их можно варьировать, чтобы
уменьшить величину функционала F. Как было показано в главе III,
решения с совпадающими знаками трансверсальных составляющих
всех импульсов скорости существуют, если пересекаются
окружности радиусов 7?i и Т?2 (рис. 4.14). Точки, соответствующие
параметрам орбит ожидания таких решений, должны принадлежать,
множеству Т точек пересечения кругов. Среди этих точек надо
найти такую, чтобы ДЕ] была минимальной.
Если прямая, проведенная под углом срг к оси ех, пересекает
дугу EiE2 (например, прямая АР' на рисунке 4.14), то, как и при
фиксированных углах <р3,ф4, для любой точки отрезка РР' выбором
соответствующего отношения величин AEZ| и AEz2 можно добиться,
чтобы ДЕ] достигала своего минимально возможного значения
AE]mff). Угол приложения третьего импульса скорости выбирается
произвольно, а угол приложения четвертого импульса с ним
однозначно связан и легко определяется.
Если прямая, проходящая под углом срг, не пересекает дугу
Е]Е2 (например, прямая АС на рисунке 4.14), то на ней надо найти
такую точку С, чтобы АС была максимальной при условии, что
AC+CD=AV\. Легко видеть, что для того, чтобы АС была
200
максимальной, необходимо чтобы точка D принадлежала отрезку
СК (рис. 4.14).
У оптимального допустимого перехода ACDK на втором
интервале маневрирования прикладывается один импульс скорости,
угол приложения которого определяется по формуле:
ср3 = larctg
ср де (р
Да cos — - Aecos(arctg(—- —)
2 Лех 2
(D Дв (п
-Ла sin + Де sin(arctg(-^-) - -у)
- 2 пи
где Ле = J Де* + Ае* .
4.4.3. Примеры расчетов. Для примера рассмотрим решение
трех задач [9]. У решения задачи 1 углы приложения импульсов
скорости первого интервала маневрирования принадлежат
множеству G и связаны соотношением (р2-<Р1=я (оптимальное
положение точки С на отрезке LN -точка его пересечения прямой,
проведенной под углом cpz). При решении задачи 2 учитывалось
дополнительное ограничение: величины импульсов скорости
второго интервала маневрирования должны быть примерно
равными (точка С находится в середине отрезка LN). Начальные
условия для задачи 2 практически совпадают с начальными
условиями для задачи 1. У решения задачи 3 только один из углов
приложения импульсов скорости первого интервала
маневрирования принадлежит множеству G (оптимальную точку на
отрезке LN необходимо найти).
Исходные данные и результаты решения задач приведены в
таблицах 4.5-4.9.
Таблица 4.5
№ задачи Леу Де, Ла Аг Az АН
1 -23.77 -22.88 108.83 -10005.87 -12.23 0.36
2 -23.75 -21.56 108.82 -10003.41 -12,19 0.31
3 -23.96 -22.41 109.06 -10004.56 -12.05 0.40
201
Таблица 4.6
№ задачи Ф, Ф2
фи, рад фи, рад Ф21, рад Ф22, рад
1 -85.217 -79.959 -85.217 -79.959
2 -85.217 -79.959 -85.217 -79.959
3 -77.79 -73.449 -77.79 -73.449
Таблица 4.7
№ задачи F ДИ FP
1 75.63 57.35 75.68
2 78.24 60.10 75.71
3 74.39 57.72 74.04
Таблица 4.8
№ задачи -ф. ди,, ди„ диг1 -ф2 ДИ,2
1 83.282 0.23 28.36 -8.28 80.140 0.10
2 83.736 0.33 26.38 0 80.136 0.09
3 77.002 0.25 27.80 -12.06 73.449 0.19
Таблица 4.8 Окончание
№ задачи ДИг2 ДИг2 ДИг3 ДИ,3 ДИ,,4 ДИ,4
1 12.95 3.95 0 1.47 5.46 12.87
2 12.06 12.19 0 7.75 2.97 7.01
3 15.98 0 0 2.82 3.37 7.94
202
Таблица 4.9
№ Реш. F ДИ -Ф1 -ф2 ДИ, ДИ2 ДИ3 ди4
1 Т1М 59.95 77.774 73.861 31.97 16.27 11.22 0.54
2 76.21 59.64 77.062 73.861 28.62 19.33 0.54 11.16
3 76.20 59.63 77.070 73.861 28.61 19.33 0.64 11.05
4 74.53 57.86 77.002 73.743 31.00 15.22 0.53 11.11
5 74.39 57.72 77.002 73.449 30.30 15.99 2.82 8.62
В таблице 4.5 приведены отклонения начальной орбиты от
заданной. Безразмерные отклонения для наглядности умножены на
И0=7771 м/с, которая соответствует го=66ОО км. В таблице 4.6
приведены разрешенные для приложения первых двух импульсов
скорости интервалы маневрирования (в радианах, отсчитываются от
точки встречи). Углы приложения третьего и четвертого импульсов
скорости фиксированы: <р3=-360°, <р4=-180°. В таблице 4.7 приведены
значения функционала F и суммарной характеристической скорости
А К. Для контроля точности решения приведены значения
глобального минимума функционала Fp, полученные при помощи
численного алгоритма, использующего перебор точек пространства
Ф1,<р2, этот алгоритм описан в главе V.
В таблице 4.8 приведены параметры решений каждой из задач.
В таблице 4.9 для задачи 3 приведены результаты решений для всех
анализируемых точек пространства фьфг-
Рассмотрим результаты решения каждой из задач. У решения
задачи 1 углы приложения импульсов скорости первого интервала
маневрирования принадлежат множеству G, а трансверсальные
составляющие всех импульсов скорости положительны. В этом
случае найденное решение является глобально оптимальным, что
подтверждает проверка (см. последний столбец таблицы 4.7).
Небольшое отличие в пользу аналитического решения объясняется
тем, что при численном решении практически невозможно точно
попасть на углы из множества G.
Иногда при решении задачи требуется, чтобы величины
импульсов скорости последнего интервала маневрирования были
примерно равными. Предложенный алгоритм позволяет получать
203
такое решение. Для этого надо воспользоваться итерационной
процедурой аналогичной процедуре, приведенной в предыдущей
главе.
При решении задачи 2 коэффициент =Д Иг4/(Д И,3-Д И,4),
определяющий положение точки С на отрезке LN, был выбран
равным 0.5. Для того, чтобы величины третьего и четвертого
импульсов полностью совпадали, следовало взять к =0.4769. При
решении задачи один из углов приложения импульсов скорости
первого интервала маневрирования выбирается на линии узлов, а
другой угол определяется при помощи итерационной процедуры.
Среди всех углов множества G допустимым является только один,
когда плоскость орбиты меняется вторым импульсом скорости.
Из таблицы 4.8 видно, что отношение боковой составляющей
второго импульса скорости к его величине в решении задачи 2
существенно превосходит аналогичные отношения в решении
задачи 1. Вследствие этого увеличивается суммарная
характеристическая скорость перехода, и, следовательно, величина
функционала F для задачи 2. Этот вывод подтверждает результаты,
приведенные в таблице 4.7.
В задаче 3 у решения с углами приложения обоих импульсов
скорости первого интервала маневрирования из множества G, знаки
трансверсальных составляющих не совпадают. В соответствии с
приведенным алгоритмом принимается, что множеству G
принадлежит только один из углов, а угол приложения другого
импульса скорости первого интервала маневрирования необходимо
определить.
Для приложения второго импульса скорости первого интервала
маневрирования подходит одна точка множества G (ф2=-73.861). С
помощью итерационной процедуры определяется такой угол
приложения первого импульса скорости, чтобы параметрам орбиты
ожидания соответствовала точка N. Так как учитывается
ограничение на минимально возможную величину импульса
скорости, то ДТ,4 приравнивается ее минимально возможному
значению 0.5м/с. Параметры решения приведены в первой строке
таблицы 4.9. Во второй строке таблицы приведены параметры
решения, вектору эксцентриситета орбиты ожидания которого
соответствует точка L. После того как определено положение
204
отрезка LN, находится оптимальное решение (третья строка таблицы
4.9), у которого на плоскости ех,еу отрезок, соответствующий
первому импульсу скорости, перпендикулярен отрезку LN.
Для приложения первого импульса скорости тоже подходит
только одна точка множества G (cpi=-77.002). Решение,
соответствующее точке L, существует, его параметры приведены в
четвертой строке таблицы 5. Решение, вектору эксцентриситета
орбиты ожидания которого соответствует точка N' (Р,4=0.5м/с), и
решение, у которого направление второго импульса скорости на
плоскости ех,еу перпендикулярно отрезку LN', не являются
допустимыми, так как используемые в них углы из множества G, не
принадлежат разрешенному интервалу маневрирования. Первым
допустимым углом будет угол <р2~-73.449. Это решение приведено в
пятой строке таблицы 4.9. Как было показано, в этом случае
найденное решение является оптимальным среди решений, у
которых угол приложения первого импульса скорости принадлежит
множеству G. Сравнение его с третьим решением из таблицы 4.9
показывает, что оно является и глобально оптимальным, поэтому
его параметры и приведены в таблицах 4.7, 4.8.
Время решения задач существенно меньше, чем в численных
алгоритмах, приведенных в [89] [4], [7]. Если углы приложения
третьего и четвертого импульсов скорости не фиксированы, то
время решения задачи в приведенном алгоритме не меняется, а в
численных алгоритмах оно увеличивается на порядки.
Напомним, что для наглядности во всех таблицах
безразмерные величины приведены умноженными на Е0=7771 м/с
(го=66ОО км).
4.5. Сравнение различных типов решений (НАСА,
ЦУП, комбинированное)
Часто для решения задачи встречи на некомпланарных орбитах
предлагается использовать довольно простую схему
маневрирования. Двумя импульсами скорости первого интервала
маневрирования формируется круговая орбита, период которой
обеспечивает необходимое время прилета к началу второго
интервала, затем импульсами второго интервала обеспечивается
выход в точку встречи на заданной орбите. На одном из этих
интервалов или на промежуточном витке на линии пересечения
205
плоскостей орбит прикладывается боковой импульс скорости,
совмещающий плоскости орбит. Такая схема маневрирования
(будем называть её «раздельная») привлекательна своей простотой,
но требует излишних затрат суммарной характеристической
скорости. При применении такой схемы даже маневры в плоскости
орбиты могут быть не оптимальными. Данная схема применялась,
например, для стыковки Shuttle с международной орбитальной
станцией [148], [179].
На рисунке 4.15 приведен пример, когда использование
круговой орбиты ожидания не увеличивает затрат суммарной
характеристической скорости. Для этого необходимо, чтобы точка с
координатами (0,0) попала в область G, пересечения кругов,
имеющих радиусы и R2 (напомним, что R2= I Дяд I).
Встреча будет осуществляться с помощью четырёх импульсов,
которым соответствуют отрезки АВ,ВС,CD,DK. Однако если
требуется незначительное изменение большого по величине вектора
эксцентриситета (такой случай изображен на рисунке 4.16), то
перелет с круговой орбитой ожидания может быть не оптимальным.
Легко видеть, что длина ломаной ABCDK (рис. 4.16),
соответствующей затратам суммарной характеристической скорости
«раздельной» схемы маневрирования, будет значительно больше
суммы радиусов Д и R2, которая соответствует затратам суммарной
характеристической скорости оптимального перелета между
компланарными орбитами.
Рис.4.15. Энергетика разных схем
маневрирования совпадает
Рис.4.16. Энергетика разных схем
маневрирования сильно отличается
206
Сравнить полные затраты суммарной характеристической
скорости с учетом затрат на поворот плоскости орбиты позволяет
рисунок 4.17. Предположим, что мы имеем дело со случаем,
изображенным на рисунке 4.15
AVZ
g A\4l+AVz2
7
’77'-d
/7__________D
A AVfl
__JA4
ZV;AVt
AVfl+AVfli
Рис.4.17. Сравнение суммарной
характеристической скорости
решений
поворот плоскости орбиты AEzm,
и «раздельная» схема
маневрирования имеет те же
затраты на компланарную
встречу, что и оптимальное
решение. Сумма трансверсаль-
ных составлящих импульсов
скорости первого интервала
маневрирования равна ДКЛ, ей
соответствует отрезок AD (рис.
4.17). Сумма трансверсальных
составляющих импульсов
скорости второго интервала
маневрирования равна АЕ,П, ей
соответствует отрезок DN.
Минимальные затраты на
им соответствует отрезок AL.
Импульс скорости, изменяющий плоскость орбиты, располагается
между вторым и третьим маневрами в плоскости орбиты. Таким
образом, «раздельной» схеме маневрирования соответствует
ломаная ADPE. Схеме маневрирования, используемой при
управлении движением «Союзов» и «Прогрессов», в которой
импульсы скорости первого интервала маневрирования имеют и
трансверсальные, и боковые составляющие, а импульсы второго
интервала только трансверсальные составляющие, соответствует
ломаная АРЕ (рис. 4.17). Если прямая, проведенная под углом cpz,
пересекает отрезок LN (рис. 4.12), то т.Р принадлежит отрезку LE
(рис. 4.17). Оптимальному решению, у которого коррекция
положения плоскости орбиты производится всеми четырьмя
импульсами скорости, имеющими как трансверсальные, так и
боковые составляющие, соответствует отрезок AM, импульсам
скорости первого интервала соответствует отрезок АО, импульсам
второго - ОМ.
Очевидно, что длина ломаной ADPE больше длины ломаной
АРЕ, в свою очередь длина ломаной АРЕ больше длины отрезка AM.
207
При уменьшении затрат на поворот плоскости орбиты (при
уменьшении длины отрезка DP) разница в затратах суммарной
характеристической скорости всех трех типов решений
уменьшается.
Поскольку время старта обычно выбирается таким образом,
чтобы в момент выхода на орбиту активный КА оказался в
плоскости орбиты КА-цели, то затраты суммарной
характеристической скорости на поворот плоскости орбиты
значительно меньше затрат на изменение, например, большой
полуоси орбиты. В этих случаях все три типа решений имеют
близкую суммарную характеристическую скорость. Как будет
показано в седьмой главе, в более сложных задачах суммарная
характеристическая скорость решений может отличаться очень
существенно.
4.6. Встреча на некомпланарных орбитах, осуществля-
емая за счет маневрирования на многих витках.
В рассмотренных выше задачах предполагалось, что маневры
исполнялись на двух разнесенных интервалах маневрирования.
Между этими интервалами находятся несколько витков, на которых
импульсы скорости не прикладываются.
Довольно часто встречаются ситуации, когда двигательная
установка относительно маломощная, а перелет в заданную точку
требуется совершить достаточно быстро. В этом случае приходится
маневрировать на большом числе последовательных витков, а
запрещенных для маневрирования витков относительно немного. В
этом разделе будет показано, что метод решения, примененный в
первых разделах главы, применим и для такой схемы
маневрирования. Величины всех маневров должны быть примерно
одинаковы, это позволяет уменьшить суммарную
характеристическую скорость маневров и использовать импульсное
приближение при определении их параметров.
4.6.1. Определение длины подинтервалов. Весь интервал
маневрирования (число витков разрешенных для маневрирования А)
разбивается на два подинтервала (Aj и N2). Первоначально
предполагается, что подинтервалы имеют одинаковую длину {N\=N2,
N\+N2=N) при четном N, и отличаются на единицу при нечетном. На
208
интервале могут быть витки, запрещенные для маневрирования,
поэтому номера витков, на которых разрешено маневрирование на
подинтервалах, обозначим их Nib N2j (l<i<Nvl< j <N2), не
обязательно идут по порядку. При определении истинных величин Nx
и AS можно выделить четыре этапа.
Этап 1. Используя уравнение для времени и общего изменения
большой полуоси, оценивается изменение большой полуоси на
каждом из подинтервалов.
Этап 2. Рассчитываются параметры двухимпульсного маневра
перехода между орбитами (алгоритмы расчета приведены в главе II) в
предположении, что корректируется суммарное изменение большой
полуоси на обоих подинтервалах, слагаемые рассчитаны на
предыдущем этапе.
Этап 3. Каждый из двух рассчитанных маневров делится между
подинтервалами, пропорционально изменению большой полуоси на
подинтервалах.
Этап 4. На данном этапе каждый из двух маневров, отнесенных
к подинтервалу, делится на число витков на этом подинтервале.
Таким образом, два маневра первого подинтервала маневрирования
разбиваются на Nx одинаковых частей, прикладываемых на разных
витках. Аналогично маневры второго подинтервала маневрирования
разбиваются на N2 одинаковых частей При
незначительном изменении элементов орбит одинаковая
продолжительность маневров на витках оптимальна.
Если величина маневров на витке, например, первого
подинтервала заметно превосходит величину маневров на витке
второго подинтервала, то число витков маневрирования на первом
подинтервале увеличивается на единицу, а на втором уменьшается на
единицу. Осуществляется переход к первому этапу вычислений.
Процедура прекращается, когда соотношение величин импульсов
становится противоположным, или когда интервал уменьшается до
одного витка. Из двух граничных случаев выбирается тот, при
котором меньше величина маневров на втором интервале. В
результате этой процедуры определяются величины Nx и N2.
Ниже будет подробно рассмотрен каждый из этапов.
Этап 1. Используя уравнения для времени прилета в точку
встречи и для изменения большой полуоси, оцениваются суммарные
209
величины трансверсальных составляющих ДК,Ь ДК(11 соответственно
на первом и втором подинтервалах маневрирования:
Z 42<Nap - NJ - + £ 3O(.Nap - = д/,
7Vi /V2
2ДК,! + 2ДК,„ =Да,
где Аор-номер витка встречи.
Затем можно приближенно оценить величину изменения
большой полуоси орбиты КА маневрами на первом подинтервале
маневрирования:
До[«2Д Vtl,
и маневрами на втором подинтервале маневрирования:
ДдцлДа- 2ДК,].
Этап 2. Аналогично тому, как это делалось в первом параграфе
данной главы, вводится величина Дд*=|Дд1|+|Да11|. Находится
решение задачи оптимального перехода между орбитами, разностью
элементов которых являются начальные отклонения Д<?х, Де7, Дг, ДК,
а вместо Да берется Да . Так как коррекция отклонений
составляющих вектора эксцентриситета Дех, Де,, и отклонений по
боку Ди, ДИ, производится пропорционально коррекции Да! и Дац
такое решение задачи перехода будет оптимальным.
Определить параметры ДКИ, ДК.Ь (рр ДКЙ, ДК,2, ср2 этого
перехода между некомпланарными орбитами можно, например, с
помощью алгоритма описанного в разделе 2.2.7.
Этап 3. Чтобы найти величины импульсов скорости,
обеспечивающие решение задачи встречи, необходимо в нужной
пропорции распределить импульсы скорости, рассчитанные для
решения задачи перехода. Аналогично тому, как это делалось в
. , Да, Да,,
разделе 4.1, импульсы скорости делятся в пропорции —ф,—г>
Да Да
соответственно для первого и второго подинтервалов. После деления
каждого из импульсов на две части получается четырёхимпульсное
решение задачи встречи. Составляющие импульсов скорости первого
и второго подинтервалов маневрирования находятся по формулам
(4.7)-(4.10)[12].
210
Этап 4. Каждый из двух маневров первого подинтервала
маневрирования разбиваются на N\ одинаковых частей,
прикладываемых на разных витках, аналогично два маневра второго
подинтервала маневрирования разбиваются на N2 одинаковых частей.
Далее по описанному выше алгоритму сравниваются величины
импульсов скорости на витках подинтервалов, и принимается
решение об изменении длины подинтервалов и осуществляется
возврат к первому этапу.
При оптимальной начальной фазе, когда А^-Аац длина
подинтервалов одинакова. Если, например, из-за большого
начального отклонения по фазе на первом подинтервале исполняются
тормозные маневры Ао^О, а Аа>0 и, следовательно, |Aai|<|Аац|, то
длина второго подинтервала будет заметно больше длины первого
подинтервала. Если Аац<0, и Аа>0, то длина первого подинтервала
будет заметно больше длины второго подинтервала.
В результате этой итерационной процедуры находится решение
задачи встречи, у которого импульсы скорости прикладываются на
всех разрешенных витках. Величины импульсов скорости,
прикладываемые на одном витке, могут отличаться, но величины
импульсов скорости, прикладываемые на разных витках на
одинаковом аргументе широты примерно одинаковы.
Поскольку решалась упрощенна система из двух уравнений,
необходимая точность времени прилета в заданную точку конечной
орбиты обеспечивается с помощью обычной итерационной
процедуры.
Если продолжительность маневров найденного решения не
превышает примерно 40° по аргументу широты, то задача решена, в
противном случае надо уточнить решение, перейдя при расчете
маневров перехода от импульсного случая к решению с малой тягой.
Параметры маневров можно уточнить с помощью итерационной
процедуры, описанной в первой главе, чтобы учесть все необходимые
возмущения.
4.6.2. Пример. Решается многоимпульсная встреча на
некомпланарных орбитах. Элементы начальной и конечной орбиты
полностью аналогичны элементам орбит из примера 4.2.3. Также
рассматриваются три варианта, которые отличаются разным
начальным положением KA-цели. Предполагается, что
211
маневрирование происходит на всех витках перелета кроме 8 и 9
поэтому число маневров во всех вариантах одинаково 26.
Результаты расчетов:
1). 6^1=5°
Суммарная характеристическая скорость маневров: 322.930 м/с.
Суммарная характеристическая скорость компл-ных составляющих: 322.91 м/с.
Суммарная характеристическая скорость боковых составляющих: 6.088 м/с.
В первый подинтервал попали витки со второго по двенадцатый, во
второй подинтервал попали витки с тринадцатого по шестнадцатый. На первом
подинтервале импульсы скорости разгонные на втором - тормозные (начальная
фазаа не оптимальная).
Ниже приведены параметры импульсов скорости: номер импульса,
виток, аргумент широты точки приложения импульса, его радиальная,
трансверсальная и боковая составляющие.
Имп. виток и dVr dVt dVz
No. град м/с м/с м/с
1 2 140.164 0.172 11.990 -0.176
2 2 316.164 -0.161 11.232 -0.053
3 3 140.164 0.173 12.103 -0.178
4 3 316.164 -0.162 11.347 -0.053
5 4 140.164 0.175 12.218 -0.179
6 4 316.164 -0.164 11.464 -0.054
7 5 140.164 0.177 12.337 -0.181
8 5 316.164 -0.166 11.584 -0.054
9 6 140.164 0.178 12.458 -0.183
10 6 316.164 -0.168 11.707 -0.055
И 7 140.164 0.180 12.582 -0.185
12 7 316.164 -0.169 11.832 -0.055
13 10 140.164 0.182 12.709 -0.187
14 10 316.164 -0.171 11.960 -0.056
15 И 140.164 0.184 12.839 -0.188
16 и 316.164 -0.173 12.092 -0.057
17 12 140.164 0.186 12.972 -0.190
18 12 316.164 -0.175 12.227 -0.057
19 13 136.164 0.108 -12.904 -0.096
20 13 320.164 -0.115 -13.785 0.074
21 14 136.164 0.107 -12.773 -0.095
22 14 320.164 -0.114 -13.659 0.073
23 15 136.164 0.106 -12.644 -0.094
24 15 320.164 -0.113 -13.536 0.072
25 16 136.164 0.105 -12.518 -0.093
26 16 320.164 -0.112 -13.417 0.072
212
2). £7^=210°
Суммарная характеристическая скорость маневров: 93.123 м/с.
Суммарная характеристическая скорость компл-ных составляющих: 93.101 м/с.
Суммарная характеристическая скорость боковых составляющих: 1.778 м/с.
В первый подинтервал попали витки со второго по седьмой, во второй
подинтервал попали витки с десятого по шестнадцатый (8 и 9 витки запрещены
для маневрирования). На обоих подинтервалах импульсы скорости разгонные
(начальная фазаа оптимальная.
Имп. виток и, dVr dVt dVz
No. град м/с м/с м/с
1 2 144.046 0.003 0.327 -0.009
2 2 312.046 -0.002 0.259 0.002
3 3 144.046 0.003 0.327 -0.009
4 3 312.046 -0.002 0.259 0.002
5 4 144.046 0.003 0.327 -0.009
6 4 312.046 -0.002 0.259 0.002
7 5 144.046 0.003 0.327 -0.009
8 5 312.046 -0.002 0.259 0.002
9 6 144.046 0.003 0.327 -0.009
10 6 312.046 -0.002 0.259 0.002
11 7 144.046 0.003 0.327 -0.009
12 7 312.046 -0.002 0.259 0.002
13 10 144.046 0.066 7.008 -0.197
14 10 312.046 -0.053 5.589 0.043
15 11 144.046 0.066 7.040 -0.198
16 11 312.046 -0.053 5.622 0.044
17 12 144.046 0.067 7.072 -0.199
18 12 312.046 -0.053 5.656 0.044
19 13 144.046 0.067 7.105 -0.200
20 13 312.046 -0.054 5.691 0.044
21 14 144.046 0.067 7.138 -0.201
22 14 312.046 -0.054 5.725 0.045
23 15 144.046 0.067 7.172 -0.202
24 15 312.046 -0.054 5.761 0.045
25 16 144.046 0.068 7.206 -0.203
26 16 312.046 -0.055 5.796 0.045
3). [7^=355°
Суммарная характеристическая скорость маневров: 298.730 м/с.
Суммарная характеристическая скорость компл-ных составляющих: 298.71 м/с.
Суммарная характеристическая скорость боковых составляющих: 3.199 м/с.
213
В первый подинтервал попали витки со второго по шестой, во второй
подинтервал попали витки с седьмого по шестнадцатый. На первом
подинтервале импульсы скорости тормозные на втором -разгонные (начальная
фазаа не оптимальная).
Имп. виток и, dVr dVt dVz
No. град м/с м/с м/с
1 2 136.151 0.096 -10.084 0.052
2 2 320.151 -0.103 -10.749 0.171
3 3 136.151 0.096 -10.006 0.051
4 3 320.151 -0.102 -10.674 0.170
5 4 136.151 0.095 -9.931 0.051
6 4 320.151 -0.101 -10.600 0.169
7 5 136.151 0.094 -9.856 0.051
8 5 320.151 -0.101 -10.527 0.168
9 6 136.151 0.093 -9.783 0.050
10 6 320.151 -0.100 -10.456 0.167
И 7 140.151 0.117 12.223 -0.195
12 7 316.151 -0.109 11.426 -0.059
13 10 140.151 0.118 12.338 -0.197
14 10 316.151 -0.110 11.544 -0.059
15 И 140.151 0.119 12.457 -0.198
16 11 316.151 -0.111 11.663 -0.060
17 12 140.151 0.120 12.578 -0.200
18 12 316.151 -0.113 11.786 -0.061
19 13 140.151 0.121 12.702 -0.202
20 13 316.151 -0.114 11.912 -0.061
21 14 140.151 0.123 12.829 -0.204
22 14 316.151 -0.115 12.040 -0.062
23 15 140.151 0.124 12.960 -0.206
24 15 316.151 -0.116 12.172 -0.063
25 16 140.151 0.125 13.093 -0.209
26 16 316.151 -0.118 12.307 -0.063
Можн :о видеть. , ЧТО Е 1 случае оптимальной начальной фазы
затраты суммарной характеристической скорости аналогичны
затратам в случае, когда импульсы скорости прикладываются на двух
разнесенных интервалах, однако сам интервал оптимальной фазы
значительно уже. При не оптимальной начальной фазе (варианты 1 и
3) затраты суммарной характеристической скорости значительно
выше, чем в случае, когда импульсы скорости прикладываются на
двух разнесенных интервалах. В первом варианте (UKi=5"')
соответственно 146.12 м/с и 322.930 м/с, в третьем варианте
(641=355°) 183.58 м/с и 298.730 м/с.
214
ГЛАВА V
ЧИСЛЕННЫЕ МЕТОДЫ
Задача расчета оптимальных параметров маневров,
обеспечивающих встречу космических аппаратов (КА) на близких
околокруговых орбитах, с помощью описанной в первой главе
итерационной процедуры сводится к задаче математического
программирования.
Для решения этой задачи можно воспользоваться как
приведенными в предыдущих главах аналитическими методами, так и
различными численными методами. Однако, в силу большой
размерности задачи и ограничений различного вида попытки прямого
использования численных методов приводят к очень большим
затратам машинного времени. Поэтому при их использовании
желательно учитывать особенности рассматриваемых задач, что
позволит ускорить процесс минимизации.
В данной главе приводится численный метод [7,11], который в
течение многих лет успешно использовался в баллистическом центре
ИПМ им. М.В. Келдыша РАН для расчета маневров КА «Союз»,
«Прогресс», модулей «Квант», «Природа» и т.д. [25]. Несмотря на
свою относительную простоту метод достаточно универсален,
обладает необходимым быстродействием, а главное обеспечивает
высокую надёжность получения решения задачи.
5.1. Постановка задачи, общий метод решения
Если учесть влияние второго члена разложения в ряд
гравитационного поля планеты (с2о), то система (1.12) примет вид
[89]:
S{Л^sin[С1 -7)Ф,-]+2ЛKicos[(1 -Г)ф/]/=ЛС> (5.1а)
/=1
Е {“Л K„cos [(1 -7)ф/ ]+2 А К, sin [ (1 -у)ф,- ]}=А^, (5.16)
215
^2ДИ,;=Да, (5.1 в)
1=1
£ {2 Д К. [1 - cos(( 1 -у)ф;)]+ДKi[-3(1 -у)ф, +4sin(( 1 -у)ф,.)]}=Д/, (5.1 г)
<=]
^(-2рДК„.ф,.cosw,sin2z0 - ДК2,.sirup,)=Дг, (5.1д)
/=|
^(2рДК„ф,.8ты,.sin2z0 + ЛК. С08ф,.)=ДК, (5.1е)
м
Зг2 R
где Р =-с20—у, у = — (5cos2z0-1), с2о=-Ю82,637*1О’6, zy=6378140M,
2r0 2
z'o,ro - наклонение и радиус опорной орбиты, zz, - аргументы широты
точек приложения импульсов скорости.
Заметим, что, если продолжительность встречи не велика (не
превышает нескольких дней), то можно использовать и более
простую систему (4.1).
Углы приложения импульсов скорости должны принадлежать
заданным множествам
Ф/С- Ft,... , фяс- Fn. (5.2)
Множества F, могут быть меньше витка и/или состоять из
нескольких отдельных интервалов, как это было у первых КА
«Прогресс». Ограничения на моменты приложения импульсов
скорости связаны с зонами видимости с Земли, конструктивными
особенностями аппаратов и т.д. Иногда углы приложения импульсов
скорости фиксируются. Например, при расчете четырех- и
трехимпульсных маневров КА «Союз» и «Прогресс» предполагалось,
что углы приложения третьего и четвертого импульсов скорости
фиксированы за виток и полвитка до точки встречи.
Задача поиска параметров оптимальных маневров
формулируется следующим образом: определить ДИ„, ДИ(;, ДИ,„ ф,
(z'=l,...,A/) при которых минимален функционал
=Е7Д^+Д^+Д^+Ей
/=| <=1
с учетом ограничений (5.1),(5.2).
216
Функционал задачи может включать вместе с суммарной
характеристической скоростью ДР7 слагаемые Qh учитывающие
особенности задачи, но желательно, чтобы Q. были выпуклыми
функциями от составляющих импульсов скорости, как и ДИ
Например, как уже было показано в главе IV, для КА «Союз» и
«Прогресс» функционал имел вид [89]:
^=Е7Д^+Д^+Д^
/=1
Здесь a,.,=2-2cos<p„ а„=-3+4sincp,, ki=ki*<5\i (Ay*>0) - заданные
коэффициенты, 5\|/ - принятая максимальная ошибка ориентации
импульсов скорости.
В отличие от пространства составляющих импульсов скорости,
в пространстве углов приложения импульсов скорости функционал W
имеет локальные минимумы. К тому же множества F, могут быть
достаточно сложными. Вследствие этого процесс минимизации
обычно проводится в два этапа [89]: при каждом фиксированном <рт
={(рь ... ,(ру} вычисляется минимум функционала
1КИ(Ф)= minPK((p, ДИ) (5.3)
ди
по переменным ДК = {ДИН, ДИ,Ь ДИ21,..., AVrN, &VlN, AVzN} при
ограничениях (5.1). На втором этапе перебором точек из допустимого
для приложения импульсов скорости множества F=F\*Fi*...*Fn,
находится глобальный минимум функционала Wm (<р) по переменным
фТ = {ф|, ... ,флг}.
Необходимо обратить внимание, что этапы проводятся не
последовательно, а попеременно. Берется точка из множества F. Для
неё минимизацией в пространстве составляющих импульсов скорости
вычисляется Wm, берется новая точка из множества F, вычисляется
соответствующее ей значение Wm и т.д., пока не будет найдено
решение, оптимальное как в пространстве составляющих импульсов
скорости, так и в пространстве углов приложения импульсов
скорости.
В двух следующих параграфах будет подробно рассмотрен
каждый из этапов решения задачи.
Найденное решение используется в описанной в первой главе
итерационной процедуре, обеспечивающей выполнение терминаль-
217
ных условий с заданной точностью с учетом влияния атмосферы,
заданного числа гармоник гравитационного поля, продолжительной
работы ДУ и т.д.
5.2. Минимизация в пространстве составляющих
импульсов скорости
Эту минимизацию можно проводить различными методами, но
лучше всего её вообще избежать. Для этого число используемых
составляющих импульсов скорости должно быть равно числу
учитываемых ограничений системы (5.1). Пусть необходимо
учитывать все шесть уравнений системы, значит, будут
использоваться шесть составляющих импульсов скорости: четыре
плоских и две боковых. Для двухимпульсной задачи используются
все шесть имеющихся составляющих импульсов. Для трех- и
четырехимпульсных задач необходимо отказаться от использования
некоторых из составляющих импульсов скорости. Как было показано
в третьей главе, для четырехимпульсной задачи целесообразно
отказаться от использования радиальных составляющих импульсов
скорости. Тогда величины трансверсальных составляющих
импульсов скорости однозначно определяются из системы (5.1). У
трехимпульсной задачи можно отказаться от использования
радиальных составляющих тех двух импульсов скорости, которые
прикладываются на одном интервале маневрирования. Тогда
трансверсальные составляющие импульсов скорости и радиальная
составляющая того импульса скорости, который один
прикладывается на своем интервале маневрирования, также
однозначно определяются из системы (5.1). Необходимо помнить, что
круг, соответствующий трансверсальным составляющим двух
импульсов скорости, исполняемых на одном интервале
маневрирования (см. Ш.З), не должен находиться внутри окружности,
соответствующей трансверсальной составляющей импульса скорости
единственного на своем интервале. Если же это происходит, то
необходимо изменить распределение числа импульсов между
интервалами.
Если использовать приведенный прием сокращения числа
используемых составляющих, то возможен небольшой проигрыш в
суммарной характеристической скорости Д V, за счет отсутствия
218
некоторых радиальных составляющих, но он вполне компенсируется
простотой и надежностью получаемого решения.
Сложнее обстоит дело с боковыми составляющими, поскольку
не ясно у каких импульсов скорости их лучше использовать. Можно
порекомендовать, в трех импульсной задаче использовать боковые
составляющие у тех импульсов скорости, для которых было принято
решение не использовать радиальные составляющие. Для
четырехимпульсной задачи целесообразно использовать боковые
составляющие импульсов скорости первого интервала
маневрирования. Тогда на втором интервале маневрирования (перед
стыковкой) будет решаться более простая задача практически без
боковых составляющих. Если требуется уменьшить суммарную
характеристическую скорость, то боковые составляющие импульсов
скорости следует использовать на том интервале, на котором сумма
трансверсальных составляющих оказывается больше. При большой
продолжительности встречи и при больших отклонениях долготы
восходящего узла (Q) использование боковых составляющих
импульсов скорости первого интервала маневрирования практически
необходимо (см. главу VII), но лучше использовать боковые
составляющие импульсов скорости обоих интервалов
маневрирования. Существует и ещё одна простая возможность
выбора оптимальных боковых составляющих импульсов скорости, о
которой будет рассказано ниже.
Если необходимо найти оптимальное решение и используются
более двух импульсов скорости, то минимизация в пространстве
составляющих импульсов скорости необходима. Для ее упрощения,
при поиске 1Ет(ф) линейные ограничения (5.1) используются для
перехода к безусловной минимизации в пространстве меньшей
размерности. В этом случае размерность пространства минимизации
сократится на число учтенных ограничений в виде равенств.
Важным является вопрос, какие из составляющих импульсов
скорости выбрать в качестве независимых переменных. Для
составляющих импульсов скорости, лежащих в плоскости орбиты,
это очевидно. Трансверсальные составляющие вносят основной вклад
в изменение элементов орбиты; их величины существенно меняются
при изменении углов приложения импульсов скорости, в то время как
величины радиальных составляющих всегда остаются близкими к
нулю. Таким образом, в качестве независимых переменных лучше
брать радиальные составляющие, а в качестве начальной точки
219
процесса минимизации использовать их нулевые значения. Это
позволит существенно сократить число шагов минимизации,
необходимых для нахождения минимума.
Сложнее обстоит дело с боковыми составляющими импульсов
скорости, поскольку трудно заранее выделить те из них, которые
будут вносить меньший вклад в процесс минимизации и,
следовательно, могут быть использованы как независимые
переменные. Однако, если имеется возможность изменять назначение
независимых боковых составляющих импульсов скорости при
переходе от одного набора углов приложения импульсов скорости к
другому, то возможность выделения менее эффективных
составляющих существует.
При большой продолжительности встречи наиболее
эффективны те боковые составляющие, углы приложения импульсов
скорости которых ближе к экватору, т.к. изменение наклонения
оказывает вековое влияние на изменение долготы восходящего узла
(ДВУ). Следовательно, в качестве независимых лучше использовать
те составляющие импульсов скорости, углы приложения которых
находятся дальше от экватора.
При относительно небольшой продолжительности встречи
(расстояние между интервалами маневрирования не превышает
нескольких десятков витков) коррекция наклонения не оказывает
заметного влияния на ДВУ. В этом случае эффективность боковой
составляющей зависит только от близости угла приложения импульса
скорости к оптимальному углу коррекции плоскости орбиты <р2
(линии пересечения плоскостей орбит). На рис. 5.1 (а) приведены
направление оптимальной коррекции плоскости орбиты <р2, величина
бокового отклонения Дг (АК), которое необходимо скорректировать
(Д/=^Дг2 + А/,2 ), и четыре угла приложения импульсов <рь <р2> фз, ф4-
Если рассматривать только коррекцию бокового отклонения, то
использование второй и третьей боковых составляющих (этому
решению соответствует ломаная АВК) будет эффективнее, чем
использование первой и четвертой составляющих, т.к. длина
соответствующей этому решению ломаной ADK, больше длины
ломаной АВК. Таким образом, оптимально использовать боковые
составляющие импульсов скорости, углы приложения которых
наиболее близки к ф2 и лежат по разные стороны от этого
направления [11].
220
Рис. 5.1. Двухимпульсная коррекция бокового отклонения:
(а) импульсы скорости прикладываются с разных сторон от линии узлов;
(б) импульсы скорости прикладываются с одной стороны от линии узлов
Если все углы приложения импульсов лежат с одной стороны от
направления <pz (рис. 5.1 (б)), то брать следует не две ближайшие, а
одну ближайшую и одну самую отдаленную составляющие
импульсов скорости. Этому решению соответствует ломаная АВК на
рис. 5. 1 (б). Решению с использованием двух других составляющих
соответствует ломаная ADK, длина которой очевидно больше длины
ломаной АВК. Таким образом, определены наиболее эффективные
составляющие. Остальные являются менее эффективными, поэтому
их следует выбрать в качестве независимых переменных при
минимизации функционала W. В качестве начальной точки процесса
минимизации берутся их нулевые значения.
Используя эту же оценку эффективности боковых
составляющих, можно полностью избежать минимизации в их
пространстве, оставив две наиболее эффективные составляющие.
Полезным является еще один вывод, который следует из
рассмотренных выше примеров. Для коррекции боковых отклонений
эффективнее использовать наборы углов приложения импульсов
скорости, в которых присутствуют углы, лежащие по разные стороны
от направления (р2.
Поскольку в процессе обеспечения полетов реальных КА
приходится решать задачи с различным числом импульсов скорости и
с различными ограничениями, используемое программное
обеспечение должно быть достаточно универсальным.
221
Для обеспечения этой универсальности при минимизации в
пространстве составляющих импульсов скорости применяется
следующая схема вычислений.
При помощи матрицы J задаётся набор отклонений, которые
необходимо корректировать (от полного вектора отклонений Д,
который используется в системе (5.1), можно перейти, если
требуется, к вектору меньшей размерности Д^=УД). В
соответствующей шкале задаются признаки, какие составляющие
импульсов скорости, обозначим их ДИь будут использоваться для
решения задачи. Формируется матрица влияния Ак этих
составляющих импульсов скорости на выделенные отклонения.
Ограничения (5.1) принимают вид:
Л*ДГ*=ДК. (5.4)
В другой шкале указывается, какие из составляющих импульсов
скорости являются независимыми переменными, в пространстве
которых будет проводиться оптимизация, их обозначим ДИ,.
Остальные составляющие будут зависимыми переменными, они
обозначены Д Vd (Д Ик=ДИ,+ДК/).
На соответствующие части можно разбить и матрицу Ак, тогда
ограничение (5.4) принимает вид:
Ai\Vi+Ad\Vd=/^К. (5.5)
Из системы (5.5) можно найти ДИ</
ДИ/=ЛДИ,+д; (5.6)
где А =- A~l А j, Д' = А~' Ьк.
Таким образом, осуществляется переход к безусловной
минимизации W в пространстве ЛИ,:
Необходимые для минимизации градиентными методами
частные производные W по независимым переменным вычисляются
по аналогичной схеме с использованием информации из тех же шкал.
Основой служат определяемые по аналитическим формулам
222
производные по всем используемым составляющим импульсов
скорости.
Если требуется сделать нулевыми только часть отклонений (АД,
то остальные отклонения (Ар=А-АД добавляются в минимизируемый
функционал в виде штрафов
W = f ^А/;+АД;+АК; + + jA'GAp,
/=1 i=i
здесь G - заданная матрица. Например, можно требовать точного
выхода в окрестность орбитальной станции, в то время как
отклонения по скоростям не обязательно должны быть нулевыми.
Тогда за счет штрафов их можно уменьшить. Подобная ситуация
обычно возникает, когда число используемых составляющих
импульсов скорости меньше числа терминальных ограничений.
Следует отметить, что в качестве метода минимизации в
пространстве составляющих импульсов целесообразно использовать
метод сопряженных градиентов, эффективность которого для данного
класса задач примерно на 10% выше эффективности метода
наискорейшего спуска [5].
5.3. Поиск минимума в пространстве углов
приложения импульсов скорости
Минимизация в пространстве углов приложения импульсов
скорости (на множестве F) является более сложной, т.к. область
минимизации может состоять из нескольких отдельных областей, из-
за наличия локальных минимумов и того, что само значение
функционала получается в результате минимизации в пространстве
составляющих импульсов скорости. По этим причинам трудно
применить какой-либо эффективный численный метод. Обычно
используют простой перебор точек из разрешенных интервалов, что
позволяет найти глобальный минимум функционала W, но требует
значительных затрат машинного времени.
Желание ускорить процесс поиска глобального минимума
заставляет искать возможность сократить число точек множества F,
для которых проводится вычисление Wm. Для этого можно
одновременно использовать два метода. Первый - геометрический,
использующий приведенные в главе III результаты, позволяет очень
223
быстро и просто исключить заведомо не оптимальные точки. Второй
метод основан на использовании оценки снизу величины Wm.
Для объяснения идеи первого метода [11] построим, как всегда,
окружности, имеющие радиусы R\ и Л2 (рис.5.2), соответствующие
сумме трансверсальных составляющих импульсов скорости первого и
второго интервалов маневрирования. Как было показано в главах III,
IV, для оптимального решения задачи многовитковой встречи точка,
соответствующая вектору эксцентриситета орбиты ожидания должна,
принадлежать области G (области пересечения кругов, имеющих
радиусы R] и Л2).
Рис. 5.2. Области существования оптимальных решений
для перелетов между непересекающимися орбитами
Таким образом, нецелесообразно использовать углы
приложения импульсов скорости первого интервала маневрирования,
при которых точка, соответствующая вектору эксцентриситета
орбиты ожидания, будет принадлежать области I. Аналогично
нецелесообразно использовать углы приложения импульсов скорости
второго интервала маневрирования, при которых точка,
соответствующая вектору эксцентриситета орбиты ожидания, будет
принадлежать области II. Область I это полуплоскость, образованная
прямой, проходящей через точки С и В (СВ перпендикулярна АК) и
касающейся окружности с центром в т.К. Область I не содержит
область G (рис. 5.2). Область II это полуплоскость, образованная
прямой, проходящей через точки D и Е (DE перпендикулярна АК) и
224
касающейся окружности с центром в т.А. Область II также не
содержит область G.
Таким образом, набор точек из множеств F отсеивается, если
фе+ф1<ф1<ф«?+2л-ф1 и одновременно фе+ф1<ф2<ф(?+2л-ф1, или когда
0<(рз<фе+л-фп или фе+л+фц<ф3<2л и одновременно 0<ф4<фе+л-фи или
фе+л+(рц<<р4< 2ль где
Де - R2 Ае- R.
<p,=arccos-----<рп =arccos-------L, ф„ =arctg—
Rx R, e Дех
Напомним, что углы фь ф2, фз, ф4 отрицательные, поэтому перед
проверкой этих условий их необходимо путем увеличения на нужную
величину 2пк привести к значению из диапазона [0,2л].
Набор точек из пространства F также отсеивается, если углы
приложения импульсов скорости первого интервала лежат выше
прямой АК, а углы приложения импульсов скорости второго
интервала лежат ниже прямой АК или наоборот. При таких углах
приложения трансверсальных импульсов скорости точка,
соответствующая вектору эксцентриситета орбиты ожидания, также
не будет принадлежать области G.
Пример решения, которое должно быть исключено по этому
критерию (вектору эксцентриситета орбиты ожидания соответствует
точка С), приведен на рис. 5.3.
Рис. 5.3. Пример неоптимального решения
225
Импульсам скорости этого решения соответствуют отрезки АВ,
ВС, CD, DK. Углы приложения импульсов скорости первого
интервала <рь <р2 лежат выше прямой АК, а углы приложения
импульсов скорости второго интервала <р3, <р4 лежат ниже прямой АК.
Таким образом, для существования оптимального решения не
допустимо, чтобы одновременно было выполнены условия (pe<(pi,
(рг'Уре+гс, и (ре+л<(рз, (р4<2л или О«рз, <р4<(ре или наоборот (ре<(рз,
(р4<(ре+л, и (ре+Я<(Р1, (р2<2л ИЛИ 0<фь <р2<фг-
Можно использовать и другие геометрические построения,
сокращающие ещё большее число точек множества F, для которых
проводится численная оптимизация, но необходимо помнить, что
алгоритм должен быть достаточно простым, чтобы давать выигрыш
по времени по сравнению с вычислением Wm.
Если окружности не пересекаются, то точка, соответствующая
вектору эксцентриситета орбиты ожидания, должна принадлежать
области D (рис.5.4).
Рис. 5.4. Области существования оптимальных решений
для перелетов между пересекающимися орбитами
Используя алгоритм, аналогичный приведенному выше, также
можно при переборе исключить, значительное число возможных
точек множества F и для непересекающихся орбит.
На втором этапе происходит отсеивание точек из областей G
или D, для которых решение компланарной задачи встречи
оптимально, однако имеются большие затраты на коррекцию
положения плоскости орбиты. Для отсеивания применяется алгоритм
[7], использующий оценку снизу минимизируемого функционала W и
последовательность [111] для перебора точек из множества F.
Аналитическая оценка снизу Wn, вычисление которой требует
значительно меньше времени, чем численное определение W,„,
226
позволяет значительно сократить общее время решения задачи. Если
величина W„ больше чем минимальное значение функционала W,
найденное к этому моменту, то численный поиск минимума в
пространстве составляющих импульсов скорости (определение Wm)
для данного набора углов приложения импульсов скорости можно не
проводить.
Эту процедуру можно пояснить на примере, изображенном на
рисунке 5.5. На этом рисунке значение функционала Wm показано
сплошной линией, значение оценки снизу W„ - точечной.
Необходимо найти минимум функционала Wm на интервале AF.
Пусть перебор точек интервала происходит с постоянным шагом от т.
А к т. F. До т. С значение Wm будет вычисляться для всех точек.
Начиная с т. С, значение Wn будет больше значения Wm в т. В, и все
точки на интервале CD будут исключены (значение Wm для них
вычисляться не будет).
Рис. 5.5. Использование оценки снизу
минимизируемого функционала
При дальнейшем переборе аналогичным образом будут отброшены и
точки на интервале EF.
Если Аа*=| Аа| (определение Аа дано в первом параграфе
четвертой главы), то в качестве оценки снизу для непересекающихся
орбит можно использовать величину
wn = +(|ae.| + |akJ)2 , (5.7)
а для пересекающихся орбит величину
227
^=7Ае2+(|ДК,| + |Л^|)2,
(5.8)
где Да, Де - разность больших полуосей орбит и модуль разности их
векторов эксцентриситетов, ДИ2„Д^ - две наиболее эффективные
боковые составляющие импульсов скорости, процедура определения
которых была описана выше. В противном случае в формулах
используется большая из величин Да или Де.
Точки Lnx последовательности были выбраны для перебора
точек из множества F потому, что они позволяют наиболее
эффективно использовать возможности величины W„. Замечательным
свойством последовательности является то, что каждые 2П её
точек равномерно распределены в единичном кубе размерности N
[111]. Множество F можно вписать в многомерный прямоугольник
L=LX*L2*..*LN, где Lt отрезок минимальной длины, содержащий
множество F. Если взять 2П точек последовательности, то из её
„ L
свойств следует, что для г-ои переменной в каждой части отрезка
L, будет находиться точка Lnx последовательности. Таким образом,
для каждого п точки последовательности равномерно распределены
по отрезку Lj, а при росте п плотность распределения увеличивается.
То, что просмотр отрезка осуществляется не с мелким
постоянным шагом, начиная с какой-то его части, а просматривается
весь отрезок с каждый раз всё более уменьшающимся шагом,
позволяет быстро определить районы существования локальных
минимумов. Таким образом, текущее значение W„ будет сравниваться
со значением функционала W близким к глобальному минимуму, и
большее число точек будет исключено из рассмотрения.
Эта возможность показана на рис. 5.6. Пусть после просмотра
первых четырех точек (они обозначены в том порядке, в каком их
выдает Lnx последовательность), равномерно распределенных на
интервале AF, в четвертой точке было вычислено минимальное
текущее значение функционала Для всех последующих точек
текущее значение W„ будет сравниваться с Wmli и как минимум будут
исключены все точки на интервалах АВ,CD и EF.
Если в процессе последующего перебора одна из точек попадет
в окрестность глобального минимума (т.ЛД, это позволит в
дальнейшем не вычислять Wm для ещё большего количества точек.
228
г
Рис. 5.6. Использование Lr^ последовательности
Существует еще один способ ускорить процесс поиска
минимума в пространстве углов приложения импульсов скорости.
Рассмотрим задачу, когда углы приложения двух последних
импульсов скорости фиксированы. Тогда первыми двумя импульсами
скорости необходимо перейти на отрезок LN (рис. 5.7). Первому
импульсу скорости соответствует отрезок АВ, второму - ВС. Изменяя
угол приложения первого импульса скорости ф[ и определяя
соответствующий ему угол приложения второго импульса скорости
ф2, можно построить зависимость ф2 от ф1 для перелета в T.N. На рис.
5.8 данная зависимость изображена сплошной линией. Затем
аналогичная зависимость строится и для перелета в т.£. . На рис. 5.8
эта зависимость изображена пунктирной линией. Построенные
зависимости являются границами областей G,
Оптимальные углы приложения импульсов скорости для
коррекции бокового отклонения принадлежат множеству
ф_ = ф20 -пк(к = 1,2,...),
«р,. = . угол, который линия пересечения плсяскоетей орбит
составляет с осью х), этим углам соответствуют штрихпунктирные
прямые на рис. 5.8. Если прямые пересекаются внутри области G (т.А
и т.В на рис. 5.8), то существует оптимальное решение, у которого
углы приложения первого и второго импульсов скорости
принадлежат множеству ф2. Этот вариант возможен, когда на рис. 5.7
229
прямая АР, проведенная под углом <pz0, пересекает отрезок LN. Таким
образом, начинать поиск оптимальных углов приложения импульсов
скорости целесообразно с углов ф! и <р2, принадлежащих множеству
<pz Если такое решение существует, то оно оптимально. Если решение
этого типа не существует, то можно рассмотреть решения, у которых
только один из углов ф2> ф| принадлежит множеству <pz. Определив
параметры близкого к оптимальному решения, можно переходить к
поиску оптимально решения на всей возможной области углов
приложения импульсов скорости, с помощью описанных выше
методов.
. Рис. 5.7. Геометрическое место вектора
эксцентриситета переходной орбиты
Рис. 5.8. Области существования
оптимальных решений
5.4. Использование графического диалога с задачей
Численный метод весьма универсален, а в случае, когда число
используемых составляющих импульсов совпадает с числом
терминальных ограничений, является также достаточно быстрым и
очень надежным. Существенным его недостатком является то, что
нет объяснения, почему было получено именно такое решение. Кроме
того, невозможно определить как оно будет меняться, например, при
учете дополнительных ограничений. Используя только численные
методы, трудно выбрать схему маневрирования, т.е. определить какое
минимальное число импульсов скорости достаточно использовать для
оптимального решения задачи и в каких местах эти импульсы
необходимо прикладывать. Численные методы более пригодны для
230
нахождения оптимальных параметров маневров заданной схемы
маневрирования.
Устранить эти недостатки позволяет организация графического
диалога с задачей. Впервые графический диалог был использован
А.К.Платоновым и Р.К.Казаковой [96] при определении параметров
маневров для межпланетных перелетов, и доказал свою высокую
эффективность. В процессе диалога с задачей на экране монитора
указывались моменты приложения импульсов скорости на начальной
и конечной орбитах, параметры маневров определялись с помощью
решения задачи Ламберта.
В книге Ю.А. Захарова [62] дано описание графического
диалога для расчета межорбитальных перелетов с конечной тягой. От
импульсного решения с помощью методов нелинейного
программирования осуществляется переход к решению задачи с
конечной тягой. Предполагалось применение графического диалога
на стадии проектирования полёта КА и при выборе характеристик
самого КА.
Нештатные ситуации, возникавшие на орбите при полете КА
типа «Союз», «Прогресс», показали необходимость создания
эффективного графического диалога с задачей, позволяющего
оперативно выбрать новую схему маневрирования, учитывающую
дополнительные ограничения, вызванные нештатной ситуацией.
Такой диалог был создан в баллистическом центре Института
прикладной математики [25].
Как уже было показано в предыдущих главах, при решении
задачи определения параметров маневров перелёта между близкими
околокруговыми орбитами импульсы скорости удобно
демонстрировать на плоскости составляющих вектора
эксцентриситета. На экране монитора изображается ломаная линия,
соответствующая импульсам скорости найденного численным
методом решения. Изображаются также окружности,
соответствующие сумме трансверсальных составляющих импульсов
скорости каждого из интервалов маневрирования. Таким образом,
рисунок на экране аналогичен рисункам 3.3, 4.12. Взаимное
положение четырехзвенной ломаной и окружностей позволяет
судить, например, насколько устойчиво решение к ошибкам
определения орбит и исполнения импульсов. Это зависит от того
насколько глубоко точка, соответствующая вектору эксцентриситета
орбиты ожидания, находится внутри области пересечения
231
окружностей G. Можно оценить, насколько углы приложения
импульсов скорости, принадлежащих первому интервалу
маневрирования, близки к углам оптимальной коррекции плоскости
орбит (это направление также изображается на экране) и т.д. На
экране существует возможность задать графически или числами
новые значения углов приложения импульсов скорости и вернуться
после этого в задачу для определения новых значений величин
импульсов скорости. Таким образом, можно учитывать
дополнительные ограничения на место приложения и величины
импульсов скорости, сокращать число используемых импульсов и т.д.
Можно учесть ошибки исполнения и/или ориентации импульсов
скорости, изобразив соответствующие эллипсы с центрами в концах
векторов, соответствующих импульсам скорости (рис. 5.8). Ошибки в
работе ДУ часто приводят к возникновению нештатных ситуаций,
поэтому их необходимо учитывать при выборе схемы
маневрирования в такой ситуации. Также с помощью графического
диалога можно учесть ограничение на высоту переходной орбиты
(см. рис. 5.9).
Рис. 5.8. Влияние ошибок импульсов скорости, прикладываемых
на первом интервале маневрирования, для решений типа CSS
232
Рис. 5.9. Взаимное расположение окружностей, соответствующих
сумме трансверсальных составляющих импульсов скорости первого
и второго интервалов маневрирования и допустимым значениям
вектора эксцентриситета орбиты ожидания
Вызов диалога происходит на заданных итерациях. Его
использование позволяет объединить возможности численного и
аналитического методов. Диалог особенно эффективен на стадии
выбора схемы маневрирования, а также в случае возникновения
нештатных ситуаций в полете. Если полет проходит штатно и
используется заранее выбранная и проверенная схема
маневрирования, то можно обойтись только численным методом, т.к.
необходимо просто определить параметры оптимальных маневров.
5.5. Примеры решения задач
В этом параграфе рассматриваются задачи определения
параметров оптимальных маневров, которые решались в
баллистическом центре ИПМ им. М.В. Келдыша РАН при
баллистико-навигационном обеспечении полета КА «Союз ТМ-30»
[11].
В момент выхода на орбиту КА «Союз ТМ-30» разность в
угловом положении корабля и станции (разность фаз) составляла
Да® 197°.
Перед первым интервалом маневрирования решалась
четырехимпульсная задача. При этом предполагалось, что на 17 витке
прикладывается фиксированный импульс скорости величиной 2м/с.
Исходные данные и результаты расчета четырехимпульсной
задачи представлены в примере 5.1. В первой части примера
233
приведены начальные условия обоих аппаратов (в гринвичской
вращающейся системе координат). Заданы F и ар динамической
атмосферы, а также, сколько гармоник разложения гравитационного
потенциала Земли будет учитываться при численном интегрировании
уравнений движения. Номером витка и аргументом широты задана
прицельная точка, а также приведено время её достижения
пассивным аппаратом. Заданы прицельный вектор и точности
выполнения терминальных условий. Отличные от нуля значения
диагональных элементов матриц J и Jz указывают, отклонения каких
параметров необходимо корректировать.
Во второй части примера приведены разрешенные для
приложения импульсов скорости интервалы маневрирования (они
заданы номером витка, аргументом широты правой и левой границ) и
шаги перебора точек из этих интервалов. Отметим, что углы
приложения третьего и четвертого импульсов скорости фиксированы
за виток и за пол витка до точки встречи. В массиве VrV,V2 указано,
какие составляющие импульсов скорости можно использовать для
решения задачи (первая позиция соответствует ДР7,., вторая - ДР7,,
третья - AKZ, «1» в соответствующей позиции показывает, что эту
составляющую надо использовать, «О» - не надо). В следующей
строке определяется, в какой системе координат фиксируется
ориентация ДУ во время реализации соответствующего маневра (0 -
инерциальная стабилизация, 1 - орбитальная стабилизация). Эта
информация указывается для каждого импульса скорости отдельно,
поскольку иногда ориентация ДУ на разных интервалах
маневрирования может фиксироваться в разных системах координат.
Приводятся также ограничения на минимальную и максимальную
величины импульсов скорости, и на минимальное угловое расстояние
между ними. В последней строке приводятся значения
коэффициентов к, для функционала W.
В третьей части примера приведена информация о
фиксированных импульсах скорости.
В четвертой части представлены полученные на последней
итерации результаты определения параметров маневров
(составляющие импульсов скорости и аргументы широты точек их
приложения). В следующей строке указано сколько потребовалось
итераций для решения задачи, приведены значения функционала W,
затрат суммарной характеристической скорости и суммы боковых
составляющих импульсов скорости, а также общее число
234
рассмотренных точек пространства F, и число точек отсеянных по
различным критериям.
В пятой части дается информация о маневрах, полученная после
численного интегрирования. Приводится время включения и время
работы ДУ, величина и ориентация импульсов скорости. Поскольку
ориентация ДУ фиксировалась в инерциальной системе координат,
время включения и ориентация ДУ выбирались таким образом, чтобы
на расчетную точку приложения импульса скорости приходилась
середина активного участка, а ориентация ДУ в этот момент
совпадала с расчетной ориентацией импульсов скорости. Этим
объясняется наличие небольших отрицательных тангажей, величина
которых пропорциональна величине импульсов, хотя радиальные
составляющие импульсов не использовались. Этим объясняется и то,
что аргументы широты моментов включения ДУ (последний столбец)
немного меньше расчетных моментов приложения импульсов. В этой
части примера приведены также отклонения корабля от станции
после проведения всех маневров.
В конце примера приведены элементы орбиты станции (ДОС) и
элементы орбиты активного КА в начальный момент и после каждого
из маневров.
Пример 5.1
ДОС КА Параметры атмосферы Грав. поле
виток 782. 3. Fo=125.O ар= 12.0 Ngarm=%.
дата 06.04.00 04.04.00 прицельная точка:
время 85139.26 104719.62 виток аргм. шир.(гр) дата время
X 3.159596 5.570846 33. 344.80 06.04.00 90048.42
У(км) -4.262639 -3.503213 приц. вектор:
Z -4.110163 .0 R, У„, N, Z, П (км,м/с)
Н 6.286519 2.291193 0. 0. -12.5 0. 0. 0.
И/км/с) 1.022838 3.694669 точности: R, Vr, V„, N, Z, Vz (км,м/с)
П 3.774388 6.110578 .100 .050 .050 .500 .100 .050
5 .0390 .0340 диаг. матрицы J=1. 1. 1. 1. Jz=l. 1.
интервалы маневрирования
N импульса 1 2 3 4
виток начала интервала 3 3 32 33
аргум. широты левой границы (град) 200. 200. 344.8 164.8
аргум. широты правой границы (град) 440. 440. 344.8 164.8
шаг перебора интервала (град) 3.0 3.0 0. 0.
используемые составл-е импульса (К, V, У2) 011 011 010 010
235
тип стабилизации ДУ (О-инерц., 1-орбитальн.) 0. 0. 0. 0.
огран-е на миним-ю величину импульса (м/с) .5 .5 .5 .5
огран-е на максим-ю величину импульса (м/с) 60. 60. 60. 60.
огр-е на мин-е раст-е между импульсами (град) 120. 120. 120. 120.
значения коэффициентов к, .007 .007 0. 0.
фиксированные импульсы:
Уимп. виток арг.шир.((7) <7И(м/с) курс тангаж
3 17. 344.8 2. 0. 0.
Приближенное решение: составл-е имп-в и их углы приложения
Номер импульса 1 2 3 4
dV„ dVn dVa- 0. 21.25 -10.95 0. 10.84 5.47 0. 6.29 0. 0. 22.38 0.
Виток арг. шир.: 3. 263. 3. 437. 32. 344.8 33. 164.8
Nit=5. 17=129.70 dVsum= 64.71 dVzsum= 16.42 Уа//=821. AW=134.
N дата время dV курс танг. 7(c) вит арг.шир.
1 20000404. 115124.0 23.90 27.26 -1.94 56.6 3. 261.06
2 20000404. 123445.1 12.14 333.20 -.97 28.6 3. 436.03
3 20000405. 90615.8 2.00 0. 0. 4.7 17. 344.80
4 20000406. 73028.1 6.29 0. -.49 14.7 32. 344.31
5 20000406. 81501.2 22.38 0. -1.74 52.2 33. 163.06
Отклонения от станции: км, м/сек
Я=-0,001 7,.= .008 И„=-12,499 У=-.046 Z= .0 К= 0.
Вит. и Hmin Umin Hmax Umax co i n e
782 344. 330.0 7.9 341.6 308.7 41.6 51.6687 117.6062 .00082
3. 360. 192.0 61.2 238. 264.8 71.5 51.6920 130.1112 .00369
3. 264. 237.7 261.1 264.3 86.4 258.8 51.6391 129.7626 .00135
4. 78. 254.6 10.8 274.7 268.8 88.9 51.6315 129.5567 .00022
17. 345. 253.1 7.9 276.0 256.2 10.5 51.6690 123.9449 .00152
32. 345. 253.8 5.4 285.5 185.8 357.7 51.6675 117.9373 .00311
33. 166. 285.1 163.1 337.4 305.7 152.3 51.6688 117.7708 .00447
Приц-я точка: высота (км)=332.6, широта—11.9, долгота (град)= 332.4
После реализации на третьем и четвертом витках двух первых из
рассчитанных импульсов скорости и определения орбиты по
измерениям на 13-15 витках решается трехимпульсная задача. При
этом определяются параметры маневра на 17 витке и параметры
маневров на последнем интервале маневрирования. Применение
этого вначале фиксированного, а затем уточняемого маневра на 17
витке позволяет компенсировать ошибки реализации маневров
первого интервала маневрирования (в первую очередь их влияние на
236
время прилёта в точку встречи). Компенсировать отклонение этого
параметра маневрами последнего интервала маневрирования намного
сложнее. Исходные данные для решения трехимпульсной задачи и
рассчитанные параметры маневров приведены в примере 5.2.
Пример 5.2
дос КА Параметры атмосферы Грав. поле
виток 782. 15. Fo= 125.0 ар= 12.0 Ngarm=8.
дата 06.04.00 05.04.00 прицельная точка:
время 85137.89 44135.78 виток аргм. шир.(гр) дата время
X 3.160009 3.866979 33. 344.20 06.04.00 90037.94
У(км) -4.262298 5.393846 приц. вектор:
Z -4.110167 .0 R, К, /„, N, Z, Vz (км,м/с)
Vx 6.286416 -3.518402 0. 0. -12.5 0. 0. 0.
К(км/с) 1.023499 2.514312 точности: R, Vr, Vn, N, Z, Vz (км,м/с)
к 3.774374 6.081848 .100 .050 .050 .500 .100 .050
S .0390 .031559 диаг. матрицы J=\. 1. 1. 1. Jz=\. 1.
интервалы маневрирования
А импульса 1 2 3
виток начала интервала 17 32 33
аргум. широты левой границы (град) 164. 344.2 164.2
аргум. широты правой границы (град) 410. 344.2 164.2
шаг перебора интервала (град) 1.0 0. 0.
используемые составл-е импульса (Vr Vt Vz) 011 010 010
тип стабилизации ДУ (0-инерц., 1-орбитальн.) 0. 0. 0.
огран-е на миним-ю величину импульса (м/с) .5 1.9 1.9
огран-е на максим-ю величину импульса (м/с) 60. 60. 60.
огр-е на мин-е раст-е между имп-сами (град) 120. 120. 120.
значения коэффициентов .007 0. 0.
Приближенное решение: составл-е имп-в и их углы приложения
Номер импульса 1 2 3
Сост-е им-в dVri dVti dVzi: 0. .61 0. 0. 7.87 0. 0. 21.47 0.
Виток арг. шир. (U): 17. 349.0 32. 344.2 33. 164.2
Nit=5. W= 29.95 dVsum= 29.95 dVzsum= .00 №//=248.
дата время dV
1 20000405. 90737.9 .608
2 20000406. 73014.9 7.868
3 20000406. 81452.0 21.471
курс танг. Г(с) вит арг.шир.
0. .11 1.4 17. 348.95
0. -.62 18.4 32. 343.5
0. -1.66 49.9 33. 162.54
Отклонения от станции: (км, м/сек)
R=0. /,.= 0. /„=-12.500 У=0. Z=-.402 Vz= .052
237
Rev U
782. 344.2
15. 0.
17. 349.0
32. 344.8
33. 165.9
Hmin 329.6 Umin Hmax Umax co 41.93 i 51.6685 Q 117.6067 e .00081
7.9 341.5 308.7
257.5 160.9 274.7 271.3 45.32 51.6695 124.9542 .00120
255.8 13.3 275.4 270.3 29.49 51.6715 123.9506 .00107
256.9 4.9 285.5 135.3 357.44 51.6686 117.9417 .00285
285.1 165.9 337.3 305.0 152.20 51.6699 117.7753 .00446
Приц-я точка: высота (км)=332.7, широта=-12.4, долгота (град)=332.1
После исполнения маневра на 17 витке и последующего
определения орбиты перед последним интервалом маневрирования на
31-32 витках решается двухимпульсная задача. Исходные данные для
её решения и рассчитанные параметры маневров приведены в
примере 5.3.
Пример 5.3
дос KA Параметры атмосферы Грав. поле
виток 782. 30. Ко=125.0 ар= 12.0 Ngarm=X.
дата 06.04.00 06.04.00 прицельная точка:
время 84937.62 30537.89 виток аргм. шир.(гр) дата время
X 2.379805 2.004973 33. 344.20 06.04.00 90037.64
У(км) -4.351406 6.325135 приц. вектор:
Z -4.522517 0. R, Уг, У„, N, Z, К (км,м/с)
Ух 6.709404 -4.125250 0. 0. -14.54 0. 0.17 0.
И/км/с) .459303 1.300320 точности: R, Уг, Ут N, Z, Уг (км,м/с)
Hz 3.089667 6.083085 .100 .050 .050 .500 .100 .050
5 .0390 .031063 диаг. матрицы J=\. 1. 1. 1. Jz=l. 1.
интервалы маневрирования
У импульса 1 2
виток начала интервала 32 33
аргм. широты левой границы (град) 284.2 104.2
аргм. широты правой границы (град) 404.2 224.2
шаг перебора интервала (град) 3.0 3.0
используемые составл-е импульса (Уг У, Уг) 111 111
тип стабилизации ДУ (0-инерц., 1-орбитальн.) 0. 0.
огран-е на миним-ю величину импульса (м/с) .5 .5
огран-е на максим-ю величину импульса (м/с) 60. 60.
огр-е на мин-е раст-е между имп-сами (град) 120. 120.
значения коэффициентов Л, .007 .007
Приближенное решение: составляющие импульсов и их углы приложения
Номер импульса 1 2
dVrl dVti dVzi -2.15 5.78 -2.19 2.36 21.50 -2.29
238
Виток арг. шир. (67): 32. 323.2 33. 164.2
№7=3. W= 29.17 dVsum= 28.30 dVzsum= 4.48 Nall= 1410.
X дата время dV курс танг. 71с) вит арг.шир.
1 20000406. 72513.7 6.545 20.75 -19.15 15.3 32. 323.20
2 20000406. 81518.6 21.753 6.09 6.24 50.6 33. 164.20
Отклонения от станции: (км, м/сек)
7?=-.001 ,001 Р„=-14.54 .002 Z=.170 VZ=Q.
Rev U Hmin Umin Hmax Umax co i Cl e
782.344.2 330.6 360.0 343.6 300.8 44.95 51.6680 117.6063 .00078
30. 0. 256.2 10.0 274.6 271.3 42.31 51.6707 118.9471 .00134
32.324.2 257.5 4.4 279.7 114.9 351.86 51.6715 117.9378 .00166
33.167.6 277.7 164.2 337.0 306.8 153.62 51.6683 117.7690 .00506
Приц-я точка: высота (км)=333.0, широта=-12.4, долгота (град)= 332.12
Для приведенной в примере 5.1 четырехимпульсной задачи
проиллюстрируем возможности графического диалога для анализа и
изменения получаемого решения.
На рисунке 5.10 изображена картинка, которую оператор видит
на экране монитора, после решения задачи на итерации с заданным
номером (в данном случае после пятой итерации).
Рис. 5.10. Оптимальное решение
Рис. 5.11. Решение с уравниванием
величин третьего и четвертого
импульсов скорости
Поскольку углы приложения третьего и четвертого импульсов
скорости фиксированы за п и 2л до точки встречи, отрезок LM, с
239
которого импульсами скорости второго интервала маневрирования
можно перейти в конечную точку К, параллелен оси ех и проходит
через точку К. Направлению оптимальной коррекции плоскости
орбиты соответствует пунктирная линия, проведенная через точку А
под углом <pz к оси ех. Решению задачи (трансверсальным
составляющим импульсов скорости) соответствует ломаная ABCDK.
Можно видеть, что пунктирная линия пересекает отрезок LM.
Как было показано в параграфе IV.2, в этом случае оптимальным
будет решение, у которого импульсы скорости первого интервала
маневрирования прилагаются в точках оптимальной коррекции
плоскости орбиты (на линии пересечения плоскостей орбит), а
величины боковых составляющих пропорциональны величинам
трансверсальных составляющих импульсов скорости. Действительно,
у приведенного в таблице 5.1 решения, найденного при помощи
численного метода, модули отношений боковых составляющих
импульсов скорости к трансверсальным составляющим для первого и
второго импульсов примерно равны, а соответствующие
трансверсальным составляющим импульсов отрезки АВ и ВС близки
к пунктирной прямой. Небольшое отличие от оптимального
аналитического решения связано с тем, что перебор углов
приложения импульсов скорости осуществлялся с шагом 3°, поэтому
было невозможно точно попасть в оптимальное решение. Третьему
импульсу скорости соответствует отрезок CD четвертому DK. Видно,
что у оптимального решения импульсы второго интервала (отрезки
CD и DK) сильно отличаются по величине. Из рисунка также видно,
что, для получения решения, у которого импульсы скорости второго
интервала маневрирования будут примерно равны по величине,
необходимо уменьшать угол приложения первого импульса скорости.
В этом случае отрезок, соответствующий первому импульсу
скорости, будет приближаться к точке К.
В разработанном в баллистическом центре ИПМ графическом
диалоге существует возможность изменять углы приложения
импульсов скорости, а затем обращаться к численному методу для
определения величин импульсов скорости. С помощью этой
возможности были выбраны углы приложения первого и второго
импульсов скорости, обеспечившие получение решения с
необходимыми свойствами (рис 5.11). Параметры импульсов
скорости этого решения и их углы приложения приведены в Примере
5.4.
240
Пример 5.4
Номер имп-са 1 2 3 4
ГгД,Л: -0 21.89 .45 .0 10.09 16.72 .0 14.11 .0 .0 14.95 .0
Виток арг. шир.: 3. 221.0 3. 440. 32. 344.8 33. 164.8
Nit=8. W= 70.49 d¥sum= 70.49 d¥zsum= 17.16
У этого решения CD~DK. Направление отрезка, изображающего
второй импульс скорости, близко к направлению пунктирной
прямой, следовательно, именно этим импульсом в основном
осуществляется коррекция плоскости орбиты (это видно и по
величинам боковых составляющих импульсов скорости). Поскольку
затраты на коррекцию плоскости орбиты у нового решения не
распределены пропорционально между первым и вторым импульсами
скорости, суммарная характеристическая скорость нового решения на
5.8 м/с больше чем у решения, приведенного в примере 5.1, зато
величины импульсов скорости последнего интервала маневрирования
примерно одинаковы.
При решении каждой из приведенных выше задач
использовалась итерационная процедура, описанная в первой главе.
Эффективность функционирования этой процедуры хорошо видна из
данных по итерациям для четырехимпульсной задачи, приведенным в
Примере 5.5. Последовательно, по итерациям выведена следующая
информация: номер текущей итерации (Nit); суммарный вектор
отклонений (SVD), который используется на этой итерации в системе
5.1 для определения параметров маневров; вычисленные на этой
итерации составляющие импульсов скорости (dVj(Vr, V„, Vz)), номера
витков и углы приложения импульсов скорости (Nj, U,), а также
получающиеся после реализации маневров, отклонения элементов
орбиты корабля от элементов орбиты станции измененных на
величину прицельного вектора (CD). Суммарный вектор отклонений
(SVD) имеет размерность м/с (координатные составляющие вектора
отклонений умножаются на угловую скорость движения по опорной
круговой орбите). Используемый на первой итерации суммарный
вектор отклонений совпадает с вектором отклонений
нескорректированной орбиты корабля от орбиты станции,
приведенным в самом начале Примера 5.5. Для ускорения
сходимости итерационной процедуры углы приложения импульсов
скорости фиксировались начиная с третьей итерации. Как можно
видеть из примера, итерационная процедура позволяет быстро и с
241
высокой точностью обеспечить выполнение терминальных
ограничений (после каждой итерации отклонения уменьшаются
почти на порядок).
Пример 5.5
CD начальные отклонения корабля от станции+ прц. век. [км, м/с]
Л=-141.47 «г=-11.25 «у= 95.79 W= 17538.6 Z= 2.635 «/=3.287
Nit=\ SVD: 162.504 11.250 -95.792 -20146.397 3.026 3.287
0. 25.45 4.48 0. 9.68 .02 0. -.77 0. 0. 32.34 0.
M U.: 3. 302.0 3. 440.0 32. 344.8 33. 164.8
CD: Я=15.48 «Л=-25.47 «^=-11.89 W=-1468.2 Z=-18.07 «/=-5.35
Nit=2 SVD: 36.728 -83.893 -18459.880 -17.729 -2.070
K,,«,,«,,: 0. 25.58 -13.28 0. 6.47 4.58 0. 5.84 0. 0. 22.92 0.
N; Uj. 3. 263.0 3. 437.0 32. 344.8 33. 164.8
CD: A—1.413 VR= 17.47 «v=1.70 N= 3.443 Z= 1.231 VZ= .310
M7=3 SVD: 146.336 19.253 -85.587 -18463.836 -16.315 -1.760
Vr„VlbVzi: 0. 21.12 -10.84 0. 10.94 5.59 0. 6.26 0. 0. 22.41 0.
N, Uf: 3. 263.0 3. 437.0 32. 344.8 33. 164.8
CD: R=.170 «?=-.408 «у=-.207 N= 7.379 Z= .021 «z=-.007
M7=4 SVD: 146.140 19.661 -85.380 -18472.312 -16.291 -1.767
«,.,,«,,«,,: 0. 21.23 -10.91 0. 10.84 5.48 0. 6.29 0. 0. 22.38 0.
M U,: 3. 263.0 3. 437.0 32. 344.8 33. 164.8
CD: R= .002 «Л=-.О44 «у=.001 W=-.597 Z=-.010 «/=-.003
Nit=5 SVD: 146.138 19.705 -85.382 -18471.626 -16.302 -1.771
Vri,V„,Vzi: 0. 21.24 -10.94 0. 10.83 5.47 0. 6.29 0. 0. 22.38 0.
M Uf. 3. 263.0 3. 437.0 32. 344.8 33. 164.8
CD: Л=-.001 «Л=.008 «v= .001 A'=-.O46 Z= 0. Vf= 0.
5.6. Использование итерационной процедуры для
точного учета ограничений на высоту орбиты ожидания
Описанную выше процедуру можно эффективно использовать
для точного выполнения ограничений на параметры орбиты
ожидания и для многих других целей.
Рассмотрим, например, её использование для точного учета
ограничения на высоту орбиты ожидания.
Пусть на /-Й итерации задача решалась при ограничении, что
высота орбиты ожидания h должна быть больше заданной величины
242
hmj. Было найдено решение, у которого вычисляемая по
аналитическим формулам высота hai удовлетворяла этому
ограничению (hai>hmJ). В процессе численного интегрирования
уравнений движения с учетом рассчитанных импульсов скорости,
рассчитывается также и высота орбиты ожидания /?,,
соответствующая этому решению. Определяется разница
между значениями высоты, рассчитанными при помощи
аналитического метода и численного интегрирования. На следующей
г+1 итерации в качестве ограничения по высоте используется
величина h„,j+\=hmi„+\h, где hmin - заданное минимально возможное
значение высоты орбиты ожидания.
Такой прием позволяет использовать довольно простые
формулы для вычисления высоты орбиты ожидания и в тоже время
выполнять ограничение на высоту с необходимой точностью.
Для определения параметров маневров, удовлетворяющих
ограничению на высоту можно воспользоваться численно
аналитическим методом, приведенным в III.6. Если же для решения
задачи используется численный метод, и число ограничений в виде
равенств совпадает с числом используемых составляющих
импульсов, то выполнение ограничения на высоту просто
проверяется для очередного найденного решения. После определения
величин составляющих импульсов для очередной точки из множества
F, проверяется выполнение ограничения haj>hm i, и, если ограничение
не выполнено, то решение отсеивается, а если выполнено, то
проверяется оптимальность найденного решения. Если полученное
решение лучше предыдущих, оно становится текущим оптимальным
решением.
Процедура, аналогичная процедуре изменения hmi, используется
при решении задачи, когда только часть из терминальных отклонений
требуется сделать нулевыми (Дк), а остальные отклонения (ДД
добавляются в минимизируемый функционал в виде штрафов.
5.7. Использование симплекс-метода для расчета
параметров маневров
Весьма эффективным для определения параметров оптимальных
маневров на околокруговых орбитах является симплекс-метод. Идея
применения симплекс-метода для расчета параметров маневров была
высказана М.Л. Лиловым в работе [75], а затем развита для маневров
243
с ограниченной тягой в работе М.Л. Лидова и Н.М. Тесленко [76].
Дальнейшее развитие этого подхода в работах В.П. Гаврилова и Е.В.
Обухова [89], [48] позволило решить задачу с фиксированным числом
импульсов скорости. Разработанный В.П. Гавриловым и Е.В.
Обуховым комплекс программ на протяжении многих лет
использовался в НПО «Энергия» при проектировании полетов КА
типа «Союз» и «Прогресс». Свой вариант симплекс-метода был
реализован в Центре Управления Полетами (г. Королев) в 1990г. и
также в течение многих лет успешно применялся для расчета
маневров всех КА, стыковавшихся с орбитальной станцией. Р.Р.
Назиров и Б.Ц. Бахшиян использовали симплекс-метод для расчета
параметров маневров межпланетных перелётов [35, 91].
Следующий шаг, сделанный А.В. Гавриловым [47,149], состоял
в использовании теории двойственности. Это позволило существенно
сократить время решения многоимпульсной задачи на этапе перебора
углов приложения импульсов скорости. Детальное, с необходимыми
примерами описание применения симплекс-метода к решению задач
маневрирования выполнено Г. А. Колеговым в работе [69].
Симплекс-метод имеет ряд существенных преимуществ. Он
позволяет решать задачу с любым количеством импульсов скорости,
с произвольным набором терминальных ограничений, позволяет
легко учитывать ограничения на величины импульсов скорости и на
места их приложения. Основное преимущество симплекс-метода -
гораздо более высокая скорость решения задачи по сравнению с
градиентными методами.
Недостатком симплекс-метода, как и любого численного метода,
является невозможность объяснения полученного решения. Нельзя
предсказать, как будет меняться решение при изменении условий
задачи. Симплекс метод для расчета параметров маневров
затруднительно использовать в бортовых алгоритмах.
При проведении массовых расчетов при подготовке к запуску
ATV в CNES иногда возникала проблема со сходимостью при
использовании симплекс-метода для определения параметров
маневров. В этих случаях требовалась подборка управляющих
констант для полного решения задачи. Из-за этого недостатка
симплекс-метода CNES остановил свой выбор [164] на описанном в
данной главе простом и надежном методе в качестве основного
метода расчета параметров маневров ATV. Впоследствии, реализация
данного метода, выполненная в CNES, была использована также для
244
расчета параметров маневров создания Formation Flying “PRISMA”.
Симплекс-метод, имеющий свои многочисленные достоинства,
используется в CNES при решении исследовательских задач [160].
Дальнейшее развитие численных методов для расчета
параметров маневров связано с работами Ю.П. Улыбышева. С
помощью метода внутренней точки [ 189] ему удалось распространить
данный подход на решение задач с малой тягой, а также на решение
комбинированных задач. В этих задачах часть маневров исполняется
маршевыми двигателями (это близкие к импульсным маневры), а
оставшаяся часть маневров исполняется двигателями причаливания и
ориентации. Протяженность последних маневров составляет
значительную часть витка. В работах Ю.П. Улыбышева протяженный
активный участок моделируется десятками тысяч псевдоимпульсов
[123,124].
Существуют и другие эффективные численные методы для
определения параметров оптимальных маневров на околокруговых
орбитах. Например, метод разработанный Ю.П. Павлушевичем.
Описание метода можно найти в работе [4]. Этот метод на
протяжении многих лет (с 1972 г. по 1990 г.) успешно применялся в
ЦУП для расчета параметров маневров КА, стыкуемых с орбитальной
станцией.
Эффективные численные методы для решения задачи встречи
создаются не только в центрах управления полётами КА, но и в
университетах [183]. Часто в основе этих методов лежит решение
задачи Ламберта [175],[184].
245
ГЛАВА VI
МАНЕВРИРОВАНИЕ С ПОМОЩЬЮ ДВИГАТЕЛЯ,
ИМЕЮЩЕГО ОГРАНИЧЕННУЮ ПОСТОЯННУЮ ТЯГУ
В предыдущих параграфах при определении параметров
маневров предполагалось, что маневры исполняются с помощью
двигателей с бесконечной тягой. Это позволяло моделировать
маневры импульсами скорости. У реальных КА тяга всегда
ограничена, следовательно, маневры имеет определенную
продолжительность. Если продолжительность маневра мала по
сравнению с периодом орбиты, то импульсное приближение можно
считать достаточно точным. Если продолжительность маневра
составляет несколько десятков градусов по аргументу широты, а при
определении параметров маневров используется импульсная модель,
остается надеяться на итерационную процедуру, описанную в первой
главе. Эта процедура в некоторых случаях может обеспечить
выполнение терминальных условий даже, если протяженность
реальных маневров доходит до 45 по аргументу широты. Однако
допустимая максимальная продолжительность маневра, при которой
сходится итерационная процедура, зависит от конкретной задачи и
может быть существенно меньше 45 , например, при решении задачи
встречи большой продолжительности. В тех случаях, когда ДУ
работает в течение значительной части витка, сходимость
итерационной процедуры нарушается, а суммарная
характеристическая скорость маневров существенно отличается от
импульсного варианта. В этих случаях при определении параметров
маневров необходимо непосредственно учитывать время работы ДУ.
Иногда импульсное решение пытаются отделять от решения с
малой тягой только ориентируясь на тягу двигателя. Это может
привести к неверному выводу. Деление двигателей на большую и
малую тягу весьма условно, что с очевидностью следует из
приведенного ниже текста.
Характеристики различных двигателей и их деление на
большую и малую тягу подробно проанализированы в работе Ю. Г.
Сухого:
246
«В источнике [104] двигатель жидкостный ракетный малой тяги
определён как двигатель тягой не более 1600 Н, используемый в
качестве исполнительного органа системы управления космических
летательных и спускаемых аппаратов. В источнике [128] приведены
области применения жидкостных ракетных двигателей малой тяги
для космических аппаратов. Так жидкостной ракетный двигатель
малой тяги (ЖРДМТ) 11Д428А - 16 (тяга - 130.5 Н, удельный
импульс тяги - 290 с) применяется на транспортных кораблях «Союз-
ТМ», «Прогресс-М», служебном модуле «Звезда» Международной
космической станции. Ракетные двигатели малой тяги (РДМТ)
17Д51(тяга - 111 Н, удельный импульс тяги - 209 с), 11Д456 (тяга -
104 Н, удельный импульс тяги - 252 с), 11Д457 (тяга - 54 Н,
удельный импульс тяги - 254 с) применяются на спутниках
дистанционного зондирования Земли. РДМТ 11Д458 (тяга - 400 Н)
применяется на разгонном блоке «Бриз». РДМТ 17Д58Э имеет тягу
13.3 Н. Существует множество различных типов жидкостных
ракетных двигателей малой тяги с использованием
двухкомпонентного и однокомпонентного топлива. ЖРДМТ на
однокомпонентном топливе кроме топлива (перекись водорода,
гидразин) используют катализатор для разложения топлива, в
результате чего образуется высокотемпературный газ, который
создает тягу. Двигатели на однокомпонентном топливе уступают
двигателям на двухкомпонентном топливе по величине удельного
импульса. Диапазон тяг однокомпонентных ЖРД малой тяги очень
широк: от долей до сотен Н.
Газореактивные системы [36] имеют свой диапазон делений по
шкале малой и большой тяги. В качестве рабочего тела в них
применяют сжатый газ (воздух, азот, аргон), размещённый в
баллонах. Они являются надёжными и простейшими из всех
ракетных микродвигателей. Их недостатками являются маленький
удельный импульс и уменьшение тяги к моменту окончания топлива
в баке. Газореактивные системы малой тяги, как правило, имеют тягу
двигателей от 0.1 до 1 Н, большой тяги - до 10 Н.
Продолжительность включения газореактивного двигателя малой
тяги может составлять от долей секунды до нескольких часов.
Длительность включения газореактивного двигателя большой тяги
обычно ограничивается минутами.
Электрореактивные системы часто более удобны для
геостационарных космических аппаратов, так как они позволяют
247
оперировать со сверхмалой тягой для компенсации небольших
возмущений орбиты. Электрореактивные двигатели (ЭРД) [68, 55]
обычно различаются по способу создания ускорения частиц:
электростатические, электротермические, электромагнитные,
магнитодинамические, импульсные. Электростатические двигатели
делятся на ионные и плазменные. Импульсные двигатели основаны
на использовании кинетической энергии газов, возникающих при
испарении твёрдого тела в электрическом разряде. В качестве
рабочего тела в ЭРД применяются жидкости и газы, а также их смеси.
Существенные успехи в настоящее время достигнуты в разработке
стационарных плазменных двигателей (СПД). Известны
отечественные магнитоплазмодинамические двигатели серии СПД с
различной величиной номинальной тяги: СПД-35 - 0.01 Н, СПД-50 -
0.02 И, СПД-60 - 0.03 Н, СПД-70 - 0.04 Н, СПД-100 - 0.083 Н, СПД-
140 - до 0.3 Н, СПД-200 - до 0.5 Н, СПД-290 - до 1.5 Н. Двигатели
СПД-35, СПД-50, СПД-60 могут применяться для малых космических
аппаратов массой 500-1000 кг; СПД-70, СПД-100 - для средних
космических аппаратов; СПД-140 - для выполнения операций
межорбитальной транспортировки и коррекции орбиты тяжелых
геостационарных спутников. Двигатели СПД-200 и СПД-290
пригодны как для коррекции орбит различных спутников, так и для
решения маршевых и транспортных задач, а также для использования
в составе разгонных блоков (РБ). Удельный импульс этих двигателей
составляет 1500-2600 с. Суммарный импульс тяги для двигателей
СПД-100 составляет около 2000 кН.с. Двигатели СПД-60
устанавливались на спутниках «Метеор», СПД-70 - на КА «Гейзер»,
«Альтаир», «Купон», «Ямал-100», СПД-100 - на КА «Экспресс-А»,
«Экспресс-AM», «Галс» [55]. За рубежом распространены ионные
ксеноновые электрореактивные двигатели «13 см» (тяга 0.018 Н), «30
см» (тяга 0.092 Н), «25 см» (тяга 0.165 Н). Удельный импульс этих
двигателей составляет от 2565 до 3800 с. Двигатели «13 см»
устанавливались на КА «Panamsat-5», «Panamsat-бВ», «Panamsat-9»,
«Panamsat-5», «DirektTV 1R» и др.; «25 см» - на КА «Galaxy 11»,
«Panamsat-1R», «Anik Fb>; «30 см» - на КА «Deep Spase 1». На
спутниках «Метеор-3», «Метеор-Природа», «Ресурс-О», «Электро»
применялись электротермические двигатели ДЭН-15, работающие на
аммиаке. Мощность аммиачных двигателей составляет примерно
100^00 Вт, номинальная тяга - 0.05-0.3 Н, удельный импульс - 100-
270 с, суммарный импульс тяги достигает 500 кН-с. Известны также
248
другие модели электрореактивных двигателей (Д-38, Д-55, Д-100-1,
Д-100-2, Х-40, Т-100, Т-160, КМ-45) с тягой в доли Ньютона,
удельный импульс тяги которых лежит в пределах 1300-4200с [55,38].
Электрореактивные системы, благодаря малой тяге, позволяют делать
включения двигателей от нескольких минут до десятков часов. С
точки зрения коррекций орбит средних геостационарных спутников
тягу удобно делить на малую (примерно от 0.5 Н до 100 Н) и
сверхмалую (от 0.01 Н до 0.5 Н) независимо от моделей применяемых
двигателей. Такое деление обусловлено возможностью или
невозможностью компенсации одним включением недельных
возмущений орбиты по наклонению среднего геостационарного
спутника в период наличия максимальных возмущений от Солнца и
Луны» [115].
6.1. Переходы между компланарными орбитами.
У реальных КА ориентация двигателя во время проведения
маневра практически всегда фиксируется в орбитальной или
инерциальной системах координат. Это обстоятельство диктует
необходимость рассмотрения каждого из этих вариантов. Также
будет предложен алгоритм для определения закона оптимального
изменения ориентации вектора тяги в общем случае.
6.1.1. Постоянная ориентация вектора тяги в орбитальной
системе координат. Рассмотрим вариант фиксирования ориентации
ДУ по трансверсали в орбитальной системе координат. Данной
ориентации соответствует случай вырождения базис-вектора в точку
(Х=0, X.!=±l, + Х3 = 0, ц=1 или ц=-1, (1.19)). Это означает, что
орбитальная ориентация вектора тяги по трансверсали и при
длительных интервалах работы ДУ может являться оптимальной. Как
и в импульсном случае, основным результатом такого маневра
является изменение большой полуоси, следовательно, такая
ориентация вектора тяги может быть оптимальна для переходов
между непересекающимися орбитами.
Чтобы максимально приблизиться к импульсному решению,
которое принимается за основу, и получить оптимальное решение,
середина активного участка должна совпадать с точкой приложения
импульса скорости [71]. Это предположение справедливо, т.к. масса
КА меняется незначительно при исполнении одного маневра и
249
реактивное ускорение можно считать постоянным. На рисунке 6.1
активному участку соответствует дуга АС орбиты (А<р), точкой
приложения импульса скорости является точка В, расположенная на
линии апсид относительной орбиты. Величина импульса скорости
АН,. Так как точка В находится в центре дуги АС изменение вектора
эксцентриситета при продолжительном маневре будет происходить в
том же направлении, что и в импульсном случае (на точку В). Однако
сама величина изменения вектора эксцентриситета в результате
действия безразмерной скорости АГ, (АГ,=АГ, /Го), равномерно
распределенной на интервале аргумента широты А<р, будет меньше
его изменения Ле в результате действия импульса скорости
аналогичной величины АГ,, (рис.6.1). Это связано с тем, что чем
дальше часть дуги, на которой реализуется импульс скорости 5 Г,,
отстоит от середины активного участка, тем больше направление
произведенного на ней изменения вектора эксцентриситета 5е
(направлено на центр части дуги) отличается от необходимого
направления на т.В (рис.6.1).
Рис. 6.2. Постоянная
ориентация в инерциаль-
ной системе координат
Рис. 6.3. Оптимальная
ориентация для измене-
ния эксцентриситета
Рис. 6.1. Постоянная
ориентация в орбиталь-
ной системе координат
Т.к. дуга АС симметрична относительно т. В, суммарный вектор
эксцентриситета направлен на т. В, но его величина меньше чем в
импульсном случае. Изменение эксцентриситета, производимое при
сообщении безразмерной скорости АГ, равномерно распределенной
на интервале аргумента широты Аср, можно рассчитать по формуле:
. Аср
Т АГ sm V
Ае = 2 | —Lcoscp<7cp = 4----(6.1)
-4/2 А(р АФ
250
где ф - угол от середины активного участка до текущей точк;
(рис.6.1). Из формулы (6.1) следует, что увеличени
продолжительности участка работы ДУ приводит к уменьшение
изменения эксцентриситета по сравнению с импульсным случаем. I
таблице 6.1 показано, на сколько процентов уменьшается изменени
эксцентриситета по сравнению с импульсным случаем в зависимост
от продолжительности участка работы ДУ (продолжительност
измеряется в градусах по аргументу широты).
Таблица 6.
Дф (град) 20 40 60 80 100 120 140 160 180
Де (%) 1.0 2.0 4.5 7.9 12.2 17.3 23.1 29.1 36.3
Дф (град) 200 220 240 260 280 300 320 340 360
Де(%) 43.6 51.0 58.6 66.2 73.7 80.9 87.8 94.1 100
Предполагая, что масса КА практически не меняется во врем
проведения одного маневра, можно рассчитать время Аг, которо
потребуется для изменения скорости КА на величину И0АИ:
WI
А1 = —КАК, (6.2
Р 0
где т - масса КА, Р - тяга двигателя.
Из (6.2) следует, что Аф линейно зависит от АК :
Дф = Л,0ДГ = £АИ = —АИ, (6.3
И’
, Ио , mV2 wc
где Ао=— ,к= — = —, иу - центростремительное ускорени
r0 Pr0 W
V2
опорной круговой орбиты (иу =—), w - ускорение, создаваемое Д’
'о
(w = -).
т
Используя (6.3), можно найти изменение эксцентриситет
орбиты в результате работы ДУ на интервале Аф:
251
Де = 4 —sin—. (6.4)
wc 2
Максимальное изменение эксцентриситета, которое можно
получить при помощи одного включения ДУ равно:
* W
Ле = 4 — , (6.5)
VT.
оно достигается при Д(р=тг. Если на другой половине витка
ориентация вектора тяги будет противоположной, то суммарное
изменение эксцентриситета будет:
Дё = 8—. (6.6)
wc
Минимальное число витков пе, требуемое для коррекции
отклонения по эксцентриситету Ле, должно удовлетворять
ограничению:
Так как изменение большой полуоси орбиты не зависит от
момента приложения трансверсального импульса скорости, а зависит
от величины этого импульса Ла=2ЛУ1 (здесь как всегда Ла -
безразмерная величина), изменение безразмерной большой полуоси
за интервал работы двигателя Дер равно:
Ла = Л<^. (6.8)
Wc
Максимальное изменение большой полуоси на витке, когда
двигатель работает весь виток (Д<р=2тг), равно:
, _ 4tw
Ла =----.
Wc
Минимальное число витков па, необходимое для коррекции
отклонения большой полуоси Ла, должно удовлетворять
ограничению:
252
Ла
Ла
(6-9)
Условия перехода на заданную орбиту, когда на каждом витке
выполняются два включения ДУ, центры активных участков которых
располагаются на линии апсид относительной орбиты, имеют вид:
. . Дф, . . Дф2 w Ле
4 sin—!-L-4sin—= —с-—,
2 2 wn
ТА , ТА WAa
2Дф, + 2Дф2 = ——,
wn
(6.10)
где п - число витков, на которых одинаковым образом работает
двигательная установка (п> па, п> пе). Более точно граница
возможного изменения Да, Де будет определена в параграфе 6.1.6.
Из системы (6.10) можно найти величины Дфь Дф2:
Дф1 =
wcNa
4wn
, п wAe
+ 2 arcsin------—
о wcNa
ъып cos—-—
8wn
Дф2 =
wcNa
4wn
- 2arcsin
wcNe
„ wNa ’
cos—-—
8w«
(6.H)
Если получается отрицательное значение Дф„ это означает, что
при исполнении данного маневра ориентация вектора тяги должна
быть на торможение.
Для переходов между непересекающимися орбитами, если
выполнено условие:
wc |Да|
2wn
> 4arcsin
щЛе
w Ла
8wncos-----
8wh
(6-12)
то затраты суммарной характеристической скорости на переход с
конечной тягой аналогичны затратам импульсного решения и равны:
ЛГ = 1^1
2
253
Для переходов между пересекающимися орбитами и между
непересекающимися орбитами, для которых не выполнено условие
(6.12), затраты суммарной характеристической скорости на переход с
конечной тягой превышают затраты импульсного решения и равны:
ДИ =-----arcsin------------. (6.13)
w „ w Да
с iswncos-----------
Увеличивая п, можно приблизиться по затратам суммарной
характеристической скорости к импульсному решению.
6.1.2. Пример. Требуется определить параметры перехода с
помощью двигателя малой тяги между орбитами, элементы которых
приведены в таблице 2.1. Эти начальные условия аналогичны
условиям, приведенным в примере 2.1.5.
Таблица 6.2
Элементы Начальная орбита (н) Конечная орбита (к)
Hmin (км) 180 340
Umax (км) 210 360
(град) 20 150
В данной задаче существенна информация о массе КА ш=300кг,
и тяге его двигательной установки Р=0.2н.
За центры интервалов работы ДУ (p[c, <р2с принимаются точки
приложения импульсов скорости при импульсном переходе (они
рассчитаны в 2.1.5). Из второго уравнения системы (6.10) можно
получить оценку минимального числа витков п необходимых для
маневрирования. Будет использована только оценка для изменения
большой полуоси, т.к. это изменение намного больше изменения
эксцентриситета.
Используем очевидное условие, что угловой интервал работы
ДУ на одном витке должен быть менее 2л:
wAa . wAa
<Р] + ф2 = —— < 2л => п > —-—.
2wn 4wn
254
Здесь w = — = 0.000667.W / с2 - ускорение, создаваемое двигательной
т
V2
установкой, w = — = 9.0м /с - центростремительное ускорение.
го
Получаем л=25. Окончательное число витков, отводимое на маневр,
примем с некоторым запасом, учитывая, что между витками
маневрирования может быть необходима пауза, а также что углы Д<р;
могут быть не найдены по приведенным зависимостям в силу
несоответствия аргумента функции arcsin ее области определения.
Принимаем п=31.
Угловая протяженность интервалов работы ДУ вычисляется по
формулам (6.11):
. w Аа „ . w Де
Дф. = —£— + 2 arcsin------—,
4wn о w Аа
8wncos——
8wn
. wАа ~ . wAe
Дф, = — ---2 arcsin-------—.
4wn о w Аа
8wncos—-—
8wn
Результат расчета:
<Pic= 180.624° Дф! = 226.012°
ф2с = 360.240 ° Дф2 = 66.069°
ДИГ1 = — Дф = 69.92м / с
Wc
AVa = 20.44 м/с
6.1.3. Постоянная ориентация вектора тяги в инерциальной
системе координат. Рассмотрим вариант фиксированной ориентации
ДУ в инерциальной системе координат. Чтобы максимально
приблизиться к импульсному решению, которое принимается за
основу, середина активного участка также должна совпадать с точкой
приложения импульса скорости (на рисунке 6.2 активному участку
также соответствует дуга АС орбиты, точкой приложения импульса
скорости является точка В). Вектор тяги в начальный момент (точка
А) должен быть направлен таким образом, чтобы в середине
активного участка (точка 5) он был направлен по трансверсали. При
этих условиях изменение вектора эксцентриситета будет происходить
в том же направлении, что и в импульсном случае, но величина
самого изменения будет меньше. Изменение эксцентриситета,
255
производимое при сообщении безразмерной скорости А К, равномерно
распределенной на интервале аргумента широты Аф, можно
рассчитать по формуле:
д<г2 А И . . . 3 зтАф ,,
Ае= --------(2со5фсо5ф + 51Пф5Шф)<7ф = ЛУ(— н---—), (6.14)
-4/2 А(Р 2 2А(Р
где Аф - угловая величина активного участка. Из формулы (6.14)
следует, что производимое изменение эксцентриситета больше, чем
при фиксации ориентации в орбитальной системе координат. В
таблице 6.3 показано, на сколько процентов уменьшается изменение
эксцентриситета по сравнению с импульсным случаем в зависимости
от угловой продолжительности работы ДУ.
Таблица 6.3
Аср(град) 20 40 60 80 100 120 140 160 180
Ае(%) 0.5 1.99 4.3 7.37 10.9 14.7 18.4 21.9 25.0
Аср(град) 200 220 240 260 280 300 320 340 360
Де(%) 27.4 29.2 30.2 30.4 30.0 29.1 27.9 26.4 25.0
Используя соотношение (6.3), можно найти изменение
эксцентриситета орбиты за интервал работы двигателя Аф:
3w w
Ле =----Аф +----зшАф. (6.15)
2wc 2wc
Из формулы (6.15) следует, что при фиксированной ориентации
вектора тяги в инерциальной системе координат изменение вектора
эксцентриситета в нужном направлении происходит на всем витке
(Дф=2л).
Максимальное изменение эксцентриситета, которое можно
получить за один виток, равно:
W
Аё = 3я—, (6.16)
оно достигается при Аф=2л.
256
Минимальное число витков пе, требуемое для коррекции
отклонения по эксцентриситету Де, должно удовлетворять
ограничению:
Изменение большой полуоси, производимое при сообщении
относительной скорости ДИ, можно рассчитать по формуле:
. Д(р
ДФ/2 д(/ sin—-
Да = 2 Г -----coscp<7(p = 4---—ДИ. (6.18)
-ЛФ/2 А(Р АФ
Данная формула аналогична формуле для изменения эксцентриситета
при фиксированной ориентации ДУ в орбитальной системе
координат.
Используя соотношение (6.3), получаем:
Л 4w . Дер
Да = sm—-.
ж 2
(6.19)
Максимальное изменение большой полуоси, которое можно
получить при помощи одного включения ДУ, равно:
* W
Да = 4 — ,
w
(6.20)
оно достигается при Дф=л. Если на другой половине витка
ориентация вектора тяги будет противоположной, то суммарное
изменение большой полуоси будет:
да = 8—.
w
(6.21)
Минимальное число витков па, требуемое для коррекции
отклонения по большой полуоси Да, должно удовлетворять
ограничению:
па>^- (6-22)
Да
257
Условия перехода на заданную орбиту, когда на каждом витке
выполняются два включения ДУ, центры активных участков которых
располагаются на линии апсид относительной орбиты, а ориентация
ДУ противоположна, имеют вид:
3 1 . 3 1 w Де
-Дер, 4-—sin Дф, --Д(р2 81пДф2 = -±—,
2 2 2 2 wn
. . Дф, . . Дф, w Да
4sin——+ 4sin—^- = —е-—
2 2 wn
где н-число витков, на которых одинаковым образом работает
двигательная установка (п> па, п> пе). Из этой системы численно
находятся величины Дфь Дф2.
6.1.4. Оптимальная ориентация вектора тяги для изменения
эксцентриситета. Определим теперь, какой должна быть ориентация
вектора тяги, чтобы обеспечить максимальное изменение
эксцентриситета. Интересует только эксцентриситет, т.к. для
изменения большой полуоси ответ был получен ранее - ориентация
вектора тяги должна быть по трансверсали.
Ориентацию вектора тяги в данной точке орбиты будем задавать
углом а, который отсчитывается от перпендикуляра к радиус-вектору
(рис. 6.3). Тогда в результате приложения импульса скорости ДР),
ДИ*
(Д И = —-) в точке, отстоящей на угол ф от середины активного
участка (рис. 6.3), произойдут следующие изменения большой
полуоси а и эксцентриситета е (в направлении точки 5):
Д Р,=Д P),cosa, ДГГ=Д Pysina,
Де(ф)=2Д РрСО8асозф+Д Р),8шазтф, (6.24)
Да(ф) =2 Д P^cosa. (6.25)
Из (6.24) следует, что максимальное изменение эксцентриситета
будет иметь место, если
^а=~^Ф (6.26)
Этот же результат получается, если воспользоваться
необходимыми условиями оптимальности. Ориентация вектора тяги,
258
при Л,]=0 (рис. 6.4), определяется формулой аналогичной формуле
(6.26):
X Ja,2 + A,2 sincp 1
tga = - = \2 3 =~tg<p.
Ц 2<Д2 + A2 coscp 2
Рис. 6.4. Годограф базис-вектора для Л=1, А.]=0.
Данная ориентация ДУ, соответствующая годографу базис-
вектора в форме эллипса, симметричного относительно оси X,
удовлетворяет необходимым условиям оптимальности. Она
обеспечивает максимальное изменение эксцентриситета среди всех
оптимальных решений. Напомним, что для случая оптимальных
импульсных переходов между пересекающимися орбитами, когда
необходимо максимально изменить эксцентриситет, годограф базис-
вектора имеет вид эллипса с центром в начале системы координат.
Отличие варианта ограниченной тяги состоит в том, что годограф
базис-вектора определяет оптимальную ориентацию ДУ не в двух
точках, где эллипс касается окружности, а во всех точках эллипса,
расположенных за пределами окружности единичного радиуса (рис.
6.4).
Далее ориентацию ДУ, определяемую формулой (6.26), будем
называть «оптимальной по эксцентриситету».
Выражение для изменения эксцентриситета в данной точке
имеет вид:
Де = Д Vp+ 3cos2 ср . (6.27)
Изменение большой полуоси вычисляется по формуле:
4 ДИ cos ср
Л/7 - - Р У
1 + 3cos2 <р
259
(6.28)
Учитывая, что ЛИ ------d<p =—dtp, за весь участок работы Ду
Дф wc
изменение большой полуоси составит:
Лф/2 4wcos<par<p 8w . /Л/з . Дф. ,, .
Ла = I -------=? = —=—arcsm(—sin—). (6.29)
-д<р/2 wc у 1 + 3 cos2 ф V 3 vv 2 2
В выражение для изменения эксцентриситета входит эллиптический
интеграл второго рода:
Дф/2
Г W I р W
Ле= —^l + 3cos фЛр = 4—Е
-Дф/2 с с
2’2'
(6.30)
В таблицах 6.4 и 6.5 показано, на сколько процентов
уменьшается изменение соответственно большой полуоси и
эксцентриситета (вычисленные по формулам (6.29), (6.30)) по
сравнению с импульсным случаем в зависимости от
продолжительности участка работы ДУ.
Таблица 6.4
Дср(град) 20 40 60 80 100 120 140 160 180
Да(%) 0 0.5 0.1 2.5 4.0 6.5 10.0 15.5 23.0
Дср(град) 200 220 240 260 280 300 320 340 360
Да(%) 32.5 43.0 53.0 63.0 72.0 80.0 87.5 94.0 100.0
Таблица 6.5
Дср(град) 20 40 60 80 100 120 140 160 180
Де(%) 0 1.5 3.5 6.0 9.0 12.5 16.0 19.5 23.0
Дср(град) 200 220 240 260 280 300 320 340 360
Де(%) 25.5 27.7 28.2 28.5 28.0 27.0 25.5 24.2 23.0
6.1.5. Сравнение различных типов ориентации вектора тяги.
Графики, описывающие изменение большой полуоси и
эксцентриситета в зависимости от угловой продолжительности
260
маневров для различных типов ориентации ДУ, приведены на
рисунках 6.5, 6.6. На графиках сплошной линией изображены
зависимости для орбитальной ориентации, пунктирной линией - для
инерциальной ориентации, линией из точек - для ориентации
«оптимальной по эксцентриситету». Чтобы не зависеть от мощности
двигателя и радиуса орбиты вместо переменных Аа и Ае
WC Л
и — Ае, поэтому значения
w
W. л
используются переменные — Аа
w
безразмерной полуоси и эксцентриситета больше 1. Чтобы получить
графики для конкретной задачи, надо разделить приведенные на
графиках значения на —.
Wc
Как можно видеть, при продолжительности маневров примерно
до 45°, кривые для различных типов ориентации близки между собой.
Изменение большой полуоси и эксцентриситета такое же, как при
эквивалентном импульсе скорости. Это объясняет эффективность
использования импульсных решений при относительно небольшой
продолжительности маневров.
Рис. 6.5. Эффективность коррекции
большой полуоси
ie
Рис. 6.6. Эффективность коррекции
эксцентриситета
Очень важен тот факт, что зависимости для инерциальной
ориентации и для ориентации «оптимальной по эксцентриситету»
близки между собой (особенно для изменения эксцентриситета).
261
Видно, что на рисунке 6.6, начиная примерно с Д(р=18О°, графики для
инерциальной и «оптимальной по эксцентриситету» ориентации идут
практически параллельно в непосредственной близости друг другу.
Это позволяет при больших отклонениях эксцентриситета вместо
трудно реализуемой «оптимальной по эксцентриситету» ориентации
использовать более простую, но практически столь же эффективную
инерциальную ориентацию. Используя близость изменения
эксцентриситета для этих типов ориентации, можно вместо интеграла
(6.30) для «оптимальной по эксцентриситету» ориентации
использовать приближенную формулу (6.31) [17] при этом ошибка не
будет превосходить 0.5%:
Де = — (—Дер + — sinДер н- 0.04-^-) Дер < п, (6.31а)
wc 2 2 л
Де = 1.54—Д<р + —^-sin Дер Д(р>л. (6.316)
vy 2wc
6.1.6. Геометрическая интерпретация маневров с
ограниченной тягой. Области существования решений
различных типов. Используемые в предыдущих параграфах этой
главы оценки областей существования решений различного типа
являются довольно грубыми и не позволяют представить картину в
целом. Желательно точно указать границы областей в одном
пространстве. Ранее при геометрической интерпретации маневров
было эффективно использовать плоскость ех, еу. В этой главе
существенным является не направление изменения вектора
эксцентриситета (оно происходит вдоль линии апсид относительной
орбиты), а соотношение изменений величины эксцентриситета и
большой полуоси. Таким образом, целесообразно использовать
систему координат, в которой по оси абсцисс откладывается
изменение большой полуоси, а по оси ординат изменение
эксцентриситета.
Рассмотрим использование этой плоскости на примере
импульсных решений. Положительный трансверсальный импульс
скорости ДР, (ему соответствует отрезок ОА на рисунке 6.7),
прикладываемый в перицентре относительной орбиты, производит
одинаковое изменение эксцентриситета орбиты и большой полуоси
2 ДР,. Отрицательному импульсу скорости -ДР), прикладываемому в
262
этой точке, соответствует вектор OD. Положительному импульсу
скорости, момент приложения которого отстоит на полвитка,
соответствует вектор ОВ. Отрицательному импульсу скорости,
прикладываемому через полвитка, соответствует вектор ОС.
Рис. 6.8. Изменение большой
полуоси и эксцентриситета
с помощью ДУ малой тяги.
Рис. 6.7. Изменение большой
полуоси и эксцентриситета
импульсами скорости
Пусть с помощью двух трансверсальных импульсов скорости
ЛИ,1,ДИ(2, прикладываемых на линии апсид относительной орбиты
(ДИ,2 - прикладывается в апоцентре относительной орбиты),
необходимо перейти на орбиту, имеющую отличие в элементах
Дал/,Дел/ (точка М на рис.6.7), причем NaM>NeM (переход между
непересекающимися орбитами). Величины импульсов скорости
находятся из системы:
2Д 2Д И,2=Л^л/,
2Д И,1-2ДИ,2=ДеЛ/.
Этому переходу на плоскости а,е соответствует ломаная OLM. Оба
импульса скорости положительные.
Если осуществляется переход между пересекающимися
орбитами, например, в точку N (Аа^-ЛеС), то ему соответствует
ломаная OKN (второй импульс скорости отрицательный).
В случае маневров выполняемых двигателями, имеющими
ограниченную постоянную тягу, на витке можно получить только
ограниченное изменение эксцентриситета и большой полуоси.
Изменению элементов орбиты при фиксированной трансверсальной
ориентации ДУ в орбитальной системе координат соответствует
263
линия OPP (рис.6.8). Точка Р' достигается после работы ДУ в
течение половины витка, точка Р, когда ДУ работает весь виток.
Уравнение, описывающее дугу ОРР, получается из формул (6.4),
(6.8):
Ле = 4—sin—-Лд •
wc 4w
Постоянной ориентации в инерциальной системе координат
соответствует линия OKS. Уравнение, описывающее дугу OKS,
получается из формул (6.15), (6.19):
. 3w . wha w . . w Sa
Se - — arcsin —-— н---sin(2 arcsin ——) •
wc 4w 2wc 4w
Близкой к ней ориентации, обеспечивающей максимальное
изменение эксцентриситета, соответствует линия OS'S. Точки S' и К
соответствуют изменениям элементов орбиты при
продолжительности маневров полвитка. Таким же образом
изображаются аналогичные зависимости в других квадрантах [30].
Во втором, третьем и четвёртом квадрантах стоят знаки «+», «-»,
«180°». Плюс показывает, что ориентация вектора тяги на разгон,
минус - на торможение, 180° обозначает, что в данном квадранте
изображается влияние маневра, середина которого отстоит на 180° от
середины активного участка, влияние которого изображается в
первом квадранте.
Для достижения точек из области, ограниченной линией ОР'Р и
осью абсцисс (область I), оптимальной является орбитальная
ориентация ДУ. На витке должны исполняться два маневра, середины
которых отстоят на 180°, ориентация ДУ одинаковая. Первому
соответствует часть линии ОР'Р, второму часть линии OP Р.
Например, переход в точку М осуществляется по траектории ОМ'М.
Величины Acpi, Дфг, соответствующие дугам OM'vt MTrf, находятся по
формулам (6.11).
Если требуется перейти на орбиту, которой соответствует точка
из области, ограниченной осью ординат и линией OS'S (область II),
например, в т. N, то оптимальной является ориентация ДУ,
обеспечивающая максимальное изменение эксцентриситета.
Постоянная ориентация в инерциальной системе координат близка к
264
ней по эффективности коррекции эксцентриситета, но немного
проигрывает в эффективности коррекции большой полуоси. Внутри
рассматриваемой области второе обстоятельство не существенно, а
«инерциальная» ориентация предпочтительней, если имеет значение
простота построения и поддержания ориентации. Переход в точку N,
которому соответствует траектория ONN, осуществляется с
помощью двух маневров. Первому соответствует часть линии OS'S,
второму часть линии OS S. Величины Аф], Афг, соответствующие
дугам ON' и NN, находятся из системы (6.23) для «инерциальной»
ориентации или используя формулы (6.29), (6.31) для «оптимальной
по эксцентриситету» ориентации.
Перейти на орбиту, которой соответствует точка из области III,
ограниченной линиями OS'S и ОР'Р и линией, соединяющей точки 5
и Р, также можно с помощью двух маневров на витке, центры
которых разнесены на 180°, однако типы ориентации ДУ для
исполнения этих маневров лучше брать разными. При исполнении
одного маневра ориентация вектора тяги фиксируется в орбитальной
системе координат, а при реализации другого в инерциальной. В
уравнения системы для определения параметров таких маневров
входят слагаемые из уравнений системы (6.10) и системы (6.23).
В области III перейти в нужную точку можно и одним
оптимальным длительным маневром с изменяющимся углом а в
течение маневра. Маневры этого типа будут исследованы в
следующем параграфе.
6.1.7. Оптимальная ориентация вектора тяги в общем
случае. Области существования различных невырожденных
решений. Были рассмотрены случаи, когда годограф базис-вектора
вырождался в точку, а также имел вид эллипса симметричного
относительно оси X. Исследуем оптимальные решения,
соответствующие другим положениям эллипса. Рассмотрим
увеличивающиеся в размере эллипсы, имеющие внешнее касание с
окружностью единичного радиуса и расположенные справа от неё
(рис. 6.9).
При росте размеров эллипса, например, варианты а), Ь), с) на
рис. 6.9, соответствующие эллипсам дуги на плоскости Аа,Ае (они
обозначены а, Ь, с на рис. 6.11) постепенно отходят от дуги ОРР,
265
приближаясь к дуге 0L Ъ, ограничивающей область (она обозначена
цифрой IV) существования решений этого типа.
Рис. 6.9. Внешнее касание годографа базис-вектора
и окружности единичного радиуса
Аналогично при росте размеров эллипса, имеющего внутреннее
касание с окружностью единичного радиуса (варианты d), е), f) на
рис. 6.10), соответствующие эллипсам дуги (они обозначены d,
рис. 6.11) постепенно отходят от дуги OS'S, заполняя всю оставшуюся
часть области III.
Рис. 6.10. Внутреннее касание годографа базис-вектора
и окружности единичного радиуса
Область существования решений этого типа обозначена цифрой V.
Линии, соответствующие эллипсам больших размеров, также
приближается к дуге OLL, но остаётся изгиб вверх связанный с
наличием участка, где ц<0. Чем меньшая часть эллипса принадлежит
левой полуплоскости, тем ближе кривая к дуге OLL и тем меньше
загиб вверх.
266
Приближенно дугу OL Ъ, разделяющую области IV и V, можно
представить зависимостью: [29]
Ае =-О.ООЗАа3 - 0.035Аа2 + 1.068Аа 0<Аа<9.67, (6.32)
а дуга SEP определяется формулами:
Ае = 0.001Аа3-0.081Аа2 -0.593Аа + 9.69 0<Аа<8.27, (6.33а)
Ае =-0.04Аа3 + 1.404Аа2 -14.295Аа + 55.332 8.27<Аа< 12.57, (6.336)
Чтобы воспользоваться данными результатами для конкретной
задачи надо перейти от истинных безразмерных отклонений Аа ,Ае к
переменным А<з,Ае, используемым в этих формулах:
W • W .
Аа = —Аа, Ае = —Ае.
w w
Информация о границе SEP очень важна, т.к. позволяет
довольно точно оценить возможность перехода между орбитами
одним маневром на витке (или сколько витков п потребуется для
маневрирования) без непосредственного вычисления параметров
самого маневра.
267
То, что при произвольных значениях А,Х[, соответствующие им
дуги на плоскости а,е не выходят за пределы границ области III, ещё
раз говорит о том, что при оптимальной ориентации вектора тяги
внутренних точек областей I и II можно достичь только двумя
включениями ДУ.
6.1.8. Определение параметров оптимального
невырожденного решения. Будем искать параметры манёвра (его
продолжительность и закон изменения угла а), обеспечивающие
заданные изменения элементов орбиты Д<з0 и Де0-
Так как из необходимых условий оптимальности следует, что
X Л sin ср /д плч
tga = - =--------------, I6-34)
ц 2(Xj + A cos ср)
можно найти косинус и синус угла а:
2(Х, + к cos ср)
cos а - , 1 ...
+ 8А,1 Л coscp + ЗЛ2 cos2 ср + А:2
A sin ср
sin а = —. — - -
cos ср + ЗА2 cos2 ср + к2
Используя (6.35) и (6.24), (6.25), получаем следующие
выражения для изменения большой полуоси и эксцентриситета:
. Л<г/2 4(Х, + A cos ср) ________, „
Д<з = I 1 ----Дер, (6.36)
-4/2 д/4^2 + 8^! A eosep + ЗА2 eos2 ср + А2
Л<₽/2 2(Х, + A cos ср) cos ср
J I 2 2 2 2~ +
-Аф/2 -\/4^i + 8XjAcoscp + ЗА cos ср + А
Asin2ср . , ,,
+ . )Дср. (6.37)
^/4А2 + 8XjAcoscp + ЗА2 cos2 ср + А2
Можно предложить следующий алгоритм для определения А,Х|
и Дер [29]. Определяется, какой области принадлежит точка (Да0,Де0).
Если области I, то Acpi, Дср2 находятся по формулам (6.11), если
области II, то Дсрь Дср2 находятся из системы (6.23), когда
268
используется фиксированная ориентация вектора тяги в
инерциальной системе координат, или используются формулы
(6.29),(6.31) при ориентации оптимальной по эксцентриситету. Нас
интересует случай, когда точка (Аа0,Ае0) принадлежит области IV или
V.
Поиск решения состоит из последовательного повторения трех
этапов. На первом этапе берётся точка из пространства к,Х\, что
задаёт положение эллипса и закон изменения угла а. Данную точку
можно задать достаточно точно, т.к. каждая из областей IV и V
предварительно разбиваются на известные подобласти. На
следующем этапе определяется значение Аф, соответствующее части
эллипса, находящейся вне окружности единичного радиуса (рис.
6.12). Эллипс теперь пересекает окружность, т.к. рассматривается
переход во внутреннюю точку областей IV и V, и, следовательно,
маневрирование осуществляется только на части витка,
соответствующей части эллипса вне окружности.
А Найденное значение Аф определяет
_________ пределы интегрирования. На третьем этапе
У вычисляются интегралы (6.36), (6.37). Если
"U у вычисленные значения Аас, Аес совпадают с
необходимой точностью с Atf0, Ае0, то
задача решена. В противном случае
Рис.6.12. Вид годографа переходим к первому этапу, т.е. берётся
базис-вектора для точек , , п
_ т*,т новая точка из пространства к,А,. В
из области 111. г г > i
окрестности оптимального решения шаги
перебора в пространстве и интегрирования уменьшаются, чтобы
обеспечить необходимую точность решения задачи.
Решить задачу для отклонений из области III можно и с
помощью двух маневров с изменяющейся ориентацией вектора тяги,
но пропадает выигрыш в уменьшении числа маневров, а реализовать
фиксированную ориентацию ДУ (альтернативное решение) намного
проще.
Алгоритм расчета параметров маневра с переменной
ориентацией вектора тяги, описанный в данном параграфе, можно
использовать также на активном участке разгонного блока для
расчета ориентации его вектора тяги.
269
6.1.9. Определение числа витков маневрирования. Найти
минимальное число витков nmi„, необходимых для перелёта на
заданную орбиту, можно с помощью формул (6.33), определяющих
внешнюю границу области III. Отклонения EciiJn^ и Ее^пт:п (им
соответствует точка Е (рис. 6.13)) должны принадлежать области III.
Увеличивая число витков п, на которых осуществляется
маневрирование, и тем самым смещая т. Е вглубь области OSP можно
уменьшить затраты горючего на перелёт.
Рис. 6.13. Области различной эффективности маневров
Как видно на рисунке 6.13, при продолжительности маневра
примерно до 45 по аргументу широты линии, соответствующие всем
трем рассмотренным ориентациям ДУ, практически сливаются, а
затраты суммарной характеристической скорости совпадают с
затратами в импульсном случае. Это одно из объяснений хорошей
сходимости итерационной процедуры, когда расчет параметров
маневров происходит в импульсной постановке, а при моделировании
маневров их продолжительность не превышает сорок пять градусов.
Элементам орбит, которые можно получить с помощью таких
маневров на рисунке 6.13 соответствует область OKL. Таким образом
увеличивать число витков перелета и уменьшать продолжительность
маневров меньше одной восьмой витка не имеет смысла. При
продолжительности маневра до 90°, отличие от импульсного случая в
изменении эксцентриситета будет меньше 10% при любой из
270
рассмотренных ориентаций ДУ. Отличие в изменении большой
полуоси от импульсного случая при ориентации «оптимальной по
эксцентриситету» будет меньше 5%, при инерциальной меньше 10%.
Таким образом, маневры продолжительностью от 45° до 90°
достаточно эффективны. Элементам орбит, которые можно получить
с помощью таких маневров, на рис. 6.13 соответствует область
KLL'K'. Если продолжительность маневра составляет полвитка,
отличие от импульсного случая в изменении эксцентриситета и
большой полуоси (кроме орбитальной ориентации) будет больше
двадцати процентов. Желательно увеличивать число витков
маневрирования, чтобы точка-цель из области K'L'SP перешла в
область OK'L'. В общем случае выбор числа витков п, на которых
маневрирует КА, должен обеспечивать компромисс между желанием
сократить время выхода на заданную орбиту (уменьшить п) и
желанием уменьшить затраты суммарной характеристической
скорости (увеличить и).
6.1.10. Распределение коррекции элементов орбиты между
витками маневрирования. В предыдущих разделах предполагалось,
что на каждом из п витков, на которых работает ДУ, должно
производиться одинаковое изменение большой полуоси и одинаковое
изменение эксцентриситета орбиты. Результаты, приведенные в
таблицах 6.1-6.4, показывают, что эффективность маневров падает с
увеличением их угловой продолжительности нелинейно. Это
позволяет предположить, что угловая продолжительность маневров
на каждом из витков должна быть одинакова. Таким образом, правые
части в уравнениях (6.10), (6.23) для разных витков маневрирования
должны быть равны между собой.
Пусть определено число витков п, на которых должна работать
ДУ. Тогда среднее изменение большой полуоси и эксцентриситета
с л Да Ле
должно быть Лал =—,Лел = —. Предполагая, что угловая
п п
продолжительность маневров на каждом из витков должна быть
одинакова, используя (6.6), можно найти изменение большой полуоси
Ла/ для последнего витка маневрирования:
w Ла ш.,Ла,
с"' ” = —Д, (6.38)
VV W
271
где wcm, wcj- центростремительные ускорения для среднего и
последнего витков маневрирования. Обозначим Ar=r/-r(J разницу
средних радиусов заданной и исходной орбит (средний радиус -
радиус круговой орбиты, имеющей тот же период, что и
рассматриваемая орбита). Тогда
Ла Ла,
__п _____J___
Г2 / Аг. 2 ’
(rm+y)
де гт = ~(го + г/)’ Пренебрегая величинами второго порядка малости,
получаем:
Аг
Аау = А<з„(1 + —).
Г
т
Необходимое изменение большой полуоси на витке
маневрирования с порядковым номером i можно найти по формуле:
Ла, = А<з„(1 + —(—-1)).
«
Аналогичная формула получается и для изменения эксцентриситета.
Предположение об одинаковой угловой длительности маневров
является достаточно простым и в тоже время более точным, чем
предположение об одинаковом изменении элементов орбиты на
каждом из витков маневрирования.
В работе [106] численным методом была установлена линейная
зависимость протяженности (по угловой дальности) активных
участков при перелётах между круговыми орбитами
расположенными на большом расстоянии друг от друга.
6.2. Встреча на компланарных орбитах с помощью
двигателей ограниченной постоянной тяги.
6.2.1. Встреча на компланарных непересекающихся орбитах.
Исследованные в предыдущем параграфе апсидальные решения
можно использовать для решения задачи встречи на компланарных
орбитах. Предполагается, что двигательная установка позволяет
произвести всё необходимое маневрирование на двух интервалах,
272
величина которых существенно меньше расстояния между ними.
Первоначально предполагается, что на каждом из интервалов
маневрирования исполняются по два маневра.
Четырём маневрам условно (теперь нельзя говорить, что
маневру точно соответствует отрезок длины 2ДИ,) соответствуют
отрезки АВ, ВС, CD, DK (рис.6.14).
Рис.6.14. Встреча на компланарных
непересекающихся орбитах
Точка С соответствует вектору
эксцентриситета орбиты
ожидания.
Реально, каждый из
маневров первого интервала
маневрирования может быть
разбит на одинаковых
частей, прикладываемых на
разных витках, аналогично
маневры второго интервала
маневрирования могут быть
разбиты на лг2 одинаковых
частей.
Если в импульсном
случае все решения, вектору
эксцентриситета орбиты ожидания которых соответствуют точки
отрезка EL (рис.6.14), имеют одинаковую суммарную
характеристическую скорость, то для ограниченной тяги суммарная
характеристическая скорость решения может зависеть от положения
т.С на отрезке EL. Обозначим х расстояние от точки А до точки С
(АС=х), тогда СК=Ле-х. Решение задачи встречи, вектору
эксцентриситета орбиты ожидания которого соответствует точка С,
можно представить состоящим из решений двух задач перехода на
каждом из интервалов маневрирования с изменением элементов
орбиты Да'1=2ДР’(/, Дв1=х и Да2=2ДИ,/Л Де2=Де-х соответственно, где
ДИ,] и ДИ,П, как всегда, вычисляются по формулам
ДЕ„«-—,
3<р10
. т, Ка iXt
ДЕ,И и — +--,
2 3Ф10
(6.39)
(6.40)
273
фю - произвольная точка первого разрешенного для маневрирования
интервала (напомним, что радиусы окружностей 7?]=2|АИ|| и
Л2=2|ДК,п|).
Поскольку для непересекающихся орбит |А<з|>Ае, то для
исполнения маневров целесообразно выбрать ориентацию
двигательной установки по трансверсали в орбитальной системе
координат, т.к. в этом случае происходит максимальное изменение
большой полуоси орбиты.
Используя (6.10), можно записать:
4w . w &V„. —sin—c-—— wc 2w 4w . sin Wc ЧА^12 ; 2w X
ак,11+аг,12 =
4w . wAV —sin—-—— wc 2w 4w . sin Wc w ЛК tin 2w txe-x m2
. АИ(|1
(6.41)
т2
где т । и т2 - число частей, на которые разбиваются трансверсальные
составляющие маневров первого AKrI1,AKZI2 и второго АК,Ш,ДК,112
интервалов маневрирования.
Из этой системы, используя (6.11), находятся величины
маневров АИ,ц, АИ,12, АИ,Ш, АИ,ц2
... А К, 2w . wx
А К,ц = —+—arcsin---с--,
2т w о wAK.
Swijcos——-
4wm,
АИ„
2m,
2w
-----arcsin
Wc
wcx
о WeAKl
cos—-—-
(6.42)
=
274
ДГ/||| A ArCSin И,‘(Де~1>),/ ,
2m- i«,c+ +
4ито2
ДГ„ =———arcsin ",-(Ae~ + .
2mr w. Stem, cos
4wm2
Если |Дп| заметно превосходит Де, а знаки Да, и Да2 совпадают
(в импульсном случае оптимальным является решение типа AS), то
суммарная характеристическая скорость маневров ДЕ равна
ДЕ=те1(|ДЕ,11|+|АЕ;12|)+^2(|ДЕ,111|+|ДЕ,П2|)=И. (6.43)
Если знаки Да| и Дя2 не совпадают (в импульсном случае
оптимальным является решение типа CNS), и |До1|+|Да2| заметно
превосходит Де, то суммарная характеристическая скорость маневров
ДЕ равна
Д E=W1 (IА Е,п |+| Д EZI2|)+W2(| Д Елп |+| Д Ея12|)=И- +1^1. (6.44)
Это же решение имеет место и для пересекающихся орбит, когда
в импульсном случае оптимальным является решение типа CNS.
Формулами (6.43), (6.44) можно воспользоваться, когда вектору
эксцентриситета орбиты ожидания соответствует точка, близкая к
середине отрезка EL. В тех случая, когда |Дя| больше Де, но их
значения близки, а также для точек близких к границам отрезка EL
суммарная характеристическая скорость маневров будет больше, за
счет больших затрат на изменение эксцентриситета.
6.2.2. Встреча на компланарных пересекающихся орбитах.
Вариант, когда в импульсном случае оптимальным является решение
типа CNS (окружности, имеющие радиусы R[ и R2, пересекаются) был
рассмотрен выше. Рассмотрим вариант, когда в импульсном случае
оптимальным является решение типа CAS (окружности, имеющие
радиусы Ri и R2 не пересекаются).
В импульсном случае все решения задачи встречи на
компланарных пересекающихся орбитах, вектору эксцентриситета
275
орбиты ожидания которых соответствуют точки отрезка EL
(рис.6.15), имеют одинаковую суммарную характеристическую
скорость. Для ограниченной тяги суммарная характеристическая
скорость решения зависит от положения т.С на отрезке EL.
Аналогично тому, как это делалось для задачи встречи на
непересекающихся орбитах, обозначим х расстояние от точки А до
точки С (АС=х), тогда СК=Ае-х.
Решение задачи встречи, вектору эксцентриситета орбиты
ожидания которого соответствует точка С, также представляем
Рис.6.15. Встреча на компланарных
пересекающихся орбитах.
состоящим из решений двух
задач перехода с изменением
элементов орбиты Aai=2AKzl,
Aei=x и Да2=2ДИ,ц, Де2=Де-х
соот-ветственно, где Д/л и AVt[l
вычисляются по формулам
(6.39), (6.40). Предположим,
что используется фиксирован-
ная ориентация ДУ по
трансверсали в орбитальной
системе координат. Поскольку
для пересекающихся орбит определяющей является коррекция
эксцентриситета, используя (6.13), можно записать выражение для
суммарной характеристической скорости апсидального решения
задачи встречи:
AV = + AV2 =—arcsin^x-i-—arcsin(A:2Ае - k2x), (6.45)
Wc Wc
где AVt и AV2 суммарная характеристическая скорость решения
задачи перехода соответственно на первом и втором интервалах
маневрирования,
=
о
oWCOS---
8w
„ w.
8wcos —
8w
(6.46)
(6.47)
276
yvc - центростремительное ускорение опорной круговой орбиты, w -
ускорение, создаваемое ДУ.
Минимум ДГдостигается при
. Де к, - к:
х = Де, = — + 2 '
2 2к?к22Ле
(6.48)
Зная Де] и Де2, по формулам (6.11) можно определить величины
импульсов скорости на первом и втором интервалах маневрирования.
Аналогичным образом можно решить задачу, когда на первом и
втором интервалах маневрирования используются разные ДУ или
разное количество одинаковых ДУ. В этом случае будут разные
значения w для первого и второго интервалов маневрирования, а
оптимальное значение х будет определяться в результате решения
квадратного уравнения.
Решив довольно простую задачу с использованием
фиксированной ориентации в орбитальной системе координат, можно
представить характер решения, и, если требуется значительное
изменение вектора эксцентриситета, а протяженность маневров
превышает 100°, перейти к «оптимальной» ориентации. В этом случае
будет одномерная минимизация по х, а для каждого фиксированного
х будут численно решаться две системы уравнений, аналогичные
системе (6.38).
6.2.3. Встреча, обеспечиваемая маневрированием на каждом
витке. В некоторых случаях для перелета в окрестность КА-цели
требуются несколько десятков и даже сотен витков, а сама схема
маневрирования не задана. Ставится задача обеспечить встречу КА,
при этом существенным является требование уменьшения времени
встречи, но без заметного увеличения затрат горючего. Для
выполнения этих условий КА должен маневрировать практически
одинаковым образом на большей части витков перелёта, и,
следовательно, нет двух выраженных интервалов маневрирования,
как в рассмотренных выше случаях. Можно предложить следующий
достаточно простой и надежный алгоритм решения данной задачи.
Процесс решения начинается с определения минимального
числа витков, необходимых для перелета на конечную орбиту. Для
этого решается задача перехода между орбитами, с помощью одного
из методов, описанных в разделах 6.1. В результате определяется
277
минимальное число витков п, необходимое для оптимального
перехода на конечную орбиту.
Промоделировав перелет с рассчитанными 2и маневрами,
можно установить, что в конце перелета КА окажется на конечной
орбите, но имеется отклонение вдоль орбиты Диу, т.к. условие встречи
еще не использовалось. Предположим, что в начальный момент
времени активный КА находится на более низкой орбите, чем КА-
цель (а/>а0, где а0 - соответственно большие полуоси орбиты КА-
цели и орбиты активного КА). Это наиболее типичный случай, но
если встретится обратный вариант (о/<а0), то он рассматривается
аналогичным образом. Если а/>а0, то всегда принимается, что АирО
(цель находится впереди активного КА). Например, если на
предполагаемый момент встречи аргумент широты КА-цели и=210°, а
аргумент широты активного КА м=215°, то Aw/=355°. И наоборот, если
aj<a0, то принимается, что АиРО (цель находится позади активного
КА). Обозначим отклонение по фазе двух КА в начальный момент
Aw0, в результате маневров перехода на последнем витке полета
отклонение по фазе стало Дм/. Если бы в начальный момент
отклонение по фазе было не имеющееся Aw0, a Auopl=Au0-Auf, то это
было бы оптимальное начальное фазовое отклонение и решение
задачи перехода было бы и решением задачи встречи. Поскольку Аи0
отличается от Auopt, чтобы решить задачу встречи необходимо
увеличить число витков перелета на т витков. Эти витки
располагаются в начале перелета, маневрирование на них не
производится. За счет того, что есть разность в периодах АР = Pf - Ро
(здесь Pf - период конечной орбиты, Ро - период начальной орбиты),
за один пассивный виток активный КА сократит рассогласование в
угловом положении вдоль орбиты на величину Дир
АР
ДМ1=2л—. (6.49)
Величина т должна быть на единицу больше целой части отношения
AwyK Дир
( Au f
m = int —- + 1,
V ^u\ J
278
Рис.6.16. Взаимное расположение
КА на орбите.
устранить всё рассогласование Ащ.
тогда за счет полета на первых пассивных витках активный КА
окажется немного впереди КА-цели.
На рисунке 6.16 положению активного КА, после исполнения
маневров перехода, соответствует т.К, положению КА-цели в этот
момент - t.L, рассогласование по фазе - Дну, изменение фазового
расстояния за один пассивный виток - Дщ, положению активного КА
после введения т пассивных
витков соответствует т.К’,
новое рассогласование по
фазе после введения пассив-
ных ВИТКОВ - AUf„-
Фактически введение
пассивных начальных витков
позволяет начать маневри-
рование в момент, когда
практически наступит опти-
мальное фазовое рассогласо-
вание. Однако поскольку т -
целое, то только с помощью
выбора этого числа нельзя
Из двух соседних значений т
выбирается то, которое обеспечивает перевод активного КА вперед
КА-цели. Для ситуации, изображенной на рисунке 6.16, т=5.
Устранить Auf„ - оставшуюся часть углового рассогласования
можно, если на последний из первых т витков перенести часть
маневра ДР), с последнего витка, а на последнем витке уменьшить
отработку исполняемой ранее величины маневра AFtL на эту же
величину ДК,]. В сумме изменение элементов орбиты останется
практически тем же самым, а угловое положение в конце полёта
изменится за счет того, что активный КА будет лететь п витков по
более высокой орбите.
Найти необходимую величину ДК(1 можно по формуле:
6л(п+1)ДИ(|=Диу„. (6.50)
Ошибки, которые возникают при использовании такой
упрощенной схемы расчёта, можно устранить, используя
итерационную процедуру. На следующей итерации дополнительное
изменение величины AVti на величину ДИ,2, которое позволит
279
устранить новое отклонение по фазе Ди/„2, вычисляется по
аналогичной формуле:
ДГ(2=Ди/й2/6л(п+1). (6.51)
После устранения фазового отклонения, найденное решение
уточняется с помощью итерационной процедуры, описанной в главе
1, чтобы терминальные условия были выполнены с заданной
точностью. На каждой итерации этой внешней итерационной
процедуры выполняется внутренняя итерационная процедура,
обеспечивающая выполнение фазового условия с заданной
точностью.
6.2.4. Пример. В таблице 6.6 приведены начальные условия
активного КА и KA-цели, расположенного на более высокой орбите.
Масса активного КА - 300кг, тяга ДУ - 0.1 н.
Таблица 6.6
Элементы Нач. орбита Кон. орбита
а (км) 6566 6721
е 0.0022845 0.00248787
СО (град) 20.0 30.0
и(град) 60.0 5.0
N вит 1 1
Дата 20140625 20140625
Время 43120.065 43120.065
Для решения задачи перехода требуется 52 витка активного КА,
за это время KA-цель пролетает 50 витков. На каждом из 52 витков
исполняются по два маневра. Ориентация ДУ фиксирована по
трансверсали в орбитальной системе координат. Аргумент широты
середины первого маневра - 89.03°, второго - 269.03°. Угловая
продолжительность первого маневра - 246.14°, второго - 102.11°.
Трансверсальная составляющая первого маневра на витке - 1.23м/с,
второго - 0.51м/с, суммарная характеристическая скорость всех
маневров - 90.35м/с. Промах по фазе при таком маневрировании
Ди/=334.133°. Чтобы устранить этот промах вводятся 27 пассивных
витков в начале перелета. После этого остается промах по фазе
wy„=-0.166°. Для того чтобы устранить оставшийся промах величина
первого маневра на последнем витке полета уменьшается на 0.016
м/с, а второго на 0.0066 м/с. Эти части маневров добавляются к
280
маневрам на 28 витке (первый виток маневрирования). После этого
промах по фазе становится практически нулевым Ап/„=-8.28*10'13
град.
6.3. Переход с помощью ДУ конечной тяги между
некомпланарными орбитами.
Для изменения ориентации плоскости орбиты обычно
используются две возможности. Довольно распространенной
является схема, в которой у КА имеются двигатели, осуществляющие
маневры в плоскости орбиты и другие двигатели, используемые для
изменения ориентации плоскости орбиты. Маневры в плоскости
орбиты и поворачивающие плоскость орбиты проводятся отдельно.
Этот вариант, обеспечивающий простое и надёжное, но не
оптимальное управление, довольно часто используется в КА,
функционирующих на геостационарной орбите, в спутниковых
системах и т.д.
Оптимальное управление можно реализовать для КА, у которых
имеется возможность выставлять вектор тяги в нужном направлении
и менять это направление заданным образом в процессе реализации
маневра. Для этого требуется довольно сложная система управления
движением вокруг центра масс. Вместо этого сложного управления
можно использовать близкое к оптимальному, но гораздо проще
реализуемое управление, описанное во второй части этого параграфа.
6.3.1. Маневр, обеспечивающий только изменение
ориентации плоскости орбиты. Вначале рассмотрим первую более
простую схему маневрирования. Поскольку маневры в плоскости и
поворачивающие плоскость не связаны между собой, их можно
рассматривать отдельно.
Изменение ориентации плоскости орбиты, производимое при
сообщении боковой скорости AKZ, можно рассчитать по формуле
. А<р
Лф/2 „ Sin—-
Az = [ —£-со8ф<Уф = 2---—ДИ., (6.52)
J„/2 А(Р А(Р
281
где Аср - угловая величина актив-
ного участка, ф- угол от середину
активного участка до текущей
точки. Середина активного
/ / участка находится на линии
______________________-У пересечения плоскостей орбит
/у____________________(рис. 6-17).
/ / Используя соотношение
С W
Аф = — А И, получаем:
w
Az = 2—sin(—). (6.53)
Рис.6.17. Изменение ориентации w 2
плоскости орбиты.
Эта формула с точностью до
множителя (2 вместо 4, т.к. влияние боковой составляющей в два раза
меньше чем трансверсальной) совпадает с формулой (6.4),
описывающей изменение эксцентриситета при орбитальной
ориентации ДУ, а также с формулой (6.19), описывающей изменение
большой полуоси при инерциальной ориентации ДУ. Этот факт очень
важен и будет в дальнейшем неоднократно использоваться.
Например, определить, на сколько процентов уменьшается изменение
угла между орбитами по сравнению с импульсным случаем в
зависимости от продолжительности участка работы ДУ, можно с
помощью Таблицы 6.1.
Реализовать описанный маневр довольно просто, т.к. для этого
достаточно поддерживать орбитальную или инерциальную
ориентацию. Ось двигателя направлена по оси, перпендикулярной
плоскости орбиты. Середина участка работы ДУ совпадает с точкой
оптимальной импульсной коррекции бокового отклонения
(вычисляется по формуле (1.146)).
6.3.2. Одновременное изменение всех элементов орбиты. Для
получения оптимального перехода между некомпланарными
орбитами необходимо совмещать изменение ориентации плоскости
орбиты с коррекцией вектора эксцентриситета и большой полуоси. В
общем случае годограф базис-вектора, определяющий оптимальную
ориентацию ДУ, будет иметь вид эллипса в пространстве X,p,v.
Найти и тем более реализовать оптимальное решение достаточно
сложно, т.к. необходимо обеспечить достаточно сложное изменение
282
ориентации ДУ в процессе исполнения маневра. Достаточно простым
является управление, которое можно реализовать при фиксированной
ориентации в орбитальной и/или инерциальной системах координат.
Будет искаться решение задачи при таком дополнительном
ограничении.
Как и для переходов между компланарными орбитами за основу
берется импульсное решение (оно будет называться базовым). Из
двухимпульсных решений задачи оптимального перехода между
околокруговыми некомпланарными орбитами, приведенных во
второй главе, выбирается решение, у которого используются только
трансверсальные и боковые составляющие импульсов скорости, а
угол приложения одного из импульсов перебирается в заданном
интервале. Особенно тщательный перебор угла осуществляется в
окрестности оптимального импульсного решения. При
фиксированном значении этого угла остальные параметры маневров
однозначно определяются по формулам (2.2а)-(2.2в) и (2.14а),(2.146).
Этим решением, можно воспользоваться почти при любых
отклонениях элементов начальной и заданных орбит. Остальные
приведенные во второй главе решения существуют каждое в своей
области.
Предположим, что базовое решение состоит из двух импульсов
скорости величиной ДИЬ ДИ2, углы приложения импульсов <р[ и <р2,
составляющие АИ(1, ДИ21 и ДК,2, ДИг2. Ориентация ДУ задаётся углами
ДУ ДИ
,8₽'=1К- (6'54)
Боковая составляющая первого импульса скорости произведет
изменение ориентации плоскости орбиты Д/^ДИг^ДИ^тр!, а
трансверсальная - изменение эксцентриситета Де1=2ДИ,|=2ДИ1созр1 и
большой полуоси Дц1=2ДИ/1=2ДИ1СО8р1.
Рассмотрим вначале вариант, когда во время исполнения
маневров двигатель сохраняет постоянную ориентацию в
орбитальной системе координат. Как всегда предполагаем, что
середина маневра по времени совпадает с моментом приложения
импульса скорости. Ускорение, создаваемое ДУ в трансверсальном
направлении wz=wcosP, ускорение, в боковом направлении wz=wsinp.
Из уравнения
283
А/, =ДГг, =AH,sinp, =2WSmplsin(^) (6.55)
wc 2
можно найти Аф[-продолжительность первого маневра:
A<p, = 2arcsin—£—L- (6.56)
2w
Такая же величина Аф! получится, если воспользоваться
уравнением для эксцентриситета:
Де, =2ДИ(1 =2AH]cospl = 4WC0Spl sin(^),
wc 2.
Аф! = 2 arcsin ——L.
2w
Аналогичным образом находится продолжительность второго
маневра Аф2:
. wcA^2
Аф2 = 2 arcsin ——
2w
Поскольку каждый из маневров обеспечивает необходимые
изменения элементов орбиты Ае}, Ai\ и Де2, Аг2, то соответствующие
элементы заданной орбиты будут сформированы такими же, как и в
импульсном случае. Сложность заключается в том, что изменение
большой полуоси будет больше, чем необходимо, т.к. она меняется
при орбитальной ориентации более эффективно, чем эксцентриситет.
Таким образом, в результате маневров будут устранены
расхождения в векторе эксцентриситета и в ориентации плоскости
начальной и заданной орбит, но останется ошибка в формировании
нужного значения большой полуоси. Устранить эту ошибку можно с
помощью итерационной процедуры [27].
Предположим, что первоначальным отклонением большой
полуоси было Аа0=а^а0 (например, Аа0>0). Это отклонение Аа0 и
отклонения Ае^, Ае><ъ Д/о, Афо использовались при определении
параметров маневров. Угол Аф0 между линией пересечения
плоскостей орбит и линией апсид относительной орбиты вычисляется
по формуле (1.14в).
284
В результате реализации рассчитанных маневров будет
сформирована большая полуось at (ai>aj). На следующей итерации
для вычисления параметров маневров будут использоваться
отклонения ^а{=^,ао+ара\, Аех0, Ае,,о, А*’о» Ау0, на последующей
Да2=Д<Я1+а/'б/2, и т.д., пока большая полуось не будет сформирована с
заданной точностью.
Если, например, рассматривается переход между
непересекающимися орбитами (А«>Ае), то такая итерационная
процедура приведет к последовательному уменьшению большой
полуоси эллипса, изображенного на рис. 2.2. Соответственно
уменьшатся величины импульсов скорости, которые служат базой
для решения с постоянной ограниченной тягой, и увеличится угол
между ними.
Предположим теперь, что в процессе реализации маневров тяга
сохраняет постоянную ориентацию в инерциальной системе
координат.
По формуле (6.56) можно рассчитать продолжительность
маневра, которая обеспечит такой же поворот плоскости орбиты, что
и базовый импульс скорости. Поскольку при ориентации в
инерциальной системе координат изменение большой полуоси
описывается такой же формулой, какой описывалось изменение
эксцентриситета при орбитальной ориентации, найденная
продолжительность маневра обеспечит необходимое изменение
большой полуоси. Однако изменение эксцентриситета будет
отличаться от требуемого. Поскольку базовые импульсы скорости
располагаются не на линии апсид относительной орбиты, ошибка
будет не только в величине вектора эксцентриситета, но и в его
ориентации.
Чтобы точно сформировать заданную орбиту, опять придется
воспользоваться итерационной процедурой, в процессе которой будут
меняться проекции вектора эксцентриситета. Процесс их изменения
аналогичен процессу изменения большой полуоси, описанному выше.
Как было показано в первом параграфе данной главы, иногда
для получения решения близкого к оптимальному требуется для
реализации одного из маневров использовать фиксированную
ориентацию вектора тяги в орбитальной системе координат, а для
реализации другого - в инерциальной. В этом случае маневр,
исполняемый в орбитальной системе координат, будет вносить
ошибку в формирование заданной большой полуоси, а маневр,
285
исполняемый в инерциальной системе координат, будет вносить
ошибку в формирование заданного вектора эксцентриситета. Таким
образом, для получения точного решения необходимо использовать
итерационную процедуру, в которой меняются как проекции вектора
эксцентриситета, так и большая полуось.
Описанные в этом параграфе решения обеспечивают
формирование с необходимой точностью заданной орбиты и, в тоже
время, они достаточно близки к оптимальным решениям, поскольку
поворот плоскости начальной орбиты совмещен с изменением её
вектора эксцентриситета и большой полуоси. Для получения решения
на основе точных уравнений движения, в котором учитываются
влияние нецентрального гравитационного поля, атмосферы и т.д.,
необходимо использовать итерационную процедуру, описанную в
первой главе. На каждой итерации этой «внешней» итерационной
процедуры используется «внутренняя» итерационная процедура,
описанная в данном параграфе, позволяющая найти «приближенное»
решение с заданной точностью.
6.3.3. Пример. Определить параметры перехода с помощью
двигателя малой тяги между орбитами, элементы которых приведены
в таблице 6.7, они аналогичны орбитам из примера 2.2.8. Масса КА
щ=300кг, тяга его двигательной установки Р=0.2н.
Таблица 6.7.
Элементы Начальная орбита Конечная орбита
Hmin, км 180 340
^Zmax> КМ 210 360
ите, (град) 20 150
i (град) 51.7 51.69
Q(град) 17.49 17.5
После оценки необходимого числа витков маневрирования,
было принято, что маневрирование происходит на 56 витках.
Совпадение начальных условий позволяет использовать
результаты расчета из примера 2.2.8:
Да = 0.02333, Да = 155.0, Де = 0.00345, Дех = -0.00344,
Леу = -0.00004, П = 0.01°, Д/ = -0.01°, Ду = -0.0127°,
=-38.1240°, ipz= 180° +w2= 141.8760°.
286
При определении параметров маневров рассчитанные
отклонения элементов орбит делятся на число витков
маневрирования.
Процедура решения состоит в переборе угла приложения
первого импульса скорости, для каждого значения этого угла
определении остальных параметров импульсного решения (второго
угла и составляющих импульсов скорости), определении с помощью
итерационной процедуры всех параметров продолжительных
маневров. Сравнение решений для различных значений первого угла
позволяет найти оптимальной решение. Такое решение было найдено
для угла ф|=-206.3°. Изменение по итерациям параметров решения,
соответствующего этому углу, приведено в таблице 6.8. Во втором
столбце приведено значение второго угла импульсного решения
(середины продолжительного маневра). В третьем и четвертом
столбцах - угловая продолжительность маневров (в градусах). В
пятом - используемое при расчетах значение большой полуоси (в км).
В шестом - ошибка в коррекции большой полуоси (в км). В седьмом,
восьмом, девятом и десятом столбцах - составляющие импульсов
скорости. В столбцах с пятого по десятый приведены данные
суммированные по всем виткам маневрирования. Это позволяет,
например, контролировать полный промах в формировании большой
полуоси. Можно видеть, что нужное значение большой полуоси
формируется с достаточно высокой точностью.
Таблица 6.8
№ -Ч>2 Д<Р1 Д(р2 Да 8а ДК1 ДК,2 ДК2, дгг2
1 35.1 105.2 76.26 155.00 -18.86 50.88 39.47 0.59 2.30
2 36.5 90.16 64.28 136.13 7.04 45.35 34.01 0.27 1.98
3 35.9 95.53 68.65 143.17 -2.28 47.41 36.05 0.39 2.10
4 36.1 93.76 67.22 140.89 0.78 46.74 35.39 0.35 2.06
5 36.1 94.36 67.71 141.67 -0.26 46.97 35.61 0.36 2.07
6 36.1 94.16 67.54 141.41 0.09 46.90 35.54 0.36 2.07
6.3.4. Довыведение МКА на солнечно-синхронную орбиту. В
качестве примера рассматривается задача перевода малого
космического аппарата (МКА) с орбиты выведения на рабочую
287
солнечно-синхронную орбиту высотой 491км. Одно из налагаемых
ограничений заключается в том, что из-за проведения различных
технологических операций маневрировать можно не ранее, чем на 50
витке полета. Для того чтобы уменьшить влияние ошибок в
определении орбиты, выполненном до начала маневрирования и
влияние ошибок, связанных с реализацией рассчитанных маневров,
требуемое изменение элементов орбиты было поделено в пропорции
0.8:0.2 между первым и вторым интервалами маневрирования.
Первый интервал начинается на 50 витке, второй интервал
маневрирования начинался на 85 витке. Сформированная орбита
контролировалась в восходящем узле 93 витка. Уточнение орбиты
после исполнения маневров первого интервала и последующий
пересчет параметров маневров второго интервала позволяет
существенно увеличить точность формирования заданной орбиты.
Относительно небольшая продолжительность полёта (43 витка)
от начала первого интервала маневрирования до контрольной точки,
достаточно большая высота начальной и конечной орбиты, позволили
для решения задачи использовать итерационную процедуру,
описанную в первой главе. Параметры маневров определялись при
использовании простейшей модели движения (центральное поле,
линеаризованные уравнения движения) по алгоритму, описанному в
6.3.2. По условию задачи ориентация ДУ фиксировалась в
орбитальной системе координат. При прогнозе учитывалось влияние
гравитационного поля 8*8 и динамическая модель атмосферы.
Ниже приведены таблицы, содержащие входную информацию и
результаты расчётов [17].
Таблица 6.9
Элементы орб. Нач. орбита Кон. орбита
Hmm (km) 418.33000 511.00000
Hmax (km) 420.35500 511.10000
Uprg (deg) 218.91800 0.13400000
1(deg) 97.594000 97.544000
gOMG (deg) 11.120000 17.190000
Nrev 1.0000000 1.0000000
Ulat (deg) 93.750000 0.10000000
S (ball) 0.78333000E-02 0.67113000Е-02
T (t.sec) 448.28006 966.07807
Data 20120425.000 20120501.000
Time 43120.065 42118.065
288
В таблице 6.9 приведены элементы начальной и конечной
орбиты: минимальная и максимальная высоты орбиты, аргумент
перицентра, наклонение и долгота восходящего узла орбиты, номер
витка, аргумент широты, баллистический коэффициент, дата и время
начальных условий.
В таблице 6.10 приведены используемые характеристики МКА и
его двигательной установки: тяга (н), удельный импульс, масса МКА
(кг), минимальное время между окончанием одного маневра и
началом следующего (с), минимальная и максимальная
продолжительность маневров (с).
Таблица 6.10
Тяга Уд.имп Вес ДТ Tmin Tmax
0.20 2060.0 300.0 600.0 0.25 3600.0
В таблице 6.11 первое число это - номер витка, на котором
должна быть сформирована заданная орбита. Следующие два числа
это номера витков, определяющих начало первого и второго
интервалов маневрирования. Четвёртое число в массиве показывает,
сколько будет витков запрещенных для маневрирования, а затем
приводятся значения самих витков. На этих запрещенных для
маневрирования витках можно уточнить параметры орбиты и
пересчитать величины оставшихся маневров.
В таблице 6.12 заданы точности формирования элементов
конечной орбиты: проекций вектора эксцентриситета, большой
полуоси [км], времени [с], наклонения [град], долготы восходящего
узла [град]. Если соответствующее число 0, то данный элемент
орбиты не корректируется. Во второй строке таблицы приведены
отклонения сформированной орбиты от заданной конечной орбиты.
Таблица 6.11
Nf N1 N2 N Nil N21
93. 50. 85. 2. 55. 91.
Таблица 6.12
Ex Ey A T I grOMG
0.000250 0.000250 0.010000 0.000000 0.000500 0.000000
-0.000002 0.000000 -0.004580 10.825450 0.000000 -0.068249
289
В таблице 6.13 приведены параметры импульсного решения,
которое используется для оценки качества полученного решения с
малой тягой. Приведены суммарный импульс скорости и отдельно
суммы трансверсальных и боковых составляющих, а также углы,
определяющие момент оптимальной коррекции вектора
эксцентриситета и изменения ориентации плоскости орбиты. Эти
пять параметров позволяют понять физику задачи.
Далее для сравнения в таблице 6.14 выводятся суммарный
импульс скорости и маневрирования при «раздельной» схеме
коррекции. В этой схеме раздельно исполняются маневры для
изменения элементов в плоскости орбиты и маневры, служащие для
поворота плоскости орбиты. Суммарные импульсы скорости для этих
маневров это второе и третье числа в таблице. Далее приведены
общее число необходимых маневров и число витков, на которых они
исполняются. Раздельная схема маневрирования в настоящее время
довольно часто используется при маневрировании находящихся на
орбите МКА с малой тягой.
В таблице 6.15 приведены параметры основного решения:
суммарный импульс скорости и отдельно суммы трансверсальных и
боковых составляющих, а также общее число маневров и число
итераций, потребовавшееся для формирования заданной орбиты с
необходимой точностью.
В таблице 6.16 приведена аналогичная информация отдельно о
маневрах на первом и втором интервалах маневрирования.
В таблице 6.17 приведены номер каждого из маневров, виток и
аргумент широты его начала и конца, курс и тангаж, задающие
ориентацию вектора тяги, величина эквивалентного импульса
скорости.
Таблица 6.13
dVimp dVinpln dVoutpl UEopt UZopt
41.53 41.02 6.51 263.2 0.00
Таблица 6.14
dVsp dVinpln dVoutpl Nman Nrev
47.56 41.02 6.55 42. 14.
290
Таблица 6.15
dV dVinpln dVoutpl 1 Nman Niter
42.30 41.02 7.71 | 38.0 6.0
Таблица 6.16
dV dVinpln dVout Nman Rt
33.60 33.03 6.18 30 0.8
8.70 8.57 1.53 8 0.2
Таблица 6.17
Nman REVbg U bg REVfn U fn COURS PITCH dVi
1 50 138.55 50 248.05 10.50 0.00 1.162
2 50 295.45 51 36.99 -10.69 0.00 1.078
29 65 138.55 65 248.05 10.50 0.00 1.162
30 65 295.45 66 36.99 -10.69 0.00 1.078
31 85 139.24 85 245.61 10.21 0.00 1.128
32 85 297.16 86 36.13 -10.02 0.00 1.048
37 88 139.24 88 245.61 10.21 0.00 1.128
38 88 297.16 89 36.13 -10.02 0.00 1.048
В таблице 6.18 для каждого маневра выводятся дата и время его
начала и конца, а также продолжительность маневра в минутах, и
величина массы МКА после маневра.
Отметим, что суммарная характеристическая скорость
импульсного решения и решения с малой тягой практически
совпадают, что говорит о высоком качестве решения при учёте
протяженности работы ДУ. Вместе с тем суммарная
характеристическая скорость традиционного «раздельного» решения
заметно больше.
Таблица 6.18
man DATAbg TIMEb DATAfn TIMEf dT Mass
1 2012042 85324.5 2012042 92147. 28.38 299.8
2 2012042 93407.0 2012042 10002 26.35 299.6
29 2012042 82041.1 2012042 84922. 28.69 295.3
30 2012042 90149.1 2012042 92828. 26.66 295.1
31 2012043 154954. 2012043 16174 27.89 295.0
32 2012043 163120. 2012043 16572 26.01 294.8
37 2012043 203340. 2012043 21013 27.96 294.0
38 2012043 211511. 2012043 21411 26.07 293.9
291
Глава VII
ФОРМИРОВАНИЕ СПУТНИКОВЫХ СИСТЕМ И
СПУТНИКОВЫХ ГРУПП
Описанные в предыдущих главах алгоритмы можно
использовать для расчета параметров маневров спутников, входящих
в спутниковые системы. Вместе с тем маневры таких спутников в
некоторых случаях имеют свои особенности, которые необходимо
учитывать.
Несмотря на всё разнообразие спутниковых систем, для каждой
из них приходится решать два типа задач оптимального
маневрирования: создание заданной конфигурации спутниковой
системы и поддержание этой конфигурации.
Задача поддержания заданной конфигурации спутниковой
системы будет рассмотрена в следующей главе. В данной главе
рассматривается задача создания спутниковой системы, которая
близка к классической задаче встречи. Каждый спутник
рассматривается отдельно, требуется перевести его в заданную точку
конечной орбиты за фиксированное время. В отличие от
классической задачи встречи, время перевода спутника в
фиксированную точку орбиты не жестко ограничено, а может
выбираться в достаточно широких диапазонах. Задача существенно
усложняется, когда спутник необходимо перевести на орбиту,
долгота восходящего узла (ДВУ) которой на десятки градусов
отличается от долготы восходящего узла исходной орбиты.
7.1. Изменение положения КА в спутниковых системах,
базирующихся на круговых орбитах
Рассматривается спутниковая система, в которой спутники
расположены на нескольких круговых орбитах, имеющих
одинаковый радиус и наклонение, но отличающихся долготой
восходящего узла. К этому типу относится значительная часть из
реально функционирующих спутниковых систем: ’’ГЛОНАСС”,
“Global Positioning System (GPS)”, “Iridium” и т.д. Выводы, которые
292
будут сделаны об оптимальной стратегии перевода спутника из одной
позиции в системе в другую, носят общий характер и могут быть
применены для каждой из систем этого типа.
Предположим, что на одной из орбит имеется резервный
спутник, который должен занять освободившееся место на своей
орбите или на орбите, имеющей другую долготу восходящего узла,
или совершить обслуживание спутника находящегося в этой позиции.
Рассмотрим различные варианты перевода спутника в новую
позицию, чтобы выбрать оптимальную схему маневрирования,
исходя из противоречивых критериев: времени перелета в новую
точку, которое желательно уменьшить, и минимизации затрат
суммарной характеристической скорости (ДИ), которые растут с
уменьшением времени перелета.
7.1.1. Изменение положения на орбите. Вначале рассмотрим
перевод спутника в другую точку той же орбиты, отстоящую на угол
Ди от исходной точки (|Дм|< 180°, Дм>0, если новая точка расположена
впереди исходной). В дальнейшем, угол Дм будет измеряться в долях
витка, его максимальное по модулю значение не может быть более
0.5.
Предполагается, что перевод осуществляется за N витков полёта
точки-цели. Число витков перелета выбирается таким, чтобы
спутнику не приходилось значительно удаляться от исходной орбиты.
Вариант существенного ухода от исходной орбиты и быстрого
возвращения на нее рассмотрен в работах Г.Г. Райкунова [103].
Используя (3.1г), можно оценить величину трансверсальной
составляющей импульса скорости ДК„ требуемой для нужного
изменения периода орбиты:
Дм
ДР>-------У (7,1)
где Vo =. — - скорость движения спутника по круговой орбите
V а
радиусом а. Момент приложения импульса скорости на витке
произвольный.
На конечном витке в апоцентре (если Дм>0) или перицентре (в
противоположном случае) прилагается такой же по величине, но
противоположно направленный импульс скорости, чтобы вернуться
293
на круговую орбиту. Таким образом, общие затраты суммарной
характеристической скорости А Г будут:
2|Дм|
ДГ-J—Ljz (7.2)
3N 0
При небольшом времени перевода спутника в заданную точку
затраты суммарной характеристической скорости весьма велики, и
для их уменьшения необходимо увеличивать число витков перелета
N. Кажется, что в пределе можно получить нулевые затраты, но это
не так. Чтобы перейти в новую точку, была изменена большая
полуось орбиты, а, следовательно, возникло отклонение в долготе
восходящего узла AQ, вследствие разной эволюции орбит под
действием нецентрального гравитационного поля. Для того чтобы
вычислить это отклонение, используется известное выражение для
изменения долготы восходящего узла за один виток 8Q, вследствие
влияния второго члена разложения потенциала гравитационного поля
в ряд по сферическим функциям геоцентрической широты:
8Q = -^cosz, (7.3)
здесь i - наклонение орбиты, р - фокальный параметр (для круговых
орбит р—а), £=2,634* 1010км5/с2, ц=уЛ/=3,986028*105км3/с2 (Л/- масса
планеты, у - гравитационная постоянная). Чтобы представить
величину 8Q, приведем ее значение для нескольких круговых орбит с
разной высотой над поверхностью Земли: Л=330 км - 8£2=0.521cosz
(градусы), Л=1400 км - 8Q=0.394cosz (градусы), /г=20000 км -
8Q=0.034cosz (градусы).
В результате приложения импульса скорости ДР) большая
полуось орбиты изменяется на Ла, а эксцентриситет на Ле.
Пренебрегая величиной ЛаЛе (далее будет показано, что
целесообразно, чтобы орбита ожидания тоже была круговой, т.е.
Ае=0), можно записать р=а+Ла. Разложив в ряд выражение для 8Q по
Ла и взяв член первого порядка малости, можно получить выражение
для изменения 8£2 в результате изменения а на Ла:
294
ЯО* 2тГ8 2Л{2 А<7
о£2 =---cosz(--) = -28Q—.
\хр а а
NV
Поскольку Na = 2а—- (3.1в), выражение для изменения 8Q в
результате приложения импульса скорости NV, имеет вид:
. NV
8Q =-45Q—(7.4)
V
у о
За каждый виток полета разница в долготе восходящего узла орбиты
цели и орбиты ожидания увеличивается на 8Q*. Таким образом,
отклонение, возникающее за N витков, можно вычислить по формуле:
NV
AQ = -48QzV—(7.5)
V
Выразив NV, через Nu из соотношения (7.1), получаем окончательное
выражение для возникающего отклонения в долготе восходящего
узла:
4
AQ = y8QAzz. (7.6)
Например, при изменении положения спутника на половину витка
поворот плоскости для орбит с высотой h= 1400км может достигать
AQ=0.262cosz (градусы), а для орбит с высотой /г=20000км
максимальный поворот плоскости орбиты AQ=0.022cosz (градусы).
Чтобы определить величину импульса скорости, необходимого
для компенсации возникающего отклонения по ДВУ, найдем
отклонения Az и AQ, являющиеся результатом приложения
бинормального импульса АД, в точке орбиты, имеющей аргумент
широты и (рис. 7.1).
В результате бинормального импульса скорости плоскость
орбиты поворачивается на угол:
Л
Ау = —-
V
(7.7)
295
Рис. 7.1. Коррекция ориентации плоскости орбиты
По теореме синусов для сферического треугольника:
sin Ay = sin(180° -(/ +AQ)
sin ДО sin и
Учитывая малость величин Ду, А/ и ДО, получаем окончательное
выражение для изменения долготы восходящего узла [90]:
sinw sinw ДИ
ДО =----Ду =-------2-. (7.9)
sin i sin i Ио
По теореме косинусов для сферического треугольника имеем:
cos(180° - (г + Дг)) = — cos Ay cos z + sin Ду sin г cos w. (7.10)
Из соотношения (7.10) можно найти выражение для изменения
наклонения орбиты:
ДИ
Д/= coswAy = cosw—(7.И)
Для того чтобы эффективно компенсировать имеющееся в
задаче отклонение по О и не создавать отклонения по i, импульс
296
скорости необходимо прилагать в максимально удаленных от
экватора точках (w=90° или w=270°, апексе и вертексе орбиты).
Величина боковой составляющей импульса определяется по
формуле:
Ду «sinz AQ = £^бпДиу (7.12)
sinw 3 smw
Предположим, что перелет в новое положение начинается в
апексе орбиты и заканчивается через 7V витков тоже в апексе, т.е.
используется двухимпульсный перелет. Разделим найденную
боковую составляющую на две равные части между этими
импульсами скорости, тогда для суммарной характеристической
скорости всего маневра получаем выражение [33]:
I 1 9 П
ДИ = 2^ДИ,2+(-ДИгП)2 = -|дм|И0^— + 45Q2 sin21. (7.13)
При больших N, когда величина — становится меньше 28Qsim,
N
затраты на коррекцию возникающего угла между плоскостями орбит
превышают затраты на вызвавшую их коррекцию положения вдоль
орбиты.
Была рассмотрена двухимпульсная схема, аналогичная схеме
исследуемой в [174], но на самом деле её недостаточно для получения
оптимального решения. Необходимо учитывать эволюцию не только
долготы восходящего узла, но и положения перицентра. На конечном
витке перицентр не будет находиться в апексе, так как на каждом
витке его положение изменяется на величину:
5co = -^-(5cos2z-1). (7.14)
Из-за этого смещения положения перицентра одного импульса
скорости, прикладываемого в апексе последнего витка полета, будет
недостаточно, чтобы сформировать круговую орбиту. Требуется
смещение импульса скорости в апсидальную точку, но это смещение
приведет к увеличению затрат на коррекцию ДВУ. Реально это
смещение незначительное и соизмеримо с изменением ДВУ.
297
максимально удаленные от
Полностью сохранить минимальное значение суммарной
характеристической скорости, определяемое по формуле (7.13),
позволяет использование четырехимпульсной схемы, когда каждый
из импульсов скорости делится на две равные части. Импульсы
скорости четырехимпульсной схемы прикладываются в апексе и
вертексе первого и последнего витков. Составляющие этих
импульсов каждого из интервалов в сумме равны по величине
соответствующим составляющим импульсов скорости
двухимпульсной схемы, но боковые составляющие имеют разный
знак.
При такой схеме маневрирования орбита ожидания будет иметь
нулевой эксцентриситет, и в конце перелета можно будет опять
использовать для приложения импульсов скорости точки
ра.
На рисунке 7.2 пунктирной
линией изображена орбита Т\,
которая является орбитой
ожидания при двухимпульсном
переходе в новую рабочую точку
(одноимпульсный переход с
рабочей орбиты То на орбиту
ожидания Т\). Линией из точек
изображен двухимпульсный
переход с рабочей круговой орбиты
То на орбиту ожидания Tf,
переходная орбита Т2. Возвращение
на рабочую орбиту осуществляется
с помощью перехода Ту
изображенного штрихпунктирной
линией.
возможность для устранения
долготе восходящего узла, это
использование отличия в эволюции орбит, имеющих разное
наклонение. Если орбита ожидания имеет другое наклонение, то его
влияние на долготу восходящего узла может скомпенсировать
влияние изменения большой полуоси.
Для изменения наклонения импульс скорости оптимально
прикладывать на экваторе в восходящем или нисходящем узле. Если
импульс скорости прикладывается в восходящем узле орбиты,
298
Д\/м
Рис.7.2. Четырехимпульсный пере -
лёт на орбиту ожидания.
Существует ещё одна
возникающего отклонения по
величина его боковой составляющей А К/, требуемой для создания
необходимого изменения наклонения, находится из уравнения:
Nk—= АН,
(7.15)
где к = —- sin z - изменение Q за виток в результате изменения
HP
АК.
наклонения на величину Az = ——. Формула для к была получена
дифференцированием выражения для 8Q по i. Таким образом,
выражение для Wzi имеет вид:
АГ =
45QAzz
ЗМ °'
(7.16)
Принимая во внимание связь к и 8Q, которая имеет вид £=-5Qigz,
получаем окончательное выражение для AVzi:
3Ntgi °
(7.17)
Эта формула справедлива для восходящего узла, в нисходящем узле
знак у AKz/ изменится на противоположный.
Высокая эффективность этого метода при i близких к 90° (в этом
случае ДКг,«0) объясняется тем, что сама величина AQ будет мала, а
изменение эволюции ДВУ при изменении наклонения велико.
Учитывая, что в конце перелета необходимо вернуться к
первоначальному наклонению, выражение для полных затрат
суммарной характеристической скорости будет иметь вид [14]:
АК = 2д/аК2 + АК,2 = ^1ко 11 + -^-. (7.18)
у ' 3N tg2i
Формулы (7.1) и (7.17) позволяют сравнить величины АК и АКг,-.
Если наклонение орбиты такое, что tgz'<4, то независимо от величины
N, затраты на коррекцию возникающего отклонения положения
299
плоскостей орбит будут больше, чем затраты на вызвавшую их
коррекцию положения спутника вдоль орбиты.
Описанные выше методы, интересны тем, что импульсы
скорости прикладываются в известных точках (на экваторе или в
наиболее удаленных от экватора точках орбиты). Однако
оптимальной является комбинация обоих методов, когда импульсы
скорости прикладываются в некоторой промежуточной точке витка
и0. Определим значение величины и0 для заданного числа витков
перелета N. Величина боковой составляющей ДИг импульса скорости,
прикладываемого на аргументе широты и, предназначенная для
компенсации имеющегося отклонения долготы восходящего узла ДО,
определяется из уравнения:
,АП .sinw.AK 4 /-Tin'!
(Жсо5« + 2-----)—- = —ЗПДм. (7-19)
sin i Ко 3
На втором интервале маневрирования импульсы скорости
прикладываются в симметричных относительно апекса точках по
отношению к точкам приложения импульсов скорости первого
интервала маневрирования (wOn=^-woi)- Это связано с тем, что
импульсами скорости второго интервала маневрирования необходимо
вернуть наклонение орбиты к его первоначальному значению. В то
же время ими нужно произвести такое же изменение Q, что и
импульсами первого интервала маневрирования, это объясняет
коэффициент 2 во втором слагаемом.
Величина ДКг минимальна, если максимальна величина стоящей
перед ней скобки, а для этого и должна быть равна w0, гДе
2
«о = arctg • (7.20)
Nk sin i
Для оптимального значения &VZ получаем выражение:
Д К = 45QA“ Vo. (7.21)
3.W2(3Qtg/)2+^у-
V sin i
300
Учитывая, что в конце перелета прикладываются такие же по
величине боковые составляющие, выражение для полных затрат
суммарной характеристической скорости будет иметь вид [33]:
АИ = 27ДК/+АК/=|НКО^Ь +
48Q2 sin2 2i
№8Q2 sin4 i + 4cos2 i
(7.22)
7.1.2. Примеры изменения положения спутника на орбите.
На рисунке 7.3 приведены зависимости от числа витков перелета N
суммарной характеристической скорости, требуемой для изменения
положения спутника на 180° вдоль орбиты. Три верхних линии
построены для спутниковой системы Globalstar (/г® 1430км, г®52°),
нижняя линия для системы ГЛОНАСС (/г» 19500км, /»64.2°). Точками
изображена зависимость АГ от N при коррекции только отклонения
вдоль орбиты Aw=180° (формула (7.2)). Пунктирной линией
изображена зависимость АГ от N, когда одновременно
корректируются Aw и AQ (АО~0.16°), а импульсы скорости
прикладываются в наиболее удаленных от экватора точках орбиты
(формула (7.13)). Сплошной линией изображена зависимость АГ от N
для оптимальной коррекции одновременно Aw и AQ (формула (7.22)).
60 .
Рис.7.3. Зависимость затрат суммарной характеристической
скорости, необходимой для перемещения спутника на 180°
вдоль орбиты от числа витков полета
Можно видеть, что для спутниковой системы Globalstar
примерно до двухсотого витка полета происходит довольно резкое
301
падение ДЕ при увеличении N. Дальнейшее увеличение N приводит к
незначительному постепенному уменьшению ДЕ для сплошной
линии и линии из точек, а в случае, когда импульсы скорости
прикладываются в наиболее удаленных от экватора точках орбиты
(пунктирная линия), затраты ДЕ практически не уменьшаются.
Для спутниковой системы ГЛОНАСС три аналогичные
зависимости практически сливаются в одну, изображенную
штрихпунктирной линией 4. Это связанно с малостью 5Q для столь
высоких орбит и соответственно с небольшой величиной
возникающего отклонения ДО (Д0®0.01°), которое можно вообще не
корректировать, а если такая необходимость возникает, то это
целесообразно делать в наиболее удаленных от экватора точках
орбиты.
Таким образом, для систем спутников, находящихся на LEO
орбитах (Low Earth Orbit), в зависимости от продолжительности
перелета можно использовать разные стратегии маневрирования. При
продолжительности перелета до 100 витков можно прилагать
импульсы скорости в апексе или вертексе орбиты, при этом затраты
суммарной характеристической скорости будут превышать 25 м/с,
если требуется сместить спутник на 180° вдоль орбиты. При
продолжительности более 1000 витков можно прилагать импульсы
скорости на экваторе, затраты будут меньше 5м/с. При средней
продолжительности оптимальна комбинированная стратегия. Этот
вывод относится к спутниковым системам: Iridium (Л~780км),
Orbcomm (Л~800км), Globalstar (Л» 143 0км) и др.
Для систем спутников находящихся на средних орбитах
(Medium orbits) GPS (Л»20100км) и ГЛОНАСС (Л~ 19500км)
оптимально прилагать импульсы скорости в апексе или вертексе
орбиты.
7.1.3. Определение компромиссной продолжительности
перелета. Как следует из графиков на рис. 7.3, вначале при
увеличении N происходит довольно резкое падение ДЕ, однако
дальнейшее увеличение N приводит к незначительному постепенному
уменьшению ДЕ Момент изменения скорости убывания ДЕ может
рассматриваться как некое компромиссное количество витков
ожидания между временем перелёта и затратами ДЕ на его
осуществление.
302
На рис. 7.4 представлена изохронная зависимость ДИ для высот
700 км и 2500 км. Можно видеть, что точка пересечения двух
графиков находится в интересующей области.
80
Д Г , м/с
Рис. 7.4. Зависимость затрат скорости от изохронных У для различных высот
Вычисление этой точки можно выполнить аналитически [20]:
N=.|—- , (7.23)
V 2Y
где: y = A-K + C-K-A-P-D-A-P-F
£, = А-М + В • К+ С М - В • Р D-В • Р • F - А-Р • Е
а = В • М - В • Р • Е
Р= , А = р2 sin4 i, В = Ар*, C = 4p2sin22i,
Н
D = 7[2Г22Р2 sin4 i, Е = 47)4F = 47[27)2р2 sin2 2i,
К = Т[4Р2 sin4 i, M = ATffp{, Р = ^-,
Pi
Т\ и Т2 - периоды двух сравниваемых орбит, р\ и р2 - их фокальные
параметры. В результате применения (7.23) получаем, что кривые
пересекаются в общем случае дважды. Например, для высот 300 и
700 км формула (7.23) даёт значения jV^SI и N2=554 витка.
зоз
Принципиальное изменение динамики убывания функции
происходит именно в точке Nh которую можно рассматривать как
точку компромиссного значения продолжительности перелёта. В
процессе исследований пределов применимости формулы (7.23) было
обнаружено, что для всех орбит кривые, показанные на рис. 7.4,
пересекаются только в том случае, если наклонение начальной
орбиты меньше 70°. Это объясняется тем, что при близком к 90°
наклонении множитель cos/, входящий в формулу скорости
прецессии ДВУ оказывается по своему значению близким к нулю,
уменьшая тем самым влияние изменённой большой полуоси на
вековой уход ДВУ. Следовательно, при значениях наклонения,
превышающих 70°, выбор компромиссного значения витков
ожидания на промежуточной орбите необходимо осуществлять,
ориентируясь на график зависимости затрат СХС от количества
витков перелёта.
Данная возможность аналитического отыскания компромисса
между затратами суммарной характеристической скорости на перелёт
и его продолжительностью может быть использована при
проектировании сложных многоуровневых спутниковых систем, при
планировании обслуживающих систем и т.д.
.....Юградусоо
— -20 градусов
— — 45 градусов
90 градусов
Рис. 7.5. Зависимость затрат суммарной характеристической
скорости от Ли для различных наклонений
304
На рис. 7.5 приведены затраты суммарной характеристической
скорости, необходимые для устранения рассогласований по фазе для
спутниковых систем высотой 700 км, имеющих различные
наклонения, при продолжительности перелета 100 витков
(используется оптимальная схема маневрирования, в которой АН
вычисляется по формуле (7.22)). Видно, что максимум затрат
суммарной характеристической скорости приходится на значения
наклонения близкие к 45°, а минимум на полярные и экваториальные
орбиты.
7.1.4. Перевод спутника в другую рабочую плоскость.
Возможен вариант, когда спутник необходимо перевести в точку,
расположенную не только на другом аргументе широты, но и в
другой рабочей плоскости. То есть, необходимо скорректировать не
только отклонение по широте Ли, но и отклонение по долготе
восходящего узла AQ, которое, как и Ди, может достигать нескольких
десятков градусов.
Прямая коррекция значительного отклонения по ДВУ требует
очень больших затрат суммарной характеристической скорости. Для
их уменьшения можно использовать влияние нецентральное™
гравитационного поля. Возникающее при движении по орбитам,
имеющим разную величину большой полуоси, отклонение по ДВУ
может в значительной мере компенсировать первоначальное
отклонение ДВУ, что приведет к существенному сокращению
суммарной характеристической скорости маневров. Для
значительного сокращения суммарной характеристической скорости
необходимо, чтобы разница в числе витков полета спутника и
целевой точки составила несколько витков (обозначим эту разницу
и).
Предположим, что орбита, на которую необходимо перевести
спутник, имеет меньшее значение ДВУ, чем орбита, на которой
спутник первоначально находится (AQ<0). Приложив в начале
перелета отрицательный трансверсальный импульс скорости, можно
получить двойной эффект. Во-первых, за счет уменьшения
фокального параметра р увеличивается |5Q| орбиты ожидания, и тем
самым на каждом витке полета будет уменьшаться разница в ДВУ.
Во-вторых, при достаточно длительном перелете спутник успеет
пролететь на п витков больше чем целевая точка (за счет меньшего
периода полученной орбиты), что дополнительно позволит
305
существенно уменьшить отклонение в ДВУ, в результате поворота
орбиты на дополнительных витках полета. В этом примере Дм
целесообразно рассматривать как положительную величину,
изменяющуюся не в диапазоне [-0.5,0.5], как в первой части этого
параграфа, а в диапазоне [0,1].
Условие того, что на разное число витков полета спутник и
целевая точка затратят одно и то же время имеет вид:
(P-AP)(N + n) = P(N-&u), (7.24)
где Р - период круговой орбиты, а АР - изменение периода за счет
трансверсальной составляющей импульса скорости первого
интервала маневрирования. Подставив в (7.24) выражение для
„ 2па . „ киа „ 2лА V. а
периода Р =---- и для изменения периода АР =----= -3--------,
^0 ^0 ^0 ^0
находим суммарную трансверсальную составляющую импульсов
скорости первого интервала маневрирования А
Это же выражение можно было получить непосредственно из (3.1г).
Для коррекции отклонения по ДВУ, рассмотрим
комбинированную стратегию, при которой импульсы скорости
прикладываются в некоторой оптимальной точке, имеющей широту
и, и в точке, отстоящей от неё на половину витка. С учетом (7.5) и
(7.19) уравнение, описывающее изменение О, будет иметь вид:
-4(W + и)8П-^-- ((TV + «)8Qtg/cosw - 2^)^- = AQ- 8Q«. (7.25)
Го sin/ Го
В правой части уравнения учтено изменение Q за счет разного числа
витков полета п, а в левую часть добавлен член, учитывающий
отличие в эволюции Q за счет движения по орбитам, имеющим
разную величину большой полуоси.
Как и ранее, предполагается, что в начале перелета (первый
интервал маневрирования) и в конце перелета (второй интервал
маневрирования) прикладываются по два импульса скорости.
306
Для оптимального значения угла приложения боковой
составляющей импульса скорости получаем выражение:
2
ип = arctg-----------------,
(N + n)3Q tg i sin i
(7-26)
которое практически совпадает с аналогичным выражением для н0
для случая перевода спутника в новую точку на той же орбите. Это
говорит о том, что выводы об оптимальных стратегиях
маневрирования, сделанные для первой задачи, справедливы и для
задачи перевода спутника в другую рабочую плоскость.
Подставив в уравнение (7.25) выражение для ДИ,1( и
предполагая, что импульс скорости прикладывается в оптимальной
точке и0, можно получить уравнение для нахождения ДИ2:
J(N + и)2 8Q2 tg2 i-= -ДО + 8Q« + -8О(Дм + и),
V sin i Ио 3
из которого
составляющих
маневрирования:
определяется суммарная величина
импульсов скорости первого
ДИ _ ЗДО-(4Дн + 7и)8О
V ~ I 4
° 3, (Af + «)28Q2tg2z + ——
V sin i
боковых
интервала
(7.27)
Таким образом, выражение для суммарного расхода имеет вид [14]:
ди^-jz (Ац + ”)2 ! (ЗДО-(4Да + 7и)8О)2
3°J(^ + h)2 (JV + /7)25Q2tg2z4-^r
У sin i
(7.28)
Легко видеть, что ДИ имеет примерно такую же зависимость от
N, как и для первой задачи.
Зависимость от п имеет более сложный характер, но поиск
оптимального значения пор! довольно прост, т.к. оно близко к
величине:
3AQ-4Aw8Q
301
доставляющей минимум второму слагаемому в формуле (7.28).
тт ДО
Иногда для оценки пор1 используется величина ---, так как
80
считается, что основная часть отклонения О должна быть
компенсирована за счет разного числа витков полета. Реальная
АО
величина пор1 более чем в два раза меньше чем -, что связано со
80
значительным уменьшением отклонения ДВУ на совпадающем числе
витков полета за счет разной величины р. Необходимо помнить, что п
это целое число, следовательно, только за счет подбора п нельзя
убрать все отклонение ДВУ, но остающаяся часть отклонения не
будет превышать 0.580 и легко устраняется с помощью ДИ,
7.1.5. Примеры перевода спутника в другую рабочую
плоскость. В качестве примера использования формулы (7.28) можно
рассмотреть перевод спутника в соседнюю плоскость для
спутниковой системы Globalstar. Разница в долготе восходящего узла
у соседних плоскостей этой системы составляет 45°, оптимальное
значение п для перевода спутника на соседнюю плоскость nopt&1Q
витков. Зависимость суммарной характеристической скорости ДИ от
числа витков полета N приведена на рисунке 7.6.
Рис.7.6. Зависимость затрат суммарной характеристической скорости,
необходимой для изменения долготы восходящего узла на 45°, от числа витков
полета (высота орбиты 1400км)
Для спутниковой системы ГЛОНАСС пор/&3000 витков,
следовательно, оптимальный перелет будет продолжаться много
тысяч витков, что говорит о неэффективности использования таких
схем изменения ДВУ, для спутниковых систем на высоких орбитах.
Необходимо непосредственно запускать спутник в нужную
плоскость.
7Л.6. Зависимость затрат суммарной характеристической
скорости от рассогласования по ДВУ. Зависимость затрат
суммарной характеристической скорости от рассогласования в ДВУ
близка к линейной, но сильно зависит от наклонения орбиты, причём
интенсивность роста затрат резко возрастает в интервале значений
ze[60°;90°] (рис. 7.7).
Рис. 7.7. Зависимость затрат суммарной характеристической скорости от
рассогласования по ДВУ для разных наклонений для высоты 700 км и У=1000
при повороте плоскости по (Д£2<0) и против (Д£7>0) естественной прецессии
На рис. 7.8 представлены результаты расчётов для различных
наклонений в малом диапазоне углов ДО. Функция затрат суммарной
характеристической скорости в этом случае представляет собой
кривую с затухающими колебаниями, причём интенсивность этих
колебаний зависит как от наклонения, так и от величины большой
полуоси (вид зависимости аналогичный). Из рис. 7.8 видно, что для
наклонений, лежащих в интервале 20°- 40°, колебания выражены
наиболее ярко. На основании рис.7.8 можно сделать следующий
309
важный вывод: при фиксированных наклонении и высоте начальной
орбиты возможен перевод КА в плоскость, имеющей большее
отклонение ДВУ, но с меньшими затратами суммарной
характеристической скорости на перевод, причём отличие для
средних наклонений может достигать 20м/с (до 86%). Это
объясняется тем, что параметр п, по своему определению является
целочисленным, что исключает возможность точной компенсации
расхождений в ДВУ одной лишь операцией фазирования в плоскости
орбиты и необходима непосредственная коррекция оставшегося
отличия ДВУ.
Рис. 7.8. Зависимость затрат скорости от рассогласования по ДВУ
для разных наклонений для высоты 700 км и А=1000
Ниже приведена зависимость дробной части абсолютного
значения п от угла между плоскостями для высоты 700 км. График,
представленный на рис. 7.9, однозначно связывает дробный остаток п
с амплитудами колебаний затрат характеристической скорости
перелёта (рис.7.8): в том случае, когда разница в числе витков полета
п близка к целочисленному значению и фазированием удаётся
практически полностью совместить плоскости, функция ДУ(ДГ1)
имеет минимумы.
зю
Рис. 7.9. Зависимость дробной части абсолютного значения п от угла
между плоскостями для высоты 700 км и У=1000 витков
Отметим следующее обстоятельство: при расчёте затрат
суммарной характеристической скорости перелёта необходимо
учитывать знак ДО (на рис.7.8 ДО>0). На рис.7.10 приведены кривые
затрат суммарной характеристической скорости для двух наклонений
(30° и 60°) для случая поворота плоскости на угол 0.1°-5° против и по
направлению прецессии ДВУ для высоты 700 км.
0 1 2 3 4 5 6 I
Рис. 7.10. Затраты скорости, необходимые для поворота плоскости,
для наклонений 30° и 60° против направления прецессии (+)
и по направлению прецессии (-)
311
Из графика на рис. 7.10 видно, что при развороте плоскости
против направления прецессии кривая затрат суммарной
характеристической скорости находится в противофазе с
колебаниями кривой, полученной для попутного разворота (очень
важная закономерность), но при этом имеет место незначительный
сдвиг вследствие отрицательного влияния эволюции ДВУ.
Влияние направления поворота плоскости также хорошо
заметно на зависимости суммарной характеристической скорости от
числа витков перелёта для разной величины угла рассогласования
орбит по ДВУ (рис. 7.11). С ростом значения требуемого угла
поворота плоскости это влияние всё более заметно в области
относительно малых значений N. Разворот плоскости в направлении
естественной прецессии линии узлов позволяет, к примеру, при
требуемом угле разворота плоскости на 30° получить выигрыш в 100
м/с в случае 450 витков ожидания (~31 день).
i 600
i
i
: 500
! 400
I 300
I
i 200
100
! 0
0 200 400 600 800 1000 1200 1400
---------dOm *15°
---------dOm -15°
dOm *30°
dOm -30°
Рис. 7.11. Зависимость затрат характеристической скорости от количества
витков для разных направлений и величин изменения ДВУ для высоты 700 км.
Проведенный анализ перевода спутника на орбиту, имеющую
существенное отличие ДВУ, позволяет наметить оптимальную
стратегию такого перевода. Исследованная зависимость суммарной
характеристической скорости перелета от отклонения ДВУ может
312
быть использована при выработке оптимальной стратегии сбора
космического мусора.
7.2. Универсальный алгоритм расчета параметров
маневров формирования спутниковых систем
Задача перевода спутника в заданную точку конечной орбиты
(точку-цель) рассматривается в самой общей постановке, когда
начальная и конечная орбиты имеют близкие, но разные значения
большой полуоси, эксцентриситета (е<0.05) и наклонения.
Отклонение долготы восходящего узла может быть любым по
величине. Задачи такого типа возникают при формировании
спутниковых систем, обслуживании спутниковых систем,
возвращении одним аппаратом нескольких спутников с орбит,
доставке грунта с других планет и их спутников и т.д.
Сложность данной задачи состоит в том, что надо не только
определить параметры маневров (как при решении обычной задачи
встречи фиксированной продолжительности, рассмотренной в
третьей и четвертой главах), но и найти оптимальное число витков
полета точки-цели N и разницу в числе витков полета активного КА и
точки-цели п. Оптимальный выбор этих величин, а также параметров
орбиты ожидания, позволяет за счет влияния нецентральности
гравитационного поля устранить практически всю величину
первоначального рассогласования ДВУ, тем самым существенно
сокращая затраты суммарной характеристической скорости,
необходимой для перевода спутника в заданную точку.
Вследствие большой продолжительности встречи, необходимой
для устранения значительных отклонений по ДВУ, возникают
проблемы со сходимостью при использовании итерационной
процедуры, обеспечивающей выполнение с заданной точностью
терминальных условий. Эта итерационная процедура была описана в
первой главе. Кроме того, импульсы скорости первого интервала
маневрирования не только напрямую изменяют эксцентриситет
орбиты (как в задаче встречи короткой и средней
продолжительности), но и через изменение эволюции орбиты за счет
трансверсальных и боковых составляющих импульсов скорости, что
также существенно усложняет задачу.
313
7.2.1. Определение разницы в числе витков полета
активного КА и точки-цели. При решении задачи будем
предполагать, что продолжительность встречи задана (число витков
полета точки-цели N фиксировано). Задача в такой постановке
интересна и важна сама по себе, кроме того, если иметь достаточно
быстрое решение этой задачи, то можно просто перебрать с заданным
шагом значения N в интересующем диапазоне и решить задачу для
каждого N. Это позволяет выбрать значение N, обеспечивающее
необходимый компромисс при попытке уменьшить и
продолжительность встречи, и затраты суммарной
характеристической скорости, которые, как правило, растут при
уменьшении продолжительности встречи. Решение об оптимальном
значении N принимает оператор, решающий задачу, на основании
анализа зависимости затрат суммарной характеристической скорости
от продолжительности перелета.
При фиксированном значении N решение задачи начинается с
определения разницы в числе витков полета активного КА и точки-
цели и. Когда эта разница будет определена, то далее уже имеется
некий аналог обычной задачи встречи, при решении которой, однако,
тоже необходимо учитывать влияние нецентральное™
гравитационного поля.
Определение оптимального значения п также осуществляется с
помощью итерационной процедуры, которая будет называться
«внешней». Описанная в первой главе итерационная процедура,
используемая для выполнения с заданной точностью терминальных
условий, будет называться «внутренней».
На первом этапе определяется приближенное значение п, при
условии, что корректируются только некоторые из элементов орбиты.
Обозначим разницу больших полуосей, аргументов широты,
наклонений, долготы восходящего узла орбит КА цели и активного
КА в начальный момент соответственно Аа0, Ан0, Аф, AQ0- Сумму
трансверсальных составляющих импульсов скорости на первом и
втором интервалах маневрирования обозначим соответственно А Ид и
ДИд]. Предполагается, что первый интервал маневрирования это -
первый виток, а второй это - последний виток полета активного КА.
Вначале рассмотрим случай, когда Дг0 достаточно мало и
изменение наклонения не участвует в изменении Q. Предполагается,
314
что для решения задачи на этом этапе используются только
трансверсальные составляющие импульсов скорости.
Учитывая (7.5),(7.24) условия компенсации отклонений Да0, Ди0,
ДОо можно приближенно записать в виде [10],[161]:
2А^+АрЛ'„ = ^1, (7.30а)
ао
АУ лу +АУ
-3(N + n)—- = -3N—ш+Дц;+и, (7.306)
АУ АУ + АУ
-4(У + и)5О—= -4У5О—+ ДО - 5Ои, (7.30в)
л •
здесь Ди0 =--, предполагается также, что вначале ДО=ДО0, после
2л
первой итерации внешней итерационной процедуры ДО=ДО0+ДО,
(где ДО, - отклонение ДВУ после первой итерации) и т.д.
Из второго и третьего уравнений можно найти выражение для п,
которое не зависит от величин импульсов
ЗЛО
750
4 4 .
-уДи0-
(7.31)
Это довольно простое выражение для п позволяет сделать
несколько важных выводов. Во-первых, п не зависит от
продолжительности встречи N. Как увидим далее, для аккуратных
решений это не совсем так, но зависимость действительно очень
слабая. Во-вторых, как уже отмечалось для частной задачи в
предыдущем параграфе, найденная величина п более чем вдвое
меньше простейшей оценки ДО/5О. Начальное фазовое
рассогласование Ди0 вносит добавку, которая не превышает половину
витка, но, т.к. при вычислении п идет округление до ближайшего
целого числа, отклонение Ди0 может изменить значение п на единицу.
От продолжительности встречи зависит сумма трансверсальных
составляющих импульсов первого интервала маневрирования, эту
сумму можно найти из (7.30а) и (7.306):
315
АК„ _ NAa0 Ли’ + п
Vo 2(N + n)a0 3(N + ri)’
\Vm Ла0 AK„
К 2a0 Vo
(7.32a)
(7.326)
Более точное значение n можно получить, если учитывать
изменение наклонения z. Обозначим сумму боковых составляющих
импульсов первого и второго интервалов маневрирования
соответственно АКг1 и ДРдь предполагая, что импульсы
прикладываются на экваторе, с учетом (7.15) получаем следующую
систему уравнений [133]:
+ Kit _ ^ao K) ao (7.33a)
-3(N + и)^- = -37V АГ'[ +A^n + Az/0* + n, (7.336)
К ^0 A^ + A^=AZO, ТУ 0» r0 (7.33b)
-4(7/ + и)5О—— - (N + и)5О tg i—± =
^0 ^0
ду + AV ли + ЛИ
= -47V5Q—---21 _ //SO tg + AQ - 5Q«
^0 ^0
В системе (7.33) переменных больше, чем уравнений. Выбрав п
в качестве независимой переменной, можно найти выражения для
составляющих импульсов:
Л'Ла,,
2(N + п)а0
Ли’ +п
3(N + n)
(7.34а)
(7.346)
2а0
у
zI N + n
N&. 4(Аи0* + h)5Q + 3(5Qh - AQ)
35Q tg i
AKzII = K0A/-AKzI.
316
, (7.34в)
(7.34г)
Оптимальным будет значение п, доставляющее минимум
функционалу
аV = Ja^+д^ + Va^ + akJ, .
Провести одномерную оптимизацию не сложно, тем более, что
хорошее начальное значение п можно вычислить по формуле (7.31).
После определения значения п, осуществляется численное или
численно-аналитическое (оно предпочтительнее, учитывая большую
продолжительность встречи) интегрирование уравнений движения
точки-цели и активного КА до прицельной точки. Прицельная точка
задаётся номером витка и аргументом широты. Вычисляются
отклонения элементов орбит и рассчитываются параметры маневров,
обеспечивающие формирование всех элементов орбиты цели кроме
ДВУ.
При определении параметров маневров предполагается, что
сохраняется распределение коррекции наклонения между
интервалами маневрирования (сохраняется наклонение орбиты
ожидания, вычисленное при определении оптимального п).
Выполняется несколько итераций внутренней итерационной
процедуры, чтобы отклонения корректируемых элементов стали
достаточно малы. После этого анализируется величина оставшегося
отклонения долготы восходящего узла ДО]. Если | AQ[ | > | 5Q* |, где
6Q =AQ0/n, то точность модели, используемой при определении и,
недостаточна, надо изменить AQ0 на величину ЛП[ и выполнить
следующую итерацию внешней итерационной процедуры (уточнить
значение л). Ниже представлена блок-схема алгоритма вычисления и.
317
Схема вычисления разницы в числе витков полета И
7.2.2. Изменение вектора эксцентриситета и большой
полуоси орбиты. Когда окончательное значение п найдено, можно
перейти к определению параметров маневров, обеспечивающих
формирование всех элементов орбиты цели. Как и для задачи встречи
средней продолжительности, решение будет искаться в виде
комбинации решений двух задач перехода, однако потребуется
318
учесть особенности связанные с влиянием нецентральное™
гравитационного поля.
На рисунке 7.12 изображены вектор эксцентриситета орбиты
точки-цели в момент встречи - вектор ОК, вектор эксцентриситета
орбиты активного КА в начальный момент встречи - ОА' и в
конечный момент - ОА. Оптимальное направление коррекции
эксцентриситета задается вектором АК.
лег
Рис. 7.12. Коррекция вектора эксцентриситета
Предположим, что прицельная точка задана на экваторе, и что
корректируется только наклонение /, а О не корректируется, такой
вариант используется, например, на первых итерациях внешней
итерационной процедуры. В этом случае оптимальное направление
коррекции плоскости орбиты совпадает с направлением оси ех. Пусть
величине необходимого изменения наклонения соответствует вектор
OL.
С помощью формул (7.32а), (7.326) оценивается распределение
изменения большой полуоси Даь Лац трансверсальными
составляющими импульсов скорости первого и второго интервалов
маневрирования. Причем эта оценка, вследствие большой
продолжительности встречи, весьма точная.
Задавшись положением т. М на отрезке OL и положением т. D на
плоскости ех,е,., и тем самым, распределив коррекцию наклонения и
вектора эксцентриситета между интервалами маневрирования,
получаем две задачи перехода. Решив эти задачи, находим
оптимальные значения суммарной характеристической скорости
каждого из переходов (ЛК,г/1 и AK^j), и, следовательно, находим
суммарную характеристическую скорость встречи А^ДИ^+ЛИруц.
Варьируя положение точек MviD можно найти оптимальное решение
задачи встречи [16].
319
При определении AK,r/II для второго интервала маневрирования
нет необходимости учитывать влияние нецентральности
гравитационного поля. Изменение большой полуоси определяется с
помощью формулы (7.326). Изменение вектора эксцентриситета
задается вектором DK, изменение плоскости орбиты вектором ML.
Известен угол между этими векторами (р.ц (рис. 7.12). Задача
перехода (нахождения АЕ,г/11) определена, и для её решения можно
воспользоваться одним из методов, описанных во втором параграфе
второй главы.
При определении АИ,г/1 для первого интервала маневрирования
учет нецентральности гравитационного поля необходим. Если
изменить вектор эксцентриситета орбиты активного КА, который он
имел в начальный момент времени (вектор ОА Q, на казалось бы
необходимый вектор AD, то получим вектор ODкоторый, как легко
видно, по величине существенно отличается от нужного вектора OD.
Чтобы получить вектор, который необходимо скорректировать, надо
от О А 'отложить отрезок AD под тем же углом ф, который вектор AD,
составляет с вектором ОА. Тогда получим нужный вектор OD",
который после эволюции займет необходимое положение OD. Орбита
ожидания, сформированная импульсами скорости первого интервала
маневрирования, должна иметь вектор эксцентриситета OD
непосредственно перед вторым интервалом маневрирования. Как
видим, в момент исполнения маневров первого интервала величина
изменения эксцентриситета равна модулю вектора OD, но
направление существенно меняется. Соответственно меняется и угол
между оптимальным направлением коррекции вектора
эксцентриситета и оптимальным направлением коррекции плоскости
орбиты. Угол фг1 отличается от угла <pzI1 (рис. 7.12). Отличие углов <р;1
и ф-п объясняет, почему оптимальное положение точки D приходится
искать не на отрезке АК, а в его окрестности. Напомним, что в задаче
встречи средней продолжительности оптимальное положение точки
D легко определить, например, она делит отрезок АК
пропорционально АИГ1 и АИ,П. После определения положения т.Р",
задача перехода для первого интервала маневрирования определена:
перейти из т.А' в i.D", при угле фз[ между оптимальным
направлением изменения плоскости орбиты и необходимым
изменением вектора эксцентриситета. Для её решения также можно
320
воспользоваться одним из методов, описанных во втором параграфе
второй главы.
7.2.3. Поворот плоскости орбиты. При коррекции
одновременно наклонения и ДВУ оптимальное направление
коррекции плоскости орбиты тоже может быть разным для разных
интервалов.
На рис. 7.13(a) разница в наклонении орбит Д/о, которую
необходимо скорректировать, отложена по оси абсцисс. Отклонение
ДВУ, которое остается после коррекции вектора эксцентриситета,
большой полуоси и положения вдоль орбиты, обозначим его AQ,.,
отложено по оси ординат.
Возможны два способа коррекции отклонения ДВУ AQ,.
Пусть при определении оптимального значения п было
установлено, что величина изменения наклонения импульсами
скорости первого интервала маневрирования должна быть А/„, а
импульсами скорости второго интервала маневрирования Д/о-А/„.
Такое распределение коррекции наклонения должно привести за счет
эволюции орбиты к изменению ДВУ в точке встречи на величину
AQ„.
На рисунке 7.13(a) влияние изменения наклонения А/„ на
изменение ДВУ изображается отрезком LM. Угол, который
составляет отрезок LM с осью абсцисс, зависит от N+n и от SQtgz (от
продолжительности полёта и скорости эволюции орбиты).
(Ь)
А /0
Рис.7.13. Коррекция ориентации плоскости орбиты
Таким образом, после коррекции плоскостных элементов
орбиты и наклонения остается отклонение ДВУ AQ,.-AQ„.
321
Для того чтобы отклонения по ДВУ не оставалось, боковые
составляющие импульсов скорости первого интервала
маневрирования должны изменять наклонение не на Д/„, а на Дщ Для
того чтобы найти Д/,. надо из точки N (О,ДО,.) провести отрезок NK
параллельный отрезку ML. Это метод коррекции ДВУ с помощью
наклонения. Не корректируя непосредственно ДВУ, только за счет
удачного выбора наклонения орбиты ожидания (Д/г) можно
полностью убрать отклонение в ДВУ. Это простой и надёжно
работающий метод, но он может быть не оптимальным по затратам
суммарной характеристической скорости.
Более универсальным и оптимальным является комбини-
рованный метод [16]. Предположим, что импульсы скорости первого
интервала маневрирования изменяют наклонение на Д/с, второго на
Д/0-Д/с. Изменение наклонения на Дгс приведет к тому, что ДВУ
изменится на ДПС. Останется отклонение ДОг-ДОе, т.к. Дгс не
совпадает с Д/,.. Коррекция отклонения ДО,.-ДОС производится
непосредственно и её оптимально распределить между интервалами
маневрирования. Например, на первом интервале маневрирования
одновременно с коррекцией Дгс скорректировать ДОр-ДОс (рис.
7.13(a)), а на втором интервале маневрирования одновременно с
коррекцией Д/0-Дгс скорректировать ДП,.-ДПр. Очевидно, что в этом
случае оптимальные точки поворота плоскости орбиты сдвинутся от
экватора и будут разными для первого и второго интервалов
маневрирования. Изменяя Д/с, и для каждого Д/с изменяя ДО,,,
получаем различные варианты изменения плоскости орбиты на
первом и втором интервалах маневрирования. Поскольку
оптимальные направления коррекции вектора эксцентриситета также
различны на первом и втором интервалах маневрирования, то
появляется возможность на каждом из интервалов сблизить
оптимальные направления коррекции вектора эксцентриситета и
ориентации плоскости орбиты и соответственно уменьшить
суммарную характеристическую скорость переходов ДИ,^ и ДК,гуц.
Необходимо обратить внимание, что иногда, для уменьшения
отклонения по ДВУ, на первом интервале маневрирования
приходится не уменьшать, а увеличивать отклонение по i (рис.
7.13(6)). Это происходит, когда ДО,. и ДО0 имеют разные знаки, где
ДО0 соответствует изменению ДВУ при изменении наклонения
импульсами скорости первого интервала маневрирования на
322
величину Д/о. В этом случае для нахождения оптимального значения
Д/с приходится перебирать точки отрезка [Д/„Д/о], а не точки отрезка
[О,Д/о] (рис. 7.13(6)).
7.2.4. Общая схема алгоритма решения задачи. Ниже
приведена общая схема алгоритма решения задачи.
Решение состоит из трех вложенных итерационных процедур.
«Внешняя» используется для определения оптимальной разницы в
числе витков полета п. «Внутренняя» - для выполнения с заданной
точностью терминальных условий (для каждого фиксированного
значения «). Третья процедура служит для обеспечения с
необходимой точностью времени выхода на заданную орбиту при
приближенном определении параметров маневров.
При уточнении значения п, рассчитываются параметры
маневров, обеспечивающие формирование всех элементов орбиты
цели кроме ДВУ. А когда оптимальное значение п найдено, для него
во «внутренней» и третьей процедурах корректируются все элементы
орбиты, включая ДВУ. Это решение и является окончательным
решением задачи.
323
7.2.5. Примеры применения алгоритма в проекте “Mars
sample return mission”. Описанная в этом параграфе методика
расчета параметров маневров встречи большой продолжительности
была реализована в виде комплекса программ (к/п), получившего
название ’’GAMA”. Для прогноза движения КА в комплексе
использовано высокоточное численно-аналитическое интегрирование
уравнений движения ’’THEONA” [51,52]. Подробное описание
численно-аналитического прогноза ’’THEONA” приведено в первом
параграфе десятой главы. Сочетание в одном к/п двух численно-
аналитических методик позволяет всего за несколько десятков секунд
получить решение наиболее сложных задач, в том числе провести
исследование зависимости суммарной характеристической скорости
маневров от продолжительности встречи. При создании комплекса
’’GAMA” пришлось преодолеть значительные трудности, связанные в
первую очередь с плохой сходимостью «внутренней» итерационной
процедуры при большой продолжительности встречи (несколько
месяцев). Для демонстрации возможностей к/п ’’GAMA” и
изложенной выше методики, положенной в его основу, будут
рассмотрены две задачи встречи на орбите Марса и две задачи
перевода спутников на нужное место в спутниковых системах на
орбите Земли.
В проекте “Mars sample return mission” [143] возвращаемый
аппарат должен был последовательно захватить на орбите Марса две
капсулы с грунтом. Предполагалось что первая капсула, доставленная
предыдущим аппаратом, была выведена на орбиту Марса за два года
до прилета возвращаемого аппарата. Поэтому возможно значительное
расхождение в ДВУ орбит возвращаемого аппарата и капсулы. В
задаче 1 рассматривалось отклонение AQ=182°. Вторая капсула
доставлялась самим аппаратом, но из-за её длительного пребывания
на поверхности Марса и из-за того, что возвращаемый аппарат в это
время осуществлял захват первой капсулы, также возникает
значительное расхождение в ДВУ (AQ=80°). Проект не был
реализован, но задачи интересны тем, что они достаточно сложные, а
их постановка и результат решения приведены в работе [143]. Это
позволяет сравнить результаты, полученные при помощи различных
методик. Эта возможность уже была использована в работе [172], в
которой также приведено решение одной из задач, рассмотренных в
[143]. Результаты, полученные в [143],[172] и результаты,
324
полученные с помощью к/п ’’GAMA” [161],[16], приведены в таблице
7.1.
В работе [143] решение обоих задач искалось с помощью
традиционной для NASA методики [148],[179], с раздельной
коррекцией ориентации плоскости орбиты и остальных элементов.
Решения такого типа будем называть «раздельные» решения. NASA
для решения задачи 1 (третья строка таблицы 3.1) потребовалось 10
импульсов и 320.8 м/с суммарной характеристической скорости, при
продолжительности встречи 123.9 дня. Комплексу ’’GAMA” для
«раздельного» решения потребовалось 6 импульсов и суммарная
характеристическая скорость АИ=233.7 м/с, при продолжительности
встречи 123.1 дня. Информация о решении приведена во второй
строке таблицы 3.1, параметры решения приведены в Пример 1.1.
В начале примера 1.1 приведены элементы орбит активного КА
и KA-цели: минимальная и максимальная высоты над поверхностью
Марса Hmin и Нтах, аргумент перицентра со, наклонение i и ДВУ Q,
номер витка и аргумент широты Nrev и Ulat. Далее приведены
суммарная характеристическая скорость маневров и отдельно затраты
суммарной характеристической скорости на маневрирование в
плоскости орбиты и на поворот плоскости орбиты, а также число
итераций «внутренней» итерационной процедуры, потребовавшихся
для решения всей задачи (с уточнением и) и на решение задачи при
фиксированном значении п. В следующих строках приведены
параметры каждого из маневров: номер витка и аргумент широты
момента приложения импульса скорости, а также его составляющие.
Далее приведены продолжительность встречи (в днях), значение п, и
отдельно число витков полета активного КА и KA-цели. В
следующей строке приведено распределение между интервалами
маневрирования затрат суммарной характеристической скорости на
изменение вектора эксцентриситета и на поворот плоскости орбиты.
В конце примера приведены заданные точности выполнения
терминальных условий и отклонения в точке встречи
сформированной маневрами орбиты от заданной конечной орбиты.
Использовалось апсидальное четырёхимпульсное решение,
поэтому четыре внутренних импульса скорости чисто
трансверсальные. Углы приложения импульсов одного интервала
маневрирования отличаются на 180. Но, как было показано,
направления оптимальной коррекции эксцентриситета разные для
первого и второго интервалов маневрирования. Два импульса
325
скорости, приведенные в последнем столбце, используются для
изменения плоскости орбиты. Они корректируют только наклонение
(оба прикладываются на экваторе), но за счет подбора их величин
полностью устраняется и отклонение по ДВУ. Четыре
трансверсальных импульса скорости решают задачу встречи на
компланарных орбитах. Как было показано в третьей главе, можно
было бы обойтись и тремя импульсами, но четырехимпульсное
апсидальное решение более универсальное, т.к. не надо
анализировать, на каком из интервалов прикладывать два импульса.
Кроме того, используя четыре импульса скорости, можно получить
решение менее чувствительное к ошибкам реализации импульсов
скорости и знания параметров орбит (см. параграф 3.9).
В решении [143] пять трансверсальных импульсов
обеспечивают необходимую эволюцию плоскости орбиты для
устранения основной разницы в ДВУ, но не решают полностью
задачу встречи, а лишь обеспечивают выход на орбиту на 0.5км ниже
заданной орбиты. В этот момент разница в положении вдоль орбиты
может составлять половину витка. Затем осуществляется
необходимое ожидание на этой близкой орбите, чтобы активный КА
догнал КА цель (ожидание может продолжаться до двух недель),
после этого с помощью двух дополнительных импульсов
осуществляется переход на заданную орбиту в малую окрестность КА
цели. Так как во время этого окончательного фазирования возникает
отклонение по ДВУ, для его коррекции используется специальный
импульс скорости, прикладываемый в апексе орбиты. Эти
дополнительные импульсы скорости объясняют ту большую разницу
в числе используемых импульсов, которая есть в двух сравниваемых
решениях. Основное отличие в затратах суммарной
характеристической скорости связано с разной схемой коррекции
отклонения вектора эксцентриситета (см. параграф 4.5).
Оптимальное по затратам суммарной характеристической
скорости решение можно получить, если у каждого импульса
скорости допускается использование всех его составляющих
(«комбинированное» решение). Такое решение, полученное с
помощью к/п ’’GAMA” приведено в Пример 1.2. Для решения задачи
потребовалось 4 импульса скорости (величина второго импульса
всего 0.54м/с), суммарная характеристическая скорость Д1/=202.4 м/с.
Информация об этом решении приведена в первой строке
таблицы 3.1.
326
В работе [172] при помощи численного метода получено
близкое по характеристикам решение (четвертая строка таблицы 3.1,
3 импульса, АЕ=199.52 м/с, продолжительность встречи 133.04 дня).
Затраты немного меньше, но продолжительность встречи больше.
Если ещё увеличить продолжительность встречи, то можно
уменьшить затраты суммарной характеристической скорости. Такое
«комбинированного» решение, полученное с помощью к/п ’’GAMA”
приведено в Примере 1.3 В этом решении используются 4 импульса,
ДК=194.6 м/с, продолжительность перелёта - 144.7 дня, параметры
решения приведены в пятой строке таблицы 3.1.
При поиске «комбинированных» решений на каждом из
интервалов маневрирования для определения параметров маневров
оптимальных переходов использовался универсальный метод (у
импульсов скорости отсутствуют радиальные составляющие),
который давал практически те же (на сотые доли процента больше)
затраты суммарной характеристической скорости что и оптимальное
решение Эдельбаума [145], но обеспечивал более быструю
сходимость итерационных процедур.
Затраты суммарной характеристической скорости уменьшаются
с ростом продолжительности встречи. Высокое быстродействие к/п
’’GAMA” позволяет найти компромиссные значения величин этих
параметров. В комплексе существует возможность перебора Nf -числа
витков полета КА-цели. Для каждого значения Nf решается задача, и
находятся значения суммарной характеристической скорости и
других параметров маневров (Пример 1.4) [16]. Общее время решения
будет существенно меньше, чем, если решать последовательность
задач при фиксированных Nf. Анализ результатов расчетов,
приведенных в Примере 1.4, показывает, что в работе [143]
действительно выбрана близкая к оптимальной продолжительность
встречи. Именно на интервале от 1350 до 1400 витков полета КА-
цели существенно уменьшается зависимость суммарной
характеристической скорости от продолжительности встречи.
Увеличивать далее продолжительность встречи уже не столь
эффективно.
Для второй задачи встречи на орбите Марса также приведено
оптимальное «комбинированное» решение (Пример 2.1),
«раздельное» решение (Пример 2.2) и решение (Пример 2.3) с
перебором числа витков полета КА цели (от 800 до 1800 с шагом 200
327
витков). Сравнить полученные результаты, с результатами [143]
можно с помощью таблицы 7.2.
Результаты расчетов, приведенные в Примере 2.3, показывают,
что и для второй задачи в работе [143] выбрана оптимальная
продолжительность встречи, т.к. именно на интервале от 1200 до
1400 витков полета KA-цели заметно уменьшается зависимость
суммарной характеристической скорости от продолжительности
встречи.
Во всех перечисленных выше примерах предполагались
импульсные маневры, т.к. не было информации об используемой ДУ.
ЗАДАЧА 1
Пример 1.1
начальная орбита орбита цели
Нтт(км) 250.0 500.0
Нтах(км) 1400.0 700.0
со(град) 4.0 184.0
/(град) 45.0 46.0
П(град) 2.0 184.0
Nrev 1.0 1.0
У/Щ(град) 184.0 184.0
dV= 233.68 м/с dVinpln= 184.68 м/с dVoutpl= 49.00 м/с Niter=95 16
Nimp Nrev Ulat dVrd dVtr dVlt
1 1. 180.00 0.0 0.0 -47.09
2 2. 185.22 0.0 54.93 0.0
3 3. 5.22 0.0 0.15 0.0
4 1221. 36.48 0.0 -0.67 0.0
5 1222. 216.48 0.0 -128.92 0.0
6 1222. 0.00 0.0 0.0 1.91
N_days-. 123.1 n=-169.0 REVfrilTG= 1392. REVfnlCH= 1223.
Clop/=185.2 £lop/=109.57 E2opt= 256.5 Zlop/=47.09 Z2pp/=1.91
Заданные точности выполнения терминальных условий
ех еу at i (град) Q/град)
0.0001 0.0001 0.01 0.1 0.0005 0.0005
Отклонения в точке встречи после выполнения маневров
Еех Ее, Еа Et Ei (град) ДО(град)
0.0000199 0.0000008 0.0011981 -0.0932687 0.0000011 0.0000036
328
Пример 1.2
dV= 202.39 м/с dVinpln= 184.22 м/с dVoutpl= 56.66 м/с М7=93 15
Nimp Nrev Ulat dVrd dVtr dVlt
1 2. 186.10 0.0 54.09 -47.41
2 3. 306.19 0.0 0.54 0.09
3 1221. 210.05 0.0 -78.71 -5.47
4 1222. 224.74 0.0 -50.86 3.66
N_days-. 123.1 «=-169.0 REVfnlTG= 1392. REVfnlCH= 1223. (71op/=183.6
E\opt= 107.66 E2opt= 257.14 ZlopZ=47.5 Z2opt=2A
Aev Де,, Да Д/ Д/ AQ
0.0000002 -0.0000002 -0.0000124 -0.0400580 -0.0000013 -0.0000171
Пример 1.3
dV= 194.59 м/с dVinpln= 186.35 м/с dVoutpl= 53.82 м/с Niter= 79 14.
Nimp Nrev Ulat dVrd dVtr dVlt
1 2. 188.50 0.0 50.13 -21.05
2 3. 11.30 0.0 -12.81 4.56
3 1461. 195.93 0.0 5.72 -0.71
4 1462. 5.09 0.0 -117.67 27.48
N_days: 144.7 «=-173.0 REVfnlTG= 1636. REVfnlCH= 1463.
7/lopZ=184.6 E\opt= 125.88 E2opt= 246.60 Z\opt= 25.6 Z2opZ=28.1
Aet Aey Да Д/ Д/ AQ
-0.0000001 0.0000004 -0.00024 -0.0424021 0.0000052 -0.0000115
Пример 1.4
dV= 205.66 м/с dVinpln= 183.11 м/с dVoutpl= 60.77 м/с Niter= 73 14
Nimp Nrev Ulat dVrd dVtr dVlt
1 2. 189.67 0.0 50.87 -47.84
2 3. 34.56 0.0 -2.08 0.67
3 1279. 244.60 0.0 -126.83 -6.51
4 1280. 84.65 0.0 3.30 -5.73
N_days: 128.2 «=-169.0 REVfnlTG= 1450. REVfnlCH= 1281.
7/lo/«=185.6 E\opt= 105.56 E2opt= 259.90 ZlopZ=48.5 Z2opt= 2.2
Дех Ae?, Да Д/ Д/ Д£2
-0.0000008 0.0000003 0.0000469 0.0951869 0.0000012 0.0000456
329
Nrevtg dV dVinpln dVoutpl n
1050. 293.40 284.35 51.11 -168.
1100. 275.40 266.82 51.52 -168.
1150. 259.69 251.39 54.81 -169.
1200. 245.23 235.24 55.75 -169.
1250. 231.92 221.97 56.34 -170.
1300. 219.46 210.91 53.97 -172.
1350. 208.59 196.96 55.30 -171.
1400. 206.87 187.01 51.38 -169.
1450. 205.66 183.11 60.76 -169.
Таблица 7.1
ЗАДАЧА 1
Число маневров A V (м/с) % Время (дни)
GAMA (комб.) 4 202.39 100 123.1
GAMA (разд.) 6 233.68 115.5 123.1
NASA (разд.) 10 320.8 158.5 (137.3) 123.9
UT&JetPL (комб.) 3 199.52 98.6 133.04
GAMA (комб.) 4 194.6 96.1 144.7
ЗАДАЧА 2
Пример 2.1
начальная орбита орбита цели
475.6 446.8 Нтах(км) 724.4 553.2 си(град) 279.3 238.4 /(град) 46.0 45.0 О(град) 80.2 1.2 Nrev 1.0 1.0 07<з/(град) 356.5 105.8 б/И=145.36 м/с dVinpln=]30.35 м/с dVoutpl=56.\4 м/с Niter=T3 11
Nimp Nrev Ulat dVrd dVtr Vlt
1 2. 190.96 0.00 -42.60 6.48
2 3. 348.66 0.00 -41.48 -25.61
330
3 1430. 322.68 0.00 28.90 -2.50
4 1431. 260.91 0.00 17.35 1.53
N_days: 116.9 n= 59.0 REVfhlTG- 1374. REVfnlCH- 1433. 7/lopZ=86.0
Elopt= 16.30 E2opt= 40.14 Zlopt=-51.1 Z2opt= -2.2
Заданные точности выполнения терминальных условий
ДеЛ Ееу Да Et Ei EQ
0.0001 0.0001 0.01 0.1 0.0005 0.0005
Отклонения в точке встречи после выполнения маневров
Еех Ееу Еа Et Ei EQ
0.0000002 0.0000001 0.000023 -0.0148 -0.0000002 -0.000001
Пример 2.2
dV- 181.74 dVinpln- 130.84 dVoutpln- 50.91 №7=86 16
Nimp 1 Nrev 1. Ulat 180.00 dVrd 0.0 dVtr 0.0 Vlt 46.34
2 2. 265.26 0.0 -83.76 0.0
3 3. 85.26 0.0 -0.11 0.0
4 1430. 48.07 0.0 44.10 0.0
5 1431. 228.07 0.0 2.86 0.0
6 1432. 0.00 0.0 0.0 -4.55
N_days:\\6.9 „=59.0 REVfnlTG- 1374. REVfnlCH= 1433. U\opt= 85.3
E\opt= 167.31 E2opt= 82.47 ZlopZ=46.3 Z2opt= -4.5
Eex Eey Ea Et Ei EQ.
-0.0000005 0.0000086 0.0004194-0.0837062 0.0000011 0.000012
Пример 2.3
dV= 125.47 dVirplr— 112.10 dVoutpl- 55.34 Niter- 30 10
Nimp Nrev Ulat dVrd dVtr dVlt
1 2. 347.32 0.0 -43.37 -24.18
2 3. 196.98 0.0 -31.32 18.18
3 1859. 174.50 0.0 33.43 11.68
4 1860. 60.77 0.0 3.96 -1.28
N_days: 153.2 „=62.0 REVfnlTG- 1800. REVfnlCH- 1862.
Elopt- 22.39 E2opt= 32.04 ZlppZ=-41.0 Z2opt=-12.2
Nrevtg dV dVinpln dVoutpl „
331
800. 203.00 193.26 55.37 58.
1000. 176.27 166.28 56.06 60.
1200. 156.45 145.34 54.29 60.
1400. 145.78 130.06 62.01 60.
1600. 134.80 119.72 59.00 61.
1800. 125.46 112.10 55.34 62.
Таблица 7.2
ЗАДАЧА 2
Число Маневров A V (м/с) % Время (дни)
GAMA (комб.) 4 145.36 100 116.9
GAMA (разд.) 6 181.74 125 116.9
NASA (раздельное) 10 219.6 151 (120.8) 116.9
7.2.6. Примеры применения алгоритма для расчета
маневров формирования спутниковых систем. Особенно
эффективен к/п ’’GAMA” для расчета параметров маневров
формирования и обслуживания спутниковых систем. В таблице 7.3
для спутниковой системы «Globalstar» приведена зависимость от
числа витков полета точки-цели суммарной характеристической
скорости, требуемой для перевода спутника в соседнюю рабочую
плоскость и отдельно затраты суммарной характеристической
скорости на маневрирование в плоскости орбиты и на поворот
плоскости орбиты.
Таблица 7.3
N Ддни) | ДИ(м/с) A Vinpin А Иoutpln
800 63.2 534.06 517.97 114.12
1000 79 425.86 395.79 147.78
1200 94.8 342.34 337.59 56.68
1400 110.6 290.17 285.17 53.41
1600 126.4 252.63 249.33 40.61
1800 142.2 223.76 218.81 46.42
2000 158 201.21 199.46 25.78
2200 173.8 182.32 179.21 33.06
2400 189.6 166.99 164.41 28.64
2600 205.4 154.13 151.93 25.41
2800 231.2 143.93 143.03 15.67
332
Высота начальной орбиты и орбиты цели 1414км, наклонение /=52°,
угол между плоскостями орбит AQ=45°.
Решение, соответствующее продолжительности перелета 2400
витков, приведено в Примере 3.1.
Пример 3.1.
** initial orbit * * final orbit
Hmin(km) 1410.0 1412.0
Hmax(km) 1418.0 1416.0
Uprg(deg) 10.0 90.0
I (deg) 52.000 52.001
gOMG(deg) 45.0 90.0
Nrev 1.0 1.0
Ulat(deg) 15.50 105.80
dV= 166.99 dVinpln= 164.42 dVoutpl= 28.65 Niter= 86 08
Nimp Nrev Ulat dVrd dVtr dVlt
1 2. 191.66 0.0 42.3301 -6.2140
2 3. 15.24 0.0 41.8784 9.7993
3 2317. 162.37 0.0 -40.1753 6.0814
4 2318. 342.36 0.0 -40.0335 -6.5529
7.3. Расчет параметров маневров формирования
разноуровневых спутниковых систем
7.3.1. Характеристики разноуровневой спутниковой
системы. Последнее время в печати большое внимание уделяется
разноуровневым спутниковым системам [101,102], [122, 123], в
которых спутники располагаются на круговых орбитах, имеющих
разные радиусы. Спутники разбиты на несколько групп, каждая из
которых представляет собой обычную одноуровневую спутниковую
систему, а их объединение дает систему с новыми свойствами. При
заметно отличающихся больших полуосях орбит разных уровней
возникает разница в скорости прецессии плоскостей их орбит. В
результате будет иметь место разный вековой уход ДВУ, что
приведёт к непрерывному увеличению угла между плоскостями
орбит. Чтобы орбиты разных уровней имели одинаковый уход ДВУ,
необходимо, чтобы они имели разное наклонение. Большая полуось
атах и наклонение /тах орбиты одного уровня, связанны с большой
333
полуосью ап1 и наклонением im орбиты другого уровня, следующим
приблизительным соотношением:
COS/пах COS',n
7/2
7/2
«.пах
(7.35)
Далее орбиты с разными большими полуосями, но с одинаковой
эволюцией ДВУ будем называть «синхронизированными».
Формула (7.35) справедлива независимо от величины
первоначального отклонения ДВУ орбит, поэтому орбиты спутников
на разных уровнях будут сохранять одинаковую взаимную
конфигурацию в пространстве.
На рисунке 7.14 приведены графики зависимостей отклонения
наклонения Дг от разницы высот Д/г для орбит, имеющих различное
наклонение. Высота всех орбит Ь=600км. Аналогичные графики для
орбит высотой h= 1100км приведены на рис. 7.15. Принимается, что
высота орбиты другого уровня будет больше на Д/г, следовательно,
реально отклонение наклонения Дг должно быть отрицательным.
Аналогичные графики приведены в [101].
Рис. 7.14 Зависимость изменения наклонения от изменения высоты
для орбиты нижнего уровня высотой Ь=600км
334
Рис. 7.15. Зависимость изменения наклонения от изменения высоты
для орбиты нижнего уровня высотой h=l 100км
7.3.2. Оценка энергетики перелета на орбиту другого уровня.
Для перелета с синхронизированной орбиты на орбиту другого
уровня (такая задача возникает при формировании спутниковых
систем) необходимо скорректировать отличие по высоте и
наклонению. Затраты суммарной характеристической скорости на
такой импульсный переход являются нижней оценкой затрат
суммарной характеристической скорости на решение реальной задачи
перелета, в которой учитываются коррекция фазы и то, что реальные
маневры могут исполняться двигателями малой тяги. Затраты
суммарной характеристической скорости на импульсный переход
можно найти, используя формулы:
335
у
ЛК = -2-Ла,
2г0
ЛК=К0Л/,
=>/а/,2 +A/Z2.
Используя выражение для ДКЬ можно найти зависимость А/ от
А/? для фиксированных затрат Д/у
А/=
А/?2
4г2
^'о
(7.36)
Такие линии для ДК2=165м/с, ДК2=200м/с и ДИ^ЗООм/с
изображены на рисунках 7.14 и 7.15.
Получить более точную оценку необходимых затрат суммарной
характеристической скорости ДК можно, если учесть реальную
продолжительность маневров, когда маневры исполняются
двигателями малой тяги. Поскольку корректируются отклонение
большой полуоси До и наклонения Д/, то на витке оптимально делать
два одинаковых маневра, середина которых находится на линии
узлов.
Найти угловую продолжительность маневра Дф и угол р,
задающий ориентацию ДУ в орбитальной системе координат, можно
из системы:
_ = 2vvcosP д(р, (7.37)
2« и’(.
"=22=₽sin(^), (7.38)
2п wc 2
здесь п - число витков, на которых производятся одинаковые
маневры.
Пересчитав Д<р одного маневра в АКвсех маневров по формуле:
ЛК = 2и—Дф, (7.39)
w
с
можно найти реальные затраты суммарной характеристической
скорости необходимые для перехода на синхронизированную орбиту.
336
Используя формулу:
Aow |
------ 4*
4/?wA<p )
Aiw.
. /Д(Рч
4zwsin(—-)
\ 2 )
(7.40)
можно найти зависимость Az от АЛ, когда двигатель работает один
виток («=1), два витка (ц=2), три витка (н=3). На рисунках 7.14,7.15
эти зависимости изображены пунктирными линиями. Таким образом,
определены области, которых можно достичь непрерывным
маневрированием в течение одного или двух витков.
7.3.3. Определение оптимального начального фазового
отклонения. Было найдено изменение А К при переходе от
импульсной модели маневров к модели, в которой учитывается
реальная тяга ДУ. На следующем этапе (при формировании
спутниковой системы) необходимо учитывать коррекцию разности
фаз А\|/. Представляет интерес частота максимального сближения
вдоль орбиты, когда разница фаз равна нулю (при обслуживании) или
заданному значению (при формировании спутниковой системы). На
рисунке 7.16 представлена зависимость числа таких встреч на
интервале времени один год от отклонения по высоте.
Рис. 7.16. Зависимость количества встреч от разности высот
На рисунке 7.17 представлена зависимость времени между
соседними встречами от отклонения по высоте. Можно видеть, что
время между встречами мало при большом отличии высот, когда
велики затраты суммарной характеристической скорости на переход.
337
Компромиссными являются средние высоты, когда и затраты
суммарной характеристической скорости относительно не велики и
возможность встречи появляется достаточно часто.
Если в начальный момент перелета А\|/~0, то необходимо сразу
перелетать на конечную орбиту (для импульсных маневров). Если в
начальный момент перелета Ду>0, но разница фаз не превосходит
величины, которую можно устранить за пассивный полет на витках,
оставшихся до момента встречи, то затраты на встречу не
превосходят затрат на переход между орбитами. Так примерно
определяется диапазон оптимальных фаз для импульсных переходов,
который зависит от разности больших полуосей орбит и
продолжительности перелета. При большем или меньшем начальном
фазовом отличии затраты на встречу будут больше затрат на переход
(см. разделы Е5.2 и 3.5).
Рис. 7.17. Зависимость времени между встречами от разности высот
Оценка разницы в угловом положении двух КА используется во
многих задачах. Например, в задаче расчета опасных сближений [18,
26]. Если на контролируемом интервале времени оцениваемое
расстояние вдоль орбиты превышает допустимое, то столкновение с
этим объектом невозможно. Расстояние вдоль орбиты превышает
допустимое, если оно больше на границах интервала, а точка
нулевого углового расстояния находится вне интервала.
7.3.4. Расчет параметров маневров формирования
разноуровневых спутниковых систем. Особенностью перелета
338
между синхронизированными орбитами является небольшое
отклонение их эксцентриситетов Де, так как каждый из них мал сам
по себе, но значительные отклонения большой полуоси Да и,
особенно, наклонения Д/. Рассчитываемые маневры являются
маневрами встречи средней продолжительности (поскольку нет
значительного отклонения ДВУ, то нет необходимости в большой
продолжительности встречи). Если продолжительность маневров
относительно мала, то для определения их параметров можно
воспользоваться алгоритмами, приведенными в главах 4 или 5.
7.4. Определение параметров маневров
формирования спутниковых групп (formation flying)
Методы, разработанные в первом и втором разделах данной
главы, могут успешно применяться и для расчета параметров
маневров формирования спутниковых групп (formation flying). В
данном разделе будут рассмотрены две задачи создания спутниковых
групп. С помощью формул, полученных в первом разделе, решена
задача создания кластера для томографии атмосферы, а помощью п/к
«GAMA» решена задача создания formation flying “Aqua Train”.
7.4.1. Создание кластера для томографии атмосферы.
Рассматривается задача создания кластера, состоящего из четырёх
микроспутников (МС), вес которых не превышает 30кг. Кластер
предназначен для томографии атмосферы.
Спутники кластера должны находиться на орбите с наклонением
расположение спутников: Ui=0°, u2=5°,
u3=24.75°, u4=34.75°. Положение
спутников показано на рис. 7.18.
звездочками.
Предполагается, что в начальный
момент ракета-носитель выводит все
спутники в одну точку на заданной
орбите, требуется развести спутники на
их рабочие места.
Рассчитывались затраты сум-
марной характеристической скорос-ти
(ДИ), необходимой для изменения
положения МС по аргументу широты на
высотой
Рис.7.18. Расположение
спутниковой группы для
томогоасЬии атмосфеоы.
339
половину максимального расстояния между МС в этом кластере в
зависимости от числа витков перелета.
Таблица 7.3
Neum ДНИ ДИ, Д Vomg ДИ,- Д Viomg ДИ, иор,
20. 1.326 12.210 12.366 35.1,32 12.249 0.980 6.591
30. 1.990 8.140 8.373 23.421 8.198 0.977 84.893
40. 2.653 6.105 6.412 17.566 6.182 0.974 83.205
50. 3.316 4.884 5.263 14.053 4.979 0.971 81.529
60. 3.979 4.070 4.518 11.711 4.183 0.966 79.867
70. 4.642 3.488 4.003 10.038 3.618 0.961 78.222
80. 5.306 3.052 3.629 8.783 3.198 0.955 76.596
90. 5.969 2.713 3.349 7.807 2.874 0.948 74.993
100. 6.632 2.442 3.133 7.026 2.617 0.940 73.412
110. 7.295 2.220 2.963 6.388 2.408 0.932 71.858
120. 7.958 2.035 2.827 5.855 2.235 0.924 70.330
130. 8.622 1.878 2.717 5.405 2.089 0.915 68.832
140. 9.285 1.744 2.626 5.019 1.965 0.906 67.363
150. 9.948 1.628 2.550 4.684 1.858 0.896 65.924
160. 10.611 1.526 2.486 4.391 1.765 0.886 64.517
170. 11.275 1.436 2.432 4.133 1.682 0.875 63.143
180. 11.938 1.357 2.386 3.904 1.609 0.865 61.801
190. 12.601 1.285 2.346 3.698 1.543 0.854 60.492
200. 13.264 1.221 2.311 3.513 1.484 0.843 59.216
210. 13.927 1.163 2.281 3.346 1.430 0.832 57.972
220. 14.591 1.110 2.255 3.194 1.380 0.821 56.762
230. 15.254 1.062 2.231 3.055 1.335 0.809 55.584
240. 15.917 1.017 2.211 2.928 1.293 0.798 54.439
250. 16.580 0.977 2.192 2.811 1.254 0.787 53.325
260. 17.243 0.939 2.176 2.702 1.218 0.776 52.243
270. 17.907 0.904 2.161 2.602 1.184 0.765 51.191
280. 18.570 0.872 2.148 2.509 1.153 0.754 50.170
340
При таком подходе затраты Д V у остальных МС этого кластера
будут немного меньше или равны (у одного МС) вычисленным
затратам ДИ Маневрировать придётся всем аппаратам, но это, во-
первых, обеспечит равномерный расход топлива, а, во-вторых, можно
одновременно устранить и ошибки выведения
В первом столбце таблицы 7.3 приведено число витков между
первым и последним маневрами (Увит), во втором -
продолжительность перевода МС в нужную точку в днях (дни), в
третьем - сумма трансверсальных компонент импульсов,
необходимая для требуемого изменения положения спутника (ДИ), в
четвертом - сумма боковых компонент импульсов, выполняемых в
апексе и вертексе орбиты, необходимая для прямой коррекции
возникающего отклонения ДВУ (AEowg), в пятом - ДИ для
аналогичных маневров на экваторе (ДИ), в шестом - ДИ маневров,
выполняемых в оптимальных точках для поворота плоскости орбиты
(ДИ/owg), в седьмом - столбце сумма боковых составляющих
маневров из предыдущего столбца (ДИ?), в восьмом - оптимальный
угол для поворота плоскости орбиты (Uopf).
На графиках, приведенных на рис.7.19, 7.20, изображены
изменения величин, приведённых в таблице, в зависимости от числа
витков полёта.
Из изложенного вытекает, что компромиссная
продолжительность формирования кластера находится в диапазоне от
100 до 200 витков. При этом затраты суммарной характеристической
скорости уменьшаются от ДИ=2.62м/с до ДИ=1.48 м/с. При меньшей
продолжительности Д V начинает резко увеличиваться, а
дополнительное увеличение продолжительности не приводит к
заметному уменьшению Д V.
Исследование задачи показало, что желательно, чтобы
продолжительность манёвра, который исполняется с помощью ДУ
малой тяги, не превышала одной восьмой витка. Если при выбранной
ДУ продолжительность манёвра превышает эту величину, то его
желательно разделить на две части, которые исполняются на разных
витках. При большом числе витков, требуемом для оптимального
формирования кластера, такое разбиение всегда возможно и не
отражается заметным образом на результатах расчётов.
341
30
25
20
Рис.7.19. Суммарные затраты характеристической скорости при разных схемах
формирования кластера (i=56°, высота орбиты Ь=550км, изменение положения
спутника относительно центра кластера Ди=17.375°)
Рис.7.20. Изменение аргумента широты точек приложения импульсов
оптимальной коррекции
7.4.2. Маневры создания formation flying «Aqua Train». С
помощью п/к «GAMA» была исследована одна из задач перевода
спутника в formation flying “Aqua Train”. Эта спутниковая группа
состоит из шести спутников, которые расположены на идентичных
орбитах, но имеется сдвиг по ДВУ и аргументу широты. Примерное
расположение спутников показано на рис. 7.21 звездочками.
342
* В таблице 7.4 приведена
зависимость затрат Д V для перевода
х ,4 спутника из одной рабочей точки
х * \ группы в другую от продол-
х ' жительности перевода. Решение,
соответствующее продолжительности
перелета 1540 витков, приведено в
Рис.7.21 Расположение спут- п 3 j
ников в formation flying Aqua r
Train”
Таблица 7.4 (Aqua Train)
N Г(дни) Д/(м/с) А К / ' inptn А VOlltpln
340 23.3 180.58 138.61 112.07
490 33.6 124.15 88.49 81.71
640 43.9 93.61 69.68 55.27
790 54.15 78.77 58.05 44.94
940 64.4 66.67 50.11 34.07
1090 74.7 57.85 39.78 30.84
1240 85.02 52.58 35.99 26.08
1390 95.3 47.78 29.43 24.22
1540 105.6 44.69 24.82 23.45
Пример 3.1 (Aqua Train)
начальная орбита орбита цели
Ятш(км) 663.0 705.0
Я/иж(км) 663.1 705.1
сор1!!(град) 53.968 77.149
/(град) 98.0800 98.2055
П(град) 263.28 266.04
6//<7/(град) 0. 30.0
<7И=44.69 м/с dVinpln=24.82м/с dVoutpl-2i.46м/с Niter=.
Nimp Nrev Ulat dVrd dVtr dVlt
1 2. 184.95 0.0 0.024 -3.52
2 3. 11.08 0.0 0.316 16.43
3 1552. 179.71 0.0 10.703 1.37
4 1553. 1.70 0.0 13.779 -2.14
N_days: 105.6 n= 15.0 REVfnlTG= 1540. REVfnlCH= 1555.
В рассмотренных выше примерах спутники было необходимо
разместить на достаточно большом расстоянии друг от друга. В том
343
случае, когда спутники должны быть расположены на небольшом
расстоянии друг от друга, стратегия маневрирования при создании
спутниковой группы несколько отличается от описанной выше.
Большое значение приобретает оценка возможности столкновения
спутников в процессе их перевода в заданное место в группе.
Уменьшить эту опасность может позволить использование
прицельного вектора, который обеспечит безопасное направление
подлета к спутниковой группе. Использование окончательного
прицельного вектора, позволит занять заданное место в спутниковой
группе. Также большое внимание следует уделить компенсации
ошибок исполнения маневров. Один из алгоритмов расчета маневров
создания близко расположенной спутниковой группы описан в работе
[137].
Как правило, спутники, входящие в formation flying,
маневрируют с помощью двигателей малой тяги. Методика расчета
параметров таких маневров описана в главе 6. Она настолько проста
и надежна, что может быть использована при разработке бортовых
алгоритмов расчета параметров маневров создания спутниковых
групп.
344
Глава VIII
ПОДДЕРЖАНИЕ ЗАДАННОЙ КОНФИГУРАЦИИ
СПУТНИКОВОЙ СИСТЕМЫ
Различают две основных стратегии поддержания заданной
конфигурации спутниковой системы: «жесткое» и «гибкое» (в
зарубежной литературе используются термины «абсолютное» и
«относительное» поддержание). При «жестком поддержании»
движение каждого из спутников согласуется с некоторым заданным
движением, что позволяет рассчитывать параметры маневров
каждого спутника независимо от положения других спутников,
входящих в систему. При «гибком» поддержании - обеспечивается
согласованное движение всех спутников системы. Оно существенно
экономичнее «жесткого», т.к. нет необходимости постоянно
корректировать те элементы орбиты, которые практически
одинаковым образом меняются у всех спутников. Например, большая
полуось всех орбит может уменьшаться под действием атмосферы
практически одинаковым образом, при этом взаимные угловые
расстояния спутников, определяющие конфигурацию системы, будут
почти постоянны. Значительные изменения больших полуосей можно
не корректировать, а поддерживать только медленно меняющуюся
угловую конфигурацию системы. «Относительное» поддержание
является более сложной задачей, т.к. при расчете параметров
маневров одного из спутников необходимо учитывать положение
всех остальных элементов системы.
8.1. «Гибкое» поддержание заданной конфигурации
спутниковой системы
8.1.1. Постановка задачи. Рассматривается задача расчета
параметров маневров, обеспечивающих поддержание заданной
конфигурации спутниковой системы, в которой спутники
расположены на нескольких круговых орбитах, имеющих
одинаковый радиус и наклонение, но отличающихся долготой
восходящего узла. Требуется, чтобы на фиксированном интервале
345
времени (интервале поддержания) взаимные отклонения спутников от
их номинальных значений по аргументу широты и, долготе
восходящего узла Q и наклонению / не превосходили заданных
величин 5w, 5Q, 8i. Необходимо учитывать ограничения на
минимальную и максимальную величину маневров, на число
маневров, выполняемых на заданном интервале времени, обеспечить
равномерный расход топлива спутниками, входящими в систему.
Элементы орбит спутников не фиксированы, важны только их
взаимные угловые расстояния, определяющие конфигурацию
системы. Таким образом, рассматривается случай «относительного»
(«гибкого») поддержания состояния системы.
8.1.2. Вычисление элементов базовых орбит. Назовем
базовыми орбитами орбиты, разницы значений контролируемых
параметров которых соответствуют номинальным величинам. Если
известны элементы (и, Q, /) для одной из базовых орбит, для всех
остальных базовых орбит они однозначно определяются из условия
номинального расположения спутников в системе.
Для примера, рассмотрим систему из 6 спутников (STARSYS).
Их начальные условия приведены в таблице 8.1 [166]. Номинальные
угловые расстояния по широте между спутниками в одной плоскости
wt/=180°, расположение спутников в разных плоскостях отличается
между собой на w„,=120°.
Таблица 8.1
№ спутника а |ки] i (гря<)| О [гря4| U |гря4|
11 7377.178 52.9992 0.057 10.043
12 7377.004 52.9994 0.134 189.913
21 7378.914 52.9995 120.025 130.085
22 7379.607 53.0010 119.945 310.057
31 7378.106 52.9998 240.011 250.120
32 7378.647 52.9989 239.925 69.847
Приведем все спутники в одну точку, например.
соответствующую положению спутника 11. Для ЭТОГО вычтем из
аргументов широты других спутников номинальные угловые
расстояния ud и/или и,„: w1|,)=wn=10.043°, и}2р=и\2-ис[=9.9\Ъ°, u2iP=u2l-
и,„=10.085°, W22p=W22_Rr^m= 10.057°, мз|/,=г/з|-2м,„=10.120°, и22р=и22-исг
2иш+360°=9.847°. Найдем такое значение приведенного базового
аргумента широты иЬр, чтобы максимальные отклонения от него были
346
равны по абсолютной величине. Легко видеть, что и/,,, равно среднему
арифметическому минимального и максимального значений и„. В
данном случае максимальное w3iP, а минимальное ui2l„ следовательно,
«*„=9.9835°, а максимальные отклонения A«,„„vo=±O.1365°. Зная uh„
приведенной базовой орбиты, легко вычислить аргументы широты
базовых орбит всех спутников. Для этого необходимо добавить
номинальные угловые расстояния ud и/или и,„: мц*=м*р=9.9835°,
U\ib=Ubp+Ud=\89.9835°, иш=иЬ1}+ит =129.9835°, w22/,=309.9835°,
Изifc=249.9835o, г/з2А=69.9835°. Аналогичная процедура применяется и
для нахождения базовых значений долготы восходящего узла.
Подставив Q/=0, Q„,=120°, получаем Оц*=0.0295°, Qi2*=0.0295°,
Q2lfc=120.0295°, Q22fc=120.0295°, Q31*=240.0295°, Q32*=240.0295°. Ещё
проще находится базовое значение наклонения, которое одинаково
для всех спутников системы 4=52.99995°. Таким образом, найдены
элементы всех базовых орбит на начальный момент времени.
Аналогичный алгоритм применяется, если плоскости или
спутники в плоскости расположены не на одинаковом, но на
известном номинальном угловом расстоянии друг от друга. Переход к
элементам приведенной базовой орбиты удобен тем, что независимо
от числа спутников в системе можно иметь дело только с одним
значением каждого из элементов. Эти параметры определяют
положение всех остальных базовых орбит.
8.1.3. Общий алгоритм решения задачи. Легко видеть что,
если максимальные отклонения контролируемых элементов орбит от
вычисленных значений соответствующих элементов базовых орбит
будут меньше половины точности поддержания конфигурации
системы, то взаимные отклонения контролируемых элементов любой
пары спутников будут меньше заданных величин 8г/, 8Q. 8/, что и
требуется по условию задачи. Предполагается, что в начале интервала
поддержания конфигурация системы удовлетворяет наложенным
ограничениям. Цель проведения маневров обеспечить, чтобы и на
всем интервале поддержания эти ограничения не были нарушены.
Так как для околокруговых орбит зависимость Q и и от времени
близка к линейной, то и зависимость от времени взаимных отклонений
по этим элементам также близка к линейной. Это позволяет
предположить что, если в начале и в конце интервала поддержания
контролируемые параметры спутника отклоняются от
соответствующих параметров своей базовой орбиты не более чем на
347
половину требуемой точности поддержания состояния системы, то
это ограничение выполнено и внутри интервала поддержания. Если
это ограничение выполнено для всех элементов орбиты каждого из
спутников, входящих в систему, то взаимные отклонения по каждому
из контролируемых элементов орбиты любых двух спутников не
превосходят допустимых
5г/ 5г/ SQ 5Q
_~Т’ 2 J’ |_“Т’Тф
орбиты будем обозначать
значений (5г/,5Г2,5г). Для краткости
5/ 5/
2 ’Т
5 5
2’2
окрестность элементов базовой
Таким образом, задача контроля взаимных отклонений на всем
интервале поддержания эквивалентна гораздо более простой задаче
перевода каждого из спутников в
5 5
2’2
окрестность своей базовой
5 5
2’2
орбиты в конце интервала поддержания.
Это позволяет предложить следующий алгоритм решения
задачи [15]. Выбирается точка в пространстве элементов
приведенной базовой орбиты в конце интервала поддержания.
Определяются элементы базовой орбиты для каждого из спутников
на этот момент. Для каждого спутника вычисляются параметры
импульсов скорости, обеспечивающих его оптимальный (по затратам
суммарной характеристической скорости) перевод в
окрестность базовой орбиты. Вычисляется значение функционала
задачи, соответствующее данной точке пространства элементов
приведенной базовой орбиты. Анализируется изменение значения
функционала по сравнению со значением в предыдущей точке и
осуществляется переход к следующей точке в пространстве
элементов приведенной базовой орбиты.
Процесс поиска параметров оптимальной базовой орбиты в
конце интервала поддержания (переход к следующей точке) можно
осуществлять численным методом, например, с помощью метода
деформируемого многогранника [121], или простым перебором с
постоянным шагом, поскольку область, на которой ищется минимум,
довольно ограничена.
Процедура заканчивается, когда будет найдено оптимальное
положение приведенной базовой орбиты в конце интервала
348
поддержания. Календарь маневров, обеспечивающий перевод
спутников в окрестность базовых орбит, соответствующих этой точке,
будет являться решением задачи.
Предположение о достаточности контроля состояния системы в
начале и конце интервала поддержания позволяет при
первоначальном определении параметров маневров каждого из
спутников использовать только информацию об его орбите и
элементах базовой орбиты и не учитывать движение остальных
спутников, что существенно упрощает задачу. Информация о
движение всей системы используется для уточнения календаря
маневров, если нарушены какие-нибудь ограничения. Например,
число спутников, выполняющих маневр на одном и том же витке,
превышает допустимое.
Для того чтобы найти исходную точку для процесса
минимизации, начальные условия всех спутников подтягиваются до
момента окончания интервала поддержания и определяются значения
контролируемых параметров и, Q, I. Вычитанием номинальной
разницы долготы восходящих узлов и аргументов широты параметры
приводятся к окрестности соответствующих величин одного из
спутников (аналогичная процедура нахождения приведенных величин
уже была описана выше). Затем вычисляются средние
арифметические значения наклонений и приведенных аргументов
широты, а также долготы восходящего узла, которые используются в
качестве начальной точки для минимизации в пространстве
параметров приведенной базовой орбиты.
Оптимальными считаются значения параметров приведенной
базовой орбиты, для которых минимален функционал [134]:
где п - число спутников, ДИ,* - располагаемый импульс скорости для
j - го спутника, ДИ, - суммарный импульс скорости, требуемый для
перевода этого спутника в окрестность его базовой орбиты.
Минимизация такого функционала позволяет равномерно
распределять затраты топлива между спутниками. Равномерность
распределения затрат обеспечивает и минимизация функционала,
предложенного Г.В. Можаевым:
349
1
деу’-де7.
(8.2)
Применение этого функционала особенно эффективно, когда у
спутников остается мало топлива. Естественно, что решения, у
которых AV* -AVj <0, не рассматриваются. Можно использовать и
другие функционалы, в которых присутствуют ДЕ,” и Vj, или
минимизировать функционал обычного вида Е=ЕД V/.
8.1.4. Определение параметров маневров. При определении
параметров маневров предполагается, что используются только
трансверсальные и боковые составляющие импульсов скорости, т.к.
этих двух переменных в сочетании с оптимальным углом приложения
импульса скорости достаточно, чтобы перевести спутник одним
маневром в нужную точку пространства и, Q, i.
С учетом (1.12.г), (7.11), (7.25), система уравнений для
определения аргумента широты точки приложения импульса
скорости w, и его трансверсальной и боковой составляющих Д Vtj, Д Vzj
имеет вид:
ЛЕ.
(-3UJ + 4sinLE)—^ = Диу, (8.3а)
ДЕ,.
cos и,.—- = Дг,, (8.36)
J у J
ЛЕ,. sinw ДЕ.
-417,5Q—--(17,5Qtgicosw,---------J~)—— = AQ , (8.3в)
Eo sin i Eo
где Ди„ AQ„ Дг) - отклонения контролируемых параметров у-го
спутника, вычисленных в конце интервала поддержания, от
параметров базовой орбиты в этой точке, и, - аргумент широты точки
приложения импульса скорости, U, - угол от этой точки до точки, в
которой вычисляются отклонения.
Рассматривается одноимпульсная схема, поскольку уменьшение
числа используемых импульсов скорости также важно для процесса
поддержания, как и минимизация функционала задачи, а
корректируемые отклонения и импульсы скорости, как правило,
небольшие. Однако, если сохранение имеющегося первоначально
отклонения по i, или даже его увеличение, позволяет уменьшить
350
отклонение по Q, и, как следствие, ДЕ), то оптимально перейти к
двухимпульсной схеме, рассмотренной в первом параграфе седьмой
главы.
Если величина импульса скорости больше допустимой, то он
разбивается на несколько импульсов, прикладываемых на разных
витках. Если величина импульса скорости меньше допустимой, то
можно сместить точку приложения импульса скорости на виток с
большим номером, увеличив тем самым величину трансверсальной
составляющей. Если нарушение ограничения на один из параметров
наступает раньше, чем можно приложить минимальный импульс
скорости, то он прикладывается перед нарушением ограничения и
затем возможно наступление скользящего режима.
Если корректируется только наклонение, импульс скорости
прикладывается на экваторе, если корректируется только долгота
восходящего узла, а система спутников расположена на большом
удалении от Земли (см. первый параграф седьмой главы), то импульс
скорости прикладывается в апексе или вертексе орбиты. Это
оптимальные точки для коррекции соответствующих параметров.
Номер витка, на котором прикладывается импульс скорости, не имеет
значения. Если корректируется только положение вдоль орбиты, то
импульс скорости прикладывается в той из апсидальных точек,
которая дает максимальное уменьшение эксцентриситета орбиты.
При этом импульс скорости прикладывается на витке ближайшем к
началу интервала поддержания конфигурации системы.
Если корректируются одновременно отклонения по аргументу
широты и по долготе восходящего узла или по наклонению, то
импульс прикладывается в апексе или вертексе орбиты или на
экваторе витка ближайшего к началу интервала поддержания, причем
из двух возможных точек выбирается та, которая позволяет уменьшить
эксцентриситет орбиты.
Если в процессе поддержания состояния системы или при её
создании орбита какого-нибудь из спутников получает достаточно
большой эксцентриситет, может возникнуть потребность в его
целенаправленной коррекции. В этом случае придется использовать
два импульса, чтобы одновременно оптимально корректировать все
элементы орбиты. Сначала из системы (8.3) находятся величины
составляющих импульса и оптимальный угол поворота плоскости
орбиты, а затем по формулам для оптимального перехода между
близкими околокруговыми орбитами определяются параметры двух
351
импульсов. Используемая в этих формулах, разность больших
полуосей орбит Д<? вычисляется по формуле:
А К/
Д<7 = 2<7—(8.4)
а угол, на который необходимо повернуть орбиту, по формуле:
ДИ.
Д? = —(8.5)
*0
где ДИ,„ ДИ2/ составляющие импульса скорости, определённые из
системы (8.3).
8.1.5. Использование итерационной процедуры. При помощи
итерационной процедуры (аналогичной процедуре описанной в
первой главе) осуществляется уточнение параметров импульсов
скорости, чтобы параметры базовой орбиты были сформированы с
необходимой точностью. На этом этапе также каждый из спутников
рассматривается отдельно.
Используемая в итерационной процедуре "прицельная" орбита
на первой итерации совпадает с базовой орбитой. После определения
(в линейном приближении) параметров импульсов скорости,
формирующих прицельную орбиту, осуществляется численное [112]
или численно-аналитическое [51,52] прогнозирование движения
спутника для точного определения параметров фактически
сформированной орбиты в конце интервала поддержания. (Для
данной задачи вследствие большого числа спутников, которые могут
входить в систему, длительных интервалов поддержания,
многократного применения прогноза, использование численно-
аналитического прогнозирования, несомненно, предпочтительней).
Вычисляются отклонения этих параметров от параметров базовой
орбиты, если отклонения больше допустимых, то параметры
прицельной орбиты изменяются на величину вычисленных
отклонений. Затем вычисляются параметры импульсов скорости,
которые должны сформировать новую прицельную орбиту, снова
вычисляются отклонения сформированной орбиты от базовой и т.д.,
пока отклонения не станут в К раз меньше требуемой точности
поддержания конфигурации системы (обычно Л=10). Эта процедура,
352
позволяющая устранить неточности линейного приближения при
определении величины импульсов скорости, повторяется для каждого
спутника системы.
Несмотря на небольшую величину импульсов применение
итерационных процедур необходимо, поскольку интервалы
поддержания могут быть весьма продолжительны, и небольшие
ошибки в величине импульсов скорости могут привести к заметным
отклонениям в конечной точке.
8.1.6. Выбор точки прицеливания. Выбор базовой орбиты в
качестве прицельной точки наиболее прост и надежно обеспечивает
выполнение терминальных условий. Однако часто в качестве
прицельной точки предпочтительнее использовать ближайшую
границу разрешенного диапазона, а не его середину [15]. Это
уменьшает затраты А V и увеличивает время пребывания
корректируемого элемента орбиты в разрешенном диапазоне, т.к.
этот элемент может меняться от одной границы к другой через весь
разрешенный диапазон, а не через его половину.
Для примера, рассмотрим изменение аргументов широты
системы из четырех спутников. На рис. 8.1 изображены их
приведенные аргументы широты в начальный момент поддержания
wlp, «гр, Щр, w4p и в конечный момент ulpf, u2pf, u2pf, и4рДесли коррекция
не проводилась). Аргументу широты приведенной базовой орбиты в
начальный момент соответствует точка иЬр, а выбранному значению
аргумента широты базовой орбиты в конечный момент времени
соответствует точка ubpf. Разрешенная полоса (разрешенный
диапазон) ограничена штрих пунктирными линиями, проходящими
через точки d0 и df и через точки Ьо и bf (d(ruh=uhl-bti=df-uh[1^uhar
bf=O.55u).
Изменение аргументов широты спутников по времени, если не
проводить коррекцию их движения, показано пунктирными линиями.
Сплошными линиями показано изменение аргументов широты после
проведения маневров. Как можно видеть, в качестве прицельных
точек выбирался не аргумент широты базовой орбиты иЬр/, а
ближайшая граница разрешенного диапазона.
Из (8.3а) следует, что затраты на коррекцию отклонения по
аргументу широты и пропорциональны величине этого отклонения.
Следовательно, затраты, необходимые для коррекции всех
353
отклонений по и, пропорциональны сумме расстояний от точек
И1рЛ«2рЛ«зрЛм4Р/'ДО прицельных точек.
, uipf
. а
Ult>f
Рис. 8.1. Изменение аргументов широты спутников на интервале
поддержания. Пунктирными линиями показано изменение аргументов
широты до проведения маневров, сплошными линиями - после
Обозначим U\pj-u2pj=a, u2pfU2pj=b, u2pj -uApf=c. Если прицельной
точкой для всех спутников является аргумент широты приведенной
базовой орбиты ubpj^\u2pf,u2pj\, то сумма расстояний до этой точки
“иьр/1Равна a+2b+c и не зависит от расположения точки щр/на
интервале (u2pf,u2pf). Это очень важное свойство, которое можно
эффективно использовать. Например, если в качестве ubpf взять одну
из граничных точек или u2pf, то соответствующий спутник не
должен маневрировать и тем самым уменьшается общее число
используемых импульсов скорости без изменения суммарной
характеристической скорости маневров. Существенно сокращается и
интервал поиска оптимального значения ubpf, которое целесообразно
искать в диапазоне [щр/,и2рД.
Если точка иЬрг сдвинута на х от интервала (u3pf,u2pj), но не
выходит из интервала (w4P/,wlp/), то сумма будет уже а+2Ь+с+2х. Если
точка ubpf выбрана так, что ни u3pf, ни u2pf не попадают в интервал (df
,bf), а прицельными точками являются ближайшие из границ df и bf
(как на рис. 8.1), то сумма будет а+2Ь+с-2Ъи, и опять не зависит от
354
конкретного расположения точки ubpf. Таким образом, использование
в качестве прицельных точек границ df и bf помогает уменьшить ДЕ
2Би гг
на величину Увеличивается и время пребывания в
разрешенном диапазоне уже после интервала поддержания, т.к.
дрейф будет происходить в направлении заданном коррекцией, т.е. от
ближней границы разрешенного диапазона к дальней. Недостатком
использования границ в качестве прицельных точек является
повышение вероятности выхода за пределы границ разрешенного
диапазона внутри интервала поддержания. Это наиболее вероятно,
когда сплошная линия близка к штрих-пунктирной, т.е. когда
начальная и конечная точки лежат с одной стороны от прямой ubpubpf.
На рис. 8.1 это линии uipdfn щрЬ?. Изобразим реальное изменение
аргумента широты первого спутника точечной линией. Как видим,
внутри интервала поддержания спутник максимально выходит за
пределы разрешенного диапазона на величину h. Чтобы устранить это
нарушение можно сдвинуть прицельную точку на соответствующую
величину вглубь разрешенного диапазона. Вычисление выхода за
границы разрешенного диапазона и сдвиг прицельной точки
осуществляются в процессе итерационного выполнения
терминальных условий. Необходимо отметить, что, выиграв в числе
импульсов скорости (когда один из спутников не маневрирует), затем
теряем в продолжительности поддержания, т. к. спутник выйдет из
заданного диапазона сразу после окончания интервала поддержания.
Но, если у спутника осталось мало топлива, и ему нежелательно
маневрировать, возможность избежать маневра становится для него
основной.
Также можно показать, что если число спутников нечетное, то
оптимально аргументы широты всех спутников приводить в
окрестность аргумента широты «внутреннего» спутника (большие и
меньшие значения аргумента широты имеют одинаковое число
спутников). Если на рис. 8.1 отбросить четвертый спутник (оставить в
системе три спутника), то в этом примере приводить аргументы
широты первого и второго спутников надо в окрестность точки u3pf.
Иногда предлагается выбирать один из спутников и с ним
согласовать движение всех остальных спутников системы (выбрать
«вожака»), В этом случае все поддерживаемые параметры орбит
остальных спутников согласуются с параметрами орбиты спутника-
вожака. Но, как показывает приведенный выше пример, каждый из
355
параметров орбит спутников оптимально приводить к «внутреннему»
значению этого параметра. «Внутренние» значения разных
параметров могут принадлежать различным спутникам. Таким
образом, в качестве вожака оптимально выбрать фиктивный спутник,
поддерживаемыми параметрами орбиты которого являются
«внутренние» параметры, реально относящиеся к разным спутникам.
Это упрощенный подход, но он показывает возможную не
оптимальность выбора конкретного спутника в качестве спутника-
вожака. Параметры такого фиктивного спутника могут быть
использованы в качестве начального значения для численного поиска
оптимальных значений, к которым надо привести параметры всех
спутников. Необходимо помнить, что значения всех параметров
вычисляются не вначале, а в конце интервала поддержания, и именно
в этот момент определяются параметры фиктивного спутника.
8.1.7. Определение интервалов маневрирования. Рисунок 8.1
позволяет ответить на вопрос, как быстро необходимо проводить
коррекцию отклонения по аргументу широты для выбранного
положения приведенной базовой орбиты в конце интервала
поддержания иър/. Крайние точки проведения маневров это точки
пересечения штриховых и штрих пунктирных линий (т.£, т.К, т.Л/,
T.N). При проведении маневров в эти моменты времени в качестве
прицельной точки нельзя использовать ближайшую границу
разрешенного диапазона, т.к. в дальнейшем, сплошная линия будет
совпадать с граничной штрих пунктирной линией, и высока
вероятность выхода из разрешенного диапазона.
Наклонение орбит i на всем интервале поддержания меняется
незначительно. Его целесообразно как можно быстрее приводить к
некоторому среднему значению (уменьшая тем самым абсолютные
величины отклонений по /), чтобы не возникали вековые уходы по О.
Для отдельных спутников целесообразно некоторое время не
корректировать наклонение, если сохранение первоначального
отклонения по / позволяет уменьшить имеющееся первоначально
отклонение по Q.
На рис. 8.2 показано возможное изменение Q для каждого из
четырех рассмотренных ранее спутников. Пунктирными линиями
изображено изменение Q после проведения коррекции аргумента
широты и наклонения. Очевидно, что для третьего и четвертого
356
спутников для выбранного значения Qbpf коррекцию О можно не
проводить, т.к. Qjp/И Cltyf попадают в разрешенный диапазон (df,br).
Рис. 8.2. Изменение долготы восходящего узла спутников на интервале
поддержания. Пунктирными линиями показано изменение долготы
восходящего узла до проведения маневров, сплошными линиями - после
Для первого спутника пунктирная прямая Q\p£\pf пересекает границу
разрешенного диапазона штрихпунктирную прямую dgdf,
следовательно, необходимо изменить Q раньше критической точки К.
Целесообразно сделать это в начальный момент, совместив с
коррекцией других отклонений, и уменьшив тем самым число
импульсов и Д/ маневра. Изменение Q происходит скачком, новое
значение после импульса будет О.1рт, а дальнейшему изменению
соответствует прямая £llpm£llpmf, которая принадлежит разрешенной
полосе. Прицельной была выбрана точка внутри разрешенного
диапазона чтобы не происходило нарушение ограничения
сразу после окончания интервала поддержания.
Аналогично для второго спутника, но изменение Q в начальный
момент ограничено величиной d$-Qip, поэтому затем в точке М
необходимо провести новую коррекцию О.
Процедура нахождения параметров импульсов повторяется для
каждого спутника, пока все спутники системы не будет переведены на
свои базовые орбиты.
Получить близкое к оптимальному решение можно с помощью
численных методов. Однако, учесть перечисленные выше физически
357
ясные возможности уменьшения А V и числа импульсов при
использовании численных методов (как правило, это симплекс метод
[166], [144], [79]) практически невозможно, т.к. отклонения
проверяются в равно отстоящие друг от друга моменты времени, а не
в моменты, когда происходит нарушение условий поддержания.
После определения полного календаря маневров проверяется
выполнение ограничений для всех спутников системы внутри
интервала поддержания. В первую очередь контролируется
выполнение ограничения на общее число маневров в течение
заданного интервала маневрирования. Если маневров больше, то
превышающая часть переносится на более позднее время. При этом в
первую очередь переносятся маневры, не содержащие
трансверсальной составляющей импульса (т.к. их можно выполнять
на любом витке), затем маневры спутников содержащих большие
запасы топлива, а также импульсы, величина которых близка к
минимально возможной. Когда календарь маневров сформирован,
производится совместное интегрирование уравнений движения всех
спутников с учетом рассчитанных импульсов скорости. Вычисляются
максимальные отклонения контролируемых параметров внутри
интервала поддержания. Если предположение о линейной
зависимости отклонений не достаточно точно, и для каких-нибудь
спутников отклонения корректируемых элементов орбиты
превышают допустимые, то сдвигаются прицельные точки для этих
элементов или рассчитываются дополнительные импульсы скорости,
уменьшающие эти отклонения.
Для полностью сформированного календаря маневров,
вычисляется значение функционала F и принимается решение об
окончании задачи или формируются новые значения элементов
приведенной базовой орбиты, а затем повторяется вся процедура
поиска календаря маневров, соответствующего этой орбите.
8.1.8. Пример расчетов. В таблице 8.2 приведены результаты
расчета календаря маневров [15] для системы спутников, начальные
условия которых содержатся в таблице 8.1.
Конфигурация системы поддерживалась на интервале шесть
месяцев, отклонения по каждому из контролируемых параметров не
должны превосходить 0.1°. Суммарные затраты на поддержание
АЕ=2.485м/сек.
358
Как можно видеть из таблицы, корректируется только
отклонение по аргументу широты, а отклонения по i и Q даже без
корректирующих импульсов остаются в разрешенном диапазоне.
Положение базовой орбиты в конце интервала поддержания было
выбрано таким образом, чтобы спутник 31 совсем не маневрировал.
Таблица 8.2
№ спутника виток и,- [град] ДИ,[м/с] АИг
11 3 330.4 0.476 0
12 2 150.5 0.528 0
21 4 151.7 -0.418 0
22 1 331.2 -0.801 0
31 6 35.7 0 0
32 5 330.5 -0.261 0
Изложенная в этом параграфе методика расчета календаря
маневров, обеспечивает поддержание конфигурации системы на
интервале времени, длина которого от нескольких дней до двух
десятков месяцев. При расчете учитываются особенности задачи, что
позволяет использовать минимальное число маневров и исполнять их
в оптимальные моменты времени. Методика в первую очередь
предназначена для расчета маневров поддержания систем спутников
расположенных на высотах от 800 до 1500км, но стратегия коррекции
отклонения по аргументу широты применима и для систем спутников,
на высотах около 20000 км, т.к. имеет универсальный характер.
Для определения параметров маневров относительного
поддержания конфигурации системы спутников на больших высотах,
когда существенным является, например, притяжение Луны и Солнца,
можно воспользоваться алгоритмом, описанным в работе Ю.П.
Улыбышева [181]. В работах Г.В. Можаева [84] и Р.Ф. Муртазина
[85], рассмотрены задачи, сходные с задачей, исследованной в
данном параграфе. В этих работах предполагалось, что маневры
исполняются в начальный [84] или в начальный и конечный моменты
времени [85]. В промежуточные моменты состояние системы не
контролировалось. На примере конкретных спутниковых систем
было проведено сравнение стратегий «относительного» (гибкого) и
«абсолютного» (жесткого) поддержаний, показано, что на
«относительное» поддержание требуется меньше маневров и
меньших затрат суммарной характеристической скорости.
359
8.2. «Жесткое» поддержание заданной конфигурации
спутниковой системы
8.2.1. Общая схема решения задачи. Несмотря на не
экономичность «жесткого» поддержания оно значительно чаще
используется в реальных спутниковых системах. При таком
поддержании движение каждого из спутников согласуется с
некоторым программным движением. Это позволяет рассчитывать
маневры каждого из спутников независимо от движения остальных
спутников системы. В процессе поддержания спутник должен
находиться в заданном диапазоне по каждому из контролируемых
элементов орбиты (находиться в боксе заданного размера). Когда
спутник в процессе эволюции его орбиты достигает одной из стенок
бокса, с помощью маневров его переводят на противоположную
стенку. Частота перевода по разным элементам может существенно
отличаться. Например, на низких орбитах приходится значительно
чаще поднимать высоту орбиты, чем корректировать другие
элементы. Когда корректируется элемент орбиты, достигший своего
предельного значения, это не означает, что не надо корректировать
остальные поддерживаемые элементы орбиты. Оптимально, чтобы в
этот момент остальные элементы орбиты корректировались
пропорционально их суммарному изменению на всем интервале
поддержания. Для расчета самих параметров маневров как близких к
импульсным, так и имеющим значительную продолжительность
можно использовать алгоритмы, описанные в предыдущих главах.
Как правило, это маневры переходов, описанные во второй и шестой
главах.
8.2.2. Поддержание большой полуоси орбиты и ее
наклонения. Рассмотрим подробнее задачу поддержания большой
полуоси орбиты КА и ее наклонения [46] в заданной окрестности
[-8<2,5<т], [-8г,8У] их номинальных значений (аод’о) на заданном
интервале времени Тк (например, один год).
При решении задачи поддержания рабочей орбиты КА можно
выделить три этапа: выбор параметров «рациональной» орбиты, на
которой начнет функционировать КА, определение момента выхода
параметров рабочей орбиты за заданные ограничения, расчет
параметров маневров, переводящих КА на «рациональную» орбиту.
360
«Рациональной» будем называть орбиту, которая в процессе
эволюции максимально долго не выходит за пределы допустимой
окрестности номинальной орбиты. Для того чтобы определить
параметры рациональной орбиты необходимо исследовать эволюцию
поддерживаемой орбиты. На рисунках раздела 8.2.3 приведено
изменение поддерживаемых элементов и эксцентриситета в
зависимости от времени для различных орбит. Все элементы орбит
претерпевают коротко периодические изменения, а эксцентриситет и
наклонение имеют также периодические изменения существенно
большей амплитуды с периодом, который всего в несколько раз
меньше интервала поддержания. Для орбит, у которых еще ощутимо
влияние атмосферы, имеет место монотонное уменьшение большой
полуоси, а у солнечно-синхронных орбит монотонное уменьшение их
наклонения.
Если нет очень жестких требований по точности поддержания
заданной орбиты, то нет смысла бороться с коротко периодическими
возмущениями. Однако их необходимо учитывать при выборе
«рациональной» орбиты, чтобы на коротком интервале времени не
выйти за верхнюю границу разрешенного диапазона. Например,
большую полуось «рациональной» орбиты арац желательно взять как
максимальное значение большой полуоси поддерживаемой орбиты
уменьшенной (сдвиг) на величину удвоенной амплитуды
короткопериодического изменения большой полуоси \акр (и на
несколько процентов от этой величины), а также на Да,„ -
методическую точность решения задачи подъема орбиты
арт, = яо+5я-2(1 + О,О5)Д^-Дя,„. (8.6)
Таким образом, в начальный момент большая полуось
«рациональной» орбиты близка к верхней допустимой границе, но
немного меньше её, чтобы за счет коротко периодических
возмущений не было нарушено ограничение на максимальную
величину большой полуоси рабочей орбиты. Для орбит с высотами
270 - 1100 км сдвиг составляет примерно 250л/. Аналогичные
величины сдвига для наклонения составляют 0.00 Г, а для
эксцентриситета 0.0005. В дальнейшем, уменьшаясь под действием
атмосферы, большая полуось орбиты достигнет своей нижней
границы.
361
В программе, рассчитывающей параметры маневров
поддержания, на первом этапе осуществляется численное
интегрирование уравнений движения КА с подключением функции
выхода, контролирующей ограничение по величине большой полуоси
в восходящем узле орбиты, также контролируются величина
наклонения, определяется амплитуда короткопериодических
колебаний обоих элементов. Желательно, чтобы в начальный момент
времени параметры орбиты были близки к параметрам
«рациональной» орбиты. Когда ограничение, например, по нижнему
значению большой полуоси будет достигнуто, происходит выход из
интегрирования. Рассчитываются параметры маневров, изменяющих
большую полуось, чтобы её значение опять совпало с величиной
большой полуоси «рациональной» орбиты. Оптимально, чтобы в этот
момент наклонение орбиты корректировались пропорционально его
суммарному изменению на всем интервале поддержания.
Пусть, например, через время ДГ от начала поддержания (или от
предыдущего подъема) возникла необходимость снова поднимать
орбиту. За время ДГ наклонение изменилось на угол Дг. До конца
интервала поддержания остается время Г. Можно предположить, что
за оставшееся время наклонение изменится еще на угол Дг =ЫТ1\Т.
Общее изменение наклонения до конца интервала поддержания
составит Дг +Дг. Пусть Д/ш - максимальное допустимое изменение
наклонения на интервале поддержания Г+ДГ (Дгш=г0±й'-гл, i„ -
наклонение на начало интервала ДГ, знак у 5i выбирается таким,
чтобы знаки у ДУ и Дгш совпадали). Таким образом, превышение,
которое необходимо скорректировать на интервале Г+ДГ, составляет
ДгА=Дг +Дг-Дгш. Та часть этого превышения, коррекцию которой
необходимо совместить с осуществляемым подъемом высоты, равна
Дг4ДГ/(Г+ДГ). Таким образом, в данный момент оптимально
совместно с подъемом высоты корректировать не отклонение
наклонения Дг, а отклонение Дгд7-:
ДГ
Дгд7. = Az - Azm ———-. (8.7)
Если
(8.8)
362
то наклонение можно не корректировать. Когда условие (8.8) не
выполнено, и коррекцию большой полуоси необходимо совмещать с
коррекцией наклонения маневры оптимально исполнять в районе
экватора.
Когда наклонение не корректируется, а необходимо
осуществлять только увеличение большой полуоси (которую можно
корректировать в любой точке орбиты), располагая маневр подъема
высоты в апоцентре орбиты, можно уменьшить ее эксцентриситет.
Маневрирование всегда начинается на витке, предшествующем
витку, на котором один из параметров орбиты выходит из
разрешенного диапазона.
После расчета и моделирования маневров, опять осуществляется
численно-аналитический прогноз вновь сформированной орбиты и
находится следующий момент выхода параметров рабочей орбиты за
границу ограничений. Процесс заканчивается, когда достигается
заданное время окончания интервала поддержания.
Один из вариантов «жесткого» поддержания орбиты с помощью
двигателей малой тяги будет рассмотрен в параграфе 8.2.5.
8.2.3. Исследование эволюции орбит. Для выбора правильной
стратегии поддержания важно знать реальное изменение элементов
орбиты. С помощью численно-аналитического интегрирования
уравнений движения ’’THEONA” [51,52] получены зависимости
изменения элементов различных орбит. На рисунках (8.3)-(8.11)
приведены графики полученных изменений большой полуоси,
эксцентриситета, и наклонения на интервалах времени три витка,
неделя и один год для орбиты с начальной высотой 700км, имеющей
первоначальное наклонение орбиты 51.6°, 63.8° и 98°.
363
Sanl-iraior axis
7079 .
Короткопериодические неравенства
в течение 3 витков
Senn-major axis
7076.24
в течение 1 недели
• Sewi-major axis
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500
Orbits
в течение 1 года
Рис. 8.3. Эволюция большой полуоси орбиты (наклонение 51.6°)
364
... 0.0 0.4 0.0 1. 2 1.6 2.0 2.4 2.0
Orbits
Короткопериодические неравенства
в течение 3 витков
Orbits
в течение 1 недели
в течение 1 года
Рис. 8.4. Эволюция эксцентриситета орбиты (наклонение 51.6°)
365
Короткопериодические неравенства
в течение 3 витков
в течение 1 недели
ОгЬ;т inclination
в течение 1 года
Рис. 8.5. Эволюция наклонения орбиты (наклонение 51.6°)
366
Sani-major axis
Короткопериодические неравенства
в течение 3 витков
Sani-major
7078.25
7078.20
7078.15
I 7078.10
» 7078.05
в
| 7078.00
3 7077.55
| 7077.90
£ 7077.85
7077.80
7077.75
7077.70
0 500 1000 1500 2000 2500 3000 0500 4000 4500 5000 5500
Orbits
в течение 1 года
Рис. 8.6. Эволюция большой полуоси орбиты (наклонение 63.8°)
367
Orbits
Короткопериодические неравенства
в течение 3 витков
О 10 20 30 40 50 60 70 80 90 100 110
Qrtlti
в течение 1 недели
в течение 1 года
Рис. 8.7. Эволюция эксцентриситета орбиты (наклонение 63.8°)
368
Короткопериодические неравенства
в течение 3 витков
500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500
Ortita
в течение 1 года
Рис. 8.8. Эволюция наклонения орбиты (наклонение 63.8°)
369
Наклонение 98'
Senl-major axis
7080
7058 ------------------------------------
0.0 0.2 0.4 0.8 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 2.6 2.8 3.0
Orbits
Короткопериодические неравенства
в течение 3 витков
Semi-гьазог axis
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500
Orbits
в течение 1 года
Рис. 8.9. Эволюция большой полуоси орбиты (наклонение 98°)
370
OtBlts
Короткопериодические неравенства
в течение 3 витков
i ‘
" О 10 20 30 40 50 ВО 70 80 $0 100 110
OrECLtS
в течение 1 недели
О 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500
Ortats
в течение 1 года
Рис. 8.10. Эволюция эксцентриситета орбиты (наклонение 98°)
371
Короткопериодические неравенства
в течение 3 витков
О 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500
Ortilj
в течение 1 года
Рис. 8.11. Эволюция наклонения орбиты (наклонение 98°)
372
Элементы орбиты КА изменяются под действием
гравитационного поля и атмосферного сопротивления Земли,
гравитационных полей Солнца, Луны.
8.2.4. Аналитический прогноз изменения элементов орбит. В
ряде случаев возникает необходимость в простейшей аналитической
оценке изменения элементов орбит. Эти вопросы достаточно полно
исследованы в работах многих авторов.
Под влиянием атмосферного торможения высота орбиты КА все
время уменьшается. Для орбит с малыми эксцентриситетами
изменение высоты h может быть рассчитано по приближенной
формуле [187]:
h = -CxSp^/mKa, (8.7)
здесь Сх - коэффициент лобового сопротивления; S - площадь
миделе-вого сечения КА для атмосферного сопротивления, м2; т -
масса КА, кг; р - плотность атмосферы на высоте полета КА, кг/мЗ; а
- большая полуось орбиты, км; ц=398603 - гравитационная
постоянная Земли, км3/с2. Рассмотрим пример расчета h по
приведенной формуле с использованием модели плотности
атмосферы NRLMSISE-00 для следующих условий: 5=2,5 м2,
а=6890,396 км, текущее значение индекса солнечной активности F10,7
совпадает со средним и равно 125 единиц, среднее значение
геомагнитного индекса ^=12,0 балла. Пренебрегая зависимостью
плотности атмосферы от времени и широты, можно вычислить [46]
плотность атмосферы на высоте h=512,396 км, которая оказывается
равной р=2,18*10‘13 кг/м3, и /г =-1,53 *10'4 м/с=-13,2м/сутки.
Солнце все время находится с одной стороны ССО и его
притяжение приводит к изменению положения орбитальной
плоскости, т.е. изменяет наклонение орбиты. Для ССО выражение
для вековых возмущений наклонения орбиты i имеет вид [157]:
— = -^-sini(l + coszJ)2sin(2wj-2Q) (8.8)
dt 16и
где, is - склонение Солнца; щ - его прямое восхождение; ns - угловая
скорость среднего Солнца; Q - долгота восходящего узла; п - среднее
движение КА. Если местное солнечное время составляет 21:00, тогда
373
2wi-2Q=90°, и для ССО высотой h=512,396 км, ЛЛ/?=-0,04о/год.
Наклонение орбиты уменьшается вследствие гравитационного
притяжения Солнца, что приводит к изменению скорости прецессии
долготы восходящего узла
d£i
dt
—J,n\ — cosz,
2 \a
(8.9)
где J2 - коэффициент при второй зональной гармонике в разложении
геопотенциала; Re - экваториальный радиус Земли. В совокупности с
начальными ошибками это приводит к значительному отклонению
местного солнечного времени прохождения восходящего узла от
расчетного значения за срок активного существования КА.
8.2.5. Поддержание солнечно-синхронной орбиты МКА. В
данной задаче поддержания солнечно-синхронной орбиты требуется,
чтобы МКА находился в диапазоне высот [510,512] км, а местное
солнечное время (МСВ) на широте 40° не выходило из диапазона
[10,11] часов. Поддержание осуществляется на интервале времени
семь лет. Маневры исполняются при фиксированной ориентации ДУ
в орбитальной системе координат.
При расчетах маневров предполагается, что плоскость орбиты
маневрами не меняется, а пребывание МКА в довольно большом
разрешенном диапазоне для МСВ обеспечивается выбором
оптимального начального наклонения орбиты.
Процесс решения задачи состоял из последовательного
повторения двух этапов.
На первом этапе осуществлялось численно-аналитическое
прогнозирование движения спутника. При прогнозе учитывалось
влияние гравитационного поля 8*8, динамическая модель атмосферы.
В процессе прогноза контролировалась высота орбиты и МСВ. В
момент, когда в восходящем узле орбиты её высота достигала нижней
границы допустимого диапазона, вызывалась задача расчёта
маневров, для определения параметров маневров, переводящих
спутник на «рациональную» орбиту. Так как требуется
незначительное изменение высоты орбиты, которое можно достичь
маневрами на одном витке, для расчётов использовалась
итерационная процедура, описанная в первой главе.
374
Ниже приведены результаты расчётов маневров поддержания
орбиты (см. таблицы 8.3 - 8.9).
В таблице 8.3 приведены элементы начальной орбиты:
минимальная и максимальная высоты орбиты, аргумент перицентра,
наклонение и долгота восходящего узла орбиты, номер витка,
аргумент широты, баллистический коэффициент, дата и время
начальных условий.
В таблице 8.4 приведены используемые характеристики МКА и
его двигательной установки: тяга (н), удельный импульс, масса МКА
(кг), минимальное время между окончанием одного маневра и
началом следующего (с), минимальная и максимальная
продолжительность маневров (с).
Таблица 8.3
Элементы Нач. орбита
Hmin (km) 511.80000
Hmax (km) 511.83000
Uprg (deg) 0.13400000
i(deg) 97.547300
gOMG (deg) 17.190000
Nrev 1.0000000
Ulat (deg) 0.10000000
S (ball) 0.78330000E-
Data 20120501.
Time 42118.065
Таблица 8.4
Тяга Уд.имп Вес AT Tmin Tmax
0.20 2060.0 300.0 600.0 0.25 3600.0
В таблице 8.5 приведены параметры решения: суммарный
импульс скорости по всем маневрам, а также общее число подъемов
орбиты и общее число выполненных маневров.
В таблице 8.6 приведены номер каждого из маневров, виток и
аргумент широты его начала и конца, курс и тангаж, задающие
ориентацию вектора тяги, величина эквивалентного импульса
скорости.
375
Таблица 8.5
dV Nlift Nman
36.60 38.0 76.0
Таблица 8.6
Nman REVbg U bg REVfn U fn COURS dVi
1 1082.00 9.28 1082.00 55.27 0.00 0.485
2 1082.00 189.28 1082.00 235.27 0.00 0.485
3 2223.00 58.74 2223.00 103.37 0.00 0.470
4 2223.00 238.74 2223.00 283.37 0.00 0.470
5 2861.00 162.50 2861.00 213.34 0.00 0.536
6 2861.00 342.50 2862.00 33.34 0.00 0.536
71 32809.0 27.04 32809.0 72.23 0.00 0.476
72 32809.0 207.04 32809.0 252.23 0.00 0.476
73 35454.0 23.57 35454.0 68.55 0.00 0.474
74 35454.0 203.57 35454.0 248.55 0.00 0.474
75 37717.0 76.85 37717.0 121.71 0.00 0.473
76 37717.0 256.85 37717.0 301.71 0.00 0.473
В таблице 8.7 для каждого маневра выводятся дата и время его
начала и конца, а также продолжительность маневра в минутах, и
величина массы МКА после маневра.
Таблица 8.7
Nman DATAbg TIMEbg DATAfn TIMEfn dT Massa
1 20120711. 74827.5 20120711. 80031.6 12.07 299.93
2 20120711. 83547.6 20120711. 84756.3 12.15 299.86
3 20120924. 101629. 20120924. 102810. 11.70 299.79
4 20120924. 110347. 20120924. 1 1 1535. 11.80 299.72
5 20121105. 102743. 20121105. 104107. 13.40 299.64
6 20121105. 111508. 20121105. 112830. 13.36 299.57
71 20180330. 90113.4 20180330. 91306.9 11.89 295.02
72 20180330. 94835.0 20180330. 100029.4 11.91 294.95
73 20180920. 104313. 20180920. 105501. 11.81 294.88
74 20180920. 113033. 20180920. 114225. 11.87 294.81
75 20190216. 92030.4 20190216. 93217.8 11.79 294.74
76 20190216. 100750. 20190216. 101940. 11.83 294.67
376
В таблице 8.8 приведено распределение по годам затрат
суммарной характеристической скорости. Их неравномерность
связана с разным уровнем солнечной активности.
В таблице 8.9 приведена информация о МСВ на начало процесса
поддержания, на моменты подъёма орбиты и на момент окончания
процесса поддержания.
Таблица 8.8
Год 1 2 3 4 5 6 7
dVH 6.77 8.80 7.68 5.73 2.84 2.85 1.89
Таблица 8.9
Nrev DATA SLT Nrev DATA SLT Nrev DATA SLT
1. 20120501 10.20 1081 20120711 10.26 2222 20120924 10.32
2860 20121105 10.35 3468 20121215 10.38 4272 20130206 10.41
4896 20130319 10.44 5443 20130424 10.46 6035 20130602 10.48
6857 20130726 10.51 7692 20130919 10.54 8209 20131023 10.56
8680 20131123 10.57 9288 20140102 10.59 9970 20140216 10.60
10548 20140326 10.62 11064 20140429 10.63 11688 20140609 10.64
12539 20140804 10.65 13330 20140925 10.67 13846 20141029 10.67
14332 20141130 10.68 15000 20150113 10.69 15760 20150304 10.69
16383 20150414 10.70 17067 20150529 10.70 18192 20150811 10.70
19134 20151012 10.70 19863 20151129 10.70 20926 20160207 10.70
22005 20160418 10.69 23480 20160724 10.67 25090 20161107 10.65
26852 20170303 10.62 28721 20170704 10.58 30743 20171114 10.52
32808 20180330 10.46 35453 20180920 10.35 37716 20190216 10.25
38838 20190501 10.19
Как можно видеть, на поддержание высоты орбиты в течение
семи лет требуется 36.6 м/с, а МСВ меняется в диапазоне от 10.2 до
10.7 часа.
В случае необходимости уменьшить разброс МСВ в процессе
функционирования МКА можно за счет коррекции наклонения.
8.3. Поддержание заданной конфигураци Formation
Flying “TerraSAR-X - TanDEM-X”.
Примером успешного создания и поддержания с высокой
точностью заданной конфигурации спутниковой группы может
служить Formation Flying (FF) “TerraSAR-X - TanDEM-X”. Спутник
377
“TerraSAR-X” был запущен 15 июня 2007 г., а спутник “TanDEM-X”
21 июня 2010 г. Изготовлены спутники корпорацией Astrium GmbH,
проект частично финансировался Германским Федеральным
Агентством Экономики и Технологии, собственником и оператором
спутников являлось космическое агентство Германии (DLR).
Основная цель запуска данной спутниковой группы - создание
глобальной цифровой модели высот повышенной точности для
широкого диапазона научных исследований и коммерческого
использования.
8.3.1. Создание спутниковой группы. После выведения TDX
находился на расстоянии 16000 км вдоль орбиты от TSX. Перевод
TDX в окрестность TSX осуществлялся с 22 июня по 19 июля.
Потребовалось 23 маневра с суммарной характеристической
скоростью 6.5 м/с. Экономия горючего была достигнута за счет
коррекции отклонения ДВУ с помощью изменения наклонения.
Данная возможность описана в предыдущей главе. В процессе полета
проводились также специальные маневры уклонения от столкновения
с космическим мусором (они описаны в следующей главе). В
результате маневров фазирования TDX оказался в 20 км вдоль
орбиты от TSX.
8.3.2. Выбор безопасной конфигурации группы спутников.
Даже небольшое расхождение в величинах больших полуосей орбит
спутников постепенно приводит к существенному изменению их
взаимного положения вдоль орбиты и, следовательно, развалу
системы. Использование разных значений наклонения или большой
полуоси также приводит к развалу конфигурации системы, в этом
случае из-за увеличения расхождения по ДВУ. Обеспечить
безопасное и продолжительное функционирование близко
расположенной группы спутников можно за счет разнесения следа
орбит в плоскости перпендикулярной вектору скорости и/или их
сдвигу вдоль траектории движения. Например, для создания
устойчивой FF можно использовать разницу в ДВУ и разницу в
векторе эксцентриситета. Разница в ДВУ приведет к
обеспечивающему безопасность смещению в боковом направлении в
районе экватора, однако в апексе и вертексе орбиты это смещение
исчезнет. Исправить ситуацию поможет разница в векторе
эксцентриситета направленная на апекс или вертекс орбиты. Тогда в
точках наиболее удаленных от экватора будет максимальное
378
относительное смещение в радиальном направлении. Подбором
величин этих двух отклонений можно добиться, чтобы ведомый
спутник (в данном случае TDX) двигался относительно ведущего
(TSX) почти по окружности в плоскости перпендикулярной вектору
скорости ведущего спутника.
В результате исполнения маневров формирования спутник TDX
оказался не только в 20 км вдоль орбиты от TSX, но имел 300 м
вертикального (в апексе орбиты) и 1305 м горизонтального (на
экваторе) отклонения (моностатическая формация). Траектория,
которую в данной конфигурации описывает ведомый спутник в
плоскости перпендикулярной вектору скорости ведущего спутника,
изображена на рис.8.14 пунктирной линией. Горизонтальное
смещение 1.3 км на пересечении экватора было выбрано для
предотвращения смещения трассы, вытекающего из 2.6 секунд
расхождения во времени пересечения экватора, вызванного 20 км
расхождением вдоль орбиты. Данная конфигурация использовалась с
22 июля по 10 октября.
Рис. 8.12. Отклонение ведомого спутника от ведущего в плоскости
перпендикулярной вектору скорости
В дальнейшем она была изменена на конфигурацию, в которой
отклонение в горизонтальном направлении было уменьшено до 362
м, а в вертикальном увеличено до 400 м (бистатическая формация).
Траектория, соответствующая этой конфигурации, на рис.8.12
изображена сплошной линией. Поскольку отклонение вдоль экватора
было уменьшено до 362м, для предотвращения смещения трассы,
отклонение вдоль орбиты необходимо уменьшить до 5.5 км, что
соответствует разнице во времени пересечения экватора 0.72
секунды.
В соответствии с формулами, приведенными в 1.4.1, чтобы
получить радиальное смещение в апексе 400м., надо приложить на
экваторе радиальный импульс скорости, направленный вверх:
379
Ar 0.4
ЛИ =—Ио =---------7609.2 ~ 0,5м/с.
' гп ° 6886
Этот импульс скорости даст изменение эксцентриситета:
АИ,.
Ио
0.5
7609.2
= 000066.
В результате действия этого импульса скорости произойдет смещение
спутника вдоль орбиты в нисходящем узле (будет отставать от
ведущего спутника) за счет того, что ведомый спутник от
восходящего до нисходящего узла летит по более высокой орбите
ЛИ
Ли = Аигп = -4——r(. «1600л/.
0 V 0
*0
Расстояние между спутниками вдоль орбиты увеличится в
нисходящем узле до 7.1 км.
На участке траектории ниже плоскости экватора ведомый
спутник будет лететь ближе к Земле, и отставание в 1600м будет
компенсировано.
Необходимое смещение по ДВУ (AQ) в восходящем узле
AQ = —= -^- = .000053,
г0 6886
таким образом, АН~0.003град.
В результате действия этих отклонений относительная
траектория спутника лежит на поверхности цилиндра радиусом 400 м
и длиной 1600 м.
В таблице 8.10 приведены параметры орбит ведущего (объект
№1) и ведомого (объект №2) спутников, отклонения вектора
эксцентриситета и ДВУ которых соответствуют вычисленным
отклонениям.
Проекции траектории, которую для данных начальных условий
описывает ведомый спутник, на плоскость перпендикулярную
вектору скорости ведущего спутника, на плоскость его орбиты и на
плоскость перпендикулярную его радиус-вектору, изображены на
рисунках 8.13-8.15. Изменения отклонений в орбитальной системе
координат от времени приведены на рис. 8.16.
380
Таблица 8.10
Объект №1 Объект №2
А 6892.93 6892.93
Ех 0.000468 0.000468
Еу 0.001238 0.001171
i 97.441 97.44
Omega 66.733 66.736
и 360 359.95
Date 7/1/2005 20:31:56.14 7/1/2005 20:31:56.14
Балл.коэф. 0.01 0.01
ЛН*»Цг*<.. •»••»«*•«•» <4»с*м <мппе< w СК
Рис. 8.13-8.16. Отклонение ведомого спутника от ведущего в орбитальной
системе координат: в плоскости г,Ь; в плоскости т.п; в плоскости п.Ь;
отклонений в орбитальной системе координат от времени: полное (dR), по
радиусу (dr), в боковом направлении (db), вдоль орбиты (dn)
381
Относительная траектория движения ведомого спутника по
поверхности цилиндра изображена на рис. 8.17 сплошной жирной
линией, траектория движения ведущего спутника изображена жирной
пунктирной линией. Положение ведущего спутника обозначено
звездочкой (т.5.)
Ж5
Рис. 8.17. Траектория ведомого спутника
относительно траектории ведущего спутника
8.3.3. Поддержание заданной конфигурации спутниковой
группы. Задача поддержания рабочей конфигурации группы
спутников разбивается на две подзадачи. В первой подзадаче
требуется обеспечить синхронизированное поддержание рабочей
орбиты каждого из спутников, входящих в группировку, во второй -
обеспечить необходимую конфигурацию положения спутников
внутри самой группировки.
Номинальная орбита TSX была выбрана одиннадцати дневной
кратности. Текущая орбита должна находиться в пределах трубы
радиусом 250 м вокруг номинальной орбиты (на рис. 8.17 основания
трубы и ее образующие нарисованы линиями, состоящими из точек).
Очень важно, что маневры, исполняемые ведущим спутником, не
должны выводить его за круг радиуса 250м в плоскости
перпендикулярной вектору скорости. Таким образом, остается не
менее 150 м между TSX и TDX в плоскости перпендикулярной
направлению движения спутника, что обеспечивает безопасное
функционирование FF. Чтобы удовлетворить ограничению в 250м в
плоскости перпендикулярной направлению движения спутника,
изменение большой полуоси не должно превышать 250м
(ДИ(<0.16м/с), изменение наклонения Д/<0.002°(Д И,<0.27м/с),
382
изменение эксцентриситета Де<.00004(ДГг<0.31м/с, ДИ,<0.16м/с),
изменение ДВУ ДП<0.002°(ДИ.<0.27м/с).
В зависимости от солнечной активности маневры удержания
текущей траектории в заданной окрестности номинальной орбиты
приходилось выполнять с периодичностью от двух дней до двух
недель. Для того чтобы заданная конфигурация спутниковой группы
не распадалась, необходимо одновременно выполнять идентичные
маневры поддержания орбиты и ведомого и ведущего спутников.
Если для поддержания орбиты корректируются большая полуось
и/или наклонение, то для их коррекции достаточно одного импульса
скорости прикладываемого в районе экватора. Если одновременно
корректируется еще и вектор эксцентриситета, то необходимо
использовать два или три импульса скорости. Следовательно, надо
одновременно выполнять последовательности маневров.
Выбранная конфигурация спутниковой группы обеспечивает ее
устойчивый полет. На рис. 8.18 изображены отклонения спутников в
орбитальной системе координат в восходящем узле в зависимости от
времени.
Зависимое ।ь параметров сближения от времени
г* М*ИТП <’1 К U*W’P М»: ЫЙКСГМ
<1*1
Рис. 8.18. Траектория ведомого спутника
относительно траектории ведущего спутника
Как можно видеть, за две недели практически не возникает
отклонений в радиальном (менееЮм) и боковом направлениях (менее
1 метра) и имеется небольшое отклонение (примерно 70 метров)
383
вдоль орбиты. Рассматривать взаимное положение на интервале
времени больше двух недель не имеет смысла, т.к. это максимальный
временной интервал разделяющий маневры поддержания орбит.
Однако ни устойчивая конфигурация спутниковой группы, ни
одновременное идентичное маневрирование для поддержания
номинальных орбит не обеспечивают сохранения рабочей
конфигурации FF. В первую очередь это связано с ошибками
исполнения основных маневров, которые будут отличаться у каждого
из спутников. Таким образом, затраты на поддержание конфигурации
будут главным образом связаны с компенсацией этих ошибок и,
следовательно, они пропорциональны затратам на поддержание
орбит. После каждых маневров поддержания орбит должны
следовать маневры поддержания конфигурации, исполняемые
“TanDEM-X”, которые будут компенсировать разницу в ошибках
больших целевых маневров.
На расхождение спутников может влиять и сопротивление
атмосферы. Ведомый спутник полвитка летает выше ведущего, а
полвитка ниже. За счет нелинейности атмосферы он может
тормозиться сильнее, чем ведущий спутник и постепенно догонять
его.
Кроме того, пока будут определяться орбиты спутников после
исполнения маневров, и оцениваться ошибки исполнения импульсов
скорости, поддерживающих высоту орбиты, произойдет расхождение
спутников вдоль орбиты. Таким образом, надо будет не только
компенсировать ошибки маневров, но и компенсировать возникший
уход вдоль орбиты. На компенсацию всех этих ошибок понадобится
как минимум два маневра. Различные стратегии компенсации
отклонения вдоль орбиты представлены на рис.8.19.
Если для компенсации отклонения вдоль орбиты использовать
достаточно большие маневры, то первоначальное отклонение от
номинала будет быстро сокращено, но также быстро спутник дойдет
до другой границы разрешенного интервала. Получится
пилообразный характер изменения отклонения вдоль орбиты (Дитах),
изображенный на рисунке 8.19 (ломаная 4). Можно уменьшить
амплитуду колебаний (ломаная 3).
384
Рис. 8.19. Различные схемы коррекции ухода вдоль орбиты
Уменьшить затраты горючего и сократить число маневров
помогают другие стратегии, изображенные на рисунке 8.19.
Например, линия 1 соответствует уравниванию больших полуосей в
первоначальный момент, расстояние вдоль орбиты между
спутниками в дальнейшем не меняется. Линия 2 соответствует
нулевому уходу от номинального положения на середину временного
интервала до следующего подъема обеих орбит, она получается при
частичном уравнивании больших полуосей. Линия 5 соответствует
нулевому уходу от номинального положения на момент следующего
подъема обеих орбит (большие полуоси уравниваются еще в меньшей
степени).
385
Глава IX
ВОПРОСЫ МАНЕВРИРОВАНИЯ
В ПРОБЛЕМЕ КОСМИЧЕСКОГО МУСОРА
Вопросы маневрирования занимают важное место в проблеме
космического мусора. В конечном счете, значительная часть
огромной работы, связанной с ведением каталога космических
объектов (КО), нужна для того, чтобы предсказать возможность
столкновения КА с КО, а затем рассчитать и провести маневры
уклонения от этого столкновения. Особую опасность представляет
столкновение с маневрирующими КО, если информация о
предстоящих маневрах отсутствует. В этом случае необходимо уметь
оценивать уже исполненные маневры активных КО и прогнозировать
исполнение будущих маневров.
9.1. Маневры уклонения космического аппарата от
столкновения с космическим мусором
Орбита, сформированная в результате проведения целевых
маневров, должна не просто обеспечивать выполнение поставленной
перед КА цели, но и быть безопасной в плане столкновения с
космическим мусором и с активно функционирующими
космическими объектами. Устранить опасность столкновения можно
с помощью специально проводимого маневра уклонения или за счет
изменения самих целевых маневров.
При расчете опасных сближений приходится сталкиваться с
двумя сторонами одной проблемы. С одной стороны нельзя
пропустить опасное сближение, с другой стороны нельзя слишком
увеличивать порог критерия сближений, которые считаются
опасными, так как в этом случае увеличивается число ложных тревог.
Реагирование на них может потребовать значительных ресурсов КА.
9.1.1. Определение размеров зоны безопасности. Орбиты КО
определяются и прогнозируются службой контроля космического
пространства на 72 часа вперед для определения возможных
386
сближений. На этом интервале вычисляется вероятность
столкновения р... Если вероятность столкновения /2с>0.0001 требуется
исполнение манера уклонения. Данное уклонение должно вывести
КА из опасной зоны, размеры которой по радиус вектору обозначим
rmin, вдоль орбиты nmi„, в боковом направлении bmi„.
Наибольшую опасность для КА представляют движущиеся ему
навстречу КО, т.к. их относительная скорость для класса низких
орбит может достигать 15.5 км/с. Основные по величине компоненты
относительной скорости располагаются в трансверсальном и боковом
направлениях. Относительная скорость по радиус вектору не
превышает 1 км/с даже для орбит КО с относительно большими
эксцентриситетами.
Скорость КО относительно КА можно вычислить по формуле
V =V -V
Ее проекции на оси орбитальной системы координат, связанной
с КА и замороженной на момент предполагаемого столкновения,
обозначим Иотнг,Иотнл,Котн;>. Оценка размера области безопасности rmi„,
nmi„, bmin определяется в первую очередь ошибкой в расчете времени
опасного сближения А? [81]. Данная ошибка возникает из-за
погрешности в определении орбит КО и КА. Затруднено также
прогнозирование движения КО, т.к. неизвестны его инерционно-
массовые характеристики и форма, также существуют ошибки
вызванные погрешностью в оценке влияния атмосферы и др.
Вызванное ошибкой At отклонение в трансверсальном
направлении получается умножением At на Еотнп
Для At =1с получаем максимальное отклонение примерно
нт,„=15.5км.
Для бокового отклонения
b . - AtV h.
mm othp
Максимальная относительная скорость в этом направлении
достигает 8 км/с, следовательно, максимальное боковое отклонение
для Az=lc примерно bmi„= 8 км.
Аналогично для радиального направления
387
- . = At V ,
тт отнг’
а максимальное отклонение в этом направлении для At =1с примерно
rmin= 1км.
Сужение зоны безопасности возможно при уменьшении At, что
достигается не только уменьшением ошибок определения орбит, но и
увеличением регулярности поиска сближений, т.к. с уменьшением
интервала прогнозирования движения снижаются и ошибки
прогнозирования.
9.1.2. Расчет одноимпульсных маневров уклонения. Обычно
уклонение от угрозы столкновения с КО осуществляется с помощью
проведения специального маневра уклонения. Методика расчета
параметров такого маневра хорошо известна [81].
Можно использовать различные схемы маневрирования для
уклонения. Наиболее часто используется уклонение вдоль орбиты,
если есть возможность проведения маневра за несколько витков до
предполагаемого момента столкновения. Данное уклонение
производится с помощью трансверсального маневра. Аналогичный
маневр, исполняемый за полвитка или за полтора витка до момента
столкновения, обеспечивает уклонение по высоте. Уклонение по
высоте можно обеспечить и с помощью маневра в радиальном
направлении, он менее эффективен, зато не меняет периода орбиты.
Предположим, что трансверсальный импульс скорости А К,
прикладывается за угол A<pi до предполагаемой точки столкновения.
Минимальная величина импульса скорости AK;m(.nn, который может
вывести КА вдоль орбиты из опасной зоны nmi„, определяется по
формулам:
(3A<Pj -48шДф1)ДЕ,и,.пл
ДИ . =-----------,
ЗАФ1 -4sinAcp1
(9.1)
где X угловая скорость движения по опорной круговой орбите, Аф1-
угол от момента приложения импульса скорости до точки
возможного столкновения (АфрО).
Если импульс скорости разгонный, то КА прилетит в точку
столкновения после того, как там пролетит КО (и>0), если импульс
388
скорости тормозной, то КА прилетит в точку столкновения раньше
(н<0). В обоих случаях будет обеспечено безопасное движение КА.
Если необходимо срочно произвести маневр уклонения, то это
эффективно сделать за полвитка или за полтора витка до точки
предполагаемого столкновения, выведя КА из опасной зоны по
высоте. Рассчитать величину маневра ДИ(Я1/ЯГ, исполняемого за угол
Дф2 до точки предполагаемого столкновения, можно по формулам:
2(1~со8Дф2)ДЕ,„,и,.
=_________^rmin
'm,n'' 2(l-cosA<p2)'
(9.2)
Подставив Дср2 = л, получаем минимальную величину маневра
(9.3)
Используя разгонный импульс скорости, КА пролетит выше
КО, при тормозном импульсе ниже (напомним, что rmin вычисляется
по формуле rmi„ =гко-Гкл).
Определим расстояние Дер, от точки приложения импульса
скорости до точки предполагаемого столкновения, при котором
эффективность обеих стратегий уклонения одинакова
... (9-4)
|ЗД(р1 -4sinA(pj| 4
Предполагая, что Дф] составляет целое число витков N,
получаем
W = (9.5)
6лЫ
Из этой формулы следует, что для приведенных выше значений Hmjn
и rmitl, если Дф] больше трех витков, то стратегия увода вдоль орбиты
становится более выгодной.
389
В сравниваемых стратегиях используются трансверсальные
импульсы скорости. Это позволяет совместить маневры уклонения с
маневрами подъема орбиты, которые необходимо периодически
проводить для спутников осуществляющих дистанционное
зондирование Земли, МКС и других КА.
Однако в ряде случаев период орбиты менять нельзя. Например,
когда КА находится на фазирующей орбите во время процесса
сближения, в частности, когда МКС обеспечивает необходимую
начальную фазу для стыкуемых с ней КА. В этих случаях
трансверсальные импульсы скорости применять нельзя и необходимо
использовать радиальные, которые не меняют период орбиты.
Влияние радиальной составляющей импульса скорости на
высоту орбиты в предполагаемый момент столкновения описывается
формулой:
-)Лг = sincpAE).
Таким образом, для выхода по высоте из опасной зоны
необходим импульс скорости —Хг ,
АЕ . = г пип = (9.6) sin ср
Величина импульса скорости будет минимальна при
ср = ±-А,А eZ:
2
AC . = V . (9.7)
если он прикладывается за четверть витка(АЕг > 0) или за три
четверти витка (АЕ <0) до точки сближения. Для безопасности и
надежности этот импульс лучше перенести на предыдущий виток.
Сравнивая уход из опасной области по высоте с помощью
трансверсального и радиального импульсов можно видеть, что в
первом случае затраты в четыре раза меньше. Таким образом, если
нет других ограничений, следует предпочесть использование
трансверсальных импульсов при выполнении маневров уклонения.
В момент максимального сближения существуют отклонения в
положении КО и КА, которые обозначим Аг, Ан, AZ>. Если маневр
уклонения сдвигает КА в сторону КО, например, маневр поднимает
390
орбиту КА, а КО первоначально находился выше КА, то величину
изменения высоты орбиты необходимо увеличить на Аг. В этой
ситуации, если маневр опускает орбиту КА, то величину изменения
высоты орбиты можно уменьшить на Аг.
9.1.3. Перерасчет маневров встречи, позволяющий избежать
столкновения с космическими объектами в процессе
фазирования. В предыдущем разделе предполагалось, что уклонение
от столкновения с КО происходит с помощью специально
проводимого маневра, однако выполнить дополнительный маневр не
всегда возможно. В первую очередь это относится к КА,
совершающим маневры встречи. Например, у КА «Союз» и
«Прогресс» после выполнения первых двух маневров (на 2-3 витках)
из серии четырех связных маневров встречи (см. раздел 5.3),
начинаются глухие витки, на которых нельзя проводить маневры.
Если орбита фазирования, сформированная первыми двумя
маневрами, представляет опасность в плане столкновения с КО, то
изменить ее специальным импульсом скорости и за счет этого
уклониться от столкновения уже не представляется возможным.
Единственный выход состоит в следующем. Необходимо
спрогнозировать фазирующую орбиту, которую должны
сформировать два первых оптимальных импульса скорости, и, если
на этой орбите существует опасность столкновения с КО, то
необходимо найти новое решение задачи встречи, с учетом
дополнительного ограничения, что КА после первых двух маневров
не должен проходить через опасную область.
Вследствие того, что величина большой полуоси, которая
должна быть сформирована импульсами скорости первого интервала
маневрирования, однозначно определена условиями задачи
(начальной разностью фаз Aw), получить безопасную орбиту можно
только за счет целенаправленного изменения эксцентриситета
фазирующей орбиты. Описанный выше специальный радиальный
импульс скорости также решает задачу уклонения за счет изменения
эксцентриситета орбиты (большую полуось данный импульс
скорости не меняет).
На плоскости ех,еу определим границы области, из которой надо
вывести вектор эксцентриситета фазирующей орбиты, чтобы
избежать столкновения с КО. Предположим, что фазирующая орбита
имеет эксцентриситет е0, аргумент перицентра со0, большую полуось
391
а0< на аргументе широты и0 имеет место столкновение с КО. Радиус
орбиты в этой точке вычисляется по формуле:
г —-------------S’___
'О 1 / ч ’
l + e0cos(w0 — со0)
Для того, чтобы на аргументе широты w0 не было столкновения
с КО, радиус орбиты в этот момент должен быть увеличен до r0+Armh,
(увод вверх) или уменьшен до r0-Armi„ (увод вниз), где Дгт,„ -
дистанция безопасного увода. Вычислив значение е для различных
значений ю при помощи формулы:
Г0 +
Д0(1-е2)
l + ecos(w0 -со)
(9-8)
можно построить
помощи формулы:
внешнюю границу запрещенной области, а при
г - Дг =————
'о , Z ч ’
l + ecos(w0 - со)
(9.9)
ее внутреннюю границу. Вывод вектора эксцентриситета
сформированной маневрами первого интервала фазирующей орбиты
из запрещенной области позволяет избежать столкновения.
На рис.9.1 представлен пример запрещенной области для
фазирующей орбиты, имеющей большую полуось <го=ЮОООкм,
эксцентриситет ео=О.З, аргумент широты соо=0°. Столкновение
происходит на аргументе широты wo=3O°. Предполагается, что
расстояние, на которое надо изменить положение КА в точке
столкновения, Дгт/я=600 км (выше или ниже). Это расстояние
существенно превышает обычно используемое для уклонения, но
позволяет представить вид всей запрещенной области.
Рис. 9.1. Вид запрещенной области
Пунктирная прямая обозначает линию симметрии запрещенной
области, угол между этой линией и осью ех равен w0. Сплошной
линией обозначена внутренняя граница запрещенной области, линией
из точек - ее внешняя граница. Т. X соответствует орбите
фазирования (е0,со0). Можно заметить, что границы запрещенной
области имеют общую точку (рис. 9.1), которая соответствует случаю
вырождения эллиптической орбиты в параболу (е=1). Размеры
запрещенной области пропорциональны Аг,и,„. Зависимость е от со
представлена на рис 9.2.
Рис. 9.2. Графики границ запрещенной области на плоскости со,е
393
На рис. 9.3 изображены запрещенные области для углов по=1ОО°
и по=21О°.
Как можно видеть, ось симметрии запрещенной области
вращается относительно начала системы координат, меняются также
положение и размеры запрещенной области.
Рис. 9.3. Положение запрещенной области для углов w0= 100° и «о_210°
Как уже отмечалось, реальное значение Arm,„ намного меньше,
чем используемое в приведенных выше примерах. На рис. 8.4
приведена запрещенная область для фазирующей орбиты КА «Союз»
а0=6660км, эксцентриситет ео=О.ОО5, аргумент широты ш0=135°,
точка встречи с орбитальной станцией п0=358°, столкновение
происходит при п0=135°, необходимое уклонение Arm„=3 км. Как
можно видеть, для приемлемого диапазона изменения
эксцентриситета (в окрестности точки Х(ем,е:Л)) запрещенная область
ограничена практически прямыми линиями. Ширина запрещенной
области равна 2Ае, где Ае вычисляется по формуле:
Ac (9.10)
394
Определим положение запрещенной области в зависимости от
аргумента широты, на котором происходит столкновение. Для этого
построим в одной координатной плоскости несколько исследуемых
областей, соответствующих wo=O0, 45°, 90°, 135°. Как следует из
положения областей на рисунке 9.5, при изменении угла и0
происходит соответствующий поворот запрещенной области вокруг
точки
Рис. 9.5. Ориентация запрещенной области в зависимости от угла ио
395
У КА «Союз» и «Прогресс» точки приложения двух последних
импульсов скорости фиксированы за виток и полвитка до точки
встречи. Это означает, что импульсами скорости первого интервала
маневрирования необходимо сформировать вектор эксцентриситета,
конец которого принадлежит прямой, параллельной оси абсцисс (см.
раздел 5.5) и проходящей через т. К, соответствующую разности
векторов эксцентриситета конечной и начальной орбит (Леж,Ле1Х)
(рис.9.6).
Рис. 9.6. Решение, при котором про-
исходит столкновение с КМ на фази-
рующей орбите
Рис. 9.7. Решение, позволяющее
уклониться от столкновения без
изменения схемы маневрирования
При данной схеме маневрирования эффективно уклониться от
столкновения возможно, если точка сближения КА и КО близка к
восходящему или нисходящему узлу орбиты (wo=O или wo=18O°). В
этом случае ось запрещенной области параллельна оси ординат и
проходит через т. С(Аех0,Аеу0), соответствующую вектору эксцен-
триситета орбит после второго импульса скорости (рис.9.6).
Чтобы получить безопасное решение, вектор эксцентриситета
фазирующей орбиты должен быть выведен из запрещенной области,
что легко сделать, изменяя углы приложения двух первых импульсов
скорости. Чтобы получить решение, суммарная характеристическая
скорость которого близка к суммарной характеристической скорости
оптимального решения, вектор эксцентриситета фазирующей орбиты
должен принадлежать области пересечения кругов радиусов А, и
(см. главу 3). Решение, удовлетворяющее этим требованиям,
приведено на рисунке 9.7.
396
Рис. 9.8. Решение, при котором
происходит столкновение
с КО на фазирующей орбите
Рис. 9.9. Решение, позволяющее ук-
лониться от столкновения после
изменения схемы маневрирования
Более сложным является случай, когда точка возможного
столкновения максимально удалена от экватора (wo=9O° или wo=27O ).
Ось опасной зоны параллельна оси абсцисс (рис. 9.8).
Без изменения схемы маневрирования (угла приложения
третьего или четвертого импульсов) уклониться от столкновения
невозможно, т.к. в используемой схеме маневрирования конец
вектора эксцентриситета фазирующей орбиты (Де^Де^о) должен
принадлежать прямой NL проходящей через середину запрещенной
области.
Необходимо изменить угол приложения одного из импульсов
второго интервала маневрирования, а лучше обоих, тогда можно
получить решение (рис. 9.9), у которого вектор эксцентриситета
фазирующей орбиты, его концу соответствует т. С, выведен из
опасной области.
Для получения решения, позволяющего уклониться от
столкновения, эффективно использовать графический диалог,
описание которого приведено в пятой главе. Данный диалог
позволяет найти компромиссное решение, которое с одной стороны
уводит т. С из опасной области, но при этом незначительно
увеличивает затраты суммарной характеристической скорости на
обеспечение встречи.
397
9.2. Оценка маневров, выполненных активным
космическим объектом
В процессе ведения каталога КО, возникает проблема
прогнозирования движения маневрирующих космических объектов
(МКО). Для решения данной проблемы необходимо уметь оценивать
реализованные маневры, используя для этого орбиты, полученные на
основе траекторных измерений. Оценка исполненных маневров,
вместе с последующим прогнозированием движения активного КО с
учетом его предстоящих аналогичных маневров позволяет
существенно повысить точность расчета опасных сближений с этим
объектом. Оценка маневров также необходима для понимания того,
насколько близко защищаемый аппарат сближался с МКО на
интервале, где исполнялся маневр. Оценка маневров, в случае, когда
конечная орбита определена с большими ошибками, позволяет
уточнить параметры этой орбиты. Кроме того, информация,
получаемая при оценке маневров КО (информация о его ускорении
при выполнении маневра), совместно с информацией, накопленной
при анализе его пассивного движения, позволяет определить
некоторые характеристики данного МКО, например, его массу и тягу
двигательной установки (ДУ).
Существующие методики оценки исполненных маневров
[155], [40] требуют значительного машинного времени для получения
результата, т.к. предназначены для произвольных орбит и, вследствие
сложности задачи, основаны на простом переборе определяемых
параметров. В данной книге рассматриваются маневры КО,
находящихся на околокруговых орбитах. Это упрощает задачу и
позволяет предложить аналитические и численно-аналитические
методы ее решения. Вместе с тем область применения предложенных
подходов сужается незначительно, т.к. на околокруговых орбитах
находится значительная часть реальных МКО. Зато время решения
задачи уменьшается на порядки, что существенно увеличивает
оперативность ведения каталога МКО. Важность такого параметра
как быстродействие обусловлена необходимостью проведения
регулярной оценки манёвров для большого количества реальных
МКО.
9.2.1. Постановка задачи, общий метод решения. Известны
два вектора состояния МКО для двух моментов времени. Требуется
оценить величину и ориентацию импульсов скорости, которые
398
произвели изменение орбиты, а также времена включения и
выключения двигательной установки. Если моменты времени, на
которые заданы вектора состояния, не сильно отстоят друг от друга,
то наиболее естественно предположение, что в интервале между
этими моментами имели место один или два маневра. При больших
временных интервалах, на которых могли иметь место несколько
маневров, точно восстановить их величины и моменты приложения
практически невозможно, можно только оценить минимальные
затраты суммарной характеристической скорости, с помощью
алгоритмов приведенных в главах 2,3,4,6.
Далее предполагается, что оцениваются двух- или
одноимпульсные маневры. Алгоритмы оценки близких к импульсным
маневров и маневров, исполняемых ДУ малой тяги, существенно
отличаются между собой и рассматриваются отдельно.
Окончательное уточнение параметров маневров осуществляется с
помощью итерационной процедуры, описанной в первой главе.
Наиболее разработаны методы оценки близких к импульсным
маневров.
Самой простой является задача, в которой требуется оценить
параметры одноимпульсного маневра в случае, когда начальная и
конечная орбиты определены с большой точностью. В случае, когда
орбиты определены с большими ошибками, имеется
неопределенность в выборе параметров оцениваемого импульса
скорости. Для оценки параметров двухимпульсных маневров обычно
используется задача Ламберта [155]. Использование приведенных в
предыдущих главах численно-аналитических методов позволяет
заметно ускорить процесс определения параметров двух импульсов
скорости. Для двухимпульсных маневров можно выделить две
подзадачи:
1) определение параметров двух связных импульсных
компланарных маневров;
2) определение параметров двух связных импульсных
маневров, вызвавших изменение всех элементов орбиты.
Для оценки маневров, исполняемых двигателями малой тяги,
в настоящее время используются численные методы, в которых, как
правило, осуществляется простой перебор возможных значений
определяемых параметров с постоянным шагом [155], [40].
Использование для оценки маневров большой продолжительности
аналитических и численно-аналитических методов, рассмотренных в
399
шестой главе, также позволяет значительно ускорить процесс
решения поставленной задачи, тем самым делая возможным
использование данной методики в технологическом цикле
составления и поддержания каталога околоземных космических
объектов. В случае маневра, исполняемого ДУ малой тяги,
предложенная методика помимо параметров маневра позволяет также
оценить величину ускорения, создаваемого двигательной установкой.
Для продолжительных маневров задачу, представленную в
общей постановке, можно разделить на следующие более простые
подзадачи:
1) определение параметров маневра, вызвавшего изменение
большой полуоси и/или вектора эксцентриситета;
2) определение параметров маневра, вызвавшего поворот
плоскости орбиты;
3) определение параметров комбинированного маневра,
вызвавшего изменение всех элементов орбиты;
4) определение параметров двух связных продолжительных
компланарных маневров;
5) определение параметров двух независимых
продолжительных компланарных маневров;
6) определение параметров двух независимых
продолжительных маневров, вызвавших изменение всех элементов
орбиты.
Расчет отклонений параметров орбиты, учет влияния
импульсов скорости. Первым шагом решения является расчет
вектора отклонений А параметров орбиты, вызванных действием ДУ.
Для того чтобы определить вектор отклонений А необходимо
осуществить прогноз начального вектора состояния на момент
времени t2. Прогноз осуществляется с учетом всех необходимых
возмущений, но без учета работы ДУ. Затем вычисляется разность
элементов конечной орбиты и орбиты полученной после прогноза.
Составляющие вектора отклонений А = (Да,Дел, Де>р, ДдДг, ДИ?)Г
определены в разделе 1.1.2.
В случае, когда интервал работы ДУ мал по отношению к
периоду орбиты КО, можно сделать следующее допущение:
изменение параметров орбиты под действием ДУ произошло
мгновенно. Данное допущение позволяет для маневрирования в
400
окрестности круговой орбиты записать условия выхода в заданную
точку конечной орбиты в виде (1.12а)-(1.12е).
Для одноимпульсного случая, определяемыми величинами
являются: ДИГ1, ДИ(1, ДКг1, <pi -составляющие первого импульса
скорости и угол его приложения. Для двухимпульсного случая,
неизвестными величинами являются: ДИг1, ДИ,15 ДИг], фь ДРД, ДИд,
ф2 - параметры первого и второго импульсов скорости.
9.2.2. Оценка параметров одноимпульсных маневров без
учета ошибок определения орбиты. Наиболее простым является
вариант близкого к импульсному маневра, выполненного за одно
включение ДУ, когда обе орбиты определены с достаточно высокой
точностью. Решение заключается в поиске момента достижения
минимального расстояния между положениями объекта на начальной
и на конечной орбитах с последующим вычислением разности
векторов скоростей в этот момент.
9.2.3. Оценка параметров одноимпульсных маневров с
учетом ошибок определения орбит. На практике при оценке
реализованных маневров приходится сталкиваться с исходными
данными, обладающими некоторой погрешностью. Данная
погрешность связана с ошибками в определении начальной и
конечной орбит (в первую очередь это относится к конечной орбите,
для которой, как правило, имеется меньше измерений). Учет
стахостического характера траекторной информации заметно
усложняет задачу, но в тоже время позволяет получить более
достоверное решение. Далее последовательно рассматривается
компланарный и некомпланарный случай.
Импульсный компланарный маневр. Предположим, что у
реализованного импульса отсутствуют радиальные составляющие.
Как следует из уравнений (1.12а)-(1.12в) радиальные составляющие
импульсов скорости не участвуют в изменении большой полуоси, а
их эффективность в изменении вектора эксцентриситета в два раза
ниже, чем у трансверсальных. Поэтому данную составляющую
практически не используются в маневрах поддержания орбиты.
Таким образом, предположение о том, что у оцениваемого маневра
радиальная составляющая импульса отсутствует, т.е. ДИГ=О, является
допустимым.
401
На рис. 9.10 концу разницы векторов эксцентриситета
начальной и конечной орбит Дё = ~ё} - ё0 соответствует т.А?, имеющая
координаты (Дщ,Деу). Угол приложения трансверсального импульса,
позволяющего скорректировать отклонение вектора эксцентриситета,
обозначен (ре. Как следует из уравнений (1.12а), (1.126), величина
импульса скорости, производящего соответствующее изменение
эксцентриситета,
ДИ = И = V —
' ° 2 ° 2 '
~~
Проведем окружность радиуса R (R =— = —---------), равного
П, rQ
безразмерной разности больших полуосей конечной и начальной
орбит. Центр окружности расположен в начале системы координат.
Если бы не было ошибок определения орбит, то т. К принадлежала
« Аа л
бы окружности, т.к. — = —- = Де.
Г0 ^0
Рис. 9.11. Влияние ошибок
определения разницы больших
полуосей и разницы векторов
эксцентриситета
Рис. 9.10. Одноимпульсный
переход между компланарными
орбитами
Вследствие ошибок определения большой полуоси и вектора
эксцентриситета каждой из орбит т.К может не принадлежать
окружности. Если она находится внутри окружности (т. К’ на рис.
9.10), то орбиты не пересекаются (|Да|>Де) и одноимпульсное
402
решение не существует. Если т. К находится вне окружности (т. К на
рис. 9.10), то начальная и конечная орбиты пересекаются (Де>|Да|),
одноимпульсное решение существует, но у импульса скорости
появляется радиальная составляющая (ВК на рис. 9.10). Чтобы
получить достоверное трансверсальное решение, необходимо учесть
ошибки определения большой полуоси и вектора эксцентриситета.
Пусть За максимальная возможная ошибка в определении
безразмерной разницы больших полуосей. Проведем две
концентрические окружности радиусом Ri=R-da и R2=R+da. На рис.
9.11 эти окружности обозначены пунктирными линиями. Область
между пунктирными окружностями соответствует допустимым
значениям безразмерной разницы больших полуосей. Построим
эллипс, ограничивающий область, которая соответствует
допустимым значениям разницы векторов эксцентриситета. Одна из
полуосей этого эллипса определяется максимальной возможной
ошибкой в величине модуля разницы векторов эксцентриситета Зе, а
другая максимальной ошибкой в угловом положении вектора
разницы векторов эксцентриситета 3<ре. Пересечение области
ограниченной эллипсом и области между пунктирными
окружностями образует заштрихованную область G, точки которой
соответствуют возможным трансверсальным одноимпульсным
решениям, обеспечивающим допустимое изменение эксцентриситета
[28]. Если области не пересекаются, то одноимпульсное решение
невозможно, и следует переходить к определению параметров
двухимпульсных решений.
Для того чтобы определить параметры оцениваемого
импульса скорости, необходимо также учесть ошибку в определении
времени исполнения маневра. Пусть угол <р, соответствует моменту
времени, когда, двигаясь по начальной орбите вперед и по конечной
назад, КА будет находиться на одном витке и на одинаковом
аргументе широты. Максимальную ошибку в определении этого угла
обозначим 3<pz. Пересечение сектора [<р,-3(р„<р,+3<р,] и области G, дает
допустимую для существования одноимпульсных трансверсальных
решений заштрихованную область Р (рис. 9.12). Чем меньше ошибка
в определении орбит, тем ближе расположены углы <р, и <ре.
403
еу
Рис. 9.12. Влияние ошибок определения разницы больших
полуосей, разницы векторов эксцентриситета и ошибки в
определении времени приложения импульса скорости
Из всех возможных точек области Р надо выбрать одну,
которая и будет определять решение задачи. Такой может быть точка,
которая достаточно быстро определяется и в тоже время
обеспечивает минимальное отличие в вероятности формирования
каждого из элементов орбиты.
Например, в качестве угла приложения импульса скорости
(р,тр можно взять угол, для которого справедливо соотношение
8фе _ 8<р,
Фе-Фн> Ф^-Ф,’
Выражая cpimp, получаем:
8<р,(ре+8(ре(р,
Р 3(ре + 8<р,
Для определения положения т.АГ на данном угле необходимо
вначале из равнения
8< (фе-ф,„,р)2
Зе2 8<ре2
найти максимальную возможную ошибку 8е/тр в величине
отклонения модуля вектора эксцентриситета при исполнении
импульса скорости на угле (р„ир
404
8е.
imp
Затем из соотношения
х _ CD - х
teimp
определяется х:
СРда
5%,+Sa’
где CD расстояние от окружности радиуса R до оси эллипса, х
отсчитывается от этой окружности и определяет положение т.К.
Импульсный некомпланарный маневр. Предположим, что
оцениваемый импульс скорости имел не только трансверсальную, но
и боковую составляющую. Угол <рг, определяющий положение линии
пересечения плоскостей орбит, является углом приложения боковой
составляющей импульса скорости. Если орбиты определены без
ошибок, то углы приложения трансверсальной и боковой
составляющих совпадают фе=фг. Если орбиты определены с
ошибками, то угол оптимальной коррекции эксцентриситета фе и
угол, на котором совершен поворот плоскости орбиты фг, не
совпадают, хотя они должны совпадать у реального импульса
скорости.
Пусть 5фг это максимальная ошибка в определении угла, на
котором совершен поворот плоскости орбиты. Прямые, проведенные
под углами фг-3ф, и ф2+3ф,, определяют область, допустимую для угла
приложения импульса, поворачивающего плоскость орбиты. Если
данная область имеет с областью Р общие точки, обозначим область
пересечения этих двух областей L (на рис. 9.13 она выделена двойной
штриховкой), то одноимпульсное решение существует, в противном
случае следует переходить к определению параметров
двухимпульсных решений.
405
Рис. 9.13. Влияние ошибок
определения разницы больших полу-
осей, разницы векторов эксцентри-
ситета, ошибки определения времени
приложения импульса скорости и
ошибки в моменте приложения
боковой составляющей импульса
скорости
Рис. 9.14. Распределения плотно-
сти вероятностей величин <ре угла
приложения импульса скорости
для коррекции вектора эксцентри-
ситета, угла, соответствующего
моменту приложения импульса ср,,
и угла, на котором происходит
поворот плоскости орбиты фг
На рис. 9.14 изображены распределения плотности
вероятностей, которые соответствуют возможным углам приложения
импульса скорости для изменения вектора эксцентриситета сре, для
поворота плоскости орбиты (рг и для момента приложения импульса
скорости ср,. Как можно видеть, углы допустимые для приложения
импульса скорости должны принадлежать отрезку АС. В качестве
угла приложения импульса скорости (pimp выбирается угол, которому
соответствует точка В (плотность вероятностей величин двух углов
одинакова). Далее для найденного угла определяется (>е,тр и т.д.
Величина безразмерной боковой составляющей импульса
скорости определяется по формуле:
ДКг = Ду,
где у - угол между плоскостями номинальных орбит.
9.2.4. Оценка параметров двух маневров малой
продолжительности. В случае, когда одноимпульсное решение не
существует, то необходимо переходить к определению параметров
406
двухимпульсного решения. Перебирая значения углов <pt и <р2, в
диапазоне, который соответствует временному интервалу между
эпохами начальной и конечной орбит, и для каждой пары углов
решая систему уравнений (1.12) относительно составляющих
импульсов, можно получить множество решений с различными
значениями суммарной характеристической скорости,
обеспечивающих перелет с начальной на конечную орбиту. За
окончательный результат принимается решение, обеспечивающее
наименьшие энергетические затраты. Назовем данный подход
методом полного перебора. Это традиционный [155], [40] подход к
решению задачи оценки двухимпульсных маневров. При этом обычно
используется хорошо известное решение задачи Ламберта, но, как
будет показано далее, используя систему (1.12) решение можно
получить значительно проще. При увеличении временного интервала
между эпохами начальной и конечной орбит число вариантов при
переборе сильно увеличивается. Даже при решении для каждого
варианта простой системы (1.12), вместо традиционной задачи
Ламберта, время расчета резко возрастает. Данный факт делает
затруднительным использование традиционного подхода в
технологическом цикле поддержания каталога КО.
Для сокращения времени расчета также можно
воспользоваться предположением об ориентации импульсов. Как
правило, сами оцениваемые маневры не являются маневрами встречи,
а являются разновидностью простейших маневров перехода. Целью
таких маневров при маневрировании в плоскости орбиты является
изменение большой полуоси и/или вектора эксцентриситета. Как уже
отмечалось, радиальные составляющие практически не используются
в маневрах поддержания орбиты. Таким образом, можно считать, что
у оцениваемых маневров радиальные составляющие импульсов
отсутствуют, т.е. AKrj=O, ДЦ.2=0. Величины радиальных
составляющих, которые могут появляться вследствие ошибок в
построении заданной ориентации ДУ, как правило, не превышают 2%
от величин импульсов скорости. Данные составляющие не изменяют
большую полуось орбиты и практически не влияют на время прилета
в конечную точку. Ими также можно пренебречь при оценке
маневров, что будет показано в одном из примеров раздела 9.2.8.
Таким образом, решение двухимпульсной задачи целесообразно
искать в классе маневров, у которых имеются только
трансверсальные и боковые составляющие. Алгоритм поиска такого
407
решения состоит в следующем [27]. На интервале в один виток
перебирается угол приложения первого импульса скорости.
Обозначим <piy- текущее значение угла <р,. Затем по формулам (2.2а)-
(2.2в), определяются величины трансверсальных составляющих ДК(1,
ДК(2 и угол приложения второго импульса скорости ф2/, после этого
по формулам (2.14а), (2.146) определяются величины боковых
составляющих AKzl, AKz2. Полученное решение будет справедливо
для любых комбинаций углов <pi„ =<р1у+2ли, <р2„=<р2/+2ли, п eN в
интервале витков между Ц и /2 . Из всех возможных пар углов в
дальнейшее рассмотрение поступают только те, которые
обеспечивают решение уравнения (1.12г) с заданной точностью Afy.
Таким образом, находится не традиционное решение, у которого
минимальна суммарная характеристическая скорость, а решение, у
которого суммарная характеристическая скорость (традиционный
критерий) минимальна при условии, что промах перелета на
конечную орбиту не превосходит некоторой заданной небольшой
величины \tf. Поскольку реальное изменение орбиты было
произведено импульсами без радиальных составляющих, то решение,
обеспечивающее практически нулевой промах по времени,
существует. Время решения задачи при таком подходе существенно
меньше времени решения при использовании полного перебора, т.к.
основной перебор угла <pi осуществляется только на одном витке,
угол <р2 не перебирается, а находится по формуле (2.2в).
Последующее рассмотрение небольшого количества различных
комбинаций углов cpi„, <р2„ для различных витков требует только
вычисления левой части уравнения (1.12г) для каждой пары углов.
Данный метод значительно превосходит метод прямого
перебора по быстродействию при сопоставимой и даже
превышающей точности расчета. Сравнительный анализ точности и
быстродействия двух методов представлен в разделе 9.2.8.
В случае, когда орбиты определены с большими ошибками,
какое-то особое решение не предусматривается, т.к. предложенное
двухимпульсное решение позволяет решить задачу.
9.2.5. Оценка одиночного маневра, исполняемого ДУ
малой тяги. Определение параметров компланарного маневра.
Как уже отмечалось в главе 6, у реальных КА ориентация двигателя
во время проведения маневра часто фиксируется в орбитальной или
инерциальной системах координат. У КА, использующих ДУ малой
408
тяги, маневр, как правило, совершается при фиксированной
ориентации ДУ в орбитальной системе координат. Далее при
решении задачи оценки параметров маневра предполагается, что
используется именно такая ориентация ДУ.
Изменение эксцентриситета и безразмерной большой полуоси
можно
орбиты в результате работы ДУ на угловом интервале А(р
найти, используя формулы (6.4),(6.8):
. . Дер w, А
4sin— = —Ле,
2 w
W
2Д(р = — Аа.
w
Разделив (9.11) на (9.12) получаем уравнение для
определения Дер:
Л 2 • sin(—)
Де 2
Ла Д<р
(9.И)
(9.12)
(9-13)
Решив трансцендентное уравнение (9.13), можно
найти
продолжительность работы ДУ Дер. Затем, используя (9.11) или (9.12),
Р
найти ускорение КА, вызванное работой ДУ (w = —):
т
WC л
w = ——Ла.
2Д<р
Характеристическая скорость маневра ДР-, определяется по
формуле:
w
дг,=—г0Д(р.
w
(9.14)
Положение середины активного участка <ре, которое
совпадает с моментом приложения импульса скорости в оптимальном
импульсном решении [71], можно определить по формуле:
ГДе,
Дел
<ре = arctan
(9-15)
409
Оценка бокового маневра. Середина активного участка
такого маневра должна находиться на линии пересечения плоскостей
начальной и конечной орбит. Найти угол <pz, определяющий
положение линии пересечения орбит, можно используя формулу:
Если поворот плоскости орбиты задан отклонениями AQ, А/,
то выражение для <pz имеет вид:
. AQ
tg<pz = sinz——
А;
Воспользовавшись (6.53) можно найти угловую
продолжительность активного участка
Аср = 2arcsinf (9-16)
где Ду - угол между плоскостями орбит, который
определяется по формуле (1.14г):
Ду = -v/Az2 + ДИ/2 .
Величина бокового импульса скорости определяется по
формуле:
W
дк=—и0Дф2.
Wc
Оценка продолжительного маневра, вызвавшего
изменение всех элементов орбиты. Рассмотрим случай, когда
корректирование компланарных и некомпланарных элементов
орбиты происходит одновременно. Для выполнения такого маневра
вектор тяги поворачивают из плоскости орбиты на некоторый угол р,
при этом имеется следующее разложение вектора тяги:
Д = Pcosp (трансверсальная составляющая вектора тяги);
Pz = /’sin р (бинормальная составляющая вектора тяги).
Соответственно отношение вектора тяги к массе (w) также
будет иметь две составляющие:
410
р р
w, = ^; и>2=-^. (9.17)
т т
Величина полного ускорения:
W = yjwf + w2z .
Предполагается, что во время проведения маневра
ориентация вектора тяги относительно орбитальной системы
координат не изменялась.
Как и ранее из уравнения (9.13) находится
продолжительность активного участка Дер, а затем, используя
уравнение (9.12), определяется wt:
wi=~~wc- (9Л8)
2Лср
Зная Лер, из уравнения (9.16) можно найти wz:
w =-----v w . (9-19)
-> • I A(P I
2sin —L
l 2 J
На следующем шаге определяется ориентация вектора тяги:
Р = arctan — . (9.20)
I J
Составляющие характеристической скорости находятся по
формулам (9.21) и (9.22):
W
ДИ, = —И0Дф, (9.21)
Wc
ДИ)=—И0Дф. (9.22)
Wc
Величина маневра ЛИопределяется по формуле:
ДИ = 7аИ,2+ЛК22 .
411
Середины активных участков для изменения эксцентриситета
и поворота плоскости орбиты должны совпадать, если эти изменения
произведены одним маневром. Однако за счет ошибок определения
орбиты может получиться так, что эти моменты слегка не совпадают.
В этом случае для определения центра активного участка можно
воспользоваться результатами, полученными для определения
момента приложения импульса при наличии ошибок в определении
орбит (см. п. 9.2.3).
Другим подходом [155],[40] к оценке манёвров большой
продолжительности является полный перебор таких параметров как
время включения и выключения ДУ, ориентация вектора тяги и
величина ускорения, создаваемого ДУ, с последующим выбором
решения, которое обеспечивает необходимое изменение элементов
орбит. При этом количество шагов, на каждом из которых
рассчитываются произведенные изменения элементов орбиты, равно
—, где - количество шагов перебора времени включения и
выключения ДУ, нр - количество шагов перебора ориентации вектора
тяги, nw - количество шагов перебора величины ускорения. Таким
образом, можно утверждать, что метод, предложенный в данном
разделе, требует на порядки меньше времени для расчёта, по
сравнению с методом использованном в работе [155], [40].
9.2.6. Оценка одиночного маневра, исполняемого ДУ
малой тяги, с учетом ошибок определения орбиты.
Компланарный маневр. В случае, когда имеются ошибки в
определении начальной и конечной орбит (также предполагается, что
в первую очередь это относится к конечной орбите), процедура
решения задачи определения параметров одиночного
продолжительного манера существенно меняется.
Предполагается, что ускорение вызванное работой ДУ
активного космического объекта w было вычислено ранее, в
результате оценки параметров одиночного продолжительного
маневра с помощью алгоритма, описанного в разделе 9.2.5, когда
начальная и конечная орбиты были определены с относительно
высокой точностью.
На рис. 9.15 построена область между пунктирными
окружностями, соответствующая допустимым значениям
412
безразмерной разницы больших полуосей. Также построен эллипс,
ограничивающий область, которая соответствует допустимым
значениям разницы векторов эксцентриситета. В отличие от случая,
рассмотренного в п. 9.2.3, область ограниченная пунктирными
окружностями и область, ограниченная эллипсом, могут не
пересекаться, причем эллипс будет находиться внутри меньшей из
окружностей. Как следует из формул (9.11), (9.12), это связано с
менее эффективной коррекцией эксцентриситета при
продолжительном маневре. Однако решение с одним включением ДУ
и в этом случае может существовать.
Рис. 9.15. Влияние ошибок определения разницы больших
полуосей и разницы векторов эксцентриситета.
Определить время середины маневра, как это делалось в
импульсном случае, затруднительно. Поэтому угол ср, не
используется. Если оценивается маневр, который не менял плоскость
орбиты, то в качестве середины углового интервала работы ДУ,
принимается угол <ре, так как середина продолжительного маневра
должна совпадать с углом приложения оптимального импульсного
маневра [71].
Алгоритм оценки параметров маневра состоит в переборе с
некоторым шагом точек из отрезка ВС (рис.9.15). Для каждого
текущего значения Да,- из отрезка ВС, используя формулу (9.12),
вычисляется угловая продолжительность маневра Дер,-,
обеспечивающая соответствующее изменение большой полуоси.
Затем по формуле (9.11) находится изменение эксцентриситета,
производимое данным маневром. Если найденное значение
413
эксцентриситета Де,- принадлежит отрезку DE, то найдено допустимое
решение. Искомым является допустимое решение, у которого
плотности распределения вероятности /?До(Да,-) и Рде(Де,-) максимально
близки друг другу. Соответствующая такому значению Да,- угловая
продолжительность маневра Дер,- является решением задачи. Середина
активного участка опять определяется углом ф„„р = фс.
Некомпланарный маневр. Предположим, что оцениваемый
маневр имел не только трансверсальную, но и боковую
составляющую. В этом случае середина оптимального маневра
поворачивающего плоскость орбиты, должна совпадать с углом ф.,
определяющим положение линии пересечения плоскостей начальной
и конечной орбиты. Если орбиты определены с ошибками, то угол
оптимальной коррекции эксцентриситета фе и угол ф„ оптимальный
для поворота плоскости орбиты, не совпадают. Пусть 0ф; это
максимальная ошибка в определении угла ф2. Прямые, проведенные
под углами ф7-5ф, и ф,+5ф2, определяют область, допустимую для
середины маневра, поворачивающего плоскость орбиты. Если данная
область имеет с областью, ограниченной эллипсом, общие точки,
обозначим область пересечения этих двух областей Р (на рис. 9.16
она выделена штриховкой), то решение с одним продолжительным
маневром может существовать, в противном случае надо переходить
к определению параметров двух маневров.
Рис. 9.16. Влияние ошибок определения разницы больших
полуосей, разницы векторов эксцентриситета и ошибки в угле <рг,
на котором происходит поворот плоскости орбиты
414
В качестве середины углового интервала маневрирования
можно взять угол <pimp, для которого справедливо соотношение:
5фе _ 8<рг
Фе-Ф™, Ф„„р-Ф.
Получаем:
Ф/тр
8q\<pg + 5<pg<pz
8фе + 5ф2
Далее опять для каждого текущего значения Да,- (из отрезка
ВС рис. 9.16) вычисляется угловая продолжительность маневра Дф„
обеспечивающая соответствующее изменение большой полуоси. Для
этого решается система (9.23) - (9.25) и определяются величины Дф;,
w,, wz:
Да, W = —W . 2Дф, Ду W = 7 т-W , э • f дфЛ ( 2 J W = yjwf + w2z , (9.23) (9-24) (9-25)
где Ду - номинальный угол между плоскостями орбит. Затем по
формуле (9.26):
M=4^sin^, (9.26)
vv, 2
находится изменение эксцентриситета, производимое данным
маневром. Если найденное значение эксцентриситета Де,-
принадлежит отрезку DE (рис.9.15), то найдено допустимое решение.
Искомым является допустимое решение, у которого плотности
распределения вероятности рЛа(Да,) и />Де(Де,) максимально близки
друг другу. Соответствующая такому значению Да, угловая
продолжительность маневра Дф, является решением задачи. Середина
активного участка определяется углом ф,тр. Ориентация вектора тяги
определяется по формуле (9.20).
Если тяга ДУ неизвестна, то задача решается так же, как и в
случае точного определения орбит.
415
9.2.7. Оценка параметров двух компланарных маневров
большой продолжительности. Как и в предыдущем разделе
принимается, что во время исполнения маневров двигатель сохраняет
постоянную ориентацию по трансверсали (как наиболее
эффективную) в орбитальной системе координат. Предлагаемый
метод решения позволяет учитывать и ориентацию в инерциальной
системе координат, но рассмотрена орбитальная ориентация, т.к. она
намного чаще встречается в практической работе.
Существует два подхода к применению двух маневров
большой продолжительности: реализация связных маневров, с целью
заданного изменения большой полуоси и вектора эксцентриситета;
реализация двух независимых маневров, каждый из которых нацелен
на изменение только одного параметра орбиты.
Если производились два связных оптимальных маневра, то,
центр углового интервала A<pi, на котором исполняется первый
маневр, должен быть расположен на угле <ре, оптимальном для
приложения первого импульса в импульсном решении:
Аеу
tg<pf =-А
Дел
а центр углового интервала второго маневра должен находиться на
расстоянии в полвитка.
В соответствии с (9.11), (9.12) условия перехода на заданную
орбиту имеют вид:
, . Дф, л . Дф, w Де
4 sin—— 4sm—— = —с-—
2 2 w (9.27)
w Ла
2Дф, + 2Дф2 = ——
w
При решении данной задачи предполагается, что ускорение
Е „
w = —, создаваемое двигательной установкой, было определено ранее
т
при оценке одиночного маневра.
Из системы (9.27) можно найти угловые продолжительности
маневров Дф! и Дф2:
416
w Ла . w Ле
Д(р, =—----н 2 arcsin------,
4w 0 w Ла
бИ-’COS——
8w
w Ла . w Ле
Л(р, =— ---2 arcsin--------.
4w о w Ла
ewcos—-—
8w
Если получается отрицательное значение Д<р, это означает,
что при исполнении данного маневра вектор тяги должен быть
направлен по трансверсали в сторону движения МКО
(осуществляется торможение).
Таким образом, было получено решение задачи перехода, а
фактически должна решаться задача встречи. Чтобы решить задачу
встречи, остается, при помощи небольшого перебора и сравнения
отклонения по времени, выбрать порядок приложения импульсов и
витки маневрирования.
Более сложным является случай, когда маневры
производились независимо и, следовательно, не обязательно, что
середины маневров разделяет полвитка. Первая часть алгоритма
оценки таких маневров аналогична алгоритму оценки параметров
двух маневров небольшой продолжительности. На одном из витков
разрешенного интервала (между временами задания начальных
условий) фиксируется угол приложения первого импульса скорости
Ф1=ф1у. Затем по формулам (2.2а)-(2.2в) определяются величины
трансверсальных составляющих и угол приложения второго импульса
скорости ф2/.
Далее, как и в предыдущем случае, предполагается, что
середины угловых интервалов, на которых исполняются
продолжительные маневры, совпадают с углами приложения
импульсов скорости оптимального импульсного решения.
Из уравнения:
Л Л W • Д(Р1
Ле, = 4—sm—- ,
1 wc 2
где Дб1 - изменение эксцентриситета, производимое первым
маневром импульсного решения, можно найти Atpi - необходимую
угловую продолжительность первого маневра, при которой
производится изменение эксцентриситета аналогичное изменению,
417
произведенному первым импульсом скорости. Аналогично находится
угловая продолжительность второго маневра Аср2:
Дср2 = 2 arcsin—.
4w
Каждый из маневров произвел необходимое изменение
эксцентриситета и в нужном направлении, таким образом, в
результате маневров будет сформирован заданный вектор
эксцентриситета.
Проблема заключается в том, что изменение большой
полуоси будет больше, чем необходимо, т.к., как следует из формул
(9.11), (9.12), при продолжительном маневре и принятой ориентация
ДУ она меняется более эффективно, чем эксцентриситет.
Устранить это расхождение можно с помощью следующей
итерационной процедуры. Предположим, что первоначальным
отклонением большой полуоси было Ла0=а^а0 (например, Аа0>0). Это
отклонение Да0 и отклонения А<?г0, Ае?0 использовались при
определении параметров маневров.
В результате реализации рассчитанных маневров будет
сформирована большая полуось значение которой превосходит
требуемое. На следующей итерации при вычислении параметров
маневров будут использоваться отклонения ^а\=Ь.а^+а^а\, Aex0,
(отклонение большой полуоси, которое стремимся скорректировать
будет меньше исходного), на последующей Аа^А^+ау-яг, и т.д., пока
большая полуось не будет сформирована с заданной точностью.
Таким образом, для фиксированного угла еру решена задача
перехода на конечную орбиту с помощью двух маневров большой
продолжительности.
Далее при переборе возможных углов еру в дальнейшее
рассмотрение поступают только те, которые обеспечивают решение
уравнения (1.12г) с заданной точностью Aiy. Это позволяет найти
решение, у которого суммарная характеристическая скорость
минимальна при условии, что промах во времени перелета на
конечную орбиту не превосходит заданной величины Д?у. Таким
образом, будет получено не только решение задача перехода, но и
решение задачи встречи.
418
Как можно видеть, перебор угла фу, как и в импульсном
случае, производится только по одной переменной и только на одном
витке.
9.2.8. Оценка параметров двух некомпланарных маневров
большой продолжительности. Также как и при переходе от
компланарного двухимпульсного решения к решению с
продолжительными участками работы ДУ, при решении данной
задачи существенно используются результаты решения предыдущей
более простой импульсной задачи.
Аналогично перебирается фу (угол приложения первого
импульса скорости) и для каждого значения угла фу с помощью
алгоритма, описанного в разделе 9.2.4, ищется импульсное решение.
Предположим, что импульсное решение состоит из двух импульсов
скорости величиной ДИ1;ДИ2, углы приложения импульсов фу и ф2,
составляющие ДИа,ДИг1 и AH(2,AHz2. Ориентация ДУ задается углами
tgP'=<’ tg₽2 =
дк2
дк,2‘
Боковая составляющая первого импульса скорости
произведет изменение ориентации плоскости орбиты
Ду1=ДИг1=ДИ]8шР1, а трансверсальная - изменение эксцентриситета и
большой полуоси соответственно Де1=2ДИ,1=2ДИ1со5р1 и
Да1=2ДИ,|=2ДК|со8р1.
Ускорение, создаваемое ДУ в трансверсальном направлении
w,=wcosP, ускорение, в боковом направлении wz=wsinp.
Аналогично тому, как это делалось в предыдущем разделе,
найдем угловую продолжительность маневра, которая произведет
изменение эксцентриситета первым маневром соответствующее
изменению, производимому первым импульсом скорости
А ПАТ/ Л Wl
Де, =2Д^, = 4—sin—Я,
wc 2
А ПАТ/ о A WCOSp. . Дф
Де, = 2ДР( cosp, = 4-—sin—21,
w. 2
... » w . Дф.
ДИ = 2—sin—il,
wr 2
419
. weAVt
Acpj = 2 arcsin—-—
2w
Рассчитанный продолжительный маневр произведет поворот
плоскости орбиты на угол Ду, вычисляемый по формуле:
, „ w . ,Д<р.
Ду = 2—sin(——).
wc 2
Можно независимо вычислить угловую продолжительность
маневра, который должен произвести необходимый поворот
плоскости орбиты
л л л tz • n ~ wsinfi, . ,Д<р,.
Ду1 = ДИг1 = Д^ sinPj =2--—sin(——),
wc 2
. wAP,
A cpj = 2 arcsin —-—L.
2w
Такая же величина A<pi получилась, когда воспользовались
уравнением для эксцентриситета, таким образом, при данной
продолжительности маневра получается необходимое изменение
эксцентриситета и нужный поворот плоскости орбиты.
Аналогичным образом находится продолжительность второго
маневра Д<р2- При найденных продолжительностях маневров будет
сформирован необходимый вектор эксцентриситета и осуществлен
требуемый поворот плоскости орбиты. Возникающая ошибка в
формировании большой полуоси устраняется с помощью
итерационной процедуры, аналогичной процедуре описанной в
предыдущем разделе.
9.2.9. Примеры оценки параметров маневров. Для
получения начальных условий, которые можно использовать для
проверки качества работы описанных выше алгоритмов, применялась
программа, в которой численно интегрируются уравнения движения
КА с учетом работы двигательной установки. В эту программу в
качестве исходных данных задавался начальный вектор состояния
КА, а также параметры маневра. В результате получается конечный
вектор состояния КА после проведенных маневров. Затем начальный
и конечный векторы состояния подавались в программу,
использующую описанные выше алгоритмы, в результате работы
420
которой получались расчетные оценочные значения параметров
маневра. Эти оценочные значения сравнивались с заданными,
которые моделировались в программе прогноза движения, и на
основании сравнения делался вывод о величине ошибки оценки
параметров маневров.
Были рассмотрены две начальные орбиты, принадлежащие к
классу низких околоземных (орбита №1) и геостационарных (орбита
№2) орбит соответственно. Элементы данных орбит представлены в
табл. 9.1.
Результаты расчетов представлены в табл. 9.2-9.9 [27, 28]. В
данных таблицах: А Г- характеристическая скорость маневра, р -
курс, 0 - тангаж, Д<р - угловая продолжительность маневра, w -
ускорение КА, создаваемое ДУ (индексы 1 и 2 обозначают номер
маневра, к которому относятся данные параметры).
Первоначально КА находился на одной из орбит, элементы
которых приведены в таблице 9.1.
Таблица 9.1. Начальные параметры тестовых орбит
Элементы орб. Орбита № 1 Орбита № 2
а (км) 6662.813 42168.262
ех 0.003335 -0.000021
еу 0.000524 0.000134
/(°) 51.72082 0.15140
Я (°) 97.72594 84.06768
и (°) 0.014097 151.36502
Дата 20.09.2012 14.04.2014
Время 02:04:13.683 21:07:26.54
В таблице 9.2 приведены результаты двух оценок
одноимпульсных некомпланарных маневров малой
продолжительности, что следует из соотношения тяги и массы КА
(Р=2940н (ЗООкгс), т=7127кг) и величины импульса скорости
(АК<26м/с). Маневры исполнялись на орбите №1.
Как можно видеть, параметры таких маневров оцениваются с
высокой точностью. Это относится не только к величине и
ориентации импульса скорости, но и к определению момента
исполнения маневра.
421
одиночных компланарных и некомпланарных маневров большой
продолжительности [27]. Масса аппарата - 7127кг. Тяга двигателей в
случае компланарных манёвров - 132.3н (13.5 кгс). Тяга двигателей в
случае некомпланарных манёвров - 122.5н (12.5 кгс). Также можно
видеть, что параметры таких маневров оцениваются с достаточно
высокой точностью.
В табл. 9.5 для низкой орбиты № 1 приведены результаты
оценок двух динамических операций, каждая из которых состояла из
двух маневров малой продолжительности, что следует из
соотношения тяги и массы КА (Р = 2940 Н (300 кгс), /и = 7127 кг) и
величины импульса скорости (АК < 26 м/с). Для сравнения оценка
проводилась с помощью традиционного метода полного перебора и с
помощью предлагаемого в данной работе ускоренного метода.
Интервал поиска моментов приложения импульсов скорости
для теста № 7 составлял примерно 3 часа:
20.09.2012 6:04:13.6835 - 20.09.2012 9:14:00.000.
Интервал поиска для теста № 8 был существенно больше и
составлял примерно 15 часов:
422
20.09.2012 6:04:13.6835-20.09.2012 21:14:00.000.
Шаг перебора углов для тестов № 7-8 принимался равным 1°,
максимальная ошибка по фазе для ускоренного метода 1 секунда.
Как можно видеть использование ускоренного метода для
орбиты № 1 позволило не только сократить время вычислений на
несколько порядков, но и повысить точность оценки маневров.
В табл. 9.6 приведены 2 примера, в которых в качестве
эталона используются решения, имеющие небольшие тангажи
импульсов скорости. В тесте 3 тангаж 1°, в тесте 4 тангаж 2°. Эти
примеры имитируют импульсы скорости, которые были исполнены в
результате соответствующей ошибки в ориентации ДУ. Как можно
видеть у ускоренного метода ошибка в определении величины
каждого из импульсов скорости не превышает 8% , в то время как
ошибка в определении величины импульсов скорости у
традиционного метода может достигать 27%. Суммарная
характеристическая скорость оценивается гораздо точнее. У
ускоренного метода ошибка примерно 2.5%, у традиционного метода
примерно 6.5%. Существенно точнее у ускоренного метода
определяется и время приложения импульсов скорости.
В табл. 9.7 приведены результаты оценки маневров,
исполняемых на геостационарной орбите (орбита № 2).
Интервал поиска для тестов № 11-12:
14.04.2014 21:07:26.5421 - 15.04.2014 21:00:00.000.
Шаг перебора углов принимался равным 0.1°, максимальная
ошибка по фазе 20 сек.
Параметры маневров для орбиты № 2 оцениваются с более
высокой точностью, что можно объяснить различием в периодах
орбит.
Для геостационарной орбиты ошибки в оценке импульсов
скорости, имеющих радиальные составляющие, практически
отсутствуют, поэтому данные примеры не приводятся.
В табл. 9.8 и 9.9 приведены результаты оценок
двухимпульсных маневров большой продолжительности.
Масса аппарата = 7127 кг. Тяга двигателей в тестах № 13-14
= 98 Н (10 кгс). Тяга двигателей в тестах № 15-16 = 5.9 Н (0.6 кгс).
Интервал поиска для тестов № 13-14:
20.09.2012 6:04:13.6835 -20.09.2012 9:14:00.000.
Интервал поиска для тестов № 15-16:
14.04.2014 21:07:26.5421 - 15.04.2014 21:00:00.000.
423
Шаг перебора углов для тестов № 13-14 = 1 °.
Шаг перебора углов для тестов № 15-16 = 0.1°.
В тестах № 13-14 принималось, что максимальная ошибка по
фазе 1 сек.
В тестах № 15-16 принималось, что максимальная ошибка по
фазе 20 сек.
Также можно видеть, что параметры маневров оцениваются с
достаточно высокой точностью и за очень короткое время.
Нет сравнения с решениями другого типа, т.к. в работах [155],
[40] оценивались только одиночные маневры большой
продолжительности.
Таблица 9.3. Оценка одноимпульсных компланарных
маневров большой продолжительности для орбиты № 1
Параметры маневра Заданные значения Результат оценки Ошибка
Тест №3
ДИ (м/с) 25 24.94 0.2%
ДФ(°) 89.13 86.12 3.4%
fH(102 м/с2) 1.858 1.917 3.1%
Время начала маневра 2:51:00.0 2:51:47.0 47 сек
Время конца маневра 3:13:33.2 3:13:28.0 5.2 сек
Тест №4
ДИ (м/с) 12.5 12.49 0.1%
Дф(°) 44.66 43.65 2.2%
1И(10‘2м/с2) 1.858 1.903 2.4%
Время начала маневра 2:51:00.0 2:51:15.5 15.5 сек
Время конца маневра 3:02:13.2 3:02:11.9 1.3 сек
424
Таблица 9.4. Оценка одноимпульсных некомпланарных
маневров большой продолжительности для орбиты № 1
Параметры маневра Заданные значения Результат оценки Ошибка
Тест №5
ДИ (м/с) 25 24.65 1.4 %
Р (°) 45 44.29 1.6 %
Дф (°) 96.47 94.66 1.9%
FF(102 м/с2) 1.720 1.726 0.4 %
Время начала маневра 2:49:01.6 2:45:46.7 3:14.9
Время конца маневра 3:13:12.2 3:09:29.6 3:42.6
Тест №6
ДИ (м/с) 12.5 12.35 1.2%
Р (°) 45 44.44 1.5%
Дф (°) 48.24 46.96 2.7 %
ЩТО'2 м/с2) 1.720 1.747 1.6%
Время начала маневра 2:49:01.6 2:45:41.6 3:20.0
Время конца маневра 3:01:06.3 2:57:21.4 3:44.9
425
Таблица 9.5. Оценка двухимпульсных маневров малой
продолжительности для орбиты № 1
Параметры импульсов Эталон Традиц. метод Ошибки трад.м. Ускор. метод Ошибки ускор.м
Тест № 7
Время 1-го импульса 20.09.2012 6:14:00.00 20.09.2012 06:12:31.06 01:28.94 20.09.2012 06:14:08.52 00:08.52
ДИ, (м/с) 10.5 12.07 15.0% 11.25 7.1%
Pi (°) 45 47.60 5.8% 46.10 2.4%
61 (°) 0 -14.38 - 0 -
Время 2-го импульса 20.09.2012 8:22:30.00 20.09.2012 08:23:53.66 01:23.66 20.09.2012 08:22:55.65 00:25.65
Д Vi (м/с) 15.0 14.26 4.9% 14.91 0.6%
₽2 (°) 315 317.41 315.24 0.1%
61 (°) 0 0.63 - 0 -
УЛИ (м/с) 25.5 26.33 3.2% 26.15 2.5%
Время вычислений - 2.521 сек - 0.003 сек -
Тест№ 8
Время 1-го импульса 20.09.2012 18:14:00.0 0 20.09.2012 18:12:27.39 01:22.61 20.09.2012 18:14:08.45 00:08.45
ДИ, (М/С) 10.5 11.90 12.3% 11.25 7.4%
Pl (°) 45 46.04 2.3% 46.11 2.5%
61 (°) 0 -15.95 - 0 -
Время 2-го импульса 20.09.2012 20:22:30.0 0 20.09.2012 20:24:05.12 01:35.12 20.09.2012 20:22:55.48 00:25.48
ДИг (м/с) 15.0 14.49 10.2% 14.91 0.6%
Рг (°) 315 316.43 0.5% 315.24 0.1%
02 (°) 0 0.92 - 0 -
£Д V (м/с) 25.5 26.39 3.5% 26.16 2.6%
Время вычислений - 57.839 сек - 0.005 сек -
426
Таблица 9.6. Оценка двухимпульсных маневров малой продол-
жительности с радиальными составляющими импульсов для орбиты № 1.
Параметры импульсов Эталон Традиц. метод Ошибки трад.м. Ускор. метод Ошибки ускор.м
Тест № 9
Время 1-го импульса 20.09.12 6:14:00.00 20.09.2012 06:11:27.75 02:32.25 20.09.2012 06:14:08.53 00:08.53
А К (м/с) 10.5 13.35 2.85 (27.1%) 11.33 0.83(7.9%)
Pi (°) 45 49.04 4.04(9.0%) 46.33 1.33(3.0%)
е, (°) 1 -25.19 26.19 0 1
Время 2-го импульса 20.09.12 8:22:30.00 20.09.2012 08:24:38.87 02:08.87 20.09.2012 08:22:52.47 00:22.47
А И (м/с) 15.0 13.82 1.18(7.9%) 14.83 0.17(1.1%)
₽2 (°) 315 319.21 4.21(1.3%) 315.39 0.39(0.1%)
02 (°) 1 -1.17 2.17 0 1
ХА V (м/с) 25.5 27.17 1.67(6.6%) 26.16 0.66(2.5%)
Время вычислений - 2.521 сек - 0.003 сек -
Тест№ 10
Время 1-го импульса 20.09.12 6:14:00.00 20.09.2012 06:11:30.77 02:29.23 20.09.2012 06:14:23.62 00:23.62
ДИ1 (м/с) 10.5 13.37 2.87(27.3%) 11.02 0.52(6.0%)
₽. (°) 45 48.99 3.99(8.7%) 44.41 0.59(1.3%)
0! (°) 2 -25.12 27.12 0 2
Время 2-го импульса 20.09.12 8:22:30.00 20.09.2012 08:24:38.86 02:08.86 20.09.2012 08:23:00.54 00:30.54
А Иг (м/с) 15.0 13.78 1.22(8.1%) 15.13 0.13(0.7%)
Р2 (°) 315 319.18 313.93 1.07(0.3%)
02 (°) 2 -0.82 2.82 0 2
ХАИ (м/с) 25.5 27.15 1.65(6.5%) 26.16 .66(2.5%)
Время вычислений - 2.521 сек - 0.003 сек -
427
Таблица 9.7. Оценка двухимпульсных маневров
малой продолжительности для орбиты № 2
Параметры импульсов Эталон Традиц-й метод Ошибки тр. мет. Ускор. метод Ошибки уск. мет.
Тест№ 11 (компланарный маневр)
Время 1-го импульса 15.04.2014 08:00:00.00 15.04.2014 08:04:21.91 4:21.91 15.04.2014 08:00:40.66 0:40.66
ДИ, (м/с) 10.5 10.52 0.02 (0.2%) 10.52 0.02 (0.2%)
Pi (°) 180 179.95 0.05 (0.0%) 179.95 0.05 (0.0%)
е, (°) 0 0.10 0.10 0 0
Время 2-го импульса 15.04.2014 20:00:00.00 15.04.2014 20:01:58.52 1:58.52 15.04.2014 19:59:21.25 0:38.75
ДИ2 (м/с) 15.0 14.97 0.03 (0.0%) 14.97 0.03 (0.0%)
₽2 (°) 180 179.96 0.04 (0.0%) 179.97 0.03 (0.0%)
02 (°) 0 0.05 0.05 0 0
ЕД V (м/с) 25.5 25.49 0.01 (0.0%) 25.49 0.01 (0.0%)
Время вычисл-й - 57.163 сек 0.146 сек
Тест № 12
Время 1-го импульса 15.04.2014 08:00:00.00 15.04.2014 07:56:17.92 3:42.18 15.04.2014 07:58:09.13 1:50.87
ДИ, (м/с) 10.5 10.40 0.10(1%) 10.32 0.18 (1.7%)
Pi (°) 45 44.88 0.22 (0.5%) 44.44 0.56 (1.2%)
Si (°) 0 0.49 0.49 0 0
Время 2-го импульса 15.04.2014 20:00:00.00 15.04.2014 20:02:26.30 2:26.30 15.04.2014 20:01:10.69 1:10.69
ДИ2(м/с) 15.0 15.10 0.10 (0.7%) 15.17 0.17 (1.1%)
₽2 (°) 315 315.06 0.06 (0.0%) 314.76 0.24 (0.0%)
02 (°) 0 1.23 1.23 0 0
ЕД И (м/с) 25.5 25.50 0 25.49 0.01
Время вычисл-й - 54.556 сек 0.145 сек
428
Таблица 9.8. Оценка двухимпульсных маневров большой
продолжительности для орбиты № 1
Параметры импульсов Эталон Решение Ошибка
Тест № 13
Время начала 1-го маневра 20.09.2012 06:14:00.00 20.09.2012 06:12:47.88 1:12.12
Время конца 1-го маневра 20.09.2012 06:26:41.74 20.09.2012 06:25:59.37 0:42.37
Дф1 (°) 50.6 52.5 1.9 (3.8%)
ДИ (м/с) 10.50 10.51 0.01 (0.0%)
Pi (°) 45 43.77 1.23 (2.7%)
Время начала 2-го маневра 20.09.2012 8:45:00.00 20.09.2012 08:44:18.95 0:41.05
Время конца 2-го маневра 20.09.2012 9:03:03.52 20.09.2012 09:02:46.80 0:16.72
Дф2 (°) 72.23 73.50 1.27(1.8%)
ДИ (м/с) 15 14.22 0.78 (5.2%)
₽2 (°) 315 313.42 1.58 (0.5%)
Время вычислений 0.13 сек
ЕЛ V (м/с) 25.5 24.73 0.77 (3.0%)
Тест№ 14 (компланарный маневр)
Время начала 1-го маневра 20.09.2012 06:14:00.00 20.09.2012 06:13:12.63 0:47.37
Время конца 1-го маневра 20.09.2012 06:26:41.74 20.09.2012 06:26:36.71 0:05.03
Дф1 (°) 50.6 53.8 3.2 (6.3%)
ДИ (М/с) 10.50 10.66 0.16(1.5%)
₽1(°) 180 183.73 3.73 (2.1%)
Время начала 2-го маневра 20.09.2012 8:45:00.00 20.09.2012 08:44:46.56 0:13.44
Время конца 2-го маневра 20.09.2012 9:03:03.52 20.09.2012 09:02:47.24 0:16.28
ДФ2 (°) 72.23 72.32 0.09 (0.0%)
ДИ (м/с) 15 13.9 1.1 (7.3%)
Р 2 (°) 180 179.77 0.33 (0.0%)
Время вычислений 0.14 сек
ЕД V (м/с) 25.5 24.56 0.94 (3.7%)
429
Таблица 9.9. Оценка двухимпульсных маневров большой
продолжительности для орбиты № 2
Параметры импульсов Эталон Решение Ошибка
Тест№ 15
Время начала 1-го маневра 15.09.2014 06:30:00.00 15.09.2014 06:33:27.26 3:27.26
Время конца 1-го маневра 15.09.2014 10:01:35.64 15.09.2014 09:55:39.01 5:56.63
ДФ. (°) 52.37 50.23 2.14(4.1%)
ДИ (м/с) 10.50 9.70 0.80 (7.6%)
Pi (°) 45.00 43.05 1.95 (4.3%)
Время начала 2-го маневра 15.09.2014 17:30:00.00 15.09.2014 17:25:06.17 4:53.83
Время конца 2-го маневра 15.09.2014 22:30:58.72 15.09.2014 22:39:26.57 8:27.65
ДФ2 (°) 74.50 78.09 3.59 (4.8%)
ДИ (м/с) 15 14.39 0.61 (4.1%)
Р 2 (°) 315 313.45 1.55 (0.5%)
Время вычислений 0.64 сек
уд V (м/с) 25.5 24.09 1.41 (5.5%)
Тест№ 16 (компланарный маневр)
Время начала 1-го маневра 15.09.2014 06:30:00.00 15.09.2014 06:25:54.38 4:04.62
Время конца 1-го маневра 15.09.2014 10:01:35.64 15.09.2014 09:58:23.64 3:12.00
Дф1 (°) 52.37 53.92 1.55 (3.0%)
ДИ (М/с) 10.50 10.14 0.36 (3.4%)
₽>(°) 180.00 179.49 0.51 (0.3%)
Время начала 2-го маневра 15.09.2014 17:30:00.00 15.09.2014 17:25:23.41 4:36.59
Время конца 2-го маневра 15.09.2014 22:30:58.72 15.09.2014 22:27:16.84 3:41.88
Дф2 (°) 74.50 76.61 2.11 (2.8%)
ДИ (м/с) 15 13.87 1.13(7.5%)
₽2(°) 180 179.64 0.36 (0.0%)
Время вычислений 0.63 сек
уд V (м/с) 25.5 24.00 1.5 (5.9%)
В таблице 9.10 приведены результаты оценки двух
одноимпульсных компланарных маневров при наличии ошибок в
определении орбит [28]. Во втором столбце приведены результаты
оценки, полученные без учета ошибок определения орбит, в третьем
- результаты оценки, полученные с учетом ошибок определения
начальной и конечной орбит, в четвертом - величина планированного
430
к исполнению импульса скорости. Как можно видеть, предлагаемый
метод позволяет существенно повысить точность оценки параметров
маневров. Кроме того, если приложить рассчитанный импульс к
начальной орбите, то можно получить конечную орбиту, которая
намного ближе к реальной, чем орбита, полученная по измерениям.
Таблица 9.10. Оценка двух одноимпульсных компланарных
маневров при наличии ошибок в определении орбит
Параметры маневра Без учета неопределен-ти С учетом неопределен-ти Эталон
Тест №1 (Электро-Л 2)
Д V (м/с) 0.410 0.419 0.419
ДИ, (м/с) -0.392 0.419 0.419
ДУг(м/с) -0.118 0
ДУ2(м/с) -0.016 0
Время ман-ра 18:07:33 18:08:17 18:09:54
Тест №2 (Луч-5В)
ДУ (м/с) 0.155 0.107 0.105
ДУ, (м/с) -0.134 -0.107 -0.105
ДУ, (м/с) 0.002 0 -
ДУг (м/с) -0.061 0 -
Время ман-ра 07:49:47 06:01:51 06:18:25
Данный алгоритм можно использовать для оценки импульсов
скорости, которые получаются при построении заданной ориентации
КА. Абсолютно точно согласовать работу двигателей,
разворачивающих КА, невозможно. Возникает импульс скорости,
влияющий на движение центра масс. Оценка, а впоследствии учет
этих импульсов скорости, позволит повысить точность прогноза
движения этих КА.
431
Глава X
УМЕНЬШЕНИЕ ЗАГРЯЗНЕННОСТИ КОСМИЧЕСКОГО
ПРОСТРАНСТВА
Существует две возможности уменьшения загрязнённости
космического пространства: первая состоит в том, чтобы не
увеличивать число космических объектов, для этого КА, у которых
заканчивается срок их активного существования, надо переводить на
орбиты захоронения; вторая возможность заключается в очистке
космического пространства от КО и в первую очередь от
крупногабаритных космических объектов. Эти две задачи будут
рассмотрены в данной главе.
10.1. Расчёт параметров манёвров, переводящих КА на
орбиту с прогнозируемым временем баллистического
существования
В задаче захоронения требуется перевести заканчивающие
работу КА на орбиты, на которых они не могут представлять
опасности для активно функционирующих КА. Для геостационарных
КА это увод заканчивающих работу КА на орбиты выше
геостационарной области (на 250 - 350 км), а для низких орбит --
перевод этих КА на орбиты, время существования на которых не
превышает заданное время Тсущ. В соответствии с [192] в настоящее
время принимается, что после завершения активной фазы полета
космических аппаратов на низких (менее 2000 км) околоземных
орбитах их необходимо переводить на орбиту, срок пассивного
баллистического существования на которой не должен превышать 25
лет (Тсуш=25).
Задача расчёта параметров манёвров перевода КА на низкую
орбиту захоронения разбивается на две подзадачи. В одной требуется
определить, какой должна быть орбита с уменьшенным временем
баллистического существования, во второй рассчитать параметры
манёвров, переводящих КА на эту орбиту захоронения. Можно
выделить два основных типа орбит захоронения. В первом случае с
432
помощью одного тормозного импульса скорости, прикладываемого в
апоцентре, формируется эллиптическая орбита, перицентр которой
находится в верхних слоях атмосферы. Во втором случае с помощью
двух тормозных импульсов скорости, прикладываемых в апоцентре и
перицентре, формируется круговая орбита, расположенная в верхних
слоях атмосферы. В первом случае требуются меньшие затраты
горючего, однако апогей орбиты захоронения остаётся в зоне рабочих
орбит активных КА и, следовательно, КА, переведённый на
эллиптическую орбиту захоронения, будет представлять опасность
для активных КА, орбиты которых расположены ниже апоцентра
орбиты захоронения. Таким образом, одна из рассматриваемых задач
заключается в том, чтобы оценить, насколько быстро апогей
эллиптической орбиты захоронения опустится из области, в которой
действуют активные КА. Перевод на круговую орбиту сразу выводит
КА из рабочей области функционирования активных КА. Высота
этой орбиты больше высоты перицентра эллиптической орбиты
захоронения.
Поскольку импульсы скорости, формирующие орбиту
захоронения, достаточно велики, а точность их исполнения в конце
периода существования КА падает, целесообразно делить эти
импульсы на части и прикладывать их на разных витках, но на одном
аргументе широты. Это позволит повысить точность знания орбиты
после приложения импульсов и аккуратнее рассчитывать вероятность
возможного столкновения с космическим мусором, в процессе
формирования орбиты. Если существует опасность столкновения, то
манёвры понижения орбиты можно перенести на последующие витки
или исполнить ранее. Из-за большой величины манёвров
эффективность переноса времени их исполнения для уклонения от
столкновения будет весьма высокой.
10.1.1. Модель движения КА на длительном интервале
времени. При выборе орбиты захоронения приходится
прогнозировать движение КА на 25 лет. Это накладывает
существенные ограничения на метод прогноза. С одной стороны,
необходимо обеспечить высокую точность прогноза, с другой
стороны он должен быть достаточно быстрым, чтобы уменьшить
общее время решения задачи.
Весьма эффективным является прогнозирование движения КА с
помощью ПК «TRACE», основанного на методах численно-
433
аналитической теории движения КА THEONA, разработанной в
Институте прикладной математики им. М.В.Келдыша Академии наук
СССР [51,52]. При сохранении высокой точности (погрешность
относительно численного интегрирования порядка нескольких
сантиметров за виток вдоль орбиты и меньше миллиметра в боковых
направлениях), быстродействие расчётов, основанных на теории
THEONA, превосходит соответствующие расчёты с численным
интегрированием в 100-300 раз.
Основные принципы численно-аналитической теории THEONA
кратко можно охарактеризовать следующим образом.
В качестве промежуточной орбиты берётся точное решение
обобщённой задачи двух неподвижных центров - эйлеровой орбиты.
Эйлерова орбита уже учитывает в себе наиболее существенные
эффекты гравитационного поля, определяемые второй, третьей и
частично четвертой зональными гармониками гравитационного
потенциала. Поэтому в дифференциальных уравнениях движения
используются именно эйлеровы орбитальные элементы. Выбор
элементов в THEONA позволяет избежать сингулярностей для почти
круговых орбит. В качестве независимой переменной выбран
аргумент широты орбиты спутника. Аргумент широты не имеет
сингулярностей для околокруговых орбит. Траектория спутника
разбивается на витки. Каждый виток начинается с восходящего узла и
заканчивается следующим восходящим узлом. Для
околоэкваториальных орбит предусмотрен другой вариант “витка” и
несингулярных орбитальных элементов. Здесь переменная
интегрирования тоже угловая, но является суммой аргумента широты
и долготы восходящего узла.
Выбор эйлеровой орбиты в качестве промежуточной позволяет
включить самые значительные возмущающие факторы в
промежуточное движение спутника. Другие динамические эффекты
учитываются с помощью численно-аналитического интегрирования
дифференциальных уравнений для эйлеровых элементов орбиты.
Силовая модель, принятая в ПК расчёта и прогноза движения
КА с помощью численно-аналитических методов THEONA,
рассматривает самые современные российские стандарты:
Модель ПЗ-90 гравитационного поля Земли. Степень и порядок
модели предлагаются оператору при инициализации ПК, но могут
быть изменены оператором. Возможно также использование модели
434
EGM2006 из IERS Conventions 2010 (ред. IAU2009), принятой в
качестве международного стандарта.
Динамическая модель ГОСТ Р 25645.166-2004 плотности
атмосферы Земли.
Гравитационное влияние Луны и Солнца.
Световое давление прямых солнечных лучей с учётом
цилиндрической тени Земли.
Приливные силы, вызываемые изменениями земной
поверхности.
Силовая модель THEONA практически не отличается от
силовых моделей, которые используются при численном
интегрировании точных уравнений движения КА.
В качестве встроенных параметров используются
фундаментальные астрономические постоянные из IERS Conventions
2010 (ред. IAU 2009). Список астрономических (IAU 2009 XXVI GA)
и геодезических (IERS Conventions 2010) констант. Предусмотрено
использование Российских стандартов для соответствующих
констант (ПЗ-90.02).
Таблица точных эфемерид Солнца и Луны в системе координат
J2000 соответствует модели DE405, созданной в JPL (Jet Propulsion
Laboratory). Расчёт положения Солнца и Луны (для учёта
гравитационного влияния внешних небесных тел и светового
давления), в зависимости от выбора пользователя программного
комплекса TRACE, может проводиться с помощью этой таблицы или
приближенных аналитических формул. Этот выбор фиксируется при
инициализации работы ПК расчёта и прогноза параметров орбиты
КА.
При рассмотрении светового давления (прямого солнечного
излучения) THEONA использует цилиндрическую модель тени от
небесного тела, вокруг которого обращается спутник. Сила светового
давления, действующего на спутник, пропорциональна коэффициенту
светового давления, зависящему как от коэффициента отражения
поверхности спутника, так и её фигуры.
Приливные силы рассматриваются ограниченно (модель Лява),
для приливного потенциала “эластичной” фигуры Земли,
учитывающего движение Луны и Солнца.
В численно-аналитическом прогнозе THEONA также
предусматривается учёт активного движения КА с манёврами
(импульсными и продолжительными).
435
Численно-аналитическое интегрирование проводится методом
“пошагового/повиткового” суммирования возмущений орбитальных
элементов, вычисляемых внутри витка аналитически. Таким образом,
эта схема вычислений позволяет отслеживать изменения
(долгопериодические и вековые) элементов орбиты без трудностей,
которые возникают в классических методах Теории общих
возмущений. Метод повиткового суммирования даёт возможность
принимать в рассмотрение изменения реальных значений физических
параметров: индексов солнечной активности и геомагнитной
возмущённости, малых движений (полюса, прецессии, нутации)
фигуры Земли и др. Кроме того, в течение времени существования
КА проходит много изменений его орбиты (манёвры, столкновения,
изменения ориентации КА и, соответственно, в силовой модели и
т.д.). Новые параметры траектории требуют уточнения орбиты, а
значит, поправок орбитальных элементов. THEONA не испытывает
сложностей в этих случаях, в отличие от аналитических теорий.
Для прогнозирования внутри текущего витка вычисляются
короткопериодические возмущения на необходимый момент времени
(или угловой переменной). Расчёт всех (вековых,
долгопериодических, короткопериодических) возмущений
проводится отдельно для каждого возмущающего фактора
аналитическим интегрированием уравнений возмущённого движения
типа Лагранжа или типа Ньютона. При этом численно-аналитическая
теория THEONA использует специальные функции, рекуррентные
соотношения которых позволяют реализовать быстрый расчёт. Они
разработаны для эффективного функционирования всей схемы
экстраполятора THEONA с учётом всех особенностей повиткового
суммирования аналитических интегралов.
Кроме известных в небесной механике, предложены новые
специальные функции:
> Функции наклонения орбиты используются при расчете
гравитационных возмущений от центрального (основного) небесного
тела, внешних небесных тел и светового давления. Они напрямую
выражаются через многочлены Якоби (Jacobi) J^(cosz) из Теории
представлений групп. Основные функции наклонения g"t(cosz)
отличаются от хорошо известных функций Каулы (Kaula functions)
только нормировкой, которая оптимизирует рекуррентные
соотношения. Новые дополнительные функции Qnmk (cos z)
436
наклонения созданы для учёта членов третьего порядка малости
(примерно 10'9 для гравитационного потенциала Земли) в
неравенствах, вызванных нецентральностью гравитационного поля
Земли.
> Функции двух аргументов <^(а,е), Их связь с функциями
Якоби (Jacobi)
ч V1 - е2 ?
(из Теории представлений групп) и
цилиндрическими функциями Бесселя (Bessel) I рода Jt(ae) можно
выразить в виде бесконечного скалярного произведения по индексу к:
В качестве второго аргумента функций используется
эксцентриситет орбиты е. Первый аргумент при учёте возмущений от
гравитационного поля основного небесного тела кратен отношению
угловой скорости вращения основного небесного тела к среднему
движению спутника. При учёте влияния гравитационных сил от
внешних небесных тел, а также светового давления, первый аргумент
функций ^(а,е) кратен отношению среднего движения спутника к
угловой скорости обращения внешнего небесного тела вокруг
центрального.
В численно-аналитической теории THEONA предложенные
функции <у"(а,е) используются при учёте гравитационных
возмущений, светового давления, приливных сил. Эти функции
эффективно работают в интегралах по аргументу широты, истинной
аномалии или истинной долготы.
Коэффициенты Ганзена (Hansen) Х^ являются их частным
случаем, с целочисленным первым аргументом:
н+1
> Присоединённые функции Лежандра (Legendre) с
нецелочисленными верхними индексами фГ(х). Они могут быть
использованы для учёта атмосферного торможения более
эффективно, чем присоединённые функции Лежандра с целыми
индексами, поскольку не требуют дополнительной аппроксимации
модели плотности атмосферы Земли. При этом они работают как для
распределения плотности по высоте, так и для учёта полуденного
эффекта - угла между направлениями на спутник и на
“послеполуденный горб” в атмосфере планеты.
Для всех используемых в THEONA специальных функций
разработана схема их рекуррентного расчёта. Она позволяет
реализовать быстрые вычисления без использования больших
сохраняемых массивов значений. Это особенно эффективно при
использовании в задачах маневрирования (программная реализация -
комплекс TRACE).
Созданный программный комплекс TRACE с использованием
прогноза THEONA выдаёт результаты в декартовых координатах
гринвичской системы координат, фиксированной на заданный
момент времени, и в оскулирующих орбитальных кеплеровых
элементах. Причём точность получения вектора состояния
(положения и скорости) КА позволяет, при необходимости,
переходить к численному интегрированию и обратно. Это может
использоваться при расчётах задач маневрирования на коротких
интервалах времени t е [/5И„;/еи(/] (точный короткий прогноз).
10.1.2. Эволюция орбит захоронения. Ниже приведены
результаты [53], полученные с помощью численно-аналитического
метода прогноза, позволяющие оценить зависимости для параметров
снижения орбиты КА при выборе его орбиты захоронения.
В первую очередь, оценивается влияние времени вывода КА на
требуемую орбиту. Характер снижения орбиты зависит от
распределения плотности атмосферы на текущий момент времени.
Это могут быть сезонный эффект (при расположении Солнца выше
или ниже эклиптики), изменения солнечной активности и
геомагнитной возмущённости. Как правило, в российских и
иностранных динамических моделях атмосферы Земли учитываются
именно эти факторы. Поскольку индекс геомагнитной
возмущённости невозможно предсказать более чем на несколько
дней, его изменения не нужно использовать при долгосрочном
прогнозе движения КА. В то же время, индексы солнечной
активности на несколько лет вперёд предоставляются различными
физическими центрами мира. Американский центр NOAA приводит
прогнозируемые данные на каждый день текущего солнечного цикла
438
солнечной активности, а также оценивает параметры следующего 11 -
летнего цикла. Скорость снижения орбиты КА также меняется в
разные сезоны существования КА на орбите. В таблице 10.1
представлена зависимость высоты круговой орбиты (второй вариант
выбора рабочей орбиты) от времени её создания (выведения КА).
Здесь приведены результаты анализа создания круговой орбиты
захоронения КА для 2 классов орбит с различными наклонениями: 98
и 51,6 градусов. При "отсрочивании" времени создания необходимая
высота начальной орбиты несколько снижается (см. строки Н7 и
8^14). Это объясняется тем, что в 2013-2015 годы средний индекс
солнечной активности растёт (в первой половине 11 -летнего
солнечного цикла), и "ранний" КА проходит плотную атмосферу на
более длительном интервале. В то же время, наблюдается и сезонный
эффект: скорость изменения в осенний/весенний период замедляется
(см. строки 2-ьЗ и 4+5).
Таблица 10.1
№ Наклонение S (bal) Год Сезон Дата Высота
1 98° 0,03 2013 лето 22.06.2013 687,029 км
2 осень 22.09.2013 685,351 км
3 зима 21.12.2013 685,512 км
4 2014 весна 21.03.2014 683,213 км
5 лето 22.06.2014 683,164 км
6 зима 21.12.2014 680,951 км
7 2015 лето 22.06.2015 679,167 км
8 51°,6 0,03 2013 лето 22.06.2013 671,341 км
9 осень 22.09.2013 670,871 км
10 зима 21.12.2013 669,772 км
И 2014 весна 21.03.2014 668,803 км
12 лето 22.06.2014 667,963 км
13 зима 21.12.2014 666,175 км
14 2015 лето 22.06.2015 664,737 км
На рис. 10.1 приведён график, на котором показана описанная
зависимость высоты рабочей орбиты КА с различными наклонениями
от даты выведения. Высота предполагает время существования 25
лет. Баллистический коэффициент КА равен 0,03.
439
i = 98 трэд
660 :
Рис. 10.1. Зависимость высоты рабочей орбиты КА от даты выведения
В таблице 10.2 приводятся результаты расчётов высоты
круговых орбит захоронения (второй вариант выбора начальной
орбиты) с различными баллистическими коэффициентами: S (bal) =
0,18; 0,03; 0,005.
Таблица 10.2
№ Наклонение S (bal) Год Сезон Дата Высота
1 98° 0,18 2013 Лето 22.06.2013 816,886 км
2 98° 0,03 2013 Лето 22.06.2013 687,029 км
3 98° 0,005 2013 Лето 22.06.2013 541,172 км
4 51 °,6 0,18 2013 Лето 22.06.2013 802,061 км
5 51°,6 0,03 2013 Лето 22.06.2013 671,341 км
6 51°,6 0,005 2013 Лето 22.06.2013 540,094 км
Разница высот требуемых орбит значительна: 162-475 км между
КА с высокими и малыми баллистическими коэффициентами. В
предложенном тесте неслучайно выбраны такие значения
баллистического коэффициента, поскольку они отображают его
диапазон для почти всех используемых КА.
Кроме круговой возможен и другой вариант выбора орбиты
захоронения КА - эллиптическая, эксцентрическая орбита с заданной
высотой апогея. Для определения параметров этой орбиты
осуществляется поиск минимальной высоты начальной орбиты КА
при фиксированном сроке существования КА. При таком варианте
440
выбора требуемая минимальная высота орбиты должна быть ниже,
чем во втором варианте с круговой орбитой, и уменьшаться при
увеличении задаваемой высоты апогея.
В таблице 10.3 приведены результаты вычисления высоты,
необходимой для 25-летнего времени существования спутника с
различными баллистическими коэффициентами и при различных
задаваемых высотах апогея орбиты. Начальная дата вывода КА на
орбиту - 22 июня 2013 года.
Понижение начальной минимальной высоты орбиты
захоронения позволяет быстрее опустить высоту апогея орбиты в
плотные слои атмосферы. Таким образом, орбита с уменьшенным
временем баллистического существования достаточно скоро уходит
из зоны рабочих орбит активных КА, что позволяет уменьшить
опасность для активных КА, орбиты которых находятся ниже
апоцентра орбиты захоронения. В дальнейшем снижение орбиты
подобно вариантам с более низкими начальными значениями
заданной высоты апогея.
Таблица 10.3
Начальная орбита Начальное наклонение Нижняя высота
Балл.коэфф. S (bal) = 0,03 Балл.коэфф. S (bal) = 0,18 Балл.коэфф. S(bal)= 0,005
Околокруговая 98° 687,031 км 816,886 км 541,172 км
51°,6 671,341 км 802,061 км 540,094 км
Верхняя высота 800 км 98° 658,728 км — 537,531 км
51°,6 625,571 км — 532,219 км
Верхняя высота 1100 км 98° 616,639 км 774,837 км 519,231 км
51°,6 614,228 км 769,414 км 517,300 км
Верхняя высота 1500 км 98° 580,110 км 504,115 км
51°,6 579,868 км 743,301 км 503,301 км
Ниже приведён график сравнения подобных снижений орбит
для варианта начальной круговой орбиты, а также эллиптических
орбит с заданной высотой апогея 800 км и 1100 км. Показана
эволюция максимальных высот рассматриваемых орбит.
441
Падение высоты в течение 25 лет при наклонении 98 град {для разных верхних высот)
Стремительное снижение высокой орбиты с начальной высотой
апогея 1100 км за первые 4 года даёт возможность утверждать, что
вариант орбит захоронения с высоким эксцентриситетом может быть
интересным с точки зрения уменьшения затрат горючего на
проведение манёвров для вывода КА на необходимую орбиту.
Для анализа конкретной схемы выбора орбиты захоронения КА
и выведения КА на эту орбиту необходимо проведение расчётов с
помощью быстродействующего программного комплекса. Это
требуется и для оценки времени снижения и выхода максимальной
высоты орбиты КА из зоны рабочих орбит активных КА в реальном
проекте.
На приведённых ниже 2-х графиках демонстрируется характер
снижения орбиты КА в течение 25 лет для обоих рассмотренных
вариантов начальной орбиты захоронения: круговой и
эллиптической. В рисунках, кроме средней высоты, показаны
максимальная и минимальная высота орбиты КА. В эллиптической
орбите эксцентриситет уменьшается, и, соответственно, снижение
высоты в плотных слоях атмосферы становится похожим на
эволюцию круговой орбиты.
442
Падение высоты в течение 25 лет при наклонении 98 град (околокруговая орбита)
Падение высоты в течение 25 лет при наклонении 98 град (начальная верхняя высота 800 км)
Годы
о----------------- ----------------*-----1----- '------------------------------------------------' ---------------------' — '------
о ь 10 15 20 2
443
10.1.3. Алгоритм расчёта параметров орбиты с
прогнозируемым временем баллистического существования.
Итерационная процедура поиска орбиты захоронения КА для точно
(менее 1 часа) заданного интервала времени существования,
использует эффективный экстраполятор TRACE, основанный на
численно-аналитической теории THEONA. Его быстродействие и
хорошая точность позволяют формировать много итерационный
процесс, не опасаясь сложностей при прогнозировании движения КА
на длительные интервалы времени.
Входные данные итерационной процедуры:
1) Параметры начальной орбиты КА (большая полуось а,
эксцентриситет е, наклонение i, аргумент перигея со, долгота
восходящего узла Q, начальный момент времени Zo и аргумент
широты w0) и характеристики самого КА (масса, баллистический
коэффициент и коэффициент отражения солнечных лучей -
светового давления).
2) Продолжительность интервала времени захоронения TL. КА
должен войти в плотные слои атмосферы (с последующим
падением) в заданный момент времени с допустимой точностью.
3) Режим выбора орбиты захоронения (круговая или эллиптическая
с фиксированным апогеем). В обоих вариантах сохраняется
плоскость орбиты (наклонение и долгота восходящего узла) на
начальный момент времени. Для эллиптической орбиты
захоронения фиксируется также точка апогея и высота
(геоцентрическое расстояние) апогея. Начальный момент
времени сохраняется.
Таким образом, решается граничное уравнение
А/г0 = /гт1П, где /гтт - высота входа КА в плотные слои атмосферы
Земли, А - оператор, зависящий от времени TL существования КА на
орбите и фиксированных параметров Q искомой орбиты
захоронения.
При поиске круговой орбиты захоронения фиксированными
параметрами орбиты являются:
Q = {z0,Q0} в начальный момент времени t0,
444
при поиске эллиптической орбиты захоронения:
Q = {/?a,co0,/0,Q0} в начальный момент времени /0, где ha - высота
апогея орбиты.
В обоих вариантах удобно, вместо переменной Л0=/г(/0),
использовать а0 = й(/0).
С учётом близкой к экспоненциальной зависимости плотности
р(Л) = ехр| —— | • р (Ао) атмосферы от высоты h над поверхностью
Земли эффективнее рассматривать уравнение с другим оператором и
логарифмической переменной 1п(Л0 -hH} или 1п(п0 -ан).
На каждой итерации осуществляется прогноз движения
спутника вплоть до попадания КА в плотные слои нижней атмосферы
с падением на поверхность Земли (Событие 1) или в течение
заданного интервала времени (Событие 2). Если эти 2 события
совпадают (с допустимой точностью), считается, что итерационная
процедура завершена, и найдены искомые начальные параметры
орбиты захоронения КА.
Алгоритм и методики итерационной процедуры поиска орбиты
захоронения можно описать следующим образом:
а) Проверка, какой вариант События итерационной процедуры
существует для начальной орбиты КА.
Ь)Уменьшение (или увеличение, в зависимости от предыдущего
События) начальной большой полуоси а0=а(/0) орбиты КА с
большим шагом вплоть до изменения варианта События.
с) При большом интервале между значениями предыдущего д*"'1’ и
текущего шага а(0") реализуется метод золотого сечения
(оптимизация метода дихотомии) для получения нового д^+1).
б)При малых интервалах между Дд"Ч) и а^л) используются метод
секущих или метод хорд, в зависимости от некоторых
характеристик алгоритма. Если на текущем шаге - происходит
Событие 1, дополнительно реализуется расчёт направления
секущей с учётом возмущений большой полуоси от
атмосферного торможения, вычисляемых на начальных витках
445
прогноза. Это дополнительно ускоряет сходимость
итерационного процесса.
е) Итерации повторяются до полной сходимости, т.е. до свершения
обоих Событий в рамках допустимой точности. Осуществляется
контроль сходимости итерационного процесса с возможностью
изменения его методов, описанных выше.
В качестве пояснения, граничное уравнение с оператором А можно
представить в виде функции при Событии 1: А) =
или при Событии 2: h(£),TL, h0) = hmiTi.
Результаты (выходные данные) алгоритма итерационной процедуры:
1) Высота ЛО=ЛЛ(^) пеРигея орбиты захоронения в начальный
момент времени t0. Для круговой орбиты высота перигея
совпадает с постоянной высотой Ло = /г(у0) орбиты.
2) Количество витков, проводимых на орбите захоронения до
"падения". Может быть использовано для подготовки
информации и анализа результатов (в частности, в графиках
или таблицах).
10.1.4. Алгоритм расчёта параметров манёвров перелёта на
орбиту с прогнозируемым временем баллистического
существования. Используя рассчитанные в предыдущем подразделе
величину радиуса круговой орбиты захоронения ту и величину
перицентра эллиптической орбиты захоронения г^, можно рассчитать
затраты суммарной характеристической скорости необходимой для
формирования соответствующей орбиты захоронения.
Изменение большой полуоси эллиптической орбиты
рассчитывается по формуле
где А -тангенциальная составляющая импульса скорости, а И -
скорость в той точке орбиты, где прикладывается импульс скорости.
Из этой формулы следует, что для оптимального изменения большой
полуоси орбиты импульс скорости необходимо ориентировать по
касательной к орбите, а максимальное изменение произойдёт, если
446
импульс прикладывать в перицентре орбиты, где скорость КА
наибольшая.
До начала основного расчёта предварительно вычисляется
скорость в апогее начальной орбиты, а также сами величины апогея и
перигея:
га = <я(1 + е),
гп = а(1-е).
При формировании эллиптической орбиты захоронения
используется один тормозной импульс скорости, прикладываемый в
апогее исходной орбиты. Величина импульса скорости находится по
формуле
4аЧ (10.2)
Для второго типа решения при формировании круговой орбиты
захоронения используются два тормозных импульса скорости.
Первый из импульсов прикладывается в апогее исходной орбиты, а
второй в перигее орбиты, полученной после приложения первого
импульса скорости. Величина первого импульса скорости
прикладываемого в апогее находится по формуле
(г.
(Ю.З)
Затем вычисляются большая полуось а„, фокальный параметр рп
и эксцентриситет еп сформированной первым импульсом орбиты и
скорость в ее перигее Vm:
2
е.
447
Рп =а„(1-е„2)>
Величина второго импульса скорости, прикладываемого в
перигее орбиты, полученной после приложения первого импульса
скорости, находится по формуле
ДИ,2 =
4а2 И
л ял
(Ю.4)
Если начальная орбита круговая, то при выборе момента схода с
орбиты можно учитывать дополнительные условия, например,
выбирать орбиту наиболее безопасную от столкновения с
космическим мусором.
10.1.5. Пример перевода КА на орбиту с прогнозируемым
временем баллистического существования. Задача расчёта
параметров манёвров перевода КА на орбиту с уменьшенным
временем баллистического существования решается в два этапа. На
первом определяется, какой должна быть орбита с уменьшенным
временем баллистического существования, на втором
рассчитываются параметры манёвров, переводящих КА на эту
орбиту. Реализованы две возможности сформировать орбиту с
уменьшенным временем баллистического существования. В первом
случае с помощью одного тормозного импульса скорости,
прикладываемого в апоцентре, формируется эллиптическая орбита,
перицентр которой находится в плотных слоях атмосферы. Во втором
случае с помощью двух тормозных импульсов скорости,
прикладываемых в апоцентре и перицентре, формируется круговая
орбита, расположенная в более плотных слоях атмосферы.
Алгоритмы определения параметров орбит захоронения и
определения параметров манёвров, формирующих орбиту с
уменьшенным временем баллистического существования, описаны
выше.
В таблице 10.4 приведены элементы начальной орбиты КА, а в
таблице 10.5 тяга его ДУ (Р), масса КА (т), удельный импульс (I),
448
время существования орбиты захоронения (dT), шаг выдачи
элементов орбиты (dN), точность формирования орбиты захоронения
(epsR), точность существования орбиты захоронения (epsT)
Таблица 10.4
Hmin 1 Hmax CO u I Q N Дата Time S (bal)
707.7 1 750.3 0 72 98 50 1 20130101 043000.15 0.0045
Таблица 10.5
P(H) т(кг) 1(сек) ёТ(день) dN mode epsR(KM) ерзТ(день)
3000 7000 0.023 9131 3000 2 .001 1
В таблице 10.6 приведена информация о трансверсальном
тормозном манёвре [53], переводящем КА на эллиптическую орбиту:
дата и время начала манёвра, его величина, номер витка, на котором
исполняется манёвр, аргумент широты его начала и конца.
Таблица 10.6
Дата Время dV(M/c) Виток U нач U кон
20130101 045822. 71.55 2 174.95 185.05
В таблице 10.7 приведена информация о двух трансверсальных
тормозных манёврах, переводящих КА на круговую орбиту.
Таблица 10.7
N ман Дата Время dV(M/c) Виток U нач U кон
1 20130101 045850.4 47.90 2 176.62 183.38
2 20130101 054643.3 59.19 2 355.74 364.26
Ниже с шагом в 12000 витков приведена информация об
эволюции элементов круговой и эллиптической орбит [53].
Ballistic 0.4500000000000D-02
Solar Radiation coefficient: 0.3500000000000D-09
449
Эволюция сформированной круговой орбиты захоронения
revolution Semi-major axis Eccentricity Argument of perigee
Inclination RAAN Argument of latitude Time
duration Altitude of perigee
0 0.691518526288D+01 0.188963633604D-02 0.534077652727929D+02
0.9798980982053D+02 0.4998835802642D+02 0.2079163930186D+00
0.3869483449816D+00 0.6737776267169D+00 0.5191467727679D+00
12000 0.6910050637D+01 0.99626895852D-03 0.97675731382D+02
0.9798681758181D+02 0.161677850795D+03 0.1200020791639D+05
0.6902365575951D+00 0.794476952433D+03 0.5174040573780D+00
24000 0.69045256152D+01 0.17642920474D-02 0.5264659611D+02
0.97988180283D+02 -0.8543534012577D+02 0.2400020791639D+05
0.1272884399222D+00 0.15873735431D+04 0.5093786551627D+00
36000 0.68984083484D+01 0.12147105789D-02 0.9581586601D+02
0.97984775341D+02 0.28772504210D+02 0.3600020791639D+05
0.75160647230D+00 0.23792727749D+04 0.5044609776106D+00
48000 0.68915398165D+01 0.1513560635D-02 0.4693031706D+02
0.9798319080282D+02 0.14448699096D+03 0.4800020791639D+05
0.4569529980653D-01 0.317003765099D+04 0.4983694254986D+00
60000 0.68837999432D+01 0.15692059216D-02 0.8693337542D+02
0.97984573775D+02 -0.9810855747773D+02 0.6000020791639D+05
0.600908254738D+00 0.395952909260D+04 0.4880257878580D+00
Flight
72000 0.68746542153D+01 0.10688947970D-02 0.4866613792D+02
0.97984268041D+02 0.2121055056212D+02 0.7200020791639D+05
0.97688345646D+00 0.4747587858528D+04 0.4842600476981D+00
84000 0.6864018972D+01 0.1747816097D-02 0.70246607D+02
0.9797954810D+02 0.1427778386D+03 0.8400020791639D+05
0.3987172583D+00 0.55339666134D+04 0.468034014978D+00
96000 0.6850988423D+01 0.1088092563D-02 0.8351860256D+02
0.97978995099D+02 -0.92957745893D+02 0.9600020791639D+05
0.65934499690D+00 0.631834067892D+04 0.45849168772D+00
108000 0.6833781483D+01 0.1348714535D-02 0.5312903244D+02
0.9797836567636D+02 0.347462338653D+02 0.108000207916D+06
0.699654008843D+00 0.7100175424764D+04 0.441384506914D+00
450
120000 0.6809484442D+01 0.1610268829D-02 0.6796995206D+02
0.97974781525D+02 0.16725486801D+03 0.12000020791D+06
0.27286508923D+00 0.78784892161D+04 0.41456741851D+00
132000 0.6763956514D+01 0.1473728186D-02 0.7866936324D+02
0.979682073356D+02 -0.524058950951D+02 0.132000207916D+06
0.550028992118D+00 0.865114296932D+04 0.369315631040D+00
139573 0.6518598360D+01 0.6637589020D-03 0.2019154822D+02
0.97930094998D+02 0.140965354553D+03 0.141000207916D+06
0.81188654224D+00 0.913143598161D+04 0.131977512142D+00
Эволюция эллиптической орбиты
0 0.698300893939907D+01 0.23641198941D-01 0.377324001414D+01
0.9798970932014D+02 0.4998792065997D+02 0.2118375662256D+00
0.3329191174416D+00 0.6737770013786D+00 0.4365476667912D+00
12000 0.697130821036D+01 0.206665984686D-01 -0.136684079987D+03
0.9798653713232D+02 0.1471525460116D+03 0.1200021183756D+05
0.6336642014066D+00 0.8056102272414D+03 0.4407849960690D+00
24000 0.696004050022D+01 0.219267241667D-01 0.794645134932D+02
0.97983352282208D+02 -0.11327332902293D+03 0.24000211837566D+05
0.45671568048419D+00 0.16085835701008D+04 0.42353845961942D+00
36000 0.694824990590D+01 0.183332692905D-01 -0.707421722178D+02
0.97983265094289D+02 -0.11211388146403D+02 0.36000211837566D+05
0.94559381308499D+00 0.24095504739073D+04 0.43738256021135D+00
48000 0.693543479024D+01 0.188557098128D-01 0.120943138911 D+03
0.97983072289462D+02 0.93474685414810D+02 0.48000211837566D+05
0.13310166721930D+00 0.32084243765405D+04 0.41871106677928D+00
60000 0.692212780045D+01 0.161662067919D-01 -0.440936036024D+02
0.97980213151987D+02 -0.15898563073397D+03 0.6000021 1837566D+05
0.25084808515384D+00 0.4005036380218D+04 0.42793255247802D+00
72000 0.690705780952D+01 0.159891438168D-01 0.123727903817D+03
0.97978789158900D+02 -0.48300702027612D+02 0.72000211837566D+05
0.88504246552474D+00 0.4799181491725D+04 0.41045768514320D+00
84000 0.689049144014D+01 0.127885229966D-01 -0.640357956355D+02
0.97972912852217D+02 0.65859025846478D+02 0.84000211837566D+05
0.64955866942182D+00 0.55906238269624D+04 0.41915043568269D+00
451
96000 0.687147050470D+01 0.133690209724D-01 0.809328236263D+02
0.97974377385835D+02 -0.17604559527898D+03 0.96000211837566D+05
0.25392688997089D+00 0.6379047711272D+04 0.39548862687624D+00
108000 0.684889647758D+01 0.916118511227D-02 -0.14887412646D+03
0.97969547364881D+02 -0.53228668831080D+02 0.10800021183756D+06
0.68754771491512D+00 0.7163888028791D+04 0.39886179535013D+00
120000 0.681821152587D+01 0.79117306044ID-02 -0.22530022704D+02
0.97963043269527D+02 0.75679477060619D+02 0.12000021183756D+06
0.83711257798131D+00 0.79441739332999D+04 0.38260601229904D+00
132000 0.67601 1617528D+01 0.610290374228D-02 0.51041811480D+02
0.97954666432225D+02 -0.14580580772984D+03 0.13200021183756D+06
0.23680918919853D+00 0.8717434169407D+04 0.33612002482384D+00
135000 0.672780453941D+01 0.482607282465D-02 0.59407342434D+02
0.97952018476325D+02 0.71634231611012D+02 0.13500021183756D+06
0.79273351724259D+00 0.89087388864899D+04 0.31212370854329D+00
138531 0.651134593280D+01 0.508719801598D-03 0.260863630465D+02
0.97918439161084D+02 -0.28915308313555D+02 0.14100021183756D+06
0.57465186133049D+00 0.9131503988132D+04 0.12475769843603D+00
Данная информация позволяет построить графики изменения
элементов орбиты в зависимости от времени или числа витков полета
КА. Ниже приведены графики изменения высоты перигея, большой
полуоси и апогея двух рассчитанных орбит захоронения.
sooo Дни
452
I Большая полуось орбиты
Ниже приведён график изменения высоты перигея и апогея
1000 JOOC 1000 4000
5?00 6000 7000 6000 ?ооо Дни
10.2. Задача удаления космического мусора.
Чтобы засорённость космического пространства не
увеличивалась, надо не только переводить отработавшие свой ресурс
КА на орбиты захоронения, но и уводить на эти орбиты крупные
фрагменты космического мусора, уже находящиеся в космосе. В
первую очередь необходимо переводить на орбиты захоронения
последние ступени ракет-носителей, разгонные блоки и крупные КА.
453
Столкновения крупногабаритных космических объектов (ККО) с
другими космическими объектами сопровождаются образованием
значительного числа осколков, обладающих большой кинетической
энергией [168]. Это может привести к лавинообразному росту числа
опасных космических объектов. Этот эффект известен под названием
синдром Кесслера [157], [168].
Согласно результатам исследований [130], [168], удаление 3-5
крупных объектов в год с низких околоземных орбит в сочетании
[167] с выполнением требований Межагентского комитета по
космическому мусору является единственным способом
предотвращения цепной реакции роста объектов космического
мусора в будущем. Однако следует отметить, что к точности этих
рекомендаций следует относиться с определенной степенью
осторожности из-за сложности прогнозирования движения КА на
длительные интервалы времени. В первую очередь это связано
ошибками прогнозирования солнечной активности.
Существует множество проектов возвращения ККО. Наиболее
эффективными являются две схемы, в которых один специально
посылаемый KA-сборщик может убрать несколько ККО.
В первой схеме предусматривается последовательный облёт
некоторого количества объектов с их сбором, либо с внедрением в их
сопло малых КА с автономным управлением и запасом топлива для
тормозного воздействия, достаточного для перевода ККО на орбиту с
уменьшенным временем баллистического существования.
Вторая схема предусматривает использования одного КА,
маневрирующего между объектами и за счёт своей двигательной
установки последовательно уводящего их на орбиты захоронения.
Такая схема менее эффективна, но позволяет быстрее перелететь к
следующему объекту. В данном разделе будут рассмотрены обе
схемы и проведено их сравнение.
10.2.1. Геометрические характеристики крупных
космических объектов. В таблице 10.8 приведены геометрические
характеристики некоторых объектов перечисленных выше типов. На
основании анализа этой таблицы можно сделать вывод, что площадь
их минимального поперечного сечения превышает 5 м2 [21].
454
Таблица 10.8.
Тип объекта Диаметр Длина Минимальная площадь Максимальная площадь
м м2
3-я ступень PH «Протон» 4.098 4.11 13.19 16.84
3-я ступень PH «Союз» 2.66 6.745 5.56 17.94
2-я ступень PH «Зенит» 3.9 10.4 11.95 40.56
2-я ступень «Ариан-5» 3.96 3.356 12.32 13.29
2-я ступень Тор- Аджена-А 1.52 4.73 1.81 7.19
РБ «Бриз» 2.49 2.654 4.87 6.61
РБ «Фрегат» 3.35 1.5 8.81 5.025
РБ «Центавр» 3.05 12.68 7.31 38.67
10.2.2. Компактные группы крупных космических объектов.
В силу выраженной целевой направленности всей совокупности
запусков КА, сформировались несколько компактных групп ККО на
низких околоземных орбитах. При рассмотрении каталога NORAD
[171] можно выделить пять групп объектов с площадью поперечного
сечения более 5 м2 [21], расположенных на низких околокруговых
орбитах (табл. 10.9).
Ширина интервала значений большой полуоси у орбит объектов
второй, третьей и четвертой групп не превышает 50 км. У первой
группы меньше 90 км.
Последняя группа обязана своим появлением запускам КА на
солнечно-синхронные орбиты, следовательно, наклонение
составляющих ее объектов является функцией высоты, а сама высота
орбит изменяется в диапазоне 527 км.
Для изменения высоты орбит объектов выделенных групп на
100 км требуется примерно 50 м/с, тогда как для поворота плоскости
орбиты на 1° необходимо примерно 130 м/с. Таким образом, наиболее
критичным является отличие по наклонению, которое и было
использовано для выделения этих пяти групп. Кроме наклонения в
455
таблице приведено число ККО, составляющих группу и диапазон
значений большой полуоси.
Таблица 10.9
Номер группы Наклонение орбит элементов группы, градусы Диапазон значений большой полуоси, км Количество ККО, входящих в группу
1 71 7193-7281 23
2 74 7122-7152 11
3 81 7211-7262 28
4 83 7318-7358 52
5 97-100 6973-7500 46
Группы определялись по каталогу КО на 21 ноября 2013года.
Время, на которое берётся каталог, не существенно, т.к. все оценки
носят качественный характер и служат для определения возможности
и эффективности различных схем возвращения ККО.
10.2.3. Портрет эволюции отклонений ДВУ. Для построения
схем облёта объектов из выделенных групп ККО необходимо знать
текущую взаимную ориентацию орбитальных плоскостей.
Непосредственное рассмотрение динамики изменения значений ДВУ
объектов приводит к усложнению задачи анализа схем облёта, так как
орбитальные плоскости достаточно быстро поворачиваются
примерно с близкими по значению скоростями. Требуется выбрать
характеризующий положение орбитальной плоскости параметр,
который был бы более статичным и непосредственно связан с
корректируемыми отклонениями. В качестве такого параметра может
выступать Д^е[-л,+л] - отклонение ДВУ всех z-х объектов от
ДВУ одного специально выбранного объекта с фиксированным
порядковым номером kel;m(m - число объектов в группе). При
таком подходе зависимости ДГ^, (?) для орбит с близкими
параметрами (которых в группах №1-4 большинство) будут
представлять собой линии с малым углом наклона, а угловое
относительное расстояние Д^Л (1) будет медленно изменяющимся во
времени. Выбор объекта с номером к, относительно которого
рассчитываются относительные угловые расстояния, лучше
456
осуществлять так, чтобы большинство прямых Дад имело угловой
коэффициент одного знака.
Графики эволюции отклонений ДВУ для выделенных групп
приведены на рис. 10.2-10.6 (на временном интервале 10 лет).
Именно эти отклонения предстоит корректировать при
последовательном перелёте от одного ККО к другому. Анализ этих
отклонений позволяет выбрать оптимальную схему облёта ККО
АП.ъ0
Рис. 10.2. Портрет эволюции отклонений ДВУ элементов группы X 1
457
Рис. 10.3. Портрет эволюции отклонений ДВУ элементов группы №2
Рис. 10.4. Портрет эволюции отклонений ДВУ элементов группы №3
458
Рис. 10.6. Портрет эволюции отклонений ДВУ группы ККМ №5
459
10.2.4. Энергетические аспекты задачи облёта ККО. В том
случае, когда портрет эволюции ДВУ содержит преимущественно
квазипараллельные прямые (рис. 10.2 - 10.4), для перелёта между
тремя ККО необходимо выполнить следующую последовательность
действий. После перелёта KA-сборщика в окрестность объекта №1
для обеспечения возможности внедрения малого КА в сопло этого
объекта, маневрирующий KA-сборщик осуществляет перелёт к
объекту №2 (рис. 10.7). Для этого импульсом АК] обеспечивается
перевод KA-сборщика с орбиты объекта №1 на орбиту ожидания (под
импульсом здесь подразумеваются, как правило, два включения
двигательной установки, локализованные на одном витке). По
достижении нужной ориентации плоскости орбиты ожидания и
требуемой фазовой разницы при помощи импульса АИ2
осуществляется перевод KA-сборщика в окрестность объекта №2, для
обеспечения возможности внедрения малого КА в сопло этого
объекта. Далее описанные действия повторяются в виде импульсов
А Из и АР) для достижения объекта №3 и т.д.
Рис. 10.7. Перелёт между орбитами на портрете эволюции отклонений
ДВУ в случае, когда параметры орбит ККО в группе имеют малые
взаимные отклонения Да и Д/
При расчёте импульсов ДИЬ АИ2 предполагается, что начальная
и конечная орбиты имеют близкие, но разные значения большой
полуоси (их разница Аа0), возможны незначительные отличия по
наклонению (Az0), отклонение ДВУ AQ0 может быть любым по
величине. Разница эксцентриситетов мала и существенно не влияет
460
на характер решения, поэтому ей можно пренебречь при оценке
суммарной характеристической скорости (СХС) манёвров.
Предполагается, что импульсы скорости, имеющие трансверсальные
и бинормальные составляющие, прикладываются на экваторе на двух
интервалах маневрирования, расположенных соответственно на
первом и на последнем витках перелёта. Также предполагается, что
перелёт осуществляется за N витков полёта ККО. За счёт
трансверсальных составляющих двух импульсов скорости первого
интервала маневрирования большая полуось орбиты изменяется
таким образом, чтобы, двигаясь по новой (фазирующей) орбите, КА
компенсировал имеющееся в начальный момент отклонение по
аргументу широты Aw0 и необходимую разницу в числе витков
перелёта п, при этом за счёт целенаправленного изменения скорости
прецессии орбиты корректируется также значительная часть углового
рассогласования по ДВУ AQ0- Бинормальные составляющие
импульсов скорости, необходимые для компенсации разницы в
наклонении Д/о, также так распределены между интервалами
маневрирования, чтобы нужным образом влиять на скорость
прецессии фазирующей орбиты.
Необходимые значения суммы трансверсальных и боковых
составляющих импульсов скорости первого &Vtl=&VtU+&Vti2,
AKzI=AKzI1+AKzI2 и второго ДКд^ДКдц+ДКде, ДКгП=ДКгШ+Д KzII2
интервалов маневрирования могут быть определены по формулам
(7.34а)-(7.34в):
д/ = jz Г N^ao Ацо+»~|
" °\_2(N + n)a0 3(У + и)ф
ДИ =jz ^1_ди
у Ш у О ~ у /I ’
2а0
Гуд.. 4(A»;+H)5Q + 3(5Qn-AQ0)
N + n ° 380 tgz
AKzlI=K0Az0-AKzI,
где 8Q - изменение долготы восходящего узла орбиты ККО за один
виток.
461
При перелёте из текущего положения к очередному ККО
требуется найти минимум функционала:
ди = 7дг„2+д^ + л/д^+ди2 .
Разницу в количестве витков полёта активного КА и цели п в
первом приближении можно определить как
Одномерная оптимизация по п может быть выполнена численно,
учитывая, что формула (10.5) даёт хорошее начальное приближение
для этого параметра. Необходимо помнить, что п - целое число,
следовательно, только за счёт подбора п нельзя убрать все
отклонение ДВУ, но остающаяся часть не превышает 1/25Q.
10.2.5. Выбор времени перелёта к следующему ККО.
Количество витков перелёта между двумя объектами N может быть
как фиксированным, так и выбираться исходя из величины
рассогласования по ДВУ, что предпочтительнее, так как учитывается
реальное пространственное распределение ККО. Затраты СХС
уменьшаются при увеличении продолжительности перелёта. Однако
при построении схем облёта существуют временные ограничения,
связанные как с нежеланием длительного ожидания, так и с чисто
техническими причинами. Таким образом, требуется искать
компромиссное значение продолжительности перелёта, которое
находится в области, где затраты ДИ перестают резко уменьшаться с
ростом N.
Зависимость, связывающая N с и позволяющая найти
компромиссное значение N, может быть получена для каждой группы
ККО на основе визуального анализа графиков ДИ(У) (рис. 10.8) для
различных ДО,/,.
На координатной плоскости ДИ// необходимо провести такую
медленно возрастающую выпуклую кривую, которая будет
пересекать графики ДИ(У), построенные для различных ДО,4 в
компромиссной области. По точкам пересечения можно построить
зависимость У(ДО,Д, которая (для группы ККО №4) достаточно точно
аппроксимируется линейной функцией [22]:
462
N(Mlik) = 69.32|ДОЙ°|+ 250.6
(10.6)
Очевидно, что описанный подход к поиску компромиссного числа
витков перелёта не является удобным для использования. С другой
стороны, в данной задаче не удаётся получить аналитическую
зависимость для нахождения компромиссного числа витков, как это
имеет место в случае перелёта в плоскости орбиты (глава VII).
Рис. 10.8. Зависимость затрат СХС от числа витков перелёта
при разных АО,* для группы ККО №4
В качестве альтернативы можно предложить следующий подход.
Затраты СХС в рассматриваемой задаче обусловлены преимущественно
величиной отклонения по ДВУ, их величина может быть оценена по
формуле (7.28):
2 |(ДН; + и)2 (ЗДО0 - (4ДМ; + 7и)5О)2
I sin i
Считая в первом приближении параметр п по формуле:
_ 3AQ0 - 4Дц„5О
П°р' ~ 750
463
функцию (7.28) можно привести к виду:
АК = -И-------°----
3 7Sfl# + 3AQ0
(Ю.7)
Одним из способов получить аналитическое решение для
нахождения N является введение функционала вида:
F = А/(А,...) + f(N)
(Ю.8)
В формуле (10.8) второе слагаемое представляет собой штрафную
функцию, которая в отличие от первого слагаемого возрастает с
увеличением аргумента. Анализ различных вариантов (линейные,
логарифмические, степенные штрафные функции, рис. 10.8) показал,
что для группы ККО №4 наилучшие результаты получаются, когда эта
функция имеет вид [23]
f(N) = ky[N (10.9)
где ^0.233917.
Компромиссное значение N может быть определено из
уравнения:
-56K05QAQ0Va^ + £(75QA + 3AO0)2 =0. (10.10)
10.2.6. Определение последовательности облёта группы
ККО, орбиты которых близки по большой полуоси и
наклонению. На следующем этапе необходимо определить
последовательность облёта элементов внутри каждой группы.
Конфигурация первых трёх групп, орбиты объектов которых близки
по большой полуоси и наклонению, на портрете эволюции ДВУ мало
меняется с течением времени, что позволяет применить для них
последовательный облет объектов в направлении естественной
прецессии ДВУ [135]. Перед каждым новым перелётом
осуществляется поиск объекта, перелёт к которому из текущего
положения за заданные N витков является наименее затратным по
СХС, что определяется в основном величиной углового
рассогласования AQt. Начало перелёта (первый объект) выбирается
таким образом, чтобы исключить перелёт между двумя соседними
самыми удалёнными друг от друга по ДВУ их орбит объектами. Так
как облёт всей группы занимает достаточно большое время, то
взаимное угловое положение орбит последних объектов за время
464
облёта может измениться. Это необходимо учитывать, пересчитывая
после каждого перелёта значения ДВУ орбит оставшихся объектов.
10.2.7. Результаты расчётов манёвров облёта объектов групп
№1, №2, №3. В качестве примера рассмотрим расчёт СХС манёвров
активного КА для облёта группы ККО №3 [22].
Орбиты объектов этой группы имеют наклонение примерно 81°.
Номера объектов группы №3 в каталоге NORAD [171] и некоторые
элементы орбит на ноябрь 2013 г представлены в табл. 10.10.
Таблица 10.10
> NORAD а, км град /, град
13771 7242 35.277 81.2
7493 7231 26.186 81.3
5732 7244 15.762 81.2
5918 7218.5 2.758 81.2
7275 7225.5 336.582 81.3
7210 7239 334.788 81.2
8846 7235 325.465 81.3
6393 7243 316.731 81.3
9904 7245 308.01 81.2
5118 7242 288.046 81.3
11963 7232 287.289 81.3
12457 7245 280.591 81.3
13403 7240.5 274.718 81.3
11166 7239 268.278 81.3
7364 7220.5 226.695 81.2
8800 7262 212.623 81.3
8027 7240 207.415 81.3
13719 7215.5 180.447 81.3
9482 7245.5 166.249 81.2
11608 7224 151.181 81.2
8520 7262 132.137 81.2
7715 7227.5 126 81.2
6257 7245 125.895 81.2
4420 7236 121.222 81.2
9662 7242.5 116.194 81.2
10515 7248.5 102.624 81.3
12646 7211.5 100.14 81.2
7575 7235.5 83.823 81.3
465
Разница по ДВУ между орбитами последнего (№ 7575) и
первого (№ 13771) объектов в момент начала облёта максимальна и
составляет 48.5°. В табл. 10.10 ККО этой группы упорядочены по
убыванию ДВУ так, чтобы исключить этот самый затратный перелёт.
Таблица 10.11
Порядок переходов при фиксир-ном N=1000 ДР, м/с Порядок переходов при гибком N Гибкое количество вит-в У(ДЩ) Время, сутки др, м/с
1 2 3 4 5 6
1-2 211 1-2 1293 91.6 167
2-3 222 2-3 1483 105.1 149
3-4 325 3-4 1968 139.5 182
4-5 499 4-5 2601 184.3 189
5-6 57 5-6 770 54.6 108
6-7 144 6-7 752 53.3 129
7-8 155 7-8 1005 71.2 139
8-9 289 8-9 2007 142.2 167
9-10 320 9-10 1591 112.7 174
10-11 89 10-11 885 62.7 137
11-12 48 11-12 367 26 26
12-13 168 12-13 1185 84 153
13-14 156 13-14 1093 77.5 147
14-16 985 14-16 4896 346.9 213
16-17 340 16-17 2576 182.5 199
17-15 56 17-15 2044 144.8 177
15-18 791 15-18 3499 247.9 209
18-19 207 18-19 1117 79.2 128
19-21 521 19-21 2141 151.7 169
21-20 132 21-26 2306 163.4 193
20-23 231 26-23 1243 88.1 147
23-26 107 23-20 422 29.9 61
26-24 168 20-25 1555 110.2 156
24-25 3 25-24 679 48.1 113
25-22 58 24-22 1026 72.7 145
22-28 341 22-27 5456 386.6 232
28-27 564 27-28 6457 457.6 204
Д\\, м/с 7 187 4 213
Общая продолж-сть 27 000b 1913.3с 52 417 витков 3714.3 суток
В табл. 10.11 представлены результаты расчётов СХС манёвров
для перелётов с фиксированным числом витков N=1000 (столбцы 1 и
466
2) и для перелётов е использованием «компромисс, числа виткот
N в зависимости от рассогласования по ДВУ (столбцы 3
Описанная выше методика была также применена Тля оасчёта
СХС манёвров облёта групп ККО №1 и №2 [22], результаты этих
расчётов приведены соответственно в табл. 10.12 и в табл 10 13
Таблица 10.12
Порядок переходов при фиксированном количестве витков N=1000 ди, м/с Порядок переходов при гибком количестве витков Гибкое количество витков У(ДП,,) Время, сутки ДИ, м/с
1 2 3 4 5 6
1-2 14 1-2 504 35.7 16
2-3 123 2-3 1349 95.6 94
3-4 11 3-4 598 42.4 21
4-5 257 4-5 2520 178.5 105
5-7 158 5-7 1709 121 90
7-8 65 7-8 1009 71.5 68
8-9 100 8-9 1285 91 81
9-10 77 9-10 1100 77.9 73
10-12 338 10-12 3225 228.5 122
12-13 92 12-13 1369 97 76
13-11 135 13-15 2134 151.2 94
11-15 211 15-11 1263 89.5 134
15-14 121 11-14 1501 106.3 90
14-17 378 14-17 1528 108.3 183
17-16 105 17-16 1710 121.2 96
16-18 213 16-18 2122 150.3 99
18-19 343 18-19 2905 205.8 104
19-21 230 19-21 2313 163.9 102
21-20 540 21-23 6303 446.6 118
20-22 176 23-22 1241 87.9 82
22-23 18 22-20 5346 378.8 162
23-6 1104 20-6 3805 269.6 223 .
AVZ, м/с 4 809 2 233
Общая продолжительность 22 000 витков 1558.7 суток 46 839 витков 3318.5 суток
467
Данные столбцов 1 и 3 показывают, между какими двумя ККО
осуществляется перелёт. В столбцах 2 и 6 показаны затраты СХС,
необходимые для осуществления этого перелёта соответственно при
фиксированном N и при «компромиссном» N. В столбцах 4, 5
приведены значения самой «компромиссной» продолжительности
перелётов, соответственно, число витков N и время перелёта в сутках.
Из табл. 10.11 следует, что использование «компромиссного» числа
витков позволяет уменьшить затраты СХС почти вдвое, но даже в
этом случае затраты СХС превышают 4 км/с, что слишком много для
современных КА.
Таблица 10.13
Порядок переходов при фиксированном количестве витков N=1000 ди, м/с Порядок переходов при гибком количестве витков Гибкое количество витков мдад Время, сутки ди, м/с
1 2 3 4 5 6
1-2 57 1-2 633 43.9 89
2-3 836 2-3 5026 348.8 183
3-4 306 3-4 2066 143.4 176
4-5 612 4-5 3517 244 182
5-6 616 5-6 3429 237.9 192
6-8 290 6-8 1749 121.4 152
8-7 69 8-7 1216 84.4 150
7-9 530 7-9 3324 230.7 196
9-10 180 9-10 855 59.3 116
10-11 101 10-11 819 56.8 104
AVZ, м/с 3 597 1540
Общая продолжительность 10 000 витков 693.9 суток 22 634 витков 1570.6 суток
Большой интерес представляет работа [141], в которой
тщательно рассмотрены все вопросы, связанные с возвращением
ККО. В данной работе кроме основного KA-сборщика, оснащённого
двумя манипуляторами и малыми КА, предлагается использовать
также KA-заправщики. Когда основной KA-сборщик израсходует
запасы горючего и малых КА, на орбиту, которую он занимает в этот
момент, выводится КА-заправщик. KA-сборщик стыкуется с КА-
468
заправщиком, восполняет запасы горючего и малых КА и продолжает
облёт оставшихся ККО. Приведённые в [141] результаты расчётов
показывают, что вес самого KA-сборщика составляет примерно
600 кг. Запасы горючего на каждом КА позволяют истратить до
2500 м/с СХС, запас малых КА на одном KA-заправщике может быть
6-7 штук.
Если рассматривать только возможности по СХС, то её ресурсов
на КА-сборщике и одном KA-заправщике хватает, чтобы облететь все
ККО группы №3. Однако количество необходимых малых КА вдвое
превышает их располагаемое количество на одном КА-заправщике,
поэтому придётся использовать ещё два KA-заправщика и вместо
части горючего запасать на них больше малых КА.
Для облёта 23 ККО группы №1 необходимо истратить 2233 м/с
СХС. Такие затраты СХС приемлемы для KA-сборщика, описанного
в работе [141], однако число требуемых малых КА слишком велико,
поэтому придётся использовать ещё два KA-заправщика. И на КА-
сборщике, и на KA-заправщиках часть горючего необходимо
замениться на малые КА.
Для облёта 11 ККО группы №2 необходимо истратить 1540 м/с
СХС. Возможности KA-сборщика по СХС существенно выше, но не
хватает малых КА, чтобы облететь все объекты группы, поэтому
необходим ещё один КА-заправщик.
10.2.8. Диагональные решения. В группах ККО №4 и №5
присутствует значительное число объектов, орбиты которых имеют
отличия по большой полуоси и наклонению, достаточные для того,
чтобы прямые относительного рассогласования по ДВУ имели
пересечения (рис. 10.5, 10.6). На рис. 10.9 изображены прямые,
соответствующие объектам с условными номерами №1, №2, №3.
После сближения с объектом №1, находясь на его орбите,
достаточно приложить только один импульс А Р], чтобы сблизиться с
объектом №2, в момент совпадения ДВУ плоскостей их орбит, и
также единственный импульс ДР'-, для последующего сближения с
объектом №3. Таким образом, количество включений двигательной
установки на участке движения от объекта №1 к объекту №3 может
быть уменьшено вдвое. Существенно уменьшаются и затраты СХС,
так как пропадает наиболее затратная по требуемой СХС коррекция
отклонения по ДВУ.
469
A
Рис. 10.9. Варианты перелёта, на портрете эволюции отклонений
ДВУ в случае, когда параметры орбит ККО в группе
имеют значительные взаимные отклонения Да и Дг
Линию ДЦД/), соответствующую одной из орбит и
пересекающую две линии, соответствующие другим орбитам,
назовём «диагональю». Для группы №5 имеется возможность найти
несколько веток, состоящих из последовательности диагоналей,
позволяющих облететь большую часть ККО, входящих в эту группу.
Предложенное решение в дальнейшем будет упоминаться как
"диагональное".
В момент пересечения прямых ДЦД/) на портрете эволюции
ДВУ орбиты двух соответствующих ККО имеют равные значения
ДВУ. Следовательно, орбиты этих объектов могут отличаться только
по большой полуоси, вектору эксцентриситета, наклонению и
аргументу широты. Численный и численно-аналитический алгоритмы
решения задачи встречи короткой и средней продолжительности,
которые можно использовать для расчёта манёвров сближения с
новым объектом, приведены в главах 4, 5, 6.
10.2.9. Поиск диагональных решений. Как можно видеть,
прямые отклонений ДВУ ДЦД/) на рис. 10.6 многократно и хаотично
пересекаются. Последовательный облёт объектов группы №5
становится неэффективным. Для решения задачи поиска веток-
решений в условиях большого количества прямых и их взаимных
пересечений целесообразно применить некоторые элементы теории
графов.
470
Для поиска диагонального решения задачи облёта ККО внутри
группы необходимо составить Т;7 - матрицу пересечений прямых
ДЦДО, аналог классической матрицы смежности [39]:
Матрица Т является симметрической, а её диагональ составляют
символы «оо», описывающие совпадение прямых Д^, (?). Если точка
пересечения прямых ДП^Г) и ДЦД/) существует, то в полях элемента
titj указывается её координата t, а если точек пересечения нет (или
пересечение имеет место при t—*<ю), то вместо элемента матрицы
ставятся прочерки. Поиск диагональных решений осуществляется
при помощи итерационного алгоритма пробега по узлам графа.
Выбранные из всего многообразия веток решения должны
удовлетворять следующим критериям:
узлы графа должны располагаться в диапазоне значений
ДО,, е[-л,+л];
направление увеличения длины ветки должно совпадать с
увеличением t;
• каждая из точек пересечения (узел графа) содержит два входа и
два выхода, маловероятно, что три и более прямых ДО,, (/)
пересекутся в одном узле;
каждая прямая ДО,, (/) может быть использована только один раз;
из двух веток приоритет отдаётся более длинной;
из двух веток одинаковой длины приоритет отдаётся той, у
которой сумма модулей угловых коэффициентов задействованных
прямых Д<Д, (Г) меньше.
При использовании диагонального решения продолжительность
перелёта к следующему ККО целиком определяется взаимной
удалённостью точек пересечения прямых ДЦ, (г) на портрете
эволюции отклонений ДВУ.
Для поиска решения с диагональными переходами
используются три цикла.
471
Внутренний цикл. Пусть движение начинается с объекта №1.
Тогда в первой строке матрицы Т необходимо найти первый элемент
/17^"оо" и Пусть это будет элемент Zlj2. Рассчитывается
импульс скорости необходимый для перелёта на новую орбиту.
Рассчитав ДР], необходимо объявить 6./=C,,i="-", т,1=\,...,п, чтобы
исключить дальнейшее использование Пой ветки, а также присвоить
всем tmj, у которых tmJ< ?Ь2. После перехода на прямую №2,
требуется найти первый элемент Z2i#"oo" и И так до тех пор,
пока не возникнет ситуация, когда с узла или нет возможности
отыскать удовлетворяющий ограничениям элемент /т+1,л или /=46
(количество объектов ККМ в группе №5), то есть найден конец ветки
с максимальной длиной. Как только дальше возможности идти нет,
нужно записать в память номера объектов ветки, затраты СХС, из
матрицы Т вывести последнюю пару tmj присвоив ей значение и
повторить поиск веток до тех пор, пока алгоритм не приведёт к
элементу с координатами [1;1]. Задача внутреннего цикла -
определить ветку наибольшей длины при начале облёта с первого
объекта.
Средний цикл. Зафиксировав самую длинную ветку с началом в
первом объекте и затраты СХС, необходимо вызвать внутренний
цикл для строки №2, считая объект №2 точкой старта, и так п раз. По
итогам из п промежуточных вариантов можно будет выбрать самую
длинную ветку для первого KA-сборщика, работающего по
«диагональной» схеме. Задача среднего цикла - определить
приоритетную точку старта и приоритетную ветку, исходящую из
этой точки и определяющую первое решение задачи.
После выполнения среднего цикла и сортировки найденных
веток по их длине может возникнуть ситуация, когда наибольшую
длину при текущей конфигурации матрицы Т имеют несколько
полученных решений. В этом случае необходимо косвенно сравнить
энергетические затраты на облёт этих качественно равнозначных
веток. На портрете эволюции отклонений ДВУ угол между прямыми
ДО,Д7) определяется разностью их угловых коэффициентов, а они
зависят от величины фокального параметра и наклонения.
Следовательно, чем больше отличия Др и Д/ у орбит двух объектов,
тем больший угол будут образовывать соответствующие прямые
Д£1,Д/). Поэтому в качестве косвенной энергетической оценки для
каждой найденной ветки необходимо вычислить сумму изменений
угловых коэффициентов при переходе от одного объекта к другому.
472
Таким образом, в конце среднего цикла из всех веток
наибольшей длины выбирается та, у которой величина суммы
изменения угловых коэффициентов принимает наименьшее значение.
Объекты ККМ, образующие выбранное решение, выводятся из
начальной матрицы То, и в рамках внешнего цикла вновь повторяется
поиск ветки наибольшей длины среди оставшихся объектов.
Внешний цикл. Необходимо вывести из начальной матрицы То
все элементы, использованные в найденном 1-ом решении, и
повторить внутренний и средний циклы заново. Задача внешнего
цикла - получить набор всех возможных «диагональных» веток,
упорядоченных по убыванию их длин и охватывающих максимально
возможное количество объектов.
После осуществления трёх циклов часть объектов оказывается
охваченной «диагональными» переходами, а облёт остальной части
может быть рассчитан по упомянутой выше последовательной схеме,
по которой рассчитывался облёт первых трёх групп ККМ.
10.2.10. Пример расчёта манёвров облёта группы №5.
Орбиты ККО группы №5 имеют наклонение в диапазоне 97.1°-100.4°.
Из нескольких областей околоземного пространства, где наиболее
высока вероятность столкновений, область, относящаяся к солнечно-
синхронным орбитам, требует наибольшего внимания [141].
Информация о ККО группы №5 по состоянию на ноябрь 2013 г.
представлена в таблице 10.14, объекты упорядочены по убыванию
ДВУ. В результате применения описанного выше алгоритма были
найдены два диагональных решения, в сумме охватывающие 30 (18 и
12) ККО из 46 [23].
Таблица 10.14
N NORAD а, км
град
1 27940 7052 170.1286 97.8
2 7946 7430.5 169.7677 100.1
3 20323 7105 166.1984 97.1
4 27006 7367.5 165.7893 99.2
5 28932 6979.5 163.8276 98.3
6 28059 7090.5 149.0105 98.7
7 11081 7315.5 143.212 99.7
8 32959 7125.5 127.9842 . 99
9 33500 6989 126.2109 _ 98.3
473
10 13778 7235 106.7009 100.1
11 25979 6973.5 96.3879 98.2
12 2174 7495.5 90.2609 100.4
13 27601 7159 65.798 98.5
14 32063 7098.5 55.4669 98.2
15 26387 7042 42.8234 98.1
16 27422 7166.5 37.8068 98.3
17 20791 7291 31.147 99.2
18 36089 7100 23.6017 98.1
19 16615 7159 14.203 98.8
20 28499 7005.5 11.2445 98.2
21 29713 6995 351.2681 97.6
22 21610 7129.5 343.3011 98.8
23 21689 7259 338.5724 99.5
24 37932 7191 336.9718 98.4
25 25400 7178.5 336.8603 98.3
26 10704 7308 333.6947 98.8
27 28050 7208.5 327.0023 98.5
28 815 7173 325.7258 99.9
29 23343 7013.5 325.2177 98.2
30 20443 7139.5 320.7193 98.8
31 27387 7144 315.5157 98.3
32 25732 7205 309.6141 98.9
33 31114 7200 306.3191 98.4
34 19468 7253.5 304.8742 99
35 25261 7153.5 303.4229 98.4
36 22830 7159.5 300.7151 98.8
37 25861 7008.5 300.5517 97.9
38 27432 7217 300.2821 98.8
39 28651 7027.5 299.5225 97.8
40 18961 7262 298.1063 99.3
41 23561 7139.5 293.7485 98.7
42 38341 6999.5 291.5595 98.5
43 23828 7191 290.3812 98.6
44 23324 7207.5 279.5703 98.9
В таблице 10.15 в столбцах 1 и 4 приведены полученные ветки
(номера объектов в последовательности осуществляемых перелётов),
а в столбцах 2 и 5 затраты СХС на перелёт к соответствующему
объекту. В столбцах 3 и 6 время перелёта в сутках. Предполагается,
что для каждой ветки используется свой активный КА.
474
Таблица 10.15
Первое решение Д V, м/с Время, сутки Второе решение Д V, м/с Время, сутки
1 2 3 4 5 6
37-38 161 60 30-26 87 161
38-40 77 5 26-32 54 244
40-33 127 52 32-25 83 88
33-35 24 16 25-36 67 52
35-41 41 100 36-10 174 1270
41-24 48 497 10-13 221 448
24-34 94 130 13-15 81 122
34-21 228 303 15-17 193 78
21-3 89 429 17-1 221 554
3-5 177 171 1-29 57 1
5-27 124 51 29-4 225 458
27-8 83 213 - -
8-28 127 52 - -
28-16 209 331 - -
16-44 90 30 - -
44-18 123 146 - -
18-46 69 356 - -
AVl, м/с по веткам 1 891 767
Время по веткам в сутках 2942 3476
| Д\\, м/с 2658
Из таблицы 10.15 следует, что полученные затраты СХС для
первой ветки составляют 1891 м/с, для второй - 767 м/с. Для облёта
первой ветки придётся использовать один KA-сборщик и два КА-
заправщика. Запасов СХС на KA-сборщике достаточно для облёта
всей ветки, но необходимо пополнять запасы отделяемых модулей.
Для облёта второй ветки можно использовать один KA-сборщик и
один КА-заправщик.
Для облёта 30 объектов достаточно всего 2658 м/с. Таким
образом, наличие диагональных пересечений на портрете эволюции
отклонений ДВУ позволяет уменьшить по сравнению с
последовательным облётом, использованным для групп ККМ №1-3,
как количество исполняемых манёвров, так и затраты СХС на облёт
объектов группы.
475
Результаты расчёта последовательного облёта ККО, не
охваченных диагональными решениями, приведены в таблице 10.16.
Таблица 10.16
Порядок перелётов Количеств о витков А(ДП,Д Время, сутки А И, м/с Продолжительность перелёта при одной заправке ДИ, м/с при одной заправке
1 2 3 4 5 6
2-6 1669 118.2 248 11439 витков 810.1 суток 2190
6-7 660 46.7 387
7-9 1350 95.6 247
9-11 2368 167.7 282
11-12 1185 83.9 681
12-14 4207 298 345
14-20 706 50 187 12893 витка 913.1 суток 2260
20-19 406 28.8 242
19-23 970 68.7 356
23-22 804 56.9 113
22-42 1599 113.3 200
42-31 6068 429.8 361
31-43 693 49 265
43-39 1373 97.2 137
39-45 274 19.4 399
AVy, м/с 4450
Продолжи- тельность 24332 витков 1723.2 суток
Данные первого столбца показывают, между какими двумя ККО
осуществляется перелёт. Во втором столбце приведены
рассчитываемые по формуле (10.10) значения компромиссной
продолжительности перелётов N, а в третьем столбце
продолжительность соответствующего перелёта в сутках. В
четвёртом столбце показаны затраты СХС, необходимые для
осуществления этого перелёта.
Для облёта 16 объектов необходимо 4450 м/с. Осуществить увод
этих объектов можно с помощью одного активного КА и одного КА-
заправщика. Результаты распределения ККО по КА приведены в пятом
и шестом столбцах.
476
10.2.11. Расчёт манёвров облёта группы №4. Номера ККО
группы №4 в каталоге NORAD [171] и некоторые элементы их орбит
по состоянию на ноябрь 2013 г. представлены в таблице 10.17.
Орбиты объектов этой группы имеют наклонение примерно 83°,
значения большой полуоси лежат в диапазоне 7318-7358 км.
Таблица 10.17
N NORAD а, км Я, | i,
градусы
1 11289 7329.5 73.6622 82.9
2 21131 7334.5 340.672 82.8
3 24678 7340.5 172.2879 82.9
4 22208 7342.5 94.1841 82.9
5 26819 7343.5 263.8941 83
6 21876 7346 83.1548 83
7 18710 7348 142.5439 83
8 22007 7349 241.8947 83
9 12682 7349.5 118.766 82.9
10 24955 7350.5 252.8786 83
И 25569 7351 265.5485 82.9
12 27819 7351 109.5972 83
13 20509 7351.5 272.864 82.9
14 21231 7352.5 171.8711 82.9
15 32053 7356 167.4046 83
16 23774 7356.5 111.474 83
17 11327 7358 230.8018 82.9
18 15100 7319.5 19.4841 82.5
19 15517 7318 318.0135 82.5
20 16409 7318 236.493 82.5
21 16736 7318 263.3544 82.5
22 17242 7323 257.8371 82.5
23 18313 7320.5 260.4844 82.6
24 22784 7323 257.1819 82.6
25 6829 7345.5 194.4667 82.9
26 10918 7345 121.9273 82.9
27 11586 7339 225.249 82.9
28 11681 7351.5 201.9585 82.9
29 14085 7348.5 236.6751 82.9
30 15360 7347 197.7759 82.9
31 16799 7345 232.311 82.9
32 18130 7348 340.261 82.9
33 20528 7360.5 204.5554 82.9
477
34 20805 7350.5 208.2701 82.9
35 21153 7350.5 351.6455 82.9
36 22308 7350.5 315.5031 82.9
37 22591 7344.5 191.6403 82.9
38 23466 7355 52.1648 82.9
39 24773 7358.5 159.5764 82.9
40 25592 7356.5 250.7425 82.9
41 25893 7347.5 174.8071 82.9
42 27535 7355 11.261 82.9
43 8597 7352.5 204.1671 83
44 8874 7353.5 145.1377 83
45 10461 7347 160.6361 83
46 11668 7351 190.146 83
47 16728 7347 123.5242 83
48 19325 7344 171.2448 83
49 19922 7345 212.7931 83
50 23180 7342.5 81.2198 83
51 27437 7347.5 215.7 83
52 28381 7342 123.4479 83
Портрет эволюции отклонений ДВУ для группы ККО №4 (рис.
10.5) представляет собой сочетание квазипараллельных и наклонных
прямых AQj(Z). Следовательно, наиболее эффективным будет
сочетание, как диагонального решения, так и последовательного
облёта. В первую очередь ищутся возможные диагональные решения
(ветки, охватывающие как можно больше ККО), так как их
реализация требует значительно меньших затрат СХС. Таких
решений в данном примере два [136], порядок облёта объектов и
требуемые затраты СХС показаны в таблице 10.18.
В первом и четвёртом столбцах приведены номера облетаемых
объектов, между которыми осуществляется перелёт. В третьем и
шестом столбцах содержатся данные по затратам СХС требуемым
для перелёта. Продолжительность перелёта между двумя объектами
внутри каждой ветки приведена во втором и пятом столбцах.
Продолжительность каждой ветки совпадает с диапазоном
построения портрета эволюции ДВУ и составляет соответственно
3148 и 3522 суток. Затраты СХС соответственно 540 и 358 м/с. По
первой ветке облетаются 12 объектов, по второй 10 объектов.
Для облёта первой ветки достаточно одного KA-сборщика и
одного KA-заправщика. Для второй ветки можно обойтись одним КА-
сборщиком.
478
Таблица 10.18
Первое решение Время, сутки ДИ, м/с Второе решение Время, сутки ДИ, м/с
1 2 3 4 5 6
48-3 88 19 29-22 409 54
3-14 9 15 22-17 81 55
14-15 290 19 17-24 102 43
15-20 653 67 24-27 254 41
20-39 309 56 27-43 528 19
39-21 469 56 43-31 752 19
21-7 75 66 31-18 714 54
7-23 363 54 18-30 617 54
23-16 439 55 30-45 65 19
16-19 392 67 - - -
19-52 61 66 - - -
Время, сут по ветке 1 3148 Время, сут по ветке 2 3522
ДУЕ, м/с по ветке 1 540 ДУЕ, м/с по ветке 2 358
AVl, м/с диагонально го решения 898
После расчёта параметров двух найденных диагональных
решений все составляющие их ККО, выводятся из рассмотрения.
Портрет эволюции отклонений ДВУ оставшихся 30 объектов имеет
тот же принципиальный вид, что и в случаях групп ККО №1-3.
Результаты расчёта последовательного облёта ККО, не
охваченных диагональными решениями, приведены в таблице 10.19.
Данные первого столбца показывают, между какими двумя ККО
осуществляется перелёт. Во втором столбце приведены
рассчитываемые по формуле (10.10) значения компромиссной
продолжительности перелётов N, а в третьем столбце
продолжительность соответствующего перелёта в сутках. В
четвёртом столбце показаны затраты СХС, необходимые для
осуществления этого перелёта.
Из таблицы 10.19 следует, что затраты СХС даже в случае
«компромиссного» выбора числа витков перелёта превышают 7 км/с.
Осуществить увод этих объектов можно с помощью одного активного
479
КА и 3 KA-заправщиков. Результаты распределения ККО по КА
приведены в пятом и шестом столбцах.
Таблица 10.19
Порядок перелётов Количество витков мдод Время, сутки А К м/с Лродолжительность перелёта при одной заправке А И, м/с при одной заправке
1 2 3 4 5 6
1-11 750 54.3 241 6640 витков 480.7 суток 1836
11-5 334 24.2 106
5-10 990 71.7 272
10-40 482 34.9 166
40-8 756 54.7 253
8-51 2049 148.3 385
51-49 472 34.2 174
49-34 807 58.4 239
34-33 387 28 128 7358 витков 532.6 суток 1936
33-28 540 39.1 199
28-46 671 48.6 236
46-25 464 33.6 163
25-37 459 33.2 167
37-41 1352 97.9 318
41-44 1620 117.2 348
44-47 1865 135 377
47-12 1105 80 291 7436 витков 538.1 суток 1745
12-26 353 25.5 102
26-9 343 24.8 100
9-6 1958 141.7 378
6-50 492 35.6 181
50-4 317 22.9 72
4-13 2083 150.8 385
13-38 785 56.8 236
38-42 3046 220.5 420 8695 витков 629.3 суток 1701
42-35 1784 129.1 364
35-32 1144 82.8 295
32-36 1821 131.8 364
36-2 900 65.1 258
AVy, м/с 7218
Продолжи- тельность 30 129 витков 2180.7 суток
480
10.2.12. Облёт ККО по второй схеме. Вторая схема уборки
ККО предусматривает использование космического аппарата (КА)
маневрирующего между объектами и за счёт своей двигательной
установки последовательно уводящего их на орбиту с уменьшенным
временем баллистического существования (ОЗ). Захват ККО
осуществляется с помощью специально разработанного узла Г117
146].
Определение орбит захоронения. В соответствии с
международными договорённостями низкоорбитальный КА должен
находиться на ОЗ не более чем 25 лет. Для рассматриваемых групп
ККО можно выделить два основных типа ОЗ: эллиптическая орбита,
перицентр которой находится в верхних слоях атмосферы, и круговая
орбита, полностью расположенная в верхних слоях атмосферы.
Перевод на круговую орбиту сразу выводит КА из области
функционирования активных КА. Высота этой орбиты больше
высоты перицентра эллиптической ОЗ.
В таблице 10.20 приведены элементы круговых и эллиптических
ОЗ, рассчитанных для ККО со средним значением баллистического
коэффициента 0.045. Использовался алгоритм, описанный в первом
параграфе данной главы. Аргумент перигея для эллиптических орбит
- 45°, начальная дата прогноза - 01 декабря 2013г. В третьем столбце
таблицы приведены радиусы круговых ОЗ, четвёртом - большие
полуоси, а в пятом - эксцентриситеты эллиптических ОЗ,
соответствующих нижней (Min) границе значений большой полуоси
орбит объектов каждой группы. В шестом столбце - большие
полуоси, в седьмом - эксцентриситеты эллиптических ОЗ,
соответствующих верхней (Мах) границе значений большой полуоси
объектов группы.
Таблица 10.20
Накл- ние, ° ^min ” @тах> КМ R, км Min а, км Min е Мах а, км Мах е
71 7193- 7281 6912.7 7000.3 0.0275 7040.2 0.0341
74 7122- 7152 6912.7 6969.6 0.0219 6981.9 0.0243 0.0329
81.3 7211- 7262 6913.1 7007.5 0.0291 7030.5
481
Как следует из таблицы 10.20, большая полуось круговой ОЗ для
всех ККО из первых трёх групп фактически одинакова и равна
6912.7км. В том случае, если значение большой полуоси орбиты ККО
лежит внутри границ соответствующего диапазона (столбец 2), то для
кор-ректной оценки элементов эллиптической ОЗ необходимо
применить ли-нейную интерполяцию элементов орбиты, приведённых
в столбцах 4-7.
На рис. 10.10 относительная эволюция плоскости круговой ОЗ
одного из объектов 2-ой группы показана пунктирной линией.
Рис. 10.10. Портрет эволюции отклонений ДВУ элементов группы №2
Стратегия маневрирования. В том случае, когда портрет
эволюции отклонений ДВУ содержит преимущественно
квазипараллельные прямые (рис. 10.11), для перелёта между двумя
ККО по второй схеме необходимо выполнить следующую
последовательность действий. После выведения активного КА в
окрестность объекта №1, происходит сближение с этим объектом и
его захват. Далее импульсом ДИ] обеспечивается перевод сцепки
"активный КА + ККО" с орбиты объекта №1 на ОЗ объекта №1. Для
круговой ОЗ, в отличие от эллиптической, под импульсом
подразумеваются два включения ДУ локализованные на одном витке.
Алгоритм расчёта параметров манёвров, переводящих ККО на орбиту
с уменьшенным временем баллистического существования, описан в
первом параграфе этой главы. После формирования ОЗ, объект №1
отделяется от активного КА, который временно остаётся на этой
орбите, ожидая, пока плоскости ОЗ и орбиты следующего объекта
482
ККО не совпадут по ДВУ. При совпадении значений ДВУ при
помощи импульса ДЮ (алгоритм расчёта параметров манёвров
описан в главах 4,5,6) осуществляется перевод активного КА в
окрестность объекта №2, далее описанные действия повторяются
Совпадению орбитальных плоскостей по ДВУ соответствуют точки
пересечений прямых на портрете эволюции отклонений ДВУ В
данном случае пересекаются прямая, соответствующая следующему
объекту, и пунктирная прямая.
10.2.13. Пример расчёта манёвров облёта групп №1-3.
Результаты расчёта манёвров облёта объектов из групп № 1-3
представлены в однотипных таблицах 10.21-10.23 [24]. Каждая из
таблиц состоит из двух частей, отличающихся друг от друга типом
ОЗ, на которую уводится очередной ККО. Все объекты в рамках
одной группы были предварительно упорядочены по убыванию
начальных значений ДВУ их орбит и пронумерованы при
рассмотрении увода по первой схеме.
Доставка активного КА к первому объекту осуществляется при
помощи ракеты-носителя, последовательность дальнейших перелётов
для случая круговой ОЗ показана в первом столбце. Так как
конфигурация орбитальных плоскостей на портрете эволюции
отклонений ДВУ у первых трёх групп мало меняется с течением
времени, то изначальная упорядоченность орбит объектов по ДВУ в
целом соответствует последовательности облёта с некоторыми
исключениями.Во втором столбце приведена продолжительность
пребывания активного КА на ОЗ предыдущего объекта до начала
перелёта к текущему объекту. В третьем столбце приведены затраты
СХС, необходимые для перелёта с ОЗ предыдущего объекта к
текущему объекту. В четвёртом столбце -затраты СХС, требуемой
для увода текущего объекта на его ОЗ. В пятом столбце приведена
объединённая СХС, требуемая для перелёта к текущему объекту и для
увода его на ОЗ. Аналогичные данные приведены в столбцах 6-Ю для
эллиптической ОЗ.
483
Таблица 10.21
Круговая орбита с уменьшенным временем баллистического существования Эллиптическая орбита с уменьшенным временем баллистического существования
Поря- док облёта Время на ОЗ, сутки С ОЗ к объекту м/с Увод на ОЗ м/с м/с Поря- док облёта Время на ОЗ, сутки С ОЗ к объекту, м/с Увод на ОЗ, м/с ЕД И м/с
1 2 3 4 5 6 7 8 9 10
1 0 0 162 162 1 0 0 108 108
2 0.1 165 165 330 2 0.2 112 НО 222
3 24.1 159 158 317 3 36.6 109 106 215
4 4.5 161 161 322 4 6.4 109 107 216
5 58.5 159 159 318 5 88.4 106 107 213
6 1.8 161 161 322 6 2.1 108 107 215
7 37.5 162 162 324 7 55.7 108 108 216
8 12.3 160 160 320 8 19.3 107 107 214
9 20.1 159 159 318 9 31.1 106 107 213
10 15.6 158 158 316 10 24.1 106 106 212
12 72.3 150 150 300 12 111.7 99 102 201
И 10.5 240 192 432 13 31.6 106 104 210
13 6.6 202 153 355 11 5.5 193 124 317
14 58.7 226 193 419 14 68.8 125 124 249
15 13.4 198 160 358 15 5.1 169 107 276
17 110.2 161 161 322 17 162.4 108 108 216
16 8.8 157 157 314 16 21.5 103 105 208
18 52.1 157 157 314 18 76.6 106 106 212
19 93.4 160 160 320 19 131.9 109 107 216
21 53.2 160 160 320 21 79.9 107 107 214
20 75.4 242 195 437 20 198.9 202 126 328
22 58.8 213 157 370 22 34.5 192 106 298
23 18.7 161 161 322 23 14.1 110 108 218
СХС м/с 3871 3761 7632 СХС м/с 2700 2507 5207
Время сумм, сутки 806.6 Время сумм, сутки 1206.4
484
Таблица 10.22
Круговая орбита с уменьшенным временем баллистического существования Эллиптическая орбита с уменьшенным временем баллистического существования
Поря- док облёта Время на 03, сутки С 03 к объекту м/с Увод на 03 м/с м/с Поря- док облёта Время на 03, сутки С 03 к объекту, м/с Увод на 03, м/с ZAK м/с
1 2 3 4 5 6 7 9 10
1 0 0 125 125 1 0 0 88 88
2 16.7 124 124 248 2 23.7 88 88 176
3 299.7 129 129 258 3 426.4 93 91 184
4 104.8 122 122 244 4 163 84 87 171
5 200.3 125 125 250 5 274.7 89 88 177
6 191.8 121 121 242 6 261.9 85 86 171
8 91.2 129 128 257 8 122.8 95 90 185
7 42.8 122 122 244 7 88.2 84 87 171
9 187.2 114 113 227 9 280.1 82 81 163
10 42.4 116 116 232 10 37.2 85 83 168
И 32.3 124 124 248 11 40.4 92 88 180
СХС м/с 1226 1349 2575 СХС м/с 877 957 1834
Время сумм, сутки 1209.2 Время сумм, сутки 1718. 4
Как следует из таблиц 10.21-10.23, продолжительность облёта
группы при использовании эллиптической 03 по сравнению с
использованием круговой 03 больше в среднем в 1.5 раза, однако при
этом требуются примерно в 1.5 раза меньшие затраты СХС.
Продолжительность облёта групп при уводе объектов на
эллиптическую 03 составляет 3.3, 4.7 и 8.7 лет, что является вполне
приемлемыми сроками для современной космической техники.
Для четвертой и пятой групп характеристики облета
существенно зависят от того с какого из объектов начинается облет.
Последовательный анализ вариантов позволяет выбрать оптимальный
начальный объект. Результаты расчёта манёвров оптимальных
облётов объектов из групп № 4 и 5 представлены в таблицах 10.24
иЮ.25.
485
Таблица 10.23
Круговая орбита с уменьшенным временем баллистического существования Эллиптическая орбита с уменьшенным временем баллистического существования
Поря- док облёта Время на ОЗ, сутки С ОЗ к объекту м/с Увод на ОЗ, м/с ЕЛИ м/с Поря- док облёта Время на ОЗ, сутки С ОЗ к объекту, м/с Увод на ОЗ, м/с ЕЛИ м/с
1 2 3 4 5 6 7 8 9 10
1 0 0 175 175 1 0 0 116 116
2 50.7 170 169 339 2 75.9 111 113 224
3 66.1 177 176 353 3 102.7 120 116 236
4 88.9 163 163 326 4 148.5 103 109 212
5 131.3 167 167 334 5 174.8 114 1И 225
6 21.1 174 173 347 6 39.6 119 115 234
7 33.3 172 171 343 7 35.5 114 114 228
8 42.3 175 175 350 8 57.5 118 116 234
9 80.8 177 177 354 9 146.9 118 116 234
10 81.4 175 175 350 10 100.3 116 116 232
И 21.5 170 170 340 11 45.8 НО ИЗ 223
12 16.8 177 177 354 12 8.5 120 116 236
13 42.2 174 174 348 13 70.6 114 115 229
14 40.6 173 173 346 14 63.9 114 115 229
16 265.3 185 185 370 16 360.4 127 121 248
17 89.5 174 174 348 17 185.4 110 115 225
15 17.3 164 164 328 15 149.4 106 110 216
18 213.2 162 161 323 18 261.3 108 108 216
19 62.1 177 177 354 19 70.9 125 117 242
21 128.7 185 185 370 21 145.8 125 121 246
20 48.1 166 166 332 26 154.9 115 117 232
23 55.9 177 177 354 20 64.7 106 111 217
26 16.3 179 178 357 23 4.3 121 116 237
25 54.3 175 175 350 25 111.1 115 116 231
24 0.3 172 172 344 24 25.6 112 114 226
22 12.1 168 168 336 22 53.6 110 112 222
28 94.4 172 172 344 28 20.4 117 114 231
27 163.3 160 159 319 27 500.2 103 107 210
СХС м/с 4661 4828 9489 СХС м/с 3091 3200 6291
Время сумм, сутки 1937.8 Время сумм, сутки 3178.5
486
Таблица 10.24
Круговая орбита захоронения Эллиптическая орбита захоронения
Поря- док облёта Время на ОЗ, сутки Затраты СХС, м/с Поряд ок облёта Время на ОЗ, сутки Затраты СХС, м/с
С ОЗ к объекту Увод на ОЗ ДУу м/с С ОЗ к объекту Увод на ОЗ AVZ м/с
1 2 3 4 5 6 7 8 9 10
18 0 0 214 214 18 0 0 136 136
42 35.1 238 232 470 42 49.1 162 145 307
35 109.1 230 230 460 35 178.4 142 144 286
32 64.1 229 229 458 32 105.0 142 143 285
2 17.2 222 222 444 2 49.8 137 140 277
36 111.1 230 230 460 36 149.5 148 144 292
19 125.6 220 214 434 1 380.4 144 144 288
1 85.2 236 230 466 5 16.4 144 142 286
5 25.3 227 226 453 И 56.3 146 144 290
11 17.1 230 230 460 10 20.4 144 144 288
10 34.4 230 230 460 19 3.1 157 135 292
40 43.4 233 233 466 40 60.8 163 145 308
8 18.9 229 229 458 8 3.8 142 143 285
29 75.5 229 229 458 29 169.3 144 143 287
17 17.9 234 234 468 17 14.5 148 145 293
31 12.1 227 227 454 31 40.7 139 142 281
23 30.1 218 215 433 51 14.4 144 143 287
51 8.0 234 228 462 49 37.4 142 142 284
24 8.8 222 216 438 43 45.3 146 144 290
27 1.3 228 224 452 27 3.4 139 141 280
49 9.5 227 227 454 33 85.1 151 146 297
21 26.3 223 214 437 34 14.3 141 144 285
43 6.9 240 231 471 46 17.3 144 144 288
22 22.6 226 216 442 28 38.8 145 144 289
34 8.7 236 230 466 30 60.9 142 143 285
33 2.5 235 235 470 25 37.6 142 142 284
28 30.7 230 230 460 23 25.0 148 136 284
46 10.5 230 230 460 15 2.8 162 145 307
30 23.1 228 228 456 37 2.6 140 142 282
25 21.4 227 227 454 24 17.9 143 137 280
37 17.9 227 227 454 48 4.9 156 142 298
15 48.6 233 233 466 45 80.3 143 143 286
48 3.8 227 227 454 14 40.4 146 144 290
20 17.2 223 214 437 41 2.9 142 143 285
41 15.3 234 228 462 44 53.0 146 144 290
487
14 5.3 231 231 462 3 14.6 138 141 279
45 9.1 228 228 456 39 4.2 150 146 296
3 16.8 225 225 450 7 35.0 141 143 284
39 29.4 234 234 468 21 69.5 156 135 291
44 22.3 232 231 463 22 14.7 138 137 275
7 27.8 229 229 458 47 54.7 162 143 305
47 110.1 228 228 456 52 34.9 140 141 281
52 13.9 226 226 452 16 10.3 149 145 294
16 28.4 233 233 466 12 55.3 142 144 286
12 25.6 230 230 460 9 150.2 144 143 287
26 32.1 227 227 454 26 5.5 141 142 283
9 4.8 229 229 458 6 110.3 143 142 285
6 118.0 228 228 456 20 28.4 155 135 290
50 22.0 226 226 452 50 10.9 161 142 303
4 22.0 226 226 452 4 135.2 142 142 284
13 162.0 219 219 438 38 265.2 148 147 295
38 29.9 232 232 464 13 47.4 132 138 270
СХС сумм, м/с 11675 11801 23476 СХС сумм, м/с 7446 7394 14 840
Время сумм, сутки 1784. Время сумм, сутки 2928.
Таблица 10.25
Круговая орбита захоронения Эллиптическая орбита захоронения
Поря- док облета Время на ОЗ, сутки Затраты СХС, м/с Поря- док облета Время на ОЗ, сутки Затраты СХС, м/с
С ОЗ к об. Увод на ОЗ AVZ м/с СОЗ к. об. Увод на ОЗ AVZ м/с
1 2 3 4 5 6 7 8 9 10
10 0 0 171 171 10 0 0 116 116
9 71 247 42 289 9 92.4 253 25 278
8 97.3 147 115 262 3 94.8 180 69 249
3 6.7 272 104 376 И 238.8 176 19 195
И 321.5 149 34 183 1 331.6 102 49 151
1 245.4 92 76 168 4 94.9 279 163 442
4 54.6 300 238 538 7 514.7 151 145 296
7 238.3 222 213 435 2 35.5 208 184 392
6 32.8 163 96 259 6 14.3 210 64 274
2 26.3 325 270 595 8 72.2 91 76 167
5 82.2 257 41 298 33 114.9 139 104 243
488
45 192.3 365 291 656 39 121.1 111 40 151
33 6.9 260 153 413 45 41.9 392 199 591
39 60.0 103 63 166 26 13.6 195 142 337
26 142.0 246 209 455 25 80.3 127 96 223
46 32.9 102 94 196 27 76.9 114 107 221
43 16.2 149 149 298 43 14.0 99 100 199
25 3.6 148 142 290 31 16.0 102 83 185
27 34.2 160 158 318 24 5.4 109 100 209
35 4.5 130 129 259 35 16.9 81 87 168
31 2.9 125 124 249 21 72.6 141 28 169
24 28.2 149 149 298 28 65.8 325 94 419
21 68.5 115 45 160 46 42.9 209 62 271
37 372.2 66 52 118 37 21.3 123 33 156
28 110.4 297 139 436 38 351.8 185 110 295
38 14.5 217 162 379 16 102.1 122 92 214
34 96.3 183 181 364 18 95.8 78 67 145
44 6.1 158 157 315 34 29.6 188 123 311
16 16.9 157 136 293 44 50.3 100 106 206
18 44.6 105 101 206 5 163.5 106 22 128
32 497.3 188 156 344 32 244.7 161 105 266
41 80.9 125 122 247 14 91.7 126 67 193
14 37.9 120 100 220 41 236.3 118 82 200
36 128.5 154 132 286 13 141.5 95 89 184
13 100.1 138 132 270 36 22.6 107 89 196
40 11.7 213 185 398 15 95.7 132 45 177
15 32.2 173 70 243 17 163.1 226 136 362
17 65.1 246 200 446 40 55.5 122 126 248
29 43.0 143 55 198 29 108.9 181 35 216
30 500.1 146 122 268 30 1067.0 128 82 210
19 113.4 132 132 264 19 27.3 92 89 181
20 170.1 102 51 153 20 346.3 105 32 137
22 219.5 141 117 258 22 915.7 125 78 203
12 488.7 366 301 667 12 469.8 334 206 540
23 10.6 218 184 402 23 256.9 164 125 289
42 238.9 144 48 192 42 740.9 158 29 187
СХС сумм м/с 8158 6141 14 299 СХС сумм м/с 7070 4120 11 190
Время сумм, сутки 5167. Время сумм, сутки 7970
489
10.2.14. Сравнение с результатами облёта по второй схеме,
полученными другими авторами. Облёт ККО по второй схеме
среди зарубежных публикаций наиболее полно рассмотрен в работе
[186] для вариантов активного КА с химической или с электро-
ракетной двигательной установкой. Несмотря на использование
различных подходов к прогнозу орбитального движения в работах
[53] и [186] получены примерно одинаковые результаты, связанные с
оценкой продолжительности нахождения апогея ОЗ в зоне рабочих
орбит КА: апогей ОЗ для рассматриваемых групп ККО опускается
ниже высоты 700 км в течение примерно 10 лет. Вместе с тем, риск
столкновения переведённого на эллиптическую ОЗ отдельно взятого
объекта с другими объектами в течение этого времени составляет
50% от начальной величины, вычисленной для исходной орбиты ККО
[186]. Утверждение о слишком большом времени пассивного
ожидания активного КА на ОЗ, приведённое в [186] является не
совсем верным. Как следует из таблиц 10.21-10.23, оно полностью
определяется текущей конфигурацией орбитальных плоскостей
объектов группы и может составлять от нескольких часов до
нескольких месяцев. По сравнению с [186] для увода 5-ти объектов с
однотипными орбитами получены примерно на 200-300 м/с меньшие
требуемые значения СХС, что объясняется выбором оптимальной
схемы маневрирования, при этом используемые эллиптические ОЗ
имеют близкие параметры.
10.2.15. Сравнение с результатами расчёта манёвров облёта
всех групп по первой баллистической схеме. Результаты облёта
всех групп по двум схемам приведены в таблице 10.26. В третьем и
четвёртом столбцах первое число относится к облёту по первой
схеме, второе по второй. При облёте ККО по второй схеме затраты
СХС в случае первой и третьей групп больше затрат СХС,
полученных с использованием первой схемы облёта в 2.4 и 1.5 раза
соответственно, затраты СХС в случае второй группы не намного, но
тоже больше. Время облёта первой группы по второй схеме меньше
времени облёта по первой схеме в 2.8 раза, для второй и третьей
групп продолжительности облёта по обеим схемам примерно
одинаковы. Сравнивать облет четвертой и пятой групп не совсем
корректно, т.к. по первой схеме облет происходит одновременно
тремя аппаратами. При облёте объектов по второй схеме активный
КА исполняет сводящий с орбиты манёвр, находясь в сцепке с
490
захваченным объектом, масса которого может быть около тонны.
Следовательно, даже при одинаковой требуемой СХС в случае
реализации второй схемы необходимо значительно большее
количество топлива и, соответственно, KA-заправщиков, по
сравнению с первой схемой.
Таблица 10.26
№ группы Число объектов СХС, м/с Продолжительность облёта, сутки Кол-во КА для первой схемы
1 23 2233 / 5207 3318 / 1206 1 КА+2(1) Зап
2 И 1540 / 1834 1570 / 1718 1 КА+1 (0)
3 28 4213 / 6291 3744 / 3179 1 КА+3 (1) Зап
4 12 540 3148 1 КА+1 (0) Зап
10 358 3522 1 КА
30 7218 21808 1 КА+3 (2) Зап
4£ 52 8116 / 14870 8850 / 2928 3 КА+4 (2) Зап
5 18 1891 2942 1 КА+2(1) Зап
12 767 3476 1 КА+1 (0) Зап
16 4450 1723 1 КА+1 (0) Зап
5i 46 7108/11190 8141 / 7970 3 КА+4(1) Зап
160 23210/39392 25623 / 17001 9 КА+14 (5) Зап
Определить необходимое число заправщиков для второй схемы
на этапе предварительного анализа можно только приблизительно,
однако понятно, что речь о значительном числе дозаправок. Таким
образом, преимущество второй схемы заключается только в
сокращённой продолжительности облёта объектов, в то время как по
энергетике и по количеству дополнительных заправок топливом она
существенно уступает первой схеме.
10.2.16. Выводы по стратегии облета всех пяти групп по двум
схемам. Подводя итоги данного параграфа можно сделать
следующие выводы:
1 .Из каталога космических объектов NORAD на низких орбитах
можно выделить пять компактных групп ККО, орбиты элементов
которых имеют близкие наклонения.
2 . Портрет эволюции отклонений ДВУ, построенный для
конкретной группы ККО, позволяет выбрать адекватную
491
стратегию облёта объектов этой группы: стратегию
последовательного облёта (группы №1-3) или стратегию
комбинации диагонального и последовательного облета (группы
№5 и №4).
3 .Использование оптимальных схем маневрирования (рассмотрены
в главе 7) и компромиссной продолжительности перелета
позволяют существенно уменьшить затраты СХС при
последовательном облете.
4 .Использование диагональной схемы облета позволяет уменьшить
по сравнению с последовательным облетом, как количество
исполняемых манёвров, так и затраты СХС на облёт объектов
группы.
5 .Преимущество второй схемы заключается только в сокращённой
продолжительности облёта объектов, в то время как по
энергетике и по количеству дополнительных заправок топливом
она заметно уступает первой схеме.
6 .Для очистки рассмотренных пяти групп по первой схеме
(уводятся почти 160 объектов) необходимо 9 KA-сборщиков и 14
KA-заправщиков, описанных в работе [141].
7 .Планируемое в настоящее время в некоторых работах [130, 177]
число малых КА на одном KA-сборщике (до 25 штук) является
явно избыточным при очистке орбит от ККО. В тоже время
количество малых КА, предлагаемое в работе [141], 6-7 штук на
одном KA-сборщике или заправщике явно недостаточно. Если
увеличить количество малых КА до 11-12 штук, то число КА-
заправщиков необходимых для облета ККО всех групп можно
уменьшить с 14 до 5.
8 .Необходимые запасы СХС на одном КА достаточно точно
определены в [141] и составляют примерно 2300 м/с.
9 .Для обеспечения необходимых ежегодных темпов изъятия ККО
(4-5 объектов) желательно, чтобы на низких орбитах
одновременно функционировали как минимум два КА-
сборщика.
10 . Задачу очистки низких орбит от ККО лучше решать комплексно,
очищая одновременно несколько компактных групп ККО.
Таким образом, КА, используемый для очистки низких орбит
от ККО, должен обладать ресурсом СХС не менее 2300 м/с и иметь на
борту до 12 малых КА.
492
ЛИТЕРАТУРА
{.Алексеев К.Б., Бебенин ЕЕ, Ярошевский В.А. Маневрирование
космических аппаратов. - Москва: Машиностроение 1970 - 232 с
2. Аппазов Р.Ф., Огарков В.И. Исследование оптимальных
многоимпульсных перелётов с ограниченным временем между
близкими почти круговыми орбитами // Космические
исследования. - 1976. - Т. 14. - № 2. - С. 1.
3. Ахметшин Р.З., Белоглазов С.С., Белоусова Н.С., Глазков А И.
Гущин В.В., Егоров В.А., Ефимов ГБ. Оптимизация перелетов к
астероидам и кометам КА с комбинированием двигателей большой
и малой тяги. - Препринт ИПМ им. М.В. Келдыша АН СССР
4. Бажинов И.К., Ястребов В.Д. Навигация в совместном полете
космических кораблей «Союз» и «Аполлон». - Москва: Наука,
1978. -224 с.
5. Баранов А.А. Оптимальная встреча на близких квазикруговых
некомпланарных орбитах// Труды VI Научных чтений по
космонавтике (Москва, 11-15 января 1982 г.). - М., ИИЕТ АН
СССР, 1983.-с.172-179.
6. Баранов А.А. О геометрическом решении задачи импульсного
многовиткового перехода между близкими околокруговыми
компланарными орбитами. - Препринт Института прикладной
математики им. М. В. Келдыша АН СССР, 1985, №64. - 27 с.
7. Баранов А.А. Алгоритм расчета параметров четырех-импульсных
переходов между близкими околокруговыми орбитам //
Космические исследования. - 1986. - Т.24. - № 3. - С. 400-403.
Baranov А.А. Algorithm for Calculating the Parameters of Four-
Impulse Transitions between Close Almost-circular Orbits // Cosmic
Research. - 1986. - V. 24. - № 3. - pp. 324-327.
8. Баранов А.А. О геометрическом решении задачи встречи на
близких почти круговых компланарных орбитах // Космические
исследования. - 1989. - Т.27. - № 6. - С. 808-816.
Baranov НМ.GEOMETRIC SOLUTION OF THE PROBLEM OF A
RENDEZVOUS ON CLOSE NEARLY CIRCULAR COPLANAR
ORBITS // Cosmic Research. -1989. - V. 27. - № 6. - PP- 689-69 /.
493
9. Баранов А.А. Алгоритм расчета параметров многовитковых
маневров дальнего наведения // Космические исследования. - 1990.
-Т.28.-№ 1.-С. 69-76.
Baranov А.А. AN ALGORITHM FOR CALCULATING
PARAMETERS OF MULTI-ORBIT MANEUVERS IN REMOTE
GUIDANCE // Cosmic Research. - 1990. - V. 28. -№ 1. - pp. 61-67.
10. Баранов A.A., Оптимальные переходы между орбитами,
имеющими значительные отклонения долготы восходящего узла//
Труды XXV Научных чтений по космонавтике (Москва, 24-
26 января 2001 г.), М., Война и мир, 2001. - С. 113.
11. Баранов А.А. Методика расчета параметров маневров встречи
КА с орбитальной станцией. - Препринт Института прикладной
математики им. М. В. Келдыша РАН, 2008, №6. - 32 с.
12. Баранов А.А. Численно-аналитическое определение параметров
маневров многовитковой встречи КА на близких околокруговых
некомпланарных орбитах // Космические исследования. - 2008. -
Т.46.-№5.-С. 430-439.
13. Баранов А.А. “Перелеты между околокруговыми орбитами” //
Энциклопедия «Машиностроение», Том IV-22, “Ракетно-
космическая техника”. Книга 1, Глава 2.3, п.2.3.7. (ISBN 978-5-
94275-589-8). Москва: Машиностроение, 2012. - С.141-151.
14. Баранов А.А. (мл). Изменение положения КА в спутниковой сис-
теме// Космические исследования-2008 - т.46. - № 3. - С.219-224.
Baranov A. Jr. А.А. Change of spacecraft position in a satellite
sistem // Cosmic Research. -2008. - T. 46. - № 3. - pp. 215-218.
15. Баранов A.A., Баранов А.А. Поддержание заданной
конфигурации спутниковой системы // Космические исследования.
- 2009,-Т.47.-№ L-С. 48-54.
16. Баранов А.А., Баранов А.А. Алгоритм расчета параметров
маневров формирования спутниковых систем // Космические
исследования. - 2009. - Т.47. - № 3. - С. 256-262.
17. Баранов А.А., Баранов А.А., Маневрирование с помощью ДУ,
имеющей постоянную малую тягу, Актуальные проблемы
Российской космонавтики, Материалы XXXIV Академических
чтений по космонавтике (Москва, 26-29 января, 2010 г.), М.,
Комиссия РАН, 2010, с. 115-116.
494
18. Баранов А.А., Каратунов М.О. Оптимизационный .метод поиска
опасных сближений на околоземных орбитах // Молодежный
научно-технический вестник. - 2012. - №5. - С.38.
19. Баранов А.А., Гришко Д.А., Майорова В.И. Исследование затрат
характеристической скорости, необходимой для обслуживания и
восполнения спутниковых систем на круговых орбитах // Инже-
нерный журнал: наука и инновации. - 2013. - № 3 (15). - С. 26.
20. Баранов А.А., Гришко Д.А. Вопросы минимизации затрат
суммарной характеристической скорости, необходимой для обслу-
живания и восполнения спутниковых систем на некомпланарных
круговых орбитах // Наука и образование. МГТУ им. Н.Э. Баумана.
Электронный журнал. - №9. - 2013. - С. 289-312.
21. Баранов А.А., Гришко Д.А. Способы уменьшения энергетических
затрат при облете элементов спутниковой группировки // Полёт. -
2014. -№ 8 (8). -С. 39-48.
22. Баранов А.А., Гришко Д.А. Баллистические аспекты облета
крупногабаритного космического мусора на низких околокруговых
орбитах// Известия Российской академии наук. Теория и системы
управления. - 2015. -№ 4. - С. 160-171.
Baranov А.А., Grishko D.A. Ballistic Aspects of Large-Size Space
Debris Flyby at Low Earth Near-Circular Orbits // Journal of Computer
and Systems Sciences International. - No.4. - 2015. - pp. 639-650.
23. Баранов А.А., Гришко Д.А., Медведевских В.В., Лапшин В.В.
Решение задачи облёта объектов крупногабаритного космического
мусора на солнечно-синхронных орбитах // Космические
исследования. - 2016. - т.54. - №3. - С. 242-251.
Baranov А.А., Grishko D.A., V. V. Medvedevskikhb, and V. V.
Lapshin. Solution of the Flyby Problem for Large Space Debris at Sun-
Syn-chronous Orbits // Cosmic Research- 2016. - V.54. - №3. - pp.
242-250.
24. Баранов A.A., Гришко Д. А., Чернов H.B. Облет
низкоорбитальных объектов крупногабаритного космического
мусора с их последова-тельным уводом на орбиту с уменьшенным
временем баллистического существования // Наука и Образование.
МГТУ им. Н.Э. Баумана. Электронный журнал-2016.-№4- С. 48-
64.
495
25. Баранов А.А., Гундобин И.О., Иванов Д.М., Капралов М.А.,
Терехова Е.О., Управление орбитальным движением КА в
программе пилотируемых полетов, Труды XVI Научных чтений по
космонавтике, Секция «Прикладная небесная механика и
управление движением» (Москва, 3-6 февраля 1992 г.), М., ИИЕТ
РАН, 1992, с. 26-27.
26. Баранов А.А., Каратунов М.О. Методика выявления и оценки
сближений космического аппарата с объектами космического
мусора// Инженерный журнал: наука и инновации. - 2016. - №4.
27. Баранов А.А., Каратунов М.О. Оценка параметров двух связных
маневров, выполненных активным космическим объектом
// Известия Российской академии наук. Теория и системы
управления. - 2016. - № 2. - С. 142-153.
Baranov A. A. and Karatunov М. О. Estimation of Parameters of two
Coupled Maneuvers Performed by an Active Space Object // Journal of
Computer and Systems Sciences International - 2016 - Vol. 55. -No. 2.
-pp. 284-295.
28. Баранов A.A., Каратунов M.O., Разумный Ю.Н., Вихрачев В.О.
Геометрический метод оценки околокруговой орбиты после
однократной коррекции. // Известия Российской академии
наук. Теория и системы управления. - 2017. - В печати
29. Баранов А.А., Прадо А.Ф.Б., Разумный В.Ю., Баранов А.А.
Оптимальные переходы с малой тягой между близкими
околокруговыми компланарными орбитами // Космические
исследования. - 2011. - Т. 49. - № 3. - С. 278-288.
Baranov A.A., de Prado A.F.B., Razumny V.Y., Baranov Jr.
OPTIMAL LOW-THRUST TRANSFERS BETWEEN CLOSE NEAR-
CIRCULAR COPLANAR ORBITS A.A. //Cosmic Research. - 2011. -
V. 49.-№3.pp. 269-279.
30. Баранов A.A., Разумный В.Ю., Баранов А.А. Формирование и
поддержание орбит МКА с помощью двигателей малой тяги. -
Препринт Института прикладной математики им. М.В. Келдыша
РАН, 2010.-№ 52.-32 с.
31. Баранов А. А., Ролдугин Д.С. Определение параметров
оптимальных шестиимпульсных и производных пятиимпульсных
маневров встречи КА на околокруговых некомпланарных орбитах.
496
- Препринт Института прикладной математики им. М.В. Келдыша
РАН, 2011.-№57.-26 с.
32. Баранов А.А., Ролдугин Д. С. Шестиимпульсные маневры встречи
КА на околокруговых некомпланарных орбитах // Космические
исследования. - 2012. - Т. 50. - № 6. - С. 472-479.
Baranov А.А., Roldugin D.S. SIX-IMPULSE MANEUVERS FOR
RENDEZVOUS OF SPACECRAFT IN NEAR-CIRCULAR
NONCOPLANAR ORBITS // Cosmic Research. - 2012. -V. 50. -
No. 6. - pp. 441-448
33. Баранов А.А., Терехова E.0. Оптимальная по базис-вектору
четырехимпульсная встреча в окрестности круговой орбиты. -
Препринт Института прикладной математики им. М.В. Келдыша
РАН, 1993.-№7.-24 с.
34. Баранов А.А., Терехова Е.О. Оптимальная четырехимпульсная
встреча на компланарных почти круговых орбитах // Космические
исследования. - 1995. - Т.ЗЗ. - № 4. - С. 420-425.
Baranov A. A., Terekhova Е.О. OPTIMAL Four-IMPULSE
RENDEZ-VOUS in Coplanar NEAR-CIRCULAR ORBITS // Cosmic
Research. - 1995. - V. 33. - No. 4. - pp. 382-387
35. Бахшиян Б.Ц., Назиров P.P., Эльясберг П.Е. Определение и
коррекция движения». - Москва: Наука, 1980. - 360 с.
36. Беляев Н.М., Белик Н.П., Уваров Е.И. Реактивные системы
управления космических летательных аппаратов». - Москва:
Машиностроение, 1979.-232.
37. Белецкий В.В., Егоров В.А. Межпланетные полёты с двигателями
постоянной мощности // Космические исследования// 1964. - Т. 2.
-№3.-С. 360-391.
38. Беликов М.Б., Горшков О.А., Муравлёв В.А., Шагайда А.А.
Электроракетная двигательная установка на базе холловского
двигателя КМ-45 для космического аппарата GSAT-4. IAC 2007 (58
Международный астронавтический конгресс), 24-28.09.2007,
Хайдерабад, Индия.
39. Белоусов А.И.. Учеб, для студентов втузов / А. И. Белоусов, С. Б.
Ткачев; Под ред. В. С. Зарубина и А. П. Крищенко. Москва, 2004.
Сер. Вып. 19 Математика в техническом университете : Комплекс
учеб, из 21 вып. / Под ред. В.С. Зарубина и А.П. Крищенко. Том
Дискретная математика (3-е изд., стер.
497
40. Боровин Г.К., Захваткин М.В., Степаньянц В.А., Тучин А.Г.,
Тучин Д.А. Идентификация маневров, выполняемых двигателями
малой тяги космического аппарата // Инженерный журнал: наука и
инновации. - 2012. - №2 (2). - С.8.
41. Будынин Ю.Л., Баллистическое обеспечение управления
орбитальным движением геостационарных КА на различных
этапах эксплуатации, 13 Международная научная конференция
«Системный анализ, управление и навигация», тезисы докладов,
Крым, Евпатория, 29 июня-06 июля 2008, с. 73-74.
42. Бушуев Е.И., Красовский А.А. О геометрическом решении задачи
импульсного перехода между близкими почти круговыми орбита-
ми // Космические исследования. - 1969. - Т. 7. - № 4. - С. 485-489.
43. Бырков Б.П., Разумный Ю.Н., Решение задачи сплошного
многократного покрытия земли полосой обзора ИСЗ //
Исследование Земли из космоса. - 1992. - №. 1. - С. 62-68.
44. Бэттин Р., Наведение в космосе». - Москва: Машиностроение,
1966.-447с.
45. Бэттин Р. Новый подход к задаче Ламберта // Ракетная техника
и космонавтика. - 1977. - Т.15. - № 5. - С. 122-129.
46. Ван Лицзе, Баранов А.А. Оптимальное удержание космического
аппарата с двигателями малой тяги на солнечно-синхронной
орбите // Вестник МГТУ им. Н.Э. Баумана. Сер. машиностроение.
-2015,-№2.-С. 68-83.
47. Гаврилов А.В. Поиск глобального минимума функционала при
решении задачи линейного маневра КА// РК техника, научно -
технический сборник, серия IX, вып.1, 1995.
48. Гаврилов В.П., Обухов Е.В. Задача коррекции с ограничением на
число импульсов // Космические исследования. - 1980. - Т.18. -
№2.-С. 163-172.
49. Гаврилов В.П., Заславский Г.С., Обухов Е.В., Скопцов А.П., Алго-
ритм решения некоторых задач двухимпульсной коррекции, преп-
ринт Института прикладной математики АНСССР,1975,№125, 34с.
50. Гобец, Долл (Gobetz F.W., Doll J.R.). Обзор импульсных траекто-
рий//Ракетная техника и космонавтика.-1969.-Т.7. - № 5. - С.3-46.
498
51. Голиков А.Р., “Численно-аналитическая теория движения искус-
ственных спутников небесных тел”, препринт Института приклад-
ной математики им. М.В.Келдыша АН СССР, 1990, №70, 26 с
52. Голиков А.Р., “Полуаналитическая теория THEONA & анализ
движения констелляций”, 5th International Workshop on
Constellations and Formation Flying, Евпатория, Украина, журнал
“Труды МАИ”, 2008.
53. Голиков А.Р., Баранов А.А., Будянский А.А., Чернов Н.В. Выбор
низковысотных орбит захоронения и перевод на них выра-
ботавших свой ресурс космических аппаратов // Вестник МГТУ
им. Н.Э. Баумана. Сер. машиностроение. - 2015. - № 4. - С. 4-19.
54. Голубев Ю.Ф. Брахистохрона с трением // Известия Российской
академии наук. Теория и системы управления.-2010.-№5.-С.41-52.
55. Горшков О. Отечественные электроракетные двигатели сегодня
// Новости космонавтики. - 1999. - № 7.
56. Гродзовский Г.Л., Иванов Ю.Н., Токарев В.В., Механика
космического полета с малой тягой. - Москва: Наука, 1966. - 680с.
57. Дубровинский Я.В., Журавлев КВ., Шершнева Н.И.
Баллистическое моделирование и расчет рабочих орбит перспек-
тивных космических аппаратов гидрометеорологического назна-
чения // Вопросы электромеханики. - 2005. - Т. 102. - С. 220-234.
58. Егоров В.А. Пространственная задача достижения луны. -
Москва: Наука, 1965. - 224 с.
59. Ежевски, Розендаал (Jezewski D.J., Rozendaal H.L.),
Эффективный метод расчета оптимальных А-импульсных
траекторий полёта в космическом пространстве. // Ракетная
техника и космонавтика. - 1968. - Т.6. - № 11. - С. 138-145.
60. Егоров В.А., Энеев Т.М., Ахметшин Р.З., Ефимов ГБ. и др.,
Траекторно-баллистический анализ полетов к астероидам и
кометам космических аппаратов с малой тягой. - В кн.:
Интеллектуальные системы автономных аппаратов для космоса и
океана. Москва. ИПУ РАН, 1997.
61. Ермилов Ю.А., Иванова Е.Е., Пантюшин С.В. Управление сбли-
жением космических аппаратов. - Москва: Наука, 1977. - 448 с.
62. Захаров Ю.А. Проектирование межорбитальных космических
аппаратов. - Москва: Машиностроение, 1984. - 175 с.
499
63. Ивашкин В.В. Оптимизация космических маневров при ограни-
чениях на расстояния до планет. - Москва: Наука, 1975. - 392 с.
64. Ивашкин В.В. Некоторые импульсные перелеты // Энциклопедия
«Машиностроение», Том IV-22, “Ракетно-космическая техника”.
Книга 1, Глава 2.3, п.2.3.6, с.125-141. (ISBN 978-5-94275-589-8).
М.: Машиностроение, 2012
65. Ивашкин В.В., Райкунов Г.Г. Оптимизация двухимпульсного
маневра встречи двух аппаратов на круговой орбите при наличии
ограничений // Космические исследования. - 1991. - Т. 29. - № 3. -
С. 352-374.
66. Ивашкин В.В., Райкунов Г.Г., Многоимпульсные траектории
встречи двух космических аппаратов на круговой орбите //
Космические исследования. - 1994. - Т. 32. - № 3. - С. 33-46.
67. Ильин В.А., Кузмак Г.Е. Оптимальные перелеты космических
аппаратов. - Москва: Наука, 1976. - 744 с.
68. Квасников Л.А., Латышев Л.А., Пономарёв-Степной Н.Н. и др.
Двигатели летательных аппаратов. - Москва: Издательство МАИ,
2001.-479с.
69. Колегов Г.А. Избранные разделы космической баллистики
искусственных спутников Земли. - Королев: ЦНИИмаш, 2007. -
270с.
70. Колегов ГА, Мельников Е.К Долгосрочное планирование
маневров формирования рабочих орбит космических комплексов//
Известия АН СССР, сер. техн. Кибернетика. - 1990. - № 3. -
С. 158-165.
71. Кузмак Г.Е., Брауде А.З. Приближенное построение
оптимальных перелётов в малой окрестности круговой орбиты//
Космические исследования. - 1969. - Т.7. - № 3. - С. 323-338.
72. Кубасов В.И., Дашков А.А. Межпланетные полёты. - Москва:
Машиностроение, 1979. - 242 с.
73. Лайон, Хенделсмен, (Lion Р.М., Handelsman М.). Базис-вектор
для импульсных траекторий с заданным временем перелёта //
Ракетная техника и космонавтика. - 1968. - Т.6. - № 1. - С. 153-
160.
74. Лебедев В.И. Расчет движения космического аппарата с малой
тягой. - Москва: Изд. ВЦ АН СССР, 1968. - 108 с.
500
75. Лидов М.Л. Математическая аналогия меж™
между некоторыми
оптимальными задачами коррекции траекторий и выбора сое
измерений и алгоритмы их решения// Космические исслело С0Става
1971. - Т.9.-№ 5.-С. 687-706. вания.-
76. Лидов М.Л., Тесленко Н.М. Оптимизация решения некоторых
задач управления полетом космических аппаратов методом спуска
по параметру// В сборнике, Математическое обеспечение
космических экспериментов. - Москва: Наука, 1978. - С. 112-141
~П. Лоуден Д.Ф. (Lawden D.F.) Оптимальные траектории для
космической навигации. - Москва: Мир, 1966. - 152 с.
78. Малышев В.В., Бобронников В.Т., Красильщиков М.Н.,
Нестеренко О.П., Федоров А.В., Программный комплекс для
анализа, синтеза и управления космическими системами,
Международная космическая конференция - 2001 «Космос без
оружия - арена мирного сотрудничества в XXI веке», Тезисы
докладов, Москва 11-14 апреля, 2001, с. 43-45.
79. Малышев В.В., Федоров А.В., Программный комплекс расчета
маневров космического аппарата, Международная космическая
конференция - 2001 «Космос без оружия - арена мирного
сотрудничества в XXI веке», Тезисы докладов, Москва 11-
14 апреля, 2001, с. 45-46.
80. Мельников Е.К. Стратегия маневрирования пилотируемой
международной космической станции// Космонавтика и
ракетостроение. - 2004. - Вып. 4(37). - С. 176-186.
81. Мельников Е.К. Строительство международной космической
станции (планирование и реальное состояние). - Королев:
ЦНИИМАШ, 2009. - 176 с.
82. Можаев Г.В. К проблеме оптимизации орбит спутниковых
систем, предназначенных для непрерывного обзора поверхности
земли, Третий Всесоюзный съезд по теоретической и прикладной
механике, Аннотации докладов, М., 1968, с. 215.
83. Можаев Г.В. Задача о непрерывном обзоре земли и
кинематически правильные спутниковые системы I,
Космические исследования. - 1972. - Т. 10. - № 6. - С. 833-84 ,
1973.-Т. Н.-№ 1.-С. 59-68.
84. Можаев Г.В. Решение некоторых задач оптимизации процесс°®
гибкой коррекции движения спутниковых систем >
501
Космические исследования. - 2001. - Т. 39. - №5. - С. 518-530; -
2001. - Т. 39. - №6. - С. 634-647.
85. Муртазин Р.Ф. Алгоритм управления движением космических
аппаратов в низкоорбитальных спутниковых системах связи//
Известия Российской академии наук. Теория и системы
управления. - 1998. - № 2. - С. 173-182.
86. Муртазин Р.Ф. Баллистическое обеспечение быстрых схем
сближения космического корабля с орбитальной станцией//
Космические исследования. - 2012. - Т. 50. - № 4. - С.142-149.
87. Муртазин Р.Ф.. Схема сближения космического корабля,
стартующего с Земли, с лунной орбитальной станцией //тр.
XXXVIII академических научных чтений по космонавтике. М.,
2013.
88. Муртазин Р.Ф. Схема ускоренного доступа к орбитальной
станции для современных космических аппаратов// Космические
исследования. - 2014. - Т. 52. -№ 2. - С. 162-175.
89. Навигационное обеспечение полета орбитального комплекса
«Салют-6» - «Союз» - «Прогресс»// И.К. Бажинов, В.П. Гаврилов,
В.Д. Ястребов и др., под редакцией Петрова Б.Н. - Москва: Наука,
1985.-376с.
90. Назаренко А.И., Скребушевский Б.С. Эволюция и устойчивость
спутниковых систем. - Москва: Машиностроение, 1981. - 288 с.
91. Назиров Р.Р., Тимохова Т.А. Оптимальная линейная коррекция
эллиптических орбит // Автоматика и телемеханика. - 1993. - № 3.
-С. 93—101.
92. Охоцимский Д.Е., Сихарулидзе Ю.Г. Основы механики косми-
ческого полета. Учебное пособие. - Москва: Наука, 1990. - 448 с.
93. Петухов В.Г. Оптимизация многовитковых перелетов между
некомпланарными эллиптическими орбитами// Космические
исследования. - 2004. - Т. 42. - №3. - С. 260-279.
94. Петухов В.Г. Оптимизация межпланетных траекторий
космических аппаратов с идеально-регулируемым двигателем
методом продолжения// Космические исследования. - 2008. - Т. 46.
-№3.-С. 224-237.
502
95. Петухов В.Г. Метод продолжения для оптимизации
межпланетных траекторий с малой тягой// Космические
исследования. - 2012. - Т. 50. - №3. - С. 258-270.
96. Платонов А.К., Казакова Р.К Система проектирования орбит в
прикладных задачах небесной механики. - Препринт Института
прикладной математики АН СССР, 1976. - №106. - 39 с
97. Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко
Е.Ф. Математическая теория оптимальных процессов. 4-е изд. -
Москва: Наука, 1983. - 392с.
98. Прассинг (Prussing J.E.). Оптимальная четырехимпульсная
встреча в фиксированный момент времени в окрестности круговой
орбиты// Ракетная техника и космонавтика. - 1969. - Т. 7. - № 5. -
С. 163-172.
99. Прассинг (Prussing J.E.). Оптимальные двух- и трехимпульсные
встречи в окрестности круговой орбиты при фиксированном
времени перехода// Ракетная техника и космонавтика. - 1970. -
Т. 8,-№7.-С. 46-56.
100. Разумный Ю.Н. К оптимизации проектно-баллистических
параметров систем периодического обзора// Исследование Земли
из космоса. - 1993. - №. 1. - С. 48.
101. Разумный Ю.Н., Козлов П.Г., Разумный В.Ю. Анализ
параметрических зависимостей для круговых и эллиптических
орбит, обладающих свойством нодальной синхронности // Научно-
технический вестник Поволжья. - №3. - 2015. - С. 196-199
102. Разумный Ю.Н., Козлов П.Г., Разумный В.Ю. Методика расчета
многоярусных спутниковых систем на круговых и эллиптических
нодально-синхронных орбитах // Научно-технический вестник
Поволжья. - №3. - 2015. - С. 196-199.
103. Райкунов Г.Г. Баллистическое обеспечение обслуживания
системы летательных аппаратов, движущихся по круговой орбите.
- Москва: Издательство ОАО «Институт подготовки кадров
машиностроения и приборостроения», 2002. - 102 с.
104. Рекомендации по каталогизации. Каталогизация продукции для
федеральных государственных нужд. Предметы снабжения.
Перечень утвержденных наименований. Госстандарт России.
Москва. Приняты и введены в действие Постановлением
Госстандарта России от 18 ноября 2002 г. № 417-ст.
503
105. Решетнев М.Ф., Лебедев А.А., Бартенев В.А., Красильщиков
М.Н., Малышев В.А., Малышев В.А., Управление и навигация
искусственных спутников Земли на околокруговых орбитах. -
Москва: Машиностроение, 1988. 336с.
106. Рыжов С.Ю., Григорьев И.С., Егоров В.А. Оптимизация
многовитковых межорбитальных перелетов КА. - Препринт
Института прикладной математики им. М. В. Келдыша РАН, 2005.
-№63.- 33 с.
107. Рылов Ю.П. Управление космическим аппаратом, входящим в
спутниковую систему при помощи электроракетных двигателей//
Космические исследования. - 1985. - Т. 23. - №. 5. - С. 691-714.
108. Саульский В.К. Многоспутниковые системы с линейной
структурой и их применение для непрерывного обзора Земли//
Космические исследования. - 2005. - Т. 43. - № 1. - С. 36-53.
109. Сихарулидзе Ю.Г. Баллистика летательных аппаратов. - Москва:
Наука, Главная редакция физико-математической литературы,
1982.- 352 с.
ПО. Соловьёв Ц.В., Тарасов Е.В. Прогнозирование межпланетных
полетов. - Москва: Машиностроение, 1973. - 400 с.
111. Соболь ИМ., Левитан Ю.Л. Получение точек, равномерно
расположенных в многомерном кубе. - Препринт Института
прикладной математики АН СССР, 1976. - №40. - 17 с.
112. Степаньянц В.А., Львов Д.В. Эффективный алгоритм решения
системы дифференциальных уравнений движения//
Математическое моделирование. -2000. - Т. 12. - Вып. 6. - С. 9-14.
113. Суслов ГК. Теоретическая механика.- Гостехиздат, 1946. - 670с.
114. Суханов А.А. Универсальное решение задачи Ламберта//
Космические исследования. - 1988. - Т. 26. - № 4. - С. 483-491.
115. Сухой Ю.Г. Коррекции орбит геостационарных спутников: В 3-х
частях. Часть 1. Особенности управления орбитальным движением
и возмущения орбит геостационарных спутников: Пособие для
специалистов. Монография. - Москва: Издательство «Сггутник+»,
2011,- 120 с.
116. Трофимов Ю.Н., Оптимальное многоимпульсное решение
задачи фазирования круговой орбиты. Актуальные проблемы
Российской космонавтики, Труды XXXVIII академических чтений
504
по космонавтике (Москва, 28 января - 31 января 2014 г.), М.,
Комиссия РАН, 2014, с. 140-141.
117. Трушляков В.И., Юткин Е.А. Обзор средств стыковки и захвата
объектов крупногабаритного космического мусора// Омский
научный вестник. - 2013.-№2(120).-С.56-61.
118. Тучин А.Г. Определение параметров движения КА по
результатам измерений при наличии шума в динамической
система. Препр./ИПМ им. М.В.Келдыша РАН.-2004.-№2.
119. Херрик С. Астродинамика. - Москва: Мир, 1978. - 359с.
120. Чернов А.А., Чернявский ГМ. Орбиты спутников
дистанционного зондирования Земли: Лекции и упражнения. -
Москва: Радио и связь, 2004. - 200 с.
121. Химмелъблау Д. Прикладное нелинейное программирование. -
Москва: Мир, 1975. - 534 с.
122. Улыбышев С.Ю., Комбинированные спутниковые системы
непрерывного глобального обзора на экваториальных и полярных
круговых орбитах типа// Космические исследования. - 2015. - т.53.
- №4. - С. 332-344.
123. Улыбышев С.Ю., Проектирование неоднородных спутниковых
систем непрерывного глобального обзора с использованием
экваториальной и околополярных круговых орбит // Космические
исследования. 2016. Т. 54. № 4.С. 1-11.
124. Улыбышев Ю.П., Соколов А.В. Многовитковые маневры с малой
тягой в окрестности геостационарной орбиты// Известия РАН.
Теория и системы управления. - 1999. - Т.18. - № 2. - С. 95-100.
125. Улыбышев Ю.П. Оптимизация многорежимных траекторий
сближения с ограничениями// Космические исследования. - 2008. -
т.46.-№ 2.-С. 135-147.
126. Улыбышев Ю.П. Оптимизация межорбитальных перелетов с
малой тягой при ограничениях// Космические исследования. -
2012. - Т.50. - № 5. - С. 403-418.
127. Эльясберг П. Е. Введение в теорию полета искусственных
спутников Земли. - Москва: Наука, 1965. - 540 с.
128. Энциклопедия "Оружие и технологии России. XXI век" Том 5
"Космические средства вооружения". М.: Издательский Д°м
"Оружие и технологии", 2002. 11. Гришин С. Д., Лесков Л. В.
505
Электрические ракетные двигатели космических аппаратов. М.:
Машиностроение, 1989.
129. Эскобал П. Методы определения орбит. - Москва: Мир, 1970. -
472 с.
130. Adam Е. White, Hugh G. Lewis. An adaptive strategy for active
debris removal// Advances in Space Research. - Vol. 53. - Issue 8. -
15 April 2014. - pp. 1195-1206.
131. Akim E.L., Golikov A.R., Numeric-Analytical Satellite Theory, 8th
International Symposium on Space Flight Dynamics, Greenbelt, USA,
April 1993, Paper No. AAS 93-315.
132. Akim E.L., Golikov A.R., NA-Theory: The Precise Method for
Prediction of the Satellite Motion in the Earth Atmosphere, 9th
International Symposium on Space Flight Dynamics, St.Petersburg-
Moscow, Russia, May 1994.
133. Baranov A.A., Baranov A.A. Satellite Constellation Deployment
maneuvers, Proceedings of the Fifth International Workshop on
Constellations and Formation Flying, 2-4 July 2008, Evpatoria, Krimea.
134. Baranov A.A., Golikov A.R. Optimal Maneuvers for Station Keeping
for a Given Configuration of the Satellite Constellation. Proceedings of
the 14 International Symposium on Space Flight Dynamics, pp. 482-
485, 08-12 February 1999, Foz do Iguacu, Brazil.
135. Baranov A.A., Grishko D.A., Mayorova V.I. The features of
constellations’ formation and replenishment at near circular orbits in
non-central gravity fields// Acta Astronautica. - Vol. 116. - November-
December 2015. - pp. 307-317.
136. Baranov A.A., Grishko D.A., Razoumny Y.N. Ballistic scheme
selection for maneuvering inside a constellation with continuously
changing configuration. Acta Astronautica (in print)
137. Boutonnet A., Martinet V., Baranov A., Escudier B. Optimal
Invariant Spacecraft Formation Deployment with Collision Risk
Management// Journal of Spacecraft and Rockets. - September-October
2005. - Vol.42- No.5- pp. 913-920.
138. Boutonnet A., Baranov A., Martinet V., Escudier B., Noailles J.
Optimal Small Formation Flying Initialization in Circular Orbit,
Proceedings of the 17 International Symposium on Space Flight
Dynamics, pp. 83-96, 16-20 June 2003, Moscow, RF.
506
139. Boutonnet A., Baranov A., Martinet V., Escudier B., Noailles J.
Optimal Analytical Solution for Invariant Spacecraft Formation
Initialization, Proceedings of the Third International Workshop on
Satellite Constellations and Formation Flying, Feb. 2003, Pisa, Italy
140. Carter T. E„ Alvarez S. A. Quadratic-Based Computation of Four-
Impulse Optimal Rendezvous near Circular Orbit// Journal of Guidance,
Control, and Dynamics. - January-February, 2000. - Vol. 23. - No.l. -
pp. 109-117.
141. M. Castronuovo. Active space debris removal — A preliminary
mission analysis and design// Acta Astronautica. - Vol. 69. - Issues 9-
10. - November-December 2011. - pp. 848-859.
142. Chao C.C., Schmitt D.L. Eliminating GPS stationkeeping maneuvers
by changing the orbital altitude// Journal of the Astronautical Sciences.
- 1991.-Vol. 39.-№. 2.-p. 141.
143. D ’Amario L.A. & al. Mars Orbit Rendez-vous Strategy for the Mars
2003/2005 Sample Return Mission, AAS/AIAA Astrodynamics
Specialist Conference, Paper AAS 99-306, pp. 1-19,16-19 August 1999,
Girwood, Alaska.
144. Dufour F., Lasserre E., Bernussou J. Optimization and simulation of
the station keeping of an homogeneous satellite constellation, 2nd
World Automation Congress (WAC'96), Montpellier, France, 1996,
pp.169-174.
145. Edelbaum T.N. Minimum Impulse Transfer in the Vicinity of a
Circular Orbit// Journal of the Astronautical Sciences. - 1967. -
V. XIV.-№2.-pp. 66-73.
146. M. Emanuelli, A. Ronse, C. Tintori, V.I. Trushlyakov. A space debris
removal mission using the orbital stage of launchers// Динамика
систем, механизмов и машин. -2012. - № 2. - С. 185-218.
147. Eneev Т.М., Akhmetshin R.Z., Efimov G.B., Yegorov V.A. Asteroid
and Comet rendezvous missions using low-thrust nuclear propulsion -
Space Forum// International Journal of Space Politic, Science,
Technology. - 2000. - N. 5. - pp. 279-305.
148. Fehse W., Automated Rendezvous and Docking of Spacecraft,
Cambridge Univ. Press, London, 2003, pp.12-13, 441-449.
507
149. Gavrilov A.V., Using branch-and-bound method for rendezvous
problem solution, Proceedings of the XV International Symposium on
Space Flight Dynamics, 16-20 June 2000, Biarritz, France.
150. Gross L.R., and Prussing J.E. Optimal Multiple-Impulse Direct
Ascent Fixed-Time Rendezvous// AIAA Journal. - Vol. 12. - No. 7. -
1974.-pp. 885-889.
151. Han C., and Xie H.W. Study on the Multi-Revolution Lambert
Transfer Algorithm for Rendezvous// Chinese Space Science and
Technology. - 2004,- Vol. 24. - No. 5. - pp.9-13.
152. Hironori Sahara. Evaluation of a satellite constellation for active
debris removal/ZActa Astronautica. - December 2014. -Vol. 105. -
Issue 1. - pp. 136-144.
153. Hughes S.P., Mailhe L.M., and Guzman J.J. A Comparison of
Trajectory Optimization Methods for the Impulsive Minimum Fuel
Rendezvous Problem// Advances in the Astronautical Sciences. - 2003.
- Vol. 113. - pp. 85-104.
154. Jones Jeremy B. Optimal Rendezvous in the Neighborhood of a
Circular Orbit// Journal of the Astronautical Sciences. - 1976. -
Vol. XXIV. -№ 1,-pp.55-90.
155. Kamensky S., Tuchin A., Stepanyants V., Alfriend K.T., Algorithm of
Automatic Detection and Analysis of non-Evolutionary Changes in
Orbital Motion of Geocentric Objects, AAS/AIAA Astrodynamics
Specialist Conference, Paper AAS 09-103
156. Kozai У. The motion of a close earth satellite H Astronomical
Journal. - 1959. -Vol. 64. - P. 367-377.
157. D.J. Kessler & B.G. Cour-Palais. Collision Frequency of Artificial
Satellites: The Creation of a Debris Belt// Journal of Geophysical
Research. - June 1978. - Vol. 83. - pp. 2637- 2646.
158. Konstantinov M.S. Optimization of low thrust transfer between
noncoplanar elliptic orbits, Paper IAF-97-A.6.06, Turin, Italy, October
1997.
159. Kriz J.A. A Uniform Solution of the Lambert Problem// Celestial
Mechanics. - 1976. - Vol. 14. - pp. 509-513.
160. Labourdette P.& A. Baranov A. Strategies for on-Orbit Rendezvous
Circling Mars, AAS/AIAA Astrodynamics Specialist Conference, Paper
AAS 01-392, pp. 1-20, 1-6 August 2001, Quebec, Canada.
508
161. Labourdette P. & Baranov A. A software for rendezvous between
near-circular orbits with large initial ascending node difference
Proceedings of the 17 International Symposium on Space Flight
Dynamics, pp. 130-142, 16-20 June 2003, Moscow, RF.
162. Labourdette P., Baranov A.A. STRATEGIES FOR ON-ORBIT
RENDEZVOUS CIRCLING MARS// Advances in the Astronautical
Sciences. - 2002. - T. 109.-C. 1351.
163. Labourdette P., Carbonne D., Goester J.F. ATV Phasing and Post-
Escape”, European workshop on space mission analysis, ESOC,
December 10-12, 2007.
164. Labourdette P., Carbonne D., Julien E., Chemama F., Kudo G. and
Laurent S. Maneuver Plans for the First ATV Mission, AAS/AIAA
Astrodynamics Specialist Conference, Preprint AAS 09-172, 17 p.
165. Lansard E., Frayssinhes E., Palmade J.-L. Global design of satellite
constellations a multi-criteria performance comparison of classical
walker pattern and new design patterns// Acta Astronautica. - 1998. -
Vol. 42,- No. 9.-pp. 555-564.
166. Lefebre L., Lamy A., Brousse P., Vincent M., Foliard J., Dufour F.,
Lasserre E. and Bernussou J. Relative Station Keeping Optimization for
Starsys Constellation, Proceedings of the XII International Symposium
on Space Flight Dynamics, Germany, Darmstadt, June 1997.
167. Lewis H.G, White A.E. Synergy of debris mitigation and removal//
Acta Astronautica. - December 2012 - Vol. 81. - Issue 1. - pp. 62-68.
168. Liou J. C. & Johnson N.L. Characterization of the cataloged Fengy-
un-lC fragments and their long-term effect on the LEO environment//
Advances in Space Research. -2009. - Vol. 43. - pp. 1407-1415.
169. Marek J.-P. Contribution a L'Etude des Rendezvous Multi-
Impulsionnels, Optimaux,-de Duree Moyenne, Entre Orbits Quasi-
Curculaires, Proches, non Coplanaires, 2nd International Colloquin on
Methods of Optimization, Novosibirsk, USSR, 1968.
170. Marec J.-P. Optimal Space Trajectories, Studies in Astronautics;
V. 1. Elsevier Sci. Pub. Co. Amsterdam-Oxford-New York, 1979.
329 p.
171. NORAD Satellite Catalog. Режим доступа: http://www-
celestrak.com/satcat/search.asp (Дата обращения 21.11.2013).
509
172. Ocampo C., Guinn J., Breeden J. Rendezvous options and dynamics
for the Mars sample return mission// AAS/AIAA Astrodynamics
Specialist Conference, Paper AAS 01-415, pp. 1-20, 2001.
173. Pitkin E.T. A General Solution of the Lambert Problem// Journal of
the Astronautical Sciences. - 1968. - Vol. XV. -№ 5. - pp. 270-271.
174. Pollard J.E. Simplified Analysis of Low-Thrust Orbital maneuvers,
Aerospace report, no. TR-2000(8566)-10, SMC-TR-0031, pp.1-39
175. Prussing J.E. and Chiu J.H. Optimal Multiple-Impulse Fixed-Time
Rendezvous Between Circular Orbits// Journal of Guidance, Control,
and Dynamics. - January- February 1986 - Vol. 9. - No. 1. - pp. 17-22.
176. Prussing J.E. A Class of Optimal Two-Impulse Rendezvous Using
Multiple-Revolution Lambert Solutions// Journal of the Astronautical
Sciences. - 2000. - Vol. 48. - No. 2. - pp. 31-148.
177. Rocket space company Ad Astra™, low Earth orbit large debris
removal using VASIMR®. Режим доступа:
http://www.adastrarocket.com/aarc/SpaceCleaner.
178. Shen H.J. and Tsiotras P. Optimal Two-Impulse Rendezvous Using
Multiple-Revolution Lambert Solutions// Journal of Guidance, Control,
and Dynamics - January- February 2003. - Vol. 26. - No.l.-pp. 50-61.
179. Shuttle Press Kit: STS-92 [on line press kit], http://www.shuttlepresskit.com/STS-92/,[retrieved 25 Mar.2007],
180. Tuchin A.G., Stepanyants V. A., Agapov V.M., Baranov A. A.
Identification Of Maneuvers Executed By Low Thrust Engines. Eighth
US/Russian Space Surveillance Workshop Space Surveillance
Detecting and Tracking Innovation Maui Hawaii April 18 - 23, 2010
181. Ulybyshev Y. Long-Term Formation Keeping of Satellite
Constellation Using Linear-Quadratic Controller// Journal of Guidance,
Control and Dynamics. - 1998. - Vol. 21. - №. 1. - pp.109-115.
182. Ulybyshev Y. Near-Polar Satellite Constellations for Continuous
Global Coverage// Journal of Spacecraft and Rockets. - 1999. - Vol.
36.-No. l.-pp. 92-99.
183. Ya-Zhong Luo, Hai-Yang Li and Guo-Jin Tang. Hybrid approach to
Optimize a Rendezvous-Phasing Strategy// Journal of Guidance,
Control, and Dynamics. - Vol. 30. - No.l. - January- February, 2007. -
pp. 185-191.
510
184. Ya-Zhong Luo, Guo-Jin Tang, Yong-Jun Lei, and Hai Yanz Li
Optimization of Multiple-Impulse, Multiple-Revolution Rendezvous’
Phasing Maneuvers// Journal of Guidance, Control, and Dvnamies
July-August, 2007. - Vol. 30. - No.4. - pp. 946-952.
185. L.Yazhong, Z.Jin, T.Guojin, Survey of Orbital Dynamics and Control
of Space Rendezvous, (2013), doi: http://dx.doi.org/10 1016/icja
2013.07.042.
186. Vitali Braun et Al. Active debris removal of multiple priority targets//
Advances in Space Research. - Vol. 51,- Issue 9.
187. Vallado D.A. Fundamentals of astrodynamics and applications.
Microcosm Press Hawthorne and Springer, New York, 2007. - 1055 p.
188. Walker J. G. Some circular orbit patterns providing continuous whole
earth coverage// Journal of British Interplanetary Society. - 1971. -
Vol. 24.-№. 11.-pp. 369-384.
189. Wright S.J. Primal-dual interior-point methods. Society for Industrial
and Applied Mathematics. Philadelphia, 1997. - 289 p.
190. Zapletin M.P., Grigoriev I.S., Zapletina E. V. First ACT global trajec-
tory optimisation competition: Results found at Moscow State Univer-
sity // Acta Astronautica. - 2007. - Vol. 61. - No. 9. - pp. 758-762.
191. Zapletin M.P., Grigoriev I.S. Constructing Pontryagin extremals for
the optimal control problem of asteroid fly-by // Automation and
Remote Control. - 2009. - Vol. 70. - No. 9. - pp. 1499-1513.
192. ГОСТ P 52925-2008 «Изделия космической техники. Общие
требования к космическим средствам по ограничению
техногенного засорения околоземного пространства»
511
Уважаемые читатели!
*о
Издательство «Спутник*»
предлагает:
Q ИЗДАНИЕ И ПЕЧАТЬ МОНОГРАФИЙ, КНИГ любыми тиражами (от 50 экз
S Срок - от 3-х дней в полноцветной и простой обложке или твердом переплете.
•7 Присвоение ISBN, рассылка по библиотекам и регистрация в Книжной палате.
7 Оказываем помощь в реализации книжной продукции.
£3 ПУБЛИКАЦИЯ НАУЧНЫХ СТАТЕЙ для защиты диссертаций в журналах
по гуманитарным, естественным и техническим наукам.
7 Журнал «Естественные и технические науки» входит в перечень ВАК.
О ПРОВЕДЕНИЕ МЕЖДУНАРОДНЫХ НАУЧНО-ПРАКТИЧЕСКИХ ЗАОЧНЫХ
КОНФЕРЕНЦИЙ по всем научным направлениям для аспирантов,
соискателей, докторантов и научных работников.
£□ ПУБЛИКАЦИЯ СТИХОВ И ПРОЗЫ в журналах «Российская литература*,
«Литературный альманах «Спутник» и «Литературная столица».
+ Набор, верстка, корректура и редактура текстов.
+ Печать авторефератов, переплет диссертаций (от 1 часа).
- Переплетные работы, тиснение, полноцветная цифровая печать.
Наш адрес: УЛоскеа, 109428, (Рязанский проспекта, д. 8 Я
тел. (495) 730-47-74, 778-45-60, 730-48-71 с 9 до 18 (обед с 14 до 15)
http://www.sputnikplus.ru e-mail; print@sputnikplus.ru
Научное издание
Баранов Андрей Анатольевич
МАНЕВРИРОВАНИЕ
КОСМИЧЕСКИХ АППАРАТОВ
В ОКРЕСТНОСТИ КРУГОВОЙ ОРБИТЫ
Издательство «Спутник +»
109428, Москва, Рязанский проспект, д. 8А.
Тел.: (495) 730-47-74, 778-45-60 (с 9.00 до 18.00).
Подписано в печать 19.07.2016. Формат 60x90/16.
Бумага офсетная. Усл. печ. л. 32. Тираж 500 экз. Заказ 4575
Отпечатано в АО «Первая Образцовая типография»
Филиал «Чеховский Печатный Двор»
142300, Московская область, г. Чехов, ул. Полиграфистов, д.1
Сайт: www.chpd.ru, E-mail: sales@chpd.ru, тел. 8(499)270-73-59
БАРАНОВ
АНДРЕЙ АНАТОЛЬЕВИЧ
ведущий научный сотрудник
Института прикладной
математики им. М.В. Келдыша
Российской академии наук,
член-корреспондент
Международной
академии астронавтики
^(Corresponding Member
of the International Academy
of Astronautics, IAA)
ISBN 97В.6-997Э-3672-5